/









































































































































































































































































































Автор: Фирсов Ю.Г.
Теги: техническая акустика строительство гидрография
ISBN: 9-785-98187-644-8
Год: 2010




Текст
Государственная морская академия имени адмирала С.0. Макарова
Ю.Г. Фирсов
Основы гидроакустики и использования гидрографических сонаров
Учебное пособие
е
Федеральное государственное образовательное учреждение высшего профессионального образования ГОСУДАРСТВЕННАЯ МОРСКАЯ АКАДЕМИЯ имени адмирала С.О. Макарова
Арктический факультет
Ю.Г. Фирсов
Основы гидроакустики и использования гидрографических сонаров
Учебное пособие
Рекомендовано УМО по образованию в области эксплуатации водного транспорта в качестве учебного пособия для студентов (курсантов) высших учебных заведений, обучающихся по специальности 180401 «Гидрография и навигационное обеспечение судоходства»
Нестор- История Санкт-Петербург 2010
УДК 681.883
ББК 3875я7
Ф62
Рецензенты:
А.О. Леонов, кандидат технических наук, начальник кафедры гидрографии Морского корпуса Петра Великого Санкт-Петербургского военно-морского института;
В А. Шматков, доктор технических наук, профессор Государственной морской академии имени адмирала С.О. Макарова
Фирсов Ю.Г.
Ф62 Основы гидроакустики и использования гидрографических сонаров. — СПб.: Нестор-История, 2010. — 348 с.
ISBN 9-785-98187-644-8
Учебное пособие по курсу «Гидрография»: «Основы гидроакустики и использования гидрографических сонаров», разработано кандидатом технических наук, доцентом Ю.Г. Фирсовым на основе курса лекций, прочитанного в 2006-2008 гг. курсантам-гидрографам старших курсов Арктического факультета Государственной морской академии имени адмирала С.О. Макарова.
Учебное пособие может быть использовано курсантами и студентами заочного факультета гидрографической специальности, а также инженерами-гидрографами, желающими самостоятельно изучить основные принципы гидроакустики и применения современных однолучевых, многолучевых эхолотов и гидролокаторов бокового обзора как в гидрографии, а также морской геологии.
УДК 681.883
ББК 3875я7
Иллюстрация на обложке учебного пособия любезно предоставлена фирмой «Kongsberg Maritime» (Норвегия).
Фирма «Kongsberg Maritime» — производитель широкой номенклатуры технологий, предназначенных для выполнения гидрографических и геодезических работ по обеспечению различных областей морской деятельности.
Многолучевые эхолоты серии «ЕМ» фирмы «Kongsberg Maritime» являются одними из лучших в мире и широко используются российскими гидрографами.
© Ю.Г. Фирсов, 2010
СОДЕРЖАНИЕ
Введение...........................................................9
Глава 1
ИСТОРИЧЕСКИЙ ОБЗОР РАЗВИТИЯ ГИДРОГРАФИИ И ГИДРОАКУСТИЧЕСКИХ СРЕДСТВ
1.1. Гидрография и батиметрия.....................................12
1.2. Краткий исторический очерк развития гидроакустики............16
1.3. Особенности распространения акустических волн в воде.........21
1.4. Многолучевые эхолоты.........................................22
1.5. Современное состояние гидролокаторов.........................26
Глава 2
ОСНОВЫ ГИДРОАКУСТИКИ И ТЕОРИИ СОНАРОВ
2.1. Акустические волны и их физические характеристики...........28
2.2. Уравнение гидролокации......................................34
2.2.1. Потери при передаче....................................35
2.2.2. Уровень помех..........................................36
2.2.3. Показатель направленности на приеме....................36
2.2.4. Сила рассеивания и сила цели...........................38
2.2.5. Порог обнаружения......................................39
2.3. Параметры морской среды.....................................40
2.3.1. Температура............................................40
2.3.2. Соленость..............................................40
2.3.3. Давление...............................................41
2.3.4. Плотность..............................................41
2.3.5. Определение солености, температуры и скорости звука....41
2.3.6. Работа с инструментами. Регистрация и обработка данных.45
2.3.7. Расчет глубины с использованием данных вертикального профиля скорости звука.......................................45
2.3.8. Требования по определению вертикальной скорости звука для работ с многолучевым эхолотом............................48
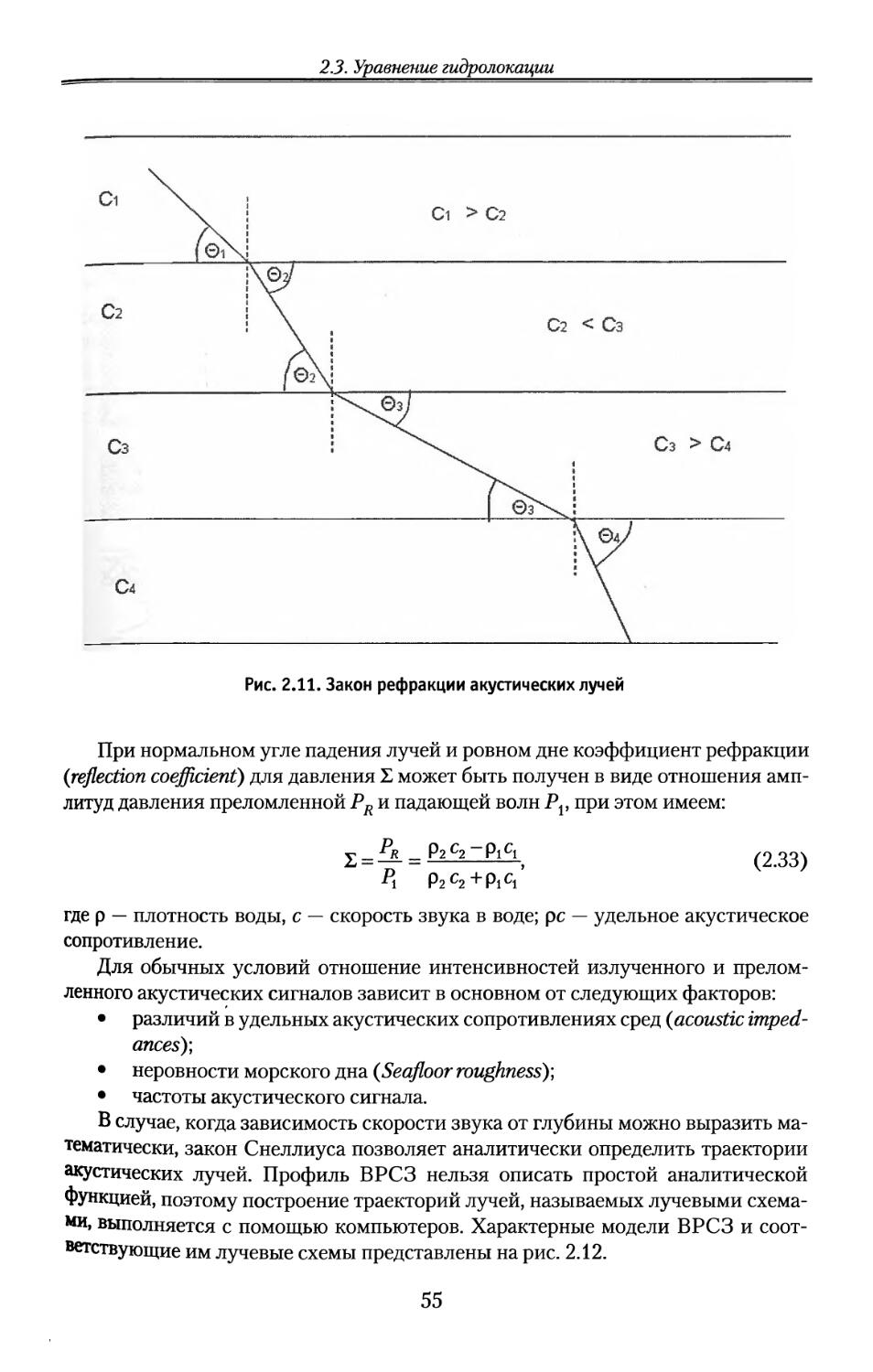
2.3.9. Распространение звука в воде...........................52
2.4. Акустические параметры......................................56
2.4.1. Частота...............................................56
2.4.2. Ширина полосы..........................................57
2.4.3. Длительность импульса..................................58
2.5. Однолучевой эхолот — простой сонар....:......................58
2.5.1. Ограничения однолучевого эхолота.......................59
2.5.2. Многолучевая батиметрия................................63
3
Содержание
Глава3 АКУСТИЧЕСКИЕ ПРЕОБРАЗОВАТЕЛИ И ИХ РЕАЛИЗАЦИИ ДЛЯ РАЗЛИЧНЫХ ТИПОВ СОНАРОВ
3.1. Классификация преобразователей с точки зрения принципа действия.66
3.1.1. Магнитострикционные преобразователи..................66
3.1.2. Пьезоэлектрические преобразователи...................67
3.1.3. Электрострикционные преобразователи .................67
3.2. Характеристики преобразователей............................67
3.2.1. Характеристики направленности........................67
3.2.2. Угловая ширина луча (Beam width).....................69
3.3. Классификация сонаров с точки зрения формирования лучей....76
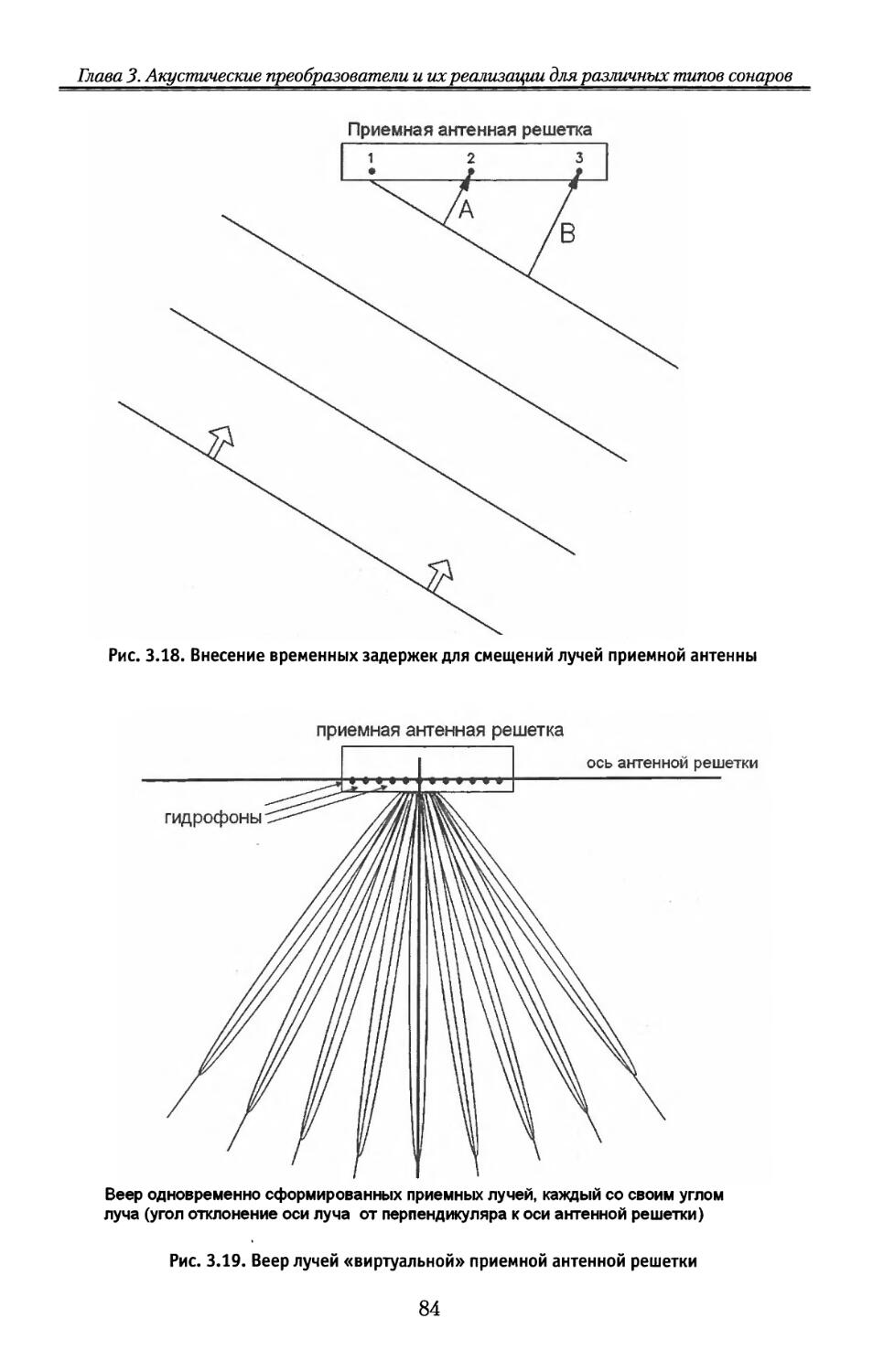
3.3.1. Формирование лучей однолучевых эхолотов .............77
3.3.2. Формирование лучей многолучевых эхолотов.............78
3.3.3. Формирования лучей сонаров (гидролокаторов) бокового обзора............................................85
3.4. Классификация преобразователей с точки зрения установки....86
3.4.1. Стационарная набортная установка ....................87
3.4.2. Буксируемый вариант (Towed)..........................88
3.4.3. Переносной вариант (Portable)........................88
3.5. Акустическое покрытие дна..................................88
3.5.1. Однолучевой эхолот...................................88
3.5.2. Многолучевой эхолот..................................88
3.5.3. Гидролокатор бокового обзора.........................91
Глава 4 ОДНОЛУЧЕВЫЕ ЭХОЛОТЫ
4.1. Принципы работы............................................93
4.1.1. Параметры однолучевого эхолота.......................94
4.1.2. Точность измерений глубин............................97
4.2. Установка и калибровка.....................................97
4.3. Работа с эхолотом и регистрация............................99
4.4. Источники ошибок и методы контроля точности...............100
4.4.1. Учет погрешностей за наклон дна.'...................100
4.4.2. Влияние погрешности определения скорости звука......100
4.4.3. Влияние погрешности определения времени.............102
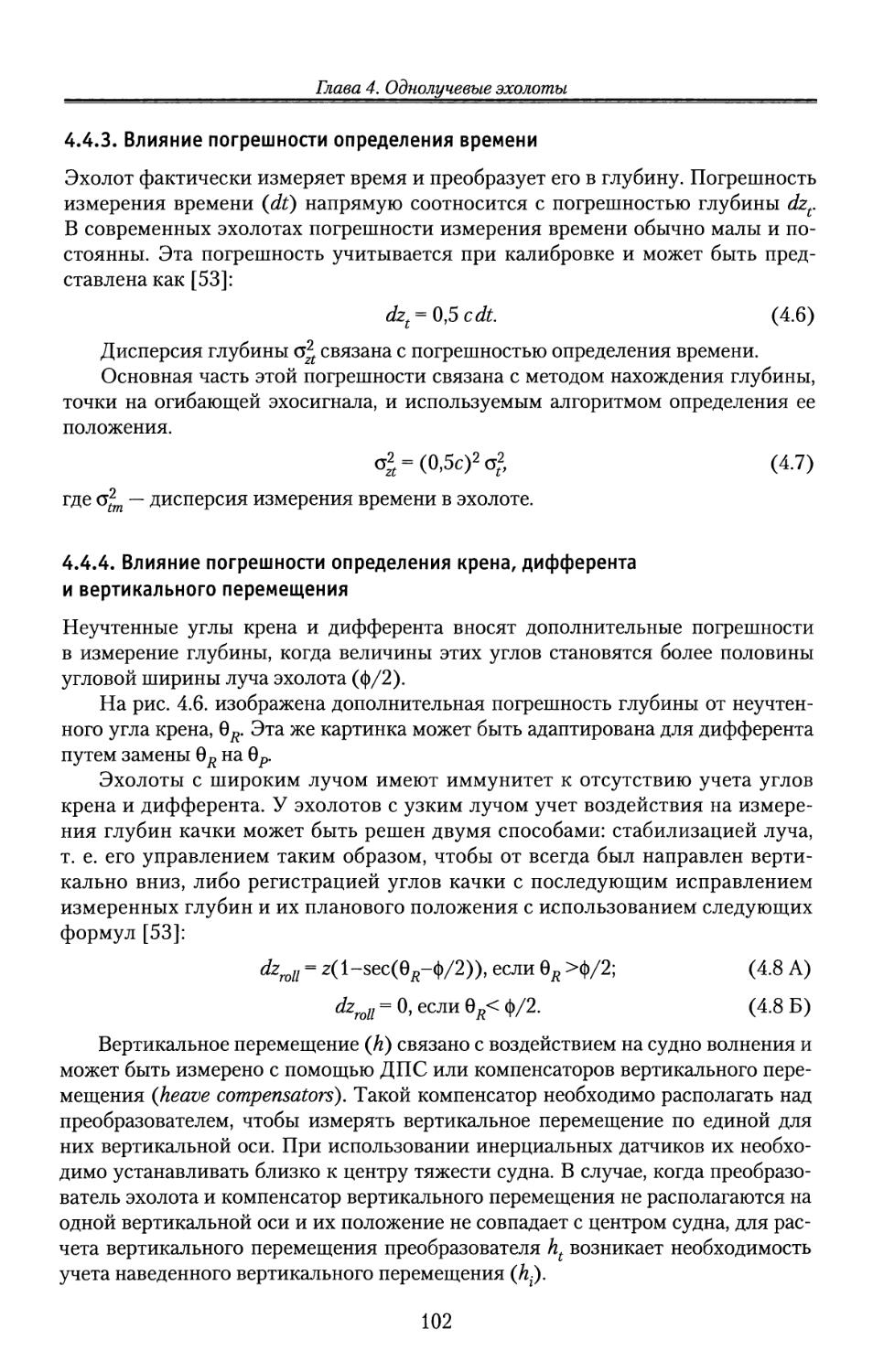
4.4.4. Влияние погрешности определения крена, дифферента и вертикального перемещения...............................102
4.4.5. Динамическое заглубление преобразователя, учет систематических ошибок от проседания и посадки.......104
4.4.6. Чтение аналоговых записей и разрешающая способность.......106
4.4.7. Интерпретация записей эхосигналов на самописце......106
4.4.8. Исправление глубин за уровень.......................108
4.5. Контроль качества исправленных глубин.....................109
4
Содержание
Глава 5
СИСТЕМЫ ПЛОЩАДНОЙ СЪЕМКИ РЕЛЬЕФА ДНА
5.1. Основные характеристики многолучевых эхолотов.................114
5.1.1. Принцип работы.............................................114
5.1.2. Детектирование дна.........................................116
5.1.3. Распределение лучей и размер пятна облучения...............120
5.1.4. Параметры сигналов.........................................121
5.1.5. Эффекты от крена, дифферента и рыскания....................121
5.1.6. Компенсация и стабилизация углов крена, дифферента и рыскания.................................................123
5.1.7. Методы формирования лучей..................................124
5.1.8. Цифровые изображения бокового обзора, получаемые с помощью МЛЭ..............................................128
5.2. Координатные системы МЛЭ.........................................129
5.2.1. Базовые уравнения многолучевого эхолота....................129
5.2.2. Угловые поправки...........................................133
5.2.3. Учет рефракции наклонных дальностей в среде с разной скоростью звука...................................134
5.2.4. Управление лучами на приеме................................136
5.3. Дополнительные поправки для расчета глубин МЛЭ и их координат.138
5.3.1. Исправление глубин, рассчитанных МЛЭ.......................138
5.3.2. Вертикальное перемещение (Heave)...........................139
5.3.3. Динамическое заглубление антенны МЛЭ.......................140
5.3.4. Учет поправки за приведение глубин к заданному нулю глубин.140
5.3.5. Расчет исправленной глубины по данным МЛЭ..................148
5.3.6. Расчет геодезических координат глубин МЛЭ на морском дне...148
5.4. Априорная точность определения глубин и их координат с помощью МЛЭ.................................................152
5.4.1. Априорная точность определения глубин .....................152
5.4.2. Априорная точность определения координат глубин............157
5.5. Интерферометрический метод формирования лучей и примеры реализации....................................................161
5.5.1. Батиметрический ГБО с интерферометрической обработкой (Interferometric sonars)....................................161
5.5.2. Батиметрический гидролокатор бокового обзора с синтезированной апертурой.................................165
Глава 6
МЕТОДИКА ВЫПОЛНЕНИЯ ПЛОЩАДНОЙСЪЕМКИ РЕЛЬЕФА ДНА МНОГОЛУЧЕВЫМ ЭХОЛОТОМ
6.1. Цифровая батиметрия и Стандарты на гидрографическую съемку S-44 МГО............................................. 169
6.1.1. Стандарты на выполнение съемки с многолучевым эхолотом..169
6.1.2. Цифровые модели рельефа и качество батиметрической съемки.... 173
5
Содержание
6.2. Методика проектирования работ с системой многолучевого эхолота.180
6.2.1. Геодезическое планово-высотное обеспечение...........181
6.2.2. Картографическое обеспечение.........................181
6.2.3. Аппаратное обеспечение...............................182
6.2.4. Океанографическое обеспечение........................182
6.2.5. Проектирование галсов, ширины полосы обзора, скорости и перекрытия смежных полос..................................182
6.3. Методика выполнения съемки с системой многолучевого эхолота....189
6.3.1. Подготовка к выполнению съемки.......................189
6.3.2. Контроль целостности при выполнении съемки с системой многолучевого эхолота в реальном масштабе времени...........203
6.4. Методика пост-обработки данных площадной съемки с многолучевым эхолотом........................................206
6.4.1. Фильтрация данных сопряженных датчиков системы МЛЭ...207
6.4.2. Исправление глубин и координат.......................207
6.4.3. Фильтрация глубин, рассчитанных МЛЭ..................208
6.4.4. Методы апостериорной оценки точности цифровой модели рельефа.....................................................209
6.5. Программное и аппаратное обеспечение для сбора данных системы МЛЭ....................................................210
6.5.1. Программное обеспечение реального времени системы МЛЭ....210
6.5.2. Аппаратное обеспечение (на примере МЛЭ ЕМ-710 фирмы Kongsberg Maritime. Inc.).............................212
Глава 7 ПРАКТИЧЕСКИЕ МЕТОДИКИ КОНТРОЛЯ И ОЦЕНКИ КАЧЕСТВА ДЛЯ МНОГОЛУЧЕВЫХ ЭХОЛОТОВ
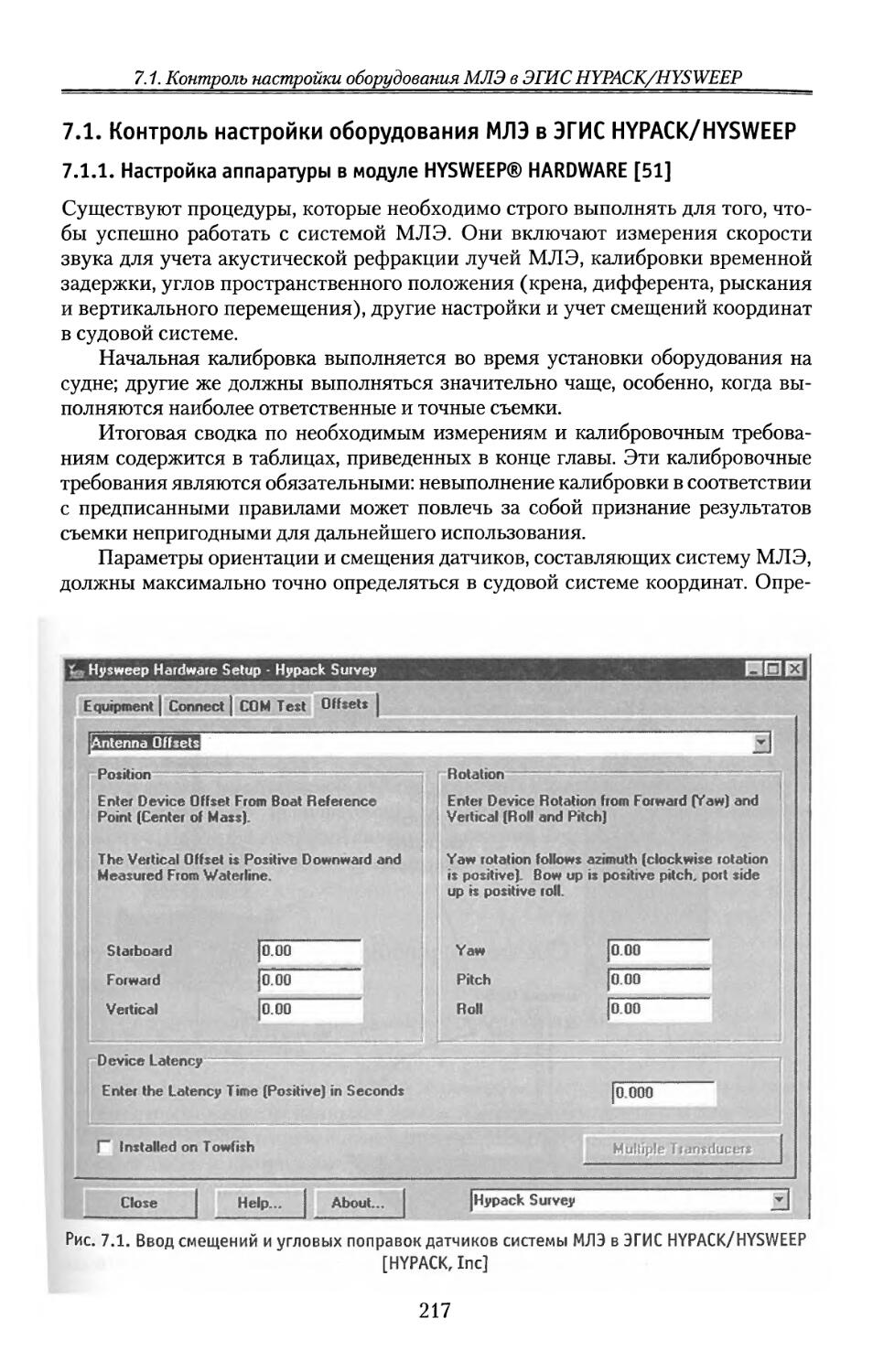
7.1. Контроль настройки оборудования МЛЭ в ЭГИС HYPACK/HYSWEEP..........................................217
7.1.1. Настройка аппаратуры в модуле HYSWEEP® HARDWARE..........217
7.1.2. Настройка аппаратуры в модуле HYPACK ® HARDWARE..........219
7.2. Контроль качества функционирования МЛЭ в режиме реального времени...............................................219
7.2.1. Общие требования к программному обеспечению МЛЭ в части контроля качества...................................219
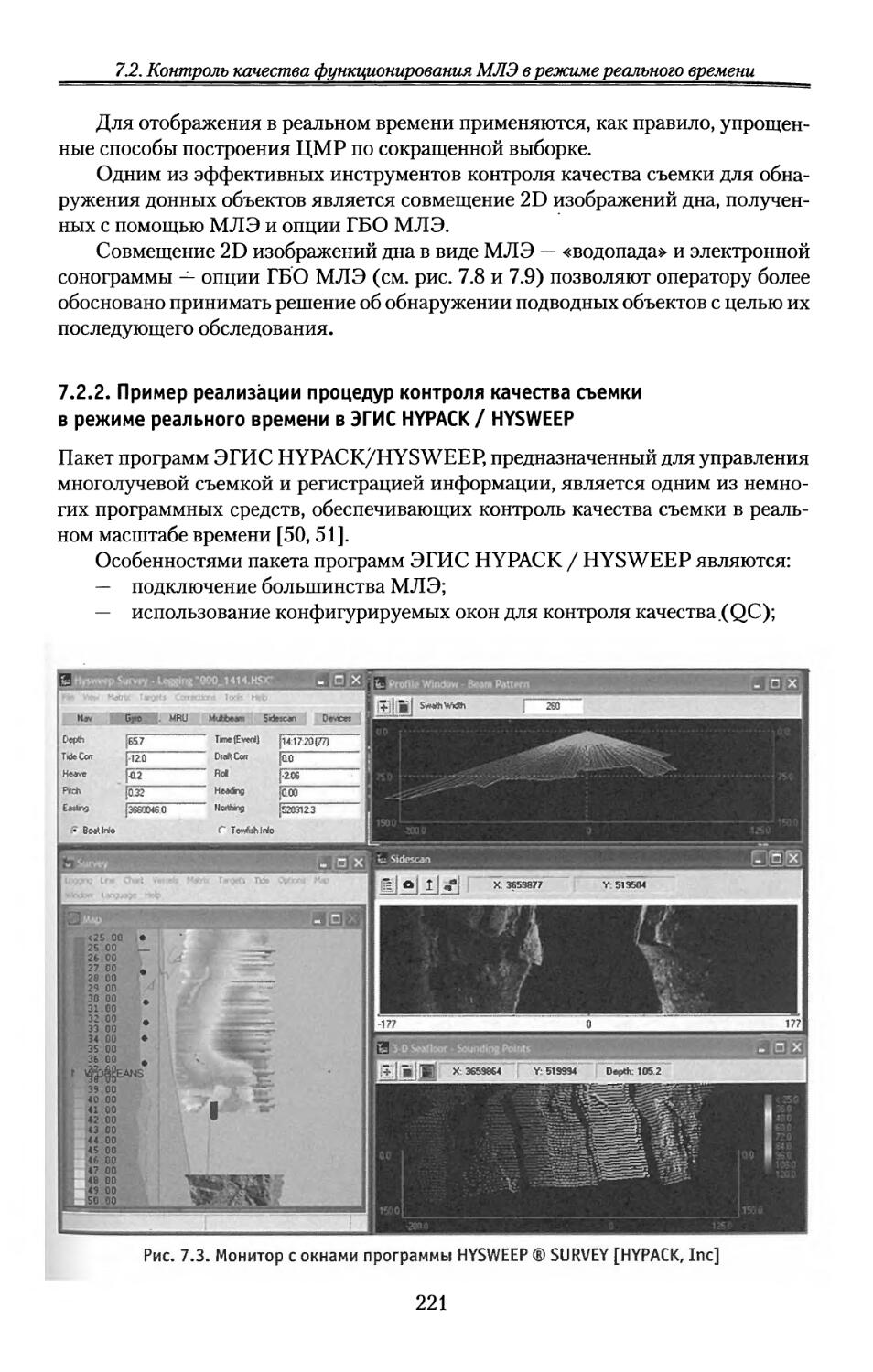
7.2.2. Пример реализации процедур контроля качества съемки
в режиме реального времени в ЭГИС HYPACK / HYSWEEP.........221
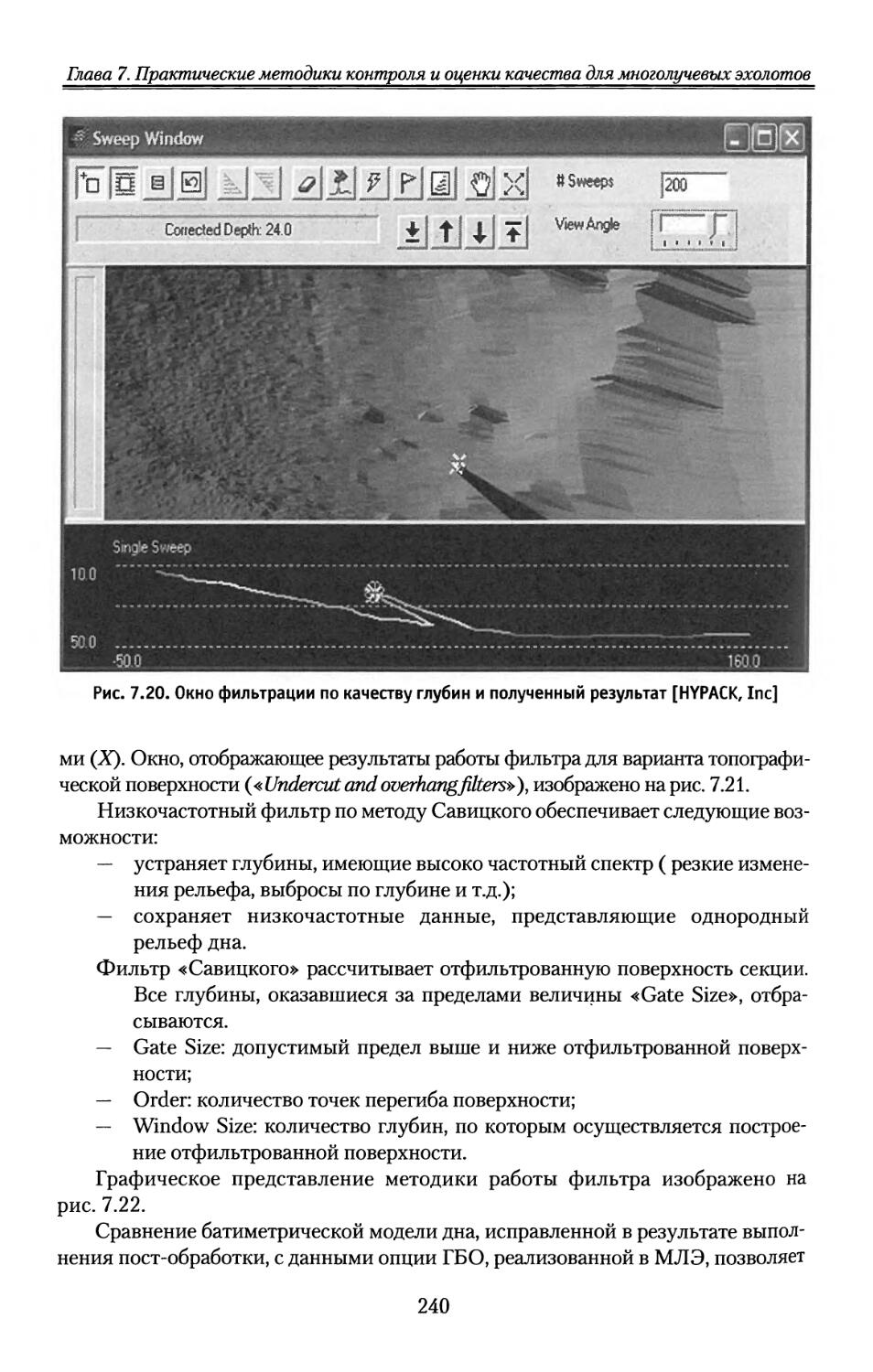
7.3. Обеспечение качества при проведении пост-обработки данных МЛЭ..232
7.3.1. Общие требования к контролю качества на этапе пост-обработки данных МЛЭ...................................232
7.3.2. Контроль качества при пост-обработке данных МЛЭ на примере HYSWEEP Office..............................................236
7.4. Контроль качества обработки и представление результатов площадной съемки с МЛЭ..........................................245
6
Содержание
7.4.1. Традиционная оценка качества представления площадной съемки в ЭГИС Hysweep.......................................246
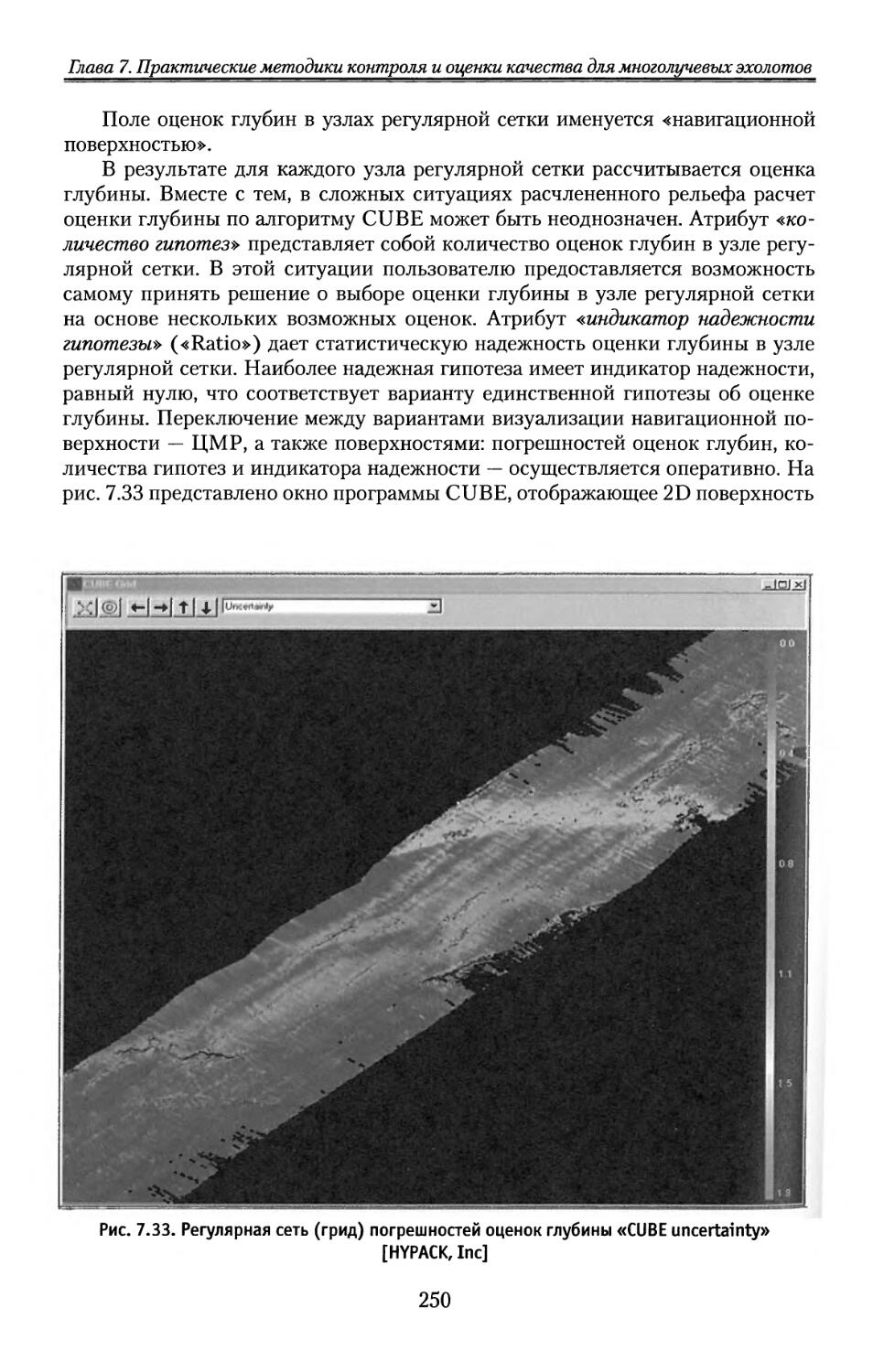
7.4.2. Оценка качества представления площадной съемки по технологии CUBE..........................................249
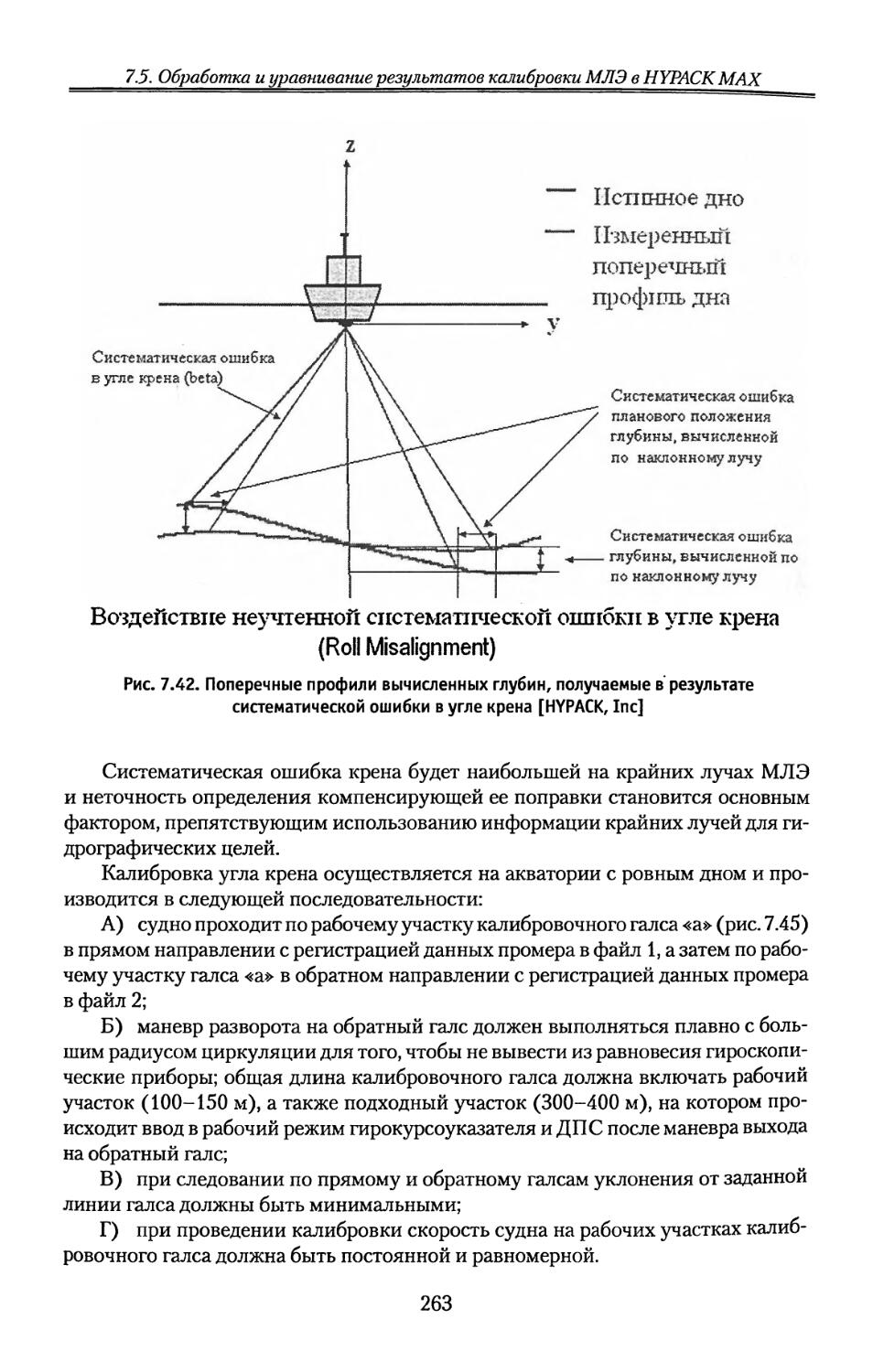
7.5. Обработка и уравнивание результатов калибровки МЛЭ в HYPACK МАХ...................................................253
7.5.1. Общие требования к выполнению калибровки.............253
7.6. Тест гарантии качества функционирования (совмещение цифровых моделей)..................................268
7.6.1. Создание «референцией» поверхности...................269
7.6.2. Контрольные (поверочные) галсы.......................269
7.6.3. Обработка данных и анализ............................270
7.6.4. Тестирование крайних лучей — определение допустимых
углов лучей (Beam Angle Test)..........................272
7.6.5. Пример выполнения теста контроля качества функционирования (QA).......................................273
7.7. Итоговые рекомендации по критериям контроля качества (QC) и гарантии качества (QA) функционирования многолучевого эхолота.... 278 7.7.1. Максимальный угол обзора.................................278
7.7.2. Наложение смежных полос обзора............................279
7.7.3. Скорость звука и калибровка с помощью калибровочной доски.279
7.7.4. Выставка осей датчиков и их калибровка («патч-тест»).279
7.7.5. Тестирование с целью гарантии качества точности
функционирования (QA)..................................279
7.7.6. Минимальная глубина..................................279
7.7.7. Максимальная скорость при съемке ....................279
7.7.8. Частота акустического сигнала........................282
7.7.9. Калибровка скорости звука............................282
7.7.10. Калибровка проседания судна на ходу.................282
7.7.11. Зарегистрированные глубины..........................282
7.7.12. Документация по калибровке, контролю качества (QC) и тесту гарантии качества функционирования (QA).............283
Глава 8
ИСПОЛЬЗОВАНИЕ ГИДРОЛОКАТОРОВ БОКОВОГО ОБЗОРА ДЛЯ ОБНАРУЖЕНИЯ ПОДВОДНЫХ ПРЕПЯТСТВИЙ
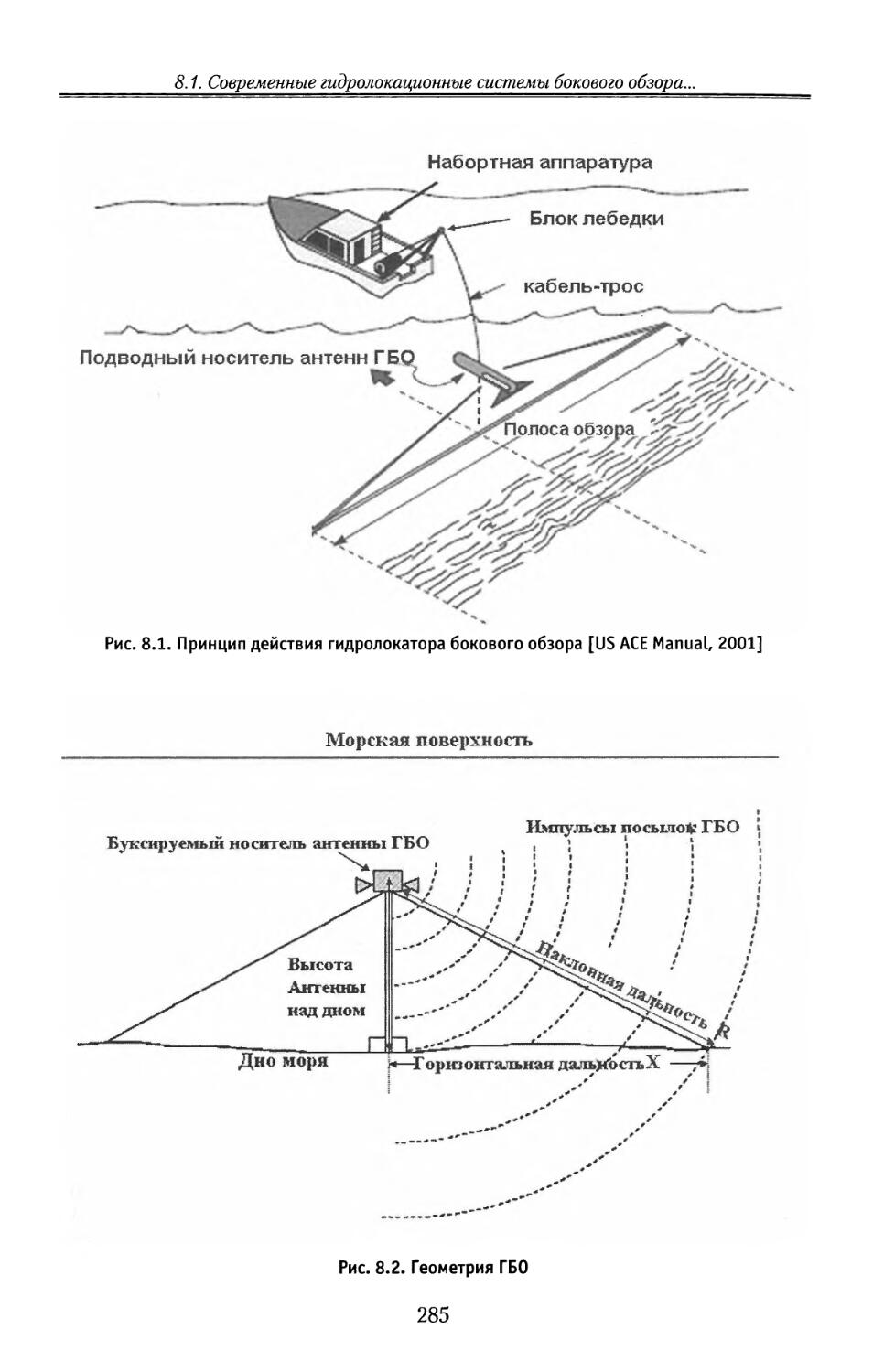
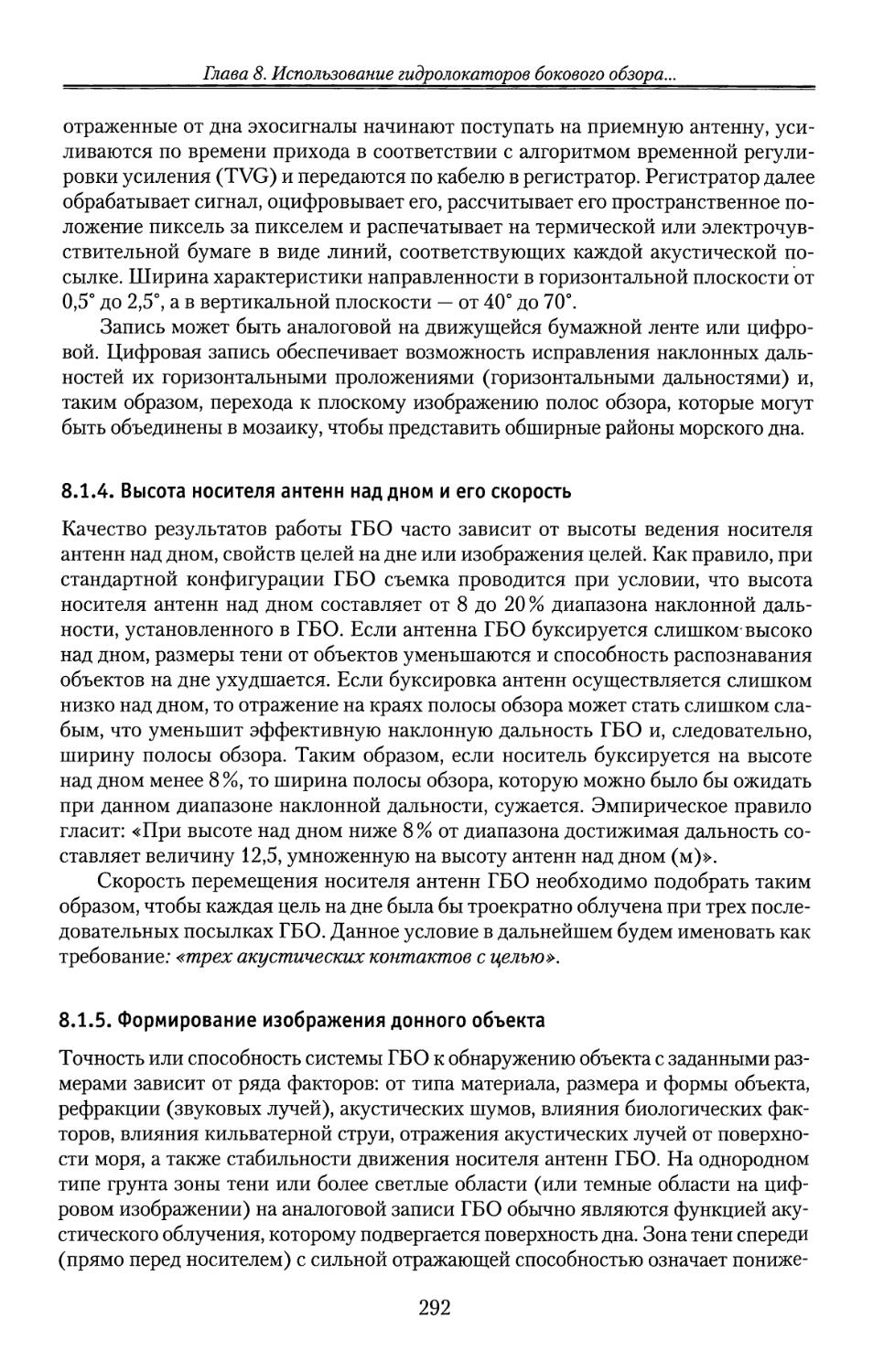
8.1. Современные гидролокационные системы бокового обзора,
предназначенные для гидрографической съемки..................284
8.1.1. Принцип работы гидролокатора бокового обзора..........284
8.1.2. Классификация гидролокаторов бокового обзора..........288
8.1.3. Состав аппаратуры гидролокатора бокового обзора.......291
8.1.4. Высота носителя антенн над дном и его скорость........292
8.1.5. Формирование изображения донного объекта..............292
8.1.6. Вычисление высоты цели над дном.......................293
8.1.7. Определение планового положения объекта на дне........293
7
Содержание
8.1.8. Записи ГБО...........................................294
8.1.9. Качество гидролокационной съемки.....................297
8.2. Требования к выполнению съемки с помощью гидролокатора бокового обзора................................................298
8.2.1. Общие требования.....................................298
8.2.2. Точность.............................................299
8.2.3. Скорость буксировки................................ 299
8.2.4. Покрытие.............................................300
8.2.5. Контроль качества съемки с помощью ГБО...............303
8.2.6. Список контактов и карта полос покрытия ГБО..........304
8.2.7. Соннограммы .........................................304
8.2.8. Окончательный отчет о контактах......................304
8.3. Программное обеспечение для работы с гидролокаторами бокового обора.................................................305
8.3.1. Использование программного обеспечения реального времени для сбора и регистрации данных ГБО
(на примере HYPACK/HYSCAN Survey)......................305
8.3.2. Программное обеспечение пост-обработки и представления съемки с ГБО...............................314
Заключение......................................................318
Список литературы...............................................327
Приложения
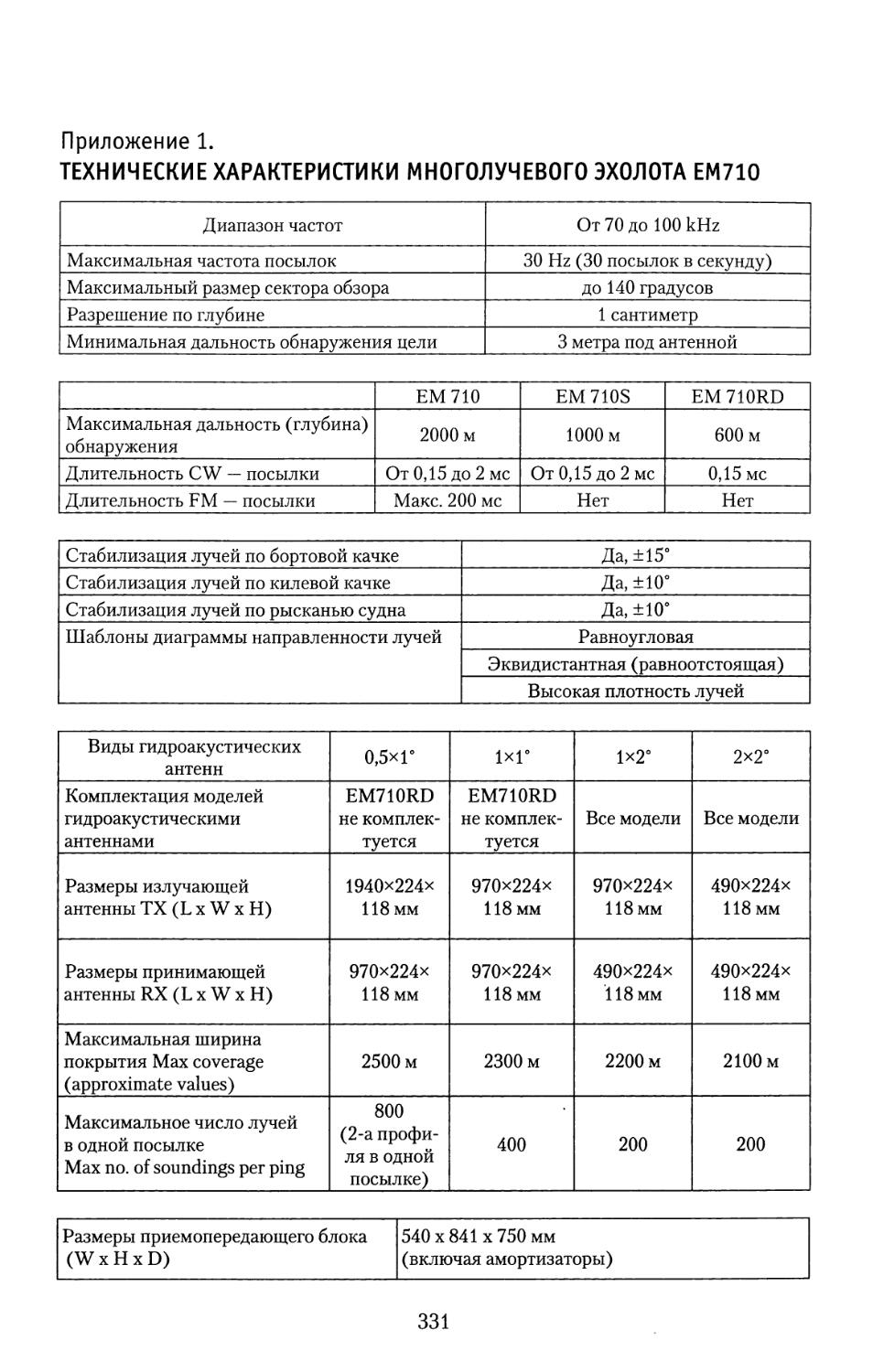
Приложение 1. Технические характеристики многолучевого
эхолота ЕМ710.....................................331
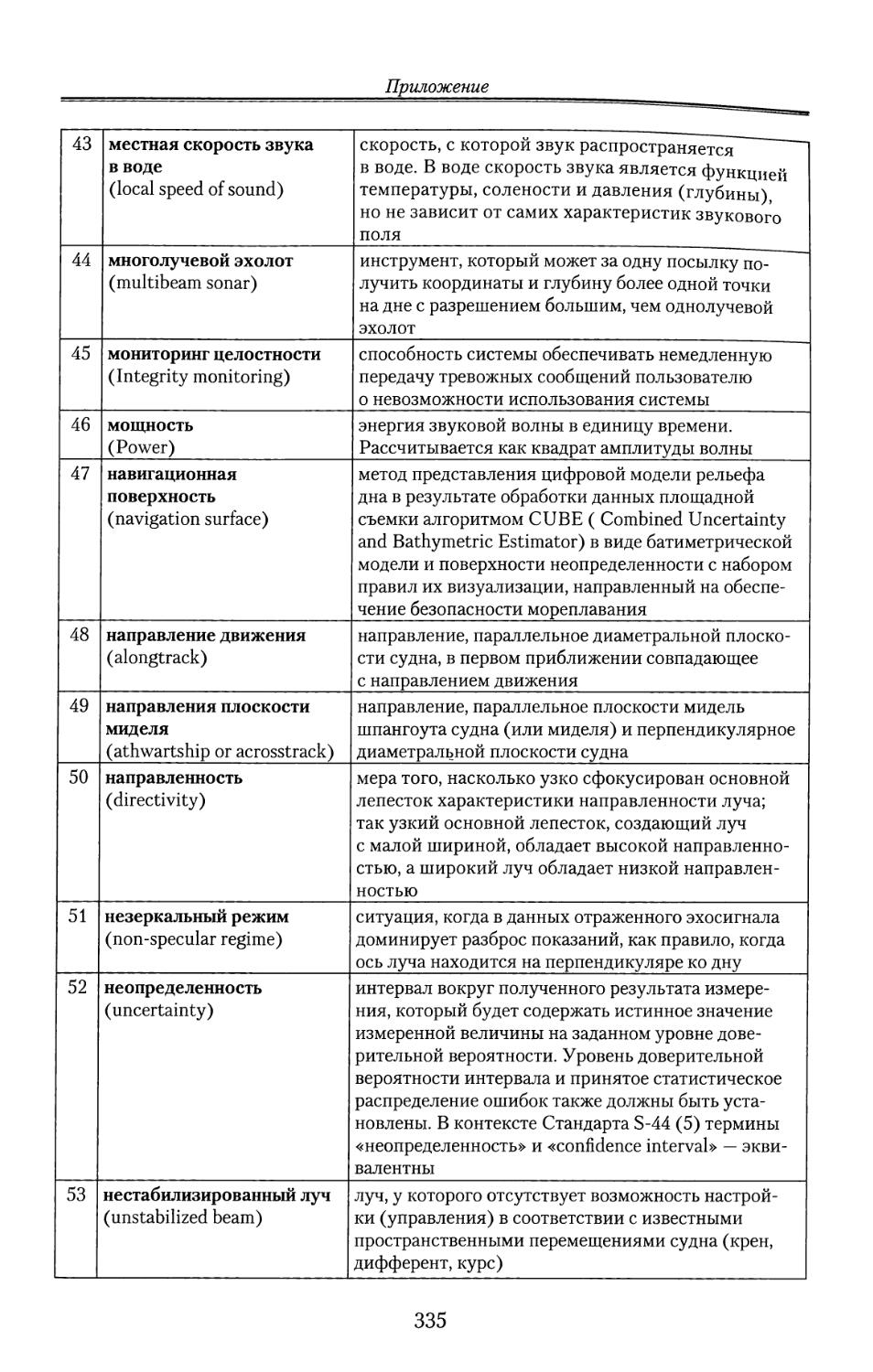
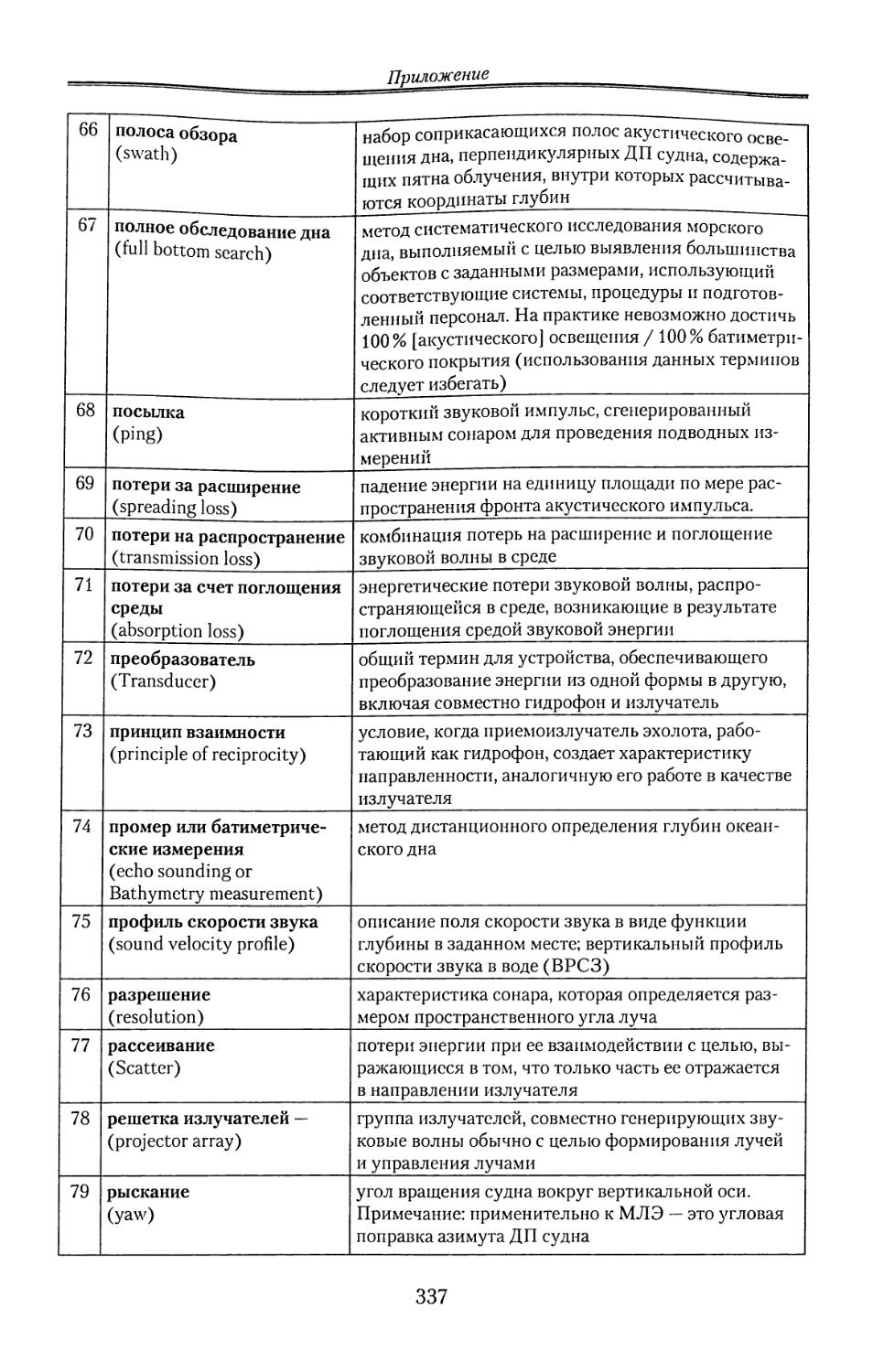
Приложение 2. Глоссарий по гидроакустике и гидрографическим
технологиям.......................................332
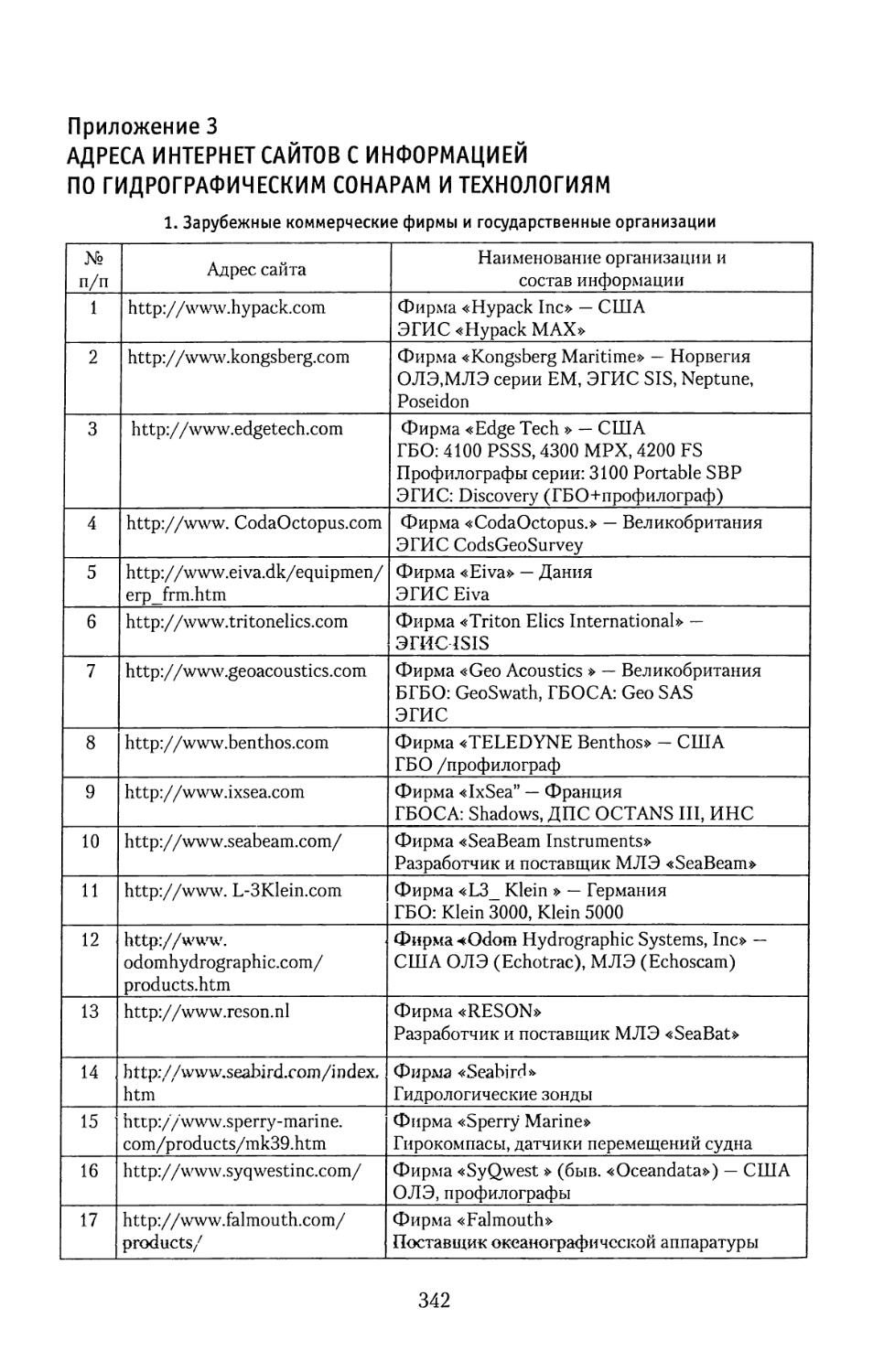
Приложение 3. Адреса интернет сайтов с информацией
по гидрографическим сонарам и технологиям.........343
Приложение 4. Перечень сокращений..............................346
Введение
Последнее десятилетие XX века ознаменовалось революционным прорывом во многих науках, связанных с изучением нашей планеты Земля. Современная гидрография за последние годы также претерпела радикальные изменения в первую очередь благодаря массовому внедрению персональных компьютеров, технологий спутникового позиционирования и появлению новых гидроакустических средств, основанных на цифровых методах первичной и вторичной обработки информации, а также регистрации данных в электронном виде. Все это способствовало радикальному увеличению объемов собираемой гидрографической информации, что позволило получать сведения о подводном рельефе практически с такой же точностью, которую обеспечивают топографические методы съемки суши.
В современных условиях возникло новое научное направление — электронная гидрография, являющаяся частью океанографии, призванное решать целый круг задач начиная с обеспечения безопасности мореплавания, а также изучения Мирового океана в целях разведки и последующей эксплуатации его природных ресурсов.
При гидрографических исследованиях объектами работ являются, как правило, поле рельефа и осадочных пород морского дна. Традиционно гидрографические работы проводились в интересах обеспечения безопасности мореплавания. Как и прежде, основную информацию, необходимую для создания морских навигационных карт и пособий, предоставляет поле рельефа морского дна, исследуемое посредством промера. В зависимости от специализации в настоящее время различаются следующие основные направления гидрографической деятельности:
— съемки для создания морских навигационных карт в интересах безопасности мореплавания (Nautical Charting);
— съемки для обеспечения прибрежных инженерных работ (Surveys for Coastal Zone Management)’,
— съемки в удаленной морской зоне для исследований и эксплуатации природных ресурсов {Industrial Offshore Surveying).
Каждое из указанных направлений поддерживается соответствующими технологиями, основой которых является специализированное гидрографическое программное обеспечение. Основным методом обследования дна продолжает оставаться акустический метод, реализуемый с помощью однолучевых эхолотов (ОЭ), многолучевых эхолотов (МЛЭ), эхотралов (ЭТ) и гидролокаторов бокового обзора (БГБО). Современной тенденцией в гидрографии является использование систем, обеспечивающих полное акустическое «освещение» морского дна.
В данном учебном пособии рассматриваются основы гидроакустики, знание которой необходимо для правильной эксплуатации гидрографических технических средств, а также основные сведения по ОЭ, МЛЭ, а также ГБО при проведении съемок различного назначения.
9
Введение
Обязательными инструментами для проведения гидрографических исследований в настоящее время являются электронные гидрографические информационные системы (ЭГИС), оборудованные портативной компьютерной техникой, прецизионными датчиками для измерений параметров полей (рельефа дна, донных осадков, гравитационного и магнитного), элементов движения судна и его местоположения, а также устройствами регистрации (архивации) информации.
Полный цикл проведения гидрографических съемок включает следующие этапы: проектирование, выполнение, пост-обработку, окончательную обработку, оформление и представление результатов. В последнее время все чаще вводится дополнительный этап — интерпретация результатов.
Наиболее совершенные современные ЭГИС обеспечивают поддержку всего цикла гидрографических исследований. Каждая из существующих ЭГИС имеет определенную «специализацию», связанную с углубленной поддержкой определенного направления гидрографической деятельности. Одной из задач пособия является подготовка учащихся к эксплуатации ЭГИС, поддерживающих МЛЭ.
В этой связи важным вопросом является всесторонний контроль качества при выполнении многолучевой съемки рельефа дна. Этому вопросу в пособии уделяется большое внимание.
В первой главе рассматриваются предметы гидрографии и батиметрии. Даются краткие исторические очерки отечественной гидрографии и развития гидроакустических средств. Рассматриваются основные положения, касающиеся влияния среды на гидроакустические измерения, и научные достижения в данной области.
Во второй главе излагаются основные сведения по гидроакустике, применительно к гидрографическим приложениям. Рассматривается уравнение гидроакустики для МЛЭ, влияние параметров морской среды на условия распространения акустических сигналов, а также наиболее важные параметры сонаров. Обсуждаются ограничения простого сонара ОЛЭ и преимущества МЛЭ.
Третья глава посвящена всестороннему рассмотрению акустических преобразователей и их реализация для различных типов сонаров. Излагаются основные сведения о характеристике направленности антенн ОЛЭ, МЛЭ, ГБО, а также вопросы акустического освещения дна.
Четвертая глава посвящена использованию однолучевых эхолотов. При этом рассматриваются принцип действия цифрового ОЛЭ, его основные параметры, методы априорной оценки точности измерений, калибровки, а также апостериорная оценка точности однолучевой съемки в соответствии с требованиями Стандарта на Гидрографические исследования (S-44) Международной гидрографической организации (МГО).
В пятой главе рассматриваются системы площадной съемки рельефа дна. Главное внимание уделено МЛЭ. Подробно рассмотрена система координат МЛЭ и методология расчета глубин и их координат. Детально излагаются вопросы априорной оценки точности расчета глубин и координат МЛЭ.
В шестой главе приводятся методики выполнения многолучевой съемки, включая контроль целостности системы на базе МЛЭ, условия калибровки систем на базе МЛЭ и основные необходимые мероприятия по контролю качества. Рассмотрены аппаратно-программные комплексы на базе МЛЭ.
10
Введение
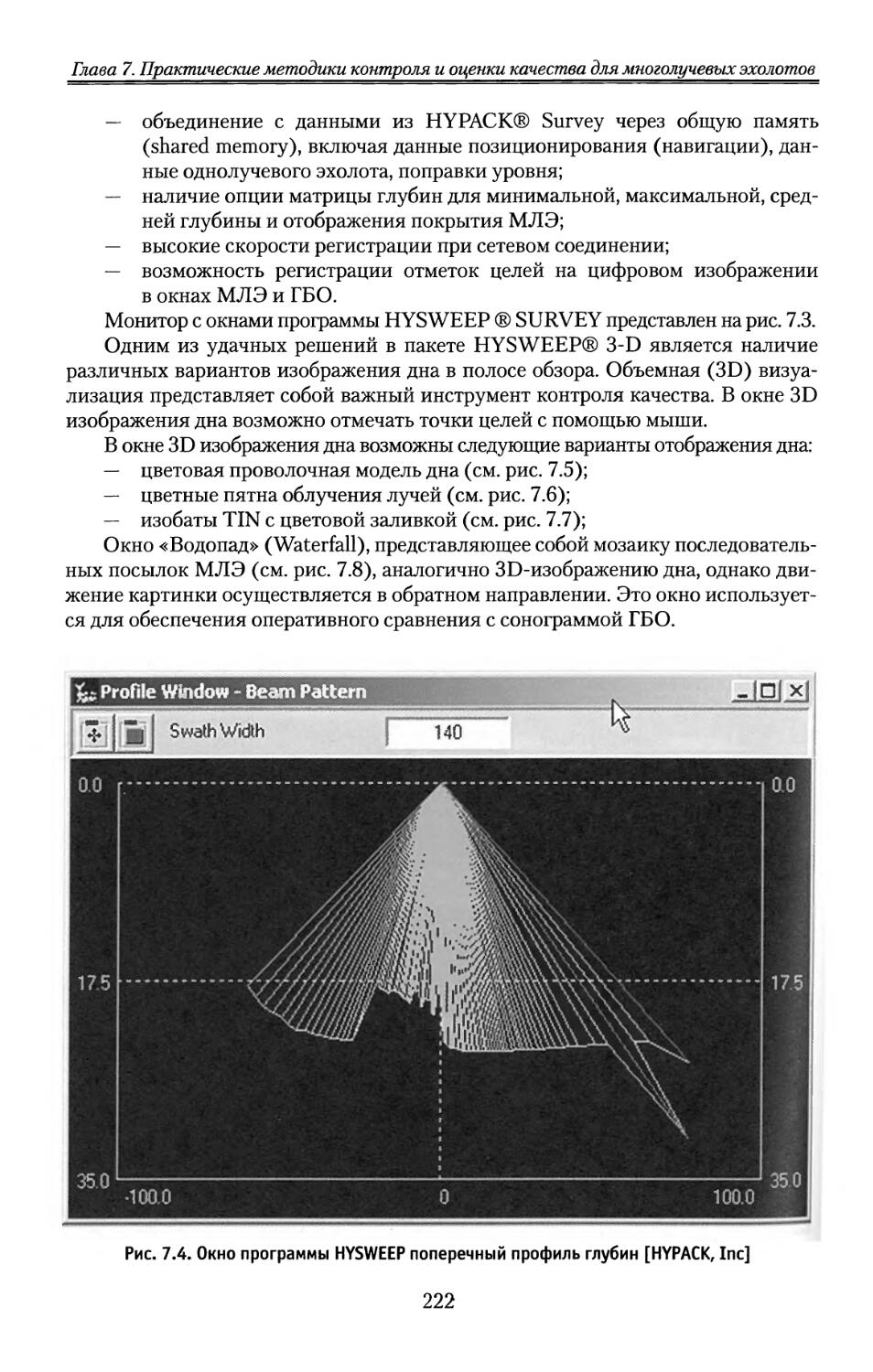
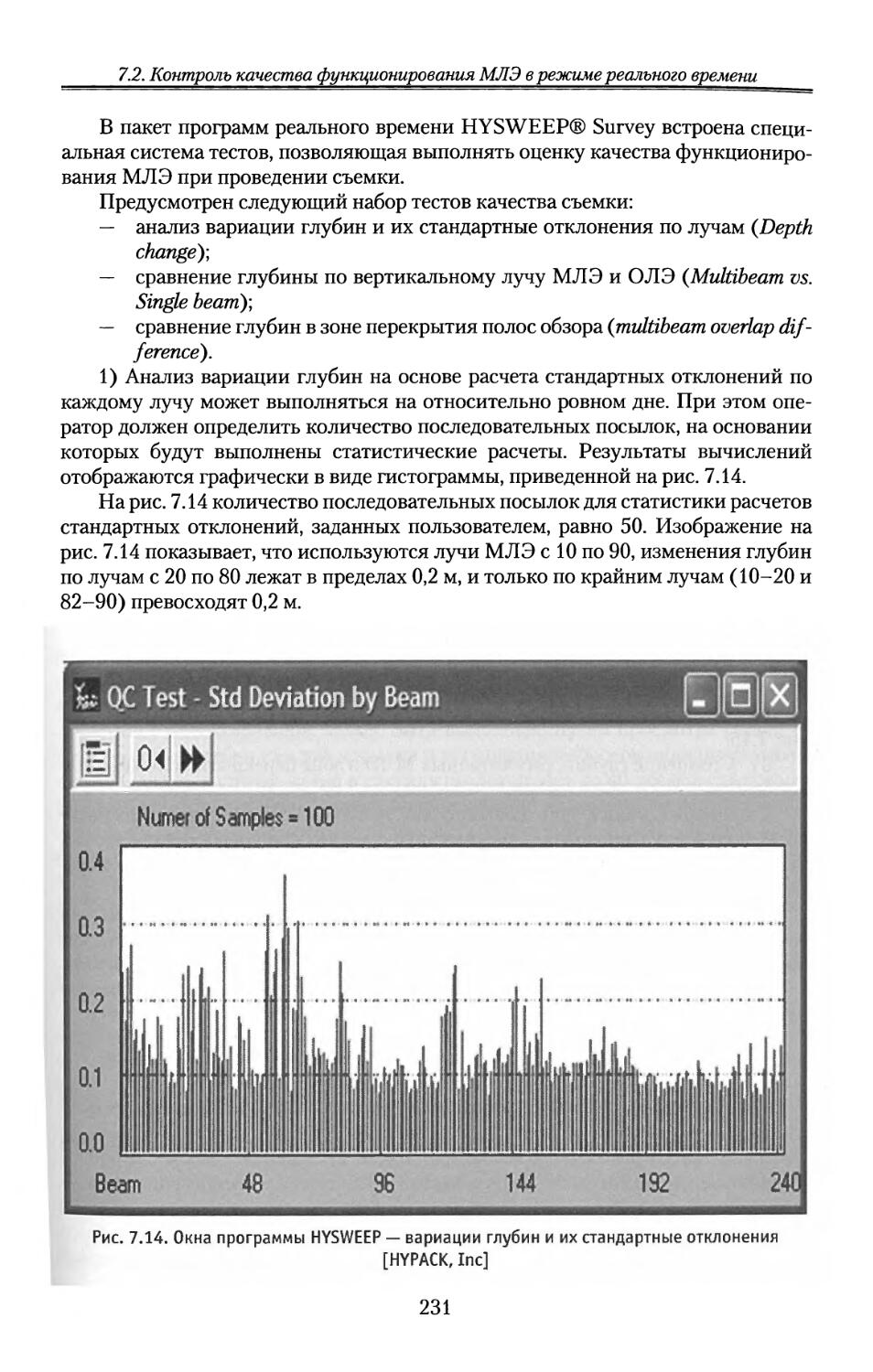
Глава седьмая посвящена практическим вопросам использования современных технологий многолучевой съемки, включая все аспекты ее проведения. В качестве примера, иллюстрирующего современную технологию многолучевой съемки, приводится ЭГИС HYPACK/HYSWEEP, являющаяся базовой при подготовке специалистов гидрографов на Арктическом факультете Государственной морской академии имени адмирала С.О. Макарова (АРФ ГМА).
Последняя глава излагает основные положения по применению гидролокаторов бокового обзора (ГБО) для поиска подводных объектов. Даются основные математические соотношения, касающиеся расчета высоты буксировки антенн над дном, а также скоростей буксировки антенн. Практическое применение технологии бокового обзора продемонстрировано на примере ЭГИС HYPACK/ HYSCAN.
В заключении дается анализ текущего состояния гидрографических сонаров и тенденции развития поддерживающих их информационных технологий.
Учебное пособие снабжено четырьмя приложениями. В первом приложении показаны основные технические характеристики МЛЭ четвертого поколения. В качестве примера приведен ЕМ-710 фирмы Конгсберг (Норвегия), как одна из наиболее совершенных современных многолучевых систем для малых и средних глубин. Во втором приложении дается глоссарий терминов по гидроакустике, системам площадной съемки и гидрографическим технологиям, снабженный переводом на английский язык.
В третьем приложении приведен список адресов Интернет сайтов, на которых можно найти дополнительную полезную информацию по системам площадной съемки рельефа дна и методике их применения, а также по датчикам многолучевых систем по состоянию на январь 2010 года.
В последнем приложении дается список общепринятых англоязычных сокращений, использованных в тексте пособия, а также список русскоязычных сокращений.
Автор выражает благодарность фирмам «Центр Геоматика» и «Мариметр», финансовая помощь которых позволила опубликовать данное учебное пособие.
Глава 1.
ИСТОРИЧЕСКИЙ ОБЗОР РАЗВИТИЯ ГИДРОГРАФИИ И ГИДРОАКУСТИЧЕСКИХ СРЕДСТВ
1.1. Гидрография и батиметрия
Морская гидрография — это один из разделов океанографии, включающий изучение Мирового океана в интересах мореплавания и использования природных ресурсов [5].
По определению Международной Гидрографической организации (МГО) гидрография является прикладной наукой, связанной с измерениями и описаниями подводного рельефа и морских берегов в интересах обеспечения мореплавания и другой морской деятельности, связанной с исследованиями, защитой среды и предсказанием ее развития.
Батиметрия — раздел современной океанографии, включающий набор технологий, обеспечивающих: гидроакустические и лазерные измерения для расчета глубин океанов, морей и внутренних водоемов, математическую обработку с целью визуального представления информации о рельефе дна в виде батиметрических моделей — аналоговых и цифровых карт, а также трехмерных изображений для использования в географических информационных системах.
В зависимости от технологии измерений различаются:
— однолучевая батиметрия, реализуемая с помощью однолучевых эхолотов;
— многолучевая батиметрия, реализуемая с помощью многолучевых эхолотов, эхотралов, а также батиметрических гидролокаторов бокового обзора с интерферометрической обработкой;
— лазерная батиметрия, реализуемая с помощью авиационных лазерных систем.
Однолучевая батиметрия способна создавать приближенную модель рельефа дна ввиду того, что измерения осуществляются вдоль заданных линий, в промежутках между которыми значения глубин получают только путем интерполяции. Многолучевая и лазерная батиметрия обеспечивают создание более качественных моделей рельефа дна за счет получения информации о глубинах в полосе обзора. При этом совмещение полос обзора с их частичным перекрытием обеспечивает полное (площадное) обследование дна акватории.
Построение батиметрической модели рельефа может осуществляться ручным или цифровым способами. Ручное построение батиметрической модели предусматривает, как правило, двухмерное представление рельефа путем проведения изобат и создания аналоговой (статичной) батиметрической карты. Цифровая модель рельефа может быть реализована алгоритмическими способами путем создания регулярной сети (GRID) либо нерегулярной триангуляционной сети (TIN). На этой основе с помощью математических методов рельеф дна может быть представлен в виде двухмерного изображения путем построения изобат, либо в виде трехмерного цветового или монохромного изображения, включающего также изображения изобат с возможной цветовой заливкой. По
12
1.1. Гидрография и батиметрия
строение цифровых батиметрических моделей может осуществляться средствами специализированных картографических и (или) географических информационных систем (ГИС).
Батиметрия — существенная часть гидрографии. В части батиметрии современная гидрография регламентирует категории съемки рельефа дна в зависимости от актуальности акваторий для безопасного мореплавания, включая точности измерений глубин и их координат, а также возможностей используемой аппаратуры по обнаружению опасных объектов на морском дне.
Развитие гидрографии тесно связано с историей мореплавания. Первоначально гидрографические работы сводились к прибрежному промеру с лотом и определением места по береговым пунктам. По мере увеличения размеров судов промер стал захватывать все более широкую полосу вдоль побережий, как издавна известных, так и вновь открываемых земель. Это был тот период, когда понятие о гидрографии было тождественно понятию навигации. Каждый моряк, открывавший новые земли, был гидрографом, а каждый гидрограф — моряком. Планомерный и систематический характер промерные работы приобрели после того, как были организованы национальные гидрографические службы.
В России гидрографические работы впервые были начаты в конце XVII в. в связи со строительством флота на Дону и Азовским походом Петра I [ 10]. В начале XVIII в. Россия, получившая выход к морским берегам, с целью обеспечения своего молодого торгового и военного флота картами и лоциями предпринимает большие работы по изучению прилегающих Балтийского, Черного и Азовского морей. В 1710 г. начинается гидрографическое изучение Балтийского моря, а в 1714 г. издается первая карта. Затем уже в середине столетия предпринимаются более детальные исследования, в результате которых в 1750 г. гидрографом Нагаевым издается карта Финского залива (см. рис. 1.1) [фонды центрального картографического общества].
Организационное оформление гидрографического дела в России осуществилось в 1718 г. с учреждением Адмиралтейств-коллегии. Во Франции в 1720 г. организация гидрографической службы связана с учреждением «Главного депо карт...». Аналогично французскому «Депо» в 1737 г. были созданы подобные же организации в Англии и Голландии. Эти учреждения начали ведать организацией и выполнением гидрографических работ, и с их созданием связано начало планомерных исследований.
В России Адмиралтейств-коллегия, ведавшая всеми делами флота, давала непосредственные распоряжения, касавшиеся проведения гидрографических работ. С 1746 г. все дела по выполнению гидрографических исследований были поручены Нагаеву (1704-1781). Его картами и лоциями для Балтийского моря мореплаватели пользовались до конца XVIII века.
Начало XIX столетия в России было ознаменовано началом кругосветных путешествий моряков русского флота [9, 10]. Эти путешествия обогатили русскую и мировую науку многими открытиями. Такие военные моряки, как Крузенштерн, Лисянский, Сарычев, Головин, Коцебу, Беллинсгаузен, Лазарев, Литке и др. произвели исследования водных пространств и берегов, которые и в настоящее время не полностью утратили свое значение. В течение первой
13
Глава 1. Исторический обзор развития гидрографии и гидроакустических средств
Рис. 1.1. Карта Финского залива Нагаева, 1750 г.
половины XIX в. было организовано 17 больших экспедиций, причем в это число не входят русские полярные экспедиции. За этот же период все остальные государства отправили всего девятнадцать экспедиций.
Особое место среди русских экспедиций занимает плавание Коцебу (1823-1826) на шлюпе «Предприятие» [9]. В этой экспедиции принял участие физик Э.Э. Ленц, впервые сконструировавший глубоководный батометр и построивший первый глубиномер с тормозом для измерения больших глубин. Измерения Ленца положили начало точным наблюдениям в океанографии. Впоследствии это изобретение глубиномера было забыто и повторено в конце века английским инженером Томсоном.
Кроме гидрографических работ в отдаленных морях в первой половине XIX в. Россия приступила к тщательным работам по исследованию отечественных морей. С 1829 г. экспедиция Шуберта начала производить первые триангуляционные работы на Балтийском море с промером вдоль всех побережий и островов, закончившиеся к 1853 г. В тот же период приступают к работам в Белом море и на Мурманском побережье под руководством М.Ф. Рейнеке. Большое значение для русской гидрографии имели работы Ф.П. Литке, который 1821-1824 гг. произвел опись берега Мурмана и южной части Новой Земли. На Черном и Азовском морях в 1825-1836 гг. опись берегов и промеры осуществлялись под руководством Манганари. На русских побережьях Тихого океана гидрографические
14
1.1. Гидрография и батиметрия
работы велись рядом русских кругосветных экспедиций и торговыми судами Российско-Американской компании.
Гидрографические работы, выполнявшиеся в этот период в русских морях (исключая Балтийское), носили не систематический, а рекогносцировочный характер, ввиду того, что не были основаны на триангуляции. В других государствах, в первую очередь во Франции, в этот же период исследования морей и океанов приобретают более углубленный характер. Вводятся новые правила и приемы для съемки берегов и выполнения прибрежных промерных работ, благодаря которым гидрография получила прочные научные основы.
В октябре 1827 г. в России создаются Управление генерал-гидрографа и Морской ученый комитет. Первым генерал-гидрографом стал Г.А. Сарычев. Дата 13 октября 1827 г. считается днем создания отечественной гидрографической службы и отмечается в России как «День Гидрографа».
Со второй половины XIX в. в связи с изменением экономических и технологических условий существования человечества начинается широкое и всестороннее исследование океанов и морей.
Началом батиметрического изучения океана можно считать 50-е гг. XIX века, связанные с прокладкой подводных трансокеанских телеграфных кабелей, когда впервые был произведен промер по трассам: Англия — остров Ньюфаундленд и остров Ньюфаундленд — Азорские острова. По данным промера американский океанограф лейтенант Мори в 1854 году составил первую батиметрическую карту северной части Атлантики [И] (см. рис. 1.2).
Новый шаг в изучении рельефа дна морей и океанов был сделан во второй половине XIX в. в связи с появлением глубоководного лота, повторно изобретенного англичанином Томсоном.
Одной из наиболее важных экспедиций второй половины XIX в. является экспедиция на корвете «Челленджер», работавшая в Атлантическом и Тихом океанах с 1872 по 1876 гг.
«Челленджер» — деревянный корвет водоизмещением 2300 тонн с паровой машиной в 1230 л. с. был снаряжен в плавание по заданию английского правительства. За три с половиной года им было пройдено 68900 морских миль и сделано 362 глубоководные станции. До этого измерения глубин на океанических профилях были сделаны на общем протяжении 17000 миль. В результате экспедиции на «Челленжере» был собран богатейший материал о глубинах, грунтах, температуре на разных горизонтах, флоре и фауне, а также течениях на поверхности и на разных глубинах. В продолжение всего рейса велись ежечасные метеорологические наблюдения. Результаты экспедиции открыли новую эпоху в развитии всех разделов океанографии, как по охвату изученных акваторий, так и по применению новых методов, способов исследований и используемых при этом приборов и инструментов. Одним из основных научных результатов экспедиции явилось подтверждение существования срединно-атлантического хребта.
Одновременно с «Челленджером» в Тихом океане работала американская экспедиция на судне «Тускарора» (1874-1878), основной целью которой являлся глубоководный промер по дуге большого круга между Сан-Франциско (США) и Японией для прокладки телеграфного кабеля. При измерении глубин вдоль Алеутских и Курильских островов были обнаружены большие глубины,
15
Глава 1. Исторический обзор развития гидрографии и гидроакустических средств
Рис. 1.2. Первая батиметрическая карта Атлантики (Мори, 1854 г.) (www. еа rt hi n stitute. colu m bia. ed u/li b ra ry)
наибольшая из которых составила 8490 м. Таким образом, впервые были открыты глубоководные впадины у Курильских и Японских островов.
Среди русских экспедиций того времени следует упомянуть кругосветную экспедицию на корвете «Витязь» (1886-1889) под командованием будущего адмирала С.О. Макарова, которая собрала большой материал по течениям, поверхностной температуре, удельному весу воды и т. п.
В начале XX в. морские державы продолжили исследование Мирового океана, однако существенный прогресс в методике измерения глубин отсутствовал. К 1905 году в Мировом океане имелось 18400 измерений глубин, выполненных при помощи троса. Однако, реальный прогресс изучения рельефа дна Мирового океана начался в 20-х гг. XX века в связи с изобретением акустических методов измерений глубин.
1.2. Краткий исторический очерк развития гидроакустики
История развития науки и техники не оставила точной даты возникновения гидроакустики. Первые упоминания о распространении звука в воде и идеи об использовании этого явления можно найти в работах Леонардо да Винчи, который в 1490 г. писал, что «если опустить в воду отверстие трубы, а другой конец
16
1.2. Краткий исторический очерк развития гидроакустики
ее приложить к уху, то можно услышать идущие вдали корабли» [34]. Можно только удивляться гениальности этого ученого эпохи Возрождения, который фактически предвидел возможность использования пассивной гидролокации. Эта идея Леонардо да Винчи с трубой, только несколько усовершенствованная, использовалась для подводного пеленгования вплоть до начала Второй мировой войны, пока не была подготовлена теоретическая и техническая база для построения современных шумопеленгаторных средств.
Со времени Леонардо да Винчи прошло более трех столетий, прежде чем французский ученый Араго, а также его соотечественник Колладон вновь обратили внимание на высокую звукопроводимость воды, которую можно использовать в практических целях [34]. А потом потребовалось еще более сотни лет, чтобы эта возможность была технически реализована, в том числе и для измерения глубин моря. Начало зарождения гидроакустики, как науки можно датировать началом XX в., хотя первые эксперименты начались значительно раньше.
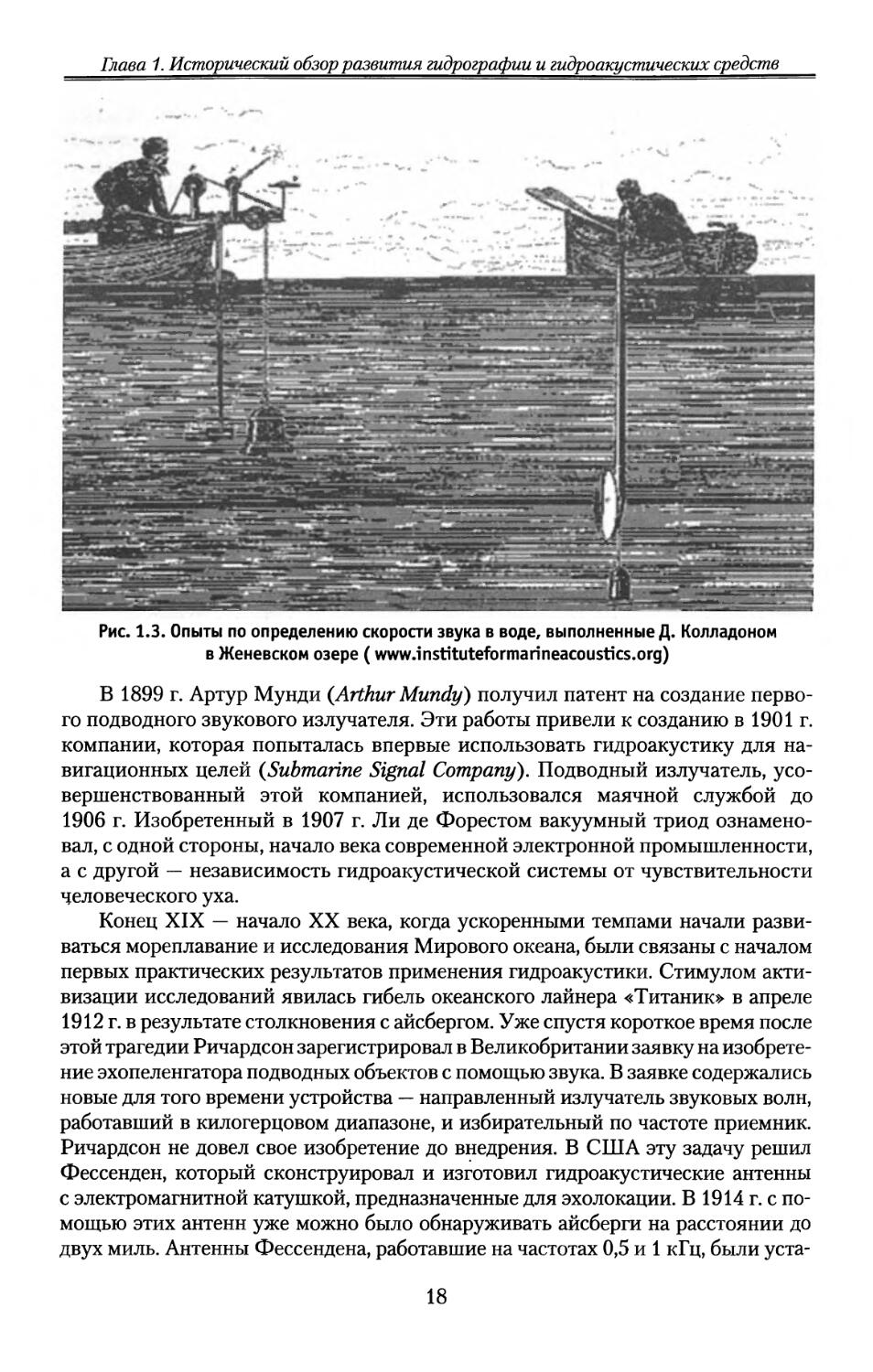
Первые гидроакустические измерения, связанные с определением скорости звука в воде, были выполнены в 1820 г. Беданом в Марсельской бухте, а затем в 1826 г. Колладоном (D. Colladon) в Женевском озере [34] (см. рис. 1.3).
4 Установив две лодки на расстоянии в 16 км, Д. Колладон разместил на одной из них слуховую трубку, соединенную с расположенной под водой мембраной. На второй лодке был установлен подводный колокол и молоток, механически связанный со стержнем, на конце которого располагался открытый огонь.
В момент, когда молот ударял в колокол, огонь соприкасался с порохом и происходила яркая вспышка. Наблюдатель на второй лодке, увидев вспышку света, запускал секундомер, а услышав в слуховой трубке звук, останавливал его. Исследователи предполагали, что свет распространяется мгновенно, а звук должен пройти расстояние в 16 км за промежуток времени, который и определялся в результате эксперимента. Несмотря на невысокий технологический уровень используемых приборов, Колладон получил величину скорости распространения звука в воде 1435 м/с, что довольно точно совпадает с известным теперь значением.
Важными вехами, способствовавшими возможности дальнейшего развития гидроакустики и подготовившими ее практическое использование, явилось открытие в 1842 г. Джоулем явления магнитострикции. Как итог накопленных знаний в области акустики лордом Рэлеем в 1877 г. была опубликована фундаментальная работа по вопросам излучения, распространения и приема звука -«Теория звука».
В 1880 г. Пьер и Жак Кюри сделали важное открытие, которое, в конечном счете, и привело к развитию современного ультразвукового преобразователя. Они заметили, что если давить на кристаллы кварца, то генерируются электрический заряд, величина которого прямо пропорциональна прикладываемой к кристаллу силе. Кроме того, ими был продемонстрирован и обратный эффект — при прикладывании к кристаллу быстро изменяющегося потенциала он начинал вибрировать. Тем самым была обеспечена основа для построения подводных источников и приемников звука. Однако, необходимость практического применения гидроакустической техники в эту эпоху отсутствовала, и все исследования продолжали оставаться на уровне экспериментов.
17
Глава 1. Исторический обзор развития гидрографии и гидроакустических средств
Рис. 1.3. Опыты по определению скорости звука в воде, выполненные Д. Колладоном в Женевском озере (www.instituteformarineacoustics.org)
В 1899 г. Артур Мунди {Arthur Mundy) получил патент на создание первого подводного звукового излучателя. Эти работы привели к созданию в 1901 г. компании, которая попыталась впервые использовать гидроакустику для навигационных целей {Submarine Signal Company). Подводный излучатель, усовершенствованный этой компанией, использовался маячной службой до 1906 г. Изобретенный в 1907 г. Ли де Форестом вакуумный триод ознаменовал, с одной стороны, начало века современной электронной промышленности, а с другой — независимость гидроакустической системы от чувствительности человеческого уха.
Конец XIX — начало XX века, когда ускоренными темпами начали развиваться мореплавание и исследования Мирового океана, были связаны с началом первых практических результатов применения гидроакустики. Стимулом активизации исследований явилась гибель океанского лайнера «Титаник» в апреле 1912 г. в результате столкновения с айсбергом. Уже спустя короткое время после этой трагедии Ричардсон зарегистрировал в Великобритании заявку на изобретение эхопеленгатора подводных объектов с помощью звука. В заявке содержались новые для того времени устройства — направленный излучатель звуковых волн, работавший в килогерцовом диапазоне, и избирательный по частоте приемник. Ричардсон не довел свое изобретение до внедрения. В США эту задачу решил Фессенден, который сконструировал и изготовил гидроакустические антенны с электромагнитной катушкой, предназначенные для эхолокации. В 1914 г. с помощью этих антенн уже можно было обнаруживать айсберги на расстоянии до двух миль. Антенны Фессендена, работавшие на частотах 0,5 и 1 кГц, были уста
18
1.2. Краткий исторический очерк развития гидроакустики
новлены на всех подводных лодках США и в период Первой Мировой войны использовались для обеспечения связи между ними в погруженном состоянии.
Первая мировая война послужила огромным стимулом для развития гидроакустики и гидролокации. Большие потери союзников на море от действий германских подводных лодок в ходе войны обусловили необходимость проведения интенсивных исследований в этой области. Была поставлена задача поиска методов обнаружения подводных лодок с помощью звука. Над решением этой проблемы работали видные физики того времени: Э. Резерфорд, Ж. Перрен, П. Ланжевен, Ч. Пирс.
В годы Первой мировой войны гидролокаторы широко использовались враждующими сторонами для обнаружения подводных лодок и надводных кораблей. Это были пассивные шумопеленгаторы, и для обнаружения подводных лодок они не всегда были эффективными. Кроме того, эти системы не позволяли достаточно точно определять расстояние до цели.
В 1917 г. для обнаружения подводных лодок французский физик П. Ланжевен построил первые пьезоэлектрические антенны, основанные на пьезоэффекте кварца, а в 1918 г. совместно с русским инженером К.В. Шиловским создал гидролокатор, который был способен обнаруживать подводные лодки на расстоянии до 1500 м [4]. Это был первый активный гидролокатор, работавший на частоте 38 кГц. Гидролокатор имел узкую диаграмму направленности и позволял определять с достаточной для практических целей точностью пеленг на цель и дистанцию до нее. В аппаратуре этого гидролокатора использовались электронные вакуумные лампы, что явилось, по-видимому, первым случаем применения электроники в гидроакустике.
Одновременно в Великобритании группа ученых под руководством американского физика Р. Бойля также занималась разработкой кварцевых антенн и созданием гидролокатора. Работы были засекречены и проводились под шифром «ас-дик» (asdic), бывшим, по-видимому, акронимом слов ^antisubmarine divisionics».
На протяжении последующих лет термин «асдик» часто употреблялся моряками в англоязычных странах для обозначения активных гидроакустических станций, а также вошел в обиход российских военных моряков, работавших с английскими гидролокаторами со времен Второй мировой войны. Впоследствии за рубежом для обозначения гидролокационных станций появилось новое название: «сонар» (sonar). Термин приобрел большую популярность и официальное признание как акроним слов: «SOund Navigation And Ranging», которые переводятся, как «звуковая навигация и измерение расстояния до подводных объектов». Этот термин можно использовать для обозначения всех средств, с помощью которых выполняются акустические измерения расстояний, в том числе и для целей гидрографии.
Практические достижения гидроакустики, полученные в период Первой мировой войны, послужили основой для расширения области ее применения не только для военных, но и мирных целей, в первую очередь для исследований Мирового океана. В 20-х гг. прошлого века в США, Великобритании и других развитых морских странах появились первые навигационные сонары — эхолоты для измерения глубины. Датой создания первого простого сонара — однолучевого эхолота принято считать 1922 г., однако массовое распространение эхолоты получили
19
Глава 1. Исторический обзор развития гидрографии и гидроакустических средств
в начале 30-х гг., когда английский исследователь Б. Вуд (1929 г.) впервые создал магнитострикционные антенны для излучения и приема звуковых волн, оказавшиеся более технологичными при изготовлении по сравнению с пьезоэлектрическими антеннами Ланжевена. Другим нововведением, значительно расширившим применение эхолотов, явилось изобретение так называемых «рекордеров» — электромеханических регистраторов эхосигналов, позволяющих записывать профиль глубин (1931 г.).
В России в конце XIX — начале XX в. также велись интенсивные работы по созданию гидроакустической аппаратуры. В области акустики и гидроакустики работала целая плеяда известных ученых: Ф.Ф. Петрушевский, А.Г. Столетов, Н.Е. Жуковский и др.. Первые успешные практические шаги в прикладной гидроакустике были сделаны адмиралом русского военно-морского флота С.О. Макаровым. Благодаря его работам, а также работам М.Н. Беклемишева, Р.Н. Ниренберга и А.Н. Крылова, российский флот имел гидроакустическое оборудование, позволявшее ему вести успешные боевые действия против кораблей ВМС Германии в период Первой мировой войны [4].
В 1890-1910 гг. на Балтийском судостроительном заводе в «гидрофонической мастерской» под руководством инженера Р.Г. Ниренберга велись разработки гидроакустических средств связи и шумопеленгования. В 1905 г. была создана первая отечественная станция звукоподводной связи с передачей сообщений кодом Морзе. В 1910 г. станции были установлены на трех русских подводных лодках. В области применения ультразвуковой связи и наблюдения под водой приоритет принадлежит уже упомянутому инженеру К.В. Шиловскому, который еще в 1912 г. предложил ультразвуковой прибор для предупреждения столкновения с айсбергами. Этот прибор послужил прототипом первого в мире гидролокатора, построенного Ланже-веном совместно с К.В. Шиловским в 1918 г., поэтому имя К.В. Шиловского по праву следует указать, как первого изобретателя гидролокатора.
Революционные события 1917 г. и последовавшая Гражданская война на время прервали развитие технической гидроакустики. Только в 1926 г. профессор С.Я. Соколов начал опыты по передаче звука в воде с помощью сконструированных им кварцевых излучателей. Эти разработки послужили основой для создания советских гидроакустических средств группой специалистов под руководством В.Н. Тюлина, которая в 1930 г. создала первую советскую гидроакустическую установку для подводных лодок. В 1933 г. в СССР был создан первый звуковой эхолот. Советские исследования в области гидроакустики между двумя мировыми войнами имели в основном оборонную направленность.
Великая Отечественная война надолго прервала исследования по мирному применению гидроакустики. Только с началом 50-х гг. отечественная промышленность снова приступила к разработке гидроакустической техники мирного назначения [4]. В 1951 г. был выпущен первый специализированный гидрографический эхолот ПЭЛ-1 с самописцем. В начале 60-х гг. был налажен серийный выпуск более современных гидрографических эхолотов ПЭЛ-3 и глубоководного эхолота ГЭЛ-3. С середины 70-х гг. выпускались промерный эхолот третьего поколения ПЭЛ-4 и эхотрал ГЭТ-2. В 80-ые гг. был создан первый гидрографический трехлучевой глубоководный эхолот ГЭЛ-4 и гидрографический комплекс бокового обзора для работ на глубинах до 500 и 2000 м (ГКБО 500 и ГКБО-2000).
20
1.3. Особенности распространения акустических волн в воде
Современные достижения гидроакустики тесно связаны с прогрессом в других областях науки и техники, в частности, физики, электроники и вычислительной техники. Огромное значение для гидроакустики имело открытие советскими и американскими исследователями искусственных пьезоэлектрических материалов — пьезокерамики, на основе которых в настоящее время и строятся гидроакустические антенны. Использование пьезокерамики позволяет существенно упростить технологию изготовления антенн и значительно уменьшить их стоимость.
Современные гидроакустические средства основаны на применении радиоэлектронной техники, поэтому уровень радиоэлектроники непосредственным образом влияет на совершенство гидроакустических средств. Современные гидроакустические технологии, немыслимые без микроэлектроники и микропроцессорной вычислительной техники, являются бурно развивающейся областью науки и техники, без которых немыслима любая морская деятельность.
Развитие технической гидроакустики связано с расширением знаний по распространению звука в морской воде, рассеянию звуковых волн на подводных объектах, более всесторонним изучением свойств гидроакустических сигналов и помех. Весомый вклад в расширение знаний по акустике океана в послевоенные годы внесли российские ученые, которыми было открыто явление сверхдальнего (волноводного) распространения звуковых волн в морской воде (1946 г.), создана теория морской реверберации (рассеяния звука на неоднородностях морской воды), подробно исследовано влияние гидрологических условий на распространение звука в океане.
Несомненна и велика роль зарубежных ученых в развитии современной гидроакустики, особенно американских исследователей.
1.3. Особенности распространения акустических волн в воде
Начало всесторонних и фундаментальных исследований по распространению акустических волн в воде было положено в годы Второй мировой войны, что диктовалось необходимостью решения практических задач военно-морских флотов и в первую очередь подводных лодок. Экспериментальные и теоретические работы были продолжены и в послевоенные годы и обобщены в ряде монографий. В результате этих работ были выявлены и уточнены некоторые особенности распространения акустических волн в воде: поглощение, затухание, отражение и рефракция. Поглощение энергии акустической волны в морской воде обуславливается двумя процессами: внутренним трением среды и диссоциацией растворенных в ней солей. Первый процесс преобразует энергию акустической волны в тепловую, а второй — преобразуясь в химическую энергию, выводит молекулы из равновесного состояния, и они распадаются на ионы [2, 3]. Этот вид поглощения резко возрастает с увеличением частоты акустического колебания.
Наличие в воде взвешенных частиц, микроорганизмов и температурных аномалий приводит также к затуханию акустической волны в воде. Как правило, эти потери невелики, и их включают в общее поглощение, однако иногда, как, например, в случае рассеяния от следа корабля, эти потери могут составить До 90 %. Наличие температурных аномалий приводит к тому, что акустическая
21
Глава 1. Исторический обзор развития гидрографии и гидроакустических средств
волна попадает в зоны акустической тени, где она может претерпеть многократные отражения. Наличие границ раздела вода — воздух и вода — дно приводит к отражению от них акустической волны, причем, если в первом случае акустическая волна отражается полностью, то во втором случае коэффициент отражения зависит от материала дна: плохо отражает илистое дно, хорошо — песчаное и каменистое. На небольших глубинах из-за многократного отражения акустической волны между дном и поверхностью возникает подводный звуковой канал, в котором акустическая волна может распространяться на большие расстояния [2, 3]. Изменение величины скорости звука на разных глубинах приводит к искривлению звуковых «лучей» — рефракции. Рефракция акустических волн в воде определяет формирование специфических условий их распространения, которые приводят к образованию четырех типов особых зон: звукового канала, изотермического слоя, поверхности с отрицательным градиентом и поверхности с положительным градиентом. Кроме того, существует явление поглощения в пространстве акустического излучения, в результате чего его интенсивность ослабевает пропорционально квадрату расстояния от излучателя.
Дальность распространения звуковых волн является сложной функцией частоты излучения, которая однозначно связана с длиной волны акустического сигнала. Как известно, высокочастотные акустические сигналы быстро затухают благодаря сильному поглощению водной средой. Низкочастотные сигналы напротив способны распространяться в водной среде на большие расстояния. Так акустический сигнал с частотой 50 Гц способен распространяться в океане на расстояния в тысячи километров, в то время как сигнал с частотой 100 кГц, обычный для гидролокатора бокового обзора, имеет дальность распространения всего 1-2 км. Приблизительные дальности действия современных гидролокаторов с различной частотой акустического сигнала (длиной волны) приведены в таблице 1.1.
Таблица 1.1
Частота акустического сигнала Длина волны акустического сигнала Дальность действия
100 Гц 15 м 1000 км и более
1 кГц 1,5 м 100 км и более
10 кГц 15 см 10 км
25 кГц 6 см 3 км
50 кГц 3 см 1 км
100 кГц 1,5 см 600 м
500 кГц 3 мм 150 м
1000 кГц 1,5 мм 50 м
1.4. Многолучевые эхолоты
Многолучевые эхолоты (МЛЭ) впервые появились в 60-х годах XX в. как средство для батиметрической съемки глубоководных районов Мирового океана в интересах ВМФ США. Первый МЛЭ для гражданского использования «SeaBeam» был создан в 1973 г. и установлен на американском исследовательском судне (НИС)
22
1.4. Многолучевые эхолоты
«Vema». Один из первых рейсов с МЛЭ привел к открытию мирового значения: были обнаружены рифторые зоны — океанические разломы земной коры, тянущиеся узкой полосой внутри подводных горных хребтов. В 1977 г. «SeaBeam» был установлен на французском НИС «Жан Шарко», а в 1980-82 гг. — на германских НИС «Сонне» и научно-исследовательском ледоколе (НИЛ) «Полар-штерн». С этого времени технические и программные средства многолучевой батиметрии стали развиваться во всем мире. В Европе разработки и создание МЛЭ начались с 1984 г. Норвежская фирма «Симрад» разработала первый МЛЭ для малых глубин ЕМ-100 и глубоководный ЕМ-12. В этот же период немецкая фирма «Круп Атлас-Электроник» создала МЛЭ «Hydrosweep», которыми стали оснащаться новые НИС Германии:«Метеор» (1986 г.) и «Поларштерн» (1990 г.). В последующие годы практически все новые НИС оснащаются МЛЭ. В России МЛЭ серийно не выпускаются, однако импортные МЛЭ установлены на многих отечественных НИС, например: ЕМ-100 на Г\С «Петр Котцов» (1991), ЕМ-12 на НИС «Геленджик» (1996), SeaBat 7150 на НИС «Академик Николай Стра-хов»(2005). Значительное количество портативных мелководных МЛЭ находится в настоящее время в эксплуатации во многих российских фирмах, выполняющих гидрографические работы различного назначения.
Несмотря на длительный период развития многолучевой батиметрии гидрографические службы не спешили внедрять МЛЭ для производства съемок морского дна в целях обеспечения безопасности мореплавания. До середины 90-х гг. прошлого века МЛЭ считался недостаточно точным инструментом для применения в гидрографии ввиду того, что многочисленные систематические ошибки, свойственные многолучевой батиметрии, были недостаточно изучены и не могли быть достаточно точно компенсированы поправками, особенно при проведении мелководных съемок. Поэтому, несмотря на очевидные экономические и технологические преимущества многолучевой съемки, обеспечивающей практически полное «акустическое освещение» полосы морского дна, гидрографическое применение МЛЭ оставалось невостребованным.
Ситуация в значительной степени изменилась с введением новой четвертой редакции Стандарта на Гидрографические съемки — специальная публикация «S-44» Международной Гидрографической организации (МГО) в 1998 г. В данной публикации регламентировалась съемка «особой» категории, предусматривающая 100 % акустическое освещение морского дна. Кроме того, к этому времени ведущие фирмы производители по своей инициативе выполнили всесторонние морские испытания мелководных МЛЭ, на практике показавшие возможность соответствия точности результатов съемки подводного рельефа требованиям нового стандарта.
За последнее десятилетие технические и программные средства МЛЭ претерпели значительные изменения. Взамен громоздкой и дорогостоящей аппаратуры, не всегда надежной и сложной в эксплуатации, благодаря наличию в ее составе нескольких компьютеров, сейчас появились достаточно компактные и надежные системы, которые могут быть установлены даже на небольших катерах. Значительно усовершенствовалось программное обеспечение, позволяющее надежно компенсировать систематические ошибки и значительно повысить точность вычисления глубин, особенно на крайних лучах.
23
Глава 1. Исторический обзор развития гидрографии и гидроакустических средств
На рис. 1.4 представлен прогресс технических средств гидрографии. Акустический метод измерения глубин, примененный в однолучевом эхолоте, был реализован в 1922 г. К этому времени в Атлантическом океане было произведено только около 3000 измерений глубин. До Второй мировой войны в мелководных районах измерения глубин производились в основном ручным лотом, а в более глубоководных районах — рыболотом. В послевоенный период гидрографические эхолоты с аналоговой записью глубин на самописец начали использоваться в нашей стране только с начала 50-х гг.
Рис. 1.4. Технический прогресс в гидрографии
Однолучевой эхолот позволял «высветить» только узкую полосу и записать профиль глубин вдоль траектории перемещения судна.
В междугалсовых промежутках глубины и характер морского дна оставались практически неизвестными. С появлением многолучевой батиметрии ситуация коренным образом изменилась. МЛЭ формирует «веер лучей» (beams) в плоскости мидель шпангоута и «освещает» полосу морского дна под судном с помощью узких акустических лучей, только один из которых будет вертикальным.
Угловое расстояние между крайними лучами определяет ширину полосы обзора для данной глубины моря. Выбором междугалсового расстояния для средней глубины моря можно добиться совмещения или небольшого перекрытия смежных промерных полос и, таким образом, обеспечить так называемую
24
1.5. Современное состояние гидролокаторов
«площадную» съемку рельефа — непрерывное акустическое освещение морского дна по мере перемещения съемочного судна по запланированной системе промерных галсов. В этом и заключается задача современной гидрографии. На практике ситуация осложняется нестабильностью поля глубин на обследуемой акватории. В районах с меньшими глубинами ширина полосы промера будет сужаться. Кроме того, точность измерений наклонных дальностей на крайних лучах, имеющих большой наклон относительно вертикали, значительно снижается благодаря рефракции звуковых волн, наличию неровностей дна и изменению его отражающей способности. В результате этого точность глубин по крайним лучам часто бывает недостаточна для гидрографического использования. В этом случае вводится понятие «гидрографической полосы обзора», т. е. полосы обзора, в пределах которой рассчитанные глубины обладают необходимой точностью.
МЛЭ измеряет не глубины, а наклонные дальности от дна до приемной антенны и угловое отклонение оси каждого луча от вертикали. На основе этой информации и вычисляется глубина по каждому лучу. Современные МЛЭ способны измерять еще и интенсивность отраженного сигнала по каждому лучу и на основе этой информации создавать геометрически правильное акустическое изображение — «сонограмму» морского дна в полосе обзора. Эта цифровая сонограмма, похожая на сонограмму гидролокатора бокового обзора, является координатно-привязанным непрерывным растровым изображением дна, обеспечивающим возможность визуального обнаружения различных естественных (эндогенных) и искусственных (экзогенных) объектов.
После выполнения исправления вычисленных глубин и расчета их вероятнейших координат, используя трехмерное поле глубин, программное обеспечение МЛЭ оперативно формирует цифровую модель рельефа дна (ЦМР) на основе нерегулярной триангуляционной сети (TIN) или регулярной сети (grid). Одним из вариантов представления цифровой модели может являться изображение рельефа дна изобатами (горизонталями). Цифровые изобаты могут быть программно сформированы на основе данных регулярной и нерегулярной сети глубин. Результатом такого представления может быть векторное изображение в формате.бхГ {digital exchenge formate). Оперативное совмещение векторного цифрового изображения в формате dxf с растровым изображением сонограммы (в одном из растровых форматов) обеспечивает возможность получения дополнительной информации как о самом рельефе, так и об объектах, которые могут находиться на его поверхности.
Упомянехм также о потенциальной возможности использования МЛЭ для получения информации о характере (текстуре) и структуре донного грунта, или о характере биоресурсов, прикрепленных к дну. Последнее приложение в настоящее время является чрезвычайно актуальным новым направлением применения МЛЭ и делает его поистине неоценимым средством пространственного изучения морских биологических ресурсов.
В последующих главах более подробно рассмотрены вопросы технической реализации современных МЛЭ, состав программного обеспечения, точность расчета глубин и их координат, процесс исследований и калибровки МЛЭ и технологии их практического применения.
25
Глава 1. Исторический обзор развития гидрографии и гидроакустических средств
1.5. Современное состояние гидролокаторов
Последнее десятилетие XX в. ознаменовалось дальнейшим развитием гидролокационных систем, которое опиралось на успехи, достигнутые в ряде областей науки, и в частности, в области цифровых методов формирования и обработки сигналов и цифровых изображений. Существенное влияние на изменение облика сонаров оказало развитие элементной базы. Гидролокаторы стали более «интеллектуальными», уменьшились их массогабаритные характеристики, а функциональные возможности расширились. Развитие геоинформационных технологий привело к появлению качественно новых принципов и средств обработки и представления гидролокационной информации. Изменилось и само понятие — гидролокатор. Раньше под термином «гидролокатор» понимались эхолокационные приборы для обнаружения подводных лодок, теперь это аппаратно-программные комплексы для определения положения подводных и плавучих объектов с помощью акустических сигналов, способные представлять информацию в цифровом виде.
К гидролокационным устройствам можно отнести большое разнообразие систем: гидролокаторы с острой диаграммой направленности, гидролокаторы кругового обзора, опускаемые с борта судна и вертолета, буксируемые гидролокаторы бокового обзора (ГБО). На протяжении многих десятилетий для получения акустического изображения дна используются ГБО. За это время ГБО прошли путь развития от громоздких аналоговых, до компактных цифровых приборов с существенно лучшими техническими характеристиками.
На сегодняшний день в мире существует множество как крупных, так и мелких фирм, выпускающих разнообразные ГБО. Эти сонары имеют узкую диаграмму направленности антенны в горизонтальной плоскости (0,2-3°) и широкую диаграмму направленности в вертикальной плоскости (40-60°). В итоге получается, что диаграмма направленности приемо-передающей антенны имеет «ножевидную» форму и направлена перпендикулярно к линии движения. Приемо-передающая антенна может располагаться как на борту судна, так и на специальном буксируемом носителе. По мере движения носителя на дне «освещается» полоса, размеры которой по ширине (перпендикулярно к линии движения) составляют 10-14 глубин на оба борта. ГБО позволяют получать высококачественное акустическое изображение морского дна и находят широкое применение в первую очередь при поиске на морском дне техногенных ( затонувшие корабли, кабели, трубопроводы и т. д.), а также экзогенных объектов (отличительные форма рельефа).
Акустическое изображение также позволяет сделать первые оценки по типам грунтов дна и определить места для дальнейшего бурения с целью получения их детальных характеристик. Однако по акустическому изображению обычного ГБО нельзя получить рельеф дна. Для решения этой задачи, как правило, применяют промерные однолучевые и многолучевые эхолоты. Вместе с тем, при применении однолучевого эхолота для построения рельефа участка дна имеется ряд недостатков, таких как большое время съемки и недостаточная точность построения рельефа ввиду того, что между промерными галсами сведения о рельефе отсутствуют. Для преодоления этого недостатка ГБО применялись в комплексе с однолучевыми эхолотами. В настоящее время МЛЭ также широко применяют
26
7.5. Современное состояние гидролокаторов
ся в гидрографии, однако при этом необходимость использования ГБО не утратила свое значение. Очень актуальным при решении некоторых ответственных задач является получение одновременно и акустического изображения участка дна, и его рельефа. МЛЭ, как правило, позволяют получать одновременно рельеф и акустическое изображение участка дна, при этом на первый взгляд кажется, что не требуется использование дополнительно еще и ГБО как отдельной системы. Но это не совсем так. Акустические изображения, выдаваемые МЛЭ (опция ГБО многолучевого эхолота), и акустические изображения ГБО существенно отличаются. Две эти технологии съемки можно рассматривать как взаимодополняющие, но не как альтернативные.
В настоящее время активно развивается новая технология ГБО, позволяющая объединить съемку рельефа и получение акустического изображения дна. Это, так называемый, батиметрический ГБО — БГБО {Swath Bathymetry Side Scan), основанный на интерферометрическом способе обработки гидролокационного сигнала. Этот способ имеет ряд преимуществ по сравнению со способом, применяемым в многолучевых эхолотах. Интерферометрическая обработка сигнала обеспечивает построение детальной карты глубин участка дна с возможностью одновременного получения высококачественного акустического изображения дна и его рельефа, причем полностью совмещенных без дополнительных ошибок.
Однако, у интерферометрических ГБО имеются и существенные недостатки, преодолением которых и заняты в настоящее время фирмы, выпускающие подобную аппаратуру. Интерферометрические ГБО разработаны во многих экономически развитых странах, в том числе и в России. Так российский БГБО «ГИДРА» успешно используется для выполнения высокоточных работ по съемке подводного рельефа.
В последующих главах будет рассматриваться использование однолучевых и многолучевых эхолотов, а также традиционных ГБО для выполнения гидрографических работ, связанных с обеспечением безопасности мореплавания. В меньшей степени будут затронуты вопросы использования гидролокационных изображений для целей изучения и анализа свойств морского дна, а также их интерпретации.
В главе 2 кратко излагаются основные теоретические вопросы гидроакустики, необходимые для понимания работы аппаратуры, основные принципы работы однолучевых эхолотов и преимущества многолучевых эхолотов для съемки рельефа дна.
Глава 2.
ОСНОВЫ ГИДРОАКУСТИКИ И ТЕОРИИ СОНАРОВ
Морская вода является той средой, где производятся гидрографические измерения, поэтому знания физических свойств морской воды и того, как распространяются в ней акустические волны, является важным для понимания того, как работают гидрографические сонары.
2.1. Акустические волны и их физические характеристики
Электромагнитные волны отлично распространяются в вакууме и воздухе, но с трудом распространяются в жидкостях. Акустические волны, как звуковые (sonic) и ультразвуковые (ultra-sonic), достигают хорошего проникновения и распространения во всех упругих средах (elastic media), когда эти среды могут колебаться, будучи подвергнуты действию изменениям давления.
В действительности звук распространяется в воде значительно более эффективно, чем в воздухе. В качестве примера можно привести китов, которые используют звуковые волны, чтобы общаться на расстояниях в десятки и даже сотни километров. Способность звука распространяться на такие большие расстояния позволяет применять дистанционное зондирование (remote sensing) в водной среде. Большинство датчиков, применяемых для измерений глубин, используют акустические волны. Устройства, которые используют звук в таких приложениях, попадают в разряд инструментов, называемых сонарами (sonars).
Для того, чтобы понять принципы работы сонаров, надо вначале уяснить, что такое звук. Особенно важно понимать, как звук распространяется в воде. Звук перемещается в воде движущимися полосами фронтов давления, известных как волна сжатия (compressional wave). Фронты давления распространяются в воде с особой — местной скоростью звука в воде (local speed of sound). Местная скорость звука в воде может меняться в зависимости от водных условий, таких как соленость, давление и температура, но она независима от характеристик самого звука — все звуковые волны распространяются в воде с одинаковой местной скоростью. В типичных морских условиях скорость звука в воде находится в окрестностях величины 1500 м/с.
Физическое расстояние между фронтами давлений в распространяющейся звуковой волне является длинной волны (wavelength). Количество фронтов давления, проходящих через неподвижную точку за единицу времени, называется частотой волны (frequency). Длина волны измеряется в метрах, а частота — в герцах (Гц). Эти величины связаны через скорость звука в воде следующим соотношением:
скорость звука (м/с) = Частота (Гц) х длина волны (м) c=f*\
28
2.1. Акустические волны и их физические характеристики
Когда звуковая волна встречает изменения в местной скорости звука, длина ее волны изменяется, но частота остается прежней. По этой причине звуковые волны обычно описываются в единицах частоты. Акустическая волна несет в себе определенное количество акустической энергии (acoustic energy). Эта энергия может быть измерена устройством, называемым гидрофон (hydrophone), который измеряет величину колебаний давления, когда фронт давления звуковой волны проходит через него [34].
Величина этих колебаний (oscillations) называется амплитудой волны (amplitude).
Амплитуда связана с акустической энергией, переносимой волной: волны с более высокими амплитудами переносят более высокую энергию. Энергия волны в единицу времени, называемая мощностью (power), пропорциональна квадрату ее амплитуды.
Интенсивность звуковой волны I представляет собой количество энергии в секунду, пересекающее единицу площади. Акустическая интенсивность характеризуется выражением вида[34]:
1=-£-; (2.1)
рс
где р — плотность воды, с — скорость звука в воде, а ре — эффективное акустическое давление, задаваемое в виде пикового значения амплитуды давления Р, деленного на корень квадратный из 2, т. е.
Р
Произведение рс — называется акустическим сопротивлением жидкости. Считая скорость распространения звука в воде 1500 м/с и плотность морской воды 1026 кг/м3, для морской воды он равен: рс = 1540-103 кг/м2 с. При некоторых условиях этот коэффициент пропорциональности между скоростью и давлением является комплексной величиной. В этом случае он называется удельным акустическим импедансом (specific acoustic impedance).
Интенсивность акустической волны рассчитывают с использованием среднего акустического давления, нежели его мгновенного значения. Акустическое давление и интенсивность, благодаря их большому диапазону изменений, обычно выражают с помощью логарифмической шкалы, отнесенной к определенному уровню давления и интенсивности. В качестве такой логарифмической шкалы используют децибел. Когда известна интенсивность I в «опорной точке», расположенной на расстоянии 1 м от акустического источника, a IRe — интенсивность в удаленной (эталонной) точке, то уровень акустической интенсивности IL определится выражением:
7Z = 101g/-, (2.2)
^Re
Альтернативно уровень акустической интенсивности можно представить в следующем виде:
7Z = 201g-^4
PRe гдеР/?е ~ эталонное давление.
29
Глава 2. Основы гидроакустики и теории сонаров
В отечественной литературе уровень акустической интенсивности ассоциируют с потерями на распространение.
На рис. 2.1 схематически показаны компоненты звуковой волны. Последовательности перемещающихся фронтов давления, представляющих движущуюся звуковую волну, показаны серым цветом с темными тенями, представляющими высокое давление и светлыми — низкое давление. Расстояние между фронтами является длиной волны. Фронт давления движется со скоростью звука. Стрелками показаны измерения изменений давления со временем, как фиксирует неподвижный гидрофон в воде.
Размер колебаний давления есть амплитуда волны, а величина времени между проходящими пиками давления — величина обратная частоте, называемая периодом волны (time period).
По мере того, как звуковая волна распространяется, она теряет акустическую энергию. Это происходит потому, что перенос изменений давления между молекулами воды не обладает 100% эффективностью — некоторая энергия тратится на генерацию тепла. Потери энергии распространяющейся волны называются затуханием (attenuation). По мере того, как звуковая волна затухает, ее амплитуда уменьшается.
Звуковые волны являются полезным инструментом для дистанционного зондирования в водной среде потому, что они могут проходить десятки километров без существенных затуханий.
Световые и радиоволны (которые используются в радиолокации), проникают в воду только на несколько метров, до того как они фактически полностью теряют свою энергию.
Ц-Ц-г “
Длина волны
дистанция
Гидрофон
30
2.1. Акустические волны и их физические характеристики
Уровень затухания звуковой волны зависит от частоты: высокочастотные акустические волны затухают быстро, в то время как очень низко частотные волны могут далеко распространяться практически без затухания. Звуковая волна типичного сонара, работающего на частоте 12 кГц, теряет половину энергии на затухание только через 3000 м распространения в водной среде.
В то время как акустическая энергия хорошо проходит через водную среду, она прерывается при резком изменении условий среды — при встрече с такими препятствиями, как скала или песок. Когда движущийся звуковой импульс (sound pulse} встречает такое препятствие, какая-то часть его энергии проникает и распространяется в новом материале. Количество передаваемой энергии зависит от ряда факторов: акустического сопротивления нового материала (произведение плотности материала и скорости звука в нем), угла падения (angle of incidence} луча — угол, под которым фронт волны звукового импульса взаимодействует с материалом (см. рис. 2.2), а также неровности его поверхности.
Энергия, которая не проникла в новый материал, должна вернуться в исходную среду — воду в виде отраженного звука, называемого эхо-сигналом. Некоторое количество ее отразится от поверхности материала — по сути, «отскочит» в направлении, которое зависит от угла падения.
Остальная энергия рассеется во всех направлениях. Как много энергии идет на отражение и как много рассеется, зависит от характеристик материала и угла падения луча. Энергия, вернувшаяся обратно в воду, другими словами,
акустический
Рис. 2.2. Компоненты события появления эхосигнала от дна моря
31
Глава 2. Основы гидроакустики и теории сонаров
не переданная в новый материал, называется эхосигналом (echo). Эхосигнал сохраняет частоту и характеристики акустической волны источника. На рис. 2.2 показаны компоненты события возникновения эхосигнала на морском дне.
Принципы работы сонара
Сонаром называется устройство для дистанционного обнаружения и определения положения объектов в воде с использованием звука. Сонар способен выполнять эти задачи, используя преимущества поведения звука в воде. Существует два типа сонаров:
• пассивные сонары (Passive sonars) —это по существу «слушающие» устройства, которые регистрируют звуки, издаваемые объектами в воде. Такие инструменты могут использоваться для выполнения сейсмических исследований, определения местонахождения подводных лодок, морских животных и любых других объектов, издающих звуки. Их применение относится к дисциплинам, не связанным с гидрографией (измерениями морского дна), и поэтому здесь не рассматриваются.
• активные сонары (Active sonars) —это устройства, которые издают звуковые волны на особых, контролируемых частотах и слушают эхосигналы от этих излученных звуков, которые возвратились от удаленных объектов, находящихся в воде.
Сонары, которые измеряют глубину, относятся к активным. Мы будем рассматривать только активные сонары, причем такие, которые используются для дистанционного измерения глубин дна — процесс, который называется промер (echo sounding) или батиметрия (bathymetry measurement). Инструменты, с помощью которых выполняются данные измерения, называются эхолотами (echo sounders). Эхолоты измеряют глубину путем генерации короткого звукового импульса или посылки (ping) и затем прослушивают эхосигнал, отраженный от дна. Время между передачей импульса и приемом эхосигнала является временем, за которое звук прошел до дна и вернулся обратно. Зная это время и скорость звука в воде, можно вычислить расстояние до дна (range). Например, если определено, что между моментом излучения посылки и моментом, когда услышан эхосигал, прошло 10 с, то используя скорость звука в воде 1500 м/с, можно утверждать, что звук прошел 15000 м. Поскольку, это путь до дна и обратно, расстояние до дна будет половиной — 7500 м. В общем виде формула выглядит так:
расстояние до дна = = 0,5 • скорость звука время • между излучением и приемом.
Для создания звуковой волны эхолот использует устройство, называемое излучатель (projector). Излучателем может быть все что угодно, способное создавать звук в воде. Излучателей, сделанных для конкретных приложений, имеется множество. Один из типов излучателей взрывает под водой заряд — такое устройство называется «буммер» (boomer). Спаркеры (Sparkers) используют электрический разрядник с высокой мощностью, создавая плазменный пузырь. Пневматические источники (Air guns) используют сжатый воздух для создания под водой свертывающегося пузыря. Такие устройства используются в первую очередь для сейсмических съемок. Они ограничены тем, что амплитуда, частота
32
2.1. Акустические волны и их физические характеристики
и длительность звукового импульса, который они вырабатывают, не могут стабильно поддерживаться от одной посылки к другой.
Сонарам, используемым для батиметрических измерений, требуются излучатели, которые способны генерировать акустические импульсы с точными, контролируемыми и повторяемыми характеристиками. Они используют излучатели на основе пьезоэлектрической керамики (piezo-electric ceramic) вещества, которое мгновенно изменяет размеры, когда к нему приложено напряжение. Эхолот может использовать особые электрические напряжения, чтобы заставить пьезоэлектрический излучатель колебаться, передавая волну давления с особыми характеристиками частоты. Такой излучатель аналогичен громкоговорителю, который преобразует электрический сигнал в колебания мембраны из ткани или бумаги и передает энергию в воздух в форме звуковых волн
Излученный в воду звуковой импульс распространяется сферически от источника —его энергия излучается во все стороны. По мере расширения сферического фронта импульса его энергия распространяется на все больший и больший район (поверхность расширяющийся сферы), что приводит к падению энергии на единицу площади. Это падение энергии называется потерями на распространение (spreading loss).
Импульс также подвержен некоторому затуханию или потерям на поглощение (absorption loss). Совместно потери на расширение и поглощение именуются потерями на передачу (transmission loss).
Общая величина потери на передачу, которой подвержена звуковая волна, зависит от пройденного волной расстояния — чем дальше проходит волна, тем она становится слабее. Когда звуковая волна взаимодействует с участком дна, говорят, что она освещает (illuminate) или акустически освещает (ensonify) эту часть дна. То, что происходит с акустической энергией в этот момент, может быть достаточно сложным. Какая-то порция энергии передается в дно. Сколько энергии будет передано, зависит от материала, из которого сложено дно. Песок и ил очень легко поглощают энергию, а скалы и металлические объекты поглощают минимум акустической энергии. Основная часть энергии, которая не может быть поглощена акустически освещенной целью, отражается или рассеивается обратно в воду. Часть отраженной энергии на единицу площади, которая направлена обратно в сторону излучателя, называется силой обратного рассеивания дна (backscatter-ing strength). После облучения дна возвращающийся эхосигнал испытывает еще большие потери на передачу. Эхолот детектирует то, что осталось от вернувшегося импульса с помощью гидрофона. Гидрофоны делают то, что и излучатели, только наоборот — они преобразуют физические колебания, которые они испытывают, когда эхосигнал попадает на них, в электрическое напряжение. Гидрофоны аналогичны микрофонам, которые преобразуют звук, передаваемый в воздухе, в электрический сигнал. Благодаря выполнению одинаковых функций, излучатели и гидрофоны в сонарной системе часто являются одной и той же частью аппаратного обеспечения. Термин «преобразователь» (transducer) относится как к излучателю, так и к гидрофону. В каждой стадии этого процесса: генерации импульса, распространении, возвращении эхосигнала и приеме — имеются источники звука, которые добавляются к окончательно принятому сигналу. Это включает, но не сводится только к звукам моря (например, волны), морские животные и судовые
33
Глава 2. Основы гидроакустики и теории сонаров
звуки от собственного судна и других судов. Имеют место также паразитные звуки, являющиеся следствием воздействия электроники сонара. Суммарный уровень этих нежелательных акустических сигналов называется уровнем шума (noise level=NL). Уровень шума ограничивает максимальную дальность любого прибора дистанционного зондирования. В мире без шумов самый маленький эхосигнал от дна мог бы быть обнаружен. Несмотря на то, что посылка и эхосигнал имеют потери на распространение (transmission losses), которые делают их все слабее и слабее, уровень сигнала в действительности никогда не падает до нуля. Между тем, в реальном мире шумов акустические сигналы становятся такими слабыми, что перестают быть различимыми на фоне других шумов, и, таким образом, становятся неопределяемыми. Соотношение сигнал/шум (signal-to-noise ratio = SNR) является отношением силы принятого сигнала к уровню помехи, которое определяет меру различимости (detectability) сигнала. Минимальное соотношение сигнал/шум, требуемое для различимости сигнала, зависит от конкретного приложения.
2.2. Уравнение гидролокации
Проектировщики гидролокационной аппаратуры ведут учет всех факторов, составляющих процесс акустической локации, используя уравнение гидролокации (SonarEquation). Это уравнение используется для изучения и выражения способности обнаружения и характеристик эксплуатации сонаров (эхолотов и гидролокаторов) как функций условий работы. Уравнение гидролокации для эхолотов определяет возможность детектирования эхосигнала в виде, так называемого, уровня полезного сигнала (Echo Level —EL), задаваемого выражением [59]:
EL=SL- 2TL +TS. (2.3)
Уравнение гидролокации обычно записывают в виде:
SL - 2 TL + TS = NL - DI + DT. (2.4)
Здесь введены следующие общепринятые обозначения:
SL — уровень излучения (source level)',
TL — потери при передаче (transmission loss);
NL — уровень шумов (noise level);
DI — показатель направленности (directivity index) в режиме приема;
TS — сила цели (target strenth) или аналогичный параметр:
BS — сила рассеивания дна (bottom backscattering strength);
DT— порог обнаружения (detection threshold).
Все величины в формуле выражены в децибелах (dB).
Параметры: SL, NL, DT DI — зависят от характеристик гидроакустической аппаратуры, в то время как: TL, NL — определяются условиями среды, а параметры: TS (BS)- характеризуют объект обнаружения.
В данном разделе каждый из этих параметров рассматривается индивидуально для того, чтобы можно было лучше изучить процессы, происходящие при распространении акустических сигналов в водной среде, и возможность обнаружения полезного эхосигнала от дна.
34
2.2. Уравнение гидролокации
Уравнение гидролокации может быть представлено в различном виде и может включать дополнительные члены. Оно ясно представляет множество факторов, вовлеченных в процесс определения глубин с помощью эхосигналов и то, как они соотносятся между собой. Таким образом, уравнение гидролокации становится удобным и полезным в процессе проектирования или для предсказания характеристик функционирования сонаров по различным сценариям. Это уравнение помогает ответить на многочисленные вопросы гидроакустики типа: «а что произойдет, что если..?» Заинтересованный читатель найдет больше информации об уравнении гидролокации в классической книге [70].
Рассмотрим уравнение гидролокации применительно к активному сонару, имея ввиду многолучевой эхолот в постановке, предложенной фирмой Simrad (1998) [59].
Уровень излучения (5Z) может быть рассчитан по формуле:
SL= 171,6+ 101g PL + DIT; (2.5)
где PL — необходимый уровень мощности излучения сонара (дБ/Вт); a.DIT— показатель направленности передающей антенны в режиме излучения.
2.2.1. Потери при передаче
Потери при передаче учитывают потери акустической интенсивности в результате геометрического фактора, т. е. потери расширения {spreading loss), пропорциональные г2, и потери на поглощение {absorption), пропорциональные коэффициенту поглощения (а), зависящего от физических и химических свойств морской воды, а также от акустической частоты (см. п. 2.3.9).
Потери на распространение связаны с геометрий луча и формой пространственного конуса (рис. 2.3). Увеличение площади приводит к понижению мощности на единицу площади.
Мощность П акустического импульса эквивалентна произведению интенсивности I на площадь облучаемой площадки А, таким образом:
Рис. 2.3. Представление потерь на распространение в зависимости от геометрии луча [IH0, М-13, 2005]
35
Глава 2. Основы гидроакустики и теории сонаров
n = IiAi=I2A2; (2.6)
где A 1=Q-jR21 и A2=Q-R22, здесь Q — пространственный угол
Таким образом, соотношение интенсивностей можно представить в виде:
— = f—\ (2.7)
л W
Если рассматривать эталонную интенсивность на расстоянии 7?1 = 1 м — т. е. расстоянии, на котором определяется уровень излучения (5Z), то логарифмическое соотношение интенсивностей, относящиеся к потерям при передаче за счет расширения, предстанет в виде:
101g^ = 101g-^ = -201g7?2. (2.8)
^Re ^2
Таким образом, потери передачи определяются следующей формулой:
TL = 201gr+ar, (2.9)
где г — расстояние до преобразователя и a — коэффициент поглощения (абсорбции).
Расчет коэффициента поглощения приводится в п. 2.3.9.1.
2.2.2. Уровень помех
Уровень помех (NL) зависит от спектрального уровня окружающих шумов (NSL) в полосе приема (receive Bandwidth), ширины полосы на приеме (w), показателя направленности на приеме (DI=DIR) и может быть представлен в виде:
NL = NSL + 101g w - DIr. (2.10)
Шумовые помехи в море могут возникать от различных источников, таких как: волны, дождь, сейсмическая активность, термические шумы, морские животные и шумы, связанные с человеческой деятельностью. Кроме шумов необходимо также учитывать комбинированный эффект, создаваемый обратным рассеянием энергии, создаваемым различными морскими объектами, включая волны, пузырьки воздуха и морские организмы в водной толще, придонный материал, находящийся во взвешенном состоянии и т. д. Этот вклад известен как уровень реверберации (Reverberation Level — RL).
2.2.3. Показатель направленности на приеме
Преобразователи всегда имеют возможность концентрировать излучаемую энергию внутри конуса (рис. 2.4), или луча. Это свойство может быть количественно оценено в уравнении гидролокации как соотношение интенсивности внутри луча и интенсивности всенаправленного излучения источника с той же мощностью.
Мощность П акустического импульса эквивалентна произведению интенсивности на площадь освещаемой поверхности площадью S. Следовательно, рас-
36
2.2. Уравнение гидролокации
Рис. 2.4. Освещенная поверхность направленного и всенаправленного излучения [IH0, М-13, 2005]
сматривая одинаковую мощность для направленного и всенаправленного излучения, имеем:
Я = /0-4тс7?2 = /5. (2.11)
Соотношение интенсивностей представим в виде:
/0 s
Теперь индекс направленности (DI) может быть получен в виде:
r>7 = 101g-^- = 101g^. (2.13)
^Re
Заметим, что для антенной решетки длинной L при длине волны X (при условии Z»X) показатель направленности может быть представлен в виде:
Z>/=101g(2Z/X). (2.14)
Существуют и другие модели, характеризующие показатель направленности антенной решетки на приеме, учитывающие ее особенности и принцип использования.
Показатель направленности антенной решетки длинной L с расстоянием между гидрофонами / и формирующей на приеме луч с углом 8, относительно перпендикуляра к линейной оси решетки (см. рис. 5.15), может быть рассчитан по приближенной формуле:
DZ^«4n/Zcos8/X2, (2.15)
где X — длина волны акустического сигнала.
Для получения реалистичных значений показателя направленности величину, рассчитанную по формуле (2.15), обычно умножают на коэффициент Z, учитывающий подавление боковых лепестков характеристики направленности.
37
Глава 2. Основы гидроакустики и теории сонаров
Рис. 2.5. Размер следа луча и обратное рассеяние (с — скорость звука; т — длительность акустического импульса)
Для многолучевого эхолота показатель направленности на приеме (дБ) может быть рассчитан по следующей эмпирической формуле:
DIr = 46,2 -101g (фгфя), (2.16)
где фг — ширина луча при излучении в направлении движения, фЛ — ширина луча на приеме в направлении, перпендикулярном движению (см. рис. 2.5).
Акустическая энергия, вернувшаяся от дна, является той энергией, которую использует сонар, а также дистанционный метод, позволяющий сделать выводы о свойствах морского дна. Знание угловой величины луча (beam angle) и профиля скорости звука в воде позволяет получить силу рассеяния (backscatter strength), исправленную на величину поглощения сферического расширения. Каждая частица дна может рассматриваться как отражатель, и возвращенная дном энергия будет суммой энергий, внесенных от границы вода-дно и от нижележащего слоя осадка, благодаря тому, что некоторая ее часть проникнет в осадок. Вместе с тем, вклад, получаемый от осадка, менее существенен при использовании высоких частот.
2.2.4. Сила рассеивания и сила цели
Сила [обратного] рассеяния (BS) обычно описывается логарифмической суммой действенной величины силы обратного рассеяния, отнесенной к единице площади (м2), именуемой индексом обратного рассеяния (backscatter index — SB), который зависит от отражающей способности дна и значения мгновенной величины отражающей площадки А — площади дна, которая вносит свой вклад в величину сигнала рассеяния. Параметр «сила цели» (TS), используемый некоторыми авторами в уравнении гидролокации, является, по сути, аналогом силы рассеяния дна (BS). Таким образом, имеем:
TS =BS = SB + 10\g А. (2.17)
38
2.2. Уравнение гидролокации
Предельные размеры отражающей площадки определяются геометрией луча сонара, особенно его шириной при излучении в направлении движения фг и шириной луча на приеме в плоскости, перпендикулярной направлению движения ф^. Для направлений, лежащих вне вертикальной плоскости, размер площадки А ограничен шириной луча фд и длительностью излученного акустического импульса т (см. рис. 2.5). Сила обратного рассеяния может быть представлена в виде:
TS = SB+W 1g (фг ф^т2), (2.18)
для углов луча, близких к нулю (0=0°);
T5 = 5B+101g| ——ф Гг|, (2.18А)
<2sin0 )
для углов луча, значительно больших нуля (0 »0°),
где г — наклонная дальность {slant range) от преобразователя до точки на дне, с — скорость звука, 0 — угол луча {beam angle), т. е. угол отклонения оси луча от вертикали.
Величина максимального значения угла луча, при котором еще можно применить формулу (2.18А) рассчитывается по приближенной формуле:
-1
6max=arccos| 1 + -^-] , (2.19)
у ^d J
где d — глубина, рассчитанная по лучу с данным углом.
Величина показателя обратного рассеяния также частично зависит от угла луча с наибольшими изменениями вблизи вертикали в типичных случаях, а при значительных углах практически следует закону Ламберта. Обычно имют место следующие соотношения:
SB = BSN, для вертикальных лучей (0 = 0°); (2.20)
SB = B5o-cos2 0, для наклонных лучей с углами: 0 > 10-25°. (2.21)
В типичных случаях величина BSN составляет —15 dB, a BS0 около — 30 dB. Эти величины могут меняться в пределах ±10 dB или даже более в зависимости от типа донного грунта и его жесткости (roughness). Рассматривая на рис. 2.5 освещенную площадку, которую называют следом луча на дне {beam footprint), легко заметить, что величина мгновенной площади А является функцией ширины луча на излучении фг Количество следов на дне по каждому лучу зависит от частоты посылок (т5).
2.2.5. Порог обнаружения
Теперь, когда все составляющие уравнения гидролокации (2.4) определены, его можно записать относительно порога обнаружения. Порог обнаружения {The Detection Threshold — DT) — параметр, зависящий от системы, который устанавливает наинизший уровень соотношения сигнал/помеха, при которым сонар способен обнаружить эхосигнал в соответствии с выражением:
EL+DIR > NSLSea + 10 1g W+DT, (2.22)
39
Глава 2. Основы гидроакустики и теории сонаров
В уравнении (2.22) взамен спектрального уровня окружающих шумов в полосе приема использована величина спектрального уровня окружающих шумов моря (NSLSea). Выполнение равенства (2.22) дает возможность обнаружения эхо-сигнала от дна.
В многолучевых эхолотах фирмы Kongsberg (Simrad) используется специальный встроенный тест {BITE = Built - In Test and Evaluation), в котором измеряется уровень окружающих шумов у антенны (NSLElectr?). Соотношение сигнал/помеха может быть рассчитано на основе разности уровня принятого эхосигнала и уровня шумов, полученных этим тестом. При этом учитывается чувствительность элементов приемной антенны (М) и количество элементов (гидрофонов), используемых для формирования луча на приеме (N). Основой для выполнения встроенного теста BITE является выражение:
EL+M + 101g ЛГ> NSLElectric + 10 log W+ DT, (2.23)
Конфигурация антенных решеток многолучевого эхолота подробно рассматривается в п. 3.3.
2.3. Параметры морской среды
2.3.1. Температура
Температура поверхности воды изменяется в зависимости от географического положения, времени года и времени дня. Распределение поля температуры является достаточно сложным и не может быть предсказано с точностью, необходимой для гидрографической съемки. Внутри водной толщи изменение температуры тоже имеет очень сложный характер. Такая непредсказуемость требует продуманного распределения станций с измерениями скоростей звука в воде, как в пространстве, так и во времени с тем, чтобы обеспечить распространение полученных профилей скорости звука на весь район съемки.
Измерения глубин очень чувствительны к изменениям в профиле скорости звука. При температуре воды 5°С изменение температуры всего на ГС дает изменение скорости звука на 4,5 м/с. Изменение температуры является доминирующим фактором в вариациях скорости звука от поверхности до нижнего горизонта термоклина (thermocline), далее с увеличением глубины главным фактором становится давление. Термоклин соответствует отрицательному градиенту температуры в отдельных слоях водной толщи, который по абсолютной величине значительно больше, чем градиенты, расположенные выше и ниже. Термоклины в океане носят в основном либо сезонный характер, как результат нагревания поверхностных слоев воды в летнее время, либо постоянный.
2.3.2. Соленость
Соленость является мерой количества соли и других минералов, растворенных в морской воде. Ее обычно определяют общей величиной твердой фазы раствора, растворенной в морской воде в количестве 1 тысячной от ее веса и обозначается: «ppt» (part per thousand) или «промилле» (%о).
40
23. Уравнение гидролокации
На практике соленость не определяется непосредственно, а рассчитывается по содержанию хлора {chlorinity), удельной электропроводности {electrical conductivity), показателю преломления (refractive index), а также с использованием некоторых других параметров, связь которых с соленостью надежно установлена. Уровень содержания хлора в образце морской воды используется в качестве образцовой солености. Объединенный комитет IAPO, UNESCO, ICES и SCOR предложил следующую формулу для определения солености по уровню содержания хлора (С1) [54, 55]:
5= 1,80655 С1; (2.24)
Средняя соленость морской воды составляет приблизительно 35%о. Величина вариации скорости звука на изменение солености на 1%о составляет величину приблизительно 1,3 м/с. Как правило, соленость измеряется с помощью специальных гидрологических зондов {CTD probe), определяющих одновременно электропроводность, температуру и глубину (давление).
2.3.3. Давление
Давление также существенно влияет на изменения скорости звука. Давление является функцией глубины, и величина изменения скорости звука составляет приблизительно 1,6 м/с на каждые 10 атмосфер, т. е. приблизительно на каждые 100 м глубины.
Давление оказывает главное воздействие на скорость звука на больших глубинах.
2.3.4. Плотность
Плотность воды зависит от температуры, солености и давления. 50% океанской воды имеет плотность от 1027,7 до 1027,9 кг/м3. Главное влияние на плотность воды оказывает ее сжатие по мере увеличения глубины. Так вода с плотностью 1028 кг/м3 на поверхности будет иметь плотность 1051 кг/м3 на глубине 5000 м [1].
2.3.5. Определение солености, температуры и скорости звука
Этот раздел описывает инструментарий, используемый для определения солености, температуры и скорости звука, а также их принципы работы и методы расчетов среднего значения скорости звука.
2.З.5.1. Измеритель скорости звука
Измеритель скорости звука {Sound Velocity Profile=SV&:P) является прибором, наиболее часто используемым для измерения профиля скорости звука в водной толще. Прибор имеет один датчик давления (pressure sensor) для измерения глубины погружения, приемопередатчик и рефлектор, разнесенные на величину d. Скорость звука рассчитывается по формуле: с = 2d/At, где At — время двойного пробега акустического сигнала между приемоизлучателем и рефлектором (аналогично измерению глубин с помощью эхолота).
41
Глава 2. Основы гидроакустики и теории сонаров
В настоящее время измерители скорости звука выпускаются многими фирмами. Реальная точность измерений составляет 0,5 м/с. Для получения надежных результатов требуется тщательная калибровка прибора, что не всегда возможно в экспедиционных условиях.
2.3.5.2. Гидрологический зонд
Гидрологический зонд (CTD) является электронным инструментом с датчиками электропроводности, температуры и давления.
Этот инструмент определяет соленость путем прямого .измерения электропроводности морской воды. Скорость звука изменяется в зависимости от упругости и плотности среды, которые в свою очередь зависят от солености, температуры и давления. На основе информации, зарегистрированной гидрологическим зондом (соленость, температура, давление), можно рассчитать скорость звука в воде на основе использования эмпирических формул.
На рис. 2.6 изображены: измеритель скорости звука (SV&P) фирмы «Applied Microsystems» и CTD-зонд фирмы SBE.
Одна из простых моделей, позволяющая рассчитать скорость звука в воде, может быть представлена в виде [53]:
C(Z, 7, 5)=1449,05+Т[4,57-7(0,0521-0,00023 ?)]+
+[1,333-7(0,0126- 0,00009-Т)](5-35) + A(Z), (2.25)
где 7 — температура в С°, S — соленость в промилле (ppt), Z — глубина в км и
A(Z) ~ 16,3-Z+0,18-Z2.
Smart Sensor SV&P System
SBE 19 Plus Seacat (CTD)
Рис. 2.6. Приборы для определения скорости звука в воде
42
23. Уравнение гидролокации
Последнее уравнение справедливо только для широты 45, а для произвольной широты ср оно может быть заменено выражением:
Z[l-0,0026cos (2ф)].
Точность получения скорости звука на основе измерений электропроводности, температуры и давления представляет сложный вопрос. Для более точного расчета скорости звука могут использоваться эмпирически формулы. Первой из таких формул была формула Вильсона (Wilson, 1959), затем формула Дел Гроссо (Del Grosso, 1972) [42], а в настоящее время используется наиболее точная формула Чена и Миллеро (МШего and Chen, 1977) [41].
Применение этих формул показывает абсолютные расхождения в скорости звука порядка 0,5 м/с при различных сочетаниях солености, температуры и давления, причем в идеальных лабораторных условиях. Формула Чена-Миллеро признается наиболее точной, поскольку является обобщением и развитием ранее выполненных исследований Вильсона и ДелГроссо. Это уравнение в основном использовано в международных технических документах ЮНЕСКО (UNESCO technical papers in marine science no. 44, 1983, no. 45, 1985). В этих документах приведены алгоритмы для расчета фундаментальных постоянных морской воды.
В большинстве коммерческих программных продуктов, поставляемых с гидрологическими зондами (например, программа SEASOFT зонда Sea-Bird), имеется возможность выбора одного из трех приведенных алгоритмов для расчета скорости звука.
Для расчета скорости звука по модели Чена-Миллеро (Chen and Millero) используется формула [41]:
а0= 1,389-1,262x10-^+7,164х10-5Г2+2,006х10-6^-3,21хЮ-8^
а1 = 9,4742х10-5-1,258x10-^-6,4885х10-8^2+1,0507x10-^-2,0122хЮ-10^
а2 = -3,9064х10-7+9,1041х10-^-1,6002х10-10^2+7,988х10-12^
a3=l,lxl0-10+6,649xl0-12t-3,389xl0-13r2
а=ац+раг+р2а2+р3а3
60=-1,922x10-2-4,42хЮЛ
= 7,3637х 10~5+1,7945х 10“7£
со=14О2,388+5,03711t-5,80852xl0-¥+3,342xl0-4i3-l,478xl0-6Z4+3,1464xl0-¥ Cj - 0,153563+6,8982х 10~4£-8,1788х 10"6£2+1,3621 х 10’^+б, 1185х КГ10^ с2=3,126х10-5-1,7107x10-^+2,5974xl0-8f2-2,5335xl0-1°i3+l,0405xl0-1¥ с3=-9,7729х Ю-9+3,8504х 10-10i-2,3643x 10-12t2 с“с0+рс1+р2с2+р3с3
d - 1,727х Ю-З-7,8936х 10"6р
cS0un</=c+as+Z>s3/2+<fc2 (2.26)
В данной формуле давление «р» задается в барах (bars).
43
Глава 2. Основы гидроакустики и теории сонаров
Преимуществом гидрологического зонда по сравнению с измерителем скорости звука является более высокая абсолютная точность измерений и более простая процедура калибровки. Вместе с тем, новые зонды — измерители скорости звука — постоянно совершенствуются и в ближайшее время могут составить большую конкуренцию гидрологическим зондам.
Значительным преимуществом использования гидрологических зондов при работе с многолучевыми эхолотами (МЛЭ) является также возможность не только определения скорости звука, но расчета коэффициента поглощения {absorption coefficient), что особенно актуально при расчете усиления приемного тракта сонара. Кроме того, величина коэффициента поглощения используется для оценки силы обратного рассеяния для цифровых изображений интенсивности обратного рассеяния, реализованных в опции гидролокации бокового обзора МЛЭ. Это становится особенно актуальным, когда требуется их сравнение с другими изображениями, например с сонограммой классического ГБО.
2.3.5.3. Батитермограф
Батитермограф используется для измерения температуры водной среды на разных горизонтах по мере погружения датчика. Имеются обрывные батитермографы «ОБТ» (expendable bathythermographs) разового действия для оперативного измерения температуры, представляющие собой контейнеры с зондом и бортовую аппаратуру. Контейнер содержит зонд с термисторным датчиком, сбрасываемым с движущегося судна и после приводнения погружающимся с определенной постоянной скоростью. Зонд соединен с бортовой аппаратурой тонким проводом, намотанным на две катушки. Одна катушка остается в контейнере на борту, а другая установлена на корпусе зонда. По мере погружения зонда катушки разматываются одновременно, в результате чего провод, находящийся в воде, натягивается слабо. Термисторный датчик меняет свое электрическое сопротивление по мере изменения температуры воды. В первых образцах прибора результаты измерений регистрировались самописцем в виде графика распределения температуры по глубине. В современных приборах запись ведется в цифровом виде с последующей обработкой на компьютере. Глубина погружения зонда рассчитывается аналитически по времени. При этом применяются различные алгоритмы. Для наиболее распространенных ОБТ эти алгоритмы опубликованы в техническом документе ЮНЕСКО [36].
Если по значениям температуры, зарегистрированным батитермографом, вычислить скорость звука в воде, то результирующая зависимость скорости звука от глубины окажется сравнимой с соответствующей закономерностью, выявленной при использовании измерителя скорости звука. Это было доказано в результате натурных экспериментов. Из подобия графиков значений скорости звука от глубины, полученных с помощью измерителя скорости звука и путем пересчета данных, измеренных батитермографом, следует, что температура и глубина являются основными факторами, определяющими скорость распространения звука по глубине в нормальных условиях в открытом море. Однако, при определенных условиях, например, в прибрежных водах или под тающим льдом; изменение солености и наличие в воде веществ во взвешенном состоянии
44
2.3. Уравнение гидролокации
оказываются существенными факторами, которые наряду с температурой могут влиять на величину скорости звука. Структура поля скорости звука более подробно будет рассмотрена в п. 2.3.8.
2.3.5.4. Термисторы
Термисторы представляют собой элементы, чье электрическое сопротивление зависит от температуры, которая, в свою очередь, зависит от величины теплового излучения, проникающего в них из морской среды. Цепочки термисторов используются для измерения температуры на разных горизонтах водной толщи. Таки цепочки, обычно установленные стационарно, состоят из нескольких термисторных элементов, равномерно распределенных вдоль кабеля. Цифровой накопитель опрашивает эти элементы последовательно и регистрирует температуру в функции времени.
2.3.6. Работа с инструментами. Регистрация и обработка данных
Важным для успешной работы с измерителем скорости звука является учет следующих особенностей его эксплуатации. Перед погружением необходимо ввести в измеритель правильные параметры, обеспечивающие интервалы регистрации данных, а также выполнить калибровку датчика давления с использованием правильного значения атмосферного давления. Это должно обеспечить надежность измерения глубины. Необходимо особо подчеркнуть, что при калибровке датчика скоростемер не должен находиться в отсеке с повышенным давлением, иначе будет внесена систематическая погрешность, которая приведет к ошибочным измерениям глубин горизонтов, на которых измеряется скорость звука.
Перед погружением измерителя скорости звука рекомендуется оставить прибор в воде в течение не менее 15 минут для того, чтобы он принял температуру окружающей среды. При выполнении погружения рекомендуется по возможности сохранять постоянной скорость погружения.
Полученный профиль скорости звука необходимо отредактировать и тщательно проверить на наличие аномальных записей скорости звука. Обычно производится одновременная запись глубины и скоростей звука при погружении и при поднятии прибора на поверхность. Оба профиля необходимо сравнить для того, чтобы убедиться в их идентичности. После этого профили часто усредняют для получения окончательного варианта профиля скорости звука. Вместе с тем, это не всегда требуется, поскольку достаточно бывает просто сравнить профили и убрать дополнительную информацию, что позволяет выполнить сортировку измерений.
2.3.7. Расчет глубины с использованием данных вертикального профиля скорости звука
После проверки достоверности, данные профиля скорости звука можно использовать для исправления глубин, записанных в файл съемки. Расчеты выполняются для исправления измеренных глубин с учетом данных вертикального профиля скорости звука (ВРСЗ). Для лучей, близких к вертикальным, что имеет место
45
Глава 2. Основы гидроакустики и теории сонаров
при использовании однолучевого эхолота, достаточную точность обеспечивает использование среднего значения скорости звука для данной измеренной глубины. Однако, для наклонных лучей необходимо выполнять трассировку лучей, учитывающую их искривление под воздействием рефракции в водной среде. Эта процедура используется в многолучевых эхолотах, о чем речь пойдет в п. 5.2.3.
Для акустического сигнала, излученного вертикально вниз (0 = 0°), среднее значение скорости звука может быть рассчитано по формуле 2.27. На практике приходится решать задачу расчета средней вертикальной скорости звука для измеренной глубины Низм и поправки за скорость звука.
Определение поправки (ДЯ2) за скорость звука, отличную от установленной в эхолоте (V), для глубины (Я^), измеренной вертикальным лучом однолучевого эхолота, возможно, когда известно вертикальное распределение скорости звука в воде (ВРСЗ). В качестве фактической берется средняя вертикальная скорость звука (С ) для данной глубины (Я^), которая может быть рассчитана по формуле:
2[(СМ+С,)/2Й„-*,)]
С, = --------------—, ( 2.27)
где С. — средняя скорость звука в г-ом горизонтальном слое с глубиной А-, С-+1 — средняя скорость звука в z+1-ом горизонтальном слое с глубиной hi+i.
Здесь п — количество горизонтов с измеренной скоростью звука: п = 1,2,3,..., т, где m — номер горизонта, соответствующий измеренной глубине: hm = Н^.
При этом поправка глубины AHz может быть рассчитана по формуле:
ДЯ^^-^Я^. (2.28)
При этом исправленная за скорость звука глубина (Нисп) рассчитывается по формуле:
(2.29)
Отметим, что для использования приведенных формул данные ВРСЗ должны быть известны для всего диапазона измеряемых глубин. Эти данные, как правило, представляются в виде таблицы соответствия глубины горизонта и измеренной на нем скорости звука, содержащейся в файле ВРСЗ.
Для решения задачи необходимо, имея данные ВРСЗ, вначале рассчитать значение скорости звука Ст на горизонте т, соответствующем измеренной глубине (hm). Для выполнения этой операции используем линейную интерполяцию, тогда имеем:
С.(2.зо)
где hj — глубина горизонта ВРСЗ со скоростью звука С- менее глубины hm, hj+i — глубина горизонта ВРСЗ со скоростью звука более глубины hm.
В качестве примера рассмотрим расчет средней скорости звука (С ) для глубины Я^ =75 м, измеренной со скоростьк^звука 1500 м/с, для данных ВРСЗ, представленных в таблице 2.1.
46
2.3. Уравнение гидролокации
Таблица 2.1.
№ п\п Глубина /г- Скорость звука С.
1 5 1470
2 10 1480
3 25 1490
4 50 1500
5 100 1530
Для наглядности результаты расчета представим в таблице 2.2.
Таблица 2.2.
№ Глубина /г- ц (Ц+1+Сг)/2 hi+rhi [(Сж+С,.)/2](Лг.+1-й,.)
1 5 1470
1475 5 7375
2 10 1480
1485 15 22275
3 25 1490
1495 25 37375
4 50 1500
75 1515 1507,5 25 37687,5
5 100 1530
Е 70 104712,5
В итоге для измеренной глубины в 75 м получаем среднюю вертикальную скорость звука:
Сф(75) = 104712,5/70 =1495,89 м/с.
Поправка за скорость звука для глубины 75 м [ДЯ2 (75)] будет равна:
АН/75) = 75х[( 1495,89/1500)-1] = 75х(-0,00274) =-0,202 м.
Исправленная за скорость звука глубина (Нисп) равна:
нисп = 75 + (-0,202) = 74,798 - 74,80 м.
Данные ВРСЗ могут быть получены на основе прямых измерений с помощью измерителя скорости звука в воде или гидрологического зонда. При отсутствии прямых наблюдений можно использовать таблицы. Таблицы скорости звука были разработаны еще в 1939 г. Первые таблицы, известные по имени автора, как «Таблицы Метыоза» (Matthews) [61], были опубликованы в 1944 г. и использовались до 1982 г., когда Международная Гидрографическая организация (МГО) приняла новый, уточненный вариант таблиц, известных как «Таблицы Картера» (Carter), которые применяются в настоящее время. Эти таблицы опубликованы в США (Echo-Sounding Correction Tables, 3-rd Edition, N.P.139, Ministry of Defence, 1980). Аналогичная отечественная публикация —«Таблицы Для исправления глубин, измеренных эхолотом за отклонение действительной вертикальной скорости звука в воде от расчетной» [19]. В таблицах Картера весь Мировой океан разделен на 85 районов. Скорость звука на глубинах более 200 м
47
Глава 2. Основы гидроакустики и теории сонаров
дана с интервалом 100 м. В качестве цифровой базы данных «Таблицы Картера» свободно доступны на сайте Британского Океанографического центра данных (British Oceanographic Data Center = BODC): www.bodc.uk.gov
Использование базы данных поправок позволяет применять их в составе гидрографического программного обеспечения, для автоматического исправления глубин, измеряемых эхолотами.
Для отдельных районов Мирового океана имеются и другие таблицы, в частности, для северо-западной части Тихого океана, изданные Мировым Центром Данных (г. Обнинск) [20].
2.3.8. Требования по определению вертикальной скорости звука для работ с многолучевым эхолотом
Многолучевая батиметрия требует возможно более точного определения распределения скорости звука в пространстве и во времени. При этом следует рассматривать четыре основных задачи.
1) Непрерывное измерение скорости звука у приемной антенны многолучевого эхолота, необходимое для правильного управления лучами на приеме. Этот вопрос подробно рассмотрен в п. 5.2.4;
2) Зондирование водной толщи с помощью измерителя скорости звука или гидрологического зонда с целью формирования ВРСЗ, необходимого для учета рефракции акустических лучей и правильного расчета глубин и их координат. Этот вопрос подробно рассмотрен в п. 5.2.3;
3) Выбор адекватного метода для экстраполяции измерений скорости звука на те глубины, где прямые измерения отсутствовали. При этом делаются предположения о характере изменений температуры и солености до дна;
4) Методика учета пространственных и временных изменений скорости звука, что особенно важно при проведении съемки в сложных гидрологических условиях (устьевые участки рек, время ледостава и таяния льда и т. д.). При этом должен осуществляться непрерывный мониторинг скорости звука с использованием специальных технических и программных средств.
Первая задача решается путем установки отдельного датчика скорости звука в районе антенны, в вторая — путем обязательного измерения ВРСЗ в период съемки. Некоторую сложность представляет собой решение третьей задачи.
В глубоком море ВРСЗ определяется с помощью измерителя скорости звука, гидрологического зонда или батитермографа. Все эти приборы выполняют измерения до определенной глубины. Далее для получения данных ВРСЗ до дна необходимо выполнить экстраполяцию. Примеры экстраполяции показаны на рис. 2.7. Для уверенной экстраполяции необходимо представлять общий характер ВРСЗ на данной акватории.
В типичный профиль ВРСЗ в глубоком море, как правило, включаются следующие участки, имеющие различные характеристики и протяженность по глубине. Непосредственно у поверхности расположен слой воды, в котором скорость звука подвержена суточным и локальным воздействиям тепла, холода и ветра. У поверхности моря может также находиться перемешанный слой с постоянным значением температуры по глубине, который образуется в результате
48
2.3. Уравнение гидролокации
Рис. 2.7. Пример вариантов экстраполяции скорости звука [Hare,2001]
перемешивания воды ветром, дующим над поверхностью моря. В перемешанном слое создаются условия для «захвата» звуковой энергии, которые приводят к формированию «звукового канала». При длительном безветрии и солнечной погоде этот слой исчезает и приповерхностная масса вод приобретает уменьшающуюся с глубиной температуру и скорость звука, как показано на рис. 2.7. и 2.8.
Под поверхностным слоем находится «сезонный термоклин». Понятие «термоклин» означает слой воды, в котором температура изменяется с глубиной. Сезонный термоклин характеризуется отрицательным градиентом температуры и скорости звука (температура и скорость звука уменьшаются с глубиной), как показано на рис. 2.8. Летом и осенью, когда приповерхностный слой воды в море нагрет, сезонный термоклин устойчив и имеет четкие границы. Зимой и весной, а также в Арктике термоклин сливается с поверхностным слоем, и выделить его порой невозможно.
Под сезонным термоклинном находится основной термоклин, который подвержен незначительным сезонным изменениям. В основном термоклине наблюдается наиболее значительное изменение температуры воды по глубине. Ниже основного термоклина до дна простирается глубоководный изотермический слой, имеющий почти постоянную температуру около 5°С. В этом слое скорость звука увеличивается с глубиной под воздействием гидростатического давления (см. рис. 2.7). Между областями отрицательного градиента скорости звука в основном термоклине и положительного градиента на больших глубинах существует слой с минимальным значением скорости звука (см. рис. 2.7).
Вследствие рефракции звук, распространяющийся на больших глубинах, отклоняется в направлении этого слоя и фиксируется в нем. В низких широтах
49
Глава 2. Основы гидроакустики и теории сонаров
Рис. 2.8. Пространственно-временные вариации скорости звука [Hare,2001]
минимум скорости звука наблюдается на глубине примерно 1200 м. В высоких широтах этот минимум смещается к поверхности моря, глубоководный изотермический слой распространяется в сторону малых глубин почти до поверхности моря, а основной и сезонный термоклины постепенно исчезают.
Положение и толщина указанных слоев меняется в зависимости от географической широты района, сезона, времени суток и метеорологических условий.
В мелководных прибрежных районах и на континентальном шельфе профиль ВРСЗ утрачивает регулярность, присущую глубоководным районам, и предсказать его форму становится практически невозможно. Наблюдаются значительные вариации ВРСЗ (см. рис. 2.8) в зависимости от характера прогрева верхнего слоя водной массы, солености и течений, особенно приливо-отливных. Профиль ВРСЗ в мелком море усложняется за счет изменений солености, вызванных наличием источника пресной воды (например, устье реки), а также вследствие многочисленных градиентных слоев с малой пространственной и временной стабильностью.
В таких условиях использование многолучевого эхолота становится затруднительным, ввиду того, что многочисленные остановки, связанные с необходимостью выполнять станции измерений скорости звука или гидрологические зондирования, резко сокращают производительность съемки.
В связи с этим недавно была предложена новая технология зондирования водной среды на ходу судна, реализованная канадской фирмой Brooke Ocean Technology, которая предложила систему профилирования ВРСЗ на ходу (The Moving Vessel Profiler =MVP). Такая система, не требующая остановки судна для выполнения наблюдений ВРСЗ, состоит из специальной дистанционно управляемой
50
23. Уравнение гидролокации
Рис. 2.9 А. Система профилирования ВРСЗ на ходу и ее использование [Brooke Ocean Technology]
лебедки и подводного носителя для размещения зонда измерителя скорости звука (или гидрологического зонда).
Имеется несколько модификаций системы (см. рис. 2.9 А), позволяющих использовать ее на разных глубинах (цифра указывает предельную глубину) и при разных скоростях судна. Система полностью автономна и не требует наличия на палубе обслуживающего персонала в процессе работы. Лебедка, управляемая компьютером, обеспечивает свободное падение зонда до дна с последующей буксировкой к поверхности. Затем цикл наблюдений повторяется (см. рис. 2.9 В). Для глубины в 100 м весь цикл погружение — всплытие занимает 4 мин. Данные передаются по кабелю в бортовой компьютер, который должен быть сопряжен с эхолотом и обеспечивает визуализацию перемещения зонда. Самая мелководная и портативная модель (MVP-30) обеспечивает зондирование ВРСЗ до глу-
Рис. 2.9 В. Система профилирования ВРСЗ на ходу и ее использование [Brooke Ocean Technology]
51
Глава 2. Основы гидроакустики и теории сонаров
бины 30 м на скорости 12 узл. Для обеспечения больших глубин зондирования судно должно замедлить ход.
Программное обеспечение системы позволяет избежать соприкосновений зонда с грунтом и выхода из воды в процессе буксировки. Дополнительным преимуществом такой системы является возможность размещения на подводном носителе других датчиков, используемых для исследования водной среды.
Систему профилирования ВРСЗ на ходу рекомендуется применять при выполнении площадной съемки в районах с наиболее сложным гидрологическим режимом, к которым относятся: акватории арктического шельфа, прибрежные устьевые участки, а также прибрежные районы со значительными колебаниями уровня моря и приливо-отливными течениями.
2.3.9. Распространение звука в воде
В этом разделе рассматривается распространение звука, а именно затухание (attenuation), отражение (reflection) и рефракция (refraction).
2.3.9.1. Затухание и поглощение
Затухание (Attenuation) заключается в ослаблении энергии распространяющейся звуковой волны в результате поглощения (absorption), сферического расширения (spherical spreading) и рассеяния (scattering) частицами, находящимися в водной толще.
Затухание есть результат распада (dissociation) и соединения (association) молекул в водной толще. Сульфат магния (MgSO4) является основным источником поглощения звуковых волн в соленой морской воде. Скорость поглощения (rate of absorption) зависит от физических и химических свойств морской воды и акустической частоты излучаемого сигнала [53]. На рис. 2.10 можно проследить, что начиная с частоты 100 кГц коэффициент поглощения (Absorption coefficient) увеличивается с ростом температуры, таким образом, следует ожидать, что дальность действия сонара (эхолота) будет изменяться в зависимости от температуры воды.
Сферическое расширение зависит от геометрии, поскольку внутри пространственного угла акустическая энергия распространяется на все большую поверхность по мере увеличения расстояния от ее источника. Как поглощение, так и сферическое расширение учитываются в уравнении гидролокации (см. п. 2.2). Вместе с тем, потери от рассеяния зависят от фактического наличия частиц или тел в водной толще. Рассеяние происходит, главным образом, в результате присутствия в воде морских организмов, и здесь основным источником является так называемый глубоководный рассеивающий слой (deep scattering layer =DSL), состоящий из планктона, глубина миграции которого может меняться в течение суток.
График на рис. 2.10 показывает, что сонары с высокой частотой акустического сигнала лучше работают в холодной пресной воде.
Увеличение глубины (Z) вносит меньший вклад, чем соленость (S) и температура (Т). При этом температура является доминирующим фактором, от которого зависит коэффициент поглощения. При увеличении глубины (наклонной дальности) потери на поглощение увеличиваются.
52
2.3. Уравнение гидролокации
Частота (кГц)
—Z200TWS30 -«-Z200 T20S30 Z 200 T20S35
—М—Z 200 Т 30 S 35 -M-Z500 T20S30 -t-Z1000 T20S30
Рис. 2.10. Графики зависимости коэффициент поглощения от частоты для разных величин глубины (Z), солености(S) и температуры (Т) [Hare,2001]
Средняя величина коэффициента поглощения водной толщи является важным параметром, который необходим для практических целей, поскольку используется в программном обеспечении многолучевых эхолотов для расчета коэффициент усиления приемного устройства. Этот параметр также используется для правильной оценки величины обратного рассеяния дна {seafloor backscat-tering strength), когда в многолучевом эхолоте реализована опция гидролокатора бокового обзора, позволяющая получать цифровые растровые изображения дна (sonar imagery). Правильная оценка коэффициента поглощения становится особенно важной, когда осуществляется сравнение цифровых изображений, полученных от разных датчиков информации или различных участков дна. Коэффициент поглощения может быть рассчитан по системе формул (2.31) [Simrad, 1998]. Исходные параметры в формулах (2.31) выражены в единицах, представленных в таблице 2.4.
Таблице 2.4
Наименование параметра Единицы измерения
а коэффициент поглощения ДБ/км
с скорость звука в воде м/с
Т температура °C
Z глубина км
S соленость ppt
f частота кГц
pH Водородный показатель воды (в пределах: 7,6-8,2)
53
Глава 2. Основы гидроакустики и теории сонаров
лД-С22/2+4^з/2. (2.31)
J +J1 J +J 2
_8,86-10(0,78рЯ"5) _ 21,445(1+0,025 Г).
с с
Л3 = 4,937- 10"4-7X2,59- 10-5-Г(9,11- 10"7-1,5• 10~8 *Т)), если 7<20°С;
А3 = 3,964 • IO’4 - Г( 1,146• 10-5-Г(1,45 10~7-6,5 • 1О~10 Г)), если 7>20°С;
Р2 = 1-Z(0,137-0,0062 Z); Р3= 1-7(0,0383-4,9- Ю’4/),
Г» iaao 1
f - 2 8 f х f - 8-17x10 2,b'l35 '° h 1 + 0,00180 x(5-35)
2.3.9.2. Рефракция (преломление) и отражение акустических волн
Рефракция (Refraction) представляет собой процесс изменения направления распространения акустической волны в результате пересечения границ с разными значениями скорости распространения звука в водной среде. Рефракция акустического луча в слоисто-неоднородной среде с переменной скоростью звука подчиняется закону Снеллиуса, который устанавливает, что в среде, состоящей из слоев с постоянными значениями скорости звука, углы скольжения 0р 02, ... лучей на границах слоев со значениями q, с2,... в этих слоях подчиняются следующим соотношениям для любого луча [34]:
COS0< COS0n COS0o zo
----L =----2- =---= const. (2.32)
Cj с2 с3
В выражении (2.32) константа равна величине, обратной скорости звука в слое, где луч становится горизонтальным, т. е. при cos 0=1. Закон Снеллиуса позволяет проследить траекторию луча, последовательно проходящего слои, выделенные на графике ВРСЗ, и используется в алгоритме «трассирования лучей», на основе которого созданы программы расчета глубин и их координат, получаемых по данным многолучевых эхолотов (см. п. 5.2.4).
На рис. 2.11. представлены границы в водной среде между областями с различной скоростью звука с1 и с2.
Если q больше чем с2, то направление распространения акустической волны изменится, и после прохождения границы угол 02 станет больше исходного угла падения луча {angle of incident) 0r
В противоположном случае (q < q) направление распространения акустической волны также изменится, но после прохождения границы угол 02 станет меньше исходного угла скольжения луча 0Г
В случае нормального угла падения (0t = 90°) рефракции акустической волны не происходит.
54
2.3. Уравнение гидролокации
Рис. 2.11. Закон рефракции акустических лучей
При нормальном угле падения лучей и ровном дне коэффициент рефракции {reflection coefficient) для давления X может быть получен в виде отношения амплитуд давления преломленной PR и падающей волн Рр при этом имеем:
S = ^.= P2C2-P1C1) (2.33)
Д р2 С2 + Р1С1
где р — плотность воды, с — скорость звука в воде; рс — удельное акустическое сопротивление.
Для обычных условий отношение интенсивностей излученного и преломленного акустических сигналов зависит в основном от следующих факторов:
• различий в удельных акустических сопротивлениях сред {acoustic impedances);
• неровности морского дна {Seafloor roughness);
• частоты акустического сигнала.
В случае, когда зависимость скорости звука от глубины можно выразить математически, закон Снеллиуса позволяет аналитически определить траектории акустических лучей. Профиль ВРСЗ нельзя описать простой аналитической Функцией, поэтому построение траекторий лучей, называемых лучевыми схемами, выполняется с помощью компьютеров. Характерные модели ВРСЗ и соответствующие им лучевые схемы представлены на рис. 2.12.
55
Глава 2. Основы гидроакустики и теории сонаров
I.Скорость звука убывает с глубиной (отрицательная рефракция).
II.Скорость звука растет с глубиной (положительная рефракция).
Ш.Скорость звука постоянна в верхнем слое и далее убывает с глубиной.
IV.Скорость звука растет с глубиной и убывает в нижнем слое.
V. Изменение скорости звука, при котором на некоторой глубине отмечается минимум (подводный звуковой канал).
Рис. 2.12. Основные модели распространения звука в воде и характерные для них лучевые схемы
2.4. Акустические параметры
Характеристики эхолота определяются параметрами его преобразователя (transducer), включающими: направленность (directivity), величину угла луча (beam width), возможность управления положением главного лепестка диаграммы направленности (beam steering), уровнем боковых лепестков (side lobes level). В этом подразделе будут проанализированы каждый из параметров преобразователя.
2.4.1 Частота
Частота акустического сигнала эхолота является параметром, определяющим дальность действия (range) эхолота и возможность проникновения звуковой волны в донный грунт (sediments). Затухание акустического сигнала в воде также пропорционально частоте. Чем выше частота, тем больше затухание и, следовательно, ниже дальность действия (глубина) и меньше величина проникновения в донный грунт. Величина угла луча зависит от акустической длины волны (wave length) и размеров преобразователя. Для получения одной и той же величины угла луча при низкой частоте потребуется преобразователь с большими линейными размерами.
Частоты эхолотов, используемых для батиметрической съемки, находятся । в следующих пределах:
56
2.4. Акустические параметры
• для глубин менее 100 м — частоты выше 200 кГц;
• для глубин менее 1500 м — частоты от 50 до 200 кГц;
• для глубин больше 1500 м — частоты от 12 до 50 кГц.
Для грунтовых эхолотов —профилографов {sediment echo sounders) частота обычно ниже 8 кГц.
2.4.2 Ширина полосы
Рассматривая величину /0 в качестве частоты, на которой излучается максимальная мощность т. е. резонансная частота (resonance frequency), а частоты fx и /2 — как соответствующие половине мощности, ширина полосы представляет собой частотный интервал между указанными частотами, показанными на рис. 2.13 [53], т. е. имеем: W=/2-/г
Усиление
Частота
Рис. 2.13. Ширина полосы преобразователя [IH0, М-13, 2005]
Величина добротности преобразователя (transducer's quality factor) Q рассчитывается по формуле:
Q=f0/W. (2.34)
Вышеуказанное соотношение показывает, что Q и W являются взаимообрат-ными величинами.
Следовательно, чтобы оптимизировать излучаемую мощность, преобразователь должен излучать частоту, близкую к резонансной, и, таким образом, иметь малую ширину полосы, т. е. высокую добротность. При приеме необходимо иметь хорошее распознавание (избирательность) эхосигналов от других сигналов. Ширина полосы должна удовлетворять условию:
W> 1/т, где т — длительность акустического импульса.
Оптимальным решением является наличие излучающего преобразователя с высокой добротностью Q и принимающего преобразователя, работающего на ТОЙ же резонансной частоте, но с низкой добротностью.
57
Глава 2. Основы гидроакустики и теории сонаров
2.4.3. Длительность импульса
Длительность импульса (pulse length) определяет величину энергии, излученной в воду. При одной и той же мощности, чем длиннее импульс, тем больше энергии будет закачено в воду, и получение тем большей дальности (глубины) можно ожидать от эхолота.
Для использования преимуществ резонансной частоты преобразователя, длительность импульса должна быть по крайней мере равна половине периода собственных колебаний. Недостатком длинных импульсов является уменьшение вертикальной разрешающей способности (vertical resolution) при распознавании объектов на дне, как показано на рис. 2.14.
Преобразователь
Эхограмма
время
Эхо сигнал от слоев воды
глубина
ДНО
короткий импульс (т’) длинный импульс (т)
Рис. 2.14. Разрешающая способность по глубине в функции длины импульса [IH0, М-13, 2005]
2.5. Однолучевой эхолот — простой сонар
Ранее всего созданным и до сих пор наиболее широко используемым эхолокационным устройством является однолучевой эхолот (single-beam depth sounders). Назначением такого инструмента являются дискретные измерения глубин моря в различных точках. Записанные глубины могут быть объединены с их плановыми координатами для построения трехмерной карты морского дна. Обычно однолучевые эхолоты используются для измерения глубин с движущихся судов. Несмотря на то, что однолучевые эхолоты имеют много ограничений, рассматриваемых ниже, полезно понять принцип их работы, как основу для дальнейшего понимания принципов работы многолучевых эхолотов.
58
2.5. Однолучевой эхолот — простой сонар
Однолучевой эхолот состоит из четырех базовых компонентов: передатчик (Transmitter), преобразователь (Transducer), приемник (Receiver), система управления и отображения (Control and Display system). Для того, чтобы собрать серию глубин на движущемся судне, работа однолучевого эхолота осуществляется в непрерывном цикле, называемом циклом посылок (ping cycle).
Циклом посылок руководит система управления и отображения. Внутри одного цикла система управления и отображения дает команду передатчику генерировать акустический импульс (или посылку). Передатчик генерирует колебательный электрический сигнал с частотными характеристиками, которые могут быть однозначно определены. Преобразователь преобразует электрическую энергию в акустическую, т. е. излучает акустические волны. В этом качестве он выступает как излучатель. Колебательные электрические сигналы преобразуются в механические колебания, которые излучаются в воду, как колебания давления или акустическая волна. При возвращении эхосигнала от дна, звуковой импульс принимается и преобразуется обратно в электрический сигнал с помощью преобразователя, выступающего уже в роли гидрофона. Преобразователь передает все принятые электрические сигналы в приемник, где они усиливаются и проходят через систему детектирующих схем с целью определения момента прихода эхосигнала. Время между моментами излучения и прихода сигналов используется в приемнике для расчета дистанции или глубины. Эта глубина сообщается системе управления, отображения и записывается. После этого система управления запускает следующую посылку. Величина времени, требуемая между передачей посылок, называется время посылки (ping time) или интервал посылки (ping interval). Используя непрерывный цикл посылок, выполняются измерения и регистрация серий глубин.
2.5.1. Ограничения однолучевого эхолота
Хотя однолучевой эхолот недорог в изготовлении и прост в использовании, он все же имеет существенные ограничения, которые делают его мало подходящим инструментом для высокопроизводительной батиметрической съемки. Эти ограничения и явились главной причиной для разработки более сложных и дорогих многолучевых эхолотов. Задачей высокоточной батиметрической съемки является выполнение точных измерений глубин во многих соседних точках морского дна для того, чтобы создать точную картину подводного рельефа. Для эффективного решения этой задачи требуются два условия: точно измеренные глубины должны иметь точно определенные плановые координаты (широту и долготу); необходимо выполнять большое количество таких измерений в единицу времени.
Основной функцией эхолота является точное измерение глубины. При батиметрической съемке сонар является наиболее полезным инструментом, если он измеряет глубину в точно известной точке морского дна, идеально прямо под судном, которое выполняет батиметрическую съемку. Используя описанный выше однолучевой эхолот, следует предполагать, что измеренная глубина находится прямо под судном, а дно идеально плоское. Если дно расчлененное, то можно легко представить ситуацию, когда первый эхосигнал может прийти от
59
Глава 2. Основы гидроакустики и теории сонаров
точки, не находящейся непосредственно под судном. На рис. 2.15 представлен случай, когда судно с эхолотом находится над расчлененным дном, где возможна ситуация, при которой донный объект, находящийся позади судна, ближе к преобразователю эхолота, чем объекты дна непосредственно под ним. Посылка однолучевого эхолота, распространяющаяся от преобразователя сферически одинаково во всех направлениях, вначале соприкасается с дном в этой точке.
У оператора эхолота нет возможности узнать, что эхосигнал пришел не от точки дна непосредственно под преобразователем. Такая ситуация приводит к неточному определению глубины и ее планового положения. Однолучевой эхолот может быть сконструирован таким образом, чтобы до некоторой степени решить данную проблему. Это осуществляется путем придания направленности излучаемой посылке. Действенно, основная часть акустической энергии посылки фокусируется в пределах узкого пространственного угла или луча (beam). Посылка, таким образом, освещает (ensonify) только небольшой участок дна, называемый пятном облучения, и первый возвращенный эхосигнал можно предполагать пришедшим именно от этого участка. На рис. 2.16 показано, как узколучевой (narrow-beam) эхолот может быть использован для получения более точных измерений глубин на расчлененном рельефе.
Вместе с тем, узкий луч не может полностью решить проблемы по двум причинам. Первая из них заключается в том, что поскольку преобразователь установлен на корпусе судна, которое подвержено воздействию волнения, то узкий
60
2.5. Однолучевой эхолот — простой сонар
Рис. 2.16. Использование узко лучевого эхолота на расчлененном рельефе
луч будет освещать разрозненные участки дна, как показано на рис. 2.17. Такая ситуация возникает при нестабилизированном (unstabilized) луче. Серьезность этой проблемы зависит от сложности погодных условий и может быть весьма существенной. Величины крена и дифферента в десятки градусов при умеренном волнении являются обычными в открытом море. Во-вторых, узкая направленность луча эхолота приводит к необходимости увеличения габаритов излучающей плоскости антенны. Так, круговой (circular) преобразователь для частоты 12 кГц с шириной луча 30° будет иметь диаметр 25 см, но чтобы обеспечить луч с углом 2,5°, уже потребуется антенна с диаметром 295 см. Стоимость изготовления таких больших преобразователей велика.
Размер пространственного угла луча определяет, насколько точно узколучевой эхолот может определять плановое положение глубины на дне. Наблюдатель, регистрирующий эхосигнал такого эхолота, может только определить, что дно находится где-то в пределах пространственного угла на рассчитанной дальности. Для простого сонара нет способа получения более точной информации. Величина пространственного угла луча определяет разрешение (resolution) такого сонара. Термин разрешение может относиться к самому углу или к размеру пятна на Дне, которое подвергается акустическому облучению данным лучом. Заметим, нто в последнем случае разрешение не является фиксированной величиной, а зависит от глубины. Чем глубже распространяется посылка, тем больше площадь, которую захватывает пространственный угол (см. рис. 2.18). Вообще площадь
61
Глава 2. Основы гидроакустики и теории сонаров
Рис. 2.17. Эффект воздействия перемещения судна на нестабилизированный луч эхолота
Рис. 2.18. Зависимость размера пятна облучения от глубины
62
2.5. Однолучевой эхолот — простой сонар
акустически освещенного дна пропорциональна величине пространственного угла и квадрату глубины.
Чтобы быть экономически эффективной, батиметрическая съемка должна выполняться в кратчайшее время. Для правильного выполнения съемки необходимо определенное судно, а эксплуатация суда стоит очень дорого. Это в особой степени относится к съемкам в глубоководных районах, когда судно должно быть достаточно большим, чтобы плавать в самых плохих погодных условиях и иметь постоянный состав команды для его эксплуатации в течение длительного времени. Однолучевой эхолот является неэффективным инструментом с точки зрения затрат времени, потому что он одновременно измеряет только одну глубину. Только площадь дна, освещаемая лучом сонара, может считаться отснятой для картографирования по единичной посылке. В цикле посылки должен быть получен эхосигнал до того, как может быть излучена следующая посылка. В действительности это выводит величину интервала между посылками из-под контроля оператора — она становится зависимой от глубины моря и скорости перемещения сонара. Если сонар имеет узкий луч, это может обеспечить высокую точность получения планового положения измеренной глубины, но такая съемка потребует дополнительных измерений крена и дифферента, а также много времени. Процесс может быть ускорен путем использования сонара с лучом большего размера, который будет покрывать большую площадь дна при каждой посылке, но это снизит разрешение в определении дна.
2.5.2. Многолучевая батиметрия
Многолучевой эхолот (МЛЭ) является инструментом, с помощью которого возможно получить более одного значения глубины и ее планового положения на дне за одну посылку и с разрешением, большим, чем у однолучевого эхолота. В действительности работа узколучевого эхолота выполняется одновременно в нескольких различных точках морского дна. Эти точки расположены таким образом, что картографируют непрерывную площадь дна — обычно полосу с точками, расположенными в направлении, перпендикулярном направлению движения судна. Эта площадь называется полосой обзора {swath). Размер полосы обзора в направлении поперек направления движения (acrosstrack, athwartship direction) называется шириной полосы обзора.
Ширина полосы обзора может задаваться либо фиксированным углом обзора (угол между крайними лучами), либо физической шириной, которая является переменной величиной, изменяясь с глубиной. Схематическое изображение полосы обзора МЛЭ представлено на рис. 2.19.
Такой подход обладает огромными преимуществами. МЛЭ способен картографировать всю полосу обзора практически за то время, которое требуется, чтобы получить эхосигнал от луча с самым большим углом. Для МЛЭ с углом обзора в 120° это время составляет удвоенную величину по сравнению с циклом посылки однолучевого эхолота, но такая система обеспечивает получение более 100 глубин по сравнению с единственной глубиной. Ввиду того, что такие системы значительно сложнее, их стоимость во много раз выше по сравнению с однолучевыми сонарами. Вместе с тем, эти затраты в значительной мере ком-
63
Глава 2. Основы гидроакустики и теории сонаров
Рис. 2.19. Полоса обзора многолучевого сонара (фирма «RESON»)
пенсируются путем сокращения судового времени. Важнейшим элементом любого гидрографического сонара является преобразователь. Этот компонент со-нарной системы особенно важен в МЛЭ и гидролокаторах. В следующей главе будут рассмотрены вопросы создания преобразователей, их классификация и характеристики.
Глава 3.
АКУСТИЧЕСКИЕ ПРЕОБРАЗОВАТЕЛИ
И ИХ РЕАЛИЗАЦИИ ДЛЯ РАЗЛИЧНЫХ ТИПОВ СОНАРОВ
Акустические преобразователи (transducers) являются одними из важнейших компонентов сонаров, и характеристики преобразования определяют некоторые из их рабочих возможностей. По этой причине особенно важно знать принципы работы преобразователей, их характеристики и такие связанные с ними вопросы, как угловая ширина луча (beam width), направленность (directivity), управление положением главного лепестка характеристики направленности, особенности установки преобразователей на судне-носителе и создаваемое ими покрытие дна акустической энергией.
Акустические преобразователи (далее преобразователи) являются устройствами для передачи и приема акустических импульсов (acousticpulses). Их работа заключается в преобразовании электрической энергии в механическую, т. е. преобразователи трансформируют электрические импульсы от генератора сигналов (signal generator) в продольные колебания, которые распространяются в среде как волны колебания давления или акустические волны. Во время приема, наоборот, волны изменяющегося давления преобразуются в электрические сигналы [34].
В этой главе рассматривается классификация преобразователей с учетом принципов работы, формируемых лучей, ширины лучей и установки преобразователей. В конце главы дается оценка акустического освещения (ensonification).
Для приема звука, распространяющегося под водой, и локализации его источника нужны мощные вспомогательные технические средства. Чтобы наблюдатель мог убедиться в наличии подводной звуковой волны, необходима гидроакустическая аппаратура, состоящая из ряда устройств различной степени сложности. Преобразователь, с помощью которого звук превращается в электрический сигнал, называется гидрофоном (hydrophon). Превращение электрической энергии в звуковую осуществляется в преобразователях, называемых излучателями (projectors). В некоторых гидролокационных системах для излучения и приема звука используется один и тот же преобразователь, в других (например, многолучевых эхолотах) — излучатели и гидрофоны конструктивно разделены.
Преобразование одного из видов энергии в другой оказывается возможным благодаря наличию у ряда материалов особых свойств — явлению пьезоэлектричества, которое иногда называют «магнитострикцией». Такими свойствами обладают некоторые кристаллические вещества, называемые пьезоэлектрическими (например, кварц или дигидрофосфат аммония), и электрострикционные материалы — поликристаллическая керамика, которая должна быть специальным образом поляризована в сильном электростатическом поле. Примерами электро-стрикционных материалов могут служить титанит бария и цирконат-титанит свинца. Возможность использования этих свойств вещества для приема и генерации акустических колебаний под водой основывается на искусстве проектирования преобразователей — самостоятельной специализированной области науки
65
Глава 3. Акустические преобразователи и их реализации для различных типов сонаров
и техники. При этом в современных условиях практически повсеместно используются пьезоэлектрические преобразователи. Рост популярности керамических материалов в гидроакустике связан с тем, что им можно придать любую заданную форму, что экономически выгодно при практической реализации.
Гидрофоны на основе единичных пьезоэлектрических преобразователей используются достаточно редко. Практически во всех областях гидроакустики применение гидрофонов требует построения приемных гидроакустических антенн, создаваемых из некоторого количества разнесенных в пространстве элементов-гидрофонов (transducer array elements'). Такие антенны, называемые иногда «антенные решетки», обладают рядом преимуществ по сравнению с единичными гидрофонами. Во-первых, антенные решетки имеют гораздо большую чувствительность, так как несколько элементов создают более высокое напряжение (при последовательном соединении) или более сильный ток (при параллельном соединении), чем единичный элемент, на который воздействует такое же звуковое поле. Во-вторых, антенная решетка обладает направленными свойствами, которые позволяют ей избирательно реагировать на звук, приходящий с различных направлений. В третьих, антенная решетка обеспечивает улучшенное соотношение сигнал/помеха по сравнению с отдельным гидрофоном, так как с ее помощью достигается подавление изотропного или квазиизотропного шума по отношению к сигналу, приходящему с того направления, в котором ориентированна антенна. Этими преимуществами и продиктована необходимость использования антенных решеток в большинстве применений гидроакустики. Причем, первое и второе из трех упомянутых преимуществ присущи излучающим антеннам в той же степени, как и приемным.
3.1. Классификация преобразователей с точки зрения принципа действия
С точки зрения принципа действия преобразователи подразделяются на магнитострикционные (magnetostrictive), пьезоэлектрические (piezoelectric) и электро-стрикционные (electrostrictive) [53].
3.1.1. Магнитострикционные преобразователи
Магнитострикционные преобразователи имеют металлические оси с никелевой катушкой. Постоянный ток (direct current), пропускаемый через ось, создает магнитное поле в катушке, которое приводит к сжатию и, следовательно, к уменьшению ее диаметра. Когда электрический ток через ось отключается, то катушка приходит к своему первоначальному состоянию. Приложение сигнала переменного тока (alternating current) приводит к сжатиям и расширениям в соответствии с характеристиками приложенного электрического сигнала. Амплитуда создаваемых колебаний будет максимальной, если частота равна собственной частоте материала преобразователя или резонансной частоте (frequency of resonance). Преобразователи этого типа, вместе с тем, менее эффективны, чем те, которые используют пьезоэлектрический эффект.
66
3.1. Классификация преобразователей с точки зрения принципа действия
3.1.2. Пьезоэлектрические преобразователи
Пьезоэлектрические преобразователи изготовлены из двух пластин с проложенным между ними слоем кристаллов кварца. Приложение электрического потенциала к пластинам приводит к возникновению колебаний в слое кварца, именуемое «пьезоэлектрическим эффектом». Изменение электрического потенциала вызывает колебания кварцевой пластины и, следовательно, колебания всего устройства. С другой стороны, механическое сжатие кварца создает потенциал между противоположными сторонами кристаллического слоя. Амплитуда колебаний будет максимальной, если частота электрического потенциала соответствует собственной частоте кварца.
3.1.3. Электрострикционные преобразователи
Электрострикционные преобразователи основаны на том же принципе, что и пьезоэлектрические. Однако используемый материал, обычно поликристалли-ческая керамика (polycrystalline ceramics) или определенные виды синтетических полимеров (synthetic polymers), не имеет природных пьезоэлектрических характеристик и, таким образом, в процессе изготовления его необходимо поляризовать. В настоящее время электрострикционные преобразователи используются практически повсеместно. Такие преобразователи являются легкими по весу, реверсивными и могут быть с успехом использованы в антенных решетках (arrays). Такие антенные решетки с наборами небольших элементов, будучи правильно сконструированы в соответствии с теоремой умножения (см. уравнение 3.6), обеспечивают характеристики, аналогичные сплошному преобразователю.
3.2. Характеристики преобразователей
3.2.1. Характеристики направленности
Чувствительность антенны изменяется в зависимости от направления относительно ее осей. Это свойство антенны, называемое направленностью, является в высшей степени полезным, поскольку оно дает возможность определить направление прихода сигнала и осуществить разрешение сигналов, приходящих с соседних направлений. Одновременно направленность приводит к снижению (по отношению к сигналу) помех, приходящих с других направлений. В антеннах излучающих систем, к которым относятся гидролокаторы и эхолоты (в том числе и многолучевые эхолоты), направленность служит для концентрации излучаемой звуковой энергии в нужном направлении.
Направленность антенн является следствием того обстоятельства, что синусоидальные сигналы поступают с какого-то одного направления на все элементы антенны синфазно, тогда как шумовая помеха приходит к различным элементам не в фазе. Аналогичным образом при поступлении широкополосных сигналов с этого направления увеличивается степень корреляции сигналов на парах элементов антенной решетки, тогда как для шумовой помехи такая тенденция отсутствует. Направление, в котором наблюдается максимальное совпадение фаз
67
Глава 3. Акустические преобразователи и их реализации для различных типов сонаров
или максимальная корреляция, называется акустической осью антенны и соответствует направлению максимальной чувствительности.
Закон изменения чувствительности антенны в зависимости от направления называется характеристикой направленности антенны. Во многих антеннах простейших форм элементы размещаются вдоль линии или располагаются по плоскости. Акустическая ось такой линейной или плоской антенны лежит под прямым углом к этой линии или плоскости (если антенна не компенсируется). Характеристику направленности линейной антенны можно графически представить в виде фигуры, имеющей форму вытянутой капли (рис. 3.1) с дополнительными присоединенными к ней «капельками», которые образуются боковыми лепестками характеристики направленности (sidelabes) [53]. Трехмерная характеристика направленности круглой плоской антенны имеет форму проекторного луча, обладающего симметрией вращения относительно нормали к плоскости и окруженного боковыми лепестками (см. рис. 3.3). Характеристики направленности, так же как и чувствительность, обычно выражаются в децибелах.
Большое значение имеют линейные антенны с равноотстоящими элементами (эквидистантные линейные решетки). Управлять положением характеристики направленности можно, вводя соответствующие фазовые и временные задержки в выходные сигналы различных элементов антенны с целью поворота главного максимума характеристики направленности в заданном направлении.
Рис. 3.1. Угловая ширина луча, определенная на уровне -3dB
68
3.2. Характеристики преобразователей
При проведении этой операции ширина диаграммы направленности и очертания ее боковых лепестков изменяются. Формирование лучей приемных антенн многолучевого эхолота будет более подробно рассмотрено в разделе 3.3.2.
В гидрографической практике большое значение имеют также непрерывные линейные и круговые антенны, у которых элементы антенны располагаются настолько близко друг к другу, что их можно считать смыкающимися. Антенна тем самым превращается в сплошной линейный преобразователь, а для нахождения его характеристики направленности используются простые расчетные и графические методы.
Аргументами для расчета угловой ширины основного лепестка диаграммы направленности является длина волны акустического сигнала X (X=c/f) и линейные размеры антенны. Формулы для расчета угловой ширины основного лепестка диаграммы направленности приведены в п. 3.2.2. Следует помнить, что в отечественной практике и технической литературе угловая ширина характеристики направленности антенны считается равной угловой ширине луча (на уровне — 3 дБ), в то время как в иностранной считается, что угловая ширина луча равна удвоенной угловой ширине характеристики направленности.
Для однолучевых и многолучевых эхолотов угловая ширина диаграммы направленности (угловая ширина луча) определяет размеры так называемого «пятна акустической освещенности» на морском дне, к центру которого относят плановые координаты положения измеренной глубины.
3.2.2. Угловая ширина луча (Beam width)
Амплитуда давления, создаваемая преобразователем при записи в полярных координатах, может быть представлена в виде произведения [53]:
P(r,b) = Pax(r)h(5), (3.1)
где 8 —угол, отсчитываемый от оси акустического луча —линии максимальной амплитуды давления и интенсивности, г — расстояние от определенной точки до преобразователя, P^fr) — амплитуда давления на оси акустического луча и /г(8) — показатель направленности (directionalfactor), который соответствует относительной силе сигнала. Показатель направленности нормализуется при 8=0°, т. е. /г(0) = 1, тогда имеем: Р(г, 0) =Раг(г)-
Направленность преобразователя характеризуется диаграммой направленности (beam pattern diagram), которая может быть представлена в виде: 5(8) = /г2(8), или в логарифмической записи:
6(5) = 101g (В(5)) = 201g (6(5)).
Преобразователь может быть охарактеризован также угловой шириной луча Ь^, эта характеристика обычно задается для угла на уровне -3 dB, иными словами угловая апертура, соответствующая половине мощности, приводит к лучу с шириной: Z^=28-3dB, см. рис. 3.1.
Измерение глубины производится с любого направления внутри пространственного конуса с данной шириной луча. Угловая ширина луча зависит от физических размеров преобразователя и частоты акустического импульса.
69
Глава 3. Акустические преобразователи и их реализации для различных типов сонаров
Например, для кругового плоского преобразователя {circular piston transducer) с диаметром D градусная угловая ширина луча на уровне -3 dB при длине волны X составляет:
^ = 60Х/Д (3.2)
а для сплошного линейного прямоугольного плоского преобразователя (rectangular face transducer) длиной L и шириной W, градусная угловая ширина луча на уровне — 3 dB при длине волны X может быть аппроксимирована в двух измерениях соответственно выражениями вида:
= 50X/Z и bw= 50Х/1Г. (3.3)
Для линейной антенной решетки, включающей N всенаправленных (ненаправленных) элементов с апертурой (расстоянием между элементами) d, суммарный сигнал, создаваемый элементами, имеет диаграмму (характеристику) направленности излучения, показанную на рис. 3.2 и 3.3.
Направление акустической оси луча перпендикулярно излучающей плоскости решетки преобразователей (face of the transducer array). При этом угловая ширина луча (град) на уровне -3 dB для такой решетки может быть аппроксимирована формулой:
^ = 50X/(^-l)J), (3.4)
где, как и ранее, X — длина волны акустического сигнала.
Показатель направленности такой решетки преобразователей имеет вид [53]:
sinf Ntc ^sin8 < X
Nsin тс —sin8 I X
(3-5)
Рис. 3.2. Показатель направленности [IHO М-13, 2005]
70
3.2. Характеристики преобразователей
Рис. 3.3. Диаграмма излучения для луча, перпендикулярного плоскости преобразователя [IH0 М-13, 2005]
Теорема умножения — это акустический закон, который определяет показатель направленности линейной решетки из N элементов — преобразователей в виде произведения — показателей направленности отдельных преобразователей [Лв(8)]} составляющих решетку, т. е. имеем:
й(8) = ^(8)^(8). (3.6)
При этом амплитуда давления, создаваемая такой решеткой на расстоянии г, может быть представлена в виде:
Р(г, 8, ф) = Р^гЩЬ, Mhamy(b, ф). (3.7)
Для линейного элемента показатель направленности (й//и) может быть представлен в виде:
. ( L . Л sm л —smo
М5) = —V----------- (38)
л — sin 5
X
Характеристика направленности для антенной решетки является действенной только в так называемой «дальнем поле» (Jarfield), т. е. в зоне, где две акустические волны, создаваемые центральным и крайним элементом одной и той же антенной решетки, имеют фазовые различия менее 180°. Данное условие может быть записано в виде:
71
Глава 3. Акустические преобразователи и их реализации для различных типов сонаров
k^R2 + (L/2)2 -kR<n, (3. 9)
где k — представляет собой номер волны.
Например, для линейной решетки преобразователей с длинной Z = 0,5 м и частотой 100 кГц дальнее поле начинается с расстояния более 4 м. Для эхолотов величина дальнего поля определяет минимально возможные измеряемые глубины. В ближнем поле процесс интерференции лучей формирует более сложное представление акустического давления.
Ось луча преобразователя или решетка преобразователей обычно перпендикулярна их плоскостям. Для того, чтобы сформировать луч, который бы не был нормален плоскости решетки преобразователей, необходимо реализовать так называемое угловое смещение луча. Этот процесс достигается с помощью технологии смещения углового положения луча (beam steering).
В антенной решетке с N ненаправленными элементами, имеющими апертуру d, может быть обеспечено угловое смещение луча путем введения фазовой или временной задержки (phase, time delay) в каждый из элементов. При этом соответствующий показатель направленности предстанет в виде [53] (см. рис. 3.4):
^(8) =
(3.10)
Nsin
Показ и _ ;атель направлен ности
1
и. У АО —
О.О А *7 _ j
0.7 I
О.о A g — / I
~ 0.5
0.4
0.3 Л /
0.2 Д
О.1 А _ УМ I "Г '/
О _с Ю -7 '5 -е >0 -45 -г Ю -15 С yroj ) 15 30 45 60 75 9 I (°) 0
Рис. 3.4. Показатель направленности для луча, направленного под углом 8ах=30° [IH0 М-13, 2005]
72
3.2. Характеристики преобразователей
Рис. 3.5. Объемная характеристика направленности луча, направленного под углом 8ах =30° [IH0 М-13, 2005]
Результатом решения данного уравнения является смещение оси луча по направлению 8^г (см. рис. 3.5).
Управление лучом может выполняться путем введения временной задержки или фазового различия в элементы антенной решетки в соответствии с формулой 3.11.
Управление лучами имеет две цели: стабилизацию лучей и формирование лучей при приеме.
Для стабилизации луча необходимо измерить угол, относительно нормали к плоскости решетки, при этом временная задержка может быть рассчитана по формуле:
п d
&„ =—sinS^, (3.11)
С где с — скорость звука у приемной антенной решетки многолучевого эхолота.
При формировании лучей сигнал от каждого элемента антенной решетки копируется для каждого луча, а временная задержка вводится в один из элементов решетки для определенного канала (луча), при этом имеем:
п d
Д£„,=—sir^., (3.12)
С
где i — порядковый номер луча, а п — номер элемента преобразователя.
Рассматривая двухмерные элементы антенной решетки, излучающие импульсы на одной и той же частоте, но с временной задержкой, получаем луч, развернутый в таком направлении, по которому волновые фронты импульсов, излучаемых двумя элементами 1 и 2, приходят в одно и то же время, как показано на рис. 3.6.
73
Глава 3. Акустические преобразователи и их реализации для различных типов сонаров
Рис. 3.6. Иллюстрация смещения луча элементов 1 и 2 преобразователя на угол 8ах [IHO М-13, 2005]
Когда луч подвергается угловому смещению, то его ширина увеличивается пропорционально величине угла смещения (8^).
Доступная апертура уменьшается в функции l/cos8 (где 8^ — угол смещения оси луча относительно перпендикуляра к оси приемной антенны). Как следствие, ширина луча увеличивается линейно от вертикали до направлений прихода эхосигналов с направлений ±60°, как показано на рис. 3.7. Например: когда смещение оси луча, имеющего ширину 1,5°, равно 0° (8^=0), то ширина луча на приеме в вертикальном направлении останется неизменной (1,5°). При смещении оси такого луча на ±30° (8^=30°), ширина луча на приеме станет: (l/cos30°)-l,5°=l,15-1,5°=1,725°, а у луча, смещенного на ±60° (8^=60°), ширина луча на приеме уже будет: (1/cos 60°)-1,5°= 2,0 • 1,5° = 3°.
В общем случае, угловая ширина луча, обычно определяемая на уровне -3 dB, увеличивается с увеличением отклонения управляемого луча (8^.) и для приемной линейной антенной решетки с N элементами и апертурой i может быть рассчитана по формуле:
1 _ £-л_____ QXj____.
w~ (AT-OJcosS^.’
(3.13)
У многих многолучевых эхолотов ширина луча на излучении в направлении ДП (фг) и на приеме в направлении, перпендикулярном ДП (фл), одинаковы, т. е. (фг = фл); в этом случае лучи на приеме имеют коническую форму. При этом на плоском дне вертикальный луч создает пятно облучения в виде окружности, а у отклоненного (управляемого) луча пятно облучения будет иметь форму, близкую к эллипсу, что продемонстрировано на рис. 3.8.
Боковые лепестки {Side lobes) вносят нежелательный эффект, заключающийся в регистрации ошибочных эхосигналов, полученных по боковым лепесткам. Это обычное явление у многолучевых эхолотов, использующих лучи с большим
74
3.2. Характеристики преобразователей
плоская антенная решетка с углом отклонения луча 0°
плоская антенная решетка с углом отклонения луча 60°
для формирования луча на прием может быть использована полная апертура
для формирования луча на прием может быть использована
уменьшенная апертура
Рис. 3.7. Изменения ширины луча на приеме (bw) в зависимости от угла смещения (8ах)
отклонением от вертикали (large beam angles), когда ошибочное определение дна возможно по вертикальному боковому лепестку или при наличии значительных неоднородностей рельефа дна, как показано на рис. 3.9. Этот эффект проявляется в получении волнообразных изобат, которые могут быть идентифицированы по форме, напоминающей греческую букву «Г2» (омега). Подавление боковых лепестков является существенно необходимым для успешной работы многолучевого эхолота. Это достигается путем использования функции «шедирования» (shading functions), применяемой на этапе приема эхосигнала, соответствующей переменному усилению, прикладываемому к элементам преобразователя. Полагая все элементы преобразователя имеющими одинаковую амплитуду, амплитуда боковых
Рис. 3.8. Следы лучей на дне (а) линейный (Ь) гиперболический
75
Глава 3. Акустические преобразователи и их реализации для различных типов сонаров
Поперечный профиль глубин
Расчлененный рельеф.
Ложная дальность по главному лепестку луча и верная дальность по боковому лепестку
глубина
Рис. 3.9. Расчет глубин по сигналам от боковых лепестков — в обоих случаях глубины и их плановое положение являются ошибочными [IHO М-13, 2005]
Поперечный профиль глубин
Вертикальный луч
лепестков составляет приблизительно -13 dB. Технология, используемая для подавления боковых лепестков, заключается в наложении «окна», которое усиливает сигнал от различных элементов с различными коэффициентами усиления. Эти «окна» обычно симметричны относительно центра антенной решетки.
Довольно часто используется алгоритм окна Чебышева {Dolph-Chebychev). Данный алгоритм имеет преимущество в части оптимизации уровня боковых лепестков для лучей с определенной угловой шириной, кроме того, это создает одинаковый уровень амплитуд у всех боковых лепестков. Недостатком применения окон является некоторое уменьшение направленности.
Более подробная информация о формировании лучей многолучевого эхолота приводится в п. 3.3.2.
3.3. Классификация сонаров сточки зрения формирования лучей
Сонары (эхолоты) можно подразделить на однолучевые и многолучевые. Отдельно стоят сонары бокового обзора (гидролокаторы бокового обзора), которые в классическом варианте не имеют батиметрических свойств (определение глубин), но позволяют формировать растровые изображения дна на основе данных интенсивности обратного рассеяния.
76
33. Классификация сонаров с точки зрения формирования лучей
Однолучевые эхолоты могут иметь преобразователи в виде одиночного преобразователя или в виде решетки преобразователей.
Многолучевые эхолоты имеют решетки преобразователей, состоящие из большого числа элементов. При этом излучатели и гидрофоны конструктивно представлены в виде отдельных антенных решеток.
У гидролокаторов бокового обзора антенна, как правило, представляет собой вытянутую антенную решетку, у которой длина значительно превышает ширину. Как указывалось ранее, это необходимо для того, чтобы можно было выполнять формирование лучей, отклоняя их в нужном направлении, а также управлять лучами с целью компенсации пространственных перемещений антенной решетки для получения направленного излучения.
3.3.1. Формирование лучей однолучевых эхолотов
Один луч требует наличия только одного преобразователя, как для передачи, так и для приема, но антенная решетка преобразователей может потребоваться в том случае, когда необходима стабилизация луча. Для стабилизации луча необходима информация об углах крена и дифферента.
Угловая ширина луча является функцией физических размеров преобразователя и длины волны акустического сигнала. Чем выше частота и чем больше
Рис. 3.10. Иллюстрация измерений глубины с использованием узко и широко лучевого эхолота [IH0 М-13, 2005]
77
Глава 3. Акустические преобразователи и их реализации для различных типов сонаров
размеры преобразователя, тем меньше уже может быть угловая ширина луча. Таким образом, чтобы получить узкий луч на низких частотах, требуется преобразователь больших размеров.
Преобразователь, выбираемый для однолучевого эхолота, может иметь узкий луч, когда требуется высокая направленность, или широкий луч, когда направленность не имеет большого значения, а приоритетным требованием является определение минимальных глубин или препятствий на дне.
Широкие лучи имеют возможность детектировать эхосигналы внутри большого пространственного угла, что является полезным для обнаружения опасностей для навигации, требующих дальнейшего обследования. Такие лучи обычно не стабилизируются, поскольку в обычных морских условиях пространственные перемещения преобразователя не влияют на результаты измерений.
С другой стороны, узкие лучи, обычно от 2 до 5°, как правило, требуются для картографирования с высокой разрешающей способностью (см. рис. 3.10). Такие лучи необходимо стабилизировать для того, чтобы всегда измерять глубины, находящиеся вертикально под преобразователем.
3.3.2. Формирование лучей многолучевых эхолотов
Многолучевые эхолоты имеют отдельные решетки преобразователей для передачи (transmission) и приема (reception) — одну излучающую (projector)n одну приемную антенную решетку (hydrophone). Причем первая ориентирована вдоль диаметральной плоскости (ДП) судна, а вторая — перпендикулярно ей. Обычным вариантом является излучение одного веерообразного луча, узкого в направлении перемещения, соответствующего ДП судна, и широкого — в поперечном ему направлении. Приемный преобразователь формирует многочисленные лучи в заранее заданных направлениях, которые являются узкими поперек направления движения и широкими — вдоль него. Это гарантирует наличие пересечений излученных и принятых лучей вне зависимости от пространственных перемещений корпуса судна (угла дифферента), с которым жестко связаны преобразователи.
Такое расположение передающей и приемной антенных решеток, показанное на рис. 3.11, носит наименование крест Миллса. Основным условием правильной работы многолучевого эхолота является соблюдение условия, чтобы ось передающей антенной решетки лежала в плоскости, параллельной ДП судна-носителя антенн, а ось приемной антенной решетки была бы строго перпендикулярна оси передающей антенной решетки и лежала в плоскости, параллельной плоскости мидель-шпангоута судна-носителя.
Ширина луча передающей антенной решетки вдоль направления движения (ДП) зависит от длинны передающей антенны L и излучаемой частоты акустического сигнала X. Более высокая частота позволяет уменьшить ширину луча при заданной апертуре (длине антенной решетки). Однако, повышение частоты излучаемого акустического сигнала ведет в большему поглощению этого сигнала средой (attenuation) и, таким образом, сокращению наклонной дальности. Частично это можно компенсировать повышением излучаемой мощности, но и наращивание мощности имеет свои пределы.
78
33. Классификация сонаров с точки зрения формирования лучей
Диаметральная плоскость
Рис. 3.11. Расположение передающей и приемной антенных решеток в виде креста Мила
Боковые лепестки характеристики направленности (луча) передающей антенной решетки разработчики стремятся уменьшить с использованием технологии «шедирования» {shading techniques). Это приводит к изменению мощности, излучаемой различными элементами передающей антенной решетки. Кроме этого имеются и другие технологии, которые все приводят к одинаковому результату — повышению уровня основного лепестка характеристики направленности и понижению уровня боковых лепестков. При этом надо отметить, хотя технологии «шедирования» и подавляют боковые лепестки, ширина основного лепестка характеристики направленности (луча) при этом немного увеличивается.
Ширина луча передающей антенны в плоскости, перпендикулярной направлению движения (ДП), определяет ширину полосы обзора многолучевого эхолота. Этот луч проектируется таким образом, чтобы повысить соотношение сигнал/шум {signal to noise ratio — SNR) на краях луча. На рис. 3.12. представлена форма луча передающей антенны в плоскости, перпендикулярной направлению движения (ДП), отображающая направление пиков излучаемой мощности.
Подобно тому, как передающая антенная решетка используется для формирования узконаправленного луча в плоскости направления движения (ДП), приемная антенная решетка гидрофонов используется для создания узконаправленных лучей при приеме эхосигналов с определенных направлений. Рассмотрим этот вопрос более подробно.
79
Глава 3. Акустические преобразователи и их реализации для различных типов сонаров
Рис. 3.12. Форма луча передающей антенны в плоскости, перпендикулярной направлению движения, учитывающая изменение в излучаемой мощности
Рассмотрим процесс прихода фронтов плоской волны, отраженной от дна, на приемную линейную антенную решетку, состоящую из регулярно расположенных элементов-гидрофонов с заданной апертурой (расстоянием между гидрофонами). Если направление перемещения фронта волны параллельно оси приемной антенны, то фронт волны достигает все три гидрофона одновременно, с одинаковой фазой и амплитудой, что и показано на рис. 3.13.
Суммирование всех трех эхосигналов просто приведет к увеличению амплитуды, частота и фаза для всех трех гидрофонов при этом остается одинаковой. Измерения складываются «конструктивно», увеличивая амплитуду без изменения фазы, как показано на рис. 3.14.
Однако, если направление перемещения фронта волны не параллельно оси приемной антенны, то фронт волны достигает каждый из трех гидрофонов в разное время (см. рис. 3.15).
Амплитуда эхосигнала на каждом гидрофоне постоянна, но фазовые углы сигналов между гидрофонами различны благодаря временной задержке прихода фронта волны на каждый из гидрофонов. При суммировании измеренных амплитуд происходит «диструктивная» интерференция, и суммарный сигнал трех гидрофонов выглядит так, как показано на рис. 3.16.
Смещение лучей, формируемых приемной антенной, используется для того, чтобы добиться условия перпендикулярности направления фронта эхосигнала оси луча на приеме.
На рис. 3.17 смещение луча, формируемого гидрофонами 1 и 2, осуществляется путем внесения переменной задержки в сигналы каждого из гидрофонов, что приводит к искусственному возникновению конструктивной интерференции. Необходимо отметить, что приемная антенная решетка при этом не пре-
80
33. Классификация сонаров с точки зрения формирования лучей
Рис. 3.13. Процесс прихода плоской волны на приемную антенную решетку
81
Глава 3. Акустические преобразователи и их реализации для различных типов сонаров
приемная антенная решетка
Фронт волны достигает гидрофоны в разные моменты времени и с различными фазовыми углами
Рис. 3.15. Процесс прихода плоской волны на приемную антенную решетку в случае непараллельности фронта волны оси приемной антенны
плУиЛ/
время
Рис. 3.16. Результат суммирования сигналов трех гидрофонов в случае непараллельности фронта волны оси приемной антенны
82
33. Классификация сонаров с точки зрения формирования лучей
Рис. 3.17. Смещение луча приемной антенны, формируемого гидрофонами 1 и 2
терпевает никаких конструктивных изменений, просто сигналы гидрофонов обрабатываются специальным способом, т. е. в каждый луч вносится временная задержка, рассчитанная по формуле (3.12).
На рис. 3.18 фронт первым достигает гидрофон 1. Теперь фронт волны должен пройти расстояние Л, чтобы достичь гидрофон 2, и расстояние В, чтобы достичь третий гидрофон. Таким образом, задержка между фронтами, достигающими каждый гидрофон, может быть рассчитана на основе известного расстояния между гидрофонами приемной антенной решетки (d) и скорости звука (с) в районе приемной антенны. По этой причине у многолучевых эхолотов в районе приемной антенны устанавливается датчик для измерения скорости звука.
Путем внесения задержки в эхосигналы от определенных гидрофонов перед их суммированием возможно добиться углового смещения осей лучей приемной антенной решетки на требуемый угол. Величина привнесенной задержки соответствует требуемым углам смещения осей приемных лучей. Используя такую технологию, для каждой приемной антенной решетки может быть одновременно сформирован веер приемных лучей с необходимыми углами отклонения главных осей лучей от перпендикуляра к оси антенной решетки, как изображено на рис. 3.19.
Таким образом, формируется «виртуальная» приемная антенная решетка, каждый луч которой будет чувствителен к приему эхосигнала с определенного направления (угла прихода эхосигнала).
Распределение приемных лучей в плоской приемной антенне, как правило, является равномерным. Однако, это не совсем удобно для практических целей, ввиду того, что расстояния между следами лучей на плоском дне в центре полосы
83
Глава 3. Акустические преобразователи и их реализации для различных типов сонаров
Рис. 3.18. Внесение временных задержек для смещений лучей приемной антенны
приемная антенная решетка
Веер одновременно сформированных приемных лучей, каждый со своим углом луча (угол отклонение оси луча от перпендикуляра к оси антенной решетки)
Рис. 3.19. Веер лучей «виртуальной» приемной антенной решетки
84
33. Классификация сонаров с точки зрения формирования лучей
обзора и на краях в этом случае будут различными. По этой причине наряду с данным «равноугловым» вариантом в современных эхолотах используется и другой — «эквидистантный» вариант. Данный вариант предполагает, что угловые смещения приемных лучей будут подобраны таким образом, чтобы линейные расстояния между следами лучей на ровном дне внутри полосы обзора были бы одинаковыми.
Суммируя все вышеизложенное, отметим, что для того, что прослушать угловой сектор излучающей антенной решетки (как правило, 70° от вертикали) с помощью приемной линейной антенной решетки, необходимо сместить ось каждого принимаемого луча на разные углы относительно перпендикуляра к оси приемной антенной решетки.
Свойства излучателей и приемников одинаковы и могут быть сформулированы следующим образом:
— увеличение апертуры антенной решетки сужает ширину луча, ось которого перпендикулярна продольной оси антенной решетки;
— угловая ширина луча измеряется на уровне половины мощности, -3 дБ;
— боковые лепестки характеристики направленности неизбежны, но могут быть минимизированы путем использования технологии «шедирования», но ценой увеличения ширины основного лепестка характеристики направленности (луча);
— путем внесения переменных временных задержек углы осей лучей могут быть смещены на направления, отличные от перпендикуляра к продольной оси антенной решетки;
— для плоской линейной антенной решетки смещение осей лучей ведет к увеличению ширины луча по мере увеличения угла отклонения оси луча от направления, перпендикулярного продольной оси антенной решетки.
В завершении рассмотрения смещений лучей приемной антенной решетки еще раз отметим, что подавление боковых лепестков является необходимым условием эффективной работы, обеспечивающей правильный расчет глубин и их планового положения на дне. В обычных условиях боковые лепестки имеют уровень ниже -20 dB.
Формирования лучей многолучевого эхолота будут повторно рассмотрено в главе 5 (п. 5.1.)
3.3.3. Формирования лучей сонаров (гидролокаторов) бокового обзора
Важно понимать основные положения, касающиеся формирования диаграммы излучения антенн, которое определяет возможности различных гидролокационных систем. Наиболее важно отметить то обстоятельство, что энергетический спектр акустического преобразователя (transducer) в пределах 180-градусного угла излучения энергии является неоднородным, будучи синусоидальной функцией. Линейная антенна состоит из набора элементов, и излученная антенной мощность увеличивается по квадратичному закону. В результате, как правило, получается основной лепесток диаграммы излучения (main lobe), в котором концентрируется максимум излученной энергии, соответствующей нулевому угловому положению, при котором ось лепестка диаграммы излучения (boresite) перпендикулярна оси линейной антенны, и набор боковых лепестков (sidelobes),
85
Глава 3. Акустические преобразователи и их реализации для различных типов сонаров
в пределах которых происходит затухание излученной энергии по мере удаления от основного лепестка в обоих направлениях (от +90° до -90°). Ширина основного лепестка диаграммы излучения зависит от линейных размеров антенны и частоты сигнала. Как уже было показано ранее, ширина основного лепестка диаграммы излучения определяется точками, в которых мощность излучения составляет -3 дБ.
На рис. 3.20 схематически показана характеристика направленности линейной плоской антенны.
Рис. 3.20. Формирование характеристики направленности плоской антенны ГБО [www. gge.unb.ca/Research/]
При фиксированной длине волны сигнала линейные антенны с большими размерами обеспечивают более узкую характеристику направленности, но и большее количество боковых лепестков. Общее правило гласит: «Ширина диаграммы излучения (beamwidth) пропорциональна количеству длин волн поперек апертуры». Под термином «апертура» понимается линейное расстояние между элементами линейной плоской антенны. Для апертур более четырех длин волн угловая ширина лепестка диаграммы направленности на уровне 3 дБ может быть рассчитана формуле (3.3).
3.4. Классификация преобразователей сточки зрения установки
Установка преобразователей на судне может осуществляться несколькими способами. Решение о способе установки преобразователей зависит от требований к транспортабельности системы, необходимости размещения преобразователей в удалении от источников шумов самого судна, включая турбулентный слой под килем, а также желания приближения их к морскому дну. Установка преобразователей может быть стационарной набортной (keel mounted), буксируемой (towed) или переносной (portable). Каждый из этих вариантов установки рассмотрен в следующих параграфах.
86
3.4. Классификация преобразователей с точки зрения установки
3.4.1. Стационарная набортная установка
Это обычный вариант установки для однолучевого и многолучевого преобразователей на больших суднах, особенно тех, которые предназначены для глубоководных съемок.
При стационарной установке возможен выбор одного из следующих конкретных вариантов:
3.4.1.1. Монтаж «заподлицо» с корпусом судна (flush mounted) — преобразователь монтируется в одной плоскости с днищем (см. рис. 3.21а). Такой вариант установки применяется как для однолучевых, так и многолучевых преобразователей. Преимуществом такого варианта является то, что он не требует специальной конструкции для установки, а недостаток заключается в неизбежных шумах самого судна.
3.4.1.2. Блистерная установка (blister) —преобразователь устанавливается в специальной конструкции — обтекателе на днище(см. рис. 3.216). Данный вариант используется как для однолучевых, так и многолучевых преобразователей. Преимущество —подавление эффекта турбулентности потока воды при обтекании корпуса (hull waterflow effect), а недостаток — необходимость установки специальной конструкции под днищем судна.
3.4.1.3. Гондола — преобразователь устанавливается в специальной конструкции в форме гондолы. Такой вариант установки используется для многолучевых преобразователей, особенно для глубоководных применений. Преимуще-
Рис. 3.21. Варианты установки преобразователей многолучевого эхолота [Kongsberg]
87
Глава 3. Акустические преобразователи и их реализации для различных типов сонаров
ством является устранение шумов судна и эффекта турбулентности обтекания корпуса, а недостатком — необходимость установки специальной конструкции под днищем и дополнительное увеличение осадки судна.
3.4.2. Буксируемый вариант (Towed)
Преобразователь устанавливается в буксируемый носитель (towed fish), аналогичный используемому для гидролокаторов бокового обзора. Применяется в том случае, когда необходимо подавление шумов судна, высокая стабильность преобразователя и возможность его приближения непосредственно к дну.
3.4.3. Переносной вариант (Portable)
Такой вариант установки обычно используется как для одно лучевых, так и многолучевых преобразователей на небольших судах, специально предназначенных для съемок мелководных акваторий.
Такая установка может быть осуществлена с одного из бортов (on the side) или на носу (over the bow) — как показано рис. 3.21в-г. Поддерживающая конструкция для преобразователя должна быть жесткой и прочной на изгиб.
3.5. Акустическое покрытие дна
3.5.1. Однолучевой эхолот
Покрытие морского дна, т. е. акустическое освещение однолучевым эхолотом, представляет собой некоторую область дна в пределах луча, называемую пятном облучения, близким к окружности (на ровном дне), радиус которого (рис. 3.22) может быть представлен формулой [53]:
a = ztan((|)/2). (3.14)
3.5.2. Многолучевой эхолот
Для многолучевого эхолота освещенная область — это результат пересечения излученных и принятых лучей, размер которой зависит от ширины лепестков характеристики направленности на излучении и приеме, угла луча (beam pointing angle), глубины моря и среднего уклона дна.
Область освещения дна каждым лучом (пятно облучения) может быть аппроксимирована эллипсом (см. рис. 3.23). Полагая дно плоским и выровненным, длина оси такого эллипса в направлении поперек судна (athwart ships) — ау может быть приближенно рассчитана по формуле [53]:
2Z фп ау =—z—tan—, у cos2 0 2
где Z — средняя глубина, 0 — угол луча и фд — угловая ширина луча на приеме в направлении поперек судна.
(3.15)
88
3.5. Классификация преобразователей с точки зрения установки
Рис. 3.22. Покрытие дна одним лучом [IH0 М-13, 2005]
Рис. 3.23. Покрытие дна одной посылкой многолучевого эхолота [IH0 М-13, 2005]
89
Глава 3. Акустические преобразователи и их реализации для различных типов сонаров
При наличии уклона дна в области акустического облучения, заданного величиной £, большая ось эллипса пятна облучения может быть аппроксимирована формулой вида [53]:
2Z фЛ
а, =---------—tan—.
у cos 0 cos (0 -£) 2
(3.16)
Размер малой оси эллипса ах, направление которой совпадает с направлением движения, при условии ровного дна может быть рассчитан по следующей приближенной формуле [53]:
2Z _ фг аг =---tan—,
cos 0 2
(3-17)
где фг — угловая ширина луча на излучении.
Покрытие морского дна является функцией размера освещаемых областей (ensonified areas), угловых расстояний между лучами в направлении поперек движения (beamspacingacrosstrack), частоты посылок (pingrate), скорости судна, а также величины углов рыскания, крена и дифферента. Для того, чтобы достигнуть полного покрытия морского дна, необходимо, чтобы освещаемые области последовательных посылок перекрывались так, чтобы каждая точка дна освещалась хотя бы одним акустическим импульсом.
Ширина освещаемой полосы или ширина полосы обзора (swath) на плоском дне может быть рассчитана по следующей формуле (см. рис. 3.24):
Sw = 2z tan( Д0/2), (3. 18)
где АО — угловое расстояние между внешними лучами многолучевого эхолота.
Особенностью многолучевого эхолота является постоянная величина углового расстояния между внешними углами и переменная величина ширины полосы обзора, которая зависит от глубины, мощности излучения и акустических свойств морского дна.
Рис. 3.24. Ширина полосы обзора и угловое расстояние между внешними лучами
90
3.5. Классификация преобразователей с точки зрения установки
В результате трудностей с учетом рефракции лучей с малыми углами скольжения, точность определения глубин по внешним лучам многолучевого эхолота значительно хуже, чем по центральным. Поэтому, некоторое количество крайних лучей, как правило, не используется. Это приводит к сужению углового расстояния между внешними лучами, которые используются для гидрографических целей.
При определении ширины полосы обзора многолучевого эхолота необходимо иметь в виду категорию выполняемой съемки (по S-44/5), поскольку необходимая точность определения глубины может быть получена только по ограниченному количеству лучей, близких к ветрикальным.
3.5.3. Гидролокатор бокового обзора
Антенна гидролокатора бокового обзора, представляющая собой вытянутую антенную решетку (длина значительно превышает ширину), обеспечивает формирование очень узкой диаграммы направленности вдоль антенны (по направлению перемещения) и значительно более широкой диаграммы направленности в поперечной плоскости. Продольная ось антенны устанавливается вдоль диаметральной плоскости судна. Антенна жестко закрепляется либо буксируется на кабель-тросе в специальном обтекателе. По мере перемещения судна антенна излучает акустические посылки и сканирует морское дно узким лучом в направлении движения. При этом в направлении поперек курса ширина диаграммы оказывается очень широкой и пользователь получает ответный эхосигнал, лимитированный только доступной дальностью его распространения. Рис. 3.25 иллюстрирует типичную картину мгновенного акустического освещения участка морского дна в результате акустической посылки ГБО по мере того, как фронт акустической волны достигает все новых областей дна в пределах узкой диаграммы излучения поперек курса.
Рис. 3.25. Мгновенное освещение участка дна с помощью единичной посылки ГБО [www. gge.unb.ca/Research/]
91
Глава 3. Акустические преобразователи и их реализации для различных типов сонаров
Размер акустически освещенной площадки (ЛЕ) является функцией следующих аргументов: горизонтальной дальности (R) луча в точке соприкосновения с морским дном с углом скольжения (Р), а также разрешения по азимуту (_R*0). Поскольку величина обратного рассеяния (backscatter strength) напрямую зависит от площади акустической площадки АЕ, то целесообразно уметь эту площадь рассчитывать. Поскольку все величины известны — это легко выполнить по следующей формуле [65]:
cosP 2WcosP F0L 2WFqLcos$
(3.19)
Здесь Fq — частота акустического сигнала ГБО в Гц, а величина площади АС получается в м2. Следует заметить, что все параметры в формуле неизменны (исключая величину R, которая должна увеличиваться с уменьшением угла скольжения Р). Уменьшающийся угол скольжения приводит к увеличению площади акустически освещаемой площадки. Большие значения АЕ могут быть интерпретированы, как имеющие более низкое пространственное разрешение. Сохраняя все параметры неизменными, увеличение величины W (ширина полосы = 1/дли-тельность импульса) тем самым уменьшит АЕ и обеспечит более высокое пространственное разрешение. Величина обратного рассеивания (BS) морского дна зависит от следующих трех главных факторов [65]:
— свойств донного грунта,
— величины угла скольжения,
— мгновенного значения площади акустического освещения, которое только что было подробно обсуждено.
Величина BS может быть рассчитана по формуле:
BS=Sd+10 lg(AE); если р<85°С, тогда: АЕ =--—------;
2 SV FQ L cos Р
если 25°<р<75°, тогда 5^=50+10 Ig(sin^P), обычно k=2, (3.20)
где Sd — коэффициент обратного рассеивания, a So — выход на исходном уровне.
Кроме рассеивания, другие факторы также оказывают воздействие на уменьшение силы возвращенного эхосигнала. Затухание (Attenuation) и сферическое рассеивание (spherical spreading) вносят главный вклад в этот процесс. Делается допущение о плоском морском дне, а также о линейности затухания возвращенного эхосигнала по времени и дистанции. Это, конечно, не имеет места в реальных условиях, когда возвращенный эхосигнал подвергается усилению в приемнике. Это усиление выполняется по принципу ВАРУ — временная автоматическая регулировка усиления (time varying gain=TVG).
Предпринимались многочисленные попытки создать оптимальную модель ВАРУ с использованием информации о свойствах грунта и углах скольжения. Вместе с тем, морское дно не является однородным с точки зрения свойств грунта и гладкости поверхности. Поэтому создание таких моделей не является тривиальной задачей.
Для многолучевых эхолотов и гидролокаторов бокового обзора существуют различные стратегии при решении данной задачи по созданию оптимальной модели обратного рассеивания.
92
Глава 4.
ОДНОЛУЧЕВЫЕ ЭХОЛОТЫ
Однолучевые эхолоты представляют собой устройства для определения глубин путем измерения временного интервала между моментами излучения звукового или ультразвукового импульса и приема его эхосигнала, отразившегося от дна.
Традиционно основным назначением эхолота являлось выработка величин последовательных глубин для формирования профиля глубин с высоким разрешением для записи на самописец эхосигналов. С записи самописца после тщательной интерпретации снимались глубины и вручную оцифровывались, для получения отметок глубин.
В течение последних десяти лет технологии, используемые в однолучевых эхолотах, прогрессивно усовершенствовались с введением оцифровывания, графической регистрации без использования механических устройств, а также возможностью введения аннотаций с записью координат на ленте самописца.
Встроенные компьютеры и микропроцессоры позволили выполнять еще более сложную первичную обработку сигналов в реальном масштабе времени, а также представление данных на цветных графических дисплеях, взамен бумажных регистраторов.
4.1. Принципы работы
Работа эхолота основана на преобразовании электрической энергии от генератора импульсов в акустическую энергию, которая излучается в воду преобразователем в виде узкого луча внутри вертикального пространственного конуса.
Акустический импульс распространяется в водной толще и взаимодействует с дном, что приводит к отражению (reflection), передаче в грунт (transmission) и рассеиванию (scattering).
Отраженная энергия, которая возвращается к преобразователю в виде эхо-сигнала, воспринимается преобразователем. Сила эхосигнала быстро убывает со временем, по этой причине принятый сигнал автоматически регулируется в соответствии с его энергетическим уровнем с использованием автоматической регулировки усиления (АРУ) или (Automatic Gain Control =AGC) и временной автоматической регулировки усиления (ВАРУ или Time Variable Gain = TVG), для компенсации понижения сигнала в функции времени. Величины этих параметров являются, как правило, заводскими установками.
После усиления, электрический сигнал поступает на детектор формы огибающей и сравнивается с установленным пороговым значением с целью фильтрации шумов. Результирующая наблюденная величина временного интервала между моментами излучения и приема t используется для расчета глубины по известной формуле:
(4.1) где с — среднее значение вертикальной скорости звука в водной толще.
93
Глава 4. Однолучевые эхолоты
4.1.1. Параметры однолучевого эхолота
Для получения высокой точности и четкости записи дна параметры эхолота должны быть заданы правильно. Наиболее важными параметрами являются [53]:
1. Мощность. Дальность действия эхолота зависит от длительности импульса, частоты и излучаемой мощности. Для оптимизации использования эхолота излучаемая мощность должна быть установлена на самом низком уровне, допустимо возможном для детектирования. Увеличение мощности ведет к появлению эхосигналов высокого уровня, что может приводить к высоким уровням реверберации, в результате которой ухудшается запись. Кроме того, увеличение мощности лимитируется явлением кавитации и негативно сказывается на материале, из которого изготавливается преобразователь.
2. Коэффициент усиления — назначает величину усиления сигнала. Усиление сигнала также увеличивает и шум (сигнал помехи), в результате чего регистрируемые данные могут содержать помехи. Рекомендуется, чтобы коэффициент усиления был настроен в соответствии с типом морского дна и мощностью излучения.
3. Интенсивность записи — параметр используется в аналоговых эхолотах для регулировки интенсивности записи на эхограмме.
4. Длина импульса. Эта величина, обычно, выбирается автоматически как функция дальности действия (диапазона глубин). Длительность импульса определяет разрешающую способность эхолота по глубине; короткие импульсы необходимы для лучшего разрешения. Может потребоваться увеличить длину импульса в районах с плохой отражающей способностью дна или с крутыми склонами. В мелководных районах, где разрешающая способность эхолота приоритетна, необходимо использовать короткие импульсы. Это уменьшит вероятность ошибочных эхосигналов в результате сильной реверберации.
5. Масштаб. Соответствует вертикальному масштабу записи глубин. Ширина бумаги самописца фиксирована, поэтому на малых масштабах будет низкая разрешающая способность записи глубин.
6. Фазовое масштабирование — один из способов преодоления ограничений разрешающей способности при аналоговой записи глубин с помощью самописцев. Заключается в задании вручную или автоматически глубин границы окна, внутри которого изменяется глубина, для поддержания регистрации с удовлетворительной разрешающей способностью вне зависимости от глубины моря (см. рис. 4.1.). Используется также и при формировании электронных эхограмм в цифровых эхолотах.
7. Заглубление антенны. Этот параметр задает заглубление преобразователя для того, чтобы записывать глубины, отнесенные к мгновенному значению уровня моря. Величина должна быть задана до начала съемки и регулярно корректироваться. Различают статическое и динамическое заглубление.
8. Скорость протяжки бумаги — особенно важна для эхолота с регистратором на бумажную эхограмму, поскольку определяет горизонтальную разрешающую способность для снятия глубин.
9. Скорость звука в воде. Это номинальная величина скорости звука в воде, соответствующая среднему значению для района работ. Для съемок повышен-
94
4.1. Принцип работы
Рис. 4.1. Регистрация глубин с разным фазовым масштабированием эхограммы [IH0 М-13, 2005]
ной точности скорость звука может быть задана равной значению этой величины около преобразователя или величине 1500 м/с с тем, чтобы выполнить окончательное исправление глубин на этапе пост-обработки, используя данные измеренного вертикального распределения скорости звука (ВРСЗ). В классическом аналоговом эхолоте этот параметр не соответствует реальной скорости звука в воде, а только тому значению, которое принято для калибровки механических и электрических компонентов эхолота для измерения правильного значения глубины. Выше изложены общие принципы работы с эхолотами, однако имеются различия между аналоговыми и цифровыми эхолотами, которые будут рассмотрены далее. Традиционный аналоговый эхолот, диаграмма работы которого представлена на рис. 4.2 [53], начинает свой цикл работы с генерации электрического импульса и излучения разряда энергии в воду. После приема эхосигнала и преобразования его в электрическую энергию, низковольтный сигнал усиливается и поступает на усилитель аналогового регистратора для того, чтобы обеспечить запись глубины на самописец, который используется для графического отображения профиля глубин с заданным горизонтальным и вертикальным разрешением.
После того, как фаза регистрации завершена, начинается следующий цикл работы эхолота.
Гидрографические эхолоты для малых глубин обычно содержат два канала (высоко- и низкочастотный). Одновременная запись по двум частотам позволяет разделить эхосигналы от верхнего мягкого слоя осадка и более твердых нижележащих слоев, благодаря их различному акустическому сопротивлению.
95
Глава 4. Однолучевые эхолоты
Рис. 4.2. Блок-схема аналогового эхолота [IH0 М-13, 2005]
Выдача данных (индикация, распечатка, запись в цифровом виде)
Микропроцессор <
Аналого-цифровое преобразование
Усилитель
Детектор огибающей эхосигнала
Временная регулировка усиления
* Преобразователь
Рис. 4.3. Блок-схема цифрового эхолота [IH0 М-13,2005]
96
4.2. Установка и калибровка
Цифровой эхолот, блок-схема которого представлена на рис. 4.3 [53], работает по той же схеме, что и аналоговый только до этапа излучения посылки. Во время приема эхосигнала, принятый сигнал усиливается в функции времени (временная регулировка усиления) и направляется через детектор огибающей, где он в итоге преобразуется в цифровой формат, который далее и обрабатывается для расчета глубины. Такая схема позволяет сохранять и отображать информацию в нескольких форматах.
4.1.2. Точность измерений глубин
Точность измерений глубин является функцией нескольких факторов, самого эхолота и среды. Обычно необходимо рассчитывать априорную точность (error budget), основываясь на этих факторах (см. п. 4.4.)
Разрешение эхолота —это способность различать эхосигналы от двух и более объектов, расположенных в непосредственной близости; обычно оно выражается, как минимальная дистанция между двумя объектами, которые можно различить. При измерении глубин главный интерес представляет вертикальное разрешение эхолота, которое зависит от следующего [53]:
1) длительности импульса — более длинные импульсы имеют меньшее разрешение (см. 2.4.3). Два объекта будут зарегистрированы как одна цель, если они расположены между собой на расстоянии менее половины длительности импульса; они будут опознаны как отдельные эхосигналы, если они находятся на расстоянии большем, чем половина длительности импульса;
2) чувствительности и разрешающей способности регистрирующей системы;
3) угловой ширины излучаемого луча.
Частота эхолота выбирается с учетом предполагаемых целей использования оборудования, т. е. диапазона измеряемых глубин. В некоторых случаях желательно иметь возможность использовать один и тот же эхолот в нескольких глубинных диапазонах. Для такого случая эхолоты могут иметь возможность работы с разными частотами и комплектоваться разными преобразователями для того, чтобы улучшить сбор данных и их качество.
Частоты в большинстве случаев совмещены с каналами. Эхолоты с двумя каналами в основном используются в мелководных и прибрежных водах; для глубоководных районов обычной практикой является использование одной низкой частоты.
4.2. Установка и калибровка
Преобразователь может быть жестко связан с корпусом, или установлен как забортное устройство сбоку или на носу судна. Существенным соображением является размещение преобразователя как можно дальше от судовых источников акустических помех, достаточно глубоко, чтобы избежать помехи от поверхности и оставаться в погруженном состоянии даже в условиях сильного волнения.
Важным также является надежное крепление преобразователя и его вертикальная ориентация. При забортной установке желательным является размеще
97
Глава 4. Однолучевые эхолоты
ние преобразователя, датчика пространственной ориентации и антенны спутниковой навигационной системы на одной вертикальной оси.
Тарирование или калибровка эхолота — это стандартная процедура, включающая настройку оборудования с той целью, чтобы убедиться в правильности измерений глубин. Калибровка может быть выполнена с помощью тарировочно-го диска (bar check) или специального преобразователя. Задачей является подбор и установка такого значения скорости звука в воде, которое согласовало бы электронные и механические компоненты.
Возможно также исправить измеренные глубины на этапе пост-обработки с использованием данных измерителя скорости звука.
В мелководных районах калибровка эхолота на среднее значение скорости звука в водной толще может быть выполнена следующими методами:
1) Тарировка (Bar check) заключается в опускании тарировочного диска (bar, plate) под преобразователь на несколько фиксированных глубин (например, через каждые 2 м) с регистрацией величины систематической ошибки в виде разности между «истиной» глубиной диска и глубиной, измеренной эхолотом (для учета при пост-обработке) или установке в эхолоте такой скорости звука, которая обеспечивала бы устранение данной систематической ошибки (см. рис. 4.4).
В последнем случае величина скорости звука, принятого в результате калибровки, будет являться средним значением из скоростей звука, полученных для разных горизонтов. Этот метод можно использовать до глубин 20-30 м.
Рис. 4.4. Иллюстрация методики тарировки эхолота [IH0 М-13, 2005]
98
43. Работа с эхолотом и регистрация
2) Использование калибровочного преобразователя выполняется по той же схеме с получением среднего значения скорости звука для исследованного диапазона глубин. Такой метод можно также использовать до глубин 20-30 м.
3) Может быть использован также и комбинированный метод с калибровочным преобразователем и измерителем скорости звука в воде. Этот метод обычно используется на глубинах более 30 м. С помощью зонда-измерителя вертикального профиля скорости звука и величины скорости звука на глубине преобразователя эхолота выполняются процедуры, описанные в п. 4.2 (2). В наиболее современных эхолотах параметр скорости звука может быть установлен равным полученному «истинному» значению. Поправка глубины вычисляется на этапе пост-обработки с учетом того, что при измерении глубин в эхолоте было выставлено «истинное »значение скорости звука, равное значению, полученному на горизонте преобразователя эхолота. Поправка глубины основана на различии между скоростью звука у преобразователя и среднего гармонического значения скорости звука, рассчитанного по данным измерения вертикального профиля скорости звука в водной толще с помощью зонда-скоростемера.
Чем больше изменяемые глубины, тем большая погрешность вносится в результате неправильного учета скорости звука. Современные скоростемеры, как правило, измеряют скорость звука на глубинах до 2000 м. При измерении больших глубин принимается допущение о линейности изменения скорости звука до дна от ее последнего измеренного значения.
При отсутствии информации о ВРСЗ в проведении гидрографических работ обычно используется стандартное значение скорости звука 1500 м/с, а поправки за скорость звука вносятся на этапе камеральной обработки. При этом возможно использование данных ВРСЗ, заимствованных из отчетов экспедиций, работавших в данном районе в предшествующие годы.
Величины скоростей звука на стандартных горизонтах для заданного района проведения работ могут быть выбраны из отечественных таблиц (адмиралтейский номер 9209), являющихся аналогом таблиц Картера (см.' п. 2.3.7). Использование данных из таблиц [19, 20] является более правильным решением, чем отсутствие учета измерений ВРСЗ. В Таблицах [19] обобщен огромный материал по ВРСЗ по всей акватории Мирового океана. Таблицы позволяют задать для стандартных горизонтов либо непосредственно поправки в измеренные глубины за отличие скорости звука от 1500 м/с, либо значения скорости звука в воде, полагая, что глубины измерялись с установленным в эхолоте значением скорости звука 1500 м/с.
4.3. Работа с эхолотом и регистрация
Работа с конкретным эхолотом производится в соответствии с его Руководством по эксплуатации. Вместе с тем, важно подчеркнуть следующие аспекты [53]:
• перед началом съемки необходимо откалибровать эхолот на реальное значение скорости звука {actual sound velocity)',
• должен быть задан диапазон возможных глубин;
• должна быть выбрана частота (канал) в соответствии с диапазоном глубин;
99
Глава 4. Однолучевые эхолоты
• при использовании аналогового эхолота необходимо установить коэффициент усиления и интенсивность записи на регистраторе так, чтобы получать четкие записи на эхограмме.
4.4. Источники ошибок и методы контроля точности
Погрешности определения глубин могут быть разделены на три категории: грубые ошибки (blunders), систематические ошибки (systematic errors') и случайные погрешности (random errors).
Грубые ошибки являются следствием неисправных механических или электронных компонентов эхолота. Систематические ошибки могут быть постоянными (offsets) и переменными (biases) и возникают в основном в результате воздействия постоянных и переменных факторов и условий. Например, у датчика перемещений судна (ДПС) после маневра возникает рассогласование между вертикальной осью преобразователя и датчика. Такие ошибки могут быть легко исправлены, если можно определить их знак и величину. Ошибки этой категории могут быть определены и устранены в результате калибровки системы.
После устранения грубых и систематических ошибок все равно остаются случайные погрешности, величины которых необходимо анализировать с использованием статистических методов. Гидрограф должен знать источники, которые вносят вклад в общую погрешность получаемых глубин, и их конкретные величины. В данном разделе рассматривается несколько источников погрешностей, и представлены методы, используемые для контроля качества.
4.4.1. Учет погрешностей за наклон дна
Рассмотрим разные величины углов наклона дна, как показано на рис. 4.5. Погрешность измерения глубины dz зависит как от угловой ширины луча, так и от величины угла наклона дна. Если не вводить поправку, то погрешность глубины можно представить в виде [53]:
rfz = zm (sec(Q-l), если £<ф/2, (4.2 А)
= zm (зес(ф/2)—1), если £>ф/2, (4.2 Б)
где ф/2 половина ширины луча; £ — угол наклона дна.
4.4.2. Влияние погрешности определения скорости звука
Изменение скорости звука трудно отследить, но оно дает погрешность получаемой глубины (dzf), пропорциональную погрешности среднего значения скорости звука de, тогда имеем:
dzc = 0,5 -tdc;
или dzc = zdc/c
(4.3)
(4.4)
100
4.4. Источники ошибок и методы контроля точности
Рис. 4.5. Влияние ширины луча и угла наклона дна на точность глубины и ее положение [IH0 М-13, 2005]
А) наклон дна менее половины ширины луча; Б) наклон дна более половины ширины луча эхолота
Величина погрешности скорости звука изменяется под воздействием следующих факторов:
а) точности определения скорости звука,
Ь) временных изменений в скорости звука,
с) пространственных изменений скорости звука.
Отметим, что дисперсия глубины о|с, являющаяся следствием наличия погрешностей в измерениях скорости звука и погрешностей ее временного и пространственного изменения, может быть представлена в виде:
ai = (2/c)2(o^ + <$, (4.5)
где — дисперсия измерений скорости звука, а ас2 - дисперсия временного и пространственного изменения скорости звука.
Временные и пространственные изменения скорости звука вносят наибольший вклад в погрешности получаемых глубин. Важно, чтобы во время планирования съемки или при начале съемки были получены профили скорости звука, расположенные по всему району работ и в разное время суток, чтобы дать гидрографу представление о необходимой частоте и положении станций определения профиля ВРСЗ, которые необходимо выполнять во время проведения съемки.
101
Глава 4. Однолучевые эхолоты
4.4.3. Влияние погрешности определения времени
Эхолот фактически измеряет время и преобразует его в глубину. Погрешность измерения времени (dt) напрямую соотносится с погрешностью глубины dzt. В современных эхолотах погрешности измерения времени обычно малы и постоянны. Эта погрешность учитывается при калибровке и может быть представлена как [53]:
dzt = 0,5 с dt. (4.6)
Дисперсия глубины о2 связана с погрешностью определения времени.
Основная часть этой погрешности связана с методом нахождения глубины, точки на огибающей эхосигнала, и используемым алгоритмом определения ее положения.
с2 = (0,5с)2 с2 (4.7)
где о2т — дисперсия измерения времени в эхолоте.
4.4.4. Влияние погрешности определения крена, дифферента и вертикального перемещения
Неучтенные углы крена и дифферента вносят дополнительные погрешности в измерение глубины, когда величины этих углов становятся более половины угловой ширины луча эхолота (ф/2).
На рис. 4.6. изображена дополнительная погрешность глубины от неучтенного угла крена, 0R. Эта же картинка может быть адаптирована для дифферента путем замены 0R на Ор.
Эхолоты с широким лучом имеют иммунитет к отсутствию учета углов крена и дифферента. У эхолотов с узким лучом учет воздействия на измерения глубин качки может быть решен двумя способами: стабилизацией луча, т. е. его управлением таким образом, чтобы от всегда был направлен вертикально вниз, либо регистрацией углов качки с последующим исправлением измеренных глубин и их планового положения с использованием следующих формул [53]:
dzroll= г(1“5ес(0я_Ф/2)), если 0R >ф/2; (4.8 А)
dzroll= еслиФ/2- (4.8Б)
Вертикальное перемещение (h) связано с воздействием на судно волнения и может быть измерено с помощью ДПС или компенсаторов вертикального перемещения (heave compensators). Такой компенсатор необходимо располагать над преобразователем, чтобы измерять вертикальное перемещение по единой для них вертикальной оси. При использовании инерциальных датчиков их необходимо устанавливать близко к центру тяжести судна. В случае, когда преобразователь эхолота и компенсатор вертикального перемещения не располагаются на одной вертикальной оси и их положение не совпадает с центром судна, для расчета вертикального перемещения преобразователя ht возникает необходимость учета наведенного вертикального перемещения (hj.
102
4.4. Источники ошибок и методы контроля точности
\
Рис. 4.6. Влияние ширины луча и неучтенного угла крена на глубину и ее положение [IH0 М-13, 2005]
ht = hm+hi’ (49>
где hm — вертикальное перемещение.
Учет вертикального перемещения и оценка его точности подробно рассмотрены в главе 5 (п. 5.3.2).
Отметим, что дисперсия наведенного вертикального перемещения зависит от точности определения взаимных смещений преобразователя и ДПС, а также точности определения углов крена и дифферента. Общая дисперсия вертикального перемещения составит:
= (41°)
где — дисперсия измеренного вертикального перемещения, — дисперсия наведенного вертикального перемещения, причем последнее, как правило, пренебрежимо мало по сравнению со значением, измеренным датчиком вертикального перемещения.
Когда датчик вертикального перемещения отсутствует, возможно сгладить эхолотные данные с целью исключения вертикального перемещения вручную на записи самописца. Такая операция требует значительного опыта в интерпретации аналоговых записей эхолота с тем, чтобы сохранить объекты, записанные на
103
Глава 4. Однолучевые эхолоты
Рис. 4.7. Ручная фильтрация вертикального перемещения на записи самописца [IH0 М-13, 2005]
эхограмме. Обычная процедура, при условии незначительной качки, заключается в том, чтобы провести усредняющую линию между вершинами и впадинами, как показано на рис. 4.7.
4.4.5. Динамическое заглубление преобразователя, учет систематических ошибок от проседания и посадки
Определение систематической ошибки заглубления преобразователя за счет проседания {settlement) и посадки {squat) относительного высотного положения статического заглубления (судно без хода относительно воды) является необходимым условием при съемке на малых глубинах (см. рис. 4.8). Точное измерение такого «динамического заглубления» преобразователя является важнейшей задачей при определении окончательной глубины. Требуется постоянное уточнение этой величины в процессе съемки [53]. Причина в том, что осадка судна постоянно изменяется в результате расходования топлива и воды.
Точность определения поправки dzdraughv компенсирующей динамическое заглубление, напрямую влияет на погрешность окончательной глубины. Проседание представляет собой общее понижение положения (увеличение осадки) движущегося судна по отношению к его неподвижному относительно воды состоянию. Этот эффект становится особенно заметен на мелководье благодаря
104
4.4. Источники ошибок и методы контроля точности
Рис. 4.8. Динамическое заглубления преобразователя эхолота (проседания, посадка). А) проседание; Б) посадка
местному понижению уровня воды, в котором движется судно. Поправку, компенсирующую проседание, обозначим dzset.
Посадка {squat) — другой эффект, имеющий место в условиях динамики, заключается в изменении осадки носом и кормой по отношению к неподвижному относительно воды состоянию. Это результат поднятия и опускания слоев воды вдоль корпуса в результате возникновения так называемых «корабельных волн». Для съемочных судов, у которых величина посадки имеет существенное значение, обычно составляют таблицу соответствия скорости хода и величины посадки в месте установки преобразователя. Поправку, компенсирующую просадку, обозначим dzsquat.
Относительное положение преобразователя (относительно датчика вертикального перемещения) следует принимать во внимание для исправления глубины в соответствии с указаниями, приведенными в п. 4.4.4.
Поправка на динамическое заглубление преобразователя (относительно поверхности воды) dz- имеет вид [53]:
^Zi ~ ^Zdraught^ ^Zset+(^Zsquat' (4-11)
Заметим, что общая дисперсия глубины погружения преобразователя запишется в виде:
^r^drau^settl^squaV (412>
где Q2draught — дисперсия поправки на заглубление, <32ettl — дисперсия поправки на проседание и <32squat — дисперсия поправки на посадку.
Данный вопрос применительно к использованию МЛЭ рассмотрен также вп. 6.3.1.
105
Глава 4. Однолучевые эхолоты
4.4.6. Чтение аналоговых записей и разрешающая способность
Чтение аналоговых записей и разрешающая способность измерений глубин зависят от принципов работы эхолота. В случае аналоговой регистрации оператор должен выбрать параметры, подходящие для работы в конкретных условиях, для того, чтобы по возможности получать четкую запись на самописце и достаточную разрешающую способность. С другой стороны, цифровая регистрация не имеет более такой зависимости от навыков оператора при проведении съемки, однако, оператору необходимо следить за процессом цифровой регистрации данных. Когда данные регистрируются на бумагу, необходимо выбирать коэффициент усиления для получения четкой записи; необходимо также выбирать вертикальный масштаб для получения разрешения по глубине, достаточного для решения поставленных задач. Для этого обычно используется фазовое масштабирование (см. п. 4.1.1).
Запись глубин на самописце должна быть подготовлена для снятия глубин; задача состоит в идентификации точек морского дна, которые будут выбраны для регистрации. В современных условиях эта задача решается с помощью оцифровки дигитайзером. Погрешности, связанные с оцифровкой, зависят от опытности и аккуратности оператора. Полагая ширину бумаги самописца 20 см и диапазон 0-200 м, ошибка снятия глубины в 0,5 мм соответствует погрешности глубины в 0,5 м. Следовательно, такой диапазон не подходит для регистрации при мелководной съемке. Погрешность считывания глубины обозначим dzread, с дисперсией
4.4.7. Интерпретация записей эхосигналов на самописце
Интерпретация требует опыта для идентификации отдельных форм, многократных отражений (multiple echoes) и ложных отражённых сигналов (false echoes) [53].
1) Ложные отражённые сигналы. Обычно являются следствием неподходящих или неблагоприятных условий работы, таких как водоросли (kelp), косяки рыбы в водной толще (см. рис. 4.9) или слои с аномально большими колебаниями температуры и (или) солености.
Ложные эхосигналы, случайно зарегистрированные эхолотом, могут быть впоследствии по ошибке интерпретированы как верные глубины. В случае сомнений в достоверности измеренных глубин необходимо произвести их всестороннее исследование и в случае необходимости выполнить дополнительные измерения глубин в сомнительной части галса.
2) Многократные отражения — представляют собой эхосигналы, полученные следующими после самого первого и являющиеся результатом многократного отражения при прохождении от дна к поверхности моря. Эти отражения часто регистрируются в виде «второго дна», как показано на рис. 4.10.
3) Вертикальное перемещение — колебательное перемещение преобразователя, жестко связанного с корпусом судна, под воздействием морского волнения. Оно может быть компенсировано датчиком вертикальных перемещений во время регистрации или отфильтровано впоследствии вручную. Инструментом для такой фильтрации является опыт гидрографа (см. п. 4.4.4)
106
4.4. Источники ошибок и методы контроля точности
Эхограмма
Рис. 4.9. Ложные отражённые сигналы на эхограмме [IH0 М-13, 2005]
Рис. 4.10. Записи многократных отражений [IH0 М-13, 2005]
107
Глава 4. Однолучевые эхолоты
Рис. 4.11. Регистрация глубины по двум каналам с разной частотой [IH0 М-13, 2005]
4) Отражённый сигнал (Side echoes) — это тоже ложный сигнал, обусловленный излучением по боковому лепестку диаграммы направленности антенны, приводит к ошибкам измерений глубин и их планового положения (см. 3.2).
5) Неконсолидированные донные осадки — часто обнаруживаются даже высокочастотным эхолотом. В мелководной акватории рекомендуется, чтобы использовались одновременно две частоты для распознавания верхнего слоя осадка от подстилающей породы, как показано на рис. 4.11. Это особенно актуально на так называемых «техногенных» акваториях, где производятся дноуглубительные работы.
4.4.8. Исправление глубин за уровень
Измеренные глубины, исправленные за пространственные перемещения судна, затем приводятся к единой вертикальной системе отсчета (vertical datum) путем введения поправки за уровень моря (tide). Погрешность глубины за счет ошибки в измерении уровня на уровенном посту обозначим как: dztide.
Иногда более значительными являются ошибки поправок, которые вычисляются с целью приведения уровня от места уровенного поста к месту измерения глубины (co-tidal correction). Поправку приведения уровня к месту измерения глубины обозначим: dzco_tidal.
Погрешность поправки приведения уровня к месту измерения глубины может стать очень существенной уже в нескольких милях от уровенного поста. Может потребоваться модель поправок приведения или взвешенное среднее значение от двух или более уровенных постов.
108
4.5. Контроль качества исправленных глубин
Дисперсия поправки за уровень с учетом погрешности измерений на уровенном посту и погрешности поправки приведения уровня может быть записана как [53]:
Gtide = Gtidem+G2co-tidal’ (4ЛЗ)
где o2idem —дисперсия измерения уровня на уровенном посту, <s2o4idal — дисперсия поправки приведения уровня к месту измерения глубины.
Определение уровня с использованием режима кинематики реального времени (GPS-RTK —Real Time Kinematic) обеспечивает более точное определение местной поправки за уровень. Вместе с тем, такой метод расчета требует знания модели различий между поверхностью эллипсоида WGS84 и вертикальной системой отсчета (нуль глубин), к которой необходимо выполнять приведение глубин. Алгоритм расчета поправок за уровень с использованием данных режима кинематики реального времени приведен в главе 5 (п. 5.3.4.2).
4.5. Контроль качества исправленных глубин
Контроль качества выполняется путем статистических расчетов, основанных на сравнении глубин с контрольных галсов (check lines) с окружающими глубинами на галсах основного покрытия. Результаты статистических расчетов сравнения глубин в точках пересечений должны подчиняться рекомендациям по точности, приведенным в специальной публикации S-44 (рис. 4.12).
Рис. 4.12. Минимальные требования к точности исправленных глубин в соответствии с категориями: 0,1 и 2 по S-44 [52]
109
Глава 4. Однолучевые эхолоты
В соответствии с представленными ранее моделями оценка погрешностей окончательно исправленной глубины в виде ее дисперсии может быть записана в виде [53]:
а2 = а2+ a2f+o2 + а2+ (4.14)
Оценка погрешностей окончательно исправленной глубины, имеющая 68 % доверительную вероятность (1о), может быть получена путем извлечения квадратного корня из дисперсии, рассчитанной по уравнению 4.14. Полагая, что составляющие погрешности следуют распределению, близкому к нормальному, оценка погрешности исправленной глубины на уровне 95 % доверительной вероятности (2о) может быть получена путем умножения на коэффициент 1,96.
Для каждой съемочной системы рекомендуется составлять бюджет погрешностей для того, чтобы оценивать ее соответствие требованиям точности стандарта S-44. На рис. 4.13 представлены оценки погрешностей для конкретного эхолота и рабочих условий его эксплуатации.
Характеристики эхолота*. Частота (Frequency) = 200 кГц; Ширина угла луча {Beam width) = 20° (Р = 10°); длительность импульса {Pulse duration) = 0,1 мс.
Условия работы: Средняя скорость звука {Mean sound speed) = 1500 м/с; вертикальное перемещение {Heave)=l м; крен (7?оЛ)=5°; скорость судна {Vessel speed)=8 узл.; посадка {Settlement)=He определялась; проседание {squat)=0,05 м.
Априорные среднеквадратические погрешности {Estimated or standard errors {1 sigmd)\
Рис. 4.13. Графическое представление оценок допустимой и априорной погрешностей глубин
110
45. Контроль качества исправленных глубин
СКП определения заглубления антенны (Draft error) = 0,05 м; СКП определения скорости звука (Sound speed variation) = 5 м/с:
СКП глубины в результате:
— вариаций скорости звука (sound speed variation) = (5/1500)z м;
— измерения времени (time measurement) = 0,02 м;
— проседания (squat) = 0,05 м;
— вертикального перемещения (heave) = 0,10 м;
— измерения уровня на уровенном посту (tide error) = 0,05 м;
— приведения уровня к месту измерения глубины (co-tidal error) = 0,05 м.
+<У2+ 01+0^ (4.15)
°z(95) = 1’96 CTZ(68)- (416)
Используя формулы (4.15) и (4.16), были рассчитаны априорные погрешности глубин на уровне 95% доверительной вероятности для разных значений глубин, представленных на рис. 4.13 (желтая кривая). Допустимая погрешность определения глубин в соответствии с заданной категорией съемки рассчитывается по формуле [56, 57]:
(a2+(db)2)V\ (4.17)
где d — глубина (м), а и b — коэффициенты, индивидуальные для каждой категории съемки (S-44\4).
Рис. 4.14. Окно программы HYPACK, визуализирующее статистические расчеты расхождений глубин в точках пересечения основных и контрольных галсов
111
Глава 4. Однолучевые эхолоты
Вычисленные допустимые погрешности определения глубин представлены на рис. 4.13 синей кривой.
Априорные значения исправленных глубин, вычисляемые по формуле (4.14) в соответствии со Стандартом S-44 (4) Международной Гидрографической Организации, имеют наименование «суммарная вертикальная погрешность» (Total Vertical Uncertainty — TVU) [31].
Априорная точность глубин рассчитывается на этапе проектирования работ с целью подтверждения возможности проведения съемки по заданной категории на данной акватории с использованием определенного оборудования и методики выполнения работ.
После завершения съемки с однолучевым эхолотом необходимо подтвердить полученную точность исправленной глубины, а, следовательно, и категорию выполненной съемки на основе имеющихся фактических материалов. Для этого выполняется сравнение глубин, полученных в точках пересечения основных и контрольных галсов промера. Обработка полученных расхождений выполняется в соответствии с правилами, изложенными в Приложении 45 отечественного нормативного документа [12]. Имеется ряд новых российских нормативных документов [16, 17, 18], в которых вопросы оценки точности промера с однолучевым эхолотом решаются недостаточно корректно [24].
Большинство современных гидрографических пакетов имеют программу для статистических расчетов расхождений глубин в точках пересечения основных и контрольных галсов. Окно такой программы в пакете HYPACK [50] изображено на рис. 4.14.
Глава 5.
СИСТЕМЫ ПЛОЩАДНОЙ СЪЕМКИ РЕЛЬЕФА ДНА
Системы площадной съемки определяют глубины в полосе обзора, простирающейся в обе стороны от преобразователя сонара (многолучевого эхолота). Эти системы организованы таким образом, что поперечный профиль получаемых глубин находится под прямым углом к направлению движения судна. По мере того, как судно движется, поперечный профиль глубин зондирует узкую полосу на морском дне, формируя в результате так называемую «полосу обзора» {swath).
В данной главе рассматриваются многолучевые эхолотные системы {Multibeam echosouners — MBES) и интерферометрические гидролокаторы бокового обзора (interferometric sonars).
Многолучевые эхолоты (МЛЭ) являются ценным инструментом для определения глубин, когда требуется полное покрытие дна. Эти системы могут обеспечивать полное акустическое освещение {ensonification) морского дна, что в итоге повышает разрешающую способность съемки и возможность обнаружения {detection capability) объектов на поверхности дна. Многолучевая сонарная система использует акустический метод формирования лучей {beamforming) или интерферометрический принцип (фазированная решетка) {interferometric techniques), на основании которых детальные данные о рельефе дна в полосе обзора могут быть получены много раз в секунду.
Единый преобразователь или пара преобразователей формируют веерообразный набор узких лучей, в результате чего обеспечивается расчет времени распространения акустических сигналов внутри полосы обзора {swath), ширина которой зависит от типа системы и глубины моря и составляет для картографических целей обычно от 2 до 14 глубин.
Обычно, излучая много акустических посылок {sweeps) в секунду (например, Reson Seabat 8101 формирует 30 посылок в секунду на наклонных дальностях 7,4 от глубины), многолучевая система может достигнуть полного покрытия дна и обеспечить высокое разрешение в пятне облучения при узкой направленности лучей, т. е. <Г. Многолучевая система может быть также сконфигурирована для полного подводного обзора (т. е. обеспечения угла обзора более 180°), что позволяет обеспечить полный боковой обзор для топографического картографирования при строительстве каналов, шлюзов, волноломов, подпорных стенок и других подводных сооружений [46].
Некоторые многолучевые системы могут собирать данные обратного рассеивания эхосигналов и создавать цифровые гидролокационные изображения одновременно с получением глубин в полосе обзора, что представляет собой большое преимущество для обнаружения подводных скал, препятствий, мелей и других объектов. Частоты многолучевого эхолота и методы обработки акустических сигналов могут быть приспособлены к конкретным требованиям съемки: для обеспечения дноуглубления, обнаружения подводных препятствий, картографирования рельефа и т.д. Многолучевые системы в реальном масштабе времени
ИЗ
Глава 5. Системы площадной съемки рельефа дна
обеспечивают сбор данных, фильтрацию, редактирование и контроль качества. Одновременно со съемкой может выполняться пост-обработка, прокладка на плоттере, расчет объемов. Таким образом, отчетный планшет и (или) трехмерная модель рельефа (3D terrain models) и окончательные объемы дноуглубления могут быть получены уже в день выполнения съемки.
5.1. Основные характеристики многолучевых эхолотов
5.1.1. Принцип работы
Принцип работы МЛЭ заключается в излучении веерообразного импульса, направленного к дну (см. рис. 5.1а). Акустическая энергия отражается от дна. Для приема эхосигналов МЛЭ формирует лучи с заданными углами, используя для этого технологию электронного формирования лучей (см. п. 3.3.2). Диаграмма направленности приемной антенны показана на рис. 5.16 Время распространения акустических сигналов между моментами излучения и приема определяют специальные алгоритмы детектирования дна (seabed detection algorithms). Используя методы трассирования лучей (см. п. 5.2.3), можно рассчитать глубину и поперечное горизонтальное расстояние (transversal distance) от приемной антенны до центра области, освещенной каждым лучом. Излученный луч имеет большую угловую
а
Передающая антенна ЭМЛ
Направление диаметральной плоскости судна-носителя ЭМЛ
Ширина диаграммы направленности передающей антенны в плоскости, параллельной плоскости мидель
Полоса облучения передающей антенны на морском дне
Рис. 5.1. Диаграммы направленности антенн МЛЭ на излучении «а» и приеме «б»
114
5.1, Основные характеристики многолучевых эхолотов
ширину поперек направления движения и маленькую вдоль направления движения; и наоборот, многочисленные лучи, формируемые во время приема, являются широкими вдоль направления движения и узкими в поперечном направлении. Пересечение этих лучей на дне представляют собой акустически освещенные области, называемые «пятна облучения» или следы лучей (footprints), к центрам которых и относят вычисляемые глубины (см. рис. 5.2). Поскольку измерения наклонных дальностей производятся с движущейся платформы (судна), имеющей шесть степеней свободы (три поступательные и три вращательные), то для расчета глубин и их планового положения необходимы точные измерения широты, долготы, вертикального перемещения, а также углов крена, дифферента и курса.
Рис. 5.2. Формирование лучей МЛЭ, следы лучей на дна
Передающая и приемная антенные решетки МЛЭ, предназначенные для создания двух вееров лучей, имеют конфигурации в виде латинской буквы «£» или «7» (см. рис. 5.3) — крест Миллса (см. п. 3.3.2). Каждая антенная решетка состоит из множества одинаковых преобразователей (transducer), расположенных на одинаковых расстояниях друг от друга по одной линии. Антенны могут быть плоскими или криволинейными.
Каждая из антенных решеток создает сложный основной лепесток характеристики направленности, узкий в направлении продольной оси антенной решетки. Пересечение лепестков характеристики направленности передающей и приемной антенных решеток создает узкий «луч» МЛЭ.
Каждый цикл излучения акустической энергии передающей антенной называется посылкой (ping).
В течение одного цикла излучения, как правило, должны быть приняты данные по всем лучам.
115
Глава 5. Системы площадной съемки рельефа дна
луч- пересечение двух акустически освещенных областей на дне
Рис. 5.3. Антенные решетки МЛЭ и геометрия лучей [www. gge.unb./Research/]
5.1.2. Детектирование дна
Детектирование дна (Bottom detection) представляет собой процесс, используемый в МЛЭ для определения времени прихода амплитуды акустического сигнала, отраженного от дна. Надежность этого процесса влияет на качество измерений. Грубые ошибки определения времени могут, среди других многочисленных причин, приводить к плохому функционированию алгоритма, используемого для детектирования дна.
Все площадные многолучевые системы используют единый подход при определении глубин. Производится акустическое освещение полосы обзора, и на основе эхосигналов по наклонным лучам с известными углам приема рассчитываются глубины. Время распространения акустического сигнала по каждому лучу пересчитывается в наклонную дальность, а затем с учетом угла луча и данных профиля скорости звука, рассчитываются глубина центра пятна луча и его горизонтальное отстояние от центра антенны. Таким образом, задачей является преобразование времени прохождения сигнала до дна и обратно в полосе обзора. Наклонные дальности определяются с использованием амплитудного и (или) фазового метода (рис. 5.4).
Амплитудное детектирование [53] основывается на определении времени, когда передний фронт сигнала встретится с дном. Обычно, такое определение основывается на расчете центра тяжести огибающей сигнала (center-of -energy method) или на методе согласованной фильтрации (matchedfilter method). Фазовое детектирование [53] основывается на нахождении времени нулевой фазы с использованием двух и более подсекций приемной антенны. Амплитудное детектирование, как правило, используется на внутренних лучах (от 0 до 45° от вертикали), а фазовое детектирование обычно применяется на внешних лучах (от 45° до 100°). Используемые методы включают: предел перехода — анализ в реальном
116
5.1. Основные характеристики многолучевых эхолотов
Рис. 5.4. Методы детектирования дна [IH0 М-13, 2006]
времени по каждому лучу с переключением между амплитудным и фазовым методами, а также комбинации амплитудного и фазового детектирования. Точка перехода от амплитудного к фазовому детектированию зависит от конструкции МЛЭ. В точках перехода точности определения глубин могут резко меняться.
5.1.2.1. Амплитудное детектирование (Amplitude detection)
Антенная решетка преобразователей (transducer array) излучает акустический импульс в направлении дна, и затем антенная решетка гидрофонов начинает период прослушивания эхосигналов от дна. В этот период, вернувшийся сигнал по каждому лучу оцифровывается временем. Время распространения сигнала для соответствующей глубины определяется детектированной амплитудой отраженного сигнала (см. рис. 5.5).
Обычным методом детектирования амплитуды является определение следующих параметров:
а) Переднего фронта огибающей отраженного сигнала (Leading Edge of the Reflected Signal).
Этот метод обычно используется в том случае, когда угол падения луча (angle of incidence) на дно близок к нулю. Время детектирования определяется по первому приходу сигнала внутри луча. При увеличении угла падения возвращенный сигнал теряет четко выраженную форму переднего фронта, и данный метод перестает давать хорошие результаты. Могут быть применены два других метода, учитывающие различия в силе отраженного сигнала в пределах пятна облучения.
117
Глава 5. Системы площадной съемки рельефа дна
амплитуда
+180
о
-190
6
zi Jo
наклонная дальность (м)
б) Максимальной амплитуды отраженного сигнала (Maximum Amplitude of the Reflected Signal).
Детектирование дна выполняется на основе времени максимальной амплитуды обратного рассеяния (maximum backscatter amplitude).
в) Центра тяжести отраженного сигнала( Centre of Mass of the Reflected Signal). Этот метод использует для детектирования дна время, соответствующее центру тяжести амплитуды сигнала.
5.1.2.2. Фазовое детектирование (Phase detection)
Амплитудное детектирование является методом, используемым для внутренних лучей (близких к вертикальным), у которых амплитуда обратного рассеяния имеет более высокие значения, а выборка меньше. Для внешних лучей амплитуда обратного рассеяния уменьшается, и величина выборки (number of samples) становится очень большой. Следовательно, эхосигнал так растягивается по времени, что метод амплитудного детектирования дает плохие результаты. На наклонном дне, простирающемся в направлении, поперечном направлению движения, размытость сигнала также несколько улучшается. Следовательно, фазовое детектирование обычно используется на больших углах падения лучей, что проиллюстрировано на рис. 5.6.
При этой методике антенная решетка преобразователей для каждого луча разбивается на две подсекции (sub-arrays), часто перекрывающиеся с центра-
118
5.1. Основные характеристики многолучевых эхолотов
наклонная дальность (м)
наклонная дальность (м)
Рис. 5.6. Фазовое детектирование дна
ми подсекций, расположенными друг от друга на расстоянии, равном половине длины волны. Угловые направления лучей установлены заранее, и каждая подсекция создает луч в направлении, преимущество которого в том, что если одновременно приходят два эхосигнала с разных направлений, то система разрешает сигнал только с направления сформированного луча.
Последовательность разности фаз затем используется для оценки времени прихода сигнала по заранее установленному направлению путем нахождения нулевого фазового сдвига (zero crossing of the phase sequence). На рис. 5.7 представлена иллюстрация изложенного метода фазового детектирования [53]. Эквиваленты центров двух подсекций представлены точками Л и В, расположенными на расстоянии «/» одна от другой, где 0 — угол прихода сигнала, измеряемый от акустической оси антенной решетки. Для ограничения последовательности дифференциальной оценки фазы с целью улучшения детектирования нулевого фазового сдвига может быть применен полином второй степени. Когда сигнал приходит с направления акустической оси, т. е. 0 =0, то сигналы двух подрешеток находятся в фазе (in phase) и это соответствует времени акустического распространения.
Внутри полосы обзора всегда используется комбинация амплитудного и фазового детектирования. Для вертикальных лучей лучше использовать амплитудное детектирование, поскольку времённая развертка измерений амплитуды (time series) для этих лучей слишком короткая, чтобы надежно использовать фазовый метод. Амплитудное детектирование используется также в случае, когда крутой
119
Глава 5. Системы площадной съемки рельефа дна
Рис. 5.7. Нахождение нулевого фазового сдвига при детектировании дна фазовым методом [IH0 М-13, 2006]
склон располагается далеко в стороне от вертикальных лучей, за исключением случая крутого понижения в строну от преобразователя. Фазовое детектирование вертикальных лучей более пригодно при больших грубых погрешностях, являющихся результатом помех в водной толще или от боковых лепестков. Детектирование по боковым лучам лучше выполнять фазовым методом, но амплитудное детектирование в этом случае может оказаться лучшим выбором при высоких значениях эхосигналов, являющихся результатом различий в отражающей способности цели или наличия отражений, близких к зеркальному. Такие условия могут возникнуть, как правило, при получении эхосигналов от таких объектов, как затонувшие суда или огромные валуны.
5.1.3. Распределение лучей и размер пятна облучения
Площадные системы съемки обычно создаются с таким расчетом, чтобы между соседними лучами оставались промежутки от 0,5° до 3°. В соответствии с физической природой достижимый промежуток между лучами не может быть менее 0,5° при сохранении приемлемых портативных габаритов электронной аппаратуры, обеспечивающей формирование лучей. Для повышения разрешающей способности применяется технология фазовой интерферометрии. Точность
120
5.1. Основные характеристики многолучевых эхолотов
МЛЭ с широкой полосой обзора определяется способностью многолучевой системы различать (разрешать) реальные углы лучей при меняющихся условиях. Аналитические соотношения изменения угловых величин лучей , отклоненных от вертикали в плоскости линейной антенной решетки, уже были рассмотрены в п. 3.3.2.
Качество и точность данных, получаемых на крайних лучах, зависит от размера пятна облучения. Аналогично однолучевому эхолоту, чем меньше угол луча, тем лучше система способна определить истинную глубину и получить высокое разрешение объектов на дне. Поскольку величина пятна облучения увеличивается в направлении крайних лучей, благодаря расширению лучей, стабильность и точность данных уменьшается, что ведет к понижению качества данных по направлению к крайним лучам. По этой причине, как правило, накладываются ограничения на использование внешних лучей, что сокращает ширину полосы обзора, акустического покрытия дна, при единичном проходе с многолучевой съемкой. Формулы для расчета размеров пятен облучения МЛЭ приведены в п. 3.5.2.
5.1.4. Параметры сигналов
Каждое пятно облучения на морском дне в пределах акустически освещенной полосы обзора возвращает отраженный эхосигнал, в котором каждый из единичных параметров (амплитуда, частота и фаза) являются взаимно зависящими величинами. Эти параметры зависят от характеристик морского дна: отражающей способности дна (bottom reflectivity) и угла наклона дна в направлении линии веера лучей МЛЭ. Качество эхосигнала зависит от первичных характеристик из-лучения/приема, а также от геометрических и отражающих свойств конкретного пятна облучения. Аппаратное обеспечение является фактором, играющим важную роль в получении качественных конечных результатов. В конструкциях, реализующих только электронное формирование лучей, преобразователи должны быть настроены на конкретное приложение. Таким образом, при детектировании дна МЛЭ дает три типа данных:
(1) угол луча, вдоль которого распространялся акустический сигнал, относительно антенны;
(2) время распространения акустического сигнала (до дна и обратно),
(3) распределение интенсивности акустического сигнала при его приеме во времени.
Эти три части информации должны быть интегрированы с данными других датчиков для того, чтобы можно было определить положение глубины в геодезической системе координат.
Большинство многолучевых систем могут также выдавать цифровые изображения дна, более известные, как псевдо-ГБО цифровые изображения (см. п. 5.1.8).
5.1.5. Эффекты от крена, дифферента и рыскания
Точность планового положения рассчитываемых глубин зависит от возможности системы компенсировать угловые смещения, вызванные креном, дифферентом и рысканием судна (рис. 5.8). Угловое смещение веера лучей и, соответственно,
121
Глава 5. Системы площадной съемки рельефа дна
Рис. 5.8. Пространственные угловые перемещения антенн МЛЭ: крен, дифферент и рыскание
пятен облучения на дне в направлении, перпендикулярном диаметральной плоскости, является весьма критичным. В системах с широкой полосой обзора даже небольшой неучтенный крен вызывает большие смещения координат глубин на крайних лучах. Таким образом, ограничения обычно накладываются именно на использование данных от внешних лучей. На рис. 5.8 представлены оси судовой (х, у, z) и локальной (У£ XL ZL) систем координат, используемых при выполнении расчетов, связанных с получением глубин и координат многолучевой батиметрии. Центр судовой системы координат располагается в центре масс судна. Ось х лежит в диаметральной плоскости (ДП) судна, ось у — в плоскости, параллельной плоскости мидель шпангоута, а ось z дополняет систему до правой и направлена верх ( перпендикулярна плоскости главной палубы). Оси х, у, z жестко связаны с корпусом судна-носителя МЛЭ. Центр локальной системы координат также поместим в центр масс судна. Ось ZL направлена вертикально вверх, ось Yl лежит в плоскости меридиана наблюдателя, указывая на север, а ось XL — дополняет систему до правой.
При этом оси XL и Yl лежат в плоскости, параллельной уровенной поверхности (поверхность моря в спокойном состоянии). При курсе, равном нулю и спокойной поверхности моря, а также правильной балластировке судна (крен и дифферент равны нулю) оси судовой и локальной систем координат должны совпадать. Под воздействием волнения судно испытывает качку, при этом появляются крен, дифферент и вертикальное перемещение.
122
5.1. Основные характеристики многолучевых эхолотов
Прибор, который обеспечивает измерение параметров качки, будем называть «датчик перемещений судна». Другие термины, такие как: «датчик качки», «компенсатор качки», «гировертикаль» и пр., неадекватно характеризуют сущность этого устройства и поэтому не рекомендуются.
В англоязычных странах датчик перемещений судна (ДПС) именуется «motion reference unit =MRU».
Современные ДПС могут быть двух типов: гироскопические и оптиковолоконные. Гироскопические ДПС измеряют три параметра: крен, дифферент и вертикальное перемещение.
При применении таких ДПС в составе системы МЛЭ должен дополнительно использоваться гирокомпас. Оптико-волоконные ДПС измеряют все четыре параметра, включая курс судна. В зарубежной специальной литературе такие ДПС часто именуются «MRU-б».
На судне ДПС должен быть смонтирован таким образом, чтобы его главные оси были параллельны осям судовой системы координат. Тогда ДПС будет выдавать правильные величины углов крена (R), дифферента (Р) и вертикального перемещения (Н).
При установке на корпусе судна передающих и приемных антенных решеток МЛЭ стремятся добиться, чтобы их строительные оси были бы параллельны соответствующим осям ДПС. Однако, практически по разным причинам всегда возникают небольшие угловые смещения, имеющие, как правило, постоянные величины. При этом измерения, выдаваемые ДПС, не будут характеризовать реальные угловые положения антенн МЛЭ, а в рассчитанные глубины и их координаты будут внесены дополнительные погрешности систематического характера. Систематические ошибки углового смещения осей антенн МЛЭ и ДПС обозначаются следующим образом: по углу дифферента — За (а//а); по углу крена — ЗР (beta), по углу рыскания — 8у (gamma).
Для определения поправок, компенсирующих данные систематические ошибки, выполняются специальные исследования МЛЭ, называемые «калибровкой». Полученные в результате калибровки поправки (а, Р, у) суммируются с данными измерений, выдаваемых ДПС, для получения исправленных значений, свободных от систематических ошибок Ризм+а’ ^изм+^’ Очевидно,
что поправки не могут быть определены абсолютно безошибочно, что необходимо учитывать при оценке точности. Калибровку проводят в определенной последовательности и неоднократно. Общие сведения по калибровке МЛЭ изложены в п. 6.3.1.3. Подробные сведения по методике калибровки МЛЭ с использованием ЭГИС HYSWEEP приводятся в главе 7.
5.1.6. Компенсация и стабилизация углов крена, дифферента и рыскания
Различаются МЛЭ с компенсацией и стабилизацией углов крена, дифферента и рыскания.
На начальном этапе развития МЛЭ выполнялась только компенсация углов крена, дифферента и рыскания, т. е. рассчитывались поправки, позволяющие правильно определить положение центров пятен облучения на морском дне. При компенсации этих углов полоса обзора, получаемая при наличии про-
123
Глава 5. Системы площадной съемки рельефа дна
Полоса обзора при наличии Полоса обзора
Полоса обзора не зависит от величин крена и дифферента
Форма полосы обзора зависит от величин крена, и ее эффективная ширина уменьшается
Рис. 5.9. Полосы обзора МЛЭ со стабилизацией лучей по крену (а) и при компенсации крена (6)
странственных перемещений антенн МЛЭ, принимает вид, представленный на рис. 5.96.
Современные МЛЭ, как правило, имеют стабилизацию по углу крена на излучении и приеме, а наиболее совершенные системы (ЕМ-710) обеспечивают также стабилизацию всех излучаемых лучей по бортовой, килевой качке, вертикальному перемещению и рысканию, а также по бортовой качке на приеме. В результате полоса обзора принимает регулярную прямоугольную форму, представленную на рис. 5.9а.
5.1.7. Методы формирования лучей
В различных многолучевых системах для определения наклонных дальностей и расчета глубин от различных направлений в антенной решетке используются методы электронного и физического формирования лучей [46].
5.1.7.1. Электронное формирование лучей
Электронное формирование лучей обычно основано на методах электронной фильтрации, позволяющих различить эхосигналы, пришедшие с разных направлений. Изначально каждый луч формируется путем отфильтровывания ненужных компонентов. Глубина рассчитывается на основе измерений наклонной дальности, полученной в виде центра тяжести огибающей эхосигнала или на основе оценки разности фаз. Многолучевые эхолоты с электронным формированием лучей определяют наклонную дальность до точки источника эхосигнала, основываясь на силе сигнала по отношению к установленному пороговому значению. Электронное формирование лучей обеспечивает стабиль
124
5.1. Основные характеристики многолучевых эхолотов
ное и устойчивое получение наклонных дальностей и углов по каждому каналу, в первую очередь для внутренних лучей. Недостатком является то, что разрешающая способность лимитирована геометрическими свойствами приемной и излучающей антенн и быстродействием мильтиплексорной электроники. При этом конструкция антенны диктует разрешающую способность системы. Ввиду невозможности иметь независимый набор фильтров для каждого канала, электроника должна обрабатывать их последовательно. Поэтому требуется мультиплексор, который работает с каждым каналом индивидуально. В это время все другие каналы игнорируются. В результате получается пространственно усеченный «блочный» поперечный профиль глубин. Все электронные формирователи лучей, как следствие, имеют некоторое наложение соседних лучей и интерференцию боковых лепестков.
Благодаря механической конструкции преобразователя, используемого для электронного формирования лучей, практически невозможно избежать наложения лучей в некоторых точках. Интерференция боковых лепестков — это следствие электронного формирования лучей. Она приводит к тому, что возникают «паразитные» эхосигналы (артифакты), которые не всегда могут быть устранены с помощью фильтров. Интерференция на боковых лепестках вызывает также проблемы в процессе детектирования дна, особенно при наличии расчлененного рельефа. При этом на цифровом гидроакустическом изображении бокового обзора могут возникать ложные цели. Электронное формирование лучей может быть применено при излучении либо при приеме сигналов.
Для управления излучением излучающие элементы антенной решетки подключаются последовательно с небольшой задержкой. Каждая линейка антенны излучателя генерирует акустический сигнал последовательно. Сумма сигналов от каждой линейки антенны создает акустический импульс в заданном направлении. Для направления лучей по нормали к поверхности антенной решетки все линейки должны были бы излучить акустическую энергию одновременно. В этом случае формирования лучей при излучении каждый луч формируется единожды. Процесс управления формированием лучей на излучении длителен, поскольку каждый луч формируется последовательно. Лучшим решением, которое и применяется во всех существующих многолучевых эхолотах с электронным формированием лучей, является применение такого же «фазированного» принципа к принимаемым эхо-сигналам. Узкие веерообразные лучи формируются поперек полосы обзора на приеме, и принятые эхосигналы обрабатываются (обычно одной итерацией для каждого луча). Для устранения мешающих компонентов сигналов по смежным каналам должны использоваться фильтры.
5.1.7.2. Физическое формирование лучей
Многолучевые эхолоты с физическим формированием лучей являются обычными проекторами узкого веерообразного луча и имеют приемную антенну из полимерных приемных элементов, физически направленную в необходимом направлении. Глубина определяется, основываясь на амплитуде эхосигнала, используя метод расчета центра тяжести огибающей. Параметры лучей определяются на основе физической формы полимерных приемных элементов.
125
Глава 5. Системы площадной съемки рельефа дна
Многолучевой эхолот ECHOSCAN фирмы «Odom Hydrographic System’s» использует пьезоэлектрический некерамический материал, известный как PVDF, которому может быть физически придана необходимая форма для получения луча (beam pattern), обладающего высокой чувствительностью к слабым сигналам, уменьшенной интерференцией на боковых лепестках и имеющего эллиптическую форму пятна (pencilbeampatterns) [46]. Благодаря тому, что ECHOSCAN не является многолучевым эхолотом с широкой полосой обзора, он может использоваться для детектирования дна (расчета глубин) методом получения наклонных дальностей на основе критерия центра тяжести огибающей эхосигнала. Таким образом, он не подвержен эффекту «отклонения луча» (“ray bending’). Для преодоления лимитированной угловой ширины полосы обзора в 90°, внутри конструкции преобразователя этого эхолота встроен датчик пространственной ориентации, позволяющий наклонять его так, чтобы просматривать вертикально расположенные конструкции или конструкции, находящиеся прямо под поверхностью воды. Гидродинамические свойства преобразователя позволяют развивать большие скорости при выполнении съемки. Там же расположены и элементы гидролокатора бокового обзора (традиционные аналоговые приемники высокого разрешения), позволяющие одновременно получать цифровое изображение. Преимущества физического формирования лучей включают: 1) очень высокое соотношение сигнал/шум; 2) пренебрежимо малую интерференцию на боковых лепестках, 3) низкий процент «плохих» данных (глубин) и 4) более низкую стоимость. Единственным фактором, лимитирующим применение физического формирования лучей, является компромисс между размером преобразователя и шириной полосы обзора многолучевого эхолота.
5.1.7.3. Комбинированные электронные и интерферометрические методы формирования лучей
Интерферометрические методы формирования лучей подробно будут рассмотрены в п. 5.5.
Имеются МЛЭ, в которых используются комбинированные электронные и интерферометрические методы формирования лучей. Примером являются модели 14,15 и 20 МЛЭ FANSWEEP. Это обеспечивает получение равномерных расстояний между центрами пятен облучения по всей полосе обзора вместо переменных расстояний, которые образуются при использовании антенн с фиксированной шириной луча. Для выполнения данного условия угол между осями лучей (beam spacing angle) должен быть переменным и изменяться от 1,5° в районе вертикали до 0,12° у наиболее крайних лучей. Вычислительная система должна полностью управлять угловыми расстояниями между осями лучей и их направлениями в реальном масштабе времени.
В этой комбинированной системе электронным методом формируются четыре излучаемых луча. Причем каждый из этих лучей имеет частоту немного отличную одну от другой, с самой низкой частотой у крайних лучей, чтобы компенсировать более длинный путь, проходимый этими лучами. Антенная решетка сконфигурирована 26 рядами элементов (преобразователей) в двух группах для обеспечения формирования лучей на излучении, а затем в десяти группах для интерферометрического приема. Комбинирование также обеспечивает высокоточ-
126
5.1. Основные характеристики многолучевых эхолотов
Равномерное угловое распределение лучей внутри единичной посылки
Эквидистантное распределение лучей внутри единичной посылки
Рис. 5.10. Равномерное угловое и эквидистантное распределение лучей единичной посылки [USAGE, 2001]
ную фокусировку лучей в направлении диаметральной плоскости. Конкретные лучи внутри полосы обзора формируются в соответствии с адаптивной схемой таким образом, чтобы обеспечивалось равномерное расстояние между центрами пятен облучения в случаях, когда дно не является ровным. Вся первичная акустическая информация сохраняется во внутренней памяти. В цикле приема лучи в обработку не вовлекаются. Вся информация буферизуется одновременно, как только она полностью получена. Это касается как амплитудной, так и фазовой информации. Независимое одновременно функционирующее программмное обеспечение работает как по классическому алгоритму формирования лучей, так и по интерферометрическому алгоритму, обеспечивая две независимых оценки глубин, которые затем составляют массив из 4096 батиметрических точек (координаты с глубиной) и точек сонарного изображения (пикселей), располагаемых поперечно диаметральной плоскости в полосе обзора. Основываясь на исходных оценках амплитуд и фаз эхосигналов, вторичный корреляционный фильтр повторно обрабатывает содержимое буфера для объединения точек в три и более группы (в общей сложности до 1440) в полосе обзора, шириной до 12 глубин. Оператор имеет возможность группировать данные, задавая количество «лучей» (точка с глубиной) до 1440, ширину полосы обзора (до 12 глубин), а также задавать небольшой сектор сужения полосы обзора (по правому и левому борту).
Эквидистантное распределение лучей является чрезвычайно удобным для последующей обработки многолучевых данных и построения цифровых моделей
127
Глава 5. Системы площадной съемки рельефа дна
рельефа дна. По этой причине большинство современных МЛЭ наряду с равномерным угловым имеют также опцию формирования эквидистантного распределения лучей единичной посылки [46].
5.1.8. Цифровые изображения бокового обзора, получаемые с помощью МЛЭ
Цифровые изображения бокового обзора, получаемые с помощью МЛЭ, как правило, уступают качеством аналогичным изображениям традиционного буксируемого ГБО. Дело в том, что размещение антенны МЛЭ вблизи поверхности моря приводит к большим углам скольжения лучей. Следствием больших углов скольжения является малые тени от объектов, расположенных на дне. Цифровые сонарные изображения, получаемые на основе амплитудных измерений (один из трех видов информации от МЛЭ), имеют ограниченную гидрографическую ценность. Каждый пиксель такого изображения представляет собой интенсивность амплитуды эхосигнала только по одному лучу, т. е. в пределах пятна облучения. Чем больше пятно облучения луча на дне, тем более приближенным
Рис. 5.11. Геометрия лучей классического ГБО (А) и опции ГБО, реализованной в МЛЭ (Б)
128
5.2. Координаты системы МЛЭ
(грубым) будет являться такое «амплитудное» цифровое изображение. Каждый пиксель окрашивается или тонируется (в оттенках серого цвета) в соответствии с величиной интенсивности эхосигнала по конкретному лучу. У крайних лучей амплитуда акустической энергии быстро убывает благодаря низкой интенсивности обратного рассеивания эхосигналов, что может приводить к возникновению ложных акустических целей в условиях интерференции боковых лепестков лучей. Геометрия лучей классического ГБО и опции ГБО, реализованной в МЛЭ, показана на рис. 5.11.
Амплитудные цифровые изображения {Amplitude imagery), называемые также цифровыми изображениями интенсивности обратного рассеивания (backscatter intensity), используются также для классификации морского дна. Цифровые изображения, не связанные с углами лучей, или изображения временной интенсивности, создаваемые некоторыми МЛЭ, очень похожи на изображения буксируемых ГБО с низким разрешением. Однако, разрешение у них значительно выше, и потоки данных больше.
Регистрация многолучевых данных, обеспечивающих независимые от углов лучей цифровые изображения, приводит к получению очень больших по объему цифровых файлов.
5.2. Координатные системы МЛЭ
На рис. 5.12 изображено положение основных датчиков МЛЭ в системе координат, жестко связанной с корпусом судна, с началом, находящимся в центре масс, которую будем именовать судовая система. Такая система координат является «правой» и чаще всего используется в коммерческих инерциальных системах и датчиках перемещений судна (ДПС). Правилом правой системы координат является условие: большой палец правой руки направлен вдоль оси х, указательный — вдоль оси у, а средний палец — вверх вдоль оси z. [59]
Второй системой координат, используемой МЛЭ, является локальная система, оси которой помечены индексом «Г». Основные соглашения по судовой и локальной системам координат были приведены в п. 5.1.5. На рис. 5.12 круговыми стрелками показаны направления положительных вращений углов для крена, дифферента и рыскания (курса). Направление на север «№ совпадает с осью У£ локальной системы. В данной системе координат к положительному изменению угла дифферента приводит движение носовой оконечности судна вверх. Положительным изменением угла крена является направление, при котором движется вверх левый борт. Положительным изменением курса является случай, когда судно катится вправо (по часовой стрелке).
5.2.1. Базовые уравнения многолучевого эхолота
Измеренная глубина (d) и ее поперечное смещение (у) могут быть определены на основе наклонного расстояния (г), полученного путем измерения промежутка времени между посылкой и приходом акустического сигнала (TWTT= two way travel time) и известного угла луча на приеме (0), который представляет собой
129
Глава 5. Системы площадной съемки рельефа дна
Направление движения судна
Рис. 5.12. Координатные системы МЛЭ, привязанные к центру масс судна
угол наклона оси луча относительно вертикали к антенной решетке, измеренный в судовой системе координат (см рис. 5.13).
Глубина d и ее поперечное смещение «г/» в судовой системе координат (xyz) могут быть вычислены по формулам [58]:
d = rcos0 = -z; (5.1)
z/ = rsin0 = 6?tan0.
(5-2)
Геометрический угол наклона луча (0), измеряется от надира, положительными являются значения для левого борта. Отсчет положительных значений производится против часовой стрелки (при наблюдении с носа в корму судна, как изображено на рис. 5.13). Позже будет показано, что такое же соглашение об измерении углов используется при описании бортовой качки, наклоне дна, установки антенной решетки и углов формирования лучей. Из приведенного черте-
жа (рис. 5.13) становится ясно, что возможно корректировать систему координат
эхолота за бортовую и килевую качку и курс вращением соответствующего век-
тора вокруг трех ортогональных координатных осей. Запишем это в матричной
форме [58]:
х
у = R(K,P,R)
О г sin0 -г COS0
(5.3)
где: R — угол вращения за счет бортовой качки (крена) судовой системы координат; Р — угол вращения за счет килевой качки (дифферента) судовой системы координат; К — угол курса судовой системы координат, отсчитывающийся от направления на «север».
130
5.2. Координаты системы МЛЭ
Z
Рис. 5.13. Связь между измеренным наклонным расстоянием, углом луча, поперечным смещением и глубиной МЛЭ
Индексы L и V означают принадлежность соответствующих векторов к локальной (Z) и судовой (V) координатным системам. Локальная система-так же является «правой», где положительные значения осей определяются правилом: ось ZL — вверх, ось У£ — на север, ось XL — на восток, (см. рис. 5.12). Знание вектора глубины в локальной системе позволяет перейти к геодезическим координатам глубины в глобальной системе отсчета. Для этого должны быть известны геодезические координаты антенны системы позиционирования, линейные смещения антенн МЛЭ и системы позиционирования, а также курс (см. п. 5.3.6). Матрица «R(K, Р, R)» в уравнении 5.3 является матрицей вращения и формируется в результате последовательного поворота осей на углы К = К-90, R=-R, Р=Р. Здесь К — курс и R — угол дифферента, измеренный ДПС. В матричной форме эту операцию можно представить в виде:
sin К -cosP o’ cosP 0 -sinP
R(K,P,R) = cos К sinP 0 0 1 0
0 0 1 sinP 0 cosP
1 0 0
0 cosP -sinP (5.4)
0 sinP cosP
Выполнив преобразования, получим матрицу поворота, преобразующую измерения, выполненные в судовой системе, в локальную систему координат, вида:
131
Глава 5. Системы площадной съемки рельефа дна
R(K,P,R) =
sin К cos Р cos К cosP sinP
- cos К cos R - sin К sin P sin R +sin К cos R - cos К sin P sin R cosPsinP
- cos К sin P-sin К sinP cos Pl
- sin К sin R - cos К sin P cos R
cos P cos P
Теперь, используя формулу (5.3) и матрицу (5.5), возможно получить координаты xL, уL в локальной системе, связанной с преобразователями МЛЭ по следующим формулам:
xL = -rsin0(cosP cosP+sinK sinP sinP)-rcos0(cosP sinP-sinP sinP cosP); (5.6)
yL = rsin0(sinP' cosP-cosP sinP sinP)+rcos0(sinK sinP+cosP sinP cosP); (5.7)
ZL =rsin0 cosP sinP-rcos0 cosP cosP. (5.8)
Далее преобразуем формулу (5.8) к следующему виду:
ZL = -rcosP(cos0 cosP-sin0 sinP) (5.9)
и воспользуемся теоремой косинуса суммы углов, тогда формулу (5.9) можно представить в виде:
ZL = -rcosP cos(0+P). (5.10)
С учетом формулы (5.1) представим индивидуальную глубину в каждой посылке в виде:
d = rcosPcos(0+P). (5.11)
Выражение (5.11) представляет собой основную формулу для расчета глубины на основе полученной дальности (г) и угла луча (0), которые измеряет МЛЭ. Глубина d определена в локальной системе и является перпендикуляром к уровенной поверхности, т. е. поверхности воды. Это значение представляет собой глубину, рассчитанную по наклонному лучу, но только в том случае, когда акустический луч представляет собой отрезок прямой, а угол 0 является геометрическим углом луча на приеме, как показано на рис. 5.13. На самом деле, чтобы перейти к такихм геометрическим значениям от непосредственно измеренных величин, мы обязаны сначала учесть искривление луча из-за эффектов распространения звука в воде в зависимости от вертикального профиля скорости звука. Этот вопрос будет рассмотрен позже.
Координаты глубины XL и YL в локальной системе (относительно антенны МЛЭ) в направлении поперек полосы обзора (положение индивидуальных глубин) могут быть получены из выражений (5.6) и (5.7) после выполнения преобразований, аналогичных уравнению (5.9), в виде:
~xl = -rcosK sin(0+P)+r sinP sinP cos(0+P); (5.12)
Xys=yL = rsmK sin(0+P)+r cosP sinP cos(0+P). (5.13)
Здесь введены обозначения: и Ду5, указывающие, что полученные величины представляют собой приращения координат от положения антенн МЛЭ до места глубины d, рассчитанные по формуле (5.11)
132
5.2. Координаты системы МЛЭ
Измеренные значения углов бортовой и килевой качки (крен и дифферент), полученные от датчика перемещений судна (ДПС), могут нуждаться в дополнительных-поправках за неточную установку самого ДПС относительно судовой системы координат. Кроме этого, строительные оси антенных решеток могут не совпадать с осями судовой системы координат из-за неточности установки или в связи с конструктивными особенностями антенн (для некоторых типов МЛЭ).
Для вычисления координат индивидуальных глубин в локальной системе, в соответствии с уравнениями (5.12) и (5.13) должна также быть учтена курсовая поправка за возможную неточность продольной установки излучающей антенны МЛЭ. Отсутствие учета этой поправки приведет к получению искаженного положения глубин. Полагаем, что поправка компаса отсутствует. В противном случае ее также следует учитывать.
Ситуация может быть осложнена еще и тем, что некоторые системы МЛЭ имеют возможности стабилизации углов крена и дифферента перерасчетом направления луча в реальном времени. Некоторые глубоководные системы учитывают разность курсов в моменты излучения и приема сигнала. В этом случае вместо величин углов качки и курса в уравнениях МЛЭ будут использоваться поправки в соответствующие углы. В любом случае, уравнения 5.11-5.13 могут быть названы базовыми уравнениями МЛЭ и всегда могут быть модифицированы под конкретный вид оборудования.
Дальнейшим применением уравнений 5.11-5.13 будет расчет априорных погрешностей координат и глубин, с учетом предполагаемых точностей измерения наклонных расстояний и углов лучей, погрешностей определения скорости звука в воде, как по вертикальному профилю, так и непосредственно в районе антенн МЛЭ. Погрешности измерений углов крена и дифферента с помощью ДПС и погрешности взаимной установки антенн МЛЭ и ДПС также должны быть учтены. В целом такие погрешности должны быть отнесены к инструментальным либо собственным погрешностям МЛЭ при измерении наклонных расстояний и углов лучей.
5.2.2. Угловые поправки
В отношении углов вращения вокруг осей судовой координатной системы необходимо помнить, что антенные решетки МЛЭ, как и другие датчики, не могут быть установлены в судовой системе абсолютно точно, поэтому измеренные угловые величины должны быть приведены в соответствие с реальными значениями, наблюдаемыми в локальной координатной системе. Так, например, ряд систем имеют ненулевые значения установочных углов, обусловленные конструктивно. В системах МЛЭ со сдвоенной антенной, угол между антеннами может составлять от 10° до 40° и фактически представляет собой «искусственно» созданный угол крена. Для получения ламинарного потока вдоль поверхности антенны рекомендуется обеспечивать набегающий поток, для чего антенна устанавливается с небольшим наклоном, соответствующим положительному дифференту. Практически всегда существуют систематические ошибки в установке антенны МЛЭ в судовой системе координат, которые невозможно предрассчитать теоретически. Такие угловые систематические ошибки могут составлять доли градуса и даже градусы и определяются экспериментально посредством специальной
133
Глава 5. Системы площадной съемки рельефа дна
калибровки системы МЛЭ и учитываются программно в виде угловых поправок крена, дифферента и курса. Таким образом, суммарные пространственные углы R, Р, К, используемые в уравнениях 5.11-5.13, являются суммой углов, измеренных ДПС, и угловых поправок, представляющих собой расхождения во взаимной ориентации антенны МЛЭ и ДПС, согласно следующим выражениям:
* = ^+0; (5-14)
Р = (5.15)
К=Кизм+у, (5.16)
где &из*е ?изм’ &изм ~ Углы крена, дифферента и курса, измеренные ДПС (и гирокомпасом), относительно осей локальной системы координат, а а, 0, у — поправки за крен, дифферент и азимут антенны МЛЭ, определяемые путем калибровки с целью исключения систематических ошибок в углах, возникших между осями антенн МЛЭ и соответствующими осями ДПС. Процедуры калибровки МЛЭ, имеющие целью определение угловых поправок: а, 0, у, кратко рассмотрены в п. 6.3.1.3 и более подробно излагаются в главе 7 (п. 7.5.2).
5.2.3. Учет рефракции наклонных дальностей в среде с разной скоростью звука
Измеренное наклонное расстояние вычисляется, как половина интервала времени от излучения до приема сигнала, умноженное на скорость распространения звука в воде, следующим образом:
ct
г=у- (5.17)
Измерение указанного интервала времени и угла приема сигнала является намного более сложным, чем в случае однолучевого эхолота, и зависит от метода определения момента прихода отраженного импульса. Все существующие эхолоты используют ту или иную форму амплитудного определения, а многие системы используют также и фазовое определение. Эти методы, известные, как соответственно амплитудный и фазовый методы детектирования дна, позволяют с большой точностью определить как угол прихода отраженного импульса, т. е. угол луча, так и интервал времени от излучения до приема сигнала. Эти методы детектирования дна были подробно рассмотрены в п. 5.1.2.
Несмотря на высокую точность определения угла луча, этот угол не является геометрическим углом радиус-вектора, проведенного от антенны МЛЭ до пересечения с поверхностью дна. Это является следствием искривления (рефракции) наклонных лучей, вызываемого изменениями скорости звука на различных горизонтах. Путь луча в такой слоисто неоднородной среде показан на рис. 5.14. Кроме того, для систем, формирующих лучи, на ортогональной приемной антенне возникает дополнительная погрешность, обусловленная неточным знанием скорости звука непосредственно в районе гидроакустической антенны. Наклонные лучи изгибаются в зависимости от изменения скорости звука согласно закону Снелиуса. На границах каждого слоя со скоростью звука, принятой за
134
5.2. Координаты системы МЛЭ
Рис. 5.14. Рефракция акустического луча в слоисто неоднородной среде
постоянную (слой постоянства), синусы углов падения и отражения луча связаны отношением скоростей звука по обе стороны границы слоев следующим образом: (см. рис. 5.14). Математически закон Снелиуса для углов падения лучей (0) может быть записан в виде уравнения (5.18):
^ = 5^ = 4, (5.18)
q с-
где k известна как «постоянная Снелиуса».
Так как скорость звука вдоль профиля измеряется дискретно, можно определить множество таких слоев. В каждой посылке (зондирующем импульсе) имеются пары значений угла старта луча и времени двойного прохождения звуком наклонного расстояния (TTWT) до дна для каждого луча. В дополнение, должна иметься серия измерений скорости распространения звука в воде на различных горизонтах — вертикальный разрез скорости звука (ВРСЗ). Разрез скорости звука может быть получен с помощью гидрологического зонда (CTD — зонд) или зонда- скоростемера (SVP). Более подробные сведения об измерителях скорости звука были изложены в главе 2. Неизвестными величинами являются глубина d и поперечное смещение у для соответствующего угла старта луча и двойного времени прохождения звука. Обычным путем коррекции рефракции луча является создание таблицы значений глубин и поперечных смещений для каждого луча с
135
Глава 5. Системы площадной съемки рельефа дна
шагом по возрастанию времени прохождения. При этом табулируется весь возможный диапазон глубин. Глубины и поперечные смещения затем могут интерполироваться для реальных значений углов старта и времени. При этом необходимо помнить, что угол старта зависит от профиля скорости звука, поэтому угол луча должен быть скорректирован на величину угла крена и установочного угла антенны. На примере рис. 5.14 видно, что расстояние, полученное на основе половины времени прохождения луча до дна (TTWT) может иметь меньшее значение, чем сумма составляющих отрезков по слоям. Используя значения угла старта луча и профиль скорости звука, возможно определить поперечное смещение и наклонное расстояние каждого слоя, а также новое значение исходного угла луча для следующего слоя из уравнения 5.18. Из полученных послойных наклонных расстояний, возможно далее рассчитать новые значения времени прохождения слоя. Используя такую процедуру последовательно для всех слоев, получаем исправленное значение глубины и бокового смещения. Математическое выражение для такой процедуры приводится ниже [59]:
0г
sin
С-
—~sin0zj
.С:-1
(5.19)
Z* п 1 /У
г =— TWTT -2У——— •
n 2[ trcfcosej’
(5.20)
п-1
^=Xdi+rncosen; (5.22)
1=1
п-1
у^ tan0f + rn sin0n.
:=1
(5.23)
5.2.4. Управление лучами на приеме
Согласно рис. 5.15, в плоскости y-z судовой системы координат зависимость между установочным углом (0) антенны МЛЭ (или углом сектора в случае цилиндрической антенны с управляемым направлением приема для внешних лучей), утлом луча (0) и углом направления приема (8) связана следующим образом:
0 = 0+8. (5.24)
В данном случае все углы положительные, кроме установочного угла антенны (0). У МЛЭ с закругленной (цилиндрической) приемной антенной управление направлением лучей используется только во внешних симметричных секторах, формирующих внешние лучи. Для плоских антенн управление направлением луча производится для всех лучей, кроме центрального, перпендикулярного антенне. Для всех систем МЛЭ, в которых производится управление приемными лучами за счет оперативного использования величины утла крена, актуальным утлом луча будет (0-0) в целях достижения равномерного покрытия полосы обзора таким образом, чтобы она имела ровные края. Этот вопрос также рассматривался в п. 5.1.5.
Для достижения управления лучами, не ортогональными плоскости антенны, производится разновременный прием на различные акустические эле-
136
5.2. Координаты системы МЛЭ
Рис. 5.15. Угловая ориентация при наличии установочных углов антенн [Hare,2001]
менты (участки) антенной решетки. Элементы, находящиеся дальше от фронта волны, включаются позже, а элементы, находящиеся ближе к фронту, включаются раньше. Таким образом, фронт волны остается когерентным. Поясним сказанное для случая плоской антенны, изображенной на рис. 5.16. По рисунку видно, что в случае плоской антенной решетки для управления приемным лучом, не ортогональным плоскости антенны, а имеющим с ней угол 8, можно воспользоваться значением апертуры L (длины сегмента между гидрофонами), используемой для формирования луча, и скоростью звука в воде (с) у антенны для вычисления временной задержки (ДО- При этом будет справедливо следующее соотношение [59]:
Рис. 5.16. Схематическое изображение принципа управления направлением луча [Hare,2001]
137
Глава 5. Системы площадной съемки рельефа дна
Рис. 5.17. Управление лучом для цилиндрической антенны [Hare,2001]
sin8 = _^. (5.25)
Формула (5.25) наглядно демонстрирует, что для точного управления приемными лучами необходимо с максимально возможной точностью знать скорость звука непосредственно у антенной решетки МЛЭ. Вопросы управления лучами на приеме были детально рассмотрены в п. 3.3.2. Для случая цилиндрических антенных решеток, используемых в некоторых типах МЛЭ, особую сложность представляет собой формирование внешних лучей с использованием только крайних секций антенны (см. рис. 5.17). В этом случае необходимо особенно точно знать скорость распространения звука непосредственно в районе антенны. Погрешность в определении этой скорости приведет к неточному вычислению временной задержки для крайних секций, что в свою очередь повлечет неверное определение направления прихода луча. Именно по этой причине в настоящее время цилиндрические антенные решетки практически перестают использоваться.
5.3. Дополнительные поправки для расчета глубин МЛЭ и их координат
5.3.1. Исправление глубин, рассчитанных МЛЭ
Имеются несколько источников систематических ошибок, которые необходимо учитывать для получения исправленных глубин по данным МЛЭ. Эти ошибки связаны с вертикальным перемещением антенны (^) и ее динамическим заглублением (^).В момент времени t глубина от поверхности (Df) может быть рассчитана по формуле:
Dt=d-kdt+ &dd, (5.26)
где d — глубина, рассчитанная МЛЭ с учетом данных ВРСЗ; Д^ — поправка глубины, учитывающая вертикальное перемещение антенны МЛЭ под воздействием вертикальной качки (волнения) на момент времени M,d — динамическое заглубление антенны (глубина антенны МЛЭ в момент Г).
Далее рассмотрим возможные систематические ошибки, которые могут возникать, как результат динамического перемещения антенны МЛЭ по вертикали,
138
5.3. Дополнительные поправки для расчета глубин МЛЭ и их координат
а также в результате разнесенного в плане положения антенны и датчика перемещений судна. Оптимальным размещением антенны МЛЭ и ДПС является их совмещение в плане (ДПС строго над антенной), однако это достигается редко. Когда ДПС и антенна МЛЭ разнесены в плане и носитель антенн испытывает качку (крен и дифферент), то возникает явление, известное как «наведенное вертикальное перемещение» (inducedheave) [53].
Отметим, что вертикальное перемещение положительно в направлении «вверх», а динамическое заглубление положительно в направлении «вниз».
5.3.2. Вертикальное перемещение (Heave)
Вертикальное перемещение для ОЛЭ уже кратко рассматривалось в п. 4.4.4. Теперь повторно рассмотрим это явление применительно к МЛЭ.
Вертикальное перемещение (вертикальная качка) представляет собой регулярное перемещение антенны МЛЭ относительно среднего вертикального положения и измеряется с помощью ДПС.
На основе этих измерений возможно вычислить поправку глубины за вертикальное перемещение антенны МЛЭ на определенный момент времени. Эти расчеты, как правило, выполняются на этапе пост-обработки данных МЛЭ на основе данных ДПС, зарегистрированных в реальном масштабе времени. Для получения надежных результатов желательно комплексировать данные ДПС с данными спутниковой аппаратуры, способной с высокой точностью определять геодезическую высоту. Мгновенное значение относительного вертикального перемещения антенны МЛЭ включает две компоненты: значение, измеренное ДПС в месте его установки (Аб/т), и наведенное вертикальное перемещение (Аб/г), обеспечивающее приведение измеренного значения к положению антенны МЛЭ. Таким образом, имеем:
Дб/=Дб/ + Дб/-. t т i
(5-27)
При расчете наведенного вертикального перемещения эффект воздействия от крена и дифферента может быть объединен. Поскольку вертикальное перемещение является относительным, то наведенное вертикальное перемещение представляет собой разность двух вертикальных координат: z-положения антенны МЛЭ при отсутствии вертикальной качки и положения антенны при наличии крена и дифферента. Вертикальное положение антенны при наличии крена R и дифферента Р может быть определено путем вращения вектора смещений (ДПС-антенна МЛЭ) с учетом матрицы вращений R(K, Р, R), определяемой в соответствии с (5.3). При этом величина б/. может быть рассчитана по формуле [59]:
Дг
^=2-Н(К,Р,К)
(5.28)
где Дх, Аг/, Аг — разности координат ДПС и антенны МЛЭ в судовой системе.
Поскольку нас реально интересует вращение только координаты z, то решение матричного уравнения (5.28) существенно-упрощается, и после несложных преобразований величина di может быть представлена в виде:
139
Глава 5. Системы площадной съемки рельефа дна
d^-AxsinP-Ay sinR cosP+ Аг(1-cosP cosP). (5.29)
В выражении (5.29) отсутствует величина курса (К), поскольку наведенное вертикальное перемещение не зависит от курса носителя антенн МЛЭ.
5.3.3. Динамическое заглубление антенны МЛЭ
Динамическое заглубление антенны МЛЭ включает три составляющие, которые были рассмотрены в п. 4.4.5. Напомним, что в статическом состоянии, когда судно-носитель антенн МЛЭ не имеет хода относительно воды, статическое заглубление антенны (ddra^) может быть измерено достаточно точно. Однако, на ходу возникает дополнительное заглубление корпуса носителя, известное, как эффекты «проседания» (settlement) и (или) «посадки»(squat). Для расчета динамического заглубления антенны МЛЭ используется формула [53]:
= ddraft^squat^set= ddraft+^ (5-30)
где dsquat — поправка на посадку; dset — поправка на проседание.
Величины поправок на посадку и проседание обычно на практике объединяются и должны экспериментально определяться для каждого носителя антенн МЛЭ. Сумму этих поправок назовем общей поправкой динамического заглубления и обозначим 8б/.
Общая поправка динамического заглубления в значительной степени зависит от скорости хода относительно воды и формы корпуса носителя. Для учета поправок составляют таблицы зависимости поправки от скорости хода или используют математическую модель данного объединенного эффекта.
Заметим, что в случае использования для трехмерного определения координат фазовой спутниковой аппаратуры, реализующей режим кинематики реального времени (RTK), необходимость учета динамической осадки отсутствует (см. п. 5.3.4.2).
5.3.4. Учет поправки за приведение глубин к заданному нулю глубин
В современной гидрографии существуют два метода исправления глубин за уровень:
— классический метод исправления глубин по данным уровненного поста;
— метод расчета поправки за уровень на основе использования фазовой спутниковой аппаратуры, способной выполнять точное измерение геодезической высоты в геоцентрической системе.
Рассмотрим каждый из данных методов исправления глубин за уровень моря.
5.З.4.1. Классический метод исправления глубин по данным уровненного поста предполагает, что в районе съемки имеется уровненный пост с известной высотной отметкой нуля глубин (h0)
В процессе выполнения гидрографических работ ведется постоянное наблюдение за уровнем и фиксируются высотные отметки уровня (Аг) на моменты времени (t). Тогда поправка за приведение к заданному нулю глубин на любой момент
140
5.3. Дополнительные поправки для расчета глубин МЛЭ и их координат
временит (t) может быть рассчитана по известной формуле (5.31), а исправленная глубина — по формуле (5.32): *
\dw=hQ-hv (5.31)
D = (^-Дб^+Дб/^+Дб/цл (5.32)
Поскольку в качестве нуля глубин используют самый низкий уровень, например, «наинизший теоретический уровень» (НТУ), на морях с приливами поправка Дб/^ как правило, отрицательная.
5.3.4.2. Метод расчета поправки за уровень на основе использования фазовой спутниковой аппаратуры, способной выполнять точное измерение геодезической высоты в геоцентрической системе
За последние годы спутниковые RTK-технологии претерпели многочисленные усовершенствования. Наиболее заметным является введение устранения неоднозначности фазовых измерений методом ^On-The-Flg= OTF» («налету»), который обеспечивает точность на уровне сантиметров независимо от динамики движения пользователя. Другие усовершенствования, касающиеся фазовых приемников и RTK технологии, включают подавление воздействия переотраженного сигнала, улучшение качества слежения за сигналами от навигационных спутников и возможность обновления данных с частотой 20 Гц при минимальной задержке при передаче навигационных данных внешнему потребителю. Совершенствование средств связи и антенн спутниковой навигационной аппаратуры (СНА) также увеличили эффективность RTK —систем.
В состав RTK системы входят референцная (базовая) и роверная (подвижная) станции, включающие фазовые GPS-приемники, антенны, радиомодемы и радиоантенны. Ключевой особенностью RTK является способность разрешения неоднозначности, определение целого количества циклов, во время движения судна-носителя МЛЭ. Для реализации данного принципа используется комбинация фазовых данных на частотах и Z2. Методика OTF включает в себя фильтр поиска и технологию вычисления неоднозначности по методу наименьших квадратов. При благоприятных условиях, разрешение неоднозначности выполняется в течение ГО секунд. На расстояниях до 15 км плановые координаты могут быть определены с точностью 5-8 см, а геодезическая высота с точностью 10 см (95 %).
Предварительно перед использованием спутниковой аппаратуры RTK в гидрографических целях необходимо определить геодезическую высоту нуля глубин. Выполняя промер с аппаратурой RTK, можно не только получать плановые координаты с сантиметровой точность, но и геодезическую высоту мгновенной поверхности моря в точке измерения глубины. Таким образом, становится возможным вычислить в реальном времени поправку за приведение измеренной глубины к выбранному нулю глубин [24].
Рассмотрим методики расчета поправок за уровень на основе использования RTK-измерений.
Спутниковая RTK — аппаратура, установленная на судне, обеспечивает высокоточное измерение геодезической высоты антенны (А) в реальном масштабе времени. С помощью эхолота измеряется глубина, которую после исправления
141
Глава 5. Системы площадной съемки рельефа дна
за скорость звука в воде и статическое заглубление антенны {ddra^ обозначим d. Высоту антенны RTK-аппаратуры над центром приведения судна обозначим Н (см. рис. 5.18).
Горизонтальное положение центра приведения судна для съемки с МЛЭ, как правило, выбирают в центре тяжести судна-носителя антенн МЛЭ. Вертикальное положение центра приведения требует тщательной фиксации, поскольку именно от этой плоскости необходимо отсчитывать высоту антенн GPS-аппаратуры и статическое заглубление антенны эхолота. При классических методах съемки, когда спутниковая аппаратура не обеспечивает необходимую точность определения геодезической высоты, положение вертикального центра приведения обычно связывают со статической ватерлинией судна, от которой отсчитывается величина заглубления антенны эхолота. Когда судно начинает двигаться относительно воды, статическая ватерлиния заглубляется. Это явление, получившее название «проседания» и «просадки», должно учитываться при окончательном исправлении глубин классического промера. Величину проседания обозначим 8d(D). На рис. 5.18. изображено, что отличие статического от динамического уровня воды не учитываются: bd =0. Из рис. 5.18. следует, что исправленная глубина D может быть рассчитана по формуле:
D = d+8d-8dw, (5.33)
где 8dw— поправка приведения к заданному нулю глубин.
Рис. 5.18. Определение глубины D, исправленной поправкой бс/^за уровень моря
142
5.3. Дополнительные поправки для расчета глубин МЛЭ и их координат
Одновременно на основе рис. 5.15. можно записать равенство:
A+8d=8dw+H+S, (5.34)
где S — превышение нуля глубин на эллипсоидом;
Теперь поправку уровня, получаемую на основе RTK-измерений, можно представить в виде:
8dw = A+8d-H-S. (5.35)
Подставив выражение для величины Adw из формулы (5.35) в формулу (5.33), получаем:
D = d-A+H+S. (5.36)
Заметим, что величина 8d больше не присутствует в уравнении (5.36), по которому выполняется расчет глубины D, исправленной за уровень RTK-методом.
В уравнении (5.36) все величины кроме S измерены. Следовательно, для использования RTK-метода необходимо определить превышение нуля глубин над эллипсоидом. Для этого необходимо иметь в районе съемки уровенный пост, который, как правило, совмещается с базовой станцией. Для наглядности рассмотрим числовой пример, изображенный на рис. 5.19, данный при условии, что плоскость нуля глубин находится выше поверхности эллипсоида. В соответствии с формулой (5.36) имеем: D=d-A+H+S=9-615+3+1,5=8. Выясним, как была получена величина 5=1,5 м.
143
Глава 5. Системы площадной съемки рельефа дна
На рис. 5.20 изображены репер и рейка уровенного поста, совмещенные с референцией станцией, обеспечивающей возможность работы в режиме RTK. Здесь Нх — высота установки RTK-антенны референцной станции над репером уровенного поста, Н2 — превышение мгновенного уровня моря над репером (определяется по результатам нивелирования), aAk — геодезическая высота RTK-антенны референцной станции. На посту должны быть выполнены уровенные наблюдения, в результате которых должны быть определены: отсчет по рейке, соответствующий среднему уровню моря за период наблюдений (как правило, за 30 суток), а также отсчет, соответствующий принятому нулю глубин. В приливных морях — это наинизший теоретический уровень (НТУ).
Располагая этими данными, возможно в момент определения величины Н2 взять отсчет мгновенного уровня по рейке и, тем самым, получить величину M,w— поправку за уровень методом, используемым в классической гидрографии (см. формулу 5.31).
Для наглядности всем величинам присвоены численные значения, как показано на рис. 5.20.
Величина Sk — в соответствии с рис. 5.20 может быть представлена в виде:
Sk-Ak-HrH2-\dw (5.37)
Используя заданные числовые значения, получаем: 5^=8,5-1,8-3,2-(2,5)=1,5.
Референцная RTK-станция
дно
Рис. 5.20. Определение превышения нуля глубин над эллипсоидом на уровенном посту
144
53. Дополнительные поправки для расчета глубин МЛЭ и их координат
Таким образом, в районе установки рейки уровенного поста (точнее в точке репера) плоскость нуля глубин на 1,5 м выше поверхности эллипсоида.
Данный метод использования RTK-режима для определения в реальном масштабе времени поправки уровня имеет следующие ограничения:
— расстояние от референцной станции до судна с RTK-ровером, как правило, ограничено величиной 10-15 км вследствие высоких требований к каналу связи и необходимости разрешения многозначности фазовых измерений;
— использование величины Sk взамен S для расчета величины 6dw поправки уровня методом RTK, по формуле (5.34) предполагает, что поверхности нуля глубин и эллипсоида параллельны. В реальном мире это условие не выполняется. При удалении от уровенного поста условие: Sk=S нарушается, и величина различия будет зависеть от характера (величины) прилива и величины ондуляций геоида, с которым коррелированна поверхность местного среднего уровня моря (СУМ), напрямую связанная с поверхностью нуля глубин.
На практике инициализацию RTK-режима работы программы гидрографической информационной системы необходимо выполнять, находясь вблизи уровенного поста и сравнивая 6dw, которая рассчитана программой, с величиной \dw, вычисленной по наблюдениям на рейке по формуле (5.31). Только после получения идентичных показаний на определенном временном интервале изменений уровня (бб/ц^Дб/^) можно полагать, что инициализация RTK-режима выполнена правильно и можно приступать к выполнению съемки.
Выполнение съемки с RTK-расчетом поправки уровня на обширной акватории возможно только в случае наличия нескольких уровенных постов в двух вариантах [50]:
— плоскость нуля глубин на акватории фиксируется относительно поверхности эллипсоида;
— плоскость нуля глубин на акватории фиксируется относительно поверхности геоида.
В последнем случае необходимо иметь детальную информацию о высотах геоида над общеземным эллипсоидом на акватории съемки. За последние годы достигнуты значительные успехи в изучении общеземного геоида. Имеются модели геоида, как глобальные — EGM96, так и региональные для Северной Америки, Великобритании, Франции и ряда других частей Земного шара. Точность определения превышений геоида над эллипсоидом в региональных моделях на суше оценивается величиной 5-10 см (95 %), однако, для морских акваторий, где точность гравиметрических наблюдений существенно ниже, указанные точности едва ли возможны.
При использовании в качестве отсчетной для фиксации плоскости нуля глубин поверхности геоида необходимо установление связи поверхностей местного многолетнего уровня моря и геоида. Тогда можно будет перейти к определению величины К — превышению геоида над поверхностью нуля глубин (см. рис. 5.21). Эти исследования для заданной акватории требуют значительных усилий, но в итоге позволят осуществлять фиксацию нуля глубин относительно более правильной и физически обусловленной поверхности, которой является поверхность геоида.
На основе рис. 5.18 можно записать соотношение:
145
Рис. 5.21. Поправка уровня при фиксации нуля глубин относительно геоида
S = N-K, (5.38)
где N — высота геоида над эллипсоидом (определяется по модели геоида), К — превышение геоида над нулем глубин.
Величина К задается пользователем для отдельных точек акватории, в которых установлены береговые уровенные посты или специальные буи, оборудованные RTK-спутниковой аппаратурой. Величины N выбираются в соответствии с используемой моделью геоида в реальном масштабе времени.
При практической реализации в электронной гидрографической информационной системе (ЭГИС) возможны три режима работы при определении поправок уровня с использованием RTK-технологии.
1. Работа в локальном районе, когда можно принять условие: Sk=S. При этом в программу вводится величина высоты RTK антенны, равная H+Sk.
2. Работа в обширном районе с фиксацией поверхности нуля глубин относительно эллипсоида.
3. Работа в обширном районе с фиксацией поверхности нуля глубин относительно геоида.
При фиксации поверхности нуля глубин относительно эллипсоида поступают следующим образом:
1. На каждом уровенном посту определяют превышение плоскости нуля глубин над поверхностью эллипсоида S^, где i — количество уровенных постов на акватории.
146
53. Дополнительные поправки для расчета глубин МЛЭ и их координат
2. Пользуясь графическими средствами, проводят на схеме изолинии равных значений Sk и строят регулярную сетку (грид), в узлах которой будут помещены интерполированные зачения SEP.xy. (см. рис. 5.22). Затем «градированные» результаты помещают в специальный файл. Например, в ЭГИС HYPACK это файл *.KTD (Kinematic Tidal Datum) [50].
3. При проведении съемки в реальном масштабе времени программа использует данные из файла *.KTD и выполняет для текущих координат (Ху К) интерполяцию величины Sy используя соответствующие значения У в узлах регулярной сетки.
В случае фиксации плоскости нуля глубин относительно поверхности геоида поступают аналогичным образом, но вмести величин Ski используется К? превышения поверхности геоида над плоскостью нуля глубин в месте расположения уровенных постов, с последующим формированием регулярной сетки и файла *.KTD.
Опыт использования RTK-методов для исправления глубин за уровень показывает, что использование величины Sk, определенной на единственном уровенном посту, может обеспечить съемку в радиусе первых километров.
Методика «градирования» величины Sk обеспечивает приемлемые по точности результаты в случае, когда имеется достаточное количество уровенных постов, равномерно расположенных на акватории, как показано на рис. 5.22. В случае, когда район съемки является линейно протяженным (например, выходящий от побережья морской канал) с береговыми уровенными постами, использование данной методики не обеспечивает точность определения поправок уровня, регла-
| Уровенные посты с известными (N-K) - высоты нуля глубин над эллипсоидом 0 Точки, где величина (N-K) проинтерполирована в узлах регулярной сетки с тем, чтобы ввести эти данные в файл .KTD (Kinematic Tidal Datum)
Рис. 5.22. Принцип построения регулярной сетки высот RTK-уровня [Hypack Manual]
147
Глава 5. Системы площадной съемки рельефа дна
ментируемую Стандартом МГО SP-44 для особой и первой категорий съемки. В такой ситуации требуется либо устанавливать в мористой части специальные буи, оснащенные RTK-аппаратурой, создавая тем самым дополнительные уровенные посты, либо использовать метод фиксации плоскости нуля глубин относительно поверхности геоида. Такой метод предусматривает наличие детальной модели геоида на акваторию съемки, а также наличие постоянно действующих уровенных постов, с помощью которых возможно определить местный средний многолетний уровень моря и надежно связать его с поверхностью геоида.
Дальнейшее использование RTK-методов определения поправок для приведения глубин к заданному уровню связано с совершенствованием RTK-аппаратуры, с созданием RTK-сетей для передачи фазовых поправок, а также с использованием новой глобальной дифференциальной системы C-Nav, обеспечивающей дециметровый уровень точности определения геодезической высоты. Это особенно актуально для проведения гидрографической съемки в труднодоступных районах, в Арктике и Антарктике [25, 27, 28,40].
5.3.5. Расчет исправленной глубины поданным МЛЭ
Исправленная глубина, рассчитываемая МЛЭ, может быть получена по следующей формуле.
5.З.5.1. Для варианта классического исправления глубин за уровень:
D = d-( Arfm+Arf.)+( Addraj+8d)+Adw, (5.39)
где d — глубина, рассчитанная МЛЭ с учетом данных ВРСЗ; Adm — величина вертикального перемещения, измеренного в месте установки ДПС в момент получения глубины 6?; Аб?- — наведенное вертикальное перемещение в момент получения глубины d; &ddrajt — статическое углубление антенны (глубина антенны МЛЭ при отсутствии хода); 5d — общая поправка динамического заглубления, полученная по таблице или модели; Adw — поправка за приведение к заданному нулю глубин на момент времени (0, рассчитанная классическим методом по формуле (5.31).
5.3.5.2. Для варианта использования RTK- методов определения поправок для приведения глубин к заданному уровню:
D-d-(^dm+^di)+(^ddraft)+8dw, (5.40)
где Sdw — поправка приведения к заданному нулю глубин, рассчитанная RTK-методом по формулам (5.35) и (5.37).
5.3.6. Расчет геодезических координат глубин МЛЭ на морском дне
Расчет положения каждой исправленной глубины в «абсолютной» геодезической системе координат, связанной с эллипсоидом (например, такой как WGS-84), требует точной информации о взаимном положении датчиков системы МЛЭ в судовой системе координат, а также параметров связи судовой и локальной систем координат. Положение каждой глубины (J), рассчитанной в МЛЭ с учетом ВРСЗ, отно
148
53. Дополнительные поправки для расчета глубин МЛЭ и их координат
сительно приемной антенны уже было рассмотрено в п. 5.1.9.1. В результате преобразования измеренной наклонной дальности и угла луча из судовой в локальную систему координат получены приращения по осям локальной системы YL, XL от места излучающей антенны МЛЭ до положения глубины на дне. При этом были введены обозначения: Ars и Xys, указывающие, что полученные величины представляют собой приращения координат, рассчитанных по формулам (5.12-5.13).
Источником геодезических координат является спутниковая навигационная аппаратура (СНА) GPS /Глонасс. Плановое положение антенн СНА и МЛЭ, как правило, не совпадает, и неучет этого обстоятельства может являться дополнительным источником систематических ошибок планового положения глубин.
Для правильного (свободного от систематических ошибок) определения геодезических координат глубины на дне необходимо:
— учитывать «динамические смещения» между антеннами СНА и МЛЭ,
— выполнять преобразование из судовой в локальную систему координат с учетом курса судна (К) на момент акустической посылки;
— учитывать возможное запаздывание поступления информации о геодезических координатах из СНА в компьютер, на котором функционирует программное обеспечение МЛЭ, выполняющее расчеты по формулам (5.3-5.13).
Смещения {offsets) между антеннами СНА и МЛЭ измеряются как приращения по осям x,z/,z в судовой системе координат и затем программно корректируются с учетом углов крена (/?), дифферента (Р) и курса (К), формируя так называемые динамические смещения'. Arfl, Хуа (см. п. 5.3.6.1).
Отсутствие учета временного запаздывания поступления координат из СНА трансформируется в систематическую ошибку положения глубины на дне по направлению перемещения антенны МЛЭ. Для учета этих систематических ошибок в плановых координатах локальной системы необходимо вычислить поправки: Д^, Xyt (см. п. 5.3.6.2).
Для расчета положения глубины могут быть использованы простые формулы, преобразующие плоские плановые координаты в локальной системе в широту и долготу геодезической системы координат. Данные формулы справедливы при наклонных дальностях в первые десятки километров. Так на каждый километр поперечного смещения погрешность составит всего 1 см.
Окончательные формулы для расчета геодезических координат глубины МЛЭ на дне имеют вид [58]:
ф = <рсрд+(Д^+Дг/а+Дг/г)/М, (5.41)
Х= XGps+(Axs+Axfl+Ax^)/N coscp, (5.42)
где <pGPS, XGPS — геодезические координаты фазового центра приема антенны СНА; Axs, Хуs — приращения координат от антенны МЛЭ до точки глубины на дне, рассчитанные по формулам (5.12-5.13), Дхд, Хуа — динамические смещения координат антенн СНС и МЛЭ в локальной системе, рассчитываемые по формулам (5.43-5.44), Xxv Xyt — поправки за временное запаздывание поступления координат от СНА, рассчитываемые по формулам (5.45-5.46), М — радиус кривизны меридионального сечения эллипсоида; N— радиус кривизны первого вертикала эллипсоида.
149
Глава 5. Системы площадной съемки рельефа дна
5.З.6.1. Расчет динамических смещений плановых координат антенн СНА и МЛЭ
При выполнении установки системы МЛЭ на судне-носителе необходимо тщательно измерять смещения между антеннами СНА и МЛЭ в судовой системе координат. Если судно-носитель находится на «ровном киле», то есть утлы крена и дифферента отсутствуют, измеренные величины смещений (х, у, z) и величины «динамических смещений» (Axfl, Az/fl) совпадают. Однако, если акустическая посылка МЛЭ была излучена в момент, когда антенна имела углы крена (Р), дифферента (Р) и курса (К), расчет динамических смещений должен выполняться по следующим формулам [59]:
/\xa=xsinKcosP-y(cosKcosR+sinKsinPsmR)+z(cosKsinR-sinKsinPcosRyj (5.43)
^ya=xcosKcosP+y(sinKcosR-cosKsinPsmR)-z(sinKsmR+cosKsinPcosR). (5.44)
Величины динамических смещений плановых координат антенн СНА и МЛЭ зависят от места размещения антенн, величин самих смещений (х, у, z), углов крена (Р), дифферента (Р), а также курса (К). На рис. 5.23 показаны различия в динамическом смещении по координате (Аг/Д) и смещений (г/, г), измеренных в судовой системе координат при угле крена R. Очевидно, Az/fl »у.
Поскольку величины динамических смещений не зависят от работы системы МЛЭ, то их необходимо вычислять единожды для каждой акустической по
Z
Рис. 5.23. Иллюстрация динамического смещения координат антенн СНА и МЛЭ при угле крена R
150
53. Дополнительные поправки для расчета глубин МЛЭ и их координат
сылки. Отметим, что измерение смещений практически выполняется от центра судовой системы координат. В качестве начала судовой системы координат при использовании МЛЭ обычно выбирают центр тяжести судна-носителя {Center Of Gravity =COG). Однако, в качестве центра может быть выбрана и точка размещения какого-либо из датчиков.
Хорошим решением является размещение ДПС в месте, удобном для его эксплуатации, по возможности ближе к центру тяжести судна и как можно ближе к антенне МЛЭ. Близость планового положения антенны МЛЭ и ДПС позволит обеспечить минимальность величин «наведенного вертикального перемещения». Антенну СНА следует размещать в плане как можно ближе к месту расположения антенны МЛЭ. Не следует использовать слишком большую высоту антенны СНА, если это не вызвано необходимостью обеспечения беспрепятственного приема сигнала или исключения помех от судовой радиотехнической аппаратуры. При забортной установке МЛЭ на малых судах наиболее удачным решением является размещение антенн СНА, МЛЭ на одном штоке совместно с ДПС.
5.3.6.2. Учет временного запаздывания поступления координат из СНА
Отсутствие учета временного запаздывания поступления геодезических координат из СНА в компьютер МЛЭ трансформируется в систематическую ошибку позиции антенны МЛЭ по направлению ее перемещения. Для учета этих систематических ошибок в плановых координатах локальной системы необходимо вычислить поправки: Ах,, Аг/Г которые являются функцией скорости хода судна-носителя относительно дна (Va) и величины интервала запаздывания (АГ).
Величины этих поправок могут быть рассчитаны по формулам [59]:
Дх? = АГ V^sinXcosP, (5.45)
Az/r=Ar Va cosK cosP. (5.46)
Точность вычисления поправок за счет временного запаздывания поступления навигационной информации зависит, главным образом, от точности знания величины АГ, а также от динамики судна.
Для водоизмещающих судов динамика не оказывает большого влияния на точность расчета поправок. Для определения величины запаздывания используется специальная калибровочная процедура, так называемый «патч-тест».
Уравнения (5.45) и (5.46) показывают, почему при проведении «патч-тестов» иногда бывает трудно разделить определение систематических ошибок угла дифферента и систематических ошибок от запаздывания поступления навигационной информации. Подробные сведения по калибровкам МЛЭ приведены в главе 7 (п. 7.5.2).
В заключение отметим, что для использования в системе МЛЭ следует применять только профессиональную СНА с минимальным временем запаздывания выдачи навигационной информации. Практически вся фазовая СНА, реализующая режим кинематики реального времени (RTK), имеет интервал запаздывания, составляющей менее 0,1 с. При использовании такой СНА отсутствует необходимость выполнения «патч-теста» для определения интервала АГ, поскольку максимальная возможная точность его определения составляет 0,1 с.
151
Глава 5. Системы площадной съемки рельефа дна
При использовании кодовой СНА следует удостовериться, что интервал запаздывания выдачи навигационной информации является постоянным и не зависит от режима ее работы. Далее необходимо выполнять «патч-тест» для определения интервала At
5.4. Априорная точность определения глубин и их координат с помощью МЛЭ
5.4.1. Априорная точность определения глубин
Источники ошибок МЛЭ уже кратко были рассмотрены в п. 5.3, при обсуждении вопросов исправления глубин многолучевой батиметрии.
При оценке точности по всем последующим формулам предполагается, что выполняемые измерения являются некоррелированными, а их погрешности подчинены закону распределения, близкому к нормальному. При этом точность измерений оценивается средними квадратическими погрешностями (СКП).
5.4.1.1. Преобразование погрешностей дальности и угла луча МЛЭ в погрешность глубины
Погрешность (СКП) глубины (сЦ.), рассчитанной МЛЭ на основе СКП наклонной дальности (аг) для угла луча (0), выражается формулой:
<3dr= Grcos6 cosP. (5.47)
Для расчета СКП глубины (а^) за счет СКП угла луча МЛЭ (а0) относительно оси х (ДП) может быть использована формула:
с^0 = q0 sin0 cosP. (5.48)
Для расчета СКП глубины (ад?0) за счет СКП угла луча МЛЭ (а0) относительно оси у (плоскость параллельная плоскости мидель-шпангоута) может быть использована формула:
c^p=apcos0 sinP,
(5.49)
где Р — угол дифферента, а ор - СКП угла дифферента.
Для определения СКП наклонной дальности (аг) могут использоваться модели погрешностей. Одной из таких моделей является модель погрешностей измерений наклонной дальности, предложенная фирмой Kongsberg [49] и реализованная в МЛЭ серии ЕМ. Согласно этой модели погрешностей СКП наклонной дальности выражается формулой:
= (ЧУ (с*)2
V 8 32 ’
(5.50)
где т — длительность акустического импульса МЛЭ, с —скорость звука в воде, a Ars — разрешение по измеренной наклонной дальности.
Погрешность угла луча МЛЭ зависит от используемого метода детектирования дна (п. 5.1). Фазовое детектирование используется, если количество
152
5.4. Априорная точность определения глубин и их координат с помощью МЛЭ
реализаций разностей фаз более десяти. Иначе используется амплитудное детектирование с определением центра тяжести огибающей отраженного сигнала. Если количества реализаций для фазового детектирования недостаточно, что является типичной ситуацией для вертикальных лучей на малых глубинах, то применяется амплитудное детектирование. При этом может быть использована модель погрешностей, в которой СКП луча определяется по следующей формуле:
^а)=ФйА
(5.51)
где фЛ — угловая ширина луча МЛЭ на приеме (угловая ширина поперек ДП см. п. 3.5.2), a. k — коэффициент, максимальное значение которого составляет 12, однако наиболее реалистичное значение равно: 4.5. Значение этого коэффициента для некоторых МЛЭ является настроечным параметром. При расчете СКП луча, однако необходимо помнить, что величина фл является функцией угла луча, а также и других факторов, в частности низкого соотношения сиг-нал/шум (s), которое может существенно исказить полученную оценку точно
сти угла луча.
В случае достаточного количества реализаций может использоваться фазовое детектирование, при котором СКП луча определяется по следующей формуле:
(ph) _ 0,2фд ие “ I— уРр
(5.52)
где пр — количество реализаций фазовых измерений, определяемое по формуле:
г tan(0 - s) фд
(5.53)
где s — соотношение сигнал/шум при приеме эхосигнала по лучу, Дгр — разрешение по фазе.
Выражение (5.53) для определения СКП луча также является чисто эмпирической моделью погрешностей, в которой возможно использование настраиваемых параметров. Имеется верхний предел количества реализаций фазовых измерений. Соотношение сигнал/шум ($) падает с увеличением угла луча и на крайних лучах может приводить к значительным искажениям оценок. В некоторых МЛЭ параметры модели доступны для регистрации с целью последующего анализа на этапе пост-обработки данных. В МЛЭ серии ЕМ (фирма Simrad-Kongsberg) значения соотношения сигнал/шум регистрируются в «датаграмме» (datagram), при этом максимальное значение составляет 127. В датаграмме также имеется параметр «фактор качества» {quality factor), который индицирует, какой способ детектирования дна был использован для расчета глубины по данному лучу. При амплитудном детектировании в параметре «фактор качества» содержится также количество реализаций, использованных при расчете центра тяжести огибающей отраженного сигнала.
В модели погрешностей фирмы Kongsberg [49] имеются ограничения. Модель обеспечивает удовлетворительные результаты, когда порог обнаружения сигнала (см. п. 2.2) составляет 10 дБ для амплитудного детектирования, а для фазового детектирования — 20 дБ. Для МЛЭ с высокой частотой акустического
153
Глава 5. Системы площадной съемки рельефа дна
сигнала порог обнаружения зависит главным образом от собственных шумов усилителей, в то время как у низкочастотных МЛЭ главными источниками помех являются собственные шумы судна.
Существуют и другие модели погрешностей, менее чувствительные к соотношению сигнал/шум, например, более сложная модель, предложенная французским Институтом изучения и исследований моря (IFREMER).
Таким образом, полагая, что соотношение сигнал/шум больше порога обнаружения сигнала, в первом приближении можно считать, что стандартное отклонение глубины по данным МЛЭ может быть рассчитано по формулам:
— для амплитудного детектирования:
= cos2 0 cos2 Р + 8
----- + у2 cos2 Р f ;
32 И I k )
(5.54)
— для фазового детектирования:
аХл
= cos2 0 cos2 Р
((Ars)2 (с т)2>| 2 2 Г0.2фк
-Р----+z/2cos2P ,
I 8 32 J
(5.55)
где у — поперечное смещение рассчитанной глубины относительно антенны МЛЭ.
Более реалистичные значения априорной оценки СКП глубины могут быть получены с использованием более сложных моделей погрешностей, однако не все производители МЛЭ приводят в технической документации параметры, необходимые для таких расчетов.
Большинство электронных гидрографических информационных систем (ЭГИС), обрабатывающих данные МЛЭ, имеют опцию расчета априорной точности глубин для заданного типа МЛЭ или на основе предложенного набора параметров, введенных по умолчанию, которые пользователь может откорректировать по своему усмотрению.
5.4.1.2. Модель погрешностей глубины за счет погрешностей скорости звука в воде Ниже приводится оценка точности глубины МЛЭ, исправленной за рефракцию акустического луча в слоисто-неоднородной среде, основанная на модели погрешностей, предложенной в учебном пособии [53]. В данной модели СКП глубины за счет погрешностей в измерении скорости звука по траектории луча и на поверхности антенны МЛЭ определяется по формуле:
<5-56)
Дополнительная СКП глубины за счет погрешности (СКП) измерения скорости звука по траектории луча рассчитывается по формуле:
, _ h2(l-tan2e')Y_2 . r^Y_2
Ш 2с J s IcJ pr’
(5.57)
где — СКП градиента профиля скорости звука, стрг — СКП измерения скорости звука на профиле ВРСЗ, а 6' — угол старта луча.
154
5.4. Априорная точность определения глубин и их координат с помощью МЛЭ
Дополнительная СКП глубины за счет погрешности (СКП) измерения скорости звука у поверхности антенны МЛЭ (сс) определяется по формуле:
f d\ 2 л /
=1 — 1 tan 0 ас. (5.58)
Существуют и другие модели, учитывающие дополнительную погрешность глубины за счет рефракции звуковых лучей и технологических особенностей выполнения измерений. При этом должны учитываться следующие факторы:
— точность зонда-скоростемера, измеряющего скорость звука в водной толще;
— точность датчика скоростемера, измеряющего скорости звука у антенной решетки МЛЭ;
— методики определения пространственно-временной изменчивости скорости звука в случае, когда измерения ВРСЗ не достигают дна;
— точность используемого метода интерполяции скорости звука от горизонта последнего измерения до дна. Обсуждение таких моделей выходит за рамки настоящего учебного пособия.
5.4.1.3. Модель дополнительных погрешностей глубины за счет погрешностей углов пространственной ориентации
Дополнительная погрешность глубины за счет СКП угла крена может быть рассчитана по формуле:
= d tan0 cosP + Qp ; (5.59)
где aR — СКП угла крена, измеренного с помощью ДПС, — СКП поправки, компенсирующей угловую систематическую ошибку рассогласования главных осей ДПС и приемной антенной решетки МЛЭ.
Дополнительная погрешность глубины за счет СКП угла дифферента может быть рассчитана по формуле:
adp = d sinP ^с2рт + , (5.60)
где Qp — СКП угла дифферента, измеренного с помощью ДПС, аа — СКП поправки, компенсирующей угловую систематическую ошибку рассогласования главных осей ДПС и излучающей антенной решетки МЛЭ, <5ps — дополнительная СКП стабилизации угла дифферента в случае, если данный режим реализован в МЛЭ; при отсутствии стабилизации угла дифферента <sps =0.
Аналогично может быть рассчитана и величина СКП азимута излучающей антенны в виде:
^=7ст1+стг> <5-61)
где <зк — курс судна, измеренный гирокомпасом или ДПС (MRU-6); — СКП
поправки, компенсирующей угловую систематическую ошибку рассогласования главных осей гирокомпаса (ДПС) и излучающей антенной решетки МЛЭ.
Величина данной СКП понадобится несколько позже для расчета точности положения глубин на дне (п. 5.4.2). Обращаем внимание, что угловые поправки, рассчитываемые по результатам калибровки МЛЭ или «патч-теста», не определяются безошибочно и должны оцениваться соответствующими СКП (с^, са, ау).
155
Глава 5. Системы площадной съемки рельефа дна
5.4.1.4. Учет погрешности определения глубины за счет ширины угла луча МЛЭ на излучении
Дополнительная СКП определения глубины за счет ширины угла луча МЛЭ на излучении (фг) может быть рассчитана по следующей формуле [59]:
(5.62)
5.5.1.5. Окончательно оценка глубины, рассчитанной МЛЭ, может быть представлена СКП в виде:
— для амплитудного метода детектирования:
+ < + <+< ’ <5-63>
— для фазового метода детектирования дна:
=7а^+а1+<+<+а1- <5-64)
5.4.1.6. Расчет оценки точности исправленной глубины
за счет точности поправки уровня и вертикальной динамики
Для получения окончательной оценки точности исправленной глубины необходимо дополнительно учесть погрешности вычисления следующих поправок:
— за вертикальное перемещение с учетом наведенного вертикального перемещения;
— за динамическое заглубление антенн МЛЭ (для варианта классического исправления глубин);
— за приведение глубины к заданному нулю глубин.
А) Расчет СКП поправки за суммарное вертикальное перемещение выполняется по формуле:
aDH =у/°Н. + <4,’ (5-65)
где ан — СКП вертикального перемещения, измеренного ДПС; ся. — СКП наведенного вертикального перемещения, которое возникает за счет разнесения антенны МЛЭ и ДПС.
Формула для расчета величины может быть записана в виде:
aHz= (х cosP-z/sinP sinP-zcosP sinP)2c|^+
+ (ycosR cosP-zsinP cosP)2<jj^+ (5.66)
+ (sinPox)2+(sinP cosPGy)? +(1-cosPc osPc2)?.
где x, у, z — смещения судовых координат антенн МЛЭ и ДПС (разности плановых координат).
На практике СКП наведенного вертикального перемещения весьма мала и ее можно не учитывать.
Б) Расчет СКП суммарного динамического заглубления антенны МЛЭ может быть выполнен по формуле:
=М+<4- <5-67)
156
5.4. Априорная точность определения глубин и их координат с помощью МЛЭ
где <5dr — СКП измерения статического заглубления антенны; — СКП общей поправки динамического заглубления (8Д рассмотренной в п. 5.3.3.
При использовании продвинутого метода исправления глубин на основе применения методики RTK (см. п. 5.3.4.2) суммарная поправка динамического заглубления равна нулю, а при оценке ее точности можно полагать: =0.
В) Расчет СКП поправки для приведения к заданному нулю глубин может быть выполнен по формуле:
= + &wp > (5.68)
где — СКП фиксации высоты уровня над нулем глубин на уровенном посту;
—™СКП поправки, обеспечивающей интерполяцию высоты уровня от уровенного поста к точке измерения глубины.
При использовании продвинутой методики исправления глубин на основе использования RTK-метода (см. п. 5.3.5.2) суммарная поправка интерполяции высоты уровня равна нулю, а при оценке ее точности можно полагать: <5W =0.
Формулы для получения исправленных глубин по данным МЛЭ для классического варианта и продвинутого варианта, основанного на использовании РТК&РТС-методов исправления глубин за уровень, приведены в п. 5.3.5.
С учетом формул (5.63-5.68) окончательное выражение для оценки точности исправленной глубины МЛЭ может быть представлено в виде [58]:
+ctL <5-69)
На основе формулы (5.69) может быть рассчитана априорная СКП для каждой глубины внутри единичной посылки МЛЭ. Как известно, СКП имеет доверительную вероятность в пределах от 63 до 68% в зависимости от близости погрешностей измерений к нормальному закону распределения.
Вместе с тем, Стандарт на Гидрографические съемки МГО S-44 регламентирует представление результатов оценки точности на уровне 95% доверительной вероятности. Для приведения полученной величины СКП к уровню 95 % ее необходимо умножить на коэффициент 1,96, т. е. а95 = 1,96q68.
5.4.2. Априорная точность определения координат глубин
Основной исходной погрешностью координат глубины на дне является погрешность определения положения той точки на судне-носителе, которая фиксируется в процессе промера тем или иным методом определения планового положения. Современные гидрографические съемки практически полностью основаны на использовании спутниковых радионавигационных систем, поэтому определяемые геодезические координаты будут относиться к фазовому центру антенны спутниковой навигационной аппаратуры (СНА). Большинство профессиональной СНА обеспечивает выдачу всесторонней оценки точности планового положения, содержащейся в предложении «$GPGST» протокола NMEA-0183. В этом предложении, помимо элементов среднеквадратического эллипса погрешностей, содержатся СКП широты (с^), долготы (сх) и геодезической высоты. Среднеквадратическую радиальную погрешность (СРО) положения антенны СНА (ом) можно представить в виде:
157
Глава 5. Системы площадной съемки рельефа дна
аМ = СТф+°Х- (5-7°)
В п. 5.3.6 приведены формулы (5.41) и (5.42), с помощью которых выполняется вычисление геодезических координат глубины МЛЭ на морском дне. В этих формулах приняты следующие обозначения:
— Az/S, Ars, индекс «s» обозначает приращения координат от антенны МЛЭ до точки глубины на дне.
— Аг/а, Дха, индекс «а» обозначает динамические смещения координат антенн СНА и МЛЭ;
— Az/f, Axt, индекс «f» обозначает поправку за временное запаздывание поступления координат от СНА.
Задачей является получение оценок точности по каждому из рассчитанных приращений, смещений, а также поправок.
Окончательная величина СКП положения глубины на дне (ср) может быть представлена в виде [58]:
= у/с^+а2;, +а^ +Ор,; (5.71)
Величина (о^), рассчитанная по формуле (5.70), представляет собой первое слагаемое формулы (5.71).
Рассмотрим далее, из каких источников складываются другие погрешности планового положения глубины на дне.
5.4.2.1. Преобразование погрешностей системы МЛЭ в погрешность положения глубины Основываясь на СПК измерения наклонной дальности, формулу для расчета СКП положения глубины можно представить в виде:
<7pr=or(l - cosOcosP). (5.72)
На основе СКП измерения курса (ак) формулу для расчета СКП положения глубины можно представить в виде:
= QKd A/(sin2P + tan20). (5.73)
5.4.2.2. Преобразование модели погрешностей МЛЭ в погрешность положения глубины Используя модель погрешностей МЛЭ, применяемую фирмой Kongsberg, погрешность положения глубины на дне может быть апроксимирована следующими формулами [49].
Применительно к амплитудному методу детектирования дна формула:
а
2 РА
= (1- cos20 cos2P)
- -I- (d2 + у2 sin2 P)f—•
32 ) * \k )
(5.74)
+
Применительно к фазовому методу детектирования дна формула:
Op =(l-cos20 cos2P)f^^ + --- + (d2 + у2 sin2Р) •
I 8 32 ) У \^Гр J
(5.75)
Отметим, что данная модель погрешностей дает хорошие результаты при значительном превышении акустического сигнала над порогом обнаружения.
158
5.4. Априорная точность определения глубин и их координат с помощью МЛЭ
5.4.2.3. Преобразование ширины луча на излучении в погрешность глубины на дне Положение глубины зависит от ширины луча в направлении ДП на излучении (фг), и дополнительная погрешность может быть учтена путем расчета СКП по следующей формуле.
орв = 0,3фгг. (5.76)
5.4.2.4. Полная погрешность положения глубины, рассчитанной поданным МЛЭ
Полагая составляющие погрешности положения глубины на дне, рассчитанные по формулам (5.72-5.76), независимыми и подчиняющимися закону распределения, близкому к нормальному, полная СКП положения глубины, рассчитанная по данным МЛЭ, может быть представлена:
— для амплитудного детектирования в виде [59]:
аР +арв +ср< +ок +орр +aL: <5-77>
— для фазового детектирования в виде:
G = /g2 +Gp + G2 +Q2 +а2 +а2 _ (5.78)
Ps у Pph Pc Pr Рр Рк
Величина (ор, рассчитанная по формулам (5.77) и (5.78), представляет собой второе слагаемое в формуле (5.71).
5.4.2.5. Погрешности места глубины
за счет относительного положения антенной решетки МЛЭ
Для приведения планового положения антенны СНА к середине антенной решетки приемной антенны МЛЭ необходимо рассчитать поправки динамического приведения по формулам (5.39) и (5.40) (см. п. 5.3.6.1). Очевидно, что поправки по направлению осей YL и XL локальной системы не могут быть рассчитаны безошибочно. Для учета точности рассчитанных поправок, перейдем от декартовых координат к полярным и рассчитаем отдельные СКП проекции на плоскость вектора, соединяющего антенны СНА и МЛЭ, которые обусловлены точностью составляющих измерений углов курса, крена, дифферента, а также выполненных измерений смещений (х, у, z).
В этом случае СКП поправки за приведение может быть представлена в виде [59]:
+ <2 + < +< • (5.79)
При этом составляющие СКП рассчитываются по формулам:
А) Для СКП относительного положения за счет СКП измерения смещений (gx.g,,;g2):
=^COS2P o2 + (l-sin2.R COS2P) Gy+(1-COS7?COS2P) (5.80)
Б) Для СКП относительного положения за счет СКП измерения угла курса (ох):
l(x2 cos2 Р + у2 (1- sin2 R cos2 Р) + z2 (1 - cos2 R cos2 P) -
cr = J 9 aK', (5.81)
a2 I y-xz/sin2PsinP-xzsin2PcosP-z/zcos2Psin2P) I
159
Глава 5. Системы площадной съемки рельефа дна
В) Для СКП относительного положения за счет СКП измерения угла кре-на (Од):
gAj = л/z/2 (1 - cos2 Р cos2 R) + z2(1 - sin2 R cos2 P) + zy sin 2R cos2 P) g^. (5.82)
Г) Для СКП относительного положения за счет СКП измерения дифферента (Ор):
оРа4 = sin Р+z/sinRcosP + zcosRcosP) ePm. (5.83)
Отметим, что СКП измерения углов курса, крена и дифферента, отмеченные индексом «ш» в формулах (5.80)-(5.83), характеризуют точность самих измерении ДПС (и гирокомпаса) и не содержат дополнительных погрешностей, возникающих за счет учета точности поправок, получаемых в результате калибровки МЛЭ («патч-тест»).
5.4.2.5. Погрешности места глубины за счет запаздывания поступления навигационной информации
При использовании СНА, имеющей.интервал запаздывания передачи координат в компьютер МЛЭ более 0,1 с, необходимо выполнять калибровку этой величины на основе с процедуры, описанной в п. 6.3.1.3 А, а полученную поправку (у) вводить в программное обеспечение МЛЭ. Эта поправка не может быть определена безошибочно и оценивается величиной СКП (одД
Априорная погрешность места глубины (о^) за счет точностей: поправки на запаздывание поступления навигационной информации, курса, скорости и угла дифферента, может быть определена по формуле:
1(А£ cosP)2 Оу + (VcosP)2 а2м +
°Pt у(А£ VsinP)2Op 4-(A£VcosP)2o^’ (5.84)
где 6V — СКП определения абсолютной скорости хода (скорость относительно дна); ак — СКП определения курса с помощью гирокомпаса или ДПС (MRU-6);
— СКП определения угла крена с помощью ДПС.
Таким образом, получены все компоненты для расчета СКП положения глубины на дне в соответствии с уравнением (5.71). Отметим, что величина СКП положения глубины (ор) имеет доверительную вероятность не более 68%. Оценка точности планового положения в соответствии со Стандартом на Гидрографические съемки МГО (S-44) должна быть представлена на уровне 95 % доверительной вероятности. Для приведения полученной величины оценки к уровню 95 % ее необходимо умножить на коэффициент 1,73 [33], т. е. ор(95) = 1,73оР(68у
Рассмотренная модель априорных погрешностей глубины и ее координат на морском дне является упрощенной, поскольку не учитывает корреляционных связей составляющих погрешностей.
В настоящее время многие пакеты программ ЭГИС осуществляют априорную оценку точности глубины и ее плановых координат на дне на основе использования соответствующих СКП составляющих погрешностей, значения которых по умолчанию задаются для определенного типа МЛЭ и могут корректироваться пользователем по его усмотрению.
160
5.4. Априорная точность определения глубин и их координат с помощью МЛЭ
5.5. Интерферометрический метод формирования лучей и примеры реализации
Альтернативный способ площадной съемки реализован с использованием батиметрических гидролокаторов бокового обзора (БГБО), которые, как правило, размещаются на подводных носителях, буксируемых на небольшой высоте над дном, или автономных подводных аппаратах, выполняющих съемку по заданной программе. В этом случае точность и разрешающая способность съемки рельефа не зависят от глубины моря. По принципу действия БГБО подразделяются на ГБО с интерферометрической обработкой сигнала и ГБО с синтезированной апертурой (ГБОСА).
5.5.1. Батиметрический ГБО с интерферометрической обработкой (Interferometric sonars)
Батиметрический ГБО с интерферометрической обработкой сигнала использует фазовую составляющую сигнала для измерения угла фронта волны, вернувшейся от дна или от цели. Этот принцип отличается от реализованного в многолучевом эхолоте, который формирует набор лучей на прием и осуществляет детектирование дна по каждому лучу амплитудным, либо фазовым методом с целью обнаружения сигнала и расчета наклонной дальности внутри полосы обзора.
В отличие от обычных ГБО, которые иногда называют «обзорно-поисковыми», интерферометрические ГБО производят одновременно измерение наклонного расстояния и направления на точку отражения эхосигнала. Для этого используется, как правило, трехэлементный интерферометр, обеспечивающий измерение наклонного расстояния и направления до точки отражения, что позволяет вычислить, как и в МЛЭ, положение точки относительно антенны интерферометра. В такой системе возможно столько измерений расстояний и углов, сколько отсчетов разностей фаз получено. При этом количество направлений, по которым производятся измерения наклонных дальностей, может достигать 1024.
БГБО, как правило, имеют три горизонтальные антенные решетки, каждая из которых создает луч, который является узким в направлении движения и широким в поперечном направлении. Одна из антенных решеток, используемая для передачи (излучения), акустически облучает участок дна, рассеивая акустическую энергию во всех направлениях. Часть рассеянной энергии вернется обратно к преобразователю, который измеряет угол. Наклонная дальность также рассчитывается на основе измеренного времени распространения акустического сигнала.
Методы, используемые для измерения углов прихода, могут быть различными [7]. Наиболее простой метод заключается в сложении копий сигнала от двух антенных решеток вместе с получением результирующей амплитудной интерференции (amplitude “fringes'1), соответствующей картине изменений силы сигнала. Если антенные решетки расположены на расстоянии половины длины волны, то будет только одна интерференционная полоса, являющаяся направлением нулевой фазы, перпендикулярной оси антенной решетки преобразователя, и направление может быть определено однозначно. Если антенные решетки преобразователей расположены на расстоянии нескольких длин волн, то угол прихода
161
Глава 5. Системы площадной съемки рельефа дна
Рис. 5.24. Принцип работы интерферометрического ГБО [Kongsberg]
определяемой волны может быть выделен из направления, по которому наблюдается максимальный (или минимальный) принятый сигнал.
Принцип работы интерферометрического ГБО изображен на рис. 5. 24.
Направления лучей определяются путем измерений временных смещений прихода сигналов на приемных элементах антенной решетки (phase differentiation). Интерферометры обеспечивают оценку дальности и направления на точки дна путем детектирования задержки распространения от конкретных точек дна до различных секций преобразователя. Направления на точки дна определяются путем установления различий во времени прихода сигналов (т. е. фазирования). Это интерпретируется электроникой как фазовое смещение (phase difference) сигнала. Затем фазовое смещение преобразуется в угол или вектор приема относительно равносигнального направления (boresight).
Для повышения точности угловых измерений в БГБО применяется метод определения направления по моменту нулевой разности фаз между двумя парами приемников антенной решетки.
Интерферометрия отличается от стандартного формированием лучей тем, что лучи создаются сигнальным процессором из данных, хранящихся в буфере приемника. В интерферометрических системах дискретные лучи физически не формируются — фазовая информация со всех направлений принимается и обрабатывается одновременно. Термин «луч» в действительности здесь в физическом смысле не может быть использован. Объединение в «лучи» является больше математической операцией, выполняемой после того, как все данные приняты и буферизированы. Интерферометрический метод может обеспечить очень высокое разрешение и большое количество «лучей». Интерферометрическая многолучевая система имеет очевидные преимущества, которые не могут быть достигнуты другими известными методами. Направления внешних лучей
162
5.5. Интерферометрический етод формирования лучей и примеры реализации
определяются более стабильно и устойчиво, а их разброс (шум) меньше, чем у систем, использующих электронные методы формирования луча. Управление лучами с целью компенсации угловых перемещений антенны проще, а сами лучи могут быть сконфигурированы таким образом, чтобы обеспечить равномерные расстояния между центрами пятен облучения {equal footprint) для компенсации углового распределения лучей (beam spreading). Разрешение по глубине ограничено только вычислительной производительностью электроники.
Преимущество интерферометрического метода заключается в том, что он обеспечивает одновременно полосовой обзор дна, дающий интенсивность обратного рассеяния, и съемку рельефа с высоким разрешением.
Интерферометрический метод не требует сложных антенных решеток для излучения и приема, и при его использовании достигается высокое разрешение и большая дальность без необходимости стабилизации и управления характеристикой направленности. Высокое разрешение используется для обнаружения небольших объектов и обеспечения детальной съемки рельефа в глубоком море. Большая дальность действия обеспечивает широкую полосу обзора со сплошным покрытием дна акустической энергией. Установка высокочастотной и, следовательно, малогабаритной антенной решетки возможна на небольшом буксируемом носителе или автономном подводном аппарате.
Недостатки чисто интерферометрической системы включают:
— фазометрические схемные решения могут быть нестабильными и вызывать вариации данных, особенно на сложном рельефе;
— разрешение зависит от производительности операций детектирования фаз (то есть, в составе аппаратной части БГБО требуется наличие высокопроизводительной вычислительной системы).
В настоящее время на рынке гидрографического оборудования доступны интерферометрические гидролокаторы бокового обзора GeoSwath Plus фирмы GeoAcoustics (Konqsberg), FANSWEEP 20 фирмы ATLAS (Германия) и C3D фирмы Benthos.
На рис. 5.25 представлен вариант размещения антенн БГБО GeoSwath Plus при забортной установке на катере. БГБО GeoSwath Plus поставляется преобразователями для частот 125 и 250 кГц. Фирмой Geo Acoustics разработаны также варианты преобразователей с частотой 500 кГц специально для установки на подводном буксируемом носителе, а также автономном аппарате.
Фирма Geo Acoustics выполнила всесторонние испытания БГБО GeoSwath Plus и сравнительные батиметрические испытания. Независимые эксперты, выполнявшие испытания МЛЭ разных фирм на одном и том же полигоне, одновременно сравнили результаты батиметрической съемки БГБО GeoSwath Plus и МЛЭ с разной угловой шириной луча. В результате был сделан вывод, что точность расчета глубин у БГБО GeoSwath Plus не хуже, чем у МЛЭ с шириной луча 1°. Точность расчета глубин БГБО GeoSwath по данным фирмы Geo Acoustics представлена на рис. 5.26. Точность глубин соответствует особой категории Стандарта S-44.
Благодаря большому количеству измерений БГБО обеспечивает чрезвычайно высокую плотность отметок глубин. Сравнение плотности глубин GeoSwath и МЛЭ, имеющих ширину луча 0,5° и Г, для глубины моря 5 м представлено на
163
Глава 5. Системы площадной съемки рельефа дна
Рис. 5.25. Вариант установки антенн БГБО GeoSwath Plus на катере [GeoAcoustics]
Альтиметр Датчик перемещений
Датчик скорости звука Преобразователь сонара
угол приема от вертикали (град)
Рис. 5.26. Точность расчета глубин БГБО GeoSwath фирмы GeoAcoustics [GeoAcoustics]
164
5.5. Интерферометрический етод формирования лучей и примеры реализации
Горизонтальное расстояние от преобразователя (м)
Рис. 5.27. Сравнение плотности глубин GeoSwath и МЛЭ при глубине моря 5 м [GeoAcoustics]
рис. 5.27. Все эти преимущества, а также ширина полосы обзора до 12 глубин, практически независимая от глубины моря, делают БГБО GeoSwath достойным конкурентом МЛЭ.
5.5.2. Батиметрический гидролокатор бокового обзора с синтезированной апертурой
В существующих ГБО поперечная разрешающая способность определяется частотой, а продольная — частотой и размером гидроакустической антенны. Для повышения разрешающей способности при приемлемых размерах антенн приходится увеличивать частоту, что приводит к уменьшению дальности действия. Для увеличения же дальности действия приходится наоборот уменьшать частоту, что приводит к увеличению размеров антенн и потере продольной разрешающей способности. Как результат — невозможность получения желаемой точности на больших расстояниях. Для преодоления этого противоречия была предложена технология ГБО с синтезированной апертурой(ГБОСА).
Основная идея ГБОСА заключается в том, что вместо увеличения длины антенны можно использовать серию последовательных посылок в процессе движения антенны. Тогда приемная антенна может быть искусственно синтезирована из когерентных комбинаций многих посылок. Полностью синтетическая апертура позволяет получить максимальную продольную разрешающую способность и/или получить обзор цели и его тени с различных углов, что позволяет избавиться от акустической тени.
Принципы ГБОСА реализованы в системе Sensoteck SAS компании Kongsberg Maritime (Норвегия), которая установлена на автономном необитаемом подводном аппарате (АНПА) «HUGIN» (рис. 5.28).
165
Глава 5. Системы площадной съемки релъефа дна
цель на дне
дальности до траверза
перемещения
дальности после траверза
дальности на траверзе
Рис. 5.28. Принцип работы ГБО с синтезированной апертурой [Kongsberg]
АНПА «HUGIN» с рабочей глубиной до 3 км может непрерывно работать без подзарядки батарей до 60 часов, оборудован ГБОСА и способен автоматически выполнять площадную съемку рельефа дна и гидролокационное обследование, в том числе и подо льдом. Длина АНПА чуть более пяти метров. АНПА имеет цифровую телеметрическую связь с обеспечивающим судном. Особого внимания заслуживает уникальная навигационная система, обеспечивающая прецизионное позиционирование аппарата. Во многом благодаря этой системе, чрезвычайной равномерности движения и низкому уровню собственных шумов, появилась возможность создания ГБОСА.
Кроме функций ГБО система позволяет производить интерферометрическую трехмерную съемку рельефа дна, получая значение глубины для каждого пикселя гидролокационного изображения.
166
5.5. Интерферометрический етод формирования лучей и примеры реализации
Фирма GeoAcoustics уже несколько лет рекламирует ГБОСА Geo SAS, а фирма IxSea (Франция) недавно поставила на рынок ГБОСА «Shadows».
Одной из главных проблем эксплуатации ГБОСА является требование высокоточной навигации. Для обеспечения требуемых точностей на стабильной платформе, которая представляет собой автономный или буксируемый подводный аппарат, необходимо использование навигационных инерциальных систем. Еще недавно такие системы были недоступны ввиду высокой стоимости и сложности эксплуатации. В настоящее время ситуация стремительно меняется, и следует ожидать очередного технологического прорыва — внедрения инерциальных систем в повседневную практику батиметрических съемок с использованием ГБОСА.
Глава 6.
МЕТОДИКА ВЫПОЛНЕНИЯ ПЛОЩАДНОЙ
СЪЕМКИ РЕЛЬЕФА ДНА МНОГОЛУЧЕВЫМ ЭХОЛОТОМ
Измерения наклонных дальностей и углов лучей в многолучевой системе являются более сложными, чем в однолучевом эхолоте. Имеются многочисленные факторы, вносящие дополнительные погрешности в измерения, выполняемые с помощью МЛЭ. Необходимо учитывать величину угла луча, угол падения луча на дно, угловую ширину излученного и принятого лучей, точности определения пространственных углов (крена и дифферента) и вертикального перемещения, алгоритм детектирования дна и вариации в профиле вертикального распределения скорости звука в воде. Обычно требуется рассчитывать априорные погрешности или модель (бюджет) погрешностей, на основе учета этих факторов. Эти вопросы были подробно рассмотрены в п. 5.4.
Многолучевые системы обладают способностью практически полного акустического освещения дна, что вносит огромный вклад в возможность более полного представления топографии дна, чем это было возможно при использовании однолучевых эхолотов (ОЛЭ). Кроме того, с помощью таких систем возможно надежное обнаружение объектов на морском дне.
Имея в виду получение глубин, разрешение МЛЭ будет зависеть от частоты, ширины излучаемых и принимаемых лучей, а также качества алгоритма, используемого для детектирования дна. Разрешение при получении глубин является функцией длительности импульса и размеров пятна облучения. Пятно облучения МЛЭ для лучей, близких к вертикальному, достаточно мало, поэтому разрешение выше, чем у ОЛЭ. Достаточно упомянуть, что у ОЛЭ, имеющего угол луча в 8°, площадь пятна облучения на дне будет в 28 раз больше, чем у вертикального луча МЛЭ с углом 1,5°.
Частоту МЛЭ выбирают исходя из предполагаемого использования оборудования, главным образом глубинного диапазона работы и требуемой разрешающей способности.
Частоты многолучевых эхолотов для разных диапазонов глубин обычно таковы:
А) Глубины менее 100 метров: частоты выше 200 кГц (мелководные МЛЭ);
Б) Глубины менее 1500 метров: частоты от 50 до 200 кГц (МЛЭ для средних глубин);
В) Глубины более 1500 метров: частоты от 12 до 50 кГц (глубоководные МЛЭ).
Гидрографическое использование МЛЭ невозможно без его сопряжения с системой датчиков. Поэтому правильнее говорить о многолучевой системе на базе МЛЭ.
Многолучевая система кроме МЛЭ должна включать следующее оборудование;
1) Датчик перемещений судна (ДПС) (motion sensor), который служит для измерения пространственных углов (крен, дифферент, курс) и вертикального
168
6.1. Цифрова бариметрия и стандарты на гидрографическую съемку S-44 и ГМО
перемещения {Heave). Датчики, которые могут быть основаны на гироскопическом или оптико-волоконном принципах, собраны в едином блоке (англоязычное наименование: MRU или IMU). Оптико-волоконный ДПС, называемый MRU-6, измеряет все четыре параметра. При этом отпадает необходимость использования гирокомпаса.
2) Датчик курса — гирокомпас {Headingsensor) — также может быть интегрирован в ДПС (MRU-6), однако, оптимальным и более точным решением особенно для малых судов является использование курса, выработанного СНА с двумя антеннами, устанавливаемыми вдоль диаметральной плоскости (ДП). Результатом применяемой в них технологии является также возможность обеспечения высокоточного определения местоположения. Фазовая СНА с тремя антеннами обеспечивает дополнительно определение углов крена и дифферента и может быть комплексирована с ДПС.
3) зонд-профилограф скорости звука {sound velocity profiler) —для измерения профиля скорости звука в водной толще;
4) зонд-датчик скорости звука {sound velocity probe) — для измерения скорости звука у излучающей поверхности преобразователя, что должно считаться обязательным для плоского преобразователя при условии управления положением главного лепестка каждого луча;
5) система определения планового положения. Система позиционирования при использовании новых технологий может быть интегрирована с датчиком курса. Для этого используется спутниковая навигационная аппаратура (СНА) GPS в дифференциальном режиме, как правило, с передачей корректирующих поправок по спутниковым каналам связи. При этом используются региональные спутниковые дифференциальные подсистемы: StarFix, SeaStar, а также глобальные подсистемы: C-Nav [26 ]и VeriPos. Для прибрежных работ может использоваться СНА, способная работать в режиме кинематики реального времени (Real Time Kinematic — RTK). В этом случае кроме высокоточного определения планового положения предоставляется возможность определять поправки уровня (см. п. 5.3.4.2).
6.1. Цифровая батиметрия и Стандарты на гидрографическую съемку S-44 МГО
6.1.1. Стандарты на выполнение съемки с многолучевым эхолотом
Отличительной особенностью современной гидрографии является ее международной характер, что связано с необходимостью создания различными государствами равноценных по точности и надежности морских карт. Стремительное развитие средств и методов современной гидрографии, внедрение в практику современного мореплавания морских электронных карт настоятельно ставят вопросы унификации требований при проведении гидрографических съемок.
Стандарты МГО на гидрографические съемки {IHO Standards for Hydrographic Survey) выходят в виде специальной публикации МГО N 44 (Special Publication 44), более известной как документ «S-44». Первое издание стандарта
169
Глава 6. Методика выполнения площадной съемки рельефа дна многолучевым эхолотом
было опубликовано в еще 1968 г. с последующими переизданиями в 1982 (вторая редакция), 1987 (третья редакция), 1998 (четвертая редакция) [56] и 2008 [57]. Необходимо отметить, что стандарты рассматриваются исключительно как добровольные документы, дающие общие рекомендации и определяющие минимальные требования к качеству проведения гидрографических съемок для стран-членов МГО, а также других стран, выполняющих данные работы в зонах своей ответственности. Предполагалось, что страны члены МГО на основе стандартов МГО будут разрабатывать свои национальные стандарты выполнения гидрографических съемок, учитывающие специфические особенности акваторий и исторически сложившиеся методические особенности выполнения работ.
В предыдущем издании стандарта S-44 (1998 г.) [56] основной упор сделан на оценку точности данных, получаемых в результате гидрографических работ, а также предоставление потенциальным пользователям метаданных, касающихся дополнительной разносторонней информации, позволяющей впоследствии использовать материалы промера для других целей.
Главными нововведениями четвертой редакции являлись: обоснование категорий (orders) гидрографической съемки (четыре категории), введение понятия суммарной перенесенной ошибки (Total Propagated Error=TPE). Стандарт впервые поставил вопрос, что с помощью суммарной перенесенной ошибки (СПО) необходимо характеризовать положение глубины на дне с учетом всех составляющих ошибок, учитывая также и размер следа луча эхолота на дне; дал рекомендации по регистрации не только результатов промера, но и оценки точности получаемых величин на уровне 95 % доверительной вероятности; ввел принцип 100 % обследования дна; ввел понятие «обнаружения объектов на дне» [23].
Главным отличием четвертой редакции Стандартов явилось введение категорий гидрографических съемок в зависимости от важности района их проведения для безопасности надводного мореплавания. В зависимости от категории съемки назначается точность определения планового положения глубины на морском дне и точность исправленной глубины.
В настоящее время действует пятая редакция Стандартов, являющаяся развитием и уточнением четвертой.
Все гидрографические съемки разделены на три категории в соответствии с предполагаемыми пользователями получаемой информации.
В таблице 6.1, которая является сутью пятой редакции Стандарта [57], в сжатой форме представлены основные требования по точностным характеристикам трех категорий гидрографической съемки.
Специальная или нулевая категория (Special Order) — специальные наиболее опасные для судоходства акватории, где глубина под килем проходящих судов минимальна. Поэтому требуется полное обследование дна (full bottom search) с обнаружением объектов, опасных для мореплавания. Эти районы национальная гидрографическая служба, ответственная за гидрографическое обеспечение, определяет самостоятельно. Глубины на таких акваториях не должны превосходить 40 м (максимально осадка современных судов).
Первая А категория (Order 1а) — для портов, подходных каналов, рекомендованных путей, прибрежных районов с интенсивным движением судов на акваториях с глубинами менее 100 м, при которой требуется полное обследование дна.
170
6.1. Цифрова бариметрия и стандарты на гидрографическую съемку S-44 и ГМО
Таблица 6.1
№ Категория съемки Особая 1а 1Ь 2
1 Описание районов Гавани, места стоянок судов и связанные с ними важные фарватеры с минимальными безопасными расстояниями Гавани, фарватеры на подходах к гаваням, рекомендованные пути и некоторые прибрежные районы с глубинами менее 100 м Гавани, фарватеры на подходах к гаваням, рекомендованные пути и некоторые прибрежные районы с глубинами менее 100 м Морские районы, не описанные в особой категории, или районы с категорией 1
2 Точность плановой привязки (95% доверительной вероятности) 2 м 5 м + 5% глубины 5 м + 5% глубины 20 м+ 10% глубины
3 Точность для исправленных глубин с 95% доверительной вероятностью а = 0,25 м b = 0,0075 а = 0,5 м b = 0,013 а = 0,5 м b = 0,013 а = 1.0 м Ь = 0,023
4 Полное обследование дна требуется требуется Не требуется Не требуется
5 Обнаружение объектов Кубические объекты> 1 м Кубические объекты > 2 м на глубинах до 40 м 10% глубины на глубинах больше 40 м Не применяется Не применяется
6 Максимальне между-галсовое расстояние Не применяется т.к. обязательно 100 %-ое обследование Не применяется, т.к. обязательно 100 %-ое обследование 3 средних глубины или 25 м в зависимости от того, что больше 4 средних глубины или 200 м в зависимости от того, что больше
7 Стационарные СНО и важные для навигации объекты с 95 % довериительной вероятностью 2 м 2 м 2 м 5 м
8 Естественная береговая линия с 95 % доверительной вероятностью 10 м 20 м 20 м 20 м
9 Среднее положение плавучих СНО с 95 % доверительной вероятностью 10 м 10 м 10 м 20 м
10 Положение топографических объектов с 95 % доверительной вероятностью 10 м 20 м 20 м 20 м
171
Глава 6. Методика выполнения площадной съемки рельефа дна многолучевым эхолотом
Первая В категория (Order 1в) — акватории с глубинами менее 100 м, не охваченные категориями 0 и 1а, при которой не требуется полное обследование дна.
Вторая категория (Order 2) — акватории с глубинами более 100 м.
Пятая редакция Стандарта S-44 определяет для каждой из указанных категорий: допустимые точности планового положения и исправленных глубин(на уровне 95% доверительной вероятности); требования полного обследования дна; способность системы съемки по обнаружению подводных объектов, потенциально опасных для навигации; максимальную подробность промера. Однако, требования по степени перекрытия смежных полос обзора при площадной съемке в Стандартах отсутствуют [30].
Комментарии к строкам 1-10 таблицы 6.1.
Строка 1: Примеры типичных районов описывают акватории, к которым применяются категории съемки.
Строка 2\ Точность плановой привязки перечисляет точности, которые должны быть достигнуты для каждой из категорий съемки. Достижение указанных точностей должно быть продемонстрировано путем расчета величины «THU» (Total Horizontal Uncertainty) — суммарной горизонтальной погрешности (СГП).
Строка 3'. Точность глубины, имея ввиду исправленную глубину, задает точности, которые должны быть достигнуты для каждой из категорий съемки. Параметры а и Ь, перечисленные в Таблице, и глубина d должны быть введены в формулу для расчета допустимой точности [56]:
[a2+(b^d)2y\ (6.1)
где а — константа погрешности глубины, т. е. сумма всех постоянных погрешностей, которые не изменяются с глубиной, b*d — погрешность, зависимая от глубины, т. е. сумма всех погрешностей, зависимых от глубины, b — коэффициент зависимости погрешности от глубины.
Достижение допустимой точности исправленной глубины должно быть продемонстрировано путем расчета величины «TVU» (Total Vertical Uncertainty) — суммарной вертикальной погрешности (СВП).
Строка 4: Термин «Полное обследование дна» (Full Bottom Search) указывает, что было выполнено обследование (Search) всего дна в целях обнаружения большинства объектов, указанных в таблице, с использованием соответствующих системы, методики съемки и персонала. Данный термин введен в качестве признания факта, что, строго говоря, невозможно добиться «100% акустического освещения» дна или так называемого «100% батиметрического покрытия». (Использование этих терминов не одобряется). В целях обеспечения безопасного мореплавания при выполнении съемок 0 и 1а категорий может считаться достаточным применение механического (гидрографического) траления с целью установления минимальных лимитирующих глубин.
Строка 5: Обнаружение объектов. Стандарт задает размеры объектов, которые должны быть обнаружены в процессе выполнения съемки. Необходимо отметить, что 100 % обнаружение объектов никогда не может быть гарантировано. Имеется в виду, что когда требуется «Полное обследование дна», съемка должна выполняться с использованием такой системы (включая методику и персонал), которая способ
172
6.1. Цифрова бариметрия и стандарты на гидрографическую съемку S-44 и ГМО
на обнаруживать объекты указанного размера с уверенностью, что такие объекты будут обнаружены с приемлемой (reasonable) вероятностью. Величина глубины в 40 м выбрана с учетом максимальных ожидаемых размеров осадки судов.
Строка 6: Междугалсовые расстояния могут быть увеличены, если используются процедуры, гарантирующие адекватную плотность глубин (см. п. 3.6 S-44). Термин «Максимальное междугалсовое расстояние» следует интерпретировать следующим образом:
— междугалсовое расстояние для однолучевого эхолота (ОЛЭ);
— расстояние между краями используемых полос обзора для систем площадной съемки.
В пятой редакции Стандарта S-44 впервые введены такие понятия, как: «гарантирование качества площадной съемки» (quality assurance), «мониторинг целостности» (integrity monitoring), «поверхность неопределенности» (uncertainty surface), «практический опыт гидрографа» (surveyors’ skills), «проверочные процедуры» (qualification procedures) и ряд других [30]. Новая терминология, использованная в Стандарте S-44 (5), приводится в приложении 2.
Одним из главных положений Стандартов является указание о том, что национальная гидрографическая служба, ответственная за обеспечение безопасности мореплавания, при выполнении площадных съемок должна разрабатывать и применять процедуры контроля качества (quality control procedures) выполняемых съемок, включая и площадную съемку рельефа дна.
Отметим, что стандарт S-44 (5) отражает требования к съемке рельефа дна, необходимые для составления морских навигационных карт для обеспечения надводной навигации на глубинах менее 100 м и не в полной мере соответствует задачам, решаемым в инженерной и промышленной гидрографии.
Другим известным «Стандартом» по выполнению площадной съемки с МЛЭ в инженерных целях на глубинах 200 м и более является Руководство по использованию МЛЭ S003 IMCA, изданное в 2006 г. International Marine Contractor Association (IMCA) [48].
Применение площадных средств съемки рельефа предполагает использование цифровых моделей рельефа, рассмотрению которых посвящен следующий раздел.
6.1.2. Цифровые модели рельефа и качество батиметрической съемки
Моделирование земной поверхности, в том числе и морского дна, основано на понятии цифровой модели рельефа (ЦМР). В зарубежной литературе под термином «DTM» чаще всего понимается ^.статистическое представление непрерывной поверхности земли с помощью большого числа выбранных точек с известными координатами x,y,ze заданной координатной системе » [14].
Цифровое моделирование рельефа связано со следующими технологическими этапами:
— создание исходного массива данных;
— преобразование исходного массива измерений для целей решения конкретной задачи и создание модели рельефа;
— визуализация модели рельефа с помощью средств компьютерной графики;
173
Глава 6. Методика выполнения площадной съемки рельефа дна многолучевым эхолотом
— интерпретация цифровой модели рельефа для получения практического результата;
— применение цифровой модели рельефа для решения прикладных задач.
При создании исходного цифрового массива для последующего формирования ЦМР могут быть применены методы прямых измерений высот (глубин), а также использованы уже имеющиеся аналоговые картографические материалы, например, карты с изолиниями (изобатами) путем их преобразования в цифровую форму. В данном учебном пособии будем рассматривать только ЦМР, полученные с использованием непосредственных измерений.
Особенностью создания ЦМР в гидрографии является сам принцип получения исходной информации о глубинах, основанный главным образом на использовании гидроакустических средств и методов съемки подводного рельефа. Визуализация ЦМР играет существенную роль в восприятии и оценке подводного рельефа и направлена на отображение элементов ЦМР и извлечение определенной информации о рельефе. Визуализация ЦМР служит целям передачи информации о рельефе как оператору ЭГИС, так и конечному пользователю результатов гидрографической съемки и, таким образом, способствует принятию решений посредством визуальной интерпретации [31].
Визуализация ЦМР может быть двухмерной (2D) и трехмерной (3D) и, как правило, осуществляется в формах:
— оперативной визуализации, имеющей целью оценку качества работы датчика исходной информации о рельефе, например, МЛЭ;
— интерактивной визуализации, необходимой для активного обследования и оценки ЦМР;
— статической визуализации для окончательного представления результатов съемки.
При оперативной визуализации до недавнего времени использовались упрощенные методы построения 2D ЦМР. С ростом производительности компьютеров современной тенденцией является повсеместный переход к ЗО-визуализации. Интерактивная визуализация направлена на получение более достоверной информации о модели рельефа, используя особенности его автоматизированного построения с учетом специфики исходной информации. При этом могут осуществляться анализ ЦМР и извлечение дополнительной сопутствующей информации. Статическая визуализация ЦМР является конечным результатом гидрографической съемки и зависит от поставленной задачи и требований заказчика к представлению окончательных результатов. Окончательные продукты съемки во многом определяются видом ЦМР.
В гидрографических приложениях ЦМР может быть представлена в виде:
— набора нерегулярно расположенных точек;
— нерегулярной треугольной сети точек (Triangulated Irregular Network^ TIN);
— изолиний (изобат);
— регулярной прямоугольной и треугольной сети точек.
Последний вид ЦМР, получивший в зарубежной литературе краткое наименование «грид» (grid), имеет наиболее широкое распространение в геоинформатике, благодаря простоте математической обработки и получения производных значений.
174
6.1. Цифрова бариметрия и стандарты на гидрографическую съемку S-44 и ГМО
В гидрографических приложениях вид результирующей ЦМР в значительной мере зависит от используемых средств съемки подводного рельефа. При использовании средств площадной съемки рельефа предпочтение повсеместно отдается использованию регулярных сетей точек. Площадная съемка на небольших глубинах приводит к появлению невиданной доселе плотности отметок глубин.
Для современной гидрографии «грид» — это в первую очередь средство для представления ЦМР на основе измерений, полученных средствами площадной съемки. При использовании МЛЭ или БГБО в мелком море размер следа луча на дне настолько мал, а количество лучей может быть настолько велико, что индивидуальные отметки глубин —набор нерегулярно расположенных точек, не могут быть представлены на электронном планшете даже в самом крупном масштабе изображения.
Остановимся на анализе регулярных сеток — «гридов», которые в последнее время приобретают первостепенное значение в гидрографических приложениях.
«Грид» поверхности дна представляет собой «матричную» структуру, которая неявным образом интерпретирует топологические зависимости между точками рельефа, в которых были выполнены реальные измерения глубин. Структура данных в гриде во многом соответствует структуре хранения информации в памяти современных компьютеров, поэтому алгоритмы моделирования при создании гридов достаточно просты. Несколько большую сложность представляют собой методы хранения информации в гридах при высокой плотности первичных данных. Основу «грида» составляют регулярно расположенные узлы сетки с известными значениями глубины (Z). Расстояние между узлами сетки по направлению плановых координат X и Y одинаковы и именуются размерностью «грида» (grid increments). Координата Z в узлах регулярной сетки формируется путем применения одного из многочисленных известных способов интерполяции от ближайших точек реальных измерений глубин. С другой стороны регулярная сетка включает набор ячеек «грида».
С точки зрения конструкции регулярной сети имеются два альтернативных способа интерпретации гридов: сеточная и матричная [31].
Сеточная интерпретация, часто именуемая при визуализации «проволочной моделью», представляет «грид» в виде набора пространственных прямоугольников, вершины которых имеют значения Z, соответствующие центрам ячеек «грида».
Матричная интерпретации, которую иногда именуют «матрицей», представляет «грид» в виде набора разновысоких ячеек, причем каждая ячейка имеет неизменное значение координаты.
Графические способы интерпретации «гридов» представлены на рис. 6.1. Сеточный грид имеет ячейку, центр которой совмещен с узлом регулярной сетки, а у матричного грида узел, как правило, расположен в центре ячейки. При этом глубина в каждой ячейке является неизменной. Такой матричный грид визуально не обеспечивает представление непрерывной поверхности дна, однако, благодаря простоте его создания, бывает удобен при использовании в определенных гидрографических приложениях. Сеточный грид наоборот обеспечивает возможность создания непрерывной поверхности, в каждой точке которой глубина может быть представлена (рассчитана) в результате интерполяции.
175
Глава 6. Методика выполнения площадной съемки рельефа дна многолучевым эхолотом
Рис. 6.1. Различные варианты интерпретации «гридов»
При практическом использовании гридов огромное значение имеют методы их визуализации. При этом наглядно обнаруживается взаимосвязь растрового и векторного представления ЦМР.
Для визуализации грида может применяться гипсометрическая шкала высот, которая часто именуется просто «цветовая шкала». Сеточный грид может быть визуализирован как сеточная модель, которую часто называют также «проволочная модель рельефа».
Проволочная модель может быть представлена в 2D/3D, однако она не всегда обладает необходимой наглядностью. Наиболее удачным методом визуализации сеточного грида является его цветное представление в соответствии с задаваемой цветовой шкалой либо его монохромное изображение. Такое представление грида, возможное в варианте 2D/3D, очень напоминает растровое изображение.
Особенностью матричного грида для гидрографических приложений является то, что узел такого грида чаще всего не располагается в центре ячейки, а является «плавающим» и зависит от задач съемки. Например, для решения традиционных гидрографических задач, связанных с обеспечением безопасности мореплавания и направленных в первую очередь на отображение на картах наименьших глубин, узел помещается в точку с наименьшей глубиной из всех возможных глубин, которые попали в ячейку матрицы. Для решения задач инженерной гидрографии, связанных, например, с дноуглубительными работами и гидротехническим строительством, для представления ячейки матрицы выбирают, как правило, наибольшую или среднюю глубину ячейки.
Матричные гриды практически всегда представляются в растровом виде в соответствии с заданной цветовой шкалой глубин и отображаются в виде 2D. Например, в ЭГИС Hypack [50] такое представление ЦМР выделено в отдельный метод, доступный как в режиме реального времени, так и на этапе окончательной обработки и представления материалов съемки, получивший наименование «матрица глубин» (matrix). Матрица глубин может создаваться на основе дан
176
6.1. Цифрова бариметрия и стандарты на гидрографическую съемку S-44 и ГМО
ных как ОЛЭ, так и МЛЭ. На этапе окончательной обработки и представления материалов матрица глубин может быть заново создана на основе TIN-модели с использованием меньшего размера ячейки грида, обеспечивая тем самым более наглядное изображение поверхности дна. Матрица глубин всегда может быть преобразована в файл регулярной сетки глубин.
При использовании гридов большое значение имеет обоснованность задания его размерности, от величины которой зависят наглядность и точность представления поверхности. Большая размерность грида ведет к потере существенных деталей рельефа. Наоборот, малая размерность хотя и обеспечивает детализацию при условии необходимой плотности исходных измерений глубин, однако, за счет существенной избыточности узлов грида ведет к значительному увеличению объемов памяти, необходимой для хранения ЦМР.
Суммируя сказанное, отметим следующие преимущества грида:
1. Представляет ЦМР без необходимости ее дополнительной обработки.
2. Пригоден для анализа поверхностей.
3. Прост в хранении и манипулировании.
4. Просто объединяется с растровыми данными.
5. При визуализации способен наглядно демонстрировать главные особенности рельефа.
К недостаткам использования грида в качестве ЦМР можно отнести следующие:
1. Практически невозможно выделять экстремальные глубины, что особенно актуально для гидрографических приложений.
2. Неспособность использования разных размерностей в едином гриде для отображения участков дна с разной расчлененностью.
3. Неэффективность хранения информации (избыточность узловых точек в районах с низкой расчлененностью рельефа).
Нерегулярная треугольная сеть точек (TIN) в отличие от грида, как правило, создается на основе реальных измерений глубин. Модель TIN значительно сложнее ввиду того, что включает топологию. Каждый треугольник сформирован тремя сторонами, каждая из которых определяется двумя точками с измеренными глубинами на концах. Концевая точка может быть вершиной одного или нескольких треугольников. Элементами TIN модели являются: стороны (ребра), вершины и треугольники. Несмотря на кажущуюся простоту, для автоматического построения TIN необходимо решить ряд сложных вопросов: как отбирать точки, как соединять их в треугольники и оптимально моделировать цифровую поверхность. Для решения этих вопросов используется триангуляция Делоне [15]. Большинство ГИС-пакетов и ЭГИС поддерживают построение ЦМР на основе TIN-модели. В ЭГИС использование TIN — это практически единственная возможность построения ЦМР на основе данных ОЛЭ.
TIN-модели имеют существенное значение для инженерной гидрографии, позволяя при высокой плотности глубин представить поверхность дна с максимальным уровнем детализации. Полезным производным продуктом TIN-модели является возможность автоматизированного построения изобат. Визуализация TIN-моделей возможна в нескольких вариантах. Например, в ЭГИС Hypack [50] используются восемь вариантов представления TIN-моделей.
177
Глава 6. Методика выполнения площадной съемки рельефа дна многолучевым эхолотом
Может возникнуть вопрос, какой же вариант сети: регулярная или нерегулярная, наилучшим образом подходит для построения ЦМР. Однозначного ответа на этот вопрос нет. Все зависит от источника данных, целей съемки и требований к конечному результату. Для съемок с ОЛЭ в инженерных целях, когда требуется максимально быстрое представление результатов, например, для обеспечения дноуглубительных работ, удачным выбором может быть использование матрицы глубин, формируемой в реальном масштабе времени для последующей оперативной передачи на земснаряд, оборудованный системой, способной ее визуализировать. Для съемок с ОЛЭ в целях обеспечения безопасности мореплавания наилучшим выбором является использование TIN-моделей с последующим построением изобат. Качество автоматически построенных изобат (отсутствие острых углов) будет наглядно демонстрировать полноту покрытия глубинами района съемки. На основе однолучевой съемки может быть построен грид, обеспечивающий создание ЦМР в виде изобат. Однако, к такой ЦМР следует относиться с осторожностью. Дело в том, что изобаты, автоматически построенные на основе гридов, созданных с использованием некоторых методов интерполяции, могут быть проведены даже в том районе, где прямое измерение глубин никогда не выполнялось.
При использовании гридов-сеток огромное значение имеют используемые методы интерполяции, когда ставится задача получения глубин в точках с заданными координатами. Существует множество математических способов интерполяции для обеспечения создания непрерывных поверхностей. Различаются методы глобальной и локальной интерполяции, у которых возможны точные и аппроксимирующие методики [13]. Далеко не все из методов интерполяции пригодны для использования в гидрографических целях. Особое место в ряду этих методов занимает геостатистическая интерполяция, более известная как «крикинг». Интерполяция по методу «крикинга» {Kriging) имеет очевидные преимущества для гидрографических приложений по сравнению с другими методами, поскольку обеспечивает оценку точности при построении ЦМР, однако, она практически не используются в современных ЭГИС.
Наибольший интерес для современной гидрографии представляют гриды, создаваемые на основе использования средств площадной съемки дна. Имеется несколько особенностей использования средств площадной съемки в мелководном море:
1) высокая плотность информации о глубинах внутри полосы обзора;
2) избыточность информации (несколько измеренных глубин в одной точке);
3) неравноточность информации (глубины внутри полосы обзора имеют разную точность).
В настоящее время существует несколько подходов к обработке и представлению данных площадных съемок. Традиционный подход, который чаще всего используется в настоящее время, унаследовал идеологию, принятую еще со времен однолучевой батиметрии. Такой подход предполагает редактирование каждой отдельной глубины с использованием возможностей компьютерной техники. При этом на этапе окончательной обработки основное время уходит на интерактивное (ручное) редактирование полученных глубин. В итоге для представления на отчетном планшете отбираются только наименьшие глубины акватории, характеризующие сугубо «гидрографический» подход к съемке рельефа,
178
6.1. Цифрова бариметрия и стандарты на гидрографическую съемку S-44 и ГМО
направленный, прежде всего, на обеспечение безопасности мореплавания. При данном подходе теряется значительная часть полезной информации о микрорельефе, кроме того, достаточно сложно получить апостериорную оценку точности выполненной съемки.
Альтернативный подход к обработке данных площадных съемок, результаты которых могут быть использованы как для обеспечения безопасности мореплавания, так и для исследовательских целей, был предложен в последние годы. Взамен представления отдельных глубин предлагается создавать так называемую «навигационную поверхность» {Navigation Surface). Данная методология получила наименование CUBE {Combined Uncertainty and Bathymetric Estimator) [37, 38, 39, 60]. Методика «CUBE» — это одна из разновидностей создания регулярной сети, когда в результате обработки кроме оценок глубин обеспечивается также получение оценки погрешности глубины в каждом узле грида. Методику «CUBE» возможно использовать и для фильтрации грубо ошибочных измерений, которые не удалось устранить на предшествующих этапах обработки. Использование, подробное рассмотрение технологии«СиВЕ» и ее реализация в ЭГИС Hypack рассматриваются в главе 7 (п. 7.4.2).
Цифровые методы сбора, обработки и представления батиметрической информации с использованием площадных средств съемки подводного рельефа по-новому ставят вопросы оценки качества.
Оценка качества многолучевой съемки имеет первостепенное значение. Под термином «качество» будем понимать совокупность трех взаимосвязанных характеристик: точности, надежности и правильности получаемых результатов площадной съемки в целях моделирования подводного рельефа [6]. Точность — это качество измерений, отражающее близость их результатов к истинному значению. «Надежность» характеризует меру исключения грубых ошибок, а «правильность» — меру исключения систематических ошибок. Методика оценки точности многолучевой съемки существенно отличается от однолучевой, которая хорошо отработана и закреплена в имеющихся инструкциях. До настоящего времени вопросы оценки точности многолучевой съемки носят дискуссионный характер. Еще более неопределенно обстоит дело с надежностью и правильностью многолучевой съемки. Под «правильностью» в дальнейшем будем понимать меру исключения (компенсации) систематических ошибок в глубинах, получаемых по результатам многолучевого промера.
Вопрос необходимости оценки точности гидрографической съемки впервые был поставлен в четвертой редакции Стандартов на гидрографические съемки S-44(1998). Было выдвинуто требование, чтобы каждая полученная отметка глубины на гидрографическом планшете имела оценку планового и высотного положения с доверительной вероятностью 95 %. В пятой редакции Стандартов S-44(2008) вопросам качества съемки было уделено повышенное внимание. Впервые введены новые актуальные термины: гарантирование качества площадной съемки {quality assurance), мониторинг целостности {integrity monitoring), «поверхность неопределенности» {uncertainty surface) — см. приложение 2.
Именно с этих позиций мы будем в дальнейшем рассматривать методики выполнения площадных съемок и представления их результатов.
179
Глава 6. Методика выполнения площадной съемки рельефа дна многолучевым эхолотом
Под целостностью системы МЛЭ будем понимать «надежную» и «правильную» работу всех датчиков, входящих в систему МЛЭ, своевременность оповещения пользователя системы об отказе датчиков, а также контроль устранения систематических ошибок, присутствие которых в выполняемых измерениях может сделать невозможным использование получаемых результатов площадной съемки в гидрографических целях в соответствии с гидрографическими Стандартами.
Контроль целостности является одной из главных составных частей контроля качества съемки с МЛЭ в реальном масштабе времени и реализован в виде системы тревог и предупреждений ЭГИС. Более подробное обсуждений вопросов гарантирования качества площадной съемки и ее целостности приводится в главе 7 на примере использования ЭГИС HYPACK/HYSWEEP [50, 51].
Контроль качества многолучевой съемки должен быть прописан на всех этапах ее выполнения: 1) подготовительном (создание проекта съемки), 2) на этапе установки оборудования МЛЭ и датчиков на судне-носителе, 3) во время съемки в реальном масштабе времени, включая выполнение калибровки и теста контроля качества функционирования, 4) на этапах пост-обработки данных, а также представления результатов съемки с МЛЭ.
6.2. Методика проектирования работ с системой многолучевого эхолота
Рассмотрим процесс проектирования съемки с МЛЭ, включая основные этапы: подготовительный, выполнение съемки, пост-обработку и представление результатов.
Проектирование площадной съемки с МЛЭ является первым и наиболее ответственным этапом работ, от качества выполнения которого во многом зависит успешность реализации всех последующих этапов. Современные гидрографические информационные системы значительно облегчают этап проектирования, позволяя интегрировать, манипулировать и визуализировать большие объемы разнородной координатно-привязанной информации.
В общем случае проектирование площадной съемки незначительно отличается от проектирования однолучевой съемки, но имеет свои особенности. При проектировании площадной съемки рельефа дна с помощью МЛЭ должны быть в первую очередь определены цели съемки. В настоящее время все больше съемок рельефа дна выполняется для решения инженерных задач, связанных с гидротехническим строительством, дноуглублением, а также размещением на шельфе конструкций, обеспечивающих деятельность морских месторождений углеводородного сырья. Существуют определенные различия, предъявляемые к съемке рельефа традиционной и инженерной гидрографией.
Традиционную гидрографию, призванную обеспечивать безопасность мореплавания на основе создания морских навигационных карт, интересуют наименьшие глубины, а точность изображения микрорельефа дна — здесь на втором плане. Инженерным приложениям нужна батиметрия — съемка микрорельефа, получение которого может обеспечить высокая точность взаимных превышений точек дна. При этом абсолютные точности глубины менее актуальны.
180
6.2. Методика проектирования работ с системой многолучевого эхолота
Требования к проектированию съемки с МЛЭ зависят от назначения съемки. Можно выделить два основных требования:
— батиметрическая съемка с заданным уровнем точности определения глубин;
— обнаружение объектов на морском дне с заданными минимальными размерами.
Для инженерных приложений часто предъявляются одновременно оба этих требования.
От формулировки требований зависят такие параметры многолучевой съемки как: величина междугалсового расстояния (подробность промера) и степень акустического покрытия дна; скорость хода судна-носителя; частота посылок; длительность импульса; состав процедур контроля качества.
Контроль качества при проектировании многолучевой съемки должен быть прописан на всех этапах, включая установку оборудования МЛЭ и вспомогательных систем на судне-носителе; выполнение калибровки и теста контроля качества функционирования; съемку в реальном масштабе времени; пост-обработку данных, а также представление результатов съемки с МЛЭ.
На каждом из обозначенных этапов в проекте работ должны быть заданы соответствующие нормы и требования. В любом случае в процессе проектирования должны быть решены вопросы геодезического, картографического, океанографического и аппаратного обеспечения. Проектирование съемки осуществляется средствами электронной гидрографической информационной системы (ЭГИС), от функциональных возможностей которой во многом зависит ее эффективность.
6.2.1. Геодезическое планово-высотное обеспечение
Является наиболее ответственным этапом проектирования и включает выбор геодезической системы координат и картографической проекции, на которой будут представляться результаты площадной съемки. При необходимости представления съемки в системе координат, отличной от геоцентрической системы WGS-84, должен быть корректно решен вопрос преобразования геодезических координат в выбранную координатную систему. Только после выбора координатной системы проекта съемки можно приступать к последующим этапам ее проектирования. При этом целесообразно преобразовать в цифровую форму координаты планово-высотной основы, которая будет использована в проекте в качестве опорных/контрольных точек, реперов уровенных постов и т. п., и записать их для хранения в файлы формата, пригодного для визуализации.
6.2.2. Картографическое обеспечение
Включает подбор всех доступных картографических материалов на акватории площадной съемки и при необходимости преобразование их в формат электронной карты с целью возможности отображения на экране компьютера ЭГИС, как картографической подложки. Большинство ЭГИС имеют возможность отображения значительного количества форматов растровых и векторных электронных карт. Некоторые ЭГИС, например, HYPACK МАХ имеют в своем составе средства создания электронных карт путем оцифровки бумажных карт. Следует также упомянуть,
181
Глава 6. Методика выполнения площадной съемки рельефа дна многолучевым эхолотом
что ЭГИС HYPACK МАХ способна отображать максимальное количество картографических подложек (более 10) по сравнению с другими ЭГИС. Большинство векторных навигационных карт форматов (СМ93/3, S-57, VPF) автоматически преобразуются в систему координат проекта. Другие форматы, включая все растровые электронные карты, могут быть отображены в виде картографической подложки только в той системе координат и проекции, в которой они были составлены.
6.2.3. Аппаратное обеспечение
Включает сопряжение с датчиками информации путем выбора специальных программ — драйверов, а также указание положения всех датчиков системы МЛЭ в судовой системе координат. Данная процедура называется настройкой оборудования (hardware setup). Все датчики сопрягаются и тестируются при проектировании съемки и непосредственно перед ее началом. Это очень ответственная операция.
6.2.4. Океанографическое обеспечение
Заключается в сборе и преобразовании в цифровую форму всей доступной информации о колебаниях уровня моря и ВРСЗ в воде в районе съемки. Файлы ВРСЗ, полученные по архивным данным для акватории съемки, могут быть использованы для выполнения площадной съемки с МЛЭ до момента выполнения прямых наблюдений. В любом случае полезно сравнение вновь полученных и архивных данных, особенно если архивные данные относятся к тому же месяцу, что и измеренный профиль ВРСЗ.
6.2.5. Проектирование галсов, ширины полосы обзора, скорости и перекрытия смежных полос
6.2.5.1. Классификация современных МЛЭ сточки зрения пользователя
МЛЭ можно классифицировать по следующим наиболее важным эксплуатационным параметрам:
— по распределению следов лучей внутри полосы обзора: «эквидистантное» (с равноудаленными пятнами контактов) или только равномерное угловое (см.п. 5.1.7.3);
— по управлению направлением лучей на излучении и приеме (стабилизации лучей);
— по принципу излучения акустической энергии: узко или широкополосная система (линейно-частотная модуляция =ЛЧМ).
В современных МЛЭ кроме обычного равномерно-углового распределения лучей дополнительно реализован режим управления приемными лучами, обеспечивающий их «эквидистантное» распределение внутри полосы обзора (см. п. 5.1.7.3), облегчающее построение цифровых моделей рельефа(ЦМР) дна.
6.2.5.2. Принципы стабилизации лучей МЛЭ
В современных МЛЭ четвертого поколения реализована технология стабилизации лучей на излучении по углам: дифферента, крена и рыскания, а также
182
6.2. Методика проектирования работ с системой многолучевого эхолота
без стабилизации
стабилизация по крену и дифференту
Рис. 6.2. Сравнение полос обзора МЛЭ с различными вариантами стабилизации луча [Hughes Clarke, UNB]
стабилизации веера принимаемых лучей по углу крена. Если же стабилизация по углу крена не обеспечивается, то «гидрографическая» полоса обзора будет дополнительно сужена до величины «эффективной полосы обзора», как показано на рис. 6.2.
Отсутствие стабилизации лучей МЛЭ по крену и дифференту приводит к необходимости выбора большего перекрытия смежных полос, что приводит к уменьшению подробности промера и, как следствие, ухудшению экономической эффективности использования МЛЭ. Полоса обзора МЛЭ со стабилизацией лучей по крену, дифференту и рысканию представлена на рис. 6.3.
6.2.5.3. Степень перекрытия смежных полос площадной съемки
При проектировании многолучевой съемки в зависимости от ее целей обязательно следует учитывать степень покрытия дна, задающую величину перекрытия смежных полос съемки. Степень 100% покрытие дна акустической энергий не предусматривает перекрытия смежных «гидрографических» полос съемки [29]. При покрытии в 125 % обеспечивается перекрытие полос в 25 % и т. д. [48].
Графическое представление степеней покрытия дна показано на рис. 6.4. При проектировании съемки рельефа дна с помощью МЛЭ должны быть в первую очередь определены цели съемки.
183
Глава 6. Методика выполнения площадной съемки рельефа дна многолучевым эхолотом
Рис. 6.3. Полоса обзора МЛЭ со стабилизацией лучей по крену, дифференту и рысканию [Hughes Clarke, UNB]
Рис. 6.4. Степень акустического покрытия дна акустической энергией
184
6.2. Методика проектирования работ с системой многолучевого эхолота
В настоящее время все больше съемок рельефа дна выполняется для решения инженерных задач, связанных с гидротехническим строительством, дноуглублением, а также размещением на шельфе конструкций, обеспечивающих деятельность морских месторождений углеводородного сырья.
От формулировки требований зависят такие параметры многолучевой съемки, как величина междугалсового расстояния (подробность промера) и степень акустического покрытия дна, скорость хода судна-носителя, частота посылок, длительность импульса, состав процедур контроля качества.
6.2.5.4. Угловая ширина обзора и скорость хода для обнаружения объектов
Ширина полосы обзора, покрытие многолучевой системы (coverage of multibeam systems), является функцией главным образом углового расстояния между внешними лучами на излучении (swath width) и глубины. Количество отдельных (индивидуальных) лучей и размеры пятен облучения в пределах полосы обзора изменяются в широких пределах и могут быть рассчитаны по формулам (3.15-3.17). Как было отмечено в предыдущих разделах, внешние лучи с каждой стороны полосы обзора больше подвержены воздействию неучтенных систематических ошибок, и их точность может не соответствовать требованиям заданной категории съемки. Максимальное допустимое для данной категории съемки угловое раскрытие или угловое расстояние между внешними лучами (см. рис. 3.24) может быть ограничено и установлено в результате выполнения независимого теста гарантии качества функционирования (см. п. 7.6).
При условии правильной калибровки и настройки МЛЭ, обеспечивающий высокую плотность отметок глубин, способен обнаруживать и распознавать меньшие по размерам объекты на дне по сравнению с однолучевыми системами. Вместе с тем следует помнить, что способность обнаружения объектов на дне может понижаться на краях полосы обзора благодаря увеличивающимся размерам пятен облучения на крайних лучах. При проектировании многолучевой съемки выбор правильного углового расстояния между внешними лучами, а, следовательно, и ширины полосы обзора, имеет первостепенное значение. Рассмотрим этот вопрос более подробно.
Покрытие морского дна акустической энергией является функцией размера пятен облучения вдоль и поперек направления движения, угловых расстояний между лучами в направлении поперек направления движения, частоты акустических посылок, скорости судна, а также величины углов рыскания, крена и дифферента. Для того, чтобы достигнуть полного покрытия морского дна необходимо, чтобы освещаемые области последовательных посылок перекрывались так, чтобы каждая точка дна освещалась хотя бы одним акустическим импульсом.
Максимально допустимая скорость судна (v), обеспечивающая полное покрытие дна, может быть подсчитана по следующей приближенной формуле [53]:
v = 5-б71ап(фг/2), (6. 2)
где v — максимальная скорость судна (м/с), S — количество посылок в секунду (1/с), d — глубина, фг — ширина луча в направлении диаметральной плоскости.
Фирмой Kongsberg были проведены специальные исследования, касающиеся способности МЛЭ четвертого поколения ЕМ 710 и ЕМ3002 выполнять требования особой категории съемки по S-44(5) в части точности получения глубин и
185
Глава 6. Методика выполнения площадной съемки рельефа дна многолучевым эхолотом
обнаружения подводных объектов [64]. Были выполнены расчеты размеров пятен облучения лучей на морском дне вдоль (ях) и поперек (а^ направления движения для разных угловых расстояний между внешними лучами МЛЭ на излучении (90,120 и 150°), а также для разных глубин моря: от 5 до 40 м. На рис. 6.5. показаны результаты, полученные для МЛЭ ЕМ 710, имеющего стабилизацию лучей по крену, дифференту и рысканию.
Размер пятна облучения на дне поперек направления движения
Рис. 6.5. Размеры пятен облучения по направлению и поперек направления движения для различных угловых расстояния между внешними лучами применительно к МЛЭ ЕМ 710 [Kongsberg]
186
6.2. Методика проектирования работ с системой многолучевого эхолота
В Стандарте S-44 (5) при задании критериев обнаружения объектов размер пятна облучения на дне не оговаривается. Однако, это очень важный параметр, от которого напрямую зависит возможность детектирования подводных целей. Практический опыт свидетельствует о том, что объект может быть опознан в случае, если пятно облучения от единичной посылки покрывает его на 70 % и более.
В некоторых национальных Стандартах (например, стандарт Новой Зеландии — LINZ) при выполнении площадных съемок регламентируется три акустических контакта с подводной целью, что обуславливает ее уверенное опознание. При этом справедливо утверждается, что глубины, полученные по единственному контакту, как правило, будут отфильтрованы на этапе пост-обработки при использовании автоматических фильтров.
Анализ графиков на рис. 6.5 показывает, что угловое расстояние между внешними лучами МЛЭ на излучении (характеристика направленности излучающей антенны поперек ДП) в 150° является максимальной величиной. У МЛЭ, имеющих этот угол более 150°, крайние лучи придется исключать, поскольку они не обеспечат необходимой точности глубин и возможности опознания целей.
6.2.5.5. Гидрографическая ширина полосы обзора МЛЭ
Одной из особенностей МЛЭ является постоянная величина углового расстояния между внешними углами лучей и переменная величина ширины полосы обзора, которая зависит от глубины, мощности излучения и акустических свойств морского дна. Величина Sw, изображенная на рис. 3.24, может быть названа теоретической шириной полосы обзора. Энергетическая ширина полосы обзора (SE) будет зависеть от указанных факторов и теоретически рассчитывается разработчиком МЛЭ. Например, для МЛЭ ЕМ 710 RD (ф/?=фг=2°) фирмы Kongsberg величину SE для различных типов грунтов можно приблизительно получить из графика, приведенного на рис. 6.6.
Другой особенностью многолучевой батиметрии является то, что глубины, вычисленные внутри энергетической полосы обзора, мотуг значительно отличаться по точности в зависимости от величины угла луча. Вследствие трудностей с учетом
Глубина (м)
Рис. 6.6. График энергетической ширины полосы обзора МЛЭ ЕМ 710 RD [Kongsberg]
187
Глава 6. Методика выполнения площадной съемки рельефа дна многолучевым эхолотом
рефракции для лучей с большими углами, точность определения глубин по внешним лучам МЛЭ значительно хуже, чем по центральным. Поэтому, некоторое количество крайних лучей на практике, как правило, не используется, что приводит к дополнительному сужению энергетической полосы обзора. Ширину такой полосы обзора (SH), внутри которой точность определения глубин не превышает определенной заданной величины, будем именовать ^гидрографической» [29]. Таким образом, при определении ширины полосы обзора МЛЭ необходимо иметь в виду категорию выполняемой съемки (по S-44/5), поскольку необходимая точность определения глубины может быть получена только по ограниченному количеству лучей.
Еще одна важная особенность многолучевой батиметрии заключается в высокой избыточности информации о глубинах в полосе обзора. При этом представляется возможным использовать статистические методы оценки точности определения глубин. В некоторых пакетах программ реализованы методы статистической обработки, позволяющие обосновано определить ширину «гидрографической» полосы обзора для конкретной системы датчиков и судна-носителя. Такая методика, позволяющая на основе выполнения тестовой съемки на специально созданном полигоне определить ширину «гидрографической» полосы обзора, точность глубин внутри которой не должна превышать допустимую величину, заданную для данной категории съемки в Стандарте S-44, либо национальном нормативном документе, подробно рассматривается в п. 7.6.
б.2.4.б. Проектирование направления галсов площадной съемки с МЛЭ
Проектирование галсов площадной съемки, как правило, отличается от проектирования галсов промера с ОЛЭ. Галсы промера с ОЛЭ стараются проложить перпендикулярно изобатам, как показано на рис. 6.7. Особенностью площадной
галсы однолучевой съемки
галсы многолучевой съемки
Рис. 6.7. Проектирование направления галсов площадной съемки
188
63. Методика выполнения съемкис системой многолучевого эхолота
съемки на сложном рельефе является постоянно меняющаяся ширина полосы обзора. При этом возникает необходимость изменения подробности промера (междугалсового расстояния). Этого неудобства можно избежать, если прокладывать галсы площадной съемки параллельно общему направлению изобат, как показано на рис. 6.7. В особых случаях, например, при съемке каналов, направление галса площадной съемки целесообразно проложить по оси канала.
Проектирование галсов осуществляется с использованием возможностей ЭГИС. При этом всегда целесообразно пользоваться картографической подложкой, отображающей наиболее подробную батиметрическую.карту, имеющуюся на район работ.
6.3. Методика выполнения съемки с системой многолучевого эхолота
Выполнение многолучевой съемки включает несколько этапов:
— подготовку системы МЛЭ к выполнению съемки;
— выполнение многолучевой съемки в реальном масштабе времени;
— пост-обработку результатов многолучевой съемки и оценку ее соответствия заданным стандартом.
Этап выполнения площадной съемки с МЛЭ в реальном масштабе времени является наиболее ответственным и дорогостоящим. При этом необходимо решать следующие задачи:
— управлять судном-носителем так, чтобы обеспечить заданную степень перекрытия смежных полос съемки;
— осуществлять непрерывный контроль целостности системы МЛЭ;
— обеспечивать непрерывную и надежную регистрацию данных на галсах многолучевой съемки.
На каждом из указанных этапов должны быть отработаны процедуры контроля качества.
6.3.1. Подготовка к выполнению съемки
6.3.1.1. Установка оборудования системы МЛЭ на судне-носителе
Установка преобразователей МЛЭ может быть либо набортной (в корпусе), либо забортной — на борту или на носу. Набортная установка используется, как правило, для больших судов и для глубоководных МЛЭ, у которых преобразователи имеют значительные габариты и массу. Это стационарный вариант постоянного крепления преобразователей. Другие варианты установки преобразователей МЛЭ используются в основном, как временные — на небольшой промежуток времени на малых судах (катерах), выполняющих съемки в прибрежной мелководной зоне. Преобразователи мелководных МЛЭ (частота излучения 200 кГц и выше) имеют малые размеры и массы.
Рассмотрим вопросы выполнения начальной ориентации осей датчиков и измерения их статических смещений при первичной установке оборудования на судне-носителе. Речь пойдет о процессе выполнения измерений и ориентирования датчиков: приемо-передающих антенн МЛЭ, гирокомпаса и датчика про
189
Глава 6. Методика выполнения площадной съемки рельефа дна многолучевым эхолотом
странственной ориентации (ДПС) относительно основных осей судовой системы координат. Измерения должны проводиться, когда судно стабилизировано на трейлере или на кильблоках в доке, когда возможны наиболее точные измерения. Это минимизирует погрешности в определении судовых координат датчиков и угловых смещений осей излучающей и приемной антенн МЛЭ относительно осей ДПС и гирокомпаса. Угловые смещения должны быть минимизированы, а остаточные статические систематические ошибки углов крена, дифферента и курса должны быть определены в результате калибровки и компенсированы поправками, учитываемыми программно.
Смещения датчиков необходимо измерять от точки начала судовой системы координат (vessel reference point). В качестве этой точки обычно выбирают центр тяжести судна (center of gravity=COG) или точку пересечения осей крена и дифферента. Центр тяжести будет изменяться в зависимости от загрузки судна, и его необходимо выбирать применительно к типичным условиям проведения съемки. На больших судах центр тяжести будет немного изменяться по вертикали вдоль оси из центра плавучести (center of buoyancy). На малых судах центры тяжести и плавучести могут не совпадать, ввиду внецентровой загрузки. Таких условий необходимо избегать, поскольку это ведет к нестабильности самого судна. Данную информацию можно получить из чертежа общего продольного плана судна. Центр судовой системы координат должен быть легко доступным местом, из которого возможно выполнять измерения до мест расположения датчиков. Оси судовой системы координат должны быть направлены следующим образом: ось х — вдоль киля судна (с положительным направлением к носу), ось у — в плоскости, параллельной плоскости мидель шпангоута(с положительным направлением в правый борт), а ось z —вертикально вверх (положительное направление). Смещения измеряются от точки начала судовой системы до центра каждого датчика.
Положения центра датчика определяется по схемам, представляемым изготовителями датчиков, или могут быть точно измерены с помощью рулетки. У антенн МЛЭ физический центр тяжести, как правило, не совпадает с акустическим центром (acoustic center), например, у МЛЭ Kongsberg ЕМ 3000. Величина и знак смещения каждого датчика повторно проверяются и записываются.
Требования к установке МЛЭ во многом зависят от судна-носителя. Наиболее серьезные требования предъявляет забортный вариант установки антенн МЛЭ на большом судне. ДПС всегда целесообразно размещать как можно ближе к центру тяжести судна (ЦТС). При маневренной установке ДПС лучше разместить в помещении гирокомпаса, а в случае специального судна — в помещении гравиметрической лаборатории, где имеются фундаменты и марки, точно обозначающие положение диаметральной плоскости (ДП), по которой должна быть выставлена продольная ось ДПС. Выставка продольной оси ДПС вдоль ДП должна осуществляться с использованием геодезических методов. Величины смещений судовых координат антенн МЛЭ, спутниковой навигационной аппаратуры (СНА) относительно ЦТС должны измеряться с точностью 0.1 м. Особое внимание должно быть уделено точности определения вертикальных координат — высоты фазового центра СНА над плоскостью статической ватерлинии и заглубление антенн МЛЭ ниже плоскости статической ватерлинии.
190
6.3. Методика выполнения съемкис системой многолучевого эхолота
Наиболее серьезные требования к точности выполнения ориентации осей датчиков и измерению их статических смещений предъявляет маневренная установка МЛЭ на катерах, когда съемки выполняются в мелководной зоне в соответствии с повышенной точностью (особая и первая категории).
Рассмотрим более подробно следующие условия, выполнение которых обеспечит необходимое качество проведения мелководных съемок:
А) Учет особенностей маневренной установки преобразователей МЛЭ.
Б) Правильность установки ДПС и гирокомпаса
В) Измерение посадки/проседания судна (Squat/Settlement) с помощью теодолита.
Г) Измерение посадки/проседания судна (Squat/Settlement) с использованием RTK DGPS
Д) Определение временной задержки ДПС
Е) Определение временной задержки системы позиционирования (Latency).
Ж) Измерение смещений датчиков и рекомендации по размещению аппаратуры
А) Маневренная установка преобразователей МЛЭ.
Преобразователи МЛЭ должны быть установлены как можно ближе к диаметральной плоскости (ДП) судна. Продольная ось излучающей антенной решетки должна лежать в плоскости, параллельной ДП, а продольная ось приемной антенной решетки должна лежать в плоскости, параллельной плоскости мидель шпангоута, т. е. быть параллельной оси х. Это условие является важным, когда у МЛЭ отсутствует электронное управление лучами.
(1) Большинство антенн МЛЭ, используемых на небольших судах, имеют забортное крепление. При таком креплении абсолютно необходимо, чтобы продольные оси антенны и киля судна (ДП) были бы параллельны как можно с более высокой точностью. Это можно достичь, когда судно находится на трейлере или на кильблоках с использованием обычных геодезических методов измерений углов и нивелирования. Поскольку консольная установка антенны позволяет поднимать ее из воды в конце рабочего дня и вновь опускать в воду при начале работы на следующий день, такой тип установки антенны должен периодически проверяться на правильность положения основных осей. Частота, с которой такую проверку необходимо выполнять, зависит от того, какого типа съемка производится и в каких условиях. Антенны, стационарно установленные на корпусе судна, обычно стабильны по месту и не требуют такой частой проверки.
(2) Угол установки антенны (относительно вертикали) должен быть определен и зарегистрирован, если ДПС не совмещен с самой антенной. Поскольку большинство судов на ходу имеют посадку на корму, антенна должна иметь небольшой положительный дифферент, чтобы компенсировать это явление. В результате выполнения калибровки систематическая ошибка угла дифферента антенны будет определена и компенсирована поправкой, введенной в программное обеспечение МЛЭ. В этом случае, при выполнении съемки лучи МЛЭ будут проектироваться по нормали к морскому дну.
Б) Датчик перемещений судна (ДПС) и (или) гирокомпас.
Продольная ось гирокомпаса должна быть выставлена параллельно оси х судна с помощью тахеометра и контрольных точек. Это можно сделать, когда судно (ка-
191
Глава 6. Методика выполнения площадной съемки рельефа дна многолучевым эхолотом
тер) установлено на трейлере или хорошо пришвартовано к причалу, при условии минимального воздействия волнения. Гирокомпас должен быть введен в меридиан, и введена широтная поправка. Необходимо выбрать две точки, расположенные на диаметральной плоскости (ДП) судна, и поместить отражатель тахеометра на каждую из них. Зарегистрируйте координаты цели с помощью тахеометра и запишите в это время отсчет гирокомпасного курса. Возьмите несколько отсчетов для надежности. По координатам целей рассчитайте азимут диаметральной плоскости и сравните с отсчетами по гирокомпасу. Рассчитайте среднее арифметическое и стандартное отклонение показаний гирокомпаса. Если систематическая ошибка получилась более 1° на уровне 95% доверительной вероятности, то необходимо исправить установку продольной оси гирокомпаса и заново повторить вышеприведенные измерения. Если систематическая ошибка меньше 1°, то ее можно учитывать как поправку гирокомпаса. Такую же процедуру можно выполнять с помощью трех комплектов фазовой СНА взамен тахеометра, но процесс занимает больше времени.
Если возможно, то ДПС должен быть помещен на линии диаметральной плоскости судна как можно ближе к его центру тяжести (центру приведения), которым является точка пересечения осей крена и дифферента судна. Некоторые ДПС обеспечивают фильтрацию вертикального перемещения при установке вне центра масс. Если возможно, используйте те же углы установки, что и у преобразователей МЛЭ. Направления продольной оси х датчика пространственной ориентации и оси х антенны эхолота должны совпадать. Азимутальное рассогласование оси датчика пространственной ориентации (отклонения в плоскости оси х судна) приведет к появлению погрешностей глубин, пропорциональных величине глубины. Курсовое рассогласование оси ДПС (отклонение в плоскости оси у судна) вызовет погрешность в угле крена при дифференте и погрешность в угле дифферента при крене.
Если преобразователь МЛЭ и ДПС расположены рядом, то многие поправки, согласующие направления осей датчиков становятся несущественными.
В) Измерение посадки/проседания судна (Squat/Settlement) с помощью теодолита.
Комбинированные посадка и проседание судна должны быть измерены на нескольких скоростях, и на основе этих данных составлена таблица (look up table) соответствия скоростей и величины динамического заглубления антенны. Эти измерения необходимы, поскольку ДПС не измеряет саму величину истинного проседания, а только ее короткопериодное изменение, которое затем плавно перейдет в новое нулевое значение вертикального перемещения, от которого и будут отсчитываться мгновенные значения.
Проседание может быть измерено с помощью теодолита (нивелира), установленного на берегу, и нивелирной рейки, установленной на судне над ДПС (в точке, где данные вертикального перемещения меньше всего фильтруются). Методика определения динамического заглубления представлена на рис. 6.8. Судно проходит несколько раз вблизи береговой станции с разными скоростями, при этом с помощью теодолита берутся отсчеты по рейке. Находятся разности высот при разных скоростях, которые сводятся в таблицу и используются, как поправки динамического заглубления антенны в процессе проведения съемки. Необходимо обратить внимание на правильность знака поправки при вводе данных в программное обеспечение.
192
6.3. Методика выполнения съемкис системой многолучевого эхолота
Рис. 6.8. Определение поправки динамического заглубления антенн МЛЭ
Г) Измерение посадки/проседания судна (Squat/Settlement) с использованием RTKDGPS. Альтернативным способом измерения поправки за посадку/проседа-ние судна является использование фазовой спутниковой аппаратуры, в которой _ реализован режим кинематики реального времени ( RTK DGPS) для измерения разностей высот. Работа производится в следующей последовательности:
1) установите антенну DGPS около центра судна и измерьте горизонтальные и вертикальные расстояния от антенны до центра приведения с помощью стальной ленты;
2) используйте данные ближайшего уровенного поста для получения сведений о высотном положении нуля глубин. Зона действия уровенного поста должна перекрывать район промера, либо следует использовать два уровенных поста;
3) выполните пробег по одному и тому же галсу с разными скоростями. Выполните пробег по галсу с разной загрузкой судна;
4) зарегистрируйте одновременно плановое положение по спутниковой навигационной аппаратуре (СНА), вертикальные перемещения, дифферент, крен, скорость судна и высоты уровня над нулем глубин. Частота сбора данных должна быть максимально возможная для СНА и для ДПС (10 и 100 гц соответственно), в то время как уровень можно регистрировать с интервалом 5-10 мин;
5) запишите высоту антенны над статической ватерлинией на стоянке;
6) все данные должны быть синхронизированы и при необходимости про-интерполированы;
7) используйте смещение антенны, высоту для расчета крена и вертикального перемещения и исправьте высоты антенны. Вычтите высоты уровня и вертикальное перемещение из высоты антенны;
8) с этими поправками за перемещение и уровень рассчитайте среднюю скорость относительно воды и среднюю высоту антенны СНА над эллипсоидом. Соз
193
Глава 6. Методика выполнения площадной съемки рельефа дна многолучевым, эхолотом
дайте таблицу соответствия скорости хода и поправок динамического заглубления антенны МЛЭ;
9) технологию RTK DGPS можно напрямую использовать для определения геодезической высоты антенн МЛЭ и тем самым исключить необходимость выполнения наблюдений уровня на уровенном посту, а также определения суммарного проседания — динамического заглубления антенны {dynamic draft). Технология получения поправок уровня по RTK DGPS была подробно изложена в п. 5.З.4.1. Если RTK DGPS используется для определения высотного положения текущего уровня, тогда в программу должно бь!ть введено только измеренное значение статического заглубления антенны МЛЭ.
Д) Временная задержка ДПС.
В результате наличия временной задержки у ДПС могут возникать ошибки угла крена, которые значительно влияют на точность расчета глубин, особенно по крайним лучам. Горизонтальные ускорения на поворотах также могут влиять на работу ДПС, что приводит к ошибкам в расчете глубин. В принципе ошибку определения угла крена можно обнаружить, наблюдая за поперечным профилем глубин на ровном или выровненном дне. О наличии ошибки свидетельствует появление короткопериодных искажений в отображении ровного дна. Пакеты программ HYPACK МАХ и Isis/Bathy могут быть использованы для проверки наличия временной задержки. Причем HYPACK может решать эту задачу в постобработке, в то время как Isis/Bathy Pro индицирует результаты проверки наличия задержки в реальном масштабе времени.
Е) Временная задержка системы позиционирования (Latency).
Временная задержка системы определения местоположения — это задержка во времени между моментом, когда координаты получены в СНА, и моментом их поступления в программу МЛЭ для регистрации совместно с глубинами. Наличие временной задержки приводит к отрицательному смещению вдоль профиля рассчитанной глубины. При выполнении съемки с малой скоростью это смещение будет небольшим. Временная задержка у разной СНА может различаться. В общем случае она зависит от времени обработки данных местоопределения, но может быть различной еще и в зависимости от того, сколько измерений используется в спутниковой обсервации. Для системы МЛЭ следует использовать СНА с постоянной наименьшей величиной временной задержки.
Если будет использоваться время, содержащееся в NMEA-сообщении СНА, то необходимо убедится в наличии правильной синхронизации между этим временем и таймером компьютера МЛЭ. Наилучшим решением является использование метки времени 1 PPS (Puls Per Second) — специального канала, имеющегося у большинства профессиональной СНА и обеспечивающего выдачу времени UTC с точность 1 мс. Большинство моделей современной фазовой спутниковой навигационной аппаратуры, реализующей режимы RTK/RTG, имеют временную задержку не более 20 мс и канал метки времени 1 PPS. Именно такую СНА и следует использовать в составе системы МЛЭ.
Ж) Измерение смещений датчиков и рекомендации по размещению аппаратуры.
Измерение смещений датчиков относительно начала судовой системы координат должно выполняться с помощью мерной ленты или электронной ру
194
6.3. Методика выполнения съемкис системой многолучевого эхолота
летки с точностью 0,1 м. На небольших судах (катерах) антенны МЛЭ и СНА могут быть совмещены по вертикали и размещены на одном штоке. Удачным решением будет размещение на том же штоке или в его непосредственной близости и ДПС. Особое внимание должно быть уделено определению высоты начала принятой судовой системы координат над статической ватерлинией, к которой будет осуществляться приведение глубин при использовании RTK метода. Начало судовой системы по высоте, как правило, совмещают со статической ватерлинией, от которой отсчитывается высота фазового центра антенны СНА и статическое заглубление антенны МЛЭ. Если для определения местоположения используется обычная кодовая СНА, то высота фазового центра антенны СНА не имеет значения, т. к. она не используется при исправлении глубин.
6.3.1.2. Тарировка многолучевого эхолота (американский метод)
Традиционная тарировка с использованием тарировочной доски может применяться для оценки начальной ошибки системы МЛЭ [46]. В США используется методика тарировки с помощью тарировочной доски для внешних лучей МЛЭ (см. рис. 6.9).
Технология поддержки тарировки МЛЭ осуществляется в гидрографическом пакете HYPACK.
Рис. 6.9. Тарировка МЛЭ с помощью специальной тарировочной доски (US АСЕ Manual, 2001)
195
Глава 6. Методика выполнения площадной съемки рельефа дна многолучевым эхолотом
6.3.1.3. Калибровка многолучевого эхолота
Калибровка МЛЭ, или как ее часто называют «патч тест» (patch test), представляет собой выполнение специальной съемки на подготовленном полигоне в особых наиболее благоприятных внешних условиях с использованием наиболее точных методов измерений и наиболее точной аппаратуры.
Калибровка имеет целью определение трех угловых систематических ошибок установки преобразователей МЛЭ, а также систематической ошибки запаздывания поступления информации о координатах.
Калибровка МЛЭ направлена на определение следующих систематических ошибок:
— взаимного углового положения приемной антенны и датчиков, измеряющих углы крена, дифферента и рыскания; в англоязычной литературе они называются «attitude errors»,
— временной синхронизации посылки МЛЭ и выработки координат СНА; в англоязычной технической литературе они называются: «timing errors».
При этом предполагается, что поправки за уровень (tide) и вертикальные перемещения (heave), а также параметры распределения скорости звука в воде измерены с максимально возможной точностью.
Для выполнения комплексной калибровки МЛЭ на акватории, близкой к району съемки, выбирается специальный калибровочный полигон, который в случае использования мелководного МЛЭ должен удовлетворять следующим требованиям (рис. 6.10).
Рис. 6.10. Морской полигон для калибровки многолучевого эхолота
196
6.3. Методика выполнения съемкис системой многолучевого эхолота
1. На полигоне должны находиться участки морского дна:
— с практически ровным дном на максимальных глубинах, которые могут встретиться при проведении самой съемки;
— с ровным склоном, имеющим уклон 15-20%.
При этом желательно, чтобы прямолинейные изобаты имели бы длину, по крайней мере, не меньшую, чем две полосы обзора МЛЭ.
2. На полигоне не должно быть препятствий для прокладки не менее трех калибровочных галсов (см. рис. 6.10. — галсы: а, Ь, с), при этом должны соблюдаться следующие условия:
— рабочая длина галсов «а, Ь, с» должна быть не менее 150 м;
— расстояние между галсами «Ь» и «с» должно быть таким, чтобы полосы обзора перекрывались бы в самой мелководной части полигона ( необходимо помнить, что чем меньше глубина по вертикальному лучу — тем уже полоса обзора МЛЭ).
При проведении калибровки должны выполняться следующие условия:
— скорость судна при проведении калибровки может изменяться от самой малой до обычной скорости промера с МЛЭ;
— для калибровки целесообразно выбирать наиболее благоприятные погодные условия с минимальным волнением;
— определение планового положения при проведении калибровки необходимо выполнять наиболее точным из возможных методов, желательно с использованием фазовой СНА, реализующей режим кинематики реального времени (RTK);
— каждый вид калибровки имеет свои особые требования, изложенные далее.
Требования к полигону для калибровки глубоководных МЛЭ практически такие же, за исключением длины калибровочных галсов. Рекомендуемая длина галсов составляет 1000-1200 м на глубинах 3000-4000 м. Основной проблемой при калибровке глубоководного эхолота является поиск приемлемой акватории.
Дальнейшее изложение процедур калибровки относится к МЛЭ с одиночной антенной. В случае двух антенной системы МЛЭ процесс калибровки требует дополнительного выполнения пробегов для независимой калибровки антенн правого и левого бортов.
Калибровка МЛЭ включает выполнение тестовых съемок для получения следующих параметров:
— временного запаздывания поступления навигационной информации (Positioning time delay)]
— постоянной систематической ошибки угла дифферента (Pitch offset)]
— постоянной систематической ошибки азимута передающей антенны (Yaw offset)]
— постоянной систематической ошибки угла крена приемной антенны (Roll offset).
А) Калибр.вка временного запаздывания поступления навигационной информации (Positioning time delay).
Временное запаздывание или задержка является постоянной систематической ошибкой между моментом определения координат в спутниковой навигационной аппаратуре (СНА) и моментом поступления этих координат в компьютер МЛЭ для привязки измерений наклонных дальностей. Процедура определения
197
Глава 6. Методика выполнения площадной съемки рельефа дна многолучевым эхолотом
систематической ошибки времени запаздывания заключается в выполнении пробега по двум парам галсов на разной скорости вдоль подводного склона, причем, чем круче склон, тем выше разрешение этого параметра. Склон должен быть ровным и такой протяженности, чтобы гарантировать достаточное количество измерений. Рис. 6.11 иллюстрирует калибровку временной задержки. Получение временной задержки основано на измерении продольного смещения отметок глубин, полученных при движении вдоль склона при разных скоростях хода судна. Во избежание влияния неизвестной систематической ошибки угла дифферента галсы должны быть пройдены в одном и том же направлении.
Временная задержка 5t (с) может быть получена на основе следующего уравнения [53]:
где Лг — горизонтальный интервал между двумя профилями глубин, вычисленных по центральным лучам на разных скоростях, a и v2 — скорости хода на первом и втором галсах соответственно.
Б) Калибровка постоянной систематической ошибки угла дифферента (Pitch offset).
Постоянная систематическая ошибка угла дифферента представляет собой суммарную постоянную систематическую ошибку углового отклонения вертикальной оси ДПС от вертикальной оси передающей антенной решетки, лежащей в продольной (диаметральной) плоскости судна.
Процедура определения систематической ошибки угла дифферента заключается в выполнении пробега по двум парам одного и того же — прямого и обратного галсов, на одной скорости вдоль подводного склона, причем, чем круче склон, тем выше
а)
Рис. 6.11. Калибровка временной задержки [IH0 М-13] а) Вид на галсы сверху; Ь) Продольные секции, где видно смещение двух профилей глубин от реального дна
198
6.3. Методика выполнения съемкис системой многолучевого эхолота
возможная точность определения этого параметра. Склон должен быть ровным и такой протяженности, чтобы гарантировать достаточное количество измерений.
Процедуру калибровки систематической ошибки угла дифферента иллюстрирует рис. 6.12. После правильного определения временной задержки, систематическая ошибка угла дифферента определяется путем измерения продольного смещения отметок глубин вдоль склона, возникших в результате наличия постоянной систематической ошибки угла дифферента. Для того, чтобы избежать какого-либо влияния систематической временной задержки, в систему должна быть уже введена поправка за временное смещение.
Систематическая ошибка угла дифферента 5а может быть рассчитана по формуле [53]:
<6-4)
где Дх — горизонтальное отстояние между отметками глубин по центральным лучам на прямом и обратном профиле, az — вычисленная глубина по центральным лучам.
В) Калибровка постоянной систематической ошибки азимута передающей антенны МЛЭ.
Постоянная систематическая ошибка угла азимута представляет собой суммарную постоянную систематическую ошибку углового отклонения оси датчика курса от оси антенной решетки передающей антенны в плоскости главной палубы, перпендикулярной продольной плоскости судна.
Процедура определения систематической ошибки азимута заключается в выполнении пробега по двум парам соседних галсов: одного прямого, а другого обратного — на одной скорости в районе с хорошо определенным батиметрическим
а)
1 п U
Рис. 6.12. Калибровка систематической ошибки угла дифферента [IHO М-13, 2005] а) Вид на галсы сверху; Ь) Продольные секции, где видно смещение двух профилей глубин от реального дна в результате ошибки угла дифферента
199
Глава 6. Методика выполнения площадной съемки рельефа дна многолучевым эхолотом
объектом на дне, таким как отмель. Полосы обзора соседних галсов должны перекрываться не более, чем на 20% в местонахождении донного объекта.
Рис. 6.13 иллюстрирует калибровку систематической ошибки азимута. После правильного определения временной задержки и систематической ошибки угла дифферента систематическая ошибка азимута получается путем измерения продольного смещения батиметрического объекта, полученного на соседних галсах. Во избежание влияния неучтенных временного смещения и систематической ошибки дифферента в систему должны уже быть введены поправки, компенсирующие эти ошибки.
Систематическая ошибка азимута 8у может быть рассчитана по формуле [53]:
<6-5>
Ль )
где Дх — горизонтальное отстояние между батиметрическим объектом, определенное на взаимно обратных галсах с линейным расстоянием AZ между ними.
Г) Калибровка постоянной систематической ошибки угла крена приемной антенны.
Постоянная систематическая ошибка угла крена представляет собой суммарную постоянную систематическую ошибку углового отклонения оси датчика пространственной ориентации и продольной оси [приемной] антенны от вертикали в плоскости, перпендикулярной диаметральной плоскости судна.
Процедура определения систематической ошибки угла крена заключается в выполнении пробега по двум парам одного и того же — прямого и обратного галсов, на одной скорости над выровненным дном.
Галсы и полосы обзора должны максимально точно перекрываться.
Калибровку систематической ошибки угла крена иллюстрирует рис. 6.14.
200
63. Методика выполнения съемкис системой многолучевого эхолота
Рис. 6.14. Калибровка систематической ошибки крена [IHO М-13, 2005]
После правильного определения временной задержки и систематических ошибок угла дифферента и азимута [ДП судна] систематическая ошибка крена получается путем измерения вертикального смещения глубин, рассчитанных по крайним лучам на взаимно-обратных галсах. Во избежание влияния неучтенных временного смещения и систематических ошибок дифферента и азимута в систему должны уже быть введены поправки, компенсирующие эти ошибки.
Систематическая ошибка крена угла 5р может быть получена по формуле [53]:
8Р = ^-‘Г^1 (6.6)
где Az — вертикальное смещение глубин, рассчитанных по крайним лучам на взаимно-обратных галсах, a Az/ — половина ширины полосы обзора или горизонтальное расстояние от [центра пятна облучения] вертикального луча до центра пятна облучения крайнего луча, где измерена величина смещения Az.
Калибровка обычно выполняется как итерационный процесс. Уточнение калибровочных вычислений должно выполняться по нескольким пробегам для того, чтобы получить усредненную величину.
Полученные поправки, компенсирующие систематические ошибки, должны иметь точность такого же порядка, как воспроизводимость (повторяемая точность) датчика пространственной ориентации. На рис. 6.14:
а) Вид сверху на два взаимно-обратных галса (полосы обзора);
Ь) Продольные секции, где смещение глубин, рассчитанных по крайним лучам, от реального дна на прямом и обратном галсах в результате наличия систематической ошибки угла дифферента. Должна соблюдаться правильная последовательность калибровки, рекомендованная в ЭГИС, и обязательно проводиться
201
Глава 6. Методика выполнения площадной съемки рельефа дна многолучевым эхолотом
повторная калибровка с целью подтверждения первоначально полученных поправок. Технология выполнения калибровок МЛЭ приводится в п. 7.5.2 на примере гидрографической информационной системы HYPACK/HYSEEP [50, 51].
6.З.1.4. Эксплуатационный тест гарантии качества работы МЛЭ (Performance Test) Эксплуатационный тест гарантии качества функционирования МЛЭ является квазинезависимым тестом, используемым для оценки качества регистрируемых данных, а также для установления их соответствия предписанным требованиям точности или требованиям к обнаружению донных объектов, заложенным в проект на выполнение работ.
Эксплуатационный тест выполняет сравнение наборов наложенных друг на друга данных, представляемых в виде цифровых моделей рельефа (ЦМР), полученных в результате выполнения двух различных съемок с МЛЭ. Такой тест может быть выполнен также и путем сравнения многолучевых данных с данными другого однолучевого эхолота. Используются также и другие тесты сравнения, такие, как приведение в соответствие результатов многолучевой батиметрии, полученной в заполненной камере шлюза, и топографических данных камеры после осушения. Способность обнаружения объектов может быть установлена акустическим тралением над имитационным объектом известных размеров, помещенным либо на открытой акватории, либо в контролируемой камере шлюза или в доке. Такие тесты должны проводиться периодически в качестве тестов контроля качества (QA check) в продолжение всего периода эксплуатации системы с МЛЭ.
Несостоятельность эксплуатационного теста свидетельствует о неправильности параметров ориентации или смещений датчиков, или неправильности введенного профиля ВРСЗ в воде и требует повторного тестирования. Исправление данных эксплуатационного теста, обработка и статистический анализ должны осуществляться в квазиреальном масштабе времени, предпочтительно на борту судна. Такая проверка качества работы МЛЭ должна выполняться перед ответственными съемками, связанными с обеспечением дноуглубления, а также перед выполнением съемок особой категории.
При обработке данных теста качества функционирования МЛЭ выполняется:
— расчет допустимых углов лучей для определения ширины гидрографической полосы обзора для заданной категории съемки;
— расчет точности глубин на основе сравнения ЦМР с данными вертикального луча МЛЭ.
Полученные результаты должны подтвердить возможность выполнения проектных точностей съемки рельефа с текущей конфигурацией оборудования, работающего с МЛЭ. Однако такие тесты не требуются перед каждой отдельной съемкой.
В таблице 7.3 приведены рекомендуемые разрешенные допуски, применительно к мелководным съемкам [46]. Для проектов, не связанных с обеспечением безопасности мореплавания, выполнение эксплуатационных тестов может проводиться еженедельно, ежемесячно, поквартально или еще с меньшей периодичностью в зависимости от наличия долговременной стабильности результатов и их изменений в различных районах съемки. В каждом таком проекте съемки периодичность выполнения эксплуатационных тестов должна предписываться в техническом задании йа выполнение работ.
202
6.3. Методика выполнения съемкис системой многолучевого эхолота
В главе 7 (см. п. 7.6) более детально описываются процедуры выполнения эксплуатационного тест контроля качества функционирования МЛЭ на основе программной технологии.
6.3.2. Контроль целостности при выполнении съемки с системой многолучевого эхолота в реальном масштабе времени
Конфигурация установки оборудования на судне и откалиброванные параметры должны проверяться в начале съемки. Основные параметры системы МЛЭ должны постоянно проверяться. Это в основном параметры, связанные с регистрацией данных, которые могут отличаться для различных акваторий съемки (максимальные рабочие глубины, ожидаемые глубины, максимальная частота посылок и т. д.).
В начале съемки должен быть получен профиль ВРСЗ и передан в МЛЭ для использования в реальном масштабе времени. Скорость звука у излучающей поверхности приемной антенной решетки должна сравниваться с аналогичным по горизонту значением, полученным от зонда-профилографа. В период съемки должно быть выполнено несколько станций профиля скорости звука в соответствии с заранее выполненным анализом временного и пространственного распределения поля скорости звука.
Съемочная система полностью автоматизирована, но оператор-гидрограф должен постоянно наблюдать за целостностью регистрируемых данных. Должно постоянно выполняться наблюдение за степенью перекрытия смежных полос и быть гарантировано полное акустическое освещение дна на акватории съемки.
Очень важно регулярно проводить сравнение глубин на перекрытии соседних полос и контролировать любую тенденцию постоянства изменений разностей глубин по лучам последовательных посылок при выполнении съемки на выровненном дне.
В конце каждой съемки настоятельно рекомендуется создавать резервную копию файлов зарегистрированных данных.
Особенности контроля целостности и качества выполнения съемки с МЛЭ зависит от технологии, реализованной в гидрографической информационной системе. В общем случае в такой системе должны быть реализованы функции мониторинга и контроля целостности следующих параметров:
— данных системы позиционирования;
— углов пространственной ориентации от ДПС и гирокомпаса;
— стабильности текущих данных ВРСЗ;
— текущего значения скорости звука у приемной антенной решетки МЛЭ в сравнении с данными из файла ВРСЗ на горизонте приемной антенны.
Рассмотрим особенности оперативного мониторинга указанных параметров.
6.З.2.1. Система позиционирования
А) Кодовая СНА. ( GPS, DGPS).
Для обеспечения гидрографической съемки, как правило, используется Дифференциальная СНА, получающая корректирующие поправки от наземных
203
Глава 6. Методика выполнения площадной съемки рельефа дна многолучевым эхолотом
радиомаяков, корректирующих станций пользователя либо спутниковых дифференциальных подсистем (StarFix, SeaStar).
Съемки второй категории согласно Стандарта S-44 (5) допускают применение СНА, не поддержанной корректирующими поправками, однако, для таких съемок применение МЛЭ не регламентируется. Дифференциальная СНА не обеспечивает необходимой оперативности контроля целостности, поэтому для съемок первой категории («а» и «в»), требующих применения МЛЭ согласно Стандарта S-44 (5), рекомендуется установка контрольной станции в районе работ. Задачей контрольной станции является непрерывный мониторинг отклонения текущей позиции от известных опорных координат. В периоды времени, когда СНА контрольной станции регистрировала недопустимые отклонения, данные площадной съемки являются недостоверными, и съемка должна быть повторена.
Для организации контрольной станции достаточно иметь носимую СНА, сопряженную с портативным компьютером, снабженным специальным программным обеспечением, например, свободно распространяемой программой «Monitor».
Б) Фазовая СНА ( RTK, StarFix-XP, SeaStar-XP, VeriPos, C-Nav&RTG).
В последнее время современная гидрография все больше начинает использовать фазовую СНА, работающую в режиме RTK, а также фазовую аппаратуру, обеспечивающую высокоточное абсолютное местоопределение на основе глобальных спутниковых подсистем типа «VeriPos» и «С-Nav».
Площадные съемки по особой категории согласно Стандарта S-44 (5) предполагают использование режима RTK, либо платного глобального сервиса, регионального StarFix-XP, SeaStar-XP, глобального «VeriPos» и «C-Nav&RTG». При использовании режимов RTK и региональных спутниковых подсистем при наиболее ответственных работах целесообразно использование контрольной станции. Платный глобальный сервис «C-Nav&RTG» имеет высокий уровень внутреннего контроля целостности, поэтому при его применении наличие контрольной станции может понадобиться только в исключительных случаях.
6.3.2.2. Многолучевой эхолот
Контроль целостности работы МЛЭ в реальном масштабе времени включает оценку оператором качества данных в процессе их регистрации путем визуального наблюдения за поведением поперечного профиля глубин (cross-track swaths) на плоском дне, выражающихся в наличии у поперечного профиля выпуклостей, вогнутостей или несимметричностей. При этом сбойные глубины должны отмечаться флажками качества, а также выдаваться предупредительные сообщения. Должно производиться сравнение при наложении смежных полос съемки либо между независимыми одиночными лучами. Программное обеспечение реального времени должно иметь функции, обеспечивающие элементы оценки качества работы МЛЭ в реальном масштабе времени и выполненяющие немедленные корректирующие действия.
Достоверность исправленных глубин, оперативно рассчитываемых МЛЭ, может быть подтверждена одним из следующих методов:
— сравнение с данными ОЛЭ, имеющего угол луча, соразмерный с центральным лучом МЛЭ, при условии размещения антенн на расстоянии, равном диаметру пятна облучения МЛЭ на дне (на глубине съемки);
204
6.3. Методика выполнения съемкис системой многолучевого эхолота
— сравнение глубин по одним и тем же лучам по заданному количеству последовательных посылок на ровном дне;
— проверка допустимости отклонений глубин в одних и тех же координатах в зонах перекрытия смежных полос съемки;
— настройка системы тревог и предупреждений функционирования МЛЭ и системы датчиков;
— оперативное 2D/3D отображение полосы обзора МЛЭ и визуальный контроль рельефа;
— контроль работы МЛЭ по отображению поперечного профиля единичной посылки;
— совмещение векторного и растрового изображений дна в полосе обзора (2Э-данные МЛЭ и данные опции ГБО МЛЭ).
Альтернативным инструментом оценки качества является традиционная та-рировочная доска для индивидуальных лучей.
В главе 7 (см.п. 7.2.2) более детально описываются процедуры выполнения контроля качества работы МЛЭ в реальном масштабе времени применительно к программному обеспечению ЭГИС HYPACK/HYSWEEP.
6.3.2.3. ДПС и гирокомпас
Большинство ЭГИС, работающих с МЛЭ, имеют в своем составе средства визуализации работы ДПС.
Многие ДПС, например, Octans III (фирмы IxSea) имеют собственное специальное программное обеспечение, которое может быть установлено на компьютере МЛЭ, для оперативного контроля качества функционирования ДПС.
6.3.2.4. Мониторинг ВРСЗ
Стабильность данных вертикального профиля скорости звука (ВРСЗ) в воде является критичной, в особенности для крайних лучей. Калибровка скорости звука в мелководных районах со сложной гидрологией должна выполняться периодически в течение дня, не реже двух раз в день и через более короткие временные интервалы или расстояния для тех проектов, в которых изменения гидрологических параметров в водяной толще (температура и соленость) могут существенно влиять на качество батиметрических данных. Качество данных ВРСЗ может быть впоследствии оценено по результатам «Эксплуатационного теста», в котором производится сравнение глубин путем наложения двух цифровых моделей данных (см. также п. 7.6).
Если данные ВРСЗ ненадежны, то тест качества функционирования продемонстрирует погрешности (неопределенности) глубин, рассчитанных по крайним лучам. При этом полоса обзора должна быть сужена путем уменьшения величин предельных углов лучей до максимально допустимой величины.
При выполнении съемки в районах со сложной гидрологической обстановкой (в устьях рек, в период ледообразования и таяния льда) рекомендуется использовать систему с буксируемым зондом (см. п. 2.3.8). Данные профиля скорости звука могут вводиться в гидрографическую информационную систему в виде файла вручную, как это делается, например, в программе «Sound Velocity Program» пакета программ HYPACK МАХ, либо автоматически от системы с буксируемым зондом по каналу связи.
205
Глава 6. Методика выполнения площадной съемки рельефа дна многолучевым эхолотом
б.3.2.5. Мониторинг скорости звука и температуры воды у приемной антенны МЛЭ Одним из наиболее важных средств для постоянного контроля качества съемки с МЛЭ является наличие отдельного датчика скорости звука в воде и желательно датчика температуры в непосредственной близости от приемной антенной решетки МЛЭ. Вопрос необходимости такого датчика для обеспечения эффективного управления лучами приемной антенны МЛЭ уже обсуждался в п. 3.3.2 и п. 5.2.4. Ошибочное значение скорости звука у приемной антенны является основным источником погрешности исправленных глубин МЛЭ, поэтому мониторинг этой величины должен являться важным элементом процедур контроля качества.
Для глубоководных МЛЭ применение датчика скорости звука в воде на приемной антенной решетке является абсолютно необходимым требованием. При этом желательна установка дополнительно и датчика температуры с целью оперативного независимого контроля показаний скорости звука.
В программном обеспечении гидрографической информационной системы МЛЭ желательно иметь специальное окно, индицирующее временную развертку величин текущего значения скорости звука и температуры воды у приемной антенной решетки. Необходимо регулярно осуществлять контроль величины скорости звука на горизонте приемной антенны, записанной в текущем файле ВРСЗ, и текущего значения от датчика скорости звука, установленного на приемной антенне МЛЭ. Желательно, чтобы такое сравнение выполнялось автоматически, а недопустимое рассогласование выдавалось в виде тревожной сигнализации. Следует помнить, что изменение скорости звука у антенн МЛЭ является сигналом для выполнения повторного измерения данных ВРСЗ.
6.4. Методика постобработки данных площадной съемки с многолучевым эхолотом
Пост-обработка должна стремиться использовать все доступные источники информации для подтверждения наличия отметок глубин, наиболее существенных для безопасности мореплавания.
Пост-обработка данных должна проводиться в районе работ непосредственно после их завершения с целью установления полноты обследования района и выявления необходимости выполнения дополнительной площадной съемки.
Контроль качества при выполнении пост-обработки данных МЛЭ обычно включает:
— просмотр данных вспомогательных систем (крен, дифферент, вертикальное перемещение, курс, поправка уровня, заглубление антенны, данные ВРСЗ) и их редактирование;
— редактирование глубин внутри одной либо нескольких посылок (поперечного профиля глубин);
— редактирование набора глубин внутри ячейки регулярной сетки — «грида»;
— расчет апостериорной точности путем сравнения поля глубин на основных галсах съемки и глубинами вертикального луча МЛЭ, полученными на контрольных — секущих галсах.
206
6.4. Методика пост-обработка данных площадной съемки с многолучевым эхолотом
Методика пост-обработки зависит главным образом от функциональных особенности используемой ЭГИС. При этом необходимо придерживаться следующей последовательности выполнения этапов [57].
6.4.1. Фильтрация данных сопряженных датчиков системы МЛЭ
6.4.1.1. Обработка данных позиционирования
Этот этап должен включать объединение данных позиционирования от различных датчиков (если необходимо), оценивание данных позиционирования и устранение резких изменений координат. Сомнительные данные должны помечаться «флажками», но не убираться из массива данных.
6.4.1.2. Данные пространственной ориентации
Данные пространственной ориентации (курс, крен, дифферент и вертикальное перемещение) должны быть оценены, а резкие изменения параметров устранены. Сомнительные данные должны помечаться «флажками», но не убираться из массива данных.
6.4.1.3. Поправки за скорость звука
На этом этапе должны быть окончательно приняты данные ВРСЗ, на основе которых ЭГИС будет рассчитывать поправки за рефракцию акустического луча. Если учет рефракции выполнялся при съемке в реальном времени, то должна быть обеспечена возможность введения новых файлов ВРСЗ так, чтобы не учитывались поправки, полученные на основе файла ВРСЗ, который использовался при съемке.
6.4.1.4. Системное временное запаздывание поступления навигационной информации Временное запаздывание в системе съемки может иметь как постоянный, так и переменный компоненты. Система сбора и система обработки должна контролировать величину запаздывания и устранять ее. Система пост-обработки должна обеспечивать введение уточненной величины запаздывания, подавляя тем самым ту величину, которая использовалась в реальном времени.
6.4.2. Исправление глубин и координат
6.4.2.1. Поправки для исправления глубин
Должны быть введены поправки за уровень, измерения ДПС, а также изменения заглубления антенн (динамическое заглубление антенны и от изменения загрузки). Должна быть обеспечена возможность введения новых поправок так, чтобы не учитывать те поправки, которые использовались при съемке.
6.4.2.2. Объединение исправленных глубин и их координат
Для этой операции необходимо учитывать как временное запаздывание, так и величины относительных смещений датчиков в судовой системе координат. Система постобработки должна иметь возможность ввода уточненных значений смещений всех датчиков, подавляя те величины смещений, которые использовались в реальном времени.
207
Глава 6. Методика выполнения площадной съемки рельефа дна многолучевым эхолотом
6.4.2.3. Анализ возвращенного эхосигнала
В случае, когда в системе пост-обработки доступна информация о временной развертке амплитуды эхосигнала, а также используемом методе детектирования дна, эта информация должна использоваться для проверки достоверность глубин.
6.4.3. Фильтрация глубин, рассчитанных МЛЭ
6.4.3.1. Автоматическая (не интерактивная) фильтрация (очистка) данных
На этом этапе полученные координаты (положение отметок глубин и глубины) должны автоматически контролироваться программой и анализироваться с использованием подходящего статистического алгоритма, по которому имеется документация и который был протестирован, в результате чего была продемонстрирована его способность выдавать стабильные точные результаты. При выборе алгоритма необходимо учитывать устойчивость оценивания, которая должна быть подтверждена успешным практическим применением.
Многие пакеты программ, применяемые для пост-обработки батиметрии с высокой плотностью данных, имеют встроенные инструменты, обеспечивающие возможности статистической обработки, имеющей целью поиск и визуализацию грубых ошибок в вычисленных глубинах (выбросов). Массивы с высокой плотностью данных и большими перекрытиями смежных полос обзора предоставляют многообещающие возможности для обнаружения выбросов. Каждое гидрографическое агентство ответственно в части оценивания и подтверждения правильности используемого алгоритма и принятых технологических процедур. Все выбросы, ошибочные или сомнительные данные, должны быть отмечены «флажками» для последующей проверки оператором. Используемый тип «флажка» должен свидетельствовать, что он выставлен на этапе автоматической очистки данных.
6.4.3.2. Интерактивная (ручная) фильтрация (очистка) данных МЛЭ
Вслед за процедурой автоматической обработки выдвигается требование, чтобы опытный и ответственный гидрограф выполнил проверку результатов автоматической чистки (фильтрации) данных, оценку результатов и разрешение любых оставшихся неоднозначностей. На этом этапе настоятельно рекомендуется применение объемной 3-D визуализации. Принятие решения об использовании или устранении кажущихся явно ложными отметок глубин может быть дополнительно обосновано путем объемного представления в трехмерном пространстве. Такие инструменты должны также предоставлять возможность «зуммирования» (изменения масштаба). Интерактивная обрабатывающая система должна также предоставлять различные режимы визуализации, показ данных в следующих вариантах: отметки глубин, неопределенности глубин, поперечный профиль по одной посылке, профиль по заданному лучу, цифровое изображение интенсивности обратного рассеивания и т. д. Должна обеспечиваться визуализация данных съемки совместно с другой полезной информацией, содержащейся на картографических подложках: береговой линией, затонувшими судами, средствами навигационного ограждения и т. д. При редактировании глубин часто может быть полезным понимание пространственного контекста рассматриваемых данных. То,
208
6.4. Методика пост-обработка данных площадной съемки с многолучевым эхолотом
что может выглядеть как ошибочная отметка глубины (выброс), вне контекста может быть опознано как реальный объект (подводные сваи, затонувшие суда ит. д.), если рассматривать их в контексте с картографической подложкой. Возможность сравнения поверхностей, построенных по вновь полученным данным и историческим данным, часто может быть полезной при подтверждении качества новой информации или наоборот, для предупреждения об обнаруженных систематических неопределенностях, которые требуют немедленного внимания.
По возможности такие инструменты должны включать согласование нормализованного цифрового изображения интенсивности обратного рассеивания с данными батиметрии и при условии, что обеспечивается автоматическое опознавание объектов на дне, зарнее помеченных флажками.
Правила, которым следовал оператор на каждом из этапов пост-обработки, должны быть документированы. Редактирование данных должно быть возможно в любых режимах и включено в контрольный журнал оператора.
Флажки, установленные на этапе автоматической фильтрации, на глубинах меньших, чем окружающие, должны требовать действий оператора, по крайней мере в отношении съемок, выполняемых по особой и первой а/b категориям. Если оператор отменил флажки, которые были выставлены на этапе автоматической фильтрации, то такое решение должно быть документировано.
Если флажок установлен самим оператором, то тип использованного флажка должен содержать в себе данную информацию.
6.4.4. Методы апостериорной оценки точности цифровой модели рельефа
В настоящее время существует несколько подходов к обработке и представлению данных площадных съемок [31].
6.4.4.1. Использование статистических методов оценки цифровой модели рельефа
Традиционный подход, который чаще всего используется в настоящее время, унаследовал идеологию, принятую для однолучевой батиметрии. Такой подход предполагает редактирование каждой отдельной полученной глубины с использованием возможностей компьютерной техники. При этом на этапе окончательной обработки основное время уходит на интерактивное редактирование полученных глубин. В итоге для представления на отчетном планшете отбираются только наименьшие глубины акватории, характеризующие сугубо «гидрографический» подход к съемке рельефа, направленный прежде всего на обеспечение безопасности мореплавания. При данном подходе теряется значительная часть полезной информации о микрорельефе, но возможно получить апостериорную оценку точности выполненной съемки в результате создания статистики по глубинам в пределах каждой ячейки грида, которая затем может быть визуализирована в виде растрового изображения.
6.4.4.2. Использование поверхностей неопределенности
В настоящее время многие батиметрические пакеты, допускающие статистическую обработку, имеют возможность создания поверхности неопределенности, связанной с батиметрией. При этом используются рассчитанные априорные
209
Глава 6. Методика выполнения площадной съемки рельефа дна многолучевым эхолотом
оценки погрешностей. Визуализация соответствующим образом закодированной поверхности, отображающей неопределенности глубин, является одним из способов, с помощью которого можно установить, что отснятая акватория удовлетворяет предъявляемым требованиям. Если какой-либо район акватории не соответствует этим требованиям, то он должен быть отмечен для последующего повторения съемки или применения альтернативной аппаратуры с целью уменьшения неопределенностей до допустимого уровня.
Если такая обработка возможна в реальном масштабе времени, то стратегия сбора данных может быть адаптирована так, чтобы по мере выполнения съемки быть уверенными в том, что регистрируемые данные имеют приемлемое качество для их предполагаемого использования.
Одним из вариантов компьютерной технологии, обеспечивающей автоматизированное создание поверхности неопределенности по результатам мелководной площадной съемки, является CUBE (Combined Uncertainty and Bathymetric Estimator) [37,39], реализация которой применительно к ЭГИС HYP АСК/ HYSWEEP изложена в главе 7 (см. п. 7.2.4).
6.5. Программное и аппаратное обеспечение для сбора данных системы МЛЭ
6.5.1. Программное обеспечение реального времени системы МЛЭ
Программное обеспечение навигации и регистрации данных, используемое с многолучевой эхолотной системой, должно иметь возможность выполнения маршрутной навигации реального времени, визуализации данных многолучевой съемки и поддержки оперативной оценки ее качества. Программное обеспечение должно также поддерживать ввод данных результатов калибровок и других поправок в полевых условиях так, чтобы данные собирались, редактировались и обрабатывались практически в реальном масштабе времени, позволяя эффективно проводить дноуглубительные работы. Данные программы должны также обеспечивать контроль качества работы МЛЭ путем оперативной визуализации цифровой модели рельефа в варианте 2D/3D.
Система поиска навигационных опасностей может потребовать более производительного РС совместимого компьютера или рабочей станции для более адекватного воспроизведения и проигрывания цифровых трехмерных изображений (3D imagery). Подпрограммы прореживания или «бинирования» должны быть интенсивно протестированы, чтобы убедиться, что целостность данных не была нарушена. Это может быть выполнено путем сравнения объемов между поверхностями, построенными по первичным и прореженным данными. Каждый производитель МЛЭ, как правило, предлагает для использования свой программный пакет для сбора данных. Такими наиболее популярными пакетами являются: PDS-2000 фирмы Reson Inc. и SIS фирмы Kongsberg MaritimeJnc. Ряд фирм-производителей гидрографического программного обеспечения также разработали пакеты программ аналогичного назначения. Наиболее распространенными пакетами являются: HYPACK/HYSWEEP МАХ фирмы HYPACK и
210
6.5. Программное и аппаратное обеспечение для сбора данных системы МЛЭ
QINS фирмы QPS. Пакеты сбора данных должны поддерживать все периферийные навигационные датчики. Они также должны обеспечивать контроль качества (QC) и поддержку качества калибровки (QA calibration), а также требования тестирования.
На рис. 6.15 изображено окно программы SIS (Seabed Information System) фирмы Kongsberg Maritime, а на рис. 7.3 — окно программы HYSWEEP [51].
На мониторе станции оператора могут быть размещены следующие окна программы SIS:
1) интенсивность эхо сигналов по лучам (signalstrength)]
2) профиль глубин очередной посылки (Depth profile);
3) трехмерное изображение серий посылок — «водопад» (3D — waterfall)]
4) акустический поперечный разрез водной толщи (watercolumn — beam-formed)]
5) регулярная цифровая модель рельефа 2D или 3D (gridded terrain model: 2D or 3D)]
6) первичные данные гидрофонов или профиль скорости звука (Raw hydrophone Data or sound velocity profile);
7) цифровое изображение бокового обзора дна (Seabed Imagery).
Изображенные окна показывают, что оператор имеет широкие возможности контролировать правильность работы системы путем визуального контроля информации, отображаемой на мониторе. Основными обязанностями оператора
7
Рис. 6.15. Окно монитора программы SIS (Seabed Information System) [Kongsberg]
211
Глава 6. Методика выполнения площадной съемки рельефа дна многолучевым эхолотом
МЛЭ являются: эффективное управление судном с целью обеспечения заданной степени перекрытия смежных полос обзора; контроль правильности регистрации информации на машинных носителях; контроль правильности работы всех сопряженных датчиков и своевременное принятие мер в случае возникновения нештатных ситуаций; оперативный контроль качества выполняемой съемки путем анализа глубин в зонах перекрытия смежных полос съемки и величин априорных оценок точности. SIS предпочтительна для глубоководной съемки [22].
Современной тенденцией является включение в пакеты реального времени опций фильтрации грубо-ошибочных измерений, однако, большинство пакетов оставляет эту операцию на этап пост-обработки.
Другие программные пакеты, такие как, CARIS HIPS, Neptune(Kongsberg Maritime), HYSWEEP/MBE (HYPACK) [51], предназначаются для пост-обработки данных МЛЭ. Пакеты сбора и пост-обработки должны быть способны редактировать и обрабатывать данные, применительно к задачам инженерной гидрографии и навигационного картографирования. Задачи пост-обработки и контроля качества выполненной съемки подробно рассматриваются в главе 7.
6.5.2. Аппаратное обеспечение (на примере МЛЭ ЕМ-710 фирмы Kongsberg Maritime. Inc.)
ЕМ710 является первой в мире широкополосной многолучевой системой, использующей полосу частот от 70 до 100 кГц. Излучаемый импульс разделен по частотам на три сектора, что позволяет увеличить диапазон измерения глубин, а также подавлять помехи, возникающие в результате многократного отражения сигнала от морского дна или других целей. В пределах каждого импульса три частотных сектора излучаются последовательно, а каждый сектор характеризуется индивидуальной частотой или формой волны. Модели EM710S и EM710RD используют импульсы линейно-частотной модуляции (CW) различной длины. В полной версии эхолота ЕМ710 используются CW импульсы и FM модуляция.
На рис. 6.16 представлено оборудование и аппаратное обеспечение типичного варианта системы МЛЭ ЕМ-710, разработанного фирмой Kongsberg Maritime.
В системе применена фокусировка луча в обоих направлениях, как при излучении, так и при приеме, что позволяет получить максимальное разрешение элементов исследуемого участка рельефа дна. Результаты предыдущей посылки являются основанием применения алгоритма фокусировки для следующей посылки, причем, фокусировка применяется индивидуально для каждого сектора частот. Для всех принимаемых лучей постоянно используется алгоритм динамической фокусировки.
С помощью электроники все излучаемые лучи стабилизируются по бортовой, килевой и вертикальному перемещению, включая рысканье судна. Принимаемые лучи стабилизируются по бортовой качке. Фильтры, корреляторы и устройства формирования луча реализованы на цифровой основе, а методика формирования луча основана на временных задержках и использует весь частотный диапазон системы. Передающие цепи полностью программируются для поддержания любой частоты и формы импульса. Использование частотной модуляции при формировании импульса позволяет увеличить дальность обнаружения цели
212
6.5. Программное и аппаратное обеспечение для сбора данных системы МЛЭ
Станция оператора
Интерфейсы (последовательные и сеть Ethernet):
данные о скорости звука, уровне моря; глубины одно лучевого эхолота.
Удаленный контроль (ОПЦИЯ»
2 или 4
Присмечнерсдамцмй •лек
Последовательные интерфейсы Система позт*оюниювания, Стабилизуя (бортова я.
ют левая и вертикальная качкиХ Курс судна. Время
Специальные интерфейсы: ------► в вод/в ывод пусков ых импульсов, сигнал синхронизации.
Электрическая сеть: 115 или 230 Вольт.
50X60 Гц
pDaiflcuj
Приетшая антенна
Излучающая антенна
Рис. 6.16. Оборудование системы многолучевого эхолота EM-710 [Kongsberg]
без ущерба для разрешающей способности системы. Чувствительные и одновременно малошумящие приемники с «плавающим решением», аналого-цифровые преобразователи позволяют обрабатывать отраженный сигнал в динамическом диапазоне 140 dB.
В ЕМ710 заложено несколько абсолютно новых, революционных идей, задающих новый стандарт для этого класса систем:
— полная стабилизация излучения с учетом всех параметров движения судна, включая рыскание;
— задаваемые оператором режимы эквидистантный (равных расстояний) или равномерное угловое распределение лучей;
213
Глава 6. Методика выполнения площадной съемки рельефа дна многолучевым эхолотом
— фокусировка лучей, как при приеме, так и при излучении для улучшения результатов съемки на мелководье;
— алгоритм формирования лучей, основанный на использовании параметров акустического сигнала;
— использование как линейно-частотно-модулированного сигнала (CW), так и частотной модуляции (FM) для увеличения диапазона измеряемых расстояний и повышения разрешающей способности;
— малошумящие приемники с «плавающим решением» не требуют применения аппаратной ВАРУ;
— регистрация эхосигнала во всем водном столбе;
— получение гидролокационного отображения дна, компенсированного за диаграмму поглощения;
— калиброванные гидроакустические антенны и приемно-передающий тракт;
— стационарные и мобильные версии системы.
Основные технические характеристики многолучевого эхолота ЕМ-710 приведены в приложении 1.
Глава 7.
ПРАКТИЧЕСКИЕ МЕТОДИКИ КОНТРОЛЯ
И ОЦЕНКИ КАЧЕСТВА ДЛЯ МНОГОЛУЧЕВЫХ ЭХОЛОТОВ
Данная глава содержит рекомендации и технические указания по процедурам контроля качества и оценки качества МЛЭ при выполнении гидрографических проектов на малых глубинах для обеспечения дноуглубления и съемки рельефа дна в интересах безопасности мореплавания. В качестве иллюстрации рассматриваются гидрографические технологии фирмы HYPACK [8,21], реализованные в электронной гидрографической системе (ЭГИС) HYPACK/HYSWEEP версии 2009 [50,51].
Требования к полевой калибровке для МЛЭ значительно более высокие, чем для ОЛЭ. Периодическая и точная калибровка совершено необходима для того, чтобы убедиться, что рассчитываемые глубины соответствуют допускам по точности, предписанным проектом работ, особенно в случае МЛЭ с широкой полосой обзора, когда рефракция на внешних лучах, неточности взаимной установки антенн и недостаточный учет ориентации пространственных углов могут значительно ухудшить качество данных. Профиль скорости звука в воде необходим для исправления рефракции на крайних лучах и должен измеряться несколько раз в день. Скорость звука изменяется в пространстве и во времени. Неверное или не отвечающее требованиям измерение вертикального распределения скорости звука (ВРСЗ) в воде может сделать данные МЛЭ непригодными для использования. Характеристикой неверного учета рефракции является искривление поперечного профиля глубин на ровном дне, когда края профиля смотрят верх или вниз.
Ориентация осей датчиков системы МЛЭ должна периодически контролироваться, а соответствующие угловые поправки определяться и анализироваться, чтобы всегда быть уверенным в качестве данных. С помощью калибровки определяются время запаздывания поступления навигационной информации (navigation time latency), смещение по крену (roll bias), смещение по дифференту (pitch bias) и смещение курса (heading bias). Датчики крена, дифферента и рыскания (yaw) должны иметь угловую разрешающую способность от 0,1° до 0,05°. Сравнительный тест контроля качества должен выполняться на независимых галсах с полосами обзора, пересекающимися на акватории с выровненным дном. Результаты теста должны сравниваться с предписанным статистическим критерием.
Процедуры тестирования отдельных устройств описаны в руководствах, поставляемых с каждым из датчиков, составляющих систему МЛЭ. Выполнения калибровок и тестов контроля качества должны быть подробно документированы и составлять часть общей системы качества, принятой в данном гидрографическом агентстве (организации). Методики калибровки и тестирования зависят главным образом от компьютерной технологии — электронной гидрографической информационной системы (ЭГИС) МЛЭ. Необходимо подчеркнуть, что
215
Глава 7. Практические методики контроля и оценки качества для многолучевых эхолотов программное обеспечение и методики калибровки, редактирования и прореживания данных МЛЭ все еще находятся в стадии совершенствования и претерпевают постоянные изменения по мере получения новых результатов и оценки их качества. Вопросы оценки точности результатов батиметрической съемки и эксплуатационные возможности обнаружения объектов с помощью МЛЭ все еще находятся в стадии исследований и всестороннего оценивания. Таким образом, любые рекомендованные процедуры, изложенные в данной главе можно рассматривать только как временные.
Система МЛЭ является сложным комплексом взаимосвязанной аппаратуры, установленной на судне-носителе, которая постоянно перемещается под воздействием внешних факторов морской среды. Для получения качественных результатов многолучевой съемки необходимо постоянно выполнять исследования этой системы и контролировать величины систематических погрешностей, свойственных многолучевой батиметрии.
Для получения вероятнейших расчетных значений точек глубин на морском дне и их координат необходимо как можно более точно определять следующие исходные параметры:
— геодезические координаты излучающей антенны МЛЭ в момент посылки;
— углы пространственной ориентации антенн в момент посылки и приема акустических сигналов;
— высотное положение антенны МЛЭ относительно принятого нуля глубин;
— пространственно-временное распределение скорости звука в водной толще в районе съемки.
Алгоритмы расчета этих параметров были подробно рассмотрены в п. 5.2 Измерения угловых пространственных координат антенны МЛЭ становятся возможными только в том случае, когда главные пространственные оси антенны МЛЭ и ДПС точно совмещены с осями судовой системы координат. На практике установка аппаратуры осуществляется при стоянке судна в доке. При этом обеспечивается горизонтальная установка фундаментов под аппаратуру. Установка ДПС, а также гирокомпаса в судовой системе координат осуществляется с помощью гиротеодолитов с высокой точностью (1-2 угловые минуты). Совмещение горизонтальных плоскостей ДПС и антенн МЛЭ осуществляется с помощью специальных высокоточных уровней. При этом погрешности рассогласования осей антенны и ДПС становятся несущественными. Однако, как только судно оказывается на плаву, возникают деформации корпуса, которые практически не поддаются учету, и возникает рассогласование пространственных осей антенн МЛЭ и ДПС. В результате данные, выдаваемые ДПС, перестают адекватно характеризовать пространственное положение антенны ЭМЛ, и требуется осуществлять калибровку антенных решеток МЛЭ. Другой причиной, по которой необходима калибровка, являются возможные постоянные ошибки данных, выдаваемых самим ДПС. Таким образом, с помощью калибровки углового положения антенн ЭМЛ определяются «интегральные» систематические ошибки углов крена, дифферента и рыскания.
216
7.1. Контроль настройки оборудования МЛЭ в ЭГИС HYPACK/HYSWEEP
7.1. Контроль настройки оборудования МЛЭ в ЭГИС HYPACK/HYSWEEP
7.1.1. Настройка аппаратуры в модуле HYSWEEP® HARDWARE [51]
Существуют процедуры, которые необходимо строго выполнять для того, чтобы успешно работать с системой МЛЭ. Они включают измерения скорости звука для учета акустической рефракции лучей МЛЭ, калибровки временной задержки, углов пространственного положения (крена, дифферента, рыскания и вертикального перемещения), другие настройки и учет смещений координат в судовой системе.
Начальная калибровка выполняется во время установки оборудования на судне; другие же должны выполняться значительно чаще, особенно, когда выполняются наиболее ответственные и точные съемки.
Итоговая сводка по необходимым измерениям и калибровочным требованиям содержится в таблицах, приведенных в конце главы. Эти калибровочные требования являются обязательными: невыполнение калибровки в соответствии с предписанными правилами может повлечь за собой признание результатов съемки непригодными для дальнейшего использования.
Параметры ориентации и смещения датчиков, составляющих систему МЛЭ, должны максимально точно определяться в судовой системе координат. Опре-
Рис. 7.1. Ввод смещений и угловых поправок датчиков системы МЛЭ в ЭГИС HYPACK/HYSWEEP [HYPACK, Inc]
217
Глава 7. Практические методики контроля и оценки качества для многолучевых эхолотов
делению подлежат следующие параметры: ориентация/смещение гирокомпаса, ориентация/смещение антенн МЛЭ, смещение антенны СНА, статическое и динамическое (посадка и проседание) заглубление антенн МЛЭ, временное запаздывание поступления информации. Эти измерения выполняются во время начальной настройки оборудования и (или) после перестановки и замены датчика. Поправки ориентации и параметры смещений вводятся в программное обеспечение в модуле настройки аппаратуры. В пакете программ HYPACK — это модуль ^Hardware Setup», окно которого приведено на рис. 7.1.
В программном обеспечении настройки системы МЛЭ, реализованном в ЭГИС HYPACK/HYSWEEP, приняты соглашения о направлении осей судовой системы координат и углов вращения, показанные на рис. 7.2.
В окне настройки положения оборудования (см. рис. 7.1.) для каждого датчика должны быть заданы параметры смещений — координаты относительно центра судовой системы («Starboard» — х, «Forward» — у, «Vertical» — z) и поправки углов: рыскания — gamma (Yaw), дифферента — alpha (Pitch) и крена — beta (Roll) — см. п. 5.1.5.
Центр судовой системы координат в плане совмещают с местом установки ДПС, который, как правило, должен размещаться вблизи центра тяжести судна и не далеко от антенны МЛЭ, чтобы избежать явления «наведенного» вертикального перемещения. По высоте центр судовых координат должен всегда находиться в плоскости статической ватерлинии, как показано на рис. 7.2.
Рис. 7.2. Оси судовой системы при настройке оборудования в ЭГИС HYPACK/HYSWEEP
218
7.2. Контроль качества функционирования МЛЭ в режиме реального времени
Параметры смещений должны быть измерены рулеткой с точностью до 0,1 м. На рис. 7.1. (закладка «Offsets») показана панель «Antenna Offsets», используемая для задания судовых координат антенны СНА. Отметим, что высота антенны над статической ватерлинией отрицательная. Другие закладки используются для ввода параметров смещений и поправок следующих датчиков: гирокомпаса, ДПС и антенны МЛЭ.
— Heading Offset (Yaw) можно задать поправку гирокомпаса (Yaw); величины смещений в судовой системе для гирокомпаса являются несущественными;
— MRU Offsets: смещение ДПС (по высоте) и угловые поправки самой ДПС (если известны);
— Sonar Head 1 and 2: задание величин смещений антенны МЛЭ в судовой системе и поправок: рыскания — gamma (Yaw), дифферента — alpha (Pitch) и крена — beta (Roll). Эти угловые поправки первоначально задаются равными нулю и затем уточняются в результате калибровки (см. п. 7.5).
7.1.2. Настройка аппаратуры в модуле HYPACK ® HARDWARE
Особенностью многолучевой съемки в ЭГИС HYPACK/HYSWEEP является необходимость совместной работы пакетов HYPACK Survey и HYSWEEP Survey. При этом программа «HYSWEEP Survey» получает данные о позиции и поправках уровня из HYPACK Survey. При настройке оборудования в HYPACK Survey необходимо задать судовую систему координат, аналогичную заданной в модуле HYSWEEP® HARDWARE, а также должны быть введены аналогичные смещения антенны СНА. Это соответствие должно строго контролироваться на этапе настройки оборудования, непосредственно предшествующего выполнению площадной съемки.
Результаты многолучевой съемки во многом зависят от характеристик и возможностей ЭГИС, используемой для съемки, обработки и представления результатов. Особенно важными являются критерии качества многолучевой съемки в реальном масштабе времени, предусмотренные в ЭГИС.
7.2. Контроль качества функционирования МЛЭ
в режиме реального времени
7.2.1. Общие требования к программному обеспечению МЛЭ в части контроля качества
Контроль функционирования МЛЭ в режиме реального времени включает оценку оператором качества данных в процессе их регистрации путем визуального наблюдения за поведением поперечного профиля глубин (cross-track swaths') на плоском дне, т. е. наличие выпуклостей, вогнутостей или несимметричностей — перекосов (см. рис. 7.4). При этом должны отмечаться флажками качества сбойные глубины и выдаваться предупредительные сообщения. Должно также производиться сравнение при наложении смежных полос обзора, либо между независимыми одиночными лучами. Программное обеспечение реального времени
219
Глава 7. Практические методики контроля и оценки качества для многолучевых эхолотов
МЛЭ должно иметь функции, которые обеспечивают элементы оценки качества работы в реальном масштабе времени и выполнение немедленных корректирующих действий.
Контроль качества в режиме реального времени должен обеспечивать:
— работу в составе программного обеспечения обработки данных МЛЭ;
— выполнение калибровок и тесты качества функционирования МЛЭ;
— контроль за правильностью работы МЛЭ и вспомогательных датчиков;
— регистрацию вычисленных глубин, с учетом данных об их надежности;
— визуальное отображение полосы обзора МЛЭ и плотность батиметрической информации в полосе обзора;
— визуальное отображение цифровой модели рельефа дна в полосе обзора;
— возможность совмещения 2D изображений дна, формируемых МЛЭ, с растровым изображением дна, полученным с помощью опции ГБО, реализованной в программном обеспечении МЛЭ.
В программах реального времени фильтрация и отбраковка глубин, рассчитанных по данным МЛЭ, как правило, не осуществляется. Однако, уже имеются новые пакеты программы для МЛЭ, в которых фильтрация глубин в реальном времени возможна. Заметим, что использование такой операции в реальном времени должно выполняться с большой осторожностью.
Оперативный контроль за правильностью работы МЛЭ и вспомогательных датчиков осуществляется путем ввода установок в системе тревог и предупреждений. Система должна быть правильно настроена, чтобы облегчить работу оператора, своевременно предупредить о возникновении и развитии опасной ситуации, в результате которой регистрируемые данные могут стать некачественными.
Регистрация глубин с характеристикой их надежности может осуществляться в нескольких вариантах:
— программа детектирования дна МЛ Э должна обеспечивать выдачу сведений о надежности рассчитанных глубин на количественном или качественном уровне;
— количественный уровень — расчет априорных СКП глубин;
— качественный уровень — флаг качества.
Визуальное отображение полосы обзора и плотность информации обеспечивается в следующем виде:
— полоса обзора, заданная оператором в форме предельных крайних углов лучей;
— полоса обзора, заданная оператором в форме предельных горизонтальных проложений;
— плотность данных в виде следов лучей на дне в полосе обзора.
Визуальное отображение цифровой модели рельефа (ЦМР) дна в полосе обзора реализуется путем визуализации ЦМР в виде 2D (двухмерное плоское) и 3D (трехмерное объемное) в следующих вариантах:
— цветовая проволочная модель дна (см. рис. 7.5);
— цветные пятна облучения лучей (см. рис. 7.6);
— изобаты TIN с цветовой заливкой (см. рис. 7.7).
220
7.2. Контроль качества функционирования МЛЭ в режиме реального времени
Для отображения в реальном времени применяются, как правило, упрощенные способы построения ЦМР по сокращенной выборке.
Одним из эффективных инструментов контроля качества съемки для обнаружения донных объектов является совмещение 2D изображений дна, полученных с помощью МЛЭ и опции ГБО МЛЭ.
Совмещение 2D изображений дна в виде МЛЭ — «водопада» и электронной сонограммы — опции ГБО МЛЭ (см. рис. 7.8 и 7.9) позволяют оператору более обосновано принимать решение об обнаружении подводных объектов с целью их последующего обследования.
7.2.2. Пример реализации процедур контроля качества съемки в режиме реального времени в ЭГИС HYPACK / HYSWEEP
Пакет программ ЭГИС HYPACK/HYSWEEP, предназначенный для управления многолучевой съемкой и регистрацией информации, является одним из немногих программных средств, обеспечивающих контроль качества съемки в реальном масштабе времени [50, 51].
Особенностями пакета программ ЭГИС HYPACK / HYSWEEP являются:
— подключение большинства МЛЭ;
— использование конфигурируемых окон для контроля качества.(С)С);
Рис. 7.3. Монитор с окнами программы HYSWEEP ® SURVEY [HYPACK, Inc]
221
Глава 7. Практические методики контроля и оценки качества для многолучевых эхолотов
— объединение с данными из HYPACK® Survey через общую память (shared memory), включая данные позиционирования (навигации), данные однолучевого эхолота, поправки уровня;
— наличие опции матрицы глубин для минимальной, максимальной, средней глубины и отображения покрытия МЛЭ;
— высокие скорости регистрации при сетевом соединении;
— возможность регистрации отметок целей на цифровом изображении в окнах МЛЭ и ГБО.
Монитор с окнами программы HYSWEEP ® SURVEY представлен на рис. 7.3.
Одним из удачных решений в пакете HYSWEEP® 3-D является наличие различных вариантов изображения дна в полосе обзора. Объемная (3D) визуализация представляет собой важный инструмент контроля качества. В окне 3D изображения дна возможно отмечать точки целей с помощью мыши.
В окне 3D изображения дна возможны следующие варианты отображения дна:
— цветовая проволочная модель дна (см. рис. 7.5);
— цветные пятна облучения лучей (см. рис. 7.6);
— изобаты TIN с цветовой заливкой (см. рис. 7.7);
Окно «Водопад» (Waterfall), представляющее собой мозаику последовательных посылок МЛЭ (см. рис. 7.8), аналогично ЗЭ-изображению дна, однако движение картинки осуществляется в обратном направлении. Это окно используется для обеспечения оперативного сравнения с сонограммой ГБО.
Рис. 7.4. Окно программы HYSWEEP поперечный профиль глубин [HYPACK, Inc]
222
7.2. Контроль качества функционирования МЛЭ в режиме реального времени
Рис. 7.5. Окно программы HYSWEEP — цветовая проволочная модель дна[HYPACK, Inc]
Рис. 7.6. Окно программы HYSWEEP — пятна облучения лучей [HYPACK, Inc]
223
Глава 7. Практические методики контроля и оценки качества для многолучевых эхолотов
Рис. 7.7. Окно программы HYSWEEP — цветные изобаты TIN с цветовой заливкой [HYPACK, Inc]
Рис. 7.8. Окно программы HYSWEEP-окно «Водопад» [HYPACK, Inc]
224
7.2. Контроль качества функционирования МЛЭ в режиме реального времени
Окно ГБО в HYSWEEP® SURVEY, изображенное на рис. 7.9, характеризуется следующим:
— окно геореференцировано, т. е. изображение привязано к координатам;
- растровое отображение возможно в оттенках серого или в цветовой гамме;
— возможна отметка позиции целей и выполнение линейных измерений с помощью мыши;
— возможно измерение высот объектов над дном;
— возможна запись выбранного мышью участка изображения сонограммы в растровый файл формата TIE
Одним из удобных инструментов пакета HYSWEEP® SURVEY является цветное покрытие с использованием матричных файлов (МТХ), которые в реальном времени обеспечивают следующие функции:
— при выполнении съемки возможно получить цветное изображение дна в полосе обзора;
— отображаются пропуски, которые надо заполнять до завершения съемки;
— полосы можно стыковать без использования во время съемки проектных галсов.
L- ° х
Sidescan
-164
Рис. 7.9. Окно программы HYSWEEP — опция ГБО МЛЭ [HYPACK, Inc]
225
Глава 7. Практические методики контроля и оценки качества для многолучевых эхолотов
Матрица заполняется либо в HYPACK® SURVEY, либо в программе HYSWEEP® SURVEY
Различные варианты представления матрицы покрытия МЛЭ, изображенные на рис. 7.10 (а, б, в, г), демонстрируют следующие возможности:
— матрица дополняется в режиме реального времени по данным съемки с МЛЭ;
— матрица масштабируется;
— матрица позволяет проводить сечения по произвольному направлению в реальном времени;
— матрица индицирует: минимальную, максимальную, среднюю глубину, разность (max-min), покрытие (1х 2х).
Матрицы покрытия имеют следующие дополнительные опции отображения:
— траектория перемещения судна;
— проектные галсы съемки;
— покрытие МЛЭ или ГБО.
Проведение сечений на матрице глубин HYSWEEP® Survey, возможное в любом направлении, позволяет оперативно отобразить его в графическом окне (см. рис. 7.11). Контроль качества съемки может быть осуществлен путем проведения сечений поперек совмещенных полос обзора, как показано на рис. 7.11а. Возможно графическое отображение минимальной и максимальной глубин ячейки как показано на рис. 7.116.
Тревожная сигнализация в пакете программ HYSWEEP®Survey.
Правильное использование системы тревог и предупреждений является основой контроля качества съемки с МЛЭ. В пакете программ HYSWEEP® Survey система тревог и предупреждений реализована в главном окне, изображенном на рис. 7.12.
Оператору необходимо постоянно следить за состоянием индикаторов. Зеленый цвет означает штатную работу соответствующего устройства, а красный — сигнализирует тревожную ситуацию.
Тревожные ситуации могут быть вызваны следующими событиями:
— потерей связи с устройством на интервале более величины «Timeout», задаваемый при настройке интерфейсного соединения;
— дрейфом вертикального перемещения (Heave Drift): после интенсивной циркуляции датчик вертикального перемещения выдает изменения с большим периодом;
— появлением недопустимой разности глубин МЛЭ и ОЛЭ на основе статистического сравнения данных вертикального луча МЛЭ и ОЛЭ;
— появлением недопустимой разности глубин в зоне перекрытия на основе статистического сравнения глубин в ячейках матрицы, находящихся в зоне перекрытия смежных полос съемки м МЛЭ.
Оператор должен следить за индикаторами. Если индикатор становится красным, следует щелкнуть по нему мышью, чтобы получить информацию о причине появления тревожного сигнала.
Обычная причина тревоги — потеря связи с датчиком на время, превышающее заданный для датчика предел (Timeout). Далее следует проверить состояние работы датчика и устранить неисправность.
226
7.2. Контроль качества функционирования МЛЭ в режиме реального времени
а)
б)
Рис. 7.10 а, 6. Окна программы HYSWEEP — матрица покрытия МЛЭ [HYPACK, Inc]
227
1лава 7. Практические методики контроля и оценки качества для многолучевых эхолотов
г)
Рис. 7.10 в, г. Окна программы HYSWEEP — матрица покрытия МЛЭ [HYPACK, Inc]
228
7.2. Контроль качества функционирования МЛЭ в режиме реального времени
а)
6)
Рис. 7.11 а, 6. Окна программы HYSWEEP — сечения в матрице глубин [HYPACK, Inc]
229
Глава 7. Практические методики контроля и оценки качества для многолучевых эхолотов
Hysweep Survey - Offline
File View Matrix Targets Corrections Tools Help
Devices
MRU Muftibea®
Sidescan
Рис. 7.12. Главное окно программы HYSWEEP — с кнопками тревожной сигнализации [HYPACK, Inc]
Предельные значения для тревожной сигнализации могут быть заданы в диалоге контроля качества съемки «QC». Параметрами системы контроля качества съемки являются (см. рис. 7.13):
— допустимый дрейф вертикального перемещения (Heave drift)]
— допустимая разность глубин МЛЭ и ОЛЭ (Multibeam — Single Beam depth difference)]
— допустимая разность глубин в зоне перекрытия (Multibeam overlap difference)]
— сигнализация о рассогласовании значений скорости звука, поступающих с датчика, установленного в районе приемной антенны МЛЭ, и величины скорости звука на горизонте антенны из файла ВРСЗ (5V Profile-Sensor Difference);
— сигнализация об отсутствии рабочего файла профиля ВРСЗ (Show Warning Until SV profile is Entered).
Тесты качества съемки в программе реального времени в HYSWEEP® (QC Tests).
Display
Depth Change by Beam
Й Sweeps in Sample Set
C Estimated Standard Deviation by Beam
C Multibeam vs. Single Beam
C Multibeam Sounding Overlap (Requires Coverage Matrix)
Г Heave Drift
Г Multibeam - Single Beam Difference
Г Multibeam Overlap Difference
Г SV Profte - Sensor Difference
Г Show Warning Until SV Profile is Entered
Рис. 7.13. Окно программы HYSWEEP — установки тревожной сигнализации [HYPACK, Inc]
230
7.2. Контроль качества функционирования МЛЭ в режиме реального времени
В пакет программ реального времени HYSWEEP® Survey встроена специальная система тестов, позволяющая выполнять оценку качества функционирования МЛЭ при проведении съемки.
Предусмотрен следующий набор тестов качества съемки:
— анализ вариации глубин и их стандартные отклонения по лучам {Depth change);
— сравнение глубины по вертикальному лучу МЛЭ и ОЛЭ {Multibeam vs. Single beam);
— сравнение глубин в зоне перекрытия полос обзора {multibeam overlap difference).
1) Анализ вариации глубин на основе расчета стандартных отклонений по каждому лучу может выполняться на относительно ровном дне. При этом оператор должен определить количество последовательных посылок, на основании которых будут выполнены статистические расчеты. Результаты вычислений отображаются графически в виде гистограммы, приведенной на рис. 7.14.
На рис. 7.14 количество последовательных посылок для статистики расчетов стандартных отклонений, заданных пользователем, равно 50. Изображение на рис. 7.14 показывает, что используются лучи МЛЭ с 10 по 90, изменения глубин по лучам с 20 по 80 лежат в пределах 0,2 м, и только по крайним лучам (10-20 и 82-90) превосходят 0,2 м.
Рис. 7.14. Окна программы HYSWEEP — вариации глубин и их стандартные отклонения [HYPACK, Inc]
231
Глава 7. Практические методики контроля и оценки качества для многолучевых эхолотов
1SI2S1
QC Test - Multibeam vs. Single deam
Рис. 7.15. Окно программы HYSWEEP — сравнение глубин МЛЭ и ОЛЭ [HYPACK, Inc]
2) Сравнение глубины по вертикальному лучу МЛЭ и ОЛЭ
При одновременной работе МЛЭ и ОЛЭ можно оперативно получать статистику различий (отклонений) глубины вертикального луча МЛЭ и глубины ОЛЭ. При этом непрерывно вычисляются следующие статистические параметры:
— абсолютная величина среднего отклонения (Ave Difference);
— среднеквадратическая погрешность (Std Deviation).
Результаты статистических расчетов отображаются в окне, изображенном на рис. 7.15.
3) Сравнение глубин, рассчитанных МЛЭ в зоне перекрытия смежных полос обзора.
Смещения глубин в одинаковых точках, полученных на разных галсах съемки МЛЭ в зонах совмещения смежных полос, не должно превосходить допуск, заданный в качестве параметра тревожной сигнализации (см. рис. 7.13) — параметр «multibeam overlap differences.
Значительные расхождения глубин на краях полосы обзора, получаемые при совмещении смежных полос обзора, является тревожным обстоятельством, как правило, свидетельствующим о недостаточно тщательной калибровке угла крена.
Альтернативным инструментом оценки качества является традиционная та-рировочная доска для индивидуальных лучей.
7.3. Обеспечение качества при проведении пост-обработки данных МЛЭ
7.3.1. Общие требования к контролю качества на этапе пост-обработки данных МЛЭ Первичные данные от МЛЭ записываются программным обеспечением реального времени.
В первичные данные во время регистрации вводятся данные вертикального разреза скорости распространения звука в воде, поправки за крен, дифферент
232
73. Обеспечение качества при проведении пост-обработки данных МЛЭ и вертикальное перемещение, а также поправки гирокомпаса, заглубления антенны и временной задержки координат, поступающих от СНА.
Файлы первичных данных, содержащие наклонные расстояния и углы лучей, амплитуду отраженного сигнала, координаты антенны МЛЭ, данные крена, дифферента, вертикального перемещения и курс, а также все поправки, введенные в режиме реального времени, как правило, копируются пользователем в новый проект для выполнения пост-обработки данных.
Первым этапом пост- обработки является загрузка файлов первичных данных, их проверка и преобразование в новый формат. При этом пользователю предоставляется возможность обработки координат. Это первый этап обработки практически любого программного обеспечения МЛЭ (например, HYPACK или Neptune). Данные каждого из датчиков, обеспечивающих работу МЛЭ, графически представляются пользователю в виде функции изменения параметра во времени, либо в виде электронного планшета. Координаты планового положения, вертикальное перемещение, изменение поправки уровня, полученные в режиме RTK, могут быть отредактированы в интерактивном режиме в соответствующем окне.
Вторым, этапом пост- обработки является обработка информации по каждой посылке МЛЭ.
При этом вычисляются координаты каждой измеренной глубины и значения глубин по наклонным расстояниям и углам приема лучей.
Данные многолучевой батиметрии обычно содержат много выбросов {spikes), которые должны быть отредактированы и, как правило, исключены из базы данных. Данные инспектируются визуально в графических окнах и параметры каждой посылки МЛЭ отображаются в алфавитно-цифровом виде.
Ручное редактирование может быть выполнено путем просмотра поперечного профиля глубин каждой посылки и устранения выбросов индивидуальных лучей. Однако, в случае, когда в секунду эхолот делает до 40 посылок, это мало реально. Обычно всю базу данных просматривают в трехмерном изображении, и выбросы вручную редактируются уже внутри объемной модели. Однако, и это очень трудозатратный процесс. Огромные массивы данных не позволяют выполнять только ручное редактирование, поэтому на втором этапе всю информацию МЛЭ пропускают через автоматические фильтры, основанные на наборе различных методик фильтрации.
Процесс очистки исходного массива глубин (фильтрация, отбраковка) должен быть основан как на ручной, так и на автоматической процедуре.
Автоматическая фильтрация, используемая для устранения «выбросов» (грубых ошибок расчета глубин), должна тщательно контролироваться и быть «интеллектуальной». Такая интеллектуальная фильтрация обычно основана на задании критерия качества или величин возможного изменения глубины. Во время этого процесса данные могут быть также прорежены {thinned) и преобразованы в форму регулярной сетки глубин, т. е. в каждой ячейке грида оставлено одно значение глубины. Эта операция в англоязычной литературе именуется «binning». Далее рекомендуется конечная объемная визуализация, позволяющая наглядно оценить качество данных.
В условиях постоянно увеличивающейся плотности многолучевых данных с одновременными требованиями минимизации размеров ячейки.«грида»
233
Глава 7. Практические методики контроля и оценки качества для многолучевых эхолотов
(>0,2 м), автоматическая фильтрация и редактирование становятся единственно возможным практическим способом обработки больших баз данных многолучевой батиметрии. В этом направлении ведется большая исследовательская работа.
7.3.1.1. Сокращение объема выборки путем «гридирования» многолучевых данных («binning»)
Подпрограммы «гридирования» данных (например, программа HYPACK MAPPER) отображает глубину в выбранной ячейке «грида» {grid cell) заданного размера, чтобы предотвратить наложение отметок глубин при их отображении и печати. Эта программа создавалась для прореживания глубин (сокращения объема выборки) многолучевых эхолотов, но может успешно использоваться и для однолучевых эхолотов.
Возможны несколько опций выбора репрезентативной глубины при создании «грида»:
(1) минимальная глубина в ячейке;
(2) максимальная глубина в ячейке;
(3) средняя, из глубин в ячейке;
(4) глубина, ближайшая к центру ячейки («shot» depth).
Именно опция глубины, ближайшей к центру ячейки, а не другие, должна использоваться. Эта опция рекомендуется как для навигационных, так и для дноуглубительных проектов. Опция «средняя глубина» способна сгладить данные, и это может быть желательно в некоторых случаях. Но это нежелательно на выкопанных склонах, поскольку средняя глубина не связана с ее плановым положением. Если записать усредненные глубины, то программное обеспечение приведет плановое положение к координатам усредненной глубины.
7.3.1.2. Смещенная минимальная глубина в ячейке «грида»
Минимальная глубина, зарегистрированная в ячейке, может быть полезна для целей обнаружения подводных препятствий. Однако, такие смещенные глубины не следует использовать для целей съемок, обеспечивающих расчеты объемов дноуглубления и должны с большой предосторожностью использоваться в навигационных проектах. Это происходит благодаря сравнительно большим вариациям в акустических измерениях глубин на техногенных акваториях. Использование минимальных глубин может также исказить результаты расчетов объемов и ошибочно отразить глубины над опасностями (clearance data). Представление ячеек минимальными глубинами может также вызвать перекос в определении минимальных габаритов при окончательной съемке каналов. Отмели над проектной глубиной канала должны быть оценены многочисленными акустическими контактами при.последовательных проходах — минимальные глубины, записанные в ячейку «грида» не всегда являются абсолютной высотой над объектом.
Критерии обработки глубин основаны на статистической оценке, вычисляемой программным обеспечением внутри одной ячейки, размер которой определяется пользователем. В связи с этим пользователь должен выбрать минимально возможный размер ячейки, но в то же время достаточно большой для того, что-
234
73. Обеспечение качества при проведении пост-обработки данныхМЛЭ
бы каждая ячейка содержала достаточное количество качественных глубин для обеспечения точности статистических вычислений. Идеальным является такой размер ячейки, при котором в ней содержится от 20 до 100 глубин.
В таблице 7.1 определяем, что на глубинах до 20 м величина ячейки не должна превосходить от 1 до 5 м, в зависимости от типа донного грунта. При расчлененном рельефе 5 м может быть многовато и можно порекомендовать меньший размер ячейки. Размер ячейки «грида» в 0,2 м может использоваться для приложений, где требуется максимальная детализация, например, съемка подводных конструкций.
Размер ячейки зависит от плотности данных, и, значит, изменяется в зависимости от типа МЛЭ, скорости судна и глубины, т.к. с увеличением глубины увеличивается как пятно облучения каждого луча на дне, так и линейное расстояние между глубинами вдоль одной посылки.
Исходя из этого очевидно, что невозможно зафиксировать размер ячейки для определенной глубины.
Для примера в таблице 7.1 представлен средний размер ячейки для диапазонов глубин, измеренных с помощью МЛЭ ЕМ 1002, при скорости хода 7 узлов:
Таблица 7.1
Глубина (м) Рразмер ячейки (м)
1 <20 1-5
2 20-80 10
3 80-200 20
4 200-400 40
5 400-1000 80
Необходимо иметь в виду, что процедура «гридирования» может исказить или деформировать получаемую отсортированную батиметрическую модель и, таким образом, отрицательно повлиять на получаемые результаты, например, при вычислении объемов при дноуглублении. Подпрограммы прореживания данных должны быть интеллектуальными для того, чтобы поддерживать цельность топографии дна. При усреднении батиметрических данных в «гриды» необходимо убедится, что базовая топография дна не будет подорвана. Если размер «грида» слишком большой, топография может быть излишне сглажена. Искажение топографии может также произойти, если «грид» создается на основе минимальных или усредненных глубин, выбираемых в ячейках или узлах цифровой модели рельефа (ЦМР=ЭТМ), такого процесса отбора следует избегать.
Многие из этих процедур и соответствующие подпрограммы интеллектуального прореживания (сортировки) продолжают постоянно совершенствоваться по мере того, как появляются и внедряются новые методы и алгоритмы.
Невозможно установить единые правила на все случаи жизни, т. к. они зависят от расчлененности рельефа, погодных условий, собственного шума судна и т. д.
Заключительным этапом обработки является расчет регулярной сетки для отображения рельефа. Критерий выбора размера ячейки влияет только
235
Глава 7. Практические методики контроля и оценки качества для многолучевых эхолотов
на время вычисления и детальность отображения. Визуальный анализ в различных вариантах отображения, изобаты, эффект источника «освещения», профили по произвольным направлениям — все это является отличным средством анализа качества полученных материалов. При выявлении «подозрительных» мест с этого этапа необходимо вновь вернуться к процедуре ручной фильтрации (очистки).
7.3.2. Контроль качества при пост-обработке данных МЛЭ на примере HYSWEEP Office
В качестве примера рассмотрим процедуры контроля качества, реализованные в программном пакете HYSWEEP Office — редактора МЛЭ (MB Editor) фирмы HYPACK (США) [51].
Редактор МЛЭ (HYSWEEP Office) имеет следующие основные характеристики:
— позволяет обрабатывать всю съемку или только один галс;
— объединяет «Патч-тест», «Тест контроля качества» (QC) и системные тесты;
— многочисленные окна просмотра данных позволяют помечать глубины «флагом» на любом этапе обработки в любом окне;
— прост в эксплуатации;
— записывает все данные в виде: глубины + поправки + конфигурации;
— допускает совмещение данных МЛЭ и функции ГБО при пост-обработке. Большинство операций в пакете выполняется в графических окнах, общее количество которых достигает 14. Для каждого этапа обработки может использоваться свой набор окон.
Всего в редакторе МЛЭ предусмотрены три этапа пост-обработки данных МЛЭ. Рассмотрим эти этапы с точки зрения процедур оценки качества. .
Этап 1. Просмотр первичных данных по каждому галсу съемки.
Обеспечивается визуальный просмотр информации от сопряженных с МЛЭ датчиков в графических окнах с возможностью интерактивного редактирования данных отдельных датчиков. Визуальному анализу должна быть подвергнута работа всех датчиков. Если в соответствующем окне индицируется прямая линия, то это означает неработоспособность — сбой датчика. Пользователю предоставляются следующие возможности:
— проверка/редактирование данных навигации; визуальный поиск сбоев (выбросов) GPS;
— проверка/редактирование данных датчика вертикального перемещения; основное внимание следует обращать на визуальный анализ на наличие «дрейфа» датчика после маневрирования судна;
— проверка/редактирование поправки уровня; сбои и выбросы, как правило, имеют место при использовании поправок уровня, полученных в режиме RTK.
Все остальные датчики допускают только визуальный просмотр данных по времени.
Окно «Графическая информация датчиков МЛЭ» представлено на рис. 7.16.
236
73. Обеспечение качества при проведении пост-обработки данных МЛЭ
Рис. 7.16. Окно редактора МЛЭ -графическая информация датчиков [HYPACK, Inc]
Этап 2. Редактирование глубин в полосе обзора МЛЭ.
Обеспечивается просмотр одного за другим всех галсов многолучевого промера. На этом этапе обеспечивается выполнение следующих процедур:
— автоматическая фильтрация для устранения грубых ошибок (выбросов);
— проверка и редактирование каждого галса интерактивно в графическом режиме;
— возможность подключения второго окна для просмотра с целью обеспечения другого ракурса графического отображения данных;
— отображение информации о каждой глубине в полосе обзора в окне «Sounding Info» (см. рис. 7.17). Одно из окон для просмотра полосы обзора изображено на рис. 7.18.
Набор доступных автоматических фильтров включает:
— грубый фильтр «min-шах» (Depth — Min and max);
— фильтрация по номеру луча (Beam number); данные с указанным номером луча отфильтровываются;
— фильтрация по предельным величинам угла луча и горизонтального отклонения (Angle limit \Offset limit);
— фильтрация по предельному заданному выбросу (Spike limit);
— фильтрация по заданному критерию качества (Quality Limit) — отклонения глубины;
— фильтрация по топографической поверхности «Undercut and overhang filters»;
237
Глава 7. Практические методики контроля и оценки качества для многолучевых эхолотов
Рис. 7.17. Окно с информацией посылки МЛЭ [HYPACK, Inc]
— фильтр по предельным значениям (Hysweep Survey Limits);
— фильтрация методом Савитского (Savitsky — Golay Filter).
Установка для включения фильтра выполняется в окне, изображенном на рис. 7.19.
Возможно использовать автоматическую фильтрацию как последовательно, так и одновременно. Установка фильтрации по заданному критерию отклонения глубины (2 м) и полученный результат показаны на рис. 7.20.
Пользователю предоставлена возможность ввода количества последовательных посылок (Sweeps), к которым будет применена процедура автоматической фильтрации. Точки с отфильтрованными глубинами отображаются желтыми крестика-
238
7.3. Обеспечение качества при проведении пост-обработки данных МЛЭ
Рис. 7.18. Окно для просмотра посылок МЛЭ в полосе обзора [HYPACK, Inc]
Рис. 7.19. Окно для установки параметров автоматических фильтров [HYPACK, Inc]
239
Глава 7. Практические методики контроля и оценки качества для многолучевых эхолотов
Рис. 7.20. Окно фильтрации по качеству глубин и полученный результат [HYPACK, Inc]
ми (X). Окно, отображающее результаты работы фильтра для варианта топографической поверхности {^Undercut and overhangfilters»), изображено на рис. 7.21.
Низкочастотный фильтр по методу Савицкого обеспечивает следующие возможности:
— устраняет глубины, имеющие высоко частотный спектр ( резкие изменения рельефа, выбросы по глубине и т.д.);
— сохраняет низкочастотные данные, представляющие однородный рельеф дна.
Фильтр «Савицкого» рассчитывает отфильтрованную поверхность секции. Все глубины, оказавшиеся за пределами величины «Gate Size», отбрасываются.
— Gate Size: допустимый предел выше и ниже отфильтрованной поверхности;
— Order: количество точек перегиба поверхности;
— Window Size: количество глубин, по которым осуществляется построение отфильтрованной поверхности.
Графическое представление методики работы фильтра изображено на рис. 7.22.
Сравнение батиметрической модели дна, исправленной в результате выполнения пост-обработки, с данными опции ГБО, реализованной в МЛЭ, позволяет
240
7.3. Обеспечение качества при проведении пост-обработки данных МЛЭ
Рис. 7.21. Окно для отображения результатов работы фильтра для варианта топографической поверхности [HYPACK, Inc]
Рис. 7.22. Принцип задания параметров для работы фильтра Савицкого [HYPACK, Inc]
241
Глава 7. Практические методики контроля и оценки качества для многолучевых эхолотов
Рис. 7.23. Монитор с окнами «очищенной» полосы обзора и опции ГБО МЛЭ [HYPACK, Inc]
более уверенно опознавать экзогенные и техногенные объекты. Донные объекты, обнаруженные батиметрией, должны быть подтверждены на растровом ГБО-изображении. Визуальное совмещение участка полосы обзора в окне батиметрии (Sweep Window) и ГБО (Side Scan) показано на рис. 7.23.
Этап 3: Редактирование по площади.
• Батиметрия по всем галсам изображается одновременно.
• Доступны три окна:
Съемка: Батиметрия в виде «грида».
Ячейка: детальный просмотр сбойных глубин в ячейках.
Профиль: разрез по произвольной линии — проверка в зонах наложения полос.
• Просмотр по всей площади возможен, но требует времени.
• Альтернативой является статистический поиск.
• Выберите файл МТХ HYPACK (созданный) или позвольте редактору МЛЭ самому создать файл.
• Разверните рамку матричного файла вдоль линии галса — удобно для редактирования в ячейке.
• Размер ячейки задается на панели «Cell Size» (см. рис. 7.25):
— если выбрана опция «Auto Sell Size», то программа редактора МЛЭ найдет оптимальную ячейку;
242
73. Обеспечение качества при проведении пост-обработки данных МЛЭ
Рис. 7.24. Монитор стремя окнами для третьего этапа обработки. [HYPACK, Inc]
Рис. 7.25. Окно для задания ячейки матрицы для оценки результатов съемки [HYPACK, Inc]
— если выбрана опция «Enter Cell Length and Width », то ввод размера ячейки осуществляется вручную. Для обеспечения статистического поиска и фильтрации глубин внутри ячеек необходимо:
• задать статистику для представления ячейки. Лучше всего работает опция «Median»;
• задать предел выше и ниже статистической поверхности (см. рис. 7.26). Тогда можно выбрать:
— автоматическую фильтрацию по критерию 2о или 4о (разработчик программы рекомендует применять эту опцию с осторожностью);
243
Глава 7. Практические методики контроля и оценки качества для многолучевых эхолотов
Рис. 7.26. Окно задания параметров поиска для оценка качества съемки [HYPACK, Inc]
— заданный предел (Set Limit)', фильтр автоматически находит внутри каждой ячейки «грида» сбойные глубины, не удовлетворяющие заданному критерию отклонения от статистической поверхности.
• Возможно ограничить район поиска и фильтрации путем задания файла границ из HYPACK® (см. рис. 7.27).
Сохранение результатов МЛЭ — съемка осуществляется в формате файлов HYSWEEP (см. рис. 7.31а):
• Формат HS2: сохраняет все данные съемки в двоичном виде. Файл HS2 имеет следующие опции:
восстанавливает отброшенные глубины;
позволяет вводить данные «patch test» и уточненные смещения антенн;
позволяет вводить уточненные значения поправок уровня и ВРСЗ.
• Формат XYZ: обеспечивает экспорт результатов съемки в программы:
HYPACK® MAPPER, TIN MODEL и т. д., а также в программное обеспечение других фирм-производителей.
244
7.4. Контроль качества обработки и представления результатов площадной съемки с МЛЭ
- Search and Fitter Options
General] Statistical] Search Only Bordering |
r Bordering in Survey Window (Edit Phase 3) -
Hypack Border File
C:\Hypack\ProiectsXSample_E dftingJnJdBMAX_106\Fi!ter.brd
Browse...
C Ignore Border During Search 7 Filter
(• Search / Filter Inside Only
C Search / Filter Outside Only
Рис. 7.27. Окно задания файла границ при выполнении оценки качества съемки [HYPACK, Inc]
Программа MULTIBEAM EDITOR может записать данные аналогично HYPACKOMAPPER (одна глубина в ячейке). Необходимо задать, какая из возможных глубин будет записана (минимальная, максимальная, разность, средняя, медианная, ближайшая к центру).
7.4. Контроль качества обработки
и представление результатов площадной съемки с МЛЭ
В настоящее время существует несколько подходов к обработке, представлению данных площадных съемок и оценки их точности.
Традиционный подход, который чаще всего используется в настоящее время, унаследовал идеологию, принятую еще со времен однолучевой батиметрии. Такой подход предполагает редактирование каждой отметки глубины с использованием возможностей компьютеров. При этом для представления на планшете отбираются только отметки наименьших глубин акватории, характеризуя тем самым сугубо «гидрографический» подход к съемке рельефа, направленный, прежде всего на обеспечение безопасности мореплавания. Данный подход, позволяющий получать апостериорную оценку точности выполненной площадной съемки, реализован практически во всех ЭГИС, обрабатывающих данные МЛЭ.
Альтернативный подход к обработке данных площадной съемки был предложен в последние годы. Взамен представления отдельных отметок глубин предлагается оперировать так называемой «навигационной поверхностью» (Navigation Surface), основанной на создании регулярной сети-«грида». Данная методика получила наименование CUBE (Combined Uncertainty and Bathymetric Estimator).
Методика CUBE [37,38,39,60] реализована в таких коммерческих ЭГИС, как: CARIS HIPS (фирма CARIS), SIS (фирма Kongsberg), QINSy (фирма QPS), Hysweep (фирма Hypack) и др.
245
Глава 7. Практические методики контроля и оценки качества для многолучевых эхолотов
Рассмотрим, в качестве примера, как реализованы методы апостериорной оценки точности, включая технологию CUBE, в ЭГИС Hysweep/Hypack фирмы Hypack Inc. (США) [51].
7.4.1. Традиционная оценка качества представления площадной съемки
в ЭГИС Hysweep
В результате третьего этапа обработки данных в ЭГИС Hysweep (п. 7.3) принятые к дальнейшему использованию глубины проходят процедуру «градирования», т. е. формирования регулярной сетки глубин с заданной размерностью (размер ячейки). Одной из операций, возможных на данном этапе, является оценка апостериорной точности многолучевой съемки путем анализа глубин, попавших в ячейку грида. При визуализации грида возможны различные опции, выбор которых осуществляется в окне, представленном на рис. 7.28. Для выбора опции отображения апостериорной точности глубины в ячейке грида в виде стандартного отклонения необходимо включить кнопку «Cell Standard Deviations (см. рис. 7.28).
View Options
Suvey | Protie | Cel | Rew Data | Sweep | Cdort |
‘Slow • 1 —............ 1 ---------------------------
C Points per Cel Г Mnmun Depth / Elevation
C Cel Vertical Range С Мамлчмп Depth/Elevabon
<• Cel Std Deviation C Average Depth I Elevation
P Track Lnes and Flamed Lnes Г~ Show Charts
Г* Depth Numbers
Рис. 7.28. Окно установок для отображения грида результатов съемки в Hysweep Office [HYPACK, Inc]
В модуле третьего этапа программы Hysweep Office предусматривается возможность задания пользователем размера ячейки грида, либо автоматическое определение размера ячейки на основе текущей плотности батиметрических данных. Внутри каждой ячейки программа анализирует все попавшие в нее глубины, рассчитывает среднюю и медианную глубину, а также стандартное отклонение. Данные в каждой ячейка грида могут быть визуализированы. На рис. 7.29 представлено окно, отображающее основную статистику по выбранной ячейке грида в графическом и алфавитно-цифровом виде: количество глубин в ячейке (Samples= 125), размах (Range= 44.5^-48.6), среднее значение глубины (Average =48.2 м), стандартное отклонение (Sigma =0.3 м) и медианное значение (Median=48.3 м).
При задании в окне «View Options» (рис. 7.28) отображения данных апостериорной оценки точности {Cell Std Deviation) в окне съемки (Survey Window), обычно отображающем растр грида, теперь будет отображаться цветной растр грида стандартных отклонений глубин, соотнесенный с цветовой шкалой (см. рис. 7.30). Пользователю предоставляется возможность создания файла грида (XYZ), в котором взамен глубины в ячейке грида Z будет зарегистрировано
246
7.4. Контроль качества обработки и представления результатов площадной съемки с МЛЭ
Рис. 7.29. Окно статистики по ячейке грида Hysweep Office [HYPACK, Inc]
Рис. 7.30. Окно цветного растра грида стандартных в отклонений глубин в Hysweep Office [HYPACK, Inc]
247
Глава 7. Практические методики контроля и оценки качества для многолучевых эхолотов апостериорное значение стандартного отклонения глубины в ячейке. Для этого достаточно в окне опций регистрации (File Save...) выбрать радио-кнопки: «XYZ Points Only» и «Save One Point per Cell», как показано на рис. 7.316.
Далее на закладке «XYZ Reduction» необходимо включить кнопку: Standard Deviation" и выбрать коэффициент увеличения (Multiplier) для более рельефного отображения величин стандартных отклонений (С.О). Для отображения поверхности стандартных отклонений теперь возможно использовать полученный файл XYZ (Z = С.О.) в программе «TIN MODEL» в виде 2D или 3D.
а)
б)
Рис. 7.31. Окно опций сохранения данных грида (закладка «Save») в Hysweep Office [HYPACK, Inc]
248
7.4. Контроль качества обработки и представления результатов площадной съемки с МЛЭ
Рис. 7.32. Изображение трехмерной поверхности (3D) стандартных отклонений, построенной в программе «TIN MODEL» пакета программ Hypack [HYPACK, Inc]
На рис. 7.32 изображена 3D поверхность стандартных отклонений, построенная в программе TIN MODEL пакета программ Hypack. Другой интересной возможностью, реализованной в пакете программ Hysweep, является экспорт двухмерной поверхности стандартных отклонений в растровый формат GeoTIFF непосредственно из программы TIN MODEL Hypack.
В дальнейшем становится возможным совмещать такой растр, используя опцию «прозрачности», с цифровой моделью рельефа (ЦМР).
7.4.2. Оценка качества представления площадной съемки по технологии CUBE
Рассмотрим реализацию технологии CUBE в ЭГИС Hysweep/Hypack. Программа «HYCUBE» была впервые реализована в пакете программ Hysweep в версии 6.2А и далее получила развитие в новой версии «2009».
Одним из главных достоинств алгоритма CUBE является возможность получения модели ошибок в виде значений плановой и высотной погрешности каждой отметки глубины. Если точность отметки глубины не соответствует заданному критерию, то эта глубина не используется для формирования оценки глубины в узле создаваемой регулярной сетки — грида. Кроме оценки глубины в каждой узловой точке грида хранятся еще четыре атрибута, которые также могут быть визуализированы в виде поверхностей:
— погрешность оценки глубины (CUBE uncertainty) с доверительной вероятностью 95 %;
— количество гипотез (hypothesis CUBE count);
— индикатор надежности гипотезы (Ratio), а также их количество.
249
Глава 7. Практические методики контроля и оценки качества для многолучевых эхолотов
Поле оценок глубин в узлах регулярной сетки именуется «навигационной поверхностью».
В результате для каждого узла регулярной сетки рассчитывается оценка глубины. Вместе с тем, в сложных ситуациях расчлененного рельефа расчет оценки глубины по алгоритму CUBE может быть неоднозначен. Атрибут «количество гипотез» представляет собой количество оценок глубин в узле регулярной сетки. В этой ситуации пользователю предоставляется возможность самому принять решение о выборе оценки глубины в узле регулярной сетки на основе нескольких возможных оценок. Атрибут «индикатор надежности гипотезы» («Ratio») дает статистическую надежность оценки глубины в узле регулярной сетки. Наиболее надежная гипотеза имеет индикатор надежности, равный нулю, что соответствует варианту единственной гипотезы об оценке глубины. Переключение между вариантами визуализации навигационной поверхности — ЦМР, а также поверхностями: погрешностей оценок глубин, количества гипотез и индикатора надежности — осуществляется оперативно. На рис. 7.33 представлено окно программы CUBE, отображающее 2D поверхность
Рис. 7.33. Регулярная сеть (грид) погрешностей оценок глубины «CUBE uncertainty» [HYPACK, Inc]
250
7.4. Контроль качества обработки и представления результатов площадной съемки с МЛЭ поля погрешностей оценок глубин в узлах навигационной поверхности в виде растрового изображения.
Использование программы HYCUBE может быть альтернативой третьего этапа пост-обработки данных МЛЭ в Hysweep Office. Результатом работы программы HYCUBE является файл «точек » (XYZ), в котором X, Y представляют собой плановые координаты узлов регулярной сетки навигационной поверхности, a «Z» может быть различной величиной в зависимости от назначения пользователя. По умолчанию параметр Z представляет собой оценку глубины в узловой точке грида навигационной поверхности (CUBEdepth estimate). Однако, пользователь может сохранить файл точек с другим атрибутом навигационной поверхности, например, погрешностью оценки глубины узла CUBE (о2) = TVU (см. п. 6.1). Выбор осуществляется оперативно путем включения соответствующий радио-кнопки в окне сохранения файла (см. рис. 7.34).
Для визуализации полученной апостериорной точности оценок глубин навигационной поверхности можно воспользоваться программой визуализации нерегулярной сети (TIN MODEL) и представить поле погрешностей в виде 2D/3D поверхности, как показано на рис. 7.33 TIN-модель создается с использованием файла XYo2 (о2 = 1,96 х е, где е — стандартное отклонение оценки глубин, рассчитанное программой «HYCUBE»). На рис. 7.35 отчетливо видны шесть полос обзора выполненной многолучевой съемки. Высокие значения погреш-
Рис. 7.34. Окно выбора варианта применения атрибутов CUBE [HYPACK, Inc]
251
Глава 7. Практические методики контроля и оценки качества для многолучевых эхолотов
Рис. 7.35. Представление поля погрешности CUBE-модели глубин в виде 3D TIN [HYPACK, Inc]
ности отмечаются на краях полос обзора. Как и при традиционном подходе к пост-обработке данных площадной съемки, далее может быть создано 2D гео-привязанное растровое изображение (GeoTIF), и реализован эффектный метод «накидывания» растрового изображения прозрачной поверхности поля погрешности глубин на навигационную поверхность дна отснятой акватории.
Можно также построить и изолинии равных погрешностей. Одной из важных особенностей технологии CUBE является обеспечение высокого уровня автоматизации с целью ускорения пост-обработки данных многолучевой батиметрии.
Для пользователя всегда большое значение имеет вопрос, соответствует ли выполненная съемка заявленной категории по Стандарту SP-44. В пакете HYCUBE имеются опции контроля допустимости погрешности каждой полученной отметки глубины. В одном их вариантов расчет допустимой погрешности (5) осуществляется по формуле (6.1).
Для использования данной опции пользователь задает номер категории (от О до 3), а программа сравнивает полученную погрешность каждой отметки глубины (8Д) с допустимым значением 5.. В случае, если ?>2>Si полученная глубина не используется для расчета оценки глубины в узле грида навигационной поверхности.
В завершении отметим, что методика CUBE имеет ограничения. Одним из наиболее существенных ограничений является «плотность» батиметрических данных (глубин). Существует зависимость между плотностью глубин и допустимой размерностью грида «навигационной поверхности». Целесообразно было бы программно рассчитывать рекомендуемую размерность грида CUBE, исходя из имеющейся плотности отметок глубин.
ЭГИС Hysweep/Hypack является одним из немногих пакетов, обеспечивающих представление результатов площадных гидрографических съемок, в кото
252
75. Обработка и уравнивание результатов калибровки МЛЭ в HYPACK МАХ
ром реализованы два альтернативных подхода к апостериорной точности глубин и их координат [32]. Сравнение результатов оценки точности, полученных с использованием этих различных подходов, позволяет повысить точность получаемой цифровой модели рельефа дна.
7.5. Обработка и уравнивание результатов калибровки МЛЭ в HYPACK МАХ
7.5.1. Общие требования к выполнению калибровки
Обработка калибровки или «патч теста» имеет целью получение величин оценок остаточных систематических ошибок пространственной ориентации антенны МЛЭ. Калибровка, которая должна проводится регулярно (см. п. 6), представляет собой набор специальных съемок на подготовленном полигоне, которые проводятся на согласованных галсах с разными скоростями хода, на разных глубинах и рельефе. Калибровка должна выполняться с максимальным качеством, чтобы регистрируемые МЛЭ данные являлись точными, правильными и надежными. В результате выполнения «патч теста» должны определяться (или подтверждаться) величины следующих потенциальных систематических ошибок:
(1) углового положения антенны эхолота по дифференту (residualpitch offset)}
(2) углового положения антенны эхолота по крену (residual roll offset)}
(3) временной задержки поступления навигационной информации (residual positioning time delay)}
(4) углового положения антенны эхолота относительно диаметральной плоскости (azimuthal = yaw offset).
Получаемые из очередного «патч теста» величины остаточных ошибок используются для уточнения начальных — ранее определенных значений и, таким образом, калибруют систему МЛЭ.
Далее рассмотрим подробно каждую из калибровок, в сумме составляющих «патч тест»; итоговая информация по всем калибровкам представлена в таблице 7.2.
При проведении «патч теста» определение местоположения должно осуществляться с помощью профессиональной дифференциальной спутниковой аппаратуры (Survey quality DGPSpositioning instrument), что особенно важно для мелководных проектов. Погодные условия следует выбирать наиболее благоприятные, чтобы обеспечивать надежное получение глубин и минимальные пространственные перемещения антенны МЛЭ. Галсы, на которых производится калибровка, как правило, прямой и обратный, поэтому важное значение имеет точное вождение судна по галсу. Калибровочные галсы следует выбирать на тех же глубинах, на которых будет производиться съемка. Порядок прохождения галсов не имеет большого значения, вместе с тем рекомендуется, чтобы по крайней мере были пройдены две системы галсов для подтверждения полученных данных с целью получения более надежных результатов калибровки. Хотя внешние лучи МЛЭ имеют малые углы скольжения, они могут дать ценную информацию при условии, что калибровка выполнена успешно. Скорость судна при
253
Глава Z Практические методики контроля и оценки качества для многолучевых эхолотов выполнении калибровки должна быть подобрана таким образом, чтобы было достигнуто 50 % перекрытие смежных полос облучения от поперечных профилей глубин. Максимальная скорость может быть подсчитана по формуле (6.2).
7.5.1.1. Калибровка временной задержки и систематической ошибки угла дифферента Две или более пары прямого и обратного галсов следует пройти с разными скоростями для обеспечения возможности проверки наличия остаточных систематических ошибок временной задержки и угла дифферента антенны. Временная задержка определяется на двух галсах, пройденных в одном направлении, но с разными скоростями. (Обе систематические ошибки могут присутствовать одновременно, поэтому они должны быть установлены и разделены на этапе обработки данных калибровки). Галсы должны быть проложены, если возможно, на участке с ровным, полого опускающимся дном с углами наклона 10-20°. Длина наклонного дна в идеальном случае должна быть по крайней мере 200 м для того, чтобы получить хорошие результаты. Если нет других особенностей рельефа, то может подойти склон канала. По крайней мере, две пары взаимно-обратных галсов необходимо пройти вверх и вниз по склону со скоростями, различающимися хотя бы на 5 узлов, для того, чтобы оценить временную задержку. Угол дифферента определяется по результатам двух пробегов по линии в разных направлениях, но с одинаковой скоростью.
7.5.1.2. Калибровка систематической ошибки угла крена
Для оценки остаточной систематической ошибки угла крена антенны необходимо на участке с выровненном дном пройти по галсу, длиной приблизительно 200 м, в прямом и обратном направлении. Систематическая ошибка крена лучше определяется в глубокой воде. В зависимости от типа МЛЭ галсы необходимо проходить с такой скоростью, чтобы обеспечить значительное перекрытие пятен облечения лучей последовательных посылок. Ширина луча вдоль направления диаметральной плоскости приводится в технической документации многолучевого эхолота.
7.5.1.3. Калибровка систематической ошибки угла отклонения оси антенны от диаметральной плоскости судна
Для выполнения такой калибровки требуется выполнить пробег по двум парам параллельных галсов, расположенных перпендикулярно длинному пологому склону, представляющему собой склон отмели или искусственного канала. Не следует использовать объекты с крутыми стенками, такие, как затонувшие суда, поскольку результаты, полученные на таких объектах, страдают неопределенностью интерпретации. Расстояние между соседними галсами должно обеспечивать 15% перекрытия полос обзора и, таким образом, ширина объекта (склона) должна быть достаточной для получения надежных данных. Эта ширина обычно должна быть больше, чем три полосы обзора. Галсы следует проходить со скоростью, обеспечивающей значительное перекрытие пятен облечения лучей последовательных посылок, и которую можно рассчитать по формуле 6.2.
Обработка и уравнивание результатов калибровки МЛЭ в ЭГИС Hypack.
Коммерческие программы автоматически вычисляют остаточные систематические ошибки дифферента, крена, курса и временное запаздывание по многолуче-
254
7.5. Обработка и уравнивание результатов калибровки МЛЭ в HYPACK МАХ
вым данным. Процедуры, рассмотренные ранее, используют всю выборку данных, полученных при выполнении «патч теста», без прореживания данных, т. е. «гриди-рования»( grinding) и «биннирования» (binning). Важным является визуализация батиметрических данных. В дополнение координаты и данные пространственной ориентации должны быть проверены на наличие погрешностей, особенно учитывая возможную задержку поступления навигационной информации. Очистка батиметрических данных здесь не требуется, поскольку будут анализироваться не отдельные, а суммарные (кластерные) совокупности вычисленных глубин.
Процедура обработки данных «патч теста» выполняется в нижерассматрива-емой последовательности, рекомендуемой фирмой Hypack Inc. и реализованной в ЭГИС Hypack.
В будущем ожидается, что программное обеспечение обработки сможет полностью автоматизировать последовательность нижерассматриваемых операций, используя улучшенные цифровые отображения и модели обработки. Такой процесс будет значительно более точным, чем настоящие последовательные процедуры.
Рассмотрим причины необходимости калибровки временного запаздывания поступления навигационной информации (Position Latency).
Обеспечение высокой точности фиксации координат приемной антенны МЛЭ в момент прихода отраженного от дна эхосигнала по каждому из лучей требует обеспечения временной синхронизации внутреннего таймера МЛЭ и СНА. В англоязычной технической литературе систематическая ошибка запаздывания поступления навигационной информации называется: «timing errors» или «Position Latency».
Систематические ошибки планового положения вычисленной глубины по направлению движения судна-носителя МЛЭ возникают в результате запаздывания поступления навигационных данных из СНА в программное обеспечение МЛЭ (см. рис. 7.36). Для определения систематической ошибки запаздывания навигационной информации выполняется сравнение батиметрических данных, полученных на двух калибровочных галсах (рис. 7.36).
При этом возможны три варианта выполнения этой калибровки, поэтому данную калибровку целесообразно комплексировать (выполнять параллельно) с другими видами калибровки.
Калибровочный галс может располагаться на акватории с ровным пологим дном, либо проходить над приметным объектом, расположенным на морском дне. При этом возможны следующие варианты:
1) калибровка при прохождении прямого и обратного галса дважды на одной скорости;
2) калибровка при прохождении одного галса дважды в одном направлении, но с заметно разными скоростями;
3) калибровка при прохождении над приметным объектом на дне с разными скоростями на встречных галсах.
Примечание: галсы в одном направлении используются для того, чтобы исключить эффект от неизвестных систематических ошибок крена и дифферента.
Калибровка временного запаздывания навигационной информации на акватории с ровным пологим дном по варианту 1 может производиться совместно с калибровкой угла дифферента.
255
Глава 7. Практические методики контроля и оценки качества для многолучевых эхолотов
Воздействие неучтенной систематической ошибки задержки поступления навигационных данных (Position Latency)
Рис. 7.36. Систематическая ошибка планового положения глубин в результате систематической ошибки запаздывания поступления навигационной информации [HYPACK, Inc]
Калибровка временного запаздывания навигационной информации на акватории с ровным пологим дном по варианту 2 может производиться в следующей последовательности:
А) судно проходит по рабочему участку калибровочного галса «Ь» (рис. 7.45.) в одном направлении с высокой скоростью, осуществляя регистрацию данных промера в файл 1, а затем по тому же рабочему участку галса в том же направлении с заметно меньшей скоростью с регистрацией данных промера в файл 2.
Б) маневр разворота на следующий (повторный) галс должен выполняться плавно с большим радиусом циркуляции для того, чтобы не вывести из равновесия гироскопические приборы; общая длина калибровочного галса должна включать рабочий участок (100-150 м), а также подходной участок (300-400 м), на котором происходит ввод в рабочий режим гирокурсоуказателя и (или) ДПС после маневра выхода на повторный галс;
В) при следовании по первому и второму галсам уклонения от заданной линии галса должны быть минимальными;
Г) при проведении калибровки скорость судна на рабочих участках калибровочных галсов должна быть постоянной и равномерной.
При третьем варианте калибровки, проходя над приметным объектом с разными скоростями, получаем различную форму сечения этого объекта вдоль линии галса. На этом также может быть построена программа расчета систематической ошибки запаздывания навигационной информации.
256
7.5. Обработка и уравнивание результатов калибровки МЛЭ в HYPACK МАХ
Рис. 7.37. Панель программы, вычисляющей поправку временного запаздывания навигационной информации (в составе ЭГИС HYPACK) [HYP АС К, Inc]
После завершения калибровки файлы 1 и 2 поступают в программное обеспечение МЛЭ для расчета поправки, компенсирующей систематическую ошибку временного запаздывания поступления навигационной информации.
Панель программы калибровки, вычисляющей поправку за запаздывание поступления навигационной информации в составе гидрографической информационной системы HYPACK МАХ, изображена на рис. 7.37. Величина систематической ошибки временной задержки может быть рассчитана по формуле 6.3, приведенной в п. 6.3.1.3.
При калибровке времени запаздывания поступления навигационной информации, как правило, не ограничиваются однократным прохождением по калибровочным галсам в варианте 1,2. Процесс выполняется итерактивно до тех, пор пока изобаты на склоне не совпадут или не окажутся в близком соответствии.
7.5.2.2. Определение систематической ошибки угла дифферента антенны
(Pitch Bias =alfa)
Систематическая ошибка угла дифферента определяется по двум парам прямого и обратного галсов, пройденных над склоном с двумя разными скоростями. Важной отличительной особенностью систематической ошибки угла дифферента является ее прямая зависимость от глубины. Таким образом, чем глубже калибровочный полигон, тем больше величина смещения.
257
Глава 7. Практические методики контроля и оценки качества для многолучевых эхолотов
На рис. 7.38 изображены возможные систематические ошибки глубины, вычисленные в полосе обзора по всем лучам ЭМЛ, и систематические ошибки планового положения этих глубин, получаемые в результате неучтенной систематической ошибки в угле дифферента.
Калибровка угла дифферента осуществляется на акватории с ровным пологим дном и производится в следующей последовательности:
А) судно проходит по рабочему участку калибровочного галса «Ь» (рис. 7.45) в прямом направлении с регистрацией данных промера в файл 1, а затем по рабочему участку галса «Ь» в обратном направлении с регистрацией данных промера в файл 2;
Б) маневр разворота на обратный галс должен выполняться плавно с большим радиусом циркуляции для того, чтобы не вывести из равновесия гироскопические приборы; общая длина калибровочного галса должна включать рабочий участок (100-150 м), а также подходной участок (300-400 м), на котором происходит ввод в рабочий режим гирокурсоуказателя и (или) ДПС после маневра выхода на обратный галс;
В) при следовании по прямому и обратному галсу уклонения от заданной линии галса должны быть минимальными;
Г) при проведении калибровки скорость судна на рабочих участках калибровочного галса должна быть постоянной и равномерной.
При движении вниз по склону, как показано на рис. 7.38, в случае, когда величина систематической ошибки дифферента положительна (задняя часть приемной антенны выше передней), положение измеренных глубин будет находить-
Воздеиствие систематической ошибки в угле дифферента (Pitch Misalignment)
Рис. 7.38. Положение полосы вычисленных глубин, получаемой в результате систематической ошибки в угле дифферента [HYPACK, Inc]
258
7.5. Обработка и уравнивание результатов калибровки МЛЭ в HYPACK МАХ
ся позади истинных, а сами измеренные глубины будут меньше истинных. После поворота на обратный курс картина изменится на противоположную. На этом и построена программа расчета систематической ошибки угла дифферента.
После завершения калибровки файлы 1 и 2 поступают в программное обеспечение МЛЭ для расчета поправки, компенсирующей систематическую ошибку дифферента приемной антенны.
Панель программы калибровки, вычисляющей поправку за дифферент приемной антенны МЛЭ в составе гидрографической информационной системы HYPACK МАХ, изображена на рис. 7.39.
При калибровке угла дифферента, как правило, не ограничиваются однократным прохождением по калибровочному галсу в прямом и обратном направлении. Величину рассчитанной поправки по данным первой калибровки используют для выполнения повторной, чтобы убедиться в надежности результата. На рис. 7.39 представлен результат повторной калибровки (Finaloffset), который отличается от предыдущего на 0,1°.
Калибровка угла дифферента не требует столь пристального внимания, как угол крена. При подготовке к промеру с МЛЭ целесообразно эту калибровку выполнять перед началом и после завершения промера на заданной акватории. Стабильность поправки, получаемой при последовательных калибровках, дает уверенность в качестве получаемых материалов многолучевого промера.
Рис. 7.39. Панель программы, вычисляющей поправку за дифферент приемной антенны МЛЭ (в составе ЭГИС HYPACK MAX) [HYPACK, Inc]
259
Глава 7. Практические методики контроля и оценки качества для многолучевых эхолотов
Величина систематической ошибки угла дифферента может быть рассчитана по формуле 6.4, приведенной в п. 5.3.1.3.
Данные каждого калибровочного галса обрабатываются с учетом только полученной величины поправки на задержку поступления навигационной информации и угловых поправок положения антенны, полученных в условиях статики (первоначальная установка см. п. 7.1). Затем полученные величины смещения по углу дифферента усредняются с использованием нескольких совпадающих значений смещений вдоль направления движения. Процесс выполняется итерактивно до тех пор, пока изобаты на склоне не совпадут или не окажутся в близком соответствии. Следует отметить, что если для определения местоположения не используется режим кинематики реального времени, то определение величины da — смещения глубин, полученных на соседних галсах, в мелком море с необходимой точностью является весьма затруднительной операцией.
7.5.2.3. Определение систематической ошибки угла отклонения оси антенны от диаметральной плоскости судна (азимутальная систематическая ошибка или ошибка в угле рыскания) (Yaw Bias=gamma)
Для определения систематической ошибки угла отклонения оси передающей антенны от диаметральной плоскости судна (по которой ориентирован гирокомпас) минимально необходимо пройти два параллельных галса: один в прямом, а второй в обратном направлении. Галсы должны быть проложены на склоне, перпендикулярно общему направлению изобат.
На рис. 7.40 изображены возможные систематические ошибки планового положения глубин, вычисленные по наклонным (боковым) лучам МЛЭ, получаемые в результате неучтенной систематической ошибки в угле рыскания.
Систематическая ошибка рыскания становится наибольшей на крайних лучах МЛЭ, и неточность определения компенсирующей ее поправки является основным фактором, препятствующим использованию информации крайних лучей для гидрографических целей, особенно на расчлененном рельефе.
Калибровка угла рыскания осуществляется на акватории с ровным пологим дном и производится в следующей последовательности:
А) судно проходит по рабочему участку калибровочного галса «Ь» (рис. 7.45) в одном направлении с регистрацией данных промера в файл 1, а затем по рабочему участку галса «с» (рис. 7.45) в том же направлении с регистрацией данных промера в файл 2;
Б) маневр разворота на следующий (параллельный) галс должен выполняться плавно с большим радиусом циркуляции для того, чтобы не вывести из равновесия гироскопические приборы; общая длина калибровочного галса должна включать рабочий участок (100-150 м), а также подходной участок (300-400 м), на котором происходит ввод в рабочий режим гирокурсоуказателя и ДПС после маневра выхода на следующий галс;
В) при следовании по первому и второму параллельным галсам уклонения от заданной линии галса должны быть минимальными;
Г) при проведении калибровки скорость судна на рабочих участках калибровочных галсов должна быть постоянной и равномерной;
260
7.5. Обработка и уравнивание результатов калибровки МЛЭ в HYPACK МАХ
Систематическая ошибка планового положения
Систематическая ошибка в угле рыскания (gamma)
— Истинное дно
Измеренное положение веера лучей
Воздействие неучтенной систематтгческой ошибки в угле рыскания (Yaw Misalignment)
Рис. 7.40. Систематические ошибки планового положения глубин, вычисленных по крайним лучам, получаемые в результате систематической ошибки в угле дифферента [HYPACK, Inc]
Д) расстояние между галсами должно быть выбрано так, чтобы в самой мелководной части обоих галсов полосы зондирования МЛЭ взаимно перекрывались, а на рабочей части галсов перекрытие полос зондирования должно составлять до 50 %.
Взамен галсов «а» и «Ь», проложенных вверх или вниз по донному склону, данная калибровка может производиться и с использованием приметного объекта, располагаемого на морском дне в средней точке между калибровочными галсами. Тогда на первом галсе положение объекта будет зафиксировано лучами одного борта, а на втором (параллельном) галсе — лучами другого борта.
При выполнении калибровки угла рыскания на склоне, как показано на рис. 7.45, в качестве «объекта» выступают равномерно расположенные параллельные изобаты. На этом также может быть построена программа расчета систематической ошибки угла рыскания. После завершения калибровки файлы 1 и 2 поступают в программное обеспечение для расчета поправки, компенсирующей систематическую ошибку рыскания — фактически курсовой ошибки установки приемной антенны.
Панель программы калибровки, вычисляющей поправку за рыскание приемной антенны МЛЭ, в составе ЭГИС HYPACK МАХ изображена на рис. 7.41. Расчет поправки рыскания, как правило, производится совместно с расчетом поправок за крен и дифферент на завершающем этапе калибровки на полигоне. Систематическую ошибку можно рассчитать по формуле 6.5, приведенной вп. 5.З.1.З.
261
Глава 7. Практические методики контроля и оценки качества для многолучевых эхолотов
Рис. 7.41. Панель программы, вычисляющей поправку за рыскание приемной антенны МЛЭ (в составе ЭГИС HYPACK MAX) [HYPACK, Inc]
Данные каждого калибровочного галса обрабатываются с учетом полученной величины поправки на задержку поступления навигационной информации и угловой поправки дифферента, а также этих угловых величин, полученных по данным статики — первоначальной установки (п. 7.1). Затем полученные величины азимутальных систематических ошибок усредняются с использованием нескольких совпадающих значений смещений вдоль направления движения, зная горизонтальное проложение наклонной дальности для луча в точках измерений. Процесс выполняется итерактивно до тех пор, пока изобаты на склоне не совпадут или не окажутся в близком соответствии.
7.5.2.4. Определение систематической ошибки угла крена антенны (Roll Bias =beta) Систематическая ошибка угла крена антенны рассчитывается с использованием данных, полученных на паре — прямом и обратном галсах, пройденных над ровным дном, по возможности в глубокой акватории. Обычно эта систематическая ошибка является наиболее существенной при использовании многолучевого эхолота на глубокой воде, и поэтому она должна быть точно измерена и устранена.
На рис. 7.42 изображены возможные систематические ошибки глубины, вычисленные по наклонным (боковым) лучам МЛЭ, и систематические ошибки планового положения этих глубин, получаемые в результате неучтенной систематической ошибки в угле крена.
262
7Л Обработка и уравнивание результатов. калибровки МЛЭ в HYIACK МАХ
Систематическая ошибка в угле крена (beta)
Истинное дно
Систематическая ошибка планового положения глубины, вычисленной по наклонному лучу
Систематическая ошибка глубины, вычисленной по по наклонному лучу
Воздействие неучтенной систематической ошибки в угле крена (Roll Misalignment)
Рис. 7.42. Поперечные профили вычисленных глубин, получаемые в результате систематической ошибки в угле крена [HYPACK, Inc]
Измеренный поперечный профиль дна
Систематическая ошибка крена будет наибольшей на крайних лучах МЛЭ и неточность определения компенсирующей ее поправки становится основным фактором, препятствующим использованию информации крайних лучей для гидрографических целей.
Калибровка угла крена осуществляется на акватории с ровным дном и производится в следующей последовательности:
А) судно проходит по рабочему участку калибровочного галса «а» (рис. 7.45) в прямом направлении с регистрацией данных промера в файл 1, а затем по рабочему участку галса «а» в обратном направлении с регистрацией данных промера в файл 2;
Б) маневр разворота на обратный галс должен выполняться плавно с большим радиусом циркуляции для того, чтобы не вывести из равновесия гироскопические приборы; общая длина калибровочного галса должна включать рабочий участок (100-150 м), а также подходный участок (300-400 м), на котором происходит ввод в рабочий режим гирокурсоуказателя и ДПС после маневра выхода на обратный галс;
В) при следовании по прямому и обратному галсам уклонения от заданной линии галса должны быть минимальными;
Г) при проведении калибровки скорость судна на рабочих участках калибровочного галса должна быть постоянной и равномерной.
263
Глава 7. Практические методики контроля и оценки качества для многолучевых эхолотов
После завершения калибровки файлы 1 и 2 поступают в программное обеспечение-МЛЭ для расчета поправки, компенсирующей систематическую ошибку крена приемной антенны.
Панель программы калибровки, вычисляющей поправку за крен приемной антенны МЛЭ, в составе гидрографической информационной системы HYPACK МАХ изображена на рис. 7.43.
В графическом окне «Cross Sections» представлены усредненные значения поперечного профиля вычисленных глубин, получаемые в результате неучтенной систематической ошибки в угле крена, при прохождении рабочих участков прямого (красный) и обратного (зеленый) калибровочных галсов.
Если бы исходная поправка {Initial Offset} равнялась нулю, то усредненные поперечные профили пересекались под определенным углом. Задачей программы является расчет такой поправки в измеряемый ДПС угол крена (beta), чтобы глубины по боковым лучам, полученные на прямом и обратном галсах, совпали. Графически это выглядит, как полное наложение усредненных поперечных профилей прямого (красный) и обратного (зеленый) галсов (см. рис. 7.43).
При калибровке угла крена, как правило, не ограничиваются однократным прохождением по калибровочному галсу в прямом и обратном направлениях. Величину рассчитанной поправки по данным первой калибровки используют для выполнения повторной, чтобы убедиться в надежности результата.
Рис. 7.43. Панель программы, вычисляющей поправку за крен приемной антенны МЛЭ (в ЭГИС HYPACK MAX) [HYPACK, Inc]
264
75. Обработка и уравнивание результатов калибровки МЛЭ в HYPACK МАХ
На рис. 7.43 представлен результат повторной калибровки (Finaloffset), который отличается от предыдущего на О, Г.
Калибровка угла крена является наиболее ответственным этапом при подготовке к промеру с МЛЭ, поэтому ее целесообразно выполнять как можно чаще и, во всяком случае, перед началом и после завершения промера на заданной акватории. Стабильность поправки, получаемой при последовательных калибровках дает уверенность в качестве получаемых материалов многолучевого промера.
Для малых углов, менее 3°, эта систематическая ошибка может быть рассчитана по формуле 6.6, приведенной в пп. 5.3.1.3.
Данные каждого калибровочного галса обрабатываются с учетом полученной величины поправки на задержку поступления навигационной информации, угловой поправки дифферента и угловой азимутальной поправки антенны, и этих же величин, полученных по данным статики — первоначальной установки (п. 7.1). Затем полученные величины систематических ошибок крена усредняются с использованием горизонтального проложения наклонных дальностей для луча в точках измерений вдоль полосы обзора. Процесс выполняется итерактивно до тех пор, пока изобаты не совпадут или не окажутся в близком соответствии. Данную калибровку необходимо выполнять перед началом каждого проекта проведения гидрографических работ, после его окончания, а также в том случае, когда в ходе проведения работ на объекте была выполнена замена СНА, ее ремонт (замена плат) или если в ходе его использования были отмечены нештатные ситуации.
После завершения калибровки полученные поправки должны быть вручную введены в программу реального времени, обеспечивающую работу МЛЭ (см. рис. 7.1). Если калибровка была выполнена только по завершении съемки, то полученные поправки могут быть выведены уже на этапе пост-обработки. Панель программы, обеспечивающая ввод угловых поправок крена (Roll), дифферента (Pitch), рыскания (Yaw) и поправки на запаздывание поступления на-
Рис. 7.44. Панель программы использования вычисленных поправок МЛЭ (в составе ЭГИС HYPACK / HYSWEEP Office [HYPACK, Inc]
265
Глава 7. Практические методики контроля и оценки качества для многолучевых эхолотов
вигационных данных (Latency), для МЛЭ SeaBat 8101 фирмы RESON в составе пакета пост-обработки ЭГИС HYPACK HYSWEEP Office представлена на рис. 7.44. Кроме того, панель «Offsets» используется и для ввода судовых координат, в которых установлена приемопередающая антенна МЛЭ SeaBat 8101: по миделю —«Starboard», по ДП — «Forward», а также по вертикальному положению относительно начала судовой системы: параметр «Vertical» (как правило, положение статической ватерлинии).
Кроме наглядного графического представления процесса калибровки и обеспечения расчета соответствующих поправок, программное обеспечение в графической форме выдает также и оценку точности глубины, рассчитанной с учетом получаемой поправки (oKHo»Depth Error»). Программное обеспечение калибровки входит в состав пакета программ каждого МЛЭ. Интерфейс программного обеспечения постоянно совершенствуется в части наглядности представления результатов и удобства работы оператора. Совершенствуются и алгоритмы расчета соответствующих систематических ошибок, повышая тем самым точность вычисления поправок.
Таблица 7.2. Резюме по выполнению калибровки МЛЭ (Patch Test) и вычислениям поправок
Задержка времени Latency Delay Ошибка дифферента Pitch Offset Ошибка азимута ДП Azimuth/Yaw Offset Ошибка крена Roll Offset
Требуемые галсы Два (2)пробега по паре галсов в одном направлении по склону или через донный объект на разной скорости; Два (2) пробега по паре галсов в прямом и обратном направлении по склону на двух скоростях Два (2) пробега по двум соседним галсам в одном направлении над донным объектом на одной скорости Два (2) пробега в прямом и обратном направлении по одному и тому же галсу на одной скорости
Ранее введенные поправки Нет Задержка по времени Задержка по времени и угол дифферента Задержка по времени Дифферент, азимут
7.5.2.5. Последовательность проведения калибровки МЛЭ, рекомендуемая в HYPACK МАХ [50]
Особенности методики выполнения калибровки многолучевой системы, как правило, определяются реализацией конкретного программного обеспечения МЛЭ. Последовательность выполнения калибровки МЛЭ рассмотрим на примере пакета программ, реализованного в составе гидрографической информационной системы HYPACK МАХ.
Программное обеспечение, реализованное в составе ЭГИС HYPACK МАХ, использует два файла, записанных на паре калибровочных галсов.
На рис. 7.45 изображена последовательность прохождения галсов «а», «Ь», «с», обеспечивающая экономию судового времени при выполнении калибровки с использованием программного обеспечения пакета МЛЭ гидрографической информационной системы HYPACK МАХ.
266
75. Обработка и уравнивание результатов калибровки МЛЭ в HYPACK МАХ
Рис. 7.45. Последовательность прохождения галсов при калибровке МЛЭ [HYPACK, Inc]
Стандартная процедура калибровки МЛЭ предусматривает следующую последовательность галсов, обеспечивающую определение:
А) временного запаздывания поступления навигационной информации;
Б) угла дифферента передающей антенны;
В) угла крена приемной антенны;
Г) угла рыскания (курсового положения) приемной антенны.
Для проведения калибровки первоначально судно выходит на галс «с» с юга и проходит его с минимальной скоростью (проход с регистрацией файла 1). Далее выполняется разворот с выходом на галс «Ь» (проход с регистрацией файла 2), который выполняется с удвоенной скоростью. Файлы 1 и 2 используются для расчета систематической ошибки временной задержки, а полученная поправка немедленно вводится в программу калибровки при проведении дальнейших работ.
Все последующие галсы выполняются с постоянной скоростью.
После завершения галса «Ь» выполняется разворот на 180° для прохождения галса «Ь» в обратном направлении с регистрацией файла 3. По окончании обратного галса файлы 2 и 3 используются для расчета систематической ошибки угла дифферента. Полученная поправка вводится в программу калибровки.
Далее выполняется галс «а» в прямом (файл 4) и обратном направлениях (файл 5). На основе этой информации рассчитывается систематическая ошибка угла крена. Поправка за крен вводится в программу расчета калибровки.
267
Глава 7. Практические методики контроля и оценки качества для многолучевых эхолотов
Последним этапом является повторный выход на галс «с» и проход его в северном направлении с регистрацией файла 6. После завершения галса «с» файлы 2 и 6 используются для расчета систематической ошибки рыскания. Вычисленная поправка вводится в программу калибровки. На этом первый этап калибровки заканчивается.
Для получения подтверждения полученных поправок целесообразно повторно выполнить калибровку по изложенной выше схеме. При этом вновь полученные угловые смещения должны быть малы.
МЛЭ, у которых две приемо-передающие антенны, имеют несколько отличную процедуру выполнения калибровки. При этом возникает необходимость прохождения дополнительных прямых и обратных галсов для расчета систематических ошибок крена отдельно для антенн правого и левого бортов.
7.6. Тест гарантии качества функционирования (совмещение цифровых моделей)
Заказчики часто задают вопрос о точности батиметрической съемки с МЛЭ. Существует несколько подходов к вопросу оценки качества — точности и надежности результатов многолучевой съемки. Одним из решений является выполнение двух тестов, реализованных в редакторе многолучевого эхолота ЭГИС «HYPACK/HYSWEEP» [46, 50]:
«Тест контроля качества МЛЭ» и «Тест сравнения МЛЭ и однолучевого эхолота», которые на основе статистических расчетов могут проанализировать данные и установить насколько качественно работает МЛЭ с данной конфигурацией внешних датчиков.
Тест контроля качества МЛЭ призван ответить на следующие вопросы:
— Насколько хорошо совпадают глубины, получаемые однолучевым и многолучевым эхолотом?
— Какова повторяемость глубин?
— Какова величина погрешностей глубин у той или другой многолучевой системы?
— Лучи с какими предельными углами следует использовать, чтобы съемка соответствовала заданным требованиям точности определения глубин?
Функциональное тестирование характеризует повторяемость глубин от МЛЭ и выполняется в соответствии со следующей методикой.
Готовится референцная цифровая поверхность на специальном полигоне (reference surface).
Выполняется тестовый (контрольный) промер на референцном полигоне.
Выполняется специальная обработка данных — функциональный тест (Performance Test), которая сравнивает глубины референцной поверхности и данные контрольного многолучевого промера и на основе их обработки дает статистические характеристики точности.
Используя данную методику, можно сравнивать точность полученных глубин с точностью, допустимой для данной категории съемки в одном из имею
268
7.6. Тест гарантии качества функционирования (совмещение цифровых моделей)
щихся стандартов: SP-44(5) или национальным, например, USACE 1110-2-1003 (см. таблицы 3-1 [46]).
Тест гарантии качества функционирования многолучевого эхолота выполняется после установки оборудования или его модернизации, или перед началом наиболее ответственных проектов. Этот тест частично проверяет параметры и поправки, которые были получены и рассчитаны в процессе проведения калибровок. Процедура проверки основана на сравнении глубин в полосе обзора, получаемых на поверочном (контрольном) галсе {check line), с глубинами цифровой модели, специально созданной с помощью наиболее точных центральных лучей того же многолучевого эхолота. В некоторых случаях такая цифровая модель, которую в дальнейшем будем называть «референцной поверхностью», может создаваться на основе измерений глубин, выполненных однолучевым эхолотом. Это адекватное решение, если удается получить достаточно густую сеть измерений однолучевым эхолотом. Этот тест, получивший в англоязычной литературе наименование QA (Quality Assurance Performance Test), не является в действительности полностью независимым, но может рассматриваться как индикатор качества работы. Неудачное выполнение такого теста, связанное с нарушением заранее известных допусков, приведенных в таблице 7.3, требует от исполнителя корректирующих действий, т. е. повторной калибровки и (или) необходимости нового, повторного выполнения QA-теста.
7.6.1. Создание «референцной» поверхности
Создание «референцной» цифровой поверхности выполняется по результатам небольшого специального промера с МЛЭ на специально выбранной акватории с выровненным дном. На полигоне прокладываются «базовые» взаимно пересекающиеся галсы, на которых выполняется съемка. Перед редактированием все глубины, полученные по лучам вне углового обзора 45-60°, исключаются из обработки. В каждом направлении выполняется по три параллельных галса с покрытием 150%, т. е. — 25% наложением смежных полос. При этом необходимо убедиться, что внутренние лучи достаточно накладываются друг на друга, чтобы обеспечить надежность данных. После завершения выполнения параллельных галсов переходят к аналогичной съемке на следующих трех перпендикулярно расположенных галсах. Скорость судна на всех галсах должна быть одинакова. Необходимо выполнить станцию измерения ВРСЗ в воде на данной акватории и ввести данные в программное обеспечение пост-обработки. Галсы референцной многолучевой съемки, состоящие из двух систем по три параллельных галса с расстоянием между галсами, равным глубине полигона, представлены на рис. 7.46а.
Съемку целесообразно выполнять на низкой воде или высокой воде для минимизации погрешностей глубин за уровень. Разрез ВРСЗ следует выполнить сразу после завершения съемки.
7.6.2. Контрольные (поверочные) галсы
Многолучевая съемка на поверочных галсах должна выполняться таким образом, чтобы обеспечить сравнение всех глубин, рассчитанных в полосе об-
269
Глава 7. Практические методики контроля и оценки качества для многолучевых эхолотов
----------------- 4xD ------------------
D ж глубина моря
Рис. 7.46. Схема галсов референцной (а) и контрольной (6) съемки [HYPACK, Inc]
Контрольные галсы
“"Т D X
4xD
I- о -I |------------ 4хэ --------------1
d « глубина моря
зора, с глубинами «референцной» поверхности. Если контрольная съемка выполняется на полигоне с глубиной 15 м, то полигон может иметь размеры: 60x60 м. Над «референцной» поверхностью должны быть выполнены два взаимно пересекающихся галса с полной (энергетической) полосой обзора. Контрольные галсы многолучевой съемки на референцном полигоне представлены на рис. 7.466.
Скорость судна должна быть такой же, как и при создании «референцной» поверхности.
7.6.3. Обработка данных и анализ
При обработке данных теста качества функционирования предполагается нижеуказанная последовательность основных операций:
(1) Загрузить промер в редактор МЛЭ — HYSWEEP Office (MB EDITOR) см. п. 7.3.2.
Применить файлы поправок уровня и ВРСЗ, отфильтровать все глубины с углами лучей ±45°. «Референцная» поверхность должна быть очищена от «выбросов» по глубине. Это необходимо выполнить вручную, используя операции сглаживания плановых координат, углов пространственной ориентации и глубин с тем, чтобы убедиться в правильности очищенных данных. Дополнительное сглаживание батиметрических данных и прореживание («гридирование») не допускаются.
(2) «Очищенные» батиметрические данные используются для создания цифровой модели рельефа (ЦМР).
Затем используется алгоритм усредненного «гридирования» (averaging grid-ding) для сглаживания данных. В каждую ячейку матрицы глубин («грида») необходимо записать среднюю из всех глубин, попавших в ячейку (минимум 3 глу
270
7.6. Тест гарантии качества функционирования (совмещение цифровых моделей)
бины в ячейке), а результат сохранить в файле формата XYZ. Размер ячейки «грида» (gridding size) не должен превосходить средней величины пятна облучения на дне для внутренних лучей или априорного значения точности определения планового положения — что больше.
Используя большое вертикальное масштабирование, полученную цифровую модель нужно визуально проконтролировать с помощью программного обеспечения трехмерной визуализации (3D).
(3) Затем индивидуально обрабатываются данные поверочных галсов. Затем глубина, рассчитанная по каждому лучу, внутри всей полосы обзора сравнивается с глубиной «референцной» плоскости в той же точке. В результате создается разностная поверхность между «референцной» цифровой поверхностью и цифровой поверхностью, созданной в результате съемки на поверочных галсах. Данная разностная поверхность может быть представлена изолиниями разностных значений, по которым возможно получить статистические характеристики, оценивающие точность функционирования многолучевого эхолота в соответствии с критериями, приводимыми в таблице 7.3.
(4) Статистические параметры, которые должны быть рассчитаны и оценены, включают:
• Невязка. Различия между глубинами поверочной и «референцной» поверхностями рассчитываются для каждого луча поперечного профиля глубин каждой посылки. Максимальные невязки не должны превосходить величин, рекомендованных в таблице 7.3. Наличие невязок с избыточными величинами на крайних лучах свидетельствует о проблемах с калибровкой и (или) скоростью звука и требует либо уточненных поправок, либо ограничения ширины угла обзора;
• Средняя невязка или смещение. Средняя невязка (смещение) между «референцной» и поверочной поверхностью не должна превосходить величину, рекомендованную в таблице 7.3. Это наиболее существенная величина теста качества функционирования многолучевого эхолота, поскольку наличие систематических смещений может вызвать искажение глубин и повлиять на результирующие расчеты объемов при обеспечении дноуглубления. Выявление недопустимой величины смещения требует немедленной оценки и исправления. Причина может быть как в самих многолучевых данных, так и в поправках за приведение к выбранному нулю глубин.
Степень доверия к полученному смещению может быть оценена путем вычисления средней квадратической погрешности смещения, как продемонстрировано в главе 4. Учитывая, что в обработке участвуют тысячи сравниваемых глубин, эта величина должна быть небольшой.
• Стандартное отклонение (средняя квадратическая погрешность).
Стандартное отклонение невязки между «референцной» и поверочной поверхностями не должно превосходить предельных значений, записанных в таблице 7.3. Предписанная точность функционирования для разных категорий съемки приводится в таблице 3.1 [46], а также в SP-44 [57]. Программы статистических расчетов обычно выдают стандартное отклонение в виде 1 су (68 % доверительной вероятности). Для получения оценки точности с уровнем 95% доверительной
271
Глава 7. Практические методики контроля и оценки качества для многолучевых эхолотов
вероятности, как это предписано в SP-44, результат необходимо умножить на коэффициент 1,96. Наличие избыточных невязок — «выбросов» и остаточных систематических ошибок увеличивает величину стандартного отклонения.
Ограничения, налагаемые на угол обзора, могут уменьшить стандартное отклонение в том случае, если большинство «выбросов» приходится на внешние лучи. Результаты данного теста могут служить в качестве подтверждения общей точности функционирования многолучевого эхолота. Для того, чтобы оценить результирующую точность как функцию ширины полосы обзора, можно исключить внешние лучи. Далее провести обработку без крайних лучей по каждому борту и вновь выполнить вышеуказанные расчеты, касающиеся сравнения «референцной» и новой поверочной поверхностей.
7.6.4. Тестирование крайних лучей — определение допустимых углов лучей (Beam Angle Test)
Качество вычислений глубин по внешним лучам может быть протестировано путем выполнения двух взаимно перпендикулярных галсов, как показано на рис. 7.47. При этом результаты, полученные на каждой полосе обзора, рассматриваются как «референцная» поверхность. Затем глубины, рассчитанные по центральным лучам полосы обзора В, используются для сравнения с глубинами, рассчитанными по крайним лучам полосы обзора А.
Полоса обзора А
Сравнение цифровых моделей двух наборов данных:
-данные по центральным лучам В, создающие точную-референцную поверхность;
-данные всех лучей полосы обзора «А», создающие тестируемую поверхность.
Рис. 7.47. Сравнение двух перпендикулярных полос обзора [HYPACK, Inc]
272
7.6. Тест гарантии качества функционирования (совмещение цифровых моделей)
7.6.5. Пример выполнения теста контроля качества функционирования (QA)
В качестве примера рассмотрим тест контроля качества функционирования МЛЭ с использованием ЭГИС «НУРАСК». Тест выполнялся на акватории размером 60x60 м с выровненным дном при вариации глубин менее 0,6 м. «Рефе-ренцная» поверхность была построена на основе прохождения двух взаимноперпендикулярных систем, включающих каждая по три параллельных галса с междугалсовыми расстояниями, приблизительно равным глубине —15 м.
7.6.5.1. Выполнение подготовительных операций
В ЭГИС «НУРАСК» создаем проект и файл матрицы глубин формата *.mtx с границей референцного полигона.
Для этого используем редактор матриц НУРАСК® для создания матрицы глубин с размером ячейки 0,6x0,6 м, тип матрицы глубин — «HYSWEEP».
Сохраняем файл пустой матрицы с именем: Reference.mtx. Создаем файлы проектных галсов: референцной съемки (две перпендикулярные системы по три параллельных галса) и тестовой съемки (два взаимно-перпендикулярных галса), как предписано в п.п. 7.7.1-7.7.11.
Вид монитора ЭГИС «НУРАСК» с матрицей глубин и проектными галсами показан на рис. 7.48. Выполняем промер с МЛЭ для создания референцной
Рис. 7.48. Монитор ЭГИС «НУРАСК» с матрицей глубин и проектными галсами для теста контроля качества функционирования [НУРАСК, Inc]
273
Глава 7. Практические методики контроля и оценки качества для многолучевых эхолотов поверхности на глубинах 15.1-15.2 м и промер на контрольных галсах в соответствии с рекомендациями п.п. 7.7.1-7.7.11.
7.6.5.2. Обработка данных промера и анализ
А) Для обработки промера референцного полигона в редакторе МЛЭ (МВ EDITOR) необходимо выполнить следующие действия:
1) загрузить промер в редактор MB EDITOR;
2) применить файлы поправок уровня и ВРСЗ, отфильтровать все глубины с углами лучей ±45°;
3) убрать все «выбросы» глубин; на 3-ем этапе записать результаты в матрицу глубин (размером ячейки 0,6 х0,6 м): Reference.mtx;
4) записать среднюю глубину в ячейке в файл формата XYZ — с именем (reference.xyz).
Окно ЭГИС с матрицей референцного полигона и контрольными галсами показано на рис. 7.49а.
Таким образом, референцная съемка преобразована в «регулярную сетку» с размером ячейки 0,6x0,6 м. Средняя глубина в каждой ячейке (~17 глубин в каждой) записана в файл «грид» формата XYZ.
Б) Затем нужно обработать контрольные галсы многолучевой съемки в редакторе MB EDITOR с учетом поправок уровня и ВРСЗ; тщательно отредактировать глубины без использования ограничений на углы лучей, т. е. использовать полную (энергетическую) ширину полосы обзора; использовать файл test.mtx в фазе 3 редактора МЛЭ. Окно ЭГИС «HYPACK» с матрицей тестового полигона и контрольными галсами показано на рис. 7.496.
7.6.5.3. Определение гидрографической полосы обзора по результатам теста контроля качества
Тест допустимых углов лучей (Beam Angle Test) выполняется в следующей последовательности:
1) использовать меню «Tools—>Beam Angle Test» в редакторе МЛЭ;
2) в окне «Beam Angle Test» (см. рис. 7.50) нажать клавишу: Open Reference Surface / Start Test;
3) в открывшемся окне выбрать файл: reference.xyz.
Тест допустимых углов лучей сравнивает глубины тестовой многолучевой съемки с глубинами референцной батиметрической модели. Результаты статистических расчетов представляются в виде графика и гистограммы (см. рис. 7.50-7.51).
На закладке «Comparison» (Сравнение) окна «Beam Angle Test», изображенного на рис. 7.50, представлены следующие данные:
— статистика смещений: глубины тестовой поверхности минус глубины внутри полной полосы обзора МЛЭ;
— график смещений глубин для угла луча, с которым была создана тестовая цифровая модель дна;
— по вертикальной оси отложены отклонения глубин по лучам внутри полной полосы обзора от соответствующих глубин тестовой модели;
— по горизонтальной оси отложены углы лучей внутри полной полосы обзора (±70°);
274
7.6. Тест гарантии качества функционирования (совмещение цифровых моделей)
Х:618163.19 Y:6G8405 87 Lat-N 40-40.052349
Рис. 7.49. Окна ЭГИС «HYPACK» с матрицей референцного полигона и галсами съемки (а) и матрицей тестового полигона и тестовыми галсами съемки (6) [HYPACK, Inc]
275
Глава 7. Практические методики контроля и оценки качества для многолучевых эхолотов
— на графике крестиками отмечены значения смещений, а кружками смещения с уровнем доверительной вероятности 95 %.
Точность глубин начинает ухудшаться, начиная с луча, имеющего предельный угол 45° (см. рис. 7.50).
На закладке «Details» окна «Beam Angle Test», изображенного на рис. 7.51, могут быть представлены гистограммы, наглядно демонстрирующие статистику различий референцной и тестовой моделей. Статистика представлена для заданных предельных углов лучей референцной модели (в примере, изображенном на рис. 7.51, углы лучей по ± 45° от вертикали).
Гистограмма представляет собой графическое распределение стандартных отклонений глубин между цифровой референцной моделью и глубиной по каждому лучу тестового измерения.
Величина «Мах Outlier» — максимальное отклонение глубины, «Mean Difference» — среднее отклонение глубин тестовой поверхности и поверхности, построенной на основе всех глубин внутри полос обзора, полученных на двух контрольных галсах. Величина «95 % Confidence» — оценка с 95 % уровнем доверительной вероятности равна 1,96 о, где о — стандартное отклонение глубины.
В представленном окне в качестве допустимой величины угла луча выбрано значение ±45°, определяющее ширину «гидрографической» полосы обзора с углом характеристики направленности на излучении 90°. Точность
Рис. 7.50. Окно программы теста допустимых углов лучей (Beam Angle Test) [HYPACK, Inc]
276
7.6. Тест гарантии качества функционирования (совмещение цифровых моделей)
Рис. 7.51. Окно программы теста допустимых углов лучей с гистограммой распределения погрешностей глубины по лучу 45° путем сравнения с глубинами «референцной» поверхности [HYPACK, Inc]
глубин внутри полосы соответствует требованиям особой категории съемки по S-44(5). Параметр «95 % Confidence» соответствует величине TVU по S-44 (5) [57]-см. п. 6.1.
Результат сравнения «референцной» поверхности с двумя поверочными галсами, взаимно-перпендикулярными полосами обзора, приведены в таблице и показаны на гистограмме на рис. 7.51.
Статистические результаты Получено Максимально допустимо
Максимальная невязка (выброс) 0,13 м 0,33 м
Средняя невязка (смещение) +0,03 м <0,06 м
Стандартное отклонение (1о) + 0,02 м —
или 95 % доверительной вероятности + 0,04 м По S-44 (5)
Результаты сравнения поверочных галсов с «референцной» поверхностью.
Этот отчет создается с помощью подпрограммы «Beam Angle Test», входящей в состав пакета программ «HYSWEEP» — программы пост-обработки данных МЛЭ «МВ Мах» фирмы «HYPACK 1пс.»
277
Глава 7. Практические методики контроля и оценки качества для многолучевых эхолотов
Пример результатов текстового отчета, выдаваемого программой, представлен в таблице.
+ Углы лучей (град.) (левый \ правый борт) Максимальные выбросы (Футы) Средняя невязка (футы) Стандартное отклонение (68 %) футы Точность на уровне 95 % доверительной вероятности (футы) = TVU (S-44)
20,0 3,7 0,11 0,08 0,16
25,0 3,7 0,11 0,08 0,16
30,0 3,7 0,11 0,08 0,15
35,0 4,0 0,11 0,08 0,15
40,0 4,0 0,10 0,08 0,15
45,0 4,0 0,10 0,07 0,15
50,0 4,0 0,10 0,07 0,15
55,0 4,5 0,10 0,07 0,15
60,0 8,8 0,10 0,08 0,15
65,0 8,8 0,10 0,08 0,16
70,0 8,8 0,10 0,08 0,16
75,0 8,8 0,11 0,08 0,16
7.7. Итоговые рекомендации по критериям контроля качества (QC) и гарантии качества (QA) функционирования многолучевого эхолота
В таблице 7.3 суммированы основные критерии возможности использования многолучевых систем [46]. Измерения, установки осей датчиков, калибровочные тесты, процедуры гарантии качества и стандарты критериев основаны на процедурах, которым в настоящее время следуют правительственные и коммерческие организации. Калибровки различных компонентов многолучевой системы и тесты точности функционирования должны выполняться и документироваться при проведении всех съемок с МЛЭ. Тесты контроля качества (QC) и гарантии качества (QA) рекомендуется проводить перед началом каждой ответственной операции обеспечения дноуглубительных работ или, время от времени, для съемок, в которых требуется высокая точность и гарантии качества. В зависимости от документально подтвержденной стабильности системы частота выполнения QC и QA тестов может быть изменена по отношению к требованиям, приведенным в таблице 7.3. Многие из последующих критериев повторяют критерии для однолучевого эхолота и эхотрала.
7.7.1. Максимальный угол обзора
Угол обзора и полоса обзора обычно не превосходят указанных величин, если только результаты независимого теста гарантий качества не покажут, что необходимая точность глубин может быть получена с большим углом обзора. Угол обзора должен быть уменьшен для ответственных операций по обнаружению объектов или если тест гарантий качества функционирования покажет плохую точность на крайних лучах. Следует избегать слишком больших пятен облучения лучей на дне путем ограничения угла обзора.
278
7.7. Итоговые рекомендации по критериям контроля качества (QC)...
7.7.2. Наложение смежных полос обзора
В навигационных проектах при акустическом тралении с целью поиска скал и других опасных объектов, оставшихся над проектным уровнем, рекомендуется обеспечивать 50% перекрытие полос (т. е. 200% покрытия дна). Для работ по обнаружению подводных препятствий угол обзора обычно не должен превосходить 90° ввиду растяжения пятна облучения, а также слабости эхосигналов от внешних лучей.
7.7.3. Скорость звука и калибровка с помощью калибровочной доски
Станции определения вертикального профиля скорости звука должны производиться через указанный интервал. Они должны выполняться в пределах района работ и с такой подробностью, чтобы вся толща воды могла быть адекватно промоделирована. Контроль качества с помощью тарировки должен выполняться для центральных лучей, если это возможно. Процедуры использования калибро-вочой доски должны следовать предписаниям, используемым для однолучевых эхолотов и эхотралов.
ТЛЛ. Выставка осей датчиков и их калибровка («патч-тест»)
Проверка выставки осей датчиков и калибровки с целью определения (подтверждения) величин остаточных систематических ошибок должны выполняться на нерегулярной основе, обычно тогда, когда обязательный QA-тест показывает, что полученные данные не соответствуют предъявляемым требованиям.
7.7.5. Тестирование с целью гарантии качества точности функционирования (QA)
Тесты QA являются абсолютно необходимыми и обязательными. Они должны выполняться в начале каждого проекта и периодически во время выполнения проекта. Промежуток времени между QA-тестами зависит от устойчивости результатов. Максимальная средняя невязка, рассчитанная между двумя наборами батиметрических данных, не должна превосходить назначенного допуска. Допустимое стандартное отклонение является функцией глубины, как показано в таблице 7.3.
1Л.6. Минимальная глубина
Многолучевой эхолот не должен использоваться для съемок, обеспечивающих дноуглубительные работы с оплачиваемым расчетом объемов при глубинах, менее указанных в таблице 7.3.
ТЛЛ. Максимальная скорость при съемке
Рекомендуемые максимальные скорости предписаны, чтобы обеспечить целостность данных. Дальнейшее уменьшение скорости может быть необходимо для
279
00
Таблица 7.3.
Классификация проектав
Навигационные проекты и дноуглубление Материал дна Другие съемки и изучение рельефа
Твердое дно Мягкое дно
КОНТРОЛЬ КАЧЕСТВА МЛЭ Максимальный угол обзора Перекрытие пятен облучения лучей Тарировка центральных лучей Проверка выставки осей датчиков Калибровка остаточных систематических ошибок («патч-тест») 90° 10%—50% 1/день Как необходимо периодически 120° 10% 1/дснь Как необходимо периодически неограниченный нс оговорен нс обязателен Как необходимо периодически
МИНИМАЛЬНО ДОПУСТИМЫЕ ГЛУБИНЫ ПРОЕКТА Дноуглубление Съемка рельефа дна > 4,6 м > 6,1 м >4,6 м > 6,1 м Не определено Любые глубины
МАКСИМАЛЬНАЯ СКОРОСТЬ НА СЪЕМКЕ 2-5 узл 5-10 узл нс лимитирована
АКУСТИЧЕСКАЯ ЧАСОТА (+ 20%) 200 kHz 200 kHz 200 kHz
ОПРЕДЕЛЕНИЕ СКОРОСТИ ЗВУКА В ВОДЕ Выполнение измерения профиля скорости звука Точность регистрации скорости звука Интервал регистрации скорости звука по глубине Предельный допуск между зондированиями Местоположение станции измерения скорости звука Внутренняя калибровка датчика скорости звука > 2/день 0,3 м в секунду 1,5 м 1,5 м в секунду В месте проведения еженедельно 2/день 0.3 м в секунду 1,5 м 1,5 м Около места съемки еженедельно 2/день 0.3 м в секунду 1,5 м 1,5 м поблизости ежемесячно
РАЗЛИЧНЫЕ ПРОВЕРКИ Калибровка проседания судна Проверка статического заглубления антенны ежегодно 2/день ежегодно 2/день ежегодно 2/день
ТЕСТ ГАРАНТИИ КАЧЕСТВА ФУНКЦИОНИРОВАНИЯ (QA) Периодичность проведения Максимальные выбросы по глубине (мах Outliers) Максимально допустимая средняя невязка (mean bias) Стандартное отклонение (95%) 1/проскт 0,3 м < 0,03 м как в таблице S-44 1/нроскт 0,3 м < 0,06 м Как в таблице S-44 3 месяца 0,6 м Нс определено Не определено
Глава 7. Практические методики контроля и оценки качества для многолучевых эхолотов
РЕГИСТРИРУЕМЫЕ ГЛУБИНЫ Для расчета объемов дноуглубления Планшет до и после дноуглубления Планшет с отчетными данными («грид») Максимальный размер ячейки «грида» Регистрация с округлением до ближайших: Все полученные глубины Отобранные глубины Ближайшие к центру глубины 1 м 0,03 м Все полученные глубины Отобранные глубины «Shot» или минимальная 5 м 0,03 м Не определено Не определено По желанию Как требуют 0,03 м
Необходимые критерии качества и точности функционирования для многолучевой съемки (продолжение)
Таблица 7.4.
Минимальная периодичность Калибровочный процесс Разрешенный допуск с вероятностью (95%) Корректирующие действия
ВЫСТАВКА ОСЕЙ ДАТЧИКОВ И ИЗМЕРЕНИЕ СМЕЩЕНИЙЙ
Преобразователи МЛЭ Начальная установка Гиротеодолит, тахеометр 0,5° перемонтировать
Гирокомпасе Начальная установка Самокалибровка спецификации производителя Переместить
Крен, дифферент, вертикальное перемещение Начало проекта Самокалибровка (Self calibration). 0,1° перемонтировать
Антенна GPS Начальная установка Нивелирование 0,03 м Переместить
Динамическое заглубление антенны ежегодно Теодолит — нивелир / DGPS 0,03 м Нет
«ПАТЧ ТЕСТ» - КАЛИБРОВКА ОСТАТОЧНЫХ СИСТЕМАТИЧЕСКИХ ОШИБОК
Дифферент (Pitch) Начальная установка и модернизация 2 пары взаимнообратных галсов на склоне 0,06 м Ввести поправку в программу
Крен (Roll) Начальная установка и модернизация 1 пара взаимно-обратных галсов на плоском дне 0,06 м Ввести поправку в программу настройки
Временная задержка (Time Delay) Начальная установка и модернизация 2 пары взаимнообратных галсов на склоне 0,06 м Ввести поправку в программу настройки
Азимутальное смещение (Azimuth/Yaw') Начальная установка и модернизация 2 пары параллельных галсов на склоне или между характерным 0,06 м Ввести поправку
7.7. Итоговые рекомендации по критериям контроля качества (QC)...
Глава 7. Практические методики контроля и оценки качества для многолучевых эхолотов
многолучевых систем или ГБО, чтобы гарантировать 100% или большее покрытие вдоль направления движения (совмещение пятен облучения) или обнаружение объектов.
7.7.8. Частота акустического сигнала
Для большинства навигационных проектов на малых глубинах рекомендована частота 200 Гц, однако, могут быть использованы системы с другими частотами, если это требуется для лучшего разрешения или проникновения сигнала в толщу осадков в конкретных районах работ. Частота не является обязательным критерием.
7.7.9. Калибровка скорости звука
Калибровка измерителя скости звука является необходимым условием для получения высокой точности данных с помощью многолучевого эхолота, особенно на крайних лучах.
Более частые калибровки могут понадобиться в условиях, где температура и соленость изменяются в районе съемки в широких пределах.
7.7.10. Калибровка проседания судна на ходу
Если для определения поправок уровня не используется фазовая СНА, реализующая режим кинематики реального времени (RTK), то определение величины поправки динамического заглубления (проседание судна на ходу и изменение загрузки) должны проводиться с указанными интервалами.
7.7.11. Зарегистрированные глубины
Для съемки, на основе которой обеспечиваются расчеты объемов дноуглубления, рекомендуется полный набор данных о глубинах. Ввиду того, что новейшие МЛЭ регистрируют значительно больше глубин, чем могут отобразить или чем необходимо для расчета объемов, то они могут быть прорежены путем «гридирования» с использованием гидрографического программного обеспечения. Выбор максимального размера ячейки грида зависит от конкретного приложения. Для проектов, обеспечивающих дноуглубление, размер грида должен быть как можно меньше, обычно рекомендуется от 1 до 5 м. При этом в качестве «репрезентативной» следует выбирать глубину, ближайшую к центру ячейки грида, а не минимальную, максимальную или среднюю. В случае ровного «мягкого» дна размер ячейки грида может быть увеличен.
Необходимые критерии качества и точности функционирования для мелководной многолучевой съемки приведены в таблице 7.3. [46]
Приведенная частота калибровок не может рассматриваться как абсолютная, поскольку зависит от местных условий, таких как акватория, на которой выполняется проект, от стабильности результатов между повторяемыми тестами, и от характера проекта и т. д.
282
7.7. Итоговые рекомендации по критериям контроля качества (QC)...
7.7.12. Документация по калибровке, контролю качества (QC) и тесту гарантии качества функционирования (QA)
Документация проекта выполнения работ и (или) файлы данных в ходе выполнения работ должны содержать документальные доказательства, что все калибровочные тесты были выполнены. Документация включает рукописный журнал (или аналогичный цифровой документ), содержащий данные угловых смещений датчиков, сведения по выставке осей датчиков (в статических условиях), результаты калибровки в соответствии с процедурой «патч теста», данные измерений вертикального распределения скорости звука в воде; наблюдения на уровенном посту в период выполнения калибровочных и промерных работ; результаты выполнения теста функционирования (performance test) и другие наблюдения, подтверждающие точность полученных глубин. Подлинные записи таких тестов и калибровок должны постоянно находиться в полевом журнале гидрографа на борту судна.
Глава 8.
ИСПОЛЬЗОВАНИЕ ГИДРОЛОКАТОРОВ БОКОВОГО ОБЗОРА ДЛЯ ОБНАРУЖЕНИЯ ПОДВОДНЫХ ПРЕПЯТСТВИЙ
8.1. Современные гидролокационные системы бокового обзора, предназначенные для гидрографической съемки
8.1.1. Принцип работы гидролокатора бокового обзора
Гидролокатор бокового обзора (ГБО) использует звуковой импульс для формирования картины подводной среды. Термин «боковой обзор» относится к тому простому факту, что такой гидролокатор «смотрит» в обе стороны, а не вперед, и формирует изображение при физическом движении антенны гидролокатора над дном. Никакой другой тип гидролокатора не может дать столь ясно интерпретируемой картины поверхности дна и расположенных на нем объектов. Гидрографические применения интересуют объекты как техногенного (затонувшие суда), так и экзогенного (формы рельефа) происхождения.
Гидролокация бокового обзора является инструментом, обеспечивающим получение изображения дна с высокой разрешающей способностью с обеих сторон от линии движения судна. ГБО не дает абсолютных высот донных объектов, однако, позволяет получать относительные превышения объектов на дне, на основе которых могут быть приблизительно оценены высоты объектов. ГБО позволяет получать детальную акустическую картину дна, называемую сонограмма {sonographs), которая в недавнем прошлом регистрировалась на бумажном носителе в аналоговом виде.
Современные ГБО обеспечивают запись акустической информации бокового обзора в цифровом виде. Цифровой ГБО, будучи объединен с многолучевой системой съемки дна, применяется при выполнении высокоточных съемок для обнаружения препятствий. Принцип работы ГБО показан на рис. 8.1 [47].
Гидролокатор бокового обзора (ГБО) функционирует следующим образом. Установленные на подводном носителе антенны буксируются в водной толще с постоянными курсом, скоростью и высотой над морским дном. Во время буксировки антенны постоянно излучают акустические импульсы с интервалом, величина которого задается с высокой точностью. Антенны начинают принимать отраженный от дна эхосигнал сразу же после его излучения. Это продолжается в течение того короткого промежутка времени, пока не будет излучен следующий импульс (см. рис. 8.2), затем цикл повторяется.
Характеристика направленности антенн ГБО в горизонтальной плоскости (вид сверху) имеет ширину менее нескольких градусов, что позволяет «просматривать» узкую полосу дна (см. рис. 8.3), зато характеристика направленности в вертикальной плоскости достаточно широкая (рис. 8.4). Это обеспечивает возможность облучать акустической энергией значительное пространство в стороне от линии движения, таким образом осуществлять так называемый «боковой обзор».
284
8.1. Современные гидролокационные системы бокового обзора...
Набортная аппаратура
Рис. 8.1. Принцип действия гидролокатора бокового обзора [US АСЕ Manual, 2001]
Морская поверхность
285
Глава 8. Использование гидролокаторов бокового обзора...
Основной лепесток
характеристики
Ширина характеристики
направленности
антенн ГБО (вид сверху)
Рис. 8.3. Форма характеристики направленности антенн ГБО в горизонтальной плоскости
Вертикальная ось антенны
вертикальной плоскости
Рис. 8.4. Форма характеристики направленности антенн ГБО в вертикальной плоскости
Возвращенный эхосигнал от узкой полосы морского дна, перпендикулярной курсу перемещения носителя антенн, записывается в аналоговом или цифровом виде. Такая запись представляет собой интенсивность обратного рассеивания сигнала — амплитуду эхосигнала в функции времени.
286
8.1. Современные гидролокационные системы бокового обзора...
В современных программах, обеспечивающих регистрацию данных ГБО, как правило, окно эхо-сигнала, имеющееся в программных пакетах регистрации, позволяет просмотреть амплитуду сигнала каждой посылки ГБО в функции времени (временная развертка эхосигнала). Амплитуды возвращенного от дна акустического сигнала представляются в единицах алфавитно-цифрового преобразователя.
Хотя это окно на первый взгляд не представляет интереса для получения локационного изображения, оно очень полезно для оценки работы ГБО. С помощью радио-кнопок возможен выбор одной из следующих опций графического изображения (см. рис. 8.5):
— представление развертки сигнала последней посылки (A Single Ping);
— представление сигналов многих посылок {Multiple Ping);
— представление необработанного сигнала от ГБО;
— представление сигнала ГБО, обработанного программой.
Рис. 8.5. Окно визуализации амплитуды эхосигнала в функции времени [HYPACK, Inc]
На локационном изображении регистрируются зоны с сильными и слабыми интенсивностями эхосигналов. Можно провести аналогию с телевизионной разверткой, когда изображение формируется сотнями линий. Одна линия не несет полезной информации, но их последовательное объединение формирует изображение. Аналогичным образом формируется акустическое изображение в современном ГБО. При приближении антенны к дну, осуществляется «поиск дна» и далее начинается излучение акустических импульсов. ГБО с частотой 325 кГц обеспечивает следование импульсов с частотой 10 Гц, при этом даже на скорости хода 6 узл. обеспечивается практически непрерывное акустическое освещение дна, изображенное на рис. 8.6.
287
Глава 8. Использование гидролокаторов бокового обзора...
Рис. 8.6. Акустическое освещение дна в результате серии последовательных посылок ГБО СМ-2
В современных ГБО повсеместно используется преобразование аналогового сигнала в цифровую форму, при этом градациям интенсивности присваиваются цифровые значения от 0 до 255. На формирование гидроакустического изображения влияют многочисленные факторы, знание которых необходимо оператору, во-первых, для получения качественных изображений дна, а во-вторых, для правильной интерпретации полученных изображений и поиска полезной информации. Цифровая регистрация современных ГБО обеспечивает создание растрового изображения прямо на экране компьютера.
8.1.2. Классификация гидролокаторов бокового обзора
Гидролокаторы бокового обзора могут быть классифицированы по следующим признакам.
— По диапазону рабочих глубин: ГБ О бывают глубоководные и мелководные.
Глубоководные ГБО используют гидроакустические сигналы на низких частотах, как правило, менее 100 кГц, для целей обследования больших по площади акваторий с невысокой подробностью для обнаружения сравнительно больших объектов.
Мелководные гидролокаторы используют высокие (200-800 кГц) и сверхвысокие частоты (800-1200 кГц) для получения детальных акустических изображений, при этом, как правило, антенна должна быть приближена к морскому дну.
— По принципу установки приемоизлучающей антенны: буксируемые или набортные.
У буксируемых ГБО приемоизлучающая антенна буксируется за судном носителем на кабель-тросе, при этом стабилизация антенны осуществляется автоматически путем специальных расчетов ее гидродинамики.
У набортных ГБО приемоизлучающая антенна жестко крепится к корпусу судна носителя либо устанавливается на специальном съемном забортном устройстве. В этом случае для обеспечения эффективной работы ГБО необходимо использовать датчик перемещений сунна (ДПС).
288
8.1. Современные гидролокационные системы бокового обзора...
Буксируемые ГБО предполагают наличие на судне специальной лебедки для использования кабель-троса. При этом положение антенны относительно центра судовой системы координат может определяться по длине вытравленного кабеля и информации о высоте антенны над морским дном, которая вырабатывается антенной и передается по кабелю на судно. В случае глубоководного ГБО определение положения буксируемой антенны относительно центра судовой системы координат выполняется, как правило, с использованием гидроакустической системы с ультракороткой базой.
— По принципу работы буксируемые ГБО бывают аналоговыми или цифровыми.
У аналогового ГБО буксируемая антенна совмещена с усилителем, а по кабель-тросу на борт судна передается аналоговый сигнал. У цифрового ГБО буксируемая антенна совмещена с аналого-цифровым преобразователем и цифровым устройством обработки акустического сигнала, а по кабель-тросу сигнал передается в цифровой форме, при этом значительно повышается помехоустойчивость и надежность работы системы ГБО.
Первые ГБО были исключительно аналоговые, при этом на борту судна регистрация гидролокационной информации также осуществлялась в аналоговом виде с помощью электромеханического устройства (фототелеграфный аппарат) путем записи на металлизированную бумагу (аналоговую сонограмму). В настоящее время даже все аналоговые ГБО осуществляют запись гидроакустической информации в цифровом виде, что обеспечивает возможность ее удобного хранения и последующей автоматизированной обработки цифровых локационных изображений.
— По принципу привязки к судну-носителю ГБО могут быть стационарные и мобильные.
Стационарные ГБО, как правило, глубоководные и буксируемые, являются частью исследовательского оборудования экспедиционного судна. Лебедка такого ГБО установлена стационарно, а набортная аппаратура смонтирована в соответствующей лаборатории и соединена проложенными кабельными линиями. Носитель антенн такого ГБО может весить несколько сот килограммов и помимо гидроакустических антенн способен нести маяк-ответчик гидроакустической системы с ультракороткой базой для фиксации положения антенн ГБО в судовой системе координат. Для буксировки антенны используется тяжелый кабель со стальной оплеткой, длина которого может достигать 5-8 км.
Основное применение стационарных ГБО — исследование океанского дна на больших глубинах.
Мобильные ГБО, как правило, мелководные, могут быть как буксируемыми, так и набортными.
Подводный носитель антенн мобильного ГБО может весить менее 20 кг, что допускает работу с ним одного человека. При работе на малых глубинах (до 20-30 м) допускается использование «мягкого» кевларового кабель-троса длиной 100-120 м; при этом можно обойтись без лебедки или использовать для хранения кабель-троса кабельную вьюшку с токосъемником. Для работы на больших глубинах могут использоваться портативные лебедки с токосъемником, вооруженные стальным кабель-тросом длиной до 600 м (см. рис. 8.9). Набортная аппаратура мобильного ГБО может включать специализированный блок для свя
289
Глава 8. Использование гидролокаторов бокового обзора...
зи с антенной, сопряженный с промышленным компьютером или портативным компьютером, содержащим необходимые платы цифрового ГБО (см. рис. 8.7Б). Современные мобильные ГБО имеют весогабаритные характеристики, обеспечивающие возможность их использования на небольших плавсредствах, вплоть до надувных шлюпок.
Такие «портативные» ГБО размещаются в специальных защитных контейнерах (см. рис. 8.7А).
Подводный носитель антенн ГБО (см. рис. 8.8) специально спроектирован таким образом, чтобы обеспечить стабильное перемещение антенны при буксировке.
Обычные параметры ГБО для работ в шельфовой зоне:
— ширина характеристики направленности: в горизонтальной плоскости от 0,5° до 2,5°; в вертикальной плоскости — от 40° до 70°;
— частота: более — 100 кГц, однако, лучшее разрешение можно получить на частотах 40-500 кГц.
Рис. 8.7. Аппаратура портативного ГБО СМ-2 фирмы С-МАХ (Великобритания)
Рис. 8.8. Подводный носитель с антеннами ГБО СМ-2 фирмы С-МАХ (Великобритания)
290
8.1. Современные гидролокационные системы бокового обзора...
Рис. 8.9. Портативная лебедка SK172 для ГБО СМ-2
Интенсивность обратного рассеяния является функцией размера объекта (площади поверхности), формы объекта, а также его расположения относительно направления движения антенны и свойств материала объекта (металл, скала, пластмасса).
— По спектру излучаемых частот ГБ О могут быть узкополосные и широко-плолосные с линейно-частотной модуляцией (ЛЧМ).
ГБО с ЛЧМ обеспечивают повышенную помехозащищенность и позволяют выполнять съемку на больших скоростях, сохраняя при этом способность обнаружения донных объектов. Именно такие ГБО целесообразно использовать для гидрографических целей.
8.1.3. Состав аппаратуры гидролокатора бокового обзора
ГБО включает устройство регистрации, подводный датчик и соединяющий их кабель.
В наиболее общем случае цифровая буксируемая гидроакустическая система бокового обзора состоит из следующих частей:
— подводный носитель антенны ГБО с блоком электроники (towfish)\
— лебедка с кабель-тросом (winch
— бортовая аппаратура, совмещенная с портативным персональным компьютером, либо специальный блок, совмещающий платы компьютера и ГБО (Data Acquisition Unit — DAU).
В наиболее простом виде ГБО регистрирует изменения интенсивности обратного рассеивания акустической энергии, поступившей от преобразователя по кабелю в регистрирующую аппаратуру.
По команде регистратора электрический сигнал направляется по кабелю в преобразователь, который преобразует сигнал в акустический импульс и излучает в водную толщу в соответствии с заданной характеристикой направленности акустических антенн ГБО. Затем через короткий промежуток времени
291
Глава 8. Использование гидролокаторов бокового обзора...
отраженные от дна эхосигналы начинают поступать на приемную антенну, усиливаются по времени прихода в соответствии с алгоритмом временной регулировки усиления (TVG) и передаются по кабелю в регистратор. Регистратор далее обрабатывает сигнал, оцифровывает его, рассчитывает его пространственное положение пиксель за пикселем и распечатывает на термической или электрочув-ствительной бумаге в виде линий, соответствующих каждой акустической посылке. Ширина характеристики направленности в горизонтальной плоскости от 0,5° до 2,5°, а в вертикальной плоскости — от 40° до 70°.
Запись может быть аналоговой на движущейся бумажной ленте или цифровой. Цифровая запись обеспечивает возможность исправления наклонных дальностей их горизонтальными проложениями (горизонтальными дальностями) и, таким образом, перехода к плоскому изображению полос обзора, которые могут быть объединены в мозаику, чтобы представить обширные районы морского дна.
8.1.4. Высота носителя антенн над дном и его скорость
Качество результатов работы ГБО часто зависит от высоты ведения носителя антенн над дном, свойств целей на дне или изображения целей. Как правило, при стандартной конфигурации ГБО съемка проводится при условии, что высота носителя антенн над дном составляет от 8 до 20 % диапазона наклонной дальности, установленного в ГБО. Если антенна ГБО буксируется слишком-высоко над дном, размеры тени от объектов уменьшаются и способность распознавания объектов на дне ухудшается. Если буксировка антенн осуществляется слишком низко над дном, то отражение на краях полосы обзора может стать слишком слабым, что уменьшит эффективную наклонную дальность ГБО и, следовательно, ширину полосы обзора. Таким образом, если носитель буксируется на высоте над дном менее 8 %, то ширина полосы обзора, которую можно было бы ожидать при данном диапазоне наклонной дальности, сужается. Эмпирическое правило гласит: «При высоте над дном ниже 8% от диапазона достижимая дальность составляет величину 12,5, умноженную на высоту антенн над дном (м)».
Скорость перемещения носителя антенн ГБО необходимо подобрать таким образом, чтобы каждая цель на дне была бы троекратно облучена при трех последовательных посылках ГБО. Данное условие в дальнейшем будем именовать как требование: «трех акустических контактов с целью».
8.1.5. Формирование изображения донного объекта
Точность или способность системы ГБО к обнаружению объекта с заданными размерами зависит от ряда факторов: от типа материала, размера и формы объекта, рефракции (звуковых лучей), акустических шумов, влияния биологических факторов, влияния кильватерной струи, отражения акустических лучей от поверхности моря, а также стабильности движения носителя антенн ГБО. На однородном типе грунта зоны тени или более светлые области (или темные области на цифровом изображении) на аналоговой записи ГБО обычно являются функцией акустического облучения, которому подвергается поверхность дна. Зона тени спереди (прямо перед носителем) с сильной отражающей способностью означает пониже
292
8.1. Современные гидролокационные системы бокового обзора...
ние (депрессию) поверхности дна. Зона тени в удаленной зоне (вдалеке от носителя) с сильной отражающей способностью означает поднятие дна.
8.1.6. Вычисление высоты цели над дном
Приблизительный расчет высоты объекта над дном может быть получен по формулам [53], вытекающим из геометрических соотношений, представленных на рис. 8.10.
Рис. 8.10. Графическое представление алгоритма определения высоты цели с помощью ГБО
Акустическая отражающая способность является функцией размера донного объекта, формы объекта, его расположения относительно направления перемещения носителя и их взаимного расположения. Сталь и скала обладают хорошей отражательной способностью. Стекловолокно, мягкая сосна, пластик и резина имеют плохую отражательную способность (плохие рефлекторы). Обычно 200 % покрытие полос съемки необходимо при использовании диапазона с наклонной дальностью 100 м. Необходима ежедневная проверка (тест) такой характеристики как способность обнаружения объекта определенных размеров.
8.1.7. Определение планового положения объекта на дне
Для того, чтобы точно определить плановое положение объекта на морском дне с помощью ГБО, необходимо в первую очередь определить центр судовой системы координат, а затем, задав смещение носителя, рассчитать плановое положение антенн [47]. В качестве центра судовой системы часто используется по-
293
Глава 8. Использование гидролокаторов бокового обзора...
GPS антенна
Блок лебедки
Носитель Антенн ГБО
Антенна эхолота
Г оризонтальная Дальность до объекта
цоризонталь-ное отстояние объекта
Рис. 8.11. Расчет плановых координат объекта на морском дна [US АСЕ Manual, 2001]
ложение антенны однолучевого эхолота, (см. рис. 8.11 и рис. 8.20). Направления «вперед» — вдоль диаметральной плоскости (ДП) и «в правый борт» (в плоскости, параллельной плоскости мидель-шпангоута) от центра приведения имеют знак «+» и называются горизонтальными отстояниями носителя по ДП и МШ соответственно. Положение антенны однолучевого эхолота в географической системе координат рассчитывается относительно известного положения антенны GPS. Для этого взаимное смещения антенн по ДП и МШ должно быть точно определено. При этих расчетах используется величина мгновенного значения курса носителя (судна), которое представляет собой угол между ДП и меридианом (направленим на Север). Когда плановые координаты антенны эхолота рассчитаны, для получения географических координат носителя антенн ГБО может быть использовано горизонтальное отстояние носителя по ДП и МШ соответственно и курс судна. Теперь для расчета положения объекта на дне необходимо использовать величину горизонтальной дальности до объекта, полученную с помощью проектирования наклонной дальности, измеренной ГБО, на плоскость дна, а также направление на объект, которое в первом приближении ортогонально курсу судна. На рис. 8.11 горизонтальная дальность около 38 м на диапазоне наклонных дальностей в 75 м. Технология расчета положения подводного носителя на примере HYPACK/HYSCAN Survey приводится в п. 8.3.1.
8.1.8. Записи ГБО
В общем случае имеется два типа записей ГБО. Приведенные на плоскость и исправленные записи показывают горизонтальные проложения наклонных дальностей, как будто аэроснимок дна. Зная высоту носителя над дном, возможно на основе
294
8.1. Современные гидролокационные системы бокового обзора...
наклонных дальностей ГБО рассчитать их горизонтальные проложения. В случае аналоговой записи, скорость протяжки бумаги, на которой выполняется запись (сонограмма), может быть скорректирована в соответствии со скоростью хода судна (подводного носителя антенн ГБО). Неисправленные записи (сонограммы) в качестве первого полученного эхосигнала представляют высоту носителя над дном. Горизонтальные дальности (горизонтальные проложения наклонных дальностей) не могут быть прямо масштабированы с использованием таких записей. Запись на рис. 8.12 повсюду показывает небольшие песчаные волны. Затонувшее судно отображается черной засветкой, символизируя сильное обратное отражение акустического сигнала. Положение затонувшего судна может быть получено путем приведения наклонной дальности до него на плоскость. В этом случае «объект» оказывается примерно в 30 м по левому борту от траектории подводного носителя. Высота затонувшего судна может быть рассчитана на основе проектирования на плоскость наклонной дальности до него и длины самой тени. Горизонтальные линии поперек записи представляют собой отметки событий, автоматически наносимые через заранее заданный временной интервал. Они позволяют оператору соотносить запись ГБО с координатами и глубинами.
Современные ГБО способны обеспечивать возможность визуализации информации, поступающей по трем каналам: два гидроакустических, боковой обзор по правому и левому бортам, и один информационный канал. Большинство
Рис. 8.12. Первичное акустическое изображение бокового обзора на экране монитора (ГБО СМ-2) [С-МАХ]
295
Глава 8. Использование гидролокаторов бокового обзора...
ГБО обеспечивает измерение высоты буксируемого носителя антенн над морским дном (altitude). Эта информация необходима для безопасной буксировка носителя над дном, удержания постоянной высоты антенн ГБО над дном для обеспечения качественного акустического изображения, а также для расчета планового положения антенн.
Информационный канал объединяет следующие данные: высоту антенны над дном и плановое положение средств местоопределения судна (как правило, координаты, поступающие в набортную аппаратуру ГБО от спутниковой навигационной аппаратуры по протоколу NMEA 0183).
Акустическое изображение бокового обзора, представленное на рис. 8.12, получено с помощью программного обеспечения реального времени, реализованного в ГБО СМ-2 фирмы С-МАХ. Это первичное, или неисправленное акустическое изображение, которое формируется наклонно излучаемыми акустическими импульсами. Центральная ось изображения представляет собой «мертвую зону», в которой акустическое изображение дна непосредственно под антеннами отсутствует. Это обусловлено особенностью характеристики направленности антенн в вертикальной плоскости (см. рис. 8.12.). На центральной оси периодически отображается высота антенн над дном, что обеспечивает контроль за высотным положением антенн. Параметр “Normal”, индицируемый в поле «Geometry» в самой верхней части изображения (рис. 8.12), указывает, что оба канала акустического изображения не исправлены за искажения, вызванные наклонным распространением акустических импульсов, неравномерным движением антенн и другими факторами.
Альтернативами обычному (Normal) отображению являются режимы: Мар и SRC. Режим Мар обеспечивает переход от наклонных дальностей (R) к горизонтальным дальностям (X), а также делает одинаковыми продольный и поперечный масштабы изображения. Режим SRC обеспечивает только 'Slant Range Correction" — коррекцию изображения, связанную с переходом от наклонных дальностей к горизонтальным, т. е. устраняет искажения акустического изображения дна в направлении поперек движения судна. Все это становится возможным при компьютерной цифровой обработке растрового изображения в реальном масштабе времени. Режим «Мар» доступен только в том случае, когда ГБО сопряжен с датчиком координат (например, СНА GPS).
Цифровая обработка позволяет оперативно решать и ряд других полезных задач, среди которых следует в первую очередь упомянуть возможность точного определения координат точек целей на дне, путем наведения на них курсора. Кроме того, с помощью ГБО можно решать задачи определения превышения донных объектов, относительно поверхности морского дна. На рис. 8.13 представлены геометрические соотношения, позволяющие выполнить такие вычисления с использованием компьютера, входящего в состав ГБО.
Данные ГБО можно использовать также для оперативного расчета длин протяженных объектов на морском дне (например, затонувшего судна). Однако, для выполнения этой операции очень важно правильно выбрать курс съемки и обеспечить проводку буксируемого носителя параллельно предполагаемому направлению простирания объекта. На рис. 8.12 изображение затонувшего судна получилось достаточно четко и его линейные размеры могут быть вы-
296
8.1. Современные гидролокационные системы бокового обзора...
числены с хорошей точностью. Следует особо подчеркнуть, что вся теория использования ГБО базируется на предположении о плоском характере морского дна, поэтому использование ГБО на сильно расчлененном рельефе вызывает дополнительные серьезные затруднения при интерпретации материалов гидролокационной съемки.
8.1.9. Качество гидролокационной съемки
Нерегулярность движения подводного носителя антенн ГБО может вызвать ухудшение изображения записи данных бокового обзора. Особенно заметно это проявляется на мелководье, когда длина вытравленного кабель-троса мала и воздействующее на судно волнение передается на подводный носитель. Когда судно испытывает килевую качку, носитель антенн также испытывает аналогичное тормозящее движение. Быстрые положительные и отрицательные ускорения носителя антенн ухудшают качество записей ГБО. Качество гидролокационной съемки зависит от точности определения углов пространственной ориентации антенны:
• Крена — ритмичных движений судна и носителя антенн вокруг их продольной оси.
• Рыскания — нестабильности прямолинейного движения судна и носителя антенн вокруг вертикальной оси.
• Вертикального перемещения — ритмичного поднятия и опускания судна и носителя антенн относительно некоторой средней плоскости.
• Дифферента — нестабильности перемещения в горизонтальной плоскости (поднятие и опускание носовой и хвостовой частей носителя антенн).
297
Глава 8. Использование гидролокаторов бокового обзора...
В случае использования набортного ГБО, когда антенны жестко связаны с корпусом судна-носителя, для получения качественной сонограммы необходимо использовать ДПС (MRU). При использовании буксируемых антенн носитель специально рассчитан таким образом, чтобы обеспечить минимальные угловые и вертикальные перемещения. При этом дополнительных средств измерения и учета параметров пространственной ориентации, как правило, не требуется.
8.2. Требования к выполнению съемки с помощью гидролокатора бокового обзора
Следующие разделы содержат требования, принятые на основе международного опыта съемок с ГБО. Эти требования разработаны для гидрографических съемок, направленных на создание морских карт, однако, данные требования могут быть напрямую использованы при выполнении ГБО-съемок, выполняемых для дноуглубительных проектов, морских инженерных и геологоразведочных работ.
8.2.1. Общие требования
ГБО должен использоваться для обнаружения препятствий, а мелководный многолучевой эхолот должен использоваться для определения наименьшей глубины над препятствием.
Применение современного цифрового ГБО рассмотрим на примере аппаратуры СМ-2 системы высокого разрешения, предназначенной для обследования дна, обнаружения и позиционирования объектов на дне (как крупных, так и малых), а также для биологических и экологических исследований и съемок. Аппаратура СМ-2 использует акустические импульсы на частоте 325 кГц и 780 кГц., что обеспечивает качество акустического (ультразвукового) изображения, близкое к фотографическому, независимо от прозрачности воды.
Стандарт Международной гидрографической организации (МГО) SP 44 (5-я редакция 2008 г.) для съемок в акваториях портов и каналов до глубины 40 м предписывает производить сплошное покрытие обследуемой акватории (съемки особой категории — Special Order), при этом съемка гидролокатором бокового обзора должна дополнять съемку, выполненную однолучевым эхолотом.
Данные ГБО должны использоваться на акваториях каналов, на которых отмечена необходимость использования многолучевого эхолота. Исполнитель работ должен регистрировать данные ГБО в цифровом виде с использованием буксируемых антенн. Система ГБО должна работать на минимальном диапазоне в 100 м так, чтобы высота носителя над дном составляла бы от 8 % до 20 % от используемого диапазона наклонной дальности.
Данные ГБО должны быть пересчитаны на плоскость картографической проекции.
Для расчета прямоугольных координат подводного носителя в первом приближении можно использовать элементы приведения к положению антенны од
298
8.2. Требования к выполнению съемки с помощью гидролокатора бокового обзора
нолучевого эхолота, координаты которого привязаны к антенне СНА. Полагая, что подводный носитель буксируется по линии, совпадающей с диаметральной плоскостью (ДП) и путевым углом судна, отстояние носителя от точки центра судовой системы координат по направлению ДП (Y) может быть рассчитано по формуле [47] (см. рис. 8.13):
Г-<8-»
где: Yoffset — смещение блока лебедки ГБО от центра приведения (например, антенны ОЛЭ) по ДП; ZQ^set — высота блока лебедки ГБО над динамической ватерлинией судна; Zj — заглубление носителя антенн ГБО, равное глубине по эхолоту минус высота носителя над дном; d — длина вытравленного кабеля на блоке лебедки ГБО; k — параметр приведения в наклонное расстояние «Са-ternary Factor», (й=0,7^-0,9); D — наклонное расстояние от блока до носителя (D=kd)\ L — горизонтальное расстояние носителя от блока лебедки по направлению путевого угла судна.
8.2.2. Точность
Съемка с ГБО должна выполняться таким образом, чтобы обеспечить обнаружение объектов с линейным размером 0,5 и 1,0 м (каждого из ребер куба) на основе измерения длины тени (S-44).
8.2.3. Скорость буксировки
Поскольку антенны ГБО излучают акустические импульсы с фиксированным интервалом (частотой), связанным с заданным диапазоном наклонной дальности, выбранная скорость буксировки антенн будет оказывать существенное влияние на способность системы детектировать цели на дне. Как правило, чем меньше скорость буксировки, тем больше возможностей для обнаружения объектов на дне. Антенны ГБО должны буксироваться с такой скоростью, чтобы обнаруживаемый объект был бы облучен А-акустическими посылками (обычно используется А=3, т. е. три акустических контакта). Зависимость возможности обнаружения цели с заданными линейными размерами от скорости буксировки графически показана на рис. 8.14.
Требуемая максимальная скорость буксировки (Ушах) в узлах может быть рассчитана по формуле:
Vmax = 1,9 TP/N; (8.2)
где: Р — частота акустических импульсов (количество импульсов за одну секунду; Т — размер цели (м); N— необходимое количество акустических контактов с целью (обычно, А=3).
Для съемки особой категории, предусматривающей обнаружение целей с размером не менее 1 м, можно приблизительно подсчитать максимально допустимую скорость буксировки для различных частот акустических импульсов, величины которых связаны с диапазонами измерения наклонных дальностей. Примеры расчета максимальной скорости по формуле (8.2).
299
Глава 8. Использование гидролокаторов бокового обзора...
Дистанция между посылками ГБО
L
Рис. 8.14. Определение скорости буксировки антенн ГБО [US АСЕ, Manual 2001]
Для частоты импульсов 7,5 имп/с, что соответствует диапазону дальностей 100 м, имеем:
^тах=1-9х1х(7,5/3) = 4,8(узл.)
Для частоты импульсов 5 имп/с, что соответствует диапазону дальностей 150 м, имеем:
^тах=1,9х1х(5/3) = 3,2(узл.)
8.2.4. Покрытие
Степень покрытия акватории должна быть 200%. Термин «степень покрытия» используется для пояснения того, до какой степени дно акватории покрыто полосами бокового обзора. Полоса обзора ГБО — это полоса поверхности дна, которая акустически освещена и зарегистрирована в записи ГБО вдоль траектории движения носителя антенн. Расстояние между линиями траекторий движения носителя антенн ГБО должно быть уменьшено от максимального значения, если запись ухудшается, т. е. если запись не показывает объекты на краях полосы обзора. Для гидрографических целей степень покрытия района ГБО-съемки выражается величиной, умноженной на 100%, и является интегральной. Степень покрытия в 100% характеризует тот факт, что поверхность дна была однократно акустически освещена с небольшими перекрытиями смеж
300
8.2. Требования к выполнению съемки с помощью гидролокатора бокового обзора
ных полос бокового обзора, которые были освещены дважды. Например, если вся поверхность дна была освещена дважды, то говорят, что степень покрытия акватории составляет 200 %.
Принятая методика, обеспечивающая 200 % степень покрытия, заключается в следующем:
(1) Методика 1. Выполняем ГБО — съемку с междугалсовыми расстояниями, равными половине дистанции между галсами, необходимыми для достижения степени покрытия — 100 %.
(2) Методика 2. Выполняем две независимые ГБО-съемки со степенью покрытия 100% так, что галсы второй съемки проходят между галсами первой. Окончательное расстояние между галсами двух съемок такое же, как и при методике 1. Однако, преимущество данной методики заключается в том, что поверхность дна просматривается боковым обзором под разными углами зрения при каждом проходе. (Возможность распознавания целей прямо под антенной ГБО и на небольшой наклонной дальности затруднительна. Данный метод позволяет обеспечивать акустическое освещение дна эхосиг-налами, полученными в стороне от антенн). Недостатком является то, что объекты, имеющие протяженность, совпадающую с направлением движения антенн (в нашем случае, направление «запад-восток» — см. рис. 8.16), могут оставаться необнаруженными.
(3) Методика 3. Выполняем две независимых ГБО-съемки с ортогональным направлением проектных галсов (см. рис. 8.17). Этот метод позволяет выполнить акустическое освещение дна с двух взаимно-перпендикулярных направлений. В зависимости от погодных условий курс направления галсов может быть подобран так, чтобы получить наилучшие эхосигналы от дна. Недостатком данной методики является то, что возможно появление плохо освещенных мест на дне, над которыми при первом и втором проходах антенны ГБО оказывались расположенными вертикально.
На рис. 8.15-8.17 в плане представлен район ГБО съемки. В центре района в виде условного обозначения помещен символ затонувшего судна, которое необходимо обнаружить с помощью ГБО. Линии со стрелками символизируют проектные галсы съемки. На рис. 8.15 проектные галсы, проложенные в направлении «запад-восток», должны обеспечить 100% степень покрытия района. Боковой обзор по правому и левому борту обеспечивает акустическое освещение в северном и южном направлениях от галса.
Расстояние между проектными галсами рассчитывается по следующим формулам [47]:
Для исправленного акустического изображения:
Рекомендованное междугалсовое расстояние = (2 х ДНД) - 40 м.
Для неисправленного акустического изображения:
Рекомендованное междугалсовое расстояние = = (2 х ДНД) - 40 м - (0,05 х ДНД),
где ДНД — диапазон наклонной дальности, установленный в ГБО (обычно для 800 кГц: 100, 50, 25 м).
301
Глава 8. Использование гидролокаторов бокового обзора...
Рис. 8.16. Съемка с ГБО: методика 2 [US АСЕ, Manual 2001]
Рис. 8.17. Съемка с ГБО: методика 3 [US АСЕ, Manual 2001]
302
8.2. Требования к выполнению съемки с помощью гидролокатора бокового обзор
8.2.5. Контроль качества съемки с помощью ГБО
8.2.5( 1). Контроль правильности функционирования
Контроль правильности функционирования системы ГБО должен прово; ся, по крайней мере, один раз в день. Контролю подвергается способность обнаруживать объекты на дне или вблизи дна на пределе диапазона накло] дальности. Каждый канал ГБО (боковой обзор правого и левого бортов) доу быть проконтролирован, чтобы убедиться в правильности настройки систем ее работоспособности. Контроль функционирования может быть выполне] любом отдельном объекте (подводной конструкции или отличительной фо рельефа), который удобно расположен или свойственен району съемки. Та цель может быть затонувшим судном, случайно обнаруженной конструкщ якорем буя, остатками трала или даже песчаным валом на дне.
Контроль правильности функционирования может выполняться в проце проведения съемки с ГБО, с соответствующей пометкой объекта на соногр; ме. Если удобной или пригодной цели на акватории не имеется, то специалт созданная цель может быть помещена на дне или вблизи дна и использова для контроля. Контроль правильности функционирования ГБО должен t ляться составной частью ежедневной работы с ГБО и должен отражаться записях ГБО.
8.2.5( 2). Существенные акустические контакты
Контакты с расчетом высоты цели над дном (на основе длины тени акустическс цели) по крайней мере 0,5 и 1,0 м должны рассматриваться как «существенные (significant), если их характерный след на сонограмме (размер, форма, качеств отображения) может быть различим.
8.2.5( 3). Корреляция сданными многолучевого эхолота
Исполнитель должен изучить данные МЛЭ и выполнить корреляцию (сопо ставление) аномальных объектов и глубин с данными ГБО. Исполнитель должен также исследовать и сопоставить цели, полученные при последовательных покрытиях ГБО (т. е. сравнить первое 100 % покрытие и второе 100 % покрытие). Аномальные объекты или цели, которые появляются повторно и коррелируются на каждой записи, обеспечивают повышенную надежность того, что система сбора работает правильно, и помогают подтвердить наличие формы рельефа (объекта) или цели. Исполнитель должен дать перекрестную ссылку и отметить каждую корреляцию целей в колонке «Примечания» списка контактов ГБО (Side Scan Sonar Contact List).
8.2.5( 4). Идентификация объектов, требующих дополнительного обследования Исполнитель должен использовать список контактов ГБО при совместном сравнении с минимальными глубинами, полученными по данным многолучевого эхолота, чтобы идентифицировать гидрографические объекты, которые могут потребовать дальнейшего обследования. Следует дать рекомендации для дальнейшего полевого обследования, которые необходимо выполнить для достижения завершенности съемки.
303
Глава 8. Использование гидролокаторов бокового обзора...
8.2.6. Список контактов и карта полос покрытия ГБО
Исполнитель должен создать отдельную карту полос покрытия ГБО для каждого 100% покрытия. Такая карта должна представлять собой графическое средство для документирования эффективной полосы обзора (scanning swath) каждой съемочной траектории, которая в достаточной степени перекрывается соседними полосами обзора.
8.2.6(1 ). Список контактов
Список контактов ГБО составляется вручную с использованием формы или в цифровом виде, объединяющем растровое изображение цели с ее текстовым описанием и основными параметрами.
В случае ручного составления списка контактов, записи в таблице списка контактов представляют собой данные, которые нужны исполнителю, чтобы изготовить предварительную карту контактов {Sonar Contact Plot). Однажды внесенный в список контакт никогда не должен убираться. Если дальнейшая обработка контакта приведет к тому, что контакт рассматривается исполнителем как несущественный, он должен быть помечен в качестве такового. Список контактов и все полевые обследования контактов и соответствующие записи, сделанные на основе списка контактов, должны быть включены в перечень предоставляемых полевых материалов как в виде твердой копии, так и в виде файла.
8.2.6(2 ). Карта контактов
Карта контактов должна показывать положение всех существенных контактов, занесенных в список контактов. На карте контактов должны отображаться только «существенные» контакты вместе с их изображениями, полученными на соседних галсах съемки. В некоторых районах «существенные» контакты могут группироваться (остатки объекта, поля валунов). Такой район может быть представлен единым объектом с наименьшей глубиной (глубинами). Только наиболее существенный контакт в группе требует представления наименьшей глубины над ним и определения его точных плановых координат.
8.2.7. Соннограммы
Если выполняется регистрация на аналоговой сонограмме, то обязательно требуется во время работы с ГБО производить запись аннотаций (поясняющих подписей). Все записи должны производиться в поле сонограммы таким образом, чтобы не затенять гидролокационное изображение. Все записи должны сопровождаться временем (UTC). Дополнительные аннотации будут сделаны во время обработки данных. Примечание: если данные ГБО предоставляются только в цифровой форме, цифровые данные должны быть аналогичным образом аннотированы.
8.2.8. Окончательный отчет о контактах
Если требуется окончательный отчет, то все операции по съемке с ГБО должны быть описаны и представлены заказчику. Необходимо указать следующие
304
8.2. Требования к выполнению съемки с помощью гидролокатора бокового обзора
данные: об изготовителе, модели и серийном номере всех частей оборудования, использованного при съемке с ГБО, ширине вертикального луча, частоте акустической посылки (например, 100 или 500 кГц). Необходимо также кратко описать последовательность операций с ГБО, включая следующие сведения: об используемых диапазонах наклонной дальности, глубине моря, расстоянии между галсами съемки и месте погружения носителя (в носу, по корме или на миделе). Следует также описать методы и частоту выполнения контроля правильности работы ГБО, указать полноту покрытия района съемки полосами обзора (100% или 200%). Где необходимо, следует указать факторы, которые могли повлиять на точность данных, такие, как стабильность хода подводного носителя, интерференция акустических сигналов, понижение уровня принимаемого эхо-сигнала от воздействия термоклина и акустических помех. Обсуждение результатов работы ГБО, посвященных исключительно пунктам исследований работоспособности, в этом разделе не требуется, если эта информация включена в в раздел «Отчет об исследованиях» или аналогичный раздел, в котором приведены данные съемки. Должны быть упомянуты методы и требования, использованные при интерпретации записей ГБО, и кратко описаны процедуры обработки. Другие пункты отчета должны быть посвящены методам, примененным для подтверждения полноты покрытия, и критериям, принятым для выбора контактов.
8.3. Программное обеспечение для работы с гидролокаторами бокового обора
8.3.1. Использование программного обеспечения реального времени для сбора и регистрации данных ГБО (на примере HYPACK/HYSCAN Survey)
Рассмотрим программное обеспечение реального времени для сбора и регистрации данных ГБО на примере программы HYPACK/HYSCAN Survey [50]. Программа обслуживания ГБО используется для подключения устройств, необходимых для выполнения съемки с ГБО. Пакет программ HYPACK® МАХ может регистрировать цифровые или аналоговые данные ГБО с помощью программы «SIDE SCAN SURVEY», которая работает совместно с программой реального времени HYPACK® SURVEY. При этом данные планового положения и курс передаются из программы SURVEY в SIDE SCAN SURVEY через общую память (см. рис. 8.18). Съемка с ГБО, как правило, выполняется одновременно с батиметрической съемкой с однолучевььм эхолотом (ОЛЭ).
Большинство аналоговых ГБО поддерживаются программной опцией «Analog Side Scan» и платой аналого-цифрового преобразования (типа PCI или PCMCIA), установленной в компьютере сбора данных.
8.3.1.1. Работа с ГБО в ЭГИС HYPACK® производится в следующей последовательности:
1. Запустите программу HYPACK®, создайте проект, установите геодезические параметры и подготовьтесь к выполнению съемки в HYPACK® SURVEY путем инициализации спутниковой навигационной аппаратуры (СНА) GPS и ОЛЭ в программе HYPACK HARDWARE.
305
Глава 8. Использование гидролокаторов бокового обзора...
Компьютер HYP АС К
HYPACK SURVEY
SHARED
MEMORY
PCS IK) l.rCAUNU.
Т1Л Г
SIDE SCAN SURVEY
GPS
ГБО (Side Scan Sonar=SSS)
GPS, ОЛЭ и поправки уровня поступают в «HYPACK® SURVEY».
ГБО возможно с данными ДПС и гирокомпаса вводятся в SIDESCAN SURVEY Информация из HYPACK® SURVEY в SIDESCAN SURVEY поступает через общую naMRTb(Shared memory),обе программы работают на одном компьютере.
Рис. 8.18. Совместная работа HYPACK® SURVEY и SIDE SCAN SURVEY [Hypack, Inc]
На рис. 8.19 для СНА необходимо задать: место установки антенны — на судне (Boat); перечень данных от СНА — на панели «Functions»; координаты антенны СНА в судовой системе — на панели «Offsets» и параметры сопряжения с СНА по последовательному каналу (в выпадающем списке «Connect» — установить «Serial Port»). Клавиша «Setup» позволяет выбрать набор установок для сигнализации. Аналогично настраивается прием данных (протокол NMEA0183) от ОЛЭ.
Рис. 8.19. Настройка оборудования в программе HYPACK HARDWARE [Hypack, Inc]
306
8.3. Программное обеспечение для работы с гидролокаторами бокового обора
Центр судовой системы координат целесообразно выбрать в месте расположения антенны ОЛЭ. Размещение антенн аппаратуры на судне показано на рис. 8.20. Дальнейшие установки программы HYP АСК HARDWARE зависят от варианта установки антенн ГБО (набортные или буксируемые). На рис. 8.19 уже создан второй объект с именем «TowFish», которому назначено устройство (драйвер) «Towcable», с помощью которого будет вычисляться положение антенн буксируемого ГБО (п. 8.3.1.3).
Рис. 8.20. Размещение аппаратуры на судне при съемке с ГБО
2. Откройте программу SIDE SCAN HARDWARE (SIDE SCAN-»SIDE SCAN HARDWARE).
3. В открывшемся окне (см. рис. 8.21) выберите марку ГБО в списке (выбран С-МАХ СМ2) и вариант навигации (выбран: «Hypack Navigation», подразумевающий набортную установку ГБО).
4. С помощью клавиши «Setup» задайте имя драйвера и установки для сопряжения ГБО (для ГБО СМ2 драйвер определен, поэтому эта клавиша на рис. 8.21. недоступна).
5. Используя закладку «Connect», выполните сопряжение ГБО с компьютером.
6. Протестируйте интерфейс последовательного соединения ГБО с компьютером (если нужно).
7. Используя закладку «offsets», введите смещения — положение антенны ГБО в судовой системе координат, только если антенна жестко связанна с корпусом судна — подробно см. далее (п. 8.3.3).
Нажмите клавишу «Close», чтобы выйти из программы «SIDE SCAN HARDWARE», при этом выполненные установки сохраняются в файле «Sidescan.ini» текущего проекта и автоматически восстанавливаются при повторном запуске программы.
Некоторые марки ГБО могут потребовать особых установок для их драйверов. В этом случае становится доступной клавиша [8е1ир].После нажатия этой клавиши появляется диалоговое окно «Driver Setup». Для сопряжения с выбранным ГБО необходимо щелкнуть по закладке «Connect» для получения доступа к установкам. Для каждого ГБО установки будут разными. После выполнения тестирования сопряжения можно переходить к вводу координат антенны ГБО
307
Глава 8. Использование гидролокаторов бокового обзора...
в судовой системе — заданию смещений антенны ГБО (offsets). Эта процедура зависит от варианта установки антенн ГБО: набортный (антенна на корпусе судна) или буксируемый — на подводном носителе (towfish).
8.3.1.2. При размещении антенн ГБО на корпусе судна их координаты в судовой системе вводятся на панели «Position» — поля: Starboard (правый борт), Forward (вперед по ДП), Vertical (вертикально вниз) см. рис. 8.22. При этом в окне настройки ГБО должен быть задан режим навигации «Hypack Navigation» (как показано на рис. 8.21. и 8.22). Для ввода судовых координат антенн СНА и ГБО используется закладка «offsets» (см. рис. 8.22). Этот вариант использования ГБО прост с точки зрения инициализации программы ГБО, но требует наличия в составе аппаратуры датчика перемещений судна (ДПС). Работа с набортным ГБО предусматривает, чтобы в программе HYPACK HARDWARE был установлен драйвер «Hysweep.dll»,обеспечивающий взаимодействие программ HYPACK SURVEY и SIDE SCAN SURVEY.
Рис. 8.21. Окно настройки ГБО и режима навигации (вариант набортного ГБО) [Hypack, Inc]
8.3.1.3. В современных ГБО чаще используется размещение антенн на подводном носителе. При этом отпадает необходимость использования ДПС, но требуется более сложная настройка программы, предполагающая использование двух объектов: судна (boat) и подводного носителя антенн (fish). В окне настройки ГБО (рис. 8.23.) должен быть задан режим навигации «Нураск Mobile».
На панели «Position» (рис. 8.24) при этом могут вводиться смещения в системе координат подводного носителя, если, например, требуется учесть
308
83. Программное обеспечение для работы с гидролокаторами бокового обора
Рис. 8.22. Задание смещений для антенны СНА при инициализации набортного ГБО [Hypack, Inc]
Рис. 8.23. Окно настройки ГБО с буксируемыми антеннами [Hypack, Inc]
309
Тлава 8. Использование гидролокаторов бокового обзора^
Sidescan Hardware Setup - C-MAX СМ2 (USB)
jai=sj
Fte
MaraAjclwer / Modd | Connect | COM Test Offsets |
|Sonaf Head 1
1*7 Instated on Towfish
About. |
|C MAX СМ2 (USB)
Ck)k
Рис. 8.24. Задание смещений в системе координат носителя антенн [Hypack, Inc]
расстояние между точкой крепления кабель-троса к носителю и местом установки антенн ГБО. Инициализация второго «объекта» — подводного носителя — осуществляется в программе HYPACK HARDWARE способом, описанным ниже.
При использовании буксируемого ГБО важным условием успешного проведения съемки является точный расчет координат подводного носителя. При большой длине вытравленного троса наиболее точным методом является использование гидроакустической навигационной системы с ультракороткой базой (USBL), позволяющей точно измерить наклонное расстояние «D» и пеленг на подводный носитель. При отсутствии USBL и при малых длинах троса остается метод расчета наклонной дальности по длине вытравленного кабель-троса с использованием модели гибкой нити в потоке. Для этого в программе HYP АСК HARDWARE необходимо создать второй подвижной объект (Mobile), присвоить ему имя, например, «TowFish» и назначить ему драйвер устройства «Towcable» (см. рис. 8.25).
Теперь для инициализации расчета координат носителя ГБО по длине вытравленного кабель-троса можно использовать клавишу «Setup», открывающую окно «Cable Counter Setup», изображенное на рис. 8.26, которое используется для установки необходимых параметров. Отметим, что величины смещений на панели «offsets» (см. рис. 8.25) должны быть нулевыми.
310
83. Программное обеспечение для работы с гидролокаторами бокового обора
Ей Ecft Option? Не*)
пл
AddDevce АсйМоЫе
Device | Advanced}
Hj-pack Con^gurc’xn
Ar Foa>
4£ЫтеаСП83
5 Ar TowFtsh
& TowCabte
Function*
v' Position v Headng S3 Speed
Options
У Record device specie message?
Offsets ~--------------- ------------------------—--------
Starboard [ООО m Yaw pOO deg
Forward рСЮ m Ro* [o~C0 deg.
Vertic^i |000 m Pich pDO deg
(Positive Downward)
Latency }0 000 tec.
Connect |None j-J
Input Type---------
I? Manual
C Dynapar
C MDTOTCO
C Seamac
Г Reckon
C СМ2 Country Furey
Fnh Depth ----
Sbatowfch C AMude sensor C Depth sensor C Deep hth
A-Frame Offset»*----—
X Offset ff о
Y Offset fso“
Z Offset |.1 e
Catenary factor P ^
ReAon factor
l...,.^—.I Cancel |
Рис. 8.25. Инициализация счетчика вытравленного троса, в программе HYPACK HARDWARE, [Hypack, Inc]
Рис. 8.26. Окно настройки метода расчета координат антенн ГБО по длине троса [Hypack, 1пс].
311
Глава 8. Использование гидролокаторов бокового обзора...
8.З.1.4. Методы получения высоты носителя антенн ГБО над дном
Для расчета высоты носителя антенн ГБО могут быть использованы следующие возможности (см. рис. 8.26):
— прямое измерение высоты с помощью эхолота, установленного на носителе {depth sensor);
— косвенное измерение высоты путем измерения заглубления носителя с помощью датчика давления с последующем использованием глубины, измеренной эхолотом {altitude sensor);
— заглубление носителя вводится вручную, как заглубление второго объекта {shallow fish);
— заглубление носителя принимается равным длине вытравленного кабель-троса {deep fish).
Для каждой марки ГБО необходимо знать, каким образом должен осуществляться расчет высоты над дном. Например, для ГБО СМ-2 можно использовать вариант «depth sensor» ввиду того, что у характеристики направленности антенн в вертикальной плоскости используется боковой лепесток, направленный вертикально вниз, по которому может быть получена высота над дном (см. рис. 8.6).
Ввод длины вытравленного кабель-троса может быть задан как ручной, так и автоматический.
Рассмотрим наиболее простой метод расчета координат подводного носителя антенн ГБО, при котором длина вытравленного троса вводится вручную. Для
[Cable Counter setup
InpuType — v Manual C Dynap® Г MDTOTCO Г Seamac Г Redjon
Г СМ2 Counbng PU5sy
A-Frame Offsets
X Offset j-20 Y Offset |£o“ Z Offset |-io
Catenary facta 91
Rh Depth-------
Shalowfeh
Afclude sensor
C Depth sens®
Deep fish
RedSon facta fhOO
I * I C***1 I
Z f - заглубление буксируемого объекта L = Y__Offset + (D 2 - Z 2)1/a D = (Caternary_Factor) * d Z — Z f + Z_Offset
Опции параметра: Fish Depth = Z f
- Shallow Fish : Z. f- вводится вручную в программе
реального времени «Survey»
- Altitude Sensor Z f = Z - z
(разность глубины судового эхолота “Z“ и высоты носителя над дном “z”
- Depth Sensor Zf опред еляется по данным датчика давления, считываемого драйвером эхолота (Echosounder driver) и присвоенного объекту и именем «towfish»
- Deep Fish: буксируемый объект находится точно
под рамой блока кабель-троса
Рис. 8.27. Расчет координат и заглубления антенн буксируемого ГБО [Hypack, Inc]
312
______83. Программное обеспечение для работы с гидролокаторами бокового обора этого в окне «Cable Counter Setup» необходимо отметить кнопку «Manual» и использовать приближенную модель, задаваемую параметром «Caternary Factor», чтобы перейти от фактической длины троса к наклонной дальности.
При наличии вычисленных величин L и Zy координаты антенн ГБО вычисляются по формуле 8.1.
Необходимо иметь ввиду, что для буксируемого ГБО при расчете координат антенн следует использовать данные путевого угла (ПУ), которые могут быть точно определены с помощью СНА Навстар/Глонасс. При использовании набортного ГБО для корректного расчета координат антенн следует использовать величину истинного курса ввиду того, что продольная ось антенны ГБО при монтаже на судне устанавливается параллельно диаметральной плоскости.
8.3.1.5. Работа с программой HYPACK/HYSCAN Survey в реальном времени
После настройки оборудования в программах HYP АСК HARDWARE в SIDE SCAN HARDWARE можно включать системы реального времени SURVEY и SIDE SCAN SURVEY.
Вид монитора с окнами программы SIDE SCAN SURVEY представлен на рис. 8.28. Эта программа позволяет производить регистрацию данных ГБО в реальном времени и просматривать зарегистрированные файлы (формата HSX) в режиме разделения времени.
Рис. 8.28. Вид экрана монитора с окнами программы SIDE SCAN SURVEY [Hypack, Inc]
313
Глава 8. Использование гидролокаторов бокового обзора...
При работе в реальном времени доступны следующие функции:
— регистрация данных ГБО в формате HSX;
— визуализация одной и нескольких полос обзора с выбором цвета в зависимости от перекрытия;
— оперативное определение высоты цели над дном по длине ее тени;
— оперативное сохранение растрового изображения цели в файлах формата JPEG и GeoTIFF;
— оперативное сохранение выбранной цели в файле целей (*.tgt) с заданным именем;
— слежение за дном при использовании датчика подводного носителя или программы «HYSCAN Bottom Tracking»;
— визуализация исправленной или неисправленной сонограммы с возможностью ее разметки по пройденному расстоянию;
— регулировка усиления сигнала ГБО с возможностью выбора;
— управление отображением электронной сонограммы с возможностью выбора ее цветовой гаммы;
— обеспечение тревожной цветовой и звуковой сигнализации о неисправности аппаратуры системы.
На рис. 8.28 представлено главное управляющее окно программы «SIDE SCAN SURVEY» (вверху слева), содержащее меню для управления режимами отображения информации и регистрации данных. Клавиши зеленного цвета, расположенные в верхней части окна, являются элементами системы тревожной сигнализации. Смена цвета клавиш на желтый является предупреждением, а красный цвет является сигналом тревоги соответствующего датчика. На рис. 8.29 изображено окно, используемое для ручного вода длины вытравленного кабель-троса.
Более полное представление о работе с программой «SIDE SCAN SURVEY» можно почерпнуть в фирменной документации HYPACK МАХ [50].
Рис. 8.29. Окно ручного ввода длины вытравленного троса [Hypack, Inc]
В составе пакета HYPACK МАХ имеется также программа для пост-обработки данных ГБО.
8.3.2. Программное обеспечение пост-обработки и представления съемки с ГБО
8.3.2.1. Для выполнения окончательной обработки и представления данных съемки с ГБО в составе пакета HYPACK МАХ имеется специальное приложение — HYSCAN Office. С помощью программы HYSCAN Office возможно вы-
314
8.3. Программное обеспечение для работы с гидролокаторами боковом
Рис. 8.30. Вид окна монитора программы HYSCAN Office (этап 2) [Hypack, Inc]
полнить преобразование файлов ГБО в форматы: MSTL — формат ГБО Marine Sonic; C3D — формат фирмы Benthos XTF (для батиметрии); JSF —формат ГБО фирмы Edgetech (JStar); XSE-файлы Elac Hydrostar; GSF —обобщенный формат ГБО (Generic Sensor Format); SDF — формат ГБО Klein 3000; СМ2 — формат ГБО фирмы СМах; HSX- QINSy (QPS); 83р- формат файла Imagenex Delta Т/ Odom ES3.
Таким образом, с помощью HYSCAN Office можно выполнять обработку данных, зарегистрированных другим ГБО. Возможно преобразовать данные, записанные с помощью HYSCAN SURVEY в формате HSX, в форматы GSF, ХТЕ
Обработка данных в программе HYSCAN Office осуществляется в три этапа: этап 1 — просмотр данных бокового обзора по каждой полосе с использованием тех же органов управления изображением, что и при съемке с ГБО; при этом можно работать с целями и выполнять измерения; этап 2 — создание мозаики с учетом протяженности данных и возможного разрешения TIF-изображения; заполнения пустых малых промежутков в растровых файлах и присвоения имен файлам мозаики формата TIF; этап 3 включает объединение полос и создание геореференцированного файла формата TIF по заданному району. Растровый геореференцированный файл мозаики, полученный в HYSCAN, может быть использован в качестве картографической подложки для продолжения работы в ЭГИС HYPACK.
315
Глава 8. Использование гидролокаторов бокового обзора...
8.3.2.2. В настоящее время на рынке гидрографических информационных технологий имеется и другие программные пакеты, обеспечивающие возможность пост-обработки и создания мозаики.
Фактически каждая фирма, выпускающая ГБО, поставляет собственное программное обеспечение. Ведущими фирмами, выпускающими ГБО, являются: EdgeTech [68,69], L3 Kleine, Imaginex Inc, TELEDYNE Benthos, C-MAX, GeoA-coustics. Существуют специализированные фирмы, разрабатывающие программное обеспечение для ГБО, такие как: Chesapeake, CodaOctopus Ltd, Triton Elies International, создающие программное обеспечение для поисковых и батиметрических ГБО. На рис. 8.31. представлено окно программы SonarWEB фирмы
Рис. 8.31. Вид окна программы SonarWEB [Chesapeake, Inc]
316
83. Программное обеспечение для работы с гидролокаторами бокового обора
Chesapeake(CIIIA)[66,67], предназначенной для пост-обработки данных ГБО и акустических профилографов. Преимуществом данного программного обеспечения является возможность прямого экспорта результатов съемки в геоинфор-мационную систему ArcGIS (фирма ESRI), а также публикации материалов в сети Интернет. Программа SonarWIZ.MAP фирмы «Chesapeake» обладает еще большими возможностями, объединяя в едином пакете систему сбора данных с пост-обработкой и представлением результатов съемки.
Выбор конкретного пакета для работы с ГБО во многом зависит от характера выполняемых съемок. Когда работа с ГБО носит эпизодический характер, то наилучшим выбором для прибрежной зоны является HYPACK/ HYSCAN. При систематических работах, выполняемых в сложных условиях на средних и больших глубинах, можно рекомендовать программное обеспечение SonarWIZ.MAP [67].
ЗАКЛЮЧЕНИЕ
В связи с расширением исследований Мирового океана и, особенно, прибрежной зоны моря современной тенденцией является повышение интереса к подводному рельефу со стороны значительно более широкого круга потребителей.
Площадные средства съемки рельефа дна постепенно вытесняют традиционные ОЛЭ, однако, ОЛЭ еще долго будут использоваться как вспомогательные средства съемки и для контроля МЛЭ.
Батиметрические ГБО с интерферометрической обработкой сигнала в настоящее время находятся в стадии интенсивного совершенствования и уже сейчас составляют значительную конкуренцию МЛЭ вслдествие более простой конструкции антенн и меньшей стоимости при сохранении вполне приемлемых характеристик по точности съемки рельефа и способности обнаружения объектов на дне. Значительным преимуществом БГБО является возможность размещения антенн на подводном стабилизированном носителе, что особенно важно для инженерных приложений, требующих получения микрорельефа и, следовательно, обеспечения максимального приближения антенн к дну. Уже имеются отдельные образцы БГБО, полностью снаряженные и размещенные на подводном носителе, например, «GeoSwath Plus» (GeoAcoustics). В настоящее время имеются отдельные образцы МЛЭ, которые могут размещаться на подводных носителях, однако, законченного изделия, установленного на носителе и поставляемого в варианте «под ключ» пока не существует.
МЛЭ и БГБО имеют свои преимущества и недостатки. МЛЭ с формированием лучей лучше работают на средних и больших глубинах и имеют преимущества на сильно расчлененном рельефе. БГБО более эффективны на малых глубинах за счет большей ширины полосы обзора, но дают худшие результаты на сложном рельефе. Благодаря успехам, достигнутым в области создания БГБО, и их более низкой стоимости по сравнению с МЛЭ следует ожидать в ближайшие годы более широкого внедрения БГБО на российском рынке гидрографических услуг.
Радикальные изменения средств и методов гидрографии привели к необходимости создания качественно нового методического документа — четвертой редакции специальной публикации МГО — S-44 (1998 г.), учитывающего глобальность средств позиционирования и возможность полного акустического освещения морского дна, что в свою очередь приводит к невиданной ранее плотности батиметрической информации. Такие объемы данных не могут быть обработаны традиционными методами, а возможность экспорта результатов промера непосредственно в формат векторной морской электронной карты ставит под сомнение необходимость учета масштаба съемки при назначении его точности. Взамен промерных профилей впервые была введена площадная съемка на основе объединения полос гидроакустического освещения дна.
Возможность представления данных промера в цифровой форме, с одной стороны, и широкого распространения географических информационных систем (ГИС) — с другой, а также расширение деятельности человечества в морской
318
Заключение
среде создали условия, когда результаты промера могут быть использованы значительно более широким кругом специалистов, чем это было в недалеком прошлом. В этой связи, одной из особенностей распространения пространственных гидрографических данных в цифровой форме является необходимость дополнения их так называемыми метаданными, несущими информацию о качестве самих данных. Метаданные позволяют оценить пригодность данных промера для решения самых разнообразных задач, часто не связанных напрямую с гидрографической деятельностью.
Нормативно техническая база гидрографии основана на минимальных стандартах гидрографической съемки, изложенных в пятой редакции специальной публикации S-44. Данная редакция касается в основном гидрографических съемок, выполняемых для обеспечения безопасности общего мореплавания в соответствии с Конвенцией SOLAS. На основе данного Стандарта большинство технически развитых морских держав создали национальные нормативные документы, регламентирующие выполнение съемок.
В настоящее время известны следующие документы:
— Standards for Hydrographic Surveys (HYSPEC), LINZ (New Zealand), 2001;
- EM 1110-2-1003 US Army Corps of Engineers, 2002 [43,44,45,46,47];
— Danish national charting Standards, 2002;
— Canadian Standards for Hydrographic Surveys, 2003;
— S 003, The International Marine Contractors Association (IMCA), 2006 [48].
— NOS Hydrographic Surveys Specifications and Deliverables. NOAA (USA), 2008 [63].
Для выполнения комплексных съемок на шельфе в интересах освоения природных ресурсов, делимитации морских границ и обеспечения безопасности мореплавания в Новой Зеландии используется Стандарт HYSPEC (2001), разработанный LINZ (Land Information New Zeland). В этом документе детально изложены требования совместного использования МЛЭ и ГБО, а также вопросы дистанционного анализа донных грунтов.
Для выполнения гидрографических съемок при подготовке и эксплуатации морских месторождений углеводородного сырья, а также проведения инженерных и геофизических работ на глубинах более 200 м Международной Ассоциацией исполнителей морских работ (IMCA) разработано Руководство по использованию МЛЭ. В этом документе регламентируются четыре категории съемок с МЛЭ, описываются методики подготовки и выполнения съемок с МЛЭ, требования к оценке точности получаемых результатов. Отечественный нормативный документ СП 11-114-2004 (Инженерные изыскания на континентальном шельфе для строительства морских нефтепромысловых сооружений), в котором регламентируется выполнение гидрографических работ для обеспечения морских месторождений, не содержит рекомендаций по использованию МЛЭ и ГБО, основывается на устаревших концепциях и не в полной мере отвечает международным требованиям в данной области.
Большой интерес для современной отечественной гидрографической практики представляет Стандарт ЕМ 1110-2-1003, содержащийся в Руководстве по гидрографической съемке, подготовленный корпусом инженеров армии США
319
Заключение
(US Army Corps of Engineers = USACE) [43-47]. В США гидрографы, выполняющие работы на внутренних водных путях, в портах и мелководных прибрежных акваториях, а также работы для обеспечения дноуглубления, пользуются нормами точности, приводимыми в третьей главе этого документа. Кроме того, в данном документе излагаются методики выполнения современных гидрографических съемок для обеспечения безопасности мореплавания и выполнения дноуглубительных работ и, таким образом, он может служить хорошим учебным пособием.
Необходимо отметить, что имеющиеся отечественные документы [16, 17, 18], призванные регламентировать выполнение гидрографических работ в прибрежной зоне моря и внутренних водных путях, до сих пор основываются на использовании устаревших технологий и не соответствуют мировому уровню по точности и детальности представления информации о подводном рельефе.
Другой национальный Стандарт американской гидрографии, касающийся выполнения съемок на шельфе и в Мировом океане [63], разработанный NOS NOAA (National Ocean Service, National Oceanic and Atmospheric Administration) в 2008 г., является в настоящее время одним из наиболее прогрессивных нормативных документов, поскольку использует последние научные достижения электронной гидрографии. В частности в этом Стандарте воплощена концепция «навигационной поверхности» (Navigation Surface), позволяющая автоматизировать обработку больших массивов информации, получаемых при использовании средств площадной съемки в мелком море, а также выполнять оптимальную оценку качества результатов площадных съемок.
Методология «навигационной поверхности» тесно связана с геоинформа-ционной концепцией цифровой модели рельефа (ЦМР=ПТМ). Подход, связанный с навигационной поверхностью, предполагает архивирование данных съемки в виде сертифицированной цифровой модели рельефа, нежели просто набора данных отдельных измеренных глубин. Такая цифровая модель сохраняется с максимально доступным пространственным разрешением. Например, при максимальном размере следа луча МЛЭ на дне в 0,5 м размерность «грида» ЦМР также должна составлять 0,5 м. Такая методология имеет то преимущество, что сохраняет максимальную разрешающую способность площадной съемки вне зависимости от того, для каких целей изначально предназначалась выполненная съемка. Для съемок, выполняемых для составления навигационных карт в целях обеспечения безопасности мореплавания, детальное отображение микрорельефа не является необходимым условием. На первое место здесь выходит выявление тех особенностей рельефа, которые являются потенциально опасными для мореплавания, а также объектов естественного и искусственного происхождения, которые могут быть опасны для надводного мореплавания.
В предшествующие годы в морской картографии сложились следующие правила использования данных промера:
— при обработке данных промера вручную отбираются отличительные и наименьшие глубины;
— базу данных промера составляют репрезентативные исправленные глубины;
320
Заключение
— каждая нанесенная на карту глубина может быть прослежена в базе данных промера;
— все нанесенные на карту глубины обладают одинаковой точностью и надежностью;
— карты составляются в последовательности уменьшения масштаба от крупного к мелкому.
Использование средств площадной съемки в мелком море приводит к пересмотру этих правил [35]. Перед современной электронной гидрографией стоят следующие вопросы:
— как обеспечить отбор репрезентативных и минимальных глубин для нанесения на морскую навигационную карту заданного масштаба;
— как оценить качество (точность, правильность и надежность) исправленных глубин;
— как повысить скорость окончательной обработки данных площадной съемки.
В ходе площадной съемки регистрируются колоссальные объемы данных, причем внутри полосы обзора рассчитанные глубины имеют разную точность [35]. На рис. 1 показаны типичные графики распределения погрешностей глубин, рассчитанных МЛЭ внутри полосы обзора. На графике справа хорошо видно, что начиная с угла луча в 65° погрешность глубины резко увеличивается.
На графике слева показан разброс глубин по лучам, полученный МЛЭ с неподвижного носителя. При этом отчетливо видно, что начиная с 65° луча разброс вычисленных глубин резко повышается, образуя своеобразное «облако» отметок глубин (swarm of soundings').
Использование МЛЭ и БГБО в мелком море приводит к тому, что рассчитанные глубины часто относятся к одним и тем же плановым координатам. При этом встает вопрос, какой из полученных глубин отдать предпочтение, а значит поместить на карту. После процесса фильтрации, связанного с устранением грубо ошибочных (сбойных) глубин, предпочтение отдается наименьшим глубинам. Такой подход соответствует «гидрографическому» принципу, призванному обеспечить безопасность мореплавания. Для инженерных приложений выбор может быть сделан, например, в пользу средней глубины. Таким образом, осуществляется «прореживание» полученных глубин с целью создания набора данных приемлемого размера, причем нет гарантий, что в процессе фильтрации в этом наборе не окажется сбойная глубина.
Далее прореженный набор данных используется для автоматизированного построения отчетного планшета, на котором вместе с отметками глубин наносятся изобаты, как правило, создаваемые с использованием TIN- модели. На рис. 2 [35] представлено объемное цифровое изображение участка дна, построенное на основе прореженной выборки с использованием TIN-модели рельефа.
В отличии от прореженной выборки, обеспечивающей построение довольно схематического рельефа, полные данные МЛЭ способны при соответствующей обработке дать объемную ЦМР дна, имеющую вполне реалистическое изображение. Объемное изображение дна, полученное на основе методологии «грида» навигационной поверхности, представлено на рис. 3 [35].
321
Заключение
36С0 зььи
3700
_ 3750
Ж
3800
3850
3900
3950
-70 -65 -60 -55 -50 -45 -40
Угол луча (град.)
Рис 1. Распределение погрешностей глубин МЛЭ внутри полосы обзора [Armstrong, 2004]
322
Заключение
Рис. 2. Объемное изображение ЦМР дна на основе TIN-модели после прореживания данных площадной съемки [Armstrong, 2004]
Рис. 3. Объемное изображение ЦМР дна на основе «грида» навигационной поверхности [Armstrong, 2004]
323
Заключение
При использовании средств площадной съемки объемы получаемой информации и плотность данных могут быть настолько велики, что анализ каждой отдельной отметки глубины становится невозможен. В этих условиях реальным является создание ЦМР, воплощенное в гриде навигационной поверхности, которая сопровождается моделью поверхности погрешностей глубин (an uncertainty model). В различных зарубежных публикациях концепция «навигационной поверхности» часто называется CUBE (Combined Uncertainty and Bathymetric Estimator). Пример использования технологии CUBE применительно к ЭГИС Hypack/Hysweep рассмотрен в п. 7.4.2.
Что касается методики составления бумажных морских навигационных карт в последовательности уменьшения масштаба, то при компьютеризации процессов обработки гидрографических данных и использовании концепции «навигационной поверхности» она утрачивает свое значение. Генерализация картографического изображения при уменьшении масштаба создаваемой карты — естественный и необходимый процесс, но требует значительных затрат ручного труда. Концепция навигационной поверхности удачно решает и эту задачу.
В результате создания базы данных на основе информации, хранящейся в навигационной поверхности, можно генерировать различные производные продукты (изобаты, глубины, выбранные по определенным критериям, цифровые модели, а также полигоны глубин и т. д.). Так для автоматизированного создания морских электронных карт (ЭНК) достаточно задать предельный масштаб ее отображения, уровень детализации (размер грида) и «гидрографический» критерий выбора глубин. При этом будет создана ЦМР заданной детальности, и на ее основе сформированы объекты ЭНК обменного формата S-57 (отметки и полигоны глубин, изобаты и т. д.). Фрагменты ЭНК крупного и мелкого масштабов, созданные из базы батиметрических данных навигационной поверхности, показаны на рис. 4 [35].
Другой важной особенностью технологии CUBE является возможность сохранения в базе данных навигационной поверхности особых отметок глубин (golden soundings). Такие особые глубины, которые могут быть получены различными дополнительными способами (например, гидрографическим тралением), не связаны с задаваемым уровнем детализации ЦМР и должны отображаться на любом масштабе.
Внедрение технологии CUBE является одним из ведущих направлений электронной гидрографии и в настоящее время поддерживается в большинстве ЭГИС. Эта концепция принята в пятой редакции Стандарта на гидрографические съемки S-44, однако, для ее внедрения в повседневную практику еще предстоит большая работа. Важной задачей в области современной гидрографии является гармонизация и других взаимодополняющих требований, содержащихся в специальных публикациях МГО: S-44 и S-57, S-32, S-100.
Одной из важных проблем, стоящих перед отечественной гидрографией, является совершенствование ее нормативной базы. Требуется создать нормативную базу выполнения площадных гидрографических работ и изготовления на их основе нового поколения морских электронных карт, соответствующих современным международным требованиям. Следует переводить национальную гидрографию на безбумажную технологию, т. е. создавать электронные навига-
324
Заключение
М 1:20000
М 1:80000
Рис. 4. Фрагменты морской навигационной карты крупного и мелкого масштабов, созданных из базы батиметрических данных навигационной поверхности [Armstrong, 2004]
325
Заключение
ционные карты с использованием современных ЭГИС (Hypack, QINSy, CARIS, dKartOffice и т. д.), а бумажные навигационные карты, которые еще длительное время будут необходимы мореплавателям, изготавливать на основе базы данных электронных карт и в тех количествах, которые необходимы конечным пользователям.
Отечественная коллекция бумажных карт, созданная огромным трудом предшествующих поколений российских гидрографов, сейчас уже полностью оцифрована. Следующему поколению российских гидрографов предстоит редактировать и уточнять базы данных этих карт и создавать электронные навигационные карты нового поколения с высоким уровнем достоверности, используя новейшие гидрографические технологии, позволяющие повысить точность и подробность получения подводного рельефа и радикальным образом сократить время между проведением съемок и доведением их результатов до потребителя.
Список литературы
1. Архипкин В.С. Алгоритмы и программы на Фортране по обработке океанографической информации. М.: МГУ, 1992. 84 с.
2. Бреховских Л.М. Теоретические основы акустики океана. Л.: Гидрометео-издат, 1882. 264 с.
3. Бреховских Л.М. Акустика океанской среды. М.: Наука, 1989. С. 222.
4. Букатый В.М. Промысловая гидроакустика и рыболокация. Учебник. М.: «Мир», 2003. 496 с.
5. ГОСТ 23634-79. Навигация и гидрография морские. Термины и определения. М.: Издательство стандартов, 1979,13 с.
6. ГОСТ 16263-70. Метрология. Термины и определения. М.: Издательство Стандартов, 1972. 54 с.
7. Зубченко Э.С. Современные автоматизированные технологии исследований Мирового океана. Дистанционные методы сбора гидрографической информации. СПб.: ВМА имени адмирала флота Советского Союза Н.Г. Кузнецова, 2007. 244 с.
8. Изаак И.Э., Смагин Ю.В. Обследование навигационных опасностей многолучевой эхолокационной системой с помощью программного обеспечения HYPACK МАХ. Труды конференции: «Современное состояние и проблемы навигации и океанографии», СПб.: ГНИНГИ, 2007. С. 349-361.
9. История Гидрографической Службы Российского Флота. СПб, ГУ НиО МО, 1997. Том. 1. Гидрографической Службы Российского Флота (1696-1917). Том. 3. Хроника важнейших событий. СПб.: ГУ НиО МО, 1996. 103 с.
10. Маркин Н.Н. Краткий исторический очерк развития гидрографии. Воен-мориздат, 1940. 108 с.
И. Основы изображения подводного рельефа на морских картах. Адмиралтейский номер 9349. ГУ НиО МО, 1973. 162 с.
12. Правила Гидрографической службы N 4, часть 2, издания ГУ НиО МО, 1984. 264 с.
13. Лурье И.К. Основы геоинформатики и создание ГИС. Часть 1. Дистанционное зондирование и географические информационные системы. М.: Издательство «ИНЭКС-92», 2002. 140 с.
14. Новаковский Б.А., Просолова С.В., Просолова И.А. Цифровые модели рельефа реальных и абстрактных геополей. М.: Научный мир, 2003. 64 с.
15 Скворцов А.В. Триангуляция Делоне и ее применение. Томск: Изд-во Томского ун-та, 2002. 128 с.
16. СП-11-104-97. «Инженерно-геодезические изыскания для строительства». Часть III. «Инженерно-гидрографические работы при инженерных изысканиях для строительства»/Госсторой России. — М.: Производственный и научно-исследовательский институт по инженерным изысканиям в строительстве (ФГУП «ПНИИИС») Госстроя России, 2004. 105 с.
17. Инженерно-гидрографические работы при инженерных изысканиях для строительства, СП-11-104-94, Часть III, 2004 г.
327
Список литературы
18. Технология промерных работ при производстве дноуглубительных работ и при контроле глубин для безопасности плавания судов в морских портах и на подходах к ним. РД31.74.04-2002. Ростов-на-Дону, 2004. 155 с.
19. Таблицы для исправления глубин, измеренных эхолотом за отклонение действительной вертикальной скорости звука в воде от расчетной. Адм. номер 9209, ГУ НиО МО, 1983, 235 с.
20. Таблицы поправок глубин, измеренных эхолотом. Вып. 1. Раздел 1. Обнинск, 1977, (Всесоюзный НИИ гидрометеорологической информации-Мировой Центр Данных), 82 с.
21. Фирсов Ю.Г. Современные гидрографические технологии и практическая подготовка инженеров гидрографов в Государственной морской академии В кн.: «Эксплуатация морского транспорта». Под ред. Емельянова. М: «Наука», 2003. С. 47-54.
22. Фирсов Ю.Г. К вопросу батиметрической изученности Северного Ледовитого океана в целях определения внешней границы континентального шельфа России в Арктике. «Геодезия и картография». 2007, В.-5. — С. 48-57.
23. Фирсов Ю.Г. К вопросу о нормативных документах для выполнения гидрографических работ. «Навигация и гидрография» 2007, —В. 23, — С. 97-107.
24. Фирсов Ю.Г. «Методы использования спутниковой аппаратуры, реализующей режим кинематики реального времени (RTK) для определения поправок за уровень». Ежеквартальный сборник статей Государственной морской академии «Эксплуатация морского транспорта». СПб, ГМ А, 2007, — В. 1(47), С. 17-21.
25. Фирсов Ю.Г., Иванов М.В. Определение высоты уровня моря в геоцентрической системе с использованием глобального спутникового сервиса C-NAV. Геодезия и картография. 2007, В.-6. С. 33-41.
26. Фирсов Ю.Г Глобальная высокоточная подсистема C-NAV спутниковой радионавигационной системы GPS. «Записки по гидрографии», 2007, — В. 270. С. 54-65.
27. Фирсов Ю.Г. Геодезические аспекты гидрографического использования приемной спутниковой аппаратуры C-Nav. «Навигация и гидрография» 2007, В.-24. С. 123-135.
28. Фирсов Ю.Г. Использование современных технологий и глобального сервиса C-Nav для гидрографического обеспечения морских геофизических работ. Ежеквартальный сборник статей Государственной морской академии «Эксплуатация морского транспорта». СПб, ГМА, 2008, В.-4(54). С. 39-44.
29. Фирсов Ю.Г. К вопросу оптимального проектирования съемки рельефа дна многолучевым эхолотом. Геодезия и картография. 2007, В.-2. С. 26-33.
30. Фирсов Ю.Г. Пятая редакции международного Стандарта на гидрографические съемки S-44 Международной Гидрографической Организации. Ежеквартальный сборник статей Государственной морской академии «Эксплуатация морского транспорта». СПб, ГМА, 2008, В.-1(51). С. 39-44.
31. Фирсов Ю.Г. Цифровые модели рельефа дна в электронной гидрографии. «Геодезия и картография», 2008, вып. 4, С. 45-53.
32. Фирсов Ю.Г. Компьютерные технологии для оценки точности площадной съемки рельефа дна. Геодезия и картография. 2008, В.-8. С. 35-40.
328
Список литературы
33. Фирсов Ю.Г. Обоснование требований к оценке точности площадной съемки в соответствии с пятой редакцией Стандарта S-44 МГО». Ежеквартальный сборник статей Государственной морской академии «Эксплуатация морского транспорта». СПб, ГМА, 2008, В.-2(52). С. 42-46.
34. Роберт Дж. Урик. Основы гидроакустики. Л.: Издательство «Судостроение», 1976. 448 с.
35. Armstrong A., Brennan R., Smith S. Implication of the Navigation Approach for Archiving and Charting Shallow Survey Data. FIG Working Week 2004. Athens,Greece, May 22-27, 2004. P. 14.
36. Calculation of new depth equations for expendable bathythermographs using a temperature-error-free method. UNESCO technical papers in marine science. No. 67, UNESCO 1994. P. 46.
37. Calder B.R., Mayer LA. Robust Automatic Multi-beam Bathymetric Processing. // Proc. US Hydro Conference. 2001, Norfolk,VA, May 2001. P. 20.
38. Calder B.R. Automatic Statistical Processing of Multi-beam Echo sounder Data // International Hydrographic Review, 2003,4(1. PP. 53-68.
39. Rob Hare, Brian Calder, Lee Alexander, Susan Sebastian. Multi-beam Error Management// Hydro International, 2004, v. 8, N. 10. P. 6-9.
40. Chance J., Gravley J., Rascoe-Hudson J. GPS for Global Tide Measurements // HYDRO International, October 2003. PP. 23-30.
41. Chen C.T., Millero FJ. Speed of sound in seawater high pressures //Journal Acoustic Society of America. 1977, 62(5). P. 1129-1135.
42. VA. Del. Grosso. New equation for the speed of sound in natural waters (with comparison to other equations) //Journal Acoustic Society of America. 1972, 56(4). P. 1084-1091.
43. EM 1110-2-1003, US ACE, 2001. Chapter 4. Survey Accuracy Estimates for Dredging and Navigation Projects. 01 January 2002. 22 P.
44. EM 1110-2-1003, US ACE, 2001.
Chapter 3, Accuracy Standards, Quality Control and Quality Assurance Requirements 01 January 2002. 16 P.
45. EM 1110-2-1003, US ACE, 2001. Chapter 9. Single Beam Acoustic Measurement Techniques. 01 January 2002,46 P.
46. EM 1110-2-1003, US ACE, 2001. Chapter 11. Acoustic Multibeam Survey Systems for Deep-Draft Navigation Projects. 33 P.
47. EM 1110-2-1003, US ACE, 2001. Chapter 12. Navigation Project Clearance and Object Detection — Mechanical Bar Sweeps and Side Scan Sonar. 01 January 2002.20 P.
48. “Guidelines for the Use of MBES for Offshore Surveys”, IMCA S 003, International Marine Contractors Association, London, UK, May, 2006.
49. E. Hammerstad, “Multibeam Echo Sounder Accuracy”, EM Technical Note, 16 March, 2000,37 P.
50. HYPACK User’s Manual. HYPACK Inc., 2008.
51. Hysweep User’s Manual. Hypack Inc, 2008, 146 P.
52. HOW TO... Understand and use the Total Propagated Error (TPE). QPS QINSy Memo, 5 March 2004. P. 17.
53. IHO Manual on Hydrography. International Hydrographic Bureau, Monaco, Publication M-13,1-st Edition, 2005, 511 P.
329
Список литературы
54. The International System of Units (SI) in Oceanography UNESCO technical papers in marine science. No. 45, UNESCO 1985. P. 124.
55. International oceanographic tables. Volume 4. UNESCO technical papers in marine science. No.40, UNESCO 1987. P. 195.
56. IHO Standards for Hydrographic Surveys, International Hydrographic Organization, Special Publication No 44, 4th Edition, 1998. 23 pp.
57. IHO Standards For Hydrographic Surveys, International Hydrographic Organization, Special Publication No 44, 5th Edition, 2008. P. 24.
58. R. Hare, 'Depth and Position Error Budget for Multibeam Echosounding”// International Hydrographic Review, Monaco, LXXII(2), September 1995. P 37-69.
59. R. Hare, “Error Budget Analysis for US Naval Oceanographic Office (NAV-OCEANO)Hydrographic Survey Systems”, HSRC, University of Southern Mississippi, Hattiesburg, USA, September 2001.
60. Rob Hare, Brian Calder, Lee Alexander, Susan Sebastian. Multi-beam Error Management. Hydro International, 2004, v. 8, N.10. P. 6-9.
61. Matthews DJ. Tables of velocity of sound in pure water and sea water. 3-rd edition, London, 1944, Hydrographic Department, Admiralty.
62. Maul G.A., Bishop J.C. Mean Sounding velocity. A brief review. // International Hydrographic Review, 1970, v.47, № 2. PP. 85-92.
63. NOS Hydrographic Survey Specifications and Deliverables. NOAA, 2008. P. 119.
64. F. Pohner: Complete data collection packages which are compliant with IHO S-44. IHO Industry conference 2002.12 P.
65. Sound Underwater Images. Guide to Generation and Interpretation of Side Scan Sonar Data.John P.Fish, H.Arnold Carr, 1990.185 P.
66. SonarWIZ.MAP User’s Manual. Chesapeake Technology, 2005.
67. SonarWEB User’s Manual. Chesapeake Technology, 2005 (русский перевод, ГМА, 2006).
68. 4300-MPX High Speed Multi-Pulse Side Scan System. User’s Manual. EdgeTech, 2005.
69. 4300-MPX High Speed Multi-Pulse Side Scan Processor software. User’s Manual. EdgeTech, 2005.
70. Robert J. Urick. Principles of underwater sound. 3-rd Edition. McGraw Book Company, 1983. P. 417.
Приложение 1.
ТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ МНОГОЛУЧЕВОГО ЭХОЛОТА ЕМ71О
Диапазон частот От 70 до 100 kHz
Максимальная частота посылок 30 Hz (30 посылок в секунду)
Максимальный размер сектора обзора до 140 градусов
Разрешение по глубине 1 сантиметр
Минимальная дальность обнаружения цели 3 метра под антенной
ЕМ 710 EM710S EM710RD
Максимальная дальность (глубина) обнаружения 2000 м 1000 м 600 м
Длительность CW — посылки От 0,15 до 2 мс От 0,15 до 2 мс 0,15 мс
Длительность FM — посылки Макс. 200 мс Нет Нет
Стабилизация лучей по бортовой качке Да, ±15°
Стабилизация лучей по килевой качке Да, ±10°
Стабилизация лучей по рысканью судна Да, ±10°
Шаблоны диаграммы направленности лучей Равноугловая
Эквидистантная (равноотстоящая)
Высокая плотность лучей
Виды гидроакустических антенн 0,5x1° 1хГ 1x2° 2x2°
Комплектация моделей гидроакустическими антеннами EM710RD не комплектуется EM710RD не комплектуется Все модели Все модели
Размеры излучающей антенны ТХ (L х W х Н) 1940x224x 118 мм 970х224х 118 мм 970х224х 118 мм 490х224х 118 мм
Размеры принимающей антенны RX (L х W х Н) 970х224х 118 мм 970х224х 118 мм 490х224х 118 мм 490х224х 118 мм
Максимальная ширина покрытия Max coverage (approximate values) 2500 м 2300 м 2200 м 2100 м
Максимальное число лучей в одной посылке Max no. of soundings per ping 800 (2-а профиля в одной посылке) 400 200 200
Размеры приемопередающего блока (WxHxD) 540 х 841 х 750 мм (включая амортизаторы)
331
Приложение 2.
ГЛОССАРИЙ ПО ГИДРОАКУСТИКЕ И ГИДРОГРАФИЧЕСКИМ ТЕХНОЛОГИЯМ
1 активный сонар (active sonar) устройство, выполняющее дистанционные измерения в морской среде путем излучения звуковых волн и обработки эхосигналов от объектов
2 акустическая энергия (acoustic energy) энергия, переносимая звуковой волной
3 акустически освещать (ensonify or illuminate) облучать (заливать) цель или область на морском дне излучаемым звуком
4 аппаратура контроля целостности (Integrity monitor) аппаратура, состоящая из СНА GNSS и радиопередатчика, установленная на точке с известными координатами и используемая для слежения (мониторинга) за качеством дифференциального сигнала GNSS. Величина расхождения текущей и известной позиции постоянно контролируется и превышение немедленно передается пользователю тревожным сообщением о невозможности использования системы
5 амплитуда (amplitude) измеренная величина колебания волны
6 аналоговый сигнал (analog signal) измерение величины, непрерывное во времени
7 антенная решетка гидрофонов (hydrophone array) группа гидрофонов, которые совместно обрабатывают приходящие сигналы, обычно с целью формирования и управления лучами
8 батиметрическая модель (Bathymetric Model) цифровое представление топографии (батиметрии) морского дна глубинами и их координатами.
9 боковой лепесток (side lobe) маленькие лепесточки по краям основного, в которых чувствительность изменяется в широком диапазоне углов по сравнению с направлением оси основного лепестка; боковых лепестков может быть много
10 величина «шединга» (shading value) величина, добавляемая к сигналу от заданного элемента преобразователя в схеме «шединга» для подавления боковых лепестков
11 вертикальное перемещение (heave) мера вертикальных движений судна под воздействием морского волнения
12 ворота «старт-стоп» (start and stop gates) задаваемые оператором величины, которые ограничивают возможный диапазон времен, на которые программе первичной обработки сонара следует обратить внимание. Могут быть свои для каждого луча
13 впадина (Troughs) район (полоса) с низким давлением в волновом поле, создаваемый звуковой волной; минимальные значения амплитуд
14 временная задержка (time delay) интервал времени, необходимый волне, чтобы пройти между двумя пунктами
332
Приложение
15 временной сдвиг (фазовый сдвиг) (time shift или phase shift) преобразование сигнала во времени, чтобы получить временное запаздывание
16 временной срез (time slice) дискретный временной интервал, содержащий всю ~~ информацию, принятую всеми гидрофонами антенной решетки в виде последовательного цифрового набора данных.
17 выбранный луч (selected beam) выбранный оператором угол, по которому индицируется эхосигнал, принятый сонаром как функция времени. Позволяет проанализировать качество эхосигнала по данному направлению (лучу)
18 гарантирование качества (quality assurance=QA) все планируемые и систематические действия, необходимые для обеспечения адекватной уверенности в том, что продукт или услуги будут удовлетворять заданным требованиям качества
19 гидролокатор (сонар) бокового обзора (sidescan sonar) сонар, измеряющий силу эхосигнала от различных участков морского дна и дающий тем самым информацию о формах рельефа и свойствах донного грунта
20 гидрофон (hydrophone) устройство, которое «слушает» звуки в воде путем преобразования физических колебаний, которые оно испытывает в результате попадания на него звуковой энергии, в электрическое напряжение
21 грубая ошибка (выброс) (blunder) результат небрежности или ошибки, вызванной воздействием внешних факторов, при выполнении измерений. Ошибка может быть обнаружена путем повторных измерений
22 дальнее поле (far field) режим, в котором дистанция до объекта дистанционного зондирования значительно больше, чем размер устройства, выполняющего дистанционное зондирование, что позволяет упростить математические расчеты путем аппроксимации. В гидроакустике аппроксимации дальнего поля применимы для океанских глубин, которые значительно больше размеров антенн сонаров
23 деструктивная интерференция (destructive interference) результат процесса наложения двух характеристик направленности не в фазе таким образом, что пики одной волны совпадают с впадинами другой, эффективно погашая друг друга
24 дискриминация шума (noise discrimination) процесс, при котором шум игнорируется, и полезный сигнал извлекается из шума, содержащего входной сигнал сонара.
25 дифферент (Pitch) угол вращения судна вокруг оси, лежащей в плоскости мидель шпангоута
26 длинна волны (Wavelength) физическое расстояние между пиками амплитуд в волне
27 ; затухание (Attenuation) любая потеря энергии волны, распространяющейся в среде
333
Приложение
28 излучатель (projector) устройство, излучающее в воду звуковые сигналы
30 изотропический источник (isotropic source) источник изотропически расширяющегося сигнала, такого, как одиночный излучатель
31 изотропическое расширение (isotropic expansion) расширение передаваемой энергии такой, как звуковая, таким образом, что она распространяется во всех направлениях
32 интервал посылок — (ping time или ping interval количество времени, необходимое для возвращения эхосигналов и их обработки между излучением посылок
33 интервал сбора (time spacing) интервал между дискретными последовательными цифровыми наборами данных
34 интерференция (interference) явление взаимодействия волновых спектров от двух и более источников, которое приводит к появлению новой волновой картины скачков уплотнения. Может быть конструктивной, деструктивной и их комбинацией
35 импеданс (Impedance) мера «сопротивляемости» среды волне, проходящей через эту среду. Для звуковой волны импеданс зависит от плотности среды и скорости звука в среде
36 контроль качества (quality control= QC) все процедуры, которые удостоверяют, что продукт отвечает определенным стандартам и техническим требованиям
37 компрессионная волна (compressional wave) волна, которая проходит через среду таким образом, что колебания происходят в направлении прохождения
38 конструктивная интерференция (constructive interference) результат процесса наложения двух характеристик направленности в фазе таким образом, что их пики и впадины совпадают, создавая новые большие пики и впадины
39 крен (roll) угол вращения судна вокруг оси, лежащей в его диаметральной плоскости
40 линейная антенная решетка (line array) антенная решетка излучателей или гидрофонов, у которой элементы установлены в линию вдоль оси
41 луч (beam) термин, используемый для обозначения фокусировки акустической энергии гидрофонной системой или чувствительности принимаемой акустической энергии внутри созданного узкого пространственного угла
42 метаданные (Metadata) информация, описывающая характеристики данных включая неопределенности результатов съемки. Определение по ISO: данные о наборах данных и аспекты их возможного использования. М. являются данными, неявным образом прикрепленными к наборам данных. Примерами метаданных являются: название набора данных, параметры качества, источник данных, неопределенности позиции и глубин и авторство
334
Приложение
43 местная скорость звука в воде (local speed of sound) скорость, с которой звук распространяется в воде. В воде скорость звука является функцией температуры, солености и давления (глубины), но не зависит от самих характеристик звукового поля
44 многолучевой эхолот (multibeam sonar) инструмент, который может за одну посылку получить координаты и глубину более одной точки на дне с разрешением большим, чем однолучевой эхолот
45 мониторинг целостности (Integrity monitoring) способность системы обеспечивать немедленную передачу тревожных сообщений пользователю о невозможности использования системы
46 мощность (Power) энергия звуковой волны в единицу времени. Рассчитывается как квадрат амплитуды волны
47 навигационная поверхность (navigation surface) метод представления цифровой модели рельефа дна в результате обработки данных площадной съемки алгоритмом CUBE ( Combined Uncertainty and Bathymetric Estimator) в виде батиметрической модели и поверхности неопределенности с набором правил их визуализации, направленный на обеспечение безопасности мореплавания
48 направление движения (alongtrack) направление, параллельное диаметральной плоскости судна, в первом приближении совпадающее с направлением движения
49 направления плоскости миделя (athwartship or acrosstrack) направление, параллельное плоскости мидель шпангоута судна (или миделя) и перпендикулярное диаметральной плоскости судна
50 направленность (directivity) мера того, насколько узко сфокусирован основной лепесток характеристики направленности луча; так узкий основной лепесток, создающий луч с малой шириной, обладает высокой направленностью, а широкий луч обладает низкой направленностью
51 незеркальный режим (non-specular regime) ситуация, когда в данных отраженного эхосигнала доминирует разброс показаний, как правило, когда ось луча находится на перпендикуляре ко дну
52 неопределенность (uncertainty) интервал вокруг полученного результата измерения, который будет содержать истинное значение измеренной величины на заданном уровне доверительной вероятности. Уровень доверительной вероятности интервала и принятое статистическое распределение ошибок также должны быть установлены. В контексте Стандарта S-44 (5) термины «неопределенность» и «confidence interval» — эквивалентны
53 нестабилизированный луч (unstabilized beam) луч, у которого отсутствует возможность настройки (управления) в соответствии с известными пространственными перемещениями судна (крен, дифферент, курс)
335
Приложение
54 обнаружение объектов (Feature detection) способность системы к обнаружению объектов заданного размера. Данные Стандарты задают величину объектов, которые должны быть выявлены во время съемки с целью обеспечения безопасности мореплавания
55 обследование дна (Bottom search) метод систематического исследования морского дна, имеющий целью обнаружение объектов, таких, как затонувшие суда, скалы и другие препятствия на дне
56 объект (feature) в контексте Стандарта S-44 — любой материальный объект, являющийся продуктом человеческой деятельности либо нет, возвышающийся над морским дном и который может быть опасен для надводной навигации
57 основной лепесток (main lobe) часть характеристики направленности, в пределах которой передается или принимается основная часть акустической энергии
58 пассивный сонар (passive sonar) прослушивающее устройство, которое регистрирует звуки, издаваемые объектами в воде (сейсмические события, корабли, подводные лодки и морские животные, каждый из которых генерирует собственные звуки)
59 первые боковые лепестки (first side lobes) первый и наиболее сильный боковой лепесток сбоку от основного лепестка характеристики направленности луча
60 период посылок (ping cycle) непрерывный цикл работы эхолота, используемый для сбора серий глубин во время движения судна
61 ПИКИ (Peaks) максимальные значения амплитуды волны
62 поверхность неопределенности (Uncertainty Surface) модель, как правило, основанная на «гридированных данных», которая описывает неопределенность глубин продукта съемки на смежных районах поверхности Земли. Поверхность неопределенности должна содержать достаточное количество метаданных для однозначного описания природы содержащихся в ней неопределенностей
63 порог обнаружения (detection threshold) значение предсказанной амплитуды, прибавляемое к величине временного среза с целью уменьшения шума от реального эхосигнала от дна
64 поправка (Correction) величина, которая прибавляется к результатам измерения или функции с целью уменьшить или минимизировать эффект (систематической) ошибки и улучшить результат измерения или функции. Поправка соответствует рассчитанной (систематической) ошибке по величине, но противоположна по знаку
65 подводный носитель (towfish) Устройство с акустическими антеннами, которое буксируется под поверхностью воды позади судна
336
Приложение
66 полоса обзора (swath) набор соприкасающихся полос акустического освещения дна, перпендикулярных ДП судна, содержащих пятна облучения, внутри которых рассчитыва-ются координаты глубин
67 полное обследование дна (full bottom search) метод систематического исследования морского дна, выполняемый с целью выявления большинства объектов с заданными размерами, использующий соответствующие системы, процедуры и подготовленный персонал. На практике невозможно достичь 100% [акустического] освещения / 100% батиметрического покрытия (использования данных терминов следует избегать)
68 посылка (Ping) короткий звуковой импульс, сгенерированный активным сонаром для проведения подводных измерений
69 потери за расширение (spreading loss) падение энергии на единицу площади по мере распространения фронта акустического импульса.
70 потери на распространение (transmission loss) комбинация потерь на расширение и поглощение звуковой волны в среде
71 потери за счет поглощения среды (absorption loss) энергетические потери звуковой волны, распространяющейся в среде, возникающие в результате поглощения средой звуковой энергии
72 преобразователь (Transducer) общий термин для устройства, обеспечивающего преобразование энергии из одной формы в другую, включая совместно гидрофон и излучатель
73 принцип взаимности (principle of reciprocity) условие, когда приемоизлучатель эхолота, работающий как гидрофон, создает характеристику направленности, аналогичную его работе в качестве излучателя
74 промер или батиметрические измерения (echo sounding or Bathymetry measurement) метод дистанционного определения глубин океанского дна
75 профиль скорости звука (sound velocity profile) описание поля скорости звука в виде функции глубины в заданном месте; вертикальный профиль скорости звука в воде (ВРСЗ)
76 разрешение (resolution) характеристика сонара, которая определяется размером пространственного угла луча
77 рассеивание (Scatter) потери энергии при ее взаимодействии с целью, выражающиеся в том, что только часть ее отражается в направлении излучателя
78 решетка излучателей — (projector array) группа излучателей, совместно генерирующих звуковые волны обычно с целью формирования лучей и управления лучами
79 рыскание (yaw) угол вращения судна вокруг вертикальной оси. Примечание: применительно к МЛЭ — это угловая поправка азимута ДП судна
337
Приложение
80 «свей» (sway) поступательное движение в направлении, перпендикулярном диаметральной плоскости судна
81 сила обратного рассеяния (backscattering strength) часть отразившейся от цели энергии, отнесенной к площади цели и отразившейся обратно в направлении излучателя
82 сила цели (target strength) термин для характеристики силы обратного рассеивания, когда речь идет о дискретных объектах, таких как мина или подводная лодка
83 систематическая ошибка крена (roll bias) систематическая ошибка угла крена антенной решетки, зависящая от конфигурации судна наплаву, но стабильная в течение определенного времени. Определяется по результатам калибровки МЛЭ и складывается с измеренным значением угла крена, полученного с помощью ДПС
84 скорость звука (sound speed) скорость, с которой звук распространяется в среде
85 среднеквадратическое радиальное отклонение (СРО) места (dRMS = distance Root Mean Square) величина, рассчитываемая как корень квадратный из суммы дисперсий широты и долготы. В зависимости от характера статистического распределения погрешностей, уровень доверительной вероятности нахождения истинного места внутри круга с радиусом СРО колеблется от 63 до 68%
86 соленость (Salinity) относительное содержание соли в океанской воде, обычно в одной части на миллион (in parts per million =PPM). Один из необходимых параметров для расчета скорости звука
87 сонар (sonar) устройство, используемое для дистанционного определения нахождения объектов в воде путем измерения расстояний с помощью звуковых волн
88 сонарные устройства (sonar devices) семейство инструментов, использующих акустические волны для дистанционного зондирования водной среды с целью обнаружения находящихся в ней объектов
89 соотношение сигнал шум (signal-to-noise ratio) отношение силы принятого сигнала к уровню сигнала помех, являющееся мерой «различимости» или «детектируемости» сигнала (возможности измерения полезного сигнала)
90 стабилизация лучей (motion или beam stabilization) процесс, при котором пространственные перемещения судна исключаются из данных, измеряемых эхолотом, для получения результатов в системе координат, связанной с центром Земли
91 степени свободы (degrees of freedom) набор возможных путей, по которым объект может двигаться, включая как поступательные, так и вращательные движения
92 суммарная вертикальная неопределенность: (Total vertical u ncertai nty=TVU) компонент суммарной перенесенной неопределенности рассчитанный в вертикальной плоскости, имеющей размерность 1D и уровень доверительной вероятности 95 %
338
Приложение
93 суммарная горизонтальная неопределенность (Total horizontal uncertainty — THU) компонент суммарной перенесенной неопределенности, рассчитанный в горизонтальной плоскости (СГН). Несмотря на то, что СГН дается как одиночная величина, она имеет размерность 2D. Делается предположение, что неопределенность анизотропна (т. е. корреляцией между погрешностями широты и долготы можно пренебречь). Это делает нормальное распределение симметричным и позволяет характеризовать радиальное распределение ошибок относительно истинного значения одним числом. Уровень доверительной вероятности 95 %
94 суммарная перенесенная неопределенность (СПН): (Total propagated uncertainty = TPU) результат перенесения неопределенностей, при котором все составляющие неопределенности измерений, как случайные, так и систематические, вносят свой вклад и переносятся на конечный результат оценки точности. Перенесение неопределенностей объединяет все измеренные неопределенности из различных источников и переносит их на результирующую неопределенность рассчитанного параметра. Уровень доверительной вероятности 95 %
95 <сурж> (surge) поступательное перемещение в направлении диаметральной плоскости судна
96 точка половинной энергии (half power point) точка на основном лепестке характеристики направленности луча, в которой излученный или принимаемый акустический сигнал имеет половину своей пиковой мощности
97 точность (accuracy) степень, с которой измеренная величина согласуется с предполагаемым истинным или принятым значением
98 траверзный угол (луча bearing angle) угол между направлением от источника эхосигнала на дне и направлением плоскости миделя, измеряемый на дне
99 угол максимального сигнала (maximum response axis = MRA) угол в пределах характеристики направленности луча, по которому излучается или принимается акустический сигнал максимальной мощности
100 угол направления (direction angle) угол, по которому направлена ось луча и в направлении которого луч имеет: (1) максимальную чувствительность (в случае луча антенной решетки гидрофонов) или (2) передает пиковые значения энергии (в случае излучающей решетки)
101 угол падения (angle of incidence) угол, по которому звуковая волна падает на поверхность дна; отсчитывается от вертикали в точке падения
102 угол старта (луча) (launch angle) | угол между вертикалью и направлением излучения эхосигнала, включая поправку за дифферент
339
Приложение
103 угол установки (mounting angle) угол, под которым линейная антенная решетка гидрофонов устанавливается на днище судна (относительно плоскости главной палубы); при установке антенны в доке угол установки должен быть равен нулю
104 уравнение гидролокатора (Sonar Equation) математическое выражение, рассматривающее все факторы, связанные с акустическими эхолокацион-иыми процессами
105 управление лучами (beam steering) процесс использования временной или фазовой задержек для направления луча, сформированного антенной решеткой гидрофонов, по определенному заданному направлению относительно оси антенной решетки
106 уровень бокового лепестка (side lobe level) размер первого бокового лепестка из серии лепестков, обычно выраженный дробным числом соотношения с пиком амплитуды основного лепестка
107 уровень доверительной вероятности (УДВ) (Confidence level) вероятность того, что истинное значение измерения будет лежать в пределах заданной точности от измеренного значения. УДВ зависит от предполагаемого статистического распределения данных и рассчитывается различным способом для величин с размерностью 1 D и 2 D. В контексте Стандарта S-44 (5), предполагающего нормальный закон ошибок измерений 95%, УДВ для размерности величин 1 D (т. е. глубины) определяется произведением коэффициента 1,96 на величину стандартного отклонения, а для позиции (размерность 2D) — произведением коэффициента 1.73 на величину среднеквадратического радиального отклонения места (см. СРО)
108 уровень излучения (transmitted source level=SL) мера величины акустической энергии, закаченной в сигнал излучателем
109 уровень шума (noise level) величина нежелательного ложного сигнала в выходных данных
110 фазовые задержки (phase delay или phase difference) дробные части колебаний волны по мере того, как она проходит определенное расстояние
111 фазовый сдвиг (phase shift) изменение фазы сигнала, введенное для того, чтобы компенсировать фазовую задержку
112 формирование лучей (beam forming) процесс использования излучающей антенной решетки и антенной решетки гидрофонов для создания узких лучей на излучение и прием акустических лучей
ИЗ характеристика направленности (beam pattern) графическое представление сфокусированной, излученной и принятой акустической энергии в пределах луча, в виде функции осевого угла луча
114 центр масс (centre of mass) точка в пространстве, относительно которой равномерно распределен вес тела и относительно которой данное тело будет вращаться
340
Приложение
115 цифровые или дискретные сигналы (digital signal or discrete signal) представление аналогового сигнала путем периодических измерений амплитуды с частотой, достаточной, чтобы однозначно охарактеризовать качество аналоговых сигналов
116 частота (frequency) количество колебаний в одну секунду акустической волны, которая попадает в индивидуальный гидрофон
117 цифровая модель рельефа (ЦМР). (Digital Terrain Model= DTM) особый вид математической модели, представляющей отображение «рельефа» как реальных, так и абстрактных геополей (поверхностей)
118 частота отсчётов (sampling rate) время между цифровыми измерениями аналогового сигнала
119 шаг элемента антенной решетки (element spacing) расстояние между соседними излучателями или гидрофонами антенной решетки
120 «шединг» ( shading) метод, в соответствии с которым уменьшаются сигналы, подающиеся на элементы излучающей антенной решетки или принимаемые с антенной решетки гидрофонов с тем, чтобы уменьшить боковые лепестки характеристики направленности
121 шединг по методу «Долф-Чебышев» (Dolph-Chebyshev Shading) метод «шединга» создает одинаковые малошумящие боковые лепестки у характеристики направленности луча
122 ширина луча (beam width или beam solid angle) мера ширины основного лепестка характеристики направленности луча. Измеряется в точке на уровне половины мощности излучения акустической энергии по данному лучу
123 ширина полосы обзора (swath width) размер полосы обзора в направлении, параллельном плоскости миделя (перпендикулярно направлению движения), который может быть измерен или фиксированным углом обзора, или расчетом в функции глубины
124 эхо сигнал (echo) акустическая энергия звука, которая отразилась от удаленной цели
Приложение 3
АДРЕСА ИНТЕРНЕТ САЙТОВ С ИНФОРМАЦИЕЙ
ПО ГИДРОГРАФИЧЕСКИМ СОНАРАМ И ТЕХНОЛОГИЯМ
1. Зарубежные коммерческие фирмы и государственные организации
№ п/п Адрес сайта Наименование организации и состав информации
1 http: //www.hypack.com Фирма «Hypack 1пс» — США ЭГИС «Нураск МАХ»
2 http: //www.kongsberg.com Фирма «Kongsberg Maritime» — Норвегия ОЛЭ,МЛЭ серии ЕМ, ЭГИС SIS, Neptune, Poseidon
3 http://www.edgetech.com Фирма «Edge Tech » — США ГБО: 4100 PSSS, 4300 МРХ, 4200 FS Профилографы серии: 3100 Portable SBP ЭГИС: Discovery (ГБО+профилограф)
4 http://www. CodaOctopus.com Фирма «CodaOctopus.» — Великобритания ЭГИС CodsGeoSurvey
5 http://www.eiva.dk/equipmen/ егр_ frm.htm Фирма «Eiva» — Дания ЭГИС Eiva
6 http://www.tritonelics.com Фирма «Triton Elies International» — ЭГИС ISIS
7 http://www.geoacoustics.com Фирма «Geo Acoustics » — Великобритания БГБО: GeoSwath, ГБОСА: Geo SAS ЭГИС
8 http: //www.benthos.com Фирма «TELEDYNE Benthos» — США ГБО /профилограф
9 http://www.ixsea.com Фирма «IxSea” — Франция ГБОСА: Shadows, ДПС OCTANS III, ИНС
10 http://www.seabeam.com/ Фирма «SeaBeam Instruments» Разработчик и поставщик МЛЭ «SeaBeam»
И http://www. L-3Klein.com Фирма «L3_ Klein » — Германия ГБО: Klein 3000, Klein 5000
12 http://www. odomhydrographic.com/ products.htm Фирма «Odom Hydrographic Systems, Inc» — США ОЛЭ (Echotrac), МЛЭ (Echoscam)
13 http://www.reson.nl Фирма «RESON» Разработчик и поставщик МЛЭ «SeaBat»
14 h ttp://w ww.seabird.com/i n dex. htm Фирма «Seabird» Гидрологические зонды
15 http://'www.sperry-marine. com/products/mk39.htm Фирма «Sperry Marine» Гирокомпасы, датчики перемещений судна
16 http://www.syqwestinc.com/ Фирма «SyQwest » (быв. «Oceandata») — США ОЛЭ, профилографы
17 http://www.falmouth.com/ products/ Фирма «Falmouth» Поставщик океанографической аппаратуры
342
Приложение
18 http://www. chesapeaketech. com Фирма «Chesapeake Technology» — США Разработчик и поставщик ЭГИС SonarWEB SonarWIZ.MAP (для обработки данных ГБО)
19 http:/ /www.qps.com Фирма «Quality Positioning Services» — Голландия, Разработчик и поставщик ЭГИС QINSy
20 http://www.caris.com Фирма «Caris Marine» — Канада; гидрографические технологии: HIPS, SIPS, LOTS
21 http://www.fugroseastar.com / TechSpec.html Фирма «FUGRO» — поставщик услуг спутниковых подсистем SeaStar
22 http://www.esri.com/library/ Фирма «ESRI Software» ГИС ArcGIS
23 http://fgdc.er.usgs.gov/fgdc. html Федеральный Центр данных США Federal Geographic Data Committee
24 http://www.thsoa.org Гидрографическое Общество Америки Hydrographic Society of America (THSOA)
25 http://www.nima.mil Imagery and Mapping Agency (NIMA) — США
26 http://www.iho.org Международная Гидрографическая организация (МГО) International Hydrographic Organisation (IHO) Документы МГО
27 http://www.cmaxsonar.com Фирма «С-МАХ» — Великобритания, Разработчик и поставщик ГБО СМ-2
28 http://chartmaker.ncd.noaa.gov Береговая съемка США (подразделение N0AA) NO A A National Coast Survey Электронные навигационные карты (ЭНК)
29 http: //www.osl.com/corporate Фирма «Offshore Systems Ltd.» Поставщик океанографической аппаратуры
30 http://www.primar.org Priniar Organisation Поставщик ЭНК (мировая коллекция)
31 http://www.oceanlmaging.com Фирма «Ocean Imaging Consultants,Inc» — США,
32 http://www.innovativesgis.com The GIS Primer (геоинформационные системы)
33 http://www.navitronic.dk/ products_fr.htm Фирма «Navitronic»
34 http://www.brooke-ocean. com/mvp_main.html Фирма «Brooke Ocean» Поставщик океанографической аппаратуры.
35 http://www. appliedmicrosystems.com/ products.html Фирма «Applied micro Systems» Поставщик океанографической аппаратуры.
36 http://www.adcp.com/ products.html Фирма «ADCP» Поставщик доплеровских акустических профилографов течений.
37 http://oceanographer.navy.mil/ ships/index.html Океанографическая лаборатория ВМС США
343
Приложение
38 http: //www.cctechnol.com Фирма «С&С Technologies Inc» — США Поставщик СНА для работы со спутниковой подсистемой C-Nav (STARFIRE)
39. http://www.navcomtech.com Фирма «NavCom Techology» — США Поставщик СНА СНА для работы со спутниковой подсистемой C-Nav (STARFIRE)
40 http://www.fugrochance.com Фирма «FUGRO» — поставщик услуг спутниковых подсистем SkyFix ХР, StarFix НР/ХР
2. Иностранные университеты и исследовательские центры
http://www.omg.unb.ca/~jhc/ Ocean Mapping Group, University of New Brunswick (UNB), Department Geodesy and Geomatics Engineering, CANADA (один из ведущих мировых учебных и научных центров в области гидрографии)
http: //www.ccom.unh.edu / Joint Hydrographic Center (UNH/NOAA) University of New Hampshire (один из ведущих мировых учебных и научных центров в области гидрографии)
http://www.soest.hawaii.edu University of Hawwaii Shool of Ocean&Earth Science&Technology
http://www.marine.usm.edu / University of Southern Mississippi Hydrographic Science Research Center (HSRC)
http: //www.plymouth.ac.uk/ University of Plymouth (UK)
3. Отечественные фирмы и организации
1 http://www.marimeter.spb.ru Фирма «Мариметр» — агент компании «Konqsberg Maritime» в РФ Поставка ОЛЭ, МЛЭ, ДПС; ЭГИС SIS, Neptune, Poseidon ЭГИС QINSy, (фирма QPS — Голландия)
2 http://www.geomatics.ru Фирма «Центр Геоматика» — агент фирмы «HYPACK Inc/» в РФ, поставка ОЛЭ, профилографов, ЭГИС HYPACK МАХ
3 http: //www.technopole.ru Фирма «ТЕХНОПОЛЬ» Поставка: МЛЭ фирмы L3_ELAK_Nautik (SeaBeam), ГБО фирмы «Geo Acoustics », ГБОСА Shadows, ДПС OCTANS III, ИНС фирмы «IxSea»
4 http://www.navgeocom.ru Фирма «НАВГЕОКОМ» агент компании «TRIMBLE Navigation» в РФ Поставка СНА фирмы TRIMBLE Navigation и ЭГИС HYDRO Pro
5 http://www.svarog.ru Фирма «Сварог» — агент компании «FUGRO» — поставщик услуг спутниковых подсистем StarFix и StarFix НР/ХР
6 http://www.romona.ru Компания РОМО НА — российская навигационно-геодезическая компания (выполнение гидрографических и морских геодезических работ)
344
Приложение 4
ПЕРЕЧЕНЬ СОКРАЩЕНИЙ
Англоязычные сокращения
AGC Automatic Gain Control
AUV Automated Underwater Vehicle
BITE Built-In Test and Evaluation
ССОМ Center for Coastal and Ocean Mapping (UNH)
COG Center Of Gravity
CTD Conductivity (actually ratio), Temperature, Depth (actually pressure) sensor
CUBE Combined Uncertainty and Bathymetry Estimator
drms distance, root-mean-square
DGPS Differential Global Positioning System
DSP Digital Signal Processing
DSL Deep Scattering Layer
DSSS Digital Side-Scan Sonar
EA Equiangular (mode)
ECDIS Electronic Chart Display and Information System
ED Equidistant (mode)
EGNOS European Geostationary Navigation Overlay System
GPS Global Positioning System
GSF Generic Sensor Format
GUI Graphical User Interface
IFREMER Institut francais de recherche pour 1’exploitation de la mer
IHO International Hydrographic Organization
INS Inertial Navigation System
JHC Joint Hydrographic Center (UNH/NOAA)
MBES Multibeam echosounder
MSAS Multi-functional transport Satellite-based Augmentation System
MVP Moving Vessel Profiler
NAVO United States Naval Oceanographic Office, also NAVOCEANO
NIMA National Imagery and Mapping Agency
NMEA National Marine Electronics Association
NOAA National Oceanic and Atmospheric Administration
NOS National Ocean Service
NRL Naval Research Laboratory
OMG Ocean Mapping Group (UNB)
PPS Precise Positioning Service (GPS)
QC Quality Control
RAIM Receiver Autonomous Integrity Monitoring
RLG ring laser gyro (compass)
ROS Report Of Survey
345
Приложение
ROV Remotely Operated Vehicle
RTCM Radio Technical Committee for Maritime use
RTK Real-Time Kinematic (GPS)
RTQA Real-Time Quality Assurance (software)
S/N Signal to Noise ratio
S-44 Special Publication 44, Standards for Hydrographic Surveys
SAS Synthetic Aperture Sonar
SBAS Satellite-Based Augmentation Systems
SBES single-beam echosounder
SNAS Satellite Navigation Augmentation System
SOG speed of vessel (over ground not through water)
SSS Side-Scan Sonar
SVP Sound Velocity (actually speed) Profiler
TVG Time Varying Gain
TWTT Two-Way Travel Time
UNB University of New Brunswick
UNH University of New Hampshire
USACE United States Army Corps of Engineers
USM University of Southern Mississippi
VOO Vessel Of Opportunity
VRU Vertical Reference Unit
WAAS Wide-Area Augmentation System
WADGPS Wide-Area DGPS
ХВТ expendible BathyThermograph
Русскоязычные сокращения
ГИС географическая информационная система
БГБО батиметрический гидролокатор бокового обзора
БСВ Балтийская система высот
ВМФ военно-морской флот
ВРСЗ вертикальное распределение скорости звука (в воде)
ГБО гидролокатор бокового обзора
ГБОСА гидролокатор бокового обзора с синтезированной апертурой
ГМА Государственная морская академия
ДПС датчик перемещений судна
ДП диаметральная плоскость (судна)
ЛЧМ линейно-частотная модуляция
МГО Международная Гидрографическая организация
МЛЭ многолучевой эхолот
НИС научно-исследовательское судно
НТУ наинисший теоретический уровень
ОЛЭ однолучевой эхолот
СНА спутниковая навигационная аппаратура
346
Приложение
СКП средняя квадратическая погрешность
СРО среднеквадратическое радиальное отклонение
ЦМР цифровая модель рельефа
ЦТС центр тяжести судна
экнис электронная картографическая навигационная информационная система
ЭГИС электронная гидрографическая информационная система
ЭНК электронная навигационная карта
эт эхотрал
Учебное пособие
Юрий Георгиевич Фирсов
Основы гидроакустики и использования гидрографических сонаров
Корректор В.П. Мартыненко Оригинал-макет ЛА, Философова Дизайн обложки ЛА. Философова
Подписано в печать 17.12.2010. Формат 70x100 У1б Бумага офсетная. Печать офсетная
Усл.-печ. л. 21,75. Тираж 500 экз. Заказ № 1895
Издательство «Нестор-История» 197110, СПб., Петрозаводская ул., д. 7 Тел.: (812)235-15-86 e-mail: nestor_historia@list.ru www.rossica.su
Отпечатано в типографии «Нестор-История» 198095, СПб., ул. Розенштейна, д. 21
Тел.: (812)622-01-23
Фирсов Юрий Георгиевич (1950 г.р.) — автор более 80 научных трудов.
В1974 году с отличием окончил Арктический факультет Ленинградского-высшего инженерного морского училища имени С.0. Макарова (ныне Государственная морская академия). Инженер-гидрограф.
Участвовал в более чем 40 морских экспедициях, в том числе в двух антарктических и кругосветной. Кандидат технических наук (1979), старший научный сотрудник (1996), доцент кафедры «Гидрография моря» Государственной морской академии (2006).