/


















































































































































































































































































































































































































Текст
MATLAB® является торговой маркой компании TheMathWorks, Inc., и
используется с ее разрешения. TheMathWorks не гарантирует точность
текста или упражнений в этой книге. Использование этой книги или об-
суждение программного обеспечения MATLAB® или связанных с ними
продуктов не означает одобрения или спонсорство со стороны TheMath-
Works конкретного педагогического подхода или практического исполь-
зования программного обеспечения MATLAB®..
CRC Press Taylor & Francis Group
6000 Broken Sound Parkway NW, Suite 300 Boca Raton, FL 33487-2742
© 2016 компанией Taylor & Francis Group, LLC
CRC Press - печать Taylor & Francis Group, информабизнес
Нет претензий к оригинальным работам правительства США
Отпечатан на бескислотной бумажной версии Дата: 20150309
Международный стандартный номер книги-13: 978-1 -4665-0681-7
(Вече)
Эта книга содержит информацию, полученную из достоверных и уважа-
емых источников. Разумные усилия были приложены для публикации
достоверных данных и информации, но автор и издатель не может взять
на себя ответственность за достоверность всех материалов или послед-
ствия их использования. Авторы и издатели попытались найти владель-
цев авторских прав всех материалов, воспроизведенных в настоящей
публикации, и извиниться перед владельцами авторских прав, если раз-
решение на публикацию в таком виде не был получено. Если имеется
какой-либо материал, авторское право которого не было подтверждено,
пожалуйста, напишите и сообщите нам об этом, чтобы мы могли испра-
вить в любой последующей перепечатке.
За исключением случаев, разрешенных в соответствии с Законом об
авторском праве США, ни одна часть этой книги не может быть пере-
печатана, воспроизведена, передана или использована в любой форме с
помощью любых электронных, механических или иных средств, извест-
ных сейчас или изобретенных в будущем, включая фотокопирование,
микрофильмирование и запись, в информационном хранилище, или в
поисковой системе, без письменного разрешения со стороны издателей.
Для получения разрешения на копирование или использование мате-
риалов этой работы в электронном виде, пожалуйста, получите до-
ступ на www.copyright.com (http://www.copyright.com/) или свяжитесь
с Copyright Clearance Center, Inc. (CCC), 222 Rosewood Drive, Danvers,
MA 01923, 978-750 -8400. CCC является не некоммерческой организаци-
ей, которая предоставляет лицензии и регистрацию для широкого круга
пользователей. Для организаций, которым были предоставлены лицен-
зии фотокопии CCС, была предоставлена отдельная система оплаты.
Уведомление о товарных знаках: Продукт или фирменные наименова-
ния могут быть товарными знаками или зарегистрированными товарны-
ми знаками, и используются только в целях идентификации и объясне-
ния без намерения нарушать авторские права.
Библиотека конгресса CIP данных
Де Сильва, В.Кларенс
Датчики и приводы : Измерительные приборы инженерных систем /
автор, Кларенс В. де Сильва –
Второе издание.
страниц см
Включает библиографические ссылки и индекс ISBN 978-1 -4665-0681-7
(щелочная бумага)
1. Автоматический контроль. 2 . Детекторы. 3 . Приводы. I . Заголовок.
2.
TJ213.D386 2015
670.42’7--dc23
2014050304
Посетите веб-сайт Taylor&Francis на http://www.taylorandfrancis.
com
и веб-сайт CRC Press на http://www.crcpress.com
1. Измерительные приборы инженерных систем ................................ 19
1.1 Роль датчиков и приводов ................................................................. 19
1.1 .1 Значение оценки в считывании...................................................... 21
1.1 .2 Инновационные технологии датчиков .......................................... 22
1.2 Сценарии применения ....................................................................... 22
1.3 Система восприятия человека ......................................................... 26
1.4 Мехатроника ...................................................................................... 28
1.4 .1 Мехатронный подход к измерительным приборам...................... 29
1.4 .2 Затруднения для измерительных приборов мехатроники .......... 31
1.5 Составляющие системы контроля ................................................... 32
1.5 .1 Управление обратной связью и прогнозированием ..................... 35
1.5 .3 Программируемые логические контроллеры ............................... 40
1.5 .3 .1 Оборудование ПЛК ...................................................................... 43
1.5 .4 Распределенное управление........................................................... 44
1.5 .5 Иерархическое управление ............................................................ 46
1.6 Процесс о снащения инструментами ............................................... 49
1.6 .1 Действия контрольно-измерительных приборов ......................... 51
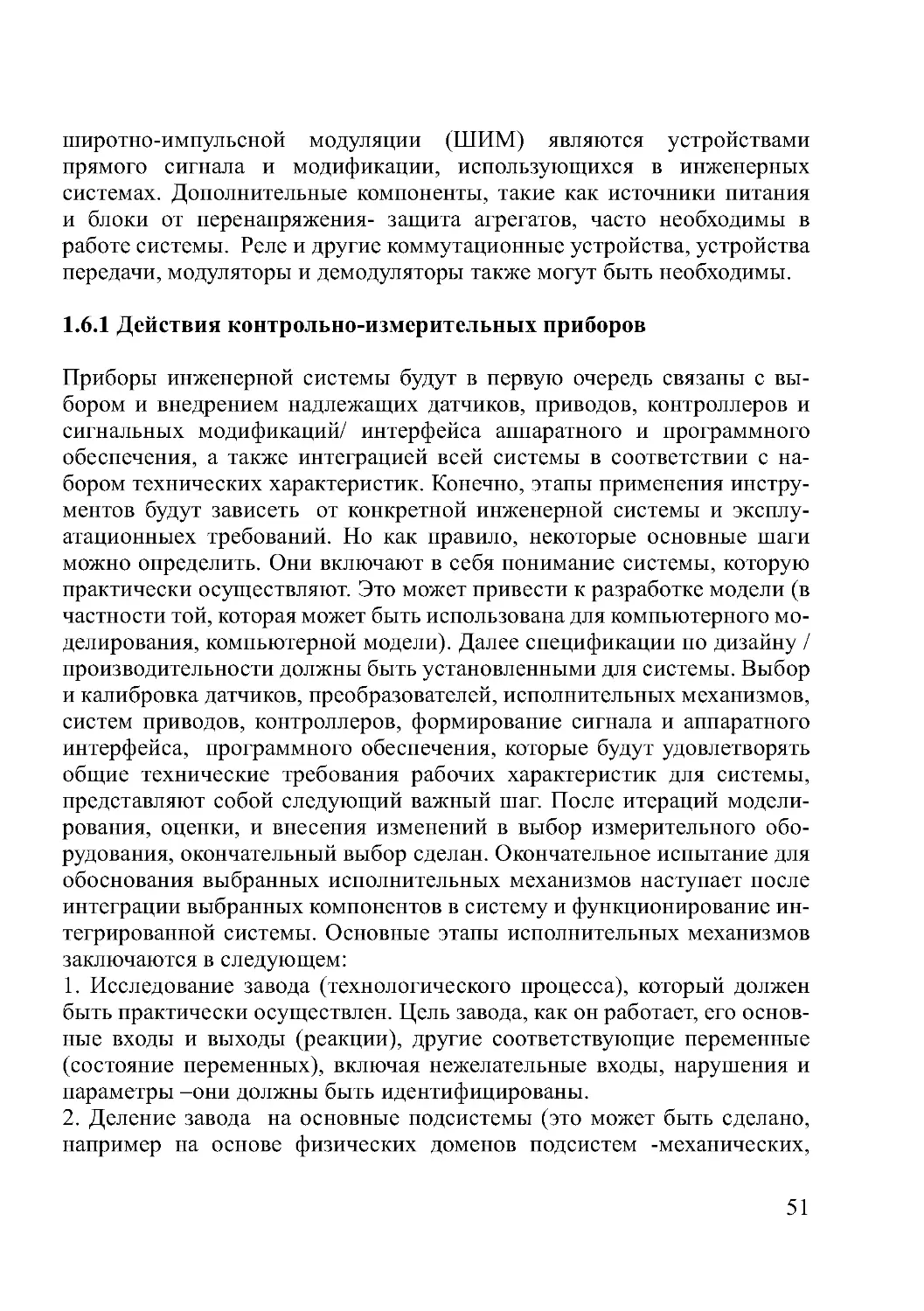
1.6 .2 Примеры применения ..................................................................... 53
1.6 .2 .1 Сетевое применение .................................................................... 53
1.6 .2 .2 Система телемедицины ............................................................... 56
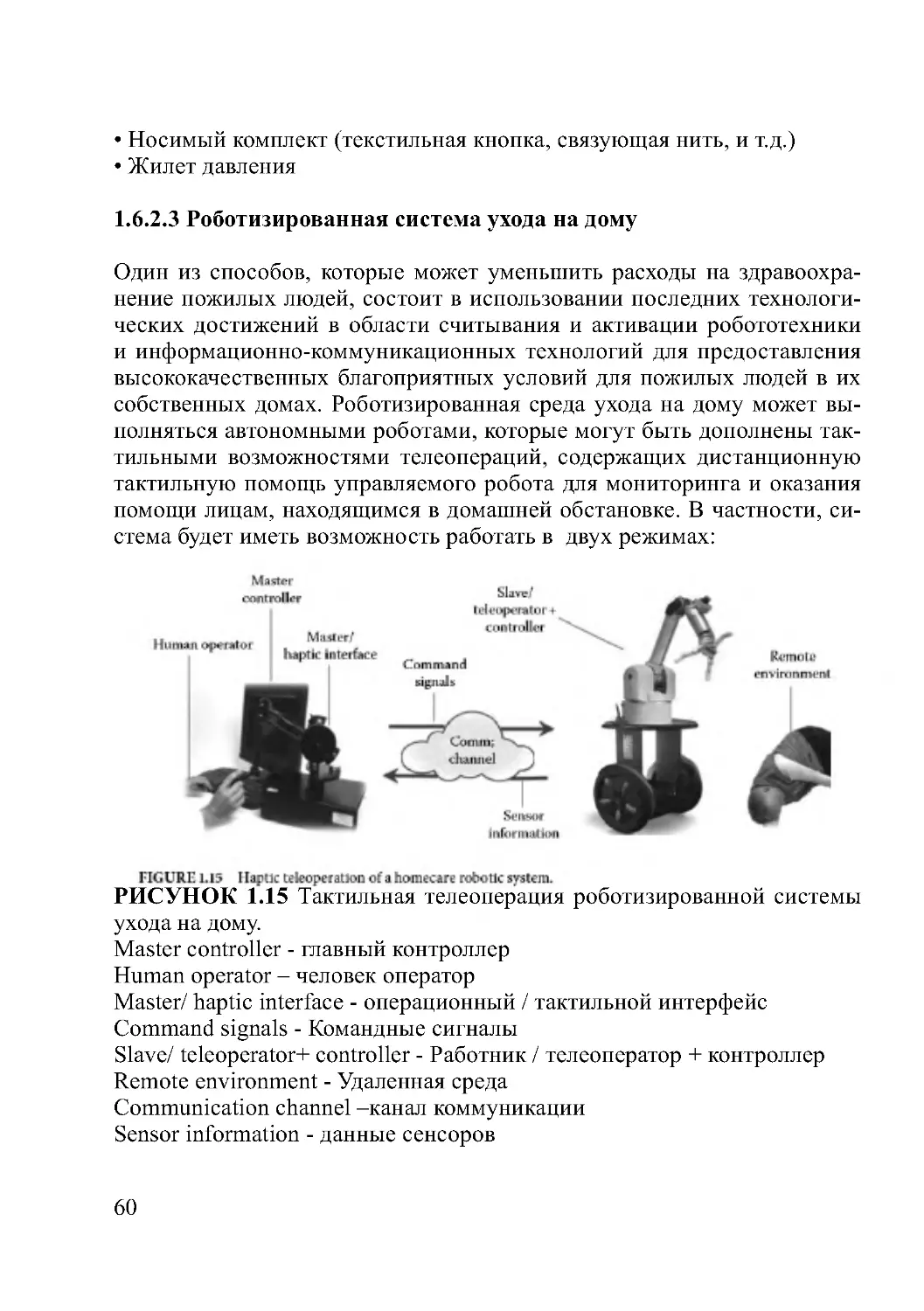
1.6 .2 .3 Роботизированная система ухода на дому ................................. 60
1.6 .2 .4 Контроль качества воды ............................................................. 61
1.7 Организация книги ............................................................................ 63
2. Взаимосвязь компонентов и обработка сигнала ............................... 67
2.1 .2 Модификация сигнала и его обработка......................................... 70
2.1 .3 Обзор главы ..................................................................................... 71
Содержание
2.2 Импеданс............................................................................................. 72
2.2 .1 Определение импеданса ................................................................. 72
2.2 .2 Важность согласования сопротивления во взаимосвязи компонен-
тов .............................................................................................................. 73
2.3 Методы согласования сопротивления .............................................. 75
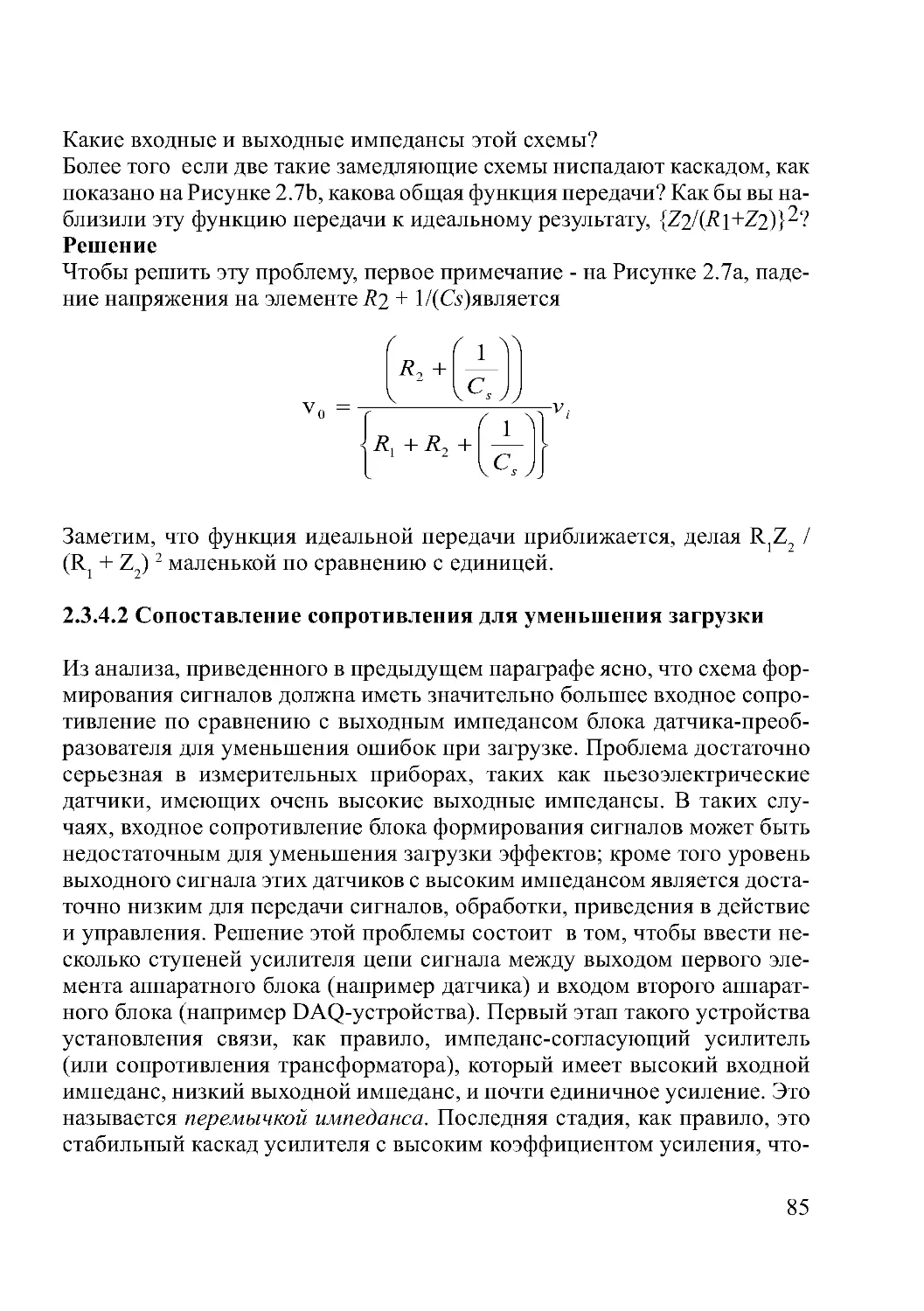
2.3 .4 .2 Сопоставление сопротивления для уменьшения загрузки ...... 85
2.3 .5 Согласование импеданса в механических системах ................... 86
2.3 .5 .1 Виброизоляция ........................................................................... 86
2.3 .5 .1 .1 Изоляция силы и движения ...................................................... 87
2.3 .5 .2 Механическая передача ............................................................... 97
2.4 Усилители ......................................................................................... 102
2.4 .1 Операционный усилитель ............................................................ 103
2.4 .1 .1 Дифференциальное входное напряжение ............................... 105
2.4 .2 Рейтинги эффективных усилителей ........................................... 107
2.4 .2 .1 Синфазный коэффициент подавления помех .......................... 110
2.4 .2 .2 Использование обратной связи в ОУ ....................................... 111
2.4 .3 Усилители напряжения, тока и усилители мощности ............... 112
2.4 .4 Инструментальные усилители ..................................................... 116
2.4 .4 .1 Дифференциальный усилитель................................................. 117
2.4 .4 .2 Инструментальный усилитель .................................................. 119
2.4 .4 .3 Общий режим ............................................................................. 120
2.4 .4 .4 Усилитель заряда ....................................................................... 122
2.4 .4 .5 Усилители переменного тока ................................................... 122
2.4 .5 Шум и контур заземления ............................................................ 122
2.4 .5 .1 Заземление шума ....................................................................... 124
2.5 Аналоговые фильтры ....................................................................... 124
2.5 .1 Пассивные фильтры и активные фильтры .................................. 128
2.5 .1 .1 Количество полюсов .................................................................. 129
2.5 .2 фильтр нижних частот ................................................................ 130
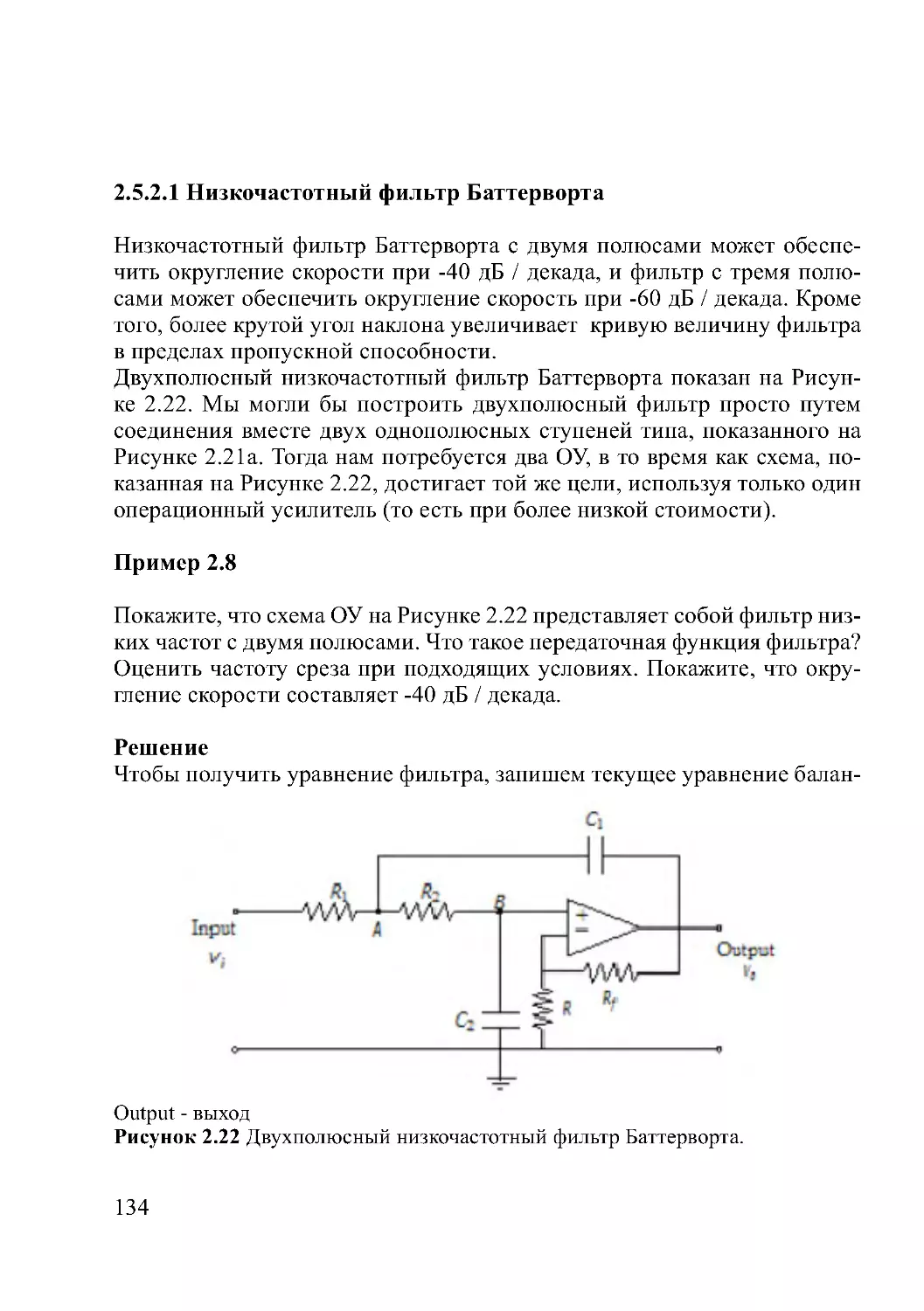
2.5 .2 .1 Низкочастотный фильтр Баттерворта ...................................... 134
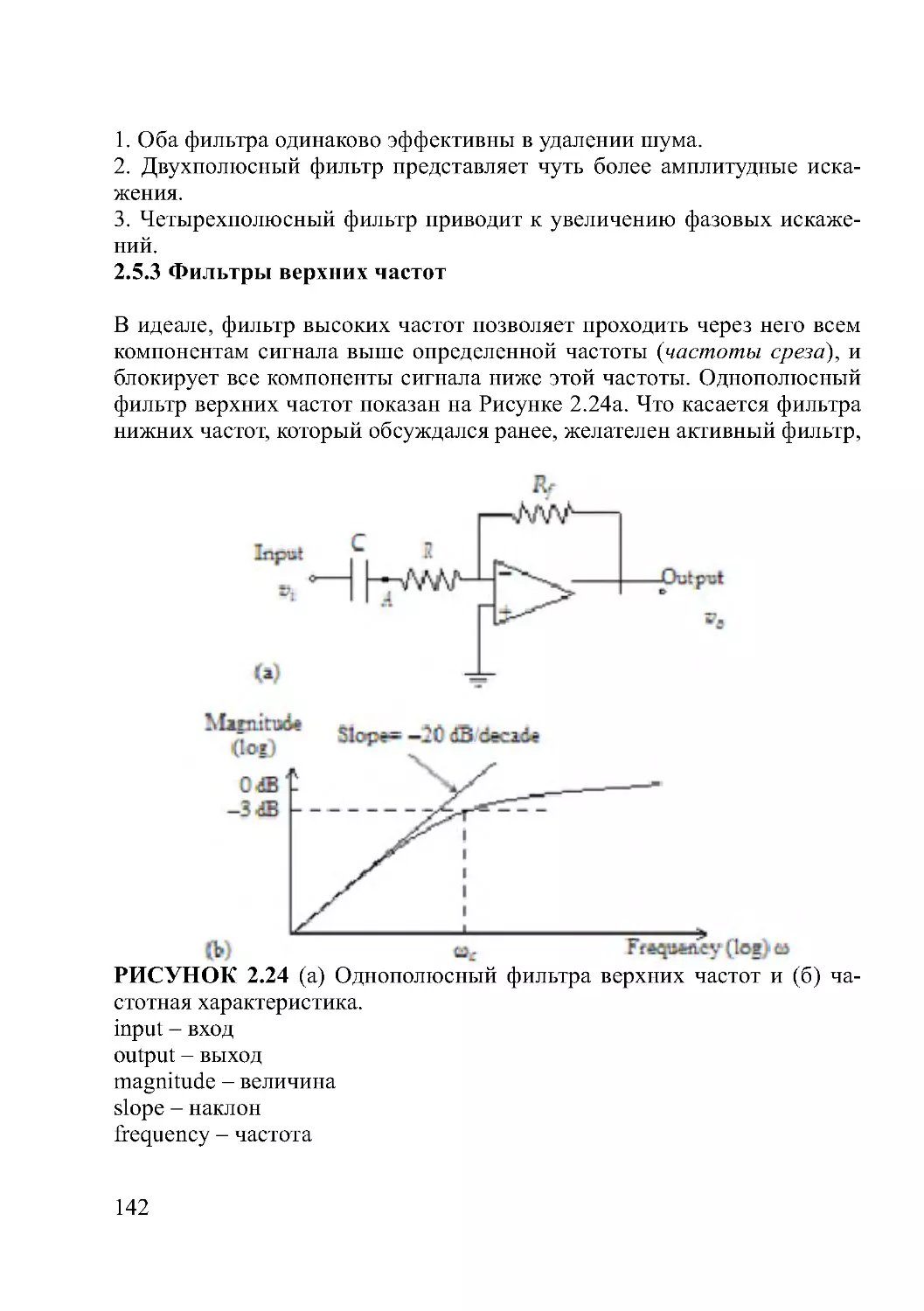
2.5 .3 фильтры верхних частот ............................................................. 142
2.5 .4 .1 Полосовые фильтры резонансного типа .................................. 146
2.5 .5Отражающие фильтры................................................................... 151
2.5 .6 Цифровые фильтры....................................................................... 152
2.5 .6 .1 Реализация программного обеспечения и аппаратная реализация. 153
2.6 Модуляторы и демодуляторы.......................................................... 154
2.6 .1 Амплитудная модуляция .............................................................. 159
2.6 .1 .1 Аналоговый, дискретный и цифровой AM .............................. 159
2.6 .1 .2 Теорема модуляции ................................................................... 160
2.6 .1 .3 Боковые частоты и боковые полосы......................................... 161
2.6 .2 Применение амплитудной модуляции ........................................ 163
2.6 .2 .1 Обнаружение неисправностей и диагностика......................... 165
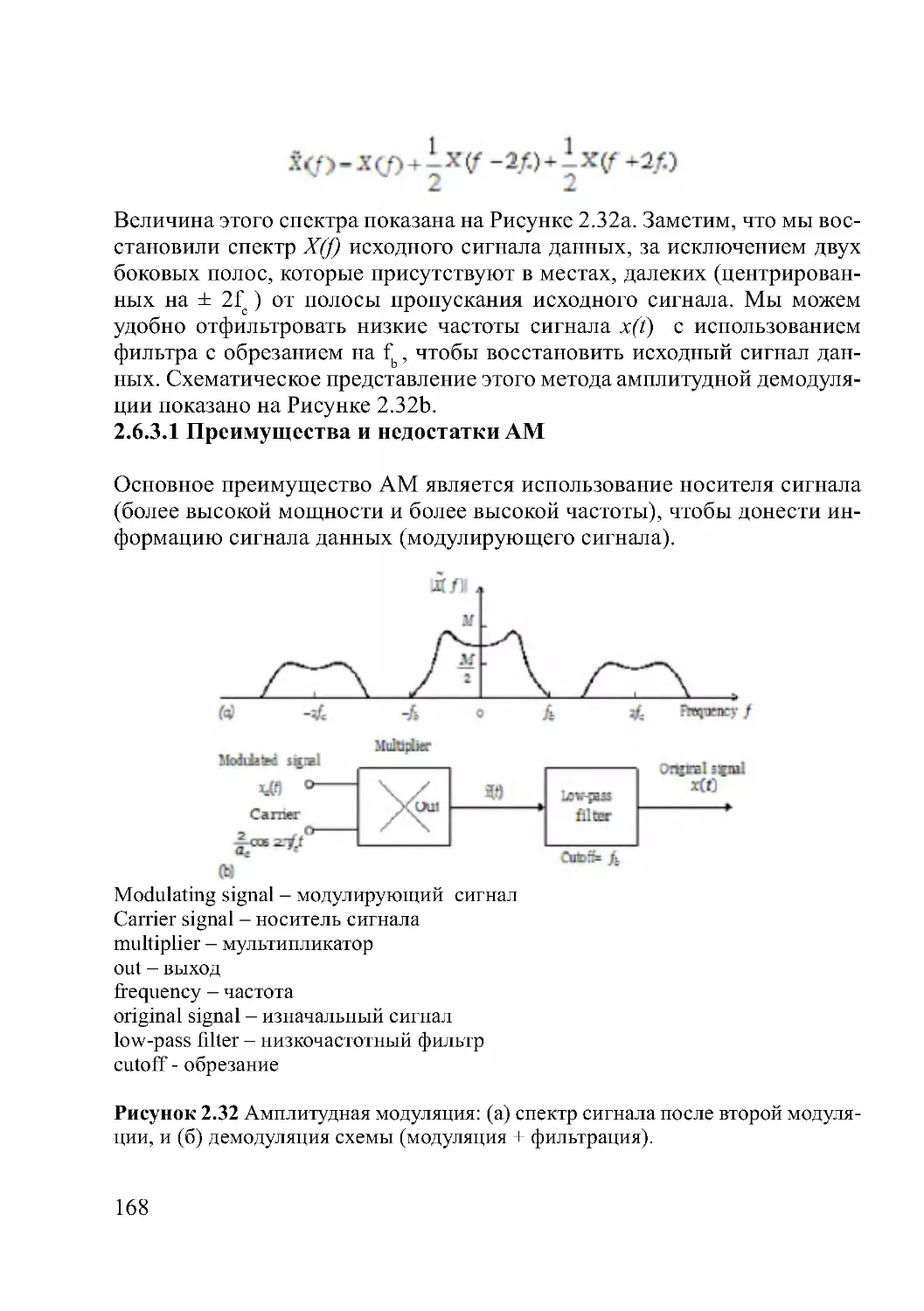
2.6 .3 Демодуляция.................................................................................. 167
2.6 .3 .1 Преимущества и недо статки AM .............................................. 168
2.6 .3 .2 Двухполосный сдерживающий носитель ............................... 169
2.6 .3 .3 Аналоговое оборудование AM .................................................. 170
2.7 Сбор данных аппаратных средств .................................................. 171
2.7 .1 .1 .1 Лестница (или R-2R) ЦАП ..................................................... 179
2.7 .1 .1 .3 Источники ошибок DAC ........................................................ 180
2.7 .2 Аналого-цифровой преобразователь ........................................... 183
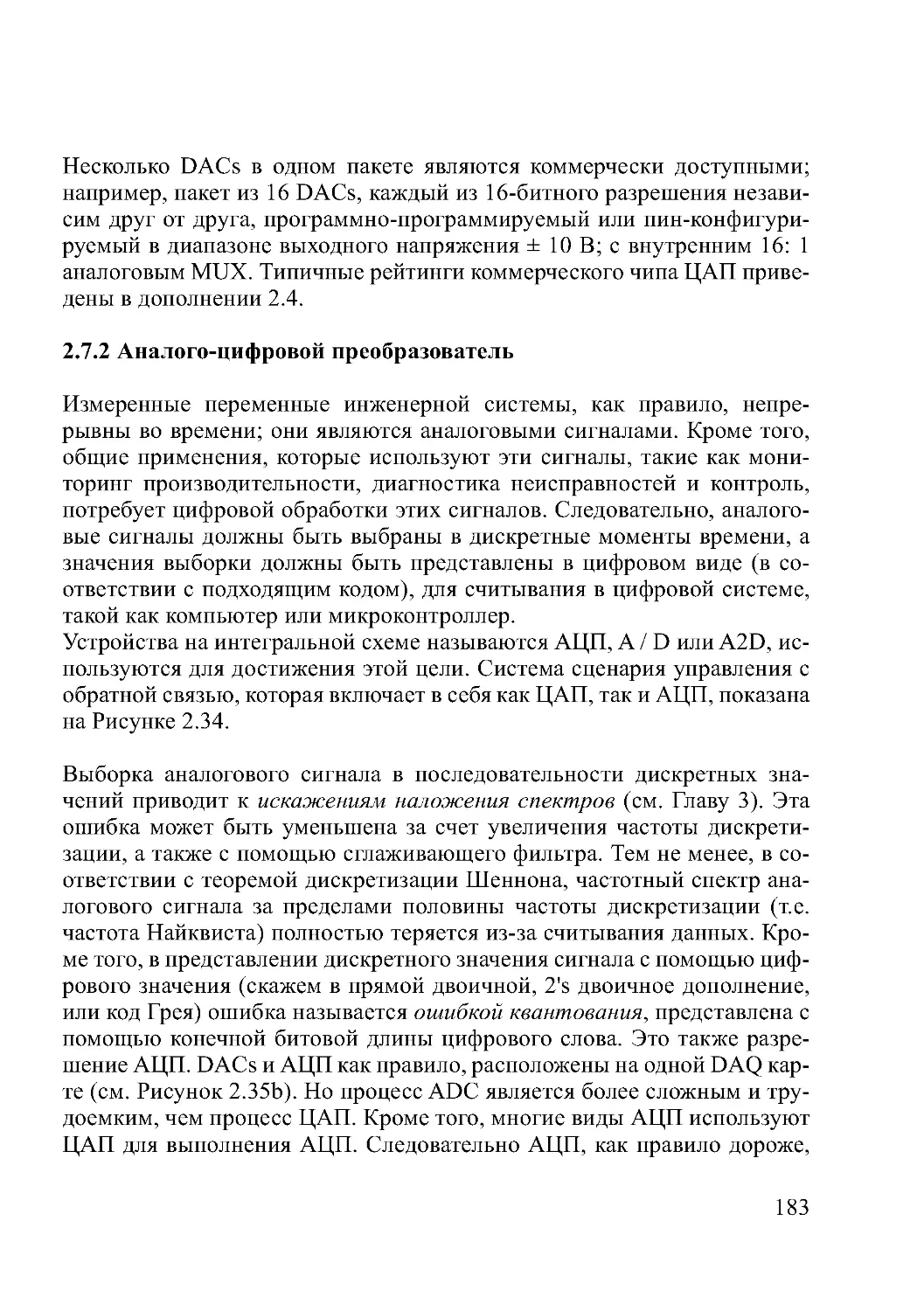
2.7 .2 .1 АЦП последовательного приближения.................................... 184
2.7 .2 .1 .1 Величина сигнала и его знак.................................................. 186
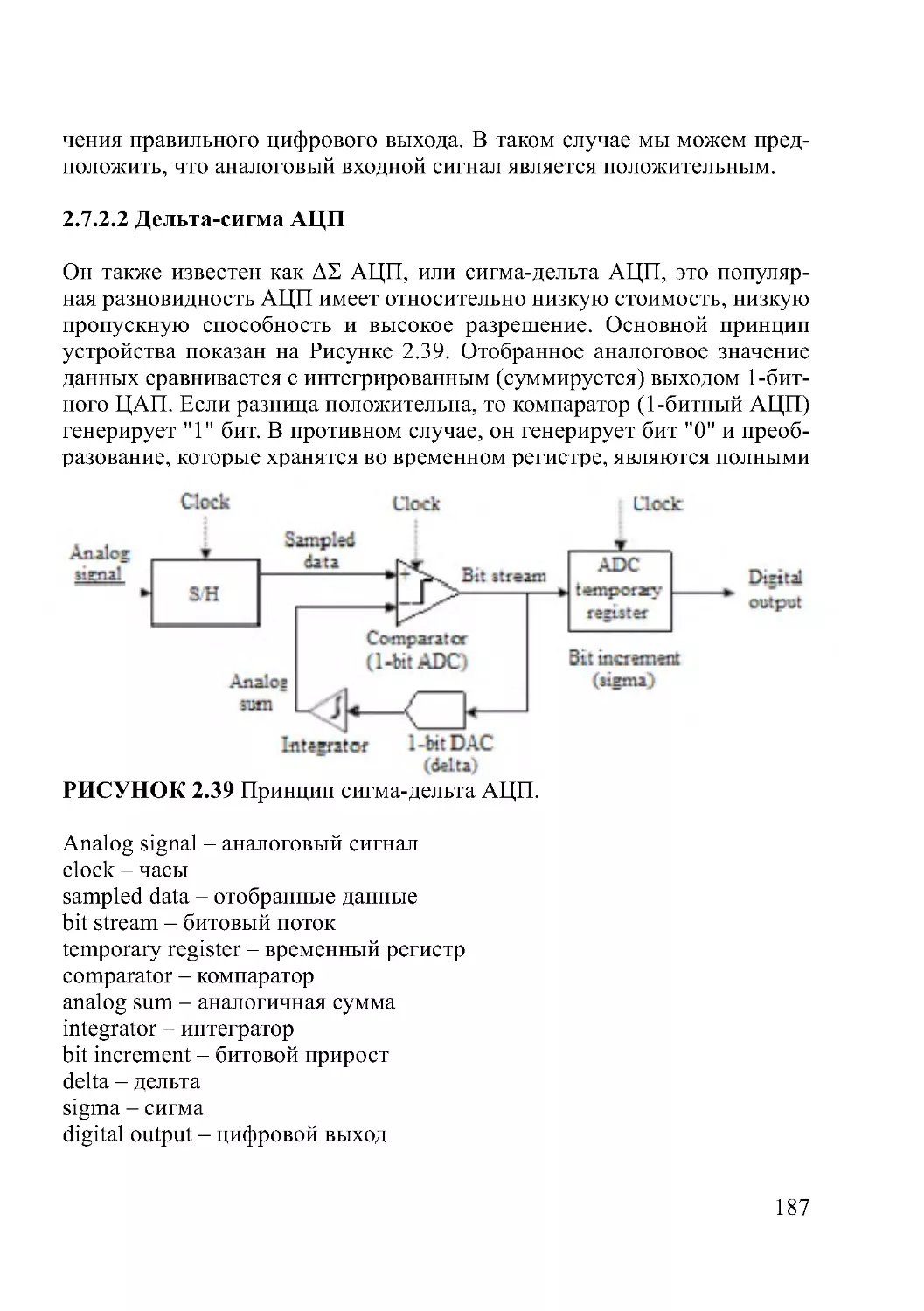
2.7 .2 .2 Дельта-сигма АЦП ..................................................................... 187
2.7 .2 .3 Характеристики производительности АЦП ........................... 188
2.7 .2 .3 .1 Ошибки разрешения и квантования ..................................... 189
2.7 .2 .3 .2 Монотонности, нелинейность и офсет ошибка.................... 190
2.7 .2 .3 .3 Скорость преобразования АЦП ............................................. 191
2.7 .3 Аппаратные средства отбора и удержания ................................. 193
2.7 .4 Мультиплексор .............................................................................. 195
2.7 .4 .1 Аналоговые мультиплексоры.................................................... 196
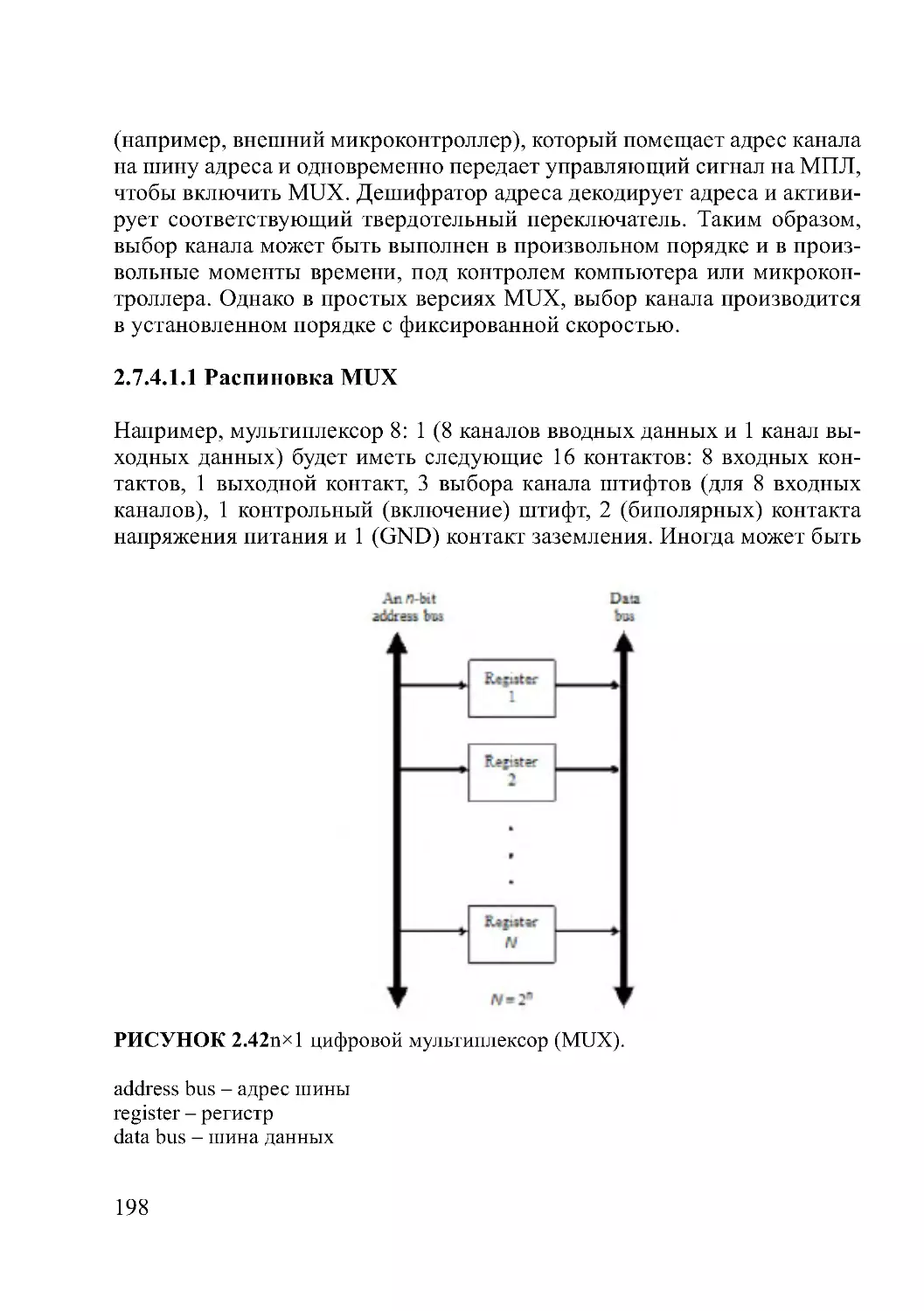
2.7 .4 .1 .1 Распиновка MUX .................................................................... 198
2.7 .4 .2 Цифровые мультиплексоры ...................................................... 199
2.8 Мостовые схемы............................................................................... 200
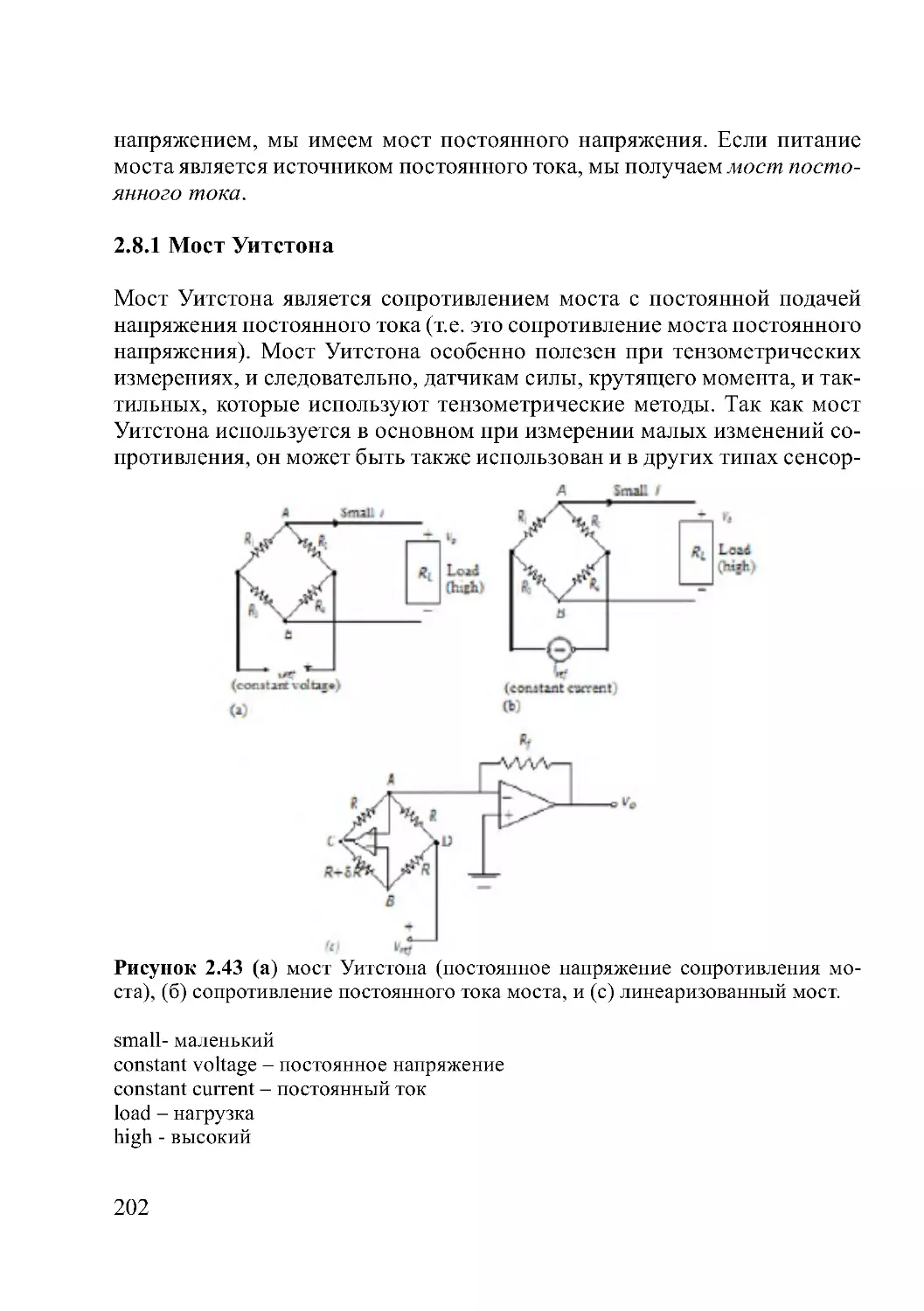
2.8 .1 Мост Уитстона............................................................................... 202
2.8 .2 Мост постоянного тока ................................................................ 205
2.8 .3 Оборудование линеаризации выходов моста ............................. 207
2.8 .3 .1 Мостовые усилители ................................................................. 208
2.8 .4 Полумостовые схемы .................................................................... 208
2.8 .5 Сопротивление мостов ................................................................. 211
2.8 .5 .1 Мост Оуэна ................................................................................. 211
2.9 Устройства линеаризации................................................................ 213
2.9 .1 Характер нелинейностей .............................................................. 214
2.9 .1 .1 Методы линеаризации ............................................................... 215
2.9 .1 .2 Линеаризация с помощью программного обеспечения ........ 217
2.9 .1 .3 Линеаризация с помощью логики программного обеспечения . 219
2.9 .2 Аналоговые линеаризующие аппаратные средства ................... 220
2.9 .2 .1 Схема смещений......................................................................... 222
2.9 .2 .2 Оборудование пропорционального выхода ............................. 225
2.9 .2 .3 Оборудование формирования кривой ..................................... 227
2.10 Различное оборудование модификации сигнала......................... 228
2.10.1 фазовращатели ............................................................................ 228
2.10.1 .1 Применение .............................................................................. 229
2.10.1 .2 Аналоговое оборудование фазовращателей .......................... 230
2.10.1 .3 Цифровой фазовращатель ....................................................... 232
2.10.2 Преобразователи напряжения в частоту ................................... 232
2.10.2 .1 Применение .............................................................................. 234
2.10.2 .2 Чипы VFC ................................................................................. 235
2.10.3 Преобразователь частоты в напряжение (ЧНП)....................... 236
2.10.4 Преобразователь напряжения в ток (НТП) ............................... 237
2.10.5 Схемы удержания максимального значения............................. 239
3. Технические характеристики и инструмент оценки параметров . . 243
3.1 Характеристика производительности ............................................ 243
3.1 .1 Параметры для технических характеристик .............................. 244
3.1 .1 .1 функциональные требования к дизайну и контролю ............. 247
3.1 .1 .2 Идеальное измерительное устройство ..................................... 247
3.1 .2 Динамические эталонные модели ............................................... 248
3.1 .2 .1 Модель первого порядка ........................................................... 250
3.1 .2 .2 Модель Простого Генератора ................................................... 251
3.2 Технические характеристики во временной области ................... 252
3.2 .1 Устойчивость и скорость реагирования ...................................... 255
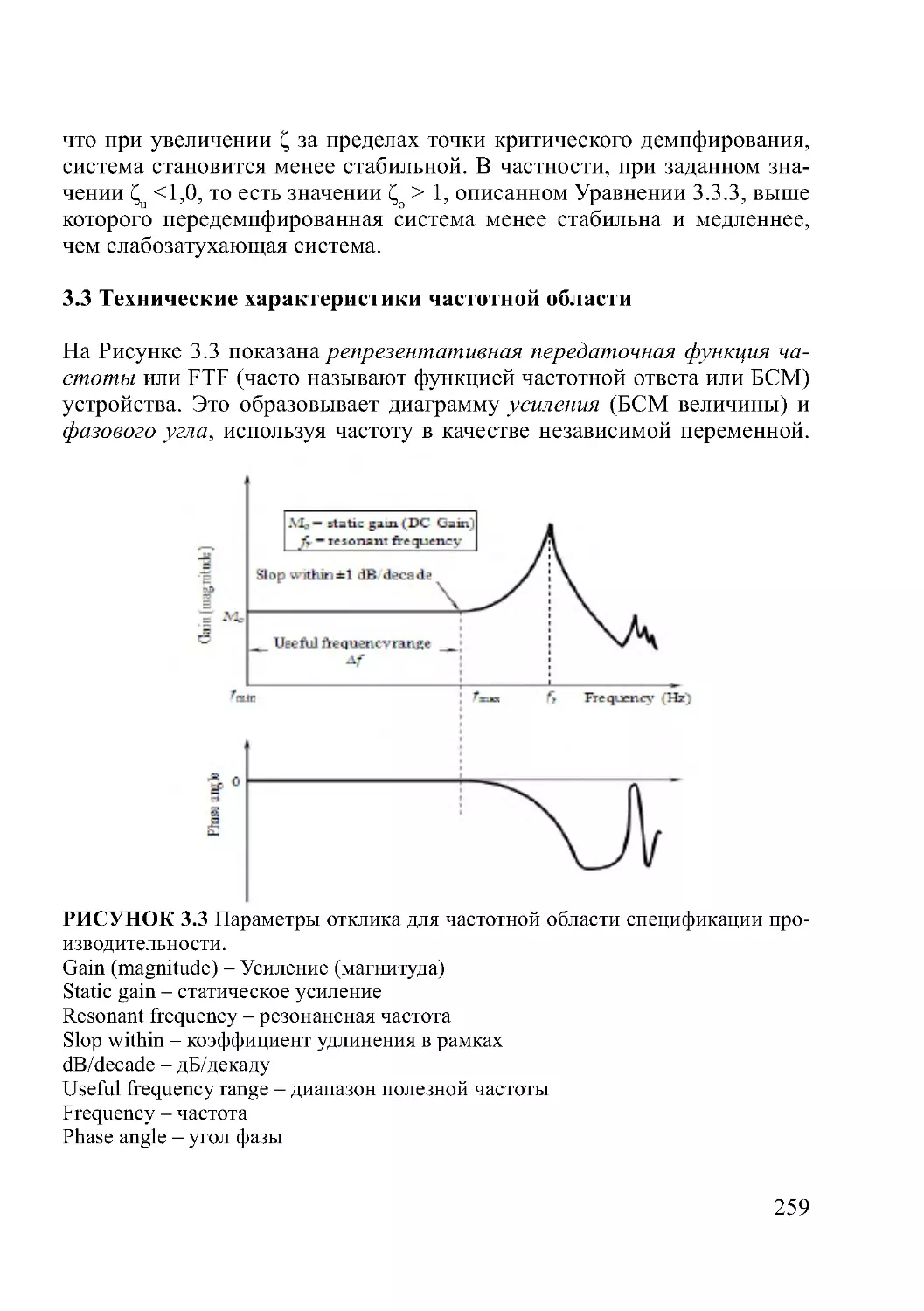
3.3 Технические характеристики частотной области ......................... 259
3.3 .1 Маржа усиления и маржа фазы ................................................... 262
3.3 .2 Модель гармонического осциллятора в частотной области ..... 264
1.4 Линейность ....................................................................................... 265
3.4 .1 Линеаризация ................................................................................ 270
4.5 Класс точности измерительного прибора ...................................... 272
3.5 .1 Оценочные параметры.................................................................. 273
3.5 .2 Чувствительность.......................................................................... 274
3.5 .2 .1 Чувствительность цифровых приборов ................................... 275
3.5 .2 .2Погрешно сть чувствительности ................................................ 276
3.5 .2 .3 .Чувствительность в управлении ............................................... 277
3.6 . Анализ пропускной способности .................................................. 291
3.6 .1 .1 Уровень передачи сигнала полосового фильтра ..................... 292
3.6 .1 .2 Полезная шумовая пропускная способность .......................... 292
3.6 .1 .4 фурье-анализ (гармонический) ширины поло сы частот ..... 294
3.6 .1 .5 Полезный частотный диапазон ................................................. 295
3.6 .1 .6 Пропускная способность прибора............................................ 296
3.6 .1 .7 Полоса пропускания системы управления .............................. 296
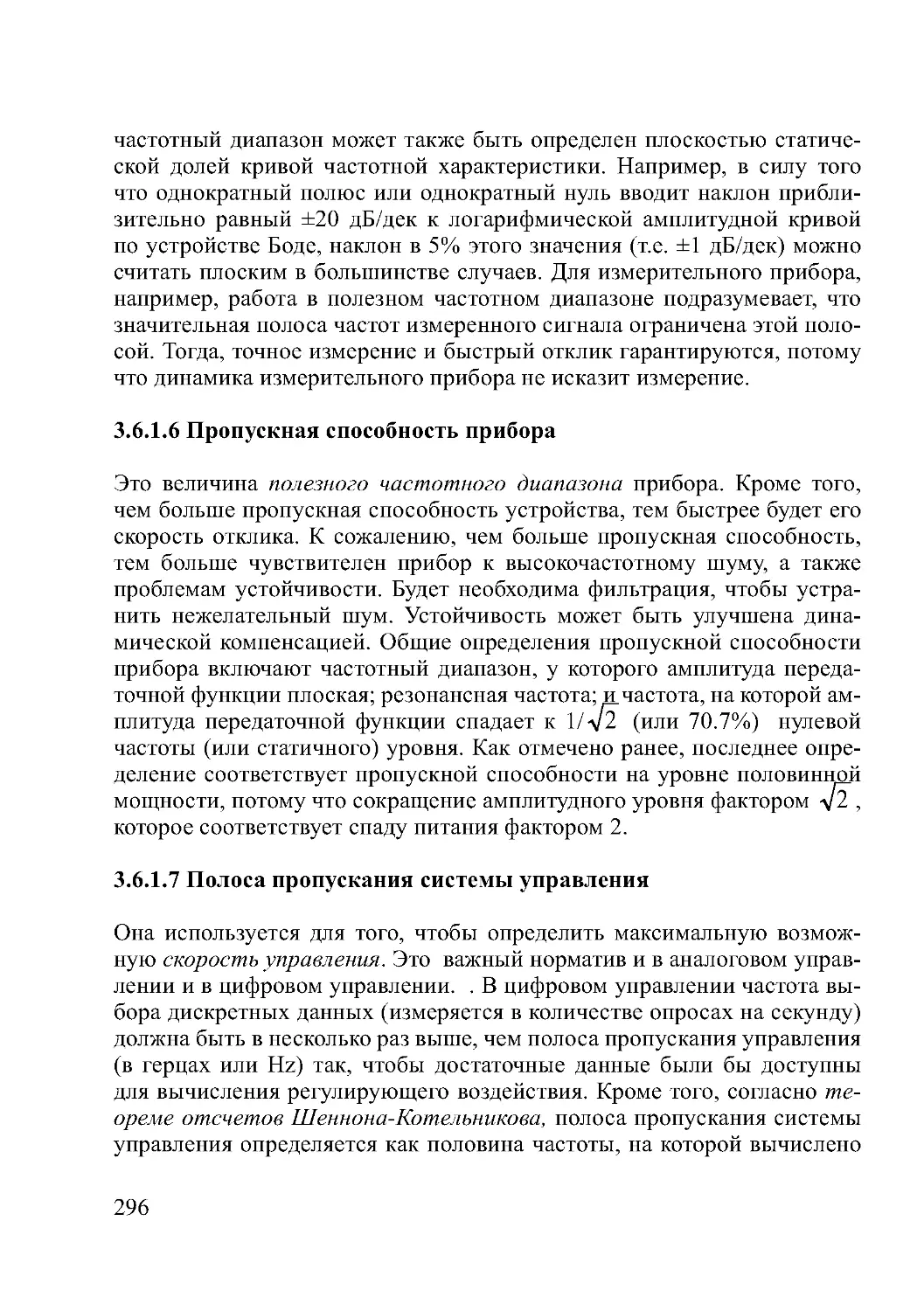
3.6 .2 . Статическое усиление.................................................................. 299
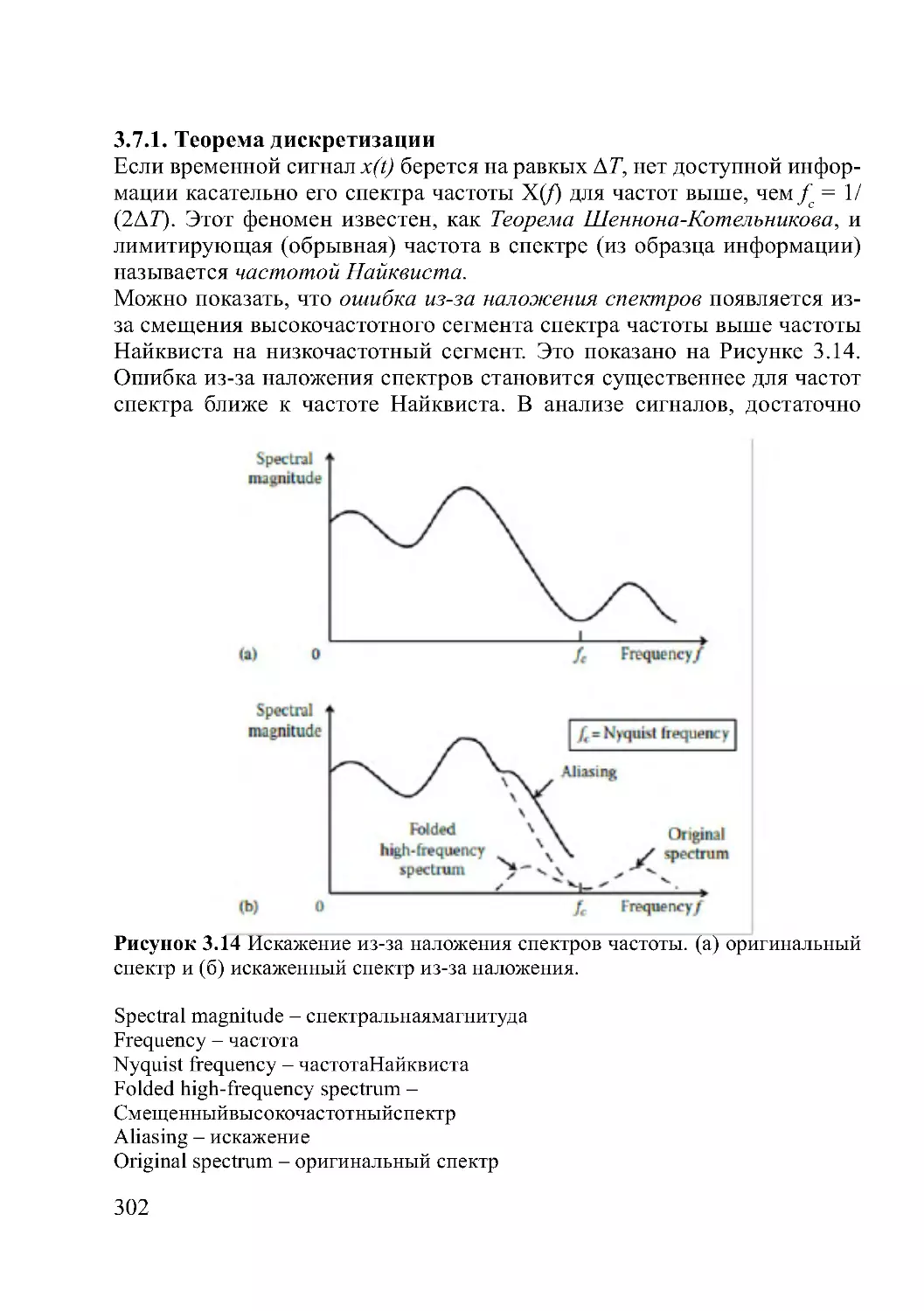
3.7 .Искажение из-за наложения спектров при дискретизации сигналов . 301
3.7 .1 . Теорема дискретизации ............................................................... 302
3.7 .2 . Другое изображение искажения ................................................. 304
3.7 .3 . фильтр сглаживания .................................................................... 304
3.7 .4 Расчетный диапазон рабочих частот систем управления ......... 311
3.7 .4 .1 . Замечание о контроле времени цикла ..................................... 311
3.8 Обсуждение погрешностей прибора .............................................. 313
3.8 .1 . Представление погрешностей..................................................... 314
3.8 .1 .1 . Точность прибора и точность измерений ............................... 315
3.8 .1 .2 . Тщательность и точно сть ......................................................... 316
3.9 . Распространенные погрешности и их комбинация ..................... 318
3.9 .1 Чувствительность в комбинации ошибок ................................... 319
3.9 .4 Равномерное распределение субъективных ошибок ................. 322
4. Оценивание по измерениям .............................................................. 331
4.1 Считывание и Оценивание .............................................................. 331
4.2 Оценка по методу наименьших квадратов .................................... 334
4.2 .1 Точечное оценивание методом наименьших квадратов ............ 334
4.2 .2 .1 Неопределенность модели и измерений .................................. 338
4.2 .3 Оценка по методу наименьших квадратов для линии ............... 342
4.2 .4 .Качество оценки ............................................................................ 344
4.3 .2 Обоснование MLE по теореме Байеса (Bayes)........................... 351
4.3 .3 MLE с нормальным распределением .......................................... 352
4.3 .4 . Рекурсивная оценка максимальной вероятно сти ...................... 354
4.3 .4 .1 . Рекурсивная оценка максимального соответствия по Гауссиану . . 355
4.3 .5 Дискретный пример MLE ............................................................ 357
4.4 . Статический скалярный фильтр Калмана..................................... 358
4.4 .1 Понятие статического скалярного фильтра Калмана ................ 359
4.4 .2 Использование формулы Байеса ................................................. 362
4.4 .3 Алгоритм статического скалярного фильтра Калмана .............. 364
4.5 Линейный многозначный динамический фильтр Калмана.......... 372
4.5 .1 . Модель пространства состояния ................................................ 373
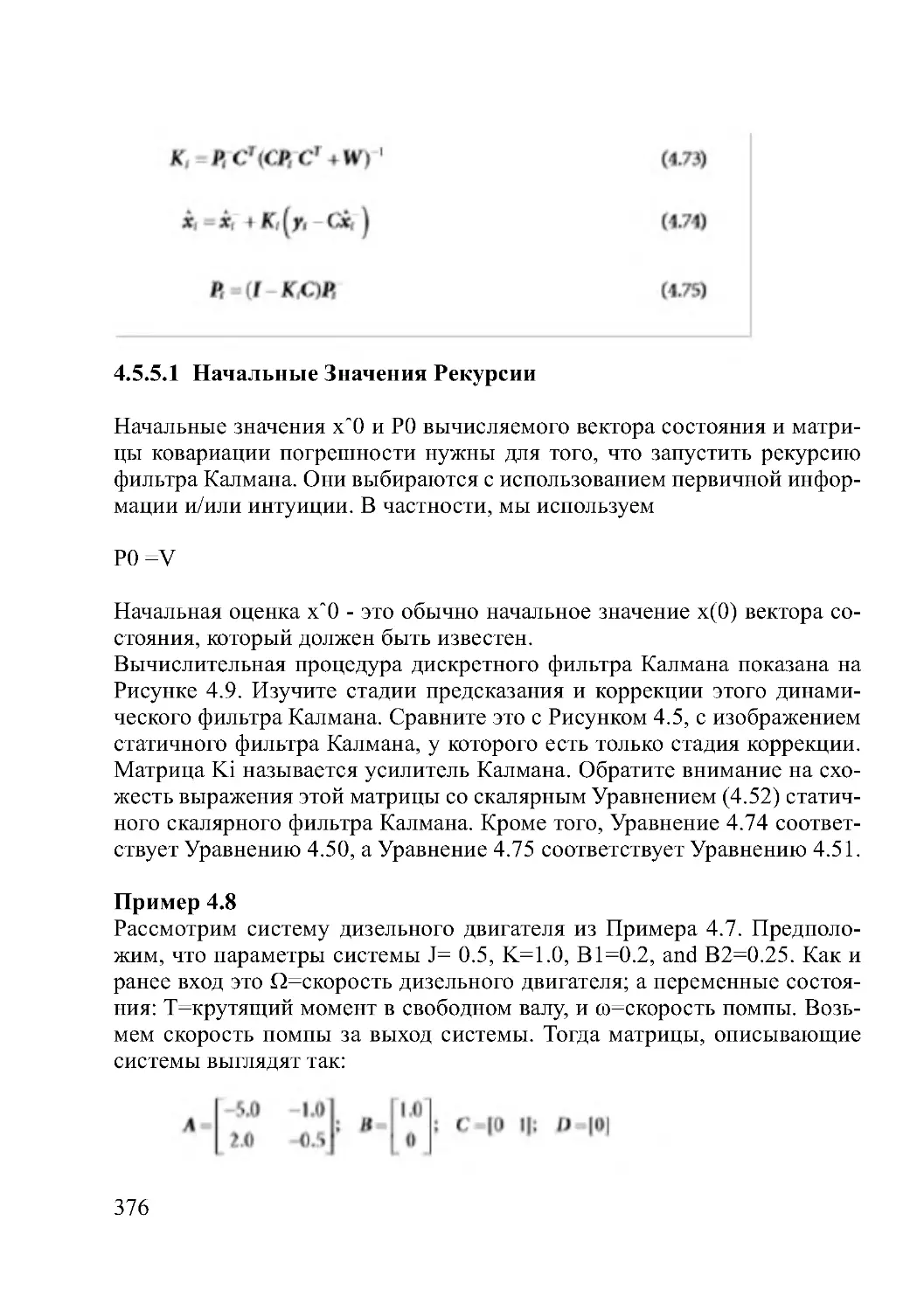
4.5 .5 .1 Начальные значения рекурсии ................................................. 376
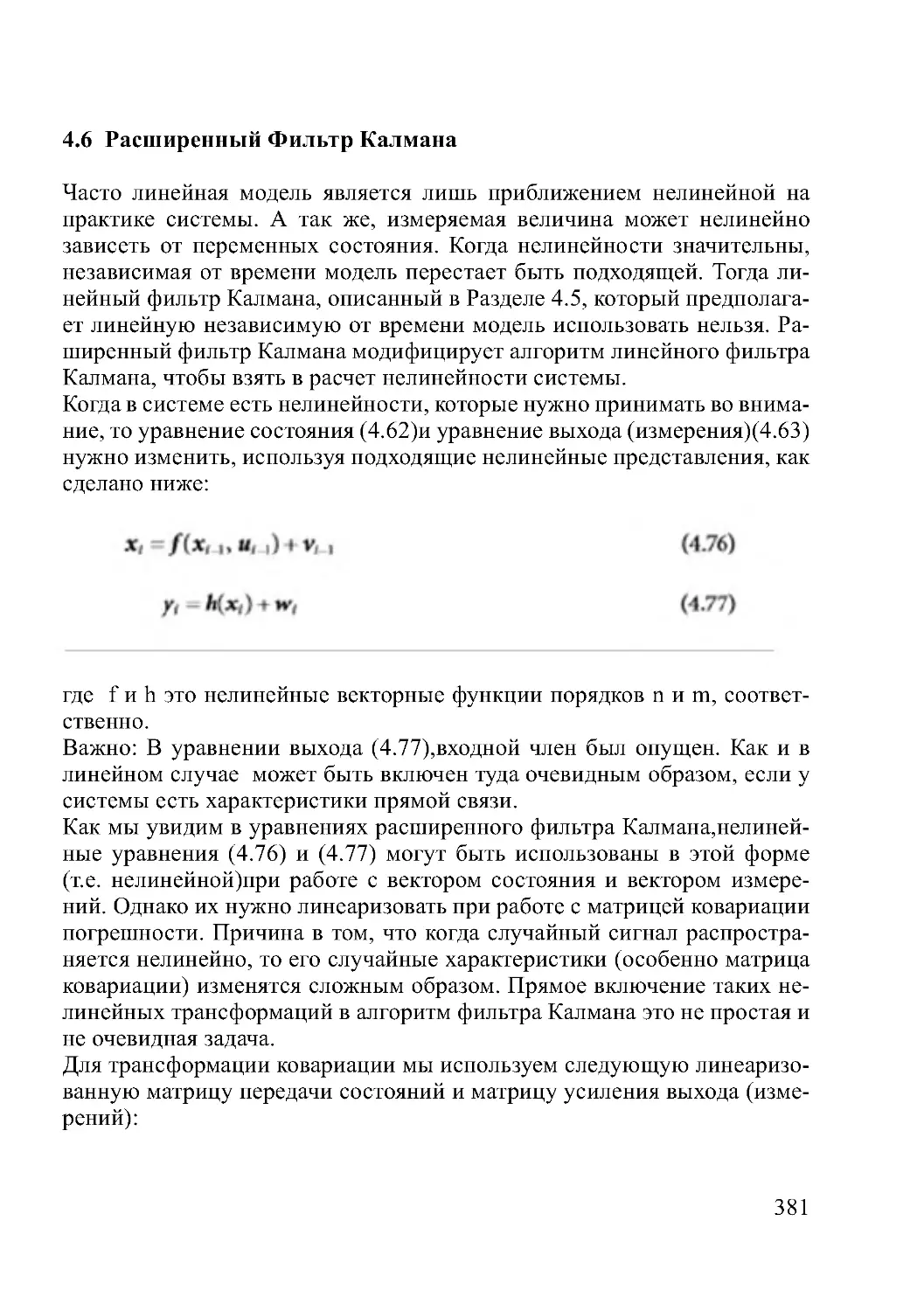
4.6 Расширенный фильтр Калмана ...................................................... 381
4.7 Сигма - точечный фильтр Калмана ................................................ 388
4.7 .1 Сигма - точечное преобразование .............................................. 390
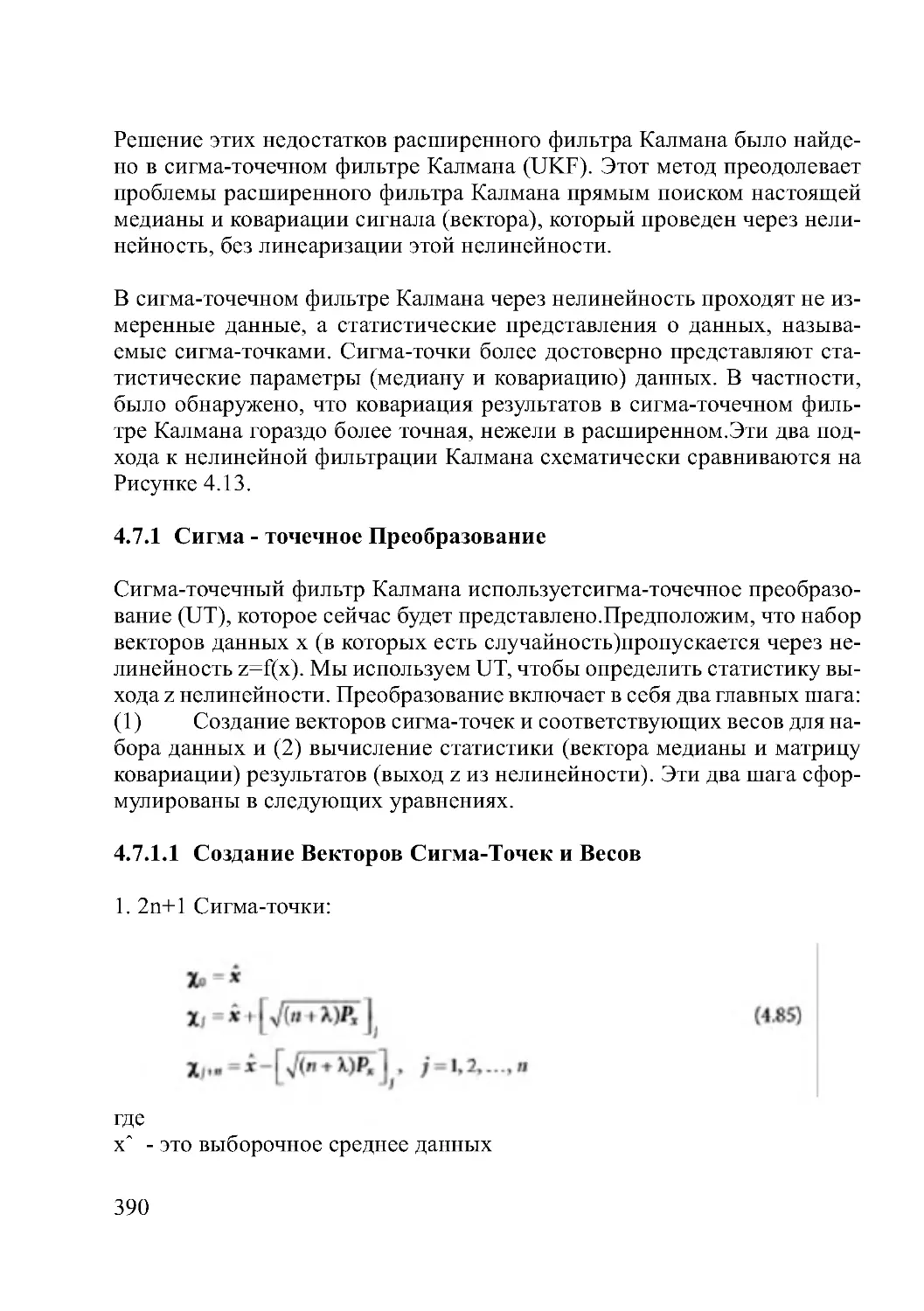
4.7 .1 .1Создание векторов сигма-точек и весов ................................... 390
4.7 .1 .1Вычисление статистики выхода ................................................ 392
4.7 .2 Алгоритм сигма - точечного фильтра Калмана .......................... 393
5. Аналоговые датчики и преоброзователи ......................................... 401
5.1 Датчики и преобразователи............................................................. 401
5.1 .1 Терминология ................................................................................ 403
5.1 .1 .1 Измеряемые значения и измерения .......................................... 403
5.1 .1 .2 Датчик и Преобразователь ........................................................ 403
5.1 .1 .3 Аналоговые и цифровые устройства датчик-преобразователь . . 404
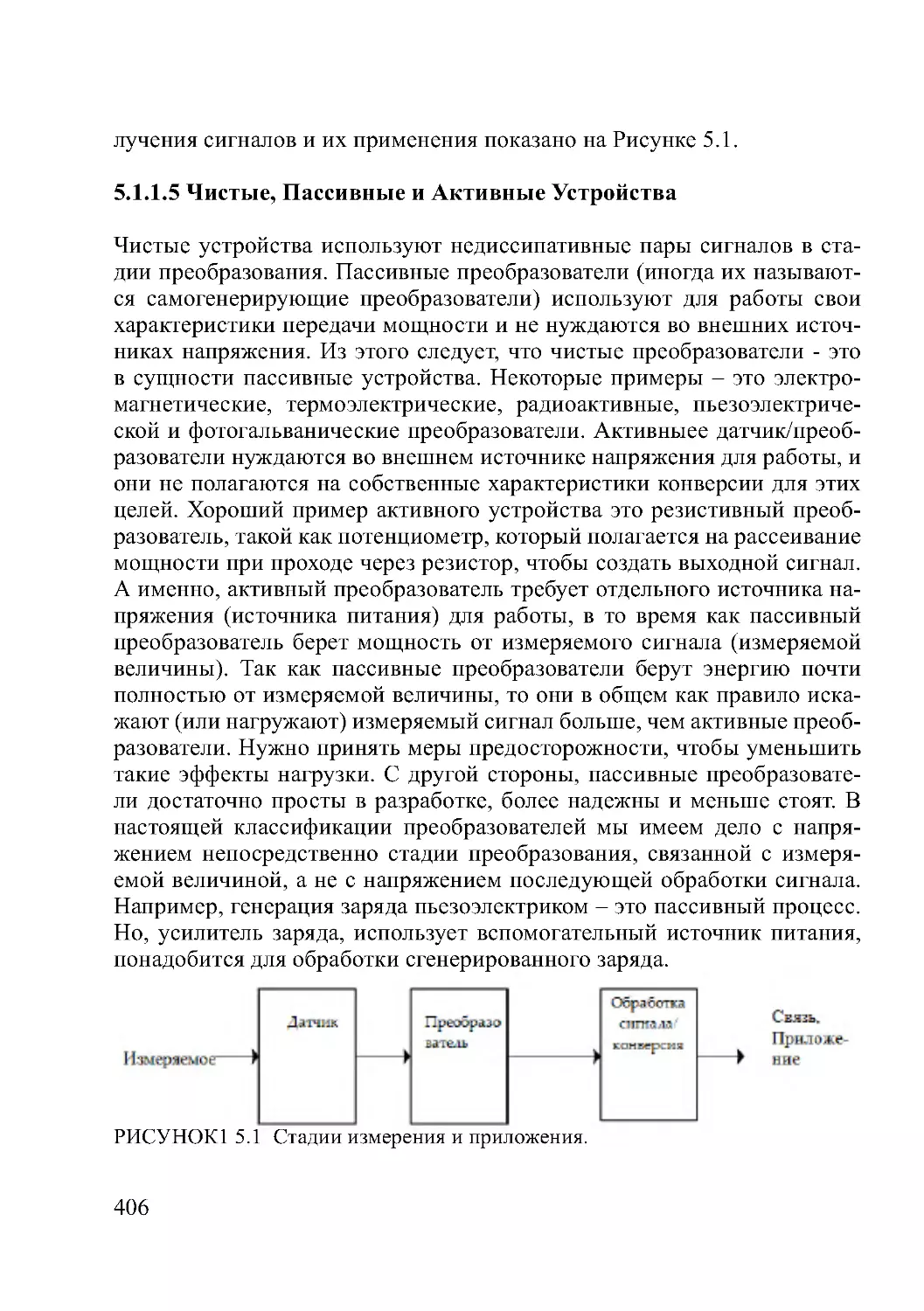
5.1 .1 .4 Обработка сигналов датчика ..................................................... 405
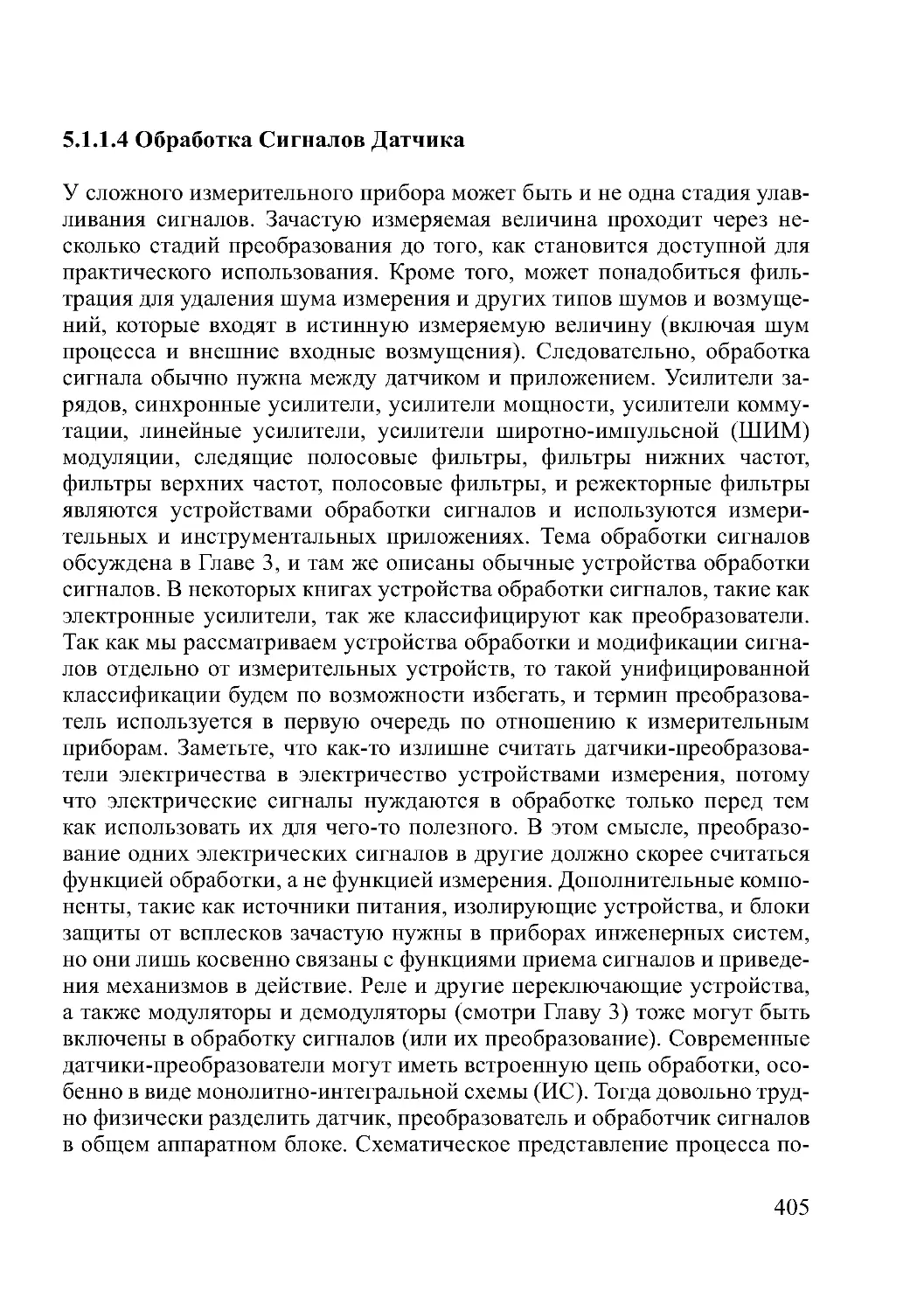
5.1 .1 .5 Чистые, пассивные и активные устройства............................. 406
5.1 .2 Типы датчиков и их выбор ........................................................... 407
5.1 .2 .1 Классификация датчиков, основанная на типе измеряемой вели-
чины......................................................................................................... 407
5.1 .2 .2 Классификация датчиков, основанная на технологиях датчиков .408
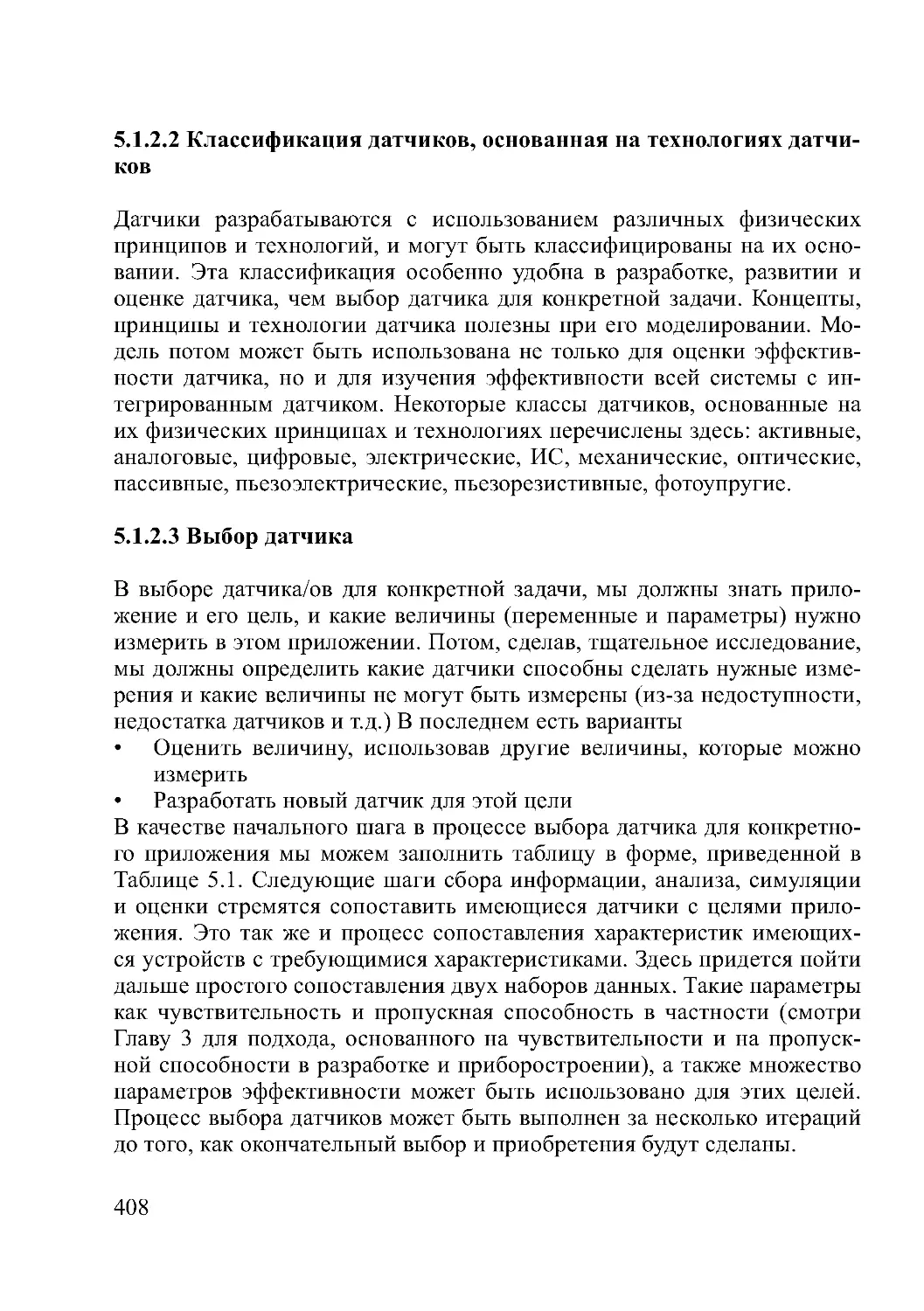
5.1 .2 .3 Выбор датчика ............................................................................ 408
5.2 Датчики для электромеханических приложений .......................... 409
5.2 .1 Преобразователи движения.......................................................... 410
5.2 .1 .1 Многозадачные элементы датчиков ......................................... 412
5..2 .1 .2 Выбор преобразователя перемещения .................................... 413
5.2 .2 Датчики усилий ............................................................................. 413
5.2 .2 .1 Датчики силы и измерение движения ...................................... 414
5.2 .2 .2 Положение датчика силы .......................................................... 415
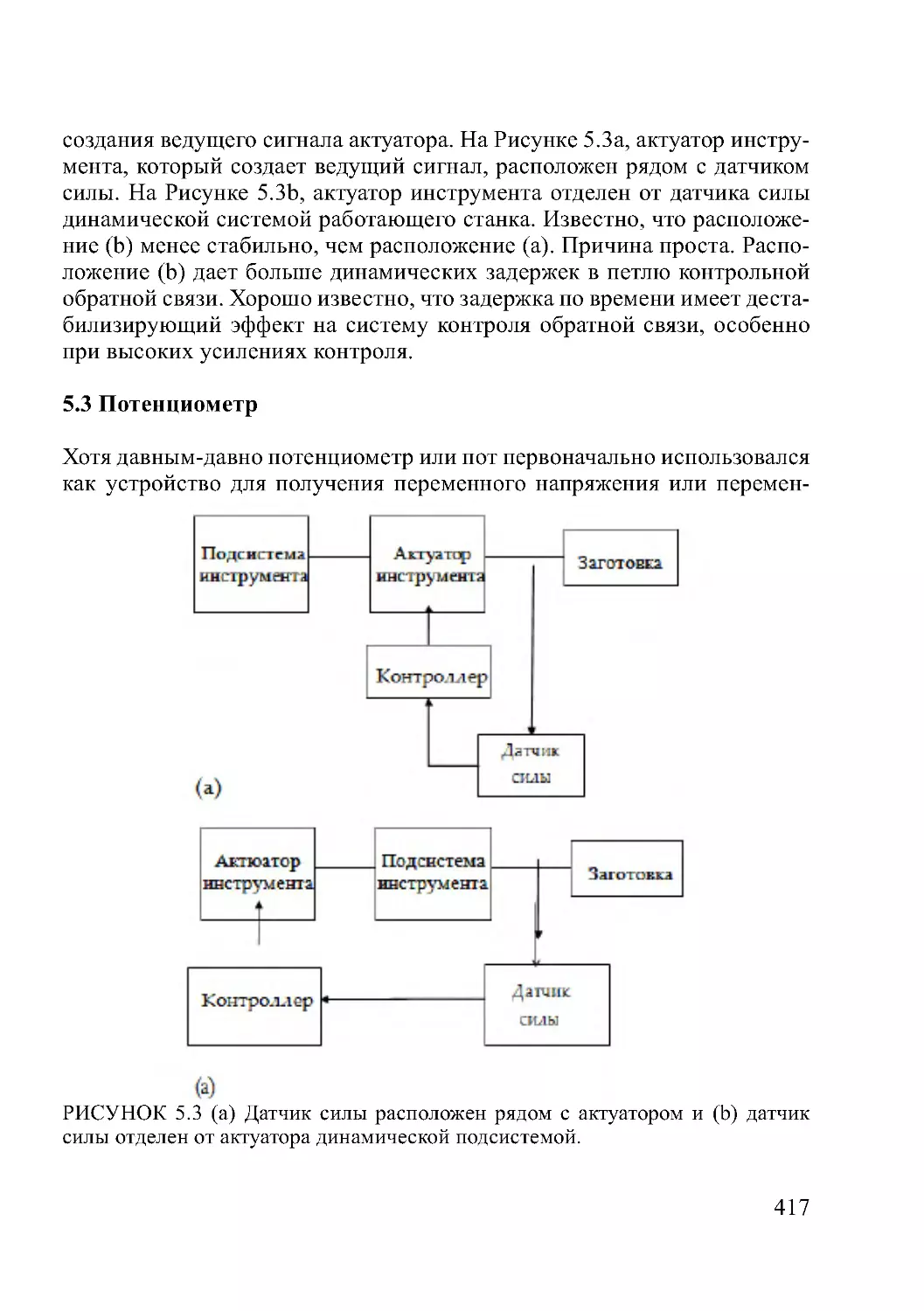
5.3 Потенциометр ................................................................................... 417
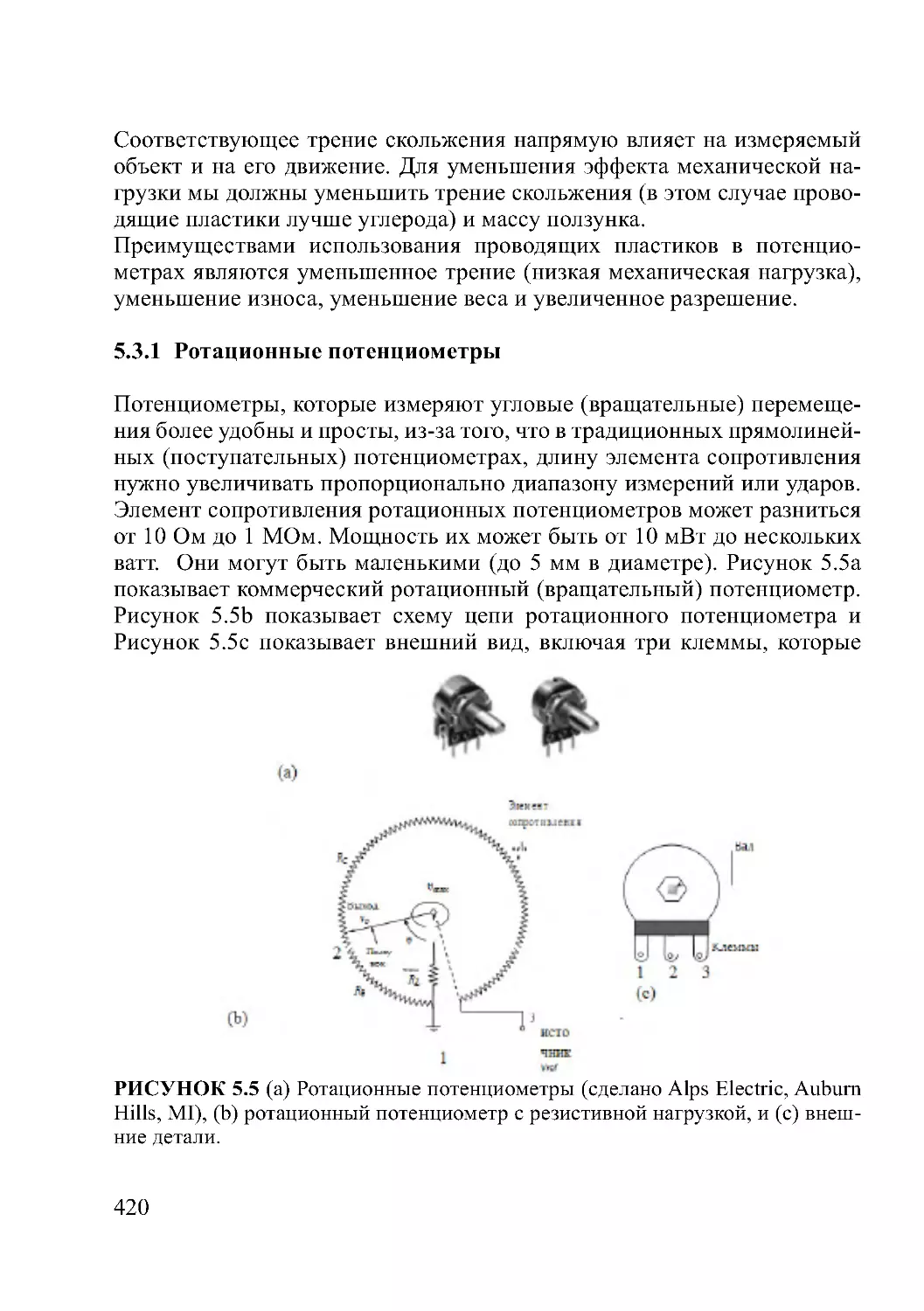
5.3 .1 Ротационные потенциометры ..................................................... 420
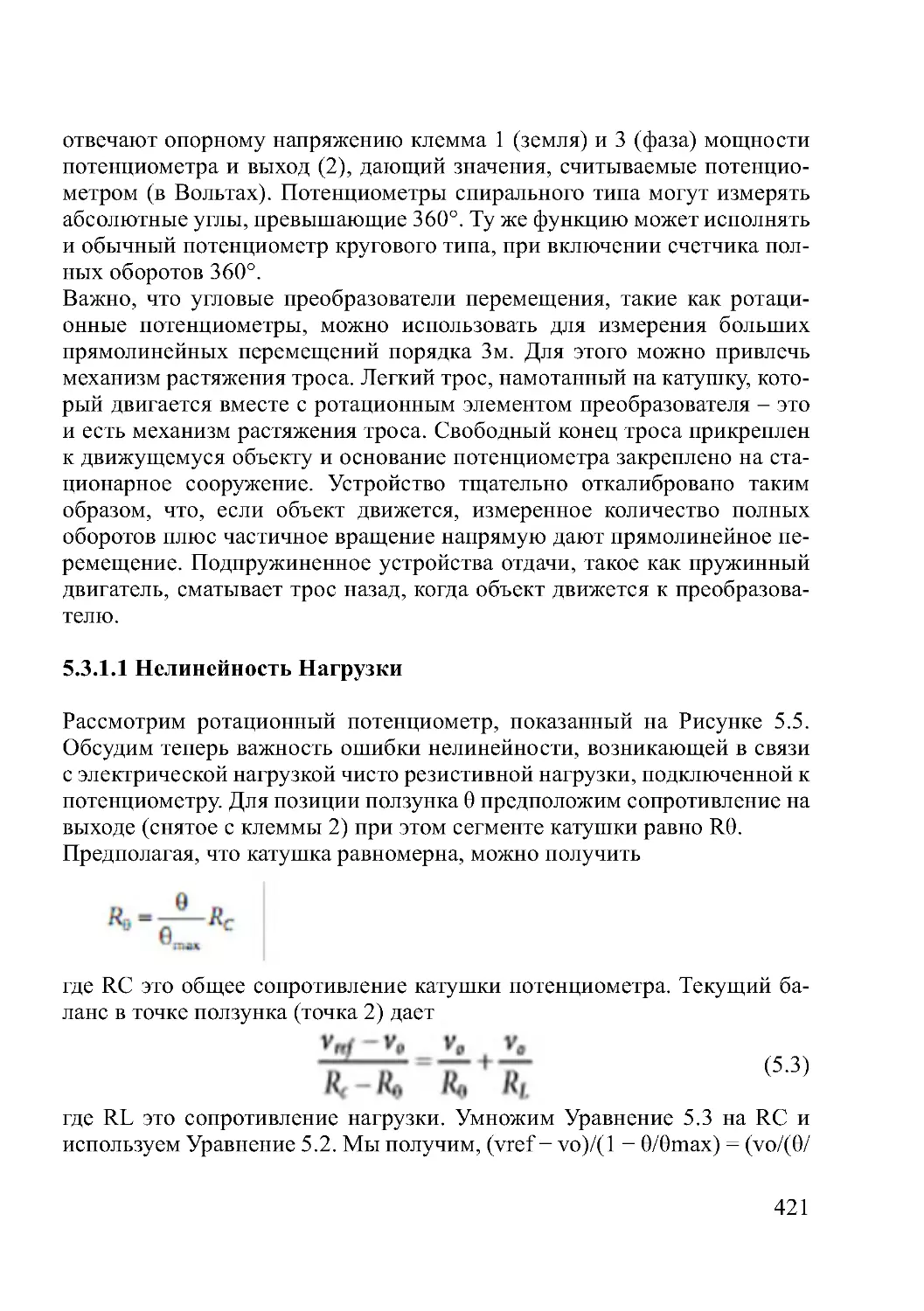
5.3 .1 .1 Нелинейность нагрузки ............................................................. 421
5.3 .2 Рассмотрение эффективно сти...................................................... 423
5.3 .2 .1 Характеристики потенциометров ............................................. 423
5.3 .2 .2 Разрешающая способность ....................................................... 424
5.3 .2 .3Чувствительность........................................................................ 425
5.3 .3 Оптический потенциометр ........................................................... 429
5.3 .3 .1 Цифровой потенциометр ........................................................... 431
5.4 Переменные индуктивные преобразователи ................................. 433
5.4 .1 Индуктивность, реактивность, и сопротивление. ...................... 435
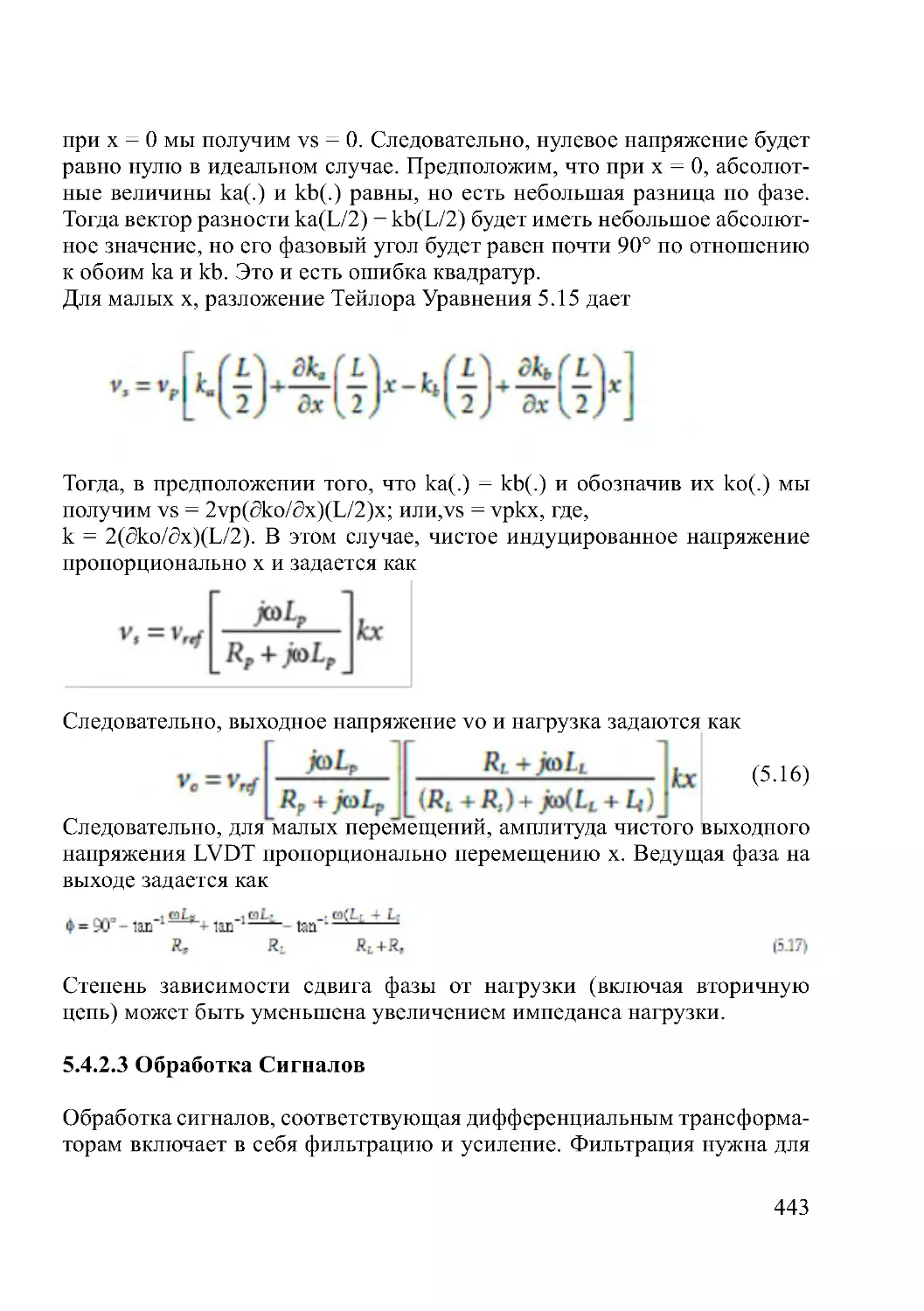
5.4 .2 .1Калибровка и компенсация ........................................................ 440
5.4 .2 .2Сдвиг фазы и нулевое напряжения............................................ 441
5.4 .2 .3 Обработка сигналов ................................................................... 443
5.4 .2 .4 Ротационно-переменный дифференциальный трансформатор/
преобразователь ..................................................................................... 448
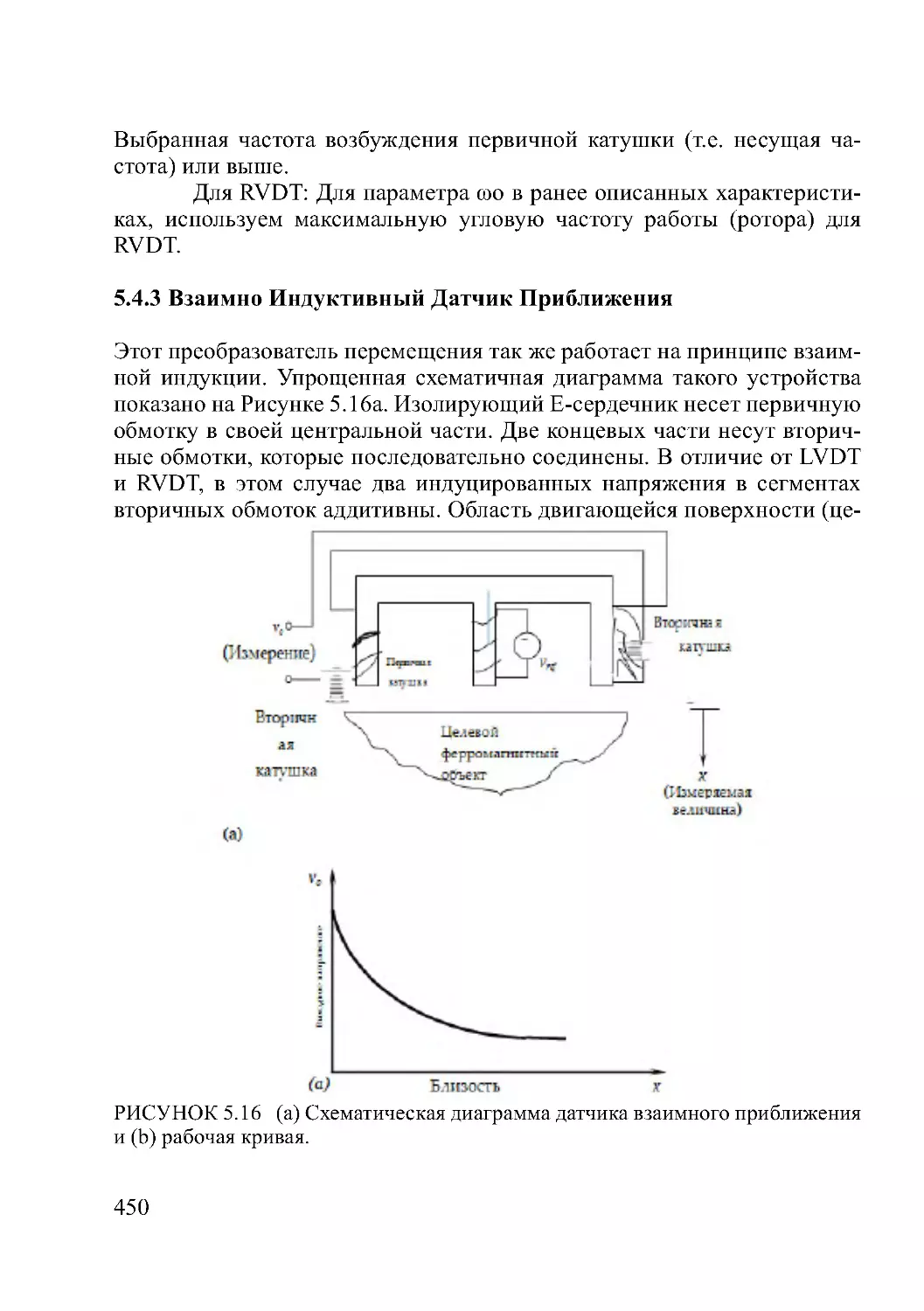
5.4 .3 Взаимно индуктивный датчик приближения ............................. 450
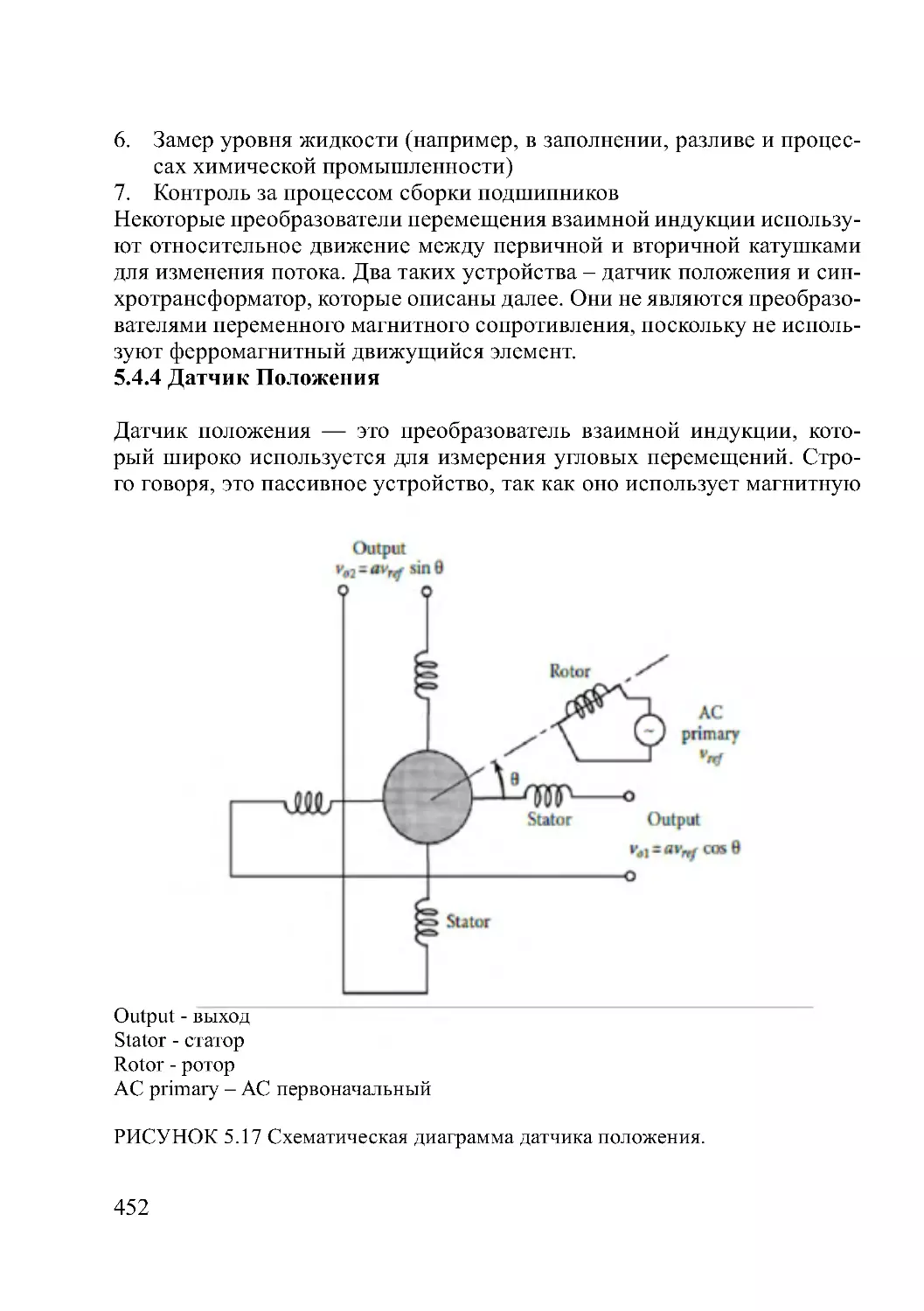
5.4 .4 Датчик положения......................................................................... 452
5.4 .4 .1 Демодуляция ............................................................................... 453
5.4 .4 .2 Датчик положения с роторным выходом ................................. 454
5.4 .4 .3 Преобразователи самоиндукции............................................... 456
5.5 Преобразователи на постоянном магните и вихревом токе ......... 457
5.5 .1 Тахометр постоянного тока .......................................................... 458
5.5 .1 .1 Электронная коммутация .......................................................... 460
5.5 .1 .2 Моделирование тахометра постоянного тока.......................... 461
5.5 .1 .3 Рассмотрение конфигураций .................................................... 463
5.5 .1 .4 Рассмотрение нагрузок ............................................................ 467
5.5 .2 Тахометр переменного тока ......................................................... 468
5.5 .2 .1 Тахометр переменного тока на постоянном магните.............. 468
5.5 .2 .2 Тахометр индукции переменного тока..................................... 470
5.5 .2 .3 Преимущества и недо статки тахометров переменного тока . 470
5.5 .3 Преобразователи вихревого тока ................................................. 471
5.6 Преобразователи переменной емкости ........................................ 473
5.6 .1 Цепи считывания емкости ............................................................ 475
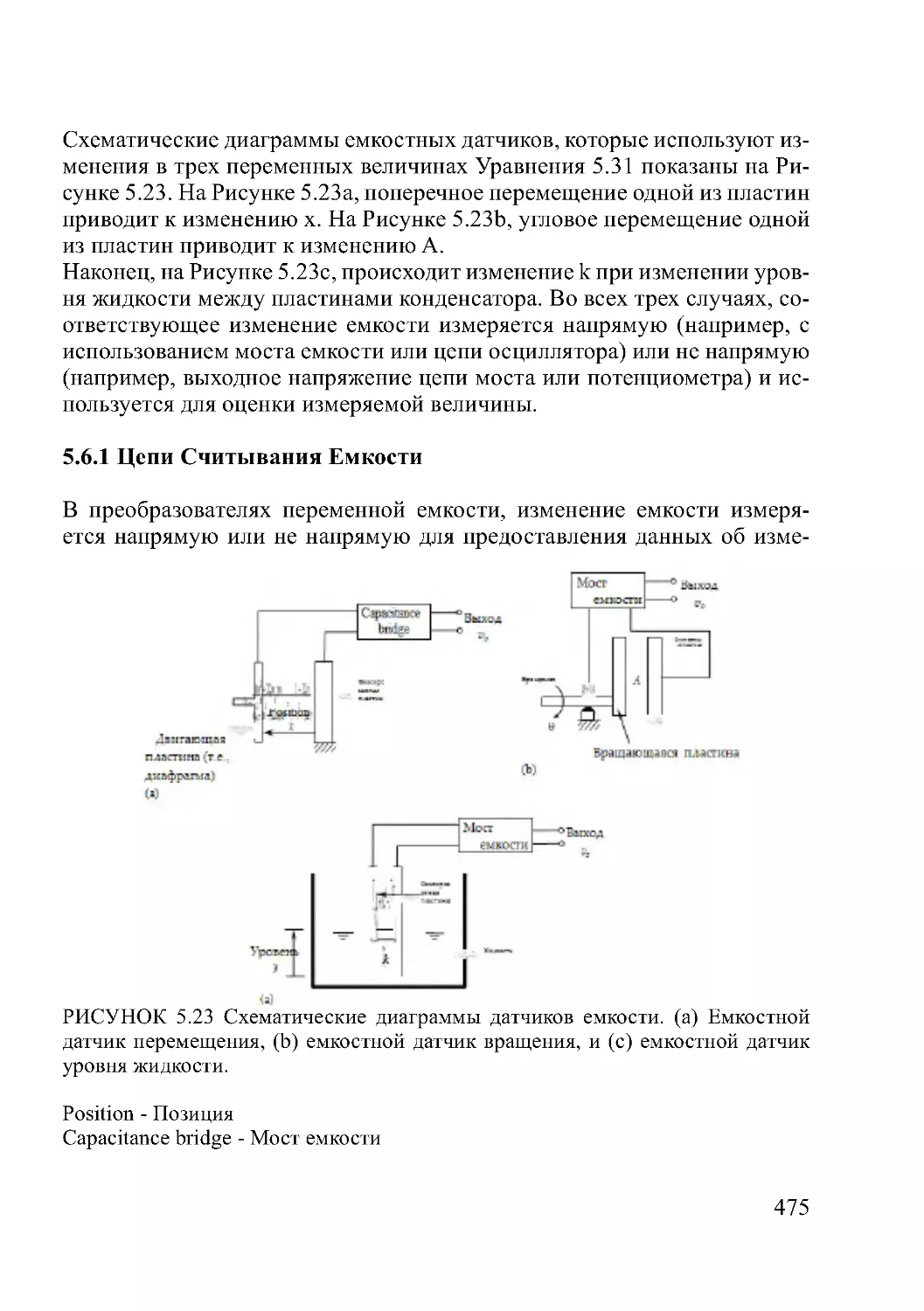
5.6 .2 Схемы емкостных датчиков ........................................................ 476
5.6 .2 .1 Емкостный мост ......................................................................... 476
5.6 .1 .2 Потенциометрическая схема ..................................................... 478
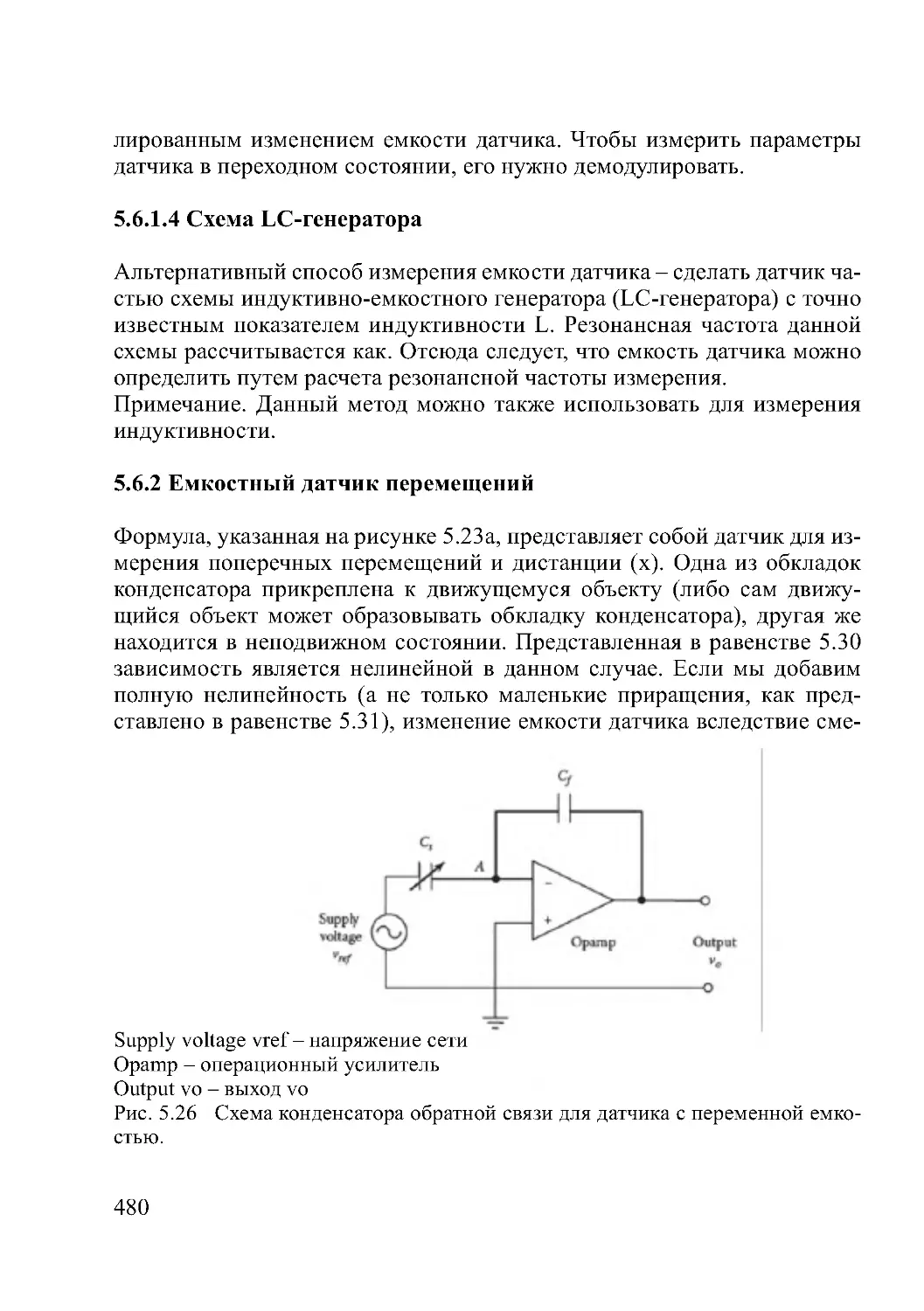
5.6 .1 .3 Схема электрометрического усилителя ................................... 479
5.6 .1 .4 Схема LC-генератора ................................................................. 480
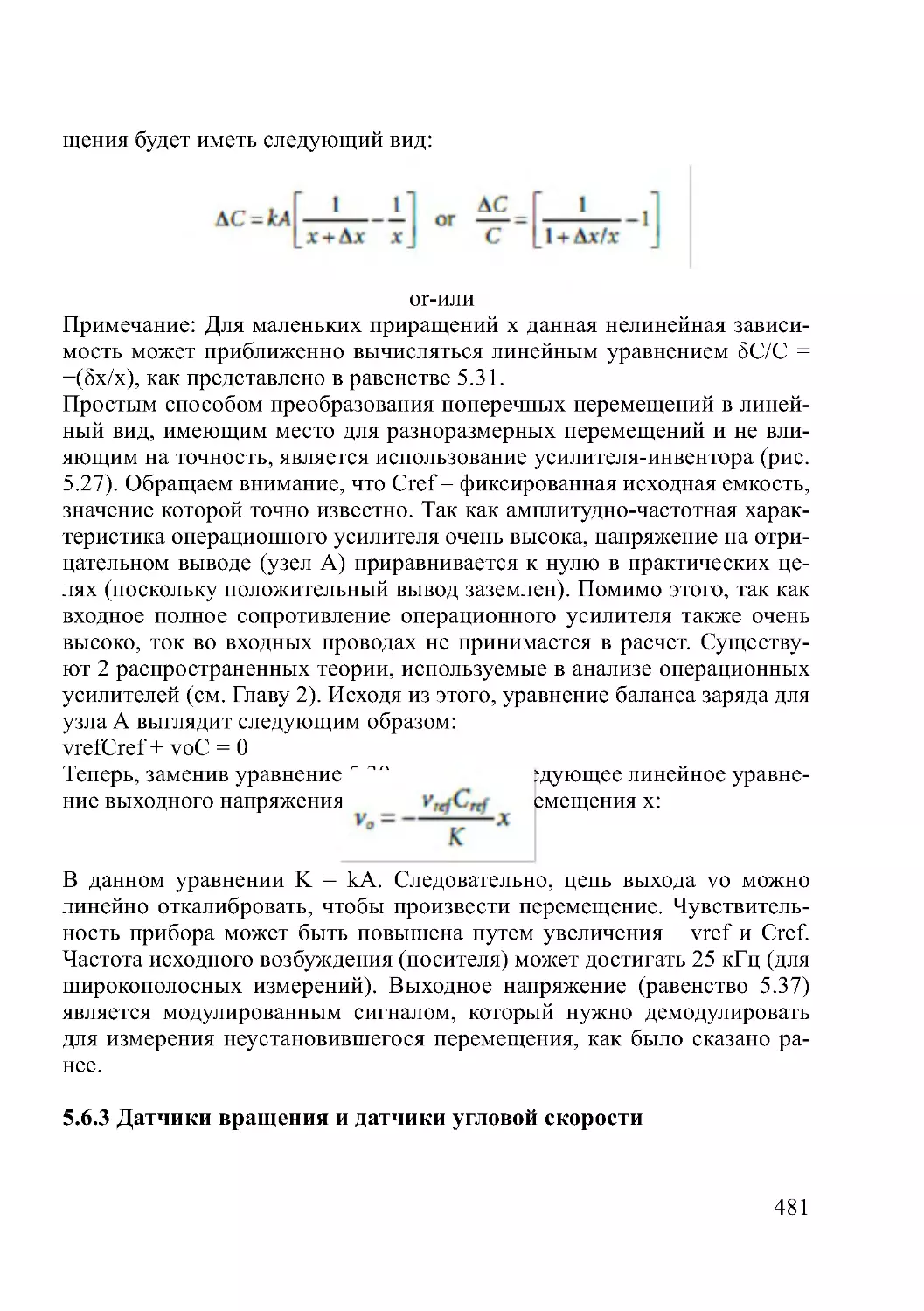
5.6 .2 Емкостный датчик перемещений ................................................ 480
5.6 .3 Датчики вращения и датчики угловой скорости ....................... 481
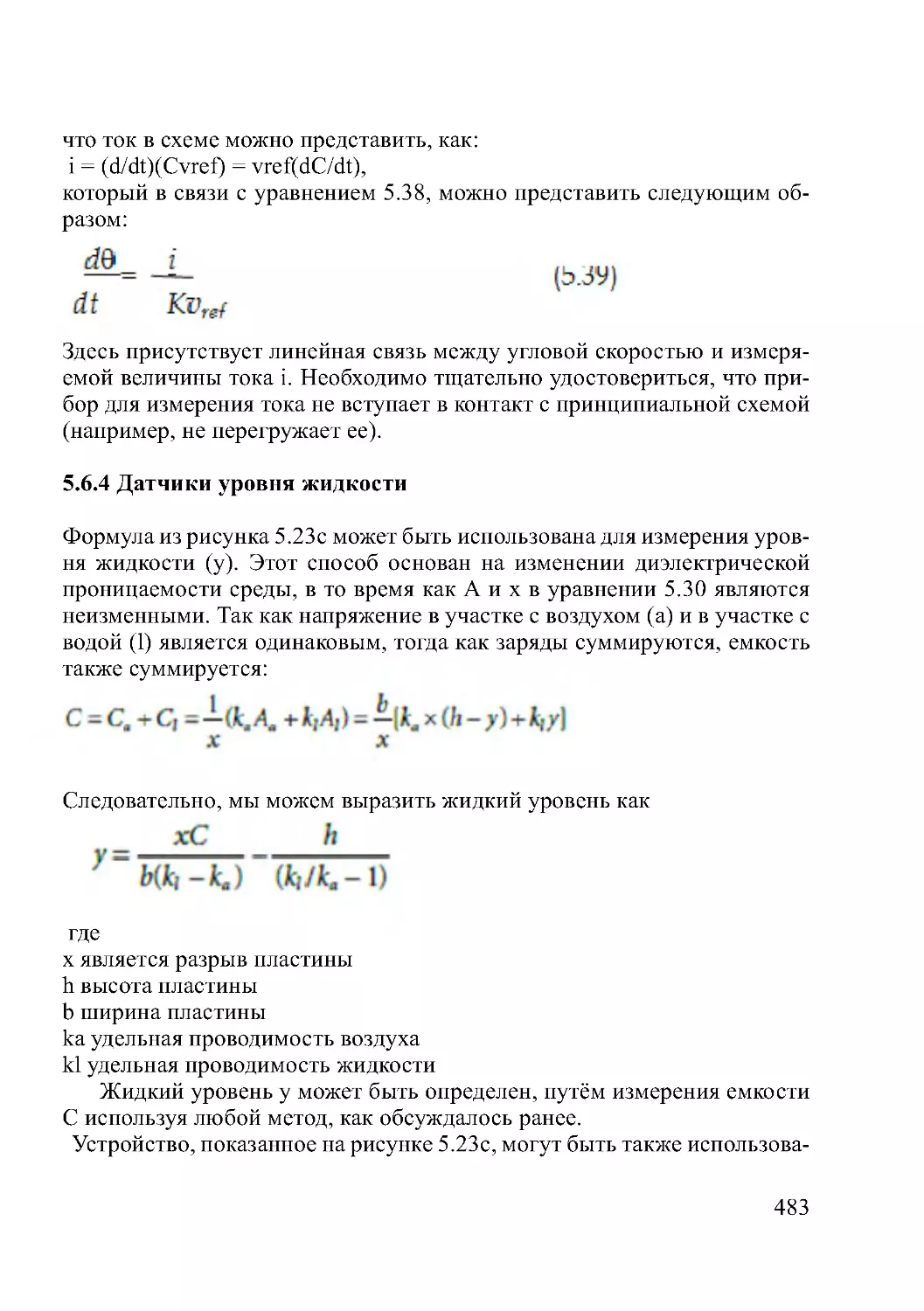
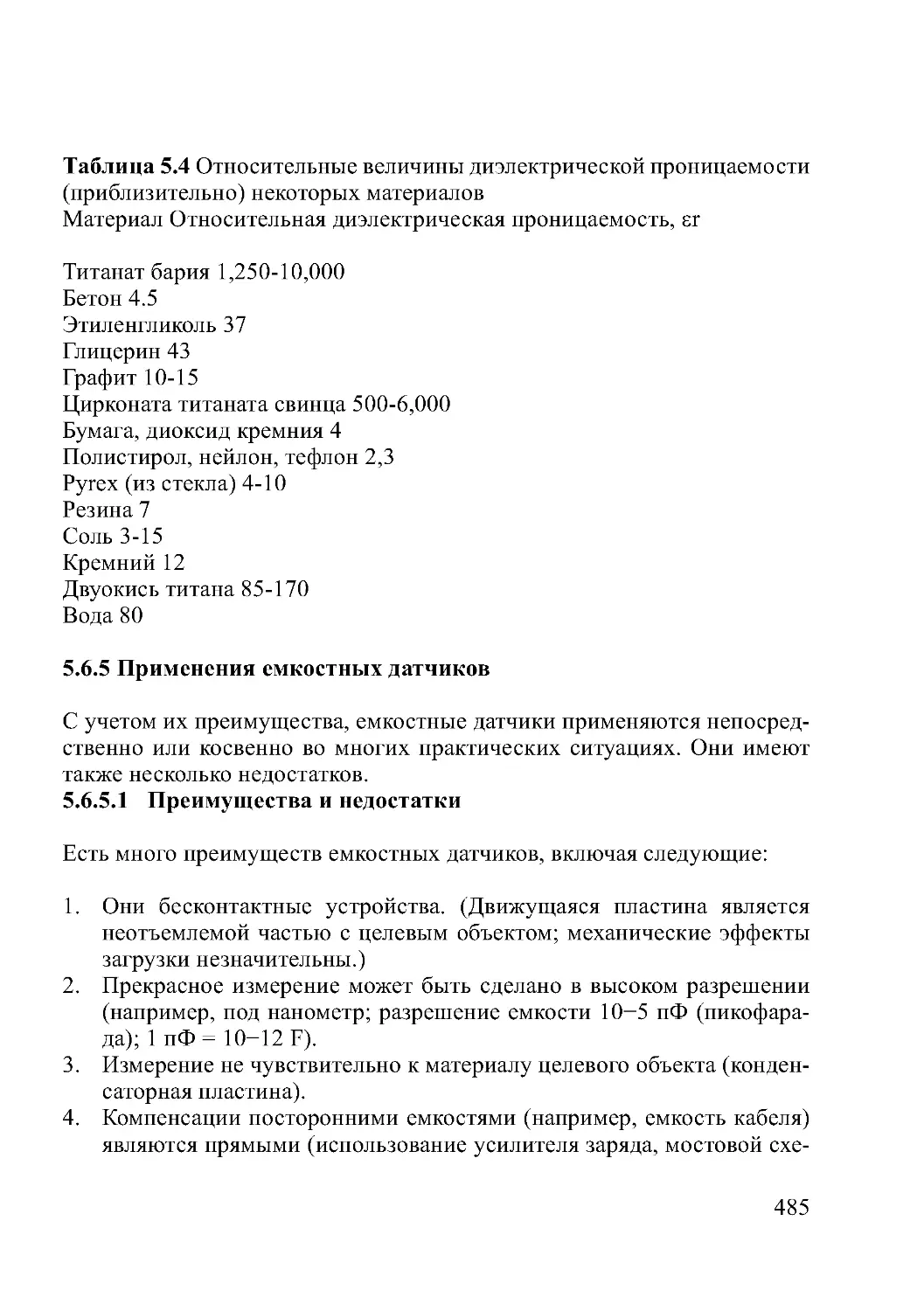
5.6 .4 Датчики уровня жидкости ............................................................ 483
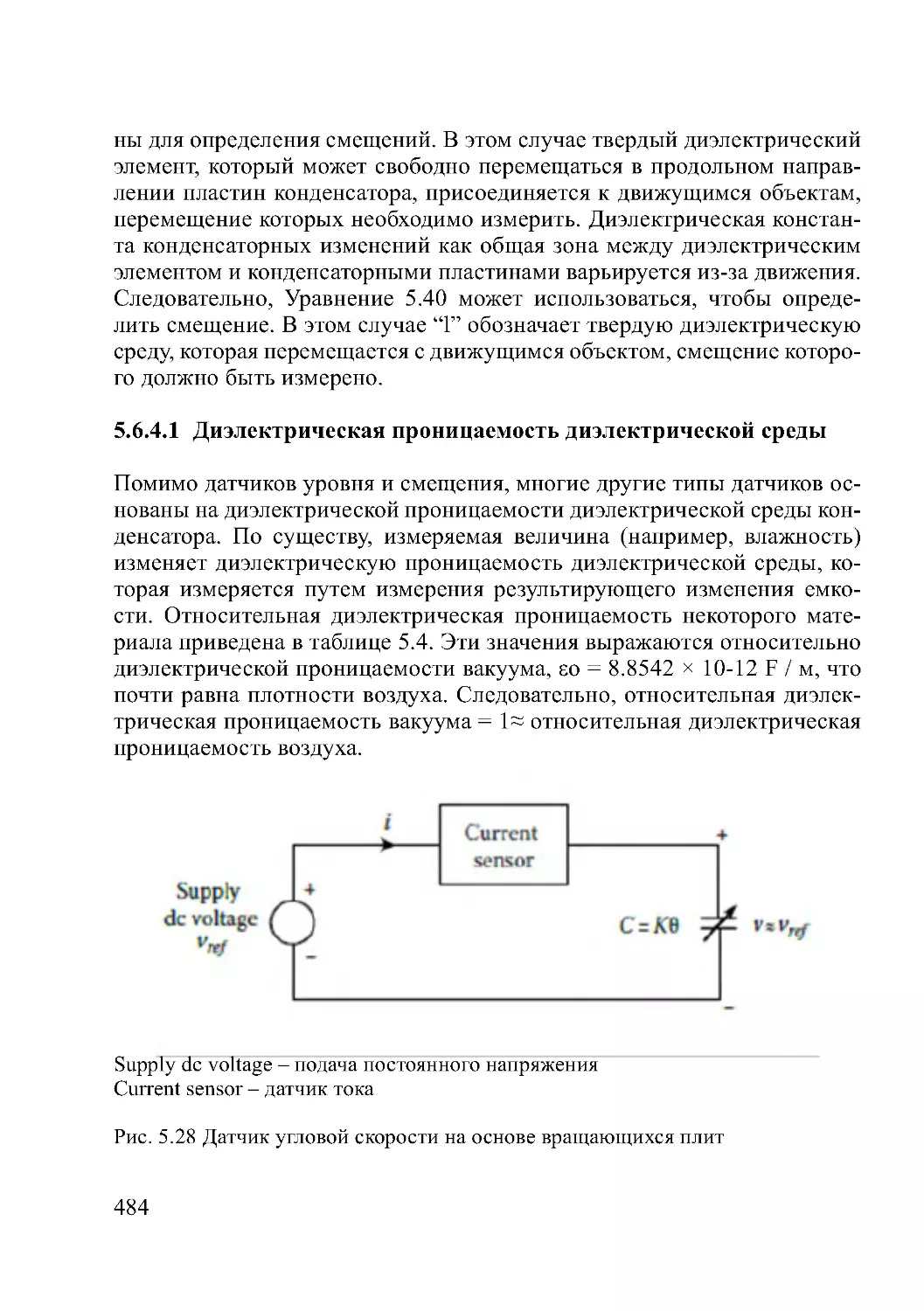
5.6 .4 .1Диэлектрическая проницаемость диэлектрической среды ..... 484
5.6 .5 Применения емкостных датчиков ............................................... 485
5.6 .5 .1 Преимущества и недо статки ..................................................... 485
5.6 .5 .2Применения емкостных датчиков ............................................ 486
5.7 Пьезоэлектрические датчики .......................................................... 487
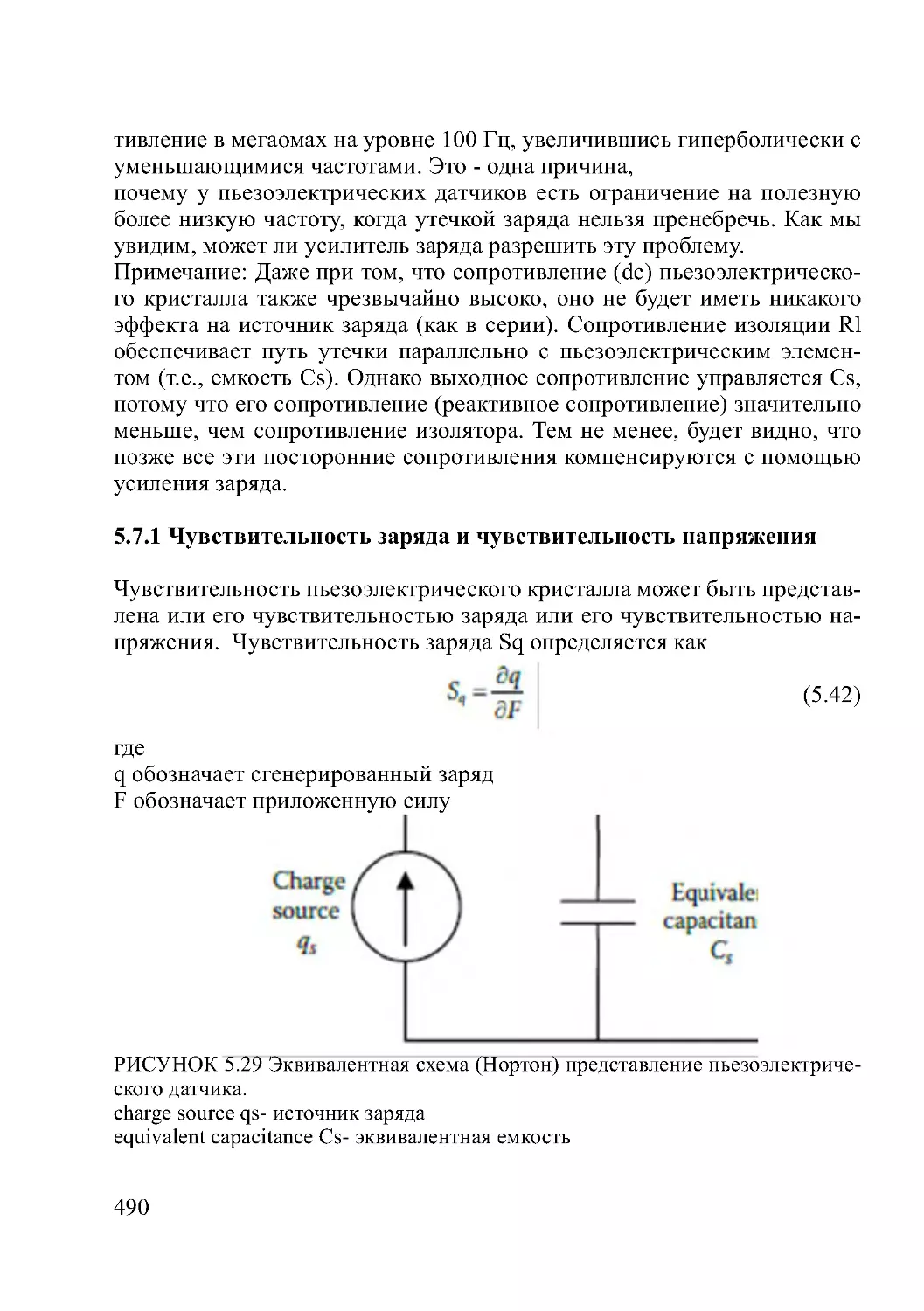
5.7 .1 Чувствительность заряда и чувствительность напряжения...... 490
5.7 .2 Усилитель заряда .......................................................................... 493
5.7 .3 Пьезоэлектрический акселерометр ........................................... 496
5.7 .3 .1 Пьезоэлектрический акселерометр ........................................ 497
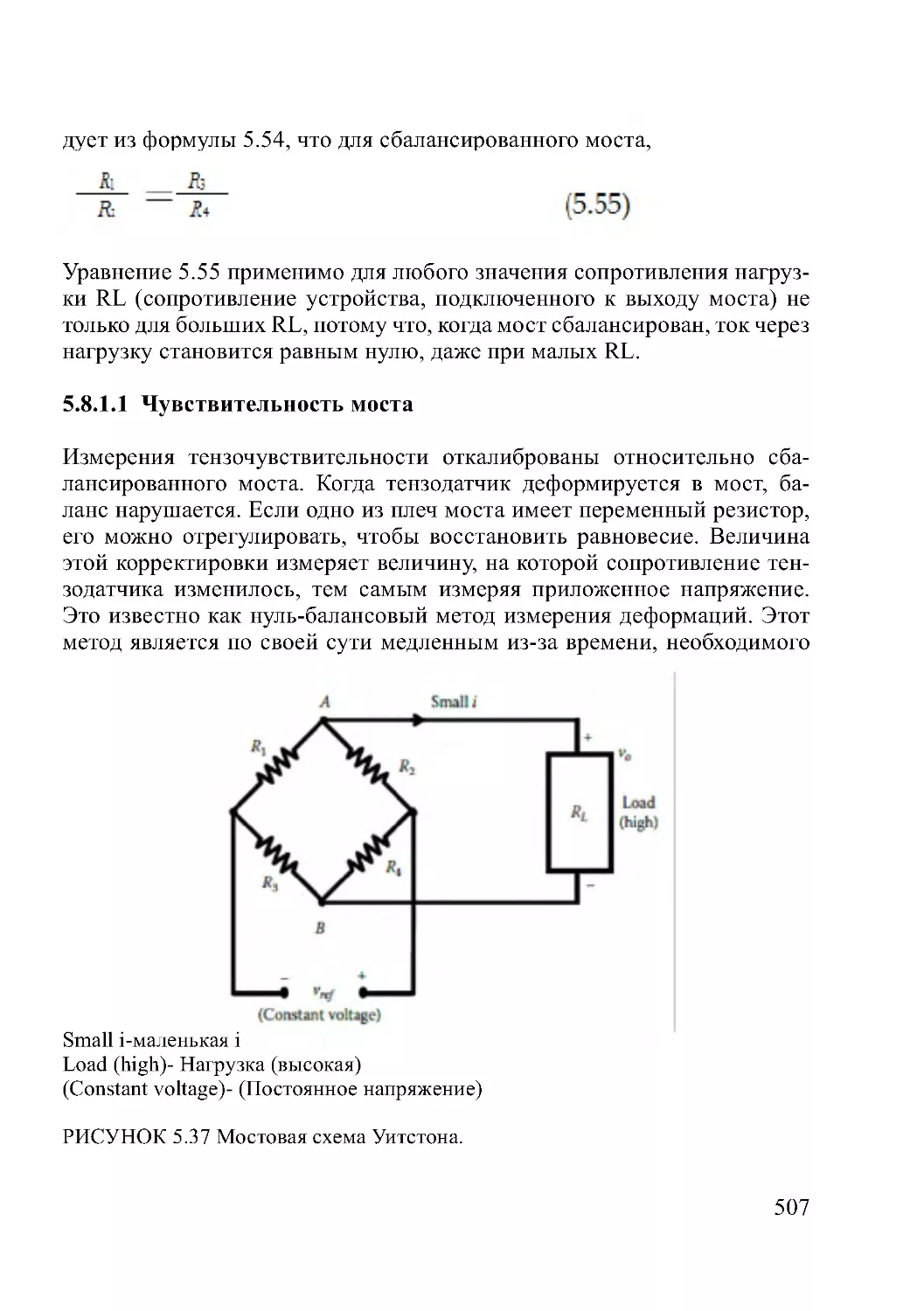
5.8 Тензодатчики .................................................................................... 501
5.8 .1 .1 Чувствительность моста........................................................... 507
5.8 .1 .2 Постоянный мо ст ...................................................................... 508
5.8 .1 .3 Калибровка Константа.............................................................. 510
5.8 .1 .4 Получение данных ................................................................... 514
5.8 .1 .5 Рассмотрение точности .......................................................... 514
5.8 .2 Полупроводниковые тензорезисторы ......................................... 516
5.9 Датчики крутящего момента ........................................................... 525
5.9 .1 Датчики вращающего момента меры напряжения .................. 527
5.9 .2 Проектные требования ................................................................ 529
5.9 .2 .1 Мощности напряжения датчика .......................................... 535
5.9 .2 .2 Предел нелинейно сти меры напряжения................................ 535
5.9 .2 .3 Требование чувствительности .................................................. 536
5.9 .2 .4 Требование жесткости ............................................................. 537
5.9 .3 Прогиб крутящего момента датчика ........................................... 545
5.9 .3 .1 Прямой прогиб крутящего момента датчика........................... 546
5.9 .3 .2 Датчик вращающего момента переменного магнитного сопро-
тивления .................................................................................................. 547
5.9 .3 .3 Датчик магнитострикционного крутящего момента .............. 548
5.9 .4 Датчики вращающего момента реакции .................................... 548
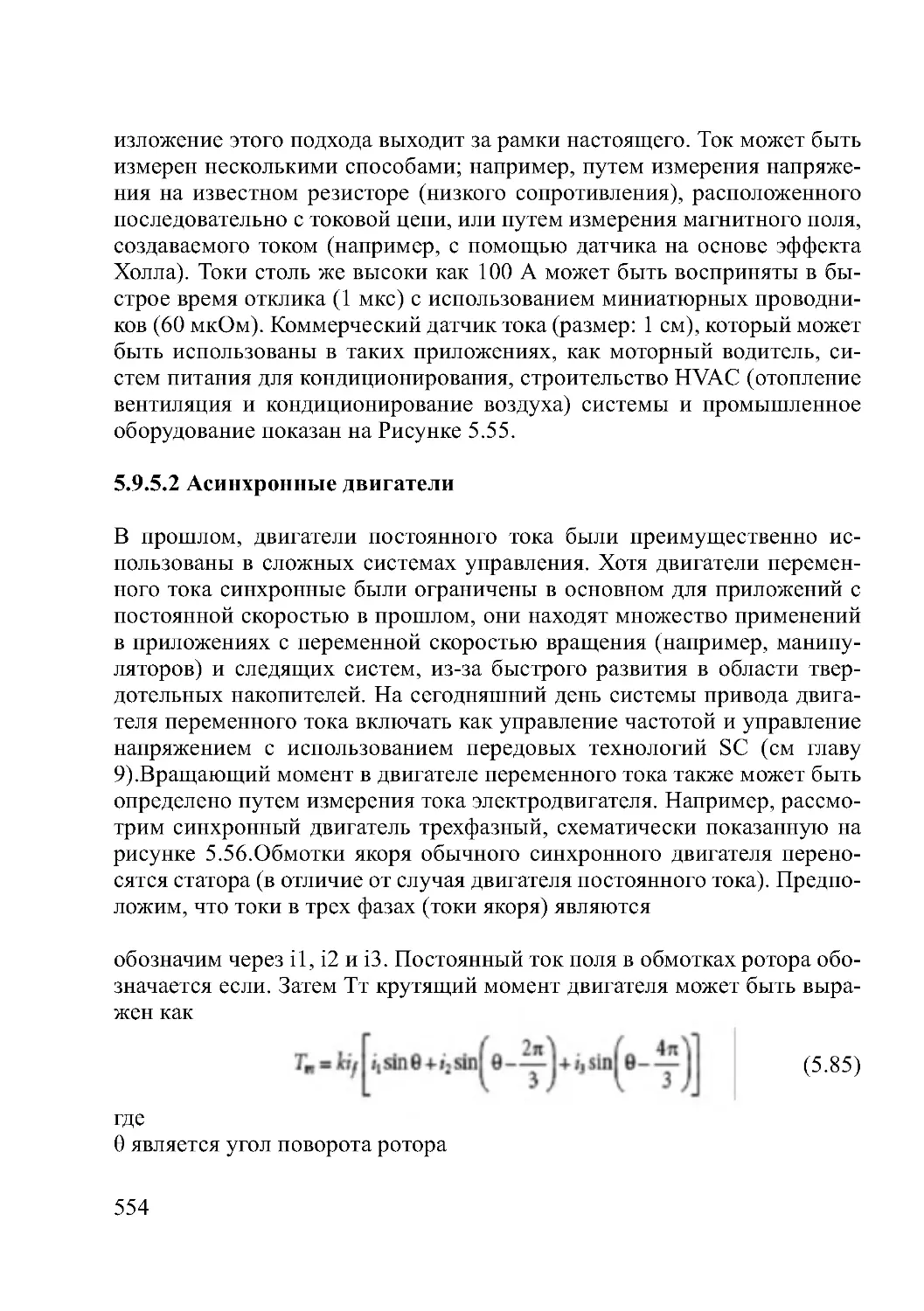
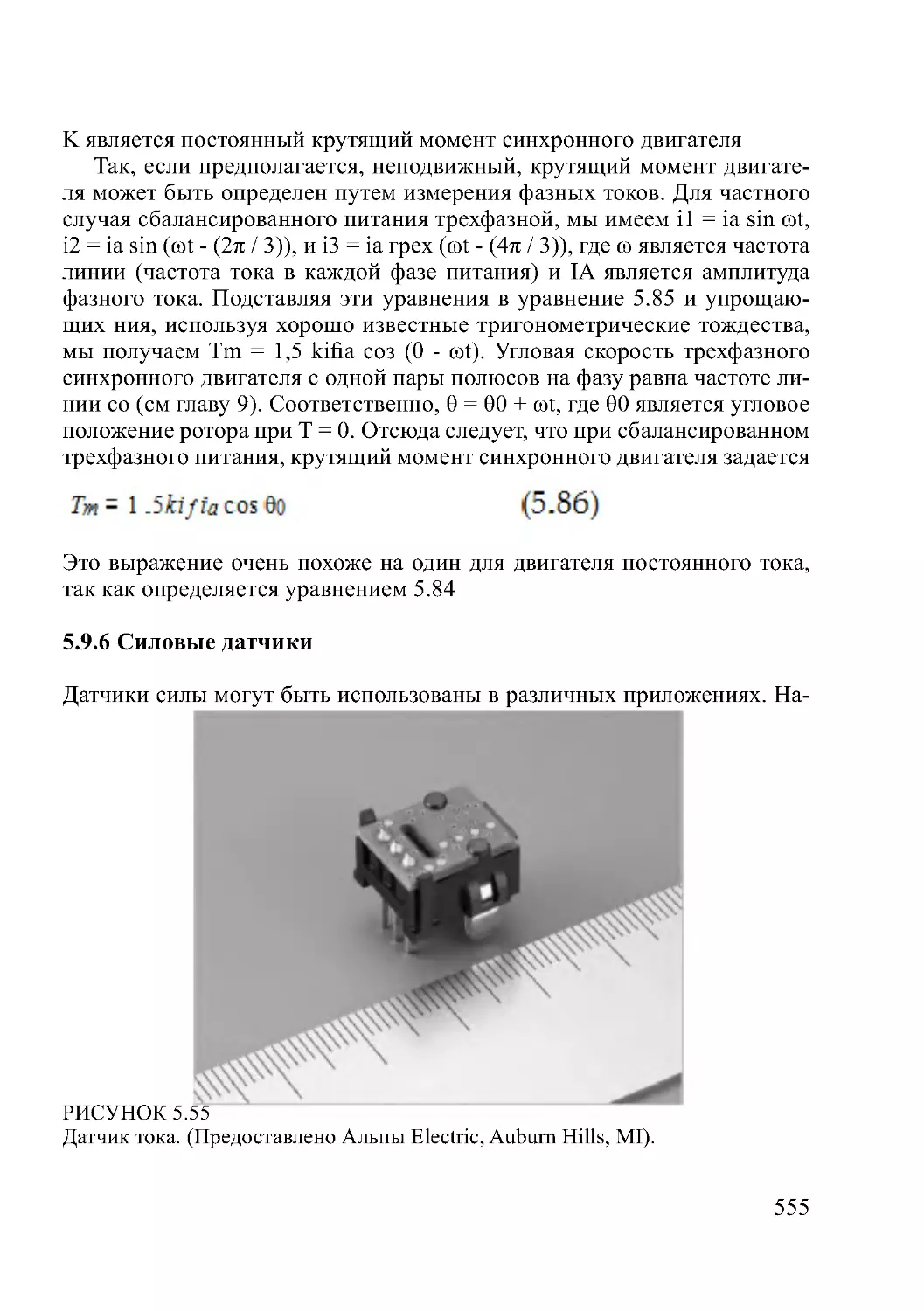
5.9 .5 Датчик тока двигателя крутящего момента ................................ 551
5.9 .5 .2 Асинхронные двигатели ............................................................ 554
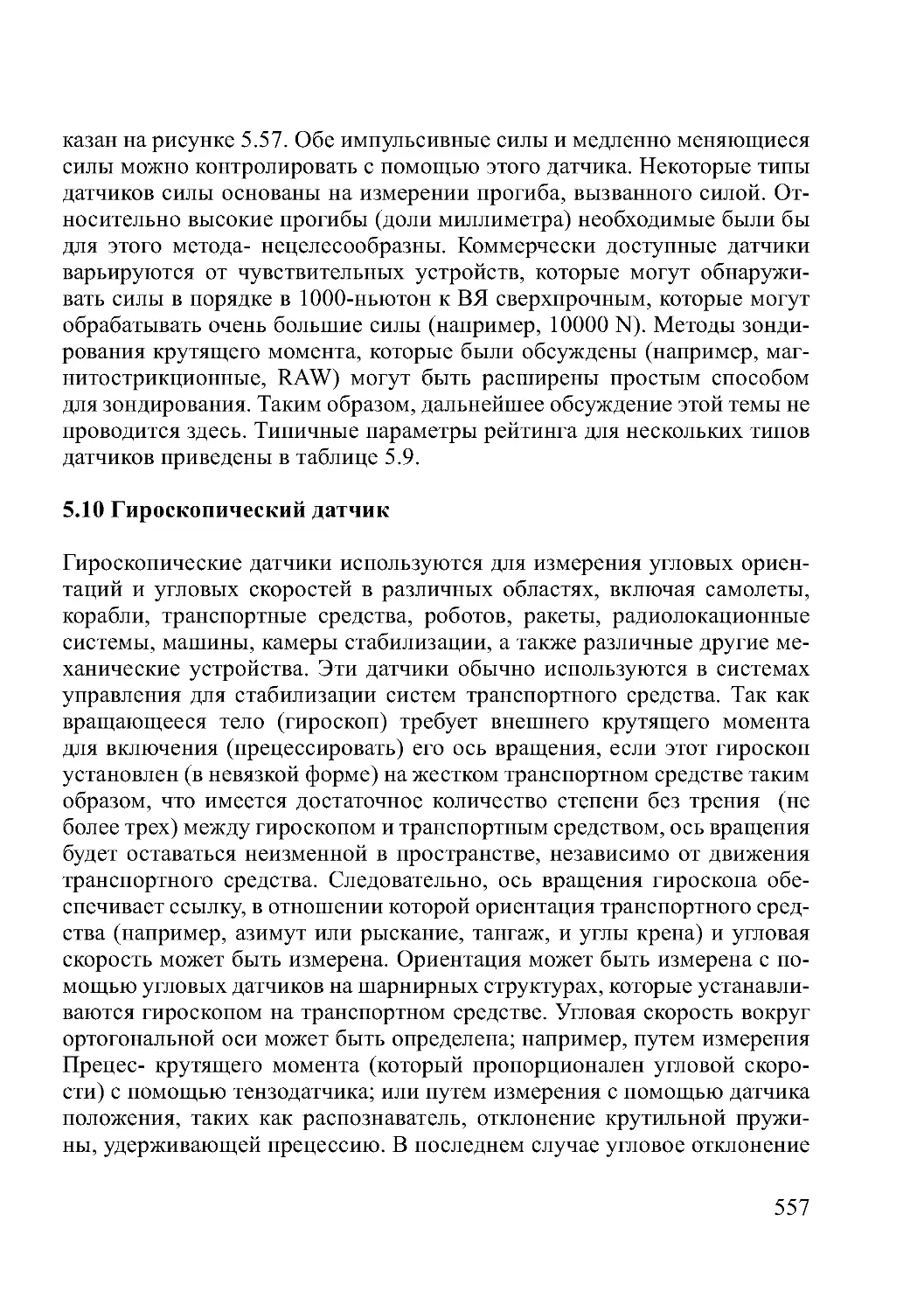
5.9 .6 Силовые датчики........................................................................... 555
5.10 Гиро скопический датчик ............................................................... 557
5.10.1Прециссионный гироскоп ........................................................... 558
5.10.2 Устройства силы Кориолиса ...................................................... 560
5.11 Термо - жидкостные датчики ....................................................... 560
5.11 .1 Датчики давления....................................................................... 560
5.11 .3 Температурные датчики.............................................................. 567
5.11 .3.1 Термопара ................................................................................. 567
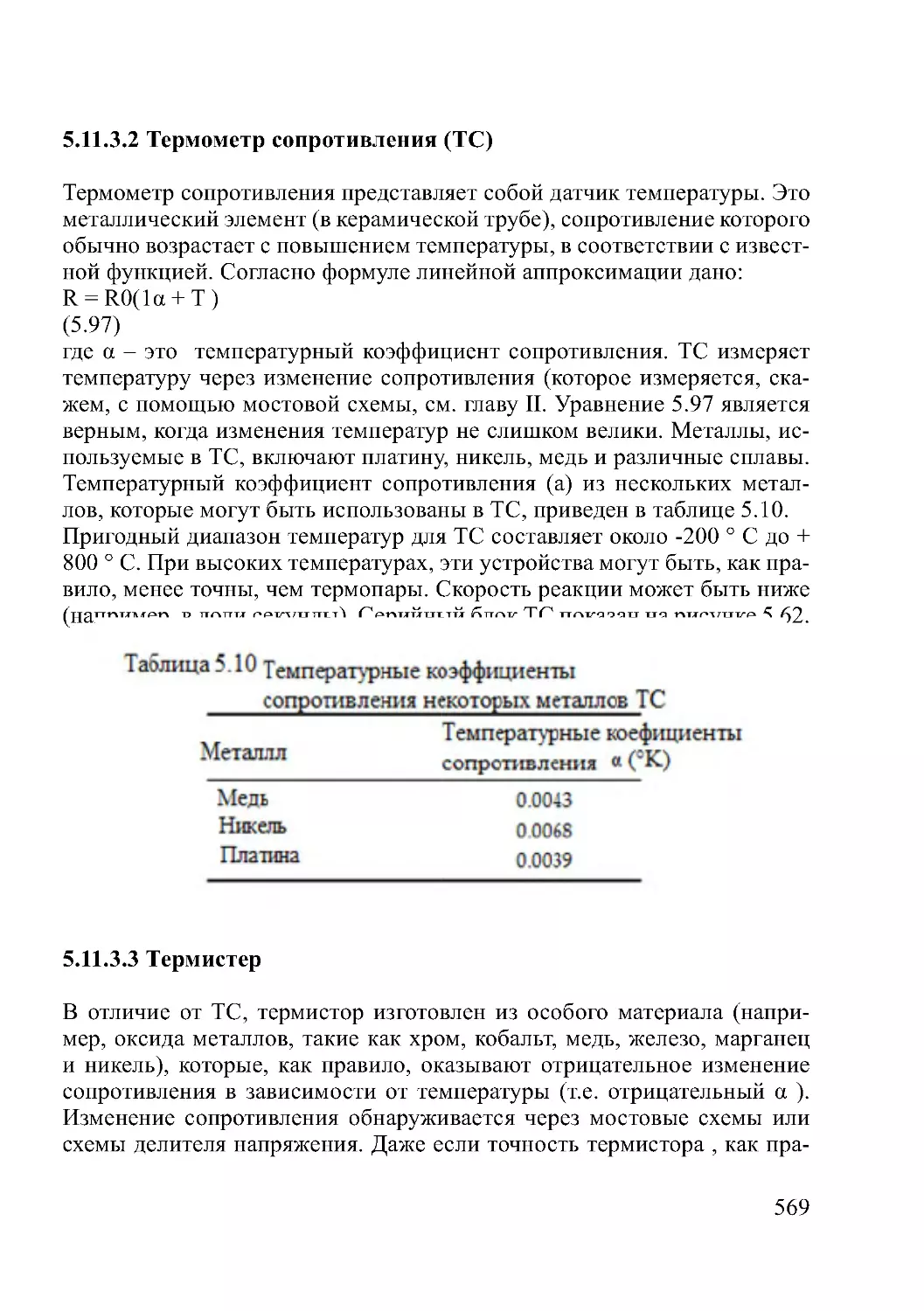
5.11 .3.2 Термометр сопротивления (ТС) .............................................. 569
5.11 .3.3 Термистер .................................................................................. 569
5.1 .3 .4 Биметаллический пленочный термометр ................................ 571
5.11 .3.5 Резонансные сенсоры температуры ....................................... 571
6. Цифровые и инновационные зондирования.................................... 573
6.1 Инновационные сенсорные технологии ........................................ 573
6.1 .1 . Аналоговые различия цифрового зондирования ........................... 574
6.1 .1 .1 Аналоговый метод зондирования (измерения): потенциометр с
3-битным АЦП ....................................................................................... 576
6.1 .1 .2 Цифровой метод зондирования. Восемь ограничительных пере-
ключателей.............................................................................................. 576
6.1 .2 Преимущества цифровых премников ......................................... 577
6.2 Цифровой датчик углового поворота ............................................. 579
6.2 .1 . Типы энкодеров ............................................................................ 579
6.2 .1 .1 . Инкрементальные энкодеры .................................................... 580
6.2 .1 .2 Энкодеры абсолютного отсчёта ................................................ 580
6.2 .1 .2 .1 Энкодер. Технология............................................................... 581
6.2 .1 .3 Оптический энкодер .................................................................. 581
6.2 .1 .4 Скользящий контакт энкодера ................................................. 583
6.2 .1 .5 Магнитный энкодер .................................................................. 583
6.2 .1 .6 Датчик приближения энкодера ................................................. 584
6.2 .1 .7 Направление зондирования ....................................................... 584
6.3 Инкрементальный оптический энкодер ......................................... 585
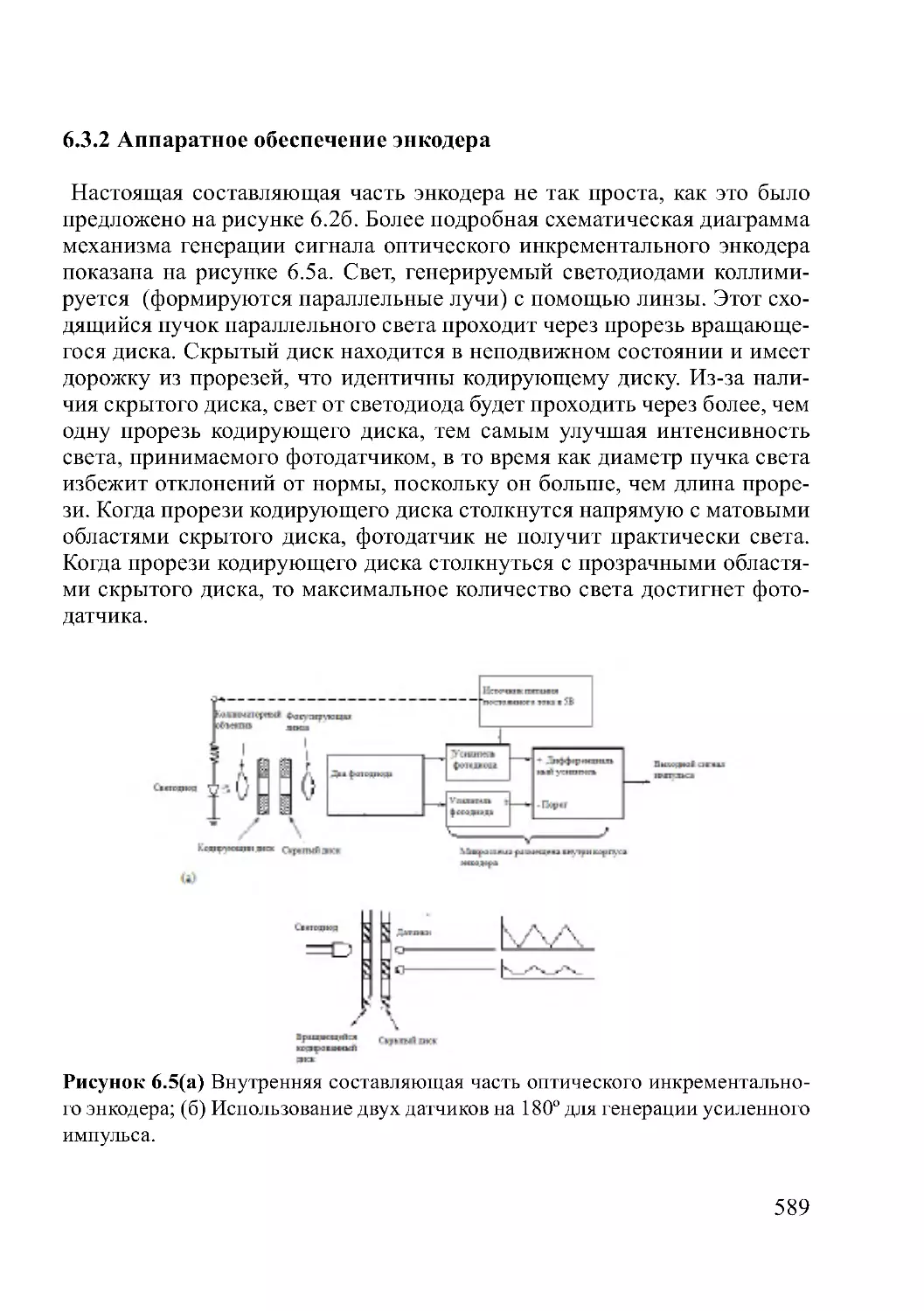
6.3 .2 Аппаратное обеспечение энкодера .............................................. 589
6.3 .2 .1 формирование сигнала .............................................................. 590
6.3 .3 Датчики линейных перемещений (Линейный энкодер) ............ 591
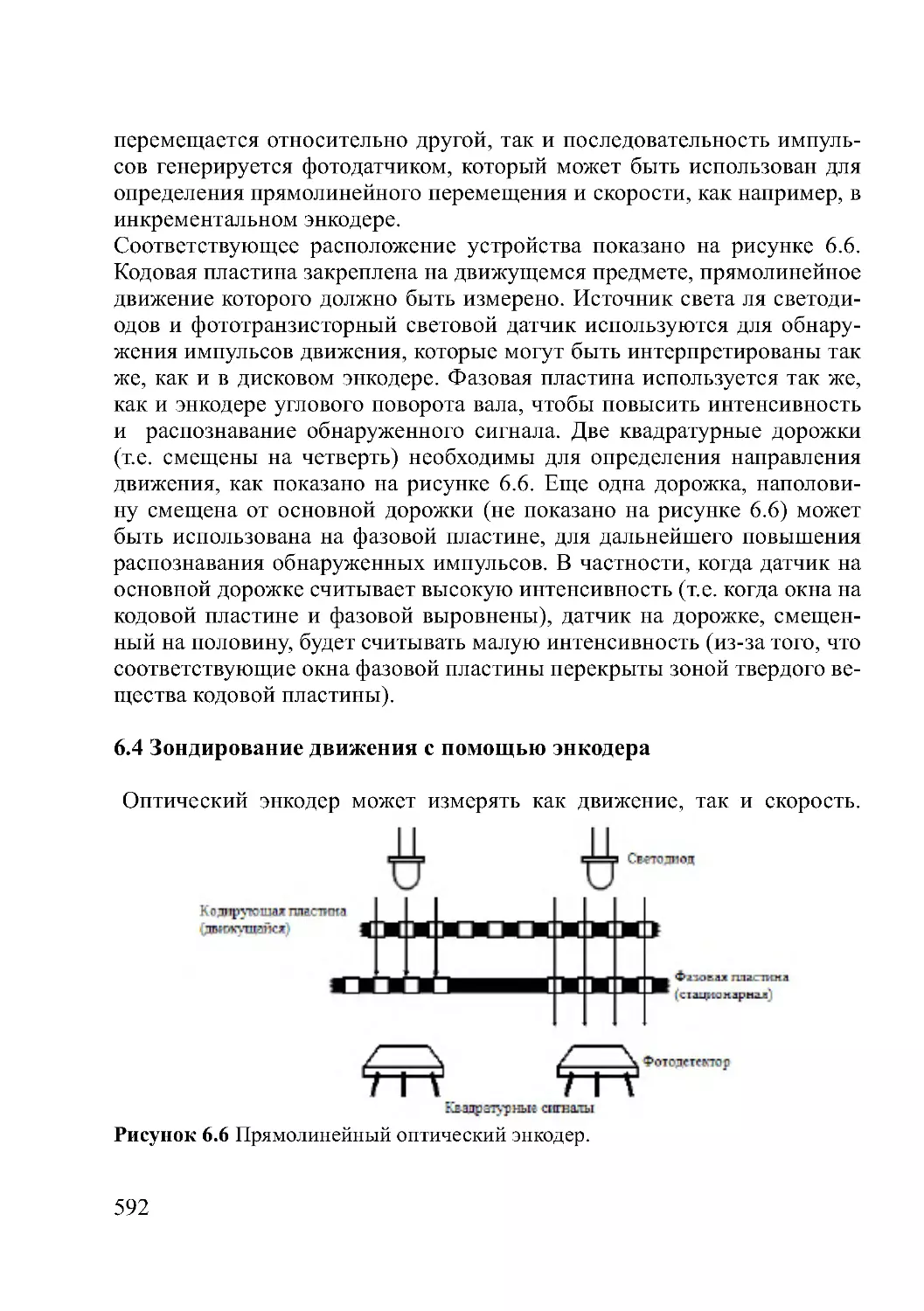
6.4 Зондирование движения с помощью энкодера.............................. 592
6.4 .1 Измерение смещения .................................................................... 593
6.4 .1 .2 физическое разрешение ............................................................ 595
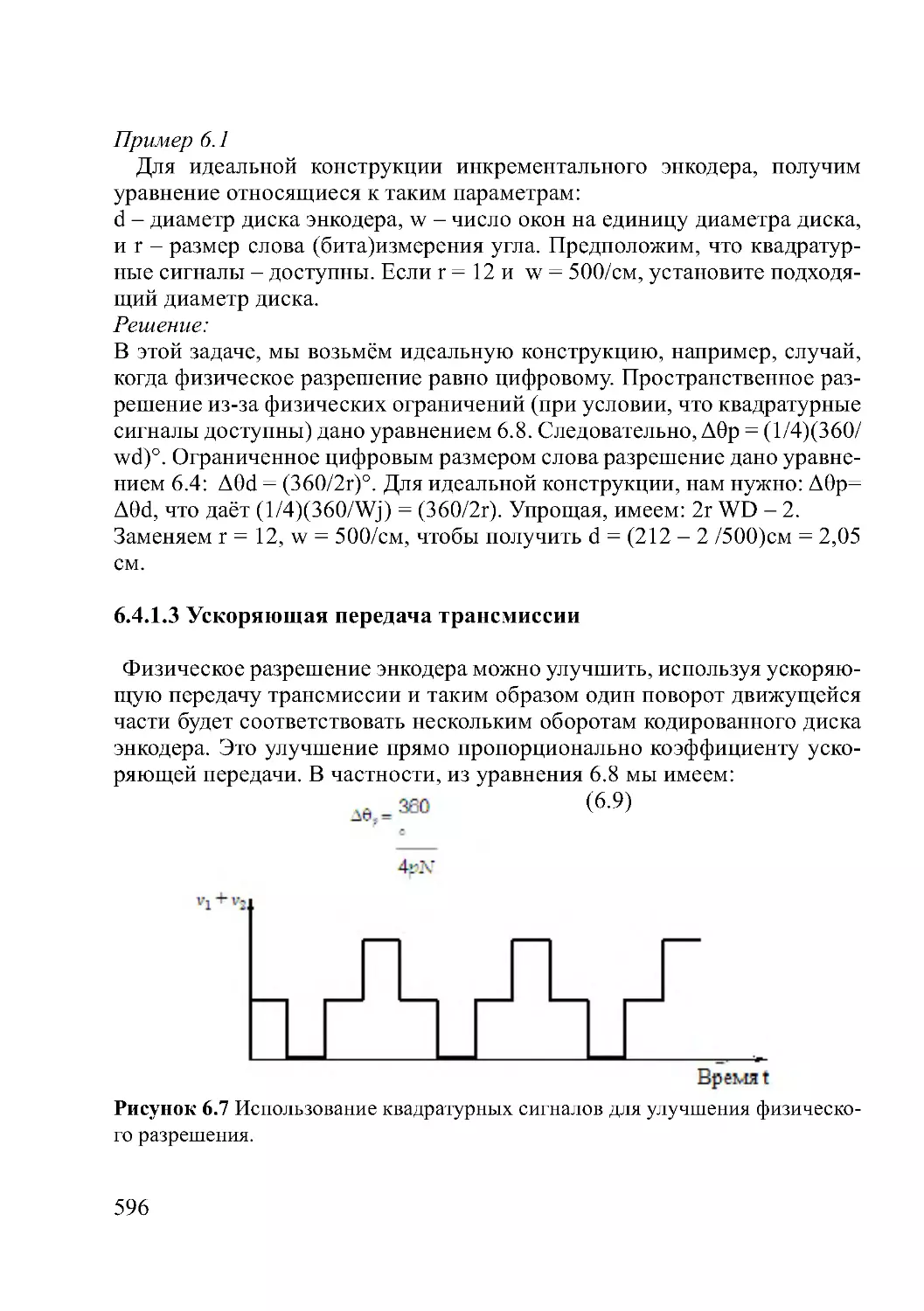
6.4 .1 .3 Ускоряющая передача трансмиссии ......................................... 596
6.4 .1 .4 Интерполирование ..................................................................... 598
6.4 .2 Измерение скорости ...................................................................... 599
6.4 .2 .1 Разрешение скорости ................................................................. 601
6.4 .2 .3 Скоро сть разрешения с ускоряющей передачей ..................... 605
6.5 Энкодеры сбора и обработки данных ............................................ 605
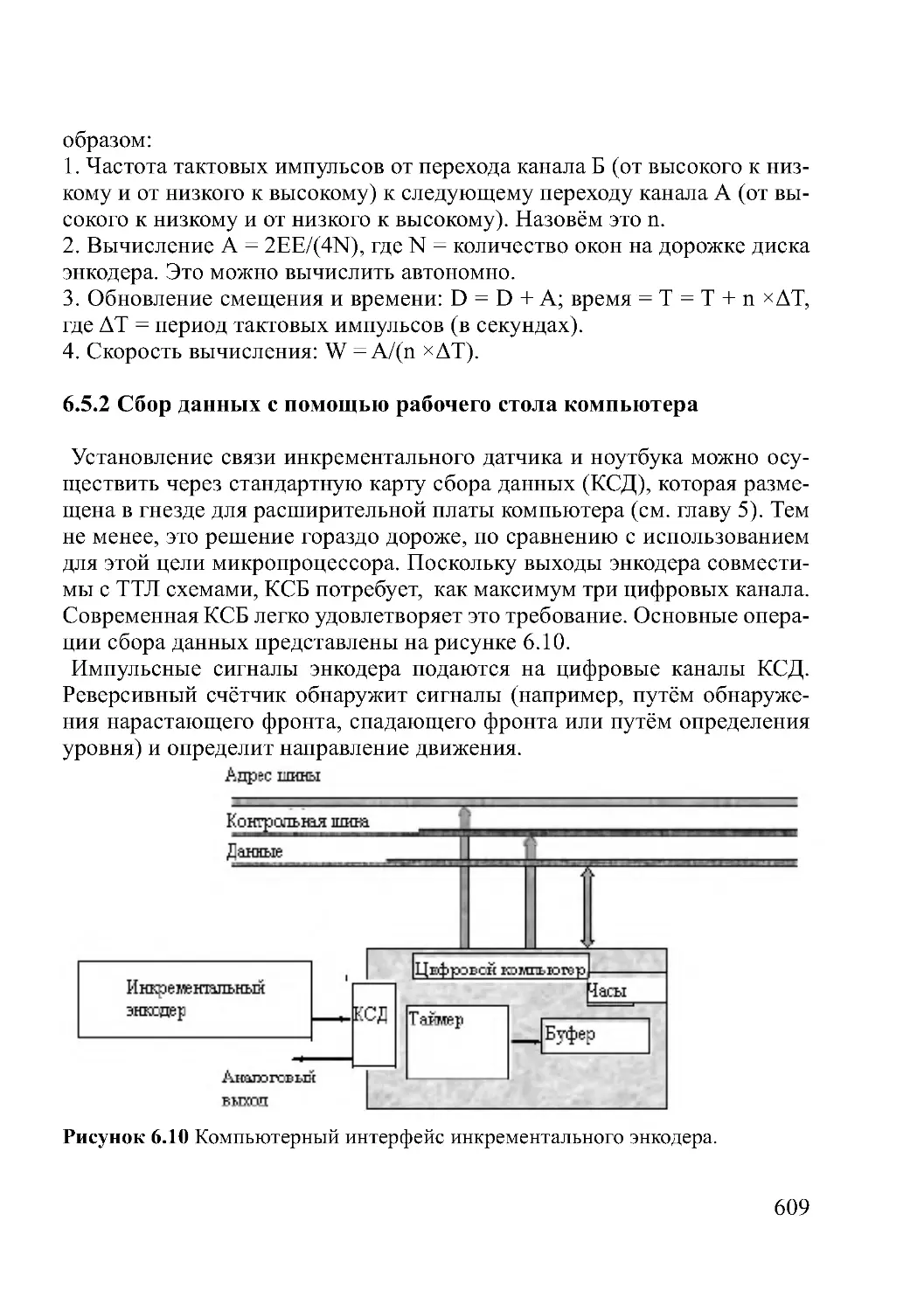
6.5 .2 Сбор данных с помощью рабочего стола компьютера .............. 609
6.6 Абсолютные оптические энкодеры ................................................ 611
6.6 .1 Код Грея ......................................................................................... 612
6.6 .2 Разрешение .................................................................................... 613
6.6 .3 Измерение скорости ...................................................................... 614
6.6 .4 Преимущества и недостатки ........................................................ 615
6.7 Погрешность датчика ..................................................................... 616
6.7 .1 Эксцентричная погрешность ....................................................... 617
6.8 Смешанные цифровые преобразователи ....................................... 622
6.8 .1 Бинарные преобразователи .......................................................... 622
6.8 .2 Цифровой преобразователь координат ....................................... 627
6.8 .4 Муаровые интерференционный полосы смещения датчиков (муа-
ровый узор) ............................................................................................. 629
6.9 Оптические энкодеры, лазеры и цифровые камеры ..................... 633
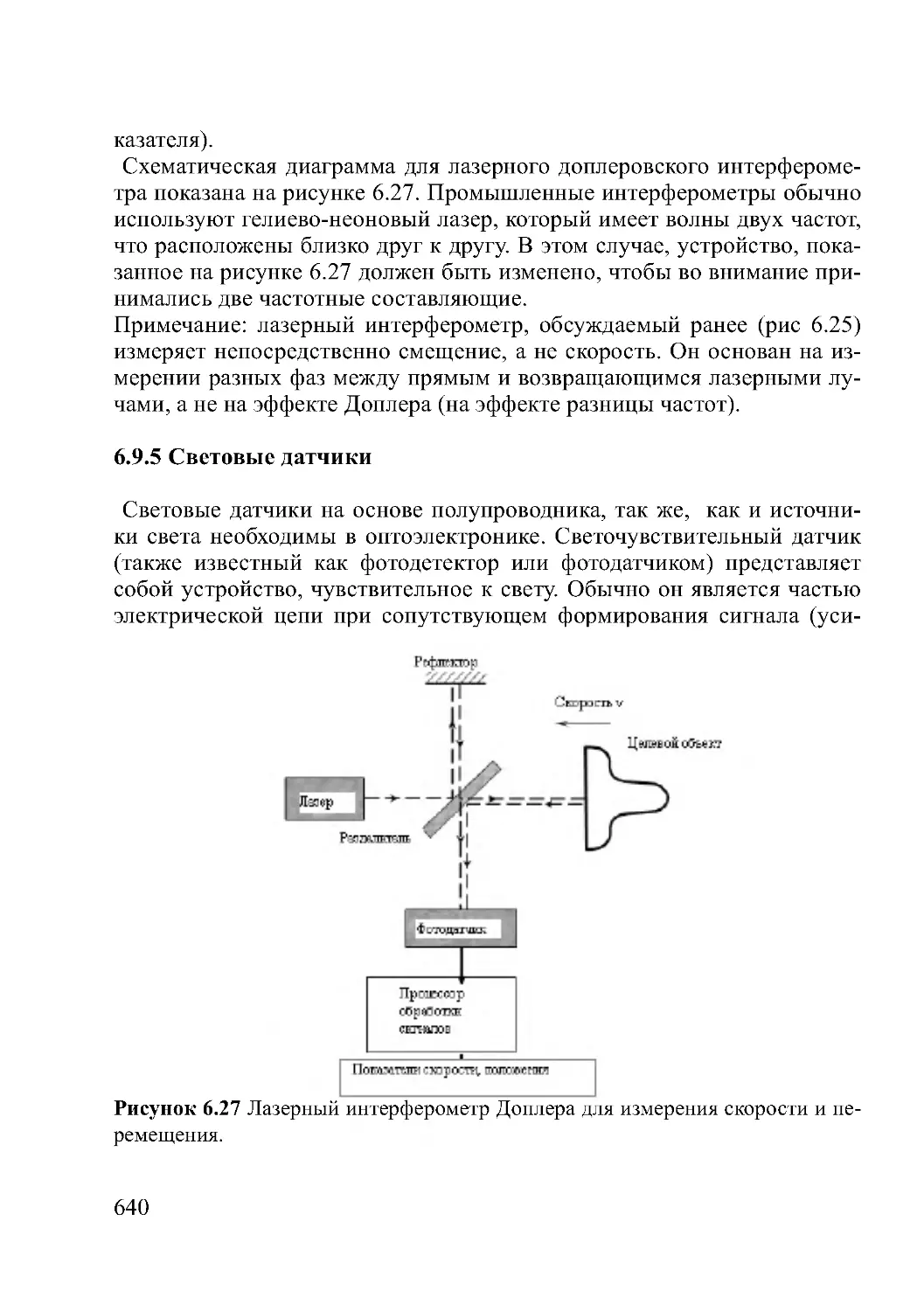
6.9 .2 Лазерный интерферометр............................................................. 635
6.9 .4 Лазерный доплеровский интерферометр .................................... 638
6.9 .5 Световые датчики ......................................................................... 640
6.9 .5 .1 фоторезистор .............................................................................. 641
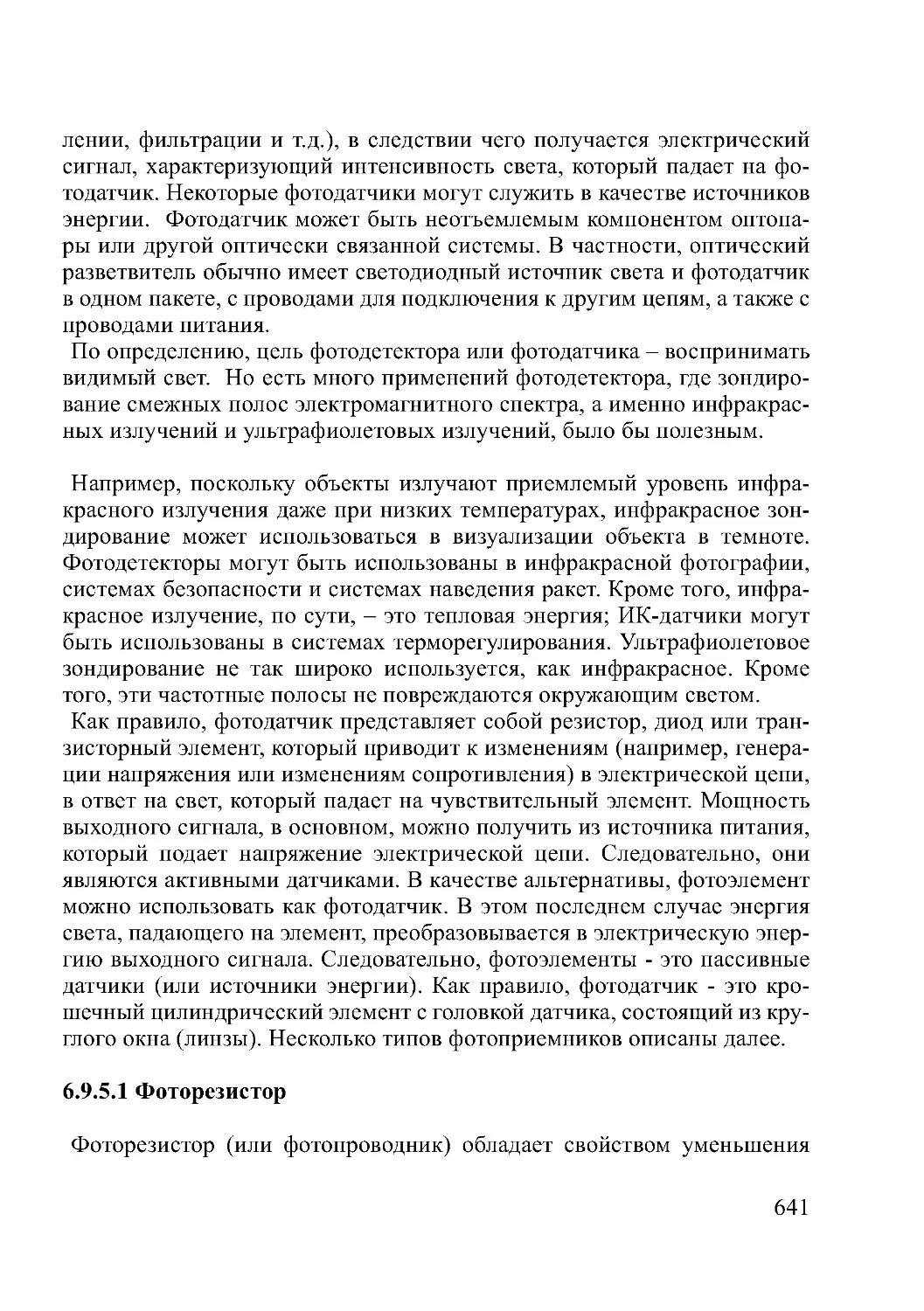
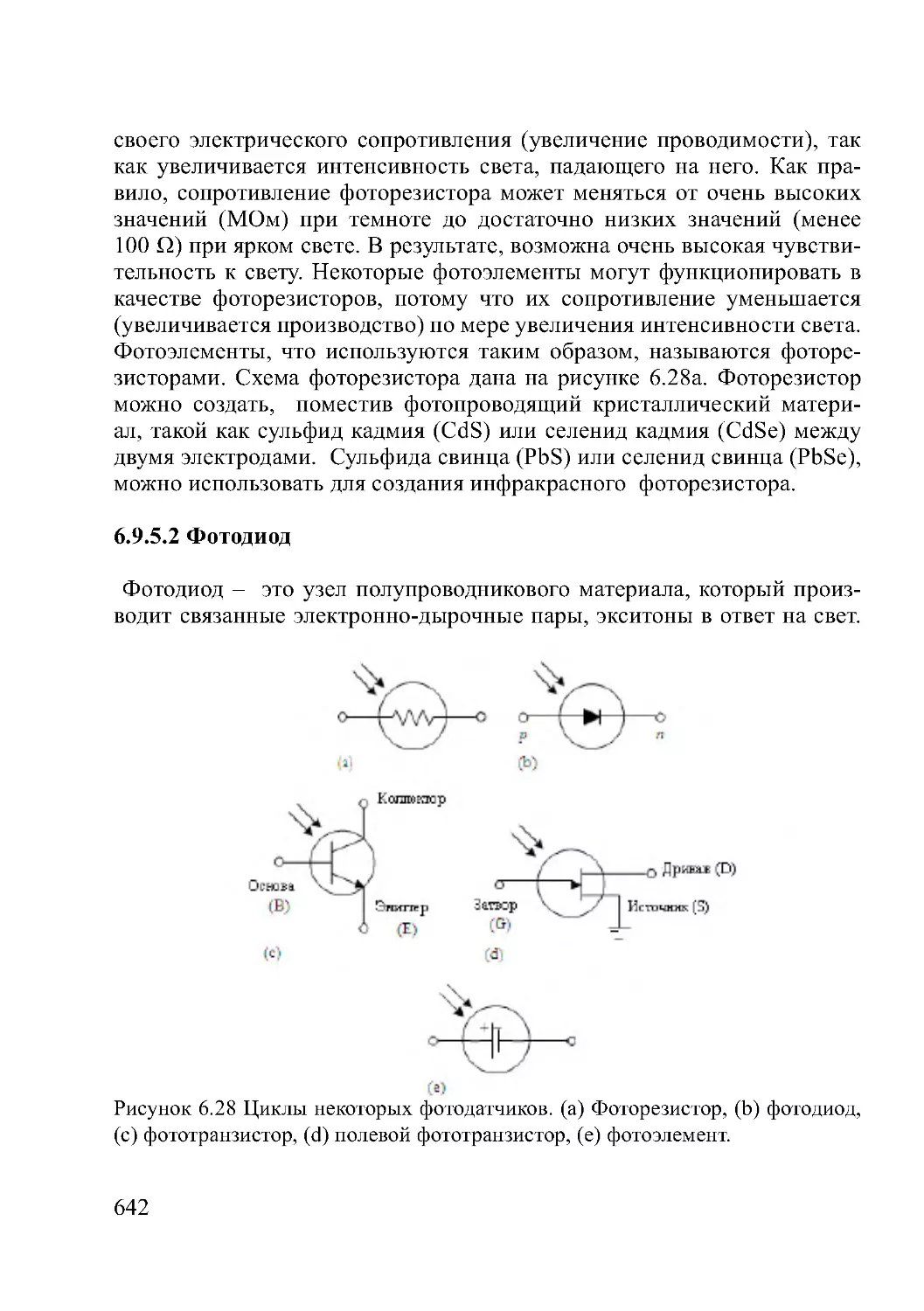
6.9 .5 .2 фотодиод ..................................................................................... 642
6.9 .5 .3 фототранзистор .......................................................................... 643
6.9 .5 .4 Интегрированная технология с эффектом полевого фототранзи-
стора ........................................................................................................ 644
6.9 .5 .5 фотоэлемент ............................................................................... 644
6.9 .5 .6 Прибор с зарядовой связью ПЗС .............................................. 645
6.9 .6 Датчики изображения ................................................................... 646
6.9 .6 .1 Обработка изображений и компьютерное зрение ................... 646
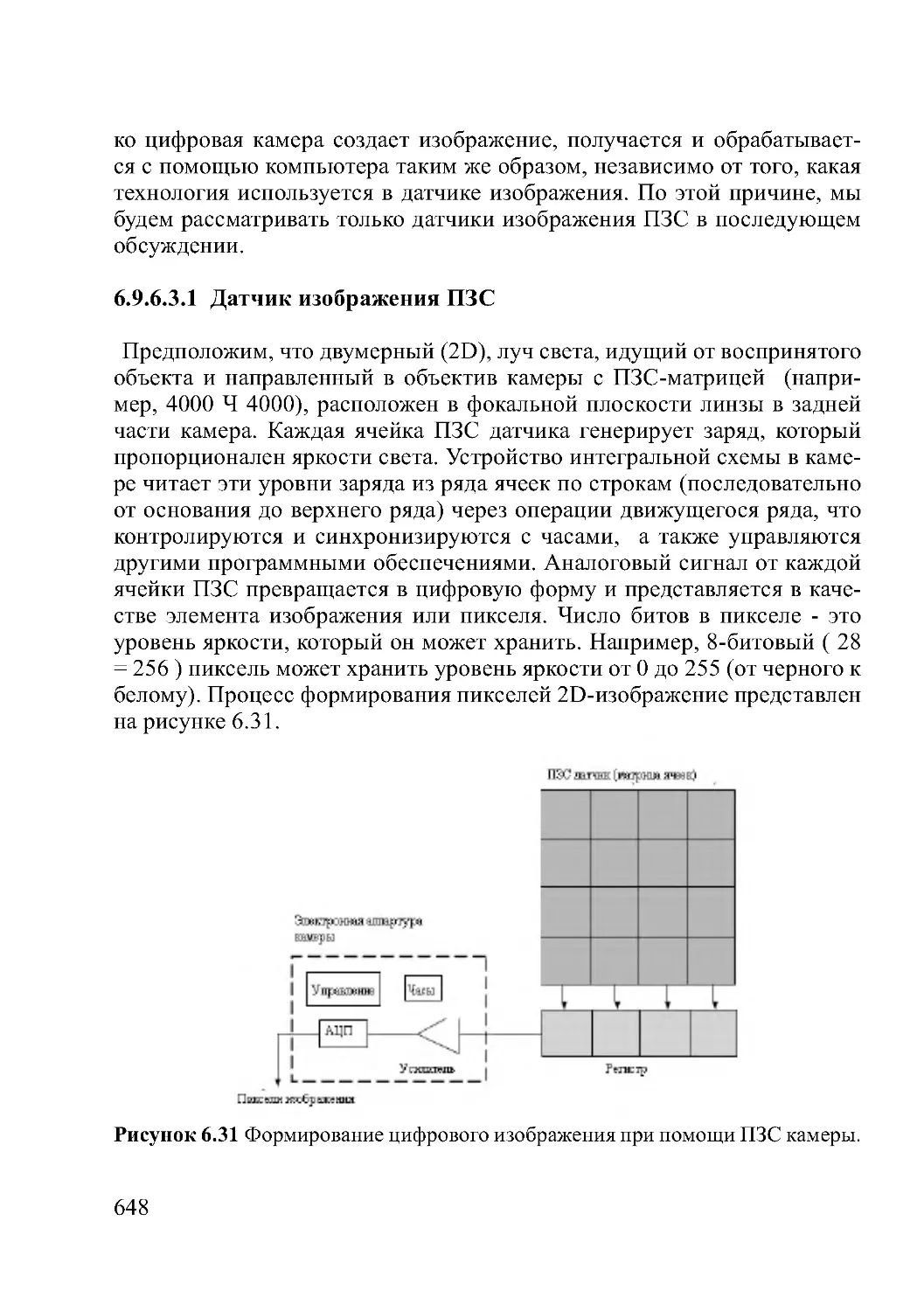
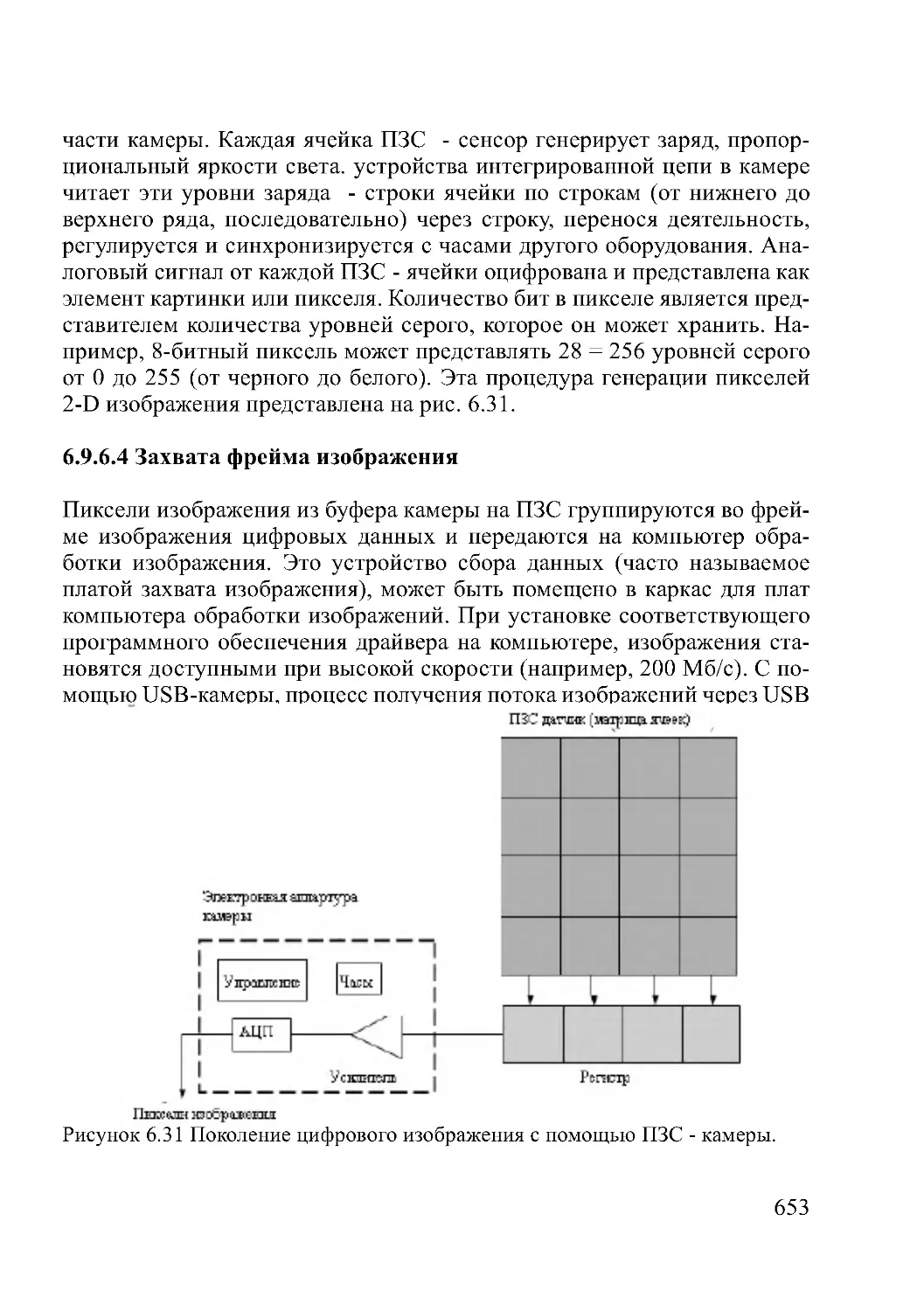
6.9 .6 .3 Камера ......................................................................................... 647
6.9 .6 .3 .1 Датчик изображения ПЗС...................................................... 648
6.9 .5 .4 фото-фет..................................................................................... 649
6.9 .5 .5 фотоэлемент ............................................................................... 649
6.9 .6 .6 Прибор с зарядовой связью....................................................... 649
6.9 .6 .7 Датчики изображения ................................................................ 651
6.9 .6 .1 Обработка изображений и машинного зрения ........................ 651
6.9 .6 .2 Изображения на основе сенсорной системы ........................... 651
6.9 .6 .3 Камеры ........................................................................................ 652
6.9 .6 .3 .1 CCD Сенсор изображения ..................................................... 652
6.9 .6 .4 Захвата фрейма изображения .................................................... 653
6.9 .6 .5 Цветные изображения................................................................ 654
6.9 .6 .6 Обработка изображения ............................................................ 654
6.9 .6 .7 Некоторые приложения ............................................................. 655
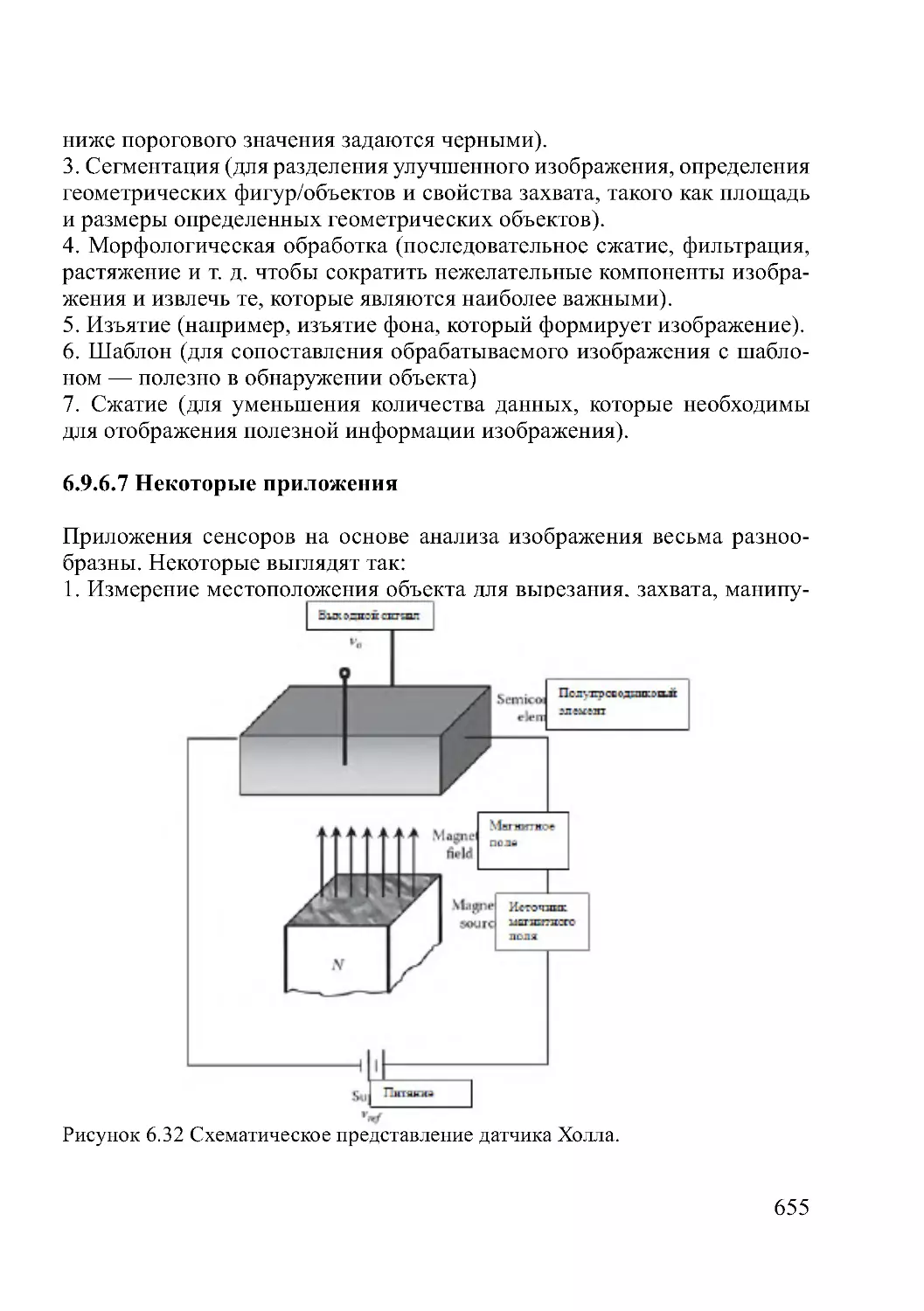
6.10 Различные сенсорные технологии................................................ 656
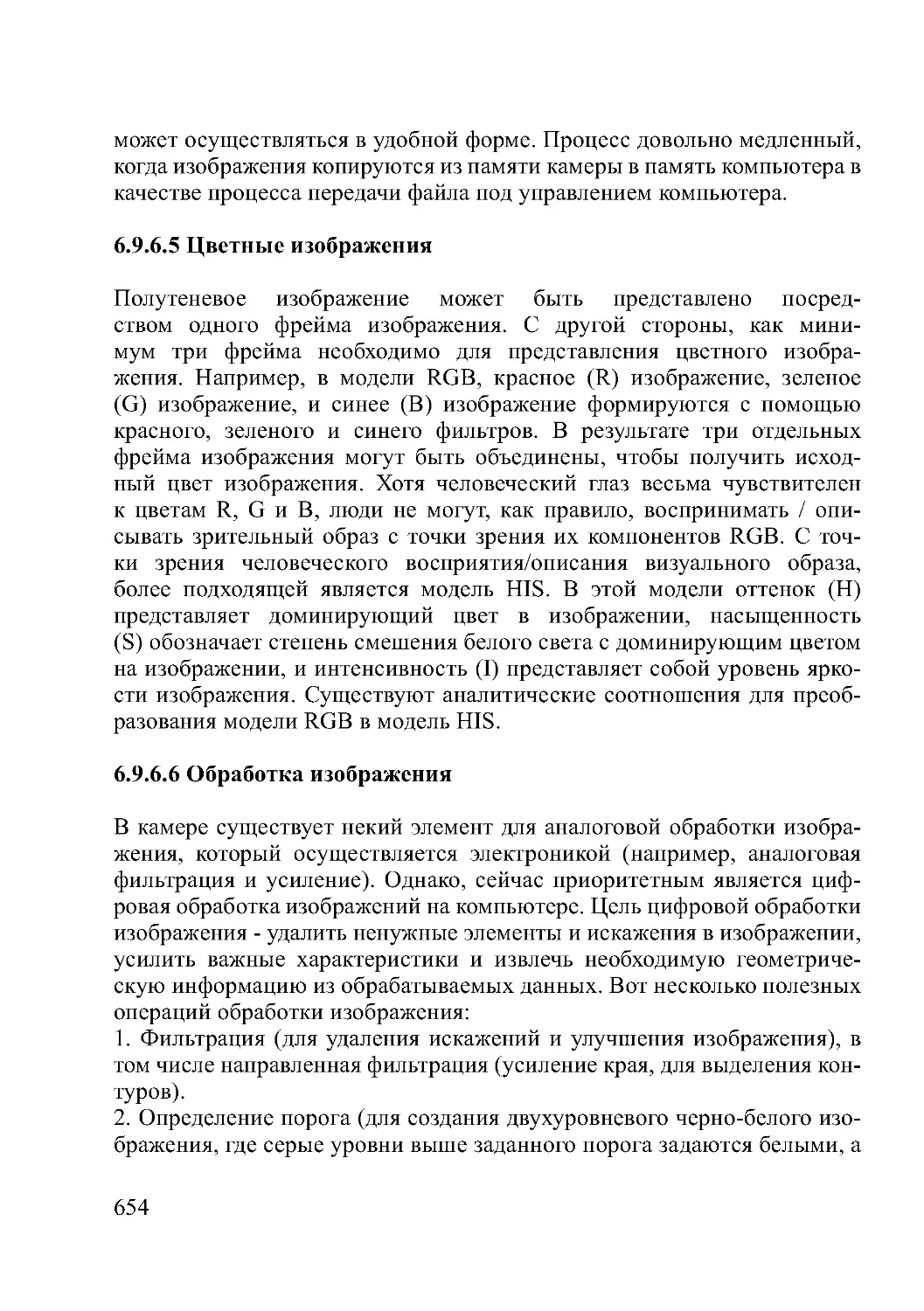
6.10.1 Датчик с эффектом Холла .......................................................... 657
6.10.1 .1 Датчики движения с эффектом Холла.................................... 657
6.10.1 .2 Свойства.................................................................................... 658
6.10.2 Ультразвуковые датчики ............................................................. 658
6.10.3 Магнитострикционный датчик смещения ................................ 661
6.10.4 Измерение и контроль сопротивления ...................................... 661
6.11 Тактильно чувствительный датчик............................................... 667
6.11 .1 Требования к тактильным датчикам.......................................... 667
6.11 .1.1 функциональные возможности .............................................. 670
6.11 .2 Состав и работа тактильных датчиков ...................................... 670
6.11 .3 Оптические тактильные датчики ............................................... 673
6.11 .4 Тензометрические тактильные датчики ................................... 675
6.11 .5 Прочие тактильные датчики....................................................... 676
6.12 датчики МЭМС .............................................................................. 677
6.12 .1 Преимущества МЭМС................................................................ 678
6.12 .1 .1 Особые примечания ................................................................. 678
6.12 .1 .2 Диапазон параметров............................................................... 679
6.12 .2 моделирование датчика МЭМС................................................. 679
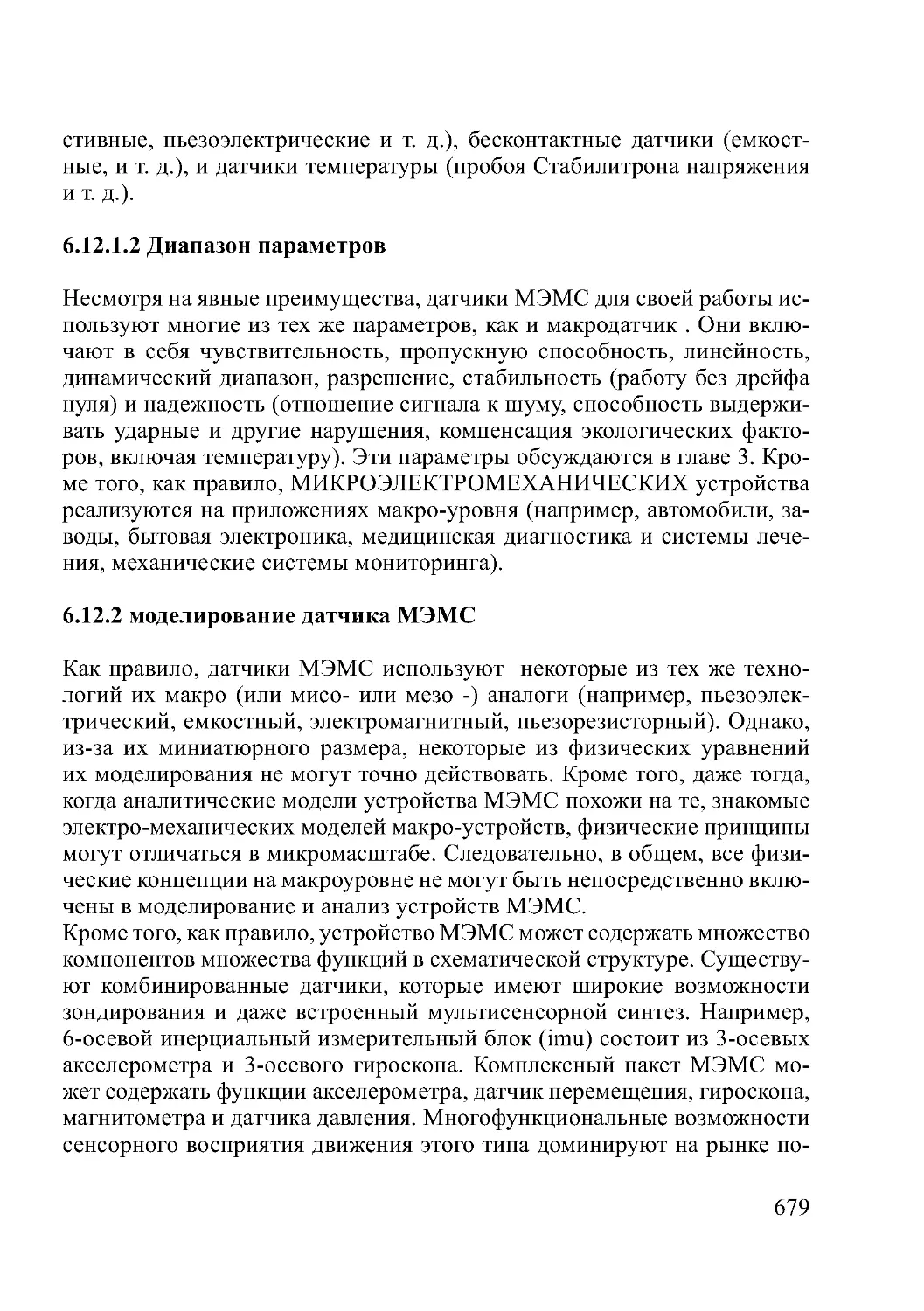
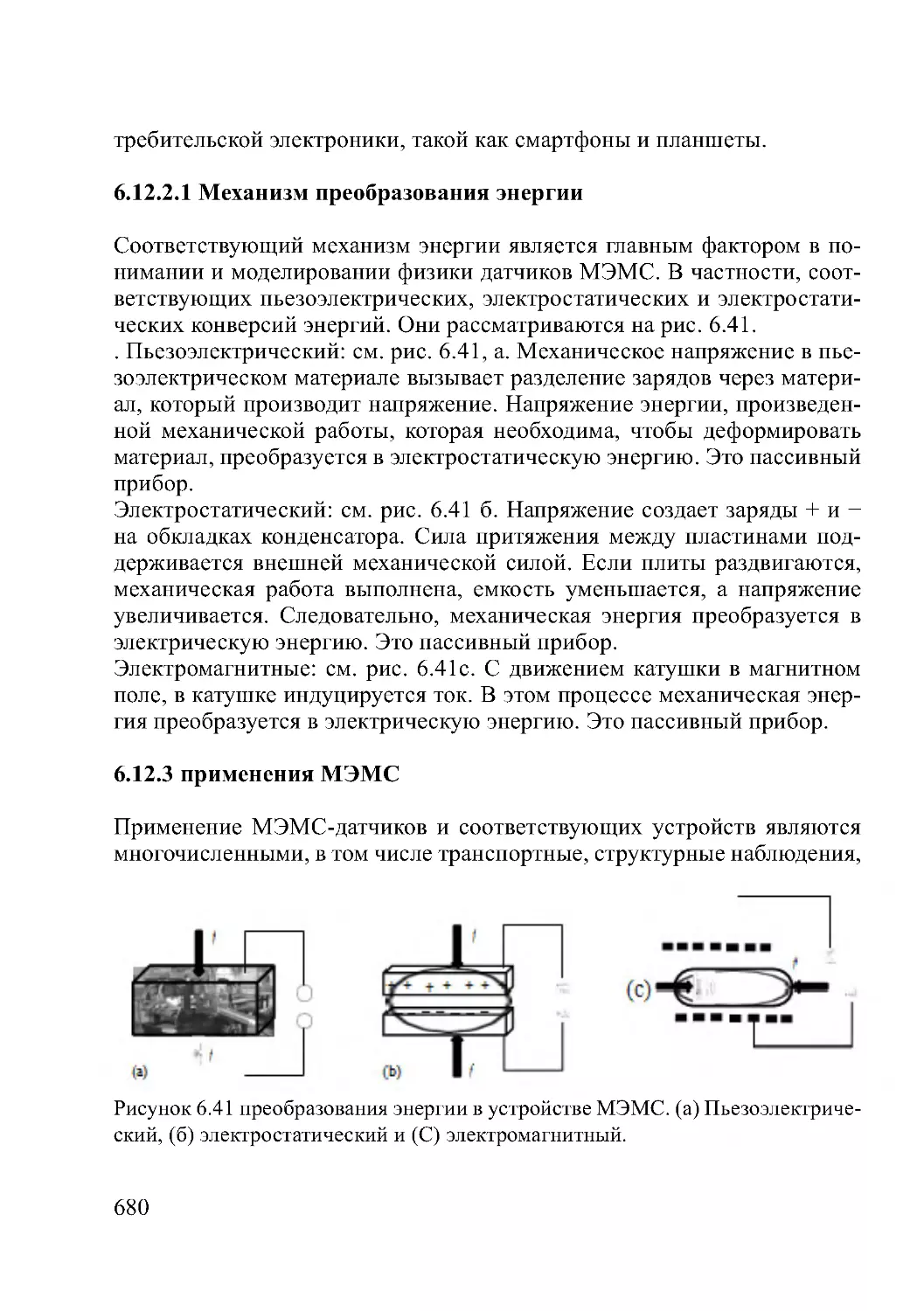
6.12 .2 .1 Механизм преобразования энергии ........................................ 680
6.12 .3 применения МЭМС .................................................................... 680
6.12 .4 Материалы и изготовление МЭМС ........................................... 682
6.12 .4 .1 Процесс изготовления ИС ....................................................... 683
6.12 .4 .2 процессы изготовления МЭМС .............................................. 684
6.12 .5 примеры датчиков МЭМС........................................................ 685
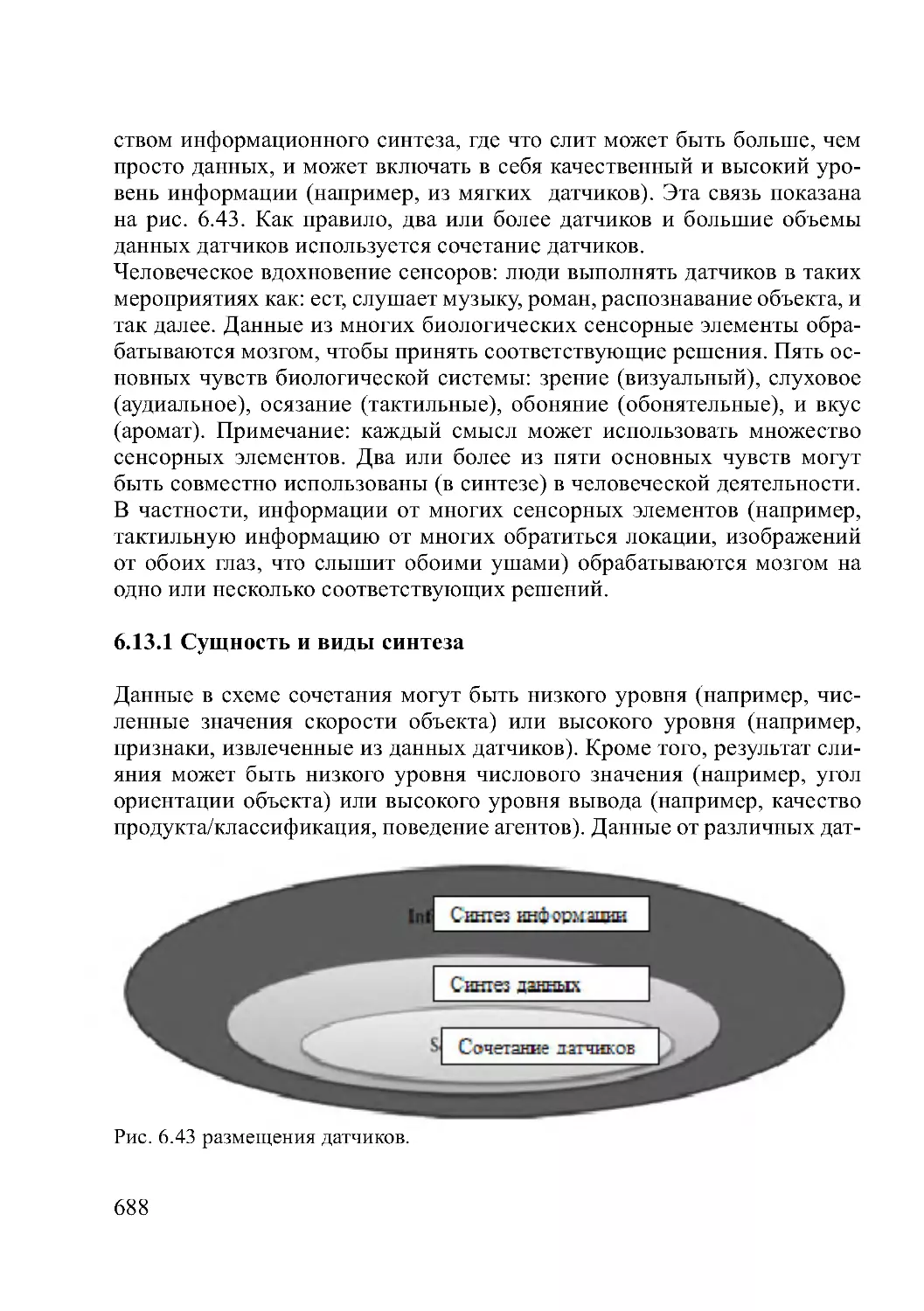
6.13 Сочетание датчиков ....................................................................... 687
6.13.1 Сущность и виды синтеза .......................................................... 688
6.13.1 .1 Архитектура сочетания ........................................................... 689
6.13.2 Применения сочетания датчиков ............................................... 690
6.13.2 .1 Технологии запуска ................................................................. 693
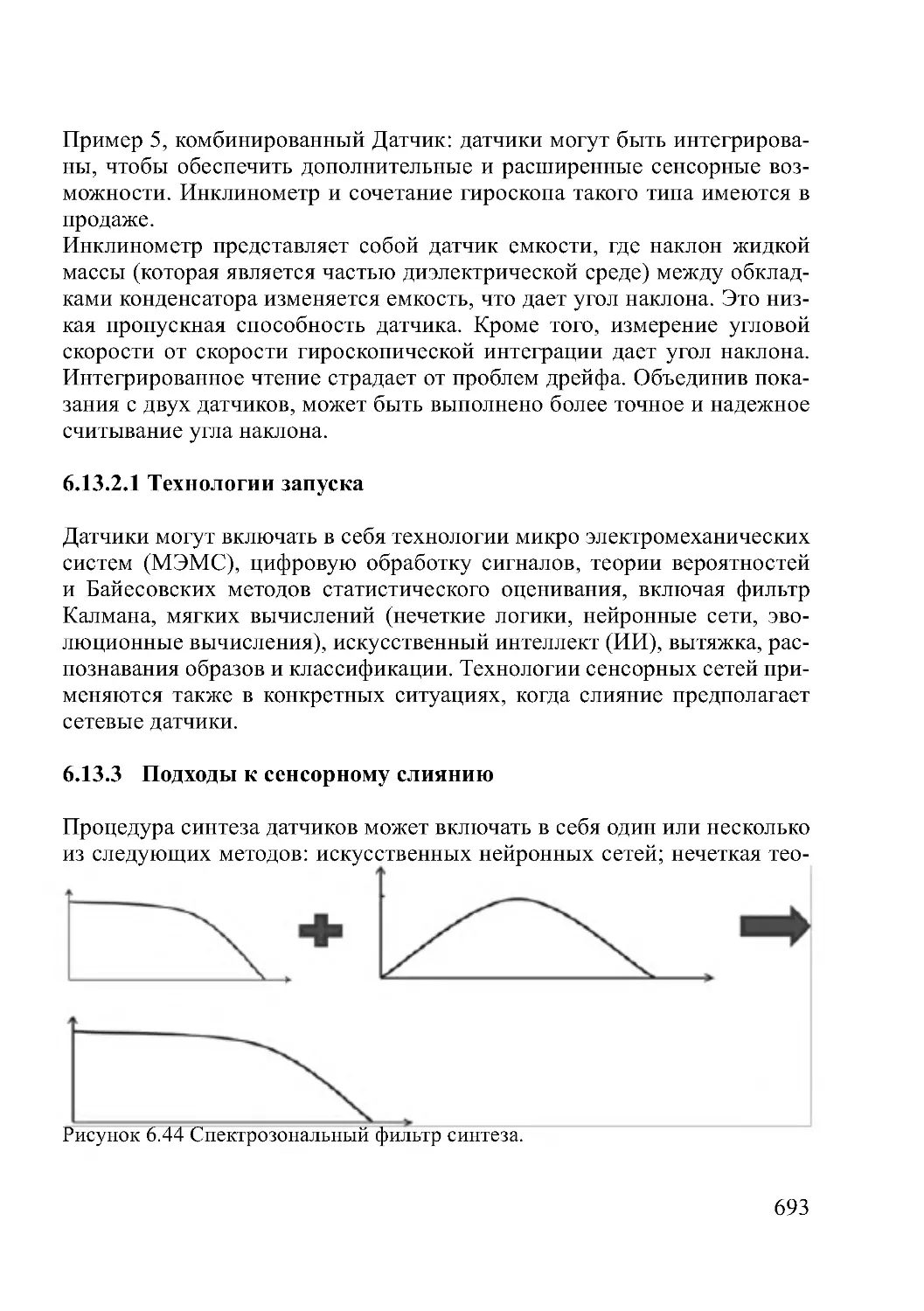
6.13.3 Подходы к сенсорному слиянию ............................................... 693
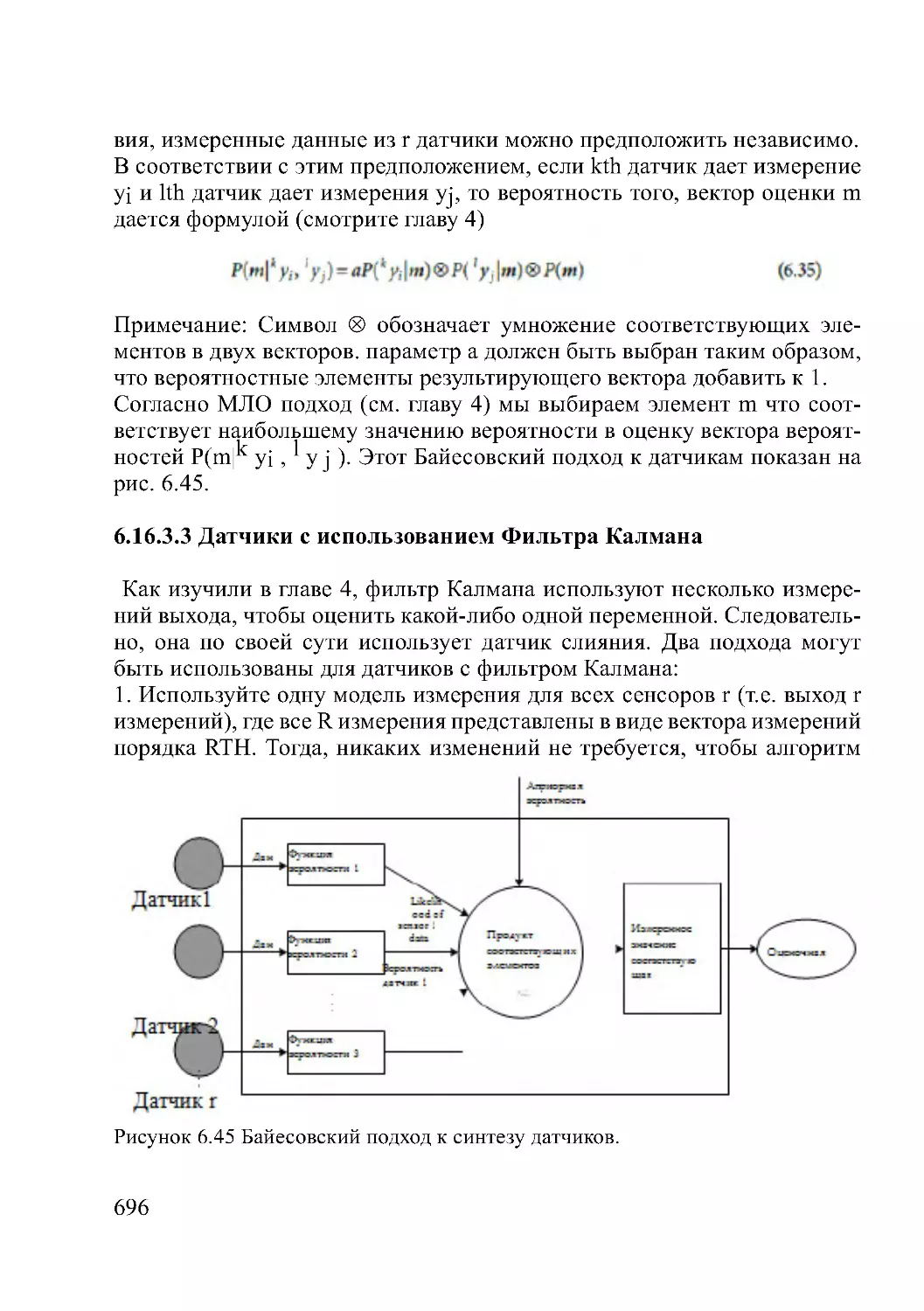
6.13.3 .1 Байесовский подход к слиянию датчиков .............................. 694
6.16.3 .3 Датчики с использованием фильтра Калмана ....................... 696
6.13.3 .4 Синтез датчиков с помощью нейронных сетей..................... 697
6.13.3 .4 .1 Обучение ................................................................................ 698
6.13.3 .4 .2 Гибридное использование с нечеткой логикой (нейро нечеткие
системы) .................................................................................................. 699
6.13.3 .4 .3 Пример: машинное обнаружение ошибок .......................... 699
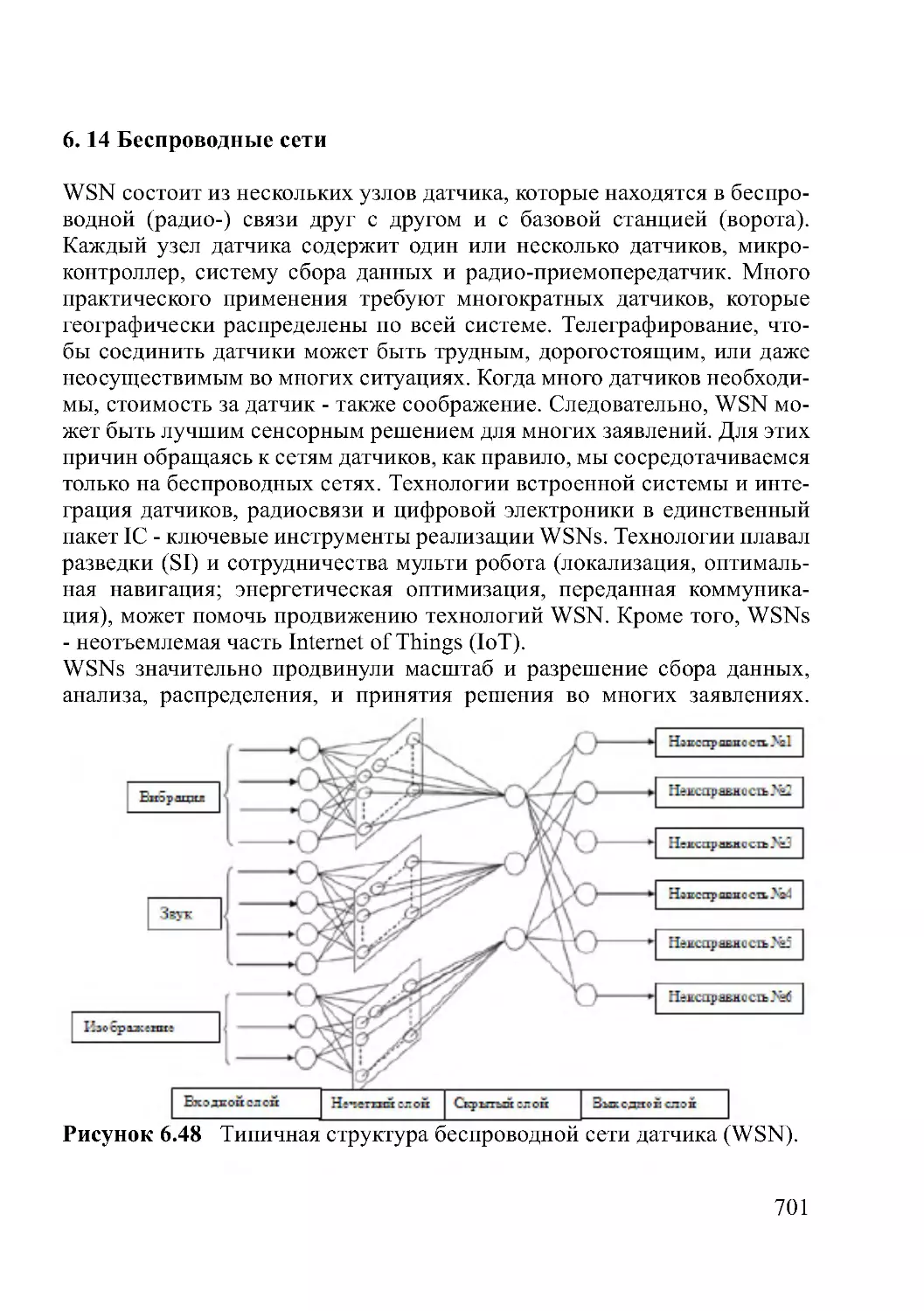
6. 14 Беспроводные сети........................................................................ 701
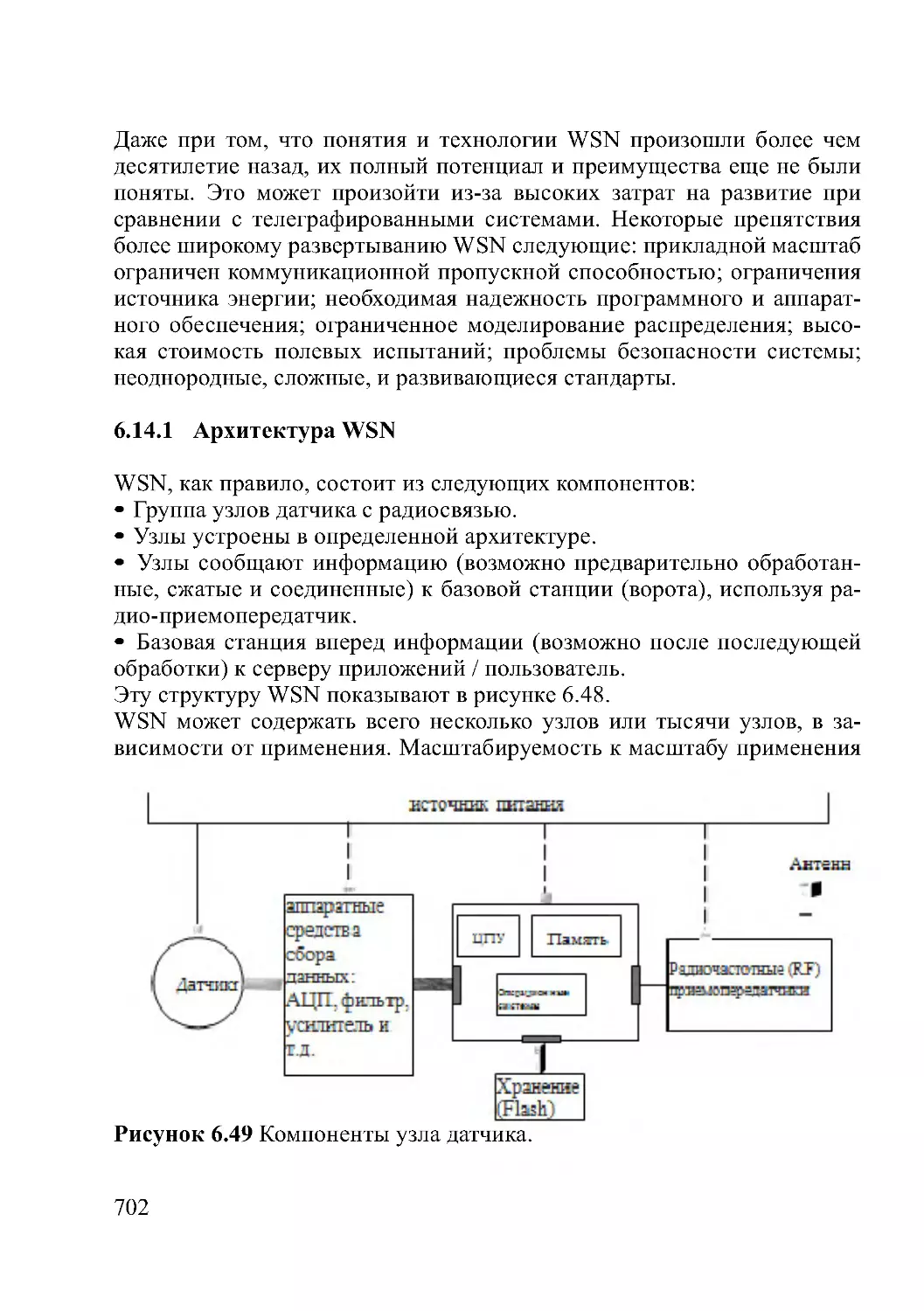
6.14 .1 Архитектура WSN....................................................................... 702
6.14 .1 .1 узел датчика .............................................................................. 703
6.14 .1 .2 Топологии WSN ...................................................................... 704
6.14 .1 .3 Операционная система WSN .................................................. 704
6.14 .2 .1 Ключевые вопросы WSN......................................................... 706
6.14 .2 .2 Инженерные проблемы ........................................................... 706
6.14 .2 .3 Проблемы питания................................................................... 707
6.14 .2 .4 Управление электропитанием ................................................. 707
6.14 .3 Проблемы коммуникации .......................................................... 709
6.14 .3 .1 Протокол связи WSN ............................................................... 709
6.14 .3 .2 Направление коммуникации в WSN....................................... 710
6.14 .3 .3 Стандарты WSN ....................................................................... 711
6.14 .3 .4 Другие программы WSN ......................................................... 712
6.14 .4 Локализация................................................................................. 712
6.14 .4 .1 Методы локализации ............................................................... 713
6.14 .4 .2 Локализация мультилатерации ............................................... 713
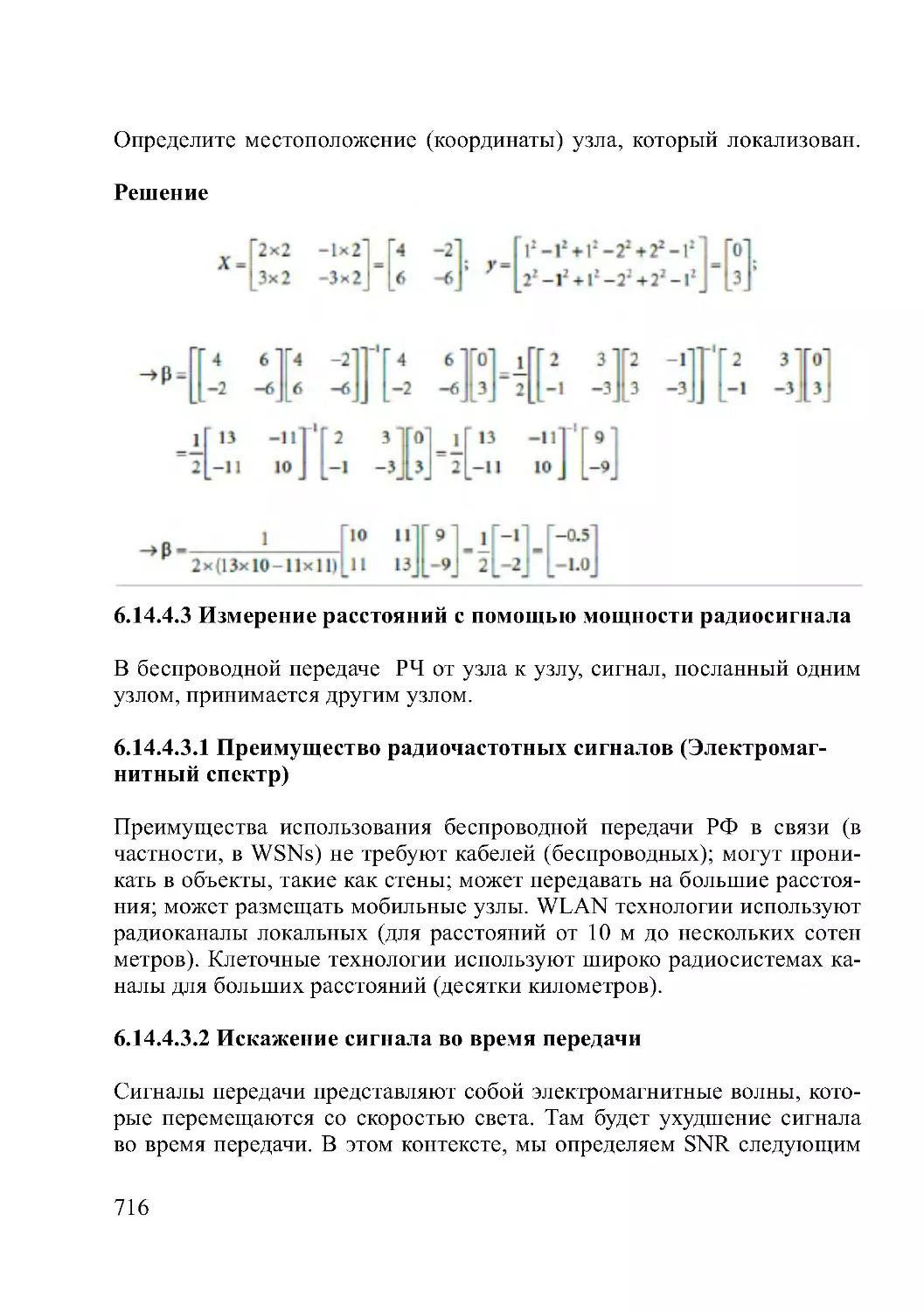
6.14 .4 .3 Измерение расстояний с помощью мощности радиосигнала716
6.14 .4 .3 .1 Преимущество радиочастотных сигналов (Электромагнитный
спектр) ..................................................................................................... 716
6.14 .4 .3 .2 Искажение сигнала во время передачи ............................... 716
6.14 .4 .3 .3 Метод...................................................................................... 717
6.14 .4 .3 .4 Использование RSSI (По данным IEEE 802.11-1999)........ 717
6.14 .5 WSN Приложения ....................................................................... 718
6.14 .5 .1 Проживание с предоставлением частичного ухода и медицин-
ского сопровождения ............................................................................. 719
6.14 .5 .2 Структурный медицинский контроль .................................... 719
19
Основные моменты главы
* Считывание, приведение в действие и контроль в контрольно-измери-
тельной системы
* Сценарии применения датчиков и приводов
* Актуальность мехатронной техники в измерительных приборах
* Человеческая сенсорная система и ее аналогия с процессом инженер-
ного зондирования
* Общие системные строения: контроль результата воздействия и пре-
дуправления, цифровое управление, программируемый логический кон-
троль, контроль распространения
* Процесс измерения и его этапы
* Примеры применения: сетевое приложение, система телемедицины,
домашняя роботизированная система, мониторинг качества воды
* Структурирование книги
1.1 роль датчиков и приводов
Это вводная книга по датчикам, преобразователям и приводам и их
интеграции в инженерную систему. В частности, в книге речь идет об
инструментарии инженерной системы, в частности системы контроля,
путем включения соответствующих датчиков, приводов и необходимого
аппаратного интерфейса.
Датчики (например, полупроводниковые тензодатчики, тахометры,
датчики температуры RTD, камеры, пьезоэлектрические акселерометры)
необходимы для измерения (понимания) неизвестных сигналов и
параметров в инженерной системе и окружающей среде. По существу,
датчики необходимы для мониторинга и изучения системы. Это знание
будет полезно не только в эксплуатации или управления системой,
1. измерительные приборы инженер-
ных систем
20
но и для многих других целей, таких как мониторинг процесса;
экспериментальное моделирование (т.е. идентификация модели);
тестирование продукта и квалификации; оценка качества продукции;
прогнозирование неисправностей, обнаружение и диагностика;
генерация предупреждения; и наблюдение. В качестве примера, обычное
применение датчиков в автомобилях, где используется огромное
разнообразие датчиков в силовом агрегате, оказание помощи в вождении,
безопасности и комфорте, и так далее, как представлено на рисунке 1.1 .
Примером другой категории приводов являются регулирующие приводы
(например, регулирующие клапаны), которые выполняют контрольные
действия, и, в частности, они управляют устройствами контроля. Микро-
электромеханические системы (МЭМС) используют миниатюрные
датчики и приводы. Тем не менее, научные принципы, лежащие в
основе этих устройств, часто являются такими же, как их макро
аналоги. Например, датчики MЭМС обычно используют емкостные,
электромагнитные и пьезорезистивные принципы. Устройства MЭМС
обеспечивают преимущества небольшого размера и легкого веса
(пренебрежимо малое количество ошибок при загрузке), высокая
скорость (с высокой пропускной способностью), и удобное массовое
производство (низкая стоимость). Опять же, автомобили обеспечивают
плодородную почву для различных типов приводов. Некоторые примеры
автомобильных приводов представлены на Рисунке 1.2 .
Датчики и приводы незаменимы в системе управления. Система
рисунок 1.3 Датчики и приводы в системе управления с обратной связью.
21
управления представляет собой динамичную систему, которая
содержит контроллер в качестве составной части. Целью данного
контроллера является генерация контрольных сигналов, которые
будут управлять процессом, который находится под контролем (так
называемое предприятие) желаемым образом (например, в соответствии
с некоторыми техническими характеристиками), с использованием
различных устройств контроля. В частности, в системе управления
обратной связью, контролирующие сигналы генерируются на основе
воспринятых сигналов отклика предприятия. Датчики, приводы и
другие основные компоненты в системе управления обратной связью
схематически показаны на рисунке 1.3 .
1.1 .1 Значение оценки в считывании
Измерения датчика не могут обеспечить истинное значение требуемого
параметра или переменной, которая необходима по двум основным
причинам:
1. Измеренная величина может не являться необходимым количеством,
и должна быть вычислена из измеренного значения (или значений) с
помощью подходящей модели.
2. Датчик (или даже процесс считывания) не является совершенным, и
представит ошибку в измерении.
Таким образом, считывание может рассматриваться как проблема
оценивания, где истинное значение измеряемой величины оценивается с
использованием измеренных данных. Две основные категории ошибок,
модели ошибки и погрешности измерений, вводятся в процесс оценки и
будет влиять на точность результата. Модель ошибки возникает от того,
что величина интереса связана с величиной, которая измеряется (или,
модель системы). Неизвестные (и случайные) нарушения ввода также
могут рассматриваться в рамках модели ошибки. Погрешность измерений
будет возникать из –за датчика и процесса считывания (например, как
установлен датчик, как собирают данные, сообщены, и записаны, и
т.д.) . Ясно, что оценка (параметров и сигналов) является важным шагом
считывания. Многие методы доступны для оценивания. Некоторые из
них представлены в этой книге (например, метод наименьших квадратов,
максимального правдоподобия, фильтр Калмана (KF), расширенный
фильтр Калмана (EKF), сигма-точечный фильтр Калмана (UKF).
22
1.1 .2 инновационные технологии датчиков
Помимо обычных датчиков,
разрабатываются
многие
виды
инновационных и передовых датчиков. Некоторые типы перечислены
ниже:
* микро - миниатюрные датчики (на основе ИС, со встроенной обработкой
сигналов).
* Интеллектуальные датчики (со встроенной системой предварительной
обработки информации, рассуждения, и вывод решений, чтобы
обеспечить знания на высоком уровне).
* Встроенный (или встроенные) и распределенные датчики . (Являются
одним целым с компонентами / факторами мультифакторной системы, и
взаимодействуют друг с другом. В распределенном считывании может
иметь место значительное географическое разделение между узлами
датчиков ).
* Иерархические сенсорные строения (низкий уровень сенсорной
информации предварительно обработан для удовлетворения потребностей
более высокого уровня) → совместимы с иерархическим управлением;
каждый уровень управления обслуживается соответствующим
сенсорным уровнем.
1.2 Сценарии применения
Датчики и преобразователи необходимы для получения выходных
сигналов (процесс ответов) для системы мониторинга, прогнозирования
неисправностей,
обнаружения
и
диагностики;
генерации
предупреждений и оповещений; управления обратной связью;
диспетчерского управления; и для измерения входных сигналов для
экспериментального моделирования (идентификации системы) и
управления прогнозированием, а также для множества других целей.
Аналогичным образом, приводы необходимы в работе практически
любой динамической системы, как автоматизированные и не
автоматизированные. Так как много различных типов и уровней сигналов
присутствуют в динамической системе, сигнал изменения (в том числе
формирование сигнала и преобразование сигнала) действительно
является важной функцией, связанной со считыванием и приведением
в действие. В частности, модификация сигнала является важным
фактором в разрезе взаимодействия. Совершенно очевидно, что объект
контрольно-измерительной системы должен быть связан с датчиком,
23
преобразователем, приводом, модификацией сигнала и компонентным
соединением. В частности, этот тема должна рассмотреть вопрос
об определении необходимых компонентов системы в зависимости
от типа, функций, операций и взаимодействия, а также правильного
выбора и взаимодействия этих компонентов для различных областей
применения. Выбор параметров (в том числе снятие размеров детали и
настройка системы) также являются важным шагом. Дизайн является
необходимой частью измерительной системы, поскольку это дизайн,
который позволяет построить систему, отвечающую эксплуатационным
требованиям, начиная возможно, с нескольких основных компонентов,
таких как датчики, приводы, контроллеры, компенсаторы и устройства
модификации сигналов.
Инженеры, в частности инженеры мехатроники, должны быть в состоянии
определить или выбрать компоненты, в частности, датчики, приводы,
контроллеры и аппаратный интерфейс для системы; моделировать и
анализировать отдельные компоненты и всю интегрированную систему;
выбрать правильные значения параметров для компонентов (т.е. снятие
размеров деталей и настройка системы) для системы при выполнении
намеченных функций в соответствии с некоторыми спецификациями.
Измерительные приборы (датчики, приводы, получение сигналов и их
модификация, контроллеры и аксессуары, и их интеграции в процесс)
применяются в отраслях машиностроения. Как правило, приборы
применяются в мониторинге процесса; неисправности прогнозирования,
обнаружения и диагностики; тестировании; и контроле, практически во
всех инженерных системах.
Некоторые инженерные отрасли и типичные прикладные ситуаций
перечислены ниже:
-
Авиационная и авиационно-космическая техника: самолеты,
космические аппараты
-Дорожное строительство: Мониторинг строительства гражданских
инженерных сооружений (мостов, зданий и т.д .)
-Химическая промышл енность: Мониторинг и контроль за химическими
процессами и заводами
-
Электротехника и вычислительная техника: Развитие электронных
и компьютерных интегрированных устройств, жесткие диски и т.д .,
управление, и контроль электрических и компьютерных систем
- Разработка материалов: Материальные процессы синтеза
Машиностроение: Транспортные средства и транспортные системы,
роботы, производственные заводы, промышленные установки, системы
24
выработки электроэнергии, реактивные двигатели и т.д.
Горнодобывающая и минеральная инженерия: Оборудование для
горнодобывающей промышленности и ее процессов
Ядерная энергетика: Ядерные реакторы; тестирование и квалификация
компонентов.
Мы продемонстрировали автомобильный пример в качестве важной
ситуации применения датчиков и приводов. Несколько ситуаций и
использование датчиков и приводов указаны в таблице 1.1 . Некоторые
важные области применения указываются следующим образом.
Инструментарий инженерной системы
таблица 1.1 Датчики и приводы, используемые в основных технических
ситуациях
Способ
основные датчики
основные приводы
Самолет
Объем двигателя, скорость,
ускорение, высота,
курс, сила давления,
температура, расход
жидкости, напряжение,
ток, система глобального
позиционирования (GPS)
Двигатели постоянного
тока, шаговые двигатели,
реле, приводы клапанов,
насосы, тепловые
источники, реактивные
двигатели
Автомобиль
Объем двигателя,
скоро сть, сила, давление,
температура, поток
жидко сти, уровень
жидко сти, видение,
напряжение, ток, GPS,
радар, гидролокатор
Двигатели постоянного
тока, шаговые двигатели,
приводы клапанов,
линейные приводы,
насо сы, источники тепла
Система отопления
дома
Температура, давление,
уровень жидкости
Двигатели, насосы,
источники тепла
фрезерный станок
Объем двигателя,
скорость, сила, акустика,
температура, напряжение,
ток
Электродвигатели
постоянного тока,
асинхронные двигатели
Робот
Оптическое изображение,
смещение, скорость,
сила, крутящий момент,
тактильные чувства, лазер,
ультразвук, напряжение,
ток
Двигатели постоянного
тока, шаговые двигатели,
асинхронные двигатели,
гидравлические приводы,
пневматические приводы
Печь для сушки
древесины
Температура,
отно сительная влажно сть,
содержание влаги, поток
воздуха
Электродвигатели
переменного тока,
электродвигатели
постоянного тока, насосы,
источники тепла
25
Как указывалось ранее , транспорт – это обширная область , где датчики
и приводы имеют множество применений. В наземном транспорте, в
частности, автомобили, поезда, а также автоматизированные системы
транзита используют системы развертывания подушек безопасности
, антиблокировочную тормозную систему (ABC), системы круиз-
контроля, системы активной подвески, а также различные устройства
для мониторинга, взимания платы за проезд, навигации, предупреждение
и контроль в области интеллектуальных систем автомобильных
дорог (IVHS). В воздушном транспорте, современные летательные
аппараты конструируются, используя современное сырье, конструкции,
электронику и контролируют получение выгод от сложных датчиков
и исполнительных механизмов в авиационных тренажерах, системах
управления полетом, навигационных системах, механизмах шасси, и т.д.
Производство и технология производства являются еще одной
обширной областью, использующей различные технологии датчиков и
исполнительных механизмов. фабрика роботов (для сварки, покраски
распылением, монтажных работ, контроля и так далее), автоматически
управляемые
транспортные
средства
(AGVs),
современные
компьютерно-исчислительные станки управления, центры механической
обработки , быстрые (и виртуальные) системы прототипирования, и
микрообрабатывающие системы – все это примеры. Контроль качества
продукта, проверка инструмента машины, и управление движением
высокой точности особенно важны в этих ситуациях, требующих
передовые датчики и приводы.
Касательно применения в медицине и сфере здравоохранения , в
настоящее время разрабатываются и используются роботизированные
технологии для обследования пациентов, хирургического вмешательства,
реабилитации, распределения лекарст и общего ухода за пациентами. В
этом контексте, применяются для пациентов новые датчики и приводы
кратковременных устройств, различных диагностических зондов и
сканеров, кроватей, тренажеров, протезных и ортопедических устройств,
физиотерапии и телемедицины.
В современной офисной среде, автоматизированные системы подачи,
многофункциональные
копировальные
машины
(копирование,
сканирование, печать, электронная передача, и так далее), пищевые
диспенсеры, мультимедийные презентации и переговоры, а также
системы контроля воздуха включают передовые технологии датчиков и
приводов.
В бытовых ситуациях и системах домашней безопасности -
26
робототехнические воспитатели и помощники, роботизированные
пылесосы, стиральные, сушильные, посудомоечные машины, открытие
дверей гаража и развлекательных центров, все используют различные
датчики, приводы и связанные с ними технологии.
Цифровые компьютеры и связанные с ними цифровые устройства
используют интегрированные датчики и исполнительные устройства.
Воздействие возрастает , так как цифровые устройства интегрируются в
огромное разнообразие других устройств и приложений. В гражданском
строительстве, краны, экскаваторы и другие строительные машины,
здания, и мосты повышают свою производительность за счет внедрения
надлежащих датчиков и исполнительных механизмов.
В области применения ко смической техники, мобильные роботы,
такие как разведка НАСА Mars Rover, роботы космических станций
и космических аппаратов зависят от считывания и приведения их в
действие для правильной работы.
Определение , анализ, согласование подбора и сопряжения отдельных
компонентов, снятие размеров компонентов и настройка интегрированной
системы (т.е. настройки параметров для получения требуемого ответа от
системы) являются важнейшими задачами в измерении и проектировании
инженерной системы. В книге эти вопросы рассматриваются, начиная
с основ, и систематически ведущие к передовым концепциям и
приложениям.
1.3 Система восприятия человека
Надежная область в развитии интеллектуальных роботов, способных
воспроизводить характеристики натурального интеллекта, касается
чувствительности . Основная цель заключается в разработке
роботизированных сенсоров, которые могут играть роль сенсорной
деятельности человека (пяти чувств):
1. Взгляд (визуальный)
2. Слух (слуховой)
3. Касание (тактильный)
4. Запах (обонятельный)
5. Вкус (вкусовой)
Датчики в первых трех категориях находятся в более продвинутой стадии
развития, начиная с основных датчиков (камеры, микрофоны и тактильные
27
датчики). Последние две категории датчиков в о сновном используют
химические процессы, и являются менее распространенными.
В дополнение к этим пяти чувствам , люди имеют также и другие
типы сенсорных функций; в частности, чувство равновесия, давления,
температуры, боли и движения. На самом деле, некоторые из этих
сенсорных возможно стей будет включать в себя использование
одного или нескольких из основных пяти чувств, одновременно через
центральную нервную систему.
В своем развитии робототехника и другие инженерные системы, уже
давно полагаются и вдохновляются чувствительным процессом людей
и животных. Основной биологический процесс считывания показан на
рисунке 1.4 . Стимул (например свет для зрения, звуковые волны для слуха)
принимается на рецепторе, где дендриты нейронов преобразуют энергию
стимула в электромеханические импульсы в дендриты нейронов. Аксоны
нейронов затем проводят соответствующие потенциальные действия в
центральную нервную систему (ЦНС) головного мозга. Эти потенциалы
затем передаются мозгом, чтобы создать соответствующее чувственное
восприятие. Сенсорно-технологические процессы, как например, те,
которые используются у робота, в основном используют аналогичные
процессы. Как мы увидим в последующих главах, они включают датчик
риСУНок 1.4 Биологический процесс считывания, и его аналогия процесса
инженерного считывания.
28
и преобразователь, передачу, преобразование и обработку сигналов.
1.4 Мехатроника
Предметом мехатроники является синергическое применение механики,
электроники, контроля и вычислительной техники в развитии
электромеханических изделий и систем, на основе комплексного подхода
к проектированию. Мехатроника особенно применима в системах
смешанного домена (или многодоменных), которые включают в себя
несколько физических доменов, таких как электрические, механические,
жидкие, и тепловые, на комплексной основе. Например, АБС автомобиля
может включать в себя механику, электронику, гидравлику, и передачу
тепла, и может быть сформирована оптимальным образом в качестве
мехатронного продукта. Мехатронные продукты и системы включают в
себя современные автомобили и самолеты, интеллектуальные бытовые
приборы, медицинские роботы, космические аппараты и устройства
автоматизации делопроизводства.
Стандартная мехатронная система со стоит из механического каркаса,
исполнительных механизмов, датчиков, контроллеров, сигналов
кондиционирования/ модификации устройств,компьютерного / цифрового
рисунок 1.5 Серводвигатель представляет собой мехатронное устройство.
(фото предоставлено Данахером Моушион, Вашингтон, округ Колумбия).
29
оборудования и программного обеспечения, интерфейсных устройств
и источников питания. Различные виды измерения чувствительности,
сбора информации и передачи вовлечены во все данные типы различных
компонентов. Например, серводвигатель, который является двигателем
с возможностью сенсорной обратной связи для точного генерирования
сложных движений, состоит из механических, электрических и
электронных компонентов. В серводвигателе, показанном на рисунке
1.5, например, основными механическими компонентами являются
ротор, статор, подшипники, механика датчика скорости, такие как
оптический кодировщик и корпус двигателя. Электрические компоненты
включают в себя электрическую схему для поля обмоток и ротора (в
случае непостоянного магнитного ротора ), а также схемы для передачи
электроэнергии и коммутации (при необходимости). Электронные
компоненты включают в себя те, которые необходимы для восприятия
(например оптический датчик для считывания перемещения и скорости и
/ или тахометр для считывания скорости). Общий дизайн серводвигателя
может быть улучшен путем принятия мехатронного подхода, где все
компоненты и функции одновременно обрабатывают его конструкцию
комплексным образом.
1.4 .1 Мехатронный подход к измерительным приборам
Изучение мехатронной техники должно включать в себя все этапы
моделирования, проектирования, разработки, интеграции, оснащения
инструментами, контроля, проведения испытаний, эксплуатации и
технического обслуживании мехатронных продуктов или систем. С точки
зрения аппаратуры, которая находится в центре внимания данной книги,
некий оптимальный и единый подход, а не последовательный, должен
быть принят в процессе КИП в отношении датчиков, исполнительных
механизмов, аппаратных интерфейсов,
а также контроллеров. В
частности, приборы должны рассматриваться в качестве неотъемлемого
аспекта дизайна . Это потому, что с помощью дизайна мы разрабатываем
системы, способные выполнять требуемые функции при соблюдении
определенных
технических
характеристик
производительности.
Датчики, исполнительные механизмы, регулировка и оснащение
инструментами играют непосредственную роль в достижении целей
проектирования.
Как правило, последовательный
подход принят в разработке
многодоменных систем (или смешанных), таких как электромеханические
30
системы. Например, первые механические и структурные компоненты
разработаны; следующие электрические и электронные компоненты
выбираются или разрабатываются,
соединяются между собой;
впоследствии компьютер или связанное цифровое устройство
выбирается и сопрягается с системой, наряду с цифровым контроллером
и т.д . Динамическая связь между различными компонентами системы
однако диктует, что точная конструкция должна рассматривать всю
систему в целом, а не проектировать различные области (например,
электрические / электронные элементы и механические аспекты)
отдельно и последовательно. Когда самостоятельно разработанные
компоненты соединены между собой, могут возникнуть некоторые
проблемы:
1. Когда два отдельно разработанных компонента соединены между
собой, первоначльные характеристики и условия эксплуатации этих двух
компонентов будут изменяться в связи с надбавкой или динамическим
взаимодействием.
2. Практически невозможно полное совпадение двух отдельно
разработанных и разрабатываемых компонентов. В результате, компонент
может быть неиспользован в достаточной степени или перегружен во
взаимосвязанной системе, в непродуктивных условиях, возможно даже
опасных и нежелательнх.
3. Некоторые из внешних переменных в компонентах станут внутренними
и скрытыми из-за взаимодействия, что может привести к проблемам,
которые не управляемы с помощью считывания и непосредственного
управления.
Необходимость в комплексном и совместном проектировании для
мультидоменных (например, электромеханических) систем может
быть определена в качестве основного обоснования в использовании
мехатронного метода. В частности, при включении приборов в процесс
проектирования такой единый и комплексный подход является наиболее
предпочтительным для датчиков, приводов, контроллеров и аппаратных
интерфейсов. Например, рассмотрим проектирование и разработку
основания датчика (как представлено в примере проекта в конце
данной главы) для телемедицинской системы . По следние достижения
в области сенсорных технологий, применяющихся при наблюдении за
состоянием здоровья человека, таких как биомедицинские нано-датчики,
пьезоэлектрические датчики, силовые датчики и датчики движения и
оптические датчики / видения для аномального обнаружения движения
людей, могут быть встроены в носитель датчика. Тем не менее, для
31
обеспечения оптимальной работы, выбора / разработки, местоположения,
монтажа и интеграции датчиков не следует рассматривать их вне
зависимости от развития других аспектов носителя.
Например,
коэффициент мехатронного моделирование (MDQ) может быть
использован для предоставления высокого качества общего дизайна
носителя , где индекс конструкции определяется по каждому требованию
(например размер, структура, компоненты, стоимость, точность,
скорость). Затем такие параметры как размер сенсора, аппаратного
интерфейса, требования к питанию, расположение компонентов и
конфигурации могут быть представлены в MDQ, что позволит улучшить
/ оптимизировать процесс сбора и обработки сигналов, формирования
тела, веса, надежности и стоимости.
1.4 .2 Затруднения для измерительных приборов мехатроники
Несмотря на то, что в теории мехатронный метод является самым лучшим
(оптимальным), особенно в отношении приборов он не может быть
практичным для реализации оптимальных результатов измерительных
приборов, как предполагалось методом . Для мехатронного подхода
требуется полностью вся система, включая процессы и приборы, для
согласованной разработке. Это предполагает, что аспекты и компоненты
всей системы могут быть изменены в соответствии с мехатронным
результатом. Тем не менее, если вся система (в том числе процесс)
не являются новой конструкцией, такая универсально сть зачастую
не является реалистичной . Например, как правило, этот процесс уже
доступен, но непрактичен, неудобен, или экономически неэффективен
для изменения всех или некоторых его компонентов. В таком случае,
даже если измерительные приборы выбираются в соответствии с
мехатронным подходом, общая система не будет функционировать
оптимальным образом, как если бы мы имели всю свободу на изменение
всего завода.
В качестве примера, давайте рассмотрим автоматизированную систему
транспортного дорожного средства в общественном транспорте .
Предположим, что система уже существует и необходима для замещения
некоторых из своих автомобилей. В таком случае непрактично
значительно изменять движение, чтобы приспособить новый дизайн
автомобилей. На самом деле свобода в автомобильном дизайне будет
ограниченна, даже если и сдерживаемая определенной направляющей
конструкцией. Если автомобиль разработан и оборудован наилучшим
32
образом , в соответствии с механотроникой, то, как функционирует
общая транспортная система не будет являться оптимальным.
Совершенно очевидно, что настоящие инструменты мехатроники не
могут быть применены для существующих процессов. Кроме того, так
как компоненты для измерительных приборов (датчики, исполнительные
механизмы, контроллеры, аксессуары аппаратных средств) могут
поступать от различных производителей, а их доступность возможно
будет ограниченной, то не практично реализовывать настоящий
мехатронный
продукт (так как имеющийся набор компонентов
ограничен, и возможно не может быть действительно сочетаем).
1.5 Составляющие системы контроля
Датчики и исполнительные устройства являются важными компонентами
в измерительной аппаратуре системы контроля . Контроллер , который
является неотъемлемой частью любой системы контроля, делает
установку (т.е. процесс, который в настоящее время контролируется)
вести себя определенным образом, в соответствии с некоторыми
спецификациями . В целом система, включающая в себя, по меньшей
мере, завод и контроллера называется системой контроля. Система
может быть довольно сложной, и может быть подвергнута известным
или неизвестным стимулам (т.е. входам), как в случае воздушного
судна. Некоторые полезные термины, связанные с системой управления
перечисляются в следующем порядке:
* Завод или производственный процесс: Система должна быть
контролируемая.
* Входы: Команды, управляющие сигналы, или возбудители (известные,
неизвестные)
* Выходы: Реакции системы
* Датчики: Устройства, которые измеряют переменные системы
(стимулы, ответы и т.д.)
* Приводы: Устройства, которые управляют различными частями
системы
* Контроллер: Устройство, которое генерирует управляющий сигнал
* Закон управления: связь или схема, согласно которой генерируется
сигнал управления
* Система управления: Как минимум на заводе и контроллер (может
включать в себя датчики, обработку сигнала, а также другие компоненты)
* Контроль обратной связи: сигнал осуществления контроля
33
определяется в соответствии с ответом объекта
* Контроль без обратной связи: ответ объекта не используется для
определения контроля действия
* Контроль: сигнал контроля определяется в соответствии с
возбуждением предприятия или модели завода
На рисунке 1.6, мы определили ключевые компоненты системы контроля
обратной связи. Показано несколько отдельных блоков, в зависимости
от различных функций, которые есть в стандартной системе управления.
В действующей системе управления, может быть трудно применить
данный тип четкого разделения компонентов; одна часть оборудования
может выполнять несколько функций или более, чем один отдельный
блок оборудования с одной функцией. Встроенные системы, в частности,
могут распределить многофункциональные компоненты, где будет
сложно разделить функциональные блоки. Тем не менее, Рисунок 1.6
полезен для понимании строения общей системы контроля обратной
связи. В аналоговой системе контроля , сигналы контроля являются
переменными, которые генерируются аналоговым оборудованием; где
нет дискретизации сигнала, и кодирование данных не используется в
цифровой системе контроля .
Проблема контроля может стать сложной по следующим причинам:
* Комплексная система (много входов и выходов, динамическая связь,
нелинейная, параметры, изменяющиеся во времени и т.д.)
* Строгие технические характеристики
* Неизвестные или неизмеримые стимулы (неизвестные входы / помехи
рисунок 1.6 Основные компоненты системы контроля обратной связи
34
/ шум)
* Неизвестные или неизмеримые ответы (неизмеримые переменные
состояния и выходы, погрешности измерений и шум)
* Неизвестная динамика (неполностью изученное оборудование)
Так как работа системы управления основана на наборе характеристик
производительности, важно определить ключевые характеристики,
которыми должна обладать хорошая система управления. В частности,
имеют большое значение следующие требования к рабочим
характеристикам:
1. Стабильная реакция (устойчивость): особенно реакция системы на
первичные условия намагничевания (питания ) должна привести обратно
к основному состоянию равновесия (асимптотической устойчивости).
Ответ на ограниченный вход должен быть также ограничен
(ограниченный вход- ограниченный выход, BIBO, стабильность).
2. Скорость быстроты ответа (скорость ответа или пропускной
способности): Система должна быстро реагировать на
вход или
намагничивание.
3. Низкая чувствительность к шуму, внешним раздражителям,
ошибкам в моделирование и вариаций параметров (чувствительность и
надежность).
4. Высокая чувствительность к входам контроля (чувствительность
входного сигнала).
5. Незначительная ошибка: Например, ошибка
отслеживания и
статическая ошибка (точность).
6. Снижение связи среди системных переменных (перекрестная
чувствительность или динамическая связь).
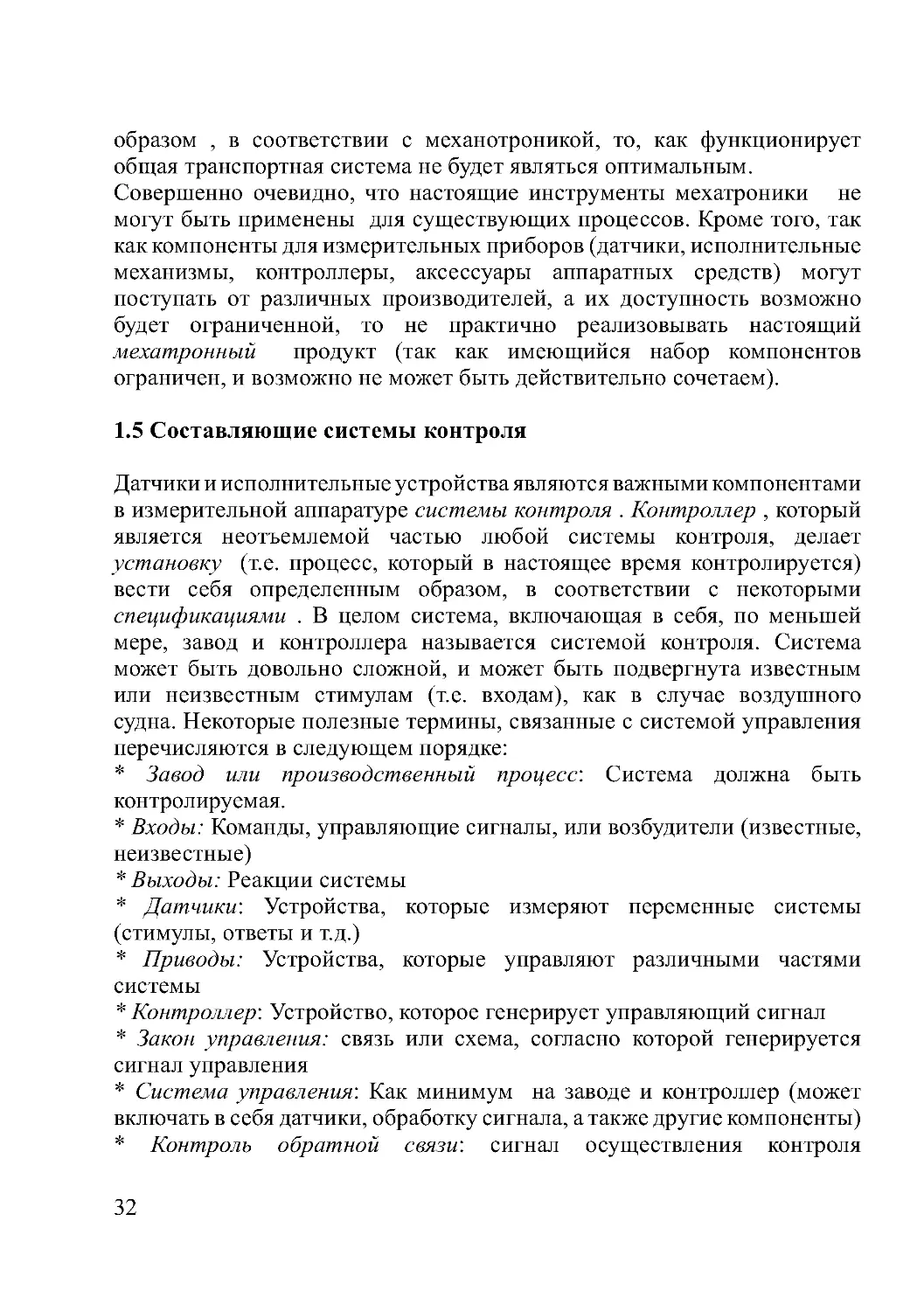
Как указано здесь, некоторые из этих спецификаций имеют довольно
общий характер. Таблица 1.2 приводит стандартные требования к
эффективности системы контроля. Некоторые требования могут быть
противоречивыми. Например, быстрая реакция часто достигается за
счет усиления системы, и увеличение усиления приводит к увеличинию
сигнала намагничивания, который имеет тенденцию дестабилизировать
систему контроля и управления. Следует также отметить, что дается здесь
является основными описаниями качества, необходимыми для хорошей
производительности. Однако, при разработке системы управления,
эти описания должны быть указаны в количественном выражении.
Характер используемых спецификаций количественных конструкций
в значительной степени зависят от конкретного используемого метода
проектирования. Некоторые из проектных спецификаций являются
35
параметрами во временной области, а другие –частотной.
таблица 1.2 Эксплуатационные характеристики для системы управления
Характерная
черта
Желаемая
ценность
Цель
Спецификации
Уровень
устойчиво сти
высокий
Ответная реакция
не растет без
органичения и
снижается до
требуемого значения
Процент
перерегулирования,
время установления,
полюс (собственное
значение) локаций,
по стоянное время,
фазы и коэффициент
усиления наценки,
коэффиценты
степени затухания
Скоро сть ответа
быстрая
Оборудование
реагирует быстро на
входы / возбудители
Время
восстановления,
пиковое время,
время задержки,
собственные
частоты нарастания,
резонансные
частоты, пропускная
способно сть
Статическая
ошибка
низкая
Минимальное
смещение от
желаемой ответной
реакции
Возможно
допущение ошибки
на этапе ввода
Прочность
высокая
Точная реакция
в условиях
неопределенно сти
(входных помех,
шума, модели
ошибок и т.д.) и
при изменении
параметров
Входной допуск
помехи / шум,
измерение допуска
погрешно сти, модель
допуска ошибок
Динамическое
взаимодействие
низкое
Один вход влияет
только на один
выход
Перекре стная
чувствительно сть,
функции кро сс-
передачи
1.5 .1 Управление обратной связью и прогнозированием
Как видно выше, в системе управления обратной связью, контур
управления должен быть закрыт, где ответ системы чувствительнымй и
36
используется для генерирования сигналов управления. Следовательно,
управление обратной связью также известно как замкнутое управление
обратной связью.
Если оборудование является стабильным, полностью и точно изученным,
и если входы на него могут быть точно генерированы (контроллером) и
могут быть применимы, то точный контроль может быть осуществлен
возможно даже и без управления обратной связи. В этих условиях
система измерения не требуется (по крайней мере не требуется для
обратной связи), таким образом мы имеем систему управления с
разомкнутым контуром. При управлении с разомкнутым контуром мы не
используем текущую информацию о реакции системы для определения
управляющих сигналов. Другими словами, нет никакой обратной связи.
Даже если датчик не является необходимым в разомкнутой структуре,
они могут быть использованы в системе с открытым контуром для
контроля подключённого, результирующего отклика, а также возможных
помех на входе.
Значимость и важность датчиков и исполнительных устройствах
являются независимыми от конкретного элемента системы строения,
который реализуется в данном приложении. Теперь мы выделим
несколько вариантов внедрения системы управления, указывая на
наличие датчиков и исполнительных элементов в них.
Даже в системе управления обратной связью могут быть входные
сигналы, которые не опознаются и используются в управлении обратной
связью. Некоторые из этих входов могут быть важными переменными
для развития, но чаще всего они являются нежелательными входами,
такими как внешние раздражители, которые являются нежелательными,
но неизбежными. В целом производительность системы управления
может быть улучшена путем измерения этих (неизвестных) входов,
и определенным образом использовать информацию для генерации
управляющих сигналов. В управлении, основанном на прогнозировании,
неизвестные входные отсчитываются, и информация, наряду с
желательными входами, используется для генерации управляющих
сигналов, которые могут уменьшить количество ошибок из-за этих
неизвестных входов или вариаций в них. Причину называть этот
метод контролем, основанном на прогнозировании, состоит в том, что
и соответствующее измерение, и контроль (и компенсация) участвуют
в прямом канале системы управления. Примечание: В некоторых
типах управления, основанного на прогнозировании, входной сигнал
генерируется с использованием модели оборудования (и не может
37
включать в себя восприятие).
Можно достичь лучших результатов путем измерения этих нарушений на
входе, и используя эту информацию при формировании управляющего
воздействия. Это управление, основанное на прогнозировании. Обратите
внимание, что при отсутствии прогнозирования дистанционного
управления, любые изменения на входах w1
,w
2
и w3 на Рисунке 1.7
будут обнаружены только через их воздействие на сигнал обратной
связи (при комнатной температуре). Следовательно, последующее
корректирующее действие может существенно отставать от причины
(т.е. изменения в wi). Эта задержка приведет к большим ошибкам и
возможным проблемам нестабильности. С предуправления, информация
о входном wi раздражителе будет направлена к контроллеру немедленно,
и его влияние на реакцию системы может быть ожидаемым, что ускоряет
действие управления, а также повышает точность ответа. Более быстрое
действие и повышение точности - два очень желательных эффекта в
предуправлении.
1.5 .2 Цифровое управление
В цифровом управлении
цифровой компьютер служит в
качестве контроллера. Практически любой закон управления
может быть запрограммирован
в
управляющий
компьютер.
Управляющие вычислительные машины должны быть быстрыми
и специализированными машинами в режиме реального времени
операций, где обработка должна быть синхронизирована с работой
оборудования и требованиями к активации. Для этого необходима
операционная система в режиме реального времени. Помимо этих
требований, управление компьютерами в основном не отличается от
общего назначения цифровых вычислительных машин. Они состоят из
процессора для выполнения вычислений и для наблюдения за передачей
данных; памяти для программ и хранения данных во время обработки;
запоминающих устройств для хранения информации, которая может
быть не сразу необходима; и входных или выходных устройств для
чтения и отправки информации.
Цифровые системы управления могут использовать цифровые
инструменты и дополнительные процессоры для приведения в действие,
формирования сигналов или функций измерения. Например, шаговый
двигатель, реагирующий на постепенные движения с помощью
импульсных сигналов, можно рассматривать в качестве цифрового
38
привода. Кроме того, он, как правило, содержит цифровую логическую
схему в его системе управления. Точно так же, двухпозиционный соленоид
представляет собой цифровой (двоичный) привод. Цифровое управление
потоком может быть достигнуто с помощью цифрового контрольного
клапана. Типичный цифровой клапан состоит из множества отверстий,
каждый из которых рассчитан пропорционально по отношению к значению
двоичного слова (2i, i = 0, 1, 2, ..., n. Каждое окно приводится в действие
с помощью отдельного быстродействующего включения / выключения
соленоида. Таким образом можно получить множество комбинаций
цифровых значений расхода. Прямое цифровое измерение смещений и
скоростей может быть выполнено с использованием осевых энкодеров.
Эти цифровые преобразователи генерируют кодированные выходные
сигналы (например, в двоичном или полутоновом представлении) или
импульсные сигналы, которые могут быть закодированы с помощью
подсчета схем. Такие выходы могут быть считаны с помощью
управления компьютером с относительной легкостью. Счетчики частоты
также генерируют цифровые сигналы, которые могут быть поданы
непосредственно в цифровой контроллер. При проведении измерений
сигналов в аналоговой форме, аналог переднего конца необходим для
сопряжения преобразователя с цифровым контроллером. Интерфейсное
плато взаимосвязи ввода / вывода могут принимать как аналоговые, так
и цифровые сигналы, доступные с цифровыми контроллерами.
Аналоговые измерения и опорные сигналы должны быть выбраны и
закодированы перед цифровой обработкой в контроллере. Цифровая
обработка может эффективно использоваться для формирования
сигнала. В качестве альтернативы, чипы цифровой системы обработки
сигнала (digital signal processing - DSP) могут функционировать как
цифровые контроллеры. Тем не менее, аналоговые сигналы должны
быть предварительно подготовлены, используя аналоговые схемы перед
оцифровкой для того, чтобы устранить или минимизировать проблемы из-
за наложения спектров искажений (больше половины высокочастотных
компонентов при отборе отображаются как низкочастотные компоненты),
и утечек (ошибка из-за сигнала усечения), а также для повышения
уровня сигнала и фильтрования посторонних шумов. Система привода
оборудования, как правило, содержит аналоговые сигналы. Часто из-
за этого цифровой выход из контроллера должен быть преобразован в
аналоговую форму . Оба аналого-цифровое преобразование (АЦП) и
цифро-аналоговое преобразование (ЦАП) можно интерпретировать как
сигнал кондиционирования (модификации) операций. Если измеряется
39
более чем один выходной сигнал, каждый сигнал должен быть выдержан
и обработан отдельно. В идеальном случае, это потребует отдельного
кондиционирования и аппаратных средств обработки для каждого канала
сигнала. Менее дорогая (но более медленная) альтернатива состоит
в том, чтоб разделить это дорогостоящее оборудование по времени с
помощью мультиплексора. Это устройство будет выбрать один канал
данных из банка каналов передачи данных в последовательном порядке
и подключать его к общему устройству ввода.
Существующая
практика
использования
выделенных,
микропроцессорных, и часто децентрализованных (т.е. распределенных)
цифровых систем управления в промышленных применениях может
быть упорядочена с точки зрения основных преимуществ цифрового
управления. Ниже приведены некоторые из наиболее важных
соображений.
1. Цифровое управление менее восприимчиво к шуму или изменениям
параметров в измерительных приборах, так как данные могут быть
представлены, сформированы, переданы и обработаны как двоичные
слова, с битами, имеющими два идентифицированных состояния.
2. Очень высокая точность и скорость возможны благодаря цифровой
обработке. Аппаратная реализация обычно происходит быстрее, чем
реализация программного обеспечения.
3. Системы управления могут очень хорошо обрабатывать цифровые
повторяющиеся задачи при программировании.
4. Сложные законы и алгоритмы управления формирования сигналов,
которые могут быть непрактичными для реализации с использованием
аналоговых устройств, могут быть запрограммированы.
5. Высокая надежность в эксплуатации может быть достигнута за
счет минимизации аналоговых аппаратных компонентов и за счет
децентрализации, используя специальные микропроцессоры для
различных задач управления.
6. Большие объемы данных могут быть сохранены, используя компактные,
с высокой плотностью данных, методы хранения.
7. Данные могут быть сохранены или поддерживаться в течение очень
длительного периода времени без удаления и без их искажения от
неблагоприятных условий окружающей среды.
8. Быстрая передача данных возможна на большие расстояния без
введения чрезмерных динамических задержек и ослаблений, как в
аналоговых системах.
9. Цифровое управление предоставляет простую и быструю возможность
40
извлечения данных.
10. Цифровая обработка использует низкие эксплуатационные
напряжения (например, 0-12 В постоянного тока).
11. Цифровое управление является экономически эффективным.
1.5 .3 Программируемые логические контроллеры
Существует множество систем управления и промышленных задач,
которые предполагают выполнение по следовательности шагов, в
зависимости от состояния некоторых элементов в системе, и от
некоторых внешних входных состояний. Программируемый логический
контроллер (ПЛК) является по существу ЦВМ-подобной системой,
которая может должным образом упорядочить сложную задачу,
состоящую из множества дискретных операций, вовлекая в участие
несколько устройств, которые нужно проводить в определенном порядке.
Технологическая операция может состоять из набора действий в двух
состояниях (включенные-выключенные), которые программируемый
логический контроллер может установить в правильном порядке и в
правильное время. Программируемый логический контроллер, как
правило, используется на заводах и на технологических установках для
подключения устройств ввода, таких как переключатели на устройства
вывода, таких как клапаны на высокой скорости в соответствующие
моменты времени в задаче, управляемые программой (релейная логика).
Примеры таких задач включают последовательность действий операции
производственной линии, начиная от сложного процесса установки,
а также его активизацией локальных контроллеров в распределенной
среде управления.
В первые дни промышленного управления соленоидными
электромеханическими переключателями, механические таймеры и
контроллеры барабана были использованы для последовательно сти
таких операций. Современные ПЛК являются прочными компьютерами.
Преимущество использования ПЛК состоит в том, что устройства на
заводе могут быть по стоянно подключены, и операция установки может
быть изменена или реструктуризирована программными средствами
(путем надлежащего программирования ПЛК), не требуя аппаратных
модификаций и повторного подключения.
Внутри, ПЛК выполняет основные функции компьютера, например,
логическую, функцию последовательности, срочности и подсчета
голосов. Он может выполнять вычисления и более простые задачи
41
управления, такие как ПИД-регулирование (пропорционально-
интегрально-дифференциальное регулирование). Такие операции
управления называются непрерывным управлением состояния ,
в котором переменные процессы непрерывно отслеживаются и
являются очень близкими к желаемым значениям. Существует еще
один важный класс элементов управления, известных как дискретно-
государственное управление (или управление дискретными событиями
), где целью является контроль за процессом следования требуемой
последовательности состояний (или этапов). В каждом государстве
однако, некоторая форма непрерывного государственного контроля
может работать, но это не совсем уместно к задаче дискретного
государственного контроля. ПЛК предназначены главным образом для
выполнения задач управления дискретными состояниями.
В качестве примера применения ПЛК, рассмотрим операцию
изготовления лопаток турбины. Дискретные шаги в этой операции могут
быть следующими:
1. Перемещение цилиндрических стальных заготовок в печь.
2. Нагревание заготовки.
3. Когда заготовка нагреется до необходимой температуры, переместить
ее в ковочную машину и приспособить ее.
4. Выковать заготовку в форму.
5. Выполненить отделочные работы поверхности для получения
требуемой аэродинамической формы.
6. Когда обработка поверхности удовлетворяет требованиям, затем
обработать на станке хвостовик лопатки.
Обратите внимание, что вся задача включает в себя последовательность
событий, где каждое событие зависит от завершения предыдущего.
Кроме того, каждое событие нужно будет начать и закончить в заданные
моменты времени. Такая последовательность времени будет иметь
большое значение для координации текущей операции с другими видами
деятельности и, возможно, для надлежащего выполнения каждого
операционного этапа. Например, деятельность частей обработки робота
должны быть согласованы с графиками ковочного и фрезерного станка.
Кроме того, заготовки должны быть нагреты в течение определенного
времени, и операция обработки не может быть ускорена без принесения
ущерба качеству продукта, интенсивности поверждения инструмента,
безопасности и т.д. Задача каждого шага в дискретной последовательности
должна быть выполнена под непрерывным контролем. Например,
фрезерный станок будет работать с использованием нескольких петлей
42
рисунок 1.8 Схематическое изображение ПЛК
Display screen- экран дисплея
Input devices – устройства ввода
Output devices – устройства вывода
Push button – кнопка для нажатия
Limit switch – конечный выключатель
Temperature sensor RTD – резистивные датчики температуры
Load sensor – датчик нагрузки
Power supply – подача энергии
Key board – клавиатура
PLC – ПЛК
Alarm – сигнал
Indicator light – индикатор света
Valve actuator – привод клапана
Solenoid – соленоид
Motor – мотор
Interface hardware – аппаратныйинтерфейс
Processor – процессор
Memory – память
43
прямого цифрового управления (ПЦУ) (скажем контуров управления,
ПИД), но дискретный контроль не связан с этим исключением начальной
и конечной точек каждой задачи.
Схематическое представление ПЛК показано на Рисунке 1.8 . ПЛК
работает в соответствии с некоторой логической последовательностью,
запрограммированной в ней. Подключение к ПЛК представляют собой
набор устройств ввода (например кнопки, концевые выключатели и
аналоговые датчики, такие как резистивные датчики температуры,
датчики давления мембранного типа, пьезоэлектрические акселерометры
и тензометрические датчики нагрузки) и множество выходных устройств
(например приводы, такие как двигатели по стоянного тока, соленоиды
и гидроцилиндры, предупреждающие сигнальные индикаторы,
такие как подсветка, алфавитно-цифровые светодиодные дисплеи и
светильники, клапаны и непрерывные элементы управления, такие как
ПИД- контроллеры). Предполагается, что каждое устройство пребывает
в двух состояниях (принимая логическое значение 0 или 1). Теперь в
зависимости от состояния каждого устройства ввода, и в соответствии
с запрограммированной логикой, ПЛК активирует надлежащее
состояние (например включен или выключен) каждого устройства
вывода. Следовательно, ПЛК выполняет функцию переключения. В
отличие от старшего поколения контроллеров, предназначенных для
секвенирования, в случае ПЛК, логика, определяющая состояние
каждого устройства вывода обрабатывается с помощью программного
обеспечения, а неаппаратных элементов, таких как аппаратные
переключатели. Переключение аппарата происходит на выходе
порта, однако. для включения или выключения выходных устройств,
управляемых с помощью ПЛК.
1.5 .3 .1 оборудование ПЛк
Как уже отмечалось ранее, контроллер представляет собой
цифровой компьютер, предназначенный для выполнения задач
управления дискретными состояниями. Стандартный ПЛК состоит
из микропроцессора, оперативной памяти и памяти ROM единиц,
аппаратного интерфейса, всё связаны между собой с помощью подходящей
структуры сети. Кроме того, должна быть еще клавиатура, экран
дисплея, и другие общие периферийные устройства. Базовая система
ПЛК может быть расширена за счет добавления модулей расширения
(модули памяти, ввода / вывода и т.д .) в систему стелажжирования.
44
ПЛК может быть запрограммированн с помощью клавиатуры или
сенсорного экрана. Уже разработанная программа может быть передана
в память ПЛК с другого компьютера или периферийного носителя
массовой памяти, такого как жесткий диск. Основная функция ПЛК
состоит в переключении (включение или выключение) устройств
вывода, подключенных к нему, в правильной последовательности, в
зависимости от состояния входных устройств и в соответствии с логикой,
продиктованной программой. Рассмотрим схематическое представление
ПЛК, как показано на Рисунке 1.8 . Обратите внимание на датчики и
исполнительные механизмы в ПЛК.
В дополнение к включению и выключению дискретных компонентов
выхода в правильной последовательности в надлежащее время,
контроллер может выполнять другие полезные операции. В частно сти
он может выполнять простые арифметические операции, такие как
сложение, вычитание, умножение и деление на входные данные. Он также
спо собен выполнять операции подсчета и синхронизации, как правило,
в рамках своих обычных функциональных требований. Преобразование
между двоичным и двоично-кодированным десятичным числом (BCD)
может потребоваться для отображения цифр на светодиодной панели,
а также для взаимодействия ПЛК с другим цифровым оборудованием
(например, цифровыми устройствами ввода и вывода). Например,
ПЛК может быть запрограммирован так, чтобы сделать измерение
температуры и измерение нагрузки, отобразить их на светодиодной
панели, сделать некоторые вычисления на эти (входные) значения, а
также обеспечить предупредительный сигнал (выхода) в зависимости от
результата.
Возможно сти ПЛК можно определить с помощью таких параметров,
как количество устройств ввода (например 16), и количество устройств
выхода (например 12), которые он может обрабатывать, число шагов
программы (например 2000), и скорость, при которой программа может
быть выполнена (например, 1 М шагов / сек). Другие факторы, такие
как размер и характер памяти и природа таймеров и счетчиков в ПЛК,
уровни сигналов напряжения, и выборы выходов являются важными.
1.5 .4 распределенное управление
Для сложных процессов с большим числом входных/выходных
переменных (например химический завод, атомная электростанция),
систем, компоненты которых расположенны на больших расстояниях
45
друг от друга, а также систем, имеющих самые разные и строгие
эксплуатационные требования (например космическая станция)
довольно трудно внедрить централизованный интерфейс обмена
данными между компьютером и монитором. В распределенных системах
управления, функции контроля распределены как географически, так
и функционально. Некоторые формы распределенного управления
целесообразны в больших системах,таких какпроизводство работы клеток,
фабрик, интеллектуальных транспортных систем и многокомпонентных
технологических установок. Система распределенного управления (СРУ)
будет иметь много пользователей, которым понадобиться использовать
ресурсы одновременно и, возможно, которые захотят также общаться
друг с другом. Кроме того, предприятию будет необходим доступ
к общим и общественным ресурсам, и средствам дистанционного
контроля и надзора. Кроме того различные типы устройств от
множества по ставщиков с различными спецификациями, типом данных
и уровней, возможно придется соединить между собой. Сеть связи с
коммутационными узлами и несколькими маршрутами необходима для
этой цели. Это по сути и есть сетевые системы управления (ССУ).
рисунок 1.9 Сетевое промышленное предприятие
Fieldbus (Промышленная Сеть)
Foundation Fieldbus – Сетевая шина
Industrial Ethernet, etc - промышленный Ethernet и др.(стандартизованный
и широко распространённый вариант Ethernet для применения в системах
промышленной автоматизации).
PD = технологическое устройство
PLC = Программируемый логический контроллер
DCS = Распределенная система управления (контроллер наблюдения)
with direct I/O – с прямым входом/выходом
46
Для достижения соединения между различными типами устройств,
имеющих различное происхождение, желательно использовать
стандартизированную сеть, которая поддерживается всеми основными
поставщиками необходимых устройств. Такие сети как Fieldbus Foun-
dation или Industrial Ethernet могут быть выбраны для этой цели. Field-
bus представляет собой стандартизированную сеть для предприятия,
которая может состоять из взаимосвязанной системы устройств. Она
обеспечивает связь между различными типами устройств различного
происхождения. Кроме того, она обеспечивает доступ к общим и
общественным ресурсам. Также она может обеспечить средствами
дистанционного контроля и надзора.
Подходящая структура для сетей промышленной установки показана
на Рисунке 1.9 . Промышленное предприятие в данном случае состоит
из множества технологических устройств (PD), одного или более
ПЛК, а также DSC-контроллера или
контроллера наблюдения.
Технологические устройства будут иметь прямой ввод / вывод со своими
собственными компонентами, будучи при этом подключенными к сети
предприятия. Аналогичным образом, ПЛК может иметь прямую связь
с группой устройств, а также сетевую связь с другими устройствами.
DSC будет наблюдать, управлять, координировать и контролировать всё
предприятие.
1.5 .5 иерархическое управление
Популярная распределенная структура управления обеспечивается
иерархическим контролем. Здесь функции управления распределены
функционально на различных иерархических уровнях (слоях).
Распределение управления может быть сделано как географически, так и
функционально. Иерархическая структура может облегчить эффективное
управление и связь в сложной системе управления.
Рассмотрим трехуровневую иерархию. Решения по управлению,
диспетчерскому контролю и координации между предприятиями в
общих чертах могут быть предоставлены диспетчерским компьютером
управления, который находится на самом высоком уровне (уровень 3)
иерархии. Следующий нижний уровень (средний уровень) формирует
параметры управления (или опорные входы) для каждой контрольной
области (подсистемы) в соответствующем предприятии. Контрольные
точки и опорные сигналы являются входами DDC, которые контролируют
каждую область управления. Компьютеры в иерархической системе
47
передают информацию с использованием подходящей сети связи.
Передача информации в обоих направлениях (вверх и вниз) должна
быть возможной для лучшей производительности и гибкости. При
подчиненном распределительном управление доступна только загрузка
информации.
В качестве иллюстрации, трехуровневая иерархия интеллектуальной
мехатронной системы (ИМС) показана на Рисунке 1.10. Нижний уровень
состоит из электромеханических компонентов с распознаванием на
уровне компонентов. Кроме того, активация и прямое управление
обратной связью также выполняются на этом уровне. Промежуточный
уровень использует интеллектуальные препроцессоры для абстракции
информации, поступающей от датчиков на уровне компонентов. Датчики
и их интеллектуальные препроцессоры вместе выполняют задачи
интеллектуального считывания. Состояние выполнения системных
компонентов может быть оценено таким способом, и настройка
компонентов, и управление компонентом-группой в результате может
быть осуществлено. Верхний уровень иерархии выполняет работы на
уровне задач, включая планирование, программирование, мониторинг
производительности системы и общего диспетчерского управления.
Ресурсы, такие как материалы и экспертизы, могут быть предусмотрены
на данном уровне и интерфейс вида- человек-машина будет доступен.
Основанное на знаниях, принятие решений осуществляется на обоих,
промежуточных и верхних уровнях. Разборка используемой информации,
как правило, уменьшится по мере увеличения уровня иерархии, в то
время как уровень интеллекта, необходимый в процессе принятия
решений будет возрастать.
В рамках общей системы, протокол связи обеспечивает стандартный
интерфейс между различными компонентами, такими как датчики,
исполнительные механизмы, формирователи сигнала, контроллеры, а
также системы окружающей среды не только позволит очень гибкую
реализацию, но также использование распределенного интеллекта для
выполнения предварительной обработки и понимания информации
.
Протокол связи должен быть основан на стандарте прикладного
уровня. По существу он должен прояснить , какие компоненты могут
взаимодействовать друг с другом и с окружающей средой, без определения
физических уровней передачи данных и сети. Протокол связи должен
предусматривать различные типы компонентов и различные абстракции
данных, чтобы быть взаимозаменяемым в тех же рамках. Он должен
также предусматривать информацию из географически удаленных мест,
48
РИСУНОК 1.10 Структура
иерархического контроля / связи для
ИМС
Database - База данных
Monitoring/control knowledge base -
На основе мониторинга / контроля
знаний
Intelligent preprocessor lev-
el -Интеллектуальный уровень
препроцессора
Top-level feedback - Обратная связь
верхнего уровня
Task information – Целевая
информация
Intelligent supervisory control system -
интеллектуальная СДТУ
Materials - Материалы
Information, knowledge, expertise -
Информация, знания, опыт
Goals, external commands - Цели,
внешние команды
Task group controllers- Групповые
контроллеры задач
Intermediate-level feedback - обратная
связь промежуточного уровня
Sensory preprocessing - Сенсорная
предварительная обработка
Context generation – создание
контекста
Abstraction - абстракция
Information preprocessors lev-
el - уровень информационных
препроцессоров
Low-level sensory feedback - низкий
уровень сенсорной обратной связи
Parameterupdating, tuning, reference
commands - Параметр обновления,
настройка, ссылки на команды
Sensor - датчик
Actuator - силовой привод
Controller - контроллер
Coordinator - координатор
Component level - уровень
компонентов
49
которые будут доведены до контрольной и коммуникационной системы
в рамках инновационно-модульной системы (ИМС).
1.6 Процесс оснащения инструментами
В некоторых ситуациях каждая функция или операция в рамках
технической системы может быть связана с одним или более физическим
устройством, компонентом или единицей оборудования, а в других
ситуациях один блок оборудования может выполнять несколько функций
системы. В нынешних условиях, говоря о инструментировке, мы имеем в
виду выявление этих инструментов или аппаратных компонентов с точки
зрения их функции, действий, параметров, рейтингов и взаимодействия
друг с другом и правильный выбор, подключение и настройка этих
компонентов для данного применения, в общем - оснащение системы.
Говоря о дизайне, мы имеем в виду процесс выбора подходящего
оборудования для выполнения различных функций в технических
системах; структурирование системы; согласование и сопряжение
этих устройств, а также выбор значений параметров, в зависимости от
характеристик системы для достижения желаемых целей системы в целом
(т. е.для соответствия спецификации), желательно в оптимальном порядке
и согласно некоторым критериям эффективности. Из этого следует, что
конструкция может быть рассмотрена в качестве цели инструментария.
В частности может быть много проектов, отвечающих заданным
требованиям производительности. Определение основных параметров
проектирования, моделирования различных компонентов и анализ часто
оказываются полезными в процессе проектирования. Моделирование
(аналитическое и экспериментальное) имеет важное значение при
анализе, проектировании и оценке системы. Идентификация аппаратных
компонентов (возможно, имеющихся в продаже готовых элементов) для
различных функций (например считывание, активация, управление)
является одним из первых шагов в КИП инженерных системах. Например,
в системах управления технологическими процессами готовых аналогов
могут быть использованы ПИД-контроллеры. Эти контроллеры для
систем управления технологическим процессом традиционно имеют
ручки или циферблаты для настройки параметров управления, то есть
пропорциональности или коэффициента усиления, коэффициента сброса
(в повторах пропорциональных действий в единицу времени), времени
и константы скорости. Указывается рабочая пропускная способность
(диапазон рабочих частот) этих устройств управления. Различные режимы
50
-
управление включением / выключением, пропорциональностью,
интегральностью и производной или их комбинациями, обеспечиваются
одним и тем же блоком управления.
Исполнительные устройства (т.е . исполнительные механизмы) включают
в себя шаговые двигатели, двигатели постоянного тока, электродвигатели
переменного тока, электромагниты, клапаны, насосы, подогреватели /
охладители и реле, которые также являются коммерчески доступными
для различных спецификаций. Привод может быть непосредственно
соединен с приводом нагрузки, это называется расположение с
прямым приводом. Чаще всего устройство передачи (коробка
передач, гармонический привод, ходовой винт, гайка, и т.д.) могут
быть необходимы для преобразования движения привода в желаемое
движение нагрузки, и для правильного согласования привода с приводом
нагрузки. Потенциометры, дифференциальные трансформаторы,
преобразователи, синхронизаторы, гироскопы, датчики деформации,
тахометры, пьезоэлектрические устройства, датчики потока жидкости,
датчики давления, термопары, термисторы и датчики температуры
сопротивления (терморезисторов) - примеры датчиков, используемых
для измерения процесса реагирования для контроля за его выполнением,
и возможно контролем.
Важным фактором, который мы должны учитывать в любой практической
инженерной системе, являются случайные ошибки или шум. Шум
может представлять собой фактическое загрязнение сигналов и ошибок
измерения или наличие других неизвестных неопределенностей и
ошибок, таких как вариации параметров, ошибки моделирования и
внешние раздражители, ошибки модели. Такие случайные факторы
могут быть удалены с помощью процесса оценки, такого как оценка по
методу наименьших квадратов (LSE), максимального правдоподобия
(MLE), а также различные виды КфС, в том числе ЭКф и методы
УКф. До оценки шум может быть удален путем прямого фильтрования
с помощью фильтров слежения, соединенных фильтров нижних
частот, фильтров высоких частот, полосовых фильтров и полосовых
режекторных фильтров и тд. Конечно, выбирая правильные и точные
датчики и процедуры считывания, возможно удастся избежать, по
крайней мере, некоторые из шумов и неопределенность сигнала.
Кроме того, слабые сигналы должны быть усилены, и форму сигнала,
возможно, придется быть изменить в различных точках взаимодействия.
Усилители заряда, синхронные усилители, усилители мощности,
импульсные усилители, линейные усилители, а также усилители
51
широтно-импульсной модуляции (ШИМ) являются устройствами
прямого сигнала и модификации, использующихся в инженерных
системах. Дополнительные компоненты, такие как источники питания
и блоки от перенапряжения- защита агрегатов, часто необходимы в
работе системы. Реле и другие коммутационные устройства, устройства
передачи, модуляторы и демодуляторы также могут быть необходимы.
1.6 .1 Действия контрольно-измерительных приборов
Приборы инженерной системы будут в первую очередь связаны с вы-
бором и внедрением надлежащих датчиков, приводов, контроллеров и
сигнальных модификаций/ интерфейса аппаратного и программного
обеспечения, а также интеграцией всей системы в соответствии с на-
бором технических характеристик. Конечно, этапы применения инстру-
ментов будут зависеть от конкретной инженерной системы и эксплу-
атационныех требований. Но как правило, некоторые основные шаги
можно определить. Они включают в себя понимание системы, которую
практически осуществляют. Это может привести к разработке модели (в
частности той, которая может быть использована для компьютерного мо-
делирования, компьютерной модели). Далее спецификации по дизайну /
производительности должны быть установленными для системы. Выбор
и калибровка датчиков, преобразователей, исполнительных механизмов,
систем приводов, контроллеров, формирование сигнала и аппаратного
интерфейса, программного обеспечения, которые будут удовлетворять
общие технические требования рабочих характеристик для системы,
представляют собой следующий важный шаг. После итераций модели-
рования, оценки, и внесения изменений в выбор измерительного обо-
рудования, окончательный выбор сделан. Окончательное испытание для
обоснования выбранных исполнительных механизмов наступает после
интеграции выбранных компонентов в систему и функционирование ин-
тегрированной системы. Основные этапы исполнительных механизмов
заключаются в следующем:
1. Исследование завода (технологического процесса), который должен
быть практически осуществлен. Цель завода, как он работает, его основ-
ные входы и выходы (реакции), другие соответствующие переменные
(состояние переменных), включая нежелательные входы, нарушения и
параметры –они должны быть идентифицированы.
2. Деление завода на основные подсистемы (это может быть сделано,
например на основе физических доменов подсистем -механических,
52
электрических / электронных, жидких, тепловых и т.д .) и сформировать
собственное физические уравнения для процессов подсистем.
Модель компьютерного моделирования может быть разработана с
использованием этих уравнений. Завод может быть уже существующий,
или концептуальный, который необходимо развивать и практически
применять до тех пор, когда он сможет быть достаточно подробно описан
и смоделирован.
3. Указание эксплуатационных
требований
(спецификации
производительности) для завода (то есть как завод должен работать
при выполнении своих задач) под надлежащим контролем. Мы можем
использовать любую имеющуюся информацию о таких требованиях,
такую как точность, разрешение, скорость, линейность, стабильность и
пропускная способно сть для этой цели.
4. Выявление каких-либо ограничений, связанных со стоимостью,
размером, весом, окружающей средой (например рабочая температура,
влажность, наличие пыли или чистых помещений, освещение, мойка) и
т.д.
5. Выбор типа и характера датчиков / преобразователей, исполнительных
механизмов и устройств формирования сигнала (в том числе и
взаимодействие аппаратного и программного обеспечения для сбора
данных, фильтрования, усилителей, модуляторов, АЦП, ЦАП, и т.д.),
которые необходимы для работы и управления заводом. Для датчиков
и исполнительных устройств, установка соответствующих рейтингов и
технических характеристик (уровни сигнала, ширину полос, точность,
разрешение, динамический диапазон и т.д.) . Для приводов, установка
соответствующих рейтингов и катионов (например мощность, крутящий
момент, скорость, температура, давление и характеристики, включающие
кривые и числовые значения). Определение возможных производителей
/ поставщиков для компонентов, пронумерование моделей и т.д.
6. Установка структуры общей интегрированной системы вместе
с соответствующими контроллерами и / или схемами управления.
Изменение первоначальной компьютерной модели для размещения
нового измерения заказчика, интегрировавшего в систему.
7. Проведение компьютерного моделирования и внесение изменения в
приборы, пока производительность системы не будет соответствовать
техническим требованиям. Схема оптимизации (например тех, которые
используют MDQ) в качестве показателя эффективности могут быть
использованы в данном случае.
8. После того, как компьютерный анализ дает приемлемые результаты, мы
53
можем приступить к приобретению и интеграции реальных компонентов.
В некоторых ситуациях, готовые компоненты могут быть недоступны. В
таком случае они должны быть разработаны и спроектированы.
1.6 .2 Примеры применения
Сейчас мы приведем пять примеров инженерных систем, которые извле-
кают выгоду из нужных сенсоров, приводов и соответствующих прибо-
ров.
1.6 .2 .1 Сетевое применение
Машина, которую мы разработали для отделения головы рыбы лосося,
показана на Рисунке 1.11 . Конвейер, движимый электродвигателем
переменного тока, сменяет рыбу в прерывистом режиме. Изображение
каждой рыбы, полученное
с использованием зарядовой связи
(ПЗС) камеры обрабатывается, чтобы определить геометрические
рисунок 1.11 Автоматизированная машина для резки рыбы
Secondary camera - Дополнительная камера
Primary camera - Первичная камера
Vertical cutter blade - Вертикальное лезвие резака
Discharge hopper - разгрузочный бункер
Electro-hydraulic manipulator - Электро-гидроманипулятор
54
особенности, которые, в свою очередь устанавливают правильное место
резки. Гидравлический привод с двумя осями затем определяет резец, и
режущий диск соответственно срабатывает с помощью пневматического
привода. Процесс считывания гидроманипулятора осуществляется с
использованием линейных преобразователей магнитострикционного
перемещения, которые имеет расширение 0.025 мм при их использовании
с 12 битным АЦП. Набор из шести датчиков калибровочного давления
установлен для измерения давления жидкости в сторонах основания и
стержня каждого гидравлического цилиндра, а также в линиях питания.
Система формирования изображения высокого уровня определяет
качество реза, в соответствии с которым вносятся корректировки
в Интернете, к параметрам системы управления для повышения
эффективности процесса. Система управления имеет иерархическую
структуру с обычным прямым контролем на уровне компонентов (низший
уровень), и интеллектуального мониторинга и ДСТУ на верхнем уровне.
Основной модуль визуального распознавания машины отвечает за бы-
строе и точное обнаружение положения жабр рыбы, на основе образа
рыбы, выловленной первичной камерой CCD. Этот модуль расположен
в основной машине, и включает в себя ПЗС-камеры для получения изо-
бражения, ультразвуковой датчик для измерения толщины рыбы, пере-
ключатель запуска для обнаружения рыбы на конвейере, ГПБ на основе
платы обработки изображения для кадра захвата и анализа изображения,
и ввода / вывода карты PCL для сбора данных и обмена цифровыми дан-
ными с управляющим компьютером электрогидравлического манипуля-
тора. Этот модуль визуального распознавания способен надежно обна-
руживать и вычислять местоположения резания в ~ 300 -400 мс. Вторич-
ный модуль визуального распознавания несет ответственность за при-
обретение и обработку визуальной информации, имеющей отношение
к качеству обработанной рыбы, которая проходит через режущий узел.
Этот модуль функционирует как интеллектуальный датчик в предостав-
лении информации обратной связи на высоком уровне в управляющем
компьютере. Аппаратные средства, связанные с этим модулем являются
ПЗС-камерами на выходе, используемые для захвата изображения обра-
батываемой рыбы, и плата обработки ГПБ на основе изображений для
визуального анализа данных. ПЗС-камера получает изображения обра-
ботанной рыбы под непосредственным контролем главного компьютера,
который определяет правильный образец для запуска камеры, рассчиты-
вая продолжительность операции резки . Затем изображение передается
55
в буфер изображения в плате ГПБ для дальнейшей обработки. Однако
в этом случае обработка изображений осуществляется для извлечения
информации высокого уровня, такой как качество обработанной рыбы.
С целью контроля и управления производственными процессами с уда-
ленных рабочих мест, мы разработали универсальную сетевую структу-
ру для аппаратного и программного обеспечения. Развитая инфраструк-
тура предназначена для оптимальной работы с основой FastEthernet (100
Base-T), где каждое сетевое устройство нуждается только в недорогой
плате сетевого интерфейса (NIC). Рисунок 1.12 показывает упрощенную
структуру аппаратных средств, которая соединяет две машины (рыбо-
перерабатывающая машина и промышленный робот). Каждая машина
непосредственно связана с его отдельным сервером управления, обра-
батывающим сетевую связь между процессом и веб-сервером, собирает
данные, отправляет управляющие сигналы в процессе, а также испол-
рисунок 1.12 Аппаратные средства структуры сетевой системы.
Remote work station - Удаленная рабочая станция
Control server - сервер управления
Web-server – веб сервер
Video-streaming server – сервер видео-трансляции
Control server - сервер управления
Process 1: Industrial robot - Процесс 1: Промышленный робот
Process 2:Fish processing machine - Процесс 2: Рыбоперерабатывающая машина
Camera (pan/tilt/zoom) + microphone - Камера (панорамирование / наклон / мас-
штабирование) + микрофон
56
няет принципы управления низкого уровня. Контроль сервера рыбопе-
рерабатывающей машины содержит одну или более плат сбора данных,
которые имеют АЦП, ЦАП, цифровой ввод-вывод, и видеозахват для об-
работки изображений.
Видеокамеры и микрофоны расположены в стратегически важных ме-
стах для захвата живого аудио- и видео сигналов, позволяющих уда-
ленному пользователю про сматривать и прослушивать их в процессе
установки, а также общаться с местным персоналом. Камера, выбран-
ная в данном случае - это Panasonic модель KXDP702, цветная камера
со встроенным панорамированием, наклоном и масштабированием 21
× (PTZ), которым можно управлять с помощью стандартного протокола
связи RS-232C. Несколько камер могут быть соединены последователь-
но цепным образом к серверу видео-трансляции. Для захвата и кодирова-
ния аудио-видео (AV) подачи из камеры, WinnovVideum 1000 PCI плата
установлена в сервер видео-трансляции. Он может записывать видеосиг-
налы с максимальным разрешением 640 × 480 при 30 кадрах в секунду,
с аппаратным сжатием, что значительно уменьшает вычислительные на-
кладные расходы на сервер видео-трансляции. Каждая из плат захвата
AV может поддерживать только один вход AV. Следовательно, должны
быть установлены несколько плат.
1.6 .2 .2 Система телемедицины
Система телемедицины разрабатывается нами. В ней используется сле-
дующий подход: продвинутое считывание, обработка сигналов и элек-
тросвязь общего пользования используются для клинического монито-
ринга пациентов, находящихся в их собственном населенном пункте, а
также для передачи только относящейся к делу информации он-лайн к
медицинскому работнику больницы на расстоянии. Медицинский работ-
ник взаимодействует с пациентом удаленно, с помощью аудио и видео
связи, и одновременно анализирует данные, передаваемые системой мо-
ниторинга, делает медицинскую оценку, диагностику и рецепт. Меди-
цинский работник может проводить консультации с другими специали-
стами он-лайн, а также может использовать другие доступные ресурсы
в определении диагноза и назначения. Использование медицинских ра-
ботников для проведения оценки состояния здоровья, диагноза, и пред-
писания является гораздо более желательным, чем популярный подход к
телемедицине и телездравоохранению.
В конструкции носителя датчика используется мехатронный (оптималь-
57
ный) подход, применяющий MDQ как функцию производительности.
Индексы дизайна в MDQ включают такие аспекты как расположение
компонентов, точность, скорость, размер, сложность, ремонтопригод-
ность, расчетный срок службы, надежность, прочность, допуск ошибки,
реконфигурация, гибкость, стоимость, удобство и ожидаемые результа-
ты. Параметры, такие как расположение датчика и конфигурации в пид-
жаке, выбраны таким образом, чтобы улучшить / оптимизировать про-
цесс сбора данных, формирование тела, вес, прочность, стоимость и т.д.
Выбор датчиков и связанных с ними аппаратных средств, в частности, в
отношении их типа, размера и особенностей для соответствия эксплуа-
тационным характеристикам системы (как это установлено в мехатрон-
ном дизайне) является важным аспектом развития датчика куртки. Соот-
ветствующими датчиками для носителя являются:
• Стандартный датчик ЭКГ (электроды кожи / грудной клетки)
• Датчики артериального давления (на основе мониторинга манжета)
• Датчики температуры (температуры или клочка кожи)
• Дыхательные датчики (пьезоэлектрические / пьезорезистивные датчи-
ки)
• Электромиограммы (кожные электроды)
• Датчик оксиметрии
• Электрический стето скоп (шеи и легких)
• Датчик чистого скоба уха
• Круговой датчик растяжения
Некоторые из экономически до ступных соответствующих датчиков и их
основные характеристики приведены следующим образом:
Цифровой стетоскоп (AgilentTechnologies; 4,5 В постоянного тока, 1
мА):
• Захватывает звуки от сердца и легких
• Сигналы должны быть усилены до обработки с помощью компьютера
• Восемь уровней усиления звука
• Активная фильтрация шумов
• Выбор режима : Стандартные режимы диафрагмы и звука, и расши-
ренный режим диафрагмы слышать высокочастотные звуки (например
произведенные механическими протезами клапаны сердца)
Цифровой диктофон ЭКГ (FukudaDenshi, 12-выводной цифровой блок
ЭКГ, 100-240 В / 50-60 Гц адаптер переменного тока):
• Захватывает полную электрокардиограмму и формирует файл данных
58
• Встроенное программное обеспечение для обработки и интерпретации
сигналов (для оказания помощи врачу в диагностике некоторых типов
сердечных заболеваний)
• функция выбора канала (руководства) (для вывода различных видов
обрабатываемой информации)
Формирование восприятия изображений, кровяное давление, темпера-
тура и кислород в крови:
• Медицинская ПЗС-камера : AMD телемедицина, 110-220 В переменно-
го тока, 50-60 Гц или 12 В по стоянного тока, со встроенным источником
оссвещения
• Цифровой монитор артериального давления: диагностик Bios а или
Omron, 110-230 В адаптер переменного тока, подключение к PC ; обеспе-
чивает кровяное давление и частоту пульса; носитель надувается, при
нажатие на кнопку
• Цифровой ушной термометр : BectonDickinson и Co./Advanced мони-
торы Corp
• Пульсоксиметр : медицинские продукты Devon; стандартное крепле-
ние на кончике пальца или мочке уха; также доступны модели крепления
на лоб и грудь.
Примечание: Артериальное давление и показания температуры могут
быть переданы по беспроводной сети от пациента к компьютеру путем
внедрения маломощных миниатюрных приемопередатчиков в датчики.
Сенсорные возможности питания: Следующие готовые датчики имеют
встроенные адаптеры переменного тока (100-240 В универсальные, 50-
60 Гц).
• Блок ЭКГ
• Медицинская ПЗС-камера
• Прибор для измерения артериального давления
Стетоскоп, термометр и пульсоксиметр, как правило, заряжаются от од-
норазовых батарей.
Другие типы датчиков, в частности пригодные для ношения амбулатор-
ных датчиков / мониторы (WAMS) могут быть также интегрированы. Не-
обходимые аксессуары для сенсорной куртки:
59
• Полный маломощный интегрированный аналоговый интерфейс для
приложений ЭКГ
• Одна часть кабеля ЭКГ с подводящим проводом
• 3-свинцовый универсальный адаптер YokemateLWS®
• Сухой электрод
• многоразовые DIN разъемы подводящего провода AMC&E, 3-свинцо-
вое, простое соединение
• Понижающий преобразователь с обходным режимом для беспрово-
дных приложений со сверхнизким энергопотреблением
• Игла для обрезания преобразователя
• Разработка de2 и образование питания
• Микро Arduino
• Модуль BLE 4.0
• Мягкий потенциометр
Рисунок 1.14 Графическое изображение сенсорной куртки
Oximetry sensor – датчик оксиметрии
Electronic stethoscope – электронный стетоскоп
Temperature sensor – датчик температуры
Stethoscope - стетоскоп
ECG sensor – датчик ЭКГ
Blood pressure sensor – датчик кровяного давления
Air pump –воздушный насос
MCU – единица микроконтроллера
Respiratory piezoelectric sensor – дыхательный пьезоэлектрический датчик
60
• Носимый комплект (текстильная кнопка, связующая нить, и т.д.)
• Жилет давления
1.6 .2 .3 роботизированная система ухода на дому
Один из способов, которые может уменьшить расходы на здравоохра-
нение пожилых людей, состоит в использовании последних технологи-
ческих достижений в области считывания и активации робототехники
и информационно-коммуникационных технологий для предоставления
высококачественных благоприятных условий для пожилых людей в их
собственных домах. Роботизированная среда ухода на дому может вы-
полняться автономными роботами, которые могут быть дополнены так-
тильными возможностями телеопераций, содержащих дистанционную
тактильную помощь управляемого робота для мониторинга и оказания
помощи лицам, находящимся в домашней обстановке. В частности, си-
стема будет иметь возможно сть работать в двух режимах:
риСУНок 1.15 Тактильная телеоперация роботизированной системы
ухода на дому.
Master controller - главный контроллер
Human operator – человек оператор
Master/ haptic interface - операционный / тактильной интерфейс
Command signals - Командные сигналы
Slave/ teleoperator+ controller - Работник / телеоператор + контроллер
Remote environment - Удаленная среда
Communication channel –канал коммуникации
Sensor information - данные сенсоров
61
(а) более автономная работа - обычный уход в течение 24 часов (мобиль-
ность, купание, переодевание, туалет, приготовление пищи, обеспечение
медикаментами, мониторинг и поиск внешней помощи и т.д.) и (б) дис-
танционный мониторинг и тактильная телеоперация в чрезвычайных си-
туациях (пока не приедет основная помощь - скорая помощь, фельдше-
ры, полиция, пожарные и т.д). Тактильная телеоперация будет включать
в себя продвинутые способы активации и считывания возможностей
робота вместе с когнитивными навыками человека (см. Рисунок 1.15).
В дополнение к датчикам в роботах (в том числе ведущему и ведомому
устройству для зрительной работы) будут необходимы дополнительные
датчики для мониторинга окружающей среды, которая является дина-
мической, неструктурированной и до конца неизвестной. Соответствую-
щие датчики для этого приложения включают в себя оптические датчики
для считывания действий, и крутящиеся датчики движения для суста-
вов роботов и операторов; тактильные сенсоры для роботизированных
пальцев; лазерные и ультразвуковые дальномеры для мобильных плат-
форм; оптические датчики для колес мобильных платформ; камеры для
мобильных платформ и рабочей среды. Соответствующие приводы явля-
ются двигателями постоянного тока и шаговые двигатели.
1.6 .2 .4 контроль качества воды
Качество местной питьевой воды измеряется с помощью нескольких
узлов датчиков, распределенных по большой географической области.
Данные, полученные от узла датчика, могут быть локально обусловле-
ны, а затем переданы на центральный сервер, в котором находится ИКТ
(информационно-коммуникационные технологии) - платформа для мо-
ниторинга и оценки качества питьевой воды. Структура системы показа-
на на Рисунке 1.16. В этой платформе качество воды определяется через
географически распределенный набор узлов датчиков. Датчики темпе-
ратуры, водородного показателя, мутности, растворенного кислорода и
электропроводности являются экономически доступными и используют-
ся при мониторинге качества воды. Система микроконтроллера исполь-
зуется для сбора данных датчиков в каждом узле датчика (SN), как по-
казано на Рисунке 1.16. Обработка на низшем уровне сенсорных данных
(например фильтрация, усиление и цифровое представление) осущест-
вляется с помощью микроконтроллера, прежде чем передать данные в
хорошем состоянии через приемопередатчик на мощный компьютер под
названием локальный сигнальный процессор (ЛСП). В ЛСП полученные
62
рисунок 1.16 Структура узла датчика (SN) системы контроля качества воды.
Charge controller - контроллер заряда
Battery - аккумулятор
Solar panel- Солнечная панель
Access point - Точка доступа
A/D DAQ board - A / D DAQ питание
Microcontroller (sensor data acquisition, low-level processing, and transmission)
-
Микроконтроллер (сбор данных с датчиков, обработка низкого уровня, и
передача)
Sensor node - узел датчика
Local signal processor – локальный процессор сигнала
Backup storage - Резервное хранилище
Controller - контроллер
Radio - Радио
Amplifier - Усилитель
GUI - графический интерфейс пользователя
Wireless sensors - Беспроводные датчики
Sensor – датчик
63
данные подвергаются обработке на высоком уровне и их сжатию, а затем
передаются через сеть Интернет на центральный компьютер, называе-
мый центральный блок оценки (ЦБО). ЦБО является единицей принятия
решений, о снованной на знаниях, которые позволяют оценить данные из
рассмотренных различных географических местоположений во времен-
ном порядке. На основе оценки, ЦБО предоставляет рекомендации по
сигналам тревоги, тенденциям, а также другую полезную информацию
о качестве воды в различных местах, а также обоснование и объяснения
этих решений. Кроме того, ЦБО оптимизирует работу платформы ИКТ
для того, чтобы сделать систему результатов более точной, равномерной
и эффективной.
Ключевыми вопросами являются следующие:
1. Вопросы местного считывания и сбора данных по мониторингу каче-
ства воды.
2. Вопросы для обработки и передачи сигналов.
3. Принятие решений по качеству воды путем оценки информации из
всех узлов датчиков.
4. Структура платформы ИКТ.
1.7 организация книги
Книга состоит из девяти глав, посвященных изложению основ, аналити-
ческих концепций, вопросов моделирования и проектирования, техниче-
ских характеристик, и способов применения датчиков, исполнительных
механизмов и интерфейсов, и модификации сигнала в рамках техниче-
ской системе приборов. Книга равномерно включает в себя основные
принципы, лежащие в основе аналитических методов, подходов к моде-
лированию, компонентных процедур отбора и методов проектирования
на систематической основе на протяжении всех основных глав. Прак-
тическое применение концепций, подходов и инструментов, представ-
ленных в вводных главах демонстрируется с помощью многочисленных
иллюстративных примеров и исчерпывающего набора тематических ис-
следований.
В этой главе рассматривается предмет измерительных приборов инже-
нерной системы, использующей датчики, исполнительные механизмы
и сигнал модификации аппаратного обеспечения. Указывается актуаль-
ность моделирования и проектирования в применении приборов. Опи-
сывается общая структуры системы управления и поясняется роль дат-
64
чиков и исполнительных устройств в этих структурах. Данная вводная
глава задает тон изучения, который охватывает оставшиеся во семь глав.
Перечислены соответствующие публикации в данной области.
Глава 2 представляет собой составную часть межсетевых соединений и
условного сигнала, который на самом деле является важным объеди-
няющим предметом в инженерных системах измерительных приборов.
Изучаются противоречивые соображения взаимосвязи компонентов и
их соответствия. Обсуждаются методы и устройства усиления, фильтра-
ции, АЦП, ЦАП, схемы моста, а также другие преобразования сигнала,
приборы и техники обработки.
Глава 3 анализирует эксплуатационные характеристики устройства, его
составные части или инструменты в области инженерной системы. Рас-
сматриваются методы технических характеристик, как во временной
области, так и в частотной. Обсуждаются общие рейтинги инструмен-
тов, использующихся в промышленности и, как правило, в инженерной
практике. Приведены связанные аналитические методы. На первый план
выдвинуты замечания относительно пропускной способности, пред-
ставлен конструктивный подход, основанный на пропускной способно-
сти. Обсуждаются ошибки в цифровых устройствах с аналитической и
практической точек зрения, в частности в результате выборки сигнала.
Глава 4 касается оценки параметров и сигналов на основе измеренных
данных. Роль оценки сводится к считыванию. Обсуждаются понятия
ошибки модели и погрешности измерений. Изучается обработка ошибок
в хаотичности (среднее значение, дисперсия или ковариация). Следую-
щие подходы представлены и проиллюстрированы на примерах: ЛСЭ;
ОМП; и четыре версии фильтра Калмана (фК), такие как скалярный ста-
тический фК; линейное динамическое расширение фК с несколькими
переменными применяется в нелинейных ситуациях; и сигматочечный
фильтр Калмана также применимы в нелинейных ситуациях и имеют
преимущества по сравнению с расширенным фК, так как она непосред-
ственно учитывает распространение случайных характеристик через си-
стему нелинейностей.
В Главе 5 представлены важные типы, характеристики и принципы рабо-
ты аналоговых датчиков. Особое внимание уделяется датчикам, которые
обычно используются в управлении инженерной практикой. Обсужда-
65
ются датчики движения, силы и датчики крутящего момента, оптиче-
ские датчики, датчики температуры, давления, датчиков и датчики по-
тока. Указаны аналитическая основа, критерии отбора, а также области
применения.
В Главе 6 обсуждаются общие типы цифровых преобразователей и не-
которых других инновационных, передовых технологий считывания. В
отличие от аналоговых датчиков, цифровые преобразователи генериру-
ют импульсы, подсчеты, или цифровые выходы. Эти устройства имеют
явные преимущества, особенно при использовании компьютерных циф-
ровых систем. Они имеют ошибки в квантовании, которые неизбежны
в цифровом представлении аналоговой величины. Рассматриваются свя-
занные с этим вопросы точности и разрешения. Обсуждаются датчики
для цифровых фотоаппаратов и захвата изображений, основанные на эф-
фекте Холла, ультразвуковые и магнитострикционные датчики, тактиль-
ные сенсоры, и MEMS. Изучается датчик слияний через подход Байеса,
фК и нейронные сети. Представлены технологии сетевого считывания и
локализации. Приведены несколько примеров применения продвинутого
считывания.
Глава 7 касается механических компонентов, которые могут быть ис-
пользованы для подключения привода к механической нагрузке. Эти пе-
редающие устройства служат в качестве средства подбора компонентов,
а также для правильного приведения в действие механической нагрузки.
Глава 8 исследует шаговые двигатели, являющиеся важным классом
приводов. Эти приводы производят постепенные движения. Удовлетво-
ряя условиям эксплуатации, они имеют преимущество или возможность
создавать заданный профиль движения с помощью спо соба открытого
контура без необходимости обнаружения движения и сигнала обратной
связи управления. Однако при некоторых условиях нагрузки и реакции
могут быть пропущены шаги движения. Следовательно, целесообразнее
использовать считывание и контроль обратной связи, когда должны быть
выполнены сложные траектории движения в соответствии с неоднород-
ными и экстремальными условиями нагрузки.
В Главе 9 представлены приводы непрерывного действия исполнитель-
ных механизмов, такие как двигатели постоянного тока, двигатели пере-
менного тока, гидравлические приводы и пневматические приводы. Об-
66
суждаются общие разновидности исполнительных механизмов в рамках
каждой категории. Описаны принципы работы, аналитические методы,
конструктивные соображения, методы отбора, приводные системы и ме-
тоды управления. Обсуждаются преимущества и недостатки различных
типов приводов на основе характера и потребностей приложения. Вво-
дится предмет струйной техники. Показаны практические примеры.
Некоторые основы теории вероятности и статистики представлены в
Приложении А. Надежные соображения и связанные с ними вероятност-
ные модели многокомпонентных систем изложены в Приложении B.
67
основные моменты главы:
• Взаимосвязь компонентов (электрическая, механическая и т.д.)
• Изменение сигнала, его обработка, преобразование и т.д
• Согласование полного сопротивления (максимальная передача мощно-
сти, максимальная эффективно сть, предотвращение отражений в переда-
че, уменьшение нагрузки)
• Механические системы (изоляция, передача)
• Операционные усилители и другие усилители, измерительные усили-
тели
• Оборудование для заземления и изоляции, заземления контура шума
•фильтры (скобяные, пассивные, активные, низкочастотные, высокоча-
стотные, полосовые, отвергающие полосу частот )
• Модуляции и демодуляции (AM, FM, PWM, PFM, PM, PCM)
• Компьютерный интерфейс: DAQ, DAC, ADC, S/H, MUX и т.д .
•Мостовые цепи (напряжение, ток, полумостовой преобразователь, ли-
неаризация и т.д.)
• Разные аппаратные средства (преобразователь "напряжение - частота"
(ПНЧ), преобразователь "частота - напряжение" (ПЧН), преобразователь
"напряжение-ток" (ПНТ), удержание пика, линеаризация и т.д).
2.1 введение
Техническая система, как правило, состоит из широкого спектра компо-
нентов, соединенных между собой для выполнения указанных функций.
Когда два компонента соединены между собой, сигналы (и мощности)
протекают между ними, поскольку два компонента взаимодействуют
(т.е. динамически в сочетании), то их сигналы (реакции) изменяются
со временем, в зависимости от динамики обоих компонентов. Когда два
2. взаимосвязь компонентов и обра-
ботка сигнала
68
устройства сопрягаются, необходимо гарантировать, что сигнал, остав-
ляя одно устройство и входя в другое, будет вести себя также на необхо-
димых уровнях сигнала (то есть значения напряжения, тока, скорости,
силы, мощности и т.д), в надлежащей форме (электрической, механи-
ческой, аналоговой, цифровой, модулированной, демодулируванной и
т.д), без искажений (в частности, загрузка одного компонента на другой,
нелинейности и шум должны быть устранены), в соответствии с требо-
ваниями конкретного применения. Очевидно, что рассмотрение компо-
нентов взаимосвязи, интерфейса между соединенными компонентами,
модификации сигнала и формирования сигнала являются важными в из-
мерении инженерной системы.
2.1 .1 взаимосвязь компонентов
Инженерные системы, как правило, являются полидоменными (смешан-
ными)системами, состоящими из более чем одного типа компонентов,
соединенных между собой. Это особенно верно с мехатронными систе-
мами, которые используют комплексный и параллельный оптимальный
подход при проектировании и разработке. Как правило, механическое (в
том числе жидкое и тепловое), электрическое, электронное и компью-
рисунок 2.1 Модель для взаимосвязи составных частей смешанного домена
(электромеханического)
Electrical subsystem - Электрическая подсистема
Mechanical subsystem - Механическая подсистема
Electrical dynamics - Электрические динамики
Mechanical dynamics- Механические динамики
Ideal energy transformer - Трансформатор совершенной энергии
Energy dissipation - рассеяние энергии
69
терное оборудование интегрировано для формирования практических
приложений. Когда компоненты соединены между собой, поведение от-
дельных компонентов в интегрированной системе может существенно
отличаться от того, когда каждый компонент работает независимо друг
от друга. Отсюда следует, что компонент взаимосвязи является важной
конструкцией и измерительным прибором (и общего развития) техниче-
ской системы.
Характер и тип сигналов, присутствующих на интерфейсе взаимосвязан-
ных компонентов зависят от характера и типа компонентов. Например
когда двигатель соединен с грузом через редуктор (передача), механиче-
ская энергия протекает на стыке этих компонентов. В этом случае сила,
которая передается, того же типа (механического), и мы особенно заин-
тересованы в связанных сигналах с угловой скоростью и вращающим
моментом. Точно так же, когда двигатель соединен с его системой элек-
тронного привода (например, электрическая цепь погружения может
быть подключена к статору или ротору или оба двигателя постоянно-
го тока зависят от типа двигателя), есть преобразование электрической
мощности схемы привода в механическую энергию ротора. Их интер-
фейс может быть представлен электромеханическим трансформатором
как показано на Рисунке 2.1 . С одной стороны мы имеем напряжение
и ток в качестве силовых сигналов, а с другой, мы имеем угловую ско-
рость и крутящий момент в качестве силовых сигналов. Примечание: В
обоих примерах будет рассеивание энергии (отходы) с обеих сторон, и,
следовательно, преобразование энергии не будет происходить со 100%
эффективностью.
В общем, когда два компонента взаимосвязаны, динамические взаимо-
действия (динамическая связь) будет происходить между ними и, следо-
вательно, условия каждого компонента будут отличаться от того, какими
они были перед подключением. Совершенно очевидно, что взаимосвя-
занные компоненты должны быть правильно подобраны для взаимос-
вязанной системы, чтобы она работала желаемым образом. Например в
случае двигателя и его электронной системой привода, достижение мак-
симальной эффективности может быть основной задачей. Затем динами-
ческое взаимодействие между двумя компонентами будет значительным.
В отличие от этого, в случае датчика и наблюдаемого объекта важно,
что динамические условия объекта не могут быть изменены с помощью
датчика (т.е . загрузка объекта с помощью датчика должна быть незначи-
70
тельной, например что касается датчика движения, то и электрическая
нагрузка, и механическая нагрузка должны быть незначительными).
Другими словами, динамическое взаимодействие между датчиком и
контролируемым объектом должно быть незначительным, сохраняя при
этом возможность точно измерять необходимое количество.
Интерфейс составной части играет важную роль в правильной работе
интегрированной системы. В частности интерфейс должен быть разрабо-
тан, изготовлен, или выбран в зависимости от конкретной функции взаи-
мосвязанной системы. Совмещение компонентов в многокомпонентной
системе должно быть сделано тщательно, чтобы повысить производи-
тельность и точность системы. В этом контексте согласование импедан-
са имеет большое значение, так как согласование полного сопротивле-
ния необходимо для получения максимальной производительности от
взаимосвязанной системы, в зависимости от ее функциональной цели.
Следующие соображения имеют существенное значение во взаимосвязи
компонентов:
1. Характеристики взаимосвязанных компонентов (например домен ком-
понента-механический, электрический / электронный, тепловой и т.д;
тип компонента-привод, датчик, схема управления, контроллер, армату-
ра или корпус и т.д).
2. Цель взаимосвязанной системы (например управлять нагрузкой, из-
мерить сигнал, связать информацию, свести к минимуму шум и наруше-
ния, в частности, механических ударов и вибрации)
3. Уровни сигнала / мощности работы
2.1 .2 Модификация сигнала и его обработка
Модификация сигнала включает в себя преобразование сигнала и его об-
работку. Она играет важную роль во взаимосвязи и сопряжении состав-
ных частей. Причины этого следующие:
1. Когда два компонента соединены между собой, их сигналы изменяют-
ся (за счет динамической связи / взаимодействия).
2. Для согласования взаимосвязанных компонентов, их рабочие сигналы
должны быть изменены (зависимо от мощности, типа и т.д .) .
3. Для применения тип сигнала и его характеристики должны быть из-
менены (например мощность, аналого-цифровое преобразование, моду-
71
ляция).
4. С учетом погрешно стей шума и других ошибок, а также систем, сиг-
налы должны отвечать стандартам (например фильтрация, усилению).
Задачи модификации сигналов включают в себя формирование сигнала
(например усиление, аналоговые и цифровые фильтрации), преобразо-
вание сигнала (аналого-цифрового преобразование [АЦП], цифро-ана-
логовое преобразование [ЦАП], ПНЧ, и ПЧН), модуляции (амплитуда
модуляции [AM], частота модуляции [ЧМ], фазовую модуляцию [фМ],
широтно-импульсную модуляцию [ШИМ], частотно-импульсную мо-
дуляцию [ЧИМ], и импульсно-кодовую модуляцию [ИКМ]), и демоду-
ляцию (т.е . обратный процесс модуляции). Кроме того, многие другие
виды операций модификации полезного сигнала могут быть идентифи-
цированы. Например, выборка и хранение (схемы S / H) используются в
цифровых данных (DAQ) системы. Такие устройства, как аналоговые и
цифровые мультиплексоры и компараторы необходимы во многих при-
менениях DAQ и при ее обработке. фазовое переключение, кривая фор-
мообразования, компенсация, и линеаризация также могут быть класси-
фицированы как модификации сигналов.
В частности для передачи, сигнал должен быть соответствующим обра-
зом модифицирован путем усиления, модуляции, оцифровки, и так да-
лее, так как отношение «сигнал-шум» передаваемого сигнала достаточ-
но велико в приемнике. Значение модификации сигнала видно из этих
наблюдений. В общем, формирование сигнала имеет важное значение
в контексте компонента взаимосвязи и интеграции, в связи с наличием
шума и неизвестных / нежелательных нарушений и ошибок в ассоции-
рованных сигналах. Поэтому сигнал модификации и его обработки явля-
ется важной темой в изучении приборов.
2.1 .3 обзор главы
В настоящей главе рассматривается взаимосвязь компонентов, таких как
датчики, DAQ аппаратные средства, схемы формирования сигнала, ис-
полнительные механизмы, устройства передачи мощности и установки
механики в инженерной системе. В данной главе описываются соответ-
ствующие формирования сигнала и модификации операций. Изучаются
основные понятия импеданса и согласование компонентов. Обсуждают-
ся желательные характеристики импеданса взаимосвязанных компонен-
тов, в зависимости от назначения и области применения. Операционный
72
усилитель (ОУ) вводится в качестве основного элемента формирования
сигнала и согласования схем импедансов для электронных систем. Об-
суждаются различные типы устройств формирования сигнала и моди-
фикации устройств, таких как усилители, фильтры, модуляторы, демо-
дуляторы, мостовые схемы, АЦП и ЦАП. Рассмотрение надежности и
связанных с ними вероятностных моделей многокомпонентных систем
изложены в Приложении B.
Обсуждения и события, приведенные здесь, могут быть довольно об-
щими в некоторых ситуациях. Тем не менее, представленные здесь кон-
цепции применимы ко многим типам компонентов инженерной системы
(мультидоменные). Конкретные аппаратные компоненты и конструкции
рассматриваются в качестве примеров в отношении компонентов интер-
фейсов, получения сигнала, его обработки и модификации.
2.2 импеданс
2.2 .1 определение импеданса
Сопротивление может быть истолкововано в традиционной электри-
ки - как обобщенное сопротивление. Это может быть интерпретирова-
но в механическом смысле, или в общем смысле в отношении других
областей (например в жидкости, тепле), а также в зависимости от типа
сигналов, принимающих участие. Например, вольтметр может изменить
токи (и напряжения) в цепи, и это касается электрического сопротивле-
ния в цепи постоянного тока или в более общем плане, электрического
импеданса, когда рассматриваются цепи переменного тока. В качестве
другого примера, тяжелый акселерометр будет вводить дополнительную
динамическую (механическую) нагрузку, которая будет изменять фак-
тическое ускорение в месте наблюдения. Это касается механического
импеданса. В качестве третьего примера, соединения термопары может
изменить температуру, которая измеряется в результате переноса тепла
в место соединения. Это касается теплового сопротивления. Точно так
же мы можем определить сопротивл ение для гидравлических систем,
магнитных систем (противодействие ) и т.д. В общем, импеданс опре-
деляется как
73
По ту сторону переменной измеряется по двум концам (портам) компо-
нента, а сквозь переменную передается через компонент в неизмененном
виде. Примеры по ту сторону переменной - напряжение, скорость, тем-
пература и давление. Примерами сквозь переменную являются ток, сила,
скорость передачи тепла, и расход жидкости. Даже несмотря на то, что
электрический импеданс определяется как напряжение / ток, который
согласуется с определением (2.1), механический импеданс, исторически,
был определен как сила / скорость, который является обратно пропор-
циональной по отношению к определению (2.1). Это изменчивость, ко -
торая определяется как скорость / сила, и должна быть истолкована как
полное сопротивление в общем смысле (то есть обобщенный импеданс)
в нашем анализе.
2.2 .2 важность согласования сопротивления во взаимосвязи компо-
нентов
Когда два электрических компонента соединены между собой, ток (и
энергия) течет между двумя компонентами и изменяет первоначальные
(несвязанные) условия. Это известно как (электрический) эффект на-
грузки, и он должен быть сведен к минимуму. В практических лучаях
адекватная мощность и ток будут необходимы для передачи сигнала, его
считывания, отображения и т.д. Такие требования приборов могут быть
удовлетворены за счет надлежащего согласования компонентов сопро-
тивлениями. В общем, когда компоненты, такие как датчики и преоб-
разователи, источники питания, управления аппаратными средствами,
DAQ платы, технологическое (т.е. производственное) оборудование, а
также формирование сигналов аппаратных средств, кабели и т.д. соеди-
нены между собой, необходимо чтобы они соответствовали импедансу
должным образом на каждом интерфейсе для реализации своих номи-
нальных уровней производительности. Такое согласование должно быть
сделано в соответствии с целью взаимосвязанной системы. Несколько
категорий согласования импеданса приведены ниже.
1. Источник и нагрузка для согласования максимальной передачи мощно-
сти: В системе привода важной целью может быть максимизация мощ-
ности, передаваемой от источника питания к исполнительному механиз-
му или нагрузке. В этом случае динамические взаимодействия между
взаимосвязанных компонентов будут значительными. Правильное согла-
сование импеданса может достигнуть требований максимальной переда-
74
чи мощности.
2. Передача мощности при максимальной эффективности: достижение
максимальной эффективности передачи мощности отличается от дости-
жения максимальной мощности потому, что максимальная эффектив-
ность не достигается при максимальной передачи мощности. Импеданс
нагрузки может быть правильно выбран для достижения высокой эффек-
тивности.
3. Предотвращение отражения в передаче сигнала: когда два компонен-
та соединены кабелем (например, коаксиальным каблем) с волновым со-
противлением (например 50 или 75 Ω для коаксиального кабеля), разни-
ца импеданса на двух концах (из-за импеданса связанных компонентов)
будет отражать сигнал (аналог упругого отражения волн из-за разницы
плотности в двух средах). Эти отраженные сигналы (подражатели) при-
ведут к дополнительной рассеиваемой мощности, снижению силы сиг-
нала и искажения сигнала, все из которых являются нежелательными.
Конечные импедансы и характеристическое сопротивление кабеля долж-
ны быть так подобраны, во избежания отражений сигнала.
4.Уменьшение нагрузки: когда два компонента соединены между собой,
в некоторых случаях требуется, чтобы выходной компонент не загружал
компонент ввода. Например, в процессе считывания датчик должен не
изменять условия во спринятого объекта. Другими словами, измеритель-
ный прибор не должен искажать сигнал, который измеряется. Проще го-
воря, датчик не должен загружать измеряемый объект. В качестве другого
примера, в системе сбора сигнала датчика, аппаратные средства приема
сигнала не должны искажать полученный сигнал от датчика (т.е. системе
сбора сигналов, которая может иметь такие функции, как фильтрация
и усиление, не следует загружать датчик). В качестве третьего приме-
ра, в регулируемом источнике питания нагрузка, подключамая к источ-
нику питания, не должна существенно изменять выходное напряжение
источника питания. Импедансы могут быть выбраны для уменьшения
загрузки эффектов. В этом случае согласование импеданса называется
мостиковым сопротивлением или мостиковым напряжением. Трансфор-
матор импеданса должен будет достигнуть определенного согласование
сопротивления для уменьшения нагрузки.
Другим побочным эффектом неправильного рассмотрения импеданса
является недостаточный уровень выходного сигнала, усложняющего об-
работку сигнала и его передачу, управление компонентов и активацию
конечного элемента управления или предприятия. В контексте техноло-
75
гии датчика-преобразователя следует отметить, что многие типы датчи-
ков (например пьезоэлектрические акселерометры, головки импеданса и
микрофоны) имеют высокие выходные импедансы в размере 1000 МОм
(МОм; 1 МОм = 1 × 106 Ω). Эти устройства генерируют низкие выход-
ные сигналы и требуют обработки, чтобы усилить уровень сигнала.
Усилители согласованного импеданса (или трансформаторы импеданса),
или импеданс соединенных устройств, которые имеют высокий входной
импеданс и низкий выходной импеданс (несколько Ом) используются
для этой цели (например усилители заряда используются в сочетании
с пьезоэлектрическими датчиками). Устройство с высоким входным со-
противлением имеет дополнительные преимущества, оно будет потре-
блять меньше энергии (то есть v2/R низок), в частности от устройства
ввода, к которому он подключен, для заданного входного напряжения и,
кроме того, передача мощности будет более эффективной. Тот факт, что
устройство вывода, имеющее низкое входное сопротивление извлекает
высокий уровень мощности от его входного устройства может быть по-
водом для загрузки ошибки в устройство ввода. В этой ситуации будет
значительное динамическое взаимодействие между двумя взаимосвязан-
ными устройствами (устройства ввода и устройства вывода).
2.3 Методы согласования сопротивления
В процедурах измерительных приборов, взаимодействие компонентов
делается для того, чтобы достичь каких-то конкретных целей. Сопротив-
ление связанных компонентов должно быть согласовано для улучшения
производительности системы в отношении этих функциональных целей
(задач). Мы рассмотрим следующие категории целей согласования импе-
данса в настоящее время.
1. Максимальная передача мощности от источника к нагрузке
2. Передача мощности с максимальной эффективностью
3. Предотвращение отражения в передаче сигнала
4. Уменьшение загрузки
Мы отделяем выражение с правой стороны Уравнения 2.1 .1 относитель-
но показателя Ri
.
Таким образом, требование к максимальной мощности выглядит следу-
ющим образом:
Rl
=R
s
Отсюда следует, что требование к максимальной передачи мощности со-
76
стоит в том, что сопротивление нагрузки должно быть равно сопротив-
лению источника.
Результат, полученный в Примере 2.1 можно легко применить в общем
случае импеданса, который касается цепей переменного тока, имеющих
как противодействие, так и реактивное сопротивление (вследствие ин-
дуктивности и емкости). Эта ситуация показана на Рисунке 2.3, где VS
является источником напряжения, Z
S
является источником полного со-
противления, и Zl
-
сопротивлением нагрузке. Если есть и другие ком-
поненты, кроме источника и нагрузки, то они могут быть объединены с
источником. Тогда Zl представляет собой эквивалентное сопротивление
Thevenin тех или иных компонентов (за исключением нагрузки). Если
эти компоненты также имеют источники, то VS представляет собой экви-
валентное напряжение источника эквивалентной схемы Thevenin.
Теперь величины имеют размер, фазу угла, и математически они пред-
ставлены комплексными величинами (с действительной частью и мни-
мой частью). Используя их величины, величина тока, протекающего че-
резцепьопределяетсякак:|I|=|Vs|/|Zl+Zs|.
Source – источник
Load- нагрузка
рисунок 2.3 Цепь полного сопротивления (AC) с источником и нагрузкой.
77
Мощность, потребляемая нагрузкой, является резистивной силой, и за-
дается следующим образом
pl
=
()()l
s
l
s
l
s
l
s
l
s
l
l
R
X
X
R
R
V
R
Z
Z
V
R
I
R
I
+
+
+
=
+
=
=
2
2
2
2
2
rms
2
1
2
1
2
1
где rms обозначает среднеквадратическое значение (для синусоидально-
го сигнала он равен 1 / из амплитуды);
R - является резистивной (реальной) частью импеданса;
Х - представляет собой реакционною (мнимую) часть импеданса.
Как видно из последней части предыдущего уравнения: одно из требова-
ний для максимизации мощности состоит в том, что реактивный вклад
в знаменателе является минимальным (т.е. равен нулю, так как он пред-
ставляет собой квадрат). Следовательно, нам нужно
После того как это условие выполняется, уравнение для мощности на-
грузки, как упомянуто выше, является идентичным чисто резистивному
случаю, который был решен в примере 2.1 . Следовательно, для максими-
зации мощности нагрузки, мы также должны
Rl=Rs
(2.3)
Объединив требования (2.2) и (2.3) видно, что общее требование для
обеспечения максимальной мощности нагрузки состоит в том, что со-
противление нагрузки должно быть компл ексно сопряженным источни-
ком импеданса:
Zl=Z
s
*
(2.4)
Это известно как соответствие сопряжения. Подставив требование со-
гласования импеданса (2.4) в мощность нагрузки экспресса, мы имеем
максимальную мощность:
l
s
s
s
l
R
V
R
V
p
8
8
2
2
max
=
=
(2.5)
78
2.3 .2 Передача мощности при максимальной эффективности
Эффективность поглощения мощности нагрузкой определяется долей
потребляемой мощности от полной мощно сти:
η=
()()s
l
l
s
l
R
R
R
R
R
I
I
+
=
+
2
2
2/1
2/1
(2.6)
Видно, что эффективность максимальна, когда сопротивление нагруз-
ки является максимальным (или сопротивление нагрузки максимум).
Следовательно, для повышения эффективности поглощения мощно сти
нагрузкой, эффективность нагрузки должна быть увеличена. В теории,
мы получаем 100% эффективность, когда сопротивление нагрузки бес-
конечно.
Ясно, что условие для достижения максимальной эффективности до-
вольно сильно отличается от условия для максимальной мощно сти
(уравнение 2.4). В самом деле, подставляя Уравнение 2.3 в 2.5 мы видим,
что при максимальной мощности КПД составляет 50%. Это условие до-
вольно низкой эффективности.
Source -источник
Coaxial cable – коаксильный кабель
Load - загрузка
рисунок 2.4 Источник и нагрузка, подключенные с помощью кабеля.
79
2.3 .3 Предотвращение отражения в передаче сигнала
Когда электрический сигнал встречает резкое изменение импеданса,
часть сигнала будет отражаться обратно. Коэффициент отражения Γ
определяется отношением напряжения отраженного сигнала r
v кна-
пряжению iv падающего сигнала:
Г=
i
r
v
v
(2.7)
Если сигнал, передаваемый через импеданс Zc внезапно встречает пре-
кращение импеданса Zl, соответствующий коэффициент отражения
Г=
c
l
c
Z
Z
Z
+
−
l
Z
(2.8)
Результаты отражения сигнала - ухудшение сигнала (по величине, и фа-
зовому углу) и диссипация (потери мощности), оба из которых являются
нежелательными. Отсюда следует, что в идеале мы хотели бы иметь Г =
0.
Рассмотрим источник внутреннего Zs импеданса, подключенного к на-
грузке импеданса Zl через кабель характерного импеданса Zc (например
50 Ом) как показано на Рисунке 2.4 .
Для того чтобы избежать отражения сигнала в любой точке подключения
(нагрузке и источнике) мы должны иметь условие согласования импе-
данса:
Zs=Zc=Zl
(2.9)
Если согласование импеданса нет, то его можно достичь с импедансом
заземления (или импеданса согласования площадки). Пример показан на
рисунке 2.5 . В этом примере предположим, что Zs ≠ Zc
. Затем импеданс
заземления Zg должен быть размещен, чтоб соответствовать:
c
g
Z
Z
1
1
Z
1
s
=
+
(2.10)
Такое расположение обеспечивает эквивалентный согласующий импе-
данс Zc в конце источника.
В коротком кабеле, отраженный сигнал перемещается к своим конечным
пунктам очень быстро и быстро затухает. Следовательно, отражение сиг-
80
нала не имеет значения в коротких кабелях. Принцип отражения сигна-
ла может быть использован для практического применения. Например,
так как повреждение в кабеле приведет к резкому изменению импедан-
са, отражение сигнала будет на поврежденном месте. Затем путем опре-
деления времени, необходимого для импульса напряжения, чтобы он
отразился обратно к источнику, может быть определено расстояние до
поврежденного места. Это принцип, лежащий в основе рефлектометра,
который используется для обнаружения повреждений в кабелях.
Отражение сигнала не ограничивается металлическими кабелями (медь,
алюминий и т.д.). Например это можно наблюдать в оптических волок-
нах и в акустических сигналах, сталкивающися с изменением акустиче-
ского импеданса в передающей среде.
2.3 .4 Снижение нагрузки
Неблагоприятный эффект ненадлежащих условий импеданса – эффекты
погрузки, искажающие сигналы. Полученная ошибка может значительно
превышать другие типы ошибок, таких как ошибки измерения, датчика,
шума и входных возмущений. Загрузка может произойти в любой фи-
Coaxia lcable – коаксильный кабель
Source - источник
Impedance matching pad – согласованная накладка импеданса
риСУНок 2.5 Применение согласующей накладки импеданса
81
зической области, такой как электрическая и механическая. Электриче-
ские ошибки при загрузке в результате подключения выходного блока,
такого как измерительного устройства или аппаратного обеспечения об-
наружения сигнала, который имеет низкое входное сопротивление для
устройства ввода, такого как источник сигнала или датчик с низким уме-
ренным сопротивлением. Ошибки механических нагрузок могут повли-
ять на устройство ввода (такое как сервопривод) из-за инерции, трения и
других сил сопротивления, генерируемых выходным компонентом, под-
соединенного к нему (например передаточный механизм, механическая
загрузка).
В инженерных системах, ошибки при загрузке могут появиться как фа-
зовые искажения. Цифровое аппаратное обеспечение также может при-
вести к ошибкам загрузки. Например АЦП аппаратного обеспечения в
DAQ может загрузить выход усилителя из тензометрической мостовой
схемы, тем самым влияя на цифровые данные.
2.3 .4 .1 каскад подключения устройств
Для того чтобы получить модель для загрузки искажения и модель
рисунок 2.6 (а) Схематическое представление входного импеданса и выходно-
го импеданса, и (б) каскадное соединение двух устройств, два порта.
82
уменьшения эффекта загрузки, мы рассмотрим каскадное соединение
двух портов электрических устройств. Модель для двух портов электри-
ческого устройства показана на рисунке 2.6а. Она показывает в частно-
сти входное сопротивление Zi и выходное сопротивление Zo устройства.
Они показаны дальше.
Входное сопротивл ение: Входное сопротивление Zi определяется как от-
ношение номинального входного напряжения к соответствующему току
через входные клеммы в то время как выходные клеммы поддерживают-
ся в открытом контуре.
Выходное сопротивление: Выходное сопротивление Zo определяется от-
ношением разомкнутой цепи (т.е. без нагрузки) напряжения на выходе
порта к току короткого замыкания на выходном порте. Напряжение ра-
зомкнутой цепи на выходе является текущим выходным напряжением,
когда нет тока, который протекает на выходном порту. Это тот случай,
когда выходной порт не подключен к нагрузке (импеданс). Как только
нагрузка подключена на выходе устройства, ток будет течь через него,
а выходное напряжение упадет до значения, меньшего, чем напряжение
разомкнутой цепи. Для измерения напряжения разомкнутой цепи, но-
минальное входное напряжение подается на входной порт и по стоянно
поддерживается, а выходное напряжение измеряется с помощью воль-
тметра, который имеет высокий (вход) импеданс. Для измерения тока
короткого замыкания, подключается амперметр с очень низким сопро-
тивлением к выходному порту.
Эти определения приведены с ссылкой на электрическое устройство.
Тем не менее, обобщение механических устройств возможно путем ин-
терпретации напряжения и скорости как переменных по ту сторону, а
также интерпретации тока и силы с помощью сквозных переменные,
как отмечалось ранее. Затем механическая подвижность должна быть
использована вместо полного электрического сопротивления в соответ-
ствующем анализе. Подобное обобщение возможно также и для других
физических областей.
Видно, что входное сопротивление Zi и выходное сопротивление Zo
представленные на Рисунке 2.6а, подходят под определения, указанные
ранее. Обратите внимание, что Vо
- в ы ходное напряжение разомкнутой
цепи. При подключении нагрузки на выходном порту, напряжение на на-
грузке будет отличаться от Vo
. Это обусловлено наличием тока через Zo
.
83
В частотной области, V
і
и Vо представлены соответствующими спектра-
ми Фурье (или в комплексной форме действительной и мнимой частями
или величиной и фазой). Соответствующее передаточное отношение мо-
жет быть выражено в терминах комплексной частотной характеристики
функции (передача) G (jω) при условии разомкнутой цепи:
Vo=Gvi
(2.11)
Далее рассмотрим два устройства, подключенные в каскаде, как показа-
но на Рисунке 2.6б. Это можно легко проверить, что применяются сле-
дующие связи:
2
2
0
1
2
1
2
2
1
o1
;
;
V
i
o
i
o
i
i
i
V
G
V
V
Z
Z
Z
V
V
G
=
+
=
=
Эти соотношения могут быть объединены, чтобы дать общее соотноше-
ние входа / выхода (I / O):
i
i
o
i
V
G
G
Z
Z
Z
1
2
2
1
2
0
V
+
=
Мы заметили из этого результата, что общая передаточная функция ча-
стоты отличается от идеально ожидаемого продукта (G2G1) множите-
лем:
1
)
/
(
1
Z
Z
2
1
2
o1
i2
+
=
+
i
o
i
Z
Z
Z
(2.12)
Отметим из Уравнения 2.12 следует, что каскад исказил частотные ха-
рактеристики двух устройств, и это представляет собой ошибку загруз-
ки. Ошибка загрузки становится незначительной, когда
)
/
(2
1
i
o
Z
Z
«1. Из
этого наблюдения можно сделать вывод о том, что когда два компонента
соединены между собой (каскадом), для того чтобы уменьшить ошибку
загрузки, входное сопротивление второго устройства (устройства выво-
да) должно быть намного больше, чем выходное сопротивление первого
устройства (устройства ввода).
Пример 2.2
Замедленное соединение, используемое в качестве компенсации элемен-
та системы управления показано на Рисунке 2.7а. Показано, что его пе-
редаточная функция задается vo/vi= Z2/(R1 + Z2), где Z2 = R2 + (1/Cs).
84
рисунок 2.7 (а) единый модуль цепи, (б) соединение каскад из двух модулей, и
(с) эквивалентная схема для (б).
85
Какие входные и выходные импедансы этой схемы?
Более того если две такие замедляющие схемы ниспадают каскадом, как
показано на Рисунке 2.7b, какова общая функция передачи? Как бы вы на-
близили эту функцию передачи к идеальному результату, {Z2/(R1+Z2)}2?
решение
Чтобы решить эту проблему, первое примечание - на Рисунке 2.7а, паде-
ние напряжения на элементе R2 + 1/(Cs)является
i
s
s
v
C
R
R
C
R
+
+
+
=
1
1
v
2
1
2
0
Заметим, что функция идеальной передачи приближается, делая R1Z
2
/
(R1 + Z2) 2 маленькой по сравнению с единицей.
2.3 .4 .2 Сопоставление сопротивления для уменьшения загрузки
Из анализа, приведенного в предыдущем параграфе ясно, что схема фор-
мирования сигналов должна иметь значительно большее входное сопро-
тивление по сравнению с выходным импедансом блока датчика-преоб-
разователя для уменьшения ошибок при загрузке. Проблема достаточно
серьезная в измерительных приборах, таких как пьезоэлектрические
датчики, имеющих очень высокие выходные импедансы. В таких слу-
чаях, входное сопротивление блока формирования сигналов может быть
недостаточным для уменьшения загрузки эффектов; кроме того уровень
выходного сигнала этих датчиков с высоким импедансом является доста-
точно низким для передачи сигналов, обработки, приведения в действие
и управления. Решение этой проблемы состоит в том, чтобы ввести не-
сколько ступеней усилителя цепи сигнала между выходом первого эле-
мента аппаратного блока (например датчика) и входом второго аппарат-
ного блока (например DAQ-устройства). Первый этап такого устройства
установления связи, как правило, импеданс-согласующий усилитель
(или сопротивления трансформатора), который имеет высокий входной
импеданс, низкий выходной импеданс, и почти единичное усиление. Это
называется перемычкой импеданса. Последняя стадия, как правило, это
стабильный каскад усилителя с высоким коэффициентом усиления, что-
86
бы усилить уровень сигнала. Усилители, согласующие импеданс, на са-
мом деле, являются операционными усилителями обратной связи.
В заключение мы хотели бы сделать следующие замечания:
1. При подключении устройства к источнику сигнала, проблемы при за-
грузке можно уменьшить, убедившись, что устройство имеет высокий
входной импеданс. К сожалению, это также снизит уровень (амплитуду,
мощность) сигнала, принимаемого устройством. Стадия усиления сиг-
нала может быть необходима при сохранении требуемых уровней полно-
го сопротивления на выходе.
2. Устройство высокого импеданса А может отражать обратно некото-
рые обертоны сигнала источника, как мы уже отмечали при отражении
сигнала. Как там показано, прекращение сопротивления (прилива импе-
данса), может быть параллельно соединено с устройством, чтобы умень-
шить эту проблему отражения сигнала. Во многих системах сбора дан-
ных, выходной импеданс выходного усилителя является равным линии
передачи импеданса (характеристика импеданса).
3. Когда желательно достижение максимального усиления мощности,
рекомендуется сопряженное согласование. В этом случае, входные и вы-
ходные импедансы усилителя согласования сделаны равными сложным
соединениям импедансов источника и нагрузки.
2.3 .5 Согласование импеданса в механических системах
Понятия согласования импеданса может быть применено прямолинейно
к механическим системам и смешанным системам (например электро-
механическим системам или мехатронным системам). Процесс следует
из знакомых электромеханических аналогий. Два конкретных случая: в
(1) изоляции ударов и вибрации и (2) системах передачи (механизм). Эти
два приложения обсуждаются в настоящее время.
2.3 .5 .1 виброизоляция
Хорошим примером взаимо связи компонентов механических систем яв-
ляется виброизоляция. Правильная эксплуатация инженерных систем,
таких как деликатные инструменты, компьютерная техника, станки и
87
транспортные средства, затруднена из-за ударов и вибрации. Цель ви-
броизоляции заключается в изоляции таких устройств от вибрации и
ударов окружающей среды (включая вспомогательную структуру или
дороги). Это достигается путем подключения виброизолятора или под-
веса между ними.
2.3 .5 .1 .1 изоляция силы и движения
Внешним возбудителем могут быть сила или движение, и в зависимости
от этого, изоляция силы (связанная с передаваемостью силы) или изо-
ляция движения (связанная с передаваемостью движением) будет при-
меняться при проектировании изолятора. По счастливой случайности,
устройство довольно схоже для двух ситуаций.
В изоляции силы, вибрации силы, которые будут обычно передаваться
непосредственно от источника (изолированные системы) к опорной кон-
струкции, отфильтровываются изолятором посредством своей гибкости
(источник) и диссипации (демпфирование), так что часть силы направ-
ляется через инерционный путь. В изоляции движения, вибрационные
движения, которые применяются к системе (например, транспортного
средства) с помощью подвижной платформы поглощаются изолятором
посредством его гибкости и диссипации таким образом, что движение,
которое передается в рассматриваемую систему, ослабляется. Проблема
конструирования в обоих случаях состоит в выборе соответствующих
параметров для изолятора, чтобы колебания, поступающие в систему
влияния, находились ниже указанных значений в полосе частот влияния
(диапазон рабочих частот). Эта проблема конструкции, по существу, яв-
ляется ситуацией механического согласования импеданса, так как пара-
метры импеданса (механические) разъединителя выбираются в зависи-
мости от параметров импеданса изолятора.
Примечание: Как указано выше, обобщенный импеданс (переменная по
ту сторону/ сквозная переменной) соответствует механической подвиж-
ности, которая является обратным значением того, что традиционно на-
зывается механическое сопротивление.
Разделитель силы и изоляция движения представлены на Рисунке 2.8 .
На Рисунке 2.8а, вибрации силы у источника обозначены как f(t). Ввиду
изолятора, источник (с механическим импедансом Zm) должен двигаться
с той же скоростью, что и изолятор (с механическим импедансом Zs).
88
рисунок 2.8 (а) изоляция силы, (б) изоляция движения, (с) пример изоляции
силы, (d) пример изоляции движения,(e) упрощенная модель станка и его опор-
ная конструкция, и (е) схема механического сопротивления изоляции силы.
generated vibration force - генерируемая сила вибрации
inertial system - инерциальная система
source - источник
isolator - изолятор
transmitted vibration force - переданная сила вибрации
fixed supporting structure - фиксированная опорная конструкция
isolated system - изолированная система
received vibration motion - движение полученной вибрации
applied vibration motion- движение приложенной вибрации
moving platform - подвижная платформа
89
Это параллельное соединение импедансов. Следовательно, сила f(t) раз-
деляется таким образом, что часть ее занимает инерционный путь (пре-
рывистая линия) Zm и только остаток (fs) передается через Zs к опорной
конструкции, являющейся изолированной системой. Передаваемая сила
дается с помощью
(2.13)
s
m
s
s
Z
Z
Z
f
f
+
=
=
f
T
На Рисунке 2.8b, вибрация движения v(t) источника подается через изо-
лятор (с импедансом Zs и подвижностью Ms) изолированной системе (с
механическим импедансом Zm и подвижностью Mm). Результирующая
сила должна передавать непосредственно из изолятора в изолированную
систему, и следовательно, эти два блока соединены последовательно.
Следовательно, мы имеем передачу движения.
(2.14)
m
s
s
s
m
m
m
Z
Z
Z
M
M
M
v
v
+
=
+
=
=
m
T
Согласно этим двум моделям мы имеем:
T
Tm
=
=
f
T
(2.15)
В результате, как правило, оба изолирующих типа могут быть сконстру-
ированы таким же образом, используя общую функцию трансмисси-
бильности Т.
Простые примеры изоляции силы и изоляции движения показаны на
Рисунке 2.8с и д. Во-первых мы получаем функцию трансмиссивно сти
(передаваемая сила) для системы на рис 2.8C . Затем в связи с Уравне-
нием 2.15, движение трансмиссивности системы на Рисунке 2.8D рав-
на одному и тому же выражению. Сначала рассмотрим проблему силы
трансмиссивности (Рисунок 2.8C), которая снова показана на Рисунке
2.8E. Это может представлять собой упрощенную модель станка и его
несущую конструкцию.
Очевидно, что элементы m,b, и f расположены параллельно, так как они
имеют общую скорость v поперек них. Следовательно, эта схема меха-
нического импеданса показана на Рисунке 2.8f. В этой схеме импеданс
основных элементов Zm
= mjω,Z
b
= b,иZk
= / (jω) для массы (m), пружи-
ны (k), и вязкого демпфера (b) (см. Таблицу 2.1 ). Подставьте импедансы
90
элемента в выражение передачи силы (которое получается при использо-
вании законов элемента соединения, показанные в Таблице 2.2 и схемы
на Рисунке 2.8f):
(2.16)
k
b
m
k
b
S
S
S
s
f
Z
Z
Z
Z
Z
Z
Z
Z
V
F
V
F
F
F
T
+
+
+
=
+
=
=
=
0
/
/
Мы получаем:
таблица 2.1 Механическое сопротивление и подвижно сть основных
механических элементов
таБЛиЦа 2.2 Законы взаимо связи для механического импеданса (Z) и
мобильности (M)
Последнее выражение получается путем деления числителя и знамена-
теля на m. Теперь используем тот факт, что k/m = ω
n
2 и b/m= 2ζωn (или
ωn
=
= незатухающая частота собственных колебаний системы; ζ=b/(2ζ=b/
(2Ökm коэффициент демпфирования системы) и делится (2.17) по все-
муωn
2. Мы получаем
91
где безразмерная частота возбуждения определяется как r= ω/ωn.
функция трансмиссивности имеет фазовый угол, а также величину. При
практическом использовании вибрационной изоляции, уровень затуха-
ния колебательного возбуждения имеет первостепенное значение, а не
различие фаз между возбуждением колебаний и реакции. Соответствен-
но, величина трансмиссивности дана как
(2.19)
Чтобы определить пиковую точку |Tf|, разграничьте выражение в преде-
лах квадратного корня знака в (2.20) и приравняйте к нулю:
Следовательно,
Это упрощается до:
Егокорни:r=0и
Корень r = 0 соответствует исходной стационарной точке на нулевой ча-
стоте. Это не представляет пик. Принимая только положительный ко-
рень для r2, а затем ее положительный квадратный корень, пик точки
передаваемости величины задается как:
92
При
малых
ζ,Taylor
ряды
экспансии
передают
С помощью этого приблизительного значения ,(2.20) принимает значе-
ние 1. Следовательно, при малом затухании, величина трансмиссивно-
сти будет иметь пик при r = 1, и из Нравнения 2.19, его значение равно
или
(2.21)
Пять кривых | Tf | по сравнению с r при ζ = 0, 0,3, 0,7, 1,0, и 2,0 показаны
на Рисунке 2.9a. Эти кривые используют точное выражение (2.19), и мо-
гут быть создано с помощью следующей программы MATLAB®:
clear;
zeta=[0.0 0 .3 0 .7 1.0 2.0];
for j=1:5 fori=1:1201
r(i)=(i-1)/200;
T(i,j)=sqrt((1+4*zeta(j)^2*r(i)^2)/((1-r(i)^2)^2+4*zeta(j)^2*r(i)^2));
end
plot(r,T(:,1),r,T(:,2),r,T(:,3),r,T(:,4),r,T(:,5));
Из передачи кривых на Рисунке 2.9a мы наблюдаем следующее:
1. Всегда существует ненулевое значение частоты, при котором величина
трансмиссивности достигнет своего пика. Это является резонансом.
2. При малых ζ пик величины передачи получается приблизительно г = 1
когда ζ- возрастает, этот пик сдвигается влево (т.е. более низкое значение
для максимальной частоты).
3. Величина пика уменьшается по мере увеличения ζ.
4. Все кривые передачи проходят через значение величины 1.0 на той
93
Рисунок 2.9 (а) Кривые передачи для простой модели осциллятора и (б) кри-
вые виброизоляции.
normalized frequency - нормированная частота
transmissibility magnitude – величина трансмиссивности
percentage isolation - процент изоляции
frequency ratio - отношение частот
94
жечастотег= 2 .
5. Выделение (т.е. | Tf | <1) задается r 〉 2 . В этой области, | Tf | возрас-
тает сζ.
6. В области изоляции, величина передачи уменьшается по мере увели-
чения г.
В качестве двух конкретных ситуаций, из кривых передачи мы наблю-
даем следующее:
Для
2
;
05.1
>
<
r
Tf
для всех ζ.
Для
[
]
075
.
7,
77.3
,
871
.
2,
964
.
1,
73.1
;5.0
>
<
r
Tf
для ζ=[0.0,0.3,0.7,1.0,2.0].
Далее предположим, что устройство на Рисунке 2.8е имеет недемпфи-
рованную собственную частоту 6 Гц и коэффициент демпфирования в
0,2. Предположим, для правильной работы требуется, чтобы система до-
стигла величины передаваемости силы менее 0,5, для текущей частоты
значение больше 12 Гц. Нам нужно:
Дляζ=0.2иr=12/6=2этовыражениевысчитываетсяпо24−2 ×22−12
×(0.2)2×22−3 =3.08>0.
Таким образом, требование удовлетворяется. На самом деле, так как
при r = 2, выражение становится 24−2×22−12× 22ζ2−3=5−48ζ2. Из
этого следует, что требование будет выполняться для 5-48ζ2>0 → ζ<
)4/5
(
=0.32.
Если требование не было выполнено (скажем, при ζ = 0,4), вариант
должен был бы уменьшить торможение.
В проектных задачах виброизолятора, что обычно указывается про-
цент изоляции, дается,
I=[1−|T|]×100%
(2.22)
Для получения результата в уравнениях 2.19 и 2.3 .1 это сравнивается с
95
(2.23)
Кривые изоляции, которые даны в уравнении 2.23, приведены на рисун-
ке 2.9b. Эти кривые могут быть использованы в конструкции виброи-
золяторов.
Примечание: Модель на Рисунке 2.8 не ограничивается синусоидаль-
ными вибрациями. Любое общее возбуждение колебаний может быть
представлено в виде спектра фурье, являющимся функцией частоты
ω. Далее спектр ответной вибрации получается множением спектра
возбуждений на функцию трансмиссивности Т. Идентичная проблема
проектирования заключается в выборе параметров сопротивления изо-
лятора k и b для удовлетворения спецификаций изоляции.
Пример 2.3
Станок, набросанный на Рисунке 2.10a, весит 1000 кг и обычно рабо-
тает в диапазоне скоростей 300-1200 оборотов в минуту. Набор мон-
тажных пружин должен быть размещен под основанием машины таким
образом, чтобы достичь уровня изоляции вибрации по меньшей мере,
70%. Имеющееся в продаже крепление пружины имеет характеристику
преломления нагрузки, показанную на Рисунке 2.10b. Рекомендуется,
чтобы можно было использовать необходимое количество этих опор
наряду с блоком инерции, если необходимо. Константа торможения
каждого держателя 1,56 × 103 N /мs. Сконструируйте систему виброи-
золяции для машины. Особенно определите количество необходимых
пружинных опор, и массы блока инерции, который должен быть добав-
лен.
решение
Во-первых, мы предполагаем нулевое торможение (поскольку на прак-
тике, уровень торможения в системе этого типа малый), а также разра-
батываем изолятор (крепление пружины и блок инерции) для уровня
изоляции больше, чем требуется 70%. Затем мы будем проверять в слу-
чае тормозящего изолятора, чтобы увидеть достигается ли требуемый
70% уровень изоляции. Для недемпфированного случая уравнение 2.19
становится:
96
Примечание: Мы использовали случай r> 1, так как область изоляции
соответствует r = 2 .
Предположим, что заниженное значение равно I=80%
.
2.0
=
⇒T
Используем уравнение 2.3 .1 и получаем
Самая низкая рабочая скорость (частота) является наиболее значитель-
ной (так как она соответствует самой низкой изоляции, так как видно из
Рисунка 2.19a). Следовательно,
От кривой преломления нагрузки крепления пружины (рРс 2.10b),
рисунок 2.10 (а) Станок и (б) характеристика преломления нагрузки крепле-
ния пружины.
An inertia block may be added here – блок инерции может быть добавлен здесь
Several spring mounts have to be placed here – несколько креплений пружин
должны быть размещены здесь
Load - нагрузка
Deflection – преломление
97
Мы попробуем 4 величины. Тогда k=4×50×103N/m
Следовательно,
Следует отметить, что должен быть добавлен инерционный блок массой
216 кг.
Теперь мы должны проверить будет ли достигнут требуемый уровень
вибрации в случае торможения.
Заменитель в тормозящем изоляторе уравнения 2.19:
Мы получаем
Это соответствует уровню изоляции 73% что лучше, чем требуемый
уровень 70%.
2.3 .5 .2 Механическая передача
Другое применение компонентов соединения и согласования импеданса
Величина жесткости =
98
соответствуют механическим проблемам скорости передачи системы
(привод, гармонические приводы, свинцово-винтово-гаечные устрой-
ства, ленточные накопители, устройства реечной передачи и т.д). Для
конкретного применения рассмотрим механическую нагрузку с при-
водом от электродвигателя. Часто прямое вождение непрактично из-за
ограничений по характеристикам скорости крутящего момента до ступ-
ных двигателей. Включая подходящий передаточный механизм между
двигателем и нагрузкой, можно изменить характеристики скорости кру-
тящего момента системы привода, как надлежит нагрузки. Это процесс
взаимосвязи сроставные частей, взаимодействия и согласования импе-
данса механических систем. Проиллюстрируем применение, используя
пример.
Пример 2.4
Рассмотрим механическую систему, в которой источник крутящего мо-
мента (двигатель) крутящего момента Т и момент инерции Jm использу-
ются для привода чисто инерционной загрузки в момент инерции Jl
,как
показано на Рисунке 2.11a.
Что такое угловое ускорение в результате Ӫ системы? Пренебрегите
гибкостью соединительного стержня.
Теперь предположим, что нагрузка подключена к тому же источнику
крутящего момента через идеальный (без потерь) механизм электродви-
гателя к коэффициенту скорости загрузки r:1, как показано на рисунке
2.11b. Каким будет ускорение в результате Ӫ g загрузки?
Получаем выражение для нормированного ускорения загрузки страни-
цa= Ӫġ /Ӫс точки зрения r и p=J
L
/Jm
. Изобразимаиrприр=0,1,1,0
и 10,0. Определим величину r при р, при которой ускорение загрузки а
будет максимальным.
Прокомментируйте результаты, полученные в этой задаче.
решение
Для устройства без передаточных механизмов, второй закон Ньютона
дает (Jm + JL) Ӫ=T. Следовательно,
Для устройства с передаточными механизмами, смотри схему пустого
корпуса, показанную на Рисунке 2.12, при передаче без потерь (т.е. 100%
99
эффективной) . Второй закон Ньютона дает
(2.4 .2)
И
(2.4 .3)
рисунок 2.12 Диаграмма пустого корпуса
рис.2 .11 Инерционная загрузка, управляемая электродвигателем: (а) без пере-
даточных механизмов и (б) с передаточными механизмами.
Torquesource – источник крутящего момента
Motor – мотор
Load – нагрузка
Gear – механизм
100
Где Tg механизм крутящего моментана инерции нагрузки. Устраняем Tg
в уравнениях 2.4 .2 и 2.4 .3 . Мы получаем
(2.4 .4)
Поделим уравнение 2.4 .4 на уравнение 2.4 .1
или передаточный коэффициент ускорения:
(2.4 .5)
где p= JL/Jm.
Из уравнения 2.4 .5 отметим, что для r=0,a=0 и для r→∞,a→0. Макси-
мальное значение а получим с помощью:
Используя положительный корень мы получаем:
p
rp=
(2.4 .6)
где p
r - это значение г соответствующего пика а. Пиковое значение а
получается подстановкой уравнения 2.4 .6 в уравнении 2.4 .5 . Таким об-
разом,
p
p
ap
2
1+
=
(2.4 .7)
101
Кроме того отметим из Уравнения 2.4.5, что при r = 1, а = г = 1 для лю-
бого значения р. Следовательно, все кривые в уравнении 2.4 .5 должна
проходить через точку (1, 1).Соотношение (2.4 .5) схематически изобра-
жено на Рисунке 2.13 при p = 0,1, 1,0 и 10,0. Максимальные значения
приведены в Таблице 2.3 .
Обратите внимание из Рисунка 2.13, что отношение скорости передачи
данных может быть выбрано в зависимости от соотношения инерцион-
ности, чтобы максимизировать ускорение нагрузки. Следовательно, свя-
занная с этим проблема согласования импеданса (конструкции) заключа-
ется в следующем. Для заданного (требуемого) пикового коэффициента
ускорения ар, выбираем r, р, используя
()()p
p
ap
2
1+
=
и
p
rp=
.
таблица 2.3 Пиковая производительность системы передачи
p
p
r
p
a
0.1
0.316
1.74
1.0
1.0
1.0
10.0
3.16
1.74
риСУНок 2.13 Нормализованное ускорение по сравнению с соотношением
скоростей.
Nondimensional load acceleration – неизмеримое ускорение нагрузки
Transmission speed ratio – коэффициент скорости передачи данных
102
В частности, мы можем констатировать следующее:
1. При JL=Jm, выбрать систему с прямым приводом (без передаточных
механизмов, то есть г = 1).
2. При JL<Jm,выбрать ускорить передачи при пиковом значении r =
M
J
L
J/
.
3. Когда JL>Jm, выбрать механизм снижения скорости при пиковом зна-
чении r.
2.4 Усилители
Напряжения, скорости, давления и температуры являются переменными
по ту сторону, так как они присутствуют по всему элементу. Токи, силы,
скорости потока жидкости и скорости передачи тепла являются сквоз-
ными переменными, поскольку они передают через элемент, в неизме-
ненном виде. Уровень электрического сигнала может быть представлен
переменными, такими как напряжение, ток и мощность. Аналогичные
переменные по ту сторону, сквозные переменные и переменные мощ-
ности могут быть определены также для других типов сигналов (напри-
мер скорости механических величин, силы и энергии). Уровни сигналов
в различных местах интерфейса компонентов в технической системе
должны быть надлежащим образом скорректированы для удовлетво-
рительной работы этих компонентов и всей системы. Например, вход
исполнительного механизма должен обладать достаточной мощностью
для приведения в действие исполнительного механизма и его нагрузку.
Сигнал должен поддерживать свой уровень сигнала выше некоторого
порогового значения во время передачи, так что ошибки, связанные с
ослаблением сигнала не будет значительными. Сигналы, применяемые
для цифровых устройств, должны оставаться в пределах указанных ло-
гических уровней. Многие типы датчиков производят слабые сигналы,
которые должны быть обновлены, прежде чем они могут быть введены
в систему мониторинга, обработку данных, контроллер, или регистратор
данных.
Усиление сигнала касается правильной регулировки уровня сигнала для
выполнения конкретной задачи. Усилители используются для выполне-
ния усиления сигнала. Усилитель является активным устройством, кото-
рый необходим внешнему источнику питания для работы. Несмотря на
то, различные электронные схемы, усилители, в частности, обычно про-
изводятся в монолитной форме с использованием оригинальный макет
интегральной схемы (ИС) для выполнения конкретной задачи усиления,
103
удобной для изучения их характеристик с использованием моделей дис-
кретных схем с ОУ в качестве основного строительного блока. Конечно,
операционные усилители доступны в виде монолитных интегральных
схем. Они широко используются в качестве основных строительных
блоков при производстве других типов усилителей и множества других
аппаратных средств, и в свою очередь для моделирования и анализа этих
различных видов усилителей и устройств. По этим причинам, наше об-
суждение усилителей будут развивать тему ОУ.
2.4 .1 операционный усилитель
Происхождение ОУ датируется 1940 годом, когда была введена вакуум-
ная трубка ОУ. ОУ получило свое название потому, что изначально он
использовался почти исключительно для выполнения математических
операций; например в аналоговых вычислительных машинах. Впослед-
ствии в 1950-х годах был разработан транзисторный ОУ. Он использовал
дискретные элементы, такие как биполярные транзисторы и резисторы.
Тем не менее, он был слишком большим, относительно медленным, по-
требляли слишком много энергии, и было слишком дорого для широкого
использования в общих применениях. Эта ситуация изменилась в конце
1960-х годов, когда интегральная схема (ИС) ОУ был разработана в мо-
нолитном виде, как единый чип ИС. На сегодняшний день ИС ОУ состо-
ит из большого количества элементов схемы на подложке обычно моно-
кристалла кремния (монолитной форме), является ценным компонентом
практически во всех электронных устройствах модификации сигналов.
Биполярное дополняет полупроводник оксидом металла (биполярные
CMOS) ОУ в различных пластиковых схемах и обычно доступны конфи-
гурации выводов.
ОУ может быть изготовлен в виде дискретных элементов с использова-
нием, скажем, 10 биполярных транзисторов и столько же дискретных
резисторов, или в качестве альтернативы (и предпочтительно) в совре-
менной монолитной форме в виде интегральной микросхемы, которая
может быть эквивалентна 100 дискретным элементам. В любом виде
устройство имеет входной импеданс Zi
, выходное сопротивление Zo
,и
коэффициент усиления открытого цикла K. Таким образом, схематиче-
ская модель для ОУ может быть задана как на Рисунке 2.14а. Схемы ОУ
доступны в нескольких формах.
Очень распространенным является восьми контактный тип корпуса ми-
кросхем (DIP) или V пакет, как показано на Рисунке 2.14b. Назначение
104
выводов (т.е. конфигурации выводов или их расположения), как пока-
зано на рисунке, который следует сравнить с Рисунком 2.14а. Обратите
внимание на последовательность нумерации против часовой стрелки,
начиная с верхнего левого вывода рядом с полукруглой выемкой (или
точкой). Эта условность нумерации является стандартной для любого
типа IC схем, а не только ОУ схем. Другие схемы включают в себя схему
риСУНок 2.14 Операционный
усилитель: (а) схематическая мо-
дель, (б) тип корпуса микросхем
(DIP) , и (С) условное обозначение
цикла.
Обозначение сокращений:
1 Смещение нуля
2 Инвертирующий вход
3 Неинвертирующий вход
4 Отрицательный источник пита-
ния Vee
5 смещения нуля
6 Выход
7 Положительный источник пита-
ния VCC
8 NC (не подсоединен)
Negative power supply - отрица-
тельный источник питания -
emitter - эмиттер
inputs - входы
output - выход
positive power supply - положитель-
ное напряжение питания
noninverting - не инвертирующий
105
8-выводной металлической банки или T схема, имеющей круглую форму
вместо прямоугольной формы предыдущей схемы, а также 14-выводная
прямоугольная четырехъядерная схема, которая содержит 4 ОУ (с общим
из восьми входных контактов, четырех выводных, а также двух выво-
дов питания). Традиционный символ ОУ показан на Рисунке 2.14c. Как
правило, есть пять клемм (выводящие или входящие соединения) к ОУ.
В частности, есть два подсоединяемых (дифференциальные) входа (по-
ложительный или неинвертирующий вход с vip напряжением и отрица-
тельный или инвертирующий вход с vin напряжением), выходной канал
(напряжение VO), а также два биполярных провода питания (+ против
или VCC или питание коллектора и -vs или Vee или питания излучателя).
Выбор вывода микросхемы (CS) может быть недоступеным в некоторых
операционных усилителях. Напряжение питания может быть ниже, чем
2,7 V и выше, ± 22 В, а неподвижный ток около 250 мкА. Как правило,
некоторые из выводов не могут быть соединены; например выводы 1, 5
и 8 на Рисунке 2.14b.
Примечание: IC пакеты с несколькими ОУ, и соответственно более (на-
пример четырехъядерная схема с 4-мя усилителями и 14 выводами: 8
дифференциальных входных коналов, 4 дифференциальных выходных
каналов и 2 выводов питания) являются коммерчески доступными.
2.4 .1 .1 Дифференциальное входное напряжение
На Рисунке 2.14 а в условиях открытого цикла (т.е. без обратной связи),
мы имеем
i
o
K
v
v=
(2.24)
Здесь входное напряжение iv является дифференцированным входным
напряжением, которое определяется как алгебраическая разница напря-
жений в положительном и отрицательном каналах ОУ. Таким образом,
in
ip
i
v
v
v
−
=
(2.25)
Усиление напряжения разомкнутого цикла К очень высоко (105–109) для
типичного ОУ. Кроме того, входной импеданс Zi может достигать 10MΩ
(типичное 2 MΩ) и выходной импеданс низкий, порядка 10 Ω и может
достигать около 75 Ω для некоторых ОУ. Так как vo, как правило, 1-15
В, из уравнения 2.24 следует, что vi≅0, так как K очень велико. Следо-
вательно, из уравнения 2.25, мы имеем vip≅vin. Другими словами, на-
пряжения на двух входных проводниках почти равны. Теперь, если мы
применяем большое дифференциальное напряжение vi (скажем, 10 В) на
106
входе, то затем в соответствии с уравнением 2.24, выходное напряжение
должно быть чрезвычайно высоким. Это никогда не происходит на прак-
тике, однако устройство быстро подавляется за пределами умеренных
выходных напряжений (порядка 15 В). Из уравнений 2.24 и 2.25, ясно,
что если отрицательный входной провод заземленный (т.е. Vin = 0), то,
vo
=Kvp
(2.26)
и если позитивный входной провод заземлен (i.e., vip= 0),то
vo
=Kvn
(2.27)
Это является причиной, по которой vip называется неинвертирующим
входом и vin
- и нв ертирующим.
Пример 2.5
Рассмотрим ОУ с усилением разомкнутого цикла 1 × 105. Если насыще-
ние напряжения составляет 15 В, то определяют выходное напряжение в
следующих случаях:
-
5μVпри позитивном проводеи2μVпри негативном проводе
-
−5μVпри позитивном проводе и 2μVпри негативном проводе
-
5μVпри позитивном проводе и −2μVпри негативном проводе
-
−5μVпри позитивном проводе и −2μVпри негативном проводе
-
1при позитивном проводе и негативный провод заземленный
-
1Vпри негативном проводе и позитивный провод заземлен
Таблица 2.4 Решение к примеру 2.5
vip
vin
vi
vo
5μV
2μV
3μV
0.3 V
−5
μV
2μV
−7
μV
−0.7V
5μV
−2
μV
7μV
0.7 V
−5
μV
−2
μV
−3
μV
−0.3V
1V
0
1V
15V
0
1V
−1V
−15
V
(d) −5 μV при позитивном проводе и −2 μV при негативном
(e) 1 V при позитивном проводе и негативный провод заземлен
(f) 1 V при негативном проводе и позитивный провод заземлен
107
решение
Эта проблема может быть решена с помощью уравнений 2.24 и 2.25. Ре-
зультаты приведены в Таблице 2.4 . Обратите внимание, что в двух по-
следних случаях на выходе будет насыщение, и уравнение 2.24 больше
не будет работать.
Полевые транзисторы, например, металл-оксид-полупроводник поле-
вых транзисторов (MOSFET), обычно использующихся в форме IC ОУ.
Тип МОП-транзистора имеет преимущества по сравнению со многими
другими типами; например, более высокий входной импеданс и более
стабильный выход (почти равно напряжению источника питания) при
насыщении, что делает MOSFET ОУ предпочтительным биполярным
плоскостным транзистором ОУ во многих применениях. При анализе
схем ОУ при непредельных условиях, мы используем следующие две
характеристики ОУ:1. Напряжения двух входных проводников должны
быть (почти) равны. 2 . Токи, протекающие в каждой из двух входных
проводников, должны быть (почти) нулевыми. Как объяснялось ранее,
первое свойство приписывается высокому коэффициенту усилению ра-
зомкнутого цикла, а второе свойство к высокому входному сопротивле-
нию в ОУ. Мы неоднократно будем использовать эти два свойства для
получения ввода / вывода уравнений для усилительных систем и других
электронных устройств, которые используют операционные усилители.
2.4 .2 рейтинги эффективных усилителей
Многие факторы влияют на производительность усилителя, ОУ в част-
ности. Для получения хорошей производительности, мы должны учиты-
вать такие факторы, как
1. Стабильность
2. Скорость отклика (пропускная способность, скорость нарастания вы-
ходного напряжения)
3. Входное сопротивление и выходное сопротивление
Уровень устойчивости усилителя, в прямом смысле, определяется дина-
микой схемы усилителя, и может быть представлен константой времени.
В этом контексте, если отрицательная обратная связь усилителя имеет
единичный прирост и фазовый сдвиг 2 π, то колебание будет устой-
чивым в генерировании. Это условие неустойчивости (или предельной
стабильности). Еще одним важным фактором для усилителя является
108
изменение параметров из-за возраста, температуры и других факторов
внешней среды. Параметр вариации также классифицируется как про-
блема стабильности, в контексте устройств, таких как усилители, так как
она относится к уравновешенности реакции, когда вход поддерживает-
ся устойчивым. Особое значение в этом контексте принадлежит темпе-
ратурной пассивности. Это может быть определено как пассивность в
выходном сигнале на изменение температуры в единице. Температурная
пассивность также зависит от отвода напряжения усилителя (например.
3.6 μV/°Cper 1.0 mV от отвода напряжения). Температурная пассивность
может быть уменьшена за счет уменьшения потребления тока в схеме
усилителя.
Скорость отклика усилителя диктует способность усилителя точно реа-
гировать на временные входы. В частности, мы ищем высокую скорость
отклика. Обычные параметры временной области, такие как время на-
растания, могут быть использованы для представления. В качестве аль-
тернативы в частотной области, скорость реакции может быть представ-
лена параметром пропускной способности. Например, диапазон частот,
в котором функция частоты отклика считается по стоянной (прямой),
может быть использован в качестве меры пропускной способности. Так
как существует некоторая нелинейность в любом усилителе, пропуск-
ная способность может зависеть от самого уровня сигнала. В частно-
сти, пропускная способность малого сигнала относится к пропускной
спо собности, которая определяется с использованием амплитуды малых
входных сигналов.
Что касается операционных усилителей, другой мерой скорости реакции
является скорость нарастания выходного напряжения, которая опреде-
ляется как максимально возможная скорость изменения выходного сиг-
нала усилителя для определенной частоты работы. Так как для данной
входной амплитуды выходная амплитуда зависит от коэффициента при-
роста усилителя, скорость нарастания выходного напряжения обычно
определяется для единицы прироста.
В идеале, для линейного устройства, функция частоты ответа (переда-
точной функции) не зависит от амплитуды выходного сигнала (т.е ., про-
дукт усиления постоянного тока и амплитуда входа). Но для устройства,
которое имеет ограниченную скорость нарастания выходного напряже-
ния, пропускная способность (или максимальная рабочая частота, при
которой выходными искажениями можно пренебречь), будет зависеть от
амплитуды выходного сигнала. Чем больше амплитуда выходного сигна-
ла, тем меньше пропускная способность для заданного предела скоро сти
109
нарастания выходного напряжения. Параметр пропускной способности,
который обычно указан для коммерческого ОУ является произведением
коэффициента усиления пропускной способности (GBP или GBWP). Это
произведение коэффициента усиления разомкнутого цикла и пропуск-
ной способности ОУ. Например, для ОУ с GBP = 15 МГц и коэффициента
усиления разомкнутого цикла 100 дБ (т.е., 105), пропускная способность
равна 15×106/105Гц=150 Гц. Ясно, что эта величина пропускной способ-
ности является довольно низкой. Поскольку коэффициент усиления ОУ
с обратной связью значительно ниже, чем 100 дБ, его эффективная про-
пускная способность значительно выше, чем у разомкнутой ОУ.
Как уже говорилось, в общем, мы хотим иметь высокое входное сопро-
тивление и низкое выходное сопротивление. Эти требования, как прави-
ло, удовлетворены ОУ.
Пример 2.6
Получить зависимость между скоростью нарастания и пропускной спо-
собностью для устройства с ограниченной скорости нарастания. Уси-
литель имеет скорость нарастания выходного напряжения в 1 В / мкс.
Определить пропускную способность этого усилителя при работе с вы-
ходной амплитудой 5 В.
решение
Очевидно, что амплитуда скорости сигнала изменения, деленная на ам-
плитуду выходного сигнала, дает оценку выходной частоты. Рассмотрим
синусоидальное выходное напряжение, данное
f
t
2
sin
vo
π
a
=
(2.6 .1)
Скорость изменения выходного сигнала равна dvo/dt = 2πfacos2πft. Сле-
довательно, максимальная скорость изменения выходного сигнала равна
2πfa.
Так как это соответствует скорости нарастания, когда f максимально до-
пустимая частота, мы имеем
S=2 π fba
(2.6 .2)
где s - скорость нарастания
fb - пропускная способность
a - выходная амплитуда
Теперь, когда s= 1 V/μs и a= 5 V, мы получаем fb= (1/2π) × (1/(1 × 10−8))
× (1/5) Гц = 31.8 кГц.
110
Проблемы стабильности и ошибки частотной характеристики, широко
распространенных в форме открытого цикла ОУ. Эти проблемы могут
быть устранены с помощью обратной связи, как будет обсуждаться, так
как эффектом передаточной функции разомкнутого цикла на передаточ-
ную функцию замкнутого цикла можно пренебречь, если коэффициент
усиления разомкнутого цикла очень велик, что имеет место при ОУ.
Несмоделированные сигналы могут быть основным источником оши-
бок усилителя, и эти сигналы включают в себя
1. Ток смещения
2. Сигналы отвода
3. Синфазное выходное напряжение
4. Внутренний шум
При анализе ОУ мы предполагаем, что ток через входные каналы равен
нулю. Это не совсем верно, так как токи смещения для транзисторов в
пределах схемы усилителя должны проходить через эти каналы. В ре-
зультате, выходной сигнал усилителя будет слегка отклоняться от иде-
ального значения.
Другое предположение, что мы делаем при анализе ОУ состоит в том,
что напряжение равно двум входным выводам. На практике, однако, токи
смещения и напряжение присутствуют на входных каналах, из-за мелких
неточностей, присущих внутренним циклам внутри ОУ.
2.4 .2 .1 Синфазный коэффициент подавления помех
Синфазное входное напряжение является напряжением на входных вы-
водах ОУ. Так как любой практический усилитель имеет некоторые пере-
косы во внутренних схемах (например, коэффициент усиления относи-
тельно одной линии ввода не равен коэффициенту усиления по отноше-
нию к другому входу, и кроме того, сигналы смещения необходимы для
работы внутренних схем), будет присутствовать ошибка напряжения на
выходе, которая зависит от синфазного входа.
Три типа несмоделированных сигналов, указанных выше, могут рассма-
триваться как шум. Кроме того, существуют и другие типы шумовых
сигналов, которые ухудшают производительность усилителя. Например,
шум заземления может попасть в выходной сигнал. Кроме того, поме-
хи оболочки и другие типы несмоделированных эффектов позволяют
генерировать внутренний шум. Обычно при анализе усилителя, несмо-
111
делированные сигналы (включая шум) могут быть представлены в виде
источника напряжения шума на одном из входных каналов. Эффекты не-
смоделированных сигналов могут быть уменьшены с помощью подходя-
щей подключенной схемы, в том числе переменных резисторов, которые
можно регулировать, чтобы устранить влияние не смоделированных сиг-
налов на выходе усилителя.
2.4 .2 .2 использование обратной связи в оУ
ОУ является универсальным устройством, в первую очередь благодаря
своим очень высоким входным сопротивлениям, низкому выходному
импедансу и очень высокому коэффициенту усиления. Тем не менее, он
не может быть использован в качестве практического усилителя без из-
менений, так как он не очень стабилен в форме, показанной на Рисунке
2.14 . Двумя основными факторами, которые способствуют этой пробле-
ме, являются частотный отклик и тенденция. Заявленный по-другому,
коэффициент усиления ОУ К очень высок, и кроме того, он не остается
постоянным. Он может изменяться в зависимости от частоты входного
сигнала (то есть, амплитудно-частотный отклик не является прямым в
рабочем диапазоне), а также от времени (т.е. есть тенденции). По скольку
коэффициент усиления очень высок, умеренный входной сигнал насы-
тит ОУ. Проблема частотного отклика возникает из-за динамики схемных
ОУ. Эта проблема, как правило, не является серьезной, если устройство
не работает при очень высоких частотах. Проблема тенденций возникает
в результате чувствительности усиления K к факторам внешней среды,
таких как температура, свет, влажно сть и вибрации, а также в результате
изменения K из-за возраста. Тенденция в ОУ может быть значительной и
должны быть приняты меры для устранения этой проблемы.
Практически невозможно избежать тенденции усиления и ошибки ча-
стотного отклика в ОУ. Тем не менее, гениальный способ был найден,
для исключения влияния этих двух проблем на выходе усилителя. Так
как коэффициент усиления K очень велик, с помощью обратной связи
мы можем практически полностью исключить его влияние на выходе
усилителя. Эта форма замкнутого цикла ОУ имеет то преимущество,
что отклики и точно сть вывода общего цикла зависят от пассивных ком-
понентов (например, резисторы и конденсаторы) в нем, которые могут
быть предоставлены с высокой точностью, а не значения параметров са-
мого ОУ. форма замкнутого цикла является предпочтительной почти для
любого применения; в частности, повторитель напряжения и усилитель
112
заряда представляют собой устройства, использующиеся свойства вы-
сокой Zi, низкой Zo и высокой K из ОУ наряду с обратной связью через
высокоточный резистор, чтобы исключить ошибки из-за большой и пе-
ременчивой К. В резюме, ОУ не очень полезен в форме открытого цикла,
в частности потому, что коэффициент усиления K является очень боль-
шой величиной. Тем не менее, так как К очень велик, указанные пробле-
мы могут быть удалены с помощью обратной связи. Именно эта форма
замкнутого цикла обычно используется в практическом применении ОУ.
В дополнение к большому и неустойчивому характеру усиления, суще-
ствуют и другие источники ошибок, которые способствуют менее иде-
альному представлению схемы ОУ. Как упоминалось ранее, следует от-
метить
1. Смещение тока происходит на входных каналах из-за смещения токов,
которые необходимы для работы с твердой схемой
2. Смещение напряжения, которое может присутствовать на выходе,
даже если входные провода открыты
3. Неравные приросты соответствующие двум входными выводами (т.е.
инвертирующий коэффициент усиления не равен неинвертирующему
усиления)
4. Шум и воздействие на окружающую среду (температурние тенденции,
и т.д.)
Такие проблемы могут производить нелинейное поведение в схемах ОУ.
Они могут быть снижены за счет правильного проектирования схем и за
счет использования компенсирующих элементов схемы.
2.4 .3 Усилители напряжения, тока и усилители мощности
Любой тип усилителя может быть построен с нуля в монолитной форме
в виде интегральной микросхемы, или в дискретной форме в виде схемы,
содержащей несколько дискретных элементов, таких как дискретные би-
полярные транзисторы или дискретные полевые транзисторы, дискрет-
ные диоды и дискретные резисторы. Но почти все виды усилителей мо-
гут также быть построены с использованием ОУ в качестве основного
строительного блока. Так как мы уже знакомы с ОУ, и операционные
усилители широко используются в электронных схемах усилителя, мы
будем использовать по следний подход, который использует дискретные
операционные усилители для построения общих усилителей. Также мо-
113
делирование, анализ и конструирование общего усилителя может быть
выполнено на этой основе.
Если электронный усилитель выполняет функцию усиления напряже-
ния, то это называется усилителем напряжения. Эти усилители настоль-
ко часто используемые, что термин "усилитель" часто используется для
обозначения усилителя напряжения. Усилитель напряжения может быть
смоделирован как
i
v
v
K
=
o
v
(2.29)
где vo
–
напряжение на выходе
vi
–
напряжение на входе
Kv
–
коэффициент напряжения усилителя
Усилители напряжения используются для достижения совместимо сти
напряжения (или переключение уровня) в схемах.
Точно так же, усилители тока используются для обеспечения текущей
совместимости в электронных схемах. Усилитель тока может быть смо-
делирован
i
ii
K
=
o
i
(2.30)
где io
- напряжение на выходе
ii
–
напряжение на входе
Ki
–
коэффициент напряжения тока
Повторитель напряжения имеет единичное усиление; Kv
= 1. Следова-
тельно, он может рассматриваться как усилитель тока. Кроме того, он
обеспечивает совместимость с импедансом и действует в качестве бу-
фера между выходным устройством низкого тока (высокий импеданс)
(источник сигнала или устройства, которое подает сигнал), и высоко-
токовым устройством ввода (приемник сигнала или другое устройство,
получающее сигнал) (с низким сопротивлением), соединенных между
собой. Следовательно, название "буфер" усилителя или трансформатор
сопротивления иногда используется для усилителя тока с единичным ко-
эффициентом усиления напряжения. Если целью усиления сигнала яв-
ляется повышение соответствующего уровня мощности, то усилитель
мощности следует использовать для этой цели. Простая модель для уси-
лителя мощно сти является
i
ðP
K
=
o
p
(2.31)
где po
–
мощность выхода
114
pi
- мощность входа
Kp
–
коэффициент усиления мощности.
Легко видеть из уравнений 2.29 - 2 .31, что
i
v
K
K
=
o
K
(2.32)
Следует отметить, что все три типа усиления могут быть достигнуты
одновременно с одного и того же усилителя. Кроме того, усилитель
тока с единичным коэффициентом усиления напряжения (например,
повторитель напряжения) представляет собой также усилитель
мощности. Как правило, усилители напряжения и усилители тока
используются в первых этапах пути прохождения сигнала (например
считывании, сбора данных и формирования сигнала), где уровни сигнала
и уровни мощности относительно низки, в то время как усилители
мощности, как правило, используются в завершающей стадии (например
окончательный контроль, приведение в действие, запись, отображение),
где как правило требуются высокие уровни сигнала и уровни мощности.
При выводе уравнений для реализации любого ОУ практического
устройства, мы используем два основных его свойства:
1. Напряжения на двух входных проводах (инвертирующее и
неинвертирующее) равны (из-за высокого дифференциального
усиления).
2. Токи на каждом входном проводе равны нулю (из-за высокого входного
импеданса).
Мы будем использовать эти условия неоднократно в следующих выводах
уравнений для практических усилителей.
Рисунок 2.15a дает схему ОУ для усилителя напряжения. Обратите
внимание на резистор обратной связи Rf, который служит целям
стабилизации ОУ и обеспечивает точный коэффициент усиления
напряжения. Положительный вывод заземлен, а входное напряжение
подается на отрицательный провод, через точно известный резистор
R, значение которого выбирается по мере необходимости. Выходной
сигнал подается обратно к отрицательному проводу через резистор
обратной связи Rf, величина которого также точно выбрана по мере
необходимости. Для определения коэффициента усиления напряжения,
напомним, что напряжения на двух входных выводах из ОУ должны
быть равны (в идеальном случае). Так, провод +ve заземлен, напряжение
в точке А также равно нулю. Далее напомним, что ток через линии ввода
ОУ идеально равен нулю, и запишем текущее уравнение баланса для
узла точки A:
115
0
R
Vi
=
+
f
o
R
V
Это дает уравнение усилитель (2.29)
i
f
v
R
R
)
1(
Vo
+
=
(2.33)
(2.34)
Примечание: Мы можем пренебречь знаком -ve коэффициента усиления,
так как он может бать изменен простым изменением клемм входа в при-
менении. Кроме того обратите внимание, что Kv зависит от R и Rf, а не
рисунок 2.15 (а) усилитель напряжения и (б) усилитель тока.
output – выход
input – вход
load – нагрузка
Следовательно, коэффициент усиления загрузки определяется
116
от усиления ОУ. Следовательно, коэффициент усиления по напряжению
может быть точно определен путем выбора двух пассивных элементов
(резисторов) R и R f. Кроме того, выходное напряжение имеет тот же знак,
что и входное напряжение. Следовательно, это неинвертирующий усили-
тель. Если напряжения противоположного знака, то мы имеем инверти-
рующий усилитель.
Усилитель тока показан на рисунке 2.15б. Ток ii входа подается на от-
рицательный вывод операционного усилителя как показано, а положи-
тельный вывод заземлен. Существует обратная связь резистора Rf, по-
дключенного к отрицательному выводу через RL нагрузку. Резистор Rf
обеспечивает путь для входного тока, так как ОУ имеет практически
нулевое значения тока. Существует второй резистор R, через который
выход заземлен. Этот резистор необходим для усиления тока. Для ана-
лиза усилителя, используем тот факт, что напряжение в точке А (то есть,
при минусовом приводе) должен быть равен нулю, так как положитель-
ный вывод операционного усилителя заземлен (нулевое напряжение).
Кроме того, весь входной ток ii проходит через резистор Rf, как показа-
но. Следовательно, напряжение в точке В является Rfii
. Следовательно,
ток через резистор R является Rfii/ R, который является положительным
в указанном направлении. Отсюда следует, что выходной ток іо задается
i
f
i
o
i
R
R
i
i
+
=
или
i
f
o
i
R
R
i
+
=1
(2.35)
Коэффициент усиления тока усилителя:
R
Rf
+
=1
Ki
(2.36)
Как и прежде, коэффициент усиления усилителя может быть точно
установлен с помощью высокоточных резисторов R и R f. Они называются
резисторами, задающими коэффициент усиления усилителя.
2.4 .4 инструментальные усилители
Инструментальный усилитель обычно представляет собой усилитель
напряжения специального назначения, который посвящен приложениям
117
измерения заказчика. Важной характеристикой инструментального
усилителя является возможность системы регулировать усиления.
Значение усиления можно регулировать вручную в большинстве
измерительных усилителях. В более сложных измерительных усилителях,
усиление программируется и может быть установлено с помощью
цифровой логики. Измерительные усилители обычно используются
с сигналами низкого напряжения. Примеры применения контрольно-
измерительных приборов усилителей включают в себя следующее:
1. Применения, которые требуют разность двух сигналов; например,
контролировать аппаратные средства, такие как компаратор, который
генерирует сигнал ошибки управления (то есть разница между опорным
сигналом и сигналом датчика обратной связи).
2. Перемещение компонента общего шума (например, 60 Гц линия шума
от источника питания переменного тока) в двух сигналах (когда тот же
самый шум появляется в обоих сигналах, принимая их разность, как это
может потребоваться для конкретного применения, составляющая шума
будет удалена).
3. Если шум или нелинейный компонент в сигнале может быть
непосредственно измерен (например, в источнике), то его можно
вычесть из сигнала.
4. Усилители, используемые для получения выходного сигнала от
мостовой схемы (мостовой усилитель)
5. Усилители,
используемые с различными датчиками
и
преобразователями.
2.4 .4 .1 Дифференциальный усилитель
Обычно,
инструментальный
усилитель
является
также
дифференциальным усилителем (иногда называемый дифференциальным
усилителем). Он генерирует разность между двумя сигналами, который
имеет множество применений, как упомянуто в контексте измерительных
усилителей. Шум заземления может быть серьезной проблемой в
несимметричных усилителей. Шум заземления может быть эффективно
устранен с помощью дифференциального усилителя, так как петли
шума формируются с обоими входами усилителя, и следовательно, эти
шумовые сигналы вычитаются на выходе усилителя. Так как уровень
шума почти одинаковый для обоих входов, это компенсируется. Любой
другой шум (например, 60 Гц линии шума), который может входить в
оба входа с той же интенсивностью, также будет отменен на выходе
118
дифференциального усилителя.
В дифференциальном усилителе оба входных провода используются
для входного сигнала, тогда как в несимметричном усилителе один из
проводов заземлен и только один провод используется для входного
сигнала.
Основной дифференциальный усилитель, который использует
единичный ОУ показан на Рисунке 2.16a. Уравнение ввода / вывода для
этого усилителя может быть получено обычным образом. Например, так
как ток через ОУ пренебрежимо мал, баланс тока в точке В дает
(2.37)
где vB
– напряжение в точке B. Таким же образом, баланс тока в точке А
определяется
R
v
v
R
v
i
A
f
A
1
o
v
−
=
−
(2.38)
Outputs – вывод
Inputs - ввод
рисунок 2.16 (а) Основной дифференциальный усилитель, и (б) основной
инструментальный усилитель.
119
Теперь мы используем свойство
S
v
=
A
v
(2.39)
для ОУ, чтобы устранить Vа и Vb из уравнений 2.37 и 2.38 .
Это дает
()
(
)
()f
i
f
g
f
R
R
v
R
R
v
R
R
/
1
/
/
1
v
1
i2
+
+
=
+
или
()1
2
o
v
i
i
f
v
v
R
R
−
=
(2.40)
Две вещи очевидны из уравнения 2.40. Во-первых, выход усилителя про-
порционален разности, а не абсолютному значению двух входов Vi1
и VI2
.
Во-вторых, коэффициент усиления по напряжению усилителя равен Rf /
R. Это известно как дифференциальное усиление. Понятно, что диффе-
ренциальное усиление можно точно установить с помощью высокоточ-
ных резисторов R и Rf.
2.4 .4 .2 инструментальный усилитель
Основной дифференциальный усилитель, показанный на Рисунке 2.16a,
и который обсуждался ранее, является важным компонентом инструмен-
тального усилителя. Кроме того, инструментальный усилитель должен
обладать способностью регулируемого усиления. Кроме того, желатель-
но иметь очень высокий входной импеданс и очень низкий выходной им-
педанс на каждом входном выводе. Желательно, чтобы измерительный
усилитель обладал более высоким и более стабильным усилением, а так-
же более высоким входным сопротивлением, чем основной дифферен-
циальный усилитель. Инструментальный усилитель, который обладает
этим базовым требованием, может быть изготовлен в виде монолитных
ИС как единая схема. В качестве альтернативы, он может быть построен
с использованием трех дифференциальных усилителей и высокоточных
резисторов, как показано на Рисунке 2.16b. Усиления усилителя можно
120
регулировать с помощью тонкого перестраиваемого резистора R2
. Тре-
бования к импедансу обеспечиваются двумя повторителя напряжения
типа усилителя, один для каждого входа, как показано на рисунке. Пе-
ременное сопротивление δR4 необходимо для компенсации ошибок из-
за неравномерного усиления общего режима. Рассмотрим сначала этот
аспект, а затем получим уравнение для инструментального усилителя.
2.4 .4 .3 общий режим
Теперь мы продолжим обсуждение на эту тему для дифференциальных
усилителей. Когда vi1
=V
i2
, в идеале, выходное напряжение VO должно
быть равно нулю. Другими словами, в идеале, любые синфазные сигна-
лы откажаются дифференциальным усилителем. Но так как коммерче-
ские операционные усилители не являются идеальными, и они обычно
не имеют в точно сти одинаковые выгоды в отношении двух входных вы-
водов, то выходное напряжение VO не будет равно нулю, когда два входа
идентичны. Соответствующая синфазная ошибка может быть компенси-
рована путем предоставления переменного резистора с высокой разре-
шающей способностью на одном из двух входных проводников диффе-
ренциального усилителя. Следовательно, на Рисунке 2.16b, чтобы ком-
пенсировать синфазные ошибки (т.е ., для достижения удовлетворитель-
ного уровня подавления синфазного сигнала), сначала два входа являют-
ся равными, а затем δR4 тщательно изменяется, пока уровень выходного
напряжения недостаточно маленький (минимальный). Как правило, δR4,
требующийся для достижения этой компенсации мала по сравнению с
номинальным сопротивлением обратной связи R4
.
Коэффициент о слабления синфазного сигнала дифференциального уси-
лителя определяется как
(2.41)
ocm
cm
V
KV
CMRR =
где К - коэффициент усиления дифференциального усилителя (т.е. диф-
ференциальный коэффициент усиления)
VCM
является синфазным напряжением (т.е. напряжение, общее для обо-
их входных проводников)
VOCM
является выходным напряжением общего режима (т.е выходное
напряжение из-за входного напряжения общего режима)
121
Обратите внимание, что в идеале VOCM
= 0 и CMRR должно быть бес-
конечным. Отсюда следует, что чем больше CMRR, тем лучше произ-
водительность дифференциального усилителя. Так как в идеале δR4 =
0, можно пренебречь δR4 при выводе уравнения инструментального
усилителя. Теперь обратите внимание на основное свойство ОУ без на-
сыщения (в частности, напряжения на двух входных проводах должны
быть практически идентичны) на Рисунке 2.16b,у которого напряжение
в точке 2 должно быть vi2 и напряжение в точке 1 должно быть vi1
. Да-
лее мы используем свойство, что можно пренебречь током через каждый
провод ввода операционного усилителя. Соответственно, ток через ка-
нал схемы B → 2 → 1 → А должен быть тем же самым. Это дает текущие
уравнения непрерывности
1
1
2
1
12
1
2
s
v
R
v
v
R
v
v
R
v
A
i
i
i
−
=
−
=
−
где Va и Vb являются напряжениями в точках А и В. Таким образом, мы
получаем два уравнения
и
Теперь, путем вычитания второго из этих двух уравнений от первого, мы
имеем уравнение для первого этапа инструментального усилителя:
()1
2
2
1
B
2
1
v
i
i
A
v
v
R
R
v
−
+
=
−
(2.42)
Далее из предыдущего результата (2.40) для дифференциального усили-
теля, мы имеем (с δR4 = 0)
()A
Bv
v
R
R
−
=
1
2
o
v
(2.43)
Уравнения 2.42 и 2.43 обеспечивают уравнения для инструментального
усилителя. Только резистор R2 изменяется для регулировки усиления
(дифференциальное усиление) усилителя. На Рисунке 2.16b, два
входных ОУ (напряжение повторителя ОУ) не должны быть абсолютно
идентичными до того, как резисторы R1 и R2 выбраны так, чтобы быть
точным. Это объясняется тем, что параметры ОУ, такие как усиление
разомкнутого цикла и входного импеданса не включены в уравнение
122
усилителя, при условии, что их значения достаточно высоки, как уже
отмечалось ранее.
2.4 .4 .4 Усилитель заряда
Важной категорией измерительных усилителей является усилитель
заряда. Он в основном используется в произведении сигнала от датчиков
высокого импеданса, таких как пьезоэлектрические датчики. Он
использует операционный усилитель с емкой обратной связью, чтобы
обеспечить формирование сигнала для устройств с высоким импедансом.
Усилитель заряда будет подробно рассмотрен в одной из следующих
глав, под пьезоэлектрическими акселерометрами.
2.4 .4 .5 Усилители переменного тока
В некоторых случаях
необходимо ограничить
постоянную
составляющую сигнала и допускать только переменную составляющую.
Кроме того, важно убрать предубежденность и отводы (DC). Постоянная
составляющая сигнала может быть перекрыта, подключив сигнал через
конденсатор. (Примечание: сопротивление конденсатора равно 1 / (jωC)
и, следовательно, на нулевой частоте будет бесконечное сопротивление.)
Если входной вывод устройства имеет ряд конденсаторов, мы говорим,
что вход переменного тока, и если выходной вывод имеет серийный
конденсатор, то выход - переменного тока. Как правило, усилитель по
переменному току имеет ряд конденсаторов как на входном проводе,
так и на выходном провод. Следовательно, его амплитудно-частотная
характеристика будет иметь высокой характеристику фильтра верхних
частот; в частности компоненты постоянного тока будут отфильтрованы.
Ошибки, связанные со смещениями тока и смещениями сигналов
пренебрежимо малы для усилителя по переменному току. Кроме того,
в усилителе по переменному току, проблемы устойчивости не очень
серьезны.
2.4 .5 Шум и контур заземления
В приборах, обрабатывающих сигналы низкого уровня (например
датчики, такие как акселерометры, схемы формирования сигналов, такие
как тензометрические мосты и сложные и деликатные электронные
компоненты, такие как жесткие диски компьютера и автомобильные
модули управления), электрический шум может привести к чрезмерной
123
ошибке, если не будут приняты соответствующие корректирующие
действия. Одна из форм шума обусловлена колебаниями магнитных
полей из-за близлежащей переменной линии тока электропередач или
электрических машин. Они обычно известны как электромагнитные
помехи (EMI). Эту проблему можно избежать путем удаления источника
электромагнитных помех, тогда колебания внешнего магнитного поля
и токи не присутствуют вблизи пораженного инструмента. Другим
решением было бы использовать волоконно-оптическую (оптически
связанную) передачу сигнала, тогда нет никакого шума проводимости
наряду с переданным сигналом от источника до объекта инструмента.
В случае жестко проводной передачи, если два сигнальных проводов
(положительные и отрицательные или горячие и нейтральные)
скручены или, если используются экранированные кабели, напряжения
индуцированного шума становятся равными в двух проводах, которые
компенсируют друг друга.
Правильная практика заземления имеет большое значение для снижения
ненужных проблем электрических помех и что более важно, для избе-
жания опасности поражения электрической безопасности. Стандартная
однофазная розетка переменного тока (120 В, 60 Гц) имеет три клеммы,
одна проводит электропитание (горячий), вторая нейтральный, а третья
присоединена к земл е (которая поддерживается при нулевом потенциа-
ле достаточно равномерно от точки к точке в сети электропитания). Со-
ответственно, штепсельная вилка электропитания прибора должна иметь
три вилки. Самая короткая плоская вилка подключена к черному проводу
(горячему), и более плоская вилка подключена к белому проводу (ней-
тральному). Круглая вилка соединена с зеленым проводом (основной),
который на другом конце соединен с шасси (или обсадной колонной)
инструмента (заземления). С учетом заземления шасси таким образом,
корпус инструмента сохраняется при нулевом потенциале, даже при на-
личии неисправности в цепи питания (например, утечки или короткого
замыкания). Схема электропитания инструмента также имеет локальное
заземление (сигнал заземления), со ссылкой на который измеряется его
мощность сигнала. Это достаточно толстый проводник внутри прибора,
и он обеспечивает общее и равномерное перенесение в 0 В. Рассмотрим
пример сигнала датчика кондиционирования, показанный на Рисунке
2.17. Блок питания постоянного тока может обеспечить как положитель-
ный (+), так и отрицательный (-) выходы. Его ссылка нулевого напряже-
ния обозначается через COM (Common Ground), это является сигналом
заземления устройства. COM от источника питания постоянного тока не
124
подключен к заземлению шасси, последний соединен с основой через
круглую вилку источника питания. Это не обходимо для избежания опас-
ности поражения электрическим током. Обратите внимание, что COM
источника питания подключен к сигнальному основанию модуля фор-
мирования сигналов. Таким образом, общий 0В предусмотрен для на-
пряжения постоянного тока, который подается в модуль формирования
сигналов.
2.4 .5 .1 Заземление шума
Основной причиной электрических помех являются контуры заземле-
ния, создающихся из-за неправильного заземления приборов. Если два
взаимосвязанных инструментов заземлены в двух разных местах, ко-
торые далеко друг от друга (многократное заземление), шум основно-
го контура может пройти сигнальный провод из-за возможной разно сти
потенциалов между двумя точками заземления. Причина заключается в
том, что сама по себе основа в целом не является однородной потен-
циальной средой (разница может составлять около 100 мВ), а ненулевой
(и конечный) импеданс может существовать от точки к точке в пределах
этой среды. Это в самом деле случай со стандартной наземной средой,
такой как COM провод. Пример схематически показан на Рисунке 2.18a.
В этом примере два провода датчика непосредственно подключены к
устройству формирования сигналов, таких как усилитель, с одним из
его входных проводников (+) заземления (в точке В). 0 В провода напря-
жения датчика заземлены через его корпус для заземления (в точке А).
Таким образом оба устройства (датчик и усилитель в данном примере)
являются опорными (то есть, соединены с корпусом здания, что является
основанием настенных розеток трех-контактных в здании). Из-за нерав-
номерных потенциалов земли, две точки заземления А и В подвергаются
разно сти потенциалов vg
. Это создаст контур заземления с общим опор-
ным проводом, который соединяет два устройства. Решение этой про-
блемы заключается в изоляции (т.е . обеспечивают бесконечное полное
сопротивление) одного из двух устройств. Это называется изменчивость.
Рисунок 2.18b показывает внутреннюю изоляцию датчика. Внешняя
изоляция, изолирующая корпусом датчика, будет также удалять контур
заземления. Изменчвость СОМ источника питания (см. Рисунок 2,17) -
другой подход к устранению контуров заземления. В частности, COM не
подключен к заземлению.
125
2.5 аналоговые фильтры
фильтр представляет собой устройство, позволяющее с помощью
только желательной части сигнала, отклонять нежелательную часть.
Нежелательные сигналы могут серьезно ухудшить работу системы
управления. Внешние помехи, компоненты ошибки в возбуждениях, а
также шумы, генерируемые внутри системы в пределах компонентов
системы и измерительных механизмов, являются такими паразитными
сигналами, которые могут быть удалены с помощью фильтра. Кроме
того, фильтр способен формировать сигнал желаемым образом. В
стандартных применениях сбора и обработки сигналов в инженерной
системе, задача фильтрации будет включать в себя удаление компонентов
сигнала в определенном диапазоне частот.
В связи с этим, мы можем выделить следующие четыре широкие
риСУНок 2.17 Пример заземления приборов.
conditionedsignal – условныйсигнал
powerin – входпитания
signal conditioner – преобразовательсигнала
sensor signal – сенсордатчика
sensor – датчик
power out – выход питания
DC power supply - источник электропитания с постоянным током
Chassis ground – заземление
ACpoweroutlet – Электрическая розетка переменного тока
earthground – заземление
hot (black) – горячий (черный)
neutral (white) – нейтральный (белый)
126
категории фильтров:
1. фНЧ
2. фильтры верхних частот
3. Полосовые фильтры
4. Недиапазонные фильтры
рисунок 2.18 (а) Иллюстрация заземления и (б) устройство изоляции для устра-
нения контуров заземления (пример внутренней изоляции).
sensor – датчик
signal lead – провод сигнала
amplifier – усилитель
ground-referenced – заземленный
common lead – общий провод
output (noisy) – выход (шумный)
floated sensor – датчик изменчивости
loop broken – сломанный провод
127
Идеальная частотная характеристика каждого из этих четырех типов
фильтров показана на Рисунке 2.19. Только величина функции частотной
характеристики (величина передаточной функции частоты) показана.
Понятно, что искажение фазы входного сигнала также должна быть
небольшой в пределах пропускной способности (допустимый диапазон
частот). Практические фильтры меньше, чем идеальные. Их функции
частотной характеристики не демонстрируют резкие отсечки, как на
Рисунке 2.19 и кроме того, некоторые фазы искажения будут неизбежны.
Особый тип полосового фильтра, широко используемый в системах
сбора и мониторинга ответных сигналов (например, в продукте
динамических испытаний) - это отслеживающий фильтр. Это
просто полосовой фильтр с узкой пропускной способностью, которая
является переменной (перестраиваемой). В частности, центральная
частота пропускной способности является переменной, как правило
путем связывания ее с частотой носителя сигнала (например сигнал
возбуждения). Таким образом, сигналы, частота которых зависит от
некоторой базовой переменной в системе (например число оборотов
ротора, частота гармонического сигнала возбуждения, частота развертки
генератора) могут быть точно отслежены в присутствии шума. Входы
отслеживающего фильтра являются сигналом того, что отслеживается
и переменная частота слежения (вход носителя). Типичный фильтр
отслеживания, который может одновременно отслеживать два сигнала,
схематично показан на Рисунке 2.20.
фильтрация может быть до стигнута с помощью цифровых фильтров, а
также с помощью аналоговых фильтров. До того как цифровая обработка
риСУНок 2.19 Идеальные характеристики фильтра: (а) фильтр низких частот,
(б) фильтр высоких частот, (с) полосовой фильтр, и (г) недиапазонный (режек-
торный) фильтр.
Magnitude - величина
frequency - частота
128
сигналов стала эффективной и экономичной, были использованы
исключительно аналоговые фильтры для фильтрации сигналов, и до сих
пор широко используются. Аналоговый фильтр обычно представляет
собой активный фильтр, содержащий активные компоненты, такие
как транзисторы или ОУ. В аналоговом фильтре, входной сигнал
пропускается через аналоговый контур. Динамика цикла будет
определять, какие (желаемые) компоненты сигнала будут пропущены
и которые (нежелательные) компоненты сигнала будут отклонены.
Более ранние версии аналоговых фильтров используются дискретными
элементами схемы, такие как дискретные транзисторы, конденсаторы,
резисторы, и даже отдельные индукторы. Так как индукторы имеют
ряд недостатков, таких как восприимчивость к электромагнитным
помехам, неизвестные эффекты сопротивления и большие размеры, то
сегодня они редко используются в схемах фильтрации. Кроме того, из-
за известных преимуществ IC устройств, аналоговые фильтры сегодня
в виде монолитных интегральных микросхем широко используются в
современных приложениях и являются предпочтительными по сравнению
с элементами дискретных фильтров. Цифровые фильтры, использующие
цифровую обработку сигнала для обеспечения фильтрации, также
широко используются сегодня.
2.5 .1 Пассивные фильтры и активные фильтры
рисунок 2.20 Схема двухканального фильтра слежения
Input channel – входной канал
Output channel –выходной канал
Tracking filter – отслеживающий фильтр
Carrier input (tracking frequency) – вход носителя (частота отслеживания)
129
Пассивные аналоговые фильтры используют аналоговые схемы, содер-
жащие пассивные элементы, только такие как резисторы и конденсато-
ры (а иногда и индукторы). Внешний источник питания не требуется в
пассивном фильтре. Активные аналоговые фильтры используют актив-
ные элементы и компоненты, такие как транзисторы и ОУ, в дополнение
к пассивным элементам. Так как внешняя сила необходима для работы
активных элементов и компонентов, активный фильтр характеризуется
необходимостью внешнего источника питания. Активные фильтры ши-
роко доступны в монолитной схеме IC, и как правило пассивные филь-
тры предпочтительнее.
Преимущества активных фильтров включают в себя следующее:
1. Загрузка эффектов и взаимодействия с другими компонентами ни-
чтожно малы, поскольку активные фильтры могут обеспечить очень вы-
сокое входное сопротивление и очень низкое выходное сопротивление.
2. Они могут быть использованы с низким уровнем сигнала, поскольку и
усиление, и фильтрация сигнала может быть обеспечена с помощью той
же активной цепи.
3. Они широко доступны в недорогой и компактной форме IC.
4. Они могут быть легко интегрированы с цифровыми устройствами.
5. Они менее восприимчивы к шуму от EMI.
Как правило, недостатки активных фильтров следующие:
1. Они нуждаются во внешнем источнике питания.
2. Они чувствительны к нелинейности насыщенного типа при высоких
уровнях сигнала.
3. Они могут ввести множество типов внутренних шумов и не смодели-
рованных ошибок сигнала (смещение, смещение сигналов и т.д).
Следует отметить, что преимущества и недостатки пассивных фильтров
могут быть непосредственно выведены из преимуществ и недостатков
активных фильтров, как указано здесь.
2.5 .1 .1 количество полюсов
Аналоговые фильтры являются динамическими системами, и они могут
быть представлены передаточными функциями, предполагая линейную
динамику. Количество полюсов фильтра - это число полюсов в соот-
130
ветствующей передаточной функции. Это также совпадает с порядком
характеристического полинома передаточной функции фильтра (т.е. по-
рядок фильтра). Примечание: Полюса (или собственные значения) явля-
ются корнями характеристического уравнения.
В нашей дискуссии мы показываем упрощенные варианты фильтров,
состоящие как правило из одной ступени фильтра. Производительность
такого базового фильтра может быть улучшена за счет сложности схем
(с увеличением числа полюсов). Основные схемы ОУ приведены для ак-
тивных фильтров. Более сложные устройства коммерчески доступны, но
наша цель состоит в том, чтобы проиллюстрировать основные принци-
пы, а не предоставлять полные описания и спецификации для коммерче-
ских фильтров.
2.5 .2 Фильтр Нижних частот
Цель фильтра нижних частот в том, чтобы пропускать все компоненты
сигнала ниже некоторой (отсечки) частоты и блокировать все компонен-
ты сигнала выше этой отсечки. Аналоговые низкочастотные фильтры
широко используются в качестве сглаживающих фильтров в области
цифровой обработки сигналов. Ошибка известна как псевдонимизация,
входит в цифровую обработку результатов сигнала, если исходный сиг-
нал имеет частотные компоненты выше половины частоты дискретиза-
ции (половину частоты дискретизации называют частотой Найквиста).
Следовательно, сглаживание искажений можно устранить, если сигнал
фильтруется с помощью фильтра нижних частот с его отсечкой, уста-
новленной на частоте Найквиста, перед считыванием и цифровой обра-
боткой. Это одна из многочисленных применений аналоговых фильтров
нижних частот. Другим типичным применением было бы устранить вы-
сокочастотный шум в считанном сигнале.
Однополюсный, активный, фильтр низких частот показан на рисунке
2.21a. Если два активных этапов фильтра, аналогичны показанному на
2.21a, соединены друг с другом, ошибки нагрузки будет незначительны-
ми, так как операционный усилитель с обратной связью (т.е. повторите-
ля напряжения) представляет высокое входное сопротивление и низкое
выходное сопротивление, сохраняя при этом коэффициент усиления по
напряжению в единстве. С помощью аналогичных рассуждений можно
сделать вывод о том, что активный фильтр имеет желательное свойство
131
очень низкого взаимодействия с любым другим подключенным компо-
нентом.
Чтобы получить уравнение фильтра для Рисунка 2.21a, мы пишем теку-
щий баланс на инвертирующем проводе ввода ОУ (ток в ОУ = 0; напря-
жение там = 0 в силу заземления инвертирующего входного провода):
Мы получаем
(2.44)
где фильтр постоянного времени
(2.45)
риСУНок 2.21 (а) однополюсный активный фильтр нижних частот и
(б) частотная характеристика.
input – вход
output – выход
slope – наклон
magnitude – величина
frequency – частота
132
Теперь из уравнений 2.42 и 2.43 следует, что передаточная функция
фильтра
(2.46)
Коэффициент усиления фильтра
(2.47)
R
R
kf
=
С этой передаточной функции ясно, что аналоговый фильтр нижних ча-
стот, по существу, является схемой задержки (то есть, он обеспечивает
задержку по фазе).
Амплитудно-частотная характеристика, соответствующая уравнению
2.46 получается путем установки S = jω; Таким образом,
(2.48)
Это дает реакцию фильтра, когда синусоидальный сигнал частоты ω
прикладывается. Величина |G(jω)| передаточной функции частоты дает
усиление сигнала, а фазовый угол ∠G (jω) дает опережение фазы выход-
ного сигнала по отношению к входу. Кривая величина нормализуется де-
лением на усиления постоянного тока k, как показано на Рисунке 2.21b.
Обратите внимание, из уравнения 2.48, что для малых частот (т.е. ω = 1
/ т) величина (нормализованная) примерно равна единице. Следователь-
но, 1 / τ можно считать частотой среза ωс:
Пример 2.7
Показано, что частота среза определяется уравнением 2.49, является
также пропускной способностью половинной мощности для фильтра
нижних частот. Покажите, что для частот намного высших, чем эта, пе-
редаточная функция фильтра на величине пло скости Боде (то есть, ве-
личина входа от частоты входа) может быть аппроксимирована прямой
линией с наклоном -20 дБ / декада. Этот наклон известен как скатыва-
ние скорости.
133
решение
С помощью функции нормализованной передачи (k=1), частота, соот-
ветствующая половине мощности (или 1 / 2 величина) задается 1/
(|tjw +1|) = 1/ 2 . Умножая накрест, возведите в квадрат, и, упрощая
уравнение получим: τ2ω
2
= 1. Следовательно, пропускная способно сть
половинной мощности это
Это совпадает с частотой среза, заданной уравнением 2.49.Теперь для
ω »1 / т (т.е., ωτ»1), нормализованное уравнение 2.47 может быть ап-
проксимировано G(jw) = 1/(tjw). Это имеет величину | G (jω) | = 1 / (τω).
Преобразовывая в логарифмической шкале, мы получаем
Отсюда следует, что log10 (величина) по сравнению с log10 (частота) кри-
вой представляет собой прямую линию с угловым коэффициентом -1 .
Другими словами, когда частота увеличивается на коэффициент 10 (то
есть, десять лет), то величина log10 уменьшается на единицу (то есть, на
20 дБ). Следовательно, округление скорости составляет -20 дБ / декада.
Эти наблюдения показаны на Рисунке 2.21b. Изменение амплитуды на
коэффициент 2 (или мощности на коэффициент 2) соответствует 3
дБ. Следовательно, когда значение тока (величина нулевой частоты)
равна единице (0 дБ), величина половинной мощности составляет -3
дБ.
Частота среза и спадания скорости являются двумя основными специ-
фикациями конструкции для фильтра низких частот. В идеале, мы хоте-
ли бы, чтобы кривая величины низкочастотного фильтра была плоской
до предела требуемой пропускной способности (частота среза), а затем
спадала очень быстро. фильтр нижних частот, показанный на Рисунке
2.2, только приближенно соответствует этим требованиям. В частности,
округление скорости не является достаточно большим. Мы предпочли
бы округления скорости по крайней мере -40 дБ / декада, или даже -60 дБ
/ декада, в практических фильтрах. Это может быть реализовано с помо-
щью фильтра высокого порядка (то есть фильтр с множеством полюсов).
Низкочастотный фильтр Баттерворта является фильтром такого типа и
широко используется.
134
2.5 .2 .1 Низкочастотный фильтр Баттерворта
Низкочастотный фильтр Баттерворта с двумя полюсами может обеспе-
чить округление скорости при -40 дБ / декада, и фильтр с тремя полю-
сами может обеспечить округление скорость при -60 дБ / декада. Кроме
того, более крутой угол наклона увеличивает кривую величину фильтра
в пределах пропускной способности.
Двухполюсный низкочастотный фильтр Баттерворта показан на Рисун-
ке 2.22 . Мы могли бы построить двухполюсный фильтр просто путем
соединения вместе двух однополюсных ступеней типа, показанного на
Рисунке 2.21a. Тогда нам потребуется два ОУ, в то время как схема, по-
казанная на Рисунке 2.22, достигает той же цели, используя только один
операционный усилитель (то есть при более низкой стоимости).
Пример 2.8
Покажите, что схема ОУ на Рисунке 2.22 представляет собой фильтр низ-
ких частот с двумя полюсами. Что такое передаточная функция фильтра?
Оценить частоту среза при подходящих условиях. Покажите, что окру-
гление скорости составляет -40 дБ / декада.
решение
Чтобы получить уравнение фильтра, запишем текущее уравнение балан-
Output - выход
рисунок 2.22 Двухполюсный низкочастотный фильтр Баттерворта.
135
са в первую очередь. В частности, сумма токов через R1 и C1 проходит
через R2
. Такой же ток должен пройти через С2
, так как ток через вывод
ОУ равен нулю (свойство ОУ). Следовательно,
(2.8 .1)
Кроме того, ток через резистор обратной связи Rf проходит полностью
через заземление резистора R, так как ток через второй вывод ОУ также
равен нулю. Следовательно, этот путь деления напряжения дает
(2.8 .2)
где
(2.8 .3)
f
R
R
k=
Из уравнений 2.8 .1 и 2.8 .2 мы получаем
Определяем константы
(2.8 .6)
Устраняем va путем подстановки уравнение 2.8 .5 в 2.8 .4, и введения пе-
ременной Лапласа s. Мы получаем передаточную функцию фильтра,
(2.8 .7)
Эта передаточная функция второго порядка становится колебательной,
если
полюса являются комплексными; то есть если
136
.
В идеале мы хотели бы иметь нулевую резонансную частоту, которая
соответствует амортизирующему значение величины
Незатухающая собственная частота:
(2.8 .8)
Коэффициент торможения:
(2.8 .9)
Резонансная частота:
(2.8 .10)
Для низкочастотного фильтра, идеальные условия соответствуют ωr =
0(т.е. отсутствует резонансный пик, давая более широкий прямой уча-
сток), когда
.
Для этого оптимального случая, из уравнений
2.8 .9 и 2.8 .11 мы получаем,
(2.8 .11)
функция частотной характеристики фильтра (см. уравнение 2.8 .7)
(2.8 .12)
Для удобства мы нормализуют эту передаточную функцию с помощью
k (то есть, установим k = 1). Теперь, для ω ≥ ωn, фильтр ответной часто-
ты является прямым с единичным коэффициентом усиления. Для ω »ωn,
фильтр отклика астоты может быть аппроксимирован G (jω) = - (ω 2 / ω
2).
Во входе (величина) в зависимости от шкалы входа (частота), эта функ-
ция представляет собой прямую линию с наклоном -2 . Следовательно,
137
когда частота увеличивается в 10 (т.е . одно десятилетие), то log10 (вели-
чины) падает на 2 единицы (то есть, на 40 дБ). Другими словами, окру-
гление скорости составляет -40 дБ / декада.
2.5 .2 .1 .1 Фильтр частоты среза
Это частота, до которой действует низкочастотная фильтрация. Для
идеального фильтра (т.е.ζ = 1 / 2 ), ω
n
может быть принято в качестве
частоты среза. Следовательно,
(2.50)
Это можно легко проверить с помощью уравнения 2.8 .12, что при
2
/1
=
ζ
, эта частота совпадает с пропускной способностью поло-
винной мощно сти (то есть частота, при которой передаточная функция
становится величиной 1 / 2 , где нормированное значение постоянно-
го тока 1,0).
Примечание: Если две однополюсные ступени (показано на Рисунке
2.21a) расположены каскадом, в результате двухполюсный фильтр имеет
передемпфированную (т.е . не колебательную) передаточную функцию
(ζ> 1), и это не представляется возможным до стичь z = 1 в отличие от
нынешнего случая. Кроме того, трехфазный низкочастотный фильтр
Баттерворта может быть получен путем каскадирования двухполюсного
блока, показанного на Рисунке 2.22 с однополюсным блоком, показанно-
го на Рисунке 2.21a. Низкочастотные фильтры Баттерворта могут соот-
ветствовать высокому выбору базовых единиц.
Очевидно, что функция передачи для идеального двухполюсника (т.е.
второго порядка) низкочастотного фильтра Баттерворта частоты среза
ωc является
(
2
.
5
1
)
Вторая функция переноса в уравнении 2.51 - это нормализованная фор-
ма, которая используется в среде MATLAB, с нормализующей частотой
так, что 0 <ωc/ω<1. Затем, как только нормализованная передаточная
функция фильтра определена с помощью MATLAB, она может быть мас-
штабирована в любую другую частоту с использованием надлежащего
частотного масштабирования ωo
.
138
Пример 2.9
Определите второй порядок нижних частот фильтра Баттерворта при
частоте среза
рад/с. Проверьте результат с помощью MAT-
LAB.Определите величину передаточной функции фильтра. Как будет
получен фильтр для 10-кратной этой частоты среза с помощью этого
результата?
Далее получим четырехполюсник (четвертого порядка) фильтра Баттер-
ворта для той же частоты среза ( =1/ 2 рад/с) и сравним два резуль-
тата.
решение
Непосредственно подставив в уравнение 2.51, мы получаем передаточ-
ную функцию фильтра
[
]5.0
5.0
v
v
2
i
o
+
+
=
s
s
Соответствующая команда MATLAB
>> [b,a] = butter(n,Wn,'s')
где n - порядок фильтра
Wn - частота среза
b- вектор числительного коэффициента передаточной функции
а - вектор коэффициента знаменателя передаточной функции
Мы получаем следующий результат
Это согласуется с аналитическим результатом. Мы можем построить ве-
личину функции частотной характеристики этого фильтра (в линейном
масштабе для частоты) с использованием MATLAB следующим обра-
зом:
>> w=linspace(0.005,0.705,142);
>> h = freqs (b,a,w);
>> plot (w,abs(h),'-')
139
Результат показан (сплошная кривая) на Рисунке 2.23a.
Из результата нормированного фильтра (для любого порядка фильтра
п), можно получить передаточную функцию фильтра, соответствующую
любой другой частоте среза и тот же порядок фильтра простым спосо-
бом. Мы про сто изменим коэффициенты полинома (как числитель, так и
знаменатель) нормированного результата следующим образом:
s0 коэффициент: Умножаем на rn
s1 коэффициент: Умножаем на rn−1 и т.д.
где r - коэффициент умножения для изменения частоты среза.
Теперь, с r = 10, что соответствует частоте среза 10 2 / рад / с, мы
имеем оптимальную передаточную функцию фильтра
Далее будем использовать четырехполюсный фильтр Баттерворта для
разработки лучшего фильтра нижних частот для того же примера, и срав-
ним два результата. Мы используем следующие команды MATLAB для
этой цели:
Величина функции частотной характеристики четырехполюсника филь-
тра Баттерворта отмечена "х" на Рисунке 2.23a. Видно, что плоскост-
ность пропускной способности значительно улучшилась. В частности,
двухполюсный фильтр довольно прямой до 0,2 рад / с, четырехполюс-
ный фильтр является прямым до 0,4 рад / с.
Искажение фазы: фильтр имеет очевидные преимущества, но мы обыч-
но достигаем их, жертвуя чем-то по отношению к искажению сигнала.
Существуют два типа искажений, входящих в сигнал (при удалении не-
желательных компонентов): (1) величина сигнала (амплитуда), которая
140
риСУНок 2.23 Оптимальная низкочастотная фильтрация Баттерворта:
(а) величины фильтра, (b) фазовые углы фильтра, и (c) сигналы времени.
Optimal low-pass Butterworth filters – оптимальные низкочастотные филь-
тры Баттерворта
frequency – частота
magnitude – величина
two-pole – двухполярный
four – pole – четырехплярный
phase angle – угол фазы
signal – сигнал
noisy – громкий
output – выход
time – время
141
будет искажена, и (2) фазовый угол сигнала, который будет искажен (бу-
дет представлено запаздывание фазы). Мы заметили искажение величи-
ны, что может быть существенным, если частота больше, чем половина
частоты среза. Искажение величины было увеличено за счет увеличения
числа фильтров полюсов. Теперь рассмотрим фазовые искажения, ис-
пользуя тот же самый пример.
Кривые фазового угла (в радианах) для двух фильтров получены с помо-
щью команды MATLAB:
>> plot (w,angle(h),'-', w,angle(h2),'-',w,angle(h2),'x')
Результаты показаны на Рисунке 2.23b с помощью сплошной кривой для
двухполюсного фильтра, и кривой с символом "Х" для фильтра четырех-
полюсника. Видно, что искажение фазы является весьма значительным.
Что касается фазовых искажений, двухполюсный фильтр лучше, чем
фильтр четырехполюсника. В частности на частоте среза, фаза запазды-
вания двухполюсного фильтра является π / 2, в то время как фильтр
четырехполюсника - π. Предположим, что генерируется синусоидаль-
ный сигнал со случайным шумом (Рисунок 2.23c), с помощью сценария
MATLAB:
% Low-pass filterdata
t=0:0.02:20.0;
u=sin (0.5*t)+0.2*sin(2*t);for i=1:1001
u(i)=u(i)+normrnd(0.0,0.1); % Gaussian random noise
end
Этот сигнал поступает на вход двухполюсного фильтра и фильтра четы-
рехполюсника с помощью команды MATLAB:
>> y1=lsim(b,a,u,t);
>> y2=lsim(b2,a2,u,t);
Далее (шумный) входной сигнал и фильтр выходов построены с исполь-
зованием
>> plot(t,u,'-',t,y1,'-',t,y2,'-',t,y2,'x')
Графики показаны на Рисунке 2.23c. Следующие замечания могут быть
сделаны:
142
1. Оба фильтра одинаково эффективны в удалении шума.
2. Двухполюсный фильтр представляет чуть более амплитудные иска-
жения.
3. Четырехполюсный фильтр приводит к увеличению фазовых искаже-
ний.
2.5 .3 Фильтры верхних частот
В идеале, фильтр высоких частот позволяет проходить через него всем
компонентам сигнала выше определенной частоты (частоты среза), и
блокирует все компоненты сигнала ниже этой частоты. Однополюсный
фильтр верхних частот показан на Рисунке 2.24a. Что касается фильтра
нижних частот, который обсуждался ранее, желателен активный фильтр,
риСУНок 2.24 (а) Однополюсный фильтра верхних частот и (б) ча-
стотная характеристика.
input – вход
output – выход
magnitude – величина
slope – наклон
frequency – частота
143
однако из-за его многочисленных преимуществ, в том числе незначи-
тельной погрешности нагрузки из-за высокого входного сопротивления
и низкого выходного сопротивления повторителя напряжения операци-
онного усилителя, который присутствует в этой схеме.
Получается уравнение фильтра, с учитыванием того, что ток через канал
С-Р-Rf такой же (так как ток не может течь в выводе ОУ). Пусть, V
a
= на-
пряжение в точке А. Мы имеем
Убирая Va в этих двух уравнений, мы получаем
что может быть записано как
(2.52)
где фильтр константы времени:
(2.53)
Для удобства (без ограничения общности) примем k=1 (т.е. R = Rf). Тог-
да, вводя переменную Лапласа s, передаточная функция фильтра запи-
сывается в виде
(2.54)
Это соответствует схеме вывода (т.е. общее опережение фазы обеспечи-
вается этой передаточной функцией). Соответствующая функция частот-
ной характеристики
(2.55)
Так как его величина равна нулю для ω<1 / т, и это единство для ω »1 / τ,
мы имеем частоту среза:
Идеальный фильтр верхних частот пропустит все сигналы выше этой не-
искаженной частоты среза, и полностью блокирует все сигналы ниже от-
144
сечки. фактическое поведение основного фильтра верхних частот, пока-
занное на Рисунке 2.24, не является совершенным, как это наблюдается
от характеристики АЧХ, показанной на Рисунке 2.24b. Можно легко про-
верить, что пропускная способность половинной мощности основного
фильтра верхних частот равна граничной частоте, заданной уравнением
2.55, как и в случае о сновного фильтра нижних частот. Скатывающийся
наклон однополюсного фильтра верхних частот составляет 20 дБ / де-
када. Крутые наклоны желательны. Многополюсные, высокочастотные
фильтры Баттерворта могут быть построены, чтобы дать более крутые
скатывающиеся склоны и плоские амплитудные характеристики про-
пускной способности.
2.5 .4 Полосовые фильтры
Идеальный полосовой фильтр пропускает все компоненты сигнала в
пределах конечной полосы частот и блокирует все компоненты сигнала
за пределами этой полосы. Нижний предел частоты пропускной способ-
ности называется нижняя частота среза (ωc1
), а верхний предел часто-
ты пропускной способности называют верхней частотой среза (ω c2
). Са-
мый простым способом для формирования полосового фильтра является
каскадирование верхних частот фильтра частоты среза ωc1
, с фильтром
нижних частот с частотой среза ωc2
.
Мы будем делать это путем под-
ключения пассивной стадии низкого прохода к фильтру высоких частот
(Рисунок 2.24). Такое расположение показано на Рисунке 2.25. Несмотря
на то, что ток нагрузки теперь будет на выходе фильтра верхних частот,
из вывода его уравнений должно быть ясно, как указано выше, что урав-
нение фильтра будет таким же.
Чтобы получить уравнение фильтра, рассмотрим сначала часть верхних
частот схемы, показанной на Рисунке 2.25.
Из ранее полученного результата (2.54) для фильтра верхних частот, мы
имеем
(2.57)
где v
o1
–в ыход высокочастотной фазы.
Уравнение для пассивной, низкочастотной стадии - простое (выход нахо-
145
дится в режиме открытой схемы):
Это дает передаточную функцию для этапа низких частот
(2.58)
Тогда, объединяя результаты (2.57) и (2.58), получаем передаточную
функцию полосового фильтра
риСУНок 2.25 (а) Активный полосовой фильтр и (б) частотная харак-
теристика.
input – вход
output – выход
magnitude – величина
frequency – частота
146
(2.59)
где
(2.60)
Частотами среза являются ωc1
= 1/τ,ω
c2
= 1/τ2
. Они показаны в частот-
ной характеристике (Рисунок 2.25b). Можно проверить, что для этого
основного полосового фильтра, наклон подьема будет +20 дБ / декада и
наклон скатывания будет -20 дБ / декада. Эти склоны не являются доста-
точными для многих применений. Кроме того, плоскостно сть частотной
характеристики в пределах пропускной способности основного фильтра
не является адекватной. Более сложные (более высокого порядка) поло-
совые фильтры с более острыми отсечками и ровными полос частот яв-
ляются экономически доступными.
2.5 .4 .1 Полосовые фильтры резонансного типа
Есть много ситуаций где требуется фильтр с очень узкой пропускной
способностью. фильтр слежения, который уже упоминался в начале раз-
дела среди аналоговых фильтров, является одним из таких применений.
Схема фильтра с резким резонансом может служить в качестве узкопо-
лосного фильтра. Каскадная RC схема не обеспечивает колебательную
реакцию (так как все полюса фильтра - реальны), и, следовательно, она
не образует фильтр резонансного типа. Схема, показанная на Рисунке
2.26a, даст желаемый эффект.
Чтобы получить уравнение фильтра, сначала запишите текущее сумми-
рование по -ve проводу ОУ:
Затем, запишем текущее суммирование в точке А:
(2.62)
147
Убрав VA из уравнений (2.63), (2.64), получаем
функция передачи фильтра
где
риСУНок 2.26 (а) А фильтр узкой пропускной спо собности частот ре-
зонансного типа и (б) частотная характеристика.
input – вход
output – выход
magnitude – величина
frequency – частота
148
τ1
=R
1
C1
τ2
=R
2
C2
k1
=R
2
/R1
k2
=R
2
/R3
Можно показать, что характеристическое уравнение может иметь ком-
плексные корни (т.е. комплексные полюса).
Пример 2.10
Убедитесь, что полосовой фильтр, показанный на Рисунке 2.26a, может
иметь частотную характеристику с резонансным пиком (Рисунок 2.26b).
Убедитесь, что пропускная способность половинной мощности Δω
фильтра задается 2ζωr при низких демпфирующих значениях (обратите
внимание, что ζ является коэффициентом демпфирования и ωr является
резонансной частотой).
решение
Мы можем убедиться, что передаточная функция, определенная урав-
нением 2.65, может иметь резонансный пик, показав, что его характе-
ристическое уравнение может иметь комплексные корни. Например,
если мы используем параметр значения C
1
=2,C
2
=1,R
1
=1,R
2
=2,R
3
=1, мы
имеем τ1
= 2,τ
2
= 2,k
1
= 2,иk1
= 2. Соответствующая характеристика
уравнения 4s2+6s+3=0, которое имеет корни: - (3/4) ± J
4/3 (полюса
являются комплексными).
Чтобы получить выражение для пропускной способно сти половинной
мощности фильтра, обратите внимание, что передаточная функция
фильтра может быть записана в виде
(2.10.1)
где ωn
- незатухающая собственная частота
ζ - коэффициент демпфирования
k- параметр усиления
149
Амплитудно-частотная характеристика определяется как
(2.10.2)
Для низкого затухания, резонансная частота ωr≅ωn
. Соответствующий
пик величины М получается путем подстановки ω = ω
n
в уравнении
2.10.2 и принимая величину передаточной функции. Таким образом,
(2.10.3)
На частотах половинной мощности мы имеем
или
Это нам дает
(2.10.4)
Положительные корни уравнения 2.60 обеспечивают путь полосы ча-
стот ωc1
и ωc2
. Корни задаются ωn
2 – ω2 = ±2 ζ ωnω. Следовательно, два
корня ωc1
и ωc2
удовлетворяют следующие два уравнения:
ω2
с1+2 ζ ωnω
с1
–
ω2
n=0и
ω2
с2-2ζ ωnω
с2
–
ω2
n=0
Соответственно, при решении этих двух квадратных уравнений и вы-
брав соответствующий знак, мы получаем
(2.10.5)
и
(2.10.6)
150
Пропускная способность половинной мощности:
(2.10.7)
Теперь, когда ωn≅ωr для низкой мы имеем:
(2.10.8)
Заметным недостатком резонансного типа фильтра является то, что ча-
стотная характеристика в пределах пропускной способности не является
прямой. Следовательно, затухание неоднородного сигнала происходит
внутри пропускной способности.
риСУНок 2.27 (а) Схема фильтра TwinT и (б) частотная характеристи-
ка.
input – вход
output – выход
magnitude – величина
frequency – частота
151
2.5 .5отражающие фильтры
Отражающие фильтры или режекторные фильтры обычно используют-
ся, чтобы отфильтровать узкую полосу составляющих шума от сигнала.
Например 60 Гц линии шума в сигнале могут быть устранены с помо-
щью режекторного фильтра с частотой 60 Гц.
Активная схема, которая могла бы служить в качестве узкополосного
фильтра, показана на Рисунке 2.27a. Это известно как схема Twin Т, так
как его геометрическая конфигурация напоминает две Т-образные схемы
соединены между собой.
Чтобы получить уравнение фильтра, обратите внимание, что напряже-
ние в точке Р является -v
o
из-за коэффициента усиления (из-за равных
сопротивлений Rf) повторителя напряжения и так как входной провод к
ОУ заземлен. Теперь мы пишем текущий баланс в узлах А и В. Таким
образом,
Далее, так как ток через положительный вывод ОУ равен нулю, мы
имеем текущий баланс в узле P как
Эти 3 уравнения написаны в форме Лапласа
где
(2.69)
152
Наконец, исключая va и vs из уравнений 2.66 -2 .68 мы получаем
(2.70)
функция частотной характеристики фильтра (с s= jω)
(2.71)
Величина этой функции становится нулевой при частоте
(2.72)
Она известна как режекторная частота. Величина функции частотной
характеристики режекторного фильтра схематически изображена на Ри-
сунке 2.27b. Замечено, что любой компонент сигнала на частоте ωo будет
полностью устранен с помощью узкополо сного режекторного фильтра.
Резкое скатывание и резкий подьем необходимы для пропуска других
(желаемых) компонентов сигнала без слишком большого затухания.
В то время как предыдущие три типа фильтров достигают их частотные
характеристики с помощью полюсов передаточной функции фильтра,
режекторный фильтр достигает своей частотной характеристики через
свои нули (корни числителя полиномиального уравнения).
Некоторая полезная информация о фильтрах резюмируется во Вставке
2.2 .
2.5 .6 Цифровые фильтры
В аналоговой фильтрации, фильтр представляет собой физическую ди-
намическую систему; обычно представляет собой электрическую схему.
Сигнал для фильтрации применяется в качестве входных данных для
этой динамической системы. Выход динамической системы является
отфильтрованным сигналом. По существу, любая физическая динамиче-
ская система может быть рассмотрена как аналоговый фильтр.
153
Линейное уравнение n-го порядка можно записать в виде:
Это рекурсивный алгоритм, в том смысле, что он генерирует одно зна-
чение выходной последовательности с использованием значений пре-
дыдущих выходных последовательностей, и всех значений входной по-
следовательности вплоть до настоящего момента времени. Цифровые
фильтры, представленные таким образом, называются рекурсивными
цифровыми фильтрами. Есть фильтры, использующие цифровую об-
работку, где блок (коллекция образцов) из входной последовательности
преобразуется с помощью одновычисляемой дроби в блок выходной по-
следовательности. Они не являются рекурсивными фильтрами. Нерекур-
сивные фильтры обычно используют цифровой анализ фурье, алгоритм
быстрого преобразования фурье (БПф) в частности.
2.5 .6 .1 реализация программного обеспечения и аппаратная реали-
зация
В цифровых фильтрах, фильтрация сигнала осуществляется посред-
ством цифровой обработки входного сигнала. Последовательно сть вход-
ных данных (обычно получают путем отбора проб и оцифровкой соот-
ветствующего аналогового сигнала), обрабатывается в соответствии с
алгоритмом рекурсивного конкретного цифрового фильтра. Это генери-
рует выходную последовательность. Результирующий цифровой выход-
ной сигнал может быть преобразован в аналоговый сигнал с помощью
цифро-аналогового преобразователя (ЦАП), если это необходимо.
Рекурсивный цифровой фильтр является внедрением рекурсивного алго-
ритма, управляющего определенной схемой фильтрации (например, НЧ,
ВЧ, поло совой и режекторный). Алгоритм работы фильтра может быть
реализован либо с помощью программного обеспечения или с помощью
аппаратных средств. В программной реализации, алгоритм фильтра за-
программирован в цифровую вычислительную машину. Процессор (на-
пример, микропроцессор или цифровой сигнальный процессор [DSP])
компьютера может обрабатывать последовательности входных данных в
соответствии с программой фильтра во время выполнения, хранящейся
в памяти (в машинном коде) для формирования отфильтрованной выход-
ной последовательности.
154
В подходе программного обеспечения, алгоритм фильтра программиру-
ется и выполняется в цифровом компьютере. В качестве альтернативы,
цифровой фильтр аппаратных средств может быть реализован в чипе
интегральной схемы с помощью логических элементов для выполнения
схем фильтрации.
Программная реализация цифровых фильтров имеет преимущество
в гибкости; в частности, алгоритм фильтра может быть легко изменен
путем изменения программного обеспечения программы, хранящейся
в компьютере. Если с другой стороны необходимо большое количество
фильтров определенной (фиксированной) структуры в промышленных
масштабах, то было бы экономично проектировать фильтр в качестве
ИС, которая может быть массового производства. Таким образом, мо-
гут быть изготовлены очень недорогие цифровые фильтры. Аппаратный
фильтр может работать при гораздо более высокой скорости по сравне-
нию с программным фильтром, так как в первом случае обработка про-
исходит автоматически через логические схемы в чипе фильтра без ис-
пользования программного обеспечения и различных элементов данных,
хранящихся в памяти компьютера. Основным недостатком аппаратного
фильтра является то, что его алгоритм и значения параметров не могут
быть изменены, а фильтр предназначен для выполнения заданной функ-
ции.
2.6 Модуляторы и демодуляторы
Иногда сигналы намеренно изменены, чтобы сохранить их подлинность
/ точность в процессе генерации, передачи, кондиционирования и обра-
ботки. В модуляции сигнала, сигнал данных, известный как сигнал моду-
ляции, используется для изменения (модулирования) свойства (например,
амплитуды или частоты) носителя сигнала. Таким образом, носитель
сигнала модулируется сигналом данных. Именно этот модулированный
носитель сигнала используется для последующей обработки (передачи,
обработки и т.д.). После передачи или кондиционирования модулирован-
ного сигнала, как правило, сигнал данных должен быть во сстановлен пу-
тем удаления носителя сигнала. Этот процесс известен как демодуляция
или дискриминация.
Существует разнообразие методов модуляции, и несколько других типов
модификации сигналов (например оцифровка) могут быть классифици-
рованы как модуляции сигнала, даже если они не могут быть обычно
названы как таковые. Следующие четыре вида модуляции показаны на
155
Рисунке 2.28:
1. Амплитудная модуляция (amplitude modulation, далее как AM)
2. Частота модуляции (frequency modulation, далее как - FM)
3. Широтно-импульсная модуляция (pulse-width modulation, далее как -
PWM)
4. Импульсная модуляция частоты (pulse –frequency modulation, далее
как - PFM)
В AM, амплитуда периодического носителя сигнала изменяется в соот-
ветствии с амплитудой данных сигнала (модулирующего сигнала) при
сохранении постоянной частоты носителя сигнала (частоты но сителя).
Предположим, что переходный сигнал, показанный на Рисунке 2.28a,
является модулирующим сигналом и синусоидальный высокочастотный
сигнал используется в качестве носителя сигнала. Полученный ампли-
тудно-модулированный сигнал показан на Рисунке 2.28b. AM исполь-
зуется в области телекоммуникаций, передачи радио- и телевизионных
сигналов, приборах и при формировании сигнала. Основной принцип
особенно полезен в таких случаях, как считывание и обеспечение ин-
струментарием инженерные системы, обнаружение неисправностей и
рисунок 2.28 (а) модулирующий сигнал (сигнал данных), (б) амплитудно-мо-
дулированный сигнал (АМ), (с) частотно-модулированный (ЧМ) сигнал, (d) с
широтно-импульсная модуляция (ШИМ) сигнала, и (е) широтно-частотно-мо-
дулированный сигнал (ШЧМ).
156
диагностика во вращающихся машин.
В FM частота носителя сигнала изменяется пропорционально амплитуде
сигнала данных (модулирующего сигнала), сохраняя при этом постоян-
ную амплитуду носителя сигнала. Предположим, что сигнал данных, по-
казан на Рисунке 2.28a, используется для частотной модуляции синусо-
идального носителя сигнала. Результат моделирования будет выглядеть
как на Рисунке 2.28c. Так как в FM, информация переносится как часто-
та, а не как амплитуда, любой шум, который может изменить амплитуду
сигнала не будет иметь практически никакого влияния на передающиеся
данные. Следовательно FM менее во сприимчивы к шуму, чем AM. Кро-
ме того, так как в FM амплитуда но сителя поддерживается постоянно ,
ослабление сигнала и шумовые эффекты, которые неизбежны при пере-
даче данных на большие расстояния, будут иметь меньший эффект чем
в случае AM, особенно если уровень сигнала данных является низким
в начале. Тем не менее, более сложные методы и аппаратные средства
необходимы для восстановления сигнала (демодуляции) в передаче FM,
поскольку FM-демодуляция включает в себя дискриминацию частот, а не
обнаружение амплитуды. FM также широко используется в радио-пере-
даче и в записи данных и их воспроизведении.
В PWM но ситель сигнала представляет собой последовательность им-
пульсов постоянной амплитуды. Длительность импульса изменяется
риСУНок 2.29 Рабочий цикл сигнала PWM.
Cycle period – рабочий цикл
PWM signal – сигнал PWM.
On time – в течении времени
Time - время
157
пропорционально амплитуде сигнала данных при сохранении по сто-
янного интервала между импульсами. Это показано на Рисунке 2.28d.
Предположим, что высокий уровень PWM сигнала соответствует со сто-
янию схемы и низкий уровень соответствует выключенному состоянию.
Затем, как показано на Рисунке 2.29, длительно сть импульса равна по
времени ΔT схемы в течение каждого периода цикла сигнала T. Рабочий
цикл PWM определяется как процент от времени в течении периода им-
пульса и задается как:
Рабочий цикл=
(2.73)
PWM-сигналы широко используются для управления электродвигателя-
ми и другими механическими устройствами, такими как клапаны (ги-
дравлические и пневматические) и станки. Следует отметить, что в дан-
ном (коротком) интервале времени, средним значением PWM-сигнала
является оценка среднего значения сигнала данных в этот период. Сле-
довательно, PWM-сигналы могут быть использованы непосредственно
в управлении процессом, без его демодуляции. Преимущества PWM
включают улучшение энергоэффективности (меньше рассеивания) и
более высокую производительность с нелинейными устройствами. На-
пример устройство может приклеиться на низких скоро стях из-за трения
Кулона. Этого можно избежать с помощью PWM-сигнала с амплитудой,
достаточной для преодоления трения, при сохранении требуемого сред-
него управляющего сигнала, который может быть очень маленьким.
В PFM также, носитель сигнала представляет собой последовательность
импульсов постоянной амплитуды. В этом методе, частота импульсов
изменяется пропорционально величине сигнала данных при сохране-
нии постоянной ширины импульса. PFM имеет те же преимущества что
и обычный FM. Дополнительные преимущества приводят к тому, что
электронные схемы (цифровые схемы в частности) могут обрабатывать
импульсы очень эффективно. Кроме того, обнаружение пульса не вос-
приимчиво к шуму, так как он включает в себя различия между присут-
ствием и отсутствием импульса, а не точного определения амплитуды
импульсов (или ширины). PFM может быть использован вместо PWМ в
большинстве случаев с лучшими результатами.
Другой тип модуляции- это PM. В этом методе фазовый угол носителя
158
сигнала изменяется пропорционально амплитуде сигнала данных. Пре-
образование дискретных (отобранных) данных в цифровой (бинарной)
форме также считается формой модуляции. На самом деле, это называет-
ся импульсно-кодовой модуляцией (PCM). В ИКМ каждый дискретный
образец данных представлен двоичным числом, содержащим фиксиро-
ванное количество двоичных цифр (битов). Поскольку каждая цифра в
двоичном числе может принимать только два значения 0 или 1, он может
быть представлен в отсутствии или при наличии импульса напряжения.
Следовательно, каждая выборка данных может быть передана с исполь-
зованием набора импульсов. Это известно как кодирование. В приемни-
ке эти импульсы должны быть интерпретированы (или декодированы),
чтобы определить значение данных. Как и с любой другой техникой им-
пульса, РСМ достаточно невосприимчивы к шуму, поскольку декодиро-
вание включает в себя обнаружение присутствия или отсутствия пульса,
а не определение точной величины уровня сигнала импульса. Кроме того
так как амплитуда импульса постоянна, передача сигнала на большие
расстояния (цифровых данных) может быть достигнута без опасно сти
ослабления сигнала и связанного искажением. Конечно будет некоторая
ошибка, вносимая самим процессом оцифровки, определямая конечным
размером слова (или динамическим диапазоном) двоичного элемента
данных. Это известно как ошибки квантования, и они неизбежны в циф-
ровой форме сигнала.
При любом типе модуляции сигнала необходимо сохранить алгебраи-
ческий знак модулирующего сигнала (данных). Различные типы моду-
ляторов справляются с этим по-разному. Например в PCM, дополни-
тельный бит знака добавляется для представления знака передаваемой
выборки данных. В AM и FM демодулятор, чувствительный к фазе,
используется для извлечения оригинала (модулирующего) сигнала с
правильным алгебраическим знаком. Обратите внимание, что в AM и
FM смена знака в модулирующем сигнале может быть представлена из-
менением фазы на 180 ° в модулированном сигнале. Это не очень замет-
но на Рисунке 2.28b и с. В PWM и PFM смена знака в модулирующем
сигнале может быть представлена изменением знака импульсов, как
показано на Рисунке 2.28d и е. В PM положительный диапазон фазовых
углов (скажем от 0 до n) может быть приписан для положительных зна-
чений сигнала данных, а также отрицательный диапазон фазовых углов
(скажем -π до 0) может быть приписан для отрицательных значений
сигнал.
159
2.6 .1 амплитудная модуляция
AM может естественным образом войти во многие физические явления.
Более важным является преднамеренное (искусственное или практиче-
ское) использование AM для облегчения передачи данных и формирова-
ния сигнала. Рассмотрим сначала соответствующую математику.
AM достигается путем умножения сигнала данных (модулирующего
сигнала) x(t) на высокочастотный (периодический) носитель сигнала
хс(t). Следовательно, амплитудно-модулированный сигнал xa(t) задается
формулой
(2.74)
Носитель может представлять собой любой периодический сигнал, та-
кой как гармонический (синусоидальный) сигнал, меандр или треуголь-
ник. Основным требованием является то, чтоб основная частота носите-
ля сигнала (носителя частоты)fc была значительно больше (скажем с ко-
эффициентом 5 или 10), чем самая высокая частота пользы (пропускной
спо собности) сигнала данных. Анализ можно упростить, если принять
синусоидальный носитель частоты. Таким образом,
(2.75)
2.6 .1 .1 аналоговый, дискретный и цифровой AM
В аналоговом АМ то, что передается это - аналоговый сигнал xa(t) = x(t)
xc(t ), непрерывный во времени. Менее диссипативным и более эффектив-
ным является дискретный АМ, также называемый импульсный АМ (или
ПАМ). Здесь модулированный аналоговый сигнал Xa(t) оцифровывается
и полученные дискретные значения (или импульсы), величина которых
является величиной передачи сигнала. Согласно теореме выборки Шен-
нона (смотрите Главу 3), сигнал должен быть отобран при минимальном
уровне удвоенной максимальной частоты заинтересованно сти (которая
является но сителем частоты) в сигнале. В ПАМ передаются величины
сигнала, а не их цифровые представления. Следовательно, они по-преж-
нему склонны к шуму. Метод AM, который устойчив к шуму во время
передачи - цифровой AM или импульсно-кодированный AM (или PCM).
160
Здесь образцы данных впервые оцифрованы (представлены в виде циф-
рового слова), и соответствующие биты переданы. В самом деле в PCM,
фактическая модуляция (т.е . операция продукта в уравнении 2.74) может
быть выполнена в цифровом виде с носителем оцифровки и сигналов
данных (модуляций), а затем цифровые (кодированные) данные переда-
ются. Этот метод является более эффективным (с учетом потерь мощно-
сти и т.д .) и гораздо более устойчивым к шуму во время передачи, чем
аналоговый АМ и ПАМ.
2.6 .1 .2 теорема модуляции
Известна также как теорема о частоте сдвига, которая говорит о том,
что если сигнал умножается на синусоидальный сигнал, фурье-спектр
сигнала продукта является просто фурье-спектром исходного сигнала,
сдвинутого по частоте синусоидального сигнала. Другими словами,
спектр фурье Xa(F ) амплитудно-модулированного сигнала Xa(t) может
быть получен из спектра фурье X(f ) исходного сигнала данных х(t), про-
сто путем сдвига его через носителя частоты fc
. Это и есть сдвинутый
спектр, который передается.
Для того чтобы математически объяснить теорему модуляции, мы ис-
пользуем определение интеграла фурье, чтобы получить
Далее
Мы имеем
или
(2.76)
Уравнение 2.76 является математическим утверждением теоремы моду-
161
ляции. Это схематически показано на Рисунке 2.30 . Рассмотрим пере-
ходный сигнал х(t) с (непрерывного) спектра фурье Х(f), чья величина
|X (f)| показана на Рисунке 2.30a. Если этот сигнал используется для
амплитудной модуляции высокочастотного синусоидального носителя
сигнала с частотой fс
, результирующий модулированный сигнал Xa(t), и
величина ее фурье-спектра являются такими, как показано на Рисунке
2.30b. В соответствии с уравнением 2.76, величина умножается на пере-
менный ток ac/2 .
Примечание: В этом схематическом примере предполагается, что сигнал
данных ограничен, с пропускной способностью fb
. Конечно теорема мо-
дуляции не ограничивается ограниченной полосой сигналов, но по прак-
тическим причинам мы должны иметь некоторый верхний предел на по-
лезной частоте сигнала данных. Кроме того, по практическим причинам
(не для самой теоремы), но ситель частоты fc должен быть в несколько
раз больше, чем fb
, так что существует достаточно широкая полоса ча-
стотот0до(fc
-f
b
), в пределах которой величина модулированного сигна-
ла практически равна нулю. Значение этого должно быть ясно, когда мы
обсудим применения AM.
Рисунок 2.30 показывает только величину частотных спектров. Тем не
менее, каждый спектр фурье имеет также фазовый угол спектра. Это не
показано для краткости. Но очевидно, что спектр фазового угла также
затронут аналогичным образом (частота смещается) АМ.
2.6 .1 .3 Боковые частоты и боковые полосы
Теорема модуляции, как описано выше, предполагает переходные сигна-
лы данных с соответствующими непрерывными спектрами фурье. Одни
и те же идеи в равной мере применимы к периодическим сигналам (с
дискретным спектром). Периодические сигналы представляют собой
лишь частичный случай того, что обсуждалось ранее, и могут быть про-
анализированы непосредственно с помощью интеграла фурье-преобра-
зования. Затем, мы должны справиться с импульсными спектральными
линиями (для дискретных спектров). С другой стороны, разложение в
ряде фурье может быть использовано, тем самым избегая введение им-
пульсивных дискретных спектров в анализе. Как показано на Рисунке
2.30c и d, ни один анализ тем не менее не будет на самом деле требо-
ваться для случая с периодическими сигналами, так как окончательный
162
ответ можно извлечь из результатов для одиночного импульсного сиг-
нала. В частности, в разложении в ряде фурье сигнала данных каждый
компонент частоты fo амплитуды а / 2 будет смещен на ± fc в двух но-
вых местах частоты к +fo и -f
c
+ fo с соответствующей амплитудой aac/
4. Компонент отрицательной частоты -f
o
также следует рассматривать
таким же образом, как это показано на Рисунке 2.30d. Модулированный
сигнал не имеет спектральную составляющую на но сителе частоты fc
,а
скорее, по обе стороны от него, при ± fcf
o
. Следовательно, эти спектраль-
ные компоненты называются боковыми частотами. Когда группа боко-
вых частот присутствует, как показано на Рисунке 2.30b, она называется
рисунок 2.30 Иллюстрация теоремы модуляции: (а) переходный сигнал данных
и его величина спектра фурье, (б) амплитудно-модулированный сигнал и его
амплитудный спектр фурье, (с) синусоидальный сигнал данных, и(D) амплиту-
да модуляции с помощью синусоидального сигнала.
163
боковой полосой. Боковые частоты очень полезны при обнаружении не-
исправно стей и диагностике вращающихся механизмов.
2.6 .2 Применение амплитудной модуляции
Основным компонентом аппаратного обеспечения амплитудного моду-
лятора является аналог мультипликатора. Он коммерчески доступен в
виде монолитной ИС. В качестве альтернативы он может быть собран
с использованием IC ОУ, различных элементов, дискретных схем. Схе-
матическое изображение амплитудного модулятора показано на Рисунке
2.31. На практике для достижения удовлетворительной модуляции были
бы необходимы другие компоненты, такие как сигнальные предусилите-
ли и фильтры. Есть много применений AM. В некоторых случаях при-
менения, модуляция осуществляется преднамеренно. В других случаях,
модуляция происходит естественным образом в результате физического
процесса, и результирующий сигнал используется для удовлетворения
практической цели. Типичные области применения AM включают в себя
следующее:
1. Обработка общих сигналов (в том числе постоянного тока, переход-
ных процессов, а также низкой частоты) путем использования преиму-
ществ переменного аппаратного формирования сигналов
2. Создание низкочастотных сигналов невосприимчивых к низкочастот-
ному шуму
3. Передача общих сигналов (DC, низкой частоты и т.д.) за счет исполь-
зования преимуществ передачи сигнала переменного тока.
риСУНок 2.31 Изображение амплитудного модулятора.
Modulating input – модулирующий вход
Carrier signal – носительсигнала
multiplier – мультипликатор
modulated signal – модулированный сигнал
164
4. Передача сигналов низкого уровня в условиях помех.
5. Передача нескольких сигналов одновременно через ту же среду (на-
пример, той же телефонной линии, то же передающей антенны и т.д).
6. Обнаружение неисправностей и диагностика вращающихся механиз-
мов.
Роль AM во многих из этих применениях должна быть очевидной, если
понимать частотно - переключающиеся свойства AM. Несколько других
типов применений также возможны в связи с тем, что мощность носи-
теля сигнала может быть произвольно увеличена до некоторой степени,
вне зависимости от уровня мощности сигнала данных (модулирующе-
го). Давайте обсудим, один за другим, шесть перечисленных категорий
применений.
Обработка сигнала: устройства обработки сигнала переменного тока,
такие как усилители переменного тока, как известно более стабильны,
чем их аналоги на постоянном токе. В частно сти, изменчивые (неста-
бильные) проблемы не являются столь серьезными и нелинейные эффек-
ты находятся ниже в устройствах формирования сигналов переменного
тока. Таким образом, вместо того чтобы обработки сигнала постоянного
тока с использованием постоянного оборудования, мы можем сначала
использовать сигнал для модуляции носителя сигнала высокой частоты.
Затем высокочастотный модулированный сигнал (переменный ток) в
результате может быть обусловлен более эффективно с использованием
переменного аппаратного обеспечения.
Устойчивость к помехам : Частотно-переключающееся свойство AM мо-
жет быть использовано при принятии низкочастотных сигналов невос-
приимчивых к низкочастотному шуму. Обратите внимание на Рисунок
2.30, где с помощью АМ, низкочастотный спектр модулирующего сиг-
нала может быть сдвинут в область очень высоких частот путем выбора
функции частоты FC
-носителя, являющегося достаточно большым. За-
тем, любой низкочастотный шум (в полосе от 0 до fc
-f
b
) не приведет к
искажению спектра модулированного сигнала. Следовательно, этот шум
может быть удален с помощью фильтра верхних частот (с отсечкой на
fc
−
fb ), так что это не повлияет на данные. И наконец, исходный сигнал
165
данных может быть восстановлен с помощью демодуляции. Поскольку
частота компонента шума может находится в пределах fb пропускной
спо сбности сигнала данных, если AM не использовался, шум будет на-
прямую искажать сигнал данных.
Передачи сигнала переменного тока: Передача сигналов переменно-
го тока является более эффективной, чем у сигналов постоянного тока.
Преимущества передачи переменного тока включают проблемы низкой
диссипации энергии . В результате модулированный сигнал может пе-
редаваться на большие расстояния более эффективно, чем сам по себе
может исходный сигнал данных. Кроме того, передача сигналов низко-
частотных (большой длины волны) требует больших антенн. Следова-
тельно, когда АМ используется (с соответствующим уменьшением дли-
ны волны сигнала), диаметр вещания антенны может быть значительно
снижен.
Слабая передача сигнала: передача слабых сигналов на большие рассто-
яния не желательна, так как дальнейшее ослабление сигнала и искаже-
ние шумом может производить катастрофические результаты. Даже если
мощность сигнала данных является низкой, за счет увеличения мощно-
сти носителя сигнала на достаточно высоком уровне прочно сть получае-
мого модулированного сигнала может быть повышена до соответствую-
щего уровня для долгосрочной передачи на большое расстояние.
Одновременная передача сигнала: Это не представляется возможным -
передавать два или более сигналов в той же частоте диапазона одновре-
менно, используя одну телефонную линию. Эта проблема может быть
решена с помощью носителя сигналов с существенно - различными
несущими частотами для амплитуды модуляции сигналов данных. При
выборе несущей частоты до статочно далеко друг от друга, спектры мо-
дулированных сигналов могут быть сделаны без перекрытия, тем самым
делая возможным одновременную передачу. Аналогичным образом с
АМ, одновременное стало возможным вещание на нескольких (AM) ра-
дио станциях в той же области широковещательной передачи.
2.6 .2 .1 обнаружение неисправностей и диагностика
Проявление AM, который особенно полезен в практике электромехани-
ческих систем в обнаружении неисправностей и диагностики вращаю-
166
щихся машин. В этом спо собе модуляции являются несознательными, а
скорее являя.тся результатом динамики машины. Дефекты и неисправно-
сти во вращающейся машине, как известно, производят периодические
вынуждающие сигналы на частотах выше чем, и как правило, в целое
кратное число раз скоростb вращения машины. Например, зазор в зубча-
той паре будет генерировать силы на частоте зубца зацепления (равной
произведению: количество зубьев × скорость вращающейся передачи).
Дефекты в роликовых подшипниках могут генерировать принуждающие
сигналы на частотах, пропорциональных вращающейся скорости времен
количества роликов в гонке подшипника. Точно так же лезвие проходит в
турбин и компрессоры, а также эксцентриситет и несимметрия в роторе
могут генерировать компоненты на частотах, которые являются целыми
числами, кратными скорости вращения. Полученный в результате сра-
батывания системы (например, ускорение в гнезде в корпусе) очевид-
но является амплитудно-модулированным сигналом, где вращающийся
отклик машины модулирует высокочастотный форсирующий ответ. Это
может быть подтверждено экспериментально с помощью анализа фурье
(БПф) полученных ответных сигналов. Для коробки передач, например,
будет отмечено, что вместо того, чтобы получить спектральный пик на
зубчатом зацеплении частоты, две боковые полосы образуются вокруг
этой частоты. Дефекты могут быть обнаружены путем наблюдения за
эволюцией этих боковых полос. Кроме того, так как боковые полосы
являются результатом модуляции конкретного форсирования явления
(например, шестеренный зуб зацепления, подшипник ролика-молотка,
турбинное лезвие прохождение, неуравновешенность, эксцентриситет,
перекосы и т.д), можно проследить источник конкретной неисправно сти
(например, диагно стировать неисправность), изучая спектр фурье изме-
ряемого отклика.
АМ является составной частью многих типов датчиков. В этих датчи-
ках сигнал высокой несущей частоты (типично на переменном токе воз-
буждения в первичной обмотке) модулируется воспринимаемым движе-
нием.. фактический сигнал движения может быть восстановлен путем
демодуляции выходного сигнала. Примеры датчиков, генерирующих
модулированные выходы – это дифференциальные трансформаторы (ли-
нейный дифференциальный преобразователь переменного или транс-
форматор [LVDT], и ее вращательный аналог RVDT), датчики магнитной
индукции близости, вихревые токи, датчики-тахометры переменного
тока и тензометрические устройства, что используют мостовые схемы
167
переменного тока. Они обсуждаются в Главе 5, и в этих случаях обра-
ботка и передача сигналов облегчаются с помощью АМ. Сигнал должен
быть демодулирован в конце, для большинства практических целей, та-
ких как анализ и запись.
2.6 .3 Демодуляция
Демодуляция или дискриминация, или обнаружение - это процесс из-
влечения начальных данных сигнала из модулированного сигнала. В
общем, демодуляция должна быть восприимчивой к фазам в том смыс-
ле, что алгебраический знак сигнала данных должен быть определен с
помощью процесса демодуляции. В двухполупериодной демодуляции
выход непрерывно генерируется. В полуволновой демодуляции никакой
вывод не генерируется для каждого альтернативного полупериода носи-
теля сигнала.
Простой способ демодуляции - это детектирование огибающей модули-
рованного сигнала. Для этого метода нецелесообразно, чтобы носитель
сигнала был достаточно мощным (то есть, уровень сигнала должен быть
высоким), и несущая частота также должна быть очень высокой. Альтер-
нативный способ демодуляции, который обычно обеспечивает более на-
дежные результаты, включает в себя дополнительный этап на выходной
модуляции, который осуществляется на уже модулированном сигнале, а
затем низкочастотной фильтрации. Этот метод может быть объяснен со
ссылкой на Рисунке 2.30.
Рассмотрим амплитудно-модулированный сигнал xa(t), показанный на
Рисунке 2.30b. Умножьте этот сигнал на нормированный синусоидаль-
ный но ситель сигнала 2/accos2πfct . Мы получаем
(2.77)
Теперь, применяя теорему модуляции (уравнение 2.76) для уравнения
2.77, мы получаем спектр фурье x(t)
или
(2.78)
168
Величина этого спектра показана на Рисунке 2.32a. Заметим, что мы вос-
становили спектр X(f) исходного сигнала данных, за исключением двух
боковых полос, которые присутствуют в местах, далеких (центрирован-
ных на ± 2fc ) от полосы пропускания исходного сигнала. Мы можем
удобно отфильтровать низкие частоты сигнала x(t) с использованием
фильтра с обрезанием на fb
, чтобы восстановить исходный сигнал дан-
ных. Схематическое представление этого метода амплитудной демодуля-
ции показано на Рисунке 2.32b.
2.6 .3 .1 Преимущества и недостатки AM
Основное преимущество АМ является использование носителя сигнала
(более высокой мощности и более высокой частоты), чтобы донести ин-
формацию сигнала данных (модулирующего сигнала).
Modulating signal – модулирующий сигнал
Carrier signal – носитель сигнала
multiplier – мультипликатор
out – выход
frequency – частота
original signal – изначальный сигнал
low-pass filter – низкочастотный фильтр
cutoff - обрезание
рисунок 2.32 Амплитудная модуляция: (а) спектр сигнала после второй модуля-
ции, и (б) демодуляция схемы (модуляция + фильтрация).
169
Данные передаются на гораздо более высокой частоте (в качестве боко-
вых полос), чем сигнал данных и извлекаются (через демодулирование)
в полученном конце. Кроме того, процесс модуляции довольно прост
(умножение двух сигналов). Тем не менее есть несколько недостатков
AM. Они включают в себя следующее:
1. Так как передается аналоговый сигнал высокой мощности и высокой
частоты, потери мощности во время передачи высоки. Следовательно,
это несколько расточительно и не вполне эффективно.
2. Так как амплитуда передаваемого сигнала изменяется с этим сигналом
данных, он склонен к шуму (при низком отношении сигнал-шум SNR),
когда уровень сигнала низок.
3. АМ сигнал потребляет больше пропускной способности, так как носи-
тель сигнала должен быть передан, а также сигнал данных.
Основные недостатки AM могут быть преодолены с помощью цифрово-
го AM (или PCM), или других методов модуляции, таких как FM и PWM,
где модулированный сигнал имеет постоянную амплитуду (а также циф-
ровые методы могут быть использованы с дополнительными преимуще-
ствами).
2.6 .3 .2 Двухполосный сдерживающий носитель
Амплитуда модуляции определяется уравнением 2.74: xa(t) = x(t)xc(t) и
называется подавлением носителя АМ или двухполосной подавленной
несущей (DSBSC) AM. Как показано на Рисунке 2.30b, его спектр состо-
ит из двух боковых полос, которые являются смещенными по частоте
спектров сигнала данных (модулирующего сигнала). Эти две боковые
полосы, которые передаются, весьма эффективны по отношению к мощ-
ности сигнала. Часто, однако, АМ представлена
(2.79)
Здесь несущий сигнал добавляется к сигналу продукта, таким образом
что сигнал продукта наплывает на носитель сигнала. Этот общий моду-
лированный сигнал имеет большую мощность. Затем индекс модуляции
определяется как
170
Индекс модуляции=
(2.80)
Очевидно, что уравнения 2.74 и 2.79 несут одинаковое содержание ин-
формации. Таким образом, в теории они эквивалентны. В частности,
при высоких уровнях индекса модуляции, два модулированных сиг-
налов весьма похожи, как показано на Рисунке 2.33 . Тем не менее, ха-
рактер и содержание мощности двух типов модулированных сигналов
различны. Когда энергоэффективная модуляция имеет важное значение
подходит АМ, заданное уравнением 2.65 . Когда желательна АМ высо-
кой мощности, то АМ, заданная уравнением 2.79 является предпочти-
тельной.
2.6 .3 .3 аналоговое оборудование AM
Наиболее важным компонентом в аналоговом АМ является аналоговый
умножитель, где сигнал данных и сигнал несущей умножаются. Ана-
логовые аппаратные умножители являются коммерчески доступными.
Например, аналоговый умножитель, который может умножать два
аналоговых сигналов и добавить к продукту другой сигнал (например,
добавить носитель, который является в точности операцией АМ, задан-
ной уравнением 2.79) в диапазоне частот от постоянного тока до 2 ГГц,
доступен как пакет IC. функция масштабирования продукта (так назы-
ваемое масштабирование усиления) также доступна, что соответствует
установке индекса модуляции.
Примечание: миниатюрный (3 мм) аналоговый умножитель (или ам-
плитудном модуляторе) IC пакета ADL5391 от AnalogDevices имеет 16
проводов, соответствует 3 дифференциальному сигналу входов (6), диф-
ференциальный выход (2), приводы напряжения питания постоянного
тока (3) для 4.5- 5 .5 В, устройство общих выводов (2), масштабирование
входа (1), чип включения (1) и опорный выход постоянного тока (1).
Есть некоторые недостатки аналогового умножения. Это нелинейная
операция с соответствующими недостатками. Шум в любом сигнале бу-
дет влиять на продукт. Кроме того, влияние на фазовый угол является
гораздо более сложным.
171
2.7 Сбор данных аппаратных средств
Инженерные системы используют цифровую DAQ для различных целей,
таких как мониторинг состояния процесса и оценки эффективности, об-
наружения неисправностей и диагно стики, оценки качества продукции,
динамического испытания, системы идентификации (например, экспе-
риментальное моделирование) и управления технологическими процес-
сами. Типичная система сбора данных состоит из следующих основных
компонентов:
1. Датчики и преобразователи (для измерения переменных в процессе,
который контролируется)
2. Устройство формирования сигнала (фильтрация и усиление регистри-
руемых сигналов)
3. Аппаратные средства DAQ (для получения различных типов контро-
лируемых сигналов, и их доступность для компьютерной шины; При-
мечание: Некоторые устройства формирования сигнала обычно присут-
ствует в DAQ)
4. Компьютер (персональный компьютер, ноутбук, микроконтроллер,
микропроцессор и т.д., для обработки полученных сигналов таким обра-
зом, чтобы достичь конечной цели системы DAQ)
5. Источник питания (внешнее формирование сигнала и активных дат-
чиков требует питания; мощность DAQ стандартно поступает от ком-
пьютера)
6. Программное обеспечение (программное обеспечение драйвера для
работы оборудования DAQ для правильного получения считанных дан-
ных; прикладное программное обеспечение для использования компью-
тера для обработки данных для конечной цели)
Рассмотрим систему мониторинга и управления технологическим про-
цессом, показанную на Рисунке 2.34. Как правило, измеряемые параме-
тры (реакции или выходы, входы) физической системы (процесс, обору-
дование, машины) доступны в аналоговой форме в виде сигналов, не-
прерывных во времени. Кроме того, как правило, сигналы привода (или
входы управления) для физической системы должны быть представлены
в аналоговой форме. Эти сигналы могут быть отфильтрованными для
удаления нежелательных компонентов и амплифицированы, чтобы при-
вести сигналы надлежащего уровня для дальнейшего использования.
фильтрация и амплификация были изучены в предыдущем разделе этой
главы. Цифровой компьютер является неотъемлемой частью типичной
172
инженерной системы, и может принимать форму ПК, ноутбука, или од-
ного или более универсальных микропроцессоров с мощными возмож-
ностями обработки или более конкретными микроконтроллерами с ши-
рокими возможностями ввода-вывода. Для получения дополнительной
рисунок 2.34 Компоненты процесса мониторинга и контроля данных
memory – память
co-processor – сопроцессор
central processor –центральный процессор
storage – хранилище
drive and application software – драйвера и прикладное программное обеспечение
computer bus – компьютерная шина
computer – компьютер
peripheral devices – периферические устройства
fixed storage – неподвижное хранилище
amplifier – преобразователь
process –процесс
plant – производство
machine – машина
sensors – датчики
signal conditioning – обработка сигнала
power supply – энергоснабжение
173
вычислительной мощности, сопроцессоры, такие как ЦСП могут быть
включены. В системе, цифровой компьютер будет выполнять такие зада-
чи, как обработка сигналов, анализ данных и сокращений, оценку пара-
метров и идентификацию модели, диагностику, анализ производитель-
ности, принятие решений, настройка и контроль. По существу, компью-
тер представляет конечную цель мониторинга и процесса сбора данных.
Компьютерная структура и аппаратное обеспечение: Компьютер ис-
пользует шину (например, PCI-периферийных компонентов взаимодей-
ствия шин) для передачи данных между компонентами в компьютере.
В обычном ПК, карта DAQ входит в слот расширения компьютера.
Сила для DAQ исходит от самого компьютера. Работа DAQ управля-
ется программным обеспечением драйвера, который предоставляется
поставщиком DAQ и хранится в компьютере. Программный драйвер
должен быть совместим с операционной системой компьютера (напри-
мер Windows, MacOS, Linux). Это программное обеспечение управляет
доступом к данным из системы сбора данных, и делает их доступными
для компьютера для дальнейшей обработки. Эта дополнительная обра-
ботка выполняется прикладным программным обеспечением, которое
может быть запрограммировано с использованием таких инструментов
как MATLAB и LabVIEW, или с помощью высокого уровня языков
программирования, таких как C и C ++. Это программное обеспечение
будет не только обрабатывать полученные данные для достижения ко-
нечной цели (анализ производительности, диагностика, идентификация
модели, управление и т.д.), но также может быть использовано для раз-
работки соответствующего графического пользовательского интерфейса
(GUI) для системы мониторинга.
Материнские платы: Материнская плата (или основная плата или си-
стемная плата) компьютера представляет собой взаимосвязанные ключе-
вые аппаратные компоненты компьютера. Внешние устройства и также
порты ввода-вывода подключенны к материнской плате через компью-
терную шину. Различные пакеты IC и другие аппаратные устройства
установлены на материнской плате, находящейся в компьютерном кор-
пусе. Другие устройства (различные карты, включая DAQ) установлены
в слоты расширения корпуса компьютера. Типичная структура систем-
ной платы компьютера показана на Рисунке 2.35a. Она показывает ос-
новные компоненты, такие как центральный процессор (CPU), память и
часы; слоты расширения для аппаратных средств, таких как DAQ, сете-
174
риСУНок 2.35 (а) Аппаратные компоненты компьютера и (б) основные ком-
поненты DAQ карты компьютера.
monitor – монитор, mouse – мышка, hard drive – жесткий диск, keyboard – кла-
виатура, video card – видеокарта, various memory – разный вид памяти, clock –
часы, network card – сетевая карта, printer – принтер, scanner –сканер, interface
hardware – интерфейс программного обеспечения, registers-регистры, interrupt
–
прерывание, counters timers – счетчики таймеры, sample and hold – выборки и
хранения, amplifier – усилитель, multiplexer – мультиплексор, I/Obusofcomputer
–
шины ввода / вывода компьютера, external connector of DAQ card – внешний
разъем DAQ карты
175
вой карты, видеокарты, памяти, звуковой карты и карты расширения па-
мяти; и порты ввода / вывода для подключения периферийных устройств
и связи, таких как монитор, клавиатура, мышь, принтер, сканер, внешнее
запоминающее устройство, локальная сеть (LAN).
Некоторые аббревиатуры, используемые в контексте компьютерного
оборудования, эксплуатации и связи, определяются следующим образом:
1. Интерфейс малых компьютерных систем (SCSI): Стандарты и про-
токолы для подключения и передачи данных между компьютерами и
периферийными устройствами, такими как жесткие диски, CD-диски и
сканеры.
2. Расширенная стандартная структура промышленности (EISA):
Стандартная шина для ПК.
3. Межсоединения периферийных компонентов шины (шина PCI): Попу-
лярная шина ПК для подключения аппаратных устройств в нем и пере-
дачи данных между ними.
4. Внутренняя шина: Шина для подключения внутреннего оборудования
компьютера. Также известна как системная шина и передняя сторона
шины.
5. Внешняя шина: Шина для подключения внешних устройств к компью-
теру. Также известна как шина расширения.
6. Универсальная последовательная шина (USB): компьютерная шина
для связи и связь с периферийными устройствами.
7. Первый вошел, первым обслужен (FIFO): Способ размещения данных
в буфере или хранилище, где самые старые данные (в нижней части хра-
нилища) обрабатываются в первую очередь.
8. Прямой доступ к памяти (DMA): Возможность аппаратного компо-
нента в компьютере получить быстрый доступ к памяти компьютера (без
прохождения через CPU).
9. RS-232: Стандарт для последовательной передачи данных.
RS-422: Расширяет диапазон соединений RS-232.
Универсальный асинхронный приемник / передатчик (УАПП): аппарат-
ный компонент, который преобразует данные между параллельными и
последовательными формами, для передачи. Обычно используется с RS-
232 и RS-422 .
TCP / IP: протокол управления передачей (TCP) представляет собой про-
176
токол связи ядра набора протоколов Internet (IP). Это протокол для рабо-
ты в сети. Более надежный за счет скорости.
Протокол датаграмм пользователя (UDP): Протокол связи в наборе IP.
Быстрее, за счет надежности.
DAQ и аналого-цифровое преобразование: входы в цифровые устройства
(как правило, компьютер или микроконтроллер) и выходы с цифрового
устройства обязательно присутствуют в цифровом виде. Следовательно,
когда цифровое устройство сопрягается с аналоговым устройством (на-
пример датчиком), аппаратные средства интерфейса и соответствующее
программное обеспечение драйвера должны выполнять несколько важ-
ных функций. Два из наиболее важных компонентов интерфейса аппа-
ратных средств являются цифро-аналоговый преобразователь (ЦАП) и
аналого-цифровой преобразователь (АЦП). Аналоговый сигнал должен
быть преобразован в цифровую форму, с использованием АЦП, в соот-
ветствии с соответствующим кодом, прежде чем он считывается циф-
ровым процессором. Для этого аналоговый сигнал сначала отбирается
в последовательности дискретных значений, и каждое отдельное значе-
ние преобразуется в цифровую форму. Во время такого преобразования
дискретное значение должно поддерживаться постоянным с помощью
S / H аппаратных средств. Если несколько сигналов (от нескольких дат-
чиков) приобретаются одновременно, то MUX, возможно, придется ис-
пользовать для чтения последовательно нескольких сигналов с помощью
компьютера. С другой стороны, цифровой выход с компьютера, должен
быть преобразован в аналоговую форму с помощью ЦАП, для подачи
в аналоговое устройство, например привод усилителя, исполнительного
устройства или аналоговую запись или устройства отображения. ЦАП,
АЦП, S / H, и MUX изучаются в этом разделе.
Оба АЦП и ЦАП являются элементами или компонентами в типичной
DAQ-карте (плате ввода / вывода или DAQ и плате управления или
ЦАП). Полные DAQ карты и соответствующее программное обеспече-
ние драйвера, до ступны от таких компаниq как NationalInstruments, AD-
LINK, Agilent, PrecisionMicroDynamics и KeithlyInstruments (Metrabyte).
DAQ карта может быть напрямую подключена к слоту расширения ПК.
и автоматически связана с шиной компьютера. Ее работа управляется
программным обеспечением драйвера, который должен быть сохранен
в компьютере. Мощный микроконтроллер единицы (например IntelGali-
177
leo) имеет DAQ функции и аппаратное обеспечение уже интегрировано
в них (например, контакты 14 цифрового ввода / вывода, 6 из которых
предназначены для широтно-импульсной модуляции выходов, 6 анало-
говых входов с встроенным аналого- -цифровым конвертером).
Основные компоненты DAQ карты показаны на Hисунке 2.35b. MUX
выбирает соответствующий входной канал для входящих аналоговых
данных. Сигнал усиливается с помощью программируемого усилителя
перед АЦП. Как уже обсуждалось в предыдущем разделе, S / H отбирают
аналоговый сигнал и сохраняет свое значение на уровне отобранного до
преобразования АЦП. Первый элемент типа пришел-первый-обслужен
сохраняет выход АЦП до тех пор, пока не будет подключен к компьюте-
ру для цифровой обработки. DAQ карта может обеспечить аналоговый
выход через ЦАП. Кроме того, типичная DAQ карта также может обе-
спечить цифровые выходы. Кодер (т.е. импульсный генерирующий дат-
чик положения) может быть непосредственно сопряжен с DAQ-картой,
для использования в случаях управления движением. Характеристики
типичной DAQ карты приведены в дополнении 2.3 . Многие из указан-
ных параметров обсуждаются в этой главе. Другие либо самоочевидны
либо обсуждаются в других частях книги. Особые пометки должны быть
сделаны о частоте дискретизации. Это скорость, при которой аналого-
вый входной сигнал оцифровывается с помощью АЦП. Частота Най-
квиста (или пороговое значение пропускной способности) из оцифро-
ванных данных, составляет половину этого числа (например при частоте
дискретизации, равной 100 Кс / с, то есть 50 кГц). Когда используется
мультиплексирование (т.е . несколько входных каналов считываются од-
новременно), эффективная частота дискретизации для каждого канала
будет уменьшена на коэффициент, равный числу каналов. Например,
если 16 каналов оцифровываются одновременно, эффективная частота
дискретизации будет составлять 100 кГц / 16 = 6,25 Кс / с, что дает часто-
ту Найквиста 3,125 кГц.
Так как ЦАП и АЦП играют важные функции в инженерных примене-
ниях мониторинга, то сейчас они обсуждаются. DACs проще и дешевле,
чем АЦП. Кроме того, некоторые типы АЦП используют ЦАП для вы-
полнения их функций. По этим причинам, мы обсудим ЦАП, прежде чем
АЦП.
Сочетание этих битов, формирующих цифровое слово в регистре DAC,
будет соответствовать численному значению аналогового выходного
178
сигнала. Затем цель ЦАП - генерация выходного напряжения (уровня
сигнала), который имеет это численное значениие, и сохранение зна-
чения до следующего цифрового слова в прибывающей цифровой по-
следовательности данных преобразовывается в аналоговую форму. По-
скольку выходное напряжение не может быть сколь угодно большим или
маленьким по практическим причинам, некоторые формы масштабиро-
вания должны быть сделаны в процессе ЦАП. Эта шкала будет зависеть
от опорного напряжения vref, используемого в конкретной схеме DAC.
Типичный блок ЦАП - это активная схема в виде интегральной микро-
схемы. Он может состоять из регистра данных (цифровых схем), твердо-
тельно переключающихся элементов, резисторов и ОУ, которые снабжа-
ются питанием от внешнего источника питания (возможно, от хо ст-ком-
пьютера), который может обеспечить опорное напряжение для ЦАП.
Опорное напряжение будет определять максимальное значение выход-
ного сигнала ЦАП (полномасштабное напряжение). Как было отмечено
выше, микросхема, которая представляет собой ЦАП, как правило, одна
из многих компонентов, установленных на печатной (PC) плате, которая
является DAQ картой (или карты ввода / вывода или платы интерфейса
или DAQ и платы управления). Эта карта вставляется в гнездо хозяина
персонального компьютера или ПК (см. Рисунки 2.34 и 2.35).
2.7 .1 .1 операция DAC
Типичная работа чипа ЦАП основана на включение и выключении по-
лупроводниковых переключателей (например КМОП-переключатели) в
надлежащее время, поскольку они руководствуются какой-то логикой,
зависящей от цифрового значения данных. Это переключение будет
определять выход схемы ОУ, который является аналоговым выходом
ЦАП. Есть много типов и форм КСР схем. форма будет зависеть глав-
ным образом от метода КСР, изготовителя и требований пользователя
или конкретного случая. Большинство типов ЦАП являются вариация-
ми двух основных типов: взвешенный тип (или прогонный тип или тип
сумматора) и тип лестницы. По следний тип ЦАП является более жела-
тельным и более энергоэффективный, даже если первый тип может быть
несколько проще и дешевле. Еще один прямой и более простой (но воз-
можно, менее точный) метод использует микросхему ШИМ. Два репре-
зентативных метода КСР изложены в следующем.
179
2.7 .1 .1 .1 Лестница (или R-2R) ЦаП
ЦАП, который использует релейную схему R-2R, известен как лестница
DAC или R-2R ЦАП. Эта схема использует только два типа резисторов,
один с сопротивлением R, а другой с 2R. Следовательно, точность рези-
сторов не столь строга как то, что необходимо для взвешенного-рези-
стора ЦАП. Схематическое изображение R-2R лестницы DAC показано
на Рисунке 2.36 . Переключение каждого элемента происходит в зависи-
мости от соответствующего значения бита (0 или 10) цифрового слова.
Сумма соответствующих значений напряжения генерируется ОУ, что яв-
ляется аналоговым выходом.
Чтобы получить уравнение ввода / вывода для лестничного ЦАП, пред-
положим, что выходное напряжение от твердотельного коммутатора,
связанного с битовым реверсивным цифровым словом- vi. Кроме того,
предположим, что v~i это напряжение на узле i лестничной схемe, как
показано на Рисунке 2.36 . Теперь, записывая текущее суммирование в
узле i, мы получаем
или
для
(2.81)
Уравнение 2.81 справедливо для всех узлов, за исключением узлов 0 и
n-1 . Видно, что ток суммирования узла 0 дает
или
(2.82)
Ток суммирования для узла n-1 дает
180
Отсюда следует, что, когда рабочий цикл изменяется от 0% до 100%,
значение по стоянного тока импульсного сигнала варьируется пропор-
ционально, от 0 до vref . Этот принцип используется в ЦАП, который
использует чип PWM. В частности, сигнал ШИМ генерируется путем
переключения ШИМ в течение периода времени, который пропорцио-
нален значению цифрового слова. Результирующий сигнал фильтрации
нижних частот с частотой среза очень низкий, как это показано на Рисун-
ке 2.37b. Величина результирующего аналогового сигнала практически
равно значению постоянного тока ШИМ, который pvref. Таким образом,
аналоговый выход в диапазоне от 0 до VREF получается, пропорциона-
лен значению цифрового слова в регистре DAC.
2.7 .1 .1 .3 источники ошибок DAC
Для данного цифрового слова, аналоговое выходное напряжение от ЦАП
не будет в точности равно тому, что задается аналитическими формула-
ми (например уравнение 2.85). Разница между фактическим выходом и
идеальным выходом является ошибкой. Погрешность ЦАП может быть
нормирована по отношению к FSV.
Есть много причин ошибок ЦАП. Типичные источники ошибок включа-
ют параметрические неопределенности и вариации, константы времени
цикла, ошибки коммутации и вариации и шум в опорном напряжении.
Несколько типов источников ошибок и представлений ЦАП приведены
ниже.
1. Код неоднозначности: Во многих цифровых кодах (например, в пря-
мом двоичном коде), увеличение ряда по меньшему биту (LSB), будет
включать в себя более чем 1 бит переключения. Если скорость переклю-
чения от 0 до 1, отличается от 1 до 0, и если переключающие импульсы
не поступают на схему коммутации одновременно, переключение битов
не происходит одновременно. Например в 4-разрядном ЦАП, увеличе-
ние от десятичной 2 до 4 десятичной будет включать в себя изменение
цифрового слова от 0011 до 0100. Это требует 2-битовых переключений
от 1 до 0 и 1-битовое переключение от 0 до 1. Если переключение от 1 до
0 происходит быстрее, чем переключение от 0 до 1, то промежуточное
значение, заданное 0000 (десятичный ноль), будет генерироваться с со-
181
ответствующим аналоговым выходом. Следовательно, будет кратковре-
менный неоднозначный код и связанная ошибка в сигнале ЦАП. Эта
проблема может быть уменьшена (и устранены в случае одноразрядно-
го прироста), если код Грея используется для представления цифровых
данных. Улучшение переключения схемы также поможет уменьшить эту
ошибку.
2. Время успокоения: Аппаратное обеспечение цикла в блоке ЦАП будет
иметь некоторую динамику, с соответствующими константами времени
и, возможно, колебаниями (докритическое затухание ответа). Следова-
тельно, выходное напряжение не может мгновенно достичь идеального
значения при переключении. Время, необходимое для аналогового вы-
хода, чтобы разместиться в пределах определенного диапазона (скажем
± 2% от конечного значения или разрешение ± 1/2), следуя прикладным
цифровым данным, называется время успокоения. Естественно, время
успокоения должно быть меньше для лучшей (более быстрой и точной)
производительности. Согласно правилу большого пальца, время уста-
новления должно быть меньше половины периода поступления данных.
Примечание: время прибытия данных = временной интервал между при-
ходом двух последовательных значений данных = обратная скорость по-
ступления данных.
3. Глюки: переключение цикла будет включать в себя резкие изменения
магнитного потока из-за текущих изменений. Это будет вызывать напря-
жение, которое будут производить нежелательные компоненты сигнала.
В схеме ЦАП, эти наведенные напряжения из-за быстрого переключения
сигналов, могут привести к сигнальным всплескам, которые будут появ-
ляться на выходе. При низких скоростях преобразования погрешность,
из-за этих шумовых сигналов, не имеет существенного значения.
4. Параметрические ошибки: резистивные элементы в ЦАП не могут
быть очень точными, о собенно, когда используются резисторы в широ-
ком диапазоне величин, как и в случае взвешенного резистора DAC. Эти
ошибки появляются на аналоговом выходе. Кроме того, старение и изме-
нения окружающей среды (в первую очередь, изменение температуры)
будет изменять значения параметров схемы, в частности, сопротивле-
ние. Это также приведет к ошибке ЦАП. Эти типы ошибок из-за неточ-
ности параметров схемы и вариации значений параметров называются
параметрическими ошибками. Последствия таких ошибок могут быть
182
уменьшены несколькими способами, включая использование компенса-
ции аппаратных средств (и, возможно, программного обеспечения), так
и непосредственно с помощью точных и надежных компонентов схемы
и применения надлежащей производственной практики.
5. Источник вариации опорного напряжения: Так как аналоговый выход
ЦАП пропорционален VREF опорного напряжения, любые изменения
напряжения питания будут непосредственно отображаться как ошибки.
Эта проблема может быть преодолена с помощью стабилизированных
источников напряжения с до статочно низким выходным сопротивлени-
ем.
6. Монотонности: Очевидно, что выход ЦАП должен изменить его раз-
решение (Δy = V
ref
/ 2n ) для каждого шага одного LSB прироста цифрово-
го значения. Это идеальное поведение не может существовать в некото-
рых практических DACs из-за таких ошибок, как те, которые упомянуты
выше. По крайней мере, аналоговый выход не должен уменьшаться, ког-
да значения цифровых входов увеличиваются. Это известно как требо-
вание монотонности, и оно должно быть выполнено с помощью практи-
ческого ЦАП.
7. Нелинейность: Предположим, что цифровой вход ЦАП изменяется от
0 (0 ... 0) (1 1 ... 1) на одну единицу младшего разряда. В идеале, аналого-
вый выход должен увеличиться постоянными скачками Δy = V
ref
/2n
, что
создает лестницу в форме аналогового выхода. Если мы рисуем наилуч-
шую линейную подгонку для этого идеального монотонного ответа, она
будет иметь наклон, равный разрешению / бит. Этот наклон известен как
идеальная шкала фактора. Нелинейность ЦАП измеряется по величине
отклонения выхода ЦАП от этой наилучшей линейной подгонки. Приме-
чание: В идеальном случае нелинейность ограничена половинным раз-
решением (1 / 2Δy).
Одной из причин нелинейности является неисправность битовых пе-
реходов. Другой причиной является схема нелинейности в обычном
смысле. В частности, из-за нелинейностей в элементах схемы, таких как
операционные усилители и резисторы, аналоговый выход не будет про-
порционален значению цифрового слова, как предусмотрено переклю-
чениями бита (бракованный или нет). Этот последний тип нелинейно сти
может быть учтен с помощью калибровки.
183
Несколько DACs в одном пакете являются коммерчески доступными;
например, пакет из 16 DACs, каждый из 16-битного разрешения незави-
сим друг от друга, программно-программируемый или пин-конфигури-
руемый в диапазоне выходного напряжения ± 10 В; с внутренним 16: 1
аналоговым MUX. Типичные рейтинги коммерческого чипа ЦАП приве-
дены в дополнении 2.4 .
2.7 .2 аналого-цифровой преобразователь
Измеренные переменные инженерной системы, как правило, непре-
рывны во времени; они являются аналоговыми сигналами. Кроме того,
общие применения, которые используют эти сигналы, такие как мони-
торинг производительности, диагностика неисправностей и контроль,
потребует цифровой обработки этих сигналов. Следовательно, аналого-
вые сигналы должны быть выбраны в дискретные моменты времени, а
значения выборки должны быть представлены в цифровом виде (в со-
ответствии с подходящим кодом), для считывания в цифровой системе,
такой как компьютер или микроконтроллер.
Устройства на интегральной схеме называются АЦП, A / D или A2D, ис-
пользуются для достижения этой цели. Система сценария управления с
обратной связью, которая включает в себя как ЦАП, так и АЦП, показана
на Рисунке 2.34.
Выборка аналогового сигнала в последовательности дискретных зна-
чений приводит к искажениям наложения спектров (см. Главу 3). Эта
ошибка может быть уменьшена за счет увеличения частоты дискрети-
зации, а также с помощью сглаживающего фильтра. Тем не менее, в со-
ответствии с теоремой дискретизации Шеннона, частотный спектр ана-
логового сигнала за пределами половины частоты дискретизации (т.е.
частота Найквиста) полностью теряется из-за считывания данных. Кро-
ме того, в представлении дискретного значения сигнала с помощью циф-
рового значения (скажем в прямой двоичной, 2's двоичное дополнение,
или код Грея) ошибка называется ошибкой квантования, представлена с
помощью конечной битовой длины цифрового слова. Это также разре-
шение АЦП. DACs и АЦП как правило, расположены на одной DAQ кар-
те (см. Рисунок 2.35b). Но процесс ADC является более сложным и тру-
доемким, чем процесс ЦАП. Кроме того, многие виды АЦП используют
ЦАП для выполнения АЦП. Следовательно АЦП, как правило дороже,
184
а их коэффициент конверсии обычно медленнее по сравнению с DACs.
Многие типы АЦП являются коммерчески доступными. Тем не менее,
их принцип действия может быть классифицирован на два основных ме-
тодов:
1. Использует внутренний ЦАП и компаратор аппаратных средств (ана-
логовое значение по сравнению с выходом ЦАП, а вход ЦАП увеличива-
ется, пока соответствие не будет достигнуто).
2. Аналоговое значение представлено счетчиком (цифровым) в пропор-
ции. Полный счет соответствует СЖф АЦП.
Два распространенных типа АЦП обсуждаются сейчас. Некоторые дру-
гие (смежные) версии рассматриваются как задачи по окончанию главы.
2.7 .2 .1 аЦП последовательного приближения
Этот АЦП использует внутренний ЦАП и компаратор. Вход ЦАП начи-
нается с наиболее значимого бита (MSB) и затем изменяется. Выходной
рисунок 2.38 АЦП последовательного приближения
Start conversion – начало преобразования
Conversion complete – конецпреобразования
comparator – компаратор
analog input signal – аналоговый входной сигнал
control logic unit – контрольный логический блок
temporary register – временный регистр
output register – выходной регистр
data valid signal- действительный сигнал данных
digital output – цифровой выход
185
сигнал ЦАП сравнивается с аналоговыми данными, пока не будет най-
дено совпадение. Это очень быстро, и подходит для высокоскоростных
приложений. Скорость преобразования зависит от числа битов в выход-
ном регистре АЦП, но практически не зависит от природы входного ана-
логового сигнала. Принципиальная схема для АЦП последовательного
приближения показана на Рисунке 2.38 . Примечание: DAC является не-
отъемлемым компонентом этого АЦП. Отобранный аналоговый сигнал
(от S / H устройства DAQ) подается на компаратор (дифференциальный
усилитель). Одновременно начальное преобразование управляющего
импульса (SC) посылается в управляющий логический блок с помощью
внешнего устройства (возможно, микроконтроллер), который управляет
работой АЦП. Затем новые данные не будут приниматься до тех пор,
пока полное преобразование импульса (CC) АЦП не отправится в управ-
ление логическим блоком. Первоначально регистры сбрасываются так,
что они содержат все 0 битов. Тогда, АЦП готов к его первому преобра-
зованию приближения.
Первое приближение начинается с синхроимпульса. Затем управляющая
логика устройства устанавливает наибольший бит временного регистра
(регистра управления DAC или последовательного регистра приближе-
ния или SAR) к одному, все о стальные биты в этом регистре равно нулю.
Примечание: Это соответствует половине фСВ АЦП. Например, если
фСВ = 12 В, выходной сигнал ЦАП теперь 6 В, сравнивается с анало-
говым значением, которое может быть любым в диапазоне 0-12 В, таких
как 8.2, 4.9 В и т.д .). Это цифровое слово во временном регистре подает-
ся на ЦАП. Аналоговый выход ЦАП (сейчас половина фСВ) вычитается
из аналогового входа (выборочные данные), используя компаратор. Если
выход компаратора> 0, то логика управления блоком будет держать MSB
временного регистра в двоичной 1, и будет переходить к следующему
приближению. Если выход компаратора <0, то логика управления бло-
ком изменит MSB на двоичный 0, перед тем как перейти к следующему
приближению.
Второе приближение начнется в другом синхроимпульсе. Это прибли-
жение будет включать второй MSB временного регистра. Как и раньше,
этот бит задается 1, и сравнивается. Если выход компаратора> 0, этот бит
остается значением 1, и считается третий СЗБ. Если выход компаратора
<0, то значение бита будет изменено на 0, прежде чем перейти к третье-
му MSB.
186
Таким образом, все биты во временном регистре установлены последо-
вательно, начиная с MSB и заканчивая ING с МДР. Содержимое времен-
ного регистра (SAR) затем передаются в выходной регистр, и действи-
тельный сигнал данных посылается контрольным логическим блоком,
подавая сигнал цифровому процессору (компьютеру), чтобы он прочи-
тал содержимое выходного регистра АЦП. Компьютер не будет читать
регистр, если нет действительного сигнала данных. Далее импульс CC
рассылается контрольным логическим блоком, и временный регистр
очищается. ADC теперь готов принять другую выборку данных для циф-
рового преобразования. Примечание: Процесс преобразования является
таким же для каждого бита во временном регистре. Таким образом, об-
щее время преобразования равно примерно в n раз преобразования вре-
мени для 1 бит. Как правило, 1 бит преобразования может быть завершен
в течение одного периода тактового сигнала.
2.7 .2 .1 .1 величина сигнала и его знак
Должно быть ясно, что если максимальное значение аналогового вход-
ного сигнала превышает FSV ЦАП, то избыточное значение сигнала не
может быть преобразовано с помощью АЦП. Избыточное значение бу-
дет непосредственно способствовать ошибке в цифровом выходе АЦП.
Следовательно, эту ситуацию следует избегать либо надлежащим обра-
зом масштабирования аналогового входа, или с помощью соответству-
ющего выбора опорного напряжения для внутреннего блока ЦАП. До
сих пор мы предполагали, что значение аналогового входного сигнала
является положительным. Если значение отрицательное, то знак должен
быть учтен в АЦП, тем или иным способом. Например, знак сигнала мо-
жет быть обнаружен по знаку выхода компаратора на начальном этапе,
когда все биты равны нулю. Если знак отрицательный, то тот же самый
процесс преобразования A / D, как и для положительного сигнала, осу-
ществляется после переключения полярности компаратора. И наконец,
знак правильно представлен в цифровом выходе (например путем до-
полнения представления этих двух для отрицательных величин). Другой
подход к счету знаковых (биполярных) входных сигналов состоит в том,
чтобы компенсировать сигнал на достаточно большом постоянном на-
пряжении, так что аналоговый вход всегда будет положительным. После
преобразования цифровой номер, соответствующий этому смещению,
вычитается из преобразованных данных в выходном регистре, для полу-
187
чения правильного цифрового выхода. В таком случае мы можем пред-
положить, что аналоговый входной сигнал является положительным.
2.7 .2 .2 Дельта-сигма аЦП
Он также известен как ΔΣ АЦП, или сигма-дельта АЦП, это популяр-
ная разновидность АЦП имеет относительно низкую стоимость, низкую
пропускную способность и высокое разрешение. Основной принцип
устройства показан на Рисунке 2.39 . Отобранное аналоговое значение
данных сравнивается с интегрированным (суммируется) выходом 1-бит-
ного ЦАП. Если разница положительна, то компаратор (1-битный АЦП)
генерирует "1" бит. В противном случае, он генерирует бит "0" и преоб-
разование, которые хранятся во временном регистре, являются полными
риСУНок 2.39 Принцип сигма-дельта АЦП.
Analog signal – аналоговый сигнал
clock – часы
sampled data – отобранные данные
bit stream – битовый поток
temporary register – временный регистр
comparator – компаратор
analog sum – аналогичная сумма
integrator – интегратор
bit increment – битовой прирост
delta – дельта
sigma – сигма
digital output – цифровой выход
188
и доступными для чтения с помощью компьютера.
Каждый "1" бит компаратора увеличивает цифровое значение во времен-
ном регистре на 1 бит.
Таким образом, цифровое слово в этом регистре увеличивается от 0, 1
бит за раз, пока значение равно аналоговому значению выборки (с точно-
стью до ошибки квантования). Термин дельта используется потому, что
цифровое значение в регистре увеличивается на 1 бит за один раз, что
соответствует выходу 1-разрядного АЦП, а также сравниваемое анало-
говое значение увеличивается на 1 бит за один раз, что соответствует вы-
ходу 1-битного ЦАП (греческая дельта обычно используется для обозна-
чения малого прироста). Слово сигма используется потому, что дельта -
значение складывается для формирования цифрового выхода (греческая,
прописная сигма обычно используется для обозначения суммирования).
Есть несколько других вариаций сигма-дельта АЦП. В них, как правило,
интегратор находится в прямом канал обратной связи, после принятия
различия между значением отобранных данных и 1-битного ЦАП на вы-
ходе. Затем 1-битный АЦП генерирует поток битов, плотность битов ко-
торых представляет собой значение выборки данных.
2.7 .2 .3 Характеристики производительности аЦП
Для АЦП, который использует встроенный ЦАП, будут применяться
одни и те же источники ошибок, которые обсуждались ранее для DACs.
Код неоднозначности не является проблемой, когда только 1 бит преоб-
разуется за раз, а также потому, что вся запись в регистре временного
АЦП передается мгновенно в выходной регистр. В АЦП, который ис-
пользует внутренний ЦАП, тем не менее, неоднозначность в регистре
DAC может привести к ошибке.
Время преобразования является одним из главных факторов, потому что
это намного больше для АЦП. В дополнение к разрешающей способно-
сти и динамического диапазона, погрешность квантования будет приме-
няться к АЦП. Эти соображения, которые регулируют производитель-
ность АЦП, изложены в следующем.
189
2.7 .2 .3 .1 ошибки разрешения и квантования
Число битов n в регистре АЦП определяет разрешение и динамический
диапазон АЦП. Для N-разрядного АЦП, размер выходного регистра
является n битов. Следовательно, наименьшее возможное приращение
цифрового выхода - один меньший бит. Изменение аналогового входа,
что приводит к изменению одного младшего разряда на выходе, является
разрешением АЦП. Для однополярного (без знака) случая, доступный
диапазон цифровых выходов составляет от 0 до 2n
- 1 . Это представляет
собой динамический диапазон. Отсюда следует, что, как и для ЦАП, ди-
намический диапазон n -разрядного АЦП задается соотношением
(2.87)
или в децибелах
(2.88)
Примечание: Разрешение улучшается с n.
фСВ АЦП является значением аналогового входа, соответствующего
максимальному цифровому выходу. Предположим, что аналоговый сиг-
нал в пределах динамического диапазона конкретного АЦП преобразу-
ется этим АЦП. Так как аналоговый вход (цифровое значение) имеет
бесконечно малое разрешение, и цифровое представление имеет конеч-
ную разрешающую способность (один младший бит), ошибка вводится
в процесс АЦП. Это известно как ошибки квантования. Цифровой но-
мер претерпевает последовательные приращения с по стоянным шагом
1 LSB. Если аналоговое значение падает в промежуточной точке в пре-
делах стадии одного LSB, в результате возникает ошибка квантования.
Округление цифрового выхода может быть осуществлено следующим
образом. Величина ошибки при квантовании вверх сравнивается с ошиб-
кой при квантовании вниз; скажем с помощью двух элементов фиксации
и дифференциального усилителя. Затем мы сохраним цифровое значе-
ние, соответствующее более низкой величине ошибки. Если аналоговое
значение ниже LSB отметки 1/2, то соответствующее цифровое значение
представляется значением в начале стадии. Если аналоговое значение
выше LSB отметки 1/2, то соответствующее цифровое значение является
значением в конце этапа. Отсюда следует, что с этим типом округления,
ошибка квантования не превышает 1/2 LSB.
190
2.7 .2 .3 .2 Монотонности, нелинейность и офсет ошибка
Рассмотрение монотонности и нелинейности имеет важное значение для
АЦП, а также для ЦАП. Для АЦП, входной сигнал является аналоговым
и выход цифровым. Игнорируя ошибку квантования, цифровой выход
АЦП будет увеличиваться постоянными шагами в виде идеальной сту-
пенчатой функции, когда аналоговый вход увеличивается от 0 с шагом
разрешения устройства (δy). Это монотонный случай. Лучшее прямоли-
нейное сходство с этой кривой, имеет наклон, равный 1 / δy (LSB, [В]).
Это идеальный коэффициент масштабирования. Тем не менее, там будет
ошибка смещения 1/2 LSB, так как наилучшая линейная модель не будет
проходить через начало координат. Корректировки могут быть сделаны
для устранения этой ошибки смещения.
Неверные разрядные переходы могут иметь место в АЦП, из-за различ-
ных ошибок, которые могут присутствовать, а также, возможно, из-за не-
исправности цикла. Лучшая линейная подгонка при таких неисправных
условиях будет иметь наклон, который отличается от идеального коэф-
фициента усиления. Разница заключается в ошибке усиления. Нелиней-
ность это максимальное отклонение выходного сигнала от наилучшей
линейной подгонки. Совершенно очевидно, что с совершенными битны-
ми переходами, в идеальном случае, будет присутствовать нелинейность
1/2 LSB . Нелинейности больше чем эта, приведут к неправильным би-
товым переходам. Как и в случае ЦАП, другой источник нелинейно сти
в АЦП это схема нелинейностей, которая будет деформировать аналого-
Вставка 2.5. Оценки
коммерческого DAC пакета
Количество аналоговых входных каналов = 6 (биполярных) (6 независимых АЦП)
Разрешение: 16 бит
Скорость дискретизации: 250 ks/s
SNR: 88 дБ
Диапазон напряжения: ±5 или ±10 В
Мощность: 140микроВольт (с 5 В заряда)
Диапазон напряжения: ± 5 или ± 10 В
Потребляемая мощность: 140 мВт (с питанием 5 В)
191
вый входной сигнал до его преобразования в цифровую форму.
2.7 .2 .3 .3 Скорость преобразования аЦП
Ясно, что АЦП гораздо медленнее, чем ЦАП. Время преобразования
является очень важным фактором, так как скорость, при которой пре-
вращение может происходить регулирует многие аспекты сбора данных,
в частности в системах реального времени. Например, частота дискре-
тизации данных должна синхронизироваться с частотой преобразования
АЦП. Это в свою очередь, будет определять частоту Найквиста (поло-
вина частоты дискретизации), что соответствует ширине полосы оциф-
рованного сигнала, и является максимальным значением полезной ча-
стоты, которая сохраняется в результате выборки. Кроме того, частота
дискретизации будет определять требования хранения и памяти. Еще од-
ним важным фактором, связанным с коэффициентом конверсии АЦП яв-
ляется тот факт, что выборка сигнала должен поддерживаться на том же
значении в течение всего процесса преобразования в цифровую форму.
Это потребует схемы удержания, и эта схема должна быть в состоянии
точно выполнять преобразования на максимально возможное время для
конкретного устройства АЦП.
Время, необходимое для дискретизированного аналогового входа, чтобы
быть преобразованым в цифровую форму, будет зависеть от типа АЦП.
Как правило, в сравнении типа АЦП (который использует встроенный
ЦАП) каждый бит перехода будет происходить в один тактовой период
Δt. Кроме того, в интегрирующем (двойной наклон) АЦП каждый отсчет
часов потребуется время Δt. На этой основе, время преобразования для
последовательного приближения АЦП может быть оценено следующим
образом.
Для n разрядного АЦП необходимы сравнения n. Следовательно, время
преобразования задается
(2.89)
где Δt – тактовый период.
Примечание: Для этого АЦП, t
c
не зависит от уровня сигнала (аналого-
вый вход).
192
Общее время, необходимое для преобразования аналогового сигнала бу-
дет зависеть от других факторов, кроме времени, требуемого для преоб-
разования оцифрованных данных в цифровую форму. Например, в мно-
гоканальном DAQ (мультиплексном) время, необходимое для выбора
каналов, должно быть подсчитано. Кроме того, время, необходимое для
выборки данных и время, необходимое для передачи преобразованных
цифровых данных в выходной регистр должны быть включены. На са-
мом деле, скорость преобразования для АЦП является инверсией этого
общего времени, необходимого для преобразования цикла. Как правило,
степень конверсии зависит в первую очередь от времени преобразования
битов, в случае сравнительного типа АЦП, и от времени интегрирования,
в случае интеграционного типа АЦП. Типичный период времени для
шага сравнения или подсчета шага в АЦП составляет Δt = 5 μs. Следова-
тельно, для 8-разрядного АЦП последовательного приближения, время
преобразования составляет 40 μs. Соответствующая частота дискретиза-
ции будет порядка (меньше чем) 1/40*10-6=25×103 выборок / с (или 25
кГц). Максимальная скорость преобразования для 8-битового счетчика
АЦП будет составлять около 5 × (28 - 1) = 1275 μs. Соответствующая
частота дискретизации будет составлять порядка 780 образцов / с. Об-
ратите внимание, что это значительно медленно. Максимальное время
рисунок 2.40 .Схема чипа отбор-и-удерживание (S/H)
Analog input – аналоговый вход
Voltage follower – последователь напряжения
Sampling grate control – контроль уровня выборки
solid-states witch – твердотельные переключатели
holding capacitor – удерживающий конденсатор
S/H output – выход S/H
supply – подача
193
преобразования для двойного наклона АЦП вероятно будет больше (т.е.
медленная скорость).
Рейтинги коммерческого пакета АЦП приведены во вставке 2.5 .
2.7 .3 аппаратные средства отбора и удержания
Стандартные области применения DAQ используют аналоговые сигна-
лы, которые должны быть преобразованы в цифровую форму с использо-
ванием АЦП для по следующей обработки. Аналоговый вход АЦП может
быть переходным, и кроме того, сам процесс АЦП не мгновенен (время
АЦП будет во много раз больше, чем время, DAC). В частности, входя-
щий аналоговый сигнал может измениться со скоростью более высокой,
чем скорость преобразования АЦП. Тогда значение входного сигнала
будет изменяться в течение периода конверсии, и будет неоднозначно
отно сительно того, что аналоговое значение входного сигнала на самом
деле соответствует определенному цифровому значению выходного сиг-
нала. Следовательно, необходимо отобрать аналоговый входной сигнал
и поддерживать входной сигнал АЦП при этом цифровое значение, пока
преобразование не будет завершено. Другими словами, так как мы, как
правило, имеем дело с аналоговыми сигналами, которые могут менять-
ся при высокой скорости, было бы необходимо отбирать и удерживать
(S / H) входной сигнал в течение каждого цикла АЦП. Каждая выборка
данных должна быть сгенерирована и захвачена схемой S / H по вопросу
контроля сигнала СК, и выбранный уровень напряжения должен поддер-
живаться постоянным, пока сигнал управления СС не выдается блоком
АЦП.
Основным элементом в схеме S / H является удерживающий конденсатор.
Схематически схема S / H чипа показана на рисунке 2.40. Аналоговый
входной сигнал подается через повторитель напряжения к твердотель-
ным переключателям. Коммутатор обычно использует полевой тран-
зистор, например полевого МОП-транзистора. Выключатель замкнут в
ответ на импульс выборки, который был открыт в ответ на удержание
импульса. Оба управляющие импульсы генерируются контрольным ло-
гическим блоком АЦП.
В течение временного интервала между этими двумя импульсами, удер-
живающий конденсатор заряжается до напряжения дискретизированно-
го входного сигнала. Это напряжение конденсатора затем подается на
194
вход АЦП через второй повторитель напряжения.
функции двух по следователей напряжения объясняются сейчас. Ког-
да переключатель на полевых транзисторах закрывается в ответ на ко-
манду образца (импульс), конденсатор должен быть заряжен как можно
быстрее. Связанная константа времени (константа времени зарядки) тс
задается
(2.90)
где Rs
- с опротивление источника
С - емкость удерживающего конденсатора
Поскольку тс должен быть очень мал для быстрой зарядки, и по скольку
С зафиксирован требованиями удержателей (как правило, C составляет
порядка 100 пф, где 1 pF = 1 × 10-12 F ), нам нужно очень небольшое
сопротивление источника. Требование удовлетворяется входным после-
дователем напряжения (который, как известно, имеет очень низкое вы-
ходное сопротивление), тем самым обеспечивая очень малые Rs
.
Затем, когда переключатель полевого транзистора открыт в ответ на ко-
манду удержания (импульс), конденсатор не должен разряжаться. Это
требование удовлетворяется за счет наличия толкателя выходного на-
пряжения. Поскольку входное сопротивление повторителя напряжения
очень высокое, ток через его выводы будет равен нулю. Из-за этого, удер-
живающий конденсатор будет иметь практически нулевую скорость раз-
ряда в условиях удержания. Кроме того, мы хотим, чтобы выход этого
второго повторителя напряжения, был равен напряжению конденсатора.
Это условие также выполняется из-за того, что повторитель напряжения
имеет единичное усиление. Следовательно, отбор будет почти мгновен-
ным, а выход схемы S / H будет поддерживаться (почти) постоянным
в течении периода удержания, в связи с наличием двух последователей
напряжения. Типичный S / H чип имеет 14 штифтов (8 контактов для
2 ОУ, 3 штифта для выключателя, 2 штифта для питания биполярного
постоянного тока и 1 штифт на поверхности земли). Кроме того, вре-
мя приобретения 3 μs, коэффициент снижения скоро сти (скорость, при
которой напряжение удерживающего конденсатора падает) 1 мВ / мс, а
максимальная ошибка смещения 3 мВ являются типичными.
195
Примечание: Практические схемы S / H являются удерживающими
устройствами нулевого порядка.
2.7 .4 Мультиплексор
MUX (иногда называемый сканер) используется для выбора одного ка-
нала за раз из банка сигнальных каналов, и подключения его к общей ап-
паратной единице. Таким образом, дорогой и сложный блок аппаратных
средств (например компьютер или даже сложный АЦП) может быть раз-
делен во времени среди нескольких сигнальных каналов. Как правило,
выбор канала осуществляется в последовательном порядке при фикси-
рованной скорости выбора канала.
Существуют два типа MUX: аналоговый мультиплексор и цифровой
мультиплексор. Аналоговый мультиплексор используется для сканиро-
вания группы аналоговых каналов. В качестве альтернативы, цифровой
мультиплексор используется для считывания одного цифрового канала
данных за раз последовательно из набора цифровых каналов передачи
данных.
С другой стороны, процесс распространения одного канала данных меж-
ду несколькими выходными каналами известен как демультиплексиро-
вание. Демультиплексор (или DEMUX или данные дистрибьютора) вы-
полняет обратную функцию MUX. Он может быть использован, напри-
мер когда тот же самый (обрабатываемый) сигнал, который по ступает
с компьютера, необходим для нескольких целей (например, цифрового
отображения, аналогового чтения, цифрового черчения, и контроля).
Мультиплексирование, использующееся для передачи сигналов на ко-
роткие расстояния (например, регистрация данных и процесс управле-
ния) обычно является мультиплексированием с временным разделением
каналов. В этом методе, выбор канала производится по времени. Сле-
довательно, только один входной канал подключен к выходному каналу
MUX. Данный метод, описан здесь. Другой метод мультиплексирования,
используемый в частности на дальние расстояния передачи нескольких
данных, сигналов, известен как мультиплексирование с частотным раз-
делением каналов. В этом методе входные сигналы модулируются (на-
пример АМ, как обсуждалось ранее) с несущими сигналами с различны-
196
ми частотами и передаются одновременно через тот же канал передачи
данных. Сигналы разделены демодуляцией на приемном конце.
2.7 .4 .1 аналоговые мультиплексоры
Мониторинг инженерной системы часто требует считывания нескольких
переменных процесса (в основном ответы или выходы). Эти сигналы
должны быть выдержаны (например путем усиления и фильтрации) и
смодулированны каким-либо образом (например с помощью АЦП) пе-
ред подачей в систему общего назначения, такую как компьютер, микро-
контроллер или регистратор данных. Как правило, модификации данных
устройств являются дорогостоящими. В частности мы отметили, что
АЦП дороже DACs. Дорогой вариант для сопряжения нескольких анало-
говых сигналов с системой общего назначения, такой как компьютер, бу-
дет обеспечивать отдельные аппаратные модификации данных для каж-
дого канала сигнала. Например многоканальные DAQs с несколькими
АЦП являются экономически доступными. Этот метод имеет преимуще-
ство высокой скорости. Альтернативный, недорогой метод заключается
в использовании аналогового MUX, чтобы по следовательно выбрать за
раз один канал сигнала и подключить его к общей сигнальной модифика-
ции аппаратного блока (состоящей из усилителей, фильтров, S / H, АЦП
и т.д). Таким образом, путем разделения времени дорогостоящего обору-
дования среди многих каналов передачи данных, скоро сть DAQ котиру-
ется в той или иной степени для значительных экономий денег. Потому
что очень высокие скорости выбора канала возможны с твердотельным
переключением (например, твердотельные скорости порядка 100 МГц
или канала реле времени 10 нс), снижение скорости из-за мультиплекси-
рования не является существенным недостатком в большинстве случаев.
С другой стороны, так как стоимость аппаратных компонентов, таких
как АЦП снижается из-за быстрого развития в области полупроводни-
ковых технологий, снижение затрат, достигаемых за счет использова-
ния мультиплексирования, может и не быть существенным в некоторых
случаях. Следовательно, некоторая экономическая оценка и инженерная
оценка будет необходима при принятии решения об использовании муль-
типлексирования сигнала для конкретного сбора данных, мониторинга
или управления приложением.
Схематическая диаграмма аналогового мультиплексора показана на Ри-
сунке 2.41. фигура представляет собой общий случай входных каналов
197
N и один выходной канал. Это называется N × 1 (или N:1), аналоговый
MUX. Каждый входной канал подключен к выходу через твердотель-
ный коммутатор, как правило, полевой транзистор или переключатель
CMOS. Один переключатель замкнут (включен), в то время. Переключа-
тель выбирается цифровым словом, которое содержит соответствующий
адрес канала. Обратите внимание, что n бит адрес может принимать 2n
цифровые значения в диапазоне от 0 до 2n
-
1 . Следовательно, MUX с
битовым адресом n может обрабатывать N = 2
n
каналов. Выбор канала
может быть сделан с помощью компьютера, который получает данные
рисунок 2.41 . Аналоговый N-канальный мультиплексор (MUX).
Analog input channels - аналоговые входные каналы
control – контроль
DCvoltage – напряжение постоянного тока
Selected analog signal – отобранный аналоговый сигнал
Switch select – выбор переключателя
Address decoder – адрес декодера
Switch address – адрес переключателя
198
(например, внешний микроконтроллер), который помещает адрес канала
на шину адреса и одновременно передает управляющий сигнал на МПЛ,
чтобы включить MUX. Дешифратор адреса декодирует адреса и активи-
рует соответствующий твердотельный переключатель. Таким образом,
выбор канала может быть выполнен в произвольном порядке и в произ-
вольные моменты времени, под контролем компьютера или микрокон-
троллера. Однако в простых версиях MUX, выбор канала производится
в установленном порядке с фиксированной скоростью.
2.7 .4 .1 .1 распиновка MUX
Например, мультиплексор 8: 1 (8 каналов вводных данных и 1 канал вы-
ходных данных) будет иметь следующие 16 контактов: 8 входных кон-
тактов, 1 выходной контакт, 3 выбора канала штифтов (для 8 входных
каналов), 1 контрольный (включение) штифт, 2 (биполярных) контакта
напряжения питания и 1 (GND) контакт заземления. Иногда может быть
риСУНок 2.42n×1 цифровой мультиплексор (MUX).
address bus – адрес шины
register – регистр
data bus – шина данных
199
нефункциональный (или неподсоединенный или NC) контакт, дополни-
тельный GND контакт и так далее.
Как правило, выход аналогового чипа MUX соединен с S / H чипом и
чипом АЦП. Повторитель напряжения может быть обеспечен как при
входе, так и при выходе MUX, чтобы уменьшить проблемы с нагруз-
кой. Дифференциальный усилитель (или инструментальный усилитель)
может быть использован также на выходе MUX для усиления сигнала
при одновременном снижении шумовых проблем, в частности, отклоняя
синфазные помехи, как обсуждалось ранее в этой главе. Выбор канала
скорости должен быть синхронизирован с отбором проб и скоростью
АЦП для каждого канала сигнала. Скорость MUX не является серьезным
ограничением, так как очень высокие скорости (твердотельные скорости
100 МГц или переключение каналов 10 нс раз) доступны с твердотель-
ным переключением.
2.7 .4 .2 Цифровые мультиплексоры
Иногда требуется выбрать одно слово данных за раз, из набора цифро-
вых слов данных, чтобы подавать в общее устройство. Например, на-
бор данных может быть выходами из банка цифровых преобразователей
(например энкодеры, измеряющие угловые движения) или выходами из
множества АЦП, которые подключены к ряду аналоговых сигнальных
каналов. Тогда конкретный цифровой выход (слово данных) может быть
прочитан с помощью компьютера, используя стандартные методы адре-
сации и передачи данных.
Конфигурация цифрового мультиплексирования (или логика мульти-
плексирования) показана на Рисунке 2.42 . В N регистрах MUX содержан
набор слов данных N. Содержимое каждого регистра может соответ-
ствовать измеряемой переменной и может быстро изменяться. Регистры
могут представлять собой отдельные аппаратные устройства (например
выходные регистры банка АЦП) или могут представлять собой места в
памяти компьютера, к которому данные передаются (читаются) на регу-
лярной основе.
Каждый регистр имеет уникальный двоичный адрес. Как и в случае ана-
логовых MUX, n-битный адрес можно выбрать (адресовать) 2n регистры.
Следовательно, число регистров будет дано N = 2
n
, как и раньше. Когда
200
адрес регистра, который будет выбран, помещается на адресной шине,
он включает конкретный регистр. Это приводит к тому, что содержимое
этого регистра быть помещено на шину данных. Теперь шина данных
считывается устройством (например. компьютером), который находится
в режиме разделения времени среди регистров данных N. Размещение
другого адреса на шине адреса приведет к выбору другого регистра и
чтению содержимого этого регистра, как и прежде.
Цифровое мультиплексирование , как правило быстрее, чем аналоговое
мультиплексирование, а также имеет обычные преимущества цифро-
вых устройств; например высокая точность, повышение помехоустой-
чиво сти, надежность (отсутствие пассивности и ошибки из-за вариаций
параметров), возможность передачи данных на большие расстояния без
сопутствующих ошибок из-за ослабления сигнала, а также возможность
не обрабатывать очень большое количество каналов передачи данных.
Кроме того, цифровой мультиплексор может быть изменен с помощью
программного обеспечения, как правило, без необходимости изменений
аппаратных средств. Если, тем не менее, вместо того чтобы использо-
вать аналоговый MUX с последующим однократным АЦП, отдельный
АЦП используется для каждого аналогового сигнального канала, а затем
используется цифровое мультиплексирование, было бы вполне возмож-
ным для подхода цифрового мультиплексирования стать более дорого-
стоящим. Если, с другой стороны, измерения уже доступны в цифровой
форме (например в качестве выхода датчика измерения смещения), то
цифровое мультиплексирование имеет тенденцию быть довольно эконо-
мически эффективным и более желательным.
Передача цифрового слова из одного источника данных (например шины
данных) на несколько регистров данных, которые должны быть доступ-
ны независимо друг от друга, может быть интерпретировано как циф-
ровое демультиплексирование. Это также простой процесс передачи и
чтения цифровых данных.
2.8 Мостовые схемы
Мостовые схемы используются, чтобы придать некоторую форму изме-
рения. Типичные измерения включают изменение сопротивления, из-
менение индуктивности, изменение емкости (или, в общем, изменение
импеданса), частота колебаний, или какой-либо переменной (стимул),
201
которая вызывает эти изменения.
Полный мост представляет собой схему с четырьмя крыльями, соеди-
ненными в виде решетки. Четыре узла сформированы таким образом.
Два противоположных узлов используются для возбуждения (напряже-
ния или тока питания) моста, а остальные два противоположных узла
обеспечивают выходной сигнал моста. Примечание: Эти два выходных
узлов, которые формируют мостовую схему; давая свое название. Мост
называется сбалансированным, когда его выходное напряжение равно
нулю. Есть два основных способа сделать измерения:
1. Балансовый метод моста
2. Дисбалансовый метод вывода
В балансовом методе моста, мы начинаем со сбалансированного моста.
При проведении измерений, баланс моста будет нарушен из-за соответ-
ствующего изменения. В результате, будет выпускаться отличное от нуля
выходное напряжение. Мост может быть уравновешен снова путем из-
менения одного из крыльев моста (при условии, что некоторые средства
предусмотрены для точной настройки, которая может потребоваться). В
этом методе, изменение, требующееся для восстановления баланса, яв-
ляется измерением. Мост может быть точно сбалансирован с помощью
сервопривода устройства.
В способе вывода дисбаланса, как правило, мы начинаем со сбалансиро-
ванного моста. Как и раньше, сальдо моста будет нарушено в результате
изменения в переменной, которая измеряется. Теперь вместо того, чтобы
еще раз уравновешивать мост, измеряется выходное напряжение моста
из-за результирующего дисбаланса и используется в качестве измерения
моста.
Есть много типов мостовых схем. Если питание к мосту является пита-
нием постоянного тока, тогда это мост постоянного тока. Точно так же
мост переменного тока имеет переменное возбуждение. Сопротивле-
ние моста имеет только элементы сопротивления в четырех ее крыльях,
и это, как правило, мост постоянного тока. Мостовой импеданс имеет
импеданс элементов, со стоящих из резисторов, конденсаторов, катушки
индуктивности в одной или нескольких из его крыльев. Это безусловно
мост переменного тока. Если возбуждения моста является постоянным
202
напряжением, мы имеем мост постоянного напряжения. Если питание
моста является источником постоянного тока, мы получаем мост посто-
янного тока.
2.8 .1 Мост Уитстона
Мост Уитстона является сопротивлением моста с постоянной подачей
напряжения постоянного тока (т.е. это сопротивление моста постоянного
напряжения). Мост Уитстона особенно полезен при тензометрических
измерениях, и следовательно, датчикам силы, крутящего момента, и так-
тильных, которые используют тензометрические методы. Так как мост
Уитстона используется в основном при измерении малых изменений со-
противления, он может быть также использован и в других типах сенсор-
рисунок 2.43 (а) мост Уитстона (постоянное напряжение сопротивления мо-
ста), (б) сопротивление постоянного тока моста, и (с) линеаризованный мост.
small- маленький
constant voltage – постоянное напряжение
constant current – постоянный ток
load – нагрузка
high - высокий
203
ных приложений. Например в термометрах сопротивления (RTD), изме-
нение сопротивления в металлическом (например, платины) элементе,
вызванные изменением температуры, измеряется с помощью мостовой
схемы.
Примечание: температурный коэффициент сопротивления является по-
ложительным для типичного металла (т.е . сопротивление возрастает с
увеличением температуры). Для платины это значение (изменение со-
противления на единицу сопротивления единицы изменения температу-
ры) составляет около 0,00385 / ° C.
Рассмотрим схему моста Уитстона, показанную на Рисунке 2.43a. Если
предположить, что выход моста является разомкнутым циклом (т.е., име-
ет очень высокое сопротивление нагрузки), то выход VO может быть вы-
ражен как
(2.91)
Для сбалансированного моста, числитель выражения RHS уравнения
2.91 должен быть равен нулю. Следовательно, условием баланса моста
является
(2.92)
Предположим, что сначала R1
=R
2
=R
3
=R
4
= R . Тогда, согласно урав-
нению 2.92, мост сбалансирован. Теперь увеличьте R1 на δR. Например,
R1 может представлять собой единственный активный тензодатчик, в
то время как остальные три элемента моста являются тождественными
фиктивными элементами. Ввиду Уравнения 2.91, изменение в выходе
моста за счет изменения δR задается
или
(2.93)
204
Заметим, что выход является нелинейным в δR / R. Если, однако, δR / R
считается малым по сравнению с 2, мы имеем линеаризованное отноше-
ние
(2.94)
Коэффициент 1/4 на RHS уравнения 2.12 .2 представляет чувствитель-
ность моста, поскольку это дает изменение выходного моста для дан-
ного изменения активного сопротивления, в то время как другие пара-
метры сохраняются фиксированными. Строго говоря, чувствительность
моста задается δvo / δR, которая равна Vref
/ (4R).
Ошибка из-за линеаризации, которая является мерой нелинейности, мо-
жет быть задана в виде процента
Следовательно, из Уравнений 2.93 и 2.94 мы имеем
(2.96)
Пример 2.11
Предположим, что на Рисунке 2.43a, сначала R1
=R
2
=R
3
=R
4
=R.Те-
перь увеличьте R1 с помощью δR, уменьшите R2 с помощью δR . Это
будет представлять собой два активных элемента, действующих в обрат-
ном направлении, как и в случае двух элементов тензодатчиков, установ-
ленных на верхней и нижней поверхностях балки при изгибе. Покажите,
что выход моста является линейным в δR в этом случае.
решение
Из уравнения 2.91, мы получаем
Это упрощается до
205
Что является линейным.
Точно так же, можно показать, используя уравнение 2.91, что пара из-
менений: R3
→R+δRиR4
→R - δR приведет к линейному отношению
выхода моста.
2.8 .2 Мост постоянного тока
Когда большие изменения сопротивления δR требуются для измерения,
мост Уитстона не может быть удовлетворен из-за его нелинейности, как
указано в уравнении 2.93 . которая является линейной. Мост постоянного
пока менее нелинеен и является предпочтительным в таких случаях. Тем
не менее он требует источник питания, который регулирует ток, и как
правило дороже, чем регулятор напряжения источника питания.
Как показано на Рисунке 2.43b, мост постоянного пока использует воз-
буждение по стоянного тока iref
, вместо питания постоянного напряже-
ния. Уравнение выхода для постоянного тока моста может быть опре-
делено из уравнения 2.91, просто зная напряжение на источнике тока.
Предположим, что это напряжение Vref
, с полярностью, показанной на
Рисунке 2.43a. Теперь, так как ток нагрузки предполагается малым (т.е.
нагрузка высокого импеданса), ток через R2 равен току через R1
, и зада-
ется Vref / (R1 + R2). Аналогичным образом, ток через R4 и R3 задается Vref
/ (R3 + R4). Соответственно при текущем суммировании мы получаем
или
(2.97)
Этот результат может быть получен непосредственно от эквивалентного
сопротивления моста, как видно по источникам тока. Подставляя урав-
нение 2.97 в уравнении 2.91, мы имеем уравнение выхода для моста по-
стоянного тока
(2.98)
Обратите внимание, с помощью уравнения 2.98, что требование балан-
сового мо ста (т.е. Vo = 0) снова задается уравнением 2.92. Для оценки
нелинейности моста постоянного тока, мы начинаем со сбалансирован-
ного условия: R1
=R
2
=R
3
=R
4
= R, а также изменяем R1 по δR, сохраняя
206
при этом оставшиеся резисторы неактивным. Опять же, R
1
будет пред-
ставлять активный элемент (чувствительный элемент) моста, и может
соответствовать активному тензодатчику.
Изменение выходного δvo задается
или
(2.99)
Сравнивая знаменатель в правой части этого уравнения с уравнением
2.93, мы видим, что мост постоянного тока менее нелинеен. В частно-
сти, используя определение, заданное уравнением 2.95, процент нели-
нейно сть может быть выражен как
(2.100)
Следует отметить, что нелинейность уменьшается в два раза с использо-
ванием постоянного тока возбуждения, вместо возбуждения постоянно-
го напряжения.
Пример 2.12
Предположим, что в мостовой схеме постоянного тока, показанной на
Рисунке 2.43b, сначала R1
=R
2
=R
3
=R
4
= R. Предположим, что R1 и
R4 представляют собой тензодатчики, монтируемые на той же стороне
стержня при растяжении. Из-за напряженности, R
1
увеличивается на δR
и R4 также увеличивается на δR. Выведите выражение для выходного мо-
ста (нормированного) в этом случае и покажите, что она является линей-
ной. Каким будет результат, если R2 и R3 представляют собой активные
датчики деформации при растяжении в этом примере?
решение
Из уравнения 2.98, мы получаем
Упрощая и сокращая общий термин в числителе и знаменателе, получим
207
линейную зависимость
(2.12 .1)
Если R2 и R3 являются активными элементами, как видно из уравнения
2.98, мы получаем тот же линейный результат, за исключением измене-
ния знака. В частности,
(2.12 .2)
2.8 .3 оборудование линеаризации выходов моста
Из упомянутых выше разработок, и как показано в примерах, должно
быть ясно, что выход сопротивления моста в общем не является линей-
ным, по отношению к изменению сопротивления активных элементов.
Конкретные варианты расположения активных элементов, однако, мо-
гут привести к линейному выходу. Как видно из уравнений 2.91 и 2.98,
что когда существует только один активный элемент, выходной мост
является нелинейным. Такой нелинейный мост можно линеаризовать с
использованием аппаратных средств; в частности ОУ элементов. Что-
бы проиллюстрировать этот подход, рассмотрим сопротивление моста
постоянного напряжения. Мы модифицируем его путем соединения двух
ОУ элементов, как показано на Рисунке 2.43c. Выходной усилитель име-
ет резистор обратной связи Rf . Уравнение выходного сигнала для этой
схемы можно получить, используя свойства ОУ, в обычном порядке. В
частности, потенциалы в двух входных проводниках должны быть рав-
ны, и ток через эти провода должен быть равен нулю. Из первого свой-
ства следует, что потенциалы в узлах А и В равны нулю. Пусть потенциал
в узле С обозначим через V. Теперь используйте второе свойство и запи-
шите текущие сложение в узлах А и В.
Узел А:
(2.101)
Узел В:
(2.102)
Заменяем уравнение 2.102 уравнением 2.101 для устранения V, а также
упрощаем, чтобы получить линейный результат
208
(2.103)
Сравните этот результат с уравнением 2.93 для оригинального моста с
одним активным элементом. Обратите внимание, что, когда δR = 0, из
уравнения 2.102, мы получаем, v = -V
REF
, и из уравнения 2.101 мы полу-
чаем VO
= 0. Следовательно, V
O
и δvo означают то же самое, как исполь-
зовано в Уравнении 2.103.
2.8 .3 .1 Мостовые усилители
Выходной сигнал от резистивного мо ста, как правило, очень мал по срав-
нению с опорным сигналом, и он должен быть усилен, чтобы увеличить
уровень напряжения до подходящего значения (например для использо-
вания в системе мониторинга, регистрации данных, или контроля). Мо-
стовой усилитель используется для этой цели. Как правило, это приборы
усилитель, который является по существу сложный дифференциальный
усилителя. Усилитель моста моделируется как простое усиление Ka , ко -
торое умножает выходной сигнал моста. Типовые характеристики:
• Усиление до 1000 (регулируемое)
• Низкая тенденция
• Широкий рабочий диапазон (± 200 мкВ до ± 5 В, регулируется шагами)
• Поставка (постоянного тока) напряжение: ± 10 В (тот же источник так-
же поставляет мостовую схему)
• Максимальный ток: 30 мА
• Высокий входной импеданс (2 МОм), так что не будет загружен выход-
ной мост
• Несколько каналов (для одновременного использования с несколькими
мостами)
• фильтр низких частот среза до 2 кГц (по выбору)
• КОСС100дБпри50Гц
2.8 .4 Полумостовые схемы
Половина моста может быть использована в некоторых случаях, требую-
щих мостовую схему. Половина моста имеет только две рычага, а выход
сливается из середины этих двух рычагов.
Примечание: Полумостовая схема несколько похожа на схему потенци-
209
ометра или делителя напряжения. В некоторых полумостовых схемах,
может существовать третий рычаг, который соединен через весь проме-
жуток этих двух рычагов. Тем не менее, выход сливается в общем узле
первых двух рычагов, в то время как другой выходной канал - в конеч-
ный узел кронштейна.
Концы двух рычагов возбуждаются двумя напряжениями, один из кото-
рых является положительным, а другой отрицательным (то есть, бипо-
лярное напряжение питания). Первоначально, два рычага имеют одина-
ковые сопротивления, так что номинально выходной мост равен нулю.
Один из рычагов имеет активный элемент. Его изменение сопротивления
приводит к ненулевому выходному напряжению.
Полумостовой усилитель, состоящий из сопротивления полумоста и
выходной усилитель, показан на Рисунке 2.44 . Два рычага моста имеют
сопротивления R1 и R2
, и выходной усилитель использует сопротивле-
ние радиочастотного излучения. Чтобы получить уравнение выхода, мы
используем два основных факта для ненасыщенного ОУ: напряжение на
двух входных проводах равны (из-за высокого коэффициента усиления),
а ток в любом канале равен нулю (из-за высокого входного импеданса).
Следовательно, напряжение в точке А равно нулю, а уравнение баланса
тока в точке А определяется
рисунок 2.44 Половина моста с выходным усилителем.
Active element – активный элемент
dummy – заглушка
output – выход
210
Это дает
(2.104)
Теперь предположим, что первоначально R1
=R
2
= R, а также активный
элемент R1 меняется с помощью δR. Соответствующее изменение в вы-
ход е
или
(2.105)
Обратите внимание, что Rf / R является коэффициентом усиления усили-
теля. В настоящее время в связи с Уравнением 2.95, процент нелинейно-
сти полумостовой схемы является
(2.106)
Отсюда следует, что нелинейно сть полумо стовой схемы хуже, чем у мо-
ста Уитстона.
риСУНок 2.45 (а) Общий мостовой импеданс, (б) мост Оуэна, и (с) осцилля-
тор Wien-моста .
Supply ac – подача переменного тока
output – выход
211
2.8 .5 Сопротивление мостов
Сопротивление мостов это мост переменного тока. Он содержит в себе
элементы общего импеданса Z1
,Z
2
,Z
3
,Z
4
в своих четырех рычагах, как
показано на Рисунке 2.45a. Мост возбуждается с помощью VREF перемен-
ного напряжения питания.
Примечание: Vref
будет представлять собой несущий сигнал, и VO выход-
ное напряжение должно быть демодулировано, если был бы необходим
переходный сигнал, представляющий изменение в одном из элементов
моста.
Импеданс мо стов может быть использован, например, для измерения
емкости в емкостных датчиках, а также для изменения индуктивно сти
датчиков переменной индуктивности и датчиков вихревых токов. Кроме
того, полное сопротивление мо стов может быть использовано в качестве
генераторных схем. Схема генератора может служить источником по сто-
янной частоты генератора сигналов (например, в продукте динамиче-
ских испытаний или в их несущих сигналах), или он может быть исполь-
зован для определения неизвестного параметра цикла путем измерения
частоты колебаний.
Анализируя с помощью понятий частотной области, частотный спектр
выходного импеданса моста задается
(2.107)
Это сводится к уравнению 2.91 в случае постоянного моста Уитстона.
Сбалансированное состояние определяется
(2.108)
Это уравнение используется для измерения неизвестного параметра в
цепи моста. Рассмотрим два особенных мостовых импеданса.
2.8 .5 .1 Мост оуэна
212
Мост Оуэна показан на Рисунке 2.45b. Он может быть использован. на-
пример для измерения как индуктивности L4
, так и емкости C3
, методом
балансового моста. Для того чтобы вывести необходимые уравнения, об-
ратите внимание, что отношение напряжение-ток к индуктору V = L(dv /
dt), а для конденсатора является I = C(dv/dt). Отсюда следует, что функ-
ция передачи напряжения/ тока (в области Лапласа) для индуктора это
V(S)/I(S)=L
s
, а для конденсатора это V(S) / I(S) = 1 / CS , Соответствен-
но, импеданс элемента катушки индуктивно сти и элемент конденсатора
на частоте ω является ZL
= jωLиZc
= 1 / (jωC). Применяя эти результаты
для моста Oуэн, мы получаем
где ω- частота возбуждения. Теперь, для сбалансированного моста, из
уравнения 2.108, мы имеем
Приравняв отдельно действительные части и мнимым частям этого урав-
нения, мы получаем два уравнения:
Таким образом, мы получаем окончательные результаты:
(2.109)
(2.110)
Отсюда следует, что L4 и С3 могут быть определены со знанием C1
,R
2
,R
3
и R4 при сбалансированных условиях. Например, с фиксированным C1 и
R2
, регулируемый R3 может быть использован для измерения переменной
L4
, и регулируемый R4 может быть использован для измерения перемен-
ной С3
.
213
2.8 .5 .2 Мостовой генератор вина
Теперь рассмотрим мостовой генератор Вина , показанный на Рисунке
2.45c. Для этой схемы, мы имеем
Следовательно, из уравнения 2.108, требование балансового моста
Уравнивая реальные части, мы имеем
(2.111)
Далее приравнивая мнимые части, мы получим: 0 = ωC4R3 - 1 / (ωC3R4).
Следовательно,
(2.112)
Уравнение 2.112 подтверждает, что схемой является мостовой генератор,
собственная частота которого задается этим уравнением, при сбаланси-
рованных условиях. Если частота источника равна собственной частоте
цикла, будет иметь место большая амплитуда колебаний. Схема может
быть использована для измерения неизвестного сопротивления (напри-
мер в тензометрических устройствах) с помощью первого измерения
частоты моста сигналов на резонансной частоте (собственная частота).
В качестве альтернативы, генератор, намагничиваемый на собственной
частоте может быть использован в качестве точного источника периоди-
ческих сигналов (генератор сигнала).
2.9 Устройства линеаризации
Нелинейность присутствует в любом физическом устройстве, на различ-
214
ных уровнях. Если уровнем нелинейности в системе (компонент, устрой-
ство или оборудование) можно пренебречь без превышения допуска
ошибки, то система может считаться линейной.
В общем, линейная система является той, которая может быть выражена
с помощью линейной аналитической модели (например, набор линейных
дифференциальных уравнений или линейных алгебраических уравне-
ний). Кроме того принцип суперпозиции выполняется для линейных си-
стем. В частности, если реакция системы на входной u1 является y1
,и
ответ на другой вход u2 является y2
, то ответ на a1u
1
+ a2u
2
будет a1y
1
+ a2y
2
,
для любого произвольного а1 и а2
.
2.9 .1 Характер нелинейностей
Нелинейность в системе может появиться в двух формах:
1. Динамическое проявление нелинейностей
2. Статическое проявление нелинейностей
Во многих случаях, полезная операционная область системы может
превышать диапазон частот, где амплитудно-частотная характеристика
является прямой. Операционная реакция такой системы называется ди-
намической. Примеры включают в себя типичную систему управления
(например, автомобиль, самолет, фрезерный станок, робот), исполни-
тельный механизм (например, гидравлический двигатель) и контроллер
(например, пропорционально-интегрально-производные или аппарат-
ные средства управления PID).
Нелинейность таких систем может проявляться в динамической форме,
такой как скачок феномена (также известный как складчатая катастрофа),
предельные циклы, а также создание частоты. Конструктивные измене-
ния, обширные корректировки или уменьшение уровня управляющего
сигнала и ширины полосы будут необходимы в целом, чтобы уменьшить
или устранить эти динамические проявления нелинейно сти. Во многих
случаях такие изменения не будут практичными, и нам, возможно, при-
дется каким-то образом справиться с наличием этих нелинейностей в
динамических условиях. Конструктивные изменения для снижения не-
линейностей могут быть связаны с заменой обычных редукторных при-
водов на устройства, таких как гармонические приводы для уменьшения
зазора, заменой нелинейных приводов с помощью линейных приводов,
215
а также с использованием компонентов, которые имеют незначительную
нелинейность (например, кулон) трения и которые делают небольшие
экскурсии движения.
От широкого большинства датчиков, преобразователей и сигналов
устройств модификации ожидается, что они будут работать в плоской
области их функции частотного отклика. Отношение I / O этих типов
устройств в рабочем диапазоне выражается (смоделированное) в каче-
стве статической кривой, а не дифференциального уравнения. Нели-
нейностей в этих устройствах будут проявляться в статической рабочей
кривой во многих формах. Эти проявления включают насыщение, гисте-
резис и смещение.
2.9 .1 .1 Методы линеаризации
В первой категории систем (например заводах, приводах и компенсато-
рах), если нелинейность проявляется в динамической форме, то должны
быть использованы методы надлежащего моделирования и управления,
для избежания неудовлетворительной деградации производительно сти
системы. Во второй категории систем (например, датчики, преобразова-
тели, и сигнал модификации устройства), если нелинейностей проявля-
ется в статической рабочей кривой, опять же общая производительность
системы будет ухудшаться. Следовательно, важно линеаризовать выход
таких устройств. Обратите внимание, что в динамических проявлениях
не представляется возможным реально линеаризовать выход, по скольку
отклик генерируется в динамическом виде. Решением в этом случае яв-
ляется либо минимизировать нелинейности в системе путем конструк-
тивных изменений и регулировок, так что линейное приближение к си-
стеме будет действительным, или в качестве альтернативы, принять во
внимание нелинейности в системе моделирования и контроля. В этом
разделе мы не имеем дело с этим аспектом (т.е . динамическими нелиней-
ностями). Вместо этого мы заинтересованы в линеаризации устройств
во второй категории, чьи эксплуатационные характеристики могут быть
выражены с помощью статических кривых ввода / вывода.
Линеаризация статического устройства может быть предпринята также
путем внесения изменений дизайна и корректировки, как и в случае ди-
намических устройств. Но так как реакция является статической, и мы
обычно имеем дело с доступным устройством (фиксированный дизайн),
216
внутренние аппаратные средства не могут быть изменены, мы будем
рассматривать только пути характеристики линеаризации ввода / вывода
путем модификации самого выхода.
Статическая линеаризация устройства может быть сделана тремя спо-
собами:
1. Линеаризация с помощью цифрового программного обеспечения и не-
линейных преобразований
2. Линеаризация с помощью цифрового (логического) аппаратного обе-
спечения
3. Линеаризация с помощью аналогового оборудования
В подходе ПО к линеаризации, выход устройства считывается в цифро-
вом процессоре с программным обеспечением программируемой памя-
ти, выход изменяется в соответствии с программными командами таким
образом, что вход-выход является линейным. Примером может служить
использование логарифмической шкалы для линеаризации нелинейных
выражений. В подходе аппаратной логики, выход считывается устрой-
ством с фиксированной логической схемой для обработки (модифика-
ции) данных. Результирующий выход также цифровой. В подходе ана-
логового аппарата, линеаризующая схема непосредственно соединена
риСУНок 2.46 (а) общая статическая нелинейная характеристика и (б) сме-
щение нелинейности.
output – выход
input - вход
217
на выходе устройства, таким образом, что выходной сигнал (аналого-
вый) от линеаризующего устройства пропорционален входу в исходное
устройство. Примером такого типа (аналога) линеаризации является ли-
неаризованный мост, как было описано выше (смотрите Рисунок 2.43c).
Эти три подхода линеаризации обсуждаются, сильно акцентируя вни-
мание на подходе аналоговой схемы. Тип отстающих фаз статических
характеристик нелинейности обладают свойством, что кривая I / O не-
взаимно однозначна. Другими словами, одно входное значение может
соответствовать более чем одному (статическому) выходному значе-
нию, и одно выходное значение может соответствовать более чем од-
ному входному значению. Игнорируя этот тип нелинейностей, давайте
сосредоточимся на линеаризации устройства с однозначной статической
кривой отклика, которая не является прямой линией. Пример типичной
нелинейной характеристики ввода / вывода показан на Рисунке 2.46a.
Строго говоря, прямолинейная характеристика с про стым смещением,
как показано на Рисунке 2.46b, также является нелинейно стью. В част-
ности обратите внимание, что суперпозиция не имеет места для характе-
ристики ввода / вывода этого типа, заданного
y=ku+c
(2.113)
Это очень легко, линеаризовать такое устройство, так как простое добав-
ление постоянной составляющей преобразует характеристику в линей-
ную форму, заданную
y=ku
(2.114)
Этот метод линеаризации известен как компенсируемый. Линеаризация
в общем является более сложной, когда кривая характеристики может
быть гораздо более сложной.
2.9 .1 .2 Линеаризация с помощью программного обеспечения
Если нелинейная зависимость между входом и выходом нелинейного
устройства известна, вход может быть вычислен при известной величине
выходного сигнала. В программном подходе линеаризации, процессор и
память, которая может быть запрограммирована с помощью программ-
ного обеспечения (например цифрового компьютера) используется для
вычисления входа с помощью выходных данных. Могут быть использо-
218
ваны три подхода:
1. Переменное преобразование
2. Уравнение инверсии
3. Таблица поиска
В первых двух методах нелинейная характеристика устройства известна
в аналитической (уравнение) форме (т.е. алгебраической модели)
y=f(u)
(2.115)
где
u является устройством ввода
y является выходным устройством
В первом методе, переменные u и у преобразуются в две новые пере-
менные ‘u’ и ‘у' (например, логарифм переменной) таким образом, что
соотношение между ‘u' и ‘у' линейное. Затем могут быть использованы
линейные методики для анализа преобразованных данных ‘u' и ‘у', не
жертвуя точностью. Так как отношение преобразования известно, то ре-
зультаты могут быть преобразованы обратно в область u и у, если это
необходимо. Во втором способе при условии, что (2.115) представляет
собой отношение один-к-одному, уникальная противоположность, за-
данная уравнением
u=f
- 1(y)
(2.116)
может быть определена. Это уравнение программируется как алгоритм
вычисления, в память для чтения и записи (RAM) компьютера. Когда
выходные значения у поступают на компьютер, процессор вычисляет
соответствующие входные значения u с помощью команд (исполняемая
программа), хранящихся в RAM.
В третьем методе (таблица поиска), достаточно большое количество пар
значений (y, u), сохраняются в памяти компьютера в виде таблицы упоря-
доченных пар. Эти значения должны охватывать весь рабочий диапазон
устройства. Затем, когда значение у вводится в компьютер, процессор
сканирует сохраненные данные, чтобы проверить, присутствует ли это
значение. Если это так, то соответствующее значение u будет считано, и
это является линеаризованным выходом. Если значение у нет в таблице
данных, то процессор будет интерполировать данные в непосредствен-
219
ной близости от величины и вычислит соответствующий выход. В ли-
нейном методе интерполяции близость таблицы данных, где значение у
падает, оснащена прямой, и соответствующее значение u вычисляется с
помощью этой прямой линии. Интерполяции высшего порядка исполь-
зуют нелинейные кривые интерполяции, такие как квадратичные и куби-
ческие полиномиальные уравнения (сплайны).
Обратите внимание, что метод переменного преобразования и уравнение
метода инверсии, как правило, более точны, чем метод таблицы для по-
иска. Кроме того, первые два метода не требуют чрезмерной памяти для
хранения данных. Но они относительно медленны, поскольку данные
передаются, преобразуются и обрабатываются в компьютере с использо-
ванием программных команд, которые хранятся в памяти и которые, как
правило, должны быть доступны в последовательном порядке. Метод та-
блицы поиска быстрее. Когда точность зависит от количества хранимых
значений данных, это метод интенсивной памяти. Для лучшей точности,
больше данных должны быть сохранены. Но, так как вся таблица данных
должна быть отсканирована, чтобы проверить данные для заданного зна-
чения, это повышение точности происходит за счет скорости, а также
требований к памяти.
2.9 .1 .3 Линеаризация с помощью логики программного обеспече-
ния
Подход линеаризации программного обеспечения является гибким, по-
скольку алгоритм линеаризации может быть модифицирован (например,
улучшилось, изменилось) просто путем изменения программы, храня-
щейся в памяти компьютера. Кроме того, очень сложные нелинейно сти
могут быть обработаны методом программного обеспечения. Как упоми-
налось выше, метод является относительно медленным.
В методе логики аппаратной линеаризации, алгоритм линеаризации по-
стоянно внедряется в виде микросхемы, используя соответствующие
цифровые логические схемы для обработки данных и элементов памяти
(например, триггеры). Обратите внимание, что алгоритм и численные
значения параметров модели (не входные значения) не могут быть изме-
нены без перепроектирования микросхемы, так как аппаратное устрой-
ство обычно не имеет программируемую память. Кроме того, будет
трудно реализовать очень сложные алгоритмы линеаризации с помощью
220
этого метода, и если чипы не массового производства для широкого ком-
мерческого рынка, первоначальная стоимость разработки чипа сделает
производство линеаризации чипов экономически неосуществимым. В
массовом производстве, однако, стоимость за единицу продукции будет
очень мала. Так как доступ к хранимым программным инструкциям и
обширной обработке данных не используются , то аппаратный метод ли-
неаризации может быть значительно быстрее, чем метод программного
обеспечения.
Цифровому линеаризующему блоку с процессором и памятью (ROM),
чья программа не может быть изменена, также не хватает гибкости про-
граммируемого устройства программного обеспечения. Следовательно,
такое устройство на основе ROM также попадает в категорию аппарат-
ных средств логических устройств.
2.9 .2 аналоговые линеаризующие аппаратные средства
Следующие три типа аналогового оборудования линеаризации обсужда-
ются:
1. Схема смещений
2. Схема, которая обеспечивает пропорциональный выход
3. Кривая формирования
Смещение является нелинейностью, которая может быть легко удалена
с помощью аналогового устройства. Это достигается путем простого
добавления смещения постоянного напряжения равноценному ответу, в
противоположном направлении. Преднамеренное добавление смещения
таким образом известно как сведение баланса. Ассоциированное уда-
ление оригинала смещения называется компенсацией смещения. Есть
много случаев взаимозачета. Нежелательные смещения, такие как те,
которые присутствуют в результатах АЦП и ЦАП, могут быть удалены
с помощью аналоговой компенсации. Постоянные (DC) компоненты
ошибкок, таких как стационарные ошибки в динамических системах
из-за изменения нагрузки, изменения коэффициента усиления и других
нарушений, могут быть устранены также путем взаимозачета. Сигналы
ошибок синфазных усилителей и других аналоговых устройств, также
могут быть удалены путем взаимозачета. В схеме измерения, такой как
схема потенциометра (балластная), где фактический сигнал измерения
является небольшим изменением δvo из стационарного VO выходного
221
сигнала, измерение может быть полностью скрыто шумом. Чтобы прео-
долеть эту проблему, в первую очередь, на выходе должно быть компен-
сировано -V
o
, так что чистый выход δvo
, анеVO+δvo
.
Впоследствии,
этот выход может быть обусловлен путем фильтрации и усиления.
Другое применение сведения баланса является изменение добавления
шкалы измерения относительной шкалы по отношению к абсолютной
шкале (например, в случае скорости). Таким образом, некоторые приме-
нения компенсирования являются
1. Удаление нежелательных смещений и компонентов постоянного тока
в сигналах (например, в АЦП, ЦАП, интегрирование сигнала)
2. Удаление стационарных компонентов ошибки в динамических харак-
теристиках системы (например, из-за изменения нагрузки и получение
изменения в системах типа 0. Примечание: Тип 0 системы представляют
собой системы с открытым контуром без свободных интеграторов)
3. Отрицание уровней общего режима (например, в усилителях и филь-
трах).
4. Сокращение ошибок, когда измерение является приращиванием выс-
шего устойчивого выходного уровня (например, в балластных схемах
для тензометрических датчиков и датчиков RTD).
5. Шкала изменения аддитивным образом (например переход от относи-
тельных к абсолютным единицам или от абсолютных к относительным
единицам).
Мы можем удалить нежелательные сдвиги простым способом, как об-
суждалось ранее. Рассмотрим теперь более сложные нелинейные ответы,
которые являются нелинейными, в том смысле, что кривая I / O не явля-
ется прямой линией. Аналоговые схемы могут быть использованы так-
же для линеаризации этого типа реакций. Схема линеаризации, которая
будет использоваться, как правило, зависит от конкретного устройства и
характера его нелинейности. Следовательно, часто схемы линеаризации
такого типа должны быть оговорены в отношении конкретного примене-
ния. Например, такие схемы линеаризации полезны в емкостных датчи-
ках поперечного смещения . Несколько полезных схем описаны позже.
Рассмотрим тип линеаризации, который известен как кривая формиро-
вания. Кривая формирования является линейным устройством, усиления
(выхода / входа) которого может быть отрегулировано таким образом, что
могут быть получены кривые отклика с различными наклонами. Пред-
222
положим, что нелинейное устройство с неравномерной (нелинейной)
характеристика ввода / вывода должно быть линеаризовано. Во-первых,
мы применяем текущий вход одновременно в устройство и в кривую
формирователя, а затем регулируем усиление кривой формирователя та-
ким образом, что его выход тесно совпадает с фактическим устройством
в небольшом диапазоне работы. Теперь выход формирователя кривой
может быть использован для какой-либо задачи, требующей устройства
вывода. Преимущество состоит в том, что линейные допущения спра-
ведливы с кривой формирователя, которая не относится к реальному
устройству. Когда изменяется рабочий диапазон, кривая формирователя
должна быть отрегулирована на новый диапазон. Сравнение (калибров-
ка) кривой формирователя и нелинейного устройства может быть сдела-
но в автономном режиме и, как только набор значений усиления, соот-
ветствующий набору рабочих диапазонов, определяется таким образом
для кривой формирования, где можно полностью заменить нелинейное
устройство по кривой формирования.
Тогда коэффициент усиления формирователя кривой можно регулиро-
вать в зависимости от фактической эксплуатации диапазона времени
работы системы. Это известно как изменение коэффицента усиления .
Примечание: Таким образом, мы можем заменить нелинейное устрой-
ство с помощью линейного устройства (формирователя кривой) в преде-
лах многокомпонентной системы без существенного ущерба для точно-
сти всей системы.
2.9 .2 .1 Схема смещений
Выходы общего режима и смещения в усилителях и других аналоговых
устройствах может быть сведено к минимуму, включая компенсирую-
щий резистор, который обеспечит точную настройку на одном из вход-
ных приводов. Кроме того, чем больше величина сигнала обратной связи
в системе управления, тем меньше установившаяся ошибка. Следова-
тельно, установившиеся смещение может быть уменьшено путем умень-
шения сопротивления обратной связи (тем самым увеличивая сигнал
обратной связи). Кроме того, так как балластная (потенциометр) схема
обеспечивает выход VO + δvo и мостовая схема обеспечивает выход δvo
,
использование мостовой схемы можно интерпретировать как смещение
метода компенсации.
223
Самый простой способ нивелировать нелинейным устройством является
использование дифференциального усилителя (или суммирующего уси-
лителя) для вычитания (или добавления) напряжение постоянного тока
на выходе устройства. Уровень постоянного тока должен быть перемен-
ным, так что различные уровни смещения могут быть обеспечены в той
же схеме. Это достигается с помощью регулируемого сопротивления на
входе привода постоянного тока усилителя.
Схема ОУ, которая может быть использована для смещения, показана на
Рисунке 2.47. Поскольку вход VI подключен к отрицательному проводу
ОУ, мы имеем инвертирующий усилитель, а входной сигнал появится в
выходном VO с его обратным знаком. Это также суммирующий усили-
тель, так как два сигнала могут быть добавлены вместе с помощью этой
схемы. Если вход VI соединен с положительным контактом ОУ, мы будем
иметь неинвертирующий усилитель.
Vref
напряжения постоянного тока обеспечивает компенсирующее напря-
жение. Компенсационный резистор Rc
, является переменной величиной,
так что выбор другого значения смещения может быть компенсирован с
использованием той же схемы. Чтобы получить уравнение схемы, запи-
шем текущее уравнение баланса для узла А, используя обычное предпо-
риСУНок 2.47 Схема инвертирующего усилителя для компенсации смеще-
ния.
input – вход
output – выход
DCreference – отношение постоянного тока
224
ложение, что ток через входной привод равен нулю для ОУ (из-за очень
высокого входного импеданса). Следовательно
или
(2.117)
Аналогичным образом, текущий баланс в узле B дает
или
(2.118)
риСУНок 2.48. Схема пропорционального выхода для активного элемента со-
противления (тензодатчика).
DC supply – подача постоянного тока
Active element – активный элемент
output – выход
load – нагрузка
225
Так как Va
= Vb для ОУ (из-за очень высокого коэффициента усиления
открытого цикла), мы можем подставить уравнение 2.117 в уравнении
2.118, чтобы получить,
(2.119)
Обратите внимание на изменение знака VI на выходе (потому что это
инвертирующий усилитель). Это не является проблемой, так как поляр-
ность может быть изменена на входе или выходе при подключении этой
схемы к другой схеме, таким образом, получая первоначальный знак.
Важным результатом здесь является наличие смещения постоянного
члена в правой части уравнения 2.119. Этот термин можно регулировать
путем выбора надлежащего значения для Rc таким образом, чтобы ском-
пенсировать заданное смещение в VI
.
2.9 .2 .2 оборудование пропорционального выхода
Схема ОУ может быть использована для линеаризации выходного сиг-
нала емкостного датчика поперечного смещения. Мы отметили, что в
мостах сопротивления по стоянного напряжения и постоянного тока и
в полумосту постоянного напряжения, зависимо сть между выходным
мостом δvo и измеряемой величиной (изменение сопротивления в ак-
тивном элементе) нелинейно в целом. Самая низкая нелинейность у мо-
ста постоянного тока и самая высокая у полумоста. Поскольку δR мал по
сравнению с R, нелинейные соотношения могут быть линеаризованы без
введения больших ошибок. Тем не менее, линейные соотношения явля-
ются неточными, и не подходят, если δR нельзя пренебречь по сравне-
нию с R. Тогда, использование схемы линеаризации было бы уместным.
Один из способов получения пропорционального выходного сигнала с
моста Уитстона является подача соответствующего коэффициента выхо-
да моста в питание моста vref
. Этот подход был проиллюстрирован ранее
(см. Рисунок 2.43c). Другой способ состоит в использовании схемы ОУ,
показанной на Рисунке 2.48. Это должно быть сопоставимо с мостом Уи-
тстона, показанного на Рисунке 2.43a. На Рисунке 2.48, R1 представляет
собой единственный активный элемент (например, активный тензодат-
чик).
226
Во-первых, давайте покажем, что уравнение выхода для схемы на рисун-
ке 2.48 очень похоже на уравнение 2.91. Используя тот факт, что током
через входной провод ненасыщенного ОУ можно пренебречь, мы имеем
текущие уравнения баланса для узлов А и В:
и
Следовательно
и
Теперь, используя тот факт, V
a
=V
b
для ОУ, мы получаем
Соответственно, мы имеем уравнение схемы выхода
(2.120)
Это отношение очень похоже на уравнение моста Уитстона (уравнение
2.91). Условие баланса (т.е. V
o
= 0) снова дается уравнением 2.92.
риСУНок 2.49 Схема кривой формирования
input – вход
output – выход
resistance switching circuit – схема сопротивления переключению
227
Предположим, что R1
=R
2
=R
3
=R
4
= R в начале (следовательно, схема
сбалансирована), так что Vо
= 0. Далее предположим, что активное со-
противление R1 изменяется δR (скажем, из-за изменения напряжения в
тензодатчике R1) . Тогда, используя уравнение 2.120, мы можем записать
выражение для результирующего изменения в выходной схеме, как
или
(2.121)
Сравнивая этот результат с уравнением 2.93, мы видим, что схема выхо-
да δvo пропорциональна измеряемой величине δR. Кроме того, обратите
внимание, что чувствительность (1/2) схемы на рисунке 2.48 вдвое боль-
ше, чем моста Уитстона (1/4) с одним активным элементом, который яв-
ляется дополнительным преимуществом схемы пропорционального вы-
хода. Изменение знака не является недостатком, так как это может быть
учтено путем изменения полярности нагрузки.
2.9 .2 .3 оборудование формирования кривой
Кривая формирования может быть истолкована как усилитель, усиление
которого регулируется. Типичная компоновка для схемы кривой форми-
рования показана на Рисунке 2.49. Сопротивление обратной связи Rf ре-
гулируется каким-либо способом. Например, схема переключения с бан-
ком резисторов (например соединены параллельно через транзисторные
переключатели, как и в случае взвешенного резистора DAC) может быть
использована для переключения сопротивления обратного к требуемому
значению. Автоматическое переключение может быть реализовано так-
же с помощью стабилитронов, которые начнут служить проводниками
на определенных уровнях напряжения. В обоих случаях (т.е . внешней
коммутации с помощью коммутационных импульсов и автоматическо-
го переключения с использованием стабилитронов), коэффициент уси-
ления усилителя является переменным скачкообразно. В качестве аль-
тернативы, потенциометр может быть использован в качестве Rf таким
образом, чтобы коэффициент усиления можно непрерывно регулировать
(вручную или автоматически).
228
Уравнение для выходной схемы кривой формирования, показанное на
рисунке 2.49, получается путем записи текущего баланса в точке А, от-
метив, чтоVa = 0.Такимобразом, (VI/ г)+(Vо/Rf) =0;или,
(2.122)
Видно, что коэффициент усиления (Rf / R) усилителя можно регулиро-
вать путем изменения Rf
.
2.10 различное оборудование модификации сигнала
В дополнении к устройствам модификации сигнала, рассмотренных
раннее в этой главе, есть много других типов схем, которые использу-
ются для модификации сигналов и связанных с ними задач. Примерами
являются фазовращатели, напряжение-частота преобразователи (VFC),
частота-напряжение преобразователи (FVC), напряжение-ток преобра-
зователи (VCCS) и удержание пика цикла. Целью настоящего раздела
является краткое рассмотрение некоторых из таких разных схем и ком-
понентов, которые являются полезными в измерительных приборах, мо-
ниторинге и управлении инженерными системами.
2.10.1 Фазовращатели
фазовращатель изменяет угол фазы сигнала. Рассмотрим синусоидаль-
ный сигнал, заданный
(2.123)
Он имеет следующие три представительных параметров:
Амплитуда,v
a
частота, ω
фазовый угол, φ
фазовый угол представляет собой упоминание времени (начальной точ-
ки) сигнала. Это важное упоминание, когда сравниваются два или более
компонентов сигнала, а также, когда сравниваются разные моменты вре-
мени сигнала (как правило не является синусоидальными). фурье-спектр
сигнала представлен в виде его амплитуды (величины) и фазового угла
по отношению к частоте.
229
2.10.1 .1 Применение
фазовый сдвиг схемы имеет множество применений. Применения могут
быть классифицированы на два типа:
1. Определение фазового угла сигнала (как правило, путем сдвига фазо-
вого угла и сравнения с опорным сигналом)
2. Смещение фазового угла сигнала для последующего использования в
применении
Опережение фазы или задержки двух квадратурных сигналов, генериру-
емых цифровым преобразователем, определяет направление движения.
В этом контексте определение фазы используется при определении на-
правления движения.
Другое применение определения угла сдвига фаз состоит в идентифи-
кации системы, где цель состоит в том, чтобы получить эксперимен-
тальную модель системы. Когда сигнал проходит через систему, фазо-
вый угол сигнала изменяется из-за динамики системы. Следовательно,
изменение фазы обеспечивает очень полезную информацию не только
о выходном сигнале, но и о динамических характеристиках системы. В
частности для линейной системы постоянного параметра, этот фазовый
сдвиг равен фазовому углу функции частоты отклика (т.е . частотной пе-
редаточной функцией) системы на этой конкретной частоте. Это поведе-
ние сдвига фаз, конечно же, не ограничивается электрическими систе-
мами и в равной степени представлены другими типами систем, в том
числе и механических систем и смешанных систем. Сдвиг фаз между
двумя сигналами может быть определен путем преобразования сигналов
в электрическую форму (с помощью соответствующих преобразовате-
лей) и смещение фазового угла одного сигнала через соответствующие
суммы с использованием фазосдвигателя до тех пор, как два сигнала не
будут находиться в одной фазе.
Другое применение фазовращателей - в демодуляции сигналов. Напри-
мер, как уже отмечалось ранее в этой главе, один из способов амплитуд-
ной демодуляции включает в себя обработку модулированного сигнала
вместе с несущим сигналом. Это однако требует модулированного сиг-
нала и несущего сигнала, для того чтобы быть в фазе. Но, как прави-
ло, так как модулированный сигнал уже передается через аппаратные
230
средства с импедансными характеристиками, его фазовый угол изменил-
ся бы. Затем необходимо сместить фазовый угол носителя, пока эти два
сигнала не будут находиться в фазе, так что демодуляция может быть
точно выполнена. Следовательно, фазовращатели используются в демо-
дулировании, например, выходных сигналов датчиков смещения LVDT.
фазовращатели используются в связи сигнала (например PM в цифровой
связи и модемах) и его передаче (например, антенны, которые не требу-
ют повторной ориентации).
2.10.1 .2 аналоговое оборудование фазовращателей
В идеале, схема фазовращателей не должна изменять амплитуду сигна-
ла при изменении фазового угла до требуемой величины. Практические
аналоговые фазовращатели могли бы также ввести некоторую степень
амплитуды искажения (по частоте). Простая схема фазовращателя может
быть построена с помощью резистора (R) и конденсатора элементов (C).
Резистор или конденсатор такой схемы RC сделаны легко регулируемы-
ми таким образом, чтобы реализовать переменный фазовый сдвиг.
ОУ на основе схемы фазовращателя показана на Рисунке 2.50 . Можно
показать, что эта схема обеспечивает фазовый сдвиг без искажения ам-
плитуды сигнала. Уравнение схемы получается путем записи текущих
Output - выход
рисунок 2.50 Схема фазовращателя
231
уравнений баланса в узлах А и В, как обычно, отметив, что током че-
рез провод ОУ можно пренебречь из-за высокого входного импеданса.
Таким образом,
и
При упрощении и вводе переменную Лапласа s, мы получаем
(2.124)
и
(2.125)
где время замыкания постоянной τ задается τ = R
c
C.ТаккакVa
=V
b
,
в результате очень высокого коэффициента усиления в ОУ, мы имеем,
подставляя уравнение 2.125 в уравнение 2.124, V
I
= (1/2)(τs+1)(VI+Vo).
Отсюда следует, что передаточная функция G (s) схемы задается
(2.126)
Видно, что величина частотно-ответной функции G (jω) является
или
(2.127)
и фазовый угол G (jω) является
или
(2.128)
По мере необходимости, величина передаточной функции равна едини-
це, что указывает, что схема не искажает амплитуду сигнала по всей про-
пускной способности. Уравнение 2.128 дает опережение фазы выходно-
го Vo по отношению к входному VI
. Обратите внимание, что этот угол
232
является отрицательным, что свидетельствует о том, что на самом деле
запаздывание фазы вводится с помощью схемы, чего и следовало ожи-
дать. Сдвиг фаз можно регулировать путем изменения сопротивления Rc
.
2.10.1 .3 Цифровой фазовращатель
В цифровом фазовращателе используется цифровой аппаратный процес-
сор для определения разности фаз входящей последовательность битов
данных. Цифровые фазовращатели в виде монолитных интегральных
микросхем (например пакет 4 мм 6-GaAs битный цифровой фазовраща-
тель с интегрированным драйвером CMOS, диапазон рабочих частот 3,5
ГГц, фазовый диапазон сдвига 360 °, максимальная погрешность 1 °, фа-
зовый шаг сдвига 6 °, напряжение питания ± 8 В постоянного тока) для
сдвига радио-частоты (сигналы РЧ) являются коммерчески доступный.
Их применение включает в себя спутниковую связь, антенны и актив-
ные фазированные радары. Цифровые сигнальные последовательно-
сти и переданные последовательности принимаются. Изменение фазы
принимаемого сигнала используется для определения расстояния (или
время полета данных). Сообщается измерение объекта деформации с ис-
пользованием лазерной голографической интерферометрии и фазового
сдвига голографических кадров данных (основанных на программном
обеспечении). Другое применение - в трехмерном измерении, которое
использует стереообразы и сдвинутые по фазе картины полос.
2.10.2 Преобразователи напряжения в частоту
Напряжение-частота преобразователь (voltage-to-frequency converter,
далее как - VFC) генерирует периодический выходной сигнал, частота
которого пропорциональна уровню входного напряжения. Поскольку та-
кой генератор вырабатывает периодический выходной сигнал в соответ-
ствии с входным напряжением, он также называется генератор, управ-
ляемый напряжением (далее как ГУН). Кроме того, поскольку частота
может быть подсчитана и представлена в виде цифрового слова, НЧП
может также служить в качестве АЦП. Кроме того, НЧП по существу
также является FM. Входное напряжение VFC может соответствовать
сигналу датчика (например тензодатчику, датчику температуры, акселе-
рометру).
233
Конденсатор использует обычный тип схемы VFC. Время, необходимое
для конденсатора, чтобы быть заряженным до уровня фиксированного
напряжения зависит от (обратно пропорционально) зарядного напряже-
ния. Предположим, что это напряжение определяется входным напряже-
нием. Тогда если конденсатор изготовлен для периодической зарядки и
разрядки, мы имеем выход, частота которого (обратная величина пери-
ода заряда-разряда) пропорциональна напряжению зарядки. Выходная
амплитуда будет определяться фиксированным уровнем напряжения, до
которого конденсатор заряжается в каждом цикле. Следовательно, мы
имеем сигнал с фиксированной амплитудой и частотой, которая зависит
Oscillator output – выход генератора
Voltagesensitive switch – переключатель чувствительный к напряжению
Reference level – опорный уровень
Input – вход
Output - выход
риСУНок 2.51 Напряжение-частота преобразователь (VFC) или генератор,у-
правляемый напряжением (ГУН): (а) схема и (б) выходной сигнал.
234
от зарядного напряжения (вход).
Схема VFC (или VCO) показана на Рисунке 2.51a. Переключатель, чув-
ствительный к напряжению, закрывается, когда напряжение на нем пре-
вышает опорный уровень vs
, и он откроется снова, когда напряжение на
нем падает ниже нижнего предела vo (0). В схеме дискретных элементов,
программируемый однопереходный транзистор может быть использован
в качестве такого устройства коммутации. Тем не менее, современные
VFCs доступны в монолитной форме, как микросхемы.
Обратите внимание, что полярность VI входного напряжения во сста-
навливается. Предположим, что переключатель открыт. Затем, текущий
баланс в точке А схемы ОУ дается формулой (VI / R) = C (Dvo / dt). Как
обычно, V
a
, напряжение в положительном проводе, равно 0, так как опе-
рационный усилитель имеет очень высокий коэффициент усиления и ток
через ОУ приводит 0, так как ОУ имеет очень высокое входное сопротив-
ление. Уравнение конденсатора зарядки может быть интегрировано для
данного значения VI
. Это дает Vo(T) = (1 / RC) vit + Vo (0). Коммутатор
будет закрыт, когда напряжение на конденсаторе Vo (t) равно опорному
уровню Vs
. Затем конденсатор будет немедленно разряжается через за-
крытый коммутатор. Следовательно, для зарядки конденсатора время Т
задается Vs
= (1 / RC) vit + Vo (0). Соответственно,
(2.129)
Переключатель будет открыт снова, когда напряжение на конденсаторе
падает до VO (0), и конденсатор снова начнет заряжать от Vo (0) до ис-
правлено Vs
. Этот цикл зарядки и мгновенная разрядка будут повторять-
ся периодически. Соответствующий выходной сигнал будет выглядеть,
как показано на Рисунке 2.51b. Это периодическая (пилообразная) волна
с периодом T. Частота колебаний (1 / T) на выходе задается
(2.130)
Видно, что частота генератора пропорциональна входному напряжению
vi
. Амплитуда генератора vs фиксируется.
2.10.2 .1 Применение
235
VFCs имеют много применений. Одно из применений - в АЦП. В АЦП
ВфК-типа, аналоговый сигнал преобразуется в колебательный сигнал с
помощью VFC. Тогда частота генератора измеряется с использованием
цифрового счетчика. Этот счетчик, доступный в цифровом виде, явля-
ется представителем уровня входного аналогового уровня сигнала. Дру-
гое применение - в цифровых вольтметрах. Здесь используется такой же
метод как и для АЦП. В частности, напряжение преобразуется в сигнал
гетеродина, и его частота измеряется при помощи цифрового счетчика.
Счетчик может быть масштабирован и отображен для обеспечения изме-
рения напряжения. Прямое применение VCO видно из того факта, что
ВфК на самом деле является FM, обеспечивая сигнал, частота которого
пропорциональна сигналу (модулирующего) на входе. Следовательно,
VFC полезно в случаях, которые требуют FM. Кроме того, ВфК может
функционировать в качестве сигнала (волны) генератора в случаях из-
менчивых частот; например, входы возбуждения для шейкеров в продук-
те динамических испытаний, возбуждения для частотно-регулируемых
двигателей и импульсные сигналы для приводных цепей шаговых двига-
телей (см. Главу 7).
2.10.2 .2 чипы VFC
VFCs обычно доступны в монолитной форме в виде интегральных ми-
кросхем. Как правило, временной резистор (например 1 кОм) и конден-
сатор (например 390 пф) должны быть внешне подключены к микро-
схеме. Основные выводы: биполярное напряжение питания постоянного
тока (2 ригеля), сигнал входного напряжения (1-контактный), сигнал
выходной частоты (1-контактный), земля (1-контактный), внешний ре-
зисторный штифт (1-контактный), внешний конденсаторный штифт
(1-контактный), логический общий контактный разъем для соединения
с другими логическими устройствами и подключенными к земле или от-
рицательному питанию (1 контактный).
Типичные параметры:
Диапазон рабочих частот (линейный): от 1 Гц до 250 кГц
Напряжение питания: ± 5 до ± 20 В постоянного тока
Потребляемая мощность: 10 мВт
Структура Pin: 8 ПКР (восемь-контактный, двойной, встроенный)
Размер: 10 мм × 6 мм пакет
Усиление: Имеет усилитель сигнала
236
Входной импеданс: 250 МОм
2.10.3 Преобразователь частоты в напряжение (чНП)
ЧНП генерирует выходное напряжение, уровень которого пропорцио-
нален частоте его входного сигнала. Один из способов получения ЧНП
является использование цифрового счетчика для подсчета частоты сиг-
нала, а затем использовать ЦАП, чтобы получить напряжение, пропор-
циональное частоте. Схематическое представление этого типа ЧНП по-
казано на Рисунке 2.52a.
Альтернативная схема ЧНП схематически показана на Рисунке 2.52b. В
рисунок 2.52 преобразователь частоты в напряжение (FCVs): (а) метод цифро-
вого счетчика и (б) метод зарядки конденсатора.
frequency signal – сигнал частоты
digital counter – цифровой счетчик
DAC – преобразователь цифрового в аналоговое (ЦАП)
Voltage output – выход напряжения
comparator – компаратор
threshold signal – пороговый сигнал
switching circuit – схема переключения
charging voltage –напряжение зарядки
capacitor circuit – схема конденсатора
voltage output – выход напряжения
237
этом методе, частота сигнала подается на компаратор вместе с уровнем
порогового напряжения. Знак выхода компаратора будет зависеть от того,
уровень входного сигнала больше или меньше, чем пороговый уровень.
Первое изменение знака (отрицательного к положительному) на выходе
компаратора используется для запуска схемы коммутации, которая будет
реагировать путем подключения конденсатора к фиксированным напря-
жением зарядки. Это позволит зарядить конденсатор. Следующее из-
менение знака (положительного до отрицательного) выходного сигнала
компаратора вызовет схемы переключения на короткий конденсатор, тем
самым мгновенно его выпуская. Этот процесс зарядки-разрядки будет
повторяться в ответ на вход генератора. Уровень напряжения, до которо-
го конденсатор заряжается каждый раз, будет зависеть от того периода
переключения (зарядное напряжение фиксировано), который в свою оче-
редь, определяется частотой входного сигнала. Следовательно, выход-
ное напряжение схемы конденсатора будет репрезентативной частотой
входного сигнала. Так как выход не устойчив в связи зарядкой кривой в
виде уклона и мгновенной разрядкой, сглаживающая схема обеспечива-
ется на выходе для удаления в результате шума пульсаций. Должно быть
ясно, что схема для этого второго подхода к ЧНП аналогичен для НЧП.
На самом деле, та же микросхема коммерчески доступена как для НЧП
и ЧНП.
Применение ЧНП включают в себя демодуляцию частотно-модулиро-
ванных сигналов, частотное измерение в случаях управления, цифровое
в аналоговые преобразование и преобразование импульсных выходов в
некоторые типы датчиков и преобразователей в сигналы аналогового на-
пряжения (например, генерация вывода для цифровых тахометров).
2.10.4 Преобразователь напряжения в ток (НтП)
Сигналы измерения и сигналы обратной связи, как правило, переда-
ются в качестве текущих уровней в диапазоне 4-20 мА, а не в качестве
уровней напряжения. Это о собенно полезно, когда область измерения не
близка к комнате мониторинга. Так как само измерение, как правило, до-
ступно в качестве напряжения, оно должно быть преобразовано в элек-
трический ток с помощью НТП. Например, датчики давления и датчики
температуры в системах тестирования рабоспособно сти обеспечивают
текущие выходы, которые пропорциональны измеренным значениям
давления и температуры. Кроме того, крутящий момент двигателя, со-
238
ответствует току, который генерирует создающей момент вращения маг-
нитного поля. Следовательно, управление крутящим моментом электро-
двигателя может быть достигнуто за счет управления током. Источники
тока, управляемые напряжением, полезны для вождения и тестирования
устройств. Полезность НТП видна из этих наблюдений.
При передаче сигнала через кабель, есть преимущества для передачи
тока, а не напряжения. Уровень напряжения будет падать из-за сопро-
тивления в тракте передачи, но ток через проводник останется незаря-
женным, если проводник не является разветвленным. Следовательно,
сигналы тока, менее вероятно, приобретают ошибки из-за сигнала осла-
бления. Еще одно преимущество использования тока, а не напряжения в
качестве измерительного сигнала, является то, что тот же сигнал может
быть использован для управления несколькими устройствами последо-
вательно (например, дисплеем, плоттером, и процессором сигналов од-
новременно), снова не вызывая ошибок вследствие о слабления сигнала
по потерянной мощности в каждом устройстве, так как тот же ток под-
водится ко всем устройствам. НТП должен обеспечивать ток, пропорци-
ональный входному напряжению, без влияния сопротивления нагрузки,
к которой ток подается.
Схема НТП на основе ОУ показана на Рисунке 2.53 . Используя тот факт,
что токами через входные схемы ненасыщенного ОУ можно пренебречь
рисунок 2.53 НтП
Input voltage – входное напряжение
Output current –выходной ток
load – нагрузка
239
(из-за очень высокого входного импеданса), запишем текущие уравнения
для суммирования двух точек А и В,
и
Соответственно, мы имеем
(2.131)
и
(2.132)
Теперь, используя тот факт, что Va
=V
b
для ОУ (из-за очень высокого
коэффициента усиления), подставим уравнение 2.131 в уравнение 2.132,
чтобы получить
(2.133)
где iо выходной ток
vi входное напряжение
Из этого следует, что выходной ток пропорционален входному напря-
жению, независимо от значения сопротивления нагрузки RL , как это
требуется для НТП.
Коммерчески, НТП доступны как мультиконтактные микросхемы. Не-
которые параметры чипа НТП состоят в следующем: рабочий диапазон
напряжения, 0-40 В; диапазон рабочего тока, 0-40 мА; используют внеш-
ний резистор.
2.10.5 Схемы удержания максимального значения
Аналоговое устройство удержания максимального значения принимает
аналоговый сигнал и имеет максимальное значение в запоминающем
конденсаторе, пока не будет получено большее значение. В отличие от
S / H, который содержит каждое выбранное значение сигнала, схема
удержания пиковых значений содержит только наибольшее значение,
достигнутое с помощью сигнала в течении периода мониторинга. Удер-
жание максимального значения полезно в различных случаях. С помо-
240
щью этого устройства, огибающий сигнала может быть получен, чтобы
представлять крайние или самые тяжелые значения сигнала. Он может
также быть использован в качестве формирующего сигнал устройства.
В обработке сигнала для ударных и вибрационных исследований дина-
мических систем, что известно как спектр реакции (например ударная
реакция спектра), определяются с помощью анализатора спектра реак-
ции, который эксплуатирует схему удержания максимального значения.
Предположим, что сигнал подается к простому осциллятору (одиничный
уровень свободы системы второго порядка, без нулей) и определяется
пиковое значение отклика (выхода). График зависимости пиковой мощ-
ности в зависимости от частоты собственных колебаний генератора, в
течение заданного коэффициента затухания, известен как спектр откли-
ка сигнала для этого коэффициента демпфирования. Обнаружение пиков
также полезно при мониторинге машин и систем сигнализации. Короче
говоря, когда требуется только одно репрезентативное значение сигнала
в конкретном случае, пиковое значение будет ведущим претендентом.
Обнаружение пиков сигнала может быть проведено с использованием
цифровой обработки. Например, сигнал дискретизируется и предыду-
щее значения выборки заменяются текущей стоимостью образца, только
если последний больше, чем первый. Таким образом, максимальное зна-
Diode – диод
Output voltage follower – выходной повторитель напряжение
Peak value (output) – пиковая мощность
Input signal – выходной сигнал
Reset switch - выключатель
рисунок 2.54 Схема удержания максимального значения
241
чение сигнала удерживается с помощью отбора проб, а затем удержания
одного значения. Следует отметить, что, как правило, момент времени,
при котором пик происходит, не сохраняется.
Обнаружение пиков может быть также сделано с помощью аналоговых
схем. Это на самом деле основа аналоговых анализаторов спектра. Схе-
ма удержания максимального значения показана на Рисунке 2.54. Схема
состоит из двух повторителей напряжения. Первый повторитель напря-
жения имеет диод на своем выходе, смещенный в прямом направлении
положительным выходом повторителя напряжения и смещен в обратном
направлении по низкой утечке конденсатора, как показано на рисунке.
Второй повторитель напряжения представляет пик напряжения, удержи-
вающийся конденсатором на выходе схемы при низком выходном импе-
дансе без загрузки предыдущей стадии замыкания (конденсатора и пер-
вого повторителя напряжения). Для пояснения работы схемы, предпо-
ложим, что vi входное напряжение больше, чем напряжение, к которому
конденсатор заряжается (V). Поскольку напряжение на положительном
выводе ОУ v i и напряжение на отрицательном выводе v, то первый ОУ
будет насыщен. Так как дифференциальный вход ОУ положителен при
этих условиях, выход ОУ будет положительным. Выход будет заряжать
конденсатор пока конденсатор напряжения v не будет совпадать с вход-
ным напряжением VI
. Это напряжение (назовем его Vo ), в свою очередь,
подается во второй повторитель напряжения, который представляет то
же значение на его выходе (обратите внимание, что коэффициент усиле-
ния равен 1 для повторителя напряжения), но при очень низком уровне
импеданса. Выход ОУ остается на насыщенном значении только в те-
чении очень короткого промежутка времени (время, затраченное кон-
денсатором для зарядки). Теперь предположим, что VI меньше V. Тогда
дифференциальный вход ОУ будет отрицательным, а выход операцион-
ного усилителя будет насыщен на отрицательном уровне насыщения.
Это обратное смещение диода. Следовательно, выход первого ОУ будет
находиться в открытом цикле, и в результате напряжение, подаваемое
к повторителю выходного напряжения все еще будет напряжением на
конденсаторе, а не на выходе первого ОУ. Из этого следует, что уровень
напряжения на конденсаторе (и следовательно на выходе второго повто-
рителя напряжения) всегда будет амплитудным значением входного сиг-
нала. Схема может быть вновь установлена путем разряда конденсатора
через твердотельный переключатель, который активируется с помощью
внешнего импульса.
242
Коммерческие детекторы аналоговых пиков доступны в монолитной
форме в виде интегральных микросхем. Режимы функций удержания и
сброса могут быть выбраны в цифровой форме с помощью штифта. Как
положительные, так и отрицательные пики могут быть обнаружены, по-
скольку оба полюса доступны в ОУ. Типичные параметры следующие:
Диапазон входного напряжения ± 10 В, CMRR 90 дБ, скорость нараста-
ния выходного напряжения 0,5 В / мкс, полоса пропускания 0,5 МГц.
243
3. технические характеристики и ин-
струмент оценки параметров
Основные моменты главы :
• Важность технических характеристик
• Использование продукта в условиях существующего выбора, дизайна /
разработке новых продуктов
• Категории технических характеристик: скорость выполнения, устой-
чивость
• Типы параметров эффективно сти: (1) параметры, используемые в ин-
женерной практике (предоставлены в соответствии с особенностями
производителя / поставщика) и (2) параметры, выведенные из инженер-
ных теоретических соображений (на основе модели)
• Модели, используемые для технических характеристик: (1) модели
дифференциального уравнения (во временной области) и (2) модели пе-
редаточной функции (в частотной области)
• Нелинейности и эффекты
• Пропускная способность в измерительных приборах
• Чувствительность в измерительных приборах
• Ошибочные приложения и соотношения
3.1 Характеристика производительности
Инженерная система состоит из интеграции нескольких компонентов,
таких как датчики, преобразователи, приборы, формирующие сигналы
и модификационные устройства, контроллеры и другие различные элек-
тронные и цифровые аппаратные средства. Производительность и реа-
лизация намеченной цели системы зависит от характеристики отдель-
ных компонентов и от того, как компоненты соединены между собой.
Все устройства, поддерживающие предполагаемые функции инженер-
ной системы можно интерпретировать как компоненты системы. Дея-
244
тельность, связанная с контрольно-измерительной системой, такая как
предписание компонентов для системы, выбор доступных компонентов
для конкретного применения, разработка новых компонентов, а также
анализ производительности системы должны быть сильно зависимы от
характеристик производительности. Требования к рабочим характери-
стикам должны быть определены или установлены на основе функцио-
нальных потребностей всей системы. Эти ее особенности устанавлива-
ются с точки зрения параметров оценки (параметров производительно-
сти) компонентов. Некоторые рабочие параметры содержатся в паспорте
продукта, который может быть получен от изготовителя или поставщика.
Для новых разработок продуктов, требуемые технические характеристи-
ки должны быть разработаны командой разработки продукта (инженера-
ми и т.д.), консультируясь с пользователями, регулирующими органами,
поставщиками и так далее.
3.1 .1 Параметры для технических характеристик
В этой главе мы изучаем оценки и параметры технических требований к
характеристикам компонентов в инженерной системе. Как правило, ком-
понент производительности задается при трех важных типах показате-
лей эффективности:
1. Скорость исполнения
2. Устойчиво сть
3. Точность
Рабочие параметры во всех трех типах обсуждаются в этой главе. Как и
следовало ожидать, из-за динамических взаимодействий в инженерной
системе, есть некоторая степень взаимосвязи между параметрами этих
трех типов.
Две категории параметров найдены в описании производительности
компонентов в инженерной системе:
1. Параметры, используемые в инженерной практике (например, параме-
тры, перечисленные при продаже в паспортах компонента)
2. Параметры, определенные с использованием технических теорети-
ческих соображений и эталонной модели, либо во временной области,
либо в частотной области.
Инструмент оценки коммерческих продуктов (категория 1 в предыдущем
списке) часто разрабатывается на основе инженерных аналитических
параметров (категория 2). Тем не менее, номенклатура и определения,
используемые в Категории 1 не могут быть совершенно одинаковыми
245
или согласованными с точными аналитическими определений, исполь-
зуемыми в Категории 2, по причинам условности и истории инженерной
практики. Тем не менее, обе категории параметров производительно сти
одинаково важны в измерительной практике, и рассматриваются в этой
главе. В частности, в главе рассматриваются основы (аналитические
основы, из практических соображений, обоснование и т.д.) техниче-
ских требований к характеристикам компонентов инженерной системы,
а также параметров, используемых для этой цели. Даже если датчики
и связанная аппаратура особенно выделяются в главе, процедуры, как
правило, применимы к различным компонентам в инженерной системе,
так как эти компоненты могут быть представлены с помощью обычных
динамических моделей, которые используются в разработке параметров
для технических требований к характеристикам.
Значительное большинство инструментов оценки, предоставленных
производителями (или, параметров, предусмотренных в паспорте ком-
мерческого инструмента, которые подпадают под категорию 1) находят-
ся в виде статических параметров. В инженерных применениях, однако,
динамические характеристики также являются очень важными, и они в
первую очередь попадают под Категорию 2. Как статические, так и ди-
намические характеристики приборов и соответствующих параметров
обсуждаются в этой главе.
Датчик определяет (чувствует) величину, которая измеряется (измеряе-
мая величина). Преобразователь преобразует обнаруженный в измеряе-
мой удобной форме для последующего использования (мониторинга, ди-
агностики, контроля, внедрения, прогнозирования, записи и т.д.). Вход-
ной сигнал датчика может быть отфильтрован, усиливаться, и соответ-
ствующим образом изменяться по необходимости для его последующего
использования. Компоненты, используемые для всех этих целей, могут
быть рассмотрены в данном контексте технических требований к харак-
теристикам и параметрам оценки. Конечно, основной конечной целью
приборов является достижения желаемой производительности от общей
интегрированной системы. Выполнение отдельных компонентов имеет
решающее значение в этом отношении, так как общая производитель-
ность системы зависит от производительности отдельных компонентов
и от того, как компоненты соединены друг с другом (и согласованы) в
системе.
Для уточнения характеристик в аналитической области (т.е., категория
2), используются два типа динамических моделей:
246
1. Дифференциально-уравнительные модели в области времени
2. Модели передаточной функции в частотной области
В частности, параметры для спецификации производительности, как
правило, разработаны с использованием этих двух типов динамических
моделей. Модели весьма полезны в представлении, анализе, проектиро-
вании и оценке датчиков, преобразователей, контроллеров, исполнитель-
ных механизмов и интерфейсных устройств (в том числе формирования
сигналов и модификации устройств). Во временной области, такие рабо-
чие параметры, как время нарастания, время пика, могут быть указаны
стабилизация времени и процент преувеличения. В качестве альтерна-
тивы, в частотной области, пропускная способность, статический коэф-
фициент усиления, резонансная частота, величина при резонансе, импе-
данс, получение запаса, и запас по фазе могут быть указан. Эти различ-
ные параметры спецификации производительности будут обсуждаться
в этой главе. В частности, пропускная способность играет важную роль
в указании и описании многих компонентов инженерной системы. Сле-
дует отметить, что полезный диапазон частот, рабочая полоса пропуска-
ния, и управление полосой пропускания являются важными факторами.
В этой главе мы исследуем несколько важных вопросов, связанных с по-
ло сой пропускания системы в некоторых деталях.
В любом многокомпонентной системе, общая ошибка зависит от ошибки
компонента. Компонент ошибки ухудшает производительность техни-
ческой системы. Это особенно верно для датчиков и преобразователей,
так как их погрешность непосредственно проявляется в системе, как
неправильно определенные переменные и параметры системы. Так как
ошибка может быть разделена на систематическую (или детерминиро-
ванную) часть и случайную (или стохастическую) часть, статистические
соображения играют важную роль в анализе ошибок. Степень серьез-
ности того, как ошибка компонента влияет на общую ошибку системы,
касающуюся чувствительности системы. В частности, чувствительность
к желательным факторам должна быть максимизирована, в то время как
чувствительность к нежелательным факторам должна быть сведено к
минимуму. Так как может быть огромное количество факторов, кото-
рые могут повлиять на производительность системы, мы должны найти
спо собы, чтобы выбрать разумный фактор из них, который могут быть
включен в задачи измерения. В этой главе также рассматриваются такие
взгляды на ошибки и анализ чувствительности.
247
3.1 .1 .1 Функциональные требования к дизайну и контролю
Как было отмечено в предыдущих главах, приборостроение представля-
ет интерес как в процессе проектирования, так и в процессе проведения
контроля. Измерение завершает разработку системы. Контроль помогает
конструкции наиболее плотно соответствовать требованиям к произво-
дительности, и в каком-то смысле избегаь недостатков. На самом деле,
в контексте мехатроники, как измерительные приборы, так и управлен-
ческие должны рассматриваться одновременно в рамках мехатронной
задачи проектирования, которая включает в себя интегрированную мно-
годоменность оптимальной конструкции. Понятно, что, особенно сти
ее технических характеристик на самом деле являются особенностями
дизайна. Измерение и контроль помогают достичь соответствия техни-
ческим требованиям.
В дальнейшем на примерах будет продемонстрировано, что особенности
контроля имеют схожие черты с особенностями измерения и дизайна.
В частности, конкретный параметр, такой, как оценка чувствительности
может быть адаптирован для достижения некоторой цели производитель-
ности за счет контроля, а также проектирования и измерения приборов.
3.1 .1 .2 идеальное измерительное устройство
Измерительные приборы, включающие в себя датчики и соответствую-
щее аппаратное обеспечение, являются важной категорией компонентов
аппаратуры инженерной системы. Их можно охарактеризовать как иде-
альный измерительный прибор. Идеальный измерительный прибор мо-
жет быть определен как тот, который обладает следующими основными
характеристиками:
1. Выход измерительного прибора мгновенно достигает измеренного
значения (быстрый отклик).
2. Выход преобразователя достаточно велик (высокий коэффициент уси-
ления, низкое выходное сопротивление, высокая чувствительность).
3. Выход устройства о стается на измеряемой величине (без дрейфования
или получить пострадавших от экологических последствий и других не-
желательных нарушений и шума), если измеряемой величины (то есть
то, что измеряется) само по себе изменяет (стабильность и надежность).
4. Уровень выходного сигнала преобразователя изменяется пропорци-
онально уровню сигнала измеряемой величины (статическая линей-
ность).
248
5. Подключение измерительного прибора не искажает саму измеряемую
велиину (погрузочные эффекты отсутствуют и полные сопротивления
совпадают, см. Главу 2).
6. Потребляемая мощность мала (высокое входное сопротивление, см.
главу 2).
Все эти свойства о снованы на динамических характеристиках и, следова-
тельно, могут быть объяснены с точки зрения динамических характери-
стик измерительного прибора. В частности, пункты с 1 по 4 могут быть
указаны в условиях ответной реакции устройства, либо во временной об-
ласти, либо в частотной области. Пункты 2, 5 и 6 могут быть определены
с использованием характеристик импеданса устройства. Во-первых, мы
обсудим характеристики реагирования, которые важны в характеристике
производительности компонента инженерной системы.
3.1 .2 Динамические Эталонные модели
Как уже отмечалось ранее, в инженерных применениях, как статические,
так и динамические параметры используются в характеристиках произ-
водительности. Динамические параметры производительности относят-
ся к устройствам динамики устройства. Например, идеальные требова-
ния никогда не могут быть точно выполнены для датчика, пожалуй, с
точки зрения динамики датчика. Например, датчик будет иметь задерж-
ку в обеспечении ее окончательного считывания из-за динамики датчика
(константа времени).
Динамические параметры производительности устанавливаются по от-
ношению к динамической модели, которая представляет динамику рас-
сматриваемого компонента (например, датчика). Оно не может быть пол-
ной и точной моделью устройства, а это скорее модель, представляющая
технические требования рабочих характеристик. Следовательно, это эта-
лонная модель. Тем не менее, динамика эталонной модели должна быть
связана с динамикой фактического устройства (или его точной модели).
Используются два типа динамических моделей:
1. Дифференциально-уравнительные модели во временной области
2. Модели передаточной функции в частотной области
Модели во временной области могут быть преобразованы в модель пере-
даточной функции (то есть, в частотной области), и наоборот, с помощью
простой операции (то есть, замены временной производной операции d
/ DT переменной Лапласа s и наоборот). Тем не менее, по практическим
соображениям значимости параметров производительности в обеих об-
249
ластях, важно рассматривать модели в обоих доменах.
Широко используются эталонные модели для компонента:
1. Модель первого порядка
2. Модель второго порядка (простой осциллятор)
Обе модели должны быть рассмотрены, поскольку полная модель вто-
рого порядка не может быть построена путем разделения двух моделей
Time – время
Response – ответ
Percentage overshoot boundary – процент превышения границ
Steady-state error boundary – устойчивое состояние ошибочных границ
Settling time boundary – устойчивое время границ
Speed of response boundary – скорость реакции границ
рисунок 3.1 (а) Рабочие параметры, основанные на ответе первого порядка и
(б) параметры отклика для спецификации временной области производитель-
ности.
250
первого порядка, так как разложение всегда будет приводить к пере-
демпфированной модели, которая не могут показать колебания, которые
обычно и естественно возникают в динамике устройства.
3.1 .2 .1 Модель первого порядка
Линейная динамическая система первого порядка задается (во времен-
ной области)
(3.1)
гдеu-вход
y - выход
τ - константа времени
k - коэффициент усиления постоянного тока
Соответствующая модель передаточной функции
Предположим, что система начинается с у(0) = y
0
и величина А шага вво-
да применяется при этом исходном состоянии. Соответствующий ответ
(3.3)
Этот ответ набросан на Рисунке 3.1а. Первый член в правой части урав-
нения 3.3 является свободным ответом, а второй член является вынуж-
денной реакцией. Должно быть ясно, что единственным существенным
параметром спецификации производительности с использованием моде-
ли первого порядка является константа времени τ.
Примечание 1: Из уравнения 3.3 следует, что, если линия рисуется при
Т = 0, с наклоном, равным начальному наклону ответа (т.е . касательной
снаклоном=(Ак-y
0
) /τ ), то оно будет достигать конечного значения
(стационарного) (Ак) в момент t = τ . Это еще одна интерпретация кон-
станты времени, как показано на Рисунке 3.1а.
Примечание 2: Можно показать, что (см. ниже) пропускная способность
половинной мощности = 1 / т.
Совершенно очевидно, что только два параметра производительно сти
251
могут быть определены с помощью эталонной модели первого поряд-
ка (константа времени Т и постоянное усиление k ). Константа времени
представляет скорость и стабильность в этом случае. Константа време-
ни является фактически единственным параметром производительно сти
для системы первого порядка, так как передаточная функция может быть
нормализована с помощью усиления k = 1 . Коэффициент усиления мож-
но регулировать в зависимости от обстоятельств (физически с помощью
усилителя или вычислительно путем простого умножения ответа на по-
стоянную величину).
3.1 .2 .2 Модель Простого Генератора
Простой генератор является универсальной моделью, которая может
представлять производительность разнообразных устройств, в частно-
сти, желаемой (заданной) производительности. В зависимости от уровня
затухания, который присутствует, как колебательность, так и неколебле-
мости могут быть представлены с помощью этой модели. Модель может
быть выражена как
(3.4)
где ωn
- незатухающая собственная частота
ζ - коэффициент демпфирования
Соответствующая модель передаточной функции
(3.5)
Примечание: Мы имеем нормализованную модель, сделав статический
коэффициент усиления = 1. Тем не менее, мы можем просто добавить
усиление k в числителе, как и в Уравнении 3.2, если это необходимо.
Затухающая собственная частота задается
(3.6)
фактическая (затухающая) система выполняет свободные (природные)
колебания на этой частоте. Реакция системы на единично-ступенчатое
252
возбуждение, с нулевыми начальными условиями, как известно,
(3.7)
где φ представляет собой фазовый угол в ответ, и дается
(3.8)
3.2 технические характеристики во временной области
Как уже отмечалось выше, даже если конкретный акцент может быть
сделан на датчики, преобразователи, и охватывающие измерительные
приборы, концепции и технические характеристики, представленные
здесь, применимы к различным другим типам компонентов в динамиче-
ской системе. На Рисунке 3.1б показан типичный этап ответа, домини-
рующего режима работы устройства. Заметим, что кривая нормирована
по отношению к стационарному значению. У нас есть несколько иденти-
фицированных параметров, которые полезны для спецификации произ-
водительности во временной области устройства. Некоторые важные па-
раметры для спецификации производительности во временной области,
используя простую одноосцилляторную модель, задаются уравнениями
3.4 и 3.5 и его шаг реагирования (3.7), приведен в Таблице 3.1. Опреде-
ления этих параметров приведены в следующем.
Время нарастания: Это время, необходимое, чтобы пройти стационар-
ное значение ответа в первый раз. В передемпфированных системах
ответ неосциллируют; следовательно, нет перерегулирования. Это опре-
деление справедливо для всех систем; Время нарастания часто опреде-
ляется как время, необходимое для передачи 90% от установившегося
значения. Время нарастания сигнала часто измеряется от 10% устано-
вившегося значения для того, чтобы оставить неровности на начальном
этапе и временные задержки, которые могут присутствовать в системе.
Модифицированное время нарастания (TRD) может быть определено та-
ким образом (см. Рисунок 3.1b). Альтернативное определение времени
нарастания, особенно подходит для неосцилляционных ответов, это об-
ратный наклон кривой шага ответа на 50% от установившегося значения,
умноженного на установившееся значение. В терминологии управления
253
технологическим процессом, это называется время цикла. Независимо
от того, какое определение используется, время нарастания представляет
собой скорость отклика времени устройства - небольшой рост указывает
на быстрый ответ.
таблица 3.1 Параметры производительности во временной области с
помощью модели простого генератора
Параметр производительности
Выражение
Время нарастания
Час пик
Пиковое значение
Процент перерегулирования (PO)
Константа времени
Время успокоения (2%)
Время задержки: Это, как правило, определяется как время, необходи-
мое, чтобы достигнуть 50% от установившегося значения в первый раз.
Этот параметр также является мерой скорости реагирования.
Пиковое время: Время на первом пике отклика устройства является пи-
ковым временем. Этот параметр также представляет собой скорость от-
клика устройства.
Время успокоения: Это время, необходимое для ответа устройства на
то,чтобы зафиксироваться в пределах определенного процента (центных
как правило, ± 2%) от стационарного значения. Этот параметр зависит от
степени демпфирования в устройстве, а также от степени стабильно сти.
Примечание: Согласно простой модели осциллятора, время успокоения
(при низком затухании) почти равно четырем константам времени. В
качестве конкретного использования этого факта, рассмотрим процесс
считывания. Так как для датчика, значение считывания времени данных
должно быть больше, чем его время установления (тогда у данных не
будет ошибок от динамики датчика), датчик должен быть более чем в 4
раза (предпочтительно в 10 раз) быстрее, чем быстрый компонент сиг-
нала (определяется его частотой), который должен быть точно измерен.
Процент перерегулирования: Это определяется как
с
254
(3.9)
с использованием кривой шага отклика нормализованного-к-единице,
где Мр- пиковое значение. Процент перерегулирования (РО) является
мерой демпфирования или относительной стабильностью в устройстве.
Установившаяся ошибка: Это отклонение фактического стационарного
значения отклика устройства от желаемого конечного значения. Уста-
новившаяся ошибка может быть выражена в процентах по отношению
к (желательно) установленному значению. В выходе устройства, уста-
новившаяся ошибка проявляется как смещение. Это систематическая
(детерминированная) ошибка. Это может быть обычно исправлено с по-
мощью перекалибровки. В устройствах сервопривода, установившаяся
ошибка может быть уменьшена за счет увеличения коэффициента усиле-
ния петли или путем введения компенсационной задержки. Стационар-
ная ошибка может быть полностью устранена с помощью интегрального
управления (сброса) действий.
За лучшую производительность выходного устройства (например, блок
датчика-преобразователя), мы хотим иметь значения ото всех вышеука-
занных параметров как можно меньше. В реальной практике, однако,
может быть трудно удовлетворить все спецификации, особенно для про-
тиворечивых требований. Например, Т
р
может быть уменьшено за счет
увеличения доминирующей собственной частоты ωn устройства. Это,
однако, увеличивает PO, а иногда и Ts
. С другой стороны, РО и Ts может
быть уменьшено за счет увеличения демпфирования устройства, но оно
имеет нежелательный эффект увеличения Tr
.
Пример 3.1
В конкретном применении, самый быстрый компонент сигнала, который
должен быть точно измерен, со ставляет 100 Гц. Оцените верхнюю гра-
ницу для константы времени датчика, который может быть использован
для этого применения.
решение
Самый быстрый компонент сигнала = (100 × 2π) рад / с
Для того, чтобы датчик был в 10 раз быстрее, чем самый быстрый ком-
понент сигнала, нам нужно
где τ - костанта времени датчика.
255
3.2 .1 Устойчивость и скорость реагирования
Свободный отклик устройства может обеспечить ценной информацией о
природных характеристиках устройства. Свободное (нефорсированное)
возбуждения, может быть получено, например, путем подачи начальных
условий возбуждения к устройству, затем позволяя ему свободно реа-
гировать. Две важные характеристики, которые могут быть определены
таким образом, являются
1. Стабильность
2. Скорость ответа
Устойчивость динамической системы предполагает, что ответ не будет
расти без границ, когда сама сила возбуждения конечна. Скорость от-
клика системы указывает на то, насколько быстро система реагирует на
силу возбуждения. Это также является показателем того, насколько бы-
стро свободный ответ (1) поднимается или падает, если система колеба-
тельная (т.е. докритическое затухание); или (2) затухает, если система
нео сциллирующая (т.е . передемпфированная). Отсюда следует, что две
характеристики, стабильность и скоро сть реакции, не являются полно-
стью независимыми. В частности, для неосцилляционных систем эти
два свойства очень тесно связаны между собой.
Уровень устойчивости линейной динамической системы зависит от ре-
альных частей собственных значений (или полюсов), которые являются
корнями характеристического уравнения. (Примечание: многочлен - зна-
менатель передаточной функции системы.) В частности, если все корни
имеют действительные части, которые являются отрицательными, то си-
стема устойчива. Кроме того, чем негативнее реальная часть полюса, тем
быстрее затухает свободная составляющая отклика, соответствующая
этому полюсу. Обратным отрицательной вещественной части является
константа времени. Следовательно, чем меньше константа времени, тем
быстрее распадается соответствующий свободный ответа, и, следова-
тельно, тем выше уровень стабильности, связанной с этим полюсом. Мы
можем обобщить эти наблюдения следующим образом:
Уровень стабильности: Зависит от скорости распада свободного ответа
(и, следовательно, от константы времени или реальных частей полюсов).
Скорость реакции: Зависит от частоты собственных колебаний и демп-
фирования для колебательных систем и скорости распада для неосцил-
ляционных систем.
Константа времени: Определяет стабильно сть системы и скорость рас-
256
пада свободного ответа (и скорость реакции также в неосцилляционных
системах).
Пример 3.2
Автомобиль весит 1000 кг. Эквивалентная жесткость на каждом колесе, в
том числе системе подвески, составляет примерно 60,0 × 103 Н / м. Если
подвеска рассчитана на процент перерегулирования 1%, оцените декре-
мент, который необходим на каждом колесе.
решение
Для быстрой оценки используем модель простого генератор (четверть
автомобиля), которая имеет вид
(3.2 .1)
где
m - эквивалент массы = 250 кг
b - эквивалент константе затухания (нужно определить)
k - эквивалентная жесткость = 60,0 × 103 Н / м
u - возбуждение смещения за рулем
Сравнивая уравнение 3.2 .1 и уравнения 3.4 мы получаем
(3.2 .2)
Примечание: эквивалентная масса каждого колеса берется в качестве од-
ной четверти от общей массы.
Для PO 1%, из Таблицы 3.1, мы имеем,
Это дает ζ = 0,83. Заменяя значения в уравнении 3.2 .2 . Мы получаем,
или
Что касается спецификаций временной области устройства, таких как
257
преобразователь, желательно иметь очень малое время нарастания и
очень малое время установления сигнала по сравнению с константами
времени системы, отклик которых измеряется, и низкий процент пере-
регулирования. Эти противоречивые требования приведут к быстрой,
стабильной и устойчивой реакции.
Пример 3.3
Рассмотрим слабозатухающую систему и передемпфированную систему
с той же недемпфированной собственной частотой, но с соотношениями
затухания ζu и ζo соответственно. Покажите, что слабозатухающая си-
стема является более стабильной и быстрой, чем передемпфированная
система, если:
где ζo> 1>ζu> 0 по определению.
решение
Используем простую модель генератора (Уравнения 3.4 и 3.5). Характе-
ристическое уравнение
(3.3 .1)
Собственные значения (полюса) являются
(3.3 .2)
Чтобы быть более стабильной, мы должны иметь слабозатухающий по-
люс, расположенный дальше от начала координат, чем доминирующий
передемпфированный полюс; Таким образом,
Это дает
(3.3 .3)
258
Соответствующая область показана как заштрихованная область на Ри-
сунке 3.2 .
Примечание: Затем слабозатухающий ответ не только затухает быстрее,
но также является быстрее (из-за его колебания).
Этот результат указывает на то, что большее демпфирование не обяза-
тельно означает повышенную стабильность. Для объяснения этого ре-
зультата дальше, рассмотрим незатухающий (ζ = 0) простой генератор
естественной частоты ωn
. Теперь, давайте добавим затухания и увели-
чение Z, постепенно от 0 до 1. Тогда, комплексно сопряженные полюса
- ζωn ± jωd отойдут от мнимой оси, когда г возрастет (так как ζωn уве-
личивается) и, следовательно, уровень стабильно сти будет возрастать.
Когда ζ достигает значения 1 (то есть, критическое демпфирование), мы
получаем два одинаковых и реальных полюса в -ω
n
. При ζ увеличении за
1, полюса будут реальными и неравными, и величина одного полюса бу-
дет меньше ωn
, и величина другого - больше, чем ωn
.
Первый (который
находится ближе к началу координат нулевого значения) является доми-
нирующим полюсом, и он будет определять стабильность и скорость ре-
акции полученной передемпфированной системы. Отсюда следует, что
при возрастании ζ за 1, оба полюса будут отклоняться от значения -ωn ,
один будет двигаться в сторону начала координат (становится менее ста-
бильным), а другой будет отдаляться от начала координат. Теперь ясно
Underdamped damping ratio – слабозатухающая соотношение затухания
Overdamped damping ratio – передемпфированное соотношение затухания
рисунок 3.2 Область (заштрихованная), где слабозатухающая система работает
быстрее и более стабильна, чем соответствующая передемпфированная систе-
ма.
259
что при увеличении ζ за пределах точки критического демпфирования,
система становится менее стабильной. В частности, при заданном зна-
чении ζu <1,0, то есть значении ζo > 1, описанном Уравнении 3.3 .3, выше
которого передемпфированная система менее стабильна и медленнее,
чем слабозатухающая система.
3.3 технические характеристики частотной области
На Рисунке 3.3 показана репрезентативная передаточная функция ча-
стоты или FTF (часто называют функцией частотной ответа или БСМ)
устройства. Это образовывает диаграмму усиления (БСМ величины) и
фазового угла, используя частоту в качестве независимой переменной.
риСУНок 3.3 Параметры отклика для частотной области спецификации про-
изводительности.
Gain (magnitude) – Усиление (магнитуда)
Static gain – статическое усиление
Resonant frequency – резонансная частота
Slop within – коэффициент удлинения в рамках
dB/decade – дБ/декаду
Useful frequency range – диапазон полезной частоты
Frequency – частота
Phase angle – угол фазы
260
Эта пара участков обычно известна как диаграмма Боде, в частности,
когда величина оси откалибрована в децибелах (дБ) и по оси частот в
логарифмическом масштабе, таких как октав или десятилетий. Экспе-
риментальное определение этих кривых может быть достигнуто либо
путем применения гармонического возбуждения и отмечая амплитуду
усиления и привод фазы в ответном сигнале в стационарном состоянии
или с помощью анализа усиления фурье и отклика сигналов либо для
переходных или случайных усилений. Экспериментальное определение
передаточных функций называется идентификацией системы в частот-
ной области.
Передаточные функции предоставляют полную информацию о реакции
системы на синусоидальное усиление. Поскольку любой временной
сигнал может быть разложен на синусоидальные составляющие посред-
ством преобразования фурье, то ясно, что ответное действие системы
на произвольное усиление может быть также определено посредством
использования информации о передаточной функции для этой системы.
В этом смысле, модели передаточных функций частотной области могут
полностью описать линейную систему. На самом деле линейная модель
во временной области с постоянными коэффициентами может быть пре-
образована в передаточную функцию, и наоборот. Таким образом, две
модели полностью эквивалентны. По этой причине, можно утверждать,
что использовать обе спецификации во временной области и специфи-
кации частотной области является излишним, поскольку они несут ту
же информацию. Часто, однако, обе спецификации используются одно-
временно, так как это может обеспечить более полное представление о
производительности системы. На самом деле, физическая интерпрета-
ция некоторых параметров производительности является более удобной
в частотной области (например, пропускная способность и резонанс) и
для некоторых других параметров удобнее во временной области (напри-
мер, скорость реакции и стабильность). В частности, параметры частот-
ной области являются более подходящими в представлении некоторых
характеристик системы гармонического (синусоидального) усиления.
Некоторыми полезными параметрами для технических требований к ха-
рактеристикам устройства, в частотной области, являются
• Полезный частотный диапазон (рабочий интервал)
• Пропускная способность (скорость реакции)
• Статическое усиление (стационарное исполнение)
• Резонансная частота (скорость и критическая область частоты)
261
• Величина при резонансе (устойчивость)
• Входной импеданс (нагрузка, эффективность, взаимодействие, макси-
мальная передача мощности, отражение сигнала)
• Выходной импеданс (нагрузка, эффективность, взаимосвязь, макси-
мальная передача мощности, уровень сигнала)
• Маржа усиления (стабильность)
• Маржа фазы (стабильность)
Первые три пункта подробно обсуждаются в этой главе, а также показаны
на Рисунке 3.3 . Резонансная частота соответствует частоте возбуждения,
рисунок 3.4 Иллюстрация маржи усиления (GM) и маржи фазы (PM). (А) систе-
ма обратной связи и (б) диаграмма Боде.
Phase lag – отставание фазы
input – вход
output – выход
gain – коэффициент усиления
phase – фаза
frequency – частота
262
где величина отклика достигает своего пика. Доминирующая резонанс-
ная частота, как правило, является самой низкой резонансной частотой,
которая, как правило, также имеет самую большую пиковую величину.
Показано, в виде fr на Рисунке 3.3 . Термин величина при резонансе само
по себе и является пиковой величиной, которая уже упоминалась ранее
и показана на Рисунке 3.3 . Резонансная частота является мерой скоро сти
реагирования и пропускной способно стью, а также частотой, которую
следует избегать во время нормальной работы и, когда это возможно.
Это особенно верно для устройств, которые имеют плохую стабильность
(например, низкое демпфирование). В частности, высокое значение при
резонансе является показателем плохой стабильности. Входное сопро-
тивление и выходной импеданс рассматриваются в Главе 2.
3.3 .1 Маржа усиления и маржа фазы
Маржа коэффициента усиления и фазы являются показателями устойчи-
вости устройства. Для определения этих двух параметров, рассмотрим
систему обратной связи (Рисунок 3.4а). Передняя передаточная функ-
ция системы является G(s) и схема передаточной функции обратной свя-
зи представляет собой Н(s). Эти передаточные функции являются пред-
ставлениями частотной области общей системы, которая может вклю-
чать в себя различные компоненты, такие как датчики, преобразователи,
исполнительные устройства, контроллеры и устройства взаимодействия,
а также модификации сигнала.
Схема системы Боде отображает величину и привод участка фазы функ-
ции передачи цикла G(jω) H(jω) в зависимости от частоты. Это схемати-
чески изображено на Рисунке 3.4b.
Предположим, что на определенной частоте ω прямая функция передачи
G (jω) обеспечивает фазовую задержку φ1
, и функция передачи обратной
связи H(jω) обеспечивает фазовую задержку φ2
. Теперь, ввиду отрица-
тельной обратной связи, сигнал обратной связи подвергается задержке
фазы π. Следовательно,
Задержка полной фазы в цикле = φ + π
Где
Задержка фазы GH= φ
1
+φ
2
=φ.
Из этого следует, что, когда полная фазовая задержка функции передачи
цикла GH(jω) равна π, задержка фазы цикла становится 2π, что означает,
263
что, если сигнал частоты ω перемещается через системный цикл, то он
не подвергнется сетевой фазовой задержке. Отметим также что, если на
этой определенной частоте, коэффициент усиления по петле |GH(jω) | бу-
дет единицей, синусоидальный сигнал с этой частотой будет в состоянии
неоднократно перемещаться через цикл, не меняя его фазу или изменяя
его величину, даже без любого внешнего воздействия, что будет соответ-
ствовать состоянию, находящемуся вблизи порога устойчивости.
В то же время, если коэффициент усиления замкнутой цепи |GH(jω)| > 1
на этой частоте, в то время как задержка фазы цикла равна π, то амплиту-
да сигнала будет монотонно возрастать, поскольку сигнал проходит че-
рез цикл. Такое положение нестабильно. Кроме того, если коэффициент
усиления замкнутой цепи ∠ 1 на этой частоте, в то время как задержка
фазы цикла равна π, то амплитуда сигнала будет монотонно падать, по-
скольку сигнал повторяет цикл. Такое положение является стабильным. В
итоге,
1.
If|GH(jω)|=1когда∠GH(jω)=−π,система находится вблизи порога
устойчивости
2.
If|GH(jω)|>1когда∠GH(jω)=−π,система нестабильна
3.
If|GH(jω)|<1когда∠GH(jω)=−π,система стабильна.
Из этого следует, что, предел малости |GH (jω) |, когда по сравнению с 1
на частоте ω, где ∠GH (jω) = −π, обеспечивает показатель стабильно сти
и называется запасом устойчивости по коэффициенту усиления (см. Ри-
сунок 3.4 б). Точно так же на частоте ω, где |GH (jω) | = 1, сумма (предел)
фазовой задержки, которая может быть добавлена к системе, чтобы сде-
лать задержку фазы цикла равной π, является показателем стабильности.
Эту сумму называют запасом устойчивости по фазе (см. Рисунок 3.4 б).
В условиях характеристик частотного диапазона, устройство, такое как
передатчик или приемник, должно иметь широкий диапазон полезного
действия. По этой причине оно должно иметь высокую основную соб-
ственную частоту (примерно 5-10 кратную максимальным частотам ра-
бочего диапазона) и отчасти, низкую степень демпфирования (немного
меньше 1).
В том, что касается технических характеристик частотной области, у
такого устройства, как измерительный преобразователь или усилитель,
должен быть широкий частотный диапазон для практического примене-
ния. Для этого у него должна быть высокая основная собственная ча-
стота (приблизительно в 5-10 раз выше максимальной частоты рабочего
диапазона) и несколько низкий коэффициент затухания (чуть меньше 1).
264
3.3 .2 Модель гармонического осциллятора в частотной области
функция преобразования H(s) для простого генератора колебаний дана
Уравнением 3.5 .
функция передачи частотыH(jω) определена как H(s)|s = j ω
, где ω- частотавозбуж-
дения.
Обратим внимание на то, что H(jω) является сложной функцией в ω.
Имеем
Амплитуда = |H(jω)| = амплитуда H(jω)
фазный выход =∠H(jω)=фазовый уголH(jω)
Так выглядит усиление по амплитуде и фазный выход выходного сигна-
ла, когда сигнал (возбуждение) частоты ω применяется к системе.
Резонансная частота ωr соответствует частоте возбуждения, когда усиле-
ние по амплитуде - максимум и дается
-
Это выражение действительно для ζ ≤ 1/ 2 . Это можно проследить
ниже:
Этот принцип используется, чтобы измерить затухание в устройствах в
дополнение к определению производительности в частотной области.
Принципы частотной области будут рассматриваться в дальнейшем в
рамках диапазона рабочих частот.
Обратите внимание: у модели первого порядка, данной Уравнением 3.1
или 3.2, имеется амплитудно-частотная характеристика.
265
3.3.2 Модель гармонического осциллятора в частотной области
функция преобразования H(s) для простого генератора колебаний дана
Уравнением 3.5.
функцияпередачичастотыH(jω)определенакакH(s)|s = j ω ,гдеω-частотавозбуж-
дения.
Обратим внимание на то, что H(jω) является сложной функцией в ω.
Имеем
Амплитуда = |H(jω)| = амплитуда H(jω)
фазный выход =∠H(jω)=фазовый уголH(jω)
Так выглядит усиление по амплитуде и фазный выход выходного сигна-
ла, когда сигнал (возбуждение) частоты ω применяется к системе.
Резонансная частота ωr соответствует частоте возбуждения, когда усиле-
ние по амплитуде - максимум и дается
-
Это выражение действительно для ζ ≤ 1/ 2 . Это можно проследить
ниже:
Этот принцип используется, чтобы измерить затухание в устройствах в
дополнение к определению производительности в частотной области.
Принципы частотной области будут рассматриваться в дальнейшем в
рамках диапазона рабочих частот.
Обратите внимание: у модели первого порядка, данной Уравнением 3.1
или 3.2, имеется амплитудно-частотная характеристика.
Очевидно, что эта модель обладает только одним рабочим параметром (посто-
янная времени τ), так как усиление kможет нормироваться по отношению к 1
(и изменяться усилителем в рамках механического способа или же вычисли-
тельным путем, умножая выходной сигнал на постоянную). Более того, модель
не может быть слабозатухающей системой, а именно явлением резонанса. Так,
модель гармонического осциллятора не может быть представлена двумя вклю-
ченными последовательно моделями первого порядка.
1.4 Линейность
В теоретическом и практическом смысле устройство считают линейным,
если оно может быть смоделировано линейными дифференциальными
уравнениями, где время t является независимой величина (или смоде-
лировано передаточной функцией, где частота ω является независимой
величиной). Полезные свойства линейной системы являются тем, где
принцип наложения применим: если входной сигнал u1 генерирует вы-
ходной сигнал y
1 , и если входной сигнал u
2 генерирует выходной сигнал y
2,
то, выходной сигнал a
1
u
1
+a
2
u
2 дает выходной сигнал a
1
y1
+a
2
y2
для любого
a
1
иa
2.
Отличительная особенность нелинейной системы заключается в том,
что ее устойчивость может зависеть от входных сигналов системы и/
или начальных условий. Нелинейные устройства часто анализируются
с помощью линейных методов путем расчета незначительных измене-
ний значения рабочей точки. Эта локальная линеаризация достигается
введением возрастающих переменных для входных и выходных сигна-
лов. Если одно приращение может покрыть весь операционный диапа-
зон устройства с достаточной точностью, это – знак того, что устройство
линейно. Если соответствия ввода – вывода представляют собой нели-
нейные алгебраические уравнения, то мы имеем дело со статической
нелинейностью. Такой случай может быть легко решен с помощью нели-
нейных калибровочных кривых, которые делают линейным устройство,
не вводя нелинейных искажений. Однако если соответствия ввода - вы -
вода представляют собой нелинейные дифференциальные уравнения,
анализ обычно становится более сложным. Эта ситуация отображает ди-
намическую нелинейность. Реализация передаточной функции прибора
в неявной форме предполагает линейность.
266
Согласно промышленной и коммерческой терминологии, линейный из-
мерительный прибор обеспечивает измеренное значение, которое варьи-
руется линейно с показателем измеряемой величины — переменной,
значение которой известно (измерено). Оно согласовывается с опреде-
лением статической линейности и соответствует предъявляемым требо-
ваниям, потому что, как правило, коммерческие приборы требуют, что-
бы диапазон рабочих режимов находился в той области, где динамика
устройства заметно влияет на выходной сигнал устройства. В некоторой
степени, все физические устройства можно назвать нелинейными. Это
Saturation level – насыщенный уровень
Device output – выход устройства
Device input – вход устройства
Linear range – линейное направление
Transfer function magnitude – магнитуда придаточной функции
Jump – скачок
Hardening nonlinearity – твердость нелинейности
Softening nonlinearity – мягкость нелинейности
Frequency – частота
Speed – скорость
Displacement – смещение
Limit cycle(stable) - Выходной сигнал предельного цикла(стабильно)
изображение 3.5 Общие проявления нелинейности в компонентах: (a) Насы-
щенность, (b) мертвая зона, (c) гистерезис, (d) явление скачка и (e) выходной
сигнал предельного цикла.
267
происходит из-за отклонения от идеального поведения по причине таких
факторов, как электрическая и магнитная насыщенность, отклонения от
закона Хука в упругих элементах, трения Кулона, аэродинамического
демпфирования, обратной реакции в механизмах и других ослабленных
деталях, или износа деталей.
Нелинейность в устройствах часто проявляется как некоторые специфи-
ческие особенно сти. В частности следующие свойства важны в обнару-
жении нелинейного поведения в устройствах.
Насыщенность: в нелинейных устройствах может наблюдаться насы-
щенность (см. Рисунок 3.5a). Ее причинами могут являться магнитная
насыщенность, которая распространена в устройствах магнитной ин-
дукции и устройствах, подобных преобразователям (например, диффе-
ренциальные преобразователи), электронная насыщенность (например,
в схеме усилителя), подвижность в механических компонентах и нели-
нейных пружинах.
Мертвая зона: Мертвая зона - область, в которой устройство не отвеча-
ет на сигнал. Хороший пример – прилипание в механических устрой-
ствах с трением Кулона. Из-за прилипания детали не переместятся, пока
приложенная сила не достигнет определенного минимального значения.
Как только движение начато, последующее поведение может быть или
линейным или нелинейным. Другой пример - обратный ход в ослаблен-
ных деталях, таких как колесная пара механизма. Сигнал уклона в элек-
тронных устройствах - третий пример. Пока сигнал уклона не достигает
определенного уровня, действие схемы не происходит. Мертвая зона с
последующим линейным поведением показана на Рисунке 3.5b.
Гистерезис: Нелинейные устройства могут произвести гистерезис. В
гистерезисе, кривая ввода – вывода изменяется в зависимости от на-
правления входного сигнала (см. Рисунок 3.5c), что приводит к петле
гистерезиса. Такое поведение распространенно в ослабленных деталях,
таких как механизмы с обратным ходом; в компонентах с нелинейным
затуханием, напрмиер трение Кулона; и в магнитных устройствах с фер-
ромагнитной средой и различных механизмах рассеивания (например,
токовихревое рассеивание). Например, рассмотрим катушку, обернутую
вокруг ферромагнитного ядра. Если постоянный ток передать через ка-
тушку, генерируется магнитное поле. Поскольку ток увеличен с ноля, на-
пряжение электрического поля также увеличится. Теперь, если ток будет
уменьшен назад к нолю, напряжение электрического поля не возвратит-
ся к нолю из-за остаточной индукции в ферромагнитном ядре. Отрица-
268
тельный ток должен быть применен для того, чтобы размагнитить ядро.
Из этого следует, что напряжения электрического поляа против кривой
изменения скорости напоминает изображенное на Рисунке 3.5c. Это -
магнитный гистерезис.
Линейное вязкое затухание также изображает петлю гистерезиса в своей
кривой смещения силы. Это свойство любого механического компонен-
та, который рассеивает энергию. (Область в гистерезисной петле дает
энергию, рассеянную в одном периоде движения.) В целом, если сила
будет зависеть от смещения (как в случае пружины) и скорости (как в
случае элемента затухания), значение силы в данном значении смеще-
ния изменится с направлением скорости. В частности сила, когда компо-
нент перемещается в одно направление (будем говорить положительную
скорость) будет отличаться от силы в том же расположении, когда ком-
понент перемещается в противоположном направлении (отрицательная
скорость), таким образом, давая гистерезисную петлю в плоскости сме-
щения силы. Если соотношение смещения и скорости к силе линейно
(как в вязком затухании), гистерезисный эффект линеен. С другой сто-
роны, если соотношение нелинейно (как например кулоновское затуха-
ние и аэродинамическое демпфирование), получающийся гистерезис не
линеен.
Явление скачка: Некоторые нелинейные устройства показывают неста-
бильность, известную как явление скачка (или катастрофа типа "Склад-
ка") в кривой амплитудно-частотной характеристики. Это показано на
Рисунке 3.5d и для устройств упрочнения и разупрочнения. С увеличи-
вающейся частотой скачок протекает от А до B; и с уменьшающейся ча-
стотой, он протекает от C до D. Кроме того, сама передаточная функция
может меняться с уровнем внешнего воздействия в случае для нелиней-
ных устройств.
Выходной сигнал предельного цикла: Нелинейные устройства могут
производить предельные циклы. Пример дан в Рисунке 3.5e по фазовой
плоскости (2-D) из скорости по сравнению со смещением. Предельный
цикл - это закрытая траектория в пространстве состояний, которое со-
ответствует незатухающим колебаниям на определенной частоте и ам-
плитуде без затухания или роста. Амплитуда этих колебаний независима
от начального расположения, с которого запускался выходной сигнал.
Кроме того, выходной сигнал не обязателен, чтобы выдержать колеба-
ния предельного цикла. В случае стабильного предельного цикла выход-
ной сигнал перейдет на предельный цикл, независимо от расположения
в окружении предельного цикла, от которого инициировался выходной
269
сигнал (см. Рисунок 3.5e). В случае нестабильного предельного цикла
выходной сигнал перейдет от него с минимальным волнением.
Создание частоты: когда линейное устройство взволновано синусои-
дальным сигналом, оно генерирует в равновесном состоянии ответ на
той же частоте, что и возбуждение. С другой стороны, в равновесном
состоянии, нелинейные устройства могут создавать колебания, которые
не присутствуют во внешних воздействиях. Эти частоты могут быть
гармоническими (целочисленное умножение частоты возбуждения),
субгармоническими (целочисленные выражения частоты возбуждения),
или негармоническими (обычно рациональные выражения частоты воз-
буждения).
Пример 3.4
Рассмотрим нелинейное устройство, смоделированное дифференциаль-
ным уравнением {dy/dt} 1/2 = u(t), где u(t) является вводом, и y - выводом.
Покажем, что это устройство создает компоненты частоты, которые от-
личаются от частот возбуждения.
решение
Во-первых, обратим внимание на то, что ответ системы определяется
Теперь для ввода, определяемого u(t) = a
1
sinω1t + a2sinω2t , простейшее
комплексирование с использованием тригонометрических функций вы-
глядит так:
Отметим, что дискретные компоненты частоты 2ω1
, 2ω2
, (ω1
−
ω2)и(ω1+
ω2) представлены. Кроме того, есть непрерывный спектр, который вне-
сен линейной функцией t, которое присутствует в выходном сигнале.
Нелинейные системы могут быть проанализированы в частотной обла-
сти с помощью функции описания. Как наблюдало сь ранее, когда гар-
моническое воздействие (на определенной частоте) будет применено к
270
нелинейному устройству, у получающегося вывода в устойчивом состо-
янии будут компонент в этой основной частоте и также компоненты на
других частотах (в результате создания частоты нелинейным устрой-
ством), обычно это гармонические колебания. Выходной сигнал может
быть представлен рядом Фурье, у которого есть компоненты частоты, ко-
торые являются целочисленным умножением частоты входного сигнала.
Описываемый функциональный подход пренебрегает всеми высшими
гармониками в выходном сигнале и сохраняет только фундаментальный
компонент. Этот выходной компонент, разделенный на значение ввода,
производит характеристическую функцию устройства. Это аналогично
передаточной функции линейного устройства, но в отличие от линейного
устройства, усиление и сдвиг фаз будут зависеть от амплитуды входно-
го сигнала. Дополнительные данные использования характеристической
функции приведены в учебниках по нелинейной теории управления.
3.4 .1 Линеаризация
Распространенный метод линеаризации нелинейного устройства заклю-
чается в рассмотрении локального поведения по небольшому рабочему
диапазону. Эта локальная линеаризация прямая, но обычно нечасто при-
менимая из-за следующих причин:
1.
Условия работы могут измениться значительно, и отдельный
локальный наклон функции может быть не правильный по всему диапа-
зону.
2.
Локальный наклон может отсутствовать быть незначительным
по отношению к O(2) условия ряда Тейлора (например Кулоновское тре-
ние).
3.
В некоторых нелинейных системах использование локальных
наклонов (например отрицательное затухание в алгоритме управления)
может привести к нежелательным последствиям (в частности, к неста-
бильности).
Некоторые методы подходят для уменьшения или устранения нелиней-
ного поведения в приборах. Среди них калибровка (в состоянии покоя),
использование линеаризующих элементов (например, резисторов и уси-
лителей на мостиковой схеме) для нейтрализации нелинейности и ис-
пользование нелинейной обратной связи (линеаризации обратной связи).
Важным результатом статической нелинейности будет искажение вы-
ходного сигнала. Его можно линеаризовать повторной калибровкой или
изменением масштаба. Например, предположим, что ввод (u) - выход(y),
271
поведение устройства определяется y=kepu. Ясно, что синусоидальный
ввод u = u0 sinωt будет далеко не синусоидальным на выходном сигнале.
Очевидно, мы можем преобразовать задачу как log(y) = pu + log(k). Сле-
довательно, соотношение ввода - вывода может точно линеаризоваться
простым использованием логарифмической шкалы для вывода и также
добавляя постоянное смещение из −log (k). В этой перекалиброванной
форме вывод для синусоидального ввода будет полностью синусоидаль-
ным.
Чтобы проиллюстрировать это, мы используем значения параметров: k
= 2.0,p =1.5,u
0
= 2.0, и ω = 1.0 . Мы используем следующую функцию
MATLAB®, чтобы определить поведение ввода - вывода (Рисунок 3.6a)
изображение 3.6 Синусоидальный выходной сигнал нелинейного устройства.
(a) поведение Ввода - вывода и (b) сигналы
272
и соответствующие два сигнала (Рисунок 3.6b):
% Response of nonlinear device u0
= 2.0;k=2.0;p=1.5;
t = 0:0.01*pi:4*pi; u = sin(t);
y = k*exp(p*u); y2 = log(y);
% plot the results
plot(u,y,'-',u,y2,'-',u,y2,'o')
plot(t,u,'-',t,y,'-',t,y,'o',t,y2,'-',t,y2,'+')
Видно, что фактическая нелинейная функция значительно искажает си-
нусоидальный сигнал, в то время как использование логарифмической
шкалы для вывода может удобно и точно линеаризовать поведение, пере-
давая неискаженный выходной сигнал. Кроме того, с выводом команды
log, показанном на Рисунке 3.6a, мы можем извлечь эти два параметра
p и k от наклона и y-прерывания линейной кривой. В частности, p = на-
клон=3.0/2.0 =1.5;logk=0.7→k=2.0.
В целях уменьшения проблем с нелинейностью советуется принимать
следующие меры предосторожности:
1 . Избегайте управления прибором при большом диапазоне уровней сиг-
нала (входы)
2 . Избегайте работы по широкой полосе частот
3 . Используйте устройства, которые не генерируют большие механиче-
ские движения
4 . Сведите к минимуму кулоновское трение и прилипание (например, ис-
пользуя надлежащую смазку)
5 . Избегайте свободных соединений и зубчатой муфты (т.е., используйте
механизмы прямого привода)
6 . Сведите к минимуму влияние факторов окружающей среды
7 . Сведите к минимуму чувствительность к нежелательным влияниям
8 . Уменьшите степень амортизации
4.5 класс точности измерительного прибора
Производители измерительных приборов обычно не предоставляют
полную быстро изменяющуюся информацию о своих продуктах. В боль-
шинстве случаев нереально ожидать полные динамические модели (во
временном интервале или частотной области) и связанные значения па-
раметров для сложных приборов в практической технической системе.
Эксплуатационные характеристики, предоставленные производителем
и поставщиком, являются, прежде всего, статическими параметрами.
273
Известные как классы точно сти измерительного прибора, они представ-
ляют собой значения параметров, таблицы, диаграммы, калибровочные
кривые и эмпирические уравнения. Динамические характеристики, та-
кие как функции передачи (например, кривые прохождения, выражен-
ные относительно частоты возбуждения), могут также быть предостав-
лены для более сложных приборов, но доступная динамическая инфор-
мация никогда не бывает полной. Объясняется это следующим образом:
при нормальных условиях эксплуатации типового устройства (напри-
мер, датчик, усилитель, аппаратура сбора данных) динамика устройства
должна иметь минимальный эффект на его выходной сигнал. Однако
некоторая информация о динамике устройства (например, постоянная
времени, пропускная способность) будет полезна при выборе условий
эксплуатации и компонентов для практического применения.
Определения классовых параметров, которые используются произво-
дителями и поставщиками приборов, в некоторых случаях расходятся
с аналитическими определениями, используемыми в руководствах. Это
особенно касается терминов линейность и устойчивость. Тем не менее,
классы точности, предоставленные производителями и по ставщика-
ми, весьма полезны при выборе, установке и синхронизации с другими
устройствами, работе и обслуживании компонентов в технической си-
стеме. Давайте исследуем ключевые эксплуатационные параметры.
3.5 .1 оценочные параметры
Типичные оценочные параметры, предоставленные производителем
приборов и поставщиком (в карте данных):
1. Чувствительность измерительного прибора и ее погрешности
2. Отношение «сигнал/шум»
3. Динамический диапазон
4. Разрешающая способность
5. Напряжение смещения нуля на выходе или ток смещения
6. Линейность
7. Дрейф нуля, полномасштабное смещение, дрейф относительно граду-
ировочной кривой (стабильность)
8. Используемый частотный диапазон
9. Диапазон рабочих частот
10. Комплексное сопротивление ввода и вывода
Мы уже обсудили значение и важность некоторых из этих параметров. В
данном разделе мы исследуем условные определения, предоставленные
274
производителями приборов и поставщиками.
3.5 .2 чувствительность
Чувствительность измерительного прибора (например преобразовате-
ля) измеряется амплитудой (ее максимум, (среднеквадратичное) RMS
значение, и т.д) выходного сигнала, который соответствует модулю
ввода (напр. измеряемая величина). Это может быть выражено как от-
ношение инкрементного выходного сигнала и инкрементного входного
сигнала (например наклон кривой ввода - вывода устройства) или, ана-
литически, как соответствующая частная производная отношения вво-
да - вывода. Также ясно, что чувствительность является амплитудно-ча-
стотной характеристикой прибора. В случае векторного или тензорного
сигналов (например, смещение, скорость, ускорение, деформация, сила),
необходимо определить направление чувствительности.
Огромное количество факторов (включая среду) может повлиять на вы-
ходной сигнал такого устройства, как датчик. Также, важными задачами
контрольно-измерительных приборов с учетом чувствительно сти явля-
ются:
1. Выбрать разумный ряд факторов, у которых есть примечательные
уровни чувствительности на выходном сигнале устройства
2. Определить чувствительность (назовем ее относительная чувстви-
тельность — безразмерная) выбранных факторов
3. Увеличить до максимума чувствительность к желательным факторам
(например, измеренное количество)
4. Довести до минимума чувствительность к нежелательным факторам
(например, тепловые эффекты на отсчете напряженности) или пере-
крестную чувствительность.
Мы вернемся к чувствительности позже в главе об анализе измеритель-
ной погрешности и комбинации ошибок.
Перекрестная чувствительность: это чувствительность, направленная
ортогонально по отношению к основному направлению чувствительно-
сти. Обычно она выражается как процент прямой чувствительности. Вы-
сокая прямая чувствительно сть и низкая перекрестная чувствительность
подходят в любом устройстве ввода-вывода (например, измерительный
прибор). Чувствительность к изменениям параметра и шуму должна
275
быть небольшой в любом устройстве, однако, и это - показатель его ро-
бастности. Однако в устройстве адаптивного управления и самонастра-
иваемом управлении чувствительность системы должна быть достаточ-
но высокой, чтобы управлять параметрами. Часто, чувствительность и
робастность являются противоречивыми друг другу условиями.
3.5 .2 .1 чувствительность цифровых приборов
Цифровые приборы обладают цифровыми выходами. Они могут быть
устройствами, которые генерируют импульсы или количества или тех
со встроенными аналого-цифровыми преобразователями (ADCs). Чув-
ствительность любого цифрового устройства может быть представлена
одинаковым образом. В частности,
Чувствительность = цифровой выход / соответствующий вход
Обычно входной сигнал является аналоговым, но цифровые входы мо-
гут определяться также, как и аналоговые. Любое n-бит устройство мо-
жет представлять 2n значения, включая 0. Тогда, максимальное возмож-
ное значение (без знака) равняется 2n−1
. Чтобы представлять величины
со знаком, мы должны определить один бит как знаковый разряд. Тогда
n-бит устройство может представлять 2n−1 положительные значения
(включая нуль) и то же количество соответствующих отрицательных ве-
личин. Другой способ интерпретирования цифрового выходного сигна-
ла – отсчет. В действительности, фактический выходной сигнал устрой-
ства можно представить как количество импульсов или событий. Значит
n-бит устройство может иметь максимум 2n количества (потому что 0
и знак не соответствуют условиям работы в данном случае). Если мы
используем второй метод, цифровая чувствительность устройства может
быть выражена как (для n-бит устройства):
2n /(максимальный входной сигнал) в отсчетах на один вход
В некоторых случаях чувствительно сть может быть выражена по отно-
шению к нескольким переменным, обозначающим входной сигнал. На-
пример, потенциометрический датчик смещения дает на выходе 1.5 V
на смещении 5 см, и если источник питания потенциометра (или, его
опорное напряжение) составляет 10 В, то чувствительность устройства
может быть определена как 1.5/5.0/10.0 V/cm/V = 30.0 mV/cm/V. Некото-
рые примеры чувствительности датчиков даны в Таблице 3.2 .
Пример 3.5
фотогальванический светочувствительный датчик может обнаружить
276
максимум 20 люксов света и генерирует соответствующее напряжение
5.0 V. У устройства есть 8-разрядный аналого-цифровой преобразова-
тель, максимум которого для входного сигнала равен 5.0 V. Какова об-
щая чувствительность устройства?
решение
Максимальное число аналого-цифровых преобразователей = 28 = 256
единиц
Это соответствует 5.0 V в АЦП, являющимся устройством выхода датчика
для максимального возможного уровня света в 20 люксов. Следовательно,
общая чувствительность устройства равна
256/20.0 единиц/люкс = 12.8 ед/лк
Примечание: Чувствительность одного АЦП равна 256/5.0 ед/В = 51.2 ед/В
TABLE 3.2 Чувствительность некоторых практических датчиков
Датчик
чувствительность
Датчик артериального давления 10mВ/В/ммHg
Датчик перемещения
10.0В/мм
Зарядовая чувствительность
пьезоэлектрического акселеро-
метра
110 пиК/Н (пикокулон на ньютон)
Датчик тока
2.0В/A
Тахометр
5%±10% для1000оборотов в минуту
Датчик давления жидкости
80мВ/кПа
Светочувствительный датчик(-
цифровой выход с АЦП)
50отсчеты/лК
Тензометрический датчик (ка-
либровочный множитель)
150
Температурный датчик (термо-
резистор)
5мВ/K
3.5 .2 .2 Погрешность чувствительности
Числовое значение чувствительности устройства, приведенное в техниче-
ских данных изделия, может расходиться с фактическим значением. Разница
между рассчитанным значением чувствительности и ее фактическим значе-
нием называется погрешностью чувствительности.
Чувствительность, которая представляет собой наклон кривой ввода - выво-
да устройства, может расходиться в значениях по таким причинам как:
277
1. Эффект перекрестной чувствительности нежелательных входных сигналов.
2. Отклонения, обусловленные износом, влиянием внешних условий и т.д
3. Зависимость от значения входного сигнала. Имеется ввиду, что наклон
изменяется вместе со значением входного сигнала, что является признаком
нелинейности прибора.
4. Локальный наклон кривой ввода - вывода (локальная чувствительность)
не может быть определен или может быть незначительным (по сравнению
с O (2)).
Локальный наклон (производная) может быть:
1. Нулевой (как при сатурации или кулоновском трении)
2. Бесконечной (как при кулоновском трении)
3. Менее значительной, чем производные высшего порядка (т.е . O (2) усло-
виями расширения ряда Тейлора нельзя не учитывать)
Затем локальная чувствительно сть может быть либо неопределенна,
либо же незначительна. В таких случаях можно использовать глобаль-
ную чувствительность (т.е, общую или максимальный выход сигнала/
соответствующий сигнал). Погрешности в чувствительности могут быть
представлены с помощью средней чувствительности ± области измене-
ния, которая соответствует разнице между минимальными и максималь-
ными значениями, в которых может находиться фактическая чувстви-
тельность. Это общее изменение чувствительности (макс-мин) является
величиной статической нелинейности устройства. Как отмечалось ранее,
чувствительность в контрольно-измерительных приборах может быть
рассмотрена или как задача проектирования или как задача регулиро-
вания. Основная цель представляет собой максимизацию чувствитель-
ности к желательным факторам и минимизацию чувствительности для
нежелательных факторов и может быть достигнута и через проектирова-
ние и через управление. Как только система разработана для параметров
чувствительности, в дальнейшем она может быть улучшена или опре-
деленные параметры чувствительности могут быть достигнуты посред-
ством управления. Этот вопрос мы рассмотрим в следующем параграфе.
3.5 .2 .3 . чувствительность в управлении
На точность системы управления могут повлиять изменения параметров в
системных компонентах и внешние помехи. Кроме того, некоторые виды
управления (например, адаптивное управление, самонастраивающееся
управление) зависят от чувствительности системы при управлении пара-
278
метрами. Из этого следует, что анализ чувствительности системы управле-
ния с обратной связью относительно изменений параметра и относительно
внешних помех весьма значителен.
изображение 3.7 (a) блок-схема системы управления с обратной связью и (b)
система круиз-контроля.
Input - ввод
Controller - контролер
Control action – действие управления
Disturbance - возмущение
Plant - энергоблок
Output - выход
Feedback signal – сигнал ОС
Feedback system – система ОС
Percentage grade – оценка отношения
Speed setting – установка скорости
Error - ошибка
Engine controller – контролер двигателя
Vehicle - ТС
Output speed – скорость выхода
279
Рассмотрим блок-схему типичной системы управления с обратной связью,
показанной в Рисунке 3.7a. В обычной системе обозначений мы имеем
Gp(s) — передаточная функция объекта управления (или регулируемой си-
стемы)
Gc(s)—передаточная функция регулятора (включая компенсатор и другие
аппаратные средства)
H(s) — передаточная функция обратной связи (включая систему измерений)
u —системная команда; y—выход системы; u
d
— воздействия внешних помех
Для линейных систем применяется принцип суперпозиции. В частно сти
если мы знаем значение выходных сигналов, соответствующее двум
отдельным входным сигналам, то выходной сигнал, соответствующий
двум одновременно приложенным входным сигналам, определяется
суммой значений отдельных выходных сигналов.
Сперва установим ud= 0. Затем нарисуем ее график для получения соотно-
шения ввода-вывода
Следующее мы устанавливаем u = 0. Далее мы получаем отношения типа
«вход-выход»:
Применяя принцип суперпозиции на (3.16) и (3.17), мы получаем общее
соотношение ввода - вывода:
функция передачи с обратной связью G̃ определяется как y/u с ud = 0 ;
таким образом,
280
Чувствительность системы к Изменению Параметра: чувствитель-
ность системы к изменению в некотором параметре k может быть выра-
жена как отношение изменения в системном выводе к изменению в па-
раметре; т.е., Δy/Δk. В безразмерной форме эта чувствительность опреде-
ляется как Sk
= (k/y) (Δy/Δk).
Примечание: безразмерная форма чувствительности обычно примени-
тельна, отому что она позволяет точно сравнить различные чувствитель-
ности (различная размерность, или масштаб изменит значение чувстви-
тельности при тех же условиях).
Так какy=G
̃
uсu
d
=0,из этого следует, что u, Δy/y=ΔG̃ /G̃
. Следовательно,Урав-
нение 3.20 может быть иметь вид Sk
=(k/G̃)(ΔG̃ /Δk);либо в пределе:
Теперь, применяя Уравнение 3.20 к 3.19, мы в состоянии определить
выражения для чувствительности системы управления к изменениям в
различных компонентах в системе управления. В частности, определяя
частную производную Уравнения 3.19, отдельно и относительно GP
,G
c
и
H , соответственно, мы получаем
Очевидно, на примере этих трех зависимостей, что, поскольку стати-
ческий коэффициент усиления (или, усиление постоянного тока) цикла
(т.е. G
c
Gp и H , где s = 0) увеличен, чувствительно сть системы управле-
ния к изменениям на объекте управления и регулятора уменьшается, но
чувствительность к изменениям в системе обратной связи приближается
к единице. Кроме того, ясно из Уравнения 3.18, что помехи входного сиг-
нала могут быть сокращены, если увеличить статический коэффициент
281
усиления GcH . Комбинируя эти наблюдения, следующий критерий раз-
работки относительно чувствительности может быть предусмотрен для
системы управления с обратной связью:
1. Сделайте систему измерения (H) устойчивой, стабильной, и очень точ-
ной.
2. Увеличьте коэффициент усиления замкнутой цепи (т.е., усиление GcG
и
H ), чтобы уменьшить чувствительность системы управления к измене-
ниям на объекте управления и регуляторе
3. Увеличьте усиление GcH , чтобы уменьшить влияние внешних помех
На практике объект управления Gp обычно по стоянен и не может быть
изменен. Кроме того, как только подходящая и точная система измерения
выбрана H, как правило, имеет неизменное значение. Следовательно,
большая часть конструкции проекта доступна только относительно G
c
. фактически невозможно достигнуть всех конструктивных требований
просто увеличивая коэффициент усиления Gc. Динамическое поведение
(т.е. вся передаточная функция ) Gc (не только значение коэффициента
усиления при s = 0) также должны быть рассчитаны должным образом,
чтобы достичь желаемую производительность в системе управления.
Пример 3.6
Рассмотрим систему автоматического поддержания скорости движения
на блок-схеме Рисунке 3.7б. Автомобиль едет наклону с постоянной ско-
ростью, установленной согласно системе автоматического поддержания
скорости.
(a) Для установки скорости u=uo и постоянного дорожного наклона u
d
=u-
do
выведите выражение для установившихся значений y
ss
скорости и e
ss
скоростной погрешности. Выразите свои ответы с точки зрения K,Kc,
u
o
,иu
do
.
(b) При какой минимальной процентной степени остановился бы авто-
мобиль? Используйте устойчивые данные и выразите Ваш ответ с точки
зрения установки скорости u
o
, и усиления регулятора K
c
.
(c)
Предложите способ уменьшить e
ss
.
(d)
Если u
o
= 4,u
do
= 2,иK=2,найдите значениеK
c
, из условия
чтобы e
ss
= 0.1.
решение
(a) Для ud=
282
Для u=0:
Следовательно, зная u и ud, используем принцип суперпозиции (для
линейных систем)
Если входные сигналы постоянны в устойчивом состоянии, соответству-
ющий выходной сигнал не зависит от характера входного сигнала во
время перехода к устойчивому состоянию. Следовательно, в этой задаче,
по сути дела, входные и выходные сигналы постоянны в устойчивом
состоянии. Следовательно, без потери общности, мы можем допустить,
что входные сигналы являются ступенчатыми функциями.
Примечание: Даже если мы допустим различную стартовую конфигура-
цию для входных сигналов, мы должны получить тот же ответ для посто-
янного выходного сигнала и для тех же постоянных входных значений.
Но математические вычисления для получения этого ответа были бы
куда более сложными.
Теперь, используя теорему окончательного значения, в устойчивом со-
стоянии:
Или
283
Следовательно, устойчивая ошибка:
Или
(b) Условие о становки автомобиля yss= 0. Следовательно, от (3.6 .2) мы
получаем
u
do
=K
c
u
o
(с) Так как K обычно неизменен (параметр завода) и не может быть скор-
ректирован, мы должны увеличить Kc, чтобы уменьшить e
ss
.
(d) Полученное u
o
=4, u
do
=2, K=2, e
ss
=0.1, подставляем в (3.6 .3)
Управление, основанное на чувствительности системы: в некоторых
случаях чувствительность используется для того, чтобы определить за-
кон управления для системы. Адаптивное управление и самонастраива-
емое управление можно привести в качестве примеров, где параметры
регулятора изменяются (адаптированы, настроенны) в зависимости от
технических требований. Чувствительно сть параметров контроллера по
отношению к производительности системы играет главную роль в схеме
управления. Эта процедура, прежде всего, использует локально линеа-
ризовавшие модели (т.е., параметры локальной чувствительности).
Для некоторых нелинейных систем, однако, использование локальной
чувствительности может привести к нежелательным результатам. На-
пример, при нелинейном затухании, локальный наклон может быть от-
рицательным, что соответствует постоянной отрицательного затухания
и генерирует отрицательные полюса (чтобы проиллюстрировать этот те-
зис, рассмотрите простой осциллятор с линейным затуханием, сделайте
постоянную затухания отрицательной, и найдите соответствующие по-
284
люса). Все это соответствует нестабильной системе. Как определенный
пример, рассмотрим модель трения по Штрибеку, показанную на рисун-
ке 3.8 . У областей 1 и 2 есть отрицательный наклон, и они соответствуют
нестабильному поведению, где, вязкое затухание (Область 3) соответ-
ствует стабильному поведению.
Отношение сигнал-шум: отношение сигнал-шум (ОСШ) - отношение
амплитуды сигнала к шумовой амплитуде, выраженное в дБ. Мы имеем
В Уравнении 3.24, P обозначает мощно сть сигнала, и M обозначает сиг-
нальную амплитуду. Для каждого синусоидального Fourier сигнально-
го компонента значение P пропорционально M2 , и это не противоречит
двум выражениям, данными в Уравнении 3.24 . Кроме того, сигнальное
значение, которое обычно используется в ОСШ, является среднеквадра-
тичным (RMS) значением. В качестве примера рассмотрим сигнал с шу-
мами, подлинный (без шума) сигнал и шумы, показанные на Рисунке 3.9 .
Они были сгенерированы, используя сценарий MATLAB:
% Signal-to-noise ratio
for i=1:501
Region – область
Unstable - нестабильно
Damping force - демпфирующая сила
Stable - стабильно
изображение 3.8 Трение по Штрибеку
285
n(i)=normrnd(0.0,0.1); % nrandom noise
end
t=0:0.02:10.0;
u=sin(t);
u2=0.2*sin(50*t);
n=n+u2;
un=u+n;
% rms of signal
sigrms=std(u)
% rms of noise
noirms=std(n)
SNR=20*log10(sigrms/noirms)
% plot the results
plot(t,u,'-',t,un,'-',t,n,'o',t,n,'-',t,n,'x')
Используя MATLAB, ценности сигнала мп и шума, а также соответсву-
ющего ОСШ (выраженного в дБ) были найдены (Примечание: В данном
примере сигналы и шум имеют нулевое значение
sigrms =
0.6663
noirms =
Signal- to-noise ratio - соотношение сигнал - шум
Voltage – напряженность
Time – время
Noise-free signal - свободный от шумов
Noisy signal –шумный сигнал
Noise - шум
изображение 3.9. Сигнал без шумов и шумы
286
0.1769
SNR =
11.5168
Как показывает опыт, значения ОСШ равного 10 дБ или больше было бы
достаточно. Значения 3 дБ (на уровне половинной мощно сти для шума)
недостаточно или неприемлемо. Конечно, при таких вычислениях, обыч-
но известен лишь сигнал с шумами (по замеру), и чистый (без шума)
сигнал точно не известен. Так как при вычислении определенно ОСШ
сигнальное значение (RMS) должно относиться к сигналу без шумов.
Затем необходимо отделить шумы от сигнала и убрать шумы насколько
возможно, вычислить RMS значение фильтруемого сигнала, получить
шумовой сигнал, вычтя фильтруемый сигнал из сигнала с шумами и вы-
числить RMS значение шума.
ОСШ может быть объяснен также с точки зрения чувствительности. Зна-
чит, оно будет представлять соотношение чувствительности к желатель-
ным сигналам и нежелательным сигналам (шумам).
Динамический диапазон: Динамический диапазон (ДД) или просто диа-
пазон измерительного прибора определяется разрешенными нижними и
верхними пределами его вывода (выходного сигнала) при поддержании
требуемого уровня выходной точности. Этот диапазон обычно выража-
ется как отношение (например, значение протокола в децибелах или дБ).
Во многих случаях нижний предел динамического диапазона равен раз-
решающей способности устройства. Следовательно, динамический диа-
пазон (отношение) обычно выражается как (рабочий диапазон) / (разре-
шающая способность) в дБ. Мы имеем
Dynamic range – динамический ряд
Range of operation – рабочий диапазон
Resolution - разрешение
Примечание: ymin может быть нулевым, положительным или отрица-
тельным
Разрешающая способность: Разрешающая способно сть ввода – выво-
да измерительного прибора - наименьшее изменение в сигнале (ввод),
287
которое может быть обнаружено и точно представлено (выходным сиг-
налом) прибором. Прибор может быть таким устройством ввода-вывода
как датчик, преобразователь, или аппаратным оборудованием преобра-
зования сигнала. Она обычно выражается как процентное соотношение
максимального диапазона прибора или как инверсия соотношения ди-
намического диапазона. Из этого следует, что динамический диапазон и
разрешающая способность тесно связаны между собой. Динамический
диапазон и разрешающая способность цифрового устройства: значение
динамического диапазона (и разрешающей способности) может легко
быть расширено, чтобы покрыть цифровые измерительные приборы.
Прибор может быть цифровым устройством самостоятельно, таким, ко-
торый генерирует импульсы и количества, или аналоговым устройством
с АЦП. Однако, реальная разрешающая способность будет некоторым
аналоговым значением δy, в зависимости от определенной задачи. На-
пример, δy может представлять инкремент выходного сигнала 0.0025 V
преобразователя (например, выход мостовой схемы тензодатчика).
Для n-разрядного цифрового устройства разрешительная способность -
это изменение в аналоговом выходе в надлежащих модулях, соответству-
ющих одному инкременту в самом младшем бите. Следовательно,
Разрешающая способность = 1 самый младший бит = δy
Так как n-разрядный код может представлять комбинацию 2n значения,
если самое маленькое значение обозначено ymin, самое большое значе-
ние - ymax = ymin + (2n − 1) δy . Следовательно,
Диапазон
Затем для n-разрядного устройства (будем говорить, устройство с
n-разрядным АЦП), динамический диапазон будет рассчитываться сле-
дующим образом:
Примечание: значение должно быть выражено в дБ.
Результат, приведенный в Уравнении 3.26, не означает, что общий ДД
устройства зависит только от его цифрового компонента. Мы получили
результат (3.26), который зависит только от количества битов
(n) устройства, потому что мы соотнесли аналоговые величины устрой-
ства непосредственно к цифровым величинам (в частности, цифровой
288
инкремент “1” к аналоговой величине δy и цифровой диапазон (2n
−
1)к
аналоговому диапазону (ymax
−
ymin
). Однако на практике, когда несколько
устройств (и аналоговые и цифровые) являются взаимосвязанными, мы
должны рассмотреть их отдельные значения ДД и использовать самое
критическое значение (т.е. самое маленькое значение) как общие ДД си-
стемы.
Пример 3.7 .
Рассмотрим прибор, у которого есть 12-разрядный АЦП. Оцените дина-
мический диапазон этого прибора
решение
В этом примере динамический диапазон определен (прежде всего), раз-
рядностью АЦП. Каждый разряд может взять двоичное значение 0 или
1.Так как разрешающая способность заданна самым маленьким инкре-
ментом, т.е. изменением младшим значащим битом (LSB), очевидно, что
цифровое разрешение = 1. Самое большое значение, представленное
12-разрядным словом, соответствует случаю, когда все 12 битов – еди-
ница. Это значение – десятичное 2
12
– 1 . Самое маленькое значение (когда
все 12 битов - нуль) является нулем. Следовательно, согласно Уравне-
нию 3.26, динамический диапазон прибора определяется по следующей
формуле: 20log
10
[(2
12
− 1)/1]=72дБ.
Смещение: Смещение в выходном сигнале может создать трудности при
измерениях. Особенно важный аспект здесь – это нулевое смещение,
которое является выходным сигналам устройства при входном сигнале,
равному нулю. Если у датчика, например, есть нулевое смещение, ре-
гулирующее воздействие, которое сгенерировано, используя его, может
оказаться неточным. Особенно, если есть смещение в сигнале ошибки,
оно может привести к неправильным действиям (потому что, корректи-
рующие действия были бы предприняты, даже когда нет никакой ошиб-
ки). Как другой пример, при симметричном режиме, мостовая схема
должна генерировать нулевой вывод. Если выходной сигнал мостовой
схемы не нуль, он должен быть компенсирован, чтобы удалить смеще-
ние. Следующий пример - дифференциальный усилитель, вывод которо-
го должен быть нулем, когда два его входных сигнала равны. Известное
смещение может быть исправлено несколькими методами, включая
1.Повторная калибровка устройства.
2.Программирование цифрового выходного сигнала (т.е. вычтите смеще-
289
ние).
3.Использование аналоговых аппаратных средств для смещения при вы-
ходном сигнале устройства.
Линейность: Эта тема уже была рассмотрена, но здесь приводятся не-
которые важные принципы. Линейность определяется калибровочной
кривой прибора. Кривая выходного значения (например, пиковое или
RMS значение) по сравнению с входным значением под статическими
(или установившимися) условиями в динамическом диапазоне прибора
известна как статическая калибровочная кривая. Ее близость с прямой
линией измеряет степень линейности прибора. Производители предо-
ставляют эту информацию либо как максимальное отклонение калибро-
вочной кривой от наименьших квадратов аппроксимации прямой линии
(также см. Главу 4) калибровочной кривой или от некоторой другой ба-
зовой прямой линии. Если аппроксимация наименьших квадратов ис-
пользуется в качестве базовой прямой линии, максимальное отклонение
называют независимой линейностью (более правильно, независимая не-
линейность, потому что чем больше отклонение, тем больше нелиней-
ность). Нелинейность может быть выражена как процент или фактиче-
ского показания в рабочей точке или полномасштабного показания, или
как максимальное изменение чувствительности как процент эталонной
(стандартной) чувствительности.
Дрейф нуля (прибора) и полномасштабный дрейф: дрейф нуля - это сме-
щение от нулевого отсчета прибора, при котором в течение длитель-
ного периода входной сигнал остается неизменным. Обратите внимание
на то, в данном случае ввод о стается на нулевом значении или любом
другом значении (если есть нулевое смещение), который соответству-
ет нулевому отсчету прибора. Точно так же полномасштабный дрейф
определяется относительно полномасштабного показания (т.е. ввод со-
храняет полномасштабное значение). В применении прибора дрейф
-
это рассмотрение устойчивости. Это определение, однако, не тожде-
ственно стандартным определениям устойчивости из учебников. Обыч-
ные причины дрейфа включают нестабильность прибора (например,
нестабильность в усилителях), изменения окружающей среды (напри-
мер, изменения в температуре, давлении, магнитных полях, влажности
и уровни вибрации), изменения в источнике питания (например, изме-
нения в базовом напряжении постоянного тока или напряжении линии
переменного тока), и изменения параметра в приборе (из-за старения,
износа, нелинейности, и т.д .). Дрейф обусловленный изменениями пара-
290
метров, вызванных нелинейностью, воздействием окружающей среды, и
т.д. известен как параметрический дрейф, дрейф чувствительности или
дрейф масштабного коэффициента. Например, изменение в пружинной
жесткости или электрическом сопротивлении из-за изменений темпера-
турs окружающей среды приведет к параметрическому дрейфу. Параме-
трический дрейф обычно зависит от уровня входного сигнала, в то время
как смещение нуля, как предполагается, является тем же на любом уров-
не входного сигнала, при неизменности остальных условий. Например,
изменение в показаниях, вызванное тепловым расширением механизма
считывания из-за изменений температуры окружающей среды, считают
дрейфом нуля. Дрейф в электронных устройствах может быть уменьшен
при использовании схем переменного тока (ac) вместо схемы постоян-
ного тока (dc) . Например, усилители на схеме переменного тока имеют
меньше проблем с дрейфом, чем усилители на dc схеме. Периодическая
проверка уровня выходного сигнала прибора с нулевым вводом - рас-
пространенный способ настройки прибора и устранения смещения нуля.
В цифровых устройствах, например, это может делаться автоматически
время от времени между выборочными точками (период выдержки), или
в других случаях.ю когда входной сигнал можго обойти, не влияя на ра-
боту системы. Калибровочная кривая устройства может измениться со
временем из-за изменений в устройстве, как упомянуто здесь. Это назы-
вается калибровочным дрейфом. Повторная калибровка может устранить
калибровочный дрейф.
Диапазон используемой частоты: он соответствует кривой равномерно-
го усиления и кривой нуль-фазы в амплитудно-частотных характеристи-
ках (функция передачи частоты или функция частотной характеристики)
прибора. Верхняя частота в этой полосе обычно должна быть меньше
чем половина (скажите, одна пятая) преобладающей резонансной часто-
ты прибора. Это - средство измерения пропускной способности прибора.
Пропускная способность: Пропускная способность прибора определя-
ет максимальную скорость или частоту, на которой прибор способен к
работе. Высокая пропускная способность подразумевает более высокую
скорость реагирования системы (скорость, на которой инструмент ре-
агирует на входной сигнал). Пропускная способность определена пре-
обладающей собственной частотой ωn или преобладающей резонансной
частотой ωr устройства. (Примечание: Для низкого затухания, ωr прибли-
зительно равен ωn, как мы видели это в выражениях для простой моде-
ли осциллятора.) Это обратно пропорционально времени нарастания и
преобладающей постоянной времени. Пропускная способность на уров-
291
не половинной мощности - также полезный параметр (см. следующий
раздел). Пропускная спо собность прибора должна быть в несколько раз
больше, чем максимальная частота соответствующих входных сигналов.
Например, пропускная способно сть измерительного прибора особенно
важна при измерении сигналов переходного процесса. Пропускная спо-
собность датчика должна быть в несколько раз больше, чем частота са-
мого быстрого сигнального компонента, значение которого должно быть
точно известно. Далее отметим, что пропускная способность непосред-
ственно связана с диапазоном рабочих частот.
3.6 . анализ пропускной способности
Пропускная способность играет важную роль в определении и характе-
ристике компонентов технической системы. В частности диапазон рабо-
чих частот, рабочая полоса пропускания и полоса пропускания системы
управления – важные аспекты этой области. В этом разделе мы изучим
несколько трактовок пропускной способности и некоторые важные во-
просы, связанные с этой темой.
3.6 .1 Пропускная способность
У пропускной способности есть различные определения в зависимости
от определенного контекста и применения. Например, при изучении ре-
акции устройства, пропускная способность относится к основной резо-
нансной частоте и соответствует скорости реакции устройства на данное
возбуждение. В полосовых фильтрах пропускная способность относится
к полосе частот (полоса пропускания) сигнальных компонентов, которые
пропущены через фильтр, в то время как компоненты частоты вне поло-
сы отфильтрованы. Относительно измерительных приборов пропускная
спо собность относится к частотам диапазона, в которых прибор точно
измеряет сигнал (диапазон рабочей частоты). В частности, если сигнал
проходит через полосовой фильтр, мы знаем, что его полоса частот в
пределах пропускной способности фильтра, но мы не можем определить
фактическую поло су частот сигнала на основе этого наблюдения. В этом
контексте пропускная способность, кажется, представляет неопределен-
ность частоты в наблюдении (т.е. чем больше пропускная способность
фильтра, тем меньше мы знаем о фактической полосе частот сигнала,
который проходит через фильтр). В сетях цифровой связи (например
Интернет), пропускная способно сть обозначает способность (информа-
ционную емкость) сети с точки зрения скорости передачи информации
(бит/с). Таким образом, термин пропускная способность может иметь
292
следующие определения:
1. Скорость отклика устройства
2. Полоса пропускания фильтра
3. Рабочий диапазон частот устройства
4. Неопределенность в частотном спектре сигнала
5. Информационная емкость сети связи
Эти различные определения термина пропускная способность могут
быть в некотором роде связаны между собой даже при том, что они не
тождествены.
3.6 .1 .1 Уровень передачи сигнала полосового фильтра
Реальные фильтры могут быть рассмотрены в качестве динамических
систем. На самом деле все физические динамические системы (напри-
мер, электро-механические системы) являются аналоговыми фильтрами.
Из этого следует, что амплитудно-частотная характеристика фильтра мо-
жет быть представлена функцией передачи частоты G(f) фильтра. График
такой функции передачи фильтра показан на Рисунке 3.10. В логариф-
мическом графике (например, в Графике Боде), амплитудно-квадратная
кривая получена обычным удваиванием соответствующей амплитудной
кривой. Обратите внимание на то, что фактическая функция передачи
фильтра (Рисунок 3.10b) не совсем плоская как идеальный фильтр, по-
казанный в Рисунке 3.10a. Контрольный уровень Gr является средним
значением амплитуды передаточной функции в близлежащей области
ее пика.
3.6 .1 .2 Полезная шумовая пропускная способность
Полезная шумовая пропускная способность фильтра равна пропускной
спо собности идеального фильтра, у которого есть тот же контрольный
уровень, и он передает то же количество энергии из источника белого
шума. Вспомните, что у белого шума есть постоянная (плоская) спек-
тральная плотность мощности (фазочувствительный детектор). Следо-
вательно, для источника шумов единицы psd, питание, переданное ре-
альным фильтром, определяется как
который, по определению,
равен питанию Gr
2B
e
, которое передано эквивалентным идеальным
фильтром. Следовательно, полезная шумовая пропускная способность
Be определяется
293
Примечание: Чем выше Be, тем больше неопределенность полосы частот
в фильтруемом сигнале (т.е., больше нежелательных сигнальных компо-
нентов проходит через нее).
3.6 .1 .3 Ширина полосы частот на уровне половинной мощности
(или 3 дБ)
риСУНок 3.10. Характеристическая функция(a) идеального полосового филь-
тра и (b) реального полосового фильтра.
Reference level – контрольный уровень
Equivalent ideal filter – соответствующий идеальный фильтр
Actual filter – фактический фильтр
Frequency – частота
риСУНок 3.11 Теоретический фильтр с линейными сегментами.
294
Половина питания от источника шумов единицы- psd, передаваемых
фильтром, является Gr2Be/2. Так как Be - это ширина идеального полосо-
вого фильтра, G
r
/ 2 ям мощности (по амплитуде). Также известно,
что уровень равен 3 дБ, так как 20log
10
2 =10log
10
2 =3dB. (Приме-
чание: 3 дБ относятся к отношению мощностей 2 или к амплитудному
отношению 2 . Следовательно, спад на 3 дБ соответствует спаду пита-
ния к половине исходного значения. 20 дБ соответствует амплитудному
отношению 10 или отношению питания 100.
Ширина полосы частот 3 дБ (или на уровне половинной мощно сти) со-
ответствует передаточной функции фильтра ширины на уровне половин-
ной мощности. У идеального фильтра уровень амплитуды равен G
r
/2.
Для фактического фильтра ширина полосы частот на половинном уровне
мощности Bp может быть такой же, как ширина полосы частот на том же
уровне амплитуды G
r
/ 2 , как показано в Рисунке 3.10b.
Обратите внимание на то, что Be, и Bp отличаются в целом. В предель-
ном спектре, где амплитудно-квадратный фильтр обладает линейным по-
вышением, снижением и плоскими сегментами, оба показателя ширины
полосы частот будут равны (см. Рисунок 3.11).
3.6 .1 .4 Фурье-анализ (гармонический) ширины полосы частот
В анализе фурье пропускная способность определяетсякак неопределен-
ность частоты в спектральных результатах. В аналитических резуль-
татах Фурье-преобразования, которые предполагают, что весь сигнал
доступен для анализа, спектр постоянно определен по всему частотному
диапазону [− ∞, ∞], и коэффициент повышения частоты δf бесконечно
мал (δf → 0). В этом случае отсутствует всякая неопределенность часто-
ты, и аналитическая ширина частоты бесконечно узка. В цифровом ана-
лизе Фурье дискретные линии спектра сгенерированы в интервалах ча-
стоты ΔF. Эта конечный коэффициент повышения частоты ΔF, который
является частотной неопределенностью, поэтому он является полосой
анализа B для этого анализа (цифрового вычисления). Известно, что ΔF
= 1/T, где T - длина записи сигнала (или длина окна, когда прямоуголь-
ное окно используется, чтобы выбрать сигнальный сегмент для анали-
за). Также следует, что минимальная частота, у которой есть значимая
точность, является полосой анализа. Эта определение полосы анализа
подтверждено тем фактом, что гармонические составляющие частоты
295
меньше, чем ΔF (или период, больше, чем T), не могут быть изучены
с помощью наблюдения за сигнальной записью длины меньше, чем T.
Полоса анализа переносит информацию относительно различимого ми-
нимального разделения по частоте в вычисленных результатах. В этом
смысле ширина полосы непосредственно связана с частотной разреша-
ющей способностью проанализированных (вычисленных) результатов.
Точность анализа (вычисление) увеличивается при увеличинии длины
записи T (т.е. при уменьшении полосы анализа B).
Когда временное окно в отличие от прямоугольного окна используется,
чтобы усечь сигнал, происходит изменение сигнального сегмента (дан-
ные) согласно форме окна. Это изменение подавляет боковые лепестки
фурье-спектра исходного прямоугольного окна, и следовательно, умень-
шает утечку частоты, которая является результатом усечения сигнала.
Однако в то же время ошибка представлена как результат информации,
потерянной посредством изменения данных. Эта ошибка пропорцио-
нальна ширина полосы самого окна. Полезная шумовая пропускная спо-
собность прямоугольного окна - незначительно меньше, чем 1/T, потому
что главный лепесток его фурье-спектра почти прямоугольный, и у ши-
рина лепестка равна 1/T. Следовательно, во всех практических целях,
полезная шумовая пропускная способность может быть взята в качестве
полосы анализа. Усечение данных (т.е ., умножение окном во временном
интервале) эквивалентно свертке фурье-спектра сигнала с фурье-спек-
тром окна (в частотной области).
Следовательно, главный лепесток спектра окна однородно влияет на все
линии спектра в дискретной спектре сигнала данных. Из этого следует,
что главный лепесток окна с более широкой полезно-шумовой пропуск-
ной способностью вводит большую ошибку в спектральные результаты.
Следовательно, в цифровом анализе фурье, ширина полосы частот взята
в качестве полезно-шумовой ширины окна времени, которое использу-
ется.
3.6 .1 .5 Полезный частотный диапазон
Он соответствует плоской области (статическая область) в кривой уси-
ления и нульфазо-ведущей области в фазовой кривой устройства (отно-
сительно ее частоты). Он определяется преобладающей (т.е . самой ниж-
ней) резонансной частотой fr устройства. Верхний частотный предел
fmax в полезном частотном диапазоне в несколько раз меньше, чем fr для
типичного устройства ввода-вывода (например, f
max
= 0.25fr ). Полезный
296
частотный диапазон может также быть определен плоскостью статиче-
ской долей кривой частотной характеристики. Например, в силу того
что однократный полюс или однократный нуль вводит наклон прибли-
зительно равный ±20 дБ/дек к логарифмической амплитудной кривой
по устройстве Боде, наклон в 5% этого значения (т.е. ±1 дБ/дек) можно
считать плоским в большинстве случаев. Для измерительного прибора,
например, работа в полезном частотном диапазоне подразумевает, что
значительная поло са частот измеренного сигнала ограничена этой поло-
сой. Тогда, точное измерение и быстрый отклик гарантируются, потому
что динамика измерительного прибора не исказит измерение.
3.6 .1 .6 Пропускная способность прибора
Это величина полезного частотного диапазона прибора. Кроме того,
чем больше пропускная способность устройства, тем быстрее будет его
скорость отклика. К сожалению, чем больше пропускная спо собность,
тем больше чувствителен прибор к высокочастотному шуму, а также
проблемам устойчивости. Будет необходима фильтрация, чтобы устра-
нить нежелательный шум. Устойчивость может быть улучшена дина-
мической компенсацией. Общие определения пропускной способно сти
прибора включают частотный диапазон, у которого амплитуда переда-
точной функции плоская; резонансная частота; и частота, на которой ам-
плитуда передаточной функции спадает к 1/ 2 (или 70.7%) нулевой
частоты (или статичного) уровня. Как отмечено ранее, последнее опре-
деление соответствует пропускной способности на уровне половинной
мощности, потому что сокращение амплитудного уровня фактором 2
,
которое соответствует спаду питания фактором 2.
3.6 .1 .7 Полоса пропускания системы управления
Она используется для того, чтобы определить максимальную возмож-
ную скорость управления. Это важный норматив и в аналоговом управ-
лении и в цифровом управлении. . В цифровом управлении частота вы-
бора дискретных данных (измеряется в количестве опросах на секунду)
должна быть в несколько раз выше, чем полоса пропускания управления
(в герцах или Hz) так, чтобы достаточные данные были бы доступны
для вычисления регулирующего воздействия. Кроме того, согласно те-
ореме отсчетов Шеннона-Котельникова, полоса пропускания системы
управления определяется как половина частоты, на которой вычислено
297
регулирующее воздействие (см. Раздел 3.7). Полоса пропускания си-
стемы управления обеспечивает частотный диапазон, в котором можно
управлять системой (предполагая, что все устройства в системе могут
работать в этой пропускной полосе).
Пример 3.8
Рассмотрим систему регулировки скорости, схематично показанную на
рисунке 3.12 . Предположим, что объект управления и регулятор вместе
выражены приближено передаточной функцией Gp(s)=k/(τps+1) где τp –
константа времени объекта управления.
(а) Приведите выражение для пропускной полосы ωp объекта без обрат-
ной связи
(b) Если тахометр обратной связи идеален и представлен единицей (от-
рицательной) обратной связи, какова полоса пропускания ωc системы
управления с обратной связью?
(c) Если тахометр обратной связи может быть представлен передаточной
функциейGs(s)=1/(τss+1), гдеτs
- константа времени датчика, объяс-
ните, почему пропускная способность ωcs системы управления с обрат-
ной связью дана меньшим количеством 1/τs и (k + 1) / (τp + τs). Предполо-
жите, что и τp и τs достаточно малы.
Далее предположим, что приблизительное значение τp
= 0.016 с . Оцени-
те достаточную пропускную полосу в герцах для тахометра. Кроме того,
если k = 1, оцените общую пропускную полосу системы управления с
обратной связью.
Если k = 49, какова представительная пропускная полоса системы управ-
риСУНок 3.12 Система регулировки скорости.
298
ления с обратной связью?
Какова должна быть частота несущего сигнала для определенного ac та-
хометра (с пропускной способно стью, как в этом числовом примере)?
Кроме того, какова должна быть критическая частота фильтра низких
частот, который используется с этой схемой демодулятора?
решение
(a) (а) М Gp(s)=k/(τps+1)→ωp=1/τp.
(b)замкнутая передаточная функция с единичной обратной связью Gc(s)=(k/
(τps+1))/(1+k/(τps+1)), что преобразуется в Gc(s)=k/(τps+1+k)→ωc=1+k/τp.
Примечание: пропускная полоса увеличилась.
(c) С датчиком обратной связи функции передачи Gs (s) = 1 / (τss + 1),
замкнутая передаточная функция
Примечание: Мы пренебреглиτpτ
s
.
Следовательно, чтобы избежать динамического эффекта датчика (кото-
рый представил нуль в Gcs (s)) мы должны ограничить пропускную по-
ло су до 1/τs
.
Кроме того, от знаменателя Gcs, видно, что пропускная полоса с обрат-
ной связью определяется как(1 + k) / (τp + τs).
Следовательно, для успешного выполнения, пропускная полоса должна
быть ограничена до минимума[(1/τs), (1 + k / (τp + τs))]. Когда τp
= 0.016 с,
мы имеем: ωp
= 1/0.016 = 62.5 рад/с = 10.0 Гц.
Следовательно, по считайте пропускную способность датчика, увеличив
в 10 раз это значение → ω
s
= 100.0 Гц = 625.0 рад/с.
Затемτs=1/ωs=0.0016сек.с k=1,(1+k)/(τp+τs)=(1+1)/(0.016+
0.0016) рад/сек. = 18.0 Гц .
Также, 1/τs = 100.0 Гц → ωcs = мин[100, 18.0]Гц = 18.0 Гц
При k= 49: (1 + k)/(τp+ τs) = (1 + 49)/(0.016 + 0.0016) rad/s = 450.0 Гц, и
как прежде, 1/τs=
100.0 Гц
→ ωcs = мин [100, 450.0]Гц = 100.0 Гц
Из этого следует, что теперь пропускная полоса системы управления
увеличилась приблизительно до 100 Гц (возможно чуть ниже, чем 100
Гц).
299
Для датчика с пропускной способностью на 100 Гц (см. Разделы 2.6 .3 и
5.4 .2 для связанной теории):
Несущая частота ≅10×100Гц.=1000.0Гц
→ 2 × Несущая частота = 2000 Гц
→ Сокращение фильтра низких частот = (1/10) × 2000 Гц = 200.0 Гц
3.6 .2 . Статическое усиление
Это усиление (например, магнитуда предаточной функции) устройства
(например измерительного приборра) в рамках полезного (плоского) ди-
апазона (или при очень низких частотах) устройства. Оно так же назы-
вается цифровым диапазоном. Высокое значение статического усиления
приводит к тому, что устройство имеет высокую чувствительность, что
является желательной характеристикой. Высокое значениие усиления
повышает выходной уровень и может увеличить скорость реагирования
и уменьшить систематическую ошибку в системе управления ответами,
но у него также есть нежелательный эффект, который со стоит в том, что
система менее стабильна.
рисунок 3.13 Механический тахометр
Dial reading – отсчет по шкале
Pointer - указатель
Shaft speed – скорость вращения вала
Viscous fluid – вязкая жидкость
Torsional spring – скручивающая пружина
300
Пример 3.9
Механическое устройство для измерения угловой частоты показано на
Рисунке 3.13. Главным элементом этого тахометра, что является рота-
ционный вязкостный демпфер (пстоянная демпфирования b), который
состоит из двух цилиндров. Внешний цилиндр имеет вязкую жидкость,
в которой врящается внутренний цилиндр. Внутренний цилиндр огра-
ничивается торсионной рессорой жесткостью k. Вращение θо внешнего
цилиндра обозначается указателем на специально откалиброванных ве-
сах. Принебрегая инерцией движущихся деталей, предоставьте анализ
пропускной способно сти для этого устройства.
решение
Момент демпфирования пропорционален соответствующей частоты
вращения двух цилиндров и ограничивается скручивающей пружиной.
Уравнение для движения подается так: b(ωi
-θ
o
)=kθ
o
, или
Предаточная функция определяется, сначало, посредством замены про-
изводной времени оператором Лапласа s и берется отношение: выход/
ввод; таким образом
Статическое усиление (например, цифровое усиление: магнитуда прида-
точной функции при s=0) является
А константа времени равна
Видно, что в этом устройстве статическое усиление и временная кон-
301
станта эквивалентны (и таким образом, у нас только параметр произ-
водительности). Проэктировочные требования к скорости (которая
уменьшается с временной константой) и выходной уровень (который уве-
личивается со статическим усилением становятся по этой причине, кон-
фликтными. С одной стороны, мы хотим получить большое статическое
усиление, что таким образом обеспечит, следовательно, высокий отсчет
датчика по шкале. С другой стороны, временная константа устройства
должна быть маленькой для получения быстрого отсчета, что точно ото-
бражает измеряемую переменную (скорости). Здесь необходимо достичь
компромиса, в зависимости от особенностей требований к дизайну. В
противном случае, или в дополнение, устройство формирования сигнала
может быть применено для усиления выходного сигнала датчика.
Примечание: В данном примере, скоро сти и уровень стабильности не
противостоят друг другу (оба улучшаются, с уменьшением временной
константы).
Теперь, давайте рассмотрим ширину полосы устройства на уровне поло-
винной мощно сти. Частота предаточной функции:
По определению, ширина полосы на уровне половинной мощности ωb
подается с помощью kg/|τjωb + 1|= k
g
√2. Таким образом, (τωb)2 + 1 = 2. Так
как и τ и ωb положительные, у нас получится τωb
=1, или
= 1/ωb
(3.9 .6)
Обратите внимание, что ширина полосы инверционно пропорциональ-
на временной константе. Это подтверждает наши прежние утверждения,
что ширина полосы это мера скорости ответа устройства.
3.7 .искажение из-за наложения спектров при дискретизации сигна-
лов
Искажение частот является важным анализом при работе с образцами
информации при постоянном сигнале. Таким образом, он полезен в циф-
ровых устройствах и системах управления. Ошибки дискретизации мо-
гут попадать в вычисления и в двувременных и в частотных доменах, в
зависимости от домена, в котором берется информация.
302
3.7 .1 . теорема дискретизации
Если временной сигнал x(t) берется на равкых ∆Т, нет доступной инфор-
мации касательно его спектра частоты Х(f) для частот выше, чем fc
=1/
(2∆Т). Этот феномен известен, как Теорема Шеннона-Котельникова, и
лимитирующая (обрывная) частота в спектре (из образца информации)
называется частотой Найквиста.
Можно показать, что ошибка из-за наложения спектров появляется из-
за смещения высокочастотного сегмента спектра частоты выше частоты
Найквиста на низкочастотный сегмент. Это показано на Рисунке 3.14 .
Ошибка из-за наложения спектров становится существеннее для частот
спектра ближе к частоте Найквиста. В анализе сигналов, достаточно
рисунок 3.14 Искажение из-за наложения спектров частоты. (а) оригинальный
спектр и (б) искаженный спектр из-за наложения.
Spectral magnitude – спектральнаямагнитуда
Frequency – частота
Nyquist frequency – частотаНайквиста
Folded high-frequency spectrum –
Смещенныйвысокочастотныйспектр
Aliasing – искажение
Original spectrum – оригинальный спектр
303
маленкий образец ∆Т необходимо выбрать для уменьшения искажения
из-за наложения спектров в домене частоты, в зависимости от процен-
та самой высокой частоты в анализируемом сигнале. Это, тем не менее,
увеличивает время подачи сигнала и требования к храниению на ком-
пьютере, которые нежелателны, особенно для анализа в реальном вре-
мени. Это так же может привести к проблемам стабильности в числовых
вычислениях. Критерий образца Найквиста требует, чтобы диапазон об-
рисунок 3.15 Простое изображение искажения. (а) Два гармоничных сигнала с
идентичными образцами информации и (б) частота спектров двух гармоничных
сигналов.
Signal – Сигнал
Time – время
Sampling rate – диапазон образца
Nyquist frequency – частота Найквиста
Amplitude spectrum – амплитуда спектра
Frequency – частота
304
разцов (1/ ∆Т) для сигнала был, как минимум, в два раза выше процента
самой высокой частоты. Вместо создания высокого диапазона образцов,
на практике используется уменьшенное значение, которое удовлетворя-
ет критерии Найквиста, вместе с фильтром сглаживания для удаления
компонентов частоты в оригинальном сигнале, который наложится на
спектр вычисленного сигнала.
3.7 .2 . Другое изображение искажения
Простое изображение искажения подано на Рисунке 3.15. Тут показаны
два синусоидальных сигнала частоты f1 =
0,2 Гц иf2
= 0,8 Гц (Рисунок
3.15а). Предположим, что два сигнала взяты в образце в диапазоне fs
=1
образец/сек. Соответствующая частота Найквиста будет fс
= 0,5 Гц. Вид-
но, что в этом диапазоне образца информация образцов двух сигналов
одинаковая. Иными словами, из информации образца сигнал частоты не
может быть отделен от низкочастотного сигнала. Таким образом, часть
высокочастотного сигнала частоты 0,8 Гц проявится, как компонент низ-
кочастотного сигнала частоты 0,2 Гц.
Это искажение, как ясно из спектра сигналов, показанных на Рисунке
3.15б. В особенности, спектральный сегмент сигнала выше частоты
Найквиста (fc) смещается на часть назких частот при образце информа-
ции, и не может быть извлечен.
3.7 .3 . Фильтр сглаживания
Из Рисунка 3.14 должно быть ясно, что если оригинальный сигнал про-
ходит через фильтр низких частот при чатоте обрывания равной частоте
Найквиста, тогда искажение из-за наложеия, из-за взятия образца, не воз-
никнет. фильтр данного типа называется фильтром сглаживания. филь-
тры аналоговой системы обеспечения могут быть использованы для
данных целей. На практике невозможно достичь идельной фильтрации.
Таким образом, некое искажение может остаться даже по сле использо-
вания фильтра сглаживания, что в дальнейшем уменьшит подходящий
диапазон частоты вычисленного сигнала. Обычно лимит полезной ча-
стоты fc/1,28 и последними 20% спектральными точками возле частоты
Найквиста нужно принебречь. Таким образом, частота обрыва филтра
выбирается ниже, чем частота Найквиста, например fc/1,28 ( 0,8 fc). В
данном случае, вычисленный спектр точно подходит к частоте обрыва
305
фильтра 0,8 fc и не подходит к частоте Найквиста fc.
Пример 3.10
Рассмотрим 1024 точки информации сигнала, взятые в образце с интер-
валом в 1 милисекунду.
Диапазон образца fs= 1/0,001 образца/сек = 1000Гц = 1кГц
Частота Найквиста = 1000/2 Гц = 500 Гц
Из-за искажения примерно 20% спектра, даже в теоретически полезном
диапазоне (например, спектр выше 400 Гц) будет искажено. Тут мы мо-
жем использовать сглаживающий фильтр с обрывом на 400 Гц.
Предположим, что цифровое вычисление преобразования фурье обеспе-
чивает 1024 точек частоты информации до 1000 Гц. Половина этого чис-
ла выше частоты Найквиста, и не даст никакой информации о сигнале.
Спектральная отделяющая линия = 1000/1024 Гц = 1 Гц (примерно)
Мы берем только первые 400 спектральных линий в качестве полезного
спектра.
Примечание: Почти 500 спектральных линий можно сохранить, если ис-
пользуется точный сглаживающий фильтр с частотой обрыва в 500 Гц.
Пример 3.11
(а) Предположим, что синусоидальный сигнал частоты f1 Гц был взят в
рисунок 3.16 Блок-схема системы управления положением пластин для измель-
чителя стружки.
Torque sensor signal – Сигнал датчика вращения
Gap sensor signal – сигналдатчиказазора
Digital controller – цифровойконтролер
ADC – аналогово-цифровой конвертер
DAC – цифро-аналоговый конвертер
Servovalve - сервораспределитель
Mechanical load – механическая нагрузка
Plate movement - движение пластин
306
качестве образца при диапазоне fs образцов в секунду. Было обнаружено,
что другой синусоидальный сигнал такой же амплитуды, но с большей
частотой f2 Гц выдает такую же информацию при образцах приfs. Каким
будет аналитическое соотношение между f1,
f2иfs?
(б) Рассмотрите систему придаточной функции G(s) = k/(1+τs). Какое
статическое усиление системы? Покажите, что магнитуда придаточной
функции достигает 1/√2 статического усиления, когда задающая частота
равна 1/τ рад/сек. Примечание: Частота, ω
b
= 1/τ рад/ сек, может быть
принята, как рабочая ширина полосы системы (завода).
(в) Рассмотрите установку для очистки стружки, которая используется
в целлюлозно-бумажной промышленности. Машина используется для
мелкой рубки древесной стружки. Она имеет фиксированную и враща-
ющуюся плоскости, которые управляются индукционным мотором. За-
зор между пластинами замеряется датчиком и так же настраивается. При
вращении пластин, стружка измельчается в целюлозу в этом зазоре. Блок
схема системы контроля положения пластин ппказана на Рисунке 3.16.
Предположим, что сигнал датчика вращения и сигнал датчика зазора взя-
ты в образцах 100 Гц и 200 Гц, соответственно, в цифровом контроллере,
который берет 0,05 сек для вычисления каждой команды положения для
сервораспределителя. Временная константа сервораспределителя равна
0,05/2π сек, и для механической нагрузки (завода) она равна 0,2/2π сек.
Оцените контрольную ширину полосы и операционную ширину полосы
для системы положения.
решение
(а) желательно, чтобы f1и f2 были расположены симметрично с двух сто-
рон от частоты Найквиста fс. Тогда, f
2
–
fс
=f
с
-f
1.
Это дает f2
=f
с
+(fс
-f
1
)=
2fс
-f
1,
или
f2+f1
=f
s
2fc
(3.11 .1)
(б)
= придаточная функция частоты
Где ω выражается в рад/сек
Статическое усиление - это магнитуда придаточной функции в стабиль-
ном состоянии (например, при нулеваой частоте).
Таким образом, статическое усиление = G(0) = k.
Когда ω=1/τ, G(jω) = k/(1+j)→|G(jω)| = k/√2 при данной частоте.
307
Это соответствует половинной ширине полосы.
(в) Из-за взятия образца, сигнал вращения имеет ширину поло сы в (1/2)
* 100Гц = 50 Гц, и сигнал датчика зазора имеет ширину полосы в (1/2) *
200 = 100 Гц.
Контрольное время цикла = 0,05 сек, что создает контрольные сигналы в
диапазоне 1/0,05 = 20 Гц.
Таким образом, 20Гц < мин (50 Гц, 100 Гц), мы имеем соответствующую
ширину полосы из образцов сигнала датчика для подсчета контрольного
сигнала.
Контрольная ширина полосы цифрового контролера = 1⁄2 * 20 Гц (из тео-
ремы Шеннона-Котельникова).
Но сервораспределитель также является частью контроллера.
Его ширина полосы = мин (10 Гц, 20 Гц) = 10 Гц.
Рабочая ширина полосы ограницена шириной полосы цифрового кон-
троллера (10 Гц) и шириной полосы аналоговой системы обеспечения
(20 Гц). Таким образом,
Контрольная ширина полосы = мин (10 Гц, 20 Гц) = 10 Гц.
Ширина полосы механической нагрузки (завода) = 1/τm рад/ сек = 1/2πτm
рисунок 3.17 Цифровая контрольная система для прибора механического раз-
мещения.
Computercontrol–компьютерное управление
DAC – ЦАП
Power supply – источник питания
Drive amplifer – приводныйгенератор
Encoder (position sensor) feedback – Ответ кодера (датчикразмещения)
Motor – мотор
Damper – демпфер
Interia – внутренняя часть
Spring – пружина
308
Гц = 2π/(2π*0,2) Гц = 5 Гц.
Рабочая ширина полосы ограничена и контрольной шириной полосы (10
Гц) и шириной полосы завода (5 Гц). Таким образом,
Рабочая ширина полосы системы = мин (10 Гц, 5 Гц) = 5 Гц.
Пример 3.12
Рассмотрим цифровую систему управления для прибора механического
размещения, как это показано схематически на Рисунке 3.17. Компьютер
управления создает контрольный сигнал, согласно алгоритму, на осно-
ве желаемого положения и фактического положения, как это измеряется
оптическим датчиком (см. Главу 6). Цифровой сигнал конвертируется в
аналоговый с помощью цифро-аналогового преобразователя (ЦАП) и
подается на приводный генератор. Соотвественно необходимо, чтобы ге-
нератор создавал сигналы тока, которые дают энергию обмоткам мотора.
Внутренний элемент, который должен был быть расположен, напрямую
(и неподвижно) прикреплен к ротору мотора и ограничен пружиной или
демпфером, как это показано.
Предположим, что комбинированная придаточная функция приводного
генератора и электромагнитная проводка (генератора вращения) двига-
теля подаются, как kε/(s2+2ζεω
ε
s+ωε
2). Тут k = соответствующее усиле-
ние, ζ = диапазон демпфирования, и ω = природная частота. Индексы ()
ε
и ()m обозначают электрические и механические компоненты, соответ-
ственно. Более того, ∆Т так же берется для вычисления каждого дей-
ствия управления и ∆Тр
- это импульсный период кодера датчика распо-
ложения.
Следующие числовые значения поданы так:
ωε
= 1000π рад/сек, ζ
ε
= 0.5,ω
m
= 100π рад/сек, и ζ
m
= 0.3.
Для решения данного примера вы можете пренебречь загрузкой эффек-
тов и эффектами сочетания, возникающих из компонентов каскадирова-
ние и сигнала обратной связи.
(А) Объясните почему (колебания) управление полосой пропускания
этой системы не может быть намного больше, чем 50 Гц.
(Б) Оцените пропускную способность системы при ΔTc
= 0,02с
(С) Объясните значение ΔTp в этом приложении. Почему, как правило,
ΔTp не должно быть больше, чем 0,5 ΔTc ?
(D) Оцените пропускную способность системы определения местопо-
ложения, при условии, что значительное динамика растений следует из-
309
бегать.
(Е) Оцените пропускную способность системы, если ωm
= 500πрад/си
ΔTc
= 0,02, остальные параметры возьмите те, что указанны выше, чтобы
снова не побуждать значительный рост динамики
решение
(А) Система привода (аппаратная часть) имеет резонансную частоту ме-
нее 500 Гц. Таким образом, частота колебаний плоского участка кривой
(т.е. рабочая область) системы привода будет составлять около одной де-
сятой этого, то есть, 50 Гц. Это будет ограничивать максимальную спек-
тральную составляющую сигнала возбуждения приблизительно до 50
Гц. Следовательно, частота будет ограничена этим значением.
(Б) Темп, при котором цифровой сигнал управления генерируется = 1 /
0,02 Гц = 50 Гц. По теореме отсчётов Найквиста-Шеннона, эффективный
(полезный) спектр сигнала управления ограничен до 1/2 × 50 Гц = 25 Гц.
Даже при том, что система привода может разместить полосу с частотой
примерно 50 Гц, ширина полосы управления будет ограничена 25 Гц из-
за цифрового управления.
(В) Обратите внимание, что ΔTp
–
это дискретизация измеритель-
ных сигналов (для обратной связи). Следовательно, его продуктивный
спектр будет ограничен до 1 / 2ΔTp
, по теореме дискретизации Шен-
нона. В следствие чего обратный сигнал не будет в состоянии достав-
лять полезную информацию о процессе за пределы частоты 1 / 2ΔTp
.
Для формирования сигнала управления со скоростью 1 / ΔTc опросов в
секунду, информационный процесс должен обладать частотой, по мень-
шей мере до 1 / ΔTc Гц. Для того, чтобы перердать эту информацию мы
должны иметь
где ΔTc
- это время, необходимое для вычисления каждого управляюще-
го действия.
Отношение (3.24) гарантирует, что по меньшей мере две точки оцифро-
ванных данных, поступающих от датчика используются для вычисления
каждого управляющего воздействия.
(Г) Частота колебаний (системы определения местоположения) прибли-
зительно (меньше, чем)
310
На частотах вблизи этого, резонанс будет препятствовать контролю, и
его следует избегать, если это возможно, если резонансы (или режимы)
растения сами должны не быть измененными с помощью контроля. На
гораздо больших частотах чем эти, процесс несущественно реагирует на
управляющее воздействие, и практически не приносит пользы (растение
будет ощущаться как жесткой стенки). Следовательно, частота рабочей
полосы должна быть значительно меньше чем 50 Гц, скажем, 25 Гц, во
избежания динамики объекта.
Примечание: Данный аспект строения, основанный на направлении при-
менения (например экскаватор, диск). Как правило, нужно контролиро-
вать динамику растений. В этом случае необходимо использовать всю
полосу пропускания (то есть максимально возможная скорость управ-
ления) в качестве рабочей полосы частот. В этом случае, даже если весь
контроль BW (т.е. 25 Гц) используется в качестве операционной BW, она
до сих пор избегает резонанса растений.
(Е) Резонанс растений в этом случае составляет около 500π / (2π) Гц =
250 Гц. Это ограничивает рабочую полосу пропускания до 250π / (2 π) Гц
= 125 Гц, с тем, чтобы избежать динамики объекта. Но пропускная спо-
собность составляет около 25 Гц, так как ΔTc
= 0,02 сек. Следовательно,
рабочая полоса частот не может быть больше, чем это значение, и будет
приблизительно равна 25 Гц.
Примечание: В качестве комментария, который не связан с вопросами
этого примера, рассмотрим расположение датчика движения (анало-
го-цифровой преобразователь). Так как АЦП объединен с двигателем, он
фиксирует движение за счет двигателя, а не приводимой нагрузки. Когда
гибкость вала, который передает двигателю нагрузку, является незна-
чительной, или если есть источник передачи скорости между двигате-
лем и объектом, оказывающим нагрузку, датчик не читает фактическую
динамику нагрузки. Если подобная ошибка является значительной, мы
должны учитывать местонахождение датчика движения при нагрузке.
Затем, мы перемещаем датчик от расположения привода. Известно, что
(в управлении с обратной связью), перемещение расположения датчи-
ка дальше от точки привода может сделать систему менее стабильной.
Таким образом, может возникнуть компромисс между уровнем стабиль-
ности и точности движения, которая определяется по месту нахождения
311
датчика движения.
3.7 .4 расчетный диапазон рабочих частот систем управления
На основании вышеприведенных концепций, теперь возможно соста-
вить ряд простых шагов для проектирования системы управления на
основе соображений пропускной способности.
• Шаг 1: Определите максимальную рабочую частоту (BWo ) системы на
основе требований конкретного применения.
• Шаг 2: Выберите процессные компоненты (электромеханические), ко-
торые обладают возможностью работать для выполнения необходимых
задач, по крайней мере, до BWo
• Шаг 3: Выберите датчики с обратным спектральным представлением
сигнала (рабочий диапазон частот больше, чем 4 × BWo ). Примечание:
Как правило, датчик BW не является ограничивающим фактором. Таким
образом, мы можем даже выбрать больший датчик BW.
• Шаг 4: Разработайте цифровой контроллер с частотой дискретизаци-
и(a)> 4 × BWo для сигналов датчиков обратной связи (то есть в пределах
спектрального представления сигнала) и cпрямым цифровым управле-
нием времени цикла (периода)(b)= 1 / (2 × BWo ). Примечание: Цифровые
управления генерируются со скоростью 2 × BWo
• Шаг5: Выберите систему контроля привода (аналоговый интерфейс ап-
паратных средств, фильтры, усилители, исполнительные механизмы и
т.д.), которая имеет частотный спектр по меньшей мере = BWo
(предпочтительно 2 × BWo ).
• Шаг 6: Объедините систему и протестируйте производительность.
Если технические характеристики не удовлетворяют требованиям, то
необходимо внести коррективы и повторите тест.
Очевидно, что система управления не должны быть разработаны только
лишь с использованием соображений пропускной способности. Многие
другие факторы, которые зависят от конкретного применения, требова-
ний к производительности, ограничений и соответствующих методов
контроля должны приниматься во внимание.
3.7 .4 .1 . Замечание о контроле времени цикла
В технической литературе часто используется выражение "ΔT
c
=ΔT
p
, где
ΔTc
-контроль длительности цикла; (период, при котором генерируются
управляющие воздействия) и ΔTp это период, за который сигналы дат-
312
чиков обратной связи оцифровываются (см. Рисунок 3.18a).
Это допустимо в системах, где полезный диапазон частот значительно
меньше, чем 1 / ΔTp (и 1 / ΔTc ). Затем, частота дискретизации 1 / ΔTp
обратной связи (и частота Найквиста 0,5 / ΔTp ) по-прежнему будет су-
щественно больше, чем полезный диапазон частот (или рабочая полоса
пропускания) растения (см рисунок 3.18б), и следовательно, выбороч-
ные данные будут точно представлять реакцию растений. Но критерий
рисунок 3.18 (а) Условные образцы сигналов датчика ответа для прямого циф-
рового управления, (б) приемлимые характеристики частоты завода для верх-
него случая, и (в) улучшеные критерии сбора образцов для сигналов ответа в
прямом цифровом контроле.
Control instants – моменты управления
Magnitude - магитуда
Frequency - частота
Nyquist frequency – частота найквиста
Measure two samples – измерениидвух образцов
Compute control action usingt two samples – расчет действия упаравления с ис-
пользованием двух образцов.
313
пропускной способности представленный ранее в этом разделе удовлет-
воряет условие ΔTp ≤ 0.5ΔTc
. Это более разумный вариант. Например,
на Рисунке 3.18c, два предыдущих образца для измерения используются
при вычислении каждого управляющего воздействия, а также вычисле-
нии управляющих воздействий, что занимает в два раза больше време-
ни, чем периода выборки данных. Здесь период выборки данных состав-
ляет половину периода цикла управления, так и для заданной частоты
управляющих воздействий частота выборки сигналов Найквиста вдвое
больше обратной связи , нежели в предыдущем случае. В результате вы-
борочные данные будут покрывать больший (двойной) частотный ди-
апазон завода. Как правило, на практике обладание более высокой ча-
стоты дискретизации для датчика не является ограничением, по скольку
быстрые датчики и системы сбора данных с очень высокой частотой
дискретизации являются общедоступными. Конечно, третий вариант бу-
дет по-прежнему использовать две предыдущих выборки данных для вы-
числения управляющего воздействия, но сделать вычисления быстрее, в
одном периоде выборки данных (а не в двух). Эта опция будет использо-
вать одну ранее использованную выборку данных и один новый образец
данных (в отличие от предыдущего варианта, в котором используются
две новых выборки данных). Таким образом, этот третий вариант потре-
бует увеличения вычислительной мощности, а также больший буфер для
хранения выборки данных для расчета управляющих воздействий.
Примечание: Можно утверждать, что в некоторых схемах управления
(например, пропорциональное управление) требуется только один обра-
зец данных для вычисления управляющего воздействия. Тем не менее,
даже в таких схемах управления, наличие более чем одной новейшей вы-
борки данных может повысить точность измерений (например, просто
принимая местное среднее, чтобы уменьшить случайный шум).
3.8 обсуждение погрешностей прибора
Анализ погрешностей в приборе или многокомпонентной инженерной
системы является сложной задачей. Трудности возникают по многим
причинам:
1. Истинное значение обычно неизвестно.
2. Показания прибора могут содержать случайную погрешности ( (а)
погрешности измерительной системы, включая погрешности датчика;
(б) Другие случайные погрешности, которые входят в систему проек-
тирования, в том числе погрешности сенсоров), которые не могут быть
314
определены точно.
3. Погрешность может быть комплексной (т.е. не простой) функцией во
многих переменных (входных переменных и переменных состояния или
переменных отклика).
4. Контролируемая инженерная система может состоять из многих ком-
понентов, имеющих сложные взаимосвязи (динамическая связь, множе-
ственные термодинамические степени свободы ответов, нелинейностей
и т.д.), и каждый компонент может внести свой вклад в общую ошибку.
Первый пункт представляет собой философский вопрос, который при-
вел бы к спору, аналогичному спору о курице и яйце. Например, если
истинное значение известно, нет никакой необходимости измерять его;
и если истинное значение неизвестно, то невозможно точно определить,
насколько неточным является конкретное показание. На самом деле, эта
ситуация может быть решена до некоторой степени с помощью стати-
стического представления ошибки, теории вероятностей, и оценки (см.
главу 4), которая подводит нас ко второму пункту в списке. Третий и
четвертый пункты могут быть решены с помощью методов сочетания
погрешностей в многофакторные системы и распространения погреш-
ностей в сложных многокомпонентных системах. В этом случае не пред-
ставляется возможным обеспечить полное решение всех этих вопросов.
Только введение в полезную аналитическую методику дает решения,
используя наглядные примеры.
3.8 .1 . Представление погрешностей
Три вещи: погрешность в измерении (данных), ошибка змерения , и по-
грешно сть в приборе (скажем, в измерительном) не являются одним и
тем же. Погрешность в части данных отличается от ее значения и ис-
тинности (правильности значения). Эта погрешность может возникать
из многих источников еще до измерения. Погрешности включают в себя
ошибки в процессе измерений, в том числе и ошибки в приборе (датчи-
ке), который используется для измерения. Погрешность прибора явля-
ется погрешностью в составляющем конкретного прибора. Эти понятия
усваиваются из последующего обсуждения.
В общем случае, погрешность в показании прибора является случайной
величиной. Вне зависимости от того, что различные факторы способ-
ствуют этой ошибке, определяется следующим образом:
Погрешно сть = (показания прибора) - (истинное значение).
315
Случайность, связанная с измерениями (количество подлежащего изме-
рению) можно объяснить двумя способами. Во-первых, так как истин-
ное значение измеряемой величины является фиксированной величиной,
хаотичность может быть объяснена как хаотично сть в погрешности,
которая как правило, происходящих из случайных факторов в реакции
прибора. Во-вторых, глядя на этот вопрос в более практическом ключе,
анализ ошибок может быть интерпретирован как оценка проблем, в ко-
торой целью является оценить истинное значение измеряемой величины
от известного набора показаний.
В этой последней точке зрения, само оценочное значение становится
случайной величиной. Независимо от того, какой подход использует-
ся, одни и те же статистические концепции могут быть использованы в
представлении об ошибке.
3.8 .1 .1 . точность прибора и точность измерений
Различные рейтинги инструментов, как обсуждалось ранее, определя-
ют общую точность прибора. Точность прибора представлена ненад-
лежащим уровнем точности, генерируемым прибором в пределах его
динамического диапазона в нормальной рабочей среде. Точность при-
бора зависит не только от физического оборудования, инструмента, но
и от его калибровки и фактических условий эксплуатации (мощность,
уровни сигнала, нагрузки, скорости, условия окружающей среды и т.д.),
рабочих условий (рабочие условия для которых прибор предназначен:
нормальных, устойчивых условиях эксплуатации; экстремальных режи-
мах, таких как аварийный пуск и выключение), недостатков настроек и
другие компоненты и системы, к которой подключен прибор, и так далее.
Точно сть может быть отнесена либо к конкретному чтению, либо к ин-
струменту. Измерение точности определяет близость измеренного зна-
чения (измерения) к истинному значению (измеряемой величине). Это
зависит не только от точности приборов, но и о том, как проводится про-
цесс измерения, как измеренные данные представлены и так далее.
Примечание: Погрешность измерения зависит не только от измеритель-
ного прибора, и как было проведено измерение, но и от других факторов,
в частности ошибки, происходящие во время обработки данных с помо-
щью измерительного прибора(шум, помехи и факторы, препятствующие
точному измерению.
Погрешность измерений определяется следующим образом:
316
Погрешно сть = (измеренное значение) - (истинное значение)
(3.28)
Поправка, определяется следующим образом:
Поправка = (истинное значение) - (измеренное значение)
(3.29)
Каждое из этих значений также может быть выражено в процентах от
истинного значения. Точность прибора может быть определена путем
измерения параметра, чье истинное значение известно, вблизи крайних
значениях динамического диапазона прибора, при определенных усло-
виях эксплуатации. Для этой цели были бы необходимы стандартные
параметры или сигналы, которые могут быть сгенерированы при очень
высоком уровне точности. Национальный институт стандартов и испы-
таний (NIST) или Национальный исследовательский совет (NRC), как
правило, отвечает за создание этих стандартов. Тем не менее, точность
и значение ошибок не могут быть определены до 100% точности в ти-
пичных устройствах, потому что истинное значение не известно. В дан-
ной ситуации мы можем только сделать оценку для точности, используя
рейтинги, предоставленные изготовителем прибора или путем анализа
данных из предыдущих измерений.
В общем, причину возникновения ошибок в инженерной системе (вклю-
чающей взаимодействия нескольких компонентов) составляют неста-
бильность прибора, внешний шум (расстройства), плохая калибровка,
неточность сформированной информации (например, неточные датчи-
ки, плохие аналитические модели, неточные правила контроля), измене-
ния параметров (например в результате изменений окружающей среды,
старения и изнашивания), и неправильное использование инструментов
(недостатки в настройке системы, неправильное и экстремальных усло-
вия эксплуатации и т.д .).
3.8 .1 .2 . тщательность и точность
Погрешно сти могут быть классифицированы как детерминированные
(или систематический) и случайные (или стохастические). Детерми-
нированные ошибки, вызываемые четко определенными факторами, в
том числе известных нелинейностей и смещений в показаниях. Они, как
правило, могут быть объяснены с помощью надлежащей калибровки, те-
317
стирования, анализа и вычислительной практики, а также компенсиру-
ющего оборудования. Списки погрешностей и калибровочные графики
обычно используются для удаления систематических погрешностей из
показаний прибора. Случайные погрешности вызваны неопределенны-
ми факторами, отражающимися на отклике прибора. К ним относятся
шум устройства, помехи на линии, случайные подключения и влияние
неизвестных случайных изменений в операционной среде. Статистиче-
ский анализ использует достаточно большие объемы данных, необходи-
мых для того, чтобы оценить случайные ошибки. Результаты, как пра-
вило, выражается в виде среднейпогрешности, являющейся системати-
ческой частью случайных погрешностей, и стандартным отклонением
или интервалом в ответе прибора.
Точность: Точность не является синонимом правильно сти. Прибор, ко-
торый имеет серьезную погрешность, может быть в состоянии сгенери-
ровать ответ на высокой точности, даже если этот вывод явно неточен.
Например, рассмотрим временное устройство (часы), которое очень точ-
но указывает шаг времени (скажем, до ближайшей наносекунды). Если
начало отсчета времени установлена неправильно, показание времени
будет ошибочным, несмотря на то, что часы имеет очень высокую точ-
ность.
Погрешность прибора может быть представлена в виде случайной вели-
чины, имеющей мкЕ (среднее значение) и (стандартное отклонение) σe.
Если стандартное отклонение равно нулю, то переменная считается де-
терминированной для большинства практических целей. В этом случае
погрешность называется детерминированной или повторяемой. В про-
тивном случае, погрешность называется случайной. Точность прибора
определяет стандартное отклонение погрешности в реакции прибора.
Показания прибора могут иметь большое среднее значение погрешно сти
(например, большое смещение), но если стандартное отклонение мало,
прибор имеет высокую точность. Следовательно, количественное опре-
деление точности будет
Погрешность = диапазон измерений / σe
(3.30)
Отсутствие точности происходит от случайных причин и плохой кон-
струкции. Оно не может быть компенсировано перекалибровкой , так же,
как точность часов не может быть улучшена за счет сброса времени. С
другой стороны, точность может быть улучшена путем повторной кали-
бровки. Многократная (детерминированная) точно сть обратно пропор-
318
циональна величине среднего мкЕ ошибки.
Примечание: Устройство с низкой систематической (детерминирован-
ной) погрешностью не может быть точным, если оно имеет случайную
погрешность.
Соответствие приборов в рейтинге со спецификациями является очень
важным при выборе инструментов для инженерного применения. Не-
сколько дополнительных соображений также следует рассматривать. К
ним относятся геометрические ограничения (размер, форма и т.д .), ус-
ловия окружающей среды (например химические реакции, в том числе
коррозии, экстремальные температуры, воздействие света, накопление
грязи, влажности, электромагнитных полей, радиоактивных сред, уда-
ров и вибрации), требования к питанию, простота эксплуатации, доступ-
ность, имеющийся опыт и репутацию производителя конкретного ин-
струмента, а также затрат, связанных с экономическими аспектами (на-
чальная стоимость, расходы на техническое обслуживание, стоимость
дополнительных компонентов и стоимость утилизации и замены). Часто
эти соображения становятся конечными решающими факторами в про-
цессе выбора устройств.
3.9 . распространенные погрешности и их комбинация
Погрешно сть в переменной отклика (выходе) устройства, или оцени-
ваемого параметра многокомпонентной динамической системы будет
зависеть от погрешностей, присутствующих в: (а) компоненте (их пе-
ременные и параметры), и как они взаимодействуют между собой, (б),
измеренные переменные или параметры (отдельных компонентов и т.д.),
испрользующихся для вычисления (оценки) или определить необходи-
мое количество (переменная или значение параметра). Зная как компо-
нент погрешности распространяется в многокомпонентной системе, и
как отдельные погрешности в системных переменных и параметров спо-
собствуют общей погрешности в той или иной переменной отклика или
параметра будет иметь важное значение при оценке пределов погрешно-
сти в сложных инженерных систем.
Например, если выходная мощность газовой турбины была вычисле-
на путем измерения крутящего момента и угловой скорости выходного
вала, погрешность полей в двух измеренных величин (крутящий момент
и скорость) будут непо средственно объединены в ошибку в вычислении
мощности. Точно так же, если собственная частота системы подвески
транспортного средства определяют путем измерения параметров массы
319
и жесткости пружины подвески, оценка собственная частота колебаний
будет напрямую зависеть от возможных ошибок в измерениях массы и
жестко сти. В качестве другого примера, в роботе-манипуляторе, точ-
ность фактической траектории концевого эффектора, будет зависеть от
точности датчиков и исполнительных механизмов насуставов и от точ-
ности управления роботом. Обобщая эту идею, общая погрешность в
системе управления зависит от индивидуальных уровней погрешностей
в различных компонентах (датчики, исполнительные механизмы, кон-
троллеры аппаратного обеспечения, фильтров, усилителей, устройств
сбора данных и т.д .), систем и последовательностей, в которых эти ком-
поненты физически соединены и взаимосвязаны между собой.
Обратите внимание, что мы имеем дело с обобщенной идеей распростра-
нения погрешностей, которая учитывает погрешности в системных пе-
ременных (например входные и выходные сигналы, такие как скорость,
сила, крутящий момент, напряжение, ток, температура, теплоемкость,
давление и скорость потока жидкости), системные параметры (напри-
мер, масса, жесткость, демпфирование, емкость, индуктивность, сопро-
тивление, теплопроводность и вязкость), а также системные компоненты
(например, датчики, исполнительные механизмы, фильтры, усилители,
интерфейс аппаратных средств, схемы управления , тепловые проводни-
ки и клапаны).
3.9 .1 чувствительность в комбинации ошибок
Для разработки аналитической основы для комбинации ошибок мы бу-
дем использовать уже знакомые положения чувствительности. После
наблюдений мы узнали, что чувствительность применима в нескольких
различных практических ситуациях; например:
1. Она определяет уровень выходного сигнала и усиление любого ком-
понента.
2. Изменчиво сть чувствительности уровня входного сигнала - показа-
тель нелинейности устройства. Разница между максимальной и мини-
мальной чувствительностью в рабочем диапазоне - мера нелинейности
устройства.
3. Отношение сигнал-шум может быть определено как соотношение чув-
ствительности к желаемому сигналу и нежелательному сигналу.
4. Чувствительность в системе управления может использоваться при
построении и управлении, в частно сти, чтобы компенсировать помехи и
определить управляющие сигналы и параметры (особенно в адаптивном
320
управлении, где значения параметров управления изменены, чтобы до-
стигнуть целей управления).
Теперь мы отдельно рассмотрим применение чувствительности в пе-
редаче ошибок и комбинации ошибок. Чтобы разработать необходимую
аналитическую основу для устройства или исследуемой системы , мы
начнем с функциональной зависимости выражения
y=f(x1, x2, ..., xr)
(3.31)
Здесь x1 - независимые системные переменные или параметры, отдель-
ные ошибочные компоненты которых распространены в зависимую пере-
менную (или значение параметра) y, которая может находиться вне опре-
деленной системы. Определение этого функционального cоотношения
f не всегда вычисляется просто, и само соотношение - модель, которая
может быть ошибочной. В частности это соотношение зависит от таких
обстоятельств как
1. Рабочие характеристики и физические свойства отдельных компонен-
тов
2. Способ соединения деталей
3. Взаимодействия (динамическое взаимовлияние) среди компонентов
4. Сигналы на входах (желательные и нежелательные) системы
Так как наша цель состоит в том, чтобы сделать приемлемую подсчет
возможной ошибки в y из-за совместного воздействия ошибок от кси,
приблизительное функциональное соотношение будет соответствовать
требуемому в большинстве случаев. Ошибка в количественном параме-
тре (переменной или параметра) искажает его значение. Следовательно,
мы обозначим ошибку в количественном параметре дифференциалом
этого параметра. Имея дифференциал в Уравнении 3.31, получаем
для небольших ошибок. Для тех, кто не знаком с дифференциальным
исчислением, Уравнение 3.32 должно быть определено, как член первого
порядка в разложении ряда Тейлора в Уравнении 3.31. Частные произ-
водные подсчитаны в условиях эксплуатации, под которыми выполнен
подсчет ошибок. Теперь, переводя Уравнение 3.32 в дробную форму, по-
лучаем
321
Где
δy/y= ey обозначает общую (распространенную) ошибку
δxi/xi= ei обозначает погрешность детали, выраженную дробями
Безразмерная чувствительность к ошибкам: безразмерное, или дроб-
ное, представление ошибки в Уравнении 3.33 является правильным. Ка-
ждая производная ∂f / ∂ xi отображает чувствительность ошибки в xiна
объединенной ошибке в y. В нашем анализе ошибок мы хотим сохранить
факторы высокой чувствительности и пренебречь факторами низкой
чувствительности. Такое сравнение чувствительности не целесообразно,
если мы не используем безразмерную чувствительность. В частности в
Уравнении 3.33, член (xi/y)(∂f/∂xi)отображает безразмерную чувствитель-
ность ошибки в кси на объединенной ошибке в y. Следовательно, этот
член отображает степень важности отдельного ошибочного компонента
в общей объединенной ошибке.
Теперь мы рассмотрим два типа подсчета объединенной (распростра-
ненной) ошибки.
3.9 .2 абсолютная погрешность
Так как ошибка δxiможет иметь либо положительное, либо отрицатель-
ное значение, максимальное значение общей ошибки находится суммой
абсолютного значения каждого члена правой части Уравнения 3.33. Сле-
дующим образом определяется значение eABS, именуемое абсолютной
погрешностью
Обратите внимание на то, что составляющая ошибка eiи абсолютная
погрешность eABS в Уравнении 3.34 всегда имеют положительные зна-
чения. Однако, при определении ошибки и положительные и отрица-
тельные значения должны обозначаться или подразумеваться (например
±eABS, ±ei).
3.9 .3 ошибка квадратичного корня
Уравнение 3.34 предоставляет оценку (максимальное значение) с по-
грешностями для общей ошибки. Так как сама оценка не точна, то в
большинстве случаев нерационально использовать такой высокий кон-
серватизм системы. Неконсервативная ошибочная оценка, которая часто
используется на практике, является ошибкой квадратного корня суммы
квадратов. Как подразумевается из названия, находится оно по следую-
322
щей формуле:
Это не оценка максимального значения ошибки. В частности,eSRSS<eABS
когда присутствует более одной ненулевой составляющей погрешности.
Отношение ошибки квадратичного корня особенно применимо, когда
погрешность детали обозначена стандартным отклонением относящего-
ся значения переменной или значения параметра и когда соответствую-
щие ошибочные источники независимы. Базовое теоретическое основа-
ние касается независимых случайных переменных (см. Приложение A).
Теперь мы представим несколько примеров передачи ошибок и комби-
нации ошибок.
3.9 .4 равномерное распределение субъективных ошибок
Используя метод абсолютного значения для комбинации ошибок, напри-
мер (Уравнение 3.34), мы можем определить относительную ошибку в
каждом элементе xi, таким образом, что внос каждого элемента в общую
ошибку eABS будет одним и тем же. Для равного ошибочного вноса от
всех компонентов r мы должны иметь
Следовательно,
Таким образом,
Уравнение 3.36 отображает условие для равных чувствительностей к
323
ошибкам.
Степень важности ошибки определена ее безразмерной чувствительно-
стью (xi/y)(∂f/∂xi). Результаты (3.36) полезны в разработке многокомпо-
нентных систем и в экономически эффективном выборе приборов для
особенного применения. В частности, используя Уравнение 3.36, мы
можем расположить элементы xi в порядке их значения. Для этого мы
переписываем Уравнение 3.36 следующим образом
где K - количество, которое не меняется вместе с xi. Из этого следует, что
рисунок 3.19 оптический датчик смещения.
DCsupply –
Photoresistive layer - светочувствительный слой
Resistance – сопротивление
Signal аcquisition circuit -
Conductor - кабель
Light intensity – интенсивность света
Light source(moves with the measured object ) – источник света(движется с изме-
ренным объектом)
Источник света (перемещающийся вместе с измеряемым объектом)
324
для равного ошибочного вноса от всех элементов, ошибка в xi должна
быть обратно пропорциональна |xi(∂f/∂xi)|. В частности элемент с самым
большим |x(∂f/∂x)|должен быть наиболее точным. Этим способом допу-
стимая относительная точность для различных компонентов может быть
подсчитана. Так как в целом самое точное устройство является самым
дорогостоящим, стоимо сть прибора, может быть сокращена, если ком-
поненты выбраны согласно требуемой общей точности, используя такой
критерий, как подразумеваемый Уравнением 3.37. Следовательно, этот
результат полезен в разработке многокомпонентных систем и в экономи-
чески выгодном выборе приборов для особенного применения.
Пример 3.13
На Рисунке 3.19 показана схема оптического устройства для измерения
смещения. Этот датчик, по сути - оптический потенциометр (см. Главу
5). Элемент потенциометра универсален и обладает сопротивлением Rc .
Светочувствительный слой находится между этим элементом и идеаль-
ным проводником электричества. Источник света, который перемеща-
ется с объектом, смещение которого измерено, направляет пучок света,
интенсивность которого I, по узкой прямоугольной области светочув-
ствительного слоя. В результате эта область становится резистивной с
сопротивлением R, которое соединяет элемент потенциометра и прово-
дник, как это показано.
Примечание: Выходной сигнал потенциометра непосредственно зависит
от сопряженного сопротивления R. Следовательно, это можно рассмо-
треть как о сновной вывод устройства.
Эмпирическое отношение между R и I определялось как ln(R/Ro)=(Io/I)1/4,
где сопротивление R находится в kΩ и интенсивность света выражена в
ваттах на квадратный метр (W/m2). Параметры Ro и Io являются эмпи-
рическими константами, имеющими те же модули как R и I. У этих двух
параметров обычно есть некоторая экспериментальная ошибка
(a) Нарисуйте кривую R по отношению к I и объясните значение параме-
тров Ro и Io.
(b) Используя метод абсолютной погрешности, покажите, что объеди-
ненная относительная ошибка eR в сопряженном сопротивлении R мо-
жет быть выражена как
где eR, eI, и eI являются от-
носительными погрешностями Ro,I, и Io.
(c) Предположим, что эмпирическая ошибка в модели датчика может
быть выражена как eRo=±0.01и eI o =±0.01 ,и из-за эффектов изменений
325
в источнике света (из-за изменений напряжения источника питания) и
при окружающих условиях освещения, относительная ошибка в I также
равна ±0.01. Если значение ошибки eR лежит в пределе ±0.02, на каком
уровнее интенсивности света (I) источник света должен работать? Пред-
положите, что эмпирическое значение Io - 2 .0 В/м2.
(d) Обсудите преимущества и недостатки этого устройства в качестве
динамического датчика смещения.
Решение
(a) Имеем lnR/Ro=(Io/I)1/4 . Так как I→∞, то ln(R/Ro)→0или R/Ro→1.
Следовательно, R
o
отображает минимальное сопротивление, обеспечен-
ное светочувствительной перемычкой (т.е. на очень высоких уровнях
интенсивности света). Когда I = I
o
, значение контактное сопротивление
R приблизительно равно 2.7 Ro , и следовательно Io обозначает нижнюю
границу для интенсивности для удовлетворительной работы датчика.
Подходящая верхняя граница для интенсивности равнялась бы 10 Io для
удовлетворительного хода работы. Используя это значение, можем рас-
считать R≃ 1.75 Ro
. Эти характеристики коротко изложены на Рисунке
3.20.
(b) Сначала мы пишем, lnR−lnRo=(Io/I)1/4и дифференцируем (возьмите
Resistance – сопротивление
Light intensity – инетнсивность света
Typical operating rangе – типичное текущее направление
Exponential curve - показательная кривая
рисунок 3.20. Характеристика сенсора
326
дифференциалы отдельных членов):
Следовательно, с помощью абсолютного метода комбинации ошибок
Обратите внимание на использование знака “+” вместо “−”, так как мы
используем абсолютный метод комбинации ошибки (т.е. положительные
величины используются, независимо от фактического алгебраического
знака).
(c) С полученными численными значениями имеем
A single-disk chip refiner – установка обрезки одиночного диска
Refiner plate – пластина установки
Pulp with steam – пыль от древесной массы
Wood chips – деревянные стружки
Water - вода
Induction motor – ассинхронный двигатель
Hydraulic actuator - гидравлического привода
Torque sensor – сенсор вращающего момента
Servovalve - сервораспределитель
Gap senor -
Digital controller – цифровой контроллер
327
Примечание: Для больших значений I абсолютная погрешность в Ro
должна быть меньше. Например, для I= 10 Io имеем, e
R
= 0.01 + (1/4)
(1/10)1/4 [0.01 + 0.01] ≃ 0.013.
Отсюда ясно, что условия эксплуатации (например I) могут быть пра-
вильно выбраны для того, чтобы получить желаемый уровень точности.
Кроме того, мы можем определить относительную значимость различ-
ных факторов ошибки в желаемом количестве (R).
(d) Преимущества:
Отсутствие контакта, малоподвижная масса (низкая инерциаль-
ная нагрузка), все преимущества потенциометра (см. Главу 5)
Недостатки:
• Нелинейное и экспоненциальное изменение R
• Эффект наружного освещения
• Возможное нелинейное поведение устройства (нелинейное отношение
ввода - вывода)
• Эффект изменений в источнике питания на источнике света
• Эффект износа на источнике света
Пример 3.14
Структурная схема для устройства переработки стружек, которое ис-
пользуется в целлюлозно-бумажной отрасли, показана на Рисунке 3.21 .
Эта машина используется для получения механической древесной мас-
сы из деревяных стружек. У установки для очистки есть один фикси-
рованный диск и один вращающийся диск (стандартный диаметр = 2
м). Асинхронный электродвигатель переменного тока заставляет пово-
рачиваться пластину. Разводкой пластины (стандартное расстояние = 0.5
мм) управляют, с помощью гидравлического привода (модуль поршне-
вого цилиндра с сервоклапаном; см. Главу 8). Стружки подаются в жер-
ло установки винтовым конвейером и разбавляются водой. По скольку
пластина вращается, стружки перемалываются в однородную массу во
внутренних канавках пластины. Это сопровождается генерацией пара
ввиду рассеивания энергии. Масса перемещается дальше для последу-
ющей обработки в бумагу. Опытная формула, связывающаяей разрыв
пластины (h) и моторный вращающий момент (T) T=ah/ (1+bh2), с поло-
жительным значением параметров a и b.
328
(a) Нарисуйте график кривой T по сравнению с h. Выразите максималь-
ный вращающий момент Tmax и разрыв пластины (h0 ) в этом вращающем
моменте только посредством a и b .
(b) Предположите, что вращающий момент двигателя измерен, и рассто-
яние в пластине устанавливается гидравлическим приводом согласно
данной ранее формуле. Покажите, что относительная ошибка в h может
быть выражена как eh=[eT+ea+(bh2/(1+bh2))eb]((1+bh2)/|1−bh2|), где
eT,ea и eb - относительные ошибки в T,a, и b, соответственно, последние
две отображающие модели ошибки.
Нормальная рабочая область установки для очистки соответствует
h>h0. Интервал 0<h<h0известен как область коллапса, и его нужно ста-
раться избегать. Если рабочее значение пластины равно h=2/ b
,
и если ошибочные значения eT=±0.05,ea=±0.02, и eb=±0.025вычислите
соответствующую ошибку в оценке расстояние в пластине.
Обсудите, почему работа при h=1/ b
нежелательна.
решение
(a) См. схему на рисунке 3.22:
Motor torque – вращающий момент двигателя
Pad collapse region – мягкая область коллапса
329
Дифференцируем (3.14.1) относительно
Следовательно, 1−bh2=0→ ho=1/ b . Подставим в (3.14 .1) Tmax=a/(2
b).
(b) Дифференциальное соотношение Уравнения 3.14 .1 получено, беря
дифференциал каждого члена(т.е., наклон умножает инкремент). Таким
образом,
Заменим ∂T/∂h из первого пункта
Разделим все Уравнением 3.14 .1:
Или
Теперь представляя относительные ошибки дробными отклонениями
(дифференциалы) и используя метод абсолютного значения комбинации
ошибок, получаем:
Примечание: добавлены абсолютные значения остаточных членов .
Следовательно, знак "минус" в члене стал плюс.
При h=2 b , имеем bh2=4. Замените данными численными значения-
ми относительную ошибку в Уравнении 3.14.2:eh=[0.05+0.02+(4/5)×0.02
5](1+4)/|1−4|=±0.15
330
При h=1/ b , из Уравнения 3.14 .2 ясно, чтоeh→∞ . Кроме того, на кривой
из пункта (a) мы видим, что в этой точке вращающий момент двигателя
не чувствителен к изменениям в расстоянии в пластине. Следовательно,
работа в этой точке не соответствует требованиям, и должна избегаться.
331
Основные положения главы
• Значение оценивания в считывании
• Понятие модели ошибки и ошибки
• Управление случайно стью в ошибке (среднее значение, изменчивость
или ковариантность)
• Метод точечной оценки наименьших квадратов
• Метод оценки прямой наименьших квадратов (прямой регрессии)
• Параметры, отображающие качество оценивания
• Оценка по методу максимального правдоподобия
• Теорема Байеса (или формула Байеса) и ее использование в оценивании
• рекурсивное оценивание
• Скалярный статический фильтр Кальмана
• Линейный, многовариантный, динамический фильтр Кальмана
• Трансформанта Ульмана
• Использование фильтра Кальмана в изучении трансформанты Ульмана
(нелинейного, многовариантного, динамичного)
4.1 Считывание и оценивание
Измеряемая величина может быть постоянным параметром (например,
момент инерции канала передачи роботизированной руки), средние ха-
рактеристики количества деталей (например, средний внутренний диа-
метр и его вариативность количсетва шарикоподшипников), переменный
параметр (например, сопротивление тензодатчика при изменении темпе-
ратуры), или переменная процесса (например, скорость механизма). Из-
мерение датчика может не обеспечить истинное значение необходимого
параметра или переменной по двум главным причинам:
1. То, что измерено, может не являться требуемым количеством и долж-
4. оценивание по измерениям
332
Sensing – считывание
Process(parameter θ to be measured) – процесс(параметры измерены)
Disturbance inputs - возмущающий входной сигнал
Process modeling – моделирование процесса
Estimator – оцениватель
Process model – процесс моделя
Estimate – оценивание
Noise disturbances – шумовые помехи
Measurement – измерение
System disturbance inputs –система возмущающего входного сигнала
Measurement noise and disturbances – измерение шума и помех
Sensor and sensing process – измерение и считывание процесса
Sensed data – измереннык данные
риСУНок 4.1 (A) использование схематической ошибки и погрешности из-
мерения в оценивании и (b) пример помех на входе и погрешности измерения.
333
но будет быть вычислено из измеренного значения (или значения), ис-
пользуя подходящую модель.
2. Датчик (или даже процесс считывания) не совершенен, поэтому надо
учитывать погрешность измерения.
Следовательно, считывание может быть рассмотрено как проблема оцен-
ки, где истинное значение измеренного количества оценено, используя
результаты измерений. Очевидно, две основных категории ошибки, схе-
матичная ошибка и погрешно сть измерения, входят в процесс оценки и
будут влиять на точность результата.
Базовое понятие схематично показано на Рисунке 4.1 . Модель процесса
показана здесь как функция fp (θ) количества θ, которое должно быть
измерено. В некоторых ситуациях эта функция может быть нелинейна и
динамична (т.е., не алгебраическая функция, а дифференциальное урав-
нение), и она может также включать неизвестные и случайные эффекты.
Другими словами, могут быть схематичные ошибки.
Примечание: Ошибки в Категории 1 включают также нежелательные и
случайные входные сигналы (помехи), которые входят в динамическую
систему (процесс). Это вызвано тем, что они также будут влиять на ре-
зультаты измерений и, следовательно, на значение, которое оценено, ис-
пользуя те данные.
На Рисунке 4.1 измерение показано как функция fm(θ) измеренного ко-
личества θ. Эта функция также может быть нелинейной и динамичной
(из-за динамики датчика) и может включать неизвестные и случайные
эффекты (например, шум датчика и ошибки в измерительном процессе)
в целом. Другими словами, измерение может не быть ни прямым, ни точ-
ным. Оценочная функция генерирует оценку измеренного количества
при помощи доступной информации (модель fp(θ)и измерительных дан-
ных из fm(θ))согласно некоторому методу. Так как информация не будет
точной или полной, оценивание не будет точным. Оптимальная оценоч-
ная функция определит наилучший результат оценки согласно некоторо-
му критерию (например, ошибка наименьших квадратов)
Много методов оценки параметра используются в считывании. Неко-
торые методы используют все результаты измерений одновременно в
качестве пакета данных, чтобы оценить требуемое количество. Это - не-
рекурсивный подход. Другие методы используют результаты измерений,
поскольку они сгенерированы и обновляют или улучшают текущий ре-
зультат на каждом шаге обнаружения (другими словами, текущая оценка
и новые данные используются, чтобы провести новое оценивание на ка-
334
ждом шаге обнаружения). Это - рекурсивный подход. Например, фильтр
Кальмана- рекурсивный подход для оценки параметра, и это явно ис-
правляет и схематичную ошибку и измерение, чтобы поступить к оценке,
которая оптимальна (тот, которая минимизирует квадратичную ошибку).
Очевидно, если измеренное количество само изменяется со временем,
нужно использовать рекурсивный или изменяющийся во времени под-
ход оценки параметра. В этой главе мы изучим оценку наименьших ква-
дратов, оценивание методом максимального правдоподобия и четыре
версии фильтра Кальмана: скалярный статический фильтр Кальмана;
линейный многовариантный динамический фильтр Кальмана; расши-
ренный фильтр Кальмана, который применим в нелинейных ситуациях;
и фильтр Ульмана-Кальмана, который также применим в нелинейных
ситуациях и имеет преимущества перед расширенным фильтром, пото-
му что он непосредственно принимает во внимание распространение
случайных характеристик через системную нелинейность. Некоторые
основы вероятности и статистики представлены в Приложении A. Со-
ображения надежности и связанные вероятностные модели многокомпо-
нентных систем обрисованы в общих чертах в Приложении B.
4.2 оценка по методу наименьших квадратов
Этим способом мы оцениваем неизвестные параметры, минимизируя
сумму ошибки в квадрате между данными и моделью данных. Следо-
вательно, это - оптимальный метод оценки. Неизвестные параметры –
это параметры модели. Если модель линейна, мы используем линейную
оценку наименьших квадратов. Если модель нелинейна, то используем
нелинейную оценку.
4.2 .1 точечное оценивание методом наименьших квадратов
В точечной оценке метода наименьших квадратов неизвестный посто-
янный параметр оценен, используя пакет измерений (с ошибкой) пара-
метра, так, чтобы сумма квадратичной ошибки между набором данных
и каналом была минимизирована. Предположим, что значение постоян-
ного параметра (например, массы) должно быть оценено при помощи
данных от нескольких повторных измерений. Приемлемая оценка пара-
метра была бы средним значением набора данных (пакетная обработка).
Можно показать, что это - также оптимальная оценка по смыслу наи-
меньших квадратов.
335
Примечание: Этот подход применим к повторному измерению (a) того
же параметра того же объекта (с ошибкой измерения) и (b) измерению
определенного параметра в каждом объекте пакета объектов, которые
номинально идентичны.
Чтобы показать это, предположим, что постоянный параметр неизвест-
ного значения m неоднократно измеряется, используя датчик (имеющий
некоторую случайную ошибку) N раз, чтобы генерировать набор данных
{Y1, Y2, ..., YN}. Примечание: По традиции мы используем верхний
регистр Y, чтобы представлять данные дл того, чтобы подчеркнуть тот
факт, что они содержат случайную ошибку. Сумма ошибки в квадрате в
наборе данных равна
Чтобы найти значение m (т.е., оценка
неизвестного постоянного m),
которое минимизировало бы ошибку в квадрате (т.е., произвело ошибку
наименьших квадратов), мы дифференцируем e относительно (w.r.t). m и
приравниваем результат к нулю:
Получаем
Это указывает на то, что оценка точки наименьших квадратов (опти-
мальная оценка) является выборочным средним значением данных.
Примечание: Здесь, модель процесса - просто тождественное равенство
или неизменяемый процесс (всего “1” в скалярном случае), так как (ста-
тичная) модель является постоянным параметром, что мы интересуемся
измерением.
Предполагая, что эта модель корректна, единственная присутствующая
ошибка является погрешностью измерения. Альтернативно, и образцо-
вая ошибка и погрешность измерения могут быть интегрированы в един-
ственный параметр ошибок, хотя мы не можем определить их разность.
Примечание: погрешность измерения может случиться из-за датчика и
произойти в измерительном процессе.
Очевидно, все ошибки будут влиять на точность оценки, данной Урав-
нением
336
Оценивание, данное Уравнением 4.2, является пакетной обработкой,
где весь набор данных используется одновременно. Следовательно, оно
должно быть выполнено в автономном режиме. Эта работа может быть
преобразована в рекурсивную схему, которая может быть выполнена ин-
терактивно (в рабочем режиме), поскольку данные измерены, следую-
щим образом:
Мы рассчитываем, что точность оценки увеличится, поскольку входит
больше данных (предполагая, что измеренное или предполагаемое коли-
чество - постоянная величина, а ошибка случайна).
4.2 .2 Случайность в данных и в оценивании
В предыдущем случае оценивания точки подверглось неслучайному, по-
стоянному количественному оцениванию, используя прямые измерения
того количества. Модель работы являлась просто идентификационными
данными или неизменяемым процессом (всего “1” в скалярном случае),
так как (статичная) модель была самим предполагаемым постоянным па-
раметром. Схематическая ошибка (или случайность модели) явно была
не рассмотрена. Конечно, случайность в измерении, через случайные
ошибки в датчике и измерительном процессе, влияет на оценку. При то-
чечном оценивании наименьших квадратов мы не могли включить ка-
кое-либо понимание измерительной случайности в процессе оценива-
ния. Хотя, эффект измерительной случайности (и случайности модели)
уменьшался бы (усреднялся) с количеством раз, сколько раз измерение
было повторено. Однако любая постоянная ошибка (смещение, ответ-
вление или ненулевая средняя погрешность) не была бы устранена или
уменьшена.
Предположим, известно, что у датчика и процесса измерения есть слу-
337
чайная ошибка, которая обозначена комбинированной вариацией .
Примечание: Нулевая средняя схематическая ошибка может быть вклю-
чена в это различие. Конечно, если хоть раз компонент включентогда два
компонента ошибки неразличимы.
Далее предположим, что каждое измерение независимо от любого дру-
гого измерения в наборе данных {Y1, Y2, ..., YN}. Более конкретно, мы
предполагаем, что Yi независима и тождественно распределенные (со-
кращенна iid) случайные переменные (т.е . у них есть то же распределение
вероятностей). Примечание: Каждое измерение - случайная переменная,
и, следовательно, оценка также случайная переменная (потому что это -
функция измеренных случайных данных). Затем различие оценки
Следовательно,
или
Этот результат подтверждает наш предыдущее заявление, что случай-
ность оценки уменьшается (и точность улучшается) так как количество
элементов данных при измерении увеличивается. Кроме того, как ожи-
далось, ясно из Уравнения 4.5, что случайность оценки уменьшается (а
точность улучшается) так как точность измерительного процесса увели-
чивается (включая датчик).
Пример 4.1
Измерительный прибор производит случайную ошибку, стандартное
отклонение которой составляет 1%. Предпологая, что каждое измере-
ние независимо от другого, сколько измерений должно быть усреднено,
чтобы уменьшить станд. ошибки в измеренном количестве меньше чем
338
0.05%?
решение
Здесь мы пользуемся тем, что Xi - iid. Следовательно, от Уравнения 4.4
для усредненного измерения,
Приσ=1%иимеем
Таким образом, необходимо усреднить результаты более чем 400 измере-
ний, чтобы достичь указанной точности.
4.2 .2 .1 Неопределенность модели и измерений
В дополнение к неопределенности, т.е. погрешности измерений, вклю-
чая датчики, аналитическое представление полученных результатов из-
мерений (ожидаемое) содержит некоторые случайные компоненты. Сама
модель предполагает некую погрешность результатов. Модель может
включать в себя отношения между измеренным значением и ожидае-
мым, плюс аналитическое представление процесса (системы), генери-
рующей данные.
Чтобы проиллюстрировать похожие понятия, представьте себе высоко-
точное производство, где шарикоподшипники изготавливаются с малы-
ми зазорами (на уровне нанометров). В частности, округло сть шариков
является важным параметром для технического контроля качества шари-
коподшипников. Предположим, что шарики обозначенного диаметра для
подшипника выбраны случайным образом из произведенной партии и
диаметр каждого шарика измерен с помощью прибора для определения
округлости.
Стандартная система измерения округлости схематически изображена
на Рисунке 4.2 . Сенсорное устройство снабжено поворотной платфор-
мой для прикрепления шарика. Датчик соприкасается с шариком, а сер-
вомеханизм устройства определяет, что контакт является постоянным.
По мере вращения платформы датчик двигается в соответствии с внеш-
ней поверхностью шарика. Движение датчика фиксируется с помощью
дифференциального преобразователя и записывается. Максимальное от-
339
клонение диаметра шарика измеряется именно так. Для измерительной
системы данного типа типична точность ±25nm с типичным для сенсора
разрешением 5 nm.
В данном измерительном процессе выборка шариков для измерений сде-
лана случайным образом, и каждый шарик также случайно выбран из
целой серии. Более того, вследствие погрешностей при производстве,
действительный диаметр шарика также может отличаться от номинала
по случайному закону (хотя, учитывая допуски, продукция вполне мо-
жет соответствовать техническим требованиям).
Как видно, в каждом случае присутствует некая погрешно сть для каждо-
го шарика вследствии:
1.
Процесс изготовления каждого шарика
2.
Выбор набора для проверки из произведенной серии
3.
Выбор шарика из набора
4.
Установка шарика и обеспечение контакта с датчиком в устрой-
стве измерения округлости
5.
Ошибки измерительного устройства (датчика)
Первая тема показала погрешность в производственной модели как та-
ковой, что напрямую влияет на качество продукции. Темы с 2-й по 5-ю
отно сятся к влиянию погрешности на процесс измерения, который вли-
яет на качество не напрямую (предоставляя неточные данные об окру-
глости).
рисунок 4.2 Измеритель округлости.
Turntable – поворотная платформа
Bearing ball – шар для подшипника
Position probe – датчик измеритель
340
Рассмотрим набор данных измерений {Y1,Y2,...,YN}. Т.к. целью изме-
рительного процесса в нынешнем приложении является определение ка-
чества произведенных шариков для подшипника, предположим, что мо-
дель, использованная для этого (для представления качества продукта),
состоит из двух частей:
1.
2.
Две эти сущности известны как несмещенная (объективная) оценка. В
частности, ожидаемое значение выборочного среднего (E) равно истин-
ному среднему и ожидаемое значение выборочной дисперсии равно ис-
тинной дисперсии. Положим, измерения Yi являются случайными пере-
менными среднего значения μ и дисперсии σ2.
Примечание: В настоящем тесте допущение iid достаточно обоснованно,
т.к. каждое измерение производилось независимо от других измерений и
природа погрешностей измерений вполне проста.
Затем, как это может быть продемонстрировано, ожидаемые значения
для двух параметров (4.6) и (4.7) равняются среднему и дисперсии из-
мерений:
Как мы увидели, в данном случае погрешность в полученных данных
измерений сочетает в себе как погрешность, заложенную в саму модель,
так и погрешно сть при измерении (пять типов, описанных ранее). Одна-
341
ко, в данном методе оценки все эти различные типы рассматриваются не
по отдельности, но интегрировано.
Погрешности в данных и ожидаемых значенияхs: следует подчеркнуть,
что погрешность присутствует в полученном сигнале, но не в параме-
трах, описывающих случайный процесс (т.е. среднее μи стандартноеσ).
Более того, данные, полученные из случайного процесса, также явля-
ются случайными (что значит, если измерения были повторены, мало-
вероятно, что мы получили те же данные) и т.о ., ожидаемые значения,
рассчитанные на основании полученных данных (выборочное среднее и
выборочное стандартное) также являются случайными.
Пример 4.2
Детектор округлости дает следующий набор измерений диаметра (в
миллиметрах) для 10 шариков подшипника, отобранных из производ-
ственной серии: 5.0,5.01, 5.02, 4.95, 4.98, 4.99, 4.99,5.0, 5.02, 4.99. Для
обработки данных определим функцию MATLAB®Stat.m, используя
сценарий следующего М-файла:
x=[5.01 5.01 5.02 4.95 4.98 4.99 4.99, 5.01 5.02 4.99]
Sample_mean=mean (x) %Calculates sample mean of array x Sample_
variance=var(x) %Calculates sample variance of array x
Теперь можно рассчитать выборочное среднее и выборочную дисперсию
(или среднеквадратическую ошибку) массива данных x по уравнениям
4.6 и 4.7:
Можно считать, что средний диаметр всей партии шариков составляет
4.997 мм. Погрешность в 0.02163 мм является погрешностью измерения
размера.
Примечание: В этом примере погрешность является совокупным резуль-
342
татом погрешности измерений и погрешностей при производстве.
4.2 .3 оценка по методу наименьших квадратов для линии
В оценке по методу наименьших квадратов линия (прямая или кривая)
привязана к данным, так что сумма квадратичной ошибки в расчете дан-
ных и линией минимизирована. В этом случае линия является моделью и
представляет более чем один параметр (Примечание: для представления
прямой линии необходимо два параметра, для квадратичной функции –
три и т.д .) . Т.к. многие алгебраические выражения становятся линейны-
ми при представлении в логарифмическом выражении, прямая линия бо-
лее всего отображает действительность при использовании осей log–log.
Понятно, что данный метод является оценочным, позволяющим оценить
два параметра модели ввода-вывода (моделирование процесса) с помо-
щью прямой линии. Приводит соответствующий набор данных к опреде-
ленной прямой, так что квадратичная ошибка минимальна. Ожидаемая
прямая линия также известна как линия линейной регрессии. В контек-
сте измерений и приборов для измерения она также называется средней
кривой калибровки. Инструмент линейно сти может быть представлен
как наибольшее расхождение входных и выходных данных (или по-на-
стоящему, калибровочной кривой, которая, разумеется, может быть не-
линейной) от самых небольших отклонений от прямой, представляющей
данные (средняя кривая калибровки). LSE принадлежит к той же теме,
что и определение режима, определение системы и экспериментальное
моделирование, где модель, статическая или динамическая, подогнана к
данным. Существенно, что параметры модели предсказуемы. Процедура
оценки параметров динамической (не алгебраической) модели выходит
за рамки настоящего издания.
Рассмотрим N - пары данных {(X1,Y1),(X2,Y2),...,(XN,YN)}, где X обо-
значает независимую переменную (входная переменная) и Y обозначает
зависимую переменную (выходная переменная) процесса или системы,
которая должна быть идентифицирована.
Предположим, ожидаемая линейная регрессия (в линейной модели) да-
ется формулой:
Y= mX+a
(4.10)
где
m– наклон,
343
a– пересечение линии
Для величины независимой переменной X величина зависимой перемен-
ной рассчитывается как (mXi+a), но измеренная величина зависимой
переменной суть Yi. Соответствующая ошибка (остаток) рассчитывается
как (Yi−mXi+a). Таким образом, сумма квадратичных ошибок для всех
точек данных:
(4.11)
Нужно минимизировать e, принимая АО внимание два параметра –m и a.
Требуемые условия: (∂e/∂m)=0 и (∂e/∂a)=0. Используя эти дифференциа-
лы в Уравнении 4.11, получаем
Разделив эти два уравнения на N и используя определение выборочного
среднего, получаем
Решив эти два связанных уравнения для m, получим
Параметр a не нуждается в точном определении, т.к . исходя из Уравне-
ний 4.10 и 4.13, мы можем исключить a и описать линейную регрессию
как
344
Примечание: Однако в Уравнении 4.4 a представляет собой пересечение
с осью Y (т.е ., значениеY при X=0) и в представлении (4.8) дается выра-
жением
4.2 .4 .качество оценки
Качество или степень достоверности оценки зависит от многих факто-
ров, включая следующие:
1. Точность данных
2. Размер набора данных
3. Метод оценки
4. Модель, использованная для оценки (например, линейное соответ-
ствие, квадратичное соответствие)
5. Количество оцениваемых параметров
Некоторая полезная статистика, отражающая ошибки степени достовер-
ности по методу наименьших квадратов, определяется следующим об-
разом.
Сумма квадратичной ошибки (SSE): Сумма квадратов ошибки для ка-
ждой данной точки, как измерено в соответствующей точке наилучшего
соответствия. В частности,
где
Yi - измеренное значение
Yˆ-
соответствующее значение, рассчитанное по линии наилучшего
совпадения (т.е ., линии, соответствующей наименьшей квадратичной
ошибке).
Значение, наиболее близкое к 0, означает, что модель и данные совпа-
дают наилучшим образом (т.е., более точны, или погрешность меньше).
Среднеквадратическая ошибка (MSE): это приведенное среднее значе-
ние SSE, которое дается выражением
где M– количество коэффициентов (сглаженной кривой), которые были
345
использованы при подгонке. Величина N−M называется остаточные сте-
пени свободы (residual degrees of freedom).
Примечание: Для линии соответствия M= 2.
Обоснование этого средневзвешенного значения должно быть понят-
ным. В частности, при использовании одинакового количества точек для
оценки большего количества коэффициентов модели, точность оценки
должна быть ниже.
Среднеквадратическая ошибка (RMSE): квадратный корень из MSE.
Коэффициент соответствия (R-squared): также называется коэффициен-
том определенности. Он определяется как
где Y – среднее значение для всех точек данных.
Примечание: В Уравнении 4.19 SSE представляет отклонение данных от
модели. Знаменатель представляет отклонение данных от их среднего
значения (но в общем, усреднение не является хорошей моделью).
Из этого следует, что квадрат R показывает насколько данные хорошо
соответствуют модели. Чем значение R-square ближе к 1, тем лучше со-
впадение данных с кривой модели.
Приведенный коэффициент соответствия (Adjusted R-squared):Для дан-
ного набора данных при увеличении количества коэффициентов подо-
гнанной кривой точность оценок уменьшается в принципе. Это принято
во внимание при вычислении приведенного коэффициента соответствия,
а именно:
где
MSE означает среднеквадратическое отклонение согласно уравнению
4.18
VAR – выборочная дисперсия данных согласно Уравнению 4.7
Примечание: При суммировании в уравнениях 4.17-4 .20 можно задей-
ствовать весовой коэффициент wi для каждого значения Yi. Вес может
служить предварительной оценкой точности и значимости определен-
346
ных данных. В формулах, приведенных выше, мы использовали одина-
ковые веса для всех значений (т.е wi=1).
Пример 4.3
Рассмотрим цепь конденсатора на Рисунке 4.3 .
Во-первых, конденсатор заряжен до напряжения vo с помощью источ-
ника постоянного тока (переключатель находится в позиции 1), затем
он разряжается через известную нагрузку (переключатель в позиции 2).
Уменьшение напряжения при разрядке измеряется в определенные мо-
менты времени. Было выполнено три отдельных эксперимента. Полу-
ченные данные приведены в Таблице 4.1 .
Если известно, что точное значение сопротивления равняется 1000Ω,
оцените емкость C в микрофарадах (μF) и напряжение источника vo в
вольтах (V).
решение
Для решения этой проблемы используем хорошо известное выражение
для свободного затухания напряжения на конденсаторе:
Возьмем натуральный логарифм уравнения 4.3 .1:
рисунок 4.3 . Электрическая цепь для оценки емкости по методу наи-
меньших квадратов.
347
таблица 4.1 Данные по разряду конденсатора
Времяt (s) 0.1 0.2 0.3 0.4 0.5
Напряже-
ние v
Тест 1
(V)
7.3 2.8 1.0 0.4 0.1
Тест 2
7.4 2.7 1.1 0.3 0.2
Тест 3 7.3 2.6 1.0 0.4 0.1
Имея Y= ln v и X= t, Уравнение 4.3 .2 дает прямую линию с наклоном
И пересечением оси – Y
a=In v0
(4.3 .4)
Используя все данные, можно рассчитать две полезные суммы:
Теперь, заменяя эти значения в Уравнениях 4.7 и 4.9, получаем
m=-10.13 и a= 3.02565
Далее, из уравнения 4.3.3 при R=1000, имеем C=1/(10.13×1000)F=98.72
μF. Из Уравнения 4.3 .4, vo=20.61V.
Примечание: В этом примере ошибка оценки была бы больше, если бы
мы не использовали логарифмическую шкалу при линейной подгонке.
Можно получить детальные результаты для данного примера, используя
метод наименьших квадратов для кривой в MATLAB. Например, мымо-
жемиспользоватьМ-файл:
x1=0.1:0.1:0.5; %one segment of x data as a row vector
348
x=[x1,x1,x1]; %assemble the three segments of x data as a row vector x=x';
%convert x data to a column vector y=[7.3,2.8,1,0.4,0.1,7.4,2.7,1.1,0.3,0.2,7.
3,2.6,1.0,0.4,0.1]; %y data
as a row vector
y=log(y); %convert y data to log scale row vectory=y'; %convert y data to a
column vector
xlabel('Time (s)'), ylabel('Ln Voltage') %Label the axesfit(x,y,'poly1')
Результат, полученный с помощью MATLAB:
Linear model Poly1: f(x) = p1*x + p2
Coefficients (with 95%confidencebounds):p1=
-10.13 (-10.82,-9 .445)
p2= 3.027 (2.798,3.255)
Goodness of fit:SSE: 0.3956
R-square: 0.9873
Adjusted R-square: 0.9863
RMSE: 0.1744
Полученное значение ошибки по методу наименьших квадратов приве-
дено на Рисунке 4.4 .
Как отмечено в начале данного раздела, подгонка кривой по методу наи-
меньших квадратов не ограничена чисто линейным (т.е. для прямой ли-
нии) приближением. Этот метод может применяться для многочленного
рисунок 4.4 Подбор методом наименьших квадратов.
Voltage – напряжение
Time - время
349
приближения в любом случая. Например, в квадратичном приближении
данные подгоняются к многочлену второго порядка, т.е. квадратичному.
В этом случае есть три неизвестных параметра, которые следует опреде-
лить путем минимизации суммы квадратичных ошибок.
4.3 Оценка максимальной вероятности
Используя метод наименьших квадратов для оценки мы минимизируем
усредненное квадратное значение расхождения между данными и оце-
ночными значениями. Учитывая, что LSE является методом оптимиза-
ции, он не обязательно является наилучшим методом оценки, т.к. неявно
предполагает полную точность самой модели (подобно вопросу о том,
кто появился раньше - курица или яйцо), и он не может быть применен
для определения отдельно ошибок самой модели и ошибок измерений.
Например, по-настоящему, мы имеем нелинейный набор данных, но мо-
дель является линейной. Тогда LSE не сможет правильно интерпрети-
ровать входную информацию. Более того, если в данных присутствует
систематическая ошибка (сдвиг), LSE не сможет ее устранить.
Другой популярный подход к оценке параметров – метод наибольшей
вероятности (далее как – MLE). В методе MLE максимизируется вероят-
ность оценочного значения, полученного из набора данных, который до-
ступен для анализа. В вычислениях метод MLE обычно выражается как
рекурсивный алгоритм. Его свойством является то, что точность оценки
возрастает по мере добавления данных.
Примечание: С помощью MLE можно анализировать более чем один па-
раметр (т.е. вектор параметров) одновременно.
Метод MLE подразумевает частичное распределение вероятности для
данных, что будет являться параметрами вероятностной функции в дан-
ном методе. Если вероятностное распределение считается нормальным
(т.е., гауссовым), то результаты, полученные методами LSE и MLE будут
одинаковы. Если же распределение не гауссово, то метод MLE даст луч-
ший результат, чем LSE
Кроме оценки параметра, метод MLE также часто используется для ги-
потетического анализа. В данном случае выбирается наиболее вероят-
ный гипотетический случай (максимизируя вероятностное соотноше-
ние) для доступных данных. Более того, так как метод MLE основан на
вероятностном распределении данных, с его помощью можно получить
доверительный интервал (confidence interval) для данных.
350
4.3 .1 аналитические основы MLE
Предположим, что процесс и датчик с некоторой погрешностью (воз-
можной как в самом процессе, так и зависящей от датчика) дают сле-
дующий набор данных случайным образом: y=[y1,y2,...,yn]. Также,
предположим, что случайный процесс (реальный процесс и реальные
измерения, например производство продукта и измерение его размеров),
генерирующий данные, представлен вероятностной функцией со сле-
дующими параметрами: m=[m1,m2,...,mr]. Это параметры модели, ко-
торые неизвестны. Целью метода MLE является оценка значения пара-
метра модели (вектора) mˆ,, при котором наиболее вероятно получится
набор данныхy.Отметьте, что набор данных yуже получен и известен, но
параметры модели m не известны.
функция распределения вероятности (pdf) для y, зависящая от параме-
тров модели m, определяется как f(y|m). Так как yизвестно, а m неиз-
вестно, f(y|m) является функцией от m. В методеMLE мы определяем m,
максимизируя f(y|m), а именно:
Таким образом, функция вероятности L(m|y), в случае оценки неизвест-
ного m, исходя из данных y определяется как
Как можно было ожидать, m и y меняются ролями в L и f, несмотря на
то, что аналитические функции L и f остаются прежними, как показано
в Уравнении 4.22 . Заметьте, L представляет вероятность частного значе-
ния параметра модели для определенного набора данных (полученного
в результате процесса, представленного моделью), тогда как f представ-
ляет вероятность достижения конкретных данных через вероятностную
модель при определенном значении параметра.
Пример 4.4
В процессе контроля качества 10 предметов были выбраны случайным
образом из общей партии и протестированы отдельно. При тестировании
каждый продукт был принят (отмечено как A) или забракован (отмечено
как R). Положим, данная процедура дала набор данных y= [A, A, R, A, R,
351
A, A, A, A, A]. Оцените наибольшую вероятность pˆ того, что случайно
выбранный продукт соответствует требованиям к качеству (A).
Решение
Пусть p=вероятность того, что выбранный продукт из всей пар-
тии является качественным. Вероятность реализации набора данных
[A,A,R,A,R,A,A,A,A,A]:
Примечание: Pr (•) означает «вероятность этого».
Уравнение 4.4 .1 также является вероятностной функцией,
Нужно определить величину p, максимизирующую L. Для этого можно
дифференцировать (4.4 .2), принимая во внимание p=0 и найти решение
для p. Простейший путь получения такого же результата – использовать
тот факт, что логарифмическая функция является монотонно возраста-
ющей и, таким образом, использовать log (L) как модифицированную
функцию вероятности и максимизировать ее. Имеем:
logL(p|[A,A,R,A,R,A,A,A,A,A)=8logp+2log(1−p)
Дифференцирование: 8/p- 2/(1- p) = 0 ® 8(1- p) - 2p= 8 -10p= 0 ® pˆ = 0.8.
Примечание: Для полноты изложения покажем, что вторая производная
функции вероятности дает отрицательное значение оценочного параме-
тра (p), так что функция вероятности показывает максимум, а не мини-
мум. В настоящем примере первая производная (логарифма вероятност-
ной функции) равняется 8/p−2/(1−p). Производная от этого будет −(8/
p2)−2/(1−p)2, что подтверждает тот факт, что поворотная точка соответ-
ствует именно максимуму, а не минимуму.
4.3 .2 обоснование MLE по теореме Байеса (Bayes)
Также можно обосновать метод MLE, используя теорему Байеса. Для
этого вспомним базовую теорию вероятно сти, которая утверждает, что
Pr(m,y)=Pr(m|y)Pr(y). Это называется цепным правилом. Здесь Pr(m,y) оз-
начает вероятность связанного проявления m и y. Также, Pr(m,y)=Pr(y|m)
352
Pr(m). Приравнивая эти два результата, получим Pr(m|y)Pr(y)=Pr(y|m)
Pr(m) или
Этот результат является вариантом теоремы Байеса и может быть ис-
пользован для рационализации метода MLE. В частности заметим, что
на RHS в Уравнении 4.23 знаменатель представляет вероятность получе-
ния определенного набора данных. Поскольку в методе MLE набор дан-
ных считается определенным, знаменатель ни на что не влияет и может
рассматриваться как константа. В числителе RHS присутствует величи-
на Pr(m). Она представляет собой априорную вероятностьm(т.е., до того,
как известен набор данных y). Как только набор данных стал известен,
у нас есть апостериорная вероятность Pr(m|y). Она представляет веро-
ятность получения определенного значения (оценки) m, как только мы
получим набор данных. Как можно увидеть из уравнения 4.23, данная
вероятность прямо пропорциональна Pr(y|m), являющейся также веро-
ятностной функцией L(m|y), как это показано в Уравнении 4.22 . Таким
образом,
Из Уравнения 4.24 становится ясно, что при данной оценке параметра m
наилучшее скорректированное значение оценки (апостериорная оценка)
–
такая, которая макимизирует вероятностную функцию L(m|y).
4.3 .3 MLE с нормальным распределением
Если данные независимы и одинаково распределены (iid) с нормальным
распределением, результаты MLE принимают особенно удобную и зна-
комую форму.
Рассмотрим случайный набор данных {Y1,Y2,...,YN}. Предположим,
что случайные данные
Рассмотрим {Y1,Y2,...,YN}.Предположим, что Yi являются iid по отно-
шению к N(μ,σ2) (т.е. нормально распределены со среднимμ и расхожде-
нием σ2).Значение pdf Yi равняется
353
Объединенный pdf целого случайного набора данных, определенного
параметрами модели μ и σ будет
Примечание: Так как Yi является iid, объединенный pdf является произ-
ведением отдельных pdf.
Действительно, это вероятностная функция для данных условий. Вслед-
ствие ее экспоненциальной природы, удобнее использовать логарифми-
ческое представление:
Дифференцируя отдельно μ и σ, и приравнивая нулю для максимизации
вероятностной функции, имеем:
Таким образом, получаем максимально вероятностные оценки:
Естественно, Уравнение 4.27 идентично оценке по методу наименьших
квадрагов (см. Уравнение 4.6), известной как несмещенная оценка сред-
него. Уравнение 4.28, однако, не соответствует несмещенной оценке для
отклонения. Несмещенная оценка для отклонения (расхождения) пред-
ставляет собой выборочную дисперсию, как представлено в Уравнении
4.7 при значении знаменателя N−1,а не N.
354
Пример 4.5
В этом примере, для определения максимально вероятной оценки при
гауссовой плотности распределения параметров для данных из Примера
4.2, мы будем использовать MATLAB. функция MATLAB mle(x) дает
максимальные значения среднего и среднеквадратическое отклонение
для нормального (гауссового) распределения. Имеем:
>>x=[5.01 5.01 5.02 4.95 4.98 4.99 4.99, 5.01 5.02 4.99];
>>Estimates=mle(x)Estimates =
4.9970 0 .0205
Примечание: Эти значения соответствуют результатам, полученным в
примере 4.2 . В частности, MLE среднего является значением выбороч-
ного среднего, 4.9970 . Стандартное отклонение в MLE равно 0.0205.
Таким образом, MLE расхождения будет (0.0205)2=4.2025×10−4.Это со-
ставляет почти 9/10 значения выборочной дисперсии 4.6778×10−4, рас-
считанной в Примере 4.2.
4.3 .4 . рекурсивная оценка максимальной вероятности
Как мы увидели, что в сущности MLE представляет собой метод опти-
мизации. Однако, за исключением некоторых специальных случаев, оп-
тимизация с помощью MLE не дает удобного законченного решения. В
такой ситуации желательно применять рекурсивный численный анализ.
Рекурсивное выражение может быть представлено в следующем обоб-
щенном виде:
mˆi=mˆi-1+ui-1
(4.29)
Здесь mˆ представляется как параметр, подлежащий оценке. В боль-
шинстве случаев инкремент рекурсии u зависит от таких факторов, как
данные (измерения) по m, расхождение за счет ошибки модели и даже
наличия значения оценки как такового. Начнем с начального значения,
принятого как mˆ0 параметр. Затем дополним его в сторону увеличения
вероятностной функции L.(Примечание: обычно удобнее использовать
logL, чем L) пошагово до тех пор, когда необходимым дополнением уже
можно пренебречь (т.е. достигнут максимум значения L).
Понятно, что требуемое направление для добавлений является градиен-
том (наклоном) δотLв понимании m. Необходимо определить:
355
mˆi=mˆi -1+ki-1di-1
(4.30)
где ki−1представляет собой весовой коэффициент добавления для i-ите-
рации. Градиент выражается как
Весовой коэффициент k также зависит от таких факторов, как данные
(измерения) по m, расхождение за счет ошибки модели и даже наличия
значения оценки как такового. По этой причине коэффициент нуждает-
ся в поправке на каждом этапе, а также потому, что имея меньшие из-
менения коэффициента, получаем большее количество обновлений при
итерации. В частности, k должен быть обратно пропорционален второй
производной L по m. Упомянутая вторая производная называется Гесси-
ан (Hessian).
Примечание: Вторая производная отрицательна вследствие того, что
градиент (первая производная) уменьшается по достижении точки мак-
симума.
Таким образом, рекурсивная формула MLE может быть представлена как
Итерации продолжаются до достижения равенства новой оценки со ста-
рой оценкой (с определенной погрешностью).
4.3 .4 .1 . рекурсивная оценка максимального соответствия по Гаусси-
ану
Предположим, мы имеем результаты измерений yколичестваm(которое
имеет оценку). Данные содержат в себе ошибку модели σm (также опре-
деляемыйσv,что соответствует ошибке модели, используемой для пред-
ставления mи/или неизвестным возмущениям, влияющим на истинное
значение m)и ошибку измерений σw. Стандартные отклонения σm и σw
также известны. Нужно оценить mˆ от m.
Предположения: Гауссово распределение (1) и (2) предполагают, что
ошибка модели и ошибка измерений равны нулю.
Поскольку распределение вероятности является гауссовым, известно,
356
что
1. Оценка MLE=среднему значению, даваемому pdf f(m|y).
2. Ошибка оценки дается стандартным отклонением, получаемым из pdf
Чтобы получить рекурсивную формулу для MLE, используем формулу
Байеса:
где
f(m) соответствует априорному значению оцениваемого m
f(m|y) соответствует апостериорному значению оценки (т.е., расчетному
значению после получения данных)
Примечание: В рекурсивных выражениях тогда f(m)соответствует пре-
дыдущей оценке, а f(m|y) – новой оценке при получении новых данных.
Нормальный (гауссов) pdfs:
При определенном данном m (т.е., когда исключается влияние случай-
ностей), случайность в определении y возможна только благодаря ошиб-
ке измерений w. Таким образом, Var(y|m)=Var(w). Также, поскольку нам
дано m, среднее от y равно y. (Примечание: Как ошибка модели, так и
ошибка измерений в среднем равны нулю). Т.е. имеем:
Т.к . нам известно значение y,f(y) в формуле Байеса (4.33) может быть
обозначено как по стоянный параметр a. Далее, подставляя (4.34)и(4.35)
в(4.33),получаем
357
Где
Уравнения 4.36and4.37 могут быть использованы для определения mˆ и
оценки расхождения ошибки s2 рекурсивно:
Позже мы увидим, что эти результаты составляют основу фильтра Кал-
мана.
4.3 .5 Дискретный пример MLE
Предположим, что ожидаемая оценка m дискретна. А именно, принима-
ется во внимание один из параметров i=1,2,...,n, что может быть пред-
ставлено вектором
m=[m1, m2,.... mn]T
Например, каждое значение mi может представлять различные состоя-
ния расстояния до объекта (близко, далеко, очень далеко, объект отсут-
ствует и т.п .).
Также, представим, что измерения или наблюдения также дискретны.
Принимаются во внимание значения y где i= 1, 2, ..., n. Это можно пред-
ставить как вектор
y=[y1, y2,..... yn]T
Измерения или наблюдения дадут эти n дискретных значений с разной
долей вероятности (сумма всех вероятностей равна 1). В особенном слу-
358
чае следовало бы получить результат измерения/наблюдения одного из
этих значений с вероятностью 1.
Для создания MLE требуется матрица вероятности (достоверности)
Тогда вектор вероятности оценки m при определенных данных y, дается
выражением (исходя из формулы Байеса):
P(m|y)=aP(y|m)P(m) (4.3)
Здесь P(m) - вектор вероятности предыдущей оценки (априорная вероят-
ность) m. Также, параметр a должен быть выбран таким образом, чтобы
вероятностные элементы вектора P(m|y) составили 1. Конечно, значение
данного параметра не относится к MLE, поскольку данный подход под-
разумевает выборку элемента из m, соответствующего значению наи-
большей вероятности в векторе вероятности P(m|y)..
4.4 . Статический скалярный фильтр калмана
фильтр Калмана является популярным методом оценки при использова-
нии данных измерений. Несмотря на то, что он может быть использован
для оценки параметров, как это делается в методах LSE и MLE, наиболее
часто его используют для оценки переменных в динамических системах.
Например, если переменные (некоторые или же все), необходимые для
определения динамического состояния системы (т.е., переменные состо-
яния), недоступны для измерения, фильтр Калмана позволяет оценить
их оптимальным образом (минимизируя среднее значение – ожидаемое
значение среднеквадратичной ошибки), используя измерения выходных
параметров. Такая оценка возможна при существовании как ошибки
модели (случайной), так и при ошибке измерений (случайной). Именно
возможность исключить (или скомпенсировать) влияние случайных эф-
фектов (шум и возмущения) дала название фильтр, хотя на самом деле
это оценщик или наблюдатель.
В отличие от метода LSE (и в некоторых случаях, с MLE), фильтр Кал-
359
мана позволяет точно и независимо подогнать ошибку модели и ошибку
измерений. Это несомненное преимущество для получения статистики
по ошибкам данного типа в случае, когда сами данные для них можно
получить независимо.
Как мы увидим в дальнейшем, фильтр Калмана использует метод пред-
положения-корректирования, в котором модель процесса используется
для первичного предположения для ожидаемого значения и ковариант-
ности его ошибки и затем эти два значения корректируются, используя
актуальные данные (выходные данные). На этапе предположения полу-
чаем априорную оценку, на этапе коррекции получаем апостериорную
оценку. В фильтре Калмана дискретного времени для этого используется
двухэтапная схема.
В данном разделе мы рассмотрим фильтр Калмана, используя формулу
Байеса для случая скалярных (это не вектор, здесь только один ожида-
емый параметр) статических по стоянных. В Разделе 4.5 будут пред-
ставлены графики для этих скалярных статических результатов, полная
формулировка фильтра Калмана дискретного времени для линейного
динамического случая, учитывающего много переменных (т.е., вектор).
Далее, в Разделе 4.6, рассмотрим обобщение подхода линейного филь-
тра Калмана для множества переменных для нелинейных процессов, ис-
пользуя EKF. Наконец, в Разделе 4.7 . будет представлен переработанный
фильтр Калмана, позволяющий избавиться от некоторых недостатков
EKF при распределении некоторых характеристик в нелинейной модели.
4.4 .1 Понятие статического скалярного фильтра калмана
Здесь представлена рекурсивная формулировка скалярного фильтра Кал-
мана для статичных систем. Использован метод MLE в сочетании с фор-
мулой Байеса (уравнение 4.23). Рассчитаем точно и независимо ошибку
модели и ошибку измерений.
В целом, оценка может быть интерпретирована как оценивание неиз-
вестного количества m (скалярного или векторного), используя данные
y, измеренные для настоящего процесса, в который вовлечено упомяну-
тое количество m. Символами обозначается m|y, что означает «m с уче-
том y». Так как m неизвестно и может зависеть от случайных собы-
тий, само значение m представляется случайным (до тех пор, пока оно
не определено или не оценено). Таким образом, распределение вероят-
ности m определено, что полностью определяет m. На самом деле, это
среднее значение (ожидаемое значение) m, полученное нами (учитывая
360
некоторые критерии, включая критерии оптимизации). Если m не явля-
ется случайным, средней значение само по себе – то, что мы ищем. Если
m действительно случайно, для определения случайности необходимы
будут дополнительные статистические данные (такие, как отклонение).
Если распределение вероятности m является гауссовым, т.е. нормаль-
ным, то два параметра – среднее и отклонение – полностью характери-
зуют m. Среднее значение дает оценочное значение, а отклонение дает
ошибку оценки. Это является основой данного аналитического подхода.
В частности, будет показан алгоритм определения pdfs для f(m|y). На-
стоящая формулировка относится к статическим системам и более того,
процесс (модель) считается численной. Другими словами, в системе не
происходят никакие динамические процессы, что означает соответствие
или отсутствие изменений при операции умножения на 1. Это означает,
что этап прогнозирования для фильтра Калмана (который использует мо-
дель) не обязателен, а требуется только этап корректирования, на кото-
ром используются данные измерений для поправки оценочных данных.
Даже при том, что модель процесса равна 1 (случай отсутствия ошибок),
некоторая ошибка самой модели может присутствовать и может быть
явно учтена в данном алгоритме.
Для данного рекурсивного алгоритма мы делаем следующие допущения:
1. При отсутствии ошибки измерения измеренный (оценочный) параметр
mи данные измерения y линейно связаны с помощью известной постоян-
ной C, называемой усилением измерения. (Примечание: Соответствует
знакомой результирующей матрице или матрице усиления результатов в
формулировке пространства состояний динамической системы. Мы уви-
дим это снова в формулировке многофакторного динамического фильтра
Калмана).
2. Ошибка модели (т.е ., ошибка при производстве продукта, как продукт
был установлен для реального использования) и ошибка измерения (на-
пример, ошибка датчиков, ошибка при использовании датчиков, ошибка
при получении сигнала) являются независимыми, как и случайные пере-
менные для Гауссиана (т.е. нормального распределения).
3. Ошибка модели vимеет нулевое среднее значение и стандартное от-
клонение σm. (Примечание: можно использовать стандартную нотацию
σv фильтра Калмана для обозначения этого стандартного значения).
4. Ошибка измерения w имеет среднее нулевое значение и стандартное
σw.
Примечание: Если среднее значение ошибки измерения ненулевое,
его нельзя оценить в данном процессе оценки. Измерительная система
361
должна быть откалибрована, чтобы избежать систематической ошибки в
измерениях. Также, предполагается, что среднее значение ошибки моде-
ли равно нулю. Если это не так и известно априори, можно просто под-
править ожидаемое значение, используя среднее значение как параметр
для смещения.
Мы оцениваем среднее значение параметра. Если среднее значение
ошибки ненулевое и неизвестно, процесс оценки не позволяет опреде-
лить его. В дальнейшем этот факт может быть подтвержден с исполь-
зованием метода наибольшей вероятности при таких параметрах веро-
ятностной функции, которые соответствуют подходу, использованному
в фильтре Калмана (минимизация ковариантно сти ошибки). В данном
случае выберем следующую функцию как обратную к вероятностной
Чтобы минимизировать RHS Уравнения 4.40 потребуется
Максимальная вероятностная оценка сама по себе является известной
величиной (т.к., она оценена, используя полученные данные y) и может
быть вынесена за пределы выражения определения ожидания (усредне-
ния) “E”в предыдущем выражении RHS. Таким образом, максимально
вероятная оценка будет
Другими словами, оцениваемая величина является средним значением m
в зависимости от данных y.
В данном случае необходимо оценить m, используя данные измерений y.
Уравнение для измерений следующее:
Здесь C- это усиление измерения, как было отмечено ранее. Переменные
и параметры в данном уравнении даны в списке приближений, приве-
денном в начале.
362
Так как среднее w имеет нулевое значение, из Уравнения 4.42 получаем
следующую зависимость средних значений m и y:
Далее, т.к. m и w являются независимыми случайными переменными, из
Уравнения 4.42 получаем:
Var(y) = Var(Cm) + Var(w) = C 2Var(m) + Var(w)
Или
4.4 .2 использование формулы Байеса
Исследуя алгоритм статического скалярного фильтра Калмана, исполь-
зуем формулу Байеса (4.23), считая pdff(•) как
Примечание: Соответственно нашему предположению, все pdfs в Урав-
нении 4.45 являются гауссовыми.
Как было выяснено (см. выше), в уравнении 4.45 f(m)соответствует апри-
орному значению оценки, а f(m|y) – апостериорному значению оценки
(т.е., значению, рассчитанному по получении данных y). В рекурсивной
формулировке тогда f(m) соответствует предыдущей оценке и f(m|y) со-
ответствует новой оценке после получения новых данных.
Имеем следующие нормальные (гауссовы) pdfs:
И учитывая Уравнение 4.43
363
При определенном данном значении m (т.е ., для этого значения нет нео-
пределенности) неопределенность y является следствием неопределен-
ности w. Таким образом, Var(y|m)=Var(w). Также, для заданного значе-
ния m, из Уравнения 4.42 получаем, что среднее значение y равно Cm.
(Примечание: среднее w равно нулю). Тогда
Подставим эти три pdfs в Уравнение 4.45:
Теперь преобразуем экспоненты в окончательное выражение:
где
Получается:
364
Как следует из уравнения 4.46, среднее значение m в зависимости от y
будет
и отклонение оценки m, учитывая y, будет
где
Примечание: Для получения окончательного результата из Уравнения
4.48, используем подстановку Уравнения 4.44 .
4.4 .3 алгоритм статического скалярного фильтра калмана
Как обсуждало сь ранее, согласно формулам Байеса, μm является априор-
ным средним m и μm|y является апостериорным средним m, как только
применяются полученные данные y. Тогда, следуя рекурсивному анали-
зу по уравнению 4.47, μm является предварительной оценкой m и μm|y,
новым значением оценки (обновленным или скорректированным) для
m(после внесения новых данных y). Таким же образом, для Уравнения
рекурсии 4.48, σm представляет собой предварительную стандартную
оценку и σm|y является новым оценочным значением стандартной ошиб-
ки оценки (после внесения новых данных y). Также, заметим, что значе-
ние оценки m является средним значением, как показано в Уравнении
4.41 . Как следует, схема рекурсивной формулировки настоящей оценки
(статический фильтр Калмана) будет:
Где
365
Итерационный процесс (4.50) начинается с начального значения mˆ0 (ко-
торое должно быть известно).
Это – ожидаемое значение m до получения любых результатов измере-
ний. Обычно оно берется как номинальное или идеальное значение (при
отсутствии каких-либо ошибок, например, как об этом пишут в сопрово-
дительных документах данного продукта). Итерационный процесс (4.51)
начинается с начальным значением m0= m, который является стандарт-
ным для ошибки модели, и который известен.
(Примечание: в обозначениях модели стандартного фильтра Калмана
стандарт обозначается как σv.). Начальный выбор правомерен, посколь-
ку еще никаких измерений выполнено и использовано не (в i=0).
Примечание: Уравнение 4.52 может быть представлено в следующей
форме:
Как следует из уравнения 4.53, Ki является просто фактором масштаби-
рования для приведения в соответствие данных измерений и измеряемой
величины (т.е. 1/C) с весовым коэффициентом ki. Общее представление
о весовом коэффициенте и рекурсивной модели в целом можно получить
несложно, как показано ниже. Например, рассмотрим два экстремаль-
ных случая:
1. Ошибкой модели можно пренебречь (т.е. σm=0)в сравнении с ошибкой
измерения (обозначенной как σw).
2. Ошибкой измерений можно пренебречь (т.е. σw=0) в сравнении с
ошибкой модели (обозначенной как σm).
В первом случае, как следует из Уравнения 4.53 k=0 и K=0, и таким об-
разом, mˆi=mˆi -1, что означает, что при итерации не используются но-
вые результаты измерений и окончательный результат оценки останет-
ся прежним. В данном случае это оправдано, т.к . процесс измерения не
всегда точен, а модель дает точный результат.
Во втором случае, исходя из Уравнения 4.53, видим, что k=1 и K=1/C и
таким образом mˆi= yi/C. Это означает, что мы полностью полагаемся
366
на результаты новых измерений и отбрасываем предыдущие оценки. В
данном случае это оправдано, т.к. процесс измерения был очень точным,
в то время, как сама модель – нет.
Рассмотрим гибридный случай первого и второго примера: Уравнение
4.53 правильным образом «взвешивает» оценку по критериям относи-
тельной точности модели и измерения. Тем не менее, как следует из
Уравнения 4.51, отклонение оценки будет неуклонно уменьшаться при
каждой последующей рекурсии.
В разделе 4.5 будет показано, что рекурсивные уравнения (4.50,4.51,4.52
РИСУНОК 4.5 Схема статического фильтра Калмана (Байеса).
Рисунок 4.6 Структурное отслеживание с использованием датчика натяжения
проволоки
Structure –структура
Strain gauge–датчик натяжения
Process –процесс
Bridge circuit electronics – Мостоваясхемаэлектроники
Measurement system – измерительнаясистема
Voltage acquisition and processing – приемы обработки напряжения
367
и 4.53) достаточно подобны рекурсивной формулировке фильтра Кал-
мана. Однако, как было отмечено ранее, настоящая статическая схема
не нуждается в этапе предположения и использует исключительно этап
корректирования фильтра Калмана. Данная схема приведена на Рисунке
4.5 . Параметр K является усилением Калмана (Kalman gain).
Пример 4.6
Структурированная система мониторинга использует полупроводнико-
вый датчик деформации для измерения деформации в некоторых крити-
ческих местах конструкции. Система состоит из датчика деформации,
электрической цепи моста, которая преобразует изменения сопротивле-
ния датчика деформации в напряжение, а также содержит систему сбора
и обработки данных, фиксирующую величину напряжения и обрабаты-
вающую даны, согласно требованиям (см. Рисунок 4.6)
В данном примере проволока, которая измеряется датчиком натяжения,
представляет собою процесс. Датчик натяжения, мостовая схема, и за-
пись его выходного напряжения представляют систему измерения. Из-
вестна следующая информация:
Калибровочная константа системы наблюдения = 400 мкε/В
Примечание: 1мкε = 1 микропроволоки = 1*10-6 проволок
Стандартное отклонение ошибки процесса (модели) σm = 5,0 мкε
Стандартное отклонение ошибки измерений σW = 2,0 мВ
Измерения (В): [1,99, 2,10, 2,05, 1,98, 1,99, 2,08, 2,09, 2,10, 2,09, 2,11]
Примечание: Это статическая (не динамическая) задача (с безошибоч-
ной частью модели = 1).
Случай 1: Определим начальные условия итерации на уровне ˆm = 800
мкε (это кажется основанным номинальным значением для проволки, с
точки зрения данной информации и калибровочной константы).
Следующая программа MATLAB используется для получения результа-
тов рекурсивного статического фильтра Калмана:
368
Согласно данным результатам, мы можем использовать 823,14 мкε, как
оцененную проволку. Обратите внимание, что std оценки улучшилось
(уменьшилась ошибка) в процессе итерации.
Случай 2: Далее, разрешите нам изменить начальное значение оценива-
емого параметра на 0 (вместо боле логического значения 800 мкε). Мы
получим следующие результаты MATLAB:
369
Видно, что финальная оценка почти такая же (821,10 мкε), с таким же
уровнем ошибки оценки.
Случай 3: Теперь давайте увеличим уровень ошибки измерений до σw=
50,0 мВ (равное 20,0 мкε) с таким же начальным значением (0) для ˆm .
Мы получим следующие результаты MATLAB:
финальная оценка теперь со ставляет 316,62 мкε, которая явно неточ-
ная и неприемлимая. Причина состоит в следующем. В данном случае,
ошибка измерения намного выше, чем ошибка модели, и таким образом,
оценка оказала меньше внимания новым измерениям. Даже так мы нача-
ли с очень маленького предположения (0) для значения оценки, оценка
быстро не изменилась по этой причине. Оцененная ошибка std оценки не
была так же высокой (3,922 в сравнении с 0, 2527 перед этим) по этой же
причине. Если мы предпримем больше попыток итерации, оценка улуч-
шится.
370
Результаты из этих трех случаев представлены на Рисунке 4.7 . В част-
ности, видно из Рисунка 4.7б, что std оценки постепенно продвигается к
стабильному значению.
Далее, мы используем классическую процедуру ОМП Гаусса, где мы бу-
дем оценивать параметры (средние и std ) распределения Гаусса, которое
рисунок 4.7 (а) Оцененнеая проволка и (б) стандартное отклонение ошибки
оценки
Estimated value - Оцененное значение
Iteration - итерация
Good starting estimate – хорошее начало оценки
Bad starting estimate – плохое начало оценки
Bad starting estimate with high measurement error – плохое начало оценки с высо-
кой ошибкой измерений
Estimation error STD – ошибка измерений STD
371
больше подойдет для создания данной информации измерения y. Мы по-
лучим следующие результаты MATLAB:
Оценка почти та кая же, как мы получили вначале с помощью оценки
Калмана. Так же обратите внимание, что std получило из этой процедуры
значение 19,661 мкε, что до статочно велико, потому что оно полагается
всецело на измерения и не отличается между ошибкой модели и измере-
ний.
Наконец, мы напрямую вычисляем среднее и std, информации данных
измерений, используя MATLAB.
Мы получим:
Когда мы сократили до микропроволок, среднее значение получилось
823, 20 мкε. Это фактически, минимальная квадратичная оценка и так
же оценка, полученная из стандартного ОМП с распределением Гаусса.
Std оценки составляет 0,0518 В (или 20,72 мкε), что так же сравнимо с
тем, которое было получено из стандартного ОМП Гаусса. Метод МКО
не имеет возможности определять или больше ошибок идет от модели
или измерений. В общем, когда доступно тольно несколько значений,
рекурсивное ОМП в виде фильтра Калмана лучше в использовании, чем
МКО, как мы видим с прошлых результатов на данном примере, так как
МКО просто определяет среднее из данных. Более того, как ожидалось,
оценка МКО идентична полученному значению при использовании кон-
векционного ОМП с распределением Гаусса.
372
4.5 Линейный многозначный динамический фильтр калмана
В прошлом разделе мы представили статический фильтр Калмана, где
модель процесса был оцениваемой единицей сама по себе. Так как мо-
дель была единицей или неизменяемой операцией, в данном случае (мо-
дель = 1 в скалярной ситуации), стадия экстраполяции фильтра Калмана
(который зависит от модели процесса) не нужена. Необходима только
стадия исправления. Теперь мы представим схему фильтра Калмана для
линейной многозначной динамической системы. Она требует и экстра-
поляцию (которая использует модель процесса) и коррекцию (которая
использует измеренную информацию).
фильтр Калмана является оптимальным средством оценки. Оно предл-
ставляет оценку посредством минимизации ковариации ошибок оценки.
Динамический фильтр Калмана может провести оценку (или обседова-
ние), не зная переменных динамической системы, используя следую-
щую информацию:
1. Линейную модель (модель пространства состояния) динамической
системы, включая статистику (матрицу ковариации V) случайных воз-
мущений, попадающих в систему (включая случайную модель ошибок).
2. Линейное соотношение между измерчяемыми выходными перемен-
ными динамической системы и оцениваемыми переменными. Отноше-
ние может быть представлено формированием матрицы выходных зна-
чений (например, матрица исзмерения усилений) С и может включать
случайные шумы (например, случайные ошибки измерений) с матрицей
ковариации W.
3. Измерения выходных сигналов.
Как было указано выше, общий фильтр Калмана использует подход экс-
траполяции-коррекции, который состоит из следующих этапов:
1. Экстраполировать неизвестные переменные и соответствующую ма-
трицу ковариации ошибок. Это оценка приори. Эта стадия экстраполя-
ции использует модель процесса и матрицу ковариации входных возму-
щений (включая модель ошибок).
2. Исправление экстраполированных переменных и соответствующей
матрицы ковариации ошибок. Это оценка постериори. Эта ступень ко-
рекции использует выходное отношение (матрицу измерения усиления)
и матрицу ковариации измерненного шума.
Далее мы представим несколько предварительных сведений, которые
нужны для понимания перед тем, как мы приступим к алгоритмам дина-
мического фильтра Калмана. Они рассматривают модель динамической
373
системы, ответ системы, дискретно-временную модель, контрольность
(доступность) и наблюдаемость.
4.5 .1 . Модель пространства состояния
Стандартный линейный динамический филтр Калмана использует ли-
нейную динамическую модель, с постоянными коэффициентами, систе-
мы, которая генерирует переменные для оценки. Динамическая система
имеет r входов и m выходов. В частности, линейная временная инвари-
ация (например, постоянный коэффициент) модели пространства со сто-
яния используется в этом фильтре Калмана. Такая модель может быть
выражена, как это показано ниже.
Уравнения состояния (удвоенные линейные дифференциальные уровне-
ния первого порядка):
И выходные уравнения (удвоенные алгебраические ураврнения):
Где,
x= [x1, x2,...,xn]Tявляется вектором состояния n-го порядка
u = [u1, u2, ...,ur]Tявляется входным вектором порядкаr
y = [y1, y2, ...,ym]Tявляется выходным вектором порядкаm
Всме эти векторы определяются в колонке векторов
Так же
A - это матрица системы
B - это матрица распределения/усиленияввода
C - это матрица выхода/измерения формирования/усиления
D- это матрица сходной подачи
Вектор состаяния отображает динамическое состояние системы. Его по-
рядок (n) это порядок (или размер) системы. Некоторые переменные со-
стояния x не могут быть прямо замерены (по разным причинам), и это
переменные со стояния, которые оцениваются, посредством измеренных
выходов и фильтра Калмана. Принято, что выход y измеряемый (но мо-
жет содержать шум измерения). Также модель сама по себе может иметь
ошибки, которые могут быть приняты в качестве аддитивных, и таким
образом, представляются как входное возмущение (случайное) в Урав-
нении 4.54.
374
Примечание: Часто матрица D нулевая. Она не равна нулю только тогда,
когда система имеет входной характер. Пример этого подан ниже.
Пример 4.7
Жесткий выходной вал источника энергии с дизельным мотором рабо-
тает при известной угловой скорости Ω(t). Он присоединен через фрик-
ционную муфту к гибкому валу, который в свою очередь запускает ги-
дравлический насос (см. Рисунок 4.8а). Линейная модель для данной
системы схематически изображена на Рисунке 4.8б. Муфта представле-
на ротационным демпфером константой дефмпфирования В1 (единицы:
вращений/угловой скорости). Коэффициент жесткости гибкого вала K
(единицы: кручение/ротации). Насос представлен крутящим моментом
сердцевины J (единицы: кручение/угловому ускорению), а его жидкост-
ная нагрузка вязким демпфером с константой демпфирования В2.
Мы можем записать два уравнения состояния для системы второго по-
рядка, относительно переменных состояний Т и ω для входа Ω, где Т -
это вращение гибкого вала; ω - это скорость насоса. Мы рассмотрим два
случая выхода системы:
(а) выход, ω1 = угловой скорости левого конца вала и (б) выход, ω = ско-
рость насоса.
Уравнения состояния теперь могут быть составлены.
4.5 .5 алгоритм Линейного Фильтра калмана
Теперь представим дискретные по времени уравнения стандартного ли-
нейного динамического фильтра Калмана. В выведении этих уравнений
воспользуемся следующими предположениями:
1. Динамическая система линейна и независима от времени и связанные
с моделью матрицы(F,G,C,D) известны.
2. Все выходыyизмеримы (хоть и возможно с шумом измерений).
3. Динамическая система наблюдаема.
4. Входные возмущения (или ошибки модели)и выходной(измеритель-
ный)шум аддитивны, независимы, обладают Гауссовскими характери-
стиками белого шума, с известными ковариационными матрицамиV и W.
Обычно так же предполагается, что в Уравнении 4.55 D=0.Модифици-
рование уравнений фильтра Калмана для того, чтобы учесть D довольно
просто и очевидно.
фильтр Калмана является оптимальным методом оценки, где неизвест-
ные переменные (вектор состояния) вычисляются путем минимизации
375
ковариации погрешности вычисления, при заданных измеренных дан-
ных, при времени стремящемся к бесконечности(т.е.,по мере продви-
жения рекурсии фильтра).А именно, в шаг времениi,предположим, что
действительный вектор состояния равен xi и его вычисленное значени-
е(с использованием измеренных данных) равно xˆi . Соответствующая
ошибка вычисления равна
ei=xi-x ˆi
(4.68)
Ее ковариация (ковариационная матрица погрешности) Pi задается как
фильтр Калмана минимизирует след ковариационной матрицы погреш-
ности Pi, при t→∞.А так же фильтр Калмана утверждает, что средняя
ошибка равна нулю, поэтому
Как говорилось ранее, фильтр Калмана следует по двух-шаговому про-
цессу предсказания и коррекции. В шаге предсказания априорные зна-
чения
xˆi и Pi вычисления состояния и ковариации погрешности вычисления
определены.
(Важно: Верхнее подчеркивание“−”обозначает априорные оценки.)В
шаге коррекции, используя действительные измерения выходов yi, эти
априорные оценки корректируются в постериорные оценки
xˆi и Pi. Соответствующие уравнения даны ниже.
Шаг предсказания (априорная оценка)
Шаг коррекции (постериорная оценка)
376
4.5 .5 .1 Начальные Значения рекурсии
Начальные значения xˆ0 и P0 вычисляемого вектора состояния и матри-
цы ковариации погрешности нужны для того, что запустить рекурсию
фильтра Калмана. Они выбираются с использованием первичной инфор-
мации и/или интуиции. В частности, мы используем
P0 =V
Начальная оценка xˆ0 - это обычно начальное значение x(0) вектора со-
стояния, который должен быть известен.
Вычислительная процедура дискретного фильтра Калмана показана на
Рисунке 4.9 . Изучите стадии предсказания и коррекции этого динами-
ческого фильтра Калмана. Сравните это с Рисунком 4.5, с изображением
статичного фильтра Калмана, у которого есть только стадия коррекции.
Матрица Ki называется усилитель Калмана. Обратите внимание на схо-
жесть выражения этой матрицы со скалярным Уравнением (4.52) статич-
ного скалярного фильтра Калмана. Кроме того, Уравнение 4.74 соответ-
ствует Уравнению 4.50, а Уравнение 4.75 соответствует Уравнению 4.51.
Пример 4.8
Рассмотрим систему дизельного двигателя из Примера 4.7 . Предполо-
жим, что параметры системы J= 0.5, K=1.0, B1=0.2, and B2=0.25. Как и
ранее вход это Ω=скорость дизельного двигателя; а переменные состоя-
ния: T=крутящий момент в свободном валу, и ω=скорость помпы. Возь-
мем скорость помпы за выход системы. Тогда матрицы, описывающие
системы выглядят так:
377
Обычно, измерить крутящий момент вала гораздо труднее, чем скорость,
особенно когда вал крутится. Так что в этом примере предположим, что
мы хотим оценить крутящий момент в свободном валу при входе скоро-
сти равном 2.0 .
Measurement system (в центре рисунка) = Система измерения
Важно: Система наблюдаема (ее можно построить) поскольку
Не вырождена.
Сначала мы используем MATLAB, чтобы определить собственные зна-
чения системы:
>>A=[-5 .0 -1 .0; 2.0 -0 .5];
>>eig(A)ans =
-4 .5000
-1 .0000
РИСУНОК 4.9 Схема вычислений дискретного динамического фильтра Кал-
мана.
378
Видно, что система стабильна, поскольку оба собственных значения от-
рицательны. А так же, единицы изерения этих значений это частота (1/с).
Следовательно, мы выберем период T=0.02с, чтобы дискретизировать
систему.
Потом мы определим дискретную по времени систему, соответствую-
щую заданной системе, используя MATLAB:
>>B=[1.0;0];
>>C=[0 1];
>>D=[0.0];
>> [F,G]=c2d(A,B,0.02);
Результирующая матрица передачи состояния F и матрица передачи вхо-
да G равны
>>F
F=
0.9045 -0 .0189
0.0379 0 .9897
>>G
G=
0.0190
0.0004
Важно: При дискретизации был использован эктраполятор нулевого по-
рядка (zoh).
Задано, что скорость входа равна2.0 .Измерения скорости помпы симу-
лируются как ее стабильное (примерно) значение (≈0.9)плюс случайные
шумы (из генератора случайных чисел). Модель(входное возмущение)и
матрицы ковариации измерений мы возьмем такие
Мы используем следующую программу MATLAB, чтобы определить
крутящий момент вала (а так же скорость помпы), используя измерен-
379
ную скорость помпы (со случайным шумом).
Важно:Оцененная скорость помпы считается за верное значение, в отли-
чие от измернного, в котором присутствуют шумы. Эта погрешность и
есть рзница между этими двумя величинами.
>>V=[0.05,0;0,0.02]; % ковариация погрешности модели (входное
возмщение)
>>W=[0.02]; % ковариация погрешности измерений
>>xe=[0;0]; Pe=V; %инициализация оценки состояния и оценки ковари-
ации погрешности
>>it=[]; meas=[]; est1=[]; est2=[]; err=[]; % объявление векторов для хра-
нения измерений, оценкок состояния и погрешности между измеренным
и оцененным выходами
>>kalmest
%вызов определенной функции kalmest.m со следующим
сценарием:
fori=1:100
it(end+1)=i; % хранение номера шага рекурсии
u=2.0; % вход скорости двигателя
xe=F*xe+G*u; % предсказанная погрешность состояния
Pe=F*Pe*F'+V; % предсказанная ковариационная матрица погрешно сти
оценки
K=Pe*C'*inv(C*Pe*C'+W); % вычисление усиления
Калмана
y=0.9+randn/20.0; % симуляция измерения скорости с шумом xe=xe+K*(y-
C*xe); % корректировка погрешности состояния
Pe=(eye(2)-K*C)*Pe; % корректировка ковариации погрешности оценки
meas(end+1)=y; % запись измеренных данных
est1(end+1)=xe(1); % запись первого состояния (крутящего момента)
est2(end+1)=xe(2); % запись второго состояния (скорости) err(end+1)=y-
C*xe; %запись погрешности измерения скорости
end
% изображениерезультатовнаграфике
>> plot(it,meas,'-',it,est1,'-',it,est1,'o',it,est2,'x',it,err,'*')
>>xlabel(‘Шаг рекурсии')
>>gtext(‘Измеренная скорость')
>>gtext(‘X: Оцененная скорость помпы')
>>gtext(‘Оцененный крутящий момент вала')
>>gtext(‘Погрешность измерения скоро сти')
>>Pe %конечная оценка ковариации погрешности
380
Pe=
0.2566 0.0049
0.0049 0.0124
Результаты показаны на Рисунке 4.10. Заметьте, что при наличии значи-
тельных погрешностей и в модели (т.е. входное возмущение) и в изме-
рениях, фильтр Калмана эффективно дал разумную оценку крутящего
момента вала. В частности, сравнив измеренную скорость (показанную
сплошной линией, в которой есть значительная погрешность ввиду ис-
пользования установившегося значения плюс случайного шума для
симуляции его) и оценку скорости(показанную кривой знаками “x”),
очевидно, что фильтр Калмана фактически устранил погрешность изме-
рения.
Шаг рекурсии
Measured pump speed - Измеренная скорость помпы
Estimated shaft torque - Оценка крутящего момента вала
Estimated pump speed - Оценка скорости помпы
Speed measurement error - Погрешность измерения скорости
риСУНок 4.10 Результаты оценки крутящего момента посредством фильтра
Калмана.
381
4.6 расширенный Фильтр калмана
Часто линейная модель является лишь приближением нелинейной на
практике системы. А так же, измеряемая величина может нелинейно
зависеть от переменных состояния. Когда нелинейно сти значительны,
независимая от времени модель перестает быть подходящей. Тогда ли-
нейный фильтр Калмана, описанный в Разделе 4.5, который предполага-
ет линейную независимую от времени модель использовать нельзя. Ра-
ширенный фильтр Калмана модифицирует алгоритм линейного фильтра
Калмана, чтобы взять в расчет нелинейности системы.
Когда в системе есть нелинейности, которые нужно принимать во внима-
ние, то уравнение состояния (4.62)и уравнение выхода (измерения)(4.63)
нужно изменить, используя подходящие нелинейные представления, как
сделано ниже:
где f и h это нелинейные векторные функции порядков n и m, соответ-
ственно.
Важно: В уравнении выхода (4.77),входной член был опущен. Как и в
линейном случае может быть включен туда очевидным образом, если у
системы есть характеристики прямой связи.
Как мы увидим в уравнениях расширенного фильтра Калмана,нелиней-
ные уравнения (4.76) и (4.77) могут быть использованы в этой форме
(т.е. нелинейной)при работе с вектором состояния и вектором измере-
ний. Однако их нужно линеаризовать при работе с матрицей ковариации
погрешности. Причина в том, что когда случайный сигнал распростра-
няется нелинейно, то его случайные характеристики (особенно матрица
ковариации) изменятся сложным образом. Прямое включение таких не-
линейных трансформаций в алгоритм фильтра Калмана это не простая и
не очевидная задача.
Для трансформации ковариации мы используем следующую линеаризо-
ванную матрицу передачи состояний и матрицу усиления выхода (изме-
рений):
382
Уравнение 4.78 дает нам матрицу Якобиана (или градиент)системы, а
Уравнение 4.79 дает процесса выхода. Линеаризованные члены матриц в
Уравнениях 4.78 и 4.79 не являются константами и должны быть вычис-
лены на каждом шагу рекурсии расшинного фильтра Калмана с исполь-
зованием текущего значения вектора состояния и вектора входа в этот
период. Мы предполагаем здесь, что функции f и h дифференцируемы и
что они мо быть вычислены аналитически или численно.
Важно: Gi−1 = ∂f/∂ui−1, но этот результат не требуется в расширенном
фильтре Калмана.
4.6 .1 алгоритм расширенного Фильтра калмана
Уравнения линейного фильтра Калмана преобразованы как указано
ниже, для получения уравнения расширенного фильтра Калмана.
Шаг предсказания (оценка априори)
Шаг коррекции (постериорная оценка)
383
Теперь мы дадим пример использования расширенного фильтра Калма-
на.
Пример 4.9
Блок пассивного амортизатора имеет механизм поршень-цилиндр как
схематически показано на Рисунке 4.11 .Цилиндр жестко закреплен и
заполнен несжимаемой гидравлической жидкостью (по обеим сторонам
поршня). Поршень имеет массу m и площадь A. В нем есть небольшое
отверстие, через которое гидравлическая жидкость перемещается из од-
ной части цилиндра в другую при движении поршня. Это течение созда-
ет сопротивление жидкости, которое нелинейно (а именно, падение дав-
ления квадратично связано с уровнем скоро сти течения жидкости через
отверстие). Пружина с жесткостьюkсопротивляется движению поршня.
Предположим, что входная сила применена к амортизатору (поршню) и
равна f (t). Определим некоторые важные переменные:
V - это скорость поршня
Q - это объемная скорость потока через отверстие в поршне (положи-
тельно при движении слева направо)
P= P2 − P1 это разница давлений с двух разных сторон поршня
Fk - это сила упругости
В модели пространства состояний системы мы используем следующие
переменные:
Вектор состояния: x= [v, fk]T
Вектор входа: u= [f(t)]
риСУНок 4.11 Пассивный блок амортизатора.
Area - площадь
384
Сделаем следующие предположения:
1. Трение между цилиндром и поршнем отсутствует.
2. Площади обоих сторон поршня равны (примерно) A.Это сделано для
того, чтобы пренебречь площадью штока.
Можно показать, что уравнения со стояния системы выглядят так
Где c - это параметр сопротивления жидкости. Отметим, что первое
уравнение состояния нелинейно.Так как скорость измерять гораздо про-
ще, чем силу упругости, возьмем матрицу усиления выхода (измерений)
равнуюC=[10].
Предположим, что если систему сделать дискретной, то мы получим
следующую нелинейную дискретную по времени модель пространства
состояний:
Мы включили в уравнение аддиивные члены случайной погрешно сти
модели (и/или возмущения) v1 и v2 .Используем следующие значения
параметров: a1=0.4, a2=0.1, a3=0.2, a4=0.3, a5=0.5, b1=1.0 и b2=0.2 .
Ввиду нелинейности модели в этом примере, мы воспользуемся расши-
ренным фильтром Калмана. Более того, так как силу упругости измерить
тяжелее чем скорость, то мы оценим ее через измерение скорости амор-
тизатора.
Предположим, что входная сила в амортизатор это синусоидальная
функция
u=2sin6t
(4.9 .3)
Измерения скорости амортизатора симулируются (приближенно) значе-
ниями, генерируемыми нелинейной моделью системы с добавленным
случайным шумом (из случайного генератора чисел). Матрицы моде-
385
ли(входного возмущения)и ковариации измерений берем такие
Дискретная модель (4.9 .2) может быть выражена как
При линеаризации (используя первый член разложения Тэйлора – пер-
вую производную) мы получим
Атакже
Воспользуемся следующей программой в MATLAB, чтобы оценить силу
упругости (а так же скорость амортизатора) используя измеренную ско-
рость амортизатора (со случайным шумом).
Важно: Оцененная скорость берется как верное значение, так как изме-
ренная скорость, в которой присутствует шум, не точна. Погрешность
измерения это разница между этими двумя величинами.
>>F=[-0 .4, -0 .2; 0.3, 0.5]; % определим линейную матрицу F (нелиней-
ный член будет добавлен позже)
>>G=[1.0; 0.2]; % определим матрицу G
>>C=[1 0]; % определим матрицу усиления выхода (измерений)
>>V=[0.02,0;0,0.04]; % ковариация погрешности модели (входное возму-
щение)
386
>>W=[0.05]; % ковариация погрешности измерения
>>n=2; m=1; % определене порядков системы и выхода
>>extkalm
>>extkalm %вызов функции kalmest.m со следующим сценарием:
Fsim=F; % модель симуляции
xe=zeros(n,1); % инициализация вектора оценки состояния Pe=V; % ини-
циализация матрицы ковариаций погрешности оценки
xsim=xe; %инициализация вектора симуляции состояния
it=[]; meas=[]; est1=[]; est2=[]; err=[]; % объявление векторов хранения
it=0; meas=0; est1=0; est2=0; err=0; %инициализация переменных для по-
строения графика
for i=1:100
it(end+1)=i; % записьшагарекурсииt=i*0.02; % время
u=2.0*sin(6*t); % входящая сила в амортизатор (гармоническая)
x1=xe(1);
F(1,1)=-0 .4 -0.1*x1; % включаем нелинейно стьxe=F*xe+G*u; % предска-
зываем оценку состояния
F(1,1)=-0 .4 -0.2*x1; % линеаризуем F
Pe=F*Pe*F'+V; % предсказываем матрицу ковариаций погрешно сти
оценки
K=Pe*C'*inv(C*Pe*C'+W); % вычисляем усиление Калмана
Fsim(1,1)=-0 .4 -0 .1*xsim(1); % включаем нелинейно сть в симуляци-
юxsim=Fsim*xsim+G*u;
forj=1:m
yer(j,1)=rand/5.0; % симулированная погрешность измерения
end
y=C*xsim+yer; % симуляция
измерений скорости с
шу-
момxe=xe+K*(y-C*xe); % скорректированная оценка состояния
Pe=(eye(2)-K*C)*Pe; % скорректированная ковариация погрешно сти
оценки
x1=xe(1); % обновление состояния 1 (скорость)
meas(end+1)=y(1); % запись измеренных данных est1(end+1)=xe(1); % за-
пись первого состояния (скорости) est2(end+1)=xe(2); % запись второго
состояния (силы упругости)err(end+1)=y(1)-C*xe; %запись погрешно-
сти измерения скорости end
% графическое представление результатов
plot(it,meas,'-',it,est1,'-',it,est1,'o',it,est2,'x',it,err,'*')
xlabelи(‘Шаг Рекурсии')
Результаты показаны на Рисункеи4.12 .иЗаметим, что несмотря на при-
387
сутствие погрешности и в модели (входное возмущение) и в измерениях,
расширенный фильтр Калмана эффективно дал разумную оценку силе
упругости. В частности,сравнивая измеренную скорость (сплошная
линия),в которой была значительная погрешность ввиду добавленного
случайного шума, и оцененную скорость (линия с“o”), очевидно, что
расширенный фильтр Калмана фактически избавился от погрешно сти
измерений.
Конечно же, расширенный фильтр Калмана гораздо лучше обычного
(линейного) фильтра Калмана при работе с нелинейными системами.
Однако, у него есть свои недостатки.Главным источником погрешно-
сти служит тот факт, что случайный сигнал проходя через нелинейную
систему может довольно сильно отличающиеся характеристики, чем от
того же сигнала прошедшего через линеаризованную модель нелиней-
ной системы.Эта проблема устраняется в сигма-точечном фильтре Кал-
мана, который представлен далее.
Шаг рекурсии
риСУНок 4.12 Результаты оценки скорости посредством расширенного филь-
тра Калмана.
Measured pump speed - Измеренная скорость помпы
Estimated shaft torque - Оценка крутящего момента вала
Estimated pump speed - Оценка скорости помпы
Speed measurement error - Погрешность измерения скорости
388
4.7 Сигма - точечный Фильтр калмана
В линейном динамическом фильтре Калмана мы предполагаем, что воз-
мущения процесса (включая погрешность модели) и измерений явля-
ются белым шумом с нулевой медианой и Гауссовским (нормальным)
распределением. Так же мы предполагаем, что модели процесса и изме-
рений (усиление выхода или усиление измерений) линейны. Если про-
цесс линеен, то любой входящий случайный Гауссовский сигнал оста-
нется Гауссовским на выходе.Для полного представления Гауссовского
случайного сигнала нужна только медиана и дисперсия (или стандарт-
ное отклонение).Более того, согласно центральной предельной теореме,
множество практических (инженерных)случайных сигналов(в которые
вносят вклад много разных независимых случайных причин) могут быть
приближены к Гауссовским.Если процесс(включая процесс измерения)
нелинеен, то одним из решений может его локальная линеаризация в
интересующей точке. (Важно:В этом случае точка будет со временем
меняться.)Линейный фильтр Калмана может быть применен в каждой
рабочей точке, с использованием соответствующей линеаризованной мо-
дели, так как рабочая точка изменяется со временем.Это и есть принцип
расширенного фильтра Калмана.Очевидный недостаток этого метода
состоит в том, что Гауссовские случайные сигналы, пройдя через нели-
нейную систему, не останутся Гауссовскими и поэтому только медиана
и дисперсия не обеспечат адекватное представление результата. Что еще
более важно, медиана и дисперсия выхода линеаризованной модели не
будут такими же, как настоящая медиана и дисперсия действительно-
го нелинейного процесса,для того же входного сигнала.В расширенном
фильтре Калмана даже данные проведены через действительную нели-
нейно сть, то ковариация будет неверной, так как ковариация проведена
через линеаризованную модель.При предполжении того, что медиана
шума равна нулю, ковариация особенно важна в фильтре Калмана. Дру-
гой недостаток этого метода в том, что ему требуются производные (т.е.
Якобианы) нелинейностей процесса f и нелинейностей измерений g. В
некоторых ситуациях(например, кулоновское трение), эти производные
могут не существовать. Вцеломприведемследующиенедостатки расши-
ренного фильтра Калмана:
1. Модель должна быть линеаризована. Это невозможно если нелиней-
ность недифференцируема.
2. Так как линеаризованную модель нужно вычислять на каждом шагу, то
затраты на вычисление гораздо выше, чем в линейном фильтре Калмана.
389
3. Гауссовский случайный сигнал не остается Гауссовским по сле про-
ведения через нелинейность. Следовательно, линеаризованная модель,
которая сохраняет Гауссовскую природу прошедшего сигнала не может
точно отражать истинное поведение прошедшего сигнала.
РИСУНОК 4.13 Схематическое сравнение расширенного фильтра Кал-
мана и сигма - точечного фильтра Калмана.
390
Решение этих недостатков расширенного фильтра Калмана было найде-
но в сигма-точечном фильтре Калмана (UKF). Этот метод преодолевает
проблемы расширенного фильтра Калмана прямым поиском настоящей
медианы и ковариации сигнала (вектора), который проведен через нели-
нейно сть, без линеаризации этой нелинейности.
В сигма-точечном фильтре Калмана через нелинейность проходят не из-
меренные данные, а статистические представления о данных, называ-
емые сигма-точками. Сигма-точки более достоверно представляют ста-
тистические параметры (медиану и ковариацию) данных. В частности,
было обнаружено, что ковариация результатов в сигма-точечном филь-
тре Калмана гораздо более точная, нежели в расширенном.Эти два под-
хода к нелинейной фильтрации Калмана схематически сравниваются на
Рисунке 4.13.
4.7 .1 Сигма - точечное Преобразование
Сигма-точечный фильтр Калмана используетсигма-точечное преобразо-
вание (UT), которое сейчас будет представлено.Предположим, что набор
векторов данных x (в которых есть случайность)пропускается через не-
линейность z=f(x). Мы используем UT, чтобы определить статистику вы-
хода z нелинейности. Преобразование включает в себя два главных шага:
(1)
Создание векторов сигма-точек и соответствующих весов для на-
бора данных и (2) вычисление статистики (вектора медианы и матрицу
ковариации) результатов (выход z из нелинейности). Эти два шага сфор-
мулированы в следующих уравнениях.
4.7 .1 .1 Создание векторов Сигма-точек и весов
1. 2n+1 Сигма-точки:
где
xˆ
- это выборочное среднее данных
391
Px - это матрица выборочной ковариации данных
[А]j это j-тый столбец разложения Холецкого (положительно определен-
ной) матрицы A
N - это размерность (порядок) вектора данных x
λ = α2n− nэто параметр пересчета
α - параметр управляющий распространением сигма-точек (обычно по-
рядка 0.001)
Важно: Разложение Холецкого положительно определнной матрицы это
произведение нижней треугольной матрицы и ее сопряжено транспони-
рованной матрицы(верхней треугольной матрицы).Это несколько похоже
на извлечение квадратного корня из матрицы.Результат функции chol()
в MATLABэто верхняя треугольная матрица.И нижняя треугольная и
верхняя треугольная матрица могут быть использованы в этом методе.
Произведение нижней треугольной матрицы на верхнюю треугольную
матрицу (именно в таком порядке) дает изначальную матрицу.
Пример:
>> A = [2 0.5 0.2;0.6 3 0.1;0.3 0.4 5];
>> L = chol(A)L =
1.4142 0.3536 0 .1414
0
1.6956 0 .0295
0
0
2.2314
>>B=L*L'B =
2.1450 0.6036 0 .3156
0.6036 2.8759 0 .0658
0.3156 0.0658 4.9791
>>C=L'*LC=
2.0000 0 .5000 0 .2000
0.5000 3 .0000 0 .1000
0.2000 0.1000 5.0000
Видно, что количество сигма точек (2n+1) прямо пропорционально раз-
мерности(n)вектора данныхx.Это требуется для адекватного покрытия
распространения данных. Одна сигма точка сама является медианой
данных. Оставшиеся 2 nсигма точек должным образом выбираются во-
круг медианы, чтобы покрыть случайность данных.
392
1. 2n+1весов:
где
β - это параметр представляющий первоначальные знания о распределе-
нии вероятности x (для Гауссовского распределения β = 2)
Верхний индекс m - означает медиана, а верхний индекс c означает ко-
вариация.
Видно, что больший вес имеет центральная лямбда-точка (медиана), что
интуитивно более привлекательно. Что более важно, можно легко под-
твердить, что медиана и ковариация взвешенной суммы 2n+1 лямбда-то-
чек векторов равны медиане и ковариации случайных данных.
4.7 .1 .1 вычисление Статистики выхода
1. Пропустим вектора сигма-точек через нелинейность:
2. Вычислим медиану и матрицу ковариации выхода zкак взвешенные
суммы:
393
Видно, что в сигма - точечном преобразовании то, что проходит через не-
линейность, это вектора сигма-точек, а не действительные точки данных.
Эти вектора сигма - точек адекватно представляют случайное поведение
данных. Сигма-точечное преобразование определяет статистику выхода
из нелинейности, используя статистику входных данных. Вчастности, из
Уравнения 4.8видно, что
a.
Взвешенная сумма векторов сигма-точек данных равна выбороч-
ному среднему (xˆ)данных.
b.
Взвешенная выборочная ковариация векторов сигма-точек дан-
ных равна ковариации (Px) данных.
Следовательно, можно утверждать, что то, что проведено через нели-
нейность – это адекватная характеристика случайности даных. Сигма
- точечное преобразование достигает этого, не меняя нелинейность про-
цесса (т.е. без потребно сти в линеаризации), а так же не требуется прово-
дить каждую точку данных (что в результате снижает вычислительную
нагрузку). Это важные преимущества над методом, использовавшимся в
расширенном фильтре Калмана.
4.7 .2 алгоритм сигма - точечного фильтра калмана
Теперь мы воспользуемся сигма-точечным преобразованием, представ-
ленным ранее, чтобы формализовать сигма-точечный фильтр Калмана.
Рассмотрим следующую нелинейную динамическую систему, выражен-
ную в дискретной по времени форме пространства со стояний, как и ра-
нее:
Где f и h - это нелинейные векторные функции порядкаnиm,и они пред-
ставляют динамику нелинейного процесса и нелинейное соотношение
выход/измерение соответственно. Вектора v и w представляют входные
возмущения(и/илипогрешность модели процесса)и выходной(измери-
тельный)шум соответственно,они предполагаются аддитивными с неза-
висимым Гауссовским белым шумом, чьи матрицы ковариации – это V
иW.
394
Как и в других алгоритмах фильтра Калмана, в сигма-точечном филь-
тре Калмана так же есть стадия прдсказания(априорная оценка)и стадия
коррекции (постериорнаяоценка), но теперь в этих стадиях использует-
ся сигма-точечное преобразование. Соответствующие вычислительные
шаги описаны ниже:
1. Инициализация вычисления (приi=0)с начальной медианой и ковари-
ацией вектора состояния: xˆ0 и P0. Мы выбираем xˆ0 как первый (цен-
тральный) вектор сигма-точек (т.е.,медиану) и следовательно x(0). Нам
нужно вычислить 2n внешних сигма-точечных вектора для этой началь-
ной точки времени (и рекурсивно для будущих точек времени i).Заметь-
те, что порядок вектора состоянияравен n.Мы выбираем
P0=V
Это должна быть положительно определенная матрица (как требует раз-
ложение Холецкого),которой в этом случае является V.
2. Вычислить фиксированный параметр и веса сигма-точек:
Альтернативный выбор весов:
Важно: При таком выборе, мы выбираем w0 меньшее 1.Потом мы выби-
раем оставшиеся равные 2n весов так, что сумма всех весов должна быть
равна1. В случае выбора таких весов, в Уравнении 4.91используйтc(=n/
(1−w0)) вместо n+λ.
395
3. Рекурсивно выполните следующее для всех точек времени i=1,2,3,...
В приведенной ниже первой стадии рекурсии мы считаем предсказан-
ные оценки (т.е. априорные оценки), аналогично процедуре в других ти-
пах фильтра Калмана.
a. Посчитаем 2n+1 векторов сигма-точек:
b. Проведем вектора сигма-точек через нелнейный процесс (Уравнение
4.76):
a. Посчитаемпредсказаннуюоценку состояния как взвешенную сумму:
b. Посчитаемпредсказаннуюматрицу ковариации погрешности как взве-
шенную сумму с добавлением входных возмущений модели:
c. Проведем вектора сигма-точек через нелинейно сть измерения (Урав-
нение4.77):
396
d. Посчитаем предсказанныевектора измерений как взвешенную сумму:
В последующем втором этапе рекурсии мы посчитаем скорректирован-
ныеоценки(т.е.,апостериорныеоценки),включив действительные изме-
рения выхода, аналогично процедуре в других типах фильтра Калмана.
e. Посчитаем матрицу авто-ковариации оценки погрешности выхода как
взвешенную сумму вместе с вкладом от шума измерений:
f. Посчитаем матрицу перекрестной ковариации оценки погрешно сти
выхода состояния как взвешенную сумму:
i. Посчитаем матрицу усиления Калмана:
j. По считаем скорректированную (т.е ., aапостериорную) оценку состоя-
ния:
где yiэто действительное измерение выхода в точке времени i.
j. Посчитаемскорректированную(т.е.,апостреорную)матрицу ковариа-
ции оценки погрешно сти:
Как можно ожидать возможны экономизации в шагах вычислений сиг-
397
ма-точечного фильтра Калмана,ввиду конкретных структур и характе-
ристик соответствующих матриц. Эти соображения выходят за рамки
настоящего рассмотрения.
Пример 4.10
В этом примере мы решаем задачу, представленную в Примере 4.9,но в
этотм раз используем сигма-точечный фильтр Калмана. А конкретнее,
мы используем следующую программуMATLAB, чтобы оценить силу
упругости (а так же скоро сть амортизатора), используя измеренную ско-
рость амортизатора(со случайным шумом).
>>F=[-0 .4, -0 .2; 0.3, 0.5]; % определим матрицу F
>>G=[1.0; 0.2]; % определим матрицу G
>>C=[1 0]; % определим матрицу усиления выхода (измерения)
>>V=[0.02,0;0,0.04]; % ковариация погрешности модели (возмущения
входа)
>>W=[0.05]; % ковариация погрешности измерений
>>n=2; m=1; % порядок системы и порядок выхода
>>ukalm
%вызов определенной функции ukalm.m со следующим
сценарием:
Fsim=F; % модель симуляции
xe=zeros(n,1); % инициализация вектора оценки состояния Pe=V; % ини-
циализация матрицы ковариации оценки погрешно сти
xsim=xe; %инициализация вектора оценки состояния alpha=0.001; %
определение параметра распространения сигма-точек
lambda=alpha^2*n-n; % параметр пересчета
beta=2; % распределение Гаусса
wm(1)=lambda/(n+lambda); % центральный вес медианы
wc(1)=wm(1)+(1-alpha^2+beta); % центральный вес для ковари-
ацииwm(2:2*n+1)=1/(2*(n+lambda)); % внешний внес медианы
wc(2:2*n+1)=wm(2:2*n+1); % внешний вес для ковариации
it=[]; meas=[]; est1=[]; est2=[]; err=[]; % объявление векторов для хране-
ния
it=0; meas=0; est1=0; est2=0; err=0; %инициализация переменных для
изображения переменных
for i=1:100
it(end+1)=i; % хранениешагарекурсииt=i*0.02; % время
u=2.0*sin(6*t); % вход (гармоничный) xlam(:,1)=xe; % вектор централь-
398
ной лямбда-точки
L=chol((n+lambda)*Pe); % разложение Холецкого нельзя использовать
если матрица не положительно определена
forj=2:n+1
xlam(:,j)=xe+L(:,j-1); % внешние векторы лямбда-точек xlam(:,n+j)=xe-
L(:,j-1); % внешние векторы лямбда-точек
end
sumx=zeros(n,1); % инициализация суммы
forj=1:2*n+1
x1=xlam(1,j); % первый элемент вектора лямбда-точкиF(1,1)=-0 .4 -0 .1*x1;
% включение нелинейности xlamx=xlam(:,j); % j-тый вектор лямбда-то-
чек
xlam(:,j)=F*xlam(:,j)+G*u; % нелинейное состояние проведения вектора
лямбда-точек
sumx=sumx+xlam(:,j)*wm(j); % взвешенная сумма
end
xe=sumx; % предсказанная оценка состояния
Pe=zeros(n,n); % инициализация суммы для оценки ковариаци-
иforj=1:2*n+1
xlamx=xlam(:,j); % j-тый вектор лямбда-точек
xlamx=xlamx-xe; %вычитаем медиану
Pe=Pe+wc(j)*xlamx*xlamx'; % матрица ковариации оценки погрешно сти
end
Pe=Pe+V; % добавить вклад от модели/входных возмущений-
sumy=zeros(m,1); % инициализация суммы
forj=1:2*n+1
xlamx=xlam(:,j); % j-тый вектор лямбда-точек
xlamy(:,j)=C*xlamx; % вектор лямбда-точек выхода (измерения)
sumy=sumy+xlamy(:,j)*wm(j); % взвешенная сумма
end
ye=sumy; % предсказанные оценки выхода
Pyy=zeros(m,m); % инициализация матрицы авто-ковариации выхо-
даforj=1:2*n+1
ylam=xlamy(:,j); % вектор
лямбда-точек
выхода lambda-
pointvectorylam=ylam-ye; %вычитание медианы
Pyy=Pyy+wc(j)*ylam*ylam'; % матрица ковариации оценки погрешно сти
end
Pyy=Pyy+W; % прибавим вклад от шума измерений
399
Pxy=zeros(n,m); % инициализация матрицы перекрестной ковариации
состояния выхода
forj=1:2*n+1
xlamx=xlam(:,j); % j-тый вектор лямбда-точек vectorylam=xlamy(:,j); %
j-тый вектор лямбда-точек выхода
xlamx=xlamx-xe; %вычтем медиану
ylam=ylam-ye; %вычтем медиану
Pxy=Pxy+wc(j)*xlamx*ylam'; % матрица ковариации погрешности оцен-
ки
end
K=Pxy*inv(Pyy); % усиление Калмана
Fsim(1,1)=-0 .4 -0 .1*xsim(1);
%
включим
нелиней-
ностьxsim=Fsim*xsim+G*u;
forj=1:m
yer(j,1)=rand/5.0; % симулированная ошибка измерений
end
y=C*xsim+yer; % симулированные измерения с шумомxe=xe+K*(y-ye);
% скорректированная оценка состояния
Pe=Pe-K*Pyy*K'; % скорректированная ковариация оценки погрешно сти
meas(end+1)=y(1); % запись измеренных данных est1(end+1)=xe(1); % за-
пись первого состояния (скорость) est2(end+1)=xe(2); % запись второго
состояния (сила упругости)err(end+1)=y(1)-xe(1); %запись ошибки изме-
рения скорости
end
% изобразимрезультатынаграфике
plot(it,meas,'-',it,est1,'-',it,est1,'o',it,est2,'x',it,err,'*')
xlabel('Шаг рекурсии')
В этой программе мы использовали первоначальную схему взвешива-
ния, данную в Уравнении4.89 .Результаты показаны на Рисунке4.14 .Оче-
видно, при присутствии погрешности и в модели (входное возмущение)
и в измерениях, сигма-точечный фильтр Кламана эффективно предоста-
вил хорошую оценку силы упругости. В частности,сравнивая измерен-
ную скорость (сплошная линия), в которой была значительная погреш-
ность прибавленного случайного шума,и оцененную скорость (линия с
“o”),очевидно, что сигма-точечный фильтр Калмана в сущности устра-
нил ошибку измерений. Более того, сравнивая Рисунки 4.14 и 4.12,оче-
видно, что оценка скорости более гладкая и более синусоидальная при
сигма-точечном фильтре Калмана, которая ближе к точном значению
400
(синусоидальному).
В качестве другого упражнения к этому примеру, мы использовали схе-
му альтернативного взвешивания, данную в Уравнении 4.90 .Результаты
были достаточно близкими к тем, которые представили на Рисунке 4.14 .
401
основные Моменты Главы
•
Терминология датчиков/преобразователей
•
Пассивные и активные устройства
•
Классификация датчиков
•
Выбор датчика
•
Потенциометр
•
Преобразователи переменной индуктивности
•
Дифференциальный трансформатор/преобразователь
•
Датчик приближения взаимной индукции
•
Распознаватель
•
Распознаватель (постоянный ток, постоянный магнит переменного
тока, индукция переменного тока)
•
Вихревой датчик тока
•
Преобразователи переменной емкости
•
Пьезоэлектрические датчики
•
Тензометрические датчики
•
Датчики силы/крутящего момента
•
Гироскопические датчики
•
Температурно-жидкостные датчики
5.1 Датчики и Преобразователи
Датчики и преобразователи — это ключевые элементы инструментария
инженерных систем. Датчики могут быть использованы в инженерных
системах для множества причин. По существу, датчики нужны для того,
чтобы контролировать и изучать систему. Эти знания будут полезны в
различных приложениях, включая следующие:
5. аналоговые Датчики и Приоброзо-
ватели
402
•
Контроль процесса
•
Оперирование или контроль системы
•
Экспериментальное моделирование (т.е ., идентификация модели)
•
Тестирование и квалификация продукта
•
Оценка качества продукта
•
Предсказание, обнаружение и диагноз ошибок
•
Образование тревоги и предупреждения
•
Наблюдение
В системе контроля датчики используются для таких целей, как
•
Измерение выходов системы для контроля обратной связи
•
Измерение некоторых видов системных входов (неизвестные входы,
возмущения и т.д .) для контроля прямой связи
•
Измерение выходных сигналов системы для контроля, адаптации па-
раметров, самонастройке и контролю наблюдателя
•
Измерение парных сигналов входа и выхода для экспериментального
моделирования оборудования (т.е., для идентификации системы)
Термины датчик и преобразователь зачастую заменяют друг друга и зна-
чат одно и то же. Однако, строго говоря, датчик следит за величиной,
которая должна быть измерена или наблюдаема (называется измеряемая
величина), а преобразователь преобразует величину в форму, которую
можно наблюдать или использовать в последующих операциях. Если это
не необходимо, мы будем использовать термины датчик и преобразова-
тель, для обозначения одного и того же устройства. Правильный выбор
и интеграция датчиков и преобразователей, это важные и необходимые
задачи в оснастке инженерной системы. Иногда, мы должны разработать
и спроектировать новые датчики или доработать существующие датчики
для специального применения. Такая деятельность основана на наборе
описаний производительности требуемых датчиков. Характеристики
идеального датчика и преобразователя представлены в Главе 3. Даже
если настоящий датчик не сможет достичь такого идеального поведения,
при разработке и оснастке инженерной системы желательно использо-
вать идеальное поведение компонентов системы в качестве справки по
поведению технических характеристик, которые могут быть воссозданы
и представлены. Модель полезна в представлении поведения датчика. А
именно, модель может быть использована для анализа, симуляции, по-
строения, интеграции, тестирования и оценки датчика.
В этой главе, обозначена роль и важность датчиков и преобразователей
403
в инженерной системе; представлены важные критерии при выборе дат-
чиков и преобразователей для инженерных целей; и несколько важных
датчиков и преобразователей, и их концепций, принципов действия,
моделей, характеристик, расходников, и приложений описаны здесь. А
именно, аналоговые датчики в макро масштабе обсуждаются в этой гла-
ве. В частности, мы изучаем датчики для электромеханического (или ме-
хатронного), жидко стного или термического применения, и некоторые
другие типы датчиков. Цифровые преобразователи, датчики микроэлек-
тромеханических систем (МЭМС), и другие практические темы, такие
как объединение данных датчиков и датчики, объединенные в сеть, изу-
чаются в Главе 6.
5.1 .1 терминология
Потенциометры, дифференциальные преобразователи, распознаватели,
измерители деформации, тахометры, пьезоэлектрические устройства,
гироскопы, меха, диафрагмы, расходометры, термопары, термисторы, и
резистивные датчики температуры являются примерами датчиков в ин-
женерных системах.
5.1 .1 .1 измеряемые значения и измерения
Переменная, которую измеряют, называют, измеряемым значением.
Примерами являются ускорение и скорость средства передвижения,
крутящий момент в шарнире робота, натяжение элемента конструкции,
температура и давление производственного процесса, и сила тока в элек-
трической цепи. Выход блока датчика – это измерение. Природа измеря-
емой величины и природа выхода датчика обычно довольно различны.
Например, измеряемая величина акселерометром это ускорение, а выход
акселерометра может являться зарядом или напряжением. Схожим обра-
зом, измеряемая величина тензочувствительного моста это деформация,
а выход моста – это напряжение. Однако, датчик может быть откалибро-
ван в единицах измерения измеряемой величины (например, в единицах
ускорения или деформации).
5.1 .1 .2 Датчик и Преобразователь
Измеряющее устройство проходит через две главные стадии при измере-
нии сигнала. Сначала, чувствительный элемент фиксирует или чувству-
404
ет измеряемую величину. Потом, это сигнал преобразуется (или конвер-
тируется)
в форму выхода устройства. По факту, датчик, который
улавливает отклик автоматически, конвертирует (т.е. преобразует) этот
сигнал в выход датчика — отклик элемента датчика. Например, пьезоэ-
лектрический акселерометр улавливает ускорение и конвертирует его в
электрический заряд; электромагнитный тахометр улавливает скорость
и конвертирует ее в напряжение; а датчик вала улавливает вращение и
конвертирует его в серию импульсов напряжения. Так как улавливание и
преобразование идут рука об руку, то термины датчик и преобразователь
взаимозаменяемо обозначают весь блок датчик-преобразователь. Ста-
дии датчика и преобразователя – это функциональные стадии, и иногда
непросто разделить их, или раздельно идентифицировать физические
элементы с ними связанные. Кроме того, это разделение и не очень важ-
но в современных устройствах. Однако, правильное разделение стадий
датчика и преобразователя (физически и функционально) это ключевой
момент при разработке новых измерительных приборов.
5.1 .1 .3 аналоговые и Цифровые Устройства Датчик-Преобразова-
тель
Обычно, полученный сигнал преобразуется (или конвертируется) в фор-
му, которая о собенно удобна для передачи, перезаписи, обработки, под-
счета, контроля, активации контроллера или управления силовым при-
водом. Поэтому выход преобразователя часто является электрическим
сигналом. Измеряемая величина — это обычно аналоговый сигнал, пото-
му что он представляет собой выход динамической системы. Например,
заряд, генерируемый в пьезоэлектрическом акселерометре нужно кон-
вертировать в напряжение нужного уровня, используя усилитель заряда.
Для использования датчика в цифровом контроллере, его нужно оцифро-
вать с использованием аналого-цифрового преобразователя (АЦП). Зна-
чит, аналоговый датчик и АЦП можно объединить и назвать цифровым
преобразователем. Существуют другие устройства с выходом в форме
импульсов без использования АЦП. В общем случае, в цифровом преоб-
разователе, выход дискретен и обычно является серией импульсов. Такие
дискретные выходы могут быть посчитаны и представлены в цифровой
форме. Это обычно приводит к оснащению цифровых преобразователей
цифровым процессором.
405
5.1 .1 .4 обработка Сигналов Датчика
У сложного измерительного прибора может быть и не одна стадия улав-
ливания сигналов. Зачастую измеряемая величина проходит через не-
сколько стадий преобразования до того, как становится доступной для
практического использования. Кроме того, может понадобиться филь-
трация для удаления шума измерения и других типов шумов и возмуще-
ний, которые входят в истинную измеряемую величину (включая шум
процесса и внешние входные возмущения). Следовательно, обработка
сигнала обычно нужна между датчиком и приложением. Усилители за-
рядов, синхронные усилители, усилители мощности, усилители комму-
тации, линейные усилители, усилители широтно-импульсной (ШИМ)
модуляции, следящие полосовые фильтры, фильтры нижних частот,
фильтры верхних частот, полосовые фильтры, и режекторные фильтры
являются устройствами обработки сигналов и используются измери-
тельных и инструментальных приложениях. Тема обработки сигналов
обсуждена в Главе 3, и там же описаны обычные устройства обработки
сигналов. В некоторых книгах устройства обработки сигналов, такие как
электронные усилители, так же классифицируют как преобразователи.
Так как мы рассматриваем устройства обработки и модификации сигна-
лов отдельно от измерительных устройств, то такой унифицированной
классификации будем по возможности избегать, и термин преобразова-
тель используется в первую очередь по отношению к измерительным
приборам. Заметьте, что как-то излишне считать датчики-преобразова-
тели электричества в электричество устройствами измерения, потому
что электрические сигналы нуждаются в обработке только перед тем
как использовать их для чего-то полезного. В этом смысле, преобразо-
вание одних электрических сигналов в другие должно скорее считаться
функцией обработки, а не функцией измерения. Дополнительные компо-
ненты, такие как источники питания, изолирующие устройства, и блоки
защиты от всплесков зачастую нужны в приборах инженерных систем,
но они лишь косвенно связаны с функциями приема сигналов и приведе-
ния механизмов в действие. Реле и другие переключающие устройства,
а также модуляторы и демодуляторы (смотри Главу 3) тоже могут быть
включены в обработку сигналов (или их преобразование). Современные
датчики-преобразователи могут иметь встроенную цепь обработки, осо-
бенно в виде монолитно-интегральной схемы (ИС). Тогда довольно труд-
но физически разделить датчик, преобразователь и обработчик сигналов
в общем аппаратном блоке. Схематическое представление процесса по-
406
лучения сигналов и их применения показано на Рисунке 5.1 .
5.1 .1 .5 чистые, Пассивные и активные Устройства
Чистые устройства используют недиссипативные пары сигналов в ста-
дии преобразования. Пассивные преобразователи (иногда их называют-
ся самогенерирующие преобразователи) используют для работы свои
характеристики передачи мощно сти и не нуждаются во внешних источ-
никах напряжения. Из этого следует, что чистые преобразователи - это
в сущности пассивные устройства. Некоторые примеры – это электро-
магнетические, термоэлектрические, радиоактивные, пьезоэлектриче-
ской и фотогальванические преобразователи. Активныеe датчик/преоб-
разователи нуждаются во внешнем источнике напряжения для работы, и
они не полагаются на собственные характеристики конверсии для этих
целей. Хороший пример активного устройства это резистивный преоб-
разователь, такой как потенциометр, который полагается на рассеивание
мощности при проходе через резистор, чтобы создать выходной сигнал.
А именно, активный преобразователь требует отдельного источника на-
пряжения (источника питания) для работы, в то время как пассивный
преобразователь берет мощность от измеряемого сигнала (измеряемой
величины). Так как пассивные преобразователи берут энергию почти
полностью от измеряемой величины, то они в общем как правило иска-
жают (или нагружают) измеряемый сигнал больше, чем активные преоб-
разователи. Нужно принять меры предосторожности, чтобы уменьшить
такие эффекты нагрузки. С другой стороны, пассивные преобразовате-
ли достаточно про сты в разработке, более надежны и меньше стоят. В
настоящей классификации преобразователей мы имеем дело с напря-
жением непосредственно стадии преобразования, связанной с измеря-
емой величиной, а не с напряжением последующей обработки сигнала.
Например, генерация заряда пьезоэлектриком – это пассивный процесс.
Но, усилитель заряда, использует вспомогательный источник питания,
понадобится для обработки сгенерированного заряда.
РИСУНОК1 5.1 Стадии измерения и приложения.
407
5.1 .2 типы Датчиков и их выбор
Датчики можно классифицировать разными способами. Одна класси-
фикация основана на природе измерений (измеряемой величины). Еще
одна категория основана на физических принципах или технологиях, ко-
торые используются в самом датчике. Очевидно, эти две категории не
связаны напрямую.
5.1 .2 .1 классификация Датчиков, основанная на типе измеряемой
величины
Первоочередным параметром в выборе датчика является природа вели-
чины (переменной, параметра), которую нужно измерить. В основанной
на этом классификации датчики делятся поля (дисциплины или области
применения) и вот некоторые примеры классов измеряемых величин.
Биомедицинские: Перемещение, сила, состав крови, кровяное давление,
температура, скорость потока, состав мочи, состав выделенный, ЭКГ,
звук дыхания, пульс, рентгеновское изображение, ультразвуковое изо-
бражение
Химические: Органические компоненты, неорганические компоненты,
концентрация, скорость передачи тепла, температура, давление, ско-
рость потока, влажность
Электрические/электронные: Напряжение, сила тока, заряд, пассивные
параметры цепи, электрическое поле, магнитное поле, магнитный поток,
электрическая проводимость, диэлектрическая проницаемость, прони-
цаемость, магнитное сопротивление
Механические: Сила (усилие, включая крутящий момент), движение
(включая позицию и отклонение), оптическое изображение, другие изо-
бражения (рентгеновские, акустические и т.д.), натяжение, деформация,
свойства материала (плотность, модули Юнга, модуль сдвига, твердость,
коэффициент Пуассона)
Терможидкостные: скоро сть потока, скорость передачи теплоты, инфра-
красные волны, давление, температура, влажность, уровень жидкость,
плотность, вязко сть, число Рейнольдса, термическая проводимость, ко-
эффициент передачи теплоты, число Биота, изображение
408
5.1 .2 .2 классификация датчиков, основанная на технологиях датчи-
ков
Датчики разрабатываются с использованием различных физических
принципов и технологий, и могут быть классифицированы на их осно-
вании. Эта классификация особенно удобна в разработке, развитии и
оценке датчика, чем выбор датчика для конкретной задачи. Концепты,
принципы и технологии датчика полезны при его моделировании. Мо-
дель потом может быть использована не только для оценки эффектив-
ности датчика, но и для изучения эффективности всей системы с ин-
тегрированным датчиком. Некоторые классы датчиков, основанные на
их физических принципах и технологиях перечислены здесь: активные,
аналоговые, цифровые, электрические, ИС, механические, оптические,
пассивные, пьезоэлектрические, пьезорезистивные, фотоупругие.
5.1 .2 .3 выбор датчика
В выборе датчика/ов для конкретной задачи, мы должны знать прило-
жение и его цель, и какие величины (переменные и параметры) нужно
измерить в этом приложении. Потом, сделав, тщательное исследование,
мы должны определить какие датчики способны сделать нужные изме-
рения и какие величины не могут быть измерены (из-за недоступности,
недостатка датчиков и т.д.) В последнем есть варианты
•
Оценить величину, использовав другие величины, которые можно
измерить
•
Разработать новый датчик для этой цели
В качестве начального шага в процессе выбора датчика для конкретно-
го приложения мы можем заполнить таблицу в форме, приведенной в
Таблице 5.1 . Следующие шаги сбора информации, анализа, симуляции
и оценки стремятся сопоставить имеющиеся датчики с целями прило-
жения. Это так же и процесс сопоставления характеристик имеющих-
ся устройств с требующимися характеристиками. Здесь придется пойти
дальше простого сопоставления двух наборов данных. Такие параметры
как чувствительность и пропускная способность в частности (смотри
Главу 3 для подхода, основанного на чувствительности и на пропуск-
ной способности в разработке и приборостроении), а также множество
параметров эффективности может быть использовано для этих целей.
Процесс выбора датчиков может быть выполнен за несколько итераций
до того, как окончательный выбор и приобретения будут сделаны.
409
Если такое сопоставление невозможно, то мы должны исследовать ка-
кие другие приборы или модификации могут быть использованы для до-
стижения сопоставления (это может включать модификацию сигналов,
включение усиления, подбор импедансов и т.д.). Если все эти попытки
не ведут к подходящему выбору датчиков, то мы можем изменить харак-
теристики приложения и/или разработать новые датчики для этой зада-
чи.
На сегодняшний день выбор датчиков довольно обширен и разнообра-
зен. Следовательно, в практике приборостроения ограничения эффек-
тивности системы происходят не из-за датчиков, а из-за других компо-
нентов (обработчиков сигнала, конверторов, передатчиков, актуаторов,
источников питания и т.д .).
5.2 Датчики для Электромеханических Приложений
410
Теперь же мы проанализируем некоторые аналоговые датчики-преобра-
зователи, которые обычно используют в приборо строении инженерных
систем. Здесь мы попытаемся не представить исчерпывающее обсуж-
дение всех типов датчиков; скорее, рассмотреть репрезентативную вы-
борку. Такой подход обоснован тем, что даже если научные принципы,
использованные в датчиках разнятся, многие другие аспекты (например,
параметры эффективности и технические характеристики, выборка, об-
работка сигнала, интерфейс, процедуры моделирования, анализ) могут
быть общими в значительной степени датчиков.
Мы начнем рассмотрение с датчиков для электромеханических задач
или мехатроники. А именно, мы здесь изучаем основные типы датчиков
передвижения (включая позиционирование, близость, прямолинейную и
угловую скорость, и ускорение). Потом мы перейдем к датчикам усилия
(силы, крутящего момента, касания и т.д .). Вслед за этим мы рассмотрим
другие типы датчиков, включая терможидкостные датчики и камеры.
Цифровые преобразователи, датчики МЭМС, а другие передовые темы
рассмотрены в Главе 6.
5.2 .1 Преобразователи движения
Под движением мы конкретно понимаем один или несколько из четырех
кинематических переменных:
•
Перемещение (включая позиционирование, расстояния, близость,
размер и масштаб)
•
Скорость (скорость изменения перемещения)
•
Ускорение (скорость изменения скорости)
•
Рывок (скорость изменения ускорения)
Каждая переменная в этой классификации это производная по времени
от предыдущей.
Измерения передвижения особенно полезны в контролировании меха-
нических откликов и взаимодействий инженерных систем, в частно сти
мехатронных. Можно привести бесчисленное множество примеров: ско-
рость вращения заготовки и скорость подачи инструмента замеряются
контролирующими механическими операциями. Перемещения и ско-
рости (и угловые и поступательные) в соединительных частях (враща-
ющихся и призматических) робота манипулятора или кинематической
связи используются в контроле траектории манипулятора. В высоко-
скоростных наземных средствах передвижения, измерения ускорения
и рывка могут быть использованы для контроля активности подвески,
411
чтобы улучшить качество езды. Угловая скорость — это ключевое изме-
рение, которое используется при контроле вращающихся машин, таких
как турбины, помпы, компрессоры, двигатели, блоки трансмиссии или
коробки передач, и генераторы на энергопроизводящих предприятиях.
Датчики близости (меряющие расстояния) и акселерометры (меряющие
ускорение) – это два самых обычных типа измерительных устройств,
использующихся в системах защиты механизмов для отслеживания со-
стояния, предсказания ошибок, диагноза и контроля больших и слож-
ных механизмов. Зачастую, акселерометр является единственным изме-
рительным прибором, использующимся в контрольных динамических
испытательных стендах (например, для испытания вибрацией). Измере-
ния расстояния используются для контроля регулирующих вентилей в
приложениях процесса. Толщина плиты (или калибр) постоянно наблю-
дается в системе автоматического контроля толщины полосы (САРТ) в
сталепрокатных станах.
Мы можем сомневаться в нужде раздельных преобразователей для из-
мерения четырех кинематических переменных – перемещения, скоро-
сти, ускорения и рывка – потому что любая переменная связана с другой
через простое интегрирование или дифференцирование. Должно быть
теоретически возможно измерить только одну из четырех переменных,
и использовать либо аналоговую обработку (через аналоговую схему)
или цифровую обработку (через процессор), чтобы получить любую из
остальных переменных движения. Однако, осуществимость такого под-
хода сильно ограничена, и она сильно полагается на несколько факторов,
включая следующие:
1 Природа измеренного сигнала (например, постоянный, высоко пере-
ходный, периодический, узкополосный, широкополосный)
2 Нужная частотность обработанного сигнала (или нужный диапазон ча-
стот)
3. Отношение сигнал-шум (ОСШ) измерения
4. Доступные возможно сти обработки (например, аналоговая или циф-
ровая обработка, ограничения цифрового процессора и интерфейса, та-
кие как скорость обработки, частота выборки, и размер буфера)
5. Требования контроллера и природа оборудования (например, постоян-
ные времени, задержки, сложность, ограничения схемы приборов)
6. Требуемая точность приложения (от которого зависят требования к
обработке и цены на приборы).
Например, дифференциация сигналов (по времени) зачастую неприем-
412
лема для шумных или высокочастотных узкополосных сигналов, пото-
му что это увеличит трудности с неприемлемыми высокочастотными
компонентами. В любом событии могут потребоваться дорогие прибо-
ры обработки сигналов для предобработки перед дифференцированием
сигнала. На практике, в низкочастотных приложениях (порядка 1 Гц),
измерения расстояния обычно дают неплохую точно сть. В среднечастот-
ных приложениях (<1 кГц), обычно предпочитают измерения скорости.
При измерении высокочастотных движений с высоким уровнем шума,
предпочитают измерение ускорения. Рывок особенно полезен в назем-
ном транспорте (качество езды), при производстве (ковка, прокатка, рез-
ка, и подобные операции по типу влияния), и в приложениях защиты от
ударов (для тонкого и чувствительного оборудования), которое учитыва-
ет высоко переходные (и высокочастотные) сигналы.
5.2 .1 .1 Многозадачные Элементы Датчиков
Соотношение один к одному не всегда существует между измеряющим
устройством и измеряемой переменной. Более того, конкретный тип эле-
мента датчика может использоваться во множестве датчиков. Например,
хоть тензодатчики – это устройства, которые измеряют деформацию (и,
следовательно напряжения и силы), они могут быть адаптированы для
измерения перемещений, при использовании подходящего вспомога-
тельного элемента датчика, такого как кантилевер (или пружина). Кро-
ме того, измерительное устройство может использоваться для измере-
ния различных переменных через подходящую технику интерпретации
данных. Например, пьезоэлектрические акселерометры со встроенными
микроэлектронными интегральными схемами (ИС) продаются как пье-
зоэлектрические преобразователи скорости. Полученные сигналы, ко-
торые дают угловое перемещение, дифференцируются, чтобы получить
угловые скорости. Генерирующие импульс (или цифровые) преобразова-
тели, такие как оптические кодировщики и цифровые тахометры, могут
служить и преобразователями перемещения и скорости, зависимости от
счета числа импульсов или их частоты. Заметьте, что частота импульсов
может измеряться подсчетом числа импульсов за определенный отрезок
времени (т.е. счет импульсов), или стробированием высокочастотного
часового сигнала через ширину импульса (т.е. синхронизация импуль-
сов). Кроме того, в частности, любой датчик силы может использоваться
как датчик ускорения, датчик скорости или перемещения, в зависимо-
сти от конкретного дополнительного элемента прямой связи (например,
413
инерция, демпфер, пружина), который был использован.
5..2 .1 .2 выбор Преобразователя Перемещения
При выборе преобразователя движения мы должны рассмотреть не-
сколько факторов. Некоторые первоначальные темы приведены ниже:
1. Кинетическая природа измеряемой величины (положение, близость,
перемещение, скорость, ускорение и т.д.)
2. Прямолинейное (обычно называемое линейным) или ротационное
(обычно называемое вращательным) движение
3. Контактный или неконтактный тип
4. Диапазон измерений
5. Требуемая точность
6. Требуемый диапазон частот операций (постоянные времени, про-
пускная способность)
7. Размер
8. Стоимо сть
9. Окружающая среда (например, магнитные поля, температура, давле-
ние, влажность, вибрация, столкновения)
10. Ожидаемый срок службы
5.2 .2 Датчики Усилий
Механическая система реагирует (выходной сигнал) на возбуждение
(входной сигнал) сделанное усилием, таким как сила или крутящий мо-
мент примененным к ней. Кроме точечных сил и крутящих моментов,
усилие может быть применено как распределенная
сила или крутящий момент, например, как тактильная сила. В этом смыс-
ле, усилие — это то, что управляет системой, и является важным предме-
том рассмотрения в приложении, которое включает в себя динамическую
механическую систему. Более того, многие существующие приложения,
чьи характеристики эффективности выражены в терминах сил и крутя-
щих моментов. Примеры включают в себя машинные операции, такие
как шлифовка, резка, ковка, экструзия и прокатка; задачи манипулятора
такие как сбор и обслуживание частей, гравировка и тонкая манипуля-
ция; устройства тактильной телеоперации; и действительные задачи, та-
кие как движение.
Силы и крутящие моменты, которые представлены в динамической
414
системе обычно являются функциями времени. Наблюдение и оценка
эффективности, обнаружение ошибок и диагностика, тестирование и
контроль динамических систем может сильно зависеть от точных из-
мерений соответствующих сил и крутящих моментов. Примером того,
где считывание сил (и моментов) может быть очень полезным – это бу-
рильный робот. Сверло держится за рабочий конец захватом робота, а
заготовка твердо закреплена на несущей конструкции зажимами. Хотя
можно использовать датчик перемещения, такой как потенциометр или
дифференциальный трансформатор, для измерения движения бура в на-
правлении оси, только это не определяет эффективность бура.
В зависимости от свойств материала заготовки (например, твердости)
и природы сверла (например, степени износа), небольшая разрегулиро-
ванность или малое отклонение в подаче (осевом движении) или скоро-
сти (вращательная скорость сверла) может создать большие нормальные
(осевые) и боковые силы и моменты сопротивления. Это может создать
проблемы, такие как чрезмерные вибрации и биения, неровное бурение,
излишний износ инструмента и плохое качество изделия. В конце кон-
цов это может привести к большой механической ошибке. Считывание
осевой силы или крутящего момента мотора, например, и использова-
ние информации для настройки переменных процесса (скорости, скоро-
сти подачи и т.д.), или даже для создания предупреждающих сигналов
и конечной о становки процесса, может значительно улучшить эффек-
тивность системы. Еще один пример, в котором считывание силы очень
полезно, это нелинейный контроль обратной связи (или техника линеа-
ризации обратной связи или ЛОС) или механические системы, такие как
роботы манипуляторы.
Так, как и сила и крутящий момент — это переменные усилия, то тер-
мин сила может употребляться для обоих переменных. Это обобщение
принимается здесь за исключением случая, где различия могут быть не-
обходимы – например, при обсуждении датчиков крутящего момента и
особые приложения для них.
5.2 .2 .1 Датчики Силы и измерение Движения
В принципе любой датчик силы может быть использован как датчик
ускорения, датчик скорости или датчик перемещения, в зависимости от
конкретного дополнительного элемента прямой связи, который исполь-
зуется. В частности, мы можем использовать
415
1. Элемент инерции (для пропорциональной конвертации ускорения в
силу)
2. Демпфер (для пропорциональной конвертации скорости в силу)
3. Пружинный элемент (для пропорциональной конвертации переме-
щения в силу)
Тогда, как схематично показано на Рисунке 5.2, мы можем использовать
считывание скорости для измерения ускорения, скорости или перемеще-
ния.
Важно: Практическая реализация идеального преобразователя скорости
в силу довольно сложна, в основном из-за нелинейности в элементах
демпфера (предположение о линейном вязком демпфере не очень реа-
листично).
5.2 .2 .2 Положение Датчика Силы
С точки зрения улучшения точности, датчик силы должен быть располо-
риСУНок 5.2 Использование дополнительного элемента прямой связи и счи-
тывание силы для измеренияe. (a) Ускорение, (b) скорость, и (c) перемещение.
416
жен именно в том месте, где нужна информация о силе. Иногда, однако,
может быть сложно (или даже невозможно) поместить датчик в нужном
месте (из-за недоступности, движению компонентов, риска, и т.д .). Тог-
да, можно поместить датчик в другом месте и потом оценить силу в нуж-
ном месте, использовав измеренные данные.
Есть и другие темы в отношении расположения датчика. С точки зрения
увеличения стабильно сти системы контроля обратной связи, например,
лучше всего расположить датчики в местах приводов, даже тогда, когда
груз, чье движение нужно измерить (для контроля обратной связи) на-
ходится еще дальше от привода (например, от расположения мотора). В
контроле обратной связи силы, местоположение датчика в соотношении
с местом актуации может иметь ключевое значение в эффективности си-
стемы, особенно в ее стабильности. Например, в приложениях с мани-
пуляциями роботов, было выяснено опытным путем, что при некоторых
взаимных местоположениях и конфигурациях зоны считывания силы
на роботе и эффектора, динамические нестабильности присутствуют в
отклике манипулятора при некоторых (больших) значениях контроль-
ных данных в обратной связи силы. Эти нестабильности, в большинстве
случаев, оказались ограниченными круговыми движениями. В целом,
известно, что когда датчики силы расположены более удаленно по от-
ношению к актуаторам движения механической системы, то система с
большей вероятностью покажет нестабильности при контроле обратной
связи силы. Следовательно, измерения желательно делать очень близко к
положению актуаторов при использовании обратной связи силы.
Рассмотрим задачу механического процесса. Актуатор инструмента соз-
дает силу, которая применяется к заготовке. Сила передается заготовке
инструментом, измеряется датчиком силы и используется контроллером
обратной связи для создания корректной силы актуатором. Станок – это
динамическая система, которая состоит подсистемы инструмента (дина-
мической) и актуатора инструмента (динамической). Заготовка так же
является динамической системой.
Взаимное расположение актуатора инструмента по отношению к датчи-
ку силы (в интерфейсе инструмент-заготовка) может повлиять на ста-
бильность контроля обратной связи системы. В общем, чем ближе акту-
атор к датчику, тем стабильнее будет система контроля обратной связи.
На Рисунке 5.3 показаны два сценария, которые можно использовать для
изучения стабильности всей системы в общем. В обоих случаях, дей-
ствующая сила на интерфейс между инструментом и заготовкой изме-
ряется датчиком силы и используется в контроллере обратной связи для
417
создания ведущего сигнала актуатора. На Рисунке 5.3a, актуатор инстру-
мента, который создает ведущий сигнал, расположен рядом с датчиком
силы. На Рисунке 5.3b, актуатор инструмента отделен от датчика силы
динамической системой работающего станка. Известно, что расположе-
ние (b) менее стабильно, чем расположение (a). Причина проста. Распо-
ложение (b) дает больше динамических задержек в петлю контрольной
обратной связи. Хорошо известно, что задержка по времени имеет деста-
билизирующий эффект на систему контроля обратной связи, особенно
при высоких усилениях контроля.
5.3 Потенциометр
Хотя давным-давно потенциометр или пот первоначально использовался
как устройство для получения переменного напряжения или перемен-
РИСУНОК 5.3 (a) Датчик силы расположен рядом с актуатором и (b) датчик
силы отделен от актуатора динамической подсистемой.
418
ного сопротивления в цепи или каком-то приложении (вручную повора-
чивая ручку), здесь мы рассматриваем его как преобразователь переме-
щения. Это активный преобразователь, который состоит из однородной
катушки провода или тонкого слоя материала высокого сопротивления,
такого как углерод, платина, металлокерамика (металлический элемент
сопротивления на керамической подложке), или проводящего пластика,
чье сопротивление пропорционально длине. Этот принцип можно ис-
пользовать для измерения и прямолинейного перемещения (с помощью
линейного потенциометра) и угловых перемещений (с помощью ротаци-
онного пота).
Коммерческий линейный (или более корректно прямолинейный) потен-
циометр показан на Рисунке 5.4a. Постоянное напряжение vref применя-
ется к катушке (или пленке) при использовании внешнего источника по-
стоянного тока. Выходной сигнал vo преобразователя – это напряжение
риСУНок 5.4 (a) Линейные потенциометры (сделано Alps Electric, Auburn
Hills, MI), (b) схематическая диаграмма потенциометра, и (c) нагрузка потен-
циометра.
Wiper (slider)
Arm – ползунок
(Supply) – источник
(Measurement) – измерение
Measurаnd – изеренный
419
постоянного тока между подвижным контактом (рычагом или ползун-
ком), перемещающимся по катушке и терминалом опорного напряже-
ния катушки, как схематически показано на Рисунке 5.4b. Перемещение
ползунка x пропорционально выходному напряжению:
vo=kx
(5.1)
Это соотношение называют законом или наклоном потенциометра.
Ошибки нагрузки: Уравнение 5.1 предполагает, что выходной терминал
находится в открытой цепи; то есть, нагрузка бесконечного импеданса
(или сопротивление в настоящем случае постоянного тока) присутствует
на выходных терминалах, так что сила тока выхода равна нулю. На прак-
тике, однако, электрическая нагрузка (схема, в которую подается сигнал
потенциометра—например, схема обработки, взаимодействия, расчета
или контроля) имеет конечный импеданс. Следовательно, выходной ток
(сила ток через нагрузку) не равен нулю, как показано на Рисунке 5.4c.
Таким образом выходное напряжение падает до ṽo, даже если опорное
напряжение vref предположительно о стается неизменным при разных
нагрузках (т.е., даже если выходной импеданса источника напряжения
равен нулю); это следствие известно, как эффект нагрузки преобразо-
вателя (а именно, электрической нагрузки), как было описано в Главе 2.
При этих условиях линейное соотношение Уравнения 5.1 не будет вер-
ным, добавляя ошибку в данные о перемещении.
Электрическая нагрузка может повлиять на преобразователь двумя спо-
собами:
1. Она изменит опорное напряжение (т.е., нагрузку источника напря-
жения).
2. Она нагрузит преобразователь.
Для уменьшения этих эффектов нужно использовать источник напря-
жения, который сильно не меняет выходное напряжение из-за различ-
ных нагрузок (например, отрегулированный или стабильный источник с
малым выходным импедансом), и систему сбора данных (включающую
схему обработки данных) с высоким входным импедансом.
Потенциометр, будучи контактным датчиком, создает также и ошибку
механической нагрузки. А именно, движущаяся часть объекта, чье пе-
ремещение измеряется потенциометром должна быть напpямую подсое-
динена к его ползунку, который находится в контакте с сопротивлением.
420
Соответствующее трение скольжения напрямую влияет на измеряемый
объект и на его движение. Для уменьшения эффекта механической на-
грузки мы должны уменьшить трение скольжения (в этом случае прово-
дящие пластики лучше углерода) и массу ползунка.
Преимуществами использования проводящих пластиков в потенцио-
метрах являются уменьшенное трение (низкая механическая нагрузка),
уменьшение износа, уменьшение веса и увеличенное разрешение.
5.3 .1 ротационные потенциометры
Потенциометры, которые измеряют угловые (вращательные) перемеще-
ния более удобны и просты, из-за того, что в традиционных прямолиней-
ных (поступательных) потенциометрах, длину элемента сопротивления
нужно увеличивать пропорционально диапазону измерений или ударов.
Элемент сопротивления ротационных потенциометров может разниться
от 10 Ом до 1 МОм. Мощность их может быть от 10 мВт до нескольких
ватт. Они могут быть маленькими (до 5 мм в диаметре). Рисунок 5.5a
показывает коммерческий ротационный (вращательный) потенциометр.
Рисунок 5.5b показывает схему цепи ротационного потенциометра и
Рисунок 5.5c показывает внешний вид, включая три клеммы, которые
риСУНок 5.5 (a) Ротационные потенциометры (сделано Alps Electric, Auburn
Hills, MI), (b) ротационный потенциометр с резистивной нагрузкой, и (c) внеш-
ние детали.
421
отвечают опорному напряжению клемма 1 (земля) и 3 (фаза) мощно сти
потенциометра и выход (2), дающий значения, считываемые потенцио-
метром (в Вольтах). Потенциометры спирального типа могут измерять
абсолютные углы, превышающие 360°. Ту же функцию может исполнять
и обычный потенциометр кругового типа, при включении счетчика пол-
ных оборотов 360°.
Важно, что угловые преобразователи перемещения, такие как ротаци-
онные потенциометры, можно использовать для измерения больших
прямолинейных перемещений порядка 3м. Для этого можно привлечь
механизм растяжения троса. Легкий трос, намотанный на катушку, кото-
рый двигается вместе с ротационным элементом преобразователя – это
и есть механизм растяжения тро са. Свободный конец троса прикреплен
к движущемуся объекту и основание потенциометра закреплено на ста-
ционарное сооружение. Устройство тщательно откалибровано таким
образом, что, если объект движется, измеренное количество полных
оборотов плюс частичное вращение напрямую дают прямолинейное пе-
ремещение. Подпружиненное устройства отдачи, такое как пружинный
двигатель, сматывает трос назад, когда объект движется к преобразова-
телю.
5.3 .1 .1 Нелинейность Нагрузки
Рассмотрим ротационный потенциометр, показанный на Рисунке 5.5 .
Обсудим теперь важность ошибки нелинейно сти, возникающей в связи
с электрической нагрузкой чисто резистивной нагрузки, подключенной к
потенциометру. Для позиции ползунка θ предположим сопротивление на
выходе (снятое с клеммы 2) при этом сегменте катушки равно Rθ.
Предполагая, что катушка равномерна, можно получить
где RC это общее сопротивление катушки потенциометра. Текущий ба-
ланс в точке ползунка (точка 2) дает
(5.3)
где RL это сопротивление нагрузки. Умножим Уравнение 5.3 на RC и
используем Уравнение 5.2 . Мы получим, (vref − vo)/(1 − θ/θmax) = (vo/(θ/
422
θmax)) + (vo/(RL/RC)). После простых алгебраических преобразований,
мы получим
Уравнение 5.4 изображено графиком на Рисунке 5.6 . Ошибка нагрузки
кажется большой для небольших значений отношения RL/RC . Хорошая
точность достижима при RL/RC > 10, особенно для малых значений θ/
θmax.
Должно быть ясно, что нужно сделать следующее для уменьшения оши-
бок нагрузки потенциометра:
•
Увеличить RL/RC (увеличить импеданс нагрузки, уменьшить импе-
данс катушки)
•
Использовать потенциометры для измерения малых значений θ/θmax
(или откалибровать только малый сегмент элемента сопротивления
для линейности данных)
Ошибка нелинейности нагрузки определяется как
(5.5)
Ошибка при θ/θmax = 0.5 для трех значений отношения нагрузок пока-
риСУНок 5.6 Нелинейность электрической нагрузки в потенциометре.
423
зана в Таблице 5.2 . Важно, что эта ошибка всегда отрицательна. Исполь-
зование только сегмента элемента сопротивления как диапазон потенци-
ометра
похоже на добавление двух конечных резисторов к элементам. Известно,
что этот способ как правило линеаризует потенциометр. Если известно,
что сопротивление нагрузки мало, то можно использовать повторитель
напряжения на выходе потенциометра, чтобы в сущности исключить
ошибку нагрузки, так как это добавление даст высокий импеданс потен-
циометру и низкий на выходе усилителя.
5.3 .2 рассмотрение Эффективности
Потенциометр — это преобразователь с резистивной связью. Это ак-
тивное устройство, которому требуется внешний источник питания для
работы. Сила, нужная для передвижения ползунка исходит от источни-
ка движения, а энергия в результате рассеивается через трение. Такая
конверсия энергии, в отличие от чисто механико-электрической конвер-
сии, привлекает довольно большие силы и энергия скорее тратится, чем
конвертируется в выходной сигнал преобразователя. Более того, энергия
электричества от опорного источника так же рассеивается через элемент
сопротивления (катушку или пленку), и в результате дает нежелательное
увеличение температуры и деградацию катушки. Это два очевидных не-
достатка использования потенциометра.
5.3 .2 .1 Характеристики Потенциометров
Ход (для линейного движения), сопротивление, опорное напряжение, и
424
мощность (при полном сопротивлении) – это ключевые параметры потен-
циометра. Максимальное движение ползунка для линейного потенцио-
метра называется его ходом. Он может быть от нескольких миллиметров
до 75см. Сопротивление потенциометра следует выбирать осторожно.
С одной стороны, элемент с высоким сопротивлением считается лучше,
поскольку это уменьшит рассеивание мощности для заданного опорного
напряжения, что дает дополнительные плюсы от уменьшения темпера-
турных эффектов и увеличивает срок службы потенциометра. С другой
стороны, увеличенное сопротивление увеличивает выходной импеданс
потенциометра и в результате соответственно увеличивает ошибку не-
линейности нагрузки если только соответственно не увеличить сопро-
тивление нагрузки. Потенциометры с низким сопротивлением имеют
сопротивления ниже 10 Ом. С высоким же выше 100 кОм. Проводящие
пластики могут дать высокое сопротивление – обычно около 100 Ω/
мм—и все больше используются в потенциометрах. Полное сопротив-
ление элемента потенциометра указано на его основании. Иногда, это
значение указывают, используя код (например, 103 означает 10 и 3 нуля,
или 10,000 Ом).
Еще один параметр характеристики, который важен для безопасно сти
использования - это диэлектрическое напряжение. Это напряжение, ко-
торое безопасно может выдержать изоляция между элементом сопротив-
ления и оболочкой (корпусом и валом) потенциометра (скажем, 2,5 кВ).
Другие меры предо сторожности включают в себя использование неме-
таллических (скажем, пластиковых) ползунков (для линейного потенци-
ометра) или валов (для ротационного) и тщательное заземление.
5.3 .2 .2 разрешающая Способность
Потенциометр с катушкой имеет конечную разрешающую спо собность.
Когда катушка используется в элементе сопротивления прибора, то кон-
такт ползунка прыгает от одного витка к другому. Соответственно, раз-
решающая способность потенциометра катушечного типа определяется
числом витков в катушке. Для катушки с N витками, разрешающая спо-
собность r, выраженная в процентном соотношении к диапазону выхода,
дается соотношением
425
Разрешающая способность
Потенциометр типа катушка имеет ограниченную разрешающую спо-
собность. Когда катушка используется в качестве резистивного элемента
потенциометра, контакт ползунка прыгает от одной стороны к другой.
Соответственно, разрешающая способность потенциометра типа катуш-
ки определяется числом витков в катушке. Для катушки, которая имеет N
витков, разрешение R, выраженное в процентах от выходного диапазона,
задается
Разрешающая спо собность (меньше), чем 0,1% (т.е . 1000 оборотов) до-
пустима для катушечных потенциометров. Практически бесконечно ма-
лая разрешающая способность (неправильно называемая бесконечной)
возможна с современными высококачественными резистивными пле-
ночными потенциометрами, которые используют проводящие пластмас-
сы или металлокерамику. Затем разрешающая способность ограничена
другими факторами, такими как механические ограничения и SNR. Тем
не менее, разрешающая способность в порядке 0,01 мм возможна с хоро-
шими прямолинейными потенциометрами.
При выборе потенциометра для конкретного применения, несколько
факторов, должны быть рассмотрены. Как уже отмечалось выше, они
включают в себя сопротивление элемента, потребляемую мощность, на-
грузку, разрешение и размер.
5.3 .2 .3 чувствительность
Чувствительность потенциометра показывает изменение (Δvo) в выход-
ном сигнале, ассоциированного с данным малым изменением (Ае) в из-
меряемой величине (смещении). Чувствительность обычно приводится
к безразмерному виду с использованием фактического значения выход-
ного сигнала (VO), и фактического значения смещения (q). Для ротаци-
онного потенциометра в частности, чувствительность S задается
Эти отношения могут приводиться к безмерному виду путем умножения
на θ/vo Выражение для S может быть получена путем простой замены
уравнения 5.4 на 5.7 .
Существуют некоторые ограничения и недостатки потенциометров как
устройств, измеряющих смещение
426
1. Усилие, необходимое для перемещения ползунка (против трения и
инерции рычага) обеспечивается смещение источника. Эта механиче-
ская нагрузка искажает измеряемый сигнал.
2. Высокочастотные измерения не представляется возможным из-за та-
ких факторов, как отскок слайдера, трение, сопротивление инерции и
напряжения в рычаге и катушке.
3.Погрешности вызывают напряжения питания.
4. Электрическая погрешность нагрузки может быть значительной, когда
сопротивление нагрузки низкое.
5. Разрешающая способность ограничена числом витков в катушке и од-
нородностью катушки. Это ограничивает измерения малых перемеще-
ний.
6. Изнашивания и нагрев (с попутным окислением) в катушке или плен-
ки, и контакта ползунка являются причинами, ускоряющими процесс
ухудшения состояния.
Есть несколько преимуществ, связанных с потенциометрами, однако, в
том числе следующие:
1. Они про сты в разработке и надежны.
2. Относительно недорогой.
3. Они обеспечивают высокое напряжение (с низким сопротивлением)
выходных сигналов, не требуя амплификаций в большинстве случаев.
4. Преобразователь импеданса может изменяться просто путем измене-
ния сопротивления катушки и напряжения питания.
Пример 5.1
Прямолинейный потенциометр был протестирован с его слайдером,
движущимся в горизонтальном направлении. Было установлено, что при
скорости 1 см / с, движущей силой 7 × 10-4 N было необходимо для под-
держания скорости. На 10 см / с усиление 3 × 10-3 N было необходимо.
Слайдер весит 5 г, а ход потенциометра составляет ± 8 см. Если этот
потенциометр используется для измерения затухающей частоты про-
стого механического осциллятора массой 10 кг; Жесткость, 10 Н / м; и
константой затухания, 2 Н / м / с, оценить погрешно сть в процентном
соотношении от механической нагрузки. Обосновать эту процедуру для
оценки затухания.
Пример 5.1
Прямолинейный потенциометр был протестирован с его слайдером,
движущимся в горизонтальном направлении. Было установлено, что при
427
скорости 1 см / с, движущей силой 7 × 10-4 N было необходимо для под-
держания скорости. На 10 см / с усиление 3 × 10-3 N было необходимо.
Слайдер весит 5 г, а ход потенциометра составляет ± 8 см. Если этот
потенциометр используется для измерения затухающей частоты про-
стого механического осциллятора массой 10 кг; Жесткость, 10 Н / м; и
константой затухания, 2 Н / м / с, оценить погрешность в процентном
соотношении от механической нагрузки. Обосновать эту процедуру для
оценки затухания.
решение
Предположим, что масса, жесткость, и константа затухания простого ос-
циллятора обозначаются M, K и B, соответственно. Уравнение свобод-
ного движения простого осциллятора задается Mẏ̇+Bẏ̇+KY=0, где у
обозначает смещение массы от статического положения равновесия. Это
уравнение имеет вид ẏ̇+2zwnẏ+w2 y = 0, где ω является незатухающая
частота о сциллятора и ζ является коэффициентом демпфирования.
Путем прямого сравнения этих двух уравнений видно что
Демпфинированная наинизшая резонансная частота
Следовательно,
Теперь, если масса рычага, а постоянную затухания потенциометра обо-
значим через t и b, соответственно, измеренная затухающая собственная
частота (измеренная с помощью потенциометра) задается следующим
образом
428
Предполагая, что линейное трение, эквивалентное постоянной затуха-
ния b потенциометра может быть оценена как b = демпфирующая сила /
стационарное состояние скорости рычага
.
Для текущего примера, b1 = 7 × 10−4/1 × 10−2 N/m/s = 7 × 10−2 N/m/s
at1cm/s;b2=3×10−3/10×10−2N/m/s=3×10−2N/m/s при10cm/s.
Мы должны использовать некоторую форму интерполяции для оценки
b для реальных условий измерений. Оценим теперь среднюю скорость
рычага. Собственная частота осциллятора ωn= 10/10 =1rad/s =1/2 Гц.
Так как один цикл колебаний соответствует движению из передачи че-
тырех ударов, шаблонный рейс проходит максимальное расстояние 4 ×
8 см = 32 см в одном цикле. Следовательно
Средняя скорость работы шаблонного рейса может быть оценена как 32
/(2π)см/с,чтопримерно
равна 5 см / с. Таким образом, операционная константа затухания может
быть оценена как среднее
b1(нарасстоянии1см/с)иb2(при10см/с):
b 5102 N/m/s
С помощью приведенных выше численных значений, мы получаем
Процентная ошибка =
Хотя потенциометры в основном используются в качестве преобразо-
вателей перемещения, они могут быть приспособлены для измерения
других типов сигналов, таких как давление и силы, с помощью соответ-
ствующего дополнительного датчика (фронтального). Например, трубка
Бурдона или сильфон может быть использован для преобразования дав-
ления в перемещение, и консольный элемент может быть использован
429
для преобразования силы или момента в перемещение.
5.3 .3 оптический Потенциометр
Оптический потенциометр, схематически изображенный на рисунке
5.7a, представляет собой датчик смещения. Слой фоторезистивного ма-
териала зажат между слоем обычного резистивного материала и слоем
проводящего материала. Слой резистивного материала имеет полное
сопротивление RC, и он однороден (т.е. он имеет постоянное сопротив-
ление на единицу длины). Это соответствует сопротивлению элемента
обычного потенциометра. фоторезистивный слой практически является
электрическим изолятором, когда свет не проецируется на него. Движу-
щийся объект, перемещение которого измеряется, вызывает движение
светового луча, проецируемого на прямоугольную область фоторези-
стивного слоя. Этот светоактивная область достигает сопротивления
Rp, связывающее резистивный слой, который находится выше фоторе-
зистивного и проводящего, который находится ниже фоторезистивного
слоя. Напряжение питания для потенциометра есть vref, а длина рези-
стивного слоя L. Световое пятно проецируется на расстоянии х от опор-
ного конца резистивного элемента, как показано на рисунке 5.7a.
Эквивалентная схема для оптического потенциометра показана на ри-
сунке 5.7b. Здесь предполагается, что нагрузка сопротивления RL при-
сутствует на выходе потенциометра, с напряжением vo. Ток через на-
грузку соответствует VO / RL. Следовательно, падение напряжения на
(1 - α) RC + RL определяется выражением [(1 - α) RC + RL] VO / RL.
Заметим, что, а = X / L, является дробным положением светового пятна.
Текущий баланс на стыке трех резисторов на рисунке 5.7b является
которое можно записать в виде
(5.8)
430
Когда сопротивление нагрузки RL достаточно велико по сравнению с ре-
зистивным элементом RC мы имеем RC / RL; 0. Следовательно, уравне-
ние 5.8, становится
(5.9)
Это соотношение еще в нелинейных х / L. Нелинейность уменьшается,
несмотря на уменьшение RC / Rp. Это также видно из рисунка 5.8, где
Уравнение 5.9 построено для нескольких значений RC / Rp. Тогда для
случая RC / Rp = 0,1, исходное уравнение 5.8 показано на рисунке 5.9 .
Measurand- измеряемая величина
Output – выход
Light spot – световое пятно
Supply – снабжение
Resistive layer - резистивный слой
Photoresistive layer – фоточувствительный слой
Conductive layer - проводящий пласт
рисунок 5.7 (а) Оптический потенциометр и (б) эквивалентная схема (α = x/L).
431
Видно, что, как и следовало ожидать, поведение оптического потенцио-
метра становится более линейным для более высоких значений сопро-
тивления нагрузки.
Примечание: Многие другие принципы могут быть использованы по-
тенциометрами для восприятия смещений. Например, альтернативная
возможность для оптического потенциометра иметь встроенный источ-
ник света, и, чтобы определить местонахождение фотодатчик на движу-
щемся объекте, чье смещение должно быть измерено. Путем калибровки
устройства в зависимости от изменения интенсивности света с расстоя-
нием между источником света и светочувствительным датчиком, рассто-
яние может быть измерено. Конечно, такое устройство было бы весьма
нелинейным и точным (как это будет зависеть от освещения окружаю-
щей среды и т.д.).
5.3 .3 .1 Цифровой потенциометр
Цифровой потенциометр представляет собой устройство, которое мо-
рисунок 5.8 Поведение оптического потенциометра при высоком сопротивле-
нии нагрузки.
Normalized output voltage – обычный выход напряжение
432
жет обеспечить цифровое измененное сопротивление. Спектр дискрет-
ного сопротивления, что он может обеспечить зависит от размера бит
устройства (например, 8-битное устройство способно обеспечить 256
дискретных значений сопротивления). Увеличение может быть запро-
граммировано линейно, логарифмически и т.п ., с использованием ми-
кроконтроллера или другого цифрового устройства, в зависимости от
применения. Совершенно очевидно, что цифровой потенциометр не яв-
ляется датчиком перемещения, а скорее разветвитель сопротивления или
сплиттер напряжения. Он упоминается здесь, чтобы избежать каких-ли-
бо неправильных представлений.
Потенциометр имеет недостатки, такие как проблемы с загрузкой (как
механические и электрические), ограниченная скорость работы, значи-
тельные постоянные времени, износ, шум и тепловые эффекты. Мно-
гие из этих проблем возникают из-за того, что он представляет собой
контактное устройство, где его ползунок должен находиться в непосред-
ственном контакте с сопротивляющим элементом потенциометра, а так-
же должен быть неотъемлемой частью движущегося объекта. Далее мы
риСУНок 5.9 Поведение оптического потенциометра для RC / Rp = 0,1.
Normalized output voltage – обычный выход напряжение
Normalized displacement – обычное смещение
433
рассмотрим несколько бесконтактных датчики движения.
5.4 Переменные индуктивные преобразователи
Преобразователи движения, использующие принцип электромагнитной
индукции, называются переменными индукционными преобразовате-
лями. Когда потокосцепление проходит через электрический проводник
изменений, напряжение пропорционально скорости изменения потока
индуцируется в проводнике. Это является основой электромагнитной
индукции. Это напряжение называется электродвижущей силой, кото-
рая, в свою очередь, создает магнитное поле, которое противодействует
исходное поле (первичному). Следовательно, механическая сила должна
выдержать изменение потокосцепления.
Скорость изменения магнитного потока, который индуцирует напряже-
ние в проводнике может быть вызвана двумя основными способами:
1. Путем изменения тока, который создает магнитное поле,
2. Путем физического перемещения (а) катушки или магнита, который
обеспечивает магнитное поле; (Б) носителя (например, мягкий желез-
ный сердечник), через который магнитный поток связан с проводником;
(В) проводник, в котором индуцируется напряжение, с некоторой скоро-
стью.
Вторая категория (принцип 2) особенно полезен в датчиках движения.
В электромагнитной индукции, если изменение f lux соединительного
устройства вызвано относительным движением, ассоциированная ме-
ханическая энергия непосредственно преобразуется (индуцируется) в
электрическую энергию. Это принцип эксплуатации электрических ге-
нераторов, а также переменных индуктивных преобразователей. В част-
ности, принцип 2 (b), может быть использован в датчике пассивного пе-
ремещения, а также принципы 2 (а) и 2 (b), могут быть использованы в
датчике пассивной скорости (тахометра).
Следует отметить, что в этих преобразователях, изменение потокосце-
пления вызвано механическим движением и механической передачей
электрической энергии при почти идеальных условиях. Индуцирован-
ное напряжение или изменение индуктивности используется как мера
движения. Отсюда ясно, что они являются пассивными преобразовате-
лями. Кроме того, замечено, что с переменной индуктивностью преобра-
зователи, как правило, связаны магнитным полем.
Влияние окружающей среды магнитных полей: одно общее свойство
(недо статок) всех переменных индуктивных преобразователей является
434
то, что их чтение будет зависеть от магнитных полей в окружающей сре-
де. Ввиду своей силы низкого поля, влияние магнитного поля земли не-
значительно, однако, за исключением весьма специфичных инструмен-
тов. Когда окружающее магнитное поле не является незначительным,
защитные меры должны быть приняты в том числе защита (например,
с использованием стального корпуса), фильтрация шума и компенсация
(например, путем измерения окружающего магнитного поля).
Есть много различных типов переменных индуктивных преобразовате-
лей. Три основных типа можно выделить:
1. Взаимно -индукционные преобразователи
2. Самоиндукционные преобразователи
3. Преобразователи постоянных магнитов (PM)
Кроме того, эти переменные индуктивные преобразователи, которые ис-
пользуют незамагниченную ферромагнитную среду известны как магни-
тоэлектрические первичные преобразователи.
Некоторые из взаимных индукционных преобразователей и большин-
ство самоиндукционных преобразователей такого типа. Строго говоря,
PM датчики не являются магнитоэлектрическими первичными преобра-
зователями.
Взаимно-индукционные преобразователи: Основное положение взаим-
но-индукционных преобразователя представляет собой две катушки:
первичной обмотки и вторичной обмотки. Одна из катушек (первичная
обмотка) осуществляет возбуждение переменного тока, который вызы-
вает постоянное напряжение переменного тока в другой катушке (вто-
ричной обмотке). Уровень индукционного напряжения зависит от пото-
косцепления между катушками. Оно используется как мера движения,
которая влияет на индуцированное напряжение. Ни один из этих датчи-
ков не используют контактные ползунки или контактные кольца и щетки,
как это делают парные резистивные датчики (потенциометры). Следо-
вательно, они имеют повышенный срок службы конструкции и низкие
механические погрешности нагрузки.
Во взаимных индукционных датчиках, изменение потокосцепления
зависит от одной из двух общих методик. Один из методов состоит в
перемещении объекта из ферромагнитного материала в пределах пути
потока между первичной и вторичной катушкой. Это приводит к измене-
нию пути потока, с соответствующим изменением потокосцепления во
вторичной катушке. Это, например, принцип работы линейно регулируе-
мого дифференциальный трансформатора (LVDT), вращающийся транс-
форматор (RVDT). Другой общий способ изменения потокосцепления,
435
заключается в том, что надо переместить одну катушку относительно
другого. Это принцип работы распознавателя, сельсина-трансформато-
ра, а также некоторые виды тахометра переменного тока.
Движение может быть измерено с использованием вторичного сигнала
(то есть, индуцированного напряжения во вторичной катушке) несколь-
кими способами. Например, сигнал переменного тока во вторичной об-
мотке может быть демодулирован и результирующий сигнал, который
представляет собой движение, непосредственно измеряется. Этот спо-
соб особенно пригоден для измерения транскрипционных движений
масштабного коэффициента. В качестве альтернативы, амплитуда или
среднеквадратичное значение вторичного (индуцированного) напряже-
ния может быть измерено. Другой метод состоит в измерении изменения
индуктивности или реактивное сопротивление во вторичной, с помощью
устройства типа индуктивной мо стовой схемы.
5.4 .1 индуктивность, реактивность, и Сопротивление.
Магнитный поток связи φ является мерой магнитного поля, которая свя-
зана с проводником. Он имеет единицы измерения (Wb) и зависит от
плотности магнитного потока, числа витков в катушке, и площади ка-
тушки. Если магнитное поле генерирует ток (т.е., электромагнетизм)
магнитное поле зависит от того тока ш, который имеет единицы измере-
ния амперы (А). Тогда мы можем написать
φ=Li
(5.10)
где L - индуктивность, и имеет единицы Wb / А или henry (H).
Напряжение V индуцируется в катушке, из-за скорости изменения маг-
нитного потока называется EMF. У нас есть
Обобщенное сопротивление или импеданс, приводимое через индуктив-
ность называется реактивное или реактивное сопротивление, и обозна-
чается через X. Это мнимая часть комплексного сопротивления. В со-
ответствии с уравнением 5.11, в частотной области (где производная по
времени d () / дт становится jω) реактивное сопротивление задается
X=Ljω
(5.12)
436
где ω является частотой сигнала.
Отношение плотности магнитного потока (единицы: тесла или Т; Weber
за квадратный метр или Wb / м2) к напряженности продольного магнит-
ного поля (единица измерения: ампер-витков на метр или At / м), для
сегмента магнитной цепи (или среднего магнитного потока пути) назы-
вается проницаемость (или магнитной проницаемо стью) и обозначает-
ся через μ. Кроме того, это есть индуктивность на единицу длины для
сегмента магнитопровода. Проницаемость имеет единицы tesla- метр в
амперах(Т•м/A)илигенринаметр(Н/м).Унасесть
где
В обозначает плотность потока
Н обозначает напряженность поля
Проницаемость свободного про странства составляет приблизительно μo
= 4π × 10-7 = 1,257 × 10-6 Н / м. Относительная проницаемость маг-
нитного пути является его проницаемостью по отношению к количеству
свободного пространства, и дается мкР = μ / μo, и она не имеет единиц.
Относительная проницаемость для некоторых материалов приведены в
таблице 5.3 .
таблица 5.3 Параметры относительной проницаемости (приблизитель-
но) и некоторых материалов
Concrete – бетон
Cooper – медь
Air – воздух
437
Aluminium – алюминий
Platinum – платина
Teflon – тефлон
Water – вода
Wood – дерево
Carbon steel – углеродная сталь
Cobalt iron – кобалтовая синяя краска
Iron – железо
Nickel – никель
Stainless steel – нержавейка
Material – материал
Relative Permeability - относительная проницаемость
Абсолютных проницаемостей могут быть вычислены из этих значений,
так как проницаемость свободного пространства известна.
Магнитное сопротивление является магнитное сопротивление сегмента
магнитной цепи (среда, через которую магнитное поле проходит). Оно
задается
где
l длина сегмента магнитопровода
А - площадь поперечного сечения магнитной цепи (поперечное сечение
катушки, а не поперечное сечение проволоки в катушке)
Видно, что проницаемость является мерой легкости, в котором магнит-
ное поле проходит среду и нежелание представляет инверсию этого. Об-
ратным нежелание Проницаемость. Из уравнения 5.14 видно, что элек-
тромагнитное сопротивление есть - единицы, представленная обратной
генри. Строго говоря, это зависит и от числа витков в катушке индуктив-
ности.
Примечание: Из уравнений 5.13 и 5.14, видно, что электромагнитное со-
противление обратно пропорционально индуктивности. Следовательно,
магнитное сопротивление может быть измерено с помощью моста ин-
дуктивности. Так как магнитное сопротивление пропорционально длине
отрезка магнитной цепи, если длина изменяется из-за некоторого смеще-
ния в объекте, мы можем измерить смещение путем измерения электро-
438
Coil form – каркас для намотки катушек
Coils – катушка индуктивности
Monolithic circuit – монолитная схема
Housing – корпус
Core - основное ядро
Insulating Form - теплоизолирующая опалубка
(Measurement) - измерение
Primary Coil - первичная обмотка
Housing - корпус
Secondary coil segment – вторичная обмотка части
Core – основное ядро
Displacement x (measurand) – смещение (измеренный)
Displacement - смещение
Voltage level – уровень напряжение
Linear range – диапазон линейности
рис.5 .10 ЛРДТ. (А) Коммерческий блок (с разрешения Scheavitz Sensors,
Measurement Specialties, Inc., Hampton VA), (б) схема, и (с) типичная рабочая
кривая.
439
магнитного сопротивления или индуктивности. Это сформирует прин-
цип датчика перемещения с переменным магнитным сопротивлением.
В качестве альтернативы, напряжение может быть вызвано в катушке,
путем перемещения его в магнитном поле. Индуцированное напряжение
пропорционально скорости катушки. Это может сформировать принцип
тахометра.
где
l длина сегмента магнитопровода
А - площадь поперечного сечения магнитной цепи (поперечное сечение
катушки, а не поперечное сечение проволоки в катушке)
Видно, что проницаемость является мерой легкости, в котором магнит-
ное поле проходит среду и нежелание представляет инверсию этого. Об-
ратным нежелание Проницаемость. Из уравнения 5.14 видно, что элек-
тромагнитное сопротивление- единицы, представленная обратной генри.
Строго говоря, это зависит и от числа витков в катушке индуктивности.
Примечание: Из уравнений 5.13 и 5.14, видно, что электромагнитное со-
противление обратно пропорциональна индуктивности. Следовательно,
магнитное сопротивление может быть измерено с помощью моста ин-
Primary Coil - первичная обмотка
Secondary coil – вторичная обмотка
рисунок 5.11 Подключение cопротивлений серии вторичных обмоток ЛРДТ.
440
дуктивности. Так как магнитное сопротивление пропорционально длине
отрезка магнитной цепи, если длина изменяется из-за некоторого смеще-
ния в объекте, мы можем измерить смещение путем измерения электро-
магнитного сопротивления или индуктивности. Это сформирует прин-
цип датчика перемещения с переменным магнитным сопротивлением.
В качестве альтернативы, напряжение может быть вызвано в катушке,
путем перемещения его в магнитном поле. Индуцированное напряжение
пропорционально скорости катушки. Это может сформировать принцип
тахометра вытесняется из этой позиции, отличное от нуля наведенное
напряжение генерируется. В устойчивом состоянии амплитуда vo этого
наведенного напряжения пропорциональна основному смещению х в ли-
нейной области (см 5.10c). Следовательно, vo является мерой смещения.
Примечание: Из-за противоположных вторичных обмоток, LVDT обе-
спечивает направление, а также величину смещения. Когда выходной
сигнал демодулируется, его знак дает направление. Если выходной сиг-
нал не демодулируется, направление определяется с помощью фазового
угла между первичным (референтным) и вторичным (выходным) напря-
жением, который включает в себя несущий сигнал.
Для того LVDT для точного измерения переходных движений, частота
опорного напряжения (частота несущей) должна быть по крайней мере в
10 раз больше, чем наибольшая значительная (полезная) частота состав-
ляющей в измеряемом движении, и, как правило, может быть до 20 кГц.
Для квазидинамических смещений и медленных переходных процессов
порядка нескольких герц, стандартный источник питания переменного
тока (при частоте 60 Гц) является адекватной. Производительность (в
частности, чувствительность и точно сть), как известно, улучшится с ча-
стотой возбуждения. Поскольку амплитуда выходного сигнала пропор-
циональна амплитуде первичного сигнала, опорное напряжение должно
регулироваться, чтобы получить точные результаты. В частности, источ-
ник питания должен иметь низкое выходное сопротивление.
Коммерческие LVDTs обычно поставляются с сопровождаемого аппарат-
ного формирования сигналов на одной печатной карте (PC). Она будет
содержать такие функциональные аппаратные средства как генератор,
усилитель, фильтр, демодулятор, и так далее. Она будет иметь термина-
лы для источника питания постоянного тока. Такое высокое входное со-
противление (например, 0,2 МОм), может быть обеспечено с помощью
аппаратных средств формирования сигналов.
5.4 .2 .1 калибровка и компенсация
441
LVDT может быть откалиброван в миллиметр на вольт (мм / V), в его
линейном диапазоне. Кроме того, и смещение (мм), может быть обеспе-
ченJ. Это, как правило, представляет собой наименьшие квадраты из на-
бора данных калибровкой. Так как температура окружающей среды и
других условий окружающей среды влияет на выходной сигнал LVDT, в
дополнение к первичной и вторичной катушкам, ссылка катушки может
быть доступна для компенсации выходного сигнала LVDT. В качестве
альтернативы, схема индуктивного моста, где два сегмента формы вто-
ричной катушки моста могут быть использованы для генерации выход-
ного сигнала LVDT. Тогда, компенсация за воздействие на окружающую
среду (в том числе температурная компенсация) достигается автоматиче-
ски, как и в любой мостовой схеме.
5.4 .2 .2 Сдвиг фазы и нулевое напряжения
Погрешность, известное как нулевое напряжение (или остаточное напря-
жение), присутствует в некоторых дифференциальных трансформаторах.
Неоднородности в обмотках (неравные сопротивления в двух сегментах
вторичной обмотки) являются основной причиной этой погрешности.
Нулевое напряжение может быть также результатом гармонических со-
ставляющих шума в сигнале основного и нелинейностей в устройстве.
Нулевое напряжение может быть проигнорировано, если она меньше,
чем 1% от выхода полной шкалы. Как правило, оно является довольно
низким (около 0,1% от полной шкалы мощности). Эта погрешность мо-
жет быть устранена из измерений использованием соответствующих
формирующих сигналов и калибровки.
Выходной сигнал от дифференциального трансформатора, как правило,
не в фазе с опорным напряжением. Индуктивность в первичной катушке
и утечки индуктивности во вторичной обмотке, в основном, ответствен-
ны за этот фазовый сдвиг. Так как демодуляция включает экстракцию
модулирующего сигнала, отклоняя составляющую несущей частоты от
вторичного сигнала, важно понимать размер этого фазового сдвига. Эта
тема рассматривается здесь. Эквивалентная схема для дифференциаль-
ного трансформатора показана на рисунке 5.12 . Сопротивление в пер-
вичной катушке обозначается как Rp, и соответствующая индуктивность
обозначается Lp. Общее сопротивление вторичной обмотки Rs Конеч-
ным индуктивность рассеяния, из-за утечки магнитного потока, в двух
сегментах, обозначенных Ll. Сопротивление нагрузки равно RL и ин-
442
дуктивность нагрузки равна LL. Сперва давайте выведем выражение для
сдвига фазы в выходном сигнале.
Магнетизированное напряжение в первичной катушке задается как vp
= vref[jωLp/(Rp + jωLp)] в пространстве частот. Теперь представим, что
сердечник, длины L, передвинулся на расстояние x от нулевого поло-
жения. Индуцированное напряжение в одном сегменте (a) вторичной
катушки будет равно va = vpka(L/2 + x), а индуцированное напряже-
ние в другом сегменте (b) будет равно vb = vpkb(L/2 − x). Здесь ka и kb
это нелинейные функции положения сердечника, а также комплексные
функции переменной частоты ω. Кроме того, каждая функция зависит
от свойств взаимной индукции между первичной катушкой и соответ-
ствующим сегментом вторичной катушки, через сердечник. Из-за проти-
востоящего расположения двух вторичных сегментов, чистое вторичное
индуцированное напряжение будет равно
В идеальном случае, две функции ka(.) и kb(.) будут идентичными. Тогда,
РИСУНОК 5.12 Эквивалентная схема для дифференциального трансформатора
/ датчика.
443
при x = 0 мы получим vs = 0. Следовательно, нулевое напряжение будет
равно нулю в идеальном случае. Предположим, что при x = 0, абсолют-
ные величины ka(.) и kb(.) равны, но есть небольшая разница по фазе.
Тогда вектор разности ka(L/2) − kb(L/2) будет иметь небольшое абсолют-
ное значение, но его фазовый угол будет равен почти 90° по отношению
к обоим ka и kb. Это и есть ошибка квадратур.
Для малых x, разложение Тейлора Уравнения 5.15 дает
Тогда, в предположении того, что ka(.) = kb(.) и обозначив их ko(.) мы
получим vs = 2vp(∂ko/∂x)(L/2)x; или,vs = vpkx, где,
k = 2(∂ko/∂x)(L/2). В этом случае, чистое индуцированное напряжение
пропорционально x и задается как
Следовательно, выходное напряжение vo и нагрузка задаются как
(5.16)
Следовательно, для малых перемещений, амплитуда чистого выходного
напряжения LVDT пропорционально перемещению x. Ведущая фаза на
выходе задается как
Степень зависимости сдвига фазы от нагрузки (включая вторичную
цепь) может быть уменьшена увеличением импеданса нагрузки.
5.4 .2 .3 обработка Сигналов
Обработка сигналов, соответствующая дифференциальным трансформа-
торам включает в себя фильтрацию и усиление. фильтрация нужна для
444
улучшения ОСШ выходного сигнала. Усиление необходимо для увели-
чения силы сигнала для сбора, передачи и обработки данных. Так как
опорная частота (несущая частота) индуцирована в (и встроена в) выход-
ной сигнал, так же необходимо правильно интерпретировать выходной
сигнал, особенно для кратких движений.
Вторичный (выходной) сигнал LVDT это амплитудно-модулированный
сигнал, где компонент сигнала на несущей частоте модулируется низко-
частотным скоротечным сигналом, произведенным в результате движе-
ние сердечника (x). Обычно используется два метода для интерпретации
грубого выходного сигнала от дифференциального трансформатора: вы-
прямление и демодуляция. В первом методе (выпрямление) выходной
сигнал переменного тока дифференциального трансформатора выпрям-
ляется для получения сигнала постоянного тока. Этот сигнал усилива-
ется и потом проходит фильтр низких частот, для устранения высоко-
частотных компонент шума. Амплитуда результирующего сигнала это
данные считываемые трансформатором. В этом методе, сдвиг фазы в
выходном сигнале LVDT нужно проверять отдельно, для определения
направления движения. Во втором методе (демодуляция), компонента
несущей частоты отнимается от выходного сигнала сравнением его ее со
сдвинутым по фазе и настроенным по амплитуде первичным (опорным)
сигналом. Сдвиг фазы обязателен, потому что, как обсуждалось ранее,
выходной сигнал не находится в фазе с опорным сигналом. Получив-
шийся результирующий сигнал (пропорциональный x), потом усилива-
ется и фильтруется.
В результате развития технологии миниатюрных ИС, дифференциаль-
ные трансформаторы со встроенной микроэлектроникой для обработки
сигналов стали более распространенными на сегодняшний день. Диф-
ференциальный трансформатор постоянного тока использует источник
постоянного тока (обычно, ±15 В) для активации. Встроенная цепь ос-
циллятора создает несущий
сигнал. Остальное устройство идентично дифференциальному транс-
форматору переменного тока. Усиленное полномасштабное выходное
напряжение может достигать ±10 В.
Подход демодуляции к обработке сигналов для LVDT показан на Рисунке
5.13a. Рисунок 5.13b показывает схематичную диаграмму упрощенной
системы обработки сигналов для LVDT. Параметры и переменные си-
стемы такие как показаны на рисунке. В частности, x(t) это перемещение
сердечника LVDT (измеряемая величина), ωc это частота несущего на-
пряжения, vo это выходной сигнал системы (измерение). Сопротивления
445
R1, R2, R3, и R, и емко сть C показаны на рисунке. В добавление ко всему,
мы можем ввести параметр трансформатора r для LVDT, как требуется.
Первичная катушка LVDT возбуждается напряжением переменного тока
vp sin ωct. Перемещение ферромагнетического сердечника, к которому
прикреплен движущийся объект, это x(t), которое нужно измерить. Две
вторичные катушки соединены оппозиционно, так что выход равен нулю
в нулевом положении, и так же можно определить направление движе-
ния. Усилитель здесь неинвертированного типа. Он усиливает выход-
ной сигнал LVDT, который является сигналом (несущим) переменного
тока частоты ωc, который модулируется перемещением сердечника x(t).
Цепь умножителя создает умножение первичного (несущего) сигнала и
вторичного (LVDT выходного) сигнала. Это важный шаг в демодуляции
выходного сигнала LVDT. Умноженный сигнал из умножителя имеет вы-
сокочастотную (2ωc) несущую компоненту, добавленную к компоненте
модуляции (x(t)). Низкочастотный фильтр убирает эту ненужную высо-
кочастотную компоненту, для получения демодулированного сигнала,
РИСУНОК 5.13 (a) Шаги обработки сигналов дифференциального трансформа-
тора и (b) система обработки сигналов для LVDT.
446
который пропорционален перемещению x(t).
Уравнение усилителя: Потенциалы положительной (+) и отрицательной
(−) клемм ОУ почти одинаковы. Кроме того, токи через это подходы поч-
ти равны нулю. (Это два обычных предположения для ОУ.) Тогда, баланс
токов в узле A дает (v1/R1) + (v2/R2) = 0. Следовательно, v2 = −kv1 и k =
R2/R1 = усиление амплитуды.
фильтр низких частот: Так как положительный (+) контакт ОУ имеет
приблизительно нулевой потенциал (земля), напряжение в узле B так же
приблизительно равно нулю. Баланс токов для узла B дате (v3 /R3) + (v0
/R) + Cv̇o = 0. Следовательно, τ(dvo/dt) + vo = −(R/R3) v3, где τ = RC =
временная константа фильтра. Передаточная функция фильтра равна vo/
v3 = −(ko/(1 + τs)), с усилением фильтра ko = R/R3. В пространстве ча-
стот, vo/v3 = −(ko/(1 + τjω)).
Наконец, если пренебречь сдвигом фазы в LVDT, мы имеем or = или
Несущий сигнал будет отфильтрован низкочастотным фильтром с подхо-
дящей предельной частотой. Тогда,
Если перемещение x(t) линейно увеличивается (т.е ., константа скоро-
сти), то сигналы u(t), v1, v2, v3, и vo
зарисованы на Рисунке 5.14 .
Пример 5.2
РИСУНОК 5.14 Природа сигналов в различных местах цепи измерения LVDT.
447
Предположим, что на Рисунке 5.13b, несущая частота равна ωc = 500
рад/с и сопротивление фильтра R = 100 кОм. Если не более 5% несущей
компоненты проходит через фильтр, оцените значение емкости фильтра
C. А также, какой будет диапазон частот (ширина полосы измерения)
измеряющего устройства в радианах в секунду с этими значениями па-
раметров?
Решение
Для того, чтобы прошло не более 5% несущей (2ωc) компоненты, мы
должны иметь
или, τωc ≥ 10 (примерно). Мы выберем τωc = 10.
ПриR=100кОм,ωc =500рад/с,мыимеемC×100×103×500=10.
Следовательно, C = 0.2 мкф.
Согласно значению несущей частоты (500 рад/с), мы сможем измерять
перемещения x(t) до 50 рад/с. Но плоская область фильтра равна пример-
но ωτ = 0.1, что, при текущем значении τ = 0.02 с, дает ширину полосы
только в 5 рад/с для всего измерительного прибора (LVDT).
Преимущества LVDT включают в себя:
1. Это по существу бесконтактное устройство без силы трения. Почти
идеальная электромеханическая конверсия энергии и легковесный
сердечник даст очень мало резистивных сил. Гистерезис (и магнит-
ный гистерезис и механический люфт) незначителен.
2. У него низкий выходной импеданс, обычно порядка 100 Ом. (Усиле-
ние сигнала обычно не требуется, кроме того, что делает цепь обра-
ботки сигналов.)
3. Он дает прямые измерения (положительные/отрицательные).
4. Устройство бывает и миниатюрных размеров (например, длиной 1
или 2 мм, измерения перемещений в доли миллиметра и максималь-
ное перемещение или шаг 1 мм)
5. У него простая и надежная конструкция (недорогая и долговечная)
6. У него не плохая разрешающая способность (теоретически, беско-
нечно малая разрешающая способность; практически, гораздо луч-
ше, чем у катушечного потенциометра).
448
5.4 .2 .4 ротационно-Переменный Дифференциальный трансформа-
тор/Преобразователь
RVDT работает, используя тот же принцип, что и в LVDT, за исключе-
нием того, что в RVDT, в качестве движущейся части используется вра-
щающийся (а не поступательный) ферромагнитный сердечник. RVDT
используется для измерения угловых перемещений. Схематическая ди-
аграмма устройства показано на Рисунке 5.15a, и обычная рабочая кри-
вая показана на Рисунке 5.15b. Вращающийся сердечник сделан такой
формы, чтобы получить достаточно широкую область линейной работы.
Преимущества RVDT в сущности те же, что и у LVDT. Так как RVDT
измеряет напрямую угловые движения, без нужды в нелинейных транс-
формациях (что делается в распознавателе, например), использование
его удобно в приложениях угловых скоростей, таких как в позициони-
ровании сервоприводов. Линейный диапазон обычно ±40° с нелинейной
ошибкой менее ±0.5% от полного масштаба.
Ошибка скорости: Как отмечалось выше, в устройствах переменной ин-
дуктивности, индуцированное напряжение создается скоростью измене-
ния магнитного потока. Следовательно, данные о перемещениях иска-
жаются скоростью подвижного элемента; схожим образом, на данные о
скорости воздействует ускорение подвижного элемента; и так далее. Для
одного и того же значения перемещения, данные, считываемые преоб-
разователем зависят от скорости измеряемого объекта при этом переме-
щении (положении). Эта ошибка известна как ошибка скорости, которая
увеличивается вместе с отношением: (циклическая скорость сердечни-
ка)/(несущая частота), для LVDT. Следовательно, ошибка скорости мо-
жет быть уменьшена с увеличением несущей частоты. Причина этого
обсуждается далее.
При высоких несущих частотах, индуцированное напряжение из-за эф-
фекта трансформатора, при заданной частоте первичного сигнала, боль-
ше, чем индуцированное напряжение из-за эффекта скорости движу-
щегося элемента. Поэтому ошибка мала. Для оценки нижнего предела
несущей частоты, для того, чтобы уменьшить эффекты скорости до при-
емлемого уровня, мы можем сделать следующее:
Для LVDT: Пусть
449
Measurement – измерение
Secondary coil – вторичная катушка
Primary coil – первичная катушка
Rotating ferromagnetic core – вращяющийся ферромагнитный сердечник
(Measurand) – измерительная величина
Secondary coil – вторичная катушка
Voltage level – уровень напряжение
Linear range – линейный диапазон
Rotation - вращение
РИСУНОК 5.15 (a) Схематическая диаграмма RVDT и (b) рабочая кривая.
450
Выбранная частота возбуждения первичной катушки (т.е. несущая ча-
стота) или выше.
Для RVDT: Для параметра ωo в ранее описанных характеристи-
ках, используем максимальную угловую частоту работы (ротора) для
RVDT.
5.4 .3 взаимно индуктивный Датчик Приближения
Этот преобразователь перемещения так же работает на принципе взаим-
ной индукции. Упрощенная схематичная диаграмма такого устройства
показано на Рисунке 5.16a. Изолирующий E-сердечник несет первичную
обмотку в своей центральной части. Две концевых части несут вторич-
ные обмотки, которые последовательно соединены. В отличие от LVDT
и RVDT, в этом случае два индуцированных напряжения в сегментах
вторичных обмоток аддитивны. Область двигающейся поверхности (це-
РИСУНОК 5.16 (a) Схематическая диаграмма датчика взаимного приближения
и (b) рабочая кривая.
451
левой объект), которая приближается к катушкам, должна быть сделать
из ферримагнитного материала, так что при движении объекта, магнит-
ное сопротивление и поток между первичной и вторичными катушками
менялся. Это, в свою очередь, изменяет индуцированное напряжение во
вторичной катушке, а изменение этого напряжения и есть измерение пе-
ремещения.
Отметим, что в отличие от LVDT, который имеет конфигурацию осево-
го перемещения, зонд приближения имеет конфигурацию поперечного
(или бокового) перемещения. Следовательно, его о собенно удобно ис-
пользовать для измерения поперечных перемещений или близости дви-
жущего ся объекта (например, поперечное движение оси вращающего-
ся вала). Из рабочей кривой, показанной на Рисунке 5.16b видно, что
соотношение перемещение-напряжение в зонде приближения довольно
нелинейно. Это значит, что эти датчики должны использоваться только
для измерений небольших перемещений (например, обычный линейный
диапазон составляет 5мм или 0.2 дюйма.), если только нет доступных
точных калибрующих нелинейность кривых.
Так как датчик приближения — это неконтактное устройство, то меха-
ническая нагрузка мала и долговечность его велика. Датчик взаимного
приближения это и устройство переменного магнитного сопротивления,
потому что ферромагнитный объект используется для изменения маг-
нитного сопротивления на пути потока. Предел рабочей частоты около
1/10 от ожидаемой частоты первичной катушки (несущая частота). Как
и для LVDT, требуется демодулировать индуцированное напряжение
(вторичное напряжение) для получения прямых (при постоянном токе)
выходных данных.
Датчики приближения используются в широком спектре приложений,
отно сящихся к неконтактному измерению перемещения и проверке из-
мерений. Вот некоторые обычные приложения
1. Измерение и контроль зазора между головкой сварочной горелки ро-
бота и рабочей поверхностью
2. Проверка толщины металла при производственных операциях (на-
пример, при прокатке или прессовке)
3. Обнаружение неровностей на поверхности механических частей
4. Измерение угловой скорости, путем подсчета количества оборотов
за единицу времени
5. Измерение вибраций во вращающихся механизмах и строениях (для
наблюдения и контроля за состоянием механизмов, и т.д.)
452
6. Замер уровня жидкости (например, в заполнении, разливе и процес-
сах химической промышленности)
7. Контроль за процессом сборки подшипников
Некоторые преобразователи перемещения взаимной индукции использу-
ют относительное движение между первичной и вторичной катушками
для изменения потока. Два таких устройства – датчик положения и син-
хротрансформатор, которые описаны далее. Они не являются преобразо-
вателями переменного магнитного сопротивления, поскольку не исполь-
зуют ферромагнитный движущийся элемент.
5.4 .4 Датчик Положения
Датчик положения — это преобразователь взаимной индукции, кото-
рый широко используется для измерения угловых перемещений. Стро-
го говоря, это пассивное устройство, так как оно использует магнитную
Output - выход
Stator - статор
Rotor - ротор
AC primary – АС первоначальный
РИСУНОК 5.17 Схематическая диаграмма датчика положения.
453
индукцию, даже хотя несущий сигнал (переменного тока) нуждается во
внешнем питании. Это надежное устройство и используется во многих
инженерных приложениях, в которых встречаются тяжелые условия
окружающей среды (например, разброс температур от −45°C до 125°C),
например, роботы, ветровые турбины, подъемные механизмы, системы
транспортировки и заводы. Датчик положения дает высокую точность
измерений (например, ±5’ ; 1° = 60’) даже при нелинейном выходе (три-
гонометрическом).
Упрощенная схематическая диаграмма датчика положения представлена
на Рисунке 5.17. Ротор содержит первичную катушку. Он состоит из од-
ной двухполюсной обмотки, заряжаемой источником напряжения пере-
менного тока vref. Ротор напрямую соединен с объектом, чье вращение
измеряется. Статор состоит из двух пар обмоток, расположенных под
углом 90° друг к другу. Если угловое положение ротора по отношению к
паре обмоток статора обозначить как θ, то индуцированное напряжение
в этой паре обмоток задается как
vo1 avref cos
(5.19)
Индуцированное напряжение в другой паре обмоток задается как
vo2 = avref sinθ
(5.20)
Заметим, что это амплитудно-модулированные сигналы—несущий сиг-
нал vref, который является синусоидальной функцией от времени, моду-
лируется движением θ. Постоянный параметр a зависит в основном от
геометрических и материальных характеристик устройства, например,
отношение количества витков в обмотках ротора и статора.
Любой из двух выходных сигналов vo1 и vo2 можно использовать для
определения положения в первом квадранте (т.е ., 0 ≤ θ ≤ 90°). Однако,
нужны оба сигнала для определения перемещения (и направление и ве-
личина) во всех четырех квадрантах (т.е., в 0 ≤ θ ≤ 360°) во избежание
неоднозначностей. Например, одно и то же значение синуса можно по-
лучить для углов 90° + θ и 90° − θ (т.е., положительное и отрицательное
вращение из положения 90°), но соответствующие значения косинусов
имеют разные знаки, и дают нам правильное направление.
5.4 .4 .1 Демодуляция
454
Как и для дифференциальных трансформаторов (т.е., LVDT и RVDT),
сигнал перемещения (скоротечного) из датчика положения можно полу-
чить демодуляцией выходных (модулированных) сигналов. Обычно это
достигается фильтрацией и вычитанием несущего сигнала, то есть полу-
чением сигнала модуляции (который является сигналом перемещения).
Два выходных сигнала vo1 и vo2 датчика положения называются квадра-
турными сигналами. Предположим, что несущий (первичный) сигнал
равен
vref va sint
(5.21)
Тогда, из Уравнений 5.19 и 5.20, индуцированные квадратурные сигналы
равныvo2=avacosθsinωtиvo2=
ava sin θ sin ωt. Умножив эти уравнения на vref, мы получим
Так как несущая частота ω должна быть примерно в 10 раз больше наи-
большей составляющей частоты в угловом перемещении θ, можно ис-
пользовать фильтр низких частот с порогом ω/10, чтобы убрать несущие
компоненты в vm1 и vm2. Это дает демодулированные выходные сигна-
лы:
Заметьте, что Уравнения 5.22 и 5.23 дают и cos θ и sin θ, следовательно,
и значение и знак θ.
5.4 .4 .2 Датчик Положения с роторным выходом
Альтернативная форма датчика положения использует два напряжения
455
переменного тока под углом 90° по фазе, созданных платой генератора
сигналов, для питания двух катушек статора. В этом случае ротор со-
держит вторичную обмотку. Сдвиг фазы индуцированного напряжения
определяет угловое положение ротора. Преимущество такого по строе-
ния состоит в том, что оно не предполагает наличие колец скольжения
и щеток для питания обмоток (которые теперь стационарны), как это
нужно было в прошлом построении, где ротор был первичной обмот-
кой. Однако, потребуется некий механизм для снятия выходного сигна-
ла с ротора. Чтобы проиллюстрировать это альтернативное построение,
предположим, что сигналы возбуждения в двух катушках статора равны
v1 = va sin ωt и v2 = va cos ωt. Когда катушка ротора ориентирована в
угловое положение θ по отношению к катушке статора2, она будет под
углом π/2 − θ от катушки статора 1 (в предположении, что катушка рото-
ра находится в первом квадранте: 0 ≤ θ ≤ π/2). Следовательно, индуци-
рованное катушкой статора 1 напряжение в катушке ротора будет равно
va sin ωt sin θ, а индуцированное катушкой статора 2 будет равно va cos
ωt cos θ. Значит полное индуцированное напряжение в катушке ротора
будетравноvr=vasinωtsinθ+vacosωtcosθ;или
vrvacos(t)
(5.24)
Видно, что угол фазы выходного сигнала ротора по отношению к сигна-
лам возбуждения статора v1 и
v2 дает и значение и знак положения ротора θ.
Выходные сигналы датчика положения это нелинейные (тригонометри-
ческие) функции от угла вращения. (Исторически, датчики положения
использовались для вычисления тригонометрических функций или для
разрешения вектора на ортогональные компоненты.) В приложениях ро-
ботизации, это иногда считается благословением. Например, в контроле
вычисления крутящего момента манипуляторов робота, тригонометри-
ческие функции сочленений нужны для того,тобы вычислить нужные
входные сигналы (опорные значения крутящего момента сочленений). В
результате, когда датчики положения используются для измерения углов
сочленений в манипуляторах, время вычисления контрольных входных
сигналов соответствующим образом уменьшается, поскольку сами три-
гонометрические функции являются прямыми измерениями.
Основные преимущества датчика положения
1. Хорошая разрешающая способно сть и высокая точность
2. Низкий выходной импеданс (высокий уровень сигналов)
456
3. Небольшой размер (например, 10 мм в диаметре)
4. Прочная конструкция (высокая износостойкость)
5. Возможно сть получить прямые сигналы синусов и косинусов изме-
ренных углов
Его главные ограничения
1. Нелинейные выходные сигналы (преимущество в некоторых прило-
жениях, где нужны тригонометрические функции вращений)
2. Ширина полосы ограничена частотой источника (несущей)
3. Скользящие кольца и щетки нужны для измерения полных и множе-
ственных вращений (что добавляет механическую нагрузку и создает
износ компонентов, окисление, проблемы с температурой и шумом)
5.4 .4 .3 Преобразователи Самоиндукции
Эти преобразователи базируются на принципе самоиндукции. В отли-
чие от преобразователей взаимной индукции здесь используется только
одна катушка. Эта катушка активируется источником напряжения пере-
Рисунок 5.18 Принципиальная электрическая схема самоиндуктивного датчика
приближения.
AC supply vref – источник питания
Inductance measuring circuit – индуктивность измеренной схемы
Ferromagnetic target object – ферромагнитная цель объекта
(Measurand) - измеренный
457
менного тока vref довольно высокой частоты. Ток создает магнитный
поток, который связан с самой катушкой. Уровень связи потока (или са-
моиндуктивность) изменяется при движении ферромагнитного объекта
(чье положение измеряется) в магнитном поле. Это движение изменяет
магнитное сопротивление магнитного пути, а также индуктивность ка-
тушки. Изменения самоиндуктивности можно измерить, используя цепь
измерения индуктивности (например, мост индуктивности). Таким об-
разом, можно измерить перемещение объекта (измеряемую величину).
Преобразователи самоиндукции обычно так же являются устройствами
переменного магнитного сопротивления.
Обычный преобразователь самоиндукции это самоиндуктивный датчик
приближения, схематическая диаграмма которого показана на Рисунке
5.18. Это устройство можно использовать как датчик перемещения для
поперечных перемещений.
Например, можно измерить расстояние между наконечником датчи-
ка и ферромагнитной поверхностью движущегося объекта, такого как
траверз или вал. Другие приложения включают те, что были упомяну-
ты для взаимноиндуктивных датчиков приближения. Измерения высо-
коскоростных перемещений могут дать ошибку (ошибку скорости) при
использовании датчиков переменной индуктивности (включая преобра-
зователи самоиндукции). Этот эффект можно уменьшить, как и в других
датчиках переменной индуктивности переменного тока, увеличив несу-
щую частоту.
Индуктивные датчики приближения делают размером в несколько мил-
лиметров. Выходной сигнал нелинеен, а максимальная дистанция обыч-
но ограничена несколькими миллиметрами. Рабочая частота находится
в диапазоне 25–1000 Гц. Если возбуждение идет от стандартного напря-
жения (60 Гц), то ширина полосы измеренного сигнала будет ограничена
5–10 Гц. Преимущества и недостатки преобразователей самоиндукции в
сущности те же, что и у преобразователей взаимной индукции.
5.5 Преобразователи на Постоянном Магните и вихревом токе
Мы представим преобразователи третьей категории преобразователей
переменной индуктивно сти: ПМ преобразователи. В частности, мы об-
судим несколько типов преобразователей скорости (тахометров). А так-
458
же мы представим еще один класс преобразователей, называемый преоб-
разователи вихревого тока. (Важно: Преобразователи вихревого тока не
являются в общем случае ПМ преобразователями.)
ПМ преобразователи: Отличительной чертой ПМ преобразователя яв-
ляется то, что в нем есть постоянный магнит (ПМ), который создает
однородное и стабильное магнитное поле. В тахометре, относительное
движение между магнитным полем и электрическим проводником ин-
дуцирует напряжение, которое пропорционально скорости пересечения
магнитного поля проводником (т.е . скорость изменения потока). Это
индуцированное напряжение и есть измерение скорости. В некоторых
конструкциях однонаправленное магнитное поле создается источником
постоянного тока (т.е. электромагнитом) вместо постоянного магнита.
Несмотря на это, они в целом называются ПМ преобразователи. В об-
щем случае ПМ преобразователи не являются устройствами переменно-
го магнитного сопротивления.
Так как магнитное поле ПМ стабильно и независимо от любых других
магнитных полей (например, от созданных индуцированным напряже-
нием), то ПМ преобразователи оказываются менее нелинейными, чем
другие типы преобразователей переменной индуктивности. У них есть и
другие преимущества. Они могут позволить иметь больший воздушный
зазор ( >1 см) между магнитом и движущимся объектом. В преобразо-
вателях переменного магнитного сопротивления, ошибочные сигналы
могут быть вызваны ферромагнитными объектами отличными от изуча-
емого. В ПМ преобразователях такие ошибки невозможны.
Преобразователи вихревого тока: флуктуирующее магнитное поле мо-
жет создавать токи даже на очень тонких и маленьких проводящих пло-
щадях. Если флуктуация поля создана механическим движением, то вих-
ревые токи дают измерение этого движения. Этот принцип используется
в преобразователях вихревого тока, таких как датчики приближения.
5.5 .1 тахометр Постоянного тока
Тахометр постоянного тока — это ПМ преобразователь, который исполь-
зует принцип электромагнитной индукции, где магнитное поле создается
постоянным током или ПМ. Напряжение индуцируется на проводящую
катушку из-за относительного движения между катушкой и магнитным
полем (пропорционально скорости изменения потока).
В зависимости от конфигурации можно измерять прямолинейные или
угловые скорости. Схематические диаграммы таких двух конфигураций
459
показаны на Рисунке 5.19. Это пассивные преобразователи, потому что
энергия для выходного сигнала vo преобразователя получена от самого
движения (т.е., измеряемого сигнала). Все устройство обычно укрыто в
стальной корпус для защиты (изоляции) его от внешних магнитных по-
лей.
В преобразователе прямолинейной скорости (Рисунок 5.19a), проводя-
щая катушка намотана на сердечник и расположена посередине между
двух полюсов магнита, что создает перекрестное магнитное поле. Сер-
дечник прикреплен к движущемуся объекту, чья скорость v измеряет-
ся. Эта скоро сть пропорциональна индуцированному напряжению vo. В
другом случае,
Permanent magnet – постоянный магнит
Output vo(measurement) – выход(измерение)
Velocity v (measurand) – скорость (измеряемая)
Moving coil – движущая катушка
РИСУНОК 5.19 ПМ преобразователи постоянного тока. (a) Прямолинейный
преобразователь скорости и (b) тахометр постоянного тока.
460
Двигающийся магнит и зафиксированная катушка могут быть использо-
ваны как преобразователь скорости (прямолинейный или ротационный).
Такое посторенние возможно более выгодно, так как оно устраняет ну-
жду в любых скользящих контактах (скользящие кольца и щетки) для
выходного сигнала, и, следовательно, уменьшает ошибку механической
нагрузки, изно с и соответствующие проблемы.
Тахометр постоянного тока (или тахогенератор) это обычный преобра-
зователь для измерения угловых скоростей. Его принцип работы тот же,
что и у генератора постоянного тока (или обратный привод двигателя
постоянного тока). Этот принцип работы проиллюстрирован на Рисунке
5.19b. Ротор напрямую подсоединен к вращающемуся объекту. Выход-
ной сигнал, который индуцирован во вращающейся катушке, снимает-
ся как напряжение постоянного тока vo с использованием подходящего
коммутатора – обычно состоящего из пары углеродных щеток с низким
сопротивлением – который закреплен стационарно, но контактирует с
вращающейся катушкой через кольца скольжения так, чтобы установить
направление индуцированного напряжения на каждом обороте (смотри
коммутацию в разделе двигатели постоянного тока). Согласно Закону
фарадея, индуцированное напряжение пропорционально скорости из-
менения магнитного потока. Для катушки высотой h и шириной 2r с n
витками, движущейся с угловой скоростью ωc в однородном магнитном
поле с плотностью потока β, оно задается как
Константа пропорциональности k между vo и ωc это чувствительность
тахометра, и используется как масштабирующий фактор в измерении
скорости ωc. Константа пропорциональности k также известна как про-
тиво-ЭДС по стоянная или постоянная напряжения, поскольку чем боль-
ше значение k, тем больше индуцированное напряжение. Обычно встре-
чаются тахометры постоянного тока с чувствительностью в диапазонах
0.5 –3, 1–10, 11–25, или 25–50 В на 1000 об/мин. Для тахометров низкого
напряжения сопротивление якоря может быть порядка 100 Ом. Для та-
хометров высокого напряжения сопротивление якоря может достигать
2000 Ом. Их размер может быть около 2 см в длину. Это достаточно ли-
нейное устройство (0.1% обычно).
5.5 .1 .1 Электронная коммутация
Скользящие кольца и щетки и соответствующие недостатки могут быть
461
устранены в тахометре постоянного тока при использовании электрон-
ной коммутации. В этом случае используется ПМ ротор вместе с набо-
ром обмоток статора. Выходной сигнал тахометра берется со стационар-
ной катушки (статора). Его нужно конвертировать в сигнал постоянного
тока с использованием механизма электронного переключателя, кото-
рый должен быть синхронизован с вращением тахометра (как в моторах
постоянного тока без щеток). Из-за переключения и соответствующих
изменений магнитного поля в выходном сигнале появятся внешне инду-
цированные напряжения, известные как переходные процессы при ком-
мутации. Это недостаток электронной коммутации.
5.5 .1 .2 Моделирование тахометра Постоянного тока
Эквивалентная цепь и механическая диаграмма тахометра постоянного
тока показаны на Рисунке 5.20. Обмотки запитаны напряжением посто-
янного тока vf. Поперечная переменная входного порта – это измерен-
ная угловая скорость ωi. Соответствующий крутящий момент Ti – это
сквозная переменная входного порта. Выходное напряжение vo цепи
якоря это поперечная переменная выходного порта. Соответствующий
ток индуктора io это сквозная переменная выходного порта. Теперь мы
имеем модель передаточных функций для этого тахометра. А также, мы
исследуем предположения, нужные для связывания этих результатов с
практической моделью вход-выход тахометра. Мы обсудим соответству-
ющие параметры для конфигурации; особенно важность механической
константы времени и электрической константы времени тахометра.
Созданное на якоре (роторе) напряжение vg пропорционально напря-
женности магнитного поля в обмотках, (которое в свою очередь пропор-
ционально току индуктора if) и скорости якоря ωi. Следовательно, vg =
K′ifωi. Предположим теперь что ток постоянный и получим vg = Kωi.
Магнитный крутящий момент ротора Tg, который сопротивляется при-
мененному крутящему моменту Ti, пропорционален напряженностям
магнитного поля на обмотках поля и якоря. Соответственно, Tg = K′ifio.
Так как if предполагается константой, то получим Tg = Kio.
Важно: Константа K это усиление или чувствительность тахометра. А
также это постоянная индуцированного напряжения и постоянная крутя-
щего момента. Это верно, если одни и те же единицы используются для
измерения механической мощности (Н• м/с) и электрической мощности
(Вт) и когда внутреннее рассеяние энергии в механизмах не значитель-
но в соответствующей внутренней связи (т.е . предполагается идеальная
462
конверсия энергии).
Уравнение для цепи якоря vo = vg − Raio − La(dio/dt), где Ra это сопро-
тивление якоря и La это индуктивность потерь цепи якоря.
Ссылаясь на Рисунок 5.20b, второй закон Ньютона для якоря тахометра
с моментом инерции J и константой затухания b можно выразить как
J(dωi/dt) = Ti − Tg − bωi. Теперь мы подставим в это выражение результа-
ты предыдущих, для того, чтобы избавиться от vg и Tg. Потом заменим
производные по времени переменной Лапласа s. Это даст нам два алге-
браических соотношения: vo = Kωi − (Ra + sLa)io и (b + sJ)ωi = Ti − Kio.
Важно: Переменные vi, io, ωi, и Ti в этих уравнениях являются на самом
деле преобразованиями Лапласа (функциями от s), а не функциями от t,
как это было ранее в уравнениях в пространстве времени. Мы сохраняем
тот же символ в обоих пространствах для простоты записи.
Наконец, io в первом уравнении устраняется с помощью второго уравне-
ния. Это дает нам выражение матрицы передаточных функций
РИСУНОК 5.20 Пример тахометра постоянного тока. (a) Эквивалентная цепь с
импедансом нагрузки и (b) схематическая диаграмма якоря
463
Соответствующие соотношения в пространстве частот можно получить
просто, заменив s на jω, где ω представляет угловую частоту (радиан в
секунду) в спектре частот сигнала.
5.5 .1 .3 рассмотрение конфигураций
Преобразователи более точно моделируются четырехполюсниками, у ко-
торых каждая из 4 переменных соответствует клемме (смотри Рисунок
5.20). Однако, это полезно и зачастую необходимо в практическом при-
менении измерительного прибора соотнести только одну переменную из
входной пары (измеряемая величина) с одной переменной второй пары
(измерение). Тогда, только одна (скалярная) передаточная функция (или
параметр усиление или, чувствительность) нужна для выявления соот-
ношения между этими двумя переменными. Для этого, в действительной
модели нужна какая-то форма разъединения. Если предположения разъ-
единения не вписываются рабочий диапазон, то в измерении появится
ошибка.
Разъединение модели: В настоящем примере тахометра, мы хотели бы
выразить выходное напряжение vo в измеренной скорости ωi. Для этого
недиагональным членом—(Ra + sLa)/K—в Уравнении 5.26 нужно пре-
небречь. Для этого, в уравнении модели (правая часть первого уравне-
ния (5.26)) мы должны сравнить весь связанный член Ti(Ra + sLa)/K со
всем прямым членом ωi[K + (Ra + sLa)(b + sJ)]/K, который включает не
только параметры, но и переменные Ti и ωi. Только тогда это будет это
будет обоснованным сравнением (и мы будем сравнивать члены в од-
них единицах измерения, и напряжение тоже). Видно, что член, которым
нужно пренебречь, становится все меньше по мере увеличения усиле-
ния тахометра (или чувствительности) K и уменьшение сопротивления
якоря Ra и индуктивности рассеяния La. Однако, это уменьшит так же
и другой член (который остался). Так как индуктивностью рассеяния La
сразу можно пренебречь, для тщательно разработанного тахометра (или
двигателя), адекватно рассматривать только K и Ra. Тем не менее, срав-
нивая члены модели разъединения, кроме значений параметров модели
(K, Ra, La, b, J) мы должны рассматривать значения (по крайней мере
предельные)
1. Переменные на входе (Ti and ωi)
2. Частота интереса переменных (ω)
Из Уравнения 5.26 видно, что динамические члены (содержащие пере-
менную Лапласа s) уменьшаются по мере увеличение K. Тогда, не только
464
весь связанный член становится мал, но и динамическая часть прямого
члена уменьшается. Оба эти последствия желательны. Заметим, из урав-
нений данных в выводе модели, что усиление тахометра K можно увели-
чить, увеличив ток индуктора if. Это будет невыполнимо, если катушки
уже насыщенны. Более того, K (или K′) зависит от таких параметров как
количество витков, размеры катушек статора, и магнитные свойства сер-
дечника статора. Так как есть ограничение в физическом размере тахо-
метра и типах материалов, использованных при создании, то ясно, что
K не может быть увеличено произвольно. Разработчик прибора должен
принять во внимание такие факторы при разработке конфигурации, оп-
тимальной во всех отношениях. В практике преобразователей, рабочий
диапазон выбирается таким образом, чтобы минимизировать эффект от
связанных членов (и нелинейностей, зависимости от частоты и т.д.), а
оставшиеся ошибки рассчитываются с использованием кривых коррек-
ции/калибровки. Этот подход более удобен, чем использование Уравне-
ния связанной модели 5.26, который вводит в модель еще три (скаляр-
ных) передаточных функции (в общем).
Постоянные времени: Еще одна желательная черта для практических
преобразователей – это статическое (т.е. алгебраическое, нединамиче-
ское) соотношение вход-выход, такое что выходной сигнал мгновенно
достигает входного значения (или измеренного значения), и зависимость
частоты от характеристик преобразователя устраняется. Тогда переда-
точная функция преобразователя становится чистым усилением (т.е . не-
зависимым от частоты). Это происходит при малых постоянных времени
(т.е., пропускная способно сть высока), как это описано в Главе 3. Воз-
вращаясь к примеру тахометра, из Уравнения 5.26 ясно, что соотноше-
ния передаточных функций становятся статичными (независящими от
частоты), когда обе постоянные времени и электричества
и механическая постоянная времени
пренебрежимо малы. Электрическая постоянная времени двигателя/ге-
нератора обычно на порядок величины меньше, чем механическая по-
стоянная времени. Значит, можно сконцентрироваться только на механи-
ческой постоянной времени. Заметим из Уравнения 5.28, что τm может
быть уменьшено понижением момента инерции ротора и увеличением
затухания ротора. К сожалению, момент инерции ротора зависит от его
465
размеров, и это определяет параметр усиления K, как мы видели ранее.
Следовательно, мы столкнулись с конструктивным ограничением при
уменьшении K. Более того, когда размер ротора уменьшен (для уменьше-
ния J), количество витков в обмотке так же уменьшится. Тогда, воздуш-
ный зазор между ротором и статором становится менее однородным, что
создает пульсацию в индуцированном напряжении (выходе тахометра).
В результате погрешность измерений может стать значительной. Теперь
вернемся к затуханию. Интуитивно понятно, что если мы увеличим b,
то больший крутящий момент Ti будет требоваться для запуска тахоме-
тра. Это создаст нагрузку на объект, чья скорость измеряется. Другими
словами, это исказит саму измеряемую величину ωi (механической на-
грузкой). Следовательно, увеличивать b следует о сторожно. Теперь, вер-
нувшись к Уравнению 5.26, мы заметим, что динамические члены пере-
даточной функции между ωi и vo увеличиваются вместе с K. Запишем
следующие преимущества от увеличения K:
1. Увеличивает чувствительность и уровень выходного сигнала
2. Уменьшает связи, то есть измерение напрямую зависит только от из-
меряемой величины
3. Уменьшает динамические эффекты (т.е., уменьшение зависимо сти
системы от частоты, тем самым увеличивая диапазон частот и про-
пускную способность или скорость отклика)
Запишем преимущества от уменьшения постоянных времени:
1. Уменьшает динамические члены (делает передаточные функции ста-
тическими)
2. Увеличивает рабочую пропускную способность
3. Делает датчик быстрее
Пример 5.3
Технические характеристики тахометра постоянного тока содержит сле-
дующие значения параметров:
Сопротивление якоря Ra = 35 Ом
Индуктивность рассеяния La = 4 мГн
Момент инерции ротора J = 8.5 × 10−7 кг ×м2 Крутящий момент трения
= 3.43 × 10−3 Н×м при 4000 об/мин
Чувствительность выходного напряжения = 3.0 V при 1000 об/мин
(а) Оцените электрическую постоянную времени, механическую по сто-
янную времени и рабочий диапазон частот тахометра.
(б) Проверьте, верны ли разъединяющие предположения (т.е., связанный
входной член пренебрежимо мал по сравнению с прямым входным чле-
466
ном).
решение
Электрическая постоянная времени
Оценка постоянной затухания
Важно: τe << τm.
Рабочий диапазон тахометра должен быть меньше, чем ωo = 1/τm =
1/0.104 с = 9.6 рад/с
Чувствительность напряжения = усиление = по стоянная крутящего мо-
мента = K = (3.0/104.7)В/рад/с или Н × м/А = 2.9 × 10-2 В/рад/с
Берем максимальный крутящий момент равным
3.43 × 10−3 Н ×м при 419 рад/с
А также, максимальную рабочую частоту ωo = 9.6 рад/с
Теперь посчитаем величины:
Прямой член,
467
Связанный член,
Видно, что ни динамическим ни связанным членом нельзя пренебречь
на максимальной рабочей частоте (9.6 рад/с), при данном значении чув-
ствительности (усиления). Очевидно, что точность датчика неприемле-
ма (возможны ошибки до 34%!).
Важно: Если мы сможем удвоить чувствительно сть тахометра до K = 5.8
× 10−2 В/рад/с, то, прямой член= 24.3 В и связанный = 2.1 .
Тогда, точность датчика будет гораздо лучше (худшая ошибка будет
<9%).
5.5 .1 .4 рассмотрение Нагрузок
Как отмечалось ранее, крутящий момент управления тахометра пропор-
ционален создаваемому току (в выходе по стоянного тока). Соответству-
ющая постоянная пропорциональности называется по стоянная крутяще-
го момента. В согласующихся единицах измерения в случае идеальной
конверсии энергии, эта постоянная равна постоянной напряжения и
чувствительности тахометра. Так как крутящий момент тахометра воз-
действует на двигающийся объект, чья скорость измеряется, то высокий
крутящий момент вызывает высокую механическую нагрузку, что неже-
лательно. Следовательно, следует уменьшать ток тахометра насколько
возможно. Это можно сделать, сделав импеданс входа устройства сбора
сигналов (т.е., считывания напряжения и интерфейса прибора) тахоме-
тра максимально большим. Кроме того, tискажение выходное сигнала
тахометра (напряжения) может возникать из-за реактивной (индуктив-
ной или емкостной) нагрузки тахометра. При использовании тахометров
постоянного тока для измерения скоростей скоротечных перемещений,
могут возникнуть ошибки из-за эффекта скорости (ускорения). Эта
ошибка скорости обычно увеличивает максимальную значимую частоту,
которая должна поддерживаться в сигнале скоростей скоротечных пере-
движений, которая в свою очередь зависит от максимальной скорости,
которую нужно измерить. Все эти типы ошибок можно уменьшить, уве-
личив импеданс нагрузки.
Для понимания, рассмотрим эквивалентную цепь тахометра с импедан-
сом нагрузки, подсоединенным к выходу цепи якоря показанной на Ри-
сунке 5.20. Индуцированное напряжение Kωc представлено источником
468
напряжения. Постоянная K зависит от геометрии катушки, числа витков
и плотности магнитного потока (смотри Уравнение 5.26). Сопротивле-
ние катушки обозначим как R, а индуктивность рассеяния как Ll. Импе-
данс нагрузки равен ZL. Из анализа цепи в пространстве частот, выход-
ное напряжение в нагрузке задается как
Видно, что из-за индуктивности рассеяния, выходной сигнал затухает
на высоких частотах ω скоростей быстрых перемещений. Кроме того,
присутствует ошибка нагрузки. Если ZL гораздо больше импеданса на-
грузки, то достигается идеальная пропорциональность vo = Kωc.
Важно: Цифровой тахометр — это преобразователь скорости, который
работает по несколько другом принципу. Он создает пульсации напряже-
ния на частоте, пропорциональной угловой скорости. Следовательно, он
считается цифровым преобразователем, как это обсуждалось в Главе 5.
5.5 .2 тахометр Переменного тока
Тахометр переменного тока — это тоже преобразователь скорости.
Обычный тахометр переменного тока имеет две обмотки статора. Одна
катушка заряжается несущим сигналом переменного тока, и индуциру-
ет сигнал переменного тока той же частоты в другой катушке статора.
Скорость вращения ротора модулирует индуцированный сигнал, и это
можно использовать.
Для измерения скорости. Есть два типа тахометров переменного тока.
Один использует ПМ ротор, а другой использует укороченную катушку
как ротор.
5.5 .2 .1 тахометр Переменного тока на Постоянном Магните
ПМ тахометр переменного тока имеет ПМ ротор и два разных набора
катушек статора, как схематически показано на Рисунке 5.21a. Один на-
бор обмоток (первичный) заряжается с помощью опорного (несущего)
напряжения переменного тока. Индуцированное напряжение в другом
наборе обмоток (вторичном) это выходной сигнал тахометра. Когда ро-
тор неподвижен или движется квазистатические, выходное напряжение
469
—
это постоянный по амплитуде сигнал очень похожий на опорное на-
пряжение, с той же (несущей) частотой, как в электрическом трансфор-
маторе. Когда ротор движется с некоторой скоростью, дополнительное
напряжение индуцируется во вторичной катушке, которое модулирует
начально индуцированное напряжение несущей частоты. Этот модули-
рованный сигнал пропорционален скорости ротора, и создается из-за из-
менения потока во второй катушке в результате вращения магнита.
Видно, что суммарный выход во вторичной катушке - это амплитуд-
но-модулированный сигнал. Его можно демодулировать для извлечения
сигнала скорости (т.е. модулирующего сигнала). Направление движения
определяется из фазового угла модулированного сигнала по отношению
к несущему. Если скорость ротора постоянна, то амплитуда выходного
сигнала будет измерением скорости (не будет нужды демодулировать
выходной сигнал).
Важно: В LVDT, амплитуда магнитного потока (рассеяния) переменно-
го тока изменяется положением ферромагнитного сердечника. Однако
в ПМ тахометре переменного тока, магнитный поток постоянного тока
создается магнитным ротором, и когда ротор неподвижен, то он не ин-
дуцирует напряжение в катушках. Поток связанный с катушками статора
изменяется из-за вращения ротора, а скорость изменения потока пропор-
циональна скорости ротора.
РИСУНОК 5.21 (a) Тахометр переменного тока на постоянном магните и (b)
тахометр индукции переменного тока.
470
Для низкочастотных приложений (≤5 Гц), стандартная частота источни-
ка переменного тока (60 Гц) будет адекватна для питания тахометра пе-
ременного тока. Для среднечастотных приложений, можно использовать
источник частотой 400 Гц. Для высокочастотных (с высокой пропускной
спо собностью) приложений, генератор сигналов высокой частоты (ос-
циллятор) может быть использован как первичный сигнал. В приложе-
ниях с высокой пропускной способностью, обычно используют высокие
частоты порядка 1.5 кГц. Обычная чувствительность ПМ тахометра по-
рядка 50–100 мВ/рад/с.
5.5 .2 .2 тахометр индукции Переменного тока
Тахометр индукции переменного тока конструктивно похож на асин-
хронный двухфазный двигатель. Расположение статора то же, что и в
ПМ тахометре, как было представлено ранее. На роторе есть обмотки,
которые укорочены и не запитаны от внешнего источника, как показа-
но на Рисунке 5.21b. Первичная катушка статора питается от источника
переменного тока. Это индуцирует напряжение во вторичной катушке
статора, как и в ПМ тахометре переменного тока. Когда ротор вращается
(в магнитном поле, созданном первичной катушкой статора) в нем так
же индуцируется напряжение. Этот сигнал модулирует индуцированный
сигнал несущей частоты во вторичной катушке статора. Демодуляция
выходного сигнала со вторичной катушки статора потребуется для из-
влечения скорости ротора.
5.5 .2 .3 Преимущества и Недостатки тахометров Переменного тока
Главное преимущество тахометра переменного тока над тахометром по-
стоянного – это отсутствие скользящих колец и щеток, так как выход
снимается со статора. Выходной сигнал с тахометра постоянного тока
обычно имеет пульсации напряжения, известные как пульсации комму-
тации или шум щеток, которые создаются, когда концы разъединенного
кольца проходят через щетку и создается биение контакта и так далее.
Частота пульсации коммутации пропорциональна скорости работы; сле-
довательно, отфильтровать их с использованием режекторного фильтра
трудно (поскольку понадобится отслеживающий скорость режекторный
фильтр). Кроме того, есть проблемы с нагрузкой трения и биения кон-
тактов в тахометрах по стоянного тока, но эти проблемы отсутствуют в
тахометрах переменного тока. Заметим, однако, что тахометр постоян-
471
ного тока с электронной коммутацией не использует скользящих колец
и щеток. Но он создает переходные процессы переключения, что так же
нежелательно.
Для тахометра, как и для любого датчика, компоненты шума доминиру-
ют при низких уровнях выходного сигнала. В частности, так как выход
тахометра пропорционален измеряемой скорости, то при низких скоро-
стях, ОСШ будет низким. Следовательно, избавление от шумов имеет
важное значение при низких скоростях.
Тахометры переменного тока дают измерения без дрейфа при постоян-
ных условиях. Это еще одно важное преимущество в сравнении с тахо-
метром постоянного тока.
Известно, что при высоких скоростях, выход тахометра переменного
тока несколько нелинеен (в основном из-за эффекта насыщения). Кроме
того, требуется демодуляция сигнала, особенно для измерения скоростей
коротких перемещений. Еще один недостаток тахометра переменного
тока состоит в том, что уровень выходного сигнала зависит от источни-
ка напряжения; а это значит, что требуется отрегулированный источник
напряжения с очень малым выходным импедансом. А также, пропуск-
ная способность измерений (предел частот) зависит от несущей частоты
(около 1/10 от несущей частоты).
5.5 .3 Преобразователи вихревого тока
Если проводящая (т.е ., с низким сопротивлением) среда подвергается
воздействию флуктуирующего магнитного поля, то в среде образуются
вихревые токи. Сила вихревых токов возрастает с напряженностью маг-
нитного поля и частотой магнитного потока. Этот принцип используется
в датчиках приближения вихревого тока. Датчики вихревого тока могут
быть использованы как датчики перемещения или датчики проверки раз-
меров.
Схематическая диаграмма датчика приближения вихревого тока показа-
на на Рисунке 5.22a. В отличие от датчиков приближения переменной
индуктивности, целевой объект в датчиках вихревого тока не обязан
быть из ферромагнитного материала. Целевой объект должен быть про-
водящим, но тонкая пленка проводящего материала, такая как корпус из
приклеенной алюминиевой фольги, подойдет. У зонда есть две идентич-
ные катушки, которые составляют два плеча моста импеданса. Ближняя
к поверхности зона катушка - это активная катушка. Другая же – компен-
сирующая катушка. Она компенсирует окружающие изменения, особен-
472
но температурные эффекты. Оставшиеся два плеча моста состоят из чи-
сто резистивных элементов (смотри Рисунок 5.22b). Мост возбуждается
радиочастотой источника напряжения. Частота может разниться от 1 до
100 МГц. Этот сигнал создается конвертером радиочастот (осциллято-
ром), который обычно питается 20 В источником постоянного тока. Когда
целевой объект (измеряемы) отсутствует, выход моста импедансов равен
нулю, что отвечает положению равновесия. Когда целевой объект двига-
ется ближе к датчику, то в проводящей среде создаются вихревые токи
из-за магнитного потока радиочастоты от активной катушки. Магнитное
поле вихревых токов противоположно направлено первичному полю,
которое создает эти токи. Следовательно, индуктивность активной ка-
тушки увеличивается, и создает неравновесие в мосту. Результирующий
выход с моста – это амплитудно-модулированный сигнал, содержащий
РИСУНОК 5.22 Датчик приближения вихревого тока. (a) Схематическая диа-
грамма и (b) мост импеданса.
473
несущую радиочастоту. Этот сигнал демодулируется для убирания не-
сущей. Получившийся сигнал (модулирующий) измеряет краткосрочное
перемещение целевого объекта. фильтр низких частот используется для
убирания остаточных высокочастотных шумов после убирания несущей.
При больших перемещениях, выход преобразователя вихревого тока не-
линейно связан с перемещением. Кроме того, чувствительность преоб-
разователя нелинейно зависит от природы проводящей среды, особенно
от удельного сопротивления. Например, при низких удельных сопро-
тивлениях чувствительность растет вместе с ними; а при высоких они
уменьшается. Блок калибровки обычно поставляется с коммерческими
датчиками вихревого тока для калибровки различных объектов и нели-
нейностей. Калибровочный фактор
обычно измеряется в вольтах на миллиметр (В/мм). Заметьте, что зонды
вихревых токов можно использовать и для измерения удельного сопро-
тивления и твердости поверхности, что в металлах влияет на удельное
сопротивление.
При считывании вихревых токов, площадь проводящей среды, соприка-
сающейся с объектом должна быть немного больше чем передняя часть
головки зонда вихревых токов. Если у объекта изогнутая поверхность,
то радиус кривизны должен быть по крайней мере в четыре раза больше
диаметра зонда. Это не очень серьезные ограничения, поскольку диа-
метр зонда обычно около 2 мм. Датчики вихревого тока это устройства
среднего импеданса; обычный выходной импеданс составляет 1000 Ом.
Чувствительность порядка 5 В/мм. Преимущества датчиков вихревого
тока включают в себя:
1. Так как несущая частота очень велика, то датчики вихревого тока
применимы только для высоко скоростных перемещений (например,
пропускные способности до 100 кГц).
2. Датчик вихревого тока — это бесконтактное устройство; а значит,
он не дает механической нагрузки на движущийся (целевой) объект.
3. Датчики вихревого тока могут точно работать даже при нечистых
движениях (пока проводящие объекты не взаимодействуют с изме-
ряемым окружением).
4. Ему требуется только тонкая проводящая поверхность, которая не
сильно шире зонда.
5.6 Преобразователи Переменной Емкости
Устройства переменной индуктивности и переменной емкости являются
474
устройствами переменной реактивно сти. (Важно: Реактивность индук-
тивности L задается как jωL и емкости C как 1/(jωC), так как v = L (di/
dt) и i = C (dv/dt).) Поэтому, преобразователи емкости попадают в об-
щую категорию преобразователей реактивно сти. Это обычно датчики с
высоким импедансом, особенно на низких частотах, как можно понять
из уравнения импеданса (реактивности) для конденсатора. Кроме того,
датчики емкости — это бесконтактные устройства в общем случае. Они
требуют специфической аппаратуры для обработки сигналов. Кроме
аналоговых датчиков емко сти, существуют цифровые (импульсо-гене-
рирущие) преобразователи емкости, например, цифровые тахометры.
Конденсатор состоит из двух пластин, которые могут хранить электри-
ческий заряд. Сохраненный заряд создает разницу потенциалов между
пластинами и может поддерживаться внешним напряжением. Емкость C
конденсатора из двух пластин задается как
(5.30)
где
A- это общая (дублированная) площадь двух пластин
x - это зазор между пластинами
k - это диэлектрическая постоянная (или диэлектрическая проницае-
мость, k = ε = εr εo; εr это относительная диэлектрическая проницае-
мость, εo это диэлектрическая проницаемость вакуума), которая зависит
от диэлектрической среды между двумя пластинами
Изменение любого из трех параметров Уравнения 5.30 может быть ис-
пользовано в процессе измерения. Поэтому, Уравнение 5.30 может быть
записано как ln C = −ln x + ln A + ln k. Взяв дифференциалы членов этого
уравнения, мы получим
Этот результат можно использовать для измерения поперечных переме-
щений, больших вращений и больших уровней жидкости.
Важно: Уравнение 5.31 верно только для малых увеличений x, но верно
для больших увеличений A и k, поскольку Уравнение 5.30 нелинейно по
x, но линейно по A и k. Однако, Уравнение 5.30 становится линейным по
x при использовании логарифмической шкалы.
475
Схематические диаграммы емкостных датчиков, которые используют из-
менения в трех переменных величинах Уравнения 5.31 показаны на Ри-
сунке 5.23. На Рисунке 5.23a, поперечное перемещение одной из пластин
приводит к изменению x. На Рисунке 5.23b, угловое перемещение одной
из пластин приводит к изменению A.
Наконец, на Рисунке 5.23c, происходит изменение k при изменении уров-
ня жидкости между пластинами конденсатора. Во всех трех случаях, со-
ответствующее изменение емкости измеряется напрямую (например, с
использованием моста емкости или цепи осциллятора) или не напрямую
(например, выходное напряжение цепи моста или потенциометра) и ис-
пользуется для оценки измеряемой величины.
5.6 .1 Цепи Считывания Емкости
В преобразователях переменной емкости, изменение емкости измеря-
ется напрямую или не напрямую для предо ставления данных об изме-
РИСУНОК 5.23 Схематические диаграммы датчиков емкости. (a) Емкостной
датчик перемещения, (b) емкостной датчик вращения, и (c) емкостной датчик
уровня жидкости.
Position - Позиция
Capacitance bridge - Мост емкости
476
ряемой величине. Более того, изменение емкости датчика, которое не
вызвано изменением измеряемой величины (например, из-за изменения
влажности, температуры, из-за старения и так далее) создает ошибки в
данных датчика и должно быть скомпенсировано. Обычные виды цепей,
использующихся для считывания емкости – это мост емкости, цепь по-
тенциометра, емкостная цепь обратной связи (усилитель заряда) и LC
контур осциллятора. Они изложены в последующих разделах.
5.6 .2 Схемы емкостных датчиков
В датчиках с переменной емкостью изменение емкости измеряется пря-
мым или косвенным методом для изучения значения измеряемой вели-
чины. Наряду с этим, изменение емкости датчика, которое произошло
не по причине изменения измеряемой величины (например, из-за изме-
нения влажности, температуры, механического старения и т.д .), может
вызвать ошибки показаний датчика и должно быть принято во внимание.
К распространенным типам схем, которые используются для измерения
с помощью емкостных датчиков, можно отнести емкостный мост, потен-
циометрическую схему, схему с емкостной обратной связью (электро-
метрический усилитель) и схема LC-генераторов. Они рассмотрены в
следующих разделах.
5.6 .2 .1 Емкостный мост
Использование емкостного моста является популярным способом изме-
рения изменений емкости (см. Главу 3). В одно из плеч моста включен
датчик, в другом находится емкостный конденсатор. Это выравниваю-
щая емкость, которая меняется схожим с датчиком образом из-за воз-
действий окружающей среды. В двух оставшихся плечах (полном мо-
сте) действует равное полное сопротивление. Питанием моста служит
напряжение переменного тока повышенной частоты. Исходно мост сба-
лансирован, поэтому выходной сигнал равен нулю. Так как емкость дат-
чика изменяется в процессе измерения, выходной сигнал перестает быть
нулевым. Теперь он состоит из несущего сигнала той же частоты, что и
ток возбуждения мо ста (формирует также и опорное напряжение), моду-
лируемый изменением емкости датчика.
Рассмотрим мостовую схему, изображенную на рис. 5 .24 . На этой схеме:
Z2 = Z2 = 1/jωC2 = сопротивлениe (например, емкостное сопротивление)
477
емкостного датчика (при емкости C2);
Z1 = 1/jωC1 = реактивное сопротивление компенсирующего конденса-
тора C1;
Z4, Z3 – полное комплексное сопротивление (обычно, реакторов);
vref = va sin ωt (удвоенная частота) – напряжение переменного тока по-
вышенной частоты;
vo=vbsin(ωt−φ)–выходмоста;
φ – фазовая задержка выхода моста по отношению к напряжению.
Используя два допущения при работе с операционными усилителями
(потенциалы положительного и отрицательного выводов равны между
собой, и сила тока, проходящая через эти выводы, равна нулю; см. Главу
2), напишем уравнение баланса токов:
((vref − v)/Z1) + ((vo − v)/Z2) = 0
и ((vref − v)/Z3) + ((0 − v)/Z4) = 0,
где v – общее напряжение в выводах операционного усилителя.
Опустив v в следующих двух равенствах, получим:
(5.32)
Compensator Z1 – Компенсатор Z1
Sensor Z2 – Датчик Z2
Excitation – Возбуждение переменным током
Bridge completion – дополняющий резистор
Bridge output vo – выходное напряжение моста vo
Рисунок 5.24 . Мостовая схема емкостных датчиков.
478
Следует отметить, что выходное напряжение моста vo = 0, когда Z2/Z1
= Z4/Z3. При таких условиях мост считается сбалансированным. Так
как датчик и компенсирующий конденсатор находятся под одинаковым
воздействием внешней среды, сбалансированный мост будет сохранять
свое состояние даже при воздействии внешней среды. Из этого следует,
что воздействие внешней среды компенсируется (по крайней мере пер-
вого порядка) схемой моста.
Из равенства 5.32 видно, что в результате изменения измеряемой вели-
чины, когда реактивное сопротивление датчика Z2 меняется из-за δZ,
взяв за основу условие уравновешенности, мы получаем следующий вид
выходного напряжения моста:
Изменение полного сопротивления (реактивного сопротивления) в кон-
денсаторе датчика изменяет несущий сигнал vref. Для измерения пере-
ходных процессов измененное выходное напряжение моста необходимо
демодулировать. В стабильном состоянии амплитуды и фазового угла
δνo относительно vref достаточно для определения δZ, исходя из того,
что Z1 и Z4/Z3 известны.
Примечание: Вместо указанного на рис. 5 .23 операционного усилителя
для достижения более эффективных результатов можно использовать из-
мерительный усилитель (см. Главу 2).
5.6 .1 .2 Потенциометрическая схема
Вместо моста для измерения сопротивления в емко стных датчиках мож-
но использовать более простую потенциометрическую схему. Пример
представлен на рис. 5 .25.
В этой схеме датчик Zs соединен с последовательным сопротивлением
Z, которое точно известно. Выходное напряжение схемы имеет следую-
щий вид:
479
Данное напряжение имеет несущий сигнал vref, модулированный изме-
нением полного сопротивления датчика (емкостного сопротивления) Zs.
Колебание полного сопротивления датчика (переходного процесса) мо-
жет быть получены путем демодулирования данного сигнала.
Это относительно про стая схема. Тем не менее, ей присущи недо статки
любой потенциометрической схема. Например, ее нельзя компенсиро-
вать на воздействия внешней среды. Кроме того, колебания сигнала-пе-
реносчика влияют на точность измерения.
5.6 .1 .3 Схема электрометрического усилителя
Схема операционного усилителя с конденсатором обратной связи Cf, ко-
торая идентична электрометрическому усилителю, может быть исполь-
зована в датчике с переменной емкостью. Схема данного типа представ-
лена на рисунке 5.26. Емкость датчика обозначена как Cs.
Баланс заряда в узле А рассчитывается как vrefCs + voCf = 0. Выходной
контур можно представить в виде:
(5.35)
Как и в предыдущем случае, он совпадает с несущим сигналом, смоду-
Supply voltage vref – напряжение сети
Output – выход
Sensor – датчик
Demodulator – демодулятор
Demodulated output – демодулированный выходной сигнал
Рис. 5 .25 Потенциометрическая схема для датчиков с переменной емкостью
480
лированным изменением емкости датчика. Чтобы измерить параметры
датчика в переходном состоянии, его нужно демодулировать.
5.6 .1 .4 Схема LC-генератора
Альтернативный способ измерения емко сти датчика – сделать датчик ча-
стью схемы индуктивно-емкостного генератора (LC-генератора) с точно
известным показателем индуктивности L. Резонансная частота данной
схемы рассчитывается как. Отсюда следует, что емкость датчика можно
определить путем расчета резонансной частоты измерения.
Примечание. Данный метод можно также использовать для измерения
индуктивности.
5.6 .2 Емкостный датчик перемещений
формула, указанная на рисунке 5.23а, представляет собой датчик для из-
мерения поперечных перемещений и дистанции (х). Одна из обкладок
конденсатора прикреплена к движущемуся объекту (либо сам движу-
щийся объект может образовывать обкладку конденсатора), другая же
находится в неподвижном состоянии. Представленная в равенстве 5.30
зависимость является нелинейной в данном случае. Если мы добавим
полную нелинейность (а не только маленькие приращения, как пред-
ставлено в равенстве 5.31), изменение емкости датчика вследствие сме-
Supply voltage vref – напряжение сети
Opamp – операционный усилитель
Output vo – выход vo
Рис. 5 .26 Схема конденсатора обратной связи для датчика с переменной емко-
стью.
481
щения будет иметь следующий вид:
or-или
Примечание: Для маленьких приращений х данная нелинейная зависи-
мость может приближенно вычисляться линейным уравнением δC/C =
−(δx/x), как представлено в равенстве 5.31.
Простым спо собом преобразования поперечных перемещений в линей-
ный вид, имеющим место для разноразмерных перемещений и не вли-
яющим на точность, является использование усилителя-инвентора (рис.
5.27). Обращаем внимание, что Cref – фиксированная исходная емкость,
значение которой точно известно. Так как амплитудно-частотная харак-
теристика операционного усилителя очень высока, напряжение на отри-
цательном выводе (узел А) приравнивается к нулю в практических це-
лях (поскольку положительный вывод заземлен). Помимо этого, так как
входное полное сопротивление операционного усилителя также очень
высоко, ток во входных проводах не принимается в расчет. Существу-
ют 2 распространенных теории, используемые в анализе операционных
усилителей (см. Главу 2). Исходя из этого, уравнение баланса заряда для
узла А выглядит следующим образом:
vrefCref + voC = 0
Теперь, заменив уравнение 5.30, получаем следующее линейное уравне-
ние выходного напряжения относительно перемещения х:
В данном уравнении K = kA. Следовательно, цепь выхода vo можно
линейно откалибровать, чтобы произвести перемещение. Чувствитель-
ность прибора может быть повышена путем увеличения vref и Cref.
Частота исходного возбуждения (носителя) может достигать 25 кГц (для
широкополосных измерений). Выходное напряжение (равенство 5.37)
является модулированным сигналом, который нужно демодулировать
для измерения неустановившегося перемещения, как было сказано ра-
нее.
5.6 .3 Датчики вращения и датчики угловой скорости
482
Согласно рисунку 5.23b, одна платформа конденсатора является опозна-
ваемым материалом (валом), который вращается, либо прикреплена к
нему. Другая платформа остается неподвижной. Так как общая область
А пропорциональна углу поворота θ из уравнения 5.30, уравнение датчи-
ка может быть записано следующим образом:
C=Kθ
(5.38)
В данном уравнении K является коэффициентом усиления датчика.
Здесь присутствует линейная связь между C и θ. Угол поворота θ можно
измерить путем измерения емкости любым способом, как было сказано
ранее. Датчик можно линейно откалибровать, чтобы определить угол по-
ворота.
Схематичный график датчика угловой скорости с применением враща-
ющихся емкостей представлен на рисунке 5.28. В нем действует подача
постоянного напряжения vref и датчик тока. Так как датчик тока должен
иметь несущественное сопротивление, напряжение в конденсаторе прак-
тически равно vref, имеющему постоянное значение. Отсюда следует,
Excitation voltage – напряжение возбуждения
Opamp – операционный усилитель
Output – выход vo
Рис. 5 .27 Схема линеаризации усилительного контура для емкостных датчиков
поперечных перемещений
483
что ток в схеме можно представить, как:
i = (d/dt)(Cvref) = vref(dC/dt),
который в связи с уравнением 5.38, можно представить следующим об-
разом:
Здесь присутствует линейная связь между угловой скоростью и измеря-
емой величины тока i. Необходимо тщательно удостовериться, что при-
бор для измерения тока не вступает в контакт с принципиальной схемой
(например, не перегружает ее).
5.6 .4 Датчики уровня жидкости
формула из рисунка 5.23с может быть использована для измерения уров-
ня жидкости (y). Этот спо соб основан на изменении диэлектрической
проницаемости среды, в то время как А и х в уравнении 5.30 являются
неизменными. Так как напряжение в участке с воздухом (а) и в участке с
водой (l) является одинаковым, тогда как заряды суммируются, емкость
также суммируется:
Следовательно, мы можем выразить жидкий уровень как
где
х является разрыв пластины
h высота пластины
b ширина пластины
ka удельная проводимость воздуха
kl удельная проводимость жидкости
Жидкий уровень y может быть определен, путём измерения емко сти
C используя любой метод, как обсуждалось ранее.
Устройство, показанное на рисунке 5.23c, могут быть также использова-
484
ны для определения смещений. В этом случае твердый диэлектрический
элемент, который может свободно перемещаться в продольном направ-
лении пластин конденсатора, присоединяется к движущимся объектам,
перемещение которых необходимо измерить. Диэлектрическая констан-
та конденсаторных изменений как общая зона между диэлектрическим
элементом и конденсаторными пластинами варьируется из-за движения.
Следовательно, Уравнение 5.40 может использоваться, чтобы опреде-
лить смещение. В этом случае “l” обозначает твердую диэлектрическую
среду, которая перемещается с движущимся объектом, смещение которо-
го должно быть измерено.
5.6 .4 .1 Диэлектрическая проницаемость диэлектрической среды
Помимо датчиков уровня и смещения, многие другие типы датчиков ос-
нованы на диэлектрической проницаемости диэлектрической среды кон-
денсатора. По существу, измеряемая величина (например, влажность)
изменяет диэлектрическую проницаемо сть диэлектрической среды, ко-
торая измеряется путем измерения результирующего изменения емко-
сти. Относительная диэлектрическая проницаемость некоторого мате-
риала приведена в таблице 5.4 . Эти значения выражаются относительно
диэлектрической проницаемости вакуума, εo = 8.8542 × 10-12 F / м, что
почти равна плотности воздуха. Следовательно, относительная диэлек-
трическая проницаемость вакуума = 1≈ относительная диэлектрическая
проницаемость воздуха.
Supply dc voltage – подача постоянного напряжения
Current sensоr – датчик тока
Рис. 5 .28 Датчик угловой скорости на основе вращающихся плит
485
таблица 5.4 Относительные величины диэлектрической проницаемо сти
(приблизительно) некоторых материалов
Материал Относительная диэлектрическая проницаемость, εr
Титанат бария 1,250-10,000
Бетон 4.5
Этиленгликоль 37
Глицерин 43
Графит 10-15
Цирконата титаната свинца 500-6,000
Бумага, диоксид кремния 4
Полистирол, нейлон, тефлон 2,3
Pyrex (из стекла) 4-10
Резина 7
Соль 3-15
Кремний 12
Двуокись титана 85-170
Вода 80
5.6 .5 Применения емкостных датчиков
С учетом их преимущества, емкостные датчики применяются непосред-
ственно или косвенно во многих практических ситуациях. Они имеют
также несколько недостатков.
5.6 .5 .1 Преимущества и недостатки
Есть много преимуществ емкостных датчиков, включая следующие:
1. Они бесконтактные устройства. (Движущаяся пластина является
неотъемлемой частью с целевым объектом; механические эффекты
загрузки незначительны.)
2. Прекрасное измерение может быть сделано в высоком разрешении
(например, под нанометр; разрешение емкости 10−5 пф (пикофара-
да); 1 пф = 10−12 F).
3. Измерение не чувствительно к материалу целевого объекта (конден-
саторная пластина).
4. Компенсации посторонними емкостями (например, емкость кабеля)
являются прямыми (использование усилителя заряда, мостовой схе-
486
мы, и т.д .).
5. Относительно менее дорогостоящие и малые.
6. Возможны линейные и высокие измерения пропускной способности
(например, пропускная спо собность на 10 кГц; 0-10-вольтовый мост
- помещенный; диапазон измерений смещения: 10–500 μm; тестовый
диаметр, 8 мм; масса, 8 г; линейность, 0.25%)
Основные недостатки включают в себя следующее:
1. Эксплуатация нуждается в чистой среде (затронутый влажностью,
температурой, давлением, грязью, пылью, старением, и т.д.).
2. Большие зазоры пластины приводят к высокой погрешности.
3. Низкая чувствительно сть (для поперечного преобразователя смеще-
ния, чувствительность <1 пф = 10-12 F ). Примечание: Могут исполь-
зоваться высокое напряжение питания и схема усилитель, чтобы увели-
чить чувствительность датчика.
Так как конденсатор полагается на свой заряд и получающееся электри-
ческое поле, любая ситуация, которая затрагивает эту область, вызовет
ошибку. У емкостного датчика, как правило, есть охрана, чтобы создать
дополнительную область вокруг него. Эта область создана тем же самым
напряжением, которое присутствует в конденсаторе датчика. Охрана по
существу действует как дающий компенсацию конденсатор, который
дает компенсацию за любые посторонние емкости, которые затрагивают
датчик.
5.6 .5 .2 Применения емкостных датчиков
Емкостный датчик может использоваться непосредственно, чтобы изме-
рить количество, которое затрагивает его емкость (т.е., величину, которая
изменяется x, A, или k в Уравнении 5.30) или количество, которое связа-
но (говорят, через вспомогательный элемент) с такой величиной (напри-
мер, используя ощущение отклонения для измерения силы, используя
клетку груза, ощущение давления, ощущение ускорения). Применения
емкостных преобразователей включают следующее:
1. Обнаружение движения (например, расположение пластины в отрас-
ли полупроводника (SC) , управление дисководом, машиностроительное
управление)
2. Замер и метрология (например, толщина пластин, измерение произве-
487
денных частей для контроля качества)
3. Объектное обнаружение (например, считая части в поточных линиях,
обнаруживая размещение прописной буквы на заводах по розливу, сен-
сорных кнопочных переключателях лифтов, и т.д.)
4.Определение уровня жидко сти (например, на обрабатывающих заво-
дах)
5. Тестирование материала (например, поверхностные свойства объек-
тов, обнаруживая воду в топливе)
6. Экологическое обнаружение (например, влажность, почва)
Пример 5.4
Емкостный датчик отно сительной влажности имеет среднюю чувстви-
тельность 2,0% RH / мкф и смещение -5,0% RH. Каков процент отно-
сительной влажно сти (% относительной влажности), что соответствует
измерению емкости 50 мкф?
решение
Предположим, линейный датчик калибровочная кривая которого задает-
сяRH=RH0+м×C
Примечание: Это предположение считается удовлетворительным в соот-
ветствии с экспериментальными данными. Принимая во внимание: RH0
= -5,0%ит=2,0%RH/мкф
ДляC=50мкф,мыимеемRH= -5+2,0×50=95%RH
5.7 Пьезоэлектрические датчики
Некоторые вещества, такие как титанит бария, монокристаллический
кварц, цирконат титанита свинца (ЦТС), лантан модифицированного
ЦТС (или PLZT), ниобат лития и пьезоэлектрический полимерный по-
ливинилиденфторид (ПВДф) генерируют электрический заряд и связан-
ную с ним разность потенциалов, когда они подвергается механическому
напряжению или деформации. Этот пьезоэлектрический эффект исполь-
зуется в пьезоэлектрических преобразователях. Это пассивные датчики,
потому что энергетическое преобразование (электромеханическая связь)
посредством пьезоэлектрического эффекта используется в обнаруже-
нии измеряемой величины.
Например, прямое применение пьезоэ-
лектрического эффекта найдено в давлении и измерительных приборах
деформации, сенсорных экранах компьютерных мониторов, сложных
488
микрофонов, датчиков удара в автомобильных механизмах, измерении
температуры (кристаллическая резонансная частота, которая изменя-
ется нелинейно с температурой, может использоваться. Например, ре-
зонансная частота увеличивается приблизительно с −20°C до +20°C и
уменьшается от +20°C до +50°C), и множество микродатчиков. Также
существуют много косвенных приложений. Они включают в себя пьезо-
электрические акселерометры и датчики скорости и пьезоэлектрические
датчики крутящего момента, и датчики силы. Конечно, в дополнение к
пассивному пьезоэлектрическому датчику, состояние сигнала (напри-
мер, усилитель заряда, которому нужен внешний источник питания),
должно использоваться с пьезоэлектрическими преобразователями.
Также интересно отметить, что пьезоэлектрические материалы дефор-
мируются, когда подвергаются разности потенциалов (или заряд или
электрическое поле), и могут служить в качестве исполнительных меха-
низмов. Это - обратный пьезоэлектрический эффект. Некоторое тонкое
испытательное оборудование (например, на неразрушающемся, дина-
мическом испытании) используют такие пьезоэлектрические элементы
приведения в действие (которые подвергаются обратному пьезоэлек-
трическому действию) для создания тонких движений. Кроме того, пье-
зоэлектрические клапаны (например, заслонки клапанов и топливные
форсунки), с прямым приводом, используют сигналы напряжения, ис-
пользуются в пневматическом и гидравлическом управлении в струйных
принтерах и автомобильных двигателях. Пьезоэлектрические приводы
используются, чтобы генерировать акустические волны в различных
приложениях включая медицинские отображения и изощренные акусти-
ческие системы. Миниатюрные шаговые двигатели на основе обратного
пьезоэлектрического действия также доступны. Микроприводы, кото-
рые используют пьезоэлектрический эффект, найдены во многих прило-
жениях включая дисководы для жестких дисков (жесткие диски). Этот
многофункциональный характер (обнаружение и приведение в действие)
пьезоэлектрического материала делает его умным материалом, который
используется в сложном техническом применении и MEMS.
Пьезоэлектрический эффект: пьезоэлектрический эффект вызван поля-
ризацией заряда в анизотропном материале (наличие несимметричной
молекулярной структуры), в результате приложенного напряжения. В
частности, заряд (или электрическое поле) выпущено, когда материал
напряженный. Это - двусторонний эффект. В частности, когда электри-
ческое поле применено к материалу, оно изменяет ионную поляризацию,
и материал теряет напряжение (т.е ., оригинальное напряжение удалено,
489
и материал возвращает свою оригинальную форму). Естественные пье-
зоэлектрические материалы в общем и целом кристаллические, тогда
как синтетические пьезоэлектрические материалы имеют тенденцию
быть керамикой. Когда направление электрического поля и направление
деформации (или стресса) одинаковы, мы имеем прямую чувствитель-
ность. Поперечная чувствительность может быть определена также в
матрицах 6× 6 со ссылкой на три ортогональные прямые оси и три вра-
щения вокруг этих о сей.
Считайте пьезоэлектрический кристалл в форме диска с двумя электро-
дами покрытым металлом на двух противоположных сторонах. Так как
кристалл - диэлектрическая среда, это устройство - по существу конден-
сатор, который может быть смоделирован емкостью. Соответственно,
пьезоэлектрический датчик может быть представлен как источник заряда
qs с емкостью Cs параллельно, как показано в рисунке 5.29. Это - Нортон
эквивалентная схема. Конечно, есть внутреннее сопротивление также в
пьезоэлектрическом элементе (между электродами), которое может быть
представлено последовательно с источником заряда. Но, это не будет
иметь никакого влияния на источнике заряда (как в серии), и опускается
(или рассматривается как внутренний по отношению к источнику заря-
да) в данной схеме. Другие эффекты, которые проигнорированы в схеме,
показанной в рисунке 5.29, изолируют сопротивление пьезоэлектриче-
ского элемента (который очень высок) параллельно с источником заряда
(Примечание: Это допускает любую утечку заряда через изоляцию, ко-
торой можно пренебречь.) и емкость кабеля параллельно с источником
заряда. (Отметьте: эффекты кабеля могут быть включены отдельно или
компенсированы.)
Другая эквивалентная схема (эквивалентное представление Thevenin)
может быть дана также там, где конденсатор последователен с эквива-
лентным источником напряжения. Это абсолютно эквивалентно схеме
Norton, данной в рисунке 5.29.
Полное сопротивление от конденсатора дают
Как видно из уравнения 5.41, что выходное полное сопротивление пье-
зоэлектрического датчика может быть очень высоким, частично в низких
частотах. Например, кристалл кварца может представить полное сопро-
490
тивление в мегаомах на уровне 100 Гц, увеличившись гиперболически с
уменьшающимися частотами. Это - одна причина,
почему у пьезоэлектрических датчиков есть ограничение на полезную
более низкую частоту, когда утечкой заряда нельзя пренебречь. Как мы
увидим, может ли усилитель заряда разрешить эту проблему.
Примечание: Даже при том, что сопротивление (dc) пьезоэлектрическо-
го кристалла также чрезвычайно высоко, оно не будет иметь никакого
эффекта на источник заряда (как в серии). Сопротивление изоляции Rl
обеспечивает путь утечки параллельно с пьезоэлектрическим элемен-
том (т.е., емкость Cs). Однако выходное сопротивление управляется Cs,
потому что его сопротивление (реактивное сопротивление) значительно
меньше, чем сопротивление изолятора. Тем не менее, будет видно, что
позже все эти посторонние сопротивления компенсируются с помощью
усиления заряда.
5.7 .1 чувствительность заряда и чувствительность напряжения
Чувствительность пьезоэлектрического кристалла может быть представ-
лена или его чувствительностью заряда или его чувствительностью на-
пряжения. Чувствительность заряда Sq определяется как
(5.42)
где
q обозначает сгенерированный заряд
F обозначает приложенную силу
РИСУНОК 5.29 Эквивалентная схема (Нортон) представление пьезоэлектриче-
ского датчика.
charge source qs- источник заряда
equivalent capacitance Cs- эквивалентная емкость
491
Для кристалла с площадью поверхности A, Уравнение 5.42 может быть
выражено как
(5.43)
где p - напряжение (нормальное, или поперечное), или давление, при-
ложенное к поверхности кристалла. Чувствительность напряжения Sv
задаётся изменением напряжения из-за возрастания единицы давления
(или напряжение) на единицу толщины кристалла. В пределе, мы имеем
(5.44)
где d - кристаллическая толщина. Теперь, так как уравнение емко сти
для пьезоэлектрического элемента дано δq = Cδv, при помощи C = kA/d,
следующая зависимость между чувствительностью заряда и напряжения
получена:
(5.45)
где k - диэлектрическая константа (диэлектрическая постоянная) кри-
сталлического конденсатора. Полная чувствительность пьезоэлектриче-
ского устройства может быть увеличена за счет использования надле-
жащим образом правильно разработанных мультиэлементных структур
(т.е., bimorphs).
Пример 5.5
У кристалла титанита бария есть чувствительность заряда 150.0 пк/Н
(пикокулон на ньютон). (Отметьте: 1 пк = 1 × 10−12 C; кулон = жил × В).
Диэлектрическая константа для кристалла 1.25
× 10−8 F/m (фарад на метр). От Уравнения 5.45, чувствительность напря-
жения кристалла вычислена как
Чувствительность пьезоэлемента зависит от направления нагрузки. Это
происходит потому, что чувствительность зависит от молекулярной
структуры (например, оси кристалла). Прямые чувствительности не-
скольких пьезоэлектрических материалов вдоль их наиболее чувстви-
492
тельные оси кристалла приведены в таблице 5.5 .
Электромеханическая связь: пьезоэлектрический эффект - результат
электромеханической связи. В частности, когда элемент напряженный,
внешнее устройство выполняет механическую работу над элементом.
Эта работа деформирует элемент, и энергия, которая входит в элемент,
хранится в виде энергии деформации. Это может быть смоделировано
как пружина, которая хранит упругую потенциальную энергию. Элек-
трический заряд высвобождается в процессе. Это - прямой пьезоэлек-
трический эффект. Устройство действует как датчик механического пе-
ремещения. Электрическое поле должно быть применено с помощью
внешних средств, чтобы не исказить элемент и выпустить сохраненную
энергию деформации. В качестве альтернативы, первоначально ненапря-
женный элемент может быть деформирован с помощью внешнего элек-
трического поля (с использованием внешнего источника электроэнер-
гии). Это - обратный пьезоэлектрический эффект, где элемент действует
как исполнительный механизм. Однако схема, показанная в рисунке
5.29, включает только электрическую динамику
таБЛиЦа 5.5 прямая чувствительность нескольких пьезоэлектриче-
ских материалов
Существенная Чувствительность заряда, Кв. (pC/N) Чувствительность
Напряжения, Sv (mV • m/N)
Цирконат-титана свинца (PZT) 110 10
Титанат бария 140 6
Кварц 2.5 50
Соль Рошеля 275 90
Для получения полного представления о пьезоэлектрическом элементе
должна быть включена также механическая динамика. В схеме, пока-
занной в рисунке 5.29, это скрыто в исходном заряде qs. Упрощенная
механическая модель может включать в себя только жесткость и инер-
ционность элемента. Тогда заряд qs будет результатом напряжения или
давления в элементе, и может быть связан через чувствительность заря-
да (см. Уравнения 5.42 и 5.43). Соответствующее напряжение, давление
или сила вызовут динамику в инерционном датчике элемента, как регу-
лируется во втором законе Ньютона. По сути, в сочетании это устройство
может быть представлено в виде элемента с двумя портами, где на один
порт осуществляется механический поток энергии, а на другой порт о су-
ществляется электростатический поток энергии.
493
5.7 .2 Усилитель заряда
Пьезоэлектрические сигналы не могут быть получены, используя устрой-
ства низкого сопротивления. Две основных причины этого следующие:
1. Давление высокой производительности в датчике приведет к неболь-
шим уровням выходного сигнала и большим ошибкам загрузки.
2. Заряд может быстро просочиться посредством загрузки.
Для преодоления этих проблем в значительной степени, усилитель за-
ряда обычно используется в качестве первичного устройства формиро-
вания сигналов для пьезоэлектрического датчика. Следовательно, элек-
трическая нагрузка на пьезоэлектрическом датчике уменьшена. Кроме
того, из-за трансформации сопротивления, выходное сопротивление
усилителя заряда довольно маленькое (намного меньше, чем выходное
сопротивление пьезоэлектрического датчика). Это фактически исключа-
ет ошибки загрузки и обеспечивает выход низкого сопротивления для
таких целей как контроль, сигнальная передача, сбор, запись, обработка
и управление. Кроме того, при помощи схемы усилителя заряда с отно-
сительно большой временной константой может быть уменьшена ско-
рость утечки заряда.
Усилитель заряда - просто операционный усилитель с емкостной об-
ратной связью (Cf). Как правило, мы также включаем резистивную об-
ратную связь (Rf). Как пример, рассмотрите схему пьезоэлектрической
комбинации датчика и усилителя заряда, как показано в рисунке 5.30 .
Мы рассмотрим, как уровень утечки заряда уменьшается, и посторонние
емкости (и другое сопротивление) компенсированы при помощи этого
расположения. Емкость датчика, емкость обратной связи усилителя за-
ряда и сопротивление обратной связи усилителя заряда обозначены Cs,
Cf и Rf, соответственно. Емкость кабеля, который соединяет датчик с
усилителем заряда, обозначена Cc. Сопротивление изолятора пьезоэлек-
трического датчика (который обеспечивает путь для утечки заряда) обо-
значено Rl. Как обычно, внутреннее сопротивление пьезоэлектрического
элемента не включено в схему, так как это последовательно с источником
заряда и, следовательно, это не имеет никакого влияния на уравнения
цепи.
Так как потенциалы в двух вводных почти равны, они в нулевом по-
тенциале (нуль). Следовательно, текущая утечка / утечка заряда через
параллельные пути датчика незначительна. (Примечание: Этому допол-
нительно помогает тот факт, что соответствующее сопротивление также
очень высоко.) Текущий баланс в точке A дает
494
(5.46)
Соответствующая функция перемещения
(5.47)
где s является переменной Лапласа. Теперь, в частотной области (s = jω),
мы имеем
(5.48)
При правильной калибровке усилителя заряда (wrt фактор −1/Cf), функ-
ция передачи частоты всей системы может быть записана как:
Piezoelectric sensor- пьезоэлектрический датчик
Insulator-диэлектрик
Cable кабель
Charge amplifier-заряд усилителя
Output-выход
РИСУНОК 5.30 Пьезоэлектрическая комбинация датчика и усилителя заряда.
495
Этим полностью управляют элементы обратной связи усилителя заряда,
который может быть точно и соответственно выбран. Выходной сигнал
устройства равен нулю при нулевой частоте (ω = 0). Следовательно, пье-
зоэлектрический датчик не может быть использован для измерения по-
стоянных сигналов (DC). С другой стороны, на очень высоких частотах,
функция передачи магнитуда M = t s w/ t 2s w2 +1 приближается к едини-
це. Следовательно, на бесконечной частоте нет никакой ошибки датчика.
Пример 5.6
Для пьезоэлектрического акселерометра с усилителем заряда уровень
точности более чем 99% получается, t s w/ t 2s w2 + 1 > 0.99 → τsω > 7.0.
Минимальная частота переходного сигнала датчика, который может вы-
держивать этот уровень точности,
ωmin = 7.0/τs.
Точно сть измерения зависит от близости M к 1.
ωmin = 7.0/τs. Отсюда следует, что для заданного уровня точности, за-
данный нижний предел на работе частоты, может быть достигнут за счет
увеличения временной константы (то есть, увеличив Rf, Cf или оба). Вы-
полнимый нижний предел частот работы (ωmin) может быть установлен
путем регулировки временной константы.
Преимущества пьезоэлектрических датчиков включают в себя следую-
щее:
1. Они обеспечивают высокую скоро сть ответа и операционной пропуск-
ной способности (очень небольшая временная константа).
2. Они могут быть произведены в небольшом размере (как микроминиа-
тюрные устройства).
3. Они пассивны и, следовательно, устойчивы и относительно просты в
эксплуатации.
4. Чувствительность может быть увеличена при помощи надлежащего
пьезоэлектрического материала.
5. По сторонние эффекты могут быть легко компенсированы с помощью
простой обработки сигнала (например, плата усилителя).
6. Они являются многофункциональными (могут служить в качестве дат-
чика или приводом в той же самой системе).
Недостатками пьезоэлектрических датчиков является следующее:
1. Высокое выходное сопротивление.
2. Температурная чувствительность.
496
3. С учетом многофункциональной способности (преимущества) одна
функция может зависеть от другой функции (например, паразитное
электрическое поле может влиять на точность зондирования).
4. Не подходит для низких частот или ds зондирования.
5.7 .3 Пьезоэлектрический акселерометр
Акселерометры: известно из второго закона Ньютона, что сила (f) не-
обходима для ускорения массы (или инерции элемента), и его величина
определяется произведением массы (m) и ускорением (a). Этот продукт
(ma) обычно называют силой инерции. Обоснованием этой терминоло-
гии является то, что если сила величины ma была применена к ускори-
тельной массе в направлении, противоположном ускорению, то система
может быть проанализирована с помощью статических соображений
равновесия. Это известно как принцип Даламбера (рисунок 5.31). Сила,
которая вызывает ускорение, само по себе является мерой ускорения.
(Примечание: Масса поддерживается на постоянном уровне.) Соответ-
ственно, масса может служить в качестве переднего плана вспомога-
тельного элемента для преобразования ускорения в силу. Это принцип
работы общих акселерометров. Есть много различных типов акселеро-
метров, начиная от тензометрических устройств, заканчивая теми, кото-
рые используют электромагнитную индукцию. Например, сила, которая
вызывает ускорение, может быть преобразована в пропорциональное
смещение, используя пружинный элемент, и это смещение может быть
измерено, используя подходящий датчик смещения. Примерами такого
типа являются дифференциально-трансформаторные акселерометры,
потенциометр акселерометры, и акселерометры с переменной емкостью.
В качестве альтернативы, деформация в подходящем месте элемента,
который был отклонен из-за силы инерции, может быть определена, ис-
пользуя тензодатчик. Этот метод используется в тензометрических ак-
селерометрах. Вибрационно-проволочные акселерометры используют
ускоряющую силу для натяжения проволоки. Сила измеряется путем
определения собственной частоты колебаний проволоки, которая про-
порциональна квадратному корню силы. В балансе силы сервомотора
(или нулевой баланс) акселерометра, элемент инерции сдерживается от
ускорения путем обнаружения его движения и подачи обратной силы
(или крутящего момента), чтобы точно уравновесить возрастающую
силу (вращающий момент). Эта сила обратной связи определяется так,
например, зная ток двигателя, и это является мерой ускорения.
497
5.7 .3 .1 Пьезоэлектрический акселерометр
Пьезоэлектрический акселерометр (или кристаллический акселерометр)
представляет собой датчик ускорения, который использует пьезоэлек-
трический элемент для измерения силы инерции, вызванной ускорени-
ем. Пьезоэлектрический преобразователь скорости просто Пьезоэлек-
трический акселерометр со встроенным усилителем интеграции в виде
миниатюрной IC.
Преимущества пьезоэлектрических акселерометров по сравнению с дру-
гими типами акселерометров являются их малый вес и высокие частоты
(до 1 МГц). Тем не менее, пьезоэлектрические преобразователи являют-
ся по своей сути устройства сопротивления с высокой выходной мощно-
стью, которые генерируют небольшие напряжения (в порядке 1 Мв). По
этой причине, специальные усилители преобразования - сопротивления
(например, усилители заряда) должны быть использованы для кондици-
онирования выходного сигнала и уменьшить ошибку загрузки.
Принципиальная схема для пьезоэлектрического акселерометра ком-
прессионного типа показана на рисунке 5.32. Кристалл и элемент инер-
Force f-сила f
Acceleration a-ускорение a
Applied force f- Приложенная сила f
Inertia force ma- Сила инерции ma
Mass m- масса m
Рис.5 .31 Иллюстрация принципа Даламбера.
498
ции (масса) ограничены пружиной очень высокой жесткости. Следова-
тельно, фундаментальная собственная частота или резонансная частота
устройства становится высокой (обычно 20 кГц). Это дает довольно ши-
рокий полезный диапазон частот или рабочий диапазон (обычно до 5
кГц) и высокую скорость работы. Нижний предел полезного частотного
диапазона (обычно 1 Гц) установлен факторами, такими как ограниче-
ния обусловливающей сигнал системы, методом монтирования, утечки
заряда в пьезоэлектрическом элементе, временной константе генериру-
ющей заряд динамики и SNR. Типичная кривая частотной характеристи-
ки пьезоэлектрического акселерометра показана в рисунке 5.33 .
Для акселерометра ускорение это сигнал, который измерен (измеримая
величина). Следовательно, чувствительность акселерометра обычно
выражается через электрический заряд на единицу ускорения или на-
пряжения на единицу ускорения (сравните с уравнениями 5.61 и 5.62).
Ускорение измеряется в единицах ускорения силы тяжести (г), и заряд
измеряется в пикокулонах, которые являются единицами 10-12 C. Ти-
пичная акселерометра чувствительность составляет 10 пКл / г и 5 мВ
/ г. Чувствительно сть зависит от пьезоэлектрических свойств (таблица
5.5), путь, в котором сила инерции прикладывается к пьезоэлектриче-
Direction of sensitivity (input)- Направление чувствительности (вход)
Spring (high-stiRness)- Пружина (высокой жесткости)
Output-Выход
Electrodes- Электроды
Inertia (mass)- Инерция (масса)
Pzoelectric elementie- Пьезоэлектрический элемент
РИСУНОК 5.32 Тип сжатия пьезоэлектрического акселерометра.
499
скому элементу (например, сжатие, растяжение, сдвиг), и масса элемента
инерции. Если используется большая масса, реакция силы инерции на
кристалл становится больше для заданного ускорения, таким образом,
создавая относительно большой выходной сигнал. Большая масса ре-
зультатов акселерометра приводит к нескольким недостаткам, однако. В
частности:
1. Масса акселерометра искажает измеренную переменную движения
(механический эффект загрузки)
2. У тяжелого акселерометра есть более низкая резонансная частота и,
следовательно, более низкий полезный частотный диапазон (рисунок
5.33)
В кристалле акселерометра компрессионного типа, сила инерции вос-
принимается как сжатие нормального напряжения в пьезоэлектрическом
элементе. Есть также пьезоэлектрические акселерометры, где сила инер-
ции прикладывается к пьезоэлектрическому элементу в качестве дефор-
Accelerometer signal dB- сигнал акселерометра dB
Useful range- Полезный диапазон
Frequency (Hz)- Частота (Hz)
Resonance-Резонанс
РИСУНОК 5.33 Типичная кривая частотной характеристики для пьезоэлектри-
ческого акселерометра.
500
мации сдвига или как деформации растяжения.
Конфигурации акселерометра: Для данного размера акселерометра,
большая чувствительно сть может быть получена при использовании
конфигурации поперечных деформаций, а не нормального напряжения.
В этой конфигурации, несколько поперечных слоев могут быть исполь-
зованы (например, в устройстве дельта) в корпусе акселерометра, увели-
чивая тем самым эффективную площадь поперечных и, следовательно,
чувствительность в пропорции к поперечной зоне. Другим фактором,
который следует учитывать при выборе акселерометра, является кросс
чувствительность или поперечная чувствительность. Перекрестная чув-
ствительность присутствует, так как пьезоэлектрический элемент может
генерировать заряд в ответ на силы и моменты (или вращающих мо-
ментов) в ортогональных направлениях. Проблема может усугубиться
из-за производственных неровностей пьезоэлектрического элемента, в
том числе материальной неравномерности и неправильной ориентации
с другими электрическими компонентами, и из-за плохого дизайна. Пе-
рекрестная чувствительность должна быть меньше, чем максимальная
погрешность (в процентах), которая разрешена для устройства (как пра-
вило, 1%).
Способы монтажа: Методика, используемая для установки акселероме-
тра на объекте, может существенно повлиять на полезный частотный
диапазон акселерометра. Некоторые общие методы монтажа являются:
1. Винтовой цоколь
2. Клей, цемент, или воск
3. Магнитная база
4. Пружинное напольное крепление
5. Ручной зонд
Сверление отверстий в объекте можно избежать с помощью второго по
пятый методы, но полезный частотный диапазон может значительно
уменьшиться, если монтируется пружинная основа или используются
портативные датчики (типичный верхний предел 500 Гц). Первые два
метода, как правило, поддерживают полный полезный диапазон (напри-
мер, 5 кГц), в то время как метод магнитного прикрепления уменьшает
верхний предел частоты до некоторой степени (как правило, от 3 кГц).
Теоретически, можно измерить скорость с начала преобразования ско-
рости в силу с помощью вязкого амортизирующего элемента и измере-
ние получающейся силы, используя пьезоэлектрический датчик. Этот
принцип может быть использован для разработки пьезоэлектрического
501
датчика скоро сти. Однако, практическая реализация идеальной скоро сти
датчиком силы довольно сложна, в первую очередь, из-за нелинейно сти
в амортизационных элементах. Следовательно, коммерческие пьезоэлек-
трические преобразователи скорости используют пьезоэлектрический
акселерометр и встроенный (миниатюрный) интегрирующий усилитель.
Принципиальная схема расположения такого пьезоэлектрического дат-
чика скорости показана на рисунке 5.34. Общий размер блока может
быть как 1 см. С двойными аппаратными средствами интеграции пье-
зоэлектрический преобразователь смещения получен, используя тот же
принцип. Метод самонаведения необходим для определения исходного
положения (начальное состояние), когда позиция измерена, используя
интеграцию. Кроме того, численное интегрирование замедляет процесс
зондирования (ограничение рабочей частоты). В качестве альтернати-
вы, идеальный пружинный элемент (или консоль), который преобразу-
ет смещение в силу (или изгибающий момент или деформация), может
использоваться, чтобы подчеркнуть пьезоэлектрический элемент, при-
водящий к преобразователю смещения. Такие устройства, как правило,
не практичны для низкочастотных (несколько герц) приложений из-за
плохих низкочастотных характеристик пьезоэлектрических элементов.
5.8 тензодатчики
Многие виды силового и крутящего момента основаны на датчиках тен-
Motion- Движение
Transducer unit- Единица преобразователя
Piezoelectric accelerometer-Пьезоэлектрический акселерометр
Impedance matching amplifier- Усилитель соответствия сопротивления
Integrating amplifier-Интегрирующий усилитель
Low-impedance signal (velocity)- Сигнал низкого сопротивления (скорость)
РИСУНОК 5.34 Схематическая диаграмма пьезоэлектрического скоростного
преобразователя.
502
зометрического измерения . Хотя величина деформации тензодатчиков
может быть непосредственно связана с напряжением и силой. Следо-
вательно, целесообразно обсудить тензодатчики под действием силы и
крутящего момента.
Примечание: Тензодатчики могут быть использованы, в некоторой сте-
пени косвенным образом (с помощью вспомогательных интерфейсных
элементов) для измерения других типов переменных, включая смеще-
ние, ускорение, давление и температуру. В тех ситуациях, когда перед-
ний конец элемента физически невиден, количество, которое должно
быть измерено (то есть измеряемые величины) в напряжении, которое
затем измеряется тензодатчиком.
Два распространенных типа тензодатчика сопротивления обговарива-
ются далее. Конкретные виды силового и крутящего момента, датчики
рассматриваются в последующих разделах.
5.8 .1 Уравнения для тензометрических измерений
Изменение электрического сопротивления материала при механической
деформации является свойство, используемое в тензодатчике типа со-
противления. Сопротивление R длина проводника L и площадь попереч-
ного сечения А задается
(5.51)
где ρ - удельное сопротивление материала. Взяв логарифм Уравнения
5.51, у нас есть log R = log ρ + log(l/A) . Теперь, взяв дифференциал каж-
дого термина, мы получаем
(5.52)
Первый член в правой части уравнения 5.52 является относительное из-
менение сопротивления, а второе слагаемое представляет собой дроб-
ную деформацию. Отсюда следует, что изменение сопротивления в ма-
териале происходит от изменения формы, а также изменение удельного
сопротивления (свойство материала) материала. Для линейных дефор-
маций, два слагаемых в правой части уравнения 5.52 являются линейны-
ми функциями деформации E; пропорциональность константы второго
члена, в частности, зависит от коэффициента материала Пуассона. Та-
ким образом, следующее соотношение можно записать для тензометри-
ческих элементов:
(5.53)
503
Константа Ss известна как фактор меры или чувствительность тензоме-
трического элемента. Численное значение этого параметра колеблется
от 2 до 6 для большинства металлических тензометрических элементов
и от 40 до 200 для тензодатчиков SC. Эти два типа тензодатчиков обсуж-
даются позже. Изменение сопротивления тензометрического элемента,
который определяет соответствующую нагрузку (уравнение 5.53), изме-
ряют с помощью подходящей электрической цепи (как правило, мо сто-
вой схемы).
Косвенные тензодатчики: множество переменных, включая смещение,
ускорение, давление, температуру, уровень жидкости, напряжение, силу
и крутящий момент, можно определить с помощью измерения дефор-
мации. Некоторые переменные (например, стресс, сила, и крутящий
момент) могут быть определены путем измерения деформации самого
динамического объекта в соответствующих местах. В других ситуаци-
ях, вспомогательный передний конец устройства может потребоваться
для преобразования измеряемой величины в пропорциональной дефор-
мации. Например, давление или смещение может быть измерено путем
преобразования их в измеримой деформации с помощью диафрагмы,
сильфона, или изгибающего элемента. Ускорение может быть измерено
сначала превращением его в силу инерции элемента подходящей массы
(сейсмической массы), а затем подвергая кронштейн (элемент деформа-
ции), к этой силе инерции, и, наконец, измерение деформации в месте
высокой чувствительности элемента кронштейна (смотрите рисунок
5.35).
Температура может быть измерена путем измерения теплового расшире-
ния или деформации в биметаллическом элементе.
Термисторы это датчики температуры из SC материалов, чье сопротив-
ление изменяется с температурой. RTDs работают по тому же принципу,
за исключением того, что они выполнены из металла, а не из SC мате-
риалов. Эти датчики температуры, а также пьезоэлектрические датчики,
которые обсуждались ранее, не следует путать с тензодатчиками. На-
правление сопротивления основано на изменении сопротивления в ре-
зультате деформации, или пьезоэлектрических свойств материалов.
Ранние тензодатчики были тонкие металлические нити. Современные
504
тензодатчики производятся в основном в виде металлической фольги
(например, с использованием медно-никелевого сплава, известного как
константан) или элемента SC (например, кремний со следами примесей
бора). Они изготовлены сначала образуя тонкую пленку (пленка) из ме-
талла или монокристалла SC материала, а затем разрезая его в подходя-
щий шаблон сетки, либо механическим спо собом, либо с помощью фо-
тоцинкографических (опто-химические) методов. Этот процесс является
гораздо более экономичным и является более точным, чем тот который
делают тензодатчики с металлическими нитями. Тензочувствительный
элемент формируется на подложке пленки из электрически изолирован-
ного материала (например, пластмассы) Полиамид. Этот элемент прикле-
ен или связан при помощи эпоксидной смолы, на котором звено должно
быть измерено. В качестве альтернативы, тонкая изолирующая пленка
керамической подложки плавится на поверхности измерения, на которой
тензодатчик смонтирован непосредственно. Направление чувствитель-
ности является основным направлением удлинения тензометрического
элемента (рисунок 5.36a). Для измерения напряжений в более чем одном
направлении, множественные датчики деформации (например, различ-
ные конфигурации и розеточные) доступны в виде отдельных единиц.
Эти блоки имеют более чем одно направление чувствительности.
Основные штаммы в данной плоскости (поверхности объекта, на ко-
тором установлен измеритель деформации) могут быть определены с
помощью этих нескольких тензометрических устройств. Типичные дат-
чики фольги показаны на рисунке 5.36b, и тензодатчик SC показан на
рисунке 5.36c.
Прямой путь для получения тензометрических измерений является при-
менение постоянного напряжения постоянного тока через серии связан-
ных пар тензометрических элементов (сопротивления R) и подходящего
(дополнительный) резистора RC, а также для измерения VO выходно-
го напряжения на тензодатчике в условиях разомкнутой цепи (то есть
с помощью устройства высокого входного сопротивления). Такая ком-
поновка известна как схема потенциометр или балластной цепи и име-
ет несколько недостатков. Любое изменение температуры окружающей
среды непосредственно вводит некоторую погрешно сть из-за связанных
с этим изменений в сопротивлении тензометрических и сопротивляемых
соединительных цепей. Кроме того, точность измерения будет зависеть
505
от возможных изменений в VREF напряжения питания. Кроме того,
электрическая ошибка загрузки будет важна, если полное сопротивле-
ние нагрузки не очень высокое. Пожалуй, наиболее серьезным недостат-
ком этой схемы является то, что изменение сигнала, поступающего из-за
деформации, как правило, небольшая часть от общего уровня сигнала
в выходной цепи. Эта проблема может быть уменьшена до некоторой
степени за счет снижения VO, что может быть достигнуто путем увели-
чения сопротивления RC. Это, однако, снижает чувствительность схемы.
Любые изменения в тензометрическом сопротивлении из-за изменений
окружающей среды будет непосредственно влиять на показания тензо-
метрических элементов, если R и RC не имеют одинаковые коэффициен-
ты по отношению к изменениям окружающей среды.
Более благоприятная схема для использования в измерениях тензодат-
чика - мост Уитстона, как сказано в Главе 2. Один или больше из этих
четырех резисторов R1, R2, R3 и R4 в мосту (рисунок 5.37) могут пред-
Output-Выход
Strain member cantilever- Напряжение элемента консоли
Housing-Корпус
Strain gauge-Тензодатчик
Seismic mass- Сейсмическая масса
Base –Основание
Mounting Threads- Установка нити
Direction of sensitivity (acceleration) - Направление чувствительности (ускоре-
ние)
РИСУНОК 5.35 Акселерометр меры напряжения.
506
ставлять тензодатчики. Отношение выхода для схемы моста Уитстона
дано (смотрите Главу 2)
(5.54)
Когда выходное напряжение равно нулю, мост сбалансирован. Это сле-
Solder tabs (for leads) (a)- Припой вкладки (для проводов) (а)
Direction of sensitivity-Направление чувствительности
packing film-пленочная тара
foil grid-сетка из фольги
single element-один элемент
two- elements rossete- двух-элементная розетка
three-elements rossete- трёх-элементная розетка
Phenolic glass backing plate (c)- фенольная стеклянная опорная пластина (с)
Doped silicon crystal (p or n type)- Кристалл легированного кремния (р или n тип)
Welded gold leads- Сварные золотые провода
Nickel-plated copper ribbons-Никелированные медные ленты
РИСУНОК 5.36 (а) тензочувствительная номенклатура, (б) датчики типичной
фольги типа деформации, и (с) полупроводниковый тензодатчик.
507
дует из формулы 5.54, что для сбалансированного моста,
Уравнение 5.55 применимо для любого значения сопротивления нагруз-
ки RL (сопротивление устройства, подключенного к выходу моста) не
только для больших RL, потому что, когда мо ст сбалансирован, ток через
нагрузку становится равным нулю, даже при малых RL.
5.8 .1 .1 чувствительность моста
Измерения тензочувствительности откалиброваны относительно сба-
лансированного моста. Когда тензодатчик деформируется в мост, ба-
ланс нарушается. Если одно из плеч моста имеет переменный резистор,
его можно отрегулировать, чтобы восстановить равновесие. Величина
этой корректировки измеряет величину, на которой сопротивление тен-
зодатчика изменилось, тем самым измеряя приложенное напряжение.
Это известно как нуль-балансовый метод измерения деформаций. Этот
метод является по своей сути медленным из-за времени, необходимого
Small i-маленькая i
Load (high)- Нагрузка (высокая)
(Constant voltage)- (Постоянное напряжение)
РИСУНОК 5.37 Мостовая схема Уитстона.
508
для балансировки моста каждый раз, когда снимаются показания. Более
распространенный метод, который о собенно подходит для снятия ди-
намических показаний с тензометрического моста, является измерение
выходного напряжения в результате дисбаланса, вызванного деформаци-
ей активного тензодатчика в мостике. Для определения калибровки кон-
станты тензометрического моста, чувствительность выходного моста
к изменениям в четырех резисторах моста должна быть известна. Для
небольших изменений в сопротивлении используется простой математи-
ческий анализ, и это может быть определено, как
(5.56)
Этот результат подчиняется уравнению 5.55, поскольку изменения из-
меряются от сбалансированного состояния. Обратите внимание, из
уравнения 5.56, что если все четыре резистора одинаковы (в значении и
материале), изменения сопротивления из-за окружающих эффектов от-
мены среди членов первого порядка (δR1, δR2, δR3, δR4), не производя
никакого чистого эффекта на выходное напряжение моста. Более точное
исследование Уравнения 5.56 показывает, что только смежные пары ре-
зисторов (например, R1 с R2 и R3 с R4) должны быть идентичными, что-
бы достигнуть этой экологической компенсации. Даже это требование
может быть ослаблено. На самом деле компенсация достигнута, если у
R1 и R2 есть тот же температурный коэффициент и если у R3 и R4 есть
тот же температурный коэффициент.
Пример 5.7
Предположим, что R1 представляет единственный активный тензодат-
чик, и R2 представляет идентичный фиктивный прибор в рисунке 5.37 .
Другие два элемента моста - резисторы завершения мо ста, которые не
должны быть идентичны тензодатчикам. Для сбалансированного моста
у нас должно быть R3 = R4, но они не обязательно равны сопротивлению
тензодатчика. Давайте определим выход моста.
В этом примере, только R1 изменяется. Следовательно, из уравнения
5.56, мы имеем
(5.71)
5.8 .1 .2 Постоянный мост
Уравнение 5.7 .1 предполагает, что только одно сопротивление (тензодат-
509
чик) в мосту Уитстона (рисунок 5.37) активно. Многочисленные другие
активирующие комбинации возможны, однако; например, напряжение в
R1 и R2 в сжатие, как и в случае двух тензодатчиков установлены сим-
метрично под углом 45 ° относительно оси вала при кручении. Таким
образом, общая чувствительность тензометрического моста может быть
увеличена. Как видно из уравнения 5.56, что, если все четыре резистора
в мостике активны, лучшая чувствительность получается, если, напри-
мер, R1 и R4 находятся в напряжении, а R2 и R3 в сжатии, так что все че-
тыре дифференциальные термины имеют тот же самый знак. Если более
чем один тензодатчик активен, выходной мост может быть выражен как
(5.57)
Где
Bridge output in the general case - Выход моста в общем случае
Bridge output if only one strain gauge is active - Выход мо ста, если только
один тензодатчик активен
Эта константа называется константой моста. Чем больше константа мо-
ста, тем лучше чувствительность моста.
Пример 5.8
Динамометрический элемент тензодатчика (датчик силы) состоит из
четырех идентичных тензорезисторов, образующих мост Уитстона, ко-
торые установлены на стержне, который имеет квадратное поперечное
сечение. Одна из противолежащей пары тензодатчиков монтируется в
осевом направлении, а другая пара установлена в поперечном направле-
нии, как показано на рисунке 5.38a. Для того, чтобы максимально уве-
личить чувствительность моста, тензодатчики соединены с мостом, как
показано на рисунке 5.38b. Определить мост константа с точки зрения
соотношения v Пуассона материала стержня.
решение
Предположим, что δR1 = δR. Затем, для данной конфигурации, мы имеем
510
Отметьте это в определения коэффициента Пуассона
Поперечная деформация = (-ν) × продольной деформации.
Теперь, как следует из уравнения 5.56, что δvo / Vref = 2 (1 + ν) (δR / 4R),
в соответствии с которой константа моста задается К = 2 (1 + ν).
5.8 .1 .3 калибровка константа
Калибровочная константа С тензометрического моста связана с напря-
жением, которое измеряется на выходе моста. В частно сти,
1 Axial gauge - Осевая мера
2 Transverse gauge – Поперечная мера
3 Cross section of sensing member- Поперечное сечение чувствительного элемен-
та
Рисунок 5.38 Пример четырех активных тензорезисторов. (a) Монтаж конфигу-
рации на динамометр и (b) по мостовой схеме.
511
Теперь, с учетом уравнений 5.53 и 5.57, константа калибровки может
быть выражена как
(5.59)
Где
K является постоянным мостом
Ss является чувствительность (коэффициента датчика) тензодатчика
В идеале, постоянная калибровка должна оставаться постоянной во всем
диапазоне измерений моста (то есть должен быть независимым от де-
формации E и времени t) и должна быть стабильной (без дрейфа нуля)
по отношению к условиям окружающей среды. В частности, не должно
быть какой-либо ползучести и нелинейно стей, таких как гистерезис или
термических эффектов.
Пример 5.9
Схематическая диаграмма тензометрического акселерометра показана
на рисунке 5.39a. Точка массы веса W используется в качестве ускорения
Cable to bridge circuit - Кабель для мостовой схемы
Strain-gauge – Тензочувствительность
Direction of sensitivity - Направление чувствительности
РИСУНОК 5.39 Миниатюрный акселерометр с использованием датчиков де-
формации. (a) схема (b) монтажная конфигурация тензорезисторов, и (с) соеди-
нение моста.
512
чувствительного элемента. Легкий кантилевер с прямоугольным попе-
речным сечением, установленный внутри кожуха акселерометра, преоб-
разует силу инерции массы в напряжение. (Примечание: Это передний
конец вспомогательного элемента).
Максимальная деформация изгиба в основе кантилевера измеряется с
помощью четырех идентично активных датчиков SC калибровки. Два из
тензодатчиков (А и В) установлены в осевом направлении на верхней
поверхности кантилевера, а остальные два (С и D), которые установлены
на нижней поверхности, как показано на рисунке 5.39b. Для того, чтобы
максимально увеличить чувствительность акселерометра, указать, ка-
ким образом, в котором четыре тензометров-А, В, С, и D-должны быть
подключены к мостовой схеме Уитстона. Что такое мост константа ре-
зультирующей цепи?
Получить выражение, связывающее приложенное ускорение а (в едини-
цах g, которое обозначает ускорение силы тяжести) к выходному мосту
δvo (измеряется с помощью моста, который уравновешивается при нуле-
вом ускорении) в терминах следующих параметров:
W = Mg = вес сейсмической массы на свободном конце элемента
Е = новый кантилевер
l = длина кантилевера
b = ширина поперечного сечения кантилевера
h = поперечное сечение высоты кантилевера
Ss = коэффициент калибровки (чувствительность) каждого тензодатчика
Vref = напряжение питания моста
ЕслиМ=5г,Е =5×1010Н/м2,l =1см,b =1мм,h =0,5мм,Ss=200,
и Vref = 20 В, определяют чувствительность акселерометра в микроволь-
тах на грамм .
Если предел текучести элемента кантилевера 5 × 107 Н / м2, что явля-
ется максимальным ускорением, которое может быть измерено с помо-
щью акселерометра? Если АDC, который считывает нагрузку сигнала в
компьютерном процессе, имеет диапазон 0-10, то сколько усиления (ко-
эффициент усиления усилителя мо ста) было бы необходимо на выходе
моста таким образом, если это максимальное ускорение соответствует
верхнему пределу АDC (10 V)?
Является ли кросс чувствительность (то есть чувствительно сть к напря-
женности и другое направление изгиба) небольшой с расположением на
тензометрическом мосту? Объясните.
Подсказка: Для консоли применяется сила F на свободном конце, макси-
мальное напряжение в корне дается s = 6Fl/bh2 с существующем приме-
513
чанием.
Примечание: MEMS акселерометры, где член кантилевера, инерция эле-
мента, и тензодатчики все интегрированы в единую SC (кремний) еди-
ницу, доступны в коммерческих приложениях, таких как датчики актива-
ции подушек безопасно сти для автомобилей (смотрите главу 6).
решение
Очевидно, что чувствительность моста максимизируется путем подклю-
чения тензорезисторов А, В, С и D к мо сту, как показано на рисунке
5.39c. Это следует из уравнения 5.56, отметим, что вклады от четырех
тензорезисторов являются положительными, когда δ R1 и δR4 являются
положительными, и δR2 и δR3 отрицательны. Постоянный мост для ре-
зультирующего расположения к = 4. Следовательно, из уравнения 5.57,
δvo / vref = δR / R или из уравнений 5.58 и 5.59, δvo / vref = Ssε. Кроме
того, ε = σ/E 6Fl/bh2 где F обозначает силу инерции F = (W/g )ẍ =Wa.
Обратите внимание, что X является ускорением в направлении чувстви-
тельности и ẍ / g = а является ускорением единиц g.
Таким образом,
or-или
Заменим значения:
Strain/g - Напряжение / g
Yield strain – Деформация при приделе текучести
Yield strength – Предел текучести
Strain - Напряжение
Number of g
́
s to yield point - Число g
́
s с получением точки
Соответствующее напряжение = 0,94 × 4,26 = 4,0 V V → усилитель уси-
ления = 10,0 / 4,0 = 2,25. Кросс чувствительности происходит от уско-
рений в двух направлениях у и z, ортогональной к направлению чув-
ствительности (х). В боковой (у) направлении, сила инерции вызывает
боковой изгиб. Это производит равное растяжение (или сжатие) нагруз-
ки в B и D и равной сжимающей (или растяжение) нагрузки в А и С. По
мостовой схеме, мы видим, что эти вклады компенсируют друг друга. В
514
осевом направлении (г), сила инерции вызывает равное растяжение (или
сжатие) напряжений во всех четырех тензорезисторов. Они также ком-
пенсируются, как это видно из соотношения в уравнении 5.56 для моста,
который дает
Отсюда следует, что этот механизм компенсирует проблемы перекрест-
ной чувствительности.
5.8 .1 .4 Получение данных
Для измерения динамических деформаций, следует использовать либо
метод нуль-баланса или метод вывода дисбаланса (смотрите главу 2).
Принципиальная схема для метода вывода Дисбаланс показан на рисун-
ке 5.40. В этом методе, выход из активного моста непосредственно из-
меряется в качестве сигнала напряжения и откалиброваны для обеспече-
ния измерения напряжения. Рисунок 5.40 соответствует использованию
моста переменного тока. В этом случае мост питается от напряжения
переменного тока. Частота питающей сети должна быть примерно в 10
раз максимальнее частоты влияния на динамический сигнал деформа-
ции (полосы пропускания). Частота питания в порядке 1 кГц является
типичной. Этот сигнал генерируется генератором и подается в мост. Пе-
реходная составляющая выходного сигнала с моста очень мала (как пра-
вило, <1 мВ и, возможно, несколько микровольт). Этот сигнал должен
усиливать, демодулировать (особенно сигналы переходных процессов),
и фильтровать, чтобы обеспечить считывание деформации. Калибровоч-
ная константа моста должна быть известна, чтобы преобразовать выход-
ное напряжение.
Тензометрические мосты питаются от сети постоянного тока являю-
щимся общим. Тем не менее, они имеют преимущества простоты в
отношении необходимой схемы и портативно сти. Преимущества пе-
ременного тока мостов включают улучшенную стабильность (дрейф),
уменьшается и точность, а также снижение потребления энергии.
5.8 .1 .5 рассмотрение точности
Манометры фольга доступны с сопротивлениями всего 50 Ом и дости-
515
гают нескольких килоом. Потребляемая мощность мо стовой схемы сни-
жается с увеличением сопротивления. Это имеет дополнительное преи-
мущество пониженной выработки тепла. Мосты с высоким диапазоном
измерений (например, максимальный штамм0,04 м / м) доступны. Точ-
ность зависит от линейности моста, воздействие на окружающую среду
(в частности, температуры) и монтажных методов. Например, нулевой
сдвиг из-за деформаций производится, когда цемент или эпоксидная
смола, которые используются для установки тензодатчика, высохнет,
приведет к ошибке калибровки. Cползание вводит ошибки при статиче-
ских и низкочастотных измерениях. Гибкость и гистерезис связующего
цемента (или эпоксидной смолы) приводят к ошибкам при измерении
деформации высокочастотного напряжения. Решения в порядке 1 мкм /
м (то есть одна микродеформация) являются общими.
Как уже отмечалось выше, поперечная чувствительность тензодат-
чика является чувствительностью к нагрузкам, которые ортогональны
к измеренной деформации. Это кросс чувствительность должна быть
небольшой (скажем, <1% от прямой чувствительности). Производите-
ли обычно обеспечивают факторы перекрестной чувствительности к их
тензодатчикам. Этот фактор, при умножении на поперечную нагрузку,
которая присутствует в данной заявке, дает ошибку в чтении напряжения
из-за перекрестной чувствительности.
Ощущение подвижных элементов: Часто деформация в движущихся
элементах ощущаются в инженерных приложениях. Примеры включают
Dynamic strain - Динамическое напряжение
Bridge – Мост
Oscillator – осциллятор
Amplifier – Усилитель
Power supply – Источник питания
Demodulator and filter – Демодулятор и фильтр
Calibration constant - постоянная калибровка
Strain reading - Чтение напряжения
РИСУНОК 5.40 Измерение динамических деформаций с помощью моста пере-
менного тока.
516
в себя мониторинг в режиме реального времени и обнаружения сбоев в
станках, измерение мощно сти, измерение силы и крутящего момента для
прогнозирования и обратной связи управления в динамических систе-
мах, измерительных приборов биомеханических устройств и тактильно-
го зондирования с использованием механической руки у промышленных
роботов. Тензодатчик, установленный на подвижном элементе нуждает-
ся в энергии для подключенной схемы (как правило, от стационарного
источника) и средства приобретения воспринятого сигнала (напряжение,
изменение сопротивления или моста выходной) с помощью стационар-
ного устройства (например, компьютера). Если движение мало или под-
вижный элемент имеет ограниченный ход, тензодатчики, установленные
на подвижном элементе, могут быть напрямую подключены к системе
источника питания, электрической схемы формирования сигналов и сбо-
ра данных с использованием спиральных гибких кабелей. Для больших
движений, в частности, во вращающихся валах, должна использоваться
некоторая форма меры замены. Скольжение кольца и щетки могут быть
использованы для этой цели. При использовании мостов, могут быть ис-
пользованы устройства взаимной индукции (вращающийся трансформа-
тор), с одной катушкой, расположенной на движущейся части, а другую
катушку держат в неподвижном состоянии. Для размещения и компен-
сации ошибок (например, потери и сбоя в выходном сигнале), которые
вызваны коммутацией, желательно поместить все четыре плеча моста,
а не только активные руки на подвижном элементе. Более современный
подход заключается в использовании телеметрии или беспроводной свя-
зи (на радиочастоте) от подвижного элемента к стационарному локаль-
ному устройству сбора данных. Сигнал кондиционирования электрони-
ки может быть расположен на подвижном элементе, так как монолитный
аппарат средств микроминиатюры доступен для этой цели. Датчик и ло-
кальное оборудование на подвижном элементе может быть приведено в
действие через сбор энергии (например, магнитная индукция, фотоэлек-
тричество).
5.8 .2 Полупроводниковые тензорезисторы
В некоторых приложениях с низким уровнем деформации (например,
динамические измерения крутящего момента), чувствительность датчи-
ков фольги не является достаточной для получения приемлемого сигна-
ла тензодатчика. SC тензодатчики особенно полезны в таких ситуациях.
Элемент напряжения SC тензодатчика изготовлен из монокристалла пье-
517
зоэлектрических материалов, таких как кремний, легированный приме-
сью микроэлементов, такими как бор. Типичная конструкция показана
на рисунке 5.41 . Коэффициент меры (чувствительность) SC напряжения
примерно на два порядка выше, чем у датчика металлической фольги
(обычно 40-200), как показано для кремния, из данных, приведенных в
таблице 5.6 .
Удельное электрическое сопротивление также высоко, что приводит к
сокращению расхода энергии и более низкое выделение тепла. Еще од-
ним преимуществом тензодатчиков SC является то, что они устойчивы к
переломам. В частности, механический гистерезис незначителен. Кроме
того, они меньше и легче, обеспечивают меньше перекрестной чувстви-
тельности, снижают погрешности распределения (то есть улучшенное
пространственное разрешение), и незначительные погрешности от ме-
ханической нагрузки. Максимальное напряжение, измеряется с исполь-
зованием калибровочным SC напряжением обычно 0,003 м / м (то есть
3000 με). Сопротивление тензодатчика может быть на порядок больше
для датчика SC напряжения; например, несколько сотен Ом для тензо-
датчика из металлической фольги (обычно 120 или 350 Ом), в то время
как несколько тысяч Ом (5000 Ом) для датчика SC напряжения. Есть
несколько недостатков, связанных с тензодатчиками SC, тем не менее,
которые могут быть истолкованы как преимущества измерителей фоль-
ги. Нежелательные характеристики датчиков SC включают в себя следу-
ющее:
1. Зависимость деформации сопротивления более нелинейные.
2. Они являются хрупкими и трудно монтируются на кривой.
3. Максимальное напряжение, которое может быть измерено от одного
до двух порядков меньше (как правило,<0,001 м / м).
4. Они являются более дорогостоящими.
5. Они имеют гораздо большую чувствительность к температуре.
Первый недостаток показан на рисунке 5.42. Есть два типа тензодатчи-
ков SC: р-типа, которые сделаны из SC (например, кремний), легиро-
ванных акцепторной примесью (например, бора) и p-типа, которые изго-
товлены из SC, легированного примеси донора (например, мышьяк). В
тензодатчиков р-типа, направлена чувствительность вдоль оси кристал-
ла (1, 1, 1), а элемент дает положительное (р) изменение сопротивления в
ответ на положительный результат деформации. В тензодатчиках p-типа,
направление чувствительно сти вдоль (1, 0, 0) оси кристалла, а элемент
реагирует с изменением отрицательной (n) устойчиво сти к положитель-
518
ному напряжению. В обоих типах, реакция носит нелинейный характер
и может быть аппроксимирована квадратичной зависимостью:
(5.60)
Параметр S1 представляет линейный коэффициент тензочувствитель-
ности (линейная чувствительность), что является положительным для
датчиков р-типа и отрицательным для датчиков n-типа. Его величина,
как правило, несколько больше для датчиков р-типа, что соответствует
лучшей чувствительности. Параметр S2 представляет степень нелиней-
ности, которая обычно является положительной для обоих типов дат-
чиков. Его величина, тем не менее, как правило, несколько меньше, для
датчиков р-типа. Отсюда следует, что датчики р-типа являются менее
нелинейными и имеют более высокую чувствительность деформации.
Нелинейная зависимость определяется уравнением 5.60 или нелинейной
Single crystal of semiconductor - Монокристалл полупроводника
Conductor ribbons - Ленты проводника
Gold leads - Золотые провода
Phenolic glass backing plate - фенольная стеклянная опорная пластина
РИСУНОК 5.41 Компонентные детали измерителя деформации полупроводни-
ка.
519
характеристической кривой (рисунок 5.42) следует использовать при из-
мерении от умеренных до больших деформаций с датчиками SC дефор-
мации. В противном случае ошибка нелинейности будет чрезмерной.
Пример 5.10
Для датчика SC напряжения характерно соотношение квадратичной де-
формации сопротивления (уравнение 5.60), получим выражение для эк-
вивалентного коэффициента датчика (чувствительность) Ss, используя
приближение линейной ошибки методом наименьших квадратов (смо-
трите главу 4) и предположим, что нагрузка в диапазоне ± εmax, долж-
на быть измерена. Выведите выражение для процентной нелинейности.
Принимая S1 = 117, S2 = 3600, и εmax = 1 × 10-2, вычислите Ss и процент
нелинейности.
решение
Линейное приближение уравнения 5.60 может быть выражено как [δR /
R]L=Ssε
Погрешность задается
520
Квадратная составная ошибки
(5.10.2)
Мы должны определить, Ss, что приводит к минимуму J. Следовательно,
мы используем ∂J / ∂Ss = 0. Следовательно, из
Уравнение 5.10.2
При выполнении интеграции и решении уравнения, мы получаем
Ss=S1
(5.10.3)
Квадратичная кривая и линейное приближение показаны на рисунке
5.43. Максимальная погрешность возникает при ε = ± εmax. Максималь-
ное значение ошибки получается из уравнения 5.10.1, с Ss = S1 и е = ± е,
таккакemax=S2εmax2
Истинное изменение сопротивления (безразмерной) от -εmax до +εmax
получается с использованием уравнения 5.60, как
Resistance change - изменение сопротивления
Strain – Напряжение
με = 1 microstrain = strain of 1 × 10–6
-
με = 1 микродеформации = напряжение
1×10-6
РИСУНОК 5.42 Нелинейное поведение полупроводника (кремний / бор) тензо-
резисторного. (а) р-типа и калибра(b) n-типа калибра.
521
Следовательно, процент в нелинейность задается N = р (макс ошибка /
диапазон) =100% × (S22 / 2S ) 100% или
(5.10.4)
Теперь, с заданными числовыми значениями, мы имеем
Мы получили это высокое значение для нелинейной, так как данные
ограничения деформации были высокими. Как правило, линейное при-
ближение является достаточным для деформации до ± 1 × 10-3 .
Чем выше температурная чувствительность, которая указана в качестве
недостатка SC тензодатчиков над металлическими, может рассматри-
ваться как преимущество в некоторых ситуациях. Например, это свой-
ство высокой чувствительности к температуре, которая используется в
датчиках пьезорезистивных температур. Кроме того, используя тот факт,
что температурная чувствительность тензодатчика SC может быть очень
точно определена, точные методы могут быть использованы для темпе-
ратурной компенсации в тензометрических схемах и калибровки темпе-
ратуры, также может быть сделано точно. В частности, пассивный SC
тензодатчик может быть использован в качестве точного датчика темпе-
ратуры для целей компенсации.
5.8 .3 Автоматическая (само-)компенсация температуры
В манометрах фольги, изменение сопротивления из-за температур-
ных колебаний, как правило, невелико. Тогда линейное (первого поряд-
ка) приближение для вклада каждого плеча моста к выходному сигналу,
в соответствии с уравнением 5.56, будет достаточно. Эти вклады урав-
новешиваются, если мы выбираем элементы тензодатчика и резисторы
завершения моста правильно — например, R1, идентичный R2 и R3
идентичный R4. Если это так, то единственный оставшийся эффект от
изменения температуры на выходе моста, сигнал поступает от измене-
ний в значения параметров к Ss (смотрите Уравнения 5.58 и 5.59). Для
датчиков из фольги, такие изменения , как правило, также незначитель-
ны. Следовательно, для малых и средних изменений температуры, до-
полнительная компенсация не требуется, когда Мостовые схемы кали-
бровочные фольги используются.
В манометрах SC, так как температура изменяется (и меняется напряже-
522
ние), а не только сопротивления, но и изменение Ss больше, по сравне-
нию с соответствующими значениями для датчиков из фольги. Следова-
тельно, линейное приближение дается уравнением 5.56, не может быть
адекватно точным для SC датчиков при переменной температуре. Кроме
того, чувствительность моста может существенно измениться при изме-
нении температуры. В таких условиях, компенсация температуры стано-
вится необходимой.
Несложный способ учета изменений температуры является путем непо-
средственного измерения температуры и коррекции показаний тензодат-
чиков с использованием данных для термической калибровки. Другой
спо соб температурной компенсации описан здесь. Этот метод предпола-
гает, что линейное приближение, данное уравнением 5.56, действующее,
и, следовательно, применимо уравнение 5.58 .
Сопротивление R и чувствительно сть деформации (или фактор кали-
бровки), Ss из SC тензодатчиков в значительной степени зависит от кон-
центрации примеси следа, в нелинейной манере.
Типичное поведение температурных коэффициентов этих двух параме-
тров для р-типа датчика SC напряжения показано на рисунке 5.44 . Тем-
пературный коэффициент сопротивления альфа и температурный коэф-
Change in resistance - Изменение сопротивления
Quadratic curve – Квадратная кривая
Linear approximation - Линейная аппроксимация
РИСУНОК 5.43 Линейное приближение наименьших квадратов для полупрово-
дникового тензодатчика.
523
фициент бета чувствительности определяются
R=Ro(1+α×∆T)
(5.61)
Ss =Sso(1+β×∆T) (5.62)
где ΔT - повышение температуры. Обратите внимание, на рисунке 5.44,
что β является отрицательной величиной и что для некоторых концен-
траций густой смазки, его величина меньше, чем значение температур-
ного коэффициента сопротивления (α). Это свойство может быть ис-
α = Temperature coe−cient of resistance - α = Температурный коэффициент сопро-
тивления
β = Temperature coe−cient of gauge factor - β = Температурный коэффициент
калибровки
Temperature coefficients (per °F) - Температурные коэффициенты (для ° F)
Compensation feasible - Выполнимая компенсация
Compensation not feasible - Компенсация, не выполнимая
Concentration of trace material (atoms/cc) - Концентрация следов материала (ато-
мов / см)
РИСУНОК 5.44 Температурные коэффициенты сопротивления и коэффициенты
датчика.
524
пользовано в самокомпенсации в отношении температуры для р-типа SC
(кремний) тензодатчика.
Рассмотрим мостовую схему постоянного напряжения с компенсирую-
щим резистором RC, подключенного к проводу питания, как показано на
рисунке 5.45a.
Можно показать, что самокомпенсация может возникнуть, если RC уста-
новлен на значение, заранее определенном на основании температурных
коэффициентов тензодатчиков. Рассмотрим случай, когда сопротивление
нагрузки очень высоко, и мост имеет четыре идентичных датчика SC де-
формации, которые имеют сопротивление R. В этом случае мост может
быть представлен с помощью схемы, показанной на рисунке 5.45b.
Поскольку полное сопротивление последовательно и параллельно про-
водимости (обратное сопротивление) является дополнением, эквива-
лентно сопротивлению мо ста R. Следовательно, напряжение, подавае-
мое на мо ст, что допускает падение напряжения на RC, не Vref, но VI,
дано как
(5
.
63)
Теперь из уравнений 5.58 и 5.59, мы имеем
Compensating resistor RC - Компенсирующий резистор RC
РИСУНОК 5.45 Мост тензодатчика с резистором компенсации. (a) Мост посто-
янного тока dc и (b) эквивалентная схема с высоким нагрузочным сопротивле-
нием.
525
(5.64)
Примечание: При этом мы полагаем, что мост константа не меняется с
температурой. В противном случае, следующая процедура по-прежнему
имеет место, при условии, что калибровочная константа С используется
вместо коэффициента калибровочных Ss (смотрите Уравнение 5.59).
Для самокомпенсации, мы должны иметь тот же результат, после того
как температура изменилась через ΔT. Следовательно, из уравнения 5.64,
мы имеем
где индекс о обозначает значения до изменения температуры. Отмена
общих терминов и кросс-умножение дает Roβ + RC (a + b) = (Ro + RC)
αβΔT. Теперь, так как α • Delta; t и β • Delta; t, как правило, значитель-
но меньше единицы, мы можем пренебречь членом второго порядка (на
RHS) в предыдущем результате. Это дает следующее выражение для
компенсирующего сопротивления:
(5.65)
Примечание: Компенсация возможна, так как температурный коэффици-
ент чувствительности тензодатчика (р) является отрицательным.
Допустимые диапазоны работы, которые соответствуют положительным
RC, показаны на рисунке 5.44 . Этот метод требует, чтобы RC поддержи-
вался постоянной при выбранном значении при изменении температуры.
Одним из таких способов является путь выбора материала с незначи-
тельным температурным коэффициентом сопротивления для RC. Другой
спо соб состоит в том, чтобы найти RC отдельно, с возможностью регу-
лирования температуры окружающей среды (например, ледяная баня).
5.9 Датчики крутящего момента
Чувствительность крутящего момента и сила полезного применения во
многих областях, в том числе следующих:
1. В роботизированном тактильном (касание) распределении и произ-
водственном приложений, таком как хватание, мелкое манипулирование
526
поверхности и замера материала, образующего там, где оказывают адек-
ватную нагрузку на объект, являются основной целью этой задачи.
2. В контроле тонких движений (например, тонкой манипуляции и Ми-
кроманипуляция) и монтажных задач, где небольшая ошибка движения
может вызвать большие разрушительные силы или снижение произво-
дительности.
3. В системах управления, которые не достаточно быстрые, где обрат-
ная связь движения используется в одиночку и обратная связь это сила
и контроль силы, упреждение может быть использовано для повышения
точности и пропускной способности.
4. В ходе тестирования процесса, мониторинга и диагностики прило-
жений, где чувствительный момент может обнаружиться, предсказать и
выявить неполадки в работе, выхода из строя компонентов или чрезмер-
ного износа (например, при мониторинге станков, таких как фрезерные
станки и дрели).
5. При измерении мощности, передаваемой через вращающиеся устрой-
ства, где мощность определяется произведением крутящего момента и
угловой скоростью в том же самом направлении.
6. При управлении сложными нелинейными механическими системами,
где измерение силы и ускорения могут быть использованы для оценки
неизвестных нелинейных членов. Нелинейная обратная связь оценоч-
ных терминов будет линеаризовать или упрощать систему (нелинейное
управление с обратной связью или линеаризирующая техника обратной
связи или LFT).
7. В экспериментальном моделировании (то есть в идентификации моде-
ли, где модель определяется с помощью анализа ввода-вывода данных),
где система ввода представляет собой крутящий момент.
В большинстве применений, зондирование производится путем обна-
ружения либо эффекта крутящего момента, либо причину крутящего
момента. Кроме того, существуют методы для измерения крутящего
момента непосредственно. Общие методы зондирования крутящего мо-
мента включают в себя следующее:
1. Измерение напряжения чувствительного элемента между приводным
элементом (или исполнительного механизма) и приводимой нагрузки,
используя тензометрический мост
2. Измерение смещения в чувствительном элементе (как в первом спо-
собе) - либо непосредственно, с помощью датчика перемещения, или
косвенно, путем измерения переменной, таких как магнитная индуктив-
527
ность или значение электрической емкости, которое изменяется со сме-
щением
3. Измерение реакции в опорной конструкции или корпусе (например,
путем измерения силы, и связанным с ним рычага длины плеча, которая
требуется, чтобы держать его внизу)
4. В электромоторах, измеряя ток якоря или ток возбуждения, который
производит крутящий момент двигателя; в гидравлических или пневма-
тических приводах, измерение давления привода
5. Измерение крутящего момента непосредственно, например, с помо-
щью пьезоэлектрических датчиков
6. Применение метода балансировки сервопривода неизвестным крутя-
щим моментом с крутящим моментом обратной связи, генерируемого
активного устройства (скажем, серводвигателя), чей крутящий момент
характеристики точно известен
7. Измерение углового ускорения, вызванного неизвестным моментом в
известном элементе инерции.
Остальная часть этого раздела посвящена изучению измерения крутяще-
го момента, используя некоторые из этих методов. Чувствительная Сила
аналогична зондированию крутящего момента, и может быть достигнута
путем тех же самых методов. Для краткости, однако, мы ограничимся
рассмотрением прежде всего крутящего момента зондирования, который
может быть интерпретирован как зондирование обобщенной силы. Рас-
ширение методов крутящего зондирования, динамометрические измере-
ния, однако, является несколько сложным.
5.9 .1 Датчики вращающего момента меры напряжения
Наиболее простой способ зондирования крутящего момента является
соединение элемента скручивания между блоками привода (например,
исполнительного механизма) и (приводом) последовательной нагрузки,
как показано на рисунке 5.46, а также для измерения крутящего момента
в элементе кручения.
Если круговой вал (сплошной или полый) используется в качестве эле-
мента кручения, отношение крутящего момента деформации становится
отно сительно простым, и дается
(5.66)
528
где
Т является крутящим моментом, передающимся через элемент
ε является основным напряжением (которое под углом 45 ° к валу оси) на
радиусе r в пределах элемента
J является полярным моментом площади поперечного сечения элемента
G модуль сдвига материала
Кроме того, напряжение сдвига τ на радиусе R вала задается
(5.67)
Из уравнения 5.66 следует, что крутящий момент Т может быть опреде-
лен путем измерения прямой деформации ε на поверхности вала вдоль
направления главного напряжения (то есть под углом 45 ° по отношению
к о си вала). Это является основой зондирования крутящего момента с
помощью измерения деформации. Используя общее уравнение моста
5.58 наряду с уравнением 5.59 в 5.66, мы получаем крутящий момент T
от выходного моста δνo:
(5.68)
Strain gauges – Тензодатчики
Torsion member - элемент скручивания
Driven unite (load) - Приводной агрегат (нагрузка)
Bridge circuit – схема моста
Torque reading - Значение крутящего момента
РИСУНОК 5.46 Крутящий момент зондирования с использованием элемента
кручения.
529
где Ss является коэффициент калибровочных (или чувствительность)
тензорезисторов. Мостик константа K зависит от количества используе-
мых активных тензорезисторов. Тензодатчики предполагаются монтиро-
ваться вдоль главного направления. Три возможные конфигурации пока-
заны на рисунке 5.47. В конфигурациях (а) и (б) только два тензодатчика
используются, и мост константа к = 2.
(Примечание: обе осевые и изгибающие нагрузки компенсируются с за-
данными конфигурациями, так как сопротивление в обоих манометрах
изменяется на ту же величину [тот же знак и ту же величину], который
уравновешивает до первого порядка, для подключения в мостовой схе-
ме, показанной на рисунке 5.47.)
Конфигурация (с) имеет две пары датчиков, установленных на двух про-
тивоположных поверхностях вала. Мост константа удваивается в этой
конфигурации, и здесь снова, датчик само стоятельно компенсирует осе-
вые и изгибающие нагрузки до первого порядка [O (δR)].
5.9 .2 Проектные требования
Два противоречащих друг другу требования в конструкции торсионного
элемента для восприятия крутящего момента являются чувствительность
и полоса пропускания. Элемент должен быть достаточно гибким, чтобы
получить приемлемый уровень чувствительности датчика (то есть до-
статочно большой выходной сигнал). В соответствии с уравнением 5.66,
это требует небольшой жесткости при кручении GJ, чтобы произвести
большое напряжение для заданного крутящего момента. К сожалению,
так как кручение - чувствительный элемент, соединен по следовательно
между приводным элементом и ведомым элементом, увеличение гибко-
сти результатов торсионного элемента в уменьшении общей жесткости
системы. В частности, со ссылкой на рисунок 5.48, общая жесткость
Kold перед подключением торсионного элемента задается
(5.69)
530
(5.70)
и жесткость, отличающаяся после подключения элемента кручения, за-
дается так
где
Км является эквивалентная жесткость узла привода (двигателя)
KL является эквивалентная жесткость нагрузки
Ks является жесткость крутящего момента чувствительного элемента
Как видно из уравнений 5.69 и 5.70, что 1 / Knew> 1 / Kold. Следователь-
но, Knew <KOLD. Такое уменьшение жесткости связано с уменьшением
собственной частоты и пропускной способности, что приводит к замед-
лению реакции на команды управления в общей системе. Кроме того,
снижение жесткости приводит к уменьшению коэффициента усиления
обратной связи. В результате, в стационарном состоянии ошибки в неко-
торых переменных движения могут увеличиваться, что требует больших
усилий от контроллера для достижения требуемого уровня точности. Од-
ним из аспектов в конструкции элемента торсиона, чтобы гарантировать,
что жесткость элемента достаточно мала, чтобы обеспечить адекватную
константа моста (к): 2 2 4
Осевые нагрузки компенсируются: Да Да
Изгибающие нагрузки компенсируются: Да Да
Конфигурация (а) (б) (с)
РИСУНОК 5.47 Конфигурации тензодатчиков для кругового датчика крутящего
момента вала.
531
чувствительность, но достаточно большая, чтобы поддерживать адек-
ватную пропускную спо собность и коэффициент усиления системы. В
тех ситуациях, где Кs не может быть увеличено адекватно без серьезной
угрозы чувствительности датчика, полоса пропускания системы может
быть улучшена за счет уменьшения либо инерции нагрузки, либо приво-
дного устройства (двигатель) инерции.
Пример 5.11
Рассмотрим жесткую нагрузку, которая имеет полярный момент инерции
JL и приводится в движение двигателем с жестким ротором, который
имеет инерционную JM. Торсионный элемент жесткости Ks соединен
между ротором и нагрузкой, как показано на рисунке 5.49a, для измере-
ния крутящего момента, переходящего в нагрузку.
(а)
определите передаточную функцию между Tm крутящим момен-
том двигателя и углом поворота крутящего элемента. Что такое круче-
ние собственной частоты ωn системы? Обсудим, почему пропускная
спо собность системы зависит от ωn . Покажите, что пропускная способ-
ность может быть улучшена за счет увеличения Кs, за счет уменьшения
Jm, или путем уменьшения JL. Дайте некоторые преимущества и недо-
статки введения редуктора на выходе двигателя.
(б) Если элемент кручения жесткости 0,5 Кs устанавливается в конце на-
грузки вала (в серии), по которому процент уменьшает первоначальное
кручение пропускной спо собность системы (представитель допустимо-
го диапазона рабочих частот для датчика крутящего момента)?
Решение
Drive element – элемент привода
Motor – двигатель
Load – Нагрузка
Torque sensing element - Чувствительный элемент крутящего момента
РИСУНОК 5.48 Деградация жесткости из-за гибкости чувствительного элемен-
та вращающего момента.
532
(а) Из диаграммы свободного тела, показанного на рисунке 5.49b, урав-
нения движения записываются:
For motor – для двигателя (5.11 .1)
For load – для нагрузки
(5.11 .2)
где
θm является вращение двигателя
θL является вращение нагрузки
Разделим уравнение 5.11 .1 по Jm, разделим уравнение 5.11 .2 по JL , и
вычтем второе уравнение из первого:
Это уравнение может быть выражено с точки зрения крученого угла:
(5.11 .3)
(5.11 .4)
Это уравнение соответствует динамическому крутящему ре-
жиму (режим вращения) системы. Передаточную функцию G (s) между
входным Tm и выходным θ получают введением переменной Лапласа s
вместо производной по времени d / dt. В частности, мы имеем
(5.11 .5)
Характеристическое уравнение системы закрутки
(5.11 .6)
Отсюда следует, что при кручении (скручивании) собственная частота
533
ωn задается
(5.11 .7)
В дополнение к этой собственной частоте, существует естественная ча-
стота нуль в общей системе, что соответствует вращению всей системы
как твердого тела без какого-либо скручивания в торсионном элементе
(то есть режим жесткого тела). И собственные частоты получаются, если
выход берется либо как θm, либо θL, а не угол поворота θ. Когда выход-
ной сигнал принимается в качестве угла поворота θ, отклик измеряется
отно сительно режима твердого тела; следовательно, нулевой элемент
исчезает из частоты характеристического уравнения, и только режим
крутильных колебаний (режим вращающихся колебаний) остается в ди-
намическом уравнении. функция передачи задается уравнением 5.11 .5
можно записать в виде
(5.11 .8)
В частотной области S = jω и полученную передаточную функцию ча-
стоты
(5.11 .9)
Stator – статор
Rotor – ротор
Motor – двигатель
Torsion member – элемент кручения
Load – нагрузка
Motor torque – крутящий момент двигателя
Transmitted torque – передающийся крутящий момент
Рисунок 5.49 Пример анализа полосы пропускания системы с датчиком крутя-
щего момента. (а) модель системы и (б) диаграмма свободного тела.
534
Отсюда следует, что если ω мала по сравнению с ωn, передаточная функ-
ция может быть приблизительно равной
(5.11 .10)
Эта статическая зависимость подразумевает мгновенный ответ без ка-
кой-либо динамической задержки. Так полоса пропускания системы
представляет области частот возбуждения, в течение которых система
реагирует достаточно быстро (что соответствует достаточно плоской об-
ласти функции величины переноса), то отсюда следует, что ширина по-
ло сы системы улучшается, когда ωn увеличивается. Следовательно, ωn
является мерой поло сы пропускания системы. Заметим прежде всего, из
уравнения 5.11 .7, что ωn (полоса пропускания системы) возрастает при
Кs увеличении, когда Jm уменьшается, или когда JL уменьшается. Если
коробка передач будет добавлена в систему, эквивалентная инерция уве-
личивается и эквивалентная жесткость уменьшается.
Это уменьшает пропускную способно сть системы, что приводит к за-
медлению реакции. Другим недо статком редуктора является люфт и тре-
ние, которые являются нелинейными, которые входят в систему. Главное
преимущество, однако, является то, что крутящий момент передается на
нагрузку, усиливается за счет снижения скорости между двигателем и
нагрузкой. Тем не менее, высокий крутящий момент и низкая скорость
могут быть достигнуты с помощью крутящего момента двигателей без
использования каких-либо переходников скорости или с помощью без-
зазорных передач, таких как гармонические приводы и тяговые (фрик-
ционные) диски.
(b) Для последовательно соединенных двух торсионных сегментов
жесткости Ks и 0,5 Кs, эквивалентная жесткость Ke задается
Для данного момента инерции, собственная частота пропорциональна
квадратному корню жестко сти.
→ Пропускная способность снижается на коэффициент 1/√3 ≈ 0/58
→ Пропускная способность уменьшается примерно на 42%
Конструкцию торсионного элемента для восприятия крутящего момента
можно рассматривать как выбор полярного момента площади J элемента
для удовлетворения следующим четырем требованиям:
535
1. Ограничение превышения мощности деформации определяется изго-
товителем тензодатчика.
2.Чтобы указанный верхний предел нелинейно сти для тензодатчика не
был превышен, для линейной операции.
3. Чувствительность датчика является приемлемым с точки зрения уров-
ня выходного сигнала дифференциального усилителя (смотрите главу 2)
в мостовой схеме.
4. Общая жесткость (ширина поло сы частот, устанавливается ошибка, и
так далее) системы является приемлемой.
В этой ситуации, датчик крутящего момента не только выполняет
функцию зондирования, но становится неотъемлемой частью структуры
исходной системы. В частности, сила, динамика, и пропускная способ-
ность системы в целом страдают от датчика крутящего момента. Сле-
довательно, конструкция датчика имеет особое значение здесь, а также
конкретные соображения системы динамики должны быть приняты во
внимание. В настоящее время мы разрабатываем проектные критерии
для четырех требований, перечисленных ранее для датчика крутящего
момента.
5.9 .2 .1 Мощности напряжения датчика
Максимальное напряжение, обрабатываемое тензометрическим эле-
ментом, ограничивается такими факторами, как прочность, ползучесть
проблем, связанных с связующим материалом (эпоксидной смалой) и ги-
стерезис. Этот предел εmax определяется изготовителем тензодатчиков.
Для типичного датчика SC, максимальный предел деформации в порядке
3000 με. Если максимальный крутящий момент, который датчик должен
обрабатывать, это Tmax, мы имеем, из уравнения 5.66
(5.71)
где εmax и Tmax указаны.
5.9 .2 .2 Предел нелинейности меры напряжения
Для больших деформаций, характерное уравнение тензодатчика стано-
вится все более нелинейными. Это особенно верно для датчиков SC.
Если мы предполагаем, что квадратное уравнение (уравнение 5.60), про-
цент нелинейности Np дается уравнением 5.10.4 . Для заданной нелиней-
536
ности, верхний предел напряжения может быть определен с помощью
этого результата:
(5.72)
Соответствующая J задается
(5.73)
где Np и Tmax указаны.
5.9 .2 .3 требование чувствительности
Выходной сигнал от тензометрического моста обеспечивается диффе-
ренциальным усилителем (смотрите главу 2), который детектирует на-
пряжение на двух выходных узлах моста (А и В на рисунке 5.37), прини-
мает значение, и усиливает его коэффициент усиления Ка. Этот выходной
сигнал подается на АDC (глава 2), который обеспечивает цифровой сиг-
нал в компьютер для выполнения дальнейшей обработки и контроля.
Уровень сигнала на выходе усилителя должен быть достаточно высоким,
так что SNR является адекватным. В противном случае, может привести
к серьезным проблемам шума. Как правило, максимальное напряжение в
пределах ± 10 V желательно. Выход усилителя v задается
(5.74)
где δνo является выход моста до усиления. Из этого следует, что жела-
емый уровень сигнала может быть получен путем простого увеличения
коэффициента усиления усилителя. Существуют ограничения этого
подхода, однако. В частности, большое усиление увеличивает воспри-
имчивость усилителя к насыщению и неустойчивости проблем, таких
как дрейф, и ошибки в результате изменения параметров. Следователь-
но, чувствительность должна быть улучшена в максимально возможной
степени с помощью механических соображений.
Подставив уравнение 5.68 в 5.74, мы получаем требования к уровню сиг-
нала, как
537
где VO заданный нижний предел на выходной сигнал от усилителя мо-
ста, а Тmax также указан. Тогда предельное расчетное значение для J
дается
(5.75)
где VO и Vmax уточняются.
5.9 .2 .4 требование жесткости
Нижний предел общей жесткости системы ограничивается такими фак-
торами, как скорость реакции (представленной полосе пропускания си-
стемы) и установившейся ошибки (представленной усилением систе-
мы). Полярный момент площади J должен быть выбран таким образом,
что жесткость на кручение элемента не опускается ниже определенного
предела К. Во-первых, мы должны получить выражение для торсионной
жестко сти кругового вала. Для вала длины L и радиуса r, угол закручива-
ния θ соответствует деформации сдвига
(5.76)
на внешней поверхности. Соответственно, напряжение сдвига задается
(5.77)
В настоящее время в связи с уравнением 5.67, крутильная жесткость
вала задается
(5.78)
Следует отметить, что жестко сть может быть увеличена за счет увели-
чения ГДж. Тем не менее, это уменьшает чувствительность датчика, так
как в связи с уравнением 5.66, измеренная прямая деформация ε умень-
шается для заданного крутящего момента, при ГДж увеличивается. Есть
два других параметра - внешний радиус r и длина L кручения элемента,
которым мы можем манипулировать. Хотя на твердом теле возрастает
вал J (четвертой степени) с R, для полого вала можно манипулировать
J и R, независимо друг от друга, с практическими ограничениями. По
этой причине, полые элементы обычно используются в качестве элемен-
538
тов крутящего момента зондирования. С помощью этих свободных кон-
струкций при заданном значении ГДж, можно увеличить R чувствитель-
ность тензометрического моста без изменения жесткости системы, и мы
можем уменьшить L для увеличения жесткости системы без влияния на
чувствительность моста.
Если предположить, что кратчайшая возможная длина L используется
в датчике, в течение определенного предела жесткости K, мы должны
иметь ГДж / L ≥ K. Тогда предельное значение для конструкции J дается
(5.79)
где указывается K.
В целом проблема разработки: Проблема разработки кругового торсион-
ного элемента для датчика крутящего момента может быть выполнена
с использованием формул (неравенство в), полученных ранее. Управля-
ющие формулы для полярного момента зоны J датчика крутящего мо-
мента, на основе четырех критерий, рассмотренных выше, приведены
в таблице 5.7 . В частности, обратите внимание на направление каждо-
го неравенства. Он выбирается таким образом, что любое значение в
пределах неравенства будет удовлетворять конкретную спецификацию
(хотя и консервативно) и лучшим значением является один соответству-
ющий равенству. Кроме того, очевидно, что из трех значений "≥" для J,
мы должны выбрать самый крупный. Тогда другие две спецификации
будут удовлетворены консервативно. Если это по величине нижнего пре-
дельного значения для J меньше верхнего предельного значения J, как
определено для спецификации чувствительности датчика (третье нера-
венство в таблице 5.7), то наиболее нижний предел является лучшим
выбором для J. Если последний больше прежнего, то нет надлежащего
выбора конструкции, и мы должны изменить некоторые спецификации и
повторить проектные расчеты.
Примечание: Даже после того, как удовлетворяющие всем четырем тре-
бованиям, приведенным в таблице 5.7, могут быть и другие требова-
ния, которые должны быть решены в конструкции датчика. Например,
толщина стенки элемента кручения, который является оптимальным по
четырем критериям таблицы 5.7, может быть слишком мал, и это мо-
жет повлечь за собой опасность структурной неустойчивости (напри-
мер, скручивание). Когда такие соображения принимаются во внимание,
окончательный дизайн чувствительного элемента может не быть опти-
мальным с учетом четырех критериев, таблица 5.7.
539
Пример 5.12
Шарнир прямого привода манипулятора схематически изображено на
рисунке 5.50 . Ротор приводного двигателя является неотъемлемой ча-
стью ведомого звена, и нет никаких передач или любого другого редук-
тора. Кроме того, двигатель статора является составной частью ведущего
звена. Тахометр измеряет совместную скорость (относительную), а рас-
познаватель измеряет совместное вращение (относительное). Зубчатые
передачи используются для повышения производительности распозна-
вателя, и это не влияет на характеристики переноса нагрузки шарнира.
Пренебрегая механической нагрузкой от датчиков и зубчатой передачи,
но в том числе трение подшипника, эскиз распределения крутящего мо-
мента вдоль оси шарнира. Предложим, место (или места) для измерения
с использованием датчика тензочувствительного вращающего момента
чистого крутящего момента передается на ведомые линии связи.
решение
Для простоты предположим, точечных крутящих моментов. Обозначая
двигателя (магнитный) крутящий момент на Tm; суммарный крутящий
момент инерции ротора и момента трения в двигателе ТL; и фрикци-
онные моменты на двух подшипниках по TF 1 и TF2; распределение
Таблица 5.7 Критерии проектирования для тензочувствительного крутящего
момента чувствительного элемента
540
крутящего момента схематически изображено на рисунке 5.51. Чистый
крутящий момент передается на ведомые линии связи, является TL. Ме-
ста, доступные для установки датчиков деформации включают A, B, C и
D. Обратите внимание, что TL определяется разницей между крутящим
моментом на B и
C. Таким образом, датчики крутящего момента тензометрически долж-
ны быть установлены в точке В и С, а разность показаний должна быть
принята для точного измерения TL. Так как подшипник трения мал для
большинства практических целей, один датчик крутящего момента, рас-
положенный на B, обеспечивает достаточно точные результаты. Тm мо-
мент двигателя также приблизительно равен переданному крутящему
моменту, когда последствия подшипников трения и нагрузки двигателя
(инерционность и трение) незначительны. Это причина, лежащая в ос-
нове использования тока двигателя (поля или якоря) для измерения вра-
щательного момента в некоторых приложениях (например, в роботах).
Пример 5.13
Рассмотрим конструкцию трубчатого элемента при кручении. Используя
обозначения таблицы 5.7, следующие проектные спецификации приве-
дены:εmax=3000με;Np=5%;Vo=10В;иК=2,5×103Н•м/радиан
для достижения полосы пропускания системы в 50 Гц. Мост с четырь-
мя активными тензодатчиками используется для измерения крутящего
момента в торсионном элементе. Предусмотрены следующие значения
параметров:
1. Для тензорезисторов: Ss = S1 = 115, S2 = 3500
2. Для торсионного элемента: внешний радиус г = 2 см; модуль сдвига G
= 3×1010Н/м2;длина
L=2см
3.Длясхемымоста:Vref=20ВиКа=100
4. Максимальный крутящий момент, который, как ожидается, является
Tmax=10Н•м.
Используя эти значения, расчет кручения элемента для датчика. Рассчи-
тываем эксплуатационные предельные значения параметров для проек-
тируемого датчика.
Решение
Предположим, коэффициент безопасности 1 (то есть использование пре-
дельных значений расчетных формул). Мы можем вычислить полярный
момент площади J с использованием каждого из четырех критериев,
приведенных в таблице 5.7
541
1.Дляεmax=3000Ме:J=((0,02×10)/(2×3×1010×3×10-3))М4=
1,11 × 10-9 М4
2.ДляNp=5:J=((25×0,02×3500×10)/(3×1010×115×5))М4=1,01
× 10-9 М4
3.ДляVO=10В:J=((100×4×115×0,02×20×10)/(8×3×1010×
10))m4=7,67×10-8m4
4.ПриK=2,5×103Н•м/рад:J=((0,02×2,5×103)/(3×1010))m4=
1,67 × 10-9 m4
Из этого следует, что для приемлемого датчика, мы должны удовлетво-
рять.
Drive link - шарнирная передача
Gearing – зубчатая передача
Tachometr - Тахометр
Motor stator - Мотор статора
Resolver - Резольвер
Ball bearing - Подшипник
Motor rotor - Мотор ротора
РИСУНОК 5.50 Стык с прямым приводом роботизированной руки.
542
and-и
Мы выбираем J = 7,67 × 10-8 m4, который является самым большим J, ко-
торый удовлетворяет всем требованиям к конструкции. Это не является
оптимальным выбором, если только четыре проектные спецификации,
приведенные в таблице 5.7, рассматриваются.
Тем не менее, этот выбор сделан так, что толщина трубки достаточно
велика для передачи нагрузки без потери устойчивости или текучести.
Чтобы проиллюстрировать это, давайте сравним этот неоптимальный
выбор конструкции с оптимальным значением. Для трубчатого вала, J
= (π / 2) (r4o – r 4i), где r внешний радиус и r есть внутренний радиус
→7.67 *10-8 = (π / 2) (0,024 r4i) → ri = 1,8 см. Теперь, с выбранным зна-
чением J:
Поскольку собственная частота пропорциональна квадратному корню из
жесткости, для заданной инерции, отметим,
что ширина полосы 50√ (1.15×103)/(2.5×103)Гц возможно при такой кон-
струкции.
Bearing – подшипник
Driven link – ведомое звено
Bearing Motor- подшипник двигателя
Torque – крутящий момент
Axial location – осевое расположение
Рисунок 5.51 Распределения крутящего момента вдоль оси прямого привода
шарнира манипулятора.
543
Примечание: В этой ситуации обнаруживаемого крутящего момента, по-
ло са пропускания датчика (то есть рабочая частота диапазон зондирова-
ния крутящего момента) и механическая пропускная способность общей
динамической системы (регулируемой крутильной собственной частоте
двух инерцией, соединенных гибким валом) являются тесно связанны-
ми между собой. Следовательно, даже если мы можем указать полосу
пропускания датчика для процесса измерения, мы косвенно сдержива-
ем механическую пропускную спо собность всей системы. Такая тесная
связь полосы пропускания датчика и пропускной способности системы
не могут присутствовать в некоторых других чувствительных ситуациях.
Теперь рассмотрим оптимальное значение для J, который J = 1,67 × 10-9
m4.Мыимеем1,67‧10-9 (π/2)(0,024–r4i)→R =1,997см.Ясно,
что это не является хорошим выбором для J, так как толщина стенки
очень мала и может легко стать причиной потери устойчивости и других
структурных проблем. Кроме того, этот выбор приведет к очень высокой
чувствительности к выходу моста (гораздо больше, чем 10 В). Таким об-
разом, желательно, чтобы остаться с неоптимальным выбором, который
дан ранее.
Примечание: Как правило, полые элементы датчика используются для
измерения крутящего момента вплоть до приблизительно 50 Н • м и
твердых элементов датчика, используются для более высоких крутящих
моментов.
Порядок, в котором тензодатчики настроены на датчик крутящего мо-
мента, может быть использован для компенсации эффектов перекрест-
ной чувствительности, вытекающей из таких факторов, как растяжение
и изгибающие нагрузки, которые вызывают ошибку при измерении кру-
тящего момента. Тем не менее, желательно использовать динамометри-
ческий - чувствительный элемент, который по своей природе обладает
низкой чувствительностью к этим факторам. Трубчатый элемент круче-
ния рассматривается в этом разделе удобно для аналитических целей из-
за про стоты соответствующих выражений для проектных параметров.
Его механическая конструкция и интеграция в практической системе
также удобна. К сожалению, этот элемент не является оптимальным
по отношению к жесткости (жесткости) для передачи, как изгиба, так
и растяжения нагрузки. Альтернативные формы и структурные меха-
низмы должны быть рассмотрены, когда присущая жесткость требуется
(нечувствительность) для поперечных нагрузок. Кроме того, трубчатый
элемент имеет ту же основную нагрузку во всех местах на поверхности
элемента. Это не дает нам выбор по отношению к местам монтажа тензо-
544
датчиков в целях обеспечения максимальной чувствительности датчика
крутящего момента.
Другим недостатком основного трубчатого элемента при кручении,
благодаря своей изогнутой поверхности, очень необходима осторож-
ность при монтаже хрупких манометров SC, которые могут быть легко
повреждены даже с небольшим изгибом. Следовательно, чувствитель-
ный элемент, который имеет плоскую поверхность для монтажа тензо-
датчика, был бы желателен.
Элемент крутящего зондирования, который имеет вышеуказанные жела-
емые характеристики (то есть присущие нечувствительности к попереч-
ной нагрузки, неравномерного распределения деформации на поверхно-
сти, а также наличие плоских поверхностей для монтажа тензодатчика),
показан на рисунке 5.52. Следует отметить, что два чувствительных
элемента соединены в радиальном направлении между приводными
устройствами и ведомыми элементами. В этой конструкции, чувстви-
тельные элементы подвергаются изгибу, чтобы передавать крутящий
момент между водителем и ведомым элементом. Сгибающее напряже-
ние измеряется в местах с высокой чувствительностью, и принимается
пропорциональным передаваемым крутящим моментом. Аналитическое
определение константы калибровки не простое для таких сложных чув-
Strain gauge – Тензодатчики
Connected to drive member - Подключение к приводному элементу
Connected to driven member - Подключение к ведомым элементам
A = torque sensing elements - A = крутящий момент зондирования
РИСУНОК 5.52 Гибкий элемент для зондирования крутящего момента. (А)
форма чувствительного элемента, и (б) расположение элементов (два радиально
расположенных элемента).
545
ствительных элементов, но экспериментальное определение простое.
Анализ методов конечных элементов может быть также использован для
этой цели.
Примечание: Тензодатчик крутящего момента измеряет направление, а
также величину крутящего момента, передаваемого через него.
Поверхностные датчики крутящего момента распространения акустиче-
ских волн (SAW): датчик SAW представляет собой микроминиатюрный
акустический резонатор, изготовленный из пьезоэлектрического мате-
риала, чья резонансная частота (в диапазоне мегагерц) изменяется в за-
висимости от деформации поверхности в месте расположения датчика.
Следовательно, его можно рассматривать как датчик натяжения, и мож-
но использовать для измерения крутящего момента. Изменение частоты
воспринимается неподвижным детектором. Преимущества датчика SAW
крутящего момента беспроводной работы (полезно для зондирования
движущихся частей) и высокую пропускную способность измерения (в
диапазоне килогерц).
5.9 .3 Прогиб крутящего момента датчика
Вместо того, чтобы измерить деформацию в элементе датчика, фактиче-
ское отклонение или деформация (скручивание или изгиб) может быть
измерено и использовано для определения крутящего момента, с помо-
щью соответствующей калибровочной константы. Для кругового вала
(сплошными или полыми) крутильных элементов, определяющим соот-
ношения для угла закручивания (q) для приложенного крутящего момен-
та (T), определяется уравнением 5.78, которое может быть записано в
виде
(5.80)
Калибровочная константа ГДж / л должна быть мала для того, чтобы до-
стичь высокой чувствительности. Это означает, что жесткость элемент
должна быть низкой. Это ограничивает пропускную способность, кото-
рая измеряет скорость реакции; и коэффициент усиления, который опре-
деляет стационарную ошибку, общей системы. Для системы с высокой
пропускной способностью твист угол θ должен быть очень мал (напри-
мер, доли градуса). Следовательно, очень точное измерение θ требуется
546
в этом типе датчиков момента. Три типа смещения - датчики крутящего
момента на основе деформации описаны ниже. Один датчик непосред-
ственно измеряет угол закручивания. Второй датчик использует изме-
нение магнитной индукции, связанной с деформацией датчика. Третий
датчик использует обратную магнитострикцию.
5.9 .3 .1 Прямой прогиб крутящего момента датчика
Непосредственное измерение угла закручивания между двумя осевыми
положениями в торсионном элементе, используя датчик углового смеще-
ния, может быть определен крутящий момент. Трудностью в данном слу-
чае является то, что в динамических условиях, относительное отклоне-
ние должно быть измерено, в то время как элемент кручения вращается.
Один тип датчика перемещения, который может быть использован здесь,
является синхротрансформатор. Предположим, что два ротора синхро-
низатора установлены на обоих концах элемента кручения. Синхро вы-
ход дает отно сительный угол вращения двух роторов.
Другой тип датчика перемещения, который может быть использован
для той же цели, как показано на рисунке 5.53a. Две ферромагнитные
шестерни шлицевых на двух осевых местах торсионного элемента. Два
стационарных бесконтактных датчика магнитного индукционного типа
(самоиндукции или взаимная индукция) расположены в радиальном на-
правлении, перед зубчатым зацеплением, в двух местах. По мере вра-
щения вала, зубья шестерни приводят к изменению потокосцепления с
датчиком близости катушек. Результирующие выходные сигналы двух
зондов последовательности импульсов, по форме напоминающей сину-
соид. фазовый сдвиг одного сигнала относительно другого определяет
отно сительное угловое отклонение одной шестерни по отношению к
другой, если предположить, что два датчика синхронизированы в усло-
виях, без каких-либо крутящих моментов. И величина и направление пе-
редаваемого крутящего момента определяются с использованием этого
метода. 360 ° фазовый сдвиг соответствует отно сительному прогибу на
целое кратное поле передач. Отсюда следует, что при таком расположе-
нии, прогибы менее половины шага зубчатого зуба могут быть измерены
без двусмысленности. Если предположить, что выходные сигналы двух
зондов являются синусоидальными волнами (фильтрация узкополосных
могут быть использована для достижения этой цели), фазовый сдвиг
φ пропорционален угловой закрутки θ. Если шестерня имеет n зубов,
первичный сдвиг фазы 2π соответствует углу закручивания 2π/n радиан.
Следовательно, θ = φ / п и из уравнения 5.80, мы получаем
547
(5.81)
где
G модуль сдвига элемента кручения
J полярный момент площади элемента кручения
φ является сдвиг фаз между двумя сигналами близости зонда
L является осевое разделение близости зондов, и n число зубьев в ка-
ждой шестерни
Примечание: Бесконтактные датчики являются бесконтактными устрой-
ствами. Вихревые токи бесконтактных датчиков и Холла бесконтактных
датчиков могут быть использованы вместо магнитной индукции зондов
в данном методе зондирования крутящего момента.
5.9 .3 .2 Датчик вращающего момента переменного магнитного
сопротивления
Датчик крутящего момента, который основан на деформации чувстви-
тельного элемента и который не требует контактирующего коммутатора,
показанного на рисунке 5.53b. Это переменное устройство, которое ра-
ботает как дифференциальный трансформатор (RVDT или LVDT), как
изучено ранее в этой главе. Крутящий-чувствительный элемент является
ферромагнитной трубой, которая имеет два набора прорезей, как пра-
вило, ориентированные по двум основным направлениям напряжений
трубки (то есть под углом 45 ° по отношению к осевому направлению)
при кручении. Когда крутящий момент прикладывается к элементу кру-
чения, один набор пробелов закрывается, а другой набор открывается,
как результат главных напряжений по нормали к оси щели. Первичные
и вторичные обмотки расположены вокруг щели трубы, и они о стаются
неподвижными. Один сегмент вторичной катушки помещается вокруг
одного набора щелей, а вторичный сегмент помещается вокруг друго-
го (перпендикулярного) набора. Первичная обмотка возбуждает пита-
ние переменного тока, а индуцированное напряжение VO во вторичной
обмотке измеряет. Когда деформирует трубку, она изменяет магнитное
сопротивление в пути потока связей, тем самым изменяя наведенные
напряжения. Для получения наилучшей чувствительности, два сегмен-
та вторичной катушки, как это показано на рисунке 5.53b, должны быть
соединены таким образом, чтобы наведенные напряжения абсолютно
подходили (алгебраическая субтрактивная), так как одно напряжение
548
увеличивается, а другое уменьшается. Выходной сигнал должен быть
демодулирован (путем удаления компонентов частоты несущей) для эф-
фективного измерения переходных крутящего момента.
Примечание: Направление крутящего момента задается знаком модули-
рованного сигнала.
5.9 .3 .3 Датчик магнитострикционного крутящего момента
Этот датчик крутящего момента использует принцип обратной магнито-
стрикции. В прямой магнитострикции, магнитострикционный материал
деформируется при воздействии на него магнитного поля. В обратной
магнитострикции (или эффект Виллари), деформация магнитострикци-
онного материала изменяет свою намагниченность. (Примечание: пре-
образование энергии между упругим потенциалом (механической) энер-
гии и энергии магнитного поля.)
Изменение намагниченности в магнитострикционном торсионном эле-
менте, может быть измерена с помощью стационарного зонда (напри-
мер, датчик на основе эффекта Холла), и из нее деформации элемента
(и, следовательно, вращающий момент осуществляется ею) может ощу-
щаться.
Общие магнитострикционные материалы являются никель и его спла-
вы, некоторые ферриты, некоторые редкие ископаемые, и Альфер (86%
железа и 14% из алюминиевого сплава). Важным свойством при их ис-
пользовании в механическом зондированию (например, крутящий мо-
мент зондирования) является стресс чувствительность ∂B / ∂σ, которая
является изменением плотности магнитного потока (единица измерения:
Weber / м2 = тесла (T)) для единичного изменения в стресса (единица
измерения: Н / м2).
Некоторые магнитострикционные материалы и их стресс чувствитель-
ности приведены в таблице 5.8 . Схематическое представление магнито-
стрикционного датчика крутящего момента приведена на рисунке 5.53c.
Примечание: Стресс =новый модуль × деформацию. Чувствительность
напряжения можно определить с помощью этого соотношения.
5.9 .4 Датчики вращающего момента реакции
Методы зондирования крутящего момента, которые были описаны до
549
Toothed wheel – зубчатое колесо
Torque – крутящий момент
Variable-inductance probes - Зонды переменной индуктивности
Phase shift processor - процессор фазового сдвига
Output – выход
Ferromagnetic tube - ферромагнитная трубка
Slits – разрезы
ac reference supply - Ссылка питания переменного тока
Secondary coils – вторичные катушки
Primary coil – катушки первичной обмотки
Magnetostrictive torsional member - Магнитострикционный элемент кручения
Magnetic probe (hall-eRect) - Магнитный зонд (зал-вертикальный)
РИСУНОК 5.53 датчики крутящего момента прогиба. (А) датчик непосред-
ственного отклонения крутящего момента, (б) датчик крутящего момента с пе-
ременной и (с) датчик магнитострикционного крутящего момента.
550
сих пор используют чувствительный элемент, который соединен между
приводным элементом и ведомым элементом. Есть два основных недо-
статка в таком расположении зондирования крутящего момента:
1. Чувствительный элемент изменяет исходную систему нежелательным
образом, в частности, за счет уменьшения жесткости системы и добав-
ления инерции. В результате, не только делает общую ширину по полосе
на уменьшения системы, но исходный крутящий момент также изменя-
ется (из-за механической нагрузки) из-за включения вспомогательного
чувствительного элемента.
2. В динамических условиях, чувствительный элемент находится в дви-
жении, тем самым делая крутящий момент измерения более трудным.
Тогда некоторая форма коммутации (например, фазным и кисти), ротор-
ный трансформатором или беспроводной телеметрии была бы необходи-
мой при чтении сигнала датчика.
Способ реакции зондирования крутящего момента устраняет эти про-
блемы в значительной степени. В частности, этот способ может быть
легко использован для измерения крутящего момента во вращающейся
машине. Опорная конструкция (или корпус) вращающейся машины (на-
пример, двигатель, насос, компрессор, турбина, генератор) является ко-
лыбелью, освободив светильники, и усилие, которое необходимо, чтобы
сохранить структуру от перемещения (т.е . удерживать) измеряется. Схе-
матическое представление метода показана на рисунке 5.54a. В идеале,
рычаг установлен на корпусе колыбели, и сила, необходимая для поддер-
жания корпуса в неподвижном состоянии измеряется с помощью датчи-
ка силы (Тензодатчика). Реакция крутящего момента на корпусе дается
(5.82)
где
FR является сила реакции, которая измеряется с помощью тензодатчика
L длина плеча рычага
В качестве альтернативы, тензодатчики или другие типы датчиков силы
могут быть установлены непосредственно в местах крепежа (например,
на болты крепления) корпуса, для измерения силы реакции, фактически
не имея колыбели корпуса. Затем реактивный крутящий момент опре-
деляется со знанием расстояния расположения крепежных от оси вала.
Метод реакции-крутящего момента зондирования крутящего момента
широко используется в динамометре (реакция динамометров), которые
551
определяют мощность передачи во вращающихся машинах посредством
измерения крутящего момента и скорости вращения вала. Недостатком
датчиков момента реакции можно объяснить с помощью
Рисунок 5.54b. Двигатель ротора инерции J, который вращается на угло-
вое ускорение ӫпоказано. По третьему закону Ньютона (действие = реак-
ция), то электромагнитный момент Tm генерируется на ротор двигателя
реагирует обратно на статор и корпус. На рисунке Tf1 и Tf2 обозначают
фрикционные моменты на двух подшипниках и ТL является крутящий
момент передается на ведомый нагрузкой.
При применении второго закона Ньютона во всей системе, заметим, что
фрикционные моменты и двигатель (магнитный) крутящего момента все
отменяет, давая J ӫ̇= TR -TL, или
TL=TR –Jӫ
(5.83)
Примечание: TL является тем, что должно быть измерено.
При ускорении или замедлении условий реакции вращающего момента
ТР, который измеряется, не равен фактической TL крутящего момента,
который передается. Способ компенсации этой ошибки для измерения
ускорения вала, вычисляет инерционный крутящий момент, и отрегули-
рует измеренный с помощью реактивного крутящего момента инерции
этого момента.
Примечание: Крутящий момент трения в подшипниках не входит окон-
чательное уравнение, которое является еще одним преимуществом дан-
ного метода.
5.9 .5 Датчик тока двигателя крутящего момента
Крутящий момент в электрическом двигателе генерируется в результате
электромагнитного взаимодействия между магнитным полем ротора и
552
Motor housing (stator) - Корпус двигателя (статор)
Lever arm – рычаг
Frictionless bearing - подшипник качения
Force sensor (load cell) - Датчик силы (датчик нагрузки)
Reaction torque TR - Реакция крутящего момента TR
Motor torque Tm - Момент двигателя Tm
Stator housing - Статор корпус
Frictional torque - фрикционный крутящий момент
Load torque TL - Момент нагрузки TL
To load – Загружать
Bearings – Подшипники
РИСУНОК 5.54 (а) Схематическое изображение установки датчика крутящего
момента (реакция реакция динамометра) и (б) взаимосвязи между крутящим
моментом и реакции моментом нагрузки.
553
статора магнитного поля двигателя (см главы 8 и 9 для получения более
подробной информации). Следовательно, ток, который генерирует маг-
нитное поле может быть использован для оценки вращающего момента
двигателя. Мы будем рассматривать как двигатели постоянного тока и
электродвигателей переменного тока.
5.9 .5 .1 Двигатели постоянного тока
В двигателе постоянного тока, ротор может иметь обмотки якоря и стато-
ра может иметь обмотоку возбуждения. Рассмотрим двигатель постоян-
ного тока, где оба ротора и статора имеют электромагниты (обмотками).
Полученный (магнитный) крутящий момент Tm задается
Tm=ki
f
ia
(5.84)
где
if текущее поле
ia это будет ток якоря
К является постоянным крутящим моментом
Как видно из уравнения 5.84, что крутящий момент двигателя может
быть определен путем измерения либо ia или if , если в то время как дру-
гая поддерживается постоянным при известным значением (или соот-
ветствующее магнитное поле обеспечивается ПМ). В частности if, если
предполагается постоянный контроль якоря и ia принимается постоян-
ный контроль поля (см главу 9).
Как было отмечено ранее (например, см рисунок 5.54b), магнитный
крутящий момент двигателя не совсем совпадает с моментом передачи,
причем последний, что должен быть во спринят в большинстве прило-
жений. Отсюда следует, что ток двигателя дает лишь приблизительно
необходимый крутящий момент. фактический крутящий момент, кото-
рый передается через вал двигателя (крутящий момент нагрузки) отли-
чается от момента двигателя создаваемых на границе раздела статором
и ротором электродвигателя. Это различие необходимо для преодоления
инерции крутящих подвижных частей агрегата двигателя (в частности,
ротор инерции) и момента трения (в частности подшипников трения).
Существуют методы для регулировки (компенсации) магнитного кол-
пака с тем, чтобы оценить передаваемый крутящий момент при доста-
точной точностью. Одним из подходов является включение подходящей
динамической модели для электромеханической системе двигателя и на-
грузки, в качестве фильтра Калмана (см главу 4), вход которого измерен-
ный ток и предполагаемый выход передаваемый нагрузки. Подробное
554
изложение этого подхода выходит за рамки настоящего. Ток может быть
измерен несколькими способами; например, путем измерения напряже-
ния на известном резисторе (низкого сопротивления), расположенного
последовательно с токовой цепи, или путем измерения магнитного поля,
создаваемого током (например, с помощью датчика на основе эффекта
Холла). Токи столь же высоки как 100 А может быть восприняты в бы-
строе время отклика (1 мкс) с использованием миниатюрных проводни-
ков (60 мкОм). Коммерческий датчик тока (размер: 1 см), который может
быть использованы в таких приложениях, как моторный водитель, си-
стем питания для кондиционирования, строительство HVAC (отопление
вентиляция и кондиционирование воздуха) системы и промышленное
оборудование показан на Рисунке 5.55 .
5.9 .5 .2 асинхронные двигатели
В прошлом, двигатели по стоянного тока были преимущественно ис-
пользованы в сложных системах управления. Хотя двигатели перемен-
ного тока синхронные были ограничены в основном для приложений с
постоянной скоростью в прошлом, они находят множество применений
в приложениях с переменной скоростью вращения (например, манипу-
ляторов) и следящих систем, из-за быстрого развития в области твер-
дотельных накопителей. На сегодняшний день системы привода двига-
теля переменного тока включать как управление частотой и управление
напряжением с использованием передовых технологий SC (см главу
9).Вращающий момент в двигателе переменного тока также может быть
определено путем измерения тока электродвигателя. Например, рассмо-
трим синхронный двигатель трехфазный, схематически показанную на
рисунке 5.56 .Обмотки якоря обычного синхронного двигателя перено-
сятся статора (в отличие от случая двигателя постоянного тока). Предпо-
ложим, что токи в трех фазах (токи якоря) являются
обозначим через i1, i2 и i3. Постоянный ток поля в обмотках ротора обо-
значается если. Затем Тт крутящий момент двигателя может быть выра-
жен как
(5.85)
где
θ является угол поворота ротора
555
K является постоянный крутящий момент синхронного двигателя
Так, если предполагается, неподвижный, крутящий момент двигате-
ля может быть определен путем измерения фазных токов. Для частного
случая сбалансированного питания трехфазной, мы имеем i1 = ia sin ωt,
i2=iasin(ωt-(2π/3)),иi3=iaгрех(ωt-(4π/3)),гдеωявляетсячастота
линии (частота тока в каждой фазе питания) и IA является амплитуда
фазного тока. Подставляя эти уравнения в уравнение 5.85 и упрощаю-
щих ния, используя хорошо известные тригонометрические тождества,
мы получаем Tm = 1,5 kifia соз (θ - ωt). Угловая скорость трехфазного
синхронного двигателя с одной пары полюсов на фазу равна частоте ли-
нии со (см главу 9). Соответственно, θ = θ0 + ωt, где θ0 является угловое
положение ротора при Т = 0. Отсюда следует, что при сбалансированном
трехфазного питания, крутящий момент синхронного двигателя задается
Это выражение очень похоже на один для двигателя постоянного тока,
так как определяется уравнением 5.84
5.9 .6 Силовые датчики
Датчики силы могут быть использованы в различных приложениях. На-
РИСУНОК 5.55
Датчик тока. (Предоставлено Альпы Electric, Auburn Hills, MI).
556
пример, силы резания, станок может контролироваться для обнаружения
износа инструмента и приближающегося отказа и диагностики причины
этого; для управления станком, через обратную связь; а также для оцен-
ки качества продукции. При испытании транспортного средства, датчи-
ки силы используются для мониторинга воздействия силы на транспорт-
ные средства и краш-тестов манекенов. Робототехнические работы и
монтажные задачи контролируются путем измерения сил, возникающих
в конце эффектора. Тактильный с помощью дистанционного управления
мастера-манипулятора и подчиненного манипулятора может использо-
вать зондирование силы для роботы концевого эффектора при взаимо-
действии с рабочей средой. Измерение сил возбуждения и соответствую-
щих ответов используется в экспериментальном моделировании (модель
идентификация) механических систем. Прямое измерение сил полезно в
нелинейном управления с обратной связью механических систем.
Датчики силы, которые используют тензометрические элементы или
пьезоэлектрические (кварцевый) кристаллы со встроенными в микро-
электронике являются общими. Например, тонкопленочные и датчики
фольги, которые используют тензометрический принцип для измерения
силы и давления являются коммерчески доступными. Эскиз промыш-
ленного динамометра, который использует тензометрический метод, по-
Stator phase – фаза статора
Rotor – ротор
Рисунок 5.56 Схема трехфазного синхронного двигателя.
557
казан на рисунке 5.57 . Обе импульсивные силы и медленно меняющиеся
силы можно контролировать с помощью этого датчика. Некоторые типы
датчиков силы основаны на измерении прогиба, вызванного силой. От-
носительно высокие прогибы (доли миллиметра) необходимые были бы
для этого метода- нецелесообразны. Коммерчески доступные датчики
варьируются от чувствительных устройств, которые могут обнаружи-
вать силы в порядке в 1000-ньютон к ВЯ сверхпрочным, которые могут
обрабатывать очень большие силы (например, 10000 N). Методы зонди-
рования крутящего момента, которые были обсуждены (например, маг-
нитострикционные, RAW) могут быть расширены простым способом
для зондирования. Таким образом, дальнейшее обсуждение этой темы не
проводится здесь. Типичные параметры рейтинга для нескольких типов
датчиков приведены в таблице 5.9 .
5.10 Гироскопический датчик
Гироскопические датчики используются для измерения угловых ориен-
таций и угловых скоростей в различных областях, включая самолеты,
корабли, транспортные средства, роботов, ракеты, радиолокационные
системы, машины, камеры стабилизации, а также различные другие ме-
ханические устройства. Эти датчики обычно используются в системах
управления для стабилизации систем транспортного средства. Так как
вращающееся тело (гироскоп) требует внешнего крутящего момента
для включения (прецессировать) его ось вращения, если этот гироскоп
установлен (в невязкой форме) на жестком транспортном средстве таким
образом, что имеется достаточное количество степени без трения (не
более трех) между гиро скопом и транспортным средством, ось вращения
будет оставаться неизменной в пространстве, независимо от движения
транспортного средства. Следовательно, ось вращения гироскопа обе-
спечивает ссылку, в отношении которой ориентация транспортного сред-
ства (например, азимут или рыскание, тангаж, и углы крена) и угловая
скорость может быть измерена. Ориентация может быть измерена с по-
мощью угловых датчиков на шарнирных структурах, которые устанавли-
ваются гироскопом на транспортном средстве. Угловая скорость вокруг
ортогональной оси может быть определена; например, путем измерения
Прецес- крутящего момента (который пропорционален угловой скоро-
сти) с помощью тензодатчика; или путем измерения с помощью датчика
положения, таких как распознаватель, отклонение крутильной пружи-
ны, удерживающей прецессию. В последнем случае угловое отклонение
558
пропорционально прецессионному крутящему моменту и, следователь-
но, угловой скоро сти.
5.10.1Прециссионный гироскоп
Гироскопическая ставка используется для измерения угловых скоростей.
Устройство, показанное на рисунке 5.58a может быть использована для
объяснения его принципа работы.Жесткий диск (гироскопический диск)
полярного момента инерции J вращается с угловой скоростью вподшип-
никах с использованием постоянной скорости двигателя, который вра-
щается вокруг оси. Момент импульса Н вокруг той же оси задается
H=Jω
(5.87)
559
Этот вектор показан сплошной линией на рис 5.58b. Из-за угловой ско-
рости (скорость) Q, которая является измеряемой величиной (или изме-
ряемой величины входного сигнала датчика), то вектор H повернется на
угол Ом • Delta; t в бесконечно малом времени & Delta; t, как показано
на рисунке. Величина результирующего изменения углового момента &
Dgr; H = Jω • Ом • Delta; t; или скорость изменения углового момента дН
/ дт = Jω • Ω. Для выполнения этого вращение (прецессию), крутящий
момент должен быть применен в ортогональном направлении, как пока-
зано на рисунке delta; н 5.58b, который является таким же, как направле-
ние вращения & thetas на рисунке 5.58a. Если это направление сдержи-
вается торсионной пружиной жесткостью K и демпфера с вращательной
константой затухания B, соответствующий резистивный крутящий мо-
ментK Ḃ. Второй закон Ньютона (крутящий момент = скорость из-
менения углового момента) дает J K Ḃ или
(5.88)
Из этого результата видно, что, когда В очень мала, угол поворота θ на
карданном подшипнике (измерено, например, с помощью распознавате-
ля) будет пропорциональна угловой скорости для измерения (Ом). Это
показание может быть откалиброван для измерения угловой скоро сти.
Load – нагрузка
Signal and power cable - Сигнал и кабель питания
Load-cell structure - Структура динамометров
Mounting – монтаж
РИСУНОК 5.57 Промышленный датчик силы (тензодатчик).
560
Основным источником ошибок для гироскопов является дрейф.
Перекалибровка должна быть сделана регулярно, чтобы устранить эту
ошибку. Это делается с помощью обнуления чтения, когда измеряемая
величина равна нулю.
5.10.2 Устройства силы кориолиса
Рассмотрим массу m, движущуюся со скоростью в относительно жест-
кой раме. Если сама рама вращается с угловой скоростью ω , то известно,
что ускорение m имеет членом, который дается 2 Ом × V. Это известно
как ускорение Кориолиса. Соответствующая сила 2мОм × V является
сила Кориолиса. Эта сила может быть измерена либо непосредственно с
помощью датчика силы либо путем измерения полученное отклонение в
гибком элементе, и может быть использовано для определения перемен-
ных (ω или V) в силу Кориолиса. Обратите внимание, что сила Кориоли-
са несколько похожа на гироскопическую силу, хотя понятия различны.
По этой причине устройства, основанные на эффекте Кориолиса, также
обычно называют гироскопы. Концепции Кориолиса набирают попу-
лярность в МЭМС на о снове датчиков, которые используют технологии
MEMS (смотрите главу 6).
5.11 термо - жидкостные датчики
Общие терможидкостные датчики включают в себя измерения давления,
расхода жидкости, температуру и скорость теплопередачи. Такие датчи-
ки могут быть использованы в самых различных технических приме-
нениях. Несколько распространенных типов датчиков в этой категории
представлены в следующих разделах
5.11 .1 Датчики давления
Общие методы измерения давления являются следующие:
1. Баланс давления с противостоящей силой (или головы) и измерение
этой силы (например, жидкие манометров и поршни).
2. С учетом давления к элементу (вспомогательный) гибкого переднего
конеца и измерение полученное отклонением (например, с трубкой Бур-
дона, сильфоны и спиральной трубки).
3. С учетом давления на внешнем интерфейсе вспомогательного элемен-
та и измерение полученного напряжения (или стресс) (например, диа-
561
фрагм и капсул).
Некоторые из этих устройств показаны на рисунке 5.59 .
Манометр: В манометре, показанном на рисунке 5.59a, столб жидкости
высотой Н и плотностью р обеспечивает напорное уравновешивание для
поддержки измеренного давления р относительное при давлении ссылки
(окружающей среды). Соответственно, это устройство измеряет маноме-
трическое давление, данное
p-pref =рgh
(5.89)
Sensor output (measurement) - Выход датчика (измерение)
Restrained by spring (K) and damper (B) - Ограничитель пружины (K) и заслонки
(B)
Angular speed to be measured (sensor input or measurand) – Угловая скорость изме-
рения (вход датчика или измеряемой величины)
Spin motor - Вращение двигателя
Inertia – инертность
РИСУНОК 5.58 (а) Гироскопическая скорость и (б) гироскопический момент
необходимый для изменения направление вектора углового момента.
562
где g ускорение силы тяжести.
Противовесный поршень: В датчике давления, показанном на рисунке
5.59b, невязкий поршень зоны А поддерживает нагрузку давления с по-
мощью внешней силы F. Основное уравнение
(5.90)
Давление определяется путем измерения F с помощью датчика силы.
Трубка Бурдона: Трубка Бурдона показана на рисунке 5.59c рикошетом
с движением распрямления в результате внутреннего давления. Это от-
клонение может быть измерено с помощью датчика перемещения (как
правило, в роторном датчике) или обозначается перемещающимся ука-
зателем.
Сильфон: гофрированный рикошетит во внутреннее давление, в резуль-
тате линейного движения, как это показано на рисунке 5.59d. Отклоне-
ние может быть измерено с помощью датчика, например, LVDT или ем-
костного датчика, и может быть откалиброван для индикации давления.
Спиральная трубка: Спиральная трубка показана на рисунке 5.59e пре-
терпевает скручивание движения (вращательное) при отклонении от
внутреннего давления. Это отклонение может быть измерено с помо-
щью датчика углового смещения (RVDT, распознаватель, потенциометр
и т.д.), чтобы обеспечить считывание величины давления через правиль-
ную калибровку.
Мембранные датчики давления: Рисунок 5.59f иллюстрирует исполь-
зование диафрагмы для измерения давления. Мембрана (обычно металл)
напряжена из-за давления. Давление может быть измерено с помощью
датчиков деформации (т.е., пьезоэлектрических датчиков), установлен-
ных на мембране. Датчики давления MEMS, использующие этот прин-
цип доступны. В одном таком устройстве, диафрагма имеет кремниевую
пластину, подложку, за одно целое с ним. При правильном легирова-
нии (с использованием бора, фо сфора и т.д .), SC миниатюрное тензо-
чувствительное может быть сформировано. На самом деле, более чем
один Пьезоресистный датчик может быть выгравирован на диафрагму,
и использыватся в мостовой схеме для обеспечения показания давления,
посредством правильной калибровки. Наиболее чувствительные места
для пьезорезистивных датчиков ближе к краю диафрагмы, где нагрузка
достигает максимама. Магнитострикционные тензодатчики могут быть
563
также использованы как датчики давления, с помощью магнито стрикци-
онпой материала в диафрагме.
5.11 .2 Датчики расхода
Объемный расход Q текучей среды связан с массовым расходом через
Qm Qm = ρQ, где ρ представляет собой плотность массы жидкости. Кро-
ме того, для потока через область А при средней скорости V, мы имеем Q
= Av. Когда поток не является равномерным, подходящий поправочный
коэффициент должен быть включен в зависимости от того, что скорость
используется в этом уравнении. Далее, в соответствии с уравнением Бер-
нулли для несжимаемой идеальной потока (без диссипации энергии) мы
имеем
(5.91)
Эта теорема может быть истолкована, как сохранение энергии. Кроме
того, обратите внимание, что давление р из-за головы жидкости высо-
той Н дается (гравитационная потенциальная энергия) ρgh. Используя
уравнение 5.91 вместе с ранее заявленной уравнением скорости потока
Frictionless – невязкий
Piezoresistors (semiconductor strain gauges) - Пьезорезисторы (полупроводнико-
вый тензодатчик)
РИСУНОК 5.59 Типичные датчики давления. (А) Манометр, (б) противовесный
поршень (с) трубка Бурдона, (d) сильфонны,(Е) спиральные трубки, и (е) диа-
фрагмы.
564
и позволяет диссипации (трения), поток через сужение (то есть, элемент
жидкости сопротивление, такие как отверстия, форсунки, клапана, и так
далее) из области А может быть показано, что подчиняются отношениям
(5.92)
где Δp является падением давления на сужении и cd является коэффици-
ент расхода для сужения. Общие методы измерения расхода жидко сти
могут быть классифицированы следующим образом:
1. Измерьте давление через известное сужение или отверстия (например,
сопла, Вентури метров, и диафрагм)
2. Измерьте гидростатический напор, который приносит поток в стати-
ческих условиях (например, трубки Пито, Индикация уровня жидко сти
с помощью поплавков, и так далее)
3. Измерьте расход (объем или масса) непосредственно (например, тур-
бинный расходомер и углового момента расходомер)
4. Измерьте скорость потока (например, Кориолиса, лазерно-доплеров-
ский измеритель скорости и ультразвуковой расходомер)
5. Измерьте влияние потока и оценки скорости потока с использованием
этой информации (например, горячей проволоки (или горячей пленки)
анемометр и магнитная индукция расходомер)
Несколько примеров расходомерами показаны на рисунке 5.60 .
Диафрагменный расходомер: Для счетчика отверстия, показанного на
рисунке 5.60a, Уравнение 5,92 применяется для измерения объемного
расхода. Падение давления измеряется с помощью методов, описанных
ранее.
Трубка Пито: Для трубки Пито показано на рисунке 5.60b, уравнение
Бернулли 5,91 применима, отметив, что скорость жидкости на свободной
поверхности трубки равна нулю. Это дает скорость потока
v= √2gh
(5.93)
Примечание: Поправочный коэффициент необходим при определении
скорости потока, так как скорость не является равномерным по всему
сечению потока.
Радиально-импульсный расходомер: В методе углового момента, пока-
занного на рисунке 5.60С, пучок труб, через которые протекает жидкость
вращается с помощью двигателя. Τ крутящий момент двигателя и угло-
вая скорость ω измеряются. По мере того как масса жидкости проходит
565
через трубный пучок, он придает угловой момент со скоростью, регули-
руемой массового расхода Qm жидкости. Вращающий момент двигателя
обеспечивает крутящий момент, необходимый для этой скорости измене-
ния углового момента. Пренебрегая потерями, основное уравнение
t=wr2Qm
(5.94)
где r-радиус центроида вращающейся массы жидкости.
Турбинный расходомер: В турбинном расходомере, вращение колеса
турбины, расположенном в текущей жидкости может быть откалиброва-
на, чтобы непосредственно получить скорость потока.
Кориолисов скорость: В методе Кориолиса, показанном на рисунке
5.60d, жидкость, проход т через сегмент "U", который шарнирно соеди-
нен с качаться из плоскости (при угловой скорости) и удерживается с по-
Motor – двигатель
Tube bundle – трубный пучок
Motion sensor - Датчик движения
Displacement sensor – датчик смещения
Coriolis torque restrained by spring - Крутящий момент Кориолиса сдерживается
пружиной
Conic cylinder – конический целиндр
Float – терка
РИСУНОК 5.60 Несколько расходомеров. (А) диафрагменный расходомер, (б)
трубка Пито, (с) углового момента расходомера,(D) измеритель скорости кори-
олисова, и (е) ротаметр.
566
мощью пружин (с известной жесткостью) в боковом направлении. Если
скорость жидкости v, в результате сила Кориолиса (за счет ускорения
Кориолиса 2ω × V) поддерживается пружинами. Некомпланарная угло-
вая скорость измеряется с помощью датчика движения. Кроме того, сила
пружины измеряется с помощью соответствующего датчика (например,
рабочий объем датчик). Эта информация определяет ускорение Корио-
лиса частиц жидкости и, следовательно, их скорость.
Лазерный доплеровский измеритель скорости: В лазерной доплеровской
велосиметра, лазерный луч проецируется на поток текучей среды (че-
рез окно) и его сдвига частоты из-за эффекта Доплера измеряют (см под
оптическим сорах дат-, в главе 6). Это является мерой скорости частиц
жидкости.
Ультразвуковой датчик потока: В качестве способа считывания скоро сти
жидкости, ультразвуковой взрыв отправляется в направлении потока и
времени полета измеряется. Увеличение скорости распространения из-за
скорости жидкости, и может быть определено, как обычно (см при ульт-
развуковых датчиков, в главе 6).
Термоанемометра: В термоанемометра с, проводник с током (I) поме-
щается в потоке жидкости. Температуры проволоки (Т) и окружающей
среды (Тф) измеряются по течению. Коэффициент теплопередачи (при-
нудительной конвекции) на границе проволоки и
движущейся жидкости, как известно, меняются в зависимости, где V
есть скорость жидкости. В стационарных условиях,
потери тепла от проволоки в жидкости точно уравновешивается теплом,
вырабатываемым проводом из-за его сопротивления (R). Уравнение те-
плового баланса дает
i2R=c(a+√v)(T-Tf)
(5.95)
Это соотношение может быть использовано для определения V.Может
быть использовано вместо проволоки, металлическая пленка (например,
платиновым напылением стеклянная трубка).
Ротаметр: ротаметр (см рисунок 5.60e) другое устройство для измере-
ния расхода жидкости. Это устройство состоит из конической трубки
с равномерно возрастающей площадью поперечного сечения, которая
ориентирована вертикально. Цилиндрический объект сплавляется в ко-
ническом трубе, через которую жидкость не начнет стекать. Масса пла-
вучего объекта уравновешивается разностью давлений на объекте. Когда
скорость увеличивается поток, объект поднимается внутри конической
567
трубки, тем самым обеспечивая больший дорожный просвет между объ-
ектом и трубкой для прохода текучей среды. Дифференциальное дав-
ление, тем не менее, по-прежнему балансирует вес объекта, и является
постоянным. Уравнение 5.92 используется для измерения расхода жид-
кости, так как увеличивается квадратично с высоты объекта. Следова-
тельно, уровень объекта можно калибровать, чтобы дать расход.
Есть и другие косвенные методы измерения расхода жидкости. В одном
методе, сила сопротивления на объекте помещенное в потоке с использо-
ванием консольного рычага измеряется (с использованием датчика тен-
зометрические в зажатом конце кантилевера). Эта сила, как известно,
квадратично изменяться в зависимости от скорости жидкости.
5.11 .3 температурные датчики
В большинстве (если не всех) измерительных приборах температуры,
температура ощущается за счет передачи тепла от источника к измери-
тельному прибору. физический (или химического) изменения в устрой-
стве, которое вызывает Теплопередача каскад преобразователя изме-
рительного устройства. Несколько температурных датчиков описаны в
следующих разделах.
5.11 .3 .1 термопара
При изменении температуры на стыке, образованном путем соединения
двух проводников в отличие, его электронная конфигурация изменяется
за счет полученного переноса тепла. Этот электронная реконфигурация
создает напряжение (ЭДС), и известна как эффект Зеебека, или термоэ-
лектрический эффект. Два перекрестка (или более) термопары выполне-
ны с двумя проводниками в отличие от таких, как железо и константан,
медь, хрома и алюмеля, и так далее. Один спай помещается в качестве
справочного источника (термокомпенсации) с температурой Т0, а другой
в исходном (температура горячего спая) от температуры Т, как показано
на рисунке 5.61. Напряжение V поперек двух спаев измеряется, чтобы
дать температуру горячего спая отно сительно холодного спая.
V=α(T-T0)+Υ(T2-T02)
(5.96)
Наличие каких-либо других спаев, например, соединений, что образо-
ванны путем присоединения электропроводки к датчику напряжения, не
568
влияет на считывание до тех пор, пока подводящие провода находятся в
одном и том же диапазоне температур. Очень низкие температуры (на-
пример, -250 ° С), а также очень высокие температуры (например, 3000
° С) измеряются с помощью термопары. Поскольку соотношение темпе-
ратуры и напряжения – нелинейное, коррекция должна быть сделана при
измерении изменений температуры; как правило, используя алгоритм
полиномиальных отношений. Чувствительно сть термопара составля-
ет около 0,1 мВ / ° С и зависит от металлической пары. Как правило,
устройство формирования сигнала будет необходимо перед использова-
нием сигнала датчика. Тип термопара определяется согласно металли-
ческой паре, которая используется; например, тип Е (хромель-констан-
тановая), тип J (железо-константановая), тип K (хромель-алюмелевая),
тип N (нихросил-нисиловая), тип T (медь-константановая). Из них, типа
E имеет самую высокую чувствительность (70 мкВ / ° C). Быстрые из-
мерения возможны при использовании миниатюрной термопары, имею-
щие низкие постоянные времени (например, 1 мс). Особое внимание при
выборе термопары (или любого другого датчика температуры) следует
обратить на:
•
Диапазон температур.
•
Чувствительность.
•
Скорость (константу времени).
•
Устойчивость ( к вибрации, окружающей среде, включая химические
вещества и т.д .).
•
Простота использования (установка и т.д .).
Рисунок 5.61 Термопара
569
5.11 .3 .2 термометр сопротивления (тС)
Термометр сопротивления представляет собой датчик температуры. Это
металлический элемент (в керамической трубе), сопротивление которого
обычно возрастает с повышением температуры, в соответствии с извест-
ной функцией. Согласно формуле линейной аппроксимации дано:
R=R0(1α+T)
(5.97)
где α – это температурный коэффициент сопротивления. ТС измеряет
температуру через изменение сопротивления (которое измеряется, ска-
жем, с помощью мостовой схемы, см. главу II. Уравнение 5.97 является
верным, когда изменения температур не слишком велики. Металлы, ис-
пользуемые в ТС, включают платину, никель, медь и различные сплавы.
Температурный коэффициент сопротивления (а) из нескольких метал-
лов, которые могут быть использованы в ТС, приведен в таблице 5.10.
Пригодный диапазон температур для ТС составляет около -200 ° C до +
800 ° С. При высоких температурах, эти устройства могут быть, как пра-
вило, менее точны, чем термопары. Скорость реакции может быть ниже
(например, в доли секунды). Серийный блок ТС показан на рисунке 5.62.
5.11 .3 .3 термистер
В отличие от ТС, термистор изготовлен из особого материала (напри-
мер, оксида металлов, такие как хром, кобальт, медь, железо, марганец
и никель), которые, как правило, оказывают отрицательное изменение
сопротивления в зависимости от температуры (т.е . отрицательный α ).
Изменение сопротивления обнаруживается через мостовые схемы или
схемы делителя напряжения. Даже если точность термистора , как пра-
570
вило, лучше, чем у ТС, соотношение температура – сопротивление го-
раздо более нелинейное:
где температура T измеряется в градусах Кельвина (К). Как правило, R
0 = 5000 Ω при Т0 = 298 ° К (т.е. 25 ° С). Характеристическая темпера-
тура β (около 4200 ° К) зависит от ее же температуры, тем самым добав-
ляя еще больше нелинейности устройству. Следовательно, надлежащая
калибровка необходима при работе в широком диапазоне температур
Рисунок 5.62 Серийный блок ТС (с разрешения РСО корпорации и Хадсона).
571
(например, > 50 ° С). Термисторы весьма надежны, они обеспечивают
быстрый отклик и высокую чувствительность (по сравнению с ТС) осо-
бенно из-за их большого сопротивления (несколько кОм) и, следователь-
но, из-за высокого изменения сопротивления.
5.1 .3 .4 Биметаллический пленочный термометр
При измерении температуры с помощью биметаллического пленочного
термометра используется Неравномерное тепловое расширение различ-
ных материалов. Если пленки двух материалов (как правило, металлов)
прочно связаны, тепловое расширение заставляет этот элемент сгибать-
ся по направлению к материалу с меньшим расширением. Этот изгиб
может быть измерен с помощью датчика перемещения, или может быть
определен с помощью стрелки прибора и шкалы. Бытовые термостаты
обычно используют этот принцип для температурного зондирования и
контроля (включения-выключения устройства).
5.11 .3 .5 резонансные сенсоры температуры
Резонансные сенсоры температуры используют температурную зави-
симость резонансной частоты одиночного кристалла диоксида кремния
(SiO2). Взаимодействующее отношение достаточно точное и четкое, а
чувствительность относительно высокая. Следовательно, эти датчики
температуры очень точны, и в особенности эффективны для измерения
очень маленьких температурных изменений.
572
573
6. ЦиФровыЕ и иННоваЦиоН-
НыЕ ЗоНДироваНиЯ
основные аспекты раздела:
•Преимущества цифровых приемников
•Возрастающее оптическое кодирующее устройство (енкодер) и аппа-
ратные функции
•Направление, расположение и скорость зондирования
•Анализ и рассмотрение ошибок
•Абсолютный оптический энкодер
•Линейный энкодер
•Бинарные цифровые датчики
•Цифровой распознаватель, тахометр
•Лазерные, волоконно-оптические датчики, гироскоп
•Цифровые фотоаппараты и получения изображений
•Эффект Холла, ультразвуковые и магнитострикционные датчики
•Тактильные датчики
•Датчики МЭМС
•Слитный датчик на основе фильтров Баеса и Калмана, нейронные сети
•Подключенные к сети сенсоры и локализация
•Сенсорные приложения
6.1 иННоваЦиоННыЕ СЕНСорНыЕ тЕХНоЛоГии
Сенсоры и приемники могут быть использованы в самых различных тех-
нических приспособлениях. Многочисленные примеры их применения
можно найти в транзитных системах, вычислительных системах, про-
цессах контроля и управления, энергетических системах, в обрабатыва-
ющей промышленности, в производстве, в горнодобывающей промыш-
ленности, пищевой промышленности, в сфере услуг, в лесном хозяйстве,
в сфере гражданского строительства и так далее. В главе 5 мы изучали
574
аналоговые сенсоры и приемники. В этой главе мы исследуем цифровые
приемники и некоторые другие инновационные методики зондирова-
ния. Основное внимание здесь уделяется приемникам, что расположены
в мехатронных системах, включая датчики движения. Как уже отмеча-
ло сь в главе 5, с помощью соответствующего дополнительного сенсора
во внешнем интерфейсе, другие измеряемые величины, такие как сила,
крутящий момент, температура и давление, могут быть преобразованы в
движение, а затем измерены с помощью датчика движения. Например,
измерения высоты (или давления) в авиационной и авиационно-косми-
ческой промышленности возможно благодаря датчикам давлений, таким
как сильфоны и диафрагменные устройства для измерения давления в
пробоотборнике в сочетании с оптическими енкодерами ( которые и есть
цифровыми приемниками) для измерения результатов смещения. Точно
так же, биметаллический элемент может быть использован для преобра-
зования температуры в смещение, которое может быть измерено с помо-
щью датчика перемещения.
Приемлемо называть аналоговый сенсор аналоговым приемником, так
как уровни сенсора и приемника идентичны. Как правило, уровень сен-
сора цифрового приемника аналогичен. Например, движение, что прояв-
ляется в физических системах, непрерывно во времени. Таким образом,
мы не можем в целом говорить о цифровых датчиках движения. Это уро-
вень приемника, который генерирует дискретный выход сигнала (напри-
мер, последовательность импульсов, количество, частоту, кодирование
данных) в цифровой измерительный прибор. Следовательно, цифровые
устройства зондирования могут быть названы как цифровые приемники,
нежели цифровые датчики. Несколько инновационных сенсорных тех-
нологий не были изучены в главе 5. Они включают в себя датчики пол-
ного сопротивления, тактильные датчики, датчики Холла, оптические
датчики и лазеры, цифровые камеры и ультразвуковые датчики. Эти дат-
чики будут изучены в этой главе. Другие важные сенсорные технологии,
которые представлены в этой главе, включают микроэлектромеханиче-
ские системы (МЭМС) датчиков, слияние данных мультисенсорной и
беспроводных сенсорных сетей (БСС).
6.1 .1 . аНаЛоГовыЕ раЗЛичиЯ ЦиФровоГо ЗоНДирова-
НиЯ
Любой измерительный прибор, который содержит информацию в виде
дискретных образцов и при считывании информации в цифровой фор-
575
ме в его работе не про слеживаются ошибки дискретизации, может быть
расценен как цифровой приёмник. Соответственно, такой аналоговый
датчик, например, как, термопара, объединенный с аналого-цифровым
преобразователем (цифра тором), (АЦП) не может быть цифровым при-
ёмником. Причина в том, что ошибки дискретизации представлены в ра-
боте АЦП (см. главу 2). В частности, измерительное устройство, которое
попадает в один из следующих типов, может быть расценено, как цифро-
вой приёмник:
1. Измеряющее устройство, что создает отдельный или цифровой выход
без использования АЦП
2. Приёмник импульсного сигнала или приёмник со счётными сигналами
3. Частотный приёмник (который может быть преобразован в счётный
или скоростной)
Примечание: при импульсном сигнале, счётчик используется для под-
счёта импульсов или для подсчёта количества тактовых циклов, в тече-
ние длительности импульса, оба из которых представляют собой цифро-
вые показатели.
Пример сравнения: для сравнения основных характеристик цифрово-
го приёмника и аналогового датчика (сенсора), рассмотрим устройство
зондирования, показанное на рисунке 6.1 . Система имеет гидроусили-
тель, который перемещает груз по прямой линии (т.е . линейный испол-
нительный механизм). На одной стороне груза, размещен потенциометр,
резистивный элемент которого выполнен из электропроводящего пла-
стика (глава 5), который образует непрерывное выходное напряжение,
что пропорционально смещению груза. С другой стороны груза, есть
указатель, который способен ограничить переключатель, потому что
груз перемещается мимо него. Всего в системе 8 таких ограничитель-
ных переключателей. Очевидно, что 3-битовый регистр, который может
отображать восемь дискретных значений, может определить абсолютное
расположение груза, как так регистр соединен с ограничительным пере-
ключателем.
Давайте сравним два подхода зондирования с точки зрения точности,
сложности, стоимо сти, полезности, надежности, и так далее. Для спра-
ведливого сравнения давайте предположим, что выходной сигнал потен-
циометра испытывается и оцифровывается с помощью 3-битного АЦП.
В то время как аналоговые и цифровые устройства уже предо ставляют
данные в 3-битовом регистре.
Рисунок 6.1 Аналоговые и цифровые методы контроля смещения.
576
6.1 .1 .1 аналоговый метод зондирования (измерения): потенциометр
с 3-битным аЦП
1. АЦП необходим для получения данных с помощью компьютера.
2. Точность данных теряется при записи (т.е. происходит ошибка из-за
шумов дискретизации), данные восстановлению не подлежат, сигналы и
шумы датчика непосредственно влияют считывание.
3. АЦП может определять непрерывные сигналы с хорошим расширени-
ем. Разрешение оцифрованного сигнала может быть улучшено с помо-
щью АЦП с большим количеством бит (скажем, 4 бита).
4. АЦП менее прочный из-за причин, 2, 6, и 7.
5. Прямое и простое зондирование; сбор данных в компьютер происхо-
дит более сложным и дорогостоящим путем (из-за фильтров и усилите-
лей, выборки и хранения, и АЦП).
6. Полностью отказывается работать, если сенсор (потенциометр) вышел
из строя.
7. Ошибка дискретизации появляется при оцифровке записанных дан-
ных (при 3-битном регистре).
8. АЦП – относительно медленный (временная константа датчиков, сиг-
нал обработки, запись, оцифровка и регистрация).
6.1 .1 .2 Цифровой метод зондирования. восемь ограничительных
переключателей
1. Легче собрать данные в компьютере (например, 1-битовый выход огра-
ничительного переключателя, как правило, совместим с комплементар-
ными схемами ТТЛ и может быть приобретен непосредственно для ми-
кроконтроллера).
2. Точность 3-битного регистра сохраняется даже при высоком уровне
шума ограничительного переключателя (потому что только 1-битная ин-
формации инициируется и не востребована для работы с ограничитель-
ным переключателем).
3. Разрешение установлено числом ограничительных переключателей.
4. Более надежный по причинам 2 и 6.
5. Имеет больше дополнительных компонентов (возможно, менее надеж-
ных), но они работают даже при условии, что ограничительный пере-
ключатель даст сбой в работе и обеспечивают идеальную точность отно-
сительно о стальных ограничительных переключателей.
6. Отсутствует ошибка дискретизации. Текущее положение ограничи-
577
тельных переключателей определяется точно.
7. Относительно быстрый (ограничительные переключатели имеют дво-
ичный код). Никакая дополнительная обработка, запись и оцифровка не
нужна.
Очевидно, что цифровой подход к зондированию имеет больше отчет-
ливых преимуществ, но в то же время и аналоговый подход также имеет
свои плюсы.
6.1 .2 ПрЕиМУЩЕСтва ЦиФровыХ ПрЕМНиков
Как было отмечено выше, существуют преимущества использования
цифровых устройств перед аналоговыми устройствами для зондирова-
ния. Устройства цифрового зондирования (или цифровые приёмники)
генерируют цифровые выходные сигналы, такие как импульсная по-
следовательность или закодированные данные, которые представляют
дополнительные преимущества в их последующем использовании. В
частности, выходной сигнал цифрового приёмника может быть непо-
средственно считан с помощью цифрового процессора, без необходи-
мости прохождения таких стадий, как запись и оцифровка. Цифровой
процессор играет ключевую роль в утилизации принятых данных, путем
упрощения сложной обработки измеряемых сигналов и других извест-
ных величин. Например, он может служить в качестве контроллера в
цифровой системе управления, который создает управляющие сигналы
для оборудования (то есть система, которая находится под контролем).
С другой стороны, если измеренные сигналы доступны в аналоговой
форме, стадии записи и оцифровки необходимы для обработки данных,
используя цифровой процессор.
Тем не менее, ступенчатый датчик цифрового измерительного устрой-
ства весьма похож на свою аналоговую копию. Есть цифровые измери-
тельные приборы, которые включают в себя микропроцессоры для ло-
кального выполнения численные манипуляций и кондиционирования,
и таким образом обеспечивают выходные сигналы в любом цифровом
виде или аналоговой форме. Эти измерительные системы особенно по-
лезны, когда требуемая переменная не может быть точно измерена, но
может быть вычислена с использованием одного или более измеренных
результатов (например, мощность = сила × скорость). Несмотря на то,
что микропроцессор является составной частью измерительного при-
бора, в данном случае, он выполняет задачу кондиционирования, а не
измерительную задачу. В данном контексте, мы рассмотрим две задачи
578
отдельно.
Когда выходной сигнал цифрового приёмника представляет собой им-
пульсный сигнал, общий метод считывания сигнала происходит за счёт
использования счётчика, либо для подсчёта импульсов (для высокоча-
стотных импульсов) или для подсчёта количества тактовых циклов, в
течение одной длительности импульса (для низкочастотных импульсов).
Счётчик размещается в буфере / регистре в виде цифрового пароля, до-
ступ к которому осуществляется с помощью компьютера, как правило,
при постоянной частоте (называемой частотой дискретизации). Если
выходной сигнал цифрового приёмника доступен в закодированной
форме (например, натуральный двоичный код или код Грея) он может
быть непо средственно прочитан с помощью компьютера. Затем кодиро-
ванный сигнал обычно генерируется, основываясь на аналогичном ряде
импульсных сигналов; при этом каждый импульс перехода генерирует
один бит цифрового слова, и численное значение этого слова определя-
ется рисунком генерируемых импульсов. Так обстоит дело, например, с
абсолютными датчиками, как описано далее в этой главе. Сбор данных
(т.е. пользовательский интерфейс) обычно осуществляется через цифро-
вой приёмник с помощью ввода входных/выходных данных или системы
сбора данных (ССД), (см. главу 2); (например, сервопривод, который мо-
жет вместить в себе несколько приёмников (например, 8 потоков закоди-
рованных данных 24-битным счётчиком)) или используя систему сбора
данных, что специально разработана для конкретного приёмника.
Цифровые приёмники (или цифровое представители информации) име-
ют несколько преимуществ по сравнению с аналоговыми методами. В
особенности:
1. В их работе не наблюдается ошибок дискретизации.
2. Цифровые сигналы менее чувствительны к шуму, повреждениям, из-
менением параметров в приборах, так как данные могут быть получены,
представлены, переданы и обработаны в виде двоичных слов, состоящих
из битов, которые обладают двумя идентифицируемыми формами (порог
шума меньше в два раза).
3. Комплексная обработка сигналов с очень высокой точностью и скоро-
стью может быть осуществлена с помощью цифровых средств (техниче-
ские аппаратные средства – быстрее, нежели программное обеспечение).
4. Высокая надежность работы системы может быть до стигнута за счёт
минимизации аналоговых аппаратных компонентов.
5. Большие объемы данных могут быть сохранены при использовании
компактных методов хранения.
579
6. Данные могут быть сохранены в течение очень длительного периода
времени без какого-либо их удаления или разрушения вследствие небла-
гоприятных условий окружающей среды.
7. Быстрая передача данных возможна через существующие средства
связи на большие расстояния, сохраняя целостность текста и без задер-
жек, по сравнению с аналоговыми сигналами.
8. При работе цифровые сигналы используют низкое напряжение (напри-
мер, 0-12 В постоянного тока) и низкую мощность.
9. Цифровые устройства, как правило, имеют низкую общую стоимость.
Эти преимущества помогают привести прочные доводы в пользу цифро-
вых измерительных систем и систем передачи сигналов.
6.2 Цифровой датчик углового поворота
Любой приёмник, который производит считывание кодированных
(цифровых) измерений можно назвать энкодером. Энкодеры представ-
ляют собой цифровые приёмники, которые используются для измерения
угловых перемещений и угловых скоростей. Применение этих устройств
включает в себя измерение действий в области управления и контро-
ля над роботизированными операторами, станками, промышленными
процессами (например, процессами пищевой промышленности и упа-
ковочной, целлюлозно-бумажной), цифровыми устройствами хранения
данных, таблицами позиционирования, системами спутникового пози-
ционирования зеркал, транспортными средствами, строительной техни-
кой, планетарными исследованиями устройств, оборудованием для поля
боя и над вращающимися механизмами, такими как двигатели, насо-
сы, компрессоры, турбины и генераторы. Высокое разрешение (которое
зависит от размера слова на выходе энкодера и числа импульсов, гене-
рируемых за один оборот кодера), высокая точность (в частности, из-за
помехоустойчивости и надежности цифровых сигналов и превосходной
конструкции), и относительная простота внедрения в цифровые системы
(так как выходной преобразователь может быть прочитана как цифровое
слово), с соответствующим снижением стоимости системы и повыше-
нием надежности. Вот одни из некоторых относительных преимуществ
цифровых приёмников в целом и энкодеров в частности, по сравнению с
их аналогами.
6.2 .1 . типы энкодеров
Энкодеры могут быть разделены на две категории в зависимости от ха-
580
рактера и способа интерпретации выхода приёмника: (1) инкременталь-
ные энкодеры и (2) энкодеры абсолютного отсчёта.
6.2 .1 .1 . инкрементальные энкодеры
Выход инкрементного энкодера представляет собой импульсный сиг-
нал, который генерируется, когда диск приёмника вращается в резуль-
тате вымеряемого движения. Угловое смещение и угловая скорость
определяется путем подсчёта импульсов или по времени длительно сти
импульса с использованием тактового сигнала. Смещение достигает не-
которой опорной точки при помощи инкрементального энкодера. Кон-
трольной точкой может быть исходное положение движущегося компо-
нента (определяется ограничительным переключателем). Опорная кон-
трольная точка на диске датчика генерируется на диске. Счётчик индекса
импульсов определяет количество полных оборотов.
6.2 .1 .2 Энкодеры абсолютного отсчёта
Абсолютный энкодер имеет много путей импульсов на диске своего
приёмника. При вращении диска абсолютного энкодера возникают пути
импульсов, которые равны по количеству импульсов, что возникают на
диске, ибо генерируются они одновременно. На данный момент, величи-
на каждого импульсного сигнала будет иметь один из двух уровней (т.е.
бинарное состояние), что определено с помощью детектора уровня. Этот
уровень сигнала соответствует двоичной цифры (0 или 1). Следователь-
но, множество импульсов создают кодированное двоичное число в лю-
бой момент. Окна в путях неравномерно распределены, но расположены
по определенной схеме для получения кодированных данных, выводи-
мых из датчика. Импульсные окна могут быть объединены в какой-то
шаблон (код) так, что сгенерированный двоичный номер в конкретный
момент времени будет соответствовать конкретному угловому положе-
нию диска. Импульсное напряжение может быть совместимо с некото-
рыми цифровыми логическими интерфейсами (например, транзистор с
транзисторной логической схемой или ТТЛ). Следовательно, цифровое
считывание данных на прямую с датчика углового положения возмож-
но осуществить при помощи абсолютного энкодера. Тем самым ускоряя
сбор и обработку цифровых данных, а также устраняя задержки и ошиб-
ки, если, например, импульс пропал (отличие абсолютного энкодера от
инкрементного). Абсолютные энкодеры обычно используются для изме-
581
рения доли оборота. Тем не менее, полный оборот может быть измерен
с использованием дополнительной дорожки, которая создает индекс им-
пульса, как в случае инкрементного энкодера. Тот же самый механизм
генерации сигнала (или датчик) может быть использован обеими типами
энкодеров (инкрементальными и абсолютными).
6.2 .1 .2 .1 Энкодер. технология
Можно выделить четыре способа генерации сигнала приёмника для
датчика углового положения вала:
1. Оптический метод (фотодатчик).
2. Метод задвижного (электропроводящего) контакта.
3. Метод магнитного насыщения (магнитное сопротивление).
4. Метод с использованием датчика приближения.
Безусловно, оптический датчик является наиболее распро страненным
и экономически эффективным. Остальные три подхода могут быть ис-
пользованы в особых случаях, когда оптический метод не подходит (на-
пример, при экстремальных температурах или при наличии пыли, дыма
и т.д.) или, когда метод избыточен (например, когда код диска уже до сту-
пен в качестве составляющей части подвижного элемента). Для данного
типа энкодера (инкрементного или абсолютного), метод интерпретации
сигнала одинаков для всех четырех типов генерации, перечисленных ра-
нее. Теперь мы кратко опишем принцип генерации сигналов для всех
четырех методов и рассмотрим только оптический энкодер в контексте
сигнальной интерпретации и обработки сигналов.
6.2 .1 .3 оптический энкодер
Оптический датчик использует матовый диск (код диска), который име-
ет один или несколько кольцевых путей, с некоторым расположением
идентичных прозрачных окон (прорезей) в каждом пути. Параллельный
луч света (например, из ряда светодиодов) проецируется на все пути с
одной стороны диска. Прошедший свет отсекается при помощи светоди-
одного блока с другой стороны диска, который, как правило, имеет дат-
чик на каждый путь. Этот механизм показан на рисунке 6.2а, где указан
только один путь и один отсекающий датчик. Датчиком света может слу-
жить кремневый фотодиод или фототранзистор. Так как свет от источни-
ка прерван матовыми областями пути, выходной сигнал от фотодатчика
представляет собой серию импульсов напряжения. Этот сигнал может
582
быть интерпретирован (например, через распознавание контура или че-
рез детектирование сигналов), чтобы получить увеличение углового по-
ложения, а также угловой скорости вращения диска.
В стандартной терминологии, воспринимающую часть такого измери-
тельного устройства исполняет диск энкодера, который соединен с вра-
щающейся частью напрямую или через шестерню. На уровне работы
приемника движение диска превращается в импульсные сигналы, кото-
рые могут быть закодированные в цифровое слово. Матовый фон из про-
резей (моделей) на диске энкодера можно создать при помощи методов
контактной печати. Основным фактором этого процесса есть точность,
которая и определяет правильность работы оптического энкодера . Если
направление вращения фиксировано (или несущественно), для диска
инкрементного энкодера требуется только один основной путь передачи
импульсов, который имеет равные интервалы и идентичные зоны проре-
зей. Контрольный путь, что имеет только одну прорезь, может быть ис-
пользован для создания индекса импульсов, чтобы начать подсчет числа
импульсов для измерения угла положения угла и вычисления количества
полных оборотов.
Примечание: матовый диск со следами от светонепроницаемых пятен
будет работать так же хорошо, как и диск оптического энкодера. В лю-
бом случае, рабочий цикл дорожки равен 50 процентам (т.е. длина про-
рисунок 6.2 (а) Схематическое изображение (инкрементального) оптического
энкодера. (б) Составляющая часть энкодера.
583
зрачной области равна длине матовой области). Составляющая часть до-
ступного по цене оптического энкодера показана на рисунке 6.2 .б.
6.2 .1 .4 Скользящий контакт энкодера
При скользящем контакте энкодера, диск приемника сделан из электро-
изоляционного материала. Кольцевые дорожки на диске формируются
путем налаживания схем проводящих электричество областей. Эти об-
ласти соответствуют прорезям на диске оптического энкодера. Все об-
ласти соединены общим кольцом скольжения, что расположено на валу
энкодера. Постоянное напряжение поступает к кольцу скольжения за
счет использования механизма столкновения. Такой скользящий контакт
сравнивает каждую дорожку и вращение диска, с этого контакта сни-
мают показатели импульсного напряжения. Схема импульсов зависит от
токопроводящей – непроводящей структуры каждой дорожки, а также
от типа вращения диска. Сигнал дешифрирования выполняется и для
оптических энкодеров. Преимущества энкодеров с скользящими кон-
тактами в том, что они высокочувствительны (в зависимости от подачи
напряжения), и имеют простое строение (низкая стоимость). К недостат-
кам можно отнести помехи передачи сигнала из-за плохого контакта и
коммутирующих устройств (например, трения, изнашивание, скачки ки-
сти из-за вибрации, а также неожиданные поломки и окисление металла
из-за электрического горения дуги). Точность приёмника сильно зависит
от точности электропроводных схем диска энкодера. Один из способов
генерации электропроводящих схем на диске – это гальванопокрытие.
6.2 .1 .5 Магнитный энкодер
Магнитный энкодер имеет высокопрочные магнитные области, что
отпечатаны на диске с использованием методик таких как гравировка,
чеканка или запись (аналогичная методика магнитной записи данных).
Эти магнитные области соответствуют прорезям на диске оптического
энкодера. Сигнал измерительного датчика представляет собой микро-
преобразователь , что имеет первичные и вторичные мотки на кольце-
вом ферромагнитном ядре. Этот датчик имеет сходство с элементом
запоминающего устройства на магнитных сердечниках в исторически
установленном центральном процессоре компьютера. Высокочастотное
(примерно 100 кГЦ) первичное напряжение стимулирует напряжение во
втором мотке работать на той же частоте, на которой работает трансфор-
584
матор. Магнитное поле достаточной силы может насытить ядро, тем не
менее, таким образом, значительно увеличить магнитное сопротивление
и спровоцировать падение индуцированного напряжения. При помощи
демодулирования индуцированного напряжения возникает импульсный
сигнал. Этот сигнал можно толковать так же, как и остальные сигналы.
Пиковое значение импульса соответствует немагнитной области, а про-
вал на вершине импульса соответствует магнитной области на каждой
дорожке. Магнитные энкодеры имеют бесконтактные измерительные
датчики, что и является их преимуществом. Они более дорогостоящие
нежели устройства, что соединены контактами, в первую очередь, из-за
цены составляющих частей трансформатора; так же они демодулируют
цепь для генерации выходного сигнала.
6.2 .1 .6 Датчик приближения энкодера
Бесконтактный датчик энкодера использует датчик приближения как
измерительное устройство. Может быть использован любой тип дат-
чика приближения, например, зонт магнитной индукции или токовый
зонд, как описано в главе 5. Например, диск зонта магнитной индукции
сделан из ферромагнитного материала. Дорожки энкодера имеют выпу-
клости, сделаны из одинакового материала, которые служат для одних и
тех же целей, что и прорези на диске оптического энкодера. Выпукло сти
спо собствуют возрастанию зонта индуктивной связи за счет уменьше-
ния магнитного сопротивления. Это способствует увеличению уровня
индуцированного напряжения. Выходное напряжение – это импуль-
сно-модулированный сигнал на частоте первичного напряжения датчика
приближения. Затем оно демодулируется и толкуется конечный сигнал
импульса. Вместо диска с выпуклостями, ферромагнитную шестерню
можно использовать вместе с бесконтактным датчиком, что размещен
в радиальной области. В принципе, это устройство работает как обыч-
ный цифровой тахометр. Если используется вихретоковый датчик, то
импульсные зоны на дорожке должный быть покрыты токопроводящим
материалом.
6.2 .1 .7 Направление зондирования
Как будет объяснено ниже более подробно, инкрементальному датчику
нужен второй зонт вместо четверти от первого зонта (подача = центр-к-
центру – расстояние между соседними окнами) для генерирования ква-
585
дратурного сигнала, который будет определять направление вращения.
Некоторые строения инкрементных датчиков имеют две одинаковых
дорожки, что смещены на четверть одна от одной, и два измеритель-
ных датчика, что расположены в радиальном направлении без смещения.
Два сигнала (квадратурные), полученные с помощью этих конструкций,
будут аналогичны тем, что исходят от предыдущего устройства. С по-
мощью дорожки, которая генерирует опорный импульс, инкрементный
датчик может иметь три дорожки на своем диске.
Во многих приложениях, энкодеры встроены в самоконтролирующие
устройства, а не монтированы снаружи на вращающемся валу. Напри-
мер, в руке робота энкодер может быть основной со ставляющей частью
объединённого двигателя и может быть расположен внутри корпуса. Это
уменьшает количество ошибок связи (например, ошибки из-за скольже-
ния винта, гибкости вала, резонанса, производимого приёмником или
прибором); ошибки установки (например, несовпадение с осью и ори-
гиналом); и общую стоимость. Энкодеры доступны в размерах: малые
(2см. и меньше), большие (15 см. в диаметре).
Так как методы интерпретации сигнала весьма схожи для разных типов
энкодеров с разными принципами формирования сигналов, мы ограни-
чим дальнейшее рассмотрение только до рассмотрения оптических энко-
деров. Интерпретация сигналов различается в зависимости от конкрет-
ного оптического энкодера и представляет собой инкрементное устрой-
ство или беспримесный прибор.
6.3 инкрементальный оптический энкодер
Есть две возможные конфигурации для диска инкрементального энко-
дера с возможностью направления зондирования:
1. Смещение конфигурации зонда (два зонта и одна дорожка)
2. Смещение конфигурации дорожки (Два зонта и две дорожки)
Первая конфигурация схематически показана на рисунке 6.3 . Диск имеет
одну круговую дорожку с идентичными и расположенными на одинако-
вом расстоянии прорезями. Площадь матовой области между соседними
окнами, равна площади окна. Примечание: Выходной импульс включен
на половине периода и на другой половине выключен, таким образом
имея рабочий цикл в 50%. Два фотодиодных датчика (зонт 1 и 2 на ри-
сунке 6.3) расположены напротив дорожки на расстоянии четверти поля
(половины длины окна). формы их выходных сигналов (V1 и V2), после
прохождения через схему формирования импульсов (идеализирован-
586
ные), показаны на рисунке 6.4а и б – для двух направлений вращения.
Примечание: окружное смещение между двумя зонтами может увели-
чиваться на целое число угловых периодов, что дает больше места для
размещения зонтов. Задержка между двумя сигналами изменится только
при помощи целого кратного 360 градусов (постоянная скорость выше
остановок и задержек), то есть не изменится.
Во второй конфигурации инкрементального энкодера используются две
одинаковые дорожки, сдвинуты друг от друга на четверть. Каждая до-
рожка имеет собственный зонт (датчик света), что расположен передом
к соответствующей дорожке. Два зонта расположены вдоль радиальной
линии диска, без каких-либо окружных смещений в отличии от преды-
дущей конфигурации. Выходные сигналы двух датчиков – такие же, как
и прежде (рисунок 6.4).
В обеих конфигурациях, дополнительная дорожка с одиночным окном
и связанный зонт – доступны. Эта дорожка генерирует опорный импульс
(индекс импульса) за один оборот диска (см. рисунок 6.4с).
Этот импульс используется, чтобы начать процесс подсчета, а также
для подсчета полных оборотов, который требуется при измерении абсо-
лютных угловых поворотов.
Примечание: Когда диске вращается с постоянной угловой скоростью,
длительность импульса и период (цикл энкодера) – постоянны (по вре-
мени) в каждом выходе датчика. Когда диск ускоряется, длительность
импульса непрерывно уменьшается; когда диск затормаживается, то
рисунок 6.3 Диск инкрементного энкодера (смещение конфигурации зонта).
587
длительность импульса увеличивается.
6.3 .1 Направление вращения
Инкрементный датчик, как правило, имеет следующие пять компонен-
тов:
1.
Основа
2.
Индекс товарного канала
3.
Канал А
4.
Электропривод постоянного тока в 5 В
5.
Канал Б
Клеммы каналов Аи Б дают квадратурные сигналы, показаны на рисунке
6.4а и б, а ось стрелки дает сигнал опорному импульсу, что показано на
рисунке 6.4с.
рисунок 6.4 Импульсные сигналы с инкрементального энкодера, имеющие
определенную форму. (А) – для вращения по часовой стрелке; (Б) – для враще-
ния против часовой стрелки; (С) – сигнал опорного импульса.
588
Смещение на четверть положения зонта (или места положения дорож-
ки) используется для определения направления вращения диска. Напри-
мер, на рисунке 6.4а показаны очертания (идеализированных) выходов
датчика (V1 и V2), когда диск вращается по часовой стрелке; и на рисун-
ке 6.4б показаны выходы, когда диск вращается против часовой стрелки.
Существует несколько методов, которые могут быть использованы, чтоб
определить направление вращения диска с помощью квадратурных сиг-
налов. Например:
1.
С помощью фазового угла между двумя сигналами
2.
С помощью подсчёта передних показателей времени двух смеж-
ных синхроимпульсов двух сигналов
3.
Методом проверки показаний (падут или поднимутся) первого
сигнала при условии, что второй будет иметь высокие показания
4.
С помощью изменения уровня (от высокого к низкому) сигнала,
чтобы проверить следующее изменение другого сигнала
Способ No1: как видно на рисунке 6.4а и б, при непрерывном вращении
V1 отстает от V2 на четверть цикла (отставание по фазе в 90 градусов) и
при ККО вращении V1 обгоняет V2 на четверть цикла. Следовательно,
направление вращения может быть получено путем определения разни-
цы фаз двух выходных сигналов, используя схему обнаружения фазы.
Способ No2: передний фронт синхроимпульса можно определить с пу-
тем сравнения последовательных уровней в определённые периоды вре-
мени (можно выполнить с помощью аппаратуры или программного обе-
спечения). Время переднего фронта синхроимпульса можно измерить с
помощью подсчета тактовой частоты. Предположим, что подсчет начи-
нается, когда сигнал V1 начинает расти (т.е. когда обнаружен передний
фронт). Пусть N1 – количество тактов (время до момента), когда V2 на-
чинает расти; и N2 – количество тактовых циклов, когда снова начинает
расти V1. Тогда, мы имеем следующее:
Способ No3: В этом случае для начала нужно выявить высокий уровень
(высокий логический или двоичный 1) в сигнале V2, а затем проверить
край сигнала V1 (падает или растет в течении высокого периода V2). Как
видно из рисунка 6.4а, мы имеем следующее:
589
6.3 .2 аппаратное обеспечение энкодера
Настоящая составляющая часть энкодера не так проста, как это было
предложено на рисунке 6.2б. Более подробная схематическая диаграмма
механизма генерации сигнала оптического инкрементального энкодера
показана на рисунке 6.5а. Свет, генерируемый светодиодами коллими-
руется (формируются параллельные лучи) с помощью линзы. Этот схо-
дящийся пучок параллельного света проходит через прорезь вращающе-
гося диска. Скрытый диск находится в неподвижном состоянии и имеет
дорожку из прорезей, что идентичны кодирующему диску. Из-за нали-
чия скрытого диска, свет от светодиода будет проходить через более, чем
одну прорезь кодирующего диска, тем самым улучшая интенсивность
света, принимаемого фотодатчиком, в то время как диаметр пучка света
избежит отклонений от нормы, поскольку он больше, чем длина проре-
зи. Когда прорези кодирующего диска столкнутся напрямую с матовыми
областями скрытого диска, фотодатчик не получит практически света.
Когда прорези кодирующего диска столкнуться с прозрачными областя-
ми скрытого диска, то максимальное количество света достигнет фото-
датчика.
рисунок 6.5(а) Внутренняя составляющая часть оптического инкрементально-
го энкодера; (б) Использование двух датчиков на 180o для генерации усиленного
импульса.
590
Следовательно, фотодатчик принимает ряд трехгранных (и позитивных
импульсов) при движении кодирующего диска. Примечание: Ширина
полученного трехгранного импульса равна полному циклу (т.е . это со-
ответствует окну прорези и не соответствует половине рабочего цикла
прямоугольного импульса). Прямоугольная последовательность импуль-
сов может быть получена путем обработки последовательности треу-
гольных импульсов.
6.3 .2 .1 Формирование сигнала
Колебания напряжения источника питания и источника света энкодера
прямым образом влияет на уровень освещённости, принятый фотодатчи-
ком. Если чувствительность фотодатчика недостаточно высока, то низ-
кий уровень света может быть интерпретирован как отсутствие света,
что приведет до появления ошибок в процессе измерения. Происходят
такие ошибки из-за нестабильности и изменения напряжения в источни-
ке питания. Устранение ошибок возможно путём размещения двух фо-
тодатчиков на расстоянии в полполя одного из них вдоль дорожки. Как
показано на рисунке 6.5б. Это устройство служит для обнаружения кон-
траста и его не следует путать с офсетным устройством, что востребуем
для определения направления. Если датчик будет сталкиваться с мато-
вой областью скрытого диска, то всегда будет считывать низкий сигнал.
Другой датчик будет считывать трехгранный сигнал, вершина которого
достигается за счёт полного перемещения окна вместе с окном кодирую-
щего диска, а впадина достигается за счёт столкновения перемещаемого
окна с матовыми областями скрытого диска. Два сигнала от этих двух
датчиков усиливаются по отдельности и закладываются в дифференци-
альный ускоритель (см. главу 2). В результате получается высокочастот-
ный трехгранный импульсный сигнал. Имеющий определенную форму
импульсный сигнал (или двоичный) может быть сформирован путём
вычитания порогового значения из этого сигнала и определения полу-
ченных положительных ( двоичных No1) или отрицательных (двоичных
No2) областей. Этот процесс будет выполнять более определённый (или
двоичный) импульсный сигнал, который невосприимчив к шуму.
Усилители сигналов – это устройства монолитно-интегральных схем
(ИС), что размещаются внутри самого датчика. Могут так же присут-
ствовать дополнительные схемы формирования импульсов. Блок пита-
ния должен быть представлен отдельно в качестве внешнего компонента
(с помощью контактного датчика). Уровень напряжения и длительность
591
выходного импульсного сигнала являются совместимыми с логически-
ми схемами (ТТЛ схемы), таким образом они могут быть считаны не-
посредственно с помощью цифровой платы. Обратите внимание, что,
если выходной уровень V1 положительно большой, мы имеем высокий
логический уровень (или двоичный). В противном случае, мы имеем
низкий логический уровень (или двоичный 0). Таким образом, точный и
стабильный выходной сигнал может быть получен даже в условиях не-
стабильного напряжения источника питания. Схематическая диаграмма
на рисунке 6.5 показывает генерацию только одного (V1) из двух квадра-
турных импульсных сигналов. Другой импульсный сигнал б (V2) будет
генерироваться с использованием идентичного аппаратного снабжения,
но при смещении на четверть поля. Сигнал импульсного индекса (им-
пульсный сигнал) также генерируется аналогичным образом. Кабель эн-
кодера (обычно ленточный кабель) имеет много контактный разъём (для
пяти штырей, упомянутых ранее).
Примечание: Единственная движущаяся часть на рисунке 6.5 – это коди-
рующий диск.
6.3 .3 Датчики линейных перемещений (Линейный энкодер)
В прямолинейном энкодере (в простонародье линейном энкодере, где
линейный – это не означает линейность, но относится к прямолиней-
ному движению), прямоугольная плоская пластина, которая двигается
прямолинейно, вместо вращающегося диска, используется с тем же ти-
пом генерации сигналов и дешифрирования механизма, что и в анало-
гово-цифровом преобразователе углового положения вала. Прозрачная
пластина с рядом матовых линий, расположен параллельно в поперечном
направлении, образуют неподвижную пластину (решеточную или фазо-
вую) приёмника. Это называется маской пластины. Вторая прозрачная
пластина с идентичным набором позиционных линий образует подвиж-
ную пластину (кодирующую). Линии на обеих пластинах расположены
равномерно, а ширина линии равна расстоянию между соседними лини-
ями. Источник света размещен на боковой стороне подвижной панели, и
свет, который передаётся через общую площадь двух пластин обнаружи-
вается на другой стороне, при помощи одного или более фотодатчиков.
Когда линии на двух пластинах совпадают, то максимальное количество
света будет проходить через общую площадь двух пластин. Когда линии
с одной пластины падают на прозрачные области другой, то практически
не будет прохождения света. Соответственно, если так как одна пластина
592
перемещается относительно другой, так и последовательность импуль-
сов генерируется фотодатчиком, который может быть использован для
определения прямолинейного перемещения и скорости, как например, в
инкрементальном энкодере.
Соответствующее расположение устройства показано на рисунке 6.6 .
Кодовая пластина закреплена на движущемся предмете, прямолинейное
движение которого должно быть измерено. Источник света ля светоди-
одов и фототранзисторный световой датчик используются для обнару-
жения импульсов движения, которые могут быть интерпретированы так
же, как и в дисковом энкодере. фазовая пластина используется так же,
как и энкодере углового поворота вала, чтобы повысить интенсивность
и распознавание обнаруженного сигнала. Две квадратурные дорожки
(т.е. смещены на четверть) необходимы для определения направления
движения, как показано на рисунке 6.6 . Еще одна дорожка, наполови-
ну смещена от основной дорожки (не показано на рисунке 6.6) может
быть использована на фазовой пластине, для дальнейшего повышения
распознавания обнаруженных импульсов. В частности, когда датчик на
основной дорожке считывает высокую интенсивность (т.е. когда окна на
кодовой пластине и фазовой выровнены), датчик на дорожке, смещен-
ный на половину, будет считывать малую интенсивность (из-за того, что
соответствующие окна фазовой пластины перекрыты зоной твердого ве-
щества кодовой пластины).
6.4 Зондирование движения с помощью энкодера
Оптический энкодер может измерять как движение, так и скорость.
рисунок 6.6 Прямолинейный оптический энкодер.
593
Кроме того, в зависимости от конструкции энкодера (кодовая пластина
линейного перемещения или вращающийся кодовый диск), можно изме-
рить прямолинейные движения или угловые движения. Инкременталь-
ный энкодер измеряет смещение по принципу считывания импульсов и
измеряет скоро сть, по принципу частотности импульсов. Цифровой про-
цессор способен выражать эти показания в технических единицах (ради-
аны, градусы, рады и т.д.) с использованием соответствующих значений
параметров физической системы.
Мы будем рассматривать угловые движения, потому что одни и те же
концепты могут быть распространены на линейные движения. Приве-
дём формулы для вычисления смещения и скорости, используя выходы
энкодера. Кроме того, обсудим важное понятие такое, как разрешающая
спо собность датчика положения энкодера в отношении скорости и сме-
щения.
6.4 .1 измерение смещения
Предположим, что максимально возможное показание, снятое с энко-
дера – это М импульсов и диапазон энкодера составляет +- θ максимум.
Угловое положение 0соответствет количеству n импульсов и вычисляет-
ся как:
(6.1)
6.4 .1 .1 Цифровое разрешение
Разрешение энкодера представляет собой наименьшее изменение в
измерениях, которые могут быть измерены реально. Так как энкодер
может использоваться для измерения смещения и скорости, мы можем
определить разрешение для каждого случая. Здесь мы рассмотрим дис-
кретность перемещения, которое определяется количеством окон n в ко-
дирующей диске и цифровым размером (количество битов) буфера или
регистра, где сохраняются исходные показатели. Сейчас мы обсуждаем
цифровое разрешение.
Дискретность смещения инкрементального энкодера задаётся измене-
нием смещения, соответствующего изменению единицы в счёте (n). Из
формулы 6.1 следует, что дискретность смещения задаётся:
(6.2)
594
Цифровое разрешение соответствует изменению единицы на уровне
битового значения. Предположим, что показания шифратора хранятся в
виде цифровых данных (знак бита – r). С учетом знака бита, мы имеем
М= 2r – 1 . Подставляя это в уравнение 6.2, мы имеем цифровое разреше-
ние:
(6.3)
Обычно θмакс = ±180° или 360°, тогда:
(6.4)
Примечание: минимальное показание будет, если все биты равны нулю,
а максимальное – если все биты равны единице. Предположим, что этих
два подсчёта представляют собой угловое смещение θ мин. И θ макс.,
тогда мы имеем:
(6.5)
Или предположим, что М = 2
r-1
, мы имеемтогдаθмакс=θмин.+(М–1)
Δθd. Исходя из этого, мы получаем условное определение для цифрового
разрешения:
(6.6)
Из этого получаем примерно такой же результат, как и в уравнении 6.4 .
Если θмакс равно 2π и θмин равно 0, тогда θмакс и θмин будут соответствовать
той же позиции на кодирующем диске. Чтобы избежать этой двусмыс-
ленности, используем:
(6.7)
Обратите внимание, что, если заменить уравнение 6.7 на уравнение 6.6,
то мы получим уравнение 6.3 . затем, имеем цифровое разрешение: (360°
–
360° / 2r)/(2r – 1), что идентично уравнению 6.4 .
595
6.4 .1 .2 Физическое разрешение
физическое разрешение энкодера определяется количеством окон N на
кодовом диске. Если используется только один импульсный сигнал (т.е.
нет определения направления) и, если только один передний фронт син-
хроимпульса обнаружен (т.е. подсчитываются полные циклы сигналов
энкодера). физическое разрешение задаётся углом наклона дорожки (т.е.
угловым разделением между соседними дорожками), который равен
(360/N) °. Однако, когда квадратурные сигналы (т.е. два импульсных сиг-
нала, один за пределами фазы, другой имеет угол 90° или четверть угла)
доступны и имеют возможность обнаружить рост или падение передне-
го фронта импульса, четыре подсчёта могут быть сделаны при помощи
цикла энкодера, тем самым улучшая разрешение в четыре раза. В этих
условиях физическое разрешение энкодера задаётся такой формулой:
(6.8)
Чтобы разобраться в этом, обратите внимание на рисунок 6.4а (или
рис. 6 .4б). Когда добавляются два сигнала V1 и V2, сигнал в результате
имеет переходный период на каждой четверит цикла работы энкодера.
Это показано на рисунке 6.7 . При обнаружении каждого перехода (через
обнаружение переднего фронта или уровневого обнаружения), четыре
импульса можно подсчитать в пределах каждого основного цикла. Сле-
дует отметить, что каждый сигнал (V1 и V2) имеет разрешение поло-
вины поля, при условии, что все переходы (фронты падения и роста)
обнаруживаются и подсчитываются вместо подсчёта импульсов (или
высокоуровневых сигналов). Соответственно, диск с 10 000 окон имеет
разрешение 0,018°, е сли используется только один импульсный сигнал
(и оба перехода проходят стадии роста, падения и обнаружения). Ког-
да используются два сигнала, то показатель разрешения улучшается до
0, 009°. Это разрешение достигается непосредственно из-за механизма
приёмника, без интерполяции. Это предполагает, что импульсы поч-
ти идеальны и переходы – совершенны. На практике невозможно это
осуществить, если использовать шумные импульсные сигналы. Затем,
необходимо формировать импульс, как отмечалось ранее. Чем больше
значение двух разрешений дано цифровым разрешением (уравнение 6.4)
и физическим разрешением (уравнение 6.8), тем больше регулируется
дискретность перемещения энкодера.
596
Пример 6.1
Для идеальной конструкции инкрементального энкодера, получим
уравнение относящиеся к таким параметрам:
d – диаметр диска энкодера, w – число окон на единицу диаметра диска,
и r – размер слова (бита)измерения угла. Предположим, что квадратур-
ные сигналы – доступны. Если r = 12 и w = 500/см, установите подходя-
щий диаметр диска.
Решение:
В этой задаче, мы возьмём идеальную конструкцию, например, случай,
когда физическое разрешение равно цифровому. Пространственное раз-
решение из-за физических ограничений (при условии, что квадратурные
сигналы доступны) дано уравнением 6.8 . Следовательно, Δθр = (1/4)(360/
wd)°. Ограниченное цифровым размером слова разрешение дано уравне-
нием 6.4: Δθd = (360/2r)°. Для идеальной конструкции, нам нужно: Δθр=
Δθd, что даёт (1/4)(360/Wj) = (360/2r). Упрощая, имеем: 2r WD – 2 .
Заменяем r = 12, w = 500/cм, чтобы получить d = (212 – 2 /500)cм = 2,05
см.
6.4 .1 .3 Ускоряющая передача трансмиссии
физическое разрешение энкодера можно улучшить, используя ускоряю-
щую передачу трансмиссии и таким образом один поворот движущейся
части будет соответствовать нескольким оборотам кодированного диска
энкодера. Это улучшение прямо пропорционально коэффициенту уско-
ряющей передачи. В частности, из уравнения 6.8 мы имеем:
(6.9)
рисунок 6.7 Использование квадратурных сигналов для улучшения физическо-
го разрешения.
597
Зазор в трансмиссии вносит новую ошибку в работу. Для достижения
наилучших результатов, этот зазор должен быть в несколько раз меньше
нежели разрешение без зазора.
Цифровое разрешение не улучшит трансмиссию, если размер буфера
(регистра), где энкодер считывает информацию, соответствует макси-
мальному углу поворота движущейся части (скажем, 360°). Тогда изме-
нения наименьшего значащего бита буфера будет соответствовать оди-
наковому изменению углу поворота движущейся части. На самом деле,
общая дискретность перемещения может повредиться в случае наличия
чрезмерного зазора. Тем не менее, если размер буфера (регистра) соот-
ветствует полному обороту кодирующего диска (т.е . вращение 360°), и
он очищается в конце каждого оборота и отдельный подсчёт всех вра-
щений кодирующего диска сохраняется, то цифровое разрешение также
можно улучшить коэффициентом р. В частности, из уравнения 6.4 мы
получаем цифровое разрешение:
(6.10)
Пример 6.2
Используя высокоточные методы штамповки дорожек на кодирующем
диске, можно достичь плотности окна – 500 окон/ см на диаметр. Рас-
смотрим 3000-оконный диск. Предположим, что повышающий редук-
тор, что используется для улучшения разрешения равен 10. Если размер
слова выходного регистра равен 16 бит, проверьте дискретность переме-
щения устройства в двух случаях:
1. Полный оборот части
2. Полный оборот кодирующего диска
Решение:
Во-первых, рассмотрим случай, в котором нет трансмиссии. С помощью
квадратурных сигналов, физическое разрешение составляет Δθр = 360°/4
×3000 = 0,03°.
Для диапазона измерения заданного на ±180°, 16-битовый выход обеспе-
чивает цифровое разрешение.
Δθd = 180°/215 = 0,005°.
Следовательно, при отсутствии трансмиссии, общая дискретность пере-
мещения составляет 0,03°.
Далее рассмотрим редукторный энкодер с передаточным отношением
598
10, и упустим из виду зазор. физическое разрешение улучшается до 0,
003°. Тем не менее, в случае 1, цифровое разрешение остаётся неизмен-
ным. Следовательно, общая дискретность перемещения улучшается до
0,005° в результате работы трансмиссии. Во втором случае, цифровое
разрешение улучшается до 0,0005°. Следовательно, общая дискретность
перемещения становится равна 0,003°.
Таким образом, дискретность перемещения инкрементального энкодера
зависит от следующих факторов:
1. Количество окон на кодовой дорожке (диаметр диска)
2. Передаточное число
3. Размер слова измеряющего регистра
Пример 6.3
Таблица позиционирования использует высокоточный свинцовый ходо-
вой винт без зазоров (2см/оборот), который приводится в действия при
помощи сервопривода со встроенным оптическим энкодером для управ-
ления обратной связью. Если требуемая точность позиционирования
составляет ±10мкм, определяют количество окон, требуемых дорожкой
энкодера. Кроме того, какой минимальный размер бита необходим для
цифрового регистра данных энкодера?
Решение.
Требуемая точность составляет ±10 мкм. Для достижения этой точно сти
требуется, чтобы разрешение для линейного датчика перемещения было
равно ±5мкм. Необходим провод ходового винта в 2 см на оборот. Для
достижения требуемого разрешения, количество импульсов на оборот
энкодера должно составлять:
Если предположить, что квадратурные сигналы доступны (с улучшен-
ным разрешением на 4), то количество окон, требуемых дорожкой энко-
дера будет равно 1000. Процентное значение физического разрешения =
(1/4000) ×100% = 0,025%. Рассмотрим буфер с размером битов r, вклю-
чая знаковый бит. Следовательно, нам нужно 2r – 1 = 4000 или r = 13 бит.
6.4 .1 .4 интерполирование
Разрешение на выходе энкодера может быть улучшено путём интерпо-
599
ляции. Это достигается за счёт добавления равно размещённых импуль-
сов между каждой парой других импульсов, генерируемых циклом эн-
кодера. Эти вспомогательные импульсы не дают истинных измерений,
и они могут быть интерпретированы, как линейная схема интерполяции
между истинными импульсами. Один из способов решения этой интер-
поляции заключается в использовании двух зондовых сигналов, которые
генерируются энкодером (квадратурные сигналы). Эти сигналы близки
к синусоидальным (трехгранным) перед тем, как они достигнут опреде-
лённой формы (например, путём определения уровня). Они могут быть
пропущены через фильтр с целью получить два синусоидальных сигна-
ла, которые на 90° вне фазы (т.е. синусоидальный и косинусоидальный
сигналы). По считывании этих двух сигналов, ряд синусоидальных мо-
жет быть сформирован таким образом, что каждый сигнал будет опаз-
дывать предшествующему сигналу на любой цельной части 360°. Путём
определения уровня или фронта (растущего или фронта спада), синусо-
идальные сигналы могут быть преобразованы в квадратные волновые
сигналы. Затем, при помощи логического соединения квадратных волн,
целое число импульсов может быть сгенерировано в пределах каждого
цикла энкодера. Это импульсы интерполяции, которые используются для
улучшения разрешения энкодера. На практике, около 20 интерполяци-
онных импульсов можно добавить между двумя смежными основными
импульсами.
6.4 .2 измерение скорости
Существует два метода определения скорости при помощи инкремен-
тального энкодера:
1. Метод счёта импульсов
2. Метод синхронизации импульсов
В первом методе, подсчёт импульсов в течение фиксированного перио-
да времени (последующий период времени, при котором считываются
данные регистра) используется для вычисления угловой скорости. Для
заданного периода считывания данных существует нижний предел ско-
рости, ниже этого предела показания будут менее точны. Для вычисле-
ния угловой скорости Ѡ при помощи этого метода, предположим, что
счёт в течение периода времени T равен количеству n импульсов. Таким
образом, среднее время для одного импульсного цикла (т.е . угол наклона
от окна к окну) равно T/n. Если на диске n количество окон, значит не ис-
пользуются квадратурные сигналы, угол перемещается в течение одного
600
импульсного периода на 2TT/N радиан. Следовательно,
Для метода счёта количества импульсов, скорость Ѡ = 2p/N = 2pn.
(6.11)
При использовании квадратурных сигналов N заменяется на 4N в урав-
нении 6.11
Во втором методе, время для одного импульсного цикла энкодера (т.е.
угол наклона от окна к окну) измеряется при помощи тактового сигнала
высокой частоты. Этот способ особенно эффективен для точного измере-
ния при низких скоростях. Предположим, что в этом методе частота это f
Гц. Если n циклов тактового сигнала подсчитываются в течение импуль-
сного периода энкодера (т.е. основное окно, которое служит интервалом
между двумя соседними окнами, не использует квадратурные сигналы),
время цикла энкодера (т.е. время оборота через угол наклона энкодера)
дано как m/f. В общем, при n количестве окон на дорожке, угол поворота
составляет в этот период 2TT/N радиан, как и раньше. Следовательно,
Для метода синхронизации импульсов, скорость Ѡ =
(6.12)
При использовании квадратурных сигналов, N заменяется на 4N в урав-
нении 6.12 .
Обратите внимание, что один инкрементальный датчик может исполь-
зоваться в качестве датчика измерении положении и датчика скорости.
Поэтому, например, в системе управления цепь позиционирования и
скорость можно закрыть при помощи одного энкодера, без необходи-
мости использовать обычный (аналоговый) датчик скорости, такой как
тахометр (см. главу 5). Разрешение скорости энкодера (которое зависит
от метода определения скорости – счёт или синхронизация импульсов)
можно выбрать в соответствии с требуемой точностью регулируемой
цепи скорости). Еще одно преимущество использования энкодера, а не
обычного аналогового датчика – это отсутствие необходимости в АЦП.
Например, импульсы, генерируемые энкодером, можно считывать не-
посредственно в микропроцессор. В качестве альтернативы, импульсы
601
можно использовать в качестве функции прерывания на компьютере. Эти
прерывания потом подсчитываются (с помощью реверсивного счётчика
или индексатора) или синхронизируются (по часам в системе собранных
данных) внутри компьютера, обеспечивая тем самым позиционирование
и подсчёт скоро сти.
6.4 .2 .1 разрешение скорости
Разрешение скорости инкрементального датчика зависит от метода, ко-
торый используется для определения скорости. Как метод счёта, так и
метод синхронизации основаны на вычислении, разрешение скорости
задаётся изменением угловой скорости, которая соответствует измене-
нию (прирасту или снижению) вычислений на единицу.
Для метода счёта количества импульсов, как видно из уравнения 6.11,
изменения на единицу счёта n соответствует изменению скоро сти,
(6.13)
Где N – число окон кодовой дорожки
Т – период времени, в течение которого происходит подсчёт количества
импульсов
В уравнении 6.13 даётся измерение разрешения скорости этим методом.
Заметим, что прикладное значение (в радах) этого разрешения не зави-
сит от самой угловой скорости, но при выражении скорости в процентах,
разрешение улучшается (становится меньше) на высоких скоростях. От-
метим далее, из уравнения 6.13, что разрешение улучшается с ростом
числа окон и периодом вычисления (подсчёта). При временных режи-
мах, точность считывания скорости уменьшается с ростом Т (потому
что, согласно с теоремой дискретизации Шеннона (в англ. Литературе
–
Шеннона, в рус. – Котельникова) в главе 3 сказано, что часто дискре-
тизации должна быть как минимум вдвое больше высшей частоты сиг-
нала скорости). Следовательно, период дискретизации не должен расти
беспорядочно. Как обычно, при использовании квадратурных сигналов,
N заменяется на 4N в уравнении 6.13 (т.е . разрешение улучшается в 4
раза). В методе импульсной синхронизации, скорость разрешения дана
(см. уравнение 6.12):
602
Где, а – это тактовая частота. Для большой m, (m + 1) может быть при-
ближено к m. Тогда, подставляя уравнение 6.12 в уравнение 6.14, имеем:
(6.15)
Заметим, что в этом случае разрешение квадратично уменьшается со
скоростью. Кроме того, разрешение уменьшается со скоростью даже тог-
да, когда оно рассматривается, как часть измеренной скорости:
(6.16)
Это наблюдение подтверждает ранее высказанное предположение о том,
что метод импульсной синхронизации подходит для низких скоростей.
Для заданной скоро сти и тактовой частоты, разрешение и дальше умень-
шается с ро стом N. Это верное, потому что, когда N растёт, период им-
пульса укорачивается и, следовательно, число тактовых циклов на пери-
од импульса также уменьшается. Разрешение может быть улучшено за
счёт увеличения тактовой частоты.
Пример 6.4
Инкрементальный энкодер с 500 окнами на дорожке используется для
измерения скорости. Предположим, что:
(а) в методе счёта количества импульсов, счётчик (в буфере) считывается
со скоростью 10 Гц.
(б) в методе импульсной синхронизации, используется тактовая частота
10 МГц.
Определить процент разрешения для каждого из этих двух методов при
измерении скорости: (1) – 1 об/c, (2) 100 об/с.
Решение:
Предположим, что квадратурные сигналы не используются.
Случай 1: скорость = 1 об/c
C 500 окон, мы имеем 500 импульсов
(а) Импульсный метод подсчёта
603
(б) Метод синхронизации импульсов
При 500 импульсах, период = 1/500 s = 2× 10 – 3 s.
При тактовой частоте 10 МГц, время счёта = 10×106×2×10-3
= 20 ×103
Случай 2: скорость = 100 об/с
С 500 окон, мы имеем 50 000 импульсов
(а) Метод счёта количества импульсов
(б) Метод синхронизации импульсов
604
Итоги подведены в таблице 6.1
Результаты, приведённый в таблице 6.1 подтверждают, что в методе
счёта импульсов разрешение улучшается при наличии скорости и, сле-
довательно, этот метод есть более подходящим для измерения высоких
скоростей. Кроме того, в методе синхронизации импульсов разрешение
уменьшается при наличии скорости и, следовательно, он есть более под-
ходящим для измерения низких скоростей.
6.4 .2 .2 Скорость с ускоряющей передачей
Рассмотрим инкрементальный энкодер с количеством окон N на дорож-
ку и соединён с вращающемся валом при помощи редуктора с ускоря-
ющей передачей. формулы для вычисления угловой скоро сти вала (1)
методом счёта количества импульсов и (2) методом синхронизации им-
пульсов, можно легко определить с уравнений 6.11 и 6.12, для этого слу-
чая. В частности, угол поворота вала, что соответствует одному интер-
валу между окнами на диске энкодера, равен 2ТТ/(рN). Следовательно,
соответствующие формулы для скорости можно получить. Заменив N на
рN в уравнениях 6.11 и 6.12 . Мы имеем:
Для метода счёта количества импульсов:
(6.17)
Для метода синхронизации импульсов:
(6.18)
605
Примечание: Эти соотношения могут быть получены более простым
спо собов, простым делением скорости диска энкодера на передаточное
сил ор, что являет собой скорость объекта.
6.4 .2 .3 Скорость разрешения с ускоряющей передачей
Как и прежде, разрешение скорости задаётся изменением скорости, со-
ответствующей изменению единству в счёте. Следовательно,
(6.19)
Для метода счёта количества импульсов:
Из этого следует, что в методе счёта количества импульсов. Ускоряющая
передача способствует улучшению разрешения.
Для метода импульсной синхронизации:
(6.20)
Примечание: в методе импульсной синхронизации, для заданной скоро-
сти, разрешение ухудшается с увеличением р. Таким образом, скорость
разрешения инкрементального датчика зависит от следующих факторов:
1. Число окон N
2. Счётчик дискретного периода T
3. Тактовая частота f
4. Скорость W
5. Передаточное число р
В частности, ускоряющая передача оказывает пагубное воздействие на
скорость разрешение скоро сти в методе импульсной синхронизации, но
оно оказывает благоприятное влияние в методе счёта количества им-
пульсов.
6.5 ЭНкоДЕры СБора и оБраБотки ДаННыХ
Инкрементальный энкодер, как правило, имеет 5 контактов, соответству-
ющие:
1. Земли
606
2. Индексу (Каналу В)
3. Каналу А
4. Источнику постоянного тока в 5В
5. Каналу Б
Каналы А и Б обеспечивают квадратурные сигналы ( позицию инкре-
ментных сигналов, расположенных на 90° вне фазы) , канал В даёт ин-
декс (полного вращения, оборотов) импульсов. Сигналы фотодатчика,
которые генерируют сигналы для всех трёх каналов, обусловлены инте-
гральной схемой в энкодере. В следствии получаются цифровые сигна-
лы (ТТЛ схемы), которые могут быть считаны напрямую микропроцес-
сором или компьютером. Характер выходных ТТЛ сигналов инкремен-
тального энкодера показаны на рисунке 6.8 .
6.5 .1 Сбор данных с помощью микропроцессора
Выходные контакты энкодера могут быть непосредственно соединены с
контактами микропроцессора. Для того, чтобы избежать искажения (на-
грузки) на выходе энкодера из-за ТТЛ нагрузки (т.е. микропроцессора),
(выход считывает данные энкодера), выходные контакты энкодера, воз-
можно, нужно будет присоединить к натяжным резисторам высокого со-
противления (например. 3 кОм). Часто загрузка (микропроцессора) сама
по себе может обеспечить необходимое сопротивление (т.е . внутренне
сопротивление микропроцессора). Выходные контакты ТТЛ считаются
низкими (или двоичными 0), когда напряжение от 0 до 4В и считается
высоким (или двоичным 1), когда напряжение между 2,6 и 5 В (рис.6 .8).
Примечание: Вмещающий диапазон напряжения такого типа необходим
для защиты от помех (до 0,4В в данном случае). Пример приложения, ко-
торое использует инкрементальный датчик и микропроцессор для кон-
троля и управления двигателем постоянного тока, показан на рисунке
6.9 .
Импульс энкодера можно высчитать и можно определить направление
вращения (и количество импульсов в регистре микропроцессора изменя-
ется на их основе) путём определения уровней (высокий или низкий) и
переходов (высокий – низкий, низкий – высокий) в выходных сигналах
энкодера, как обсуждалось ранее. Например:
Если канал А идёт по переходу от высокого к низкому и Канал Б при
этом на низком уровне, то импульс инкрементный. Если Канал А идёт по
переходу от низкого к высокому. А Канал Б при этом на высоком уровне,
607
рисунок 6.9 Использование инкрементального энкодера и микропроцессора
для регистрации движений двигателя.
рисунок 6.8 выходы инкрементального энкодера.
608
то импульс декрементный.
Это положение должно быть ясно из рисунка 6.4 . такие операции про-
делываются с отношением к внутренней частоте процессора. Требуемая
частота операции зависит от типа энкодера и потребности применения
конкретного вида зондирования. Для начала выбирается подходящий
энкодер, пригодный для применения. Далее оценивается максимальное
количество импульсов в секунду. Как правило. Максимальная частота
импульса есть достаточной для частоты операции подсчёта дважды.
Должно быть установлено программное обеспечение драйвера в ми-
кропроцессоре, внесена библиотека программирования и должен быть
запрограммирован микропроцессор (например, с помощью настольного
компьютера с микропроцессором, подключенного через USB- кабель),
чтобы прочитать энкодер и вычислить смещение и скорость. Псевдокод
(высокоуровневое описание компьютерной программы) для выполнения
этой цели приводится ниже:
Эта программа импортирует библиотеки, создаёт порт для сбора дан-
ных, о существляет сбор данных и вычисления движения в цикле. Вы-
числение угла поворота и скорость может быть выполнено следующим
609
образом:
1. Частота тактовых импульсов от перехода канала Б (от высокого к низ-
кому и от низкого к высокому) к следующему переходу канала А (от вы-
сокого к низкому и от низкого к высокому). Назовём это n.
2. Вычисление А = 2ЕЕ/(4N), где N = количество окон на дорожке диска
энкодера. Это можно вычислить автономно.
3.Обновлениесмещенияивремени:D=D+A;время=T =T+n×ΔT,
где ΔТ = период тактовых импульсов (в секундах).
4. Скорость вычисления: W = A/(n ×ΔT).
6.5 .2 Сбор данных с помощью рабочего стола компьютера
Установление связи инкрементального датчика и ноутбука можно осу-
ществить через стандартную карту сбора данных (КСД), которая разме-
щена в гнезде для расширительной платы компьютера (см. главу 5). Тем
не менее, это решение гораздо дороже, по сравнению с использованием
для этой цели микропроцессора. Поскольку выходы энкодера совмести-
мы с ТТЛ схемами, КСБ потребует, как максимум три цифровых канала.
Современная КСБ легко удовлетворяет это требование. Основные опера-
ции сбора данных представлены на рисунке 6.10.
Импульсные сигналы энкодера подаются на цифровые каналы КСД.
Реверсивный счётчик обнаружит сигналы (например, путём обнаруже-
ния нарастающего фронта, спадающего фронта или путём определения
уровня) и определит направление движения.
рисунок 6.10 Компьютерный интерфейс инкрементального энкодера.
610
Импульс в одном направлении (например, по часовой стрелке) увели-
чивает показание на единицу, а импульс в противоположном направле-
нии приведёт к падению показателя на единицу. Показания передаются
в задвижку буфера таким образом, что показатели считываются из само-
го буфера, а не из счётчика. Такое расположение обеспечивает эффек-
тивный способ сбора данных, так как процесс подсчёта может продол-
жаться беспрерывно в то время, как компьютер считывает показатели из
задвижки буфера.
Компьютер распознаёт различные компоненты в системе измерения с
использованием адреса, и эта информация передана индивидуальным
составляющим через адресную шину. Начало, конец и характер дей-
ствий (например, считывание данных, обнуление счётчика, очистка
буфера) передаются к различным устройствам с помощью компьютера
через шину управления. Компьютер может распоряжаться действиями
шины, и составляющая часть может отвечать сообщением (например,
работа завершена) в противоположном направлении. Данные (например,
показатели) передаются через шину данных. В то время, как компью-
тер считывает данные из буфера, управляющие сигналы гарантируют,
что никакие данные не передаются в этот буфер из счётчика. Очевидно,
что операция сбора данных состоит из квитированных операций меж-
ду главным процессором компьютера и дополнительных составляющих.
Больше чем один энкодер может быть адресован, контролирован и счи-
тан тремя одинаковыми шинами компьютера. Примечание: как уже упо-
миналось в главе 2, шины являются проводниками; например, многово-
локонные кабели передают сигналы в аналогичную логическую схему.
Внутренняя электроника энкодера может питаться от источника посто-
янно тока 5 В, что расположен в компьютере.
При измерении смещения (положения) объекта с помощью инкремен-
тального энкодера, счётчик импульсов считывается компьютером только
при конечных интервалах времени (скажем, 5мс). Чистый подсчёт даёт
смещение. В измерении перемещений требуется кумулятивный счёт, бу-
фер не обнуляется после подсчёта, как только показатели считываются
компьютером.
При измерении скорости с помощью метода счёта количества импуль-
сов, буфер считывает данные через фиксированные промежутки време-
ни Т, это время используется также для счёта временного цикла. Счётчик
обнуляется каждый раз, когда показатели передаются в буфер, таким об-
разом можно начать новый счёт. С помощью этого метода, новые спосо-
бы считывания данных доступны в любой момент дискретизации.
611
При использовании метода импульсной синхронизации для вычисления
скорости, счётчик на самом деле выполняет роль таймера. Цикл энко-
дера рассчитывает время, используя часы (внутренние или внешнее). И
показатели передаются в буфер. Затем счётчик обнуляется и начинается
следующий цикл синхронизации. Буфер периодически считывается ком-
пьютером. С помощью этого метода, доступны новые способы считыва-
ния данных на каждом цикле энкодера. Обратите внимание, что при пе-
реходных скоростях временной цикл энкодера становится переменным и
не имеет прямого отношения к периоду дискретизации данных. В методе
импульсной синхронизации, желательно, чтобы период дискретизации
был немного меньше. Нежели время цикла энкодера, чтобы процессор
не пропустил ни одного показателя.
Более эффективное использование цифрового процессора может быть
достигнуто с помощью программы обработки прерываний. При помо-
щи этого метода, счётчик (или буфер) посылает запрос на прерывание к
процессору, когда готов новый счётчик. Затем процессор временно при-
останавливает текущую операцию и считывает новый данные. В этом
случае процессор не находится в постоянном ожидании, чтобы начать
считывать данные.
6.6 абсолютные оптические энкодеры
Абсолютный энкодер генерирует кодированное цифровое слово каж-
дого дискретного углового положения своего кодирующего диска. Это
достигается путём создания набора импульсных сигналов (каналов пе-
редачи данных), число который равно размеру слова (количеству бит)
чтения. В отличии от инкрементального энкодера, отсутствует счёт им-
пульсов. Абсолютный энкодер может использовать различные методы
(например, оптический метод, скользящий контакт, магнитное сопротив-
лении и датчик ближней локации) для генерирования сигнала датчика,
как описано выше для инкрементального энкодера. Оптический метод, в
котором используется код диска с прозрачными и матовыми областями;
и парой источников света и фотоприёмников, является наиболее распро-
страненной техникой.
Упрощенный шаблон кода на диске абсолютного энкодера, который ис-
пользует прямой двоичный код, показан на рисунке 6.11а. число дорожек
(n) в этом случае равно 4, но на практике n обычно равно 14 и может
быть выше даже, чем 22. Диск разделён на 2n сектора. Каждая разделён-
ная область матрицы, образованная таким образом. Соответствует биту
612
данных. например, прозрачная область будет соответствовать двоичной
1 и матовая – двоичному 0. Каждая дорожка имеет зонд, подобный тому,
что используется в инкрементальном энкодере. Множество n зондов рас-
положено вдоль радиальной линии и наружных дорожек на одной сто-
роне диска. Источники света (например, светодиоды) освещают другую
сторону диска. По мере того. Как диск вращается, группа зондов генери-
рует импульсные сигналы, которые по сылаются в каналы аналогичных
данных. На данный момент, особое сочетание уровней сигналов в кана-
лах передачи данных обеспечивает кодированное слово таким образом,
что оно однозначно определяет положение диска в то время.
6.6 .1 код Грея
В абсолютном энкодере существует проблема распознавания данных,
связана с прямым двоичным кодом. Обратите внимание, в таблице 6.2,
что с использованием прямого двоичного кода, на переход от одного
сектора к соседнему может потребоваться более чем одно переключе-
ние битов в двоичные данные. Например, переход от 0011 до -1 —или от
1011 до 1100 требует трехбитного переключения, и переход от 0111 до
1000 или от 1111 до 0000 требует четырех битного переключения. Если
световые датчики не выровнены вдоль радиуса диска энкодера, или если
производственные ошибки для импринтинга шаблона кода на диске,
были высокими в допустимых нормах, или воздействия на окружающую
среду, привели к большим неровностям в матрице, то бит не может пере-
ключаться с одного считывания на другое одновременно. Это приведёт к
неоднозначным считываниям в течение переходного периода. Например,
если при переходе от 0011 к 0100, младший бит (МЗР) переключится
первым, то считывание становится равно 0010. В десятичной форме, это
неправильно указывает на то, что поворот был от угла 3 до угла 2, в то
время как на самом деле, это был поворот от угла3 до угла 4. Такие не-
однозначности в распознавании данных можно избежать, используя код
Грея, как показано на рисунке 6.11б. обратите внимание, что в случае
кода Грея, каждый смежный переход включает в себя только один бит
переключения.
Для абсолютного энкодера, код Грея не является существенным со-
ставляющем для решения проблемы неоднозначности в битовой комму-
тации. Например, для данного абсолютного считывания, два смежных
абсолютных показания известны автоматически. Значение индекса мо-
жет быть проверено при помощи соотношения этих двух действующих
613
возможностей (или одной возможности, если направление вращения
известно), чтобы проверить правильность считывания. Другой подход
заключается в ведении задержки (например, триггера Шмитта) для чте-
ния выходного сигнала. Таким образом, считывание будет приниматься
только после того, как все биты переключения займут место, тем самым
устранив возможность промежуточного двусмысленного считывания.
6.6 .2 разрешение
Разрешение абсолютного энкодера ограничивается размером слова
выходных даны. В частности, смещение (позиция) разрешения задана
угловым сегментом, который также является угловым разделением меж-
ду смежными прозрачными и матовыми зонами на внешней дорожке ко-
дирующего диска.
(6.22)
Где n – число дорожек на диске (что равно числу битов в цифровом чте-
614
нии). На рисунке 6.11а, размер слова данных составляет 4 бита. Это мож-
но презентовать как десятичные числа от 0 до 15, как дано 16 сегментом
диска. В каждом сегменте, младший бит является внешним элементом, а
старший – внутренним. Прямое двоичное изображение сегментов диска
(угловых положений), приведено в таблице 6.2 . Угловое разрешение для
этого упрощенного примера (360/214)°, или 0,022°. Если n = 14, разреше-
ние дополнительно улучшается до 0,000086.
Для абсолютного энкодера, повышающая зубчатая передача может
быть использована для улучшения дискретности датчика. Тем не менее,
это имеет свои недо статки, упомянутые при рассмотрении инкремен-
тальных датчиков (например, зазоры, что дают дополнительный вес и
нагрузку, а также влекут увеличение стоимости). Кроме того, когда в
процесс включен механизм ускорения передачи, абсолютный характер
считывания будет ограничен долей вращения главного вала, в частно-
сти 360°. Мы можем преодолеть это ограничение путём подсчёта общего
оборота кодирующего диска.
Оригинальный способ улучшения разрешения абсолютного энкодера
доступен при помощи генерации вспомогательных импульсов между
битов переключения кодирующего слова. Для этого требуется вспомога-
тельная дорожка (обычно размещена в качестве самой дальней дорожки)
с лучшей передачей, чем у МЗР дорожки и некоторые средства направ-
ления зондирования (например, два световых зонда, что размещены на
расстоянии четверти один от одного, чтобы генерировать квадратурные
сигналы. Это эквивалентно инкрементальному энкодеру с более высо-
ким разрешением наряду с абсолютным энкодером, слитые в одно еди-
ное целое. Зная показания датчика абсолютного энкодера (из его коди-
рованного выхода) и направление движения (из квадратурного сигнала),
то можно определить угол, соответствующий последовательным инкре-
ментальным импульсам (с лучшей дорожки) до следующего считывания
абсолютного слова. Конечно, если сбой данных происходит между аб-
солютными показаниями, дополнительной точностью (и разрешением),
это обеспечивает потерю показателей инкрементальных импульсов.
6.6 .3 измерение скорости
Абсолютный датчик положения также может использоваться для из-
мерения скорости. Для этой цели может быть использован либо метод
импульсного отсчета времени или метод измерения угла. При первом
спо собе, интервал между двумя последовательными показаниями стро-
615
бируется (или измеряется по времени) с использованием высокочастот-
ного стробирующего сигнала, как и в случае с инкрементным датчиком.
Типичная частота стробирования составляет 1 МГц. Запуск и остановка
стробирования вызываются закодированными данными с датчика. Ци-
клы тактов подсчитываются счетчиком, как и в инкрементном датчике, и
счетчик сбрасывается (обнуляется) после каждого цикла подсчета. Угло-
вая скорость может быть вычислена на основе этих данных. Во втором
спо собе, изменение угла измеряется от одного абсолютного считывания
угла к другому, и угловая скорость вычисляется как отношение: [измене-
ние угла] / [период дискретизации].
6.6 .4 Преимущества и недостатки
Основное преимущество абсолютного датчика положения является его
спо собность обеспечить абсолютные показания угла (для полного по-
ворота 360 °). Следовательно, если считывание пропущено, то это не
повлияет на следующее считывание. В частности, цифровой выход од-
нозначно соответствует физическому вращению кодирующего диска, и,
следовательно, конкретное показание не зависит от точно сти предыду-
щего считывания. Это обеспечивает иммунитет к недостаточности дан-
ных. Пропущенный импульс (или сбой данных) в инкрементном датчике
будет нести погрешность в последующих считываниях, пока счетчик не
будет сброшен.
Инкрементный датчик должен быть включен в течение всей работы
устройства. Таким образом, сбой питания может вызвать сообщение об
ошибке, если показание не реинициализируется (или калибруется). Аб-
солютный датчик положения имеет преимущество, что он должна быть
включена и контролируем только тогда, когда берется считывание.
Поскольку матричный код на диске является более сложным в абсолют-
ном датчике положения и требуются больше датчиков света, абсолютный
датчик положения может быть почти в два раза дороже, чем инкремент-
ный. Кроме того, поскольку разрешающая способность зависит от коли-
чества присутствующих дорожек, он является более дорогостоящим для
получения более тонкого эффективного урегулирования. Абсолютный
датчик положения не требует цифровых счетчиков и буферов, однако,
если повышение разрешения не осуществляется с помощью вспомога-
тельной дорожки или импульсов синхронизации, которые используется
для расчетов. скоро сти.
616
6.7 Погрешность датчика
Погрешно сти в показаниях датчика могут исходить от нескольких факто-
ров. Основными источниками этих погрешностей являются следующие:
1. Погрешность квантования
2. Погрешность сборки (эксцентриситет вращения и т.д.)
3. Погрешно сть муфты (люфт шестерни, проскальзывание ремня, сво-
бодная посадка, и т.д .)
4. Структурные ограничения (деформация диска и вала, деформации
вследствие нагрузки)
5. Производственные допуски (погрешность из-за неаккуратно имприн-
тированных шаблонов кода, неправильное позиционирование датчиков
выключения, ограничения и нарушения в генерации сигналов в воспри-
нимающих аппаратных средствах и т.д.)
6. Окружающие эффекты (вибрация, температура, легкий шум, влаж-
ность, грязь, дым и т.д.)
Эти факторы могут привести к неточным показаниям перемещения и
скорости и ошибочного обнаружения направления движения.
Одна из форм погрешностей датчика в считывании есть гистерезис. Для
данного положения движущегося объекта, если показание датчика за-
висит от направления движения, измерение имеет погрешность гисте-
резиса. В этом случае, если объект поворачивается из положения А в
положение В и обратно в положение А, например, начальныеи конечные
показания датчика не будут совпадать. Причины гистерезиса включают
в себя зазор в зубчатых муфтах, скользящую посадка, механическую де-
формацию в коде диска и вала, задержки в электронных схемах и ком-
понентах и шумные импульсы сигналов, которые делают обнаружение
импульсов менее точными.
Необработанный импульсный сигнал с оптического датчика является
несколько нерегулярным и не состоит из совершенных импульсов, в
первую очередь, из-за вариации интенсивности света, принимаемого оп-
тическим датчиком и шума, создаваемого несовершенными источника-
ми света и фотоприемников. Шумные импульсы имеют несовершенные
края. В результате обнаружения импульса через обнаружение края мо-
жет привести к погрешностям, например, несколько точек подачи заказа
для того же импульса. Этого можно избежать, включив триггер Шмитта
(логическую схему с электронным гистерезисом) в цепь детектирования
перепада, так что небольшие неровности импульса не будут приводить
к погрешностям, при условии, что уровень шума находится в пределах
617
зоны гистерезиса триггера.
Недостатком этого способа, однако, является то, что гистерезис будет
присутствовать даже тогда, когда сам датчик идеален. Практически бес-
шумные импульсы могут быть получены, если два фотодатчики исполь-
зуются для одновременно обнаружения соседних прозрачных и непро-
зрачных областей на дорожке, и отдельный контур (компаратор) исполь-
зуется для создания импульса, который зависит от знака разности напря-
жений из двух сигналов датчиков. Этот метод формирования импульсов
был описан ранее, со ссылкой на рисунок 6.5.
6.7 .1 Эксцентричная погрешность
Эксцентриситет (обозначается е) датчика определяется как расстояние
между центром вращения C кодового диска и геометрический центр G
круговой кодовой дорожки. Ненулевой эксцентриситет вызывает по-
грешно сть измерений, известную как эксцентричная погрешность. Пер-
вичные вклады в эксцентриситет являются
1. Эксцентриситет вала (es)
2. Эксцентриситет в сборе (еа)
3. Эксцентриситет дорожки (еt)
4. Радиальный люфт (ер)
Результаты эксцентриситета вала, если вращающийся вал, на котором
установлен кодирующий диск, несовершенен, таковы что ее ось вра-
щения не совпадает с геометрической осью. Эксцентриситет сборки
вызывается, если кодирующий диск неправильно установлен на валу:
таким образом, что центр кодирующий диск не совпадает с осью вала.
Эксцентриситет дорожки происходит от нарушений в процессе имприн-
тинга кодовой дорожки, таким образом, что центр окружности дорожки
не совпадает с номинальным геометрическим центром диска. Радиаль-
ный люфт вызывается люфтом узла в радиальном направлении. Все че-
тыре из этих параметров являются случайными величинами. Пусть их
средние значения будут μs, μa, μt, и μp, а стандартные отклонения- σs,
σa, σt и σp, соответственно. Очень консервативная верхняя граница для
среднего значения общего эксцентриситета определяется суммой ин-
дивидуальных абсолютных (т.е. считаются положительными) средние
значения. Более разумная оценка обеспечивается среднеквадратическим
значением (rms), как дано
μ=μ
2
+μ2+μ2+μ2
(6.23)
618
Кроме того, если предположить, что отдельные эксцентриситеты явля-
ются независимыми случайными величинами, стандартное отклонение
общей эксцентричности задается
σ=
σ2
+σ
2
+σ
2
+σ
2
(6.24)
Зная μ среднего значения и стандартное отклонение от общего эксцен-
триситета, можно получить разумную оценку для максимального экс-
центриситета, которое может произойти. Разумно предположить, что
эксцентриситет имеет гауссово распределение (или нормальный), как
показано на рисунке 6.12 . Вероятность что эксцентриситет лежит между
двумя заданными значениями получается по площади под кривой рас-
пределения плотности в пределах этих двух значений (точек) на оси х.
В частно сти, для нормального распределения вероятность того, что экс-
центриситет лежит в пределах ц - 2σ и ц + 2s составляет 95,5%, а вероят-
ность того, что эксцентриситет лежит в пределах ц - 3σ и μ + 3σ состав-
ляет 99,7%. Мы можем констатировать факт, что, например, при уровне
доверия 99,7%, чистая эксцентричность не превысит m + 3σ.
Пример 6.5
Средние значения и стандартные отклонения четырех основных вкладов
в эксцентриситет валового датчика (в миллиметрах) распределились сле-
дующим образом: эксцентриситет вала = (0,1, 0,01); Эксцентриситет при
сборке = (0,2, 0,05); Эксцентриситет трека= (0,05, 0,001); Радиальный
Probability Density – плотность вероятности
Variable value – переменная величина
риСУНок 6.12 Гауссова(нормальная) функция распределения плотности.
619
люфт = (0,1, 0,02).
Оценить общую эксцентричность на уровне достоверности 96%.
Решение
Используя уравнение 6,23, среднее значение общей эксцентрично сти
оценивается как среднеквадратичное значение отдельных средств:
μ=
0.1
2
+ 0.2
2
+ 0.05
2
+ 0.1
2
= 0.25 mm
Используя уравнение 6.24, стандартное отклонение от общего эксцен-
триситета оценивается как
σ=
0.012
+ 0.05
2
+ 0.0012
+ 0.022
= 0.055 mm
Теперь, предполагая, что распределение является гауссовым, оценка для
общего эксцентриситета на уровне достоверности 96% определяется по
формуле:
eˆ = 0.25+2×0.055 =0.36mm
После того, как общий эксцентриситет оценивается вышеуказанным об-
разом, соответствующая погрешность измерений может быть определе-
на. Предположим, что истинный угол поворота есть θ и соответствую-
щее измерения является θm. Погрешность эксцентриситета задается
рисунок 6.13 Номенклатура погрешности эксцентриситета (С = центр враще-
ния, G = геометрический центр кодовой дорожки).
620
∆θ=θm−θ
(6.5 .1)
Рисунок 6.13 представляет максимальную погрешность, существова-
ние которой может быть доказано, когда линия эксцентричности (CG)
симметрично расположена в пределах угла поворота. Для этой конфи-
гурации теорема синусов треугольников дает sin(Δθ/2)/e = sin(θ/2)/r, где
г-код радиуса трека, который для большинства практических целей мо-
жет быть принят в качестве радиуса диска. Следовательно, погрешность
эксцентриситета задается
Интуитивно ясно, что погрешность эксцентриситета не должна вводить
измерения полных оборотов, и это можно проверить путем подстановки
θ = 2π в уравнение 6.5 .2 . Мы имеем Δθ = 0. При наличии нескольких
оборотов, погрешность эксцентриситета является периодической с пе-
риодом 2π
Арксинус небольшого количества примерно равен самой величине, в
радианах. Следовательно, при малых е, погрешность эксцентриситета в
уравнении 6.5 .2 может быть выражена как
Кроме того, при малых углах поворота, дробная погрешность эксцентри-
ситета задается
что на самом деле является в худшей возможной дробной погрешностью.
При увеличении угла вращения дробная ошибка уменьшается (как пока-
зано на рисунке 6.14), достигая нулевого значения для полного оборота.
С точки зрения грубой погрешности, худшее значение имеет место при
θ = π, что соответствует половине оборота. Из уравнения 6.5 .2 ясно, что
максимальная грубая погрешность из-за эксцентриситета задается
621
Если это значение составляет меньше половины разрешения датчика, по-
грешно сть эксцентриситета не имеет значения. Для всех практических
целей, так как e гораздо меньше r, мы можем использовать следующее
выражение для максимальной погрешности эксцентриситета:
Пример 6.6
Предположим, что в примере 6.5, радиус кодирующего диска 5 см. Оце-
ните максимальную погрешность из-за эксцентриситета., е сли каждый
трек имеет 1000 дипольных отражателей, определить, является ли зна-
чительной погрешность эксцентриситета.
Решение
При заданном уровне доверия, мы рассчитали общий эксцентриситет
= 0,36 мм. Теперь, с помощью уравнения 6.5 .5 или 6.5.6, максимальная
угловая погрешность задается
Normalized fractional eccentricity error – обычная дробная эксцентрическая
ошибка
Angle of rotation – угол поворота
рисунок 6,14 фракционная эксцентриситетная погрешность изменения угла
поворота датчика.
622
Предполагая, что квадратурные сигналы используются для улучшения
разрешения датчика, мы имеем
Resolution =
360°
= 0.09°
4 ×1000
Обратите внимание, что максимальная погрешность из-за эксцентриси-
тета больше в 10 раз разрешения датчика. Следовательно, эксцентриси-
тет будет существенно влиять на точность датчика.
Эксцентриситет инкрементного датчика также влияет на фазовый угол
между квадратурных сигналов, если используются однотрековый и два
датчика. Эта погрешность может быть уменьшена с помощью располо-
жения двух дорожек, с двумя датчиками, расположенными вдоль ради-
альной линии, так, что эксцентриситет в равной степени влияет на два
выходных сигнала.
6.8 Смешанные цифровые преобразователи
Теперь несколько других типов цифровых преобразователей, которые
полезны в инженерных приложениях, описаны. Типичные области при-
менения включают в себя конвейерные системы промышленных про-
цессов, x-y таблицы позиционирования, станки, приводы клапанов, и
другие системы хранения данных и роботизированных манипуляторов.
Для этих устройств, методы обнаружения, интерпретации, кондициони-
рования сигнала более или менее такие же, как и те, которые описаны до
этого.
6.8 .1 Бинарные преобразователи
Цифровые бинарные преобразователи являются датчиками двух состоя-
ний. Информация, представленная таким устройством, охватывает толь-
ко два состояния (вкл / выкл, присутствие / отсутствие, выше/ниже и
т.д.), которые могут быть представлены одним битом. Например, конце-
вой выключатель представляет собой датчик, который используется для
определения достиг ли объект определенного положения (или, предела),
и полезен в определении наличия / отсутствия и в подсчете объекта. В
этом смысле, концевой выключатель считается цифровым преобразо-
вателем. Дополнительная логика необходима, если также необходимо
направление контакта. Концевые выключатели доступны как для пря-
623
молинейных, так и для угловых движений. Коммерческий конечный вы-
ключатель показан на рисунке 6.15. Он может обнаруживать объекты,
идущие с любого направления (т.е . он является двунаправленным).
Предел движения может быть обнаружен с помощью механических
средств с использованием простого контактного механизма, чтобы за-
крыть схему или вызвать импульс. Хотя чисто механическое устройство,
состоящее из связей, зубчатых колес, храповых колес, предохранителей,
и так далее могут служить в качестве концевого выключателя, электрон-
ные и твердотельные переключатели обычно предпочтительны по таким
причинам, как скорость, точность, долговечность, низкие требования
активирующей силы (практически до нуля), низкая стоимость и малый
размер. Любой датчик приближения может служить в качестве чувстви-
тельного элемента концевого выключателя, для обнаружения присут-
ствия объекта. Сигнал датчика приближения затем используется, напри-
мер, чтобы активировать счетчик, в качестве механического выключате-
ля или цепи реле, или просто в качестве входного сигнала на компьютере
или цифровом контроллере для индикации положения (наличия) объект
для того, чтобы предпринять дальнейшие действия. Микровыключатель
представляет собой твердотельный выключатель, который может быть
использован в качестве концевого выключателя. Микропереключатели
обычно используются при подсчете операций, например, для того чтобы
держать подсчет готовой продукции на заводском складе.
риСУНок 6.15 Двусторонний концевой выключатель. (предоставлено Alphs
Electric, Auburn Hills, MI).
624
Существуют много типов бинарных преобразователей, которые приме-
няются в обнаружении и подсчете объектов.
Они включают
1. Электромеханические переключатели
2. фотоэлектрические устройства
3. Магнитные (эффект Холла, вихревых токов) устройства
4. Емкостные устройства
5. Ультразвуковые приборы
Электромеханический выключатель механически активируется и под-
пружинивает электрический выключатель. Контакт с прибывающего
объекта включает переключатель, таким образом замыкается цепь и про-
исходит обеспечение электрического сигнала. Этот сигнал обеспечивает
текущее состояние объекта. Когда объект удаляется, контакт теряется и
переключатель выключается с помощью втягивания пружины. Это соот-
ветствует отсутствующему состоянию.
В остальных четырех типов бинарных преобразователей, перечислен-
ных выше, сигнал (световой луч, магнитное поле, электрическое поле,
или ультразвуковые волны) порождается источником и принимается
приемником. Проходящий объект прерывает сигнал. Это событие мож-
РИСУНОК 6.16 Два структурные формы преобразователя. (А) через (противо-
положность); (Б) отражения (рефлекс); (С) перехватывающий
(вероятность).
625
но обнаружить с помощью обычных средств, с использованием сигнала,
принимаемого в приемнике. В частности, уровень сигнала, нарастающий
фронт, или падающий фронт может быть использован для обнаружения
события. Три следующих механизма излучателя-приемника являются
общими:
1. Через конфигурации
2. Отражающие (рефлекторные) конфигурации
3. Диффузные (близостные, перехватывающие) конфигурации
В основе конфигурации (рис 6.16a), приемник находится непосред-
ственно перед излучателем. В отражающей конфигурации, пара излуча-
тель-источник находится в одном пакете. Излучаемый сигнал отражается
от отражателя, который расположен напротив пакета эмиттера-приемни-
ка (Рисунок 6.16b). В диффузной конфигурации пара эмиттер-рефлектор
также в одном пакете. В этом случае обычный датчик приближения мо-
жет датчиком обнаружения присутствия объекта. (рис 6.16c), используя
сигнал от перехватывающего объекта. Когда фотоэлектрический метод
используется, светодиод может служить в качестве эмиттера а фототран-
зистор может служить в качестве приемника. Инфракрасные светодиоды
являются предпочтительными излучатели для фоторезисторов, посколь-
ку их пиковые спектральные характеристики совпадают, а также потому,
что они не зависят от окружающего света.
Многие факторы регулируют производительность цифрового преобра-
зователя для обнаружения объекта, например:
1. Рабочее расстояние между датчиком и объектом)
2. Время отклика
3. Чувствительность
4. Линейность
5. Размер и форма объекта
6. Материал объекта (например, цвет, отражательная способность, про-
ницаемость, диэлектрическая проницаемость)
7. Ориентация и выравнивание
8. Условия окружающей среды (свет, пыль, влага, магнитное поле и т.д.)
9. Сигнальные соображения кондиционирования (модуляция, демодуля-
ция, шейпинг и т.д.)
10. Надежность и конструкция
Пример 6.7
Время отклика двоичного датчика для подсчета объектов является са-
мым быстрым (самое короткое) временем, за которое преобразователь
626
должен обнаружить состояние объекта и сгенерировать сигнал подсче-
та (например, импульс). Рассмотрим процесс подсчета пакетов на кон-
вейере, как показано на рисунке 6.17. Предположим, что, как правило,
пакеты длиной 20 см располагаются вдоль конвейера на расстоянии 15
см. Временя отклика преобразователя-10 мс используется для подсчета
пакетов. Оценить показатель допустимой максимальной рабочей скоро-
сти конвейера.
Решение
Если скорость конвейера v см / мс, затем,
Package-present time =
20.0
ms
v
Package-absent time =
15.0
ms
v
Package-present time – пакет в настоящее время
Package-absent time – пакеты в отсутствующее время
При выборе датчика, мы должны использовать более короткую из этих
двух раз. Следовательно, время отклика датчика, по меньшей мере, (15,0
/об)мс→10,0≤(15,0/об)или,V≤1,5см/мс.
Edge Detector – детектор контуров
Objects – объекты
Conveyor - конвейер
РИСУНОК 6.17 Подсчет объектов на конвейере.
627
Максимально допустимая рабочая скоро сть составляет 1,5 см / мс или
15,0 м / с. Это соответствует скорости счета 1,5 / (20,0 + 15,0) пакетов /
мс или около 43 пакетов / с.
6.8 .2 Цифровой преобразователь координат
Цифровые преобразователи координат или взаимно-индукционные дат-
чики работают, как аналоговые вращающиеся трансформаторы, исполь-
зуя принцип взаимной индукции. Они известны как индуктосины. Циф-
ровой преобразователь координат имеет два диска, обращенных друг к
другу (но не в контакте), один (статор) неподвижен, а другой (ротор),
соединен с вращающимся объектом, движение которого измеряется. Ро-
тор имеет тонкую фольгу с электрическим проводником, отпечатанным
на нем, как это схематически показано на рисунке 6.18. Печатный узор в
форме импульсов, близок друг к другу, и, подключен к источнику пере-
менного тока высокой частоты напряжения vref. Диск статора имеет два
отдельных печатных узора, которые идентичны образцу ротора, но один
узор на статоре сдвигается на четверть высоты от другого рисунка (При-
мечание: шаг = расстояние между двумя последовательными гребнями
фольги). Первичное напряжение в цепи ротора вызывает напряжения в
двух вторичных (статор) фольгах на той же частоте; то есть, ротор и ста-
тор индуктивно связанны. Эти наведенные напряжения являются квадра-
турными сигналами (т.е. на 90 ° по фазе). При вращении ротора, уровень
индуцированных изменений напряжения находится в зависимости от
отно сительного положения образцов фольги на двух дисках. Когда кон-
фигурации пульсовой фольги совпадают, индуцированное напряжение
максимально (положительно или отрицательно), и, когда рисунок фоль-
ги ротора имеет половину высоты смещения от узора фольги статора,
индуцированные напряжения в смежных сегментах компенсируют друг
друга, производя нулевой выход. Выход (индуцированных) напряжений
V1 и V2 в двух пленках статора имеют компонент несущей на частоте
подачи и компонент модулирующего вращения диска. Последний (мо-
дулирующий компонент) может быть извлечен через демодуляцию (см
главы 2 и 5) и преобразовываться в соответствующий сигнал импульса с
использованием формирования импульсов схемы, как и для инкремент-
ного датчика. Когда скорость вращения ротора является постоянной, два
модулирующих компонента являются периодическими и почти синусо-
идальными, с фазовым сдвигом 90 °. Когда скорость не постоянна, дли-
тельность импульса будет меняться в зависимости от времени.
628
Как и в случае инкрементных датчиков, угловое смещение определяется
путем подсчета импульсов, а угловая скорость определяется либо путем
подсчета импульсов в течение фиксированного периода времени или по
времени импульса. Направление вращения определяется по разно сти
фаз двух модулирующих сигналов. (в одном направлении, сдвиг фазы на
90 °, а в другом направлении, то есть -90 °.) Очень тонкие постановления
(например, 0,0005 °), могут быть получены из цифрового распознавате-
ля, и, как правило, нет необходимости в использовании повышающей
передачи или других методов, чтобы улучшить разрешение. Эти датчи-
ки, как правило, дороже, чем оптические. Использование контактного
кольца, чтобы подавать сигнал несущей может рассматриваться как не-
достаток.
Рассмотрим обычный распознаватель, описанный в главе 5. Его выходы
могут быть преобразованы в цифровую форму с помощью соответству-
ющего оборудования. Строго говоря, такое устройство не может быть
рисунок 6.18 Принципиальная схема импульсного тахометра.
Supply -- подача
Slip ring with brush – колца генератора с щеткой
Rotor disk – диск ротора
Stator disk – диск статора
Secondary foil 2 – вторичная рапира
Primary foil – первичная рапира
Output - выход
629
классифицировано как цифровой распознаватель.
6.8 .4 Муаровые интерференционный полосы смещения датчиков
(муаровый узор)
Предположим, что кусок прозрачной ткани размещён на другой такой
же ткани. Если одна часть перемещается или деформирована по отноше-
нию к другой, мы заметим различные рисунки темных и светлых узоров
(линий) в движении. Такие тёмные линии называются муаровыми интер-
ференционными полосами. фактически, французский термин «moiré»
отно сится к такому типу ткани, как шелк, которая производит муаро-
вые узоры. Пример такого узора показан на рисунке 6.20. Рассмотрим
прямолинейный энкодер, который был описан ранее. Когда окно одной
щели пластины перекрывается оконными щелями другой, мы получаем
переменный свет и темный оттенок. Это особенный случай появления
муаровых полос. Устройство для создания муаровых полос можно ис-
пользовать для измерения движения твёрдого тела одной пластины дат-
чика отно сительно другой.
Применение муаровой техники не ограничивается зондированием пря-
молинейных движений. Эта технология может быть использована для
зондирования угловых движений (оборотов) и, в более общем плане,
для распределения информации (например, упругой деформации) одной
пластины относительно другой. Рассмотрим две пластины с сетками
рисунок 6.20 Модель муарового узора.
630
(оптическими линиями), что расположены на одинаковом расстоянии
р. Предположим, что первоначально сетки двух пластин в точности со-
впадают. Теперь, если одна пластина деформируется в направлении этих
линий, пропускание света через две пластины изменено не будет.
Тем не менее, если пластина деформируется в перпендикулярном на-
правлении к сетке линий, то ширина окна этой пластины будет дефор-
мироваться соответственно. В этом случае, в зависимости от характера
деформаций пластины, одни прозрачные линии одной пластины будут
полностью покрыты матовыми линиями другой пластины, так же другие
прозрачные линии первой пластины будут иметь совпадающие прозрач-
ные линии на второй пластине, таким образом, наблюдаемое изображе-
ние будет иметь тёмные линии (муаровые), в соответствии с областями
с прозрачными наложениями друг на друга двух пластин. В результате,
полученный муаровый узор предоставит модель деформации одной пла-
стины, относительно другой. Такие двумерные полосовые модели могут
быть обнаружены и могут быть предметом наблюдения матрицы опти-
ческого энкодера, используя прибор с зарядовой связью (ПЗС) и фото-
графические средства. В частности, так как муаровый узор представляет
собой двоичный фрагмент информации, двоичные методы оптического
зондирования (как оптические энкодеры), и методы цифровой обработки
изображений могут быть использованы приёмниками. Соответственно,
эти устройства могут быть классифицированы как цифровые приёмни-
ки. При помощи муаровой техники, можно реализовать очень малое раз-
решение (например, 0,002мм) так, как может быть использовано рассто-
яние между более тонкими линиями.
Для более глубокого понимания и анализа муаровых технологий, рас-
смотрим две сетчатые пластины с линиями на одинаковом расстоянии
(расстояние между окнами) р. Одну пластину будем удерживать в непод-
вижном состоянии. Эта пластина с эталонной сеткой (основной, глав-
ной). Другая пластина – это пластина, содержащая решётку (сетку) с пе-
ременным показателем преломления или образец сетки, что расположен
над неподвижной частью пластины и поворачивается таким образом, что
переменный показатель преломления образует угол с эталонной сеткой,
как показано на рисунке 6.21 . Показанные линии, на самом деле, яв-
ляются матовыми областями, одинаковыми по размеру и с одинаковым
расстоянием между окнами.
Однородный источник света размещен на одной стороне накладываю-
щихся пластин и свет, что через них проходит, можно наблюдать, с дру-
гой стороны. Тёмные полосы называют муаровыми и рассматривают как
631
результат, как показано на рисунке 6.21 .
Муаровый узор соответствует лини, что соединяет ряд точек пересече-
ния матовых линий двух пластин, потому что свет не может пройти че-
рез такие точки. Это дополнительно показано на рисунке 6.22 . следует
отметить, что в данном устройстве, линия основного тона двух пластин
одинакова и равна р. Созданная муаровая линия, показана на рисунке
6.22 пунктиром. Поскольку модель линии двух пластин идентична по
симметрии расположения, муаровая линия должна разделить пополам
тупой угол (π – а)/2, образованного пересекающимися матовыми линия-
ми. Другими словами, эта линия образует угол (π – а)/2 с неподвижными
сетками. Кроме того, вертикальное разделение (или разделение вдоль не-
подвижных сеток) муарового узора должно быть р/tan a.
В общем, оборот циферблата пластины относительно опорной пласти-
ны можно измерить путём зондирования ориентировки муаровых линий
отно сительно неподвижных сеток. Кроме того, период муаровой линии
в направлении эталонной дифракционной сетки равно р/tan a, и когда
пластина перемещается прямолинейно на одинаковых расстояниях меж-
рисунок 6.21 формирования муаровых полос.
632
ду сетками, интерференционные полосы также смещаются вертикально
на р/tan a (см. рисунок 6.22). очевидно, что прямолинейное смещение
указательной пластины может быть измерено путём измерения рассто-
яния между интерференционными полосами. В двумерной структуре
муарового узора, эти факты можно использовать в качестве локальной
информации для зондирования полного движения и деформации.
Пример 6.8
Предположим, что каждая пластина датчика деформации муарового
узора имеет высоту линии 0,01 мм. Растягивающая нагрузка приклады-
вается к одной пластине в перпендикулярном направлении к линиям.
При растяжении, наблюдается 5 муаровых узоров на расстоянии 10 см от
изображения муара. Что такое деформация при растяжении пластины?
Решение
На каждые 2 см пластины приходится одна муарная полоса (10/5 = см.).
Следовательно, расширение 2 см пластины равно 0,01мм и
рисунок 6.22 Ориентировка муаровых полос.
633
В этом примере, мы предположили, что растяжение при деформации
пластины равномерное. Под неоднородным распределением деформа-
ций, наблюдаемая картина муарного узора не будет параллельной к пря-
мым линиям, но будет иметь довольно сложные формы.
6.9 оптические энкодеры, лазеры и цифровые камеры
Есть много лазеров, использующие свет или лазер в качестве основы
для измерения. Кроме того, изображения с камеры широко используются
в целях зондирования. В данном разделе рассматриваются некоторые из
таких датчиков.
Лазер: лазер (усилитель света, что при помощи испускания излучения)
производит электромагнитное излучение в ультрафиолете, видимых
или инфракрасных диапазонах спектра. Лазер может обеспечить одно-
частотный (монохроматический) источник света. Кроме того, электро-
магнитное излучение в лазере – когерентно, в том смысле, что все ге-
нерируемые волны имеют постоянные фазовые углы. Лазер использует
колебание атомов иди молекул различных компонентов. Лазер полезен в
волоконной оптике. Но он также может быть непо средственно использо-
ван в целях зондирования и в контрольно-измерительных устройствах.
Гелиево-неоновый лазер и полупроводниковый лазер обычно использу-
ются в оптических устройствах датчиков.
Волоконно-оптические датчики: характеристика составляющей части
волоконно-оптического датчика представляет собой комплект из стекло-
волокна, который может нести свет. Каждое оптическое волокно может
иметь диаметр порядка нескольких мкм, примерно до 0,01мм. Есть два
основных типа волоконно-оптических датчиков. В косвенном типе (или
примесном), оптическое волокно исполняет роль среды, в которой дат-
рисунок 6.23 Волоконно-оптический датчик положения.
634
чик света передаёт данные. В этом типе чувствительный элемент сам
по себе не состоит из оптических волокон. Второй тип – прямой или
встроенный. Во втором типе оптическое волокно исполняет роль чув-
ствительного элемента. Когда меняются условия воспринимающей сре-
ды, свойства распространения света оптических волокон также меняют-
ся (например, из-за микроизгибов прямолинейного волокна в результате
приложенной силы), чтобы обеспечить измерение изменённых условий.
К первому типу внешних датчиков относятся волоконно-оптические
датчики положения, близости и датчики касания. Ко второму – волокон-
но-оптические гироскопы, гидрофоны, а также некоторые типы датчи-
ков микромасштабного смещения силы.
6.9 .1 волоконно-оптический датчик положения
Волоконно-оптический датчик положения (или бесконтактный датчик,
или датчик смещения) схематично показан на рисунке 6.23.
Расслоение оптического волокна разделено на две группы: передачу во-
локна и приём. Свет от источника света проходит вдоль первого пучка
волокон к целевому объекту, положение которого измеряется. Рассеян-
ный свет отражается на поверхность приёмных волокон и отводится на
фотодетектор. Интенсивность света, принимаемого фотодетектором,
будет зависеть от позиции х целевого объекта. В частности, если х = 0,
передающий пучок будет полностью перекрыт и интенсивность света на
приёмнике будет равна нулю. С ростом х, интенсивность принимаемо-
го света будет расти, по причине, что все больше и больше света будет
отражаться на вершине приёмного узла. При некотором значении х, это
позволит достичь пика. При увеличении х за пределы этого значения,
все больше и больше света будет отражаться вне приёмного узла. Сле-
довательно, интенсивность принимаемого света будет падать. В общем,
кривая близости – интенсивности для оптического датчика приближения
рисунок 6.24 Принцип работы волоконно-оптического датчика приближения.
635
будет нелинейной и будем иметь форму, показанную на рисунке 6.24 .
При помощи этой кривой мы можем определить положение х, как только
будет известна принимаема фотодатчиком интенсивность света. В каче-
стве источника света может быть использован лазер (структурирован-
ный свет), инфракрасный источник света или какой-либо другой тип,
например, светодиод. Такое устройство как фотодиод или полевой фото-
транзистор, могут быть использованы в качестве светочувствительного
датчика (светоприёмника). Этот тип волоконно-оптических датчиков мо-
жет быть использован вместе с подходящим фронтальным устройством
(например, сильфоном) для измерения давления, силы и т.д.
6.9 .2 Лазерный интерферометр
Лазерный интерферометр полезен для точного измерения малых пере-
мещений. Это применение волоконной оптики, где оптическое волокно
используется для передачи света в большей мере, чем для измерения
светочувствительности. В этом волоконно-оптическом датчике положе-
ния используется тот же пучок волокон для отправки и получения мо-
нохроматичного луча света. В качестве альтернативы, одномодовое во-
локно, которое передаёт только монохроматические излучения (волны
определённой длины), можно использовать для достижения этой цели. В
любом случае, как показано на рисунке 6.25, светоделитель (А) исполь-
зуется таким образом, что часть света отражается на вершину узла, а
другая часть света достигает целевого объекта (как показано на рисунке
6.24) и отражается обратно (используя зеркало, установленное на объек-
рисунок 6.25 Лазерный интерферометр положення.
636
те) на вершину пучка. Таким образом, часть света, что возвращается с
пучка не выходила за рамки светоделителя, в то время, как другая часть
прошла между делителем (А) и объектом (через дополнительное рассто-
яние, равное удвоенному расстоянию между делителем и объектом). В
результате, два компонента будут иметь разные фазы φ:
(6.25)
Где
х – расстояние целевого объекта от светоделителя
Λ – длина волны монохроматического света
Обратный луч направляется на датчик света, используя светодели-
тель(Б). зондируемый сигнал обрабатывается с помощью принципов
интерферометрии для определения φ и расстояния х из уравнения 6.25.
Тонкая резольвента, полученная при использовании этого типа волокон-
но-оптических датчиков лучше, нежели доля микрона.
Преимущества: к преимуществам волоконной оптики можно отнести
отсутствие чувствительности к магнитным и электрическим шумам (из-
за оптической связи); безопасную эксплуатацию при работе с высокими
температурами, при работе в коррозионных и опасных средах; высокая
чувствительность. Кроме того, проблемы механической нагрузки и из-
нашивания отсутствуют, потому что волоконно-оптические датчики по-
ложения – это бесконтактные устройства, где отсутствуют подвижные
элементы.
Недостатки: к недостаткам волоконно-оптических датчиков можно от-
нести чувствительно сти к изменениям интенсивно сти источника света и
зависимость от условий внешней среды (температура, пыль, влага, дым
и т.д.) . Уравнять всё это можно, учитывая температуру.
Характеристика волоконно-оптического датчика: в качестве внутренне-
го применения волоконной оптики в зондировании, рассмотрим прямой
оптический элемент волокна, которой поддерживается на обоих концах.
В этой конфигурации, почти 100% света в конце источника будет пере-
даваться через оптическое волокно и достигать конца детектора (приём-
ника). Теперь предположим, что небольшая нагрузка прикладывается к
небольшому сегменту волокна в середине. Он будет слегка отклоняться
из-за нагрузки, и в результате, количество получаемого детектором све-
637
та может значительно снизиться. Например, микроотклонение всего на
50 мкм, может привести к снижению коэффициента интенсивности на
детекторе на 25. Такое расположение может быть использовано при зон-
дировании преломления, силы и тактильном зондировании. Ещё одним
внутренним составляющим элементом есть волоконно-оптический ги-
роскоп, как описано далее.
6.9 .3 волоконно-оптический гироскоп
Это датчик угловой скорости, в котором используется оптоволоконный
кабель. Вопреки своему названию, это не гироскоп в обычном смысле
этого слова. В этом датчике используются две петли оптического волок-
на, обёрнутые вокруг цилиндра, что вращаются вместе с цилиндром с
той же угловой скоростью, которую нужно измерить. Один цикл несет
монохроматический свет (или лазерный луч) в направлении по часовой
стрелке, а другой несёт луч от того же источника света в направлении
против часовой стрелки (рис. 6 .26). поскольку лазерный луч идёт по од-
ному направлению с вращением цилиндра, то таким образом он достига-
ет более высокой частоты, нежели другой луч. Разница в частоте (извест-
на как эффект Саньяка) двух лазерных лучей, полученный в одном месте
будет измерять угловую скорость цилиндра. Этого можно достигнуть
при использовании интерферометрии, так как объединенные сигналы –
это синусоидальный толчок.
В результате, светлые и тёмные узоры (полосы) должны присутствовать
в обнаруженном свете, и они будет измерять разность частот и в след-
рисунок 6.26 Волоконно-оптический лазерный гироскоп.
638
ствии скорость вращения оптических волокон.
В лазерном (кольцевом) гироскопе, лазеру не обязательно иметь круго-
вую траекторию. Треугольные и квадратные траектории также использу-
ются. В общем частота биения ΔѠ комбинированного света двух лучей,
распространяющихся в противоположных направлениях, задаётся фор-
мулой:
(6.26)
Где
А – закрытая площадь пути перемещения (πr2 для радиуса цилиндра r),
p – длина (периметр) пройденного пути (для цилиндра – 2π r).
Λ – длина волны лазера
Ω – угловая скорость объекта (или оптического волокна)
Длина оптического волокна, намотанного вокруг цилиндра может пре-
вышать 100 м и даже достигать 1 км. Угловое смещение можно измерить
с помощью лазерного гироскопа, путём подсчёта количества циклов и
хронометрирующий частей цикла. Ускорение можно определить при
помощи цифрового определения коэффициента изменения скорости. В
лазерном гороскопе существует альтернативный способ использования
двух раздельных витков оптического волокна, намотанных в противо-
положном направлении. Тот же виток можно использовать для передачи
света с противоположных концов волокна от того же лазера. Светодели-
тель должен использоваться в данном случае так, как показано на рисун-
ке 6.26.
6.9 .4 Лазерный доплеровский интерферометр
Лазерный доплеровский интерферометр используется для точного из-
мерения скоро сти. Он основан на двух явлениях: эффект Доплера и ин-
терференция световых волн. Последнее явление используется в датчике
положения лазерного интерферометра, который обсуждался ранее. Для
того, чтобы объяснить прежнее явление, рассмотрим источник излуче-
ния (например, источник света или источник звука), который движется
относительно приемника. Если источник движется в том же направле-
нии, что и приемник, то частота принимаемой волны увеличивается;
если источник движется в противоположном направлении от приемника,
639
частота принимаемой волны уменьшается. Изменение частоты пропор-
ционально скорости источника относительно движений приемника. Это
явление известно, как эффект Доплера.
Теперь рассмотрим монохроматическую (одночастотную) световую
волну с частотой Δf (скажем, 5 Ч 1014 Гц), излучаемую лазерным источ-
ником. Если это луч принимается световым детектором и отражается
целевым объектом, частота принимаемой волны будет F2 = F + f. Увели-
чение частоты ΔF будет пропорционально скорости V целевого объек-
та, который считается положительным при движении по направлению к
источнику света. В частности,
(6.27)
где с – скорость света в конкретной среде (как правило, воздухе). Те-
перь, сравнивая частоту f2 отраженной волны, с частотой f1 = F исход-
ной волны, мы можем определить F и, следовательно, скорость целево-
го объекта. Изменение частоты F в следствии эффекта Доплера можно
определить путем наблюдения интерференционной картины благодаря
интерференции световых волн. Чтобы понять это, рассмотрим две волны
v1 = синусоидальную 2πf1t и v2 = синусоидальную 2πf2t. Если мы со-
вместим эти две волны, в результате получим волну V = V1 + V2 = а (sin
2πf1t + sin 2πf2t), которая может быть выражена следующим образом:
(6.28)
Из этого следует, что объединенный сигнал биения и частоты равен F /
2. Поскольку f2 очень близок по своему значению к f1, эти удары будут
проявляться в виде темных и светлых линий (полос) в результате свето-
вой волны. Это явление известно, как интерференция волн. Изменение
частоты F можно определить двумя способами:
1. Путем измерения расстояния между полосами
2. Путем подсчета биения в заданном временном интервале или при
помощи синхронизации последовательных ударов, используя высокоча-
стотный тактовый сигнал.
Скорость целевого объекта определяется таким же образом. Смещение
можно получить путем цифровой интеграции (или путем накопления по-
640
казателя).
Схематическая диаграмма для лазерного доплеровского интерфероме-
тра показана на рисунке 6.27. Промышленные интерферометры обычно
используют гелиево-неоновый лазер, который имеет волны двух частот,
что расположены близко друг к другу. В этом случае, устройство, пока-
занное на рисунке 6.27 должен быть изменено, чтобы во внимание при-
нимались две частотные составляющие.
Примечание: лазерный интерферометр, обсуждаемый ранее (рис 6.25)
измеряет непосредственно смещение, а не скорость. Он основан на из-
мерении разных фаз между прямым и возвращающимся лазерными лу-
чами, а не на эффекте Доплера (на эффекте разницы частот).
6.9 .5 Световые датчики
Световые датчики на основе полупроводника, так же, как и источни-
ки света необходимы в оптоэлектронике. Светочувствительный датчик
(также известный как фотодетектор или фотодатчиком) представляет
собой устройство, чувствительное к свету. Обычно он является частью
электрической цепи при сопутствующем формирования сигнала (уси-
рисунок 6.27 Лазерный интерферометр Доплера для измерения скорости и пе-
ремещения.
641
лении, фильтрации и т.д.), в следствии чего получается электрический
сигнал, характеризующий интенсивность света, который падает на фо-
тодатчик. Некоторые фотодатчики могут служить в качестве источников
энергии. фотодатчик может быть неотъемлемым компонентом оптопа-
ры или другой оптически связанной системы. В частности, оптический
разветвитель обычно имеет светодиодный источник света и фотодатчик
в одном пакете, с проводами для подключения к другим цепям, а также с
проводами питания.
По определению, цель фотодетектора или фотодатчика – воспринимать
видимый свет. Но есть много применений фотодетектора, где зондиро-
вание смежных полос электромагнитного спектра, а именно инфракрас-
ных излучений и ультрафиолетовых излучений, было бы полезным.
Например, поскольку объекты излучают приемлемый уровень инфра-
красного излучения даже при низких температурах, инфракрасное зон-
дирование может использоваться в визуализации объекта в темноте.
фотодетекторы могут быть использованы в инфракрасной фотографии,
системах безопасности и системах наведения ракет. Кроме того, инфра-
красное излучение, по сути, – это тепловая энергия; ИК-датчики могут
быть использованы в системах терморегулирования. Ультрафиолетовое
зондирование не так широко используется, как инфракрасное. Кроме
того, эти частотные поло сы не повреждаются окружающим светом.
Как правило, фотодатчик представляет собой резистор, диод или тран-
зисторный элемент, который приводит к изменениям (например, генера-
ции напряжения или изменениям сопротивления) в электрической цепи,
в ответ на свет, который падает на чувствительный элемент. Мощность
выходного сигнала, в основном, можно получить из источника питания,
который подает напряжение электрической цепи. Следовательно, они
являются активными датчиками. В качестве альтернативы, фотоэлемент
можно использовать как фотодатчик. В этом последнем случае энергия
света, падающего на элемент, преобразовывается в электрическую энер-
гию выходного сигнала. Следовательно, фотоэлементы - это пассивные
датчики (или источники энергии). Как правило, фотодатчик - это кро-
шечный цилиндрический элемент с головкой датчика, состоящий из кру-
глого окна (линзы). Несколько типов фотоприемников описаны далее.
6.9 .5 .1 Фоторезистор
фоторезистор (или фотопроводник) обладает свойством уменьшения
642
своего электрического сопротивления (увеличение проводимости), так
как увеличивается интенсивность света, падающего на него. Как пра-
вило, сопротивление фоторезистора может меняться от очень высоких
значений (МОм) при темноте до достаточно низких значений (менее
100 Ω) при ярком свете. В результате, возможна очень высокая чувстви-
тельность к свету. Некоторые фотоэлементы могут функционировать в
качестве фоторезисторов, потому что их сопротивление уменьшается
(увеличивается производство) по мере увеличения интенсивно сти света.
фотоэлементы, что используются таким образом, называются фоторе-
зисторами. Схема фоторезистора дана на рисунке 6.28а. фоторезистор
можно создать, поместив фотопроводящий кристаллический матери-
ал, такой как сульфид кадмия (CdS) или селенид кадмия (CdSe) между
двумя электродами. Сульфида свинца (PbS) или селенид свинца (PbSe),
можно использовать для создания инфракрасного фоторезистора.
6.9 .5 .2 Фотодиод
фотодиод – это узел полупроводникового материала, который произ-
водит связанные электронно-дырочные пары, экситоны в ответ на свет.
Рисунок 6.28 Циклы некоторых фотодатчиков. (а) фоторезистор, (b) фотодиод,
(с) фототранзистор, (d) полевой фототранзистор, (е) фотоэлемент.
643
Обозначение фотодиода показано на рисунке 6.28b. Доступны два типа
фотодиодов. фотогальванический диод генерирует достаточный по-
тенциал на переходе в ответ на падающий на него свет. Следовательно,
внешний источник смещения не является необходимым для фотоэлек-
трического диода. фотопроводящий диод переносит изменение сопро-
тивления на переходе в ответ на фотоны. Этот тип фотодиод работает
образом обратного смещения; р-провод диода подключен к отрицатель-
ному проводу схемы, а n-провод подсоединен к положительному прово-
ду цепи. Условия распределения могут происходить при напряжении в
10В, соответствующий ток будет почти пропорционален интенсивно сти
света, падающего на фотодиод. Следовательно, этот ток может быть ис-
пользован в качестве меры для интенсивности света. Чувствительность
фотодиода довольно низка из-за процессов обратного смещения. Так как
уровень выходного тока, как правило, низкий (доли миллиампер), мо-
жет быть необходимо усиление, перед использованием его в последую-
щем применении (например, передачи сигнала, приведения в действие,
управления, отображения). Полупроводниковые материалы, такие как
кремний, германий, сульфид кадмия и селенид кадмия обычно использу-
ются в фотодиодах. фотодиоды имеют большую скорость отклика. Диод
со слоем с собственной проводимо сти может обеспечить еще более бы-
стрый отклик, чем обычный pn диод.
6.9 .5 .3 Фототранзистор
Любой полупроводниковый фотодетектор со схемой усиления, встро-
енной в тот же пакет (чип) часто называют фототранзистором. Следова-
тельно, фотодиод с схемой усилителя в одном устройстве можно было
бы также назвать фототранзистором. фототранзистор изготавливает-
ся в виде обычного транзистора биполярного перехода с основой (В),
коллектором (С) и выводом эмиттера (Е). Символическое изображение
фототранзистора показано на рисунке 6.28c. Это npn транзистор. Осно-
ва – центральная область фототранзисторного элемента. Коллектор и
эмиттер являются двумя концевыми областями (n) элемента. В процессе
работы транзистора коллекторный переход смещен в обратном направ-
лении (то есть, положительный провод цепи соединен с коллектором и
отрицательный провод схемы соединен с базой транзистора npn). В ка-
честве альтернативы, фототранзистор может быть подключен, как два
терминальных устройства, к своему плавающему базовому терминалу
и терминал коллектора оказывает правильное влияние (положительное
644
для npn транзистора). Для заданного уровня источника напряжения, кол-
лекторный ток (ток, что проходит по проводам коллектора) ic почти про-
порционален интенсивности света, падающего на коллекторный переход
транзистора. Следовательно, ic может быть использован в качестве меры
для интенсивности света. Германий или кремний являются полупрово-
дниковыми материалами, которые обычно используются в фототранзи-
сторах.
6.9 .5 .4 интегрированная технология с эффектом полевого фото-
транзистора
Полевой фототранзистор аналогичен по отношению к стандартному
Пф. Это показано на рисунке 6.28d, для канала n в Пф. Он состоит из
полупроводникового элемента типа n (например, кремния, легированно-
го бором), и называется каналом. Намного меньший элемент материала
типа n прикреплён к элементу типа n. Провод элемента типа n образует
затвор (G). Дренаж (D) и источник (S) являются двумя проводами в кана-
ле. Работа полевого транзистора зависит от электростатических полей,
создаваемых потенциалом прикладных проводов Пф. При работе Пф
затвор смещен в обратном направлении. Когда свет проецируется на за-
твор, текущий дренаж будет увеличиваться. Следовательно, ток дренажа
(ток провода D), можно использовать в качестве меры для интенсивно-
сти света.
6.9 .5 .5 Фотоэлемент
фотоэлементы подобны фотодатчикам за исключением того, что фотоэ-
лемент используется в качестве источника электроэнергии, а не датчика
излучения. Солнечные элементы, которые являются более эффектив-
ными при солнечном свете, обычно доступны. Типичный фотоэлемент
представляет собой полупроводниковый элементный переход, выпол-
ненный из материала, такого как монокристаллический кремний, поли-
кристаллический кремний и сульфид кадмия. Выстроенные элементы
используются в приложениях умеренной мощности. Типичная выходная
мощность со ставляет 10 мВт / см2 на площадь поверхности, с потенци-
алом около 1,0 В. Цепь фотоэлемента показана на рисунке 6.28e.
645
6.9 .5 .6 Прибор с зарядовой связью ПЗС
ПЗС представляет собой интегральную схему (монолитное устройство)
полупроводникового материала. ПЗС сделаны из кремния, схематически
представлены на рисунке 6.29. Кремниевая пластина (р-типа или n-типа)
окисляется, чтобы генерировать слой диоксида кремния на свою по-
верхность. Матрица металлических электродов осаждается на оксидный
слой и соединена с выходными проводами ПЗС. Когда свет падает на
ПЗС-элемент (от объекта), заряды пакета генерируются внутри подлож-
ки кремниевой пластины. Теперь, если внешний потенциал приложен к
конкретному электроду ПЗС, потенциальная яма формируется под элек-
тродом и заряды пакета оседают здесь. Этот заряд пакета может переме-
щаться по ПЗС в выходной цепи путем последовательного включения
электродов с использованием импульсов внешнего напряжения.
Такие заряды пакета соответствует пикселю (изображению элемента)
изображения объекта. Выходная схема - это видеосигнал изображения.
Скорость импульса может быть выше, чем 10 МГц. ПЗС-матрицы обыч-
но используются в целях визуализации, в частности, в камерах. Типич-
ный ПЗС элемент передней области нескольких квадратных сантиметров
может обнаружить 576 × 485 пикселей, но более крупные элементы (на-
пример, 4096 × 4096 пикселей) до ступны для обнаружения также. При-
рисунок 6.29 ПЗС.
646
бор с инжекцией заряда (ПИЗ) подобен ПЗС. Тем не менее, в ПИЗ су-
ществует матрица пар полупроводникового конденсатора. Каждая пара
конденсатора может быть непосредственно направлена через импульс
напряжения. Когда конкретный элемент направлен, потенциальная яма
будет сокращаться, тем самым вводить меньшую часть носителя в под-
ложку. Соответствующий сигнал, списывается из подложки, формируя
видеосигнал. Уровень сигнала ПИЗ, существенно меньше, чем у ПЗС,
из-за большей ёмкости.
6.9 .6 Датчики изображения
Изображение объекта действительно является ценным источником ин-
формации об этом объекте. В этом контексте, устройство формирования
изображения представляет собой датчик. В зависимости от устройства
формирования изображения, может быть много разновидностей изо-
бражений, таких как оптические, тепловые или инфракрасные, рентге-
новские, ультрафиолетовое, акустические, ультразвуковые, и так далее.
Поскольку методы обработки изображений весьма схожи в этих устрой-
ствах, мы будем рассматривать здесь только цифровую камеру в каче-
стве датчика изображения. Это очень популярное оптическое устройство
формирования изображения, которое используется в различных инже-
нерных приложениях, таких как технический контроль процесса и виде-
ние робототехники.
6.9 .6 .1 обработка изображений и компьютерное зрение
Изображение может обрабатываться (анализироваться) с целью получе-
ния более очищенных изображений, из который можно получить такую
важную информацию про края, контуры, области, и другую геометриче-
скую информацию. Это называется обработкой изображений. Компью-
терное зрение выходит за рамки обработки изображений и выполняет
такие операции, как распознавание объектов, распознавания образов и
классификация, абстрагирование, и принимает основанные на получен-
ных знаниях решения использовать информацию, извлеченную посред-
ством обработки изображений. Отсюда следует, что компьютерное зре-
ние выполняет более высокие уровневые операции, нежели обработка
изображений и это похоже на человеческие выводы, сделаны на основе
того, что они видят.
647
6.9 .6 .2 Сенсорная система на основе изображения
Полный комплект такой системы состоит из камеры (например, ПЗС-ка-
меры или камеры на КМОП-структурах), системы сбора данных (напри-
мер, видео-захвата), компьютера и соответствующего программного
обеспечения. Такая система схематически показана на рисунке 6.30 . На
рисунке не показаны другие полезные компоненты, такие как структури-
рованный источник освещения, который может быть необходим, чтобы
захватить хорошее качество и четкие изображения, без теней и так далее.
6.9 .6 .3 камера
Цифровая камера имеет матрицу полупроводниковых элементов, чув-
ствительных к яркости света, поступающего от объекта (через объектив
камеры). Датчик изображения современных цифровых камер обычно ис-
пользует технологию ПЗС или технологию на КМОП-структурах. Менее
распространены такие технологии как ПИЗ. Датчики изображений ка-
меры на КМОП-структурах – менее дорогие, поскольку они используют
одни и те же процессы, что и для массового производства интегральных
схемах (ИС) микросхем, и они потребляют меньше энергии. Кроме того,
такие датчики можно рассматривать, как матрицу цифровых элементов,
которые соответствуют элементам изображения (пикселям), что доступ-
ны непосредственно для получения данных изображения. С другой сто-
роны, сформированные заряды в ячейках матрицы ПЗС извлекаются
последовательным образом, а затем оцифровываются для формирования
изображения. Технология ПЗС – более продумана и создает изображения
лучшего качества, нежели технология КМОП. Тем не менее, как толь-
Рисунок 6.30 Сенсорная система на основе изображений
648
ко цифровая камера создает изображение, получается и обрабатывает-
ся с помощью компьютера таким же образом, независимо от того, какая
технология используется в датчике изображения. По этой причине, мы
будем рассматривать только датчики изображения ПЗС в последующем
обсуждении.
6.9 .6 .3 .1 Датчик изображения ПЗС
Предположим, что двумерный (2D), луч света, идущий от воспринятого
объекта и направленный в объектив камеры с ПЗС-матрицей (напри-
мер, 4000 Ч 4000), расположен в фокальной плоскости линзы в задней
части камера. Каждая ячейка ПЗС датчика генерирует заряд, который
пропорционален яркости света. Устройство интегральной схемы в каме-
ре читает эти уровни заряда из ряда ячеек по строкам (последовательно
от основания до верхнего ряда) через операции движущегося ряда, что
контролируются и синхронизируются с часами, а также управляются
другими программными обеспечениями. Аналоговый сигнал от каждой
ячейки ПЗС превращается в цифровую форму и представляется в каче-
стве элемента изображения или пикселя. Число битов в пикселе - это
уровень яркости, который он может хранить. Например, 8-битовый ( 28
= 256 ) пиксель может хранить уровень яркости от 0 до 255 (от черного к
белому). Процесс формирования пикселей 2D-изображение представлен
на рисунке 6.31.
рисунок 6.31 формирование цифрового изображения при помощи ПЗС камеры.
649
6.9 .5 .4 Фото-Фет
фотополевой транзистор похож на обычный фет – транзистор. Символ,
показанный на рис. 6 .28 (d) - для N-канала фото-фет. Он состоит из по-
лупроводника N-типа элемента (например, кремний с примесью бора),
и называется каналом. Значительно меньший элемент p-типа присоеди-
нен к N-типа элементу. Ведущий p -Типа элемент - в форме ворот (г).
Сток (D) и источник (s) - два провода на канале. Время обслуживания
фет – транзистора зависит от электростатических полей, создаваемых
потенциалами в случае работы фет. Во время эксплуатации фотополево-
го транзистора отрицательный потенциал на затвор подается N-каналом
фото-фет Когда свет проецируется на ворота, ток стока будет увеличи-
ваться. Следовательно, ток стока (ток в D свинец) может быть использо-
ван в качестве измерения интенсивности света.
6.9 .5 .5 Фотоэлемент
фотоэлементы похожи на фотодатчики за исключением того, что фотоэ-
лемент используется в качестве источника электроэнергии, а не датчика
радиации. Более доступными считаются солнечные батареи, которые
эффективны при солнечном свете. Типичный фотоэлемент представляет
собой полупроводниковый элемент, составные элементы которого изго-
товлены из таких материалов, как кремний монокристалл, поли - кри-
сталлический кремний и сульфид кадмия. Ячейки массивов используют-
ся с умеренной мощностью. Типовая выходная мощно сть составляет 10
МВт/см2 на площадь поверхности, с потенциалом около 1,0 В. Символ
- схема фотореле представлена на рис. 6 .28 е.
6.9 .6 .6 Прибор с зарядовой связью
Прибор с зарядовой связью представляет собой совокупность структур,
сформированных на общей полупроводниковой подложке. ПЗС изготов-
лен из кремния. Схематически это представлено на рис. 6 .29. Кремние-
вой пластины (Тип p или N - типа) окисляется, чтобы создать слой SiO2
на поверхности. Матрица металлических электродов, нанесенных на
оксидный слой, связана с ПЗС - выходом. Когда свет попадает на ПЗС
- элемент (от объекта), заряд - пакеты формируются в подложке кремни-
евой пластины. Теперь, если подать небольшой положительный потен-
циал на один из электродов ячейки ПЗС, а два других электрода оставить
650
под нулевым потенциалом относительно подложки, на языке энергети-
ческих диаграмм это означает, что под электродом формируется потен-
циальная яма.
Этот заряд - пакет может перемещаться по ПЗС в выходной цепи после-
довательно, подавая сигнал на электроды с помощью импульсов внеш-
него напряжения. Такой заряд - пакет соответствует пикселю (элементу
изображения) изображения исследуемого объекта. Схема вывода виде-
осигнала изображения. Коэффициент пульсации может быть выше 10
МГц. ПЗС - матрицы обычно используются в приложениях обработки
изображений, о собенно в камерах. Типичный ПЗС - элемент с лицевой
области в несколько квадратных сантиметров может обнаружить не
только 576 × 485 пикселей, но более крупные элементы (например, 4096
× 4096 пикселей). Заряд - устройство светоизлучающий диод похоже на
ПЗС. Но в СИД есть матрица пар полупроводниковых конденсаторов.
Каждая пара в конденсаторе может напрямую зависеть от импульсов
напряжения. Когда рассматривается конкретный элемент, потенциал со-
кращается, тем самым впрыскивая нео сновных носителей в подложку.
Соответствующий сигнал, выпущенный из подложки, образует видео-
сигнал. Уровень сигнала СИД существенно ниже чем у ПЗС из - за более
высокой емкости.
Рис. 6 .29, а прибор с зарядовой связью (ПЗС).
651
6.9 .6 .7 Датчики изображения
Изображение объекта является действительно ценным источником ин-
формации об этом объекте. Поэтому устройство формирования изобра-
жения представляет собой и датчик, и изображение зондируемых дан-
ных. В зависимости от принципа получения изображения, оно может
быть различных видов. Например, оптического, теплового, или инфра-
красного, рентгеновского, ультрафиолетового, акустического, ультразву-
кового и др. Поскольку методы обработки изображения весьма похожи,
среди этих устройств визуализации здесь в качестве сенсора мы будем
рассматривать только цифровые камеры. Это очень популярный опти-
ческий прибор визуализации, который используется в различных техни-
ческих приложениях, таких как контроль промышленных процессов и
наблюдение за управляемыми роботами.
6.9 .6 .1 обработка изображений и машинного зрения
Изображение обрабатывается (анализируется) для получения более изы-
сканного образа, из которого можно выделить такую информацию, как
кромки, контуры, геометрические области и др. Это называется обра-
ботка изображения. Компьютерное зрение выходит за рамки обработки
изображений и выполняет такие операции, как распознавание объектов,
распознавание образов и классификация, абстракция, на основе зна-
ний и принятия решений с использованием информации, извлеченной
посредством обработки изображения. Из этого следует, что компьютер
включает операции более высокого уровня, чем обработка изображения
и сродни тому, что могут предположить люди, основываясь на том, что
они видят.
6.9 .6 .2 изображения на основе сенсорной системы
Целостный образ на основе сенсорной системы состоит из камеры (на-
пример, камера CCD или CMOS камеры), система сбора данных (напри-
мер, устройство автоматического поиска), компьютер и соответствующее
программное обеспечение. Такая система схематически показана на рис.
6.30 . В рисунок не включен такой компонент, как структурированный
источник света, который может понадобиться, чтобы захватить хорошее
качество и четкое изображение, без теней и прочее
652
Датчик
изображения
(цифровая
камера)
Аппаратные средства
получения
изображения
(платы
видеозахвата)
Процессор
обработки
изображений
(цифровой
компьютер)
Рисунок 6.30 на о снове камеры сенсорной системы.
6.9 .6 .3 камеры
Цифровой фотоаппарат имеет массив или матрицу полупроводниковых
элементов, чувствительных к яркости света, идущего от объекта (через
объектив). Матрицы современных цифровых камер обычно использует-
ся в приборе с зарядовой связью (ПЗС) технологии или к технологии
комплементарного металло - оксидного полупроводника (КМОП). Менее
распространенные технологии, такие как стоимость устройства впрыска
(СИД) не найдено. КМОП - датчиков изображения являются менее доро-
гими, потому что они используют те же процессы, которые используют-
ся для массового производства интегральных схем (ИС) фишки, и они
используют меньше энергии. Кроме того, CMOS-датчик изображения,
может рассматриваться как матрицы цифровых элементов, соответству-
ющих элементов изображения (пикселей), которые могут быть доступны
напрямую (параллельно) для извлечения данных изображения. С другой
стороны, генерируемых зарядов в ячейках ПЗС - датчик изображения по-
лучаются в несколько последовательных моды и оцифровываются для
формирования изображения. Технология CCD является более зрелым и
создает лучшее качество изображения, чем у КМОП - технологии. Одна-
ко после того, как цифровая фотокамера создает изображение, оно может
быть приобретено и обработано компьютером в той же форме (напри-
мер, с помощью платы видеозахвата или USB-соединение) независимо
от того, какая технология используется в датчике изображения. По этой
причине, мы будем рассматривать только датчики ПЗС в последующем
обсуждении.
6.9 .6 .3 .1 CCD Сенсор изображения
Предположим, что двумерный (2-д) луч света, идущий от лоцируемого
объекта, направляется в объектив камеры на ПЗС - матрице (например,
4000 × 4000), расположенный в фокальной плоскости линзы в задней
653
части камеры. Каждая ячейка ПЗС - сенсор генерирует заряд, пропор-
циональный яркости света. устройства интегрированной цепи в камере
читает эти уровни заряда - строки ячейки по строкам (от нижнего до
верхнего ряда, последовательно) через строку, перенося деятельность,
регулируется и синхронизируется с часами другого оборудования. Ана-
логовый сигнал от каждой ПЗС - ячейки оцифрована и представлена как
элемент картинки или пикселя. Количество бит в пикселе является пред-
ставителем количества уровней серого, которое он может хранить. На-
пример, 8-битный пиксель может представлять 28 = 256 уровней серого
от 0 до 255 (от черного до белого). Эта процедура генерации пикселей
2-D изображения представлена на рис. 6 .31.
6.9 .6 .4 Захвата фрейма изображения
Пиксели изображения из буфера камеры на ПЗС группируются во фрей-
ме изображения цифровых данных и передаются на компьютер обра-
ботки изображения. Это устройство сбора данных (часто называемое
платой захвата изображения), может быть помещено в каркас для плат
компьютера обработки изображений. При установке соответствующего
программного обеспечения драйвера на компьютере, изображения ста-
новятся доступными при высокой скорости (например, 200 Мб/с). С по-
мощью USB-камеры, процесс получения потока изображений через USB
Рисунок 6.31 Поколение цифрового изображения с помощью ПЗС - камеры.
654
может осуществляться в удобной форме. Процесс довольно медленный,
когда изображения копируются из памяти камеры в память компьютера в
качестве процесса передачи файла под управлением компьютера.
6.9 .6 .5 Цветные изображения
Полутеневое изображение может быть представлено посред-
ством одного фрейма изображения. С другой стороны, как мини-
мум три фрейма необходимо для представления цветного изобра-
жения. Например, в модели RGB, красное (R) изображение, зеленое
(G) изображение, и синее (B) изображение формируются с помощью
красного, зеленого и синего фильтров. В результате три отдельных
фрейма изображения могут быть объединены, чтобы получить исход-
ный цвет изображения. Хотя человеческий глаз весьма чувствителен
к цветам R, G и B, люди не могут, как правило, воспринимать / опи-
сывать зрительный образ с точки зрения их компонентов RGB. С точ-
ки зрения человеческого восприятия/описания визуального образа,
более подходящей является модель HIS. В этой модели оттенок (H)
представляет доминирующий цвет в изображении, насыщенность
(S) обозначает степень смешения белого света с доминирующим цветом
на изображении, и интенсивность (I) представляет собой уровень ярко-
сти изображения. Существуют аналитические соотношения для преоб-
разования модели RGB в модель HIS.
6.9 .6 .6 обработка изображения
В камере существует некий элемент для аналоговой обработки изобра-
жения, который осуществляется электроникой (например, аналоговая
фильтрация и усиление). Однако, сейчас приоритетным является циф-
ровая обработка изображений на компьютере. Цель цифровой обработки
изображения - удалить ненужные элементы и искажения в изображении,
усилить важные характеристики и извлечь необходимую геометриче-
скую информацию из обрабатываемых данных. Вот несколько полезных
операций обработки изображения:
1. фильтрация (для удаления искажений и улучшения изображения), в
том числе направленная фильтрация (усиление края, для выделения кон-
туров).
2. Определение порога (для создания двухуровневого черно-белого изо-
бражения, где серые уровни выше заданного порога задаются белыми, а
655
ниже порогового значения задаются черными).
3. Сегментация (для разделения улучшенного изображения, определения
геометрических фигур/объектов и свойства захвата, такого как площадь
и размеры определенных геометрических объектов).
4. Морфологическая обработка (последовательное сжатие, фильтрация,
растяжение и т. д. чтобы сократить нежелательные компоненты изобра-
жения и извлечь те, которые являются наиболее важными).
5. Изъятие (например, изъятие фона, который формирует изображение).
6. Шаблон (для сопоставления обрабатываемого изображения с шабло-
ном — полезно в обнаружении объекта)
7. Сжатие (для уменьшения количества данных, которые необходимы
для отображения полезной информации изображения).
6.9 .6 .7 Некоторые приложения
Приложения сенсоров на основе анализа изображения весьма разноо-
бразны. Некоторые выглядят так:
1. Измерение местоположения объекта для вырезания, захвата, манипу-
Рисунок 6.32 Схематическое представление датчика Холла.
Выходной сигнал
656
лирования и т. д .
2. Измерение/оценка размера, формы, веса, цвета, текстуры, твердости и
т. д. для оценки качества и классификации продукции.
3. Визуальное обслуживание. Здесь измеряется фактическое положение
объекта (с помощью изображения с камеры) и сравнивается с положени-
ем роботизированного рабочего органа (захват, рука, инструмент и т. д.).
Разница (ошибка) используется для создания команды движения робота,
таким образом, что рабочий орган достиг объекта. Такой же подход мо-
жет быть использован в навигации мобильных роботов и автоматиче-
ских транспортных средств.
4. Распознавания объектов в различных приложениях безопасности, пре-
дохранения, контроля работоспособности и автоматизированной обра-
ботки.
5. В области телемедицины – для дистанционного обследования паци-
ента.
6.10 различные сенсорные технологии
Несколько других датчиков, которые используются в инженерных при-
ложениях, таких как датчик Холла, ультразвуковой датчик, магнито-
стрикционный датчик, и датчик импеданса обговариваются далее.
Рисунок 6.33 кодовый датчик углового положения с эффектом Холла или циф-
ровой тахометр.
657
6.10.1 Датчик с эффектом Холла
Рассмотрим полупроводниковый элемент, на который действует напря-
жения постоянного тока vref
. Если магнитное поле направлено перпенди-
кулярно к направлению этого напряжения, напряжение vo будет сфор-
мировано в третьем ортогональном направлении в полупроводниковом
элементе. Это известно, как эффект Холла (открыт Е.Х. Холлом в 1879).
Схематическое представление датчика Холла показано на рис. 6 .32.
6.10.1 .1 Датчики движения с эффектом Холла
Датчик на основе эффекта Холла может быть использован для обнаруже-
ния движения различными способами; например, как аналоговый датчик
приближения, концевой переключатель (цифровой), или кодовый датчик
углового положения. Так-как выходное напряжение vo растет, в то вре-
мя как расстояние от источника магнитного поля на полупроводниковый
элемент уменьшается, выходной сигнал vo может быть использован как
мера приближения. Это принцип, лежащий в основе аналогового датчи-
ка приближения. Кроме того, определенное пороговое значение уровня
выходного напряжения vo может быть использовано для создания дво-
ичного выходного сигнала, который отображает присутствие/отсутствие
объекта. Этот принцип используется в цифровом концевом переключа-
теле. Использование ферромагнитного зубчатого колеса (как для цифро-
вого тахометра) изменение магнитного потока образует кодовый датчик
углового положения.
Продольное расположение датчика приближения, в котором движущий-
ся элемент приближается головой в сторону датчика, не подходит, если
есть опасность не попасть в цель, так как это приведет к повреждению
датчика. Более желательной конфигурацией является боковое располо-
жение, в котором движущийся член скользит в сторону чувствительной
поверхности датчика. При таком поперечном расположении чувстви-
тельность ниже. Связь между выходным напряжением vo и расстояни-
ем х от датчика Холла, измеренная от движущегося элемента, является
нелинейной. Линейные датчики Холла используют калибровку, чтобы
линеаризовать их выходной сигнал.
Практичный механизм для датчика движения, основанного на эффек-
те Холла, будет иметь полупроводниковый элемент и фиксированный
источник магнитного поля, соотносимые друг к другу в одном блоке. С
658
движением ферромагнитного члена в воздушный зазор между источни-
ком магнитного поля и полупроводниковым элементом, изменяется по-
токосцепление. Напряжение выходного сигнала vo меняется. Этот меха-
низм предназначен как для аналогового датчика сближения, так и для
концевого выключателя. С помощью зубчатого ферромагнитного колеса,
как на рис. 6 .33, чтобы изменить VO и потом, формируя результирующий
сигнал можно генерировать последовательности импульсов пропорцио-
нально вращению колес. Это лежит в основе кодового датчика углового
положения или цифрового тахометра. Помимо известного применения
датчиков движения, датчики Холла используются для электронной ком-
мутации бесщеточных двигателей постоянного тока (см. главу 9), где
схема двигателя соответствующим образом находится в зависимости от
углового положения ротора относительно статора.
6.10.1 .2 Свойства
Чувствительность практического элемента датчика Холла в порядке 10
В/Т (Примечание: T обозначает Тесла, что является единицей плотно сти
магнитного потока; 1 ТЛ = 1 ВБ/м2). Устройство на эффекте Холла имеет
положительный температурный коэффициент сопротивления, а темпе-
ратурный коэффициент чувствительности отрицательный. Учитывая эти
свойства, может быть до стигнута автокомпенсация температуры (для
полупроводниковых тензодатчиков, см. главу 5).
Датчики движения Холла являются надежными устройствами и имеют
множество преимуществ. Они не подвержены снижению включающего
напряжения тиристора при превышении максимально допустимой ско-
рости нарастания импульса (в частности, формируемое напряжение - не
зависит от скорости изменения магнитного поля). Кроме того, их работа
не сильно влияет на общие экологические факторы, кроме магнитных
полей. Это бесконтактные датчики с соответствующими преимущества-
ми, как уже упоминало сь ранее. Некий гистерезис будет присутствовать,
но это не серьезный недостаток в цифровых преобразователях. Другим
возможным недостатком является загрязнение выходного сигнала дат-
чика магнитным полем окружающей среды. Доступно миниатюрное
устройство Холла (шкала в мм).
6.10.2 Ультразвуковые датчики
Звуковые волны имеют частоту в диапазоне от 20 Гц до 20 кГц. Ультраз-
659
вуковые волны являются волнами давления, как и звуковые волны, но их
частота выше слышимых (ультра) частот. Ультразвуковые датчики ис-
пользуются во многих приложениях, в том числе медицинской визуали-
зации, локационных систем для камер с возможностью автофокусиров-
ки, датчики уровня и датчика скорости. В медицине, обычно используют
зонды ультразвука частотой 40 кГц, 75 кГц, 7,5 МГц и 10 МГц.
Ультразвук может быть сформирован по нескольким принципам. На-
пример, высокочастотные (гигагерц ) колебания пьезоэлектрических
кристаллов, подвергнутых электрическому потенциалу, используются
для создания очень высоких частот ультразвука. Другой метод заключа-
ется в использовании свойств магнитострикционного материала, кото-
рый деформируется при воздействии на него магнитного поля. Ответные
колебания могут производить ультразвуковые волны. Другой метод гене-
рации ультразвука заключается в применении высокочастотного напря-
жения в металлопленочных конденсаторах. Микрофон может служить
ультразвуковым детектором (приемником).
Как аналог волоконно-оптического зондирования, существует два рас-
пространенных способа использования ультразвука в датчике. Первый
спо соб – внутренний — ультразвуковой сигнал претерпевает изменения
при прохождении через объект, в результате акустического импеданса
и характеристик поглощения объекта. Результирующий сигнал (изобра-
жение) может быть интерпретирован для определения свойств объекта,
Рисунок 6.34 Ультразвуковой датчик положения.
660
таких как текстура, упругость и деформация. Этот подход был исполь-
зован, например, в инновационном датчике для определения упруго сти
икры сельди. Этот принцип используется также в медицинской ульт-
развуковой визуализации. Другой подход — внешний способ — когда
измеряется время полета ультразвука от источника до объекта и обрат-
но до приемника. Этот подход используется для измерения расстояния
и положения и в контроле размеров. Например, ультразвуковой датчик
этой категории используется для измерения толщины рыбы. Этот метод
используется также в автофокусировке камеры.
В измерении расстояния (дальность, близость, перемещение) посред-
ством ультразвука, импульс ультразвука проектируется на целевом объ-
екте, и засекается время, необходимое для получения эхо-сигнала. Сиг-
нальный процессор вычисляет положение объекта, возможно, компенси-
руя влияние условий окружающей среды. Эта конфигурация показана на
рис. 6 .34. Применимое соотношение
(6.29)
где
t-время полета ультразвуковых импульсов (от генератора к приемнику)
x-это расстояние между ультразвуковым генератором/приемником и це-
левым объектом
с-скорость звука в среде (обычно в воздухе)
При таком подходе расстояние в несколько сантиметров до нескольких
метров может быть измерено с высоким разрешением (например, в мил-
лиметр или меньше). Поскольку скоро сть распространения ультразву-
ковой волны зависит от среды и температуры среды (обычно воздуха),
ошибка поступит в ультразвуковые показания, если датчик не компенси-
рует изменения среды, особенно температуры.
Кроме
того,
можно
измерить
скорость
целевого
объек-
та, используя эффект Доплера, путем измерения (синхрони-
зации) изменения частоты между переданными и полученны-
ми волнами. Здесь использован феномен такта. Применимое
соотношение является уравнением 6.27; теперь, f = частота ультра-
звукового сигнала и с = скорость звука.
661
6.10.3 Магнитострикционный датчик смещения
Свойства магнитострикционного датчика и его использование в измере-
ниях напряжения или стресса были описаны в главе 5. Кроме того, вре-
мяимпульсный метод на основе ультразвука может быть использован в
магнитострикционном датчике смещения (напр., датчик, изготовленный
компанией Temposonics). Принцип этого метода показан на рис. 6 .35 .
Сенсорная головка создает проверочный импульс тока, который прохо-
дит вдоль магнитострикционного провода или стержня (так называемый
волновод), который заключен в защитный кожух. Таймер запускается с
отправкой проверочного импульса. Импульс, который переносит маг-
нитное поле, взаимодействует с магнитным полем постоянного магнита
и создает ультразвуковой импульс (напряжение) (посредством магнито-
стрикционного действия волновода). Этот импульс поступает на головку
датчика и отмечает время. Время полета пропорционально расстоянию
магнита до датчика. Целевой объект привязан к магниту датчика, и его
положение (х) определяется с помощью времени полета, как обычно.
Можно измерить такими датчиками такт (максимальное смещение), ко-
торый изменяется в пределах от нескольких сантиметров до одного или
двух метров, с разрешением выше 50 мкм. С помощью питания постоян-
ного тока в 15 В, датчик может обеспечить выход постоянного тока в ди-
апазоне ±5 В. Поскольку в датчике используется магнитострикционный
носитель с защитным неферромагнитным слоем, можно избежать нико-
торых из общих источников ошибок в ультразвуковых датчиках, которые
используют воздух в качестве среды распространения.
6.10.4 измерение и контроль сопротивления
Рассмотрим механические операции, где мы нажимаем на пружину, ко-
торая имеет постоянную жесткость. Здесь, значение силы полностью
определяет смещение; аналогично величина смещений полностью зави-
сит от силы. Из этого следует, что в данном примере мы не в состоянии
контролировать силы и перемещение независимо друг от друга одно-
временно. Кроме того, в этом примере это невозможно применить силу
управляющего сигнала, которая имеет достаточно определенное отно-
шение со смещением. Другими словами, контроль жесткости не пред-
ставляется возможным. Теперь предположим, что мы толкаем сложную
динамическую систему, а не простой пружинный элемент. В этом слу-
чае, мы должны быть в состоянии управлять толкающей силой в ответ
662
на перемещение динамической системы так, чтобы отношение силы к
перемещению изменялось в указанном порядке. Это и есть действием по
регулировки жесткости (или управление податливостью).
Динамическая жесткость определяется как отношение: (Выходная
сила)/(смещение входного сигнала), выраженное в частотной области.
Динамическая гибкость является обратной величиной к динамической
жесткости.
Механическое сопротивление определяется как отношение: (Выходная
сила)/(скорость ввода), в частотной области. Мобильность является об-
ратной величиной механического сопротивления. Обратите внимание,
что и жесткость, и сопротивление имеют отношение к силе и параме-
трам движения в механической системе. Цель контроля сопротивления
- сделать функцию сопротивления равной некоторой заданной функции
(без отдельного контроля или независимого ограничения соответствую-
щих параметров силы и параметров скорости). Управление силой и дви-
жением можно считать предельными случаями контроля сопротивления
(и контроля жесткости). С целью контроля силы, чтобы сохранить силу
переменной без отклонения от желаемого уровня, в присутствии неза-
висимых вариаций, соответствующей переменной движения (входного
сигнала), сила - это выходная переменная, чье отклонение (приращение)
от требуемого значения должно быть сведено к нулю. Следовательно,
управление силой можно интерпретировать как управление нулевым со-
противлением, когда скоро сть выбрана в качестве переменной движения
(или контроль нулевой жесткости, когда смещение выбирается в каче-
стве переменной движения). И наоборот, контроль перемещения можно
рассматривать как управление бесконечной жесткостью и контроль ско-
Рис. 6 .35 магнитострикционный ультразвуковой датчик смещения.
663
рости можно рассматривать как контроль бесконечным сопротивлением.
Контроль сопротивления должен быть достигнут с помощью активных
средств, как правило, путем создания силы, связанной с перемещением.
Контроль сопротивления о собенно пригодится при механических мани-
пуляциях в отношении физических ограничений, которые не жесткие,
как это в случае деформируемого скрепления и заданиях на обработку
на станке. В частности, очень высокое сопротивление естественным
образом присутствует в направлении ограничения движения и очень
низкое сопротивление в направлении свободного движения. Проблем,
которые возникают с помощью управления движением в приложениях,
где небольшие ошибки движения создают значительные силы, можно
до некоторой степени избежать, если использовать контроль жесткости
и контроль сопротивления. Кроме того, может быть гарантирована ста-
бильность всей системы, а надежность системы улучшена посредством
правильного ограничения значений параметров сопротивления.
Контроль сопротивления может быть особенно полезным в случаях
тонкой и гибкой манипуляции; например, при обработке гибких и не-
однородных природных материалов, таких как мясо. В этом случае ме-
ханическое сопротивление (т. е. в области, где механический процессор
или режущий инструмент взаимодействует с обрабатываемым объектом)
дает ценные характеристики процесса, которые могут быть использова-
ны в порядке контроля задач обработки. Поскольку импеданс касается
скорости входа - это функция передачи. Концепции контроля импеданса
можно применить также в тех случаях, когда вход не в скорости, а выход
-
это не сила. Все-таки, термин управление сопротивлением использу-
ется в литературе, даже если соответствующая передаточная функция,
строго говоря, не является сопротивлением.
Пример 6.9
Контроль процессов, таких как станки и автоматизированные манипуля-
торы могут быть рассмотрены с точки зрения контроля сопротивления.
Например, рассмотрим фрезерный станок, который выполняет прямой
срез на заготовке, как показано на рис. 6 .36, а. Инструмент для установки
неподвижен, а стол станка, который держит заготовку, движется вдоль
горизонтальной оси со скоростью v—скорость подачи. Сила нарезания
в направлении подачи - f. Предположим, что стол станка приводится в
движение с помощью скоростного искажения, согласно закону:
F = Zd(Vref
–
V)
(6.9 .1)
664
где
Zd - это направление сопротивления стола
Vref - скорость подачи
(Заглавные буквы используются для представления переменных в ча-
стотной области системы). Сопротивление резки Zd заготовки удовлет-
воряет отношение:
F=ZwV
Рисунок 6.36 (а) фрезеровочная работа по прямому распилу; (б) сопротивление,
представленное блок-схемой.
665
Обратите внимание, что Zw зависит от свойств системы, и мы, как пра-
вило, не имеем прямого контроля над ним. Общая система представле-
на блок-схемой на рис. 6 .36 б. Проблемы управления сопротивлением
приспо сабливает (или адаптирует) ход сопротивления Zd с тем, чтобы
сохранить скорость подачи около Vref и силу нарезания около Fref.. Мы
будем определять адаптивный закон управления для Zd..
решение
Цель управления удовлетворяется путем минимизации целевой функ-
ции:
Где,
fo -это допустимое отклонение силы
vo - допустимое отклонение скорости
Например, если мы хотим строгий контроль скорости подачи, мы долж-
ны выбрать небольшое значение для vo, что соответствует тяжелой на-
грузки на темп подачи в J. Следовательно, эти два допустимых отклоне-
ния параметров являются параметрами нагрузки, в функции затрат.
Оптимальное решение определяется
Теперь из уравнений 6.9.1 и 6.9 .2, мы получаем
666
При дифференцировании уравнений и 6.9 .5 6 .9 .6, мы получаем
и
Далее мы подставляем уравнения и 6.9 .7 6 .9 .8 в 6.9 .4 и делим на общий
член, чтобы получить:
Уравнение 6.9 .9 расширяется после подстановки уравнений 6.9 .5 и 6.9 .6
для того, чтобы получить необходимое выражение для Zd::
Где Zo = (fo/vo) и Zref = (Fref/Vref).
Уравнение 6.9.10 является законом для контроля импеданса для движе-
ния стола. В частности, Zw зависит от характеристик заготовки, характе-
ристик вставного резца, и скорость вращения вставного резца—извест-
но благодаря подходящей модели или может быть экспериментально
определено (идентифицировано) посредством отслеживания v и f, а так
как Zd и Zref указаны, мы можем определить необходимое сопротивле-
ние движения Zd с помощью уравнения 6.9 .10. Параметры контроллера
движения стола — особенно таблица коэффициента усиления — могут
быть скорректированы, чтобы соответствовать этому оптимальному со-
противлению. К сожалению, точное соответствие практически невоз-
можно, потому что Zd - это обычная функция частоты. Если компонент
пропускной способности высок, мы можем предположить, что функция
сопротивления не зависит от частоты, и это несколько упрощает задачу
контроля сопротивления.
Обратите внимание, из уравнения 6.9.2, где в идеальном случае V = Vref
и F = Fref мы имеем Zw = Zref. Тогда, из уравнения 6.9 .10, следует, что
сопротивление движения бесконечной магнитуды необходимо для точ-
ного контроля. Этого, однако, невозможно достичь на практике. Конеч-
667
но, верхний предел сопротивлению движения должен быть установлен в
любой практической схеме контроля сопротивления.
6.11 тактильно чувствительный датчик
Очувствления обычно трактуется как контактное восприятие, но вос-
приятие информации от тактильного датчика отличается от простого
зажима, где проводится всего несколько измерений дискретной силы. В
очувствлении, распределение силы измеряется, используя близко распо-
ложенные массивы датчиков силы и, как правило, используют матрицы
датчиков с кожными параметрами.
Тактильные ощущения особенно важны для двух типов операций: (1)
захватывание и тонкая манипуляция и (2) определение объекта. В опе-
рациях захвата и тонких манипуляциях, объект должен находиться в
стабильном состоянии и без повреждений, не допускается, чтобы он
скользил. Идентификация объекта включает в себя определение фор-
мы, расположение и ориентацию объекта, а также для обнаружения или
выявления свойств поверхности (например, плотность, твердость, тек-
стура, гибкость) и дефекты. В идеале, эти задачи потребуют два типа
очувствления:
1. Непрерывные пространственные измерения контактирующих пере-
менных сил.
2. Восприятие особенностей деформации поверхности (переменных).
Эти два типа данных, как правило, связанные с помощью определяющих
отношений (например, отношения напряжения–деформации) сенсорной
поверхности тактильных датчиков или объекта, который определяется.
В результате, либо почти непрерывное пространственное восприятие
тактильных сил или датчиков тактильной особенности прогиба, по от-
дельности, часто называют очувствлением. Обратите внимание, что об-
учение может быть важной частью очувствления. Например, поднятие
хрупких предметов, таких как яйца и подбирая объект, который имеет
такую же форму, но сделан из гибкого материала, не являются идентич-
ными процессами; они требуют некоторого обучения через прикоснове-
ние, особенно когда нет возможности для визуального наблюдения.
6.11 .1 требования к тактильным датчикам
Значительные успехи в очувствлении имели место в области робото-
668
техники. Приложения, которые являются очень общими и многочис-
ленными, включают в себя: автоматизированный контроль поверхно сти
профилей и соединений (например, сварных или клееных деталей) для
дефектов; обработку материалов и транспортировку деталей (например,
взять и положить), сборку деталей (например, соединение деталей);
идентификацию деталей и измерения в производстве приложений (на-
пример, определение размеров и формы лопаток турбин); гаптическое
дистанционное управление ведомым роботом удаленно, используя ма-
нипулятор; и тонкую манипуляция (например, производство приклад-
ного искусства, роботизированная гравировка, и роботизированная ми-
крохирургия). Примечание: для некоторых из этих приложений может
понадобиться только простое касательное очувствление (усилие–крутя-
щий момент), если детали схватываются и направляются правильно и
если уже существует точная информация о процессе и объектах.
Естественно, для тактильного сенсорного устройства были имитирова-
ны функции человеческого пальца. В частности, тактильный датчик дол-
жен быть совместим со свойствами кожи, вместе с соответствующей сте-
пенью свободы, гибкости и ловкости, достаточной чувствительностью и
разрешением на получение информации, адекватной надежности и ста-
бильности для выполнения различных задач для местной аналитики, для
выявления информации и в учебных целях. Хотя пространственное раз-
решение пальца человека со ставляет около 2 мм, еще более высокие про-
странственные разрешения (менее 1 мм), могут быть реализованы, если
получать информацию через другие органы чувств (например, зрение).
Во время касания одновременно используются также предыдущий опыт
и интеллект. Тактильное ощущение пальца человека составляет порядка
1 г. Кроме того, человеческие пальцы могут предсказывать надвигающу-
юся силу скольжения во время хватания, так что корректирующие меры
могут быть приняты до того, как объект фактически упадет. На элемен-
тарном уровне, требуются знания касательного напряжения распределе-
ния и фрикционные свойства на общей поверхности между объектом и
рукой. Дополнительная информация и интеллектуальные возможности
обработки также необходимы для прогнозирования точного скольжения
и принятия корректирующих мер для предотвращения выскальзывания.
Это, конечно, несколько идеальных функций для тактильного датчика,
но они практически нереальны.
Датчик плотности, динамический диапазон, время реакции или про-
пускная способность, прочность и физическая прочность, размер,
устойчивость (динамическая устойчивость), нелинейность, гибкость
669
и локализованные данные (в том числе обработка данных, обучение и
реорганизация) являются важными факторами, которые необходимо
учитывать в анализе, проектировании или выборе тактильного датчика.
Из-за большого количества элементов датчика, условия сигнала и обра-
ботки для тактильных датчиков, является проблемой. Типовые техниче-
ские требования к промышленным тактильным датчикам заключаются в
следующем:
1. Пространственное разрешение около 1 мм (около 100 элементов дат-
чика)
2. Силовое разрешение около 2 г
3. Динамический диапазон 60 дБ
4. Емкость силы (максимальная сенсорная сила) около 1 кг
5. Время отклика 5 мс или меньше (ширина полосы частот свыше 200
Гц)
6. Низкий гистерезис (минимум диссипации энергии)
7. Долговечность в суровых условиях работы
8. Надежность и нечувствительность к изменению условий окружающей
среды (температура, пыль, влажность, вибрация и т. д.)
9. Способность обнаруживать и даже предвидеть скольжения
Выбранные технические характеристики зависят от конкретного прило-
жения.
Хотя технологии очувствления еще не достигли своего пика, и широ-
кое распространение и использование тактильных датчиков в промыш-
ленности еще в будущем, все же несколько видов тактильных датчиков,
которые отвечают и даже превосходят вышеупомянутые спецификации,
являются коммерчески доступными. В будущем развитие этих датчиков,
должны решить две группы вопросов:
1. Способы повышения механических характеристик и дизайна тактиль-
ных датчиков, так что точные данные с высоким разрешением могут
быть получены с помощью датчика.
2. Пути совершенствования анализа сигналов и возможности обработки,
так что полезную информацию можно было бы извлечь аккуратно и бы-
стро из данных, полученных с помощью осязания.
Под второй категорией, мы также должны рассмотреть приемы исполь-
зования тактильной информации в управлении обратной связью динами-
ческих процессов. В этой связи, должны решаться вопросы разработки
алгоритмов управления, правила и определение методов для интеллек-
туальных контроллеров, которые используют тактильную информацию.
670
6.11 .1 .1 Функциональные возможности
функциональные возможности являются важным фактором в сложных
манипуляторах и роботизированных руках, которые задействуют так-
тильные ощущения. функциональная возможность устройства условно
определяется как отношение [число степеней свободы в устройстве]/
[резолюцию движения устройства]. Мы будем называть ее маневренно-
стью.
Мы можем определить другой тип функциональных возможностей, так
называемую мощность:
Мощность =[число степеней свободы] / [разложение силы] (6.30)
Оба вида функциональных возможностей применимы в механических
манипуляциях, где используется тактильная чувствительность.
6.11 .2 Состав и работа тактильных датчиков
Сенсорная поверхность тактильного датчика обычно изготавливается из
эластомерного коврика или гибкой мембраны. Исходя из этой общей ос-
новы, принцип действия тактильного датчика отличается, прежде всего,
прогиб тактильной поверхности ощущается в зависимости от распреде-
ленной силы.
Общие методы очувствления включают следующие пункты:
1. Использование близкорасположенного набора тензометров или дру-
гих типов датчиков силы для во сприятия распределенной силы.
2. Использование токопроводящего эластомера, тактильных поверхно-
стей. Изменение его сопротивления, так как она деформируется, будут
определять распределенные силы.
3. Использование близко расположенных датчиков прогиба или бескон-
тактных датчиков (например, оптические датчики) для определения про-
филя прогиба тактильной поверхности.
Так как сила и прогиб связаны через материальное уравнение для так-
тильного датчика (сенсорной панели), то, в очувствлении, необходим
только один тип измерения, а не и сила, и прогиб. Профиль распреде-
ления силы или профиль прогиба, полученный таким образом, может
рассматриваться как 2-д массив или изображение и могут подвергаться
обработке (фильтрации, и т. д .). и отображается в виде тактильного изо-
671
бражения, или используется в приложениях (идентификация объекта,
контроль манипуляций и т. д.).
Контактные распределения сил в тактильных датчиках обычно измеря-
ют с помощью массива датчиков силы, расположенных под гибкой мем-
браной. Массивы пьезоэлектрических датчиков и металлические или
полупроводниковые тензодатчики (датчики пьезорезистивные) с доста-
точной плотностью (количество элементов на единицу площади) могут
быть использованы для измерения тактильного распределения усилий
(см. главу 5). В частности, полупроводниковые элементы имеют низкую
прочность, но обладают хорошей чувствительностью. Кроме того, кожа,
как и сама мембрана, может быть изготовлена из электропроводного
эластомера (например, графит-этилированный неопреновый каучук), у
которого изменение сопротивления может быть воспринято и использо-
вано для определения распределения силы и прогиба. В частности, при
увеличении тактильного давления, сопротивление конкретного сегмента
резины уменьшается. И ток, проходящий через нее (из-за применения
постоянного напряжения) будет увеличиваться. Проводники могут быть
вытравлены под эластичным элементом для определения текущего рас-
пределения в подушечку, благодаря правильной схеме приема сигнала.
Проблемой проводных эластомеров являются, электрические помехи,
нелинейность, гистерезис, низкая чувствительность, дрейф, низкая про-
пускная способность и слабая материальная прочность.
Профиль прогиба тактильной поверхности может быть определен с по-
мощью матрицы датчиков или датчиков прогиба. Электромагнитные и
емкостные датчики могут использоваться в получении этой информации.
Принципы работы этих типов датчиков были обсуждены в главе 5. Оп-
тические тактильные сенсоры используют для светочувствительных эле-
ментов (фотодатчиков), чтобы увеличить интенсивность света (или ла-
зерных лучей, отраженных от тактильной поверхно сти) как обсуждалось
ранее в этой главе. Оптические методы имеют преимущества: свободны
от электромагнитных помех и безопасны во взрывоопасных средах, но
они могут иметь погрешности из-за рассеянного света, попадающего на
матрицу, изменения интенсивно сти источника света и изменения усло-
вий окружающей среды (например, грязи, влажности и дыма).
Пример 6.10
Панель тактильного датчика со стоит из матрицы из токопроводящих
элементов эластомера. Сопротивление Rt в каждом тактильном элемен-
672
те определяется как Rt = a/Ft,, где Ft = тактильная сила, приложенная к
элементу и является константой. Схема, показанная на рис. 6 .37 исполь-
зуется для получения тактильного сигнала датчика vo, которая измеряет
местные тактильные силы Ft. Всю матрицу сенсорных элементов можно
проверить путем адресования соответствующих элементов через соот-
ветствующий механизм переключения.
Для схемы получения сигнала, показанной на рис. 6 .32, получить соот-
ношение для выходного напряжения vo в условиях параметров a, Ro и
других, при необходимо сти, и переменной Ft. Покажите, что vo = 0, ког-
да элементы не адресуются (т. е. когда цепь переключается на источник
опорного напряжения в 2,5 В).
решение
Определим: vi = входной сигнал схемы (2,5 или 0,0 В); vo1 = выход пер-
вого ОУ.
Мы используем следующие свойства ОУ (см. главу 2):
1. Напряжения на два входных провода равны.
2. Токи через два входных провода равны нулю.
Следовательно, обратите внимание, тот же vi на обоих входных выводах
первого ОУ (и на узле A); и то же нулевое напряжение на обоих входных
сигналах ведет второе ОУ (и на узле B), потому что один из проводов
заземлен.
Рис. 6 .37 схема получения сигнала для тактильного датчика из проводящего
эластомера.
673
Текущий баланс в А:
Текущий баланс в B:
Подставим 6.10.1 в 6.10.2 и так же подставим данное выражение для Rt
.
Мы получим v0
= (Ro/a)Ft(5,0-2vi). Подставим два включаемых значения
для vi
. У нас получится
При адресации
При ссылке = 0
6.11 .3 оптические тактильные датчики
Схематичное изображение оптического тактильного датчика (он постро-
ен в лаборатории человеко-машинных систем Массачусетского техно-
логического института—МТИ) показан на рис. 6.38, в котором исполь-
зуется принцип оптического датчика приближения, как уже говорилось
ранее. В системе гибкий тактильный элемент состоит из тонкой, све-
тоотражающей поверхности, встроенной в наружный слой (сенсорная
панель), из высокопрочной резины и внутреннего слоя из прозрачной
резины, оптических волокон, равномерно и жестко закрепленных через
этот внутренний слой резины, так что свет может проецироваться непо-
средственно на отражающей поверхности.
Источник света, светоделитель и цифровая камера образуют единый блок,
который можно перемещать в боковом направлении, чтобы сканировать
весь массив из стекловолокна, если один кадр камеры не охватывает весь
массив. Разделительная перегородка отражает часть света от источника
света на пучок оптических волокон. Этот свет отражается от отража-
674
ющей поверхности и принимается камерой. Поскольку интенсивность
света, получаемого с камеры, зависит от близости отражаемой поверх-
ности, полутоновые по интенсивности изображения, обнаруженные ка-
мерой, будут определять профиль прогиба тактильной поверхности. Ис-
пользуя соответствующие определяющие соотношения для тактильных
датчиков, можно определить тактильные распределение сил. Используя
соответствующие определяющие отношения для тактильной сенсорной
панели, можно так же определить распределение тактильной силы. Ус-
ловия процессора обработки изображений (фильтрация, сегментация, и
т.п.) последующие фреймы изображения, полученные фрейм граббером,
и вычисляет профиль прогиба и распределение, таким образом, соответ-
ствующий тактильной силы. Четкость изображения будет зависеть от
пиксельного размера каждого фрейма изображения (например, 512*512
пикселей, 1024*1024 пикселя, и т.п.), а также расположение оптической
волоконной матрицы. Разрешающую способность силы (или тактильные
ощущения) тактильного сенсора можно исправить на списании толщи-
ны эластомерного слоя, который определяет жесткость сенсора.
Рисунок 6.38 Схематическое изображение волоконно-оптического тактильного
датчика.
675
В описываемом волоконно-оптическом тактильном датчике (Рис. 6.33),
оптические волокна служат средой, через которую световые или лазер-
ные лучи передаются на тактильные поверхности. Это внешнее исполь-
зование волоконно-оптических датчиков. Кроме того, могут быть раз-
работаны встроенные приложения, где в качестве оптического волокна
служит сам чувствительный элемент. В частности, для определения
тактильного давления применяется сетка из стекловолокна. По скольку
количество света, проходящего через волокно, будет уменьшаться из-за
деформации, вызванной тактильным давлением, интенсивность света на
приемнике может быть использована для определения тактильного рас-
пределения давления.
Доступен еще один вариант оптического тактильного датчика. В этой
конструкции источник света и приемник находятся на самой осязатель-
ной поверхности; оптические волокна не используются. Принцип рабо-
ты этого типа тактильного датчика показан на рис. 6 .39 . Когда эласто-
мерная сенсорная панель нажимается в определенном месте, контакт,
прикрепленный к площадке в данной точке, приходит в движение (в на-
правлении x), тем самым загораживая свет, полученный фотодиодом от
светодиода.
6.11 .4 тензометрические тактильные датчики
Тензометрический тактильный датчик был разработан Корпорацией
"Eaton", штат Мичиган. Он может быть использован для определения
размера и местоположения давления соприкосновения в точке, что по-
лезно, например, в приложениях сопряжения деталей. Квадратной пла-
стины, длины а, поддерживаются скользящими петлями на четырех уг-
лах на тензометрических весоизмерительных датчиках, как показано на
рис. 6 .40а. Магнитуду, направление и точки силы Р, как правило, при-
менимую к пластине, можно определить, используя показания четырех
(тензодатчиков) датчиков нагрузки.
Чтобы проиллюстрировать этот принцип, рассмотрим диаграмму, пока-
занную на рис. 6 .40, б. Расположение силы Р определяется координатами
(x, y) в Декартовой системе координат (х, у, Z), с началом, расположен-
ным на 1, как показано на рисунке. Датчик нагрузки, считывающий на
месте i, обозначается Ri. Равновесия в направлении Z дает баланс сил:
P=R1+R2+R3+R4(6.31)
676
Пример 6.11
В определенной части процесса сопряжения деталей, используя прин-
цип тензометрического тактильного датчика, предположим, что допуск
на погрешно сть измерения расположения силы ограничивается до δr.
Определите допустимое отклонение δf для датчика нагрузки.
решение
Возьмем дифференциалы от уравнений 6.10.1 и 6.10.2 в примере 6.10:
δP=δR1+δR2+δR3+δR4
и
Pδx + xδP = aδR2 +aδR3.
Прямая подстановка дает
δx= (δR2+δR3)-(δR1+δR2+δR3+δR4).
Обратите внимание, что х лежит между 0 и а, и каждый δRi мо-
жет отличаться на ± δf. Следовательно, наибольшая погрешность в Х
подана (2а/Р) δf. Она ограничена до δr. Таким образом, мы имеем δr =
(2а/Р) δf, или
Это дает допустимую погрешно сть силы. Тот же результат получается
при рассмотрении у вместо x.
6.11 .5 Прочие тактильные датчики
Другой тип тактильных датчиков (пьезорезисторный). В нем использу-
ется массив полупроводниковых тензометрических датчиков, установ-
ленных под сенсорную панель на жестком основании. Таким образом,
распределение силы на сенсорной панели измеряется непосредственно.
Ультразвуковые тактильные датчики о снованы, например, на эхо им-
пульсном диапазоне. В этом методе тактильная поверхно сть состоит из
двух мембран, разделенных воздушным зазором. Время, необходимое
для прохождения ультразвукового импульса через зазор отражается на
приемнике и зависит, в частности от толщины воздушного зазора. Так
как этот интервал времени изменяется в зависимости от деформации
677
тактильной поверхности, он может служить мерой деформации тактиль-
ной поверхности в заданном положении.
Другие возможности для тактильных датчиков включают в себя исполь-
зование химических эффектов, которые могут присутствовать при при-
косновении к объекту и влиянии захвата на собственной частоте колеба-
ния массива чувствительных элементов.
Пример 6.12
Когда тактильное очувствление предпочтительнее сенсорного обнаруже-
ния нескольких точечных сил? Пьезоэлектрический тактильный датчик
имеет 25 чувствительных к силе элементов на квадратный сантиметр. Каж-
дый чувствительный элемент датчика может выдержать максимальную
нагрузку 40 Н И может обнаружить изменения нагрузки порядка 0,01 Н.
какое разложение силы тактильного датчика? Что такое пространственное
разрешение датчика? Каков динамический диапазон сенсора в децибелах?
решение
Тактильность является предпочтительней, когда это не простое при-
косновение. формы, поверхностные характеристики, характеристики
гибкости в управлении (перекладывание или хватание) объектом можно
определить с помощью тактильного очувствления.
Разрешение силы = 0,01 Н
Пространственное разрешение
динамический диапазон
6.12 датчики МЭМС
Микро электромеханические системы (МЭМС) - устройства микроми-
ниатюры, состоящие из микроминиатюрных компонентов, таких как
датчики, приводы, процессоры обработки сигнала, интегрированные и
встроенные в один чип. Они имеют механические, электрические, элек-
678
тронные особенно сти при эксплуатации. Размер устройства может быть
в суб - миллиметровой шкале (0.01–1 .0 мм), размер компонента может
быть таким же маленьким, как микрометр (микрон), в диапазоне 0.001–
0.1 мм. Поскольку МЭМС использует технологии интегральной схемы
(ИС) в их изготовлении, многие компоненты могут быть интегрированы
в одном устройстве (например, несколько миллионов).
6.12 .1 Преимущества МЭМС
Преимущества МЭМС это в первую очередь преимущества устройства
ИС. Преимущества включают:
• Микроминиатюрный размер и вес
• Большая площадь поверхности по отношению к объему (сравнивая в
тех же единицах измерения)
• Большая интегральная схема (БИС) компонентов/схем
• Высокая производительность
• Высокая скорость (20 передач скоростей коммутации)
• Низкое энергопотребление
• Доступность для массового производства
• Низкая стоимость (в массовом производстве)
В частности, микроминиатюрный размер также означает незначитель-
ные механические нагрузки, быструю реакцию, и незначительный рас-
ход энергии (и электрические нагрузки).
6.12 .1 .1 особые примечания
Типичноеустройство МЭМСимеет встроенные функции, в первуюочередь
сенсорное определение
• приведение в действие
• Обработка сигнала
Доступны различные типы датчиков МЭМС. Они включают в себя: ак-
селерометр (пьезоэлектрические, емкостные и т. д .), датчики потока (на
основе дифференциального измерения давления; измерения температу-
ры нагретого элемента и средний расход и т. д.), гироскопы (Кориолиса
и т. д .), датчики влажности (емкостный и т. д.), датчики света (полупро-
водниковый фотодетектор и т. д .), магнитометры (для измерения магнит-
ного поля; и т. д.), микрофлюидные датчики (включают в себя несколько
датчиков: температуры, давления, расхода, тока и т. д ., и), микрофоны
(пьезоэлектрический и др.), датчики давления (мембранные пьезорези-
679
стивные, пьезоэлектрические и т. д .), бесконтактные датчики (емкост-
ные, и т. д.), и датчики температуры (пробоя Стабилитрона напряжения
и т. д.).
6.12 .1 .2 Диапазон параметров
Несмотря на явные преимущества, датчики МЭМС для своей работы ис-
пользуют многие из тех же параметров, как и макродатчик . Они вклю-
чают в себя чувствительность, пропускную способность, линейность,
динамический диапазон, разрешение, стабильность (работу без дрейфа
нуля) и надежность (отношение сигнала к шуму, способность выдержи-
вать ударные и другие нарушения, компенсация экологических факто-
ров, включая температуру). Эти параметры обсуждаются в главе 3. Кро-
ме того, как правило, МИКРОЭЛЕКТРОМЕХАНИЧЕСКИХ устройства
реализуются на приложениях макро-уровня (например, автомобили, за-
воды, бытовая электроника, медицинская диагностика и системы лече-
ния, механические системы мониторинга).
6.12 .2 моделирование датчика МЭМС
Как правило, датчики МЭМС используют некоторые из тех же техно-
логий их макро (или мисо- или мезо -) аналоги (например, пьезоэлек-
трический, емкостный, электромагнитный, пьезорезисторный). Однако,
из-за их миниатюрного размера, некоторые из физических уравнений
их моделирования не могут точно действовать. Кроме того, даже тогда,
когда аналитические модели устройства МЭМС похожи на те, знакомые
электро-механических моделей макро-устройств, физические принципы
могут отличаться в микромасштабе. Следовательно, в общем, все физи-
ческие концепции на макроуровне не могут быть непосредственно вклю-
чены в моделирование и анализ устройств МЭМС.
Кроме того, как правило, устройство МЭМС может содержать множество
компонентов множества функций в схематической структуре. Существу-
ют комбинированные датчики, которые имеют широкие возможности
зондирования и даже встроенный мультисенсорной синтез. Например,
6-осевой инерциальный измерительный блок (imu) состоит из 3-осевых
акселерометра и 3-осевого гироскопа. Комплексный пакет МЭМС мо-
жет содержать функции акселерометра, датчик перемещения, гироскопа,
магнитометра и датчика давления. Многофункциональные возможности
сенсорного восприятия движения этого типа доминируют на рынке по-
f
680
требительской электроники, такой как смартфоны и планшеты.
6.12 .2 .1 Механизм преобразования энергии
Соответствующий механизм энергии является главным фактором в по-
нимании и моделировании физики датчиков МЭМС. В частности, соот-
ветствующих пьезоэлектрических, электростатических и электро стати-
ческих конверсий энергий. Они рассматриваются на рис. 6 .41 .
. Пьезоэлектрический: см. рис. 6 .41, а. Механическое напряжение в пье-
зоэлектрическом материале вызывает разделение зарядов через матери-
ал, который производит напряжение. Напряжение энергии, произведен-
ной механической работы, которая необходима, чтобы деформировать
материал, преобразуется в электростатическую энергию. Это пассивный
прибор.
Электростатический: см. рис. 6 .41 б. Напряжение создает заряды + и −
на обкладках конденсатора. Сила притяжения между пластинами под-
держивается внешней механической силой. Если плиты раздвигаются,
механическая работа выполнена, емко сть уменьшается, а напряжение
увеличивается. Следовательно, механическая энергия преобразуется в
электрическую энергию. Это пассивный прибор.
Электромагнитные: см. рис. 6 .41с. С движением катушки в магнитном
поле, в катушке индуцируется ток. В этом процессе механическая энер-
гия преобразуется в электрическую энергию. Это пассивный прибор.
6.12 .3 применения МЭМС
Применение МЭМС-датчиков и соответствующих устройств являются
многочисленными, в том числе транспортные, структурные наблюдения,
Рисунок 6.41 преобразования энергии в устройстве МЭМС. (а) Пьезоэлектриче-
ский, (б) электростатический и (C) электромагнитный.
681
смартфоны, изыскание источников энергии, здоровье человека, монито-
ринг и лечение. Есть различные датчики МЭМС, в частности, в кате-
гориях: медико-биологической, механической (в том числе термо-жид-
костную и материальную инженерию), химической, промышленности,
обороны, энергетики, услуг и телекоммуникации. В частности, техноло-
гии МЭМС в биологических и медицинских применениях приобретают
такое значение, что к ним используется термин BioMEMS. Рынок МИ-
КРО ЭЛЕКТРОМЕХАНИЧЕСКИХ устройств и технологий достигнет в
США $25 млрд, и растет темпами около 10% в год. Основное препят-
ствие для этого роста не технологические возможности МЭМС, а скорее
их внедрение и эксплуатация в суровых практических условиях. В этом
контексте, комплектование и надежность устройств МЭМС становятся
основными практическими соображениями.
датчики МЭМС и приводы помещаются в различные приложения. Они
включают в себя:
• Автомобили (например, Акселерометры и гироскопы инерциальные
измерительные модули или для развертывания подушки безопасности,
контроля, безопасности и предотвращения столкновений, качество езды
и динамической устойчивости; тормоза; автомобильные шины датчики
давления)
• Биомедицинские приложения (Био-МЭМС и микрофлюидные, вклю-
чая лаборатории-на-чипе, который использует жидкости для диагно-
стики ВИЧ/СПИД, тесты на беременность, и т. д.; MicroTotalAnalysis—
био сенсоры и хемосенсоры; импланты, стенты; микрохирургические
инструменты, включая микророботы для ангиопластики, ангиографии,
эндоскопии, лапароскопии, хирургии и ангиопластики, ангиографии,
эндоскопии, лапароскопии и нейрохирургию; тканевую инженерию, в
том числе применение в клеточной биологии, протеомики и геномики;
одноразовые датчики артериального давления, внутриглазного давления
в глазах, повышение внутричерепного давления внутри черепа, внутри-
маточного давления и ангиопластики; Имус в дефибрилляторах и карди-
остимуляторах; микрофонах и слуховых аппаратах; микроиглах, патчах
и т. д. для контролируемой поставки/выпуске препарата, био-сигналах
электродов, телесные жидкостях, извлечении и отборе проб, раковой те-
рапии, и микродиализе; протезах, ортопедических аппаратах, инвалид-
ных колясках и т. д.)
• Компьютеры, бытовая электроника, и бытовая техника (сенсорный
экран контроллеры; струйных сопел принтера и картриджей; Имус и
682
Микрофоны для мобильных телефонов, ноутбуки, планшеты, игровые
устройства, персональные медиа-плееры, цифровые фотоаппараты,
наушники; жесткие диски, компьютерная периферия, беспроводные
устройства и т. д. в компьютерах; интерферометрический модулятор ди-
сплей приложений, таких как плоские дисплеи)
• Тяжелое машиностроение, транспортировку и строительство инже-
нерных сооружений (транспортных средств, самолеты—сенсорная и
контролирующая поверхность крыльев и т. д.; строительных машин, аэ-
рокосмической индустрии, спортивные и оздоровительные техники; дат-
чики напряжений и деформаций в зданиях, мостах и т. д ., беспроводная
передача и контроль)
• Оптические МЭМС (micromirrors, сканеры, Пико-проекторы, противо-
туманные линзы, световые датчики для тепловидения, высокоскорост-
ных оптических коммутационных устройств—20 НС скоростей)
• Энергетический сектор (датчик-агрегат для отопления и охлаждения
зданий; нефти и газа; сбор энергии; микро охлаждение)
• Глобальная система позиционирования (GPS) датчики (для автомоби-
лей, курьерская отслеживание посылок и обработка)
6.12 .4 Материалы и изготовление МЭМС
Ключевые особенности в процессе изготовления устройства МЭМС яв-
ляются: устройство должно быть микроминиатюрным; аппарат должен
иметь много интегрированных компонентов, имеющих различные функ-
циональные структуры; и многие устройства должны быть изготовлены
в одном пакете. функциональная структура (например, датчик, привод и
т. д .) аналогична структуре схемы на интегральных схемах (ИС). Кроме
того, и к счастью, вполне зрелые процессы СК (полупроводниковые) из-
готовления могут быть использованы при изготовлении МИКРО ЭЛЕК-
ТРОМЕХАНИЧЕСКИХ устройств, а также. Как и микросхема, устрой-
ство МЭМС формируется путем формирования необходимых функцио-
нальных структур на подложке. Подложка может быть силиконовой (как
в IC откалывает), полимерной (дешевле и легче изготовить), металли-
ческой (например, золото, никель, алюминий, медь, хром, титан, воль-
фрам, платина, серебро), или керамической (например, нитрид кремния,
алюминия или титана; карбид кремния; они обеспечивают желательные
характеристики материала для датчиков, приводов, и т. д.) .
683
6.12 .4 .1 Процесс изготовления иС
Поскольку процесс изготовления устройства МЭМС похож на микро-
схемы, мы сначала кратко изложим процесс изготовления микросхемы.
Основные шаги в процессе изготовления пакета ИС являются такими:
подготовка субстрата, роста пленок, легирования, фотолитографии,
травления, снятия фоторезиста, нарезки и упаковки. Эти вопросы допол-
нительно обсуждаются далее.
Подготовка субстрата: процесс изготовления ИМС начинается с тонень-
кого кусочка подложки, на котором формируется цепь (состоящая из эк-
вивалента многим миллионам взаимосвязанных транзисторов и других
компонентов). Как правило, это тонкий кусок полированной кремниевой
(Si) пластины.
Рост пленки: тонкая пленка (кремния, диоксида кремния, нитрида крем-
ния, поликристаллического кремния или металла) осаждается на под-
ложке. Именно на этой пленке изготовлены компоненты и взаимосвязи
в цепи ИС. Пленка должна иметь четко определенную кристаллическую
ориентацию относительно кристаллической структуры подложки.
Допинг: контролируемое незначительное количество легирующих мате-
риалов (атомов примеси) вводят в пленку (например, путем термической
диффузии или ионной имплантации). Эта низкая концентрация легирую-
щих материалов (например, бора, фосфора, мышьяка, сурьмы), позволит
определить по следующее формирование структуры электронной схемы.
фотолитография: тонкий равномерный слой светочувствительного мате-
риала (фоторезиста) формируется на суб - страте (через спин-покрытия и
предварительным спеканием). Шаблон, который соответствует структу-
ре цепи, переносится на фоторезист с применением интенсивного света
через маску (стеклянную пластину с нанесенным контурным рисунком
пленки хрома).
Травление: химическое вещество (влажный или сухой) используется для
удаления областей пленки или подложки, не защищенных шаблоном фо-
торезиста.
удаление фоторезиста: фоторезист, который помог сформировать струк-
туру цепи на подложке, удаляется. Этот процесс называется золением.
Нарезка: Плата имеет структуру ИC и нарезается квадратной формы.
Упаковка: нарезанная платаупакованавзащитный кожух.Корпустакжефор-
мирует электрические контакты, которые соединяют микросхема на плате.
Заключительным этапом является проверка микросхема.
684
6.12 .4 .2 процессы изготовления МЭМС
Основные процессы изготовления МЭМС являются по существу такими
же, как для микросхем. В частно сти, они осаждения (осаждение пленки
на подложку; например, физическое или химическое осаждение); копи-
рование (перенос рисунка или mems структуры для фильма; как правило,
литография используется для этой цели); травление (удаления ненужных
частей пленки или подложки, вне структуры МЭМС; для влажного трав-
ления, где материал растворяется при погружении в химический раствор
или сухое травление, где материал распылен или растворен, используя
реактивные ионы или паровой фазы протравки) и подготовка кристалла
в сборке (удаление отдельных плашек, которые образовались в струк-
туре МЭМС на пластине); нарезку (резку или шлифовку пластины пра-
вильной формы; скажем, тонкой квадратной).
Комплекс функциональных структур (сенсорное восприятие, возбуж-
дение, обработки сигналов и т. д .) МЭМС устройства изготавливаются
несколькими способами.
Основными являются:
1. Навальная микро обработка
2. Микро обработка поверхности
3. Микро формовка
Объемная микро обработка: требуемые МЭМС структуры строятся
(вытравленно) на подложке в тройном измерении. Пластины могут быть
связаны с другими платами, а также, в виде специальных функциональ-
ных структур (например, пьезоэлектрические, пьезорезистивные и ем-
костные датчики, и мостовые схемы).
Поверхностная микро обработка: требуемые МЭМС структуры форми-
руются слой за слоем на подложку с несколькими процессами осажде-
ния и травления (стоматологический) пленочного материала. Несколько
таких слоев может образовывать необходимые зазоры между структур-
ными слоями (например, разрыв пластины конденсаторов).
Микро формовка: в микро формовке, необходимые МЭМС структуры
изготавливаются с помощью формочек для внесения конструктивных
слоев. Поэтому травление не требуется (в отличие от навального и по-
верхностного микро соответствия). После нанесения, формы растворя-
ются с помощью химических веществ, которые не влияют на используе-
мые МЭМС строительные материалы.
685
6.12 .5 примеры датчиков МЭМС
МЭМС датчики, использующие пьезоэлектрические, емкостные, пье-
зорезистивные (тензометрические), и электромагнитные принципы
являются общими. Поскольку эти принципы были рассмотрены ра-
нее, они не повторяются. Вместо этого мы приведем примеры МЭМС
датчиков по нескольким категориям приложения, чтобы проиллю-
стрировать диапазон, разнообразие и полезность МЭМС датчиков.
МЭМС акселерометр: подход, используемый в технологии МЭМС аксе-
лерометр для преобразования ускорения в силу инерции инерционной
массы, которая сгибает микроминиатюру кантилевера. Одна состоит
в том, чтобы иметь консольные элементы с точечной массой (инерци-
онной массы) на его свободном конце. Как кантилевер деформиру-
ется (изгибается) за счет сил инерции точечной массы, соответствую-
щее смещение может быть во спринято емкостным, пьезорезистивным
или пьезоэлектрическим методами. Еще одна структура, которая ис-
пользует емкостной метод имеет две гребенки, одна неподвижная, а
другая опирается на консольные (весна) и проведение пробных масс
Рис. 6 .42 емкостный акселерометр МЭМС.
686
на другом конце (см. рис. 6 .42). Зубья гребня образуют обкладки кон-
денсатора. Неподвижные пластины расположены между подвижной
пластиной. Как гребень движется за счет сил инерции инерционной
массы, изменения емкости. Это изменение емкости измеряется, что и
дает ускорение. Некоторые параметры изменения МИКРОМЕХАНИ-
ЧЕСКОГО кантилевера/конденсатора акселерометра являются: Диапа-
зон = ±70 г, чувствительность = 16 МВ/г, пропускная способность (3
дБ) = 22 кГц, Напряжение питания = 3-6 в, потребляемый ток = 5 ма.
Тепловой МЭМС акселерометр: при этом датчик, обогрев пузырек воз-
духа занимает место инерционной массы. Два термисторы используются
для измерения температуры. Ее принцип заключается в следующем. Из-за
ускорения, воздушный пузырь движется в этом направлении, между двумя
элементами термистора. Как следствие, температура одного термистора
увеличивается,а другого уменьшается. Разницатемпературдает ускорение.
МЭМС гироскоп: гироскоп измеряет угол (ориентация) и скорости ги-
роскоп измеряет угловую скорость. Оба типа используют зондирование
Кориолиса и гироскопического момента, образовавшиеся в скоро сти
или моменте импульса вектора изменения ориентации. Усилие или кру-
тящий момент может быть воспринято (например, через изменение ем-
кости гребня кантилевера, как в МЭМС акселерометре) для получения
значения гиро скопа. Доступны трех-осевые МЭМС гироскопы, которые
зависят от сил Кориолиса. Параметры рейтинга МЭМС устройства Ко-
риолиса: Диапазон = ±250°/С, чувствительность = 7 МВ/°/с пропускная
спо собность (3 дБ) 2,5 кГц, напряжение 4-6 в, потребляемый ток 3,5 ма.
МЭМС гемометр: прибор имеет два электрода, с помощью которых им-
пульсы тока могут быть применены к пути между электродами. Образец
крови впрыскивается через путь между электродами. В результате из-
менение электрического сопротивления (или импульсы сопротивление)
измеряется, что является показателем количества клеток крови. Приме-
чание: сенсируется и счет пульса и высота пульса. Счетчик импульсов
выдает число клеток крови; амплитуда импульса может быть использо-
вана, чтобы различать красные и белые кровяные клетки.
МЭМС датчик давления: этот датчик использует условные мембраны
(подложки Si) между двумя электродами, чтобы измерить давление. Ем-
кость между электродами изменяется, с движением мембраны (с присо-
единенной пластиной конденсатора) из-за давления. Измерение емко сти
дает значение давления. Другой тип МЭМС датчика давления исполь-
зует пьезорезистивный (тензометрический) кантилевер. С его деформа-
цией из-за разницы давлений на двух сторонах, полученный заряд в со-
687
противлении измеряется с помощью мостовой схемы, что дает перепад
давления. Параметры: Диапазон измерений 260-1260 мбар, Напряжение
питания 1.7–3 .6 V, а датчик веса = 10 мг. Он используется в биомедицин-
ских приложениях, таких как диагностика и лечение нервно-мышечных
заболеваний.
МЭМС магнитометр: этот датчик использует магниторезистивные свой-
ства элементов МЭМС для измерения магнитного поля. Он использует-
ся в приложениях электронного компаса, GPS-навигации и обнаружения
магнитного поля.
МЭМС датчик температуры: этот датчик используется стабилитрон про-
боя, которого напряжение пропорционально абсолютной температуре.
Параметры рейтинга: Чувствительность 10 МВ/K и ток 450 мкА до 5 ма.
МЭМС датчик влажности: в нем используется принцип изменения ем-
кости в полимерных диэлектрических планарных конденсаторах из-за
влажности. Как правило, это МЭМС датчики, которые измеряют как
влажность так и температуру.
6.13 Сочетание датчиков
В конкретном приложении, одного датчика, или один набор сенсорных
данных может не предоставлять требуемую информацию в полном объ-
еме, аккуратно и надежно. Тогда нам придется полагаться на данные от
нескольких датчиков. Комбинированные датчики, называемые также
мультисенсорной интеграции данных, - это процесс объединения дан-
ных из двух или более датчиков, чтобы повысить сенсорное решение.
В результате усовершенствования могут включать в себя: точность, раз-
решающая способность, надежность и безопасность (например, отказ
датчика, как и в области применения авиации), надежность, стабиль-
ность (относительно датчика дрифт и т. д.), уверенность в себе (сниже-
ние неопределенно сти), применяемость (например, расширение области
применения и рабочий диапазон), уровень агрегации (информационное
моделирование, сжатие, комбинации и т. д.), и уровень детализации и
полноты и всесторонности (например, сочетание 2-D изображения для
получения аутентичной 3-D изображение; комбинирование взаимодо-
полняющих АЧХ).
Синтез датчиков является подмножеством объединения данных, в кото-
рых данные не могут прийти непосредственно от датчиков (например,
слияние знаний и опыта; —также называется непрямой синтез, и на ос-
нове модели данных). Кроме того, слияния данных является подмноже-
688
ством информационного синтеза, где что слит может быть больше, чем
просто данных, и может включать в себя качественный и высокий уро-
вень информации (например, из мягких датчиков). Эта связь показана
на рис. 6.43. Как правило, два или более датчиков и большие объемы
данных датчиков используется сочетание датчиков.
Человеческое вдохновение сенсоров: люди выполнять датчиков в таких
мероприятиях как: ест, слушает музыку, роман, распознавание объекта, и
так далее. Данные из многих биологических сенсорные элементы обра-
батываются мозгом, чтобы принять соответствующие решения. Пять ос-
новных чувств биологической системы: зрение (визуальный), слуховое
(аудиальное), осязание (тактильные), обоняние (обонятельные), и вкус
(аромат). Примечание: каждый смысл может использовать множество
сенсорных элементов. Два или более из пяти о сновных чувств могут
быть совместно использованы (в синтезе) в человеческой деятельности.
В частности, информации от многих сенсорных элементов (например,
тактильную информацию от многих обратиться локации, изображений
от обоих глаз, что слышит обоими ушами) обрабатываются мозгом на
одно или несколько соответствующих решений.
6.13.1 Сущность и виды синтеза
Данные в схеме сочетания могут быть низкого уровня (например, чис-
ленные значения скорости объекта) или высокого уровня (например,
признаки, извлеченные из данных датчиков). Кроме того, результат сли-
яния может быть низкого уровня числового значения (например, угол
ориентации объекта) или высокого уровня вывода (например, качество
продукта/классификация, поведение агентов). Данные от различных дат-
Рис. 6 .43 размещения датчиков.
689
чиков могут быть использованы одновременно—параллельно (более же-
лательно) или последовательно всего один датчик одновременно (менее
желательно). Следует отметить, что датчик сетей не имеет существенно-
го значения для датчиков, хотя сетевые датчики могут быть использова-
ны в приемниках.
6.13.1 .1 архитектура сочетания
Существует несколько способов синтеза информации. Эти способы
могут зависеть от типов датчиков и сенсорной информации, характера
приложения и ресурсов, доступных для применения синтеза. Некоторые
из этих сравнительных архитектур и подходов синтеза описаны далее.
Комплементарное, конкурентное, кооперативное слияние: Синтезиро-
ванные датчики дополняют друг друга при низком по сравнению с кор-
поративным синтезе. Явным преимуществом является снижение непол-
ноты информации. Например, четыре РЛС измерения регионы, которые
не идентичны (может иметь некоторое перекрытие). В конкурентном
синтезе, каждый сенсор измеряет одно и то же свойство само стоятельно,
а отдельные элементы сенсорных данных сравнительно срастаются. Тем
лучше датчик (например, более точная, быстрее) будет на пользу. К до-
стоинствам можно отнести повышение точности и надежности, а также
снижение неопределенности. Например, четыре РЛС измерения одной и
той же области. В кооперативном синтезе, датчик измеряет другой дат-
чик и должен (и по просьбе самого датчика или монитора выше уровня)
дополнить/улучшить необходимую информацию. Примечание: два дат-
чика может иметь одно и то же свойство (для повышения его точности,
надежности и т. д.) или разные свойства (заполнить необходимую ин-
формацию), но это делается совместно. Например, в стереовидения , он
может быть предварительно назначены, что одна камера получает изо-
бражения в одной плоскости, а другая камера получает изображения в
другой плоскости. Затем изображения объединяются в 3D-изображение.
Это может быть похоже на взаимодополняющий синтез. Однако, в ком-
плементарных слияниях датчики, не предназначенные для конкретных
ролей восприятия информации.
Централизованное или распределенное (децентрализованная) слияние:
в централизованном слияние данные от различных датчиков поступают
на один центральный процессор, чтобы осуществить термоядерный син-
тез. В распределенных синтезах, датчик получает информацию от одно-
го или более других датчиков, а также осуществляет синтез. Таким об-
690
разом, каждый датчик выполняет некоторый уровень синтеза локально,
используя некоторые данные от других датчиков. Гибридная архитекту-
ра, которая имеет централизованный и децентрализованный кластеры,
датчиков могут также быть реализованы.
Однородные против гетерогенного синтеза: в однородном синтезе, за-
действованные датчиков идентичны. В гетерогенном синтезе, включили
различные датчики (разные типы, функции и т. д .).
Синтез каскадной модели: согласно этой модели, процедура син-
теза выглядит следующим образом. Очувствление →предвари-
тельная обработка → вытяжка → шаблон обработки решения →
оценка ситуации → оформление. Шаги выполняются последова-
тельно, сверху вниз. Следовательно, это иерархическое слияние
модель.
Иерархический синтез: эта архитектура является многоуровневой. Каж-
дый слой может выполнять различные уровни синтеза, в частности, сли-
яние данных, функция синтеза, и решение синтеза "снизу-вверх" архи-
тектура. Процесс синтеза в слое может рассматриваться в качестве само-
стоятельной деятельно сти синтеза, как указано далее.
Данные уровня синтеза: сенсорных данных (с минимальной предвари-
тельной обработки, такие как усиление и фильтрация) непосредственно
соединены с помощью алгоритма синтеза.
Характеристика уровня синтеза: характеристики (или атрибуты данных)
извлекаются из различных элементов данных датчика отдельно. Эти функ-
цииинтегрированы в вектор признаков,который предо ставляетсясистемой
Fusion для общего принятия решения (или оценка требуемого количества).
Решение на уровне синтеза: каждый датчик отдельно обрабатывает свои
данные, чтобы прибыть на сенсорные решения (или оценка требуемого
количества). Эти отдельные решения/оценки оцениваются и смешанная/
плавленого системой Fusion для окончательного принятия решения (или
оценка).
Слияния можно классифицировать также исходя из характера (или уро-
вень абстракции) то, что входит в процесс синтеза и то, что выходит.
Очевидно, что это имеет отношение к иерархическому синтезу . Некото-
рые возможности ввода слияние и выход приведены в таблице 6.3 .
6.13.2 Применения сочетания датчиков
Сенсорное сочетание может применяться в любой ситуации, где исполь-
зуются многочисленные датчики для выполнения специфической рабо-
691
ты. Применения включают: глобальные системы обнаружения (GPS);
компьютерное обучение; принятие деловых решений; умные системы
транспортировки; прогноз погоды; медицинское диагностирование, те-
лемедицина; экспертные системы; потребительская электроника и раз-
влечения; военная и оборонительная (расчет цели, автоматизированная
идентификация целей, снарядов, предупредительных систем, надзор,
навигация, контроль над автономными транспортными средствами); ав-
томобильную (например, избежание столкновения); авиацию и космос
(например, навигация,
таблица 6.3 Возможные входные и выходные сигналы процессов слия-
ния
Входное слия-
ние
Выходное слия-
ние
Пример
Информация
Характеристи-
ки
Решение
Информация
Характеристи-
ки
Информация
Информация
Характеристики
Решение
Характеристики
Решение
Решение
Слияние мульти спектральной
информации
Слияние информации с или без
изображения
Несочетаемые датчики
Выделение формы
Опознание объекта
Опознание графического ша-
блона
высота зондирования воздушного судна); робототехники (например, нави-
гация, обнаружение и идентификация объекта);стерео - скопической визуа-
лизации; управление технологическими процессами и автоматизации; ди-
агностико-прогностический мониторинг (мониторинг машины условие /
здоровье);слияниекратно масштабных изображений;ибиометрической ау-
тентификации с использованиемотпечатков пальцев и радужной оболочки.
Пример 1, стереоскопическое изображение: В конкретной установке, две
отдельных камеры используются в разных местах и ориентации, но со-
средоточены на том же объекте. Изображения из двух камер можно ком-
692
бинировать, чтобы дать представление 3D-изображения в представлении
/ объекта. Датчик может быть использован в этом процессе. Примечание:
Отношение: Камера до камеры расстояние / камеры до объекта расстоя-
ние должно быть> 1/400, чтобы сохранить эффект кроскопического сте-
реотипа; ~ 1/80 типична. Соответствующее применение этой процедуры
заключается в оценке высоты растительности или структур.
Пример 2, военное применение: рассмотрим обнаружение и локализа-
цию подводной лодки. Сенсорная информация от нескольких типов ги-
дролокаторов передаются через спутниковую систему к бортовому ком-
пьютеру корабля. Выполняет компьютер слияние датчика, а включенные
также другую информацию, имеющуюся в своей базе данных, чтобы
локализовать подводной лодки. Эта информация затем передается в во-
енный самолет для принятия соответствующих мер.
Пример 3, Мультиспектральное объединение данных (комплементарное
зондирование) в знак признания объекта: В этом приложении, предпо-
ложим, что датчик 1 точно обеспечивает функции изображения низкой
частоты (например, большие объекты изображения, см фото) и датчик
2 точно обеспечивает функции изображения высоких частот (например,
края объекта). Комбинируя (совмещая) информацию от датчиков 1 и 2,
лучшего распознавания объекта и вычисления признаков (спектральное
разрешение) может быть до стигнуто.
Пример 4, комбинированный фильтр: Когда частотная характеристика
одного датчика не подходит для данного применения, два или более дат-
чиков различных частотных характеристик, могут быть использованы
и их реакции в сочетании, чтобы обеспечить более полный ответ. Это
аналогично, например, в комбинации фильтра нижних частот с / на поло-
совой фильтр, чтобы увеличить пропускную способность фильтра. Это
называется мультиспектральных слияние данных. Возьмите следующие
два фильтра:
фильтр
низких
частот
vo/vi
=
1/(τs
+1)ипо-
ло совой фильтр:
vo/vi
=τ
1s/(τ1s
+
1)(τ2s
+
1)
Эти два фильтра могут быть объединены (параллельно), чтобы дать:
Как показано на рис. 6 .44, этот процесс генерирует низкочастотный
фильтр, который имеет большую пропускную способность.
693
Пример 5, комбинированный Датчик: датчики могут быть интегрирова-
ны, чтобы обеспечить дополнительные и расширенные сенсорные воз-
можности. Инклинометр и сочетание гироскопа такого типа имеются в
продаже.
Инклинометр представляет собой датчик емкости, где наклон жидкой
массы (которая является частью диэлектрической среде) между обклад-
ками конденсатора изменяется емкость, что дает угол наклона. Это низ-
кая пропускная способность датчика. Кроме того, измерение угловой
скорости от скорости гироскопической интеграции дает угол наклона.
Интегрированное чтение страдает от проблем дрейфа. Объединив пока-
зания с двух датчиков, может быть выполнено более точное и надежное
считывание угла наклона.
6.13.2 .1 технологии запуска
Датчики могут включать в себя технологии микро электромеханических
систем (МЭМС), цифровую обработку сигналов, теории вероятностей
и Байесовских методов статистического оценивания, включая фильтр
Калмана, мягких вычислений (нечеткие логики, нейронные сети, эво-
люционные вычисления), искусственный интеллект (ИИ), вытяжка, рас-
познавания образов и классификации. Технологии сенсорных сетей при-
меняются также в конкретных ситуациях, когда слияние предполагает
сетевые датчики.
6.13.3 Подходы к сенсорному слиянию
Процедура синтеза датчиков может включать в себя один или несколько
из следующих методов: искусственных нейронных сетей; нечеткая тео-
Рисунок 6.44 Спектрозональный фильтр синтеза.
694
рия множеств; нейро-нечетких систем; методы ядра (поддержка вектор-
ных машины); и вероятностные методы (байесовский логический вывод,
теория Демпстер-Шафера и фильтр Калмана). Следующие основные ме-
тоды синтеза датчика обсуждаются в следующем:
1. Синтез датчиков вероятностного (Байесовского) подхода
2. Сенсорный синтез с помощью фильтра Калмана
3. Сенсорный синтез с помощью нейронных сетей
6.13.3 .1 Байесовский подход к слиянию датчиков
Слитый датчик включает в себя вывод необходимых информаций из муль-
тисенсорных данных. Существует возможность ошибки модели и ошиб-
ки измерения в данных (см главу 4). Это проблема оценки, где данные для
оценки более чем одного датчика. Следовательно, традиционные мето-
ды оценки, могут быть использованы в мультисенсорного задаче оценки.
Рассмотрим сначала случай датчиков, которые генерируют дискретные
измерения. Он включает в себя проблему дискретного плавления датчи-
ка. Мы будем использовать максимальную оценку правдоподобия (MLE)
осуществлять слияние датчика. Корпус одного датчика был представлен
в главе 4. Теперь мы расширим метод Мультисенсорного слияния данных.
Как и в главе 4, предположим, что расчетная величина m дискретно.
В частности, она занимает одно из набора дискретных значений i, i = 1,
2, ..., n. Следовательно, он может быть представлен векторным столбцом
m = [m1, m2, ..., mn]T.
Например, каждый из mi может представлять собой другое состояние
близости от объекта (рядом, далеко, очень далеко, ни один объект и т.д .)
или, несколько размеров измерения объекта (маленький, средний, боль-
шой). Кроме того, предположим, что измерение / наблюдение у, соответ-
ственно дискретным. Это берется n дискретные значения yi, i = 1, 2, ...,
n. Он может быть представлен вектором y = [y1, y2 ,..., yn].
В общем случае (с неопределенным или мягкий датчик), измерение или
наблюдение могут быть представлены вектором вероятностей соответ-
ствующих значений вероятности для этих n дискретных величин. (При-
мечание: сумма вероятностей в векторе= 1.) Более распространенной
является ситуация, дело хрустящего датчика, который бы обеспечивал
измерение / наблюдение точно одной из этих п дискретных величин, при
вероятности 1.
Для того, чтобы оценить максимальное правдоподобие (ОМП), нам нуж-
на матрица правдоподобия
695
Примечание: Структура этой матрицы:
Эта вероятность матрицы является по существу модель датчика ре-
гулирующего характеристиками датчика. В частности, элемент pij
матрицы указывает на вероятность существования конкретного дискрет-
ного состояния mi измеряемой величины m, когда измерение является
дискретным значением yj.
Проблема оценки: определить вектор вероятностей, соответ-
ствующих дискретному вектору параметров m = [m1, m2,
...,
mn], учитывая измеренные данные. Значение параметра, соот-
ветствующее наибольшему значению вероятности этого век-
тора является расчет максимального правдоподобия (ОМП).
Предположим, что существует r > 1 датчики для измерения количества
дискретных m. Мы будем иметь r матрицы правдоподобия L(m|k y)= P(k
y|m),=1,2,...,r.
Предположение: Принимая во внимание значение измеряемой величины
м, измерения датчиков г независимы.
Примечание: Это более слабое предположение, чем измерениям эффекта r
датчики независимы. Обоснование этой условной независимости явля-
ется то, что, поскольку m является единственной общей основой для r
датчики, как только m дается (т.е. ., m больше не случайным образом),
хаотичность этой общей основы удаляется. При выполнении этого усло-
696
вия, измеренные данные из r датчики можно предположить независимо.
В соответствии с этим предположением, если kth датчик дает измерение
yi и lth датчик дает измерения yj, то вероятность того, вектор оценки m
дается формулой (смотрите главу 4)
Примечание: Символ ⊗ обозначает умножение соответствующих эле-
ментов в двух векторов. параметр a должен быть выбран таким образом,
что вероятностные элементы результирующего вектора добавить к 1.
Согласно МЛО подход (см. главу 4) мы выбираем элемент m что соот-
ветствует наибольшему значению вероятности в оценку вектора вероят-
ностей P(m|k yi , l y j ). Этот Байесовский подход к датчикам показан на
рис. 6 .45.
6.16.3 .3 Датчики с использованием Фильтра калмана
Как изучили в главе 4, фильтр Калмана используют несколько измере-
ний выхода, чтобы оценить какой-либо одной переменной. Следователь-
но, она по своей сути использует датчик слияния. Два подхода могут
быть использованы для датчиков с фильтром Калмана:
1. Используйте одну модель измерения для всех сенсоров r (т.е. выход r
измерений), где все R измерения представлены в виде вектора измерений
порядка RTH. Тогда, никаких изменений не требуется, чтобы алгоритм
Рисунок 6.45 Байесовский подход к синтезу датчиков.
697
фильтра Калмана, представленный в главе 4. Мы можем просто приме-
нить фильтр Калмана всех r измерений одновременно (т.е. параллельно).
2. Использование r различные модели измерения для r датчиков.
Тогда правильное уравнение выхода должно быть использовано в фильтре
Калмана, в зависимости от используемого в данный момент датчика. Затем
фильтр Калмана применяется последовательно к измерениям датчиков r.
Примечание: В подходе 2, то есть лучше, если система находится отдель-
но наблюдаемых для всех моделей измерения r.
Примечание 2: Любой вариант фильтра Калмана (линейный, расшири-
тельный, недушистый и т.д.) может быть использован в системе датчи-
ков.
Проблема на основе мониторинга и оценки фрезерного станка с исполь-
зованием фильтра Калмана было дано в главе 4. Продолжением этой
проблемы, с мониторингом и мультисенсорного слияния через фильтр
Кальмана дается как проблема в настоящей главе. Видно, что фильтр
Калмана подход к синтезу датчиков до статочно просто.
6.13.3 .4 Синтез датчиков с помощью нейронных сетей
Вдохновленные биологической архитектурой нейроны в мозгу, нейрон-
ные сети массово подключенных сетей вычислительных нейронов. Они
обладают параллельной и распределенной обработкой структур. Их ос-
новные характеристики включают следующее:
• Они могут принимать множество входных сигналов (например, от
многих датчиков).
• Они способны учиться на примерах. (Примечание: обучение является
атрибутом интеллекта.)
• Они могут приближаться к высоко нелинейным функциям.
• Они имеют серьезные вычислительные мощности.
• Они имеют память о своих обрабатываемых информаций.
Все эти характеристики могут быть использованы в системе датчиков.
Узлы нейронной сети (NN), которые подключены через взвешенные
пути, называются синапсами, расположены во входной слой, один или
более скрытых слоев и выходных слоев. На узле, взвешенные входы сум-
мируются, порогами, и пропускают через функцию активации, чтобы
сгенерировать выходной узел. В слиянии датчика, узлы во входном слое
приведены данные из нескольких датчиков, и скрытые слои осуществля-
ют слияние датчика. Конденсированные выходы обеспечиваются узлами
698
в выходном слое.
Многие типы нейронных сетей доступны. В сети прямого распределе-
ния (статической сети) потока сигнала от узла к другому узлу в прямом
направлении (в настоящее время нет пути обратной связи). В цепи обрат-
ной связи (динамический или рецидивирующий сетей) выходы одного
или нескольких узлов подаются обратно в один или несколько узлов в
предыдущем слое. Примечание: Обратная связь обеспечивает возмож-
ность памяти.
6.13.3 .4 .1 обучение
NN должен научиться решать эту проблему, которая дается ему. Это мо-
жет быть сделано с помощью примеров (и обучение NN через них) или
через опыт выполнения задачи, где механизм предусмотрен для поощ-
рения правильных действий и наказываться неправильные действия. В
контролируемом обучении во внешнем устройстве учитель предоставля-
ет наборы данных ввода-вывода (примеры). Во время обучения, для дан-
ного входа, выход сети сравнивается с желаемым выходом. Правило обу-
чения (например, градиент правило спуска) используется для настройки
параметров сети, чтобы минимизировать ошибку (например, алгоритм
обратного распространения ошибки). В неконтролируемом обучении,
нет учителя, чтобы привести примеры ввода-вывода для обучения сети.
Вместо этого перед полученными знаниями, руководства, местной ин-
формации и внутреннего контроля используются для обновления пара-
метров сети.
Примечание: В этом случае, для данного входа, правильный вывод зара-
нее неизвестен. Соответствующие шаги: Входящие данные приведены
в сеть; выход сети проверяется на основе предварительных знаний, ру-
ководящих принципов и внутренней информации; и сетевые параметры
настраиваются с помощью шага 2 и правила адаптации. Армирование
обучения имитирует адаптивное поведение человека к окружающей сре-
де. Не нитрованного в том смысле, что нет никакого учителя, чтобы при-
вести примеры ввода-вывода. Процедура выглядит следующим образом:
Сетевые соединения изменяются в зависимости от производительно сти
и соответствующей информации обратной связи из окружающей среды
(то есть, правильно или неправильно ответ); Правильный ответ Þ со-
ответствующие соединения усилены (вознаграждение), неверный ответ
Þсоответствующие соединения ослаблены (штраф).
699
6.13.3 .4 .2 Гибридное использование с нечеткой логикой (нейро не-
четкие системы)
Нечеткая логика, которая до некоторой степени имитирует механизм
рассуждений человека, могут быть интегрированы с нейронными сетя-
ми для повышения производительности. Такие нейро-нечеткой системы
обычно используются в слиянии датчика. Существуют три основных
типа: (1) инкорпорировать NN в качестве посредника / инструмента в
нечеткие логики системы (например, узнать правила / поезда и функ-
ции принадлежности, используя NN). Использование нечеткого вывода
для слияния датчика; (2) С помощью нечеткой логики для представления
особенностей данных датчиков. Используйте NN (возможно, с нечетки-
ми нейронами, нечетких весов и т.д.) для датчика / функция слияния;
(3) Используйте отдельные нечеткие подсистемы и подсистемы NN о су-
ществлять деятельность разных слитых (например, нечеткая система
делает информационное слияние для высокого уровня надзорных дей-
ствий / настройки; NN предохранители данные датчика низкого уровня
непосредственно для управления с обратной связью).
6.13.3 .4 .3 Пример: машинное обнаружение ошибок
Сплав датчика обычно используется в машинном медицинском контро-
ле, обнаружении ошибки и диагнозе. Это довольно логично, потому что
как правило несколько разрозненных датчиков используются в контро-
ле производственного процесса машины. Мы разработали автоматизи-
рованную промышленную машину для сокращения рыбы (см. рисунок
1.1). В этой машине потенциальные ошибки/сбои (1) Заблокированная
рыба, (2) Неудача гидравлической цилиндрической системы, (3) Неудача
системы конвейера, (4) Отказ гидравлического насоса, (5) Отказ гидрав-
лических клапанов сервомотора, и (6) Неудача пневматического резака,
которым управляют.
Мы развивали нейро нечеткую сеть для обнаружения ошибок машины,
через сплав датчика (Лэнг и де Сильва, 2008). Микрофоны, камеры и
акселерометры (для ощущения вибрации в различных местоположени-
ях) являются главными датчиками, которые используются для контроля
машины (см. рисунок 6.46). Данные из датчиков предварительно обра-
ботаны, чтобы извлечь полезные особенности. Они предоставлены вход-
ному слою. Эта информация тогда передана к нечеткому слою, который
использует нечеткую логику, чтобы вывести статус машины на основе
700
каждых данных о датчике. Эти сенсорные выводы сплавлены в скры-
том слое. Слой продукции тогда обеспечивает природу ошибки (включая
ошибку бесплатный статус). Нейро нечеткую сеть, которая используется
с этой целью, показывают в рисунке 6.47.
Рисунок 6.46 Архитектура системы диагностики неисправностей машины.
FIGURE 6.47 Нейро-нечеткий слитый датчик для диагностики неисправностей
машины.
701
6. 14 Беспроводные сети
WSN состоит из нескольких узлов датчика, которые находятся в беспро-
водной (радио-) связи друг с другом и с базовой станцией (ворота).
Каждый узел датчика содержит один или несколько датчиков, микро-
контроллер, систему сбора данных и радио-приемопередатчик. Много
практического применения требуют многократных датчиков, которые
географически распределены по всей системе. Телеграфирование, что-
бы соединить датчики может быть трудным, дорого стоящим, или даже
нео существимым во многих ситуациях. Когда много датчиков необходи-
мы, стоимость за датчик - также соображение. Следовательно, WSN мо-
жет быть лучшим сенсорным решением для многих заявлений. Для этих
причин обращаясь к сетям датчиков, как правило, мы сосредотачиваемся
только на беспроводных сетях. Технологии встроенной системы и инте-
грация датчиков, радиосвязи и цифровой электроники в единственный
пакет IC - ключевые инструменты реализации WSNs. Технологии плавал
разведки (SI) и сотрудничества мульти робота (локализация, оптималь-
ная навигация; энергетическая оптимизация, переданная коммуника-
ция), может помочь продвижению технологий WSN. Кроме того, WSNs
- неотъемлемая часть Internet of Things (IoT).
WSNs значительно продвинули масштаб и разрешение сбора данных,
анализа, распределения, и принятия решения во многих заявлениях.
рисунок 6.48 Типичная структура беспроводной сети датчика (WSN).
702
Даже при том, что понятия и технологии WSN произошли более чем
десятилетие назад, их полный потенциал и преимущества еще не были
поняты. Это может произойти из-за высоких затрат на развитие при
сравнении с телеграфированными системами. Некоторые препятствия
более широкому развертыванию WSN следующие: прикладной масштаб
ограничен коммуникационной пропускной способностью; ограничения
источника энергии; необходимая надежность программного и аппарат-
ного обеспечения; ограниченное моделирование распределения; высо-
кая стоимость полевых испытаний; проблемы безопасности системы;
неоднородные, сложные, и развивающиеся стандарты.
6.14 .1 архитектура WSN
WSN, как правило, состоит из следующих компонентов:
• Группа узлов датчика с радиосвязью.
• Узлы устроены в определенной архитектуре.
• Узлы сообщают информацию (возможно предварительно обработан-
ные, сжатые и соединенные) к базовой станции (ворота), используя ра-
дио-приемопередатчик.
• Базовая станция вперед информации (возможно после последующей
обработки) к серверу приложений / пользователь.
Эту структуру WSN показывают в рисунке 6.48.
WSN может содержать всего несколько узлов или тысячи узлов, в за-
висимости от применения. Масштабируемость к масштабу применения
рисунок 6.49 Компоненты узла датчика.
703
-
важное рассмотрение WSN. Даже при том, что, как правило, у узла
датчика есть всего один датчик, возможно иметься несколько датчиков в
данном узле датчика, где мера - монетные дворы приобретены от одного
датчика за один раз. Базовая станция (ворота) собирает данные от узлов
датчика до беспроводной передачи Рф. Так как это не экономично или
выполнимо передать все данные от всех датчиков до базовой станции,
из-за таких ограничений как способность данных, диапазон передачи,
энергопотребления и требований точности, сенсорные данные предва-
рительно обработаны и сжаты в узле датчика прежде, чем передать к
базовой станции. Базовая станция далее обработает информацию, кото-
рая собрана от узлов датчика, и передается обработанная информация к
серверу в применении (пользователь) место для использования в приме-
нении.
Примечание: в некоторой архитектуре WSN лидер (владелец) узел мо-
жет служить базовой станцией.
6.14 .1 .1 узел датчика
Узел датчика содержит датчик (или несколько датчиков), обрабатывая
спо собность (микродиспетчер с операционной системой, центральным
процессором, памятью и вводом/выводом), аппаратное и программное
обеспечение сбора данных, источник энергии,
и приемопередатчик Рф с антенной, которая является всенаправленной
(передающий однородно во всем направлении в 2-м). Узел датчика - про-
граммируемое программное обеспечение. Привод головок может быть
объединен в узле, в зависимости от применения, но это не необходимая
функция узла датчика. Привод головок может управлять сенсорными
действиями или другими функциями в узле, используя внешние коман-
ды (от базовой станции, пользователя, и т.д .) . Размер узла датчика может
колебаться от 1 до 10 cm или больше. Компоненты типичного узла дат-
чика показывают в рисунке 6.49.
Аппаратные средства узла датчика характеризуются простотой, низкой
стоимостью, ограниченной функциональностью и низким потреблени-
ем энергии (и мощная эффективность). В частно сти, микро диспетчер
узла датчика не должен быть сложной и платформой общего назначе-
ния обширных возможно стей. Его операционная система должна быть
простой, поддержать удобный язык программирования высокого уров-
ня (например, C/C ++), и определенный для заявлений WSN (например,
704
TinyOS, который поддерживает основанное на событии программиро-
вание вместо того, чтобы мульти пронизывать). Intel Galileo, Ардуино
ООН и Распбэрри Пи является всеми возможными микро диспетчерами
для узла датчика. Однако некоторые из этих микродиспетчеров могут
быть более влиятельными, чем, что необходимо для конкретного приме-
нения.
Пятнышки: Крошечные и недорогие узлы датчика (пятнышки) масштаба
миллиметра, с ограниченным ощущением, обработкой и возможностя-
ми передачи могут использоваться в специальных заявлениях (напри-
мер, защита, экологический мониторинг). Они могут быть развернуты
по большим площадям, используя мобильное развертывание (например,
посеяться по воздуху вертолетом или беспилотником). Пятнышки ис-
пользуют недорогие и простые источники энергии (например, самопоко-
ление, фотоэлектрическое).
6.14 .1 .2 топологии WSN
Узлы в WSN могут быть связаны согласно различной топологии. Они
включают звезду, кольцо, автобус, дерево, петлю и полностью связан-
ную топологию. Некоторые примеры даны в рисунке 6.50 . Решение о
соответствующей топологии главным образом зависит от применения.
Ограничения ресурса, коммуникационная пропускная способность и
стоимость - соответствующие проблемы.
6.14 .1 .3 операционная система WSN
OS управляет микроконтроллером в узле датчика. Это обеспечивает ин-
терфейсы между заявлениями и аппаратные средства в узле, и намечает
задачи в узле. Общедоступное OSs для WSNs включает TinyOS, Contiki и
OpenWSN. OS для узла WSN должен быть намного менее сложным, чем
OS общего назначения компьютера. Встроенных систем ОС будет впол-
не подходящими (например, ЭКОС, УНЦ / OS; конкретного приложения;
низкая стоимость, низкое энергопотребление). Виртуальная память не
нужна и работа в режиме реального времени также может быть добавле-
на роскошь для узла датчика. Некоторые примеры операционных систем
для WSNs приведены в следующем.
TinyOS: Специально предназначенный для WSN; использует управ-
ляемую событиями программную модель (не multithread-луг); про-
стая и эффективная власть; состоявшая из обработчиков собы-
705
тий и задач с семантикой пробега к завершению: когда внешнее
событие имеет место (например, поступающий пакет данных; чтение
датчика), это сигнализирует о соответствующем обработчике событий.
LiteOS: Предоставляет UNIX-подобной абстракции и поддерживает C.
Contiki: Использует более простой стиль программирования C.
RIOT: Реализует архитектуру микроядра; обеспечивает мно-
гопоточность со стандартным API (прикладном
программ-
ный интерфейс); поддерживает C / C ++. RIOT поддержива-
ет общие КАТО протоколы, такие как 6LoWPAN, IPv6, RPL, TCP,
UDP. (Примечание: RIOT может быть чрезмерным для БСС.)
ЭРИКА предприятие: с открытым исходным кодом ядра, многожильный,
защита памяти; поддерживает C.
1.1 .2 Преимущества и проблемы WSNs
Многие преимущества WSNs на самом деле происходят из недостатков
телеграфирования. В частности телеграфирование трудное в некоторых
ландшафтах (например, под водой, городским пейзажем, обширными
и глубокими отдаленными районами, сложный ландшафт, такими как
горные формирования и холмы). Следовательно, это вводит высокую
стоимость установки и обслуживания. В стоимость увеличения с коли-
чеством датчиков, а также расположение и области эксплуатации. Соот-
ветствуя этому, энергопотребление также увеличивается и уменьшения
эффективности. Расточительная природа телеграфирования может, пре-
жде всего, прибыть из рассеивания энергии, которое увеличивается со
степенью развертывания сети датчика. Они грязны (кабельная путаница)
и менее гибки (не могут удобно приспосабливаться к мобильным датчи-
кам, перемещению места или расширению). Кроме того, кабели (связ-
ки провода включая оптоволокно) менее надежны. В частности кабели
могут столкнуться с поломкой и неудачей соединителя (из-за старения,
износа, несчастных случаев, злонамеренного действия, и т.д.). Главные
преимущества WSNs перечислены следующим образом:
• Безпроводная
• Может иметь много узлов и покрыть очень большие площади
• Легко масштабируемый к прикладному масштабу (например, тысячи
узлов)
• Низкая стоимость установки и операции
• Надежная возможность соединения, прочная, и безопасная
• Гибкая структура узлов (реструктуризация, подвижно сть, перевычис-
ление, и т.д.)
• Автономный и самоорганизующий
706
• Может работать в резкой окружающей среде
• Распределенная архитектура с распределенной обработкой и (умным)
принятием решения
• Точный, эффективный, и быстрый
6.14 .2 .1 ключевые вопросы WSN
Проблемы, общие для датчиков и зондирования являются важным под-
множеством вопросов WSNs. Кроме того, есть конкретные вопросы, ко-
торые включают в себя многообразие и распределение узлов; беспро-
водная передача; коммуникационную сеть; ограничения мощности;
доступные технологии; Приложения; управление энергопотреблением;
топология сети; автономная работа; самоорганизации; надежность; ком-
муникационные технологии и протоколы; локализация узла; скорость
передачи данных; перегруженность сети связи; Мобильность / узел сети;
Пустота (для некоторых узлов, может не быть приемником узла в диапа-
зоне передачи, например, если узлы движутся); синхронизация (узловых
деятельности); стандарты (эволюционирует).
Примечание: Стоимость решения проблемы может превысить возмож-
ную экономию (по крайней мере на начальном этапе).
6.14 .2 .2 инженерные проблемы
Основные технические сложности WSNs включают в себя следующее:
Компонент жизни и жизни сети: Сеть может функционировать, даже
если некоторые компоненты терпеть неудачу; щелочная жизнь аккуму-
лятору составляет 2-5 Вт ч, а две батареи будет длиться около месяца при
включении питания = 9 мВт; гия сбора урожая и / или быть энергоэффек-
тивным имеют важное значение.
Скорость ответа: Ответ на событие, пользовательский вопрос, и т.д.;
уменьшает целую жизнь.
Надежность: В резкой окружающей среде развертывания; низкая стои-
мость → низкое качество, низкая прочность и надежность.
Масштабируемость: Вычисление к прикладному масштабу (тысячи уз-
лов могут требоваться); распределенный, иерархическая архитектура
(не централизованный) → нужна местная обработка.
Автономная (оставленная без присмотра) операция: самолокализация,
самокалибровка, синхронизация, самоорганизация.
707
Незнакомые и динамические среды: Адаптация действий и протокола,
чтобы максимизировать работу; использование изучения и моделей дан-
ных, чтобы минимизировать передачу.
Ограничения ресурса: Например, власть; особенности/надежность/без-
опасность пределов; поможет определенное для применения внедрение.
6.14 .2 .3 Проблемы питания
Питание имеет решающее значение в WSN приложениях. На самом
деле, энергоэффективность является более важным, чем ИНГ и переда-
ча данных Процесс - эффективности. Например, отправка 1 бит данных
потребляет на три порядка больше энергии, чем обработка одной коман-
ды. Кроме того, вычислительные технологии являются более продвину-
тыми, чем гибкие технологии питания (например, батареи, собирающие
энергию), и развиваться намного быстрее. Энергия не легкодоступна во
многих приложениях WSN и срок службы источника энергии не явля-
ется легко предсказуемым, как много неизвестных и случайных факто-
ров могут повлиять на нее. Батареи не являются лучшим решением для
WSNs, поскольку они громоздки, не возобновляемая / перезаряжаемая
на удаленных объектах, срок их службы не могут быть адекватными, и
так далее.
6.14 .2 .4 Управление электропитанием
Конструкция для энергетической эффективности (т.е. компонентов си-
стемы проектирования и интегрировать их таким образом, чтобы опти-
мизировать потребление энергии и энергоэффективность, что является
проблемой мехатронного дизайна) является важным фактором в WSNs.
Технологии производства электроэнергии (разработка и использование
соответствующих, эффективных и дешевых энергий технологии) явля-
ются ключевыми аспектами в этой связи. Сохранение энергии (принятие
мер по сокращению использования и потерь мощности во время работы
системы) и управления мощностью (например, с помощью микрокон-
троллера, контролировать использование мощности во время работы
системы) следует использовать в управлении питанием в WSNs. Неко-
торые важные соображения и подходы к управлению питанием в WSNs
указаны в следующем.
Парадигмы управления энергетикой: коммуникация мультиперелета;
контроль за направлением (оптимизируют бегство передачи, выбирая
708
эффективные властью узлы относительно исполнительного индекса);
езда на велосипеде обязанности; предварительная обработка данных
(обрабатывают/сжимают данные в местном масштабе перед передачей);
пассивное участие (когда у двух узлов будет та же самая информация,
передайте только один); адаптивная выборка; адаптивное ощущение и
передача (прекращают ощущать и передача, когда ощущаемое количе-
ство не изменяется); использование эффективных технологий власти
(например, эффективные и недорогие батареи, получая энергию от окру-
жающей среды — солнечный, вибрация, ветер, волны, геотермические,
и т.д.; некоторые узлы могут использовать линию — мощность перемен-
ного тока).
Многократная коммуникация: Радиопередача использует большую
часть питания в WSN. Сила передачи (потребление/разложение) увели-
чивается по экспонентам с диапазоном передачи (и сигнал надежности и
уменьшение силы). Передача мощности / аппаратного датчика увеличе-
ния отношения питания с частотой (увеличения порядком величины или
больше поскольку частота удваивается). Много интервальная коммуни-
кация может использоваться, чтобы достигнуть предназначенного места
назначения (с промежуточными узлами, уменьшить диапазон передачи).
Это повышает эффективность питания, точность и надежность. Кроме
того, интервальная стратегия может быть оптимизирована (т.е. опти-
мальным выбором промежуточных узлов).
Рабочий цикл: Это - важный подход к управлению электропитанием и
проводится микро - диспетчером узла. Методы включают следующее:
фиксированный рабочий цикл: используйте активным сном рабочие ци-
клы для всех компонентов (датчик, аппаратные средства сбора данных,
процессор); адаптивный рабочий цикл: приведите компонент в действие
только, когда он будет необходим. Спящий в других случаях; используй-
те часовые (т.е., узлы, которые всегда бодрствуют). Минимальный набор
часовых необходим, чтобы поддержать освещение WSN. Другие узлы
могут спать если не необходимые; оптимизация передачи сообщений/
коммуникации: минимизируйте передачу сообщений. Коммуникация,
которую стимулируют, может использоваться, ощущая событие (т.е ., ак-
тивировать передачу только, когда ощущение выполнено — это миними-
зирует мощность датчика и коммуникационную силу).
Предварительная обработка данных: Локальный процесс / сжатия дан-
ных в микроконтроллере узел перед передачей (таким образом, что толь-
ко компактные и меньшие количества информации передаются). Это
важно в управлении питанием, так как отправка 1 бит данных потребля-
709
ет на три порядка больше энергии, чем обработка одной команды. Пред-
варительная обработка может включать в себя сжатие данных, агрегации
и моделирования, которые являются зависимые от протокола. Примеры:
мы можем использовать такие операции, как минимальное, максималь-
ное и среднее для сжатия данных. Кроме того, дискретный набор данных
{х} может быть представлена в виде модели, такой как (линейный) ах +
Ь.
Адаптивная выборка: Более быстрая выборка производит больше дан-
ных. Некоторые датчики, возможно, нуждаются в большой мощности
и могут потратить впустую энергию. Быстрое ощущение необходимо,
если измеряемая величина не изменяется быстро. В таких ситуациях
может использоваться адаптивная выборка. Подход: измените темп вы-
борки и период выборки данных в зависимости от датчика и примене-
ния; определенно, темп выборки увеличения, когда изменяется быстро,
и уменьшается иначе.
6.14 .3 Проблемы коммуникации
Передача данных является ключевой функцией WSN. Связанные с этим
вопросы включают топологию сети, протоколы коммуникаций, стандар-
ты связи, многоинтервальную связь, сетевой трафик (например, низкая
скорость передачи данных, пульсирующего трафика, мониторинг при-
ложений типа). Примечание: Режим серийной съемки дает возможность
посвящать весь канал для передачи данных из одного источника, а также
данных. Ориентированность (т.е. парадигма программирования, которая
сосредоточена на обработке и ретрансляции данных). Некоторые из этих
вопросов были решены уже. Другие основные вопросы обсуждаются в
следующем.
6.14 .3 .1 Протокол связи WSN
Протокол связи определяет формат и заказ обменов сообщениями, и ка-
кие по следующие меры были бы приняты среди предприятий коммуни-
кационной сети. Модель протокола устроена в слои. В WSN много узлов
и базовые станции хотели бы посылать или получать данные в установ-
ленный срок. Следовательно, WSN нужен протокол связи. Требования
протокола WSN ограничены ограничениями ресурса (маленькая память,
и небольшой размер, переменные условия).
Управление доступом к среде (MAC), уровень протокола: Это важный по-
710
дуровень модели протокола WSN. Его функции включают координацию
передачи между соседними узлами и в совместно используемом канале
(для оптимизации и избежать столкновения пакетов); координации дей-
ствий по общему каналу (шаги: тест, если занят, если не занят, передачу,
если занят, подождите и повторите попытку); Взаимодействия связи: за-
прос на передачу (RTS) и ясно, чтобы послать (CTS); спящий режим (для
узлов, которые не активны), которая экономит энергию, упрощает связь
для других узлов; режим прослушивания с низким энергопотреблени-
ем, чтобы решить, сна или бодрствования; и возврат пакета (ждут, если
отправка не актуальна). Это согласуется с открытым стандартом IEEE
802.15.4 и широко используется, но она довольно сложна.
Примечание: Еще одна версия протокола MAC слоя является B-MAC.
IEEE 802.15.4 характеристики (специфические для WSN): диапазон ча-
стот передачи 868 МГц / 928 МГц 902 / 2.48-2 .5 ГГц; скорость переда-
чи данных: 20 кбит (868 МГц) 40 кбит (902 МГц) и 250 кбит (2,4 ГГц);
поддерживает звезды и одно ранговая сеть (сетка) сетевые соединения;
шифрование передаваемых данных, для обеспечения безопасности;
определяет качество линии связи (полезно для алгоритмов много интер-
вальной сетки сетей); надежной передачи данных.
6.14 .3 .2 Направление коммуникации в WSN
Данные должны быть правильно разбиты в WSN. Для этого использует-
ся алгоритм направления. WSN не нужны сложные методы направления
как в Интернете. Типичный метод направления для WSN (1) обнаружи-
вает соседа - узлы луга (ID и местоположение) Примечание: Узел знает
свою собственную особенность (местоположение, способность, остаю-
щаяся власть, и т.д.)), (2) выборы, которые лучшие узлы, (3) посылает
сообщению в тот узел назначения.
Отметьте 1: Как только местоположение узла известно, сообщения по-
сылают в координаты местоположения, не ID узла (названные географи-
ческим отправлением или GF).
Отметьте 2: WSN не должен по сылать сообщения в узел сна, если он не
пробужден сначала.
Проблемы направления в WSN: Временная задержка, надежность, оста-
ющаяся энергия, скопление данных, чтобы уменьшить транс - стоимость
миссии. может использоваться мульти передачи. Семантика односто-
ронней передачи данных: сообщение, посланное в определенный узел;
семантика передачи: сообщение, посланное в несколько узлов одновре-
711
менно; семантика нечеткости: сообщение, посланное, не определяя уз-
лов (распространение или затопление).
Протокол маршрутизации: функция протокола маршрутизации, учиты-
вая адрес получателя, правильно данные о маршруте к тому месту на-
значения. Это должно быть прочно к неудачам узла и неумышленному
разъединению. Кроме того, это должно быть эффективное питание и
не слишком сложное. TCP/IP - протокол общего назначения. Это слиш-
ком сложное для WSN и не энергосберегающее. Алгоритм направления
используется в протоколе маршрутизации. Мульти передача может ис-
пользоваться, чтобы оптимизировать питание, надежность, и т.д. IETF
(Специальная комиссия интернет-разработок) стандартизирует РУЛОН
(Направление по сетям Малая мощность и Lossy). Это важно для WSN.
Протоколы маршрутизации для WSN: Некоторые протоколы маршру-
тизации для WSNs даны следующим образом. РАПА (Низкая энергия
Адаптивная Иерархия Группы): операция разделена на раунды. Каждое
круглое использование отличие группы узлов с головами группы (CH).
Узел выбирает самый близкий CH и соединения группы, чтобы передать
данные; PEGASIS (Эффективность власти Сбор в Информационных си-
стемах Датчика): нет никакого формирования группы. Каждый узел об-
щается только с самым близким соседом (регулируя его сигнал власти,
который только услышит самый близкий сосед). Сила сигнала исполь-
зуется, чтобы измерить расстояние прохождения. После формирования
цепи лидер выбран из цепи (у которого есть самая остаточная энергия);
VGA (Виртуальная Архитектура Сетки): это использует скопление дан-
ных и обработку в сети, чтобы максимизировать сетевую целую жизнь.
Это энергосберегающее.
6.14 .3 .3 Стандарты WSN
Стандарты необходимы, чтобы достигнуть составляющей совместимо-
сти (совместимость устройств от различных производителей), надлежа-
щая коммуникация, и так далее.
Примеры коммуникационных стандартов WSN включают следующее:
• WiFi: Названный WLAN (беспроводная локальная сеть); УВЧ исполь-
зования 2.4 ГГц и сигнал радио СВЧ на 5 ГГц - nals; (IEEE) 802.11 стан-
дарта; для организации сети устройств в окружении.
• Bluetooth: Стандартизированный IEEE как IEEE стандарта беспрово-
дной личной сети области (WPAN)
802.15. Малая дальность технологии Рф для коммуникации среди элек-
712
тронных устройств и Интернета. Прозрачная для пользователя синхро-
низация данных. Использует нелицензированную группу на 2.4 ГГц.
• ZigBee: IEEE Использования 802.15.4 как физический слой и слой
MAC. Более безопасный. Топология сети Hybrid Star - Mesh поддержек.
Рентабельная, малая мощность, радио.
·6LoWPAN.
• Адресуемый как устройство IPv6, например, Вашим PC.
• Происходящие стандарты - следующее:
–
RFC4919: 6LoWPAN обзор
–
RFC6775: Соседнее открытие
–
RFC6282: формат Сжатия для дейтаграмм IPv6
–
RFC6606, 6568: требования Направления и пространство дизайна
• WirelessHART / IEC 62591
• Альтернатива ZigBee для промышленного применения, но более высо-
кая стоимость
• Снижение мощности и более устойчивы к помехам, чем ZigBee, но
IEEE 802.15.4e будет конкурентоспособным
6.14 .3 .4 Другие программы WSN
Синхронизация времени: Это важно, поскольку большинство данных
имеют смысл только с начала отсчета времени (временных рядов); Пе-
репрограммирование: это необходимо для обновления встроенного про-
граммного обеспечения всех узлов в сети (чертой сложения, об ошибке
/ исправления безопасности) по воздуху и по нескольким хмелям. Меры
безопасности имеют важное значение для предотвращения хакеров уста-
навливают прошивку.
6.14 .4 Локализация
Локализация включает определение географического местоположения
узлов WSN. Это необходимо для нахождения и узлов отслеживания.
Использование локализации включает контроль пространственной эво-
люции WSN, который необходим, например, в пространственном сборе
данных и определении пространственной статистики; определение каче-
ства освещения узла; достижение балансировки нагрузки узлов; облег-
чение направления (например, оптимальный, бегство мультиперелета); и
оптимизация коммуникации.
В WSN данным нужны и ссылка времени и в ссылка местоположения
713
(например, целевое отслеживание, обнаружения вторжения). Для лока-
лизации система координат и алгоритм могут быть определенными для
применения.
Следующее - шаги локализации:
1. Установите местоположение отобранных узлов (якоря/маяки/ориенти-
ры)
2. Измерьте расстояния до них от узла, который будет локализован
Проблемы локализации включают точность, скоро сть, коммуникацион-
ный диапазон, энергетическое требование, или внутренняя или наруж-
ная, 2-я или 3D, враждебная или дружественная окружающая среда, ко-
торый узлы локализовать, как часто локализовать, где вычисление лока-
лизации выполнено, и как локализовать (т.е., метод локализации).
6.14 .4 .1 Методы локализации
Основные методы измерения расстояния в локализации включают время
полета сигнала; радиосигнала сигнала на приеме. Два подхода следую-
щие:
1. Сначала определите время полета сигнала Рф от узла до узла. Тогда
используйте геометрию для вычисления координат узлов.
2. Используйте энергию полученного сигнала (т.е., энергетическая поте-
ря во время передачи).
Примечание: для обоих методов нужны узлы маяка (ориентиры), место-
положения которых известны (и узел может послать/, получают сигналы
им).
Косвенный Метод: Подсчитайте количество перелетов между узлами.
Тогда используйте среднее расстояние за перелет, чтобы оценить рассто-
яние между этими двумя узлами.
Для определения абсолютного положения могут использоваться GPS
или GPS с мобильного. Этот метод не может использоваться в закрытом
помещении.
6.14 .4 .2 Локализация мультилатерации
Мультилатерация касается оценки положения узла (то есть, локализо-
вать ее) с использованием расстояния от него до трех или более ориенти-
ров (с известными положениями). Необходимая формула для локализа-
ции происходит в настоящее время. На рисунке 6.51, пунктирные круги
обозначают диапазоны передачи эпохального узла. Рассмотрим общий
714
узел ориентир I, местоположение которого (координаты по отношению
к плоской декартовой системе координат) известно. Расстояние от этого
узла к узлу, чтобы быть локализованным измеряется каким-либо спосо-
бом (например, с использованием времени-пролета или потери энергии
передаваемого сигнала).
Выраженное в опорной декартовой системе координат, известные вели-
чины являются следующие:
(xi, yi) являются координаты ith ориентир, i = 1, 2, ..., n для n знаковые
узлы.
di это расстояние от ith ориентир от узла к локализации.
Позволить δi быть ошибкой в измерении расстояния от расстояния di.
Нам необходимо определить следующее:
(x, y) координаты узла локализованного
Рисунок 6.51 Локализация узла с помощью мультилатерации .
715
теорема Пифагора:
Вычтите последнее (nth) уравнение с первого раза (n − 1) уравнения. Мы
получаем n − 1 уравнение:
Примечание: ε обозначает вектор ошибки измерения
Квадратичная ошибка:
Для определения оценки ошибки методом наименьших квадратов (LSE)
в р, мы поступим следующим образом.
Минимизирование E
Пример 6.14
В локализации узла упражнения с тремя знаковые узлами, были получе-
ны следующие три вектора данных:
716
Определите местоположение (координаты) узла, который локализован.
решение
6.14 .4 .3 измерение расстояний с помощью мощности радиосигнала
В беспроводной передаче РЧ от узла к узлу, сигнал, посланный одним
узлом, принимается другим узлом.
6.14 .4 .3 .1 Преимущество радиочастотных сигналов (Электромаг-
нитный спектр)
Преимущества использования беспроводной передачи Рф в связи (в
частности, в WSNs) не требуют кабелей (беспроводных); могут прони-
кать в объекты, такие как стены; может передавать на большие расстоя-
ния; может размещать мобильные узлы. WLAN технологии используют
радиоканалы локальных (для расстояний от 10 м до нескольких сотен
метров). Клеточные технологии используют широко радиосистемах ка-
налы для больших расстояний (десятки километров).
6.14 .4 .3 .2 искажение сигнала во время передачи
Сигналы передачи представляют собой электромагнитные волны, кото-
рые перемещаются со скоростью света. Там будет ухудшение сигнала
во время передачи. В этом контексте, мы определяем SNR следующим
717
образом: SNR является мерой (дБ) от силы принимаемого сигнала по
отношению к деградации сигнала из-за передачи. Примечание: Изобра-
жение большего размера SNR означает более легкий (и более верный)
восстановление исходного сигнала из принятого сигнала (за счет устра-
нения фонового шума). Проблемы деградации сигнала включают в себя
следующее:
1. Сила сигнала уменьшается (сигнал будет расходиться) даже в свобод-
ном пространстве. Это называется потери в тракте передачи.
2. Помехи с другими сигналами (в частности, передаваемых сигналов в
той же полосе частот, экологическое электромагнитных помех от других
устройств, и т.д.) уменьшит SNR.
3. Объекты, которые препятствуют в деградации пути передачи сигнала
(причина отражения, поглощения, затенения и т.д .). Движущиеся объек-
ты вызывают более серьезные проблемы.
4. Частота появления ошибочных битов (BER) есть вероятностью того,
что передаваемый бит принят с ошибкой. Она уменьшается с увеличе-
нием SNR и со скоростью передачи данных (Мбит-мега бит в секунду).
6.14 .4 .3 .3 Метод
Деградация сигнала во время передачи может использоваться для оцен-
ки расстояния. Прямое преимущество метода - то, что мы используем су-
ществующие коммуникационные аппаратные средства и ресурсы WSN,
и нет никакой потребности в дополнительных аппаратных средствах для
локализации. В этом методе власть полученного сигнала определена (от
полученного индикатора силы сигнала, RSSI) много раз, и образец оз-
начает, что Пи, j вычислен. Затем используя известное справочное рас-
стояние d0 и отсчет мощности P0, следующая модель затенения силы
сигнала (потеря пути) используется, чтобы оценить расстояние:
где η является показатель потери на трассе ~ 2 .
6.14 .4 .3 .4 использование RSSI (По данным IEEE 802.11 -1999)
У RSSI есть стоимость в пределах от 0 до RSSI, Максимального, Он обе-
спечен подслоем радио-транс неправильного протокола Сьона (8-бит-
718
ный RSSI) как,
Мощность (дБм) = RSSI_VAL + RSSI_OFFSET
Типичная точность = ±6 dB
Примечание: dBm означает децибел милливатт. Это сокращение от от-
ношения мощности в децибелах(dB) мощности измеряется в милливатт
по отношению к 1 мВт. Поскольку сигналы мощности, мы используем
10log10 (коэффициент мощности), а не 20log10 (), чтобы преобразовать
в дБ.
6.14 .5 WSN Приложения
Применение WSNs, по существу, те из нескольких датчиков. Они могут
включать в себя как распределенные сенсорные определения (зондиро-
вания географически обширные системы) и слияние датчиков (повыше-
ние точности и надежности спо собность конкретного чувственного ре-
шения / цели путем объединения и объединения информации из несколь-
ких датчиков, чтобы определить конкретное измерение). Однако распре-
деленная (географически) - самая естественная прикладная категория
WSNs. Ключевые применения WSNs перечислены следующим образом:
• Защита, наблюдение и безопасность: Например, VigilNet с Иерархиче-
ской Архитектурой состоят - луг (1) прикладные компоненты; (2) ком-
поненты промежуточного программного обеспечения; (3) Крошечные
системные компоненты OS
• Экологический мониторинг: Загрязнение, качество воды, лесные по-
жары, стихийные бедствия, ядерные вмятины загрязнения, и т.д .; про-
странственное распределение: 1 cm–100 m; временная выборка: 1 мс к
нескольким дням; размер датчика: 1-10 см
• Транспортировка (земля, воздух, вода, и под водой)
• Контроль оборудования и структура гражданского строительства (на-
пример, для основанного на условии обслуживания; обнаружение на-
чала сейсмической активности) по низким темпам выборки. Как только
деятельность обнаружена, выборка сделана по намного более высокому
уровню,
• Промышленная автоматизация
• Робототехника (например, сотрудничество мультиробота в спасении,
защите, уходе на дому, будущих городах)
• Развлечения
• Интеллектуальные рабочие пространства
719
• Медицинский уход за престарелыми
• Энергия (исследование, производство, передача, управление)
6.14 .5 .1 Проживание с предоставлением частичного ухода и меди-
цинского сопровождения
Определенное внедрение - архитектура AlarmNet для телемедицины,
теле здоровья, ухода на дому, и т.д. Его особенности включают следую-
щее:
• Сети тела и фронтенды: Терпеливые датчики
• Установленная местоположение сеть датчика: живущая сеть космиче-
ского пространства Пациента
• Основа: Соединяет взаимодействующие устройства как ноутбук, сото-
вый телефон и iPad к сети
• Базы данных в сети: Используемый для работы в режиме реального
времени, временного хранения, и т.д .
• Базы данных бэкенда: Используемый для долгосрочного архивирова-
ния, сбора данных, и т.д., в центральном сервере
• Интерфейс пользователя: Пациенты и сиделки соединяют использова-
ние PDAs, сотовые телефоны, iPad, и т.д.; изнашивание использования
- способные узлы датчика и экологические узлы датчика
Примечание: Некоторые - мобильные узлы.
Задачи: Локализация, терпеливая идентификация, контроль, сбор дан-
ных, предварительная обработка и скопление, хранение, передача, дей-
ствие.
6.14 .5 .2 Структурный медицинский контроль
Шаблоны напряжения, акселерометры, камеры, и т.д. могут использо-
ваться для контроля мостов, зданий и других структур гражданского
строительства через WSN. Гибкий, недорогой, контроль с высоким раз-
решением возможен этим способом. Посредством непрерывного контро-
ля произведен большой объем данных. Ведение учета, анализ данных,
и интенсивный диагноз и предсказание нависших проблем сделаны с
проверенными данными. Основанное на условии обслуживание может
быть выполнено, используя произведенную информацию. Власть для уз-
лов датчика - проблема. Сбор и преобразование побочной энергии (по-
средством вибрации, солнечной, и т.д.), был бы желателен с этой целью.
Другие заявления включают телемедицину и контроль качества воды,
720
которые используют WSN и развиты в нашей лаборатории (Промышлен-
ная Лаборатория Автоматизации, Университет Британской Колумбии).
Эти проекты обрисованы в общих чертах в Главе 1.