














































































































































































Автор: Исаков А.Б. Анисимов В.И. Азбелев П.П.
Теги: электротехника компьютерные технологии радиоаппаратура (радиоэлектронная аппаратура) микросхемы схемотехника сборник задач
ISBN: 5-283-04495-5
Год: 1991




СБОРНИК ЗАДАЧ ПО МИКРОСХЕМОТЕХНИКЕ
АВТОМАТИЗИРОВАННОЕ
ПРОЕКТИРОВАНИЕ
Под редакцией В. И. Анисимова
Допущено Государственным комитетом СССР по народному образованию в качестве учебного пособия для студентов вузов,
обучающихся по специальности "Автоматика и управление в технических системах"
Ленинград
ЭНЕРГОАТОМИЗДАТ Ленинградское отделение 1991
ББК 32.844-02 С23
УДК 621.3.032:681.3(075.8)
Рецензенты — кафедра ЭВМ МИФИ (зав. кафедрой Л. Д. Забродин), кафедра конструирования и производства электронной вычислительной аппаратуры КПИ (зав. кафедрой Ю. М. Каниболотский)
С23 Сборник задач по микросхемотехнике: Автоматизированное проектирование: Учебное пособие для вузов / В. И. Анисимов, П. П. Азбелев, А. Б. Исаков и др.; Под ред. В. И. Анисимова.—Л.: Энергоатомиздат. Ленингр.
отд-ние, 1991.—224 с.: ил.
ISBN 5-283-04495-5
Содержит около тысячи вопросов и задач, отражающих представленные в сборнике методики автоматизированного проектирования аналоговых и цифровых электронных устройств. Даны примеры решения типовых задач с применением ЭВМ. Представлены основные разделы дисциплин “Электронные элементы и устройства”, “Микросхемотехника и электронные цепи” и др.
Для студентов и преподавателей вузов, может быть полезна специалистам, занимающимся разработкой и применением микросхем.
С
2405000000-125 051(01) - 91
236-91
ББК 32.844-02
Учебное пособие
Анисимов Владимир Иванович, Азбелев Петр Павлович Исаков Александр Борисович, Капитонов Михаил Васильевич Соколов Юрий Михайлович, Хорьков Геннадий Иванович
СБОРНИК ЗАДАЧ ПО МИКРОСХЕМОТЕХНИКЕ.
АВТОМАТИЗИРОВАННОЕ ПРОЕКТИРОВАНИЕ
Редактор С. П. Левкович. Художник переплета В. Л. Черников Художественный редактор В. М. Мартынов
Технический редактор Я. А. Минеева. Корректор М. С. Мордашева ИБ № 2819
Сдано в набор 28.11.90. Подписано в печать 24.07.91 Формат 60x881/16. Бумага офсетная № 1 Гарнитура литературная. Печать офсетная. Уел. печ. л. 13,72. Уел. кр.-отг. 13,72. Уч.- изд. л. 14,35. Тираж 10 000 экз. Заказ № 1586. Цена 2 р.
Энергоатомиздат. Ленинградское отделение 191065, Ленинград, Д--65, Марсово поле, 1. .Ленинградская типография № 4 Государственного комитета СССР по печати. 191126, г. Ленинград, Социалистическая ул., 14.
ISBN, 5-283-04495-5
© В. И. Анисимов, П. П. Азбелев, А. Б. Исаков, М. В. Капитонов,
Ю. М. Соколов, Г. И. Хорьков, 1991
ПРЕДИСЛОВИЕ
В настоящее время разработка сложных микроэлектронных устройств невозможна без широкого применения систем автоматизированного проектирования (САПР). Во многих случаях использование схемотехнических САПР позволяет отказаться от экспериментальных исследований проектируемого устройства и тем самым в десятки раз ускорить процесс создания новой схемы. К настоящему моменту издано много книг, посвященных автоматизации схемотехнического проектирования и ориентированных в основном на разработчиков САПР радиоэлектронной аппаратуры; имеется обширная литература по микросхемотехнике аналоговых и цифровых устройств. Однако для большинства специалистов, работающих в области микросхемотехникй, наиболее важными являются вопросы использования отечественных и зарубежных САПР в практике схемотехнического проектирования. В учебной литературе эти вопросы отражены недостаточно.
В этой книге изложены методические аспекты использования схемотехнических САПР при проектировании различных аналоговых и цифровых микроэлектронных устройств. При этом для каждого класса электронных устройств процесс проектирования представляется в виде совокупности задач, решаемых разработчиком с помощью ЭВМ. В работе также определяется роль разработчика и ЭВМ на различных этапах автоматизированного схемотехнического проектирования микроэлектронного устройства. При этом в методическом плане авторы для каждого класса устройств старались изложить задачи в такой последовательности, чтобы результаты автоматизированных исследований способствовали углублению схемотехнического мышления разработчика.
В сборнике задач обобщен в основном оригинальный материал, накопленный авторами в процессе применения учебно-исследовательских схемотехнических САПР, разработанных в ЛЭТИ имени В. И. Ульянова (Ленина). Для большинства задач приводятся ответы. Изложение материала сопровождается примерами решения типовых задач. Большое внимание авторы
з
уделяют задачам автоматизированного параметрического синтеза микроэлектронных устройств, которые успешно решаются при использовании в схемотехнических САПР комплекса программ “Оптимизация ”.
Настоящий сборник задач может быть полезен студентам вузов, обучающихся по специальностям 2201, 2202, 2203, 2207, 1907, 2101.
Главы 1 и 2 написаны совместно В. И. Анисимовым, А. Б. Исаковым и Ю. М. Соколовым; главы 3 и 8 —А. Б. Исаковым и Ю. М. Соколовым; главы 4 и 5—М. В. Капитоновым; главы 6 и 7—Г. И. Хорьковым; главы 9, 10 и 11 —П. П. Азбе- левым.
Авторы выражают признательность разработчикам учебноисследовательских САПР ДИСП и ЭМЦ К. Б. Скобельцину, Н. К. Перкову, О. С. Белецкому, С. Н. Ежову, И. Г. Кревскому, А. И. Ларистову, А. В. Никитину, А. В. Шнайдеру, Ю. Г. Уксус- никову, Н. И. Вольской за предоставленный материал для подготовки книги, замечания и советы, которые позволили улучшить содержание сборника задач.
Авторы
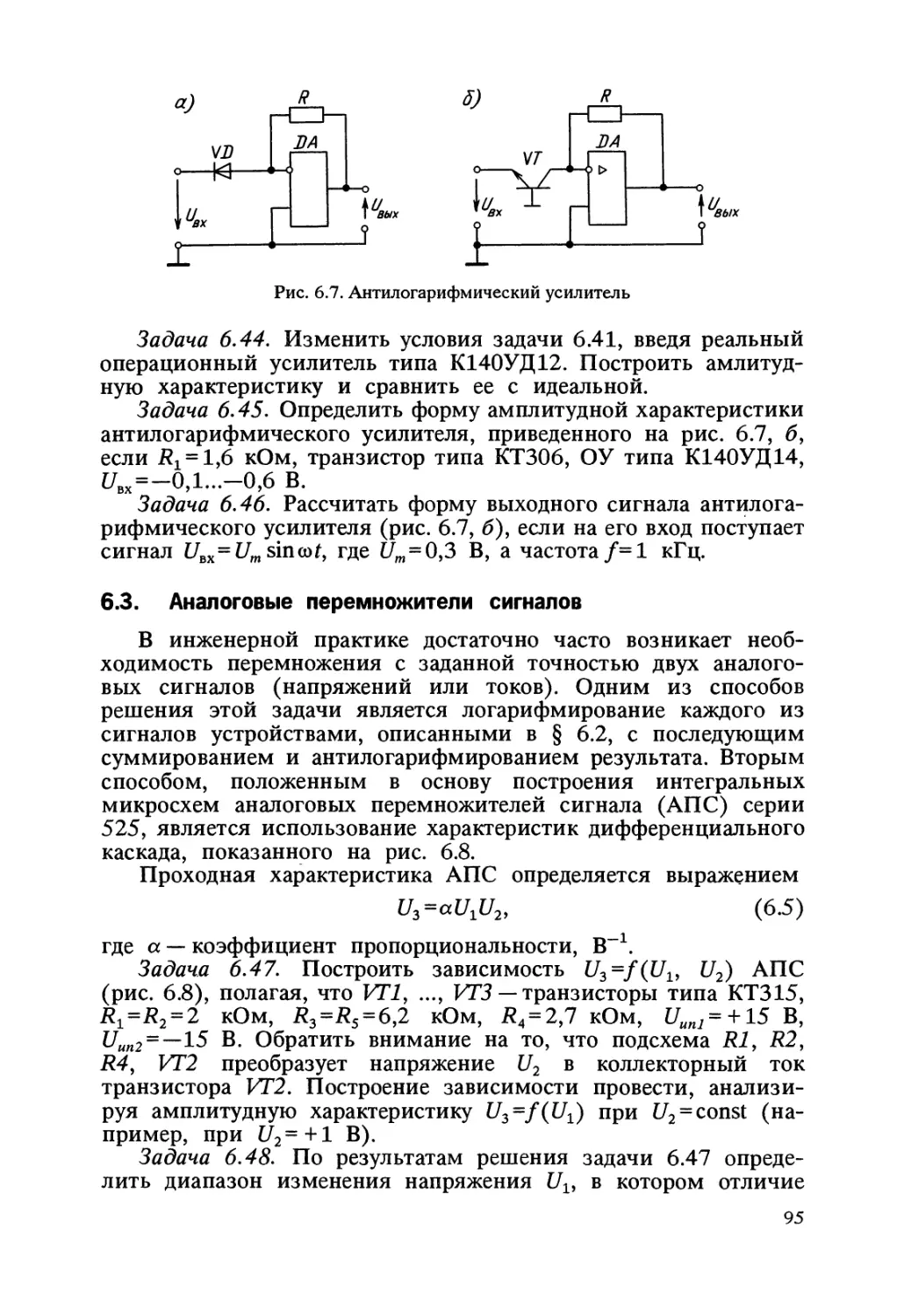
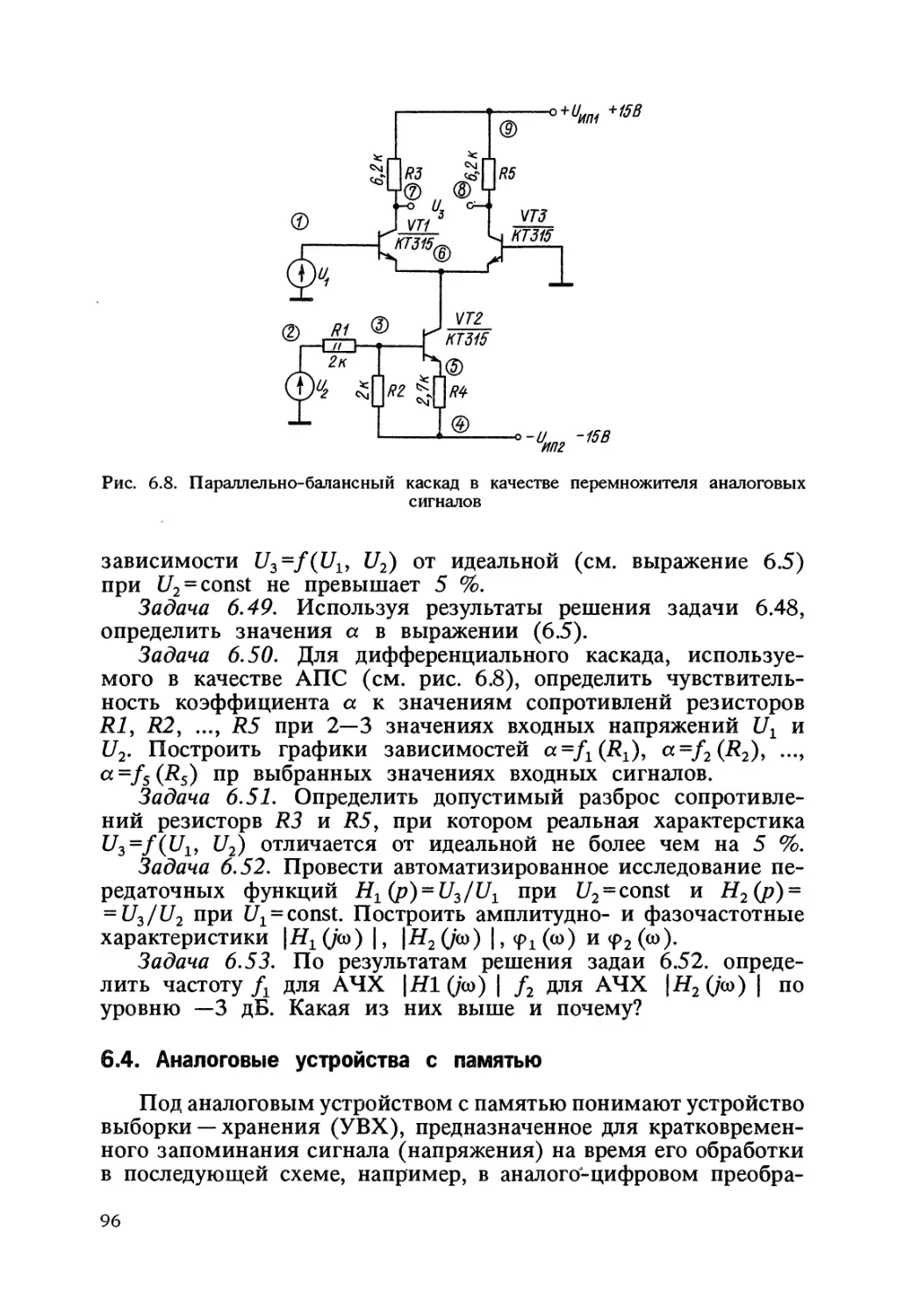
ОСНОВНЫЕ ОБОЗНАЧЕНИЯ
АЛУ — арифметико-логическое устройство
АПМ — автоматная пользовательская модель
АПС — аналоговый перемножитель сигналов
ARCO активные ДС-фильтры АУ — аналоговое устройство АЧХ — амплитудно-частотная характеристика БД — база данных
БДМК — база данных моделей компонентов
БИС — большая интегральная схема БМЭ — базовая модель элемента БСР — банк схемных решений БЯ — бистабильная ячейка ВМ — пакет программ “Временное моделирование”
ГПСЧ — генератор псевдослучай¬
ных чисел
ГСА — граф-схема алгоритма ДЛС — двухъярусная логическая схема
ДН — делитель напряжения ДНФ — дизъюнктивная нормальная форма
ДПП — диалоговый пакет программ ДУ — дифференциальный усилитель ЗФ — заграждающий фильтр ИМС — интегральная микросхема ИОН — источник опорного напряжения
И ПТ — источник постоянного тока ИСН — интегральный стабилизатор напряжения ИТ—источник тока КК — карта Карно
КМОП — микросхемы на комплементарных МОП-транзисторах КФУ — комбинационный функциональный узел
КЦУ — комбинационное цифровое устройство
ЛА—линейный автомат ЛМ — логическое моделирование ЛУ — логарифмический усилитель ЛЭ — логический элемент М2 — ЛЭ “Сложение по модулю 2” МГ—модель генератора сигналов МТИ — многовыходная таблица истинности
МФЛЭ — многофункциональный логический элемент ОБС — очередь будущих событий ОДС — одноразрядный двоичный сумматор
ОЗУ — оперативное запоминающее устройство
ОУ — операционный усилитель ПЗУ — постоянное запоминающее устройство
ПЛМ — программируемая логическая матрица
ПМ — пользовательская модель ПС — принципиальная схема ПФ — пропускающий фильтр ПФУ — последовательностный функциональный узел
ПЦУ — последовательностное цифровое устройство РУ — решающий усилитель РЭ — регулирующий элемент РЭА — радиоэлектронная аппаратура САПР — система автоматизированного проектирования СБИС — сверхбольшая интегральная схема
СДНФ — совершенная дизъюнктивная нормальная форма СИС — микросхемы средней степени интеграции
СЛМ — система логического моделирования
СОЗУ — сверхоперативное запоминающее устройство
СПМ — структурная пользовательская модель
5
СтДж— счетчик Джонсона ТВ — таблица возбуждения ТВЗ — триггер с внутренней задержкой
ТЗ — техническое задание ТИ — таблица истинности ТП — таблица переходов ТТЛ — микросхемы транзисторнотранзисторной логики ТТЛШ — ТТЛ с диодами Шоттки ТФВ — таблица функций возбуждения
УВХ — устройство выборки-хранения
УГО — условное графическое обозначение
УЗСР —узел задания статического режима
УЛЭ — универсапьный логический элемент
ФВЧ — фильтр верхних частот ФНЧ — фильтр нижних частот ФП — функциональная подсхема ФС — функциональная схема ФУ — функциональный узел ФЧХ — фазо-частотная характеристика
ЦУ — цифровое устройство ЭСЛ — микросхемы эмиттерносвя- занной логики
ЯОФС — язык описания функциональных схем
РАЗДЕЛ ПЕРВЫЙ
СХЕМОТЕХНИКА АНАЛОГОВЫХ УСТРОЙСТВ
ГЛАВА ПЕРВАЯ
АВТОМАТИЗАЦИЯ СХЕМОТЕХНИЧЕСКОГО ПРОЕКТИРОВАНИЯ
1.1. Общие сведения
Под проектированием понимается процесс преобразования информации исходного описания объекта проектирования в выходное описание, необходимое и достаточное для технической реализации нового изделия, удовлетворяющего требованиям технического задания. Проектирование называют автоматизированным, если отдельные его этапы осуществляются при взаимодействии человека и ЭВМ. Проектирование называют автоматическим, если все необходимые этапы проектирования выполняются на ЭВМ без участия человека.
Проектирование радиоэлектронной аппаратуры (РЭА), как правило, выполняется автоматизированными методами. Системы автоматизированного проектирования (САПР) представляют собой сложные программно-технические комплексы средств автоматизации схемотехнического, функционально-логического и конструкторского проектирования, подготовки производства и выпуска технической документации.
Процесс структурного, функционального и схемотехнического проектирования РЭА включает в себя решение задач анализа, оптимизации и синтеза, которые называются проектными процедурами и имеют следующее содержание [1, 2]:
Одновариантный анализ (расчет) — определение характеристик устройства при постоянных значениях параметров его компонентов и неизменной структуре.
Многовариантный анализ заключается в иследовании устройства при изменении параметров компонентов и характеристик внешних информационных сигналов.
Оптимизация — процесс целенаправленного изменения параметров компонентов устройства (при параметрической оптимизации) или структуры устройства (при структурной оптимизации) для получения наилучших в том или ином смысле значений выходных параметров и характеристик проектируемого устройства. Как правило, оптимизация осуществляется по многим критериям, поскольку проектируемое устройство должно удовлетворять комплексу технико-экономических требований. Параметры компонентов устройства, в результате изменения которых
7
выполняется параметрическая оптимизация, называются варьируемыми. Закон изменения варьируемых параметров определяется конкретным алгоритмом оптимизации.
Синтезом в общем случае называется генерация исходного варианта устройства, включая его структуру (структурный синтез) и значения параметров компонентов (параметрический синтез). Полученное в результате синтеза устройство может быть не оптимальным по всем критериям, но обязательно должно быть работоспособным. Синтезированное устройство, как правило, нуждается в дополнительной оптимизации. Если же в результате синтеза удается найти вариант устройства, наилучший по нескольким критериям, то такой синтез называется оптимальным. Структурный синтез электронных устройств является творческим процессом, плохо поддающимся автоматизации. Задачи синтеза, как правило, решаются с помощью узкоспециализированных программных комплексов, ориентированных на синтез определенного класса устройств, например, созданы программы синтеза аналоговых и цифровых фильтров.
1.2. Основные виды анализа аналоговых устройств
При схемотехническом проектировании аналоговых и цифровых устройств необходимо решить такие задачи, как расчет статического режима, переходных процессов, исследовать частотные характеристики схемных функций и спектральный состав выходного сигнала. Решение этих задач позволяет определить качественные характеристики передаваемых в схеме сигналов (амплитуда и фаза, задержка и длительность импульсных сигналов и др.). Кроме этого, в некоторых случаях необходимо провести анализ нестабильности нулевого уровня и его температурного дрейфа, чувствительности схемы к изменению параметров компонентов, решить задачи анализа шумовых характеристик схемы и оптимизации ее параметров [1—3].
Анализ статического режима выполняется для построения карты режимов по постоянному току, а также для определения различных характеристик схемы в статическом режиме (анализ проходной характеристики усилительных и нелинейных устройств, расчет перегрузочной способности по входу и диапазона изменения выходных токов и напряжений и т. п.). Анализ статического режима также проводят для определения рабочей точки по постоянному току нелинейных элементов схемы перед последующим анализом переходных процессов или частотных характеристик (в последнем случае нелинейная схема автоматически линеаризуется в окрестности найденной рабочей точки).
8
Анализ схемы во временной области включает в себя решение одной или нескольких основных задач:
а) расчет переходных процессов под действием источников переменного сигнала или импульсных последовательностей;
б) отыскание периодических решений при действии периодического сигнала;
в) отыскание периодических решений автоколебательных систем при отсутствии внешних сигналов.
Анализ схемы во временной области может быть выполнен двумя методами. В первом случае, когда уровни информационных сигналов в схеме значительно меньше уровней токов и напряжений в статическом режиме, анализ переходных процессов проводится в линеаризованной схеме, где все нелинейные элементы заменены их малосигнальными аналогами. Такой анализ переходных процессов выполняется, как правило, с минимальными затратами машинного времени и ресурсов ЭВМ. Во втором случае, когда уровни информационных сигналов соизмеримы с уровнями токов и напряжений, анализ во временной области проводится в нелинейной схеме в режиме “большого” сигнала. Для проведения автоматизированного анализа нелинейной схемы требуются значительно большие затраты машинного времени.
Анализ схемы в частотной области включает в себя решение следующих задач:
а) расчет комплексных схемных функций (коэффициентов передачи, входных и выходных сопротивлений, У-пара- метров);
б) построение карты расположения нулей и полюсов, исследование устойчивости;
в) анализ шумовых характеристик и нелинейных искажений.
Анализ частотных характеристик схемных функций используется достаточно широко при проектировании усилительных и радиочастотных устройств. Для оценки устойчивости схемы целесообразно провести анализ расположения нулей и полюсов, особенно когда в схеме возможно появление резонансов. Действительно, при автоматизированном анализе частотных характеристик схемных функций достаточно узкий резонансный пик может быть пропущен в ряду дискретных частотных точек, выбранных для анализа.
Спектральный анализ используется при исследовании нелинейных радиотехнических устройств таких, как детекторы, смесители, модуляторы, амплитудные ограничители и др. Спектральный анализ позволяет определить амплитуды гармоник выходного сигнала устройства при воздействии на его вход периодического сигнала произвольной формы, а также спектральный состав периодических решений автоко¬
9
лебательных систем. Автоматизированный анализ спектрального состава выходного сигнала, как правило, выполняется на базе дискретного преобразования Фурье.
Анализ чувствительности проводят для оценки степени влияния вариации параметров компонентов на характеристики проектируемого устройства. По значениям коэффициентов чувствительности разработчик может выявить компоненты схемы,, отклонения параметров которых от номинальных значений приводят к наибольшим изменениям характеристик проектируемого устройства, а следовательно, определить требования к точности реализации тех или других элементов.
Не менее важное значение автоматизированного анализа чувствительности заключается в получении информации о том, какие именно компоненты или их параметры и в каком направлении следует изменять в процессе оптимизации, а также при настройке разработанного устройства.
Анализ нестабильности позволяет определить реакцию схемы на изменения параметров ее компонентов под воздействием совокупности внешних дестабилизирующих факторов: колебаний температуры, напряжений источников питания, старения компонентов, технологического разброса параметров компонентов. При достаточно малых изменениях параметров компонентов задача автоматизированного анализа нестабильности сводится к линейной задаче в результате замены компонентов схемы автономными многополюсниками. Автономные параметры многополюсников могут иметь различное смысловое содержание, например, отражать температурный дрейф или технологический разброс параметров компонента. Если необходимо определить нестабильность характеристик схемы в широком диапазоне изменений дестабилизирующих воздействий, целесообразно провести многовариантный анализ схемы (например, для определения температурной нестабильности статического режима нелинейной схемы в широком диапазоне температур).
Анализ шумовых характеристик позволяет оценить отношение сигнал-шум в проектируемой схеме, т. е. определить вклад источников шума и входного сигнала в выходной сигнал схемы. Наиболее важными составляющими шума в электронных цепях являются дробовой, тепловой и фликкер-шумы. Источники шума обычно моделируют в виде автономных некоррелированных источников напряжения и тока, подключенных к резисторам и полупроводниковым приборам. Вклад каждого источника шума в выходной сигнал схемы рассматривается независимо от других источников. Суммарная амплитуда шумов на выходе схемы равна квадратному корню из суммы квадратов амплитуд шумов, обусловленных отдельными источниками.
10
1.3. Оптимизация характеристик аналоговых устройств
Решение задачи проектирования обычно связано с выбором оптимального, наилучшим образом удовлетворяющего требованиям технического задания, варианта устройства из некоторого допустимого множества решений. Эффективное решение задач оптимального проектирования возможно только при разумном сочетании формальных поисковых методов оптимизации и неформальных способов принятия оптимальных проектных решений. Поэтому решение задач оптимального проектирования необходимо рассматривать не только в вычислительном аспекте, но, скорее, в творческом, учитывая опыт и знания инженера-схемотехника на всех этапах автоматизированного проектирования. Одной из наиболее сложных операций при решении задач оптимального проектирования является этап математической формулировки задачи, которая включает в себя выбор критерия оптимальности, определение варьируемых параметров и задание ограничений, накладываемых на варьируемые параметры [1, 4].
Среди задач схемотехнического проектирования, которые целесообразно решать с привлечением методов оптимизации, выделим следующие задачи параметрического синтеза и оптимизации:
определение параметров компонентов схемы, обеспечивающих ее экстремальные характеристики при заданных ограничениях;
определение параметров функциональных узлов схемы исходя из требований технического задания на характеристики устройства в целом (например, определение коэффициента усиления и полосы пропускания отдельных каскадов усилителя исходя из требований технического задания на коэффициент усиления и полосу пропускания усилителя);
определение параметров компонентов схемы, обеспечивающих специфические характеристики устройства (например, определение значений элементов цепи коррекции усилителя для обеспечения его устойчивости при заданной глубине обратной связи);
адаптация существующих схемных решений с целью подбора параметров, удовлетворяющих новым требованиям к схеме;
уточнение значений параметров компонентов схемы, полученных в результате использования методов ручного инженерного расчета.
В любой из перечисленных задач реализуемые характеристики проектируемого устройства являются функциями вектора варьируемых (настраиваемых) параметров, составляющих некоторое подмножество полного набора параметров компонентов схемы. Целью параметрического синтеза или оптимизации является определение вектора варьируемых параметров X, обес-
11
Рис. 1.1. Графическая интерпретация базового набора критериев оптимальности, используемых в задачах оптимизации
печивающего наилучшее соответствие характеристик устройства У=У(Х) требованиям технического задания. Для решения этой задачи необходимо прежде всего выбрать формальный критерий оценки качества каждого из вариантов разрабатываемого устройства, который позволил бы различать их между собой и устанавливать между ними отношения предпочтения. Если такая оценка может быть представлена функциональной зависимостью вида
F=F (У(Х)) = У(Х),
называемой обычно критерием оптимальности или целевой функцией, то задача поиска параметров компонентов схемы сводится к классической задаче оптимизации — нахождению экстремума некоторой функции качества F (X) при наличии ограничений (равенств, неравенств или двусторонних границ), накладываемых на варьируемые параметры и характеристики проектируемой схемы.
В процессе поиска оптимального решения для каждой конкретной задачи может оказаться предпочтительным определенный вид критерия оптимальности. Рассмотрим базовый набор критериев оптимальности, позволяющий удовлетворить разнообразные требования инженера-схемотехника к оптимизируемым характеристикам разрабатываемых устройств [1].
Для отыскания экстремума (минимума или максимума) показателя качества, такого, например, как потребляемая схемой 12
мощность, частота среза, используется само значение критерия оптимальности без преобразования:
М*)=уУ(Х),
где у — весовой коэффициент, задающий относительную важность этого показателя по сравнению с другими, если одновременно оптимизируется несколько показателей качества.
В задачах, требующих максимального соответствия оптимизируемой характеристики и некоторой желаемой, например, при оптимизации частотных характеристик, наиболее целесообразно использовать критерий среднего квадратического отклонения (рис. 1.1, а)
F2 (*)=у (Y(X)-Yy, (1.1)
где Y* — желаемое значение характеристики. Для характеристики, заданной дискретным набором точек, целевая функция
у,(у(х.р,)-у;)\ (12)
где ЛГ—число точек дискретизации независимой переменной р\ Y(X, р{) — значение оптимизируемой характеристики в /-й точке интервала дискретизации; у{— весовой коэффициент /-го значения оптимизируемой характеристики, отражающий важность выбранной точки по сравнению с другими.
Минимизация функций (1.1) и (1.2) обеспечивает близость характеристик по среднему квадратическому отклонению. Максимизация этих функций может быть использована при расчетах на наихудший случай.
В некоторых задачах оптимизации необходимо обеспечить превышение (рис. 1.1, б) или непревышение (рис. 1.1, в) оптимизируемой характеристикой некоторого заданного уровня. Эти критерии оптимальности реализуются следующими функциями:
для обеспечения превышения заданного уровня
F3(X) =
О при Y(X) > Ун’;
y(YH*-Y(*))2 при Y(X)< Ун\
(1.3)
для обеспечения непревышения заданного уровня
О при Y(X) < Ув*;
y{Y{X)-Ylf при Y(X)>Tt,
F4(X) =
(1.4)
где YH*, Y*— нижняя и верхняя границы допустимой области для характеристики Y (X).
Если необходимо, чтобы оптимизируемая характеристика (рис. 1.1, г) проходила в некоторой допустимой зоне (кори¬
13
доре), используют комбинацию двух предыдущих критериев оптимальности:
0
при
Гн < У(X) < у;:
>
ад-
y(Y(X)-y;)2
при
y(X)>y;-,
(1.5)
у (Гн - У(*))2
при
y(X)<y;.
В тех случаях, когда требуется реализовать лишь
форму
кривой, игнорируя при этом
постоянное
смещение по
верти-
кали (рис. 1.1, д), используется критерий сдвига:
F6(X) = i,V, (y;-Y(X, Pi)-Y\2,
/= 1 4 '
где
= (y;-y(x, р,.)).
Кроме рассмотренных выше критериев оптимальности, в задачах параметрической оптимизации и синтеза могут также использоваться критерии пропорциональности кривых и линейности характеристик при игнорировании угла наклона прямой [1, 5].
Задачи оптимального проектирования РЭА обладают специфическими особенностями, к которым относят: многоэк- стремальность функции качества, наличие ограничений на выходные параметры и характеристики проектируемого устройства, большую размерность вектора варьируемых параметров. Для решения подобных задач используют библиотеку алгоритмов поиска.
Алгоритмы глобального поиска (алгоритм случайного поиска, монотонный алгоритм глобального поиска, алгоритм сканирования на сетке кода Грея и другие), как правило, дают достаточно грубую оценку глобального экстремума при небольших затратах вычислительных ресурсов и требуют значительного увеличения числа вычислений для получения более точной оценки положения экстремума.
Алгоритмы локального поиска (алгоритм интуитивного поиска, алгоритм сопряженных направлений Пауэлла) чаще всего отыскивают ближайший локальный экстремум, а траектория их движения сильно зависит от выбора начальной точки.
Стратегия решения задач оптимального проектирования предусматривает применение глобальных процедур оптимизации на начальных этапах поиска и уточнение полученного глобального решения быстросходящимися в окрестности оптимальной точки локальными алгоритмами. Такая стратегия позволяет, во-первых, с достаточной надежностью и точностью определить значение
14
глобального экстремума и, во-вторых, существенно снизить вычислительные затраты на поиск. При этом этапы глобального поиска могут выполняться с невысокой точностью, а этапы локального уточнения проводятся в области притяжения глобального экстремума, что требует значительно меньшего числа вычислений. Так, например, хороших результатов за приемлемое время оптимизации можно достичь, применяя последовательно монотонный алгоритм глобального поиска и локальный алгоритм сопряженных направлений Пауэлла. На первом этапе требуется, как правило, 50...100 вычислений функции качества, чтобы локализовать глобальный экстремум. Несколько большее число вычислений (100...250) требуется, чтобы уточнить решение, однако оно в несколько раз ниже, чем требуется в случае применения одного локального алгоритма.
1.4. Системы
автоматизированного проектирования
Многие термины, относящиеся к САПР РЭА, имеют несколько значений. Для уменьшения неопределенности приведем термины и определения, которые используются в дальнейшем изложении.
Схему будем рассматривать как совокупность компонентов, подключенных к узлам схемы. Полюсы (выводы) компонентов, как правило, имеют свои имена, например, база, коллектор, эмиттер. Свойства каждого компонента отражает модель koai- понента, которая характеризуется набором параметров. Значения параметров определяются типоль компонента, например, параметры транзисторов КТ315 и КТ315А имеют разные числовые значения. Все компоненты, имеющие одинаковый принцип действия, относятся к одному виду. Например, к одному виду относятся все биполярные транзисторы. Отметим также, что в системах автоматизированного проектирования компоненты, относящиеся к одному виду, могут описываться несколькими моделями различной степени сложности.
В этом разделе рассматриваются основные функциональные характеристики диалоговых систем схемотехнического проектирования радиоэлектронных схем ДИСП и ЭМЦ, разработанных в ЛЭТИ имени В. И. Ульянова (Ленина). Система ДИСП ориентирована на использование персональных и мини-ЭВМ, а система ЭМЦ —на ЕС ЭВМ. Детальное описание систем ДИСП и ЭМЦ приведено в работах [1, 5].
Системы ДИСП и ЭМЦ предназначены для проведения научно-исследовательских и опытно-конструкторских работ по проектированию аналоговых и цифровых устройств РЭА. Они обеспечивают проведение непрерывного цикла проектных процедур.
15
Системы ДИСП и ЭМЦ обеспечивают многотерминальный режим работы пользователей. Программное обеспечение систем включает инвариантную обслуживающую подсистему и несколько диалоговых пакетов прикладных программ (ДПП), которые ориентированы на проведение определенного вида анализа. К настоящему времени в состав систем входят следующие пакеты прикладных программ:
1. “ Статика” — определение статических характеристик нелинейных электронных схем, построение карт режимов компонентов;
2. “Нелинейная динамика” — расчет переходных процессов и анализ прохождения сигналов различной формы в нелинейных электронных схемах;
3. “Линейная динамика” — анализ переходных процессов в линейных и линеаризованных схемах;
4. “Частота” — анализ частотных характеристик произвольных схемных функций;
5. “Оптимизация” — определение координат экстремальных точек и оптимизация частотных характеристик электронных схем;
6. “Чувствительность” — анализ функций чувствительности электронных схем в частотной области;
7. “Нестабильность” — анализ нестабильности статического режима электронных схем;
8. “Полином”—расчет численных значений схемных функций, заданных отношением полиномов, расчет корней полиномов;
9. “Спектр” — расчет спектральных характеристик сигналов;
10. “Фильтр” — автоматизированный синтез активных фильтров;
11. “Троичное моделирование” — анализ функциональных и принципиальных схем цифровых устройств без учета временных параметров;
12. “Временное моделирование” — анализ функциональных и принципиальных схем цифровых устройств во временной области и проверка их работоспособности;
13. “База данных” — управление данными в специализированной базе данных моделей компонентов и подсхем;
14. “График” — постпроцессор ббработки графической информации.
При выборе алгоритмов расчета, реализованных в ДПП, учитывались такие противоречивые требования, как универсальность, эффективность и минимизация времени проведения анализа. Так, для решения задачи анализа статического режима используется группа методов продолжения решения по параметру в сочетаний с модифицированным алгоритмом Ньютона. В качестве варьируемых параметров^ в исходной системе нелинейных уравнений выступают либо значения независимых источников напряжения и тока, либо сопро¬
16
тивления резисторов, шунтирующих все нелинейные компоненты схемы. Для анализа переходных процессов в линейных и нелинейных электронных схемах используются неявные методы интегрирования второго порядка с автоматическим выбором шага, являющиеся компромиссом между точностью расчетов и алгоритмической сложностью.
Анализ нестабильности статического режима схемы при воздействии дестабилизирующих факторов проводится на основе общей методики анализа схем с автономными многополюсниками. При анализе чувствительности схемных функций к вариации параметров компонентов используется метод дифференцирования уравнений, позволяющий при однократном решении системы уравнений определить чувствительности всех координат схемы к одному из параметров. Определение корней полиномов передаточной функции основывается на применении метода Хичхока. Анализ спектральных характеристик базируется на алгоритме дискретного преобразования Фурье.
Процедура параметрической оптимизации может быть выполнена одним из следующих алгоритмов оптимизации: глобального поиска, случайного поиска, интуитивного поиска и алгоритмом, использующим сетку кода Грея. Наличие большого числа алгоритмов оптимизации позволяет существенно повысить эффективность работы подсистемы оптймизации в зависимости от типа и сложности решаемых задач. В процессе оптимизации пользователю предоставляется возможность модифицировать информацию о векторе варьируемых параметров и критериях оптимизации. Процесс оптимизации завершается подстановкой вектора оптимальных параметров во внутреннее описание исследуемой схемы и выводом результатов оптимизации на внешнее устройство.
Практическое использование систем ДИСП и ЭМЦ предусматривает организацию активного диалога между студентом и ЭВМ, в рамках которого система сообщает пользователю перечень возможных проектных процедур, задает вопросы и подсказывает форматы ответов. Обеспечение взаимодействия с системой широкого круга пользователей достигается наличием двух форм диалога: директивной (командной) и сценарной. Основной формой для опытного пользователя является директивная, при которой инициатива принадлежит пользователю. Выполняя очередную команду, система переходит в режим ожидания следующей. При сценарной форме диалога, рассчитанной на режим обучения малоквалифицированных пользователей, на каждом шаге диалога система предлагает возможные пути продолжения работы. На любом уровне взаимодействия пользователь может обратиться к инструкции по системе. Вывод инструкции на терминал осуществляется по запросу
17
или с помощью команды, которая может быть подана на любое сообщение системы.
1.5. Подготовка описания
аналоговой схемы
для автоматизированного анализа
В состав диалоговых лингвистических средств САПР входят три языка: язык описания схем, язык управления проектированием и язык запросов к базе данных. Язык описания схемы в системах ДИСП и ЭМЦ реализован как пассивный: текст описания схем может быть передан транслятору как из файла на внешнем устройстве, так и введен в систему непосредственно с помощью клавиатуры дисплея в процессе сеанса диалогового взаимодействия пользователя с системой. Языки управления проектированием, редактирования описания схемы и запросов к базе данных являются языками диалогового типа. Диалоговые команды этих языков обрабатываются интерпретаторами и передаются соответствующим программным модулям для немедленного выполнения.
Подготовка схемы для описания ее на входном языке системы заключается в нумерации узлов и компонентов. Общий узел схемы имеет номер 0. Рекомендуется входному узлу присваивать номер 1, а выходному—2. Остальные узлы нумеруются в произвольном порядке (на рисунках показаны в кружках). Каждому компоненту схемы присваивается имя и номер (в качестве имен компонентов, как правило, используются имена моделей).
Аналоговые схемы, подлежащие анализу, могут содержать следующие компоненты: пассивные ЖС-элементы; диоды и стабилитроны; биполярные, полевые и МДП-транзисторы; операционные усилители и компараторы; взаимные индуктивности и трансформаторы; управляемые источники тока и напряжения; независимые источники напряжения и тока.
В системе ДИСП-5 пользователю предоставлена возможность самому создавать произвольные модели компонентов из перечисленных выше базовых компонентов, и записывать их в специализированную БДМК.
Язык описания схемы реализован в двух вариантах. Первый используется только в младших версиях системы ДИСП и обладает минимальной избыточностью описаний. Второй вариант является подмножеством входного языка системы ЭМЦ на ЕС ЭВМ [5]. Такая совместимость входных языков позволяет без изменения текста описания схемы переходить из системы ДИСП в более произвольную систему ЭМЦ.
При формировании текста описания схемы размерности параметров могут не указываться в явном виде. В языке системы ДИСП
18
©
Рис. 1.2. Дифференциальный усилитель (пример подготовки схемы к автоматизированному анализу)
по умолчанию приняты следующие единицы физических величин: сопротивление —
кОм; емкость —мкФ; индуктивность — Гн; напряжение —
В; ток—мА; время —мс; фаза — градус; частота — кГц.
Рассмотрим процесс подготовки описания схемы для автоматизированного анализа в системе ДИСП на примере дифференциального усилителя, представленного на рис. 1.2.
Идентификация схемы выполняется с помощью задания двух переменных NAME и N. Переменная текстового типа NAME определяет имя схемы:
NAME = flHO. УСИЛИТЕЛЬ;
Переменная N определяет число узлов в схеме и может быть явно не' задана.
Текст описания схемы состоит из предложений описания компонентов, директив и комментариев, записанных в произвольной последовательности. Обязательными элементами предложения являются: имя, знак равенства, список констант и переменных, которые отделяются друг от друга запятой, каждое предложение завершается точкой с запятой (;). Описание компонентов анализируемой схемы имеет вид:
<имя компонента>[<число компонентов>] = <номера узлов подключения компонента 1>, < список параметров компонента 1 >!...<номера узлов подключения компонента п >, <список параметров компонента п>\
Для разделения описаний компонентов, относящихся к одной модели, используется символ “!”, имеющий значение “конец описания компонента”. Имя компонента определяет символическое имя модели компонента, например, R — для резисторов, Г— для транзисторов и т. п. Параметр < число компонентов > — необязательный элемент описания, определяющий размер предложения. Номера узлов подключения и параметры компонента указываются в произвольном формате через запятую. Рекомендуемые формы описаний компонентов, модели которых имеются в базе данных системы ДИСП, приведены в Приложении 1. Комментарий может содержать произвольную последовательность символов, заключенную в апострофы (’).
19
Описание резисторов, конденсаторов и источников напряжения схемы (см. рис. 1.2) имеет вид:
R = 2,6,10! 3,6,10! 5,6,40;
С = 2,3,20Е-6; ’ЕМКОСТЬ КОРРЕКЦИИ5 Е = 0,6,10! 0,7,-10! ’ИСТОЧНИКИ ПИТАНИЯ’
0,1,0,0,1; ’ВХОДНОЙ СИГНАЛ’
При описании активных компонентов целесообразно использовать ссылки к параметрам, значения которых хранятся в базе данных системы. Описание транзисторов схемы (см. рис. 1.2) имеет вид
Т = 1,2,4,К198НТ1! 0,3,4,К198НТ1! 5,4,7,К198НТ1!
5,5,7,К198НТ1;
Если параметры компонента отсутствуют в базе данных системы, то для сокращения объема описания целесообразно использовать именованные группы параметров, называемые также описателями:
<имя описателя > = < список параметров >;
Например:
К198НТ1 = 1, 1.3Е-10, 152, 3, 0.06, 1Е4, 1Е4, 7Е-6, 12Е-6, 3.7Е-6, 1.2Е-5, 0.65, 0.7, 0.34, 0.32;
В описателе последовательно задаются параметры транзистора: тип проводимости, ток отсечки 7S, коэффициент усиления Вп и т. д. (см. приложение 1).
Для успешной работы пакетов прикладных программ необходимо предварительно определить условия выполнения анализа и указать выходные координаты схемы, значения которых будут выводиться на внешнее устройство в процессе расчета. Например, переменные STEP и NY задают начальный шаг интегрирования и выходной узел анализируемой схемы. По умолчанию в системе принято STEP=1 мкс и NY=2. Для схемы (см. рис. 1.2) необходимо переназначить выходной узел: NY=3.
Задание списка частот /i, /2, ..., /«, на которых требуется исследовать проектируемую схему в рамках пакетов программ “Частота” и “Чувствительность”, производится следующим образом:
F=/i, /2, ..., fn; или FD=FN, FK, SF; или FDL=FN, FK, NFD;
Здесь /i, /2, ..., fn — значения частот в кГц, FN и FK- начальное и конечное значения частот линейного (FD) или логарифмического (FDL) диапазонов частот в кГц, SF—шаг в кГц, с которым производится приращение частоты внутри диапазона, NFD — число частотных точек на декаду изменения частоты, в которых необходимо провести анализ. Например, для схемы (см. рис. 1.2) можно задать: FDL=0.01, ЗЕЗ, 3;
Описание схемы завершается служебным словом “КОНЕЦ” (допустимо сокращение “К”), после которого любой текст игнорируется транслятором.
Основными элементами языка описания схемы системы ЭМЦ являются структуры, массивы и директивы [5].
20
, Рассмотрим пример подготовки описания схемы (см. рис. 1.2) для ее анализа в системе ЭМЦ. Для идентификации схемы и разработчика используются директивы “СХЕМА” и “РАЗРАБОТЧИК”:
СХЕМА: ДИФФЕРЕНЦИАЛЬНЫЙ УСИЛИТЕЛЬ; РАЗРАБОТЧИК: ИВАНОВ А. А.;
Информация о компонентах схемы записывается в виде структуры с именем “ОПИСАНИЕ”. Внутри структуры рписания отдельных компонентов разделяются точкой с запятой. В последней строке после точки с запятой ставится символ имеющий значение “конец описания структуры”. Для описания каждого компонента необходимо составить отдельное предложение, включающее в себя имя модели, узлы подключения, номинал или параметры модели. Если требуемый компонент представлен в базе данных системы, достаточно указать лишь его тип. В качестве разделителей в предложениях допускается использование пробелов, запятых, звездочек, открывающих и закрывающих скобок. В любом месте текста описания схемы допускается записывать комментарий, заключенный в апострофы.
Имена видов компонентов и порядок записи узлов включения компонентов различного вида совпадают с именами и порядком записи, принятыми в системе ДИСП. Модели компонентов и порядок записи их параметров в системах ЭМЦ и ДИСП также совпадают.
Описание компонентов схемы (см. рис. 1.2) на входном языке системы ЭМЦ имеет вид:
ОПИСАНИЕ:
Rl(2,6) 15К; R2(3,6) 15К; R3(5,6) 20К;
Cl(2,3) 20Е-6;
Tl(l,2,4) 198НТ1; Т2(0,3,4) 198НТ1;
Т3(5,4,7) 198НТ1; Т4(5,5,7) 198НТ1;
Е1(0,1) OB; Е2(0,6) 10В; Е3(0,7) - 10В;*
Для облегчения описания схемы на входном языке целесообразно в описании компонентов использовать ключевые слова: ТИП = < имя типа >
МОДЕЛЬ = < имя модели >
ПАРМ = (< список параметров модели >)
РЕЖИМ = (<режим по постоянному току>) например,
Т1 (1,3,4) ТИП = 198НТ1; или Т5 (8,4,10) ПАРМ = (0,1.3Е-10,
0.025, 152, 10 ...);
Если на входном языке заданы имя типа и параметры модели, то имя типа игнорируется и обращение к базе данных не проводится.
Для вызова пакетов прикладных программ достаточно после описания схемы указать символическое имя, например: СТАТИКА; — расчет статического режима схемы
21
ЧАСТОТА 1; — расчет частотных характеристик ОПТЧХ; — оптимизация частотных характеристик
При обнаружении имени пакета прикладных программ дальнейшая трансляция текста описания схемы приостанавливается и выполняется соответствующий вид анализа. Перечень массивов и структур, необходимый для проведения каждого вида анализа, приведен в работе [5]. Например, для анализа частотных характеристик необходимо задать массив идентификаторов схемных функций, массив внешних узлов схемы и массив частот:
CO=KU, ZBX, ZBbIX; МВУ=1, 0, 2, 0; ЧАСТОТА: 3, 10, 30, 100, 300;
Имя пакета прикладных программ может быть указано в тексте описания схемы несколько раз, например, для проведения многовариантного анализа характеристик схемы.
Директива “ИЗМЕНИТЬ” (допустимо сокращение имени “ИЗМ”) позволяет изменять элементы структур описания схемы и задания на оптимизацию. Формат директивы:
ИЗМЕНИТЬ <имя структуры >: <вид и номер компонента > < ключевое слово > = < новое значение>, < ключевое слово > = < новое значением..;*
Ключевые слова: УЗЛЫ, ТИП, МОДЕЛЬ, ПАРМ, РЕЖИМ. Например, в схеме (см. рис. 1.2) необходимо изменить значение емкости конденсатора С1 и соединить базу транзистора VT2 с источником сигнала Е1:
ИЗМЕНИТЬ ОПИСАНИЕ:
С1=40Е-6; Т2 УЗЛЫ=(1, 3, 4);
По директиве “КОНЕЦ” обработка текста описания прекращается.
Описание задания на оптилшзацию в системах ДИСП и ЭМЦ включает в себя прежде всего описание варьируемых параметров компонентов и описание оптимизируемых характеристик и критериев оптимальности. Описание каждого из варьируемых параметров должно содержать имя компонента схемы, границы вариации и начальное приближение параметра. В соответствии с принятой во входном языке системы ДИСП формой представления исходных данных для описания варьируемых параметров используется массив с именем VARP:
VARP=< нижняя граница вариации >, < верхняя граница вариации>, {<начальное приближение^*}, <имя компонента >, <имя параметра модели компонента >! {< описание других варьируемых параметров > };
Здесь в фигурных скобках указаны необязательные элементы синтаксиса. В частности, если не указано начальное приближение, то за его значение будет принята середина интервала вариации. Например, запись
VARP = 5, 20, 10, Rl, R! 5Е-6, 40Е-6, Cl, С! 50, 150, 100, Tl, BN;
22
Таблица 1.1
Вид критерия оптимизации
Обозначение на входном языке
Число желаемых значений
Минимизация значений характеристики
MIN
0
Максимизация значений характеристики
МАХ
0
Среднее квадратическое отклонение от желаемой характеристики:
минимизация
MINCKO
1
максимизация
МАХСКО
1
Принадлежность зоне, заданной верхней
и нижней границами
ZONE
2
Превышение заданного уровня
EXCEED
1
Непревышение заданного уровня
UNEXCEED
1
Сдвиг по вертикали
SHIFT
1
Линейность характеристики
LIN
0
Пропорциональность по вертикали
PROP
1
означает, что варьируется сопротивление резистора R1 в пределах от 5 до 20 кОм, с начальным приближением 10 кОм, емкость конденсатора С1 в границах от 5 до 40 пФ с начальным приближением 17,5 пФ и коэффициент усиления BN биполярного транзистора 77 в границах от 50 до 150 с начальным значением 100.
Для описания критериев оптимальности и оптимизируемых характеристик используется предложение
<имя критерия> {[<число частичных сумм>, <число описателей каждой суммы > ]} = < значение частоты >, <желаемое значение 1>, {<желаемое значение 2>}, {< весовой коэффициент}, {<имя схемной функ- ции>}, {<описание других частичных сумм>};
Здесь < имя критерия > — одно из имен критериев оптимальности, приведенных в табл. 1.1. Число желаемых значений изменяется в зависимости от вида критерия оптимальности. Так, для критерия минимизации схемной функции желаемое значение отсутствует. В случае использования критерия “принадлежность зоне” необходимо указать нижнюю и верхнюю границы зоны, т. е. число желаемых значений равно двум.
Таблица 1.2
Тип схемной
Схемная функция
функции
«и
гъх
■^вых. К. 3
2ВЫХ. XX
Модуль Модуль, дБ Фаза
Вещественная часть Мнимая часть
мки
МДБКи
OKU
REKU
IMKU
MZBX
мдвгвх
Фгвх
REZBX
IMZBX
мгвыхкз
мдвгвыхкз
Фгвыхкз
REZBbIXK3
IMZBbIXK3
MZBbIXXX
MflBZBbIXXX
Фгвыххх
REZBbIXXX
IMZBbIXXX
23
Весовой коэффициент, характеризующий степень влияния данной частотной точки, является необязательным элементом предложения и имеет значение по умолчанию, равное 1. Именем схемной, функции может быть любое из имен, приведенных в табл. 1.2. Например, запись
MINCKO = (U, 60, 1, MDBKU! 1, 40, 1! 10, 220, 5! 100, 0, 10! 1000, -20, 5;
означает, что требуется оптимизировать модуль коэффициента передачи по напряжению в децибелах (MDBKU) на частотах 0,1; 1; 10; 100; 1000 кГц по критерию минимизации среднеквадратичного отклонения от желаемых значений 60, 40, 20, 0, —20 дБ с весовыми коэффициентами, соответственно равными 1, 1, 5, 10, 5. В данном примере параметры < число частичных сумм> и < число описателей каждой суммы > опущены, а описания отдельных частичных сумм отделяются восклицательными знаками. Заметим также, что имя схемной функции указано только для первой частичной суммы, а для последующих его можно опустить, при этом принимается имя схемной функции, указанное в первой строке описания.
Метод оптимизации указывается пользователем путем выбора соответствующей проектной процедуры в подсистеме оптимизации. Константы настройки метода задаются в режиме диалога после инициализации программы оптимизации, реализующей указанный пользователем метод.
ГЛАВА ВТОРАЯ
МЕТОДОЛОГИЯ АВТОМАТИЗИРОВАННОГО СХЕМОТЕХНИЧЕСКОГО ПРОЕКТИРОВАНИЯ АНАЛОГОВЫХ МИКРОЭЛЕКТРОННЫХ УСТРОЙСТВ
2.1. Общие сведения
Автоматизированное схемотехническое проектирование аналоговых электронных устройств связано с определенными трудностями, обусловленными высокой степенью неоднородности параметров их элементов. Действительно, во многих случаях аналоговая схема, содержащая сотни компонентов, может не иметь двух одинаковых по параметрам. В настоящее время не удается осуществить полную автоматизацию проектирования аналоговых микроэлектронных устройств, т. е. их проектирование без участия человека, особенно при решении задач схемотехнического синтеза. Однако при максимальном использовании квалификации разработчика и осуществлении тесного взаимодействия между разработчиком
24
и ЭВМ задачи структурного и параметрического схемотехнического синтеза могут быть успешно решены. Этому во многом способствует комплекс оптимизационных программ, имеющихся в современных САПР РЭА.
При проектировании сложных аналоговых электронных устройств используется системный подход, базирующийся на теории многоуровневых иерархических систем. При этом проектируемое электронное устройство рассматривается как система, которую можно разделить на подсистемы более низкого порядка. Подсистемами самого низкого порядка являются элементы, внутренняя структура которых не представляет интереса, однако их свойства влияют на проектируемую систему. Каждая система, в свою очередь, является подсистемой системы более высокого порядка. Однако в процессе автоматизированного проектирования сложных объектов нет необходимости строить всю иерархию систем, в нее целесообразно, как правило, включать только системы и подсистемы на два порядка выше и ниже проектируемой, существенно с ней связанные [7].
В соответствии с системным подходом осуществляется декомпозиция процесса проектирования сложных электронных устройств, т. е. разбиение общей задачи на составные части. При этом весь процесс проектирования подразделяется на несколько иерархических уровней. Каждому уровню соответствует свое определение системы и элемента. Части объекта, рассматриваемые как элементы на некотором к-м уровне, описываются как системы на соседнем более низком (к+ 1)-м уровне [6].
В качестве примера рассмотрим иерархическую структуру систем и подсистем при проектировании интегрального стабилизатора напряжения (ИСН), входящего в состав цветного телевизора:
1. Цветной телевизор;
2. Источник вторичного электропитания цветного телевизора;
3. Интегральный стабилизатор напряжения (проектируемая система);
4. Функциональные подсхемы ИСН (регулирующий элемент, источник опорного напряжения и т. д.);
5. Компоненты схемы (резисторы, транзисторы и т. д.).
Рассмотрение систем пп. 1 и 2, имеющих более высокий
порядок, чем проектируемая система, необходимо для составления грамотного технического задания (ТЗ) на проектируемый ИСН. Системы пп. 4 и 5, более низкого порядка, чем проектируемая, определяют иерархические уровни процесса проектирования. Так, при проектировании функциональной схемы электронного устройства ИСН является системой, а функциональные подсхемы — элементами (подсистемами); при
25
проектировании функциональной подсхемы стабилизатора она представляет собой систему, а в качестве элементов системы выступают компоненты схемы. При схемотехническом проектировании ИСН, как правило, не нужно подробно исследовать внутреннюю структуру компонентов схемы (транзисторов, резисторов, конденсаторов), но необходимо иметь четкое представление об ограничениях на параметры компонентов, о паразитных связях между ними, обусловленных полупроводниковой интегральной технологией.
В процессе автоматизированного проектирования аналоговой микроэлектронной аппаратуры, как правило, используются элементы как нисходящего, так и восходящего проектирования. При этом восходящее проектирование (снизу вверх) характеризуется решением задач более низких иерархических уровней перед решением задач более высоких уровней. Противоположная последовательность приводит к нисходящему проектированию [6].
2.2. Типовой маршрут процесса автоматизированного схемотехнического проектирования
Процесс автоматизированного схемотехнического проектирования электронных устройств реализуется в соответствии с определенным планом, который можно представить в виде логического графа (маршрута проектирования, логической схемы), отображающего очередность выполнения основных проектных процедур и операций [7]. При построении маршрута проектирования представляется целесообразным сформулировать рекомендации по разделению функций разработчика и ЭВМ на различных этапах схемотехнического проектирования.
Для аналоговых микроэлектронных устройств, проектируемых с использованием метода подсхем, можно предложить маршрут проектирования, представленный на рис. 2.1. Этот маршрут соответствует следующей иерархической структуре систем и подсистем проектируемого объекта: аналоговое устройство (АУ) функциональные подсхемы (ФП) компоненты (транзисторы, резисторы и т. д.). В процессе автоматизированного проектирования АУ целесообразно выделить три уровня: 1) проектирование функциональной схемы (ФС) (АУ — система, ФП — элементы системы); 2) проектирование функциональных подсхем (ФП — система, ее компоненты — элементы системы); 3) проектирование принципиальной схемы (ПС) (АУ — система, его компоненты — элементы системы).
Почему процесс автоматизированного проектирования АУ недостаточно полно охватывается первым и вторым иерархическими уровнями? Это обусловлено тем, что реальные АУ, как
26
27
правило, только в первом приближении при значительном их упрощении можно разбить на несколько слабо связанных между собой функциональных подсхем. Так, например, в интегральных операционных усилителях и стабилизаторах напряжения во многих случаях удается выделить функциональные подсхемы, только исключив из рассмотрения множество цепей, образующих дополнительные связи (цепи коррекции и защиты, общие цепи задания статического режима и т. д.). Поэтому автоматизированное проектирование АУ на третьем уровне, позволяющее учесть все многообразие реальных связей в принципиальной схеме, представляется совершенно необходимым.
Маршрут проектирования (см. рис. 2.1) отражает проектные процедуры и операции на первом и третьем уровнях проектирования. При этом предполагается, что большинство задач второго уровня (проектирование ФП) решается на стадии формирования банка схемных решений ФП.
Рассмотрим уровень проектирования функциональной схемы АУ (см. рис. 2.1, блоки 1...7). По результатам проектирования на более высоком иерархическом уровне формируется ТЗ на разработку АУ. Сначала разработчиком синтезируется первоначальный вариант ФС и рассчитываются исходные значения параметров ФП (на основании банка схемных решений, собственных оригинальных исследований и т. д.). Потом автоматизированными методами анализируются определяющие характеристики ФС (например, проводится расчет схемных функций ФС с использованием пакета программ “Частота”): Предположим, что в результате анализа ФС требования ТЗ оказываются невыполненными. В этом случае можно: 1) изменить параметры ФП и снова повторить анализ (цикл параметрического синтеза ФС —рис. 2.1, блоки 3...6); 2) перейти к другой ФС и провести анализ ее основных характеристик (цикл структурного синтеза ФС —рис. 2.1, блоки 2...5, 7); 3) осуществить корректировку ТЗ.
Следует отметить, что целесообразно переходить к другой ФС только в том случае, если несмотря на множество итераций исчерпаны все возможности получения положительного проектного решения в цикле параметрического синтеза исследуемой ФС. Очевидно, что если вся совокупность ФС, которой располагает разработчик, не обеспечивает основных характеристик проектируемого АУ, то необходимо корректировать ТЗ.
На уровне проектирования функциональных схем АУ можно широко использовать схемотехнические САПР, в частности ДИСП и ЭМЦ. Это обусловлено тем, что, во-первых, эти САПР располагают базой данных моделей компонентов (БДМК), удобной для математического описания функциональных подсхем АУ, во-вторых, например, САПР ДИСП и ЭМЦ имеют комплекс программ “Оптимизация”, позво¬
28
ляющий осуществить автоматизированный параметрический синтез ФС. Действительно, для математического описания большого числа различных функциональных подсхем АУ удобно использовать макромодель операционного усилителя, которая имеется в БДМК учебно-исследовательских САПР ДИСП и ЭМЦ.
Процесс автоматизированного схемотехнического проектирования на первом уровне продолжается до тех пор, пока не будет синтезирована приемлемая функциональная схема АУ. При этом становятся известными значения выходных параметров функциональных подсхем, которые удовлетворяют требованиям ТЗ на проектируемое АУ. На основании этих значений разработчиком из банка схемных решений выбираются ФП проектируемого АУ и синтезируется первоначальный вариант принципиальной схемы (ПС). Таким образом, использование автоматизированных проектных процедур параметрического синтеза, которыми располагают схемотехнические САПР, позволяет исключить трудоемкую задачу последовательного перебора всех схем ФП, составляющих банк схемных решений.
На уровне автоматизированного проектирования принципиальной схемы АУ (см. рис. 2.1, основные блоки 8...14) можно выделить циклы: 1) параметрического синтеза ПС (блоки
9.. .12); 2) структурного синтеза ПС (блоки 8...11, 13); 3) изменения ФС или корректировки ТЗ (блоки 5...12, 13, 6, 3, 4 или блоки 8... 11, 13, 6, 3, 4, 5, 7, 2, 3, 4 или блоки
8.. .11, 13, 6, 3, 4, 5, 7, 1, 2, 3, 4).
Очевидно, что изменять структуру ПС целесообразно, исчерпав все возможности ее параметрического синтеза для получения приемлемого проектного решения. Если все многообразие ПС проектируемого АУ, известных разработчику, не удовлетворяет требованиям ТЗ по каким-то параметрам, то может возникнуть необходимость снова ввести изменения в ФС или даже скорректировать ТЗ.
На этом уровне проектирования с максимальным использованием возможностей схемотехнических САПР не только анализируются определяющие характеристики ПС, но и решаются задачи их оптимизации, осуществляются поверочные расчеты всех параметров АУ, определяются диапазоны их изменения. Большое внимание здесь уделяется определению параметров элементов, формирующих заданные динамические свойства АУ. Как правило, именно на уровне автоматизированного проектирования ПС определяются параметры корректирующих цепей, обеспечивающих устойчивость АУ и заданное качество переходного процесса на его выходе. Следует отметить, что в маршруте проектирования (см. рис. 2.1) циклы параметрической и структурной оптимизации ПС и ФС совпадают с циклами параметрического и структурного синтеза этих схем.
29
Каково соотношение ролей разработчика и ЭВМ в процессе автоматизированного схемотехнического проектирования АУ? При решении задач структурного синтеза ФС и ПС, характеризующихся большим числом неформальных операций, основная роль принадлежит разработчику, ведущему проектирование с учетом банка схемных решений. Это обусловлено тем, что в настоящее время в схемотехнических САПР ДИСП и ЭМЦ отсутствуют программы структурного синтеза АУ. Напротив, большинство задач параметрического синтеза и параметрической оптимизации ФС и ПС, задачи анализа, поверочные расчеты решаются, как правило, автоматизированными методами. Так, например, использование программных комплексов “Статика” и “Нестабильность” систем ДИСП и ЭМЦ позволяет определить область разброса координат статического режима АУ; применение программных комплексов “Частота”, “Чувствительность” — оценить влияние разброса параметров компонентов ПС на разброс схемных функций АУ, на его устойчивость и т. д. При оценке влияния паразитных связей, вносимых полупроводниковой интегральной технологией, на основные параметры микроэлектронного АУ особенно важна способность учебно-исследовательских САПР ЭМЦ и ДИСП быстро анализировать сложные схемы в частотной области.
2.3. Методика формирования банка схемных решений
Применение в процессе автоматизированного проектирования АУ банка типовых схемных решений значительно расширяет информационные возможности разработчика, концентрирует его внимание на лучших схемных решениях, известных в мировой практике. При этом удается повысить качество проектных решений, значительно сократить сроки автоматизированного проектирования, а также снизить требования, предъявляемые к квалификации разработчика АУ в области схемотехники.
В состав банка схемных решений (БСР) могут входить наборы принципиальных схем АУ, разработанных ранее, а также наборы функциональных схем АУ и схемных решений их функциональных подсхем, известных разработчику БСР. Каждая схема в БСР характеризуется численными значениями ее основных параметров. Очевидно, что разработчик АУ, получив ТЗ на его реализацию, должен прежде всего внимательно просмотреть готовые ПС уже спроектированных АУ, имеющиеся в БСР, и только убедившись, что ни одна из них не удовлетворяет требованиям ТЗ, он может начинать самостоятельное проектирование.
30
Рассмотрим процесс формирования в БСР самого большого набора — набора схемных решений функциональных подсхем АУ. В этом процессе можно выделить следующие этапы:
1. Формирование начального набора схемных решений ФП;
2. Расчет статического режима ФП и его нестабильности;
3. Определение параметров макромоделей ФП;
4. Экспертная оценка свойств ФП по их основным параметрам;
5. Корректировка набора схемных решений ФП;
6. Выявление зависимостей параметров макромодели ФП от изменения статического режима;
7. Составление паспорта на схемные решения ФП;
8. Занесение информации в ЭВМ.
В качестве примера рассмотрим процесс формирования в БСР набора дифференциальных усилителей (ДУ) сигнала рассогласования (функциональные подсхемы интегральных стабилизаторов напряжения). Предположим, что на основании литературных источников разработчик БСР выбрал 20 схемных решений ДУ (первый этап). На втором этапе ему необходимо с использованием пакетов программ “Статика” и “Нестабильность” систем ДИСП или ЭМЦ провести расчет статического режима этих схем, определив сопротивления резисторов. При этом целесообразно для различных схем ДУ задавать одинаковые или близкие режимы по току тех транзисторов, которые определяют основные параметры усилителя. Выполнение этого условия делает правомочным проведение сравнительной характеристики ДУ по этим параметрам. На третьем этапе с использованием пакета программ “Частота” определяются параметры макромоделей всех схемных решений ДУ (входное сопротивление ЯвхДУ, выходное сопротивление i?BbIX ду, коэффициент усиления по напряжению ^ду), а на четвертом этапе разработчик БСР проводит по этим параметрам сравнительную характеристику (экспертную оценку) свойств усилителей. В результате этой экспертной оценки корректируется набор схемных решений ДУ (пятый этап), т. е. исключаются решения, в которых сложность схемной реализации не приводит к улучшению их параметров (устаревшие схемы). Таким образом, из 20 схем ДУ окончательно в БСР могут войти, например, 5...10 схем. Для схем ДУ, вошедших в банк, целесообразно с использованием ЭВМ выявить зависимость их параметров от изменений статического режима, для чего эти параметры определяются при нескольких значениях эмиттер- ных токов входных транзисторов ДУ (шестой этап).
Формирование разработчиком БСР набора схемных решений ДУ заканчивается составлением паспорта (седьмой этап), который включает в себя принципиальную схему усилителя и ее краткое описание. Например, схеме ДУ, представленной
31
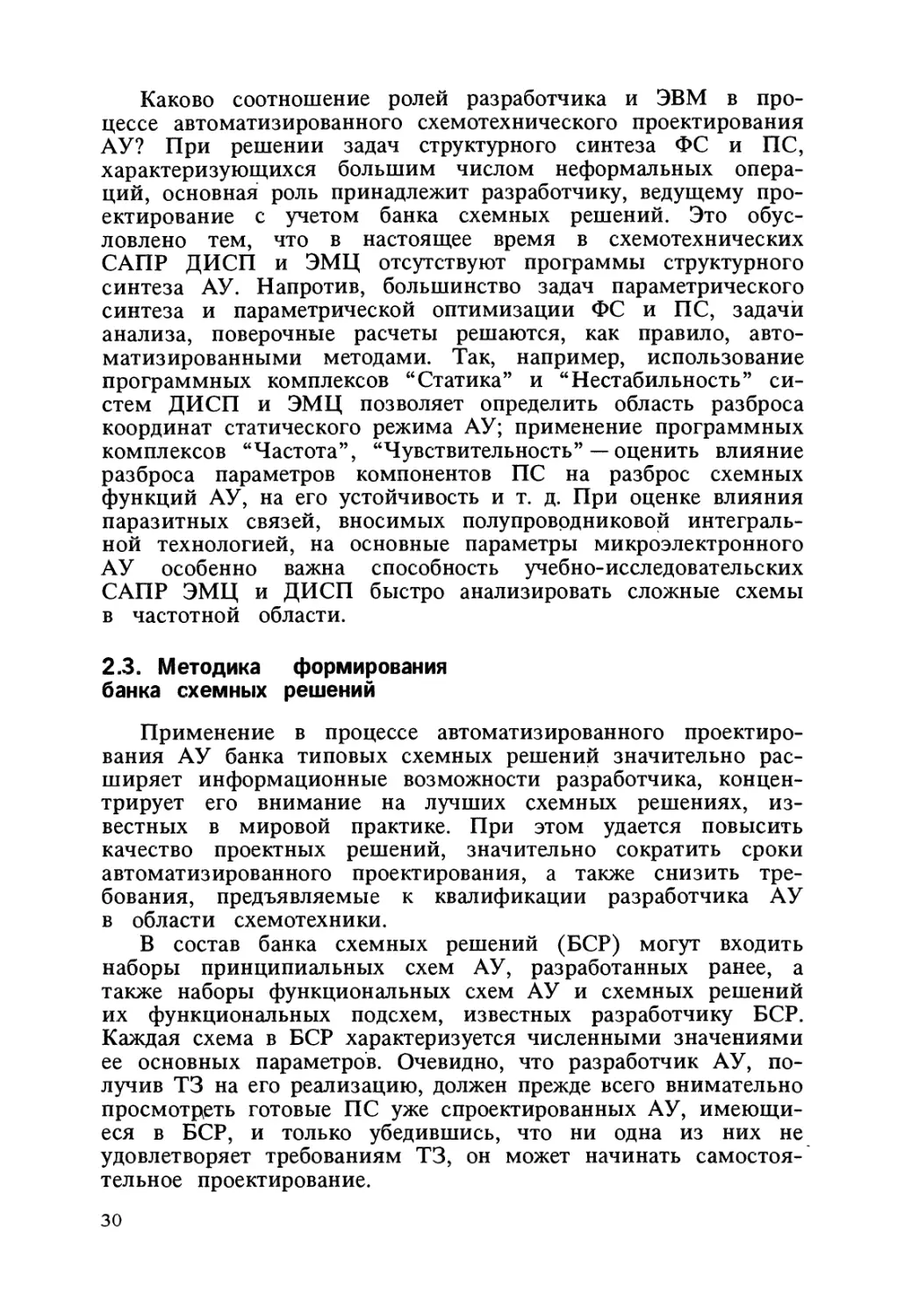
Рис. 2.2. Схема дифференциального усилителя
на рис. 2.2, соответствует следующее описание (для трех режимов работы):
1. 1эк=1,8 мА, 1эг = 0,3 мА, /э/=0,6 мА, где к = 1, 2, 13; / =
= 3...6, 8...12; j =7,14; ~0,05 ким; 2С^дУ =(0,5...1) 10 , -КВх.ду =
= 25...30 кОм, RBbIX Ду = 10...20 кОм.
2. /э/с=0,18 мА, /э/=0,03 мА, /эу =0,06 мА, jR2 = 0,5 кОм;
Кипу = (0,5...2) 10 , ^вх.ду= 100...300 кОм, Двых. ду =
= 50...200 кОм.
3. Lk = 18 мА, L: = 3 мА, L • = 6 мА, i?2 = 5 Ом; iC7 пу = -(0,5..3)10s, Я„.д,-1...3 КОМ, $вых.ду = 1—3 кОм.
(2.1)
В описании (2.1) приводятся значения параметров #вх.ду, ^вых ду» Киду Для трех различных режимов работы ДУ. Наличие такой информации позволяет при автоматизированном проектировании ИСН, варьируя режим работы ДУ, изменять параметры усилителя и вследствие этого — основные параметры проектируемого ИСН.
2.4. Пример автоматизированного схемотехнического проектирования аналоговой микросхемы
Рассмотрим в соответствии с маршрутом (см. рис. 2.1) процесс автоматизированного схемотехнического проектирования интегрального стабилизатора напряжения (ИСН) с фиксированным положительным выходным напряжением [8]. Основные данные ТЗ на проектируемый ИСН: UBblX ii0M = 15 В;
4max = 1 A; C/Bxmin= 18 В; t/Bxmax = 30 В; коэффициент стабилизации Кст>2 • 104 при £/вх=30 В; Яъых < 0,001 Ом; максимальная
32
мощность рассеяния на стабилизаторе Рсттах ^ 20 Вт; ток нагрузки при срабатывании цепи защиты 1,6 А> /н к з> 1,2 А; коэффициент полезного действия стабилизатора rj =РВЬ1Х/РВХ> >0,7 при t/BX=18 В,
Процесс проектирования представим в виде совокупности задач, решаемых разработчиком в тесном взаимодействии с ЭВМ и БСР, при этом используем учебно-исследовательскую САПР ЭМЦ. Рассмотрим основные задачи на уровне автоматизированного проектирования функциональной схемы ИСЫ.
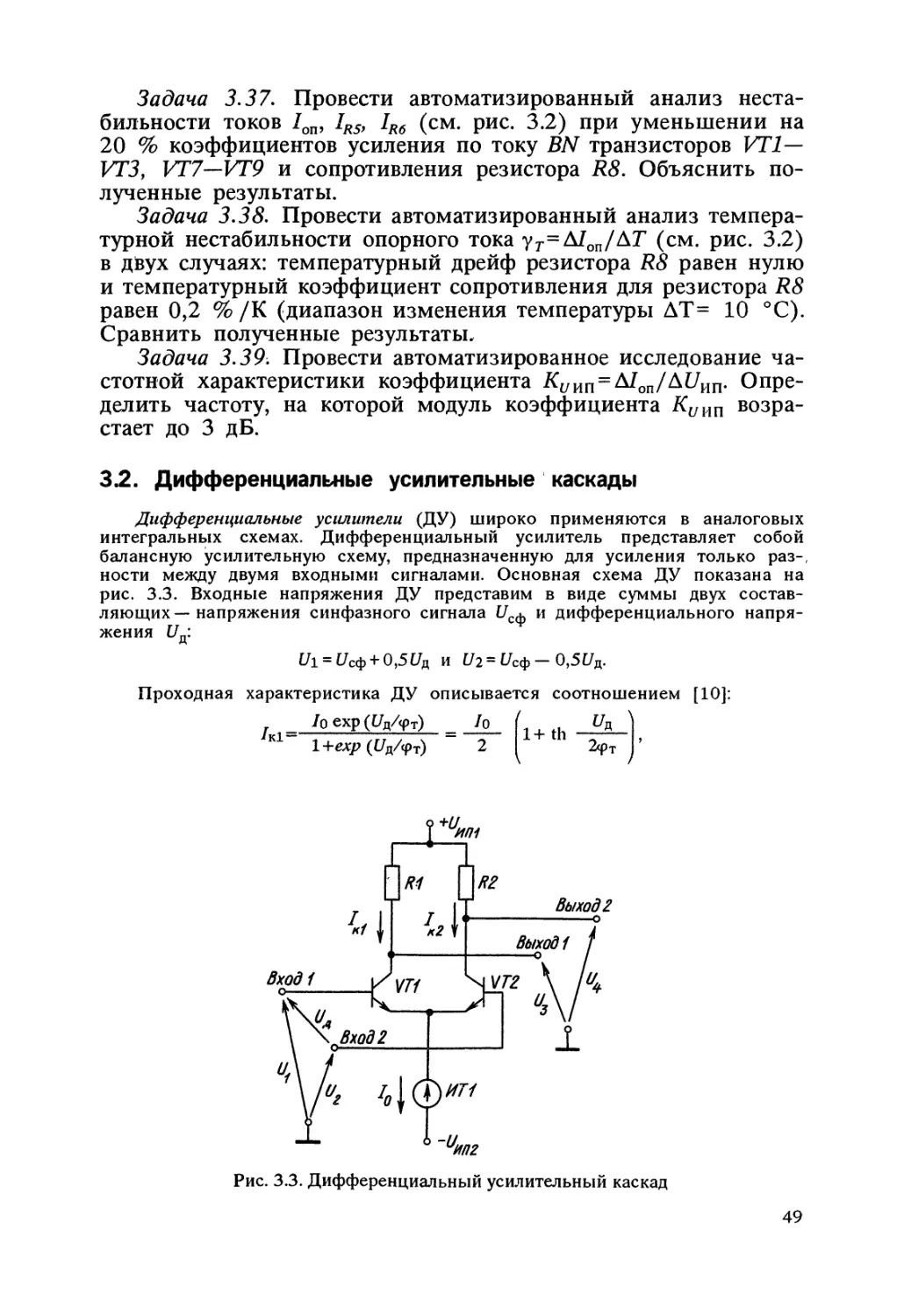
Задача 2.1. Выбрать функциональную схему ИСН (структурный синтез ФС, см. рис. 2.1, блок 2).
Проектируемый ИСН является высококачественным стабилизатором по точностным параметрам КСТ и RBblx, а также имеет сравнительно высокий КПД. Известно, что такие параметры удается обеспечить в непрерывных компенсационных стабилизаторах напряжения с последовательным включением регулирующего элемента. Поэтому выбираем типовую функциональную схему ИСН, соответствующую стабилизаторам этого подкласса (рис. 2.3). В этой ФС для повышения коэффициента стабилизации Кст подключаем ИОН к выходу стабилизатора.
Задача 2.2. Привести ФС (рис. 2.3) к виду, удобному для автоматизированного проектирования.
При автоматизированном исследовании ФС ограничимся основной проектной процедурой — определением таких значений параметров ДУ, при которых обеспечиваются заданные точностные параметры Кст и RBblx стабилизатора. В этом случае можно упростить ФС, исключив из нее УЗСР и совместив друг с другом функциональные подсхемы ИТ и ДУ. Для достаточно простых функциональных подсхем РЭ и ДН нецелесообразно вводить специальные макромодели, гораздо проще их представить на схемном уровне. При этом ФС (рис. 2.3) можно заменить эквивалентной схемой (рис. 2.4), удобной для автоматизированного проектирования. В этой схеме VT1, VT2, R1 — типовой РЭ стабилизатора, представляющий собой составной транзистор; #2, R4 — ДН, сопротивления которого легко определить по известным напряжениям £/вых ном=15 В; 1/оп« 1,2 В, задав ток ДН: IR2 = IR4=3 мА; R3=RH=UBbIx.HOM/IHmax Следует от- метить, что в схеме (см. рис. 2.4) ДУ характеризуется макромоделью ОУ с большим коэффициентом передачи по напряжению (KUDA2 > > ИОН — макромоделью ОУ с малым коэффициентом передачи (KUDAJ < < 1).
Две последующие задачи характеризуют цикл автоматизированного параметрического синтеза ФС (см. рис. 2.1, блоки 3...6).
Задача 2.3. Определить такой минимальный коэффициент усиления по напряжению ДУ KudA2, при котором обеспечи-
2-1586
33
Рис. 2.3. Функциональная схема интегрального стабилизатора напряжения
РЭ — регулирующий элемент; ДУ — дифференциальный усилитель сигнала рассогласования; ИОН — источник опорного напряжения £/оп; ДН — делитель выходного напряжения; ЯГ—источник тока; УЗСР — узел задания статического режима; /?н — сопротивление нагрузки
вается заданный коэффициент стабилизации Кст ИСН (см. рис. 2.4).
Коэффициент стабилизации ИСН Кст = (Д£/вх/Д£/вых) х x(UBblx/UBX) связан с коэффициентом передачи стабилизатора по напряжению Kv очевидным соотношением:
TS ^^ВЫХ
Л,г =
A
(2.2)
В соответствии с выражением (2.2) на основании данных ТЗ получаем желаемое значение параметра 0,25* 1СГ4.
Для данного случая при решении задачи параметрического синтеза в качестве целевой функции принимаем критерий минимального среднего квадратического отклонения (1.2), а именно:
^2 i^UDAl) = т^П \Кц O^UDAl) ^{/] > (2.3)
где Кц^Кцрм) — функция от аргумента KUDA2.
Таким образом, при автоматизированном решении этой задачи с использованием пакета программ "Оптимизация" определяется такое значение варьируемого параметра KUDA2, при котором обеспечивается желаемое значение параметра Кц стабилизатора (2.3).
Рис. 2.4. Функциональная схема стабилизатора, используемая при автоматизированном проектировании
34
При этом разработчик ИСН задает пределы, в которых варьируется параметр KUDA2 (103...106) и его начальное значение (5-103). В этом случае разработчик не имеет достаточной информации о схеме, поэтому диапазон варьирования параметра Kuda2 выбирается очень широким. При уменьшении этого диапазона, как правило, сокращается длительность оптимизационной процедуры, но при этом разработчик должен располагать предварительной информацией о том, что требуемое значение параметра находится внутри этого узкого диапазона.
Сформируем для решения поставленной задачи исходное задание на входном языке системы ЭМЦ. При этом считаем, что сопротивления резисторов схемы определены по результатам задачи 2.2, а мощные интегральные транзисторы VT1 и VT2 имеют следующие параметры: (32=100, #б2 = 0,1 кОм, R32 = 1 Ом, Rk2 = 500 кОм, рх = 50, i?61 = 0,01 кОм, Лэ1 = 0,1 Ом, i?Kl = 10 кОм. В качестве источника опорного напряжения (DA1) из БСР выбираем схему с параметрами: RbxDA1 = 7 кОм, i?BbixiMi = 0>05 кОм, Kudai = 0,01; для ДУ сигнала рассогласования (DA2), выбор которого предстоит сделать, задаем типовые значения параметров: ДвхО42 = 30 кОм; RBMX da2 = 20 кОм.
Исходное задание:
СХЕМА СТАБИЛИЗАТОР - ФС1; ОПИСАНИЕ: Rl(5,2) 05; R2(2,6) 4.6; R3(2,0)15 ОМ; R4(6,0)0.4; T2(4,l,5) ПАРМ = (100,0.1,10м,500,0,0); Т1(5,1,2) ПАРМ = (50,
0.01,0.ЮМ, 10,0,0); DA1(0,2,3) МОД=ОУЛ, ПАРМ = (7,
0.05,0.01,0,0,0); DA2(6,3,4) МОД = ОУЛ, ПАРМ = (30,20, 0,0,0,0); *NN=6; МВУ=1,0,2,0; ОПТИМИЗИРОВАТЬ: MIN CKO KU(A4X) = 0.25Е — 4; *ЧАСТОТА=0; ВАРЬИРОВАТЬ: DA2/#3/5000 (1ЕЗДЕ6); *ОПТЧХ; КОНЕЦ;
Результат автоматизированного параметрического синтеза:
ДУ min = KUDA2 = 32 200.
Задача 2.4. Определить такое максимальное выходное сопротивление ДУ Явыхслг* ПРИ котором обеспечивается заданное выходное сопротивление стабилизатора. В схеме на рис. 2.4:
йвых = 10_б кОм.
Целевая функция для данной задачи имеет вид (1.2)
^2 С^выхDA2) = m^n [ZBK3 (RBblxDA2) ~ ^вых] > (^-4)
где ZBK3 (RBblxDA2) - функция от аргумента RBblxDA2.
В этом случае стремимся получить требуемое значение выходного сопротивления ИСН в режиме короткого замыкания входа стабилизатора (ZBK3), варьируя в широких пределах (1(Г2...103 кОм) выходное сопротивление DA2 (RBblxDA2) от начального значения 50 кОм (2.4).
2*
35
Отличие исходного задания для этой задачи от предыдущего состоит в следующем (KUDA2) « 3,2-104):
ОПТИМИЗИРОВАТЬ: MIN CKO ZBK3 (АЧХ) = 1Е-6; ♦ЧАСТОТА=0; ВАРЬИРОВАТЬ: DA2/#2/50 (1Е - 2,
1ЕЗ); *ОПТЧХ; КОНЕЦ
Результат автоматизированного параметрического синтеза:
^выхДУтах ~~ ^bb\xDA2 ~ 20,7 КОМ.
Задача 2.5. Осуществить выбор схемы ДУ (см. рис. 2.3.) из банка схемных решений.
По результатам задач 2.3, 2.4 очевидно, что параметры ДУ (см. рис.2.3) должны удовлетворять условиям:
Киду — К-идутт =3,2* 10 ; ^ 5)
^выхДУ — ^выхДУтах =20,7 Юм.
В соответствии с условием (2.5) выбираем из БСР схему ДУ, приведенную на рис. 2.2 (режим 1).
Таким образом, автоматизированные исследования ФС (задачи 2.3, 2.4) позволяют исключить трудоемкий последовательный перебор всех схем ДУ из БСР на уровне проектирования принципиальной схемы ИСН
Задача 2.6. Осуществить поверочный автоматизированный расчет ФС (см. рис. 2.4) при типовых параметрах ДУ (см. рис. 2.2, Куду—6*10 , ^выхду=^ кОм).
Исходное задание:
ОПИСАНИЕ:
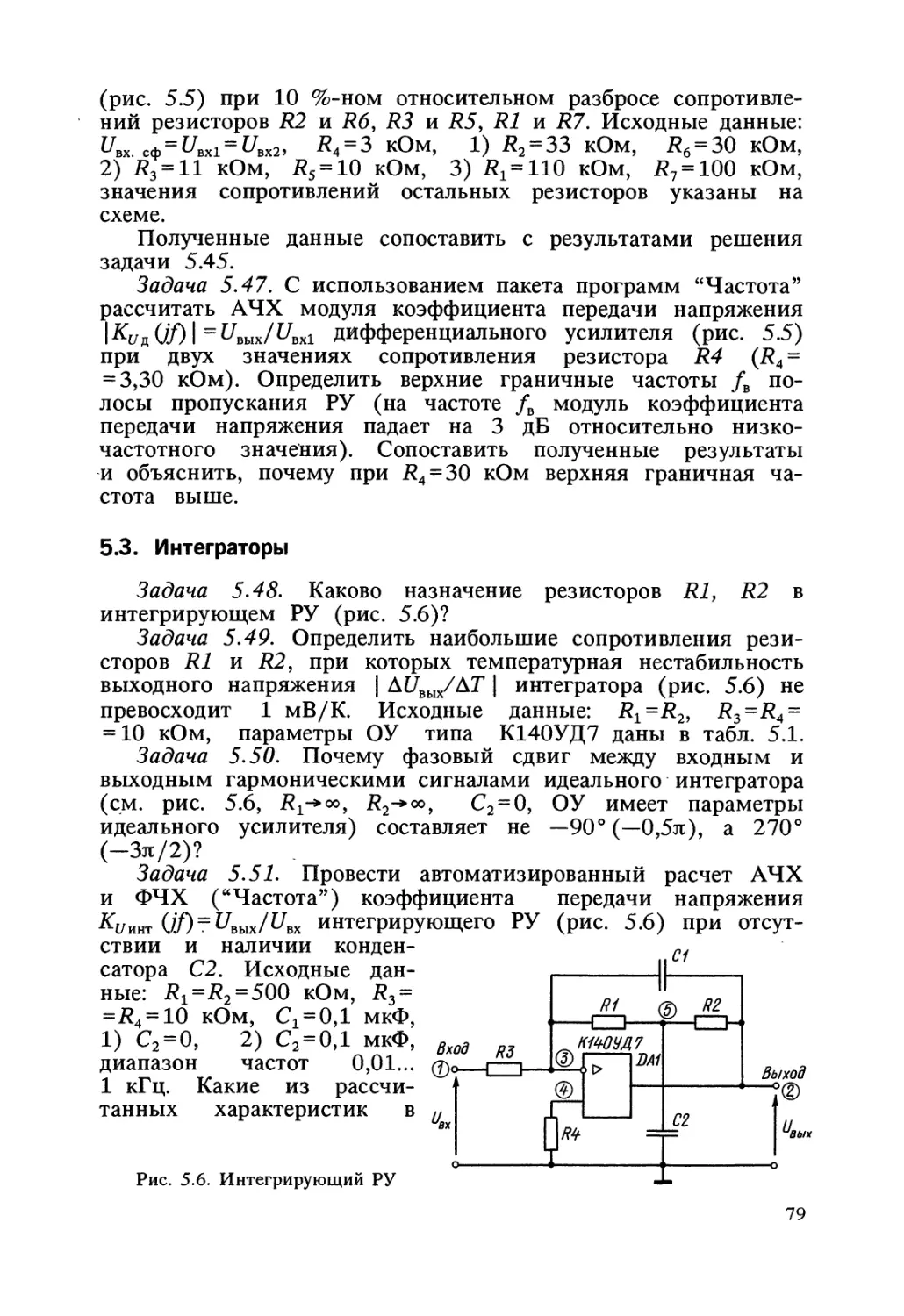
NN=6; СФ = Ки, ZBK3; МВУ=1,0,2,0; ЧАСТОТАМ; ЧАСТОТА 1; КОНЕЦ;
Из задания видно, что для ИСН определяются схемные функции Kv и #Bblx(ZBK3) с использованием пакета программ частотного анализа “Частота Iм.
Результаты автоматизированного расчета: Ки~0,12 -1СГ4 (Кст«4-104), Явых«0,9• 10-6 кОм удовлетворяют требованиям ТЗ.
Задача 2.7. Предположим, что ц результате автоматизированного решения задачи 2.4 все ДУ из БСР не удовлетворяют требованиям по параметру #ВЫхду (2.5). Как выйти из создавшегося затруднения?
В этом случае целесообразно изменить схему РЭ. Действительно, чем больший коэффициент усиления по току имеет РЭ, тем меньше выходное сопротивление ИСН при одном и том же выходном сопротивлении ДУ. Таким образом, используя в качестве РЭ тройной составной транзистор с большим коэффициентом усиления по току, удается выполнить требование ТЗ на ИСН по параметру ЯЪЪ1Х даже при большом выходном сопротивлении ДУ.
36
Вход
Рис; 2.5. Принципальная схема интегрального стабилизатора напряжения
VT3, VT4, R4 — регулирующий элемент; R8, R13 — делитель напряжения; VT20...VT23, R7, R10...R12, — источник опорного напряжения; ГТб...ГТ<5, VT10...VT14, VT16...VT18, VD3,R16 — дифференциальный усилитель сигнала рассогласования; VT1, VT2 — источник тока; КГ5, VD1, VD2, R1,R6, R9 — узел задания статического режима; VT9, VD4,R2,R3, Д5 — цепь защиты стабилизатора по выходному току; VT15;VT19, Дб, R17 — цепь тепловой защиты; Ci, Д/5 — цепь коррекции стабилизатора
Рассмотрим основные задачи на уровне автоматизированного проектирования принципиальной схемы ИСН.
Задача 2.8. По результатам задач 2.1...2.6 выбрать начальный вариант принципиальной схемы ИСН (структурный синтез ПС —рис. 2.1, блок 8).
Проведем синтез начального варианта ПС стабилизатора, взяв за основу ФС (см. рис. 2.3) и выбрав для каждой функциональной подсхемы соответствующую схему из БСР (в частности, ДУ—схема на рис. 2.2, РЭ — схема на составном транзисторе—рис. 2.4). Подробное обоснование выбора схемных решений ИОН, УЗСРи других дополнительных подсхем ИСН приведено в работе [8]. С учетом вышеизложенного получаем принципиальную схему стабилизатора, приведенную на рис. 2.5. Проведем автоматизированными методами анализ устойчивости этого ИСН и синтез его корректирующих цепей (задачи
2.9...2.14).
Задача 2.9. Преобразовать ПС (см. рис. 2.5) к виду, удобному для проведения автоматизированного исследования устойчивости ИСН.
Устойчивость ИСН будем оценивать на основании частотной характеристики петлевого усиления системы 7\> (/со). При построении эквивалентной схемы ИСН для определения его петлевого усиления целесообразно в схеме (см. рис. 2.5)
37
Рис. 2.6. Принципиальная схема, используемая для исследования устойчивости
стабилизатора
отключить делитель #5, R13 от выхода стабилизатора, а также исключить из схемы функциональные подсхемы и компоненты, не оказывающие существенного влияния на параметр 7^0) (УЗСР, ИОН, цепи тепловой и токовой защиты и т. д.). При этом ПС на рис 2.5 преобразуется в схему на рис 2.6, удобную для нахождения петлевого усиления автоматизированными методами,
Tv{j*>) = Um{j»)fUn (/со)
Задача 2.10. Провести автоматизированный расчет частотных характеристик (модуля и фазы) петлевого усиления нескорректированного ИСН (см. рис. 2.6, С2 = 0).
Исходное задание:
СХЕМА СТАБИЛИЗАТОР-ПС1; ОПИСАНИЕ:
NN= 14; СФ = КИ; МВУ = 1,0,2,0; ЧАСТОТА=0.01,
0.1,1,10,30,100,300,1ЕЗ,ЗЕЗ,1Е4; ЧАСТОТА1; КОНЕЦ;
Результаты автоматизированного расчета представлены в табл. 2.1.
Задача 2.11. Почему уже в диапазоне низких частот (f = = 10 Гц) фазовый сдвиг петлевого усиления ИСН (см. рис. 2.6) составляет 180° (см. табл. 2.1)?
Это объясняется тем, что при автоматизированном расчете определяется полный фазовый сдвиг схемы
<Рх = <Р и + <Рд> (2-6)
(где <ри=—180° — фазовый сдвиг, обусловленный инвертировани¬
38
ем схемой входного сигнала; (рд —дополнительный фазовый сдвиг, обусловленный реактивными компонентами схемы, а также инерционностью ее активных компонентов.
Действительно, в схеме на рис. 2.6 инвертируется фаза входного сигнала. Так, если будем рассматривать в этой схеме путь пердачи сигнала от входа до выхода: VI15 (общий эмиттер) — VT13 (общая база) — VT11—VT9—VT3—VT8 (общие коллекторы), то убедимся, что транзистор VT15 инвертирует фазу входного сигнала.
Задача 2,12. На основании результатов предыдущей задачи (см. табл. 2.1) оценить, устойчив или нет нескорректированный ИСН.
По критерию Найквиста для устойчивости электронного устройства с цепью общей отрицательной обратной связи необходимо, чтобы на частоте среза петлевого усиления системы, где его модуль равен 1(0 ДБ), абсолютное значение дополнительного фазового сдвига петлевого усиления <рд (без учета инвертирования) было меньше 180°. Из рассмотрения табл. 2.1 очевидно, что это условие не выполняется, следовательно, нескорректированный ИСН неустойчив, а значит необходимо решать задачу обеспечения его устойчивости путем введения корректирующих цепей.
Задача 2.13. Определить параметры корректирующей цеи ИСН (см. рис. 2.6), при которых обеспечивается его устойчивость (параметрический синтез ПС —рис. 2.1, блоки 9... 12).
В ИСН вводим корректирующую цепь C2,R3 и осуществляем ее автоматизированный параметрический синтез, варьируя сопротивление R3 в пределах 1,01...100 кОм, а емкость С2 в пределах 1(Г6...1(Г2 мкФ; начальные значения: R3 = l кОм, С2 = 1 нФ.
При вариации параметров R3, С2, стремимся получить желаемую частотную характеристику модуля петлевого усиления в децибелах (KU (АЧХБД)). Зададим эту характеристику четырьмя точками частотного диапазона, для каждой
Таблица 2.1
Частота, кГц
Нескорректированный ИСН
Скорректированный ИСН
Модуль, дБ
Фаза, ...°
Модуль, дБ
Фаза, ...°
0,01
86
-180
79
-244
0,1
86
-180
59
-267
1
86
-187
39
-269
10
82
-239
19
-270
30
74
-284
10
-272
100
59
-337
-0,4
-277
300
40
-27
-9
-293
1000
14
-94
-14
-347
3000
-17
-179
-19
-166
10 000
-62
-291
-55
-303
39
из которых определена приемлемая зона модуля петлевого усиления: / = 1 кГц, LT(/) = 20 lg |7/(//) I =39...41 дБ; /=
= 10 кГц Lr(f) = 19...21 дБ;/ = 100 кГц; LT(/)=-1...1 дБ;/=300 кГц, LT(f) =—11...—9 дБ. Желаемая частотная характеристика имеет наклон —20 дБ/дек около частоты среза петлевого усиления, что позволяет реализовать устойчивую систему и обеспечить сравнительно большой запас устойчивости по фазе (в несколько десятков градусов).
Следует отметить, что задание зоны для желаемой частотной характеристики во многих случаях обеспечивает более быстрое решение задачи автоматизированного параметрического синтеза по сравнению с заданием этой характеристики в однозначном виде. В исходном положении для каждой точки частотного диапазона указывается также вес, характеризующий ее значение (3; 3; 3; 1); при этом наименее важной является четвертая точка.
Исходное задание:
ОИСАНИЕ:
NN=14; МВУ=1,0,2,0; ОПТИМИЗИРОВАТЬ: ЗОНА KU (АЧХДБ) (39,41/19,21/-1,1/-11,-9) (3,3,3,1); *ЧАСТО- ТА= 1,10,100,300; ВАРЬИРОВАТЬ: R3(#l) 1 (0.01,100); С2(#1) 0.001(1Е-6, 1Е-2); *ОПТЧХ; КОНЕЦ;
В результате работы пакета программ “Оптимизация” системы ЭМЦ получаем следующие значения параметров: R3 = = 0,35 кОм, С2 = 1,4 нФ.
Задача 2.14. Убедиться, что ИСН (см. рис. 2.6) с параметрами корректирующей цепи С2, R3, определенными по результатам решения задачи 2.13, устойчив пр вариации в широких пределах емкости нагрузки Сх (поверочные автоматизированные расчеты ПС —рис. 2.1, блок 9). Значения емкости Сх: 0; 0,1; 10 мкФ; диапазон частот: 0,01; 0,1; 10; 30; 100; 300; 103; 3-103; 104 кГц.
Исходное задание:
ОПИСАНИЕ:
NN=14; СФ=КП; МВУ = 1,0,2,0; ЧАСТОТА = 0.01,0.1,1,10, 30,100,300,1ЕЗ,ЗЕЗ,1Е4; ЧАСТОТА1; ИЗМ.С1 = 0.1; *ЧА- СТОТА1; ИЗМ.С1 = 10; *ЧАСТОТА1; ИЗМ.С1 = 0; *ЧА- СТОТА1; КОНЕЦ;
Из задания видно, что нужно стремиться с использованием директивы "Изменить” получить четыре семейства частотных характеристик петлевого усиления ИСН, варьируя емкость Сх.
Частично результаты автоматизированных расчетов представлены в табл. 2.1 (Сх = 1 мкФ). Из их рассмотрения очевидно, что ИСН устойчив, запас устойчивости по фазе составляет 83°
40
(2.6). Результаты расчетов при других значениях емкости Сх также говорят об устойчивости ИСН.
Проведем автоматизированное исследование статического режима ИСН, представленного на рис. 2.5 (задачи 2.15...2.21).
Задача 2.15. Осуществить поверочный автоматизированный расчет статического режима ИСН (см. рис. 2.5) при входном напряжении 11ъх = 20 В.
Исходное задание:
ОПИСАНИЕ:
Е1(0,1)20 В; NN=27; СТАТИКА; КОНЕЦ;
Фрагменты результатов автоматизированного расчета статического режима ИСН (см. рис. 2.5), полученные с использованием пакета программ “Статика” САПР ЭМЦ, имеют вид:
* СТАТИКА* - НАЧАЛО УЗЛОВЫЕ НАПРЯЖЕНИЯ СХЕМЫ Ul = 20.0 (В) U2= 15,1 (В)...
♦РАБОЧИЕ РЕЖИМЫ РЕЗИСТОРОВ
РЕЗИСТОР НАПРЯЖЕНИЕ (В) ТОК (МА) МОЩНОСТЬ (МВТ)
R14 15.127 0.10085Е04 0.15685Е05
* * РАБОЧИЕ РЕЖИМЫ БИПОЛЯРНЫХ ТРАНЗИСТОРОВ ТРАНЗИСТОР U3B(B) UKB(B) 1К(МА) 1Э(МА) 1Б(МА) Р(МВТ)
Т4 0.725 3.77 0.995Е03 0.101Е04 21.1 0.455Е04
ПОТРЕБЛЯЕМАЯ МОЩНОСТЬ=20875 (МВТ) ♦СТАТИКА* - КОНЕЦ
На печать выводятся узловые напряжения схемы U1...U27 в вольтах, координаты рабочих точек компонентов, мощности, рассеиваемые на компонентах схемы, а также суммарная мощность, потребляемая схемой.
Выводы по результатам автоматизированного расчета: ИСН в статическом режиме функционирует нормально; UBblx ~ — 15,1 В, Uon = U6L6« 1,2 В (см. рис. 2.5); режимы транзисторов ДУ по току близки к режиму 1 (см. рис. 2.2) за исключением транзстора VT11 (7Кп = 0,4 мА); компоненты VT15, VT19, R2, R3, R17, VD4, VT9 обесточены, что соответствует нормальной работе стабилизатора.
Задача 2.16. Осуществить автоматизированный расчет задачи 2.15 с условием, что ИСН (см. рис. 2.5) используется при максимальном токе нагрузки/птах= 5 А, Я14 = 3 Ом, Rs= 0,08 Ом.
41
Результаты автоматизированного расчета: {Увых «9 В; тран-? зистор VT11 обесточен; ИСН потерял свою работоспособность.
Задача 2.17. В чем причина потери работоспособности ИСН (см. рис. 2.5) при условиях задачи 2.16?
При увеличении тока нагрузки /нтах от 1 А до 5 А значительно возрастает ток базы транзистора VT3. В этом случае значение коллекторного тока транзистора VT2 оказывается недостаточным для обеспечения режимов по току компонентов VT6, VD3, VT7, VT8, VT11 и КГЗ, что и приводит к обесточиванию транзистора VT11 и уменьшению выходного напряжения ИСН.
Задача 2.18. Каким образом обеспечить нормальный статический режим для ИСН (см. рис. 2.5) при условиях задачи 2.16?
Для этого нужно увеличить коллекторный ток транзистора VT2, а следовательно, необходимо уменьшить сопротивления резисторов R6 и R9. В результате ручного расчета получаем скорректированные сопротивления резисторов: R6 = 0,13 кОм, Rg = = 1,6 кОм, R16 = 0,05 кОм.
Задача 2.19. Осуществить поверочный автоматизированный расчет статического режима ИСН (см. рис. 2.5) при условиях задачи 2.16 и скорректированных сопротивлениях Я6, R9, R16, (задача 2.18).
Результаты автоматизированного расчета: ИСН функционирует нормально; 1/вых^15,1 В; £/ог~ 1,2 В, /кП~0,6 мА, /бз ~ 1 мА.
Задача 2.20. Для ИСН (см. рис. 2.5) при входном напряжении [7ВХ = 30 В, варьируя сопротивление нагрузки R14, определить максимальную мощность рассеяния на ИСН (цикл параметрической оптимизации ПС —рис. 2.1, блоки 9...12).
Исходное задание:
ОПИСАНИЕ:
Е1(0,1)30 В; NN=27; СТАТИКА; ИЗМ. R14=12 ОМ; ♦СТАТИКА; ИЗМ. R14 = 0 ОМ; *СТАТИКА; ИЗМ. R14 = = 6 ОМ; *СТАТИКА; ИЗМ. R14 = 3 ОМ; *СТАТИКА; КОНЕЦ;
Результаты автоматизированного исследования: РСттах=:^пот~ PrL4 « 19 Вт при R14 = 12 Ом, что удовлетворяет требованиям ТЗ.
Задача 2.21. Сделать вывод о том, нужен ли для ИСН (см. рис. 2.5) теплоотвод при условиях задачи 2.20.
ИСН можно использовать без теплоотвода, если максимальная мощность рассеяния на микросхеме не превышает 1...2 Вт. При Рсттах = 19 Вт наличие теплоотвода обязательно.
Задачи 2.1...2.21 не претендуют на всестороннее рассмотрение процесса автоматизированного схемотехнического проектирования аналогового устройства, но помогают сделать важный вывод. Автоматизированное проектирование АУ ни в коей мере
42
не исключает процесса интенсивного схемотехнического мышления разработчика, которое особенно активизируется при структурном синтезе ФС и ПС, а также при осмыслении негативных результатов автоматизированных исследований.
ГЛАВА ТРЕТЬЯ
МИКРОСХЕМОТЕХНИКА ТИПОВЫХ ФУНКЦИОНАЛЬНЫХ ПОДСХЕМ ИНТЕГРАЛЬНЫХ АНАЛОГОВЫХ УСТРОЙСТВ
3.1 Источники постоянного тока и цепи задания статического режима
Микросхемотехника интегральных аналоговых устройств значительно отличается от схемотехники АУ, построенных на дискретных компонентах. Это обусловлено, во-первых, высокой идентичностью параметров активных элементов, реализуемых в одном кристалле, во-вторых, ограничениями полупроводниковой интегральной технологии на диапазон изменения параметров пассивных элементов. Так, например, технологический разброс напряжений эмиттер — база для двух биполярных транзисторов, находящихся в одном кристалле, не превышает 3...5 мВ при равных токах эмиттеров, а для двух дискретных транзисторов одного типа он может достигать 50... 100 мВ. С другой стороны, в рамках полупроводниковой интегральной технологии трудно реализовать большие сопротивления и емкости (более 100 кОм и 100 пФ). Поэтому не удивительно, что, например, два усилительных устройства с одинаковыми параметрами будут иметь совершенно различные схемы, если одно из них предназначено для реализации в виде микросхемы, а другое — в дискретном исполнении. На начальных этапах схемотехнического проектирования аналоговых микросхем (см. гл. 2) целесообразно всесторонне исследовать базовые функциональные подсхемы АУ.
Источники постоянного тока (ИПТ) являются основными ФП, используемыми для задания статического режима аналоговых интегральных схем; при этом сложные интегральные АУ могут содержать десятки ИПТ. Идеальный ИПТ обеспечивает заданный ток в нагрузке RH, который не зависит от изменения сопротивления Ян, т. е. выходное сопротивление Явых такого ИПТ, стремится к бесконечности. В аналоговой микросхемотехнике реальные ИПТ, как правило, реализуются на биполярных транзисторах с использованием их коллекторных выводов в качестве токозадающих; при этом используется то свойство биполярного транзистора, что его коллекторный ток слабо зависит от напряжения коллектор — база [9].
Рассмотрим типовые схемы ИПТ, представленные на рис. 3.1. В этих схемах выходным током является ток IR2, а резистор R2 представляет собой нагрузку ИПТ. Источники тока реализуются на маломощных интегральных п — р — п-транзисторах TIN). В схемах на рис. 3.1, я, б, г осуществляется параметрическая компенсация температурных изменений напряжений эмиттер — база соответствующих транзисторов; в схеме на рис. 3.1, в такая компенсация отсутствует. При выполнении условия Я$ -ЯА схемы на рис. 3.1, я, б представляют собой повторители тока (отражатели тока, токовые зеркала), поскольку в этом случае их статический коэффициент передачи по току =/Л2/^К1 близок к единице.
Проведем автоматизированное исследование схем ИПТ (рис. 3.1) и их сравнительную характеристику по следующим основным параметрам: выходному сопротивлению Явых, температурной нестабильности выходного тока
43
Рис. 3.1. Типовые схемы источников постоянного тока
Л/д2/АГ, коэффициенту Кц ип = А1К2/&иш, характеризующему изменение выходного тока от изменения напряжения питания. В дальнейшем при сравнении схем на рис. 3.1 их параметрам присваиваются индексы: “1” — для рис. 3.1, а, “2”—для рис. 3.1, б и т. д. Для повторителей тока (рис. 3.1, а, б) представляет также интерес параметр характеризующий отклонение статического коэффициента передачи ИПТ от единицы Сдт =
= |1-к,|).
Сравнительную характеристику схем ИПТ проводим при одинаковых в первом приближении режимах по току всех транзисторов (/к * 1 мА) и идентичных сопротивлениях нагрузки (RH = 1 кОм). Автоматизированное исследование схем ИПТ (рис. 3.1) проводится с использованием учебно-исследовательской САПР ДИСП и определяется совокупностью задач 3.1...3.20. Описание схемы ИПТ (рис. 3.1, а) на входном языке системы ДИСП имеет вид:
NAME = ИСТ. ТОКА 1; N = 5; R=3,l,14! 2,3,1! 4,0,0.6! 5,0,0.6;
Т = 1,2,5,T1N!1,1,4,T1N; Е= 0,3,15; F= 0.0,0.1,1,10,100Д000,10000;. “К” Здесь диапазон частот F задан для решения тех задач, где необходимо определить схемные функции ИПТ и их частотные характеристики. Если в схеме ИПТ по условиям задачи необходимо изменить сопротивления
44
резисторов, тип транзисторов, то в тексте описания проводится соответствующая редакция. Описание схем ИПТ (рис. 3.1,6 —г) необходимо подготовить самостоятельно.
Задача 3.1. Провести автоматизированный расчет статического режима ИПТ на рис. 3.1, а с использованием пакета программ “Статика” и по его результатам определить статический коэффициент передачи схемы по току Ki=IR2/Irv
Задача 3.2. По результатам расчета статического режима (задача 3.1) объяснить, чем обусловлено отличие параметра Kf от единицы для ИПТ (см. рис. 3.1, а).
Задача 3.3. Провести автоматизированный расчет статического режима ИПТ на рис. 3.1, а при использовании в нем маломощных интегральных транзисторов типа р — п—р (VT1, VT2 — T1P, г/ип = — 15 В). По результатам расчетов (задачи 3.1 и 3.3) сравнить по параметру схемы на п — р — /2-транзисторах (6/w) и р — п — р-транзисторах (Ь1р).
Задача 3.4. По результатам автоматизированных расчетов (задачи 3.1 и 3.3) объяснить, в чем причина неидентичности параметров Ь1р и Ь1п для схем ИПТ на транзисторах типа п — р — п и р — п — р.
Задача 3.5. Какие изменения необходимо провести в схеме на рис. 3.1, а, чтобы статический коэффициент передачи по току ИПТ (Kj=IR2/Ir1) стал больше единицы?
Задача 3.6. Провести с использованием пакета программ “Частота” расчет выходного сопротивления RBblx ИПТ на рис. 3.1, а, для двух случаев: 1) R3=R4 = 0,6 кОм; 2) R3=R4 = 0. Дать сравнительную оценку полученных результатов.
Задача 3.7. На основании результатов автоматизированных расчетов задачи .3.6 сделать вывод о целесообразности введения в схему резисторов R3 и R4.
Задача 3.8. Сравнить друг с другом по выходному сопротивлению ИПТ на рис. 3.1, а, реализованный на п — р — 72- транзисторах (i?BbIX?J —см. задачу 3.6 цри R3=R4 = 0,6 кОм) с таким же ИПТ на транзисторах типа р — п—р (Ялыхр — см. условия задачи 3.3).
Задача 3.9. По результатам автоматизированного расчета задачи 3.6 (случай 1) определить граничную частоту /гр, на которой модуль выходного сопротивления ИПТ | ZBbIX (//) | на 3 дБ меньше своего максимального значения.
Задача 3.10. Провести автоматизированный расчет статического режима ИПТ на рис. 3.1, б и на основании его результатов и результатов задачи 3.1 сравнить схемы на рис. 3.1, а, 6 по параметру 6,.
Задача 3.11. Объяснить результат задачи 3.10 со схемотехнических позиций.
Задача 3.12. Сравнить между собой по параметрам 67 и RBblK два варианта схемы на рис. 3.1, б: 1) R3=R4 = 0, 2) R3=R4 =
45
= 0,6 кОм (автоматизированные расчеты проводятся по аналогии с задачами 3.6 и 3.10.
Задача 3.13. На основании результатов задачи 3.12 сделать вывод о целесообразности введения в схему резисторов R3 и R4.
Задача 3.14. По результатам задач 3.1 и 3.12 объяснить, в чем преимущество ИПТ на рис. 3.1, б перед ИГТТ на рис. 3.1, а, jR3=#4 = 0.
Задача 3.15. В чем заключается недостаток при введении в схемы ИПТ на рис. 3.1, а, б резисторов R3 и R41
Задача 3.16. Провести автоматизированный расчет статического режима схемы ИПТ на рис. 3.1, в для двух случаев: 1) R± = 1 кОм; 2) R± = l кОм. По его результатам сделать вывод о том, является или нет эта схема повторителем тока (IR2~Iri) при изменении сопротивления Rx в широких пределах.
Задача 3.17. Провести с использованием пакета программ “Нестабильность” сравнительную оценку схем ИПТ на рис. 3.1, а, б, в по температурной нестабильности выходного тока ут.
Задача 3.18. Объяснить результаты задачи 3.17 со схемотехнических позиций.
Задача 3.19. Провести с использованием пакета программ "Частота” сравнительную оценку ИПТ на рис. 3.1, а, в по пара- метру Kulin = AIRyAUm.
Задача 3.20. По результатам автоматизированных расчетов задач 3.17 и 3.19 определить, в чем заключается достоинство и недостаток ИПТ на рис. 3.1, в по сравнению с ИПТ на рис. 3.1, а.
Задача 3.21. Получить соотношение для статического коэффициента передачи по току K^I^/Irj ИПТ (см. рис. 3.1, г) при условии R3 = 0.
Задача 3.22. Построить график зависимости h2=f(lRl) (СМ. задачу 3.21). Чем объясняется спад полученной характеристики при токах, больших 100 мкА?
Задача 3.23. Провести автоматизированный расчет статического режима ИПТ на рис. 3.1, г, изменяя напряжение питания от 1 до 5 В с шагом 100 мВ. Построить график зависимости Ir2 ~f (^Ri)‘
Задача 3.24. На основании автоматизированных расчетов задачи 3.23 определить входной ток ИПТ, при котором его выходной ток принимает максимальное значение (IR2 max). Определить коэффициент передачи по току ИПТ K^I^/Irj при
^R2 ~J-R2 max*
Задача 3.25. Какие изменения необходимо внести в схему ИПТ на рис. 3.1, г, чтобы ее коэффициент передачи по току при IR2=1R2max был равен единице.
Задача 3.26. Провести повторный расчет статического режима ИПТ (см. задачу 3.23), предварительно увеличив ток отсечки
46
IS транзистора VT2 в 2,7 раза (площадь перехода эмиттер — база транзистора VT2 увеличивается в 2,7 раза). Сравнить полученные результаты с результатами, полученными в задаче 3.23.
Задача 3.27. По результатам расчетов задачи 3.26 определить коэффициент нестабильности выходного тока ИПТ, при изменении входного тока от 50 до 150 мкА (KHCl=AIR2/AIR1).
Задача 3.28. Провести автоматизированный анализ чувствительности коэффициента передачи по току Kj=IR2/IR] к изменению параметра BN (см. табл. П.1) транзисторов VT1 и VT2 для R2 = 0 и R2 = 92 Ом. Сравнить полученные результаты.
Задача 3.29. Провести анализ нестабильности выходного тока ИПТ на рис. 3.1, г при изменении температуры. Рассчитать коэффициент нестабильности (ут =IR2/AT).
Задача 3.30. Провести автоматизированный сравнительный анализ ИПТ на рис. 3.1, а и рис. 3.1, г в частотной области по параметру Kunu = AIR2/AUvm, где А[/ип—изменение напряжения источника питания (ИП). Замечание: для ИПТ на рис. 3.1, г постоянное напряжение источника Е1 выбирается таким образом, чтобы IR2=Ir2max (см- задачи 3.23 и 3.24).
Цепь задания Статического режима интегральных микросхем, работающих в сравнительно узком диапазоне изменений питающих напряжений, может быть выполнена на основе комбинации рассмотренных выше ИПТ.
В интегральных микросхемах, работающих в широком диапазоне изменений питающих напряжений, как правило, используются специальные подсхемы задания статического режима. Одна из таких подсхем показана на рис. 3.2. Она включает в себя цепь задания статического режима VT1, VT2, VT5, VT7, VT8, R2, R3, R7, R8; источники тока КГЗ, КГ9, обеспечивающие
47
задание рабочих точек функциональных подсхем, и цепь запуска Rl, VT4, VT6, VT10. Два включенных встречно ИПТ: VT1, VT2, R2, R3 и VT5, VT7, VT8, R8 обеспечивают стабилизацию опорного тока 10П на уровне:
4п = (*>т1пЛ0/я8,
где <рт ~ 25 мВ — температурный потенциал; N=S38/S3l — отношение площадей переходов эмиттер —база транзисторов VT8 и VT7 (при проведении автоматизированного анализа отношение площадей моделируется отношением токов отсечки IS). Так, при указанных на схеме номиналах резисторов и отношении площадей транзисторов N= 10 значение /оп составляет 100 мкА. Температурный дрейф тока 10П определяется температурным дрейфом разности напряжений эмиттер — база транзисторов VT8, VT7 и температурным дрейфом резистора R8.
В задачах 3.31—3.39 проводится автоматизированное исследование подсхемы задания статического режима (рис. 3.2). Исходные данные: все п — р — /г-транзисторы, кроме VT8, одного типа— TIN, транзистор VT8 — типа T3N, а все р — и — р-транзисторы—типа TIP (см. приложение 1). Отношение площадей эмиттеров транзисторов VTS и VT7, кроме случаев, оговоренных особо, равно 10.
Задача 3.31. Провести автоматизированный расчет статического режима схемы на рис. 3.2 и определить значения токов 1(Ж> 1ц5у Ir6-
Задача 3.32. Отключить цепь запуска Rl, VT4, VT6, VT10, исключив из описания схемы транзистор VT4 (см. рис. 3.2). Провести повторный автоматизированный расчет статического режима схемы.
Задача. 3.33. Сравнить результаты расчетов статического режима в задачах 3.31 и 3.32. Объяснить, как происходит процесс “запуска” подсхемы задания статического режима при включении напряжения питания.
Задача 3.34. Провести автоматизированный многовариантный расчет значений токов /оп, IR5, IR6 (см. рис. 3.2), последовательно задавая различные отношения площадей переходов эмиттер — база транзисторов VT7 и VT8: S38/S3l=lss/Is7 =
= 10, 3, 1. Объяснить полученные результаты.
Задача 3.35. Провести автоматизированный расчет статического режима схемы на рис. 3.2, изменяя напряжение источника питания Е1 от 5 В до 1 В с шагом 1 В. Определить минимальное напряжение источника питания, при котором схема сохраняет работоспособность.
Задача 3.36. Используя результаты расчетов задачи 3.35, определить коэффициент нестабильности опорного тока ^Ип = = Д/оп/Д[/1Ш при изменении напряжения источника питания на 1 В.
48
Задача 3.37. Провести автоматизированный анализ нестабильности токов /оп, IR5, IR6 (см. рис. 3.2) при уменьшении на 20 % коэффициентов усиления по току BN транзисторов VT1— VT3, VT7—VT9 и сопротивления резистора R8. Объяснить полученные результаты.
Задача 3.38. Провести автоматизированный анализ температурной нестабильности опорного тока уг=Д/0П/ДГ (см. рис. 3.2) в двух случаях: температурный дрейф резистора R8 равен нулю и температурный коэффициент сопротивления для резистора R8 равен 0,2 % /К (диапазон изменения температуры ДТ= 10 °С). Сравнить полученные результаты.
Задача 3.39. Провести автоматизированное исследование частотной характеристики коэффициента Киш = А1оп/AUvm. Определить частоту, на которой модуль коэффициента Киип возрастает до 3 дБ.
3.2. Дифференциальные усилительные каскады
Дифференциальные усилители (ДУ) широко применяются в аналоговых интегральных схемах. Дифференциальный усилитель представляет собой балансную усилительную схему, предназначенную для усиления только раз-, ности между двумя входными сигналами. Основная схема ДУ показана на рис. 3.3. Входные напряжения ДУ представим в виде суммы двух составляющих—напряжения синфазного сигнала Ucф и дифференциального напряжения С/д:
Ui = £/сф + 0,5£/д и £/2 = £/сф-0,5[/д.
Проходная характеристика ДУ описывается соотношением [10]:
Рис. 3.3. Дифференциальный усилительный каскад
49
где <рт— температурный потенциал, равный 25,8 мВ при температуре 300 К. Линейный участок проходной характеристики дифференциального усилителя составляет примерно ±2у?т. При входном дифференциальном напряжении, превышающем ±2<рт, коллекторные токи транзисторов ограничиваются на уровне ± /0.
В режиме малого сигнала, при дифференциальном входном напряжении, не превышающем ± <рт, коэффициенты усиления дифференциального Ки и синфазного Кисф сигналов определяются следующими приближенными соотношениями:
Ки =
U
2 Ч>т
(ЯкИ'-вых);
XUсф ‘
!,сф
1сф
1Л
2 г,
о
где RK=R± =R2 — сопротивление в коллекторной цепи транзисторов VT1, VT2; гвыч — динамическое выходное сопротивление входных транзисторов; г0 —выходное сопротивление источника тока ИТ1. Типовые значения коэффициента усиления дифференциального сигнала для ДУ с пассивной нагрузкой составляет 50...100, а синфазного сигнала — 10_3. Коэффициент подавления синфазного сигнала К0 Сф = Ки/Кисф, обычно измеряемый в децибелах, характеризует способность схемы усиливать сигналы, подаваемые на дифференциальный вход, и ослаблять сигналы, подаваемые наимметрич- ный вход.
В задачах 3.40...3.52 проводится автоматизированное исследование идеализированного дифференциального усилителя (м. рис. 3.3). Принципиальная схема ДУ, подготовленная для проведения автоматизированного анализа, приведена на рис. 1.2. В этой схеме все транзисторы имеют одинаковые параметры и тип — TIN (см. приложение 1).
Задача ЗАО. Провести автоматизированный расчет статического режима ДУ (см. рис. 1.2.) Выбрать сопротивления резисторов R1 и R2 таким образом, чтобы напряжения в узлах 2 и 3 составляли 5 В. Исходные данные: R3 = 20 кОм, Е1= 0, Е2 = = 10 В, Е3 = -10 В.
Задача 3.41. Провести автоматизированный расчет статической проходной характеристики ДУ lKi=/(C/i) при изменении дифференциального входного напряжения (напряжение источника Е1) от —150 мВ до +150 мВ с шагом 5 мВ.
Задача 3.42. По результатам расчетов задачи 3.41 определить диапазон дифференциального входного сигнала, в котором нелинейность проходной характеристики ДУ не превышает 5 %.
Задача 3.43. Провести автоматизированный расчет входных токов ДУ' (токи баз транзисторов VT1 и VT2) при изменении дифференциального входного сигнала от —25 мВ до 25 мВ с шагом 5 мВ. Оценить разность входных токов при дифференциальном входном сигнале 0 В и 25 мВ.
Задача 3.44. По результатам расчетов задачи 3.43 определите входное сопротивление ДУ для дифференциального сигнала (ДВХ=Д£УД761).
Задача 3.45. Провести автоматизированный анализ частотных характеристик коэффициентов усиления дифференциально¬
50
го сигнала Ки1 = и2/и1 и Ки2 = (и3 —■ и2)/и1 при использовании одиночного выхода —узел 2 и при использовании дифференциального выхода —узлы 2, 3. Исходные данные: С1 = 0, диапазон частот FDL=1, ЗЕ5, 3.
Задача 3.46. Как изменится коэффициент усиления дифференциального сигнала на низкой частоте/=1 кГц при увеличении эмиттерных токов транзисторов VT1 и VT2 в два раза?
Задача 3.47. Провести автоматизированный расчет коэффициентов Кш и Кт (см. задачу 3.45), предварительно уменьшив сопротивление резистора R3 до 10 кОм. Сравнить полученные результаты с результатами расчетов, полученными при решении задачи 3.45.
Задача 3.48. Отредактировать описание резистора R3 (R3 = = 20 кОм), соединить базу транзистора VT2 с базой транзистора VT1. Провести автоматизированный расчет статического режима ДУ (см. рис. 1.2) при подаче синфазных входных напряжений в диапазоне —10...10 В. Определить диапазон допустимых синфазных входных напряжений. Замечание: контролируйте токи коллекторов и напряжения коллектор — база транзисторов VT1, VT2.
Задача 3.49. Рассчитать коэффициенты передачи синфазных входных напряжений на низкой частоте (f= 1 кГц) при использовании симметричного (узлы 2, 3) и несимметричного (узел 2) выходов. Объяснить полученный результат.
Задача 3.50. Рассчитать входные сопротивления ДУ на низкой частоте (/ = 1 кГц) для синфазного #вхсф и дифференциального RBX сигналов. Объяснить столь существенное различие полученных результатов.
Задача 3.51. Провести автоматизированный анализ влияния нестабильности питающего напряжения [/ИП1 на выходное напряжение ДУ при использовании одиночного выхода — узел 2 и при использовании симметричного выхода —узлы 2, 3. Исходные данные: базы транзисторов VT1 и VT2 соединены с общей шиной, частота /= 1 кГц. Объяснить полученные результаты.
Задача 3.52. Провести автоматизированный многовариантный расчет статического режима ДУ при изменении входного дифференциального сигнала от —100 мВ до 4100 мВ для двух значений температуры: —60 и +125 °С. Определить входные напряжения ДУ, при которых температурный дрейф выходного напряжения максимален. Объяснить полученный результат.
Технологический разброс разности напряжений эмиттер — база двух транзисторов, выполненных на одном кристалле, достигает 3...5 мВ. Поэтому разность выходных напряжений реального ДУ отличается от нуля при дифференциальном сигнале, равном нулю. Напряжение смещения UCM представляет собой разность входных напряжений, которую необходимо приложить на вход усилителя для того, чтобы дифференциальное выходное напряжение было равно нулю.
51
В задачах 3.53...3.58 исследуется влияние технологического разброса параметров пары транзисторов VT1, VT2 на статические характеристики ДУ. Для проведения автоматизированного исследования используется схема ДУ, приведенная на рис. 1.2, где все транзисторы описываются моделью TIN. Отредактируйте описание модели транзистора КГ2, увеличив на 10 % ток отсечки IS и коэффициент усиления по току BN.
Задача 2.53. Рассчитать статическую проходную характеристику ДУ 4i =/([/д) при изменении входного дифференциального сигнала от —10 мВ до +10 мВ с шагом 0,5 мВ. Определить напряжение смещения ДУ.
Задача 3.54. Рассчитать входные токи ДУ (токи баз транзисторов VT1 и VT2) при изменении дифференциального входного сигнала от —25 мВ до +25 мВ с шагом 5 мВ. Определить разность входных токов при входном сигнале 0 и 25 мВ.
Задача 3.55. Сравнить результаты расчетов, проведенных в задачах 3.43 и 3.54. Объяснить, чем вызвана разность входных токов при дифференциальном входном напряжении, равном нулю.
Задача 3.56. Провести многовариантный расчет статического режима ДУ для двух значений температуры —60 и +125 °С при U = 0.
Задача 3.57. По результатам расчетов, проведенных в задачах 3.52 и 3.57, определить температурный дрейф напряжений в узлах 2 и 3 (см. рис. 1.2), вызванный напряжением смещен ия.
Задача 3.58. По результатам расчетов задачи 3.56 определить температурный дрейф тока базы транзистора VT1 и разности токов баз транзисторов VT1, VT2.
Рис. 3.4. Дифференциальный усилитель с цепью активной нагрузки
52
* Рассмотренная схема дифференциального усилителя (см. рис. 3;2 и 1.2) является типовой и широко применялась в интегральных операционных усилителях первого поколения (К140УД1 — К140УД5). Усиление по напряжению этого ДУ не очень велико 30...40 дБ. Поэтому для получения необходимого коэффициента усиления операционного усилителя (80—120 дБ) необходимо использовать два-три усилительных каскада. Применение большого числа усилительных каскадов существенно затрудняет частотную коррекцию операционного усилителя (см. гл. 4). Существенно повысить коэффициент усиления ДУ возможно, если в качестве нагрузки транзисторов, входящих в схему параллельного баланса, использовать источник постоянного тока (см. рис. 3.1, а, б). На рис. 3.4 приведена схема ДУ с цепью активной нагрузки VT1, VT2, Rl, R2. Коэффициент усиления данного ДУ в основном определяется выходным сопротивлением транзистора VT2 и входным сопротивлением следующего каскада и может достигать 50...60 дБ.
В задачах 3.59...3.69 проводится автоматизированное исследование ДУ (см. рис. 3.4). Цепь ЕЗ, R4 необходима для задания потенциалов коллекторов транзисторов VT2, VT4.
Исходные данные: все п — р — /г-транзисторы типа TIN, все р — п — р-транзисторы — TIP; номиналы резисторов и напряжения источников питания указаны на схеме (см. рис. 3.4).
Задача 3.59. Провести автоматизированный анализ статического режима ДУ при условии [/д=0. Определить коллекторные токи всех транзисторов и выходной ток /вых.
Задача 3.60. Используя результаты расчетов задачи 3.59, объяснить почему выходной ток ДУ не равен нулю при входном дифференциальном сигнале, равном нулю.
Задача 3.61. Провести автоматизированное исследование проходной характеристики /ВЫХ=/(С/Д) ДУ (см. рис. 3.4) при изменении напряжения источника Е1 от —150 мВ до +150 мВ. Определить диапазон входных напряжений, в котором нелинейность проходной характеристики не превышает 5 %.
Задача 3.62. Увеличить сопротивления резисторов R6 и R7 до 50 Ом. Повторить расчет по условию задачи 3.61. Сделать выводы о влиянии резисторов R6 и R7 на проходную характеристику ДУ.
Задача 3.63. Уменьшить сопротивления резисторов R6 и R7 до 1 Ом; соединить базу транзистора VT4 с базой транзистора VT3. Изменяя напряжение источника Е1 в пределах от —10 В до +10 В, определить диапазон допустимых синфазных входных напряжений ДУ. Замечание: в диапазоне допустимых синфазных входных напряжений выходной ток ДУ должен оставаться почти постоянным.
Задача 3.64. Ввести технологическое рассогласование пары транзисторов VT3, VT4, увеличив на 10 % ток отсечки IS
53
и коэффициент усиления по току BN транзистора VT4. Соединить базу транзистора VT4 с общей шиной через резистор R8 (см. рис. 3.4). Провести автоматизированное исследование проходной характеристики ДУ при изменении входного дифференциального сигнала от —10 мВ до 4-10 мВ. Определить напряжение смещения ДУ. Замечание: при = Z7CM выходной ток ДУ равен нулю.
Задача 3.65. Увеличить сопротивление резисторов R5 до 1 кОм. Провести повторный расчет по условию задачи 3.64. Сделать выводы о влиянии сопротивления резистора R5 на напряжение смещения ДУ.
Задача 3.66. Увеличить сопротивление резисторов R5 и R8 до 1 кОм. Провести повторный расчет по условию задачи 3.64. Сравнить результаты, полученные в задачах 3.64—3.66. Чем объясняется изменение напряжения смещения при одновременном увеличении сопротивлений резисторов R5 и R8.
Задача 3.67. Восстановить исходные описания резисторов R5 и R8 (R5=R8=:1 Ом), уменьшить сопротивление резистора R2 на 10 %. Провести автоматизированный расчет напряжения смещения по условию задачи 3.64. Сделать вывод о возможности регулировки напряжения смещения в результате изменения отношения сопротивлений резисторов R1 и R2.
Задача 3.68. Провести автоматизированное исследование частотных характеристик коэффициента Kv=u21их усиления по напряжению. Определить коэффициент усиления на низкой частоте и частоту, на которой модуль коэффициента передачи уменьшается на 3 дБ для двух случаев: R6=R7 = 1 Ом и i?6 = =R7 = 50 Ом. Объяснить со схемотехнических позиций полученные результаты. Замечание: при исследовании частотных характеристик последовательно с резистором R4 включить индуктивность ^ = 100 Гн.
Рис. 3.5. Дифференциальный усилитель с каскадным включением транзисторов в цепи параллельного баланса
54
Задача 3.69. Провести автоматизированное исследование частотных характеристик коэффициента усиления синфазных входных напряжений KUc^. Определить коэффициент ослабления синфазных входных напряжений Ко сф = 201ё(\Кд/Кисф |),
В большинстве современных операционных усилителей используется ДУ, схема которого приведена на рис. 3.5. В схему параллельного баланса ДУ входят четыре транзистора 77, VT2, VT3, VT6. Транзисторы VT4, VT5 (в диодном включении) обеспечивают задание статического режима ДУ, Одной из особенностей ДУ (рис. 3.5) является возможность изменения крутизны проходной характеристики в результате изменения отношений площадей коллекторов пар транзисторов VT3, VT4 и VT5, VT6. В задачах 3.70...3.74 проводится автоматизированное исследование ДУ на рис. 3.5.
Исходные данные: все р — п — р-транзисторы типа TIN, все р — п — р-транзисторы —г TIP. Цепь ЕЗ, R2 необходима для задания потенциалов коллекторов транзисторов VT6 и VT10.
Задача 3.70. Провести автоматизированный расчет проходной характеристики /Вых=/(*Л) ДУ (см. рис. 3.5) при изменении напряжения источника Е1 от —200 мВ до +200 мВ. Определить диапазон входных напряжений, в котором нелинейность проходной характеристики не превышает 5 %. Сравнить результаты расчетов с результатами, полученными в задаче 3.61.
Задача 3.71. Провести автоматизированное исследование частотной характеристики коэффициента усиления Ки=и2/и1 дифференциального усилителя (см. рис. 3.5). Определить коэффициент усиления на низкой частоте и частоту, на которой модуль коэффициента передачи уменьшается на 3 дБ. Сравнить полученные результаты с результатами расчетов задачи 3.68.
Задача 3.72. Изменить отношение площадей эмиттерных переходов пар транзисторов VT3, VT4 и VT5, VT6 в два раза. Для этого увеличить в два раза параметры IS транзисторов VT4 и VT5. Провести исследование проходной характеристики /Вых= используя условие задачи 3.70.
Сравнить полученные результаты.
Задача 3.73. Провести автоматизированное исследование характеристик ДУ, используя условия задач 3.71 и 3.72. Сравнить со схемотехнических позиций полученные результаты.
Задача 3.74. Провести автоматизированное исследование динамических характеристик ДУ (см. рис. 3.5) при скачкообразном изменении дифференциального сигнала от —200 мВ до +200 мВ. Определить скорость нарастания выходного сигнала.
55
3.3. Выходные каскады
Основным назначением выходных каскадов является отдача в нагрузку заданной или максимально возможной мощности, близкой к предельной для данного типа интегральных транзисторов. Выходные каскады являются усилителями больших сигналов, т. е. в этих каскадах изменения токов и напряжений выходных транзисторов под воздействием входного сигнала соизмеримы с их статическими уровнями или даже превышают их. В настоящем разделе рассматриваются выходные каскады усилителей с непосредственной связью, которые наиболее технологичны при их реализации в полупроводниковом интегральном исполнении [10].
Рис. 3.6. Типовые схемы выходных каскадов
56
При проектировании мощных интегральных выходных каскадов возникает проблема отвода теплоты от микросхемы, что обусловлено ее внутренним саморазогревом вследствие большой мощности рассеяния на выходных транзисторах каскада. При этом, если по условиям работы выходного каскада максимальная мощность рассеяния на микросхеме превышает 0,5...2 Вт, то она устанавливается на теплоотвод, обычно ребристой конструкции. С использованием теплоотвода мощность рассеяния на микросхеме может быть увеличена до 5...20 Вт.
Типовые схемы выходных каскадов, пригодные для реализации в полупроводниковом интегральном исполнении, представлены на рис. 3.6. Каждый из этих каскадов имеет двуполярный диапазон изменения выходного напряжения (7ВЫХ и работает в режиме класса АВ, при котором обеспечиваются высокие энергетические характеристики каскада и малый уровень нелинейных искажений выходного сигнала. В рассматриваемых каскадах введены цепи защиты от перегрузок по току нагрузки /н. При автоматизированном исследовании выходных каскадов (рис. 3.6) вводятся в рассмотрение следующие параметры: f/BbIX тах — максимальное выходное напряжение ( ^вых max — ^вых 5 Циитах)! Л. max “ максимальный ТОК нагрузки; Рнтах = = ^нтах^выхтах —максимальная мощность рассеяния на нагрузке; jRHmin = = ^выхтах/^нтах”минимальное сопротивление нагрузки каскада; /нач — начальный ток выходных транзисторов каскада при £/ВЬ1Х = 0; /пот — ток потребления выходного каскада от источника питания; Рпот — мощность, потребляемая выходным каскадом от источников питания; /н к 3 — ток нагрузки каскада в режиме короткого замыкания его выхода с общей шиной (Ян = 0); Ки~ивых/иъх’ коэффициенты пеРеДачи каскада по напряжению и
току соответственно: RBX, RBblx — входное и выходное сопротивления каскада соответственно.
Рассмотрим функционирование выходного каскада (см. рис. 3.6, а). В этом каскаде режим класса АВ реализуется путем введения в схему транзисторов в диодном режиме VT3 и VT5. При положительном выходном напряжении (£/вых > 0) транзистор VT1 находится в активной области, транзистор VT8 — в области отсечки; ток нагрузки /н течет по цепи: + С^ит- коллектор и эмиттер транзистора VT1 — резисто R2 — резистор нагрузки R5 — общая шина. При отрицательном выходном напряжении (t/BbIX < 0) транзистор VT1 находится в области отсечки, транзистор VT8 — в активной области; цепь протекания тока нагрузки: общая шина — резистор нагрузки R5 — резистор R4 — эмиттер и коллектор транзистора VT8 — (7ИП2. На рис. 3.6, а VT2, VT4, R2 — цепь защиты транзистора VT1 от перегрузок по току нагрузки /н при ивых >0; VT6, VT7, R4 — цепь защиты транзистора VT8 от перегрузок по току /н при ивых < 0 (VT2, VT7 — транзисторы в диодном режиме). Эта схема предназначена для обеспечения следующих выходных параметров каскада, ^выхтах — Ю Aimax — Ю ^нтах- “-^н тах^вых max — Ю0 мВт
(^Hmin=^5= 1 кОм); при этом она реализуется на маломощных интегральных транзисторах TIN, TIP, Т2Р.
Автоматизированное исследование выходного каскада (см. рис. 3.6, а) определяется совокупностью задач 3.75...3,84; при этом начальное описание схемы на входном языке системы ДИСП имеет вид:
NAME = BbIX. КАСКАД1; N=11; R=3,5,ll! 8,2,0.044! 1,6,0.01!
2,9,0.044! 2,0,1; 7,4,11; Т= 5,3,8, TIN! 5,10,5, TIN! 5,5,6. TIN! 8,10,2,
TIN! 6,6,7, TIN! 9,11,2, TIP! 11,7,11, TIN! 7,4,9, T2P; E=0,3,15!
0,4,-15! 0,1,0; F = 0.0,0.1,1,10,100,1000,10000; “K”
Задача 3.75. Провести автоматизированный расчет статического режима выходного каскада (см. рис. 3.6, а) с использованием пакета программ “Статика” (UBX = 0, #H=i?5->oo) и по его результатам определить начальный ток выходных транзисторов каскада (1нач=1э1=1э8).
51
Задача 3.76. Какие изменения необходимо провести в схеме, если по результатам задачи 3.75 ток /нач превышает максимально допустимое значение (0,1 /н max)?
Задача 3.77. Провести автоматизированный расчет статического режима схемы на рис. 3.6, а для двух случаев: 1) £/вх = = +13 В; 2) UBX =—13 В, и по их результатам выяснить, обеспечивается или нет в схеме заданный диапазон изменения выходного напряжения (i7BbIX=—10... + 10 В).
Задача 3.78. Какие изменения необходимо провести в схеме, если по результатам задачи 3.77 заданный диапазон выходного напряжения не обеспечивается?
Задача 3.79. Провести автоматизированные расчеты статического режима схемы на рис. 3.6, а для двух случаев, близких к режиму короткого замыкания выхода каскада с общей шиной:
1) t/BX=+6 В, Я5 = 1 Ом; 2) С/вх = —6 В; #5 = 1 Ом, и по их результатам выяснить, находится или нет ток /н к 3 в заданном
Диапазоне (1,2/н тах < 4.к. з ~~^R5 — ^ Зонтах)*
Задача 3.80. Что нужно изменить в схеме, если по результатам задачи 3.79 получаем: /н к з > 1*84 шах)?
Задача 3.81. Повторить задачу 3.79, зашунтировав в схеме (см. рис. 3.6, а) диоды VT2 и VT7.
Задача 3.82. По результатам задачи 3.81 сделать вывод о том, зачем в схеме нужны диоды VT2 и VT7.
Задача 3.83. С использованием автоматизированных расчетов, определить, можно ли в схеме на рис. 3.6, а обеспечить параметры: /пот lt/BbIX=0^ 2 мА, £/выхтах > Ю В, Тнтах> 1 А, из- менив сопротивления схемы следующим образом: #2=#4 = = 0,44 Ом, #5 = Ю Ом (см. задачи 3.75, 3.77).
Задача 3.84. Какие структурные изменения нужно провести в схеме на рис. 3.6, а, чтобы обеспечить выполнение условий задачи 3.83?
Рассмотрим схему выходного каскада на рис. 3.6, б. В этом каскаде по сравнению с каскадом на рис. 3.6, а удается получить более высокие энергетические параметры /н тах, Рн тах, что обусловлено использованием в этой схеме составных транзисторов VT1, VT4 и VT10, VT11 в качестве выходных транзисторов каскада. Применение комплементарного составного транзистора VT10, VT11 объясняется тем, что мощные интегральные п-р — «-транзисторы более технологичны, чем такие ж&р — п — р-транзисторы. При положительном выходном напряжении UBblx составной транзистор VT1, VT4 находится в активной области,, составной транзистор VT10, VT11 — в области отсечки; при напряжении UBblx < 0 наоборот. В схеме ни рис. 3.6, б режим класса АВ обеспечивается транзисторами в диодном режиме VT2, VT5, VT7, защита от перегрузок по току нагрузки — цепями VT3, VT6, R2, R4, R6 (UBblx > 0); VT8, VT9, R7, RIO, R12 (£/вых < 0). Выходной каскад реализуется на маломощных интегральных транзисторах TIN, TIP, и мощных интегральных и—/? —«-транзисторах T3N; он должен обеспечить следующие выходные параметры: UBblxmax - 210 В, /нтах> 100 мА, Рн гаах > 1 Вт (Лню)п = Л8 = 0Д кОм).
Автоматизированному исследованию выходного каскада на рис. 3.6, б посвящены задачи 3.85...3.96. Для решения этих задач составим начальное описание схемы на входном языке системы ДИСП:
58
NAME=BbIX. КАСКАД2; N = 17; R=3,6,15! 3,10,6! 12,13,2! 10,13,0.13!
I, 5,0,01! 13,2,0.005! 2,14,0.005! 2,0,0.1! 17,7,0.2! 11,14,0.13! 7,4,15!
II, 4,6! 15,4,2; T= 6,3,12, TIN! 6,6,16, TIN! 6,8,6, TIN! 12,3,13, T3N!
16,16,5, TIN! 10,8,2, TIN! 5,5,17, TIN! 11,9,2, TIP! 9,7,9, TIN!
7,15,14, TIP! 15,14,4; T3N; E-0,3,15! 0,4,-15! 0,1,0;
F = 0.0,0.1,1,10,100,1000,10000; "K"
Задача 3.85. С использованием пакета программ "Статика" провести автоматизированный расчет статического режима выходного каскада на рис. 3.6, б при исходных данных: [7ВХ=О, RH=RS-*оо. По его результатам выяснить, превышает или нет ток потребления каскада 7П0Т заданное значение: /ПОт=^+^2 + +hi+1*4 ^ 20 мА-
Задача 3.86. Какие изменения в схеме на рис. 3.6, б необходимо провести, если по результатам задачи 3.85 получаем: 7П0Т > 20 мА — из-за большого начального тока выходных транзисторов (7нач * 1э4 « 7э11)?
Задача 3.87. Почему в схеме на рис. 3.6, б для обеспечения начального тока /нач используются три диода VT2, VT5, VT71
Задача 3.88. Решить задачу 3.77 для схемы, представленной на рис. 3.6, б.
Задача 3.89. По результатам задачи 3.88 выяснить, что нужно изменить в схеме, если заданный диапазон изменения выходного напряжения не обеспечивается.
Задача 3.90. Провести автоматизированные расчеты статического режима выходного каскада (см. рис. 3.6, б) для двух случаев, близких к режиму короткого замыкания на выходе: 1) [/вх=+6 В, Д8 = 0,1 Ом; 2) UBK =—6 В, R8 = 0,1 Ом, и по их результатам определить мощность Рпот, потребляемую каскадом от источников питания. Нужен ли для данной микросхемы теплоотвод, если ее конструкция позволяет без теплоотвода, рассеивать мощность до 1,5 Вт?
Задача 3.91. Повторить задачу 3.90 с учетом следующих изменений в схеме: R2=R12 -*00, R4=ZR10 = 0.
Задача 3.92. По результатам задач 3.90, 3.91 объяснить, зачем в схему на рис. 3.6, б вводятся резисторы R2, R4, RIO, R12.
Задача 3.93. По результатам задач 3.88, 3.90, 3.91 объяснить, почему в схеме на рис. 3.6, б не удается получить высокие энергетические характеристики, исключив резисторы R2у R4, RIO, R12 и соответственно увеличив сопротивления резисторов R6, R7.
Задача 3.94. Сравнить с использованием пакета программ “Частота” схмы на рис. 3.6, а, б по входному и выходному сопротивлениям.
Задача 3.95. Сравнить с использованием пакета программ “Частота” схемы на рис. 3.6, а, б, по коэффициентам передачи по току Kj и напряжению Ки.
59
Задача 3.96. Можно ли в схемах на рис. 3.6, а, б получить коэффициент передачи по напряжению (Ки=ивых/иъх) больше единицы?
Рассмотрим функционирование выходного каскада (см. рис. 3.6, в). В этом каскаде в отличие от каскадов на рис. 3.6, а„ 6 удается обеспечить диапазон изменения выходного напряжения UBblx, значительно превышающий, диапазон изменения напряжения UBX. В качестве выходных транзисторов каскада используются комплементарный составной транзистор VT2, VT4, усиливающий входной сигнал при напряжении иъых > 0, и транзистор VT7, работающий в усилительном режиме при напряжении UBblx< 0. Работа выходного каскада в режиме класса АВ обеспечивается цепью задания начального тока VT5, Щ, R7. В каскад введены две цепи защиты от перегрузок по выходному току; VT1, R3 — защита составного транзистора VT2, VT4 (UBblx > 0); VT8, R13 — защита выходного транзистора VT7 (UBblx < 0). Схема на рис. 3.6, в построена на маломощных интегральных транзисторах TIN, TIP и мощных интегральных транзисторах T3N; она предназначена для обеспечения следующих выходных параметров каскада: £/ВЬ1хгаах> 15 В, /нтах> 100 мА, />нтах> 1,5 Вт (KHmin = = R9 = 0,15 кОм). Начальное описание схемы на входном языке системы ДИСП имеет вид:
NAME = ВЫХ. КАСКАД 3; N=14; R = 3,5,1000! 3,8,0.14! 3,12,0.005!
2,9,6! 5,6,6! 9,0,0.066! 6,7,3! 10,0,0.66! 2,0,0.15! 10,2,6! 1,7,0.01!
11,4,0.15! 14,4,0.005! Т= 12,8,3, TIP! 8,13,12, TIP! 5,8,9, TIN! 13,12,2,
T3N! 6,5,7, TIN! 7,11,10, TIP! 11,2,14, T3N! 14,11,4 TIN! E= 0,3,18!
0,4-18! 0,1,0; I = 3,5,1; F= 0.0,0.1,1,10,100,1000,10000; ”K“
Процесс автоматизированного исследования выходного каскада (см. рис. 3.6, в) отражен в задачах 3.97...3.110.
Задача 3.97. Провести автоматизированный расчет статического режима выходного каскада (см. рис. 3.6, в) при исходных данных: UBblx= —1 В, Rg^<x> (предполагаем, что при данном уровне напряжения UBX выходное напряжение UBblx близко к нулю). По его результатам выяснить, находится ли начальный ток (ток эмиттера) выходных транзисторов VT4, VT7 в заданных пределах: 0,01 /„max- 4ач- ^ 0,1/нтах.
Задача 3.98. Предположим, что по результатам задачи 3.97 получаем очень большое положительное напряжение, UBblx. Ка^ ким образом нужно скорректировать исходные данные для этой задачи, чтобы уменьшить напряжение UBblx до приемлемого уровня (I [/вых I < 5 В)?
Задача 3.99. На основании результатов задачи 3.97 выяснить, каким образом можно в схеме (см. рис. 3.6, в) уменьшить начальный ток /нач.
Задача 3.100. Провести автоматизированный расчет статического режима схемы (см. рис. 3.6, в) при исходных данных: UBX=—1 В, R9 = 0,15 кОм. Сравнить между собой
уровни выходного напряжения, полученные по результатам расчетов задач 3.97 (ll^S и 3.100 и объяснить
их отличие друг от друга. '
Задача 3.101. Провести автоматизированный расчет статического режима каскада (см. рис. 3.6, в) при исходных данных: R4=R9=Rl0 -» оо, UBX=—1 В. По его результатам определить на¬
60
пряжение иъых и выяснить, в каких режимах находятся транзисторы VT2, VT4 и VT7.
Задача 3-102. По результатам задачи 3.101 выяснить, зачем в эту схему введены резисторы R4, R10.
Задача 3.103. Провести автоматизированный расчет статического режима схемы (см. рис. 3.6, в) при исходных данных: R4=R10-* оо, Я9 = 0,15 кОм; определить напряжение 1/ВЬ1Х. По результатам задач 3.101, 3.103 выяснить в каких случаях резисторы R4, R10 можно не вводить.
Задача 3.104. Провести автоматизированные расчеты статического режима каскада (см. рис. 3.6, в) для двух случаев: 1) 1/вх=0, 2) иъх=— 2 В. По их результатам проверить, обеспечивается ли в схеме заданный диапазон изменения выходного напряжения (£/ВЬ1Х=—15... +15 В).
Задача 3.105. Провести автоматизированные расчеты статического режима схемы на рис. 3,6 в для двух случаев, близких к режиму короткого замыкания на выходе каскада: 1) UBX = = —0,5 В, Rg = 0,1 Ом; 2) С/вх =—1,5 В, #9 = 0,1 Ом. По их результатам выяснить, находится ли ток короткого замыкания каскада /н.к.3 в заданных пределах: 1,1/нтах </н к 3 < 1,6/нтах.
Задача 3.106. Что нужно изменить в схеме, если по результатам задачи 3.105 получаем: 1Н К З 1,1/нтах?
Задача 3.107. Предполагаем, что конструкция микросхемы выходного каскада (см. рис. 3.6, в) позволяет рассеивать на нем без теплоотвода мощность менее 1,5 Вт. По результатам задачи 3.105 сделать вывод о целесообразности использования теплоотвода для этой микросхемы.
Задача 3.108. Для схемы на рис. 3.6, в с использованием пакета программ “Частота” определить схемные функции: Ки=иъых/иък9 ^вх, ^вых* По результатам автоматизированных расчетов задач 3.94, 3.95, 3.108 сравнить схемы на рис. 3.6, б, в по этим параметрам.
Задача 3.109. Инвертирует или нет выходной каскад (см. рис. 3.6, в) фазу входного сигнала?
Задача 3.110. В чем состоят преимущества и недостатки схемы на рис. 3.6, в перед схемой на рис. 3.6, б, если эти каскады используются в качестве выходных каскадов усилителей напряжения?
ГЛАВА ЧЕТВЕРТАЯ
МИКРОСХЕМОТЕХНИКА ИНТЕГРАЛЬНЫХ ОПЕРАЦИОННЫХ УСИЛИТЕЛЕЙ
4.1. Статический режим
Системы автоматизированного схемотехнического проектирования позволяют провести анализ характеристик ОУ, оптимизировать параметры отдельных каскадов, синтезировать новые схемотехнические решения.
Достаточно подробные описания схемотехники исследуемого ОУ даны в работах [11, 15, 18, 30]. Отметим, что транзисторы VT5, VT6 (рис. 4.1) моделируют двухколлекторный транзистор; резисторы R14, R15 — плечи переменного резистора регулировки напряжения смещения ОУ.
Расчет статического режима осуществляется с цепью общей отрицательной обратной связи. Поэтому все расчеты производятся при непосредственном соединении инвертирующего входа и выхода. Фиктивный резистор R1 введен в схему для того, чтобы при размыкании цепи обратной связи не менялось число узлов схемы. Входные напряжения подаются на прямой вход ОУ и повторяются на выходе, так как ОУ с цепью обратной связи есть повторитель напряжения.
Задача 4.1. С использованием пакета программ “Статика” осуществить многовариантный расчет, в результате которого
R1
Рис. 4.1. Операционный усилитель
Все п-р — «-транзисторы - типа TIN, IТ1,.... VT6, VT12, I TJ3, F77 7 - типа TIP, КГ23, VT25 — типа Т2Р
62
определить узловые напряжения и параметры статического режима всех элементов ОУ (см. рис. 4.1) при [/вх=10 В, R6=RH = 2 кОм (режим нормальной нагрузки); UBX= 10 В, R6=RH = 0 (режим короткого замыкания в цепи нагрузки). Описание схемы составить аналогично приведенному в § 2.4. Результаты расчета использовать при решении последующих задач.
Задача 4.2. Оценить допустимый уровень синфазных входных напряжений ОУ (см. рис. 4.1) положительной UBX Сф и отрицательной U~x cф полярностей, если предельно допустимое напряжение коллектор — база (коллектор — эмиттер) для всех транзисторов превышает 30 В (Uum + Uun2). Считать, что минимальные напряжения между коллектором и базой транзисторов могут достигать нулевого значения.
Задача 4.3. Какие элементы схемы ОУ (см. рис. 4.1) определяют уровни токов короткого замыкания цепи нагрузки при положительной и отрицательной полярностях выходного напряжения?
Задача 4.4. Оценить сопротивления резисторов R3 и R5 (см. рис. 4.1), если требуется обеспечить ток короткого замыкания цепи нагрузки при положительной полярности выходного напряжения /н.к.3.= 30 мА, а при отрицательной полярности — /нТк.з.= 10 мА. Считать напряжения открытых переходов эмиттер — база транзисторов равными 0,6 В.
Задача 4.5. Оценить мощности, рассеиваемые на выходных транзисторах VT7 и VT24 ОУ (см. рис. 4.1) в режимах короткого замыкания цепи нагрузки (R6 = 0) при положительной и отрицательной полярностях выходного напряжения, если R3=R5 = = 20 Ом, Цэ_б 11= Цэ-б 17 2:5 0)6 В.
Задача 4.6. С использованием пакета программ “Статика” провести следующие машинные эксперименты: 1. Отсоединить коллектор транзистора VT17 от узла 26 и подклюить его к базе VT24 (узел 23) (см. рис. 4.1). 2. Присоединить коллектор VT17 к базе VT22 (узел 19). В обоих случаях рассчитать статические режимы по току транзисторов VT17, VT22, VT23, VT24 при отрицательной полярности выходного напряжения Е/вых~£/вх = = —10 В. Объяснить полученные результаты.
Задача 4.7. Почему статические режимы по току транзисторов VT15 и VT16 (см. рис. 4.1) выбираются близкими?
Задача 4.8. Проводя многовариантный расчет с помощью пакета программ “Статика” оределить сопротивление резистора R11, при котором напряжение смещения UCM ОУ (см. рис. 4.1) возрастает до 3 мВ. Для этого провести расчеты для нескольких сопротивлений резистора R11, последовательно снижая это сопротивление на 10 кОм (Дп = 50...10 кОм). При UBX = 0 выходное напряжение ОУ (узел 2) соответствует напряжению смещения
63
усилителя. Обратить внимание на степень отличия базовых токов транзисторов VT15 и VT16.
Задача 4.9. Каково назначение переменного резистора, который представлен на рис. 4.1 резисторами его плеч R14 и R15 (R1A + R1S = 5 кОм = const)?
Задача 4.10. Определить диапазон регулировки напряжения смещения ОУ (см. рис. 4.1) с помощью переменного резистора, отображенного резисторами его плеч R14 и R15 (#14 + R1S = 5 кОм = const). Для этого провести расчеты статического режима ОУ при R14 = 0,1 кОм, R1S = 4,9 кОм и R14 = 4,9 кОм и R1S = 0,1 кОм. Выходное напряжение ОУ (узел 2) равно напряжению смещения при UBX = 0.
Задача 4.11. Определить средний входной ток /вх ОУ, повторив задачу 4.1 при исходных данных: UBX = 0, R6 = = 2 кОм.
4.2. Низкочастотные параметры
Задача 4.12. С использованием пакетов программ ”Часто- та“ и ’’Чувствительность* на постоянном токе определить коэффициент усиления напряжения Ки, входное RBX и выходное RBblx сопротивления ОУ (см. рис. 4.1), а также рассчитать коэффициенты чувствительности схемных функций к изменению параметров активных элементов схемы 5” = = (с)W/dx)(x/W), где Ж—схемная функция (Ки, RBX, Явых), х — параметр модели элемента. На основании анализа значений коэффициентов чувствительности выделить параметры транзисторов, в наибольшей степени влияющие на схемные функции.
Предположим, что имеем вариант описания схемы (рис. 4.1), соответствующий задаче 4.1. До проведения заданных расчетов нужно определить статический режим элементов ОУ с использованием пакета программ ” Статика* для получения параметров линейных моделей транзисторов. Так как статический расчет должен быть проведен при [7ВХ = 0 и R6 = = 2 кОм, то нужно внести эти изменения в соответствующие массивы (в задаче 4.1 последний расчет проводится для ивх=- 10 В и R6= 0).
После проведения расчета статического режима параметры Kw RBX и £вых определяются при исключении цепи отрицательной обратной связи, охватывающей ОУ. Для этого вывод резистора R1, соединенный с узлом 2, нужно подключить к общей шине. За входной вывод ОУ примем узел 1 (Вх.2). Необходимо также отключить источник напряжения UBX. Указанные переключения должны найти свое отражение в директиве изменений структуры схемы.
Продолжение текста описания, соответствующего задаче 4.1, выглядит следующим образом (САПР ЭМЦ):
64
H3M:R6 = 2; ЕЗ ПАРМ [1] = 0;* СТАТИКА; ИЗМ ОПИСАНИЕ: R1 УЗЛЫ (0,3); ЕЗ УЗЛЫ (0,0);*
МВУ = 1,0,2,0; ЧАСТОТА=0; CO=KU; ЧАСТОТА1; ВКОМ=Т; ЧУВСТВИТЕЛЬНОСТЬ; CO = ZBX; ЧАСТО- ТА1; ВКОМ=Т; ЧУВСТВИТЕЛЬНОСТЬ; CO=ZBbIX; ЧАСТОТА1; ВКОМ=Т; ЧУВСТВИТЕЛЬНОСТЬ; КОНЕЦ;
После проведения расчетов получены следующие результаты (записаны в округленном виде):
Ху* 370 000, S*g «0,25, *-0,25, Sj&*-0,22,
S ~ —0,25, Sj& «-0,25, Sj^16 * 0,9, S$22 * 0,18,
5^2* 0,8; * 1 MOM, S~ —0,9-10-7, 5«bx»-0,2-10-7,
SJ& * - 0,2• 10-7- 5 * - 0,35-10-7, 5 * - 0,35-10"7,
Лвых«-270 Ом, S^b.x«0,l-10-7, Sfag®0,4-10-7,
S fet * 0,3-10-7,
где гэ, /*к —дифференциальные сопротивления эмиттерного и коллекторного переходов транзистора; (Здг — коэффициент усиления тока в схеме с общим эмиттером при нормальном включении транзистора, цифры в индексах указывают номера транзисторов.
Задача 4.13. Почему коэффииент усиления тока базы fiN16 транзистора VT16 оказывает сильное влияние на коэффициент усиления напряжения ОУ (см. результаты задачи 4.12)?
Задача 4.14. Как изменится коэффициент усиления напряжения ОУ (сгй. рис. 4.1) при увеличении уровня статических токов транзисторов входного дифференциального каскада?
Задача 4.15. Во сколько раз подсистема активной нагрузки (VT15, VT18, VT19, R7, R8, R9) ОУ (см. рис. 4.1) увеличивает коэффициент усиления напряжения входного дифференциального каскада?
Задача 4.16. Как изменится входное сопротивление ОУ (см. рис. 4.1) при увеличении уровня токов транзисторов входного дифференциального каскада в статическом режиме, если считать, что коэффициенты усиления по току транзисторов остаются постоянными?
Задача 4.17. С использованием пакетов программ “Частота” и “Чувствительность” на постоянном токе определить коэффициент передачи синфазных входных напряжений Ки сф ОУ (см. рис. 4.1), а также рассчитать коэффициенты чувствительности Кисф к изменению параметров транзисторов. Выделить коэффициенты чувствительности, имеющие наибольшие абсолютные значения, и тем самым определить параметры транзисторов, оказывающих преобладающее влияние на Кисф.
3-1586
65
До проведения заданных расчетов осуществить определение статического режима элементов ОУ для получения параметров линейной модели транзисторов (см. задачу. 4.12).
После выполнения расчета статического режима вывод резистора R1, соединенный с узлом 2, подключить к узлу 1, который считать входным. Отключить источник напряжения UBX.
Задача 4.18. С использованием пакета программ “Частота” на постоянном токе определить коэффициент передачи синфазных входных напряжений Кисф ОУ (см. задачу 4.17). Задать относительный разброс дифференциального сопротивления эмиттерного перехода гэ равным 5 %, коэффициент передачи тока базы (3^—10 %, сопротивление коллекторного перехода гк — 20 % для транзисторов VT18 и VT9, VT12 и VT13, VT18 и VT19.
Задача 4.19. Какой из каскаов ОУ (см. рис. 4.1) в наибольшей степени определяет коэффициент ослабления синфазных входных напряжений?
Задача 4.20. Абсолютные значения параметров транзисторов входного дифференциального каскада или их относительный разброс в большей степени определяют значение коэффициента ослабления синфазных входных напряжений ОУ (см. рис. 4.1)?
4.3. Динамические свойства
Задача 4.21. С помощью пакета программ ”Частота“ рассчитать значения амплитудных частотных (АЧХ) и фазовых частотных (ФЧХ) характеристик коэффициента передачи напряжения ОУ Kv(jf) (см. рис. 4.1) без цепей коррекции и при отсутствии емкости нагрузки Сн = С3 = 0 при следующих значениях частоты — 0: 0,1; 0,3; 1; 3; 10; 30; 100; 300; 103; З103; 104; 3 1(г кГц. В качестве входа принять инвертирующий вход ОУ (Вх.1).
Используем систему схемотехнического проектирования САПР ЭМЦ. Перед проведением расчета частотных характеристик необходимо определить статические режимы элементов схемы (“Статика”) для нахождения параметров линейных моделей транзисторов (см. задачу. 4.12). После проведения статического расчета необходимо ввести следующие изменения в структуру схемы: 1. Отключить источник сигнала UBX. 2. Резистор R1 подключить между выводом Вх.2 и общей шиной. 3. Осуществить перенумерацию узлов для выводов Вх.1 и Вх.2, сделав вывод Вх.1 узлом i, а вывод Вх.2 узлом 3. Это необходимо делать для тех версий САПР ЭМЦ, где за входом жестко закрепляется узел 1 (номер выходного узла можно изменять). При этой перенумерации меняются номера узлов баз транзисторов VT8 и VT9.
66
Таблица 4.1
Частота, кГц
Модуль KU(jf)
Модуль KU(jf), дБ
Фаза KU(jf), ...°
0
370000
111
-180
од
370000
111
-180
0,3
370000
111
-180
1
369000
111
-180
3
366000
111
-180
10
338300
110
-188
30
221400
107
-207
100
68160
97
-244
300
12170
82
-293
103
1260
62
-356
ЗЮ3
140
43
-24
10 4
5,8
15
-91
3-104
0,1
-20
-38
Заключительная часть текста описания схемы и задания на расчет отражает изложенное выше:
ИЗМ ОПИСАНИЕ: ЕЗ УЗЛЫ (0,0); R1 УЗЛЫ (0,3); Т8 УЗЛЫ (3,6,7); T9 УЗЛЫ (1,6,8); CO=KU; МВУ=1,0,2,0; ЧАСТОТА=0, 0.1, 0.3, 1,3, 10, 30, 100, 300, 1ЕЗ, 3E3.1E4, ЗЕ4; ЧАСТОТА1; КОНЕЦ;
Результаты расчета приведены в табл. 4.1, которая включает в себя только часть информации, предоставляемой системой проектирования.
Задача 4.22. Выполнить расчеты, аналогичные приведенным в задаче 4.21 при емкости нагрузки СН=С3 =0,001 мкФ и отсутствии цепей коррекции Сх = С2 = 0.
Задача 4.23. На основании результатов расчетов, приведенных в задаче 4.21 и полученных после решения задачи 4.22, сделать вывод об устойчивости усилителя, если ОУ охватить цепью единичной отрицательной обратной связи, т. е. соединить инверсный вход Вх.1 с выходом. В этом случае АЧХ и ФЧХ коэффициента передачи напряжения Kv (jf) являются соответствующими харктеристиками передаточной функции петлевого усиления Tv (jf).
Задача 4.24. Какие коэффициенты деления выходного напряжения должна иметь цепь безынерционной отрицательной обратной связи, охватывающей ОУ без цепей коррекции (см. рис. 4.1), при Сн = С3 = 0 и Сн =С3 =0,001 мкФ для того, чтобы усилитель был устойчив с запасом по фазе в 30°? Чему равны частоты среза АЧХ модуля передаточной функции петлевого усиления для этих случаев? Для решения задачи воспользоваться результатами задачи 4.21 (см. табл. 4.1) и задачи 4.22.
Задача 4.25. В схеме ОУ (см. рис. 4.1) цепь частотно-зависимой отрицательной обратной связи, введенная с помощью
з
67
конденсатора Cl, охватывает два усилительных каскада: первый каскад выполнен на основе транзистора VT16, второй — VT22. Какой из этих каскадов является инвертирующим?
Задача 4.26. Проводя многовариантный расчет, с помощью пакета программ “Частота” определить емкость корректирующего конденсатора С1, при которой частота среза / АЧХ модуля коэффициента передачи напряжения |Х^(//)|ОУ (см. рис. 4.1) равна 700 кГц (|К^(//ср) | =1). Значение емкости конденсатора С1 варьировать в пределах 10...50 пФ. Определить запас по фазе А<рт^ усилителя с цепью единичной
обратной связи Л^% = 360°- \<pKu(ifcp)\, где <pK(j(jfcp) -фа-
зовый угол, соответствующий arg Kv(jf) на частоте среза. В качестве входа принять Вх.1 (см. задачу 4.21), С0 = 0, С3 = 0,001 мкФ.
Задача 4.27. С помощью пакета программ “Оптимизация” определить емкость корректирующего конденсатора С1, при которой логарифмическая амплитудная частотная характеристика (ЛАЧХ) модуля коэффициента передачи напряжения \KV (jf)\ ОУ (см. рис. 4.1) имеет наклон в высокочастотной области — 20 дБ/дек с частотой среза 300 кГц. Для этого следует считать, что значения ЛАЧХ \Ки (jf) | на частотах 3, 30, 300 кГц находятся в зонах, ограниченных следующими точками модуля 38,42; 18,22; — 2, 2 дБ с весовыми коэффициентами, равными 1 для каждой пары точек. Емкость конденсатора С1 варьировать в пределах 10... 100 пФ с начальным значением 30 пФ. В качестве входа принять Вх.1 ОУ (см. задачу 4.21), С2 = 0, С3 = 0,001 мкФ.
Задача 4.28. Записать текст задания на оптимизацию для задачи 4.27 применительно к системе схемотехнического проектирования САПР ЭМЦ. Этот текст должен выглядеть следующим образом:
NN=26: МВУ = 1,0,2,0; ЧАСТОТА=3,30,300; ВАРЬИРОВАТЬ: C1# 1/ЗЕ-5(1Е-5,1Е-4); ОПТИМИЗИРОВАТЬ: ЗОНА KU (АЧХДБ) (38,42/18,22/- 2,2) (1,1,1);
ОПТЧХ; КОНЕЦ;
Задача 4.29. Почему корректирующий конденсатор, формирующий цепь частотно-зависимого делителя, как правило, включают в высокоомные узлы усилителя? Например, в схеме ОУ (см. рис. 4.1) конденсатор С2 подключен к высокоомному узлу 11.
Задача 4.30. Проводя многовариантный расчет, с помощью пакета программ “Частота” определить емкость корректирующего конденсатора С2 (см. рис. 4.1), при которой на частоте среза/ср АЧХ модуля коэффициента передачи напряжения \Ки (jf) | фазовый угол <рк (fcp) равен — 340°. Какой запас по фазе Ду>г при
этом имеет усилитель, охваченный цепью единичной отрицательной обратной связи? В качестве входа принять Вх.1 ОУ (см. задачу 4.21), Сх = 0, С3 = 0,001 мкФ.
68
Задача 4.31. Сопоставить значения емкостей конденсаторов С1 и С2 (см. задачи 4.27, 4.29, 4.30) и объяснить причину их существенного отличия.
ГЛАВА ПЯТАЯ
ЛИНЕЙНЫЕ АНАЛОГОВЫЕ ЭЛЕКТРОННЫЕ УСТРОЙСТВА
5.1. Инвертирующие и неинвертирующие решающие усилители
Решающий усилитель (РУ) включает в себя ОУ и внешние компоненты, образующие цепь отрицательной обратной связи. Различные вопросы теории и схемной реализации РУ рассмотрены в работах [10, 12, 13, 14, 16, 18—24].
Задачи, в которых анализируются свойства РУ, можно разбить на три группы. Решение задач первой группы предполагает автоматизированное исследование влияния параметров ОУ и компонентов цепей обратной связи на смещение и нестабильность нуля (выходного напряжения покоя) РУ. В процессе решения задач второй группы выявляется зависимость точности преобразования входных сигналов от свойств активных и пассивных компонентов в диапазоне сравнительно низких частот. Заключительная группа задач посвящена исследованию динамических свойств РУ. В процессе решения большей части задач выполняется синтез параметров компонентов цепей обратной связи и ОУ, при которых реализуются заданные характеристики РУ.
Задача 5.1. Какому условию должно удовлетворять сопротивление резистора R3 для того, чтобы смещение и нестабильность нуля на выходе инвертирующего РУ (рис. 5.1) не зависели от среднего выходного тока и его нестабильности (£/вх = 0)?
Задача 5.2. Зависит ли смещение и нестабильность нуля на выходе РУ (рис. 5.1) от уровней входного тока, разности входных токов и их нестабильностей при следующих значениях сопротивлений резисторов: JR1=jR3 = 0, R2-> <х>.
Задача 5.3. На основании расчетов смещения нуля на выходе инвертирующего решающего усилителя (рис. 5.1) выбрать тип ОУ, обеспечивающего меньшие значения выходного напряжения при различных сопротивлениях резисторов Rl, R2, R3. Исходные данные: ОУ типов К140УД7 и К140УД8А (табл. 5.1); 1) Rl = R2= 10 кОм, R3 = 5 кОм; 2) RL = R2 = 10 МОм, R3 = 5 МОм; 3) R± = 100 кОм, R2= R3 = 10 кОм; 4) Rx =
= 10 МОм, R2 = R3 = 1 МОм.
69
C1
R1
t=b
Рис. 5.1. Инвертирующий решающий усилитель
Задача 5.4. С использованием пакета программ “Чувствительность” на постоянном токе рассчитать коэффициенты чувствительности 5^и схемной функции KUn = UBblx/UBX масштабного инвертора (см. рис. 5.1) к изменению параметров ОУ типа 140УД7 (см. табл. 5.1) и сопротивлений резисторов R1, R2, R4 (SxUil=(dKUil/dx)(x/KUll), где х — параметр элемента). Провести анализ значений коэффициентов чувствительности с целью выявления параметров элементов, в наибольшей степени влияющих на изменение схемной функции. Расчеты выполнить для двух случаев: 1) R1=R2 = 10 Юм, R4 = 5 кОм, Кип =
= —R1/R2=—1; 2) ^=1 МОм, #2=i?3=10 кОм, КЦи = —100.
Задача 5.5. По результатам решения задачи 5.4 определить допустимый разброс 6RL = (A/^/i^) 10 %, 6R2 = = (AR2/R2) 100 % сопротивлений резисторов Rl, R2, при котором точность преобразования входного сигнала масштабным инвертором (см. рис. 5.1) . 6Кии = \АКии/Кии \ 100 % =0,1 %, где АКи и — абсолютное отклонение коэффициента передачи напряжения РУ относительно номинального (расчетного) значения Кц и = — RJR2. Абсолютные отклонения сопротивлений резисторов ARX, AR2 относительно номинальных значений R±, i?2, указанных в исходных данных задачи 5.4, могут иметь разные знаки.
Задача 5.6. С использованием пакета программ “Оптимизация” найти значение коэффициента усиления напряжения Ки ОУ, при котором на постоянном токе обеспечивается заданная точность преобразования входного сигнала масштабным инвертором (см. рис. 5.1) bKUtt = \АКии/Кии | 100 % = = 0,1...0,05 %. Исходные данные: Rx = R2 = 10 кОм, R3 =
= 5 кОм Кии = —RJR2 =—1, параметры ОУ (RBK = 400 кОм, RBblx = 0>5 кОм, Кц) варьировать в пределах 102...105 с начальным значением 103.
С учетом указанной точности преобразования коэффициент передачи напряжения РУ | Кии | - | AKUn | = | KUn | (l-bKUu) составляет 0,999...0,9995.
70
Таблица 5.1
Параметр
К140УД7
К140УД8А
Коэффициент усиления напряжения Ки
5 • 104
5 • 104
Входное сопротивление Яъх, кОм
400
103
Выходное сопротивление Лвых, Ом
500
200
Напряжение смещения UCM, мВ
±4
20
Температурный дрейф напряжения смеще¬
±6
50
ния АС/см/АГ, мкВ/К
Средний входной ток /вх, нА
200
0,2
Разность входных токов /вх р, нА
±50
0,15
Температурный дрейф разности входных то¬
0,4
—
ков А/вх р/ДТ, нА/К
Частота среза /ср, МГц
0,8
1
Постоянная времени, мс:
Т1
0
—
Т2
10 4
—
*3
2•10“4
—
Примечание. Постоянные времени т2 т3 соответствуют передаточной функции Ки(р) = Кц(1 + т1р)/(1+т2р)(1+т3р).
В качестве системы схемотехнического проектирования используем САПР ДИСП. Для поставленной задачи текст описания схемы и задания на оптимизацию выглядит следующим образом: NAME = ИНВЕРТОР; N = 4; R = 2,3,10! 1,3,1010,-4,510,2,2; АОУ = 3,4,2,400,0.5,1E3,0,0; F = 0; VARP = 100ДЕ5ДЕЗ, АОУ1,КО; ZONE = 0,0.999,0.9995,1 MKU; “К”
В результате расчета получено ^=23 870, при котором 1^и 1=0,9991.
Задача 5.7. Определить коэффициент усиления напряжения Ки ОУ, при котором на постоянном токе точность преобразования входного сигнала РУ (см. рис. 5.1) &Кии = = 0,1...0,05 %. Исходные данные: R± = 1 МОм, R2 = R3 =
= 10 кОм, KUn =—100, параметры ОУ R'= 400 кОм, Явых= = 0,5 кОм, Кц изменять в пределах 10 ...106 с начальным значением 104 (см. задачу 5.6).
Задача 5.8. С использованим пакета программ ‘‘Частота” определить верхнюю граничную частоту /в полосы пропускания масштабного инвертора (см. рис. 5.1) при R1 = R2 = = 10 кОм, С1 = С2=0, ОУ типа К140УД7 (см. табл. 5.1). На частоте /в модуль коэффициента передачи напряжения \KUK(jf)\ падает на 3 дБ относительно низкочастотного значения | Кии | = RJR2 = 1 (0 дБ). Найти фазовый сдвиг <рк
ч/и
на этой частоте.
Задача 5.9. Уменьшается или увеличивается верхняя граничная частота /в (см. задачу 5.8) при повышении абсолютного значения коэффициента передачи напряжения масштабного инвертора?
71
Задача 5.10. Определить время установления tycT переходного процесса РУ (см. рис. 5.1), при котором выходное напряжение входит в зону ошибки, равной ± 0,1 % установившегося выходного напряжения ивых(°°). Исходные данные: ОУ типа К40УД7 (см. табл. 5.1), 2?i=/?2=100 кОм, R3=50 кОм, С3 = С2 = 0, ко входу приложено скачкообразное воздействие амплитудой t/BX=— 0,1 В, ивх (t) = UBXl (f), где 1(f)— единичная ступенчатая функция; иъых (оо)=— (R1/R2) UBX.
Время установления определяется промежутком времени, в течение которого выходное напряжение РУ войдет в зону 0,099... 0,101 В, так как установившееся выходное напряжение иВЬ1Х(°°) = ОД В.
Для расчета используем пакет программ “Линейная динамика”. Текст описания схемы и источника входного сигнала для САПР ДИСП выглядит следующим образом:
NAME=ИНВЕРТОР; N = 4; R = l,3,100! 2,3,100! 0,4,50! 0,2,2; С = 0,3,0! 2,3,0; АОУ = 3,4,2,400,0.5,5Е4,0,2Е-4; Е = 0,1,0,0, 0,1,0,0,0,-0.1; “К”
Результаты решения задачи показывают, что переходный процесс носит экспоненциальный характер с временем установления tycT ~ 1,7 мкс, при котором выходное напряжение равно 0,099 В.
Задача 5.11. Используя пакет программ “Линейная динамика”, определить амплитуду первого (наибольшего) выброса ивых т1 переходного процесса, а также время установления fycr, при котором выходное напряжение инвертора (см. рис. 5.1) входит в зону ошибки, равной ± 0,1 % установившегося выходного напряжения ивых(°°). Исходные данные: ОУ типа К140УД7 (см. табл. 5.1), ^=#2 = 100 кОм, R3 = 50 кОм, С1 = 0, С2 = 10 пФ, ко входу приложено ступенчатое воздействие амплитудой UBX=— 0,1В, иъх (t) = UBX1 (f), где 1 (f) — единичная ступенчатая функция.
Задача 5.12. Почему при увеличении емкости конденсатора С2 снижается степень затухания переходного процесса РУ (см. рис. 5.1)?
Задача 5.13. Используя многовариантный расчет найти емкость корректирующего конденсатора С1, при которой переходный процесс РУ (см. рис. 5.1) перестает носить колебательный характер (становится монотонным). Определить время установления LCT выходного напряжения при зоне ошибки, равной ± 0,1 % установившегося значения wBbIX(oo). Исходные данные: ОУ типа К140УД7 (см. табл. 5.1), Rx = R2 = 100 кОм, Д3 = 50 кОм, С2 = 10 пФ, uBX(t) = t/BXl(f), UBX =— 0,1 В, 1(f)-
единичная ступенчатая функция, «ВЬ1Х(°°) = — C^i/^2) t/BX = 0,1 В. Сопоставить время установления переходного процесса с результатом решения задачи 5-9.
Задача 5.14. Рассчитать АЧХ и ФЧХ передаточной функ-
72
5)
Рис. 5.2. Инвертирующий повторитель напряжения (а) и схема для определения
петлевого усиления (б)
ции петлевого усиления Tv(jf) инвертирующего повторителя напряжения (рис. 5.2, а) при С1 = С2 = 0, R3 = 0. Определить частоту среза /ср> на которой | Tv(jf) | =1, и запас устойчивости по фазе Д<рГ(/= 360°— | <pTu(fcр)|. Для расчета характеристик
функции петлевого усиления РУ нужно отключить вывод резистора R1 от выхода и считать его входом; вход РУ подключить к общей шине. Эти преобразования приводят к схеме на рис. 5.2, б, для которой Ти = E/BbIX/t/BX.
Задача 5.15. С использованием пакета программ “ Оптимизация” определить допустимую емкость нагрузки С2 (рис. 5.2, б), при которой РУ (рис. 5.2, а, R3 = 0, £^ = 0) находится на границе устойчивости, т. е. запас устойчивости по фазе Л<рГ(/= 360°-- | <рт (fcр) | * 0. При подготовке текста
задания воспользоваться критерием оптимизации “ЗОНА”, приняв для фазного угла <pTu(fcp) зону —358...—360° на частоте
среза /ср, являющейся результатом решения задачи 5.12.
Задача 5.16. Определить допустимую емкость нагрузки, при которой запас устойчивости по фазе Д<рг^= 28...30°, т. е.
Фг^(/*ср)= — 330...—332° (см. описание задачи 5.15).
Задача 5.17. Рассчитать переходный процесс (“Линейная динамика”) РУ (рис. 5.2, а) при Сх = 0, R3 = 0 и емкости нагрузки С2, полученной в результате решения задачи 5.15. Определить амплитуду наибольшего (первого) выброса UBblxml
73
и время установления tycT переходного процесса при входе в 5 %-ную зону ошибки относительно установившегося значения выходного напряжения wBbIX (<») = — (R1/R2) I/BX= — UBX. Входной сигнал представляет собой ступенчатое напряжение амплитудой UBX =—0,1 В, т.ё. uBX(t) = UBXl(t), где 1 (t) — единичная ступенчатая функция.
Задача 5.18. Проводя многовариантный расчет, определить емкость корректирующего конденсатора С7, при которой переходный процесс на выходе РУ (рис. 5.2, а) носит монотонный характер (не имеет колебаний). Определить время установления tyCT переходного процесса при 5 %-ной зоне ошибки установления. Исходные данные: R3 = 0,1 кОм, С2 является результатом решения задачи 5.16, uBX(t) = UBXl(t)9 UBX = —0,1 В, 1 (t) — единичная ступенчатая функция, С1 варьировать в пределах 10...300 пФ.
Задача 5.19. Для РУ (рис. 5.3) найти наибольшее сопротивление резистора R2, при котором температурная нестабильность выходного напряжения AUBblx/AT не превышает 4,8 мВ/К (UBX = 0). Чему равен при этом сопротивлении коэффициент усиления напряжения Киру = UBblx/UBX РУ? Исходные данные: ОУ типа К140УД7 (см. табл. 5.1), 2?х = = 1 МОм, R3 = R6 = 10 кОм, R4 = Rs = 100 кОм. Многовариантный расчет проводить с помощью пакета программ “Нестабильность”.
Задача 5.20. Какой из параметров и какого ОУ оказывает наибольшее влияние на температурную нестабильность выходного напряжения РУ (см. рис. 5.3 и задачу 5.19)?
Задача 5.21. С использованием пакета программ “Оптимизация” определить коэффициенты усиления напряжения КЦ1 и Кт ОУ DA1 и. DA2, при которых на постоянном токе обеспечивается выходное сопротивление i?BbIxPy =0,05...0,1 Ом и входное сопротивление ЯвхРУ =100...150 МОм (см. рис. 5.3). Исходные данные: параметры ОУ DA1 и DA2 RBX = 400 кОм, Двых=0,5 кОм, ^=1 МОм, R2 =R4 =RS = 100 кОм, R3 = R6 = = 10 кОм. Воспользоваться критерием оптимизации “Зона”;
R1 R2
Рис. 5.3. Решающий усилитель
74
КЦ1 и Кт варьировать в пределах 102...105 с начальными значениями 103.
Задача 5.22. Какие типы обратной связи используются в РУ, выполненных на основе ОУ DA1 и DA2 (см. рис. 5.3)? Как влияют обратные связи на входное и выходное сопротивления устройства?
Задача 5.23. Рассчитать коэффициенты чувствительности S*u ру = (дКиру/дх) (х/Ки Ру) коэффициента передачи напряжения РУ Киру = ивых/иъх к изменению параметров ОУ и сопротивлений сех резисторов (х— изменяемый параметр компонента). Выделить параметры компонентов, в наибольшей степени влияющих на изменение схемной функции. Исходные данные: ОУ типа К140УД7 (см. табл. 5.1), Rx = 1 МОм, R2=R4=R5 = = 100 кОм, R3 =R6 = 10 кОм.
Задача 5.24. Почему коэффициенты чувствительности S^py и S^py имеют низкие значения (см. задачу 5.21)?
Задача 5.25. По результатам решения задачи 5.23 определить допустимый разброс сопротивлений резисторов Rl, R2, R3, R5 bRt = (AR/Rt) 100 % (i = 1, 2, 3, 5), при котором точность преобразования входного сигнала РУ ЬКиру = (АКиру/Киру) 100 «±0,4 %, где АКиру — абсолтное отклонение коэффициента передачи напряжения РУ относительно расчетного значения Киру= = —(R2/R3) (1 + R^Rs). Отклонения сопротивлений резисторов ДК; от номинальных значений Rt, указанных и исходных данных задачи 5.23, могут иметь разные знаки.
Задача 5.26. Проводя многовариантный расчет (“Частота”), определить сопротивление резистора R2, при котором верхняя граничная частота полосы пропускания РУ (см. рис. 5.3) /в = = 30 кГц. На этой частоте модуль коэффициента передачи напряжения \Kupy(jf) \ падает на 3 дБ относительно низкочастотного значения. Исходные данные: ОУ типа К140УД7, R± = l МОм, R3=R6=10 кОм, R4~R5 = 100 кОм. Сопротивление резистора R2 варьировать в пределах 100...500 кОм.
Задача 5.27. Каким ОУ DA1 или DA2 определяется верхняя граничная частота /в полосы пропускания РУ (см. рис. 5.3) при (1 +R±/R5)>R2/R3 (см. задачу 5.26)? Типы ОУ DA1 и DA2 одинаковы.
5.2. Дифференциальные решающие усилители
Задача 5.28. Определить наибольшее абсолютное значение коэффициента передачи напряжения дифференциального РУ (рис. 5.4) KUa = UBbJ(UeKl-UBx2), при котором температуная нестабильность выходного напряжения Д[/ВЫХ/ДГ не превышает 0,47 мВ/К. Исходные данные: R^R^ R2=R3 = 100 кОм,
иъх1 = UBX 2 = 0.
75
R1
Так как | К^д | =R1/R2, то задача сводится к отысканию наибольших сопротивлений резисторов Rl, R4. При решении задачи можно использовать пакет программ “Нестабильность”.
Задача 5.29. Почему на сопротивления резисторов R1, ..., R4 дифференциального усилителя (рис. 5.4) накладываются условия ^=#4, R2=R31 Записать при этих условиях выражения для коэффициентов передачи напряжения по первому Килх = = иьых/ивх1 и второму KUa2 = UBblJUBx2 входам, считая ОУ идеальным.
Задача 5.30. На постоянном токе рассчитать коэффициент передачи напряжения синфазных входных напряжений Кисф дифференциального усилителя (рис. 5.4). Для этого объединенные входы Вх.1 и Вх.2 РУ считать входным выводом для синфазного сигнала ивхсф = 11^ = 11^. Исходные данные: 1) R± = R2=R3 = =Д4 = 100 кОм, 2) R1=R4 = 1 МОм, #2=#з = 100 кОм.
Следует обратить внимание на то, что в этом случае для ОУ типа К140УД7 (см. табл. 5.1) Ки = 0. При решении
задачи использовать пакет программ “Частота”.
Задача 5.31. С использованием пакета программ “Чувствительность” налюстоянном токе рассчитать коэффициенты чувствительности SxUcф = (дКисф/дх) (х/исф) схемной функции передачи напряжения синфазных входных сигналов Кисф= ивых/ивхсф к изменению параметров ОУ и сопротивлений резисторов R1, ..., R4 (х — изменяемый параметр компонента) (см. рис. 5.4). Исходные данные: t/BX. с* = t/BXl = [/вх2, 1) Rx= R2= R3=R4= 100 кОм,
2) R1=R4 = 1 МОм, K2=i?3 = 100 кОм.
Задача 5.32. Почему коэффициенты чувстительности ^сф по сопротивлениям резисторов R1, ..., R4 5^сф (/=1, 2, 3, 4)
принимают чрезвычайно большие значения (см. результаты решения задач 5.30 и 5.31)?
Задача 5.33. На постоянном токе рассчитать коэффициенты передачи напряжения синфазных входных сигналов Кисф = = ивык/ивх сф дифференциального РУ (см. рис. 5.4) при заданном разбросе сопротивлений резисторов R1 и R4, R2 и R3. Исходные данные: иъх сф = 11вх1 = UBx2, 1) R1=R3=R4 = 100 кОм, #2= 110 кОм,
76
2) R1 = 90 кОм, R2 = 110 кОм, R3=Ra = 100 kOm, 3) R± = = 900 kOm, R2= 110 kOm, R3 = 100 kOm, jR4= 1 МОм. Сопоставить полученные данные с результатами решения задачи 5.30.
Задача 5.34. Проводя многовариантный расчет АЧХ (“Частота”) модуля коэффициента передачи синфазных входных напряжений \Кисф0/)\ дифференциального усилителя (см. рис 5.4), определит допустимый разброс между емкостями конденсаторов С1 и С2, при котором на частоте / = 1 кГц \Кисф (jf) \ меньше или равен заданному значению. Исходные данные: ^вх. сф= uB*i = ^вхг. 1) Rl = R2 = R3 = RA = 100 кОм, Cx = 5 пФ, \KUct(jf)\< 0,65 10-3, 2) RX=R, = 1 МОм, R2=R3 = 100 кОм,
Cx= 5 пФ, \Кисф0/)\< 0,12 • 10 , C2 изменять от 5 до 2 пФ.
Задача 5.35. Почему при увеличении разброса емкостей конденсаторов С1 и С2 (см. рис. 5.4) модуль коэффициента передачи синфазных входных напряжений начинает падать с более низких частот (см. результаты решения задачи 5.24)?
Задача 5.36. С помощью пакета программ “Оптимизация” определить частоту среза /ср АЧХ модуля коэффициента усиления напряжения ОУ DA1 |^(//ср) = 1, при которой модуль коэффициента передачи напряжения | Кил (jf) | = UBblx/UBX дифференциального РУ (см. рис. 5.4) имеет желаемую АЧХ, находящуюся в заданной зоне. Исходные данные: параметры ОУ Кц~5 * 1C)4, Лвх=400 кОм, RBblx = 0,5 кОм; i?1=jR4 = l МОм, R2=R3 = 100 кОм, С^С^О, \KUR(jf)\ должен принимать значения между 16 и 18 дБ на частоте 50 кГц, между —1 и + 1 дБ на частоте 500 кГц.
При расчете коффициента передачи напряжения дифференциального РУ Вх.2 подключить к общей шине. Частота среза /ср связана с параметром т2 модели ОУ (см. табл. 5.1) следующим образом: т2=Ки/2к/ср. Использовать критерий оптимизации “Зона”, т2 варьировать в пределах 5...20 мс с начальным значением 10 мс.
Задача 5.37. Почему в результате решения задачи 5.36 получается частота среза /ср ОУ, близкая к 500 кГц?
Задача 5.38. Чему равны входные сопротивления по каждому из. входов дифференциального РУ (см. рис. 5.4), если параметры ОУ приближаются идеальным?
Задача 5.39. В чем состоит неудобство регулировки коэффициента усиления напряжения Кид = ивых/(ивх1 — UBx2) дифференциального усилителя (см. рис. 5.4)?
Задача 5.40. Определить наибольшие значения сопротивлений резисторов R2 И R6 (R2=R6) дифференциального РУ (рис. 5.5), при которых температурная нестабильность выходного напряжения | AUBUX/AT | не превышает 2,7 мВ/К. Исходные данные: Я4 = 3 кОм, параметры ОУ приведены в
табл. 5.1. Использовать пакет программ “Нестабильность”.
77
Рис. 5.5. Дифференциальный РУ с высоким входным сопротивлением
Задача 5.41. Получить выражение для коэффициента передачи напряжения Ки = UBblx/(UBXl—UBx2) дифференциального усилителя (см. рис. 5.5), считая ОУ DAI, DA2, DA3 идеальными, R2=R6, R3= Rs, R^Rj. Оценить значения KUjx при R4 = = 3,30 кОм.
Задача 5.42. Определить коэффициенты чувствительности S^Un = (дКия/дх) {х/Кид) коэффициента передачи входного напряжения KUA=UBbJUBXl дифференциального РУ (см. рис. 5.5) к изменению сопротивлений резисторов R1, ..., R7 и параметров всех ОУ (х — изменяемый параметр компонента). Сопротивление резистора R4 принять равным 3 кОм. При расчете коэффициентов чувствительности Вх.2 подключить к общей шине, так как t/Bx2 = 0. Использовать пакет программ “Чувствительность”.
Задача 5.43. Почему коэффициенты чувствительности S^Un к изменению параметров ОУ имеют сравнительно низкие значения (см. результаты решения задачи 5.41)?
Задача 5.44. Изменением сопротивления какого резистора удобно проводить регулировку коэффициента передачи напряжения KUR = UBblx/(UBXl—UBx2) дифференциального РУ (см. рис. 5.5)? Использовать результаты решения задач 5.39 и 5.40.
Задача 5.45. На постоянном токе определить коэффициент передачи синфазных входных напряжений KUc^=UBblx/UBX>сф дифференциального усилителя (см. рис. 5.5). Для этого объединенные входы Вх.1 и Вх.2 РУ считать входным выводом для синфазного сигнала ^Вх.сф = ^вх1 = ^вх2> Я4 = Рассчитать коэффициенты чувствительности = (дКисф/дх) (.х/Кисф) к изменению параметров всех ОУ и сопротивлений резистора схемы (х—изменяемый параметр компонента). Выделить компоненты, вариация параметров которых в наибольшей степени влияет на изменение Кисф.
Задача 5.46. На постоянном токе рассчитать коэффициенты передачи синфазных входных напряжений KUc^=UBX/UBX РУ
Зь, кОм.
ghUсф _
78
(рис. 5.5) при 10 %-ном относительном разбросе сопротивлений резисторов #2 и #6, R3 и R5, R1 и R7. Исходные данные: ^вх. Сф = ^вх1 = ^вх2> #4 = 3 ком, 1) #2 = 33 кОм, #6= 30 кОм,
2) Я3 = 11 кОм, Д5 = 10 кОм, 3) #, = 110 кОм, #7 = 100 кОм, значения сопротивлений остальных резисторов указаны на схеме.
Полученные данные сопоставить с результатами решения задачи 5.45.
Задача 5.47. С использованием пакета программ “Частота” рассчитать АЧХ модуля коэффициента передачи напряжения 1^д0У)1 =^вых/^вх1 дифференциального усилителя (рис. 5.5) при двух значениях сопротивления резистора R4 (#4 = = 3,30 кОм). Определить верхние граничные частоты /в полосы пропускания РУ (на частоте /в модуль коэффициента передачи напряжения падает на 3 дБ относительно низкочастотного значения). Сопоставить полученные результаты и объяснить, почему при #4 = 30 кОм верхняя граничная частота выше.
5.3. Интеграторы
Задача 5.48. Каково назначение резисторов Rl, R2 в интегрирующем РУ (рис. 5.6)?
Задача 5.49. Определить наибольшие сопротивления резисторов R1 и #2, при которых температурная нестабильность выходного напряжения | А1/ВЫХ/АГ | интегратора (рис. 5.6) не превосходит 1 мВ/К. Исходные данные: #,=#2, #3=#4 =
= 10 кОм, параметры ОУ типа К140УД7 даны в табл. 5.1.
Задача 5.50. Почему фазовый сдвиг между входным и выходным гармоническими сигналами идеального интегратора (см. рис. 5.6, #,-*<», #2~*°°> С,2 = 0, ОУ имеет параметры
идеального усилителя) составляет не —90° (—0,5л), а 270° (—Зл/2)?
Задача 5.51. Провести автоматизированный расчет АЧХ и ФЧХ (“Частота”) коэффициента передачи напряжения Кит иЛ = ивыЖк интегрирующего РУ (рис. 5.6) при отсутствии и наличии конденсатора С2. Исходные данные: #,=#2-500 кОм, #3 =
=#4 = 10 кОм, С, = 0,1 мкФ,
1) С2 = 0, 2) С2 = 0,1 мкФ,
диапазон частот 0,01...
1 кГц. Какие из рассчитанных характеристик в
Рис. 5.6. Интегрирующий РУ
79
большей степени приближаются к АЧХ и ФЧХ коэффициента передачи напряжения идеального интегратора I К'пт(jf) I -1/2Я/СА, Гкиият=-270°.
Задача 5.52. С использованием пакета программ “Оптимизация” определить сопротивление резистора R1, при котором отличие модуля коэффициента передачи напряжения 1^4/интОУ) I =U&bJUBX интегрирующего РУ (рис. 5.6) от соответствующего значения модуля \ K^„HT(jf) | для идеального интегратора не превосходит 1,5...2 % на частоте /=80 Гц. Исходные данные: R2=0, С2=0, R3=RA = 10 кОм, (^ = 0,1 мкФ, сопротивление резистора R1 варьировать в пределах
100.. .104 кОм с начальным значением 100 кОм.
Модуль коэффициента передачи напряжения идеального интегратора \К^кт (jf) | =1/2л fCtR3 на заданной частоте равен 1,989. Поэтому для реального интегрирующего устройства модуль коэффициента передачи напряжения должен лежать в пределах
1.95.. .1.96.
В качестве системы схемотехнического проектирования используем САПР ДИСП. Нумерация узлов схемы приведена на рис. 5.6. Для поставленной задачи текст описания схемы и задания на оптимизацию выглядит следующим образом: NAME=ИНТЕГРАТОР; N=5; R=3,5,100! 2,5,0! 1,3,10! 0,4,10; С=2,3,0.1! 0,5,0; АОУ=3,4,2,400,0.5,5Е4,0,10, 2Е-4; VARP = 100, IE4,100, Rl, R; ZONE = 0.08,1.95,
1.96,1, MKU; “К”
В результате расчета получается Rx = 103 кОм, при котором \Киипт№ |=1,953.
Задача 5.53. Для исходных данных изложенных в задаче 5.52, определить сопротивление резистора R1, при котором отличие модулей коэффициентов передачи напряжения идеального и реального интеграторов не превосходит 0,15...0,2 % на частоте / = 80 Гц.
Задача 5.54. Определить сопротивление резистора R1, при котором отличие фазового сдвига Дкрк от —270° между
входным и выходным гармоническими сигналами интегратора (рис. 5.6) не превышает 5...10° на частоте/=80 Гц. Исходные данные: i?2 = 0, С2=0, R3=R4 = 10 кОм, Сх=0,1 мкФ, сопротивление резистора R1 варьировать в пределах 100... 104 кОм с начальным значением 100 кОм.
Фазовый сдвиг между входным и выходным сигналами идеального интегратора составляет —270°. Поэтому для реального интегрирующего устройства с учетом условий задачи фазовый угол лежит в пределах —260...—265°.
Задача 5.55. Может ли интегратор (см. рис. 5.6) служить для преобразования входных сигналов, имеющих большой уровень постоянной составляющей?
80
Задача 5.56. В каких режимах может работать интегрирующий РУ (рис. 5.7)?
Задача 5.57. С использованием пакета программ ”Линейная динамика" определить интервал времени tycT, в течение которого выходное напряжение начальных условий интегратора (рис. 5.7) достигает значения wBbIX (£уст)=9,99 В. Исходные данные: ключ SW1 замкнут, SW2 находится в положении 2; в качестве входного сигнала принять ступенчатое входное напряжение мвх2 (0 = ^вх21 (0 амплитудой Е/вх2 = —10 В (1 (t) — единичная ступенчатая функция).
Задача 5.55. Чему равно напряжение на конденсаторе С1 при разомкнутом ключе SW1 и ключе SW2, находящемся в положении 2 (режим введения напряжения начальных условий С/вх2)?
Задача 5.59. Оценить уровень выходного напряжения интегрирующего РУ (рис. 5.7.) в конце интервала времени интегрирования fHHT=l мс, если ко входу приложено ступенчатое напряжение иъх1 (t) = UhXll (t) амплитудой UBXl=—10 В (1 (t) — единичная ступенчатая функция). Ключ SW1 разомкнут, SW2 находится в положении 1.
Задача 5.60. Проводя многовариантный автоматизированный расчет (”Линейная динамика"), найти наименьший коэффициент передачи напряжения Ки ОУ DA1, при котором относительное отличие линейно изменяющегося выходного напряжения иъых (t) интегратора (см. рис. 5.7) от расчетного выходного напряжения и* (t) для идеального интегратора
6Л = {J <ых (‘„нт) - «вых ('инт) I / Кых (0 I ) 100 % не превышает 2,5 % в конце интервала времени интегрирования t„m= 1 мс. Исходные данные: параметры ОУ DAI RBX-400 кОм,
RBblx=0,5 кОм, т2 = 10 мс, т3 = 2-10~4 мс, iC(/=500...104; ко входу приложено скачкообразное напряжение ивх1 (t) = UBXll (t) амплитудой ивх1=—10 В (1(f) — единичная ступенчатая функция), 'Сх(Онт) =- (0н/СА) UBX1 = 10 В, ключ SW1 разомкнут, SW2 находится в положении 1.
Вход 2 Ri R2
81
Задача 5.61. Почему в начальный промежуток времени интегрирования напряжение на выходе РУ имеет отрицательную полярность (см. результаты решения задачи 5.60)?
Задача 5.62. На основе многовариантного расчета (“Линейная динамика”) найти наименьшую частоту среза /с« АЧХ модуля коэффициента усиления напряжения \Kv(jf)\ ОУ (\Ки (jfcp) | =1), при которой относительное отличие линейно изменяющегося выходного напряжения uBblx(t) интегратора (см. рис. 5.7) от расчетного выходного напряжения uBblx(t) для идеального интег-
ратора 6Л ={ | «1* (0 -«вых (U) I I «в*ых (^инт) I} Ю0 % не превышает 0,5 % в конце интервала времени интегрирования ^инт= 1 мс. Исходные данные: параметры ОУ DAI Kv=5 -104, 2?вх=400 кОм, 1?вых=0,5 кОм,т2=Х^/2л/ср = 10...2СЮ мс, ко входу приложено ступенчатое напряжение uBXl(t) = UBXll (t) амплитудой UBXl=? —10 В (1 (0—единичная ступенчатая функция), ив*ых (*инт)=—(*инт / С А) х х UBX1 = 10 В, ключ SW1 разомкнут, SW2 находится в положении 1.
Задача 5.63. При размыкании ключа SW1 напряжение UBx2 через резисторы R1 и R2 приложено к выходу интегратора (см. рис. 5.7). Почему влияние этой цепи на изменение выходного напряжения выражено очень слабо?
5.4. Усилители переменного тока
Задача 5.64. Провести автоматизированный расчет статического режима (“Статика”) каскодного усилителя (рис. 5.8). Определить потенциалы узлов схемы (на рисунке обведены кружками) и( ( =1, 2, ..., 10) и следующие координаты статического режима всех транзисторов: IKj, IK.6j— ток коллектора и напряжение коллектор — база у-го транзистора,^!, 2, 3.
Задача 5.65. Последовательно увеличивая сопротивления всех резисторов на 10 %, провести многовариантный расчет статического режима усилителя (рис. 5.8). Сопоставить полученные данные с результатами решения задачи 5.64.
Задача 5.66. Вариация сопротивлений каких резисторов каскодного усилителя вызывает наибольшие изменения токов коллекторов транзисторов VT1 и VT2 (см. результаты решения задач 5.64. и 5.65)?
Задача 5.67. Изменение сопротивления какого резистора вызывает наибольшее увеличение потенциала узла 9 схемы каскодного усилителя (см. результаты решения задач 5.64 и 5.65)?
Задача 5.68. Почему повышение сопротивления резистора R6 вызывает увеличение коллекторного потенциала транзистора VT1 (узел 8) (см. результаты решения задач 5.64 и 5.65)?
Задача 5.69. Почему потенциалы узлов 3 и 10 близки друг к другу (см. результаты решения задачи 5.64)?
82
Рис. 5.8. Каскодный усилитель (все транзисторы типа TIN)
Задача 5.70. Каково назначение резистора R4 в схеме каскодного усилителя (см. рис. 5.8)?
Задача 5.71. Определить нестабильность коллекторного потенциала транзистора VT1 (узел) AUg/AT (см. рис. 5.8), вызванную температурным изменением характеристик транзисторов VT1, VT2, VT3. Для расчета использовать пакет программ “Нестабильность”.
Задача .72. С использованием пакета программ “Чувствительность” рассчитать коэффициент передачи напряжения Ku=UBbJUm усилителя переменного тока (см. рис. 5.8) и коэффициенты чувствительности Sfu= (дКи/дх) (х/Ки) к изменению сопротивлений резисторов и параметров транзисторов (х — изменяемый параметр элемента) на частоте / = 100 кГц, С1 = С2 = С3 = С4 = 0,1 мкФ.
На основании анализа коэффициента чувствительности выявить резисторы и параметры транзисторов, в наибольшей степени влияющие на коэффициент передачи напряжения усилителя.
Задача 5.73. Почему коэффициенты чувствительности SrU, SrV имеют низкие значения (см. результаты решения задачи 5.72)?
Задача 5.74. Провести многовариантный автоматизированный расчет АЧХ модуля коэффициента передачи напряжения \Ku(jf)\=UBbVi/UBX усилителя переменного тока (см. рис. 5.8). Исходные данные: диапазон частот от 1 кГц до 100 мГц, С2~С3 = 0,1 мкФ, 1) С^С^ОД мкФ, 2) Сх = 0, С4=0,1 мкФ,
3) С1 = 0,1 мкФ, С4=0, 4) СХ = С4 = 0. Сопоставить АЧХ для указанных вариантов расчета.
Задача 5.75. На основании результатов расчета задачи 5.74 определить верхнюю граничную частоту /в полосы пропускания
83
каскодного усилителя при Сг = 0,1 мкФ, С4 = 0. Почему в этом случае усилитель является наиболее высокочастотным?
На частоте /в модуль коэффициента передачи напряжения \Kv(jfB)\ падает на 3 дБ относительно значений модуля в полосе пропускания (f </в).
Задача 5.76. На основе каких транзисторов усилителя (см. рис. 5.8) реализовано каскодное включение каскадов?
Задача 5.77. Почему при Сх = 0, С4 = 0,1 мкФ модуль коэффициента передачи напряжения \Ku(jf)\ усилителя имеет наибольшие значения в полосе пропускания (см. результаты решения задачи 5.74)?
Задача 5.78. С использованием пакета программ “Оптимизация” определить емкости конденсаторов Cl, С2, СЗ, при которых низкочастотный участок АЧХ модуля коэффициента передачи напряжения | Ки (jf) | = t/BbIX/ t/BX каскодного усилителя на частотах 30 и 100 кГц (см. рис. 5.8) лежит в диапазоне 14—16 дБ, 17—19 дБ. Емкости конденсаторов варьировать в пределах 0,001...0,1 мкФ с начальным значением 0,01 мкФ.
Задача 5.79. Для условий задачи 5.78 записать текст задания на оптимизацию (САПР ЭМЦ). Этот текст выглядит следующим образом:
ВАРЬИРОВАТЬ: С1/#1/0.01(0.001,0.1); С2/#1/0.01
(0.001,0.1); СЗ/#1/0.01(0.001,0.1); ОПТИМИЗИРОВАТЬ: ЗОНА KU (АЧХДБ) (14,16/17,19) (1,1): ОПТЧХ;
КОНЕЦ;
Задача 5.80. Провести автоматизированный расчет статического режима (“Статика”) широкополосного усилителя (рис. 5.9). Определить потенциалы узлов схемы (на рисунке обведены кружками) Ui(i=1, 2, ..., 14) и следующие координаты статического режима транзисторов VT1, VT2, VT3, VT5: IKj, t/K_6 — ток коллектора и напряжение коллектор — база j-го транзистора, j =1, 2, 3, 5.
Задача 5.81. Увеличением сопротивления какого резистора схемы усилителя (рис. 5.9) можно повысить напряжение коллектор-база транзистора VT5 (UK_65) (см. результаты решения задачи 5.80)? При решении задачи провести расчет статического режима усилителя для увеличенного сопротивления предполагаемого резистора.
Задача 5.82. Вариация сопротивлений каких резисторов схемы усилителя переменного тока (рис. 5.9) оказывает наибольшее влияние на изменение эмиттерных токоэ транзисторов VT1 и УТ51
Задача 5.83. Определить изменение эмиттерного потенциала транзистора VT1 (узел 14) AU14/AT (рис. 5.9), вызванное температурной нестабильностью характеристик всех транзисто-
84
%ип
10В
©
Рис. 5.9. Широкополосный усилитель (все транзисторы типа TIN)
ров VT1, VT7. Для расчета использовать пакет программ
“ Нестабильность ”.
Задача 5.84. Какие из транзисторов вносят наибольший вклад в результирующую температурную нестабильность напряжения узла 14 (см. результаты решения задачи 5.82)?
Задача 5.85. С какой целью в схему усилителя (см. рис. 5.9) введены транзисторы VT4, VT6, работающие в диодном включении?
Задача 5.86. С использованием пакета программ “Частота” определить коэффициент передачи напряжения Kv=UbblJUbX, входное jRbx и выходное ЯВЬ1Х сопротивления широкополосного усилителя (рис. 5.9) на частоте 100 кГц.
Задача 5.87. Каково назначение резистора R4 в схеме усилителя (см. результаты решения задачи 5.86)?
Задача 5.88. Почему выходное сопротивление широкополосного усилителя (см. результаты решения задачи 5.86) имеет низкое значение?
Задача 5.89. Для широкополосного усилителя (см. рис. 5.9) рассчитать коэффициенты чувствительности sfu- (дКи/дх) х х(х/Ки) схемной функции к изменению сопро¬
тивлений резисторов и параметров транзисторов (х — изменяемый параметр элемента).
Задача 5.90. Почему коэффициенты чувствительности Sjfu схемной функции Ки к изменению сопротивлений
резисторов R6 и R9 имеют наибольшие значения (см. результаты решения задачи 5.88)?
Задача 5.91. На основе автоматизированного расчета АЧХ (“Частота”) модуля коэффициента передачи напряжения |^0У) I =
85
^[/вых/^вх в диапазоне частот от 10 Гц до 10 МГц определить нижнюю/н и верхнюю/в граничные частоты полосы пропускания широкополосного усилителя (см. рис. 5.9). На частотах /н и /в модуль коэффициента передачи падает на 3 дБ относительно Ки
в полосе пропускания (/н < /</в).
Задача 5.92. С использованием пакета программ “Оптимизация” определить емкости конденсаторов С1 и СЗ, при которых нижняя граничная частота /н полосы пропускания усилителя (рис. 59) лежит в области 10 кГц. В этом случае низкочастотный участок АЧХ модуля коэффициента передачи напряжения iKfjQfJ | =f/BbIX/[/BX можно охарактеризовать зоной, которая на частотах 10 и 30 кГц соответствует следующим модулям: 16—18 дБ, 19—21 дБ. Емкости конденсаторов варьировать в пределах 0,001...0,1 мкФ с начальными значениями 0,01 мкФ (см. задачу 5.79).
Задача 5.93. Провести автоматизированный расчет статического режима регулятора тембра (рис. 5.10), в результате которого определить напряжение коллектор — база [/к_б1 и ток коллектора 1к1 транзистора VT1.
Задача 5.94. Какие элементы схемы задают и стабилизируют статический режим транзистора VT1 (рис. 5.10)?
Задача 5.95. Осуществляя многовариантный расчет (“Частота”) АЧХ модуля коэффициента передачи напряжения \Ku(jf) | = = £4ых/^вх регулятора тембра (рис. 5.10), проследить изменение формы АЧХ в зависимости от соотношений сопротивлений резисторов R3 и R4 (Д3+Д4 = 100 кОм=const), R10 и R11 (2?10+1?11 = 47 KOM=const), моделирующих соответствующие потенциометры. Диапазон частот от 20 Гц до 20 кГц. Исходные данные: 1) R3=R4=50 кОм, i?10=i?11 = 23,5 кОм, 2) R3 = 1 кОм,
86
R4=99 kOm, R10=R11 = 23,5 kOm, 3) R3 = 99 kOm, i?4 = l kOm, ^0=^11 = 23,5 kOm, 4) R3=R4=50 kOm, i?i0=46 kQm, i?u = = 1 kOm, 5) R3=R4=50 kOm, i?io = l kOm, RX1 = 46 kOm.
Задача 5.96. При каких сопротивлениях резисторов R3, R4 и RIO, R11 модуль коэффициента передачи напряжения | К1Г (/'/) | регулятора тембра имеет наименьшее значение на частоте 20 Гц и обеспечивается равномерная передача сигналов в области верхних частот (см. результаты решения задачи 5.95)?
Задача 5.97. При каких сопротивлениях резисторов R3, R4 и RIO, R11 модуль коэффициента передачи напряжения \Kv(jf) \ регулятора тембра имеет наибольшие значения на частотах 20 Гц и 20 кГц (см. результаты решения задачи 5.95)?
ГЛАВА ШЕСТАЯ
НЕЛИНЕЙНЫЕ ЭЛЕКТРОННЫЕ УСТРОЙСТВА И ФУНКЦИОНАЛЬНЫЕ ПРЕОБРАЗОВАТЕЛИ
6.1. Усилители-ограничители
При проектировании некоторых электронных устройств зачастую необходимо ограничить линейный участок характеристики устройства по заранее заданному уровню выходного напряжения, положительному или отрицательному. Формировать амплитудную характеристику с нелинейностью подобного вида возможно, используя операционный усилитель, в цепь отрицательной обратной связи которого включаются пассивные двухполюсники, обладающие нелинейной вольт-амперной характеристикой. При определенном значении входного (выходного) сигнала происходит резкое изменение глубины обратной связи в результате изменения сопротивления нелинейного двухполюсника и, следовательно, изменение коэффициента передачи всей схемы в целом. Одной из наиболее важных задач проектирования усилителей-ограничителей является оценка точности формирования амплитудной характеристики.
Задача 6.1. Построить идеализированную амплитудную характеристику URUX=f(UJ устройства, показанного на рис. 6.1, полагая, что операционный усилитель DA1 — идеальный, а через обратно смещенные диоды VD1, VD2 токи не протекают. Исходные данные: R1=R2 = 10 кОм; VD1 и VD2 диоды типа 2Д503А; U„ni = UHn2 = lS В.
Задача 6.2. По условиям задачи 6.1 определить коэффициент усиления операционного усилителя KDA, необходимый для обеспечения заданного диапазона амплитудной характери¬
87
стики устройства на рис. 6.1, D=80 дБ, с погрешностью на границе диапазона £/вх=1 мВ не хуже 5 %. При этом считать, что сопротивление утечки диодов 100 МОм, вариация параметра KDA— 103...104. Для решения этой задачи приведем описание схемы и условия расчета на входном языке учебнопроектной САПР. Используется подсистема оптимизации статического режима ОПТСТАТ. Варьируемый параметр описывается в структуре ВАРЬИРОВАТЬ, а требования к выходному напряжению (напряжение 4-го узла схемы) — в структуре ОПТИМИЗИРОВАТЬ. Задание на проектирование примет вид
ОПИСАНИЕ:
R1 (1,2) 10К; R2 (2,4) 10К; DA1 (2,0,3,5,6) К140УД8А;
Д1 (2,3) ТИП=2Д503А; Д2(3,4) ТИП = 2Д503А;
Е1 (0,1) ПАРМ=(—1мВ,0,0); Е2(0,5) ПАРМ=(-15,0,0);
ЕЗ (0,6) ПАРМ = ( 15,0,0); * NN=6;
ВАРЬИРОВАТЬ: DA/#3/ 1Е4(1ЕЗ, 1Е6); *
ОПТИМИЗИРОВАТЬ: ЗОНА U4(0,95 1мВ) ОПТСТАТ;
КОНЕЦ
Задача 6.3. Оценить, насколько уменьшает заданный диапазон амплитудной характеристики устройства, приведенного на рис. 6.1, наличие напряжения смещения UCM и входных токов /вх1, /вх2 реального операционного усилителя DA1. Исходные данные: i?1=R2 = 10 кОм; Цвыхтах=10 В; VD1 и VD2— диоды типа 2Д503А; KDA = 105; 1ъх1=1вх2=0,1 мкА; UCM = 1 мВ.
Задача 6.4. На вход функционального преобразователя (см. рис. 6.1) поступает синусоидальный входной сигнал ивх (t) = = UBKm sin со f. Определить форму напряжения на инвертирующем входе операционного усилителя DA, его выходе и выходе устройства. Исходные данные: t/m = 100 мВ; / = 10 кГц; R1 = =#2 = 20 кОм; VD1 и VD2 — диоды типа 2Д503А; DA типа К140УД8А; С=0.
88
Рис. 6.2. Двухполупериодный прецизионный ограничитель
Задача 6.5. Для условий задачи 6.4 определить форму напряжений в узлах 2, 3 и 4 устройства при С = 1 нФ.
Задача 6.6. Для функционального преобразователя (см. рис. 6.1) определить форму зависимости UBWim=fUBXm, где UBxm- амплитуда входного синусоидального сигнала ивх (t) = UBxm sin Ш. Исходные данные: UBxm= 10 мВ...10 В; R1=R2=20 кОм; С = = 1 мкФ; / = 1 кГц. Оцените отклонение полученной характеристики от желаемой.
Задача 6.7. Для условий задачи 6.6 оценить зависимость полученной характеристики UBMXm=f(UBXm) от частоты / = = 10 Гц...10 кГц и наметить пути ее минимизации.
Задача 6.8. На рис. 6.2 показан функциональный преобразователь, реализующий функцию среднего значения входного напряжения. Построить амплитудную характеристику устройства, полагая операционные усилители DAI, DA2 идеальными; диоды типа КД509, R1=R2=R4=R5 = 10 кОм; R3 = 5,1 кОм.
Задача 6.9. На вход устройства (рис. 6.2) поступает синусоидальный сигнал uBX(t) = UBxmsinoit, где UBxm = 2 В; /=5 кГц; С =0. Используя условия задачи 6.8, построить форму выходного напряжения.
Задача 6.10. Объяснить, почему наличие в схеме устройства на рис. 6.2 двух диодов с ярко выраженной нелинейностью вольт-амперной характеристики не находит своего отражения в форме амплитудной характеристики устройства, как показывает решение задачи 6.8?
Задача 6.11. Для исходных данных задачи 6.8 определить минимальное значение емкости конденсатора С, при которой на частоте входного сигнала / = 100 Гц при максимальной амплитуде входного синусоидального сигнала UBXm=5 В уровень пульсаций выходного напряжения А 11вых не превышает 5 мВ. Операционные усилители DA1,DA2 типа К1532Д2: вариации параметра С в пределах 1 нФ...1 мкФ.
Задача 6.12. Используя в устройстве на рис. 6.2 операционные усилители типа К140УД6, определить требования к
89
Рис. 6.3. Двухполупериодный прецизионный ограничитель с высоким входным
сопротивлением
параметрам /обр и #обр диодов VD1 и VD2, при которых можно получить предельное значение заданного диапазона D амплитудной характеристики £/выхт =/(UBX т). Остальные исходные данные взять из условий задачи 6.8.
Задача 6.13. На рис. 6.3 показан прецизионный двухполупериодный выпрямитель. Определить сопротивление #3, обеспечивающее минимизацию погрешности преобразования при положительной и отрицательной полярностях входного сигнала. Исходные данные: R1=R2 = 1 кОм; #4 = 2 кОм; операционный усилитель типа К140УД10; диоды типа КД505; t/BX = 10 мВ... 10 В; #з = 100 Ом...1 МОм.
Задача 6.14. Описать работу устройства на рис. 6.3 при положительной и отрицательной полярности входного сигнала.
Задача 6.15. Построить эпюры напряжений в узлах 1...6 устройства на рис. 6.3 при подаче на вход синусоидального сигнала uBX (t) = UBxm sin Ш, где 17BXW=5 В; / = 100 Гц.
Задача 6.16. Для устройства на рис. 6.3 определить наличие цепей обратных связей при положительной и отрицательной полярностях входного сигнала.
Задача 6.17. Построить переходный процесс прецизионного выпрямителя (см. рис. 6.3), если на его вход подан сигнал положительного напряжения амплитудой UBxm. Исходные данные: #1=#4 = 20 кОм; #2 = 10 кОм, #3 = 100 кОм; VD1 и VD2— диоды типа КД509; DA1 и DA2 — операционные усилители типа К153УД5, UBxm = 5 В.
Задача 6.18. По результатам решения задачи 6.17 построить АХЧ и ФХЧ устройства, наметить пути для получения апериодического переходного процесса при подаче на вход скачка положительного или отрицательного напряжения.
Задача 6.19. Выбрать для анализа одно из устройств, показанных на рис. 6.4. Определить наличие цепей обратной связи в нем, описать эту цепь.
Задача 6.20. Построить амплитудную UBblxm=f(UBXm) характеристику устройства, выбранного в задаче 6.19, самостоятельно сформулировав требования к сопротивлениям резисторов
90
R3 R5
R2
У
Ьа1
>>
5
г—h
IVBi
ил
улг
R3
Li
ЛАЙ )>
1
7УЛЗ
£4
яг
Рис. 6.4. Функциональные нелинейные преобразователи
устройств. Параметры ОУ при этом считать идеальными. Диоды выбрать из справочника или из базы данных.
Задача 6,21. Изменить условия задачи 6.20, введя параметры реального операционного усилителя, построить амплитудную характеристику, сравнить ее с результатами задачи 6.20.
Задача 6.22. Оценить влияние параметров операционного усилителя (t/CM, /вх, Кц) на амплитудную характеристику (см. задачи 6.19...6.21).
91
Задача 6.23. Определить тип полученного функционального преобразователя (см. задачи 6.19...6.22).
Задача 6.24. Провести анализ амплитудно- и фазочастотных характеристик исследуемого устройства, оценить диапазон рабочих частот (по уровню —3 дБ).
Задача 6.25. Исследовать выбранное устройство при подаче на вход ступенчатого напряжения заданной амплитуды. Объяснить полученный результат и рассмотреть варианты получения апериодического переходного процесса.
6.2. Логарифмические и антилогарифмические усилители
Логарифмические (ЛУ) и антилогарифмические (АЛУ) усилители предназначены для преобразования входного сигнала в выходной с логарифмической либо экспоненциальной зависимостью:
ubb„ = u\g
(6.1)
ивых = 1/ехр
(6.2)
где U и Е — некоторые константы, имеющие размерность напряжения.
Указанные зависимости достаточно просто реализуются при включении диода в прямом направлении в цепь отрицательной обратной связи операционного усилителя, поскольку вольт-ам- перная характеристика диода определяется соотношениями
UVD = m<VT\n (Iva/Is)
(6.3)
ИЛИ
где Is— обратный ток р — п -перехода; (рт—температурный потенциал, приблизительно равный 26 МВ при 20 °С; т = = 1, ..., 2 зависит от технологии изготовления и типа полупроводникового прибора.
Задача 6.26. Для ЛУ (рис. 6.5, а) построить амплитудную характеристиу £/Вых=/(^вх)> полагая операционный усилитель идеальным, ^ = 10 кОм, VD1 типа КД109 в диапазоне £/вх = 1 мВ...10 В.
Задача 6.27. Используя построенную в задаче 6.26 амплитудную характеристику, представить графически зависимость выходного сигнала UBblx (t), если UBX=Um sincof, где Um = 1 В, /= 10 Гц.
Задача 6.28. Ввести в условие задачи 6.26 реальный операционный усилитель типа К153УД2. Построить ампли¬
92
тудную характеристику, сравнить ее с идеальной, полученной в задаче 6.26.
Задача 6.29. Определить требуемое значение коэффициента усиления ОУ (см. условия задачи 6.28), при котором погрешность преобразования у, зависящая от амплитуды входного сигнала и
ги„.
параметров элементов схемы: [?вых= U In
(1+у)
не превы¬
сит 1 %. Исходные данные: UBX= 10 мВ...1 В, i?1 = 10 кОм; VD1 типа КД109, вариация параметра Ки в пределах 103...10б.
Задача 6.30. Для ЛУ (см. рис. 6.5, а) определить максимально допустимые значения напряжения смещения и входных токов
О.У, при которых в диапазоне входных сигналов 10 мВ...10 В погрешность преобразования не превысит 3 %. Исходные данные: KDA = 10s, вариации параметра UCM в пределах 0,1 мВ... 10 мВ; 1ВХ в пределах 10 нА...1 мкА.
Задача 6.31. В ЛУ, показанном на рис. 6.5, б, в цепи обратной связи усилителя DA1 используется биполярный транзистор VT1. Определить, при какой полярности входного сигнала ЛУ реализует функцию (6.1)?
Задача 6.32. Построить амплитудную характеристику ЛУ на рис. 6.5, б, полагая ОУ идеальным, VT1 типа КТ315, й1 = 10 кОм, R2 = 0, Сх = 0. Сравнить полученную харакеристику с функцией (6.1).
Задача 6.33. Построить амплитудную характеристику ЛУ при использовании ОУ типа К153УД5 и сравнить ее с результатом задачи 6.32. В чем заключается отличие?
Задача 6.34. Разомкнуть цепь обратной связи ЛУ на рис. 6.5, б и построить АХЧ и ФЧХ петлевого усиления, полагая 1?1=10 кОм, ОУ типа К153УД5, VT1 типа КТ315В, С1 = 0, R2=0. Определить частоту, на которой обратная связь устройства становится положительной.
Задача 6.35. Резистор R2 и конденсатор Q ЛУ на рис. 6.5, б предназначены для коррекции частотных характеристик. Определить емкость корректирующего конденсатора Сх, которая соответствует границе устойчивости ЛУ, рассматриваемого в задаче 6.34, если R2-l кОм. Вариации параметра Сх в пределах 1 пФ...1 мкФ.
Рис. 6.5. Типовой логарифмический усилитель
93
Задача 6.36. Построить амплитудную характеристику устройства (см. рис. 6.5, б). Исходные данные: R2=l кОм, ОУ типа К153УД5. Объяснить тот факт, что введение в схему резистора R2* 0 почти не изменило форму амплитудной характеристики.
Задача 6.37. Описать работу прецизионного логарифмического усилителя с температурной компенсацией обратных токов транзисторов при положительной и отрицательной полярностях входного сигнала. Указать полярность напряжения на элементах устройства, если Uoa = +1 В.
Задача 6.38. Построить амплитудную характеристику ЛУ на рис. 6.6 в диапазоне входного сигнала UBX=1 мВ...20 В, t/on = 0,l В. Исходные данные: ^=^ = 100 кОм; Д3 = 10 кОм, #4 = 1,1 кОм, /?s = 5,l кОм, ОУ типа К153УД5, транзисторы VT1 и VT2 представляют собой ИМС серии 591.
Задача 6.39. По результатам решения задачи 6.38 построить эпюры напряжений в узлах 1, 2, 4 и 5 устройства на рис. 6.6, если на его вход поступает входной сигнал uBX(t) = = UBXmsin<at, где UBxm= 1 В,/ = 100 Гц.
Задача 6.40. Для схемы ЛУ (см. рис. 6.6) определить значение емкостей корректирующих конденсаторов С1 и С2, обеспечивающих устойчивость работы рассматриваемого устройства. Исходные данные: см. задачу 6.38, С2 и С2 в пределах 1 нФ...1 мкФ.
Задача 6.41. На рис. 6.7, а показан антилогарифмический усилитель. Полагая параметры операционного усилителя идеальными, построить амплитудную характеристику UBblx=f(UBX) устройства при изменении входного сигнала в диапазоне UBX= = —0,1...—0,6 В при ^ = 10 кОм, диод КД503.
Задача 6.42. Сравнить полученную в задаче 6.41 амплитудную характеристику АЛУ с идеальной (см. выражение 6.4). В чем заключается отличие?
Задача 6.43. Рассчитать форму сигнала на выходе антило- гарифмического усилителя (рис. 6.7, а), если входной сигнал ubX(t) = UBxmsinwt, где UBXm = 0,5 В, / = 1 кГц.
94
Рис. 6.7. Антилогарифмический усилитель
Задача 6.44. Изменить условия задачи 6.41, введя реальный операционный усилитель типа К140УД12. Построить амлитуд- ную характеристику и сравнить ее с идеальной.
Задача 6.45. Определить форму амплитудной характеристики антилогарифмического усилителя, приведенного на рис. 6.7, б, если ^ = 1,6 кОм, транзистор типа КТ306, ОУ типа К140УД14, t/BX=-0,l...-0,6 В.
Задача 6.46. Рассчитать форму выходного сигнала антилогарифмического усилителя (рис. 6.7, б), если на его вход поступает сигнал UbX=Um sinco^, где l/w = 0,3 В, а частота/=1 кГц.
6.3. Аналоговые перемножители сигналов
В инженерной практике достаточно часто возникает необходимость перемножения с заданной точностью двух аналоговых сигналов (напряжений или токов). Одним из способов решения этой задачи является логарифмирование каждого из сигналов устройствами, описанными в § 6.2, с последующим суммированием и антилогарифмированием результата. Вторым способом, положенным в основу построения интегральных микросхем аналоговых перемножителей сигнала (АПС) серии 525, является использование характеристик дифференциального каскада, показанного на рис. 6.8.
Проходная характеристика АПС определяется выражением
1/3=а[/1[/2, (6.5)
где а — коэффициент пропорциональности, В-1.
Задача 6.47. Построить зависимость U3=f(U1, U2) АПС (рис. 6.8), полагая, что VT1, ..., VT3 — транзисторы типа КТ315, R1=R2 = 2 кОм, R3=Rs = 6,2 кОм, Ra = 2,7 кОм, Uunl = + 15 В, ииП2 =—15 В. Обратить внимание на то, что подсхема Rl, R2, R4, VT2 преобразует напряжение U2 в коллекторный ток транзистора VT2. Построение зависимости провести, анализируя амплитудную характеристику U3=f(U1) при l/2 = const (например, при t/2=+1 В).
Задача 6.48. По результатам решения задачи 6.47 определить диапазон изменения напряжения Ul9 в котором отличие
95
Рис. 6.8. Параллельно-балансный каскад в качестве перемножителя аналоговых
сигналов
зависимости U3=f(Uly U2) от идеальной (см. выражение 6.5) при U2 = const не превышает 5 %.
Задача 6А9. Используя результаты решения задачи 6.48, определить значения а в выражении (6.5).
Задача 6.50. Для дифференциального каскада, используемого в качестве АПС (см. рис. 6.8), определить чувствительность коэффициента а к значениям сопротивленй резисторов Rl, R2, ..., R5 при 2—3 значениях входных напряжений иг и U2- Построить графики зависимостей a=f1(R1), а=/2(1?2), ..., a=fs(Rs) пр выбранных значениях входных сигналов.
Задача 6.51. Определить допустимый разброс сопротивлений резисторв R3 и R5, при котором реальная характерстика U3=f(U1, U2) отличается от идеальной не более чем на 5 %.
Задача 6.52. Провести автоматизированное исследование передаточных функций Ях (р)-U3/U1 при U2 = const и Н2(р) = = U3/U2 при из = const. Построить амплитудно- и фазочастотные характеристики \H1 (joy) |, |Я2 (/со) |, срх (со) и <р2 (со).
Задача 6.53. По результатам решения задай 6.52. определить частоту/х для АЧХ |Я1(/со) | /2 для АЧХ |Я2(/со) | по уровню —3 дБ. Какая из них выше и почему?
6.4. Аналоговые устройства с памятью
Под аналоговым устройством с памятью понимают устройство выборки — хранения (УВХ), предназначенное для кратковременного запоминания сигнала (напряжения) на время его обработки в последующей схеме, например, в аналого-цифровом преобра-
96
Рис. 6.9. Устройство выборки — хранения (аналоговая память)
зователе. УВХ имеет вход аналогового сигнала, управляющий вход и выход аналогового сигнала, как показано на рис. 6.9. В режиме выборки коэффициент передачи по напряжению Ки между аналоговым входом и аналоговым выходом равняется единице, т. е. выходной сигнал “ отслеживает” входной. В режиме хранения напряжения на выходе УВХ сохраняется постоянным на уровне Ивых(Уо) = Ивх(0> гДе момент времени, в который устройство переключается из режима выборки в режим хранения. Выбор режима УВХ осуществляется подачей логического сигнала на управляющий вход УВХ.
На рис. 6.10 показана упрощенная схема УВХ на двух операционных усилителях DAI, DA2, транзисторе VT1, выполняющем функцию аналогового ключа SW, и конденсаторе С1» Повторитель напряжения на DA1 обеспечивает высокое входное сопротивление УВХ. Усилитель DA2 в режиме повторителя обеспечивает высокое входное сопротивление, необходимое для минимизации токов разряда конденсатора С1 и малое выходное сопротивление для согласования с нагрузкой.
Задача 6.54. Определить, какой допустим ток перезаряда конденсатора С1 в режиме “Хранение”, чтобы за время хранения txp = l мс напряжение на конденсаторе (например, равное 1 В) изменилось бы не более чем на 2 %, если значение Сг = 10 нФ?
Задача 6.55. Выявить влияние напряжения смещения операционных усилителей на характеристики УВХ.
Рис. 6.10. Простейшее устройство выборки — хранения
4-1586
97
Рис. 6.11. Устройство выборки — хранения К1100СК2
Задача 6.56. Определить максимальное допустимое значение сопротивления открытого ключа SW на транзисторе VT1 в режиме “Выборка”, при котором модуль коэффициента передачи H(p) = UBaJUBX на частоте / = 100 кГц при Сх = = 0,1 мкФ отличался бы от единицы не более чем на 1,0 %?
Задача 6.57. Описать работу схемы УВХ К1100СК2 в режиме “Выборка” и в режиме “Хранение” (рис. 6.11).
Задача 6.58. Определить требуемое значение скорости нарастания выходного напряжения Уи ОУ DA1 и DA2, при которой
переходный процесс UBax (t) за время Дt = t2 — tl завершается с заданной точностью 1%. Исходные данные: С = 1 мкФ, Af=l мкс, ОУ типа Г40УД6; Vv в пределах 1—100 В/мкс.
Задача 6.59. Используя исходные данные задачи 6.58, определить выходной ток ОУ (см. рис. 6.11), необходимый для установления переходного процесса за время At, если максимальная скорость нарастания выходного напряжения ОУ
V,
^ьых DA1
= Vrr =10 В/мкс.
ивыхОЛ2 '
Вариации параметра /ВЬ1Х в пределах 1...20 мА; 6 = 1 %; At= 1 мкс.
Задача 6.60. Определить допустимое значение сопротивления RBK„ открытого ключа SW, при котором погрешность 6 не превышает 1 % при At= 1 мкс. Исходные данные использовать из условия задачи 6.58, RBKJI в пределах 10 Ом...10 кОм, ОУ— идеальные.
Задача 6.61. Определить время хранения txp, в течение которого (см. рис. 6.11) напряжение UBbVl изменяется не
Рис. 6.12. Устройства выборки — хранения с коррекцией формы амплитудно- и фазочастотной характеристики
98
Рис. 6.13. Пиковый детектор
более чем на 2 %. Исходные данные: С= 1 мкФ, ОУ типа К140УД6.
Задача 6.62. Определить сопротивление резистора R1 для получения апериодического переходного процесса UBKIX(t). Исходные данные (рис. 6.12): С=1 мкФ, ОУ типа К153УД5, R в пределах 10 Ом...10 кОм.
Задача 6.63. Для пикового детектора (рис. 6.13) определить значение Ки ОУ DA1 и DA2, обеспечивающее ошибку запоминания амплитуды входного сигнала не более ОД %. Исходные данные: С=10 нФ, диоды типа КД521, R1=R2 = 16 кОм, Кц в пределах 103...106.
ГЛАВА СЕДЬМАЯ
АКТИВНЫЕ /?С-ФИЛЬТРЫ И /?С-ГЕНЕРАТОРЫ СИНУСОИДАЛЬНЫХ КОЛЕБАНИЙ
7.1. Аппроксимация активных /?С-фильтров
Под ARC-фильтром понимают четырехполюсник, модуль передаточной функции которого остается почти постоянным в определенной области частот, называемой полосой пропускания (прозрачности) и достаточно резко падает с удалением от границ этой области. Область частот с достаточно большим подавлением амплитуды сигнала называется полосой заграждения (задерживания). Между полосами пропускания и заграждения находится переходная область.
По взаимному расположению полос пропускания и заграждения различают фильтры нижних частот (ФНЧ), фильтры верхних частот (ФВЧ), полосно-пропускающие фильтры (ПФ) и полосно-заграждающие фильтры (ЗФ), как это показано на рис. 7.1
Исходными данными для проектировния фильтра на этапе аппроксимации (аппроксимация — задача образования функции по исходным данным) являются: А — неравномерность модуля коэффициента передачи фильтра в полосе пропускания; (1)2— граница полосы пропускания; о 2— граница полосы заграждения; |Я(до2) | — модуль коэффициента передачи фильтра на границе полосы заграждения.
Искомая аппроксимация функции передачи простейшего ФНЧ полино- минального типа имеет вид
н(р)
fo
ъ0 + Ъ]Р + ь2р2 + ...+ V"
(7.1)
4
99
Рис. 7.1. Форма амплитудно-частотных характеристик активных ЛС-фильтров
где а0, Ь0, Ъь ..., Ьп — полиноминальные коэффициенты; « — порядок полинома.
Существует несколько математических способов отыскания полиноми- нальных коэффициентов и порядка полинома по исходным данным на проектирование (A, |# (/0)2) I)» таких как: аппроксимация по Бат-
терворту, аппроксимация по Чебышеву, аппроксимация полиномами Лежандра (фильтры класса L), аппроксимация по заданному групповому времени и т. п. Наиболее часто в инженерной практике пользуются аппроксимацией по Баттерворту и по Чебышеву.
При аппроксимации по Баттерворту при условии, что Д<<1 и |Я(/со2) |2< < 1, порядок полинома отыскивается по формуле
п > 0,5
‘g 2А|Яр2) |2
lgO^/o-L
(7.2)
где п приобретает ближайшее большее целое значение.
Полиноминальные коэффициенты отыскиваются посредством нахождения корней (полюсов) ркп нормированной по частоте передаточной функции Я (рп):
jkn
при нечетном п рип - е~п~;
кп (7.3)
. 2к-1 л
при четном п ркп = d п Т,
где к = 1, 2, ..., 2п.
В дальнейшем рассматриваются только полюса, расположенные в левой комплексной полуплоскости.
В результате расчетов получается нормированная передаточная функция
Н(рп) = -
П (Рп -Ркп)
^0
Ьо + Ь1Рп+..ЛЬпрп„ ■
(7.4)
100
Переход от нормированной функции Н (рп) к искомой Н (р) осуществляется заменой переменной рп = ар, где
1
1 ,
2 п
<°nl
(1-Д)2
0)1
2jc/i
При аппроксимации по Чебышеву, когда А < < 1 и |#(/а>2)| << 1, полинома рассчитывается по формуле
arch У2А|Я(до2)|
” archo^/o^ ’
порядок
(7.6)
arch х = In (х + у[х^~- 1 ).
Полюса передаточной функции рк находятся по выражению рк = Вк± ju>k - - sin A sin В ± j cos^4 ch В,
где А = ^2п~ ^ = \ arS^ y/lb ’ ars^1A: = In (х ~ V*5"- 1 ).
Задача 7.1. Решить задачу аппроксимации ФНЧ по Баттерворту по исходным данным: А=0,1; |Я(/со2)| =0,08;/! = ! кГц;/2 = 2 кГц. Определить порядок полинома п, построить график расположения корней рк на комплексной плоскости р, записать нормированную Я (рп) и денормированную Я (р) передаточные функции.
Задача 7.2. По результатам задачи 7.1, полагая, что pn=jo>n, a p=jcо, построить графики амплитудно-частотных характеристик |Я(/соп)] и |Я(/со)|. Сравнить полученные графики с исходными данными на проектирование. В чем отличие между собой графиков |Я(/о)п)| и | Я (/со) | ? В чем отличие между собой графиков ФЧХ <р (соп) и <р (со)?
Задача 7.3. Объяснить, почему при расчете параметров аппроксимирующих полиномов по выражениям 7.2 и 7.6 берут ближайшее большее целое значение?
В чем будет заключаться отличие графиков АЧХ |Я(/со)|, например при я = 3,15 и при п = 4?
Задача 7.4. Утверждают, что при аппроксимации по Баттерворту корни характеристического полинома рк располагаются на окружности. Аргументировать это утверждение.
Задача 7.5. Решить задачу аппроксимации ФНЧ по Чебышеву по исходным данным задачи 7.1. Определить порядок полинома я, построить график расположения корней рк на комплексной плоскости р, записать нормированную Н(рп) и денормированную Н(р) передаточные функции.
Задача 7.6. По результатам решения задачи 7.5, полагая, что р=усо, построить графики АЧХ и ФЧХ | Я (/со) | и (р (со).
101
Сравнить полученные графики с исходными данными на проектирование. Почему график АЧХ |Я(/со)| в точке со=со2 проходит ниже заданного значения |#(/со2)|?
Задача 7.7. Утверждают, что при аппроксимации по Чебышеву корни характеристического полинома рк располагаются на эллипсе. Доказать это утверждение.
Задача 7.8. Сравнить между собой решение задач 7.1 и
7.5. Какие выводы можно было бы сделать в этом случае?
7.2. Реализация активных /?С-фильтров
Задача реализации ARC-фильтров сводится к выбору принципиальной схемы, способной реализовать передаточную функцию порядка п, и расчету параметров элементов схемы, при которых обеспечивается получение требуемых значений полиноминальных коэффициентов (выражение 7.1).
При построении ARC-фильтров разработчик чаще всего решает задачу позвенной (покаскадной) реализации, поскольку по результатам этапа аппроксимации получают искомую передаточную функцию Н{р) в виде произведения сомножителей (7.4).
При этом чаще всего отрицательный вещественный полюс отражает необходимость реализации звена первого порядка, а пара комплексно-сопряженных полюсов соответствует звену второго порядка. Реже, но встречаются реализации, при которых, например, порядок полинома п - 3 реализуется одним звеном третьего порядка, который невозможно разделить на каскады: на звено первого порядка и звено второго порядка. В качестве первого примера авторы выбрали одно из наиболее интересных и распространенных звеньев второго порядка ЛЯС-фильтров, принципиальная схема которого представлена на рис. 7.2. Данное звено ЛЯС-фильтров является универсальным. Его можно использовать при проектировании ^4/?С-фильтров в качестве звена фильтра нижних частот, фильтра верхних частот, либо полосового фильтра. Для этого достаточно использовать в качестве выходного один из имеющихся у звена выводов (узел 2, 6 или 8).
По первому выходу передаточная функция устройства имеет вид
Н(Р)фнч ~
Нф>1
т
О>0
+ а>л
'Р+Р1
(7.7)
что соответствует звену второго порядка ФНЧ. По второму из выходов
Н (р)фвч “
Щр2
tog + ш0
-Р+Р2
что соответствует звену второго порядка ФВЧ. И по третьему выходу
н(р) ПФ =
Н(р>оР
“>0
+ СО
0 Q
Р+Р2
(7.8)
(7.9)
что соответствует звену второго порядка полосового фильтра.
В выражениях (7.7)...(7.9) со0 — частота настройки звена (для полосового фильтра со о — частота резонанса); Q — добротность звена; Н0 — безразмерный коэффициент, являющийся составной частью коэффициента передачи.
102
R1
Рис. 7.2. Звено второго порядка ARC-фильтров
Основными соотношениями, связывающими параметры звена второго порядка с параметрами пассивных элементов схемы, являются
1 (7.10)
_V*
I ~ ▼ г.
R^C1RsC2
Если выбрать R1-R2, R4=R5=R и Сх = С2 = С, то
(Oq = 1/ RC]
1
0 =
Rn
\+ *2(*1+*3) )
*1*3
h0=r2/r3.
(7.11)
(7.12)
(7.13)
Задача 7.9. Полагая операционные усилители Л41, ..., ZM3 идеальными (для расчета достаточно принять Ки = 109, RBX = = 109 Ом, RBblx = 0,01 Ом, постоянные времени передаточной функции операционного усилителя тх, т2, ... принять равными нулю), при указанных на схеме (см. рис. 7.2) параметрах пассивных элементов R1=R2=R3=R7 = 20 кОм, R4=RS=85 кОм, R6= 10 кОм, С1 = С2=4,7 нФ рассчитать и построить ампли- тудно- и фазочастотные характеристики передаточной функции Н (p) = U2/U1. По АЧХ и ФЧХ определить вид фильтра (ФНЧ, ПФ или ФВЧ).
Задача 7.10. По характерному поведению АЧХ за пределами полосы пропускания, по поведению ФЧХ, по скорости спада АЧХ (дБ/дек) доказать, что анализируемое звено является звеном второго порядка.
Задача 7.11. По исходным данным задачи 7.9, при указанных на схеме (см. рис. 7.2) параметрах пассивных элементов рассчитать и построить АЧХ и ФЧХ передаточной функ-
103
ции Н (p) = U/Uv По АЧХ и ФЧХ определить вид фильтра ФНЧ, ПФ или ФВЧ).
Задача 7.12. По характеру поведения АЧХ за пределами полосы пропускания, по виду ФЧХ доказать, что анализируемый фильтр является фильтром второго порядка.
Задача 7.13. По исходным данным задачи 7.9, при указанных на схеме (см. рис. 7.2) параметрах пассивных элементов рассчитать и построить АЧХ и ФЧХ передаточной функции Н (р) = U/U^
Задача 7.14. Определить, есть ли в схеме на рис. 7.2 цепи обратной связи? Если есть, то указать их тип.
Задача 7.15. Для ФНЧ на рис. 7.2 построить амплитудную характеристику [/ВЬ1Х =/(t/BX), полагая параметры операционных усилителей идеальными (значения параметров указаны на рисунке).
Задача 7.16. Построить амплитудную характеристику ФНЧ, используя параметры ОУ типа К140УД8А. Определить иъых0= иъъ1Х\иъх_0, границы диапазона линейной зависимости иъых= <р (t/BX), иъых тах, динамический диапазон, В =
= 20 lg , дБ. Определить коэффициент передачи ФНЧ
^ вых 0
на постоянном токе.
Задача 7.17. Для полосового фильтра, используя режим ДИСП “Расчет экстремумов частотных характеристик”, при DA1, ..., ВАЗ типа К140УД8А определить частоту резонансв и модуль коэффициента передачи на частоте резонанса
|*О0)|. Для расчета экстремума можно использовать метод параболической интерполяции.
Задача 7.18. Используя формулы (7.10)... (7.1), рассчитать параметры элементов схемы на рис. 7.2 в соответствии с заданным вариантом ТЗ (табл. 7.1).
Задача 7.19. Провести автоматизированный расчет частоты резонанса и коэффициента передачи |Х(/со0)| по исходным данным задачи 7.18.
Задача 7.20. Решить задачу 7.18 с параметрами реальных операционных усилителей DA1, ..., ВАЗ. Рассчитать АЧХ, ФЧХ и осуществить поиск экстремумов АЧХ.
Задача 7.21. Сравнить результаты решения задач 7.19 и 7.20. Сделать вывод о влиянии реальных параметров операционных усилителей на значения f0Q и |#(/со0)|.
Задача 7.22. Рассчитывать чувствительность частоты резонанса и модуля коэффициента передачи \K(j<o0)\ полосового фильтра с параметрами, описанными в задаче 7.20, к параметрам пассивных (Rl9 R29 ..., R79 Cl9 С2) и активных (ZA41, ..., ВАЗ) компонентов схемы.
Задача 7.23. Определить температурный дрейф напряжения покоя АС/вых0/АГ ФНЧ (рис. 7.2) и влияние £/см и /вх на температурный дрейф 1/вых0.
104
Таблица 7.1
Вариант ТЗ
/О кГц
Q
\KQf0)\
Тип ОУ
1
10
10
6
К140УД8
2
1
8
1
К140УД6
3
5
5
10
К140УД7
4
20
2
7
К140УД9
5
7
3
5
К140УД20
6
4
3
3
К544УД1
7
0,5
5
1
К553УД1
8
10
10
2
К533УД2
9
8
2
7
Я553УД5
10
30
2
10
К140УД11
Задача 7.24. Определить форму выходного сигнала ФНЧ (рис. 7.2), если на вход фильтра подать сигнал амплитудой 1 В и частотой 1 кГц.
Задача 7.25. Определить тип фильтра для схем ARC-фильт- ров (рис. 7.3).
Задача 7.26. Проанализировать схемы, представленные на рис. 7.3, определить, в каких из них присутствует цепь положительной, отрицательной обратной связи, в каких схемах обратной связи нет.
Задача 7.27. Какой будет форма сигнала на выходе, если на активный ЯС-фильтр нижних частот с характеристиками Д = 0,05; \H(jco2) | =0,01; /х = 1 кГц;/2 = 5 кГц подать периодическую последовательность импульсов амплитудой в 1 В частотой 1 кГц и коэффициентом скважности, равным 2?
Задача 7.28. Выбрать из схем на рис. 7.3 звено второго порядка полосового ARC-фильтра с положительной обратной связью. Построить для этого звена АЧХ и ФЧХ, полагая, что i?x = 1 кОм, 1?2 = 2 кОм, JR3 = 1 кОм, Сх = 0,1 нФ, С2 = 0,01 нФ, К= +1.
Задача 7.29. Разомкнуть цепь положительной обратной связи для звена, анализируемого в задаче 7.28, для чего входные зажимы схемы закоротить (t/BX = 0), вход усилителя отсоединить от точки соединения R3 и С2. Подавая сигнал на вход усилителя и снимая сигнал обратной связи с резистора R3, получить передаточную характеристику возвратного отношения Т (р)=К (р)/3 (р). Под К (р) понимается коэффициент передачи усилителя, /? (р) — коэффициент передачи цепи обратной связи, Т (р) — возвратное отношение. Построить характеристику | Т (jco) | и <рт(со).
Задача 7.30. По результатам задачи 7.29 определить коэффициент усилителя, при котором на некоторой частоте со0 выполняется условие баланса амплитуд | Г (jco0) | = 1 и баланса фаз <рт(со0) = 2кя (к =0, 1, 2).
Задача 7.31. Выбрать из схем на рис. 7.3 два звена второго порядка ФВЧ, одно из которых содержит цепь отрицательной обратной связи, другое — положительной обратной связи. Про-
105
Рис. 7.3. Звенья второго порядка АКС-фильтров нижних частот, верхних частот
и полосовых фильтров
вести параметрический синтез звеньев таким образом, чтобы получить одинаковую для них форму АЧХ, а именно f[ = = 4 кГц; /2 = 2 кГц; А =0,08; |Н (ja>'2) | =0,1.
Задача 7.32. Определить чувствительность формы АЧХ, ФВЧ (см. задачу 7.31) к отклонению параметров пассивных (резисторы, конденсаторы) и активных (коэффициент передачи усилителя) компонентов схемы. Построить зависимость чувствительности модуля коэффициента передачи (АЧХ) от частоты для всех компонентов схемы.
106
Задача 7.33. Объяснить, почему чувствительность модуля коэффициента передачи схемы с положительной обратной связью выше, чем у схемы с отрицательной обратной связью.
Задача 7.34. Рассчитать форму сигнала на выходе звеньев второго порядка ЛЯС-фильтра верхних частот (см. задачу 7.31), если на их вход поступает синусоидальный сигнал амплитудой 1 В и частотой 4 кГц.
Задача 7.35. Определить форму выходного сигнала на выходах устройств, описанных в задаче 7.31, если на их вход поступает сигнал постоянного тока амплитудой + 2 В?
На рис. 7.4 представлена простая, широко применяющаяся схема звена второго порядка ARC-фильтра нижних частот.
Задача 7.36. Рассчитать АЧХ и ФЧХ для параметров компонентов R1=R2=R3=R4 = 1 кОм, С1 = С2= 1 нФ. Операционный усилитель — идеальный.
Задача 7.37. Проанализировать чувствительность формы АЧХ к параметрам компонентов схемы при R1=R2, Сг = С29 определить требуемые значения R±, R2, С±, С2, i?3, R4 для получения формы АЧХ (см. рис. 7.4), где К0 = 2,5, /0 = 300 Гц, | К (jco0 ) | = 7, ОУ — идеальный.
Задача 7.38. Оценить, как изменится форма АЧХ и ФЧХ устройства на рис. 7.4 при использовании реального операционного усилителя типа К140УД6А.
Задача 7.39. Оптимизировать параметры компонентов схемы на рис. 7.4 с целью получения параметров фильтров, заданных в задаче 7.37, при использовании реального операционного усилителя К140УД6А.
Задача 7.40. Определить форму АЧХ ARC-фильтра при последовательном (каскадном) соединении фильтра . нижних частот и фильтра верхних частот.
Задача 7.41. Определить зависимость входного реактивного сопротивления схемы звена ARC-фильтра (см. рис. 7.4) в диапазоне частот от 0 до 1 кГц. Определить выходное сопро-
С1 1нФ
Рис. 7.4. Звено второго порядка ARC-фильтров нижних частот
107
тивление источника сигнала такое, чтобы форма АЧХ изменилась не более чем на 5%.
Задача 7.42. Построить зависимость выходного реактивного сопротивления устройства, показанного на рис. 7.4, от частоты. Исходные данные: KDA1 = 104; #BbIxzM = 102 Ом. Параметры ОУ в диапазоне частот 0...1 кГц считать безынерционными.
Задача 7.43. Объяснить, почему при рассмотрении звеньев второго порядка ARC-фильтров (рис. 7.3) не встречаются звенья без активных элементов (без операционных усилителей, усилителей с конечным коэффициентом усиления, гираторов, конверторов, отрицательного сопротивления и т. п.)?
7.3. Проектирование /?С-генераторов синусоидальных колебаний
Под ЛС-генераторами синусоидальных колебаний понимается электронное устройство, способное при подключении к нему источников постоянного тока генерировать на своем выходе весьма близкий к синусоидальному сигнал вида иъых (t) = Um sin <о0 t, где Um — амплитуда, со0 — частота колебаний.
Для получения устойчивых колебаний синусоидальной формы необходимо наличие активного усилительного элемента (например, неинвертирующего усилителя напряжения с коэффициентом усиления по напряжению Ки и частотно-зависимой цепи положительной обратной связи у0. с(р).
При этом должно быть выполнено два условия:
1. Суммарный фазовый сдвиг на частоте колебаний по петле обратной связи должен быть равен
<Ръ(«>0)=<ру(ю0)+<Ро.сХшо)=2жп (п=0; ± 1; ±2...); (7.14)
где <ру (coq) и (р0 с (а>0) — фазовые сдвиги, вносимые усилителем и цепью положительной обратной связи на частоте <о0.
2. МЪдуль коэффициента передачи по петле обратной связи для “малого” сигнала
\Т (j (о0)\ = \K(j (Oq)\ I y0.c(/a>o)| ^ 1. (7.15)
Цепь положительной обратной связи, как правило, выполняют в виде звена второго порядка полосового фильтра, АЧХ и ФЧХ которого показаны на рис. 7.5.
В качестве усилителя с заданным коэффициентом передачи обычно используют операционный усилитель, включенный по схеме неинвертирующего решающего усилителя, как показано на рис. 7.6. Коэффициент передачи по напряжению неинвертирующего решающего усилителя
Kwy-Ui/U^l + yyRj). (7.16)
Для регулировки усиления используют нелинейность в цепи отрицательной обратной связи операционного усилителя DA (см. рис. 7.6), т. е. либо R2 должны иметь нелинейную вольт-амперную характеристику. Один из возможных вариантов зависимости Rx = <р (U2) показан на рис. 7.6. Для реализации зависимости R1=<p(U2) в качестве резистора R± и RC-генераторах используют полупроводниковые (управляемые напряжением, током и т. п.) резисторы (например, термисторы, фоторезисторы, полевые транзисторы с управляемым р — «-переходом и т. п.). Для управления сопро-
108
Рис. 7. 5. Частотные характеристики звена второго порядка полосового фильтра
тивлением любого из нелинейных элементов требуется постоянное напряжение (или ток), пропорциональное амплитуде выходного напряжения U2-
В качестве функционального преобразователя F на схеме ЯС-генератора (рис. 7.7) используется двухполупериодный прецизионный выпрямитель на операционных усилителях DA2,
DA3. Наличие конденсатора С2 позволит F выполнять также функцию фильтра нижних частот, выделяющего из широкого спектра сигнал постоянного тока U3, пропорциональный U2m.
Задача 7.44. Почему один из резисторов цепи отрицательной обратной связи операционного усилителя (см. рис. 7.6) должен иметь нелинейную вольт- амперную характеристику?
Задача 7.45. Какая форма сигнала была бы на выходе jRC-генератора, если оба резистора (R1 и R2) (см. рис. 7.6) имеют линейную вольт-амперную характеристику?
Задача 7.46. Нарисовать вольт-амперную характеристику, которую должен иметь резистор R2 (см. рис. 7.6), если R1—линейный резистор.
Задача 7.47. Какие изменения следует произвести в принципиальной схеме ДС-генератора (см. рис 7.7), если в качестве управляемого сопротивления использовать не полевой транзистор с управляющим р — «-переходом VT1, а, например, фоторезистор?
Задача 7.48. Почему в схеме ЯС-генератора на рис. 7.7 используется двухполупериодный выпрямитель выходного сигнала?
Задача 7.49. На какие характеристики RC-генератора влияет емкость конденсатора С2 функционального преобразователя F (см. рис. 7.7)?
Рис. 7. 6. Реализация активного элемента RC-ГСК на операционном усилителе
109
Рис. 7.7. Принципиальная схема RC-TCK
Задача 7.50. Рассчитать передаточную функцию положительной обратной связи (см. рис. 7.7) с целью получения АЧХ и ФЧХ (см. рис. 7.5), прлагая при этом, что R3=R2 = 10 кОм, Сг = Сг = 1 нФ.
Задача 7.51. Используя результаты расчетов задачи 7.50, определить по графикам АЧХ и ФЧХ частоту резонанса ю0, на которой <ро.с.(о>о)=0» a |у0.сОо) I = V о.со-
Задача 7.52. Определить сопротивление резистора R1 при котором выполняется условие “баланса амплитуд”, для схемы неинвертирующего решающего усилителя (см. рис. 7.6), зная значение уо с0 из решения задачи 7.51 и полагая i?2 = 10 кОм.
Задача 7.53, Полагая, что операционный усилитель DA1 (см. рис. 7.6) типа К153УД2, определить форму АЧХ и ФЧХ неинвертирующего решающего усилителя (передаточная функция К (p) = U2/U1). По полученным результатам найти фазовый сдвиг сру(со), вносимый решающим усилителем на частоте со0, найденной в задаче 7.51.
Задача 7.54. По результатам решения задач 7,51 и 7.53 определить частоту со'0, на которой суммарный фазовый сдвиг по петле положительной обратной связи <р2(соо) = 0. Таким образом, частота генерации RC-генератора определена как со'0.
Задача 7.55. Определить чувствительность значения частоты резонанса системы со'0 к отклонениям параметров пассивных и активных компонентов схемы.
Задача 7.56. Зная, как меняется от частоты фазовый сдвиг сру (со) решающего усилителя, определить требования к форме фазочастотной характеристики цепи положительной обратной
но
связи «ро.сО^Х ПРИ которой минимизируется влияние частотных свойств операционного усилителя DA1 на частоту со'0 колебаний ЯС-генератора.
Задача 7.57. Объяснить, какое влияние на частоту колебаний о>о FC-генератора (см. рис. 7.7) оказывают характеристики функционального преобразователя F.
Задача 7.58. Полевой транзистор с управляющим р — и-переходом может быть использован в качестве управляемого резистора, сопротивление которого зависит от напряжения U3_и. Однако это сопротивление не является строго линейным. Построить вольт-амперные характеристики 7=/(Е/с_и) в диапазоне значений управляющего напряжения U8 (см. рис. 7.7) от О до 2[/3_иотс, Я10=ДП = 1 МОм.
Задача 7.59. По результатам решения задачи 7.58 определить ограничения на величину t/c_H = t/2max (см. рис. 7.7), при которых с заданной точностью (например, 10 %) сохраняется линейность вольт-амперных характеристик управляемого сопротивления.
Задача 7.60. Построить графически зависимость управляемого сопротивления Дс_и как функцию управляющего воздействия i?c_H=/(t/8). С учетом результатов решения задачи 7.52 определить управляющее напряжение U8, при котором выполняется условие “баланса амплитуд”.
Задача 7.61. Исследовать амплитудную характеристику U3 = =f(Ui) решающего неинвертирующего усилителя (см. рис. 7.7) при значениях U8 в диапазоне 0...t/3_HOTcF77.
Задача 7.62. Определить исходя из задач 7.60, 7.61 управляющее напряжение 1/8, необходимое для обеспечения амплитуды колебаний выходного напряжения, равной 3 В.
Задача 7.63. Построить амплитудную характеристику U5 = =f(U3) однополупериодного прецизионного ограничителя функционального преобразователя F (см. рис. 7.7), полагая, что R6=R8 = 10 кОм, операционный усилитель DA2 типа К153УД2, диоды VD1, VD2 типа КД503В. Диапазон изменения Е/3 от —10 В до +10 В.
Задача 7.64. Рассчитать форму напряжений в узлах 5 и 6 схемы функционального преобразователя. Исходные данные: Um~5 В, /0 = 1 кГц, операционный усилитель DA2 считать идеальным.
Задача 7.65. Построить амплитудную характеристику U8 = =/(t/3) функционального преобразователя F, полагая, что R1 = =R4 =Rs= 10 кОм, JR7 = 5,1 кОм, U0 = 0, DA3 типа К1532УД2.
Задача 7.66. Исследуйте форму АЧХ и ФЧХ функционального преобразователя F (при U0 = 0), полагая С2 = 10 нФ.
Задача 7.67. Определить спектр выходного сигнала U8(t) функционального преобразоватля F при U3 = Um sin со '0t, полагая Um = 5 В, /0'= 1 кГц. Объяснить полученный результат.
ill
Задача 7.68. По результатам решений задач 7.66 и 7.67 определить требуемую емкость конденсатора С2 (см. рис. 7.7), при которой для частоты колебаний ЯС-генератора /0 = 1 кГц амплитуда второй гармоники на выходе функционального преобразователя F составит 0,05 амплитуды Uw выходного напряжения Ж>генератора.
Задача 7.69. Построить амплитудную характеристику U8 = =/(i/0) ПРИ U3 = 0 функционального преобразователя F. Определить требуемое значение t/0, при котором выполнение условия “баланса амплитуд” /?С-генератора, представленного на рис. 7.7, соблюдается при амплитуде выходного напряжения генератора, равной 2 В.
Задача 7.70. Разомкнуть цепь положительной обратной связи (см. рис. 7.7), исключить из схемы JRC-генератора элементы 2?2, R3, С1 и О, исследовать амплитудную характеристику t/3=/([/1).
ГЛАВА ВОСЬМАЯ
СХЕМОТЕХНИКА ИНТЕГРАЛЬНЫХ МИКРОСХЕМ ДЛЯ ИСТОЧНИКОВ ВТОРИЧНОГО ЭЛЕКТРОПИТАНИЯ
8.1. Источники опорного напряжения
Источник опорного напряжения (ИОН) является одним из важнейших функциональных узлов, который во многом определяет как точностные, так и эксплуатационные характеристики интегральных стабилизаторов напряжения (ИСН).
Наиболее широко применяются в ИСН параметрические ИОН, выполненные на основе интегральных стабилитронов (рис. 8.1) [8, 19]. Статический режим стабилитрона задает /^-канальный транзистор VT1, включенный по схеме источника постоянного тока. Цепь VT2, Rlf R2, VD2 обеспечивает температурную стабильность опорного напряжения. Значение опорного напряжения ИОН определяется выражением
Uon ~ UVD2
■+■ R*
иэ-Ь2 UVD2 + R2
где ~ падение напряжения на диоде VD2; £/ст — напряжение стабилизации стабилитрона VD1; U3_б2 — падение напряжения эмиттер — база транзистора VT2.
В задачах 8.1...8.8 приводится автоматизированное исследование ИОН (рис. 8.1). Описание схемы этого ИОН на входном языке системы ДИСП имеет вид
NAME= ИСТОЧНИК НАПРЯЖЕНИЯ 1; R=4,2,2.4! 2,5,1; Т = 3,4,1, TIN! 5,5,0,TIN; TY= 1,3,1,TYP; ST = 0,3,STN; E=0,1,10,0,1; FDL = 0.1,3E3,3; “K”
Здесь диод VD2 описан как n — р — «-транзистор, у которого узлы базы и коллектора соединены. Параметры моделей транзисторов и стабилитрона приведены в приложении 1.
112
Рис. 8.1. Источник опорного напряжения
Задача 8.1. Определить сопротивление резистора R2, необходимое для получения нулевого температурного дрейфа опорного напряжения (см. рис. 8.1). Исходные данные: Rx = 2,4 кОм; темпертур- ная нестабильность напряжения UCT составляет + 2 мВ/К, а температурная нестабильность напряжений f/ra2 и U3.62 составляет —2 мВ/К.
Задача 8.2. Провести автоматизированный многовариантный анализ статического режима ИОН (см. рис. 8.1) для двух значений сопротивления резистора R2 (R2~l кОм и R2 = 2 кОм) при двух значениях температуры -30 и +20 °С.
Задача 8.3. По результатам расчетов задачи 8.2 определить сопротивление резистора R2, необходимое для минимизации температурной нестабильности опорного напряжения.
Задача 8.4. По результатам расчетов задач 8.2, 8.3 отредактировать описание резистора R2. Провести автоматизированный расчет статического режима ИОН при двух значениях температуры —30 и +20 0 С. Определить значение опорного напряжения и его температурную нестабильность.
Задача 8.5. Провести автоматизированный анализ статического режима ИОН (см. рис. 8.1), изменяя напряжение источника питания Е1 от 5 до 10 В с шагом 1 В. Определить минимальное входное напряжение, при котором ИОН сохраняет работоспособность. Замечание: контролируйте значение опорного напряжения.
Задача 8:6. По результатам расчетов задачи 8.5 определить коэффициент нестабильности опорного напряжения при изменении входного напряжения KHcU = A Uon/ A Um.
Задача *8.7. Провести автоматизированное исследование коэффициента сглаживания пульсаций iCcr=20 lg (| m2/«i) t ИОН (рис. 8.1). Определить частоту, на которой модуль Кст возрастает на 3 дБ.
Задача 8.8. Провести автоматизированный расчет выходного сопротивления ИОН на частоте 100 Гц.
Источники опорного напряжения, выполненные на основе согласованных пар интегральных п—р — n-транзисторов, представлены на рис. 8.2 [10, 19]. Опорное напряжение таких ИОН определяется следующим образом:
иоп=иэ.6 + ик,
из
а)
б)
Рис. 8.2. Источники опорного напряжения, выполненные на основе прямосмещен- ных переходов интегральных резисторов
где U3.6 — падение напряжения эмиттер — база; UK — компенсирующее напряжение, имеющее положительный температурный коэффициент. Компенсирующее напряжение, как правило, пропорционально разности напряжений эмиттер — база А [/э_6 двух транзисторов, работающих при различных плотностях эмит- терных токов. Так, в схеме ИОН (рис. 8.2, а)
UK = I2R3 ш д иэ_ь = А.,
где <рт=кТ/q — температурный потенциал. Температурная нестабильность опорного напряжения будет минимальна, если выбрать параметры схемы так, чтобы выполнялось равенство
Uoa = А е0 = £7,_в1 (Г0) + <рт-g- In , (8.1)
где А е0 » 1,205 В — ширина запрещенной зоны кремния; Г0— номинальная температура. Например, полагая 1Х /12 = R2/ R3 = = 10, можно получить близкий к нулю температурный коэффициент опорного напряжения.
В источнике опорного напряжения (рис. 8.2, б) транзисторы VT4 и VT5 работают при одинаковых коллекторных токах, но имеют различные площади переходов эмиттер — база. В этом случае компенсирующее напряжение
UK~(h+I2)R2 = 2-|2-<р'т1п^-,
где 5Э/—площадь перехода эмиттер —база /-го транзистора. Термокомпенсация опорного напряжения достигается, если выполняется равенство
114
(8.2)
Uon — Л £q — Цэ-64 ( Tq ) + 2 ^ ^>T In ^ ^ .
Для схемы ИОН (рис. 8.2, б) S35 / S34 = 10.
В задачах 8.9—8.20 проводится автоматизированное исследование ИОН (рис. 8.2, а, б). Исходные данные для схемы (рис. 8.2, а): все транзисторы имеют тип TIN, #2 = R4 = = 600 Ом, R3 = 6 кОм, = 4 кОм. Исходные данные для схемы (рис. 8.2, б): все р — п— ^-транзисторы имеют тип TIP, транзистор VT4— типа П/V, транзистор VT5 — типа T3N, R1 = = 1,2 кОм, R2-6 кОм, иш= 10 В.
Задача 8.9. Используя соотношения (8.1) и (8.2), проверить, выполняется ли условие термокомпенсации опорного напряжения при указанных на схемах (рис. 8.2, а, б) номиналах резисторов. Исходные данные: U3_6(T0) ~ 600 мВ,
<рт=25,8 мВ.
Задача 8.10. Провести автоматизированный расчет статического режима ИОН (рис. 8.2, а) при двух значениях температуры —20 и +30 °С. Определить значения токов и 12.
Задача 8.11. По результатам расчетов задачи 8.10 определить коэффициент температурной нестабильности у т= A Uon /АТ опорного напряжения и, если необходимо, скорректировать сопротивление резистора R3 для получения нулевого температурного коэффициента.
Задача 8.12. Ввести технологическое рассогласование характеристик пары транзисторов КГ2, VT3 (см. рис. 8.2, а), увеличив на 10% параметр IS модели транзистора VT2. Рассчитать статический режим ИОН при двух значениях температуры. Определить опорное напряжение и его температурный дрейф.
Задача 8.13. Провести автоматизированный расчет статического режима ИОН (см. рис. 8.2, б) при двух значениях температуры —20 и +20 °С. Определить коэффициент температурной нестабильности у т = A Uon / А Г и, если необходимо, скорректировать сопротивление резистора R2 для получения нулевого температурного коэффициента.
Задача 8.14. Провести автоматизированный расчет статического режима ИОН (см. рис. 8.2, б), изменяя напряжение источника питания от 1 до 5 В с шагом 0,5 В. Определить; минимальное входное напряжение, при котором ИОН сохраняет работоспособность. Замечание: контролируйте значение опорного напряжения.
Задача 8.15. Провести автоматизированный расчет чувствительности опорного напряжения ИОН (см. рис. 8.2, а) к изменению сопротивления резистора R2. Объяснить, почему изменение резистора R2 влияет на значение опорного напряжения?
115
Задача 8.16. Провести автоматизированный расчет чувствительности опорного напряжения ИОН (см. рис. 8.2, б) к изменению сопротивлений резисторов R1 и R2. Объяснить, почему одновременное изменение резистора R1 и R2 почти не влияет на значение опорного напряжения.
Задача 8.17. Провести автоматизированное исследование коэффициента сглаживания пульсаций Ксг входного напряжения ИОН (см. рис. 8.2, а) в диапазоне частот FDL=0.1, 5ЕЗ,3. Определить частоту, на которой модуль Ксг возрастает на 3 дБ. Сравнить полученные результаты с результатами задачи 8.7.
Задача 8.18. Провести исследование ИОН (см. рис. 8.2, б) по условию задачи 8.16. Сравнить ИОН (см. рис. 8.2, а, б) по параметру Ксг.
Задача 8.19. Провести автоматизированный расчет выходного сопротивления RBblx ИОН (см. рис. 8.2, а) на частоте 100 Гц. Сравнить полученные результаты с результатами задачи 8.8.
Задача 8.20. Провести автоматизированный расчет выходного сопротивления ИОН (см. рис. 8.2, б) на частоте 100 Гц. Сравнить ИОН, представленные на рис. 8.2, по параметру RBblK.
8.2. Интегральные стабилизаторы постоянного напряжения
В источниках вторичного электропитания различных электронных устройств и систем широко применяются интегральные стабилизаторы напряжения (ИСН). Они представляют собой аналоговые микросхемы, стабилизирующие постоянное напряжение на их выходе 1/вых при изменении в широких пределах входного напряжения UBX и тока нагрузки /н. Большинство отечественных и зарубежных ИСН имеет структуру непрерывного компенсационного стабилизатора постоянного напряжения с последовательным включением регулирующего элемента; при этом удается обеспечить в ИСН сравнительно высокие энергетические и точностные параметры. Интегральные стабилизаторы подразделяются на ИСН с регулируемыми и нерегулируемыми выходами, на ИСН положительной и отрицательной полярности и на двуполярные ИСН [8].
Процесс всестороннего автоматизированного схемотехнического проектирования ИСН включает в себя синтез ФС и ПС; автоматизированное исследование статического режима и его нестабильности и связанных с ним энергетических характеристик; анализ и оптимизацию точностных параметров ИСН; автоматизированное исследование динамических характеристик стабилизатора, включая синтез его корректирующих цепей, обеспечивающих устойчивость ИСН и заданные показатели качества переходного процесса; поверочные расчеты всех параметров ИСН и определение областей их разброса. В § 2.4 представлены некоторые аспекты сквозного схемотехнического проектирования ИСН, начиная от синтеза ФС и кончая поверочными расчетами ИСН. В процессе такого проектирования синтезируется новая принципиальная схема ИСН. Во многих практически важных случаях перед началом проектирования разработчику уже известна начальная ПС будущего ИСН (аналог), и ему необходимо осуществить коррекцию параметров ее элементов, чтобы удовлетворить требованиям ТЗ (проектирование по аналогу). При этом разработчику не нужно решать большую часть задач структурного синтеза ФС и ПС стабилизатора (см. рис. 2.1).
116
Предположим, что по результатам анализа литературных источников разработчик выбрал схему аналога проектируемого ИСН, приведенную на рис. 8.3 (R5 —резистор нагрузки). Теперь разработчику необходимо осмыслить эту схему в схемотехническом плане; провести автоматизированное исследование статического режима и энергетических характеристик стабилизатора, убедившись, что ИСН обеспечивает выходные параметры: UBblK ном= 5 В, /н щах-1 А, а также осуществить минимизацию температурной нестабильности выходного напряжения ИСН ( у = А С7ВЫХ /АТ).
На начальном этапе работы с аналогом ИСН (рис. 8.3) разработчик может получить большой объем информации непосредственно из визуального рассмотрения незнакомой схемы. Процесс дальнейшего более глубокого схемотехнического осмысления разработчиком ИСН связан с проведением автоматизированных исследований. Задачи 8.21...8.30 посвящены автоматизированным исследованиям статического режима работы ИСН (рис. 8.3) и его энергетических характеристик; при этом используется САПР ДИСП.
Задача 8.21. Провести автоматизированный расчет статического режима ИСН с использованием пакета программ “Статика” ([/вх =10 В) и по его результатам определить напряжение на выходе стабилизатора.
Задача 8.22. По результатам задачи 8.21 определить, каким образом нужно изменить сопротивления R3, R8 делителя напряжения, чтобы обеспечить UbblXM0M = 5 В.
Задача 8.23. На основании автоматизированных расчетов задачи 8.21 определить наибольшую мощность, рассеиваемую на одном транзисторе ИСН.
©
Рис. 8.3. Схема интегрального стабилизатора напряжения положительной полярности с фиксированным выходом
VT3, VT4, R1 — регулирующий элемент; R3, RS — делитель напряжения; VT6...VT14, R2, R7, R9... R14 —усилитель сигнала рассогласования, схемотехнически совмещенный с источником опорного напряжения; VT5, VT7, VT12> R4, R6, R9, R12 —узел задания статического режима; VT1, VT2 — источник тока; С1 — цепь коррекции
117
Задача 8.24. По результатам задачи 8.21 найти мощность, рассеиваемую на микросхеме ИСН и выяснить, нужен ли для нее теплоотвод.
Задача 8.25. По результатам задачи 8.21 сделать вывод о том, может ли ИСН нормально функционировать при токе нагрузки: 7Н = IR5 = 2 А.
Задача 8.26. На основании автоматизированных расчетов задачи 8.21 объяснить, почему регулирующий элемент ИСН должен быть реализован на составном транзисторе VT3, VT4, а не на одиночном транзисторе VT4.
Задача 8.27. Повторить автоматизированные расчеты задачи
8.21 ([/вх = 15 В). Сравнить результаты расчетов задач 8.21 и 8.27 и сделать вывод о том, какие транзисторы существенным образом (более чем на 20 %) изменяют свой режим по току при вариации напряжения [/вх.
Задача 8.28. По результатам автоматизированных расчетов задач 8.21 и 8.27 определить, у каких транзисторов ИСН изменения напряжений С/К.б аналогичны изменениям напряжения [/вх.
Задача 8.29. Повторить автоматизированные расчеты задачи
8.21 в режиме холостого хода на выходе ИСН (Rs оо). Сравнить результаты расчетов задач 8.21 и 8.29 и сделать вывод о том, у каких транзисторов значительно (более чем на 5 %) изменяются эмиттерные и коллекторные токи при вариации сопротивления нагрузки Rs.
Задача 8.30. По результатам автоматизированных расчетов задач 8.21 и 8.29 определить, у каких транзисторов ИСН существенно (более чем на 20%) изменяются напряжения £/к_б при вариации сопротивления нагрузки Rs.
Рассмотрим методику минимизации температурной нестабильности Уиъых= A UBbJ А Т стабилизатора (см. рис. 8.3) с
использованием автоматизированных расчетов. Сначала разра^ ботчик из визуального рассмотрения схемы определяет соотношения, характеризующие опорное напряжение Uon и его связь с выходным напряжением ИСН:
URю * * (I/a-612 + U3.67 ~ tW
Л14
t/ьых - иоп (! + -§-)• (8-3)
Анализ соотношений (8.3) позволяет разработчику выявить механизм параметрической компенсации температурной нестабильности опорного напряжения (уи = A Uon /АТ). Действительно, поскольку напряжение UR10 определяется разностью напряже¬
на
ний эмиттер —база транзисторов VT12, VT7 и VT9, VT13, то оно имеет положительный температурный коэффициент (см. § 8.1):- Следовательно, в соответствии с выражениями (8.3) отрицательный температурный дрейф напряжений эмиттер — база транзисторов VT6, VT10, VT11 компенсируется положительным температурным коэффициентом напряжения UR10. При этом темпера- турная нестабильность опорного напряжения у иоп может быть сведена к нулю соответствующим выбором сопротивления Д10: Очевидно, что при минимизации параметра у иоп минимизируется и параметр у ивъ1Х (8.3). Теперь, когда разработчик имеет полную ясность в качественном плане о механизме минимизации параметров у иъъ1Х, у иою он может приступить к автоматизиро-' ванным исследованиям ИСН (см. рис. 8.3), которые характеризуются совокупностью задач 8.31...8.38.
Задача 8.31. Провести автоматизированный расчет статического режима и его нестабильности ИСН с использованием пакетов программ “Статика”, “Нестабильность” (£/вх = 10 В), и по его результатам определить параметр у Uonl = A U6 / А Т:
Задача 8.32. В зависимости от результата задачи 8.31 увеличить (уuoni< 0) или уменьшить (уиоп1 > 0) на 1 кОм сопротивление R10 и повторить задачу 8.31 с новым значением сопротивления R10.
Задача 8.33. По результатам задач 8.31 (y^oni) и 8.32 {Уи опт) определить приращение температурной нестабильности ■^■ОН. А У иоп ~~ |У(/оп1 У U cm2 I *
Задача 8.34. По результатам задачи 8.38 определить приращение сопротивления Я10, при котором параметр уиоп ИСН стремится к нулю ( A R10 = yUonl / A yUon).
Задача 8.35. Повторить задачу 8.31, изменив в соответствии с задачей 8.32 сопротивление jR10 на величину AjR10, полученную по результатам задачи 8.34. Убедиться, что в этом случае получаем температурную нестабильность опорного напряжения (уиопз)> много меньшую первоначальной (уиоп1 > >Уиопз%
Задача 8.36. На основании результатов автоматизированных расчетов задачи 8.35 и в соответствии с соотношениями (8.3) изменить сопротивление R3 таким образом, чтобы получить TJ —с г>
<-/вых. ном ^
Задача 8.37. Повторить задачу 8.35, изменив сопротивление R3 по результатам задачи 8.36 (поверочные расчеты). Сравнивая результаты автоматизированных расчетов задач 8.37 и 8.38 убедиться, что в последнем случае ИСН имеет значительно меньшую температурную нестабильность выходного напряжения уиъых, а также меньшее отклонение выходного напряжения от номинального (UBblXH0M =5 В).
Задача 8.38. Почему температурный дрейф напряжений эмиттер —база транзисторов VT3, VT4 регулирующего элементу не оказывает существенного влияния на параметр у£/вых ИСН?
119
РАЗДЕЛ ВТОРОЙ
СХЕМОТЕХНИКА ЦИФРОВЫХ УСТРОЙСТВ
ГЛАВА ДЕВЯТАЯ
МЕТОДЫ И СИСТЕМЫ ЛОГИЧЕСКОГО МОДЕЛИРОВАНИЯ
9.1. Общая характеристика систем логического моделирования
Начальные сведения о системах логического моделирования (СЛМ) можно найти в работах [25—27]. Здесь же рассмотрим лишь некоторые характеристики СЛМ, непосредственно связанные с материалом предлагаемых задач. Изложение ведется на примере САПР ДИСП [1], но большинство из поясняемых методов и примеров используется также и в других САПР [27, 47].
При логическом моделировании (ЛМ) цифровых устройств (ЦУ) из всех физических параметров, характеризующих действующие в ЦУ сигналы, учитываются (и то не всегда) лишь временные. Значения сигналов представляются абстрактными логическими уровнями 0 и 1, а также, возможно, некоторыми дополнительными символами, в первую очередь- символом “неопределенность” (обозначение на временных диаграммах, выводимых на печать). Эти символы троичного алфавита позволяют рассматривать электронные ЦУ на логическом уровне.
Вместе с тем степень учета временных соотношений в ЦУ— важнейшая характеристика СЛМ, во многом определяющая эффективность применения последней. В этом смысле можно выделить три основных типа СЛМ.
1. Системы логического моделирования, в которых конкретные временные параметры элементов ЦУ и входных сигналов вообще игнорируются. Некоторый учет временных зависимостей достигается специальной организацией процесса моделирования. В основном же выявляется последовательность изменений сигналов, но без оценки реальных промежутков времени между этими изменениями.
При так называемом троичном моделировании исходят из допущения о возможности произвольного соотношения между задержками сигналов как в элементах схемы, так и в линиях связи между ними. При таком подходе говорят о троичном моделировании по Эйхельбергеру [25]. Это очень “жесткий” метод в том смысле, что любая схема ЦУ, выдержавшая испытание троичным моделированием, будет надежно работать при любом соотношении задержек в конкретном образце ЦУ.
120
В то же время троичное моделирование “бракует” многие вполне работоспособные схемы, указывая на риски сбоя (состязания сигналов [28, 29]) в таких ситуациях, в которых их в действительности не будет. Поэтому сформулированное выше основное допущение о задержках несколько смягчают, переходя к так называемому А -троичному моделированию, рассмотренному в работе [25].
А -троичный метод использован в пакете “Троичное моделирование” (ТМ) САПР ДИСП. Пакет ТМ может быть настроен пользователем на троичное либо А -троичное моделирование; возможно также моделирование в двоичном алфавите.
Моделирование без учета временных соотношений называют иногда статическим ЛМ; используют его, главным обрат зом, для проверки правильности функционирования ЦУ. Тем не менее при хорошей организации подобного моделирования можно получить верное в первом приближении представление о временных соотношениях в ЦУ, особенно если реальные задержки всех элементов близки. Выявляются также грубые промахи в организации временного режима работы ЦУ и случаи некорректного управления элементами.
Достоинством статических СЛМ является скорость моделирования, а также относительная простота программного обеспечения, благодаря чему они могут быть реализованы на простейших ЭВМ.
2. Системы логического моделирования, в которых обес-1 печен учет временных параметров элементов ЦУ. В первую очередь, это задержки распространения сигнала (далее простд “задержки”), учитываемые в разных СЛМ с различной степенью подробности. Могут учитываться также и другие параметры, характеризующие работу элементов во времени.
Примером может служить пакет “Временное моделирование” (ВМ) САПР ДИСП. Отметим сразу, что все задачи в последующих главах, для решения которых рекомендуется пакет ТМ, могут быть решены с использованием пакета ВМ, а также других СЛМ.
Логическое моделирование, при котором учитываются временные параметры элементов ЦУ и входных сигналов, иногда называют динамическим.
Нужно заметить, что в большинстве СЛМ рассматриваемого типа игнорируется процесс изменения сигналов в переходном режиме, т. е. не учитывается время нарастания и спада сигналов; считается, что сигналы изменяются мгновенно.
Логическое моделирование с учетом временных параметров позволяет получить значительно более близкую к реальности картину поведения ЦУ во времени, чем статическое ЛМ. Однако, если моделям элементов приписаны фиксированные значения задержек, остается не выясненным вопрос о влиянии возможного разброса последних. Как известно, производители элементов (микросхем) задают допуск на значения задержек (обычно они ограничены только сверху), и в критических ситуациях несоответствие реальных задержек принятым при моделировании может привести к фактической неработоспособности ЦУ, успешно прошедшего проверку.
121
Поэтому в некоторых СЛМ предусматривают возможность умета допусков на значения задержек (так называемое моделирование с нарастающей неопределенностью [25]). Такая возможность предусмотрена и в пакете ВМ САПР ДИСП.
3. Наконец, наиболее полный учет временных соотношений обеспечивается в СЛМ, в которых принимается во внимание конечное время нарастания и спада логических сигналов, т. е. их изменения от 0 к 1 и от 1 к 0. При этом могут быть выявлены так называемые “пички” — кратковременные импульсы, вызванные непродолжительным взаимодействием изменяющихся сигналов на входах элементов. Йеобходимо, правда, оговориться, что достоверность выявления этих кратковременных импульсов зависит от того, насколько задержки элементов, принятые при моделировании, соответствуют задержкам в реальных ЦУ. Применение рассматриваемого метода оправдано, например, при ЛМ интегральных ЦУ, поскольку в этом случае задержки могут быть учтены достаточно точно [47]. В САПР ДИСП, как уже говорилось, сигналы считаются изменяющимися мгновенно.
Введем еще некоторые термины, необходимые для понимания режимов работы СЛМ.
В литературе нередко вводят понятия “синхронное” и “асинхронное” ЛМ, используя эти слова как синонимы пояс- йенных выше терминов “статическое” и “динамическое” ЛМ соответственно. В САПР ДИСП в эти понятия вкладывается несколько иной смысл. Различие между синхронным и асинхронным моделированием заключается в способе подачи на модель ЦУ входных воздействий.
При синхронном моделировании сигналы на входах модели ЦУ изменяются лишь после того, как в модели завершились переходные процессы, вызванные предыдущим изменением. Интервалы между последовательными изменениями каких- либо из входных сигналов называются тактами. Изменение любого из входных сигналов обозначает окончание одного такта и начало следующего. В каждом такте выполняется моделирование ЦУ до достижения устойчивых (при данных входных сигналах) состояний элементов и модели в целом. Если по какой-либо причине устойчивое состояние не может быть достигнуто, программа “зацикливается”, это служит основанием для автоматического прерывания процесса моделирования.
Таким образом, при синхронном моделировании программы, имитирующие входные воздействия, вызываются по запросу самой моделирующей программы.
В пакете ТМ САПР ДИСП осуществляется только синхронное ЛМ независимо от режима работы (троичное, А -троичное, двоичное ЛМ).
122
Ситуации, при которых устойчивое состояние модели ЦУ не достигается, могут возникнуть по двум причинам. Во-первых, в неудачно спроектированной логической схеме с обратными связями при определенных сочетаниях входных сигналов может образоваться, например, замкнутая в кольцо цепочка инверторов, число которых нечетно. Роль инвертора может выполнять и многовходовый инвертирующий элемент, на все входы которого, кроме одного, поданы пассивные логические уровни. В такой цепочке возникают автоколебания (паразитная генерация), которые и будут причиной прерывания процесса синхронного моделирования.
Во-вторых, возможно зацикливание моделирующей программы, обусловленное несовершенством используемого метода. Так, в двоичном алфавите нет средств для отображения неопределенного состояния элемента (неопределенного значения сигнала). Поэтому, когда в реальном ЦУ будущее состояние элемента оказывается непредсказуемым (скажем, состояние /^S-триггера при некорректном управлении им), двоичная программа ЛМ зацикливается.
В аналогичной ситуации при строго троичном моделировании элементу будет присвоено неопределенное состояние. Вообще, доказано, что процесс троичного моделирования по Эйхельбергеру всегда сходится.
При А -троичном моделировании в неблагоприятных ситуациях зацикливание синхронной программы ЛМ возможно, однако такие случаи редки.
В пакете ТМ САПР ДИСП состояния элементов рассчитываются по так называемому методу простых итераций [25]. Число итераций, необходимое для обработки каждого входного воздействия, может сильно меняться при моделировании одного и того же ЦУ, в зависимости от его текущего состояния и конкретных входных сигналов.
Таким образом, единицами измерения модельного времени при синхронном статическом ЛМ служат: для входных сигналов — такт, для расчета состояний модели 'ЦУ — итерация.
Числом итераций измеряются, в частности, назначаемые задержки элементов в модели ЦУ при А -троичном ЛМ [25].
Синхронный режим может быть использован и в динамическом ЛМ. Состояния элементов рассчитываются с учетом временных параметров по так называемому событийному методу, рассмотренному ниже, но принцип достижения устойчивого состояния сохраняется. Это позволяет выяснить полное реальное время переходных процессов в ЦУ после каждого входного воздействия. Синхронный режим предусмотрен и в пакете ВМ. Заметим, что его называют иногда асинхронным потактовым режимом.
При асинхронном моделировании входные воздействия подаются на модель ЦУ в соответствии с моментами реального времени, указанными пользователем. Степень завершения переходных процессов в модели при этом никак не учитывается. Это полностью соответствует работе реальных ЦУ, особенно при высоких частотах следования входных сигналов. В таком режиме осуществляют динамическую проверку работы ЦУ на предельной частоте.
Особенностью динамического моделирования ЦУ является событийный подход к расчету состояний элементов [25, 47].
123
По сути дела, он заключается в том, что состояния рассчитываются не для всех моментов модельного времени подряд, а лишь для тех, когда происходят события, т. е. изменений на внешних входах или на выходах элементов.
Для пользователя это имеет принципиальное значение прежде всего потому, что событийный принцип сохраняется в выводимых временных диаграммах. Шкала модельного времени оцифрована лишь в моменты событий, линейный масштаб не соблюдается.
Кроме того, событийного принципа придерживаются и при описании сигналов, подаваемых на входы модели ЦУ.
9.2. Алфавиты логического моделирования в САПР ДИСП
В пакете ТМ для представления логических сигналов используется троичный (трехзначный) алфавит {0, 1, х}. Логические значения 0 и 1 не нуждаются в пояснениях; символ алфавита “х”, на выводимых временных диаграммах обозначаемый звездочкой, в различных ситуациях может означать [25]: переходное состояние сигнала от 0 к 1 или от 1 к 0; риск сбоя в 1 (в 0), т. е. 0-состязания (1-состязания) [28]; неопределенное значение сигнала на выходе элемента с памятью, независимо от причины возникновения такого состояния; неопределенное значение сигнала на выходе любого элемента перед началом моделирования.
В любом случае последовательность символов или одиночный символ “х” трактуется следующим образом: фактическое поведение сигнала на данном отрезке времени неизвестно и может быть любым —от постоянного значения 0 или 1 до многократных изменений.
Для понимания временных диаграмм, выводимых пакетом ТМ, необходимо иметь в виду, что строго троичное моделирование в каждом* такте осуществляется в две фазы.
В первой фазе определенные (0 и 1) значения всех входных сигналов, которые должны измениться, заменяют переходными значениями “х”, после чего выполняется итерационное моделирование до достижения моделью ЦУ устойчивого состояния.
Во второй фазе переходные значения заменяются назначенными определенными и схема снова моделируется до достижения устойчивого состояния.
При А -троичном моделировании значения “х” удерживаются на входах не до устойчивого состояния модели, а в течение некоторого фиксированного числа итераций, назначаемого пользователем (параметр DELTA; далее А). Пользователем же назначается и задержка сигналов в элементах (параметр DELAY; далее т, Варьируя параметры А и т, можно менять режимы моделирования.
При А = 0, т = 1 реализуется моделирование в двоичном алфавите. Символ “х” вообще не возникает на входах модели; на временных диаграммах он появляется лишь при неопределенном начальном состоянии схемы либо при некорректном управлении элементами с памятью.
124
При т>Д (например, А =1, т = 2) выполняется А-троичное моделирование.
По желанию можно реализовать и моделирование по Эйхельбергеру, положив т=1 и назначив достаточно большое значение А (скажем, не менее числа элементов в схеме).
Состояния элементов (значения их выходных сигналов) рассчитываются в троичном алфавите по известным правилам [25]:
1. Отрицание неопределенности — неопределенность.
2. Основные логические операции определяются троичными таблицами истинности (табл. 9.1).
В пакете ВМ основным алфавитом служит пятизначный {0,1,х,/Д}. Возможен выбор между пятизначным и двоичным алфавитами путем присвоения переменной ALF значений 5 или 2; по умолчанию ALF=5.
Таблицы истинности основных логических операций в пятизначном алфавите сведены в табл. 9.2.
Символы “/” и “\” служат для обозначения переходов сигнала из 0 в 1 и из 1 в 0 соответственно. За символом “х” сохраняются все его перечисленные выше значения, за исключением переходных.
Подчеркнем, что символы “/” и “\” не имитируют реальные переходные процессы на входах и выходах элементов. Переключения, как сказано ранее, предполагаются мгновенными; переходные символы удерживаются на временных диаграммах всегда в течение всего одной единицы модельного времени (исключение составляет режим моделирования с нарастающей неопределенностью). Их назначение — смысловая разгрузка символа “х” и большая наглядность временных диаграмм.
Таблица 9.1
Х1
0
X
1
0
X
1
0
X
1
х2
0
0
0
X
X
X
1
1
1
Конъюнкция х^х2
0
0
0
0
X
X
0
X
1
Дизъюнкция х1Ух2
0
X
1
X
X
1
1
1
1
Сумма по модулю 2 х1®х2
0
X
1
X
X
X
1
X
0
Таблица 9.2
оеооо
0/х\1
ххххх
0/х\1
mi
ши
0/х\1
Отрицание х1
11111
\\\\\
ххххх
пт
00000
Дизъюнкция х^ух2
0/х\1
//хх 1
xxxxl
\xx\l
11111
Конъюнкция х±х2
00000
0/хх/
Охххх
0хх\\
0/х\1
Сумма по модулю 2 х1фх2
0/х\1
/ххх\
ххххх
\ххх/
1\х/0
125
Входные сигналы в обоих пакетах описываются всегда только в двоичном алфавите.
Дополнительно к основным логическим состояниям учитывается так называемое “третье” состояние выходов элементов [30], обозначаемое на временных диаграммах символом Z. Это состояние не является логическим; оно соответствует отключению элемента от связанной с его выходом линии. “Третье” состояние используется в ЦУ при реализации монтажной логики и для двунаправленного обмена данными через один и тот же внешний вывод. Таким образом, для вывода временных диаграмм в пакете ТМ используется четырехзначный алфавит, в пакете ВМ — шестизначный.
9.3. Сравнительная характеристика пакетов ТМ и ВМ
Принципиальное различие между подходами к ЛМ в пакетах ТМ и ВМ рассмотрено в § 9.1. В табл. 9.3 сформулированы основные особенности пакетов. Часть из этих особенностей должна быть уже ясна из предшествующего изложения; другие особенности поясняются далее.
Сведения, собранные в табл. 9.3, характеризуют пакеты ТМ и ВМ как с содержательной стороны (принципиальная возможность учета тех или иных параметров ЦУ и его элементов), так и с формальной (средства описания параметров на входном языке подсистемы).
Временные параметры элементов, учитываемые в пакете ВМ, рассмотрены в § 9.5; общая характеристика входного языка —в § 9.6.
В моделируемом ЦУ процессы протекают в реальном времени. В модели ЦУ процессы разворачиваются в модельном времени, всегда измеряемом в целочисленных значениях. Если в пакете ТМ, как уже говорилось, единицами модельного времени служат такт и итерация, то в пакете ВМ используется единица реального времени (параметр TIME). Задержки и другие временные параметры описываются всегда в единицах TIME. Конкретное значение этой единицы может быть назначено пользователем либо принято по умолчанию равным 1 нс.
Существенно, что выбор единицы TIME относительно слабо влияет на длину выводимых временных диаграмм благодаря событийному принципу представления результатов. При переходе, скажем, от Т1МЕ=1 нс к TIME =10 нс временные диаграммы могут стать короче лишь благодаря тому, что некоторые события в модели ЦУ, разделенные промежутками времени в несколько наносекунд, окажутся в одном десятина- носекундном отрезке.
126
о;
I
й
ш °<
«и« 2 ё *
в*
со £
&
Ё
со а
«« Ё 2
с о Си СО а
53
е
О
1
о
5
6
<L> S
a g>
§§
a §
s л &я W
н
х
я
Н
л
ж
ж
О
2
я
Я
0)
X
г
о
а
е
§
v
S
X
V
гг
<и
н
со
а з
ЁН
S Е
Я
>я о
о
ю
2 v
я 2 ж
II
н со
СО I 8.8 г* s.s
8 S
Is
Ǥ
(и а
5 “
8 S
2 Ef
о S я * as S. »-
s эе
в « ?
S
а
P
CO
0
1
а
<D
a:
<u
>я
о
§
2
<l)
Я
ЭЗ
я
о
я
c
О
n
Ш
a
g о
§ g
fS
Ий
Si
eg
x о
<L>
11
Я H
и ft
S <L>
s 2 gS W
я
s
ЕГ
Я
а
<L>
h
s
s&
vg°
° s
« g 2 G S К 8 8*
• x
g 1
O *
X =
6 s
gg
о g
S ° «
III
et
W
1 S s ! X g
m
4
SB
M
я § cu 3 c «
>>
I I I DEI S <D <D
8.8 3
“ &S
fa Я CO
2sS
3 x а
gif
§ g S
5 O &
* я
Я g к
O’ g
Я ^ X
* я 2
g * X
W
&
127
Разброс значений задержек Учтен в методе моделирова- Поля допуска для назначенных элементов могут быть учтены элементов ния при помощи специального описания
Окончание табл. 9.3
128
Естественно, что при изменении масштаба времени параметры элементов, как назначаемые пользователем, так и принятые по умолчанию, пересчитываются (при необходимости с округлением).
Принципиальное различие в методах моделирования, используемых в пакетах ТМ и ВМ, влияет, в частности, на решение одной из важнейших задач ЛМ — выявление рисков сбоя. Как известно, риск сбоя возникает на выходе некоторого элемента в тех случаях, когда на его входах имеют место противоречивые изменения. Точные моменты этих изменений неизвестны; при неудачном сочетании на выходе элемента появляется непредусмотренный кратковременный импульс (или, наоборот, провал).
Моменты входных изменений зависят от задержек в предшествующих элементах (а также и от задержек в линиях связи, если они ощутимы), и все упирается, таким образом, в степень незнания точных значений этих задержек.
Наибольшую “подозрительность” в этом отношении проявляет метод строго троичного моделирования, поскольку он базируется на предположении о произвольном соотношении задержек. Отсюда и “выявляемая” при троичном моделировании возможность рисков сбоя иногда даже в таких ситуациях, в которых на практике они невозможны.
Переход к А -троичному методу равнозначен смягчению допущения о задержках, что можно сформулировать, например, так: если принято т > А, то задержки в элементах больше задержек в линиях связи.
Наконец, при пятизначном моделировании с учетом реальных задержек (пакет ВМ) риск сбоя на выходе элемента признается возможным лишь при условии, что на его входах одновременно произошли противоположные изменения (появились символы “/” и “\”). Так как эти символы приписываются той или иной линии в течение всего одной единицы TIME, то указания на возможность риска сбоя (символы неопределенности “х”) появляются на временных диаграммах редко.
Уточним, что под противоположными изменениями на входах подразумеваются изменения, логически противоречиво влияющие на состояние выхода; кроме того, подразумевается, что никакой другой вход в этот момент времени не блокирует рассматриваемые входы.
В пакете ТМ всегда используется только синхронное моделирование (хотя, как следует из принципа А-троичного моделирования, при этом в первой фазе устойчивое состояние модели и не достигается).
В пакете ВМ также предусмотрена возможность использовать синхронный режим. Состояния модели ЦУ рассчитываются в этом случае точно так же, как в асинхронном режиме, с учетом временных параметров элементов и в реальном времени, но расчеты выполняются до достйжения устойчивого состояния (очередь будущих событий пуста). В таких условиях назначение пользователем конкретных моментов времени изменения входных сигналов не имеет смысла, и входные последовательности описываются, как и в пакете ТМ, в терминах тактов.
В асинхронном же режиме каждый входной сигнал изменяется в назначенное для него время, независимо от протекания процессов в модели ЦУ.
Как в пакете ТМ, так и в пакете ВМ (синхронный режим) предусмотрена возможность вычисления сигнатур [26, 50]. Сиг¬
5-1586
129
натуры, рассчитанные для назначенных пользователем точек схемы в заданном временном окне, выводятся на печать (вместо временных диаграмм) в общепринятом шестнадцатиричном алфавите 0, 1, ..., 9, А, С, F, Н, Р, U. При вычислении сигнатур имитируется работа шестнадцатиразрядного сдвигающего регистра с обратными связями от 16, 12, 9 и 7-го разрядов. Сигнатуры очень удобны при необходимости установить идентичность, скажем, двух длинных трудно обозримых двоичных последовательностей (см. задачу 10.36). При разработке моделей элементов для пакетов ТМ и ВМ сигнатуры были использованы с целью сравнения функционирования моделей с функционированием реальных микросхем-прототипов. Это позволило обеспечить высокую степень достоверности моделирования.
9.4. Модели элементов
При моделировании первостепенную важность имеет вопрос о том, какие модели имеются в распоряжении пользователя для описания ЦУ. Теоретически достаточно очень скромного набора простейших логических элементов (ЛЭ), из которых можно собрать любой более сложный узел. Однако на практике такой подход неприемлем по двум основным причинам.
Во-первых, описание реальных ЦУ в терминах простейших ЛЭ может оказаться весьма громоздким. Во-вторых, в качестве элементов (неделимых структурных единиц) в современных ЦУ используются сложные узлы (микросхемы), и пользователь часто не в состоянии представить такой узел схемой из простейших элементов.
Поэтому набор моделей, предлагаемых в распоряжение пользователя в системах ЛМ, обычно включает в себя готовые модели многих достаточно сложных цифровых узлов; этот набор называют базовым, а входящие в него модели — базовыми люделями элементов (БМЭ).
В подсистеме ЛМ САПР ДИСП используется широкий набор БМЭ, сравнимый с составом развитых серий цифровых микросхем (например, К555 или К561 [30]). Более того, прототипами при разработке моделей послужили именно конкретные микросхемы транзисторно-транзисторной логики (ТТЛ, ТТЛ с диодами Шоттки) и логики на комплементарных МОП-транзисторах (КМОП). Дополнительную гибкость базовому набору придает возможность параметрической настройки моделей, т. е. возможность указания необходимого числа входов, выходов, разрядов, характера входов и выходов (прямые или инверсные).
Эта возможность обеспечивается благодаря тому, что пользователь при описании ЦУ оперирует не конкретными мик¬
130
росхемами, а отвлеченными ЛЭ, триггерами, дешифраторами, регистрами и т. п. Это именно те структурные единицы, из которых составляются функциональные схемы, предусмотренные в ГОСТ 2.702—75. Соответствующий язык описания ЦУ будем далее называть языком описания функциональных схем (ЯОФС). Одна и та же БМЭ может быть использована для описания на ЯОФС микросхем ТТЛ, КМОП, функциональных ячеек базовых матричных кристаллов и т. п.
Это, впрочем, не исключает возможности описания ЦУ в терминах конкретных микросхем; для этого используется язык описания принципиальных схем (ЯОПС), который здесь не рассматривается.
Правила описания ЦУ на ЯОФС содержатся полностью в инструкции1 по применению подсистемы и кратко излагаются далее. Здесь же укажем, что ЯОФС следует рассматривать как базовый язык подсистемы, так как он используется и во внутреннем (хранимом в ЭВМ) представлении ЦУ.
В обоих пакетах —ТМ и ВМ —доступен один и тот же набор БМЭ; более того, в процессе моделирования используются одни и те же троичные модели (подпрограммы). Для перехода к пятизначному алфавиту в пакете ВМ выполняется дополнительная обработка сигналов на входах и выходах БМЭ (ср. [47, с. 72]).
В зависимости от сложности и назначения элементов- прототипов все БМЭ можно разделить на несколько групп (уровней).
1. Так называемый вентильный уровень: БМЭ простейших ЛЭ (вентилей) типа И, ИЛИ, И —НЕ, ИЛИ —НЕ, сложения по модулю 2 (М2), М2 с отрицанием, мажоритарного и мажоритарного с отрицанием. Основная особенность ЛЭ этой группы — равноправность (полная взаимозаменяемость) всех их входов. Кроме того, обычно ЛЭ этой группы имеют единственный выход. Правда, ЛЭ эмиттерно-связанной логики (ЭСЛ) имеют, как правило, парафазные выходы (прямой и инверсный у каждого элемента); возможность описания таких ЛЭ. в подсистеме предусмотрена.
Элементы типа И —ИЛИ, И —ИЛИ —НЕ, встречающиеся, главным образом, в схемотехнике ТТЛ, также следует отнести к простейшим ЛЭ, хотя их входы взаимозаменяемы лишь в пределах групп И, что приходится учитывать при описании.
2. БМЭ триггеров всех основных типов. Существенно, что адекватное описание пользователем на вентильном уровне уже некоторых сложных триггеров может встретить известные затруднения.
1 Инструкции по применению пакетов ТМ и ВМ, составленные Ю. Г. Уксусниковым, использованы при написании гл. 9.
5
131
3. Базовые модели специальных элементов: псевдоэлемент “монтажное И”, “последовательный ключ”, “задержка на N интераций (на N единиц времени TIME)”. Введение специальных моделей позволяет описать: широко применяемую в схемах ЦУ монтажную логику; схемы с открытым коллектором и общим (на несколько вентилей) нагрузочным резистором описываются при помощи БМЭ “монтажное И”; схемы с тремя состояниями выхода—при помощи БМЭ “ последовательный ключ”; шинную организацию связей, характерную для современных ЦУ; структуры, часто применяемые в схемотехнике КМОП и основанные на принципе коммутации логических сигналов с помощью ключей типа, например, К564КТЗ; задержки в линиях связи, а также задержки в элементах, приводящие к неодновременному срабатыванию их выходов.
К специальным следует отнести также и БМЭ запоминающей емкости и БМЭ резисторов, используемых для фиксации логического уровня в разомкнутой (“подвешенной4.) линии (так называемые pull-up- и pull-down-резисторы).
Запоминание емкостью последнего логического уровня на время, пока линия, соединенная с конденсатором, разомкнута (отключена от всех источников сигналов), особенно важно в структурах КМОП. Фиксирующие резисторы принудительно задают в такой разомкнутой линии уровень логической единицы (логического нуля) независимо от уровня, предшествовавшего разомкнутому состоянию. В обоих случаях предотвращается логическая неопределенность в линии.
4. Базовые модели элементов типовых функциональных узлов (ФУ) цифровой техники, соответствующих микросхемам средней степени интеграции (СИС), таких, как сумматоры, компараторы, дешифраторы, мультиплексоры, счетчики, регистры. Использование этих БМЭ наряду с моделями низших уровней позволяет моделировать любые ЦУ, построенные с применением основного состава микросхем наиболее широко распространенных серий ТТЛ и КМОП.
5. Базовые модели элементов для моделирования постоянной и полупостоянной полупроводниковой памяти — постоянных запоминающих устройств (ПЗУ) и программируемых логических лштриц (ПЛМ) [31]. БМЭ рассчитаны на представление ПЗУ и ПЛМ, программируемых и (или) перепрограммируемых пользователем. Поэтому описание на входном языке, помимо связей с другими элементами, должно содержать также и описание функций, ца которые запрограммировано ПЗУ (ПЛМ). Разумеется, таким образом могут быть описаны и микросхемы с так называемым масочным программированием, в которые информация заносится раз и навсегда еще на стадии изготовления.
6. Базовые модели элементов оперативных (ОЗУ) и сверхоперативных (СОЗУ) запоминающих устройств.
132
Начинающему пользователю при освоении пакетов ТМ и ВМ можно рекомендовать последовательно переходить от низших уровней к высшим.
Все БМЭ являются функциональными моделями. Это означает, что расчет состояний БМЭ в процессемоделирования основывается не на их структуре, а на тщательно проанализированном алгоритме функционирования, учитывающем все возможные входные и внутренние состояния БМЭ (элемента, отображаемого на БМЭ). Точная привязка каждой хоть немного сложной БМЭ к известной микросхеме-прототипу исключает неоднозначное понимание пользователем закона функционирования БМЭ. Все БМЭ организованы таким образом, что внутренние процессы в них не приводят к рискам сбоя на выходах. Последние могут иметь место лишь при условии противоречивых или некорректных воздействий на входах БМЭ.
Несмотря на широту и гибкость набора БМЭ, этого набора может оказаться недостаточно для описания реальных ЦУ. Поэтому в подсистеме ЛМ САПР ДИСП предусмотрена возможность создания и занесения в базу данных (БД) дополнительно к БМЭ, хранящихся в БД, так называемых пользовательских моделей (ПМ), используемых для: описания микросхем (узлов), которые не удается отобразить ни на одну БМЭ; компактного описания в составе ЦУ часто повторяющегося фрагмента схемы, т. е. некоторой подсхемы; описания подсхем, используемых во многих ЦУ и многими пользователями.
Удобно различать два типа ПМ.
Если структура объекта описания полностью известна, то может быть создана структурная ПМ (СПМ), например, на вентильном или вентильно-триггерном уровне. В общем случае в состав СПМ могут входить любые БМЭ и (или) другие ПМ. В последнем случае допустимое число уровней вложения — пять.
Если же структура описываемого элемента неизвестна или не вполне ясна, но может быть составлено описание его функционирования в виде таблицы истинности или таблицы переходов, то рекомендуется применять автоматную ПМ (АПМ). Автоматная пользовательская модель строится на основе ПЗУ или ПЛМ для реализации таблицы истинности либо на ПЗУ (ПЛМ) и регистре памяти для реализации таблицы переходов.
Следует сказать, что существуют и другие подходы к созданию пользователем собственных моделей. Так, в системе САЛП [48] пользователю предоставляется возможность описать элемент и алгоритм его функционирования на специальном языке.
9.5. Временные параметры моделей элементов
Все временные параметры описываются как целочисленные величины, кратные единице модельного времени TIME. По умолчанию Т1МЕ=1 нс. Можно переопределить это значение.
Основные временные параметры элементов — времена задержки распространения сигнала (далее просто “задержки”) учитываются в пакете ВМ следующим образом.
133
A. Для простейших логических элементов —И, И —НЕ, ИЛИ, ИЛИ —НЕ, И —ИЛИ И —ИЛИ —НЕ, сумматора по модулю 2, мажоритарного — задержки распространения сигнала при включении и выключении, т. е. ^°p и р [30].
Б. Для всех остальных элементов — средняя задержка
^зд.р.ср
B. Специальным моделям — псевдоэлементу монтажной логики и последовательному ключу приписана нулевая задержка.
Г. Предусмотрена модель элемента задержки на N единиц TIME, причем значение N задается пользователем.
Количественные значения задержек могут быть установлены для каждой конкретной схемы двумя способами.
Во-первых, в пакете хранятся значения задержек, принимаемые по умолчанию. При этом для каждой БМЭ имеется три варианта значений:
а) для элемента ТТЛ; б) для элемента КМОП при напряжении питания [/ип=5 В; в) для элемента КМОП при
^и.„ = ю В.
Задержка от любого входа элемента до любого его выхода принимается одной и той же.
Во-вторых, имеется возможность определить индивидуальные задержки для каждого элемента схемы, составив их дополнительное описание.
Наконец, пользователю предоставляется возможность не только задать (принять по умолчанию) детерминированные значения задержек, но и указать поле допуска для этих значений. Моделирование при этом выявляет зону неопределенности момента изменения каждого сигнала в схеме.
Помимо задержек, учитывается свойство фильтрации логическими элементами и более сложными узлами коротких импульсов на входах. Это свойство заключается в том, что кратковременные изменения на каком-либо из входов не влияют на состояние выхода вследствие инерционности элемента. Более сложный случай — близкие по времени изменения на разных входах, логически эквивалентные кратковременному импульсу на одном входе. Степень учета этих явлений регулируется в пакете ВМ с помощью флагов 9 и 10, что поясняется рис. 9.1. Напомним, что флаг — двоичная переменная, используемая для управления режимом моделирования. Значения флагов могут быть заданы пользователем с клавиатуры. Говорят, что флаг поднят (сброшен), если он установлен в состояние 1 (0). В качестве порогового значения длительности отфильтровываемого воздействия принимается значение соответствующей задержки.
Базовые модели простейших ЛЭ и специальные модели сведены в табл. 9.4. Элементы-прототипы в табл. 9.4 и далее приведены как примеры и в качестве образцов, по которым
134
Рис. 9.1. Управление свойством фильтрации кратковременных воздействий в пакете ВМ с помощью флагов 9 и 10: а — пример БМЭ (элемент И—НЕ); 6 — сигналы на входах БМЭ; в, г, д, е — сигналы на выходе БМЭ: в — сброшены оба флага, подавляются короткие импульсы на одиночных входах; г — поднят только флаг 9, подавляются короткие импульсы на одиночных входах и логически эквивалентные им воздействия на различных входах; д — поднят только флаг 10, свойство фильтрации не реализуется; е — подняты оба флага, подавляются только воздействия на различных входах, логически эквивалентные коротким импульсам
а)
Ь
Ю
Ф
Ю
1
0
1 0 1
О-
л
UL
1
0 ь
1
t
1—
1
—и
■ \
_ L
t
описаны с любым элемента —
выбраны значения задержек, прини- ^ маемые по умолчанию. В случаях когда прототип отсутствует, значения задержек приняты условно. Задержки е) цри включении и выключении элемента записаны через дробную черту: t10 /101
1 ЗД.|/ оД.р*
Все БМЭ из табл. 9.4 могут быть реальным числом входов (модель мажоритарного с любым нечетным числом входов).
Модели триггеров приведены в табл. 9.5.
Помимо задержек, для триггеров и всех элементов с памятью, работающих под управлением динамического тактового входа, могут быть учтены времена предустановки ts и удержания th. Пусть для определенности триггер имеет прямой динамический тактовый вход, т. е. запись информации осуществляется по перепаду
0—1 на тактовом входе. Тогда информационный сигнал на входе D (сигналы на входах J, К) должен быть установлен не позднее, чем за время ts до этого перепада и сохраняться неизменным не менее времени th после перепада [32, с. 116; 29, с. 176]. Если эти требования не соблюдены, безошибочное занесение информации гарантировать нельзя. Соответствующей БМЭ в таком случае
присваивается неопределенное состояние.
Для занесения в пакет конкретных значений ts и th необходимо их специальное описание. По умолчанию ts = = th = 0. Следует, однако, помнить, что в любом случае недопустимо изменять информационные сигналы одновременно с рабочим перепадом на тактовом входе — состояние БМЭ станет неопределенным.
В табл. 9.6, 9.7 приведены некоторые БМЭ комбинационных и последовательностных функциональных узлов, упоминаемые далее в задачах. Все эти БМЭ, за исключением ALU и GRP, могут быть настроены параметрически на необходимое число
135
Таблица 9.4
Имя модели
Функциональное описание моделируемого элемента
Пример
Задержка
при описании элементов, нс
элемента-
прототипа
ТТЛ
КМОП 5 В
КМОП
10 в
OR
NOR
ИЛИ
ИЛИ—НЕ
К555ЛЕ1
К561ЛЕ10
15/15
120/200
90/100
AND
NAND
И
И-НЕ
К555ЛА4
К561ЛА8
15/15
160/250
80/120
ANDOR
NANDOR
И-ИЛИ
И-ИЛИ-НЕ
К555ЛР11
20/20
200/250
100/120
MOD2
Сумма по модулю о
К555ЛП5
30/22
-
—
NMOD2
То же с отрицанием
К561ЛП2
—
300/300
160/160
MAJ
NMAJ
Мажоритарный То же с отрицанием
К561ЛП13
30/22
320/320
160/160
ANDW
Псевдоэлемент монтажной логики
-
-
-
SW
Последовательный
ключ
-
-
-
-
DELN
Элемент задержки
—
N/N
N/N
N/N
Таблица 9.5
Имя
Функциональное описание
Пример
элемента-
Задержка при описании элементов, нс
модели
моделируемого триггера
прототипа
ТТЛ
КМОП 5 В
КМОП 10 в
TRSTA
Асинхронный
К555ТР2
22
^-триггер
К561ТР2
—
600
300
TRSTC
Синхронный
22
/£5-триггер
—
—
600
300
TDTS
£>-триггер со статиче¬
К155ТМ7
20
ским управлением
(К561ТМЗ)
—
350
120
TDTD
D-триггер с динамиче¬
К155ТМ2
25
ским управлением
К561ТМ2
—
420
150
TJKTS
Ж-триггер со статическим управлением
(К155ТВ1)
40
-
-
TJKTD
Ж-триггер с динамиче¬
К555ТВ9
25
ским управлением
К561ТВ1
—
600
250
Пр имечание. Скобки означают неполное функциональное соответствие БМЭ указанному прототипу.
136
Таблица 9.6
Имя
модели
Функциональное описание моделируемого узла
Пример
элемента-
прототипа
Задержка при описании элементов, нс
ТТЛ
КМОП 5 в
КМОП
10 в
СОМР
Цифровой компаратор
К555СП1
К561ИП2
24
900
360
SUM
Комбинационный двоичный сумматор
К155ИМЗ
К561ИМ1
40
2000
1000
DSH
Дешифратор двоичного (двоично-десятичного) кода
К155ИДЗ
К561ИД1
36
580
230
MUX
Мультиплексор
К155КП1
К561КП1
35
580
230
IP5K
Двоичный сумматор-пере- множитель
К561ИП5
-.
1500
600
ALU
Четырехразрядное ариф- метическо-логическое устройство
К155ИПЗ
К561ИПЗ
40
1100
400
GRP
Блок ускоренного переноса
К155ИП4
К561ИП4
22
300
90
Таблица 9.7
Имя
модели
Функциональное описание моделируемого регистра
Пример
регистра-
протртипа
Задержка при описании элементов, нс
ТТЛ
КМОП 5 В
КМОП
10 в
RGS
Параллельный регистр со статическим управлением
К155ТМ7
К561ТМЗ
20
350
120
RGD
Параллельный регистр с динамическим управлением
К155ТМ8
К561ТМ2
25
420
150
RG1
Универсальный сдвигающий регистр
К155ИР1
35
-
-
RG13
Универсальный сдвигающий регистр
К155ИР13
30
-
-
RGSP
Сдвигающий регистр
К555ИР8
К561ИР2
20
980
370
входов (выходов, разрядов). Присваиваемые по умолчанию значения задержек в этом случае остаются неизменными. Для моделей регистров сохраняют силу замечания о возможности
137
Таблица 9.8
Имя
Функциональное описание моделируемой БИС
Пример
микросхемы-
прототипа
Задержки при описании элементов, нс
модели
ТТЛ
КМОП 5 В
КМОП 10 в
ROM
Постоянное запоминаю¬
К155РЕЗ
30
щее устройство (ПЗУ)
—
—
580
230
PLA
Программируемая логическая матрица (ПЛМ)
К556РТ1
50
-
-
описания времен предустановки и удержания, сделанные ранее применительно к моделям триггеров.
В табл. 9.8 приведены БМЭ программируемых матричных БИС. Эти модели также настраиваются параметрически; при использовании конкретной версии системы должно быть учтено ограничение на часть адресного пространства, отводимую для хранения информации, содержащейся в ПЗУ и ПЛМ.
Полный перечень БМЭ и их характеристики содержатся в инструкциях по применению пакетов.
9.6. Порядок описания схем цифровых устройств для их моделирования
В этом параграфе рассматривается описание схемы ЦУ на ЯОФС. Порядок описания на ЯОПС изложен в инструкциях по применению пакетов ТМ и ВМ,
На схеме ЦУ, подготавливаемой к описанию на ЯОФС, должны быть пронумерованы все узлы. Узлами считаются:
внешние входы ЦУ;
все выходы всех элементов ЦУ (точнее, выходы соответствующих БМЭ);
условные точки с именами LOGF и LOOT, вводимые при необходимости подачи на неиспользуемые входы БМЭ логических уровней 0 и 1 соответственно.
Таким образом, любой выход и вход каждой БМЭ должен оказаться подключенным к одному (и только одному) узлу. Как правило, внутренним узлам схемы всегда соответствуют реальные выводы элементов ЦУ. Исключения имеют место при использовании вспомогательных моделей: ANDW — для описания монтажной логики или DELN —для дополнительного описания задержек в элементах ЦУ.
Описание задания на моделирование на ЯОФС должно включать в себя простые переменные и массивы, задающие общие характеристики схемы и условия ее моделирования, массивы с именами БМЭ (описание собственно схемы, т. е.
138
Таблица 9.9
Имя
Семантика
Присваиваемые
Значения по
переменной
значения
умолчанию
N
Число узлов схемы
Не более 500, не менее
старшего номера узла, использованного в описании
REGIM
Режим моделирования:
А
D
асинхронный
D
синхронный расчет сигнатур
С
ALF
Алфавит моделирования:
двоичный
2
—
пятеричный
5
5
TIPL
Тип логики:
ТТЛ, ттлш
ТТЛ
ТТЛ
КМОП при UK.n~5 В
КМОП5
—
КПОМ при С/И.п= 10 В
КМОПЮ
—
LOGF
Узел логического 0
В пределах общей
Отсутствие в описа¬
LOGT
Узел логической 1
нумерации узлов
нии означает, что соответствующий узел не используется
NAME
Имя схемы
Последовательность
букв и цифр (не более 14 символов)
элементов и связей между ними) и описание входных сигналов в виде моделей генераторов.
Простые переменные, используемые в описании, приведены в табл. 9.9. Обязательна для явного описания лишь переменная N, значения остальных могут быть приняты по умолчанию, если это устраивает пользователя.
Массивы, используемые в описании (помимо массивов с именами БМЭ), приведены в табл. 9.10. Обязателен для описания лишь массив WWCX, остальные могут быть опущены с принятием соответствующих условий по умолчанию. В массив WYWCX включаются любые узлы, процессы в которых представляют интерес в этом эксперименте над моделью ЦУ. В частности, в него обычно включаются входные узлы для привязки процессов в модели к входным сигналам.
Описание БМЭ имеет вид
МОД=Ж, А2, ..., Ж; (9.1)
где МОД —имя БМЭ; Al, А2, ...— числа, называемые параметрами, в качестве которых могут использоваться: число
139
Таблица 9.10
Имя массива
Назначение массива, задаваемые значения
Значения по умолчанию
WWCX
Список номеров узлов внешних входов схемы не более (75)
-
WYWCX
Список номеров узлов схемы, объявляемых выходными для вывода временных диаграмм (не более 50) или сигнатур (не более 16)
В режимах А и D: первые 50 узлов схемы; в режиме С: первые 16 узлов
INTV
Интервал вывода (начало и окончание) на временные диаграммы результатов; окно расчета сигнатур; в режимах D, С: номера тактов, в режиме А: моменты модельного времени
Начало: первый такт или первый момент времени; окончание определяется наибольшим значением конца зоны в описаниях моделей генераторов
САР
Список номеров узлов тех выходов с тремя состояниями, к которым подключены запоминающие емкости
Отсутствие массива в описании означает, что соответствующих узлов в схеме нет
REST
RESF
Списки номеров узлов тех выходов с тремя состояниями, которые для исключения возможной неопределенности подключены через резисторы к уровням логической 1 (REST) и логического нуля (RESF); резисторы не описываются
Отсутствие массива в описании означает, что соответствующих узлов в схеме нет
PARTI ME
Определение значения единицы модельного времени TIME (отличного от 1 нс) и, возможно, границ поля допуска для задержек, одинакового для всех элементов. При изменении единицы TIME выполняется пересчет задержек с округлением в меньшую сторону
Отсутствие массива в описании означает принятие значения Т1МЕ=1 нс*и нулевой ширины поля допуска
НС
Список номеров тех узлов, для которых пользователь задает начальные состояния с указанием этих состояний (0 либо 1)
Всем узлам не упомянутым в массиве, присваивается неопределенное начальное состояние (при отсутствии массива НС — всем узлам)
Альтернатива: программное обнуление начальных состояний всех узлов при поднятом флаге 4
140
входов, выходов, разрядов элемента, либо жестко фиксированное для данной БМЭ, либо выбираемое пользователем для ее настройки; номера узлов подключения входов и выходов; число, несущее дополнительную информацию.
Общий порядок описания по схеме (9.1):
МОД=число входов, число выходов, номера узлов подключения входов, номера узлов подключения выходов, дополнительная информация.
Дополнительная информация включается в описание лишь в отдельных случаях, остальные элементы описания используются всегда. Информация о числе входов иногда детализируется применительно к входам различного назначения.
Все элементы, отображаемые на одну и ту же БМЭ, описываются в одном массиве с именем МОД; описания разделяются знаками “!”, массив всегда завершается знаком
МОД=^41 Д2, ..., АК\
C1]C2, ...‘ СР\
В описании схемы не должно быть двух массивов с одинаковыми именами. Далее массивы описания записываем в строку.
Порядок описания входов БМЭ безразличен лишь при условии, что они взаимозаменяемы. В других случаях порядок описания входов жестко регламентируется. Выходы также описываются в строго установленном порядке.
Так, например, порядок описания БМЭ триггеров должен соответствовать указанному в табл. 9.11.
Как правило, входы БМЭ —прямые (исключения оговариваются). Для указания на то, что вход инверсный, его описывают со знаком “минус” (“—”). На значение задержки это не влияет.
Неиспользуемые входы БМЭ подключают к узлу LOGF или LOGT (смотря по тому, какой логический уровень является пассивным для данного входа). Это относится и к тем входам, которые отсутствуют у описываемого элемента, но предусмотрены в соответствующей БМЭ. Например, у триггера 1/2 К555ТВ6 [30, с. 81] нет входа 5, предусмотренного в модели TJKTD.
Всем неиспользуемым по схеме ЦУ выходам БМЭ присваивается в описании номер “0”. При трансляции описания вместо нулей подставляются свободные номера узлов.
В качестве примера приведем описание триггеров, показанных на рис. 9.2: TRSTA = 2,2,1,2,3,4; TRSTC = 3,2,6,5,7,8,9; TDTS = 2,2,11,10,12,13; TDTD = 4,2,16,15,-14.-17,18,19;
TJKTD = 5,2,22,21,23,20,24,25,26! 5,2,-29,28,30,-27,33,32,0;
Последним описан триггер, у которого вход R не используется (вход БМЭ TJKTD подключен к узлу LOGF = 33) и
141
Таблица 9.11
Модель триггера
Число
входов
Число
выходов
Порядок
описания
входов
выходов
TRSTA
2
2
5, R
Прямой, за¬
TRSTC
3
2
С, S, R
тем инверсный
TDTS
2
2
С, D
TDTD
4
2
С, D, S, R
TJKTS, TJKTD
5
2
С, /, К, S, R
оставлен неподключенным инверсный выход (вместо номера узла проставлен 0). Заметим, что вместо 33, ... можно записать ..., —34, ..., где LOGT = 34 — номер узла логической 1.
Примеры описаний схем имеются в задачах (см. гл. 10, 11).
Порядок описания более сложных БМЭ приведен в инструкциях по применению пакетов ТМ и ВМ.
Порядок описания ПЗУ
ROM = общее число входов, число выходов, номера
узлов подключения входов разрешения, номера узлов подключения адресных входов, номера узлов подключения выходов, число входов разрешения;
Кроме того, заполняется массив PROGROM, в котором перечисляются двоичные выходные наборы ПЗУ, упорядоченные по возрастанию адресов. Наборы записываются в восьмеричном коде.
Приведем пример описания ПЗУ с семью выходами и пятью адресными входами (рис. 9.3). Единственный вход разрешения (инверсный) постоянно подключен к нулевому уровню. ПЗУ запрограммировано для индикации в виде шестнадцатиричных символов четырехразрядных двоичных слов, поступающих на входы 1—4. При поступлении единичного уровня на вход 5 индицируется прочерк. Описание предназначено для занесения в БД в качестве АПМ с именем ROMSEG.
1 —
S
т
— 3 5 — 6 —
S
с
т
— 8 10 —
л
т
2 —
R
‘
,— 4 7 —
R
1
у—9 11 —
с
14—$$
15 — D
16-
17—\R__
—18
-19
2°—1
S
т
21 —
J
22—
'с
23—
к
24—
R
—25
-26
29-
F
т
J
к
<
к
-12
-15
-32
Рис. 9.2. Условные графические обозначения триггеров
142
7
8
9
10 11 12 13
F
£
A
G
D
2
В
C
Рис. 9.3. К описанию АПМ на основе ПЗУ 1 — ПЗУ; 2 — обозначения сегментов индикатора
NAME=ROMSEG; N=13; LOGF=6;
WWCX = 1—5; WYWCX = 7—13;
ROM = 6,7 -6,1,2,3,4,5,'7,8,9,10,11,12,13,1;
PROGROM = 77,6,133,117,146,155,175,7,177,157,167,71,161, 166,163,76,16 *100;
Последняя запись в массиве PROGROM означает, что число 100 должно быть повторено 16 раз (индикация прочерка).
Описание ПЛМ строится по тому же принципу: описание включения ПЛМ в схему ЦУ (массив PLA) и описание программирования ПЛМ; последнее занимает два массива, так как кроме выходных наборов, необходимо описать также и конъюнкции (термы), заносимые в первую матрицу ПЛМ [31, 33].
При ЛМ с учетом временных параметров элементов для пользователя весьма существенна возможность задать эти параметры по своему усмотрению. В пакете ВМ для этой цели служат специальные массивы, перечисленные в табл. 9.12.
Описание массива DLNNN для случая простейших логических элементов (см. табл. 9.4, первые пять строк):
DLNNN = НЭ,КЭ,Т01,Т10;
где НЭ и КЭ — начальный и конечный номера элементов в массиве NNN в описании схемы; в частном случае НЭ=КЭ; Т01 и Т10 —значения и £3д° р.
Если, например, в массиве NAND в описании схемы фигурируют шесть элементов, то массив
DLNAND = 1,3,22,15! 6,6,7,6;
изменяет задержки 1,2,3 и 6-го элементов; для остальных сохраняются значения по умолчанию.
Для комбинационных БМЭ, ПЗУ и ПЛМ массив DLNNN имеет вид
DLNNN=НЭ,КЭ,ТЗ;
143
Таблица 9.12
Имя массива.
Назначение
DLNNN
NNN — имя БМЭ
А. Описание задержек, отличных от задаваемых по умолчанию. Задержки одинаковы для всех сочетаний вход-выход каждого элемента, описанного в массиве.
Б. Описание времен предустановки ts и удержания th для элементов с памятью.
Формат описания различен для простейших логических элементов, комбинационных узлов и элементов с памятью
DWNNN
NNN-имя БМЭ (кроме имен из табл. 9.4)
Описание задержек, неодинаковых для различных входов конкретного элемента (все выходы БМЭ срабатывают одновременно)
RZNNN
NNN-имя БМЭ
Описание для отдельных элементов допусков на значения задержек, отличных от допусков, задаваемых массивом PARTIME (см. табл. 9.10), либо отличных от нуля, если массив PARTIME не описан.
Задаваемый допуск одинаков для всех задержек каждого конкретного элемента, описанного в массиве RZNNN
где ТЗ —средняя задержка БМЭ.
Для элементов с памятью (см. табл. 9.5, 9.7), имеющих динамический тактовый вход, в описание массива DLNNN добавляются значения времен предустановки ts (ТПР) и удержания th (ТУД):
DLNNN=НЭ,КЭ,ТЗ,ТПР,ТУД;
Описание задержек, неодинаковых для различных входов одного элемента, имеет вид DWNNN= НЭЛ,НУЗ,ТЗ;
где НЭЛ — порядковый номер элемента в массиве NNN в описании схемы; НУЗ — номер узла, к которому подключен данный вход; ТЗ — назначаемое значение задержки.
Описание допусков на значения задержек имеет вид, одинаковый для всех типов БМЭ:
RZNNN=НЭ,КЭ,Д“,Д+;
где Д , Д + — нижняя и верхняя границы поля допуска в процентах, 0<Д“, Д+<100 %. Назначаемый допуск действует как для значений задержек, принятых по умолчанию, так и для определенных в массивах DLNNN, DWNNN.
Для описания входных воздействий, подаваемых на модель ЦУ, в пакетах ТМ и ВМ используются модели генераторов (МГ).
Описание МГ периодической импульсной последовательности имеет вид
GT = ЫУЗ,НЗ,КЗ,ТИ,ТП,ЧП;
144
где НУЗ — номер узла подключения; НЗ и КЗ (начало и конец зоны действия генератора) — номера единиц модельного времени, совпадающие с началом первого импульса и окончанием последней паузы последовательности; ТИ и ТП — длительность импульса и паузы; ЧП —число периодов в последовательности. Для синхронных режимов параметры МГ описываются в тактах, для асинхронного режима — всегда в наносекундах. В последнем случае к имени МГ добавляется буква A: GTA.
Описание МГ произвольной импульсной последовательности имеет вид
GP = HY3,H3,K3,T1,T2,...TK;
где НУЗ и НЗ имеют прежний смысл; уровень сигнала в конце зоны (КЗ) может быть любым (0 или 1); Tl, Т2, ...— моменты изменения уровня сигнала на противоположный (записывается номер первой единицы модельного времени, соответствующей новому значению сигнала).
С целью экономии памяти введено три разновидности МГ GP, различающиеся допустимым числом изменений уровня: GP5A (не более двух изменений), GP10A (не более семи), GP25A (не более 22). К одному и тому же узлу можно подключить и несколько МГ при условии, что зоны их действия не перекрываются. В синхронном варианте буква А заменяется на S.
Модель генератора-счетчика используется только в синхронных режимах и предназначена для организации полного двоичного перебора на заданных входах модели ЦУ. Ее описание GC = H3, КЗ, НУ31, НУ32,..., НУЗК; где НЗ и КЗ задают начало и окончание перебора в номерах тактов; НУ31, НУ32, ...— номера узлов подключения выходов МГ; число их — не более 15.
Поясним еще назначение некоторых флагов.
Флаг 2 определяет режим вывода состояний узлов схемы по списку WYWCX на временные диаграммы. При сброшенном флаге выводятся все вычисляемые состояния узлов; при поднятом—лишь начальное и конечное состояния в каждом такте. Этот режим удобен для определения длительности переходных процессов в ЦУ после каждого входного воздействия. Флаг 2 используется только в синхронном режиме.
Флаг 7 в поднятом состоянии позволяет выполнить перед началом моделирования логический контроль описания схемы. При этом могут быть выявлены грубые промахи в подключении элементов (либо в использовании БМЭ для их описания). По завершении контроля выводится описание схемы и сообщения об ошибках или о сомнительных случаях, требующих внимания пользователя.
Флаг 8 в поднятом состоянии разрешает выполнение моделирования с нарастающей неопределенностью; при этом
145
будут учтены допуски на значения задержек, заданные в массиве PARTIME и (или) в массивах RZ... При сброшенном флаге 8 разброс задержек не принимается во внимание. Назначение флагов 9 и 10 рассмотрено в § 9.5 (см. рис. 9.1).
ГЛАВА ДЕСЯТАЯ
СИНТЕЗ, АНАЛИЗ И ПРОВЕРКА КОМБИНАЦИОННЫХ ЦИФРОВЫХ УСТРОЙСТВ
10.1. Комбинационные и последовательностные цифровые устройства
Комбинационными ЦУ (КЦУ) называют, как известно, устройства, не имеющие памяти. Состояние всех элементов КЦУ и его выходов (в стационарном режиме) всегда полностью и однозначно определяются состояниями входов.
Напротив, последовательностными ЦУ (ПЦУ) называют устройства, обладающие свойством памяти. Во внутренней памяти ПЦУ в явной или неявной форме отражена информация о предыстории входной последовательности. В общем случае чем больше емкость внутренней памяти ПЦУ (т. е. чем больше число его различных внутренних состояний), тем больший отрезок входной последовательности может быть учтен в этой памяти.
В ЦУ используются как блоки ”чистой“ памяти (ОЗУ, СОЗУ, регистры), так и узлы, наряду с запоминанием информации осуществляющие и ее преобразование. Последовательностные узлы обеспечивают в ЦУ хранение информации, комбинационные — ее функциональное преобразование. В известном обобщенном представлении ЦУ цифровым автоматом [29, 32] четко выделяются функциональный (логический) преобразователь и узел памяти (просто “память”), КЦУ в этом смысле — автомат без памяти.
Законченное (функционально самостоятельное) ЦУ всегда обладает памятью. Тем не менее, важная роль КЦУ оправдывает отдельное их рассмотрение и изучение.
Структурным признаком КЦУ является отсутствие в его схеме контуров обратной связи (замкнутых путей прохождения сигнала). При этом предполагается, что элементами схемы служат комбинационные элементы, в частности — простейшие ЛЭ (вентили). Условие отсутствия контуров, однако, не необходимо. Существуют схемы с обратными связями, состояния которых, тем не менее, всегда полностью определяются лишь входными сигналами. Примером может служить схема, выделенная штриховым контуром на рис. 11.11.
При исследовании (синтезе, анализе) КЦУ могут приниматься во внимание два аспекта. Во-первых, логическая (функциональная) сторона дела: соответствие реализованных КЦУ функций заданным. Во-вторых, характер переходных процессов в КЦУ — их длительность, влияющая на быстродействие ЦУ в целом, и возможность рисков сбоя. Последние, очевдно, представляют собой реальную опасность лишь в том случае, когда они могут привести к изменению состояния элементов памяти и тем самым повлиять на дальнейшую работу ЦУ.
Переходные процессы могут вообще не приниматься во внимание в случае, когда КЦУ управляет устройством индикации для предъявления информации человеку или электромеханическим устройством, которое значительно более инерционно, чем электронные логические узлы.
146
Рассмотрение ПЦУ будет продолжено в одиннадцатой главе, здесь же займемся лишь КЦУ.
С позиций различия в приемах построения (проектирования) КЦУ их можно разделить на две группы.
К первой группе отнесем КЦУ для преобразования одного кода в другой, дешифрации и контроля кодов, коммутации логических сигналов, а также КЦУ, аппаратно реализующие арифметические (или вообще математические) операции над числами, представленными в двоичных кодах — сумматоры, вычитатели, умножители и др. Комбинационные ЦУ такого рода чаще всего имеют регулярную структуру и строятся с расчетом на возможность их объединения с целью обработки многоразрядных чисел.
Вторую группу оставляют КЦУ так называемой “произвольной логики”. Эти КЦУ строятся для реализации некоторой совокупности сведенных воедино логических зависимостей, причем обычно отсутствует возможность краткого и четкого содержательного описания функционирования ЦУ на языке численных или иных регулярных преобразований.
Примером может служить, скажем, логический преобразователь микропрограммного автомата, управляющего ходом вычислительного процесса в ЦУ.
Комбинационные ЦУ первой группы обычно проектируются “вручную”, на основании хорошо разработанных правил, методик и опыта проектировщика. Для построения КЦУ второй группы целесообразно использовать средства автоматизированного проектирования (программы и системы минимизации логических функций, синтеза автоматов и т. п.).
Анализ и проверка схем КЦУ может проводиться как “вручную”, так и с помощью СЛМ. “Ручные” методы, очевидно, применимы лишь для весьма несложных устройств либо для устройств с регулярной структурой и повторяющимися узлами. В задачах этой и следующей глав применение средств ЛМ рекомендуется в целях их освоения и для несложных схем.
Элементной базой при создании КЦУ служат вентили и более сложные комбинационные узлы (в свою очередь, состоящие, конечно, из вентилей). Такие узлы выпускаются в интегральном исполнении и применяются в качестве неделимых структурных единиц ЦУ.
Особую роль при создании КЦУ (и, в частности, логических преобразователей автоматов) играют программируемые БИС с матричной структурой [31]. Два основных их преимущества — универсальность и возможность программирования (настройки на конкретные функции) непосредственно по месту применения.
10.2. Вентильные логические схемы
В этом и следующих параграфах одновременно с изучением методов разработки и анализа ЦУ предлагается осваивать и соответствующие средства автоматизации их проектирования, главным образом —СЛМ на примере подсистемы ЛМ САПР ДИСП.
Учитывая неавтономность рассматриваемых КЦУ, будем называть их далее комбинационными функциональными узлами (КФУ).
Подлежащий разработке КФУ будем представлять как логический преобразователь с т входами и п выходами. На входах действуют логические переменные xv ..., хт\ на выходах — реализуемые логические функции
yi=fi(xu xm)(i= 1, ..., п). (Ю.1)
147
Наборы входных переменных записываем в формате xm..jcx. Например, входной набор 110 прочитывается какх1 = 0, х2-хъ = 1. Аналогичное соглашение примем и для выходных наборов.
КФУ может быть задан:
1. Содержательным (словесным) описанием.
2. Таблицей истинности (ТИ) или ее специфической разновидностью-картой Карно (КК).
3. Системой логических уровнений, явно и (или) неявно определяющих выходные переменные через входные и допускающих в общем случае вложенность.
4. Системой логических выражений вида (10.1), непосредственно задающих выходные логические функции.
Отметим, что задание КФУ первым или вторым (а иногда и третьим) способом не исключает возможность неполного (частичного) определения выходных функций. Иначе говоря, соответствующие описания могут и не давать определенного ответа относительно конкретных значений функции на некоторых из (иногда и на большинстве) наборов. Если это не является оплошностью постановщика задачи, то обычно при проектировании доопределяют значения функции на упомянутых наборах произвольно (явно или неявно), исходя из удобства схемной реализиции.
Составим, например, словесное описание мажоритарного элемента:
1. Число входов т нечетно, выход один.
2. На выходе 1 появляется всегда, когда не менее чем на / = (ш + 1)/2 входах одновременно появились 1, иначе на выходе 0 (“голосование простым большинством”).
В ТИ трехвходового мажоритарного элемента 1 будет соответствовать наборам 011, 101, 110, 111; значение 0 —
наборам 000, 001, 010, 100. Карта Карно, задающая трехвходовый мажоритарный элемент, показана на рис. 10.1 (клетки, соответствующие нулевым значениям, оставляем пустыми).
Выходная функция элемента может быть описана так:
у = ХхХ^С3 Ух^с^съ УХхХ^С3 VXxX2X3 = ХхХ2 Уххх3 V *2X3,
где приведены неминимизированное (СДНФ) и минимизированное (ДНФ) выражения для мажоритарной функции [34].
Задача ЮЛ. Пусть fM(xx, ...,хт) — мажоритарная функция от заданного нечетного числа т переменных. Справедливо ли выражение
/м (*1, .... *5)=/м(/м (*1, *2> *з)> *4. *5)? (10.2)
Попытайтесь решить задачу аналитически. хз Задача 10.2. На рис. 10.2 показано со- 0 единение двух трехвходовых мажоритарных / элементов в соответствии с функцией (10,2); параллельно по входам подключен пяти-
х1 0 1 i 0
Рис. 10.1. Карта Карно мажоритарной функции
1
1
1
1
X, О 0 1 1
148
Рис. 10.2. Последовательное соединение мажоритарных элементов (к задаче 10.2)
входовый мажоритарный элемент. Описание схемы на ЯОФС для пакета ТМ.
NAME = MAJMAJ; N = 8; DELTA = 0; DELAY = 1;
MAJ = 3,1,1,2,3,61 3,1,4,5,6,71 5,1,1,2,3,4,5,8;
GC = 1,32,1,2,3,4,5;
Генератор GC обеспечивает на входах полный перебор.
Выполнить моделирование и по его результатам проверить ответ на задачу 10.1.
Как известно, в ЦУ используют цифровые компараторы, т. е. КФУ сравнения ^-разрядных двоичных чисел А (Ак_± ... А0) и В (Вк_± ..JB0). Типовые интегральные узлы такого рода формируют на выходе функции F=, F<, принимающие значение “1” при условии, что А >В , А = В, А<В соответственно. Тем самым задано описание КФУ на содержательном уровне. Ограничимся рассмотрением выхода F>. Очевидно, F> = 1, если
(Лк-1 >Bfc-l) V (Лк-1 В к-1) Л (Лк-2 >Bk-l) V (Лк-1 ~ &к-1) Л
Л (Ак_2 - Вк_2) Л (Ак_г >Вк_3) V... (10.3)
Условиям Д>Д и Ai = Bi соответствуют логические формулы ДД и At Ф Вt= AV ДД. Для двухразрядного компаратора имеем
F> = А1В1V (ЛтР 1 V^,|i)(^oB0) = ^i-®i V^qBA.
(10.4)
Получено явное описание логической функции F>.
Задача 10.3. Показать, что выражение (10.4) может быть упрощено:
F> — А1В1 ^A^qBq (10.5)
Задача 10.4. Общее выражение (10.3) сохранит свою силу, если скобки вида (А( = Д) заменить на (А± > В,), чему соответствует логическое выражение ЛД = Д\Д. Используя такую замену, переписать (10.4) и сравнить результат с (10.5).
149
Задача 10.5. Рассмотреть функциональное описание интегрального четырехразрядного компаратора К555СП1 [30, табл. 1.113] и записать логические выражения по образцу (10.4) (ограничиться первыми восемью строками таблицы, т. е. игнорировать пока расширительные входы).
Типовые интегральные четырехразрядные компараторы имеют расширительные входы />, /=, /< для наращивания числа разрядов сравниваемых чисел, так что в целом компаратор имеет 11 входов [30, рис. 1.134]. Очевидно, сигналы А>ВУ А = В, А<В, приходящие на расширительные входы от младших разрядов, взаимно исключают один другой; поэтому из 23 = 8 комбинаций на этих входах лишь три —рабочие (001, 010, 100). Таким образом, из 211 комбинаций на входах компаратора рабочих лишь 3.28 = 768. Следовательно, система выходных логических функций отдельно рассматриваемого четырехразрядного компаратора определена неполностью. В зависимости от конкретной схемной реализации компаратора его реакция на нерабочие воздействия может быть разной (см. также задачу 10.31).
Задача 10.6. Пополнить выражения для выходных функций компаратора (см. задачу 10.5) так, чтобы при любой нерабочей комбинации на расширительных входах все выходные сигналы принимали нулеое значение.
Задача 10.7. Можно ли использовать рассматриваемый компаратор (см. задачу 10.5) для получения сигналов А>В, А <В1 Если да, то каким образом?
В ЦУ нередко приходится использовать перекодирование чисел (или иных данных). В табл. 10.1 сведены основные четырехразрядные двоичные и двоично-десятичные коды.
На основании данных табл. 10.1 можно составить ТИ для преобразования одного кода в другой. Для примера запишем ТИ преобразования стандартного двоичного кода в код Грея (в каждой. паре двоичных комбинаций первая — аргументы, вторая функции): 0000-0000, 0001-0001, 0010-0011, 0011-0010, 0100- 0110, 0101-0111, 0110-0101, 0111-0100, 1000-1100, 1001- 1101, 1010-1111, 1011-1110, 1100-1010, 1101-1011, ИЮ- 1001, 1111—1000. Если в каждой паре поменять комбинации местами, получим ТИ обратного преобразования.
Рекомендуется нанести каждую из этих ТИ на четыре карты Карно и рассмотреть их внимательно. Реализуемые при прямом и обратном преобразованиях функции — линейные функции алгебры логики. Линейные функции реализуются ЛЭ сложения по модулю 2 (М2).
Для построения кода Грея на любое число разрядов следует начать с нулевой комбинации и затем изменять на каждом шаге самую ладшую двоичную цифру, какую только возможно, так, чтобы комбинации не повторялись.
Задача 10.8. Записать пятиразрядный код Грея.
Задача 10.9. Построить из двухвходовых элементов М2 схемы для преобразования шестиразрядного стандартного дво-
150
Таблица 10.1
Двоичная
комбинация
Стандартный
ДВОИЧНЫЙ КОД
Двоичный код Грея
Двоично-десятичные
коды
8421
2421сд
"+ 3"
0000
0
0
0
0
0001
1
1
1
1
—
0010
2
3
2
2
—
0011
3
2
3
3
0
0100
4
7
4
4
1
0101
5
6
5
—
2
оно
6
4
6
—
3
0111
7
5
7
—
4
1000
8
15
8
—
5
1001
9
14
9
—
6
1010
10
12
—
—
7
1011
11
13
—
5
8
1100
12
8
—
6
9
1101
13
9
—
7
—
1110
14
11
—
8
—
1111
15
10
—
9
—
Примечания: 1. Код 8421 — код прямого замещения, основной двоично-десятичный код. 2. Код 2421сд — самодополняющийся код Айкена. 3. " + 3" — самодополняющийся код с избытком 3. Подробнее о двоичнодесятичных кодах см. работу [34], о коде Грея — [29].
ичного кода в код Грея (А) и для обратного преобразования (Б). Принципы построения этих схем изложены в работе [29].
Соединить преобразователи А и Б последовательно, описать схему для пакета ВМ (синхронный режим) и организовать на внешних входах полный перебор.
Задачу решить дважды, построив преобразователь Б в двух вариантах [29, рис. 2.16, а, б]. Сравнить схемы по быстродействию и по расходу двухвходовых сумматоров по модулю 2.
При реализации логических функций схемами из элементов И, И — НЕ, ИЛИ, ИЛИ — НЕ очень часто описание функций задано (получено) в ДНФ, например, как в выражениях (10.4), (10.5). Записи функций в ДНФ (либо в ДНФ с отрицанием — ДНФ — НЕ) соответствует двухуровневое построение схемы, показанное на рис. 10.3, а.
Двухуровневой логической схемой (ДЛС) является часть, реализующая собственно логические преобразования, задаваемые ДНФ. Входные буферные элементы обеспечивают получение инверсных значений переменных и необходимое значение внутреннего коэффициента разветвления; выходные — необходимый наружный коэффициент разветвления. Двухуровневая ЛС может быть построена из перечисленных выше ЛЭ в различных сочетаниях.
Задача 10.10. На рис. 10.3, б показана двухуровневая схема: в первом ярусе элементы типа А, во втором —типа Б. Если использовать в качестве типов А и Б элементы И, И — НЕ, ИЛИ, ИЛИ — НЕ, то возможно 16 различных комбинаций: И, И; И, И-НЕ; И, ИЛИ; И, ИЛИ - НЕ; И-НЕ, И; И-НЕ, И —НЕ и т. д. Проанализируйте, какие из этих сочетаний
151
а)
1
X
ДМ'
1
т
*
7/п
*, 7
/■
X
5).
А
б
А
в)
^=Q-e“l=0-e да
&о
Рис. 10.3. Использование ЛЭ в логических схемах
пригодны для реализации ДНФ (ДНФ —НЕ)? Какие результаты дают другие сочетания?
Задача 10.11. Проверить свой ответ на задачу 10.10 моделированием (пакет ТМ, двоичный алфавит). Соединить параллельно по входам 16 схем (рис. 10.3, б) с различными комбинациями элементов в двух ярусах и организовать на входах полный перебор.
В задаче 10.10 для варианта, скажем, И — НЕ, И получаем у = х1х1 х3х4 = х1х2 V х3хА (ДНФ —НЕ).
Для варианта ИЛИ — НЕ, И — НЕ:
у = Х1V х2 Х3 V х4 = Хг Ух2 V*3 v*4,
что соответствует четырехвходовому элементу ИЛИ.
В ГОСТ 2.743 — 82 предусматриваются эквивалентные формы условных графических обозначений (УГО) логических элементов (рис. 10.3, в). Эта эквивалентность основана на законах де-Моргана [34]: xvy = xyj ху~ = хМу. В САПР ДИСП соответствующее преобразование обеспечивается возможностью описания входов как инверсных. Например, двум типам элементов (рис. 10.3, в) соответствуют эквивалентные описания А и Б:
A. NAND = 2,1Д,2,3; NOR= 2,1,4,5,6;
Б. OR = 2,1-1,—2,3; AND = 2,1,-4,-5,6;
Задача 10.12. Повторить задачу 10.11, использовав эквивалентные описания элементов И,И — НЕ, ИЛИ, ИЛИ — НЕ на основе законов де-Моргана.
В ЦУ нередко используется так называемая монтажная (проводная) логика. При этом открытые (коллекторные, стоковые) выходы двух или более элементов объединяются общим нагрузочным резистором. В САПР ДИСП для описания такого соединения используется БМЭ псевдоэлемента монтажной логики ANDW (рис. 10.3, г). Элемент “монтажное И” (БМЭ ANDW) перемножает сигналы, приходящие на его входы:
152
У = ХуХ2 Х3ХА = х±х2 УХ3Х4\
таким образом, схема на рис. 10.3, г эквивалентна в логическом отношении элементу 2 — 2И — 2ИЛИ — НЕ [35] и реализует ДНФ — НЕ от входных переменных. Ее описание на ЯОФС:
NAND = 2,1,1,2,5! 2,1,3,4,6; ANDW = 2,1,5,6,7;
Задача 10.13. Исходя из КК (см. рис. 10.1), записать в виде ДНФ —НЕ функцию, определяемую следующим образом: функция трех переменных равна 1, если не менее, чем две переменных, одновременно приняли значение 0, иначе равна 0. Реализовать функцию, используя: а) подходящие сочетания элементов двухъярусной схемы (см. задачу
10.10); б) элементы И — НЕ с открытым выходом и монтажную логику. Описать схемы и проверить их моделированием. При описании схем на ЯОФС открытые выходы специально не оговариваются.
Задача 10.14. Переорганизуйте табл. 10.1 (только для двоично-десятичных кодов) следующим образом: первая колонка— десятичные цифры от 0 до 9; следующие колонки — четырехразрядные комбинации, соответствующие десятичным цифрам в различных кодах.
В переорганизованной таблице (см. задачу 10.14) любые две колонки двоичных комбинаций, упорядоченные соответствующим образом, задают МТИ для преобразования одного кода в другой. Во всех случаях выходные функции недоопределены (определены лишь для 10 наборов из 16). На рис. 10.4 показаны КК преобразования кода 8421 в код с избытком 3. Неопределенные значения функций отмечены прочерками. Считывая с КК ДНФ выходных функций, распоряжаемся неопределенными значениями по своему усмотрению. Имеем
У1 = *1*, У2 = Х1Х2УХ1Х2; у3 = адvxjc3Ух±х^3; у4 = х±х3 V х2х3Vx4 Запись уз в ДНФ — НЕ позволяет использовать одни и те же слагаемые для получения у3 и у4.
Задача 10.15. Реализовать преобразователь кода 8421 в код с избытком 3 на основе приведенных выражений. Построить несколько вариантов, используя различные элементы. Проверить моделированием.
Задача 10.16. Построить ТИ и схемы для преобразования: кода 8421 в код 2421сд; кода 2421сд в код 8421; кода с избытком 3 в код 8421. Проверить схемы моделированием.
Задача 10.17. Построить и проверить моделированием схему, которая могла бы служить (без дополнительного управления ею) как для преобразования кода 8421 в код 2421сд, так и обратного преобразования.
Вернемся к цифровым компараторам. Как показано на стр. 149, компаратор можно описать выражением (10.3) и ему
153
У* Уз у г У1
х2 О 0 1 1
Х4-Хз О О
0 1
1 1 1 О
х1 0 1 1 О
Рис. 10.4. Карты Карно преобразователя кодов
подобными. В выражении (10.4) выходная логическая функция F> окончательно записана в ДНФ. Если, однако, не раскрывать скобки в формуле (10.4), а непосредственно реализовать схемой из ЛЭ скобочную форму, то будет построена многоярусная схема. На рис. 105 показан фрагмент схемы, формирующий результаты сравнения двоичных цифр в i-м разряде (промежуточные результаты при сравнении многоразрядных чисел).
Скобочная форма в (10.4) представляет собой не что иное, как ДНФ от таких промежуточных переменных (каждой из них соответствует скобка).
Задача 10.18. Какие функции будет реализовывать схема (см. рис. 105), если все элементы ИЛИ — НЕ в ней заменить элементами И — НЕ? Используя опыт решения задачи 10.10, предложить другие варианты получения функций, реализуемых этой схемой.
Задача 10.19. По образцу функции (10.3) записать полные выражения для выходных функций четырехразрядного компаратора со входами переноса. Перейти к скобочным логическим выражениям по образцу формулы (10.4) и построить четырехразрядную схему. Описать ее и выборочно проверить моделированием.
Указание. Ячейку, формирующую промежуточные результаты поразрядного сравнения, целесообразно описать и занести в БД как СПМ (см. § 9.4).
Задача 10.20. Решить задачу 10.19 с учетом усложненных требований к компаратору, сформулированных в задаче 10.6.
Задача 10.21. Можно ли использовать компараторы, построенные в задачах 10.19, 10.20, для сравнения чисел, представленных: а) двоично-десятичными кодами 8421, 2421сд, 44 +3”, б) кодом Грея?
Непосредственная независимая реализация всех трех выходных функций компаратора избыточна. Действительно, любая из них должна быть равна единице лишь при условии, что обе другие равны нулю. Например, F_ = F>F< =F> vF< или F<=F=vF>. Точно так же, вообще говоря, избыточны и три расширительных входа, так как, скажем,/< =/=V/>. Но наличие всех трех расширительных выводов — вопрос удобства, в то время как внутренняя
154
Рис. 10.5. Сравнение двоичных цифр в одном разряде цифрового компаратора
реализация компаратора потребителю микросхемы безразлична; речь может идти разве что о поведении микросхемы на нерабочих наборах.
Задача 10.22. Выбрать две из трех функций F>9 F=, Fk по соображениям простоты реализации, построить схему компаратора и выборочно проверить ее моделированием (см. указание к задаче 10.19).
Задача 10.23. Можно ли построить многоразрядный компаратор с последовательным переносом из одноразрядных блоков (см. рис. 10.5)? Из двухразрядных?
Задача 10.24. Взяв за основу структуру схемы (см. рис. 10.5), построить из элементов И —НЕ схему, реализующую логическую функцию у = ЛВфС = АВС У АВС.
Задача 10.25. Построить из элементов И —НЕ схему, реализующую логическую функцию ABQCD =ABCD®ABCD.
Задача 10.26. Взяв за основу структуру схемы [35, с. 739], построить из элементов И — НЕ одноразрядный перемножи- тель-сумматор, реализующий функции сумм S = АфВСфРъх и переноса Рвых = АВСУАРЪХ уВСРвх (см. также задачу 10.24).
Задача 10.27. Построить из элементов И — НЕ одноразрядный перемножитель-сумматор, реализующий функции сум- мы S = АВфСОфРвх и переноса Рвых =ABCD vABPBX v CDPBX (см. также задачу 10.25).
Задача 10.28. Исследовать схему (рис. 10.6) на предмет возникновения в ней статических рисков сбоя. Необходимые пояснения имеются в работе [47, с. 108—112], откуда и заимствована схема. Элементы типа А описать как элементы И, типа Б — как элемент ИЛИ, одновходовый элемент — как инвертор. Зафиксировать сигналы хх = х3 =1, изменять сигнал х2 сначала от 0 к 1, затем от 1 к 0.
Схему моделировать в двух вариантах: а) без элемента, показанного пунктиром (элемент Б описывается как двухвходовый), б) с элементом, показанным пунктиром. Убедиться, что введение избыточного элемента устраняет в рассматриваемой ситуации риск сбоя.
Задача 10.29. Повторить задачу 10.28, описав элементы типа А как элементы ИЛИ, элемент Б— как элемент И. Зафиксировать *i = *з = 0> изменять х2. Выявить различие в поведении обеих схем.
Задача 10.30. Моделировать каждую из четырех схем, рассмотренных в задачах 10.28, 10.29, при входной последовательности х3х2х1 = 011,100, 111,101,001,010,110,000. Сравнить ре-
155
Рис. 10.6. Комбинационная схема к задачам 10.28 — 10.30
зультаты с полученными в предыдущих задачах и убедиться, что введение в комбинационную схему избыточных элементов может полностью устранить риски сбоя лишь при условии, что переменные на входах изменяются поодиночке (интервал между изменениями должен быть достаточен для завершения в схеме переходных процессов).
10.3. Типовые комбинационные функциональные узлы
В этом параграфе рассматривается построение типовых КФУ из простейших ЛЭ или менее сложных КФУ, применение КФУ по прямому их назначению (типовое включение), а также некоторые “нетиповые” способы применения отдельных узлов (микросхем). Принципы построения и функционирования КФУ широко освещены в литературе [29, 30, 32, 34, 40, 49].
Задача 10.31. Сравнить параллельный и последовательный способы объединения четырехразрядных компараторов в многоразрядную схему [30, с. 183]. Построение 24-разрядного компаратора по параллельной схеме показано на рис. 10.7. В последовательной схеме расширительные входы каждой следующей секции соединяются с одноименными выходами предыдущей; на расширительные входы младшей секции подаются постоянные уровни так же, как на рис. 10.7.
При изучении параллельной схемы обратить внимание на возможность появления нерабочих комбинаций на расширительных входах (см. пояснения перед задачей 10.6). Следует ли все комбинации на расширительных входах, кроме 001,010,100 считать нерабочими, если иметь в виду необходимость объединения микросхем в параллельную схему?
Задача 10.32. Построить параллельную и последовательную схемы 24-разрядного компаратора (см. задачу 10.31) из четырехразрядных блоков (БМЭ СОМР). Соединить схемы параллельно по входам и описать на ЯОФС для пакета ВМ. Дополнительно подключить ко входам еще одну БМЭ СОМР, описав ее как 24-разрядную. Задать входные последовательности для выборочной проверки логических и временных соотношений. Использовать по умолчанию задержки для элементов ТТЛ.
Указание. Для упрощения эксперимента зафиксируйте одно из чисел, скажем число А (подключив соответствующие входы к постоянным логическим уровням LOGF и LOGT), и меняйте лишь число В.
156
В задаче 10.32 три проверяемые схемы 24-разрядных компараторов будут иметь при моделировании различные задержки: а) компаратор на основе 24-разрядной модели —
задержку, предусмотренную для БМЭ СОМР (24 нс для элемента ТТЛ); б) параллельная схема — 2 х 24 = 48 нс; в) последовательная схема — различные задержки от разных блоков к окончательным выходам (6 х 24 = 144 нс для первой ступени, 24 нс —для последней).
Задержка 24-разрядной БМЭ может быть откорректирована и приведена в соответствие с задержками реальной схемы компаратора — последовательной или параллельной. Для этого используется массив DWCOMP либо массив DLCOMP (см. § 9.6).
Пусть при решении задачи 10.32 БМЭ СОМР описаны в следующем порядке: первые шесть составляют параллельную схему (см. рис. 10.7), следующие шесть — последовательную [30, с. 183], 13-я БМЭ — 24-разрядная.
823'
V
•4*
4о
V"
А18’"
В15
"13
10 .Ajn
а8...а5
V
вп
А,... А,
о
Рис. 10.7. Параллельная схема многоразрядного компаратора
157
Полагая, что 24-разрядная БМЭ использована для описания параллельной схемы, откорректируем задержку следующим образом:
DLCOMP = 13,13,48;
Если же 24-разрядная БМЭ описывает последовательную схему, то в массиве DWCOMP должны быть описаны задержки 6x24=144 нс, 5x24 = 120 нс, ..., 2x24 = 48 нс для входных узлов соответственно 1, 2, ..., 5-й ступеней.
Задача 10.33. Повторить моделирование схемы (см. задачу 10.32), скорректировав задержку 24-разрядной БМЭ СОМР сначала применительно к параллельной, затем — к последовательной схемам.
Задача 10.34. Схема ОДС [32, § 11.1; 29, § 4.2] может быть представлена различными способами. Помимо представления на уровне простейших ЛЭ (скажем, И —НЕ [35, с. 739]), ОДС можно описать как параллельное соединение трехвходовых элементов М2 (функция “сумма”) и мажоритарного (функция “перенос”). В пакетах ТМ и ВМ возможно описание ОДС как одноразрядной БМЭ SUM.
В схемотехнике цифровых устройств широко распространено иерархическое построение схем. С целью освоения такого подхода построить иерархическую структуру четырехразрядного сумматора, описывая ее для моделирования вложенными СПМ (см. § 9.4). Построение структуры иллюстрируется рис. 10.8.
A. Соберем из ЛЭ И — НЕ схемы трехвходовых элементов М2 и мажоритарного и занесем их в БД с именами РММ2 и PMMAJ:
NAME=PMM2; N=8; WWCX=l-3; WYWCX = 8; NAND =
= 3,1,1,-2,-3,4! 3,1,-1,2,-3,5! 3,1,-1,-2,3,6! 3,1,1,2,3,7!
4,1,4,5,6,7,8;
NAME = PMMAJ; N = 7; WWCX = 1-3; WYWCX = 7;
NAND = 2,1,1,2,4! 2,1,2,3,5! 2,1,1,3,6! 3,1,4,5,6,7;
Оба элемента реализованы в виде ДЛС из ЛЭ И — НЕ.
Б. Объединим СПМ РММ2 и PMMAJ в СПМ PM1SUM, представляющую ОДС:
NAME = PM1SUM; N = 5; WWCX = 1-3; WYWCX = 4,5;
РММ2 = 3,1,1,2,3,4; PMMAJ = 3,1,1,2,3,5;
На выходе 4 СПМ PM1SUM реализуется функция суммы, на выходе 5 — функция переноса.
B. Из четырех СПМ PM1SUM соберем схему четырехразрядного сумматора с последовательным переносом [29, рис. 4.2; 32, рис. 11.9, а]:
NAME=PM4SUM; N = 17; WWCX=l-9; WYWCX = 10-14;
PM1SUM = 3,2,1,2,6,10,15! 3,2,15,3,7,11,16! 3,2,16,4,8,12,
17! 3,2,17,5,9,13,14;
На узел 1 подается входной перенос, на узлы 2 —5 — число А, на узлы 6—9 —число В; четырехразрядная сумма снимается
158
в)
а)
Рис. 10.8. Иерархическая структура четырехразрядного сумматора: а — ЛЭ М2, б — мажоритарный ЛЭ, в — одноразрядный сумматор, г — четырехразрядный сумматор
с узлов 10 — 13, выходной перенос с узла 14; межразрядные переносы действуют в узлах 15, 16, 17.
Задача 10.35. Описания всех СПМ в задаче 10.34 приведены в том виде, в каком они должны быть занесены в БД. Пополнить эти описания, включив в них описания генераторов сигналов и режимов моделирования, и организовать тестирование СПМ. В зависимости от числа входов использовать либо полный перебор, либо выборочную подачу входных сигналов. После тестирования СПМ низшего уровня необходимо удалить из ее описания лишнее и занести СПМ в БД для использования в составе СПМ высшего уровня.
159
Задача 10.36. Организовать сравнение СПМ PM4SUM (см. задачу 10.34) и БМЭ SUM на всех 29 = 512 возможных входных наборах. Подключить модели параллельно по входам, перебор организовать с помощью модели генератора-счетчика GC. Для сравнения использовать сигнатуры (режим С в пакете ТМ). СПМ и БМЭ включить параллельно по входам; сохранить описание PM4SUM из задачи 10.34, для выходных узлов БМЭ SUM использовать номера 18—22 (5Х, ..., 54, РА):
1 и пишира jlu V^l) •••> А 4/*
NAME = SUMSUM; N = 23; REGIM = С; LOGT = 23;
Под номером 23 описан узел логической 1. Число выводимых сигнатур должно быть целой степенью двойки. Поэтому узел LOGT описан шесть раз в списке выходов.
Задача 10.37. Выполнить моделирование по описанию из задачи 10.36. Сигнатуры в узлах 10 и 18, 11 и 19 и т. д. должны совпасть.
Задача 10.38. Описать вентильные схемы четырехразрядных сумматоров с последовательным и ускоренным или групповым переносом (микросхемы К155ИМЗ и К555ИМ6) [36, рис. 3.43 и 3.45]. Включить схемы параллельно по входам и выполнить моделирование с помощью пакета ВМ на выборочно заданных входных наборах. Наблюдать переходные процессы на выходах; оценить различие в быстродействии схем. Полезно подобрать неблагоприятные сочетания двоичных слагаемых на входах, например от суммы 1001 + 0111 перейти к сумме 1111 + 0001 при нулевом входном переносе, и т. п.
Задача 10.39. Можно ли использовать стандартный четырехразрядный сумматор (скажем, К555ИМ6) в качестве компаратора для сравнения двух произвольных четырехразрядных чисел А и В? Какие ответы могут быть получены (А >ВУ А = В и т. п.)? При положительном ответе указать способ включения.
Задача 10.40. Решить задачу 10.39 для случая сравнения числа А с двоичной константой С. При положительном ответе указать способ включения.
Используем сумматоры для преобразования двоично-десятичных кодов (см. задачи 10.14—10.16 и табл. 10.1). Если рассматривать четырехразрядные комбинации как двоичные числа (независимо от значения этих комбинаций в двоичнодесятичных кодах), то преобразование, скажем, кода 8421 в код 2421сд можно представить следующим образом:
(10.6)
160
Рис. 10.9. Преобразователь кода 8421 в код 2421сд 1— код 8421; 2—код 2421сд
где ЛГвх и Л/вых — десятичные эквиваленты двоичных комбинаций на входе и на выходе. Соотношение (10.6) можно реализовать с помощью двоичного сумматора; для выявления порогового значения на входе используем компаратор (рис. 10.9). Когда десятичный эквивалент входной комбинации превышает четыре, сигнал 1 с выхода компаратора подается на сумматор, обеспечивая слагаемое “шесть” во второй строке (10.6).
Задача 10.41. Убедиться в справедливости соотношения (10.6) и в правильности реализации его схемой на рис. 10.9. Проверить схему моделированием.
Задача 10.42. Можно ли заменить компаратор в схеме на рис. 10.9 сумматором? (Ср. с задачей 10.40.) Если да, то построить схему и проверить ее моделированием.
Задача 10.43. Используя четырехразрядные сумматоры, построить и проверить моделированием схемы для преобразования: а) кода 8421 в код “ + 3”; б) кода “ + 3” в код 8421; в) кода 2421сд в код 8421; г) кода 2421сд в код “ + 3”; д) кода “+3” в код 2421сд (см. табл. 10.1). При необходимости использовать инверторы.
Указание. Вычитание числа М при использовании четырехразрядного сумматора можно заменить прибавлением числа 16— М.
В работах [32, § 11.3; 29, § 4.7] описаны схемы перемножения двоичных чисел. Умножение двоичного числа А на двоичное число В сводится к умножению числа А на отдельные разряды В{ и сложению результатов с необходимым сдвигом [32, с. 199]. Перемножение двоичных цифр выполняется элементами И.
На рис. 10.10 в качестве примера показана схема перемно- жителя-сумматора, реализующая арифметическую операцию Q=AT+K + LxM, где N, К, L, М— двухразрядные двоичные
6-1586
161
Рис. 10.10. Перемножитель-сумматор двухразрядных двоичных чисел
числа, Q — четырехразрядное. Условные графические обозначения сумматоров показаны со встроенными элементами И на входах числа В. Выходы переноса обоих сумматоров могут быть использованы для наращивания схемы “по вертикали” (т. е. по числу разрядов чисел К, L). Наращивание “по горизонтали” (по числу разрядов чисел М, N) иллюстрируется самой схемой (рис. 10.10), в которой соединение сумматоров обеспечивает переход от одноразрядных чисел М и N к двухразрядным. Будем коротко характеризовать такие схемы парой чисел Rl9 R2, где R1 и R2 обозначают число разрядов чисел М, N и К, L. Таким образом, на рис. 10.10 показана
(2.2) -схема, собранная из двух (1,2)-схем.
Задача 10.44. Сравнить схему на рис. 10.10 со схемой интегрального перемножителя К561ИП5 [37], рассмотреть и усвоить принципы соединения таких схем при наращивании числа рэзрядо.
Задача 10.45. Собрать (2,2)-сумматор-перемножитель, аналогичный схеме на рис. 10.10, из одноразрядных блоков (см. задачу 10.26) и проверить его работу моделированием.
Указание. Схема, описанная в задаче 10.26, представляет собой (1,1)-сумматор-перемножитель. Из таких схем рекомендуется собрать две (1,2)-схемы, а уже из них —
(2.2) -схему.
Задача 10.46. Описать схему на рис. 10.10 для пакета ТМ (элементы И придется описать отдельно от сумматоров). Параллельно по входам подключить БМЭ IP5K. После выборочного совместного тестирования удалить из описания лишнее и занести схему (рис. 10.10) как СПМ в БД с именем, скажем, SUMMULT.
Задача 10.47. Собрать из СПМ SUMMULT (см. задачу 10.46) схему (4,4)-сумматора-перемножителя и выборочно проверить ее моделированием.
Задача 10.48. В работе [32, с. 163] изложены принципы и приведена схема наращивания размерности дешифраторов (т. е.
162
увеличения числа разрядов дешифруемого двоичного кода).
Построить схему дешифрации пятиразрядного двоичного кода, полагая, что имеются интегральные дешифраторы К555ИД7 [30]. Описать схему, используя БМЭ, и проверить ее моделированием (не забудьте проконтролировать возможность стробирования дешифратора).
Задача 10.49. Интегральный дешифратор К155ИДЗ [30, с. 132] выявляет все 16 четырехразрядных комбинаций и поэтому может быть использован для дешифрации любого из четырехразрядных двоично-десятичных кодов.
Рассмотреть, какие выходы микросхемы К155ИДЗ и в каком порядке нужно использовать для каждого из кодов. Поставить эксперименты с помощью пакета ТМ для всех двоично-десятичных . кодов из табл. 10.1. От эксперимента к эксперименту вам придется менять лишь список выходов WYWCX и описания генераторов (каждый раз задавайте входное комбинации в порядке, определяемом данным кодом для десятичных цифр 0, 1, ..., 9).
Задача 10.50. В работе [32, с. 159] изложены принципы и приведены схемы наращивания размерности мультиплексоров (т. ё. увеличения числа адресуемых информационных каналов). Полагая, что в вашем распоряжении имеется сдвоенный четырехканальный мультиплексор К531КП2 [30, с. 144], построить схему восьмиканального мультиплексора.
Указание. В этой простой задаче выходы мультиплексоров можно объединить просто элементом ИЛИ, обеспечив необходимое управление по стробирующим входам микросхемы К531КП2 (ср. [32, рис. 10.2]).
Задача 10.51. Повторить задачу 10.50, считая, что вместо К531КП2 в вашем распоряжении аналогичный мультиплексор К555КП12, имеющий, однако, выходы с “третьим” состоянием, допускающие использование “монтажной” логики.
Указание. Для описания выходов с тремя состояниями используйте БМЭ SW.
Задача 10.52. Объединить схемы, построенные в задачах 10.50 и 10.51, в одном описании для пакета ВМ, включив их параллельно по входам, и проверить работу схемы моделирования. Использовать БМЭ MUX и БМЭ необходимых ЛЭ. Обратить внимание на величины задержек от общих входов к выходам обеих схем. Задержки БМЭ принять по умолчанию.
Многофункциональные элементы. Пусть некоторая логическая схема реализует функцию F (xv хт). Зафиксируем постоянными логическими
уровнями состояния входов х±, хк, к<т. Тогда по остальным входам хк+ь хт схема будет реализовывать некоторую функцию от га — к переменных f(xk+v хт). Меняя способ фиксации входов xv хк,
можно получать различные функции ft(xk+v хт). Входы xv хк
6
163
используются при этом как настроечные. В этом заключается идея построения многофункциональных ЛЭ (МФЛЭ), оперативно перестраиваемых в процессе работы ЦУ. Многофункциональный ЛЭ называют универсальным (УЛЭ), если он способен при соответствующих настройках реализовать все возможные функции от заданного числа переменных.
Пусть р — настроечная переменная. Двухвходовый элемент М2 реализует функцию у=рфх\ при р- 0 имеем у = х (повторитель); при р = 1 —у = = х (инвертор). Этот прием нередко используется в практике (см. задачу 10.59).
Трехвходовый мажоритарный элемент реализует функцию у=рх±ч чрх^чхлх~>. При р = 0 имеем у = хлх0 (элемент И); при р=1 получаем у -хл Чх2Ух^х2-х1Чх2 (элемент ИЛИ). 1
Стандартный мультиплексор с т адресными и 2т информационными входами представляет собой УЛЭ по отношению к функциям от т переменных. Достаточно на адресные входы А0, ..., Ат_х подать переменные xv ..., хт, а на информационные Dq, ..., DM (М = 2W—1) — значения требуемой функции на наборах соответственно 0...0, ..., 1...1. Эти 2т значений и задают настройку УЛЭ [32, § 13.1; 29, с. 101].
Например, для реализации на восьмиканальном мультиплексоре (т = = 3) мажоритарной функции от трех переменных на входы D0, ..., Z)7 подаются постоянные уровни 0, 0, 0, 1, 0, 1, 1, 1, (ср. с описанием на стр. 148).
Задача 10.53. Построить схему для реализации с помощью восьмиканальных мультиплексоров трехвходовых элементов М2 и мажоритарного и проверить ее моделированием.
Задача 10.54. Реализовать .на 16-канальном мультиплексоре схему сравнения двух двухразрядных двоичных чисел, генерирующую 1 при их неравенстве, 0 при равенстве.
На мультиплексоре с т адресными входами можно реализовать и функцию от п>т переменных, если на настроечные входы подавать не только константы 0 и 1. Для этого необходимо разложить функцию по некоторым т ее аргументам [32, с. 214]. Например, разложение мажоритарной функции /м(a'x, х2, х3) по переменным xv х2 имеет вид
/м = XjX2 F° V x^F1 V X]X2F^ V x1x2F3.
Э^о разложение легко проследить по KK (см. рис. 10.1), где функциям г — г соответствуют столбцы, каждый из которых задает определенную функцию от переменной х3:
F°= 0; F1 = F2 = х3; F3 = 1.
Точно так же в разложении функции от четырех переменных (см. КК на рис. 10.4) по переменным л'з, ха функциям F° —F3 соответствуют строки, и т. п.
Способ реализации, рассмотренный выше, соответствует разложению функции по всем ее аргументам; при этом функции F°, F1,... вырождаются в константы.
См. также стр. 169.
Задача 10.55. Реализовать на четырехканальном мультиплексоре мажоритарную функцию от трех переменных.
На адресные входы А0у Ах подать переменные хъ х2; на вход D0 — 0, на входы D1 и D2 — x3> на вход D3 —1.
164
Задача 10.56. Реализовать и проверить моделированием схему из задачи 10.55.
Задача 10.57. На двухразрядном четырехканальном мультиплексоре К531КП2 [30, рис. 1.103] реализовать ОДС (см. задачу 10.34). Функции “сумма” и “перенос” разложить по переменной Р1Л. Описать схему и проверить ее моделированием.
Задача 10.58. На двух 16-канальных мультиплексорах типа К155КП1 реализовать пятивходовые элементы М2 и мажоритарный. Соединить мультиплексоры параллельно по адресным входам и проверить моделированием.
Задача 10.59. На рис. 10.11 показана схема МФЛЭ, построенная по принципу, использовнному в микросхеме CD4048A. На верхние входы элементов М2 подаются настроечные переменные pv р2, ръ. Многофункциональный ЛЭ реализует в зависимости от настройки восемь различных функций от переменных х1—х4. Определить эти функции аналитически для каждой настроечной комбинации. Сравнить схему на рис. 10.11 с постановкой задач 10.10—10.12. Проверить ответ моделированием.
Важное применение принципа многофункциональности- построение КФУ арифметическо-логических устройств (АЛУ), настраиваемых на выполнение одной из 16 логических либо арифметических операций над двумя m-разрядными словами (числами). Рассмотрим схему четырехразрядного АЛУ К155ИПЗ [30, рис. 1.132]. Ограничимся случаем настройки на режим четырехразрядного двоичного сумматора (на выводе 8 уровень 0, на выводах 3 — 6 управляющее слово 1001). При этом, однако, реализация сумматора отличается от рассмотренных ранее (см. задачу 10.38). Во входной части схемы в каждом разряде формируются так называемые функции генерации переноса Gi = AiBi и распространения переноса Pi=Ai\/Bi [40, с. 135]. Легко проверить, что Gi®Pi=Ai®Bi\ это реализует выходную функцию суммы полусумматора. Добавляя инвертиро-
Рис. 10.11. Многофункциональный логический элемент
165
ванный сигнал входного переноса (вывод 7), в первом разряде получаем: Ft =А1 фВ1ф'С0 = А1фВ1фС0, т. е. функцию суммы на вьшоде 9.
Существенно, что сигналы G, и Pt используются одно- временно . и в старших разрядах для получения Fj (/>/), так что в*; схеме исключается цепочка последовательных переносов при формировании не только выходного переноса (как, скажем, в К555ИМ6), но и разрядных сумм.
Задача 10.60. Проверить, можно_ли сложение по модулю 2 Gffii заменить на произведение G/P,.
Задача 10.61. Построить схему четырехразрядного сумматора с формированием разрядных сумм и выходного переноса при помощи вспомогательных функций Gt и Р,. Необходимый теоретический материал можно найти в работе [40, с. 135; 29, с. 127]. Почти в такую же схему выродится и схема АЛУ К155ИПЗ, если зафиксировать управляющие сигналы на ее входах, как показано выше.
Задача 10.62. Проследить по схеме, построенной в задаче 10.61, глубину логических цепочек от входа переноса ко всем выходам. Проделать то же для схем сумматоров К155ИМ1 и К555ИМ6 (см. задачу 10.38). Сравнить результаты и оценить разницу в задержках. Повторить задачу 10.38, включив построенную схему параллельно с К155ИМ1 и К555ИМ6.
10.4. Применение ПЗУ и ПЛМ для построения комбинационных функциональных узлов
В современных ЦУ для реализации КФУ широко используются программируемые микросхемы с матричной структурой, главным образом ПЗУ и ПЛМ [31; 32, § 13.2, 13.3].
Комбинационные функциональные узлы на ПЗУ. Функциональные возможности ПЗУ полностью характеризуются указанием числа адресных входов т и числа выходов п: (т, и)_Г13У. Такое ПЗУ позволяет реализовать любую систему п логических функций от т переменных, для чего достаточно составить МТИ системы.
Задача 10.63. Реализовать на (6,4)-ПЗУ КФУ, осуществляющий циклический сдвиг входного четырехразрядного слова на 0,1,2,3 разряда. На первые четыре входа ПЗУ подать входное слово хАхъх2хх\ сигналы на оставшихся двух входах х^с5 будут адавать в двоичном коде значение сдвига:
х&х5 00 01 10 11
Выходное слово *4*3*2* 1 хЗл'^тл'4 х2х1х4х^ xjx4x3x2
Для описания МТИ с целью программирования достаточно перечислить выходные комбинации в порядке возрастания входных адресных комбинаций (адресов) от 0...0
166
до В нашем случае имеем (комбинации читаются по
колонкам):
0000
0
0000
0
0000
0
0000
0
0001
1
0010
2
0100
4
1000
10
0010
2
0100
4
1000
10
0001
1
ООН
3
ОНО
6
1100
14
1001
11
0100
4
1000
10
0001
1
0010
2
0101
5
1010
12
0101
5
1010
12
оно
6
1100
14
1001
и
ООН
3
0111
7
1110
16
1101
15
1011
13
1000
10
0001
1
0010
2
0100
4
1001
11
ООН
3
оно
6
1100
14
1010
12
0101
5
1010
12
0101
5
1011
13
0111
7
1110
16
1101
15
1100
14
1001
И
ООН
3
оно
6
1101
15
1011
13
0111
7
1110
16
1110
16
1101
15
1011
13
0111
7
1111
17
ни
17
1111
17
1111
17
Справа от двоичных комбинаций записаны их восьмеричные эквиваленты, используемые для описания содержимого ПЗУ в массиве PROGROM.
Будем считать, что наше ПЗУ имеет инверсный вход разрешения, так что активный режим обеспечивается при подаче на этот вход нулевого уровня. Описание ПЗУ на ЯОФС: NAME = SHIFT4; N = 11; LOGF =11;
WWCX = 1-6; WYWCX = 1-10;
ROM = 7,4,-11,1,2,3,4,5,6,7,8,9,10,1;
PROGROM = 0,1, ..., 17,0,2, ..., 17,0,4, ..., 17,0,10, ..., 17;
В последней строке описания вместо точек проставляются все приведенные выше восьмеричные эквиваленты выходных комбинаций.
Задача 10.64. Завершить оформление описания из задачи 10.63; на входных узлах 1—6 организовать полный перебор. Проверить работу комбинационного сдвигателя с помощью пакета ТМ.
Задача 10.65. Полагая, что имеются лишь (5,4)-ПЗУ, построить из них (6,4)-ПЗУ и реализовать на нем сдвигатель из задачи 10.63. Одноименные выходы ПЗУ объединить монтажной логикой (БМЭ ANDW, см. стр. 132).
Указание. Задача наращивания числа адресных входов ПЗУ решается точно так же, как и при наращивании числа адресных входов дешифратора [32]; см. также задачу 10.48.
Задача 10.66. Создать АПМ микросхемы К155ПР6 (КФУ для преобразования двоично-десятичного кода в двоичный). Микросхема представляет собой (5,8)-ПЗУ, программируемое в условиях производства (так называемое “масочное” ПЗУ). МТИ имеется в работе [36, табл. 3.46]. После необходимого тестирования занести АПМ в БД с именем PR6.
167
Задача 10.67. Используя микросхему К155ПР6 (АПМ PR6, см. задачу 10.66), построить схемы для преобразования двух и трех тетрад двоично-десятичного кода в двоичный код [36, рис. 5.90 и 5.91]. Выборочно проверить схемы с помощью пакета ВМ; оценить величины задержек.
Задача 10.68. Создать АПМ для микросхемы К155ПР7 (КФУ для преобразования двоичного кода в двоично-деся- тичный на основе (5,8)-ПЗУ; ср. с задачей 10.66). Занести АПМ в БД под именем PR7. МТИ имеется в работе [36, табл. 3.47].
Задача 10.69. Используя микросхему К155ПР7 (АПМ PR7—см. задачу 10.68), построить схемы для преобразования 8- и 12-разрядного двоичного кода в двоично-десятичный [36, рис. 5.93 и 5.95]. Выборочно проверить схемы с помощью пакета ВМ; оценить величины задержек.
Задача 10.70. Построить на микросхеме К155РЕЗ [36], которая представляет собой (5,8)-ПЗУ, КФУ для преобразования пятиразрядного двоичного кода в код Грея и для обратного преобразования (см. задачи 10.8, 10.9). Выходы 1—4 использовать для первого — четвертого разрядов кода Грея (по отношению к этим выходам входная комбинация рассматривается как комбинация двоичного кода); выходы 5—8 используйте для четырех младших разрядов двоичного кода (по отношению к ним входная комбинация рассматривается как комбинация кода Грея). Старший разряд, очевидно, можно передавать без преобразования. Благодаря этому пятый вход ПЗУ остается неиспользованным; БМЭ ROM может быть описана как (4,8)-ПЗУ.
Проверить схему моделированием при полном переборе на входах.
Наращивание ПЗУ Наращивание ПЗУ по числу выходов осуществляется легко: если имеются (т, я)-ПЗУ и
нужно построить (т, АГ)-ПЗУ, причем (к — 1) п < N < kn, то используют к (т, /?)-ПЗУ, включая их параллельно по входам.
Наращивание ПЗУ по числу входов требует значительно больших затрат. Для построения из (т,п)-ПЗУ блока на М входов (М=я+А:), т. е. (М, я)-ПЗУ, требуется использовать 2к штук (т, п) -ПЗУ плюс схему управления ими по входам разрешения (см. задачу 10.65).
Задача 10.71. Используя параллельное по входам включение (5,8)-ПЗУ К155РЕЗ, построить дешифратор пятиразрядного двоичного кода и проверить схему моделированием. Сравнить решение с решением задачи 10.48.
Задача 10.72. Подсчитать, сколько (5,8)-ПЗУ К155РЕЗ потребуется для посроения дешифратора шестиразрядного двоичного кода. Сравнить с построением такого же дешифра¬
168
тора из микросхем К555ИД7 [30, с. 163].
Задача 10.73. Необходимо построить блок ПЗУ емкостью 1024 восьмиразрядных слова, т. е. (10,8)-ПЗУ. Подсчитать, сколько микросхем придется использовать (не считая схемы управления), если в распоряжении имеются: а) (5,8)-ПЗУ
К155РЕЗ; б) (8,4)-ПЗУ К556РТ4; в) (9,8)-ПЗУ К556РТ5 [36, 38].
Переорганизация ПЗУ, т. е. изменение соотношения между числами его входов и выходов при условии сохранения общей информационной емкости. Для этого приходится использовать вспомогательные элементы; удобно применять мультиплексоры.
Пусть, например, требуется переорганизовать (5,8)-ПЗУ емкостью 32 восьмиразрядных слова (32x8 = 256 бит) для реализации одной функции от восьми переменных F(xx, ... , х8), т. е., по существу, создать (8,1)-ПЗУ. Используем мультиплексор с восемью информационными входами D0, ..., D7 и тремя адресными входамиЛ0,Л1,Л2. Подадим младшие переменные хх, ..., х5 на входы ПЗУ, старшие переменные х6, х7, х8 — на адресные входы мультиплексора; выходыу0, ...,у7 ПЗУ соединим с одноименными входами D0, ..., D7 мультиплексора. Полученная схема представляет собой (8,1)-ПЗУ, которое можно запрограммировать для реализации любой функции F от восьми переменных.
Для этого выход у0 ПЗУ программируется на значения функции F на наборах с 000 00000 по 000 11111, выход Уу— на значения F на наборах с 001 00000 по 001 11111, ..., выход у7 — на значения F на наборах с 111 00000 по 111 11111. Такое распределение значений функции означает не что иное, как разложение ее по переменным х6—х8 (см. § 10.3). Использование этого приема рекомендуется при решении задач 10.74, 10.75.
Задача 10.74. Имея в распоряжении (5,8)-ПЗУ, составить схему для переорганизации его с целью реализации двух функций от семи переменных и схему для реализации четырех функций от шести переменных. Целесообразно ли решать такие задачи путем расширения ПЗУ по входам (см. с. 168)?
Задача 10.75. Как следовало бы распределить значения функции по выходам ПЗУ, если бы в условиях примера (см. выше) на входы ПЗУ были поданы старшие переменные, а на адресные входы мультиплексора — младшие?
Комбинационные функциональные узлы на ПЛМ. Для реализации на ПЛМ система логических функций должна быть представлена не в СДНФ, а в ДНФ. Пусть имеется ПЛМ с т входами и п выходами. Для реализации на ней системы п логических функций от т переменных необходимо соблюсти дополнительное (по сравнению с ПЗУ) ограничение. А именно, общее число попарно различных слагаемых во всех ДНФ системы не долно превышать некоторого фиксированного для данной ПЛМ числа 1; I называют числом
169
термов или числом промежуточных шин [32, гл. 13]. Таким образом, следует говорить не о (т, и), а о (т, п, /)-ПЛМ. Сами по себе слагаемые ДНФ (термы) могут состоять из любого числа букв — от 1 до т включительно.
В составе БИС ПЛМ оказывается одним из основных средств реализации произвольной логики [39], так как метод ПЗУ в этом случае невыгоден из-за большой избыточности. Количественное сравнение проводится, например, в работе [31] по критерию так называемой информационной площади. По сути дела, информационная площадь численно совпадает с числом программируемых элементов в ПЗУ или ПЛМ, например, с числом пережигаемых перемычек.
Задача 10.76. Записывая для fc-разрядного цифрового компаратора (без входов переноса) выражения типа (10.3), попытаться установить закономерность возрастания числа слагаемых N в ДНФ типа (10.4) в зависимости от числа разрядов к. Очевидно, для функций F> й F< результат будет одинаковым.
Задача 10.77. Установить закономерность возрастания числа слагаемых в ДНФ, описывающей функцию Fm ^-разрядного цифрового компаратора, в зависимости от числа разрядов к (ср. с задачей 10.22). Функция F= = 1, если
(Лк-i ~^k-i)^(Лк-2 ~ Вк.2)л... л(/40 = В0).
Вместо функции, F= (см. задачу 10.77) можно реализовать ее отрицание F= с последующим инвертированием. Функция F= = 1, если (Ak_1*Bk_1)v...v(AQi£BQ). Условие А^В{ реализуется логической функцией ЛДШ, =ЛД \МД.
Задача 10.78. Решить задачу 10.77^ при условии, что непосредственно реализуется функция F, с последующим ее инвертированием.
Задача 10.79. Обобщив решения задач 10.76 — 10.78, оценить необходимые значения параметров т, п, / ПЛМ, на которой можно было бы реализовать /с-разрядный цифровой компаратор с выходами F>y F=, F< (к = 4, 6, 8). Использовать прием, рассмотренный в задаче 10.22, для чего потребуется дополнительный ЛЭ.
Указание. В работе [31] подробно рассмотрен вопрос, связанный с реализацией на ПЛМ цифровых компараторов. Там же приводятся примеры реализации КФУ на более сложных, чем рассматриваемые здесь, трехъярусных ПЛМ.
Минимизация системы логических функций. Если предполагается реализация системы на ПЛМ, то в минимизирующей программе полезно учесть следующие соображения: а) общее число попарно различных слагаемых в минимизированной системе должно быть по возможности малым (кратчайшая система ДНФ); б) число переменных, входящих в каждое слагаемое, не играет роли, так как в ПЛМ предусмотрена возможность реализации на каждой из промежуточных шин термов с числом сомножителей до т [31]; в) желательно предусмотреть возможность инвертирования не¬
170
которых функций для более простой их реализации, так как в выходных цепях ПЛМ обычно предусматривают программируемые инверторы [31].
Чтобы сделать решение обозримым, возьмем наглядный пример задачи небольшой размерности: число аргументов — 4, число функций —7. Построим преобразователь двоично-десятичного кода в код управления стандартным семисегментным индикатором. Как следует из табл. 10.1, можно построить преобразователь, который без дополнительного управления обеспечит индикацию десятичных цифр, представленных на его входах как в коде 8421, так и в коде 2421сд (ср. с задачей 10.17). Полагая, что сегменты индикатора включаются при логическом уровне 1 управляющего кода, и представляя входные и выходные двоичные комбинации их восьмеричными эквивалентами, получим исходную МТИ:
0,173
5,67
13,67
1,30
6,167
14,167
2,155
7,31
15,31
3,75
10,177
16,177
4,36
11,77
17,77
Здесь запись, например 14,167, означает двоичные комбинации аргументов 1100 и функций 1110111 (нумерация справа налево); таким образом, на входном наборе 1100 (десятичная цифра 6 в коде 2421сд, в коде 8421 не используется) будут гореть все сегменты индикатора, кроме четвертого. Нумерация сегментов показана на рис. 10.12.
Минимизация этой системы с помощью учебной программы дала следующие результаты:
№
терм №
терм
No¬
терм
1
0101 6
хЮО
ll
0100
2
хООх 7
хОЮ
12
1хх0
3
0x11 8
xlxO
13
111х
4
хООО 9
11x0
14
Юхх
5
хОИ 10
ЮОх
Распределение термов по функциям:
Функция
1: 1,3,4,6,7,9,12,14;
Функция
4:
2,3,7,9,11,13;
Функция
2: 1,4,8,12,13,14;
Функция
5:
1,2,3,8,9,14;
Функция
3: 1,5,7,8,12,13,14;
Функция
6:
1,4,5,6,7,12,13,14;
Функция
7:
4,6,7,12.
В записи термов знак_ “х” означает отсутствие буквы; например, 1хх0 означает x4xv
171
1
Рис. 10.12. Семисегментный индикатор
Как видно, на реализацию системы затрачено 14 термов, т. е. в среднем по два терма на функцию. Это достигается путем отказа от оптимального результата для каждой отдельно взятой функции. Заметим, что программа не инвертировала ни одной из функций, хотя такая возможность в ней предусмотрена.
Для реализации системы необходима (4,7,14)-ПЛМ. В случае когда зажиганию сегмента соответствует низкий уровень (0), повторное решение приводит к необходимости (4,7,12)-ПЛМ.
Рассмотренная задача не является типовой в том смысле, что она почти полностью определена. В реальных задачах система функций может быть не определена на большинстве наборов, и в этом случае эффективность минимизации значительно выше.
Задача 10.80. Проследить, какой символ будет индицироваться при поступлении на входы синтезированного преобразователя единственной нерабочей комбинации 1010. Дело в том, что на преобразователь такого рода можно наложить и дополнительные ограничения — скажем, потребовать гасить все сегменты при нерабочих комбинациях на входах.
Задача 10.81. Нанести МТИ и результаты минимизации, приведенные выше, на семь КК и убедиться, что программа недоиспользовала возможности минимизации отдельных функций, но зато нашла слагаемые, общие для нескольких функций.
Задача 10.82. Используя БМЭ PLA и массивы PROGPLA, ADRPROG, описать схему для реализации синтезированного преобразователя и проверить ее моделированием (пакет ТМ).
Задача 10.83. Сравнить решение задачи 10.17 с решением, полученным с помощью программы минимизации. Оно содержит девять термов: 001х, 011х, хЮО, 0101, xxxl,100x, 1х0х, xllx, 101х со следующим распределением термов по функциям: функция
1—5; функция 2—1,4,7; функция 3—2,3,7,9; функция 4—4,6,8 (термы приведены в порядке их нумерации).
Задачи 10.84—10.89 рассчитаны на то, что читатель располагает программой совместной минимизации системы логических фунций.
Задача 10.84. Составить МТИ для преобразования в код управления 7-сегментным индикатором двоично-десятичных кодов: а) 8421; б) 2421сд; в) кода с избытком 3 (см. табл. 10.1). МТИ должны содержать по десять строк, на остальных шести наборах функции полагать неопеделенными. Минимизировать системы и определить необходимые параметры ПЛМ для их реализации.
172
Задача 10.85. Повторить задачу 10.84, введя в МТИ дополнительное условие: при всех нерабочих комбинациях каждого кода не должен гореть ни один сегмент.
Задача 10.86. Повторить задачи 10.84, 10.85, изменив логче- ский уровень, соответствующий зажиганию сегмента, на противоположный. Сравнить решения.
Задача 10.87. Составить МТИ для преобразования четырехразрядного двоичного кода в код управления семисегментным индикатором для индикации символов шестнадцатиричного кода: 0, 1, ..., 9, А, Ъ, С, d, Е, F. Минимизировать полученную систему и определить необходимые параметры ПЛМ для ее реализации.
Задача 10.88. Сравнить решения, полученные в задачах 10.80— 10.83, с реализацией тех же систем функций на (4,7)-ПЗУ. Если минимизация не дает преимуществ, объяснить, почему.
Задача 10.89. Преобразование многоразрядного двоичного кода в двоично-десятичный код и обратное преобразование, основанное на построении многоярусных структур из интегральных блоков К155ПР6, К155ПР7, осуществляется с большой задержкой и “плохими” переходными процессами (см. задачи 10.67, 10.69).
Оценить, насколько приемлема была бы реализация на основе ПЛМ. Составить МТИ для преобразования, скажем, двоично-десятичного кода (числа от 0 до 199, девять разрядов) в двоичный код (восемь разрядов). Минимизировать систему и определить параметр / (8,7, /)-ПЛМ (младший разряд передается на выход без преобразования).
Задача 10.90. Для сложения двоично-кодированных десятичных чисел применяют двоично-десятичные сумматоры [32, рис. 11.13; 34, рис. 7.1; 40, рис. 5.45].
Построить такой сумматор на один десятичный разряд для кода 8421, реализовав его как соединение ОДС (первый разряд) и пятиричного сумматора (второй — четвертый разряды) с последовательным переносом. Для построения пятиричного сумматора составить МТИ системы функций от семи переменных Рх, А2, А3, Л4, В2, В3, В4; выходными будут функции сумм S2 53, S4 и переноса Р4. Минимизировать систему и определить параметры необходимой ПЛМ. Если результат по сложности приемлем, описать схему, составленную из ОДС и ПЛМ, и выборочно проверить ее моделированием. Сравнить полученное решение с указанными выше схемамй по сложности и быстродействию.
Задача 10.91. Пятиричный сумматор (см. задачу 10.90) можно реализовать и на ПЗУ. Определить, какая из микросхем ПЗУ, перечисленных в задаче 10.73, подойдет для этой цели.
Задача 10.92. Определить, какая из микросхем ПЗУ, перечисленных в задаче 10.73, пригодна для того, чтобы полностью реализовать на ней двоично-десятичный сумматор на одну десятичную цифру (см. задачу 10.90).
173
Задача 10.93. Определить параметры ПЛМ, необходимые для построения указателя старшей единицы в двоичном слове [32, с. 178]. На вход должно подаваться 16-разрядное слово; на выходе должен формироваться двоичный код, соответствующий номеру разряда, содержащего старшую единицу.
ГЛАВА ОДИННАДЦАТАЯ
СИНТЕЗ, АНАЛИЗ И ПРОВЕРКА ПОСЛЕДОВАТЕЛЬНОСТНЫХ ЦИФРОВЫХ УЗЛОВ
11.1. Общая характеристика последовательностных цифровых устройств
Последовательностные ЦУ, или устройства с памятью, можно разделить на две основные группы. Первую группу составляют устройства “чистой” памяти — оперативные (ОЗУ) и сверхоперативные (СОЗУ) запоминающие устройства. Принципы их построения и функционирования описаны в работе [38]; в этой главе они не рассматриваются.
Вторая группа включает в себя последовательностные функциональные узлы (ПФУ), которым и посвящена в основном эта глава.
Последовательностные ФУ не только (а иногда—не столько) запоминают вводимые в них данные, но и преобразуют эти данные. В связи с этим ПФУ обычно имеют в своем составе КФУ, что и отражается в обобщенном представлении ПФУ цифровым автоматом [32, с. 94; 29, с. 301].
Иногда информация извне на ПФУ вообще не подается, и они управляются лишь тактовыми импульсами. В этом случае функция ПФУ заключается в генерации заданной последовательности двоичных символов или слов, в частности двоичных чисел. Примером могут служить разнообразные ПФУ, построенные на основе сдвигающего регистра с обратной связью [29, гл. 10; 32, § 9.4]. Некоторые из таких ПФУ рассматриваются в этой главе.
Особое место среди ПФУ занимают счетчики [29, гл. 9; 32, гл. 9], которым посвящено несколько задач в § 10.3. Построение счетчиков — хороший пример структурного синтеза цифровых устройств с памятью.
В некоторых случаях логический (функциональный) преобразователь, входящий в состав ПФУ, удобно реализовать, используя программируемые микросхемы (ПЗУ, ПЛМ). Этот вопрос, заслуживающий специального рассмотрения, вынесен в § 11.4.
Что касается построения блока памяти в ПФУ, то элементной базой для него служат триггеры [32, гл. 7; 29, гл. 6]. Правильный выбор типа триггера для синтеза того или иного ПФУ имеет во многих случаях решающее значение; в других случаях неудачный выбор типа триггера может привести к построению хотя и работоспособного, но не оптимального по структуре ПФУ. Поэтому в § 11.1 подробно изучаются различные схемы триггеров и особенности их функционирования.
Промышленность выпускает большое число интегральных ПФУ различных типов. В первую очередь, это. счетчики и параллельные, сдвигающие и универсальные регистры. Наиболее употребительные микросхемы такого типа послужили прототипами для соответствующих БМЭ в САПР ДИСП (см. § 9.4). Модели других ПФУ могут быть построены при необходимости различными способами:
174
а) настройкой имеющихся БМЭ путем указания в описании нужного числа\ разрядов, описания входов как инверсных, фиксацией на некоторых в^одаД БМЭ постоянных логических уровней;
би составлением СПМ (см. § 9.4) на основе имеющихся справочных данных о структуре ПФУ;
в) составлением АПМ (см. § 9.4) на основе имеющейся справочной информации о функционировании ПФУ, заданном, например, таблицей переходов.
В некоторых задачах § 11.3, 11.4 представляемый таким образом ПФУ выступает как самостоятельный объект изучения, синтеза или моделирования.
Проблемы синтеза ПФУ наиболее полно проявляются при построении устройств логического управления — управляющих цифровых автоматов. Задачи такого типа подробно, с большим числом примеров рассмотрены в работе [31] и в эту главу не включены. Система автоматизированного проектирования управляющих автоматов на матричных БИС, в которой реализованы методы и подходы, развитые в работе [31], описана В [42].
Здесь же необходимо подчеркнуть следующее.
При построении некоторого КФУ либо логического преобразователя ПФУ на программируемых БИС (ПЗУ, ПЛМ) МТИ системы логических функций или таблица переходов обычно заданы однозначно, и задача проектировщика заключается в том, чтобы “вписать” эти таблицы в некоторую структуру из ПЗУ и (или) ПЛМ. Разработчик может минимизировать систему функций, используя, в частности, ее недоопределенность, комбинировать ПЛМ и ПЗУ, составляя из них одноярусную (“тривиальную” [31]) либо многоярусную структуру, но при всем этом он не вправе изменять исходную таблицу.
Иначе ставится задача при синтезе управляющих автоматов. Исходное задание формулируется обычно на более абстрактном уровне — в виде алгоритма функционирования будущего автомата. Алгоритм может быть описан на языке граф-схем (ГСА) [31], либо на любом другом, но независимо от этого у проектировщика остается большая степень свободы: он сам формирует МТИ логического преобразователя автомата, переходя к ней от исходного описания. При этом проектировщик имеет возможность “подгонять” МТИ под намеченную структуру; в частности, подходящим этапом проектирования для такой подгонки является кодирование внутренних состояний автомата, что широко используется в работе [31].
11.2. Триггеры и генераторы импульсов
Разновидности триггеров (триггерных систем), принципы их построения и функционирования рассмотрены в работах [32, гл. 7; 29, гл. 6; 49, § 2.8]. Здесь же кратко поясним лишь принципиальное различие между двумя основными разновидностями триггеров.
Простейший одноступенчатый триггер представляет собой ячейку памяти (бистабильную ячейку—БЯ) на элементах ИЛИ — НЕ (асинхронный ^-триггер) либо И — НЕ (асинхронный Л5-триггер с инверсными входами R и S) [29, рис. 6.1, 6.2]. Эта ячейка может быть снабжена дополнительными входными элементами для организации синхронного ввода данных (синхронный, или тактируемый /?5-триггер).
Наряду с RS-триггерами широко распространены также и простейшие /1-триггеры (защелки) [29, § 6.2], которые как элементы памяти используются только в синхронном режиме; асинхронный нетактируемый /1-триггер логически эквивалентен двум <• последовательно включённым инверторам
175
[41, с. 62]. Есть, однако, одна тонкость, связанная с очередностью переключения выходов (см. задачи 11.5, 11.6).
Простейшие триггеры типов D и RS широко используются для запоминания как служебной информации в ЦУ, так и данных. При этом они часто группируются по 4 (6, 8, ...) разрядов с общим управлением по тактовым входам; такую сборку называют (статическим) параллельным регистром.
При построении разнообразных ПФУ, содержащих несколько триггеров, одни из которых управляют входами других (под воздействием общих тактовых сигналов), к этим триггерам предъявляются дополнительные требования. Дело в следующем.
При поступлении разрешающего уровня тактового сигнала начинают изменяться (с некоторой задержкой) выходные сигналы одноступенчатого триггера. Если несколько таких триггеров связаны линиями взаимного управления (по информационным входам) непосредственно или через логические элементы, то возникает нежелательная ситуация. Выходные сигналы триггеров изменяются (или уже изменились), а их входы все еще доступны для занесения информации (триггеры “прозрачны” [29, с. 202]). Это приведет к повторному изменению состояний, и так может продолжаться до тех пор, пока сохраняется разрешающий уровень на тактовых входах.
Задача 11.1. Два D-триггера (“защелки”) соединены между собой, как показано на рис. 11.1. Описать схему для пакета ВМ; указанные на схеме начальные состояния элементов задать с помощью массива НС (см. замечание к задаче 11.20). Смоделировать в синхронном режиме поведение схемы при подаче на тактовый вход единичного уровня и сделать выводы.
Результаты моделирования в задаче 11.1 наглядно показывают, что простейшие одноступенчатые триггеры невозможно использовать с общей цепью синхронизации при условии, что одни из них должны управлять другими.
Для преодоления этого недостатка необходимо разнести во времени два процесса: а) при записи информации в триггер его выходные сигналы должны оставаться неизменными; б) к моменту обновления информации на выходах триггера его входы должны быть уже недоступны для записи.
Это реашзуется в так называемых триггерах с внутренней задержкой (ТВЗ) [41, с. 83]. Имеется в виду задержка второго процесса относительно первого, обеспечиваемая внутренним устройством триггера.
Ясно, что ТВЗ, кроме основной ячейки памяти, должен содержать и дополнительную память; в качестве таковой часто используется вторая ячейка, триггеры такого типа называют двухступенчатыми (тип MS, [29, 32]).
Существуют, однако, и ТВЗ, в которых вспомогательная память — кратковременная. Роль такой кратковременной памяти может исполнять,
176
скажем, обычный ЛЭ, на выходе которого в течение некоторого времени после входного воздействия еще сохраняется старое значение сигнала. Время памяти определяется задержкой сигнала в элементе (см. задачу 11.17). Для кратковременного запоминания сигнала используют также конденсаторы или иные инерционные элементы [32, с. 116].
В ГОСТ 2.743 — 82 предусматривается разделение триггеров по способу управления записью: различаются статические и динамические тактовые входы. Это отражается и на УГО триггеров. Однозначно связать способ построения ТВЗ со способом управления записью нельзя. Так, двухступенчатые Ж-триггеры всегда приходится рассматривать как статические, что связано с присущей им специфической реакцией на помеху при разрешающем уровне на тактовом входе (см. объяснения понятий “проскок фронта” и “захват 0 или 1” в работе [29, с. 202]). Краткие (и, к сожалению, частично устаревшие) сведения о соответствующем поведении интегральных триггеров в сериях ТТЛ имеются в работе [35, с. 726—730J.
В то же время двухступенчатые /)-триггеры, в частности, в сериях КМОП (например, К561ТМ2) ведут себя как динамические. Этим обусловлена современная тенденция строить интегральные ТВЗ типа Ж на основе ТВЗ типа D с обратной связью [29, рис. 6.12] (см. также задачи 11.14-11.16).
Задачи, связанные с синтезом триггеров, не рассматриваются. Дело в том, что построение действительно новой схемы триггера требует большого искусства, а главное — задача должна решаться обязательно не только на уровне логических, но и электрических схем и с учетом особенностей используемой технологии.
Обычно речь идет не о синтезе новой схемы, а о приспособлении какого-либо из известных решений к конкретным условиям.
Одноступенчатые триггеры.
Задача 11.2. Два синхронных RS'-триггера, показанные на рис. 11.2, различаются лишь значениями задержек элементов 1 и 5, что учтено ниже в описании схемы. Задержка элемента 5 увеличена для искусственного нарушения симметрии схемы триггера; задержки всех остальных элементов принимаются по умолчанию: 15 нс для элементов ТТЛ. Описание
1
I I I I l l l l l I ,
2
п гг п п п , ,
*
3
т i m , , ,....
<
1 2 3 4 5 6 7 8 9 10 11
Рис. 11.2. Схема и временные диаграммы к задаче 11.2
177
схемы: NAME=RSFF; N=11; WWCX=l-3; WYWCX=1-11* NAND = 2,1,1,2,4! 2,1,1,3,5! 2,1,4,7,61 2,1,5,6,71 2,1,1,2,81
2,1,1,3,91 2,1,8,11,10! 2,1,9,10,11; DLNAND = 5,40,40;
GP5S = 1,1,11,11! 3,2,7,4,5; GP10S = 2,1,9,2,3,6,7,8,9;
Описания генераторов задают входные сигналы для управления триггерами в асинхронном режиме (на тактовый вход постоянно подан разрешающий уровень); триггеры “прозрачны” для информационных сигналов S и R. Моделирование в режиме D (по умолчанию) позволяет не заботиться об описании конкретных моментов изменения входных сигналов [они описаны в терминах тактов (см. § 9.6)] и полностью проследить развитие процессов в схеме.
Чертеж, построенный по временным диаграммам, полученным при моделировании, показан на рис. 11.3. Моделирование выполнено при поднятом флаге 2, поэтому на печать выведены состояния узлов схемы лишь в первой и последней единицах времени для каждого такта (см. § 9.6). Первый такт длится, как видно, 71 нс, второй и третий —57 нс и т. д. На входах обоих триггеров трижды возникает “запретная” комбинация 5 = R = 1. Как видно, опасна не сама по себе эта комбинация (если только одинаковые уровни на прямом и инверсном выходах триггера допустимы для последующих элементов); некорректным является непосредственный переход от этой комбинации к комбинации 5 = R = 0.
Временные диаграммы показывают также, что неопределенные состояния на выходах триггера возникают лишь при условии его
7 5 5
5 3
5 5 4 4 4
1117 17
1212171717171212
/МИМ
ГГТГ
М М М I М I к_
г ГГК_/Г
мм
К Л~К /П\
з ЛТГ
« *_ГП
К_/1
I I I I к
5 *ГП
TTL
I мм гг
6 *m_j
гттт
I I I I l#*l Mill
7 *__гтт
I I I
МММ#*
8 *__гп
ГТТ__ЛТ_ГТП
9 *ГП
_гп
I I М I ГТ1
ю *гл г
гттт
Л I II II I II II
11 *_ГГГП I I I I т п
Рис. 11.3. Временные диаграммы, полученные в результате моделирования схемы
на рис. 11.2
178
симметрии. Если плечи триггера (по временным соотношениям) несимметричны, он будет в рассмотренной ситуации всегда устанавливаться в определенное состояние. На практике чаще всего существенная асимметрия может быть обусловлена неравномерной (особенно емкостной) нагрузкой выходов триггера. На это, конечно, нельзя рассчитывать при проектировании.
Задача 11.3. Повторить моделирование, выполненное в задаче 11.2, обеспечив такие же переключения триггера в синхронном режиме (сначала подготавливаются сигналы S и R, затем подается тактовый импульс, вводящий данные в триггер).
Задача 11.4. Может ли возникнуть ситуация некорректного управления бистабильной ячейкой в триггере-защелке (см. рис. 11.1)?
Задача 11.5. Исследовать работу одного из триггеров, показанных на рис. 11.1, в асинхронном режиме (триггер “прозрачен”). При разрешающем уровне на тактовом входе получаем асинхронный D-триггер. Выполнить моделирование схемы с учетом задержек: 2—3 раза изменить сигнал D. На временных диаграммах обратить внимание на порядок переключения выходных сигналов триггера.
Задача 11.6. Повторить задачу 11.5, заменив элементы И— НЕ в схеме триггера элементами ИЛИ —НЕ. Обобщить наблюдения. Обратить внимание на то, что с помощью схемы асинхронного D-триггера всегда можно обеспечить нужный порядок изменения противофазных сигналов: сначала один сигнал переходит от 0 к 1, затем второй —от 1 к 0 (задача 11.5); триггер на элементах ИЛИ —НЕ обеспечивает противоположный порядок изменения (ср. [29, рис. 6.1, в]).
Задача 11.7. На рис. 11.4 показана схема Ж-триггера, используемая в сериях КМОП-микросхем (например, К561ТВ1). Штри-
Рис. 11.4. Схема Ж-тригтера на основе D-триггера с внутренней задержкой, построенного на двух “защелках”
179
ховым контуром обведена защелка, выполненная на двунаправленных ключах и элементах ИЛИ — НЕ [30, с. 235]. Логическая схема, связывающая на рис. 11.4 внешние входы 2 и 3 с защелкой, построена иначе, чем в работе [30]. Убедиться, что эти схемы эквивалентны. Убедиться также в том, что схема (см. рис. 11.4) логически тождественна схеме [29, рис. 6.12].
Задача 11.8. Описать схему защелки (см. рис. 11.4, номера узлов помещены внутри штрихового контура):
NAME = LATCH; N = 8; TIPL = КМОПЮ;
WWCX = 1,7,2 - 4; WYWCX =1-8;
NOR = 2,1,3,8,5! 2,1,4,5,6; SW = 2,1,1,2,81 2,1,7,6,8; .
Тип логики КМОП 10 указан для выбора соответствующих задержек по умолчанию.
Задача 11.9. Пополнить описание защелки (см. задачу 11.8) описанием генераторов для ее тестирования. Для управления ключами дополнительно описать инверторы 8 и 9 (см. рис. 11.4). Проверить асинхронную установку триггера в оба состояния по входам 3 и 4, а также все четыре возможных перехода (0—0, 0—1, 1 — 1, 1 — 0) при синхронном управлении. Убедиться в “ прозрачности” триггера при разрешающем уровне на тактовом входе. По умолчанию использовать синхронный режим моделирования.
Если модель функционирует правильно, занести ее в БД как СПМ с именем LATCH (предварительно удалить описания генераторов и инверторов, а также сократить список вывода: WYWCX = 5,6,8).
При анализе временных диаграмм обратить внимание на случаи кратковременного появления третьего состояния в точке соединения ключей (узел 8). Постарайтесь объяснить эти случаи.
Задача 11.10. В реальной полупроводниковой структуре в схеме на рис. 11.4 во время “переброса” ключей сигнал в точке их соединения поддерживается емкостью между этой точкой и подложкой. Благодаря этому кратковременные переходы в третье состояние не возникают (см. задачу 11.9).
Пополнить описание СПМ LATCH (см. задачу 11.8) описанием САР = 8,120; этот массив описывает емкость, подключенную к узлу 5, и задает время хранения сигнала на ней (120 единиц TIME, в нашем случае 120 нс). Выполнить повторно тестирование модели (см. задачу 11.9) и занести ее в БД как СПМ с именем LATCH1.
Триггеры с внутренней задержкой.
Задача 11.11. Описать схему на рис. 11.4, используя в ней СПМ LATCH (см. задачу 11.9). Элементы 1, 2, 5 и относящиеся к ним связи и внешние входы удалить; внешним информационным входом считать узел 9 (вход D). Задержки элементов принять по умолчанию, назначив TIPL = КМОПЮ. Полученная схема представляет собой D-триггер с динамическим тактовым входом (ср. [30, рис. 2.33]).
180
Исследовать схему (пакет ВМ, синхронный режим). Проверить установку триггера в оба состояния по асинхронным входам 4 и 5, а также все четыре возможных перехода (0—0, 0—1, 1—1, 1—0) при синхронном управлении. Кроме того, убедиться в “непрозрачности” триггера, меняя сигнал D при обоих уровнях на тактовом входе.
Задача 11.12. Повторить задачу 11.9, использовав СПМ LATCH1 (см. задачу 11.10) вместо СПМ LATCH и отметить различия на временных диаграммах.
Приняв, что времена предустановки ts и удержания th определяются длительностью переходных процессов в схеме, оценить эти времена по результатам моделирования. За время ts принять наибольшую длительность такта после изменения сигнала D (узел 9) при нулевом уровне на входе С (узел 1). За время th принять наибольшую длительность такта после изменения сигнала С с 0 на 1 при неизменном уровне на входе D. Найденные таким образом значения ts и th зависят, конечно, от значений задержек элементов, принятых при моделировании.
Задача 11.13. Оценить сверху значения ts и th для известной шестиэлементной схемы D-триггера с динамическим управлением [30, рис. 1.54]. Принять по умолчанию TIPL=TTJI и соответствующие задержки элементов; использовать программу эксперимента из задач 11.11, 11.12.
Замечание. Полученные оценки неприменимы, конечно, к интегральному триггеру К155ТМ2 и к аналогичным ему.
Задача 11.14. Описать в полном объеме схему Ж-триггера (см. рис. 11.4) и исследовать ее. Для проверки синхронного управления триггером целесообразно предусмотреть в описании входных сигналов все возможные сочетания выходного состояния триггера q и сигналов Ж, приняв, например, такой порядок эксперимента: а) асинхронная установка q = 0; б) проверка при синхронном управлении — подача тактовых импульсов при сочетаниях Ж = 00,01,10,00,10,01,11,11 (при этом каждый из переходов триггера 0—0, 0— 1, 1—0, 1— 1 осуществляется двумя способами); в) асинхронная установка q = 1; проверка “непрозрачности” триггера путем изменения сигналов J и К при обоих уровнях на тактовом входе.
Задача 11.15. По временным диаграммам, полученным в задаче 11.14, оценить сверху для исследуемого триггера значения^ ts и th (см. задачу 11.12).
/if-триггер с динамическим управлением К155ТВ15 (рис. 11.5) построен путем модификации схемы шестиэлементного D-триггера (см. задачу 11.13). Замена внешнего входа D на входы J и К достигается с помощью дополнительной логики (ср. со схемой, показанной на рис. 11.4).
Задача 11.16. По аналогии с задачами 11.14, 11.15 выполнить эксперименты со схемой триггера К155ТВ15.
181
Для организации эксперимента можно использовать рекомендации из задачи 11.14, учтя лишь, что вход К— инверсный.
Задача 11.17. Исследовать схему триггера К555ТВ9 (рис. 11.6). В отличие от рассматривавшихся ранее схем здесь необходимо обеспечить определенное соотношение между задержками элементов. Объяснение этой особенности можно найти в работе [29, § 6.6]. Для назначения требуемых задержек записать массив DL... (см. § 9.6). Программу эксперимента составить по аналогии с задачами 11.14, 11.15.
Задача 11.18. Составить план исследования двухступенчатых триггеров. В эксперименте используем так называемый триггер с запрещающими связями [29, рис. 6.11] (рис. 11.7, а) и триггер К155ТВ1 [30]. Последний имеет по три входа J и К; для исследования достаточно оставить по однохму (рис. 11.7, б).
В эксперименте можно выделить две части.
1. Исследование функционирования триггеров в “штатном” режиме:
182
а)
Рис. 11.7. Двухступенчатые Ж-триггеры
сигналы J, К изменяются лишь в паузах между тактовыми импульсами; при разрешающем уровне на тактовом входе сигналы J, К неизменны.
2. Исследование недостатков, связанных с чувствительностью триггеров к положительным или отрицательным помехам на входах J, К при разрешающем уровне на тактовом входе. Подробный разбор этих недостатков имеется в работе [29, § 6.3].
С этой целью можно наметить, например, следующий порядок изменения входных сигналов: а) асинхронная установка q = 0; б) проверка “штатных” режимов при синхронном управлении — подача сигналов J, К в последовательности, описанной в задаче ,11.14 с изменением их в паузах между тактовыми импульсами; в) асинхронная установка q = 0; г) проверка реакции триггеров на изменение информационных сигналов при разрешающем уровне на тактовом входе, причем с учетом симметрии схемы триггера достаточно проверить одну ее половину—подача сигналов CJK в последовательности 000, 100, 110, 100, 000, 001, 101, 100, 101, 000. В заключительной части эксперимента при первых пяти наборах имитируется положительная помеха на входе J при q - 0 и С = 1; при последних пяти — отрицательная помеха на входе К при (7 = 1 и С = 1.
183
1 п П П П П П n t
Рис. 11.8. Схема и временная диаграмма входного сигнала к задаче 11.20
Задача 11.19. Проверить схемы двухступенчатых Ж-триггеров по плану, составленному в задаче 11.18. Триггеры включить параллельно по входам.
На рис. 11.8 показано использование синхронного iW-триггера в^ качестве счетного путем введения обратных связей: S = q, R = q [30, с. 68]. Остающийся при этом свободным тактовый вход используется для подачи счетных импульсов.
Такая структура действительно может быть работоспособной, но лишь при условии соблюдения жесткого ограничения на временные соотношения. А именно: счетный импульс должен заканчиваться прежде, чем изменится состояние выходов триггера и на входные вентили поступят изменившиеся сигналы обратной связи.
Для исследования этой ситуации на модели необходимо воспользоваться пакетом ВМ в асинхронном режиме. Входные импульсы следует подавать с достаточно большим периодом следования, длительность их можно изменять в процессе эксперимента либо от эксперимента к эксперименту, если проводить моделирование несколько раз.
Условимся, что недопустимо подавать входные импульсы длительностью менее задержки входных элементов. Следовательно, в эксперименте должна быть установлена верхняя граница длительности.
На рис. 11.8 показана временная диаграмма входного сигнала; соответствующее описание генератора: GP25A =
= 1,100,800,120,200,225,300,330,400,435,500,540,600,645,700,750. Диаграмма составлена в расчете на то, что для всех элементов схемы t здР=£ зд=20 нс, что должно быть учтено массивом DLNAND = 1,4^20,20;
Задача 11.20. Закончить описание схемы (рис. 11.8) для эксперимента и провести моделирование. Не забудьте описать начальные состояния в массиве НС: триггер не имеет установочных входов.
Последняя рекомендация нуждается в пояснениях. Реальный триггер при включении питания всегда устанавливается в некоторое определенное состояние, заранее неизвестное, если он симметричен. Описаны СЛМ, в которых элементы памяти автоматически устанавливаются перед началом моделирования в случайное, но определенное состояние (0 или 1). Однако в реальных системах обычно применяется начальная установка либо внешним сигналом, либо автоматическая. Именно последний случай и модели-
184
Рис. 11.9. Генераторы импульсов на ЛЭ
руется описанием массива НС. Альтернативное решение—предусмотреть установочный вход при описании схемы.
Генераторы импульсов.
Задача 11.21. Известно, что в схеме, состоящей из соединенных в кольцо инверторов, возникают автоколебания, если число инверторов нечетно [29, с. 170]. Составим кольцо из пяти элементов: четыре инвертора и элемент 2И — НЕ; свободный вход последнего используем как внешний вход кольца. Это даст возможность устанавливать начальное состояние схемы и “освобождать” кольцо в фиксированный момент времени, разрешая автоколебания.
Опишем три таких кольца, объединив их внешние входы (рис. 11.9, а):
HAND = 2,1,1,6,2! 1,1,2,3! 1,1,3,4! 1,1,4,5! 1,1,5,6!
2,1,1,11,7! 1,1,7,8! 1,1,8,9! 1,1,9,10! 1,1,10,11! 2,1,1,16,12! 1,1,12,13! 1,1,13;14! 1,1,14,15! 1,1,15,16;
Зададим разброс задержек: во втором кольце ±30 %, в третьем—±50 %: RZNAND = 6,10,30,30! 11,15,50,50;
Завершить описание схемы для моделирования ее в асинхронном режиме (пакет ВМ). Принять для всех элементов t зд.р=^ зд.Р=100 нс. Подать на внешний вход единичный уровень в интервале от 100 до 5000 нс, предусмотрев окончание зоны действия генератора, скажем, при 5500 нс, чтобы наблюдать завершение процесса.
Объяснить на полученных распечатках состояния элементов к моменту 5000 нс.
Задача 11.22. Повторить эксперимент из задачи 11.21, задав произвольные (в пределах указанных допусков), но фиксированные задержки элементов 6—15. Сравнить результаты.
Используя Б Я и элемент задержки, можно построить модель ждущего мультивибратора [30, § 1.21]. Вот описание возможной структуры (рис. 11.9, б): NOR = 2,1,1,3,2! 2,1,2,4,3! 1,1,2,4; DLNOR = 3,3,100,5; НС = 2,1! 3,0! 4,0;
185
Последний элемент ИЛИ —НЕ (инвертор) выполняет роль времязадающего элемента задержки с инверсным выходом. Его задержка описана особо, задержки других элементов приняты по умолчанию.
Задача 11.23. Сравнить схему (рис. 11.9, б) со схемой [49, рис. 2.21, г], в которой в качестве элемента задержки применена 2?С-цепочка. Завершить подготовку к моделированию и проверить схему; Запускающий импульс с уровнем 1 подается на узел 1. Определить, как связаны с задержкой времязадающего элемента длительности импульсов, генерируемых на выходах (узлы 2 и 3).
Задача 11.24. Исследовать на модели, как влияет на работу схемы ждущего мультивибратора (см. задачу 11.23) длительность запускающего импульса. Проверить две ситуации: а) входной импульс заканчивается раньше, чем выходной, б) заканчивается позже, чем выходной.
Задача 11.25. Определить, с какой целью задержки инвертора на включение и выключение (см. задачу 11.22) описаны резко различными.
Задача 11.26. Модифицировать схему ждущего мультивибратора (см. задачу 11.22), построив Б Я на элементах И —НЕ; проверить схему моделированием.
11.3. Синтез, анализ и проверка последовательностных функциональных узлов
Принципиальное различие между КФУ и ПФУ установлено в § 10.1. Некоторые дополнительные сведения приведены в § 11.1.
Для логического описания ПФУ (в общем случае — автомата) необходимо установить функциональную связь между каждым его текущим Q1 и следующим Qt+ внутренними состояниями с учетом воздействия на внешние входы (если они имеются) входных сигналов X?' Здесь Q = qb ..., qx— набор состояний элементов памяти (триггеров); X - хт, х±— набор значений входных двоичных сигналов. Моменты дискретного времени t, t + 1, ... отсчитываются с учетом способа управления триггерами. Так, при построении ПФУ на триггерах с прямым динамическим тактовым входом границами единиц дискретного времени служат моменты перехода тактового сигнала от 0 к 1. В случае если используются двухступенчатые триггеры с прямым статическим тактовым входом, такими границами следует считать переходы тактового сигнала от 1 к 0, и т. п.
В явном виде тактовые сигналы в логическое описание не включаются.
Набор X называют входным состоянием, набор Q — внутренним состоянием (или просто состоянием) автомата. Переменные qit составляющие набор 0, называют внутренними. Наборы X и Q, рассматриваемые совместно, иногда называют полным состоянием.
Функция (У+1 = Fq(Xi, q‘) называется функцией переходов автомата; она, очевидно, и задает требуемую функциональную связь. В общем случае должна быть опйсана также функция выходов Y = FY(X?, Q1) (автомат Мили), либо Y* = FY(Q*) (автомат Мура) [31], где Y - уп,..., ух — набор выходных сигналов. Для типовых ПФУ очень часто Y = Q, т. е. выходы элементов памяти служат и внешними выходами автомата (не считая, возможно, буферных выходных вентилей, не влияющих на логические соотношения).
186
Таблица 11.1
У
Q*
е,+1
X1
Q*
е'+1
0
000
001
1
000
111
0
001
010
1
001
000
0
010
011
1
010
001
0
011
100
1
011
010
0
100
101
1
100
011
0
101
110
1
101
100
0
110
111
1
110
101
0
111
000
1
111
110
Таким образом, основной (или единственной) в логическом описании ПФУ является функция переходов Fq, ставящая в соответствие каждому полному состоянию л, Q1 следующее состояние Qt + 1 Эта функция представляется обычно в виде таблицы переходов (ТП), в каждой строке которой записаны наборы X, Q1 (аргументы) и Qt+ (функции).
Пусть, например, трехразрядный реверсивный двоичный счетчик управляется внешним сигналом X = х\ при х = 0 счетчик работает на сложение, при х = 1 — на вычитание; счет ведется циклически по модулю 8. ТП счетчика представлена в табл. 11.1.
Впредь таблицы такого рода будем записывать компактнее, заменяя двоичные наборы (числа) их восьмеричными эквивалентами. Запись табл. 11.1 в строку: 0,0,1; 0,1,2; 0,2,3; 0,3,4; 0,4,5; 0,5,6; 0,6,7; 0,7,0; 1,0,7; 1,1,0; 1,2,1; 1,3,2; 1,4,3; 1,5,4; 1,6,5; 1,7,6. Здесь первое, второе, третье восьмеричные числа задают наборы соответственно X\ Q', Qt+i.
В случае когда внешние сигналы отсутствуют, в записи ТП фигурируют лишь пары восьмеричных чисел, например 0,1; 1,3 и т. п.
Особо следует отметить случай, когда в ПФУ, построенном на / элементах памяти, используются в качестве рабочих не все возможные 21 внутренних состояний. Такая ситуация имеет место, например, в двоично-десятичных счетчиках, в подробно рассматриваемых далее счетчиках Джонсона (см. стр. 190).
Последовательностный ФУ может оказаться в нерабочем состоянии при включении питания или в результате сбоя. Возникает вопрос о возможности вывода ПФУ из любого нерабочего состояния в рабочий цикл под воздействием тактовых импульсов и, возможно, внешних логических сигналов. Информация о поведении ПФУ в нерабочих состояниях включается и в справочники (см., например, графы переходов интегральных счетчиков [30, с. 93]).
Если требование автоматического выхода в рабочий цикл существенно, то учитывать его следует еще на этапе составления ТП, пополняя ее необходимыми переходами из нерабочих состояний (см., например, задачи 11.54, 11.95).
187
Для счетчиков Джонсона оказывается возможным аналитическое решение этой задачи, основанное на применении общей формулы для логической функции обратной связи (задача 11.34; см. также задачу 11.37).
В задачах анализа и синтеза автоматов функция переходов декомпозируется. Действительно, схемой логического преобразователя непосредственно реализуется не функция FQ, а функция
Z = Fz(X, Q), (11.1)
где Z = Z/, ..., — набор сигналов на информационных входах
триггеров; за каждой буквой z может скрываться в зависимости от типа триггера одна либо две логические переменные (SR; D; Ж; ...). В свою очередь,
Q‘+1 = FT(Z‘, Ql) (11.2)
— функция, связывающая следующее состояние блока памяти Qt+1 с его текущим состоянием (У и сигналами управления Z'. Для отдельно взятого триггера функция (11.2) задает его функцию переходов. Управляющие сигналы Z называют обычно функциями возбуждения.
Конкретная запись функции (11.2) для одиночного D-триггера
q, + 1 = D1. (11.3)
Для Ж-тригтера [33, с. 112]
q, + 1 = Jlq (t) V Klq'. (11.4)
Впрочем, Ж-триггер можно представить и как автомат, реализующий функцию переходов (11.4) и использующий в качестве памяти D-триггер (ср. с рис. 11.4).
Функции вида (11.3), (11.4) могут быть использованы при анализе схемы ПФУ: известно текущее состояние триггера q* и его входные
сигналы, скажем, J и К; по ним может быть вычислено следующее состояние qt+ .
Для синтеза схемы ПФУ по заданной ТП уравнение (11.2) необходимо решить относительно Z':
2* = фz(Qf, Qt+1). (11.5)
Соотношение (11.5) указывает, как нужно управлять автоматом (или каждым конкретным триггером), чтобы перевести его из известного текущего состояния Q1 в заданное следующее Qt+1 (из q* в q/+1). Соотношения (11.5) для триггеров конкретных типов представляют обычно в виде так называемых таблиц возбуждения (ТВ). В табл. 11.2 приведены ТВ для основных типов триггеров. Значок “х” означает безразличное значение функции.
Заметим, что ТВ для /?5-триггера (см. табл. 11.2) построены с учетом запрещения нежелательной комбинации на входах (ср. с задачей 11.2).
188
Таблица 11.2
Qt+l
RS-триггер
D-триггер
/Я-триггер
Г-триггер
Q
S
R
D
J
К
Т
0
0
0
X
0
0
X
0
0
1
1
0
1
1
X
1
1
0
0
1
0
X
1
1
1
1
X
0
1
X
0
0
Структурный синтез ПФУ. Определим теперь последовательность действий при синтезе ПФУ. Предполагается, что используются ТВЗ, управляемые общей последовательностью тактовых импульсов (строится синхронный ПФУ). Специфическая разновидность ПФУ — асинхронные счетчики — будет рассмотрена особо.
Полагаем, что ТП проектируемого ПФУ задана или легко может быть записана по его содержательному описанию (см., например, табл. 11.1).
Последовательность синтеза:
1. При необходимости пополнить ТП переходами из нерабочих состояний в требуемые рабочие.
2. Вместо значений следующих состояний Qt+1 в ТП подставить значения функций возбуждения (для конкретных триггеров они берутся из табл. 11.2). Полученная таким образом таблица соответствует уравнению (11.1) и может быть названа таблицей функций возбуждения (ТФВ).
3. Рассматривая ТФВ как МТИ логического преобразователя, реализовать эту МТИ схемой.
Дело сводится, таким образом, к построению КФУ, реализующего функцию (11.1).
Задача 11.27. Построить ТФВ по заданной ТП: 0,1; 1,3; 3,7; 7,6; 6,4; 4,0. ТП определяет, как видно, циклическую работу некоторого автономного (без внешних управляющих сигналов) ПФУ.
Таблица 11.3
Q1
Функции
3
2
1
*3
*3
S2
*2
Si
*1
0
0
0
0
X
0
X
1
0
0
0
1
0
X
1
0
X
0
0
1
1
1
0
X
0
X
0
1
1
1
X
0
X
0
0
1
1
1
0
X
0
0
1
0
X
1
0
0
0
1
0
X
0
X
189
Переходя к двоичной записи ТП и используя двухступенчатые ^S-триггеры, с помощью табл. 11.2 получаем табл. 11.3.
Как видно из табл. 11.3, функции 5,, R( на некоторых наборах не определены; кроме того, все эти функции не определены на наборах 010 и 101 —эти состояния, как следует из ТП, вообще не входят в число рабочих состояний ПФУ. Таким образом, не использована возможность пополнить ТП. В данном частном случае для этого есть основания (см. стр. 192, задачу 11.34).
Минимизируя функции из табл. 11.3 и распоряжаясь при этом неопределенными состояниями по своему усмотрению, получаем простые выражения, в явном виде представляющие уравнение (11.1):
53 = #2> *3 = #2> $2 ~ Я±\ ^2 = Я 1\ ^1 = 9ъ\ ^1 = Яз
(рекомендуется выполнить минимизацию самостоятельно!).
Поскольку триггеры имеют как прямые, так и инверсные выходы, схема ПФУ в этом случае может быть построена без логических элементов, реализующих функции Sh R( (рис. 11.10).
Замечание. В случае когда для построения ПФУ используются D-триггеры, ТФВ совпадает с ТП, что следует из выражения (11.3) и соответствующего столбца табл. 11.2 (см. задачи 11.30, 11.31).
Продолжение темы синтеза синхронных ПФУ по общей методике см. в задаче 11.46 и далее. Ближайшие задачи и примеры посвящены счетчикам специального вида, на примере которых выясняются некоторые существенные вопросы.
Трехразрядный ПФУ, синтезированный в примере 11.8, называют счетчиком Джонсона (СтДж) [29, § 10.2; 32 с. 154]. Характерная особенность СтДж с любым числом разрядов: при каждом переходе (т. е. в каждой строке ТП) изменяется лишь одна внутренняя переменная.
Задача 11.28. По ТП из задачи 11.27 построить временные диаграммы для выходных сигналов триггеров ql9 q2, q3. Совместить эти диаграммы с диаграммой тактовых импульсов, считая, что триггеры срабатывают по отрицательному перепаду на их тактовых входах. Задержки триггеров не учитывать. Убедиться, что в каждом такте срабатывает только один триггер.
Именно благодаря этой особенности СтДж оказывается возможным построение его на одно-
Рис. 11.10. Схема счетчика Джонсона, синтезированная в задаче 11.27
190
Рис. 11.11. Схема счетчика Джонсона на од- , ноступенчатых триггерах (к задаче 11.29)
ступенчатых триггерах [29, с. 286], что следует рассматривать как исключение из общего правила.
Задача 11.29. Описать для моделирования (пакет ВМ, синхронный режим) схему трехразрядного СтДж из работы [29, с. 286] (рис.
11.11). Часть схемы в штриховом контуре предназначена для организации двухфазного тактирования [29].
Моделировать схему в двух вариантах—без учета и с учетом связей, показанных штриховыми линиями. При отсутствии этих связей элементы И — НЕ описываются как двухвходовые. Асинхронные Л^-триггеры представить моделью TRSTA либо БЯ на элементах И — НЕ.
Необходимые пояснения имеются в работе [29, с. 286—288].
Задача 11.30. Повторить синтез, выполненный в задаче 11.27, используя не RS-, а D-триггеры. Можно ли применить в этой схеме одноступенчатые D-триггеры (защелки)?
Задача 11.31. Синтезировать четырехразрядный СтДж (восемь рабочих состояний) по ТП 0,1; 1,3; 3,7; 7,17; 17,16; 16,14; 14,10; 10,0. Составить ТП, ТФВ и построить схему на D-триггерах.
Общий принцип построения СтДж описан в работе [32, с. 154] и иллюстрируется задачами 11.30, 11.31. Уравнения (11.1) для ^-разрядного СтДж всегда могут быть записаны следующим образом:
А =_?,-! (| = 2-*);
Di=Qk ,
(11.6)
где первая строка описывает сдвигающий регистр, и, следовательно, ^-разрядный СтДж строится на ^-разрядном сдвигающем регистре с обратной связью, задаваемой второй строкой [32, рис. 9.22, а].
Задача 11.32. Представить схемой на сдвигающем регистре восьмиразрядный СтДж и записать ТП для него (16 строк).
Вторая характерная особенность СтДж, построенного непосредственно по выражению (11.6), заключается в том, что
191
число его рабочих состояний (2к) меньше (или намного меньше) общего возможного числа состояний сдвигающего регистра (2fc). Возникает вопрос о поведении счетчика в нерабочих состояниях. Дело в том, что нерабочие состояния образуют нерабочие циклы; оказавшись в одном из нерабочих состояний (при включении или в результате сбоя), СтДж может длительное время функционировать по нерабочему циклу (ср. [29, рис. 10.5, в; 32, с. 156—157]).
Так, в четырехразрядном СтДж (см. задачу 11.31), кроме рабочего, существует еще и нерабочий цикл из восьми состояний. Пользуясь общим выражением (11.6), нетрудно проследить этот цикл. Берем любое состояние из числа не вошедших в рабочий цикл, например, 00102 = 28 и находим последовательность 2,5; 5,13; 13,6; 6,15; 15,12; 12,4; 4,11; 11,2.
Задача 11,33. Пятиразрядный СтДж (декада Джонсона) содержит в рабочем цикле десять состояний 0,1,3,7,17,37,36,34,30, 20. Найти остальные (нерабочие) циклы (два по десять и один из двух состояний), построить временные диаграммы для этих циклов (см. задачу 11.28).
Устранение нерабочих циклов в СтДж. Рассмотрим общую методику построения СтДж с самовосстанавливающимся рабочим циклом (с автоматическим выходом из любого нерабочего состояния в рабочий цикл под воздействием только тактовых импульсов, без дополнительной принудительной установки).
Обобщим задачу, считая, что строится /г-разрядный СтДж с числом состояний в цикле N4(k<Nn<2k). Для обеспечения свойства самовосстановления необходимо усложнить цепь обратной связи по сравнению со второй строкой (11.6), построив ее в соответствии с выражением
Di = 4k Чк-1 - Ч^ЧАк Чк-1 - Чг, (11-7)
где первое слагаемое содержит т старших переменных, а второе (не считая qx) — п старших переменных, причем
n = 2k — N^+1. (11.8)
Для устранения нерабочих циклов необходимо выполнить условие
m>k-NJ 3. (11.9)
Заметим, что 1=к—т +1, г=к—п + 1, и всегда т>п, 1<г.
Выражение (11.7) приводится к виду, удобному для реализации на элементах ИЛИ —НЕ
^ = Чк V qk.x V...Vqr V q,V qr_x V...V q, (11.10)
Задача 11.34. Построить на пятиразрядном регистре декаду Джонсона, не имеющую нерабочих циклов. В соответствии с
192
выражениями (11.7), (11.8), (11.9) находим: «=2-5—10 + 1 = 1; т>5—10/3; т = 2. В соответствии с (11.10) применяем обратную связь
Di = <М4 V s = Я 5 V?1 yqA.
Задача 11.35. Найти значения к, т, п для построения СтДж с числом состояний в цикле: а) семь, б) девять, в) одиннадцать, г) двенадцать.
Задача 11.36. Записать по образцу (11.10) выражения для обратной связи в счетчиках, указанных в задаче 11.35.
Задача 11.37. Познакомьтесь с несколько иным способом устранения нерабочих циклов в СтДж. Способ использован в интегральных счетчиках серий КМОП (см. [30, рис. 2.37, 2.40]).
На рис. 11.12 показана схема четырехразрядного СтДж. Цепь обратной связи несколько усложнена, кроме внутренних переменных она управляется и входными х2,х1 (узлы 8, 7). При х2=х1-1 обратная связь полностью соответствует выражению (11.7). При х2 = 1, х1 = 0 “выключается” первое слагаемое в выражении (11.7), схема работает в стартстопном режиме с самоостановом в состоянии 0000. Для вывода счетчика из этого состояния достаточно на короткое время (1—3 такта) изменить х2 с 1 на 0.
Правая часть схемы — дешифратор кода СтДж (ср. [30, рис. 2.40; 32, с. 155]). Дешифратор можно рассматривать как выходной логический преобразователь, реализующий функцию Y=Fy(Q).
Левая часть схемы — цепь загрузки в счетчик произвольного состояния, представленного параллельным четырехразрядным кодом на входах 1—4. Загрузка выполняется при единичном уровне на входе 5 разрешения записи. В рассматриваемой схеме это цепь введена для проведения модельного эксперимента (см. задачу 11.39). В реальном ПФУ целесообразнее подавать извне состояния в трехразрядном двоичном коде, предусмотрев в составе ПФУ преобразователь этого кода в код СтДж.
Задача 11.38. Убедитесь по схеме на рис. 11.12, что цепь обратной связи работает, как описано выше.
Задача 11.39. Подготовить описание схемы (см. рис. 11.12) для моделирования. Использовать пакет ВМ (синхронный режим) для проверки как логики работы, так и временных соотношений. В эксперименте предлагается выполнить следующие проверки:
1. Запись нулевого состояния в СтДж по параллельным входам.
2. Прогон СтДж в рабочем цикле с самоостановом в состоянии 0000; кратковременная подача х2 = 0 для проверки выхода из состояния 0000.
3. Проверка поведения СтДж и дешифратора в нерабочих состояниях, для чего следует все восемь нерабочих состояний поочередно загрузить в счетчик и в каждом случае проверить переход в следующее состояние, подав тактовый импульс.
Приведем описания моделей генераторов для выполнения намеченного эксперимента: GT=5,25,56,1,3,8! 6,3,24,1,1,11!
6,27,58,1,3,8; GP5S = 3,28,54,40,52! 4,40,54! 5,1,1! 7,1,58,18,24! 8,1,58,20,22; GP10S = 1,32,54,36,40,44,48! 2,24,51,28,36,40,44;
7-1586
193
Рис. 11.12. Схема четырехразрядного счетчика Джонсона с дешифратором и цепями для параллельного ввода кода состояния (к задачам 11.38—11.43)
По описаниям генераторов обязательно построить временные диаграммы входных сигналов и осмыслить по схеме содержание эксперимента.
Обратить внимание на то, что триггеры в схеме (см. рис. 11.12) срабатывают по перепаду 0—1 на тактовом входе, и поэтому входные сигналы х2, изменяются только в моменты отрицательных перепадов тактового сигнала. Если бы использовались триггеры со статическим управлением, пришлось бы увеличить паузу между тактовыми импульсами до двух единиц модельного времени и изменять управляющие сигналы в паузе.
Принять Т1РЬ=КМОПЮ и задержки по умолчанию.
Задача 11 АО. Выполнить моделирование схемы (см. рис.
11.12) по описанию, подготовленному в задаче 11.39. Моделирование целесообразно выполнять при поднятом флаге 2 для сокращения временных диаграмм и оценки длительности переходных процессов.
194
Проанализировать результаты, убедиться в правильности работы схемы.
Задача 11.41. По результатам моделирования (см. задачу
11.40) построить граф переходов СтДж (см. рис. 11.12). Пример построения графа имеется в работе [32, рис. 9.24]. Убедиться в том, что из всех нерабочих состояний счетчик может выйти в рабочий цикл.
Задача 11.42. По результатам моделирования (см. задачу
11.40) исследовать временные соотношения в схеме (см. рис. 11.12).
1. Определить наибольшую длительность такта в рабочем цикле и по ней оценить максимальную частоту тактовых сигналов.
2. Оценить наибольшее время, необходимое для загрузки в счетчик любого состояния со внешних входов 1—4.
Задача 11.43. По результатам моделирования (см. задачу
11.40) исследовать работу дешифратора кода СтДж при нерабочих состояниях последнего. Обратить внимание на то, что одновременно возбуждаются несколько выходов дешифратора. Полезно воспользоваться при этом КК на четыре переменных (#1> •••> #4)> нанося на каждую из них одно из рабочих состояний и контур, соответствующий функции дешифрации этого состояния (ср. [32, с. 155]).
Задача 11.44. Предположим, что построен пятиразрядный СтДж с дешифратором, реализованным на двухвходовых вентилях (по аналогии с рис. 11.12). Сколько выходов дешифратора будет одновременно возбуждаться при каждом из нерабочих состояний счетчика? Для ответа можно использовать КК на 5 переменных (см. задачу 11.43).
Замечание. При необходимости ответ на задачу можно легко получить двоичным моделированием. Достаточно описать лишь дешифратор (десять двухвходовых вентилей, некоторые входы которых описаны как инверсные) и организовать на входах полный перебор (32 состояния).
Задача 11.45. Повторить моделирование (см. задачу 11.40), опустив флаг 2. При этом на печать выводятся все состояния (а не только установившиеся). Проследить, возникают ли риски сбоя на выходах дешифратора при* переходах а) по рабочему циклу, б) по нерабочему циклу. Пояснить результаты.
Синтез счетчиков. Автоматизация синтеза.
Задача 11.46. Составить ТП двоично-десятичного счетчика, работающего в коде 2421сд (см. табл. 10.1). По аналогии с задачей 11.27 синтезировать счетчик, используя двухступенчатые Ж-триггеры и ЛЭ для реализации функций возбуждения. Построить схему и проверить ее моделированием. Определить, в частности, поведение счетчика в нерабочих состояниях, для чего целесообразно организовать в модели входы параллельной записи по образцу схемы (см. рис. 11.12).
7*
195
Задача 11.47. Усложнить условия задачи 11.46, предусмотрев внешний сигнал Р0: при Р0=1 счетчик работает, при Р0 = 0 переходит в режим хранения (тактовые импульсы не вызывают переключения счетчика). Сигнал переноса Р0 может изменяться лишь в паузах между тактовыми импульсами.
В ТП режиму хранения соответствует условие Qt+1~Ql (запись 0,0,0; 0,1,1; 0,2,2; и т. д.).
Синтезировать логику и построить схему.
Задача 11.48. Дополнительно снабдить счетную декаду из задачи 11.47 логикой для организации переноса в следующую декаду Р4. Р4= 1 лишь при последнем состоянии счетчика 1111 = 910 и при условии Р0 = 1. В остальных ситуациях Р4 = 0. Внешние выходы декады: q^q4\ Р4; внешние входы: тактовый С, переноса Р0, входы параллельной записи (см. задачу 11.46).
Описать схему и проверить ее моделированием.
Задача 11.49. Счетную декаду, построенную и проверенную в задаче 11.48, занести в БД как СПМ под именем, скажем, DECAIK (предварительно удалить из описания все лишнее).Объединить две СПМ DECAIK в один двухдекадный счетчик и проверить его работу моделированием.
Указания. 1. Входы тактовый и разрешения записи объединить. 2. Проверить работу счетчика в нормальном режиме и при нерабочих состояниях декад (см. задачи 11.46 и 11.39).
В случае синтеза ПФУ с суммарным числом входных и внутренних переменных более 4—5 использование КК для минимизации становится затруднительным. В этих случаях можно использовать либо программу минимизации логических функций, либо специальные программы структурного синтеза, выполняющие по заданной ТП формирование ТФВ и (раздельную либо совместную) минимизацию функций возбуждения.
Приведем пример работы учебной программы такого рода. Программа позволяет использовать по выбору пользователя ТВЗ типов RS, D, Ж, Г (см. табл. 11.2) и раздельно минимизировать либо сами функции возбуждения (например, /, К), либо их отрицания (/, К). Результаты выводятся в виде ДНФ (ДНФ — НЕ) функций возбуждения для каждого триггера (разряда); слагаемые ДНФ представляются троичными наборами (см. стр. 170).
В программу вводятся параметры NX (число входных переменных, допустимо NX=0); NQ (число разрядов); NS (число строк в ТП), NTIP (тип триггера) и RM (желаемая форма представления — ДНФ или ДНФ—НЕ). ТП представляется тройками (при NX = 0 —парами) восьмеричных чисел, как и ранее в этом параграфе.
Задача 11.50. Спроектировать четырехразрядный ПФУ, работающий под управлением внешних сигналов х2, хг либо как
196
суммирующий двоичный счетчик (х2=х1 = 1), либо как суммирующий двоично-десятичный счетчик в коде 8421 (лс2=1, ^ = 0); при х2=х1=0 должен обеспечиваться режим хранения; комбинация л:2=0, х±=1 не используется. Имеем, таким образом, NQ =4, NX =2, NQ+NX=6. Заметим, что, запретив на входах одну из комбинаций, тем самым определяем систему функций возбуждения лишь на 16+16 + 10 = 42 наборах из
2-64. Следовательно, N8 = 42. Если потребовать, например, чтобы режим хранения обеспечивался при х2 =0 независимо от значения х1У то система будет не определена лишь на шести нерабочих наборах кода 8421, т. е. получим NS=58.
Программа позволяет получить для каждого задания восемь решений (четыре типа триггера, ДНФ и ДНФ —НЕ для каждого из них); из этих решений нетрудно выбрать наилучшее в определенном смысле.
Для описанной выше задачи приведем только одно из восьми решений: ДНФ для функций JxKl9 ..., J4K4:
RM =1
1- й разряд ДНФ
2- й разряд ДНФ
3- й разряд ДНФ
4- й разряд ДНФ
К1х хххх К1х ххх1 Кlx xxll К10 ххх 1
NTIP =Ж Лх хххх /xl xxxl /1х xxll Klx xl11
/1х Oxxl Лх xl 11
Слагаемые ДНФ выведены в формате х2хх qA...qx\ буквы J и К указывают на принадлежность слагаемых с соответствующим ДНФ.
Отметим, что приведенное решение содержит всего семь различных слагаемых; для сравнения укажем, что в варианте с использованием D-триггеров — 16 слагаемых, и все они разные.
Программа распечатывает также все переходы синтезированного ПФУ. При этом проверяется и поведение ПФУ в нерабочих состояниях. В отличие от программ моделирования, для этого используется не схема (ее еще нет), а найденные ДНФ.
Задача 11.51. Построить схему ПФУ по результатам из задачи 11.50. Использовать Ж-триггеры с динамическим управлением. Дополнить схему цепью переноса с выходными сигналами у1 и у2, по смыслу соответствующими входным сигналам х1 и х2, исключив при этом возможность появления комбинации у2=0, у±=1. Предусмотреть вход сброса. Проверить схему моделированием во всех режимах работы. Выяснить также, каково будет поведение схемы при появлении на входах нерабочей комбинации и в нерабочих состояниях кода 8421.
Указание. В нерабочие состояния кода 8421 схему можно установить в режиме двоичного счета.
Задачи 11.52 —11.55 рассчитаны на то, что читатель располагает программой структурного синтеза или хотя бы про¬
197
граммой минимизации логических функций. Если имеется программа типа описанной перед задачей 11.50, рекомендуется считать несколько вариантов и выбирать наилучший. Если Же таких программ нет, можно использовать КК на шесть переменных, что, правда, требует известного навыка.
Задача 11.52. Синтезировать четырехразрядный ПФУ, управляемый входными сигналами х2, xv Если х2=0, ПФУ должен работать как двоичный счетчик, при этом х1 играет роль сигнала входного переноса. Если х2 = 1, ПФУ должен работать как сдвигающий регистр, при этом вход хх используется для последовательного ввода данных.
Построить схему на Ж-триггерах, пополнить ее цепями выходного переноса (при х2 = 0) и сброса. Проверить схему моделированием.
Задача 11.53. Составить ТП четырехразрядного ПФУ, который при значениях управляющих сигналов х2хх =11,10,01 должен делить частоту входных тактовых импульсов соответственно в 16, 12, 10 раз. Дополнительное условие: скважность выходного сигнала —2 (длительности импульса и паузы равны). Это условие при делении частоты, скажем, в 14 раз удовлетворяется при таком, например, цикле состояний: 0000, 0001, 0010, ООН, 0100, 0101, ОНО, 1000, 1001, 1010, 1011; 1100, 1101, 1110. Комбинация 00 на входах не используется.
Задача 11.54. Синтезировать по ТП из задачи 11.53 ПФУ, предусмотрев вход сброса. Проверить схему моделированием, в том числе и на нерабочих наборах. Обратить внимание на то, что одни и те же внутренние состояния могут быть рабочими либо нерабочими в зависимости от того, какая комбинация подана .на управляющие входы.
Задача 11.55. Составить ТП по условиям из задачи 11.53 с тем отличием, что при х2хх =00 ПФУ должен переходить в режим хранения. Построить схему и проверить ее моделированием.
Многофункциональные ПФУ. Типичной для микропроцессоров структурой является объединение АЛУ и регистра-аккумулятора (“регистра результата”) в схему автомата с обратной связью, например [32, рис. 14.8; 49, рис. 4.55]. Рассмотрим частный случай, когда АЛУ настроено на режим двоичного сумматора. Если выходы аккумулятора соединены с портом А АЛУ, то, очевидно, в каждом такте содержимое аккумулятора получает приращение, равное числу, поданному на порт В АЛУ: At*1=At+Bt (без учета входного переноса). Если, например, в четырехразрядной схеме число В =0001 и входной перенос С0=0 (либо В =0000 и С0 = 1), рассматриваемая структура будет работать как двоичный счетчик: А*+1=А'+1.
Задача 11.56. Описать схему, состоящую из четырехразрядных АЛУ и регистра с динамическим управлением (можно
198
8
Г
4 1
7 1 9 1
АО
MS
В
т
44-
1
4 1
ВО
j
'с
5\ 6 1 1
1
2
3
71
1
Рис. 11.13. Многофункциональный элемент с памятью
применить БМЭ ALU и RGD). Основные функциональные выходы АЛУ соединить со входом регистра, порт А АЛУ— с выходами регистра; порт В и вход переноса используются для управления.
Используя таблицу настроек АЛУ [30, табл. 1.105, 1.106; 49, табл. 4.3], моделировать работу узла в режиме суммирующего и вычитающего двоичного счетчика.
Задача 11.57. Схему из задачи 11.56 моделировать в режиме сдвигающего регистра с последовательным вводом данных.
Задача 11.58. Построить многофункциональный элемент с памятью, используя мультиплексор и D-триггер с динамическим управлением. Решение показано на рис. 11.13. Мультиплексор в этой структуре может использоваться как по прямому назначению —для подачи на триггер сигналов с различных направлений, так и в качестве УЛЭ (см. стр. 164). Структуру на рис. 11.13 будем рассматривать как многофункциональный элементарный автомат, который при необходимости может быть охвачен обратной связью с выводов 8, 9 на выводы 3 — 6.
Задача 11.59. Описать, тестировать и занести как СПМ в БД схему на рис. 11.13 с именем, скажем, RGCELL. Полезно предусмотреть дополнительно вход асинхронного сброса триггера.
Задача 11.60. Из ячеек RGCELL (см. задачу 11.59) собрать четырехразрядный универсальный регистр, эквивалентный по функциональным возможностям микросхеме К555ИР11 [30, с. 107]. Проверить схему моделированием (для сравнения параллельно по входам полезно подключить БМЭ RG13).
Задача 11.61. Из ячеек RGCELL (см. задачу 11.59) собрать регистр с циклическим сдвигом данных на 0 (режим хранения), 1, 2 или 3 разряда. Выбор величины сдвига —двумя внешними управляющими сигналами. Описать и моделировать схему.
Задача 11.62. На базе ячейки RGCELL (см. задачу 11.59) собрать и проверить моделированием: а) Г-триггер, имеющий два входа Тг и Г2, объединенные логикой И (переключение триггера разрешается лишь при Т{Г2 = \\ б) Ж-триггер; в) DV- триггер [32, с. 110; 49, с. 57].
199
Например, для реализации DK-триггера использовать выводы 1 и 2 (см. рис. 11.9) как входы соответственно D и V; выводы 3 и 4 соединить с выводом <5; на выводы 5 и 6 подать соответственно 0 и 1.
Описать схемы и проверить их моделированием.
Задача 11.63. Из DV -триггеров, построенных к задаче 11.62, собрать параллельный четырехразрядный регистр со входом разрешения записи (ср. схему регистра К555ИР27 [30, с. 129]); проверить работу схемы моделированием.
Задача 11.64. Из ячеек RGCELL (см. задачу 11.59) собрать четырехразрядный параллельный регистр для приема данных с двух направлений. Выбор направления приема осуществлять по одному из двух управляющих входов; второй использовать как вход разрешения записи. Проверить схему моделированием.
Асинхронные (последовательные) счетчики. В таких счетчиках достигается значительное (по сравнению с синхронными) упрощение межразрядных логических связей благодаря тому, что информационная нагрузка частично или полностью переносится на тактовые входы. Младший разряд в таких счетчиках всегда управляется входными тактовыми (счетными) импульсами (СХ = С^); старшие (все или некоторые) разряды управляются по тактовьш входам с выходов предыдущих разрядов (С, =ду. либо С, =qp j < /). Для правильного назначения тактовых связей необходимо прежде всего конкретизировать способ управления триггерами по тактовым входам. Будем считать, что информация на выходах триггера обновляется по отрицательному (1—0) перепаду тактового сигнала; это могут быть, следовательно, триггеры с инверсным динамическим либо с прямым статическим входом.
Для двоичных счетчиков (к разрядов, модуль счета М = 2к) всегда Ci=qi_l, i =2, ..., к; логические связи становятся вообще не нужными [32, рис. 9.1; 29, рис. 9.2]. При построении недвоичных асинхронных счетчиков (к разрядов, М< 2к) организация тактовых связей сложнее. Приведем простое правило для определения тактовых связей, наложив на счетчик следующее ограничение: последовательность его состояний должна представлять собой сплошной отрезок двоичного цикла, содержащий лишь один “недвоичный” переход. Например, 000, 001, 010, 011, 100, 101; 000... (М =6); или ООН, 0100, ..., 1100; ООН... (М =10, код с избытком 3). Заметим, что переход типа 1111, 0000 — двоичный, гак что, скажем, последовательность, задаваемая кодом 2421сд (см. табл. 10.1) удовлетворяет наложенному ограничению.
Указанное ограничение вводится не потому, что было бы трудно развить метод синтеза для общего случая. Это сделать как раз несложно. Однако эффективность перехода к асинхронному управлению триггерами по тактовым входам тем меньше, чем сильнее требуемая последовательность счета отличается от двоичной (ср. дапее с задачей 11.66).
200
Тут же обратим внимание на то, что необходимо проявлять осторожность при построении асинхронных счетчиков, управляемых внешними сигналами (например, реверсивных). Это связано с тем, что изменение модуля или направления счета, задаваемое внешними сигналами, требует, как правило, изменения не только логических, но и тактовых связей в схеме (см. [32, рис. 9.9]). Такие переключения при известных условиях могут привести к ложным срабатываниям асинхронного счетчика.
Тактовые связи при наложенном ограничении определяются на основе анализа единственного недвоичного перехода от состояния А = акак_1...а1 к состоянию В =bk bk_1...b1. Сформулируем правило:
1. Состояния А и В записываются в виде к— разрядных двоичных наборов. 2. Рассматриваются разряды, начиная со старшего; разряду присваивается текущий номер /. 3. Если состояние /-го триггера не меняется (qf = qf)9 то полагаем С, = q1Л и переходим к рассмотрению следующего ' разряда.
4. Если состояние / -го триггера изменяется (tff 5*#f), перебираем разряды, начиная с (/—1)-го, пока не встретится такой r-й разряд, состояние которого меняется с 1 на 0; тогда полагаем C}=qr. Если же подходящего разряда не найдется, полагаем С, = Свх; переходим рассмотрению следующего разряда. 5. Полагаем Сх = СВХ.
Задача 11.65. Назначить тактовые связи для асинхронного счетчика (код 8421, см. табл. 10.1). Имеем Л =1001, В =0000. Рассматривая разряды, начиная с четвертого, получаем CA=qx\ С3 — ?2> С2 ~#1> -Свх.
Задача 11.66. Назначить тактовые связи для асинхронных счетчиков, работающих в кодах с избытком 3 и 2421сд (см. табл. 10.1).
Задача 11.67. Назначить тактовые связи для /с-разрядных асинхронных делителей частоты в М раз, М=5, 6, 7 (/с=3); М= 9, 12, 15 (к =4); М=20, 24, 25, 30 (к =5); М =60 (*=6). Счетная последовательность во всех случаях начинается с состояния 0...0. В общем случае это требование не обязательно.
Рис. 11.14. Графы тактовых связей для четырехразрядных счетчиков: а — синхронный двоичный счетчик; б — асинхронный двоичный счетчик; в — двоично-десятичный счетчик (код 8421)
201
После назначения тактовых связей триггерам счетчика присваиваются ранги по следующему правилу: источнику входных импульсов присваивается ранг Я=0; /-му триггеру присваивается ранг R + 1, если он управляется по тактовому входу от источника с рангом R. Ранжирование триггеров можно наглядно отобразить с помощью графа тактовых связей [44], в котором /-му триггеру соответствует вершина с номером /, и тактовые связи обозначаются дугами. Например, на рис. 11.14 показаны графы тактовых связей для четырехразрядных счетчиков: двоичного синхронного, двоичного асинхронного и двоично-десятичного асинхронного из задачи 11.65.
Задача 11.68. Построить графы тактовых связей для счетчиков из задач 11.66, 11.67.
При синтезе недвоичных асинхронных счетчиков не ограничиваются назначением тактовых связей. Необходимо определить и реализовать также и функции возбуждения триггеров. Отличие от методики синтеза синхронных ПФУ, рассмотренных ранее в этом параграфе, заключается в том, что для некоторых (иногда многих) переходов логическое управление триггерами не требуется; для ФВ остальных триггеров (если только они тактируются не входными импульсами) возрастает число неопределенных состояний.
Процесс определения логических связей может быть разбит на два этапа: 1. Выделение триггеров, не требующих вообще логического управления (в этом случае используются асинхронные счетные триггеры). 2. Составление и при необходимости минимизация функций возбуждения для остальных триггеров.
На первом этапе продолжается рассмотрение единственного недвоичного перехода счетчика. Некоторый 1-й триггер не требует логического управления (может быть выполнен как асинхронный счетный), если он тактируется с выхода предыдущего разряда (С/=^/_1) и при этом либо изменяет в недвоичном переходе свое состояние (#f * qf ), либо (в противном случае) на выходе тактирующего (/—1)-го триггера — нерабочий перепад (00, 01, 11, но не 10).
При выполнении второго этапа необходимо соблюсти два правила.
А. Функции возбуждения каждого /-го триггера, нуждающегося в логическом управлении, определены только для тех переходов счетчика, при которых на входе С, происходит рабочий перепад 1—0. Кроме того, как и для синхронных ПФУ, полагаем, что все функции возбуждения не определены на нерабочих состояниях счетчика.
Б. Логическое управление триггером, имеющим ранг R, разрешается только от триггеров с рангом R^R; логические связи между триггерами одного ранга допускаются лишь при условии,
202
что их тактовые входы непосредственно объединены (в частности, допускается управление с собственного выхода). Это правило имеет целью предотвратить состязания в счетчике [44].
Задача 11.69. Закончить синтез счетчика из задачи 11.65.
Применяя сформулированные правила, находим, что в логическом управлении не нуждаются первый триггер (он меняет свое состояние на каждом такте) и третий триггер
(Яз =ЯВз> C3 = q2, qA2=qB2 = 0).
Выберем для реализации счетчика D-триггеры. С учетом правила А получаем МТИ для ФВ D4 и D2 (четвертый и второй разряды; оба они тактируются от первого триггера):
Яа
Яз
Я 2
Я1
»2
0
0
0
1
0
1
0
0
1
1
0
0
0
1
0
1
0
1
0
1
1
1
1
0
1
0
0
1
0
0
Функции определены лишь на пяти наборах из 16. Минимизируя их с помощью^ карт Карно с учетом правила Б, получаем D4=q2q3, D2=q2q4. Первый и третий триггеры — асинхронные счетные, поэтому Dx =qv D3 =q3 [32, рис. 7.8].
Задача 11.70. Используя результаты синтеза асинхронного двоично-десятичного счетчика, полученные в задачах 11.65, 11.69, построить схему и проверить ее моделированием. Целесообразно проверить и переходы из нерабочих состояний, для чего в модели можно предусмотреть возможность параллельной загрузки, как это сделано в схеме (см. рис. 11.12).
Задача 11.71. Закончить синтез асинхронных счетчиков из задач 11.66—11.68, построить схемы и проверить их моделированием.
Задача 11.72. Рассмотреть схему из задачи 11.70 и убедиться, что она может быть представлена последовательным соединением двух асинхронных секций с модулями счета М=2 (асинхронный счетный триггер) и М=5. Эти секции могут быть соединены и в обратном порядке, что предусмотрено, например, в организации интегральных счетчиков ИЕ2, ИЕ4, ИЕ5 серии К155 [30, с. 87—90]. Описать такое соединение для счетчика из задачи 11.70 и проверить работу схемы моделированием. Код, в котором работает счетчик при таком включении, называют кодом 5421. Выходной сигнал в этом режиме имеет скважность 2 (ср. с задачей 11.53).
Задача 11.73. Используя результаты, полученные в задачах 11.67, 11.71, построить секционированные делители частоты в М раз, М = 12, 14, 18, 24, 30. Сравнить полученные для М = 12, 24, 30 схемы со схемами, полученными непосредственным синтезом. Имеет ли смысл синтезировать по полной методике асинхронные счетчики с четным модулем счета?
203
Задача 11.74. Синхронные делители частоты также можно соединить между собой асинхронной связью. Продумайте, например, как соединить таким образом два делителя частоты в десять раз (см. задачу 11.46) Не забудьте об учете знака рабочего перепада на тактовом входе.
Опишите схему (используя, например, аппарат СПМ) и проверьте ее моделированием.
Наибольшая частота входных тактовых импульсов двоичного асинхронного счетчика /вх зависит от его назначения в схеме ЦУ. Если должно четко фиксироваться каждое рабочее состояние счетчика (скажем, ведется счет до некоторого установленного числа), то интервал между тактовыми импульсами должен быть достаточен для последовательного срабатывания всех триггеров счетчика. Если же счетчик используется как делитель частоты в М раз и необходимо лишь получить с выхода последнего триггера сигнал с частотой /вх /М, то возможна работа при более высокой частоте. По многоразрядному асинхронному двоичному счетчику в таком случае распространяется одновременно несколько волн входных воздействий. Иначе говоря, (.N + 1)-й тактовый импульс можно подавать, не дожидаясь, когда закончится переходный процесс после N-го импульса [32, с. 140].
Задача 11.75. Построить схему четырехразрядного асинхронного двоичного счетчика (см., например, [32, рис. 9.1]) с полным дешифратором (16 четырехвходовых вентилей И); предусмотреть вход сброса. Описать схему для моделирования (пакет ВМ, асинхронный режим). Положить Т1РЬ=КМОП и принять задержки по умолчанию: 90/100 нс для БМЭ AND, 150 нс для БМЭ TDTD. Описать сигнал сброса и затем 16 тактовых импульсов с периодом не менее 600 нс. Выполнить моделирование.
Задача 11.76. Исследовать временные диаграммы для выходов триггеров, полученные в задаче 11.75. Убедиться в том, что счетчик при переходе от состояния Q к состоянию Qt+1 проходит через некоторые промежуточные состояния, что обусловлено последовательным характером срабатывания триггеров. Убедиться также, что, хотя каждое рабочее состояние, в конечном счете, успевает установиться (период входных импульсов назначен достаточно большим), безошибочное считывание числа с выходов счетчика возможно лишь к концу периода тактовых импульсов.
Задача 11.77. Исследовать временные диаграммы для выходов дешифратора, полученные в задаче 11.75. Убедиться в том, что дешифратор успевает отслеживать промежуточные состояния при переходах счетчика и, следовательно, на его выходах возникают “пички”, что необходимо учитывать при использовании таких схем.
Задача 11.78. Повторить моделирование (см. задачу 11.75) еще 2—3 раза, уменьшая период следования тактовых сигналов. Постарайтесь экспериментально оценить наименьший период, при котором счетчик еще может работать как делитель частоты. Одновременно оценивайте возможность фиксации каждого состояния счетчика и характер сигналов на выходах дешифратора (см. [32, с. 140]).
204
Отметим, что, строго говоря, следует учитывать свойство фильтрации коротких импульсов элементами дешифратора, а при приближении к критической входной частоте — также и времена предустановки и удержания триггеров (когда, скажем, входы D или S и R подключены к собственным выходам).
Задача 11.79. Исследовать вопрос о предельной частоте входных импульсов применительно к недвоичным асинхронным счетчикам. Сможет ли, скажем, четырехразрядный делитель частоты в 10 раз работать на такой же частоте, как и делитель частоты в 16 раз (при построении их из одинаковых элементов)? Если ответ вам неясен, повторите эксперименты (см. задачи 11.75—11.78) со счетчиком из задачи 11.70.
Задача 11.80. Подумайте, как нужно доработать методику определения тактовых связей (см. задачу 11.65), чтобы учесть, во-первых, и противоположную полярность рабочего перепада на тактовом входе, во-вторых, — возможность синтеза вычитающих асинхронных счетчиков.
Приведем пример работы учебной программы, предназначенной для синтеза счетчиков.
Программа выполняет структурный синтез счетчиков без внешних управляющих сигналов (ср. стр. 196). На последовательность состояний счетчика налагается сформированное выше ограничение (см. стр. 200). Благодаря этому можно не вводить ТП в программу. Вместо ТП вводятся параметры NS — число рабочих состояний, Н — начальное состояние, SH — направление счета (SH=1: счет на сложение, SH = —1: счет на вычитание). Например, для суммирующего декадного счетчика в коде 2421сд: NS=10, H = ll10, SH = 1; для вычитающего декадного счетчика в коде 8421: NS=10, Н = 910, SH = —1, и т. п. По этим параметрам программой автоматически разворачивается ТП.
Вводятся также параметры NQ, NTIP, RM (см. стр. 196) и параметры СТ (тип счетчика; СТ = 0: синхронный, СТ=1: асинхронный) и RP (рабочий перепад на тактовых входах триггеров; при RP = 0 рабочим является перепад
1—0, при RP = 1 — перепад 0—1).
Пусть задано: NQ = 4; NS = 10; RM = 1; СГ=1; NHP = JK; RP = 0; SH=1; H = 0;
По этим исходным данным программа вывела:
РАЗРЯД 4 3 2 1
ТАКТ. ОТ 1 2 1 ВХ.
1- й разряд /=К= 1
2- й разряд ДНФ Кхххх /Оххх
3- й разряд /=К= 1
4- й разряд ДНФ Кхххх J xllxx
Вывод отличается от рассмотренного на стр. 197 только указанием тактовых связей (ср. с рис. 11.14, в). Вывод Kxjpcx означает, что во 2- и 4тм разрядах на вход К следует подать 1.
11.4. Применение ПЗУ и ПЛМ для построения последовательностных цифровых узлов
При построении ПФУ с применением программируемых матричных БИС память обычно реализуют на триггерах с одним информационным входом, преимущественно на .D-триггерах с динамическим управлением. Для моделирования такой памяти хорошо подходит БМЭ RGD — параллельный регистр с динамическим управлением записью.
205
Некоторые примеры реализации типовых ПФУ на *Т1ЛМ с памятью приведены в работе [31], полезный материал имеется также в [33].
Методика составления ТП и ТФВ в случае применения ПЗУ и ПЛМ не отличается от обычной (см. § 11.3).
При использовании ПЗУ минимизация не требуется. Следует, однако, обратить внимание на нерабочие состояния проектируемого ПФУ и при необходимости запрограммировать ПЗУ так, чтобы обеспечить желательные переходы из этих состояний.
При использовании ПЛМ, как и для КФУ, может оказаться полезной минимизация системы функций возбуждения с целью получить кратчайшую систему ДНФ. Если при этом переходы из нерабочих состояний не включены в исходные данные, то в процессе минимизации возможно произвольное доопределение и необходима соответствующая проверка (ср. стр. 187).
Задача 11.81. Построить на условном (4,4)-ПЗУ четырехразрядный счетчик, работающий в коде Грея (см.
табл. 10.1). Использовать четырехразрядный регистр с динамическим управлением.
Имеем следующую ТП: 0,1; 1,3; 3,2; 2,6; 6,7; 7,5; 5,4; 4,14; 14,15; 15,17; 17,16; 16,12; 12,13; 13,11; 11,10; 10,0. ТФВ в случае D-триггеров формально совпадает с ТП (см. задачу 11.27). Поэтому сразу можно записать для моделирования массив PROGROM (перечень выходных слов ПЗУ в восьмеричном представлении, в порядке возрастания адресов):
PROGROM = 1,3,6,2,14,4,7,5,0,10,13,11,15,17,12,16;
Выходы регистра соединяются с адресными входами ПЗУ. Счетные импульсы подаются на тактовый вход регистра. Используя вход разрешения ПЗУ, все его выходы можно перевести в единичное состояние. Следовательно, этот вход можно использовать для синхронной установки счетчика в состояние 1111 независимо от текущего адреса на входах ПЗУ. Обнуление (сброс) счетчика возможно, если предусмотрен соответствующий вход регистра.
Задача 11.82. Составить схему счетчика (см. задачу 11.81) и проверить его работу моделированием.
Задача 11.83. Используя два (5,8)-ПЗУ К155РЕЗ и параллельный регистр К555ТМ9 [30, с. 77], построить шестиразрядный счетчик, работающий в коде Грея, и проверить схему моделированием.
Линейным автоматом (ЛА) называют автомат, функции переходов (и выходов) которого — линейные (см. § 10.2) логические функции [45]. Функция переходов ЛА задается квадратной булевой матрицей А; /-му столбцу матрицы соответствует текущее состояние /-го триггера q \, а j-й строке — следующее состояние j-го триггера #j + 1. Предполагается, что ЛА построен на ТВЗ D-типа. Элемент матрицы а{]= 1, если#]*1 зависит от #', иначе ^=0. Пример матрицы А:
206
0
1
0
1
1
1
1
0
0
0
0
1
1
0
0
0
0
1
1
0
0
0
0
1
1
Строки этой матрицы читаются следующим образом: q '+1 = q 2 Ф Я 4Ф Я ‘s> Я 2+1 = Я Я 2 и т. д. С помощью матрицы А текущее Q‘ и следующее Qt+1 состояния автомата связываются матричным уравнением [45].
Учитывая (11.3), по матрице А можно строить логический преобразователь, управляющий D-триггерами, из ЛЭ М2 или на основе ПЗУ: Dx =Я2®Яа®Я$\ D2 = qx®q2 и т -Д-
Будем записывать матрицу построчно; запись приведенной выше матрицы: А=01011, 11000, 01100,. 00110, 00011. Эта матрица представляет собой 13-ю степень матрицы Ах = 11011, 10000, 01000, 00100, 00010. Линейный автомат, задаваемый матрицей Аь может быть реализован на сдвигающем регистре с обратной связью, определяемой первой строкой матрицы [45].
Запись матрицы можно сделать еще короче, если представить двоичные строки их восьмеричными эквивалентами: А=13,30,14,6,3.
Задача 11.84. Определить параметры ПЗУ, необходимого для реализации автономного ЛА, задаваемого матрицей А. Построить ЛА на параллельном регистре с динамическим управлением и ПЗУ и проверить его работу моделированием.
Указания. 1. Перед тем, как подавать на регистр тактовые импульсы, ЛА необходимо установить в любое определенное состояние, отличное от 0...0. 2. Построенный ЛА представляет собой генератор псевдослучайных чисел (ГПСЧ) [46]; период его работы составляет 2 —1 = 31, поэтому целесообразно подать не менее 32 импульсов. 3. Полезно обратить внимание на то, что в матрице на главной диагонали во всех строках, кроме первой,
стоят единицы, поэтому D*-=... 0#,-0 Это наводит на мысль заменить
D-триггеры на Г-триггеры, поскольку Tt = Dt 0 qt. Используя эту возможность (для единообразия также и для первого триггера), получаем цепочку из Г-триггеров (по структуре аналогичную сдвигающему регистру), охваченную обратной связью: T1 =#i0#2®#4 Эту обратную связь можно реализовать на ЛЭ М2, и тогда нет необходимости в ПЗУ.
Задача 11.85. Построить ЛА из задачи 11.84, используя указание 3 к этой задаче. Проверить схему моделированием совместно со схемой из задачи 11.84.
Сигнатурный анализатор (СА). Восьмиканальный восьмиразрядный СА описывается как ЛА матричным уравнением
Q'+1 =А£)'фВХ', (11-11)
где Q и X — восьмиразрядные векторы внутреннего и входного состояний ЛА; А и В —матрицы размером 8x8; А= = (35,200,100,40,20,10,4,2); В =(200,100,40,20,10,4,2,1). Смысл
207
матрицы А тот же, что и на стр. 207; в матрице В у-й строке соответствует следующее состояние j-го триггера #J + 1, /-му столбцу — /-я входная переменная х(. Покомпонентная запись матричного уравнения (11.11) при указанных матрицах А и В имеет следующий вид:
я[+1 = я а© я б® я '5ф я '4ф* !;
Я‘ + 1 = Я^-1®Х; 0‘=2-8).
(11.12)
Уравнения (11.11) и (11.12) представляют собой линейный вариант функции переходов общего вида FQ (см. § 11.3).
Задача 11.86. Построить схему восьмиканального восьмиразрядного СА, определяемого уравнениями (11.12). Использовать D-триггеры с динамическим управлением и ЛЭ М2 (либо ПЗУ). Предусмотреть вход установки нулевого состояния. Поставить на модели следующие эксперименты: А. Моделировать работу СА, подав на него не менее чем 15 тактовых импульсов, задавая при этом в каждом такте произвольные восьмиразрядные векторы на входах X. Проследить за формированием сигнатуры, под которой понимается конечное внутреннее состояние СА. Б. Повторить эксперимент А, подавая на вход х± последовательность 1111100000111111 при постоянных нулевых уровнях на входах х2—х8. В. Повторить эксперимент Б, изменив последовательность на входе х±: 0111100000011001. Сравнить сигнатуры, полученные в экспериментах Б и В, и попытаться объяснить результаты. Необходимый теоретический материал можно найти в работе [50].
Задача 11.87. По результатам минимизации, выполненной при решении задачи 11.52, оценить необходимые параметры ПЛМ. Построить схему и проверить ее моделированием. Будем считать результаты приемлемыми, если они позволяют обойтись одной-двумя (т, п, /)-ПЛМ т < 16, п < 8, / < 48.
Задача 11.88. Выполнить задание, сформулированное в задаче 11.87, для исходных данных из задачи 11.53.
Задача 11.89. Выполнить задание, сформулированное в задаче 11.87, для исходных данных из задачи 11.55.
Задача 11.90. Построить на ПЛМ четырехдекадный двоичнодесятичный счетчик с хорошим быстродействием. Последнее условие требует организации параллельных переносов из младших декад в старшие. По числу входов и выходов нас устроили бы две (16,8,48)-ПЛМ К556РТ1; включив их параллельно по входам, получим (16,16,48)-ПЛМ, что в сочетании с 16-разрядным регистром обеспечит возможность решения задачи при условии, что, выполнив минимизацию, уложимся в 48 термов.
Однако, прямой синтез такого счетчика (ср. с задачей 11.50) затруднителен хотя бы уже потому, что исходная
208
ТП содержит 104 переходов. Наметим поэтому косвенный путь решения задачи. Для упрощения не будем учитывать необходимость входного и выходного переносов.
1. Синтезируем на Г-триггерах одну декаду требуемого счетчика (найдем ДНФ функций возбуждения) и выясним таким образом число термов на декаду.
2. Термы для второй — четвертой декад будем пополнять сомножителями, учитывающими междекадные переносы. Пусть триггерам в декадах присвоены номера 1—4, ..., 13—16. Перенос из первой_декады во вторую должен возникать при комбинации qAq3q2<h (код 8421); эти буквы и должны быть добавлены в термы второй декады. Если, скажем, при синтезе получена функция возбуждения T2=q4qv то для второго разряда второй декады сразу можно записать
^6 Q& 9s 9а 9з ?2 9v
В термы для третьей и четвертой декад придется добавлять по 8 и 12 букв соответственно, но это не является препятствием, так как в m-входовой ПЛМ каждый терм может включать в себя до т букв.
Задача, таким образом, сведена к синтезу одной декады, который может быть выполнен очень тщательно, в частности, с применением средств автоматизации.
Задача 11.91. Как изменится поведение четырехдекадного счетчика, если при синтезе одной декады, используя нерабочие состояния кода 8421, считать условием переноса не комбинацию q4 q3 q2 ql9 а комбинацию q4 q{l (Cp. схему счетчика К155ИЕ9 в работе [36, рис. 3.29]).
Задача 11.92. Синтезировать четырехдекадный двоично-десятичный счетчик (код 8421). Использовать подход, описанный в задаче 11.90. Предусмотреть вход сброса. Выборочно проверить схему моделирования.
Указание. Для выборочной проверки схемы в модели можно предусмотреть параллельную загрузку в счетчик нужных состояний (см. стр. 194) либо использовать массив НС. Следует помнить, однако, что при программировании ПЛМ ошибка может быть допущена в любом отдельно взятом терме (в любой функции), поэтому наиболее надежна все-таки полная проверка.
Задача 11.93. Повторить задачу 11.92 при условии, что счетчик должен работать в коде 2421сд (см. табл. 10.1).
Задача 11.94. Синтезировать и проверить моделированием двоично-десятичный счетчик из задачи 11.92 с дополнительным требованием: счетчик должен быть реверсивны, т. е. работать под управлением внешнего сигнала А на сложение (А -0) или на вычитание (А =1). Чтобы сохранить неизменным число входов ПЛМ (16), старшую декаду выполнить без четвертого разряда (при этом она выродится в трехразрядный
209
двоичный счетчик). Модуль счета, таким образом, уменьшится с 10 000 до 8 000.
Задача 11.95. Повторить задачу 11.92, усложнив исходные данные для синтеза. Предусмотреть перевод счетчика из любого нерабочего состояния (первым же тактовым импульсом) в состояние 0...0.
Задача 11.96. Решить задачу 11.93, усложнив ее условия так же, как в задаче 11.95.
Задача 11.97. Оценить, насколько целесообразно при решении задач 11.92 — 11.96 записывать функции возбуждения триггеров в ДНФ—НЕ с расчетом на использование программируемых инверторов в ПЛМ. Вопрос требует логического анализа.
Задача 11.98. В задачах 11.92 — 11.96 ПЛМ, в принципе, может быть, заменена на ПЗУ. Определить необходимую емкость ПЗУ и .оценить целесообразность такого технического решения.
Задача 11.99. Рассмотреть 2, 3, 4 и 5-разрядный коды Грея (см. табл. 10.1, задачи 11.82, 11.83). Можно ли применить подход, описанный в задаче 11.90, для синтеза многоразрядного счетчика, работающего в коде Грея (т. е. детально синтезировать, скажем, первую четырехразрядную секцию и затем “достроить” вторую, третью и четвертую)?
Ответы к задачам
ГЛАВА ТРЕТЬЯ
3.1. 0,9...0,99. 3.2. Статический коэффициент передачи по току BN транзистора VT1 имеет конечное значение. 3.3. Ь 1р> Ь 1п. 3 .4. Коэффициент BN у интегральных п —р — w-транзисторов выше, чем у интегральных р — п — р-транзисторов. 3.5. Увеличить сопротивление R3 или уменьшить сопротивление R4. 3.6. Л вых > >вых- 3.7. При введении в схему резисторов R3 и R4 удается значительно повысить выходное сопротивление И ПТ. 3-8. R,mn> RBblxp. 3.9. /„ =1.-100 кГц. 3.10. *л »6/2. 3.11. В схеме на рис. 3.1, б в отличие от ххемы на рис. 3.1, а ток базы транзистора VT1 компенсируется токами баз транзисторов VT2 и VT3. 3.12. R ^х « R £^х,
3.13. Можно не вводить. 3.14. Двых2 > Явых1, Ь12 < Ьц- 3.15. Уменьшается диапазон изменения выходного напряжения схемы на напряжение UR4. 3.16. Нет. 3.17. ут3 »уТ1 * ут2. 3.18. В ИПТ (см. рис. 3.1, я, б) температурные изменения напряжений С/Э_б двух транзисторов взаимно компенсируются; в ИПТ на рис. 3.1, в этого не происходит. 3.19. Кципз< < «Киит. 3.20. Достоинство схемы на рис. 3.1, в: Киипз «КиШ11 ее недостаток: ут3 > > ут1. 3.21. Выходной ток ИПТ описывается соотношением: IR2 ~Jri ехР (—^4^ri/ Фт)* 3.22. При токах, больших 100 мкА, начинает заметно сказываться падение напряжения на резисторе R4. 3.24. IR1 « «100 мкА. 3.25. Увеличить площадь перехода эмиттер—база транзистора VT1. 3.27. Kyd « 0,2. 3.29. ут « 0,35 мкА/К. 3.31. /оп * 100 мкА, IR5 «
210
«300 мкА, fR6 «100 мкА. 3.33. При включении напряжения питания транзистор VT4 переходит в активный режим, обеспечивая токи баз транзисторов VT1, VT2, VT5. 3.34. Значение тока /оп прямо пропорционально зависит от сопротивления резистора R8 и значения тока отсечки IS транзистора VT8. 3.35. ^ипшп ®* 2,4 В. 3.36. Киш[ « 0,3 мкА/В. 3.37. Кцип 1»2 мкА/В. 3.38. а) ут « 0,33 мкА/К, б) у т « 0,12 мкА/К. 3.39. Около 560 кГц. 3.40. R1=R2=10 кОм. 3.42. При 1/д < 48 мВ. 3.43. Разность входных токов Д/вх = 0 при ид = 0 и Д/вх«4 мкА при С/д = 25 мВ. 3.44. RBX« 10 кОм. 3.46. Коэффициент усиления возрастает в два раза. 3.48. Диапазон допустимых синфазных напряжений составляет—8,6...+ 5,2 В. 3.50. RBX « 10 кОм, RBX Сф« 10 МОм. 3.52. Температурный дрейф выходного напряжения ДУ максимален при С/д « ± 52 мВ. 3.53. UCM « 3 мВ. 3.54. Разность входных токов Д1ВХ«55 нА при С/д=0 и Д/вх«3,5 мкА при £/д = 25 мВ. 3.55 Технологическим рассогласованием параметров IS и BN транзисторов VT1 и VT2. 3.57. ДС/см/ДГ« 10 мкВ/К. 3.58. Д/б1/ДГ«25 мА/К. 3.60.
Выходной ток ДУ примерно равен сумме токов баз транзисторов VT1 и VT2. 3.61. При С/д « 48 мВ. 3.62. Включение эмитгерных резисторов R6 и R7 расширяет диапазон линейной работы ДУ. 3.63. Диапазон допустимых синфазных напряжений —8,6...+ 9 В. 3.64. С/см «3 мВ. 3.65. Напряжение смещения увеличилось примерно на 2,5 мВ в результате падения напряжения на резисторе R5. 3.68. Ки« 65 дБ при R6=R7= 1 Ом и Ки « 42 дБ при R6=R7=50 Ом. При увеличении сопротивлений резисторов R6 и R7 снижается проводимость передачи ДУ. 3.69. Кцсф«6,5 • 10 . 3.70. При С/д <95 мВ. 3.71. Ки~68 дБ, частота
около 115 МГц. 3.73. Кц уменьшился примерно в два раза. 3.75. /нач = 0,1...1 мА. 3.76. Увеличить сопротивления R2, R4 или Rv R6 3.77. Обеспечивается: U вь1х= И---12,5 В, t/^x=—10,5...—12 В. 3.78. Уменьшить сопротивления Rx, R6 или R2, R4. 3.79. Находится. 3.80. Увеличить сопротивления R2, R4. 3.81. Нет. /н к 3 > > 1 )S/H max* 2.82. Для предотвращения работы транзисторов VT4, VT6 в инверсном режиме, что приводит к резкому возрастанию тока /н к. з- 2.83. Нет. ^Выхтах<<1^ 2.84. Вместо транзисторов VT1, VT8 использовать составные транзисторы. 3.85. Нет. 3.86. Уменьшить сопротивление R9 или увеличить сопротивления R6, R7. 3.87. Температурные изменения напряжений трех диодов компенсируют температурные изменения напряжений эмиттер— база транзисторов VT1, VT4, VT10. 3.88. Обеспечивается: U^bix —10...12 В, 14ыХ= —10...—11,5 В. 3.89. Уменьшать сопротивления R6, R7 или R4, R10, или увеличивать сопротивления R2, R12. 3.90.
= 0,8...1,2 Вт, Р®г=0,9...1,3 Вт. Не нужен. 3.91. Р = 1,8...2,2 Вт, Р *,от= 1.9...2,3 Вт. Нужен. 3.92. Для уменьшения значений параметров /н к з, РПОт в режиме короткого замыкания на выходе каскада. 3.93. В схеме (см. рис. 3.6, 6) в отличие от предлагаемой схемы удается получить: /нкз < < <<1нтах, что и улучшает энергетические свойства каскада. 3.94. ЯВХ2>ЯВх1> ^вых2 < < ^вых1. 2.95. Kj2 > > Кп, KV1 « Ки2. 3.96. Нет, поскольку выходные транзисторы этих каскадов представляют собой эмиттерные повторители, коэффициент передачи которых по напряжению несколько меньше единицы. 3.97. Находится. /нач = 3...8 мА. 3.98. Увеличить по модулю на несколько сотен ^ милливольт отрицательное напряжение UBX. 3.99. Уменьшить сопротивления Rs, R2, R12 или увеличить сопротивления R7, R3, R13.
3.100. | С/ВВк1 >> | U$lx\. Низкоомный резистор нагрузки R9 убирает асимметрию токов /э4 и /к7 при сравнительно небольшом напряжении UBblx.
3.101. Наиболее вероятны два случая: U £^х= 16... 17,5 В, РТ2, VT4 — B
насыщении, ^х=-16--17,5 В, VT7 — в насыщении. 3.102. Для стабилизации статического режима каскада при высокоомном сопротивлении нагрузки R9. 3.103. t/BbIX=1...3 В. При постоянной низкоомной нагрузке R9. 3.104. Обеспечивается. U$lx= 15,5...17 В, t/®x=-15,5...-17 В.
211
3.105. Находится. 4lk.з. = 120...140 мА, /^2)к 3 = 110...130 мА. 3.106. Уменьшить сопротивления R3, R13. 3.107. Теплоотвод необходим. 3.108. Киз > > >>KU2, Rbx3<Rbx2, ^выхз > > Лвых2- 3.109. Нет. 3.110. Преимущества: ^выхтах > > ^вхтах» ^и~иъых/ивх> > Недостатки. 7?вых3 > > Т?вых2, ^вхЗ <
<#вх2*
ГЛАВА ЧЕТВЕРТАЯ
4.2. ^ вх.сф.~ 14>4 в> ^вххф.*-12’8 в- 4 3- VT11> кз> У717* У725*
VT26, Д5, /Ш. 4.4. Д3 = 20 Ом, Д4 = 60 Ом. 4.5. Р7=Р24 = 450 мВт.
4.6. 7^ = 3800 мА, /^=90 мА, /^3 = 3700 мА, мА,
/К1)7=109 мА, /К22=109 мЛ /К23=1 ^ 7(к2}4 = 30 мА. 4.7. Для того,
чтобы разные токи баз ТТ15 и ТТ76 не рассимметрировали статический режим по току транзисторов входного каскада. 4.8. Яц = 10 кОм. 4.9. Регулировка напряжения смещения. 4.10. 7/см = 12...—12 мВ. 4.11. /вх= 0,1 мкА.
4.13. При вариации Рдг1б изменяется входное сопротивление каскада на транзисторе VT16 (эмиттерный повторитель) и тем самым меняется результирующее сопротивление нагрузки входного каскада. Это приводит к изменению коэффициента усиления напряжения ОУ. 4.14. Возрастает. 4.15. В два раза. 4.16. Снизится. 4.17. ЛГ{/С(Ь = 5...10, sf^4> = 33, SKuc* = -8, 5%сф = -33,
г исф гэ8 rKg гзд
5%сф = 8, S?Uc Ф = 30, S,U сф = _9, 5%сф = _28, $%сф = _4б, 5%сф = 4б.
гк9 ’ гэ12 ’ гэ13 гк13 гэ18 * гэ19
4.18. KUc^ = 30. 4.19. Входной каскад. 4.20. Относительный разброс параметров. 4.23. Не устойчив. 4.24. 1/120.00, 1/50000. 4.25. На транзисторе VT22. 4.26. С1 = 30 пФ. 4.27. Сх = 50 пФ. 4.29. Чтобы снизить емкость корректирующего конденсатора. 4.30. С2 = 1 мкФ.
ГЛАВА ПЯТАЯ
5.1. R3=R1R2/(R1+R2). 5.2. Не зависит. 5.3. 1) К140УД7, 2) К140УД8А, 3) К140УД7, 4) К140УД8А. 5.4. 1) 5^и = _$£ьги= 1; 5*(/и = _7 . ю-7,
S*Uи = б • 10-5, ^и = 10_6, 5&/и =_1(Г5, 2) = _5%и = ± 5%и =.
ки квх квых ' К1 к2 к4
=7 • 10-5, 5^1/и = з. ю 3, S%Uи=10-4, S%Vи=-510-4. 5.5. 16^ | = |в/г21 =
U вх вых
= 0,05%. 5.7. Ки = 180*10 , при котором \Кии\ =99,94. 5.8./в= 400 кГц. 5.9. Уменьшается. 5.11. иъыхт1 = 0,125 В, *уст = 6,5 мкс. 5.12. Снижается запас устойчивости, так как емкость С2 вносит дополнительный полюс в передаточную функцию петлевого усиления РУ. 5.13.'0^ = 10 пФ, fycT = 5,5 мкс.
5.14. /ср = 300 кГц, А<рГ[/=70°. 5.15. С2 = 0,003 мкФ. 5.16. С2 = 0,001 мкФ.
5.17. иъъ1хА1-0,13 В, *уст=4 мкс. 5.18. Сх = 10 пФ, густ=6 мкс. 5.19. R2 = = 100 кОм, Kvру = -110-5.20. А/ /АГОУ 7X47. 5.21. КЦ1 = 3000, Ки2 = = 300 000, ДвхРУ = 110 МОм, Явыхру = 0,02 Ом. 5.22. Последовательно-параллельная обратная связь (7X47), повышает входное сопротивление РУ. Параллельно-параллельная обратная связь (7X42), снижает выходное сопро- тивление РУ. 5.23. jjupy =-jgupy = 0,91, S%upy =_ s%UW = -1. 5.24. Коэффициент передачи напряжения РУ практически не зависит от R. и R6,
Киру (1 +R1/R5)(R2/R3). 5.25. |6Лг.|=0Д %. 5.26. Д,=200 кОм. 5.27. DA1.
5.28. Д1=Д4= 1 МОм, |Кид|=10. 5.29. \Ku^\ = ]kUr2\=R1/R2. 5.30.
1) Кисф= 10—7, 2) 1,5-КГ7. 5.31. 1, 2) ^сф = ^сф==_^сф =
212
* _^исф=_(4...6) 10б, ^=-(0,2...0,3), ^ЬСКФ=-^СФ=1- 5.32. Потому,
что Кисф стремится к нулю. 5.33. 1) Кисф=0,045, 2) Кисф = 0,09, 3) Кисф = = 0,17. 5.34. 1, 2) С2 = 3 пФ. 5.35. Из-за соответствующего разброса АЧХ модулей коэффициентов передачи напряжения по первому и второму входам. 5.36. т2= 15 мс, /ср = 500 кГц. 5.38. RbXi=R2, Явх2=Л3+Л4. Нужно
одинаково изменять сопротивления двух резисторов. 5.40. Л2=Я6 = 30 кОм. 5.41. Х(/д = —(1+2Л2/Л4)(Л1/Л3), Кц = — 210 для Л4 = 3 кОм, Кид =—30 для Л4 = 30 кОм. 5.42. S%ua=-S%ua=-S*un=l, 5^д=5£</Д=0,5. 5.43. /Сид не
зависит от параметров ОУ при большой глубине отрицательной обратной связи, которую и создают ОУ. 5.44. R4. 5.45. Кисф = 10~6, 5д^сФ=
=-^сФ=^сф=-^сф=-о,9-106' *^сф=—^сф=—4-103, 5^хсф=
= _^х2Ф="14’ ^ь«Ф1=_^Ф2=18- 5-46‘ 1} %сф = 0,25-10-5, 2) Кисф = 0,08,
3) KUc£ = 0,09. 5.47. /в = 30 кГц при Я4 = 3 кОм, /в=100 кГц при R4 = 30 кОм.
5.48. Для снижения смещения и нестабильности выходного напряжения.
5.49. R1=R2 = 500 кОм. 5.50. ОУ вносит фазовый сдвиг —180°. 5.51. С2 = = 0,1 мкФ. 5.53. Ях= 1 МОм. 5.54. R1= 200 кОм, при котором <рк =
= —264°. 5.55. Не может. 5.57. fycr=7 мс. 5.58. Ucl^UBx2. 5.59. «Вых(*инт) = = 10 В. 5.60. Xt/=103. 5.61. За счет прямого прохождения входного сигнала через С1 на выход. 5.62. т2 = 100 мс, /ср = 80 кГц. 5.63. Выходное сопротивление интегратора мало. 5.64. U1 = 0, £/2 = 0, {/3 = 1,24 В, t/4= 10 В, С/5 = = 4,23 В, £/6 = 1,95 В, С/? = 0,57 В, tf8 = 7,47 В, 179 = 3,56 В, £/10=1,28 В, /к1 = 1,26 мА, £/к_б1 = 3,24 В, /к2 = 1,28 мА, C/K_g2 = l,61 В, /к3 = 1,13 мА, i7K_63 = 0,7 В. 5.66. Л5, Лб. 5.67. /?3. 5.68. Из-за снижения тока коллектора VT1. 5.69. Через R4 протекает малый базовый ток VT3. 5.70. Для введения отрицательной обратной связи. 5.71. Д1/8/ДГ=3,4 мВ/К. 5.72. 5^^=0,8,
s£w=0,6, ^=-0,95, 5^=0,17, 5р^2=0,45, 5^=-0,46. 5.73. Резисторы Л2, Л4,
[/и= 6,65 В, U12=_ 1 В, а13 = 0,66 В, и1А
R6 почти не влияют на коэффициент передачи напряжения при наличии Cl, С4. 5.74. /в=20 МГц, введена отрицательная обратная связь через R4 (С4 = 0) и реализовано каскодное включение каскадов VT2 и VT1 ((^ = 0,1 мкФ). 5.76. VT2 и VT1. 5.77. Исключена отрицательная обратная связь через R4 (С4 = 0,1 мкФ) и нагрузочное сопротивление VT3 включает Ri+R$ (С^О). 5.78. Ci=C3 = 0,01 мкФ, С2 = 0,1 мкФ. 5.80. /^ = 0, С/2 = 0, t/3= 10 В, С/4 = 2,05 В, f/5 = 1,38 В, U6 = 0,72 В, Г/7 = 2,09 В, £/8 = 1,52 В, С/9= 1,65 В, t/10 = 0,86 В,
~ - 5,98 В, /к1« 1 мА, С/К.б1 = 3,35 В,
(=5 В, /„5 = 0,7 мА, С/к_55 = 0,13 В. 5.81. R1. 5.82. Rl, R7, R9. 5.83. At/14/AT=4 мВ/К. 5.84. КГ2, VT4, VT5, VT6. 5.85. Чтобы скомпенсировать температурное изменение напряжений эмиттер— база VT2, VT5. 5.86. Кц= 10, Лвх=100 кОм, Лвых = 9 Ом. 5.87. Для увеличения входного сопротивления. 5.88. Усилитель имеет цепь отрицательной параллельной обратной связи для выхода (R6). 5.90. Отношение сопротивлений резисторов R6, R9 определяют Ки. 5.91. /н = 2 0 Гц, /в= 200 кГц. 5.92. С1 = 0,005 мкФ, С2 = 0,006 мкФ. 5.93. £/к.б1=11 В, /к1 = 2 мА. 5.94. Rip R8, R9. 5.95. Л3 = 99 кОм, Л4 = 1 кОм, ^io=^n=23,5 кОм. 5.96. Л3 = 1 кОм, R4 = 99 кОм, R10= 1 кОм, Яи = 46 кОм.
/К2 — 23 мА, f/K_62 ^>9
кЗ"
ГЛАВА ШЕСТАЯ
6.2. Х£)Л1> 6*104. 6.3. На 30 дБ. 6.10. Объясняется наличием глубокой ООС (KDA-+ оо), линеаризующей форму амплитудной характеристики. 6.11. <^ = 0,15 мкФ. 6.12. /обр<0,1 нА, ^обр^1»5 МОм. 6.13. Я3 -620 Ом. 6.29. Kv>4-104. 6.30. 17см<1,5 мВ, /вх<0,25 мкА 6.34. 1...5 МГц. 6.35.
<^ = 0,1 мкФ. 6.40. Сх> 1200 нФ, С2> 820 нФ. 6.48. Ux^8 мВ. 6.49.
213
а = 7,4 1/мВ. 6.51. 5 %. 6.53. Д = 1,5 МГц, /2 = 7 МГц. 6.54. /с< 0,2 мкА. 6.58. VUbvafi2S В/мкс. 6.59. /выхтах>8 В/мкс. 6.60. Лвкл < 240 Ом. 6.61. /Д = 620 Ом. 6.62. Кц > 4-10.
ГЛАВА СЕДЬМАЯ
7.1 п =5. 7.5. п =3. 7.16. D >62 дБ; К0 = 1; 7.17. /0 =37 Гц, |К(/о>0)1 =3. 7.37. /?4 = 1 кОм, Я3 = 1,5 кОм; ^=^2=1 кОм; Сх= 1 мкФ; С2 = 0,25 мкФ.
7.49. На спектральный состав выходного напряжения ЯС-генератора. 7.51. о)0 = Ю5с'1> у0 = 0,33. 7.52. Л1 = 5,1 кОм. 7.53. 1,7°. 7.61. Us = 2,5 В. 7.69. С2 ^ 0,15 мкФ.
ГЛАВА ВОСЬМАЯ
8.1. Д2=1,2 кОм. 8.3. Д2 = 1,18 кОм. 8.4. Прц Г-20 °С tfon = 2,47 В, Ут= 0,014 мВ/К. 8.5. ииnmto“7 В. 8.6. ЯнсС/=0,3 мВ/В. 8.7. Ксг * 56 дБ, /в = 310 кГц. 8.8. Явых =“ 1,1 кОм. 8.9. Выполняется. 8.10. *= 1 мА,
12 ■= 100 мкА. 8.11. ут«0,07 мВ/К, Я3 = 5,8 кОм. 8.12. Ыоп» 1,23 В, ут = = 3 мВ/К. 8.13. ут= 0,11 мВ/К. 8.14. 1/ип min “2 в- 8.15. Резистор R2 определяет токи эмиттеров транзисторов VT4, VT5. 8.16. См. выражение (8.2). 8.17. Ксг ** —42 дБ. 8.19. RBUX = 300 Ом. 8.20. Лвых » 1,2 кОм. 8.21. 1/вых < 5 В. 8.22. Увеличить сопротивление R3 или уменьшить сопротивление Rs. 8.23. Рк4 "• 4,6...4,9 Вт. 8.24. Р=4,6...5,4 Вт. Нужен. 8.25. Может, поскольку /38>>/6-3. 8.26. /б4> >/к2. 8.27. Транзистор VT5. 8.28. У транзисторов
КГ2...КГ5. 8.29. У транзисторов VT3, VT4, 8.30. Таких транзисторов
нет. 8.31. у цоп< 0. 8.38. Потому, что транзисторы VT3, VT4 подключены к выходу усилителя сигнала рассогласования и, следовательно, их температурный дрейф усилителем не усиливается.
ГЛАВА ДЕСЯТАЯ
10.1. Несправедливо. 10.4. Результаты должны совпасть. 10.8. В восьмеричных эквивалентах: 0, 1, 3, 2, 6, 7, 5, 4, 14, 15, 17, 16, 12, 13, 11, 10, 30, 31, 33, 32, 36, 37, 35, 34, 24, 25, 27, 26, 22, 23, 21, 20. 10.9. А:
У 6=х6’ ys=xs®x6, У4=х4®х5'’ Уз=х1®х4> У2=х2®хЗ> У1=*1®*2- Б: хб=Уб> х5=у5фу6; х4=У4®У5®Уб> хз=Уз®~®Уб'> -х1шУ1®-ФУб Ю.13. у-
= *-i*2\л*2*з • 10.17. МТИ в восьмеричных эквивалентах: 0, 0; 1,1; 2,2; 3,3; 4,4; 5,13;_6,14; 7,15; 10Д6; 11,17; 13,5; 14,6; 15,7; 16,10; 17,11. 10.18. AwB, ABvAB, AvB, т. е. А < В, А*В, А > В. 10.21. а) да; б) нет. 10.24. у =А1ШаВСВС. 10.25. y-ABCDAB ABCDCD. 10.31. Последовательно: 2, 3, 4, 5, 6; параллельно: 3, 4, 5, 6, 6. 10.37. Верные сигнатуры: 1Н18, UPFU, U142, PF73, 4С61. 10.39. Нет. 10.40. Да; А >С или А > С. 10.42. Можно. 10.53. М2: подать 0 на входы D0, D3, Х)5, Г>6, 1 — на входы
D2, Da, D7; мажоритарный: подать 0 на входы £>0, Dv D2, D4) 1— на входы D3, Ds, D6, D7. 10.54. Подать 0 на входы D0, D5, D10, Z>15, на остальные входы D подать 1. 10.57. Переменные Ait В( подать на адресные входы; сумма: подать Рвх на входы D0 и £>3, Рвх~на входы Dx и D2; перенос: подать О на вход D0, Рвх—на входы D1 и Z>2, 1 — на вход D3. 10.58. М2: подать х5 на 1, 2, 4, 7, 8, 11, 13, 14-й входы D, на остальные подать *5; мажоритарный: подать 0 на 0, 1, 2, 4, 8-й входы D, 1 — на 7, 11, 13, 14, 15-й, на остальные входы D подать х5. 10.59. При настройках от 000 до 111 МФЛЭ работает как элемент ИЛИ —И, И — ИЛИ — НЕ, ИЛИ - НЕ, И, ИЛИ - И - НЕ, И - ИЛИ, ИЛИ, И - НЕ. 10.60. Можно, так как АВ@(АМВ)=АВ(АЧВ). 10.72. 16 ПЗУ. 10.73. а) 32, б) 8,’в) 2. 10.76. 2*—1.
214
10.77. 2к. 10.78. 2k. 10.79. Для непосредственной реализации двух функций из трех необходимо значение параметра / при к =4,, 6, 8 соответственно 23, 75, 271. 10.80. Набор 1010 покрывается термами 7, 12 и 14-м; любая из функций, в ДНФ которой входит хотя бы один из этих термов, примет на наборе 1010 значение 1. 10.84. Во всех случаях девять термов. 10.86. Во всех случаях девять термов. 10.90. 38 термов. 10.91. К556РТ4. 10,92. К556РТ5. 10.93. (16,4,16)-ПЛМ.
ГЛАВА ОДИННАДЦАТАЯ
11.1 В схеме возникнет генерация. 11.4. Нет, так как в статическом режиме на входах БЯ либо противоположные сигналы, либо пассивные уровни. 11.9. Появление третьего состояния обусловлено задержкой в инверторе 9. 11.21. На диаграммы выводятся состояния элементов в определенные моменты времени; при фиксированном моменте “освобождения” кольца и неизвестной частоте колебаний состояния элементов в достаточно отдаленный конкретный момент времени однозначно определить нельзя. 11.25. Желательно иметь малое время восстановления схемы. 11.30. Защелки использовать нельзя; следует применить D-триггеры с динамическим управлением. 11.33. В восьмеричных эквивалентах: 2, 5, 13, 27, 16, 35, 32, 24, 10, 21; 6, 15, 33, 26, 14, 31, 22, 4, 11, 23; 12, 25. 11.35. а) 4, 2, 2; б) 5, 3, 2; в) 6, 3, 2; г) 6, 3, 1. 11.44. Три выхода (при нерабочих состояниях из циклов по 10 состояний); пять выходов (при нерабочих состояниях из цикла, включающего в себя два состояния). 11.46. ТП в восьмеричных эквивалентах: 0, 1; 1, 2; 2, 3; 3, 4; 4, 13; 13, 14; 14, 15; 15, 16; 16, 17; 17, 0. 11.54. Решение для триггеров Г-типа (в векторной записи; см. стр. 197): первый разряд ДНФ 1х хххх, хххОхх; второй разряд ДНФ xl xxxl, хх 0хх1; третий разряд ДНФ хх xxll, хО xlxl, Ox xlxx; четвертый разряд ДНФ хх xlll, хО xlxl, Ox xlxx. 11.62. а) выводы 1 и 2 использовать как входы Тх и Т2, выводы 3—5 соединись с выводом 8, вывод 6 — с выводом 9; б) выводы 1 и 2 использовать как входы / и К соответственно, на вывод 4 подать 1, на вывод 5—0. соединить попарно выводы 3 и 8, 6 и 9. 1J.63. Входы V-триггеров объединить и использовать как вход разрешения записи. 11.64. Если вывод 2 использовать как вход разрешения записи, то в каждой ячейке следует соединить выводы 3 и 4 с выводом 8, выводы 5 и 6 использовать для приема данных с двух направлений, выбираемых сигналом на выводе 1. 11.66. В обоих случаях четвертый разряд тактиру¬
ется с выхода третьего, первые три —входными импульсами. 11.79. Не сможет, так как должны успевать устанавливаться логические сигналы управления триггерами. 11.84. (5,5)-ПЗУ. 11.86. Сигнатуры в экспериментах Б и В должны совпасть, так как поэлементная сумма по модулю 2 соответствующих входных последовательностей делится на характеристический многочлен СА (см. работу [50]). 11.91. Изменятся, только переходы из нерабочих состояний. 11.98. 210х 16 бит, т.-е. 1 Мбит Это 16 корпусов КР556РТ16 [38] плюс схема управления. 11.99. Нельзя, так как код Грея — не позиционный [29].
ПРИЛОЖЕНИЕ 1
КОМПОНЕНТЫ И МОДЕЛИ,
ИСПОЛЬЗУЕМЫЕ В СИСТЕМЕ ДИСП
Схемные компоненты различных видов (резисторы, конденсаторы, диоды, транзисторы) представляются в системе ДИСП в виде электрических моделей. Активные компоненты (диоды, стабилитроны, транзисторы, операционные усилители) в зависимости от вида анализа, как правило, характеризуются двумя моделями: линейной и нелинейной.
Для нелинейных моделей активных компонентов в базе данных системы хранятся численные значения параметров. Причем каждому компоненту определенного типа соответствует свой набор параметров. Численные значения параметров линейных моделей не фиксируются в базе данных. Эти параметры либо задаются пользователем на входном языке системы, либо вычисляются автоматически в результате работы модуля “Линеаризация”.
Следует отметить, что в системе ДИСП имеется иерархия моделей активных компонентов различного уровня сложности. Так, например, биполярный транзистор может быть описан моделью Эберса — Молла или зарядоуправляемой моделью Гуммеля — Пуна.
Оперативная информация об объектах, описанных в базе данных системы на текущий момент времени, может быть получена с помощью команды * */BR (распечатка каталога БДМК). Состояние каталога активных компонентов БДМК на декабрь 1989 г. приведено в приложении 2.
В табл. П.1 представлены описания моделей пассивных R, Ц С — двухполюсников, источников напряжения Е и тока /, а также активных схемных компонентов (диодов D, стабилитронов ST, биполярных транзисторов Г, полевых транзисторов ТУ и операционных усилителей OY). Параметры моделей записаны в том порядке, в каком они должны задаваться на входном языке системы. Подробное описание моделей и характеризующих их аналитических зависимостей рассматривается в работах [1, 5]. Там же приведены данные, используемые для описания моделей, и способ их представления в базе данных системы.
Таблица П.1
Модели
аналоговых компонентов РЭА
Номер
параметра
Идентификатор
Единица физической величины
Наименование параметра
Резистор R
(конденсатор С, индуктивность L)
1
N1
—
Номер узла 1
2
N2
—
Номер узла 2
3
R (С, L)
кОМ (мкФ,Гн)
Номинальное назначение сопротивления (емкости, индуктивности)
4
ГС1
1/К
Линейный температурный коэффициент
5
ТС2
1/К2
Квадратичный температурный коэффициент
Источник
напряжения Е (источник тока /)
1
N-
—
Номер узла отрицательного полюса источника
2
ЛГ+
—
Номер узла положительного полюса источника
3
ECONST
В
Постоянная составляющая
(ICONST)
(мА)
напряжения (тока)
4
DEC
В
Температурное изменение
(DIQ
(мА)
напряжения (тока)
5
DF
Признак наличия сигнала в частотной области (1 — есть, 0 ~ нет)
6
NMOD
—
Номер модели сигнала во временной области
7...21
A1..A21
В (мА, мс)
Параметры функциональной зависимости сигнала
Диод D (стабилитрон AS)
1
NA
—
Номер узла анода
2
NK
—
Номер узла катода
3
IS
мА
Тепловой ток
4
N.
—
Коэффициент неидеальности перехода
5
BV
В
Пробивное напряжение
6
IBV
мА
Ток через диод в начале пробоя
7
RS
кОм
Объемное сопротивление
8
TT
мс
Постоянная времени
9
CIO
мкФ
Барьерная емкость при нулевом смещении перехода
10
VJ
В
Встроенный потенциал
11
FC
—
Коэффициенты аппроксима¬
12
M
ции зависимости барьерной емкости от напряжения на р — п-переходе
13
EG
В
Ширина запрещенной зоны
14
XTI
Температурный коэффициент тока IS
15
TBV
1/К
Температурный коэффициент пробивного напряжения
217
Продолжение табл. П. 1
Номер
параметра
Идентификатор
Единица
физической
величины
Наименование параметра
Биполярный транзистор Т (модель Эберса — Молла)
1
NB
—
Номер узла базы
2
NK
—
Номер узла коллектора
3
N3
—
Номер узла эмиттера
4
ТИП
—
Тип проводимости (0 —р — п — р\ 1 —п —р —п)
5
IS
мА
Тепловой ток
6
BN
Коэффициент передачи тока базы в нормальном включении
7
BI
—
Коэффициент передали тока в инверсном включении
8
RB
кОм
Объемное сопротивление тела базы
9
КУТЭ
кОм
Сопротивление утечки перехода эмиттер — база
10
КУТК
кОм
Сопротивление утечки перехода коллектор — база
11
СЭО
мкФ
Барьерная емкость перехода эмиттер — база
12
CKO
мкФ
Барьерная емкость перехода коллектор — база
13
ТАУЭ
мс
Постоянная времени эмиттера
14
ТАУК
мс
Постоянная времени коллектора
15
ФОЭ
В
Контактная разность потенциалов эмиттера
16
ФОК
В
Контактная разность потенциалов коллектора
17
мэ
—
Коэффициент качества перехода эмиттер — база
18
мк
—
Коэффициент качества перехода коллектор — база
19
EG
В
Ширина запрещенной зоны
20
XTI
—
Температурный коэффициент тока IS
21
ХТВ
—
Температурный коэффициент тока базы
22
KF
—
Коэффициент шума
23
AF
—
Коэффициент шума
Полевой транзистор ТУ
1
N3
—
Номер узла затвора
2
NC
—
Номер узла стока
3
NM
—
Номер узла истока
4
ТИП
—
Тип проводимости канала (0 — р-типа; 1 — л-типа)
5
мА
Тепловой ток
6
ICO
мА
Начальный ток стока
7
изо
В
Напряжение отсечки
8
К
__
Показатель степени
218
Окончание табл. П.1
Номер
параметра
Идентификатор
Единица
физической
величины
Наименование параметра
9
L
1/В
Коэффициент модуляции длины канала
10
RC
кОм
Объемное сопротивление области стока
11
RH
кОм
Объемное сопротивление области истока
12
СЗИО
мкФ
Емкость затвор — исток при нулевом смещении
13
СЗИО
мкФ
Емкость затвор — сток при нулевом смещении
14
ССИ
мкФ
Емкость сток — исток
15
РВ
В
Контактная разность потенциалов
16
MJ
Коэффициент качества перехода
17
TICO
1/К
Температурный коэффициент тока ICO
18
тизо
1/К
Температурный коэффициент напряжения отсечки
19
EG
в
Ширина запрещенной зоны
Операционный усилитель OY
1
NBX —
-
Номер узла инвертирующего входа
2
NBX +
—
Номер узла неинвертирующего входа
3
ЫВЫХ
—
Номер узла выхода
4
NE —
Номер узла отрицательного полюса источника питания
5
NE +
—
Номер узла отрицательного полюса источника питания
6
RBX
кОм
Входное сопротивление
7
квых
кОм
Выходное сопротивление
8
RE
кОм
Сопротивление потребления
9
ЯВХСФ
кОм
Входное сопротивление для синфазного сигнала
10
КО
—
Коэффициент усиления
11
КЕ
-
Коэффициент пропорциональности
12
КСФ
—
Коэффициент передачи синфазного сигнала
13
ЕСМ
В
Напряжение смещения
14
IBX —
мА
Ток инвертирующего входа
15
IBX +
мА
Ток неинвертирующего входа
16
ТАУ1
мс
Постоянная времени 1 (нуль)
17
ТАУ2
мс
Постоянная времени 2 (полюс)
18
ТАУЗ
мс
Постоянная времени 3 (полюс)
19
хп 1
—
Температурный коэффициент —входного тока
219
ПРИЛОЖЕНИЕ 2
КАТАЛОГ МОДЕЛЕЙ БАЗЫ ДАННЫХ ДИСП
Модель D —диод
1-Д220А 5—2Д202Д 9—2Д204А 13—2Д520А 17-Д18 21—КД521А 25—2Д210А 29—КД203А 33—КД509А
2—КД512А
6—2С107А
10—2Д212А
14—2В102А
18-Д237В
22—2Д510А
26—2Д104А
30—КД208А 34—КД513А
3—КД503А
7—2Д102А
11—2Д203А
15-Д245
19-Д237Б
23—2Ц106А
27—КД105В
31—КД209Б
4-Д226Б
8—2Д103А
12—2Д522Б
16-Д214
20—2Д213А
24—2Д220А
28—КД106А
32—2Д219А
Модель ST — стабилитрон
1-Д814А 5-Д814Д 9-Д815Г 13-Д816А 17-Д817А 21—КС133А
2-Д814Б 6-Д815А 10-Д815Д 14-Д816Б 18-Д817Б 22—КС139А
3-Д814В 7-Д815Б 11-Д815Е 15-Д816Д 19-Д817В 23—КС147А
4-Д814Г 8-Д815В 12-Д815Ж 16-Д816Г 20-Д817Г 24—КС156А
25—КС168А
26—2С133А
27—2С147А
28-2С168А
29—2С191Ж
30—2С211Ж
31—2С522А
32—2С527А
33-STN
34-STE
Модель Т —
биполярный транзистор
1—КТ3107Б
2—KT819B
3—KT816B
4—КТ814В
5—КТ818Г
6—KT817B
7—КТ815Б
8-КТ801А
9—КТ503Д
10—КТ502Д
11-П307В
12—КТ3102А
13—КТ203В
14—2ТС622А
15—198НТ1Б
16—2ТС613Б
17—1НТ251
18—2ТС613А
19—159НТ1Б
20—2Т201Б
21—2Т203Б
22—2Т368Б
23—2Т326Б
24—2Т3108В
25—2Т208М
26—2Т312Б
27—2Т313А
28—2Т363Б
29—2Т603А
30—2Т608А
31—2Т608Б
32—2Т630А
33—2Т630Б
34—2Т830В
35—2Т831В
36—2Т928А
37-2Т70 4Б
38-2Т908А
39—2Т919А
40—2Т921А
41—2Т809А
42—2Т203Г
43—2Т316Б
44- 2Т903Б
45—2Т208К
46—1НТ2510С
47—КТ3107В
48—TIN
49-T2N
50-T3N
51—TIP
52-Т2Р
53—2Т203А
54—2Т312А
55—2Т326А
56—2Т808А
57—2Т911А
58—КТ3107А
59—КТ819Г
60—КТ315А
61—КТ315Б
62—КТ315В
63—КТ315Г
64—КТ361А
65—КТ361Б
66-КТ361В
67—КТ361Г
68—КТ3102Б
69—КТ3102В
70—КТ3102Г
71—КТ3102Д
72—КТ3102Е
73—КТ203А
74—КТ3107Г
75—КТ3107Д
76—КТ3107Е
77—КТ3107К
78-21928Б
79—КТ922А
80—КТ922Б
81—21922А
82—КТ345А
83—КТ345Б
84—КТ350А
85—КТ351А
86—КТ352А
87—КТ357А
88—КТ611Б
Модель ТУ
— полевой транзистор
1—2П103А
2—2П103Б
3—2П103В
4—2П103Г
5—КП302А
6—2П103Д
7—2П302А
8—2П302Б
9—2П3028
10—2П303А
11—2П303Б
12—2П303В
13—2П303Г
14—2П303Д
15-ТУР
16-7УЛГ
Модель ОУ — операционный усилитель
1—140УД1А
5—К140УД2Б
9—К140УД7
13—К140УД9
17—К153УД1Б
21—К544УД1Б
25—544УД1А
29—544УД2Б
33—153УД5Б 37—574УД2Б 41—140УД6Б
2—140УД1Б
6—К140УД5А
10—К140УД8А
14—К140УД11
18—К153УД2
22—К544УД1В
26—544УД1Б
30—140УД5А
34—140УД17А 38—574УД2В 42—140УД7
3-
7-
11-
15-
19-
23-
27-
31-
35-
39-
43-
■КР140УД1
•К140УД5Б
•К140УД8Б
•К140УД12
•153УД5А
■К140УД6Б
-544УД1В
-140УД5Б
-140УД17Б
■574УД1А
•140УД8А
4—К140УД2А 8—К140УД6А 12—К140УД8В 16—К153УД1А 20—К544УД1А 24—140УД13 28—544УД2А 32—К140УД1А 36—574УД2А 40—140УД6А 44—140УД9
220
СПИСОК ЛИТЕРАТУРЫ
1. Диалоговые системы схемотехнического проектирования / В. И. Анисимов, Г. Д. Дмитревич, К. Б. Скобельцын и др.; Под ред. В. И. Анисимова.— М.: Радио и связь, 1988.—288 с.
2. Автоматизация схемотехнического проектирования: Учебное пособие/ В. Н. Ильин, В. Т. Фролкин, А. И. Бутко и др.; Под ред. В. Н. Ильина.— М.: Радио и связь, 1987.—368 с.
3. Влах И., Сингхал К. Машинные методы анализа и проектирования электронных схем / Пер. с англ.— М.: Радио и связь, 1984.—560 с.
4. Батищев Д. И. Методы оптимального проектирования.— М.: Радио и связь, 1984.—224 с.
5. Учебно-исследовательская система автоматизированного проектирования радиотехнических схем: Учебное пособие для вузов.— Л.: Изд-во Ле- нингр. гос. ун-та, 1989.—256 с.
6. Системы автоматизированного проектирования в радиоэлектронике: Справочник / Е. В. Авдеев, А. Т. Еремин, И. П. Норенков, М. И. Песков; Под ред. И. П. Норенкова.— М.: Радио и связь, 1986.—368 с.
7. Петренко А. И., Семенков О. И. Основы, построения систем автоматизированного проектирования.—Киев: Вища школа, 1984.-296 с.
8. Полянин К. П. Интегральные стабилизаторы напряжения.— М.: Энергия, 1979.—192 с.
9. Соклоф С. Аналоговые интегральные схемы / Пер. с англ.— М.: Мир, 1988.-583 с.
10. Титце У., Шенк К. Полупроводниковая схемотехника: Справочное руководство / Пер. с нем.— М.: Мир, 1982,—512 с.
11. Аналоговые и цифровые интегральные микросхемы: Справочное пособие / С. В. Якубовский, Н. А. Барканов, Л. И, Ниссельсон и др.; Под ред. С. В. Якубовского.— М.: Радио и связь, 1984.—432 с.
12. Гутников В. С. Интегральная электроника в измерительных устройствах.— Л.: Энергоатомиздат, 1988.—304 с.
13. Гальперин М. В. Практическая схемотехника в промышленной автоматике.— М.: Энергоатомиздат, 1987.—320 с.
14. Захаров В. К., Лыпарь Ю. И. Электронные устройства автоматики и телемеханики: Учебник для вузов.— Л.: Энергоатомиздат, 1984.—432 с.
15. Ефимов И. Е., Козыть И. Я., Горбунов Ю. И. Микроэлектроника: Проектирование, виды микросхем, функциональная микроэлектроника: Учебное пособие для вузов.— М.: Высшая школа, 1987.—416 с.
16. Алексенко А. Г., Шагурин И. И. Микросхемотехника: Учебное пособие для вузов / Под ред. И. П. Степаненко.—М.: Радио и связь, 1982.—416 с.
17. Агаханян Т. М. Интегральные микросхемы: Учебное пособие для вузов.— М.: Энергоатомиздат, 1983.—464 с.
18. Херпи М. Аналоговые интегральные схемы / Пер. с англ.— М.: Радио и связь, 1983.—416 с.
19. Гребен А. Б. Проектирование аналоговых интегральных схем / Пер. с англ.— М.: Энергия, 1972.—256 с.
20. Хоровиц П., Хилл У. Искусство схемотехники: В 2 т. / Пер. с англ.—М.: Мир, 1984.—Т.1.
21. Кожарский Г. В., Орехов В. И. Методы автоматизированного проектирования источников вторичного электропитания.— М.: Радио и связь,
1985.-184 с.
22. Алексенко А. Г., Коломбет Е. А., Стародуб Г. И. Применение прецизионных аналоговых микросхем,—М.: Радио и связь, 1985.
23. Современная теория фильтров и их проектирование / Пер. с англ.; Под ред. Г. Темеша, С. Митра. — М.: Мир, 1987.
24. Хоровиц П., Хилл У. Искусство схемотехники / Пер. с англ.—М.: Мир, 1983. -Т.2.
221
25. Автоматизированное проектирование цифровых устройств/ С. С. Ба- дулин, Ю. М. Баранулов, В. А. Бердышев и др.; Под ред. С. С. Бадулина.—М.: Радио и связь, 1981. —240 с.
26. Киносита К., Ас ад а К., Карацу О. Логическое проектирование СБИС/ Пер. с япон.—М.: Мир, 1988. —309 с.
27. Иоффе М. И. Диагностирование логических схем. Алгоритмы моделирования и автоматического синтеза теста. —М.: Наука, 1989.—158 с.
28. Лазер И. М., Шубарев В. А. Устойчивость цифровых микроэлектронных устройств.—М.: Радио и связь, 1983.—216 с.
29. Потемкин И. С. Функциональные узлы цифровой автоматики— М.: Энергоатомиздат, 1988.—320 с.
30. Шило В. Л. Популярные цифровые микросхемы: Справочник.— М.: Радио и связь, 1987.—352 с.
31. Баранов С. И., Скляров В. А. Цифровые устройства на программируемых БИС с матричной структурой.—М.: Радио и связь, 1986.—272 с.
32. Угрюмов Е. П. Проектирование элементов и узлов ЭВМ: Учебное пособие для вузов.—М.: Высшая школа, 1987.—318 с.
33. Мурога С. Системное проектирование сверхбольших интегральных схем: В 2 кн. Пер. с англ.—М.: Мир, 1985.—Кн. 2.—290 с.
34. Савельев А. Я. Прикладная теория цифровых автоматов: Учебник.— М.: Высшая школа, 1987.—272 с.
35. Справочник по интегральным микросхемам / Б. В. Тарабрин, С. В. Якубовский, Н. А Барканов и др.; Под ред. Б. В. Тарабрина.—М.: Энергия, 1980.—816 с.
36. Применение инте!ральных микросхем в электронной вычислительной технике: Справочник / Р. В. Данилов, С. А. Ельцова, Ю. П. Иванов
и др.; Под ред. Б. Н. Файзулаева, Б. В. Тарабрина.—М.: Радио и связь.
1986.-384 с.
37. Ланцов А. Л., Зворыкин Л. Н., Осипов И. Ф. Цифровые устройства на комплементарных МДП интегральных микросхемах.— М.: Радио и связь, 1983.-272 с.
38. Полупроводниковые БИС запоминающих устройств: Справочник / Под ред. А. Ю. Гордонова, Ю. Н. Дьякова.—М.: Радио и связь, 1986.
39. Эйрис Р. Проектирование СБИС. Метод кремниевой компиляции / Пер. с англ.—М: Наука, 1988.—456 с.
40. Будинский Я. Логические цепи в цифровой технике / Пер. с чешек—М., Связь, 1977.—392 с.
41. Букреев И. Н., Мансуров Б. М., Горячев В. И. Микроэлектронные схемы цифровых устройств. — М.: Сов. радио, 1975.—368 с.
42. Комплекс средств автоматизации проектирования устройств логического управления на основе программируемых БИС с матричной структурой/ В. А. Скляров, И. Р. Булатова, А. М. Ковальчук и др. // Управляющие системы и машины. —1989. — № 4.—С. 88—92.
43. Азбелев П. П. Проектирование самовосстанавливающихся счетчиков на сдвигающих регистрах // Известия ЛЭТИ. —1984, вып. 345.—С. 3—6.
44. Азбелев П. П. Предотвращение состязаний при проектировании асинхронных счетчиков // Известия ЛЭТИ.—1983, вып. 332.—С. 35—39.
45. Гилл А. Линейные последовательностные машины. Анализ, синтез и применение. — М.: Наука, 1974.—288 с.
46. Федоров Р. Ф., Яковлев В. В., Добрис Г. В. Стохастические преобразователи информации. —Л.: Машиностроение, 1978.—304 с.
47. Савельев П. В., Коняхин В. В. Функционально-логическое проектирование БИС / Под ред. Г. Г. Казеннова. —М.: Высшая школа, 1990. —156 с.
48. Система автоматизации логического моделирования электронной вычислительной аппаратуры / Г. Н. Соловьев, Л. А. Батанов, Б. Н. Ковригин и др.—М.: МИФИ.—1985. —18 с. (Препринт/ МИФИ: 002).
49. Схемотехника ЭВМ: Учебник для студентов вузов спец. ЭВМ/ Под ред. Г. Н. Соловьева. —М.: Высшая школа, 1985.—391 с.
50. Ярмолик В. Н. Контроль и диагностика цифровых узлов ЭВМ.— Минск: Наука и техника, 1988.—240 с.
222
ОГЛАВЛЕНИЕ
Предисловие 3
Основные обозначения 5
РАЗДЕЛ ПЕРВЫЙ СХЕМОТЕХНИКА АНАЛОГОВЫХ УСТРОЙСТВ 7
ГЛАВА ПЕРВАЯ. АВТОМАТИЗАЦИЯ СХЕМОТЕХНИЧЕСКОГО ПРОЕКТИРОВАНИЯ
1.1. Общие сведения —
1.2. Основные виды анализа аналоговых устройств 8
1.3. Оптимизация характеристик аналоговых устройств 11
1.4. Системы автоматизированного проектирования 15
1.5. Подготовка описания аналоговой схемы для автоматизированного анализа 18
ГЛАВА ВТОРАЯ. МЕТОДОЛОГИЯ АВТОМАТИЗИРОВАННОГО СХЕМОТЕХНИЧЕСКОГО ПРОЕКТИРОВАНИЯ АНАЛОГОВЫХ МИКРОЭЛЕК- ТРОННЫХ УСТРОЙСТВ 24
2.1. Общие сведения —
2.2. Типовой маршрут процесса автоматизированного схемотехнического проектирования 26
2.3. Методика формирования банка схемных решений .... 30
2.4. Пример автоматизированного схемотехнического проектирования аналоговой микросхемы 32
ГЛАВА ТРЕТЬЯ. МИКРОСХЕМОТЕХНИКА ТИПОВЫХ ФУНКЦИОНАЛЬНЫХ ПОДСХЕМ ИНТЕГРАЛЬНЫХ АНАЛОГОВЫХ УСТРОЙСТВ 43
3.1. Источники постоянного тока и цепи задания статического режима —
3.2. Дифференциальные усилительные каскады 49
3.3. Выходные каскады 55
ГЛАВА ЧЕТВЕРТАЯ. МИКРОСХЕМОТЕХНИКА ИНТЕГРАЛЬНЫХ ОПЕ- РАЦИОННЫХ УСИЛИТЕЛЕЙ 62
4.1. Статический режим —
4.2. Низкочастотные параметры 64
4.3. Динамические свойства 66
ГЛАВА ПЯТАЯ. ЛИНЕЙНЫЕ АНАЛОГОВЫЕ ЭЛЕКТРОННЫЕ УСТРОЙСТВА 69
5.1. Инвертирующие и неинвертирующие решающие усилители —
5.2. Дифференциальные решающие усилители 75
5.3. Интеграторы 79
5.4. Усилители переменного тока 82
223
ГЛАВА ШЕСТАЯ. НЕЛИНЕЙНЫЕ ЭЛЕКТРОННЫЕ УСТРОЙСТВА И ФУНКЦИОНАЛЬНЫЕ ПРЕОБРАЗОВАТЕЛИ 87
6.1. Усилители-ограничители —
6.2. Логарифмические и антилогарифмические усилители .... 92
6.3. Аналоговые перемножители сигналов 95
6.4. Аналоговые устройства с памятью 96
ГЛАВА СЕДЬМАЯ. АКТИВНЫЕ /?С-ФИЛЬТРЫ И ЯС-ГЕНЕРАТОРЫ СИНУСОИДАЛЬНЫХ КОЛЕБАНИЙ 99
7.1. Аппроксимация активных ЯС-фильтров —
7.2. Реализация активных ЯС-фильтров 102
7.3. Проектирование ЯС-генераторов синусоидальных колебаний 108
ГЛАВА ВОСЬМАЯ. СХЕМОТЕХНИКА ИНТЕГРАЛЬНЫХ МИКРОСХЕМ ДЛЯ ИСТОЧНИКОВ ВТОРИЧНОГО ЭЛЕКТРОПИТАНИЯ 112
8.1. Источники опорного напряжения —
8.2. Интегральные стабилизаторы постоянного напряжения ... 116
РАЗДЕЛ ВТОРОЙ СХЕМОТЕХНИКА ЦИФРОВЫХ УСТРОЙСТВ 120
ГЛАВА ДЕВЯТАЯ. МЕТОДЫ И СИСТЕМЫ ЛОГИЧЕСКОГО МОДЕЛИРОВАНИЯ -
9.1. Общая характеристика систем логического моделирования —
9.2. Алфавиты логического моделирования в САПР ДИСП . . 124
9.3. Сравнительная характеристика пакетов ТМ и ВМ .... 126
9.4. Модели элементов 130
9.5. Временные параметры моделей элементов 133
9.6. Порядок описания схем цифровых устройств для их моделирования 138
ГЛАВА ДЕСЯТАЯ. СИНТЕЗ, АНАЛИЗ И ПРОВЕРКА КОМБИНАЦИОННЫХ ЦИФРОВЫХ УСТРОЙСТВ 146
10.1. Комбинационные и последовательностные цифровые устройства —
10.2. Вентильные логические схемы 147
10.3. Типовые комбинационные функциональные узлы 156
10.4. Применение ПЗУ и ПЛМ для построения комбинационных функциональных узлов 166
ГЛАВА ОДИННАДЦАТАЯ. СИНТЕЗ, АНАЛИЗ И ПРОВЕРКА ПОСЛЕДОВАТЕЛЬНОСТНЫХ ЦИФРОВЫХ УЗЛОВ 174
11.1. Общая характеристика последовательностных цифровых уст¬
ройств —
11.2. Триггеры и генераторы импульсов 176
11.3. Синтез, анализ и проверка последовательностных функциональных узлов 186
11.4. Применение ПЗУ и ПЛМ для построения последовательностных цифровых узлов 206
Ответы к задачам 210
Приложение 1. Компоненты и модели, используемые в системе ДИСП 216
Приложение 2. Каталог моделей базы данных ДИСП 220
Список литературы 221
224