/





























































































































































































































































































































Автор: Вулгаков Э.Б.
Теги: детали машин передачи (механические) подъемно-транспортное оборудование крепежные средства смазка машиностроение
ISBN: 5-217-02355-4
Год: 1995




Текст
Э.Б. Булгаков
ТЕОРИЯ
ЭВОЛЬВЕНТНЫХ ЗУБЧАТЫХ ПЕРЕДАЧ
Москва
"Машиностроение” 1995
УДК621.81/.85
Теория эвольвентных зубчатых передач/Э. Б. Булгаков.—М.: Машиностроение, 1995.—320 с. ISBN 5-217-02355-4
Изложена обобщенная теория эвольвентных зубчатых передач внешнего и внутреннего зацепления с прямыми и косыми симметричными и несимметричными зубьями, образующими зубчатую передачу из двух или из цепочки подряд зацепляющихся колес, или из колес, размещенных на соосных валах. Все функции зацеплений построены вне зависимости от производящего контура, что позволяет существенно расширить область применения параметров передач, способствующих повышению их несущей способности.
Для инженеров-конструкторов и расчетчиков машиностроительных предприятий и конструкторских организаций, преподавателей вузов, аспирантов и студентов.
Abstract см. с. 316.
Библиогр.: 25 назв. Ил. 131. Табл. 12.
В 2702000000-069
038(01)-95
Издание выпущено в счет дотации, выделенной Комитетом РФ по печати
Научное издание
Булгаков Эдгар Борисович
ТЕОРИЯ ЭВОЛЬВЕНТНЫХ ЗУБЧАТЫХ ПЕРЕДАЧ
Редактор М. М. Семенова
Обложка художника В. Н. Погорелова Корректор Л. Г Изосимова
ИБ №7155
Лицензия ЛР №080003 от 15.08.91
Сдано в набор 3.10.94. Подписано в печать 25.07.95
Формат 60 х 88/16. Бумага офсетная
Гарнитура антиква. Печать офсетная
Усл. печ. л. 19,6. Усл. кр.-отт. 19,6. Уч.-изд. л. 19,65
Тираж 1500 экз. Заказ №553
Отпечатано в АООТ “Оригинал” 101898, Москва, Хохловский пер., 7 с оригинал-макета, изготовленного в отделе наборного оборудования АО “НИИполиграфмаш”
ISBN 5-217-02355-4
© Э. Б. Булгаков, 1995
ОТ АВТОРА
Учись смотреть на известное другими глазами.
Наставление
Мой знакомый—старый технолог говорил, что эвольвента—таинственная кривая. Я не стал бы настаивать на этом, поскольку это не так. Но вот то, что она красива—сомнений нет.
Действительно, всмотритесь в развертку окружности—эвольвенту, в тот завиток, который образуется точкой на конце натянутой нити, разматывающейся с окружности. Этот завиток очень красив и изящен, как, впрочем, и многие другие кривые, созданные самой природой. А все, что создает природа, не только красиво, совершенно по форме, но и прочно, т. е. обладает достаточным запасом, чтобы не разрушиться даже от случайных и неожиданных нагрузок, если, конечно, они не превышают некоторый предел.
Пересекающиеся между собой эвольвенты—развертки окружности сначала в одном, а затем в противоположном направлении—образуют зубцы, которые при числе равном z = 5 отвечают правилу золотой пропорции, поскольку лежащее в ее основе число Фибоначчи равно 2cos(rc/5). Вероятно, можно найти общие закономерности в изменении параметров эвольвентных зубцов и эвольвентного зацепления, подчиненных правилу золотой пропорции. Для этого надо увидеть в эвольвентном зацеплении может быть до конца неосознанные заимствования у природы.
Если все, что красиво—прочно, и если в эвольвентном зацеплении рассмотреть красивую в своей простоте форму зубцов, то при своем взаимодействии друг с другом, т. е. в передаче движения, они кроме того обладают высокими кинематическими свойствами и высокой работоспособностью. Эти качества определили долгожительство и конкурентоспособность эвольвентных передач в машиностроении. Наша задача—отказавшись от стереотипных подходов к анализу и синтезу эвольвентного зацепления, показать ее возможности, до сего времени неизвестные, и пути совершенствования на этой основе зубчатых передач.
Госпоже эвольвенте предстоит еще долгая жизнь в технике!
3
© Э. Б. Булгаков
ПРЕДИСЛОВИЕ
Настоящая работа возникла в целях повышения несущей способности, ресурса и надежности авиационных зубчатых передач путем улучшения или изменения их геометрии.
Современная традиционная теория эвольвентных передач выросла на идеях унификации технологии производства, предопределившей ее развитие на многие годы вперед. В построениях теории технология являлась той первоосновой, на которой развивалась логическая схема синтеза и анализа передач—от технологии, от инструмента к изделию—зубчатому колесу.
Позднее, когда определились параметры исходного контура, в наибольшей мере удовлетворяющие задачам технологии, а также конструирования зубчатых передач, изучение свойств зацепления производилось в подавляющем большинстве случаев на основе стандартного исходного контура, причем путь анализа был направлен от технологии к изделию. Получалась довольно странная ситуация, когда, еще не зная свойств изделия, четко знали единственный унифицированный и даже стандартизированный путь его получения.
Беда теории, построенной на такой основе, заключается в том, что она порождена с ограничениями и, когда надо убедиться, все ли возможности реализованы эвольвентной передачи, совокупности средств аналитического анализа оказывается недостаточно.
Автор пошел по другому, не традиционному пути исследования эвольвентной зубчатой передачи. Он отделил технологию зубонаре-зания от формирования зацепления, не зависящую от этой технологии, т. е. нарушил сложившуюся схему синтеза и анализа передач.
Такой путь возможен, если параметры зацепления связать с основной окружностью, поскольку эвольвентное зацепление инвариантно к технологии.
Более 50 лет тому назад X. Ф. Кетов, а несколько позднее Н. П. Лопухов выразили геометрические параметры эвольвенты через основную окружность. Однако собственно синтез эвольвентного зацепления ими проводился на основе исходного контура и станочного зацепления.
Образование зубчатых передач с помощью математического аппарата обобщающих параметров, рассмотренного в этой книге—наиболее общий метод проектирования эвольвентных зубчатых передач—был разработан в первую очередь для применения на ЭВМ при автоматизированном проектировании.
4
© Э. Б. Булгаков
При проектировании передач в обобщающих параметрах сначала определяют профили сопряженных зубцов (зубьев без переходных кривых)—их параметры и свойства, а также качественные показатели зацепления. Затем определяют параметры производящего контура, параметры переходной кривой зуба, качественные показатели передачи, ее исполнительные размеры, а также исполнительные размеры колес (А. с. № 299682, F 16 h 1/10). Проектирование производится по схеме: от изделия к технологии, от зубчатого колеса к производящему контуру—инструменту. При проектировании традиционными методами по ГОСТ 16532-70 «Передачи зубчатые цилиндрические эвольвентные внешнего зацепления. Расчет геометрии» или по работе [13, 24] заранее известен исходный производящий контур или во всяком случае часть технологического процесса, определяющего конфигурацию зубьев, и проектирование осуществляется по схеме: от исходного производящего контура, от инструмента—к изделию, к зубчатому колесу.
При проектировании зубчатых передач в обобщающих параметрах производящий контур появляется на завершающем этапе проектирования, после того как определились свойства зацепления. Его принимают таким, чтобы, сформировав эвольвентный профиль с заданными свойствами, одновременно получить технологичную переходную кривую, обеспечивающую минимальную концентрацию напряжений у основания зубьев.
Теория зубчатых передач в обобщающих параметрах позволяет получить лучшие решения, чем традиционная теория, в общем являющаяся ее частным случаем. Однако для зубчатых передач в обобщающих параметрах часто требуется специальный инструмент с нестандартными параметрами. И здесь инженеру надо решать, по какому пути двигаться в задачах проектирования. Во всяком случае, теория должна идти впереди практики, показывая ей перспективу и направления развития.
Зубчатые передачи в обобщающих параметрах следует применять, когда исчерпаны возможности улучшения их качественных показателей традиционными методами проектирования. Эта теория предназначена для крупносерийного или массового производства, где затраты на изготовление специального инструмента, составляющие малую часть всех расходов на производство, окупаются уменьшением массогабаритных характеристик, улучшением энергетических и эксплуатационных (КПД, надежность и др.) показателей зубчатых передач и изделия в целом. Или когда используют высоконапряженные колеса с нешлифованным поднутренным основанием зубьев, изготовление которых невозможно без специального инструмента,
5
© Э. Б. Булгаков
и, наконец, во всех случаях, когда при изготовлении высоконапряженных зубчатых колес по каким-либо причинам используется специальный инструмент или специальная технология и сами зубчатые передачи должны обладать высокой несущей способностью и надежностью.
Теория и расчет зубчатых передач в обобщающих параметрах, развитые в работах автора [1, 4—6], а затем его учеников М. С. Задина, Н. Г. Подбельского, Г. В. Ривкина, А. Л. Капелевича, В. М. Ананьева, в настоящей монографии расширена до общей теории передач с эвольвентными профилями зубьев.
В разд. I монографии рассмотрен анализ эвольвентного зацепления как внешнего, так и внутреннего, как с симметричными, так и несимметричными профилями зубцов, в разд. II на основании анализа—синтез как отдельных пар, так и различных соединений— в цепочку или в соосную передачу, от экзотических пар, имеющих лишь теоретическое значение, до вполне реальных и целесообразных. В разд. III показана реализация математических построений в результате станочного зацепления. Однако при этом станочное зацепление не образует, не формирует зацепление так, как в традиционной теории. Станочное зацепление лишь слепо выполняет требования анализа и синтеза, показывая свою «строптивость» лишь на стадии образования переходной кривой. А если окончательную конфигурацию зубчатых колес получить методом копирования на высокоточных финишных операциях, то теория открывает практике резервы повышения несущей способности зубчатых передач, которые могут сдерживаться лишь возможностями опор.
Главная задача этой книги—показать, что у технологичной эволь-вентной зубчатой передачи есть большие резервы повышения несущей способности, ресурса и надежности средствами геометрии зубчатого зацепления, почти не используемые сегодня.
Отдельные аспекты теории и геометрического расчета эвольвентных зубчатых передач см. в работах [1, 4—10, 12], а также в ОСТ 100480-83 «Передачи зубчатые цилиндрические эвольвентные внешнего зацепления. Расчет геометрии в обобщающих параметрах», ОСТ 102718-91 «Передачи зубчатые цилиндрические эвольвентные внутреннего зацепления. Расчет геометрии в обобщающих параметрах», ОСТ 102567-85 «Редукторы соосные».
Автор выражает признательность инж. Курасовой О. А., оказавшей ему помощь в оформлении книги.
6
© Э. Б. Булгаков
ОСНОВНЫЕ ОБОЗНАЧЕНИЯ И ОПРЕДЕЛЕНИЯ
Параметрам и независимым переменным зубчатых колес с внешними зубцами присвоены индекс I и 2, а колес с внутренними зубцами индекс 3 Во внешнем зацеплении индекс 1, а во внут рением — индекс 2 относятся к параметрам меньшего колеса — шестерни. причем передаточное число во внешнем или во внутреннем зацеплении соответственно равно и = г2/ г| £ 1,0 или ы2_3 = = г3/ 72 £ 1,0. где z — число зубцов. Параметры внутреннего зацепления пары сопряженных колес отмечены индексами 2—-3, как, например, передаточное число и7_3. Параметрам зацепления в соосной передаче также присваивают индексы сопряженных колес, например индекс 1—2 или 2—3. Зубцы в отличие от зубьев не имеют переходных кривых — галтелей. Согласно ГОСТ 16530—83 и 16531—83 индекс а относится к окружшизти вершин и головок зуба, индекс /— к окружности впадин и ножке зуба, р — к окружности нижней точки активного профиля / — к окружности граничной точки активного профиля, знак • показывает, что параметр является коэффициентом или принадлежит к зубцу с несимметричным профилем Параметры отдельно взятого колеса выражены в долях диаметра его основной окружности, параметры зацепления — в долях диаметра основной окружности шестерни. Полюс зацепления обозначен точкой Ж центры колес точкой О, точки пересечения разноименных эвольвент у зубца точками А, И
ОСНОВНЫЕ ОБОБЩАЮЩИЕ ПАРАМЕТРЫ, ИЛИ НЕЗАВИСИМЫЕ ПЕРЕМЕННЫЕ ФУНКЦИЙ ЗАЦЕПЛЕНИЙ
dt —диаметр основной окружности, с которой раз-
ворачивается эвольвента
^А —диаметр окружности заострения зубца
тл = — относительная толщина зубца на окружности
вершин
<*« — угол профиля на окружности вершин <1Л или
в верхней точке активного профиля
7
© Э. Б. Булгаков
О — угол профиля на окружности диаметра
О, — угол профиля на окружности заострения зубца внутреннего зацепления вблизи окружности daZ при inv03 > —
3 *s
ОСНОВНЫЕ ПАРАМЕТРЫ ЗУБЦОВ
—диаметр окружности вершин
— одна из двух основных окружностей зубца с несимметричным профилем, причем d/ > dt, где — другая основная окружность
К — коэффициент асимметрии профиля несимметричного зубца п2 — относительная толщина зубца на окружности вершин, эвольвенте которой соответствует диаметр основной окружности d*
ms — относительная толщина несимметричного зубца на окружности вершин
рь — основной шаг на окружности d*
рх — окружной шаг на окружности
ах —текущий угол профиля на окружности диаметра dx
Рх — угол наклона линии зуба
Сх — угол давления на окружности диаметра dK
Рх — радиус кривизны эвольвенты на окружности dx
ОСНОВНЫЕ ПАРАМЕТРЫ ЗАЦЕПЛЕНИЯ
— межосевое расстояние
— коэффициент радиального зазора в зацеплении з или в передаче п. где цифры после буквы указывают на номера сопряженных колес
Pw — шаг на начальной окружности dv
лг — угол зацепления
— угол профиля в нижней точке активного профиля коэффициент торцового перекрытия
— коэффициент осевого перекрытия
б * — коэффициент, характеризующий размещение полюса зацепления U/ по отношению к фазам (зонам) зацепления, если < 2,0
8
© Э. Б. Булгаков
ПАРАМЕТРЫ СООСНОГО ЗАЦЕПЛЕНИЯ
С — коэффициент числа зубьев в соосной передаче —число сателлитов
ari-2 —угол зацепления в соосной передаче между колесами
* 1 и г2
ar2-j —угол зацепления в соосной передаче между колесами
* 2 и г2
ПАРАМЕТРЫ СТАНОЧНОГО ЗАЦЕПЛЕНИЯ
л —угол профиля производящего реечного контура (ПРК)
— коэффициент высоты головки зуба ПРК
— коэффициент высоты ножки зуба ПРК
hi — коэффициент высоты зуба ПРК
С* —коэффициент радиального зазора зуба ПРК о •
— коэффициент толщины зуба ПРК на делительной пря-мой
тао —относительная толщина зуба производящего контура долбяка (ПКД)
“о —передаточное число в станочном зацеплении ПКД с заготовкой
I — коэффициент смещения ПРК
z0 — число зубьев ПКД
а<го — угол станочного зацепления с заготовкой колеса
v — угол профиля внутреннего сложного производящего реечного контура (СПРК)
х — коэффициент смещения исходной производящей рейки
9
© Э. Б. Булгаков
Раздел I
АНАЛИЗ ЭВОЛЬВЕНТНОГО ЗАЦЕПЛЕНИЯ
1. ИСХОДНЫЕ ПОЛОЖЕНИЯ ТЕОРИИ ЭВОЛЬВЕНТНОГО ЗАЦЕПЛЕНИЯ
11. ЭВОЛЬВЕНТА ОКРУЖНОСТИ
Эвольвента является разверткой окружности, называемой основной, диаметр которой обозначается db (рис. 1.1). Эвольвента основной окружности не выходит из плоскости этой окружности и поэтому является плоской кривой. Далее под определением «эвольвента» будем понимать эвольвент)' основной окружности.
Рис. 1.1. Эвольвента — развертка основной окружное™
Нанесем на эвольвенту точку X; она ограничивает исследуемый участок эвольвенты AfX где точка М является точкой возврата эвольвенты. Проведем в точку X радиус-вектор ОХ = Rx, а из точки X к
окружности с* касательную XV Касательная XN является радиусом кривизны эвольвен ты в точке X и обозначается рл, угол XON = ах называется углом профили эвольвенты. По условию образования эвольвенты рл = UMN. Так как UAW = (Z.XOM + ax)d>/2. Рл ~ то ^ХОМ =
= tgajf - ах, или mvax я = tgotjr — <\г Значения эволь-ве1гпюй функции inv (involu-tio — инволюта) приведены в специальных таблицах для расчета зубчатых передач, например [2]. Можно написать, что
<хх £ 0. uivax £ 0 и рх > 0.
Рассмотрим значения параметров эвольвенты при ее развертке на угол 2л на границе квадрантов основной окружности (рис. 1.2). Полагая текущий угол профиля ах фиксированным на границах 1,
10
© Э. Б. Булгаков
е'
Рис. 1.2. Эвольвента (кружншти при развертке на угол Inv а^г « 2л
II, III и IV квадрантов обозначим его соответственно Лр аи. аш и Л|у. Так. I квадрант характеризуется центральным углом inva j = л/ 2 с углом профиля а । » 70 34®. По условиям построения эвольвенты = аа = ^(invaj + а()/ 2 = d#tgar/2; радиус-вектор /?[ = Оа dbSeca}/ 2. Таким образом, эвольвенте Ма с центральным углом inva, = л/ 2 соответствует и угол
tgot|, т. е. развертка основной окружности d» больше, чем ей соответствующий угол inva । « л/ 2. I—II квадрантам соответствует центральный угол inva п « л. угол профиля а п н развертка основной окружности на VMeab = ЬЬ - (invau 4- au)d4/2 = tgaHd>/2.
11
© Э. Б. Булгаков
Центральный угол шуаш = l-J-л I—Ш квадранта определяет раз-вертку основной окружности на ^Meabc = сс = р 1П= tga ш dJ*L По аналогии I—IV квадрант характеризуется центральным углом invoifv = 2л и разверткой основной окружности на VMeabcMe = = ее = p[v= tgafv^/2.
Теперь обратимся к развертке основной окружности в пределах л и 2л.
При полной развертке основной окружности на угол 2л радиус кривизны эвольвенты ММ - = лг/4. Развертка завершается радиусом-вектором ОЛ1 = R?* = 1 + 4л’? = 3,18113d» при угле
профиля ax,= 80.96 е. Половина развертки основной окружности соответствует радиусу кривизны эвольвенты ря = ^-id» и радиусу-вектору Rx = i dj I + л* = 1.64845d!> при угле профиля ал = 72 34 е Значения углов профиля ах, инвалюты которых кратны л/2. радиусы кривизны эвольвенты и ее радиусы-векторы для четырех квадрантов представлены в табл 1.1
1.1. Параметры эвольвенты при inva* , кратном -я
Параметр Квадрант
1 п 111 IV
irvar 1 2Я л м|— Ь 2л
70.34 77.45 80.72 82.63
р/ dt 1.39952 2.24608 3.06001 3.86563
р/ 0.44548 0.71495 0.97403 1.23047
R/ dt 1.48615 2.30106 3,10059 3,89784
R/ xdb 0.47306 0.73245 0.98695 1.24072
Рассмотрим разноименные эвольвенты — левую и правую, развернутые из общей точки возврата М (см. рнс. 1.2). Эти эвольвенты пересекаются между собой дважды — при центральных углах inva = л и inva = 2л. Первое пересечение эвольвент в точке Ъ наступает при inva п = л и соответствует образованию однозубого эвольвеггтного зубца cb М, где через ЛЦ обозначается угол профиля на окружности заострения. Так. при предельном центральном угле invOl( = n/z имеем, что л = л/г и отсюда г=1 Такой зубец 12 © Э. Б. Булгаков
непосредственно опирается на основную окружность, а его угол профиля на окружности заострения (У,, = 77.45 °. Только однозубый эвольвентный зубец имеет общую точку возврата разноименных эвольвент.
При invO > mvOn разноименные эвольвенты меняются местами — левый становится правым, а правый левым, причем при inv 0 = 2л зубец уже не размещается на основной окружности. Если на основной окружности расположить симметрично две точки возврата, то при центральном угле invaK = invOx/2 = л/2 и его предельном значении inv 0, = л/z получаем, что л/2 = л/z; отсюда z = 2. а из табл. 1.1 получим 1пу0я/2 = 70.34®. Точно также трехзубый эвольвентный венец получим при inv0 </3 = л/3 и предель ном значении inv 0 = л/г. причем 0 я/3 = 65,46 ® при г = 3 и т. д.
1.2 ЭВОЛЬВЕНТНЫЙ ЗУБЕЦ ВНЕШНЕГО ЗАЦЕПЛЕНИЯ
Рассмотрим абстрактный геометрический образ эвольвентного зубца зубчатого колеса внешнего зацепления (рис. 1.3). Боковые профили такого зубца ограничены только эвольвентой основной окружности и поэтому зубцы в отличие от зубьев нс имеют переходных кривых — галтелей.
Разноименные эвольвентные профили пересекаются в точке А на окружности заострения вершины зубцов с диаметром dA. Отсюда необходимым и достаточным условием построения на плоскости профиля эвольвентных зубцов зубчатого колеса является наличие двух концентрических окружностей — основной окружности d> и окружности заострения вершины зубцов d& По мере приближения окружности с текущим диаметром dx к окружности заострения с диаметром происходит возрастание угла профиля который стремится к предельной постоянной величине, равной 0. Поэтому угол профиля на окружности заострения, характеризующий конфигурацию заостренного зубца в точке пересечения разноименных эвольвент его профиля, равен
л
0 = агссоь—. (1.1)
Угол й определяет конфигурацию зубца в связи с расположением точек возврата М разноименных эвольвент профиля на основной окружности относительно его оси симметрии. Из рис. 1.3 следует, что половина дуговой толщины зубца на основной окружности пропорциональна invO. Таким образом, угол 0 определяет эволь-вентный профиль зубца до оси его симметрии
13 © Э. Б. Булгаков
Если не учитывать силы трения между контактирующими зубцами зацепляющейся пары колес, то воздействие зубца, передающего усилие на зубец, воспринимающий это усилие, происходит по нормали к профилям зубцов или под углом давления между нормалями к профилю и к оси симметрии зубца Угол 0 также замечателен тем. что к нему стремится текущий угол давления £х. причем
Сх = tg <*х “ *nv (1.2)
14 © Э. Б. Булгаков
Таким образом, можно написать, что
- <*Д. d, < dt < d&.
(1.3)
Следовательно, как текущий угол профиля а х, так и текущий угол давления £ х стремятся для данного зубца к предельному значению 0 на окружности заострения. В самом общем смысле дли зубчатого колеса с некоторым числом зубцов z угол 0 является независимой переменной.
Важнейшей характеристикой зубца служит его толщина на окружности вершин с диаметром da, которая выражается через угол профиля ав. Удобнее пользоваться не абсолютным значением 5в. а ее относительной величиной та = S^/d* > 0.
Протяженность эвольвентного профиля можно выразить через его радиусы кривизны в крайних точках А н V или. иными словами, через развертку основной окружности, или через нормали в этих точках:
О s р, = '-d„ tga, S рх S р„ = jd, tgO. О-4)
Весьма интересна точка Ф эвольвентного профиля (см. рис. 1.3), в которой касательная к эвольвенте является нормалью к ее радиусу кривизны. Между точками М и Ф касательная к эвольвенте имеет отрицательный угол наклона, а между точками Ф и А — положи тельный, что приводит к дублированию значений дуговых толщин зубцов в окрестностях точки Ф.
Обратимся к рис. 1.4, на котором показано размещение зубцов на основной окружности d6 в зависимости от утла 0 или, точнее,
Рис. 1.4. Варианты размещения зубцов на основной окружности: а — I1JV0 < л/г; б — invfl = л/г; в — invfl > л/г
15
© Э. Б. Булгаков
от соотношений между inv 0 и л/г. Если inv 0 < л/г. то точки возврата Л! разноименных профилей соседних зубцов расположены на основной окружности на некотором расстоянии друг от друга (рис 1.4. а); если inv О = л/г, то разноименные эвольвенты соседних зубцов имеют общую точку возврата М (рис. 1.4. б); если inv 0 > л/ г, то разноименные эвольвенты соседних зубцов пересекаются выше основной окружности в точке V. а точка возврата М попадает в «тело» соседнего зубца (рис. 1.4. в; рис. 1.3).
Перейдем к более общему рассмотрению размещения эвольвентных зубцов относительно основной окружности На рис. 1.5 показан шсстнзубцовын венец-колесо зубцы которого расположены на основной окружности в «исходном положении», определяемым значением inv 0 [ = л/ г. Такое размещение зубцов непосредственно на основной окружности условимся называть размещением в I ряду, причем индекс у угла 0 римской цифрой указывает на номер ряда расположения зубцов относительно основной окружности. Колеса с зубцами, расположенными в 1 ряду, образуют наиболее распространенные ныне зубчатые передачи, а также передачи с большими и весьма большими коэфф ицнс1гтами перекрытия, т. е. передачи с одновременным зацеплением двух, трех и более пар зубцов.
Увеличение угла профиля на окружности заострения, т. е. наращивание значения 0| благодаря переходу на более отдаленные от основной окружности участки эвольвенты, сопровождается монотонным изменением всех размеров зубцов При этом расположение зубцов относительно основной окружности зависит от соотношения центрального угла inv 0, и л/г. Если inv О, = л/г, то завершается 1 и начинается II ряд зубцов; если 2л/г > inv 0, > л/г, то зубцы размещаются во II ряду; если Зл/г > inv 0, > 2л/г, то — в III ряду и т. п. Центральный угол каждого последующего ряда зубцов отличается от предыдущего ряда на угол л/г. Поэтому для N-ro ряда зубцов
invON = inv 0, + (N - 1)л/г . (1.5)
где Од. 0N— углы профиля на окружности заострения зубцов 1 и N-ro рядов соответственно
Например, в II! ряду объединяются три зубца I ряда при неизменном числе г зубцов на колесе. Таким образом, при непрерывном развертывании эвольвенты основной окружности создается картина размещения зубцов в N м ряду, подобная их размещению в I ряду. Из формулы (1.5) следует, что так как N = (invON - invOjz/л + + 1, то, например, при г = 30 и предельном центральном угле в 1 ряду invO| = л/г центральный угол, равный invON = 2л. имеет место в ряду N = 60, центральный угол invO ь = л — в ряду N = = 30. при 1пуОм = л/2 —в ряду N = 15. При этих же условиях,
16
© Э. Б. Булгаков
например, в ряду N = 2 центральный угол invftN и п = у1л. а в ряду N = 3 он равен inv О N . ш = л н т. д.
Чем дальше ряд N размещения зубцов отстоит от основной окружности, тем труднее в торцовом сечении (у прямозубых колес) получить в передаче двухпарное и тем более многопарное зацепление хотя бы на незначительном угле поворота. Только в этом случае применение косозубых венцов обеспечит передачу вращения от одного колеса к другому.
Наряду с эвольвентнымм прямозубыми зубчатыми колесами широкое применение имеют эвольвентные кисозубые колеса, образующие косозубос эвольвснтное зацепление Поверхность зубцов
17 © Э. Б. Булгаков
эвольвентных косозубых колес образована в результате развертки не основной окружности (как у прямозубых колес), а множества окружностей, расположенных по винтовой линии и образующих основной цилиндр.
Рассмотрим рис. 1.6. на котором по основному цилиндру диаметра df, с осью 00 без скольжения обкатывается плоскость №. В данное мгновение с основным цилиндром по линии AW соприкасается плоскость №, на которой нанесена линия зубца В№, описывающая в пространстве эвольвентную поверхность. Линия М№ — винтовая линия на основном цилиндре, или линия зубца, проведенная под утлом наклона к касательной AW. Если точка В лежит на окружности вершин МВ — эвольвента левого профиля зубца, то полная развертка эвольвенты соответствует углу tgty и потому радиус кривизны в точке В равен pg = tg^ /2. С другой стороны, Рв - К >g Р»- Тогда
= | tg* etg Р, </, <|6)
Рис, 1.6. Эваилеизнак пенерхв^съ лоеизубато зубца
18
© Э. Б. Булгаков
— максимальная длина зубца, при котором эвольвента его переднего торца смещена по отношению к эвольвенте поверхности заднего торца на угол полной развертки эвольвенты зубца.
Условимся, что при рассмотрении пары зацепляющихся колес внешнего зацепления их параметрам и независимым переменным будем присваивать индексы 1 и 2. например, z,. z2. О,, 02. При рассмотрении отдельного зубчатого колеса с внешними зубцами индексы опускают.
1 3. ЭВОЛЬВЕНТНЫЙ ЗУБЕЦ ВНУТРЕННЕГО ЗАЦЕПЛЕНИЯ
Эвольвентный зубец внутреннего зацепления, всем параметрам которого присвоим индекс 3. показан на рис. 1.7. При равномерном расположении зубцов z3 через угол л/г3 он так же, как зубец внешнего зацеплении, размещается между двумя концентрическими окружностями — основной окружностью с диаметром 3 и окружностью ^острения впадины зубцов с диаметром
Если в качестве независимой переменной во внутреннем зацеп* лении принять угол 03, то в отличие от независимой переменной 02 во внешнем зацеплении он будет выполнять функционально иную роль. Для зубчатых колес с внутренними зубггами угол 03 ограничивает эвольвентный профиль сверху, т. е. характеризует «ок ружность впадин» до тех пор. пока к зубцу не пристроена переходная кривая, а угол профиля аа3 ограничивает профиль снизу, т. е. определяет окружность вершин. По этой причине, если толщина зубца на окружности вершин оа3 и. следовательно, относительная толщина зубца па3 * S,3/dbA - 0. т. е. зубцы заостренные, то на окружности вершин о, з * 03. В то же время у зубчатых колес с внешними зубцами как независимые переменные 0, так и углы профиля а6 ограничивают эвольвенту зубца с одной стороны — сверху, причем 0 > ав. а при та = 0 угол профиля ota = 0.
Обратимся к рис. 14 представленные на котором три варианта размещения зубцов распространим на колесо с внутренними зубцами. Если в пределах одного зубца разноименные эвольвенты не пересекаются (см. рис. 1.4, а), то он характеризуется условием inv 03 < л/г3, а относительная толщина зубцов на основной окружности SA3 = mb3 = Sb3/db3 > 0. (Знак * указывает на то. что параметр выражен в долях диаметра основной окружности ) Для предельного случая существования такого зубца при ал3 = 0 имеем ша3 = /п>3 = л/г3 - inv 03. Вместе с гем здесь возможен такой зубец, у которого при принятой относительная толщина зубца
19 © Э. Б. Булгаков
Пне. 1.7 Ээолъвснтннй зубец внутреннее зацепления
на окружности вершин т.3 > Однако зубцы с такой конфи-гурацией встречаются редко Если разноименные профили имеют общую точку М. с которой разворачиваются эвольвенты, то inv 03 = л/г3 и mt3 = 0. В этом случае угол профиля ал3 определяется только принятой относительной толщиной зубца на окружности вершин Наконец, если разноименные эвольвенты профиля зубца пересекаются выше основной окружности с диаметром dt3, то inv 03 > л/*3 и относительная толщина зубца на основной окружности не имеет смысла (см. 1.4. в). Зубец такой конфигурации имеет наибольшее распространение.
Зубчатые колеса с шгутрештими зубцами, у которых /пьзв0 или вообще не имеют смысла или имеют ограниченное применение (см. рис. 1.4. б, (г, 1.7). У нашедших наибольшее применение в технике зубчатых колес н качестве независимой переменной удобнее принимать не угол профиля 03 пересечения эвольвент соседних
20
© Э. Б. Булгаков
зубцов, а угол профиля б3 пересечения эвольвент одного зубца. При этом 03 3 ал3 н эвольвенты зубца снизу ограничены окружностями заострения 5 da3, а сверху — окружностями пересечения эвольвент соседних зубцов с диаметрами dA3 (см. рис 1.7).
Для зубчатых колес с внутренними зубцами, у которых inv 03 £ л/г3 и 03 г» 0, имеем
• t/*3
= arccos -7-. (1.7)
Ядз
причем
inv 03 = inv 03 - л/г3.
Для зубчатых колес с внутренними зубцами, у которых invO3 < л/г3, а также в самом общем случае, т. е. при inv 03 л/г3, независимая переменная
_ d^ 3
а,“агссо5эп' <14 * * * * 19>
Профили абстрактных зубцов внутреннего зацепления как бы очерчены разноименными эвольвентными профилями соседних зубцов внешнего зацепления. В первом приближении можно считать, что впадина между зубцами внутреннего зацепления является телом зубца внешнего зацепления.
Условимся параметрам зубчатого колеса с внешними зубцами присваивать индекс 2. если это колесо участвует во внутреннем зацеплении.
14. ПОЛЕ НЕЗАВИСИМЫХ ПЕРЕМЕННЫХ
В прямоугольной системе координат на рис. 1.8 представлено односвязное поле значений 02 зубцов ги внешнего зацепления.
Каждой точке этого поля соответствуют зубцы определенной кон фигурации, расположенные некоторым образом по отношению к основной окружности. При таком рассмотрении поля назначение
углов 02 пока ничем не ограничено и в этом смысле они являются
независимыми переменными.
Если рассмотреть два сопряженных зубчатых колеса, то. принимая для них из поля независимых переменных некоторые значения О,. 02. можно проследить за переходом зубца от исходного состояния на основной окружности к конфигурации на некотором расстоянии
21 © Э. Б. Булгаков
inv^-
Колец ряда
TH? Т/
Начало ряда
(Уряд
ill ряд
Hl ряд
U ряд
Пряд
Ряд
ряда
-Ар-
4444
Начал^Конец ряда
Рнс.1 1.В. Поле нгзааискчыт перемглчыч при НСКДТОрЫХ яиченнях
1~Л1
т-и
°И
Н~!
НН
Hi
ИХ (У+рряд z2
Зл zz
2Я г?
1ряд
2г
л
$
от основной окружности Угол 0. характеризующий icpM некотором dt конфигурацию зубца в I ряду, также определяет ее и любом ряду, например в N-м, причем invON вычисляется по формуле, приведенной па с. 16,
Как указывалось пыше, если inv 0 < л/г, то зубцы размещаются u I ряду; если inv 0 л/г. то завершается I н начинается П ряд зубцов. В системе кпорлиттат t\F прямая inv - л/s,l 3 = 0 делит поле независимых переменных на четыре части. Ниже будет показано, что пересечение прямых inv Q, = л/га с прямой inv i\, = л/гя в точке Ц отличает параметры ауСнюв. с равными толщинами 5И = на осн овин к окружностях.
Зубцам I ряда соответствуют параметры 0(1 Oj. лежащие в лря-Доутольнике поля, который трансформируется в квадрат
при «=].0; изменение зубцов I ряда происходит в интерядле (0, uiv (>! = л/zj. Если inv&l? > л/?12. то зубцы размещаются но II ряду в прямоугольниках а.,1 -ЦТЛ—ГИД и л?ЛТ—UU—[[.62 причем в прямоугольниках О|,]—1[.(КЛ—I — одновременно у двух сопряженных колес с числом зубцов и г2. Точка Ои, тая же как
22
© Э. Б. Булгаков
точка Op отмечает значения 0, и О2, обеспечивающие равенство толщин SA| = 3>2 зубцов на основных окружностях.
Аналогичные рассуждения можно распространить на пару колес внутреннего зацепления г2, г3, заменив па рис. 1.8 индекс 1 па 3. Тогда зубцам г3, размещенным в 1 ряду, соответствуют независимые переменные invt>3 > л/г3. Этим зубцам соответствуют независимые переменные между осями ординат 02 R системах координат О^ООз и Ф20^з-
Независимые переменные 0р 02 или 02, 03 начинают выполнять функцию параметров как только заканчивается их выбор из множества возможных вариантов поля.
1.5. ЭТАПЫ ПРОЕКТИРОВАНИЯ ОБОБЩАЮЩИЕ ПАРАМЕТРЫ
Равномерно расположенные зубцы на основной окружности образуют некоторый абстрактный образ зубчатого колеса. Он приобретает реальные очертания после конструктивной доработки основания зубца, в результате чего появляются переходные кривые и зубец заменяется зубом. В связи с этим можно представить следующие этапы проектирования зубчатых передач.
1. Синтез эвольвентного зацепления вне зависимости от технологии — производящего контура, при котором геометрические и кинематические показатели зацепления выбирают в целях снижения динамической нагрузки, увеличения толщины контактно-гидродинамической масляной пленки и контактной прочности, а также стойкости поверхностей зубцов против заедания.
2 Синтез зубьев, при котором элемент технологического процесса например производящий контур, выбирают, учитывая возможности появления станочной интерференции и образования переходной кривой, причем последняя должна явиться минимальным концентратором напряжений
В соответствии с принципами синтеза зацепления и зубьев проектирование и связанный с ним расчет осуществляются от изделия — зубчатого колеса к технологии — производящему контуру (инструменту) в два этапа. На нервом этапе определяют параметры зацепления, профиль зубца и значительную часть качественных показателей. т. е. группу таких параметров, как коэффициенты перекрытия Еа н Eyj. удельное скольжение профилей X, коэффициент формы зубца У (см. ниже). На втором этапе в зависимости от принимаемого технологического процесса определяют параметры производящего реечного контура (ПРК) или параметры производящего контура долбяка (ПКД). или производящего контура единичного деления (ПКЕД).
23 © Э. Б. Булгаков
Выше было показано, что эвольвептный зубец вольностью характеризуется двумя концентрическими окружностями с диаметрами d* и или их отношением, arccos которого является углом профиля О на окружности заострения Кроме того, важной характеристикой зубца является его толщина на окружности вершин Sa £ 0. Выше относительную толщину зубца в долях диаметра основной окружности dt на окружности вершин обозначали через та = 0.
Таким образом, чтобы охарактеризовать зубчатый венец с числом зубцов z. необходимо иметь значение db и а также та, Удобнее вместо значений dt и использовать значения диаметра d* основной окружности и угла профиля 0 на окружности заострения, определяемые по формуле (1.1) или (18). Тогда г, 0, da, ma — параметры, которые назовем обобщающими, полностью характеризуют зубец, зубчатый венец и наконец, как будет показано далее, зубчатое зацепление.
Каждое из сопряженных колес (зубчатых венцов) определяется своими обобщающими параметрами, причем на их принадлежность тому или иному колесу указывает индекс у параметра, например, индекс I или 2, или 3 у параметра z. б. dt или та
Синтез и анализ зацепления будем проводить при единичном диаметре основной окружности db = 1,0. исключив таким образом из рассмотрения один из обобщающих параметров, играющий роль масштабного фактора. [ В традиционной теории зубчатых зацеплений роль масштабного фактора выполняет модуль зацепления (мм), обозначаемый через /я| Таким образом число обобщающих параметров будет уменьшено до трех. т. е. г. О и та. Связь между масштабами зубчатых колес будет выполняться через передаточное число ц = z2/2, для внешнего зацепления и н2-з= гз/гз при внутреннем зацеплении. Относительные параметры и конфигурация отдельно взятого зубца определяется двумя параметрами — 0 и гпв. группа зубцов, формирующих зубчатый венец, также их числом г.
В самом общем случае угол б независимая переменная раз личных функций, описывающих зубчатые зацепления; он превращается в параметр, как только закончится его выбор из поля независимых переменных (см. рис. 1.8). Точно также относительная толщина тй зубца на окружности вершин может играть роль независимой переменной до тех пор, пока из множества вариантов при расчете и проектировании не будет принят единственный вариант.
Таким образом, обобщающие параметры характеризуют в долях диаметра основной окружности геометрию, исполнительные размеры и качественные показатели зубчатых колес и передачи в целом. В результате кинематического расчета и расчета на прочность после определения диаметра db осуществляется переход к фактическим исполнительным размерам колес.
24 © Э. Б. Булгаков
При переходе от абстрактного зубчатого венца к реальному зубчатому колесу —от зубцов к зубьям, т. е. при выполнении 2-го этапа проектирования, появляются новые независимые переменные, необходимые в процессе так называемого станочного зацепления (см. разд. III).
1 6 ЕЩЕ РАЗ ОБ ОБОБЩАЮЩИХ ПАРАМЕТРАХ
Важнейшим обобщающим параметром эвольвентного зубца является относительная толщина на окружности вершин та = Sa/de 0. Оценим возможный диапазон изменения тй при проектировании передач ныне традиционными методами. Толщину зубца на окружности вершин обычно выражают в долях модуля зацепления гл, т. е. Se = пт, где п £ 0, и, как правило, 0,25 S п < 0.5 Так как т = 2 sec а, то та = п 2 ”* sec а. или с точностью до sec а получим
Широко применяются зубчатые колеса, у которых та = 1/2,5г.
Относительная толщина зубца тл — параметр, который принимается в зависимости от ряда конструктивно технологических фак торов: профильной модификации, размещения фасок, химико-термического упрочнения, прочности головки зубца, особенно в связи с кромочным контактом, н т. д. Зависимость (1.10) отражает сложившуюся практику назначения толщины зубца на окружности вершин как функцию модуля зацепления. В самом общем смысле относительная толщина зубца та определяется углами 0 и ал и не зависит от числа зубцов г. В ряде случаев целесообразно задаваться величиной та только как функцией 0. Чем больше угол 0, т. е. чем под большим углом пересекаются между собой разноименные эволь центы зубца, тем при прочих равных условиях можно допустить меньшую его толщину Sa па окружности вершин. Например, для заведомо большого значения 0 г л/4 может быть принята ш4 = 0. Если принять линейную связь между О и тв
т---- + 7=|- (HD
4 ITIIX
то. положив при относительную толщину зубца тв = 0, получим примерную конфигурацию вершины зубцов при т. = var (рис. 1,9)
Число зубцов z также один из обобщающих параметров. Выбор г зубцов обусловлен функциональной ролью зубчатого колеса в 25 © Э. Б. Булгаков
передаче. Например, являются ли зубчатые колеса сателлитами в соосной передаче или образуют цепочку из подряд зацепляющихся колес, и т. д. Эти, а также ряд других факторов, определяюнщх выбор числа зубцов г у зубчатых колес, подробно рассмотрены в разд. II.
Наконец, надо еще раз подчеркнуть, что в назначении обобщающих параметров лежит такое непременное условие, которое определяет взаимосвязь между двумя концентрическими окружностями — и — основной и заострения, поскольку между ними лежит эвольвенгный профиль зубца. В качестве обобщающего параметра может быть принят иной параметр, но так или иначе оп ределяющий эту взаимосвязь. Например, обобщающим параметром может стать угол развернутости эвольвенты на окружности заострения v — tg 0 или эвольвентяый центральный угол профиля зубца на окружности заострения 0 = inv 0. или приращение к = 2AS/de дуговой толщины зуба AS на основной окружности по отношению к некоторой исходной толщине зубца, при которой
ГПа
Рис. L9. Конфигурации верн ины гаппвки внешнего зуба в зависимости ат та и 0 при г = 20
26 © Э. Б. Булгаков
inv 0 = л/г, a AS = О, или угол профиля аа на окружности вершин зубцов и т. д.
Между этими параметрами устанавливается следующее соотношение.
8 = V - о- = л/г ± X . (1.12)
Перечисленные обобщающие параметры, каждый в отдельности, должны быть дополнены известными параметрами — г, d4. тл.
Обобщающие параметры 0, v, х равноценны 0 и каждый из них в отдельности определяет полностью относительную геометрию и качественные параметры колес, зацепления и передачи в целом. Использование одних из них может привести к упрощениям записей некоторых уравнений, а использование других — к чисто внешним преимуществам, облегчающим, например, понимание отдельных выводов. схемы образования зубцов и т. д.
Основными обобщающими параметрами, используемыми в этой работе, являются углы профиля 0 на окружности заострения зубцов и утлы профили аа на окружности их вершин. Угол 0 можно назвать параметром толщины зубца, а угол аа — параметром высоты зубца. Однако некоторые наиболее важные при проектировании уравнения и область существования зацепления приводятся в обоб щающих параметрах х и 6 (табл 1.2).
1.7 СИСТЕМА ПРОЕКТИРОВАНИЯ В ЗАВИСИМОСТИ ОТ тл. ПРИНЦИПЫ СИММЕТРИИ ПРИ ПОСТРОЕНИИ ЗУБЦОВ
Проектирование зубчатою зацепления может производиться при требуемом конструктором значении толщины Sa зубцов на окружности вершин. Основная система проектирования, охватывающая подавляющее большинство случаев применения передач, производится при Se) Sa2 “ Sal_2 во внешнем и при Se2 = Sa3 = Sa2_3 во внутреннем зацеплении. Однако в этом случае относительные толщины зубцов не равны друг другу, т. е. та * тз2 и тв2 # me3. Так как при Sal_2 имеем тл\ ~ 5e|-2/d»l« тл2 ~ Sal-2/ udbV ТО mt2 “ та 1/U АНЗЛОГИЧИО “РИ $в2-3 т-2 = 5а2-з/^Г таЗ = 2-з/ «2-3 2- ТОГДЗ
тл3 = Тпа2/и2-з- Отсюда следует, что если толщины зубцов на окружности вершин равны Sttl_2 или Se2_s, то относительная тол щина зубцов /пв|23 = л/г|,3. где п > 0.
Введем обозначения при 5e| = Sa2 = Sa ,_2 и при Sa2 = 5а3 = = $й2-з соответственно mal_2= итл2 и /па2_3-me2« = и,_3та3. В общем случае из соображений, известных конструктору. Sa( * Sa2 или $д2 * 5а3, что может соответствовать, в частности та1= тв2 или та2= та3.
27
© Э. Б. Булгаков
12 Некоторые зависимости эвольвентного зацепления в обобщающих параметрах ж и О
Наименование параметра или функции Обозначение В параметрах Хц2 В параметрах 2
Дуговая толщина зубца на окруж нпсти диаметра ^Х 1.2 (л / 4 “ ^V«XI.2) KcajuAu (в(2 - invax12) secаХ|2[ J
То же, на истклший окружности S*l,2 (я/г12 + ><t.2)d»i.2 *L2^L2
Отнионельнам толщина зубца на окружности вершин m4 1.2 - inweL2 4 */*!.•{>« ««L2 (0L2 - invaeL2)secaaL2
Угол зацепления °т С ♦ и)“‘(*/*| ♦ *t ♦ UKj) 0 * - ж/»1)
Начато интерференции afi2 = 0 - inv arctg [(1 4 u)tgar| - - жв (Cos arctg [(1 4 o)tg«rJ + ж/л, = 0 0( - me (Cos arctg |(1 4 u)tgor] -- inv arc tg[(l 4 u)tgar] = 0
'Л 1 =0 /1 4 и и^ — mv arctg 1—-— t (1 4- и 1 гл<2с os arctg . tgar К i TO : X 1 S3 II о /1 4 и \ - тв2аи arctg <gar! - fl 4 и \ - invarctg —-—tgar a 0
28
© Э. Б. Булгаков
В пеки юром смысле относительная толщина зубца та на ок* ружности вершин может служить мерой оценки симметричности построения профиля зубца. Зубцы зубчатого колеса-венца, число которых равно г, равномерно через угол у, = 2л/ г расположены па основной окружности с диаметром d* т. с. на центральном угле, равном 2л. Между тем очертания профилей зубцов при их равно мерном размещении производятся относительно осей симметрии. Например, эвольвентный зубец (с внешними зубцами) имеет, по крайней мере, две оси симметрии: ось 04 симметрии тела зубца и ось ОУ симметрии впадины между зубцами. Оси симметрии ограничивают протяженность эвольвентного профиля от точки А до точки У. часть которого может стать рабочим профилем, т. е. профилем. участвующим в передаче движений (см. рис 1.3)
При симметричном построении тела зубца относительно оси симметрии 04 сумма дуговых толщин каждой из половин сопряженных зубцов равна половине окружного шага на измеряемой окружности. Отсюда все соотношения симметричною эвольвенгного зацепления исходят из параметров сопряженных зубцов до оси О А. т. е из параметров двух половин зубцов, находящихся в зацеплении. В этом случае во внешнем зацеплении относительная голищна зубца mt= 2|me, где тл = | /пвПр<, + Irenes • где I ~~ ,,оловина относительной толщины зубца до оси симметрии О А.
Если ось симметрии 04 делит толщину зубца Sa на две неравные части, то зубчатое колесо-венец имеет две основные окружности с диаметром db и d*. Эвольвентный профиль, соответствующий основной окружности db, служит для передачи основного рабочего движения а эвольвентный профиль основной окружности d* —
у
при реверсировании (рис. 1.10). Тогда
и по-
2 d
•
строение тела зубца, как и в рассмотренном выше случае, осуществляется по параметрам каждой из половин сопряженных зубцов, т. е. в пределах половины шага; при этом число параметров, формул, уравнений возрастает в 2 раза.
В самом общем случае можно отказаться от симметричного построения тела зубца относительно его оси симметрии ОА при двух основных окружностях с диаметрами db и d*. При этом одновременно
будет нарушен принцип симметричного построения впадины между зубцами относительно оси OV (см. рис. 1.3), а относительная толщина та зубцов перестает быть мерой их асимметрии Равномерность расположения зубцов на центральном угле, равном 2л, здесь будет определяться гем же углом у, на некотором диаметре db < dx < </д между соответствующими точками левого и правого
29
© Э. Б. Булгаков
Рис. 1.10. Несимметричный звиаьвснтный профиль зубца, образованный из двух половим симметричных зубцпя:
а — симметричный профиль зубца при двух диаметрах основнзжх окружнсстгя d^ d*;
6 — несимметричный профиль зубца, один из профилей которого развернут с акружностк при размещении плгмцадки ^5И* на окружности заострения dA со стороны эвслъненты
окружности d *: в — несимметричный профиль с неравными площадками |Зв к |Sa* на разноименных профилях зубца
профиля (где dA — диаметр окружности заострения). Таким образом, принцип симметрии будет распространяться на зубцы не в пределах его тела или впадины между зубцами, а в пределах шага. Здесь могут быть получены иные результаты, чем при построении зубцов относительно оси симметрии ОА (см. § 2.4).
Если ввести понятие о коэффициенте начального шага — как части принимающего участие в передаче вращения, то А. Л. Ка-пелевич показал, что у колес с несимметричным профилем, имеющем зубья типа I, этот коэффициент < —, а у колес с зубьями типа II
Лл
1.8. СХЕМЫ ЗАЦЕПЛЕНИЯ
Пара зубчатых колес с внешними г| и г2 или внешним za и внутренним г3 зубцами образует внешнее или"внутреннее зацепление. Если профили зубцов очерчены по эвольвенте окружности, то полученное зацепление является эвольвенттгым.
30
© Э. Б. Булгаков
Взаимодействие сопряженных зубцов происходит по нормали к профилям. В этом случае имеет место правильное зацепление. Если нормаль к профилям продолжить в обе стороны от точки контакта до основных окружностей, то они совпадут с радиусами кривизны эвольвент сопряженных зубцов. Геометрическое место точек контакта профилей зубцов в силовом смысле или их касания в кинематическом на неподвижной плоскости основных окружностей колес образуют линию зацепления Вне линии зацепления эвольвенты сопряженных зубцов либо пересекаются в зоне между основной окружностью и линией зацепления, либо расходятся вследствие выхода зубцов из зацепления. При выходе из зацепления зубцов внутреннего зацепления иногда возможно пересечение эвольвент.
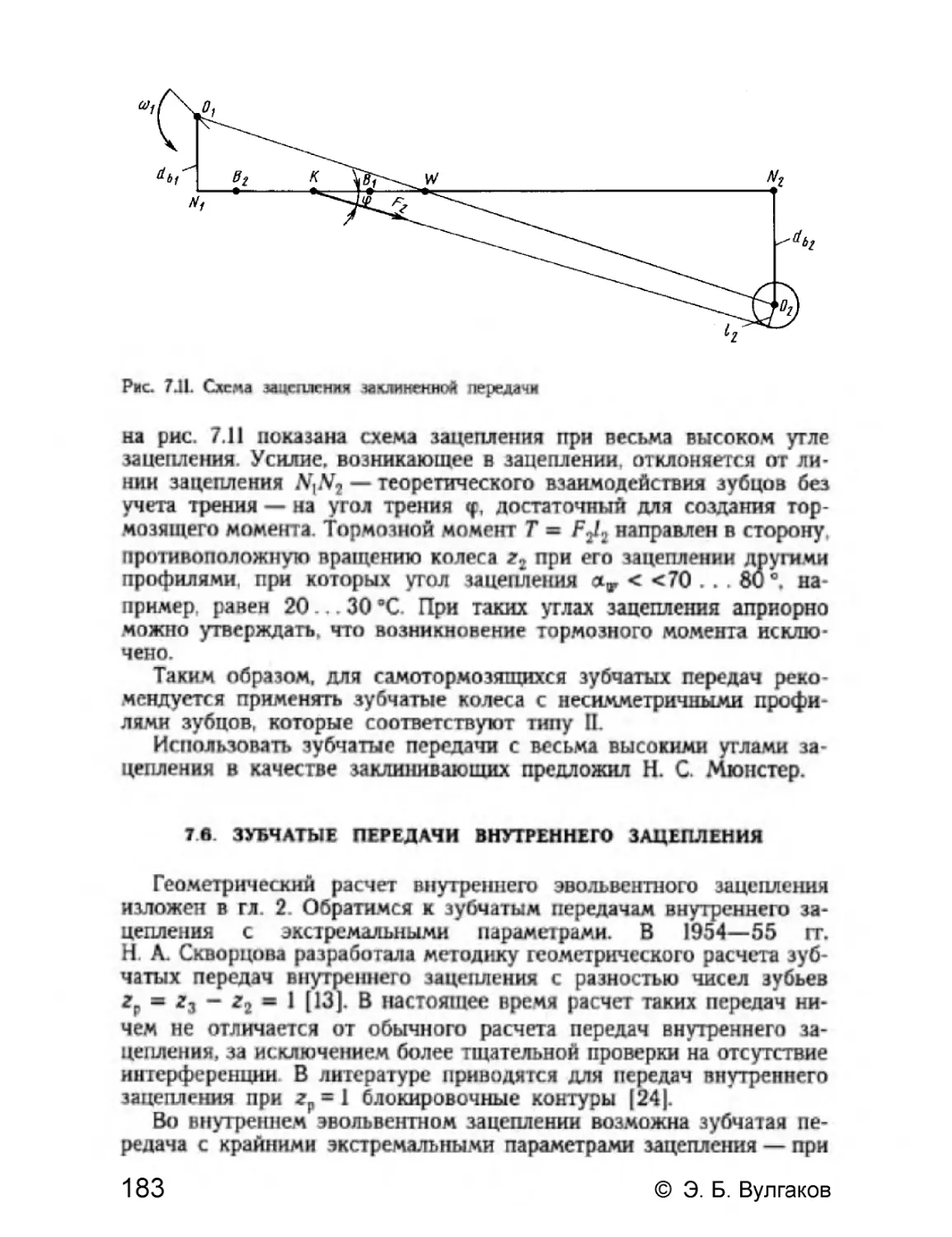
Центры зубчатых колес внешнего зацепления или центры их основных окружностей обозначаются точками 0( и О2, а у внутреннего зацепления точками О2 н О3 соответственно для зубчатых колес с числами зубцов — z2 и z2 - 23. Расстояние между центрами колес по линии центров OtO2 и О2О3 называется межосевым расстоянием обозначаемым aw для внешнего (рис. 1.11, а, б, в) и аг2-з Для внутреннего зацепления (рис. 1.11, г. д, е).
Линии зацепления N}N2 у внешнего зацепления и У2ЛГ3 у внут реннего зацепления пересекаются в точках 1Г и IF; 3 с линиями центров OjO2 и OjO3 под острыми углами Z.O|W7V( = = LO2WNr2 = л/2 - ат и г.О21Г2_3У2=£О31Г2_3У3= л/2 - ат2_3. где аг, аг2_3— углы зацепления, а точки W, 1Р2_3 — полюса зацепления Окружности с диаметрами и dr2, а также dw2 и rfr3 касаются друг друга в полюсах зацепления W и U72_3 соот’ ветственно и называются начальными окружностями.
Начальная окружность, так же как угол зацепления,— понятие, относящееся к сопряженной парс зубцов (колес). Начальная окружность делит зубец на две неравные части — на головку и ножку. У колес с внешними зубцами головка лежит выше начальной окружности, ножка — ниже, а у колес с внутренними зубцами наобо рот — головка лежит ниже начальной окружности, ножка — выше.
Окружности вершин зацепляющих колес с диаметрами dot23 отсекают на линиях зацепления /V|Ar2 и N2N3 активные, или рабочие части и на которых происходит взаимодействие (контакт или касание) сопряженных профилей зубцов (где Blt В2 и Bs — граничные точки). Если полюс зацепления расположен между граничными точками fiu2J, то сопряженные зубцы попеременно зацепляются своими частями до и после начальных окружностей Как при внешнем, так и при внутреннем зацеплении ножка зубца шестерни сопрягается с головкой колеса, а по мере поворота ше стерни — ведущего колеса пары, головка зубца шестерни вступает в контакт с ножкой зубца колеса Более «простая» картина контакта имеет место при внеполюсном зацеплении, когда полюс зацепления
31 © Э. Б. Булгаков
о?
32
© Э. Б. Булгаков
Рис. L11. Схемы зацепления во внешнем (о, б, в) и во внутреннем (г. d, «) зацеплениях
находится вне активной части линии зацепления У колес, образующих такое зацепление, зубцы состоят либо из одних головок, либо из одних ножек, контактирующих на всем протяжении активной части линии зацепления. Зацепление зубцов сопряженных колес происходит по линии зацепления в пределах основного шага рь, рь 2-з — расстояния по нормали между одноименными профилями соседних зубцов. Активная часть линии зацепления BtB2 и BtB3 всегда больше или в крайнем случае теоретически равна основному шагу рь По этой причине активная часть линии зацепления делится на участки одно* и двухпарного или двух* и трехларного зацепления и т. д Важное значение имеет место расположение полюса IF по отношению к участкам двухпарного зацепления, если ВХВ2 или В2В3 < 2р4. 2рА2—з*
Размещение полюса IF в зоне двухпарного зацепления характеризуется коэффициентом Л*, соответствующим расстоянию по линии зацепления от полюса до ближайшей точки однопарного контакта, выраженному в долях диаметра основной окружности меньшего из колес пары
Во внешнем зацеплении, если полюс IV' размещен на ножке зубца шестерки z, и головке зубца колеса z, (см. рис. 1.11, б, в).
= (||3)
если полюс IF размещен на ножке зубца колеса z2 и головке зубца шестерни, то
••1 л
= х(tg ol2 — tgotr) — —,
2 2 к Б «2 Б »' (1.14)
33 © Э. Б. Булгаков
если во внутреннем зацеплении полюс VT2_3 размещен на головке зубца г2 и ножке зубца г3, то (см. рис. 1.11, <Э, е)
62-3 2(tga«2 . Ц ||
а если на ножке зубца шестерни гг и головке зубца колеса г3, = 2^8а<2-з “ ^алз) ~ • ц р
Во всех случаях б*23 > 0, причем коэффициент расстояния от полюса до начала зоны олнопарного зацепления д*23 выражен в долях диаметра основной окружности db меньшего из колес пары.
Длина линии зацепления — алгебраическая сумма радиусов кривизны сопряженных профилей — является величиной постоянной, зависящей от межосевого расстояния и угла зацепления, а именно: для внешнего зацепления
= Р*1 + РжЗ = (1 I?)
для внутреннего зацепления
^з = Р«з “ Р»2 = аг2-зяпаг2_3. (1.18)
В то же время радиусы кривизны сопряженных профилей зубцов изменяются в каждой точке контакта. Если полюс зацепления расположен в пределах активной части линии зацепления, то в граничных точках внешнего зацепления контактируют сопряженные зубцы с максимальными и минимальными значениями радиусов кривизны во внутреннем зацеплении — с радиусами кривизны максимальными либо .минимальными.
Фигуры, изображенные на рис. I II, называются схемами зацепления. Используя схемы зацепления устанавливают важные геометрические и кинематические соотношения эвольвентного зацеп ления.
1.9 ОСНОВНЫЕ ЗАКОНОМЕРНОСТИ ЭВОЛЬВЕНТНОГО ЗАЦЕПЛЕНИЯ
Главное достоинство эвольвентного зацепления — постоянство его передаточного отношения, если контактные точки в процессе сопряжения зубцов лежат на общей нормали к их профилям. Эта нормаль, являющаяся одновременно линией зацепления, пересекает линию центров в полюсе зацепления U7 — мгновенном центре вращения колес. Образовавшиеся таким образом начальные окружности
34 © Э. Б. Булгаков
касаются между собой в полюсе зацепления U7, который делит
линию центров на отрезки, ному отношению, т. е. f = стен как теорема Виллиса.
Эвольвентное зацепление
обратно пропорциональные передаточ-Wi dw^ — = — = const. Этот закон изве-
также замечательно тем. что раздвижка
центров колес не приводит к изменению передаточного отношения. Так. вследствие монтажных погрешностей или по каким-либо причинам у пары колес изменяется угол зацепления и расстояние. Однако при постоянных основных окружностях новое положение полюса зацепления определит новые начальные окружности, частное от деления которых, равное передаточному отношению, останется без изменения.
Эвольвентное зацепление подчиняется также закону Эйлера— Савари, устанавливающему связь между кривизнами сопряженных профилей и начальных окружностей, который для внешнего зацепления имеет следующий вид (см. рис. 1.11):
1 I J_ 1 ) 0
Р, - X " р, - X ~ l<frl dr2 2 “5ес “г • (119)
Кривизны эвольвентных профилей или так называемая приве-
денная кривизна — =
— + — при л = 0. г. е. в полюсе зацепле
ния,— важнейший геометрический фактор, определяющий ктггакт ную прочность зубцов по Герцу Чем больше радиус кривизны у сопряженных профилей, тем меньше герцовскис контактные напряжения. Однако, как следует из уравнения Эйлера—Савари. радиусы кривизны профилей зубцов непосредственно связаны с габаритами
передачи, с межосевым расстоянием.
Важная особенность эвольвентного зацепления проявляется в реечном зацеплении — в зацеплении эвольвентных зубцов с рейкой, имеющей прямолинейные образующие, угол между которыми 2а (а — угол профиля рейки). Эга особенность состоит в том. что начальным окружностям колес при зацеплении с рейкой соответствует угол профиля эвольвенты, который равен углу профиля рейки. На этом свойстве реечного зацепления основано станочное зацепление в процессе производства зубчатых колес. В более развернутом
виде эту аксиому станочного зацепления можно записан» следующим образом: в процессе формирования эвольвентных зубцов можно в таких пропорциях изменять угол профиля рейки, размеры рейки и ее положение по опюшению к зубцам колеса, чтобы основная окружность н окружность заострения зубцов колеса остались без изменения (см. радд. Ш).
35
© Э. Б. Булгаков
2. ГЕОМЕТРИЯ ЭВОЛЬВЕНТНОГО ЗАЦЕПЛЕНИЯ
2.1 ВНЕШНЕЕ ЭВОЛЬВЕНТНОЕ ЗАЦЕПЛЕНИЕ
Геометрия эвольвентных зубцов. Эвольвенты й зубец, рассмотрение которого начато в гл. 1. лежит между основной окруж ностью db и окружностью заострения вершины зубцов с/л. причем угол профиля & может иметь различные функциональные назначения - быть независимой переменной или обобщающим параметром, когда он наряду с диаметром является известной, т. е. принятой при проектировании, величиной
Из рис. 1.3 следует, что диаметр окружности заострения вершины зубцов является максимальным диаметром зубца, равным
t/д = seed dbt (2.1)
диаметр окружности вершины зубца
da = secaa db. (2 2)
где ae - угол профиля на окружности вершины.
Текущий диаметр окружности dx, если invO < л/г лежит в интервале db s dx s с/д и равен dx = sec ах dt, где лх - угол профиля в текущей точке X,
Так как диаметр dx определяется углом профиля ах. т. е. характеризует высоту зубца, то его со значительной долей условности можно назвать параметром высоты зубца.
Когда 1ПУ0>л/г. эвольвенты соседних зубцов пересекаются выше основной окружности в точке V профиля. Тогда угол профиля в точке V
invav = invO - л/г , (2.3)
а диаметр окружности пересечения эвольвент соседних зубцов dv - secavdb, db < dv < dA.
Дуговые толщины зубца также определяются непосредственно из рис. 1.3. Так. на окружности с текущим диаметром dx центральный угол 2фг стягивает дугу Sx, а его половина равна фх = = invO - invax и поэтому
Sx = (invO - invaj sec ax db. (2.4)
В частном случае на основной окружности, на которой ах - О, имеем Ss = invOda. Отсюда понято почему, конечно условно, можно назвать угол 0 параметром толщины зубца
Поскольку основной системой проектирования является проектирование зацепления при постоянной относительной толщине со
36 © Э. Б. Булгаков
пряженных зубцов ma|2 = const, то важно установить связь между /пв, 0 и аа. Из выражения (2.4) следует, что при dx =da. ах = а,, = Se. а также при Sx/dt - та имеем
тл cosau + invae — invO = 0. (2.5)
Решение трансцендентного уравнения (2.5) можно произвести с помощью номограммы, приведенной на рис. 2.1.
Так как угловой шаг между зубцами у, = 2л/2, то окружной шаг на окружности dx
рх = — secot* d, (2 6)
• A Ав
а на основной окружности основной шаг р> = — d>t и поэтому ок-
ружной шаг лежит в диапазоне ~ Рх - ~ зесО <4 •
Весьма важным параметром является дуговая ширина впадины между зубцами ех = рх - Sx. Так. на текущем диаметре dx
ех «= (л/г - invO + in var) sec <хг 4Д. (2.7)
Также весьма важным параметром является угол давления эволь венты. значение которого следует непосредственно из рис. 1.3:
t>x - lKax “ invO, (2.8)
/77д 0,003 -| 0,004 -0,005- Invdi 0,050 0,045 1 1 | 1 1 1 1 1 41 5 <=> ’Se /Т1д 0,003 0,005 - Invda 0,140^ 0,135 Л 0,130 ‘n 4 S 3 ft S Itlllflll Juj
0,040 4 0,125 0,130
— 0,045 0,120 Ч h 0,125
0,010 - S3 ? & 1111111 ~-0,040 0,010 - lllllllllllll Ё- 0,120 H 0,115
Z - 0,100 -= =- 0,110
0,015 - 1111111111111 Ч4 Ча 1 | 1 1 1 1 | 1 । Л са Ч> 0,015 - 0,095 0,090 4 ^^0fl85 0,080 -= 0,075 4 ЧГ 4s ЧГ 111111111111 I 1111 I и
— 0fl70 А 0fl85
— 0,025 - 0р65 4 z-0fl80
0,020 — ~- 0,020 L 0,020 - Sb Я lutijniil Й 12 *4 45» 45a lllllllllllllll
- Y 0,060
0,025- -0,015 0,025 - ^0,055
1*нс. 2J. Нлмофаммл для игре де-гения угля профита ал на скружностн вершин ryOaa внешнего зацепления при известных значениях 9 и nie
37 © Э. Б. Булгаков
где tg<xx - угол развертки или развернутости эвольвенты в текущей точке X профиля зубца, причем О < S 0. Угол развернутости эвольвенты в некоторой точке X пропорционален радиусу кривизны эвольвенты в этой точке (см. формулу (14)).
Используя значение утла давления по (2.8). можно представить некоторые выражения в другом виде Например, может оказаться полезной другая запись уравнения (2.5). если, учитывая кромочный контакт при расчетах на прочность, задаться значением утла давления ип Тогда получим macoscta — ав + £в = 0. Ширину впадины на текущем диаметре dx можно записать так: ек = (л/г + ал) х х seceA dx, а в точке V связь угла профиля яу с углом давления «и - ^ = я/г.
Анализ функции толщины Sx зубца, особой точки Ф профиля и некоторые другие сведения об эвольвенгно.м зубце см в гл. 4
Если правую ортогональную систему координат разместить в центре основной окружности db и ось ординат направить по оси симметрии тела зубца, то уравнение эвольвентного профиля можно записать в параметрическом виде, где параметром является эволь-вептная функция invO, а независимой переменной угол профиля ях (см. рис. 1.3):
х = j COS (invO - inva,) seta, </.,
Y = | sin (invt> - inva*) secotx .
Угол зацепления. Рассмотрим внешнее эвольвентное зацепление и определим условие, при котором происходит правильное зацепление двух зубчатых колес с эвольвентными зубцами. Для выполнения условия сборки таких колес в передачу в качестве исходных параметров принимают число зубцов сопрягаемых колес г, и г^ их независимые переменные 01 и 02. а также диаметр основной окружности
Перекатывания без скольжения профилен сопряженных зубцов - г2 происходят по начальным окружностям d^x и </гг.
На начальной окружности углы профиля эвольвент сопряженных зубцов и ат2 равны между собой, т. е. дт1 = аг2 = аг1_2. Они образуют фундамент схемы зацепления будущей зубчатой передачи -угол зацепления аг1_2 = аг. Условие собираемости зубчатых колес с эвольвентными зубцами в плотном зацеплении, т. е. без бокового зазора, записывается в виде
Рт = 3Г1 +
Л л
Рг = _ — , ЗеСЛр Др [.2 .
г1,1
38
© Э. Б. Булгаков
= — db ] = udh!, z\
где Srl 2 и pv - соответственно толщины зубцов и их шаг на на чальных окружностях; и - передаточное число.
Далее можно написать. что n/zt = Sri/^ri + 5r2/drl.
На основании выражения (2.4) Srl/drl = inv О, - invaw и поэтому имеем Sr2/dr; = л/Zj - invO, 4- invaw. Также на основании (2.4) Sr2/drl = Sr2«/dr2 = (invO2 - invotw) u имеем основное уравнение зацепления
1 /. л . . л . (2.10)
invar « т—— (invv. + и invv2-------).
г I + и' ’ г1
Угол зацепления ar является функцией независимых переменных 01>2 и числа сопряженных зубцов zL2 и не зависит от их относительной толщины /п4|2 на окружности вершин.
Из схемы зацепления (см. рис. 1.11. с) следует, что межосевое расстояние зацепления пары сопряженных колес
ar = 1(1 + w)secard>l, (2«11)
а если известно межоссное расстояние av, то угол зацепления
= arc с os—=— 2а
Следует обратить внимание на то. что в процессе вывода формулы, а затем в окончательной формуле (2.10) учитываются только половины зубцов до оси симметрии и половина шага на начальной окружности. Следовательно, формулу (2 10) можно использовать при проектирования зубчатых колес, зубцы которых симметричны в пределах половины углового шага, т. е построены относительно оси симметрии ОД (см. рис. 1.3) тела зубца; при этом 0 ar < л/4. Если ось ОА не является осью симметрии тела зубца, а симметрия выдерживается в пределах шага то, как ниже будет показано, ar > л/4.
Через угол зацепления ar выражается кривизна сопряженных профилей, которая учитывается при расчете на контактную проч ность по формуле Герца эн - f{K *4 ... ). где - контактные напряжения. Л' - приведенная кривизна сопряженных профилей зубцов.
Обычно контактные напряжения по Герцу определяют в полюсе зацепления, для которого приведенная кривизна профилей зубцов 2(1 4- и)
X--L^ctg«r.
39
© Э. Б. Булгаков
Приведенная кривизна сопряженных профилей (см. рис 1.11) „ 1 I I Ри + Pn
к“р^“₽^ + ₽^“где прнвздеины* кривизны в текущей точке X; рх12- радиус кривизны зубцов в текущей точке X.
Приведенная кривизна сопряженных профилей в текущей точке X 2(1 + utga„ctgan)
‘g«x2ud»i <tU)
Если учесть нагруженность зубчатой передачи, а через нагру-женность ее размеры, то удается более наглядно показать влияние геометрии на контактную прочность по Герцу
Нагруженность зубчатой передачи определяется через коэффи-
циент я0 = 2 ♦ 10 -----—где крутящий момент Г| — в нм.
и brari
br, ^Г| —в мм. При расчете напряжений по Герцу в результате умножения нормальной погонной нагрузки, действующей на зуб на приведенную кривизну под радикалом выделяется kn и coscc 2<хг, а именно — <р(Л0 cosec 2ат ... )^2. Таким образом, здесь возможна приближенная оценка влияния геометрии на контактную прочность по Герцу.
Влияние геометрии на контактную прочность и в связи с этим на долговечность сопряженных зубцов, если она определяется по контактно гидродинамической теории смазки, учитывается через Фя = sinllj cos015 [21]. Контактная прочность здесь, так же как и при применении расчета по Герцу, возрастает с увеличением угла зацепления лт, достигая максимальных значений уже при других значениях <хг. Так, по Герцу максимум контактной прочности достигается при аг = л/4. а согласно контактно-гидродинамической теории {.мазки максимальной толщины пленка достигает при > 45°. например при 60, 70® в зависимости от условий нагружения.
Имеются иные объяснения увеличения контактной прочности, но так или иначе все они связаны с углом зацепления аг и с его ростом.
Коэффициент перекрытия. Если угол зацепления аг-фундамент схемы или здания зацепления, то коэффициент перекрытия ео - параметр, наполняющий это здание шумом. Чем больше коэффициент перекрытия тем при прочих равных условиях меньше шум у работающей зубчатой передачи Э. Бакингем, известный английский ученый, называл этот шум музыкой зубчатой передачи 40 © Э. Б. Булгаков
Коэффициент перекрытия е6Г или коэффициент продолжительности зацепления, показывает число одновременно находящихся в зацеплении-контакте пар зубцов Например, если Еа = 1.0, то одновременно в зацеплении-контакте находится одна пара зубцов, если еа = 2.0. то две пары, если = 3,0, то три пары и т. д. А если Ea = 1.5? Это означает, что часть времени, а это время равно 50 % от общего времени, находящегося в зацеплении контакте пары зуб цов, эта пара одна в зацеплении-контакте, а во вторые 50 % времени их уже две. Или по-другому. Если В,52 - активная часть линии зацепления (рис. 111. а), которую можно назвать продолжительностью зацепления, то целая часть коэффициента перекрытия еи ука зывает на постоянное число пар зубцов, находящихся в зацеплении контакте. а десятичные части коэффициента показывают продолжительность зацепления пар зубцов, превышающих целую часть коэффициента перекрытия Таким образом, если, например, га = = 2,15, то в зацеплении-контакте всегда находятся две пары зубцов, а продолжительность контакта трех пар зубцов составляет 0.15 продолжительности зацепления.
Если рь — шаг по основной окружности, то у правильно работающей передачи р* < В{В2, или теоретически, в крайнем случае р., = В}В2: в общем виде В{В2/рь = ес s 1,0.
В теории зацепления рассматриваются идеальные зубчатые передачи у которых не принимаются во внимание погрешности изготовления До и деформации сопряженных зубцов б. Если б > Д 0. то передача «точная под нагрузкой», в зацеплении имеет место контакт профилей и фактический коэффициент перекрытия за счет де^юрмации зубцов превышает теоретический, Т. е. > еа Если б < До, то передача «неточная под нагрузкой» и силовой контакт профилей в зацеплении отсутствует. В этом смысле наступает неопределенность положения профилей на линии зацепления, при которой за счет больших погрешностей и малой деформации зубцов теоретический коэффициент перекрытия ед не реализуется и всегда равен единице (а может быть и меньше). Таким образом, коэффициент перекрытия ед - теоретический коэф фициент или один из параметров геометрического расчета, который должен уточняться при расчете на прочность с учетом нагруженное™ н точности изготовления зубчатой передачи.
Непосредственно из схемы зацепления (см. рис. 1.11, а) следует, что коэффициент перекрытия ес = В{В2/р^ равен
= ^1 “ 'ga.j - О + 1- (2.i3)
41
© Э. Б. Булгаков
Если у сопряженных колес zf и z2 заостренные зубцы (/naL2 = 0) в результате aeL2-* 012. то при лт = const коэффициент перекрытия е^ а 12 " 0 достигает наибольшего значения. Переписывая формулу (2.10) в развернутом виде. т. е. учитывая inv0|2 = = tgO|2 - 0ц>. получим из (2.13) коэффициент перекрытия
^12 = ” = 1 + Л [0( + и02 _ (] + tfj ar ] (2.14)
Если сопоставляются передачи с числом зубцов zt и z.2 и одинаковыми углами зацепления то г"*1-2" 0 > Еа за счет возрастания продолжительности зацепления благодаря увеличению диаметров окружности вершин сопрягающихся колес. Таким образом, если при прочих равных условиях необходимо увеличить коэффициент перекрытия еа то следует увеличить диаметры окружностей вершин ddl2. Однако при этом возрастут углы профиля aeL2. что приведет к уменьшению гс<12. а значит, толщины зубцов Seh2 А если такое решение невозможно, то надо пойти по другому пути, например. применяя несимметричные профили зубцов.
Интерференция профилен и радиальный зазор в зацеплении. Интерференция - своего рода паралич зацепления, при котором оно перестает работать. Зубцы упираются, заклиниваются своими вер шинами в основания сопряженных зубцов и колеса теряют возможность вращаться. Такое явление применительно к 1-му этапу синтеза зацепления условно, поскольку зубцы - математический, абстрактный геометрический образ: зубцы еще не оформлены в виде зубьев и пока еще нс имеют переходных кривых. Поэтому при таком понимании интерференции она наступает вне линии зацепления — левее точки V, или правее точки N2, где линия зацепления нормальна только к одному из профилей зубца (см. рис. 1.11, а).
Интерференция возможна также тогда, когда вершина зубца одного колеса упирается в точку V пересечения эвольвент впадины зубца другого колеса (см. рис 1.3) В этом случае пересекаются эвольвентные профили зубцов па линии зацепления.
Обратимся вновь к схеме зацепления на рис. 1.11. а Первый случай интерференции наступает, когда <хд) = 0 и invOj < л/zt, или «,2 = 0 и inv02 < n/z2, или одновременно вЧ2 = 0. где а. 12 - угол профиля эвольвенты в нижней точке активного профиля (интерференция вблизи или ниже основной окружности)
Прежде всего составим условия зацепления у основания зубца z2, т. е. в точке Из рис. I ll, а следует:
I + и , 1
~«г - й1**-!- (2 15)
42
© Э. Б. Булгаков
Начало интерференции наступит, когда точка В{ совпадет с точкой N2, а а,2 = 0 при invO2 < л/2^ Учитывая (2.15), после преобразований получим
invOj = melcos arctg ((1 + u)tg ar ] + (I + u) tg ar -
(2.16)
• - arctg |(1 + u)tgar |.
Аналогично, если invO, < л/г(, то у основания зубца zl имеем
>g«,i = (I + «)tg«r - (217)
начало интерференции наступает при a t = 0. если invOj < л/z,:
л » /1 + и .
inv02 « jn^cos arctg —-—tgar
fl + и ) - arctg I —— tg ar I .
Второй случай интерференции наступает выше основной окружности, если invOj > л/г12 на лилии зацепления при условии, что akl2 = агС;. Если угол профиля L2 определить по формулам (2.15), (2.17) и вычислить эвольвентную функцию этого утла, т. е inva^12, которую затем сопоставить с invaFt2 = invOu -- л/Z| 2. то получим после преобразований условия начала интерференции у шестерни г1 при invOt > л/г.
(I + u)ar - «а,г + um.jcosa., -
- arctg [(1 + u)tgar - и tg«,2] - 0. '
у колеса z2 при invO, > л/г2
(1 + u) a, - e,( + mucosa,, -fl + и I \ - “ arc,g I —— 'е“» - - 'g ».i I = о-
Радиальный зазор в зацеплении - жизненное пространство, без которого не может существовать зубчатая передача - расстояние между окружностью вершин зубцов одного колеса и окружностью впадин колеса с ним сопряженного, измеренное по линии центров. Эго расстояние окончательно формируется на 2-м этапе проектирования, при котором оно заполняется пристраиваемыми к зубцам переходными кривыми В оптимальном варианте из множества воз можных вариантов эти переходные кривые должны явиться наи меньшим концентратором напряжений. Кроме того, радиальный за зор, в некотором роде дренажное отверстие, через которое проходит поток масла, охлаждающий зубья зубчатых колес, и в которое попадает масло с их рабочих поверхностей.
43
© Э. Б. Булгаков
Поскольку на 1-м этапе проектирования зацепления зубцы пока не имеют переходных кривых и. следовательно, окружностей впадин, радиальный зазор здесь понятие условное. Роль «окружности впадин» на этом этане проектирования выполняет окружность диаметра dv пересечения эвольвент соседних зубцов, если invOl2 > л/ги, или основная окружность с диаметром если invOL2 < л/г1д,
Если invO, > л/г^ то коэффициент радиального зазора между вершиной зубцов колеса г2 и «окружностью впадин» dyl шестерни г, равен С„*, , = 4-(ог - = (<*«г + dvi)L «ли °»| *
С"2_| = |l(l + «)secar -usecae2 - sec аи]. (221)
Если invO2 > л/г2. то коэффициент радиального зазора между вершиной зубцов шестерни г, и «окружностью впадин» dv2 колеса
*2 С>*-2 = * dvd1 н™
Q*i-2 = |[(1 + M)secar- secael - usecav2] <222)
Если invfy < л/г1( то коэффициент радиального зазора между окружностью вершин da2 колеса г2 и окружностью впадин шестерни г1 равен С/2_| = ~r~[ov — ^(da2 + dH)] или в другом виде
Сэ*2-1 = |l0 + «)sccar — usecaa2 -Ц. (2 23)
Если invO2 < л/г2, то коэффициент радиального зазора между окружностью вершин dol шестерни zt и «окружностью впадин» rf,z колеса z2- основной окружностью равен С3*_2 = = T"l°r - |(rf.l + rf»2)l- "ЛИ
C’l-t “ 51(1 + “) seca, - seca, , - и ]. (2 24)
Коэффициенты радиального зазора С,*_2. и С,*_2 2-i определяются при диаметре основной окружности del меньшего из колес пары Радиальный зазор измеряется по линии центров и его абсолютные значения равны 2_| = C3*i-z 2-1^1 • , =
= С* 1—2, 2—1 Г
44
© Э. Б. Булгаков
2.2 ВНУТРЕННЕЕ ЭВОЛЬВЕНТНОЕ ЗАЦЕПЛЕНИЕ
Геометрия эвольвентных зубцов. Некоторые сведения об эволь-вентном колесе с внутренними зубцами, расположенными между окружностями с диаметрами dbi и dA$ были приведены в гл. 1. Зубчатые колеса с такими зубцами г3 (см. рис. 1.7). сопряженные с зубчатыми колесами, имеющими внешние зубцы г2. образуют внутреннее эвольвентное зацепление г2 - г3.
У зубчатого колеса с внутренними зубцами минимальный диаметр окружности заострения вершины зубцов
(225)
Диаметр окружности вершины зубца
= duseca-s. (2.26)
где 03 - угол профиля на окружности заострения вершины зубца. аа3-угол профиля на окружности заострения вершины зубца.
Согласно (1.8) угол 03 связан с углом профиля 03 на окружности заострения впадины зубцов соотношением inv03 = inv03 - л/г3. Таким образом, расчет геометрии с применением угла профиля 03 возможен, если invO3 > л/г3. Если inv03 < л/г3, то основная ок ружность с диаметром db3 является окружностью с минимальным диаметром зубцов внутреннего зацепления. В этом случае в качестве независимой переменной во внутреннем зацеплении удобнее принимать угол профиля 03 на окружности заострения впадины зубцов.
В общем случае, если invO3 x/z3, то дуговая толщина зубца z3 на окружности с текущим диаметром dX3 (см. рис. 17) равна Sj(3 = Фхз^хз* или
SX3 ж (л/гз “ inv03 + ’пуахз) S€C ax3d>3 • (2 27)
Если ввести обозначения для опюсительной толщины зубцов на окружности вершин тл3 = S-3/dl3. то для окружности вершин можно записать
/я.з cos ote3 - inv ae3 + inv03 - .-t/z3 = 0. (2.28)
Если mvOj £ л/г3. то удобнее пользоваться независимой переменной 63, где 0 < < 03 Тогда дуговая толщина зубца опреде-
ляется по формуле
SX3 = (invaX3 - invQ3) sec aX3db3, (2-29)
а угол профиля аяЧ на окружности вершин из уравнения
45
© Э. Б. Булгаков
me3cos«e3 - invote3 + invO3 = 0. <230)
Номограмма для определения угла профиля ад3 по известным значениям 03 и т<3 приведены на рис. 2 2. Особенности определения толщин зубцов но формулам (2.27) и (2.28) см. в гл. 4.
Окружные шаги для внутренних зубцов определяют по тем же формулам, что и для колес с внешними зубцами, например, на окружности с диаметром dK3:
Рхз = ^secax3db3- (2.31)
Отсюда следует, что дуговая ширина впадины между зубцами ехз ~ Рхз “ ^хз- илн
ехз = (inv03 - invax3)sccax3<3; (2.32)
для зубчатых колес при inv03 > л/г3, если произвести замену переменных,
ехз = (inv03 - inv<xx3 + n/z3)secaX3da3. С2-33)
Угол давления в текущей точке Х3
Сх» =‘8вхэ - ta**3 . (234)
или, заменяя пере.мешгые, £д з » tgcxx 3 - inv б3 + л/г3.
Если ось X из центра зубчатого колеса направить по оси сим метрии тела зубца, то в ортогональной системе координат уравнение его профиля в общем виде с использованием независимой переменной и3, записывается в следующем виде:
X a | cosj^- - inv 0 3 + invax3| sec ax3 d>3,
Y = |sin [y- - inv 03 + invot, J sec otX3 d>3, <2‘35)
где 0 £ ax3 £ 03.
Угол зацепления. Так же как во внешнем зацеплении, угол зацепления зубчатых колеч. внутреннего зацепления с числами зубцов и г2 определяется из условия равенства на начальной окружности суммы толщин сопряженных зубцов в плотном зацеплении окружному шагу, а именно ST2 + Sr3 = рг2_3. Так как $гз = еТ2, то eir2/d(r2 = Sr3/dr3 = л/г2 - inv02 + invarz. С другой стороны, при otr2_3> arctg invO3 имеем 5ГЗ/4ГЗ = л/г3 - inv03 + inv<xr3 или Sr3/dr2 = л/г2 - «2..a(inv03 - invar3). Принимая во внима л . л , ние. ЧТО Рт2-3 - Рт - —“п = —“г2- получим при = *3 г2
= аг3 = аг2_3 основное уравнение зацепления
46
© Э. Б. Булгаков
invar2_3 = ----------r (u2_3invO3 - invO^),
й2-3 ” 1
где u2_3 = z3/z2, или в другом виде при invQ3 г n/z3
inva- , = ~ --------г (“з-31I1V^3 ~ invO2 ♦ л//2).
2—4 “2—3 “ 1
(2.36)
(2.37)
Как будет показано далее, угол зацепления аг2_3 во внутреннем зацеплении 0 < аК2_3 < л/2.
Из схемы зацепления (см рис. 1.11, а), следует, что угол зацепления аГ2_3 пары сопряженных зубчатых колес внутреннего зацепления. выраженный через межосевое расстояние аГг з передачи, равен
(238)
«г 2-з = arccos (112_3 - l)-s--.
/аГ2-3
или при известном угле зацепления аг2-з мсжосевое расстояние
av2—з = 2 з l)secar2_3rf>2
Приведенная кривизна сопряженных профилей зубцов во внут-V 1 1 1 РхЗ “ Рх2
рением зацеплении равна л,_3= --= —--—=-------
Рпр./2-з Рхг Рх з РхаРхз где ргрх2-з — приведенный радиус кривизны зубцов в точке X, Рх2 и Рхз“ радиусы кривизны в точке X эвольвент зубчатых колес г2 и z3. Обычно приведенная кривизна К2_3 значительно меньше, чем кривизна у сопряженных зубцов внешнего зацепления
В текущей точке X приведенная кривизна сопряженных зубцов внутреннего зацепления
„ 2(u,_3tga„ctg«„ - 1)
2-3 'Вал2и2—(2.39)
в полюсе зацепления
Я2_3 = - J 2 3 «2-3 <
Из схемы внутреннего эвольвентного зацепления (см. рис. 1.11, д) следует что коэффициент перекрытия е„г_3« В?В3/рл2_3 равен
г2
еаг-з = 2л I 'еа"г“ ,ga“’ * <“г-э “ 0 'garz-3 I (2.40)
В алгебраическом виде формулу для коэффициента перекрытия
48
© Э. Б. Булгаков
EeZ_3 можно получить. выразив угол профиля oceZ3 через угол давления £а2_3 на окружности вершин
z2
Еа2—3 = 2Л ^«2 “ “2-3 ^аЗ + (W2-3 “ 0 аТ2-3 1’ (2 41)
В предельном случае, когда /л-23« 0 и, следовательно. аа2= 02 и ав3= 03. после преобразований
1 Z ’
«02-3= 2 + 2л { а2 - “2-3 Оз + (“1-3 -0 агг-з 1 • (2.42)
При сопоставимых числах зубьев ей2_3 >
Интерференция профилей и радиальный зазор в зацеплении. При образовании колес с внутренними зубцами эвольвентный участок его основания далеко отстоит от основной окружности, т. е. всегда а,3 > 0. Поэтому интерференция у основания зубца колеса z3 не происходит. Угол профиля в конце активного профиля эвольвенты зубца колеса z3 определяют из схемы зацепления (см. рис. 1.11, г)
“2—3 — * I
'8»,з ” —------lg«!Fz-j + Г— •go.z > °- (2.43)
“z-3 “2-3
Интерференция у основания зубца шестерни г2 наступает при условии, когда tx,2 = 0. Из схемы зацепления следует, что
(2-45)
tga,2 = u2 3 lga.3 - («2_, - 1) tg a,2_3 (2.44)
и при inv02 < л/г2 началу интерференции соответствует угол про филя на окружности вершин зубца колеса г3
'U2-3 “ 1 aa3 = arC*g ~--------
“2—3 }
Если произвести замену переменных с учетом (2.30), то получим условие начала интерференции ар2 = 0 в другом виде:
“2-3 “ 1
7 2-3
“2-3
^в1Г1-3 •
inv03 =
Д-р_3 “ I
—--------Ig«rz-J - arctg
“г-з
(2.46)
Чем больше относительная толщина зубца та3 на окружности
49
© Э. Б. Булгаков
вершин, тем при меньших значениях О3 наступает интерференция профилей.
Возможна интерференция вне линии зацепления, когда происходит пересечение эвольвент в зоне вершин зубцов.
В исходном положении разместим тело зубца шестерни z2 и впадину зубца колеса z3 таким образом, чтобы их оси симметрии совпа ли между собой, а следовательно, совпали с линией межосевых рассто яний (рис. 2 3). Затем повернем шестерню г2 на некоторый угол <pv, при котором вершина его зубца столкнется с вершиной зубца колеса г3. Такое положение сопряженных колес соответствует интерференции головок их зубцов вне линии зацепления.
Запишем условие отсутствия и условие начала интерференции профи лей зубцов вне линии зацепления. Первое условие выполняется. если
зубцов У3 - У2 > 0 или. прини мая во внимание, что Ф2 = «2-зФз- «Де Ф2.3 “ текущие углы поворота шестерни г2 и колеса г3, получим
^(ф) = ~ Паз) - secac2 5*П (М2-зФз “ фв2) > 0.
Второе условие - начало интерференции - наступит. если </Г(Ф) п —~= 0, или dtp
w2_3 secae 3 С08(фз - nfl3) - и.2_3 secae2 cos (и2_3ф3 - Фе,) = 0.
sec ae »
Обозначим через x =-----------— и первое условие приравняем
W2-3 sec ааЗ
нулю Тогда получим систему из двух уравнений
Рис. 2.3. Интерференция вер-тин сопряженных колес во внутреннем зацеплении
fsin(<рз - цв3) - xsin(«2_3<p3 - фв2) - 0. |COS(<p3 “ Ц,з) “ X U2_3 CO5 («2_3 ф3 - ф„2) = 0.
50
© Э. Б. Булгаков
Решение этой системы выполнено Н. Т. Халебским следующим образом. Второе уравнение системы путем замены функций приводится к виду
ЬШ2(фз - Ч.з) = * '«?-з(«2_Э<Рз - Фа2) - Х2“2 + 1-
Производя подстановку в первое уравнение системы, имеем
sin («2-зЪ - *.2) = IV Х у~3 -уГ (2-47) х V и{_, - 1
где половина угловой толщины зубца z2 на окружности вершин фа2 « invO2 - invac2.
Условие начала интерференции на колесе 23 получим, подставив (2.47) в первое уравнение системы:
sin(<p3 - пв3) =
(248)
где половина угловой ширины впадины колеса г3 на окружности вершин Цд з inv03 - inva, 3 = invO3 - invai 3 4- л/г3.
Если заданы z2, z3, тл2 и /п<3, то уравнения (2.47) и (2.48) с тремя неизвестными Ф2 03 и <р3 сводят к двум неизвестным, на пример к 03 и <р3, производя решения для наперед принятых из некоторого интервала значений 02 [13, 22).
Определим коэффициент радиального зазора во внутреннем за ценлении на 1-м этапе синтеза зацепления, когда окружность впадины сопряженных колес, формируемая при станочном зацеплении, еще не известна
Если за условную окружность впадин колеса г3 принять окружность с диаметром sec03d^3 - u2_3secO3 dt2, то коэффициент радиального зазора между окружностью вершин зубцов шестерни z2 и такой окружностью впадин колеса z3 будет равен
с,*г-з = 11("г-з “ 1) “ seca,2 - u2_3sec 0} ). (2.49)
Радиальный зазор между окружностью вершин колеса г3 и «окружностью впадин* шестерни z2 равен:
если invQ, < л/г2, то, принимая условный диаметр окружности впадин, равным dh2, имеем
Сз-2 = | [(«2-а ” D secar2_3 - u2_3secaa3 - I ], (2.50)
если inv(>2 > л/г2. то при диаметре окружности впадин, равном с/>25есаи2. получим
51
© Э. Б. Булгаков
СЛ-2 = |((«2-3 - l)secctr2_3 - u2_3secae3 - secav2J. (2.51)
Радиальный зазор измеряется no линии центров, причем его абсолютное значение равно коэффициенту радиального зазора, умноженному на численное значение диаметра основной окружности db2 шестерни г2.
2.3. ОСОБЕННОСТИ ГЕОМЕТРИИ КОСОЗУБОГО ЭВОЛЬВЕНТНОГО ЗАЦЕПЛЕНИЯ
Поле косозубого зацепления. На рис. 1.6. показана развертка основного цилиндра катящейся по нему плоскости, когда между линией касания плоскости с основным цилиндром и линией зубца, а точнее будущего зубца, установлен угол Развертку основного цилиндра можно представить как развертку множества основных окружностей, точки возврата эвольвент которых размещены на линии зубца по винтовой линии; линия зубца - винтовая линия с постоянным углом наклона
Как и у прямозубой эвольвентной передачи, контакт зубцов у косозубой теоретически линейчатый, но уже на винтовой поверхности зубцов. Фактически с учетом погрешностей изготовления н сборки он прерывисто-линейчатый, а с учетом деформации зубцов, тела колеса, валов, опор и других элементов и деталей передача имеет вид ряда площадок (пятен) или некоторого непрерывного и часто не по всей длине зубца пятна контакта.
У прямозубой передачи теоретическая суммарная длина контактных линий L при заданной ширине рабочего венца Ьг зависит только от коэффициента перекрытия Сд, и если 1,0 < < 2,0, то
она лежит в диапазоне bT S L £ 2Ь^ если 2,0 S еа S 3,0, то 2bT < L < ЗЬГ и т. д. При одной и той же ширине рабочего зубчатого венца длина контактной линии зубца косозубого колеса больше, чем у прямозубого колеса иа sec , где рА - основной угол наклона линии зубца ка основном цилиндре. Однако суммарную длину контактных линий L косозубой передачи можно определить только по так называемому полю зацепления.
У косозубой передачи часть радиуса кривизны BN линии .зацепления 5,В2 = Ед рь и рабочая ширина зубчатого венца bv образует на плоскости Л7. касательной к основному цилиндру, поле зацепления (см. рис. 16). Поле зацепления заполняют контактные липни или следы пересечения поверхности, касательной к основному цилиндру, с одноименными эволызентными поверхностями косозубых зубцов.
В косозубом эвольвентпом зацеплении наряду с торцовым перекрытием, характеризуемым коэффициентом перекрытия еа возникает осевое перекрытие г.^ = Ьг/рхь, где pXt - осевой шаг зубцов 52 © Э. Б. Булгаков
по основному цилиндру, - рабочая ширина венца Тогда суммарный коэффициент перекрытия у косозубой эвольвентной передачи
•ч в е* + (2.52)
Теперь определим суммарную длину контактных линий поля зацепления для частного случая, когда на активной части линии зацепления укладывается целое число основных шагов р>. например, два основных шага В этом случае коэффициент торцового перекрытия еа = 2.0. Такое поле на рис. 2.4. отмеченное буквами
одновременно имеет четыре контактные линии /] = Рхь seep,. /2 = 2pxt seep,, l3 « (dr - px,) seep, и /, «
= (Ar - 2pXft)secp,. сумма которых равна 2Arsec(V Так как ee = = 2 0, то суммарная длина контактных линий
£ = ea6rsecp,. (2.53)
Такой же результат получим, если в рабочей ширине зубчатого венца bv уложется целое число осевых шагов pXk.
Таким образом, если у косозубой передачи коэффициент торцевого перекрытия является целым числом или если осевой коэффициент перекрытия целое число, или если одновременно еа и ед целые числа, то суммарная длина контактных линий является величиной постоянной, определяемой по формуле (2.53).
Допустим, что 1.0 < е.а < 2,0; 2,0 < ри < 3.0. Определим суммарную длину контактных линий в наиболее общем случае, когда Еа и ед не являются целыми числами.
Пусть прямоугольное поле зацепления (см. рис. 2.4)
или В\В2 Вг Bt имеет различные по длине активные части линии зацепления Еа р, и стороны 5,5, = В2В2 = В2 В2 . равные рабочей ширине зубчатого венца Из этой ширины выделим часть ширины b , в которой укладывается целое число осевых шагов рл, при некотором числе контактных линий зубцов. причем 6Г-Ь = ДА < рх,. Таким образом, постоянная часть суммарной длины контактных линий Ltonst = ЕаАзесР, формируется на поле зацепления В|В2В2В| или на поле В{В2 Х2Х{, причем диагональ площадок со сторонами рх, и р, соответствует максимальной длине контактной линии, проходящей через эту площадку.
Переменная часть суммарной длины контактных линий которая состоит из постоянной Д и переменной Д частей, образуется
53 © Э. Б. Булгаков
Рис. 2.4. Пеле зацепление эдмьлентноЛ косозубой передачи в другой меньшей половине поля зацепления или
(см- рис. 2.4). Эти поля представим состоящими из уча* стков а, Ь, с, из которых а. b - неполные по осевому шагу рхл, а с, кроме того, неполный по торцовому шагу рь, т. е. неполный целиком.
На участках fl, b всегда присутствуют q одинаковых отрезков контактных линии, суммарная постоянная длина которых Л Lcon>( = q Д b • sec fl6, где g-целое число основных шагов в активной части линий зацепления г,арь‘. при 1,0 < ги < 2,0 число q = I, при 2,0 £ Еа < 3.0 число q = 2 и т. д.
Переменная часть суммарной длины контактных линий Д£гвг зависит от соотношения сторон неполного участка с, от его положения по отношению к диагонали полной площадки со сторонами Рхь н р>.
Обратимся к табл. 2 1, в которой показано размещение участка с с различным соотношением сторон на этой площадке. Длина контактной линии на участке с, которая параллельна диагонали площадки со сторонами рхь и ph, вне зависимости от ее положения на площадке не больше A b - secpa или рь (ц, - q) cosec^. Эти величины соответствуют максимальным длинам переменной части кон-
54
© Э. Б. Булгаков
2.1. Переменная часть Д£у1г суммарной длины контактных линий
55
© Э. Б. Булгаков
тактной линии Л Lvv tnu. Переменная часть контактной линии может быть равна A £var если участок с расположен выше диагонали площадки со сторонами и р>. Другие экстремальные варианты получения AL^ приведены в табл. 21.
Таким образом, в самом общем виде суммарную длину контактных линий поля зацепления, если коэффициенты торцового ев и осевого ер перекрытий не являются целыми числами, определяют по формуле
L = (гаЬ + qbb) seefi, + A , <2 54>
где A £vaf принимается из табл. 21; b - часть рабочей ширины зубчатого венца Ьт, крата я осевому шагу. Более подробно о суммарной длине контактных линий см. в [17-19].
Косозубая зубчатая передача работает тем спокойнее, ее динамика гем меньше и несущая способность тем выше чем ближе суммарная длина контактных линий поля зацепления к постоянной величине; наибольший эффект достигается при L = const.
При проектировании косозубых передач следует стремиться к постоянной длине контактных линий, которая определяется по формуле (2.53). В ряде случаев этой цели проще добиться изменением рабочей ширины зубчатого венца Ьт до bw = b , кратной осевому шагу pXi, чем путем проектирования зубчатых колес с целочисленными значениями коэффициента торцового перекрытия Сц.
Косозубое эвольвентное зацепление можно охарактеризовать с помощью независимых переменных, определяющих углы сдвига профилей зубцов в торцовых сечениях колес (см. рис 16):
fyu ~ агс (2^ru tgPi, (2.55)
Тогда коэффициент осевого перекрытия сопряженных колес
(2.56)
Некоторые параметры косозубых колес. Эвольвентная поверхность косозубого зубца при пересечении с цилиндрической поверхностью. соосной с основным цилиндром, образует винтовую линию, или линию зубца с постоянным углом наклона [iA на основном цилиндре с диаметром d,. - на цилиндрической поверхности с
диаметром dx и т. д.
Развертку линии зубца можно представить в виде прямоугольного треугольника. Одни катет этого треугольника - расстояние .между передним и задним торцами колеса, равное ширине bw зубчатого венца; другой катет - дуговое смещение между передним и задним торцами колеса в точках пересечения эвольвентой поверхности зубца с цилиндрической поверхностью, соосной основной При уг
56 © Э. Б. Булгаков
ловом смещении дуговые смещения иа цилиндре с диаметрами dt и dx соответственно равны d4<p/2 и dxy/2. Разворачивая дуговые смещения в катет прямоугольных треугольников, получаем
Ьт и Отсюда имеем tgPr = -- tgJJ,. или
Рх = arctg (sectx, tgfr). (2.57)
Формулой (2.57) устанавливается важная связь между углами наклона линии зубца на соосных цилиндрических поверхностях и углом профиля в торцовом сечении; на основном цилиндре угол профиля эвольвенты равен нулю.
При проектировании зубчатых передач в обобщающих параметрах исходными являются параметры колес в торцовом сечении (оно же нормальное сечение для прямозубых колес). У косозубых колес различают исходные параметры колес в торцовом и вторичные -в нормальном сечениях, причем параметры в нормальном сечении могут быть необходимы при синтезе зубьев колес на 2-м этапе проектирования (см. гл I), т. е. при станочном зацеплении (см разд Ш).
Проектирование косозубых зубчатых колес традиционным способом [13. 24] начинается с выбора инструмента, параметры которого задают в нормальном сечении При дальнейшем расчете от нормального сечения в станочном зацеплении переходят к рабочему зацеплению в торцовом сечении.
Весьма важна также связь между углом профиля некоторой 1екущей точки X эвольвентой поверхности на некоторой линии зубца с углами наклона в торцовом к в нормальном сечениях. Это соотношение проще всего получить, рассматривая колесо с бесконечным числом зубцов, т. е. рейки с профильным углом а, который обозначим, как у зубчатого колеса ах.
На рис. 2.5 показаны торцовое (а) и нормальное (в) сечения рейки, а также проекция рейки (б) на некоторую плоскость с углом наклона линии зубца Шаг рейки в нормальном сечении рп для общности обозначений запишем как шаг зубчатого колеса рх Точно так же таг рейки в торцовом сечении р обозначим подобно зубчатому колесу рх. Так как шаг рейки в нормальном сечении является катетом прямоугольного треугольника, гипотенуза которого равна шагу в торцовом сечении, то
Рг. - Р1<лз$х. (2.68)
Высота зуба рейки не зависит от секущей плоскости - торцовой или нормальной - и потому из Д а Ьс н Да b с , учитывая, что ас = =kpx, а с = kpKll (где k - коэффициент пропорциональности), получим
57
© Э. Б. Булгаков
Рис. 2.5. Рейка — зубчатое колесо с числом зуб цов г = «:
а — юриоеос сечение рейки, б — проекция рейки на гориюсальиую плоскость, в — сече кие рейки плоскостью, нормальной к рабочей поверхности зубцов
. Рх* *
= — tga,. или Рх
•g«x. = ««ppg»»- (2.59)
В ряде задач при расчете на прочность приходится пользоваться некоторыми параметрами косозубых колес в нормальном сечении, напри* мер радиусом кривизны. Если из точки X на эвольвентной поверхности зубца провести к основному цилиндру радиусы кривизны в торцовом и в нормальном сечениях, то получим
Рх« = pjr (260)
Рассмотрим еще одно понятие, применяемое при расчетах косозубых колес. -привсдеинос к прямозубому косозубое зубчатое колесо. Такое колесо получают приближенным. некогда принятым способом, состоящим из ряда операций. Во-первых, рассекают косозубое колесо плоскостью, нормальной к линии зубца. У полученного
в сечении эллипса малую ось принимают равной b = d/2, а большую ось а = d cos р/2. где d -диаметр окружности косозубого колеса в торцовом сечении, угол профиля эвольвенты на которой равен углу профиля а с ним сопряженной рейки, а угол р соответствует линии зубца с утлом профиля а. Во-вторых, переходят к окружности приведенного зубчатого колеса, которая касается лишь с одной стороны эллипса на его малой осн. Из аналитической геометрии известно, что диаметр такой окружности d^ - 2а2/Ь. Тогда диаметр приведенного колеса “ d sec2p или, переходя к шагу prp а, - рг sec2p. В-третьих, считают, что шаги у приведенного прямозубого колеса (а он получен в нормальном сечении) и исходного косозубого колеса в торцовом сечении равны между собой, г. е. p^seep = р. Отсюда следует, чго число зубцов у косозубого колеса, приведенного к прямозубому,
Ач». = *
(261)
58
© Э. Б. Булгаков
Приведение косозубого колеса к прямозубому - одна из немногих, а может быть даже единственная операция в теории эвольвентных зацеплении, непосредственно и строго не вытекающая из геометрии эвольвентных передач. Тем не менее некоторые параметры косозубых колес в нормальном сечении, как отмечено в [17. 22]. близки к параметрам приведенного колеса, например радиус кривизны эвольвенты на окружности с диаметром а.
Теперь обратимся к паре сопряженных косозубых зубчатых колес. Чтобы происходило правильное зацепление, такие колеса должны иметь равные по величине, но противоположные по направлению углы наклона линий зубцов по основным цилиндрам. Если одно колесо имеет правое направление линии зубца, то другое - левое, и. таким образом. » 0. Как отмечалось выше, геометрия
косозубых зубчатых колес и зацепления в целом рассматривается в торцовом сечении. Переход к нормальному сечению необходим лишь на стадии реализации косозубых колес, т. с. при станочном зацеплении (см. разд. Ш).
Уравнения эвольвентной винтовой поверхности и контактных линий, а также зацепление косозубого колеса с рейкой см. в [22].
2.4 ГЕОМЕТРИЯ ЭВОЛЬВЕНТНОГО ЗАЦЕПЛЕНИЯ С НЕСИММЕТРИЧНЫМИ ПРОФИЛЯМИ ЗУБЦОВ
Несимметричные зубцы двух типов. Обязательным условием существования зубчатых колес с несимметричными профилями зубцов является наличие двух основных окружностей, которые назовем базовыми. Каждой стороне зубца - левой или правой - соответствует своя основная базовая окружность и ее развертка - базовая эвольвента Несимметричные зубцы с базовыми эвольвентами образуют теоретически правильное зацепление, если они ♦абсолютно» точные и жесткие. В реальных зубчатых передачах учитывают погрешности изготовления и деформации зубьев, чтобы обеспечить правильное зацепление. В этом случае кроме базовой основной окружности применяют небазовые, которым соответствуют две, три и более эвольвент, «исправляющих* теоретический профиль. Такой профиль зубца, состоящий из отдельных участков, деформируясь под нагрузкой. обеспечивает под нагрузкой правильное зацепление.
♦ Исправления» профиля по толщине и высоте зубца, так называемая профильная модификация, измеряются весьма малыми величинами (микронами и их десятками или десятыми долями миллиметра) и не вносят заметных изменений в его очертания
Наличие двух основных базовых окружностей значительно ♦искажает» привычный симметричный профиль зубца, который характеризуется коэффициентом асимметрии профиля К = d*/d> * 1,0, 59 © Э. Б. Булгаков
где rff - диаметр основной базовой окружности со стороны угла зацепления < Если К - 1.0. то несимметричный зубец трансформируется в симметричный и, таким образом, зубчатое зацепление с несимметричными профилями зубцов можно рассматривать как наиболее общин случай эвольвентного зацепления. Изменение контура зубца осуществляется в целях улучшения качественных показателей зубчатой передачи при ее работе в направлении, передающем наибольшую нагрузку с учетом числа циклов нагружения (ресурса, долговечности).
Применение зацепления с несимметричными профилями зубцов расширяет возможности эвольвентного зацепления, позволяет получить передачи с ранее неизвестными свойствами [9J. Поскольку в настоящей главе не рассматриваются передачи с модифицированным профилем, то в наименованиях основная базовая окружность или базовая эвольвента слово «базовая» опускается
Обратимся к двум способам образования несимметричных зубцов, рассмотренных в гл. 1. Если зубцы зубчатых колес с несимметричными профилями симметричны в пределах половины углового шага (см. §2.1), то такие зубцы назовем зубцами, образованными по способу 1, или зубцы типа I. Зубец этого типа асимметричен относительно оси. проходящей через центр колеса и точку пересечения разноименных эвольвент, образующих его тело. Зубец состоит из двух половин некоторых симметричных зубцов. В пределах половины углового шага у сопряженных колес зубцы каждого из колес асимметричны на 1/4 углового шага.
Можно взять два колеса с одинаковым числом z симметричных зубцов, эвольвенты которых развернуты с различных основных окружностей диаметров d* > db, н соединить их противоположные стороны Например, правую половину зубца с основной окружностью db соединить с левой половиной зубца, имеющей основную окружность d*. «Базой» такого объединения явится ось симметрии ОА, и в самом общем случае зубец будет характеризоваться не только двумя основными окружностями db и d*. но и двумя окружностями заострения dA и d£ (рис. 2.6, а. б).
Если довести до заострения левую половину зубца, эвольвента которого разворачивается с основной окружности диаметра db. и принять диаметр окружности заострения равным диаметру окружности вершин t/д = da, то площадка Sa на окружности вершин разместится на его правой половине (см. рис. 2.6. а). Зубчатые колеса с такими зубцами при прочих равных условиях облегчают получение максимального коэффициента перекрытия е„ со стороны основной окружности dt при неизменном угле зацепления аг,
60
© Э. Б. Булгаков
Рнс. 2 6 Несимметричный зубец типа I а и сш не го зацепления: а — при sj = isf; б - при 5? « |(Se + S*)
• лл
61
© Э. Б. Булгаков
величина которого зависит от Оц, т. е. от d^ Уменьшай коэффициент перекрытия ео путем уменьшения диаметра окружности вершин dal2 < dAL2» пРи ^AL2 ~ const, можно увеличить площадку Sjl2, часть которой разместится на левой половинке зубца (рис. 2.6, 6). Суммарная толщина зубца шестерни на окружности вершин 5ЛХ = (Se 4- S*)/2, где 5в/2 и S//2 - толщина зубцов на окружности вершин, приходящаяся на левую или правую части профиля, эвольвенты которых развернуты с основных окружностей d> и d*. Эти толщины, а следовательно, и толщины по начальным окружностям принимаются такими, чтобы в паре с сопряженным колесом обеспечить беззазорное или плотное зацепление.
Итак, зубцы типа I построены путем использования функций зацепления, определяющих исходное эвольвентное зацепление с симметричной конструкцией зубцов. В этом случае реализуются все математические соотношения и предельные параметры зацепления, характерные для зубчатых передач с симметричными профилями зубцов.
Если зубцы зубчатых колес с несимметричными профилями симметричны в пределах целого углового шага, то такие зубцы назовем зубцами, образованными по способу П, или зубцами типа И. У этих зубцов отсутствуют привычные оси симметрии 0/1 и 0V (см рис. 1.3); они подобны соседним зубцам колеса, полностью с ними а не половины, как у зубцов типа I.
Таким образом, в основу образования зубцов типа П и зацепления в целом положены функции, не связанные с некоторой исходной симметричной конфигурацией зубцов Кроме того, отличительной особенностью таких зубцов является равенство диаметров окружностей заострения разноименных профилей сопряженных колес ^Л1 = ^А1 и ^Л2 = ^Д2» т. е. профили зубца ограничены одной окружностью заострения (рис. 2.7). У такого зубца независимая переменная 0. соответствующая
Рнс. 2.7. Несимметричный зубец типа II внешнего тацеппенмя
эвольвенте окружности с диаметром d*, однозначно
62
© Э. Б. Булгаков
связана с утлом 0’ окружности d*‘t угол 0* является зависимой переменной. В этом случае уменьшается число параметров, необходимых в качестве исходных при расчете (А. с. 1060839, СССР, F 16 Н 55/08).
Коэффициент асимметрии профиля зубца. Рассмотрим сопряженные колеса как внешнего, так и внутреннего зацепления, если К = df/dt > 1,0. Так, для колес с внешними зубцами zx и г2 К{ = d^/dbi, = <&/d^ но и = = d>2/dH = d*2/d\,
Кх = К2 = К.
Аналогично для сопряженных колес внутреннего зацепления А2 Л* “ 4*j/d>3, но и2_3 = d>3/di2 = d/3/df2 и тогда А2 = А3 =А, т. е. коэффициент асимметрии профиля зубца есть величина постоянная для данной пары зацепляющихся колес
Для зубцов колес как внешнего, так и внутреннего зацепления можно написать. что диаметр текущей окружности dx = dfc seed* = dA* secax. Отсюда текущий угол профиля <х/, coot встствующнй эвольвенте окружности диамегра d/, можно выразить через коэффициент К:
К = cosa/ secax . (2.62)
В частных случаях, если dx = da (диаметру окружности вершин), го К = cosot * secaa, или если dx = da = dA, то К = cosa * secO , а если dr = dA = dA. то К = cosO'secO .
Окружные шаги по разноименным сторонам зубцов с несиммет ричными профилями равны между собой: так как рх = у second*, Рх = ^secaxKd>, то рх =Apxcosajr seca/, а учитывая, что cosar 1 ----; = - получим рх = рх. cosar Л
Так как основной шаг эвольвентных зубцов, диаметр основной
Л • ф л ф /Т _ л
окружности которых db, равен = - db « — Kdb. то
К _ Pl <2 63)
Р. '
С коэффициентом К также связано межосевое расстояние a v. Так, для внешнего зацепления можно записать 2аг = = (I + и) secar d4l — (1 + wjseca^dfi и поэтому
К = cos secar . (2.64)
© Э. Б. Булгаков
63
По аналогии для внутреннего зацепления
К = cos a J2_3 secar2_3 . (2.65)
Проверка на заострение несимметричных зубцов типа I. Формирование беззазорного зацепления несимметричных зубцов типа I происходит при одном параметре, замыкающем размерную цепь толщины зубцов.
Рассмотрим наиболее общий случай расчета пары зубчатых колес внешнего зацепления, когда задают числа зубцов z(, z2, независимые переменные 0р 02, диаметр основной окружности dhV коэффициент асимметрии Л' и относительную толщину несимметричных зубцов Z| на окружности вершин mal = (тв1 + где =
= Se|/cf>|t ma* = - Также в качестве известной
величины принимают та2 = Sa2/dh2'
Так как zL2 известны, то угол зацепления аг, соответствующий контакту профилей, развернутых с основных окружностей dH2. определяем по (2.10), а угол зацепления соответствующий основным окружностям d>lJ2, по формуле (2.64). т. е. как aj = arccos cosar).
Расчет зависимых переменных производим на основании (2.5) и (2.62)
invO* = (2m/j - мв1)со$ал| + inv arccos (Я cos otel) (2.66) и на основании (2.10)
invOJ = —Г(1 + 1/,_2) invotg., 2 - invO* 4- — ], (2 67)
«1-2 L - 2*| J
причем искомая относительная толщина зубца z2, профиль которого соответствует эвольвенте основной окружности с/Д, равна
т*2 - [inv02 — invarccos(Кcosаа2)|К~’sccaa(2.68)
Суммарная относительная толщина зуб1щ г3 на окружности вершин
та2 " 2^«2 ^ez)’ (2.69)
где та2 = 5а2/</д2» /лй*2 = Sa*2/J6*2 = 5e’2/Kdb2, причем абсолютная толщина зубца z, на окружности вершин Зв2 = m^2dtr
При прочих равных условиях чем ближе к нулю, тем коэффициент перекрытия са ближе к наибольшему значению со стороны эвольвентных профилей, разворачивающихся с основных окружностей db 12; при тл 12 = 0 коэффициент перекрытия е.а равен 64 © Э. Б. Булгаков
максимальной величине. Из этих соображений следовало бы при нимать в расчетах тл и = 0.
Заострение зубцов наступает в большинстве случаев тем веро ятнее. чем меньше их число. Если по каким-либо причинам невозможно одновременно получить у шестерни z, и колеса z2 относительные толщины /neU2 = 0. то целесообразно принимать заостренными зубцы zt со стороны диаметра dt г полагая та( = 0. Таким образом, в этом случае искомой величиной остается относительная толщина Я1а*2 колеса г2 со стороны диаметра db[.
На рис. 2.8, а показан несимметричный профиль зубца типа I внутреннего зацепления, образованный из двух половин симметричных зубцов, совмещенных по оси симметрии Такой зубец имеет в общем случае две окружности заострения <впадин» с диаметрами dA3 и z/дз и две основные окружности с диаметрами db3 и db3, эвольвенты которых характеризуются независимыми переменными 03 и 0*. При этом построение переходных кривых (см. разд. Ш) несколько сложнее, чем при ^дз = ^дз- Кроме того, если inv03 > л/га, то зубец ограничивает также окружность заострения его вершин радиуса O3V.
Рассмотрим геометрию внутреннего зацепления с несимметричными профилями зубцов, если известны числа зубцов z2, z3, независимые переменные 02, 03. коэффициент асимметрии профиля зубца К, диаметр основной окружности db2, а также тл2 и т.з = Здесь так же. как при расчете внешнего зацепления
с несимметричными профилями зубцов, требуется определить относительную толщину гта окружности вершин сопряженного зубца со стороны эвольвенты, разворачивающейся с большего диаметра основной окружности, т. е. в данном случае искомой является относительная толщина Л1.*3= S*3/d*3 зубчатого колеса z3.
При указанных условиях диаметры окружности вершин de?i. так же как их углы профиля авХЗ, известны. Тогда по условию (2.62) определяем углы профиля аа’дз и по формуле (2.5) зависимую переменную 02. Затем по формуле (2.36) находим угол зацепления аг2 зи емУ соответствующий по формуле (2 62) угол зацепления ®т2-3’ а 1,0 формуле (2.36) зависимую переменную 0*. Наконец, по формуле (2.28) определяем искомую относительную толщину симметричного зубца z3 внутреннего зацепления на окружности вершин. эвольвенте которого соответствует диаметр db3, т. е.
<п/3 = (л/*з “ invO; + invafl*3) хсл*3 > 0. <2 70)
65
© Э. Б. Булгаков
Рис. 2.8. Несимметричный зубец типа I (а) и типа II (6) внутреннего зацепления
66
© Э. Б. Булгаков
Суммарная относительная толщина несимметричного зубца z3
“Л = 5 (™.з + И я».*»). <2П)
а его абсолютная толщина на окружности вершин dai
S 3 = w23d.3. (2.72)
Геометрия несимметричных зубцов типа II. Обратимся к рис. 2.7, понимая на нем изображенную ось ОА не как ось симметрии, служащую границей двух половин симметричных зубцов. Здесь ось ОА - некоторая ось, разделяющая две эвольвенты, развернутые каждая со своей основной окружности - d* или df. Тогда можно написать, что дуговая толщина 5Л зубца на окружности диаметра dx равна Sx = | (t, + */) dx, или
Sx = |(invO - invax + invO* - invax ) secax d#. <2.73)
Дуговая толщина зубца на окружности диаметра dx в другом виде
= | [ invO - invax + inv arccos (X cosO) -
- inv arccos (K cosax) ] sec»x . (2.74)
Если ax = xe, то $Л = Se и потому относительная толщина зубца на окружности вершин та = Sft/dh связана с независимой переменной О и углом профиля otfl уравнением
тв cosao + inv агссо5(Ксо5Лв) — inv arccos(X cosO ) = 0. (2.75)
Определим углы зацепление зубчатых колес с несимметричными профилями зубцов в самом общем виде. Для колес Z|-z2 внешнего зацепления из условия беззазорного зацепления можно написать, что рТ = STl + ST2, где STl2 ~ толщины зубцов на начальной окружности, на которой угол профиля эвольвенты в зависимости от
направления вращения равен углу зацепления аг или рт =
л W
= — second
г, *
- начальный шаг, величина которого от направления
вращения не зависит. Тогда, учитывая (2.73), получим основное
уравнение зацепления эвольвентных колес с несимметричными профилями зубцов, каждый из которых развернут со своей основной
окружности dHZ и dfu = Xd>u и ограничен окружностью заострения dAL2:
invaT + invaj -
1
I + и
[invO, + invO* 4- u(inv02 4- inv02) -
0
(276)
67
© Э. Б. Булгаков
Основное уравнение зацепления можно написать в другом виде в зависимости от шести параметров и, К, 0H 02, otv,
invar + inv arctg(X cosar) - ц [ invO, + и inv02 +
2л (2 77)
+ inv arccos(/f cosOj) + и inv arccosfK cos02)-1 = 0.
zi
Рассмотрим зубец внутреннего эвольвентного зацепления зубчатого колеса г3 с несимметричными профилями зубцов (тип П), если профили симметричны в пределах углового шага 2л/г3. С таких позиций обратимся к рис. 2.8.6. понимая ось О3РИ лишь как разделяющую эвольвентные профили, развернутые с основных окружностей db3 н Можно написать что дуговая толщина зубца на окружности диаметра rfX3 равна Sx3 = |(фхз + М’лз) ^з- гдс
= invaX3 - inv03; = inva*3 - inv(l3* Тогда
sxj = }(invax3 - invft3 + inv“x3 - inA’)scc“»3rf.3 (278)
Дуговая ширина впадины между зубцами на окружности dX3
ехз в у 5€Свхз^»з “ $хз* (2.79)
Если положить, что sf3 = \з- и относительную толщину зубца внутреннего зацепления записать как mfl3 = Sa3/db3. а также учесть (2.62), то независимая переменная 03 будет связана с углом профиля аа3 на окружности вершин уравнением
2me3cosa<3 - invae3 + inv03 - inv arccos (К cosa, 3) + + inv arccos (K cos03) = 0. (2.80)
Теперь обратимся к зацеплению пары колес г2-г3. Так как в беззазорном зацеплении на начальной окружности Sr2 + Sr3 = — secar2_3 dt2, то. переписывая выражения (2 73) и г2
(2.78) при ax2 = arJ_a, ar*2 = ’n„3. aI3 = ar2_3 и ахз = art-3» получим основное уравнение внутреннего эвольвен-тного зацепления с несимметричными профилями зубцов типа 11
invctr2-з * inveJj-a “ -—!----гК-з( + »nvO34) -
“2-3 “ 1
л л* 2л , _ (28!)
- invO2 — inv02 4- — ] = 0.
22
68
© Э. Б. Булгаков
Если учесть. что по (2.65) угол зацепления ЛГ 2-3 = arccos СОБаГ2-з)* то получим другой вид основного уравнения
1 •
invar2_3 4- inv arccos (К cosar 2_3)-------------г [н?_з( inv03 +
«2-3 ~ *
+ invO3*) - invO2 - invO2* +—] = 0. (282)
*2
Это уравнение связывает между собой восемь параметров: z2. «2-з» & 03> Ф3*. 02, 02, <ХГ5—з-
Освободившись в последнем уравнении от зависимых переменных 0/. 02. угол зацепления аг2_3 удобнее вычислять из следующего основного уравнения:
I »
invaT2 3+ inv arccos (К cosaT2_ 3)--------------г |«2-з “ inv02 4-
«2-3 “ 1
4- «2-з >nv arccos (К cosft3) - inv arccos (K cos02) + — | » 0. (2 &3) причем
°if2-3 = arccos (Xcosar2_3). (2 84)
Определение некоторых параметроя зубчатых передач с несимметричным профилем зубцов. Выше указывалось. что лубчатрс колеса с меенмметрзгчкыми профилями зубцов типа I как бы сложены из двух лротивспожишаях - левой и правой половины симметричных зубцов. каждой из которых соответствует своя основная окружность Поэтому на эти передачи распространяются все основные соотнооения. полученные для зацепления с симметричными профилями зубцов, после того как была осуществлена п^члк-рка «на заострение, зубца, заключающаяся а выпил пен ни условии у
/иа 2 > 0. Для последующих расчетов заданные. а затем и вычисленные параметры каждой из половин (до оси симметрии) сопряженных зубцов-для внешнего зацепления
г2. 0t. t>2. лтв1. md2. К. й|*. #2*. жс*. т*.2- для внутреннего яцеплени 22. г3. Ъ* ^з- М- К' 4*2' ^з*» ^2** m*3 - достаточны для расчета различных
параметров зацепления по формулам гл. 2.
При расчете парамет|К1в зацепления .тубнатых колес с несимметричными профилями зубцов типа II П|ювг|жа на заострение не требуется, так как относительные толщины зубцов на окружное ти вершин - величины задаваемые.
После тете как были ппрсде.лсны угль мисплгния н <Ту2_з по уравнениям (2 74) и (2.82). углы гацеп-агчия и «ij-?—з 00 уг-ювиям (2.65) и (2.64), а углы профиля ла-дз~гс уравнениям (2.5) и (2.30). уг.чы прсфиля вв*?3 по условию (2.62), расчет друох параметров щкжзеодится также по формулам гл. 2. Таи как углы профиля на ок:>ужностн вершин и углы зацепления зубцов, зватьаенты которых разворачиваются
69 © Э. Б. Булгаков
с основной окружности d*, равны aa*jj = area»(Кcosaa। 23). ит ~ arccos (Л' сомг) и а* 2_3 = arccos (К cosar2_3). то формулы гм. 2. можно выразить через параметры эвольвенты, соответствующей диаметру основной окружности db.
Тогда для пары внешнего зацепления г,-?2 углы профиля сгД2 определяем по формулам (2.15) и (2.17). а коэффициент перекрытия «а|_2_по формуле (2.13). или в развернутом виде
Iga/l = G + “) artcttt (К спмг) - a tg arccos (К cosafl (2.85)
ф 1 + л |
Z " —~ Ч? ««И»(Кcosa^) - - tg arccos (К cnsaa &fig)
• zl
ta —I tgarea»(Kcosael) + и tgarccos(Acosae 2) -ZJT
- (1 + u) tg arccos (K cosay )). (2.87)
Для пары колес внутреннего зацепления г2-г3 ^тлы профиля аД,з определяем по формулам (2.43) и (2.44), а коэффициент перекрытия t*2_з ~ 1,0 ФгзРмУле (2.40); в развернутом виде
tga/a “ “2-з tg arccos (* cosa« з) - («2 з - V tg агсаи (*сомг2-3): (188)
• “2—3 ” । I
tK«?3 = ~-------tg (*cosar2-з) ♦---------------tgarccos (Кcosa 2);
“2-3 “2—3 (2.89)
• *2
*а 2-3 " I tg arccos (К cosa4 2) - я2_3 tg arccos (A cosae 3) +
* - I) tg arccos (K cosar2_3)j. (2-9O)
2 5 КИНЕТОСТАТИКА И КПД ЭВОЛЬВЕНТНОГО ЗАЦЕПЛЕНИЯ
Кинематика внешнего зацепления. На 1-м этапе синтеза пара зубчатых колес внешнего или внутреннего зацепления образует зубчатую передачу у которой в полной мере функцию зацепления выполняют эвольвентные зубцы.
Кинематические соотношения эвольвентного зацепления следуют для пары сопряженных зубчатых колес непосредственно из схемы зацепления (рис. 2.9). Пусть в эвольвентной передаче внешнего зацепления ведущим колесом является шестерня ?|. вращающаяся вокруг центра О( по часовой стрелке с угловой скоростью Ор рад/с Тогда ведомое колесо г2 будет вращаться вокруг своего центра Оу против часовой стрелки с угловой скоростью — <i>2, рад/с. Передаточное отношение зубчатой передачи является частным от
70
© Э. Б. Булгаков
зсппра скорости схолнжгник
Рис 2.9. Схема зацепления, скорости в текущей точке X и во внешнем зацеплении
и ведомого с учетом
деления угловых скоростей ведущего колеса
знака т. е. направления вращения Потому передаточное отношение пары зубчатых колес внешнего зацепления является величиной от* рицательной:
<*>1
(2.91)
<1>2
При расчетах геометрии зубчатых передач, а также при расчетах на прочность пользуются абсолютным значением передаточного отношения, которое записывается как передаточное число
dj.2 ^2
и - ~г~ = I— = Т“ “ri г1
Определим основные кинематические параметры сопряженных колес. Окружная скорость движения (м/с) контактной точки по
*2
(2.92)
© Э. Б. Булгаков
линии зацепления равна окружной скорости зубчатых колес на основных окружностях:
(2.93)
При известной геометрии колес скорость движения контактной точки по линии зацепления определяет период и. следовательно, частоту зацепляющихся зубцов Так как зубцы отстоят друг от друга по линии зацепления на величину основного шага рь -= — db । = — dt 2. то период их зацепления равен Тг = рь/ УА. м .
г1 2i п 2
Если выразить угловую скорость u>t (рад/с) через частоту вращения П| (об/мин) шестерни at, как ю, = л л,/30, то период (с) зацепления зубцов
Т, = — = —. (2.94)
' "i«i
а частота зацепления (Гц)
/ _ ± _ (2 95)
Л “ Т, 60 60 ‘
Окружная скорость контактной точки зубцов является функцией ее положения на линии зацепления
V -1м d (2.96)
*ХС2 — 2 4д “ХК2»
где < d<l2 s delJ, и. таким образом, является различной для шестерни г, и колеса 2г. Лишь в полосе зацепления W когда av « (dTl + dr2)/2. окружная скорость является величиной постоянной для сопряженных колес:
V'r = ^(Г| = = 2 wl^ri = = Kvj \'2secair • ^2-97)
Отсюда передаточное число и =
^У2
<Лг|‘
Скорость перемещения контактной точки вдоль профиля зубцов определяется как проекция скорости ее движения по линии зацеп ления на касательную к сопряженным профилям, т. е. на нормаль к линии зацепления,
К» 12 “ Кммз tga.ru2- (2 98)
С другой стороны, в относительном вращении зацепляющихся зубцов
Ут = ю о (2 99)
KXL2 4.2 PlU ’ '
т. е. скорость перемещения контактной точки вдоль профиля зубцов тем больше, чем больше радиус кривизны эвольвенты зубца в этой
72
© Э. Б. Булгаков
точке. Поскольку контактная точка одновременно принадлежит го ловке с наибольшими радиусами кривизны одного зубца и ножке с меньшими радиусами кривизны с ним сопряженного зубца, то скорость перемещения головки зубца по отношению к ножке с ним сопряженного зубца всегда будет больше. Головки относятся к опережающим, а ножки зубцов к отстающим профилям зубцов.
Наличие различных по скоростям взаимного перемещения сопряженных профилей в каждой контактной точке зубцов, относящихся одновременно к шестерне и колесу, приводит к проскальзыванию профилей во всех точках линии зацепления, кроме полюса IF, в котором это проскальзывание отсутствует, т. е. равно нулю.
В некоторой текущей контактной точке X
ЦхХ = Уп ~ Кг2 = ^МА12 (Ч>ЛП “ Ч>аХ2) (2.100) или в той же точке X на расстоянии 1Х от полюса зацепления IF Кжх = wi(Pn + О ~ wz(Pr2 + G) Тогда, учитывая, что рг2 = = и рГ|, получим
= (о, + wj lx - Q/x, (2.101)
где Q - относительная угловая скорость зубцов вокруг центра мгновенного вращения, которым является полюс IF зацепления в относительном движении.
Эпюра изменения скорости скольжения показана на рис. 2.9, на котором линия Np — линия изменения скорости У/, линия ЛГ26 -скорости V/. а заключенные между этими линиями векторы скоростей — скорости скольжения профилей зубцов УгяЛ. Скорость скольжения - величина алгебраическая, знак которой зависит от места расположения контактной точки X по отношению к полюсу зацепления ИГ.
О качестве зацепления (передачи) судят по удельному скольжению профилей
. (2.102)
vT
где ЦхХ! в У/, - У/2. УосХ2 = Х<2 “ УА- т- е- 110 отношению скорости скольжения профилей в некоторой точке к ее скорости перемещения по рассматриваемому профилю. Удельные скорости скольжения профилей на головках зубцов всегда положительные, на ножках — отрицательные.
После преобразовании удельное скольжение удобнее определять по формулам
X, = 1 - tg«/2 ctgan; (2.103)
Xj = I - tgoijrjctgaxj. (2.104)
Эпюра изменения удельной скорости скольжения вдоль линии 73 © Э. Б. Булгаков
зацепления приведена па рис. 2 10 В ряде случаев возможно полное или близкое к нему выравнивание удельных скоростей скольжения у сопряженных зубцов шестерни и колеса в крайних точках линии зацепления (см. гл. 5). Иногда такое мероприятие - полное и частичное выравнивание удельных скоростей скольжения - приводит к улучшению работоспособности зубчатых передач: повышению контактной выносливости поверхностей зубцов и их стойкости к заеданию, т. е. разрыву масляной пленки.
Контактно-гидродинамическая масляная пленка между сопряженными зубцами зависит от суммарной скорости перемещения контактной точки вдоль профиля зубцов:
v£k=v;, + v;,. (2’05)
Кинематика внутреннего зацепления. Рассмотрим кинематику внутреннего эвольвентного зацепления. Вращение сопряженных колес вокруг своих центров О2 и О3 происходит в отличие от внешнего зацепления в одну сторону, например, как показано на рис. 2.11. против часовой стрелки Тогда передаточное
отношение
(2.106)
(2107)
зубцов в относительном
передаточное число
а мгновенная угловая скорость вращения
движении вокруг полюса зацепления будет равна не сумме угловых скоростей, как во внешнем зацеплении, а их разности, т. е. Q -= о)2 - (i)3. Это означает, что скорости скольжения эвольвентных профилей во внутреннем зацеплении
Кд. X 2—3 = Кг2 “ Кп “ ^N2 fiCt>aX2 “ = ^2-3 (^JOB)
где скорость движения контактной точки по линии зацепления
Vuy Л — — o’ шз (2.109)
л Z...O л z п 1 9 j в □
будет меньше, чем скорость скольжения во внешнем зацеплении при прочих равных или близких условиях.
74
© Э. Б. Булгаков
Рис. 2,12. Эпюра уде-ОйюА
Ряс. 2.11. Схема зацепления и скорости в текущей точке X скорости скольжения во во внутреннем зацеплении внутреннем заме плени и
Период и частота зацепления зубцов и окружная скорость определяются по формулам (2 94), (2 95). (2 96) и (297) при замене индексов I и 2 на 2 и 3 соответственно.
Удельное скольжение профилей
Ц = 1 - tgar3ctgar2; (2.110)
Х3 = 1 - tg<xx2clg<xX3. (2.111)
Эпюра изменения удельной скорости скольжения показана на рис. 2.12.
Иногда кроме скольжения профилей как во внешнем, так и во внутреннем зацеплениях учитывают их ускоренное скольжение [13]. Выравнивание последних в граничных точках линии зацепления, вероятно, особенно целесообразно в открытых передачах, т. е. в передачах, работающих без смазывающего материала, а также при ограниченной подаче смазывающего материала
Кинематика соосной передачи. Одновременное применение двух зацеплений - внешнего и внутреннего - в соосных передачах
75 © Э. Б. Булгаков
рассмотрено в разд. II. Соосная передача образует большой класс передач с большими кинематическими возможностями и ей посвящена обширная литература [18, 19]. Здесь же на примере одноступенчатой соосной передачи покажем ее кинематические превращения в передачу с одной или двумя степенями свободы, имеющей различные значения передаточных отношений.
На рис. 2.13. а показана соосная передача, обычно обозначаемая 2К.-Н Она состоит их четырех звеньев - двух центральных колес 2| и z3 (два колеса 2К), водила Н и сателлита z2. Колеса zL3 называются центральными потому, что их оси вращения совпадают с центром передачи или с геометрической осью ее внешних валов, к которым подводятся и с которых снимаются крутящие моменты.
Кинематические возможности соосных передач описываются формулой Виллиса, которую представим в виде уравнения
Ч - Чг “ (w3 - = 0 (2 112)
где X 3 - передаточное отношение передачи, если передача движения происходит от центрального колеса z, к центральному колесу z3 при остановленном водиле, a>L3 - угловые скорости центральных колес г1.3
Уравнением (2.112) устанавливается кинематическая связь между всеми четырьмя звеньями соосной передачи. Так, если остановлено
Рис. 2.13. Схема соосной передач»* и план окружных скоростей (а), план угловых скоростей (б)
76
© Э. Б. Булгаков
водило Н и. следовательно, = 0. то из (2.112) имеем <1—3 = = о>1 /й)3; если остановлено центральное колесо г3. т. е. ы3 = 0.
TO W| — W,f + (Dw 1]_3 = 0, 1|_3 = I — —- — 1 — ilH и iw = 1 — *L—3’ г/
если остановлено центральное колесо zt. то = I - =
*1-3
= 1 - igLi- Таким образом, получаемые три варианта соосной передачи имеют одну степень свободы, а их кинематические возможности выражены через передаточное отношение i£_3 соосной
передачи или через обрагнуую величину = -77—. Очень часто
Ч—1
передаточное отношение i/Lj представляют как
//!_3 =---- = — р и потому ijJ = 1 + р, = 1 + —. Если сателлит
zi Р
г2, связанный с водилом Н, вращается не только вокруг собственной оси. но одновременно вокруг оси центральных колес, то такая соосная передача называется планетарной.
Планетарная передача трансформируется в передачу с двумя степенями свободы, называемую дифференциальной, если о*, # 0 и о>з # 0. Тогда в уравнении (2.112) имеем три неизвестных Wp и>3. <ow. и для получения требуемого закона движения соосной дифференциальной передачи необходимо принимать в качестве исходных угловые скорости двух из трех звеньев.
Определив передаточное отношение соосной передачи, можно графоаналитическим способом найти окружные скорости ее звеньев. Рис. 2.13 иллюстрирует законы изменения окружных н угловых скоростей зубчатых колес и водила. На плане окружных скоростей (см. рис. 2.13, а) в некотором масштабе построен вектор окружной скорости центрального колеса равный 2^1-z = | wi и вектор окружной скорости водила Н, равный О2О 2 = + ^гз) Законы изменения скоростей движения
звеш.ев соответствуют линиям О^_2 для центрального колеса Ор3О2 -для водила Н. 3 — для сателлита z2.
Усилия н КПД в эвольвентной передаче. Без учета трения, ошибок изготовления и деформаций в прямозубой передаче взаимодействие зубьев происходит в плоскости зацепления, т. е. в плоскости. касательной к основным цилиндрам. В торцовом сечении оно осуществляется по линии зацепления и определяется крутящим моментом Гр передаваемым ведущей шестерней zlf совпадающим с направлением вращения с некоторой угловой скоростью
77 © Э. Б. Булгаков
Со стоооны зуба колеса z2 возникает сопротивление с усилием = 27*,/dH, действующим в сторону, противоположную подводимому вращению При расчете на прочность валов и их опор это усилие прикладывают к полюсу зацепления U7 и раскладывают на окружную Г1(Жр_ = Fj cosotj. и радиальную FlpoA = F|Sinar составляющие. В этом простейшем случае реакцию от усилия F( можно рассматривать в плоскости зацепления без его разложения на составляющие.
Влияние силы трения на усилие в зацеплении происходит за счет изменения угла приложения нормальной силы Ft в текущей точке с углом профиля лх на величину угла трения ± <р, где «+» принимается для ведомых, а ♦-» для ведущих зубцов, что в последнем случае приводит к увеличению действующего изгибающего момента от окружной составляющей.
Картина действия сил несколько усложняется у косозубой передачи, так как их векторы зависят от направления вращения колес к от направления и наклона линии зуба, составляющей в плоскости зацепления с осями колес угол 3» (рис. 2.14).
о)
Рис. 2.14. Усилия п косозубой передаче: и — в Пфцсеом сечении; б — в плоскости, касап-льний к начальным цилиндрам; 9 — в пространстве. где №абс — плоскость зацепления
78
© Э. Б. Булгаков
В плоскости зацепления усилие взаимодействия зубьев равно F,1: оно нормально к линии зуба и условно приложено к середине его ширины В связи с тем, что линия зуба составляет с осями колес угол силу F^ раскладывают на силу F*, действующую в торцовом сечении. В свою очередь силу F^ раскладывают на окружную и радиальную силы.
Если линия зуба проходит через полюс зацепления W то нор-т 27.
мальная сила F, - -т— scc^. а се составляющие — окружная “и
27
• осемя fi« = радиальная Flp^= Fl3l4ltgar.
u art
где pr — угол наклона линии зуба на начальном цилиндре.
Применяют также шевронные зубчатые кплеса, состоящие как бы из двух соединенных между собой косозубых колес - полушевронов. линии зубцов у которых имеют противоположные направления. Осевые силы каждого из полушевронов равны и противоположны по направлению. Поэтому у шевронных зубчатых колес отсутствуют осевые усилия. Без учета потерь на трение сумма мощностей, подводимых к передаче и отводимых от нее. равна нулю и для передачи 2К-Н 7] ц + Т„ шн 4- Т3 ш3 = 0. Отсюда если
= 0. то 7] u)j + 73 и>3 = 0 или 73/7t = -Л1/л3 = -iilj = р: если (Oj — 0, то 7| о>| + 7^ <0^ = 0, или Т/ 7[ — Ш] /= i| = = -(14- р); если <Oj = 0, то Тн ын + 73 ш3 = 0, или Тн/73 = = - ш3 - - i3'„ - - (1 + 1 /р).
Обратим внимание на потери мощности в зубчатой передаче, или на ее КПД. Эти потери возникают в связи с преодолением сил трения в зацеплении и в опорах, а также гидравлического и аэродинамического сопротивления. Последние потерн связаны со смазыванием и охлаждением зубчатой передачи маслом, погружением вращающихся зубчатых колес в масляную ванну и их вращением в масляном тумане внутри редукторного пространства.
При расчетах усилий в зацеплении потерями из-за трения в связи с их малой величиной пренебрегают, что идет в запас прочности. Однако эти казалось бы незначительные потери мощности нагревают зубчатые колеса передачи и другие детали редуктора, которые охлаждаются маслом в специальных устройствах - радиаторах и теплообменниках В мощных редукторах эти потери могут составлять сотни киловатт Вот почему расчету КПД посвящены многие работы и. в частности. [18, 20).
В этой книге отмстим лишь схематичный подход к оценке потерь в зацеплении и в опорах у зубчатой передачи.
Под действием сил трения взаимодействие зубцов будет происходил» не по нормали к их профилям, а с отклонением от линии 79 © Э. Б. Булгаков
зацепления на угол трения «р. Отсюда с учетом трения возникает линия действия NyN2 сил. например, в зоне однопарного зацепления (рис. 2 15). Момент от сил в зацеплении уравновешивается моментом трения в опорах. Этот момент ранен реакции в опорах, умноженный на радиус круга трения = rsintf^. где г - радиус вала под опору,
Рж. 2.15. Схема зацепления с учетам трения
а - угол трения в опоре. Из-за малости углов трения в опоре « / (где /- коэффициент трения в опоре) и тогда Рд, = гf. Определив по схеме зацепления плечи Ц и /2 сил. действующих в передаче с учетом угла трения <р, а также радиус круга трения с учетом коэффициента трения /, находим КПД
^2 ~ Р<» 2 г.
П = т---— — • (2.113)
<2 ” Р? I *2 ' '
КПД зубчатой передачи зависит от множества факторов и. в частности, от точности изготовления зубчатых колес и их монтажа. шероховатости поверхностей зубьев, организации смазывания, физико-механических свойств масла, силового и температурного режима работы и т. д. Одно из замечательных достоинств эвольвентных зубчатых передач - васокий КПД. Например, потери мощности в основной кинематической трех-, пятиступенчатой цепи мощных редукторов вертолетов составляют максимум 1,5-2,0 %.
80
© Э. Б. Булгаков
3. ФУНКЦИИ ЭВОЛЬВЕНТНОГО ЗАЦЕПЛЕНИЯ И ИМ СООТВЕТСТВУЮЩИЕ ИЗОЛИНИИ
3.1 ФУНКЦИИ ТОЛЩИНЫ ЗУБЦА
Все изучаемые функции можно подразделить на два типа: на функции зубца, или функции одной независимой переменной, и на функции зацепления, или функции двух независимых переменных, которые в рассматриваемой области являются непрерывными и по тому дифференцируются. Если функции зацепления придать некоторые численные значения, т. е. рассечь поверхность плоскостями н следы их пересечения спроектировать на плоскость независимых переменных, то получают линии постоянного уровня или изолинии.
Обратимся к рис. 1.3 и 3.1. на которых показан эвольвентный зубец внешнего зацепления.
Эвольвентная функция inva^ при ar = л/2 разрывная и потому диапазон выбора угла профиля
О < ах < л/2.
(3J)
Угол профиля эвольвенты зубца ограничен существенно меньшим интервалом: он изме няется от ах - 0 в точке возврата Л1 эвольвенты до ах — 0 на окружности заострения диаметра Можно допустить теорети чески, что при ах -* 0 макси чаль ное значение ^т*х 89 ° (см. так же гл. 1).
Одновременно с утлом профиля ад изменяется угол давления £х, который при рассмотрении кинематики обкатки по эвольвенте касательной прямой правильнее
© Э. Б. Булгаков
назвать углом огибания. Этот угол алгебраически дополняет до прямого угла угол наклона касательной к эвольвентному профилю зубца в некоторой текущей точке, определяемый значением производной и поэтому
aretg (dy) * k “ f (3 2)
Определим угол наклона касательной к эвольвентному профилю зубцов внешнего зацепления. Для этой цели продифференцируем по лх параметрическое уравнение эвольвенты (2.9)
dX tgxx sin (inv 0 - inv ax) 4- cos (inv 0 - inv txT)
dY ~ sin (inv 9 - inv ax) - tg ax cos (inv 0 - inv otx) ‘
или в другом виде, обозначая половину дуговой толщины зубца в текущей точке X через фх. а угол наклона касательной через к
dX _ _ tgax sim|>y 4- cosM>y
dY * я1пфх - tga^cos^ ‘
На окружности заострения диаметра d^ угол огибания равен Сд = 9. а на основной окружности при ах = О С» = ” inv9 и поэтому
-inv9s£x<9. (3.4)
Таким образом, чем дальше от основной окружности отстоит точка X. тем ближе ей соответствующие углы профиля ах и огибания £х будут к конечной величине, к которой они стремятся — обобщающему параметру 0. Чем ближе текущая точка X к основной окружности, тем ближе углы профиля ах и огибания £х к нулю, причем угол огибания, проходя через ноль, приобретает отрицательные значения, стремясь к - inv9.
Рассмотрим экстремальные значения толщины зубца внешнего зацепления. Если ах = 0, то из (2 4) имеем invO = St/dt = т. е. эвольвентная функция invO или обобщающий параметр 6 = invQ численно равен половине угловой толщины зубца на основной окружности
По мерс увеличения угла профиля ах угол наклона касательной (dX\
arctgl^y <0 возрастает до л/2 в точке Ф; при этом £х=ф = 0. Из условия построения эвольвенты (см. рис. 3.1) ее радиус кривизны в точке Ф равен рф = где Sd = inv9dft. Так как tgx* = 2 рф/d*. то
arctginv9. (3.5)
Угол профиля Оф можно рассматривать как минимально возможный на окружности вершин зубца, т. е «в1ПЛ=аф.
82 © Э. Б. Булгаков
Наибольшей дуговой толщины достигает зубец в точке <1>. она равна Здихф = или
5|Пмф= arctg invO>/ l+inv20d4 (3.6)
Поэтому при углах профиля 0 < ах < Лф толщина зубца равна S,(invO -I- invax) secax dx, и, следовательно, зависимость (2 4) справедлива лишь при ах > Лф= arctg invO.
При угле <хА > Яф толщина эвольвентного зубца непрерывно уменьшается, достигая при ах = дуговой ширины, равной толщине зубца S4 на основной окружности. Из уравнения (2 5) после преобразования имеем
invO (1 — cos at J — inv = 0. (3.7)
Решение уравнения (3 7) приведено на рис. 3.2, а характер изменения функции относительной толщины зубца в зависимости от углов и показан на рис. 3.3.
Аналогичную задачу рассмотрим для эвольвентных зубцов внутреннего зацеплс1гия. Касательную к эвольвентному профилю зубцов внешнего зацепления можно представить условно как элемент реечного зацепления Во внутреннем зубчатом зацеплении касательная к эвольвентному профилю — математическая абстракция, никак не связанная с реечным зацеплением, поскольку касается профиля изнутри зубца, а нс снаружи, как в зубцах внешнего зацепления. На основании уравнения (2.35) угол наклона касательной к эвольвенте
Рис. 3.2. Угол профиля aXi. со отъетгтвутошхй толщине зубца
83
Рис. 3.3. Функция Sx/df, сттнпгитрльнпй тппщинь чуЛца
© Э. Б. Булгаков
(38)
хз = inv«x3 - inv°3-
dX
dY
V 4 1 dX
в текущей точке X равен tgA = —. где
dX и tgttx3sin4)x3 + cosih 3 dY “ tgax3cos*xj + sin*,/
угловая ширина зубца в текущей точке Х3 равна 4?хз = — — *з
- inv03 + invax3 = invaX3 - mv03. Угол наклона касательной (dX\
— дополняется до прямого угла утлом давления £хз, который вычисляется по формуле (2.34).
Интервал изменения 03, 03 и ахз рассмотрен в гл. 2. Отметим, что угол давления £хз учитывает свойства эвольвенты окружности вне зависимости от принадлежности к зубцу внешнего или внутреннего зацепления Поэтому интервал (3 4) применительно к внутреннему зацеплению
—invfhj < £r3 s O3. (3.9)
У зубца z3 возможны различные конфигурации в зависимости от отношения его дуговой толщины к угловому шагу, а именно от inv О3 л/г3 (см также гл. 1, рис 1.4)
Если inv03 < л/г3. то толщина зубца 23. возрастающая от основной окружности, имеет различные темпы увеличения на различных участках эвольвенты. Исходная толщина зубца на основной окружности между точками возврата М эвольвенты равна St3 = (л/г3 - inv03)dft3. Если SA3 - S-s. то угол профиля ав з — 0. Далее, от точки Af происходит монотонное уменьшение толщины зубца до точки Ф3, в которой изменяется кривизна аваль ненты. Так как угол профиля в точке Ф3 на основании (3 5) равен Оф3 = arctg inv03< то учитывая (2.31) и (3.6), получим дуговую тол щину зубца внутреннего зацепления 5ф3 = рф 3 — или
$фз = —sec arctg inv03 - arctg invO?V l+inv2O3 гз
Теоретически возможен случаи, когда в образовании эвольвен-тиого профиля зубца z3 занят участок между точками М и Ф, т е когда ах3 и3< Оф3 = arctg inv 03. Тогда в формуле (2.27) для определения толщины зубца перед invoc* 3, а в (2.28) при определении угла ad3 перед invafl3 необходимо знаки ♦+• и •-» соответственно поменять на обратные.
Выше точки Ф3 происходит быстрое возрастание толщины зубца гг которая при угле профиля аоз равна его толщине на основной 84 © Э. Б. Булгаков
•3 (3.10)
Рис. 3.4. Олгйство клали ни й углов лацеплеинй ar = const(a) и ar 2-3 “ 0001Ц^)
окружности. Из уравнения (3.7), если положить aJ>3 = axt. определяется искомый угол профиля Если invO3 = л/г3, то 03 = 0, и в этом частном случае угол профиля а, на окружности вершин зубцов определяется только относительной толщиной зубца т<3= = invae3V l+tg2*^-
При invO3 > л/z3 в некоторой точке Х3 толщина зубца может равняться расстоянию по основной окружности между точками возврата разноименных эвольвент. Для такого случая угол профиля ахз определяется из уравнения
invO3(l — со5<хлз) - invax3 = 0. (3 11)
3.2. ФУНКЦИИ УГЛА ЗАЦЕПЛЕНИЯ
Угол зацепления во внешнем зацеплении описывается неявной функцией (2.10). Ее можно представить как семейство плоских одно параметрических кривых, где при и = const и z; = const параметром является угол зацепления <хг, а независимыми переменными О, и 02 (рис. 3 4, а). Кривая Fa [0b 02/(0ь 02)] = 0по уравнению (2 10) при ar = const является изолинией угла зацепления, где /(Op 02) = aw Представим уравнение (2.10) в развернутом виде
Fa (О,. 02. er) = TT-tg»i - 7Т-ftl + Г7~ tg -a\ 1 г 1 + И ° 1 |4-й 1 14-И ° *
1+а 7 r zt(l+a)
85
© Э. Б. Булгаков
и продифференцируем функцию Fa (О,. 02. ат) = 0 по независимым
переменным.
Тогда
получим.
что
ig2
a и Л v a 7
утр = tg o2- — = - tg atr и, таким образом, частное производные зацепления
= I tg~ V| d0| l + u lg2ar
_ и tg2 0?
d02 l+u |g2a '
Отсюда имеем, что
rf <»•?
1 lg20i “ tg2».
(3 12)
/ar=a»st
и угол наклона касательной к изолинии а
a (d /
Ta г = const = arctg —= arctg ( l/ar«<oa$t
= const
I tg2t>l
Если « ^] _2, то в этой точке убывающая функция Fa(&t. ^.«и) = 0 имеет
производную
d 1
7Г ---"прижшм
> 'ar-ansl
inv0|_2 = inv а
(3.13)
Если
раллельна формулы
' d д2У
k ' а г-const
оси абсцисс *|. причем ф • 0. Независимую перемени узо спределякл из
- 0. то в этой точке касательная к изолинии = const па-
invO, =------inv а
£ и
(3.14)
Если
= 0, то в этой точке касательная к изолинии а« const
'а^апЛ
параллгпьня оси ординат 02- причем J 0 и
inv^ •
(1+к) invа- + —
Г «1
(3.15)
Интересны значения +uait*oetrriioA функции независимой переменной одного из зубцов
86
© Э. Б. Булгаков
колес, если ♦ы>львентная функция с ним сопряженного колеса (зубца) равна
uivOj = — Тогда
1 + tf invta =----inva.:
z и
(3J6)
при invdj
invt| 0'Fu)invair. (3.17)
Так как одноаарамстркчснког ураннгнж* семейство кривых Fa(.^ ®2,ar) " ° Р33* решается относительно параметра атто аю не имеет особых точек, дискриминантных кривых и пгнбаяпецнх [4]. В этом легки убедиться, если пр^тифференднроадть уравнение
2
(^1^2-“») = 0 IXJ мг; получим -------- (1 + u) tg ar.
9 Agr
Дискриминантная кривая — решение системы
»Fa
откуда 1лтй| + «iav0? -л/д| “ 0.
Полученное уравнение является не уравнением дискриминантной кривой, а уравнением изолинии a. в 0.
При 0j = 0 или = 0 соответствующие эвольвентные функции inv^! = л/г( или invO2 = л/zj. Таким образом, изолиния ar = 0 для заданной пары чисел зубцов г;. z2 на осях координат 0]( 02 касательно к прямым invOt 2 - = 0 При 0 2 = const и
4 г
г, 2 = const прямые invOt 2------- 0 можно рассматривать, как
4 2
новую систему координат. Ill квадрант которой ограничен изолинией Лдг = 0 (см. рис. 3.4, а). Исследование уравнения
F„ (О,. 07. ar) = 0 анализом кривизны изолинии ar = const см. [4].
Если в качестве независимой переменной принять угол профиля ав( t на окружности вершин, то функция угла зацепления или изолиния при яг = const записывается в виде
^(«<1* а«?) ж 0 + “) invar ~ ।cos “ »nvaal -
- й (md j cosa„ j + inva.,) - у = 0. (3.19)
Рассмотрим функцию ’^э а*2-з) = ° Угла зацепления
«(Г2-3 внутреннего зацепления, которую на основании (2.36) пред ставим в развернутом виде
87
© Э. Б. Булгаков
^а2—3(^2' вГ2—з) “ (а2—3“ 1) ^КаГ2—.1*“ (й2-3~ ОаГ5—3”
— И2_3 tgftj + U2_3 03 + tg(h2 — ^2 ~ 0.
dFa2-^ t 14i_2 д/Га2-^3 2л дЛ»2-3
°1СЮДа ’) ‘Гаг:-з. -^- = '84 =
= - и tg’O3 и тогда частные производные ах?-з 1,0 независимым переменным 0хз
& <*У2-3 _ 1^2 д аг2—3 _ ц2—3 ^3
Э^2 U2-3“l tg2«*rj-3 д03 «2-3”1 1g2 «1У2_3
Окончательно имеем
'<УО.Л tg2O3
= “*-v? <3 20)
/aV2—3 "CXJITSt ь £
и. таким образом, функция угла зацепления аг2 3 является возрастающей (рис. 3 4. б)
Если 03 = 0. то стГ2 3 < 0 — теряется обычно вкладываемый смысл в угод зацепления.
Если О, то независимая переменная колеса г3, выраженная через «зольвентную функции.
inv03 • — ---mver2_3. <3 21)
3
л
Если tnv#Q = —.то
• г2 44о ч "" < Л
inv#» = —— -----invar2 ч +—; (3.22)
“2-3 г3
Я если mv#, « —.то 3 >3
inv#2 * ----(“2—3“ 1)'П*иТ2_3. (3.23)
Уравнение нэплкнни <iy >_3— 0 имеет вид
“2—3,nv^3 ” inv#2 = °. (3 24)
т. е. изолиния «г2 3= 0 проходит через начало координат йг и через точку OlfTV С координатами inv#2 = л/г2 и aivi?3 = л/г3.
Смещение оси ординат #2 на величину inv#3 = я/лл означает переход к нооий системе координат #2. #3. где inv#3 = inv#3 - я/е3 (см. рис. 3.4. б). В згой новой системе координат отгекаекя часть изолинии углов зацеплений аг2_з при 88 © Э. Б. Булгаков
invfl^ < т/г-j, н через начало координат tirf, й.( про ходит изолиния
invuir, _3~ л/г, - 0. где zf • гъ~ гг.
Угол зацепления ar2_3« const можно выразить через другие независимые переменные. например, учитывая (2.5) и (2.28). через углы профиля аа?3 на окружности вершив. Тогда получим уравнение изолиний угла зацепления ат2_а= const в другом виде
= («2-3 - 0invaT2_3- u2_3invae3 +
+ «г-з^з cos ote3 + m. 2cosaa2+ invaa2 - = 0. 25*
г2
3 3 ФУНКЦИИ КОЭФФИЦИЕНТА ПЕРЕКРЫТИЯ
Коэффициент перекрытия еа или ка2_3 является сложной функцией или функцией от функции При построении изолиний коэф фициента перекрытия эту функцию представим зависящей от двух независимых переменных.
Сначала рассмотрим внешнее зацепление (рис. 3.5 а). В результате совместного решения выражения (2.13) и уравнения (319) получим уравнение изолинии со = const
^(»«| <’.г) = “.I “ <".icosaal + u(aal - m^cosa.j) -
2 л ea -----—
*!
- J(2ee-I)-O.
(326)
Функцию коэффициента перекрытия можно представить в
алгебраическом виде, если выразить угол п|юфиля на окружности вершин <ха12 через угол огибания к эвольве!гге касательной на ок ружиости вершин £в 2 Тогда из совместного решения (2.13). (2.10) и (2 8) имеем
(£д|« ^в2« ar) ж 2 + 2 т [^й| + И ” е° в О’ (3-27)
При .2 = т е‘ Для заостренных зубцов передачи при mai,j = 0 из (3 27) получим зависимость (2 14)
Уравнения (2.13). (214). (326) и (3.27) являются однопараметрическими уравнениями семейства плоских кривых при параметре ен = const и независимых переменных 0|( 62 или aal. ate2. или
Ьд |« tod 2-
Рассмотрим построение изолиний ra = const, для чего прежде
89
© Э. Б. Булгаков
Рис. 3.5. Семейство изолиний коэффициентов перекрытия ta = const (а) и 2-3 “ tonsl <*>
90
© Э. Б. Булгаков
всего определим ее характерные точки для заданной пары заостренных зубцов zt и z2. т. е. при тл ।ч 2 = 0.
Можно показать, что и зол им ня га - 1,0 при тД1 - 0 не пересекается с изолинией
av 0 [4]. Определим координаты пересечения изолиний iQ • const с осями координат.
Так. утлы хаое:стсния иг. <.иип»стствук<цис пересечению изолиний » const при тЛ| 2 0 с осями координат, найдем из совместноп) решения выражений (2.14) с (3.14). а затем с (3.15). Тогда получим при • О 14-М П ♦ Ж
и при 9у — 0
(3.28)
1а = 0:
и
(l + «)lgar- tgj (1 4 и)аг + у (2 «а - I)] +
(3.29)
Z? отвечает
К^жддчу значению са - const для некоторой пары чисел зубцов и свей угол зацепления ar и независимые переменные, вычисленные по формуле (3.14) при й| = 0 и по (3.15) при « 0.
Ощедетим угон наклона касательной к изолинии га = const, уравнение которой получим из (3.26) при ма, 2 - О. aftJ 2 “ ^1. Таким образом, функцию коэффициента перекрытия представим в виде функции трех независимых переменных
Вычислим частные произоцдные этой функции
О > ж/аес^
у
1 + и + ( tgdt + и tgfl2---)
aFr"ai,2e° a = am*t
д 0[
д Г”* 1.2 - 0 •а • const
2яв,
1 + и + (IgA, + и tgfln -
*1
и отсюда после упрощений
f ^2
'•Ч-e I тцг
® cas20| «Х1>» 1
“2
(3.30)
(I + иХ«+54г?О2) - cas20j( tgtf+u tgi2-----) ‘
В зависимости от соотношений независимых переменных Л2 и зкйчрний параметров и и функция G*** сопя? (*!• ^2» *в) “ ° может Оытъ при 0, < как возра
91
© Э. Б. Булгаков
стающей, так и убывающей. В точке й, = Л2 = ^[—2 эта фУн*Цня як-таетоя убывающей,
Pfs'l I
причем —т- =-----.
и
' ' 1а • сот* I
Определим максимальные значения независимых переменных t)| ft-. на изолинии еа = const в наиболее общем виде при ц 2 ы 0. Для этой цели определим производную функции Гг<з(Са|. Са 2* йг) 0 по уравнению (3.27)
Z| дат
7ft[J=277^~(1^“) 7ft“ д еа 'l 2t ^а«т д а 1г
---1 • —--- — (1 + и) д $2] 2 я д 9<2-д 9'2
Частную промзвцдную функции угла схибании £а |. * находим, используя (2.8):
= tg2j>t 2 С1 4 wal.2s"|g«1.2) /*U2j tg2^ 2- md 2$1Ла4|л
Если далее в два/д9{ 3 пидсгаимгь частные- ирон людные дат/д9^2, d£el 2/^ftL2 а также производной (3.12). то после упрощений имеем угол наклона каезтольнен к ихегнннм ва = const:
Приравняем производную (3.31) к нулю. Это означает, что касательная К иэилннми еа » const в некоторой точке, которую назовем точкой £. будет параллельна оси абсцисс
(3.31)
ft| и ордината 9? будет наибольшей. Координаты ттяек Е находим кз условия, что
(ЭМ
-Г- » 0. откуда имеем
д&1
> га » COTII
5Ш2«г - $in2aa ( + Л1а аа j cos2aa t 0. (3.32 >
Корень уравнения (3.32) равен
/ tg2«fll - ma|Sbafl| Й“Г V l + m4|Sinael
(3.33)
Выразим угол профиля аа 2 через независимую переменную аа используя выражения (2.13) и (3.33):
92 © Э. Б. Булгаков
2* tgad| !♦« / lB aal “ жя1$'п®-1 (334)
t8tt° 2 *2 *a “ u * 1 + mfl |«П “a I
Далее, принимая во внимание (2-5), получим независимую переменную Л2:
* inv arctg
Ц«а1 и
а<1 - ”<нЫПдЯ|
I + me jsln алg
(3.35)
Уравнение для определения угла профиля аа । при некотором значении еа получим.
производя подстановку в (2J0) invd? нз (3-35). tga^ из (3.33). a mvfl| из (2,5);
окончательно имеем
(1 + и) inv arctg
“al - malsin“al
, ”• ffi, rcos a. t —
l*me|smael
- tnvae [ -
2л
- м inv arctg — tQ -г2 \
Задача значительно
е. Mi = 0. Тогда из
аа I ~ ^<jls,na4 I
I + m iwna .
а2
U
(3.36)
u
зубец z, заостренным, поскольку йв| = #[, то
упрощается. если принять уравнения (3.32) следует, что
» ат. Учитывай (2-10) и (2J4). имеем
л
invav = uivflj----------.
(337)
(3.38)
млн после совместного решения и упрощений , 2л<в 2л «а
* ——18аг-----------—
г2 Ч
C’g Т-(2₽а
(3-39)
Корень приведенного квадратного уравнения (3-39). саэтветсгвутхцмй максимальной ординате c2r.,u при некотором еа » const.
“ “У
*2
я -2л Гл
— ««)2 >— f«c'g - (2 fa ~’)
(3.40)
93
© Э. Б. Булгаков
Причем fl] = л независимая переменная инределяетт из выражении (3.38).
По аналогии с определением координат точки £ находим точку F (рис. 3.5, а), абсцисса которой fl, будет наибольшей. Так, на основании (3-31) при
—7- = 0 имеем
а 1/п
' ' €а " COIlSt
sin*ar - sin2ae2 + 2 sinad 2 CCtt'aa 2 “ ®‘ (3.41)
Если 2 = 0, to aa 2 » &•/. «у “ а Угол зацепления, соответствующий точке
F, равен
при наибольшем значении независимой переменной
тм = аж + “ (2 ео ~ 1)* (3.43)
г1
В общем случае при лл? = 0 угал профиля 2 соответствует максимальному значению независимой переменной fl, Т91 при зацеплении пары зубчатых колес zj-z5 и известном коэффициенте перекрытия еа и определяется из уравнения
................/ 2 “ me2s^ncrd2
(I ♦ u) inv arctg у/-:------;---------и т, 7 cosa.
• V 1 + тв2зтав2 л2 л
и invad 2 “
^ааТ wa2sinqa2
1 + жа 2 sin а„ 2
Максимальное значение абсциссы находим по формуле
*1 тм “
+ invarctg
g«2 ~ w«25intta2
1 + ma2sinaB2
и ^аа 2 + 0 + “)
дапее независимую переменную 0-, определяем по (2.5). Определение кривизны изолинии га см. в (4).
94
© Э. Б. Булгаков
Рассмотрим построение изолинии коэффициента перекрытия Рв2-з = const во внутреннем зацеплении (рис. 3.5, б).
Коэффициент перекрытия ee2_3 как функцию двух независимых переменных aj2 и а-3, а при гс2-з я const — уравнение изолинии коэффициента перекрытия-получим в результате решения (2.40) с (2.28) и (2.5):
*а 2—3
2 л
- (“г-з ~ *) arctg
U2—3
(346)
+ 7(2^-з'1) = 0-
г2
Уравнение (3.46) является однопарамстрическим уравнением семейства изолиний га2-з = const заданной пары зубчатых колес z2, z3 при некоторых значениях та2,з и независимых переменных <ха2» яаЗ- которые связаны с независимыми переменными 02, 03 и 03 через соотношения (2.5), (2.28) и (2.30).
Определим характерные пчкн изолиний г„2— з ~ const.
Определим угол наклона касательной к изолинии «о2— з ~ const 00 (2 40). для чего сначала вычислим частные производные по независимым переменным О».
= -^sec2aa —+ re-s№aro_3-------^7=4
2 я 2 д^2 2 я Г2 3
2 deix3
° Q2—3 4 9 у
* 'а2 -3 d *3
2 ииГ2-,
^“г2-3
•3 * а л ^3
Определим частную производную
мл
оаювании (2.2S). Имеем
2
dF _ .. 9F
3 дал3
^аа 2
4- ma3sina<3). Так как о Vg
Эаг2 вычисленные частные производные —-г-д if 2
“Г2 в ^з/Св^.з +
2 ~ я’в2**пов2)< то’ ислалыуи ранее
ел2_3»сом1
йаГ2—3
---—----. ПОЛУЧИМ с v
ЧГ *3
U tg‘’*2
д #3
и
(sin2ae 3 «► j тл Змп2аа Зс«юа 3) 1 - cosec2ar 2_3 (з«п2ав j - | т„ ^п2ав geos аа 2)“‘ - cosec2ar 2_3
(3.47)
95
© Э. Б. Булгаков
Ординату точки Е (нииЛситыосе значение независимой переменной П8Х ) определим 9 ?
0; тогда получим sm ar2_3 - sm aa 3— е«?-звиял1
- /яд 3sinae 3cos2ae 3 - 0. или Гл------------------------------------------------------ (3.48)
. / 1Г««3 * '"a3«n«a3 з = V -----;--------------
rj-4 у I-ms3sinaa3
Если далее совместно рассмотрим выражения (2.36), (2-40), (2.5), (2.28) и (3.48), то получим уравнение, из которого определяется угол «.3:
(«2 ,3-1)arctg
д<3 * "дЗ^вдЗ |-т„ з$»Павз
~ “2-3 (ааЗ + ^З^^аЗ) ”
~ 2—3 “ О " °
(3.49)
Полученному из уравнения (3.49) углу профиля а-3 соответствует независимая переменная 03 но (2.28), а далее по уже известным значениям 0^2—3 и ^3- применяя (2.5), определим независимую переменную 0; гаал
Наибольшее значение независимой переменной 03|пи (абсциссу тачки F) находим /<)03’' 2
по (3.47) из условия ТТ" = □. Тогда напучим яп‘а|р2_3-
К '<a2_3=const
9 ч
- sin аа 2 + me ?$in аа 2 cos ав 2 • 0. или
/ т°а? ~ %2*ь°аа
8 "г 2—з“ у I ♦ /пЛ «.sin ал j
(350)
Далее, пп аналогии с гтредндутцкм выводом из совместного решения (2.36). (2.40), (2.5). (2.28) и (3.50) получим уравнение, из которого определим угол ав2 при принятых значениях г2. г3. me2(3 * ^а2-з;
/ 11Г аа 2 - та ?5»П Лв 2 л
<»2-з - Iprctgy | + - ма + “. г - г““а. г - т;< &аг-з - о -
w 0 • # 4 Л
96
© Э. Б. Булгаков
Определив по уравнению (351) угол профиля аа2- по (3.50) угол зацепления «у2—3' находят по (2.5) а по (2.36) искомое максимальное значение Так же как во внешнем зацеплении, задача упрощается, если принять тж 3 0. Тогда определим координаты точки Е из выражений (3.48). (2.40). (2.28). (2.36) и (2.5). Так как при этом «г2—Зшаа3* то зацепления
____________*42_____________
° г 2 ~ 3 / 2 я 2
у 1 + ( ^ГЗ-З + еа 2—з)
- arctg( tg«r2_3 + “^ «а 2—з) + ““ («а 2-3 “ 0 = & (3 52>
*2 ^2
Угол зацепления аг2_3. соответствующий независимым переменным точки F. определяем при жа2«0 из совместного решения (2.40), (256), (2.28) и (350) при вГ2—3 ~ Л1в з ( 2*
°Г2-3-----у-----------=f=--------j " МС,8 1ЯаГ2-3 -“^2-
у I * ^Й"Г 2—3 “ ~ 'а 2-з)
ч-0-° <SJ3>
Определим координаты точки С (рис. 3.5). ограничивающей изолинию tO2—з и ПРИ 0? " 01 т е- пересечении с осью абсцисс #3. Тогда, на основании совместного решения (2 36). (2.40) и (2.28) после упрощений потучмм
(**2—3 ”* I
tf2 3 tggyi~3
2х '
(З.М)
В уравнениях (3 52) - (3.54) при задатвял дооолнхгельмых условиях, либо аГ2—з равняется ав3 или либо 02 = 0-определяем угол зацепления аг2—з-
97 © Э. Б. Булгаков
Затем, после ре:иения уравнения (3.52}, заменяем переменные по (2.28). В mtx рассмотренных случаях при известном угле зацепления аг2_3 и одной из независимых
переменки другую независимую переменную определяем из (136).
Координаты точки В определяются пересечением изолиний еа const с нзгиш-кис* аг2—з“0- Так как в атом случае invO2 = *2—з^^з- а
2 л
‘К «а 2 = “2-3<8а.з + —га2_3
на основании (2.40). то учитывая (15) и (128).
получим уравнение, из которого находим угол профиля аа 2 при некотором
2__з ~ const:
tgl—-V®2-S
«-2
- мв 2амав 2 - «2_3 аге
(3-55)
Вычн<_'1ен»мму углу профиля са2 соответствует по (15) независимая переменная inv
(U. а также Ф3. поскольку inv Ф3 ------.
“2-3
3.4. РАЦИОНАЛЬНЫЕ СООТНОШЕНИЯ ФУНКЦИЙ УГЛА ЗАЦЕПЛЕНИЯ И КОЭФФИЦИЕНТА ПЕРЕКРЫТИЯ
Угол зацепления и коэффициент перекрытия являются важнейшими параметрами эвольвентного зацепления. В подавляющем большинстве случаев при проектировании высоконапряженных зубчатых передач следует стремиться к одновременному увеличению этих параметров Однако рост одного из них неизбежно приводит к уменьшению другого. Вот почему прежде всего необходимо установить условия получения максимального значения одного из параметров при постоянном значении другого. Затем можно принимать решения о предпочтительности одного из параметров перед другим.
Рассмотрим на поле независимых переменных 0р б2 изолинии утла зацепления аг и коэффициента перекрытия еа (рис. 3.6, а). При заданных значениях zlt z2, mal и тл2 каждой точке (Q,. 02) изолинии ел = const соответствует некоторый угол зацепления <хг, который в некоторой точке Q достигает максимального значения. Определение координат искомой точки Q сводится к нахождению экстремума одной функции при наложении дополнительного условия на другую функцию. Или. учитывая, что в некоторой точке Q изо-
98 © Э. Б. Булгаков
Рис. 3.6. Изсгшнмм = const и ео «const аа знешмем (а) и шилкмии агз-звсаО51 м fa2—3" 0X151 м внутреннем (б) зацеплениях
линин еа « const и ar = const имеют общую касательную, полу
чим условие
р £1 d о,
(3.56)
Производные функций утла зацепления <хг и коэффициента перекрытия еа были вычислены выше по формулам (3.12) и (3.31). Если полученные производные приравнять между собой, то при порядке касания п = I изолиний агш const и = const должно выполняться тождество
cos\j(l + = cos2 ae2(l + melsin ав2), (3.57)
или в виде, более удобном для вычислений,
/nelsinJaal + sin2ae| - ma|Sinaal - ma2sin5ae2 -- sin2cte2 + ma2sinaa2 = 0. (3.58)
При ^12 = 0 точка Q находится на биссектрисе прямого угла системы координат, как показано на рис. 3.6. а.
Аналогичная задача для внутреннего зацепле!гия (рис. 3.6, б) также сводится к выполнению условия
d 0, к
аГ2-3
= const
d0,1
/•а 2-3
(3.59)
Здесь, учитывая производные (3.20) и (3.31), получим.
+ т» ?5>nae 2) = С0$2 а-з0 “ We3Sinaal) (3.60)
99
© Э. Б. Булгаков
или в виде более удобном для вычислении
m<2sin3ote2 + sin2aa2 - me2sincxa2 + ma3sin3ao3 -
- sin2ae3 - me3sinafl3 « 0. (3.61)
3 6 ФУНКЦИИ ИНТЕРФЕРЕНЦИЙ
Рассмотрим функции интерференции профилей во внешнем зацеплении при inv 6| г л/гь 2. При a, 12 « 0 изолинии интерференций описываются уравнениями (2.16) и (2.18). в которых принятому углу зацепления <хг отвечает одна из двух независимых переменных. Определим пересечение изолиний интерференций с осями координат 0, и 02. Так. если = 0. то на основании (2.15) и (2.10) имеем, что при 0, = 0 угол зацепления ar = 0 и inv 02 = л/г2: при 02 = 0, т. е. при пересечении изолинии а. = 0 с осью абсцисс 0t. принимая во внимание (2.10) и (2.5), получим
(3 62)
Если а,| = 0, то на основании (2.17) и (2.10) при 02 = 0 имеем аг - 0 и inv0t = л/г,; при 0( = 0, учитывая также (2.5), получим
Углу зацепления a.v из уравнении (3.62) и (3.63) соответствует независимая переменная из (2.10).
Изолинии интерференций = 0 и а;? = 0 показаны на рис. 3.7. Исходной точкой построения изолинии = 0 является абсцисса 0,. эвольвентная функция которой равна —, а у изолинии zi
= 0, ординате ее пересечения с осью координат соответствует эвольвентная функция, равная
—. Изолинии интерференции пересекаются в точке В. которая на поле независимых переменных при некоторых значениях zt. z2 и mB1. «в2 характеризует минимальный угол зацепления и максималь ный коэффициент перекрытия.
100 © Э. Б. Булгаков
Рж. 3.7. Изолинии интерференций во внешнем зацеплении
Поскольку иэотинии интерференции определяют предельные параметры эвольвентного зацепления, которые зависят как от взаимного положения изолиний интерференций, так и от их расположения га отноозенип к профилям угла зацепления и коэффициента перекрытия, то они вновь рассмотрены в гл 4.
Изолинии интерференции зубцов при inv 0L 2 > .t/zl 2, когда invOu2 - invapL2 — л/г. 2 = 0, более удобно записываются в виде (2.19) и (2.20). Начальные точки, принадлежащие осям координат, определяем исходя из следующих соображений если inv 0j = л/гг то аи = 0, следовательно. = 0 Если при этом применять 03 = 0 то угол зацепления аг = 0. Значит, изолиния
интерференции apj - = О при inv 0, = n/zx и 02 = 0 на оси
абсцисс имеет общую точку с изолиниями <хг = 0 и а,, = 0. Точно так же изолиния аГ2 “ а^2 ~ ® ПРИ ^2 ~ п/2г и 0, = 0 имеет
общую точку с изолиниями ctv = 0 и а,2 = 0.
Одновременная интерференция при inv012 < л/гк2 и invOU2 > я/гс2 возможна при следующих условиях:
если inv0t > л/г( и invO2 < л/г2, то может наступить интср ференция у основания зубца выше основной окружности и у основания зубца z2 вблизи основной окружности; такое условие отображается на поле 0t, 02 некоторой точкой £( в результате решения двух уравнений интерференций = 0 и a,, - <xV| = 0 т. е. (2.15) и (2.19);
если invO2 > л/г2 и invfy < л/z,. то может наступить интерфе ренция у основания зубца z, вблизи основной окружности и у основания зубца z2 выше основной окружности; одновременно две интерференции наступают при независимых переменных fy, 02, соответствующих точке поля, где одновременно удовлетворяются два уравнения (2.17) и (2.20), т. е. ал1 = 0 и ао2 — av2 « 0.
101 © Э. Б. Булгаков
LkJ внутреннее зацеплении интерференция уоснкжлнии зуПця шестерня Eg значительно отрзниянктег odnen применения существования зацесиканя (см. ст. 6j. Она наступает при ^5 = О и ей соответствующая изолиния описывается уравнением (2.46). приняв
*з а* и2—з- таг-а)
3.6. ФУНКЦИИ РАДИАЛЬНОГО ЗАЗОРА
Радиальный зазор тем в большей мере ограничите г возможность реализации зацепления, чем меньше относительная толщина зубцов йа окружности вершин у сопряженных зубцов, достигающая мн-ннмзльной величины при М*2,з = О.
Рассмотрим семейство однопараметркческнх кривых, отображающих радиальный зазор во внешнем зацеплении й экстремальных и наиболее опасных условиях, когда = 0. Изолинии функций радиального зазора в зацеплении показаны на рис. 3.8.
Обратимся к функциям радиального зазора при г. е. Сэ*_2 и
С *| при мд * з = 0. Нд пме игдаиненг-шх переменных &. ату группу функций ращеЛме* Прямая i[ivfl3 - п/z^ = 0. Если invAj < ТО существу?! функция
июлаемм урщжкинсм (2.24^ если inv^g > то функция
Caj_j = ГСП51 — ГЖ) уравнению (2.23). Из уравнений (2.2Й| к (?.24) при уелпаин
102
© Э. Б. Булгаков
Так. как tnvdyj = inviJ2 - x/zj. то, учитывая (2.10). получим. что invay? «
1 + В I
—— invar - — invtj н отсюда. если ar > то av2 > av н функция
С,*|_2 const является возрастающей. Поэтому целесообратно определить диол» условия
перемещения изолиний С,"—2 " con5t с ’ИНИеЙ *nv^2 “ */*2 " 0 н осью TW*’
наг Л2. Салветгтвующая функции ? изолиния пересекается с прямой invi2 - ж/а2 = 0 при av2 0 и отсюда из (2.22) и (3.17)
invarc5ec((t + u) sec а F - и - 2СЭ*_2) - (I + и) in* ат » 0. (3.64)
Пересечение с осью ординат (Ь возможно. если " 0. В этом случае из (2.22) и
(314)
/I + и 2 •
(I + и) invar - и inv arcsec -ц- sec а г - - СИ_2
- 0.
(3.65)
Углу зацепления аг из уравнений (3 64) и (3 65) соответствуют независимые ле*
ременные по (3.17) и (3.14). Угол наклона касательной к иллинии Са*_2 - const при ma 12 = 0 записывается как
(3.66)
" atg2^ cosec ar - cosec av2
* 9 Gj _2 “ гегэ" <
Если прензэадную по (3.66) или ей обратную величину приравнять нулю. то воз
растающая функция Сэ*|—2 ггРихет экстремальные значения при • 0 или при
0| • Дуг. а также при «г « av>^ Угол наклона касательной к изолинии
С,*|_2 const
(3.67)
покалывает, что функция является убывающей. Она принимает экстремальные значения при О, - О н.лн при av = Op а также = 0 или aF = 0. При пересечении с осью Оу т. е. когда = 0 угол зацепления из (2.24) равен
sec а г
« + 2 £,*-2 1 * и
(3.68)
при пересечении с асып д,. когда Д. = 0. из совместного решения уравнений (2.24) и (3J5)
- (1 + м) inv а т--------- 0
(3.69)
при пересечении с прямой iitv 9., - л/а2 • 0 из (2.24) и (3.17) invarcsec[ (1 + и)sec*»r - и - 2ГЭ*_2] - 0 + и) mvor = 0.
(3.70)
103
© Э. Б. Булгаков
Независимые переменные для углов зацепления аг, вычисленных по (3.68) - (3.70). определяются по формулам (3.15) - (3.17).
Рассмотрим функции коэффициента радиального зазора С,?_] и ^2—| при invOj £ ж/zj. если । 2 0. Эта группа функций на пояс др д? разделяется граничной прямой invdj - ж/zj = 0 на две группы. Так, функция Сэ*2_( - const по уравнению (2.21) при irrvd] > ж/^. а функция C*2—i const по уравнению (123) существует прм invdt < я/гх. Уравнения (2 21) и (2.23) совместимы, когда invd, ж/ар при этом aV| = 0 и С*2_| = С*2_г
Угол наклона касательной к изолинии С*2_, "const.
(dd2\ cosecav। - cosec ay
Д’) _• ” ~ utft - cretc d2 (37l>
' C32__1 = гсп*’ •
Для этого случая mvaV| (1 + u) in very - uinvd? и поэтому при d5 > ar угол <ir > <»У|. т. e. функция C3*2_| является возрастающей. Она принимает экстремальные значения при д[ - 0 или при - aVp или при аг « д2.
При пересечении изолинии С*^—\ " const с линией mvd| - >г/?| 0 угол зацепления определяется из уравнения
(1 + к) inva- - и inv arcsec I--seta-- — - - С * | - 0. (3.72)
' ' “ I u * и и *2—11
а при пересечении с осью абсцисс д,
(1 + u) invar - invarcsec( (] + к) secar - 2С*2_|) 0. (3.73)
Утл наклона касательной я изолинии С,*2—l = 0X131
ММ tg4| cosec ar
" и tfiTdo (a»ec«r - *2) ’ (3 H)
'Cj 2_| * const * '
при aw < d2 функция C, 2—i является убывающей, достигая экстремальных значений при 0| - 0 или <зг • 0.
УГОЛ зацеп ления ar при перемещении и «линии ^>2—I с прямой Invdj - х/хх = 0 определяется из уравнения
/I + и ] 2С,ч _ Л
(I -♦ u) invar - и inv arcsec —-— secar — —--------— 0. (3 75)
з при пересечении с осью абсцисс й,
1 + 2 С э*2—1
secaT--------—-------. (3.76)
104
© Э. Б. Булгаков
Изолиния С,*2_| пересекается с осью ординат в некоторой точке с ординатой 02, утл зацепления в которой определяется из уравнения
1 4-и /14-и । I
-----Inva- - inv arcsec sec a v u • I II-и и
j ♦ i . Л (3.77)
3 7. ФУНКЦИИ, ХАРАКТЕРИЗУЮЩИЕ РАЗМЕЩЕНИЕ ПОЛЮСА В ЗОНЕ ДВУХПАРНОГО ЗАЦЕПЛЕНИЯ
Пределы существования функции \*2 внешнего зацепления (см, гл 1) можно'записать как
° s e*2 S т («о - ')• (3 78)
*2
причем при 1,0 < еа < 2,0 двухпарная зона зацепления чередуется с однопарной, при 2.0 < еа < 3,0 — трехпарная с двухпарной зоной. При 1,0 < еа < 2.0 и д*2 = 0 полюс зацепления расположен на границе зон однопарного и двухпарного зацепления, причем из (1.11) и (1.12) следует, что
tg«. , = J5- + tg«r (3.79)
uz Zl.2
Построение нэгииннй 3^ const производим при заданных значениях Х|. х2, *ie । и <яа 2- выражая углы профиля ав t j, а затем независимые переменные 2 через угол зацепления av н коэффициент перекрытия Тогда из (1.11) к
2 •
(2.13) tpra2 = — (ta - 1) - -<*j 4- tgar. учитывая также tgnfl t in (1.11). получим
Если эти выражения вид ста нить в фэрмулу (2J0) для угла зацепления, то получим уравнение нзитннки д* = const
105
© Э. Б. Булгаков
Если учесть (1-12). то аналогично получим изолинию А* = const
(1 ♦ и) inva д.
(3.81)
причем приняты? ат спответггаутот еа
и независимая переменная 0( из (2.10).
Граничная изолиния 3(* 0 пересекается с изолинией <а 1.0 и изолинией
( О I некоторой точке с координатами а* 2 “ аг и inv flj • invor + я/Z|. Точно также изолиния 62* • 0 пересекается с изолиниями еа • 1.0 и Сэ*_2 • 0 в некоторой пике с координатами аЛ । = аг и imrfl2 « invar ♦ я/а2. При га 2,0 изолинии
3( 2 0 имеют общий корень а& । 2 --- + 18аг • т е- МЭГ1ТИНИИ • 0 и
\ 1,1 /
<5 2* • 0 пересекаются в эдной пике.
Во внутреннем зацеплении размещение полюса в зоне двухпарного контакта (см гл, 1) характеризуется коэффициентом д2*_3 и 63* в интервале
о S й,’_, J s — (cQ,_3 - 1). (3 82)
Zai
106
© Э. Б. Булгаков
Если д2*_3>з = 0, то полюс зацепления размещается на границе однопарного и двухпарного зацепления, причем из (1.13) и (114)
t£ai2,3 = 1?аГ2-3 ± ± 2 $2 -3.3* (3.83)
*2.3
где верхний знак «+• относится к ал2, т2 и 62* 3.
Изолинии ^2*-3 " С0П5< и “ сто$1 строят при Zq, z3. л«в 2 и та з по той же схеме решения уравнения, что и для внешнего зацепления. В результате совместного рассмотрения выражении (2.40). (2.6). (2.28), (2.38) получаем уравнение изолинии
= 0
\2
2-3
2-3
(3.84)
Уравнение ихлиммм <J * const получаем исходя из тех же соображений:
(«2_3-,)invar2_J-u2_3invarctg( lg<»r 2-3 ~ 2 ~ * ^3* I ~
\ 3 J
3
♦ inv
\12
3 А
„ 3
arctg Г^-з tgaa з - - I) tgor2_3 + -
+ - — - 0. (385)
/ ~Тя ~г г2
\/^ * Гв2-3 18авЗ “ (“2—3“ О 18аГ2—З^3“1а2—3| V L *2 J
Уравнения (3.84) и (3.85) решаются при построении изолинии 6* ~ 00051 к-’гн 8?*_3 « const задаваясь некоторым коэффициентам перекрытия ta 2_3. Определив таким образом угол зацепления аг2_3. далее по (3.83) находят утлы профиля ав2 и ав3, a по (2.5) и (2.28) - нрзявисимыр переменные #2 в 03.
107
© Э. Б. Булгаков
4. ПРЕДЕЛЬНЫЕ ПАРАМЕТРЫ ЭВОЛЬВЕНТНОГО ЗАЦЕПЛЕНИЯ
4.1. ЭКСТРЕМАЛЬНЫЕ ПАРАМЕТРЫ ВНЕШНЕГО ЭВОЛЬВЕНТНОГО ЗАЦЕПЛЕНИЯ
При проектировании зубчатых передач, когда отыскиваю! оптимальные параметры зацепления, прежде всего необходимо определить интервал их поиска.
Такие функции, как функции коэффициента перекрытия и интерференций. ограничивающие область поиска параметров зацепления. монотонно изменяются и не имеют экстремумов. Поэтому экстремальные значения ряда функций определяются для граничных, т. е. наперед заданных условий. К таким функциям относятся функции угла зацепления, коэффициента перекрытия, относительной толщины зубцов на окружности верптин, а также число зубцов; к наперед заданным условиям, ограничивающим эти функции - функции интерференций, коэффициентов перекрытия еа и £в2_3, равных единице для прямозубых зубчатых передач, а также условия рационального соотношения функций угла зацепления и коэффициента перекрытия.
В гл. 4 рассматриваются предельные параметры эвольвентного зацепления, колеса которых имеют зубцы типа I симметричные в пределах половины углового шага.
Максимальный и предельный угол зацепления. Если зубец принимает предельную конфигурацию, т. е. при mOi г> = 0. угол зацепления пары зубчатых колес достигает наибольшей величины при некотором коэффициенте перекрытия ест. Тогда из условия (3.57) при т0( ( = 0 угол зацепления аг достигает наибольшей величины при некотором еа, если независимые переменные сопряженных зубцов с симметричным профилем 0, = 02 = 0ю_2о
Перепишем для этих условий выражения (3.13) и (2.14)
mv О10_20 = inv аг + у.
из совместного решения которых имеем
tg[«r + “(2е« - l)j - tgar - = 0.
После преобразований получим приведенное квадратное уравнение
108
© Э. Б. Булгаков
2 2л . 2л . л_ ..
•g »т + —«atg«r - — tactg —(2е„ - I) £с zc
корень которого равен
+ 1 = 0,
(4.1)
tgа, = - Jеа + у/ (JСа)’*^^[(2^-03 (42)
Таким образом, наибольший угол зацепления аг при принятом ео = const и предельной при та । 2 = 0 конфигурации симметричных зубцов зависит только от их суммарного числа zc. если независимые переменные 0, = 0, = Если коэффициент перекрытия ест принять равным предельной величине, т. е. для прямозубых колес передачи положить га = 1.0 то из (4.2) получим .максимальный угол зацепления
Итак, максимальный угол зацепления ariniX при ек = 1,0 и /па12 = 0 зависит только от суммарного числа зубцов zc = (1 + u)Zi сопряженных колес.
Предельный угол зацепления имеем из рассмотрения предела функции tgaFmu при zc->«
Г прел = lim lg«raux “ lim «г^00 -e-*«
Отсюда следует, что у передачи, составленной из колес с заостренными симметричными прямыми зубцами при коэффициенте перекрытия еа = 1,0 и суммарном числе зубцов zr -* », предельный угол зацепления аТгред = Так как увеличение коэффициента перекрытия еа сопровождается уменьшением угла зацепления, то (Хг-ред = ограничивает сверху область существования зацепления (см. гл. 6).
Таким образом, у цилиндрических эвольвентных зубчатых передач внешнего зацепления с симметричными профилями зубцов угол зацепления осг < и при zt -* » функции aF « «ffzj имеет асимптоту <хг = — (рис. 4.1).
Если применяют несимметричные зубцы типа П. симметричные в пределах целого углового шага, то изменяются предельные
109
© Э. Б. Булгаков
Рис 4.1. Предельные параметры внешнего зацепления с симметричными профилями прямозубых зубцов
параметры и, в частности, угол зацепления во внешнем зацеплении превышает предельный угол ЯГпред = для этого случая угол зацепления аг лежит в интервале (О. |)-
Как следует из формулы (2 10), угол зацепления aw определяется только независимыми переменными О,. 02 н числами зубцов 2р Zo Однако реализация угла зацепления ограничивается условиями образования зацепления — недопуще
нием интерференции при достаточном коэффициенте перекрытия, который зависит от та, Докажем, что наименьший угол зацепления аг будет соответ
ствовать таким соотношениям между параметрами зубцов на поле 0,. 02 в некоторой точке наступает интерференция у основания зубцов при условии, что inv 0, 2 < л/2| г Здесь отметим, что из совместного решения уравнений (2.15) и (2.17) имеем для точки В поля независимых переменных
« = tgae|Clgde2.
(44)
Сопоставим в точке В поля при invJj 2 < */*l2 ’ТЛЬ4 наклоне касательные к и хх1 инн ям = 0 и а;2 0 с утлом наклона касательной к изолинии аг = const Угол наклона касательной к изолинии а?| 2 " 0 определим, мегюльлуя полученные выше dar da‘i 1
частные производные yg— к ' Тогда получим при ар t = О
tg2?! 1 - С05‘<Хв 2(1 + го0 £>1пав 2)
U 1ЯГ*Г C0S j Г ~ 0М2ав 2 0 + тс 2>
при ар 2 0
d fl.
'“Р2 = ®
tg*fl| C0s“«B- — COS2cr |(1 + |аПаг* |) и tg2fr2 1 - соа2ав |(1 + sinatf |)
(4.5)
(4.6)
110
© Э. Б. Булгаков
В частном случае при • О
при mg । » О
d9<
tg4
ar
ar
(47)
,2.
/а,2-0 « 2
«8)
aH-o
2
2
В точке В угол наклона касательной к изолинии ар 2 « 0 при шв । = 0 определим, используя (4.8), (4.4) и (2.15) Так как в этом случае tg 9] “ (1 + в) tgcrr< а 2
. В пзй же анке 3 угол
tg ^2 = *Й *1 ro Yp 2 = a,clK ” (2 ♦ “)
и I + и
наклона касательной к изолинии а,|ж0 при /на2 * 0 определим на основании (4.7), I и
(4J3) и (2.17). Так как при этом tg02 » tgа^. a IgO^utgC^ то
u
,2 2
У«| ° arctg — . „ .
г»1 * I + 2 и' ' т
В точке В при тох же условиях. учитывая (3.12) и (44). имеем, что
уа r = arctg (- и). Тогда получим
?ар 2 " 0 > 7С г -* Уа^ । 0 • (4.9)
Таким образом. сравниваемые функции ямляютсх убывающими — изолиния а„2 “ 0 наиболее пологая. u^j — О — наиболее крутая. Изолиния од- •“ coast внешним образом пересекает в пнке В поля 9л изолинии интерференций у основания зубцов при условии, что invfy 2 < i (ряс. 4.2). Отпада следует, что в точке В поля независимых переменных при inv9l2 < я/г^2 угол зацепления является минимальным
Я« .
и min
Рис. 42 Углы наклона касательных в точке В к изолиниям «г = const, a 0 н a. «О
Л *2
111
© Э. Б. Булгаков
В оСдцем случае. если мв * 0 то дач точки В гюям игиа»кнчыл нгргмгнных •• ♦
й(. ’Г* inv0| 2 < л/г1,2 иажно написать;
” 2 + « tg2», 2 /ЛЛ"”2*"1 0 + «)2 *вЧ
Ы„ ,.о‘ G ♦ '«V’ Hl 1.0”“(1 + 2“)^’tCa'r' Рг ?•
Учитывая (312). получим. что и в этом случае неравенство (4.9) удовлетворяется.
Составим уравнение для определения угла зацепления аг в точке В поля независимых переменных 0,. 02 при одновременной у основания интерференции зубцов. В результате совместного решения выражений (2.10). (2.16) и (2.18) получим
А 1
(1 + u) invars - .... -
V 1 + (1 + u)s tg2a
Г и П U/П-О
- inv arctg Г(1 + и) tgar„J---- -
у/1 + ('Hf •«“»*.)
- ninvarctgp-^tga/.J + у = 0. (410)
\ “ / zl
В самом общем виде при та L 2 * 0 минимально возможный угол зацепления можно определить, предположив что коэффициент перекрытия достигает минимального значения е® = 1,0 в точке В поля независимых переменных Тогда из совместного решения (2.15) и (2.13) при условии (4.3) получим
в ___ л 2 . л । .
«пй = arctg —. (4.11)
Отсюда угол зацепления тем ближе к нулю, чем больше суммарное число зубцов zc Например, если принять «ГсЛ = 1/2 *. то zt = 720.
Таким образом, если зубчатая передача эвольвентного внешнего зацепления при -* 1.0 и некотором /пв( 2 * 0 ограничивается интерференцией профилей <*^2 = 0, то при zf -» <» угол зацепления
-* 0.
В ряде случаев, например при шлифовании зубчатых колес инструментом в виде рейки, т. е с числом зубцов z0 -* «, угол станочного зацепления <хго = 0 По этой причине в приведенном ниже диапазоне существования угла зацепления otr нижний предел ограничен как знаком больше, так и знаком равенства:
112
© Э. Б. Булгаков
Если принять специальные меры против интерференции, то у косозубой передачи можно получить угол зацепления аг = 0 при конечных числах зубцов у сопряженных колес.
Максимальный коэффициент перекрытия. Коэффициент перекрытия в торцовом сечении, во всяком случае для прямозубой передачи. ев £ 1.0. При принятом угле зацепления аг коэффициент перекрытия га достигает наибольшего значения, если углы профиля сопряженных зубцов передачи <ха1 и ал2 удовлетворяют условию (3.57). Чем меньше maU2. тем. как известно из гл. 2. при прочих равных условиях коэффициент перекрытия е.в становится больше.
Наконец, коэффициент перекрытия ев при принятом угле зацепления аг возрастает до максимальной величины при maL2 = 0. когда 0, = 02 = 0|С_2(1. Для этого случая коэффициент перекрытия £д ограничивается для пары сопряженных зубцов — z2 независимыми переменными Ot = = Ош—20« которые распо-
ложены на биссектрисе Q q ортогональной системы координат 0t.Об.» (рис. 4.3.). Биссектриса Q q — прямая О|о — = 0 — пере-
секает изолинию г.а = 1.0 в точке
Рис 43. Положения точек Q. q и В и углы наклона кл<ап*лы<ых на илкг.кинях еа const. "Он - 0 при
Q. а изолинию ал1 = 0 в точке q, если передаточное число и > 1, invOj < л/г,. Тогда q расположе на на изолинии яг1 = 0 между точками D и В (рис. 5.1), причем при и = I она совпадает с точкой В пересечения изолиний = 0 и ар2 = 0. При гпв| 2 = 0 и 0| = 02 = О|0_20 можно переписать формулу (2.14) следующим образом:
1[а’ = 2 + 2 л (1 + 20 “ аг)-
(4.13)
Наибольшее предельное значение коэффициента перекрытия еа ограничивается границами интерференций при inv б, 2 < л/ги2.
Учитывая также что значение интерференции afi2 = 0. ограни чнвающен зацепление, с увеличением и и z2 уменьшается, прежде всего рассмотрим коэффициент перекрытия удовлетворяющий
113
© Э. Б. Булгаков
функцию а ! = 0. Здесь в самом общем случае из (2.13) и (2.17) получим
eJ-Atga„. 014)
Z л
т. е. коэффициент перекрытия еа достигает наибольшей величины на границе интерференции у основания зубца zt и зависит от его угла профиля при inv .
Наибольшее предельно допустимое значение коэффициент перекрытия eJ достигает при наибольшем угле зацепления в точке q, где одновременно удовлетворяется условие интерференции o^i = 0, сопряженные зубцы доведены до заострения Л1„12 = 0. причем inv 0| < л/Zj. Так как при этом tgO2 = —lg«r< О, = 0, = О|0_20, а учитывая (4.14),
<!« = <415>
Таким образом, для заостренных зубцов сопряженных колес при mat2= 0 и принятом угле зацепления по формуле (4.2) максимальный коэффициент перекрытия на линии q Q поля независимых переменных О,, 02 равен или меньше максимального коэффициента перекрытия е^, ограниченного в точке q интерференцией
а = 0 т. е. Едта1 — Еашм (Рис- 4.4). Исключив из формул (4 2) и
(4.15) угол зацепления aj*. получим уравнение для определения
максимального коэффициента перекрытия в точке q
4л-и(1 + «)(e’n.,)1-2nzcej„„ctg 1)у
+ z? = 0.
(416)
Докажем, что точка q не является единственной точкой области сущеспюаамия зацепления на пазе Л|. 02. в котором возможна реализация коэффициента перекрытия fa<na.v Сравним при — О. Л, - — d|0 tq Углы наклона касательных в точке
q к изолиниям еа « const и a#J( = 0. Так. на целовании (3.31) имеем Mbl* । 1Л,к а ♦ »)*
-гт- “-----, а на основании (4.7) “ГТ" ------7.——
dft в ' dfl. * и (I + 2м)
' ' ra" cnnsl * а., । 0
Отскца следует, что
>ар t 0 * oftri (417)
114
© Э. Б. Булгаков
Pmg 4.4. Предельный коэффициент перекрытия eJnM при md l2 = 0 и ар1 = О
115
© Э. Б. Булгаков
Тогда убывающие функции изолинии ta - const и а „ = 0 не касаются одна другой, а Пересекаются в точке Q. причем более пологая изолиния еа ш const углубляется вовнутрь области выбора независимы* неременныл А], fl2. где коэффициент перекрытии в некоторой точке паля будет больше, чем в точке q.
В точке В поля 0р О, независимые переменные сопряженных зубцов, связанные с передаточным числом и и углом зацепления а£ соотношениями (4.4) и (2.15) или (4.4) и (2.17), определяют коэффициент перекрытия после совместного решения с (2 13) при условии одновременной интерференции у основания зубцов, когда invO] 2 < л/г, 2
ea’ = ^tga;. (418)
Докажем, что коэффициент перекрытия возможно реализовать на граница! ин
терференций. т. е. что внутри области существования зацепления ta < с£. Дм этого попарно сравним углы наклона касательных в точке В к изолиниям г£ - const.
яД - 0 и -const. аД “ °- Так. при = 0. учитывая (4 7). (4 8). (3.31),
(4.4) и (2.15).
pfiM (и+ 2) и /diM «(1 ♦ «)2 эес2ст £
d 0. > 1 + 2м ' d fl. й 1 + 2и
V Ve’-coMt . V 'Ц = о
получим
У<1/| "0е " const •
7<а^2 — О'* — const *
(419)
Таким образом, изолиния еЛ = const является более пологой, чем изолиния = 0. и более крутой, чем изолиния аП1 = 0 (рис. 4.5), проходит через точку В снаружи, «внешним образом* и не заходит вовнутрь изолиний а^ = 0и ^2 = 0, ограничивающих область существования эвольвентного зацепления
Отсюда вытекает важное следствие: в точке В поля независимых переменных (►,, 02 характеризуют одновременным проявлением двух интерференций у основания сопряженных зубцов Z] и z2 при inv 0| 2 < я/2сг* коэффициент перекрытия е* для заданной пары колес достигает максимального значения Тогда в формуле (4 18) сле-116 © Э. Б. Булгаков
Рис. 4.5. Максимальные значения казффицнекта перекрытия «ат71И и ему соответствующие углы зацепления ef при л^. г " 0 <а) и макси.цальный коэффициент перекрытия '«гг.ак в TOW Я ПР" «Г mm <б)
6)
дует понимать, что при /n1L2 £ 0 коэффициент перекрытия еа = сапах Это важное следствие имеет другое доказательство. Из сравнения коэффициентов перекрытия по (4.15) и (4.18) получим
= и еJ tga£ etga^. (4-20)
Отсюда, если и > tg ajetgaj., то > ej Так как < aj., то
при и > 1,0 условие (4.19) всегда соблюдается.
Определим для заданной пары чисел зубцов передачи коэффициент перекрытия в точке В поля 0ь 02- Д™ этой Цели из совме-
стного решения (4.10) и (4.18) получим
(4.21)
117
© Э. Б. Булгаков
Коэффициенту перекрытия соответствует угол зацепления вычисленный по (4.18).
В самом общем случае при и -* ® из уравнения (4.21) после раскрытия неопределенностей следует:
2 ч 2
(4.22)
При передаточном числе и -* « изменение коэффициента перекрытия в зависимости от числа зубцов z, показано на рис. 4.5, а, а в точке В — максимальный коэффициент перекрытия Еатмх ПРИ минимальном угле зацепления .
Для заданной пары чисел зубцов коэффициент перекрытия прямозубой передачи лежит в диапазоне
1,0 < е„ < е“.
(4.23)
У косозубых передач торцовый коэффициент перекрытия еа 2 0.
Максимальные и предельные относительные толщины зубцов на окружности вершин. В некоторой точке М поля независимых переменных Ор б2 для данной пары зубцов z(. z2 при шу 0U2 < л/гь 2 и при га = е® = £*=1,0 угол зацепления аУпигрд . вычисленный по формуле (411), достигает предельного минимального значения при некоторой относительной толщине зубцов на окружности вершин. Наиболее вероятный случай проектирования передач имеет место при равных толщинах зубцов на окружности вершин, когда Sa, = $<3, т. е. /пв, = и та3 = та1_2. Тогда в точке М относительная толщина данной пары зубцов т*_2п(жд определяется из уравнения (4 21), а угол зацепления аг1Пт = arctg 2л/гс из рис. 4 1.
Предельное значение относительной толщины зубцов на окружности вершин определим из уравнения (4.22), если положить еа = 1.0, а и а». Тогда получим
118
© Э. Б. Булгаков
Предельного максимального значения относительная толщина зубца на окружности вершин достигает при zt = 6; в этом случае ^12 пред в 0,16848.
Таким образом, в эвольвентном внешнем зацеплении прямозубых зубчатых колес с симметричным профилем зубцов О S /лв S 0.16848.
У косозубых зубчатых колес предельную относительную толщину зубцов на окружности вершин определим из уравнения (4.21) для предельного коэффициента перекрытия в торцовом сечении ва = 0 при одновременной интерференции зубцов у основания
= 0, если Л141 = ита2 = mal_v При этих условиях получим, » л
что -о = ъ— Однако вдали от интерференции
Л
= 0 ПРИ га = 0 относительная толщина зубцов на окружности вершин может быть больше, чем в точке В поля независимых переменных.
Минимальные числа зубцов у сопряженных колес передачи. В точке В поля независимых переменных 'О,. 02 при одновременной интерференции зубцов у основания, когда invOL2<rt/zL2 коэффициент перекрытия etf = 1.0. a = 0 предельная комбинация
чисел зубьев сопряженных колес определяется из уравнения (4.21).
Если у прямозубых колес положить минимально возможное число зубцов zImir= 3. то корень уравнения (4.21) равен 10.2, т. е. = II; если z, = 4. то корень
уравнения равен 5.4. т. е. z.2 m(ft = 6; если принять и = 1.0 то корень уравнения равен 47, т. е. zi-2im = Разрешенная предельная комбина ция чисел зубцов 3<zmlr<ll. приведенная на рис. 4.6 позволяет реализовать передаточные числа и в диапазоне 1 < и < 3.6(6) или обратную величи-
I ну — в диапазоне и
I > - > 0.27273. и
Числа зубцов, лежащие в интервале (3, II),
119
© Э. Б. Булгаков
будем называть минимальными Применение z < zmu, для прямозубых зубчатых передач принципиально невозможно из-за интерференции профилен и уменьшения коэффициента перекрытия до га < 1.0 У косозубых зубчагых передач такие жесткие требования к торцовому коэффициенту перекрытия е„ отсутствуют, он может быть меньше 1.0 и теоретически равняться нулю. Поэтому число зубцов у сопряженных колес косозубой передачи может быть уменьшено до «1 ж 22 в I.
Предельные параметры внешнего эвольвентного зацепления. Выше рассматривались для данной пары zb z2 такие основные параметры эвольвентного внешнего зацепления, как угол зацепления аг, коэффициент перекрытия еа и относительная толщина зубцов на окружности вершин тл.
В табл. 4.1 в зависимости от z, и и представлены экстремальные значения углов зацепления <хг в точках Q н М при еа = 1,0 и соответственно при лзД2 = 0 и максимальные значения
коэффициента перекрытия Га'1:ци и ему соответствующего угла зацепления при meU2 = 0. предельные значения относительной толщины зубцов на окружности вершин (т* )^л в точке М, а также координаты точек -М и В в системе координат 0,. 02. Чтобы избежать интерференции и нарушения непрерывности зацепления при коэффициенте перекрытия, меньшем единицы, действительные углы зацепления должны быть немного меньше табличных в точке Q и немного больше табличных в точках М и В. коэффициент перекрытия немного меньше, чем приведенный в таблице для точки В.
Таким образом, каждую пару чисел зубцов можно охарактеризовать интервалом изменения следующих основных параметров:
«", 5 «Г 1.0 < ео < 0 < m. < m*. (4.25>
4.2. ЭКСТРЕМАЛЬНЫЕ ПАРАМЕТРЫ ВНУТРЕННЕГО ЭВОЛЬВЕНТНОГО ЗАЦЕПЛЕНИЯ
Максимальный и предельный угол зацепления. Если зубцы внутреннего эвольвентного зацепления имеют предельную конфигурацию. т е. если зубцы заострены (тл2 3 = 0). то а-2 = 02. а угол профиля на окружности вершин зубца z3 из (2.30) равен ав3 = 03. Тогда условие рационального соотношения функций ат2-з и выполняется в случае, если ав2 я “ а-з - ^з- 410 120 © Э. Б. Булгаков
4.1. Предельные параметры внешнего эвольвентного зацепления
Точка Q Точка М Точка В при Точка М Координаты
"42 - 0
*1 aWmui аГщп (аеа max) max m*rpea точки М точки В при 1 2 = °
•г
1 2 3 4 5 6 7 8 9 10
в - 1
5 35.07 32.14 33.14 1.039 0.03773 52,31 52.31 52.56 5156
10 40.26 17.44 25.31 1.505 0.11752 41.96 41.96 43 40 43.40
15 41.89 1L83 21.72 1.902 0.09270 36.99 36.99 38.54 3854
20 42.69 8.93 19,53 2.258 0,07342 33.84 33.84 35.35 35.35
25 43J6 7J6 18,00 2.586 0.06020 3L57 3L57 33.02 33,02
30 43.45 ем 16.85 2.893 0.05083 29.82 29.82 31.21 31,21
35 43.69 5J3 15,95 3,183 0,04392 28,42 28.42 29.75 29,75
40 43,86 4.49 15,20 3,460 0.03862 27,25 27,25 28.53 28ЛЗ
45 43.99 3.99 14,58 3.726 0,03445 26,25 26.25 27.49 27,49
50 44.09 3.60 14.05 3.983 0,03108 25.39 25.39 26.59 26.59
55 44J7 3.27 1358 4.231 0,02831 24.64 24.64 25,79 25,79
60 44.24 3.00 13J8 4,471 0,02599 23,96 23,96 25.09 25,09
65 44.30 2,77 1231 4.705 0.02401 23.36 23.36 24.46 24.46
70 44.35 2.57 12.48 4.934 0,02232 22.81 22.81 23.89 23.89
75 44.39 2.40 12.19 5.157 0.02085 22,31 22.31 23.36 23.36
80 44.43 2.25 11/92 5.374 0.01955 2186 21.86 22.88 22.88
85 44.47 2.14 11.67 5.588 0,01841 21,44 21.44 22.44 22,44
90 4430 2.00 11.44 5.797 0,01740 21.05 21.05 22.03 22.03
95 4452 1.93 11.23 6.002 0,01649 20.68 20.68 21,65 21,65
100 44.55 1.80 11,03 6.204 0,01567 20,34 20,34 21.30 2130
и = 2
5 38,58 22.73 26,70 1.20 0.13765 54,29 38.69 56.46 37,02
10 40.89 ИЛЗ 20,10 1.75 0,13119 42.76 32,84 47.67 28,76
15 42.95 7.95 17,14 2,21 0.09676 37,36 29.40 1 42.77 24.82
20 43,47 5.98 15.35 2.62 0,07514 34,04 27.02 39.47 22,38
25 43,78 4,79 14.11 3,00 0.06108 31,70 25.25 37.02 20.66
30 43,99 3,99 13.18 3,35 0.05134 29,91 23.87 35.10 19.36
35 44.13 3.42 12.46 3.69 0.04424 28,48 22.75 33.53 18.33
40 44.24 3.00 11.86 4.01 0.03884 27.29 2181 32.22 17.49
45 44.33 2.66 1L37 4.32 0.03460 26,29 2101 31.09 16.78
50 44.39 2.40 10,94 4.61 0.03119 25,42 20.32 30,11 16.17
121 © Э. Б. Булгаков
Продолжение табл. 4.1.
1 2 3 4 5 6 7 8 9 10
55 44.45 | 2.18 10,57 4.90 0,02840 24.66 19.71 29.25 15.64
60 44.50 2.00 10.25 5,18 0.02605 23.98 19.16 28.48 15.17
65 44.54 1,84 9.96 5,45 0.02406 23,37 18.67 27.78 14,76
70 44.57 1.71 9.70 5.71 0.02236 22.83 18.23 27Д5 14.38
75 44.60 1.60 9,47 5,97 0.02088 22,33 17,83 26.57 14.04
60 44,62 1.50 9.25 6.22 0.01958 21.87 17,46 26.04 13,73
85 44.64 1.41 9,06 6,47 0.01843 21.45 17Л2 25.55 13,45
90 44,66 1,33 8,87 6,71 0,01741 21,05 16.81 25.10 13.18
95 44.68 1.26 8,71 6.95 0.01650 20,69 16,52 24.68 12,94
100 44,70 1.20 8.55 7.18 и 0.01568 = 3 20,35 16,24 24,28 12,71
5 40.26 17.44 21.62 1.26 0,15712 54.65 32.59 57.76 27,85
10 42.69 8.93 15.99 1.82 0.13309 42.87 28.67 48.89 20,91
15 43.47 5.98 13.53 2.30 0.09728 37,41 25.77 43.91 17,79
20 43,86 4.49 12,07 2,72 0.07535 34,07 23.71 40.53 15,91
25 44,09 3,59 11.06 ЗД1 0,06118 31,71 22,16 38.03 14,61
30 44,24 3.00 10.32 3,48 0.05140 29.92 20.94 36,06 13,54
35 44,35 2,57 9,73 3.82 0.04427 28,49 19.96 34.45 12.88
40 44.43 2.25 9,26 4.15 0,03886 27.30 19.13 33.11 12.26
45 44.50 2.00 8,86 4.47 0.03462 26.29 18,42 31,95 11.74
50 44.55 1.80 8,52 4,77 0.03121 25.42 17.81 30.94 11,30
55 44.59 1,63 8,23 5,06 0,02840 24.66 17.27 30.06 10.92
60 44.62 1,50 7,97 5.35 0,02606 23.98 16.79 23.26 10.58
65 44.65 138 7,75 5.63 0.02407 23.38 16.37 28.55 I IOJ28
70 44.68 1,28 7,54 6.90 0.02236 22.83 15.98 27.90 10,01
75 44.70 1.20 7,35 6.16 0.02088 22.33 15.62 27.31 9.77
80 44.72 1.12 7,19 6.42 0.01958 2L87 15.30 26.77 9.54
85 44,73 1.06 7.03 6.67 0.01844 2L45 15.00 26.26 9.34
90 44.75 1.00 6.89 6.92 0.01742 2LO5 14.72 25.80 9J5
95 44.76 0.95 6.76 7.17 0.01550 20,69 14.46 25,38 8.98
100 44,77 0,90 6.64 7.41 и 0.01568 = 4 20.35 14.22 24.95 832
5 41.25 14.11 17.93 1.29 0.16285 54,75 29.08 58.29 22.03
10 43.16 7.16 13,11 1.85 0.13355 42.89 26,07 49,34 16.23
15 43.78 4.79 11.05 2.33 0.09379 37.42 23.48 44.31 13,71
20 44.09 3,59 9,83 2.76 0.07639 34.07 21.06 40,90 12.22
25 44,27 2.88 9.00 3,15 0.06120 31.72 20.19 38.37 11.20
30 44.39 2.40 8.38 3.52 0.05141 29.92 19.08 36.38 10.44
35 122 44.48 2.06 7,90 3,87 0.04428 28.49 18.18 © : 34.76 Э. Б. В> 9.84 /л га ко в
Продолжение табл. 4.1.
1 I 2 | 3 | 4 | 5 | 6 | 7 | 8 I 9 | 10
и — 4
40 44.55 1.80 7.51 4.20 0,03887 27,30 17,42 33,40 9,36
45 44,60 1,60 7.19 4.52 0,03463 26.29 16,78 32,23 8,96
50 44,64 1.44 6.91 4.82 0,03121 25.42 16.22 31.22 8,61
55 44,67 1.31 6,67 5.12 0.02840 24,66 15.72 30.32 8,32
60 44,70 1.20 6,46 5,41 0,02606 23.98 15.29 29,52 8,06
65 44,72 1.U 6.27 5,69 0,02407 23,38 14,90 28,80 7.82
70 44.74 1.03 6.11 5.96 0,02236 22.83 14.54 28.15 7,62
75 44,76 0.96 5.96 6.23 0,02088 22,33 14.22 27.55 7,43
80 44,77 0,90 5.82 6.49 0.01958 21.87 13,92 27.00 7.26
85 44.79 0.85 5.69 6.74 0.01844 21.45 13,65 26,49 7.10
90 44.80 0.80 5.58 7.00 0.017422 21.05 13.40 26.02 6.96
95 44.81 0,76 5,47 7,24 0,01650 20.69 13.16 25.59 5.83
100 44.82 0,72 5,37 7.48 0.01568 20.35 12.95 25.18 6.70
и 5
5 41.89 11.83 15.23 1.3 0.16497 54,79 26.73 5833 18,10
10 43,47 5.98 11,06 1.87 0,13368 42,90 24.24 49.54 13.20
15 43.99 3.99 9.29 2.34 0,09742 37,42 21,84 44.48 11.11
20 44.24 3.00 8,26 2,77 0,07540 34.07 20.10 41.06 9,88
25 44,39 2.40 7.56 3.17 0.06121 31.72 18,78 38.52 9,04
30 44.50 2.00 7.03 3,53 0,05142 29,92 17,74 36.51 8.42
35 44.57 1.71 6.63 3.88 0.04428 28,49 16.90 34,89 7.94
40 44,62 1.50 6,30 4.22 0.03887 27.30 16.20 33,52 7,55
45 44.66 1.33 6,03 4.54 0.03462 26.29 15,60 32.35 7.22
50 44,70 1,20 5,79 4,84 0.03121 25.42 15.07 31.33 6,94
55 44.73 1.09 5.59 5.14 0,02840 24.66 14,62 30,43 6,70
60 44,75 1,00 5.41 5,43 0,02606 23,98 14,21 29,63 6,49
65 44.77 0.92 5.26 5.71 0,02407 23,38 13.84 28,90 6,30
70 44.78 0,86 5Д2 5.98 0,02236 22,83 13,51 28,25 6,13
75 44,80 0,80 4.99 6.25 0.02088 22,33 13.21 27.65 5.98
80 44.81 0.75 4.87 6.51 0.01959 21.87 12,94 27,10 5,84
85 44.82 0.70 4.77 677 0,01844 21.45 12.68 26.59 5.72
90 44,83 0.67 4.67 7.02 0,01742 21.05 12.49 26.12 5.60
95 44.84 0,63 4,58 7.27 0.01650 20.69 12.45 25,68 5.49
100 44.85 0,60 4.49 7.51 0,01568 20.35 12.02 25,26 5,39
123
© Э. Б. Булгаков
соответствует независимым переменным биссектрисы ортогональной системы координат 02 03. Это означает, что касание изолиний Сйга*л2-3 = СОП5( И «rj-З = С0П$1 И £а 2_3 = COflSl ПРОИСХОДИТ При тл1 з 0. если ^ж03-02_3. Для этого случая на основании (2.37) и (2.42) можно написать, что
= й™02-з +
1 гр ,
Ва2-3 = 2 + 2л ^(Х’Г2-3 ~ ^2-з)
(4.26)
(4.27)
и равнозначные независимые переменные на шестерне z2 и колесе z3 равны 02_3 = аг1_3-^-(2еа2_3-I). где гр = z3 - z2 = = г2 (U2-3 “ 0*
Если в результате совместного рассмотрения (4.26) и (4.27) исключить независимую переменную 02_3, то получим уравнение ’г»г2 з - <g[«T2-3 - ~(2tat-3 “ 1)] которое
приводится к квадратному уравнению. Корень этого уравнения при та1-з = 0 и некотором наперед заданном коэффициенте перекрытия «а2_3 = const, т. е. при выполнении условия (3.60), является максимальным углом зацепления
Отсюда следует, что максимальный угол зацепления для заданной пары чисел зубцов z2, z3 при mfii3 = 0, который наступает при еа2-з = ЬО равен
что соответствует независимым переменным
(4.29)
Так как zp = z2 (м2-з ”1). то при д2_3 -* ® тангенс максимального угла зацепления по (4.29) стремится к своему предельному значению
Злррд = lint 2—3 HIM = 1'0’
"2-3 * *
124
© Э. Б. Булгаков
Таким образом, как и во внешнем зацеплении, во внутреннем, зацеплении для колес с предельной конфигурацией сопряженных зубцов при та7 3 = 0, а также при ест2_3 = 1Д 02 «= 03 =• 02_3 и «2_3 ** “ предельный угол зацепления а£2_3 = ^.
Уменьшение передаточного числа и2_3 или zp = z2(«2_3-I) сопровождается увеличением угла зацепления, который превышает значение а^г-Зпрм- полученное при и2_3-*« (рис. 4.7). Таким образом, если во внешнем зацеплении максимальный угол стремится л
к своему предельному значению, равному при гс -*« снизу, т. е. от меньших углов зацепления, то во внутреннем зацеплении при ц2_3 “• 00 угол зацепления стремится к сверху, т. е. от больших углов зацепления.
Риг 17 Предельные параметра анутреннегэ зацепления с симметричными профилями зутМкэи
125
© Э. Б. Булгаков
Находят некоторое применение зубчатые передачи внутреннего зацепления с малой разностью чисел зубцов и, в частности, даже при zp = 1.0, когда угол зацепления “гг—з > например хг2-з®50° или 60° или даже больше, чем 60 е. Разность чисел зубцов внутреннего зацепления может быть доведена даже до zp = z3 - z2 = 0 при угле зацепления ав.2_3 = у Это означает, что самом общем виде для зубчатых передач внутреннего зацепления можно написать, что при ^-*0 (см разд. II).
Минимальный угол зацепления для заостренных зубцов при та 2< 3 = 0 и при 02 = 03 = 02_3 в предельном случае, когда наступает интерференция у основания зубца z2. т. е. при а/2 = 0. определим из (4.26) и inva£MrtB - inv arctg упрощений и2_3 — 1 .
»fC‘g —------<g»i2-3m«
"2-3 \
®г2—3n*t
j
Тогда
7 = ° р
получим
или после
и 1КаГ2—3mm “ 16аГ2-3«тш|“ _ “ 0.
"2-3
з ~
l
(430)
Независимую переменную, соответствующую агг-зтш- определяем с учетом (2.45)
02_з = arctg
\
(431)
f I
когда 02 = 03 = 02_3 максимальный угол зацепления
Ц2—3 ~ И2—3 Таким образом, при <па13 = 0 и рациональных соотношениях между углами зацепления аг2_3 и коэффициентом перекрытия еа2-3
аигпшх2-з определяется по формуле (4.28) и ему соответствует коэффициент перекрытия е„а_3 = 1.0. Минимальный угол зацепления определяется из уравнения (4.30) и ему соответствует коэффициент перекрытия ваг-зшм который (см ниже) при выборе независимых переменных по биссектрисе прямого угла системы координат 02 достигает максимального значения при а, г = 0.
Рассмотрим экстремальные углы зацепления при тв2,з = 0 в экстремальных условиях: при интерференции у ножки зубца z2, когда «^2 = 0. и при предельно допустимом коэффициенте перекрытия г«2-з = *0 Здесь возможны два случая - при малом и при большом 126 © Э. Б. Булгаков
значениях 02. При малом значении 02 (ниже такие независимые переменные соответствуют точке С поля 02 03) из совместного решения (2 37). (2.42) и при ав3 = б3 из (2.44) получим уравнение, ««-3=
из которого определяется угол * i..
л
tg «2_загс,е
U2-3
-—-о,
(4.32)
Ц2-3 ~
а затем 03 = arctg 02 из (2.37).
При наибольшей величине О, теоретически угол зацепления должен уменьшаться при одновременной интерференции ал2 = 0 до весьма малой величины, близкой к нулю. Как показано в (23]. вследствие пересечения эвольвент во внутреннем зацеплении на линии зацепления зубчатая передача при аг2_3 = 0 неосуществима. Поэтому лишь формально при небольших значениях 02 предельной точке с координатами inv02 = л/г2 и inv03 = л/?3 соответствует предельный, но неосуществимый угол зацепления хг2_3 = Однако уже вблизи этого угла зацепления, при немного больших значениях, передача уже существует.
Рассмотрим экстремальные параметры функций зацепления при mezj * 0. Прежде всего обратимся к экстремальным значениям функций ar2_3 = const и ео2_3 = const в случае их рациональных соотношений, удовлетворяющих условию (3.60). Максимальный угол зацепления ос1Г2_3 ^получим в результате решения при га2_3 = 1.0 уравнения (3 46) при условии (3 60). Минимальный угол зацепления яг2-зПил и е*У соответствующий максимальный коэф фициент перекрытия еа2_3|ПИ имеет место при интерференции у ножки зубца а.. 0 шестерни z2.
Для решения этой задачи, например, в системе координат независимых переменных ad2, ав3 необходимо найти совпадающие координаты , или точку пересечения двух изолиний = 0 и
dOj
пересечения этих изолиний Для удобства записи представим условие интерференции (2.45) в виде invar2_3= invarctg
и независимую переменную
d0; do"
= 0 Обозначим через q точку «а 2-3 “
U2-3 .
u2 3 - I ga-3 '
2
127
© Э. Б. Булгаков
Выразим эту запись интерференции через независимые переменные
ota2, <ха3 для чего используем уравнение изолинии угла зацепления (3.25):
(и2-з “ 1) inv arctg
14 >_я
^±T‘8“.3 !—3 1
Л
+ “2-3 т< 3C0Sad 3 + та 2C0Sct<s 2 + ,nVaa 2 “ ~ = °’ г2
или после упрощений
- «2-3 inVad а +
(Пп___з
-------Г’К’.з +
“2-3 1
“2-3 та 3COS аа 3 + та 2C0S 2 + illV “ “ “ °-
*2
(4.33)
Задаваясь, например, ай2, определяют из (3.60) угол ав3; некоторая пара чисел ав2, аа3 из (3.60) должна удовлетворять уравнению (4.33), т. е. являться его корнем - координатой точки q. Далее по (3.25) и (2 40) определяют соответственно <хгг_3тг и ar2_3max Либо если стали известны углы профиля ас2 и яс 3, то при принятых z2. z3 и me2< m43 нм соответствуют 02 и 03 (или 03) по формулам (2.28) и (2.30) и, наконец, угол зацепления otr2_3 по (2.26) или по (2.37).
Рассмотрим соотношения функций «а2-3 Н аг 2-3 при тв2Л * 0 в экстремальных условиях при интерференции a,2 = 0 без наложения условий (3.60). Так. коэффициент перекрытия определим из (2.40) и (2.44)
е^’’-^tga.,. 034)
Выразим независимую переменную шестерни г2 через коэффициент перекрытия
а также учитывая независимую переменную 03 из (2.46) и производя подстановку в (2.37), получим
(“
2—3
- П 1а,2ж° U аГ2—3
128
© Э. Б. Булгаков
где ^*2-3 = итлз при s.2 = sa3
При а 2 = 0 получим также полезное уравнение, связывающее коэффициент перекрытия с углом профиля на окружности вершин у/ЧЯАГ*<> 7
Экстремальный угол зацеплении аг2_3 определим из уравнения (4.35) при е„2-з= Ь0. В системе координат независимых переменных - на поле независимых переменных - этот случай соответствует пересечению изолиний = 1.0 с изолинией а,2 = 0 в некоторой точке, которую обозначим буквой С. Полученному углу зацепления аг2-з соответствуют углы профиля вычисленные по формулам (4.34) и (2.45)
Подводя итог рассмотрения предельных значений углов зацепления во внутреннем зацеплении, можно написать, что
о < «Г2-3 S Г (4.37)
Максимальный коэффициент перекрытия. Максимальный коэффициент перекрытия сначала рассмотрим при тй2.з - 0- При рациональных соотношениях между углом зацепления <хГ2_3 и коэффициентом перекрытия ел2_3, т. е. в случае, если независимые переменные 02 и 03 выбираются по биссектрисе прямого угла системы координат 02, 03; ладанному углу аг2_3 соответствует единственное максимальное значение еа2-3пм • вычисленное по формуле (429).
В некоторой точке q поля 02. ^з Н1 (2.40), (2 44) и (3.60) коэффициент перекрытия равен
129
© Э. Б. Булгаков
q _ p f 4
*а2—Jtnii “ Ortn -^tF2—3nuc •
(4.38)
"‘“2—3
Точке q отвечает минимальный угол зацепления <Хг2-зт.о- вычисленный по уравнению (4.30). который явится максимально достижимым для максимально возможного коэффициента перекрытия 2—3 «па* ,1а биссектрисе qQ поля 02. 03 независимых переменных.
При наибольшем значении 02 максимальный коэффициент перекрытия формально имеет место при аг2_3=0. если зацепление ограничено интерференцией ад2 = 0 Тогда 03=0. invO, = л/г2. а на основании формулы (242) максимальный коэффициент перекрытия определяется по уравнению
tg L 2—3 mu
(4-39)
^ct 2—3 max “
Например, при z2 = 35. z3=IOO е^г-этал = 3,9. Формально при
а» 2—з ~ 0 наряду еа «можно реализовать* зубчатую передачу
2— тих
при еа23 = 1.0. В этом случае из выражений (3.24) и (2.42) получим
«2-3^
«2-3
(4.40)
где invO3 = —!— invO3, или 03 = —!— 0.» — —. «2—3 «2-3 ' г2
Если тл13 * 0. то при выполнении условия (3.60) максимальному коэффициенту перекрытия ej2_3inax соответствует угол зацепления <Xr2_3lrun при независимых переменных, принимаемых по линии qQ поля 02, 03. В этом случае е^2_3п„ определяется на основании пары чисел ас2, Зпол ученных из уравнения (4.33).
Каждому углу’ зацепления а?2-з° соответствующему независимым переменным, при котором наступает интерференция а,, 2 = 0 отвечает по уравнению (4 35) коэффициент перекрытия га2_3. Один из этих коэффициентов ей2_3 явится наибольшим при наименьшем угле зацепления для данном пары зубцов z2, z3 при некоторых значениях лгя2, /п<3.
Отсюда при малых значениях 03 или 03 и больших 02 экстремальные значения а^-з и с„2_3 также определяются началом интерференции <х^,2 = 0 У ножки зубца zT Тогда если аГ2_3 = 0. то 130 © Э. Б. Булгаков
при <*,2 = 0 и 5a2 = S,.3 из (3.24), (2.28) имеем
. „ Л та2—3 . л Л _
invtr3 ------------и inv02 --------тл, 3 (Точка D поля псзави-
г3 и2-3 Z2
симых переменных, см. рис. 5.2). При этом формально при агг-з = 0 коэффициент перекрытия Достигает максималь-
ного значения, определяемого из уравнения (4.35):
(2л а п 2 = 0 | У F а 2—3 max *2 /
(441)
Для передачи z2 = 35, z3 = 100, ma г 3 = 75- коэффициент пе-
2*2.3
Рекрытия = 3.4.
Представляет также интерес иной формальный случай при атг_3ж0 и га = 1,0, т. е. вдали от интерференции аг2 = 0 поле независимых переменных такой случаи соответствует некоторой точке В, параметры которой определяем из совместного решения (2.40), (3.24). (2.28) и (2.5):
“г-з«.з + т. г-з™5 Л. э — агс,6 (Т" + "г-з,8а.э| +
\ г2 1
(4.42)
Определив ав3, находим ae2 = arctg — + и2-з^авз •
_ \*2 /
Здесь следует еще раз напомнить что все соотношения, полученные при аг2_3 = 0 отражают лишь тенденции в развитии параметров. границы их существования и не могут служить для построения зубчатых передач.
Максимальные относительные толщины mei3n„ и предельные комбинации зубцов. При увеличении толщины зубцов на окружности вершин уменьшается коэффициент перекрытия еа2 3 и возможность появления интерференции а„2 = 0 на ножке зубца z2 Предельная толщина зубцов Se2>3 ограничивается минимальным коэффициентом перекрытия ест2 3 = 1.0 и формальным не реализуемым углом зацепления аг2_3 = 0. На поле независимых переменных
131
© Э. Б. Булгаков
такой передаче соответствуют независимые переменные некоторой точки М. к которой стремится точка В при еа2_3 ** ЬО.
% 2—3 “* mа 2-3 шал и аг2-3 ш
Если абсолютная толщина зубцов Se 2. Sa 3 на окружности вершин da7 = dc3, то из уравнения (4.41) имеем
Изменение максимальной относительной толщины зубцов та 2—з max в зависимости от числа зубцов z2 во внутреннем зацеплении показано на рис. 4 8
Сочетание зубцов предельной конфигурации (при mi2_3 = колеса которых образуют зубчатую передачу с рациональными параметрами по (3 60) в точке q поля независимых переменных (когда б2 = 03, а а(2 = 0и еа2 -з ~ Ь0). определим из совместного рассмотрения (4.30) и (4.38). Исключив из уравнений угол зацепления аГ2- Зш' получим
Рж. 4 Я. Максимальная ппниип*льнав толщина Jv(jUUU И_ ВО
Е2—3 [DB1 влутреньйем зацеплении в зависимости от 1иглв зубцов
© Э. Б. Булгаков
132
или в другом виде в зависимости от и и2_3 2л 1 /2л
arctg — (а2_з - 1) - arctg | — д2_3 р /
- = 0. р
р
Предельные значения чисел зубцов z2 или разности чисел зубцов zp z3 - z2 в зависимости от передаточного числа и2_3 показаны на рис. 4.9 при та2>3 = 0, е’2_3 = Ь0, а 2 = 0. В этом случае за-
цепления «г2—Зпт Достигает максимального значения при принятом коэффициенте перекрытия ej2_3 ® 1,0. хотя и является минимальным из всевозможных значений линии qQ поля независимых переменных на которой 02 = <>з Таким образом, уравнение (4.43) не является универсальным. Например, разность чисел зубцов при maZ3 # 0 может составлять zp=1.0 при углах зацепления «г2-з > и Даже zp = 0 при otr2_3 [25].
Рис. <9, Предельные числа lytiufe гтри 3 = 0 во «утреннем, зацеплении
133 © Э. Б. Булгаков
Предельные параметры внутреннего эвольвентного зацепления. На поле независимых переменных 02, 03 (или 02, 03) для данной пары чисел зубцов z2. z3 имеется ряд особых точек, соответствующих предельным параметрам эвольвентного зацепления. Так. точка Q характеризует максимальный угол зацепления а£2_3смк, который можно получить при 3 = 1.0 только при предельной конфигурации зубцов, когда mai3 = 0.
В точке М поля коэффициент перекрытия также е^-з = 1.0. В этом случае его формирующие экстремальные параметры - угол зацепления и относительная толщина зубцов на окружности вершин действуют по-разному на коэффициент перекрытия. Так, в точке М поля угол зацепления формально равен а^2_3 = 0, а /п4"_3 такой значительной величине, при которой коэффициент перекрытия уменьшается до единицы. Конечно, угол зацепления а^.2 3 = 0 условен, практически не реализуем, но именно он определяет нижнюю границу существования зацепления при минимальном угле зацепления и максимальной относительной толщине зубцов на окружности вершин.
На поле имеется также некоторая точка D, замечательная тем. что опять-таки при условном, формальном угле зацепления хГ2_з = 0 и одновременной шггерференцни у ножки зубца шестерни г2, когда а,2 = 0, ей соответствующие независимые переменные отвечают передаче с максимальным коэффициентом перекрытия fca 2—3 шах-
Таким образом, каждая пара зубчатых колес с числами зубцов ~ гз» образующая внутрЛшее эвольвентное зацепление характеризуется интервалом изменения следующих основных параметров;
aV 2-3 min < аГ2—3 “ аГ2—Зтаг
1,0 S Г-а2_3 < ^авш* 0 ^«2—3 < ^л2— Зпп* (4.45)
Предельные параметры эвольвентного внутреннего зацепления
представлены в табл. 4.2 для пяти передаточных чисел иг_2 = —
Z2 при восьми значениях чисел зубцов z2. В табл. 4.2 приведены координаты независимых переменных точки Q. а также координаты и основшяе параметры в точке q. В точке q при предельной конфигурации зубцов (/л,2,3 = 0) на границе интерференции при а,2 = 0 коэффициент перекрытия достигает максимальной величины еа 2-з max ПРИ наибольшем угле зацепления. Для данной пары зубцов
134 © Э. Б. Булгаков
4.2. Предельные параметры внутреннего эвольвентного зацепления
«2 «3 me2.3 " 0 Точка М
Точка Q Точка 4 Точка D
аТ2—Зпих ^2 * ^3 ° Г 2—3 еа 2-3 ^2-3 тах яв2—3
1 2 3 4 5 6 7 8 9
“2—3* 2
21 42 49.07 40.50 42.800 1547 24,84 2373 0.075840
25 50 48.45 41.25 40,680 1,710 23.5? 3.187 0.063461
31 62 47.805 41.998 38.170 1,939 21.457 3.629 0,051006
35 70 47,495 42,352 36,807 2,084 20517 3,908 0,045114
41 32 47.139 42.75 35.086 2,292 19,35 4,306 0,038459
45 90 46.95 42.95 34.100 2.425 18.71 4362 0,035018
55 ПО 46,60 43,33 32,060 2.741 1739 5,169 0,028620
61 122 46.45 43,50 31,050 2.922 16.75 5.517 0,025790
“2-3* 3
21 63 47.09 42,80 37,60 1.72 27J8 Х873 0.075841
25 75 46.76 43.16 35.64 1.90 2555 3.187 0.063461
31 93 46.43 43.52 33,33 2Д6 23,67 3.629 0,051006
35 105 46,26 43.69 32,08 2,328 22,68 3,907 0.045114
41 123 46.08 43.89 30,52 2.565 2L46 4,307 0.038459
45 135 45,99 43.99 29.64 2,716 20,77 4562 0,035018
55 165 45.81 44,17 27,80 3.0772 19,37 5.169 0,028621
61 183 45.73 44.26 26.90 3.2832 18,68 5.517 0.025796
“2-3“ 4
21 84 46,40 43.55 35,48 1.77 28.13 Х87 0.07584
25 100 46J8 43,78 33,58 1,98 26,47 3J9 0,06346
3! 124 45.96 44,02 31.37 2,26 24.57 3,63 0,05100
35 140 45,85 44,13 30,18 2,43 23.56 3,91 0,04511
41 164 45.72 44,26 28,68 2.68 2X31 4.31 0.03846
45 180 45,66 44,33 27,84 2.84 21.61 4.56 0,03508
55 220 45,54 44,45 26,09 3,215 20Д69 S.I7 0.02862
61 244 45,49 44.51 25.23 3.432 19.467 5517 0,02579
“2-8* 5
21 105 46.06 43,91 34,32 1,825 28,639 2,873 0,07584
25 125 45.89 44.09 3X46 2,025 26.974 3.187 0,06346
31 155 45,72 44,27 30,30 2,307 25,056 3,629 0,05100
35 175 45,64 44,35 29,14 2.484 24,037 3,908 0,04511
41 205 45,54 44.45 27.69 2,739 2X772 4.307 0,03846
45 225 45.50 44 50 26.86 2,902 2X060 4.562 0,03502
55 275 45.41 44,59 25.17 3,291 20.603 5J69 0,02862
61 305 45,37 44.63 24.33 3512 19.890 5517 0.025795
135
© Э. Б. Булгаков
Продолжение табл. 4.2
1 2 3 4 5 1 6 7 - 9
“2-3 = 8
21 168 45,61 44,38 32.71 1.879 29.34 2.873 0,07584
2S 200 45.51 44,48 30,92 2,085 27.66 3.187 0.06346
31 248 45.41 44.58 28.83 2.376 25.72 1629 0.05100
35 280 45,37 44.63 27,71 2,561 24,688 3,908 0.04511
41 328 45,31 44.69 26,32 2,824 23.403 4,307 0.03846
45 360 45,28 44.71 25,53 2,993 22,679 4.562 0,03502
55 440 45,23 44,76 23,90 3.394 21.196 5.170 0.02862
61 488 45,21 44,79 23,10 3,624 20,470 5,517 0,02580
можно получить большие значения еа2_3. например, при прибли-
жении к точке D, однако как при /иаХЗ = 0, так и при
з * О У70-” зацепления будет всегда меньше, чем в точке q на границе интерференции а 2 = 0.
5. ОБЛАСТЬ СУЩЕСТВОВАНИЯ ЭВОЛЬВЕНТНОГО ЗАЦЕПЛЕНИЯ
5 1. ОБЛАСТЬ СУЩЕСТВОВАНИЯ КАК ФУНКЦИЯ та
Эвольвентное зацепление определяется рядом функций при некоторой относительной толщине Tta, 2 3 зубцов z12t3 на окружности вершин, зависящих от двух, а иногда от одной независимой переменной. Каждую функцию можно отобразить в виде некоторой поверхности над плоскостью независимых переменных (см. гл. 3).
Если функции зацепления придать некоторое численное значение, т. е. рассечь поверхность плоскостями и следы их пересечения спроектировать на плоскость независимых переменных, то полученные линии уровня, или изолинии, будут отражать постоянное качество зацепления, а их совокупность — область существования. Каждая точка области существования, определяемая множеством функций, характеризует некоторые удовлетворительные свойства зацепления внутри границы, образуемой рядом функций, отражающих граничные (предельные) параметры зацепления.
Вне этой области может существовать отдельное зубчатое колесо, но не существует зубчатое зацепление — пара сопряженных зубча-136 © Э. Б. Булгаков
тых колес с непрерывно (без перерыва по углу поворота) взаимо-огибаемыми эвольвентными зубцами. За границами таким образом области выбор независимых переменных для зацепления не разрешается.
Параметры зацепления, взятые из области существования зацепления, отражают условия построения этой области: при некоторой относительной толщине та зубцов - z2 или z2 - z3 находящихся в плотном зацеплении, радиальный зазор в зацеплении, в значительной мере определяющий параметры переходной кривой (см. разд. U1), жестко не регламентируется.
Область существования зубчатого зацепления является скалярным полем геометрических, а также скалярным, и в ряде случаев векторным полем качественных параметрон зацепления некоторой пары зубцов Z|, z2 или z2, z3 при относительной толщине на окружности вершин, равной mel, тл2, та2. Поскольку 0L2>3 > 0, то область существования эвольвентного зацепления располагается в I квадранте системы координат fy, 03 или 02. 03. или 02. 03. Ниже будет показано, что при относительной толщине зубцов на окружности вершин = var образуется так называемая абсолютная область существования эвольвентного зацепления. Абсолютная область существования— наибольшая часть поля 0ь б2 или 02. 03 (02, 03) некоторой пары колес с числами зубцов zh z2 или z2 z3 соответственно, отвечающая параметрам зацепления возможных для реализации во всем диапазоне относительных толщин зубцов на ок ружности вершин от заострения до максимальной величины, при которой коэффициент перекрытия еще равен еа 3 1.0.
5.2. ХАРАКТЕРНЫЕ ТОЧКИ ОБЛАСТИ СУЩЕСТВОВАНИЯ ЭВОЛЬВЕНТНОГО ЗАЦЕПЛЕНИЯ
Рассмотрим координаты точек, занимающих крайние положения по отношению к соседним точкам области существования. Такими точками на поле 0,. 02 во внешнем зацеплении (рис. 5.1) и 02. 03 или 02, 03 во внутрщшем зацеплении (рис. 5.2) будут являться:
а) некоторая точка Q, соответствующая наибольшему углу зацепления «Гямх, ®Г2-Зги« ПРИ есх2-3 = 10 СООТВеТСТВвННО
при внешнем и внутреннем зацеплении;
б) некоторая точка В, полученная в результате пересечения двух изолиний интерференций у основания зубцов на основной окружности во внешнем зацеплении и соответствующая наименьшему углу зацепления
137 © Э. Б. Булгаков
Рис. 5.1. Характерные точки области существования внешнего жпьвентного зацепления
в) некоторые точки С и D. каждая из которых получена при пересечении изолинии ед = 1.0 с одной из изолиний интерференции во внешнем зацеплении или во внутреннем зацеплении — при пересечении изолинии а,2 « 0 с изолиниями еп?_3 » 1,0 и ат2_3 = 0: каждой из этих точек соответствует экстремальное значение одного из независимых переменных:
г) некоторая точка В во внутреннем зацеплении, определяемая пересечением изолиний еа2_3 = Ю с изолинией аг2_3 ~ 0;
д) некоторые точки Е н F на изолинии еа « 1,0, каждая из которых соответствует наибольшим значениям одной из независимых переменных
Таким образом, точки Q В, С, D, Е, F определяют границы реальной части поля 02 или 02, 03. Между этими точками лежит область существования эвольвентного зацепления для нары z7 при mau = const или соответственно для пары z2. z3 при тв2.з = const (см. рис. 5.1 и 5.2, а).
На области существования внутреннего зацепления в системе координат б2. 03 (см. рис. 5.2, б) отмечены также точки D D ,
138
© Э. Б. Булгаков
Рис. 5.2. Характерные точки существования внутреннего эвольвентного зацепления: а — в системе координат б — в системе координат #?. **3
139 © Э. Б. Булгаков
ограничивающие изолинии аг2_3 = 0 и а,2 = 0 в результате их пересечения с осью ординат 6^
Обратимся к характерным точкам области существования внешнего зацепления (см. рис. 5.1). Координаты точки Q на поле 0|, б2 соответствуют при еа = 1,0 и та12 = 0 наибольшему углу зацепления а£пи < определяемому по формуле (4.3); в этом случае 0, = 02 = 0|0_го = аг™ + я/гс (см. гл. 3). Если
= 'Яд 2 e mai—2» то ПРИ рациональном соотношении аг и еа, Т. е. при выполнении условия (3.57) угол профиля аа1 ® ae2 = <xai_2 и, следовательно, согласно (2.5) независимые переменные равны 0| = б2 = 0|_2. В этом случае на основании (2.17) при га = |,0 получим
lg ®«1-г “ + —• (SJ)
Выразим угол профиля аа1_2 на окружности вершин через независимую переменную по формуле (2 5)
и далее по формуле (3.13) окончательно имеем
(5.3)
Полученному из уравнения (5.3) углу зацепления oif^ соответствует угол профиля ая|_2. а по (2.5) — независимая переменная ^1-2‘
Если mal * 0, mil2 # 0, то точка Q соответствует на области существования максимальному углу зацепления при
= 1,0 Этой точке отвечают углы профиля ав| и аа2 из (3.26), одновременно удовлетворяющие тождество (3.57). Точка В поля 0|. ПРИ г - 0 определяется как пересечение изолиний интерференций ад1 = 0 и ал2 = 0 при invO] 2 < л/г12. Этой точке отвечает наименьший угол зацепления по уравнению (4.10), которому соответствуют независимые переменные по (2.16) и (2.18). Координаты точки С определяются при коэффициенте перекрытия 140 © Э. Б. Булгаков
еа = 1,0, когда начало интерференции наступает у основания зубца если inv02 < л/?2 и а,2 = 0.
Из совместного решения (2 13) и (2.15) получим наименьшее . . (2л 1
значение угла профиля aa2(nJn = arctg —еа или в нашем случае \2’ /
при = 1,0
«.гм» = arctgj1 (5 4)
г2
и тогда
inv02rolr =
(55)
Так как начало интерференции у основания зубца z2 определяется независимой переменной 0j по (2.16), то, произведя подстановку в (2.10), получим
ит
(56)
я
Координаты точки D также определяют при ев = 1,0 когда начало интерференции наступает у основания зубца zh если invOj < л/z, и = 0 Из (4.10) при = 1.0 имеем, что tget., = 2л /г{ и. вычислив 02 по (2.18) на основании (2.10), получим уравнение для определения угла зацепления в точке D поля независимых пе
ременных
/1x4 . * (1 + и . I . (\ + и . \
(I + u)ar+ umc2cosarctgI—-—tg<xr - u arctg I —-—tgaTl +
причем
141
© Э. Б. Булгаков
В точке Е ордината области существования достигает максимального значения Ф2 та1, причем угол профиля ав1 определяется из уравнения (3.36) при = 1,0 и также при еа = 1,0 из (3.35) — 02паи. соответствующий угол зацепления — по (3.33). Если /па1в 0, то в точке Е независимая переменная угол зацепления
определяется при еа = 1,0 по (3.40), а затем 02mix = <хг + л/г2. В точке F абсцисса области существования имеет максимальное значение при та2 в 0, когда 02 = av, угол зацепления при еа = = 1,0 определяется по (3 42), а 01твх = а, 4- л /zv Если та 1.2*0, то 0| ти определяем при 1^= 1.0 по (3.45), причем предварительно вычисляем также при ео= 1.0 по (3.44) угол профиля
<*в2-
Рассмотрим характерные точки области существования внутреннего зацепления (см. рис. 5.2. б). В точке Q области существования при еа 2-з - угол зацепления достигает максимального значения
при = 0. определяемого по (4.28). причем независимые переменные в точке Q находим по (4.29) Если * 0, то пара значений углов профиля х<2 и ав3 из уравнения (3 41) должна удовлетворять тождеству (3.60), после чего определяются независимые переменные 02 и 03 по (2.5) и (2.28), а затем угол зацепления по (2.37). В точке С области существования зацепления с„2.з = 1.0 и а, 2 = ° Тогда, из совместного решения (3 25). (2.45) и ПРИ еа2-з ~ t0 а также (2.40), получим
1£аГ2—3
(“2—3 “ 0аГ2-3 “ U2-3 х
(5.9)
Углу зацепления а,2_3 из уравнения (5.9) соответствует по (2.45) и (2.28) независимая переменная 03, а затем по (2.36) минимальное значение ординаты 02mln.
Точка D области существования определяется как пересечение изолинии <хг2_3 = 0 с изолинией = 0 причем минимальное
142
© Э. Б. Булгаков
значение абсциссы
inv#3™ = у- - (5.10)
3
Координаты точки В определяются как пересечение изолиний еа2-з = и аг2-з = 0 по уравнению (3.55), а затем по (2.5) с учетом, что в этом случае inv03 = invO2/u2_3.
Представляет интерес также точка D с координатами inv03 = n/z3, аг2-з = 0. а также точка D , как пересечение изо линии ар2 = 0 с прямой mv03 — л/z3 = 0. т. е. с осью ординат 02 при 03 = 0. Тогда на основании (2 46) угол зацепления. соответствующий точке D , определяется из уравнения
(“i—з ~ ।
(“2—3 “ DW«r2-3 - “2-3 -----tg®F2-3 ”
I “2-3 \
= 0
(511)
“2-3 ~ 1
Точки D и D являются граничными для изолиний аг2_3 и af2 = 0 в системе координат 02, 03.
Наибольшую ординату 02 точки Е области существования при та2 з * 0 определяем при еа2-з = 1«0. сначала вычислив по
(3.49) угол профиля ай3 и по (2.28) ему соответствующую независимую переменную 03. затем по (3.48) угол зацепления аГ2_3 и, наконец, по (2.36) независимую переменную 02. При тагз - 0 в точке Е угол зацепления аг2_, = (^^ например
(3 48)) и. учитывая (2.37) и (2.42), получим
inveri-j = invO!ml, “ у-г2 - Л л
аЯГ2-3 = W2max “ , • *2
откуда наибольшую ординату 62owx находим из уравнения
tg(O2mn< - - tgO2f_ + ^ = о. (5.12)
Абсцисса 03tn„ достигает наибольшей величины в точке F области существования. В этом случае при me2.3 # 0 сначала определяется угол а<2 при Гдо-з = 1»0 по (3 51), затем угол зацепления
143
© Э. Б. Булгаков
йтг-з по (3.50), затем 02 по (2 5) и. наконец, 03 = 03г1М по (2.36). Если твгз = 0, то в точке F угол зацепления аг2_3 « 02 на осно ванни (3.50), а на основании (2.36) аг2_3 = 03. Таким образом, в системе координат 02 при та2 3 - 0 в точке F абсцисса ^Зшзж = ^2 ~ аТ2-3-
5 3 НЕКОТОРЫЕ ИЗОЛИНИИ ОБЛАСТИ СУЩЕСТВОВАНИЯ
На области существования, кроме изолиний, рассмотренных в гл. 4, наносят также изолинии, характеризующие те или иные параметры или свойства зубчатого зацепления или зубчатых колес. Например, приведенный радиус кривизны или кривизна эвольвенты в полюсе зацепления, определяемые по формулам (2.12) и (2.39), являются для данной пары чисел зубцов zt, гг или z2. z3 функцией лишь углов зацеплений или otr2_3. Поэтому изолинии углов зацепления совпадают с приведенными радиусами кривизны. Изолинии углов зацепления на областях существования являются также изолиниями межосевых расстояний. На область существования наносят также изолинии коэффициентов скольжения [4,7] или коэффициентов единичных напряжений (см. гл. 6) и др.
При анализе станочного зацепления, и в частности назначения производящего контура, используют изолинии коэффициента ширины впадины между зубцами. Например, для внешнего зацепления изолинии коэффициента ширины впадины строят но уравнению, полученному при совместном решении уравнений (2.7) с уравнс киями (2.10), (25), (2.15) и (2.17):
для
колеса z2
^uicosaai- invaa t-
и inv arctg
x sec arctg
•g«r - | lg«.l
(5 13)
для шестерни
ej + |(1 + u) invotr - uma2cosaa2 - и invaa2 -
- inv arctg ^(1 + u) tgar - и tgae2|. x
x sec arctg [(I + «) tgar - и lgae2j = °- (5*14)
Полезным может оказаться изолиния равенства толщин сопряженных зубцов по начальным окружностям р. - 2Se = 0.
144
© Э. Б. Булгаков
5 4 ОБЛАСТЬ СУЩЕСТВОВАНИЯ ВНЕШНЕГО ЗАЦЕПЛЕНИЯ
Рассмотрим область существования внешнего зацепления в системе координат 0| 02. Обратимся к рис. 5.3, на котором показана область существования зубчатых колес внешнего зацепления при тз12* 0- лежащая внутри области существования при /naL2« 0. Об ласть существования зацепления ограничена изолиниями ннтерфс ренции = О и а,2 = О у основания зубцов на основной окружности и изолинией коэффициента перекрытия еа - 1,0. Углы зацепления ar = const, пропорциональные межоссвым расстояниям аг, образуют сетку изолиний, а оси, проведенные через значения независимых переменных 0L2. для которых invO] 2 = jt/zL2, делят область существования на четыре части. I ряд зубцов zx лежит во II и III квадрантах системы координат inv0(; invO2, зубцы z2 — в III и IV квадрантах; II ряд зубцов 2Х — в I, IV, a z2 — в I и П квадрантах. Независимые переменные III и I квадрантов образуют соответственно зубчатые зацепления, состоящие из колес с зубцами, размещенными в I и II рядах.
Изолинии начала интерференции при invOu > л/гх 2 если радиальный зазор в зацеплении равен нулю, делят область существования на три части. На рис. 5.3 также показаны изолинии б]*2 = 0; еа = const; eL2 = const, а также изолинии коэффициентов радиального зазора С,’_2 = const; C*2_j = const; С3*_2 = const; С*2_| = = const. Положение области существования зависит от значения maL2— чем больше значение относительной толщины зуб цов на окружности вершин, тем больше область существования смещена в сторону меньших углов зацепления по отношению к области существования при /па1 2 = 0 Для заостренных зубцов пары на области существования нанесена линия Qq. определяющая параметры зацепления.Осоответствующие наибольшему коэффициенту перекрытия еа при принятом угле зацеплешш
На рис 5.4 для пары зубчатых колес zt = 20. z2 = 31 показана область существования Q D В С Q при /neL2 = 0, область существования QDBCQ при та 12 = 1/2,5 zU2, а также абсолютная область существования зацепления Q D DMCC Q .
Области существования построены в системе координат 0,. 02, параллельно с которыми показаны шкалы и ав2 при /па! 2 = 1/2 5 Zj 2 с неравномерными делениями [см. формулу (2.5)]. На поле 0,, 02 нанесены не зависящие от относительной толщины зубцов тв1 2 изолинии углов зацепления аг, которые одновременно являются изолиниями межосевых расстояний a£ = ar/dH и
145
© Э. Б. Булгаков
Рис. 5.3. Область сущестиивания внешнего зацепления пары z( = 18. г2 = 27 при «а 1,2= °- "а 1,2 = 0025
приведенных радиусов кривизны pl^ = pnp/^>i- На область существования при wuU2 = 1/2 5 2 нанесены также изолинии коэффициентов перекрытия га. коэффициентов dj*2 = 0. а также линии Qq и АА — равнопрочности по изгибу зубцов (см разд II). При meU2 = 0 область существования достигает наибольших углов зацепления при коэффициенте перекрытия ед = 1,0 При этом ин-
146
© Э. Б. Булгаков
Рж 5.4. Область сущестжжанмя внешнего зацепления пары зубчатых колес zt 20, *2 я 31 При /лв i 2~ 0 н т<| 2е 1/2^г| j и бсотепная область существования этой лары при me । 2" var
терфсренция зубцов во внешнем зацеплении будет происходить при сравнительно больших углах зацепления и средних коэффициентах перекрытия. Если принять гпа1 2 > 0 то область существования эволь-вентного зацепления переместится и сторону меньптих углов зацепления и при t.a = 1.0 о»гяЬл"° > йгп1^>0 в то же время интерференция наступает при больших коэффициентах перекрытия
147
© Э. Б. Булгаков
° < сйЙ^*2 > °, которые также реализуются при меньших, чем при l 2 = 0- углах зацепления.
Наибольший коэффициент перекрытия елпжж имеет место в точке В поля 0р 02 при /пй12 = const; при этом угол зацепления достигает минимального значения внутри области существования. Однако этот угол максимален для Полученного в точке В коэффициента га. При дальнейшем увеличении тг1 2 происходит уменьшение поля области существования, которая вырождается в точку — точку М — при eJ* = 1.0. В этой точке значение угла зацепления минимально для данной пары ?2 Из рис. 5 4 видно, что абсолютная область существования зацепления Q D DMCC Q лежит в следующих пределах основных параметров: 7,02° £ otT < 43.2е; 1.0 < 5 1.0; при-
чем коэффициент перекрытия Ед при md 2 = 0, т. е. внутри абсолютной области существования, максимальный по величине. На протяжении всей области еа изменяется при наибольших углах зацепления от 1,0 в точке Q до 1,0 в точке М. Таким образом, область существования от максимальной площади при meL2 = = 0 уменьшается по мере увеличения me|2 и вырождается в точку М при т.н п„.
Абсолютная область существования ограничена изолинией D Q С коэффициента перекрытия еа = 1.0 при /п..и = 0, геометрическим числом точек 0,, 02 — линией D DB ... М. соответствующих коэффициенту перекрытия ео = 1,0 при maL .,>0 и при одновременной интерференции а,, = 0. а также геометрическим местом точек , 02 — линией С СВ ... М — соответствующим коэффициенту перекрытии га = 1.0 при та, 2 > 0 и при одновременной интерференции о^2 = О. На поле 01, 02 точка Af. в которую вырождается область существования, занимает крайнее положение в геометрическом месте точек В В... одновременной интерференции *^ = 0 и ^2 = 0.
Поскольку область существования для данной пары 2t, z2 строя! при moL 2= const, а коэффициент перекрытия ео= ...). то. сопоставляя области существования при различных значениях /яи1_ 2» получим семейство изолиний еа= const.
На рис. 5.5 показан пример сравнения областей существования для двух значений тл. 2, где вместо изолиний параметров построены их эпюры. Так как область существования симметрична, поскольку передаточное число и = 1,0, то линия Qq является осью симметрии сопоставимых областей, на которой лежи! гонка М. Дчя абсолютной области ADM изменение показано на липин Qq эпюры - от 148 © Э. Б. Булгаков
50
OS
точке M.
в
Рис. 5.5. Области сущегпюрания внешнего зацепления зубчатых колес Л[ж Zn ж 7 при ««12®^ (П и mak2“1/22L2 (“). а так же абсолютная область сущее твикни* ADM (области построены др оси симметрии Q<?)
m<u2 = О в точке Q до тл L 2 таж
<00
На эпюре г.а отражено изменение коэффициента перекрытия на линии Qq от 1.0 в точке А до максимального значения в точке В области существования при /пв| 2 = 0. На участке ВМ линии Qq изменение коэффициента перекрытия еа происходит в соответствии с увеличением тл. Таким образом, участок АВ эпюры коэффициента перекрытия га относится лишь к области существования 2= = 0, участок ВМ — к "’ai? = var
Положение области существования по отношению к исходному положению при meL 2 = 0 определяется не только значением та । 2, но и числом зубцов г( 2» сопряженных колес и передаточным числом и. При и = 1.0, как указывалось выше, область существования симметрична по отношению к линии Qq, при и > 1.0 интерференция я. 2= 0 уменьшается или исчезает почти совсем, например, у пары 2j = 14. z2=150, meL2= I/2.5г, 2-
Увеличив число зубцов при некотором передаточном числе и, можно получить передачи при более высоких коэффициентах перекрытия, достичь весьма больших углов зацепления, уменьшить жесткость зубцов й т л Уменьшив число зубцов, можно получить
149 © Э. Б. Булгаков
колеса с большими значениями независимых переменных при которых относительная толщина зубцов на окружности вершин может быть сведена к минимуму.
На рис. 5 6 при постоянном передаточном числе и - 1.0 показаны три области существования эвольвентного зацепления, при = 5: Zj_2 = 50 и z(_2 = 500. Эти области построены как при та ( 2 я 0, гак и с числами зубцов zt_2 = 5O и zt_2 = 5OO при 2>0. Так как при и = 1,0 области существования симметричны относительно линии qQ, то последние две области с различными значениями относительной толщины зубцов на окружности вершин совмещены по этой линии.
Конструктивные пропорции зубцов zL 2 — их конфигурация — зависят от значения независимых переменных 0ь 02. Так как не* зависимые переменные в пределах области существования эволь*
0 W 20 50 40 50 Uj
Рис. 5.6. Область существования wieiniiero зацепления при и = 1.0: z, при т«12 = 0 OK *i—2 = ^0 при «з| 2ж0 (II) и л«в । 2 = I?2,5zl2 (Ш) ^_2 = 5OO при **«1-2®° W н \|‘_2я,/2-»'1_2
150
© Э. Б. Булгаков
веятного зацепления меняются в широких пределах, то меняются внутри области соотношения между толщиной и высотой сопряженных зубцов (рис. 5.7). Если в точках 3, 4 и 5 эти соотношения являются приемлемыми, то в точках 10, 11, 12 они неудовлетворительны. если требуется увеличить несущую способность передачи. Таким образом, для высоконапряженных передач использование всей области существования нецелесообразно. Здесь можно провести аналогию с блокировочным контуром (см. разд. Ш). незначительная часть поля которого используется при проектировании некинематических передач. На блокировочном контуре существенное различие в конструктивных пропорциях сопряженных зубьев наступает при некоторой разнице в толщинах 5л1. Зв2 их зубцов на окружности вершин, в то время как на области существования — при различных в значениях 0|, 02. с учетом передаточного числа и.
Схемы зацепления определяется в зависимости от положения полюса зацепления по отношению к активной части линии зацепления или в зависимости от значения коэффициента перекрытия.
При Еа < 2.0 имеют место во внешнем зацеплении следующие пять схем зацепления: между изолиниями б/ = 0 и б./ - 0 размещение полюса в зоне однопарного зацепления; между изолиниями б * = 0 и C*2-i - 0 размещение полюса зацепления на ножке зубца шестерни г, и головке зубца колеса л2; между изолиниями б?* = 0 и С,*_2 = 0 размещение полюса на ножке зубца колеса л2 и головке зубца шестерни zx‘ левее изолинии С,’_2 0 и правее изолинии С*2-1 — 0 размещение полюса зацепления вне активной части линии зацепления (рис. 5.8). При и > 2.0 размещение полюса зацепления на активной части линии зацепления также определяется передаточным числом и, соотношениями между независимыми переменными Ор 02 и числами сопряженных зубцов.
В заключение этого параграфа рассмотрим область существования внешнего зацепления в других координатах. В гл. 2 было показано, что некоторые трансцендентные уравнения геометрии эвольвентного зацепления при переходе из системы координат , 02 в систему координат х, 2 и $12 преобразуются в линейные. В этом случае изменяется конфигурация областей существования, продемонстрированная на рис. 5.8-5.10. На рис. 5.9 показан блокировочный контур (П). перестроенный в систему координат х}, их-, (см. § 13.5). Некоторые уравнения в обобщающих параметрах х12 и 0L2 представлены в табл. 1.2.
Области существования внешнего эвольвентного зацепления для 153 сочетаний чисел зубцов опубликованы в [4. 5] и в ОСТ 100480-83 «Передачи зубчатые цилиндрические эвольвентныс внешнего зацепления. Расчет геометрии в обобщающих параметрах».
151 © Э. Б. Булгаков
Рис. 5.7. Конструктивные пропорции зубцов в различал точках области существования внешнего зацепления зубчатых колес ijeI7, ^ = 28 при /пв1« 0,025. /пд -j= 0.015
152
© Э. Б. Булгаков
Рис. 5.8. Область существования влешнега заисгстснии зубчатых колес zj 20. zj 42 при Л1а| j 0 в системе координат в,.
153
© Э. Б. Булгаков
Рис. 5.9. Область существования внешнего зацепления зубчатых колес 2| = 20, Zj=42 при (па| 2 “ О в системе копрднна! Хр ик^
154
© Э. Б. Булгаков
Ц lnvd\-GtU
Рис. 5.10. Область существования внешнего зацепления зубчатых колес 20, 42
при ma] j = 0в системе координат 0,. и62
5.5. ОБЛАСТЬ СУЩЕСТВОВАНИЯ ВНУТРЕННЕГО ЗАЦЕПЛЕНИЯ
Область существования внутреннего эвольвентного зацепления, так же как и внешнего, строят для наперед заданной пары чисел зубцов г2, г3 при некоторой также наперед заданной относительной их толщине на окружности вершин /пд43 = const.
На риг 5 11 а показаны области существования для пары колес
155
© Э. Б. Булгаков
с числом зубцов г2 = 23 и г3 = 91. построенные в системе координат независимых переменных 02 3 при трех значениях л<2>3 —0; 0,4/г и 0,7/г.
Область существования, например, при та t 3 = 0 ограничена изолинией B(QCj коэффициента перекрытия го2_3= 1,0, изолинией C(qDt интерференции а,г=0 и изолинией DlBt угла зацепления аг2_3 = 0. Вне этой области проходит граница интерференции вершин зубцов. Внутренняя часть области является разрешенной для выбора независимых переменных.
На области существования нанесены изолинии углов зацепления ar2_3= const, которые не зависят от 3, в то время как коэффициент перекрытия еа2_3 от me2 3 зависит. При заостренных зубцах г2, г3 изолиния коэффициента перекрытия еа2_3= const за хватывает наибольшую область выбора углов зацепления аг2_3 и для рассмотренного примера она лежит в интервале (О. 46. 32 •). Угол зацепления яг2_Зоах достигает максимального значения в точке Q линии Qq - геометрического места точек 02, 03, в которых при некотором угле зацепления коэффициент перекрытия наибольший. В точке q независимые переменные 0,., 03 соответствуют минимальному углу зацепления «г2_3 = 34.5° на линии Qq и при этом угле зацепления наибольшему коэффициенту перекрытия еа2-33*0- В тоже время внутри области существования коэффициент перекрытия еп2_3 тем больше, чем меньше угол зацепления аг2_3 117111 меньше 02, 03.
Интересна точка £>( с координатами invOi3= л/*13, которая лежит на изолинии <хг2_3=0. Независимые переменные 02, 03, эвольвентная функция которых inv(>2 э= л/zi3 являются границей при «переходе* зубцов из одного в другой ряд размещения относительно основной окружности. При та2 3 = 0 вся область существования располагается в I и IV квадрантах системы координат inv(h,= л /z2 inv03= л /?3. Если независимые переменные 02. 03 принимаются из IV квадранта, то зубцы сопряженного колеса z2 располагаются непосредственно на основной окружности, т. е. в I ряду, в то время как зубцы сопряженного колеса г3 только во II ряду Зубцы колеса г3 всегда располагаются только во II ряду, поскольку независимые переменные 03 принимаются inv03> л /z3 . Независимой переменной принятой из I квадранта, соответствуют зубцы, размешенные во II ряду относительной основной окружности.
По мере увеличения та1 3> 0 область существования перемещается в сторону меньших значений 02, 03 и меныпих значений
156
© Э. Б. Булгаков
Рис. 5.11. Область существования ннуугреннепо зацепления зубчатых колес га = 23. л3»91 при > 3 - О /По 2.3 е 25*2.3 '’Чг.з “1/1.4^2.3 ("О в системе координат 0?. (о) и flg, <>3 (б)
157
© Э. Б. Булгаков
углов зацепления аг2_3, а следовательно, больших коэффициентов перекрытия 2_3. Самый большой коэффициент перекрытия
Еа2-з теоретически достижим в точках £[.,.0^. т. е. на границе
с интерференцией при аг2—зв 0 При rnai3> 0 точка D пересечения изолинии ах2-з= О с изолинией интерференции ад2= 0 располагается в Ш квадранте системы координат invO2=rt/z2, invO3= л /гл и, следовательно, в [II квадрант попадает часть области существования. Независимые переменные 03. принятые из этой части области существования, соответствуют зубцам г3, размещенным в I ряду. т. е непосредственно на основной окружности.
При увеличении относительной толщины зубцов /п. 2 3 на окружности вершин область существования уменьшается, перемещаясь в область малык значений углов зацепления otT2 3. При некотором
/пг2-3 max область существования вырождается в точку Л!, в которой ео2-зя tO. а угол зацепления аг2_3=0. Точка Af, так же как точки
От..., расположены на изолинии л1Г2_3=0
Таким образом, изолиния аг2_3= 0 от точки М до точки В-, изолиния ев2_3= 1.0 при /ла2 3 = 0 от точки Bj до точки Ct через точку Q и, наконец, геометрическое место точек С„ Сп, Ст... М пересечения изолиний ^2= 0 с гО2-зж1-0 определяют границы абсолютной области существования внутреннего зацепления Абсолютная область существования - это максимальная площадь возможного выбора 02, 03 из поля независимых переменных пары зубчатых колес с числами зубцов z2, z3 при некоторых относительных толщинах на окружности вершин т^з^ 0.
Зубчатые колеса с внутренними зубцами z3, если им соответствующая эвольвентная функция inv03< л /г3, находит ограниченное применение. По этой причине, чтобы отсечь редко используемую часть области существования, а также по причине, изложенной в гл, I, целесообразно применять независимую переменную f>3. характеризующую по аналогии с внешним зацеплением окружность вершин. На рис. 5.11, б показана область существования в системе координат (К 03.
В этой системе координат расположение оси ординат 02 таково, что отсчет значений независимой переменной 03 по оси абсцисс начат с inv03= л /г3. Таким образом, часть области существования на рис. 511, а, лежащая в III квадранте системы координат inv02= л /z2 , inv03= л /л3 в системе координат 02, Ф3 отсутствует. Тем не менее даже и в этой системе координат (02, 03) область
158
© Э. Б. Булгаков
малых значений 03, редко используемая, получается достаточно растянутой.
Рассмотрим область существования при maZ 3 = 0. Эта область ограничена изолинией коэффициента перекрытия га2 3= 1.0. изолинией BlDl угла зацепления аУ2_3в0 изолинией ДС| интерференции ар2~ 0 Изолинии аГ2_3= 0 и а>2= 0 пересекаются в точке D{ с координатами invO2= л /2г . invO3= л /23, а линия Qq является биссектрисой ортогональной системы координат 02. 03.
При /паФ 3> 0 изолиния коэффициента перекрытия Ей2_3-1.0 и интерференции а;2=0 в области малых значении ограничена осью ординат 02. Таким образом, например, при m<23= 1 /2.5г^2 область существования ограничена изолиниями ел2_3= 1,0-линией CnQnDn, изолинией <х, 2= 0 - линией Сп£)п и участком DnDn оси ординат 02.
Абсолютная область существования в системе координат 02, 03 ограничена изолинией ВДС, коэффициента перекрытия Ea2_3s 1.0 при та2 з-О, изолинией BlDl угла зацепления
<*Г2_3= 0. участка DiD[i оси ординат 02 и геометрическим местом точек DuCj пересечения изолиний еа2_3= 1.0 с ад2=0 при
Области существования внутреннего эвольвентного зацепления для 44 пар зубчатых колес опубликованы в ОСТ 1.02718-91 «Передачи зубчатые цилиндрические эвольвентные внутреннего зацепления. Расчет геометрии в обобщающих параметрах».
S 6 ОБЛАСТЬ СУЩЕСТВОВАНИЯ КОСОЗУБОГО ЗАЦЕПЛЕНИЯ
В торцовом сечении косозубое внешнее эвольвентное зацепление не отличается от прямозубого. Однако у зубчатой передачи с косозубым зацеплением выбор независимых переменных при некотором та t 2 = const по сравнению с областью существования прямозубого эвольве1ггного зацепления значительно расширяется за счет перехода через границу изолинии ео= 1.0 и. таким образом, через угол зацепления аг= л/4 для симметричных зубцов в пре делах половины углового шага.
В самом общем виде у косозубых передач в торцовом сечении коэффициент перекрытия еа S 1,0. а угол зацепления может доходить до л/2. При теоретически возможном случае при «^=0 передача движения от ведущего к ведомому зубцу (колесу) осуществляется
159 © Э. Б. Булгаков
Ряс. 5.12. Область сушгсттюыния косозубого зйа<ык*мтниго оцепления пары зубчатых катес “ 20. z2 = 42 при l/X5a^
только за счет взаимодействия зубцов в осевом направлении, учитываемом коэффициентом осевого перекрытия.
Если взять область существования прямозубого эвольвентного зацепления для пары колес с числами зубцов г} и z2 при относительной их толщине на окружности вершин m<u г и'достроить на этой области изолинии О s га< 1,0 то получим область существования эвольвентного косозубого зацепления в торцовом сечении. На рис. 5.12 показана такая область, расширенная не только за счет уменьшения га< 0. но также за счет увеличения аг> л /4.
160 © Э. Б. Булгаков
Рис. 5.13. Область сущсствовання коспзубого эвольвентного зацепления при и ~ 1,0 яа.|.2ж °- г1 * 2: 3: .5 к 20:
/ —и «пиния еа 0; 7 и 3 — и «линии интерференций ах1 О и ад2 0; 4 и 5 — изолинии границ вне полти него зацепления и <тг • i>.
Естественно, чем больше 2 тем меньше область выбора независимых переменных в торцовом сечении
В случае применения косозубого эвольвентного зацепления число зубцов у сопряженных колес даже при и = 1,0 может быть уменьшено до 2( = 22 “ г1-2“ !• Зацепление таких двух эвольвентных зубчатых колес - червяков производится при некотором достаточном коэффициенте осевого перекрытия ед, значения которого не могут найти отражение на области существования косозубого зацепления в торцовом сечении.
161 © Э. Б. Булгаков
На рис. 5.13 показана область существования косозубого внешнего эвольвентного зацепления при и = 1,0, 2=0, различных
значениях zH2 [8|. Эти области ограничены изолиниями коэффициента торцового перекрытия ео= 0 (линии /) и изолиниями интерференции зубцов a 12= 0 (линии 2 и 3): штрихом также отмечены изолинии Еа= 1.0 при г,_2 = 20 и г,_г=5, определяющие области существования прямозубого зацепления. При одновременной интерференции на основной окружности (в точке В области существования) у косозубых сопряженных колес с числом зубцов, например, zH2 = 1 .минимальный угол зацепления *гт1с= 61,34е, а коэффициент перекрытия достигает максимального значения, равного Ед мх= 0,582. У пары прямозубых зубчатых колес с числами зубцов Z|_2S& (см. рис. 5.6) область существования, ограниченная сверху штрихом на рис. 5 13. весьма незначительна по сравнению с областью существования косозубого зацепления.
5 7. ОБЛАСТЬ СУЩЕСТВОВАНИЯ НЕСИММЕТРИЧНОГО ЗАЦЕПЛЕНИЯ
Рассмотрим область существования внешнего зацепления, зубчатые колеса которой z.- z2 имеют зубцы типа I с несимметричным профилем (рис. 5.14). В системе координат 0. 02 она состоит из двух областей, первая (/) из которых определяет выбор независимых переменных 0| 2 дли профилей. основные окружности которых равны 2. а другая (//)-зависимых от 0] 2 переменных 0,*2. соответствующих профилям, разворачивающихся с основных окружностей диаметров d*{ т Такие области лежат внутри области существования тех же колес с симметричными профилями зубцов (III) при maL2= = 0, а при малых углах зацепления несколько выхолят за ее пределы.
Так как К = d* / d* > 1.0, то область 1 выбора независимых переменных 2 лежит при углах зацепления лг(_2> 2. При боль-
ших углах зацепления она ограничена коэффициентом перекрытия eai—2= 1’0’ отмеченным изолинией LQS (рис. 5.14). Этим независимым переменным соответствует угол зацепления aj по формуле (2.64). Учитывая, что в рассматриваемом на рис. 5.14 примере tnt|2 = 0- зависимые переменные 0*2 на основании (2.62) определяются по формулам (2 66) и (2 67). Каждой паре значений 0’2 будет отвечать коэффициент перекрытия е„> 1, изображенный на области П граничной линией L'q's'. При значениях зависимых 162 © Э. Б. Булгаков
Рис. 5.14. Область сущсспюеанкх несимметричного зацепления с зубцами шла I при г( = 57. = S4, «Jj = 0.06, *«<12 = О. К*М47
переменных 0*2 больших на колесе 2г и малых на шестерне z( и наоборот коэффициент перекрытия t,* уменьшается и достигает предельного значения = 1,0. На области существования // изо линии коэффициента е*= 1.0. обозначенные L*D* и SC*, отображены в граничные линии LD и SC области существования 1, которым соответствуют еа> 1.0. На рис. 5.14 независимым переменным 0, 2 точки А при аг= 37,21° отвечают эвольвентные профили зубца с основными окружностями d6l 2» а соответствующим зависимым переменным 0*2 точки А* при aj = 24® эвольвентные профили, развернутые с основных окружностей d6*L2. По этой же причине, т. е вследствие того, что коэффициент отношения диаметров основных окружностей /С >1,0, интерференция профилей aj, 2= 0, возникающая при небольших углах зацепления, ограничивает выбор зависимых переменных 0*2; изолинии интерференции аД2 = 0 обозначены на области II как D В С. Этим изолиниям соответствует граничная линия DBC на области существования I выбора 0L 2 вдали от интерференции. Более подробно см в работе (10)
163 © Э. Б. Булгаков
Раздел II
СИНТЕЗ ЭВОЛЬВЕНТНОГО ЗАЦЕПЛЕНИЯ
6. ВЫБОР ЧИСЛА ЗУБЦОВ. ПОЛНЫЙ ЦИКЛ ПЕРЕСОПРЯЖЕНИЯ И ПОСЛЕДОВАТЕЛЬНОСТЬ ЗАЦЕПЛЕНИЯ ЗУБЦОВ
Количество зубцов у зубчатой передачи в значительной мере влияет на ее работоспособность, Пересппряжение в самом общем смысле — процесс, а в частности — очередность входа зубцов в зацепление — зависит как от передаточного чиста (является ли оно целым или дробным), так и непосредственно от числа зубцов — будет ли оно простым, кратным например, двум, составным и т. д. Изучение псресопряжения зубцов, в частности, необходимо при анализе влияния на динамику н прочность зубчатой передачи несистематических погрешностей изготовления или других дефектов зубцов. Встреча таких зубцов рассматривается за период полного пересопряжения, при котором зубцы зацепляющихся колес вернутся а исходное положение через некоторое число оборотов каждого из колес.
Таким образом, при выборе числа зубцов необходимо решить две задачи во-первых, определить число оборотов у сопряженных колес, при котором происходит полный цикл пересопряжения и во-вторых, определить последовательность входа зубцов в зацепление
Приведем несколько примеров полного пересопряжения зубцов и последовательности их зацепления я зависимости от ряда факторов
Допустим, что и = 1.0. Тогда полное пересоприжение зубцов произойдет в течение одного поворота колес, причем каждый зубец будет зацепляться только с одним определенным зубцом Если передаточное число и * 1,0 и является целым числом, го полное пересопряжение зубцов произойдет через и оборотов шестерни 2] или через один оборот колеса z2, причем некоторый зубец ше стерни будет входить в зацепление и раз через зубцов.
Например, z, = 15, z2 = 45. u = 45/15 = 3. Тогда полное пересопряжение зубцов произойдет через три оборота шестерни z, = 15 или через один оборот колеса 22 = 45 Пронумеруем зубцы колес z, 2 и начнем отсчет их зацеплений с исходного положения — момента, когда зубец 1-й шестерни z, находится в контакте с зубцом 1го колеса г7. При этом зубец 1-й шестерни Z] через 15 зубцов будет 3 раза входить в зацепление с зубцами колеса z2: сначала контакт зубцов будет происходить в исходном положении, затем он наступит
164 © Э. Б. Булгаков
через 15 зубцов, когда зубец 1-й шестерни zt войдет в зацепление с зубцом 16-м колеса г2 и, наконец, опять через 15 зубцов — с зубцом 31-м, после чего процесс пересопряжения повторится.
Иную картину получим, если передаточное число и г 1.0 и является нецелым числом. Здесь возможны несколько вариантов полного персе спряжения зубцов Допустим, что числа зубцов г( и z2 у сопряженных колес являются либо оба простыми числами, либо одно из них В этом случае для полного пересопряжения зубцов шестерня Z| должна сделать г2 оборота, а колесо г2 сделает оборот, в течение которых каждый зубец шестерни войдет в зацепление со всеми зубцами колеса г2. Например, если и = 51/49, то полное пересопряжение зубцов произойдет через 49 оборотов колеса г2 = 51 или, что одно и то же, через 51 оборот шестерни 2, = 49.
Другой вариант пересопряжения наступает, если числа зубцов 2j = tm и z2 = qm являются составными, причем 1 и q — либо оба простые, либо простым числом является одно из них. а /71 — общим наибольший множитель, не равный 2. В этом случае для полного пересопряжения зубцов колесо г2 должно сделать t оборотов, а шестерня — q оборотов и некоторый зубец шестерни будет входить в зацепление с некоторым зубцом колеса г2 через т зубцов. Например, предположим, что zt = 16. г2 = 20. Числа 16 и 20 — составные и поэтому передаточное число можно записать как и -= 20/16 = 5 • 4/(4 • 4) = 1,25, где q = 5. t = 4, т = 4 Отсюда следует, что полное пересопряжение зубцов произойдет через q = 5 оборотов шестерни = 16 или через / = 4 оборота колеса г2 = 2О. причем каждый зубец шестерни г, через m = 4 зуба будет сопрягаться с соответствующими зубцами колеса Так, зубец 1-й шестерни г, зацепляется с зубцом 1-м колеса г2, а затем через т = 4 с зубцами 5, 9. 13 и 17-м, зубец 2-й с зубцами 2, 6, 10, 14, 18-м, зубец 10-н с зубцами 10, 14. 18. 2, 6-м и т. д
Рассмотрим еще один пример. Допустим имеется передача, состоящая из последовательно зацепляющихся колес = 40, гв = 32 и гс«20, где — паразитное колесо. Такая передача распадается на две пары сопряженных колес с нецелыми и с неравными единице передаточными числами иАВ = 40/32 = 5 • 8/(4 8) и ик = 32/20 = « 8 • 4/(5 • 4) У передачи zA—zB полное пересопряжение зубцов произойдет через пять оборотов колеса = 32 или через четыре оборота колеса гА - 40, причем некоторый зубец колеса гл будет зацепляться через т = 8 зубцов с зубцами колеса zB Так, если 1-й зубец колеса г4 зацеплялся с 1-м зубцом колеса ?я. то далее он войдет в зацепление с зубцом 9-м. затем с 17-м. после чего с 25 и 32-м зубцами.
В то же время у передачи —zc полное пересопряжение зубцов произойдет через восемь оборотов колеса гс = 20 или через пять оборотов колеса zfl = 32, причем зубец 1-й колеса гс = 20 будет зацепляться через четыре зубца с зубцами колеса гв = 32 — с зубцом 1, 5, 9, 13. 17. 21. 25. 29-м.
165 © Э. Б. Булгаков
Таким образом, зубец 1-й колеса гл и zc входит в зацепление с разноименными профилями зубцов I. 9, 17 и 25-м колеса гв. Дополнительно при зацеплении с колесом zA контактирует зубец 32-й. а при зацеплении с колесом zc— 5, 13, 21 и 29-й зубцы. Следовательно, если имеются следы контакта на зубцах, то в наибольшей мере они должны проявиться с двух сторон на I, 9. 17 и 25-м зубцах колеса zB.
Наконец, может быть еще один вариант пересспряжения зубцов передачи, числа которых, являясь составными, имеют общий наибольший множитель т = 2. В этом случае некоторый зубец |-й шестерни zt будет входить в зацепление через один зубец с зубцами колеса z2. Например, при передаточном числе и = 22/18 = = 11 • 2/(9 • 2). где общий наибольший множитель т = 2, полное пересопряжение зубцов наступает через девять оборотов колеса 2г = 22 или через II оборотов шестерни zl = 18. а указанный зубец 1 й будет контактировать со всеми нечетными зубцами колеса z2 (в последовательности I, 19, 15. II, 7, 3, 21. 17, 13, 9 и 5), зубец ’2-й со всеми четными и т. д.
Сформулируем в общем виде расчет последовательности зацепления зубцов если пронумеровать зубцы сопряженных колес г, < г2 и в качестве исходного положения принять зацепление зубцов с номерами 1, то за полный цикл пересопряжения очередность входа зубца колеса z2, номер которого Лг = z2, с зубцами шестерни zl происходит в следующей последовательности: на первом обороте колеса z2 зубец с порядковым номером N = z2 зацепляется с зубцом шестерни Z|. имеющим порядковый номер = z?— zb на втором обороте колеса z* этот зубец зацепляется с зубцом шестерни zb номер которого = Zj— (zt— Nfy, наконец на л — обороте зубец шестерни имеет порядковый номер = za— (Zj- если 4V,rf < Zj, а если > zt, то номер зубца = z2- fcZ|+ где k — передаточное число и, округленное в меньшую сторону до целого числа.
Таким образом получают некоторую начальную последовательность зацепления зубцов шестерни z,. зацепляющихся с зубцом колеса z2, имеющего номер А = z2. Новая последовательность зацепления зубца колеса z2 с номером А = z2 - 1 или А = z2 - 2 и т. д, отличается от начальной на I или 2 и так далее зубца соответсгвенно. Если сопряженные зубчатые колеса имеют четное число зубцов Zj и z2, при которых зубцы с четными номерами зацепляются между собой, а нечетные между собой, то последовательности номеров зубцов, находящихся в контакте с некоторым наперед заданным зубцом колеса z2, определяются отдельно но приведенным выше формулам как бы для двух пар колес — только с четными и только с нечетными зубцами.
166 © Э. Б. Булгаков
Наконец, отметим, что число зубцов, вступивших в зацепление, при котором происходит полный цикл или период их полного пересопряжения у пары колес, равно числу зубцов одного из колес, умноженному на число оставшихся зубцов у сопряженного с ним колеса после сокращения общих множителей. Оставшиеся после сокращения зубцов у пары сомножители равны числу оборотов шестерни zt. если этот сомножитель у числа z2 зубцов колеса и наоборот.
Используя приведенное выше в одном из примеров обозначение, имеем, что суммарное число зубцов, участвующих в зацеплении на периоде полного пересопряжения, равно z2 = 2{q = z2f. где q — число оборотов колеса z2, a t — число оборотов шестерни zlt необходимых для полного пересопряжения зубцов пары колес.
Кроме процесса пересопряжения зубцов на динамику и прочность зубчатой передачи влияет количество зубцов, а применительно к прочности — зубьев При прочих равных условиях, например, если сопряженные колеса имеют равные шаги по начальным окружностям и равные диаметры основных окружностей, то чем больше число зубцов (зубьев), тем меньше их коэффициент формы, или местные напряжения у основания зубцов (зубьев), больше коэффициент перекрытия, выше стойкость их поверхностей против заедания
7. ЗУБЧАТАЯ ПЕРЕДАЧА ИЗ ДВУХ СОПРЯЖЕННЫХ КОЛЕС
7.1. РАЦИОНАЛЬНАЯ ЧАСТЬ ОБЛАСТИ СУЩЕСТВОВАНИЯ ЕДИНИЧНЫЕ ИЗГИБАЮЩИЕ НАПРЯЖЕНИЯ
Изгибающие напряжения в зубе в значительной мере зависят от его геометрии у основания — сечения и радиусов кривизны переходной кривой. На 1-м этапе проектирования, когда параметры переходной кривой, являющейся концентратором напряжений, не известны, вычисленные для зубцов изгибающие напряжения условны. Однако и они. во всяком случае на 1-м этапе проектирования, в том числе автоматизированного, позволяют лишь приблизиться к наиболее целесообразному решению.
Определение единичных напряжений у основания зубца с единичными параметрами (rf6= 1.0, 6Г= 1,0) при действии на него единичной статической удельной, нормальной к профилю силы F = 1,0 производится в зависимости от независимых переменных Ц. 02 на области существования эвольвентного зацепления. Изгибающие напряжения в зубце можно определить, используя решения плоской задачи теории упругости о клине, к вершине которого приложены сжимающая и изгибающая силы, а также изгибающий момент [3].
167 © Э. Б. Булгаков
Рис. 7.1. ЗуОц. нагруженный единичной статической уделы* й. нормальной к профилю склон F = 1,0
Встроим в зубец клин, стороны которого проходят через точки / и X (X— точка приложения силы F: рис. 7.1). Тогда, не нарушая напряженного состояния клина у основания, можно приложил, к его вершине Ож силу F — ее составляющие Fx и Fr а также компенсирующий изгибающий момент Т.
Если сторона клина ОК1 = rt, а половина утла при вершине р, то
2
sinp________fyCQSp______________7sin2p
2р - sin 2р 2р + sin2p Г((5*П2Р “ 20со$2р)
(71)
где силовые факторы Fx = Fsin^, FY = Fcos£x, 7=7,+ Гу. здесь 7Х = F хХХ = lFsin^ sin^xsecardft; Tr = FyO^X = ^Fcos^x x x (sin4>. seca, etgp + cos^, secot, -cos\p, secaj db. образующая клина
г, = Ksinthi secoi, cosec^ db, половина угла при вершине клина
168
© Э. Б. Булгаков
зшф, seca, - sin4>, зеса. (7.2)
3 = arc tg-----------------------.
ьсо$фж seca, - cosi|>f seca/
угол давления в точке X определяется по формуле (2.8); половина угловой толщины зубца в точках Ли/; фг« invO - invax, ф, = invO - invar
Угол профиля в (раничной точке / контакта несколько меньший, чем угол ар, и может быть принят примерно равным для
шестерни 2, угол определяют по формуле (2.17). для колеса гг —по (2.15).
Оценим при dt = 1,0 изгибную прочность зубца через напряжения б.1,0 в точке I. если к нему в некоторой точке Л приложена сила F = 1.0. действующая по нормали к профилю и отнесенная к ширине
1 о ь
зубчатого венца 6Г; б, ог-у. или в развернутом виде
io 4 » . Л f sinpeos^ cospsinL.
б.ио = — созесф, cosot. sinp { -6f5 . Д - *n , . * -
1 и r - sin2p 2p + sm20
- cosec*, cose, sinp яп2р ^rm2p <sin*« +
+ (ылф, seca, ctgfl + cosifoseca, - cosi^secaj cosC,)} (7.3) где и учитывается только при определении о// для колеса z2. Если сопряженные зубчатые колеса имеют одинаковые механические свойства, то без учета числа циклов перемен напряжений выбор независимых переменных из области существования должен удовлетворять условию равнопрочности зубцов <з^° - 0j2° = 0.
В традиционных методиках расчета на прочность изгибающие напряжения определяют через коэффициент формы зуба, *б<сленно равный напряжениям, которые получают также при нормальной силе F / br = 1.0. но при модуле зацепления т = —seca = 1.0, (где a — угол профиля ПРК. см. ниже).
Для определения изгибающих напряжений в зубце внутреннего зацепления, аппроксимированном клином воспользуемся формулой (7.3), полученной’для зубцов внешнего зацепления. Будем учитывать, что вместо половины угла при вершине клина по формуле (7.2) следует подставить в формулу (7.3) угол
я - sinMin <М)
p-i — arctg------ " --------
Б со$фд secctfl - со5фгз secan
вместо углов давления —угол давления £*3 по формуле (2.34).
169
© Э. Б. Булгаков
вместо углы = invar3j - invftj. вместо aXu углы otrj и лгз-
После того как вычислены единичные изгибающие напряжения зубцов 6,12.3. становятся известными все качественные параметры зубцов и зацепления, изолинии которых определяют рациональную часть области существования эвольвентного зацепления для принятой пары чисел зубцов г, при некоторой относительной толщине iWjm на окружности вершин
Совокупность изолиний ar = const или приведенных радиусов кривизны рпр. коэффициентов перекрытия ео = const, удельных скольжений X, единичных изгибающих напряжений бД?3 = const или их разности -б,г° = 0 для различных точек приложения нагрузки к профилю образует рациональную часть области существования Принятые из рациональной части области существования независимые переменные должны правильно соотноситься с геометрическим местом точек qQ. определяющим наиболее целесооб разную связь двух важных параметров зацепления — ctr и ео
Необходимо учитывать также конструктивные пропорции зубцов и их конфигурации, изменение которых в зависимости от 012 ио" казаны на рис. 5.7. Зубцы с наиболее целесообразной формой или, лучше сказать, конфигурацией находятся в рациональной части области существования.
7.2. КОНСТРУИРОВАНИЕ ЭВОЛЬВЕНТНЫХ ЗУБЦОВ
При традиционном расчете отсутствует понятие о конструировании зубьев и зацепления Зубья *получают из-под инструмента» со смещением, и на параметры зубчатых колес и зацепления можно влиять только через инструмент и его установку при нарезании.
Свободный синтез некоторой пары зубцов, а затем зацепления возможен при применении обобщающих параметров, синтезе на ЭВМ. Независимые переменные принимаются из области существования эвольвентного зацепления или из ее рациональной части при некоторой принятой толщине зубцов та на окружности вершин или. в самом общем виде, из абсолютной области существования. При принятых из тех или иных соображений независимых переменных 0|. 0?, для зубцов с симметричной конфигурацией конструирование сводится, во-первых, к пристраиванию к зубцу переходной кривой или переходной поверхности, которая явилась бы наименьшим концентратором напряжений Эта операция рассматривается в разд. III книги. Отметим лишь, что переходная кривая или переходная поверхность может быть образована как методом
170 © Э. Б. Булгаков
параметров зубцов и зацепления, рассмот-
1*мс. 7.2 Схема зацепления зубчатых колес со скэшечной вершиной головки зубьев
сгибания, так и методом копирования, благодаря чему имеются широкие возможности получения их как минимальных концентраторов напряжений.
Вторая особенность конструирования заключается в оформлении вершины головки зубца В качестве неординарного решения здесь могут рассматриваться зубцы со скошенной вершиной (рис. 7.2). благодаря чему могут быть увеличены независимые переменные, а отсюда угол зацепления хт и коэффициент перекрытия еа. С другой стороны, не изменяя независимые переменные путем применения скошенной вершины, можно, если это требуется, увеличить толщину зубца 5а у вершины, если у зубца с симметричной вершиной она недостаточна.
Наконец, применение при проектировании несимметричных зуб цоп I и II типа открывает большие возможности при их синтезе на ЭВМ. Здесь кроме ренных в разд. I книги, используется такой арсенал синтеза, как регулирование параметров переходной кривой. применение скошенной вершины зубца и. наконец, изменение конфжура-цнн тела зубца в целях управления его жесткостью. Последнюю связывают с точностью изготовления зубчатых колес, поскольку согласование погрешности изготов ления с жесткостью зубцов должно обеспечить работу передачи в режиме •точной под нагрузкой», когда деформация зубцов пре вытает. например, наибольшую вероятную разность их основных (если зубья прямозубые) шагов Некоторые примеры синтеза приводятся ниже.
171
© Э. Б. Булгаков
7.3 ЗУБЧАТЫЕ ПЕРЕДАЧИ С БОЛЬШИМИ УГЛАМИ ЗАЦЕПЛЕНИЯ ИЛИ С БОЛЬШИМИ КОЭФФИЦИЕНТАМИ ПЕРЕКРЫТИЯ
Угол зацепления лт и коэффициент перекрытия еа, являющиеся функциями независимых переменных а также зависящие от числа зубцов у сопряженных колес.— взаимосвязанные параметры. Кроме того, как известно, коэффициент перекрытия ?а зависит также от относительной толщины зубцов на окружности вершин или от диаметров окружностей вершин зацепляющихся колес. Как во внешнем, так и во внутреннем зацеплении с увеличением угла зацепления аг коэффициент перекрытия еа уменьшается. При проектировании высоконапряженных зубчатых передач стремятся к одновременному получению высоких значении как аг. гак и га. Поскольку такие решения не выполнимы, то здесь наиболее целесообразны два компромиссных варианта проектирования: возможно увеличение угла зацепления до схт = 30 ° и более за счет уменьшения коэффициента перекрытия до 1.3... 1,4 или возможно уменьшение утла зацепления до аг > 22 ° при гарантированном двухпарном зацеплении на всей активной части линии зацепления
Рассмотрим получение зубчатых передач с большими углами зацепления Зубчатым колесам, образующим такую передачу, соответствуют большие углы профиля на окружности заострения — независимые переменные 0 Так как касательные к профилям зубца на окружности заострения образуют угол 20. то при больших значениях 0 этот угол может быть близок к прямому. В этом случае отпадает необходимость назначения больших значений относительных юл ш ин зубцов на окружности вершин, во всяком случае для колес с внешними зубцами, например, /па1, £ 1 / 2.5г, ,. Уменьшение та. если это допустимо из условия размещения фасок и химикотермического упрочненного слоя, проведения профильной и продольной модификации и т. д.. является резервом увеличения активною профиля зубца. Последнее означает, что при неизменном угле зацепления возрастает коэффициент перекрытия. Увеличение угла зацепления сопровождается уменьшением скорости скольжения, что благоприятно сказывается на увеличении контактно-гидродина мического слоя смазки и стойкости поверхностей зубьев против заедания Толстая контактно-гидродинамическая пленка — естественный демпфер колебаний зубьев зубчатой передачи, а увеличение приведенных радиусов кривизны в связи с увеличением угла зацепления приводит к уменьшению контактных напряжений по Герцу. У зубчатых колес с большими значениями О растет нзгибная проч кость зубьев и их жесткость Увеличение жесткости способствует превращению передач в «неточные под нагрузкой*, когда деформация зубцов меньше погрешности изготовления зубчатых колес. Отсюда следует, что такие передачи необходимо изготавливать как 172 © Э. Б. Булгаков
можно более точны ми
Перечисленные свойства передачи, дополняющие или взаимоисключающие друг друга, затрудни ют принятие единственного решения о путях повышения несущей способности передачи, используя возможности геометрии зацепляющися колес Независимые переменные зубчатых колес, например, для чисел зубцов и г2, при некоторой их относительной толщине /naL2 на окружности вершин принимаются из области существования тем ближе к граничной линии ?.а — 1,0, чем большим требуется угол зацепления аг. Чем
Рис 7.3. Номограмма выбора независимых переменных
#2 при еа ~ 2-05« та цг = 1 / 2.51^ и равнопрочных по изгибу зубцах
менее передаточное число отличается от 1,0 и (или) чем больше суммарное число зубцов гг = г{ + г2, а также меньше относительная толщина зубцов /па1д, тем ближе угол зацепления к предельному значению Например, угол зацепления = 40 ° у почти заостренных зубцов при /пв|_2 = 0,001 может иметь зубчатая передача
г, = г2 = 50 при 0|_£ = 42.45 ° и коэффициенте перекрытия
га = 1,10. В этом примере касательные к разноименным профилям
зубцов на окружности вершин пересекаются под углом - 84 ° и потому т;1_2 = 0.001 является реальной величиной (А с. 912981, F 16 Н 1/08).
Рассмотрим зубчатые передачи с повышенным коэффициентом перекрытия *а. С учетом допусков на изготовление и сборку зубчатых колес, а также деформаций их зубцов под нагрузкой принимают коэффициент перекрытия в диапазоне 1.9 <еа <2,05. Склонность к заеданию у передач зависит от коэффициента перекрытия еа
173
© Э. Б. Булгаков
02
Рис. 7.4. Схема зацепления зубчатой передачи u»LO. Z|_? = 50. #j 26’50'. «в|_2 = 0.01; av - 15". еа - 3.16
174
© Э. Б. Булгаков
о,
Pwc. 7.5. Схема зацепления (а) и общий вид (б) зубчатой передачи при аг-1.0, *1-2-75. *1-2“ • 24.2, |_j—0,
-15". «а —4.34
175
© Э. Б. Булгаков
и она тем вероятнее, чем ближе к двум и более дйух. Одним из радикальных способов уменьшения возможности появления заедания является унеличеиие угла запгплспия, отсюда снижение скорости скольжения, а затем увеличение толщины контактно-гидро динамической пленки.
Чем больше коэффициент перекрытия eft, тем выше податливость зубцов и тем вероятнее при достаточной точности изготовлений их многопарный кшггант
На рис. 7.3 представлена номограмма выбора независимых переменных 0г при ед = 2.05 и = I / 2r5zL£ для зубчатых передач с числами зубцов у сопряженных колес в диапазоне 25 S 300 и углами зацепления в диапазоне 2Q * 2d °. Быб-ранным по номограмме параметрам соответствуют равнопрочные по изгибу эубгцл в случае приложения нагрузки к их вершине. На этапе синтеза зубцов понятие о их равнопрочностн в значительной мерс условное, поскольку еще не учитываются местные напряжеЕши у переходных кривых; лишь на втором этапе синтеза переходные кривые подстраивают к зубцам.
Перспективными являются зубчатые передачи с коэффициентом перекрытия ед>ЗД зубчатые колеса которых изготовлены из материала с модулем упругости существенно меньшим, чем у стали, например из полимеров. В этом случае изменяются привычные конструктивные пропорции зубцов — зубцы удлиняются, а их эвольвенты переешаются под более острым, чем объпзно. углом. Высокая податливость таких зубцов обеспечивает распределение нагрузки между сопряженными парами, а влияние погрешностей изготовления колет на распределение нагрузки между зубцами при этом играет значительно меньшую роль, чем у стальных зубчатых колес
На рис. 7.4 и рис 7.5 показанье примеры зубчатых передач при > 3,0 и > 4,0, причем но втором случае — при предельной конфигурации зубцов.
7.4 ЗУБЧАТЫЕ ПЕРЕДАЧИ. СОСТАВЛЕННЫЕ ИЗ КОЛЕС С МИНИМАЛЬНЫМ числом ЗУБЦОВ
В гл. 5 было получено уравнение (SJ7). из которого следовали комбинации чисел z, и z? при предельных условиях существования Зацепления, когда наступала интерференция одновременно у основания сопряженных зубцов я,,| 2 = 0 — в точке В поля независимых переменных ft, ft, — при коэффициенте перекрытии гй" в зависимости от относительной толщины s зубцов па окружЕюсти вершин. При предельной КОНфЁН'УряцИЕ! зубцов, когда ffl3l 2 = 0. были получены минимальные их числа, лежащие в диапазоне 3 s 5 11, которые могут образовывать зубчатую передачу при предельном коэфф и -176 © Э. Б. Булгаков
Рмс. 7.6. Схема зацепления (а) и общий »ид (б) 1>-бчап>й передачи с минимально возможными числами зубьев при а, = 3, = И»
««1.2= °- *1“ *• *2 = 29.93*.
а ж = 2-1.3*, са » 1.008
пиенте перекрытия сыа = 1,0 (см. рис. 5.6). Например, при /па12 ° 0. и е/= 1.0, если принять г, = 3, из уравнения (5.17) получим
177 © Э. Б. Булгаков
z<2 e 10,2. Округляя это число до числа зубцов гг = II. из того же уравнения получим ?.а = 1,008. На рис. 7.6 показаны схема зацепления и общий вид зубчатой передачи, составленной из колес с минимальными числами зубцов Zj = 3, z2 = II. Из схемы зацепления видно, что у такой передачи значительный участок профиля зубца колеса z2 огибает весьма незначительный участок профиля зубца шестерни Z|.
Такая передача имеет высокие скорости скольжения, се зубцы далеки от равнопрочности и она представляет скорее теоретический интерес, как образованная из колес с минимальными числами зубцов. Тем не менее зубчатая передача zt= 3, z2= 11 представляет интерес в качестве кинематического привода.
В интервале минимальных чисел зубцов практический интерес представляют зубчатые колеса, образующие зубчатую передачу при и = 1,0. Если в этом случае принять z, = z2 = z(_2, /па1 = тл2 =
= Л1о|_2 и аа] = аа2 = ал1_г. то
еа = пг “ ’g«r).
угол зацепления
invcty. = inv01_2
л
или
invar = /пв1_2 cosaal_2 -I- invael_2 -гг1-2
Из совместного решения (7.5) и (7.7) получим
<хп]_2- arctg (tgaal_2--' г1-2 '
л , L л
- mu,_2 cosaal_2— — 2) = °
(7 5)
(76)
(77)
(78)
Если принять некоторый коэффициент перекрытия га и толщину зубца на окружности вершин /па1_2 в качестве исходных данных, то. определив угол профиля аа|_г. далее по формуле (7.7) вычисляют угол зацепления <хг. Остальные параметры зубчатых колес и передачи в целом определяют с учетом передаточного числа и » 1,0 по формулам гл. 2. Так. диаметр окружности вершин зубчатого колеса </ц1_2 = secau ,_2 rfH_2, угол профиля в нижней точке активного профиля зубца lga,i-2 = — igotal_2, мсжосевос расстояние
Qr — seca^ ]_2.
178
© Э. Б. Булгаков
Рис. 7.7. Область существования внешнего зацепления при • 5,
Реализовать передаточное число и= 1,0 возможно лишь при /|_2 г 5. В частности, при г(_2 = 5 и тп_2 » 0 область существования эвольвентного зацепления весьма незначительна, причем коэффициент перекрытия изменяется в интервале 1.0 £ еа S 1.039 (рис. 7.7). В табл. 7.1 представлены параметры зубчатых колес и передачи с минимальными числами зубцов при U = 1,0.
Важная область применения зубчатых колес с минимальными числами зубцов при и = 1,0 — шестеренчатые насосы. При прочих равных условиях: постоянном межосевом расстоянии, ширине зубчатою венца и пр — применение минимальных чисел зубцов при-
7.1. Параметры зубчатых колес и передачи
с минимальными числами зубцов при и = 1,0 db = 1.0
Параметры Числе зубцов Z|_2
5 6 7 8 9 10 11
1,1-2 52.60 49.87 47.75 46,09 44,85 43,64 42.23
п 45 5 3 3 3 3 3
«а 1-2 52.50 48.95 46.08 44.40 42.70 42.00 40,55
ат 33,31 30.06 28 26,94 26,75 26,20 24.43
еа 1.028 1.09 1.128 1.2 1.3 1.3 L4
1.64268 1.52272 1,44164 1,39962 1,36070 1.34562 1.31608
«Г 1.19604 1.15540 1.13257 1,12173 1.11985 1J1451 1,09834
179
© Э. Б. Булгаков
Рмс 7.8. Схема зацепления (а) и общий вид (б) губчатой передачи при « = 1.0. ^i_j" б. та 1-2= °- *1-2= 52’40' йг = 33’34'.
га = 1.03
водит к росту межзубцовой впадины, а отсюда к увеличению его производительности. Например при уменьшении числа зубцов с г,_2 = II до z,_2 = 5 производительность насоса возрастает более чем в 1.5 раза.
У зубчатой передачи шестеренчатых насосов не требуется высокий коэффициент перекрытия га; обычно ла < 1,10 и часто 1.05 .. . 1,07. Относительную толщину зубцов в этом случае принимают равной Л1а1_2 = I / пг12, где п = 3. и тогда таким условиям отвечают зубчатые передачи при 2|_2 й 6. Однако аккуратное изготовление зубчатых колес в серийном производстве позволило применить для масляного насоса редуктора вертолета Z|_2 = 5 (рис. 7.8) при незначительной их толщине на окружности вершин.
180 © Э. Б. Булгаков
7.5 ЗУБЧАТЫЕ ПЕРЕДАЧИ С НЕССИМЕТРИЧНЫМИ ПРОФИЛЯМИ ЗУБЦОВ. САМОТОРМОЗЯЩАЯСЯ ЗУБЧАТАЯ ПЕРЕДАЧА
Зубчатые передачи с несимметричными профилями зубцов — наиболее общин тип цилиндрических эвольвентных зубчатых передач. Здесь мы. сдерживаемые здравым инженерным смыслом, можем в полной мере отдаться фантазии и найти новые оригинальные решения.
Прежде всего можно значительно повлиять на геометрические параметры зацепления: при необходимости увеличить угол зацепления до аг = л / 2. так как у колес с несимметричными профилями зубцов угол зацепления лежит в интервале (0. л/2); повысить коэффициент перекрытия до ра - 2,0 и более; уменьшить удельное скольжешсе профилей, а между зубцами впадины вписать более пологую переходную кривую и таким образом спроектировать зубцы с наименьшей концентрацией напряжений у основания; наконец, проектирование зубцов можно подчинить наперед принятому закону изменения жесткости сопряжешлых зубцов с учетом фактического коэффициента перекрытия (или фаз зацепления, см. ниже).
Рис. 7.9. Зубчатая передача с неехмметркчлыми зубцами при г, - 15, • 69,
К - 1,25, ij - 48,32’, - 42,41 ’, MeJ 2 - 0,0042, ma2 - 0,091, - 40’,
а* = 16,75 еа = 1J5, ej* = 1.5
181
© Э. Б. Булгаков
Рис. 7.10. Схема трансформации несимметричных зуСдев при 20, = 42;
аг 45 « 10 *
На рис. 7 9 показана зубчатая передача с несимметричным профилем зубцон со скошенной вершиной, угол зацепления которой при передаче основного усилия составляет хг = 40®; на рис. 7.10 показана утриронанная трансформация зубцов в целях регулирования жесткости (А. с. 962695, F 16 Н 1/08).
Другие примеры применения зубцов с несимметричными профилями будут рассмотрены ниже
Обратимся к самотормозящейся зубчатой передаче, используя для этой цели у зубцов несимметричные профили, через которые в одном направлении передается вращение, а в другом — происходит заклинивание. Для этой цели, например, у передачи внешнего зацепления повысим угол зацепления до аг = 70 . . . 80 ® по эволь-вентным профилям, развернутым с меньших из двух основных окружностей. В этом случае зубцы должны соответствовать типу II зубцов с несимметричными профилями. При таком высоком угле зацепления угол трения в зацеплении (р. который учитывался лишь при расчете КПД. может сыграть иную, конструктивную роль. Так,
182
© Э. Б. Булгаков
Рис. 7.11. Схема зацепления заклиненной передачи
на рис, 7.11 показана схема зацепления при весьма высоком угле зацепления. Усилие, возникающее в зацеплении, отклоняется от линии зацепления Л’рУ2 — теоретического взаимодействия зубцов без учета трения — на угол трения <$, достаточный для создания тормозящего момента. Тормозной момент Т = F^2 направлен в сторону, противоположную вращению колеса z2 при его зацеплении доугими профилями, при которых угол зацепления < <70 . . . 80 °. на пример равен 20... 30 ’С. При таких углах зацепления априорно можно утверждать, что возникновение тормозного момента исключено.
Таким образом, для самотормозятцихся зубчатых передач рекомендуется применять зубчатые колеса с несимметричными профилями зубцов, которые соответствуют типу П.
Использовать зубчатые передачи с весьма высокими углами зацепления в качестве заклинивающих предложил Н. С. Мюнстер.
76. ЗУБЧАТЫЕ ПЕРЕДАЧИ ВНУТРЕННЕГО ЗАЦЕПЛЕНИЯ
Геометрический расчет внутреннего эвольвентного зацепления изложен в гл. 2. Обратимся к зубчатым передачам внутреннего зацепления с экстремальными параметрами. В 1954—55 гг. Н. А. Скворцова разработала методику геометрического расчета зубчатых передач внутреннего зацепления с разностью чисел зубьев zp = z3 - z2 - 1 [13]. В настоящее время расчет таких передач ничем не отличается от обычного расчета передач внутреннего зацепления, за исключением более тщательной проверки на отсутствие интерференции В литературе приводятся для передач внутреннего зацепления при гр = 1 блокировочные контуры [24].
Во внутреннем эвольвентном зацеплении возможна зубчатая передача с крайними экстремальными параметрами зацепления — при
183
© Э. Б. Булгаков
Рнс. 7.12. Схеме зацепления зуСяатой передачи анутрсннсгс зацепления при гр - О, “'г-з - " > 2
разности чисел зубцов zp = z3 - z2 = О и угле зацепления лт2_3 = л / 2. Такая передача — исключение из обшил правил образования эвольвентного зацепления, подчиняемого полученным выше на протяжении всей книги математическим соотношениям; она. напоминая зубчатую муфту, поскольку z3 = z2 = z, и2-з = 1.0 и d>3 = = d*. отличается от нее разными значениями независимых
переменных, причем 03 > 02
Передача вращения от одного колеса к другому здесь происходит при межосевом расстоянии аг2-з- равном максимальному боковому зазору между профилями сопряженных зубцов, измеренному по линии зацепления при совпадении осей их тела и впадины. От величины межосевого расстояния <хг2_3 зависит характер сопряжения зубцов — зубец ведущего колеса z( всегда находится в пределах впадины ведомого колеса z3. Таким образом, функции зубчатой передачи реализуются лишь в пределах возможного бокового
184
© Э. Б. Булгаков
зазора. Тогда межосевое расстояние определяется как полуразность ширины впадины одного зубца и толщины другого зубца на основной окружности. Отсюда следует, что межосевое расстояние
а»2-з - - inv02> db.
(7-9)
На рис. 7 12 показана схема внутреннего эвольвентного зацепления зубчатых колес с общими числами z зубцов, одинаковыми диаметрами основных окружностей db. с неравными углами профиля на окружности вершин зубцов при > ав3 и. наконец, с углом зацепления аг2-з - л / 2. В этом случае линия межосевого расстояния О2О3 параллельна линии зацепления Af3/V2B3B2. а полюс зацепления U7 перемещается бесконечность. Зацепление зубцов происходит в пределах активной части В2В3 линии зацепления BqB3N2^3- Не выходя из впадины зубца колеса г3. зубец ведущего колеса z2 уже не участвует в передаче движения, поскольку зубцы не зацепляются, а лишь соприкасаются на активной части В2В2 линии зацепления B2 fl3N2^3 своими нерабочими профилями.
Из схемы зацепления видно, что
В<)№г> + ЯГ2-3~ 2
га1-ь~-----------Z-----------= ЙГ + - mv<y.
Г* ‘-1
или. произведя замену переменных по (2.5) и (2.28), получим
12. . (710)
*02-3 = 2 + 2я - ""«г105®-! ~ “«3 “ т.зсом«з)-
При предельной конфигурации зубцов, т. е. при me2> 3 = 0. когда ae2 = a 3flj = Oj, коэффициент перекрытия достигает максимального значения
2—3IDM
(7-П)
Из схемы зацепления на рис. 7.12 также следует, что углы профиля в граничных точках активного профиля
л (712)
tg<X,2 = 04,3 + + ffla2COS(Xe2 + ШУЯ. 2 - '
Л (7.13)
*g«,3 = “.2 - m.2COSa«2 - 'П.зС“«.3 + mve«3 + 7 ' '
причем - 0.
Зубчатая передача внутреннего зацепления при zp = 0 и atr2_3 = л / 2 имеет интересную кинематическую особенность.
поскольку осуществляется при равенстве диаметров основных
185
© Э. Б. Булгаков
окружностей у сопряженных колес. Отсюда разность тангенсов углов профиля эвольвенты зубцов в текущей точке есть величина постоянная по всей линии зацепления, равная межосевому расстоянию аг2-з- Например, для точек контакта В2 и получим ~ ^«-2 = (&айз “ *КаЛ2 = 2агз-э / Тогда па основании формулы (2.100) имеем постоянную скорость скольжения по всей линии зацепления
VaJ = шагг_3,. (714)
Рис. 7.13. Схема зацепления (а) и ибщий вид (б) косозубоЙ зубчатоЛ передачи при и ~ 1,0, 1, И|—2 = 15.62 ।__«>в 0.
«д- — 65*, /?4 = 34,92*. ta “ 0,559, —
= 0.5
186
© Э. Б. Булгаков
где о> = o)l = их,, точка X лежит в интервале (В2. #з) (см. рис. 7.12).
Впервые построил и исследовал такую передачу в 1955 г.
В. М. Ястребов [25]; блокирующие контуры приводятся в [24].
7.7. КОСОЗУБЫЕ ЗУБЧАТЫЕ ПЕРЕДАЧИ
Если отвлечься от реальностей при изготовлении косозубой передачи, т. е. полагать колеса абсолютно точными и жесткими (не-деформируемыми), то ее функции могут выполняться одновременно за счет сопряжения зубцов как по линии зубца, так и по линии профиля Функции зацепления за счет линии зубца обеспечиваются перекрытием в осевом направлении, который учитывается коэффициентом перекрытия а за счет линии профиля — в окружном направлении учитываются через коэффициент перекрытия еа. У прямозубой передачи зацепление происходит при реализации торцового перекрытия, поскольку осевого перекрытия у такой передачи нет. При синтезе косозубой передачи имеется широкий выбор между торцовым и осевым перекрытиями, что может явиться резервом несущей способности.
Рассмотрим возможности косозубых передач на примерах с экстремальными параметрами Обратимся к зубчатому колесу, имею щему один зубец, т. е. z = I. Ясно, что какое колесо возможно только в косозубом исполнении. Из гл. I следуег, что при общей точке возврата Af эвольвент разноименных профилей зубца при z -1 эвольвентный угол invv\ = л. а независимая переменная
- 77.45 •.
На рис. 7.13 показана пара однозубцовых колес, образующих зубчатую передачу при и - 1.0, независимая переменная которых несколько меньше предельной, а именно Ц_2 = 75.62 е. При таком
Рис. 7.14. Косозубая зубчатая передача при и 1.0, Z|_2 2. ^1-2 " ^3 *•
'’’al—2 w ат " ®5,31 *. « 13,3 *,
£ft = 0,5В&, ? = 0,855
187
© Э. Б. Булгаков
Рис 7 15 Схечя зацепления косозубой передачи при Д|Ч «2 = 4°. е,- 75,6*. 0?- 45.3-. аг - 44.13 Д6 - 13,3*. *а - 0.66. в- = 0.59
значении ty_2 каждый из профилей имеет свою точку возврата; при угле зацепления аг = 65° коэффициенты перекрытия га = 0,559 и
= 0,5. Зубчатое колесо г = I можно рассматривать как однозаходный. а при 2-2 — как двухза-ходный эвольвентный червяк (рис. 7 14) с линейчатым контактом.
На рис. 7.15 показана другая возможность косозубого зацепления — получение большого передаточного числа в одной ступени. Тот же. что и в предыдущем примере однозубцовый колесо-червяк зацепляется с зубчатым колесом z2 - 40, обеспечивая переда
точное число и = = 40 г.ри коэффициентах перекрытия = 0.66, Ед = 0,59 (А с. 1060835, F 16 Н 1/06. F 16 Н 55/08).
На рис. 7 16 показана еще одна косозубая передача при числах зубцов z( = 9 и ж 12. У колес этой передачи переходная кривая вписывается между углами профиля эвольвент на шестерне а.^—ап=67.14°—66.9°=О,24®, а у колеса лр2— aV2 =68,14°—67 77°= =0,37®, разноиме!П1ыс профили зубцов пересекаются под углом 20 = 140’ что позволяет увеличить диаметр окружности вершин за счет уменьшения толщины $в1 2. Однако в этом примере Sol 2 или /л3|<2 были приняты достаточно большими из иных соображений, а коэффициент торцового перекрытия Еа = 0,5 полагался доста
точным. поскольку суммарный коэффициент перекрытия ес= + > to
188
© Э. Б. Булгаков
Рис. 7.16. Схема зацепления (а) и общий вид (б) косозубай передачи при = 9.
“ 12, Ф|_2И 70*. •’’’□1“ 0.15. жж2в аг “ 68,8*. га = 0.5, в зависимости от b
Приведенные примеры — не высоконапряженные передачи. Они лишь показывают возможность косозубого зацепления, которой не имеет прямозубое — варьированием перекрытия торцовым и осевым
189
© Э. Б. Булгаков
78 ЭВОЛЬВЕНТА ОКРУЖНОСТИ В ТОРЦОВОЙ МУФТЕ
Эвольвента окружности находит применение не только в качестве профильной кривой зубца зубчатого колеса передачи На рис. 7.17 показано неподвижное жесткое торцовое соединение, или муфта, состоящая из двух полумуфт — левой и правой, на торцовой поверхности которых сформированы зубцы, направленные по эвольвенте окружности.
Рис. 717. Торцовая муфта с мюлъвенпюй линией зубца, состоящая нз двух пплумуфт, а также червячная фреза дпя их нарезания
Эвольвента развернута с основной окружности диаметра и является линией зуба с углом наклона на окружности диаметра dx, равном = arccos db / dx. Так же как у косозубой передачи углы левой и правой полумуфт равны по величине, но противоположны по направлению.
Торцовая муфта с эвольвентной линией зубца технологична, так как образуется методом огибания инструментом реечного типа (см. ниже), режущая кромка которого расположена н плоскости, касательной к основному цилиндру. Поэтому по точности изготовления она не уступает зубчатому колесу, что не может не сказаться на ее несущей способности. Профили зубьев по касательной к основной окружности имеют одинаковые сечения (А. с. 1368521, F 16 DI/02, 11/00)
8. ПОДРЯД ЗАЦЕПЛЯЮЩИЕСЯ КОЛЕСА.
ФАЗЫ ЗАЦЕПЛЕНИЯ
Подряд зацепляющиеся колеса с неподвижными в пространстве осями вращения называют рядовыми передачами. Такого рода передачи часто встречаются в редукторных коробках различных машин.
190 © Э. Б. Булгаков
Передаточное число подряд зацепляющихся колес определяется как отношение чисел зубьев колес, смонтированных на внешних валах коробки, т. е. валах, к которым подводятся и снимаются крутящие моменты. Промеж уточные, или паразитные, колеса на передаточное число такой цепочки колес не влияют. Так. и « (-1)’’-1?Л / z,. где < — ведущее колесо внешнего приводного вала, zn — ведомое колесо внешнего ведомого п вала, между которыми (н—2) зубчатых колеса и (л-1) зубчатых зацеплений.
Рассмотрим цепочку подряд зацепляющихся прямозубых колес. Представим такую цепочку состоящей из групп по три колеса в каждой группе, из которых центральное колесо в предыдущей группе является первым в последующей группе, и т. д. Таким образом, изучение возможных комбинаций подряд зацепляющихся колес сводится к исследованию цепочки из трех колес ряда.
Основная задача проектирования подряд зацепляющихся колес заключается в размещении их центров, а следовательно, схем зацепления таким образом, чтобы исключить синфазное, или одновременное зацепление зубцов у сопряженных колес в одной фазе (зоне схемы зацепления).
Если геометрия сопряженных колес такой цепочки задана, то известна схема зацепления для каждой пары колес и, следовательно, положение полюса зацепления, а также зон одно- и двухпарнлго зацеплений на ее активной части. Каждая пара зубчатых колес может быть так размещена по отношению к другой паре колес, что их зацепление будет происходить в одной зоне. Например, одновременно у первой пары колес зацепление будет происходить в зоне однопарного зацеплешгя, у второй также в зоне однопар ного зацепления, у третьей пары также и т. д. Наиболее вероятна синфазность зацепления у подряд зацепляющихся колес с равноделен ным шагом, центры (осн) которых расположены на одной прямой
Синфазное зацепление приводит к параметрическим (крутильным) колебаниям, росту динамических нагрузок, возникновению дефектов не только у зубчатых колес, но н в соединении колес с валом — в шлицах и т. д. Однако погрешности изготовления и сборки, деформации зубьев и фактическая продолжительность их контакта, являющаяся функцией окружной скорости, нагрузки, жесткости и т. д.. искажают теоретическую схему зацепления. Тем нс менее схемы зацепления подряд зацепляющихся (цепочек) колес и их рациональное взаимное положение должно явиться основой как при проекгировании, так и при построении динамической модели передачи. Необходимо учитывал» возможность возникновения синфазного зацепления и умегъ от нее отстроиться на всех этапах проектирования и доводки передачи.
Пусть подряд зацепляющиеся колеса размещены на одной прямой. Такое положение будем считать исходным при проектировании.
191 © Э. Б. Булгаков
Рис. 8.1. Подряд зацепляющиеся колеса с рвшоделенными шагами к с четными числами зубьев иелушсги центрального колеса л2
В процессе проектирования центры будем отклонять от прямой в зависимости от требований компоновки, а также для нарушения синфазною зацепления. Допустим, что центральное колесо, в данном случае колесо, расположенное между соседними колесами ряда, является ведущим колесом г2 с четным числом зубьев и с равно-деленным шагом. Зубья такого колеса при зацеплении с зубьями соседних колес, имеющих тот же равноделенныи шаг, работают одним впереди идущим рабочим профилем под углом зацепления *ri-i = »Г2-3 = аг (рис. 81).
Установим при сборке ведущее колесо г2 и ведомое так. чтобы их контакт происходил в полюсе зацепления Wj-i- Тогда угол между радиусом основной окружности, проведенным в точку возврата эвольвенпя кон тактируемого зуба и линией центров 0х0203. равен invotr.
Вследствие симметричного расположения на основной окружности зацепляющихся четных зубьев z2 их контакт с зубьями колеса z3 на рабочем профиле будет происходить в точке, положение которой также определяется углом invar. Эта точка является полюсом зацепления UZ2_3 колес г2-г3, поскольку накрест лежащие
192
© Э. Б. Булгаков
de
щу а*
aw
do
Рис. 8.2. Подряд зацепляющиеся катета с рааноделеиными шагами, с нечетным числом зубьев централыкгс кплеса г5 и ведущим крайним колесом
углы mvar характеризуют одну общую для двух зацеплений начальную окружность dv7. Заметим, что указанным выше условиям соответствуют параллельность линий зацеплении Л2М пары z2-Zj и W2Af3 пары z2—Z3.
Допустим, что крайнее колесо Z| ряда является ведущим, а колесо z., с ним сопряженное имеет равнодслснное нечетное число зубцов (рис. 8 2). В этом случае зубья колеса z2 работают разными про-Лилями — одним профилем с колесом zh противоположным профилем с колесом z3, для которого этот профиль является ведущим. Линии зацепления и AZ2N3 уже не параллельны а их продолжения пересекаются под углом 2<хг.
Так же как в предыдущем случае, при сборке установим колеса z, и z2 так. чтобы их контакт происходил в полюсе зацепления Колесо z2 зацепляется с колесом z, и z3 с одним общим углом зацепления и поэтому имеет одну начальную окружность dvt. Вследствие того, что у колеса z2 нечетное число зубьев, против его зуба, контактируемого с зубом колеса z в полюсе UZ|-2, расположится на колесе z2 впадина, дуговая ширина которой составляет по начальной окружности половину окружного шага л / 2z2<fr2.
193
© Э. Б. Булгаков
Следовательно, через полшага разместится зуб, контакт которого с зубом колеса z3 произойдет в полюсе зацепления VF2_3. определя емого также углом invar.
Таким образом, как в первом (см, рис. 8.1), так и во втором (см. рис. 8.2) случаях контакт зубьев одновременно происходит в полюсах или при зацеплении колес zz-zt или z{-z2 и в полюсе IF2_3 у пары z2—z3. У колес с равноделенным шагом тем вероятнее размещение полюса зацепления в зоне олнопарного зацепления, чем меньше передаточное число и, т. е. ближе к 1,0. Для нарушения синфазного зацепления достаточно линию центров О2О3 повернуть па угол меньший, чем угол, соответствующий основному шагу 2л / za.
Не меняя межцентровых расстояний, зафиксируем колесо z2. соответствующее контакту г2-г[ в полюсе зацепления 1Г2_| и перекатим колесо zz в новое положение с центром в точке О3. Пусть в результате этого перекатывания колеса г3 относительно центра О2 на некоторый угол <р2 моменту времени при котором происходит одиопарцый контакт зубцов Zj—z2 в полюсе зацепления будет соответствовать у пары колес z2-z3 контакт зубцов в зоне двух-парного зацепления. Представим угол ф2, отнесенный к db2 / 2, соответствующим пути прохождения контактных точек по частям зон однопарных зацеплений и ^г-Л* где точка Л— начало зоны однопарного контакта. Связав таким образом коэффициенты перекрытия еа1_2 пары Z|-z2 с коэффициентом перекрытия &rt2_3 пары z2“Z3, получим, учитывая, что картина зацепления пары зубчатых колес повторяется синхронно через основной шаг р,, 4- 1Г2_,Л
+ Л—. или
*2
1 г. . л , . 2л
Ф? в 2 [ М>аИГ + ео2-3 “ 2)j + k
где k = 0, 1. 2, 3, . . .
Только в случае, если eal_2 + ед2_3 = 3 зона однопарного зацепления пары z2—г,. равная рь (2—ео2_|). будет полностью «закрыта» зоной двухпарного зацепления пары ^2“ г3' равной Р» (са2-з“0- В этом частном случае
1 /. . лх . 2л
Ф*2 я 2 - —) + •
(8.2)
194
© Э. Б. Булгаков
Для того чтобы определить контактную точку Х2_3 при повороте зубчатого колеса z3 вокруг колеса z2. будем исходить из того, что угол <р2 задан или вычислен по формулам (8 1), (8 2). Так как угловой шаг колеса г2 равен хг-, = = 2л / z2- то на дуге, соответствующей центральному углу <у2, разместится, как правило. нецелое число зубьев z2 = <р2 / т»2 (рис. 8.3). Если после округления z2 до целого числа г2 имеем z2 > z2, то точка Х2_3
Рис. 8.3. Определение контактной точки -У2—3 1 зоме двухпариосо зацепления при повороте кпэеса z3 вокруг колеса
будет находиться между ^2-з и ЛГ3; если ^2^2-з- У[ЛУ *2 хг2 отвечает положение
г2 < г2. то на участке
точки на рабочем профиле зуба, отстоящей от нового положения линии центров О2Ог на угол i|>2 = <у2 - г2 т,2- Тогда LNaO2N2 = invar + ф2 + ат = tgar+ ф2, или окончательно
1*2л2-3
(tgar + Ф2 - *2X2)-
(8.3)
Вторая контактная точка Х2„3 будет определяться соотношением между z2 < z2, в связи с чем к отрезку ЛЛ2_3 следует алгебраически прибавить основной шаг —-d>2.
г2
Рассмотрим случай, когда расположенные на одной прямой подряд зацепляющиеся с равными углами зацепления аг1_2= <хг2-з= . . = аг зубчатые колеса, имеющие равноделенные шаги. находятся по отношению к друг другу' в противофазе. Зацепление в противофазе наступает, когда ведомое центральное колесо z2 имеет четное число зубьев или когда центральное колесо z2 с нечетным числом зубьев является ведущим
195 © Э. Б. Булгаков
Рис. 8.4. Подряд зацеплнклцигся колеса с рашоделеннымк шагами, с четным чмапм зубьев центрального жплрся j2 и ведущим крайним колесом
Допустим, что центральное колесо z? имеет четное число зубьев (рис. 8.4). Так же как в случае, изображенном на рис. 8.1, у пары колес г,—г2 контакт зубьев произойдет в полюсе зацепления UP|_2. Тогда получим, что полюс IF2_3 у пары колес г2-г3 разместится на нерабочем профиле зуба колеса z2, находящегося в контакте с зубом колеса га. так как колесо z; является ведомым и его зубья работают разными профилями. Линии зацепления N\N2 и N2^3 пересекаются под углом зацепления 2аг.
Определим расположение контактной точки Х2_3 из рис. 8.4. на котором произведем построение вспомогательного треугольника Д О2ЛЛГ. У этого треугольника сторона O2UZ = равна радиусу начальной окружности dr2 / 2. Центральный угол ф между сторонами O21F2_3 и О21Г равных треугольников и
A O2NW равен ф = 2 (invflt, — invar). Так как N2X2_3 « UN?NO из . |
условия построения эвольвенты, то ЛГ?Х2_3 = (аг + ф + 4- invar). или окончательно
(84)
Так как точка Х2_3 вероятнее всего расположена на вершине
196 © Э. Б. Булгаков
зубца колеса г2 (в чем легко убедиться, используя формулы для расчета фаз зацепления на линии зацепления), то точка Х2_3 контакта позади идущего зубца будет отстоять от точки Л2_3 на величину основного шага и поэтому
у y -MX — (8.5)
/*2Л2-3 “ /У2Л2-3 рЧ2-
Допустим, что центральное колесо z2 ведущее, имеет нечетное число зубцов и поэтому с сопряженными колесами будет зацепляться одним впереди идущим профилем. В этом случае линии зацепления и параллельны и при контакте пары z2-it в полюсе зацепления U^-i в полюсе зацепления будут соприкасаться в беззазорном зацеплении нерабочие профили зубцов пары z2-z3. Контакт рабочих профилен произойдет в точке Л2_э и в Х2_3. положение которых на линии зацепления определяется по формулам (8.3)—(8.5).
Условия появления синфазного или противофазного зацепления у цепочки зацепляющихся колес с равноделенным шагом (и равными углами зацепления), если их центры расположены на одной прямой, представлены в табл. 8.1.
8 1. Фазы зацепления у колес с равноделенным шагом при расположении их центров ив одной прямой
Пен 1ральние колесо г2 С четным числим тувьев С нечетным числом зубьев
Ведущее Синфазное Противофазное
Ведомое Противофазное Синфазное
Рассмотрим более общий случай расчета соотношения между фазами зацеплений, когда у подряд зацепляющихся зубчатых колес центры расположены на одной прямой, а углы зацепления «г 1-2 * вг2-з •*•••* аг„-(я+1) Тогда центральное зубчатое колесо имеет две начальные окружности dr2-i (или в зави-симости от того, является оно ведущим или ведомым) и dr2_3, причем на этих окружностях зубцы будут располагаться с нерав-ноделенными и неравными друг другу шагами
Допустим, что центральное колесо г2 является ведущим с четным числом зубцов и неравноделенным шагом. Установив контакт у пары г2-Z| в полюсе зацепления на впереди идущем профиле
197
© Э. Б. Булгаков
Рис. 8.5. Подряд, зацепляющиеся колеса с игранными углами зацеплений, центры которых расположены на одной прямой
зубца колеса z}1 получим у пары колес z2—z3 контакт на том же профиле в точке Л2_3 (рис. 85). Так как z2 имеет четное число зубьев, то положение оси его контактируемого зуба с линией центров определяется углом invO2 - invar2_t. откуда имеем
^2^2-3 “ 2^6 2 (ar2-3 + *nVctr2-l)-
(86)
Если центральное колесо г2 является ведомым с нечетным числом зубцов и с неравноделенным шагом расположение контактируемых зубцов в полюсе зацепления UZt_2 для пары Zj-z, будет определяться углом invar|_2 между линией центров и радиусом, проведенным в точку возврата эвольвенты. Точно так же для пары зубцов z2-z3, контакт которых будет осуществляться в точке Х2-з по другой начальной окружности, положение контактируемого зубца колеса z2 определяется углом invarl_2. В этом случае контактные точки и Х2_3 располагаются на разных профилях зубцов, причем положение точки Х2_3 определяется по формуле (8.4).
Неравные углы зацепления аг(_2 = ar2-t * аг2_3 и неравно-деленные шаги колес приводят при исходном контакте пары z,-z2 в полюсе зацепления к контакту пары z2-z3 вне полюса зацепления, в контактной точке Х,_3 В случае, если точка Х2_3 не располагается в зоне двухпарного зацепления, колесо z3 надо повернуть вокруг центра О2 неподвижного колеса z2 на угол <р2.
198
© Э. Б. Булгаков
значение которого вычисляют по формулам (81). (8-2). полагая аГ = 2 ж аГ2-Г
Рассмотрим центральные колеса г? — ведомое с четным числом зубцов и ведущее с нечетным числом зубцов соответственно, которые зацепляются с зубчатыми колесами, расположенными на одной прямой под разными углами зацепления аГ|_2 = ar2-i * Лгг-з* Такая схема контакта центральных колес приводит к противофазе зацеплений, причем расположение контактной точки Л2_3 на линии зацепления определяют по формуле (8.3), полагая ат = аг2_3 и invar = invaTI_2. Положение точки %2_3 на ножке позади идущего зубца колеса определяем по формуле (8.5).
Наиболее общий случай зацепления зубчатых колес показан на рис. 8.6. когда центры колес расположены не на одной прямой, а их контакт происходит под разными углами зацепления. Допустим, что ведущим является крайнее колесо г, ряда, причем линия центров О|О2 составляет с линией центров О?О3 угол у — меньший из двух углов между полюсами зацеплений IF2_3 и W'|_2. Соединим зубчатые колеса и z2 таким образом, чтобы их контакт происходил в полюсе зацепления и определим число зубцов z2, разместившихся между полюсами зацеплений. Отсчет будем производить от зубца, ось которого повернута по отношению к линии центров на угол invO^ - invarl_2. Тогда
‘ Л *2 (8 7)
*2 = (у - mvftj + mva.n-J —
где tz2 = 2л / z2 — угловой шаг центрального колеса.
Так как z2 в общем случае число дробное, то его округление в меныпую сторону до целого числа z2 <z2 приведет к тому, что ось зубца колеса г2 будет располагаться левее линии центров О2О3. Числу зубцов z2 соответствует центральный угол г2 и поэтому угол между осью контактируемого зубца и линией центров будет равен
г" <8.8)
ув = у - inv0t2 + mvari_2 — 2л —
г2
Рассмотрим случай, когда центральное колесо г2 является ведущим, По сути дела, этот случаи будет отличаться от предыдущего тем. что контактная точка /2_3 будет размещаться на профиле зубца, противоположном профилю зубца, показанном на рис. 8.6.
199 © Э. Б. Булгаков
Рис 8.6. Подряд зацепляющиеся колеса с игранным, углами зацеплений, центры которых расположены не на одной прямой
Отсюда положение контактной точки Л2_3 на линии зацепления определяется по формуле
Л^Л-З = (®п-з+ Т. + invftj. <8-9)
где знак «-♦ принимается, если г2— ведомое колесо, а знак «+», если ведущее. В зависимости от фазы зацепления, в которой находится точка, следует принимать решение о повороте линии центров О2О3 относительно точки О3.
Радикальным образом можно избавиться от влияния синфазного зацепления на работоспособность подряд зацепляющихся колес, если все пары цепочки будут иметь гарантировашюс (г. е. с учетом допусков на изготовление и сборку, а также деформации зубцов под нагрузкой) двухпарное зацепление. Здесь следует принять меры против возникновения заедания поверхностей зубцов и для этой цели использовать все средства улучшения геометрии, в частности путем увеличения угла зацепления до максимально возможного значения.
Если у первой пары колес получен коэффициент перекрытия * 2,0 при достаточном SdL2 и угле зацепления > 20 °, то для третьего колеса цепочки или в общем случае для колеса ал+1 угол профиля на окружности вершин авяЧ.1 при некоторой принятой для данного решения относительной толщины зубца тм, то mw+J определяется из уравнения
200
© Э. Б. Булгаков
“^(М-1) (а..+1 + ^.+|COS«.,+1) - (1 + “-ен-1)) X
X arclg [<g«.. - «„(»+i)>g«..+i ~ 2лго_(п+1) / г,] + C = 0. (8.10)
причем - ?»+i/z,; C - a.,- m,ncos a„- ^-(2eaH^.l)- I) . а коэффициент перекрытия принимается 1.90... 2.05. Угол зацепления можно получить, например, из формулы для вычисления ко эффициента перекрытия (А с. 1413332. F 16 Н 1/20)
Параметры зацепления подряд зацепляющихся колес можно также улучшить, используя зубчатые колеса с несимметричными профилями зубцов.
9. СООСНАЯ ЗУБЧАТАЯ ПЕРЕДАЧА
9.1. СХЕМЫ ЗАЦЕПЛЕНИЯ СООСНОЙ ПЕРЕДАЧИ
Соосной передачей называется передача, имеющая два внешних вала, расположенных на одной геометрической оси. через которые подводятся и снимаются крутящие моменты; так как внешние валы соосны, то зубчатая передача называется соосной. В кинематическом отношении она состоит из трех зубчатых колес: двух с ннешними зубцами и z2. образующих внешнее зацепление г,-г2. и одного с внутренними зубцами 23, которое зацепляется с колесом г2. образуя внутреннее зацепление ?2—г3. Зубчатые колеса и г3. имеющие общую совпадающую геометрическую ось. называются центральными, а расположенное между ними колесо г2 — паразитным, или сателлитом. Простейшая соосная зубчатая передача, которая состоит из двух пар колес внешнего зацепления, здесь не рассматривается
На рис. 9.1 изображена схема зацепления соосной передачи 2К—Н с центральными колесами zi и z3 и тремя (лг = 3) сателлитами г2. зубцы которых симметричны. Центры центральных колес отмечены совпадающими точками О( и О3, сателлита / — точкой сателлита 2 — точкой сателлита 3 — точкой О23. межцентровое расстояние — аг = аГ1-2 = о,2_3. Линию центров О13Оа. проходящую через полюс внешнего зацепления И^-g и далее проведенную до полюса внутреннего зацепления 1F2_3, назовем осью симметрии соосной передачи. Этим осям присвоим номера сателлитов, обозначенными римскими цифрами 1, II, Ш. которые в самом общем виде (ниже) будут обозначаться буквой j
К основным окружностям сопряженных колес с диаметрами и db2, а также db2 и db3 проведены линии зацепления — касательные N|Ar2 для и AyV2 для г2-г3. Перпендикуляр к линиям 201 © Э. Б. Булгаков
Рис. 9.L Схема зацепления ехмкной передачи с симметричными профилями зубцов
зацепления составляет с линией центров 013О2 угол зацепления аГ1-2 Л714 внешнего зацепления пары колес z,-z2 и угол зацепления ат2_3 для внутреннего зацепления пары колес z2—z3.
Внутри отрезка прямой ЛГ|Л'2 отмечена активная часть В1В2 линии зацепления пары zt-z2. образованная пересечением окружностей вершин dal2 с касательной У^2; она характеризуется четырьмя углами профиля эвольвенты зубцов. К этим углам во внешнем зацеплении относятся угол профиля аД| = ZAr(OlB1 на окружности вершин центрального колеса zt и угол профиля в нижней активной точке ot,| = Z.NiO{Bi, а у сателлита z2— угол профиля на окружности вершин LN2Or,B2 ~ аа2 и Угол профиля в нижней активной точке а,2_| = £Л2О22В(. Линия зацепления NpV3 пересекает линию
202
© Э. Б. Булгаков
центров О(О2 в точке делящей межцентровое расстояние а7 на отрезки, пропорциональные числам зубцов z( и z2 и равные радиусам начальных диаметров dr) / 2 и / 2 колес zt и z2. Активная часть линии зацепления BtB2 = ?а{-2рь-
На продолжении линии зацепления А3ЛГ2 показана активная ее часть В2ВЭ = Ea2_3pfr, которая для пары колес г2-?3 внутреннего зацеплении получена в результате пересечения с окружностями вершин диаметров е/а2 и da3. Активная часть линии зацепления В2В3 также определяется четырьмя углами профиля зубцов Так, у сателлита z2 с внешними зубцами — это уже известный угол <хй2, а также угол профиля в нижней активной точке л.2-з = LN2O^y У колеса z3 с внутренними зубцами угол профиля на окружности вершин ад3 = £У3О3В3. угол профиля в нижней активной точке профиля LN3O3B2 = ар3. В полюсе зацепления 1^2-3 пары колес z2-z3 внутреннего зацепления, лежащей на пересечении продолжения линии центров О2ОА с линией зацепления N3A/2B3B2, перекатываются без скольжения начальные окружности с диаметрами dw2-z и ^гз-
Линия зацепления ЛГ,Лу направленная слева направо вверх, соответствует контакту зубцов колес z(—z2 правыми профилями, т. е. вращению центрального колеса Zj по часовой стрелке. При этом сателлит z2 и центральное колесо z3 будут вращаться против часовой стрелки, зацепляясь левыми профилями. Таким образом, зубья сателлита z2 работают разными профилями во внешнем и во внутреннем зацеплении каждый из которых характеризуется своим полюсом зацепления VT3_2 или 1Г2_3, диаметрами начальных окружностей drz-i или ^irz-з и, наконец, углами профиля в нижней активной точке ос/2_| или <а,2-з-
На рис. 9.2 показана схема соосной передачи с несимметричными профилями зубцов. Схема также образована из двух центральных колес Z| и z3 с центром в точке О, 3 и сателлита z2 с центром в точке О2. причем межосевое расстояние соосной передачи О, 3О2 = аг=аГ|. 2 = а г 2-3 Все зубчатые колеса имеют две основные окружности, из которых окружности большого диаметра от мечены звездочкой, г. е. ^Д2.з > 2 з-
Если привод осуществляется от центрального колеса г( по часовой стрелке, то зацепление зубцов Zj-z2, развернутых с основных окружное!ей и db2. происходит правыми профилями на активной
203
© Э. Б. Булгаков
Рис. 9.2. Схема мцеплсния соосной передачи с несимметричными профилями зубцов
части ВХВ2 линии зацепления NXN2 под углом зацепления otrI_2. Зубцы сателлита z2 при этом являются ведомыми, а повернувшись на угол л при зацеплении с колесом г3 — ведущими. В этот момент контакт зубцов сателлита г2 осуществляется левыми профилями, развернутыми с основных окружностей d*2 и d/3, на активной части В2*В^ линии зацепления ЛГ3*Л^В3*В2’ под углом зацепления
аГ2-3-
При реверсе передачи, т. е. в случае, если ведущая шестерня г, вращается против часовой стрелки, контакт левых профилей зубцов <г2, развернутых с основных окружностей d/ и d*2, пронс-
204
© Э. Б. Булгаков
ходит на активной части В*В2 линии зацепления М*У2* под углом зацепления Пряные профили зубца z2. соответствующие
основным окружностям di2 и dbi, вступают в зацепление с колесом z3 на активной части В2В3 линии зацепления NjN^3B2 под углом зацепления аг2_3. Аналогичный результат имеет место, если привод будет осуществляться от центрального колеса
Таким образом, при ведущих центральных колесах z1 и г3 зубцы сателлита z2 работают разноименными профилями, причем параметры эвольвентного зацепления в значительной мере определяются наличием у сателлита двух основных окружностей. Следовательно, работа зубцов сателлита z2 обеими профилями сопровождается эффектом попарного использования основных окружностей dbX-db2 и db*2-d*3 или db*—db*2 и db2-db3, что соответствует получению
передач с углами зацепления аГ|_2 и oty2-3 или otri-2 и аг2_3.
Отсюда следует замечательное свойство соосной передачи с несимметричными профилями зубцов, когда улучшают параметры зацепления одной стороны зубцов за счет другой. Такой синтез зацепления (см. ниже) возможен для нереверсивной или условно нереверсивной соосных передач, находящих наибольшее применение в машиностроении.
Если соосную передачу превратить в несоосную, т. е. выполнить ведущим колесом сателлит z2. то эффект попарного использования основных окружностей пропадает. Так, если колесо z2 вращается по часовой стрелке, то колеса г -г2 работают только правыми, а z3—левыми профилями зубцов, эвольвенты которых развернуты с основных окружностей d>2, db3. Если же колесо являясь ведущим, вращается против часовой стрелки, то зубцы колес г,—z2 работают только левыми, а зубцы колеса z3 — правыми профилями. эвольвенты которых развернула с основных окружностей
9.2. УСЛОВИЯ ПРОЕКТИРОВАНИЯ СООСНОЙ ПЕРЕДАЧИ
Выбор чисел зубцов у соосной передачи производится не только с учетом требований, изложенных в гл. 8, но также при выполнении специальных условий проектирования — условий соосности, сборки и соседства. Как будет показано ниже, числа зубцов соосной передачи влияют на углы зацепления между центральными колесами и сателлитом, а также на значение параметров зацепления в связи с изменением конфигурации и положения области существования соосного зацепления относительно системы координат.
205
© Э. Б. Булгаков
Условие соосности. По условиям изготовления соосной передачи межосевое расстояние аг1_2 пары зубчатых колес zx—z2 внешнего зацепления должно быть равно межосевому расстоянию аг2_3 пары зубчатых колес z2—z3 внутреннего зацепления. Так как аГ|_2= = }(1 + «2-г) а аг2_з=| («з-s “ 1) secar2_3 d>2. то
при аг1_2= ог2—з имеем
(1 + «2_() Secar|_2= «2-l(U2-3 “ l)seca,2_3. или
Z| 4- z2 (9.1)
------— = cosarl_2secar2_3, <3 "" <2
или, вводя обозначения в иной записи: С = создц. t_2 seccc, 2_3, где г 4- Zo гвни
коэффициент чисел зубцов С = —------- = .
2з “ г2 z”
Условие (9.1) или то же условие в иной записи называется условием соосности.
Если С- 1,0, то угол зацепления аГ|_2 пары колес z, - z2 равен углу зацепления аг2_3 пары колес z2 - z3; если С < 1.0. то аГ1_2 > ага-з и если С > । 0, то ап-2 < На рис. 9.3 показана номограмма для определения углов зацепления и
»(г2-з R зависимости от коэффициента С. Как следует из номограммы. наиболее целесообразные значения С лежат в диапазоне 0,95 5 С < 1,05.
Составим основное уравнение зацепления соосной передачи, связывающее углы зацепления с числами зубцов и независимыми переменными 0(, 03 центральных колес, исключив зависимую переменную 02 сателлита. Если угол зацепления аг2-з определить из основного уравнения внутреннего зацепления (2,37) и выразить через этот угол, исходя из условия соосности (9.1) угол зацепления аУ|_2 и, наконец, учесть зависимую переменную 02 из основного уравнения внешнего зацепления (2.10), то получим основное уравнение соосного зацепления
z*** inva rl_2+ zjh inv arccos (С *со$аГ1 - z, invOj - z3inv03 = 0,
(92)
где zc-= z, + z2. z “ = z3 - z2. C "'= z” / z™.
206
© Э. Б. Булгаков
Рис. 9.3. Нлчосрамма для выбора углов зацепления а* и а9 исходя из условия *1—2 *2—3
соосности
Условие сборки. Оно удовлетворяется без каких-либо проверок при числе сателлитов лгж 1. В этом случае всегда зубцы сателлита 22 разместятся во впадине зубцов центральных колес z} и zs за счет их поворота таким образом, чтобы у сопряженных колес оси симметрии зубцов совпали с осями симметрии впадин. Однако при лг > 1 такому повороту колес будет препятствовать первый сателлит, установленный в зацеплении с двумя центральными колесами [18]. В общем виде условие сборки
г1 + *з - = 0 (93)
где пт—число сателлитов; обычно принимается из диапазона 3 5 лг < 9; е — некоторое целое число.
Однако не только уравнение (9.3) и разумный диапазон значений числа сателлитов лг определяют реальность осуществления передачи Необходимо убедиться, что число сателлитов пг удовлетворяет еще одному условию — условию соседства (см. ниже). Отсюда
207 © Э. Б. Булгаков
следует, что на рассматриваемом этапе расчета оперируют не с фактическим числом сателлитов лг, а лишь с их возможным вариантом, Если возможное число сателлитов а,... а,, где ая = г|я + £3, / ек, лежит обычно в интервале (3, 9) и удовлетворяет условию соседства, то эти числа могут быть приняты равными числам лг сателлитов Фрагмент перечня чисел зубцов соосной передачи 2К—Н при некотором интервале Z, и i^3 представлен в табл. 9.1.
вД. Фрагмент перечня чисел зубцов л,, г3. соосной передачи 2К—И при заданных условиях
rt Я* 1 «1 *2 «3 с
1.95 65 26 127 0.90 3. 4. 6, 8
27 0.92 3. 4. 6, 8
28 0.94 00 Н
29 0.96 3. 4. 6. 8
30 0.98 3. 4. 6. 8
31 1.00 3. 4. 6. 8
32 1,02 3. 4. 6. 8
33 1.04 W * о» □0
66 27 129 0.91 3. 5
28 0.93 3. 5
29 0.95 3. 5
30 0.97 3. 5
31 0.99 3. 5
32 1.01 3. 5
33 1.03 3. 5
1.97 66 27 130 0,90 4. 7
28 0.92 4. 7
29 0.94 4. 7
30 0.96 4. 7
31 в 0.98 4. 7
32 1.00 4. 7
33 1.02 4. 7
34 1.04 4. 7
1.96 67 27 131 090 3. 6. 9
28 0.92 о» <0 со
29 0.94 3. 6, 9
30 0,96 3. 6. 9
31 0,98 3. 6. 9
32 1.00 3. 6, 9
г 33 1.02 3. 6. 9
34 1.04 а. чз
1.94 66 27 131 0.90 4. 5. 8
28 0,92 4. 6. 8
29 0.94 4, 5, 8
30 0.96 4. 5. 8
31 0.98 4. 5. 8
32 1.00 4. 5. 8
33 1.02 4. 5. 8
34 L04 4. 5. 8
208
© Э. Б. Булгаков
Условие соседства. Одним из условий монтажа соосной передачи является удовлетворение условий соседства: равномерно размещенные по окружности сателлиты должны располагаться с боковым зазором Д, достаточным для размещения перемычек водила (если оно есть), обеспечения минимальных потерь масла от барботажа и т. д. (рис. 9.4).
Пусть а — некоторое число сателлитов а = лг или фиктивное их число а>лг. Если в предельном случае сателлиты 12 касаются один другого при зацеплении с центральным зубчатым колесом Zi и а — целое или нецелое число, то
т z2 л Л
cosa sin-cosaF1_2 = О «?2--------------2 fl
(9.4)
исходя из условия касания фиктивных сателлитов
Рис. 9.4. Схема определения бшшеого зазора А между сатллитами при кх равномерном размещении (а) и при размещении фиктивного, в общем случае нецелого. числа сателлитов (б)
Так как сателлиты одновременно зацепляются с центральным колесом г3, то можно написать формулу (9.4) через другие переменные:
arcsin
--------г sec а. 2 cos а- , и2_3 - I ‘2 *2—3
Поскольку а >яг, то на долю суммарного бокового зазора между сателлитами придется некоторая часть сателлита, полученная из условия касания сателлитов между собой, равная а— лг. Тогда
209
© 3. Б. Булгаков
боковой зазор между сателлитами в долях диаметра окружности вершин сателлита при А = О
(95)
9.3. УСЛОВИЯ СООСНОСТИ СООСНОЙ ПЕРЕДАЧИ С НЕСИММЕТРИЧНЫМИ ПРОФИЛЯМИ ЗУБЦОВ
Обратимся вновь к рис. 9.2. на котором показана схема соосной зубчатой передачи с несимметричными профилями зубцов Зубцы сателлита г2, являясь ведомыми, работают разными сторонами профиля во внешнем г{-z2 н во внутреннем za-z3 зацеплениях. При одном — рабочем направлении вращения наибольший крутящий момент с учетом числа циклов нагружения передается наиболее напряженной парой г,—г2.
Предположим, что сателлит za зацепляется правым профилем с правым профилем зубца центрального колеса z,. Допустим, что здесь получен достаточный, наиболее целесообразный или даже максимально допустимый угол зацепления аг1_а, соответствующий основным окружностям dbl- db2. Этот угол аГ1_2 должен отвечать условию соосности (9.1) и поэтому угол зацепления аг2_3 пары z2-z3 получается заданным: чем больше угол <хг1<.2, тем больше угол «г2-з- Вместе с тем передача внутреннего зацепления при прочих равных условиях является менее напряженной, чем передача внешнего зацепления, и увеличение угла зацепления otr2_3 при такой ситуации является бессмысленным и даже вредным меро приятием (например, хотя бы из-за увеличения усилий, действующих на опорах и деформирующих обод колеса z3 с внутренними зубцами).
При зацеплении с центральным колесом 23 зубец сателлита z2 работает левым профилем, который в принципе может разворачиваться с другой основной окружности, имеющей диаметр db 2. Левому профилю зубца колеса z2 при сопряжении с зубцом колеса г3 будет соответствовать угол зацепления а^2_3 < аг2-з( а емУ из условий соосности (9.1) угол &VI-2 пары колес г,-г2.
Таким образом, соосную передачу с несимметричными профилями зубцов можно представить в виде двух параллельно включенных в кинематическую цепь вариантов соосных передач с симметричными зубцами удовлетворяющими условиям сборки при межосевом расстоянии аг|_2 = const и при одинаковых значениях коэффициента С. Тогда одна передача будет работать с углами зацепления
210 © Э. Б. Булгаков
ari-2 — ar2-3’ a другая — с углами зацепления a^i-2 - ^п-з- причем их условия соосности
COSCty , _2$еС01у 2_.д — С, с osct |_2 seed 3 = С»
Объединяя две передачи в одну и трансформируя симметричные зубцы колес в зубцы с несимметричными профилями, получим соосную передачу. работающую при углах зацепления ап-2 “ Лг2-з в одном рабочем направлении и при углах а^|_2 - <хГ2-з в противоположном направлении (см. рис. 9.2).
Условия равенства межосевых расстояний или условия соосности передач с симметричными зубцами являются недостаточными для назначения углов зацеплений у соосной передачи с несимметричными профилями зубцов. Используем еще одно условие, накладывающее ограничение на выбор углов зацеплений — коэффициент отношения диаметров основных окружностей, который представим как К = = coscty]_2 secar(_2 Так как С = cosa^,_2 secaj2_}, то С/К = = cos аг1_г sec a J Отсюда условием выбора углов зацеплений явится система из трех уравнений с четырьмя неизвестными, представляющая условие соосности соосной передачи с несимметричными профилями зубцов:
cosarl_2 secar2_3 = С, (9.6)
. cosa^|_2 seca^2_3 = С.
cosaV|.2 seca^2-3 = *•
где С = (г, + z2) / (23 - 2j); x = С / К; К = d*{ / dbi = ... = =^ез /
Условие соосности определяет правило назначения углов зацеп лений в соосной передаче с несимметричными профилями зубцов в случае, если одно из центральных колес 2, или z2 является ведущим.
I. Из четырех углов зацеплений: аГ|_2> <хг2_3, ®г!-2- arг-з ~ один угол является независимым или назначаемым, три угла завн симы от принятого угла зацепления и от коэффициентов Сих
2. Углы зацепления одного направления вращения зависят не от коэффициента С, как в соосной передаче с симметричными профилями зубцов, а от отношения х = С / К. При х < 1.0 угол
211
© Э. Б. Булгаков
зацепления arl_2 > при х = 1,0 углы зацепления ari-2= = <*г2-з и при х > 1,0 угол зацепления <х^2_3 > ат1_2.
3. Улучшение свойств рабочего направления вращения соосной передачи осуществляется за счет противоположного направления путем выбора наиболее целесообразного угла зацепления Ят1_2 или яг2_3. Обычно задаются углом зацепления хГ1_2. характеризующим наиболее напряженку*! пару колес *j—г2 в соосной передаче. Здесь в принципе возможны два решения либо значительное увеличение угла зацепления аг1_2 по сравнению с углом аг2_3 при достаточном коэффициенте перекрытия еа (_2, либо обеспечение гарантированного двухпарного зацепления ео(_2 = 2,05 при 20 °<аГ|_2<25 —26 °, а также аГ|.2 £ <*w2-3-
Углы зацепления, коэффициент перекрытия и другие параметры по нерабочим профилям зубцов также должны обеспечить достаточную несущую способность передачи при ее обратном, нерабочем вращении (A.C. 1155806, F 16 Н 1/28).
На рис, 9.3 показана номограмма для выбора углов зацеплений по известным значениям коэффициентов С и х, а на рис. 9.5 — ключ к ее решению. Так. задавшись углом зацепления <%г1_2 и используя линию х, определяем угол «г2-з (действие 1-2-5), а используя линию С, находим угол аг2_3 (действие ЬЗ-4). Так как угол зацепления <*г2-з >гже определен, то, употребляя опять же линию С, находим угол <*ri-2 (действие 5 6).
При проектировании передачи с ведущим колесом z2, вследствие ее обратимости в передачу с ведущими центральными колесами Z| и z3, также учитываемся, чю х = cos ar |_2 sec а^г-з- Однако в этом случае параметры зацепления определяются условиями соосности, в которых учитывается только коэффициент чисел зубцов С.
Рис. 9.5. Ключ к решении но-жжраммы, гкжазвнней на рис. 9.3. для ихкной передачи < неенм метричными зубцами в -ивисимостч от коэффициентов С и X
212
© Э. Б. Булгаков
».4. ВЫБОР ЧИСЕЛ ЗУБЦОВ ДЛЯ СООСНОЙ ПЕРЕДАЧИ
Рассмотрим выбор чисел зубцов у соосной передачи 2К-Н путем графоаналитического решения условий соосности и сборки.
Введем обозначение р = z3 / zt, (р = -/^з. см. гл. 2) и представим условие соосности (9.1) в другом виде
(Ср - 1) zl - (1 + С) z2 = 0. (9.7)
или
1 + С Ср - Т*2
В системе координат zb z2 прямая линия по уравнению (9.7) проходит через начало координат и имеет угловой коэффициент к = (1 + С) / (Ср - 1).
Условие сборки — уравнение (9 3) прямой линии в другом виде можно представить как уравнение прямой в отрезках
п^е п^е
(9.8)
Эта прямая будет составлять с осями координат zb z3 угол 45° и отсекать на осях отрезки, равные ли-е. Ясно, что сумму чисел зубцов z, + za. соответствующую такой прямой, можно представить в виде комбинации из двух сомножителей attb а.2е2,.... аяея.
Обратимся к рис. 9.6, на котором показана схема — ключ к решению номограммы для выбора чисел зубцов. В правой части рис. 9.6, а и 6 соотношением между числами зубцов Zj и z2 учитывается условие соосности в виде уравнения (9.7). Для наперед заданного числа р и трех значений коэффициента С строят три прямые линии под углами 62-1 = arctg к оси z2.
В левой части рис. 9 6, а. б в системе координат zr z3 проведен Zn
под углом д2-3 = arcctg — луч, геометрическое место точек кото-*1
рого соответствует заданному числу р. В этой же части номограммы под утлом 45° к осям координат проведена прямая линия, отвечающая условию сборки по уравнению (9.8). Пересечение прямой с осями координат определяет возможное число сателлитов z, / е1 = = z3 / с, . . . ая = Z| / еп = z3 / еп. Если оно удовлетворяет принятому интервалу лт и условию соседства (см ниже), то отмечается точками на прямой, проведенной перпендикулярно к оси z3 в месте ее пересечения с прямой, построенной по уравнению (9.8).
Во всех случаях использования номограммы должно быть нзве-
213 © Э. Б. Булгаков
Рис. 9.6. Ключ к решению нилогра.чхы для определения чисел зубцов гр г2. г3 у соосноЛ передачи 2К—Н:
а — при изоеспых числах зубцов центрл.п>кыд колес г( и г3. чис.к- р и интервале коэффициента С, 6 — при ишестном числе зубцгж у сателлита г2. числе р и интервале коэффициента С
гтное число р = г3 / 2,. а также число зубцов одного из сопряженных колес. Тогда при принятом значении чисел зубцов центрального колеса (или центрального колеса z3) в левой части рис. 9.6. а определяем z3 (или zj и возможное число сателлитов а2....,а 0 правой части — при принятом диапазоне коэффициента С находим интервал значении чисел зубцов у сателлита г2. На рис. 9.6. б показана схема выбора чисел зубцов при известном числе зубцов у сателлита z2. В этом случае при принятом диапазоне коэффициента С определяют интервал изменения чисел зубцов центральных колес z, и z3 соосной передачи. Ясно, что каждому сочетанию чисел зубцов Zj-z3 соответствует свой ряд а, ..ал возможного числа сателлитов.
На рис 9 7 представлена номограмма для определения чисел зубцов у сопряженных колес zt. z2. 2з соосной передачи, построенной для числа р = -принятого с учетом применения передаточных отношений в редукторах общего назначения На номограмме возможные числа сателлитов а, соответствующие сумме ?! + z3. отмечены точками на дополнительной сетке построенной вдоль оси г3 и вдоль левой части номограммы. Числа зубцов z2 по оси z2 откладываются подряд по натуральному ряду чисел в интервале (20. 90). В то же время на шкалах и г3. наряду с постоянной сеткой через 10 зубцов, отмечены лишь те значения чисел зубцов центральных колес, сумму которых можно представить в виде одного или нескольких произведений из двух сомножителей. В этом произведении один из сомножителей может явиться возможным числом пт сателлиюв.
214
© Э. Б. Булгаков
Рис, 9.7. Номограмма для определения чисел зубцов д, 2%, Z3 и возможного числа сателлитов а у соисниА передачи 2К—II в зависимости от числа р • <23 /*1 • —Q—з и коэффициент» С в интервале (0.95. 1.05)
215
© Э. Б. Булгаков
Номограмма на рис. 9.7 позволяет быстро представить различные комбинации чисел зубцов z,. z2. z3 соосной передачи в зависимости от условий проектирования. Поскольку интервал изменения коэффициента С не является жестко регламентированным (его значение уточняется в процессе расчета на прочность), для получения целочисленных значений г он может несколько отличаться от принятых на номограмме. Например, если при р = 2,5 задаться zt = 54, то получим z3 135 при а 3, 7 и 9 и диапазон чисел зубцов сателлитов 39 < z2 £ 43, которым (точно!) по формуле (9.1) соответствует коэффициент С в интервале (0,96375, 10540), Изменение числа зубцов у сателлита z2 до 38 приведет к уменьшению коэффициента С, который будет равен 0.94845.
Используя решения номограммы как по схеме, изображенной на рис. 9 6. а. так и по схеме рис. 9.6.6 или применяя результаты решения номограммы по одной из схем для решения по другой, получим набор наиболее целесообразных результатов.
».5. ОБЛАСТЬ СУЩЕСТВОВАНИЯ СООСНОГО ЗАЦЕПЛЕНИЯ
Каждое из зацеплений соосной передачи в отдельности — внешнее или внутрештее — характеризуется двумя независимыми переменными О,. 02 и 02, Объединение в соосную передачу двух зацеплении, для которых независимая переменная 02 является общей, делает невозможным независимое назначение переменных О,, 93 для центральных колес г, и г3 — одно из этих переменных становится зависимым Если три переменных свести к двум, то можно представить область существования соосного зацепления на плоскости Такими переменными могут быть независимая переменная 07 и углы внешнего аг1_2 или внутреннего <хг2_3 зацеплений.
Изолинии соответствия углов зацеплений. Условие соосности (9.1) отражает связь углов зацеплений аг1_2 и <хг2_3 с числами зубцов z,. z2, z3 в предположении, что они удовлетворяют условию сборки Назовем изолиниями соответствия углов зацеплений или просто изолиниями соответствия часть изолиний углов зацеплений <хгi-2 в системе координат 9,, 02 и изолиний осг2_3 в системе координат 02, 03. независимые переменные которых определяют функции зацеплений, удовлетворяющие всем условиям существования зацеплений: соосности, сборки и соседства (условие сборки — при выборе чисел зубьев).
На рис. 9.8 показаны совмещенные области существования внешнего / и внутреннего 11 зацеплений соосной передачи с нанесением в качестве примера двумя линиями соответствия /—1 и 2—2. являющимися частями изолиний углов зацеплений Они ограничены условиями существования, рассмотренными выше, а также изолинией 216 © Э. Б. Булгаков
Рис. 9.8. Область существования внешнего (/) и внутреннего (//) зацеплений в системе координат дп. и 9% ^3 соотвегстаенно при = 48. » 27. гз *
ячхз" l/S^Lll-OO-9^
1—1 и 2— 2 —линии соитветсгакя при углах зацепления аг 2" 30* и вГ|_2" 24.17’; изолиния АЛ — при действительном числе сателлитов nF=? и боковом та юре А « 0; изолиния ВВ — при фиктивном чисто сателлитов а «8
АА соседства действительного числа сателлитов nv-7 при отсутствии бокового зазора, т. е. при Д = 0. Условие соседства значительно уменьшает возможности выбора независимых переменных при принятых углах зацепления Изолиния ВВ фиктивного значения а = 8 числа сателлитов характеризует нарастание бокового зазора Д между сателлитами внутри области существования В данном примере суммарный боковой зазор между сателлитами равен Д = (8 / 7 - l)de2.
Таким образом, рассмотренная система выбора независимых переменных предусматривает построение областей существования внешнего и внутреннего зацеплений с нанесенными изолиниями
217
© Э. Б. Булгаков
углов зацеплений. Среди этих изолиний отыскиваются линии соответствия углов зацеплений Затем определяют части этих линий, которым соответствуют независимые переменные, принятые с учетом выполнения условий соседства Полученное таким образом соосное зацепление свободно от граничных условий существования каждого из зацеплении в отдельности.
Если выбор независимых переменных 02 ограничен лишь условиями существования соосного зацепления, то угол — зависимая переменная — целиком определяется первыми двумя. Отсюда в соосном зацеплении, образованном нз двух зацеплений — внешнего и внутреннего, характеризуемых тремя переменными Ор 02, Оу лишь две переменные являются независимыми. Так. из основного уравнения соосного зацепления (9 2) при принятых z2 г3, для некоторых значении и ат1_2 можно определить зависимую переменную О3. а следовательно, при необходимости и О3. Что касается 02, то ее величина определяется из формулы (2.10).
Область существования соосного зацепления в системе координат 0t, ,_г Применение линий соответствия — наиболее про-
стой выбор независимых переменных соосного зацепления из областей существования внешнего и внутреннего зацеплений Однако он не позволяет зримо представить поле выбора независимых переменных. ее рациональную часть, необходимую, например, при автоматизированном проектировании. Вместе с тем их двух областей существования с тремя независимыми переменными 0р 0* 03 можно получить одну область существования в системе координат 02. «г|—а = arccos(Ccosar2_3).
Совмещение областей существования внешнего и внутреннего зацеплений приводит к получению области существования, одно временно принадлежащей двум зацеплениям Независимые перемен ные, соответствующие этой области, образуют зацепления, удовлетворяющие всем условиям существования: отсутствию интерференции. достаточности перекрытия и толщины зубцов на окружности вершин, а также условиям соосности и соседства, если на областях нанесена соответствующая изолиния АА. Условие сборки удовлетворяется при подборе чисел зубцов у сопряженных колес соосной передачи
В системе координат б2, аг1_2 построение области существования внешнего зацепления zt—z2 или в системе координат 02, «тг-з области существования внутреннего зацепления z2—z3 аналогично построению этих областей соответственно в системах координат 0р 02 и б2’ °з (°з) (см. гл. 3 и 5). поскольку arl_2 = /(О,, 02) и <хг2_3 = <р(02. frj). Если области существования
218
© Э. Б. Булгаков
внешнего и внутреннего зацепления построены, то их перенос в систему координат соосного зацепления 02, аг 1-2 = = arccos(C cosar2_3) не составляет затруднении Тем не менее в качестве примера преобразуем в систему координат 02, аг|_2 изолинии Еа2_3 = const и а 2 = 0 внутреннего зацепления, хотя этот путь и более громоздкий.
Уравнение изолинии коэффициента перекрытия еа2_3 = const получим совместным решением уравнений (2.40), (2.28), (2.5). (9.1) и (2.36) путем исключения независимой переменной 03:
ICOS(Xr, ,] t I ,
—г— - ui-3arcle<7-Htg«.2 + (u2_3 -1) x
° / u2-3
x tg arccos
COS&gp |_2
। COSCt w ।_g
tg% + (“г-j -l)tg arccos--------------
- Л1, 2cosa, 2 + a, 2 - (2ca 2_3 - I)— - 0
(9.9)
Корнем уравнения (9.9) является при принятом ar,_2 угол профиля аа2, которому соответствует независимая переменная 02.
Изолиния интерференции = 0 во внутреннем зацеплении записывается по уравнению (2 44). Решая это уравнение совместно с (2.28), (9.1) и (2.36), получим
mv02 = (u2_3- 1) х
(cosar]_2\ ц2_,-1 fcosa«.
--------- -H2_3arctg -------tg arccos ---- ‘ -
Г- / 3 \ ^ /
U2—ЗтаЗ
Л
“2-3
tg arccos
CQSOtyi 2
(910)
2
Построив по уравнениям (9.9) к (9.10) изолинии сй2—з — const и аР2 - const, получим область существования внутреннего зацепления в системе координат 02.
= arccos(C cosar2_3) При построении этой области не учитывалась
219
© Э. Б. Булгаков
интерференция вследствие упора вершин сопряженных зубцов, практически лежащая в области invO3 < —, т. е. при несуществующих
значениях 03. Совместив эту область с перестроенной в систему координат 02, аг|_2 областью существования внешнего зацепления, получим общую для двух областей область существования соосного зацепления,
На рис. 9.9 представлена область существования соосного зацепления, образованная путем отображения областей существования внешнего I и внутреннего II зацеплений в систему координат 02. аГ1—2= arccos(Ccosotr2—3). Для конкретного примера она ограничена изолинией коэффициента перекрытия ео , 2 = 1,0 во внешнем
зацеплении, изолинией интерференции а,2 « 0 во внутреннем за цеплении, а также изолинией числа сателлитов — фиктивного а = = 8 (линия ВВ) и действительного лг = 7 (линия АЛ).
Независимые переменные, принятые из области AABDBA, по зволяют осуществить соосную передачу с числом сателлитов лг = 7. Так как уравнение изолинии соседства составлено в
Рис. 9.9. Область с у шествовании соосного за* цегпекия в системе координат 02. С(п_2я = arccos (С cusay ) с параметрами за-целления, пика денными на рис. 9.8.
предположении касания между собой сателлитов, то на изолинии АА зазор между сателлитами Д = 0. Однако при выборе независимых переменных вдали от линии АА он быстро возрастает и уже на линии ВВ составляет примерно седьмую часть от диаметра сателлита. В этом случае как бы можно разместить при касании между собой восемь цилиндров-рсли ков, окружности которых равны начальному диаметру сателлита при лг = 7.
На этом примере видно преимущество выбора независимых переменных из области существования соосного зацепления по сравнению с их назначением по линии соответствия, по которым трудно представить перспективу отбора углов 9 ц 02 93
220
© Э. Б. Булгаков
Построение области существования соосного зацепления (см рис. 9 9) проводится при относительной толщине зубцов на окружности mai .2 3 = const. Изменение та — Sa/db приводит к изменению положения границ области существования, т. е. к получению новых сочетаний углов зацепления аг1_2 и аг2_э. Таким образом, для кинематически между собой связанных зубчатых колес z,. z2, z3 соосного зацепления, удовлетворяющих условию сборки, область существования представляется в системе координат 02, «гi-2. причем переход от угла зацепления аг1_2 внешнего зацепления к углу зацепления аг2_3 внутреннего зацепления осуществляется по формуле ar2_.3= arccos(cosa71 2/С).
Такая область дает достаточно четкое представление о возможностях соосной передачи, однако для получения переменных — независимой Oj и зависимой 03 — здесь необходимо производить соответствующие расчеты. Так. из области существования соосного зацепления в системе координат 02, аГ1_2 независимая переменная 01 определяется как invO, = (1 + Ui-^inva,,—2- W|_2inv02 + + л /г,, а зависимая переменная 03 — из уравнения (9.2) или. используя неравномерную шкалу аг2_3 области, как invO3= = (1 - z2/z3)invci1F2-3+ z2/*3inv02 - л/г3.
Характерные точки области существования соосного зацепления и ее построение. Получение характерных точек областей существования внешнего и внутреннего зацепления, определяющих границы реальных частей поля 0(. 02 и 02, 0^ подробно рассмотрено в гл. 3 и 5.
При построении области существования соосного зацепления необходимо определить в системе координат 0?, аГ|—2 ее характерные точки. В табл. 9.2 представлены уравнения координат характерных точек области существования внешнего и внутреннего зацеплений.
Обратимся к определению точек пересечения граничных изолиний областей существования внешнего и внутреннего зацеплений — возможных шести вариантов, которые в системе координат 02, «п-2, показаны на рис. 9.10.
1. Точка S пересечения изолиний коэффициентов перекрытия еа1_2= const и £а2-з= const. Прежде всего в результате совместного решения уравнений (2.13). (2.10) и (2.5) составляется уравнение (9.11) изолинии сд|_2в const. записываемое как Fi(aa2, аТ1—2. z(. mal—2) = 0. Координата точки S оп-
ределяется совместным решением этого уравнения с уравнением (9.9). изолинии коэффициента перекрытия ett2_3= const при условии. что ert|_2= 1,0 и 1,0. Определив из совместного решения
221
© Э. Б. Булгаков
9.2. Координаты точек пересечения граничных изолиний областей существования внешнего и внутреннего соосных вацеплений
Координаты точек пересечения S. К и L изолиний, определяемые путем решения системы уравнений
S
- arctfi
С + ы1—2) 18а1Г1—2 “ “1—2^аа2 +
2*<<1 1—2
(1 + “1—2) ^rl—2 “ *1—2[Еаа2 +
^еа 1-2
+ «|_? - аа2) + — (Чл-2 ~ 0 = 0
урвлненне (9.9) при еа|_2 1.0. еаа—3 "
(9.11)
X
Уравнение (9.11) При еа 1—2 ~ № уравнение (9.10) при ммене переменных с учетам (2.5)
L
( atri— («2—3“ О см--------7— I
- u2_3arctg
1 + «1 2
—-------1елт|-2
“1-2
“2-3
-Оз.г-Г^-
2 2
-----'г 1-2 “ — 2-3+ (“2-3" 1) arccns
Ч—2 £Ч
<osari_2
“2-3 mo 3
“2—3
I + U|_2 -------tg»<ri-2+ <“2-3“ Otgaiccos “1-2
СП5ЛГ(_2'
I
2леа 2-з
(I + U] _ 2 и 2
“1—2
(912)
Л1Д *'
С
С
уравнение (2.18) при «лз—3“ 1.0
222
© Э. Б. Булгаков
Продолжение табл. 9 2
К сердим а гы точек пересечения Р. V и 1* изолиний, определяемые путем решения склепы уравнений
Р
"»ul
я
-- axctgta + ♦“i-2('". 2c®«a2+ lnv«e2) - — «о (9.131
Э *1
уравнение (9.9) при ee |_j L0, ^а2—3 ~
V
m^jcosarctg
r “1-2
— '8-^-2
1 + “1-2
2“ tgcty^jacrlg
т “1-2 “1-2
“2-3“ *
-------tcarcros
“2-3
“2-3 таЗ
С
- (“2-3~ *) arccos
^1-2 c
+ *2-з arctg
“2—3”
tgarccos
“2-3
<"QSaU* 1_2
С
---«о
(9 И)
уравнение (218)
(I * «l_2)inVaF|-2~ "»e tcosarctg((l > M]_2) tg«r l-2I - (1 ♦ “l-2)tg«ri-2+ arctg (1 + «L_2)tg«Tl-2 ~
U’’1
cosart_2\ r«j-3"
---r--- ~ “2-3"ttg|——
\ v / I “2-3
“2-Зла 3
“2-3” 1
------- tgarccos
“2-3
» 0
c
\^2
(915)
уравнение (118)
223
© Э. Б. Булгаков
9.10. Основные варианты пересечения ихитинин областей существования внешнего и внутреннего зацеплений
уравнений (9.9) и (9.11) угол профиля а<2 по уравнению (2 5), находим независимую переменную 02.
2. Точка К пересечения изолинии коэффициента перекрытия Еа t_2= const с изолинией интерференции af2 = 0 во внутреннем зацеплении. Она определяется в результате совместного решения уравнений (9 10) и (911) при условии, что inv02 - me2cosx 2+ + inv«.2 и ! 0.
3. Точка L пересечения изолиний коэффициента перекрытия £й2-з= const с изолинией интерференции а, =0 во внешнем зацеплении. В результате совместного решения уравнения (9.9) с уравнением (2.17) при условии, что ая(= 0. получаем уравнение (9.12). записываемое как F3(aT1_2, 2,. ?2, z3, /иа2, т , .) = 0.
Определив при га2_3= 1,0 корень аг1_2 этого уравнения и подставив его в (2.18), получаем вторую координату 02.
4. Точка Р пересечения изолиний коэффициента перекрытия е«2-з= c°nsl изолинией интерференции я..2= 0 во внешнем зацеп
224
© Э. Б. Булгаков
лении Уравнение (2.15) при а^2= 0 решается совместно с уравнениями (2 10) и (2.5). Полученное уравнение (9.13), записываемое как F4(ari_2, ав2, u,_2, г, /па| г) = 0' решается при ей2_3= 1,0 совместно с уравнением (9.9). Одному из корней уравнений — углу профиля ав2— соответствует независимая переменная 02 по уравнению (2.5).
5. Точка V пересечения изолиний интерференций = 0 во внешнем и л,2= 0 во внутреннем зацеплении. В результате совместного решения уравнений (2.18) и (9.10) получим уравнение вида
С. W|_2, u2_3. ша2, ma3, z2) = 0, откуда определяем угол зацепления аг1_2. Затем по уравнению (2.18) находим 0,.
6. Точка W пересечения изолиний интерференций лр2- 0 во внешнем и во внутреннем зацеплении В результате совместного решения уравнений (2.10). (2.16). (9.10) получим уравнение (9.15) вида Fe(arl 2« С ai 2- и2 i« тлр = 0* корень которого равен аГ1_2. Затем по уравнению (2.16) определяем независимую переменную 0v
При построении области существования соосного зацепления на ЭВМ составляют подпрограмму вычисления аргумента эвольвентой функции, например путем ее аппроксимации степенным рядом |2|. Определив координаты характерных точек и точек пересечения граничных изолиний областей существования внешнего и внутреннего зацеплений, т. е. определив корни соответствующих трансцендентных уравнений, решают их, принимая некоторый целесообразный для построения шаг изменения одного из корней, например, для 02 шаг ± Д 02. Один из двух определяемых корней — 02 или аг1_2— принимается из соображения удобства решения трансцендентного уравнения.
Некоторые сведения о построении на ЭВМ области существо вания внешнего зацепления, приведенные в [5]. в полной мере можно использовать при построении области существования соосного зацепления.
Если при заданных числах зубьев z,. z2. z3 (С = cons!) и относительной их толщине на окружности вершин meU2<3= const известны области существования внешнего и внутреннего зацеплений, то построение области существования соосного зацепления сводится к отображению этих областей в новую систему координат. Такой графоаналитический метод построения заключается в выполнении следующих операций:
I. Отображение области существования внешнего зацепления Zj—z2 в системе координат 0(, 02 и области существования внутреннего зацепления в системе координат 02, 03 соответственно в системе координат 0,. аГ(_2— область 1 и 02, аг2_3 — область II (рис. 9.11. а).
225
© Э. Б. Булгаков
Рис. 9. И Схема графоаналитического построения области существования соосного зацепления на основе отображения областей существования внешнего и внутреннего зацеплений
2. Отображение области существования внутреннего зацепления в системе координат 02, аг2—з в систему координат 02. аг1_2 с учетом, что аГ|_2= arccos (С cosa(r2_3) (рис. 9.11,6).
3. Совмещение области I внешнего зацепления в системе координат 02, аГ|_2 с областью II внутреннего зацепления в системе координат 02. ar]_2= arccos (Сcosar2_3) (рис. 9-11. в).
4. Определение общей для двух областей I и П области, являющейся областью существования соосного зацепления (рис. 9.11, г).
Области выбора независимых переменных соосного зацепления. Независимые и зависимые переменные 0|( 02, 03 могут быть определены из соответствующих областей выбора переменных, полученных в результате отображения области существования соосного зацепления в систему координат О,. 02 для пары колес г,—2г внеш
226
© Э. Б. Булгаков
него зацепления к в систему координат 02. 03 для пары колес г2—г3 внутреннего зацепления. Такое отображение сводится к разрешению уравнений граничных изолиний области существования соосного зацепления относительно 0, для пары колес zt—z2 внешнего зацепления и 03 нары колес г2—г3 внутреннего зацепления.
На рис. 9.12, а в системе координат 02, «Г|_2 показана область существования соосного зацепления, а также дополнительно ось координат аг2_х. имеющая неравномерную шкалу.
Область существования соосного зацепления ограничена следующими изолиниями: изолинией АВ соседства сателлитов при пг = = 5 и боковом зазоре между ними А = 0; изолинией ВС и DE коэффициента перекрытия ев|_2= 1.0 для пары колес внешнего зацепления; изолинией CD коэффициента перекрытия еа2_3= 1.0 для пары колес внутреннего зацепления; изолинией EF начала интерференции ар2= 0 во внутреннем .зацеплении и. наконец, изолинией FA начала интерференции a 0 во внешнем зацеплении. На рис. 9.12.6 представлены также результаты отображения области суще-. ствования соосного зацепления в систему координат 0,. 02 и 02, 93.
Изолинии области существования соосного зацепления отображаются в соответствующие изолинии и граничные линии в новых системах координат, образуя замкнутые области выбора переменных 0|t 02, 03. Граничные линии, например ВС и DE на области существования соосного зацепления, соответствующие изолиниям ей1_2= 1,0 во внешнем зацеплении и ес2_3= 1,0 во внутреннем зацеплении, при построении имеют переменные Oj и 03. непосредственно полученные из формул (2.10) и (2.37) для вычисления углов зацепления яг1_2 и аг2_3; при этом учитывается условие (9.1) при определении переменной 03.
Граничной линии ЕЕ области существования соосного зацепления соответствуют изолинии ал2= 0. которым отвечает-переменная 0( по формуле (2.16) и б3 — по формуле (2.46) с учетом условия (9.1). Точно так же граничной линии FA области существования соосного зацепления соответствует изолиния a^t= 0. Переменные 02 по формуле (2.18) и 03 по формуле (2 37) служат для вычисления угла зацепления аг?-з» ПРИ этом следует учесть (9.1).
Изолиния АВ бокового зазора А = 0 между сателлитами отображается в систему координат 0р 02 путем использования формулы (2.10). а в систему координат 02. 03 — формулы (9 4).
На рис. 9.13 на конкретном примере показаны все этапы графоаналитического построения области существования соосного зацепления и областей выбора независимых и зависимых переменных.
227
© Э. Б. Булгаков
Рис. 9.12. Область существований соосного зацепления в системе координат #2« «П—2 (°) и обвести выбора переменных в системе координат *|. и 0) ГТРИ «1"<U 48. гз«129. 1.2.3е 1/2^1 Z3« C“L04829. au "5
© Э. Б. Булгаков
228
Ркс 9.13. Процедура графоаналитического построения области существования соосного зацеплении и областей выбора переменных при 2[ я 29. 2J я 23. 23 • 76. "Ч 1. 2. 3- । / 2.5^ 2.3. С » 0.98U3
© Э. Б. Булгаков
229
Так, на рис. 9.13, а показаны области существования отдельных пар зубчатых колес внешнего 29, г2 = 23 (/) и внутреннего 23. z3 = 76 (//) зацеплений при 1/2,5*! 2 3. на рис. 9.13,6 —
области / и II, отображенные в систему координат 02, и 02. аг2—з гоответственпо (здесь же намечены изолинии возможных чисел сателлитов а = 5,5 и 7) На рис. 9.13. в показано отображение области II в систему координат 02’ otr1_,= arccos (С cosar2—3). на рис. 9.13. г — область I рис. 9.13, б совмещена с областью // рис. 9.13, в. На рис. 9.13, д показана общая для двух областей I и II площадь. являющаяся областью существования соосного зацепления, а на рис. 9.13, е — ей соответствующие области выбора переменных.
Некоторые сведения об области существования зацепления с несимметричными профилями зубцов приводятся в [6].
Некоторые результаты выбора параметров соосного зацепления. Выбор параметров соосного зацепления начинается с выбора чисел зубцов кинематически между собой связанных зубчатых колес г2. 23, удовлетворяющих условию сборки. Таким колесам при известном передаточном числе соответствует коэффициент С и некоторый набор сателлитов nv (см. табл 9.1). При относительной толщине зубьев на окружности вершин /nal2j= const этим колесам, собранным в соосную передачу, отвечает некоторая область существования соосного зацепления в системе координат 02, аГ1_2= = arccos (С cos«r2_3). а также область выбора независимых и зависимых переменных в системе координат 0,, 02 н
03 для г2—г3.
Обратимся вновь к рис. 9 12. Одной из границ области существования спосного зацепления является изолиния АВ соседства сателлитов при лг = 5 и боковом зазоре между ними Д = 0. Боковой зазор в пределах области существования нарастает сверху вниз и уже на изолинии а—а он примерно равен Д ~ (5,5/5 — 1)^Л2 = =0,lde2. Некоторой точке G на области существования соосного зацепления при боковом зазоре между сателлитами Д = 0,lde2, 02 = 32е и углах зацепления аГ|_2= 30° и аг2 3= 34е соответствуют 0, = 36.9е и 03 = 33.8*.
Область существования соосного зацепления и области выбора переменных 0U23 ограничиваются принятым при проектировании числом сателлитов лг. В качестве примера рассмотрим еще одну соосную передачу (рис. 9.14) По условию сборки (9.3) такая передача может иметь число сателлитов лг = 3 или 4. или 6.
Если принять нг = 3, то область существования соосного зацепления достаточно велика, причем на изолинии а—а боковой зазор между сателлитами равен Д = 0.33da2. Эта область ограничена изолинией АВ интерференции лр2= 0 во внутреннем зацеплении и
230 © Э. Б. Булгаков
Рис 9.14. Область существования овсиво зацепления в области выбора переменных ^д,з при ti= 24. 2зж4?> 2з = 120. maL2.3“ !/2Л2(1 2, 3. С =0.97260. пт=3.4
231
© Э. Б. Булгаков
изолинией АС интерференции tx_2e 0 во внешнем зацеплении, а также изолинией ВС коэффициента перекрытии еЛ|_2= 1,0 во внешнем зацеплении Увеличение числа сателлитов до пг = 4 значительно уменьшает область существования соосного зацепления, которая в этих условиях ограничивается изолиниями соседства а—а при Д = 0, изолиниями ^1-2= 1.0 и а,2= 0.
Изолиния бокового зазора Д » 0.33da 2. соответствующая предыдущему примеру, лежит вне области существования, так же как изолиния бокового зазора Д = 0 при п г = 6.
На областях существования соосного зацепления и выбора независимых и зависимых переменных отмечена точка Q при Лг1_2= 28,5®, аг^ з= 25®. 02 = 32®. = 39,5е, 03 = 28.24°. которым
соответствуют передачи с боковым зазором между сателлитами Д « 0,406^5 при пг = 3 и Д «= 0,054^,2 при = 4 (см. рис. 9.14).
Таким образом, область существования соосного зацепления необходима не только для определения таких параметров, как
Рж. 915 Области выбора независимых переменных Др сяхного зацепления при = 79. г3 = 158, z2 = 36 ( / X г2 = 42 (//), яц * - I / 2.5
232
© Э. Б. Булгаков
«vi-2 и ^2- но и ;1ЛЯ определения возможности реализации числа сателлитов, полученных по уравнению сборки (9.3).
На область существования соосного зацепления также значи-тельное влияние оказывают числа зубьев zt 23 сопряженных колес. Чем меньше С, тем в сторону больших углов зацепления <xri-2 смещается область существования соосного зацепления: возникает возможность улучшения качественных показателей наиболее напряженной пары внешнего зацепления. Наоборот, чем больше С, тем в сторону меньших углов зацепления «гi—з смешается область существования соосного зацепления. Такой вариант передачи во многих случаях позволяет получить коэффициент перекрытия во внешнем зацеплении £а,_2= 2 05 при аг1_2 > 20е.
Если в процессе проектирования изменение передаточного отношения q*3 недопустимо, то улучшить качественные показатели зацепления можно за счет изменения числа зубьев z2. Так, на рис. 9.15 показаны области выбора независимых переменных 0j. для соосных зацеплений, отличающихся между собой лишь числами зубьев у сателлитов: в первом (/) случае г2 = 36, во втором (//) г, = = 42. Увеличение z2 привело к увеличению коэффициента с с 0.95041 до 1,05217, а также к изменению области выбора независимых переменных. Если по втором случае (при г2 = 42) возможно осуществление зацепления при £а|_2,0 и аг1_2 > 20°, например Cai—2е 2.05, «г!_2в 23.01°, ео2_3= 1.19. ат2_3® 28.98°. то в первом случае такие параметры получить нельзя.
9.6. ОПРЕДЕЛЕНИЕ ТОЧЕК КОНТАКТА ЗУБЦОВ, ОДНОВРЕМЕННО НАХОДЯЩИХСЯ В СООСНОМ ЗАЦЕПЛЕНИИ
Активная часть линии зацепления В^В2 или В2В3 у зубчатой передачи при 1,0 < t—2.2—з < 2,0 имеет "один однопарный и дна
двухпарных участка зацепления (см рис. 1.11, а и б). В соосной передаче 2К—Н одновременно происходит 2лг зацеплений — п г внешних и лг внутренних где лг— число сателлитов г2 В каждый момент времени зубцы, например, сателлитов z2 будут располагаться на различных участках линии зацепления, или в разных фазах зацепления. Такая особенность работы соосной передачи при Kai-2.2-3< 2.0 может привести к тому, что в предельном случае в зацеплении будет находиться от 2п г зубцов, если предположить их одновременное размещение в зоне однопарного контакта, до 4л v зубцов, если их контакт также одновременно происходит в зоне двухпарного зацепления. Ясно, что изменение числа пар зубцов, одновременно участвующих в работе, влияет на крутильную жесткость и динамическую нагруженность соосной передачи, а также
233 © Э. Б. Булгаков
в целом на ее несущую способность. Поэтому очень важно уметь учитывать фазы зацепления соосной передачи и воздействовать на факторы, их определяющие.
На линиях зацепления соосной передачи 2К—Н рассмотрим положение одновременно находящихся в зацеплении зубцов сопряженных колес по отношению к полюсам зацепления или ТС'з-з, координаты которых заранее известны. Допустим, что контакт сопряженных зубцов внутреннего зацепления г2_г3 происходит левыми профилями, т. е. центральное колесо zt вращается по часовой стрелке (рис. 9.16). Допустим также, что в некоторый момент времени некоторый зуб сателлита N=1 с числом зубьев находится в зацеплении (в контакте) в полюсе зацепления с некоторым зубом центрального колеса z3 (исходное положение). Одновременно сателлит N=1 находится во внешнем зацеплении 2j—z2 с централь ным колесом контакт с зубьями которого по отношению к полюсу зацепления VT|_2 определяется четностью числа z2 и значением С.
Рассмотрим первый вариант общего случая исходного положения сопряженных зубьев, если сателлит N=1 имеет нечетное число зубьев г2 и если С * 1,0. Последний означает, что углы зацепления пары внешнего и внутреннего зацеплений не равны друг другу, т. е. аг1_2 -^«г2-з и сателлит будет иметь две начальные окружности (см. рис. 9.1). Обозначим точку контакта зубцов через Л, „ где i — номер колеса по кинематической схеме; / — для центральных колес порядковый номер сателлита, отсчитываемый по часовой стрелке, а для сателлита — номер сопряженного центрального колеса
Если установить пару зубцов внутреннего зацепления z2-г3 в полюсе зацепления VT2_3, то ПРИ и* контакте левыми профилями между осями коггактирующих зубцов и осью / передачи установятся углы (см. рис. 9.16, а)
Фз! = »nvar2_3 - inv03 ; (®16)
(р23 — inv02 ~ л^у2_3.
Во внешнем зацеплении положение оси контактируемого зубца сателлита N=1 по отношению к осн I передачи определяем, учитывая число зубцов между зацеплениями, т. е. на дуге, соответствующей центральному углу, равному л. Так как центральный угол у2 между осью контактируемого зубца сателлита N«1 во внутреннем зацеплении и осью / передачи со стороны внешнего зацепления равен т2 = л ~ Фгз* то на соответствующей ему дуге окружности разместятся z2 = у2 / т<2 зубцов, где угловой шаг сателлита 234 © Э. Б. Булгаков
Рис 916 Распсспжсннс сателлита N • I соосной передачи при С * 1,0 по отношению к оси симметрии Л если число зубцов г2 нечетное (а) или г2 четное (б)
тг2 = 2л / z2, и поэтому
Ф'Д = Л — ^*,2^2 + ^23 где г2 — ближайшее целое число к числу
(9 18)
(919)
Из рис. 9 16. а следует, что положение контактной точки Хц зубца сателлита N=l при его зацеплении с зубцом центрального колеса Zj определяется расстоянием
жг v U / Л к (9 20)
— 2^» 2 f®ri-2 + ,пу9г — T21) -
Так как вся длина линии зацепления N{N2 = = у (1 *" а1-г) то расстояние от точки до контакт-
ной точки Хи равно Л^Хц = N{N2 — С другой стороны, из рис. 9.16. а также следует, и тогда после подстановок I Фп
*1
что JV|XU » 2d»i (1П™1 ” Фи + а1Г1-2 и упрощений окончательно
= ^izTa
(9.21)
235
© Э. Б. Булгаков
Рассмотрим второй вариант общего случая, когда г2 является числом четным, а С * 1,0
Так же как в первом случае, пару зубцов внутреннего зацепления z2—г3. контактируемых левыми профилями, установим в полюсе зацепления W'2_3, причем угол между осями этих зубцов и осью
/ передачи <р31 и ф23 определим по формулам (9.16) и (9 17). Так как число зубцов z2 четное, то их ось симметрии является осью симметрии колеса. Поэтому контактирующий правыми профилями зубец сателлита N=l во внешнем зацеплении будет диаметрально противоположен контактирующему зубцу во внутреннем зацеплении (рис. 9.16. б) и тогда, углы как накрест лежащие, <р2з “Va* Так как
Л2Хи —
(9.22)
то угол между осью / передачи и осью контактирующего зубца колеса z.
Фи' = у + г1
(9.23)
Обратимся к частным случаям, когда С = 1.0. т. е. когда сателлит имеет одну начальную окружность, проходящую через полюса 1^-2 и Ц72_3 внешнего и внутреннего зацеплений (рис. 9.17). До
пустим, что г2 — число нечетное, а С — 1,0. По начальной окружности произведем отсчет окружных шагов от точки контакта или от полюса 1F2_3 внутреннего зацепления, расположенного на левом
профиле зубцов
Окружной шаг pv. как извест но, измеряется между одноименными профилями и состоит из суммы толщины зубца и ширины его впадины. Тогда целому числу шагов Ntpr (где Nz — целое число) соответствует дуга окружности от полюса Wz2_3 на левом профиле зубца сателлита до левого профиля последнего зубца. В то же время толщина этого зубца, равная половине окружного шага рт / 2, замкнет угол л на его правом профиле в полюсе зацепления 1^1-2 (рис. 9.17. а) Таким образом, на половине сателлита, которую
охватывает центральный угол л, длина дуги начальной окружности равна z2pr / 2 = + /vj рг и точка контакта пары z-z2 сов-
падает с полюсом внешнего зацепления 1Г|_,. Полюс зацепления размещается на профиле зубца сателлита N=l. ось симметрии
которого расположится на рассматриваемой половине колеса, т. е правее от оси I соосной передачи. Так как при нечетном числе зубцов г2 ось симметрии сателлита совпадает с осями симметрии зубца и впадины, то полюса зацепления будут находиться
236
© Э. Б. Булгаков
Рис. 9.17. Расположение сателлит» N I соогной передачи при С = 1.0 по отнотению к оси симметрии /, если чисто зубцов нечетное (а) или чгпюс (6)
на разноименных профилях зубцов, т. е. полюс на правом, рабочем профиле зубца сателлита г2.
Оси симметрии к о »п актирующих зубцов центральных колес г13 буду! размещаться левее оси I передачи. Для пары внешнего зацепления угол между осями равен
» invO, - invarl_2, (9.24)
для пары внутреннего зацепления z2—z3 угол (р3, определяется по формуле (9 6).
Рассмотрим второй частный случай, когда число 22 является четным, а С- 1.0. Тогда на половине сателлита с центральным углом л по начальной окружности разместится целое число ок ружных шагов. Отсчет окружных шагов от точки контакта 1Г2_3 завершится в точке 1Г1_2 контакта на левом, в данном случае нерабочем профиле зубца сателлита (рис. 9.17. б).
Таким образом у сателлита с четным числом зубцов ось симметрии совпадает с осями зубцов или с осями их впалин, что исключает контакт зубцов одновременно в двух полюсах 1Г;_2 и 1Г2-з Контакт
237
© Э. Б. Булгаков
правыми профилями зубцов центрального колеса Z| с зубцами z2 сателлита N = I произойдет в точке Хп. Таким образом, при контакте зубца сателлита z2 с центральным колесом г3 в полюсе зацепления 1^2-3 симметричный зубец сателлита z2 контактирует в точке Хц с зубцом центрального колеса г}, причем между осью зубца г( и осью I соосной передачи устанавливается угол, который непосредственно следует из рис. 9 17. б
Фп = mvar|_2- invO! + 2л / zt.
Также из рис. 9 17, 6
= 2*41 far 1-2 “ Фи + *nv^i
ап-2 “ Фи + inv^i
(9.25)
(9.26)
Наконец, если имеет место внеполюсное зацепление хотя бы в одном из зацеплений, предположим во внутреннем, за исходное положение сателлита N = I следует принять контакт его зубца в некоторой конкретной точке схемы зацепления, например в точке В2(Х31) (рис. 9.18). Определим положение осей контактирующих зубцов центральных колес z3 и г, по отношению к оси / симметрии соосной передачи, если UT2_3X3I = 1Г2_3В2 известно. Так непосредственно из рис. 9 18 следует, что положение оси контактирующего зубца колеса z3 при его зацеплении с сателлитом V = 1. если контактной точкой является точка В? (Х31), определяется углом
у - аГ1_, + tga j - invO,. *3
(9.27)
Для тоги чтобы определить положение оси контактирующего зубца центрального колеса г, по отношению к оси I, необходимо предварительно найти положение осей контактирующих зубцов са теллита N s 1 во внутреннем и затем во внешнем зацеплении Во внутреннем зацеплении угол между осью контактирующего зубца сателлита N = I и осью / равен ф23 = Да + invO2 - inva-s (рис. 9.19). Из &О2аВ2 и ДО3аВ2 имеем sinA2 = (^з / de2) siii7l3, где угол
= л / z3 - ф/j - invO3 + inv«,3.
Тогда окончательно
<р?3 = invO2 - invad2 + aersin
sin (аг2_3 - а, 3\ . (9.28)
Во внешнем зацеплении положение оси зубца сателлита N = 1 по отношению к оси / соосной передачи в зависимости от четности чисел z2 определяем по формулам (9 21) или (9.23), предварительно вычислив по (918) и (9 19) угол ф2,; при четном числе зубцов сателлита 22 Угол Ф21 = ф/з
238 © Э. Б. Булгаков
Рис. 9.18. Расположение зубца центрального колеса z3 в не полюсного зацепления по отношению к оси симметрии /
Положение контактной точки в значительной мере зависит от схемы передачи
Таким образом, если в начале сборки соосной передачи установлен только один сателлит N = 1, то могут быть по крайней мере следующие исходные положения зубцов при зацеплении центральных колес zi 3 с сателлитом z2:
если сателлит имеет нечетное число зубьев z2 и С # 1.0. то для пары колес z2—z3 внутреннего зацепления, установив их контакт в полюсе зацепления U^2_3, определяем положение осей контактирующих зубьев по отношению к оси I передачи по формулам (9.16)— (9.21);
при С= 1,0 контакт зубьев одновременно осуществляется в полюсах зацепления Wrt_2 и 3, а положение осей зубьев определяется по формулам (9.16) и (9.24);
если сателлит имеет четное число зубьев z2 и С * 1.0, то при контакте пары зубьев z2—z3 в полюсе зацепления V2_3 положение осей контактирующих зубьев по отношению к оси I передачи оп ределяем по формулам (9 16), (9.17) и (9-23);
при С =1.0 контакт в полюсе внешнего зацепления невозможен. если зубцы предварительно установлены в полюсе зацепления TF2_3; в этом случае используются формулы (9.6) и (9.15);
если за исходное положение принять контакт зубцов г2—z3 в некоторой наперед заданной точке линии зацепления, например в точке В2 заполюсной передачи, то угол поворота контактирующего зубца колеса z3 по отношению к оси I передачи определяем по (9.27), угол ф,'3 — по (9 28), угол <ря — по (9 8) и (9.9), а угол ФЦ' — по (9.21) или (9.23).
239
© Э. Б. Булгаков
Рис. 919. Контактирующие зубцы 22 и z3 1М<г >атюс1«0Го зацепления и углы по-_____ It .
ворла ^23 и 101 о*1®*' по отношению к осн симметрии /
Определив положение осей симметрии зубцов центральных колес при зацеплении с сателлитом N = = 1 относительно оси / передачи, найдем положения осей контактирующих зубцов и контактных точек. если в зацеплении последовательно вводятся сателлиты N = 2, N = 3 и т. д. Эти положения сателлитов N>1. соответствующие исходному положению сателлита N = 1, назовем начальными положениями.
Определим в общем виде у центральных колес числа зубцов z3р размещенные между осями соосной передачи с порядковыми номерами N = /—I mN»/, т. е. между сателлитами N = /—1 и N « / Так как угол между осями соосной передачи глГ = 2л / пг а угловой шаг центральных колес z3[ равен сг3 । = 2л / 23 |, то число зубцов в секторе между осью 3y6i(a z3 j ближайшего к оси передачи N = /—I и осью N = / равен
где знак принимается в случае, если ось контактирующего зубца центрального колеса z3J при зацеплении с сателлитом N = /—1 отклоняется от оси передачи N = /—I влево, а знак «-♦, если вправо.
Округляя z31 до ближайшего целого числа z3 р получим два варианта углов между осью контактирующего зубца центрального колеса г3 [ при зацеплении с сателлитом N = / и осью передачи N = /: если z3J округляется в меньшую сторону, то угол <p^r отклоняется влево от оси N = / передачи, если округляется в большую сторону, то вправо Расположение рассчитываемых углов ф3'1; по отношению к осям передачи и им соответствующие формулы приведены в табл 9.3 Принципиальная схема расположения углов Ф между осями контактирующих зубцов центральных колес Z] и z3 и осями симметрии соосной передачи при числе сателлитов пт = 5 приведена на рис. 9 20.
240
© Э. Б. Булгаков
9.3 Угол между осью контактирующего зуба центрального колеса г. 3 при зацеплении с сателлитом N " / и осью N • / симметрии передачи
Схема расiкгиjжгния угли»
Расчетные фирму.ты
Примечание. Сплошными линиями обозначены оси симметрии N / -1 (оертхкатьная) и N / с утлом тя^ между ними.
Следующий этап расчета заключается в определении расстояний от полюса зацепления до контактной точки на сателлите с порядковым номером N > 1 Так, при внутреннем зацеплении 22—z3 с сателлитом N = j. когда контакт происходит на головке зуба колеса г3 (рис. 9.21, а)
^2-3^3/ ® 2 (^Л|г2—з “ inv03 + — 4- d>3,
(9.30)
д
ЗД, 2^*3 (аг2-з + “ Тз?) » (9.31)
241
© Э. Б. Булгаков
I
Рис. 9.20. Схем* расположения углов между <хями sytkiue начес г( 3 и гилью осями симметрии соосной передачи
Рис. 9.21. Схема расположения контактной тачки A'j । при зацсгшенми с сателлитом N / пл отношению к <хн / передачи на центральных колесах z3 (в) и 2] (б)
242
© Э. Б. Булгаков
при внешнем зацеплении колес Z|—z, с сателлитом N = /, если контакт происходит на ножке зуба колеса zt (рис. 9 21. б).
^-г^ч = 2d»i (fl/ “ invOi +
Wu = |</,| (arl_2 + invO, - <рЛ.
(932)
(9.33)
Полученные формулы соответствуют рис. 9.21, когда ось контактирующего зуба находится правее оси / передачи во внутреннем зацеплении и левее во внешнем. Если ось j передачи располагается правее контактирующего зуба во внутреннем зацеплении и левее во внешнем зацеплении, то в формулах (9.30) и (9.32) перед утлом принимать знак <+»; в формуле (9 32) правые три члена, а в формуле (9.33) последние два члена принимаются с обратным знаком. В этом случае контактная точка будет располагаться на ножке зуба колеса z3 во внутреннем и на головке зуба колеса zt во внешнем зацеплении
9.7. ФАЗЫ ЗАЦЕПЛЕНИЯ И ЭПЮРА МГНОВЕННОГО КОНТАКТА ЗУБЦОВ В СООСНОМ ЗАЦЕПЛЕНИИ
Определим положение точек контакта Xif по отношению к зонам однопарного или двухпарного зацепления, которое выше условились называть фазой зацепления. Фазы зацепления определяются на основании сопоставления относительно полюса зацепления Wr1_2 2_3 координаты точки контакта Xt. зубцов с координатой начала зоны двухпарного зацепления (см. рис. 1.11). Как указывалось
в гл. 1 и 2. если б < 0, то полюс зацепления находится в зоне однопарного зацепления, если б > 0. то в зоне двухпарного. Однако в большинстве случаев такой приближенной оценки положения точки контакта может оказаться недостаточной, например, при определении числа пар зубьев во внешнем н во внутреннем зацеплении, одновременно находящихся в зацеплении, в зависимости от угла поворота центрального колеса z,.
Рассмотрим фазы зацепления сателлита N = 1 в одном из четырех вариантов — при С * 1.0 и С = 1,0. z2 — четном и нечетном — исходного положения, когда колеса z2—z3 устанавливаются так, чтобы осуществился контакт их зубцов в полюсе зацепления W2_3. Только если С = 1,0 и число зубцов z2 у сателлита нечетное, то в исходном положении одновременно происходит контакт в полюсе зацепления lFj_2 у пары колес внешнего зацепления z,—z2, т. е. одновременно осуществляется контакт в полюсах ^„2 и U^2_3 (см. рис 9.17, в).
243
© Э. Б. Булгаков
В остальных трех вариантах исходного положения в самом общем случае у пары зубчатых колес —z2 контактная точка Хи, ближайшая к полюсу зацепления 1Г|_2, с ним нс совпадает (см. рис. 9 16 и 9.17, б). Определив по знаку дг-з.3 фазу размещения полюса 1Г2_3 на линии зацепления, находим фазу зацепления пары 2]—г2, сравнивая 2 с расстоянием Wi_jZu, вычисленным по формуле (933).
Определив фазы зацепления сателлита I в исходном положении, перейдем к определению фаз зацепления других сателлитов, а именно: N = 2. 3....лг. Положения контактных точек Xif на линии
зацепления, где i = 3, 1, / = 2. 3.лг, соответствующие исход-
ному положению контактной точки Х31 и Хц сателлита /. выше назвали начальными положениями Начальное положение точек контакта Ху каждого сателлита фиксируем расстоянием W7., _3Х3, н
а также и N\Xlt (где j — порядковый номер сателлита) которое сопоставляем с соответствующими значениями : 2_3 3.
Начальные положения ко1ггактных точек Хй, Хц. Х3, и X, на активных частях линий зацеплений В{В. и В2В3 можно также непосредственно определить, вычислив по приведенным выше формулам A3A3j и N{Xift где I S/S лг.
Рассмотрим перемещение контактных точек н зависимости от угла поворота центрального колеса г(. Для этого представим пересо пряжение зубьев в виде непрерывно чередующегося циклического процесса, когда двухпарное зацепление сменяется однопарным, а затем двухпарным, а затем вновь однопарным и т. д.
Перемещение контактной точки Хп от точки В2 до точки fi, линии зацепления (см. рис. 1.11) равносильно повороту колеса г1 на угол Yi*2®1 = или
тЛ* = ?
(9-34)
В исходном положении контактная точка Хц находилась на расстояния от полюса зацепления WZ|_2, чему соответствует
угол поворота
¥ S tBa <9 35)
Иными словами, контактная точка Хц к исходному положению уже «прошла» некоторый пугь по линии зацепления от точки В2 (Р|) до точки Х||.
Аналогично в начальном положении контактной точке при зацеплении центрального колеса zt с / — сателлитом соответствует угол поворота
244 © Э. Б. Булгаков
,₽a <936>
где угол Т,7Л откладывается от точки B2)(P|Z) по направлению к точке fily.
Полное перемещение контактной точки Xit от точки В3 до точки В2 линии зацепления соответствует повороту центрального колеса г3 на угол Тз*2®1 = tga,3 - tga.j. или
„ (9.37)
Тз ~ Fa2-3-
*3
Начальные положения контактных точек Х31 и X3j определяются по формуле
„- - 2N^> (9 38) Та, - '8“,з ~ d
о О
В соосной передаче контактные точки во внешнем и внутреннем зацеплении перемещаются навстречу друг другу и от углов у^31 и Tijsr где 2 лг, необходимо вести отсчет их положения в зависимости от угла поворота ведущего, например, центрального колеса гг
Если схемы зацепления каждого из зацеплений построены и определено исходное положение сателлита N = I на линиях зацеп* легши, а также определены начальные положения на линиях зацеплений сателлитов N = 2, 3, .... то можно узнать суммарное число пар зубцов, находящихся в контакте в момент начала отсчета.
Следовательно, в момент начала отсчета по числу зон однопарного и двухпарного зацепления, в которые попали контактные точки Лц. X3l, X3j, можно судить о суммарном числе пар зубцов z^**, одновременно находящихся в зоне контакта. Один из вариантов расчета производится по формуле
2пг S 2 2(Ра + Ргз) 2 (ра + Ри) s 4я»- <939> I I
где p2l и p,rj — число зон одно- и двухпарного зацепления на схемах внешнего и внутреннего зацеплений в момент начала отсчета.
В следующее мгновение, например при повороте центрального колеса z{, в картине зацеплений произойдут изменения. Допустим, что в некоторый момент времени контактная точка центрального колеса z} при зацеплении с сателлитом N = I из исходного положения. предположим из точки переместилась в точку С линии зацепления, проделав путь UZ|_2C = /|. Ясно, что из своих
245
© Э. Б. Булгаков
начальных положений контактные точки, Х12, Х13 . . . Х1(1 г, сателлитов N = 2,3..... лг также переместятся по линии зацеплений на отрезок, равный Однако в общем случае все они будут находиться в иных, чем точка С, точках своих линий зацеплений Следовательно, в это мгновение суммарное число пар зубцов во внешнем зацеплении будет иным, чем при начале отсчета Этот процесс имеет ту же закономерность при последующих поворотах центрального колеса гг
Пусть центральное колесо вращается по часовой стрелке Разместим одну над другой линии внешних зацеплений зубчатых колес z,—г2 таким образом, чтобы все они начинались от линии отсчета исходных для сателлита N = 1 и начальных для всех остальных сателлитов положений и продолжались в правую сторону, т. е. в сторону движении кшггактных точек. Затем продолжим линии за цеплений каждой из пар до тех пор, пока в положениях картин зацеплений не повторится картина зацеплений при начале отсчета. Каждое из вертикальных сечений этих линий будет соответствовать конкретному числу одновременно находящихся в зацеплении пар зубьев за полный цикл пересопряжения пары. Каждое сечение отвечает определенному времени от начала отсчета или углу поворота центрального колеса г(. Производя суммирование числа пар зацепляющихся колес в каждом из сечений, построим эпюру мгновенного контакта зубьев во внешнем зацеплении
Точно гак же разместим линии зацеплений нары зубчатых колес г2—г3 внутреннего зацепления. Однако в связи с тем, что во внутреннем зацеплении контактные точки перемещаются в направлении, противоположном перемещению во внешнем зацеплении, будем их откладывать левее линий внешнего зацепления Так, отметим контактную точку исходного положения сателлита N = I, от которой отложим линию зацепления влево, затем от начальных положений сателлитов N = 2.3......пг. которым соответствуют контактные
точки Х32. Х33....ХУв). построим остальные линии зацеплений.
Аналогично внешнему зацеплению построим эпюру мгновенного контакта пары z2—z3 внутреннего зацепления. Если теперь сложить эпюры мгновенных контактов внешнего и внутреннего зацеплений, учитывая, что их построения производились по обеим сторонам линии исходных и начальных положений, то получим суммарную эпюру мгновенных контактов пар зубьев в соосной передаче.
Проведенные построения выполнены в предположении изготовления без ошибок абсолютно жестких недеформируемых зубьев зубчатых колес, водила и корпуса редуктора Упругая деформация зубьев, водила, корпуса и других деталей ошибки изготовления и сборки внесут значительные коррективы в суммарную эпюру мгновенных контактов. Эпюра будет иметь менее резкие очертания, станет более сглаженной, отдельные выбросы ее будут осреднены в одних случаях и примут резкий характер в других. Однако первым этапом расчета числа пар зубьев в соосной передаче, принимающих 246 © Э. Б. Булгаков
участие в статическим распределении усилий между зубьями сателлитов, является эпюра мгновенных контактов или суммарного числа зубцов, дающая представление об идеализированном процессе зацеплений в соосной передаче.
9 8. ЕЩЕ ВАЗ О ВЫБОРЕ ЧИСЕЛ ЗУБЦОВ В СООСНОЙ ПЕРЕДАЧЕ
Используя формулы (9.6), легко убедиться, что при числе зубцов у центральных колес кратных числу пг сателлитов, у соосной передачи пересопряжение зубцов по каждому из зацеплений будет происходить в одной и тон же фазе — при однопарном или двухпарном зацеплении.
В этом случае возникает гак называемое синфазное пересопряжение зубцов, растут крутильные колебания и динамические усилия в зацеплении От этого явления можно избавиться и таким образом повысить несущую способность передачи, если сателлиты будут иметь разные числа зубцов — г2, z2, z2 ... Кроме того, использование сателлитов с разными числами зубцов г,, г?. z2 ... расширяют возможности изготовления, сборки и применения соосной передачи. Так, если известны zx, z3. О,. 03. то некоторому числу зубцов z2 будет отвечать единственное значение аг,_2 из уравнения (9.2), а ему — из (2 10) зависимая переменная 02. Другому числу зубцов z7 будет соответствовать уже иной угол зацепления аГ|-2 и 10106 зависимое переменное 02 и т. д.
Правильность зацепления сателлитов с числом зубцов z2. z2> z2 ,... в соосном зацеплении возможно лишь при постоянном основном шаге у сопряженных колес, что влечет за собой изменение диаметра их основных окружностей. Так как = — с!ьг, г2
Рь = Рь = —и так как р4 = р> = р* . . . , то при z2 z2
некотором числе зубцов z2 сателлита, отличающихся от числа зубцов z2 У Другого сателлита, их основные окружности изменяются пропорционально изменению чисел зубцов:
91
(9.40) *2
Таким образом, был показан пример еще одного использования основного уравнения соосного зацепления (А. с. 1647187, F 16 Н 1/34).
247 © Э. Б. Булгаков
Раздел III РЕАЛИЗАЦИЯ ЭВОЛЬВЕНТНОГО ЗАЦЕПЛЕНИЯ
10. ВНЕШНЕЕ И ВНУТРЕННЕЕ СТАНОЧНЫЕ ЗАЦЕПЛЕНИЯ
10 1 ОСНОВНЫЕ ОПРЕДЕЛЕНИЯ
Станочное зацепление — теоретическое взаимодействие некоторого прообраза инструмщгга — производящего контура с заготовкой зубчатого колеса в предположении их движений, вращательных и поступательных необходимых при формировании зубьев. При станочном зацеплении реализуются математические построения эвольвентного зацепления, рассмотренные в разд. I и II книги.
Однако эвольвентное и станочное зацепления инвариантны, что означает принципиальную независимость эвольвентных зубцов, образующих эвольвентное зацепление, от технологии, в данном случае — от инструмента. Эвольвентный профиль определяется только основной окружностью и окружностью заострения, и в его математическом описании отсутствуют технологические параметры получения зубцов. Следствием образования зубцов в результате их нарезания являются также переходные кривые (поверхности), которые так или иначе соединяются — касаются или пересекаются — с эвольвентным профилем (поверхностью) и зубцы трансформируются в зубья, т. е. в зубцы с подстроенной к ним переходной кривой (поверхностью). Переходная кривая (поверхность) уже зависят от технологии, от параметров инструмента и его установки по отношению к заготовке,
Переходные кривые (поверхности) у зубьев, не участвующие в эвольвентном зацеплении, при работе колес передачи испытывают наибольшие деформации растяжения или сжатия своих волокон, приводящие к местным, так называемым изгибающим напряжениям. Местные напряжения связаны с их местной концентрацией, которые, когда рассматривается теоритическая концентрация напряжений, зависят только от геометрии переходной кривой и сечения зуба
Переходные кривые зависят также от типа производящего контура. связанного с методом образования зубьев. Так. при получении колес методом обкатки (огибания) производящий контур, огибающий заготовку, имеет бесконечное или конечное число режущих зубьев. Если производящий контур имеет бесконечное число режущих зубьев, то он называется производящим реечным контуром н ему соответствует зуборезный инструмент типа зуборезной гребенки или червячной фрезы. Если производящий контур имеет конечное число 248 © Э. Б. Булгаков
зубьев, то ему соответствует инструмент н виде специального зубчатого колеса — долбяка, обладающего режущими свойствами. Дол-бяку отвечает свой производящий контур — производящий ко>пур долбяка.
Метод обкатки и связанный с ним производящий контур универсален в том смысле, что он инвариантен к параметрам нарезаемых зубьев. Исключение составляет другой метод изготовления зубчатых колес — метод деления. В этом случае инструмент (пальцевые, мо дульные фрезы) прорезает впадину между зубьями колеса с конкретными параметрами после дискретного поворота заготовки на величину углового шага.
Значительную перспективу применения в производстве зубчатых колес имеют станки с электронным делением делительной окружности на окружные шаги. Метод деления, используемый ранее при изготовлении зубчатых колес с невысокими требованиями к точности, превратился в высокоточный и. что очень важно, в высокопроизводительный метод. Геометрия зубчатого колеса, получаемая методом деления, исключительно проста: к эвольвентному профилю подстраивают переходную кривую, из множества возможных вариантов являющуюся наименьшим концентратором напряжений, одновременно обеспечивающую достаточный радиальный зазор между зубом и впадиной сопряженных колес в сборе.
Задача станочного зацепления заключается не только в формировании зубьев в соответствии с параметрами эвольвент синтезн руемых зубцов, но и в их получении при минимальной концентрации напряжений.
При реальном технологическом процессе не производящий контур, а последний зуборезный инструмент финишных операций, взаимодействуя с заготовкой, формирует окончательный профиль зуба. При этом в конфигурацию профиля зуба вносятся конструктивно технологические отклонения, связанные с припусками и допусками при обработке, и т. д.
Ниже рассматривается получение зубчатых колес методом обкатки.
Обратимся к схеме станочного зацепления (рис 10.1), на которой показано взаимодействие режущей грани t—t некоторого инструмента с заготовкой колеса. При анализе этого взаимодействия исходят из того, что:
относительное движение режущей грани t—t можно представить как вращательное вокруг мгновенного центра вращений:
геометрическим местом точек мгновенных центров вращения является окружность и прямая, окружность полоида или центром да — называется также делительной окружностью с диаметром d £ db. поскольку на ее длине укладывается целое число угловых шаюв. соответствующих этой окружности, по-другому, эта окружность делится на целое число угловых шагов, потому и называется делительной: прямая, которая называется делительной, жестко связана с режущей гранью t—t инструмента;
249 © Э. Б. Булгаков
1>нс. 10.1. Огибание касательной t—t эдолюентмого профиля зубца
взаимоогнбаемые профили, в данном случае эвольвента и прямая t—t, имеют общую так называемую контактную нормаль в тачке их касания. проходящую через мгновенный центр вращения (см. теорему Виллиса в гл. 1);
на неподвижной плоскости мгновенный центр вращения называется полюсом станочного зацепления IFO — точка касания делительной прямой с делительной окружностью, которые перекатываются одна по дру-
гой без скольжения в отношении V/a> = d/2, где V—окружная скорость на делительной окружности заготовки колеса; w — угловая скорость колеса при нарезании. Крайние положения мгновенных центров вращения при взаимодействии режущей касательной t—t с заготовкой определяют ее угол поворота при формировании эвольвентного профиля.
Угол поворота колеса соответствует перемещению мгновенного центра вращения из точки Р, в точку (см. рис. 10.1). Это означает, что контактные нормали проходят через граничную точку / сопряжения эвольвенты с переходной кривой и через точку А пересече1шя разноименных эвольвент зубца, причем угол поворота равен
- 2Р^Р,/d. где диаметр делительной окружности d- cosa (а — угол профиля эвольвенты в точке ее пересечения с делительной окружностью).
Угол поворота заготовки <рте при нарезании эвольвентного профиля от точки А до точки / является углом развертки эвольвенты фя между этими точками, равный = IgO - tgar. Тогда
- tga,)cosat d> = PAP{.
(10.1)
Эта зависимость указывает на связь угла поворота заготовки Ф„ с делительной окружностью, выраженной через угол а, т. е. на связь с технологией при образовании эвольвентного профиля |4)
250 © Э. Б. Булгаков
10.2. ПРОИЗВОДЯЩИЙ РЕЕЧНЫЙ КОНТУР И СВОЙСТВА СТАНОЧНОГО ЗАЦЕПЛЕНИЯ
Производящий реечный контур (ПРК) определим как ортогональную проекцию режущих кромок зуборезного инструмента реечного типа на торцовую поверхность нарезаемого зубчатого колеса, если направление проектирующих лучей совпадает с направлением его зубьев. Производящий контур определяет «форму и номинальные размеры зубьев нарезаемых колес в результате обкатки их при номинальном положении ... относительно заготовки» (ГОСТ 13755— 81).
Производящий контур лежит в основе зуборезного инструмента, однако им не учитываются передние, задние углы и другие присущие инструменту особенности. Производящий контур в торцовой плоскости является общим как для прямозубых, так и для косозубых колес (см. также § 10.4).
Назначение ПРК связано, во-первых, с получением на некотором колесе с числами зубьев zt и г2 профиля зубца в соответствии с независимыми переменными Г|, т2 при потребной относительной его толщине на окружности вершин твЬ тл2 и углах профиля a,i, аР2 в конце активной части; во-вторых, с формированием пе реходной кривой на зубе с наименьшим концентратором напряжений; в третьих, с обеспечением посте сборки зубчатых колес достаточного радиального зазора в передаче. С выбора параметров ПРК начинается 2-й этап синтеза эвольвентных колес (рис. 10.2. а).
Рассмотрим схему станочного зацепления методом огибания, соответствующую взаимодействию простого ПРК с заготовкой (рис 10.2, б). Под простым будем понимать ПРК, режущие грани зуба которого, формирующие эвольвентный профиль, образованы двумя прямыми, составляющими между собой угол 2а. а вершина контура, определяющая переходную кривую зуба, очерчена одной кривой или двумя кривыми и касательной к ним. Угол а называется углом профиля ПРК. Зуб ПРК делится на две части — головку и ножку начальной прямой а—а. Если высота головки h. равна высоте ножки h;, то такой ПРК называется равновысоким, если по начальной прямой толщина зуба ПРК равна ширине впадины между зубьями, то — равноделенным.
Взаимодействие ПРК с заготовкой происходит по линии станочного зацепления УВ, нормальной к режущей грани контура и про ходящей через полюс станочного зацепления U/o. Этот полюс определяется пересечением линии зацепления NB с нормалью кна-чальной прямой ПРК. если нормаль проходит через центр 0 колеса; полюсом определяется диаметр делительной окружности d нарезаемого колеса. Именно на этой окружности происходит ее деление на зубья в соответствии с шагом ПРК на прямой а — а . называемой делительной, параллельной начальной прямой а — а В ряде случаев 251 © Э. Б. Булгаков
Рис. 10.2. Простой ПРК (а) и его станочное зацепление с заготовкой (6)
делительная прямая может не совпадать с начальной и тогда между ними устанавливается расстояние, равное Z,db. где £ — коэффициент смещения. Если |»0. то соответствующее положение ПРК по отношению к заготовке называется номинальным
Делительная окружность и делительная прямая, касающиеся одна другой в полюсе 1Г{> станочного зацепления, перекатываются друг по другу без скольжения в результате принудительного движения, задаваемого зуборезным станком, с окружной скоростью V=(od/2, где о> — угловая скорость вращения заготовки при нарезании На рис. 10.2, б показан угол станочного зацепления Z. ОЛПГо, который равен углу а профиля ПРК Следовательно, в соответствии со схемой станочного зацепления у формируемого зуба на делительной окружности угол профиля эвольвенты равен углу а станочного зацепления, а значит, и углу а профиля ПРК.
Пусть здесь и далее задан запас от интерференции зубцов в зацеплении, так как интерференция может наступить, если а,<а,.
Из станочного зацепления следует, что ;VP - V = tga^ -откуда вводя обозначения, имеем запас от интерференции в долях диаметра основной окружности нарезаемого колеса
/ = 2(lga' " ,got,)-/гО.
(10.2)
252
© Э. Б. Булгаков
Условие (10.2) позволяет от параметров зубцов azli2. полученных на 1-м этапе синтеза, перейти к параметрам зуба a/L2. определяющим касание или пересечение переходной кривой с эвольвентным профилем. В работе (12] проводятся некоторые придержки для оценки коэффициента /, который тем больше, чем меньше число зубьев z н угол профиля ПРК а; 0,0005< / <0,03
Если заданы параметры нарезаемого колеса и осуществлен переход от угла профиля к углу a/t а также задан угол профиля а ПРК. то известна схема станочного зацепления (см. рис. 10.2, 6). Из схемы зацепления следует, что проекция длины активной части В/ линии зацепления А’В на межоссвую линию OW» является граничной высотой зуба ПРК. а именно в полях диаметра нарезаемого колеса
V = sin® • ,ЮЛ)
Если далее учесть коэффициент перекрытия которому соответствуют длины активной части В1 линии зацепления по формуле (2.13), а также угол профиля по (2.15) или по (2.17), то при совместном решении с (10.3), для простоты рассуждений полагая afi = а., получим
' ♦ л
Л, =jEasina. (10.4)
л, = Р* Ea sina
I
Таким образом, высота зуба ПРК определяется коэффициентом перекрытия Sq, которое может иметь нарезаемое колесо в рабочем зацеплении с парным колесом. Отсюда также следует, что на области существования эвольвентного зацепления изолиния = const является также изолинией коэффициента высоты h* зуба ПРК при некотором профильном угле а, если полагать л, = at.
На области существования эвольвентного зацепления в точке с координатами 0|, 02, принятой на изолинии ва = const, при некотором профильном угле а ПРК будут отвечать коэффициенты высоты зуба ПРК. связанные между собой через передаточное число и = На самом деле, полученную из схемы рабочего зацепления длину активной части линии зацепления переносят на схему станочного зацепления, полагая at.,, = «д и = а[3 с учетом (10.2). Поэтому при образовании сопряженных зубьев принекотором общем профильном угле высота зубьев ПРК = hf\udbi’,
^tl ~ Л/2 = Л,.
Итак, при нарезании пары колес, образующих предачу с не-253 © Э. Б. Булгаков
которым коэффициентом перекрытия необходимо подобрать такие параметры ПРК, которые обеспечили бы станочное зацепление поочередно с каждым из формируемых колес при этом коэффициенте перекрытия
Из схемы станочного зацепления (см. рис. 10.2, б) коэффициент головки зуба ПРК в долях равен h* = = ^(1ga - tga, -I- 2/) sinot. или с учетом (10.2)
».* = jego - tg»,) Sina; 5)
коэффициент ножки зуба ПРК
V - g(tg»« - tg«) sina (J0 e)
и коэффициент высоты зуба известный по формуле (10 4). можно записать как Л/ = А* + А*, или
+ 2/) sina, (10.7)
или. переходя к углу профиля а,. см. формулу (10.3).
Толщина зуба ПРК на делительной прямой должна равняться дуговой ширине впадины на делительной окружности между зубьями нарезаемого колеса, Тогда, учитывая по формуле (2.7) луговую ширину впадины между зубьями колеса, получим в долях db коэффициент толщины зуба ПРК па делительной окружности при угле профиля а на делительной окружности у нарезаемого колеса:
* /л \
Sa = — + inva - invO sec a .
) (10.8)
У равноделенных зубьен ПРК коэффициент толщины зуба
= ?ра = Seca где — «кружной шаг зубьев зубчатого колеса на делительной окружности На области существования зацепления ПРК с равнодсленными зубьями пара независимых переменных 0|, 02:
invO,^ = inva + | —- (10.9)
Радиус скругления головки зуба ПРК при d* = 1,0 определяется по формуле
254
© Э. Б. Булгаков
fta - «»*) - h/lga seca,
(10.10)
где w' 2 0 — коэффициент, характеризующий прямолинейную часть вершины головки зуба ПРК.
Коэффициент высоты скругления головки зуба ПРК
С* « р*(1 -sina), с = сЧ-
(ЮЛ)
При проектировании ПРК всегда следует стремиться к полному скруглению вершины его зуба, или к р, гаах, приводящему к снижению концентрации напряжений. Однако прямолинейная площадка w d6 может явиться технологической базой при контроле диаметра окружности вершин инструмента реечного тина, от которой будет затруднительно в ряде случаев отказаться. Максимальный радиус скругления вершины зуба ПРК и технологичность ПРК. а также достаточность радиального зазора между зубьями колес в передаче — главные критерии в назначении параметров ПРК.
Значение коэффициента высоты скругления ножки зуба ПРК определяется при проектировании собственно реечного зутборезного инструмента — зуборезной гребенки или червячной фрезы Во всяком случае ножка зуба ПРК не должна внедряться в периферийную часть заготовки и потому
Со = 1 - cos (a3 - а) | second,.
(1012)
Производящий реечный контур, спроектированный для зубчатого колеса с некоторым числом зубьев г и независимой переменной 0. можно использовать для нарезания зубчатого колеса с другими параметрами, если этому контуру придать смещение £d, (см. рис. 10.2. 6) Смещение \db — средство для применения ПРК в новых условиях; оно не изменяет свойств зацепления, но оказывает влияние на параметры переходной кривой зуба при принятом ПРК и. следовательно. на концентрацию напряжений у его основания.
Коэффициент смещения £ — величина алгебраическая и положительная. т. е. £ > 0, если ПРК отодвигается от центра О заготовки, и отрицательная г. е. £ < 0, если ПРК приближается к ее центру. Допустим что ПРК задан, т. е известны его угол профиля а. толщина зуба ПРК па начальной прямой Sa Тогда на делительной прямой толщина зуба ПРК ($а)д = Sa - 2£ tga должна быть равна по формуле (2.7) ширине впадины еа между нарезаемыми зубьями
255 © Э. Б. Булгаков
на делительной окружности. Отсюда коэффициент смещения £ при нарезании зубчатого колеса с числом зубьев г и независимой переменной 0 при применении ПРК с профильным углом а и коэффициенте толщины зуба S*e на начальной прямой
В = |cosecalSjcosa - inva + invO-—].
Возможность применения такого, может быть, даже случайного ПРК к нарезанию колеса с некоторыми наперед заданными параметрами требует ряда проверок. Во-первых, у станочного зацепления, образовашюго ПРК с заготовкой, шаг по основной окружности колеса р, = —должен быть ранен шагу по нормали к произ-
водящим профилям ПРК. Во-вторых, выбор параметров ПРК предусматривает обязательную проверку нарезаемых зубчатых колес на отсутствие внедрения головок зубьев одного колеса в основание зуба колеса с ним сопряженного. Такие требования распространяются не только на проверку некоторых имеющихся в наличии ПРК. Она должна быть предусмотрена в качестве обязательного этапа при проектировании ПРК.
Диаметр окружности впадин наряду с переходной кривой определяется непосредственно из схемы станочного зацепления (см. рис. 10.2, б):
d,=
sec a
Тогда радиальный зазор между диаметрами окружностей вершин
(10.14)
и впадин сопряженных колес
Qi—2.2—I - ат “ 2^«L2 + ^/2,1) •
Ql-2.2-1 > 0 •
(10.15)
или в развернутом виде — коэффициент радиального зазора между окружностью вершин зуба шестерни 2| и окружностью впадин зуба колеса z2 в долях диаметра d>
Q*-2 = | Г (1 + *0 secar - secae| - и secal +
+ (Ла* 4- Q* - £2) и
(10.16)
— коэффициент радиального зазора между окружностями вершин зуба колеса г2 и окружностью впадин зуба шестерни г}
Q*2-i = 2 [(* + и) secav ~ и seca-2 “ seca] ♦ + Q “ ^1 ‘ (1017)
В-третьих, необходима проверка ПРК на отсутствие станочной
256
© Э. Б. Булгаков
интерференции — подреза, если используется некоторый готовый контур. Проектирование ПРК для зубчатых колес с некоторыми параметрами построено таким образом, что возможность возникновения подреза исключается. Об интерференции в станочном зацеплении см. ниже.
Наконец, обратимся к оценке некоторых предельных параметров ПРК. Прежде всего, как это следует из формул (10.5)—(10.8). профильный угол а ПРК является его независимой переменной и независимой переменной станочного зацепления. Если не требуется получение переходной кривой в результате механической обработки, то минимальный профильный угол ПРК может быть <х = 0. Такой ПРК положен в основу шлифовальных кругов тарельчатого типа, работающих «одной точкой» по методу фирмы «Мааг» (Швейцария).
Одно из максимальных значений угла профиля ПРК а может быть получено если zc -♦ », то -* л/4, а если число зубьев стремится к минимально возможному 2=3. то оц, = 65,45е. Назначаемый угол профиля л ПРК не может быть для нарезаемого колеса большим, чем угол ал профиля на окружности вершин В этом случае коэффициенты перекрытия в рабочем и станочном зацеплении не будут равны между собой.
Интерференция во внешнем станочном зацеплении. При проектировании зубчатых колес, если параметры ПРК определяются по формулам (10.5)—(10.8) и т. д . интерферернция в станочном зацеплении — подрез исключается. Подрез возникает, если ПРК, спроектированный для нарезания некоторого колеса, применяется для нарезания другого колеса со смещением ^ds, не удовлетворяющим условию (10.13).
В станочном зацеплении подрез происходит в том случае, если точка пересечения линии зацепления [конхоиды Никомеда (см. »гн-же), на которой формируется переходная кривая] с линией зацепления, на которой формируется эвольвентный профиль, лежит левее точки N (см. рис. 10.2. б). Граничное условие подреза соответствует такому смещению ПРК к центру колеса, при котором его точка М за счет винтовой образующей зубьев червячной фрезы в поступательном движении совпадает с точкой I линии зацепления, которая, в свою очередь, совпадает с точкой М Находим из AAW0 и ДОЛГ1Г0
Smta = h* “-sinatga. (10.18)
В процессе станочного зацепления подрез исключен, если шит
Допустим, что условие (10,18) не удовлетворяется и происходит подрез зуба зубчатого колеса ПРК с острозаточснными зубьями без скругления на вершине. Определим угол профиля в «точке подреза» в соответствии с [15].
257 © Э. Б. Булгаков
Начальное положение ПРК. обозначенное цифрой I (рис 10.3), таково, что продолжение его режущей грани проходит через центр колеса и точку N возврата эвольвенты. Такое положение контура соответствует началу подреза. Пусть в положении II. которое ПРК займет, повернувшись на угол ф. подрез эвольвенты будет закончен в точке П, угол профиля в которой обозначим ап. Тогда из &ОЕП имеем ОЕ • /?л cos( inva п + a + <р); так как UPj’E = = (Лй - £) и Яп = jsecand*, то
secan cos(inv an + a 4- <p) - seca + 2(hc* ~ £) = 0. (1019)
Рж. 10.3. К определению угла ирифнля н «точке п одре ад*
Поскольку в уравнении (10.19) два неизвестных — а п и ф. составляется второе уравнение, для чего прослеживается путь ПРК из I во И положение. Так. в 1 положении расстояние по делительной прямой от мгновенного центра скоростей IV4 о до точки k0 (проекция точки С па начальную прямую) равно k0Wi=CD= fjseca -Л>| tg® -Во II положении проекция тон же точки (на рис. 10.3 — точки П) на делительную прямую — точка k — находится от мгновенного центра скоростей W" в относи тельном движении на расстоянии kVrf = kvWi + |<(1 seco С дру-гой стороны, из АОЕП имеем ПЕ — AW'n = /?nsin(inva(1 4- a 4- ф) или после упрощений
(10.20)
sec а п sin(invan + а 4- ф) - ф seca -- [seca - 2(А* - |) Jtga = 0 .
Решая уравнение (10.19) и (10.20) совместно получим
Ф = sec a nl cosa sin(inva л 4- a 4- ф) - sina x (1021) x cos(invan + a + ф)|
или ф = secan sin(invan 4- ф).
Введем обозначение л = ф 4- inva п и перепишем уравнение 258 © Э. Б. Булгаков
(10.21) следующим образом:
sink - (invan - XXoson = 0. (10.22)
Так как корень уравнения (10.22) с достаточной точностью равен X. « 2ап + 0.1 ап1, то, подставив его в уравнение (I0.I9), получим
sec an cos(a + 2on 4- 0.1 an3) - seca + 2(he* - £) 0 . (10.23)
Последнее уравнение представим в другом виде, обозначив В = 2(h* - £)cosa, тогда 1 - cosasecan cos(a 4- 2<Xn 4- 0,1 an3) = В .
Решение уравнения (10.23) для различных значений профильного угла а ПРК представлено в [4, 12].
В работе [15] показано, что наиболее «подрезающая точка» ПРК со скругленной вершиной зубьев лежит в непосредственной близости от точки сопряжения скругления зуба с режущей гранью. Поэтому с достаточной для инженерных расчетов точностью решение уравнений (10 23) можно распространить на ПРК со скругленной вершиной зубьев.
Уравнение переходной кривой зуба колеса с внешними зубьями. Составим уравнение переходной кривой зуба формируемого колеса, для чего рассмотрим две системы координат: неподвижную ХОУ. ось ОХ которой размещена на оси зуба ПРК. центр координат в точке О и подвижную xWy. связанную с ПРК (рис. 10.4). Систему координат xWy располагаем на делительной прямой ПРК и оси
Рн<- 10-1. К tocraaneinno уравнении переходной кршюн зуба
259 © Э. Б. Булгаков
Переходная кривая ID зуба колеса (см. рис. 10.6) образуется в общем случае скругленной вершиной ЛШХ/ИО головки зуба ПРК. Формирование переходной кривой начинается в тот момент времени, когда контактная нормаль Мр, ПРК в относительном движении совпадает с нормалью зуба колеса, проходящей через граничную точку /. Образование переходной кривой завершится при слиятгии контактных нормалей ПРК и колеса, когда точка D зуба колеса совпадет с точкой Мо зуба ПРК.
Таким образом, в процессе формирования переходной кривой мгновенный центр вращения ПРК в относительном движении пробегает по делительной прямой путь PD Р,. соответствующий повороту ПРК на угол ср = 2PD Р} /d = 2cos2a |(Л*Д- £) coscca - pf), или
ф « cos2x (tga - (got, - Uoseca - 2р/). (10.24)
Принимая за начало отсчета формирования переходной кривой расстояние делительной прямой от полюса зацепления 1Г0 до оси симметрии зуба ПРК. равное = ра/2. получим
J S f « 7 + 2cos2a ((Л.* - fcjcoseca- р/1. (10j5j
При составлении уравнения переходной кривой зуба колеса угол поворота <р заготовки удобнее выразить через угловой параметр у, характеризующий скругление зуба производящего контура, который отсчитывается от оси симметрии по часовой стрелке:
0sTs2-a. (10.26)
2d. Тогда (см. рис. 10.4) можно написать, что ф = ~^(Уо + xotgy) или
Ф = 2cosa (у0 + xotgy).
(10.27)
Если вершина зуба ПРК скруглена дугой окружности, то х0 и у0 — координаты центра скругления зуба ПРК в подвижной системе координат xWy. В табл. 10.1 в долях приведены эти координаты в зависимости от того, будет ли зуб ПРК скруглен полностью Р/п»х - неполностью 0 < р4 < pimix или совсем не скруглен р, = 0
Координаты текущей точки на скругленной вершине зуба ПРК (см. рис. 10.4)
X = Xq + Pi cosy .
У = Уо - Р, siny
260
(10.28)
© Э. Б. Булгаков
10.L Координаты центра скругления зуба ПРК
• р, Ч) УЭ
• Pi пн Аа* “1”Р* 1 * 2 г5Ка
о < рГ < р *тм кэ1— Й | и 1 В •
0 V + 2/Ctgaj
Общее уравнение переходной кривой зуба колеса получим в результате перехода к неподвижной системе координат:
х$еса - х cosq? + ycpseca - у sin<jp
Г ) \* /
—seca-
d.
(10.29)
Переходная кривая по уравнению (10.29) — эквидистантная кривая к удлиненной эвольвенте центра скругления зуба ПРК — сопрягается с эвольвентным профилем на окружности диаметра d{t определяемой из схемы станочного зацепления (см. рис. 10.2)
dt = 2db
поворота <р как р ~
(10.30)
Радиус кривизны переходной кривой, заданной в параметрическом виде по (10 29), получаем дифференцированием X и Y по углу / v‘2 A v’2 уЗ/2 или после преобразований
/ г 2 \
р - d, ₽; + . (10.31)
' -2СО5 ф + X0COS1|> /
В точке / касания переходной кривой с эвольвентным профилем изменяется знак и величина радиусов кривизны этих кривых С увеличением профильного угла я ПРК и его смещения радиус кривизны переходной кривой зуба уменьшается, а сечение зуба возрастает. На концентрацию напряжений у основания зуба влияют какрадиус кривизны переходной кривой р. так и толщина зуба 2 К
В случае, если вершины зубьев зубчатых колес, которым соответствует ПРК с полностью скруглсшгым зубом, внедряются в основание зубьев с ними сопряженными, т. е. условие (10.15) 261 © Э. Б. Булгаков
Рис 10.5. Схема ста* ночного зацепления ЛРК. вершина зуба которого очерчена па работой
не выполняется, необходимо увеличить коэффициент радиального зазора С у ПРК.
Пусть вершина зуба производящего реечного контура очерчена параболой (рис. 10.5)
у2 = 2РХх. (10 32)
где Р—фокальный параметр, а X,. У(— система координат на оси зуба контура, показанная на рис 10 5.
Тогда угол наклона касательной к параболе dYx / dXx - P/Y2PX{ или. исключая фокальный параметр,
dYx 1 Г,
<,033>
Фокальный параметр получим из совместного решения (10 32) и (10.33):
/лу\2 P=2Xt^ . (10 34)
В точке сопряжения параболы с производящей прямой контура X] = С*, К| = |Sf* - dYx/dX{ = tga; P = 2C*t%J<x, производя подстановку в (10.33), получим
С*-{toga-Л/V (10.35)
Радиус кривизны параболы вершины зуба ПРК
р* = 2C*tg2a созес^ (10.36)
262
© Э. Б. Булгаков
Из (10.10), (10.11) и (10.35) следует, что увеличение ЛС* — коэффициента радиального зазора, если зуб ПРК очерчен но параболе, по сравнению с зубом, скругленным дугой окружности, составляет
—Sa |ctga - (1 - sina)seca
Ал
у - (1 - sma)seca tga > 0,
(10.37)
Приведем уравнение (10.32) к виду, удобному для пользования. Так как фокальный параметр Р 2C*tg2x, а Х| "|У| ctgy, где текущий угол у наклона касательной (рис. 10.5)
°StS2 *’ (10.38)
го после упрощений в системе координат Х1( У1
Х>~ C’tg-at^T. (10.39)
У, = 2С V» ‘КТ •
Из рис. 10.5 и на основании (10.39) координаты текущей точки Af в системе координат xWy равны
х = h* - £ + С*(1 - tg2a tg2y),
у = ^secat - 2C*tg2a tgy. (10.40)
Ал A.
В некоторый момент времени ПРК касается нарезаемой заготовки в точке М (XL; У]). При этом контактная нормаль отметит на делительной прямой полюс Рм в относительном вращении, а произ-
водящий контур пройдет путь id ср = (у + rtgy)d* или после упрощений
<₽ = “ + 2cosa tgy J Л/ - * + С*[ 1 - tg2x (2 + tg2y) 1 >.
(10.41)
Для построения переходной кривой зуба колеса в системе ко ординат XOY используем уравнение (10 29)
В более общем случае зуб ПРК может быть очерчен параболической кривой у^~СР*. где т > 1; С = const — коэффициент при фокальном параметре. Эволюция вида и свойств параболической кривой, происходит за счет изменения показателя степени и значения СР. Можно представить иное оформление вершины зуба ПРК. например в виде двух дуг окружности [12], в виде эллипса, цепной линии и т. д. При составлении уравнения переходной кривой зуба с несимметричным профилем станочное зацепление рассматривается
263
© Э. Б. Булгаков
в отдельности для каждой из сторон контура по формулам, при* веденным выше.
Таким образом, на 1-м этапе синтеза зацепления вне зависимости от параметров ПРК осуществляется выбор эвольвентного профиля зуба колеса и зуба колеса с ним сопряженного. На 2-м этапе синтеза, теперь уже синтеза зубчатых колес, производится такое их образование, при котором переходная кривая, соединяющая у основания между собой соседние зубья непосредственно или через окружность впадин, является наименьшим концентратором напряжений.
Такую операцию возможно осуществить, воздействуя на независимую переменную ПРК — профильный угол а, а также на радиус скругления р4, в некоторой степени от него не зависимого. Кроме того, имеется третий инструмент влияния на параметры переходной кривой — смещение ld> ПРК. Однако смещение должно быть таким, чтобы параметры эвольвентного контура — г, 0. та, db — не изменились
На рис 10 б показано изменение очертании переходных кривых, соответствующих двум различным ПРК. Первая / переходная кривая — пологая, берущая начало на окружности диаметра d;> d>, вторая И — крутая с началом на основной окружности dt. Постро
Рж. 10.6. Оиюеаннс зуба колеса i = 20. i • 29.5': переходная кривая 1 соотнгтггаует
ПРК при а - 20*. h* - 0,0552, р, тм -при полном скруглении зуба: переходная кривая !! — при а = 15’. р> « 0
ения осуществлялись таким образом, чтобы диаметр окружности впадин колеса оставался постоянным.
Сопоставление при неизменном эвольвентном профиле различных переходных кривых, соответствующих различным ПРК, следует производить по коэффициентам формы зуба, учитывающим местные напря жения. Обычно их получают методами теории упругости (1. 3|.
Если определяют напряженно-деформированное состоя ние (ндс) зубьев, обода и других элементов зубчатых колес, то производят некоторую подготовительную работу Так как геометрия зубчатых колес, пара которых образует зубчатую передачу, описывается каждая в своей неподвижной системе координат. привязанной к центру колеса, то для определения ндс
264
© Э. Б. Булгаков
пары контактирующих зубьев их геометрия должна быть представлена в одной системе координат, например в системе координат А\О| К| шестерни 2, (рис. 10.7). Для этой цели осуществим параллельный перенос системы координат ХлО^Х* ИЗ ТОЧКИ О2 в точку О, на расстоянии а г, при которой она переходит в систему координат XvOj/». Затем осуществим ее поворот на угол л + cpi + полного совпадения новой си стемы координат Х2 О,У2 колеса 22 с системой координат аду, *
На рис. 10 7, а показана во внешнем зацеплении текущая контактная точка Л1 (х2-у2)« се координаты в промежуточной системе координат Х2О,У2 и в окончательной системе координат А^^У?- Так, из ДО^Ор где х2, у2 для эвольвентного профиля получают из уравнения (2.9), а переходной кривой — из (10.29),
х2 = Х2 ~ ат со5ф2. (10.42)
1/2 = Urj-sirnf-j -I- У2.
Из &аЬО{ и &асМ
*1 = Хг'со5(ф1 + ф2) +
+ y2sin(T, + <р2) (10.43)
= - X2sin(<p| + (f2) ”
— ^2COS(T1 + Ф2) •
где (рис. 10.7.5) <р2 = аг + + inv 02 - Ф1 + Ф2 =
= inv0,+ mvO2.
Рис. 10.7. Схема проведения системы координат X2O2Y2 колеса » системе координат Х|О|К| шестерни Z;
265
© Э. Б. Булгаков
10.3. ПРОИЗВОДЯЩИЙ КОНТУР ДОЛ БЯКА ВО ВНУТРЕННЕМ СТАНОЧНОМ ЗАЦЕПЛЕНИИ
Рис. !0.8. Долбяк производящий контур
Долбяк — инструментальное зубчатое колесо с внешними зубьями — основной инструмент для обработки зубчатых колес с внутренними зубьями (рис. 10.8) (13]. Он может применяться также при обработке колес с внешними зубьями.
Так же как обычное зубчатое колесо, долбяк характеризуется числом зубьев г0, независимой переменной Од и относительной толщиной тй0 на окружности вершин. Однако у долбяка последние два параметра не являются постоянными, а изменяются от торца к торцу в зависимости от степени его переточки (износа).
Если расстояние между торцовым сечением нового долбяка и сечением долбяка предельно переточенного обозначить через I, то изменение радиуса окружности его вершин равно ARo = 7?"0 - R^ = ki tgd, где k — ко-эффициент. характеризующий степень переточки (k = 1 — новый долбяк. k = = 1/2— долбяк средней изношенности); б. 7 — задний и передний углы долбяка на вершине соответственно; о = | о — радиус окружности вершин нового долбяка; R™ — радиус окружности вершин предельно переточенного долбяка.
Долбяк средней изношенности с числом зубьев 701 независимой переменной 0о, относительной толщиной на окружности вершин тй0 и равноделенным шагом имеет делительную окружность, профильный угол эвольвенты на которой равен а и которая делит высоту эвольвентной части зуба на две равновысокие части
Таким образом, в каждом сечении долбяк имеет свои фактические параметры и т/0 при кетменном диаметре основной окружности d>0. При геометрическом расчете рассматривают ортогональную проекцию на плоскость резания режущих граней зубьев долбяка, определяющих конфигурацию формируемых зубьев у нарезаемого колеса Такую проекцию долбяка или его сечение плоскостью параллельной торцовой плоскости заготовки колеса называют производящим контуром долбяка (ПКД). ПКД. характеризующий долбяк средней изношенности, имеет на делительной окружности среднее
266 © Э. Б. Булгаков
г
значение угла профиля а ® -(Од + 03) и толщину зуба
<? л j (10.44)
о “ л ~ seca и * о , ZZo
где Jft0 —диаметр основной окружности долбяка в среднем сечении (при средней изношенности).
Угол профиля на окружности заострения определим как
“А = ^ + tave (10.45)
а его связь с углом профиля аз0 и относительной толщиной invOo = ma0cosae0 + inva<G. (10.46)
В качестве первого ориентира при назначении параметров ПКД можно воспользоваться графиком на рис. 10 9. на котором показана снизь между z(>, 0в, /па0 по результатам анализа реальных долбяков.
Как правило, долбяки изготовляются с нескругленной острозато-ченной вершиной.
Рассмотрим конкретный пример вычисления основных параметрон ПКД с некоторым числом z0, если этим контуром образуется зубчатое колесо с внутренними зубьями, параметры которого z3,
Од, /па3. ПКД и формируемое зубчатое колесо в станочном зацеплении образуют пару зубчатых колес z0—г3, геометрические параметры которых могут быть легко определены, если, например, рассматривать угол профиля бп на окружности заострения вершины зуба контура как независимую переменную.
Обратимся к схеме станочного зацепления (рис. 10.10), на которой центры ПКД и нарезаемого колеса обозначены точками Oq и О3 соответственно, линия зацепления обозначена N3NvB№\)Bq' се активная часть ВпВ3, угол станочного зацепления аг0. Будем полагать что из параметров нарезаемого колеса известны число зубьев z0 и независимая
Рис. 10.9. Относительная толщина tiU|i вершины туАл ПКЛ и зависимости от числа зуАьм Zo, независимой переломной Ло и переточки до диаметра окружности вершин <1й(^ - 100 и 80 мм
267
© Э. Б. Булгаков
Рис. 10.10. Схема внутреннего стакжнпго зацепления
нарезаемого колеса г3:
переменная его зуба для некоторого сечения ПКД. Тогда, на основании (2.37) угол станочного зацепления
I mvotro =------ х
к (uoinvOj - invO0 + у-) , где и0 z3/?0 — передаточное число в станочном зацеплении.
По аналогии с внешним зацеплением в качестве независимой переменной может быть принят угол станочного зацепления ат0. Однако во внешнем зацеплении угол станочного зацепления является одновременно углом профиля зуба ПРК. Толщину зуба ПКД на делительной окружности с профильным углом а = агг) определим, используя формулу (2.33) как ши рину впадины между зубьями у
invotr 0 - invt>3 secar0 db3 ,
(10.48)
•$сгО ~
Далее определим углы профиля зуба ПКД в граничных точках на основании схемы станочного зацепления:
на окружности вершин
tg*eo= «otg*,3-(uo~ l)tgairo. (10.49)
в конце активного участка профиля
lg*H)= «olg«43“(“o- l)tgaro~2/o, (10.50)
где /о = | (tga^o “ lg<x,o) — запас против станочной интерференции. Наконец, используя формулу (10.46), получим последний искомый параметр зуба ПКД — его относительную толщину на окружности вершин та0>0. При недостаточной величине ша0 необходимо изменить независимую переменную 00 или число зубьев г0 долбяка и повторить расчет.
Такое проектирование ПКД исключает интерференцию на линии станочного зацепления или вблизи нее. Однако возможна интер ференцня вдали от линии станочного зацепления и потому требуется проверка по формулам (см. ниже).
268
© Э. Б. Булгаков
Проектирование переходной кривой с наиболее целесообразными параметрами производят путем изменения как числа зубьев z0 ПКД, так и его независимой переменной Оо. Из схемы станочного зацепления следует, что станочное межосевое расстояние
Дго = " l)secarod>0 . (10.51)
Интерференция во внутреннем зацеплении. В процессе станочного зацепления ПКД с колесом z3, имеющим внутренние зубья, могут возникнуть те же интерференции, что и в рабочем зацеплении, т. е. при зацеплении колес z2 - Однако при этом роль зубчатого колеса г2 будет выполнять ПКД и вместо заклинивания произойдет станочная интерференция — срезание части зуба колеса. Так, может наступить интерференция между переходной кривой зуба ПКД и окружностью вершин зуба колеса 23, если при расчете параметров ПКД не учитывалась формула (10.50). Тогда исходя из схемы станочного зацепления (см. рис. 10.10) можно написать, что угол профиля в нижней активной точке зуба ПКД
а,о - arctgfu0tgae3 - (Uo - l)tgaro]. (10.52)
Вдали от липин зацепления может произойти срез головки зуба колеса z3. Рассмотрим вывод формул (2.47). (2.48) применительно к станочной интерференции. для чего при определении угла ф-3 cosae з
положим х =-----------. а вместо п2-з передаточное число и0 =
XZf)COS<Xe 0
= z3/z0. Если через f3 обозначить угол между линией центров и радиусом окружности вершин колеса с диаметром ^о3, проведенным в точку пересечения с окружностью вершин зубьев ПКД (обратимся к рис 2 3. полагая ar=aT0, rf62=da0), то из косоугольного треугольника со сторонами da3/2,ar0, dd0/2 имеем
т(^Л + d? о) + Ото
Тз = arccos------г—--------- (10.53)
«аЗ«1Г0 ' z
Зга интерференция отсутствует, если
Л„о > «J0-
(10.54)
Наконец может наступить вне линки зацепления при столкновении вершин зубцов 20 и 23 интерференция второго рода. Она наиболее вероятна при малой разности чисел зубьев между z3 и z0.
На рис. 10.11 показаны два положения зубьев ПКД и колеса z3. Первое положение соответствует контакту зубьев в полюсе станочного зацепления W'o- Тогда между линией 63O0Wq и радиусами окружностей, проведенными через вершины зубьев, устанавливаются углы, равные для ПКД (invae0 - invar0), для z3 — (inva^ I, - invota3). При повороте ПКД на угол <р0 = п0<рз может
269 © Э. Б. Булгаков
Рис. 10.11. Схема интерференции зубцов (интерференция второго рода)
произойти встреча вершин зубьев z0 и z3 в точке А (второе положение). В этом случае
<Го = То + ,nvao “ invar 0 , Фз = T3-»nvar0 + invaa3
где из косоугольного треугольника ДЛО3О0
|(4?3 dao) аго
То = arccos-------z----------
d.ofllFO
7 (rfA ” <£) + ДГ0
Тч = arccos------------------
Интерференция отсутствует, если
Фо > “офз •
(10.55)
(10.56)
(10.57)
(10 58)
(10.59)
Более подробно об интерференции во внутреннем зацеплении см [13. 22].
Уравнение переходной кривой зубьев внутреннего зацепления. Переходная кривая зуба колеса с внутренними зубьями — удлиненная гипоциклоида — образуется в результате станочного взаимодействия режущей кромки вершины зуба долбяка с заготов
270 © Э. Б. Булгаков
кой Переходную кривую формирует точна В» ПКД. образуемая в результате пересечения эвольвентного профиля зуба ПКД с его окружностью вершин (см. рис. 10.12. а).
Расположим прямоугольную систему координат хпОпУо так, чтобы ось OoJt0 была направлена по осн симметрии впадины зуба ПКД. Тогда угол между осью Вдо И радиусом
фп = “ “ inv^n + inva^o, (1Q.&0)
1 координаты точки
XD .
1 . . (10 61)
0D = -siniftjsectf^
Уравнение удлиненной гипоциклоиды в системе кордяизт ЛО3У, где ось О:Д проходят через ось симметрии нарезаемого зуба внутреннего зацепления, записывается в следующем виде:
271
© Э. Б. Булгаков
где межоссвое расстояние аг0 определяется по формуле (10.51). координаты режущей точки Во по (10.61), а угол ф является углом поворота заготовки в процессе станочного зацепления Он характеризует угол поворота <р профильной нормали в процессе формирования переходной кривой от точки /3 сопряжения эвольвентного профиля с переходной кривой до точки D3 сопряжения переходной кривой с окружностью впадин нарезаемого зуба: (ft £ ф £ фп (рис. 10.12, 6). Так, в точке О3 положение профильной нормали опре-делятеся углом <р = <ft = фо/^о ИЛН
Л О Ф/ = “--“cosae0
*з «о
(10.63)
а в точке /3
<Р// - lga/з “ <*то " inv03*. (10.64)
Диаметр окружности, проходящей через точку 13 сопряжения переходной кривой с эвольвентным профилем на зубе колеса z3 при некотором сечении ПКД, определяют из схемы станочного зацепления (см. рис. 10.10), полагая, что точка 13 сливается с точкой В^:
- 2 у piyosinairi) + | -у/(d^Q - d?0) j + ~d?3 . (10.65)
Переходная кривая располагается между диаметрами dl3 и диаметром окружности впадин:
df3 — 2а jtq + da о , (10.66)
Радиальный зазор, измеряемый по линии центров, между окружностями диаметров вершин и впадин сопряженных колес определяется при станочном зацеплении:
012—3 = 2^^/з “ 2) “ аг2-з ♦ (10.67)
GlJ-2 = ^(da3- df2) ~ 0Г2-3 ♦
(10.68)
G1 2-3. 3-2 > 0 •
10 4. ОСОБЕННОСТИ СТАНОЧНОГО ЗАЦЕПЛЕНИЯ КОСОЗУБОГО КОЛЕСА. ПРОИЗВОДЯЩАЯ РЕЙКА
При проектировании зубчатых колес определяют параметры их зубцов в торцовом сечении — оно же нормальное для прямозубого колеса. Этим колесам в станочном зацеплении соответствует образ
272
© Э. Б. Булгаков
плоского инструмента — производящий реечный контур (ПРК). ПРК — понятие, связанное с плоскостью и потому имеющее только торцовое сечение.
У косозубых колес за исходные или первичные параметры также принимают параметры зубцов в торцовом сечении. В процессе станочного зацепления, т. е. на 2-м этапе синтеза колес, вторичными являются параметры их зубьев, к которым подстроены переходные кривые, а также зубья уже не плоского ПРК. а производящей рейки. Производящая рейка появляется только при рассмотрении косозубых колес
За производящую рейку для косозубых колес так же, как и для прямозубых колес, принимается се торцовое сечение. Однако при рассмотрении станочного зацепления косозубого колеса с производящей рейкой необходимо перейти от ее исходного торцового сечения к нормальному сечению.
Станочное зацепление при образовании косозубых колес происходит в плоскости станочного зацепления нормальной к поверхности формируемых зубьев и к нормальному сечению зубьев производящей рейки. Переход от ПРК или торцового сечения производящей рейки к нормальному сечению рейки выполняется по формулам п. 2.3.
При расчете зубчатых колес в обобщающих параметрах нормальное сечение производящей рейки необходимо лишь на стадии уточнения параметров переходной кривой зубьев в этом сечении, если это потребуется, а также при проектировании зуборезного инструмента и инструмента для его контроля.
10 5. ОСОБЕННОСТИ СТАНОЧНОГО ЗАЦЕПЛЕНИЯ ПРИ ОБРАЗОВАНИИ ЗУБЧАТЫХ КОЛЕС С НЕСИММЕТРИЧНЫМИ ПРОФИЛЯМИ ЗУБЬЕВ
Определение параметров ПРК для зубчатых колес с несимметричными профилями зубьев осуществляется на основе схемы станочного зацепления аналогично расчету параметров ПРК при формировании зубьев колес с симметричными профилями. Основной особенностью этого станочного зацепления является наличие двух основных окружностей с диаметрами d* и d*. одной делительной окружности с диаметром d и одного полюса станочного зацепления UT0. Отсюда d = db seca = dfseca*, где a и a* — углы профиля ПРК. один из которых является независимой переменной, например ос а другой я * — зависимой переменной станочного зацепления (рис. 10.13):
я* я arccos(ZCcosa). (10.69)
Толщина зуба ПРК на делительной прямой равна дуговой ширине впадины между зубцами и потому
273 © Э. Б. Булгаков
Рис 10.13. Схема ствночниси зацепления ПРК с заготовкой при образовании зубчатых колес с асимметричными зубьями
Sa = [inva - invO + inv arccos (Kcosa) - inv arccos (KcosO) + + 2л/г] |sec« dt. (Ю70)
Высоту головки зуба ПРК определяют для каждой из сторон контура ПРК. т. е. в зависимости от углов а и а*. При а> а* имеем h( > Л *, причем коэффициенты головки, ножки и высоты зуба определяются в соответствии с формулами (10.5) — (10.7).
Вершина головки зуба ПРК должна быть очерчена плоской кривой, касательной к его разноименным сторонам в граничных точках Такую кривую провести тем сложнее, чем больше разность между углами а и а* и между ha и h*. Здесь следует учитывать формулы (10.10) и (10.11), принимая во внимание, что С = h* + С - Лв = р,;(| - sina). Коэффициент скругления высоты ножки зуба ПРК определяем при а>а* по формуле (10.12).
При образовании зубчатого колеса 2$ внутреннего зацепления
274
© Э. Б. Булгаков
с несимметричными зубьями параметры ПКД также определяются отдельно для эвольвент, разворачивающихся с основных окружностей db3 и d*3. Обкатка разноименных сторон зуба зубчатого колеса z3 в станочном зацеплении происходит по одной общей делительной окружности и, следовательно, углы профиля ПКД на делительной окружности, связаны между собой зависимостью (10.69). Остальные параметры ПКД получим на основании этой главы и § 2. Так, толщина зуба ПКД на делительной окружности
5аз - [inva - inv03 - inv arccos(Xcos6 ) 4- inv arccosfKcosa) +
4- 2л/г3]| seca (1071)
Наилучшим результатом расчета являются такие параметры ПРК и ПКД, которые соответствуют зубьям зубчатого колеса, имеющим наименьшую концентрацию напряжений у основания. Как во внешнем, так и во внутреннем зацеплении при малых углах профиля прозводящего контура возрастает возможность станочной интерференции, для чего необходима проверка по приведенным формулам в этой главе и в гл. 2.
И. СТАНОЧНОЕ ЗАЦЕПЛЕНИЕ ПРИ ОБРАЗОВАНИИ ЗУБЧАТЫХ КОЛЕС С ЗУБЬЯМИ, ПОДНУТРЕННЫМИ У ОСНОВАНИЯ. ИСПОЛНИТЕЛЬНЫЕ РАЗМЕРЫ
11.1 ОБЛАСТЬ ПРИМЕНЕНИЯ ЗУБЧАТЫХ КОЛЕС С ПОДНУГРЕННЫМ ОСНОВАНИЕМ ЗУБЬЕВ
Выше рассматривался расчет зубчатых колес и им соответствующий ПРК, определяющий конфигурацию зуба на завершающей стадии обработки заготовки.
Применение финишных операций, например, таких как шевин гование или шлифование, приводит к тому, что предшествующая им технологическая операция — зубофрезерованис или зубодолбле-ние — служит для подготовки зубьев к последующей обработке. Необходимость такой предварительной обработки вызывается рядом обстоятельств. Так. при шлифовании зубчатых колес, например тарельчатым абразивным кругом, не представляется возможным получить переходную поверхность, эквидистантную предварительно обработанной под шлифование. В этом случае у основания зуба происходит больший, чем на эвольвснтной поверхности, съем металла (см. рис. 10.6), в результате чего в зоне резания повышается тепловая напряженность и как следствие возникают прижоги поверхностного слоя Последние сопровождаются структурными изменениями в
275 © Э. Б. Булгаков
тонких поверхностных слоях, возникают растягивающие остаточные напряжения, сжимающие или даже полностью исключащие положительное действие химико-термической обработки, в результате которой наводятся сжимающие остаточные напряжения. По этой причине высоконапряженные шлифованные зубчатые колеса имеют зубья, поднутренные у основания (рис. 11.1).
У зубчатых колес с поднутренным основанием зубьев шевингу-ется или шлифуется лишь эвольвентный профиль, а у основания ножки зуба шевер или абразивный круг имеет свободный выход Это означает, что основание ножки зуба остается, например нешлифованным. сохраняя геометрию, полученную при предшествующей механической обработке, и сжимающее остаточные напряжения после химико-термической обработки. Таким образом, окончательную конфигурацию зуба с поднутренным основанием, например при шлифовании, опреде ляют, по крайней мере, два инструмента: абразивный круг для обработки эвольвентной поверхности и специальный инструмент реечного типа для обработки основания, а также эвольвентной поверхности с припуском под шлифование. Такой инструмент. обычно червячная фреза или зуборезная гребенка называется фрезой или гребенкой с протуберанцем. Им соответствует сложный производящий реечный контур (СПРК).
Если нет уверенности в высоком
качестве шлифования, при котором исключается такой дефект, как прижог. а также если финишной операцией является шевингование, необходимо применять зубчатые колеса с поднутренным основанием зубьев. Прн поднутрении ножки зуба можно не только избавиться от дефектов шлифования, но и в ряде случаев снизить концентрацию напряжений, несколько увеличить податливость зубьев. При шлифовании требуется большее заглубление переходной кривой в тело зуба, чем при шевинговании. Расчет зубчатых колес с поднутренным основанием зубьев при шлифовании с учетом припусков и допусков см. а работе [И].
11.2. КОНФИГУРАЦИЯ ЗУБЬЕВ С ПОДНУТРЕННЫМ ОСНОВАНИЕМ И ЕМУ СООТВЕТСТВУЮЩИЙ СПРК
Рассмотрим конфигурацию зуба с поднутренным основанием ножки (рис. 11.2). В общем случае основание зуба — галтель — состоит из двух кривых: переходной кривой и эвольвенты, которую назовем вспомогательной — тип I (рис. 11.2, а) или из одной переходной кривой, если вспомогательная эвольве1гга выходит за контуры
276 © Э. Б. Булгаков
Рис 11.1. Макропитиф фрагмента зубчатого колеса с поднутренным основа ннец зубьев
зуба —тип 11 (рис. 11.2, б). Таким зубьям соответствует СПРК, изображенный на рис. 11.3. СПРК можно представить как бы состоящим из двух между собой жестко скрепленных простых ПРК — внешнего и внутреннего, из которых внешний соответствует эволь-вентному профилю зуба, а внутренний — галтели.
Характерными точками па профиле зуба (см. рис. 11.2) являются точка D, определяемая окружностью впадин df и осью симметрии впадины зуба, точка П пересечения галтели зуба — вспомогательной эвольвенты или переходной кривой — с основным эвольвентным профилем, а также точки р — конца активного участка эвольвенты, которой соответствует угол Тогда
du ** •
.1 . (111)
i - - lg*n) > О
Переходная кривая DE? формируется скругленной частью вершины зуба СПРК и сопрягается в точке Еу со вспомогательной эвольвентой МГЕГПЭУ, которым соответствует внутренний контур с профильным углом v. Вспомогательная эвольвента разворачивается с основной окружностью диаметра и имеет точку возврата Nr.
Сложный производящий реечный контур характеризуется двумя независимыми переменными: профильными углами а и v, характеризующими внешний и внутренний контуры. Внешний контур СПРК
Рис. 11.2. Конфи! урацил <уба с поди утренним сх_воелннсм ножки:
а — тип I; б — тип //; I — пг помогите льная энлльаента: ? — основная «водъвента; 3 — переходная кривая зуба с поднутрением; 1 — переходная кривая зуба без поднутрения 277 © Э. Б. Булгаков
определяет эвольвентный профиль зубца с параметрами г. О, /л,. и dt. Задавшись углом профиля а СПРК. по формулам (10.5) — (10 8) определяют параметры внешнего контура (см. рис. 11.3). Если также в качестве независимой переменной принять угол профиля внутреннего контура v и коэффициент высоты прямолинейной части внутреннего контура /, то радиус скругления вершины его зуба
Pi г =
- W•) - Aa*tga - /‘tgv
secv,
коэффициент радиального зазора
GT = р£( 1 - sinv).
(П2)
(113)
Из дополнительных построений, показанных на рис. 11.3. б — &С МС. &С CU и ДО TU имеем коэффициент, характеризующий расстояние между скругленной частью вершины зуба и прямолинейной частью внешнего контура
А п = р^еса [1 - cos(a - v) + /*(tga - Igv)].
(114)
Иногда, если при проектировании задаются коэффициентом А *, который близок к припуску под шевингование или шлифование, то можно определить коэффициент прямолинейной части внутреннего контура
278 © Э. Б. Булгаков
A *cosa cosv - I ^5a* - Л/tgot I [ I - cos(a - v)]
Г =-----------------12 ---1-------------- (11.5)
J sin(a - v) - tgv [ 1 - cos(a - v)]
Внешний н внутренний контуры сдвинуты относительно друг друга на величину q, определяющую постоянное смещение СПРК при формировании переходной кривой зуба:
q = “ 0- (116)
Коэффициент высоты головки внутреннего контура = Q* + + /*. или
= ^*tg<x ctgv + /*. (1Ь7)
113. ГАЛТЕЛЬ ЗУБЧАТЫХ КОЛЕС С ПОДНУТРЕННЫМ ОСНОВАНИЕМ ЗУБЬЕВ
Допустим, что требуется спроектировать зубчатое колесо с поднутренным основанием зубьев, если заданы z. тл. 0. j. db. Дн, параметры сопряженного колеса, а также возможное заглубление переходной кривой в обод на величину Д/} по сравнению с зубом без поднутрения.
Процесс станочного зацепления сложного производящего контура с заготовкой можно разделить на два станочных зацепления простых производящих контуров Такое представление о станочном зацеплении упрощает задачи расчета зубьев с поднутренным основанием.
Прежде всего отметим, что на основании теоремы Виллиса в станочном зацеплении передаточное число и0 зависит только от чисел зубьев сопряженных колес и инструмента и, следовательно, является постоянным, поскольку два простых контура, соединенных в один сложный, имеют общий полюс станочного зацепления Это означает, что нарезаемое колесо и производящий контур имеют одну и только одну делительную окружность и начальную прямую.
Рассмотрим рис. П.4, на котором показана схема внешнего станочного зацепления при нарезании зубьев с поднутренным основанием сложным производящим реечным контуром с протуберанцем.
Формирование профиля ножки зуба колеса производится на трех линиях станочного зацеплеш<я. Так. нарезание основной эвольвенты происходит па рабочем участке WnF линии станочного зацепления U/(PV. причем конец этого участка — точка F — определяется пересечением траектории поступательного перемещения точки С ПРК с линией зацепления. В тот момент, когда точка С сольется с точкой F , формирование основной эвольвенты завершится. При 279 © Э. Б. Булгаков
дальнейшем поступательном движении производящий контур займет положение, при котором точка С сольется с точкой F Заготовка при этом повернется на угол а—v и начнется формирование вспомогательной эвольвенты. Когда «режущая точка» С совпадает с точкой Е нарезание вспомогательной эвольвенты на линии станочного зацепления F Е закончится. Переходная кривая зуба колеса образуется на линии £ D станочного зацепления — конхоиде Ни-комеда.
Станочная интерференция имеет место на участке F К линии зацепления причем производящий контур будет внедряться в основную эвольвенту в направлении от точки F к точке Л' по мере поворота заготовки на угол a—v. После того как поворот заготовки на угол а—v завершится, начнется на участке Е F линии зацепления формирование вспомогательной эвольвенты, пока точка С производящего контура не сольется с точкой Е .
280 © Э. Б. Булгаков
В результате рассматриваемой станочной интерференции при dp > dbv происходит пересечение основной и вспомогательной эволь вент, возможные границы которой
(11.8)
где из &OFF (рис. 11.4)
<*па - у/ fjseca - A/j2 + (A/ctga)’ ; 9)
из &OFF "
(|seca - Afl*j ‘ + (A.’ctgv)2 . Ю)
Если dbv>dna, то возможные границы интерференции
(ПП)
Определим параметры точки пересечения эвольвент. Прежде всего отмстим, что диаметр делительной окружности в станочном зацеп-Л611ИИ
d = secadfc (11.12)
можно выразить через диаметр основной окружности вспомогательной эвольвенты
d = secvd<ir, (11.13)
откуда получим, что
dbtl = seca cosv db. (1114)
Положение вспомогательной эвольвенты по отношению к основной эвольвенте зуба колеса зависит как от диаметра dby, так и от параметра 0v. Последний найдем из таких
соображений. Разделим ПРК с протуберанцем на два простых
контура, не изменив их установки по отношению к нарезаемому колесу. Тогда соответствующие им зубья будут иметь одинаковую толщину — при формировании зуба внешним контуром на окружности диаметра d, внутренним контуром — на окружности диаметра d +2q (см. рис. 11.4). Так как Sa = d(invO - inva):
Sv = (d + 2<?) получим
invOw - inv arccos
и полагая Sa = Sv>
. a. invO - inva
invv* ------------------------------
1 -I- 2A,.*(sina etgv - cosa)
+ inv arccos
_________cosv___________
4- 2ha‘(sina etgv - cosa)
(1115)
281
© Э. Б. Булгаков
В результате рассматриваемой станочной интерференции при dp > dbv происходит пересечение основной и вспомогательной эволь вент, возможные границы которой
(11.8)
где из &OFF (рис. 11.4)
<*па - у/ fjseca - A/j2 + (A/ctga)’ ; 9)
из &OFF "
(jseca - Afl*j ‘ + (A.’ctgv)2 . Ю)
Если dbv>dna, то возможные границы интерференции
(ПП)
Определим параметры точки пересечения эвольвент. Прежде всего отмстим, что диаметр делительной окружности в станочном зацеп-Л611ИИ
d = secadfc (11.12)
можно выразить через диаметр основной окружности вспомогательной эвольвенты
d = secvd<ir, (11.13)
откуда получим, что
dbtl = seca cosv db. (1114)
Положение вспомогательной эвольвенты по отношению к основной эвольвенте зуба колеса зависит как от диаметра dby, так и от параметра 0v. Последний найдем из таких
соображений. Разделим ПРК с протуберанцем на два простых
контура, не изменив их установки по отношению к нарезаемому колесу. Тогда соответствующие им зубья будут иметь одинаковую толщину — при формировании зуба внешним контуром на окружности диаметра d, внутренним контуром — на окружности диаметра d +2q (см. рис. 11.4). Так как Sa = d(invO - inva):
Sv = (d + 2<?) получим
invOw - inv arccos
и полагая Sa = Sv>
. a. invO - inva
invvv ------------------------------
1 -I- 2A,.*(sina etgv - cosa)
+ inv arccos
_________cosv___________
4- 2ha‘(sina etgv - cosa)
(1115)
282
© Э. Б. Булгаков
чим уравнение для определения угла профиля а п для галтели типа I inv arccos(cosv seca cosa п) - inva п + invO - invOy = 0. (11.23)
В процессе станочного зацепления может произойти подрез вспомогательной эвольвенты. Он наступит в случае, когда точка С (см. рис. 11.4) производящего реечного контура с протуберанцем при поступательном перемещении пересечет линию зацепления ниже точки возврата Лгу вспомогательной эвольвенты
Такая интерференция возможна, если
h * + /* > |seca sin2v.
(11.24)
Подрез вспомогательной эвольвенты аналогичен подрезу эвольвентного профиля, рассмотренного в гл 10.
При определении условий подреза вспомогательной эвольвенты имеется в виду простой острозаточенный ПРК с параметрами v; h* + /*. Определив из уравнения (10.23) угол профиля ап в точке подреза вспомогательной эвольвенты, получим ему соответствующий диаметр
9 9
dn = seca п seca cosvd».
(11.25)
j ин
Если drl < dp, то подрез возможен в пределах галтели, для чего определим угловую толщину зуба по основной и вспомогательной эвольвентам на окружности диаметра dn (рис. 11.5. е); получим, используя (11.22), что вспомогательная эвольвента подрезается в пределах галтели, если
invO - inv arccos(cosa Пу cosa secv) > invOv- inva .
(11.26)
Если зуб, очерченный по вспомогательной эвольвенте, имеет угловую толщину на основной окружности большую, чем на этой окружности зуб. очерченный по основной эвольвенте, то вспомо гательная эвольвента лежит вне галтели (рис. 11.5. в). Это условие записывается в виде
invOr > invO — inv arccos(cosa secv). (11.27)
Так как вспомогательная эвольвента лежит вне галтели, то галтель состоит из одной переходной кривой. Определим точку П пересечения переходной кривой с основной эвольвентой, для чего обратимся к рис. 11.6 На окружности диаметра dx - dn можно написать: фх + Цх - л/г = 0. где = invO - invar
Уравнение переходной кривой, записанное в системе координат XVOYV (см ниже), перепишем в системе координат XVOYV
283
© Э. Б. Булгаков
Рис. 11.5. Bapwaimj галтели зубьев с поднутренным эотпваннем:
а. б — галтель тки Г, а — д — галтель шла //; « — недопустимый вариант галтели типа II
Ху = X^cosy + k^sin— , ’ л .л Yv — К,с 05-Xysin—
г v z
(11.28)
Тогда половина угловой ширины впадины зуба на окружности
dx = 2 у/x? + У2 = 2 у/х? + Y? равна
Лл " arctg
(11.29)
При dx = dn; лх = <хп = arccos-^ после подстановки b (11.29) получим “п
уравнение для определения угла профиля ап в точке пересечения профилей для галтели типа II
- invin + invO - j = 0. (11.30)
Составим уравнение переходной кривой зуба с поднутренным основанием галтели, для чего обратимся к рис. 11.4. Если галтель
284
© Э. Б. Булгаков
имеет вспомогательную эвольвенту, то переходная кривая лежит в интервале
^£> а dxv £ ^/п ’• (11.31)
если не имеет вспомогательной эвольвенты. то
dn^dxv^dfn, (1132)
где диаметр окружности впадин зубьев с подпутренным основанием
dla = (seca - 2(ЛГ -/* - С/)</, (Н 33)
Координаты центра скругления зуба
ПРК с протуберанцем в долях d>
= ha + f — piV sinp , v 1 ( * I
I у seca —w I.
(1134)
Угол поворота заготовки в этом случае равен
фу = 2cosa (Уо>, + XOytgr>-) /И 35) где угловой параметр у, лежит в диапазоне
0<т, s|n-v. (1'36)
Общее уравнение переходной кривой зуба получим на основании (10.28) и (10.29)
Рис. ll.fi. Пересечение переходной кривой с ОС1КЛНОЙ эоспьвснтсй
< 2**° V “/ * + А
' I ♦ ♦ ♦
-жса-к„ -f + - co$yv)
4- -( seta (w- у) + »*1 sinpe A.
I x ♦
Wv " p (Ру “ j) + ® J J(1L37)
Таким образом конфигурация зубьев с поднутренным основанием формируется в процессе станочной интерференции.
Если d. > dir и не удовлетворяется неравенство (11.27), то возможна галтель, состоящая из переходной кривой и вспомогательной эвольвенты (тип I, см. рис. 11 5, а, б). В этом случае радиус окружности пересечения эвольвент, лежащий в интервале (11.8), определяется через профильный угол ап из уравнения (11.23). Координаты вспомогательной эвольвенты, зависимая переменная 0„ 285 © Э. Б. Булгаков
которой вычисляются по (11.15). определим из уравнения (11.18); вспомогательная эвольвента находится между окружностями радиусы которых лежат в интервале (11.16). Если удовлетворяются неравенства (11.24) н (11 26), то возможен подрез вспомогательной эвольвенты, причем угол профиля в точке подреза определяется из уравнения (10 23). Такой профиль основания зуба является недопустимым (см. рис. 11.5, е).
Тип II галтели (см. рис. 11.5, в), состоящий из одной переходной кривой, возможен в случае, если удовлетворяется неравенство (11.27). Тогда угол профиля ап в точке пересечения переходной кривой с основной эвольвентой вычисляется по уравнению (11.27), где координаты точек переходной кривой определяются по уравнению (11.57). Другие варианты размещения вспомогательных эвольвент показаны на рис. 11.5.
Вспомогательная эвольвента может явиться составной частью галтели зуба с поднутренным основанием (тип I). Она образует вспомогательный эвольвентный зубец, в частности характеризуемый углом 0г. При наперед заданных параметрах ПРК с протуберанцем угол 0г является функцией не только параметров контура, но и независимой переменной 0. Как указывалось выше, угол — зависимая переменная от независимой переменной 0 основного эвольвентного профиля зубца, параметров контура и положения ПРК с протуберанцем по отношению к заготовке.
11.4. ЧАСТНЫЙ СЛУЧАЙ ОБРАЗОВАНИЯ ЗУБЬЕВ С ПОДНУТРЕННЫМ ОСНОВАНИЕМ
Допустим, что радиус подреза, удовлетворяющий условию (11.1), задан. Проще всего получить этот радиус, если ему соответствующий угол профиля ап в точке подреза эвольвенты будет равен углу профиля а ПРК с протуберанцем в той части, которая образует рабочий эвольвентный контур зуба колеса. В этом случае делительная окружность проходит через точку подреза П профиля; ее диаметр
«. d = 2/?п = secand>. (11.38)
Так как ширина впадины зуба колеса по делительной окружности равна толщине зуба ПРК (рис 11.7), то
b = 2(>nva п “ «nvO + •
где Дгу — возможное заглубление переходной кривой в обод колеса; d, — диаметр окружности впадин зубьев без поднутрения.
286
© Э. Б. Булгаков
Радиус скругления зуба ПРК с протуберанцем находим из геометрических построений (см. рис. 11.7) cosv piV = о?Г '—г(^ “ 2atgv - w), 2(1 -snv)v 6 f высота прямолинейной части
(11.40)
/= о - pJV(l - sinv);
(1141)
при w = 0 piF = r£-/tgv secv. I aL
Используя (11.5), выразим высоту прямолинейной части ПРК с
протуберанцем через коэффициент Ап
A ncosa ncosv - [1 - cos(a п “ V)1
sin(an - v) - tgv [1 - соз(ап - v)) (11.42)
Диаметр окружности впадин зубьев с поднутренным основанием
Рис. 11.7. Схема станочного зацепления ПРК с заготовкой (частный случай): Л — формируемый зуб: В — ПРК; / — рабочая звгльвента; 2 — вспомогательная эвольвента; 3 — переходная кривая; 4 — средняя линия ПРК с углом профиля а ГГ 5 — средняя .пиния ПРК с утлом профиля г
287
© Э. Б. Булгаков
равен
d/n=d-2a. (11.43)
Эволъвентная часть галтели — вспомогательная эвольвента — разворачивается с основной окружности диаметра она сопрягается с переходной кривой но окружности радиуса Ягг, определяемого из схемы станочного зацепления (см. рис. 11.7)
+/’с«Л • (Ц44)
Так как толщины зубьев на делительной окружности по основной и вспомогательной эвольвентам равны, то зависимая зубца, профиль которого очерчен по вспомогательной эвольвенте
invOF = invO - inva п + invv . щ 45 j
Уравнение вспомогательной эвольвенты и координаты ее точки возврата вычисляют по (1118) и (11.19), полагая a = &п. причем текущий радиус R*v принимается из интервала
I cosv sectsS я/, S R„. <u 461
Чтобы составить уравнение переходной кривой зуба колеса, определим положение центра скругления зуба ПРК с протуберанцем по отношению к делительной прямой и осн симметрии впадины зуба колеса
A^ov (J ~~ Pi v sinv)dj ,
V =2Цесл lwd-i (1147)
'Of 2^ П 2^ °* '
Далее используя (11.35). (11.36) и (10 28) на основании (10.29), получим уравнение переходной кривой зуба. Чем меньше величина /. тем в большей мере переходная кривая ближе к окружности радиуса р1и.
Коэффициент полной высоты зуба производящего контура с протуберанцем по аналогии с формулой (10.7)
.. L. , (11.48)
= 2<tga«“’g«n)5’naii- '
11.5. ИСПОЛНИТЕЛЬНЫЕ РАЗМЕРЫ
Размеры, проставляемые на чертеже зубчатого колеса н сборочном чертеже зубчатой передачи, называют исполнительными. К исполнительным размерам относят диаметры окружности вершин зубьев da при внутреннем и внешнем заацсплении. в ряде случаев —
288 © Э. Б. Булгаков
диаметры окружностей впадин и d,2 соответственно, а для передачи — межосевое расстояние аг или аг2_3. Наконец, эта толщина зубьев, которую часто измеряют по делительной или какой-то иной окружности dx, если d,<dx<da. Однако на толщину зубьев по делительной окружности накладываются технологические погрешности нарезания и она не может быть принята в качестве контролируемого параметра.
В качестве основного контролируемого геометрического параметра принимается длина общей нормали или расстояние между разноименными эвольвентами двух и более зубьев, измеренное по касательной к основной окружности. Такой контроль в наибольшей мере приближен к сопряжению зубчатых колес в беззазорном зацеплении.
Обратимся к рис. 11.8. на котором показана измерительная скоба, охватывающая по общей нормали п основных шагов рь и одну толщину зуба S4 по основной окружности IF = S, + п pt, или
lF=(invO +л (1149>
Длина общей нормали для косозубых колес определяется в нор мяльном сечении
W; = \Fcosp. (11.50)
Так как U7 = tga^. то число основных шагов или число измеряемых зубьев z = п + 1 равно л = ^(tgax “ invO), причем ar ® (^ + «,)/2- Длина обшей нормали лежит в диапазоне Рт < IF/2 < рв. где pr я — радиусы кривизны эвольвент в полюсе и на окружности вершин соответственно. Если pv > IF/2. то окончательное определение длины общей нормали производится при л, увеличенном до целого числа; если pe < IF/2. то л уменьшается до целого числа
Иногда размер зубчатых колес в зависимости от четности их зубьев контролируют с помощью роликов (рис. 11.8, б). Если число зубьев зубчатого колеса г четное, то
Af, = D + dasecan. (11.51)
если число зубьев зубчатого колеса г нечетное, то
Afm>4 = D + d»secaD cos^j. (11.52)
При контроле должно соблюдаться условие
D 4- d^ecoc/j > d.;
D <D<D (,,53>
где D — диаметр ролика, мм.
Экстремальные значения диаметра ролика Dmn и определяют
по следующим уравнениям:
289 © Э. Б. Булгаков
inv arctg (tga,-•^2i-inv(> + у = 0; (1155)
л. D Л
invao = mv0 + — -(11.56)
Зубья с несимметричным профилем не имеют общей нормали к разноименным профилям и потому при их контроле применяют ролики (рис. 11.9).
А. Л. капелевич, используя работу Н. И. Рогачевского, для контроля зубчатых колес с несимметричным профилем зубьев, получил необходимые формулы, приведенные ниже в наиболее общем виде. Так, размер по роликам для зубчатых колес с внешними и внутренними зубьями при четном числе зубьев z
M = dD ± D. (11.57)
при нечетном числе зубьев г
Л1 = dD cos'T— ± D, 2z
(11.58)
где D — диаметр ролика, dD — диаметр окружности, на котором
290 © Э. Б. Булгаков
находятся центры роликов, причем верхний знак относится к зубчатым колесам внешнего зацепления, а нижний — к зубчатым колесам внутреннего зацепления.
Построим зубец, эвольвенты которого эквидистантны эвольвен-тным профилям контролируемых зубцов, но проходят через центры роликов, причем otD — угол профиля эвольвенты на окружности dD и а’ = arccos(Kcosa^). Угол профиля определяется из уравнений: для колес внешнего зацепления
invaD -4- invaJ = invO + invO* +
D X+ 1 2л d> К z'
(11 59)
для колес внутреннего зацепления
mveD + mvaD = invO + invO - -------—. (11.60)
Для определения предельных значений — диаметра ролика находят углы эвольвентного профиля в точках С и С* его контакта с профилями зубьев
«С = arctg(lga0 , (11.61)
«с - arctg(tgap + . (11.62)
Рж. 119. Размер М по роликам зубчата? казсса с н<ч иммгтричнымн профилями п>«гшних (а) и внутренних (5) зубьев
291 © Э. Б. Булгаков
Наибольший диаметр ролика определяют для случая, когда точка контакта С находится в верхней активной точке. При этом учитывают наличие фаски или профильной модификации зуба. Из совместного решения (11.62) с (11.59) для зубчатых колес внешнего зацепления и с (11.56) для зубчатых колес внутреннего зацепления находят ОгЛЖ. Наименьший диаметр ролика Отаг определяют для случая, когда он касается окружности вершин, т. е. когда +0fnm- В этом случае углы профиля
d>
aD = arccos . _ л—. (11.63)
“а +
aD = arccos
(11.64)
min
Величину Осад находят из совместного решения (11.57) и (11.64) с уравнениями (11.59) и (11.56). Окончательно диаметр ролика лежит в интервале (D^, Отм).
Современный контроль осуществляется также путем оценки колебания межосевого расстояния на специальном приборе.
Исполнительные размеры зубчатого колеса приводятся в долях диаметра его основной окружности, а у передачи в целом — в долях диаметра основной окружности меньшего из колес пары. В массовом или крупносерийном производстве такое выражение исполнительных размеров не должно вызывать затруднений при оформлении чертежей зубчатых колес или при их производстве.
Однако в мелкосерийном и единичном производстве и особенно при необходимости соблюдения стандартов на основные параметры изделий может оказаться целесообразным переход на другие представления о размерах контролируемых колес, чем диаметр основной окружности. Диаметр основной окружности может принимать любые значения из натурального ряда чисел и использование в этих условиях некоторого производящего контура для формирования некоторого колеса здесь становится возможным лишь при равенстве их шагов.
При необходимости ограничения номенклатуры зуборезного инструмента и зубчатых колес можно прийти к идее, высказанной Н. X. Кетовым, о целесообразности их стандартизации на основе модуля зацепления на основной окружности, равного m. = db 2 1 (мм).
Если необходимо выразить параметры производящего контура или зубчатых колес через модуль зацепления /л, являющийся масштабом при традиционном проектировании, то эти параметры в долях диаметра основной окружности следует умножить на zcosa. так как m =—secct.
z
292
© Э. Б. Булгаков
12. ОБЛАСТЬ СУЩЕСТВОВАНИЯ СТАНОЧНОГО ЗАЦЕПЛЕНИЯ И ПРОИЗВОДЯЩЕГО КОНТУРА
12.1. ОБЛАСТЬ СУЩЕСТВОВАНИЯ СТАНОЧНОГО ЗАЦЕПЛЕНИЯ
Область существования эвольвентного зацепления определяет свободный выбор независимых переменных для принятой пары чисел зубьев колес и относительной толщины зубьев на окружности вершин. Она адекватна области ставочного зацепления, если зубчатые колеса образуются методом деления Если зубчатые колеса обра зуются методом огибания, то реализация параметров эвольвентного зацепления принятых из ее области существования, зависит от параметров производящего контура. Тогда зубчатое зацепление рассматривается состоящим из отдельных колес, каждое из которых в станочном зацеплении взаимодействует с производящим контуром. Здесь возникают различные станочные интерференции, ограничивающие выбор независимых переменных эвольвентного зацепления при принятом производящем контуре.
Рассмотрим область существования станочного зацепления между производящим контуром долбяка (ПКД) и колесами с внешними и внутренними зубьями. В этом случае наиболее ярко проявляются все особенности станочного зацепления. В отличие от зацепления с ПРК зацепление с ПКД зависит от числа зубьев г0 контура и степени его переточки.
Принципиальное изображение областей станочного зацепления ПКД с зубчатыми колесами г2 и показаны на рис. 12.1. По оси абсцисс отложены независимые переменные нарезаемых зубчатых колес и О3, а по оси ординат — независимая переменная Ор ПКД. если для колес пары используется единый инструмент. Так как Оо является функцией относительной толщины тл0 на окружности вершин зубьев ПКД. то левее областей существования показана связь между этими параметрами, принятая линейной. Возможная переточка зубьев ПКД определяет диапазон изменения утла Oq, ограничивающий области существования станочного зацепления (на рис 12 1 линии I—I и II—II).
Сами области существования станочного зацепления в своей основе те же области существования эвольвентного зацепления, в котором роль зубчатого колеса выполняет ПКД с числом зубьев г0 при независимой переменной do, зависящей от относительной толщины зубцов me0 на окружности вершин. Таким образом, на рис 12.1 изображены области существования во внешнем зацеплении пары 20—г3 с независимыми переменными Оо = f (та 0), 02 и во внутреннем зацеплении 2 пары Zq—z3 с независимыми переменными ^0 = / (та о)’ 03.
293
© Э. Б. Булгаков
Рис. 12.1. Ойпасги существования внешнего и внутреннего с’аночных мцетении ПКД с чжлом зубьев ар = 50 при 0.005 £ * 0,012 с зубчатыми колесами г? " 35, 23е
=100 при ffte п, з • I/? *2, з
В связи с тем, что зубья ПКД обладают режущими свойствами, изменился смысл некоторых изолинии интерференции. Например, попавшая в диапазон реальных углов Ofe между линиями I—/ и //—// изолиния интерференции яр2 = 0 во внешнем зацеплении является изолинией подреза зубьев шестерни z2. а изолиния интерференции аг? = 0 во внутреннем зацеплении — изолинией среза головки зуба колеса ?3
При построении областей существования станочных зацеплений / и // должны быть учтены все возможные интерференции, рассмотренные в гл. 10 Однако не все они ограничивают конкретные области существования станочного зацепления
12 2. ОБЛАСТЬ СУЩЕСТВОВАНИЯ ПРК ВО ВНЕШНЕМ СТАНОЧНОМ ЗАЦЕПЛЕНИИ
При известных параметрах зубчатого колеса — г, 0. mt, ар — независимая переменная а ПРК может изменяться в достаточно широких пределах, во всяком случае, в итервале (0, ла) Как ука*
294 © Э. Б. Булгаков
зывалось выше, каждому новому значению угла профиля а ПРК будет соответствовать переходная кривая, сопрягаемая, если отсутствует подрез, с эвольвентным профилем в некоторой точке / при неизменных параметрах эвольвентного профиля. Таким образом, каждому ПРК со своим углом профиля сх отвечает своя переходная кривая и запас от станочной интерференции
/о = “ tgar) - 0. С другой стороны, каждая переходная кривая
является концентратором напряжений и из ряда вариантов ПРК следует выбрать такой, который бы обеспечил получение переходной кривой при минимальной концентрации напряжений.
Вместе с тем те же или близкие к оптимальным значения параметров переходной кривой и. следовательно, концентрации напряжений можно получить за счет смещения ПРК на величину $db. Отсюда возникает область существования ПРК, которая строится в системе координат 0|, Qz внешнего зацепления при /пл12 = const и принятых числах зубьев г(, г2.
Допустим, что задан равновысокий и равноделенный ПРК с углом профиля а, высотой hfL2 s 2AaL2 = secadbL2/zL: и толщиной зуба на начальной прямой Saцз » X-^-seca dbl 2 при коэффициентах
2 *L2
Л/*2 = 2Лв’12 н SJl2- Определим независимые переменные Oj и Oj, соответствующие началу интерференции, когда /0 = 0 или
a/,i.2’afU2 = 0 (121)
при известных значениях чисел зубцов г2, а также относительной их толщине гпа j, та2 на окружности вершин.
Так, для колес 2 н'а основании (10.5) имеем
(12.2)
Производя подстановку 4, 2 из (10.13), 1
*g«/l(2" c«ec/r(SjlJCtga- 2A’l2) + tgc»-cosec^efinva +------I + cosec2a invflj 2« 0
\ 2/
Если учесть значения углов префкпя 2 по (2.17) и (2.15). то окончательно имеем уравнение изолинии станочной интерференции дли шестерни
С, + coset2a U)Vtf| + ulga0 2 ” (1 + u)tgav » 0
для колеса г2
пслучим
(123)
С2 •+ tfcosec2a invftj + tgae । - (1 +• ^)tgcT = 0.
где C| = cos«y.-(5^ctga - 2h* t) + tga - cosec2a inva + —!.
I e4
(12.4)
295
© Э. Б. Булгаков
К уравнению станочной интерференции зубыш
л \ nva * — .
можно падойти иным путем и, мажет быть, билет логичным. если в этим уравнении представить лчгпн параметры формируемого
колеся и ПРК. освободившись ат параметров сопряженного в рабочем мцеплении колеса и передачи в целом. Такое условие можно получить, если ут.ъ профиля a?L2 представить как lgaf ц 2 - tgua t 2 - 2леЛ/zt 2. а коэффициент перекрытия га на основании (10.4) вы
разить через коэффициент h* высоты зуба ПРК.
Точки пересечения изолиний станочной интерференции получим из совместного решения уравнений (12.3) и (12.4)
С| - С2 + cosec2a (mvi, - uinv02) + Btjfau 2 - tgae t 0 . < >2-5)
Учитывая полученные выше частные производные, имеем
(Л>2 \ »^^(cosec2^ у - co$ec2a)
ddj = .чл ( 2 “ Г’
1 / а_. - а. 1 ^Г<>2 cosec-a r---------------------------
! «и» ae 2 - 2Ла 21
М2' tg2^ cosec2a r -1 /(stn2ad । - -me 1sin2ae [<owa t)
ut^dn созес2аг - coeec2a
'ap2-aJ2 2
(12.7)
Производные (12.6) и (12.7) определяют утлы наслана кэсателыых в системе координат t|. до к изолиниям станочной интерференции, описанным уравнениями (12.3) и (12.4).
Из условий —г-rfd,
интерференциях у ножки зубца угол профиля a • ut. а у ножки зуба колеса г-2 угол
- 0 получим максимум функции в некоторой точке: при ар 2 “ а12
зацепления av - arcsir-y/ sin2ae L - |bi# t sin2uB [Cnsa^ ।,
Функции интерференций имеют максимум в другой точке, если
0.
При юпгрфг{>снцни у нзжкм зуба шестерни з, она наступает, когда угол зацепления
ау airiin-y/ «In^ 2 - |*ie 2sin2afl 2cosaa 2, я у ножки зуба колеса г^, когда
а * ау.
Построим мжи1мнин радиального зазора в зубчатой передаче, зубчапам классам которой соответствует общий ПРК и станочная интерференция, описываемая уравнениями (12.3) к (12.4) Для этой цели произведем подстановку коэффициента смещения 2 по формуле (10.13) в уравнения (10.16) и (10.17). Тогда в предельном случае, если принять радиальный зазор в передаче равным нулю, получим уравнение изолинии радиального зазора между окружностями вершин зубьев шестерни г( и В1ШХЛ зубьев колеса СП1—2 “
296
© Э. Б. Булгаков
(1 + u)secar - secae । + 2гЦЛв 2 + C2) — 2 cl?a + 54X11 +
я (12.8)
+ со5еот(д1с 2CO6aa2 + ^vac 2 “ *nva--)1 "
z2
Уразнрнж- радиагьнгго зазора между окружнитями вершин зубьев колеса г2 н впадин зубьев шестерни г( при Сп 2 । “ °
(I + u)5ewr - 445«ae 2 + 2(Л*| + Cf) - S„ tctgu - seca -
/ Д\ л (12.9)
- coseca т ,cosa . + inva . - inva------- 0
si si ui «I
\ */
Из совместного решения уравнений (12.8) и (12.9) получим точку пересечения изолиний радиальеъис заиров. Продифференцируем уравнения (12.8) к (12 9) гю переменным йр Й2> имея я виду ранее полученные частные производные. Тогда угол наклона ка-
сательной К ИЗОЛИНИЯМ Cq|_^2—|“®
I 2
tg coseca г -1/(sinGe! - мв jCOS аа । )
rf^i • । „2л иамесаг-собесе
'сП1-2 = 0
dt2\ tg2»j
" < А
•'Спзч-о tg2
casecar - cosccar
2 ucosecar -1 /(sinae 2 - ocos'ae j)
(12.10)
(12.11)
Приравнивая производные нулю, получим, что функция Сщ_2 = 0 имеет .максимум в некоторой точке, когда ar •* аге sin а также в другой точке, если
av агс51п(51паа । - та |CO52aa |). Максимум фуъкнич Ср 2_j наступает при а = av. а также если ar » arcsinjм(»1пав тл ч<х>$2аа г)|.
Положение изолиний радиального зазора зубчатой передачи на плоскости независимых переменных 0h 02 существенно зависит от радиального зазора ПРК Например, очерчивая вершину зуба ПРК параболой вместо окружности, можно раздвинуть границы области свободной от нулевого зазора. Область существования ПРК показана на рис. 12.2 для случая, когда вершина зуба ПРК скруглена дугой окружности. В основном ее ограничивает радиальный зазор, а на небольшом участке — станочная интерференция.
При обосновании группового ПРК, т. е. ПРК. соответствующего группе колес с некоторыми достаточно близкими параметрами, без существенного проигрыша в изгибной прочности зубьев, область существования ПРК отображают в систему координат единичных местных напряжений (коэффициентов формы зуба).
297
© Э. Б. Булгаков
42
38
34
30
26
22
30 34 38 42 г>,°
Гж 12.2. Область существо-мнкя ПРК при а = 20 *.
Ла] 2 - 1.0641Я/гц2, С* -= 0J266O4/*l2> № сопряженной пары губчатых «алее при £| 20. 25.
^1,2 = 1/25/1.2
12.3 ОБЛАСТЬ СУЩЕСТВОВАНИЯ ПКД ВО ВНУТРЕННЕМ СТАНОЧНОМ ЗАЦЕПЛЕНИИ
Область существования ПКД во внутреннем зацеплении, в частности, ограничена станочными интерференциями, которые можно записать так:
^2, з ~ ®»2. з = 0» (12.12)
где 3 — угол профиля в конце активного участка эвольвенты зуба при рабочем зацеплении с зубом сопряженного колеса; а/2,з—угол профиля в конце активного участка эвольвенты тех же зубьев при станочном зацеплении с ПРК при нарезании колеса г2 и ПКД при нарезании колеса
На основании (2.44) и (2.15), условие (12.12) можно записать применительно к колесу *2 с внешними зубьями как 'g^tr 0-1'-------1^0— з^я 3 4 о “
1 4-1^_2
“ (“о—з “ “о—2)1Кат2—з1- ^сли учесп» угол станочного зацепления из (10.47), то после
298 © Э. Б. Булгаков
подстановки и упрощений подучим
1 + Kf) 2 *П'*^2 йо~ Wt [“Q-3l»«a3-(“0-3‘ “О-2№«В’2-3+ 1Кав(>)1 + “0—2
+ 0СМаа 0 + taltea б) ~ ~ " °- (12.13)
ИО_З’1
По аналогии на основании (2.43) имеем, что tga/3 --4- . . tgay 0_3.
“О—3 “0—3
«2-3 -1 1в% 1
• '«% - '«“'1-3+ и ”ои ,go'0-3’^ZFi1<“«-’'‘,»-’>x
х 1Ка» 2—3 * “О— 2 “ ’^и о!
Если далее учесть (10.47). то окончательно подучим
' * “О—3 ~ 1 f 1 ’
--Z bTV аГГZ-=^^-3 “ “o-Z^F 2-3 + “o-'?««<. 2 " ^aol - " *0—3-----------------I “o—3 1
- пЦСЧ, o““. о + Im», o) + £ - 0 (12.141
0-3 3
Изолинии станичной интерференции строят для принятого сечения ПКД с параметрами го- °аО- определяя 0? из уравнения (12J3) или из (12.14). задаваясь аГ2-3 и соответственно перебирая аа3 или а<2.
Область существования ПКД также ограничена рддиа.'мшм зазором в передаче, При некоторой величине СГ2_^3_2гО составим на основании (10.68) и (10.69) изолинии коэффициентов радиалыюго зазора. После подстановок и упрощений при принятом сечении ПКД с параметрами г0. аа 0. та0 н угле зацепления ог2_з подучим независимую переменную #2 в зависимости от угла профиля а, 3:
. । + “о -г. , “о-г г . ’“% .
|Л'Л---—— inv »rcs«< p0_3seca, 3+ —- - (и,>_3- н^жса, г_3-
(J—2 * “0—2 L "0—2 '
* *“0-2<5э_211 + °а’”‘ 0 * ‘"та* о) ’ ° <12 '5>
При тех же условиях подучим независимую переменную Oj в зависимое™ от угла профиля j:
inv*3 -
“0-3"
“0-3
1 . я
------л ” «ПУсс п) + — » 0.
«0-3 в0 а0 П/ *3
(12.16)
299
© Э. Б. Булгаков
На рис. 12.3 показана область существования некоторого сечения ПКД для пары зубчатых колес внутреннего зацепления. Эта область занимает лишь ту часть области существования эвольвентного зацепления. которая ограничивается изолинией коэффициента перекрытия Ед 2—3 = 1-0 (линия /). Линия 2 является границей станочной интерференции = которая описывается уравнением
(12.13), а линией 3 определяется (раница станочной интерференции
" «ц" 0 ио уравнению (12.14). Кроме того область существования ПКД интерференцией в связи с подрезанием головки зуба колеса z3 [линия 4 соответствует условию а₽о = О по формуле (10.52)].
Область существования ПКД и се расположение на области существования эвольвентного зацепления в значительной мере зависит от степени переточки (изношенности) зубьев ПКД; новый ПКД занимает большую часть области существования эвольвентного зацепления. чем ПКД с изношенными, переточенными зубьями.
300 © Э. Б. Булгаков
13. НЕКОТОРЫЕ СВЕДЕНИЯ О ЗУБЧАТЫХ ПЕРЕДАЧАХ С ПАРАМЕТРАМИ ЗАЦЕПЛЕНИЯ, СВЯЗАННЫМИ С ПРОИЗВОДЯЩИМ КОНТУРОМ
13 1. ИСХОДНЫЙ ПРОИЗВОДЯЩИЙ КОНТУР РЕЙКИ. МОДУЛЬ ЗАЦЕПЛЕНИЯ
На протяжении многих десятилетий формировалась теория эволь-пе1ггных передач, параметры зацепления которых зависели от параметров производящего контура или, как его еще называют, производящей рейки В этой теории лрочзводчв^н рейка является исходной, потому что исходят' от ее параметрон при построении ЭСех соотношений эвольвентного зацепления. Таким образом, в основу теории положен примат технологии над конструкцией и осуществляется принцип проектирования от технологии к изделию.
В настоящей главе, главным образом на примере зубчатых передач внешнего зацепления, приводятся фрагменты теории зубчатых передач, если производящий контур является исходным. Результатами проектирования в соответствии с этой теорией являются частные решения, ограниченные параметрами исходного производящего контура.
Техно логическое начало при проектировании зубчатых передач (колес) лежит » исходной произвпдрпцен рейке, на основе которой проектируется зуборезный инструмент. Параметры исходной производящей рейки (ИПР) ограничены параметрами абстрактного исходного контура. Исходный контур образуется в плоскости нормальной к поверхностям зубьев ИПР в результате заполнения впадин между ее зубьями. Поскольку исходный контур расположен н нормальной плоскости, то его параметры приводятся также в нормальной плоскости (сечении). Эти параметры регламентированы стандартом. Отсюда ограниченная номенклатура зуборезного инструмента н реализация возможностей эвольвентного зацепления.
Параметры исходного контура записываются при модуле tn -= 5 мм Модуль является масштабом исходного контура, а затем я зубчатых колес, все геометрические размеры которых нм кратны. Он определяется числом зубьев г колеса, укладывающихся в дна-метро делительной окружности т модуль раз.
Наибольшее распространенно имеет исходный контур по ГОСТ 13755—Si «Зацепления зубчатые. Исходный контур цилиндрических зубчатых колес*, параметры которого приведены в табл. 13-1, тип ]. Однако в ряде отраслей машиностроения применяют ИСХОДНЫ е контуры по ГОСТ Р 50531—93 или мм соответствующие исходные производящие реечные контуры, например в авиационной промышленности (см. табл, 13.к тип li н тин III) или в турбинных зубчатых передачах. Для высоконапряженных зубчатых передач (колес) ответственного назначения, а также для изделий крупносерийного 301 © Э. Б. Булгаков
или .массового производства при назначении параметров исходного контура часто отступают от ГОСТ 13755—81. если его применение не обеспечивает надежность несущую способность, ресурс и массово-габаритные показатели зубчатой передачи.
13.1. Параметры исходных производящих реечных контуров
Тки а0 £ Л/ ♦ Pi с’ v*
1 20 L0 1.0 0.37995 0.25 0J2879
П 25 L0 1.0 0.35208 0.20328 0
111 28 0.9 0.9 0.34754 0.18438 0
Примечания. Исходные производящие контуры типа II и 111 применят при изптжленим зубчатых колес по нормам плавности и по нормам контакта не грубее 7 степени точности по ГОСТ 1643—81. При работе зубьев по всей активной части линии зацеплеиия контур типа П обеспечивае’ увеличение итгибнок и контактней прочности выегжензпрюкенных зубчатых передач, в контур типа III — дальнейшее увеличение их ресурса и контактной прочности по сравнению с передачей, зубчатым колесам которой соответствует контур с утлом профиля а 25*.
При рассмотрении станочного зацепления оперируют праобразом
зуборезного инструмента — производящим исходным контуром ре-
ечного типа — исходной производящей рейкой или исходным производящим контуром типа долбяк.
Параметры зубчатых колес непосредственно связаны с исходным производящим контуром, расположенным в нормальном сечении к поверхностям формируемых зубьев. У прямозубых колес это сечение совпадает с торцовым, а у косозубых не совпадает. В то же время многие исполнительные размеры зубчатых колес выражаются через модуль зацепления в торцовом сечении, хотя параметры исходного производящего контура приводятся в нормальной плоскости. Поэтому необходим переход от регламентированных параметров исходной производящей рейки (см. табл 13.1) к его параметрам в торцовом сечении. Так, модуль в торцовом сечении
/л, = т seep
на делительной окружности диаметра d = m,z = d^seca,,
(131)
(13.2)
где угол профиля зуба ИПР в торцовом сечении а, = arctg(tga seep).
Поскольку высота зуба ИПР в нормальном и торцовом сечении одинакова го коэффициент высоты зуба ИПР
Л,* = /i|*cosp.
(133)
302
© Э. Б. Булгаков
коэффициент головки зуба
= Ajcosp. коэффициент радиального зазора
С* = С*соф,
шаг
(13.4)
(13.5)
(13.6)
р* = рЧеф
132. ЗАВИСИМОСТЬ ПАРАМЕТРОВ ЗАЦЕПЛЕНИЯ ОТ ПАРАМЕТРОВ ИПР
Внесем некоторые коррективы в рис. 10.2. Будем понимать изображенный на нем производящий реечный контур как исходный, а вместо коэффициента смещения | введем в целях выполнения принципиально иных задач другое обозначение — коэффициент смещения х. Отличие коэффициента смещения В. рассмотренного в гл. 10. от коэффициента смещения х заключается в том. что его применение обеспечивает улучшение параметров формируемых зубьев у зубчатых колес, если параметры исходного производящего контура известны. В рассматриваемом случае зубья зубчатых колес синтезируют в процессе станочного зацепления. а при проектировании зубчатых колес в обобщающих параметрах их синтез от параметров ГТРК не зависит (не считая переходной кривой зубьев).
Таким образом, смешением ИПР можно добиться изменения параметров формируемых зубьев и в целом эвольвентного зацепления. Например, смещением ИПР можно изменить толщину формируемых зубьев на некоторой окружности диаметра dx
„ cosa, л
= '"•7^7 2 + + ^inva, - invaXf
(13.7)
где xf— коэффициент смещения в торцовом сечении. Так как величина смещения — радиальною перемещения ИПР из одного положения в другое — одинакова в торцовом и в нормальном сечениях, т. е. хт = xtm. то их коэффициенты смещения будут разными а
именно
х,= х соф.
(13.8)
Угол зацепления определяется также в торцовом сечении
invaTf = inva, +
(139)
где X) и if, — коэффициенты торцовых смещений при формировании зубчатых колес с числами зубьев г, и г2.
В официальной методике геометрического расчета зубчатых передач по ГОСТ 16532—70 «Передачи зубчатые цилиндрические
303
© Э. Б. Булгаков
внешнего зацепления. Расчет геометрии* радиальный зазор в зацеплении между зубом и впадиной сопряженных колес равен высоте скругления части зуба ИПР. Исходя из этих условий получают диаметр окружности вершин зубьев колеса, который также зависит от коэффициента смешения хг, а именно
^1.2 = ^i.2 + 2/n, Л*, - x21f + —zc
cosa?
COSOCy.
(13 10)
где zc = 4- г2.
Из приведенных формул, например (13.7), (13 9), видна зависимость параметров зацепления от параметров ИПР и ее смещения. В этом случае только угол профиля а и его смещение х влияет на формирование зубьев колеса, если же применяется исходный производящий контур типа долбяка, то также число зубьев z0 и параметры его сечения.
Отсюда становится понятным зависимость эвольвентного зацепления от методов производства (технологии): коэффициент смещения х однозначно не определяет конфигурацию эвольвентных зубьев и его нельзя рассматривать отдельно от параметров исходного производящего контура Это означает, что один и тот же профиль зубьев у зубчатых колес нельзя получить, не изменяя коэффициента смещения х, если один исходный контур заменяется другим.
Впервые В. А. Гавриленко [ 13] стал учитывать эти особенности образования зубчатых колес с исходным производящим контуром долбяка в зависимости от степени его переточки как при внешнем, так и при внутреннем зацеплении
13.3. АКСИОМА СТАНОЧНОГО ЗАЦЕПЛЕНИЯ И ЕЕ ПРИМЕНЕНИЕ
Зубчатые передачи, с параметрами зацепления зависящими от ИПР. полностью определяются четырьмя параметрами: числом зубьев г формируемого колеса, его модулем зацепления т. углом профиля а ИПР и коэффициентом смещения х.
Используя сведения о зубчатых передачах, полученные из предыдущих разделов книги, можно следующим образом сформулировать аксиому станочного зацепления: при формировании зубьев зубчатых колес можно в таких пропорциях изменять модуль т зацепления, профильный угол а ИПР и ее коэффициент смещения х, чтобы диаметры основной окружности db и окружности d& заострения зубьев зубчатых колес остались неизменными. Аксиома станочного зацепления лежит в основе некоторых технологических приемов изготовления зубчатых колес, когда по тем или иным соображениям, переходя от одного исходного производящего контура к другому, не изменяют параметры эвольвентного зацепления сопряженных зубьев, допуская изменение параметров переходных кривых.
304 © Э. Б. Булгаков
Рассмотрим, например, образование зубчатых колес с модулем зацепления т, числом зубьев z и коэффициентом смещения х ИПР с углом профиля а, коэффициентом высоты h*, коэффициентом радиуса скругления вершин р/ * 0. Допустим, что для этих же целей используется иная ИПР с углом профиля ап и коэффициентом радиуса скругления вершины зуба p,*z х 0, как например, при шлифовании зубчатых колес тарельчатым кругом. В этом случае высота головки зуба ИПР равна ha и = .
Рис. 13.1. Толщина зубьев на кон центриэеииа «жружнистяд
Поскольку аи * а, го согласно аксиоме станочного зацепления изменится модуль зацепления, а следовательно, диаметр делительной окружности, коэффициент сме щения ИПР Тогда, чтобы не изменился диаметр основной окруж ности. модуль зацепления должен быть равен
/ип =
cosa m-------.
cosazz
а диаметр делительной окружности
. cosa
= a-------.
cosazz
(13.11)
(1312)
Искомое значение коэффициента смещения можно получить нс ходя из равенства угловых толщин зуба, соответствующих ИПР с углами профиля а и az/ (рис. 13.1). Тогда
5» $ х
-г = + inva,
at а
Зц
т | + 2х tga 2я + 2х"lga,/)
или —---------------L + inva = —i--------------L- + invaz/.
mz • mnz
Отсюда коэффициент смещения при образовании эвольвентного профиля
305 © Э. Б. Булгаков
a)
Рк<. 13.2. Схемл положений ИПР при фирмирикании лубчаюго колеса (а) и дополнительные построен»» (б)
X'i=fiX+2lfc/inV’“i,1V“")'
(13 13)
Установка ИПР с углом профиля ап и со смещением xf9,mu не обеспечивает обработку переходной поверхности.
Обратимся к рис. 13.2, на котором показаны схемы установки ИПР с углом профиля а (позиция I) и позиции для ИПР с углом alt. Позиция I соответствует положению ИПР со смещением хт ее средней (начальной) линии, обозначенной цифрой I. относительно делительной окружности с диаметром d. Позиция П — это уже новая ИПР, используемая при образовании эвольвентного профиля со смещением Хцтп, средняя линия которой обозначена цифрой 2. В этой ситуации делительная окружность имеет диаметр du.
Чтобы обработать переходную кривую, необходимо ИПР переместить к центру заготовки до положения позиции Ill, соответствующей позиции 1 ИПР при обработке впадины.
Разместим систему координат так. как показано на рис. 13.2. Тогда при т = 1,0 получим ординату кромки вершины зуба ИПР х0 н = Л’ + Со* “ х ~ 2 (I - cosa/cosa,,) тч. С другой стороны.
—
cosa
СО5<ХП
(АГ - Х;7)
(13.14)
306
© Э. Б. Булгаков
Отсюда следует, что коэффициент смещения ИПР
ГЛ .• cosa /,• . \ 1 /. cosa
"Xrrv^;/- (1315)
Однако положение ИПР, соответствующее позиции Ш, приведет к срезу эвольвентного профиля. Чтобы срез профиля не произошел, необходимо ИПР переместить в позицию IV в тангенциальном направлении. причем тангенциальный коэффициент смещения будет равен
(1316)
Уон ~
(13.17)
тн.
абсцисса положения кромки вершины зуба ИПР cosa СОЧ/
Средние линии ИПР в III и в IV позиции обозначены соответственно цифрами 3 и 4,
В случае, если использовалась ИПР, у которой радиус скругления вершин зуба p’w * 0. то координаты центра скругления
хо// “ хоп ~ ти9т •
, I - sina/z
Уо н ~ Уон ~ п ~~ cosa//
Далее, по уравнению (10.62) можно построить переходные кривые зуба при общем эвольвентном профиле, ным ИПР (см. рис. 10.6).
(13.18)
соответствующие раз-
13 4. БЛОКИРОВОЧНЫЙ КОНТУР И ЕГО СВЯЗЬ С ИСХОДНЫМ ПРОИЗВОДЯЩИМ КОНТУРОМ
Коэффициенты смещения выбирают, используя блокировочные контуры, которые строят для каждой пары чисел зубьев при принятом исходном производящем контуре с модулем зацепления т - 1,0 [12. 14, 24]. Блокировочный контур определяет область выбора коэффициентов смещения х2. например, для передачи внешнего зацепления. Эта область свободна от интерференций — заклинивания в рабочем зацеплении, среза зубьев в станочном зацеплении, заострения зубьев; внутри области коэффициенты перекрытия еа > 1,0.
На рис. 13.3 показан блокировочный кошур, ограниченный изолиниями интерференций, заострения зубьев, когда ов 2 = 0, а также изолинией коэффициента перекрытия = 1.0. Внутри блокировочного контура построен другой контур, выбор коэффициентов смещения в котором обеспечивает коэффициент перекрытия > 1J2 и 307 © Э. Б. Булгаков
толщину зубьев > m/4 на окружности вершин шестерни 2Ь Зуб шестерни 2, более склонен к заострению, чем зуб колеса z2, и для данного примера изолиния 5й2 = т/4 лежит вне блокировочного контура.
09 , Uwmax. = 29,9
Рис 13.3, Блокировочный контур при ИПР й = 23‘, = !,0. С = 0,20323. Z|=12.
±2 е 34
308 © Э. Б. Булгаков
На блокировочном контуре нанесена сетка прямых линий под углом 45° к положительным направлениям □сей координат xL х2, которые соответствуют постоянным значениям углов зацепления аг и межосевых расстояний
1 cosa
а г = -mzc----. Кроме то-
i COSOK gr
го, на блокировочном контуре нанесены изолинии радиусов окружностей вершин зубьев. построенные по (13.10). Как видно из рис. 13.3, при принятой ИПР и числах зубьев угол зацепления лежит в диапазоне 21°1Г < ат < 33°09', что соответствует изменению межосевого расстояния от ar= 22.35m до 24.9m, в то время как у равносмещенной передачи
Х| = - х? (а = аг = 25е) межосевое расстояние аг = = ^m(zt + z2) = 23m. Биссектриса прямого угла IV кван-дранта системы координат xL х2 — линия равносмещенной передачи — делит блокировочный контур на две ча-
Рж. 13.4. Блсжировеччый контур пары колес = 28, = 50 с хсхсадны.ч кснтур^л по ПХ7Т
13755—81 (а-20*, - 1.0; Со - 0,25 >,
образованных ноныг. дилбмким с чистим ту’лев го • 22:
/ — с учетом фактических параметров дшСяка; 2 — с применением формул реечного зацепления
сти: на область выбора коэффициентов смещения, при которых ar > а и ат > или ar < а и ar < ymzc. Альбомы блокирующих it i
контуров приводятся в ГОСТ 16532—70 «Передачи зубчатые цилиндрические внешнего зацепления. Расчет геометрии», а также в |24|
Как указывалось выше, если зубчатые колеса формируются дол-бяком, то необходимо учитывать параметры фактического сечения зуба исходного производящего контура по В А Гавриленко [13]. Тем не менее, в некоторых инженерных методиках используют не производящий контур долбяка. а его образующий производящий реечный контур В этом случае реечный контур со своим смещением
309
© Э. Б. Булгаков
выступает в качестве исходного. как бы заменяющего долбяка. На рис. 13 4 показан блокировочный коггтур /, построенный с учетом числа зубьев г0 долбяка и смещения х0 режущего сечения его зуба, отражающий реальные границы выбора коэффициентов смещения Х[ х?. Цифрой 2 отмечен блокировочный контур с нереальными
границами, полученными с использованием указанного упрощения. Этот пример показывает, насколько актуальными являются расчеты геометрии зубчатых колес с учетом фактических параметров исходных производящих контуров |16].
Область выбора коэффициентов смещения на блокировочных контурах или положение блокировочных контуров относительно системы координат коэффициентов смещения xL х2 в значительной
мерс определяется параметрами исходных производящих контуров Так, на рис. 13.5 показано изменение очертаний блокировочных кон 1 урон и их положений относительно системы координат коэффициентов смещения хг х2. Так как угол зацепления при принятом
= *|(1 + и) и хс « X, + х2 является только функцией угла профиля а зуба ИПР, то каждому углу профиля ИПР будет соответствовать свой угол зацепления. Более подробно о влиянии параметров исходного контура на блокировочные контуры см в (12].
При решении задачи о целесообразности выбора той или иной ИПР для некоторой пары зубчатых колес сопоставляют блокировочные контуры, перестроенные в систему координат аг, Х| (см. рис. 13.5) Так как аг = ф(а, хс...). то каждому углу зацепления аг при некотором суммарном смещении хс будет соответствовать некоторая ИПР с некоторым углом профиля а. Таким образом можно определить область коэффициентов смещения, отсюда углы зацепления, коэффициенты перекрытия и другие параметры. соответствующие принятым ИПР. Если передачи сравнивают при межосевом расстоянии ar = const, то угол зацепления аг передачи при модуле зацепления т и угле профиля а ИПР связан
= arccos
с искомыми параметрами соотношением т cosa ------------------------------------COSar т cosa
где штрихом отмечены искомые параметры.
(13.19)
13.5. БЛОКИРОВОЧНЫЙ КОНТУР
И ОБЛАСТЬ СУЩЕСТВОВАНИЯ ЭВОЛЬВЕНТНОГО ЗАЦЕПЛЕНИЯ
При угле зацепления ar = const установим связь независимых переменных функций зацепления б]( frj с коэффициентами смещения Х| 2 и углом профиля а ИПР.
Допустим, что для этой цели рассматриваются зубчатые колеса с числами зубьев zu2. Так. принимая во внимание толщину зуба
310 © Э. Б. Булгаков
a)
Риг 13 5. Ишжировочный контур к его наложение по отношению к осям координат д. XVв зависимости от числа зубьев г| • 12, Z2*V4r и параметров исходного контура;
а — исходный контур по ГОСТ 13755—61. <5 — исходный кехтур типа II (см. табл. 13.1 ); в — исходный контур с параметрами а = 30*. йа* = L0. С 0.12012
311
© Э. Б. Булгаков
на основной окружности по (13.7), (2.5). а угол зацепления по (13.9) и (2.10), после упрощений получим
. Л , л/2 + 2xi 2tga
inv01|2 = mva +-------j-—*----. (13.20)
По формуле (13.20) для принятого угла зацепления аг граничные линии блокировочного контура внешнего зацепления отобразим в систему координат Oj, 02 и полученную область совместим с областью существования эвольвентного внешнего зацепления (см. рис. 5.8, 6). Блокировочный контур занимает лишь незначительную часть области существования эвольвентного зацепления, располагаясь вблизи от изолиний интерференций. Как показали исследования, с увеличением углов профиля исходных производящих ре ечных контуров, отображенные в систему координат 0|, 02. блокировочные контуры размещаются в области более высоких углов зацепления.
Если не учитывать специфику долбяка. зуб которого имеет переменное режущее сечение, и считать, что у зубчатого колеса с внутренними зубьями толщина зуба на основной окружности jt/2“2x3'tga .
-------------------invа. а угол зацепления invar2_3= - inva + 2xptga/гр, где хр = х3 - х2. гр = г3 - г2. а также учесть (2.27) и (2.36), то получим при общих методах расчета углов зацепления аг2-з = const независимые переменные по формуле (13.20). поменяв индекс I на индекс 3.
При некотором угле зацепления <»г2_3 можно по (13.20) определить независимые переменные и отобразить блокировочный контур в систему координат 02. б3. Положение блокировочного контура на области существования внутреннего зацепления показано в работе [6]. Необходимо иметь в виду что отображение блокировочного контура на область существования, проведенное при постоянных углах зацепления atr » const, в значительной мере условно, во-первых, потому, что область существования строят при mB1 2 = const а у блокировочного контура Selt2 = var; во-вторых, для сравнения сопоставимых линейных размеров зубьев необходимо учитывать ♦поправку» на масштаб, равную d^/m - zcosa. При общих независимых переменных 0|, 02 или . 03 все параметры зацепления будут различными, кроме углов зацепления <хг или <хг2_3 общих по условиям построения. Вместе с тем совмещение блокировочного контура с областью существования эвольвентного зацепления показывает резервы, перспективы применения эвольвентного зацепления.
312
© Э. Б. Булгаков
ЗАКЛЮЧЕНИЕ
Наиболее простой способ повышения несущей способности эвольвентных цилиндрических зубчатых передач заключается, в частности, в улучшении их геометрических показателей, влияющих на прочность. Во многих случаях для этого требуется лишь изменить зуборезный инструмент — его параметры, что в массовом и серийном производстве или при изготовлении уникальных маптин. или во всех случаях, когда это экономически целесообразно, не может явиться серьезным препятствием на пути внедрения методов проектирования зубчатых передач в обобщающих параметрах.
Метод проектирования зубчатых передач в обобщающих параметрах можно назвать методом свободного синтеза эвольвентного зацепления и передачи в целом потому, что он не зависит от производящего контура, т. е. от технологии Теперь становится понятным. что эта независимость или инвариантность в полной мере касается лишь зацепления. При нарезании зубчатых колес без производящего Koirrypa не обойтись, но он целиком и полностью подчинен задачам получения требуемых параметров зацепления и передачи в целом, их качественным показателям, играя в этом смысле подчиненную роль. По отношению к традиционному геометрическому расчету инструмент меняется местами с деталью — зубчатым колесом: сначала определяют параметры зубчатого зацепления с требуемыми качествами а затем инструмент и соответствующую ему персхощгую поверхность зубчатого колеса.
Итак, что дает свободный синтез эвольвентного зацепления?
I. Используя метод проектирования зубчатых передач в обоб-щающих параметрах можно резко изменить интервал или границу применения параметров эвольвентного зацепления. Для прямозубых передач с симметричными профилями зубьев утлы зацепления аг лежат в интервале (0, 45°), коэффициенты перекрытия в торцовом сечении >> 1.0. коэффициенты перекрытия £*^2.05 (гарантированное двухпарное зацепление) при ат > 20*; числа зубьев у шестерни < 17—20, например 7, 9, что позволит повысить передаточное число в одной ступени. При этом к зубцам, имеющим требуемую по соображениям прочности и технологии толщину на
313 © Э. Б. Булгаков
окружности вершин, пристраивают переходную кривую, являющуюся наименьшим концентратором напряжении.
Что дает такое изменение параметров в отношении прочности? Если исходить из расчета контактных напряжений по формуле Герца, которую с большим приближением применяют для расчета зубчатых передач, то контактные напряжения прямо пропорциональны cosec 2 2<хг. Это означает, что увеличение угла зацепления с 20 до 30° при прочих равных условиях приведет к уменьшению контактных напряжений в 1,16 раза, что позволит увеличить передаваемую нагрузку более чем в 1,34 раза.
Надо помнить, что расчет по Герцу является условным. Им. например, не учитывается влияние на несущую способность кон-гактно гидродинамической пленки, в частности зависящей от угла зацепления аг. Из формулы по расчету толщины масляной пленки |21] следует что в полюсе зацепления она является функцией <р = sin1,15*, соз0,1баг. Отсюда следует, что при прочих равных условиях увеличение угла зацепления аг с 20 до 30 0 сопровождается увеличением толщины масляной пленки примерно в 1.5 раза. Такой рост толщины масляной пленки, в свою очередь . приводит к образованию естественного демпфера колебаний в зацеплении, уменьшению контактных напряжений, которые не учитываются формулой Герца, а также к увеличению долговечности передачи, к уменьшению тепловыделения и потерь на трение. Нельзя забывать о негативной стороне повышения угла зацепления аг При том же крутящем моменте и межосевом расстоянии увеличение угла зацепления <хг. приводит к увеличению сил. действующих на опоры.
Увеличение коэффициента перекрытия с учетом нагруженности и точности изготовления не может не сказаться на их несущей способности. Здесь особо следует подчеркнуть возможность создания передач при > 2.0 и аг > 20е. Увеличение углов зацепления аг > 20 е в этом случае сопровождается увеличением толщины масляной пленки, уменьшением динамической нагрузки, скольжения и потерь на трение профилей, что приводит к уменьшению вероятности возникновения заедания поверхностей зубьев и к росту несущей способности передачи.
У передач, имеющих малый модуль упругости, например изготовленных из полимеров, можно добиться распределения усилий между зубьями в широком диапазоне нагрузок, что может быть особенно эффективно при коэффициенте торцового перекрытия
> 2.0 -=-3 0.
2 Применение метода расчета зубчатых передач в обобщающих параметрах к зубчатым передачам с несимметричными профилями зубьев также резко расширяет диапазон их применения, улучшает их качественные показатели. У передач с несимметричными про-
314
© Э. Б. Булгаков
Филями зубьев один из профилей, испытывающий большую нагрузку, улучшается за счет менее нагружаемого профиля. Здесь при е<у = 2.05 можно увеличить угол зацепления аг по сравнению с симметричными зубьями, появляются большие возможности в регулировании жесткости зубьев и т. д.
Перспективно применение зубчатых колес с несимметричными профилями зубьев для передачи 2К—Н с одновенцовым саггелнтом. Именно таким образом был получен угол зацепления <хг = 33° между центральным колесом и сателлитом в редукгоре, выполненном по схеме 2К—Н для авиационного турбовинтового двигателя.
Использование обобщающих параметров для косозубого зацепления - перспективное направление повышения несущей способности зубчатых передач. В косозубых передачах можно получить > 30°. если это станет необходимым, при этом функция толщины контактной пленки возрастет. Уменьшение торцового перекрытия должно компенсироваться увеличением осевого перекрытия.
3. Включение непрерывно изменяемой геометрии зубчатых передач, полученной наиболее общим методом, в систему автоматизированного проектирования может ответить на вопрос об эффективности использования их расчета в обобщающих параметрах. Здесь самые современные методы расчета на прочность и динамику сочетаются с самым общим представлением об эвольвентном зацеплении В этом случае возникает возможность управлять геометрией зацепления — параметрами зацепления и передачи в целом, а также, не меняя эти параметры, влиять на конфигурацию зубьев и таким образом воздействовать на их жесткость, концентрацию напряжений у основания (коэффициент формы зуба), динамическую нагрузку и т. д.
315
© Э. Б. Булгаков
ABSTRACT
General theory of involute gearing of external and internal gearing with straight and slanting, symmetrical and non-symmetrical teeth forming the gearing. The gearing consists of two or a chain of wheels installed one after another or aligned. The theory is noteworthy and has no analogues in the world technical literature.
Different aspects of the theory are considered. Irrespective of the production method the gearing is synthesised, the geometry, gearing functions, areas of application and maximum parameters are analized; gearing samples are represented with extreme and maximum gearing angles, gear ratio and contact ratio, etc. Peculiar features for selecting the number of teeth on the contacting wheels, calculation of gearing phases and optional for their alteration are presented. At the final stage of the gearing design the selection of the generating rack is done wim the due attention to the peculiarity features of the machined gearing. A transition is made from the abstract teeth to their real analogues.
The generalized theory provides more total involute gearing design if compared with the traditional one and reveals all options the gearing.
The generalized theory has become the basis for the developed method of highly—stressed gearing design. The latter finds its application in the gear box creation for a new aviation turboprop engine. The contact—hydrodinamic oil film available at the gear-box gearing is 1,5 times thicker and is looked upon as a natural oscillation dampfer, being compared with the gearing with standart parameters. The time for the engine development has been decisively decreased due to the application of such gearing. A method has been developed for designing special gearing that is applied for example in oil pumps as well. It is also applied in aviation gear-box construction.
316
© Э. Б. Булгаков
СПИСОК ЛИТЕРАТУРЫ
1. Авиационные зубчатые передачи и редукторы: Справочник / Под ред. Э. Б. Булгакова. М.: Машиностроение, 1981, 347 с.
2. Андрющенко В. М. Математические таблицы для расчета зубчатых передач. М.: Машиностроение. 1974, 438 с.
3. Биргер И. А., Шорр Б. Ф., Иосилевич Г. Б. Расчет на прочность деталей машин: Справочник. М.: Машиностроение, 1979, 702 с.
4. Булгаков Э. Б. Зубчатые передачи с улучшенными свойствами. Обобщенная теория и проектирование. М.: Машиностроение, 1974, 264 с.
5. Булгаков Э. Б., Васина Л. М. Эвольвентные зубчатые передачи в обобщающих параметрах: Справочник. М.: Машиностроение, 1978, 174 с.
6. Булгаков Э. Б. Соосные зубчатые передачи. М.: Машиностроение, 1987. 197 с.
7. Булгаков Э. Б., Капелевич А. Л. Возможности косозубого эвольвентного зацепления // Вестник машиностроения. 1982. № 3. С. 12—14.
9. Булгаков Э. Б., Капелевич А. Л. Возможности несимметричных зубчатых передач // Вестник машиностроения. 1986, № 4. С. 14—16.
10. Булгаков Э. Б., Ривкин Г. В. Проектирование зубчатых колес с несимметричным профилем зубьев//Машиноведение. 1976. № 5. С. 35—39.
11. Булгаков Э. Б., Попов В. И., Шершуков Ю. Д. Проектирование на ЭВМ зубчатых колес с поднутренным основанием зубьев и технологии их обработки // Вестник машиностроения. 1981. №3. С. 42-45.
12. Булгаков Э. Б. Высоконапряженные зубчатые передачи. Геометрическая теория. Расчет. М.: Машиностроение. 1969. 104 с.
13. Гавриленко В. А. Основы теории эвольвентой зубчатой передачи. М.: Машиностроение. 1969. 432 с.
14. Громан М. Б. О блокирующих контурах эвольвентного зацепления // Вестник машиностроения. 1962. № 12. С. 12—17.
15. Давыдов Я. С. Подрез зубьев реечным инструментом // Изв. вузов. Машиностроение. 1963. №6. С. 5-15.
16. Журкина Н. С., Мафтер В. И. Построение блокирующих контуров на ЭВМ с учетом особенностей геометрии зуборезного инструмента // Вестник машиностроения. 1989. №4. С. 51-53.
17. Кудрявцев В. Н. Зубчатые передачи. М.—Л.: Машгиз. 1957. 263 с.
18. Кудрявцев В. Н. Планетарные передачи. М.—Л.: Машиностроение. 1966. 307 с.
19. Кудрявцев В. Н., Державец Ю. А., Глухарев Е. Г. Конструкции и расчет зубчатых редукторов / Под ред. В. Н. Кудрявцева. Л.: Машиностроение, 1971. 328 с.
20. Крейнис М. А., Розовский М. С. Зубчатые механизмы. М.: Наука, 1972. 427 с.
21. Коднир Д. С. Контактная гидродинамика смазки деталей машин. М.: Машиностроение, 1976. 304 с.
22. Литвин Ф. Л. Теория зубчатых зацеплений. М.: Наука, 1968. 584 с.
23. Рубцов В. Н. Предельный случай синтеза передач внутреннего зацепления: Сб.: Детали машин // Труды Уфимского авиационного института. Вып. 63. Уфа: 1973. С. 52_55.
24. Справочник по геометрическому расчету эвольвентных зубчатых и червячных передач / Под ред. И. А. Болотовского. М.: Машиностроение, 1986. 447 с.
25. Ястребов В. М. Исследование малогабаритного планетарного редуктора с паразитным сателлитом //Изв. вузов. Машиностроение. 1960. № 5. С. 51_54.
317
© Э. Б. Булгаков
ОГЛАВЛЕНИЕ
От автора............................................................................ 3
Предисловие.......................................................................... 4
Основные обозначения и определения................................................... 7
Раздел I. Анализ эвольвентного зацепления............................................10
1. Исходные положения теории эвольвентного зацепления................................10
1.1. Эвольвента окружности...................................................... 10
1.2. Эвольвентный зубец внешнего зацепления..................................... 13
1.3. Эвольвентный зубец внутреннего зацепления.................................. 19
1.4. Поле независимых переменных................................................ 21
1.5. Этапы проектирования. Обобщающие параметры................................. 23
1.6. Еще раз об обобщающих параметрах........................................... 25
1.7. Система проектирования в зависимости от та. Принципы симметрии при построении зубцов........................................................... 27
1.8. Схемы зацепления........................................................... 30
1.9. Основные закономерности эвольвентного зацепления........................... 34
2. Геометрия эвольвентного зацепления................................................36
2.1. Внешнее эвольвентное зацепление............................................ 36
Геометрия эвольвентных зубцов. Угол зацепления. Коэффициент перекрытия.
Интерференция профилей и радиальный зазор в зацеплении
2.2 Внутреннее эвольвентное зацепление.......................................... 45
Геометрия эвольвентных зубцов. Угол зацепления. Интерференция профилей
и радиальный зазор в зацеплении
2.3. Особенности геометрии косозубого эвольвентного зацепления.................. 52
Поле косозубого зацепления. Некоторые параметры косозубых колес
2.4. Геометрия эвольвентного зацепления с несимметричными профилями............. 59
Несимметричные зубцы двух типов. Коэффициент асимметрии профиля зубца. Проверка на заострение несимметричных зубцов типа I. Геометрия несимметричных зубцов типа II.
Определение некоторых параметров зубчатых передач с несимметричным профилем зубцов
2.5 Кинетостатика и КПД эвольвентного зацепления................................ 70
Кинематика внешнего зацепления. Кинематика внутреннего зацепления.
Кинематика соосной передачи. Усилия и КПД в эвольвентной передаче
3. Функции эвольвентного зацепления и им соответствующие изолинии....................81
3.1. Функции толщины зуба....................................................... 81
3.2. Функции угла зацепления.................................................... 85
3.3. Функции коэффициента перекрытия............................................ 89
3.4. Рациональные соотношения функций угла зацепления и коэффициента перекрытия. 98
3.5. Функции интерференции......................................................100
3.6. Функции радиального зазора.................................................102
3.7. Функции, характеризующие размещение полюса в зоне двухпарного зацепления...105
4. Предельные параметры эвольвентного зацепления................................... 108
4.1. Экстремальные параметры внешнего эвольвентного зацеплени...................108
Максимальный и предельный угол зацепления. Максимальный коэффициент перекрытия.
Максимальные и предельные относительные толщины зубцов на окружности вершин. Минимальные числа зубцов у сопряженных колес передачи. Предельные параметры внешнего эвольвентного зацепления
4.2. Экстремальные параметры внутреннего эвольвентного зацепления...............120
Максимальный и предельный угол зацепления. Максимальный коэффициент перекрытия.
Максимальные относительные толщины ш и предельные комбинации зубцов. Предельные параметры внутреннего эвольвентного зацепления
318
© Э. Б. Булгаков
5. Область существования эвольвентного зацепления................................... 136
5.1. Область существования как функция та........................................136
5.2. Характерные точки области существования эвольвентного за-цепления...........137
5.3. Некоторые изолинии области существования....................................144
5.4. Область существования внешнего зацепления...................................145
5.5. Область существования внутреннего зацепления................................155
5.6. Область существования косозубого зацепления.................................159
5.7. Область существования несимметричного зацепления............................162
Раздел П. Синтез эвольвентного зацепления........................................... 164
6. Выбор числа зубцов. Полный цикл пересопряжения и последовательность зацепления зубцов.............................................. 164
7. Зубчатая передача из двух сопряженных колес...................................... 167
7.1. Рациональная часть области существования. Единичные изги-бающие напряжения.167
7.2. Конструирование эвольвентных зубцов.........................................170
7.3. Зубчатые передачи с большими углами зацепления или с большими коэффициентами перекрытия.........................................172
7.4. Зубчатые передачи, составленные из колес с минимальным числом...............176
7.5. Зубчатые передачи с нессиметричными профилями зубцов.
Самотормозящаяся зубчатая передача...........................................181
7.6. Зубчатые передачи внутреннего зацепления....................................183
7.7. Косозубые зубчатые передачи.................................................187
7.8. Эвольвента окружности в торцовой муфте......................................190
8. Подряд зацепляющиеся колеса. Фазы зацепления..................................... 190
9. Соосная збчатая передача......................................................... 201
9.1. Схемы зацепления соосной передачи...........................................201
9.2. Условия проектирования соосной передачи.....................................205
Условие соосности. Условие сборки. Условие соседства
9.3. Условия соосности соосной передачи с несимметричными профилями зубцов.......210
9.4. Выбор чисел зубцов для соосной передачи.....................................213
9.5. Область существования соосного зацепления...................................216
Изолинии соотвествия углов зацеплений. Область существования соосного зацепления в системе координат cr ц- _п. Характерные точки области
существования соосного зацепления и ее построение. Область выбора независимых переменных соосного зацепления. Некоторые результаты выбора параметров соосного зацепления
9.6. Определение точек контакта зубцов, одновременно находящихся в соосном зацеплении . . 233
9.7. Фазы зацепления и эпюра мгновенного контакта зубцов в соосном зацеплении....243
9.8. Еще раз о выборе чисел зубцов в соосной передаче............................247
Раздел III. Реализация эвольвентного зацепления..................................... 248
10. Внешнее и внутреннее станочные зацепления....................................... 248
10.1. Основные определения.......................................................248
10.2. Производящий реечный контур и свойства станочного зацепления...............251
Интерференция во внешнем станочном зацеплении. Уравнение переходной кривой зуба колеса с внешними зубьями
10.3. Производящий контур долбяка во внутреннем станочном зацеплении.............266
Интерференция во внутреннем зацеплении. Уравнение переходной кривой зубьев внутреннего зацепления
319
© Э. Б. Булгаков
10.4. Особенности станочного зацепления косозубого колеса. Производящая рейка.272
10.5. Особенности станочного зацепления при образовании зубчатых колес с несимметричными профилями зубьев.......................................... 273
11. Станочное зацепление при образовании зубчатых колес с зубьями, поднутренными у основания. Исполнительные размеры................................ 275
11.1. Область применения зубчатых колес с поднутренным основанием зубьев......275
11.2. Конфигурация зубьев с поднутренным основанием и ему соответствующей СПРК.276
11.3. Галтель зубчатых колес с поднутренным основанием зубьев.................279
11.4. Частный случай образования зубьев с поднутренным основанием.............286
11.5. Исполнительные размеры..................................................288
12. Область существования станочного зацепления и производящего контура.......... 293
12.1.Область существования станочного зацепления..............................293
12.2.Область существования ПРК во внешнем станочном зацеплении................294
12.3.Область существования ПКД во внутреннем станочном зацеплении.............298
13. Некоторые сведения о зубчатых передачах с параметрами зацепления, связанными с производящим контуром............................................... 301
13.1. Исходный производящий контур рейки. Модуль зацепления...................301
13.2. Зависимость параметров зацепления от параметров ИПР.................... 303
13.3. Аксиома станочного зацепления и ее применение.......................... 304
13.4. Блокировочный контур и его связь с исходным производящим контуром.......307
13.5. Блокировочный контур и область существования эвольвентного зацепления...310
Заключение........................................................................ 313
Abstract.......................................................................... 316
Список литературы................................................................. 317
320
© Э. Б. Булгаков