/




































































Автор: Хохулин В.С. Чумаков В.А.
Теги: космическая техника ракетостроение учебное пособие
ISBN: 5—7035—2298—6
Год: 2000




Текст
ХОХУЛИН В,С, ЧУМАКОВ В А.
ПРОЕКТИРОВАНИЕ КОСМИЧЕСКИХ
РАЗГОННЫХ БЛОКОВ С ЖРД
Хохулин В.С., Чумаков В.А. Проектирование космических разгонных блоков
с ЖРД: Учебное пособие для курсового и дипломного проектирований. - М.: Изд-во
МАИ, 2000..-72 с.: ил.
Излагаются основы проектирования космических разгонных блоков (РБ) с
ЖРД в обеспечение курса «Проектирование ЛА». Приводится постановка задачи вы-
бора проектных параметров РБ. Рассматривается задача определения затрат характе-
ристической скорости при маневрах РБ. Приводится методика выбора проектных па-
раметров РБ и расчета энергомассовых и объемных характеристик РБ с ЖРД.
Рецензенты; А.С.Бирюков, С.Д.Панин
Тем. план 1998, поз. 45
Хохулин Владимир Сергеевич
Чумаков Вадим Алексеевич
ПРОЕКТИРОВАНИЕ КОСМИЧЕСКИХ
РАЗГОННЫХ БЛОКОВ С ЖРД
Редактор Т.В. Моисеева
Подписано в печать 17.03.2000.
Бумага газетная. Формат 60x84 1/16. Печать офсетная.
Усл. печ. л. 4,18. Уч.-изд. л. 4,50. Тираж 500.
Зак. 2263/1287. С. 81.
Типография Издательства МАИ
125871, Москва, Волоколамское шоссе, 4
ISBN 5—7035—2298—6
© Московский авиационный институт, 2000
ВВЕДЕНИЕ
Расширение круга задач, решаемых космическими аппаратами (КА)
связано с освоением все более высоких околоземных орбит, полетами в око-
лолунное пространство, к планетам Солнечной системы. Реализация этих за-
дач сопряжена с использованием все более энергоемких перелетов, которые
требуют больших затрат характеристической скорости (Л^р). При этом либо
могут быть использованы существующие разгонные блоки (РБ), либо возника-
ет необходимость в разработке новых РБ, обладающих более широкими функ-
циональными возможностями.
В пособии рассматриваются приближенные методы расчетов проектно-
баллистических и массовых характеристик РБ, предназначенных для доставки
полезных грузов (КА) с низких базовых орбит ИСЗ на требуемые промежу-
точные и конечные орбиты.
Целью работы является создание облика разгонного блока, определение
рационального сочетания его основных проектных параметров, массовых и
геометрических характеристик.
Состав рассматриваемых в пособии математических моделей, описы-
вающих движение и структуру РБ, ориентирован на использование при прове-
дении параметрических расчетов ПЭВМ или калькуляторов.
1. ПОСЛЕДОВАТЕЛЬНОСТЬ ВЫПОЛНЕНИЯ И КРАТ-
КОЕ СОДЕРЖАНИЕ КУРСОВОЙ РАБОТЫ
Процесс выполнения курсовой работы включает следующие этапы:
1. Анализ задания. Анализ задач, стоящих перед проектируемым РБ.
Анализ зарубежных и отечественных прототипов.
2. Обоснование исходных данных, а также диапазона изменения про-
ектно-конструктивных параметров РБ. Исходя из энергоемкости задачи, ре-
шаемой РБ, предварительный выбор проектно-конструктивных параметров,
числа ступеней, конструктивно-компоновочного решения, с помощью которо-
го будет производиться выбор наилучшего варианта.
3. Выбор схемы перелета. Расчет импульсной составляющей характе-
ристической скорости. Для многоступенчатых РБ разбиение характеристиче-
ской скорости по ступеням. Если оговорено в задании, расчет времени переле-
та и определение дат старта и прибытия на планету' назначения.
3
4. В зависимости от состава комплектующих систем и агрегатов аппа-
рата построение модели массовых характеристик РБ в соответствии с типом
двигательной установки (ДУ) и конструктивно-компоновочной схемой аппа-
рата.
5. Уточнение энергозатрат на выполнение маневров и определение ра-
циональных проектных параметров РБ с учетом выбранного критерия совер-
шенства.
6. Расчет массовых и объемных характеристик аппарата, его систем и
агрегатов. Разработка конструктивно-компоновочной схемы РБ. Количество
видов, разрезов и сечений на чертеже должно обеспечить достаточную ин-
формацию о принятых конструктивно-технологических решениях.
7. Описание работы основных систем РБ: двигательной установки,
системы запуска ДУ, подачи компонент топлива, наддува топливных баков,
обеспечение теплового режима и т.д.
8. Оформление пояснительной записки, содержащей задание, резуль-
таты расчетов, необходимые рисунки, схемы, графики, описания, перечень
литературы.
При выполнении КР необходимо пользоваться данным учебным посо-
бием. руководствуясь указаниями консультанта.
2. ПОСТАНОВКА ЗАДАЧИ ВЫБОРА
ОСНОВНЫХ ПРОЕКТНЫХ ПАРАМЕТРОВ РАЗГОН-
НЫХ БЛОКОВ КА
Достижения современной ракетно-космической техники позволяют раз-
работать и обеспечить эксплуатацию разнообразных разгонных блоков (РБ)
для решения различных транспортных и служебных задач. Маневры, осуще-
ствляемые РБ КА, можно условно разделить на следующие группы:
- изменение параметров орбит;
- межорбитальные переходы в центральном поле тяготения;
- перевод КА на траектории перелета к планетам Солнечной системы.
- поддержание (стабилизация) параметров орбит в требуемых диапа-
зонах (коррекция);
- сближение, причаливание и стыковка с другими космическими объ-
ектами, спуск с орбиты и посадка.
В пособии рассматриваются приближенные методы расчета проектно-
баллистических и массовых характеристик РБ КА, предназначенных для осу-
4
ществления межорбитальных и межпланетных перелетов, т.е. маневров, ос-
новной целью которых является доставка полезных грузов с низких орбит
ИСЗ на требуемые орбиты назначения.
В большинстве случаев эта задача может быть реализована с использо-
ванием различных стратегий перелета, которые различаются количеством
активных участков, временем перелета, суммарными затратами характери-
стической скорости, потребной на перелет, и т.д. Рациональная траектория
перелета выбирается с учетом предъявляемых к аппарату требований и огра-
ничений
Очевидно, что различным схемным решениям (одно-, полутора-, двух-
ступенчатый РБ и т.д.) будут соответствовать разные значения стартовой мас-
сы системы РБ + КА. на опорной орбите даже при реализации одной и той же
транспортной задачи. Поэтом}' основным содержанием задачи проектирования
РБ как раз и является выбор траектории перелета, а также таких проектных
параметров, облика и структуры РБ, его ДУ, и т. д., которые обеспечивают
решение транспортной задачи наилучшим образом.
В качестве маршевых ДУ можно рассматривать различные типы ракет-
ных двигателей, отличающихся как принципом преобразования первичной
энергии в кинетическую энергию газов, истекающих из сопла двигателя, гак и
схемными, конструктивными и энергетическими характеристиками.
Маршевые ДУ можно разделить на следующие типы:
- двигательные установки на химическом топливе:
• жидкостные (ЖРД) с удельным импульсом тяги в вакууме
/уд = 3000+4600 м/с;
• твердотопливные (РДТТ) с /уд = 2500+3000 м/с;
- ядерные ракетные двигатели (ЯРД) с твердой активной зоной -
/уд = 8000+10000 м/с;
- электрические ракетные двигатели (ЭРД) с /уд = 2000+10000 м/с.
Наибольшее распространение в настоящее время при решении задач
межорбитальных перелетов получили жидкостные и твердотопливные ракет-
ные двигатели (двигатели "большой" тяги), как обладающие высоким конст-
руктивным совершенством, надежностью и достаточно высокими энергетиче-
скими характеристиками.
5
Характерной особенностью перелетов РБ КА с двигателями "большой"
тяги является то, что основное время РБ совершает свободный полет по пере-
ходной орбите, а продолжительность работы двигателя на активном участке
пренебрежимо мала по сравнению с полным временем перелета.
В большинстве случаев тот или иной переход РБ КА с начальной на ко-
нечную орбиту может быть осуществлен по различным траекториям, разли-
чающимся количеством активных участков, необходимых для реализации
перелета, суммарными затратами характеристической скорости, потребной на
перелет, и т.д. Рациональная траектория перелета выбирается с учетом предъ-
являемых к разгонному блоку или космическому аппарату требований и огра-
ничений.
В качестве основных критериев выбора проектного решения РБ могут
рассматриваться различные показатели: стоимость, надежность, энергетиче-
ские и массовые характеристики РБ и т.д. На начальном этапе проектирования
в качестве основных критериев, как правило, рассматриваются энергетические
и массовые характеристики РБ.
В общем случае любой вариант РБ КА можно охарактеризовать целым
рядом параметров, среди которых выделяют, так называемые, основные про-
ектные параметры - величины, которые однозначно в совокупности с началь-
ной массой /А?о и массой полезного груза определяют энергомассовые и
геометрические характеристики аппарата.
В качестве основных проектных параметров РБ с ЖРД обычно рас-
сматриваются:
- количество ступеней РБ - N ;
Р
- начальная тяговооруженность ступеней РБ Ну =-------------—
' gi"^
- удельный импульс тяги двигательной установки Jya п j,
i = 1JV;
т
- относительная конечная масса РБ |ЛК =---, а также относитель-
но
т.
ная конечная масса ступеней РБ ;
' и0
6
- законы управления вектором тяги ДУ на активных участках траек-
тории ит.д.
Так как параметры двигательной установки во многом определяют об-
лик разгонного блока, то наряду с рассмотренными основными проектными
параметрами РБ рассматривают также следующие параметры двигательной
установки:
- величину давления в камере сгорания двигателя /ф. ;
- геометрическую степень расширения сопла рк/ра .
Главной целью проектного поиска является определение такого сочета-
ния значений основных параметров РБ, которое обеспечивает требуемые лет-
но-технические характеристики РБ и соответствует экстремальным значениям
функционалов, определяющих совершенство проектируемого изделия. На на-
чальном этапе проектирования для решения этой задачи используются, как
правило, приближенные методы поиска, отвечающие по точности получаемых
результатов требованиям инженерной практики.
При этом снижение трудоемкости решения общей вариационной задачи
комплексной оптимизации основных проектных параметров РБ, его двига-
тельной установки и управления на активных участках траектории перелета
достигается за счет разделения общей задачи на две независимые части; ди-
намическую и проектно-массовую (параметрическую) задачи.
Решением динамической задачи являются оптимальные траектории пе-
релета, законы управления движением на активных участках, значения по-
требных затрат характеристической скорости во всем возможном диапазоне
изменения основных проектных параметров аппарата.
Параметрическая (проектно-массовая) задача - это определение опти-
мальных значений основных проектных параметров РБ, а также расчет его
массовых характеристик.
Наиболее часто используемым критерием решения параметрической
задачи является критерий Нц.г = ,nn.rlmQ характеризующий массовое
совершенство РБ. При этом обычно рассматривают следующие две основные
постановки этой задачи (прямая и обратная):
1. При заданной начальной стартовой массе 7??0 системы РБ + ПГ оп-
ределить рациональную совокупность основных проектных параметров РБ.
его массовые и геометрические характеристики, обеспечивающие максималь-
ное значение транспортируемой массы полезного груза.
7
2. При заданной массе полезного груза известных параметрах
начальной и конечной орбит определить такую совокупность основных пара-
метров. которая будет обеспечивать минимальные значения начальной стар-
товой массы miп(/7?о ) системы РБ + ПГ.
В процессе проектирования РБ необходимо учитывать ряд ограничений
типа неравенств как на сами проектные параметры, так и на функции от них.
К числу таких ограничений, к примеру, относят ограничения на габариты РБ,
а именно: ограничения на его длину L и диаметр миделя , удлинение
РБ {к = £/ £>) и т.д. В зависимости от характера эти ограничения удовле-
творяются на различных этапах проектирования.
Рассмотрим последовательно аналитическое решение динамической и
параметрической задач проектирования на примере РБ и ЖРД.
3. ОПРЕДЕЛЕНИЕ ЗАТРАТ ХАРАКТЕРИСТИЧЕСКОЙ
СКОРОСТИ ПРИ МАНЕВРАХ РБ КА
Из всего многообразия задач по транспортировке полезных грузов, ко-
торые решаются с помощью космических РБ, выделим следующие:
- разгон с низкой (эллиптической) околоземной орбиты на переход-
ную траекторию с заданным уровнем энергии;
- торможение с переходной траектории для выхода на околоземную
орбиту' с заданными параметрами;
- межорбитальные многоимпульсные переходы в поле одного притя-
гивающего центра (например, полеты в околоземном космическом
пространстве).
Рассмотрим параметры движения и энергозатраты РБ, требуемые для
решения выделенных задач.
ЗЛ. Параметры траектории движения РБ
Движение РБ КА происходит в центральном поле тяготения на высотах,
где влиянием аэродинамических сил можно пренебречь. При составлении
уравнений движения, определении траектории движения РБ на активных и
пассивных участках его полета используют инерциальные (см. приложение 1)
и орбитальную системы координат
Положение космического РБ в этих координатах однозначно определя-
ется либо прямоугольными, либо сферическими координатами (рис. 3.1).
8
Долгота восходящего узла £1(0 < О. < 2 л) определяет пространствен-
ное положение плоскости орбиты относительно плоскости экватора (£2 - это
угол, расположенный в экваториальной плоскости и отсчитываемый от на-
правления на точку весеннего равноденствия у до линии узлов т.е, ли-
нии пересечения плоскости орбиты с плоскостью экватора). Восходящим уз-
лом орбиты называют точку, в которой тело переходит из южного полуша-
рия в северное. Противоположная точка называется нисходящим узлом.
Плоскость орбиты РБ
Положение РБ на орбите
Основная плоскость
экваториальной ~''-
инерциальной
системы координат
Л
Направление на
точку' перицентра
орбиты КА
Рис 3.1. Орбитальная прямоугольная и полярная /',3 систе-
мы координат: а - положение космического аппарата (точка А);
б - положение орбитальной прямоугольной системы координат
относительно экваториальной инерциальной системы
координат
Наклонение орбиты Z (0 < / < л) характеризует двугранный угол ме-
жду плоскостью орбиты и плоскостью экватора, отсчитываемый от плоскости
9
экватора против хода часовой стрелки для наблюдателя, находящегося в точке
восходящего угла. Интересно отметить, что при Z = О и Z = Л траектория
РБ располагается в плоскости экватора. Причем в первом случае движение
происходит по вращению Земли, а во втором - против.
Положение перицентра траектории фиксируется с помощью угла
СО (аргумента перицентра), отсчитываемого в плоскости орбиты в направле-
нии движения.
Положение КА в орбит альной системе координат определяет истинная
аномалия 3 - угол между направлением на перицентр и радиус-вектором Г ,
характеризующим текущее положение КА.
Относительное управляемое движение РБ на активном участке, а также
баллистическое движение на пассивном участке описываются следующими
уравнениями.
где
R = — +
т Ri
RRj
Ду
R =-
Rp = y\fmj —
(3.1)
(3.2)
п
— R — Rj', Г - радиус-вектор, характеризующий положение космического
аппарата в абсолютной инерциальной системе координат (например; в гелио-
центрической); Z‘o - радиус-вектор, характеризующий положение центрально-
го притягивающего тела (например, Земли при рассмотрении околоземных
межорбитальных перелетов, а также при рассмотрении маневров РБ в сфере
действия Земли при старте к планетам солнечной системы).
Здесь функция R$ характеризует действие притяжения небесных тел за
исключением центрального тела. Если центральное тело выбрано правильно,
то
(3.3)
10
(3.4)
т е. определяющими факторами при движении РБ будут сила притяжения цен-
трального притягивающего тела и тяга ДУ РБ, которые определяют траекто-
рию движения РБ.
Интегрирование уравнений баллистического движения КА позволяет
получить ряд зависимостей, в том числе интеграл энергии
2 г
который определяет энергоемкость переходной орбиты РБ КА.
Переходная орбита РБ КА связывает начальную и конечную орбиты
КА. Переходная орбита содержит активные участки полета с работающим
двигателем (участки управляемого движения) и пассивные участки полета с
выключенным двигателем (участки баллистического движения).
В рамках данной работы будем рассматривать такие маневры РБ, при
которых активные участки имеют место в начале и конце переходной орбиты,
а в случае многоимпульсных маневров траектория перелета разбивается на
ряд промежуточных переходных орбит, имеющих активные участки в началь-
ной и конечной фазах.
Траектория пассивного участка определяется параметрами движения РБ
на конце соответствующего активного участка, а именно: скоростью И, углом
0 наклона вектора скорости к местному горизонту и координатой гк конца
активного участка. В соответствии с первым законом Кеплера эта траектория
является одним из возможных конических сечений (прямая, окружность, эл-
липс, парабола, гипербола). Уравнение орбиты записывается в виде
• 1 + е cos 3
(3.5)
где Г - расстояние от притягивающего центра до КА; р - фокальный пара-
метр орбиты: е -эксцентриситет; 0 - истинная аномалия (рис. 3.1).
Более подробно параметры эллиптической, параболической и гипербо-
лической орбит рассмотрены в приложении 3.
Значение скорости РБ в конце активного участка не только определяет
характер движения, но и позволяет определить требуемые энергетические
возможности РБ. Таким образом, для расчета проектных параметров РБ необ-
ходимо с достаточной точностью задать величину характеристической скоро-
11
сти хар. потребную для решения конкретной задачи с учетом возможных
потерь хар на активном участке.
Рассмотрим приближенное решение этой задачи как для случая меж-
планетных перелетов, так и для случая межорбитальных переходов в гравита-
ционном поле планеты с учетом особенностей динамических процессов на
активных участках траектории движения.
3.2. Расчет в импульсной постановке энергозатрат при
межпланетных перелетах
Задачу определения проектно-баллистических характеристик РБ КА, в
зависимости от требуемой точности и количества выбираемых параметров и
величины полезной нагрузки, доставляемой к планетам назначения, можно
решать различными методами, в основе которых лежит кусочно-коническая
аппроксимация баллистической траектории полета. Принципиально эти мето-
ды делятся на два типа: методы импульсной аппроксимации и методы, учиты-
вающие протяженность и непрерывность активных участков (разгона и тор-
можения КА), которые условно называют методом конечных тяг.
В методе импульсной аппроксимации активный участок представляется
в виде мгновенного изменения скорости при неизменном положении КА. Т.е.
предполагается, что в точке схода с круговой промежуточной орбиты КА
мгновенно переходят на гиперболическую орбиту отрыва, а в одной из точек
(в точке входа) гиперболической орбиты прибытия КА мгновенно переходит
на планируемую околопланетную конечную орбиту. Благодаря такой им-
пульсной аппроксимации активных участков вся межпланетная траектория
представляется из трех "кусков" конического сечения (рис. 3.2): 1) гиперболи-
ческой орбиты отрыва (движение в гравиосфере Земли); 2) гелиоцентрическо-
го участка межпланетного перелета (движение между орбитами Земли и пла-
неты назначения); 3) гиперболической подлетной траектории (движение в гра-
виосфере планеты назначения). Гелиоцентрический участок межорбитального
перелета, в свою очередь, может состоять из нескольких кеплеровских орбит,
если для разгона и торможения КА используются гравитационные поля дру-
гих планет или промежуточные активные маневры.
-Важным моментом в методе кусочно-конической аппроксимации явля-
ется сопряжение конических сечений межпланетной траектории. Традицион-
ный путь удовлетворения условий сопряжения заключается в предположении,
что момент выхода КА из гравиосферы Земли и момент входа КА в гравио-
сферу планеты назначения совпадают соответственно с точками пересечения
12
гелиоцентрической орбиты перелета с орбитами Земли и планеты назначения
(рис. 3.3).
Рис. 3.2. Кусочно-коническая аппроксимация межпланетной траектории
полета КА при импульсном изменении скорости: 1 - промежу-
точная орбита; 2 - гиперболическая орбита отрыва; 3 - гелио-
центрический участок межорбитального перелета; 4 - конечная
орбита; 5'- гиперболическая орбита прибытия
С физической точки зрения это означает, что планеты рассматриваются
в качестве негравитирующих центров, а с геометрической - пренебрегаются
размеры гравиосфер планет (см. приложение 4). Поэтому стыковка считается
выполненной, если асимптота гиперболической орбиты отрыва будет парал-
лельна вектору гиперболического избытка скорости отрыва Ксст’ опреде-
ляемого из равенства
V = V -V^ (3-6)
' оо ет ’ ст ' Ф > ' ’
а асимптота гиперболической орбиты прибытия параллельна вектору гипербо-
лического избытка скорости Vx подх пл ’ который определится из равенства
И = И - V (3 7)
ГООПОДХ.ПЛ г ПОДХ.ПЛ ГПЛ-
Здесь Ист и ^подо ш “ векторы начальной и конечной скорости поле-
та КА на гелиоцентрическом участке (рис. 3.3).
13
Рис 3.3. Г елиопснтр ичсский участок межпланетной траектории полета КА
Метод импульсной аппроксимации хотя и приводит к определенной
идеализации истинной картины межпланетного перелета, но позволяет в пер-
вом приближении достаточно просто определить энергетические затраты, не-
обходимые для его реализации.
Использование этого метода позволяет построить следующую струк-
турную схему решения задачи по определению проектно-баллистических ха-
рактеристик КА. Вначале решается внешняя задача - задача по определению
гелиоцентрического участка межорбитального перелета, одним из результатов
которой является нахождение Vcr @ и Иподх пл • Далее обращаются к реше-
нию внутренних задач, т е. к нахождению гиперболических орбит отрыва и
прибытия, соответствующие асимптоты которых должны быть параллельны
Йюст© и ^ооподх.пл > а константы интегралов энергии равны и
подх. пл - соответственно.
Внешняя задача. Исходной информацией при решении задачи
межпланетного перелета являются энергетические возможности стартового
разгонного блока, массовые энергетические ограничения на межпланетную
экспедицию в целом, ограничения на даты старта, время перелета и т.д.
Большое число варьируемых параметров резко усложняет задачу по определе-
нию проектно-баллистических параметров РБ Поэтому в рамках данной ра-
боты будем рассматривать только траектории перелета, требующие мини-
мальных энергетических затрат. В поле одного притягивающего центра таки-
ми траекториями, как известно, являются эллипсы минимальной энергии (эл-
14
липсы Хомана), характерной особсщюстью которых является то, что они ка-
саются в точках апсид круговых орбит планет (рис. 3.4).
Предполагая, что орбиты Земли и планет круговые и лежат в одной
плоскости (плоскости эклиптики), рассмотрим основные параметры перелета
Земля - планета Солнечной системы.
Большая полуось
« = |('ф+''пл)> (3.8)
где Г® - средний радиус орбиты Земли; Гп;г - средний! радиус орбиты плане-
ты.
Период обращения
Рис. 3.4. Схема межпланетного перелета по эллипсу Хомана (эллипсу ми-
нимальной энергии): 1 - положение Земли в момент старта; 2 -
положение Марса (планеты назначения) в момент прибытия
Очевидно, что время перелета по такому эллипсу равно половине пе-
риода обращения:
15
1 rj~ Tt y-,3/2
'nep = 7C/ =-i=a ' • (3.10)
2 ^Ц©
Примечание. Определение возможных дат старта для реализации хоманов-
ского перелета, а также возможные отклонения времени пере-
лета приведены в приложении 4.
Потребные скорости старта и скорости подхода к планете цели опреде-
ляются следующим образом.
Как известно (см. п. 3.1), скорость движения КА по гелиоцентрической
орбите определяется как
V =
П И
Ц©----
V а 7
(З.Н)
тогда гелиоцентрическая скорость старта и скорость подхода к планете цели
определяются из следующих выражений:
(3.12)
(3.13)
где Г11Л = —--; ИКр ф = ^ц& /Г® - круговая скорость Земли при ее движе-
г®
нии вокруг Солнца: ИКр = ^Це/Гпл - круговая скорость планеты при
ее движении относительно Солнца.
Относительные скорости КА на границе сфер действия Земли и плане-
ты цели или гиперболические избытки скорости старта (отрыва) Ист @ и
скорости подхода к планете цели 'Подх. ид определяются с помощью соот-
ношений (3.6) и (3.7).
В скалярной форме эти уравнения записываются следующим образом в
случае перехода по эллипсу Хомана к внешним планетам:
^ст = ^сг®-^ (3.14)
' ^к> подх. пл = ^пл" подх. пл (3-15) .
16
и внутренним планетам
ст - ~Кт. ® -
V -Г -К
гоо подх. пл ’подх. пл пл-
(3.16)
(3.17)
Внутренняя задача. В рамках внутренней задачи анализируется
движение космического аппарата в пределах гравиосферы планеты в плането-
центрических координатах. Рассматриваются два возможных случая: движе-
ние космического аппарата после старта с промежуточной орбиты до границы
гравиосферы планеты (задача отрыва), а также движение от границы гравио-
сферы планеты до завершающего околопланетного маневра (задача захвата).
Используя интеграл энергии планетоцентрического движения, получаем
планетоценгрические скорости старта от Земли и подхода к планете цели
планеты цели.
Скорость Кст ® определяет энергетические затраты при старте к пла-
нете цели непосредственно с поверхности Земли. Как правило, выведение
космических аппаратов на траекторию межпланетного перелета осуществля-
ется с промежуточной околоземной опорной орбиты. В этом случае энергети-
ческие затраты д Ист при переходе с опорной околоземной орбиты на меж-
планетную траекторию в случае импульсной аппроксимации активных участ-
ков определяется следующим образом:
А Ист - А Кг - Ист © - Р'оп. орб ® ’ (3 2())
где Орб @ - геоцентрическая скорость аппарата в соответствующей
стартовой точке опорной околоземной орбиты.
17
Аналогично скорость Иподх пл определяет энергетические затраты
при торможении космического аппарата, движущегося по гипербол отеской
околопланетной траектории, и посадке его на поверхность планеты При рас-
чете энергетических затрат на переход КА с гиперболической околопланетной
траектории на заданную околопланетную круговую или эллиптическую орбиту
поступают аналогичным образом:
Д Кюрм = Д ^2 ид ~ Ктодх. пл ~ Кил. орб. пл ’ (3.21)
где Кт. орб пл ~ планетоцентрическая скорость в заданной точке расчетной
околопланетной орбиты.
Необходимо отметить, что величины А Кт 11 Д Корм существенно
зависят от параметров опорных орбит.
3.3. Расчет энергозатрат при межорбитальных переле-
тах в поле одного притягивающего центра
Затраты характеристической скорости при межорбитальных перелетах
в основном зависят от вида перехода и параметров начальной и конечной ор-
бит. В случае использования для межорбитальных перелетов траектории ми-
нимальной энергии (эллипсов Хомана), а также с учетом малой в большинстве
случаев протяженности активных участков суммарные затраты на межорби-
тальный переход представляются аддитивной функцией
w
(3.22)
i=i
глобальный минимум которой при наличии ограничений будет иметь место в
случае обеспечения минимального значения каждого из слагаемых.
Компланарные межорбитальные перелеты. Компланарные
межорбитальные перелеты - это перелеты между орбитами, лежащими в од-
ной плоскости.
Одноимпульсные межорбитальные перелеты осуществляются между
орбитами, которые имеют (рис.3.5) хотя бы одну общую точку (пересечения
или касания). Величина потребного для данного перехода импульса определя-
ется разностью скоростей КА на конечной и начальной орбитах. Например,
для случая перехода (рис. 3.5, а) с начальной круговой (гн) орбиты на ко-
18
нечную = Гн, Гак J более энергетичную (внешнюю) эллиптическую ор-
биту потребные затраты определяются соотношением
Л^ = ^к
для перехода с начальной круговой
Оак
— ^Н’
3.5, б)
/'и)на внутреннюю
л V - V - V
n r ~ г кр. н г ак
(3.23)
эллиптическую
(3.24)
л и
дг дт
Рис. 3.5. Одноимпульсные межорбитальные переходы
в поле притягивающего центра
для перехода с начальной эллиптической (гаН, внутреннюю круговую
(гк) орбиту (рис. 3.5, в)
ЛИ = И№-Икр.к= (325)
I 'к | 'к 'ан ?
для перехода с начальной эллиптической (гаН, на внешнюю круговую
(гк)орбиту (рис. 3.5, г)
19
АО = ^КО К - ^Н
1S.JJ. К. ЯП
(3.26)
для перехода с начальной эллиптической 1?'ан,гпн Iна внешнюю эллиптиче-
скую (гя к = Гт, ГаК)орбиту (рис. 3.5, д)
Д 1/ = у -V
г г лк глн
(3.27)
для перехода с начальной эллиптической ^ан, f'nHJ на внутреннюю эллипти-
ческую (глк = Гян, ГаК) орбиту (рис. 3.5, е)
ди - у -0 = ’ Г 7Ш Г лК । 1 2г 1 ^'ан 1 2гак (3.28)
^ГН г + Г 1 'ян 'ан ] zkh ^ак
Переход между двумя пересекающимися эллиптическими орбитами
(рис. 3.5, ж) осуществляется путем сообщения КА дополнительного импульса
скорости А V в точках пересечения (I и II) начальной и конечной орбит. Ве-
личина импульса скорости Доопределяется следующим образом:
где
АО1,11
i.n
______________________i,ii
O02 + 02 -2O00Kcos<p
(3.29)
arctg— -arctg—-
г гк r гО у
Vr ,KT- радиальная и нормальная составляющие скоростей в точках перехо-
да.
Перелет между двумя круговыми или эллиптическими орбитами, кото-
рые не пересекаются и не касаются друг друга, возможен с помощью двухим-
пульсного перехода (рис. 3.6). В этом случае суммарные энергетические за-
траты определяются следующим образом:
А ОЕ = A 0J + А О2. (3.30)
20
В случае перехода между двумя круговыми (гк) орбитами
Рис. 3.6. Двухимпульсный компланарный межорбитальный перелет по
эллипсу Хомана: а - между круговыми орбитами; б - между
эллиптическими орбитами
Для хомановского перелета между двумя эллиптическими (^н^ан) и
, г«к ) орбитами (рис. 3.6, б) справедливы следующие соотношения:
21
^Г7СН
J 'лн гак
(3.36)
Пространственные межорбитальные перелеты. Практиче-
ские задачи исследования околоземного космического пространст-
ва требуют выведения космических объектов на орбиты, имеющие
различное наклонение к плоскости экватора. Так как космический
аппарат, как правило, выводится на промежуточную околоземную
орбиту, наклонение которой во многом определяется географиче-
ским положением космодрома и часто не совпадает с наклонением
целевой конечной орбиты, для выведения космического аппарата
на целевую орбиту приходится осуществлять поворот плоскости
орбиты (рис. 3.7), что требует'дополнительных энергетических за-
трат. Эти затраты определяются следующим образом:
Рис. 3.7. Поворот плоскости орбиты с приложением импульса скорости
в узле начальной и конечной орбит
Необходимо отметить что затраты на поворот плоскости орбиты значи-
тельны. Например, при Л/ = 60° потребный импульс № равен местной
круговой скорости.
Рассмотрим некомпланарные межорбитальные перелеты между двумя
круговыми орбитами (гн < гк). В этом случае могут быть использованы как
22
двух-, так и трехимпульсные схемы перелета по эллипсу Хомана. Анализ
энергетических затрат при рассматриваемых перелетах показывает, что по
сравнению с трехимпульсной схемой двухимпульсный переход (рис. 3.8)
обеспечивает меньшие затраты скорости. Причем суммарный поворот (Д/)
плоскости орбиты осуществляется в два этапа. На первом этапе происходят
увеличение скорости до перигейной для хомановского перелета и одновремен-
но разворот плоскости орбиты на угол Д/,. Угол А/,, как правило, составля-
ет несколько градусов. Второй импульс прикладывается в апогее переходного
эллипса, скорость при этом должна быть у величена до круговой на конечной
орбите, а плоскость орбиты развернута на угол Д/2 = Д/ — Д/,. В частности,
при переходе с низкой начальной круговой орбиты, имеющей наклонение
/ ж 60е. на конечную геостационарную орбиту разворот плоскости орбиты
при первом импульсе составляет Д/j » 3° и при втором
Д/2 = Д/ - Д/, -57°.
Рис. 3.8. Схема двухимпульсного пространственного перехода с
поворотом плоскости в перигее и апогее переходной траектории
Потребные импульсы скорости Д и Д для совершения простран-
ственного двухимпульсного перелета между круговыми орбитами определя-
ются из следующих выражений:
ДИ, =
2
sin —
2
(3.38)
23
В случае двухимпульсного межорбитального перехода между' неком-
планарными эллиптическими орбитами при сообщении импульсов в апси-
дальных точках для подсчета энергетических затрат пользуются следующими
соотношениям и:
А И — пер + ^л н2 • Vr пер • COS Д/|,
пер + Kt к — 2 Уа пер • к • COS Д^ >
(3.40)
(3.41)
где
V
г апер
у
г г.пер
'лН - 2?з + Лян > 'ан ~ + Аан ’ 'лк 2?з + Ллк, /аК R3 + haK.
3.4. Расчет энергозатрат при маневрах РБ с учетом
протяженности активных участков
Рассмотрим сравнительно простую модельную задачу' по определению
скорости, которую может приобрести РБ КА под действием реактивной силы в
конце активного участка. В идеальном случае, когда движение РБ происходит
в безвоздушном пространстве вне поля притяжения планеты и направление
тяги совпадает с вектором скорости, траектория движения будет прямолиней-
ной. В этом случае уравнение движения РБ в скоростной системе координат
имеет вид
(3.42)
24
где Рп - тяга двигательной установки в пустоте:
dim
Pn=goPw.n[-^'
/уд п - удельный импульс ДУ в пустоте.
Тогда
уд.п|
dt
dV Т dm
ttl — — — J
dt уд п dt
(3.43)
или
(3.44)
,r/ _ г dm
dV - /уд.г[
3 tn
Предположим, что /уд п = const. Тогда после интегрирования
(3 44) получим
И = -/уД.п In т + С. (3.45)
Константу' интегрирования С определим из начальных условий
ш|/=0 = т0 и И|?=о = Ир , где ITIq и Vq - начальные масса и скорость РБ
соответственно. В результате получим формулу для расчета приращения вели-
чины скорости Д V (() к моменту времени t:
(3.46)
AK(») = K(/)-K0 = -Jw,ln-L
fnQ
Отсюда полное приращение скорости РБ в конечный момент времени
tv , когда использовано все топливо, будет
К
(3.47)
т
Д — Д V — — *^уд.п ~* ~*^уд.п 113 Цк
//;0
ш
где тк - конечная масса РБ; — —-— относительная конечная масса РБ.
т0
Эта формула носит, как известно, имя К.Э. Циолковского и определяет
идеальную скорость РБ, т.е. максимально возможную скорость, которую мо-
жет развить РБ в идеальных условиях (вакуум, отсутствие сил притяжения,
вектор тяги все время направлен по вектору скорости).
25
Идеальная скорость не зависит от режима работы двигателя и его тяги,
но зависит от удельного импульса ДУ в пустоте (скорости истечения
//7К
струи) и относительной конечной массы Цк =------- Для многоступенчатого
'«0
РБ суммарная, идеальная скорость вычисляется по формуле
У //? (V
А^ид! = Ад.п,- = Ад-п, (3-48)
7=1 ш0,- 7=1 .
где N - число ступеней
В реальных условиях на активном участке полета на РБ действует при-
тяжение планеты, кроме того, направление тяги двигательной установки мо-
жет не совладать с вектором скорости движения РБ. В результате возникают
так называемые потери скорости.
Для оценки величины потерь скорости рассмотрим управляемое дви-
жение центра масс РБ в центральном поле тяготения в плоскости некоторой
начальной произвольной орбиты (рис. 3.9, где г - радиус-вектор РБ; /д -
радиус-вектор РБ в точке старта; V - скорость центра масс РБ; Р - тяга ДУ;
6 - угол наклона вектора скорости к местному' горизонту7; Vq - истинная
аномалия начала активного участка; ф - угловая дальность полета; а - угол
атаки РБ КА).
Рис. 3.9. Движение РБ КА на активном участке
Это движение описывается следующей системой уравнений:
26
dV п т = Р cos о. - mg sin 6; dt (3.49)
dr — = TsinO; dt .. dQ n . _ mV2 W — = P sin a - mg cos 0 + cos 0: (3.50) (3.51)
dt R dg> V — = —sm0: dt R dVx P . _ , dt m (3.52) (3.53)
где V - скорость РБ; Р - тяга ДУ; g- ускорение свободного падения; а-
угол между вектором скорости и вектором тяги ДУ; 0 - угол наклона вектора
скорости к местному горизонту; ф - угловая дальность полета; Г - радиус-
вектор РБ; / - время.
К этой системе уравнений необходимо добавить уравнение изменения
массы аппарата на активном участке траектории
Р
m = ----1. (3.54)
•'уд.п
Начальными условиями для рассматриваемой системы уравнений будут
параметры движения КА, соответствующие моменту старта РБ:
|/=0 ~ И), б|т=0 = 6о> 4=0 = ф|/=о = Фо> /я|/=0 = т0
В предположении о том, что известна временная зависимость утла на-
клона вектора скорости к местному горизонту 0((), произведем оценку' при-
ращения конечной скорости РБ за время работы двигательной установки /к .
Для этого рассмотрим дифференциальное уравнение (3.49) изменения скоро-
сти РБ на активном участке:
dV Р
—cosa-gsm0, (з.55)
dt т
представим первый член в правой части уравнения (3.55) в следующем виде
27
р. р ph \
— cos а =--------(1 - cos а}.,
т т т
Тогда уравнение (3.55) будет иметь вид
dV =------(1 - cos a)- gsinS dt.
т т
(3.56)
(3.57)
Проинтегрируем эти уравнение почленно на активном участке, т е. на
участке работы двигательной установки от / = 0 до t — tK ;
АИ = И
cos a)dt - j g sin Qdt.
0
(3.58)
В соответствии с (3.42) первый интеграл в (3.58) определяет идеальную
скорость РБ
^^ид ~ *^уд.д I11 — *^уд.к Ик (3.59)
т0
Второй интеграл будет отличен от нуля, если угол атаки а 0. Этот
интеграл определяет потери скорости на управление вектором тяги ДУ:
р р 60)
А Кпд = [—(1 - cosa)Jf - (1 - cosa) [—dt =
J ' m
= (1-СО8)срДГвд,
где (1 - COS a)Cp - среднеинтегральное значение этого параметра на актив-
ном участке траектории.
Третий интеграл определяет потери скорости, вызванные притяжени-
ем центрального гравитационного поля (гравитационные потери). Эти потери
являются наиболее существенными:
Д
ДКрав = fgsiner// = (gsine)cprK> (3'61)
о
где (g sin б)Ср - среднеинтегральное значение на активном участке.
Таким образом, приращение скорости на активном участке полета РБ с
учетом потерь на управление (3.60) и гравитационных потерь (3.61) запишется
как
28
А Кс — А Ивд А ^упр А ^грав
(3.62)
или
ДГК =[1-(1-
cos а
1 тк
1п ——
уд.п U1
(gsin0)cp/K. (3.63)
Для определения приращения скорости по формуле (3.63) необходимо
знать среднеинтегральные величины (1 — COS а)ср и (,g sin 0)Ср, завися-
щие от траектории полета и проектных параметров РБ КА. Эти величины оп-
ределяются в процессе численного интегрировании уравнений движения на
активном участке при различных начальных параметрах движения и различ-
ных значениях проектных параметров РБ.
В общем случае гравитационные потери скорости при старте РБ с .на-
чальной орбиты ИСЗ определяются несколькими факторами:
- высотой начальной орбиты (как правило, рассматриваются орбиты,
близкие к круговым);
- величиной идеальной импульсной скорости (энергией движения в
конце разгона (торможения)),
- удельным импульсом тяги ДУ «7уД п ’>
- тяговооруженностью РБ AZq
Р
- законом управления вектором тяги ДУ на активном участке,
т.е. А И|рав = %, /уд.п, ^0? а(0)
Для диапазона начальной тяговооруженности РБ 0.1 < Hq < 1, им-
пульсных скоростей разгона 0.5 < АИимп < 8 км/с с околоземной орбиты
(Н > 200 км) и при оптимальном законе управления тяги ДУ оценку грави-
тационных потерь можно провести по следующей приближенной аналитиче-
ской зависимости:
AJZ = 0 0189 _________—_______ЛК t2,
“'гран 'J.'JLOy “’ими‘д ’
(Япл + h)
(3.64)
29
где pinJI - гравитационный параметр планеты; 7?1Ъ1 - средний радиус плане-
ты; /? - высота начальной орбиты; А Пшп “ импульсная скорость разгона
(торможения); время работы двигательной установки РБ.
Если известна импульсная скорость разгона (торможения), то время ра-
боты ДУ при начальной тяговооруженности РБ и удельном импульсе ДУ
Jуд определяется по формуле
(3.65)
где Д И1П1П - импульсная скорость; - удельный импульс.
Единицы измерения Д Птмп - м/с. tg - с. Дц- ы/с‘. Расчет-
ные зависимост для определения ДИИХ(П изложены в разл 3.2 и 3.3.
Рассмотрим учет потерь на управление. Как показывают результаты ис-
следования и оптимизации управления вектором тяги при разгоне РБ с двига-
тельными установками большой тяги с начальных низких (11 > 200 км) орбит
ИСЗ на переходные траектории различных энергий, вектор тяги двигательной
установки должен быть направлен в каждый момент времени почти по каса-
тельной к траектории (т.е угол а близок к нулю). Тогда обеспечивается наи-
большее увеличение интеграза энергии при разгоне. Кроме того, при этом
потери скорости на управление будут небольшими. Учитывая это. потери на
управление могут быть учтены при определении эффективного удельного им-
пульса ^уд1^1 в (3.65) введением коэффициента фуПр < 1 (см. разд. 4).
С учетом вышеизложенного и в соответствии с (3.62), полные затраты
скорости (характеристическая скорость), необходимые для разгона РБ КА с
начальной орбиты на переходную или конечную орбиту с заданной энергией
движения ( И(Г1 известно), можно представить в виде
Игар _ П1мп + Нрав + Al упр (3.66)
Величина Д Нгмп в (З.Ьб), при которой обеспечивается мгновенный
переход РБ с начальной орбиты на новую заданную или переходную траскто-
30
рию, зависит только от параметров этих орбит и не зависит от основных про-
ектных параметров аппаратов. Для достаточно широкого класса маневров КА,
рассматриваемых на практике, величину А И1МП можно определить по из-
вестным аналитическим зависимостям, полученным из решения задач в им-
пульсной постановке (см. разд. 3.2, 3.3). Таким образом удается исключить из
задачи оптимизации основных проектных параметров РБ все функции и пара-
метры, связанные с динамикой полета (определение координат оптимальных
точек при включении ДУ, оптимальных законов управ тения движением РБ на
активных участках и оптимальных переходных орбит).
4. ВЫБОР ОСНОВНЫХ ПРОЕКТНЫХ ПАРАМЕТРОВ И
РАСЧЕТ ЭНЕРГОМАССОВЫХ И ОБЪЕМНЫХ ХА-
РАКТЕРИСТИК РБ С ЖРД
Перейдем к решению параметрической (массовой) задачи проектирова-
ния. Исходными данными для решения этой задачи являются определенные в
динамической части энергозатраты РБ, необходимые для реализации заданной
транспортной операции. Целью задачи является определение основных про-
ектных параметров РБ.
В сил}' того что одним из наиболее важных требований, предъявляемых
при разработке РБ КА, является высокое конструктивное совершенство, в
качестве критерия выбора рационального проектного решения может быть
использована относительная масса полезного груза |ДП г. Максимальные зна-
чение Цп г при решении прямой задачи проектирования позволяет получать
минимальную начальную (стартовую) массу РБ, а при решении обратной за-
дачи - максимальную массу полезного груза при заданной стартовой массе РБ.
. Результатом решения параметрической задачи является определение
основных проектных параметров, а также энергочассовых, объемных и гео-
метрических характеристик разгонного блока и его двигательной установки. '
4.1. Постановка задачи
Будем считать, что известны параметры начальной, конечной и пере-
ходной орбит (т.е известна схема транспортной операции), заданы конструк-
тивно-компоновочная схема РБ, тип ДУ и компоненты топлива. Тогда массо-
вая часть'задачи формулируется следующим образом:
1) при заданной начальной стартовой массе РБ определить /Пи г(П1аху.
31
2) при заданной массе полезного груза Zrtnr определить WWinin).
В модели массовых характеристик РБ рассмотрим основные системы,
которые однозначно характеризуют его конструктивно-компоновочную схему
и массы которых могут быть выражены через проектные параметры. Тогда
стартовую массу одноступенчатого РБ с ЖРД на начальной орбите можно
представить в следующем виде:
//?() = /Иду + tn, р + tn, о + /Ипр + ГПП г, (4.1)
где /Иду - масса двигательной установки с рамой крепления и арматурой;
/77т р - масса рабочего топлива (окислителя и горючего), необходимая для
реализации рассматриваемой схемы транспортной операции. /Ито- масса
топливного отсека (включает массы баков окислителя и горючего, переходни-
ки между ними, системы подвода топлива к ДУ, системы и топливо для над-
дува баков, арматуру, гарантированные остатки топлива и топливо незабора);
///пр- масса прочих систем РБ (системы управления и энергоснабжения с
кабельными сетями, система обеспечения запуска ДУ, переходники между
отсеками РБ, детали общей сборки и т.д.); ///п г - масса транспортируемого
полезного груза.
Конечная масса того же РБ после выполнения всех маневров запишется
как
(4.2)
//7К = /Иду + tn, o + ///пр + Wn г .
Для общности решения задачи в обеих постановках уравнения можно
представить в безразмерном виде:
///к _ Ртгг "* УдуЦ) + Лр.о + Мир
Цк —
/7/р
(4.3)
1 + /7Т о
где 1-1 п. г = ^nr/wO _ относительная масса полезного груза;
УДУ ~ ~ Удельная (относительная) масса двигательной установ-
ки; /Zq - начальная тяговооружснность РБ; П,о = tn,ojtn,.p - относи-
тельная масса топливного отсека; |_llip - ftl^jmQ - относительная масса
прочих систем .
32
Из уравнения (4.3) легко получить выражения для относительной массы
полезного груза
1-1п.г = 0 + ^г.о) Ик — УДУ^О ~ Лг.о ~ Нпр- (4.4)
Значение р.п г будем рассматривать в качестве критерия эффективно-
сти. Это позволяет обобщить прямую и обратную задачи и привести их к виду
^пгтах ~ Нк,гоО + ят.о)— УДУ^О ~ ^т.о ~ Нпр}- (4.5)
wo
Следует отметить, что решение параметрической задачи в прямой по-
становке (Н1п г задано) возможно только методом последовательных при-
ближений, поскольку от минимизируемой в этом случае начальной стартовой
массы РБ зависят многие величины, входящие в уравнение (4.3). Например,
относительная масса топливного отсека существенно зависит, особенно при
малых заправках топлива, от абсолютного количества топлива в баках, отно-
сительная масса ДУ - от абсолютной величины тяги и т.д.
Только при получении нулевого приближения оказывается возможным
пренебречь этими зависимостями (например, взять величины Hq , Уду,
&г о • 1-1пр из статистики) и, используя результаты решения динамической
части задачи, найти ц® г из выражения (4.4).
Существенно проще параметрическая часть задачи решается в обратной
постановке, когда критерием эффективности является доставка максимальной
массы полезного груза при заданной начальной стартовой массе РБ КА.
В этом случае могут быть использованы приближенные аналитические
зависимости по определению основных составляющих начальной массы РБ
(/?7Т о. Шду , /Ипр , 1Пт р). полученные по результатам обработки стати-
стических данных по различным типам РБ и ДУ и из решения динамической
части задачи:
'Иду = /(Р); mQ = /(/^.р); /ипр = /М • (4.6)
33
4.2. Определение энергетических характеристик двига-
тельных установок РБ КА
Определение удельных энергетических характеристик
ДУ. Одной из важнейших энергетических характеристик термохи-
мических ракетных двигателей (РДТТ, ЖРД) является удельный
импульс (ГОСТ 17655-72) — отношение тяги двигателя в вакууме к
секундному расходу тс г. тива:
/ду = м/с. (4.7)
тт
Этот параметр по смыслу совпадает со скоростью истечения газа из со-
пла двигателя. Единицей измерения удельного импульса является м/с (нс/кг).
Для нерегулируемых двигателей суммарный импульс тяги двигателя при вы-
полнении активного маневра будет
~4 ’ ^д > (4.8)
где -время работы двигателя при выполнении активного маневра РБ.
Тогда
^уд = > (4-9)
где /Дт р - суммарная масса топлива, прошедшая через головку камеры сго-
рания двигателя за время .
Достигнутые в настоящее время и некоторые перспективные характери-
стики жидкостных ракетных двигателей США [ 6 ] представлены в табл. 4.1,
Удельный импульс тяги ЖРД зависит от многих факторов, наиболее
важными из которых являются следующие:
- теплотворная способность топлива;
- коэффициент соотношения компонентов топлива по массе
^ni — /^ок/^ггор> (4.10)
где /Иок, WrOp - секундные массовые расходы окислителя и горючего,
соответственно:
- Р^1Ра~ степень расширения газов в сопле двигателя;
34
- принятая система подачи компонентов топлива (вытеснительная или тур-
бонасосная);
- при турбонасосной системе подачи компонентов топлива важное значе-
ние имеет принятая схема двигателя (разомкнутая или замкнутая);
- Рк - давление в камере сгорания.
Основные свойства наиболее распространенных в ракетной технике
компонентов топлива как криогенных, так и высококипящих приведены в
табл. 4.2.
При рассмотрении энергетических характеристик ЖРД необходимо
различать понятие «теоретический» и «действительный» удельный импульс
тяги двигателя.
гТ
Теоретическое значение удельного импульса ЛуД определяется из тер-
модинамического расчета в предположении полного сгорания топлива в каме-
ре и равновесного состава продуктов сгорания (состав в сечениях сопла соот-
ветствует расчетным значениям температуры и давления) при одномерном
расширении газов, а также отсутствии отвода тепла и трения:
= (411)
где - скорость истечения продуктов сгорания на срезе
сопла двигателя; Fa - Fa площадь выходного сечения сопла; ра -
давление в выходном сечении сопла.
Теоретическая скорость истечения определяется из выражения
Г к-\~
\dP^\k , (4 12)
~ 1 Цп.с у/’к)
где к - показатель адиабаты; Rq - универсальная газовая постоянная (Rq =
8317 Дж/кг моль К); [Д.п с - молекулярная масса продуктов сгорания; рК, ра
- давление газов в камере сгорания и на срезе сопла, соответственно.
W =
а
35
Характеристики
Двигатель Страна - произво- дитель Назначение двигателя Компоненты топлива Тяга в пустоте, ’ кН
F-1 Рокитдайн США 1 ст. PH “Сатурн-5" Oj/RP-l 7789
У-2 США 2 и 3 ст. PH “Сатурн-5” о2/н2 1020
SSME Рокитдайн США Орбитальная ст. МТКК о2/н2 2090
RS-2701A (Н-1) США 1 ст. PH “Тор-Дельта” O2/RP-1 1020
LR 89-NA-7 США 1 ст. “Атлас-Аджена”, “Атлас-Центавр” O2/RP-1 873
LR 105-NA-7 США 2 ст. “Атлас-Аджена", “Атлас-Центавр” O-/RP-1 . 357.7
Викинг-2 SEP Франция 1 ст. PH “Ариан” N2OVA-5O 687
SEP Франция 1 ст. PH “Диамаи-С” НгОЛЗДМГ 392.4
LR 87-A.I-5 Аэроджет США 1 ст. ракеты “Титан” N2O4/A-50 1050
LR 91-AJ-5 Аэроджет США 2 ст. ракеты “Титан ЗЕ/Центавр” N2O4/A-50 450
НМ-7 Франция 3 ст. PH “Ариан” О2/Н2 70
МВБ ФРГ 3 ст. PH “Ариан” О2/Н2 57.78
LR 10А-3- Пратт-Уитни США Ступень “Центавр” О2/Н2 66.71
XLR81-BA-13 Белл США Ступень “Аджена” ^Ог/НДМТ 71.12
36
Таблица 4.1.
зарубежных ЖРД
Удельный импульс в пустоте, м/с Лю5, Н/м2 F f = -Lsl. J& р 1 кр дв ^раб ’ с ^ДВ’ кг /Иду W = р кг/кН
2982 69 10:1,16:1 165 8407 0.1079
•4169 50.5 27.5:1 500 1585 0.1554
4562 210 77.5:1 5.5 480 2872 0.1374
2894 49.5 8:1 6 242 1068 0.1047
2688 44.9 8:1 2.23 686 0.0789
3021 51.6 25:1 466 0.124
2727 56.6 139 776 0.113
2413 390 0.0994
2806 54 \ 150 1751 0.1668
3041 57.5 45.2:1 1.8 210 564 1.253
4169 35.7 563 145 0.2071
4258 29.5 72 0.246
4356 28.1 57:1 5 380 133 0.1993
2943 35 240 132 1.856
37
LU
00
Физические свойства жидких компонентов топлива
Таблица 4.2.
Компонент топлива к т№к ПДК, мг/л р. кг'м5 Коррозионная активность Взрывоопасность Пожароопасность
Окислитель. F. О: N.O, HNO, Н2О2(Ю0%) C1F,
85.02 53.6 0.005 1503 Очень активен Очень опасен Опасен
90.2 54.5 - 1135 - Относительно безопасен Опасен
294 262 0.0018 1450 Очень активен Безопасен Относительно безопасен
359.2 232 0.005 1509 . Очень активен Безопасен Относительно безопасен
423 272.6 - 1450 Активен Относительно безопасен Относительно безопасен
285 197 0.0004 1866 Очень высокая Опасен Опасен
Горючее: н2 Керосин Т-1 (CHOjNjH, N.H, ch,n2h, А-50 В. - Н, СН,
20 14 - 70.7 Очень высокая Опасен Опасен
425 213 0.3 800 Слабая Опасен Опасен
336 216 0.0005 800 Слабая Каталитически опасен Опасен
385.6 275 0.001 1004 Слабая Опасен Опасен
360 220 0.00035 871 Слабая Опасен Опасен
343 265 0.00035 900 Слабая Опасен Опасен
331.6 226 6 0.00001 680 Слабая Очень опасен Очень опасен
112 91 - 451 Слабая Относительно безопасен Опасен
ПДК - предельно допустимая концентрация вещества в воздухе
Отношение действительного удельного импульса к теоретическому
определяет коэффициент удельного импульса фд :
Фд = А'л/Ад > (413)
который отражает реальные потери в камере сгорания двигателя и сопле:
*^УД = Фд^уд, (414)
т е. коэффициент срд учитывает несовершенство смешения компонентов топ-
лива в камере сгорания, степень неполноты сгорания, потери на трение и дру-
гие процессы неравновесного горения:
Фд = Фкам ' Фсопл ~ /к’Рк/Ра Т.Д.).
Для современных ЖРД с профилированными соплами
Фк = 0.98, фсопл = 0.98-4199.
Действительный удельный импульс тяги ЖРД для расчетного режима
работы двигателя в условиях космического пространства (рк = 0 )может
быть определен по следующим зависимостям
М = JP +
•'уд ' улг
Л-1
Ра
к
м/с,
(4.15)
RT '
ё()^уд \ Р >
где
Л« = 0 + 206 + 0.76А - 0.003р} - 10р„ + 2.45р’ м/.
Величины /уД ст, R , 7К, к для некоторых сочетаний компонентов
топлива представлены в табл. 4.3.
39
Таблица 4.3
Характеристики жидких топлив
Окислитель Горючее Ртопл' кг/м3 Т * К ’ К R, Дж/ /кг-К К=^- •^уд.ст ' м/с
Жидкий ки- слород О2 Керосин 2.9 1075 3550 378 1.21 2747
Азотный тет- раксид N2O4 НДМГ 2.8 1185 3360 380 • 1.23 2629
Азотный тет- раксид N2O4 Аэрозин 50% и гидро- зин 50% 2.8 1240 3300 370 1.23 2649
Азотная ки- слота HNO3 + окислы азота НДМГ 3.0 1280 3140 378 1.23 2482
Жидкий ки- слород Жидкий водород 5.56 350 3422 520 - 4081*
* Для пары Н2+О2 приведено расчетное значение удельного импульса тяги
УД
Для топливной пары азотный тетраксид (N2O4) + диметилгидразин
((СНз)2Г12Н2) значение теоретического удельного импульса тяги двигателя
можно определить по приближенной зависимости
(d Г0'25
Л - 4000 - 2600 <416>
\Ра)
Значение удельного импульса /уд , которое используется в выражении
для расчета энергозатрат на каждом активном участке движения РБ, должно
также учитывать потери, обусловленные отличием удельного импульса всей
40
двигательной установки от удельного импульса маршевого двигателя фду, а
также потери фупр, которые возникают в случае, если маршевая двигатель-
ная установка используется также и для управления положением РБ на актив-
ном участке.
Потери срду в основном обусловлены особенностями работы системы
подачи компонентов топлива в двигательную установку, т.е. фду ~ фп. При
этом будем считать, что в случае применения системы подачи с дожиганием
фп = 1, а при использовании ДУ без дожигания
Фп = 0.985 - 0.004/#6 (4.17)
Потери на управление вектором тяги невелики и составляют 0.5 + 1.5%,
т.е. коэффициент потерь
Фупр =0.995-0.99. (4.18)
С учетом (4.17) и (4.18) значение удельного импульса определяется
следующим образом:
*^уд = ^удФпФупр = *^удФдФпФупр ( )
В приведенных выше формулах приняты следующие единицы измере-
ний: тяга ДУ - Н, давление в камере сгорания и на срезе сопла - Н/см2. удель-
ный импульс тяги - м/с.
Диапазоны изменения основных характеристик ДУ: Р = (0,5-ь 100)-И)1
Н. рк =500ч1000 Н/см2, Рк/Да =1000410000.
4.3. Определение начальной тяговооруженности и состав-
ляющих начальной стартовой массы РБ КА
Начальная тяговооруженность РБ
В общем случае начальная тяговооруженность разгонных космиче-
ских блоков с ДУ "большой тяги" должна определяться в результате оптими-
зации проектных параметров или задаваться по прототипам.
На начальной стадии проектирования с достаточной степенью точности
рациональное значение Hq может быть определено с использованием сле-
41
дующей аналитической зависимости, которая справедлива для широкого диа-
пазона удельных импульсов тяги ДУ и возможных типов маневров РБ (при
линейном законе управления вектором тяги ДУ):
/20
иопт
= 0.04- (1 + г?)/^-5со^дДГимп ехр -
& ^имп
Ja
Jyn У
( г
1 - ехр
ДЕ'иМП
/Д
•'уд
(4.20)
где - угловая скорость движения РБ на начальной орбите
(421)
Ь - некоторый статистический коэффициент Ь « 0.035.
В формуле (4.20) используются следующие единицы величин: /уД -
м/с, /Лд ~ КГ, Аорб " КЛ1> Мпл ~ •
Составляющие начальной стартовой массы РБ
А. Масса топлива РБ. Суммарную массу топлива, заправляемого в
баки РБ , можно представить в виде суммы масс топлива Д/Тт , расхо-
дуемых на каждое включение ДУ:
п
"ч? = •
где П - количество включений ДУ в ходе выполнения перелета; /Мг
(4 22)
- мас-
са топлива, расходуемая при каждом включении двигателя.
Масса топлива IH
может быть представлена в виде
42
— /л T T j + ш т т .
+ ш
“ "4т.ост р
(4.23)
где тт р j - масса рабочего топлива:
ZHr.p j = ^0 ' 1 “ ехР ~
Архару
Ал .
(4.24)
АНТ в / ' масса топлива, расходуемого (выбрасываемого) перед запуском
ДУ;
^.ост / ‘ масса топлива, остающаяся в баках и трубопроводах, если рас-
сматривается последний маневр РБ или его ступени, если РБ
многоступенчатый.
Масса топливных остатков Мтост >• включает остатки незабора топ-
лива в баках, трубопроводах и двигательной установке, гарантированные
остатки, топливо, идущее на создание газов наддува баков и т.д.
При использовании криогенных компонентов топлива (жидкий водо-
род. жидкий кислород) в суммарную массу топлива необходимо включить
массу топлива, которая будет потеряна за счет испарения за период автоном-
ного полета изделия.
Таким образом, суммарную массу топлива, заправляемую в баки РБ, с
учетом (4.23) можно представить как
п п
^т^ ~ 2w^r.pJ *" 22^т.в j 4" ^т.ост j 4“ ^исп^ (4.25)
J=1 J=1
Суммарная масса испарившегося топлива во многом определяется кон-
структивно-компоновочной схемой РБ (несущие или подвесные баки окисли-
теля и горючего), характеристиками теплоизоляции баков, начальной темпе-
ратурой компонентов топлива после заправки, рабочим давлением наддува
баков, условиями ориентации РБ на пассивных участках полета по отношению
к Солнцу и планетам, которые являются основными источниками внешнего
теплового воздействия, временем нахождения РБ в космическом пространстве
и т.д.
Масса топлива W-r B у , расходуемая перед запуском ДУ. использую-
щей высококшгящие компоненты топлива, включает только достартовые вы-
бросы топлива при его запуске, т.е.
43
ттъ=тав. (4.26)
В случае применения криогенных компонентов топлива необходимо
учесть выбросы топлива, расходуемые на захолаживание трубопроводов и
двигателя:
^т.в j = тд..л j + ,изах/ (4 27)
Достартовые выбросы топлива при запуске двигательной установки
/Йд.в = (0.8 - 1 -0) P/j}a . (4.28)
На захолаживание системы питания и двигателей РБ на криогенных
компонентах топлива расходуется
тзах = (1.0 - 1.2) P/j^. (4.29)
Масса остатков горючего и окислителя в баках РБ может быть пред-
ставлена в следующем виде:
^т.ост ~• ^гар.з ^нез > (4.30)
где Шгар 3 - масса гарантированного запаса топлива; fniK3 - масса топлива
незабора (масса топлива, остающаяся в баках РБ).
Масса гарантированного запаса топлива (окислителя и горючего) опре-
деляется с учетом среднеквадратичных отклонений, удельного импульса ДУ
(Gу ~ 40м/с), коэффициента избытка окислителя (о^ «0.095) и конечной
массы РБ (Ст «0.005 Ш). /
Относительная масса гарантированных остатков топлива может быть
определена по формуле
_ - Р
^гар.з. — (1.1 ~ 1 -5) (4.31)
Лд
Масса топлива, остающаяся в баках (масса незабора), зависит от фор-
мы и геометрических размеров баков окислителя и горючего, протяженности
трубопроводов, питающих двигательную установку', типа применяемых уст-
ройств для забора топлива из баков, характеристик двигательной установки:
/инез = (2,0 2;5)—-. (4.32)
•'уд
44
Относительная масса испарившегося топлива в условиях околоземных
транспортных операций продолжительностью 10-15 часов может быть опре-
делена как
/7ГИСП = = 0,02 0,025.
/и0
(4.33)
Б. Масса топливного отсека. Масса топливного отсека существен-
но зависит от вида применяемых компонентов топлива, конструктивно-
компоновочной схемы РБ. заправляемой массы топлива и параметров систе-
мы подачи компонентов.
Обработка статистических данных, опубликованных в литературе, и ре-
зультатов расчетов массовых параметров топливных отсеков позволяет ис-
пользовать следующую аналитическую зависимость для определения массы
топливного отсека с высококипящими компонентами топлива окислитель -
азотный тетраксид (N2O4) или азотная кислота (HNO3) и горючими - аэрозин-
50 (50% по массе гидразина (М2Н4) и диметилгидразина), диметилгидразин
или несимметричный диметилгидразин:
тг
пг0 = 80.5-------+ 200. (4.34)
Рт
Масса топливного отсека для криогенных компонентов топлива может
быть определена по приближенной зависимости
1.71
^т.о — Q 5 ' ^Ту 200 . (4.35)
Рт
В выражениях (4.34), (4.35) /А?т_, - суммарная масса заправляемого
топлива (1 • Ю3 < т.[у < 50 • 103кг); рт - средняя плотность топлива.
, кг/м3.
В. Масса прочих систем при наличии системы управления.
тпр - 300 + О.О5то кг. (4.36)
45
Г. Масса двигательной установки. Масса ДУ может быть
представлена в следующем виде:
п
тду = S ,ЛД ’ (4 37)
1
где п - количество двигателей, входящих в состав двигательной установки;
тд - масса одного двигателя.
Масса двигателя, работающего на высококипягцих компонентах топли-
ва, определяется в зависимости от его основных характеристик Р,рк,рк!Ра
следующим образом:
Г Л03
_ л р0.9 „-0.3 Рк
Мд 0.05 • Р • (4.38)
\Ра >
Масса двигателя, работающего на криогенных компонентах' топлива, в
первом приближении может быть определена по формуле
та = О.8Р05. (4 39)
В формулах (4 38) и (4.39) используются следующие единицы величин:
Р - тяга двигателя, Н; рк ,ра - давления в камере и на срезе сопла двигате-
ля. Н/см‘.
4.4. Расчет объемных характеристик РБ
Объем топливных баков. Объемы топливных баков окислителя и
горючего включают объем дозы заправки соответствующего компонента топ-
лива, объем газовой подушки и объем арматуры:
^б[о,г] ~ д.з[о,г] + ^г.п [о.г] + ^арм [о.г]’ (4.40)
где з |о гj - объем дозы заправки; Иг п г] - объем газовой подушки;
^арм [о,г]" объем, занимаемый внутрибаковой арматурой и магистралями.
Суммарная масса заправляемых окислителя и горючего с учетом (4.25)
может быть определена по формулам
46
кт
= —-—т ;
1
/Ну = ---т ,
1 + кт Е
(4.41)
(4.42)
где кт = mo/ih,. - массовый коэффициент соотношения компонентов топ-
лива. 1
Тогда объемы дозы заправки окислителя и горючего при расчетных
температурах Тр заправки определяются как
/Ну
V
Д-з0
(4 43)
Ро(Гр)
"7V,
v
д. 3,
(4.44)
РгОр)’
где р0(Тр), рг(7"р) - плотность окислителя и горючего при расчетных тем-
пературах заправки.
- Газовая подушка в топливном баке необходима для:
- компенсации изменения объема дозы заправки компонентом топлива
при изменении его температуры;
- учета термической усадки бака в случае применения криогенных ком-
понентов топлива;
- обеспечения требуемого давления в баке в процессе предстартового
наддува при запуске двигательной установки.
В общем случае объем газовой подушки необходимо выбирать мини-
мально возможным с учетом условий функционирования РБ. В числе прочих
факторов это определяет массовое совершенство топливного отсека. На на-
чальном этапе проектирования объем газовой подушки обычно учитывают как
долю от объема дозы заправки.
Для высококипящих компонентов топлива
Ц.п =(0.02 +0.03) . кЛЗ;
для криогенных компонентов топлива
Игп = (0.03+ 0.06)-Ид 3.
(4.45)
(4.46)
47
Большее значение объема газовой подушки (4.53) относится к бакам
жидкого водорода.
Объем, занимаемый внутрибаковой арматурой и магистралями (в слу-
чае, если они проходят через бак окислителя и горючего):
Иарм = 0.005 = 0.006-Ид з. (4.47)
Диаметры трубопроводов подачи компонентов топлива к двигательной
установке определяются по следующей формуле:
^т.р[о,г] - 7(4™[о,г])/(яР[о.г]^) > (4 4g)
где V - скорость движения компонента топлива по трубопроводу,
V = 5 = 10 м/с.
Геометрические характеристики ДУ. Основные характеристики и
размеры двигателей ЖРД могут быть определены по следующим приближен-
ным зависимостям:
- относительная площадь выходного сечения сопла
( 2 1к-1
Fa _ + 1, \/< + 1
^кр г ri ~ a±l
। к. Рк ) V Рк >
(4.49)
где Fa и FKp - площадь сечения на срезе сопла и в критическом сечении
соответственно; к - показатель адиабаты; ра и рК - давление на срезе
сопла и в камере сгорания:
- площадь критического сечения сопла, м2:
р - J* т
КР ~ ''УД 1П4 ’
Рк ’ 'О
где th - секундный расход топлива, кг/с:
(4.50)
(4.51)
48
- площадь среза сопла, м2:
h = /а • Ар; (4.52)
- радиус критического сечения сопла, м:
4,, = ip; <4-51>
II Л
- радиус среза сопла, м:
А. = <454>
' - длина сопла Lc :
а) длина конического сопла, м:
4,к = — = 3,74^ - Якр). <4 55)
tgac
Ь) длина профилированного сопла, м:
А.к — (4.56)
- объем камеры сгорания двигателя, м3:
ик =ТшА-^- 10 4, (4.57)
А
где Т- время, необходимое для превращения жидкого топлива в газообраз-
ное. Т =0,0044-0,005 с;
- площадь поперечного сечения камеры сгорания, м2:
4 = (8-10)FKp; • (4.58)
- радиус поперечного сечения камеры сгорания, м:
А = (4.59)
- длина камеры сгорания, м:
А ~ А/А > (4.60)
- длина конусной части камеры сгорания, м:
Ар = (А - Ap)/tg₽ = А - А> (р = 45°). (4.61)
49
Примечание. Объем двигательного (хвостового) отсека, а также объем
переходного отсека между ступенями определяются исходя из количества и
характеристик двигателей, входящих в состав ДУ (см. предыдущий раздел).
Объем приборного отсека. Если приборы системы управления и
бортового радиокомплекса размещены в едином приборном отсеке, то его
массу и объем можно определить с помощью следующих зависимостей:
- масса приборного отсека
тс у =150 + О.О25/77о; (4.62)
- объем приборного отсека
*п.о ='«с.у/Рп.О’ (4.63)
где рпо- средняя массовая плотность приборного отсека, рпо~250<350
кг/м3.
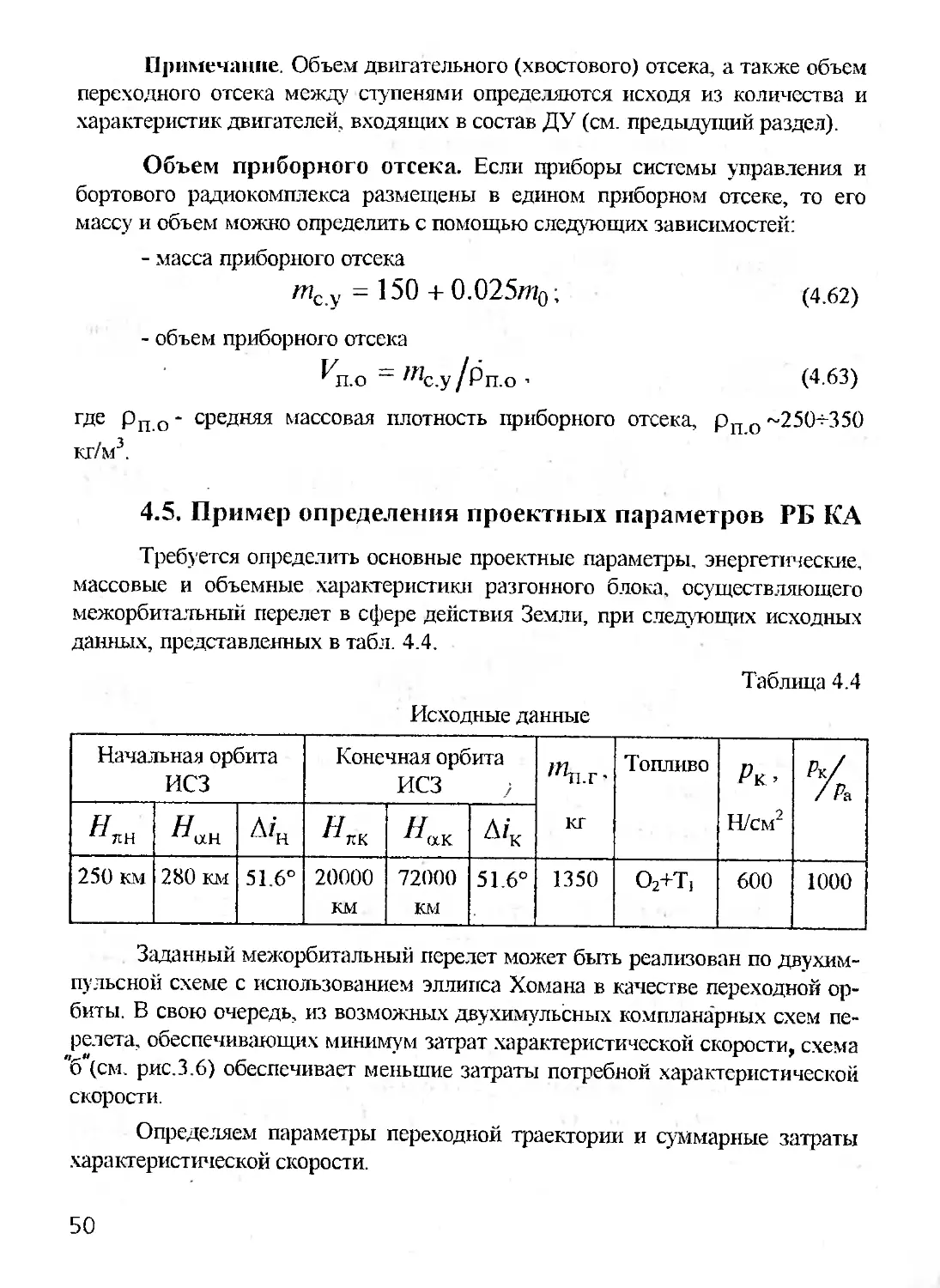
4.5. Пример определения проектных параметров РБ КА
Требуется определить основные проектные параметры, энергетические,
массовые и объемные характеристики разгонного блока, осуществляющего
межорбитальный перелет в сфере действгы Земли, при следующих исходных
данных, представленных в табл. 4.4.
Таблица 4.4
Исходные данные
Начальная орбита ИСЗ Конечная орбита ИСЗ ; /мп.г - КГ Топливо Рк ’ Н/см2 Рк/ /Ра
Ялн Az’H А/’к
250 км 280 км 51.6° 20000 км 72000 км 51.6° 1350 о2+т, 600 1000
Заданный межорбитальный перелет может быть реализован по двухим-
пульсной схеме с использованием эллипса Хомана в качестве переходной ор-
биты. В свою очередь, из возможных двухимульсных компланарных схем пе-
релета, обеспечивающих минимум затрат характеристической скорости, схема
"б (см. рис.3.6) обеспечивает меньшие затраты потребной характеристической
скорости.
Определяем параметры переходной траектории и суммарные затраты
характеристической скорости.
50
Скорость в перицентре начальной орбиты .
=6371 + 250 = 6621 км, Г„„ = 6651 км;
JvJtl \J> /1x1 1ЛП
S2raH = /398600 / 2-6651
rra+raH V 6621 V 6621 + 6651
Скорость в апоцентре начальной орбиты
= [^ / 2гта /398600 / 2-6621
aH КЛян+Ън V 6651 1/6621 + 6651
Потребный импульс скорости в перигее переходной орбиты
398600 Г / 2-78371
6621 6821 + 78371
2-6651
6621 + 6651
Потребный импульс скорости в апогее переходного эллипса
/39860(< | 2 -26371
I 78371^¥26371+ 78371
2-6651
6621+78371^
= 710м/с.
5. Суммарные затраты импульсной скорости на перелет
А^импГ ~ А^имп + А ^2имп - 3488 м/с.
Поскольку задана масса полезного груза (прямая постановка задачи),
решение параметрической (массовой) части задачи проектирования РБ будем
проводить методом последовательных приближений.
В качестве нулевого приближения значения начальной тяговооружен-
ности и значений коэффициентов модели массовых характеристик примем
• /70 =0.3. «т0 =0.09, уду =0.018, Цпр =0.1.
6. Для заданных компонентов топлива (О2 + Т1) определим действитель-
' ный удельный импульс ДУ в соответствии с зависимостями, рассмот-
ренными в разд. 4.2.
Действительный удельный импульс ДУ РБ
*^уд ~ ^удФупрФп "•
51
* _ RTK
уд •'уд "Г
рй
£о*^уд \Pv-j
/Рд = 0.95/уд.ст + 206 + 0.76рк - 0.0003/?к2 - 70^а + 2.54/?а2.
Задаем давление в камере сгорания двигателя и на срезе сопла
Рл = 0.6 Н/см2, Ря/ Рк = 0.001, Р = 600. Получим
ci cl / г». К
/Рд = 0.95- 2747+206+456-108-42+0.914 = 312256» 3123 м/с;
г* 378-3550 ППП1 0.21 717,м/
Jvrt = 3123 +--------- 0.001------= 3136 м/ .
уд g0- 3123 1.21 /с
Принимаем коэффициент потерь на управление фуПр = 0.99.
Коэффициент потерь на подачу топлива
<рп = 0.985 - 0.0004/£6 = 0.985 - 0.0004 • 6ОО0 6 = 0.963.
Действительный удельный импульс ДУ
/дд = 3136 • 0.99 • 0.963 = 2991 м/с.
7. Определяем гравитационные потери скорости на первом активном уча-
стке:
А Игоав, = 0.0189 —---------т • А Гимп, t1;
rpaBj . _ , гг \3 нищ >
\R® + Пц)
( ди А ! гИМПI 1 - ехг L /Д L < уд >J Ja 'уд
Тогда
1 - exp f 2778v < 2991J •2991
0.3-9.81
= 6148 с.
ДИ® , 0 0189—3- 86°0 7 • 2778 • (614.8)2 = 27.25м/с
1 (6371 + 250)3
8. Затраты характеристической скорости на первом активном участке
АИх°ар1 =Д^имП| -ьД^ав, = 2778 + 27.25 = 2805.25 м/с
9. Относительная конечная масса РБ в конце первого активного участка
52
Рк! = ехР
д и°
r xapt
Тр
*уд
= 0.39145.
10. Относительная конечная масса разгонного блока в конце второго ак-
тивного участка
Ок = Hkj ехР -
ДИ°
г хар2
Тр
-*УД
710
2991,
= 0.30973.
При вычислении рк в конце второго активного участка предполагает-
ся. что
Д IZ0 = Д у
г хар2 ° имп2 ’
т.е. гравитационные потери на втором активном участке не учитываются. Это
обусловлено тем, что ускорение свободного падения в апогее переходного эл-
липса мало:
12.
( 6371 V А 2
= 0.06 м/с2.
= 9.81
g = go —
Относительная конечная масса полезного груза нулевого приближения
Опт ~ М-кО + ^т.о) ~ УдУ^О — ^т.о ~ Опр =
= 0.30873 • (1 + 0.9) - 0.3 • 0.018 - 0.09 - 0.1 = 0.141 L
Начальная стартовая масса РБ
- тп.г _ 1350
° " Нп., 0.1411
Rn + h
<78378
= 9567 кг •
и
1.
Первое приближение
Оптимальная начальная тяговооруженность РБ
«о = 0.04 (1 + О.О35)/^-5сол2/"дД ИИМП1
ехр -
AV
° гИМП |
^уд
х 1 - ехр
-AV
гИМПI
7Д
•'уд
0.4
= 0.3706.
53
2.
3.
4.
5.
6.
7.
8.
9.
10.
11.
54
Гравитационные потери скорости на первом активном участке •
Д«л аВ1 = 0.0189—-Ж-ДР Z2 = 17.86 » 18м/с,
(7? + /г/
где /д = 498 с.
Полные затраты характеристической скорости на перелет
АГ^ = А/ИМП1 + АИ^аВ1 + ДГИМП2 = 3506м/с.
Относительная конечная масса блока первого приближения
А Ру
= 0.30969.
к. •'УД )
Суммарная масса топлива
= (1 - |4)'Ио = 0.69031 • 9567 = 6604кг.
Суммарная тяга двигательной установки
Р1 = = 3545.5кгс * 34781.65Н.
Масса топливного отсека
, пи
/4о =80.5— + 20 = 514.5.
ртср
Относительная масса топливного отсека
J = тт.о 514-5 = Q 07те;
ml. 6604 ии//У-
Цк = ехр -
Масса двигательной установки
Н
_CM2J
Относительная масса двигательной установки
I _'л/ду£о_ПП9
УДУ ~---“7— = °-02.
т^у = О.ОО5Р0 9[Н| • р3>3
Рк
= 71.24.
Масса прочих систем
т^р = 300 + 0.05//?? = 778,35.
12.
13.
14.
Относительная масса прочих систем
nJ .= —gy- = 12222 = 0.08136.
пр mg 9567
Относительная масса полезного груза
Нп.г = + 4.о) - 7ду4 - 4.0 - 4ip = 0.30969- (1 +
+ 0.0719) - 0.02 • 0.3706- 0.0779- 0.08136= 0.16714.
Начальная стартовая масса блока
т}} = -13-— = 8076.9 « 8077 .
0 0.16714
Второе приближение
При расчетах второго приближения необходимо учесть достартовые
выбросы топлива, связанные с запуском двигательной установки. Для двух
запусков двигательной установки масса выбросов топлива составит
II О по Р1 О по 34781.6 10 4
/и" = 2 0.8----= 2 0.8-------= 18.6 кг.
»» уд 2991
В качестве исходной информации воспользуемся также начальной стартовой
массой разгонного блока, полученной в первом приближении, = 8077 кг.
Проведем расчеты согласно пунктам 1-14 первого приближения:
1. «J1 = 0.358285.
2 Д^[рав = 15 м. ta =514.8» 515 с.
3. Д141 = Д Иим111 + Д и“ав + Д ИИМГ12 =2778+71()+15=3503м/с.
4. ^=0.310.
5 = (1 - >2(}=5586,89=5587кг.
6. Р11 = 4I/7i(jg0=2864H.
7. Л/4.0 = 438 375 «г.
55
8. <4.о = 0.0785 .
9. Шду = 59.29 кг .
10. уду = 0.02 .
11. /«пр = 703.85 кг.
12. Цпр =0.087.
13. р-пг =0.16166» 0.162.
14. tltf = 8350 кг.
Поскольку отличие начальной стартовой массы, полученной во втором
приближении, от массы РБ, полученной в первом приближении, составляет
3.27%, следует сделать еще одно приближение.
Третье приближение
1. Яр11 =0.361.
2. Д ^грав = 19 м- гд = 510 9 ~ 511 с .
3. Л Kv11 =3507м/с.
4. ц”1 0,309587=0,310.
5. «4” = О “ Р-к1 =5762,5 кг.
6. Рш = лг011«41^о=2957ОН.
7. /?4 о = 452.8 кг.
8. fl™ = О 0783 .
9. ^ДУ = 61.5 кг .
10. уду = 0.02 .
11 «4р =717.5 кг.
12. Цпр =0 086.
56
13. Цпн = 0.1627.
14. /Ид11 = 8293,7=8294, отличие от iHq менее 1%.
Результаты расчетов сводим в табл. 4.5.
Таблица 4.5
Результаты расчетов
Параметры Номер приближения
0 1 2 3
«0 0.3 0.37 0.358 0.361
Рк 0.309 0.3097 0.310 0.310
Лг.о 0.09 0.078 0.0785 0.0783
Уду 0.018 0.02 0.02 0.02
Рпр 0.1 0.081 0.087 0.086
9567 8077 8350 8294
/«т.о - 514.5 438.3 453
- 6604 5587 5780
Шду - 71.2 59.3 61.5
'«пр’ - 778.3 704 717.5
PjI.JC 0.141 0.167 0.162 0.1627
57
ЛИТЕРАТУРА
1. Левантовский В.И. Механика космического полета в элементарном изло-
жении,- М.: Наука, 1974,- 487 с.
2. Соловьев Ц.В., Тарасов Е.В. Прогнозирование межпланетных полетов.-
М.: Машиностроение, 1973,- 400 с.
3. Механика космического полета / Под. ред. акад. В.П. Мишина,- М.: Ма-
шиностроение, 1989,- 406 с.
4. Сафранович В.Ф, Эмдин Л.М. . Маршевые двигатели космических аппара-
тов,- М.: Машиностроение, 1980,- 240 с.
5. Основы теории и расчета жидкостных ракетных двигателей / Под. ред.
проф. В.М. Кудрявцева,- М.: Высшая школа, 1983,- 703 с.
6. Козлов А.А., Новиков В.Н., Соловьев Е.В. . Системы питания и управле-
ния жидкостных ракетных двигателей,- М.: Машиностроение, 1988,-
352 с.
7. Алемасов В.Е., Дрегалин А.Ф, Тишин А.П. Теория ракетных двигателей.
- М.: Машиностроение, 1989. - 464 с.
58
ПРИЛОЖЕНИЯ
Приложение I. СИСТЕМЫ КООРДИНАТ
В механике космического полета используют инерциальную и орби-
тальную системы координат.
Название инерциальной системы координат связывается с названием
того небесного тела, относительно которого ведется отсчет. Рассматривают
гелиоцентрические системы координат с началом в центре масс Солнца и
планетоцентрические системы координат с началом в центре масс планеты.
В соответствии с основной (опорной) плоскостью инерциальные сис-
темы координат делятся на эклиптические и экваториальные системы коорди-
нат. Основной плоскостью в эклиптической системе координат является плос-
кость орбиты Земли (плоскость эклиптики), а в экваториальной системе коор-
динат - плоскость экватора планеты.
Основная ось (Ох) инерциальной системы координат направляется в
сторону точки весеннего равноденствия планеты на небесной сфере (в астро-
номии небесная сфера определяется как сфера произвольного радиуса с цен-
тром, помещенном в произвольной точке пространства).
Положение КА на эклиптической или экваториальной системах коор-
динат может задаваться прямоугольными или сферическими координатами,
как это показано на рис. П. 1.1
Z Z
Рис. П.1.1. Инерциальные системы координат: а - эклиптическая система
координат (X - астрономическая долгота (0 < X < 2 л), [3 - астрономиче-
ская широта (—л/2 < Р < л/2)); б - экваториальная система координат
(ос - прямое восхождение (0 < ос < 2 л), 5 - склонение (— л/2 < 5 < л/2)
59
В орбитальной системе координат, начало которой помещается в цен-
тре масс небесного тела, при баллистическом невозмущенном движении ос-
новной плоскостью является плоскость орбиты КА, а основная ось Охю на-
правлена в перицентр орбиты (если орбита КА - правильная окружность, то
основная ось выбирается из соображений удобства). Для определения положе-
ния КА используется как прямоугольная, так и полярная системы координат
(см. рис. З.1.). Следует отметить, что в орбитальной системе координат
удобно и просто проводить анализ движения КА.
Рассмотрим положение орбитальной прямоугольной системы коорди-
нат Oxwy^Zw относительно инерциальной системы координат (рис. П.1.2.).
перицентра орбиты КА
Рис. П. 1.2. Положение орбитальной прямоугольной системы координат
OxwywZw относительно экваториальной инерциальной системы координат
Введем некоторые пояснения к обозначениям, принятым на
рис. П.1.2:
Q - долгота восходящего узла - угол, расположенный в вертикальной плос-
кости и отсчитываемый от направления в точку весеннего равноденствия
у (оси Ох) до линии узлов , т е. линии пересечения плоскости ор-
биты с плоскостью экватора (основной плоскостью орбитальной системы
координат).
60
Восходящим узлом орбиты называют точку, в которой тело переходит
из южного полушария в северное; противоположная точка № называется
нисходящим узлом;
i - наклонение орбиты - двугранный угол между плоскостью орбиты и плос-
костью экватора, отсчитываемый от плоскости экватора против хода ча-
совой стрелки для наблюдателя, находящегося в точке восходящего узла;
со - аргумент перицентра - угловое расстояние перицентра л от восходящего
узла, отсчитываемое в плоскости орбиты в направлении движения;
и - истинная аномалия;
И - аргумент широты.
Приложение 2. ПАРАМЕТРЫ ТРАЕКТОРИЙ ДВИЖЕНИЯ В
ЦЕНТРАЛЬНОМ ПОЛЕ ТЯГОТЕНИЯ
Эллиптическая орбита. Основные параметры эллиптической орбиты
приведены на рис. П.2.1, где С1 -большая полуось;
р = ' фокальный параметр; = /1/(1 - е)
b - малая полуось;
- радиус перицентра;
е = {а — )[а - эксцентриситет орбиты (0 < е < 1); а = (гп + Та)/2 ;
Zi = у[ар .
Рис. П.2.1. Эллиптическая орбита
Скорость космического аппарата, двигающегося по эллиптической
орбите, согласно интегралу энергии определится из соотношения
61
причем
(П.2.1)
(П.2 2)
(П.2.3)
Орбитальные координаты Za и а также радиальная Vr и транс-
версальная составляющие скорости движения КА как функции истинной
аномалии о определяются из соотношений
х“ =7г: Р—rrcosW,
(1 + е cos 9)
У о, = т,-------r?sin(9);
(1 + е cos 9)
Vr =е- sin(9)
= (1 + е - cos(9))^.
Период обращения по эллиптической орбите
Vn
(П.2.4)
(П.2 5)
(П.2.6)
(П.2.7)
(П.2.8)
Параболическая орбита. Основные параметры параболической
орбиты приведены на рис. П.2 2 , где е - 1; Г - р/(1 + cos(9));
= р/2; р = г; г -> со при 9 -» п.
62
Рис. П.2.2. Параболическая орбита
Скорость в перицентре параболы
(П.2.9)
Эту скорость обычно называют параболической скоростью или скоро-
стью освобождения, при которой КА достигнет границы сферы земного при-
тяжения.
Гиперболическая орбита. Гиперболическая орбита изображена на
рис. П.2.3. Для нее характерны следующие парахМетры: е > Г,
г = р/(1+е- cos(&)); гл = д/(1 + е); г&=я/2 = р; г -» оо при
—> Фас> с08(фас) ~---
е
Скорость в перицентре гиперболической орбиты превышает парабо-
лическую скорость:
Ищп > (И-210)
V г 71
т е. космический аппарат, имеющий начальную гиперболическую скорость,
выходит из сферы действия планеты и может совершать межпланетные пере-
леты.
63
Приложение. 3. Основные параметры планет. Сферы
действия планет
Основные параметры орбит и характеристики планет приведены в
табл. П.3.1, и П.3.2.
Рассмотрим более подробно понятие «сфера действия планеты». Со-
вершенствование методов баллистического проектирования КА базируется на
использовании проектных методов решения уравнений движения КА при од-
новременном обеспечении соответствующей точности. Наиболее простое ре-
шение уравнений движения имеет место в задаче двух тел: КА - небесное те-
ло. В рамках этой задачи гравитационным влиянием других притягивающих
тел пренебрегают или учитывают их действие как возмущающее Это решение
в первом приближении используется в задачах баллистического проектирова-
ния. Уменьшение отклонение решения от точного достигается правильным
учетом гравитационного поля Солнца, ограниченной гелиогравиповсрхностью
и отдельных гравитационных полей планет, каждое из которых ограниченно
планетогравиповерхностью.
Область пространства, в которой при вычислении возмущений целе-
сообразно принимать планету за центральное тело, а Солнце - за возмущаю-
щее, называется гравитационной сферой планеты.
64
Таб inца П.3.1
Параметры орбит планет Солнечной системы
Небесное тело Астроно- мическое обозна- чение Среднее расстояние от Солнца Период обращения Средняя орбитальная скорость Средняя угловая скорость движения по орбите Эксцентри- ситет Наклон к эклиптике
относительная V = Vn.,/Ve абсолютная
а е млн. КМ годы] СУТКк - км/с град/сутки - град
Меркурий 0 3870 57.91 87,970 1,6073 47,873 4,093 0,20563 7,004
Венера $> 0.72333 108,21 224,701 1,1758 35,021 1,6021 0,00679 3,394
Земля б 1,0000 149,60 1 0,006 1 29,785 0.9856 0,01672 —
Марс d 1,52369 227.94 1 321,730 0,8101 24,129 0,5240 0,09338 1,850
Юптер 5,20280 778,34 и 314.840 0,4384 13.058 0,0831 0,04845 1.306
Сатурн h 9,53884 1427,0 29 166,980 0,3238 9.644 0,0335 0,05565 2,491
Уран 6 19.19098 2871,0 84 0.0745 0,2282 6,798 0,0117 0,04724 0.773
Нептун т 30.0707 4498.6 164 280.30 0,1824 5,432 0,0060 0,00858 1.774
Плутон к 39,52 5912 247 255,100 0,1591 4.739 0.0040 0.25344 17.140
Лупа 0,3844 от Земли 27,322 1,023 13.176 0.05490 5,144 (средн.)
<т>
СП
Физические и космодинамические характеристики планет. Лупы и Солнца
Таблица П.3.2
Небесное тело Отношение массы Сол- нца к массе небесного тела Гравитаци- онный параметр к. км3/с2 Сред- ний радиус сферы дей- ствия. млн. км Средн- ий радиус сферы. млн. км Средний радиус планеты ♦ Г * км Скорость освобож- дения на поверхно- сти. V у осв км/с Относи- тельное ускорение силы тяжести на поверх- ности без учета вращения. 8 пл /<§ © Период вращения вокруг оси. 1/с Наклон экватора к орбите, град
Меркурий 6025000 2,2028*10“ 0,11 0,36 24,39 4,250 0,38 58,6 сут (0)
Венера 408520 3,24875*10-' 0,62 1,70 6050 10,363 0,90 243,16 сут 176°
Земля 332958 3.983032*Ю5 0,93 2,50 6371 11,186 1,00 23ч. 56мин. 04с 23°27'
Марс 3098000 ' 4.284*10“ 0.58 1,80 3388 5,029 0.38 24ч. 37мин. 23с 24°48'
Юпитер 1047,58 1,266901*10s 48,2 88,0 69400 60,430 2.68 9ч. 50,5мин. 3°7'
Сатурн 3498,5 3,79357*10“ 54.5 108,0 57800 36,230 1,16 10ч. 14,5мин. 26°45’
Уран 22900 5,795*10’ 54,8 116.0 25170 21,454 0,93 10ч. 42мин. 98°0'
Нептун 19300 6,877*10’ 86.8 194,0 24540 23,67 1,16 15ч. 48мин. 29°
Плутон 4000000 — — — 23400 ? ? 6ч. 19,Змии. ?
Луна 270705000 4,903*10’ 0,866 1737 2.376 0.165 27322сут. 6°40,7' (средний)
Солнце 1 1,32718*10“ 9*10’’ 696000 618 27.9 25,38 сут (на экваторе) 7’15' к эклиптике)
Размеры этой области определяются соотношением возмущающего
ускорения и ускорения, обусловленного силой притяжения центрального тела,
при сведении общей задачи к задаче трех тел: КА - Солнце - планета.
Сферой действия, или грависферой Лапласа называют область про-
странства, в которой
55 5F
(П.3.1)
г о
где 55 - возмущающее ускорение, создаваемое системой притяжения Солн-
ца; F - ускорение от силы притяжения планеты, когда она принимается за
центральное тело; 5 F - возмущающее ускорение, создаваемое силой притя-
жения планеты; 5 - ускорение от силы притяжения Солнца, когда оно при-
нимается за центральное тело.
Поверхность сферы действия определяется равенством
. 55 5F
Т = - (П.3.2)
и весьма близка к геометрической сфере с центром в центре планеты и радиу-
сом
2
л _ п( тпл V
Дл - л -------- , (П.3.3)
где R - средний радиус орбиты планеты; Дл - радиус грависферы Лапласа.
Помимо грависферы Лапласа при решении задач баллистического
проектирования рассматривают в качестве грависферы также грависферу ми-
нимальных отклонений. Ее поверхность близка к геометрической сфере с цен-
тром в центре планеты и радиусом
д0 = у/V
I та J
(П.3.4)
Параметры грависферы Лапласа и грависферы минимальных откло-
нений приведены в табл. П.3.3.
67
Таблица П.3.3
Значение радиусов гравпсфер планет
Планета Радиус грависферы, млн. км
Д0
Меркурий 0.113 0.320
Венера 0.616 1.46
Земля 0.925 2.16
Марс 0.578 1.56
Юпитер 48.2 26.6
Сатурн 54.6 94.1
Уран 51.9 101.2
Нептун 87.0 167.9
Плутон 37.6 83.0
Приложение 4. Определение времени перелета и дат
старта при хомановских межпланет-
ных перелетах
Определение опорных дат старта для циклов оптимальных полетов к
планетам солнечной системы проведем при следующих предположениях:
- орбиты Земли и планет круговые и лежат в одной плоскости;
- перелет осуществляется по траекториям минимальной энергии (эллипсу'
Хомана, см. рис. 3.7.).
Время перелета. Траектории минимальной энергии представляют
собой эллипсы, касающиеся в точках апсид круговых орбит планет.
Период обращения по такому эллипсу
гр 'ill
1 = _____а1 >
Цо
(П.4.1)
68
где а = ——- большая полуось орбиты перелета, - средние
значения радиуса орбиты Земли и планеты соответственно;
Це - гравитационная постоянная Солнца.
Если выразить расстояние в астрономических единицах (гф=1), а вре-
мя - в земных сидерических периодах (7©=!), тогда
Т = у! а3
(П.4.2)
— 1 ' пл
где а =------д.
2
Время полета от Земли к планете (табл. П.4.1)
Znep 2
(П.4.3)
Таблица П.4.1
Время перелета к планетам Солнечной системы
по траекториям минимальной энергии
Планета Солнце Меркурий Венера Марс Астероиды
^пер годы 0.177 0.288 0.401 0.710 1.01-1.74
сутки 65 105 146 259 369-636
Планета Юпитер Сатурн Уран Нептун Плутон
^пер ГОДЫ 2 745 5.980 16.0 30.65 45.80
сутки 1000 2180 5840 11200 16800
В случае полета с планеты на планету
^пер ~ 2
где 11 и А*2 ' средние радиусы орбит планет.
(П.4.4)
69
Истинные орбиты планет отличаются от круговых. Учет влияния экс-
центриситета позволяет определить верхнюю и нижнюю оценки времени пе-
релета к планетам
э
~тах , 7 шах Л
'® + 'пл
(П.4.5)
I 3
1 ц ~min ~min А
^min __ 1 I г® + 1пл
пе₽ " 2 2
„ .шах .ruin гт л о
Значения ?ПСр и «ПСр приведены в таол. П.4.2.
(П.4.6)
Таблица П.4 2
Верхние и нижние оценки времени перелета к планетам
1 Панета Мерку- рий Венера Марс Юпитер Сатурн Уран Нептун Плутон
^тах ‘пер ГОДЫ 0,260 0,390 0,644 2,550 5,36 15,0 30,2 38,5
сутки 95 138 234 935 1,955 54,75 11040 11060
Milin ‘пер года 0.320 0,412 0,780 2,910 6,60 17,1 30,8 57,3
сугки 115 150 283 1070 2408 6240 11250 20950
Даты старта. Дата старта при пролете с Земли на планету может
быть определена из условия, что разность гелиоцентрических долгот Земли в
момент старта и планеты в момент прибытия (угол перелета) равна Л .
Долгота Земли в момент старта определяется из следующего
соотношения:
V© - Н'е(| + ®©^Тф>
(П.4.7)
70
где V©>u ~ долгота Земли в момент начала отсчета времени, рад, —
- Iti/Tq, = 2л - угловая скорость Земли вокруг Солнца, рад/год;
/СТе - время старта с Земли на планету от начала отсчета времени, годы:
Долгота планеты V|/riJI в момент прилета:
Ч'пл = Ч'пло +юплКтф + ^пер)>
где ц/ - долгота планеты в момент начала отсчета времени; со „„
Т ПЛп * * 11JI
(П.4.8)
2л
у -
угловая дальность обращения планеты вокруг Солнца.
Разность долгот Земли и планеты может отличаться на 2л:
V© ~ Упл = ±л + /г • 2л; (к = 0;± 1;± 2;...;±у
где к - количество циклов от начала отсчета времени.
С другой стороны, разность долгот
V© ~ 1РпЛ = (^©0 ~ ^ПЛ0
откуда легко определить время старта на планету:
± л + к • 2л — AV|>0 + ®пл^пер _ о +
— ст © с >
СО @ ® пл Кт ю пл ^пе р э
®© ®пл
- /О
где д\|/0 = у©0 - ZCT@ -время
Тс - период времени между циклами.
Период времени между циклами
2л 1
(П.4.9)
(П.4.10)
старта для нулевого цикла;
Т
1 пл
Т -1
1 пл 1
(П.4.11)
с 1
®© ЮПЛ ] _ *
т
1 пл
равен синодическому период}' обращения планеты.
Для полета с планеты на планету синодический период составляет
(П.4.12)
Т\
Время старта с Земли для нулевого цикла от начала отсчета времени
71
у0 _ — 71 д^0 + ® планер
‘ст®
®Ф - ®пл
+ 7г:ер
Т -1
‘пл 1
(П.4.13)
Л\|У
где дц/0 = —.
2л
Для определения даты старта необходимо знать гелиоцентрические
долготы планет в начальный момент времени.
ОГЛАВЛЕНИЕ
ВВЕДЕНИЕ................................................... 3
1. ПОСЛЕДОВАТЕЛЬНОСТЬ ВЫПОЛНЕНИЯ И КРАТКОЕ СО-
ДЕРЖАНЬЕ КУРСОВОЙ РАБОТЫ .'.............................. 3
2. ПОСТАНОВКА ЗАДАЧИ ВЫБОРА ОСНОВНЫХ ПРОЕКТНЫХ
ПАРАКЕТРОВ РАЗГОННЫХ БЛОКОВ КА........................... 4
3. ОПРЕДЕЛЕНИЕ ЗАТРАТ ХАРАКТЕРИСТИЧЕСКОЙ СКОРО-
СТИ ПРИ МАНЕВРАХ РБ КА.................................. 8
.3.1. Параметры траектории движения РБ.................. 8
.3.2. Расчет в импульсной постановке энергозатрат при межпла-
нетных перелетах...................................... 12
.3.3. Расчет энергозатрат при межорбитальных перелетах в поле
одного притягивающего центра.......................... 18
.3.4. Расчет энергозатрат при маневрах РБ с учетом протяжен-
ности активных участков............................... 24
4 ВЫБОР ОСНОВНЫХ ПРОЕКТНЫХ ПАРАМЕТРОВ И РАСЧЕТ
ЭНЕРГОМАССОВЫХ И ОБЪЕМНЫХ ХАРАКТЕРИСТИК РБ С
ЖРД.........'.......................................... 31
4.1. Постановка задачи............................... 31
4.2. Определение энергетических характеристик двигательных
установок РБ КА................................. 34
4.3 Определение начальной тяговооружснности и составляю-
щих начальной стартовой массы РБ КА 41
4.4 Расчет объемных характеристик РБ................. 46
4.5. Пример определения проектных параметров РБ КА ... 50
ЛИТЕРАТУРА............................................... 58
Приложение I. Системы координат........................... 59
Приложение 2. Параметры траекторий движения в центральном поле
тяготения............................................... 61
Приложение .3. Основные параметры планет. Сферы действия планет .. 64
Приложение 4. Определение времени перелета и дат старта при
хомановских межпланетных перелетах...................... 68