/






























































































































































































































































































































































































































































Текст
Н. Н. МОИСЕЕВ
МАТЕМАТИЧЕСКИЕ
ЗАДАЧИ
СИСТЕМНОГО .
АНАЛИЗА
Допущено Министерством высшего
и среднего специального образования СССР
в качестве учебного пособия
для студентов вузов, обучающихся
по специальности ^Прикладная математика»
МОСКВА <НАУКА>
ГЛАВНАЯ РЕДАКЦИЯ
физико-математической ЛИТЕРАТУРЫ
1981
22.18
М 74
‘ УДК 519.6
Математические задачи системного анализа. Моисе-
ев Н. H.-М.: Наука. Главная редакция физико-математической
литературы, 1981. — 488 с. .
В основу книгй положен курс лекций, читаемый автором'в
Московском государственном университете по новой дисциплине —
системному анализу. В ней содержится изложение методов иссле-
дования сложных систем с помощью ЭВМ; значительное внима-
ние уделяется методам предварительной обработки систем урав-
нений, анализу систем и, прежде всего, методам асимптотического
анализа. Излагаются основы теории управления.
Табл. 1, илл. 51, библ. 73 назв.
(ум? 6
М ~ 053(02) Э? 13’81- 1502000000
Издательство «Наука».
Главная редакция
физико-математической
литературы, 1981
ОГЛАВЛЕНИЕ
Предисловие..........................................................5
Глава 1. Методы исследования операций в системном анализе .... 11
§ 1. Вводные замечания..................-....................... И
§ 2. Некоторые типичные задачи исследования операций.............17
§ 3. Неопределенность целей.......................................28
§ 4. Другие типы неопределённостей ..............................40
§ 5. Заключительный комментарий...................................55
Глава II. Управляемые системы.......................................60
§ 1. Предварительные 'замечания ................................60.
§ 2. Понятие управляемых систем................................ 70
§ 3. Стохастическая задача и двухэтапная оптимизация.............76
§ 4. Методы расчета оптимальных программ, использующие принцип
максимума . . ............................'..............84
§ 5. Проблема быстродействия....................................102
§ 6. Прямые методы расчета оптимальных программ.................106
§ 7. Проблемы синтеза............,.....................* .... 114
Глава III. Кибернетические системы и имитация .....................130
§1.0 термине «системный анализ»-............................ 130
§ 2. Проблемы моделирования............................... 136
| 3. Кибернетические системы.............• • ,..................147
§ 4. Примеры иерархических систем........................... 162
§ 5. Программный метод в нерефлексных системах..................185
§ 6. Имитация и машинный эксперимент............................210
§ 7. Модель назначения штрафов за загрязнение окружающей среды 219
Глава IV. Асимптотические методы в системном анализе (регулярный
случай)............................;...............................226
§ 1. Предварительное обсуждение................................ 226
§ 2. Классическая теория Пуанкаре................................231
§ 3. Некоторые примеры...........................................238
§ 4. Метод Пуанкаре расчета автоколебательных и периодических ре-
шений в квазилинейных системах..................................252
§ 5. Метод усреднения...........................................260
§ 6. Случай нескольких осциллирующих степеней свободы...........283
Глава V. Теория тихоновских систем (асимптотика сингулярного вы-
рождения) ......................................................... 292
§ 1. Некоторые вопросы общего характера . . 292
§ 2 Линейная задача............................................302
§ 3. Примеры тихоновских и квазитихоновских систем.......... -324
1»
4
ОГЛАВЛЕНИЕ
Глава VI. Методы теории возмущений в задачах оптимального управ-
ления ........................................................... 347
§ 1. Простейшие схемы теории возмущений........................347
§ 2. Методы усреднения в задачах оптимального управления .... 362
§ 3. Сингулярные задачи оптимального управления................374
Глава VII. Экспертизы и неформальные процедуры....................394
§ 1. Предварительные замечания.................................394
§ 2. Некоторые примеры сложных экспертиз.......................400
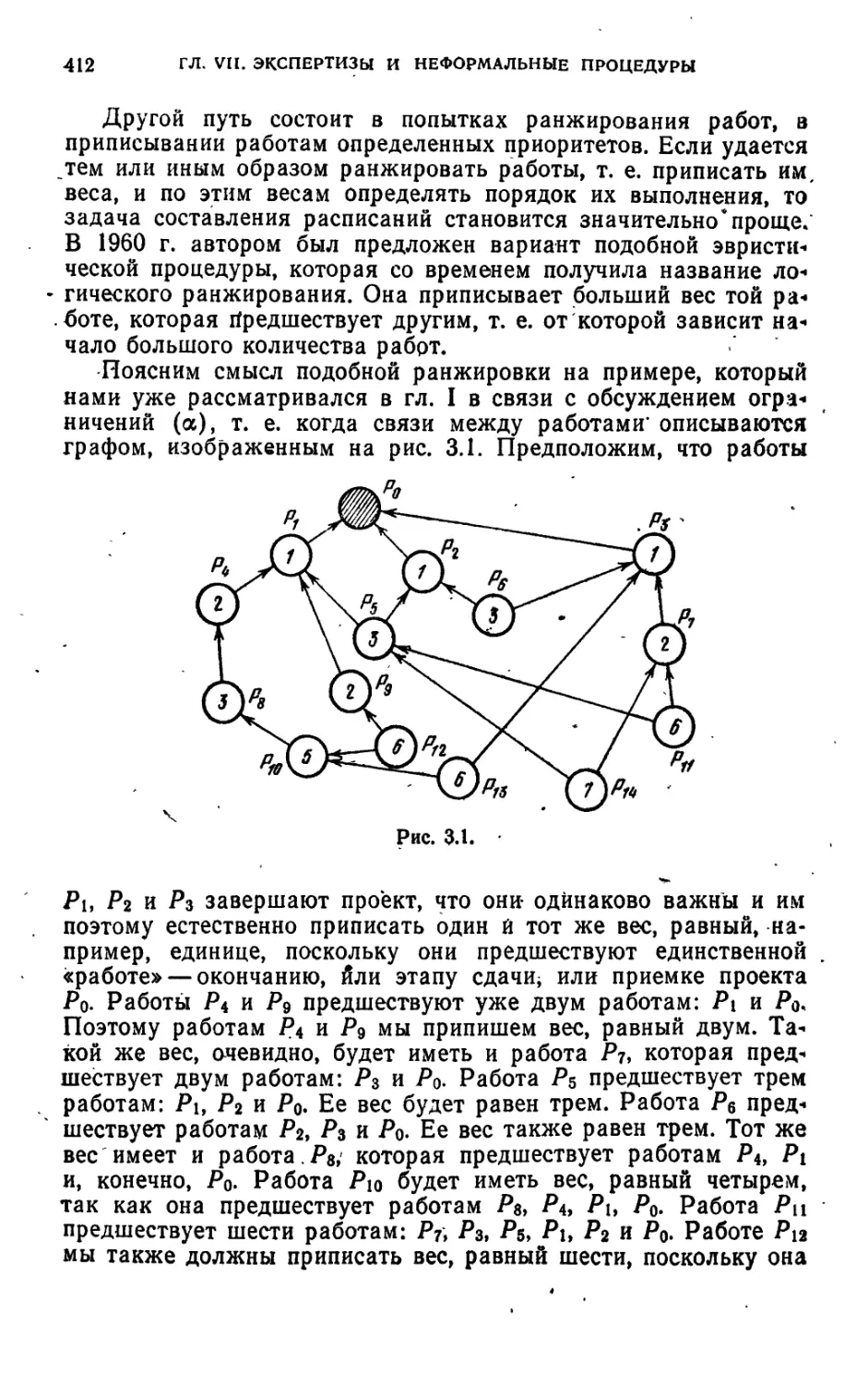
§ 3. Эвристические методы в дискретных задачах.................409
§ 4. Проблемы матричного синтеза...............................426
§ 5. Стохастические задачи.....................................438
Глава VIII. Некоторые проблемы автоматизации проектирования . . . 447
§ 1. Некоторые общие вопросы автоматизации проектирования . . . 447
§ 2. Некоторые варианты схемы проектирования...................458
Литература....................................................* . . 480
Предметный указатель........................................... . 483
ПРЕДИСЛОВИЕ
Дисциплина, именуемая «системный анализ», родилась в
силу возникшей необходимости вести исследования междисцип-
линарного характера. Создание сложных технических систем,
проектирование сложных народнохозяйственных комплексов и
управление ими, анализ экологических ситуаций и многие дру-
гие направления инженерной, научной и хозяйственной деятель-
ности требовали организации исследований, которые носили бы
нетрадиционный характер. Они требовали объединения усилий
специалистов разных научных профилей, унификации и согла-
сования информации, получаемой в результате исследований
конкретного характера. Успешное развитие подобных междис-
циплинарных или, как иногда говорят, системных или ком-
плексных исследований во многом обязано тем возможностям
обработки информации, использованию математических мето-
дов, которые появились вместе с электронной вычислительной
техникой и дали одновременно не только инструмент, но и язык
высокой степени универсальности. Подчеркнем еще раз: систем-
ный анализ возник в эпоху ЭВМ, и его развитие во многом
определяется ее современными возможностями и перспективами.
По этой причине термин «системный анализ» в этой книге мы
будем понимать достаточно узко. Он будет означать совокуп-
ность методов,' основанных на использовании ЭВМ и ориентиро-
ванных на исследование сложных систем — технических, эконо-
мических, экологических и т. д. В результате этих исследова-
ний должно возникать не просто новое знание — результатом
системных исследований является, как правило, выбор вполне
определенной альтернативы: плана развития региона, пара-
метров конструкции и т. д. Таким образом, системный анализ—
это дисциплина, занимающаяся проблемами принятия решений
в условиях, когда выбор альтернативы требует анализа слож-
ной информации различной физической природы. Поэтому ис-
токи системного анализа, его методических концепций лежат в
тех дисциплинах, которые занимаются проблемами принятия
решений, — теории исследования операций и общей теории
управления,
6
ПРЕДИСЛОВИЕ
Проблема принятия решений имела и имеет в жизни чело-
века особое значение; ведь’ любая деятельность, — это, в конеч-
ном итоге, цепочка принятия решений. Однако в подавляющем
большинстве случаев процесс принятия решений, т. е. выбор
одной из возможных альтернатив действия, не требует при-
влечения каких-либо научных методов — ситуации довольно
просты, и люди обходятся опытом, традиционными навыками,
интуицией. «*»
Но иногда ситуации оказывались такими сложными, что у
человека, принимающего решение, уже не было уверенности в
том, что его выбор правилен. В таких случаях возникала не-
обходимость в научных методах принятия решений. Постепенно
эти методы развивались и к настоящему времени сложились в
отдельную дисциплину — теорию принятия решений. На совре-
менном этапе ее развития, когда ее аппарат, ее инструментарий
опирается на широкое использование ЭВМ, а система ее моде-
лей превратилась в сложную и развитую систему, эта теория
стала называться системным анализом.
Трудно сказать, когда зародилась эта дисциплина. Ясно
одно: ее истоки — где-то в глубине человеческой истории, они
появились вместе с зачатками -военного -искусства, торговли,
производства и т. п.
Но до поры до времени все то, что относилось к выбору ра-
циональных решений, наукой в собственном смысле слова еще
не являлось. Это был лишь набор правил, который подытожи-
вал человеческий опыт или отражал субъективное представле- '
ние того или иного лица. Принятие решений начало превра-
щаться в научную .дисциплину лишь тогда, когда стали возни-
кать специфические модели, когда появилась методическая
общность анализа задач различной физической природы.
Становление новой дисциплины следует датировать концом
XIX и началом XX века, когда появились первые работы по
теории регулирования, когда в экономике начали впервые го-
ворить об оптимальных решениях, т. е. когда появились первые
представления о функции цели (полезности), когда В. Парето
был сформулирован первый принцип компромисса.'
Развитие теории принятия решений определялось, б одной
стороны, развитием математического аппарата, появлением
приемов формализации, а с другой — новыми задачами, возни-
кавшими в промышленности, военном деле, экономике.
Особенно бурное развитие теории принятия решений нача-
лось после пятидесятых годов, когда на основе теории эффектив-
ности, теории игр, теории массового . обслуживания появилась
синтетическая дисциплина — «исследование операций». Она за-
,тем постепенно переросла в* системный анализ, который явился
синтезом исследования операций и теории управления.
ПРЕДИСЛОВИЕ
7
Современная теория принятия решений имеет обширный
инструментарий, включающий в себя развитый математиче-
ский аппарат и современные вычислительные системы. И все
же, какие бы успехи ни делала теория принятия решений с по-
мощыб новейших современных методов, опирающихся цл
формализованное описание ситуаций, все еще остаются необхо-
димыми, а подчас и играют решающую роль традиционные при-
емы анализа, использующие опыт и интуицию, способности
человека к ассоциациям и многое другое, что лежит вне матема-
тики и пока еще не присуще искусственному интеллекту.
Поэтому изложение методов системного анализа должно обяза-
тельно включать описание используемых неформальных про-
цедур, без которого любое представление о системном анализе
будет не только неполным, но и искаженным. Необходимо не
только описать исследуемые эвристические приемы и способы
рассуждений. Очень важно показать также, как эти эвристиче-
ские, неформальные методы вписываются в современную тео-
рию принятия решений, как они видоизменяются под влиянием
tforo инструментария, которым теперь оснащена эта теория.
Сегодня системный анализ — это обширная синтетическая
дисциплина, включающая в себя целый ряд разделов, носящих
характер1 самостоятельных научных дисциплин. Попытка дать
более или менее полное изложение вопросов, которые сегодня
принято относить к системному анализу, заранее обречены на
неудачу.
В этой книге автору хотелось бы взглянуть на предмет в це-
лом— показать его истоки, возможности его инструментария,
продемонстрировать те способы сочетания формальной и не-
формальной манеры мышления, которые удается объединить
благодаря системам машинной имитации*).
Но для реализации подобного замысла, для того чтобы по-
казать, как в системном анализе сочетаются эксперименталь-
ное, эвристическое и строгое математическое начала, необходи-
мо быть достаточно лаконичным при описании отдельных разде-
лов и методов. А это означает, что автор должен ориентиро-
ваться на более или менее подготовленного читателя.
Когда я обдумывал содержание этой книги и характер
подачи материала, то в качестве своего читателя я видел
прежде всего студента старшего' курса, специализирующегося
в прикладной математике. У него за плечами университетский
курс анализа "(и в том числе солидные знания в области
*) В идейном, методологическом плайе данная книга близка к работе [7]
и является конкретизацией ее идей в той области человеческой деятельности,
которая связана с проблемами принятия решений. Знакомство с книгой [7]
поможет'-изучающему системный анализ увидеть целый ряд особенностей тру-
па математика в прикладных областях.
8
ПРЕДИСЛОВИЙ
дифференциальных уравнений), он уже изучил численные ме-
тоды, методы оптимизации, вариационное исчисление и многое
другое. Ему важно увидеть, как все эти дисциплины, как все
разнообразные и на первый взгляд мало связанные знания ока-
зываются переплетенными в единый узел и начинают быть по-
лезными для практики именно благодаря тому, что единая цель
цементирует эти знания, а математик, который ими владеет,
постепенно превращается в архитектора системы, превращается
в одно из основных действующих лиц в процессе крупных ис-
следований междисциплинарного характера.
Конечно, мне хотелось дать в руки человеку, занимающемуся
системными, исследованиями, определенную рецептуру, помочь
ему найти свой собственный путь. Подчеркиваю — собственный,
ибо для исследования любой системы, если она действительно
сложная, недостаточно знать существующие рецепты. Анализ
каждой сложной системы —это уникальная проблема, требу-
ющая не только разносторонней культуры, но и изобрета-
тельства и таланта. Любое руководство — это всего лишь по-
мощник.
Но для того, чтобы быть по-настоящему полезной людям,
ведущим конкретные исследования, книга должна демонстри-
ровать прецеденты. Поэтому последняя глава ее посвящена не-
которым конкретным примерам применения системного ана-
лиза— приложению общих положений, развиваемых в книге.
В качестве области приложения идей и методов системного ана-
лиза выбрана проблема автоматизации проектирования. Эта
область является, вероятно, той сферой деятельности, в кото-
рой применение вычислительной техники сулит особенно боль-
шие перспективы и для которой системный анализ является
естественным инструментом ее использования.
Обсуждаемый предмет очень широк, и слова «автоматиза-
ция проектирования» призваны его несколько сузить. И все же
термин «автоматизация проектирования» сегодня охватывает
очень много различных по своему содержанию понятий. Среди
них есть и чисто технологические: структура банков данных,
средства автоматизации графических работ, управляющие про-
граммы и даже языки программирования. Все это мы обсу-
ждать не будем.
Центральным рассматриваемым здесь вопросом является
проблема автоматизации начального этапа проектирования, так
называемого аванпроектирования. В этой проблеме основное
наше внимание будет сосредоточено на выборе альтернативных
вариантов при завязке проекта (как иногда говорят, при форми-
ровании облика изделия) или создании генеральной схемы
народнохозяйственного комплекса. Эта проблема является,
вероятно, не только наиболее трудной, но и узловой проблемой
ПРЕДИСЛОВИЕ
9
проектирования. В самом деле, ведь ошибка в исходных пози-
циях не может быть затем исправлена ни совершенством
графической техники, ни методиками обработки результатов
эксперимента, ни станками с программным управлением, ни
совершенством методов инженерных расчетов. Ее не может ком-
пенсировать и качество используемой вычислительной системы.
Аванпроекти’рование — это как раз та область, где хорошая на-
учная основа, т. е. применение передовых методов анализа, мо-
жет компенсировать относительную слабость вычислительной
техники. Конечно, все то, о чем будет идти речь ниже, не-
возможно реализовать без ЭВМ. Но тем не менее не ЭВМ здесь
играет первую скрипку, а совершенство методов научного ана-
лиза. .
Если мы сегодня научимся помогать конструктору, проекти-
ровщику или плановику не ошибаться в выборе основного,
«базового» варианта будущей конструкции или проекта на-
роднохозяйственного комплекса, то это и будет тем решающим
вкладом теории принятия решений в автоматизацию проектиро-
вания, который столь необходим в период резкого усложнения
различных народнохозяйственных и' технических разработок,
технологий и т. д. Я уверен, что использованиесовременного ар-
сенала средств обработки информации и методов, созданных в
науке, потребует такой же коренной перестройки процессов про-
ектирования и планирования, а также совершенствования про-
цедур принятия решений, как появление паровоза потребовало
в свое время замены грунтовых дорог железными.
Охватить все вопросы, которые связаны с процедурами при-
нятия решений при создании проектов и технологий, в книге
любых размеров, вероятно, невозможно. Поэтому автор ставит
перед собой значительно более скромную задачу — написать
книгу, которая призвана.показать читателю, что создание си-
стемы программных процедур должно опираться на некоторые
общие принципы.
Есть еще одна трудность, с которой нерерывно сталки-
вается автор. Лица, хорошо владеющие необходимым аппара-
том, редко занимаются анализом конкретных систем, и,
наоборот, исследователи конкретных систем редко владеют
достаточно широким арсеналом математических средств. По-
этому перед автором стоит почти непосильная задача написать
книгу, которая была бы достаточно проста для исследователей
конкретных систем и привлекательна для лиц, разрабатываю-
щих математические методы, необходимые для системного
анализа.
Предлагаемая книга возникла из лекций, которые в разное
время автор читал студентам МФТИ и МГУ. Особую роль в ее
создании сыграл цикл лекций, который автор прочел слушате-
10
ПРЕДИСЛОВИЕ
лям инженерного потока факультета вычислительной математики
и кибернетики МГУ. Это были специалисты, которые сами
занимаются «практическим» системным анализом.
Работа с этой группой специалистов в течение двух се-
местров убедила автора в. необходимости создания синтети-
ческого курса «Введение в системный анализ». Этот курс должен
был бы связать вместе целый ряд дисциплин, которые обычно
читаются в университетах» методы оптимизации,. элементы ис-
следования операций, теория оптимального управления, до-
полнительные главы дифференциальных уравнений, — с эври-
стическими процедурами, без которых анализ более или менее
сложных систем невозможен.
И объединяющим началом здесь должны быть идеи имита-
ции и человеко-машинного1 диалога, организация которого вы-
растает постепенно в самостоятельное научное направление.
Книга состоит из четырех частей. В первой части, содержа-
щей три главы, излагается методическая база системного ана-
лиза. Показывается, как на основе, методов исследования
операций и теории уйравления возникла общая концепция ки-
бернетических систем и системного анализа.
Во второй части, тоже состоящей из трех глав, излагаются
методы теории возмущений.
. Третья часть, состоящая из одной главы, посвящена демон-
страции того, что называется «эвристическими процедурами».
А последняя часть, тоже состоящая из одной главы, как уже
говорилось, посвящена автоматизации проектирования.
Такая компоновка материала позволяет отчетливо увидеть
место математики и математика в системном анализе и связь
формальных и неформальных элементов этой дисциплины.
Структура книги, подбор и расположение материала и осо-
бенно характер его подачи и интерпретации сложились в ре-
зультате многолетней совместной работы, долгих и трудных
дискуссий с моими ближайшими товарищами по работе в
ВЦ АН СССР П. С. Краснощековым, ТО. Н. Павловским,
А. А. Петровым и многими другими. Особенно важной для
автора была помощь Ю. Г. Евтушенко, Ф. И. Ерешко, А. Ф.' Ко-
ноненко и Е. М, Столяровой, которые прочли всю рукопись и
внесли в ее текст много полезных улучшений. Всем им автор
выражает свою искреннюю благодарность.
Н. Н. Моисеев
Г л а в a I
МЕТОДЫ ИССЛЕДОВАНИЯ ОПЕРАЦИЙ
В СИСТЕМНОМ АНАЛИЗЕ
§ 1. Вводные замечания
Исследование операций, как об этом уже говорилось в пре-
дисловии,-является одним из основных истоков системного ана-
лиза. Можно сказать даже больше. Основные концепции, прин-
' ципы анализу сйстем являются развитием идей теории исследо-
вания операций, и ее методы являются сегодня одной из основ-
ных глав системного анализа. Вот почему первая глава’ этой
книги посвящена изложению основных идей исследования опе-
раций и такой их интерпретации, которая необходима для по-
следующего анализа.
Сам термин «исследование, операций» родился в послевоен-
ные годы, когда стало очевидно, что задачи широкого класса,
возникшие в самых различных сферах человеческой деятельно-
сти, имею!, несмотря на их качественное различие, одно общее —
они сводятся к выбору способа действия, варианта плана, пара-
метров конструкции, т. е. к принятию решений, и этого общего
достаточно для построения единой теории и единой системы
методов. В этих условиях и возник термин «операция» —термин
очень общий. Он означает любое целенаправленное действие. Го-
воря об операцииГ’мы всегда ассоциируем с ней некоторого субъ-
екта (оперирующую сторону), который формулирует цель опера-
ции и в'Интересах которого последняя проводится. Цель опера-
ции—обычно некоторый внешний (экзогенный) элемент —счи-
тается заданной.
Наряду с-субъектом, т. е. с оперирующей стороной, мы всегда
имеем дело еще с исследователем операции*). Он действует в
интересах оперирующей стороны; и его задача состоит в том,
чтобы найти способ использования ресурса (т. е. возможностей
оперирующей стороны), обеспечивающий достижение некоторой-
цели.
В такой общей постановке новая дисциплина отвечала по-
требностям целого ряда направлений человеческой деятельности.
Начиная с сороковых годов проблемам исследования операций
*) В переводной литературе часто используется термин «аналист» — анг-
лийский эквивалент русским терминам.«исследователь операции» или просто
«исследователь».
12
ГЛ. 1. МЕТОДЫ ИССЛЕДОВАНИЯ ОПЕРАЦИЙ
посвящается все большее и большее количество работ. Среди
этих работ мы видим и чисто математические, и методологиче-
ские исследования, и работы, посвященные анализу конкретных
операций в экономике, военном деле, сельском ’хозяйстве, про- '
ектировании и т. д.
„ Исследование операций как научная дисциплина сформиро-
валось в послевоенные годы, но ее основы были заложены значи-
тельно ранее, причем работы, выполненные в СССР, внесли
весьма весомый вклад в формирование принципов и системы ме-
тодов исследования операций.
Задачи, которые составили отправную позицию для становле-
ния исследования операций как самостоятельной дисциплины,
принадлежали самым различным направлениям человеческой
деятельности. Так, например, Д. А. Вентцель и В. С. Пугачев
развивали так называемую «теорию эффективности технических
систем», в рамках которой возникли многие методы и принципы
< выбора конструктивных параметров технических систем, наилуч-
шим образом отвечающих достижению целей, ради которых со-
здавались эти технические системы. Аналогичные идеи возник-
ли и начали серьезно влиять и на развитие теории управления
техническими системами — дисциплины, которая в предвоенные
годы подошла к исследованию сложных систем управления
типа автопилота. Проблема определения таких, конструктивных
характеристик, которые должны были бы наилучшим образом
обеспечить достижение некоторой цели, например обеспечивать
устойчивый полет самолета по заданному курсу, постепенно ста-
новится одной из центральных в теории управления.
Возникли подобные задачи и в экономике. В конце тридца-
тых годов была решена знаменитая задача об оптимальном рас-
крое, была сформулирована транспортная задача и т. д.
Еще в 1927 г. Ф. Рамсеем была сформулирована задача об
оптимальном распределении известиций. Заметим, что задачи о
наилучшем способе распределения ресурсов всегда занимали
значительное место в экономике, хотя вычислительные сложно-
сти появляющихся задач не давали до поры до времени возмож-
ности их эффективно анализировать. Возникновение широкого
фронта экономико-математических исследований еще ждало
своего часа — создания и внедрения электронной вычислитель-
ной техники.
- А. Я. Хинчин и Б. В. Гнеденко в середине тридцатых годов
начали изучать класс вероятностных задач, получивших впо-
следствии название задач теории массового обслуживания. Боль-
шой стимулирующий импульс это направление получило во вре-
мя войны вследствие необходимости планирования боевых дей-
ствий и бережного расходования имеющегося и, как правило,
весьма ограниченного ресурса.
$ I. ВВОДНЫЕ ЗАМЕЧАНИЯ
13
Во время войны исследование операций получило широкое-
развитие в Англии и США, благодаря чему в послевоенные
годы и возник термин.«исследование операций».
В послевоенные годы были созданы первые ЭВМ и неизмери-
мо обогатился вычислительный арсенал математики. Это не мог-
ло не сказаться на развитии всех теорий, связанных с конкрет-
ными задачами практики, и, следовательно, на требованиях к
проведению разнообразных и сложных расчетов.
Появление ЭВМ было одним из важных факторов, стимули-
рующих объединение разнообразных задач, связанных с проб-
лемами принятия решений, в единую научную дисциплину, кото-
рая получала название «исследование операций».
Значительное место в становлении новой дисциплины в СССР
принадлежит Ю. Б. Гермейеру. С его именем связано и более яс-
ное понимание смысла дисциплины, ее места в общем русле раз-
вития послевоенной науки (см. [4]), и широкое развитие специ-
альных математических методов. Он ввел также и новый тер-
мин «теория исследования операций», чтобы подчеркнуть
существование концептуального начала, т. е. некоторой общей
методологии в анализе задач принятия решений — задач су-
щественно разной физической природы.
Такое уточнение сыграло свою роль и было весьма необхо-
димым, ибо в англоязычной литературе господствовал чисто
прагматический подход, наложивший определенный отпечаток
эклектики, — исследование операций представлялось как собра-
ние различных, более или менее похожих задач, для которых
могли быть использованы однотипные методы решения. Только
после работ Ю. Б. Гермейера стало уместным говорить об ис-
следовании операций как о единой дисциплине, изучающей опре-
деленный класс моделей человеческой деятельности. В данной
книге мы будем использовать термины «исследование операций»
й «теория исследования операций», не различая их смысла. Вся-
кий раз, используя термин «исследование операций», мы будем
иметь в виду тот его более глубокий смысл, о котором мы толь-
ко что говорили.
Новую научную дисциплину нельзя было считать дисципли-
ной чисто математической, хотя она широко использовала мате-
матические методы и породила целый ряд направлений при-
кладной математики. Главным же содержанием дисциплины
были сложные проблемы принятия решений, при изучении кото-
рых неформальные методы, представления здравого смысла и спо-
собы описания — математическая формализация задач,— играли
не меньшую роль, чем формальный, математический аппарат.
Примечание. Даже в постановке задач, которая основывается пр^
жде всего на содержательном анализе проблемы, огромную роль играет ма-
тематическая культура исследователя. Надо уметь не только ясно понять
14 ПЛ. I. МЕТОДЫ ИССЛЕДОВАНИЯ ОПЕРАЦИЙ
смысл задачи, но и сформулировать ее так, чтобы она была доступна для
анализа математическими средствами.
Итак, исследование операций оказалось дисциплиной синте-
тической, в которой можно выделить три главных направления,
причем только одно из них связано с традиционным примене-
нием математики. Эти три направления соответствуют следую-
щим трем этапам, которые всегда присутствуют в исследовании.
а) Построение модели, т. е., формализация
изучаемого процесса или я в л.е н-и я. Оно сводится к
описанию процесса на языке математики. На этом этапе речь
идет о построении модели процесса, а не операции. С помощью
одной и той же модели могут изучаться разные операции.
б) Описание операции — постановка задачи.
Оперирующая сторона (субъект, ассоциированный с системой)
формулирует цель операции. Цель операции всегда предпола-
гается экзогенным, (внешним) фактором по отношению к опера-
ции и должна быть еще формализована. Задача исследователя
Операции—провести необходимый анализ неопределенностей,
ограничений и сформулировать в конечном счете (совместно с
субъектом, в интересах которого проводится операция) неко-
торую оптимизационную задачу
f(x)-> max, хе G. (1.1)
Здесь х — элемент некоторого нормированного пространства Е,
определяемого природой модели, G cz Е-— множество, которое
может иметь сколь угодно сложную природу, определяемую
структурой модели и особенностями исследуемой операции. Та-
ким образом, задача исследования операции на этом этапе
нами трактуется как некоторая оптимизационная проблема.
В действительности задача исследователя операции несколько
шире. Анализируя требования к операции, т. е. те цели, которых'
предполагает достигнуть оперирующая сторона, и те неопреде-
ленности, которые при этом неизбежно присутствуют, исследова-
тель должен сформулировать цель операции на языке матема-
тики. Язык оптимизации здесь оказывается естественным и
удобным, но вовсе не единственно возможным. В главе II мы
встретим такие операции, в которых выбор решения будет свя-
зан с другими математическими задачами. Там будет, например,
идти речь о выборе параметров автопилота, дающего возмож-
ность самолету попасть в заданную точку. Мьцувидим, что при
этом выбор параметров автопилота осуществляется так, чтобы
гарантировать устойчивость движения самолета. Таким обра-
зом, представление-цели в форме (1.1)—не единственный спо-
соб формализации. Но оно удобно, поскольку методы оптимиза-
ции достаточно развиты, а язык оптимизации обладает, как мы
увидим, достаточно большой степенью общности. "
$ I. ВВОДНЫЕ ЗАМЕЧАНИЯ
15
в) Решение возникающей оптимизационной
задачи. Строго говоря, только этот третий, заключительный
этап исследования операции можно отнести собственно к мате-
матике, хотя без участия математика (с его знанием языка ма-
тематики и возможностей ее аппарата) успешное выполнение
двух первых этапов невозмбжно. Для его‘завершения могут по-
•требоваться тонкие математические методы. Довольно часто
сложность (связанная, например, с размерностью вектора х или
структурой множества G) не позволяет ограничиться чисто ма-
тематическим исследованием задачи (1.1), и доведение до конца
исследования данной операции может потребовать применения
разнообразных эвристических приемов. Заметим попутно, что
трудности неформального анализа подчас являются определяю-
щими. В конечном счете именно формирование гипотез и харак-
тер описания процесса могут стать решающими факторами эф-
фективности анализа.
По этому поводу уместно сделать одно замечание. Один из.
крупнейших русских математиков, А. М. Ляпунов, считал не-
обходимым любую, однажды поставленную физическую задачу
изучать в дальнейшем как задачу «чистой математики», т. е.
не использовать никаких соображений неформального харак-
тера. В задачах исследования операций провести эту точку зре-
ния очень трудно. Успешное завершение исследования .требует
использования на всех этапах неформальных рассуждений. По-
этому проверка качества решения, его соответствия исходной
цели исследования превращается в важнейшую проблему теории.
В исследовании операций возникли определенная термино-
логиял Принципы анализа. Поскольку под операцией мы будем
понимать любое целенаправленное действие, то в качестве «мо-
дели операции» мы должны себе представлять некоторую сово-
купность, состоящую из субъекта (оперирующей стороны), фор-
мулирующего цель операции, запаса активных средств (ресур-
сов) для проведения операции, набора стратегий, т. е. способов
использования этих ресурсов, и критерия — способа сравнения
различных стратегий, преследующих достижение цели операции.
Сам критерий, точнее — стремление к максимизации или мини-
мизации сто значений часто и объявляется целью операции.
Такое определение иногда вызывает известные трудности.
Дело в том, что выбор стратегий обычно стеснен целым рядом
ограничений и часто бывает удобно одно из них (например,
обеспечение потребителя товаром) объявить целью операции.
Цель операции может быть достигнута не единственным обра-
зом, и критерий служит для отбора наиболее экономной стра-
тегии (например, способа перевозки товаров) из числа
допустимых, т. е. удовлетворяющих всем ограничениям и (в том
числе) обеспечивающих достижение цели управления,
16 гл. I. МЕТОДЫ ИССЛЕДОВАНИЯ ОПЕРАЦИЙ
Точно так же бывает удобно выделять в специальное поня-
тие математическую «модель операции» — совокупность всех
ограничений и условий. В этом случае критерий не включается
в модель. Это значит, что одну и ту же стратегию, одну и ту же
~= реализацию операции можно оценивать разными способами. Та-
кая терминология идет из теории управления. Она удобна, но не
универсальна. Иногда мы- будем отождествлять понятия крите-
рия и цели управления — в вопросах терминологии мы не будем
придерживаться особой строгости. Удобство использования того
или другого термина будет определять наш выбор.
Говоря об ограничениях, имеет смысл разделять их на две
группы — физические и критериальные. Вторые определяются
требованиями к конструкции или проекту. Например, проекти-
руя пассажирский лайнер, мы хотим, кроме достижения макси-
мальной экономичности, чтобы его крейсерская скорость была,
например, не меньше 800 км/ч; распределяя землю под посевы
зерновых, нам нужно добиться урожая максимальной стоимости,
но при заданной структуре конечного продукта. Эти ограничения
не очень жесткие. Они находятся в распоряжении субъекта и в
принципе-могут быть нарушены или изменены. Отступление от
них не противоречит физике процесса, физическим законам. Иное
дело — ограничения физические, которые являются следствиями
законов сохранения. Например, обозначив через qi норму поли-
ва-количество воды,, которое мы должны направить на ороше-
ние единицы земельной площади х,. Тогда
(1.2)
где Q — общее количество воды, которое накоплено в водохра-
нилище.
Кроме того, суммарная площадь земли, которую мы можем
использовать под посевы, также должна быть фиксирована, т. е.
величины xi должны удовлетворять еще одному ограничению:
T.Xi^X,
(1.3)
где X — суммарная земельная площадь.
Условия (1.2) и (1.3) ни при каких обстоятельствах не могут
быть нарушены, ибо (1.2) и {1.3) выражают законы сохранения.
Указанное обстоятельство может вызывать трудности принципи-
ального характера.
Заметим, что условия (1.2) и (1.3) существенно отличаются
друг от друга. Мы выбираем вполне определенные величины х,-,
и в условие (1.3) входит также вполне определенная детермини-
рованная величина X. Иначе обстоит дело с условием (1.2), в
котором величины qi и Q — случайные. В одном .из следующих
§ 2. НЕКОТОРЫЕ ТИПИЧНЫЕ ЗАДАЧИ
17
параграфов этой главы мы еще вернемся к обсуждению подоб-
ной ситуации.
Важным понятием является исследователь операций. Он
является частью оперирующей стороны, но не отождествляется
(как правило) с ней. Он обладает иной информированностью об
обстановке операции^ Все исследование операции должно про-
водиться с позиции исследователя операции, исходя из его ин-
формированности, но с учетом возможного обновления информа-
ции, которую предоставляет ему оперирующая сторона.
По мере обсуждения отдельных вопросов, возникающих при
исследовании операций, мы будем конкретизировать общие
принципы и терминологию.
§ 2. Некоторые типичные задачи исследования операций
Приведем несколько примеров, демонстрирующих те классы
задач, с которыми имеет дело исследователь операций.
X) а) Транспортная задача. Пусть в пунктах ai, а2, ...
, ап находятся склады, в которых хранятся товары в коли-
чествах Х2......Хп соответственно. В пунктах Ь\, Ь2, ..., Ьт
находятся потребителя, которым необходимо поставить эти то-
х’вары в- количествах, не меньших чем Уь Уг...Ут соответ-
ственно. Обозначим через йц стоимость перевозки единицы груза
между пунктами а(- и bj.
Исследуем операцию перевозки потребителям товаров в ко-
личествах, достаточных для, того, чтобы удовлетворить потреб-
ности потребителей. Обозначим через хц количество товара, пе-
ревозимого из пункта а, в пункт Ь/. Для того чтобы удовлетво-
рить запросы потребителей, необходимо, чтобы величины хц
удовлетворяли неравенству
2Х^У/. (2.1)
Но со склада номера i мы не можем вывезти продукт в количе-
стве большем, чем там имеется. Это означает, что искомые ве-
личины должны удовлетворять еще одной системе неравенств:
^хц^Х{. (2.2)
Удовлетворить условиям (2.1) и (2.2), т. е. составить план
перевозок, обеспечивающий запросы потребителей, можно бес-
численным числом способов. Для того чтобы исследователь
операций мог выбрать определенное решение, т. е. назначить
определенные величины ху, должно быть сформулировано неко-
торое* правило отбора, определяемое с помощью критерия, ко-
торый отражает наше субъективное представление о 11ели. При
этом мы получим лишь одну из возможных, оценок выбранного
КРАСНОЯРСКАЯ .
КРАЕВАЯ i
БИБЛИОТЕКА «
18
ГЛ. I. МЕТОДЫ ИССЛЕДОВАНИЯ ОПЕРАЦИИ
Проблема критерия, как уже говорилось, решается незави-
симо от исследования операции — критерий должен быть задан
оперирующей стороной. В данной задаче одним из возможных
критериев будет стоимость перевозки. Она определяется оче-
видным образом:
= , (2.3)
Теперь задачу о перевозках мы можем сформулировать сле-
дующим образом: определить величины удовлетворяю-
щие ограничениям (2.1), (2.2) и доставляющие функции (2.3)
минимальное значение.
Ограничение (2.2) — это условие баланса, или закон сохране-
ния,' т. е. условие физического типа; условие (2.1) естественно
назвать целью операции, ибо смысл операции в том и состоит,
чтобы обеспечить запросы потребителей. Эти два условия со-
ставляют, пр существу, модель операции. Реализация операции
будет зависеть от критерия, т. е. от того, как мы будем выби-
рать способ, при помощи которого будет обеспечено достижение
цели операции.
Такое разделение имеет определенный смысл, поскольку в
одной и той же модели операции (т. е. модели целенаправлен-
ных действий, имеющих одну и ту же цель) могут возникать
разные критерии — разные способы оценки пути достижения
цели. Таким образом, критерий может фигурировать в различ-
ных ролях. Он может выступать и как способ формализации
цели, и как принцип отбора (выбора) способа действий из числа
допустимых, т. е. удовлетворяющих
ограничениям.
б) Задача распределения
удобрений. Будем рассматривать
задачу распределения ограниченного
количества удобрений между • посева-
ми п различных сельскохозяйственных
культур. Предположим, что урожай-
ность fi(xi) культуры номера i яв-
ляется нелинейной вогнутой функцией
от Xi — количества внесенных на еди-
ницу площади удобрений (рис. 2.1).
Тогда урожай культуры номера i будет равен Sifi(xi), где si —
площадь, занятая культурой номера I. Будем считать, что сум-
марная площадь фиксирована, т. е.
п
(2.4)
§ 2. НЕКОТОРЫЕ ТИПИЧНЫЕ ЗАДАЧИ
19
где S— заданное число. Будем также считать, что продукция
должна быть получена во вполне определенном ассортименте,
т. е. должны иметь место равенства
sih(xi)
Sift (*1)
i = 2, 3, .... ft,
где — заданные числа.
Введем ограничение
п
Е StXi^X,
(2.5)
(2.6)
где X — суммарное количество удобрений.
Изменяя величины х,, si так, чтобы не нарушить условий
(2.4)—(2.6), мы будем получать различные варианты плана
использования площади S. Эти планы мы должны научиться
сравнивать между собой. Введем критерий следующим обра-
зом: обозначим через pi цену единицы продукта номера /, через
q— цену единицы удобрений. Тогда суммарный доход от про-
дажи продукта, за вычетом расходов на покупку удобрений,
будет равен
п
J (X, s) = Е (piSif I (Х{) — qsiXi)f ~ (2.7)
я /el
X = (Xi....xj, s = (s........sn).
Мы можем разыскивать такой способ распределения земель,
который максимизирует функционал (2.7) при ограничениях
(2.4)—(2.6). Заметим, что величину X мы также можем считать
искомой.
в) Задача об ирригации и складировании. Рас-
смотрим теперь более сложную задачу, в условиях которой
присутствуют случайные величины. Она является упрощенным
вариантом задачи о распределений инвестиций на создание зон
поливного земледелия и строительство складов. Задача является
многошаговой задачей принятия решений (в том смысле, что мы
изучаем некоторый динамический процесс, развертывающийся во
времени), поскольку планирование инвестиций производится на
ряд лет вперед. Случайными факторами являются погодные
условия, которые определяют случайный характер урожайности.
Обозначим эти случайные величины через р и q: р — урожай-
ность на богарных (без искусственного орошения) землях, q —
урожайность на поливных землях (q > р при одних и тех же
погодных условиях). Функции распределения Рр и Fq величин р
и q будем считать известными. Через S(n) и s(n) обозначим
соответственно площади богарных и поливных земель в год
номера п. Суммарную площадь сельскохозяйственных угодий
20
ГЛ. I. МЕТОДЫ ИССЛЕДОВАНИЯ ОПЕРАЦИЙ
S*(n) будем считать известной:
S(ra)4-s(n) = S*(ra).
(2.8)
Потребность в зерне Ф(га) в каждый год планирования мы бу-
дем также считать заданной величиной.
Суммарный урожай в год номера п будет, очевидно, случай-
ной величиной Ф+(га) = pS(n)+ qs(n), функцию распределения
которой Гф+ (п) мы можем вычислить.
Разность Ф+(га)-Ф(га) может быть как положительной, так
и отрицательной. Если эта разность положительна, то избыток
урожая мы можем отправить на склад (элеватор); если отрица-
тельна — мы можем взять недостающий продукт со склада. Эта
величина должна удовлетворять некоторым очевидным соотно-
шениям. Так, на склад мы не можем отправить количество зер-
на, большее тех свободных емкостей, которыми в данный мо-
мент располагают склады. В свою очередь, величина этих сво-
бодных (или резервных) емкостей зависит от предыстории, т. е.
от того, какое количество зерна в предыдущие годы мы брали
со склада или отправляли на склад. Кроме того, объем складов
зависит от того, какие инвестиции мы направляли на строитель-
ство складов. Точно так же количество зерна, которое мы можем
взять со склада, зависит от того, сколько в элеваторах в данный
год хранится зерна, т. е. зависит от предыстории процесса. Обо-
значим через Q(n) количество зерна, которое мы можем по-
местить на склад либо взять со склада (в первое случае-прирост
количества зерна Q(ra)>0, во втором Q(n)<0). Пусть
R (п — 1)— количество зерна, которое находилось на складе в
году номер га —1, и пусть G(n) —суммарная емкость складов
в году п. Тогда Q(ra) определяется так:
л. ( min (Ф+ (га) — Ф (га), G (га) — R (п— 1)), если Ф+ (га)>Ф (га),
I max (Ф+ (га) — Ф (га), — /?(«—!)), если Ф+ (га)<Ф (га).
(2-9)
Все величины Q, R, G, Ф (вычисляемые* в одних и тех же еди-
ницах— кубометрах или тоннах) должны, очевидно, удовлетво-
рять динамическим соотношениям
О (га) - О (п - 1) + х(с7-> (2.Ю)
R(n) — R(n~~ 1) + Q (га), (2.11)
где через х(п — 1) обозначены капитальные затраты на строи-
тельство элеваторов, а через Сх — стоимость единицы емкости
элеватора,
§ 2, НЕКОТОРЫЕ ТИПИЧНЫЕ ЗАДАЧИ
21
Величина Ф+(п) зависит от количества поливных земель
s(n), которое, в свою очередь, определяется динамическим со-
отношением
?(ra) = s(n-l)+ , (2.12)
где Су — затраты на единицу орошаемой площади, а у(п — 1) —
капитальные затраты (инвестиции) на орошение в году п — 1.
Уравнения (2.8), (2.10) — (2.12), где величина Q(n) опреде-
ляется соотношениями (2.9), — это и есть математическая мо-
дель изучаемого многошагового процесса. Величины х(п) и у(п)
связаны общим ограничением:
x(n) + y(n) = z(n), ' (2.13)
где z(n) —заданная величина — суммарные средства, выделен-
ные на инвестиции в строительство элеваторов и создание ир-
ригационных систем. Задавая тем или иным образом величины
х(п) и у(п) и начальное состояние системы, т. е. величины G(0),
/?(0) и s(0), мы можем вычислить распределение дефекта —ве-
личины Д(п): '
a(n) = S(n)p + s(n)?-<D(n)-Q(«) (2.14)
для любого года п.
Перейдем теперь к обсуждению возможных критериев эф-
фективности (целевых функций). Очевидно, что чем меньше
математическое ожидание абсолютной величины дефекта, тем
система будет лучше. Поэтому в качестве критерия, оцениваю-
щего функционирование системы за один год номера п, можно
принять величину этого математического ожидания:
./(^р) = М(|Д(п)|)=ТЖ|*).
Но система функционирует не один год, а много лет. Тогда,
обозначив через N горизонт .(срок) планирования, мы можем
в качестве1 критерия, оценивающего систему" в целом, принять
/1= шах | Д(п)|. (2.15)
l<n<N
Вместо критерия (2.15) можно принять
J*i= шах|Д(и)|. (2.15х)
*) Здесь и ниже черта наверху будет означать математическое ожидание
соответствующей случайной величины.
22 ГЛ. I. МЕТОДЫ ИССЛЕДОВАНИЯ ОПЕРАЦИЙ
Критерий (2.15') может оказаться более удобным для опери*
рующей стороны. Заметим, что он всегда мажорирует критерий
(2.15), т. е..
но вычисление Ji обычно бывает значительно проще вычисле-
ния .
Наряду с критерием (2.15) оценку проекта дает и критерий
N ______
л=£|Д(п)|. (2.16)
П-1
Положительные и отрицательные дефекты не равнозначны. Если.
Д(га)>0, то это означает, что часть урожая просто пропадаег.
Если Д(п)<0, то зерна для покрытия потребностей не хватает
и его приходится экспортировать.
Таким образом, в качестве еще одного критерия мы можем -
принять величину
. /з = 2ГДШ (2.17)
п
где усреднение проводится по отрицательным дефектам: Д(п)<
<0.
Итак, мы видим, что в одной и той же операции могут
фигурировать самые разные критерии эффективности. А по-
скольку стратегии (в данном случае распределение инвестиций)
мы .будем определять из условия
(2.18)
i— 1, 2, 3, то каждому Л будет отвечать своя стратегия — ре-
шение одной из задач (2.18); будем называть ее оптимальной
стратегией.
г) Задача составления расписаний. Теория распи-
саний— это целое большое направление в дискретной матема-
тике и теории исследования операций. Проблема составления
расписания работ —выбор их очередности, выделение опреде-
ленного объема ресурса, который должен расходоваться на их
выполнение — занимает важное место и в планировании, и при
составлении проектов сложных технических или экономических
комплексов.
Поясним содержание этой проблемы на одной из основных
задач этого класса: найти такое распределение ресурса и такое
назначение очередности работ, при которых совокупность работ,
составляющих проект, будет выполнена за минимальное время.
Итак, предположим, что эксперт — проектировщик, конструктор,
плановик — определяет перечень работ Pi, Рг, ...» Ря, необхо-
димых для завершения проекта, и требуемый ресурс для его вы-
полнения. Ресурс может быть самой разнообразной природы.
§ 2. НЕКОТОРЫЕ ТИПИЧНЫЕ ЗАДАЧИ
23
Это могут быть люди (количество рабочей силы той или иной
квалификации), оборудование, сырье, деньги и т. д. Таким об-
разом, говоря о том, что объем требуемого ресурса задан, мы
имеем в виду, некоторый векторный норматив: каждой работе
поставлен в соответствие некоторый вектор, дающий перечень
объемов -ресурса различной природы, которые необходимы для
завершения работ. Однако выполнение работ бывает обычно
стеснено многими ограничениями, которые, как правило, удается
разбить на две группы.
Ограничения (а): .они описывают взаимную зависимость
работ.. Это ограничения логического характера. Наиболее ти-
пичный пример — ограничения типа графа: выполнению работы
номера i предшествует некоторая совокупность работ, без вы-
полнения которых работа- номера i начаться не может. Типич-
ным примером таких ограничений являются ограничения, с ко-
торыми сталкивается производитель работ при строительстве
здания: крыша не может быть построена до того, как построены
стены, строительство стен может быть начато только после того,
как построен фундамент, и т. д.
Рис. 2.2.
Ограничения типа (а) могут быть сформулированы на языке
теории графов. Для этого условимся работы обозначать верши-
нами ориентированного графа, тогда его ребра будут показы-
вать, какие работы и в какой последовательности должны вы-
полняться. Ограничения (а) могут иметь и более сложную, ло-
гическую природу*). На рис. 2.2 представлен один из возмож-
ных примеров подобного описания ограничений типа (а).
*) Например, работы могут быть взаимозаменяемыми, некоторые из ра-
о°т на определенном этапе должны вестись параллельно и т. ц,
24
ГЛ. I. МЕТОДЫ ИССЛЕДОВАНИЯ-ОПЕРАЦИЙ.
Ограничения (§): этот тип условий связан с объемом ре-
сурса, который может быть выделен на реализацию проекта.
Обозначим через v(t) вектор ресурса, который может быть вы-
делен на выполнение проекта в год номера t*). Через u‘(t)
будем обозначать долю работы номера I, которую планируется
выполнить в год номера t (0 uz(/) 1), а через —
вектор ресурса, который должен быть выделен для выполнения
работы «'(/). В этих условиях ограничения (0) могут быть
представлены в следующей форме:
(«‘(0)^(0 V/, (2.19)
или ей аналогичной.
Условия (Р) — это типичные условия, с которыми исследо-
ватель операции сталкивается при решении практически любой
распределительной задачи.
Итак, если векторы v(t) заданы, то план реализации проекта
сводится к следующей задаче: для каждого интервала времени t
должны быть указаны перечень работ и доля u‘(t) этих работ,
которую необходимо выполнить- так, чтобы суммарное время
осуществления проекта было минимальным. Доля u‘(t) опреде-
ляется в десятичной или какой-нибудь другой шкале, a t—-
дискретно. Поэтому задача построения расписания — это задача
дискретного программирования. Количество допустимых альтер-
натив (решений) конечно. С точки зрения «чистой» математики
рассматриваемая задача не содержит каких-либб принципиаль-
ных трудностей — она может быть решена простым перебором.
Однако, если число работ достаточно велико, то реализация пе-
ребора даже на мощной ЭВМ требует астрономического времени
и практически невозможна. Можно показать, что использование
простого перебора возможных вариантов для составления опти-
мального по времени расписания, содержащего 1000 работ, по-
требует (если использовать ЭВМ типа БЭСМ-6) времени, равного
существованию нашей Галактики. А расписание; содержащее
1000 работ, является весьма ординарным, и основная трудность
состоит в том, чтобы указать порядок выполнения работ, не на-
рушающий ограничений типа (а). Поэтому в задачах теории
расписаний, подобных той, которая описана, невозможно обой-
тись без неформальных, эвристических методов.
д) Обсуждение. Итак, мы рассмотрели несколько типич-
ных задач, с которыми сталкивается исследователь операции.
С точки зрения математика — это обычные задачи математиче-
ского программирования. Первая из рассмотренных задач, так
*) В этой задаче рассматривается случай дискретного времени: t =1,
2, 3, ... означает номер временного интервала, например номер года, отсчи-
тываемый от начала работы. 1
§2. НЕКОТОРЫЕ ТИПИЧНЫЕ ЗАДАЧИ
25
называемая транспортная задача, является одной из простейших
задач линейного программирования. Задача о распределении
удобрений — это уже задача нелинейного программирования.
Третья из рассмотренных задач (см. п. в)), несмотря на ее ве-
роятностный характер, также сводится в конечном счете к за-
даче нелинейного программирования. Наконец, задача п. г)
является задачей целочисленного программирования.
Каждая из этих задач относится к той или иной главе мате-
матики, и для ее решения существуют разнообразные, хорошо
изученные алгоритмы.’ Мы не будем излагать эти общеизвест-
ные методы, которые составляют предмет курсов оптимизации
факультетов прикладной математики университетов и вузов, и
отошлем читателя к соответствующим учебным пособиям
(см. [10]).
Читателю, прослушавшему курс лекций по оптимизации, мо-
жет показаться, что исследование операций, по существу, то-
ждественно тем разделам математики, которые связаны с оты-
сканием решений экстремальных задач при наличии специаль-
ного вида ограничений. Однако такое представление было бы
ошибочным. Скорее, верно обратное утверждение. Теория мате-
матического программирования, т. е. теория решения экстре-
мальных задач при наличии ограничений, возникла и развилась,
прежде всего, благодаря потребностям исследования операций.
Поэтому многие зарубежные авторы, занимающиеся приложе-
ниями математики к решению инженерных или экономических
проблем, рассматривают задачи линейного, нелинейного и цело-
численного программирования не как разделы математики, ис-
пользуемые в исследовании операций, а как составную часть
этой дисциплины. Это —другой крайний взгляд на предмет.
В действительности, как я думаю, все разделы, относящиеся
к-математическому программированию, на самом деле являются
разделами математики и их развитие невозможно без изучения
задач математического программирования как предмета мате-
матических исследований.
Математическое программирование и другие методы реше-
ния экстремальных 'задач составляют основу аппарата иссле-
дования операций. Но сама теория исследования операций никак
не может быть сведена к решению экстремальных задач. Более
того, исследование операций не является чисто математической
дисциплиной и главные сложности анализа конкретных опера-
ций, как правило, состоят не в преодолении математических
трудностей.
Обсуждение задач, приведенных в данном параграфе, пока-
зывает, что первый шаг — это формализация .операции, ее опи-
сание с помощью языка математики. От той), как будет форма-
лизована задача, зависит вся судьба исследования. Простое
26
ГЛ. I. МЕТОДЫ ИССЛЕДОВАНИЯ ОПЕРАЦИЙ
описание делает анализ довольно простым, но если оно' не будет
в достаточной степени адекватно.реальности, то может привести
к результатам сомнительной достоверности. Наоборот, пере-
усложненная задача, учитывающая разнообразные детали про-
цесса и с большими подробностями описывающая реальность,
может привести к такой затрате машинного времени, которая
окажется не оправданной высокой точностью результата. Одним
словом, уже при составлении модели исследователь операции,
который, как правило, является математиком, должен руковод-
ствоваться как своим опытом так и способностями, умением про-
никать в содержание задачи и ясностью понимания цели всего
исследования. Мы видим, что этот первый этап очень далек от
традиционной математики, и, тем не менее, преодолеть его
трудности может лишь человек, представляющий себе возмож-
ности аппарата, т. е. он должен быть не де-юре, а де-факто
математиком.
Примечание. В последнее время делаются попытки разделить обязан-
ности программиста-исследователя и «постановщика» задач. Такое разделе-
ние должно делаться с большой осторожностью. Конечно, на определенной
стадии разделение обязанностей оказывается необходимым и часть програм-
мистской работы может быть поручена специалистам, в области машинного
программирования. В особенности если это касается* вопросов организации
системы программ, управляющих программ, работ с массивами и т. д. Но
что абсолютно необходимо для успехд исследования — это объединение в лице
исследователя операции математика- и специалиста, в тонкостях понимающего
специфику предмета.
Еще более сложные проблемы возникают тогда, когда мы
пытаемся формировать критерий — способ оценки качества на-
ших действий, начинаем сравнивать различные варианты стра-
тегий. Типичной является ситуация, когда операция оценивается
несколькими показателями. В этом случае мы говорим о не-
определенности целей. Преодолеть эту неопределенность фор-
мальными методами невозможно. Здесь необходимы дополни-
тельные исследования и гипотезы. В следующем параграфе мы
познакомимся с характером этих дополнительных предположе-
ний и с некоторыми способами представления информации,
которые помогают в ряде случаев преодолеть эту неопределен-
ность.
Но есть и иные сложности при формировании критерия. Они
связаны со стохастическим характером операций. Предположим,
что критерий имеет вид
ЦхЛ) = Ц*Л), (2.20)
где £ — случайный параметр с Известным законом распределе-
ния, х — вектор конструктивных характеристик- проектируемой
системы. Конструктор стремится выбрать параметры .проекти-
§ 2. НЕКОТОРЫЕ ТИПИЧНЫЕ ЗАДАЧИ
27
руемого объекта так, чтобы значение критерия было по возмож-
ности больше. Но операция
/(х, g)-*max (2.21)
X
имеет смысл лишь тогда, когда мы фиксируем значение £. То-
гда, решая задачу (2.21), получим функцию £(£), т. е. каждому
значению g сопоставляем значение х = ^(^), являющееся реше-
нием задачи (2.21). Значит, стратегия £(£)—это оптимальная
стратегия в том случае, если мы знаем или будем знать в мо-
мент принятия решения значение случайного фактора g. В про-
тивном случае неизвестно, какой вектор конструктивных пара-
метров х мы должны выбрать.
Когда проектируемая конструкция должна использоваться
многократно, кажется разумным выбрать такие значения кон-
структивных параметров, которые максимизируют математиче-
ское ожидание критерия, т. е. являются решением задачи
Л (х) = f (х, |) -> max. (2.22)
X
Но такое утверждение не является абсолютным и могут встре-
титься обстоятельства, требующие иных подходов. Например,
определенную роль может играть и дисперсия критерия. И, мо-
жет быть, имеет смысл иногда поступиться немного значением
математического ожидания для того,“Чтобы уменьшить возмож-
ный разброс результатов, т. е. уменьшить значение дисперсии
/2(х) = (Нх,1)-7(хД))2. (2.23)
Заметим, что математическое ожидание f(x, g) — это. некото-
.рая функция от х:
f(x,g) = f(x). (2.24)
Ее вычисление может оказаться весьма трудоемким. Мы долж-
ны сначала задать величину вектора х и лишь затем провести
усреднение — операцию, которая также может требовать значи-
тельных затрат машинного времени. Теперь мы можем оценить,
сколь трудоемок будет процесс отысканий экстремальных зна-
чений функции f*(x). В одной из последующих глав мы еще-вер-
немся к. проблеме отыскания экстремальных значений функций
типа (2.24).
. Трудности решения задачи (2.22) часто заставляют заме-
нять эту задачу другой. Заметим, что решение задачи (2.21) для
фиксированного значения случайного параметра £ может быть
очень простым, поэтому вместо задачи отыскания
max f* (х) = f*
х
28
ГЛ. I. МЕТОДЫ ИССЛЕДОВАНИЯ ОПЕРАЦИИ
разыскивают решение другой задачи:
maxf (х, g)==f.
X
Так как f > f* *), то тем самым мы получаем полезную верхнюю
оценку. Могут быть приведены и другие соображения о выборе
целевой функции.
Таким образом, в случае, когда мы предполагаем использо-
вать проектируемую конструкцию много раз, проблема выбора
критёрия в виде (2.22) или (2.23) мало чем отличается от си-
туаций, в которых случайные параметры отсутствуют. Дополни-
тельные сложности здесь носят чисто вычислительный характер.
Они связаны с более громоздким вычислением целевой функции,
поскольку мы должны проводить операцию усреднения.
Ситуация оказывается значительно более сложной, если речь
идёт о выборе параметров конструкции или плана в случае их
одноразового использования. Именно с такой ситуацией мы
столкнулись при обсуждении задачи распределения инвестиций
на строительство элеваторов и' ирригацию. В этом , случае ин-
формация о статистических характеристиках формально не
имеет никакого смысла: какова бы ни была вероятность того,
что значение g будет равно 1010 или 10—10, мы ничего не можем
сказать о величине функционала, и, строго говоря, выбор х
(и значение функции f(x, £)) может быть произвольным. Зна-
чит, мы должны постулировать справедливость некоторой гипо-
тезы, вводить функцию риска, оценивать «шансы» и т. д. По
существу, мы так и сделали, рассчитывая «оптимальное» рас-
пределение инвестиций. Гипотеза, на которую мы опирались,
могла быть сформулирована примерно в следующих терминах:
функция цели выбирается так, как если бы наша система была
предназначена для многократного функционирования. В данном
конкретном случае в этом есть определенный смысл, так как,
планируя распределение инвестиций на перспективу, мы создаем
ценности, которые нам будут служить много лет.
\ § 3. Неопределенность целей
Исследование тех операций, которые были рассмотрены в
предыдущем параграфе, сводилось к четко поставленным мате-
матическим задачам оптимизации — эти задачи не содержали
неопределенностей. Стохастические задачи, т. е. задачи, содер-
жащие случайные величины или функции, мы не относим к чис-
лу задач, содержащих неопределенные факторы: если в качестве
•) Это утверждение — следствие очевидного неравенства
max (fi (х) + ft (х)) < max ft (х) + max ft (х). .
§ 3. НЕОПРЕДЕЛЕННОСТЬ ЦЕЛЕЙ
29
целевой функции мы можем использовать средние значения не-
которых величин, то задача отыскания оптимальной стратегии
сводится к обычной задаче оптимизации, без каких-либо до-
полнительных гипотез.
Но задачи, не содержащие неопределенностей, являются ско-
рее исключением, чем правилом, — адекватное реальности опи-
сание проблемы практически всегда содержит различного типа
неопределенности, отражающие то естественное положение, в
котором находится исследователь: любое его знание относи-
тельно и неточно. В исследовании операций принято различать
три типа неоцределенностей: неопределенность целей, неопреде-
ленность наших знаний об окружающей обстановке (неопреде-
ленность природы) и неопределенность действий реального про-
тивника или партнера. Рассмотрим последовательно эти три
типа неопределенностей и попробуем понять, что необходимо ис-
следователю для анализа соответствующих задач средствами
математики.
В предыдущем параграфе мы рассмотрели ситуации, в кото-
рых выбор стратегии сводился к определению экстремальных
значений функций. Но уже при обсуждении этих экстремальных
задач мы обратили внимание читателя на то, что имеют смысл и
другие подходы — в качестве критериев уместно использовать
иные целевые функции.
В самом начале этой главы отмечалось, что в исследовании
операций цель, целевая функция носит экзогенный характер.
В результате исследования операции выбирается способ дости-
жения цели — стратегия. Тем не менее назначение самой цели,
критерия, т. е. формализация цели (выбор целевой функции),
всегда или почти всегда — трудная проблема. Рассмотрим снова
задачу о распределении удобрений. Мы использовали критерий
(см. (2.7)),- который является, по существу, комбинацией двух
критериев: суммарной стоимости продукции и затрат на ее про-
изводство. Естественное стремление исследователя операций —
найти такую стратегию, которая максимизирует доход (суммар-
ную стоимость продукции) и минимизирует затраты. Если сле-
довать этому стремлению исследователя, то вместо задачи (2.7)
мы получим задачу вида
fW^rnax,
-F(x)->max (F(x)-> min), '
гДе f(x) и F(x) —функции, характеривующие соответственно
Доход и затраты.
Такая задача, в отличие от задачи, рассмотренной в преды-
дущем параграфе, как правило, решения уже не имеет. В самом
ч ле. чем больше будут затраты F(x), тем выше будет урожай
30 ГЛ. I. МЕТОДЫ ИССЛЕДОВАНИЯ ОПЕРАЦИЙ
к
и, следовательно,, тем больше будет суммарная стоимость про*
дукции f(x) .
Таким образом, обе цели оказываются противоречащими
друг другу. Заметим, что этот факт нашел свое выражение в
распространенной фразе: добиться максимума производства с
минимумом затрат. Она строго научного смысла не имеет, ибо
минимум затрат —нуль, а с нулевыми затратами произвести ка-
кую-либо полезную работу нельзя? Но, несмотря на кажущуюся
бессмысленность, эта фраза правильно отражает тенденции, ин-
тересы оперирующей стороны. Рассмотренная ситуация типич-
на: она показывает, что, даже зная цели (желания) оперирую-
щей стороны, исследователь операции еще не может приступить
к своему «основному делу» — решению оптимизационной задачи.
Слова «основное дело» не случайно взяты в кавычки. Формали-
зация— это не менее важная, а часто и более трудная часть
проблемы. К тому же «основным делом» может оказаться не
решение оптимизационной задачи, а выбор решения, удовлетво»
ряющего тому или иному условию.
Для того чтобы свести задачу исследования операции к
стандартной задаче оптимизации, необходимо сформулировать
еще дополнительные гипотезы, не вытекающие из постановки
задачи. Одной из таких дополнительных гипотез в предыдущем
параграфе было введение целевой функции
Z = f(x)-F(x).
А как сформулировать единую цель, если критериев много:
fi(х)-*max, f2(x)-*max, .... fn(x)->max,
а ресурс для их достижения находится только в «одних руках»?
И хотя математика не может дать однозначного ответа на этот
вопрос, она может помочь принять решение и сделать, правиль-
ный выбор. Это и есть проблема неопределенности цели (жела-
ний). Она типична для любого крупного технического и народ-
нохозяйственного проекта. Например, совершенно естественно
желание главного конструктора самолетов добиться того, чтобы
его самолет был самым скоростным, самым высотным, самым
надежным и к тому же самым дешевым. Но ведь добиться всего
этого одновременно невозможно в принципе! Реальная конструк-
ция всегда будет каким-то компромиссом, каким-то сочетанием
требуемых качеств. Но каких — конструктор заранее не знает.
В этом и заключается’ основная проблема многокритериально-
сти (неопределенности целей).
Итак, неопределенность целей необходимо требует привле-
чения дополнительных гипотез, если мы хотим однозначно сфор-
мулировать цель операции.
31
$ 3. НЕОПРЕДЕЛЕННОСТЬ ЦЕЛЕЙ
Отметим, что исследование операций понемногу-начало пре-
вращаться в некоторую синтетическую дисциплину, опираю-
щуюся не только на обширный математический аппарат, но и на
целый ряд методов преодоления неопределенностей. Проблема
принятия решения в условиях неопределенности постепенно де-
лается центральной проблемой, которой, собственно говоря, и
обязано превращение исследования операций в самостоятель-
ную теорию. В рамках этой теории изучалась, в частности, раз-
личные способы преодоления неопределенностей, необходимые
для этого гипотезы и свойства решений, им удовлетворяющие.
Остановимся .здесь на некоторых наиболее употребительных
способах преодоления неопределенности целей и обсудим тот
случай, когда перед исследователем операции стоит задача вы-
бора способа действия (вектора х), обеспечивающего макси-
мальное значение функциям
f2(x)....fn(x)
одновременно.
а) Линейная с-вертка. Вместо п частных критериев fi.
предлагается рассматривать один критерий вида
п
F(x)=Zctft(x), . (3.2)
i-i
где Ci — некоторые положительные числа, тем или иным спосо-
бом нормированные (например, 2^сг=1^.
Такой способ свертки вводит, по существу, отношение экви-
валентности различных критериев (целевых функций), так как
величины Ci показывают, насколько изменяется целевая функ-
ция F(x) при изменении критерия fi(x) на единицу: с, = dF/dfi.
Коэффициенты сг —дщзультат__экспертизы; _они отражают
представление оперирующей стороны о содержании компромис-
са, который она вынуждена принять. Таким образом, содержа-
ние компромисса состоит в ранжировании целей, которое' вместе
с назначением весовых коэффициентов и является той дополни-
тельной гипотезой, которая позволяет свести задачу со многими
критериями к задаче с единственным критерием, определяемым
формулой (3.2).
Такое ранжирование, разумеется, представляет собой далеко 1
не универсальный способ преодоления неопределенности целей.
б) Использование контрольных показателей.
Очень часто в задачах планирования и проектирования задается
некоторая система нормативов: f*, f*2, ..., f*. Это значит, на-
.пример, что параметры будущей конструкции должны быть та-
ковы, чтобы максимизировать функции ft(x) при условиях
i = l,2..............п.
32 ' ГЛ. I. МЕТОДЫ ИССЛЕДОВАНИЯ ОПЕРАЦИИ
В таких случаях целевую функцию удобно представить в виде
F(x) = min —-г- .(3.3)
и искать вектор х, который обеспечивает максимальное значе-
ние F(x). Смысл здесь достаточно прост. При данном значении
вектора х величина 'F(x) дает нам значение наихудшего из по-
казателей fi(x). Значит, условие F(x)-+max означает выбор та-
кой системы конструктивных параметров х, которая максими-
зирует отношение 7-го реально достигнутого значения критерия
к его контрольному значению. Если значения f*{ жестко не за-
даны, то они могут быть определены в результате экспертного
опроса. "
Критерий в форме (3.2) обладает следующим важным до-
стоинством. Предположим, что ограничения, наложенные на вы-
s бор компонент вектора х, являются линейными:
(3.4)
так же как и функции f{ (х) = £ ^х*. Тогда очевидно, что за-
дача выбора с использованием критерия (3.2) сведется к задаче
линейного программирования: определить максимум линейной
формы
при линейных ограничениях (3.4).
Критерий (3.3) при этих условиях обладает тем же свой-
ством. Это легко показать, используя новую переменную
Тогда очевидно, что к ограничениям добавятся еще и такие:
ft(x)>Vft, (3.5)
и мы придем к следующей задаче линейного программирования:
определить максимум по х скаляра V, удовлетворяющего огра-
ничениям (3.4) и (3.5).
в) Простейший способ преодоления неопре-
деленности целей. Предположим опять, что мы ввели не-
которую систему контрольных показателей f*, относительно-ко-
торых критерии fi(x) должны удовлетворять ограничениям
i=l, .... га. . (3.6)
§ 3. НЕОПРЕДЕЛЕННОСТЬ ЦЕЛЕЙ
33
Предположим, что, кроме того, среди критериев fi мы вы-
делили некоторый основной, например fi(x). Тогда мы снова
пришли к однокритериальной задаче в
fi(x)-*max
при условиях (3.6).
Схема подобной редукции к однокритериальной задаче яв-
ляется, вероятно, сцмой простой и наиболее употребительной в
инженерной практике. Задача конструктора (проектировщика)
сводится только к назначению допустимых границ используе-
мых показателей.
г) Введение метрики в пространстве целевых
функций. Рассмотрим еще одну широко используемую ги-
потезу. Предположим, что мы решили систему одндкритериаль-
ных задач
^(xJ-^-max, i=l, 2, ..., п,
и нашли в i-й задаче вектор х = xt, доставляющий максималь-
наб'значение критерию fi(x):
= 1=^1, .... п. (3.7)
Совокупность скалярных величин ft определяет в простран-
стве критериев некоторую точку, которую назовем точкой «аб-
солютного максимума». Если векторы xi различны, то не су-
ществует такого выбора, который позволил бы достичь этой
точки: точка (fi, /г, • •., fn) является недостижимой в простран-
стве критериев. Введем теперь положительно определенную
матрицу R =(rij). Тогда скалярная величина
Л=^§(Л(^-Ь)г//(//(х)-Ь) .(3.8)
определяет в пространстве критериев некоторое расстояние от
точки, соответствующей данному вектору х, до точки «абсолют-
ного максимума».. В частном случае, когда R — единичная мат-
рица, ____________
А=д/Е(Ш-/г)2 (3.9)
есть евклидово расстояние от точки (fi(x), f2(x), ..., fn(x)) до
точки (/i, f2, ..., f„) в пространстве критериев.
В качестве нового скалярного критерия мы можем принять
функцию (3.8). Ее минимизация дает определенную полезную
исследователю информацию: показывает наши предельные воз-
можности достижения «абсолютного максимума».
Введение подобных критериев также соответствует опреде-
ленным гипотезам, принятие которых остается на совести ис-
следователя. И эти критерии ничем не лучше рассмотренных
выше, хотя они и отражают определенные свойства задачи
2 Н. Н. Моисеев
34
ГЛ. I. МЕТОДЫ ИССЛЕДОВАНИЯ ОПЕРАЦИИ
исследования операций: несут информацию, полезную оперирую-
щей стороне.
д) Компромиссы Парето. Сталкиваясь с многокрите-
риальными задачами, естественно попытаться найти способы
сведения их к обычным задачам с одним критерием, поскольку
для однокритериальных задач, да еще с достаточно гладкой це-
левой функцией, существуют хорошо разработанные методы
решения. Эти способы, разумеется, должны носить неформаль-
ный характер, ибо они не могут быть получены как результат
решения какой-либо математической задачи. Мы уже рассмот-
рели несколько подобных способов, основанных на операции
свертывания критериев. Смысл тех способов свертывания кри-
териев, которые были изложены, достаточно очевиден: одну за-
дачу мьд заменили другой, причем в правомочности подобной
замены и состояло содержание новых гипотез.
Но к анализу многокритериальных задач можно подойти и
с других позиций: попытаться сократить множество исходных
вариантов, т. е. исключить из неформального анализа те ва-
k рианты решений, которые заведомо будут плохи. Рассмотрим
один из подобных путей, предложенный итальянским экономи-
стом В. Парето в 1904 г.
Предположим, что мы сделали некоторый выбор. Обозначим
его через х* и предположим, что существует некоторый другой
выбор £ такой, что для всех критериев },(х) имеют место нера-
венства
(ЗЛО)
причем хотя бы одно из неравенств — строгое.
Очевидно, что выбор £ педпочтительнее х*. Поэтому все век-
торы х*, удовлетворяющие (3.10), следует сразу исключить из
рассмотрения. Имеет смысл заниматься сопоставлением, под-
вергать неформальному анализу только те векторы х*, для ко-
торых не существует х такого, что для всех критериев удовле-
творяются неравенства (3.10). Множество всех таких значе-
ний х* называют множеством Парето, а вектор х* называют
неулучшаемым вектором результатов (вектором Парето), если
из f»(^)>A(x*) для любого i следует fi(£) = ft(x*) (см. [5]).
Предположим, что цели субъекта определяются двумя одно-
значными функциями:
fl(x)->max, f2(x)-+max.
Тогда каждому допустимому значению переменной х отве-
чает одна точка на плоскости (f\,fz) (рис. 3.1) и равенства
fl~fl(x), f2 = fi(x)
определяют параметрическое задание некоторой кривой abed
в этой плоскости. Но к множеству Парето можно отнести далеко
§ 3. НЕОПРЕДЕЛЕННОСТЬ ЦЕЛЕН
35
не всю кривую. Так, участок Ьс, очевидно, не принадлежит мно-
жеству Парето, поскольку вместе с ростом fi происходит и рост
с Таким образом, на этом участке изменению переменной х
отвечает одновременное увеличение обеих целевых функций, и,
следовательно, такие варианты решений должны быть сразу ис-
ключены из дальнейшего рассмотрения.
Из тех же соображений должен быть исключен участок а'Ь,
поскольку для каждой его точки е найдется точка, принадле-
жащая участку cd, в которой значения обеих функций fi и fi
больше, чем в точке е. Значит,
претендовать на принадлежность
к множеству Парето могут толь-
ко участки аа! и cd, причем точ-
ка а' также должна быть исклю-
чена.
В теории принятия решений
существует термин «принцип Па-
рето», заключающийся в том,
что выбирать в качестве реше-
ния следует только тот вектор х,
который принадлежит множеству Парето. Принцип Парето не
выделяет единственного решения, он только сужает множе-
ство альтернатив. Окончательный выбор остается за лицоц, при-
нимающим решение. Но исследователь, математик, построив
множество Парето, конечно, облегчает прЪцедуру выбора ре-
шения.
Принцип Парето играет очень важную роль в автоматизации
проектирования. Предположим, например, что речь идет о про-
ектировании водохозяйственного комплекса. В результате созда-
ния этого комплекса появится возможность обеспечить водой не-
сколько крупных промышленных и сельскохозяйственных объек-
тов и тем самым повысить их эффективность. Но одновременно
возникает и целый ряд отрицательных явлений. Большая пло-
щадь водохранилища, которая необходима для регулярной ра-
боты гидрокомплекса, приводит к застойным явлениям, большим
потерям воды на испарение и т. д. Помимо этого, уменьшение
количества воды в речной системе ухудшает условия рыбовод-
ства и судоходства, а строительство промышленных комплексов
увеличивает загрязнение и, следовательно, ухудшает качество
воды, поступающей на поля, и т. д. Одним словом, ситуация
оказывается принципиально многокритериальной, цели проекти-
ровщика могут быть выписаны в виде
fi(-v)-*max, i— 1, ..., га.
Проектировщик оказывается перед необходимостью искать
омпромисс. И одним из путей отыскания этого компромисса
2*
36 ГЛ. I. МЕТОДЫ ИССЛЕДОВАНИЯ ОПЕРАЦИИ
будет построение множества Парето, изучение которого дает
большую информацию. Лицо, принимающее решение, видит, в
частности, сколько «стоит» увеличение одного из показателей,
как оно сказывается на остальных показателях, значения кото-
рых непременно ухудшаются. Это множество оказывается, как
правило, весьма сложной природы. Его анализ интуитивными
методами вряд ли возможен.
Но, помимо критериев ft(x), достаточно часто в распоряже-
нии проектировщика есть еще некоторый общий критерий. F(x).
Иногда он бывает формализован, записан в явном виде. Напри-
мер, таким критерием может быть стоимость проекта. В этом
случае- исследователю операций представляется возможность
решить задачу до «конца». Для этого ему достаточно определить
вектор х, который дает решение задачи: F(x)-»-max при xs
sPo(h, •••, fn), где Pc(f\, .... fn) — множество Парето для
функций fi, ..., fn на множестве G допустимых векторов х.
Например, в случае водохозяйственного комплекса множество G
определяется таким распределением воды по объектам xi, при
котором ее количество не превосходит притока Q(x).
Введение «общего» критерия Р(х) и максимизация его зна-
чений на множестве Парето также является некоторой гипоте-
зой, поскольку из совокупности критериев fi....fn, F один из
критериев мы специальным образом выделяем.
Примечание. В проблемах выбора решения большую роль играют
методы последовательного анализа и отбраковки неконкурентоспособных
вариантов, методы последовательного сжатия множества альтернатив. В си-
стемном анализе они занимают едва ли не центральное место в формирова-
нии процедур выбора альтернатив. В одной из следующих глав мы будем
о них говорить подробнее. Принцип Парето относится к этому же кругу
вопросов.
е) О численных методах построения множе-
ства Парето. Приближенное построение множества Парето
- относится к числу очень важных и трудных задач численного
анализа. С расширением круга проблем, которые изучает си-
стемный анализ (например, с появлением задач автоматизации
проектирования), значение методов эффективного анализа мно-
жества Парето непрерывно растет. Однако до самого последнего
времени этим вопросам уделялось очень мало внимания, и чис-
ленные методы построения точек множества Парето в настоя-
щее время только начинают развиваться. На нескольких простых
примерах поясним содержание возникающих здесь проблем.
Начнем с рассмотрения простейшего случая двух критериев.
Пусть речь идет о задаче
fi (х)-^ max,
f2(x)-*max, (З.П)
х е Gx.
$ 3. НЕОПРЕДЕЛЕННОСТЬ ЦЕЛЕЙ
37
Каждой точке х е Gx соотношения
А = f2=f2(x) . (3.12)
ставят в соответствие некоторую точку f е Gf в плоскости кри-
териев (рис. 3.2). Соотношения (3.12) определяют отображение
множества Gx на Gf. '
Множество Gf носит название множества достижимости или
множества предельных возможностей. Изучение структуры этого
множества может оказаться весьма полезным при исследовании
различных задач проектирования и планирования. Поэтому в
последние годы началось систематическое изучение возможно-
стей построения множеств достижимости. Заметим, что множе-
ство Парето представляет собой лишь часть границы множества
достижимости. На рис. 3.2 множеством Парето будет-дуга АСВ.
Приближенное построение множества Парето сводится к по-
следовательному решению ряда задач математического про-
граммирования. Опишем одну из возможных схем расчета.
Фиксируем некоторые желательные значения критериев fi и f2:
fi = Ci, fz — Ci.
Значения Ci и С2 следует выбрать так, чтобы они принадлежали
множеству достижимости. .
Примечаяи.е. В общем случае проблема определения внутренней точ-
ки множества достижимости может оказаться совсем не простой.
Решаем теперь две оптимизационные задачи.
Ь fi(x)->tnax, II:- f2(x)->max,
х €= Gx, f2(x) = C2l x g= Gx, fi(x) = Ci.
Решив эти задачи, мы определим точки а й b (рис,. 3.8),
проведя через них прямую /, мы получим простейшую аппро-
ксимацию множества Парето.
ла ДЛЯ1 Уточнения аппроксимации, решив нижеследующие за-
д чи III и IV,. мы находим еще две точки — с и d,—•
38
ГЛ. I. МЕТОДЫ ИССЛЕДОВАНИЯ ОПЕРАЦИИ
принадлежащие этому множеству:
Ш: f! (х)-> max, IV: f2(x)->max,
x^Gx, f2 = Ci, X(=Gx, f! = C3.
Значения C3 и Ci снова должны принадлежать множеству
достижимости. Через точки а, с, d, b мы проведем ломаную 2,
которая и будет следующим приближением. Очень часто подоб-
ной информации о структуре множества Парето уже бывает
достаточно для решения практических задач. Описанный способ
можно распространить и на случай большего числа критериев.
Для аппроксимаций множества Парето можно поступить и
по-другому. Пусть М и Х2 —строго положительные числа такие,
что
Ai + A2=1. (3.13)
Составим новый критерий
f1 = Wi (х) -J- A,2f2 (х)
и решим следующую задачу математического программирова-
ния:
f1 (х)-> max. '
/ хе Gx
Оказывается, что решение этой задачи определяет такой век-
тор х, что точка
f2 = f2(x)
принадлежит множеству Парето.
Поэтому аппроксимацию множества Парето мы можем осу-
ществить следующим образом (рис. 3.4). Решаем задачу
Л?/1 (х) + (х) -> max, (3.14)
* * *
§ 3. НЕОПРЕДЕЛЕННОСТЬ ЦЕЛЕЙ
39
где Л? и А.® удовлетворяют условию (3.13). Задача (3.13), (3.14)
определит некоторый вектор ха, который в плоскости f опреде-
лит точку а с координатами
Точно так же мы определим точку 0 и че0®з точки а и 0 прове-
дем прямую 1. Она. будет простейшей аппроксимацией множе-
ства Парето (см. рис. 3.4). Строя точки у и 8, мы можем полу-
чить с их помощью ломаную 2, которая будет следующим при-
ближением, и т. д.
При использовании подобных построений возникает вопрос:
можно ли таким способом построить любую точку множества
Парето?.Другими словами, каждой ли точке множества Парето
мы можем поставить в соответствие такой вектор Х=(Л1, ...
...» Ьп), удовлетворяющий условиям У*, A.z= 1,> 0, i = 1, ...
..п, что решение задачи оптимизации .
(M) = ZWiW-* max
х&ох
определяет совокупность чисел fi, являющихся координатами
данной точки множества Парето? В общем случае ответ на этот
вопрос остается открытым. Он решен, притом положительно,
Рис. 3.5.
линей-
напри-
параг-
только для того случая, когда
множество Gx — многогран-
ник, а критерии имеют вид
Г = « X),
т. е. являются также
ными функциями (см.,
мер, {39]).
В заключение этого
рафа сделаем одно замечание
о точности описанного способа
аппроксимации множества Па-
рето.
Если множество Парето
выпукло, то, увеличивая коли-
чество точек, которые определяются одним из описанных выше
способов, мы можем построить многогранник, аппроксимирую-
щий это множество с любой степенью точности. Это иллюстри-
руют примеры, изображенные на рис. 3.3 и 3.4. Но, к сожалению,
практика дает примеры множеств.Парето, которые не являются
выпуклыми. Тогда задача их аппроксимации резко усложняется,
’-итуация, которая здесь возникает, показана на рис. 3.5.
40
ГЛ. I. МЕТОДЫ ИССЛЕДОВАНИЯ ОПЕРАЦИИ
§ 4. Другие типы неопределенностей
< а) Природные неопределенности. В предыдущем
параграфе мы рассмотрели трудности, связанные с существова-
нием неопределенности целей. Но эта неопределенность, как об
этом уже было сказано, — не единственный тип неопределенно-
стей, с которыми сталкивается исследователь операции.
Второй тип неопределенности мы будем называть неопреде-
ленностью природы. Предположим, что мы знаем нашу цель,
например, мы хотим так проложить маршрут и распорядиться
имеющимся запасом горючего, чтобы наш самолет как можно
быстрее долетел от Москвы до Владивостока. Но время полета Г
будет зависеть не только от нас, но gnje и от погоды на трассе.
Эта ситуация очень типична, и для ее описания в исследовании
операций принята вполне определенная формализованная схе-
ма. Целевую функцию (например, время полета) записывают
в виде
ММ, (4.1)
где аебв — некоторый параметр (или функция), который мы
заранее не знаем и не можем контролировать. Выбор х — на-
шего способа действий, который обеспечивает минимальное
значение Т, — будет, очевидно, существенно зависеть от а.
Значит, говоря о природной неопределенности при исследо-
ваний операции, мы имеем в виду выбор действий в условиях,
когда целевая функция задана, но задана не совсем точно —
она содержит неопределенный параметр. Решая задачу
f (х, а) -> шах,
X
мы можем определить вектор х лишь как функцию параметра а:
х = х(а). (4.2)
♦ Если никакой информацией о факторе неопределенности а мы
не располагаем, то и результат'оптимизации f(x, а) произволен.
В реальных ситуациях информация о параметре а обычно имеет
ЧРД
а е Ge,
где Оа —некоторое множество. ~
Но подобной информации также недостаточно для одно-
значного решения задачи. Формула (4.2) определяет лишь не-
которое отображение множества неопределенности природных
факторов G^ на множество Gx, которое естественно назвать
множеством неопределенности результата.
Множество неопределенности результата Gx— это, конечно,
очень важная характеристика изучаемой операции, но его по-
ч 4 4. ДРУГИЕ ТИПЫ НЕОПРЕДЕЛЕННОСТЕЙ 4i
строение сопряжено с большим объемом сложных вычислений.
В то же время есть еще один подход,, который дает строгую,
правда, лишь одностороннюю оценку. Это так называемый
принцип наилучшего гарантированного результата. Поясним его
содержание. Так как для любого х
mln f (х, а)< f (х, а), (4.3)
«®ов
то и для любого а е Оа '
f = max min f (х, а) С max f (х, а). (4.4)
х а е Оа х
Число f*. определенное формулой (4.4), называется гарантиро-
ванной оценкой, а соответствующее х = х* — гарантирующей
стратегией в том смысле, что, каково бы ни было значение па-
раметра неопределенности а, выбор х = х* согласно формуле
(4.4) гарантирует, что при любом а значение целевой функции
будет не меньше, чем f*. Для получения гарантирующей стра-
тегии необходимо решить следующие задачи оптимизации:
1) вычислить min f (х, а) для любого х\ в результате будут
aeG •
найдены а = а* (х) и / (х) = / (х, а* (х));
2) вычислить max/(х, а*(х)); в результате будут определены
х = х* и /* (х*) = /*.
Гарантированную оценку можно значительно улучшить, если
знать заранее, что в момент «действия» (или «опыта») станет
известна величина параметра а. Определим значение функции
х «= х(а) такое, что для любого а
max f (х, а) = f \зс (а), а) = J (а). (4.5)
X ч
<
Вычислим затем такое а = а, которое определяет -
min J (а) = f (а) = min maxf (х, а);
ввОа в®°а *
Так.как
min max f (х, а) max .min f (х, а) = Г,
ае0а х t х а «<?а
*то информация о том, что в момент принятия решения мы будем
знать величину неопределенного фактора, например состояние
погоды, позволяет получить новую гарантированную оценку,
- более* «совершенную». Но в этом случае гарантирующей стра-
тегией будет не вектор х = х*, а некоторая функция
х = х(а).
4?
ГЛ. I. МЕТОДЫ ИССЛЕДОВАНИЯ ОПЕРАЦИЙ
Выбор гарантирующей стратегии поведения —это рациональ-
ный способ принятия решения. В результате использования этой
стратегии мы гарантируем себя от всяких случайностей: каковы
бы ни были не контролируемые нами факторы, мы обеспечим
себе значение целевой функции не меньшее, чем f*. Но всегда
остается возможность как-то улучшить этот результат. Для это-
го надо принять решение, связанное с определенным риском,
поскольку, задавшись, нйпример, каким-либо значением неопре-
деленного фактора, мы можем получить не только большее, но
и меньшее значение целевой функции. Рассмотрим подробнее
ситуацию с риском. Здесь обычно принято различать два край-
них случая: выбор производится многократно и выбор является
однократной операцией. В обоих случаях предполагается, что
а — случайная величина, закон распределения которой известен.
Мы увидим, что разница между этими двумя случаями.не столь
уж велика.
Поскольку а —случайная величина, то значение функции
f(x, а) будет также случайной величиной. Поэтому исходную за-
дачу в тех случаях, когда речь идет о многократно повторяю-
щихся операциях, естественно заменить некоторой вероятност-
ной. С подобной ситуацией мы уже сталкивались в §г2. В каче-
стве оценки выбранной стратегии мы можем теперь принять
величину максимума математического ожидания -
fi = max f (х, а).
X
Но замена задачи f(x, а)->шах задачей f(x, а)->тах —не
единственный способ перехода к стохастической постановке.
Можно поступить, как мы это видели, и иначе, приняв в каче-
стве оценки величину
f2 = rtiax f (х, а) = f (£ (to), а),
X *
где х = к (а) —наилучшая стратегия при известном а.
Могут быть и другие критерии. Обозначим, например, через
а среднее значение случайной величины а; ему будет отвечать
некоторая функция fs = f(x, а), максимум которой мы также
сможем использовать для оценки.
Замена одной из этих задач любой другой является актом
неформальным, ибо эти задачи — совершенно разные. И вообще,
какие бы критерии мы в этой ситуации не формулировали, их
выбор в любом случае не является строгой математической опе-
рацией. Он будет отражать наше предположение о том, что
определение параметров системы, произведенное согласно но-
вому, введенному нами правилу, обеспечивает ей желаемое ка-
§4. ДРУГИЕ ТИПЫ НЕОПРЕДЕЛЕННОСТЕЙ 43
чество. Подобная ситуация — следствие того очевидного факта,
что исходное требование
f (х, а) -* max (4.6)
эквивалентно,, по существу, бесконечно большому числу различ-
ных в общем случае критериев. В самом деле, предположим,
что параметр а принимает лишь дискретные значения ои, «2, ...;
тогда условие. (4.6) эквивалентно максимизации множества кри-
териев:
дх.аО-^тах,
f (х, а2)-> max,
............................. (4.7)
f (х, а„)-> тах>
Значит, задача.принятия решения в условиях неопределен-
ности природы, когда параметр, характеризующий эту неопре-
деленность, случаен, имеет' много общего с задачей принятия
решения в условиях неопределенности цели. В предыдущем па-
раграфе мы видели, что в этой ситуации мы должны ввести
дополнительную гипотезу — произвести свертку критериев.
А, свертка критериев всегда является актом неформальным, и
любой из критериев ft, fz, fi, с помощью которых мы считали
возможным производить выбор стратегий, будет только гипоте-
зой. Это утверждение справедливо в равной степени и для мно-
гократно повторяющихся операций, и для одноразовых. Только
при многократно повторяющихся операциях свертка критериев,
сводящаяся к переходу к стохастической постановке, вполне
естественна. Сказанное означает, что, хотя этот переход отра-
жает наше субъективное представление о цели операции, он
имеет интуитивное обоснование (в опыте людей). Подобная
формализация не противоречит поставленным целям, достаточно
им адекватна в случае многократно повторяющейся операции.
Другое дело, когда выбор х — однократная* операция. В этом
случае информация о том, что а — случайная величина с из-
вестными статистическими характеристиками, практически ни-
чего не может дать.
И тем не менее, как мы уже знаем из анализа примера о
строительстве элеваторов, стохастическая трактовка задачи мо-
жет использоваться в случае однократных операций и имеет для
этого свою мотивировку— дает одну из возможных сверток
критериев.
Заметим, что с аналогичной ситуацией мы сталкиваемся и
при анализе ограничений. В § 1 мы привели пример физических
ограничений
S QiXt <Q,
(4.8)
44
ел. I. МЕТОДЫ ИССЛЕДОВАНИЯ ОПЕРАЦИЙ
где Q — общее количество воды в водохранилище. Поскольку
значение Q зависит от погодных условий, Го оно является вели-
чиной случайной. Предположим, что Q принимает лишь дис-
кретные значения. Тогда условие (4.8) эквивалентно следующим
неравенствам:
Условие (4.8) является «физическим», нарушить его мы не
можем: не можем дать земле больше воды, чем есть в нашем
распоряжении. И, выбирая величины Xi, мы -не знаем заранее,
каково будет значение Q. Но для принятия решения, т. е. для
выбора xi, значение Q мы должны тем или иным способом
фиксировать. Назначение Q или переход к стохастическому опи-
санию всегда будет некоторой новой гипотезой.
А как согласовать принятое решение с той реальностью, ко-
торая будет иметь место после выбора величин х(? В самом
деле, это не так просто, так как физическое ограничение мы
нарушить не сможем. Значит, мы сталкиваемся с новой опера-
цией: перераспределить воду так, чтобы в новых условиях (после
получения новой информации) добиться максимального значе-
ния нашей целевой функции. Но, подчеркнем еще раз, это будет
уже новая задача.
Приняв то или иное значение случайного параметра Q или
вводя в качестве критерия стохастическую характеристику про-
цесса, мы никогда не можем сказать заранее, каков будет
результат данной операции. Конечно; в нашем распоряжении
всегда есть гарантирующая стратегия. Обозначим, например,
через Q* минимальное значение величины Q; тогда, сделав вы-
бор величин Xi из предположения, что
<Q»,
г
мы заведомо обеспечим выполнение условия (4.8) и сможем
иметь гарантирующую оценку, т. е. гарантировать получение
минимального урожая.
Во всех остальных случаях мы будем иметь дело с новыми
гипотезами, т. е. с риском, принятие Которого целиком опреде-
ляется решением исследователя операции7 или оперирующей
стороны.
б) Активный партнер. Перейдем теперь к описанию не-
определенностей, связанных с существованием активных парт-
неров или противников, действия которых мы не можем пол*
ностью контролировать.
§ 4. ДРУГИЕ ТИПЫ НЕОПРЕДЕЛЕННОСТЕЙ
45
В теории исследования операций особое место занимает изу-
чение ситуации, в которой участвует много субъектов (много
оперирующих сторон), причем каждый из них стремится достичь
своей цели
I i (х,, х2, ..., х„) -> max
xi.
и имеет для этого определенные возможности, которые описы-
ваются вектором Xi, Xi Gi. .
Заметим, что формально такая ситуация включает в себя
проблему многокритериальное.™,* требующую отыскания векто-
ра х, при котором достигается максимум критериев fi(x). В са-
мом* деле, если мы отождествим цель каждого из субъектов
с его критерием fi(xt), а в качестве описания множества б,-
примем условие
• Х,=Х2 = ••• — хп,
то. получим частный случай задачи со многими активными парт-
нерами. Но, конечно, общий случай ситуации со многими субъ-
ектами гораздо сложнее и требует для своего анализа целого
ряда специфических гипотез. Поясним это на примере двух
субъектов.
Итак, пусть два субъекта А и Б, располагающие возмож-
ностью выбора векторов х и у, стремятся к достижению своих
целей,, которые мы будем записывать в виде
f (х, у)->max, <p(x, «/)->max, xsX, y^Y.
В частном случае может оказаться, что f = —<р; такую си-
туацию мы будем называть антагонистической. .
Примечание. Антагонистические ситуации были предметом множества
исследований и сделались основным объектом изучения в теории игр — мате-
матической дисциплине, возникшей благодаря работам француаского матема-
тика Э. Бореля из задач анализа салонных игр. Чисто антагонистическая си-
туация является в известном смысле вырожденной. Наиболее типичен кон-
фликт, в котором интересы партнеров или противников не совпадают, но и
не строго противоположны.
Общий случай нетождественности интересов (целей) парт-
неров (субъектов) мы будем называть конфликтом. При изу-
чении конфликтных ситуаций, т. е. при изучении возможных
способов выбора, удобно отождествить исследователя с одним
из субъектов. Условимся, например, говорить «мы», когда речь
идет о субъекте А. Это тем более имеет смысл, ибо анализ
всегда проводится с позиций интересов какого-либо из субъ-
ектов.
В связи с тем, что исход нашего выбора зависит от выбора
субъекта Б, мы должны принять ту или иную гипотезу о его
поведении, которое, в свою очередь, будет зависеть от характера
46 ГЛ. I. МЕТОДЫ ИССЛЕДОВАНИЯ ОПЕРАЦИЙ
информированности субъекта Б. Здесь возможно несколько
гипотез (несколько случаев).
а) Каждый из субъектов не имеет никакой информации о
выборе, который сделал другой субъект. В этом случае мы мо-
жем найти гарантированную оценку. Для субъекта А она будет
выражаться формулой
f* = max mln f (x, у), (4.9)
xsXgeV
для субъекта Б — формулой
Ф* = max min ф (х, у). (4.9')
y&Yх&Х
Решая задачи (4.9) и (4.9'), мы найдем векторы х* и у*,
которые реализуют значения [* и ф*. Это значит, что, сделав
выбор х = х*,-мы при любых условиях (любом выборе у Y)
гарантируем, что значение нашей целевой функции f (х, у) будет
не меньше, чем /*.
В этой ситуации могут быть предложены и различные ва-
рианты риска. Например, мы можем принять гипотезу о том, что
другой субъект использует гарантирующую стратегию у — у*.
Тогда наш выбор будет иным:
f (х, У*) -*• шах.
»ех
Мы определим вектор х = х** и соответствующее значение
функции f = /**. При этом f** f*, но если противник (парт-
нер) сделает иной выбор, например у = //**, то может ока-
заться, что f(x**, у**) < /*. Но риск есть риск: мы сформулиро-
вали гипотезу, и если она оказалась неверной, то и результат
может оказаться совсем иным.
Р) Пусть в момент нашего действия (выбора х) мы, т. е.
субъект А, будем знать выбранное субъектом Б значение у.
Тогда нашу стратегию — выбор х — следует искать в виде
функции х = х(у). Мы можем ее определить эффективно; для
этого нам надо решить задачу оптимизации
/(*,#)-> max. (4.10)
х е X
Условие (4.10) определит искомую стратегию х = й(у)'.
Для этого случая мы можем также вычислить гарантирован-
ный результат /; он будет отличен от /*:
f — min max f (x, у),
уeУx<=X
и йо всех случаях /* Д
§ 4. ДРУГИЕ ТИПЫ НЕОПРЕДЕЛЕННОСТЕЙ
47
Заметим, что, выбирая свою стратегию — вектор х,— мы в
этой ситуации никак не можем повлиять на выбор, который
сделал другой субъект.
у) Предположим теперь, что субъект Б в момент принятия
своего решения будет знать наш выбор; например, мы обязаны
сообщить его субъекту Б. В этом случае мы не можем оказать
влияние на выбор, который сделает субъект Б. В самом* деле,
если мы знаем целевую функцию субъекта Б, то естественно
сделать предположение о том, что субъект Б будет делать вы-
бор из условия
<р(х, #)->тах. (4.11)
Решая задачу (4.11), мы можем определить отклик субъек-
та Б на наш выбор, который, согласно нашей гипотезе, будет
оптимальной стратегией субъекта Б:
У=р(х), (4.12)
Теперь мы можем распорядиться выбором х. В самом деле,
подставляя (4Д2) в выражение для целевой функции f(x,y),
мы получим
f(x,g(x)) = F(x), (4.13)
и теперь свой выбор мы можем сделать из условия
F(x)->max.
(4.14)
Итак, информация о том, что субъект Б будет знать наш
выбор, и гипотеза (о том, что субъект Б выберет свою опти-
мальную стратегию, позволяют нам так воздействовать на его
выбор, чтобы он в максимальной степени соответствовал нашим
целям.
Если максимум (4.11) достигается не в одной точке, а на
множестве Af(^), то гарантированный результат субъекта А
вычисляется взятием минимума по этому множеству, а наилуч-
ший гарантированный результат субъекта А находится затем
взятием максимума по х е X, т. е.
f** = max min f {х, у).
х&Х у е М (х)
Описанная ситуация достаточно часто встречается на прак-
тике, и ей нетрудно придать ту или иную экономическую интер-
претацию. Так, вектор х мы можем отождествить с ресурсом,
а функцию (4.12) назвать производственной функцией, которая
описывает-наивыгоднейший для субъекта Б способ использова-
ния ресурса. Таким образом, субъекту Б выделялось такое
48
ГЛ. I. МЕТОДЫ ИССЛЕДОВАНИЯ ОПЕРАЦИЙ
количество ресурса, чтобы его деятельность наилучшим обра-
зом соответствовала нашим целям.
6) Проблема штрафа и поощрения. В пункте 0) мы
рассмотрели такую ситуацию, в которой наша стратегия носила
характер синтеза:
х = £(у). (4.15)
Теперь предположим, что мы не только располагаем воз-
можностью выбора стратегии (4.15), но и можем заранее со-
общить ее субъекту Б. Оказывается, что эта информация позво-
лит найти наш отклик на действия субъекта Б, наилучшим об-
разом соответствующий нашим целям, и повлиять в нужном на-
правлении на действия субъекта Б.
В самом деле, наиболее естественной гипотезрй о поведении
субъекта Б будет предположение о том, что свое знание нашей
стратегии £(у) он использует для оптимизации своей целевой
функции ф(х,у), которая в этом случае будет иметь вид
Ч(х,у) = у(£(у),у). (4.16)
Задача, которая стоит перед субъектом Б, — найти такой вы-
бор у, который доставляет максимум функции ф* (*/) = Ф (ЯЯ. 0 •
Решая эту задачу, мы найдем у как некоторый оператор от
нашей стратегии .£(«/):
У = № («/)]. (4.17)
Выражение (4.17) означает, -что каждой стратегии £(у) по-
ставлено в соответствие свое значение вектора у. выражение
(4.17) дает отображение, множества наших стратегий на мно-
жество выборов субъекта Б. Зная этот оклик субъекта Б на
нашу стратегию £(у), мы можем заняться выбором нашей опти-
мальной стратегии. Для этого достаточно решить задачу
f (*(#). Я* (#)])-* max. (4.18)
iW
Это — некоторая специальная оптимизационная задача.
В результате ее решения мы найдем нашу оптимальную стра-
тегию х(у) и значение целевой функции, которое будет ей со-
ответствовать.
Если, максимизируя функцию (4.16), мы найдем не един-
ственный вектор у, а множество векторов есть Л1(х), то наи-
лучший гарантированный результат субъекта А будет
' ' Г“ = тах min f(&(y),y),
X g= Х1 у e= M U)
где £ = 2(y), причем хеXb Xi —множество всех функций со
значениями в X,
5 4. ДРУГИЕ ТИПЫ НЕОПРЕДЕЛЕННОСТЕЙ
49
Рассмотренной ситуации также легко придать экономиче-
скую интерпретацию. Она дает схему функционирования эконо-
мических организмов, когда один из них имеет возможность
воздействовать на поведение другого с помощью штрафов и по-
ощрений, которые описывает функция &(у).
Можно рассмотреть еще много других похожих ситуаций*).
В зависимости от характера информированности ^субъектов мы
будем получать различные случаи взаимодействия партнеров.
Мы рассмотрели здесь ситуации, которые можно назвать
идеальными. Предполагалось, что.оба партнера не только точно
знают свои цели, но и полностью информированы о целях дру-
гого партнера. Такие случаи встречаются довольно редко. Ти-
пично другое: мы никогда точно не знаем целей наших партнеров
или противников, а противники, т. е. другие субъекты системы,
также не очень точно знают наши цели. Лицо, анализирующее
конфликтную ситуацию, всегда должно с этим .считаться. Не-
соответствие реальности тех представлений, которые имеют
субъекты, — это дополнительная трудность формирования гипо-
тез о поведений, без которых невозможно принять более или
менее обоснованные решения. Для построения гипотез о пове-
дении других субъектов мы должны обычно формулировать
гипотезы об их информированности. -
в) Ситуации равновесия. Анализ неопределенности,
как мы это видели в предыдущем параграфе, опирался на ряд
гипотез, с помощью которых' из множества альтернатив выде-
лялось некоторое подмножество «претендентов». В результате
подобного анализа происходит отбрасывайие, исключение заве-
домо «плохих» вариантов решений, которые не могут претендо-
вать на право быть оптимальными. Обсуждая проблему неопре-
деленности целей, ’ мы подробно остановились на изложении
принцица Парето — важнейшего из принципов отбора рацио-
нальных решений. Паретовский анализ определяет условия, ко-
торым необходимо должен удовлетворять разумный компро-
мисс. Принцип Парето сохраняет свою силу и при анализе кон-
фликтных ситуаций со многими субъектами. Одна из важных
проблем, возникающих при изучении конфликтных ситуаций со
многими субъектами, — это проблема' коллективных решений,
коллективного формирования компромисса. Очевидно, что в
этой ситуации все те решения (альтернативы выбора), которые
могут быть заменены другими, обеспечивающими большие зна-
чения целевых функций всех субъектов одновременно или части
субъектов, но без уменьшения значений целевых функций
м *2 В последние годы анализу подобных вопросов посвящено довольно
а ™ и важных исследований. Читателю, желающему глубже по-
271 омиться с п°Добной проблематикой, можно рекомендовать книги [4, 5,
50
ГЛ. I. МЕТОДЫ ИССЛЕДОВАНИЯ ОПЕРАЦИИ
остальных субъектов, должны быть отброшены. Одним словом,
обсуждая правильность коллективных решений, следует иметь
в виду только. варианты, принадлежащие множеству Парето.
Эти варианты (мы будем их называть эффективными) обла-
дают тем свойством, что улучшить значение целевой функции
какого-либо субъекта можно только за счет других субъектов.
Но при анализе ситуации со многими субъектами, кроме
принципа выбора эффективных решений (принципа Парето),
существуют еще другие принципы. Мы остановимся на одном из
них, так называемом принципе устойчивости, или принципе рав-
новесия. Он возник в классической теории игр, предмет кото-
рой — анализ антагонистических конфликтов двух лиц. Рассмот-
рим ситуацию с двумя субъектами и предположим, что цель
субъекта А — максимизировать значение функции f(x,y) и для
этого он располагает возможностью выбирать вектор х из не-
которого множества X. Другими словами, цель субъекта А мы
можем записать так:
f шах. • (4.19)
х €= X
Поскольку ситуация — антагонистическая, то цель субъекта
Б будет строго противоположна, т. е. он будет стремиться йе-
пользовать свои возможности так,
чтобы
f (х, у) -* min. (4.20) .
y^Y
Заметим, что в этой ситуации
речь идет не о локальных экстре-
мумах, а о глобальных на соответ-
ствующих множествах, и главная
задача состоит в том, чтобы сфор-
мулировать рекомендации о спосо-
бах выбора одновременно для обоих
субъектов. В классических поста-
новках всегда речь идет о некото-
ром «абсолютном» или «объектив-
ной» анализе с позиций некоторого третьего субъекта, который
не имеет собственных целей и которому доступна любая инфор-
мация.
Итак, какие же здесь могут быть рекомендации?
Предположим, что на прямом произведении, множеств X и Y
функция f(x,y) имеет седловую точку (рис. 4.1). В этой точке
имеет место очевидное равенство, которое и является определе-
нием седловой точки:
/
Г = max min f (х, у) = min max f (х, у). (4.21)
*<gX уеГ j/еГхеХ
§ 4, ДРУГИЕ ТИПЫ НЕОПРЕДЕЛЕННОСТЕЙ
61
Обозначим через (х*, у*) координаты седловой точки. Очевидно,
что никому из субъектов не имеет смысла, не выгодно выбирать
в качестве своей стратегии какую-либо другую точку, кроме х*
или у*. Предположим, например, что субъект Б выбрал вместо
стратегии у — у* другую, у — у'. Как видно из рисунка, мини-
мальное значение целевой функции, которое он может себе обес-
печить при разумном поведении партнера А (т. е. в том случае,
когда последний выберет х = х*), будет а' > а. В этом смысле
седло является точкой устойчивого выбора. Поскольку речь идет
об экстремальных значениях глобального, а не локального ха-
рактера, то ситуация сохраняется и в общем случае многих сед-
ловых точек.
, Предпрложим, например, что функция f(x,y) имеет две’сед-
ловые точки (х*, у*) и (Л, У), в которых, как это следует
из (4.21),
' f«/) = f(MW. . (4.22)
Заметим, что свойством (4.22) не исчерпываются все заме-
чательные свойства седловых точек. Оказывается, что седло-
выми точками функции f(x,y) яв- .
ляются не только точки (х*,у*) и
(£,У), но. и две другие точки (х*,У) । •
и (%, У*), и в этих точках значения
функции удовлетворяют равенству У* ~--Н" I---
/«0 = Ш,/)=Г- ! : !
Докажем это, свойство. Пусть . л ___£1______1Д__.
точки А и В являются седловыми | ]
точками (рис. 4.2); их координаты | , [
обозначим (х*, у*) и (х, У) соответ- -l--------1--».
ственно. Рассмотрим точку С с ко- 0 х х х
ординатами (х*,$) (для точки D с ' Рис. 4.2.
координатами (Д у*} все рассуж-
дения аналогичны). Поскольку (Д У), (х*, у*) — седловые точки,
то VxeX и Vt/e У
f(x,^<HX,^)<f(Ajr), (4.23)
f(x,/)<f(x*,/)<f(x*,^), (4.24)
откуда с помощью (4.21), (4.22) получаем цепочку неравенств
Г = НЛЮ</(Л0</(М) = Г.'
Отсюда следует, что
Кроме того, из (4.23) и (4.24) получаем, что
Н<0) = Нх*,/)<Ж^)
52
ГЛ. I. МЕТОДЫ ИССЛЕДОВАНИЯ ОПЕРАЦИЙ
И
Эти соотношения в совокупности и означают, что (х*, у) — сед-*
ловая точка.
Итак, если у нас есть две седловые точки (А и В), то мы
сразу находим еще две седловые точки (С и D), и значения
функции в этих точках равны между собой.
Теперь становится понятной роль седловых точек в теор.ии
антагонистических конфликтов. Если седловых точек несколько,
То каждый ,из субъектов может использовать любую из страте-
гий у* или Q, определяющих седловую точку. Любая из этих
стратегий обеспечит субъекту Б одно и то же значение целевой
функции, не меньшее f*. Если другой субъект выберет также
одну из стратегий х* или Д то значение целевой функции будет
/♦; точно такое же значение целевой функции обеспечит себе и
субъект А.
Таким образом, в-том случае, когда седловая точка суще-
ствует, мы действительно можем говорить об оптимальном ре-
шении с точки зрения обоих субъектов, и проблема принятии
решения сводится только к определению максимина. Вот по-
чему основные усилия в классической теории игр, изучающей
антагонистические конфликты, в течение многих лет были на-
правлены на изучение таких задач, которые сводились к иссле-
дованию седловых точек (либо к такому видоизменению исход-
ной постановки задачи, которое приводило бы в конечном итоге
к анализу ситуаций равновесия, т. е. седловых точек).
Исключительное значение ситуаций равновесия и антагони-
стических конфликтах заставило, естественно, сделать попытку
распространить понятие равновесия на общий случай многих
субъектов. Предположим, что с системой ассоциировано W субъ-
ектов, каждый из которых может делать выбор своей стратегии
Xi е Xi и стремится сделать этот выбор так, чтобы максимизи-
ровать свою целевую функцию fi. Но значения целевой функции
в общем случае будут зависеть не только от его выбора, но и
от выбора, который сделают другие субъекты, т. е.
fi = fi(xi, х2, .... xz_i, хь Х(+ь .... хы).
Будем называть точку (выбор) x — {xi, .... xN} ситуацией рав-
новесия, если для любого i имеет место условие
maxfi^i, tf2, • &i-\, Xi, &i+\, .... = %i, • • #N).
*l (4.25)
Точки равновесия естественно называть устойчивыми точ-
ками, поскольку если субъект номера i отступит от своего рав-
§ 4. ДРУГИЕ ТИПЫ НЕОПРЕДЕЛЕННОСТЕЙ
63
новесного значения, т. е. выберет свою стратегию отличной от
Xi, то'яри условии, что остальные субъекты сохранят свой выбор,
проиграет прежде всего он сам, так как
fi(Xi, .. •> Х/_ь Xi, X/+i, .. .,Ху) (Xj, ..., X/.Xjv). (4.26)
На этом основании возник так называемый принцип устойчи-
вости (или принцип Нэша, по имени его автора), который сво-
дится к утверждению, что выбор рациональной стратегии дол-
жен производиться среди множества точек равновесия, т. е. среди
точек, удовлетворяющих условию (4.25) (или (4.26)).
Посмотрим, в какой степени этот принцип универсален, в ка-
кой мере его можно использовать для оценки качества альтер-
натив. И так ли уж очевидно, что все множество альтернатив,
не удовлетворяющих. принципу Нэша, следует исключать из
анализа? Прежде всего заметим, что при' существовании не-
скольких субъектов, каждый из которых стремится к достиже-
нию собственных целей, не совпадающих с целями других
субъектов, речь всегда идет о некотором компромиссе: когда
принимаются коллективные решения, каждый из субъектов дол-
жен в той или иной мере поступиться частью-своих интересов.
Поэтому условие устойчивости — очень важное свойство компро-
мисса. . -
Если все субъекты смогли условиться о том, чтобы придер-
живаться выбора xi = Л/, то тот субъект, который- нарушает до-
говоренность, прежде всего и пострадает: устойчивость — это
известная гарантия против нарушения договоренности. Заметим,
именно договоренности, т. е. коллективного решения. В этом и
состоит принципиальное отличие общего случая от случая ан-
тагонистического конфликта-при наличии седловой точки, кото-
рый мы только что рассмотрели и где само понятие компромис-
са не имеет смысла.
В самом деле, в случае антагонистического конфликта двух
лиц никакой договоренности для выбора оптимальной стратегии
не требуется, так как иного рационального способа поведения,
кроме того, чтобы принять равновесную стратегию (если она
существует), нет.
Совершенно иначе обстоит дело в случае многих субъектов.
Рассмотрим известный пример, принадлежащий Ю. Б. Гермейе-
ру. Пусть целевые функции субъектов имеют вид
f/(xi, ..., xN) = xl + -xt), - (4.27)
причем на «действия» субъектов — скалярные величины х,—
наложены ограничения
Оi=l, N. (4.28}
V
S4 ГЛ. I. МЕТОДЫ ИССЛЕДОВАНИЯ ОПЕРАЦИИ
Точкой равновесия будет, очевидно,
*<=!, /=1, 2, ..., N, (4.29)
и в этой точке значение .... = ft — 1. Это будет устой-
чивая точка. В самом деле, если все субъекты, кроме субъекта
номера I, будут придерживаться стратегии (4.29), а субъект но-
мера i примет стратегию
xt = 1 — б
(в силу условия (4.28) .субъект номера i может только умень-
шить величину Xi по сравнению с ее равновесным значением),
то значение ,его целевой функции будет удовлетворять условию
fz=l-6<L
т. е. будет меньше того значения, которое ему обеспечил бы вы-
бор равновесной стратегии х;=г=Д = 1. Но равновесная страте-
гия в этом случае вовсе не является оптимальной. Существует
бесчисленное множество стратегий, которые будут обеспечивать
значения целевых функций, большие равновесного, причем всем
субъектам одновременно. Полагая, например, Xi = 0, мы най-
дем, что при таком выборе >
. = 1 при tf>2.
Но точка х,==0, i = 1, 2, ..., N, очевидно, не будет устой-
чивой. В самом деле, предположим, что все субъекты, кроме
субъекта номера t, придерживаются стратегии х/ = 0, а субъект
номера i примет стратегию xi = l. Тогда значение его целевой
функции ft будет равно N, а не N— 1. Что же касается осталь-
ных субъектов, то отступление субъекта номера I от «эффек-
тивной стратегии» xi = 0 приведет к уменьшению значений их
целевых функций. В этом случае их «доход» будет равен ,
f,= W-2,
Подведем некоторые итоги. Устойчивость выбора — это очень
важное свойство альтернативы в том случае, когда имеет место
взаимодействие многих субъектов (АГ>2). Но устойчивый вы-
бор может не принадлежать к числу эффективных, т. е. к мно-
жеству Парето. Поэтому, если решение принимается независимо
всеми партнерами (субъектами), то трудно рассчитывать, чтобы
они сделали устойчивый выбор.
Таким образом, принцип устойчивости (принцип Нэша) вряд
ли может считаться принципом выбора альтернативы. Иное
дело, если речь идет о коллективном решении, когда оно при-
нимается по договоренности всеми субъектами одновременно.
§ 5. ЗАКЛЮЧИТЕЛЬНЫЙ КОММЕНТАРИИ
55
Но и в этом случае остается" всегда элемент сомнения: не выбе-
рет ли часть субъектов, по договоренности внутри этой группы,
иную стратегию (например, одну из стратегий, принадлежащих
множеству Парето)? Тогда эта группа добьется ббльших ре-
зультатов по сравнению с остальными.
По существу, единственный случай, при котором условие
устойчивости может рассматриваться как принцип отбраковки
неконкурентоспособных вариантов, — это случай, в котором
устойчивые точки являются одновременно точками множества
Парето. Такие системы встречаются очень редко, но, несмотря
на это, имеют (как мы увидим) весьма большое практическое
значение. Гораздо чаще мы сталкиваемся с ситуациями, в кото-
рых эффективные альтернативы являются неустойчивыми, а
устойчивые —не эффективными. Случаи, когда устойчивые точ-
ки являются одновременно паретовскими, всегда отвечают ка-
ким-либо важным практическим задачам. Поэтому одним из
важных направлений теории исследования операций является
изучение систем, в которых устойчивые точки принадлежат мно-
жеству Парето.
§ 5. Заключительный комментарий
Мы привели весьма беглый обзор некоторых проблей, входя-
щих в исследование операций. Основное содержание этой дис-
циплины схематично можно представить в следующем виде:
1) математическое описание-г создание модели операции;
2) анализ неопределенностей и формализация понятия цели
(формирование целевой функции, критерия);
'3) решение возникших оптимизационных и других математи-
ческих зад&ч.
Эта схема достаточно условна, ибо указанные разделы тесно
переплетаются в процессе исследования конкретной операции.
Построение модели операции, а с него начинается любое
исследование, требует глубокого понимания специфики процесса
и тех возможностей математического анализа, которыми распо-
лагает исследователь операции. .На этом этапе речь идет о «фи-
зике»- процесса. Мы еще не говорим о цели исследования, но
она уже неявно присутствует: модели экономического процесса,
предназначенные для выбора альтернатив развития энергетики
региона или развития систем орошения того же региона, будут
разными, хотя развитие энергетики нельзя отделить от развития
сельскохозяйственного или какого-либо ’ другого производства.
Но уровень детализации отдельных блоков будет совершенно
иным. В модели, описывающей экономическое развитие региона,
предназначенной для выбора альтернатив развития энерге-
тики, сельское хозяйство, например, будет описано в очень
56 гл. I. МЕТОДЫ ИССЛЕДОВАНИЯ ОПЕРАЦИИ
агрегированных (интегральных) показателях, но зато все осо-
бенности производства энергии будут описаны со многими де-
талями. В модели региона,, предназначенной для анализа разви-
тия систем орошения, наоборот, сельскохозяйственное производ-
ство должно быть описано очень детализированно, но зато
энергетика будет входить в модель только своими агрегиро-
ванными показателями. Таким образом, предназначение модели
накладывает определенный отпечаток на исходные позиции ее
формирования.
Важный элемент исследования — изучение той информации,
которая оказалась в руках исследователя. Он должен решить,
в какой, степени эта информация соответствует построенной мо-
дели и, может быть, видоизменить тем или иным образом мо-
дель (например, ввести некоторые новые характеристики и т. п.).
Примечание. Достаточно распространенной является точка зрения,
что именно используемая информация является определяющим фактором при
создании модели. Я категорический противник подобных взглядов. «Тради-
ционная» информация, которую используют экономисты, проектировщики,
формировалась на основании потребностей «традиционной» технологий анали-
за, не учитывающей возможностей вычислительной техники. Поэтому этап
изучения информации обычно должен завершаться формированием новых тре-
бований к информации. Вместе с тем исследователь должен всегда оставаться
на позициях реализма и излишняя требовательность к информации может
быть только вредной.
Еще один аспект в проблеме, изучения соответствия модели
и информации связан с тем^ что последняя в силу обстоя-
тельств, которые вне нашей компетенции, может быть неточной
или недостаточно точной. В этих условиях чрезмерная детали-
зация модели (стремление добиться «предельной адекватности»
модели реальному процессу) будет не только ненужной, но и
просто вредной. '
Следующая группа проблем —это формирование критерия и
гипотез, преодолевающих неопределенность. Надо начинать с
перечисления критериев (показателей}, предельных возможно-
стей. Существенным элементом является изучение множества
Парето для наиболее «важных» критериев. В конечном счете мы
все равно придем к некоторой свёртке критериев. Поскольку
возможны различные варианты свертки, то необходим их анализ
и сравнение результатов. Безусловно, должны быть отброшены
все те критериальные функции, у которых существует ярко вы-
раженный «острый» максимум.
Реальные конструкции, их свойства должны быть устойчи-
выми относительно малых изменений характеристик проекта, ибо
реализация проекта будет происходить с неизбежными откло-
нениями от расчетного оптимального варианта, и эти отклонения
.не должны существенным образом сказываться на качестве кон-
струкции. Другими словами, совершенно неприемлема ситуация,
§ 5. ЗАКЛЮЧИТЕЛЬНЫЙ КОММЕНТАРИЙ
57
изображенная на рис. 5.1,6; следует всегда стремиться работать
с критерием, зависимость которого, от конструктивных парамет-
ров имеет вид, изображенный на рис. 5.1, а.
Очень важное место в анализе занимают оценки гарантиро-
ванного результата (минимаксной стратегии). Расчет мини-
максной стратегии —это краеугольный камень исследования лю-
бой операции, единственный объективный результат анализа,
который не зависит от гипотез информированности.
Примечание. Вокуг этого тезиса sвсегда возникали дискуссии, и
лиц, стоящих на этой точке зрения, многие считали принципиальными против-
никами любого риска. Я думаю, что подобное суждение появилось как ре-
зультат известного недопонимания подобной позиции. В самом деде, использо-
вание гарантированных стратегий никак не противоречит стратегиям риска.
Стремление к риску присуще человеческой природе. Но что такое риск? Это,
прежде всего, Система гипотез о внешней обстановке или действиях другого
субъекта. Приняв эту новую систему гипотез, описывающих ситуацию риска,
т. е. сузив тем или иным образом множество возможных стратегий, мь| можем
в новых условиях снова сформулировать минимаксную стратегию и оценить
гарантированный результат.
Все сказанное выше относится к «нематематической» части
исследования операций. Но, как бы ни важна была интуиция и
логика обычного «здравого смысла», на этапах формирования
модели и критерия огромную роль играет математический ана-
лиз: определение предельных оценок,/структуры множества Па-
рето и многие другие вспомогательные задачи исследования лю-
бой операции. Это — непрерывный, последовательный диалог с
природой, цепочка математических экспериментов. В системном
анализе и исследовании операций именно математические экс-
перименты заменяют исследователю физический, натурный или
модельный эксперимент.
Среди используемых математических методов особую роль
играют методы решения оптимизационных задач. Они состав-
ляют фундамент системы математического обеспечения проблем
принятия решений. Сегодня эти методы — линейного, нелиней-
ного, динамического, стохастического программирования, раз-
личные методы дискретной оптимизации — получили достаточно
58 ГЛ. I. МЕТОДЫ ИССЛЕДОВАНИЯ ОПЕРАЦИИ
глубокое развитие. Им посвящена огромная литература, они
вошли в программу всех тех высших учебных заведений, кото-
рые готовят специалистов по прикладной математике, экономи-
ке, автоматизации проектирования и т. д. Более того, во всех
развитых странах сейчас созданы или создаются пакеты про-
грамм, реализующих те или другие методы оптимизации. Эти
- пакеты снабжены обычно специальной управляющей програм-
мой (операционной системой), которая позволяет использовать
их в режиме диалога и делает доступной эксплуатацию систем
оптимизации для специалистов, которые не являются профес-
сионалами в области прикладной математики.
Оптимизационные задачи исследования операций обладают,
как правило, одной важной особенностью, которую всегда дол-
жен, иметь в виду исследователь операции. Мы уже отмечали,
что критерии должны быть устойчивыми по отношению к ошиб-
кам практической реализации рыбранных параметров. Другими
словами, в разумно поставленных оптимизационных задачах ис-
следования операций типичной является ситуация, когда не тре-
буется высокой точности при отыскании оптимальных значений
параметров.
Из приведенных рассуждений следует вывод, весьма важный
для практической реализации схемы анализа операция. Имея
в своем распоряжении детализированную, хорошо обоснованную
- модель, т. е. записанную на языке математики систему ограни-
чений и связей между ее'элементам и, и построив критерий f(x),
не следует сразу пытаться решать задачу отыскания его экстре-
мумов
f(x)-> max. (5.1)
хе Q
Эта задача может оказаться очень трудной и требующей боль-
шой затраты машинного времени. А так как в процессе выбора
параметров подобную операцию отыскания экстремумов прихо-
дится проводить многократно, то трудоемкость решения зада-
чи (5.1) может оказаться решающим фактором всего исследо-
вания.
Поэтому имеет смысл, наряду с исходной моделью, построить
некоторую близкую модель, в которой будут упрощены по срав-
нению с (5.1) система ограничений и критерий. Другими сло-
вами, предлагается, наряду с задачей (5.1), рассматривать не-
которую другую, «близкую» задачу:
ф(х)->тах. ' (5.2)
X Я
Эта задача может оказаться на много порядков проще задачи
(5.1), а оптимальные значения показателей системы будут при
этом почти совпадать. Обозначим через л* решение задачи
5 S. ЗАКЛЮЧИТЕЛЬНЫЙ КОММЕНТАРИЙ
59
(5.1), а чё^ез к — решение задачи (5.2). Если упрощенная мо-
дель достаточно хороша, то значение f(x*) почти не будет отли-
чаться бт значения /(х).
.Построение упрощенных моделей играет важную роль в ис-
следовании сложных операций. В процессе выбора параметров
обычно приходится многократно возвращаться к оптимизацион-
ным, задачам типа (5.1). Значит, для успеха исследования не-
обходимо, чтобы операция оптимизации была достаточно «быст-
рой», достаточно экономной.
Таким образом, речь идет о двух классах моделей и, соот-
ветственно, о двух классах алгоритмов: быстрых и поверочных.
С помощью быстрых алгоритмов на упрощенных моделях мы
выбираем основные параметры будущей конструкции, прини-
маем основные проектные решения. Можно сказать, что с по-
мощью быстрых алгоритмов мы делаем эскиз операцию фор-
мируем облик (создаем аванпроект) будущей конструкции или
строим генеральную схему будущего проекта. Затем с помощью
более полной модели, адекватность которой не вызывает сомне--
ний, мы проверяем ход операции, количественные показатели
конструкции. Если необходимо, мы с помощью полной модели
проводим уточняющую коррекцию принятых решений. К сожа-
лению, какой-либо универсальной процедуры упрощения моде-
лей не существует. Некоторые соображения на этот счет будут
изложены в главах IV—VI. Но в большинстве случаев упроще-
ние модели основывается на здравом смысле.
Проблема математического обоснования возможности заме-,
ны полной модели моделью упрощенной, использования быст-
рых алгоритмов всегда бывает трудной. А иногда такое обосно-
вание даже и провести невозможно, в особенности если упро-
щение связано с понижением порядка системы. Но идея
двухэтапности (а в более сложных системах и многоэтапное™)
процесса принятия решения, идея построения и использования
быстрых алгоритмов и сочетания расчетов, проведенных с их по-
мощью, с поверочными расчетами на полной модели является
одной из центральных в системном анализе. Ее обсуждение
пройдет красной нитью через всю книгу, а некоторые главы бу-
дут. целиком посвящены именно этой проблеме и способам по-
строения быстрых алгоритмов.
Если в рамках исследования оптаций возникли основные
методологические и методические принципы системного анали-
за, то аппаратом исследования динамических задач системный
анализ обязан прежде всего теории управления, которой будет
посвящена следующая глава.
Г л a-в a II '
УПРАВЛЯЕМЫЕ СИСТЕМЫ
§ 1. Предварительные замечания
Теория управления, • так же как и исследование операций,
была одним из источников идей и методов, на базе которых
возник современный системный анализ. Она явилась первой
научной дисциплиной, целиком направленной на развитие ме-
тодов принятия решений. Исследование операций и теория
управления — дисциплины очень родственные между собой. Бо- .
лее того, принятое ныне определение операции является столь
общим, что любая задача теории управления может быть из-
ложена на языке теории исследования операций.
Формально теория управления—дисциплина с чрезвычайно .
широким спектром собственных проблем — может быть включе-
на в исследование операций. Но такое обобщение вряд ли це-
лесообразно.
Традиционно предмет изучения теории исследования опера-
ций— это задачи статики и, в крайнем случае, многошаговые
задачи принятия решений. Что же касается теории управления,
то она сразу же была ориентирована на задачи динамики. Кро-
ме того, в рамках теории управления столь много оригинальных
и важных для приложений идей, что нерационально отождеств-
лять обе дисциплины или включать одну в другую. Обратная
связь, программное движение, механизм управления, оптималь-
ное управление^— всеми этими понятиями мы обязаны прежде
всего теории управления. Наконец, идею программного мето-
да — метода, который становится сегодня методической основой
научного управления общественными процессами, мы, как будет
показано ниже, также можем увидеть в теории управления.
Разделение процесса управления на управлёние программным
движением и последующую коррекцию с помощью механизмов
управления, которое является одним из краеугольных представ-
лений программного метода и лежит в основе синтеза больших
управляемых систем, также появилось в теории управления.
Зарождение теории управления (или теории регулирования,
как она называлась в течение первых ста лет своего существо-
вания) обычно принято датировать сороковыми годами XIX века,
§ 1. ПРЕДВАРИТЕЛЬНЫЕ ЗАМЕЧАНИЯ
в)
когда в двух разных странах независимо друг'от друга появи-
лись две работы, посвященные одной и той же проблеме — про-
блеме выбора параметров регулятора Уатта. Автором одной из
них был английский физик Д. К. Максвелл, а другой — наш со-
отечественник, инженер И. А. Вышнеградский. Обе эти работы
были посвящены одной из актуальнейших технических проблем
своего времени — созданию научных основ регулирования хода
паровой машины: принципов, позволяющих обеспечить постоян-
ство оборотов вала при изменяющейся внешней нагрузке.
Актуальность проблематики, безупречная логика анализа и
ясность окончательных результатов надолго определили
основную тематику и методы исследования возникающей дис-
циплины.
В XIX веке проблемам теории регулирования посвящали
свои исследования многие выдающиеся представители инженер-
ной и естественнонаучной мысли: А. Стодолла в Австро-Венгрии,
Э. Раус в Англии, Н. Е. Жуковский в России. Большое влияние
на развитие идей и методов теории регулирования оказало по-
явление • общей теории устойчивости и, прежде всего, теории
устойчивости А. М. Ляпунова, язык которой в течение долгого
времени был основным языком теории управления.
Покажем, как связана задача теории регулирования с основ-
ными проблемами теории устойчивости. Предположим, что речь
идет об ^управлении, т. е. о целенаправленном изменении како-
го-либо физического процесса, и влиять на течение этого фи-
зического* процесса мы можем путем изменения тех или иных
конструктивных параметров Пусть для определенности речь
идет о проектировании конструкции автопилота — прибора, ко-
торый может многократно изменять положение рулей и тем са-
мым изменять характер полета самолета. Пилоту задается цель
(например, место и время прибытия). Йо этой цели рассчиты-
вается курс.. Пилот выводит самолет на расчетный курс и
включает автомат. Движение самолета будет описываться не-
которой системой дифференциальных уравнений
x = (1.1)
Здесь х вектор, описывающий фазовое состояние системы,
т. е. координаты и скорость самолета, £ — случайный вектор’
характеризующий внешние воздействия, р — вектор конструк-
тивных параметров автопилота, которые могут выбираться субъ-
ектом, ответственным за то, чтобы автопилот обеспечивал до-
стижение цели управления (в данном случае конструктором),
бпя НаЯ РасчетнУю траекторию самолета, мы всегда можем вы-
ппи птначало отсчета таким образом, чтобы этой -траектории
и сутствии внешних возмущений отвечали нулевые значения
62
ГЛ. И. УПРАВЛЯЕМЫЕ СИСТЕМЫ
фазовых переменных. Значит, точка х — 0 должна удовлетво-
рять уравнению
7(0, t, р, 0)®0. (1.2)
Предположим, далее, что "в некоторый момент / = /0.на дви-
жение самолета, подействовало некоторое случайное возмущение
(например, порыв ветра), в результате которого состояние си-
стемы изменилось:
х(/0) = х0#=О. (1.3)
Каким условиям должно удовлетворять движение самолета,
чтобы, несмотря на отклонение (1.3), он достиг заданной цели?
Прежде всего, очевидно, что значения компонент вектор-функ-
ции x(t), характеризующих положение самолета по отношению
к расчетной траектории, не могут увеличиваться (по абсолют-
ной величине). Так как траектория самолета должна пройти
через цель управления, то необходимо, чтобы возникшее вслед-
ствие каких-то причин отклонение параметрон полета самолета
от расчетных значений со временем могло исчезнуть. Опыт по-
казывает, что для обеспечения этих особенностей полета само-
лета достаточно, чтобы движение самолета обладало асимпто-
тической устойчивостью. Последнее означает, что должно вы-
полняться условие
limx(/) = 0. (1.4)
/“>00
Примечание. Условие (1.4) не является строго необходимым или
строго достаточным. В самом деле, достижение цели управления должно про-
изойти за конечное время Г. В то же время условие (1.4) описывает асимрто-
тические свойства движения при t -> оо Возможность такой замены конеч-
ного отрезка времени бесконечным означает только од^о — характерное время
полета самолета является «практически» бесконечно большим: оно гораздо
больше времени, необходимого для компенсации возмущения (характерного
времени затухания колебаний самолета). Таким образом, хотя возможность
использования условия (1.4) является опытным фактом, она, как мы увидим
ниже, открывает разнообразные пути количественного анализа. Замена боль-
шого, но конечного отрезка времени бесконечным является широко распро-
страненным приемом: исследование на бесконечном интервале времени иногда
оказывается более простым, чем исследование поведения функций на конечном
интервале.
Проблема исследования устойчивости тривиального решения
(х = 0) системьГ (1.1)—это и есть основная задача теории
устойчивости, одной из важнейших глав теорий дифференциаль-
ных уравнений. Но задача проектирования автопилота, обеспе-
чивающего асимптотическую устойчивость движения самолета,
не сводится только к задаче теории устойчивости. Как правило,,
нам недостаточно выяснить, устойчив ли полет самолета с дан-
ным автопилотом. Более того, нам приходится обычно опреде-
лять допустимые интервалы изменения параметров автопилота
§ I. ПРЕДВАРИТЕЛЬНЫЕ ЗАМЕЧАНИЯ
63
(компонейт вектора р), обеспечивающие устойчивость, т. е. ре-
шать задачу, в некотором смысле обратную.
Поскольку отклонения от расчетной траектории — величины
xi(t) —должны быть малыми, то естественно использовать для
решения рассматриваемой задачи идеи линеаризации, т. е. за-,
менить уравнение (1.1) линейным. Отбрасывая члены порядка
О(х2), получим
х = Ах, (1.5)
где А — матрица (^')х_0 Uo- Уравнение (1.5)—однородное
(в силу условия (1.2)), и задача исследования свойств решений
уравнения (1.5) уже гораздо проще исходной.
В первый период своего развития теория регулирования изу-
чала проблемы регулирования стационарных движений: поддер-
жания постоянных оборотов машины, обеспечения равномерного
прямолинейного полета самолета на заданной постоянной высоте
и т. д. В случае стационарных движений правая часть уравне-
ния (1.1) не содержит времени, а . элементы матрицы А по-
стоянны. При этом проблема асимпотической-устойчивости сво-
дится к чисто алгебраической задаче: найти условия, которым
должны удовлетворять коэффициенты характеристического
уравнения |А — ЛЕ|=0, чтобы все его корни имели отрица-
тельные действительные части. Эта проблема носит название
проблемы Рауса — Гурвица; ее исследование положило начало
теории автоматического регулирования*).
Необходимые условия асимптотической устойчивости триви-
ального решения уравнения (1.5) можно получить многими спо-
собами. Умножим, например, скалярно обе части уравнения
(1.5) на вектор х, тогда это уравнение можно переписать в виде
х) = 2(х, Ах), (1.6)
где {’, •) —скалярное произведение.
Если квадратичная форма
(х, Ах) — £ atM,
и
dfl I
где az/ = —о q—элементы матрицы А, положительно
определена, т. е. для любого х О (х, Ах) > 0, то скалярное
роизведение (х, х) растет и тривиальное решение не может
ть асимптотически устойчивым. Поэтому в качестве условий
ческого^«пл^Я РаУс,а — Гурвица изложены в любом курсе теории автомати-
. »ото управления (см., напримёр, [12]).
64
ГЛ. II. УПРАВЛЯЕМЫЕ СИСТЕМЫ
устойчивости часто' используют условия отрицательной опреде-
ленности квадратичной формы (х,Ах). На основании критерия
Сильвестра эти условия можно записать в следующем виде:
ап < О,
Яц «12
«21
>о,
«и «12 ... <hn
>0.
(1.7)
аП\ аП2 . • • аПП
Поскольку значения ац зависят от конструктивных параметров
регулятора, т. е. от компонент вектора р, то условия (1.7) можно
рассматривать в качестве условий, определяющих выбор век-
- тора р.
Условия устойчивости можно представить различным обра-
зом, и вопрос об их выборе носит субъективный характер.
Именно соображения удобства, наглядности побуждали инже-
неров искать все новые и новые формы представления условий
устойчивости. Критерии Михайлова, Найквиста и многие дру-
гие широко используются в инженерной практике.
Условия устойчивости, записанные в той или иной форме,
определяют в пространстве параметров некоторое множество G\.
Выбор р s Gi гарантирует выполнение условия устойчивости
(1.4), что, в свою очередь, гарантирует достижение цели управ-
ления. Но условие устойчивости — не единственное, которому
должны удовлетворять параметры регулятора. В основе полу-
чения этого условия всегда лежит конкретная конструкторская
схема — некоторая структура. Так, в работах Максвелла и Выш-
неградского изучались вопросы устойчивости поддержания за-
данного числа оборотов двигателя с помощью вполне конкрет-
ного устройства — регулятора Уатта. Значит, изучая способы
управления, некоторым процессом, мы должцы всегда решать
сразу две задачи: выбор у принципиальной схемы регулятора
(автопилота или какого-либо другого механизма) и затем выбор
его параметров, обеспечивающих достижение целей управления.
Первая задача- всегда носит характер изобретательства. Хотя
существует целый ряд исследований, в процессе которых были
выработаны разнообразные рекомендации о выборе структуры
механизмов управления, тем не менее, в конечном итоге, вопрос
о конструктивной схеме механизма остается вопросом конструк-
торским, а оценка совершенства этой конструкции не сводится
только к той характеристике, которая нас сейчас интересует.
Простота, технологичность, надежность — не менее важные по-
казатели. Таким образом, конструктивная схема накладывает на
выбор параметров р вполне определенные ограничения:
P^G2, (1.8)
причем чаще всего условие (1.8) имеет вид
(1.9)
§ t. ПРЕДВАРИТЕЛЬНЫЕ ЗАМЕЧАНИЯ 65
где р1 — i-я координата вектора р. Значит для достижения цели
управления, т. е. выполнения условий (1.4), необходимо,
чтобы
ре G = G!nG2. (1.10)
Может оказаться, что множество G пурто. Это будет озна-
чать, что выбранная конструкция регулятора (система управле-
ния) не может обеспечить достижение цели управления — она
должна быть заменена другой.
Заметим, что по своей постановке описанная проблема вы-
бора значений конструктивных параметров родственна задачам
исследования операций, которые мы рассматривали в предыду-
щей главе, и, более того, она может быть сформулирована на
языке исследования операций. В самом деле, в этой задаче есть
цель управления, которая может быть представлена в форме
условия (1.4), система ограничений (1.1) и ресурс, необходимый
для достижения цели, — возможность выбора параметров регу-
лятора, удовлетворяющих ограничениям вида (1.8).
Критерий достижения цели управления (1.4) может быть
сформулирован и в терминах оптимизации. Для этого доста-
точно ввести новый критерий, например:
. fl, если limx(/) = 0,
* I tоо
^(р) । о, если iimx(/)^=0, НЛО
к /->О0
или, в эквивалентной форме (см. (1.10)),
{1, если peG,
0. если р*О. О-11'’
Теперь условие (1.8) или (1.10) можно представить в виде
J(p)->max, (1.12)
и любое решение оптимизационной задачи (1.12)'является ре-
шением исходной задачи. Переформулировка задачи, в терми-
нах оптимизации, конечно, не меняет ее природу. Она показы-
вает лишь генетическую близость задач исследования операций
' и задач теории управления.
Условия (1.4) и (1.12) не выделяют единственного решения
вадачи. По существу, они определяют целое множество пара-
метров G — целый класс допустимых конструкций, обеспечи-
вающих достижение цели управления. Поэтому в распоряжении
инструктора еще остается возможность уточнения вектора р,
виям°ЖН0СТЬ подчинить его каким-либо дополнительным усло-
на м’ Что эквивалентно дополнительной оптимизации, но уже не
ножестве G21 а на множестве G.
® Н. Н. Моисеев
ГЛ. И. УПРАВЛЯЕМЫЕ СИСТЕМЫ
06
Еще в предвоенные годы начали появляться работы, посвя-
щенные исследойанию качества управления, т. е. выбора на
множестве устойчивых управлений такого управления, которое
удовлетворяло бы некоторым дополнительным требованиям. При
создании автопилота, управляющего полетом пассажирского са-
молета, таким дополнительным требованием могло быть требо-
вание минимизации перегрузок: пассажиру важна не только
устойчивость полета, обеспечивающая достижение цели, но и
определенный комфорт. Если достижение цели возможно мно-
гими способами, то появляется возможность обеспечить этот
комфорт. Таким образом, задачу оценки качества регулирования
можно сформулировать следующим образом: на множестве па-
раметров р, удовлетворяющих условию
р е G,
найти такие значения р, которые обеспечивают выполнение
условия
Цр)-> min, ' (1.13)
где Цр) —некоторый функционал, зависящий от траектории и
характеризующий, например, допустимую величину перегрузки.
Вообще, вопрос об оценке качества регулирования не так прост.
Обозначим через w вектор ускорений, через Т — время полета
самолета. Тогда имеет смысл рассмотреть целый ряд критериев,
каждый из которых так или иначе оценивает перегрузку, т. е.
комфорт пассажира, например:
h(p)— max |w|, (1-14)
t ® [0. T]
T
I2(p)=*\\w\dt, (1.15)
9
Г
Zs(p) = J(w, w)dt. (1.16)
0
Качество комфорта пассажира и перегрузка связаны далеко
не однозначной зависимостью, и вряд ли ее можно охарактери-
зовать каким-нибудь одним числом. Критерий (1.14) —это ло-'*
„ кальная характеристика, и, конечно, желательно, чтобы в про-
цессе полета система управления «срезала» пиковые перегрузки.
Но не менее желательно и уменьшение интегральных оценок
перегрузок, которые описываются критериями (1.15). или (1.16).
Таким образом, оценка качества управления — это типичная
многокритериальная проблема, и при ее исследовании мы стал-
киваемся со всем тем спектром неопределенностей, о котором
шла речь в предыдущей главе.
_ -ft. ПРЕДВАРИТЕЛЬНЫЕ ЗАМЕЧАНИЯ 67
В технических журналах довоенных лет можно найти целый
ояД статей, посвященных обсуждению критериев качества управ-
ления. Чаще всего исследовались задачи с критерием (1.16). Но
я думаю, что основные аргументы для подобного выбора лежали
вне сферы содержательного анализа: критерии (1.14) и (1.15)
приводили к столь трудным задачам, что не было никаких на-
дежд найти их аналитические решения. Таким образом, уже в
тридцатые годы в теории регулирования возникали задачи, ко-
торые по своей постановке были совершенно аналогичны совре-
менным задачам исследования операций, хотя авторы, изучав-
шие подобные задачи, были очень далеки от современных взгля-
дов на их содержание.
В последние годы войны и первые послевоенные годы про-
изошло качественное расширение проблем, которыми занима-
лась теория регулирования, расширение, которое постепенно
привело к тому, что традиционный перечень ее задач оказался
отодвинутым на второй план. В результате этого процесса по-
степенно практически исчез и сам термин «теория регулирова-
ния», и вместо него стали использовать термин «теория управ-
ления». "
Такое расширение круга изучаемых задач было связано
прежде всего с нуждами возникшей ракетной техники. До войны
теория регулирования изучала, как- правило, процессы, разви-
вающиеся на большом интервале времени. Именно поэтому ме-
тоды классической теории устойчивости, оперирующей с асимп-
тотическими свойствами решений (при j->oo), оказались удоб-
ными при исследовании реальных задач: время полета самолета
было на много порядков больше времени компенсации его от-
дельных колебательных движений. В теории регулирования
даже возник термин «переходной процесс» — процесс возвраще-
ния системы к исходному стационарному режиму после окон-
чания действия случайного возмущающего фактора.
Оперируя преимущественно со стационарными режимами;
теория 'регулирования изучала переходные процессы главным
образом в связи с изучением качества управления. Потребности
же ракетной техники привели к совершенно иным задачам, по-
скольку движение ракеты было, как правило, кратковременным
и могло рассматриваться как единый переходной процесс. Но
было и еще одно обстоятельство, которое потребовало новых
постановок задач, — это стоимость горючего, необходимого для
движения ракеты. Отношение затрат топлива, необходимого для
доставки полезного груза, к количеству этого груза обычно
етоль велико, что проблема расчета траектории, обеспечиваю-
щей достижение цели управления с минимальными затратами
самЛИВа’-САелаЛаСЬ УЖе в сеРадинв СОРОКОВЫХ годов одной из
ЫХ актуальных задач математической теории движения
3*
68
ГЛ. II. УПРАВЛЯЕМЫЕ СИСТЕМЫ
ракет. К этой проблеме было привлечено внимание большого
количества математиков и инженеров. И в результате многолет-
них усилий в настоящее время возникла новая научная дисцип-
лина— теория оптимального управления (см. [8, 10, 11]). Среди
работ, посвященных этой проблеме, необходимо выделить работу
Д. Е. Охоцимского [59], в которой уже содержалась, е точ-
ностью до терминологии, современная постановка задач теории
оптимального управления.
Задачи, возникшие в теории летательных аппаратов, снаб-
женных ракетными двигателями, значительно отличались от
традиционных задач теории регулирования. Как мы уже гово-
рили, в сороковых годах усилия специалистов были главным
образом направлены на изучение способов управления стацио-
нарными движениями на бесконечном интервале времени. Что
же касается задач динамики ракет, то это, прежде всего, су*
щественно нестационарные задачи. Кроме того,- время протека-
ния процесса управления часто бывает очень малым. Например,
время горения порохового заряда наших первых боевых ракет
исчислялось секундами или долями секунд, и в течение этих
секунд развивался весь процесс управления. Естественно, что все
традиционные постановки задач теории регулирования никак не
соответствовали новой реальности. Требовалась кардинальная
перестройка самого мышления специалистов, их переориентация
на совершенно новые задачи. В силу этих обстоятельств про-
блема динамики управляемого полета ракет в течение довольно
продолжительного времени развивалась вне теории регулирова-
ния. Слияние этого направления с теорией регулирования, ко-
торое и привело к созданию теории управления, произошло уже
позднее — в пятидесятые годы. ‘
В теории регулирования вопрос об отыскании программного
управляемого движения обычно не возникал. Это движение
либо было известно заранее (например, задавалось количество
оборотов турбины в секунду), либо определение его было три-
виальным (например, расчет параметров полета самолета на
заданной высоте). В теории регулирования решалась, как мы
видели, другая задача — построение оператора обратной связи,
обеспечивающего заданный режим (заданное программное дви-
жение). Конечно, обе эти задачи — определения программного
движения и управления этим движением — тесно связаны между
собой (и эту связь мы будем подробно обсуждать). Но до поры
до времени теоретические основы решения обеих задач развива-
лись независимо друг от друга. Расчет программных траекторий
превратился в большое и развитое направление складывающей-
ся теории управления. Такие задачи носили, как правило, ва-
риационный характер. Упомянутая работа Д. Е. Охоцимского
открыла эго направление. Несколько позднее в СССР, а затем
§ 1. ПРЕДВАРИТЕЛЬНЫЕ ЗАМЕЧАНИЯ
69
и в США начали появляться фундаментальные исследования,
посвященные этим проблемам. Работы Т. М. Энеева, Л. И. Шат-
ровского в СССР, Блекуэлла, Брайсона, Лейтмана в США и
многие другие составили основу нового направления.
В конце сороковых и начале пятидесятых годов и в класси-
ческой теории регулирования начинают возникать вариационные
постановки задач. Это были прежде всего задачи на быстродей-
ствие. Возникновение нового направления в теории регулирова-
ния обычно связывают с именем А. А. Фельдбаума, опублико-
вавшего в начале пятидесятых годов большую серию статей,
посвященных проблемам быстродействия.
Вариационные задачи, которые возникли в динамике ракет
и теории регулирования, обладали одной важной особенностью,
которая не позволяла сводить их к классическим задачам ва-
риационного исчисления и применять затем развитые методы
математического анализа. Как известно, классические задачи
вариационного исчисления легко сформулировать в терминах
теории управления. Трудность была в другом. Вариационное
исчисление, если использовать язык теории управления, опери-
ровало с управляющими функциями «(/), на которые либо не
накладывалось никаких ограничений, либо их допустимые мно-
• жества были открытыми. В ракетодинамике же и теории регу-
лирования возникала качественно новая проблема: управления
»(/), как правило, должны были принадлежать замкнутым мно-
жествам, что отражало естественные технические требования.
Так, тяга двигателя принципиально ограничена:
р(0<Рп>ах V/. (1.17)
Точно так же угол поворота руля и пределы изменения других
управляющих органов всегда удовлетворяют условиям типа
(1.17). Эта .особенность исключала возможность непосредствен-
ного использования хорошо развитых методов вариационного
исчисления и требовала создания некоторого специального ап-
парата. Несмотря на то, что к началу пятидесятых годов целый
ряд конкретных задач такого типа был уже решен, еще не был
выработан единообразный подход к их анализу. Для каждой
задачи, по существу, развивался собственный метод. Тем не ме-
нее вполне уместно говорить о том, что уже в начале пятидеся-
тых годов стала возникать новая теория, которая позднее полу-
чила название теории оптимального управления. Этой теории
суждено было сделаться той основой, благодаря которой воз-
никла современная теория управления техническими системами,
идеи и методы которой во многом определяли направление
развития,системного анализа.
. Выдающуюся роль в развитии теории оптимального управ^|
ления сыграл Л. С. Понтрягин, который сформулировал прин-1
70
ГЛ. П. УПРАВЛЯЕМЫЕ СИСТЕМЫ
цип максимума, позволяющий с помощью множителей Лагран-
жа свести задачу оптимального управления к некоторой спе-
циальной краевой задаче для системы обыкновенных диффе-
. ренциальных уравнений (см. книгу [И]).
После работ Л. С. Понтрягина и его школы в теории управ-
ления произошла определенная канонизация языка и методов,
и благодаря этим работам окончательно оформилась современ-
ная теория управления. На базе общего языка и общего фор-
мализма произошло’объединение теории регулирования с дру-
гими направлениями, которые занимались изучением задач
управления.
В настоящее время идеи оптимизации и методы теории опти-
мального управления глубоко проникли во'все исследования
прикладного характера, в конструкторские разработки и оказа-
ли определяющее влияние на развитие системного анализа.
§ 2. Понятие управляемых систем
В предыдущем параграфе был дан краткий обзор истории
возникновения и эволюции основных, идей теории управления. -
Теперь конкретизируем некоторые понятия, которыми мы уже
. пользовались, и придадим им тот смысл, который будет необ-
ходим для дальнейшего изложения. Управляемые системы будут
трактоваться как естественное развитие динамических систем,
свойства которых считаются известными из теории дифферен-
циальных уравнений.
а) Управления. Мы ограничимся рассмотрением систем,
которые описываются обыкновенными дифференциальными
уравнениями
* = /(*,«,/,£). ’ (2.1)
Здесь x — n-мерный фазовый вектор, g —A-мерный (k < я), век-
тор возмущений (внешних воздействий), который может быть
случайным (тогда он задан своим статистическим описанием)
либо неопределенным (характеризующим недостаточность на-
ших знаний об изучаемом явлении). В обоих случаях вектор
В(0 задается своей принадлежностью, к некоторому множеству!
UOeGlW Vt (2.2)
Вектор-функция u(t) размерности т^п носит название управ-
ления или управляющего вектора. Это «свободная» вектор-функ-
ция, находящаяся в нашем распоряжении; считается, что с си-
стемой ассоциирован некоторый субъект, способный и имеющий
право принимать решения, т..е. выбирать управляющую функ-
цию, которая может быть функцией времени (« = «(/)), фазо-
§ 2. ПОНЯТИЕ УПРАВЛЯЕМЫХ СИСТЕМ
71
вого вектора (и = м(х)), возмущения (« = «(£)) или иметь бо-
лее общий вид (м = и (/, х, £)).
Напомним, что при обсуждении задач исследования опера-
ций термином «субъект» мы называли оперирующую сторону
или исследователя операций. В теории управления, которая
имеет дело и с-техническими системами, с этим термином мы
будем- связывать также и конструктора, который проектирует
систему управления.
Во всех тех случаях, когда вектор управления является
функцией фазовых переменных и возмущений, предполагается,
что эти величины известны или становятся известными субъекту
к моменту принятия решения. Позднее мы увидим, что это пред-
положение, в свою очередь, требует описания некоторого инфор-
мационного процесса. Выбор величины и обычно -стеснен каки-
ми-либо ограничениями. Мы их будем записывать в виде
a(=G„ (2-3)
где Gu — некоторое множество произвольного вида.
На изменение фазовых координат также могут быть нало-
жены ограничения, например, такие:
xeG, V/. (2.4)
Иногда условия (2.3) и (2.4) приходится объединяты
(/, х, «) е Gxu V/ (2.5)
или
(/, х, и, |) е G Vt. (2.6)
Условие (2.4) называется фазовым ограничением, условия
(2.5) и (2.6) — смешанными ограничениями. Условия смешан-
ного типа часто называются ограничениями типа узких мест.
Этот термин пришел из экономики; например, выпуск продукта
не может превосходить мощности предприятия, которая, в свою
очередь, зависит от управляющих воздействий — использования
части продукта на инвестиции. Экономико-математические ис-
следования оказывают большое влияние на развитие современ-
ной теории управления.
Системы уравнений вида (2.1), к которым добавлены огра-
ничения (множества) Gj, Gu, Gx, мы будем называть управляе-
мыми системами. Позднее, рассматривая конкретные примеры,
мы обсудим содержательный смысл этого понятия.
Примечание. Наряду с системами (2.1) приходится рас-
матривать и их разностные аналоги, например:
Л»+1“*л.+</(*«, /д), (2.1)
72 ГЛ. II. УПРАВЛЯЕМЫЕ СИСТЕМЫ
а также системы более общего вида:
%п+1 === С^П> ^п> 5п)- (2.1 )
Дискретные уравнения типа (2.1') или (2.1") возникают не
только в процессе дискретизации задачи, которая необходима
для ее анализа с помощью ЭВМ. Существуют системы с дис-
кретным временем, которые трудно свести к виду (2.1). К их
числу относятся, например, системы, описывающие динамику
популяций с неперекрывающимися поколениями, некоторые про-
цессы, протекающие в сельском хозяйстве, и др. Таким образом,
изучая преимущественно системы вида (2.1), будем иметь в
виду, что они далеко не исчерпывают всех практически важных
типов систем.
б) Цель управления и критерий качества. Среди
специалистов по теории управления распространено еледующее
утверждение: «Если не существует цели управления, то и го-
ворить об управлении не имеет смысла». Это утверждение, как
мы увидим позднее, нельзя абсолютизировать, как и большин-
ство подобных утверждений, связанных с конкретными задачами
практики, но до поры до времени мы будем считать его аксио-
мой. И говоря об управлении, мы будем иметь в виду процессы
формирования целей, отыскание и реализацию сТюсобов их до-
стижения.
Управляемые системы создаются для достижения тех или
иных целей: самолет—для того, чтобы перевозить людей или
грузы из одного места в другое, ракета —для вывода косми-
ческого аппарата на заданную орбиту, система управления на-
родным хозяйством — для обеспечения людей товарами и т. д.
Цель управления — это субъективное представление лица, от-
ветственного за 'выбор управлений (по нашей терминологии
субъекта системы), о тех мотивах, которыми следует руковод-
ствоваться при выборе свободной функции «(•).
Функция u(t, х, £) после того, как мы ее выбрали, является
формализованным описанием способов достижения цели. В тео-
рии управления эта функция часто называется законом управ-
ления. Таким образом, одна из основных задач теории управ-
ления— отыскание закона управления по заданной цели.
Цель управления можно сформулировать, как мы это знаем,
в терминах максимизации некоторого функционала:
Ji(«)->max. (2.7)
Предположим, например, что речь идет о выводе космиче-
ского аппарата на некоторую круговую орбиту в заданный мо-
мент времени t = Т:
\\x\\^T = R, (2.8)
где || х || =» V(x‘)2 + (х2)2 + (х3)2
§ 2. ПОНЯТИЕ УПРАВЛЯЕМЫХ СИСТЕМ
73
Функционал типа
например, так:
А(«)={о
(2.7)
если
если
можно задать многими способами;
(^ + (хУ + (*Ук-Д,
(х1)2 + (Х2)2 + (^)2|<жГ^Я.
Но достижение максимума функции (2.7') — это не един-'
ственная цель, которой стремится достичь субъект, принимаю-
щий решение о запуске ракеты. Естественным является его
стремление достичь этой цели с минимальными затратами. Эта
цель также может быть формализована в терминах максимума
некоторого функционала вида
т .
Jq(u) = \f(x, u)dt. ' (2.9)
о
Заметим, что Любые ограничения вида (2.2) —(2.6) также
можно сформулировать в тех же терминах. В самом деле, опре-
делим функционал /2(и), например, так:
( 1, если (/, х, и, £) eG,
h («) I О, есди (f, x.f и> Q qb Q,
Тогда условие (2.6) мы можем представить в виде
/8 («)-* max.
(2.10)
Заметим, наконец, что и само уравнение (2.1) есть некото-
рое ограничение, поэтому требование, чтобы эволюция системы,
т. е. изменение вектора х, следовала уравнению (2.1), также
может быть сформулировано в терминах оптимизации.
Таким образом, процесс управления при фиксированных
целях сводится к определению такого управления «(•), которое
одновременно доставляет максимум совокупности функционалов
/<(«)-► max, 1 = 0, 1, 2.....k. (2.11)
Подобная задача имеет математический смысл только в не-
которых специальных случаях. Обозначим через Q/ множество
тех управлений, на которых функционалы достигают макси-
мального значения, т. е. множество вектор-функЦий, которые
являются решениями задач //(«)-► max. Тогда для того, чтобы
задача оптимизации (2.11) имела смысл, необходимо, чтобы
- к
П О/ 0» (2.12)
f-0
т-е. чтобы пересечение множеств управлений, соответствующих
максимальным значениям функционалов, не было пустым.
74
ГЛ. II. УПРАВЛЯЕМЫЕ СИСТЕМЫ
Если же условие (2.12) не выполняется, то задача управле-
ния не сводится непосредственно к задаче максимизации типа
(2.11), и в этом случае необходим некоторый предварительный
этап неформального анализа исходной задачи (так же как и
в исследовании операций).
В теории управления выработаны определенные приемы, сни-
мающие эту трудность. Прежде всего выделяется цель управле-
ния и фиксируются ограничения. Хотя формально, как мы ви-
дели, все условгия, которым должно удовлетворять искомое ре-
шение, могут быть записаны единообразно с помощью операции
максимизации, удобно различать цель управления (функцио-
нал /1), ограничения (функционалы h....../*) и функционал
качества (/о). Эти условия имеют разный физический смысл, и
их разделение создает наглядность, которая позволяет инжене-
ру или исследователю сформулировать задачу, в наибольшей
степени соответствующую тем объективным целям, ради кото-
рых создается та или иная конструкция.
В теории управления техническими системами типичным яв-
ляется случай, когда
со— fl 0,
с-1
т. е. когда можно достичь цели управления, удовлетворив всем
ограничениям. Именно этот случай изучался в классической тео-
рии регулирования. Поскольку множество со не пусто, то есте-
ственно на этом множестве попытаться найти такое решение,
которое максимизирует еще один функционал — качество /0.
Таким образом, задача (2.11) обычно заменяется задачей '
Jo(w)->mAx. ' (2.18)
и е со
в) Пример. Рассмотрим пример, который сыграл весьма
важную роль в формировании идей и методов современной тео-
рии управления, — задачу о выводе на орбиту космического ап-
парата. В последующем изложении мы не раз будем обращаться
к этому примеру для пояснения тех или иных особенностей
теории. ‘ '
Уравнение движения центра массы ракеты имеет вид
m^ = mg + R + Q. (2.14)
где х — фазовый вектор, m — —масса аппарата, g— век-
тор напряженности сил тяжести, R — R (х, dx/dt) — Аэродина-
мическая сила, действующая на аппарат, Q = qku — реактив-
ная сила, —скаляр —расход массы:
•$- = «. (2.15)
$ 2. ПОНЯТИЕ УПРАВЛЯЕМЫХ СИСТЕМ
75
а —единичный вектор направления реактивной силы, k — коэф-
фициент, зависящий от конструктивных параметров двигателя
и, прежде всего, от скорости истечения газов. Величины q и и
являются управлениями, причем они должны удовлетворять
ограничениям
0<«7<<7тах, (2.16)
II и II2 - (и1)2 + (и2)2 + (М8)2 - 1 • (2.17)
Цель управления формулируется так: в момент времени Т,
' аппарат должен выйти на круговую орбиту, т, е. фазовые' пере-
менные должны удовлетворять условиям
(2.18)
Первое из этих условий определяет точку на орбите, в которую
должен быть выведен аппарат, а второе означает, что в момент
вывода его скорость должна быть подобрана так, чтобы после
выключения двигателя космический аппарат вращался по за-
данной круговой орбите.
На фазовый вектор x(t) наложено очевидное ограничение:
||х(/)||>Яз V/>0, (2.19)
где /?3 — радиус Земли.
Кроме того, вывод иа орбиту должен быть реализован с ми-
нимальными затратами топлива или, что то же самое в данной
задаче, на орбиту должна быть выведена максимальная масса,
т. е.
т
—mQ — \q (2.20)
о
Итак, задача о выводе на орбиту космического аппарата
сводится к отысканию управлений q(t) и u(t), удовлетворяю-
щих условиям (2.14)—(2.19) и доставляющих максимум функ-
ционалу (2.20). Управление, которое удовлетворяет всем усло-
виям У/ф max для i = l, 2....k, т. е. обеспечивает достиже-
ние цели управления и удовлетворяет ограничениям, мы будем
называть допустимым управлением. В рассматриваемом приме-
ре, если время Т достаточно велико, существует бесчисленное
множество допустимых управлений, образующих множество (о,
на котором и рассматривается задача (2.13).
Сформулированная задача о выводе космического аппарата
на орбиту не имела аналогов в классической теории регулиро-
вания. В результате ее решения вычислялась опорная или, как
ее теперь принято называть, программная траектория. Аналогом
76
ГЛ. II. УПРАВЛЯЕМЫЕ СИСТЕМЫ
программного движения в теории регулирования можно счи-
тать тот стационарный режим* который должен был поддержи-
вать управляющий механизм (регулятор Уатта, автопилот
и т. д.).
§ 3. Стохастическая задача и двухэтапная оптимизация
Пример, который мы рассмотрели в предыдущем параграфе,
в некотором смысле является исключительным, поскольку он
относится к чисто детерминированной ситуации, а таковых в ре-
альных условиях практически не бывает.
Если в правую часть уравнения (2.1) входит случайная век-
тор-функция Е = £(0» то и процесс изменения фазового вектора
х «x(t) оказывается случайным. Таким образом, общей зада-
чей теории управления оказывается задача управления случай-
ным (стохастическим) процессом. В своей общей постановке
подобная задача оказывается чрезвычайно сложной. И в теории
управления выработаны разнообразные способы ее упрощения.
Обычно мы стремимся свести анализ реальных стохастических
систем к последовательному исследованию ряда детерминиро-
ванных задач. Конечно, эта редукция далеко не универсальна
(да и не всегда возможна), но она играет очень важную роль
в теории управления (и системном анализе). В этом ^параграфе
мы приведем типичный пример подобного сведения стохастиче-
ской задачи к детерминированной.
а) О постановке задачи. Итак, рассмотрим достаточно
общую стохастическую управляемую систему
x = f(t, х, и,1). (3.1)
Предположим, что наша цель — перевести систему за время Т
из состояния х(О) = хо в состояние х(Т) = хт. Поскольку систе-
ма (3.1) находится под действием случайных воздействий
то, каково бы ни было управление, фазовый вектор х(/) будет
также случайной функцией времени. Поэтому мы не можем фор-
мулировать цель управления в детерминированной форме и
условие х(Г) = хг нужно заменить каким-либо требованием,
сформулированным в вероятностных терминах, например, так:
Ц = (х(Т)-хт)2-*т1п (3.2).
или
J2 = P{||x(T)-M<e}-*max, (3.3)
где Р{у < а} означает вероятность того',’ что случайная вели-
чина у не превосходит детерминированной величины а*).
•) Напомним, что черта наверху означает математическое ожидание со-
ответствующей случайной величины.
§ 3. СТОХАСТИЧЕСКАЯ ЗАДАЧА
77
Условие (3.2) при х(Т) = хт минимизирует дисперсию, а (3.3)
максимизирует вероятность того, что конечное значение фазо-
вого вектора находится внутри некоторого достаточно малого
интервала с центром в хт. Оба эти условия тем или иным обра-
зом оценивают точность достижения желаемой цели (х(Т) = хг).
Примечание. Такие вероятностные представления ноли управления
вовсе не исчерпывают возможных интерпретаций точности достижения цели
управления. Например, вместо функционала (3.2) можно рассмотреть и такой:
/з = ((х (Т)^хг), R(x(T)^ xT))t (3.2')
где # — некоторая положительно определенная матрица, коэффициенты кото-
рой вводят отношение эквивалентности оценок точности выполнения условий
xi(T)=X/r, 1, п.
Наряду с вероятностными ограничениями вида (3.2), (3.3)
в задаче могут присутствовать и детерминированные ограниче-
ния*), например ограничения на фазовые переменные:
х s Gx,
или ограничения на управления:
и €= Gu
ИЛИ / .
т
\udt^C (3.4)
°,
и т. д.
• Таким образом, при описании стохастических задач теории
управления мы сталкиваемся с той же ситуацией существования
«физических» детерминированных ограничений, с которой мы
уже имели дело в исследовании операций.
Функционал качества управления
т . '
Jo = \f(x, u)dt (3.5)
о
также обычно формулируется в детерминированной форме.
Выражения типа (3.4) вполне корректны: количество горю-
чего в ракете всегда ограничено вполне определенной величи-
ной. Но оценка качества управления в форме (3.5) уже не яв-
ляется достаточно оправданной: очевидно, что качество управ-
ления мы можем оценивать какой-либо средней характеристи-
кой, например величиной
т
Гй = F (х, и) dt.
_______________ о
*) Под детерминированными ограничениями здесь и далее будем пони-
мать ограничения, которые должны выполняться с вероятностью 1.
(3.6)
78
ГЛ. II. УПРАВЛЯЕМЫЕ СИСТЕМЫ
Таким образом, реальная задача управления обладает целым
рядом трудных особенностей, которые позволяют свести ее к
чисто оптимизационной задаче только за счет введения допол-
нительных гипотез. Первая трудность подобной редукции состоит
в том, что данная задача содержит и стохастические, и детер-
минированные ограничения. Достаточно общей математической
теории, а тем более вычислительных алгоритмов для подобных
задач просто нет. Вторая, и еще большая, трудность состоит
в- том, что стохастическая задача многокритериальна по суще-
ству: она не сводится к задаче типа (2.13). Значит, при анализе-
стохастической задачи мы необходимо должны использовать не-
которые гипотезы — для формирования оптимизационных задач
мы должны опираться на те или иные предположения.
Теория управления изучает разнообразные постановки сто-
хастических задач, отражающие те или иные особенности изу-
чаемых систем, которые позволяют сформулировать упрощаю-
щие гипотезы.
б) Схема двухэтапной'оптимизации. Широкий
класс задач управления дают те ситуации, в которых возмуще-
ния считаются малыми. Тогда предположение о том, что | и О,
должно давать удовлетворительное первое приближение для ре-
шения задачи.
При этом условии функция x(t) уже не будет случайным
процессом и функционалы (3.2), (3.2') превратятся в конечные
выражения. Например, функционал (3.2) примет вид
. 11~(х(Т)-хтУ~(х(Т)-хту.
Минимального значения этот функционал достигает при
х(Т) = хт. (3.7)
Таким образом, мы приходим к обычной задаче оптимального
управления: определить управление и{1), удовлетворяющее де-
терминированным ограничениям и переводящее систему
х = /(х, и, t, 0)
из состояния х(0)=»хо в состояние х(Т) = хт так, чтобы мак-
симизировать некоторый функционал качества:
т
Jo= F(x, и) dimax. (8.8)
о
Траектория x(i), являющаяся решением этой задачи, назы-
вается программной траекторией (или оптимальной програм-
мой), а управление u(t), которое ее реализует, называется про-
граммным (или оптимальным) управлением.
§3. СТОХАСТИЧЕСКАЯ ЗАДАЧА.
79
. Вернемся снова к примеру о выводе космического аппарата
на орбиту. Та постановка, в какой мы описывали в предыдущем
параграфе эту задачу, как раз и дает программную траекторию.
С помощью этой задачи мы можем рассчитать необходимые
для вывода на орбиту затраты горючего и представить себе ха-
рактер траектории движения космического аппарата. Мы можем
найти также и законы управления:'функцию q(f), описывающую
характер использования горючего, и u(t) —изменение со време-
нем наклона газовых рулей, управляющих направлением реак-
тивной тяги. .
Однако если мы попытаемся использовать найденный опти-
мальный закон управления для решения нашей технической за-
дачи, то. достичь заданного конечного состояния в заданный мо-
мент времени мы не сможем. Программная траектория — это
траектория, вдоль которой реальная ракета никогда не летает.
В самом деле, движение ракеты (как и любой другой управляе-
мой системы) определяется не только управлениями, но и дей-
ствием случайных, неконтролируемых факторов. Например, в
случае движения ракеты это будут флуктуации плотности воз-
духа, порывы ветра, неточности в выполнении управляющих
команд и т. д. В результате они сведут ракету с расчетной про-
граммной траектории. Поэтому необходима дополнительная си-
стема управления, задача которой — корректировать не преду-
смотренные заранее случайные воздействия. Эту дополнитель-
ную, корректирующую систему условимся называть автопило-
том. Нетрудномубедиться в том, что принципы построения этой
дополнительной (корректирующей) системы управляющих меха-
низмов качественно отличаются от тех, которые лежат в основе
построения программного управления. Математически это будет
совсем иная задача. Рассмотрим это обстоятельство подроонее.
Итак, пусть мы снова имеем систему (3.1). Полагая в ней
£ = 0, получим
х = f (t, х, и, 0). ~ . (3.9).
Решая для этой системы задачу (3.7), (3.8), находим программ-
ную траекторию и управление
* = *(/), и = й(0. (3.10)
Реальные траектория- и управление будут, в силу предполо-
жения о малости случайных возмущений, мало отличаться от
своих программных значений. На этом основании положим
х = *(/) + И0, п = й(/) + о(/). .(3.11)
Считая у и v величинами’того же порядка малости, что и
и подставляя (3.11) в исходную систему (3.1), линеаризуем ее
80
ГЛ. II. УПРАВЛЯЕМЫЕ СИСТЕМЫ
относительно у, и и 5- В результате получим линейную систему
y = Ay + Bv + C%, (3.12)
ГДе А = (-g-)o, В - (^-)о. С = (-g-)Q - матрицы, причем
производные вычислены вдоль программной траектории, т. е.
при нулевых значениях величин g, v и у. Случайный процесс
g(0> не ограничивая общности, можем считать центрированным,
т. е.
f(0 = 0 V/. (3.13)
Для рассмотрения системы (3.12) воспользуемся методом
вариации произвольных постоянных. Обозначим через
матрицу линейно независимых частных решений однородной си-
стемы уравнений
У — Ау, (3.14)
согласно которой матрица У удовлетворяет матричному уравне-
нию
-§- = ЛУ, У(0) = £, . (3.15)
где Е — единичная матрица.
Решение уравнения (3.12) будем искать в виде
У=Ус,
где с — вектор, компоненты которого являются Неизвестными
функциями времени. Подставляя это выражение в (3.12) и ис-
пользуя (3.15), находим, что вектор с удовлетворяет неоднород-
ному дифференциальному уравнению
Yc = Bv + Cg,
или
t
С= Jy-l(T)(Bt,4-Cg)rfT4-c*,
о
где с* — вектор произвольных постоянных интегрирования. '
Так как неизвестная у должна удовлетворять нулевым на-
чальным условиям, то с* = 0, и мы находим
t
y=^G(t,x) (Bv 4- С|) dx, (3.16)
о
где G — так называемая матрица Грина G(t, т) = У(/)У-\(т).
§3. СТОХАСТИЧЕСКАЯ ЗАДАЧА
81
Для отыскания нового управления используем условие (3.2),
которое теперь мы можем переписать в форме
W), (3.17)
Используя (3.16), представим (3.17) в виде
Л»(y(D, - $ J.G(t, s)G(/, т){(Во(s), Во(т)) +
о о
+ (Bo(s), Cg(T)) + (Bo(T), C&(s)) + (Cg(s), C|(T)))dT. (3.18)
Предположим теперь, что мы собираемся разыскивать кор-
ректирующее управление так же, как и программное управле-
ние, в форме v — v(t), т. е. отыскивать некоторую детермини-
рованную функцию времени, которая минимизировала бы дис-
персию (3.17). Тогда v(t) уже не будет случайной величиной и,
следовательно,
(Во (т), Во («)) = (Во (т), Во (s)),
. . (BUWcf(^j) = (Bo(s), Cg^j^O,
(Во(т), Cl(s)) = (Во(т), Cgfcjj = О,
и выражение (3.18) примет следующий вид:
т т
Л = W), y(T)) = J ( (В (S) о (з), В (т) о (т)) dx ds +
о о
т т
(C(s}l(s), C(x)l(x))dxds.
(3.19)
Каждое из слагаемых, стоящих в правой части выражения
(3.19), является положительной величиной. Значит, если мы хо-
тим выбрать управление о(/) так, чтобы минимизировать (3.19),
то мы необходимо должны принять о = 0, т. е. если мы хотели
уменьшить ошибку с помощью заданной функции времени, то
наилучший способ управления — вовсе не управлять системой..
Следовательно, корректирующее управление v следует вы-
бирать так, чтобы оно зависело тем или иным образом от воз-
мущающих факторов £(/)• Однако выбирать о как функцию §
непосредственно — трудно, поскольку мы должны иметь воз-
можность измерять эту величину. Но зависимость р(£) можно
Учесть и косвенно, измеряя фазовые переменные или их откло-
нения от программного движения, т. е. отыскивать корректи-
82
ГЛ. II. УПРАВЛЯЕМЫЕ СИСТЕМЫ
рующее управление следует в форме
o — v(t,x) (или v = v(t, у)). (3.20)
Таким образом, задача отыскания оптимального корректи-
рующего управления состоит в определении функции v — v(t,,x),
доставляющей минимум функционалу (3.17) при условии (3.12).
Кроме того, на управление v(t, х) еще накладываются ограничен
ния «ресурсного типа», поскольку
« = (й + о) е Gu.
Эта задача уже качественно отличается от задачи программ*
ного управления и носит название задачи синтеза или задачи
проектирования оператора обратной связи. Если в задаче про-
граммного управления искомое управление зависит только от
начального состояния системы и цели управления, то в задаче4
синтеза оно должно быть определено для всех значений фазо-
вого вектора x(t).
в) Обоснование схемы двухэтапной оптими-
зации. Итак, предположение о малости внешних возмущений
позволило нам не только разделить задачу на две последова-
тельные, менее сложные задачи, но и распределить наши воз-
можности управления так, чтобы обеспечить решение двух за-
дач оптимизации. На первом этапе мы выбирали программное
управление. Оно позволило выбрать программную траекторию,
которая обеспечивала достижение заданной цели (при условии
отсутствия внешних возмущений) с минимальными затратами
ресурса, а на втором этапе мы определили параметры автопи-
лота (функцию v(t,x)) — механизма, обеспечивающего при за-
данном ресурсе максимально возможную точность достижения
цели. Эта схема решения проблемы управления часто носит на-
звание двухэтапной оптимизации. Она играет важную роль не
только в теории управления техническими системами, но, как
мы это увидим позднее, она лежит в основе так называемого
программного метода управления экономическими и другими
системами, функционирование которых определяется действиями
людей.
Изложенная схема является, конечно, эвристическим прие-
мом решения двухкритериальрой задачи, поскольку для ее
решения в принципе не существует регулярной строго обоснован-
ной процедуры. Но коль скоро мы црлучаем с ее помощью неко-
торое вполне определенное решение, то представляется необхо- *
димым оценить его, сопоставить его с решениями, полученными
с помощью других способов выбора закона управления v(t, х).
Изложенная процедура дает правило выбора решения в двух-
критериальной задаче
/о («)-*• min, Л («)-> min.
§3. СТОХАСТИЧЕСКАЯ ЗАДАЧА
Предположим, что мы составили линейную свертку этих функ-
ционалов в форме
ц /(«) = /о(-) + ^(’). (3.21)
где с — некоторая фиксированная положительная постоянная.
Рассмотрим теперь задачу
/(и)-* mln.
Покажем, что для функционала /(и) мы всегда можем получить
. двустороннюю оценку. Обозначим через й и v решения тех двух
задач, о которых шла речь 'в этом параграфе. Поскольку
функция и* = и -|- v является допустимым решением, то
Г</(й + о), (3.22)
где через /* = /(«•) обозначено минимальное значение функцио-
нала (3.21), которого можно достигнуть выбором функции и =
« U*.
С другой стороны, нетрудно показать, что всегда
Г>/о(й). (3-23)
В самом деле, предположим обратное: . -
/о(Й)>Л (3.24)
и вычислим
Г = /(«‘) = /0(«*) + с/1(и*).
Так как оба функционала Jo и Л по своему смыслу положи-
- тельны, то очевидно, что /• Zo(«*). Тогда на основании (3.24)
Уо(й)>/о(«*). Но это неравенство противоречит предположе-
нию о том, что й — оптимальное управление, доставляющее ми-
нимальное значение функционалу /<>(•)• Итак, мы получили дву-
стороннюю оценку
/о(4)<7‘</о(й + о) + с/1(й + о). . (3.25)
Оценка (3.25) показывает, что предложенный метод выбора
решения на основе двухэтапной оптимизации дает удовлетвори-
тельную точность для всех сверток типа (3.21),если только зна-
чение функционала Ji(-) не очень велико или постоянная с,
характеризующая «ценность» функционала Д (•) .для оперирую-
щей стороны, также не очень велика. Схема двухэтапной опти-
мизации, разделяющая процесс управления на два последова-
тельных этапа — выбор программы и построение механизма
реализации этой программы, — является одним из важнейших
Эвристических приемов современной теории управления. Он в
равной степени необходим и для управления техническими и
технологическими системами, где он возник, и для управления
Модальными и экономическими системами, где он сделался
84
ГЛ. II. УПРАВЛЯЕМЫЕ СИСТЕМЫ
основой программного (или, как иногда говорят, программно-
целевого) метода управления. Получаемая двусторонняя оценка
(3.25) дает обоснование этому приему. Точнее, она позволяет
изучить возможности использования идей двухэтапной оптими-
зации при анализе конкретной системы управления на основе
решения обеих оптимизационных задач, не решая общей задачи
(оптимизации функционала (3.21)).
Следующие параграфы будут посвящены численной реали-
зации схемы двухэтапной оптимизации.
§ 4. Методы, расчета оптимальных программ,
использующие принцип максимума
Оптимальная программа определяется как решение. вариа-
ционной задачи
У (и)-* min (4.1)
при условиях
x = f(x, и, t), (4.2)
(х, и) <= G. (4.3)
Задача (4.1)—(4.3) носит название задачи оптимального управ-
ления (см., например, [8, 11]).
Методы решения задач отыскания экстремума функций при-
нято разделять на два класса: на прямые методы и методы,
использующие необходимые условия. Эта классификация 'до-
вольно условна. Тем не менее она бывает удобной, поскольку
методически она имеет своим истоком различие в подходах к
проблеме отыскания экстремума. Проиллюстрируем это на про-
стейшее примере отыскания безусловного минимума функции
g(x).
Прямые методы имеют своим истоком идеи спуска (напри-
мер, градиентного):
' ^n+1 ~ ~
а второй класс методов связан с возможностью редукции (све-
дения) задачи отыскания экстремума к решению трансцендент-
ного уравнения
А=0.
дх
Каждый из этих подходов имеет свои достоинства и недостатки
и свою область применения.
Методы расчета оптимальных программ также принято раз-
делять на два класса. К первому относятся прямые методы,
которые используют тот или иной способ редукции вариацион-
ной задачи (4.1) — (4.3). к конечномерной задаче. В результате
$ 4. МЕТОДЫ РАСЧЕТА ОПТИМАЛЬНЫХ ПРОГРАММ 85
дискретизации возникает специальная задача математического
программирования. Эти методы получили в последнее время
особенно большое распространение. На их основе разработано
много стандартных программ и создаются пакеты прикладных
программ разнообразного назначения, в частности диалоговые
системы оптимизации (см. [10]). Этим методам мы посвятим
следующий параграф.
Тем не менее прямые методы не являются универсальными,
и существует немало задач, для которых они малопригодны.
Поясним эту мысль на примере простейшей схемы редукции за-
дачи оптимального управления к задаче математического про-
граммирования. Предположим, что функционал Ци) имеет вид
т
J(u)=\f(x, и, f)di. (4.4)
о
Разобьем интервал интегрирования на N частичных отрезков
длиной т и будем считать управление на этих отрезках постоян-
ным. Уравнение (4.2) заменим простейшей разностной схемой
(схемой Эйлера):
хк+1 = xk + xf (хк, ик, tk). (4.5)
To же самое проделаем с функционалом (4.4):
N-1
Ци) = х^ F(xk,uk,tk). (4.6)
•fe-0
Конкретизируем условие (4.3). Примем, например, что
х(О) = хо, x{T) = xN, uk^Gk, k = 0.........N, (4.7)
. где Gk — некоторые выпуклые множества.
Задача минимизации функционала (4.6) при ограничениях
(4.5) и (4.7) — это стандартная задача нелинейного програм-
мирования. Трудности решения этой задачи определяются мно-
гими обстоятельствами, и главные — это ее размерность, количе-
ство переменных и количесгво ограничений. Размерность
возникающей задачи математического программирования опре-
деляется в основном двумя обстоятельствами: размерностью век-
тора х и количеством интервалов N, т. е. произведением п\ N.
Если N достаточно велико, то даже в тех случаях, когда
размерность вектора х невелика, задача математического про-
граммирования оказывается чрезвычайно трудоемкой. Число N
определяется прежде всего требованиями точности. В техниче-
ских'задачах очень часто мы сталкиваемся с ситуацией, когда
N достигает больших величин (задачи динамики полета, задачи
механики сплошной среды и многие другие). В подобных
86 ГЛ. II. УПРАВЛЯЕМЫЕ СИСТЕМЫ
ситуациях необходимы качественно другие методы решения за-
дач, которые малочувствительны к увеличению числа Я частич-
ных интервалов. Таковыми являются методы, использующие не-
обходимые условия экстремума, только, в отличие от случая оты-
скания безусловного экстремума функции с помощью необходи-
мых условий, задача для функционала сведется не к задаче
отыскания нулей функции dg(x)/dx, а к некоторой краевой за-
- даче для обыкновенных дифференциальных уравнений.
Г" В теории численных методов расчета оптимальных программ
I особую роль играет принцип максимума. Сформулируем прин*
| цип максимума и поясним его возможности на примере функ-
|.ционала вида (4.4)^ Наряду с системой (4.2) рассмотрим со-
' пряженную систему1
Ф = — = Ф (х, ф, м, 0, (4.8)
где Я — функция Гамильтона:
Я = (ф, f) — F(x, и, f). (4.9)
Будем предполагать, что выбор управления стеснен условием
a(/)eG Vt (4.Ю)
Тогда справедлива следующая
Теорема (принцип максимума Понтрягина). -
Для того, чтобы функция u(t) доставляла минимум функциона-
лу (4.4) при условиях (4.2) и (4.10), необходимо, чтобы она
доставляла максимум функции Гамильтона, т, е. чтобы она
была решением задачи
Н(х, ф, и, /)-*тах. (4.11)
иеО
К условию (4.11) должны быть добавлены еще условия
трансверсальности. Мы будем рассматривать главным образом
такие задачи, в которых начальное состояние системы фикси-
ровано:
х(О) = хо. (4.12)
Рассмотрим сначала тот случай, когда и конечное состояние
системы фиксировано:-
. х(Т) = хт. t (4.13)
В этой ситуации сформулированная теорема позволяет непо-
средственно свести задачу .отыскания оптимальной программы к
краевой задаче для системы обыкновенных дифференциальных
уравнений. В самом деле, из условия (4.11) мы можем найти
управление и как функцию ф, х и t:
u = u($,x,t). (4.14)
$ 4. МЕТОДЫ РАСЧЕТА ОПТИМАЛЬНЫХ ПРОГРАММ
87
Подставляя выражение (4.14) в уравнения (4.2) и (4.8), мы
получим следующую систему уравнений порядка 2п (п — раз-
мерность вектора х):
х = X (х, -ф, /), ф = W (х, ф, 0, (4.15)
-где Х(х, ф,t)=f(x, и(х, ф, /), 0» 0=ф(*. Ф»
и(х, ф, 0> О-
Для системы (4.15) мы имеем ровно 2п краевых условий?
п скалярных условий (4.12) на левом конце траектории и п
условий (4.13) на ее правом конце.
Поскольку речь идет о необходимых условиях, то принцип
максимума Понтрягина означает, что оптимальная программа
может содержаться только среди решений краевой задачи (4.12),
(4.13) для системы (4.15).
. Если правый конец траектории не фиксирован и на его выбор
наложено количество условий, меньшее п, то для редукции за-
. дачи к краевой необходимо еще определенное количество уело*
вий, которые называются условиями трансверсальности. Они
накладывают определенные ограничения на концевые значения
импульсов (сопряженных переменных) ф(Т).
Поясним смысл условий трансверсальности на нескольких
примерах.
Пусть, например, на правый конец траектории вообще не
наложено никаких ограничений. В этом случае оказывается, что
сопряженные переменные должны удовлетворять условию
Ф(Т) = 0. (4.16)
Условие (4.16) замыкает задачу — мы снова имеем 2п условий?
л условий (4.12) на левом конце и п условий (4.16) на правом.
'Условие (4.16)—это частный случай условий трансверсаль-
ности. Подобные условия существуют для ограничений весьма
общей природы; например, если траектория должна оканчи-
ваться на поверхности
Ф(х(Г)) = 0, (4.17)
то функция ф (0 при t = T должна удовлетворять условию
трансверсальности вида
= (4-18)
где X — некоторый скалярный множитель, который выбирается
условия (4.17). Мы снова приходим к краевой задаче для
-системы (4.15), причем п условий мы задаем на левом конце
траектории, а п условий — на правом. Подробный вывод условий
трансверсальности содержится в любом курсе вариационного
исчисления или теории оптимального управления.
88
ГЛ. И. УПРАВЛЯЕМЫЕ СИСТЕМЫ
Итак, с помощью необходимых условий задача определения
оптимальной программы сводится к краевой задаче для си-
стемы обыкновенных дифференциальных уравнений. Процедура
решения этой задачи в качестве промежуточного этапа содер-
жит решение вспомогательной экстремальной задачи (4.11)
определения максимального значения функции Гамильтона. Эту
задачу мы должны решать на каждом шаге численного инте-
грирования, и ее размерность равна т — размерности управляю-
щего вектора, т. е. можно сказать, что ^теорема Понтрягина
осуществляет декомпозицию задачи размерности m'XN на N
задач размерности т, связанных между собой процедурой чис-
ленного интегрирования дифференциальных уравнений. По мере
роста N использование этого подхода, по сравнению с прямыми
методами, становится все более и более выгодным, так как
трудности решения оптимизационных задач нелинейного про-
граммирования растут экспоненциально с ростом N, а трудно-
сти решения краевых задач растут линейно по AL В то же время
эти методы'чувствительны к росту, размерности вектора х. Та-
ким образом, прямые методы расчета оптимальных программ и
методы, основанные на редукции задачи оптимального управ?
ления с помощью принципа максимума к краевой задаче для
системы обыкновенных дифференциальных уравнений, взаимно
дополняют друг друга.
Единственной задачей теории дифференциальных уравнений,
для которой существуют хорошо разработанные стандартные
Численные процедуры решения, является задача Кон1и (методы
Эйлера, Рунге —Кутта и т. д.). Что же касается краевых задач,
то для их решения подобных стандартных процедур нет, и* раз-
нообразные методы численного решения краевых задач так или
иначе используют идеи сведения краевых задач к решению по-
следовательности задач Коши.
Методы решения краевых задач, возникающих в теории опти-
мального управления, условно можно разбить на три класса.
а) Метод’пристрелки. Этот метод иногда называют
способом подбора начальных условий.
Одна из особенностей краевых задач, обсуждаемых в этом
параграфе, состоит в том, что на'левом конце траектории за-
даны значения фазовых координат, а значения .импульсов ф(0)
неизвестны. Поэтому первое, что приходит в голову, — это по-
пытаться так подобрать начальные значения импульсов ф(0),
чтобы удовлетворить условиям на правом конце траектории.
В качестве подобных условий рассмотрим для определенности
условия (4.13).
Предположим, что мы задали тем или иным образом вели-
чины ф(О) = фо. Теперь начальные данные для системы (4.2),
(4.8) нам известны и мы можем с помощью того или иного
§ 4. МЕТОДЫ РАСЧЕТА ОПТИМАЛЬНЫХ ПРОГРАММ
89
способа решить задачу Коши. Воспользуемся, к примеру, мето-
дом Эйлера. Зададим шаг интегрирования т и положим
X ((k + 1) т) == X (kx) 4- xf (х (kx), и (kx), kx),
ty((k 4- 1)т) = ф(£т) 4- x<p(x(kx), u(kx), kx> ' /
В частности,
x (т) = x (0) 4- т/ (х (0), и (0), 0), z
•ф (т) = -ф (0) 4- т<р (х (0), и (0), 0).
Для определения х(т) и.ф(т) нам нужно найти управление
«(0). Для этого, согласно принципу максимума, мы должны
найти
шах Я(ф(0), f(x(O), и(0), 0)). (4.11')
и (0) €= Ол
Если Go —открытое мнджество, то для решения задачи (4.11')
можно использовать необходимые условия максимума функции,
которые позволят свести ее к решению трансцендентного урав-
нения
4^- = 0. (4.21)
- ди ' '
Определив из условия (4.11') и(0), мы мол(ем затем с по-
мощью формул (4.20) вычислять значения х(т), ф(т). Повторяя
эуу процедуру, можно найти последовательно величины х(2т),
ф(2т); х(3т), ф(3т) и т. д. В конце концов мы найдем величины
х1(Т)—составляющие вектора х(Т). Поскольку мы выбрали
величины ф(0) произвольным образом, то при t = T условия
х*(Г) — Ху = 0, i=l, ..., п, в общем случае выполнены не бу-
дут. Введем вектор рассогласования:
Ф = х (Т) — хт.
Очевидно, что Ф будет функцией величин компонент ф(0):
Ф = Ф(ф(0)).
Задача будет решена, если мы подберем такой вектор ф(0),
Для которого
ф(ф(0)) = 0. (4.22)
Таким образом, наш метод приводит к известной задаче оты-
скания нулей некоторой вектор-функции. Для ее решения можно
использовать хорошо разработанные методы (например, метод
Ньютона), для которых существуют многочисленные пакеты
прикладных программ. Поэтому может показаться, что здесь нет
никаких особых проблем, во всяком случае тогда, когда раз-
мерность вектора х.,не очень велика. На самом деле все оказы-
вается гораздо сложнее, и реализация изложенной схемы ре-
шения может встретить подчас непреодолимые трудности.
90
ГЛ. II. УПРАВЛЯЕМЫЕ СИСТЕМЫ
Функциональная зависимость Ф (-ф (.0)) реализуется с помощью
решения задачи Коши. А эта задача, в силу особенностей си-
стемы (4.2), (4.8), всегда оказывается неустойчивой. (Я под-
черкиваю: всегда.) Продемонстрируем это обстоятельство на
простом примере, когда уравнение (4.2) линейно относитель-
но х:
х = Ах + Л(и). (4.23)
Возможны два случая: либо среди корней уравнения |А — %£| =
= 0 есть хотя бы один, у которого действительная часть поло-
жительна, либо все собственные числа матрицы А имеют от-
рицательные действительные части.
В первом случае решение уравнения (4.23) будет иметь экс-
поненциально растущие слагаемые, какова бы ни была функция
«(/). Это означает, что при численном решении задачи Коши
мы сталкиваемся с необходимостью оперировать с большими
числами — счет' будет неустойчив.
- Во втором случае аналогичные трудности мы встретим при
интегрировании сопряженного уравнения (4.8). Это уравнение
будет иметь вид
ф=-4г=—Л‘*+ <4-24>
где А* означает транспонированную матрицу. Поскольку соб-
ственные числа матриц А и А* однаковы, то каждому корню
с отрицательной действительной частью матрицы А будет от-
вечать корень с положительной действительной частью матрицы
—А*. Таким образом, если решение уравнения (4.23) устойчиво,
то решение уравнения (4.24) будет неустойчиво, и наоборот,
т. е. на этом пути мы неизбежно встречаем вычислительные
трудности, связанные с неустойчивостью решения задачи Коши-.
Вычисление функции Ф(ф(0)) при этом, будет затруднено.
При решении конкретных задач неустойчивость решения за-
дачи Коши приводит к тому, что небольшое отклонение началь-
ных значений ф (0) от тех значений, которые "должны были бы
быть в окончательном решении, приводит к очень большим зна-
чениям^ величины Ф(ф(0)). По этой причине реализация любых
численных процедур метода пристрелки требует глубокого пред-
варительного анализа, который позволили бы выбрать хорошее
начальное приближение. Употребляя термин «хорошее», мы
имеем в виду такое начальное приближение, для которого зна-
чение рассогласования Ф (ф (0)). невелико. Тогда, применяя, на-,
пример, те или иные модификации метода Ньютона, мы можем
провести вычисления с большой точностью.
Несмотря на описанные особенности метода пристрелки, он
очень широко распространен и с его помощью было решено
$ 4. МЕТОДЫ РАСЧЕТА ОПТИМАЛЬНЫХ ПРОГРАММ
91
большое количество задач, возникающих в инженерных и эко-’
номических расчетах.
б) Метод редукции к линейной задаче. Сущест-
вует класс задач расчета оптимальных программ, для которых
могут быть предложены эффективные регулярные способы ре-
шения. Для таких задач отыскание оптимальной программы
сводится к решению, задачи Коши без дополнительных про-
цедур отыскания корней функции, как это было в предыдущем
пункте. Это —класс линейных задач оптимального управления
с квадратичным функционалом.
Рассмотрим систему, изменение фазовых координат которой
описывается линейным уравнением
х = Ах + Ви, (4.25)
где-Л и В —матрицы, элементы которых ац и Ьц — некоторые
заданные функции времени. В скалярном виде система (4.25)
запишется так:
п т ,
х* — Д йцХ1 4- Д Ъци1; (4.259 .
Предположим, что начальное состояние задано:
х*(0) = 4 ./ = 1, .... п, . (4.26)
и поставим задачу отыскания'такого управления и(t), которое
переводит систему из состояния (4.26) за время Т в состояние
х*(Т) = х|, г=1, ...,п, (4.27)
. так, чтобы функционал
- Т ' ..
J = J [(х, Сх) + (х, Du) + («, £«)] dt (4.28)
о
принимал на траектории x(t) минимальное значение. Здесь С =
”=(£//), D=(dz/), Е = (ец) —матрицы, размеры которых оче-
видным образом определяются размерностями векторов.х и и;
Матрица В положительно определена.
Составим выражение для функции Гамильтона:
Н = (ф, Ах + Ви)— (х, Сх) — (х, Du) — (и,. Ей).
.. Уравнение для импульсов будет иметь вид
ф = _-^- = -Л’ф + Сх + £>и, (4.29)
гдеС==С4-С*
92
ГЛ. II. УПРАВЛЯЕМЫЕ СИСТЕМЫ
Поскольку на управление не накладывается никаких ограни-
чений, то для того, чтобы функция Гамильтона достигала на
траектории максимального значения, необходимо, чтобы
= D*x — Eu — 0, (4.30)
где Ё — Е-{-Е*. Если матрица Е не является особой, т. е. если
Е~1 существует, то система уравнений (4.30) имеет единствен-
ное решение
. u = E~1(B*^-D*x). (4.31)
Таким образом, в этом случае мы имеем явное выражение для
управления в виде функции импульсов и фазовых переменных,
причем эти функции линейны.
Подставляя выражение (4.31) в систему уравнений (4.25),
(4.29), мы приведем ее к виду
x — MiX + ф = М2х + М2Ф> (4.32)
где Mt = A- BE~lD*, Ni = BE~lB\t М2 = С - DE~lD*, N2 =
=* — А* + DE~lB*. Таким образом, в самом общем случае квад-
ратичного функционала задача расчета оптимальной программ.ы
для линейной системы сводится к краевой задаче для системны
линейных дифференциальных уравнений.
Линейные дифференциальные уравнения — это единственный
класс дифференциальных уравнений, для которых разработаны
регулярные методы решения краевых задач. Поясним их содер-
жание. Рассмотрим уравнение
V — Ay^-f, (4.33)
где у, f — n-мерные вектор-функции, и предположим, что ста-
вится задача о нахождении решения уравнения (4.33) при уело-
ВИЯХ
(!i> У СО) = £ W (Q = i == 0, 1, ...., k. (4.34)
Метод, который позволяет дать эффективное решение задачи
(4.33), (4.34), основан на возможности переноса граничных
условий вида (4.34) из одной точки в другую. Мы будем гово-
рить, что условие (4.34) перенесено из точки t, в произвольную
точку t, если удастся так определить (независимо от у) вектор-
функцию и скалярную функцию 0(/), удовлетворяющие
условиям
g(li) = h, Р(О = аъ‘ (4.35)
что (g(/), y(t))= Р(/) для любого момента времени t ti. Лег-
ко убедиться, что для этой цели можно использовать сопряжен-
§‘4. МЕТОДЫ РАСЧЕТА ОПТИМАЛЬНЫХ ПРОГРАММ
93
ное уравнение. Этим
нение
термином мы условимся называть урав-
g^-A'g,
(4.36)
где А* — транспонированная матрица.
Умножим скалярно обе части уравнения (4.33) на g, а урав-
нения (4.36) —на у и результаты сложим:
(у, g) + (У, g) = (Ay, g) + (g, f) — (A*g, y). (4.37)
Так как (Ay, g) = (A*g, у), то уравнение (4.37) можно предста-
вить в виде
d(y, g)!dt = (g, f),
откуда
' t
(g, y)t = (g> y)tt + $ (g> f) di‘
Полученное равенство доказывает следующую важную тео-
рему.
Теорема. Если функция g(t) удовлетворяет уравнению
(4.36) и первому из условий (4.35), а функция р(/) удовлетво-
ряет уравнению
^ = (g,f) - (4.38)
и второму из условий (4.35), то'вектор-функция y(t) для любых
t удовлетворяет условию
(g(i),y(t)) = m (4.39)
На основе доказанного утверждения любое линейное усло-
вие вида (4.34) можно перенести из точки t, в любую другую
точку. Для этого достаточно решить одну задачу Коши для
сопряженной системы и еще одну — для скалярного уравне-
ния (4.38).
Примечание. Мы рассмотрели некоторую процедуру переноса гранич-
ных условий для линейных дифференциальных уравнений. В вычислительной
математике эту процедуру называют также методом прогонки, поскольку с
помощью решения задачи Коши мы «перегоняем» значения функции из одной
точки в другую. Термин «прогонка» мы будем использовать в дальнейшем изло-
жении.
Этот результат открывает путь для стандартизации методов
решения линейных оптимизационных задач с квадратичным
функционалом. Первый этап решения — сведение линейной зада-
чи к краевой для линейной системы. (4.32). Это — совершенно
стандартная процедура, сводящаяся к обращению и перемно-
жению матриц. Второй этан — это перенос граничных условий,
которые задаются условиями трансверсальности на концах
94 ГЛ. II. УПРАВЛЯЕМЫЕ СИСТЕМЫ
траектории. Этот этап также вполне стандартен — он требует
решения задач Коши. После переноса граничных условий нам
остается решить стандартную задачу Коши. Таким образом, ли-
нейная задача оптимального управления с квадратичным функ-
ционалом сводится к решению трех задач Коши, т. с. к после-
довательности стандартных процедур.
Конечно, в этой задаче существуют свои «подводные кам-
ни», свои трудности, и, как правило, они также связаны с не-
устойчивостью. Более того, основываясь-на тех замечаниях, ко-
торые мы сделали при обсуждении метода пристрелки, можно
утверждать, что при переносе граничных условий мы всегда
сталкиваемся с неустойчивостью. Поэтому реализовать описан-
ную схему прогонки на ЭВМ в том виде, как она была здесь
изложена, обычно бывает столь же трудно, как и реализовать
метод пристрелки.
Однако метод прогонки обладает одной замечательной осо-
бенностью: он всегда может быть модифицирован таким обра-
зом, чтобы процедур а, счета оказалась устойчивой. Покажем, как
это можно сделать. Перенос граничных условий будем осу-
ществлять с помощью аналитического продолжения величин k
на/ — другими словами, мы построим такие гладкие функции g
и р, которые при t = ti обращаются в Ц и ai соответственно и
удовлетворяют для любого t условию (4.39). Но это продолже-
ние заведомо не единственно. Поэтому вместо найденной функ-
ции g(t) можно подобрать другую, £(/), причем так, чтобы ее
модуль был заданной постоянной величиной. Обозначим
где g(i}—вектор-функция, удовлетворяющая сопряженному
уравнению (4.36) и условиям (4.35), a m(t) —некоторая функ-
ция, которую нам предстоять выбрать. Составим уравнение, ко-
торому должна удовлетворять функция £(/):
£ = mg + mg = mg — mA*g,
но g = g/m, поэтому
ё=~ё~А*ё. (4.40)
Выберем теперь функцию m(f) так,-чтобы модуль функции ё
был постоянной величиной, например: (£,£)= 1- Для этого не-
обходимо и достаточно (при условии, что (6, /<)=!), чтобы
(ё, ё) = 0. Это условие дает уравнение для m (f) s .
%(ё,ё)-(ё,Аё)=о.
откуда
rii . . (A*g, g)
т (ё> й)
§ 4. МЕТОДЫ РАСЧЕТА ОПТИМАЛЬНЫХ ПРОГРАММ
95
Подставляя полученное соотношение в уравнение (4.40), на-
ходим уравнение для £:
| = + (4.41)*
, Подчиним дополнительно функцию g(t) условию =
Нам осталось только определить новую функцию 0(f)-' Положим
; • ₽(0 = (Ш^(0)
и найдем
&-(£ Л+ (4.42)
Таким образом, перенос граничного условия совершается
снова по формуле (£,#) = 0, где g(t) определена как решение
задачи Коши g(ti)=li для уравнения (4.-41), а функция 0(/)
определяется уравнением (4.42) и условием 0(6)= а/.
Этот результат очень важен: поскольку перенос граничных
условий всегда устойчив, то мы должны совершать его так,
йтобы задача Коши для уравнения (4.33) также была устойчи-
ва. Если, например, мы снова имеем задачу с фиксированными
концами: х(0) = хо, х(Т) = хт — и решение уравнения х = Ах
устойчиво, то граничные условия с правого конца траектории
следует перенести на левый конец. Если решение неустойчиво,
то граничные условия с левого конца следует перенести на пра-
вый конец и решать задачу Коши справа налево.
Таким образом, изложенный аппарат является очень гибким
инструментом решения краевых задач и мы имеем возможность
почти всегда избежать трудностей, связанных с неустойчивостью
счета.
Замечания. 1. В результате переноса краевых условий мы
получаем их в форме
у (/»))=₽ (о.
♦ z
Для того чтобы использовать стандартные методы, нам необхо-
димо еще разрешить эту систему относительно вектор-функции
У (it). Но матрица этой системы может оказаться плохо обуслов-
ленной. Эту трудность можно преодолеть надлежащим обобще-
нием изложенного выше приема (см. [8]).
2. Использование сопряженных, уравнений для анализа си-
стем линейных дифференциальных уравнений было известно еще
Лежандру и Лиувиллю. Таким образом, возможность переноса
граничных условий из одной точки в другую, не решая краевой
задачи, была известна еще в первой трети XIX века (соответ-
ствующая процедура называлась методом факторизации). Но
проблема устойчивой реализации этой процедуры возникла, есте-
ственно, только после появления вычислительных машин.
96
ГЛ. II. УПРАВЛЯЕМЫЕ СИСТЕМЫ
Исчерпывающее решение этой проблемы было дано А. А. Абра-
мовым (см. работу [16]). Изложение процедуры переноса мы
провели, следуя'идеям А. А. Абрамова.
Таким образом, решение линейных задач оптимального
управления с квадратичным функционалом (без ограничений на
управление) может быть сведено к системе регулярных проце-
дур. Это обстоятельство можно использовать для построения
различного типа итерационных методов.
Пусть теперь уравнение управляемой системы нелинейно и
имеет вид
x = f(x, «), (4.43)
причем снова идет речь о решении двухточечной задачи опти-
мального управления:
х (0) = х0, х (Т) = хт, (4.44)
' т
J(u) = ^F (х, и) dt -* min. (4.45)
о .
Предположим также, что ограничения на управление в этой
задаче отсутствуют и время Т фиксировано.
Зададим некоторое управление м = м°(0. которое мы рас-
сматриваем как начальное приближение к решению. Подставив
это управление в уравнение (4.43) и решая для него задачу
Коши х(О) = хо, находим некоторую траекторию х = х°(0- Эта
траектория в общем случае не будет удовлетворять условиям на
правом конце, т. е. х°(Т)=£хт. Управлению» u°(f) будет отве-
чать некоторое значение функционала /о-
Введем теперь новые переменные х = х° -|- у, и = и° 4- v.
Предполагая у и v малыми, удержим в уравнении (4.43) члены,
линейные относительно у и и. В результате мы придем к си-
стеме линейных уравнений
^Ay.+ Bv, (4.46)
где А, В — матрицы: ' •
. в=т
' \ ' х—х°
и=-и1’ и-и*
функция y(f) удовлетворяет нулевым граничным условиям
на левом конце. На правом подчиним ее условиям
у{Т) = ут = хт-х<>(Т\ (4*47)
Сделаем замену переменных также и в функционале, но
удержим в его выражении не только линейные, но и квадратич-
$ 4. МЕТОДЫ РАСЧЕТА ОПТИМАЛЬНЫХ ПРОГРАММ
ные слагаемые относительно у и и. В результате мы получим
новый функционал <р:
Ф = $ [(«, У) + (0, v) + (Су, у) + (Du, у) + (Ей, о)] dt. (4.48)
Смысл введенных обозначений очевиден; а и 0 — это векторы
а = dF/dx, 0 — dF/du, а С, D и Е — матрицы:
i=l, ..., я; / = 1
.1 / d*F \
2 \ ди1 ди1)
I, /= 1, .,т.
Все эти величины вычислены при х = х°(/)’, и = u°(f).
Итак, мы пришли к задаче отыскания управления и, пере-*
водящего систему (4.46) из начала координат в состояние
(4.47)' за время Т и доставляющего при этих условиях минимум
функционалу (4.48). Эта задача, как мы видели, сводится к
краевой задаче для линейной системы, т. е. может быть решена
регулярными методами. В результате мы получим новое управ-
ление
(4.49)
«1 = и° + и
и новую фазовую траекторию xf, которая будет решением за-
дачи Коши для исходной системы (4.43) с управлением, рав-
ным Щ.
Вычислим еще новое значение функционала /i = /i(xi, и\).
Если окажется, что J\ < /о, то это означает, что решение
(«1, *1) улучшает исходное приближение, и мы можем повто-
рить процесс, полагая в качестве начального приближения Xi
и «Ь~
Если окажется, что Л > /0> то надо поступать так же, как
и при реализации метода Ньютона или метода наискорейшего
спуска, т. е. принять
и\ = и° + kv
где k — некоторое положительнее число, меньшее 1. При этом
функционал /1 становится функцией k. Затем мы находим та-
кое k, при котором Л (Л)-* min.
Сходимость подобной итерационной схемы не изучена, од-
нако целый ряд решенных задач показывает ее эффективность
при условии, что начальное приближение «достаточно хоро-
шее».
4 Н. Н. Моисеев
<J8 ГЛ. II. УПРАВЛЯЕМЫЕ СИСТЕМЫ
Примечание. В конце шестидесятых годов Р' Веллман предложил
итерационный метод решения задач оптимального управления, который был
им назван методом квазилинеаризации (см. [1]). Практически он идентичен
изложенному выше методу линеаризации. Однако есть одно отличие. Р. Велл-
ман не использует техники переноса граничных условий, гарантирующих
устойчивость счета.
Метод прогонки и итерационные схемы, в которых он ис-
пользуется, эффективны для решения задач без ограничений на
управление. Однако его применяют и в более общем случае.
Метод прогонки используется'и для решения нелинейных крае-
вых задач. Пусть речь идет о нелинейной системе, уравнений
вида ,
х = ф(х), • (4.50)
где х —вектор четной размерности, ф(х)—некоторая нелиней-
ная вектор-функция. Предположим, что половина условий за-
дана на левом, а другая половина условий — на правом конце
траектории.
Общая итерационная схема, использующая метод прогонки,
состоит в следующем. Определяем тем или иным способом на-
чальное приближение х° и представляем уравнение (4.50) в виде
х — А (х°) х + L (х, х°),
где £(х,х°) = <р(х)—А(х°)х. Если ф(х)—дифференцируемая
функция, то оператор А — это матрица частных производных:
и структура итерационной схемы очевидна:
хк = А (x*_i) xk + L (xft_i, xA_j).
Подобные схемы расчета носят уже чисто эвристический ха-
рактер; тем не менее существует довольно много процессов, для
которых они позволили получить полезные для практики ре-
' зультаты.
Примечание. В этом пункте был изложен метод переноса граничных
условий для линейных уравнений, который всегда приводит к устойчивым
процедурам счета. Он позволяет, в частности, получить численное решение
задачи Коши для уравнения вида
х = Л(/)х + /(0
даже тогда, когда частные решения этого уравнения — быстро растущие
функции. Предположим, что начальные условия заданы в виде
х (0) == х0 (х1 (0) = I «= 1, ..k),
где Xq —ья координата вектора х0. Эти условия можно переписать в виде
(вр х) = 4
где ei — единичный орт f-й оси.
$ 4. МЕТОДЫ РАСЧЕТА ОПТИМАЛЬНЫХ ПРОГРАММ
99
Предположим теперь, что нам надо вычислить значение х(Т). Для этого
надо решить сформулированную выше задачу Коши и проинтегрировать чис-
ленно уравнение от t — 0 до t = Т. Но если среди собственных чисел матри-
цы Л(0) есть такие, которые обладают большой положительной действитель-
ной частью, то частные решения однородного уравнения х = 4(/)х будут
быстро растущйми и любой метод численного решения будет реализовать
очень трудно. Однако для вычисления х(Т) мы можем избежать решения за-
дачи Коши, если она неустойчива. Вместо этого мы должны решить п устой-
чивых задач Коши
&(0)=е<,
в результате чего найдем п соотношений
(&(П, х (?))=₽, (Г).
Изложенные подходы позволяют усовершенствовать целый
ряд численных процедур и, в частности, усовершенствовать
характер итерационных процедур в методе пристрелки.
в) Методы, использующие процедуру решения
задач со свободным концом. Задачи со свободным пра-
вым концом обладают одним замечательным свойством: для
получения точного решения задачи оптимального управления,
если она линейна по фазовым переменным, достаточно решить
две задачи Коши.
Рассмотрим систему
х = Д (/) х + <р (/, и), (4.51)
где ф — произвольная нелинейная функция, а управление «(О
удовлетворяет ограничениям вида
и е G. (4.52)
Начальное состояние системы задано:
х(О) = хо, (4.53)
а на-правый конец траектории никаких ограничений не нало-
жено.
Рассмотрим для этой систему задачу >
т -
I = F (x,u)dt -* min, (4.54)
о
где F— линейная функция от х вида F(x, и) = (с; x) + f'(u)'.
Согласно изложенному в начале параграфа, для сведения
этой задачи к краевой нужно составить функцию Гамильтона
Н — (ф, Ах) + (ф, ф (/, й)) — (с, х) — f (и) (4.55)
и уравнение для сопряженных переменных (импульсов)
Ф = + (4.56)
4*
100
ГЛ. И. УПРАВЛЯЕМЫЕ СИСТЕМЫ
* Так как на правый конец траектории никаких ограничений не
накладывается, то согласно условию трансверсальности (4.16)
: Ф(П=о.
Заметим, что уравнение для импульсов в этом случае не со-
держит фазовой переменной и может быть проинтегрировано не-
зависимо от уравнения (4151). Так как значения импульсов на
правом конце траектории известны, то, решая задачу Коши
(4.16), (4.56) справа налево, мы найдем импульсы ф(/) неза-
висимо от х.
Точно так же независимо от х может быть определено управ-
ление u(t). В самом деле, управление находится из условия
Я->тах, но функция Гамильтона Н, как следует из (4.55), со-
держит лишь два слагаемых, в которые входит управление,—
скалярное произведение (ф,<р (/,«)) и /(«). Следовательно,
управление «(/) находится из условия
— /(«) + (Ф> Ф (J. «)) -* max. (4.57)
usG
'Отсюда сразу находим и — поскольку ф(0> как функция
времени, нами уже определена. Найдя управление, мы подстав-
ляем его в уравнение (4.51) и, решая для него задачу Коши
(4.53), определяем фазовую траекторию x(t).
Итак, линейная по фазовой переменной задача оптимального
управления со свободным концом может быть решена регуляр-
ными методами, т. е. сведена к двум задачам Коши и задаче
нелинейного программирования-(4.57).
Это обстоятельство послужило источником создания разно-
образных итерационных процедур. В СССР первая работа по-
добного рода была опубликована Л. И. Шатровским [72], в
США —А. Брайсоном.
Оба автора предложили практически идентичные итерацион-
ные процедуры, получившие название метода Шатровского —
Брайсона. Содержание этих процедур опирается на следующую
схему рассуждений. . ,
Предположим, что мы имеем общую задачу оптимального
управления (4.43), (4.45), (4.52), (4.53) со свободным правым
концом. Задаем некоторое начальное управление и°-и вычис-
ляем траекторию х°, отвечающую этому управлению. Затем в
уравнении. (4.43) -и выражении функционала (4.45) делаем за-
мену переменных
х = х° + у, u — u° + v
и удерживаем члены, линейные по у и v. Получаем уравнение
для фазовой переменной
y = Ay + Bv ' (4.58)
§ 4. МЕТОДЫ РАСЧЕТА ОПТИМАЛЬНЫХ ПРОГРАММ
101
ж выражение для функционала
т- „ -
+ V)]dt,
о
4 (4.59)
тде с \дх)у.о* '
Решая задачу Ji -> min при ограничениях (4.58) и при огра*
яичении u°4-oeG, находим новое управление. Принимая его
в качестве нового приближения, повторяем расчет и т. д.
Подобная процедура линеаризации не является достаточно
оправданной с точки зрения удобства реализации машинного
счета. В самом деле, для численного решения задачи Коши пе-
реход к линейной системе не дает никакого выигрыша. Для
программирования более важно иметь компактную форму запи-
си. При линеаризации же мы вычисляем производные и теряем
а компактности первоначальной формы запи.си нелинейного
уравнения. И. А. Крылов и Ф. Л. Черноусько [50] предложили
свою модификацию метода. Содержание метода Крылова — Чер-
яоусько сводится к реализации следующих процедур.
1) Задается некоторое начальное приближение.—функция
«°(/), и для уравнения (4.43) решается задача Коши, в резуль-
тате чего определяется значение х°(Т).
2) Поскольку значения импульсов на правом конце траекто-*
рии заданы (см. (4.16)), то мы можем решить задачу Коши •
ф(Г) = 0 . •
для системы
п
-S-**0’"0)’ /==1«•••««• <4-б°)
С'**
Решение задачи проводится справа налево от t == Т до t = 0.
3) В процессе интегрирования системы (4.60) определяется
новое управление и’ из условия
• Н = (ф, f) * — F (х°, и) max.
иев
4) Используя найденное управление, повторяем, процедуру.
Метод Крылова — Черноусько гораздо экономнее метода
Шатровскогр — Брайсона и более удобен для машинной реали-
зации. В общем случае метод Крылова — Черноусько расхо-
дится. Для улучшения его сходимости можно, например, про-
цедуру интегрирования системы (4.43) с управлением wj заме-
нить интегрированием этой системы с управлением
п । «I — и0
И« = “+-Ъ!Г-’
102
ГЛ. IT. УПРАВЛЯЕМЫЕ СИСТЕМЫ
где k выбирается из условия J(«i)< J(u°). Этот метод был под*
вергнут разнообразным исследованиям, и его сходимость впер-
вые доказана М. Ф. Бейко и И. В. Бейко [23].
В настоящее время методы расчета оптимальных программ,,
использующие необходимые условия в форме принципа макси-
мума Понтрягина, превратились в большую самостоятельную
главу вычислительной математики. В этом параграфе мы огра-
ничились схематичным изложением лишь некоторых идей, ил*
люстрирующих основные направления, по которым развиваются
эти методы.
§ 5. Проблема быстродействия
• Среди задач теории управляемых систем особое место зани*
мают задачи на быстродействие. Формальная постановка задач»
следующая. Пусть мы имеем управляемую систему
х = f (х, и, /), (5.1)
начальное состояние которой фиксировано:
х(О)=Хо. . (5.2)
Требуется найти управление «(/), удовлетворяющее условию
и (t) е Gu, (5.3)
которое выводит систему на терминальное множество Gt за ми-
нимальное время Т. Описание множества От может быть весьма
общим. В качестве функционала в этой задаче выступает само
время — длительность процесса управления Т.
Задачи на быстродействие в их классической постановке
встречаются, в практике проектирования систем управления не
столь уже часто. В конкретных проектах более важную роль
играют, как правило, другие показатели: затраты денег, мате*
риалов и т. д. Но без задач на быстродействие обойтись нельзя:
оценка времени реализации проекта — это также важнейший из
критериев. Он часто показывает «реализуемость» проекта, прак-
тическую целесообразность всего замысла. Задача на быстро-
действие дает обоснование назначению предельных (или дирек-
тивных) сроков для завершения, проекта (в зависимости от за*
трат), вывода экономической системы на заданную траекторию
развития и т. д. Практическое значение методов отыскания
управлений, оптимальных по быстродействию, трудно переоце-
нить, и в следующей главе мы увидим их место в общей системе
процедур программного метода.
Задачи на быстродействие сыграли важную роль в развитии
теории управления. Именно они оказались теми первыми зада-
чами, для которых был сформулирован принцип максимума. Как
§ 5. ПРОБЛЕМА БЫСТРОДЕЙСТВИЯ
103
мы увидим ниже, формально задачи на быстродействие яв-
ляются частным случаем задач теории управления, и необходи-
мые условия, которым должно удовлетворять управление в за-
дачах на быстродействие, легко следуют из общих фактов тео-
рии управляемых систем и принципа максимума, который мы
сформулировали. Тем не менее с вычислительной точки зрения
они имеют целый ряд особенностей, заставляющих подвергать
задачи на быстродействие специальному рассмотрению.
Для упрощения последующих рассуждений будем считать,
что терминальное множество состоит из одной точки, т. е. ко-
нечное положение системы фиксировано:
х(Т) = хт. (5.4)
Рассмотрим общую задачу оптимального управления с ин-
тегральным функционалом: определить траекторию системы
(5.1), переводящую систему из состояния (5.2).в состояние (5.4)
так, чтобы вдоль траектории x(t) функционал
г
J(u) = ^F(x, u,f)dt (5,5)
о
достигал минимального значения при выполнении условия (5.3).
Выпишем для этой задачи необходимое условие в форме
принципа максимума. Составим для этого функцию Гамильтона
Н = (ф,Л-Г(х,п,0, ' - (5J5)
где импульсы ф удовлетворяют системе уравнений
* = -% = -!> + ?. (5.7)
Согласно принципу максимума, для того чтобы функция «(/)]
€ыла оптимальным управлением в задаче (5.1) —(5.5), необхо-
димо, чтобы в каждый момент времени она доставляла макси-
мальное значение функции Гамильтона:
Н (х, ф, и, I) -+ max. (5.8)
“s0«
Время Т может быть как фиксированным, так и свободным,
т* е. найденным в результате решения задачи. Но если время
»ам не задано, то для его определения необходимо некоторое
Дополнительное условие. Заметим, что в случае фиксированного
времени мы получаем краевую задачу, позволяющую определить
Управление и фазовую траекторию. Меняя время Т, мы будем
получать различные' управления'и различные траектории.
Ваз ОлУЧИТь дополнительное условие для определения Т можно
v личными сдособами. Например, оно следует из условий
104
ГЛ. II. УПРАВЛЯЕМЫЕ СИСТЕМЫ
трансверсальности, которые мы сформулировали в предыдущем
параграфе: если на фазовую переменную x‘(t) не наложено ни-
каких ограничений в момент начала процесса t = 0 или окон-
чания процесса t — Т, то соответствующая этой переменной
двойственная переменная — импульс фД/)—должна обратиться
в нуль йри t = 0 или при t — Т, т. е.
Ф/(0) = 0 (5.9)
или
ф/(Г) = 0. (5.9')
Введем теперь дополнительную фазовую переменную хп+у-
с помощью равенства xn+l = 0 и переменную т, 0 т к Сде-
лаем замену независимой переменной t = хп+1т; тогда xn+i = Т.
Воспользовавшись этим, мы можем переписать задачу (5.1)—
(5.5) в следующем виде. Уравнения управляемого процесса за-
пишутся так:
-g- = x«+* I/(x,w>x"+4),. ------------0, . (5.10)
а выражение для функционала примет вид
1
J (и) = xn+l J F (х, и, xn+lx) dx.
О
(5.11)
Для задачи (5.10), (5.11) составим условия принципа макси-
мума. Введем новую функцию Гамильтона Я* для ‘системы
(5.Ю):
Я* = хп+1.Я + фп+1.0. .
Импульсы фь ...» фп, фл+1 будут удовлетворять условиям
dtyi _____________ дН* ____^.п+1 дН
. dx dxi дх1 * '
dx dxn+l dt
i =(5.12)
„ дН
Н ~ ~дГ TXn+1’
(5.13}
На фазовую переменную xn+1 при t = 0 и t = T никаких огра-
ничений не накладывается, поэтому условия трансверсальности
имеют вид
Ф»+1 (°) = Фп+i(l) = °,
или, иначе,
1
^-тхп+,]л = 0." (5.14)'
0 '
§5. ПРОБЛЕМА БЫСТРОДЕЙСТВИЯ
105
Выражение (5.14) и является тем дополнительным условием, ко-
торое позволяет определить неизвестную постоянную хп+1.
Задача на быстродействие является частным случаем задачи
< нефиксированным временем, когда F(x, «,/) = !. При этом Н—
1 и задачу на быстродействие мы можем сформули-
ровать следующим образом: найти решение системы
• ^-x“+7U«,x”+4), ---(5.15)
е котором управление и удовлетворяет принципу максимума
Я = (ф, f)xn+i -> max, -
и
выполнены граничные условия
х(О) = хо, х(1)=хг, (5.16)
« параметр xn+l выбирается из условия
$[(Ф.Л + ^ГТХй+,]^=1.
.. о
• * <
Задача (5.15), (5.16) имеет целый ряд специфических осо-
бенностей с точки зрения организации вычислительного процес-
са: .наличие параметра xa+l, который должен быть определен из
дополнительного условия (5.14), затрудняет реализацию числен-
ного решения. В настоящее время развит целый ряд приемов,
имеющих целью преодолеть эти трудности. Укажем на некото-
рые из них.
а) Использование методов нелинейного про-
граммирования. Если интервал времени Т не очень велрк
fr. е. точность задачи не требует большого числа шагов по вре-
мени), то переход к разностной аппроксимации задачи и замена
«е тем или иным вариантом задачи нелинейного программирова-
ния позволяют использовать библиотеку стандартных программ.
Задача нелинейного программирования, которая здесь воз-
никает, формулируется следующим образом: определить мини-
мум линейной функции
х —► min
при условиях. 4
х (i + 1) = X (i) + Дхй+7 (х (/), ut, xn+1T/),
*(O) = xo, х(Я) = хг, Ui^Ui, Д=1/АГ, т, = /Д.
б) Переход к монотонно изменяющейся коор-
динате. Во многих технических задачах можно указать ка-
кую-либо из координат, о которой известно, что она изменяется
106
ГЛ. II. УПРАВЛЯЕМЫЕ СИСТЕМЫ
монотонно. Например, в задачах о движении искусственных
спутников такой координатой всегда оказывается полярный
угол ф. Тогда замена независимой переменной t на монотонную
переменную ф сводит задачу с нефиксированным временем
к стандартной задаче оптимального управления.
в) Введение дополнительного функционала*
Фиксируем переменную xn+l, причем выбираем ее значение за*
ведомо меньшее, чем Tmin, и решаем задачу с фиксированным
временем для минимизации функционала
. Г = ((х (1) - хт), R (х (1) - хг)), (5.17>
где R — некоторая положительно определенная матрица, харак*
теризуюшая точность достижения цели управления.
Решая последовательно ряд задач минимизации функциона*
ла (5.17) для x"+1 <xf+l <x"+i, мы можем найти величины
J*(xn+l). (5.18>
,Они показывают зависимость значений функционала (5.17) or
хп+1. Аппроксимируя эту зависимость той или иной достаточно-
простой функцией, мы находцм корень уравнения
J*(xn+1) = 0, (5.18'>
после чего решаем краевую задачу (5.15), (5.16) для найден*
ного из (5.18') фиксированного значения х"+1.
§ 6. Прямые методы расчета оптимальных программ
а) Два способа редукции задач оптимального
управления к задачам конечномерной оптими'*
з а ц и и. Переход к конечномерному (дискретному) описанию
.непрерывных задач открывает перспективу для использования
развитого аппарата нелинейного и динамического программи*
рования. В предыдущем параграфе мы уже использовали ко*
нечномерную аппроксимацию. Вернемся теперь снова к этому-
вопросу. Будем изучать систему
х = /(х, и) (6.1^
и функционал
т
J (и) — ^ F (х, u)di. (6.2>
о
Ограничиваясь простейшей разностной схемой, мы заменим
(6.1) и (6.2) следующими выражениями:
xi+i = xt 4- xf (xi( ut), (6.3>
N-l
J — x^F(xhUi), i = 0,l,..., N— 1, (6.4>
i-0
$ 8. ПРЯМЫЕ МЕТОДЫ РАСЧЕТА
107
ti — ir, x(tt) — xh u{ti)=Ui.
К уравнениям (6.3) должно быть добавлено начальное условие
х (0) = х0 (6-5)
я условие на правом конце, которое мы для определенности
примем в виде
x(T) = xT = xN, (6.6)
где хн — некоторый фиксированный вектор. Кроме того, на из-
менение управления и фазового вектора могут быть наложены
и другие ограничения.
После такой замены задача минимизации функционала (6.2)
свелась к отысканию минимума функции (6.4) при ограниче-
ниях (6.3), (6.5) и (6.6). Итак, мы пришли к некоторой задаче
нелинейного программирования. Но характер связей (6.3) при-
дает этой задаче некоторые особенности, позволяющие развить
специальные методы ее исследования.
Равенство (6.3) позволяет последовательно исключить фа-
зовые векторы:
Xt •= х0 + т/ (х0, По) — Ф1 («о),
х2 = Ф( (по) + xf (Ф, (По), Hi) — Ф2 (По, U1),
Хк = Ф*-1(«0. • . ., «4-2) + xf (Ф*_1 («о..ИА_2), Uk-l) =
= ф*(по, ...,«4-1),
Функционал (6.4) становится функцией только векторов по, ...
«... иы-и
N—1
/ = Ео Л («о, «I, ..., «<), (6.7)
где Л (wo, «ь .... ui) — xFttbi'tuo, .... u/-i)', u<).
Итак, мы видим, что функционал J превратился в сумму
слагаемых Ц, причем слагаемые номера i зависят только от
•первых i 4-1 неизвестных переменных. Функции вида (6.7) бу-
дем называть функциями с последовательным включением неиз-
вестных.
- Другой способ редукции задачи оптимального управления к
•конечномерной задаче оптимизации связан с так называемой
элементарной операцией. Предположим, что в пространстве со-
стояний (х, /) мы провели плоскости I — h = in, Эти плоскости
108
ГЛ. II. УПРАВЛЯЕМЫЕ СИСТЕМЫ
обозначим через Si. Траектория системы у пересекает плоско*
сти S/ в точках xi. Введем теперь в рассмотрение оператор
B(xt, Xi+i), который паре точек xi и xt+i ставит в соответствие
управление щ, переводящее систему за время т из, состояния xt
в состояние xt+i, и участок траектории yi, <+i, который соединяет
эти точки. Этот факт мы будем записывать в виде
(Yl.i+Ь «<) = 5(Х/( Х;+1),
а оператор В(х,, х,+1) будем называть элементарной операцией..
Функционал J мы сможем представить теперь в виде
N-l fi+i N-l
Цх,и) = ^ 5 F <V«. 1+1. «i) dt = У ф! (xh xl+l). (6.8>
i-0 tt i-0 _
Таким образом, если нам дана элементарная операция B(x/,.x/+i)r
то траектория определяется конечным числом точек х/— точек
пересечения этой траектории с поверхностями S/.
Понятие элементарной операции может быть расширено. Мы
не будем связывать построение дуги у,, i+i с отрезком фазовой
траектории. Определим операцию B(xi, x;+i) как некоторую про-
цедуру построения вектора Ui и отрезка - у/, ж, соединяющего,
заданные точки х/и xz+i.
При помощи этой операции мы можем построить аппрокси*
мацию фазовой'траектории некоторой ломаной, состоящей из-
Дуг у/. ж» и свести исходную задачу оптимального управления
к задаче определения минимума функции конечного числа пере*
менных (6.8). Кривую, составленную из этих дуг, мы будем на*
зывать ломаной Эйлера.
Если в качестве «длины» отрезка у,-, ж принять величину
г i+i
Д/= J F(y/>/+1, ut)di,
то исходную задачу мы можем сформулировать еще и в сле-
дующих терминах: среди ломаных Эйлера, соединяющих две-
заданные точки хо и хГ, найти ломаную минимальной длины.
Проблема построения элементарной операции всегда яв-
ляется достаточно трудной, и стандартные приемы ее построения
отсутствуют. Иногда она строится очень просто, например в про-
стейшей задаче вариационного исчисления, когда уравнения
(6.1) имеют вид х— и. Тогда можно положить щ = (хж — х,)/т»
Если размерности векторов и и х совпадают, то построение*
элементарной операции можно свести к решению трансцендент*
ного уравнения *
5 6. ПРЯМЫЕ МЕТОДЫ РАСЧЕТА
109
Если размерность вектора и меньше размерности фазового
вектора х (типичный случай), то построение элементарной опе-
рации сильно усложняется. В этом случае удобно искать по-
стоянное управление Ui, выбирая его так, чтобы точка xi+i,
определяемая формулой
была по возможности ближе к точке xi+l (рис. 6.1).
z Примечание. Процедура выбора управления ui должна быть по-
строена так, чтобы отклонение <МТ)Я“|*Ж — при т->0.
б) Метод градиентного спуска. Благодаря специ-
альной форме ограничений в задачах нелинейного программи-
рования, возникающих при дискре-
тизации задач оптимального управ-
ления, стандартные методы числен-
ного рещения таких .задач несколь-
ко упрощаются. Продемонстрируем
это обстоятельство на примере ме-
тода градиентного спуска.
Рассмотрим задачи минимиза-
ции функции
ЛГ-1
J — У, // («о, «ь .... Ui), (6.9)
i-0
где ui — векторы размерности т. Каждый шаг градиентного ме-
тода сводится к расчету следующего приближения по формуле
Л-1
М/ = й/_и^^. = й/_%(?/> . (6.10)
i-f
где й/ — предыдущее приближение, х>0 называемся шагом
градиентного спуска.
Напомним, что dli/diij — производные скалярной функции по
векторному аргументу, т. е. они векторы с компонентами
dlt д!{ ди}
ди]' "" .duf
После замены (6.10) функционал (6.9) превратится в функ-
цию скалярной величины х: / = J(x). Шаг х может быть выбран
так, чтобы значение /(х) было минимальным. Этот вариант
градиентного спуска называется методом наискорейшего спуска.
Займемся‘вычислением векторов Gt. Для этого заметим, что
Функцию Jlfi -f- v) можно представить в виде ' *
ЦП + о) = J (й) + б/4- О (о2),
110
ГЛ II. управляемые системы
где
АГ-1
1-0
vi — приращение вектора «1. В уравнениях (6.3) положим Xi =*
— xi + yt, Ui — ili + Vi. Сохраняя линейные члены, мы будем
иметь
У i+l = Ai+dJi + Bi+\Vit (6.11)
df (х,, й.) df (х,, йЛ
где Ai+i, Bi+i — матрицы:Л/+1=Е+т—В(+1 = х—
Е — единичная матрица.
Из уравнений (6.11) будем последовательно исключать фа-
зовые переменные. Так как левый конец фазовой траектории
фиксирован, то i/о = 0 и, следовательно,
yi = BiVo = Di,oVo,
У2 — A2B1V0 + B2V1 = Dg, о°о 4" ^2, 1^1» (6.12)
Уз= Ds, о^о + Ds, jOi + ... + Ds,s_ius_i,
где Ds, i — матрицы:
Ds, 0 ~ AsAs_t ... A2B1,
Ds, 1 — Л4Л4_1 ... A3B2, '
Ds, 4—1 “" Bs.
Аналогичным образом преобразуем выражение для функ-
ции 6J:
N-l N-1
Ы(У, V)= £ (di, у{) + £ (gb Vi), (6.13)
i-1 /-0
ГПА J ~ WPP ГГ . dF(Xl>
где di — x dx , gi — т: du
Подставим в равенство (6.13) выражения ys по формулам
(6.12). В результате очевидных преобразований получим окон-
чательно
N-\
bJ=Z(G{,Vi), (6.14)
i-o •
где векторы Gt определяются формулами '
W-l N-1
о,- s,o:.a+so. 01=2°;.а+«,............. (6.15)
§ 6. ПРЯМЫЕ МЕТОДЫ РАСЧЕТА
Ш
а Ds. i — транспонированная матрица. Таким образом, производ-
ные функционала определяются явными формулами (6.14),
(6.15).
Согласно' схеме градиентного спуска Vi = —мОг, следова-
тельно,
N-l
i-0
Аналогично могут быть построены и другие схемы методов
конечномерной оптимизации.
в) Возможные схемы динамического про-
граммирования. С помощью элементарной операции мы
представили функционал J в форме (6.8). Функции такого рода
носят название аддитивных. Они представляют собой сумму
слагаемых, каждое из которых зависит только от двух пере-
менных с последовательными номерами. Эта структура позво-
ляет использовать разнообразные схемы последовательного ана-
лиза вариантов.. Здесь мы остановимся лишь на одной из схем
подобного рода.
Мы уже заметили, что использование элементарной операции
позволяет переформулировать задачу оптимального управления
Рис. 6.2.
в терминах теории графов—-она сводится к отысканию крат-
чайшего пути на графе специального вида. Остановимся на
этом подробнее.
В пространстве (х, £) проведем гиперплоскости 2г. t = it,
i=r=0, 1, 2, ..., N. Считая, что х,-е S,-, построим в каждой ги-
перплоскости дискретную сетку значений (узлов) xf, где s—
номер узла в гиперплоскости 2,. С помощью элементарной опе-
рации соединим узлы xj, i — 0, 1..N-, s — 1, 2, .... М. В ре-
зультате получим некоторый граф (рис. 6.2).
Задача состоит в том, чтобы найти на этом графе ломаную
кратчайшей длины, соединяющую точки Хо и Ху. Напомним, что
112 ГЛ. И. УПРАВЛЯЕМЫЕ СИСТЕМЫ
длиной отрезка ломаной, соединяющей точки x*t, xj+1, мы усло-
вились называть величину -
Фi (xi> x?+i) = Iks $ ~ J ? (У i. i+1» uks (0) dt,
где Uks(i)—управление, построенное с помощью элементарной
операции по заданным узлам х®, xki+l.
Примечание. Элементарная операция определяет выбор управления
на участке кривой, соединяющей точки, х®, х*+1. Однако, как мы уже видели,
в подавляющем большинстве случаев управление выбирается не точно, а при-
близительно. Решая задачу Коши
*(*/)-4 *-f(x, uks(i))
с управлением, которое мы выбрали с помощью элементарной операции, мы
построим траекторию, которая не пройдет точно через выбранную точку
х|+1. Таким образбм, совокупность траекторий, определенных с помощью
узлов X/, вообще говоря, не будет траекторией, проходящей точно через
эти узлы. Траектории с управлениями и « и (х®, х*+1) будут лишь аппрокси-
мировать траекторию, проходящую через эти узлы сетки.
Изложим алгоритм отыскания кратчайшего пути на графе
специального вида, который изображен на рис. 6.2. Этот
алгоритм, названный алгоритмом «киевский веник», был пред-
ложен В. С. Мйхалевичем и Н. 3. Шором (см. [56]). Рас-
смотрим точки xf1, лежащие в гиперплоскости Ть Расстояние
каждой из этих точек до начальной точки х0 обозначим через
WD. Рассмотрим теперь узлы сетки х£’ в гиперплоскости 22-
Расстояние каждой- из этих точек до узла, лежащего в гиперпло-
скости 21, будет lk,k, (2), а длина ломаной; соединяющей узел
х|“ с начальной точкой х0 и проходящей через точку х^, будет
равна сумме
Zfc0(l)+At (2)-
Определим теперь ломаную минимальной длины/*г(2), соеди-
няющую начальную точку Хо с точкой xfr. Очевидно, что
'»,(?)-= ™п (/„(!) + /,,,,(2)). . (6.16)
Й1
Равенство (6.16) ставит в соответствие каждому из узлов,
лежащцх в гиперплоскости 2а, длину кратчайшей ломаной, со-
единяющей этот узел с начальной точкой Хо. Только эти ломаные
и следует сохранить для последующего анализа, а остальные
пути, соединяющие узел х^! с начальной точкой Хо, могут быть
отброшены, так как они не могут принадлежать ломаной крат-
§в. ПРЯМЫЕ МЕТОДЫ РАСЧЕТА ИЗ
I
Чайшей длины, соединяющей точки хо и хц. В самом деле, на
основании формулы (6.8) общую длину ломаной, соединяющей
начальную и конечную точки траектории, можно представить
в виде суммы
/»,о(1) + (2) + ... + lks+lks (s + 1) + ... + (N),
а минимальная длина ломаной будет вычисляться по формуле
7=min(.. ,(min( min(/il0(l) + 1Ы,(2)) + (ls,(3))/. ДО).
Значит, в состав ломаной минимальной длины, * соединяющей
•Точки Хо и Xn, может быть включена только та ломаная, кото-
рая имеет длину 1к, (2).
. Дальнейшая структура алгоритма очевидна. Определив ло-
маные длины (2), на следующем шаге мы будем искать ло-
маные минимальной длины, соединяющие узлы х^ с начальной
точкой. Их длина определится формулой
!,.(3) = min(!„(2) + /,A(3)), (6.17)
И т. д.
Изложенный алгоритм требует весьма значительных затрат
времени, так как он связан с большим перебором. Оценим его
трудоемкость. Число узлов в плоскостях 2/ обозначим через М;.
Значит, на каждом шаге номера i 4-1 мы совершаем перебор
вариантов из множества Mi возможных путей, проходящих че-
рез данный фиксированный узел х***1, и из этого множества
по формуле типа (6.17) выбираем один вариант и его запоми-
наем. Таким образом, на каждом шаге номера i + 1 мы должны
запомнить Л!,+Г чисел 4/+1 («4-1). Для определения величины
Z*/+1(*4-l) требуется вычислить Mi функций 1^+1*г(«4-1). сло-
жить их с величиной lkt(i), хранящейся в памяти, и сравнить
между, собой полученные величины. Предположим, что на это
расходуется Мр машинных операций.
Следовательно, общее число Q машинных операций, необхо-
димое для реализации алгоритма, оценивается формулой
N-1
Q = ZMiMi+ir^M^N, М = max Mt. (6.18)
Величина Mi зависит от числа п — размерности вектора х. Если
через pt обозначить число узлов по -каждой координате, то
Mi-p*. Таким образом, оценка (6.18) может быть записана
в виде
Q~p*nrN, р = тахр{. (6.19)
114
гл. и. управляемые системы
Оценка (6.19) показывает, что трудоемкость изложенного
варианта метода динамического программирования мало чув-
ствительна к росту интервала времени (числа N, от которого
она зависит линейно). В то же время она быстро возрастает
с увеличением размерности вектора х.
Объем вычислений, необходимый для реализации описанной
схемы, привел к созданию ряда ее упрощенных вариантов (ме-
тод блуждающей трубки, метод локальных вариаций и др.), ко-
торые нашли широкое практическое применение (см. по этому
поводу [8]). .
Методы, подобные изложенному, оказываются весьма полез-
ными для решения широкого круга задач планирования. Они
в некотором смысле универсальны — их можно использовать при
ограничениях самой общей природы, когда возможности других
методов уже исчерпаны.
§ 7. Проблемы синтеза
Как следует из общей схемы двухэтапной оптимизации, опре-
деление оптимальной программы — это лишь первый шаг проек-
тирования системы управления. На следующем этапе мы долж-
’ны построить механизм управления, который реализовал бы
найденную программную траекторию, т. е. обеспечивал бы до-
стижение цели управления с максимальной точностью при за-
данном количестве ресурса управления.
Эта задача, как было показано в § 3 этой главы, сводится
к следующему: определить корректирующее управление у так,
чтобы
7(o)->min (7.1)
о
при условии
х = Лх + Во + |, (7.2)
х(0) = 0, . (7.3)
где £ = £(/)—внешние возмущения. Мы предполагаем, что
£(/)—центрированный случайный процесс (т. е. |(/) = 0 для
любого (), стохастическое описание которого нам полностью из-
вестно.'
Примечание. В общем случае условие (7.3) может быть заменено
более общим условием х(0) = а, где а —некоторая центрированная случай?
ная величина.
Функционал /(и) определяет точность достижения цели, на-
пример величину дисперсии.
В задаче отыскания оптимального корректирующего управ-
ления, как мы видели в § 3, управляющие функции v должны
s 7. ПРОБЛЕМЫ СИНТЕЗА 115
быть не просто функциями времени, но зависеть также и от фа-
зового состояния системы, т. е.
v = v (х, t). (7.4)
Кроме того, корректирующее управление обычно удовлетворяет
- тем или иным ограничениям; мы будем их записывать в виде
v @ G. (7.5)
В общем случае для решения этой задачи регулярных ме-
тодов нет. Она гораздо труднее обычной задачи оптимального
управления. Для нее отсутствуют также и результаты общего
характера,’ например необходимые условия типа принципа мак-
симума. Таким образом, нет каких-либо необходимых условий,
которые могли бы служить отправной точкой для построения
эффективных методов расчета.
Примечание. Последнее утверждение не совсем точно. Для функцио-
нала (7.1) и управления (7.4) всегда может быть составлено уравнение Велл-
мана и построены процедуры его решения методами динамического програм-
мирования. Но машинная реализация этих процедур возможна лишь в исклю-
чительных случаях;
Задача (7.1)—(7.5) носит название задачи синтеза управле-
ния или задачи проектирования оператора обратной связи. Этим
термином называют зависимость (7.4), поскольку она ставит
в соответствие величине х, характеризующей отклонение реаль-
ной траектории от расчетной — оптимальной программы, — кор-
ректирующее воздействие v. Построение оператора .обратной
связи— это центральная задача любого процесса управления.
Мы можем ошибиться в выборе оптимальной программы.
Это изменит величину функционала: например, достижение цели
будет нам стоить дороже. Но если мы плохо сконструируем опе-
ратор обратной связи, то весь процесс управления может раз-
рушиться: наша система потеряет устойчивость, и мы вообще
рискуем не достичь цели управления. Пусть программная траек-
тория полета ракеты вычислена и найден самый дешевый способ
вывода нашего аппарата на орбиту. Но это не решает проблему,
если автопилот не гарантирует устойчивости полета ракеты и
небольшие случайные возмущения способны ее опрокинуть. Ска-
занное в полной мере относится также к экономическим и со-
циальным системам: проблема синтеза оператора управления
(проектирование механизмов управления) является центральной
проблемой анализа и проектирования систем.
Примечание. Несмотря на то, что построение оператора обратной
связи является важнейшей главой теории управления, гто этой проблеме по-
священо огромное количество исследований, др сих пор не создано общей
теории синтеза. Проблема оказывается чрезвычайно сложной, и более или
менее полно изучены лишь простейшие случаи линейных систем.
116
ГЛ. II. УПРАВЛЯЕМЫЕ СИСТЕМЫ
В этом параграфе мы дадим. краткое описание некоторых
численных методов построения оператора обратной связи, т. е.
построения функции v(x, f), и укажем способ оценки функцио-
нала /, который независимо от его физического смысла мы бу-
дем называть мерой точности достижения цели управления.
а) Линейный синтез с постоянными коэффи-
рентами обратной связи. Поскольку строгие методы
решения задачи оптимального синтеза (7.1) — (7.5) отсутствуют,
то основные усилия исследователей направлены на развитие
способов замены задачи оптимального синтеза более простыми
задачами, которые позволяют определить характеристики меха-
низма обратной связи, обеспечивающего «практически удовле-
творительные результаты».
Эти способы сводятся, как правило, к сужению класса до-
пустимых функций о(х, t), т. е. к построению таких совокупно-
стей v (х, /), внутри которых возможно эффективное решение за-
дач синтеза. Оператор обратной связи, построенный с их по-
мощью, уже не будет оптимальным в смысле исходной задачи
(7.1) — (7.5). Поэтому в подобных ситуациях мы будем говорить
не об оптимальном, а о возможном (допустимом, виртуальном)
синтезе.
Об одном из таких приемов речь уже шла в начале этой
главы, когда вместо функционала (7.1) мы использовали усло-
вие устойчивости, а оператор обратной связи (7.4) строили в
форме линейной функции фазовых координат:
o = Lx, (7.6)
где L — матрица (L = (1ц)), . элементы которой — постоянные
числа, называемые коэффициентами усиления.
Решение, этой задачи не единственно и дает лишь систему
ограничений, которым должны удовлетворять коэффициенты
усиления 1ц, например систему неравенств вида
/Г/ (7.7)
Такая неоднозначность удобна инженерам, поскольку она
дает возможность варьировать в определенных границах зна-
чения конструктивных параметров и удовлетворить еще тем или
иным условиям, которые оказались не формализованными и не
были включены в исходную постановку задачи.
Но редукция к задаче устойчивости имеет смысл лишь тогда,
когда время Т функционирования системы достаточно велико.
Естественным развитием этих идей при создании механизмов
управления на конечном интервале времени является сведение
задач синтеза к некоторым задачам нелинейного программиро-
вания. Поясним схему этой редукции для того случая, когда
§ 7. ПРОБЛЕМЫ СИНТЕЗА
117-
-функционал J имеет вид математического ожидания
/ = (х(Г),х(Т)). (7.8)
Будем искать решение задачи обратной связи в форме (7.6),
где L = (1ц) (так же, как и в задаче проектирования оператора
обратной связи, реализующего устойчивое движение системы)
будет постоянной матрицей.
Обозначим через G(t,x) = (ga(t,x)) матрицу Грина уравне-
ния Хт=(А +BL)x. Так как начальные условия мы считаем ну-
левыми, то решение уравнения
-x = (A + BL)x + $
мы можем выписать в виде
t
x(0=$G(/,T)|(r)dT. (7.9)
О
Теперь функционал (7.8) запишется следующим образом:
тт
J — G (t, х) G (t, s)g(т) I (s)dx ds.
(7.10)
0 0
Случайный процесс мы считаем известным, и поэтому
все элементы корреляционной матрицы (или матрицы ковариа-
ций) К==(Л//(т, s)), где кц = Ц(&(х)У (s)) = i‘ (т)^ (з), мы
должны считать заданными величинами. Что же касается эле-
ментов матрицы G(t, т), то они зависят от коэффициентов уси-
ления 1ц. Задав матрицу L, мы можем с помощью фбрмул (7.9),
(7.10) вычислить значение функционала. Но для этого нам надо
сначала вычислить матрицу Грина, т.' е. решить п задач Коши
(п — размерность вектора х).
Таким образом, функционал I — это некоторая функция ко-
эффициентов усиления 1ц и задана эта функция через решение
системы линейных дифференциальных уравнений. Но так как
фазовая переменная x(t) будет зависеть от коэффициентов уси-
ления 1ц нелинейно, то решение задачи синтеза сводится к за-
даче нелинейного программирования. Нач.иная с конца шести-
десятых годов подобный подход получил весьма широкое рас-
пространение, несмотря на то, что функционал / не является
в общем случае выпуклой функцией. Благодаря тому, что в
задачах синтеза требования точности, как правило, не бывают
высоки, решение задачи этим методом во многих случаях уда-
лось практически реализовать (см. [62,63]).
Изложенная схема решения задачи использует по меньшей
мере два предположения. Во-первых, предполагается,-что коэф-
It
118 ГЛ. II. УПРАВЛЯЕМЫЕ СИСТЕМЫ
фициенты усиления можно считать постоянными числами. Такое
предположение удобно для инженера, проектирующего систему
управления, поскольку оно позволяет использовать достаточно
простую конструктивную схему автопилота. Но в какой степени
с помощью такой системы можно обеспечить точность достиже-
ния цели, близкую к оптимальной, всегда остается вопросом, ре-
шение которого может быть получено лишь с помощью экспе-
римента, например с помощью массовых машинных расчетов.
Во-вторых, предполагается, что обратная связь 'определяет
управляющие воздействия, которые зависят линейно от откло-
нений фазового вектора от программной траектории. Это также
предположение, которое требует обоснования.
Существует много работ, в которых делаются попытки из-
бавиться от этих предположений.
б) Оптимальный линейный синтез. Рассмотрим
снова линейную систему
* = Лх + о-Н. (7.11)
Управление будем разыскивать в классе линейных функций
v — Lx, но элементы матрицы L = (1ц) будем считать функция-
ми времени. Подчиним эти величины ограничениям вида
(7.12)
где Du — некоторые множества. В инженерных задачах эти
ограничения имеют обычно вид (7.7).
Будем считать, что случайный процесс £(/) 'задан своим
каноническим разложением:
m
(7.13)
i-t
где «р/(0 — некоторая заданная система вектор-функций раз-
мерности п, a ci — скалярные независимые случайные величины
с известными статистическими характеристиками, причем ci = О
(случайный процесс центрирован).
Вектор x(t) также будем отыскивать в виде некоторой
суммы
m 4
х(1)»£^(0. (7.14)
где %»•(/)—неизвестные вектор-функции. ’
Подставив выражения (7.13) и (7.14) в, исходное уравнение
(7.11), получим
m
Е Ci Ь - (Л + £) X: ~Ф/] = 0. (7.15)
$ 7. ПРОБЛЕМЫ СИНТЕЗА
119
Для того чтобы это равенство было справедливо для любых
реализаций ct и любых t е [О, 7], необходимо и достаточно,
чтобы величина, стоящая в квадратных скобках, была равна
нулю при любых t, т. е. чтобы функции х«(0 удовлетворяли
системе обыкновенных дифференциальных уравнений размерно-
сти пХт:
+ + f=l,2.........т. (7.16)
Поскольку в начальный момент х(0) = 0, то вектор-функции
%,(/) должны также удовлетворять нулевым начальным уело*
виям:
Х<(0) = 0;
Рассмотрим теперь выражение для функционала (7.8). Под»
ставляя в него выражение,(7.14), мы будем иметь
п ______ п / т \2
/==£(х')2(Т) = Е( Ecixl).
/-1 /
(7.17)
Так как ci — независимые случайные величины, >г. е. =
“если i k, то выражение (7.17) приобретает вид
пт _
;-££ед)!-
(7.18)
Поскольку ci — случайные величины с известным распределен
нием, то с2 — заданные числа, и функционал (7.18) —это детер*
минированная функция конечных значений неизвестных функций
Х{(Т). Таким образом, задачу оптимального линейного синтеза
при ограничениях (7.12) мы свели к задаче оптимального управ-
ления: определить функции ///(/), доставляющие минимальное
значение функционалу (7.18) при условиях (7.16), (7.12).
В результате решения этой задачи мы находим коэффи-
циенты усиления как .некоторые функции времени. Конечно, эта
задача достаточно высокой размерности, но, будучи задачей со
'свободным концом, она допускает использование эффективных
методов типа метода Крылова — Черноусько. ,
К сожалению, данный способ реализации оператора синтеза
обратной связи может быть использован лишь при ограничениях
типа (7.12). На практике же чаще всего встречаются ограниче-
ния другого рода, напрймер, имеющие вид
(7.19)
Для того чтобы развить эффективные методы решения по-
добных задач, можно попытаться ввести штрафные функции.
Но метод функций штрафа, широко распространенный и хорошо
120 гл. II. УПРАВЛЯЕМЫЕ СИСТЕМЫ
разработанный для детерминированных задач теории оптималь-
ных программ, в задачах синтеза разработан очень плохо, и
его обсуждение в этой области началось совсем недавно.
в) Синтез в задачах с квадратичным ф у н к •
ционалом. До сих пор мы обсуждали проблемы построения
оператора обратной связи в виде линейной функции фазовых ко-
ординат. Предположение о линейности, естественно, сужает
возможности управления; операторы обратной связи, исполь-
зующие более сложные функциональные зависимости, в общем
случае могут обеспечить большую точность достижения цели
управления, чем наилучший из линейных. Поэтому естественным
образом возникает вопрос: а существуют ли вообще системы,
для которых решением задачи оптимального синтеза является
линейный оператор обратной связи? И что представляют собой
эти системы? Ответ дает следующая теорема *).
Теорема. Пусть мы имеем, линейную систему (7.Ц.), в
которой отсутствуют ограничения на управление. Тогда реше-
нием задачи о минимизации квадратичного функционала яв-
ляются линейная функция (7.6), где элементы 1ц суть некоторые
функции времени.
Уточним теперь выражение для функционала. До сих пор
мы рассматривали квадратичные функционалы вида
. / = (х(7'),х(Г)) - (7.20)
или
/ = (х(Г),/?(х(Т))),. (7.20')
с помощью которых мы оценивали точность достижения цели
управления. Но решение задач минимизации таких функциона-
лов при условии, что на управление не наложено никаких огра-
ничений, совершенно тривиально.
В самом деле, если считать, что выбор управлений не стеснен
никакими ограничениями, то до поры до времени мы вообще
можем не управлять движением системы. Мы можем подождать,
пока за счет внешних возмущений §(/) накопится некоторое от-
клонение от расчетного режима (от программной траектории,
которая в данном случае соответствует началу координат х ss
= 0), а затем приложить управляющий импульс, компенсирую-
щий это отклонение. Чем позднее (т. е. чем ближе к моменту
окончания процесса t = Т) мы приложим зггот импульс, тем
точнее мы достигнем цели управления, т. е. точки Хг з 0.
В таком виде полученный результат практического смысла не
имеет, поскольку в реальных условиях управляющие импульсы
всегда ограничены и импульс, больший некоторой вполне опре-
♦) Доказательство см. в книге [8].^ .
S 7. ПРОБЛЕМЫ СИНТЕЗА
121
деленной величины, реализован быть не может. Решать же за-
дачу синтеза с ограничениями на управления типа неравенств
в общем случае мы не умеем, а теория штрафных функций для
подобных задач не разработана. Поэтому вместо функционала
(7.20) обычно в инженерных задачах рассматривается функцио-
нал
т
J = (х(Т),х(П) + $ К (0 (о(0, v (0) dt, (7.21)
о
Где А(/)> 0 —некоторая заданная функция.
В конце предыдущего пункта мы сделали замечание о воз-
можностях использования штрафных функций в задачах синтеза
С ограничениями на управление. Имеет ли это отношение к рас-
сматриваемому случаю?
Дополнительное слагаемое в (7.21). похоже на функцию
штрафа. Но ,это лишь внешняя «похожесть». Если множитель
А(/) в выражении для функции штрафа стремится 'к оо, то.
решение задачи с функцией штрафа стремится к решению за-
дачи с ограничением, нарушение которого мы оштрафовали.
т
Поскольку слагаемое J А (/)(»(/), v(t))dt с видом ограничения
о
не связано, то подобное утверждение в данном случае спра-
ведливым быть уже не может. Тем не менее интегральное
слагаемое в выражении (7.21) смысл имеет. Оно ограничивает
возможный рост управлений и дает результаты, приемлемые
для-практики: варьируя величину А(/), как правило, можно
обеспечить выполнение ограничений на управления.
Мы сформулировали теорему, которая справедлива для лю-
бых квадр’атичных функционалов и, в частности, для функцио-
налов вида (7.21).-
Проиллюстрируем схему рассуждений при выводе этого ре-
зультата для случая функционала (7.21). Заменим исходное-
уравнение (7.11) системой разностных уравнений •
.х4+1‘=Фл + o'ft + f*, 6 = 0,1....N—l, (7.22)
где N — число интервалов разбиения отрезка времени [0,7].
Если мы используем простейшую разностную схему первого по-
рядка точности, то
Ф* = Е4-Л(4)т, о>*==о(4)т, /* = |(4)т,
где т = T/N— шаг по времени, а Е — единичная матрица. Точно
так же преобразуем и функционал (7.21):
N—1 _______
/ = xN) +Zdk (wk, wk). (7.23)
A-0
122 ГЛ. И. УПРАВЛЯЕМЫЕ СИСТЕМЫ
Итак, мы пришли к задаче отыскания минимума функцией
нала (7.23) при ограничениях (7.22), т. е. мы должны найти
величины Wo, ..,, w^-i, удовлетворяющие условиям (7.22) и
доставляющие минимальное значение функции (7.23). Решать
эту задачу будем методом динамического программирования.
Предположим, что система находится в состоянии xN-i, т. е.
до окончания процесса остался один временной интервал. По*
ставим вспомогательную задачу: определить управление
доставляющее минимальное значение функционалу (7.23). По-*
скольку система тем или иным образом уже оказалась в со-
стоянии хц-1 и изменить это положение мы не можем, един-
ственным для нас способом повлиять на окончательный резуль-
тат является выбор (надлежащим образом) управления на по-
следнем шаге по времени.
Введем обозначение
JV-1
JN = (xN, Х/f) + Z dk (wk, wk) =
fc-0
• N-2
== (xN, xN) + dN_i (Wif-t, WN_1) + E dk (a»A, Wk). (7.24)
n»0
Последнее слагаемое в этом выражении уже было выбрано (тем
или иным образом).
Подставим в (7.24) выражение для xN из (7.22). Получим
dN==(^N-lxN-U Ф#-1*ЛГ-1) +
+ 2 (o’w-i, Фдг-iAjv-i) + 2 (fft-i, Фдг-1*#_1) + 2 (wN_\, f^-t) +
N-2 r
(fN-bfN-l) + dN_i(wN^i, 1Уу_1) 4- E dk(wk, Wk).
n-0
Вычислим условное-математическое ожидание In-\ величи-
N-2
ны J№, считая, что хц-i и £ (wk, Wg) фиксированы, и ирини-
_________________________п-0
мая во внимание, что fn-i = 0:
Jn-i (xn-i) — &n-i, Rn-ixn-i) + 2 (wn-i, Фдг-1*л-1) +
____________________________ N-2
+ (wN.lt wN.i) + (ftf_i, fN~i) + dw-i (W-ь + E dk (wk, wk),
n»0
где /?лг-1 = Фдг-]Флг-1.
Минимальное значение Jy-i найдем из условия
$ ?. ПРОБЛЕМЫ СИНТЕЗА'
123
Это условие мы имеем право использовать, поскольку на выбор
управлений, т. е. величин w, никаких ограничений не накла-
дывается. Это условие дает уравнение для определения вели*
ЧИНЫ Wn-i‘.
®N-lxN-l 4" WN-1 4" dn-lWn-l = 0»
откуда
=-----= Bn-ixn-1‘ (7.25)
Итак, на последнем шаге нашего процесса мы должны счи*
тать управляющее воздействие w^-i линейной функцией фазо*
вой переменной Xn-i. Подставляя (7.25) в выражение для
находим
d __________ аг-2
e j 1 --(xN-li 4" (/jV-b /аг-1) 4- У, (wk, Wk).
11 -11 П-0
(7.26)
Подведем теперь некоторые итоги начального этапа решения
задачи синтеза методом динамического программирования.
В каком бы состоянии ни оказалась система перед последним
шагом нашего процесса, независимо от всей предыстории,
управляющее воздействие wn-ъ наилучшее среди возможных
управлений на этом шаге, мы определяем по формуле (7.25),
и оно оказывается линейной функцией отклонения х'ц-i от рас*
четной программной траектории.
Найдя оптимальное значение Wn-\, мы одновременно полу*
чили условия, которым должны удовлетворять остальные управ*
ляющие воздействия о>о, • • •, а»лг-2. Они должны доставлять ми*
нимум некоторому функционалу/лг-ь Этот функционал вычис*
ляется по формуле (7.26). В этом функционале присутствуют
терминальный член, характеризующий отклонение фазового
вектора, и интегральный член, штрафующий за чрезмерно боль*
шое значение управления. Функционал (7.26) отличается от ис-
ходкого тем, что терминальный член определен теперь не для
значения k = N, а для значения k — N — 1. Определив управ-
ление на последнем интервале, мы перенесли условие, на-
ложенное на окончание процесса, на один шаг к началу, т. е.
в точку tk — N — 1.
Задача минимизации функционала (7.26) ничем не отли-
чается от рассмотренной, и мы можем применить для ее реше-
ния те же самые рассуждения, которые мы только что исполь-
зовали. Другими словами, мы снова должны предположить, что
состояние на предыдущем шаге, т. е. вектор xN-2, нам известно,
заменить в выражении (7.26) величину хя-i по формуле
XN—1 — ®n-2xN-2 4- &N-2 4" f jV-2
424
ГЛ. II. УПРАВЛЯЕМЫЕ СИСТЕМЫ •
и, преобразовав выражение (7.26),. решить задачу о минимиза-
ции функции, квадратичной по wn-ъ В результате мы най-
дем, что
t»jy_2 = (7.27)
т. е. управление на предпоследнем шаге процесса снова ока-
жется линейной функцией отклонения хц-г, независимо от пред-
шествующей истории процесса.
Затем мы должны составить функционал для определения
управлений а>о, wi, .,., и>я-з. Он также будет, иметь вид, ана-
логичный (7.26):
7JV-2 — (^-2> Ялг-2%-2) 4
dN-\
*+^-1
+ (^-1’^-1) + 1 + d~* (wk, wk),
" fe-0
где матрица /?у-2 вычисляется очевидным образом, и т. д.
В результате этой процедуры мы получим последовательность ,
управлений вида
Г wt — Btxlt (7.28)
являющихся линейными функциями от соответствующих фазо-
вых состояний. Формула (7.28) дает исчерпывающее решение
задачи.
Приведенные рассуждения не являются строгим доказатель-
ством теоремы. В самом деле, мы доказали утверждение лишь
для случая конечноразностных уравнений. Переход к пределу
при т -> О (или W -> оо) отнюдь не тривиален. И хотя сам факт
оптимальности линейного оператора обратной связи в задачах
с квадратичным функционалом был известен, вероятно, уже с
конца сороковых годов, его строгое доказательство было дано
Р. Калманом лишь в начале шестидесятых годов.
Полученный результат имеет большое прикладное значение.
Дело заключается даже не в том, что для данного класса задач
мы можем представить в явном виде оператор обратной связи.
Мы нашли класс систем, для которых оптимальным является
именно линейный оператор обратной связи. Но подавляющее
большинство механизмов управления, создаваемых инженерами,
строится именно по этому типу. Зная класс систем, для которых
эти операторы являются оптимальными, мы можем оценить сте-
пень соответствия создаваемых механизмов оптимальному об-
разцу управляемых систем.
г) С и нт ез о п ер атор а о б р а т н о й с в я з и н а о с н о в е
прогноза. Одна из основных трудностей построения механиз-
ма управления состоит в том, что приходится учитывать стоха-
5 7. ПРОБЛЕМЫ СИНТЕЗА 125
стичность внешних возмущений и работать со стохастическими
уравнениями. Отсутствие эффективного математического аппа-
рата заставляет упрощать задачу (например, заменять ее ли-
нейной), сужать классы операторов, среди которых мы пы-
таемся найти оптимальный, и т. д. Но, несмотря на все эти
упрощения, мы всегда в конечном итоге стремимся свести за-
дачу к последовательности детерминированных задач оптими-
зации.
В данном пункте мы опишем один способ реализации прин-
ципа обратной связи, опираясь на возможность эффективного
решения задачи определения оптимальной программы без 'пред-
положения о линейности исходной системы.
Рассмотрим управляемую систему достаточно общего вида
x = f(x,u, £,/),. (7.29)
где управление подчинено условию
‘ u<=U, (7.30)
а качество-управления оценивается функционалом
. т
Jt = F(x (7)) +. J <р (х, и ($), з) ds *), (7.31)
t
где F и ф — заданные скалярные функции.
Начальное состояние системы для определенности будем
считать фиксированным:
х(О) = хо. (7.32)
Разобьем отрезок [0, Г] на N частей длины т: то = 0, т№= 7,
j/==jt. В момент времени т/ будем строить прогноз £♦(/) слу-
чайного процесса по результатам наблюдений за внешними
возмущениями на отрезке [0, т,]. Этот прогноз равен условному
математическому ожиданию величины £(/) при условии, что из-
мерены ее значения при t т/, т. е. он определяется формулой
t (0 = О)/ё («). s < xi), t > xt. (7.33)
Поскольку мы предполагаем, что статистическое’ описание
процесса £(/) нам полностью известно, то определение (7.33)
в принципе возможно. Однако во многих конкретных ситуациях,
например при оценке погодных характеристик, вычисление по
формуле (7.33) может оказаться затруднительным. Тогда при-
водится использовать прогноз,, носящий экспертный характер;
*) Выражение (7.31) дает оценку управления при условии, что в момент
Времени t известно состояние объекта x(t). Вопрос о том, как оценивать про-
цесс «в целом», мы обсудим позднее.
126
ГЛ. И. УПРАВЛЯЕМЫЕ СИСТЕМЫ
во всяком случае, мы всегда будем считать, что в нашем распо*
ряжении есть некоторый оператор, ставящий в соответствие на*
блюдениям функции £(з) на интервале 0 < т/ функцию
(0 для значений t > т<:
' (7.34).
Подставляя функцию £*(/) в исходное уравнение (7.29), мы
получим детерминированную систему
х = /(х, и, &*(/), /), х(т/) = х/. (7.35)
Построим оптимальное программное управление и/(/)' в за*
даче (7.35) с функционалом /т/. Функция ui{t) будет, очевидно,
зависеть от xi, xi, £*(0» т. е.
= ть х{, Г(0),
Полученное таким путем управление мы будем называть ку«
сочно-программным управлением.
Если в нашем распоряжении имеются операторы прогноза П|
и экономный способ построения кусочно-программного управле-
ния, то общая схема управления выглядит следующим образом.
В начальный момент мы строим прогноз
Г(0 = По5(0)
и находим управление «о(0> которое минимизирует функционал
т
J0 = F(x (Г)) + ф (х, и (s), s) ds.
о
Это управление используется на отрезке времени [О, ti]. В мо«
мент времени ti делается новый прогноз с учетом той реали-
зации случайного процесса %(f), которую мы наблюдали;
Г(0 = 1Шз), зе[0, Т1].
С помощью этого прогноза мы строим новое программное
управление Это новое управление используется на отрезке
времени [тьтг], после чего строится новый прогноз и новое
управление, которое минимизирует функционал
т
JTl=F(x(T))4- ^ф(х, m (s),_ s)ds,
Ti
И т. д.
Изложенный здесь метод управления иногда называют ме-
тодом скользящего плана. Очевидно, что он реализует опера-
тор обратной связи в каждый момент коррекции. Он позволяет
§ 7 ПРОБЛЕМЫ СИНТЕЗА
127
найти управление, зависящее от того состояния, в котором на-
ходится объект вслед'ствие действия тех или иных внешних воз-
мущений.
Но существует одно принципиальное отличие изложенной
схемы управления от тех, которые мы изучали ранее. До сих
пор мы всегда ориентировались на принципы двухэтапной опти-
мизации и строили оператор управления, который стремится
вернуть систему на исходную программную траекторию. Способ
скользящего плана не требует возвращения системы на какую-
либо определенную траекторию. Обратная связь, которая с по-
мощью метода скользящего плана вводится в систему, ориен-
тируется сразу на конечную цель — цель управления. Процедура
построения программной траектории сама реализует оператор
обратной связи — задача управления не разделяется на проце-
ДУРУ расчета программы и процедуру синтеза.
Использование подобных принципов управления открывает
разнообразные перспективы для.развития эффективных спосо-
бов синтеза оператора обратной связи. Они удобны во многих
сферах человеческой деятельности: в управлении процессами ир-
ригации, в экономическом планировании, в управлении ресурса-
ми и т. д. Но для их эффективного использования необходимо по-
нять, при каких условиях изложенные методы управления яв-
ляются оптимальными и какое соотношение с оптимальными
методами управления они имеют в общем случае.
Заметим прежде всего, что поскольку мы рассматриваем
стохастическую задачу, то и функционал, оценивающий каче-
ство управления, должен быть сформулирован в соответствую-
щих терминах. Будем рассматривать функционалы вида
г
J = Го = F(x(T)) + J qp(x, u(s), s) ds. (7.36)
• о
Предположим, что случайный процесс £(/) есть белый Шум, т. е.
гауссовский процесс с нулевым средним и корреляционной мат-
рицей s) = E8(t— s), где Е— единичная матрица, а
6(t — s) —векторная дельта-функция. Предположим, далее, что
процесс (7.29) линеен по фазовым координатам, управлению и
возмущению. Пусть, например, он имеет вид (7.11), а функцио-
нал (7.36) — квадратичный, т. е. имеет такой же .вид, как те
функционалы, которые мы рассматривали в данном параграфе.
Сформулированные предположения позволяют в явном виде
найти оптимальное управление и значение функционала (7.36),
®сли использовать метод, изложенный в предыдущем пункте.
Для этого же случая нетрудно решить задачу и предлагаемым
методом кусочно-программных управлений. Благодаря этому
Метод кусочно-программных управлений синтеза оператора об-
128
ГЛ. Щ УПРАВЛЯЕМЫЕ СИСТЕМЫ
ратной связи можно сравнить с точным методом, дающим опта-
мальное решение-.
Оказывается, что (см. [43]):
1. При прогнозе возмущения в дискретные моменты времени
разность между значениями функционала для кусочно-про-
граммного управления, с одной стороны, и для оптимального
стохастического синтеза, с другой', неотрицательна и имеет по-
рядок А (А — максимальный промежуток между моментами
коррекции).
2. Если прогноз возмущений корректируется непрерывно, то
значение функционала, даваемое стохастическим синтезом, и
значение, получаемое с помощью метода кусочно-программного
управления, совпадают.
Итак, в случае возмущений типа белого шума и линейных
систем изложенный метод построения оператора обратной связи
является методом получения оптимального решения. Никаких
других результатов математического характера, относящихся к
системам более обще'го вида, не известно. И получить их, на-
верное, достаточно трудно, -поскольку общая теория нелинейных
стохастических уравнений развита пока еще очень слабо. В об-
щем случае предлагаемый метод можно рассматривать как -не-
которую удобную эвристическую процедуру эффективного по-
строения оператора обратной связи для нелинейных систем в
условиях, когда на управление наложены ограничения общего
вида. •
Метод кусочно-программных управлений имеет широкую
сферу применения, и, в частности, с его помощью могут быГь
построены т-ак называемые диспетчерские графики, широко
используемые при управлении различными народнохозяйствен-
ными комплексами. К этому вопросу мы еще вернемся в пред-
последней главе.
д) Некоторые комментарии. Мы изложили ряд ме-
тодов синтеза систем управления, ориентированных на исполь-
зование электронной вычислительной техники. Мы видим, что
они носят, как правило, эвристический характер:’ строгих ре-
зультатов и строгих оценок почти нет. Поэтому естественнее
говорить не об оптимальном хинтезе, а о возможном, допусти-
мом синтезе. Но в то же время мы изложили конструктивные
способы построения механизмов управления. Следовательно,
у нас появляется возможность их экспериментальной проверки
с помощью ЭВМ. Машинный эксперимент на основе математи-
ческих моделей открывает новую страницу в развитии методов
исследования управляемых систем. В самом деле, имея в рас-
поряжении тот или другой механизм управления (автопилот),
реализованный в форме алгоритма, мы можем с помощью ма-
шинного эксперимента наблюдать результат его функциониро-
$ 7. ПРОБЛЕМЫ СИНТЕЗА
129
вания. Имея систему критериев, можем оценить его эффектив-
ность и решить вопрос о его применимости.
Таким образом, машинный эксперимент позволяет подклю-
чить к анализу систем управления неформальные методы. Это
тем более важно, что на практике при создании технических
систем управления, а особенно при создании систем управления
хозяйственными комплексами, любая классическая постановка
‘задачи, безупречная с точки зрения математики, является до-
статочно условной схематизацией того реального процесса уп-
равления, который мы исследуем. /-
В' свете сказанного значение методов приближенного син-
теза систем управления трудно переоценить. Но став на путь
построения операторов обратной связи с помощью эвристиче-
ских процедур, мы переносим многие трудности в сферу ма-
шинного эксперимента. Его организация превращается в боль-
шую самостоятельную проблему. О .ней мы начнем разговор
уже в следующей главе.
б Н. Н. Моисеев
Глава Ш
КИБЕРНЕТИЧЕСКИЕ СИСТЕМЫ И ИМИТАЦИЯ
*
§1.0 термине «системный анализ»
В предисловии было дано определение термина «системный
анализ» и сформулировано утверждение о том, что системный
анализ — это своеобразный синтез идей и принципов теории ис-
следования операций и методов теории, управления с возмож-
ностями современной вычислительной техники. Можно сказать,
что системный анализ — это современный этап развития этих
дисциплин. Далее, в соответствии с этим тезисом были изло-
жены основные идеи и концепции теории исследования операций
и теорий управления. Теперь с этих позиций мы снова вернемся
к обеуждению предмета системного анализа и его связи с дру-
гими дисциплинами. Это тем более необходимо, что исполь-
зуются три «системных» понятия: «системный анализ», «теория
систем» и «системный подход». Между ними часто ставят знак
тождества, что приводит к некоторой путанице. Поскольку в
дальнейшем мы будем говорить о методах системного анализа,
то нам сразу нужно четко определить те термины, которые мы
предполагаем использовать.
Слово «система» и связанные с ним термины получили' ши-
рокое распространение. Это произошло потому, что на передний
план все более- и, более выступает необходимость изучения
сложных комплексов (систем)*). Такая необходимость‘опреде-
ляется резким усложнением создаваемых технических кон-
струкций, устройств, технологий и всех совокупностей хозяй-
ственных связей, с которыми приходится иметь дело экономи-
стам, хозяйственным руководителям и инженерам.
Потребность изучения биологических объектов и проблем
экологии, которые с каждым годом становятся все актуальнее,
также приводит исследователя к сложнейшим системам.
♦) Понятие «система» относится к числу тех, для которых трудно дать
аккуратное определение. Часто системой называют совокупность элементов,
между которыми существуют те или другие связи (например, система двух
притягивающихся масс). В этой книге мы не будем пытаться давать строгое
определение системы. Для наших целей достаточно того интуитивного поня-
тия системы, которое имеется у каждого, изучающего предмет.
§ I. О ТЕРМИНЕ «СИСТЕМНЫЙ АНАЛИЗ»
131
В ответ на потребности изучения сложных систем возникла
дисциплина «системный анализ». Ее, как это уже подчеркива-
лось, естественно считать дальнейшим развитием исследования
операций и теории управления, поскольку одной- из центральных
проблем системного анализа является проблема принятия ре-
шений.
В первых двух главах мы рассмотрели круг вопросов, тра-
диционно относимых к исследованию операций и теории управ-»
ления. В частности, были рассмотрены вопросы, связанные с
проблемой неопределенности, в том числе неопределенности
цели, и был указан ряд гипотез и приемов, которые помогают
решить эту проблему и уточнить сами цели. Но того инстру-
мента (инструмента теории исследования операций), о котором
шла речь, часто оказывается недостаточно.
Неопределенность цели, с котдрой мы сталкивались до сих
пор, состояла в многокритериальности. Трудно было соизмерить
и сопоставить между собой различные требования — трудно
формализовать понятие «цель», объединить показатели. Но мо-
жет оказаться, что мы либо вообще не сможем сколько-нибудь
точно поставить цели, либо те цели, которые хотелось бы по-
ставить, нереальны. (Примеры подобных ситуаций дает порой
экономика.) В этом случае на помощь приходит системный
анализ.
Допустим, что речь идет о планах перспективного развития
ЗаНадно-Сибирского топливно-энергетического комплекса. Как
определить цели? Конечно, -мы всегда можем сформулировать
требования: топлива побольше, затрат поменьше и т. д. Но для
проекта плана необходимы более или менее точнее показатели
и реалистические цели, которые согласуются с потребностями
страны и могут быть обеспечены существующими ресурсами.
Подобные проблемы уже не вписываются в стандартную схему
исследования операций. В самом деле, в таких проблемах самый
главный момент-г-сформулировать цели, которые должен пре-
следовать проект. Цель перестает быть экзогенным фактором,
как это было в теории исследования операций или теории
управления, она становится самостоятельным объектом иссле-
дования.
Мы сталкиваемся теперь с исследованием операций, целью
которых является определение цели другой операции (например,
проекта развития региона). Что надо исследователю для того,
чтобы установить, «правильно сформулировать» те реалистиче-
ские цели, осуществление которых должны обеспечивать созда-
ваемые конструкция или хозяйственный комплекс? Очевидно,
что для этого необходимо, прежде всего, представить себе
функционирование будущей конструкции, сопоставить ее воз-
можности с теми ресурсами, ^которыми будет располагать
5*
132 ГЛ. Ш. КИБЕРНЕТИЧЕСКИЕ СИСТЕМЫ И ИМИТАЦИЯ
субъект. Достичь этого можно лишь с помощью физических
(макеты будущих конструкций) или математических моделей.
Таким образом, если мы хотим использовать математику,
сначала мы должны описать систему моделей и создать матема-
тический аппарат, который позволит провести анализ изучае-
мого процесса, увидеть последствия наших решений, оценить
наши возможности при различных'альтернативах, и только на
основе такого анализа мы можем сформулировать цели. Слож-
ность изучаемых и проектируемых систем приводит к необхо-
димости - создания специальной, качественно новой техники
Исследования, использующей аппарат имитации — воспроизве-
дения на ЭВМ специально организованными системами мате-
матических моделей функционирования проектируемого или
изучаемого комплекса.
Примечание. Последнее утверждение вовсе не означает недооценки
классических аналитических методов анализа. Более того, эффективное ис-
пользование имитационных систем необходимо предпвлагает. предварительную
обработку модели. Этим вопросам будут посвящены следующие две главы.
Отметим, что исследование динамики процесса, позволяющее
увидеть перспективы и наметить цели,— это лишь один из
аспектов системного анализа, может быть, и самый важный, ио
дтнюдь не исчерпывающий всего многообразия вопросов, на ко-
торые он в состоянии дать ответ. Наконец, это всего лишь пер-
вый шаг исследования. Следующая проблема состоит в том,
чтобы реализовать намеченные цели, т. е. сформулировать це-
почку решений, в результате выполнения которых будет обес-
печено достижение этих целей (выбраны параметры создавае-
мых конструкции или проекта).
Среди задач, возникающих в связи с созданием соответ-
ствующих проектов, большое место занимают проблемы соче-
тания структурных и функциональных аспектов. Один из труд-
ных вопросов, связанных с этим, относится к проблемам проек-
тирования иерархической организации. Любые более или менее
сложные системы всегда организованы по иерархическому прин-
ципу в связи с тем, что централизованные обработка информа-
ции и принятие решений часто бывают невозможны из-за боль-
шого объема информации, которую следует собирать и.перера-
батывать, из-за возникающих при этом задержек и искажений
и т. д. Если речь идет о проектировании технических систем,
то задача исследования систем (задача проектировщика) со-
стоит прежде всего в разработке самой функциональной схемы,
которая может быть реализована заведомо не единственным
способом, и в определении частных целей.
Значительно сложнее обстоит дело, когда речь идет о- на-
роднохозяйственных комплексах, функционирование элементов
которых зависит от того, как управляют ими люди. В отличие
$ t; О ТЕРМИНЕ «СИСТЕМНЫЙ АНАЛИЗ»
133
от машины, человек всегда имеет собственные цели и интересы,
и проектировщику системы уже недостаточно только формули-
ровать цели для нижних звеньев. Необходимо еще быть уве-
ренным, что эти цели будут достигнуты, т. е. что нижние звенья
выполнят требования верхних звеньев. А для этого, в свою
очередь, должен быть спроектирован специальный «механизм»*),
'ибо одной команды, одного приказа для достижения цели бы-
вает недостаточно. Вот почему возникает потребность в спе-
циальной теории, которая должна развивать принципы создания
иерархии в управлении й методы их анализа. Теория иерархи-
ческих систем, которая изу.чает некоторые из аспектов этой про-
блемы, является- одной из важнейших частей системного ана-
лиза.
.Таким образом, системный анализ —это дисциплина, разви-
вающая методы проектирования сложных технических, народ-
нохозяйственных,' экологических систем, организационных
структур и т. д. Системный анализ, как дальнейшее развитие
теории исследования операций и теории управления, включает
в себя эти дисциплины со всем арсеналом средств, развитых в
их рамках.
Поскольку любой анализ сложных систем невозможен без
использования ЭВМ, то, когда говорят © методах' системного
анализа, имеют обычно в виду процедуры, основанные на ис-
пользовании ЭВМ.
Термин «системный анализ» в русском языке не имеет точ-
ного аналога в иностранных языках. В начале шестидесятых
годов в США появился термин «system analysis» для обозначе-
ния возникавшей тогда техники анализа сложных систем, раз-
вивавшей прежде всего методы исследования операций и изу-
чавшей, в частности, те способы представления информации, ко-
торые облегчают исследователю формулирование целей операции.
Исследователь операций в зарубежной литературе обычно
назывался «analyst». Для того чтобы.подчеркнуть особенность
квалификации специалиста, занимающегося анализом и проек-
тированием сложных систем, стали употреблять термин «system
analyst». Таким образом, термин «system analysis» следовало
бы перевести как «анализ систем», но его* однажды перевели
как «системный анализ», так как на английский язык оба эти
термина переводятся одинаково: «system analysis». В русском
же языке термин «системный анализ» несет гораздо большую
смысловую нагрузку: этим термином называют большую само-
стоятельную дисциплину. Заметим, что и в настоящее время
термин «system analysis» понимается на Западе как анализ
*) В экономике социалистических стран существует специальная проблема
построения народнохозяйственного механизма (хозрасчет, система поощрения
и т. д.), задача которого состоит в реализации народнохозяйственных планов.
134
ГЛ. III. КИБЕРНЕТИЧЕСКИЕ СИСТЕМЫ И ИМИТАЦИЯ
систем, как совокупность более или менее простых рецептов ис-
следования конкретных систем. В СССР стала возникать син-
тетическая дисциплина, включающая в себя — это необходимо
подчеркнуть — не только конкретные приемы представления ин-
формации, но и фундаментальные разделы теории.
Наряду с термином «системный анализ» большое распро-
странение получил и термин «теория систем». Несмотря на
широкое использование этого термина, его единое понимание
отсутствует. Точно так же (как уже указывалось) не удается
определить достаточно четко и сам тертшн «система».
Возникновение «теории систем» обычно связывают с именем
известного биолога Л. Берталанфи (см. [21]), который в пяти-
десятых годах в Канаде организовал центр системных исследо-
ваний и опубликовал большое количество работ, в которых
пытался найти то общее, что присуще любым достаточно слож-
ным организациям материи как биологической, так и обще-
стренной природы. Однако подобными вопросами начали за-
ниматься задолго до Берталанфи. Наиболее фундаментальные
исследования этого плана связаны с. именем нашего соотече-
ственника А. А. Богданова, который еще в начале века начал
создавать теорию организации*). В своей работе он вводит
Понятие организации как одного из первичных понятий. Мате-
?‘ ия существует во -времени и пространстве. Она всегда имеет
у или иную организацию. В то же время и организацию нельзя
мыслить без ее материального носителя. Основание для построе-
ния теории А. А. Богданов видит в том, что, несмотря на фан-
тастическое разнообразие материала, существующего в природе,
количество архитектурных или организационных форм относи-
тельно невелико. Он демонстрирует это на многих примерах
самой разной физической природы. А. А. Богданов изучает не
только статику. Он анализирует разнообразные особенности
механизмов отбора, определяющие эволюцию организации, про-
слеживает ее развитие.
Позднее теорией организации (синонима теории систем)
ванимались выдающиеся представители отечественного естество-
знания— И. И. Шмальгаузен [73], В. Н. Беклемишев и ряд
других специалистов, которые внесли много оригинального в
трактовку понятия организации и показали значение этого по-
нятия для общего представления о развитии материального
мира.
♦) Подробнее см. книгу [22]. Второе ее издание вышло в Москве в 1923 г.,
а последнее — в 1929 г. также в Москве, уже после смерти автора, организа*
тора и первого директора Института переливания крови. Во многих новейших
исследованиях отмечается, что некоторые положения тектологии предвосхи-
тили идеи кибернетики. В тектологии отразились и механистические ошибки
А. А. Богданова.
§ I. О ТЕРМИНЕ «СИСТЕМНЫЙ АНАЛИЗ»
138
Примечание. Я думаю, что вклад русских и-советских исследователей
во многих отношениях является решающим в формировании теории организа-
ции, и многочисленные апелляции к работам Берталанфи и его последователей
Часто не являются достаточно оправданными, поскольку большинство разви-
ваемых ныне идей так или иначе связано с работами А. А. Богданова и дру-
гих советских исследователей.
Таким образом, в отличие от системного анализа, дйсцип-
дины .прикладной, ориентированной на решение конкретных
практических задач, теория систем относится скорее к методо-
логии науки.
В литературе часто не делается различия в терминах «си-
стемный анализ» и «теория систем». Из сказанного же следует,
что путать эти два термина нельзя.
Но системный анализ и теория систем еще не исчерпывают
той «системной терминологии», которая возникла в последние
десятилетия.
Как мы уже говорили, существует еще одно понятие —«си-
стемный подход», — еще более расплывчатое и неточное. Тем
не менее оно отражает определенные тенденции, которые стали
особенно заметны в послевоенные десятилетия.
В развитии науки всегда отчетливо прослеживались две ли-
нии— анализ и синтез. Мы всегда видим стремление к анали-
зированию— изучению конкретных фактов, проникновению в
глубь изучаемого факта, вскрытию тонкой структуры явления
и т. д. Но рядом точно так же всегда существует стремление
создавать синтезирующие теории, позволяющие объединить
различные факты, увидеть перспективы развития того или иного
процесса, его "связи с другими явлениями, учесть их взаимную
обусловленность и т. д.
При создании синтезирующих теорий иногда происходит и
некоторая утеря информативности: не все факты удается сразу
уложить в единую схему, не весь арсенал практически полевых
методов можно сразу приспособить к новой системе взглядов.
Например, теория Птолемея, помимо общей геоцентрической
концепции, давала способы расчета положения планет на не-
бесном своде. Теория Коперника содержала гелиоцентрическую
концепцию, но на первых порах никакими способами, позво-
ляющими предсказывать положения планет, не располагала и,
значит, для практики (например, для практики мореплавания),
в отличие от теории Птолемея, была непригодна. Только после
работ Кеплера она получила ту аппаратную основу, которая
позволила ей полностью заменить теорию Птолемея.
В разные периоды времени значение обоих подходов было
различным, хотя две тенденции всегда существовали парал-
лельно. Большое значение имело стремление к обособлению
дисциплин, к отысканию новых фактов, стремление сделать факт
136
ГЛ. III. КИБЕРНЕТИЧЕСКИЕ СИСТЕМЫ И ИМИТАЦИЯ
единственной целью научных исследований. В то же время ро«
ждались новые, пограничные области, в которых невозможно
отличить одну науку от другой: химию от физики или от био-
логии и т. д.
В последние десятилетия роль синтезирующих построений
стала особенно большой. Потребность не просто изучать яв-
ление, факт, но устанавливать его связь с другими фак.тами
и привела к появлению специального термина «системный под-
ход». Эта потребность проявляется сейчас так ярко, что возни-
кают не только новые научные направления на стыке между
отдельными естественными науками, но и исследования, относя-
щиеся в равной степени к -компетенции естественных и обще-
ственных наук. Современный интерес к подобным синтетическим
построениям связан с возросшими возможностями переработки
информации. По-видимому, исследователь всегда стремился по
возможности «системно» подойти к воззрению на тот или иной
факт, но далеко не всегда он мог иметь в своем распоряжении
необходимый инструмент. Сейчас, в век ЭВМ, эти возможности
резко возросли. Отсюда, как следствие, и стремление к изуче-
нию явления во- всей его полноте, в связи с другими явлениями.
Системный подход "непрерывно стимулируется .потребностями
практики, которая выдвигает все более и более сложные проек-
ты, требующие анализа междисциплинарных проблем.
Примечание. Системный подход, как мы видим, — это некоторый об-
щеметодологический принцип. Его гносеологический аспект — это теория си-
стем. Его рецептурная, аппаратная реализация — это системный анализ. Это
деление довольно условно, и, как мы увидим ниже, чисто аппаратные вопросы
далеко не всегда можно (и нужно) отделять от вопросов философских.
В этой книге мы не будем касаться общих проблем методо-
логии и сосредоточим внимание только на системном анализе,
его методах и на самом существенном его отличии от других
дисциплин — необходимости объединения формальных и нефор-
мальных методов анализа, на" демонстрации того, как строгие
методы, основанные на использовании современных математи-
ческих средств, вписываются естественным образом в канву
естественнонаучного и гуманитарного мышления.
$ 2. Проблемы моделирования
Любые методы системного анализа (так же как и методы
исследования операций и теории управления) опираются на
математическое описание тех или иных фактов, явлений, про-
цессов. Наше знание всегда относительно, поэтому описание на
любом языке также отражает лишь некоторые стороны явлений
и никогда не является абсолютно полным.
$ 2. ПРОБЛЕМЫ МОДЕЛИРОВАНИЯ
137
В настоящее время широкое распространение получило сло-
во «модель». Понятие «модель» допускает много различных
трактовок, существует классификация моделей и т. д. Подроб-
ный анализ этого понятия лежит за рамками данной книга.
Употребляя слова «модель», «модельное описание», мы будем
иметь в виду некоторое описание, отражающее именно те осо-
бенности изучаемого процесса, которые и интересуют исследо-
вателя. Точность, качество такого описания определяются пре-
жде всего соответствием модели тем требованиям, которые
предъявляются к исследованию, соответствием получаемых с
помощью модели результатов наблюдаемому течению процесса.
Если при описании моделей используется язык математики,
то говорят о математических моделях. В дальнейшем мы будем
говорить только о математических моделях.
Примечание. Любая научная дисциплина всегда имеет дело только
с приближенным, «модельным» описанием. Но эти модели могут использовать
самые разные языки (и символы). Для того чтобы их отличить от математи-
ческих моделей, часто используют термины «содержательная модель», «вер-
бальная модель» и др.
Изучение математической модели всегда связано с некоторой
«алгеброй» — правилами действия над изучаемыми объектами,
которые отражают связи между причинами и следствиями. Ко-
гда подобная алгебра оказывается достаточно развитой, мы го-
ворим, что в рамках данной модели возникла теория. Иногда
говорят о деталвной разработке теории. Отдельные факты тео-
рии— утверждения, теоремы — иногда называются законами
(второй закон Ньютона, закон Стокса и т. д.). Точно так же
ряд исходных положений феноменологического характера,» хо-
рошо проверенных опытом, также называется законами По-
этому иногда говорят, что теория (или модель) опирается на
законы.
Построение математических моделей является основой всего
системного анализа. Это — центральный этап исследования или
проектирования любой системы. От качества модели зависит
судьба всего последующего анализа.
Конечно, и в исследовании операций, и в теории управления
построение моделей всегда занимает важное место. Но только
в последнее время, с возникновением системного анализа, ко-
торый оперирует с процессами, связывающими явления различ-
ной физической природы, возникла практическая необходимость
более глубокого изучения принципов .моделирования (матема-
тического описания).
Построение моделей — всегда процедура неформальная, и,
конечно, оно очень сильно зависит от исследователя, его опыта,
таланта, всегда опирается на определенный опытный материал,
в связи с чем мы говорим, что процесс моделирования имеет
138 ГЛ. HI. КИБЕРНЕТИЧЕСКИЕ СИСТЕМЫ И ИМИТАЦИЯ
феноменологическую основу, Модель должна достаточно пра*
вильно отражать явления, однако одного этого еще мало, Она
должна Рыть удобной для использования. Поэтому степень де-
тализации модели, форма ее представления определяются це-
лями исследования и непосредственно зависят от исследова-
теля. Работая с одним и тем же опытным материалом, разные
исследователи могут представлять его различным образом.
Изучение и формализация опытного материала — не един-
ственный способ построения математической модели. Важную
роль играет получение моделей, описывающих частные явления,
из моделей, описывающих явления более общие. Так, модель
пограничного слоя Прандтля может быть выведена из более
общей модели — уравнений Навье — Стокса. Она является,
асимптотической моделью. Новый экспериментальный материал’
может привести к более совершенной модели, и тогда ранее
известная модель сделается асимптотической. Такая судьба по-
стигла ньютоновскую механику, которая долгое время была чи-
сто феноменологической моделью. Но после создания специаль-
ной теории относительности она превратилась в ее следствие и
может быть выведена из нее с помощью предельного перехода
о2/с2 ->• 0, где v — скорость собственного движения, с — скорость
света. Подобных примеров много. Они иллюстрируют важную
сторону развития естественных наук. Появление большого ко-
личества «асимптотических» моделей говорит о зрелости науч-
ной дисциплины, о глубоких логических связях между отдель-
ными явлениями, познанными в рамках данной дисциплины.
Сегодня математическое описание, построение математиче-
ских моделей охватывает чрезвычайно обширные области зна-
ния, и выработано немало принципов и подходов, носящих в
современных условиях уже достаточно общий характер. Оста-
новимся на этом подробнее.
Основная задача научного анализа — выделить реальные
движения *) из множества мысленно допустимых, сформулиро-
вать принципы их отбора. Проблема математического модели-
рования состоит в описании этих принципов отбора в тех тер-
минах и переменных, которые наиболее полно характеризуют
изучаемый предмет. Принципы отбора сужают множество до-
пустимых движений, отбрасывая те, которые не могут быть
реализованы. Чем более совершенна модель, тем уже стано-
вится множество реальных движений, тем точнее оказывается
прогноз. В различных областях знания принципы отбора дви-
жений разные. После появления работы Ф. Энгельса «Анти-Дю-
ринг» стало принятым различать три уровня организации , ма-
*) Здесь и далее термин «движение» употребляется в широком смысле —
изменение вообще, всякое взаимодействие материальных объектов.
$ 2. ПРОБЛЕМЫ МОДЕЛИРОВАНИЯ
139
терии: неживая материя, живая материя и самая высокая орга-
низация материи — мыслящая, познающая себя материя —об-
щество. Такое деление оправдано' качественно различными
принципами отбора реальных движений, не сводимыми к прин-
ципам нижних уровней организаций.
На самом нижнем уровне — уровне неживой материи —
основными принципами отбора являются законы сохранения ве-
щества, импульса, энергии и т. д. Любое моделирование должно
начинаться с выбора исследователем основных (или, как гово-
рят, фазовых) переменных, с помощью которых он.записывает
законы сохранения.
Но законы сохранения не выделяют единственного движения
• и не исчерпывают всех принципов отбора. Необходимо учиты-
вать второй закон термодинамики, принципы минимума дисси-
пации энергии, устойчивости. Очень важны всякого рода усло-
вия (ограничения): граничные, начальные и др.
Законы сохранения являются в некотором смысле «абсо-
лютными», но их недостаточно. Они не обеспечивают однознач-
ности возможных движений. Другие принципы отбора произво-
дят дальнейшее сужение множества возможных движений. •
Принцип минимума диссипации энергии отбирает, например,
из числа возможных движений, подчиняющихся законам сохра-
нения, те движения, реализация которых приводит к минималь-
ному росту энтропии. Принцип устойчивости приводит к тому,
что исследователь может сосредоточить свое внимание на изу-
чении лишь тех форм движения, характерное время существова-
ния которых достаточно большое, и т. д.
Между принципами отбора существует определенная «иерар-
хия». Изучение турбулентности показывает, например, что су-
ществует лишь та ее форма, которая, будучи устойчива, одно-
временно приводит к минимальной скорости роста энтропии.
Построение модели и ее последовательная разработка опи-
раются на принципы отбора и, в свою очередь, формируют новые
принципы отбора, т. е. те законы, выйти за рамки которых изу-
чаемый процесс не может. На уровне живой материи все прин-
ципы отбора движений, справедливые в неживой материи, со-
храняют свою силу*). Поэтому и здесь процесс моделирования
*) Тот. факт, что законы, справедливые для неживой материи, сохраняют
стою силу и для живой материи, долгое время был предметом дискуссий.
Особенно много трудностей вызывал второй закон термодинамики. Этот во-
Врос был решен в тридцатых годах Л. Берталанфи, который, по-видимому,
Первым показал, что живые существа являются открытыми системами. Этр
означает, что они не могут существовать без обмена веществом и энергией
с окружающей средой (этим-то и объясняются наблюдаемые у ни-х уменьше-
ния энтропии). Эти исследования составляют основной вклад Берталанфи в
биологию и «теорию систем» (см. книгу [21]).
140
ГЛ. IT I КИБЕРНЕТИЧЕСКИЕ СИСТЕМЫ И ИМИТАЦИЯ
начинается с записи законов сохранения. Однако основные пе-
ременные оказываются уже иными.
Пусть, например, речь идет о какой-либо биологической
макросистеме. Основное содержание происходящих в ней про-
цессов— существование сообществ биологических видов. Впер-
вые систематически динамику подобных' систем начал изучать
итальянский математик В. Вольтерра. Наиболее характерными
для таких систем являются процессы потребления пищи. Зна-
чит, законы сохранения вещества и энергии должны быть вы-
ражены в терминах трофических связей — кто кого ест и в каком
количестве. Именно вывод этих соотношений и их- исследование
составляют содержание книги [3].
Но тех принципов отбора реальных движений, которые свой-
ственны неживой природе, недостаточно, чтобы объяснить со-
держание процессов, .происходящих в живом мире. При функ-
ционировании живых организмов происходит отбор движений
(конечно, согласно законам неживой'материи), которые не яв-
ляются следствием законов сохранения, определяющих течение
процессов в неживой природе. Здесь дело осложняется тем, что
живой материи свойственны целесообразные действия, поэтому
объяснить наблюдаемое в живом мире без использования поня-
тий обратной связи и информации оказывается невозможным.
В дальнейшем изложении мы будем часто использовать
термин «гомеостазис». Существует несколько его определений,
заметно отличающихся друг от друга. Мы условимся называгь
областью гомеостазиса организма (или областью стабильности)
ту область внешних параметров (параметров среды), внутри
которой возможно существование организма.
Живой организм стремится сохранить свою стабильность —
гомеостазис. Это означает, что при различных внешних условиях
он должен вести себя так, чтобы его состояние не вышло из той
области параметров, которая обеспечивает возможность про-
должения существования организма. Любой живой организм об-
ладает рецепторами (датчиками),’позволяющими ему оценить
свое положение по отношению к границе гомеостазиса (век-
тор х), и способностью к определенным действиям (вектор и).
Таким образом, получая информацию (сигнал) об окружающем
его мире, он формирует свои действия в зависимости от харак-
тера этой информации. Последнее означает, что действия жи-
вого организма, т. е. реальные движения, выбираются вполне
определенным образом — с помощью обратной связи
(2.1).
организм стремится уйти от своей гомеостатической границы.
Это означает, что живой организм обладает вполне определен-
ным поведением: он способен изменять свое положение по от-
$ 2. ПРОБЛЕМЫ МОДЕЛИРОВАНИЯ
141
ношению к границе области гомеостазиса, он способен изме-
нять в определенных границах свои внутренние характеристики,
меняя тем самым структуру области гомеостазиса. В известных
условиях организм может изменять и сами характеристики
окружающей среды.
Стремление сохранить свой гомеостазис порождает вполне
определенные механизмы отбора реальных движений (поведе-
ния), не выводимые из принципов, определяющих течение про-
цессов в неживой природе.
Вопрос о возможности объяснить явления, наблюдаемые в
живом мире, с позиций физики (или химии) носит название
проблемы редукционизма. Она имеет большую историю. Работы
Берталанфи внесли определенный вклад в ее решение. Они, во
всяком случае, показали,, что законы физики нельзя игнориро-
вать при изучении процессов, происходящих в живой природе, но
не больше. Проблема редукционизма до сих пор открыта. И в
этих вопросах мы вынуждены следовать принципам В. И. Вер-
надского, который, обсуждая проблемы развития жизни на Зем-
ле' и влияние этого развития на эволюцию Земли как системы,
не мог, конечно, пройти мимо проблемы возникновения жизни.
И он лучше, чём, может быть, кто-то другой, понял, сколь слож-
на эта проблема. Осознавая, что ее исследование вряд ли ему
доступно, В. И. Вернадский предлагал считать, что эта про-
блема находится за кадром той дисциплины, тех исследований,
которыми он занимался. Он считал необходимым констатировать
существование жизни, и только!' Только благодаря такому ис-
кусственному сужению предмета исследований, благодаря вве-
дению своеобразного постулата В. И. Вернадскому удалось
построить одну из самых выдающихся системных конструкций
современного естествознания — биогеохимию. Мы находимся
примерно в таком..же положении. Мы можем только констати-
ровать наличие определенных механизмов, без которых пред-
ставить существование и функционирование биологических мак-
росистем невозможно, а вопрос о том, как они связаны с прин-
ципами отбора, с законами, найденными в физике и химии,
считать находящимся за кадром системного анализа (точнее,
тех его вопросов, изучением которых мы занимаемся).
Итак, описать функционирование любой живой системы мы
не можем без использования обратных связей. Подчеркнем еще
раз, что связи вида (2.1) называются обратными связями лишь
Тогда, когда они не могут быть выведены из общих законов
физики. Это обстоятельство не всегда правильно понимается, и
термин «обратная связь» в системном анализе часто исполь-
зуют также для тех связей, которые могут быть выведены, на-
пример, из законов, сохранения. Здесь й далее, когда мы гово-
рим об обратных связях, мы имеем в виду только те связи,
142
ГЛ. III. КИБЕРНЕТИЧЕСКИЕ СИСТЕМЫ И ИМИТАЦИЯ
которые носят целесообразный или целенаправленный харак-
„ тер. Поэтому употреблять термин «обратная связь» для опи-
сания каких-либо явлений, происходящих в мире неживой ма-
терии, смысла не имеет: любой термин следует использовать
лишь тогда, когда без него нельзя обойтись.
Примечание. Понятие «обратная связь» родилось в технике. И здесь
его использование вполне уместно, ибо технические системы — это порождение
целенаправленной деятельности человека. Технические системы можно рас-
сматривать как четвертый уровень организации материи — неживая материя,
созданная целенаправленной деятельностью людей. Поэтому понятия инфор-
мации, обратной связи вполне уместны при описании технических систем. На-
пример, структура обратной связи, реализуемой автопилотом, — следствие не
законов сохранения, а замысла конструктора.
Биологические системы относятся к классу управляемых си-
стем рефлексивного типа. Управляемых — потому что они со-
держат свободные функции, находящиеся в распоряжении этих
систем, и используют их для достиженйя своих целей, а реф-
лексивного типа — в силу рефлексности функций поведения.
Термин «рефлексивный» подчеркивает простоту зависимости
управляющей функции от информации (рефлекса от возбужде-
ния). Этот термин введен в науку биологами и прежде всего
школой И. П. Павлова, и мы будем использовать его именно
в этом исходном смысле.
При описании функционирования биологических форм орга-
низации материи большую роль играет понятие «организм».
Организмом мы называем любую систему, обладающую соб-
ственными целями и способностью (ресурсом) для их достиже-
ния, т. е. целенаправленными действиями. Только организм
' способен индуцировать петли обратных связей.
Отдельный индивид является организмом. Это очевидно.
Определенные особенности организмов проявляют, например, и
группы животных. Оказывается, что и популяцию в известных
условиях можно рассматривать как организм [36]. Любая био-
логическая макросистема всегда является иерархической систе-
мой. При анализе легко обнаруживается, что цели более высо-
кого иерархического уровня, как правило, не тождественны
целям нижнего уровня. Например, интересы стада в целом (т. е.
гомеостазис) не тождественны стремлению сохранить ^гомеоста-
зис отдельного животного. Более высокие иерархические уровни
уже нельзя считать организмами. Например, биогеоценоз (эко-
система), вероятно, не является организмом," хотя и можно
говорить о гомеостазисе биогеоценоза. Однако он, по-видимому,
.не обладает необходимой потенцией для организации верхней
петли обратной связи, т. е. целесообразного использования ре-
сурсов для сохранения гомеостазиса биогеоценоза в целом. Но'
это вовсе не означает, что описать динамику экосистемы можно
§ 2. ПРОБЛЕМЫ МОДЕЛИРОВАНИЯ
143
без использования понятия обратной связи, ибо экосистема со-
стоит из большого количества организмов.
Тот факт, что описать функционирование любой живой ор-
ганизации без использования понятия «обратная связь» нельзя,
стал известен достаточно давно,, по крайней мере до того, как
появился сам термин «обратная связь». Во всяком случае в
1911 г. этот факт был уже известен А. А. Богданову. Принцип
обратной связи в современных терминах был сформулирован
в 1931 г. создателем биокибернетики П. К. Анохиным.
Примечание. Таким образом, претензии Н. Винера на то, что именно
он ввел принцип обратной связи в теорию биологических систем, кажутся, по
меньшей мере, неосновательными.
Итак, при описании биологических макросистем мы должны
основываться на законах сохранения и системе обратных свя-
зей, которые ча'сто называются функциями поведения.
На рбщественном уровне организации материи возникает со-
вершенно новое явление — трудовая деятельность. Именно по-
этому для описания моделей в этой области мы должны поль-
зоваться терминами трудовой деятельности людей (экономи-
ческими терминами). В качестве примера рассмотрим известные
балансовые соотношения производства.
Обозначим через х вектор производимой продукции. Его
компоненты — это количества отдельных видов произведенной
продукции. Например, х1— это количество выплавленной стали,
х*— цветных металлов, х3— металлорежущих станков и т. д.
Через А=(а(/) обозначим матрицу прямых затрат, т._ е. вели-
чина aij определяет количество продукции вида /, необходимое
для производства единицы продукции вида i. Тогда очевидно
следующее балансовое соотношение:
х = Ах +' у,
или, в координатной форме,
х1 = £ацх1 + у1, I, j<=l, .... п. (2.2)
Вектор у = {у1, .. •, Уп} называется вектором конечного про-
дукта .(этот продукт может быть использован на инвестиции,
потребление, отправлен на склад и т. д.).
Соотношения (2.2) являются простейшей экономической мо-
делью, так называемой моделью Леонтьева (по имени амери-
канского экономиста В. В. Леонтьева, который впервые, еще
в тридцатые годы, начал использовать модели подобного рода).
Эта модель использует только законы сохранения (балансовые
соотношения). Подобно моделям Вольтерра, балансовые мо-
дели в экономике описывают потоки материи — материальных
144
ГЛ. Ill, КИБЕРНЕТИЧЕСКИЕ СИСТЕМЫ И ИМИТАЦИЯ
ценностей, продуктов. В настоящее-время существует обширная
теория подобных (продуктовых)- моделей.
Описывая процессы, протекающие на биологическом уровне
организации, мы говорим о целесообразных действиях. Очевид-
но, что при описании процессов, протекающих в человеческом
обществе, следует говорить о действиях целенаправленных.
Здесь мы также говорим об обратных связях, об информацион-
ных процессах, которые при этом оказываются неизмеримо
сложнее, чем в случае неживой материи. Заметим, что при
описании процессов, протекающих в неживой материи,-у нас
нет необходимости использовать термин «информация». Он воз-
никает только тогда, когда может идти речь о целесообразных
или целенаправленных действиях, т. е. только на уровне живой
материи.
В биологических системах мы имеем дело с очень простыми
информационными процессами. Функции поведения рефлексного
типа, которые описываются простыми функциональными зависи-
мостями: < t
реакция — f (сигнал^
по существу являются параметризацией информационных про-
цессов, протекающих в биологических системах. Иное дело —
процессы, протекающие в человеческом обществе. При их мо-
делировании мы уже часто должны специальным образом опи-
сывать процедуры обработки информации,.и не только потому,
что эти, процессы могут быть достаточно длительными и слож-
ными из-за объема информации, которая функционирует в си-
стеме. Самое главное, наверное, состоит в другом. Человек на
основе информации принимает решение, и связь сигнал — реак-
ция уже не носит характера рефлекса. Она, во-первых, является
сложным.оператором, и во-вторых, не однозначна. Нам прихо-
дится сталкиваться с необходимостью учета субъективного фак-
тора. Этими обстоятельствами трудности построения моделей,
описывающих функционирование человеческих коллективов, не
исчерпываются. Выше уже была отмечена роль понятия орга-
низма и то, что организмом является не только каждое живое
существо, но при известных условиях и группа живых существ,
и даже популяция в целом. Но этими макрбсистемами практи-
чески и исчерпывается «организмичность» биологического уров-
ня организации. Иное дело — человеческое общество. Здесь
практически любая группа людей, любой человеческий коллек-
тив имеют свои цели и средства их достижения. (Особенное зна-
чение приобретают сообщества, связанные с производственной
деятельностью людей.) Интересы различных групп могут ока-
зываться сильно отличающимися друг от друга. В предельном
случае — в случае классов — эти интересы часто носят антаго-
$ 2. ПРОБЛЕМЫ МОДЕЛИРОВАНИЯ
145
нистический характер. Для того чтобы описать более или ме-
нее адекватно реальности любой процесс, происходящий в об-
ществе, мы необходимо должны уметь описывать сложнейшую
гамму общественных интересов и противоречий. Классическая
политэкономия дает блестящий пример такого-объединения чи-
сто экономических и социальных начал, без которого понять
суть общественных процессов и построить модель, обладающую
хорошими прогностическими возможностями, видимо, нельзя.
Ясно, что интересы (цели) различных групп связаны е их
гомеостазисом, и поэтому здесь также уместно говорить о го-
меостатических общностях. Но связи условий гомеостатической
стабильности, целей, которые непосредственно влияют на ха-
рактер решений принимаемых субъектами (мы отождествляем
понятия организма и субъекта), с самими действиями, предпри-
нимаемыми для достижения этих целей, как правило, весьма
опосредовании. Ни о какой рефлексности здесь не может быть
и речи. Человек обладает способностью анализировать проис-
ходящие процессы,-предвидеть исходы своих действий, строить
гипотезы о поведении других субъектов, предугадывать их дей-
ствия и т. д. Поэтому обратные связи, которые возникают в
человеческом обществе, не могут быть реализованы с помощью
простейших функций поведения рефлексного типа. Математи-
ческое описание этой нерефлексности — труднейшая проблема.
Очень часто (скорее, как правило) мы не в состоянии форма-
лизовать процессы общественной природы и должны использо-
вать для их описания параметризацию в форме функций пове-
дения, полученную на основе экспертных оценок. Неопределен-
ности, с которыми мы сталкиваемся при описании таких
процессов, приводят к необходимости создания специальной
техники анализа, о которой мы уже говорили в предыдущих
главах и которой, по существу, и .посвящена основная часть
этой книги. .
Несмотря на все трудности, математическое описание, т. в.
математическое моделирование, превратилось в развитое науч-
ное направление. Конечно, в разных областях человеческого
знания модели играют различную роль. Если в физике и тех-
нике исследование математических моделей — это один из
основных методов исследования и проектирования, то в про-
блемах изучения биологических и социальных макросистем
математические модели служат не столько для получения точ-
ных количественных характеристик, сколько для нахождения
оценок, позволяющих видеть допустимые границы наших дей-
ствий или возможности исследуемых процессов, тенденции их
развития. Весьма велика роль математических моделей как
единого языка описания, позволяющего структуризовать и ка-
нонизировать усилия исследователей.'
146
ГЛ. III. КИБЕРНЕТИЧЕСКИЕ СИСТЕМЫ И ИМИТАЦИЯ .
Подводя итог сказанному, рассмотрим сложившуюся в на-
стоящее время некоторую условную классификацию математи-
• ческих моделей по характеру и способу использования произ-
вольных функций и параметров, которые они содержат.
а) Модели без управления. Они описывают.динами-,
ческие процессы (с помощью, например, дифференциальных или
разностных уравнений), которые не содержат свободных пара-
метров или функций, к их числу относится большинство чисто
прогностических моделей, когда заданное начальное состояние
определяет траекторию процесса. Модели такого рода могут
быть и стохастическими, например, они могут содержать слу-
чайные величины и функции:
x = f(x, t, |),
где g— некоторый случайный вектор с известным законом рас-
пределения. В э.том случае нас будут интересовать не отдельные
траектории, а их статистические свойства, например среднее
значение.
Модели подобного рода являются типичными для описания
процессов, происходящих в неживой природе.
б) Модели, которые могут быть использованы
для оптимизации некоторых д^ й с т в и й. Рассмот-
рим динамический процесс, модель которого описывается урав-
нением вида
x = f(x, t, и), (2.3)
где выбор функции u(t, х) находится в распоряжении какого-то
субъекта. Вектор-функция u.(t,x) называется управлением.
Управление выбирается из условия достижения некоторой цели.
Весьма распространенный класс задач с помощью данной мо-
дели можно описать следующим образом: за время Т перевести
систему из состояния
х(О) = хо (2.4)
в состояние
'х(Т) = хт (2.5)
* так, чтобы «затраты» были минимальными, т. е.
т
F(x, и, /)(//-> min. (2.6)
о
Ограничения (2.4), (2.5) и целевую функцию (2.6) мы не
включаем в понятие модели. Для одной и той же модели (2.3)
могут ставиться разные задачи.
Обсуждению моделей подобного рода была посвящена пре-
дыдущая глава.
§ 3 КИБЕРНЕТИЧЕСКИЕ СИСТЕМЫ
147
в) Модели, которые могут использоваться для
анализа конфликтных ситуаций. Предположим, что
динамический процесс определяется действиями нескольких
субъектов, в распоряжении которых имеются управления: и,
v, w, ... Тогда
. i = f(x, I, и, v, w, (2*7)
причем управления будут выбираться из условий вида
г
и, v, w, ...,
о
т'
и> w> •••»
о
каждое-из которых отражает вполне определенные интересы
того или другого субъекта.
Анализ подобных моделей требует создания специального
аппарата. Они описывают класс систем, которые мы назовем
кибернетическими. Им будет посвящен следующий параграф.
Но оказывается, что описанными типами моделей еще не
охватывается большое количество ситуаций, необходимость изу-
чения которых и привела к появлению дисциплины, именуемой
системным анализом, — это ситуации, которые не могут' быть
полностью формализованы и для изучения которых необходимо
включение в математическую модель функционирующего «био-
логического» звена — человека (эксперта).
§ 3. Кибернетические системы
В предыдущем параграфе мы уже ввели понятие кирберне-
тических систем. Этим термином мы назвали класс систем, ко-,
торые являются обобщением управляемых систем. Еслипри
описании управляемой системы мы предполагали, что с систе-
мой ассоциирован какой-либо один субъект (оперирующая сто-
рона или исследователь), то с кибернетической системой будет
уже ассоциирована целая группа субъ^стов, обладающих соб-
ственными целями.
Когда мы говорим об управляемой системе, то самая глав-
ная ее особенность, которую мы имеем в виду, состоит в том,
что в системе существуют свободные функции, которыми может
распорядиться в своих интересах суоъект, ассоциированный с
системой. Система может быть динамической (описываться диф-
ференциальными или разностными уравнениями) или статиче-
ской, но она остается управляемой по существу. Точно так же
148 гл. ПТ. КИБЕРНЕТИЧЕСКИЕ СИСТЕМЫ И ИМИТАЦИЯ
кибернетическая система отличается прежде всего существова-
нием многих субъектов, каждый из которых имеет возможность
оказывать влияние на систему в целом, изменять характер ее
движения в своих собственных интересах. Это главное. Говоря
о кибернетических системах, мы будем чаще всего описывать
их дифференциальными уравнениями или рассматривать част-
ный случай статических задач. Но многое из того, что будет
сказано, относится и к тому случаю, когда 'эволюция таких си-
стем описывается разностными уравнениями. '
Итак, кибернетической системой мы будем называть систему
(2.7): ,
x = f(x, I, и, v, w, ..., £), (3.1)
где и, v, w, ... — управляющие функции, находящиеся в рас*
поряжении различных субъектов, но в отличие от (2.7),' рас-
смотрим более общий случай — правая часть (3.1) содержит еще
случайную вектор-функцию £(/).
При изучении управляемых систем мы всегда пользовались
описанием, которое отражало уровень знаний исследователя и
субъекта, т. е. всегда было субъективным. Поскольку модель
может дать лишь приближенное описание, то, отождествляя ее
с изучаемым процессом, мы всегда делаем известное предполо-
жение— формулируем гипотезу о соответствии модели изучае-
мому процессу. Следовательно, уже при изучении управляемых
систем' мы пользуемся субъективным описанием, ибо гипотеза
формулируется субъектом, отражает его представления, его ин-
формированность.
С кибернетической системой ассоциирован целый ряд субъ-
ектов, каждый из которых имеет собственное представление о
системе, и эти представления отнюдь не являются тождествен-
ными. Следовательно, при изучении кибернетических систем
тем более не может быть никакого «объективного описания», и
изучение кибернетических систем может проводиться лишь с
позиций определенного субъекта, основываться на его целях и
его представлении о ситуации.
Заметим, что в реальных системах подобного типа не су-
ществует звена (элемента), где бы концентрировалась вся
«объективная» информация о системе.
При изучении управляемых систем мы обращали внимание
на то, что субъекту приходится в условиях неопределенности
принимать определенные гипотезы об’окружающей обстановке,
действующих силах и т. д. При анализе кибернетических систем
эти гипотезы сильно усложняются. Для того чтобы, например,
сделать просчет какой-либо траектории системы, мы должны не
только задаться той или иной «моделью обстановки», т. е. сфор-
мулировать гипотезы о природе вектор-фулкций £(/), но и еде-
5 3. КИБЕРНЕТИЧЕСКИЕ СИСТЕМЫ
140
лать какие-то предположения о величинах управляющих воз-
действий, которые находятся в распоряжении других субъектов.
На основании каких же посылок мы можем предугадать дей-
ствия других субъектов?
Мы будем исходить из того предположения, что у каждого
субъекта существует некоторая объективная цель. А. если такая
цель существует, то ее обычно можно сформулировать в терми-
нах максимизации некоторого функционала. Для субъекта но-
мера I эту цель мы будем записывать в виде
/<-> max.
J-io дело в том, что эту цель мы, как правило, точно не знаем.
Более того, ее может не знать и сам субъект номера I (вспо-
мним рассуждения о неопределенности целей). •
Теперь предположим, что мы тем или иным образом сфор-
мулировали гипотезу о характере целей субъектов. Этого мало.
Действия субъекта, т. е. величины его управляющих воздей-
ствийг- будут еще зависеть от его информированности. Кроме
того, очень важно знать, что думают другие субъекты киберне-
тической системы о целях тогб субъекта, с позиций которого
ведется анализ, на базе какой информации они принимают ре-
шения, что они знают о его информированности и т. д. Таким
' образом, в отличие от обычных управляемых систем, выбор «на-
шего» управления, например u(t), будет определяться не только
«нашей» целью . -
Ji~*max
и заданием обстановки (т. е. £(/)). Мы должны изучить усло-
вия различного вида рефлексий,' их влияние на окончательный
результат принятого решения *и многое другое.
В настоящее время изучается уже довольно много разных
типов систем, но построить теорию, которая была бы достаточно
общей, наверное, пока еще не представляется возможным. По-
этому особое значение приобретает выделение классов систем,
для изучения которых можно использовать некоторые более
•Или менее общие подходы, об общих свойствах которых можно
говорить. Здесь мы опишем несколько систем, более или менее
соответствующих подобным требованиям, — это системы, обла-
дающие иерархической структурой, и системы гермейеровского
типа.
а) Причины, обусловливающие необходи-
мость введения иерархических структур. Иерар-
хия в системе предполагает определенное «неравноправие» —
^Подчинение одних элементов системы другим. Понятия «нерав-
ноправие», «подчинение» требуют, конечно, уточнения и коммен-
тариев.
150
ГЛ. III. КИБЕРНЕТИЧЕСКИЕ СИСТЕМЫ И ИМИТАЦИЯ
Сам термин «иерархическая организация» (или «иерархиче-
ская структура») употребляется при весьма различных обстоя-
тельствах. Иерархические системы широко распространены в
технике: например, сложная система связи, система обработки
данных, система управления транспортом и многие другие всегда
организованы по иерархическому принципу, который позволяет
выполнять параллельно различные операции, работать с от-
дельными информационными массивами и т. д.
Необходимость иерархической организации в технических
системах следствие их сложности, когда централизованная
обработка информации либо просто невозможна, либо требует
такой затраты времени (или средств), которая недопустима по
техническим условиям.
Термин «иерархия» употребляется в словосочетании с терми-
ном «управление» — например, «иерархическая система управ-
ления». Основная задача иерархической организации — распре-
деление функций обработки информации и принятия решений
между-отдельными элементами системы. Если объем информа-
ции, необходимый для принятия решения, невелик, то нет необ-
ходимости и в создании какой-либо системы распределения
Обязанностей по принятию решений: они могут выполняться
централизованно.
Любая структура — это дополнительные ограничения, в об-
щем случае сужающие множество допустимых стратегий. Обо-
значим через f(x) целевую функцию системы. Тогда очевидно,
что
max f (х) max f (х), (3.2)
хе Q' Xf=G
если только G' с: G.
Поэтому отказ от полностью централизованной системы
управления (преднамеренное сужение множества стратегий (?)
должен быть обоснован какими-то дополнительными обстоя-
тельствами. Для этого, в частности, необходимо более подробно
изучить структуру информационных процессов и зависимость
качества информации от организационной структуры системы.
Обозначим через f(«, g) целевую функцию, которую мы хо-
тим максимизировать. Вектор и = {«ь ит} — это вектор
управления, £ — переменная, характеризующая неопределен-
ность. Пусть в условиях полной централизации и е Gu и при
этом имеется некоторый уровень неопределенности £ е (?t. Сле-
довательно, гарантированная оценка значения целевой функции
будет иметь вид
f*=max min f(u, g). • (3.3)
u e Gu 5 e
Предположим теперь, что мы ввели в систему иерархическую
структуру управления. Это значит, что мы распределили функ-
§ 3. КИБЕРНЕТИЧЕСКИЕ СИСТЕМЫ 151
ции управления по отдельным звеньям. Другими словами, от-
дельные решения будут теперь приниматься по ограниченной
информации, без использования всего объема сведений. Напри»
мер, в системе управления транспортом мы можем представить
себе полную централизацию, когда выбор решения, например
составление расписания, будет проведен- с учетом состояния дел
на всех дорогах, всех станциях и разъездах. В принципе мы
можем провести подобные расчеты и создать «оптимальное
расписание», но для его составления потребуется столько вре-
мени, что в момент, когда расйисание будет готово, необхо-
димость в нем уже исчезнет. Поэтому мы вынуждены состав-
лять расписание для отдельных дорог или узлов, используя
лишь ограниченную информацию, касающуюся только этих
объектов. Следовательно, распараллеливая обработку информа-
ции, распределяя ее между отдельными звеньями, мы можем
принять решение, игнорируя более сложные зависимости, на-
пример ситуацию на соседней дороге. Значит, мы переходим к
более узкому множеству стратегий G' cz G. Но одновременно
происходит и уменьшение уровня неопределенности. При де-
централизованной обработке информации мы можем отдельные
ее массивы обрабатывать более подробно,- т. е. можем умень-
шить уровень неопределенности и повысить качество информа-
ции. Значит, теперь g s G( с: G$, и мы получим уже другую
гарантированную оценку!
f = max min f (и, g). (3.4)
При этом вопрос о том, рационально ли вводить в систему
управления данную структуру или нет, решается в конечном
Счете сравнением величин типа (3.3) и (3.4).
Таким образом, проблема оценки иерархической организа-
ции сводится к сопоставлению двух противоречивых тенденций.
Переход к иерархической структуре сужает множество страте-
гий, но одновременно и снижает уровень неопределенности, т. е,
делает возможным получение более качественного решения.
Выбор структуры системы, обладающей иерархической фор-
мой организации, встречает одну трудность. Количество воз-
можных архитектурных форм составляет некоторое конечное
множество. И проектируя систему, мы должны одновременно
выбрать и стратегию (определить значения управляющих функ-
ций), и наилучшую «архитектуру» организации. Итак, вариан-
тов допустимых иерархических структур обычно бывает не-
сколько. Мы говорим о том, что существует некоторое дискрет-
ное множество структур S. Если угодно, S — это множество
проектов. Каждому проекту — элементу $ е S — отвечают свое
152
ГЛ III. КИБЕРНЕТИЧЕСКИЕ СИСТЕМЫ И ИМИТАЦИЯ
множество стратегий use и свое множество неопределенно*
стей G|. Этим множествам отвечают свои гарантированные
оценки результата
Г = max min f (и, |),
Я употребил слова «в конечном счете», поскольку, прежде чем
и задачу проектирования иерархической структуры мы можем
в конечном счете сформулировать как задачу отыскания эле-
мента s е S. который решает задачу
fs-> max*), ' (3.5)
$€8S
решать задачу (3.5), мы должны еще построить само множе-
ство S. И если решение задачи (3.5) носит в определенной
степени формальный характер, то построение множества S —
множества возможных «конструктивных схем», — как правило,
носит характер некоторого изобретения и не является фор-
мальный.
Итак, в результате проектирования иерархической системы
-управления в технических системах мы произведем распреде-
ление функций принятия решения между отдельными звеньями
системы. При этом вместе с описанием «заданий» мы должны
сформулировать (спроектировать) определенный-алгоритм, т. е.
систему правил обработки информации и правил выбора реше-
ния на основе полученной информации. В результате мы полу-
чим некоторую систему рефлексного типа. ,
Примечание. Заметим, что звеньями этой системы будут скорее всего
люди, например диспетчеры. Тем не менее этим лицам в технических системах
предписаны вполне определенные правила поведения, отклонения от которых
можно рассматривать (без больших натяжек) как дополнительный «шум», по-
вышающий уровень неопределенности. Нерефлексность «биологических» звень-
ев в технических системах обычно можно-не учитывать. Следовательно, рас-.
Вределив «задания» между звеньями технической системы, мы можем ожи-
дать их невыполнения либо вследствие неисправности звеньев (в том числе и
плохой работы операторов или диспетчеров), либо вследствие появления не-
предусмотренных внешних помех.
С совершенно иной ситуацией мы сталкиваемся при проек-
тировании иерархических структур управления производствен-
ными, народнохозяйственными или любыми другими социаль-
ными системами, в которых главным объектом управления яв-
ляются не машины, а люди, где в полной мере проявляется
нерефлексная природа социальных систем.
*) Изложенная схема оценки качества организационной структуры отно-
сится к техническим (рефлексным) системам. Перенос этих рассуждений на
нерефлексные системы требует, как мы увидим ниже, дополнительных гипо-
тез и машинного эксперимента с помощью имитационной системы.
15»
§ 3. КИБЕРНЕТИЧЕСКИЕ СИСТЕМЫ
Причины, порождающие необходимость создания в социаль-
ных системах иерархических структур управления, в принципе
те же, что и в технических, — невозможность централизованной
переработки информации. В результате невозможность перера--
ботать за заданное время нужным образом информацию (обо-
сновать решение) приводит к тому, что решения оказываются
недостаточно продуманными, что эквивалентно высокому уров-
ню неопределенности. Поэтому приходится распараллеливать
обработку информации и «делегировать» права принятия реше-
ния нижним звеньям иерархии.
Например,. директор треста , совхозов какого-нибудь боль-
шого региона не может знать деталей обстановки в каждом из
совхозов с той степенью подробности, как это знают директора
отдельных совхрзов. И поэтому решения, которые могут при-
нять эти директора, будут более обоснованными (с точки зре-
ния тех целей, к которым они будут стремиться), чем решение,
принятое на верхнем уровне. Отсюда и возникает необходимость,
в определенной децентрализации принятия решений, т. е. де-
-централизации управления. Однако вместе с децентрализацией
в системе возникает и целый ряд особенностей, которые в прин-
ципе снижают эффективность функцйонирования системы. Пре-
жде всего, так же как и в технических системах, происходит
сужение множества стратегий, связанное с тем, что нижние
звенья работают толькр-х частью информации..Но, кроме того,
в социальных системах возникают еще новые обстоятельства,
качественно усложняющие анализ.
Как только отдельной части организма «делегируются» пра-
ва по принятию решений, она приобретает определенные воз-
можности достижения собственных целей, которые ей объек-
тивно присущи, т. е. становится самостоятельным организмом, и
неизбежно возникают определенные противоречия между частью
и целым.
Если в технических системах мы выделяем, например, неко-
торый ресурс какому-либо из звеньев системы, то одновременно
мы определяем способ его использования. Этот способ при дан-
ных конкретных условиях, которые станут известны в опреде-
ленный момент диспетчеру (или автомату), должен обеспечить
максимальную эффективность системы в целом. Наша задача
как проектировщиков технической системы управления — опре-
делить этот способ использования ресурса (например, составить,
диспетчерский график функционирования водохранилища в за-
висимости от особенностей паводка, которые станут известны
к моменту начала паводка).
Иное дело — социальные системы. Конечно, и здесь мы мо-
жем предложить (спроектировать) те или иные рецепты ис-
пользования выделенных ресурсов. Но нельзя не считаться е
164
ГЛ. III. КИБЕРНЕТИЧЕСКИЕ СИСТЕМЫ И ИМИТАЦИЯ
тем, что нижние звенья приобрели все особенности организма
й им присущи собственные цели и интересы, к которым они
будут стремиться, используя приобретенные возможности. Зна-
чит, и управлять этими системами надо иначе, чем техниче-
скими, с учетом объективных особенностей, которыми обладают
социальные системы.
Вопрос о возникновении объективных целей у социальных
групп и систем очень сложен. В конечном счете он так или
иначе связан с гомеостазисом. Но все эти связи очень опосре-
дованны, преломлены через призму традиций социальной ин-
фраструктуры, и проследить их далеко не просто. Эта проблема
ждет еще своего глубокого философского и социального ана-
лиза. Но в тех конкретных ситуациях, с которыми имеет дело
исследователь вполне определённой системы,- подчас можно из-
бежать анализа этих трудных вопросов и более или менее точно
назвать основные цели. При этом надо всегда помнить о су-
ществовании противоречий, о том, что любая сформулирован-
ная цель является- известным компромиссом. Да и создание
самой иерархической структуры в социальных системах — это
тоже всегда некоторый компромисс.
Я подробно говорил о роли информации при создании иерар-,
хических систем. Но можно привести и другой аргумент в
пользу их создания. Субъекты объединяются в иерархическую
структуру, потому что это им «выгодно»: ограничивая свои
желания, они при этом лучше обеспечивают свою стабильность.
Например, интересы (цели) какого-либо отдельного пред-
приятия (организации) — это всегда результат разрешения про-
тиворечий между верхним уровнем, например объединением, в
которое входит предприятие, и самим предприятием.
Руководствуясь подобными соображениями, во многих кон-
кретных случаях уже можно с более или менее удовлетвори-
тельной точностью перечислить цели изучаемого организма.
Примечание. При описании кибернетических систем (особенно в про-
цессе формирования гипотез поведения субъектов системы) неизбежен высо-
кий уровень неопределенности. Это отсутствие четкости в постановке матема-
тических задач всегда следует иметь в виду, выбирая метод исследования.
б) Возможные схемы иерархических органи-
заций. Простейшей схемой иерархической организации си-
стемы управления является так называемая двухступенчатая
веерная структура (рис. 3.1). Этот термин определяет систему,
в которой существует один привилегированный субъект, кото-
рый имеет возможность управлять остальными субъектами. По-
ясним содержание этого термина. Некий субъект, впредь име-
нуемый Ц (Центром), стремится достичь определенных целей,
которые мы будем описывать так:
F(xh ..., xN, yi....#y)->max. . (3.6)
« 3. КИБЕРНЕТИЧЕСКИЕ СИСТЕМЫ
. .155
Здесь xi — управляющие воздействия Центра на отдельные
звенья П\, Пн, которые мы условимся называть Произво-
дителями. Они обладают собственными целями:
fi(xh yt)-* max . (3.7}
Таким образом, интересы Производителей определяются вели-
чинами yt, которые находятся в их собственном распоряжении,
и величинами Xi, которыми распоряжается Центр. В этой про-
стейшей схеме предполагается, что значение целевой функции
Производителя номера i не зависит от действий других Произ-
водителей*).
Неравноправие субъектов проявляется в том, что именно
Центр назначает правила формирования воздействий х,-, кото-
рые зависят тем или иным образом от действий Производителей
(от их выбора величин yi), и Производителям эти правила
становятся известными в тот момент, когда они принимают ре-
шения о выборе величин yi. Тем самым Центр в иерархических
системах описанного типа имеет возможность (которая иногда
называется правилом первого хода) направлять в нужное русло
усилия нижних звеньев. Заметим, что в описанной схеме Центр
передает определенную информацию нижним звеньям, — это для
него может оказаться выгодным.
Говоря об оптимальном управлении в иерархических систе-
мах, мы имеем в виду такой выбор xi, который предполагает
при данных значениях функций fr, характеризующих интересы
отдельных звеньев, максимизацию целевой функции (3.6).
Естественным обобщением двухступенчатой является мно-
гоступенчатая иерархия. На рис. 3.2 изображена возможная
схема трехступенчатой иерархической организации. Целевая
функция Центра Цо будет иметь вид
, F^F(xi, .... xk, yi, ук),
*) Веерная иерархия является самой изученной из иерархических струн*
тур. См., например, [5, 8, 44, 45].
166
ГЛ. НТ. КИБЕРНЕТИЧЕСКИЕ СИСТЕМЫ И ИМИТАЦИЯ
где xi, ...» хк — управления, которые находятся в' распоря-
жении центра До (воздействия Центра Цо на элементы
Дъ Целевые функции последних будут иметь вид
fi — fi(ул» •••*» Уш? zn>...2«;)> t=l, 2, ..., k,
где уц — это управление Hi (Центра номера I): его воздей-
ствие на Пц (Производителя номера /, подчиненного Ui).
И наконец, целевые функции Производителей Пц будут
= «</). k\ i=*\, .... Nt;
где величины Zu характеризуют действия Производителей. Пер-
вый ход в этой иерархической структуре делает Центр Цо —он
сообщает правила назначения управляющих воздействий Цент-
рам Hi в зависимости от их выбора (от их действий). Следую-
щий ход делается Центром Hi (/ = 1, 2, .... k), который со-
общает правила выбора воздействий уц.
В этих схемах предполагается, что обмен информацией ндег
только вдоль иерархической лестницы: звенья одного и того же
уровня информацией не обмениваются. Могут быть рассмотрены
и такие обобщения описанных структур, где возможен опреде-
ленный уровень обмена информацией.
Изучение реальной жизни сталкивает нас с самыми неожи-
данными формами иерархической связанности, отражающими
сложность и взаимообусловленность разнообразных процессов
общественной природы, производства и многообразие интересов
общественных и производственных организмов. Рассмотренные
иерархические структуры отражают важные особенности отрас-
левого управления: отрасль подчиняется государству и/ в свою
очередь, распадается на главки, тресты, отдельные предприя-
тия. Иерархия веерного типа встречается в системах управле-
ния войсками (откуда, вероятно, она и -перекочевала в хозяй-
$ 3. КИБЕРНЕТИЧЕСКИЕ СИСТЕМЫ
157
ственное управление). Конечно, в реальной жизни'она бывает
более сложной. Мы сталкиваемся и с неизбежным обменом ин-
формацией в нижних звеньях, и с передачей информации через
несколько уровней иерархии. Тем не менее описанные схемы
охватывают основные особенности широкого класса иерархиче-.
ских форм взаимодействия субъектов в реальных кибернети-
ческих системах. Поэтому их изучение в последнее десятилетие
превратилось в большое самостоятельное направление приклад-
ной математики и системного анализа. -
’ Но схемы веерного типа, конечно, не исчерпывают всего мно-
гообразия возможных схем иерархической связанности. В по-
следние годы важное значение стало приобретать изучение
иерархических организаций так называемой ромбовидной струк-
туры.
Любое предприятие находится. в довольно сложных, конф-
ликтных отношениях с другими членами иерархической органи-
зации. Прежде всего, оно подчиняется отрасли — является зве-
ном отраслевого управления. - Но одновременно предприятие,
которое находится на территории того или иного города, райо-
на, является и элементом региональной инфраструктуры. Дру-
гими словами, оно входит и в иерархию региональной системы
Рис. 3.3.
управления. Ситуация, в которой находится предприятие, схема-
тично представлена на рис. 3.3. Подобные структуры называют-
ся ромбовидными. Направление стрелок показывает направле-
ние, «подчиненности».
Верхний уровень располагает определенными возможностя-
ми влиять на действия второго уровня, т. е. отраслевого и
регионального управлений. В свою очередь, отрасль может ока-
зывать управляющие воздействия на деятельность Производи-
теля и практически почти не способна оказать влияние на ре-
шения, которые принимаются на региональном уровне. То же
158
• ГЛ. HI. КИБЕРНЕТИЧЕСКИЕ СИСТЕМЫ И ИМИТАЦИЯ
самое можно сказать н о региональном управлении. Оно имеет
разнообразные возможности влиять на характер решений, при-
нимаемых на уровне предприятий, расположенных в данном
регионе, и практически лишено возможности влиять на реше-
ния, которые принимаются на уровне отрасли. Что касается
Производителя, т. е. предприятия, то его руководство всегда
должно принимать решение в условиях определенного конф-
ликта: с одной стороны, его действия ограничены региональным
и отраслевым управлением, а с другой стороны, оно имеет свои
собственные интересы, являющиеся следствием сложившихся
производственных отношений, правовых и юридических норм и
многих других факторов, определяющих жизнь и развитие об-,
щества.
На рис. 3.3 изображена лишь самая простая из возможных
схем ромбовидной иерархии. Так, например, государство может
декретировать определенные условия функционирования от-
дельного предприятия, т. е. непосредственно влиять на харак-
_ тер решений, принимаемых на нижнем уровне, отдельные ром-
бовидные структуры могут взаимодействовать и т. д. Тем не
менее схема, изображенная на рис. 3.3, отражает многие важ-
ные черты реальной, часто встречающейся на практике иерар-
хической структуры. Сегодня теория ромбовидной иерархии уже
стала объектом многих исследований .(см., например, [33]).
Интерес к подобным исследованиям мотивируется реалистич-
ностью постановки .задачи. Иерархия государственного управ-
ления необходимо представляет собой ячеистую структуру, ка-
ждая ячейка которой является ромбовидной структурой: реаль-
но й отраслевое, и региональное управления. Одним из вопросов
большой народнохозяйственной значимости является проблема
организации управления по отраслевому или региональному
принципу. Обе эти схемы не противоречат друг другу. Речь
должна идти о рациональном сочетании обоих типов управле-
ния, о разумном (можно при известных условиях говорить:
оптимальном) распределении прав и обязанностей между раз-
личными звеньями иерархии.
Мы описали несколько возможных схем иерархически орга-
низованных систем. Все они основаны на признании объектив-
ности интересов отдельных звеньев, на противоречии -целого и
.части. Это кардинальный пункт построения теории иерархиче-
ских систем, и, по мнению автора, он является ключевым для
понимания тех отправных позиций, которые позволят исследо-
вать механизмы, определяющие развитие экономических, эколо-
го-экономических и других социальных систем. .
в) Системы Гермейера. До сих пор мы рассматривали
кибернетические системы с иерархической организацией — их
участники не были равноправны. Однако существует обширный
§ 3. КИБЕРНЕТИЧЕСКИЕ СИСТЕМЫ
159
класс кибернетических систем, в которых все субъекты равно-
правны и в которых какая-либо иерархия отсутствует в прин-
ципе. К их числу относятся, например, все кибернетические си-
стемы, которые описывают международные конфликты, эволю-
цию экологических условий и многое другое. Функционирование
таких систем' требует принятия коллективных решений, поэтому
они не могут быть описаны с помощью иерархических схем.
В первой главе мы уже начали изучение систем, требующих
принятия коллективных решений, и указали трудности, которые
здесь возникают. Главная проблема в теории подобных си-
стем— найти разумные условия компромисса. Было показано,
ЧТОэодним из основных принципов является принцип Парето:
компромисс должен быть эффективным. Но принадлежности к
множеству Парето' еще недостаточно для формирования ком-
промисса. Мы говорили также и о принципе устойчивости Нэша.
Если компромисс удовлетворяет принципу Нэша, то субъектам,
принявшим компромисс, невыгодно отступать от своих обяза-
’ тельств. В этом случае еубъект, который нарушит условие ком-
промисса, будет нести потери.
В огромном большинстве конфликтных ситуаций, описанных
в литературе, устойчивые' компромиссы не являются паретов-
скими, а компромиссы, принадлежащие множеству Парето, не
являются устойчивыми. Однако существуют и исключительные
случаи, когда множество эффективных компромиссов содержит
устойчивые выборы. Как мы увидим ниже, подобные системы
имеют очень важное прикладное значение.
Ю. Б. Гермейером и И. А. Вателем [30] был изучен новый
•важный класс систем, которые как раз и обладают указанным
свойством. Была изучена ситуация, которая в теории исследо-
вания операций получила название «путешественники в одной
лодке». Представим себе, что в системе имеется N равноправ-
ных партнеров (субъектов), каждый из которых обладает опре-
деленными собственными целями. Но помимо собственных целей
все они обладают одной общей целью — доплыть до берега. Это
обстоятельство требует от каждого из субъектов, чтобы он во
имя достижения общей цели поступился частью своих ин-
тересов. .
Итак, мы рассматриваем систему, в которой имеется N субъ-
ектов, целевыми функциями которых будут i==_l, .... N,
где ресурс xi находится целиком в распоряжении субъекта но-
мера I. Но кроме этих целевых функций имеется еще некоторая
общая цель, которую мы условимся описывать функцией
Р(у\, Ее значения будут зависеть уже от деятельно-
сти всех партнеров: у; — ресурс, который выделяет субъект но-
мера I для достижения общей цели, — его вклад в коллектив-
ную цель.
160 ГЛ. III. КИБЕРНЕТИЧЕСКИЕ СИСТЕМЫ И ИМИТАЦИЯ
Таким образом, цели каждого из субъектов описываются
векторным критерием
ft(x{)->max, F(yu .... z/^-^max, (3.8)_
причем Xi + yt = a,, t=l, . ..„, N, где а, — некоторый суммар-
ный ресурс, который находится- в распоряжении субъекта но-
мера i. Значит, каждый из субъектов должен как-то разделить
свой ресурс: часть ресурса, величину Xt, он может направить
на достижение своих личных, «эгоистических» целей, а другую
часть ресурса, yi — — х/, он направляет на обеспечение об-
щественных интересов.
Примечание. Заметим, что подобная ситуация вполне типична. К ее
исследованию сводятся многие проблемы, имеющие важное практическое зна-
чение, например: проблема выполнения .общих обязательств, требований руко-
водства, проблема выделения средств для охраны или восстановления каче-
ства окружающей среды. Анализ-возможных вариантов действий суверенных
государств для достижения некоторой общей цели — военной, политической,
экономической — относится к тому же кругу вопросов.
Как мы знаем из первой главы, анализ подобной конфликт-
ной ситуации должен начаться со сведения векторного кри-
терия (3.8) к некоторому скалярному критерию. Положим
Л-ЧЧШ), F(yh ..., yN)), (3.9)
/
где ¥ — некоторый оператор свертки .критериев ft и F, на-
пример:
Л == min {Xif((xt); F (yit ..,, yN)} (3.9‘)
или
л=Л(ха+иГ(//ь.... м (3.95
где и ц — весовые коэффициенты, характеризующие степень
заинтересованности субъектов в достижении общей цели. Ки-
бернетические системы с критериями вида (3.9) будем назы-
вать. гермейеровскими.
Для кибернетических систем гермейеровского типа может
быть формализовано понятие гомеостазиса.. Границей области
гомеостазиса в пространстве переменных у\, уы будем на-
вивать поверхность F(y\, ..., yN)=Fe, выделяющую в этом
пространстве область существования всей совокупности субъ-
ектов (гомеостазиса, стабильности). Условимся, что области го-
меостазиса отвечает значение функционала F, превосходящее Fo.
Таким образом, максимизация функции F дает формальное
описание стремления субъекта находиться в возможно более
стабильном состоянии. •
Для статических гермейеровских систем справедлива сле-
дующая
§ 3. КИБЕРНЕТИЧЕСКИЕ СИСТЕМЫ
161
Теорема Гермейера —В ател я. Пусть fi, F—моно-
тонно возрастающие функции своих переменных. Тогда суще-
ствуют устойчивые решения, среди которых по меньшей мере
одно является эффективным.
Авторы этой теоремы не только установили ее справедли-
вость, но и предложили эффективный способ определения си-
туации равновесия. Он сводится к следующей системе процедур.
Упорядочим всех субъектов по принципу
1 (а1) W2 (az) ^ ... ^ kf/ffi (ац).
Тогда оказывается, что существует такое p^N, что все yi для
/ 5s р должны быть приняты равными нулю (т. е. субъекты,
у которых kifi(ai) малы, могут все свои ресурсы расходовать
на достижение своих внутренних (эгоистических) целей.
А остальные величины yi будут определяться из системы урав-
нений
hifM = F(yu •••» УР, 0........0), /—1,2, .... р.
В результате мы находим доли ресурса, выделяемые субъектами
на достижение общей цели. .Заметим, что часть партнеров во-
обще не принимает участия в коллективных мероприятиях. Эти
субъекты либо не обладают достаточным ресурсом, либо имеют
низкую технологию (ft (а/) мало), либо у них низка заинтересо-
ванность в итогах коллективного решения (%/ мало) (см. по-
дробнее [55]).
В работе [30] рассматривались лишь статические системы,
т. е. системы, не зависящие от времени. Вопрос о том, в какой
степени полученные результаты переносятся на динамические
системы, остается открытым.
Примечания. 1. Гермейеровские системы приобрели в последнее вре-
мя большое значение в связи с проблемами глобальной экологии. Дело в том,
что эколого-экономические системы глобального характера необходимо ока-
зываются гермейеровскими. В самом деле, нарушение равновесия биоты или
необратимое изменение климата могут вывести человечество из области его
гомеостазиса. Следовательно, каким бы ни был набор субъектов рассматри-
ваемой кибернетической системы, среди критериев, которыми они будут ру-
ководствоваться, всегда присутствует критерий стабильности, общий для всех
субъектов. Но если эта система гермейеровская, то целесообразно рассматри-
вать для нее проблему отыскания устойчивых коллективных решений, принад-
лежащих множеству Парето. Таким образом, изложенная система рассужде-
ний дает известные основания для построения теории, позволяющей исследо-
вать допустимые типы решений в процессах взаимодействия производственной
деятельности людей и окружающей среды. По мере своего развития такая
Теория может оказаться полезной для решения многочисленных проблем
Управления ресурсами и производственной деятельностью,, вызванных необхо-
димостью1 сосуществования.
2. Представляется весьма интересным изучение гермейеровских систем,
Обладающих определенной иерархической структурой, в которых к тому же
Субъекты обладают векторными критериями более общего вида, нежели (3.8).
в Н. Н. Моисеев
162
ГЛ. III. КИБЕРНЕТИЧЕСКИЕ СИСТЕМЫ И ИМИТАЦИЯ
.§ 4. Примеры иерархических .систем
В первой главе много места было уделено обсуждению осо-
бенностей конфликтов, в которых субъекты не являются равно-
правными. По существу, там уже были изложены схемы рас-
суждений и структура гипотез, которые обычно используются при
анализе и проектировании иерархических систем управления.
В этом параграфе мы рассмотрим ряд примеров, иллюстрирую-
щих особенности процедур принятия решений в конфликтах, где
партнеры неравноправны. Кроме того, в первой главе изучались
только статические системы. Динамика, развитие во времени
вносит целый ряд особенностей. Некоторые из них мы рассмот-
рим в этом параграфе.
а) Задачи распределения ресурсов в экономи-
ческой системе с иерархией. Рассмотрим объединение
N промышленных предприятий (трест, синдикат), выпускающих
однотипную продукцию. Будем предполагать, что это объедине-
ние организовано по принципу веерной иерархии. Во главе
объединения находится некоторая управленческая организа-
ция — управление трестом, которое мы будем называть Цент-
ром. Обозначим через Pt объем продукции, выпускаемой пред-
приятием (Производителем) номера i. Для упрощения рассу-
ждений величины Pi будем считать скалярами. Результат
функционирования Центра определяется результатами производ-
ственной деятельности Производителей — сам Центр .никакой
продукции не производит. Оценки деятельности Центра могут
быть самыми разными. Мы не будем останавливаться на их
детализации. Для нас важно лишь одно — целевая функция
Центра однозначно определяется продукцией, которую выпу-
скают Производители:
' J = J(Pt, ..., PN). (4.1)
Предположим еще, что Центр лишен возможности декрети-
ровать объемы производства Pt'. он может влиять на величи-
ны Pi лишь косвенно, учитывая интересы и цели Производите-
лей. Будем считать, что объем продукта Pi, произведенного
Производителем номера i, однозначно определяется объемом
фондов Xi и количеством рабочей силы £,•:
Pi = fdx{, Ц). (4.2)
Функция fi носит название производственной функции.
Примечание. Условие (4.2)—это некоторая гипотеза. Производствен-
ная функция предприятия описывает предельные возможности производства.
Строго говоря, равенство (4.2) должно было бы быть заменено неравенством
Pi<fi(*i< Li)> (4.3)
§ 4. ПРИМЕРЫ ИЕРАРХИЧЕСКИХ СИСТЕМ
163
и объем выпускаемого продукта следовало бы рассматривать в качестве
управляющего фактора, стесненного ограничением (4.3). Тем не менее мы
ограничимся анализрм того случая, когда Производитель использует свои
предельные возможности. *
Существуют различные способы аппроксимации производ-
ственной функции. В экономико-математических исследованиях
широкое распространение получила функция Кобба — Дугласа
^<=[0,1], 1=1, .... N, (4.4)
' где ai и ki — некоторые характеристики предприятия.
Будем считать, что доход Производителя Л равен стоимости
произведенной продукции за вычетом накладных расходов.
Условимся для простоты, что они сводятся только к оплате ра-
бочей силы. Если мы обозначим через ©i среднюю ставку зара-
ботной платы (фиксированную величину), то доход Л будет
равен
Ji = с iPt — &iLi, (4.5)
где Ci — цена продукта. Если величина фондов фиксирована, то
объем выпущенной продукции однозначно определяется количе-
ством рабочей силы Lt. Величина Li является управляющим
параметром, который полностью находится в распоряжении
Производителя.
Для того чтобы иметь возможность управлять действиями
Производителя, Центр должен располагать какими-то спосо-
бами воздействия на цели Производителя, которые он, разу-
меется, должен знать (или считать, что он их знает). Будем
предполагать, что каждый из Производителей стремится мак-
симизировать собственную прибыль:
Jl = ciPl — (UtLi-^max. (4.6)
Примечание. Если Центр не знает целей Производителя, то он дол-
жен сформулировать гипотезу типа (4.6).
Одним из способов воздействия Центра на действия Про-
изводителя может быть ресурс, который находится в распоря-
жении Центра и должен.расходоваться на создание основных
фондов Производителя. Итак, условимся, что Центр знает, что
Производитель, получив в свое распоряжение ресурс щ, произ-
ведет в течение планового периода следующую продукцию: '
Значит, задача Центра — задача планирования — состоит в та,-
ком распределении ресурса (7:
N
. U (4.8)
6*
164
ГЛ. 1П. КИБЕРНЕТИЧЕСКИЕ СИСТЕМЫ И ИМИТАЦИЯ
которое доставляет максимум функции (4.1). Однако результат
распределения ресурса будет зависеть не только от того, какие
величины иц стесненные условием (4.8), назначит Центр, но и
от того, какое количество рабочей силы Li привлечет для ра-
боты Производитель. Центру известно, что Производитель в
момент своего выбора будет знать величину ui — выбор Центра.
Кроме того, мы условимся считать, что Центру известна целе-
вая функция Производителя (4.6). На основании информации,
которой располагает Центр, он должен считать, что Произво-
дитель выберет такое значение Li, которое доставит максимум
величине
/z“I” и^ I L[ i — G>tLt.
Решение этой задачи при фиксированных xi и всегда суще-
ствует, и его легко получить в явном виде из условия dh/dLi =
= 0. Мы находим, что
Lt — di (xt + Ui), (4.9)
где
[см, ' 1
v(1~4l •
Используя выражение (4.9), мы можем легко свести задачу
планирования к задаче математического программирования.
В силу (4.9)
Pi — Ci~ki*i (xt + ut)=+ уг«р
т. e. результат действий Производителя является линейной
функцией выделенного ресурса. Таким образом,
J(Pit PN) = J(₽i + Yiui> •••> Pjv + Yw“w) =
= /*(«!,..., uN), (4.10)
и Мы приходим к задаче отыскания максимума функции (4.10)
при линейном ограничении (4.8). *
Итак, гипотеза о поведении Производителей позволила Цент-.
ру рассматривать Производителей как обычные рефлексные
звенья.
Примечание.‘Если функция цели Центра линейна, например:
N
(4.Н)
i
то задача максимизации этой функции тривиальна: надо вычислить коэффи-
циенты yt и весь ресурс передать тому из Производителей, у которого вели-
чина у больше.
б) Управление с помощью штрафов и поощре«
н и й. В примере п. а) Производитель получал в свое распоря*
5 4. ПРИМЕРЫ ИЕРАРХИЧЕСКИХ СИСТЕМ
165
жение ресурс в строго фиксированном количестве, не зависящем
ют способа его использования и результатов деятельности Про-
изводителя. При таком способе воздействия на Производителя
Центр не мог непосредственно влиять на его функцию цели.
Теперь уместно напомнить одно утверждение, к обсуждению
•которого мы еще не раз будем возвращаться: факт существова-
ния собственных целей у подсистем — это некоторая объективная
реальность. Если элемент системы. обладает правом само-
стоятельного использования ресурса, то он неизбежно превра-
щается в организм и его основная цель — сохранение собствен-
ного гомеостазиса. В разных ситуациях-для разных организмов
условия гомеостазиса будут разными. В самом деле, если струк-
тура общественных отношений такова, что стабильность произ-
водственного коллектива (организма) обеспечивается уровнем
его дохода, то целевую функцию Производителя можно пред-
ставить в форме (4.6). Но может оказаться, например, что
основное условие, которое будет обеспечивать его стабильность,
новее не доход, а требование регионального управления, свя-
занное с очисткой среды. Тогда критерий Производителя будет
совсем иным. Критерий Производителя прямым образом зависит
ют структуры производственных отношений и правовой инфра-
структуры общества. Центр не может повлиять на этот факт. Он
яе может изменить общественных отношений, которые в каче-
стве меры стабильности организма определяют уровень его до-
хода или другие факторы. Но Центр может повлиять на вели-
чину дохода Производителя, заставляя тем самым его действо-
вать в направлении,- выгодном Центру. На этом принципе и
юсновывается действие экономических механизмов управления.
Поясним это соображение примером, когда Центр может непо-
средственно влиять не на структуру, а на величину целевой
функции вида (4.6); меняя ее в зависимости от тех решений,
которые выбирает Производитель.
Сохраним условия примера, рассмотренного в п. а), и будем
считать, что деятельность Производителя' описывается произ-
водственной функцией Кобба — Дугласа (4.4), причем положим
для простоты, что все ki = I /2, i = 1, 2,- ..., N. Целевую функ-
цию (доход) Производителя запишем в виде
A(4=w!'24'’-“A+ti(p,)- <4-12>
Здесь <р/(Р/)—дополнительное вознаграждение (или штраф),
которое выплачивается Центром Производителю в зависимости
от результатов его деятельности. Величины xi будем считать
фиксированными. Это позволит представить функцию (4.12) в
виде
+ <₽,(₽,), (4.13)
166
ГЛ. HI. КИБЕРНЕТИЧЕСКИЕ СИСТЕМЫ И ИМИТАЦИЯ
где 6i = ciaix’/2. Гипотезу поведения Производителя оставляем
старой: мы считаем, что он выбирает управление из условия
максимума своего дохода, при этом, конечно, в интересах Цент-
ра, чтобы Производитель в момент принятия решения зц^л усло-
вия поощрения или наказания, т. е. характер функции Ф< (/’<)'.
Условие максимума функции (4.13)
dJ, 1 d<p. dP,
~dLT~~2^iLi i J("dPl~dTi = Q (4.14>
/ позволяет определять значение Lt = L*i, доставляющее макси-
мум функции Ji(Li). При этом L*t будет функционалом — будет
зависеть от вида функции фг(Рг): £, = £^[ф,(Рг)]. Точно так
же функционалом будет и оптимальный объем продукта
Р* = Р\ [ф, (Л)]- Следовательно, задача определения’ опти-
мального управления Центра — это задача определения таких
функций штрафа и поощрения ф((Л), которые доставляют мак-
симальное значение функции цели Центра J(Pi, ...» Ря). Эгу
функцию мы теперь перепишем в виде
/ = 7(Р! [ф1], ₽2[ф2]., Pn [флг] ). (4.15>
Задача определения экстремальных значений функционала
(4.15) является сложной и нестандартной задачей оптимизации,,
поскольку сами функционалы PJ определяются из решения
также весьма сложной оптимизационной задачи 7,->тах. Даже
для того очень простого частного случая иерархической системы»
который мы рассматриваем, решение задачи эффективного
определения оптимального штрафа требует создания специаль-
ных методов.
В самом д'еле, пусть Pi, Аг, ..., Рн— объемы продукции
Производителей, которые доставляют максимальное значение
функции цели Центра. Тогда функции штрафа мы можем за-
дать, например, в виде
Ф, (Л) = (р1 - pi)2 - + ©Д, (4.16)
/=1.....N,
где А,— произвольные отрицательные числа. В этом случае вы-
ражение целевой функции Производителя примет вид .
Л-ЫЛ-АЛ
Для того чтобы обеспечить максимум своего дохода, Произво-
дитель вынужден так распоряжаться своими ресурсами, чтобы
объем его продукции был равен Pt. Структура штрафа (4.16)
делает интересы Цроизводителя совпадающими с интересами
Центра.
§ 4. ПРИМЕРЫ ИЕРАРХИЧЕСКИХ СИСТЕМ
167
Легко видеть, что функций вида (4.16), которые делают ин-
тересы Производителя тождественными интересам Центра, мо-
жет быть построено бесчисленное множество. Однако неограни-
ченный штраф или поощрение вряд ли могут представлять ка-
кой-либо практический интерес. В задачах, «достаточно реаль-
но» поставленных, величина штрафа либо ограничена, .т. е.
удовлетворяет условиям вида
<Р^СФ, (4.17)
где G<p — некоторое множество, либо значение функции J за-
висит от функций ф<:
/ = Ря, Ф1, фдг].
Основная сложность возникшей здесь задачи оптимизации — та
же, что й в задачах синтеза. Необходимо отыскивать функции
<р/(Р(), зависящие от фазовых координат.
Для решения таких задач в настоящее время существуют
два подхода. Один из них — использование традиционной для
теории синтеза идеи параметризации искомой функции, а другой
•связан с одной из теорем Ю. Б. Гермейера, которая утверждает
эквивалентность задачи отыскания оптимального решения в не-
которой иерархической игре двух лиц специальной задаче не-
линейного программирования (см. [27]). Поясним содержание
обоих подходов для того случая, когда имеются лишь два субъ-
екта: Центр и Производитель.
Предположим, что Центр распоряжается выбором элемен-
та х, а Производитель — элемента у. Оба субъекта, соответ-
ственно Центр и Производитель, стремятся обеспечить свои ин-
тересы:
F(x, y)->max, (4.18*)
f(x, у)-> max. (4.18")
Стратегия Центра — функция х —ф(у). Она сообщается Про-
изводителю к моменту принятия им своего решения о выборе у.
Предполагается, что Производитель доверяет Центру и, узнав
ф(у), выбирает у из решения задачи
f (Ф (У), У) -* max. (4.18'")
В результате решения этой задачи определяется точечно-мно-
жественный оператор у = У[ф(-)]. После этого Центру остает-
ся выбрать функцию ф(-) из решения задачи
sup inf Г(ф(у), у).
«(•> »еТН>(-)1
168
ГЛ. III. КИБЕРНЕТИЧЕСКИЕ СИСТЕМЫ И ИМИТАЦИЯ
В частности, если при любой ф(-) решение задачи (4.18'")
единственно, получим задачу определения функции ф(«), реал и*
зующей
sup F (Ф (г/), У),
где у — решение задачи (4.18"') при заданной ф(•).
Первый подход к решению этой задачи — параметризация
функции ф (£/). Он состоит в том, что мы представляем эту функ-
цию в зависимости от нескольких параметров, например, так:'
Ъ(у) = ау + Ьу*. (4.19)
Примечание. Выбор класса функций, которому должны принадле-
жать штрафы и поощрения,это специальная и трудная проблема. Дело &
том, что расширение класса допустимых штрафов и поощрений может суще-
ственно изменить значение целевой функции. Ю. Б. Гермейер [5] привел при*
меры, показывающие, что включение в число допустимых штрафов и поощре-
ний разрывных функций может сколь угодно сильно изменить окончательный
результат.
Используя представление (4.19) функции ф(у), мы пред*
стдвим задачу (4.18") в форме
Г (а, Ъ, у) —► rfiax,
откуда следует, что если решение этой задачи при любых а, Ь
однозначно, то у — это некоторая функция параметров а и Ьг
* У = у{а, Ь),
и задача (4.18") превращается в специальную задачу матема*
тического программирования, аналогичную задаче, рассмотрен*
ной в п. а) этого параграфа.
Другой подход связан со следующим фактом. Рассмотрим
задачу
f(x, у) -► min. (4.20'}
X
Ее решением будет функция х = х*(у).
Затем решим еще одну оптимизационную задачу:
f (х* (у), у) -> max. (4.20">
у
Значение функционала, отвечающее этой процедуре, обозначим
. через и. рассмотрим еще одну задачу оптимизации, теперь
уже для функции F:
F(x, #)->max (4.20'")
*. у
при дополнительном условии
- /(X, у)>Г. (4.21)
Решение задачи (4.20'") при условии (4,21) определит век*
$ 4. ПРИМЕРЫ ИЕРАРХИЧЕСКИХ СИСТЕМ
169
торы и Теорема Гермейера утверждает, что оптимальной
стратегией Центра будет функция х(у) *):
( х°, если у *= у°,
I х* (у), если у Уа>
(4.22)
Здесь х° = х°, #° = #°, если f (х°, у0) > /*. Если же f (х°, у9) = /•,
то Д таковы, что f(x°, и j?°, z/° с e-точностью,
выбираемой Центром, реализуют решение задачи (4.20"'). Та-
ким образом, если мы решили оптимизационные задачи (4.20'),
(4.20") и (4.20"'), то синтезирующая функция х(у) выписывает-
ся в явном виде (4.22). Этот факт трудно переоценить, так как
юн открывает перспективы для эффективного построения меха-
низмов управления в экономических системах.
Путь, который предлагает приведенная теорема для эффек-
тивного построения функций наказания и поощрения, может по-
казаться отнюдь не простым. Более того, на первый взгляд он
кажется даже более сложным, чем традиционный способ по-
строения синтеза. В действительности же он может оказаться
чрезвычайно эффективным для построения механизмов управ-
ления в иерархических системах.
Для того чтобы продемонстрировать его возможности, поста-
раемся дать экономическую интерпретацию проведенным рас-
суждениям. Рассмотрим задачу (4.20'). Мы можем трактовать
ее как задачу определения таких воздействий Центра на Про-
изводителя, которые ставят его в самые трудные условия. Но
поскольку эти действия всегда стеснены определенными рамками
и количество воздействий невелико, то задача (4.20') бывает,
как правило, тривиальна. Например, если мы можем варьиро-
вать цены, то мы должны их назначить самыми малыми: 'если
мы назначаем функцию поощрения, то она должна быть равна
кулю; штраф — максимально допустимым и т. д..
Задача (4.20")—это задача выбора Производителем своей
яаилучшей стратегии в трудных для него условиях, а величина
/*— его гарантированный результат.
Задача (4.20"')—это задача выбора оптимальной стратегии
Центра в условиях полной централизации, но с одновременным
выполнением требования (4.21), которое означает, что интересы
Производителя должны быть учтены — ему должен быть обес-
печен результат не ниже f*.
Таким образом, цепочка оптимизационных задач (4.20) ока-
зывается достаточно часто не такой уж сложной и имеющей
простой экономический смысл.
*) Этот результат верен при условии, что замыканием множества
1*> У-У) >{*} является {х, yt f(x,y)^f*}, что обычно выполнено. Более
подробно см. книгу [5J.
170
ГЛ. III. КИБЕРНЕТИЧЕСКИЕ СИСТЕМЫ И ИМИТАЦИЯ
Кроме того, решение (х°, у°) можно рассматривать как согла*
сованную программу, поскольку Производителю выгодно ее при*
держиваться — в этом случае он получит максимальное поощре-
ние. Отступление от этого согласованного решения немедленна
приводит к наказанию: обратная связь действует автоматически»
Функция (4.22) имеет вид, изображенный на рис. 4.1. Эта
функция разрывна. Всюду, за исключением точки у = у°, она
совпадает с функцией x*(t/) (т. е. с решением задачи (4.20'),.
которое определяет наихудшие условия функционирования
Производителя — максимальный штраф).
Решение (4.22) не очень удобно для практического использо*
вания. Но оказывается, что функцию (4.22) можно изменять-
в довольно широком диапазоне. Во многих реальных ситуациях,
оптимальная стратегия Центра не единственна, и мы можем,
заменить разрывную функцию (4.22) сглаженной функцией так»,
как это изображено rfa рис. 4.2 *).
После этих замечаний вернемся снова к рассматриваемому
•примеру. Напомним, что Производитель стремится максимизи*
ровать функцию (4.13), распоряжаясь лишь одной величиной —
количеством нанимаемой рабочей силы Lt.
Поскольку объем выпускаемого продукта определяется
только количеством рабочей силы, то мы можем искать функ-
цию <pt (P() как функцию только L\12. Обозначим Lj/2 через zr
Итак, задача Производителя состоит в следующем:
(zt) = aizl — c^z2 + <р< (гг) -> шах
при условиях zt 0, ф/ (z,) 0. Проведем решение этой задачц
обоими изложенными способами. Рассмотрим сначала первый
способ.
Положим <fi(zt') = cilzi + с^2. Из условия dJi/dzi—G найдем
+ С<1
Zi ~ 2 - сц) ’
*) Сегодня это направление теории иерархических систем продвинуто-
достаточно далеко. Кроме упомянутой книги Ю. Б. Гермейера [5] см., напри-
мер, работы [25, 45].
* § 4. ПРИМЕРЫ ИЕРАРХИЧЕСКИХ СИСТЕМ
171
Предположим теперь, что целевая функция Центра имеет вид
/=ЕМ“Е <₽<(*/) (4.23)
i = l i = l
или
где
/ Е( (с/1г/ "Ь Ci2Zi) Е Фр
Ф, = (k{ С{ j) Z{ Ci2Zj.
Используя выражение для г,-, получим
k, — с,, , с.„(д,, + с.Л2
•Функция Ф*(сп, с/2) имеет достаточно простой вид, и задача
ее максимизации не представляет трудностей.
Посмотрим, что дает второй путь решения задачи. Так как
<p,(z/)^0, то наихудшее значение функции поощрения будет
<р< = 0. Тогда
Jt (z) = а;гг — to^l
и, следовательно, гарантированный
результат будет следующим:
J/ = й//4®/. • -
Задача (4.20"'), где F имеет вид
(4.23), будет такой:
Ф^ = ktZi — ф/ (z) -* max
яри условии, что/г ^сх|/4шг От-
сюда сразу находим
Ф, = 0, Z/ — 6ti/2®i.
В данном случае второй подход следует предпочесть, и не
потому, что мы получили окончательный результат более ко-
ротко: решение задачи с помощью параметризации тоже до-
статочно просто. Дело здесь в другом. В первом случае нам
не удалось обнаружить очевидный результат: интересы Центра
и Производителя в рассматриваемом случае совпадают — Про-
изводитель будет выбирать Lt —Li (рис. 4.3). Затраты на наем
рабочей силы при Li > Li не окупаются стоимостью получен-
ного продукта. Но такой выбор невыгоден и Центру, поскольку
-Он платит за дополнительный наем рабочей силы в виде функ-
ции поощрения ту же сумму, что и Производитель.
в) Целенаправленное использование экзо-
генного ресурса. Рассмотрим еще одну задачу, которая
172
ГЛ. III. КИБЕРНЕТИЧЕСКИЕ СИСТЕМЫ И ИМИТАЦИЯ
формально эквивалентна задаче, которую мы только что изу*
чали. В п. а) мы рассмотрели способ управления предприятиями
с помощью выделяемого им ресурса. При этом величину вы-
деляемого ресурса мы непосредственно не связывали с резуль-
татом его использования, т. е. с объемом произведенного про-
дукта. ' '
Вернемся теперь снова к модели распределения ресурса, но
условимся, что величина выделяемого ресурса — это некоторая
функция производимого продукта Р,:
и предположим, что ресурс, выделяемый Центром, расходуется
на инвестиции — на создание новых мощностей.
Гипотезу о поведении Произвсчителя мы также сохрани»
старой: будем считать, что свою стратегию Производитель вы-
бирает из условия максимизации своего дохода Jr.
Предположим, что функция а<(Р/) задана. Поскольку никаких
ограничений на величину Ц мы не накладываем, то правило
выбора величины Li получим из условия
(4.24>
Величину производной dPi/dLi вычислим, рассматривая равен-
ство
как неявное задание зависимости Pt(Li), откуда
- (1 -»,) (*,+«< (?,»*'=°-
Из этого равенства находим
0->,)»,+ = (425>
Таким образом, в рассматриваемом случае задача Центра
сводится к следующей: определить неотрицательные функции
Ui(Pi), доставляющие максимум функционалу /(Pi, PN)
при ограничениях (4.25).
Можно привести еще очень много других • примеров, иллю-
стрирующих возможности управления в иерархических системах»
$ 4. ПРИМЕРЫ ИЕРАРХИЧЕСКИХ СИСТЕМ 173 '
Например, одна из возможностей, которая реально почти всегда
используется в любых иерархических системах, — это ограниче-
ние возможной активности нижних звеньев. Приведем один ти-
пичный пример — ограничение фонда заработной платы:
i — 1, .... У. (4.26)
До сих пор мы считали, что производственная функция пред-
приятия — зависит только от xi— фондов и Lt —
количества рабочей силы. На самом деле большую роль играет
также и ставка заработной платы, изменяющая условия лайма
квалифицированной рабочей силы. Другими словами, Pt —
ts=fi(Xi,.Li,<i>i) и ставку заработной платы естественно считать
одним из управляющих факторов, находящихся в распоряжении
Производителя. Но величину Qi следует тогда включать в число
факторов, которыми управляет Центр. Условие (4.26) дает нам
еще один способ управления.
Примечание. Заметим, что формально описанный способ управления
совершенно аналогичен (с чисто математической точки зрения) способу упра-
вления с помощью распределения ресурса. Однако в реальных условиях все
описанные способы управления имеют столько неформальных особенностей,
что их следует изучать самостоятельно. Способы воздействия верхнего уровня
на нижние звенья иерархии — способы воздействия на их интересы и исполь-
зования их интересов для достижения определенных целей верхнего уровня, —
как правило, возникают в результате неформального содержательного ана-
лиза. А роль математики состоит в выяснении количественных аспектов, в на-
хождении разумных соотношений управляющих параметров и состояний си-
стемы.
г) О рациональной степени децентрализации
и эффективности децентрализованных струк-
тур. Проблема рациональной степени децентрализации —это
одна из важнейших народнохозяйственных проблем. Если тот
или иной народнохозяйственный организм делается достаточно
сложным, то, как уже говорилось выше, полная централизация
ёго управления может легко приводить к ошибочным решениям
из-за невозможности своевременной обработки необходимой ин-
формации. Однако высокая степень децентрализации также чре-.
вата отрицательными последствиями: превращаясь в самостоя-*
тельные организмы, отдельные звенья начинают преследовать
собственные цели. В этих условиях может оказаться, что пре-
имущество децентрализованного управления, способного более
полно учитывать особенности информации, будет сведено к нулю
чрезмерной активностью звеньев, игнорирующих интересы си-
стемы в целом.- Вот. почему .мера активности, «делегируемая»
верхним звеном подчиненным ему нижним звеньям, должна
быть объектом специального анализа. Ее определение — это
одна из ключевых задач теорий децентрализованных систем
управления. Обратим внимание на то, что постановки задач,
174
ГЛ. III. КИБЕРНЕТИЧЕСКИЕ СИСТЕМЫ И ИМИТАЦИЯ
которые возникают в этой теории, качественно отличаются от
тех, с которыми приходится иметь дело в традиционной теории
антагонистических игр.
Пусть в системе существуют два субъекта X и У. Интересы
субъекта X описываются так:
- F(x, у)-*- шах.
> х е ах
I
Интересы субъекта У выражаются в виде
F(x, У)~+ min .
«sOy
Представим себе, что субъект X имеет возможность изменять
множество стратегий Gy субъекта У. Очевидно, что ему всегда
выгодно сужать множество стратегий своего партнера (в данном
случае противника, поскольку рассматриваемая ситуация анта-
гонистична).
Совершенно иное дело в теории иерархических систем управ-
ления. Субъекты этой системы имеют свои собственные интере-
сы, но они отнюдь Не антагонистичны интересам Центра. По-
этому Центру может оказаться выгодным расширять права от-
дельных звеньев. Но это расширение прав (т. е. множества
возможных стратегий) выгодно лишь до определенной степени.
Эта допустимая мера активности определяется, конечно, специ-
фикой данной системы, и в каждой системе она разная. Уни-
версальных рецептов здесь нет.
Итак, проблема проектирования иерархической системы
управления состоит, прежде всего, в построении модели функ-
ционирования системы при заданной структуре. Если мы будем
говорить о веерной иерархии, то структура будет определяться
перечислением самостоятельных звеньев. Напомним, что каждое
звено при этом становится самостоятельных организмом. Сле-
довательно, второй этап проектирования состоит в выяснении
целей нижних звеньев. Может быть, лучше говорить не о целях,
а об интересах нижних звеньев, хотя формально эти оба поня-
тия тождественны. Конечно, точно указать целевую функцию
нижнего звена (Производителя), как правило, невозможно: ин-
тересы Производителя всегда описываются системой критериев,
и выбор свертки критериев, максимизация которой будет опре-
делять действия Производителей, всегда включает в себя эле-
мент субъективизма. Тем не менее, для того чтобы Центр мог
назначать свои управляющие воздействия, необходима опреде-
ленная гипотеза о целевых фуйкциях Производителей (гипотеза
поведения). «Определив» целевые функции Производителей, мы
должны выяснить способы управления, которые имеются в рас-
поряжении Центра и Производителей. И наконец, на следующем
§ 4. ПРИМЕРЫ ИЕРАРХИЧЕСКИ^ СИСТЕМ 175
этапе мы можем редуцировать задачу к некоторой специальной
задаче оптимизации. Эти задачи будут аналогичны тем, которые
описывались в атом параграфе. Анализ таких задач позволит
нам найти оптимальные'(в рамках принятых гипотез) механиз-
мы функционирования: правила распределения ресурса, систему
штрафов и поощрений, меру допустимой активности и т. д.
Заметим, что на этом этапе анализа уже вполне уместно вве-
сти понятие оптимального управления иерархической системой
как управления, доставляющего максимальное значение целевой
функции Центра в предположении, что управления Производи-
телей определены на основании гипотез об их поведении. По-
следний этап проектирования иерархической структуры как раз
и состоит в'расчете оптимального управления. Когда мы проек-
тируем любую новую систему, мы всегда хотим убедиться в том,
что она окажется лучше старой, причем оценку эффективности
мы стремимся делать на самом раннем этапе проектирования,
задолго до того, как эта система начнет создаваться, а тем
более функционировать. Естественно, что все сказанное в полной
ме^е относится и к проектированию иерархических систем
управления.
Заметим, прежде всего, что в рамках рассуждений, которые
использовались в этом параграфе, провести сравнение эффек-
тивности различных систем управления невозможно в принципе,
поскольку мы исследовали функционирование иерархической
системы в условиях наличия полной информации, полной ее
определенности. А в рамках подобной теории любая децентра-
лизация, т. е. замена полностью централизованной системы
иерархической, невыгодна.
Обозначим через 7* оптимальное значение целевой функции
Центра в иерархической системе управления. Предположим те-
перь, что система полностью централизована, т. е. Центр может
распоряжаться не только распределением экзогенного ресурса,
назначением штрафов и т. д., но и количеством нанимаемых ра-
бочих. Максимальное значение целевой функции в этих условиях
обозначим через J**. Тогда очевидно, что всегда
/** г*
А = —jr—-^0,
поскольку введение иерархической организации в систему — это
только дополнительные ограничения, сужающие множество до-
пустимых стратегий. Поэтому, для того чтобы оценить целесо-
образность введения той или другой иерархической структуры,
мы необходимо должны принять во внимание изменение харак-
тера информации, которое происходит вместе с появлением
иерархии. Смысл введения иерархии состоит, прежде всего, в
уменьшении уровня неопределенности в процедурах принятия
176 гл. III. КИБЕРНЕТИЧЕСКИЕ СИСТЕМЫ И ИМИТАЦИЯ '
решений. Таким образом, нам необходимо вернуться к тем рас*
суждениям, которые мы привели в начале предыдущего пара-
графа. Повторим эти рассуждения применительно к примеру
распределения экзогенного ресурса в двухступенчатой иерархи-
ческой системе.
Производственную функцию 'Производителя будем записы-
вать в форме
pi^(.ai+k)xilLlrkt> .............к.
Здесь Ь— параметр, который точно известен Производителю
(например, & = 0), но не известен Центру. Величина ai харак-
теризует эффективность фондов, она зависит от условий данного
предприятия (качество помещения, квалификация рабочей силы,
уровень организации и т. д.).
Поскольку Производитель точно знает свои возможности, то,
приняв .решение о количестве рабочей силы, он будет точно
знать объем продукта, который он предполагает выпустить.
Иное дело — Центр, который располагает об этом гораздо мень-
шей информацией. Пусть, например, Центру известны только
пределы изменения величины
17
Предположим, что Центр принял схему полной централизации,
т. е. он не .только распределяет ресурс ui по Производителям,
но и имеет право назначать величины Ц. Тогда его целевая
функция будет иметь вид
J=J(Pb .... PN)= '
= J((a, +S,)^ + «.)** Llrkl...(aw + S#)(*„ + LHkN^
(4.27)
или ~
J = Z(ui, •♦., Uff, Lj, ..., Ln, •••» Sa).
Прежде чем искать максимальное значение функции (4.27),
мы должны принять определенную гипотезу о величинах Si.
Наиболее естественной характеристикой системы будет макси-
мальный гарантированный результат
= max max min /(«i, .. •> uN, Lh .... LN, Si> • • • , Sa).
’ Рассмотрим теперь тот случай, когда _в системе введена
иерархическая структура принятия решений. Как оценить воз-
можное значение функционала Центра? Мы можем построить
гарантированную оценку. Для этого мы должны решить задачу
/1 == Ji (Lt, и{, Si)-> max. (4.28)
f 4. ПРИМЕРЫ ИЕРАРХИЧЕСКИХ СИСТЕМ
177
Решение задачи (4.28) нам дает значение .
- тогда функционал (4.27) может быть представлен в виде
(ult ...» U/f, Si. • • •» Sw)»
и, следовательно, максимальный гарантированный результат
будет иметь вид
Г= чпах min J(ut................. gb $N),
Найденная деличина будет также важной и полезной оценкой
•Иерархической структуры. ,
Для функционалов /*, /** мы можем снова составить вели-
Теперь мы уже не можем утверждать, что всегда А 0. Но
достаточно ли этой характеристики для принятия решения о це-
лесообразности введения иерархии в систему управления? На-
верное, в общем случае недостаточно.
В реальной ситуации важную роль будут играть и другие
характеристики системы, например сложность и надежность
системы передачи данных, стоимость обработки информации
И т. д. Для окончательного суждения о замене полностью цен-
трализованной системы управления системой с иерархической
Структурой имеют определенный смысл машинные эксперименты
для различных значений
Машинная имитация функционирования системы с исполь-
зованием метода Монте-КарЛо может, быть весьма важным эле-
ментом в оценке качества управления: проектировщик или бу-
дущий ’ ее пользователь с помощью подобных экспериментов
наглядно увидит особенности функционирования системы в раз-
ных условиях информированности.
Мера неопределенности во многом зависит от используемых
технических средств. С ростом “быстродействия ЭВМ, качества
терминальных устройств, систем передачи данных и т. д. допу-
стимый уровень централизации, вероятно, будет расти.
х В заключение заметим, что для исследования задачи, решае-
мой Центром, нет прямой необходимости знать целевые функ-
ции отдельных звеньев системы. По существу, нам (т. е. субъек-
ту, представляющему Центр) достаточно знать лишь отклик,
реакцию звена на действие Центра. Это обстоятельство может
быть источником разнообразных упрощений.
178 - ГЛ. III. КИБЕРНЕТИЧЕСКИЕ СИСТЕМЫ И ИМИТАЦИЯ
д) Динамика иерархических систем. Перейдем те-
перь к рассмотрению кибернетических систем, состояние кото-
рых изменяется во времени, ограничившись, как и ранее, обсу-
ждением примеров.
Рассмотрим снова систему с веерной иерархией (объедине-
ние, фирму), состоящую из N Производителей (предприятий),
выпускающих продукты Pi, ..., Р». Обозначим через xi основ-
ные фонды t-го Производителя. Изменение фондов мы будем
описывать уравнениями
Xi = — ktXi + + i = 1......N, (4.29)
где ki — коэффициент амортизации, м,-— инвестиции Центра
(фирмы), Vi — внутренние капиталовложения («/ и Vi— потоки
капиталовложений в единицу времени: щ— управляющие функ-
ции Центра, vi — управляющие функции Производителя).
Процесс производства будем описывать производственными
функциями вида
Pi = ^i(xi, Lit (ог), i=l, (4.30)
Здесь Li — количество рабочей силы, ю,— ставка заработной
платы. Величины Li и со, также находятся в распоряжении Про-
изводителя, их выбор стеснен ограничениями вида
LtLt >0, со/ >0, &iLi^Qi, /=1, ..., N.
Смысл двух первых ограничений очевиден: предприятие, для
того чтобы оно могло функционировать, должно иметь некото-
рый минимум рабочей силы, а ставка заработной платы долж-
на быть больше некоторого минимума. Последнее же неравен-
ство означает, что фонд заработной платы ограничен. Величи-
на Qi находится в распоряжении Центра — это одно из его
управлений, а величины L~ и ©Г считаются заданными.
Создав продукт, описываемый вектором Pi, Производитель
реализует его: сдает на склад фирмы или продает через торго-
вую сеть. Обозначим через с,- вектор цен;- тогда Производитель
получит в единицу времени сумму (Ci, Pi). Из этой суммы он
должен заплатить зарплату рабочим anti, сделать вложения
в фонд фирмы (отчисления) ?,(Л), произвести внутреннее ин-
вестирование vi и компенсировать текущие затраты Ri(Pi). Обо-
значим через Ti остаток стоимости продукта после расходов»
TtW = (с4, Pi) - [^iLi + Yi (Pi) + Vi + Ri (Pi)]. (4.31)
Величину T,(Z) условимся называть социальным фондом пред-
приятия. Эта величина находится в распоряжении Производи-
теля и может расходоваться на поощрение работающих, на со-
циальные нужды и т. д. По своему смыслу эта величина не-
отрицательна для любого t е [О, Г].
§ 4. ПРИМЕРЫ ИЕРАРХИЧЕСКИХ СИСТЕМ
179
Будем считать, что условия гомеостазиса связаны с объемом
социального фонда при дополнительных ограничениях типа
Pi^PT, i = 1, • • •, N. Таким образом, если внешние инвестиции
ui(t) заданы, если известна функция ?>(РгУ, которую естествен-
но назвать функцией поощрения или штрафа, если известен
фонд заработной платы Qt, то задача, которую должен решать
Производитель, состоит в том, чтобы так распорядиться внут-
ренними капиталовложениями Vi(t), ставкой заработной пла-
ты ©,(/) и количеством рабочих £/(/), чтобы максимизировать
в тОм или ином смысле свой социальных фонд. Этот функционал
мы обозначим.
= (оь L{).
Он может иметь самую разнообразную природу. Например,
можно принять, что
Л= min Тг(0. (4.32)
t е [О, Г1
Максимизация функционала (4.32) означает максимизацию
минимального размера социального фонда, создаваемого в еди-
ницу времени. Не менее естественно рассматривать и инте-
гральные функционалы типа
т
• (4.33)
о
где Т — плановый период. Задачи с функционалами (4.32),
(4.33) являются стандартными задачами оптимального управ-
ления. Заметим, что величина планового периода Т — это еще
одна субъективная характеристика Производителя, определяю-
щаяся не только внешними факторами, но и его личными каче-
' ствами (в частности, дальновидностью).
Рассмотрим теперь функционирование правления фирмы
(Центра), которой подчиняется Производитель. По своему
смыслу эта организация управленческая, и сама по себе ника-
ких ценностей не производит. Эффективность ее деятельности
оценивается по результатам работы предприятий, входящих в ее
состав. Критерий, которым руководствуется фирма, имеет вид
/ = /(?!,..., PN, уь Yjv)- (4.34)
В выражении (4.34) подчеркивается, что доход фирмы зависит
от структуры функций поощрения Если критерий Центра
считать не зависящим от этих функций, а фонд поощрения — не-
ограниченным, то тривиальным будет следующее утверждение:
всегда могут быть назначены поощрения (или штрафы)
Vn_(Pn), вынуждающие Производителей выбирать
180
ГЛ. Ш. КИБЕРНЕТИЧЕСКИЕ СИСТЕМЫ И ИМИТАЦИЯ
свои управления так, как будто управление фирмой полностью
централизовано.
В качестве функционала J могут выступать самые разные
величины: точность соблюдения государственного плана, мак*
симизация -числа комплектов оборудования, чистый доход и т. ц.
Задача руководства фирмы состоит в распределении ресурса U,
имеющегося в ее распоряжении:
фонда заработной платы Q:
'* EQ/==q.
и назначении таких функций поощрения или штрафа yi(Pi) за
выпуск продукции, чтобы максимизировать доход {4.34).
Таким образом, фирма располагает тремя способами воз-
действия на Производителей: она может распределять ресурс,
вводить функции штрафа и поощрения и ограничивать-
активность Производителей.
Описанная ситуация приводит, по установившейся термино-
логии, к некоторой дифференциальной игре N 4-1 субъектов.
Какой-либо общей теории, позволяющей исследовать эту ситуа-
цию более или менее единообразным способом,, не существует.
Классические задачи Р. Айзекса, Л. С. Понтрягина, Н. Н. Кра-
совского и др. относятся к проблемам антагонистических игр,,
и полученные ими результаты малопригодны.для анализа задач,
которым посвящена эта книга (см. [17], [49]).
А. Ф. Кононенко удалось в случае неантагонистических диф-
ференциальных игр использовать идеи Ю. Б. Гермейера и раз-
вить на основе этих идей весьма общий формализм (см. [46;
47]), который позволяет надеяться на возможность создания
эффективных вычислительных” процедур. Кроме того, исследова-
ния А. Ф. Кононенко помогают увидеть ситуацию, которая воз-
никла в теории дифференциальных игр, с новой точки зрения.
Результаты, полученные в теории неантагонистических игр, не
могут быть перенесены с помощью непрерывного перехода в
теорию антагонистических игр. Последние являются некоторым
сингулярным вырождением, и, по-видимому, им отвечает кон-
струкция, весьма плохо отражающая реальность: достаточно
глубокое изучение конкретных конфликтов показывает, что
интересы их участников обычно не строго антагонистичны.
Первым шагом в анализе любой иерархической системы
должна быть гипотеза о поведении отдельных ее звеньев. Пред-
положим, что мы ее сформулировали, например, в форме мак-
симизации функционала (4.33).
Примечание. Заметим, что, в отличие от статического случая, нам
надо делать предположения не только о структуре Функций Ч'д, но и о глу-
5 4. ПРИМЕРЫ ИЕРАРХИЧЕСКИХ СИСТЕМ
181
бине прогноза, т. е. о величине временного интервала планирования Т. Для
разных субъектов системы эти величины могут оказаться разными.
При фиксированных внешних воздействиях Центра максими-
зация целевого функционала Производителя будет некоторой
задачей оптимального управления, и выбор Производителем
управляющих воздействий при разных воздействиях Центра бу-
дет, естественно, разным. Это значит, что задача Производи-
теля является на самом деле не задачей оптимального управ-
ления, а задачей синтеза: определить управления как функции
или функционалы от управляющих воздействий Центра.
Предположим тем не менее, что мы ее смогли решить (т. е.
построить эффективно действующий алгоритм). Тогда остается
последний шаг. Мы должны решить задачу Центра: выбрать
функции vi(Pi)» доставляющие максимум функцио-
налу (4.34). Это снова задача синтеза, только более сложная»
чем та, которую нужно решать Производителю.
Примечание. В самом деле, Производитель, в рамках нашей схемы,
должен решать задачу значительно более простую, нежели Центр: Произво-
дитель всегда знает «условия игры», т. е. функции и ограничения, которые
назначены Центром, и решает задачу для конкретных значений этих величин.
Центр же должен иметь для решения собственных задач весь спектр задач
Производителя — для любых значений величин, находящихся в распоряжении
Центра. 4
Таким образом, хотя “нам и удалось расчленить проблему
анализа деятельности фирмы (объединения) .на ряд последова-
тельных оптимизационных задач (что, конечно, является боль-
шим шагом вперед), вряд ли можно предложить эффективные
численные методы их решения.
В таких задачах, по-видимому, нельзя обойтись без исполь-
зования техники имитации, и § 6 этой главы будет посвящен
Проблеме проектирования и использования имитационных си-
стем. Здесь же мы заметим лишь следующее.
Реальный анализ и проектирование динамических иерархи-
ческих систем, по-видимому, будет сводиться к следующей по-
следовательности неформальных, человеко-машинных процедур.
1. Эксперт (проектировщик, управляющий) предлагает схему
организации — некоторый вариант иерархической структуры.
2. Эксперт с помощью исследователя операций определяет
вариант управляющих воздействий Центра.
3. Исследователь операций решает задачи оптимального
управления, находит, реакции Производителя, рассчитывает
функционалы Центра и полученную информацию предъявляет
эксперту.
4. Эксперт вместе с исследователем операций разрабатывает
новую систему управляющих воздействий Центра и т, д.
182
ГЛ. III. КИБЕРНЕТИЧЕСКИЕ СИСТЕМЫ И ИМИТАЦИЯ
На последнем этапе, разумеется, нужно иметь некоторый
специальный алгоритм, поскольку количество возможных ва-
риантов, даже при дискретизации задачи, .заведомо очень ве-
лико.
Подобные человеко-машинные процедуры хороши еще и тем,
что в реальных проблемах подобного рода всегда имеется не-
мало неформализуемых факторов, которые можно учесть только
в условиях вмешательства эксперта в процесс расчета опти-
мального решения.
Описанная процедура напоминает процедуру Брауна-Робин-
сон для решения задач теории игр.
Наконец, существуют еще способы, использующие для целей
синтеза идеи Ю. Б. Гермейера. Таким образом, пессимизм за-
мечания о том, что вряд ли сегодня могут быть предложены
эффективные алгоритмы для решения рассматриваемых задач,
может быть, и не очень оправдан. Просто до настоящего вре-
мени почти никто еще серьезно не занимался созданием эффек-
тивных численных процедур в теории управления иерархиче-
скими системами.
е) Некоторые особенности з.адач с повторе-
нием. Динамические задачи принятия решений, в отличие от
статических, при условии, что с системой, ассоциировано не-
сколько субъектов, обладают целым ^рядом возможностей для
раскрытия неопределенностей. Представляя себе в общих чертах
интересы и цели нижних звеньев, Центр может точно и не знать
сначала многих конкретных особенностей функционирования
Производителей. В результате наблюдений за деятельностью
нижних звеньев Центр получает о них определенную информа-
цию, которая при достаточном количество повторных процедур
принятия решений позволит снять существующую неопределен-
ность, устранить имеющуюся неполноту информации. Эта про-
блема получила название проблемы адаптивного управления.
Она возникла еще в пятидесятых годах, а сейчас идеи адапта-
ции успешно используются в теории иерархических систем
(см. работы [26, 58]). Развиваемая теория имеет большое при-
кладное значение. В частности, она позволяет выявить те скры-
тые резервы, которыми обладают Производители и которые, бу-
дучи известными Производителям*, обычно не сообщаются верх-
ним уровням иерархии.
Поясним на примере некоторые из возникающих здесь осо-
бенностей. Предположим, что целевая функция Производителя
Имеет вид
J i == CiPt — a>iLi, (4.35)
где Рг = at (xt + urf1 L\~kl, i — l.N. Здесь а/ —эффектив-
ность фондов, xi — объем фондов, щ— инвестиции Центра,
§ 4. ПРИМЕРЫ ИЕРАРХИЧЕСКИХ СИСТЕМ
183
(Xi + Ui).
Предположим, что эффективность фондов Центру неизвестна.
Задача Центра — так разместить инвестиции между Произво-
дителями, чтобы максимизировать аддитивный функционал
N Т
(4-36)
i = l t=o
На первом шаге процесса Центр может распределить инвести-
ции ю(1), исходя из некоторых неточных значений коэффи-
циента эффективности а/, например at = а,о.
Полагая, что Производитель максимизирует свой доход на
каждом шаге (например, он стремится его максимизировать в
течение каждого года), мы находим из условия
dZ7 = (l — (•*« + ut) * ~ o,
что
r __Г ciai (* — ki)
L‘-L—
Здесь величина ui считается известной, она вычисляется, напри-
мер, на основе тех или иных предположений об эффективности
фондов. Зная Li, мы можем вычислить затем и величину Р,:
Г с.а, (1—k.)
Л(1) = а<(х< + «<(1))[ 1 l\t . (4.37)
Но величина Pi станет известной Центру независимо от расче-
тов: Р;(1)—это продукция Производителя, . поступающая на
склад Центра. Следовательно, формула (4.37) позволит ему
определить неизвестную величину а,.
Итак, смысл адаптивного управления очевиден: мы делаем
определенные предположения о возможном значении неизвест-
ного нам параметра. В результате наблюдений за теми или
иными характеристиками процесса мы получаем новую инфор-
мацию, которая дает нам возможность найти точное значение
неизвестного параметра.
Предлагаемые рассуждения могут быть использованы и для
анализа более сложных случаев.
Может оказаться, например, что Центру будут неизвестны
Два параметра: не только эффективность фондов, но, например,
и величины Xi. Тогда равенство (4.37) будет связывать две не-
известные величины: а,- и Xi. На следующем шаге мы можем
вычислить
г с.а, (1 - k.) -|(l~*i)/*i
Pt (2) = at (xt 4- ut (2)) [-L1L—Ш j (4.38)
184
ГЛ. 111. КИБЕРНЕТИЧЕСКИЕ СИСТЕМЫ И ИМИТАЦИЯ
и, сравнивая это значение с наблюдаемым Р<(2), получим вто*
рое уравнение для определения второй неизвестной величины.
Но для этого нам надо задать еще величины щ(2). Если на
первом шаге мы задали величины ц<(1) на основании той или
иной гипотезы о значениях неизвестных величин щ и xt, то на
Следующем шаге мы можем уже использовать более тонкие рас*
суждения, имея в виду аддитивный характер функционала.
Величины м<(2) мы можем, например, вычислить из условия
максимума
к
j1-1
при дополнительных условиях (4.37) и (4.38), где «/(!) счи*
тается известным. В результате мы найдем щ и xi.
Схему адаптивного управления можно еще больше услож*
нить, отыскивая и/(1) и м/(2), максимизируя
N
^cdPity + P,®]
при условиях (4.37) и (4.38).
• Схема адаптивного управления—> это очень гибкий меха*
низм, который может быть приспособлен для анализа «весьма
широкого спектре проблем принятия решений в условиях неон*
ределенности. Повторение 'актов принятия решений способно
обеспечить исследователя недостающей информацией. В про*
цессе деятельности предприятий производственные функции мо«
Гут меняться. Это значит, что в рамках той или иной аппрокси*
мации будут изменяться их параметры. Расхождение величин,
вычисленных заранее, с данными наблюдений как раз и будет
означать, что значения параметров производственной функции
Изменились. Используя рассуждения, подобные тем, которые
были здесь проведены, мы можем восстановить неизвестные зна*
чения этих параметров.
Эффективность использования идей адаптации во многом за*
висит от структуры используемых функционалов. Эти идеи
позволяют относительно просто восстанавливать значения неиз-
вестных параметров, если функционал Центра имеет вид суммы
(4.36). Можно развить более или менее эффективные процедуры
типа динамического программирования и для общего случая
аддитивных функций. Что же касается целевых функций более
общего вида, то реализация подобных адаптационных алго-
ритмов представляется очень сложной. Насколько известно
автору, для общего случая нет каких-либо эффективных алго-
ритмов.
4 5. ПРОГРАММНЫЙ МЕТОД
185
§ 5. Программный метод в нерефлексных системах
Анализ нерефлексных систем, а тем более выработка управ*
ляющих воздействий в подобных системах, представляется про*
блемой столь сложной и многоплановой, что говорить о каких*
либо универсальных методах очень трудно. Тем не менее в те*
чение последних 10—15 лет возник некоторый общий подход к
созданию принципов управления в сложных нерефлексных си-
стемах. Он получил название программного (или программно-
целевого) метода. Строго говоря, термин «метод» не очень под-
ходит для его описания. Скорее, это совокупность рекомендаций,
которые достаточно хорошо разработаны и приобретают черты
метода только в некоторых специальных случаях управления
экономическими системами. В этом параграфе мы опишем об-
щую схему программного метода в кибернетических системах,
а затем продемонстрируем ее применительно к задаче управле-
ния централизованным народнохозяйственным организмом со*
циалистического типа.
а) Еще раз о задаче двухэтапной оптимиза-
ции. В предыдущих главах мы уже изложили подходы к ана-
лизу сложных, многокритериальных проблем, в частности под-
черкнули необходимость сочетания формальных и неформаль-
ных методов при исследовании любых более или менее трудных
задач управления. Сейчас эти идеи будут конкретизированы и
использованы для выработки общих подходов в проблемах вы-
бора управлений в кибернетических системах.
Рассмотрим снова систему с одним субъектом (управляе-
мую динамическую систему)
^ = /(х, и, I, I), (5.1)
где £(/) описывает случайные внешние воздействия. Для этой
системы мы формулируем цель управления. Предположим, что
формулировка цели — некоторый внешний акт (например, цель
является доктриной). Цель управления мы можем формулиро-
вать в терминах принадлежности траекторий системы некото-
рому множеству, в виде условий, накладываемых на терминаль-
ные значения фазовых-переменных, целью управления может
быть система контрольных показателей в экономике или задан-
ная орбита вывода космического аппарата.
Таким образом, цель управления — это некоторые ограниче- -
ния. Кроме того, мы формулируем критерии, оценивающие спо*
собы достижения цели управления (например, затрату горю*
чего или другого ресурса), т. е. критерии оценивают стоимость
достижения цели в тех или иных терминах.
Итак, первый этап процесса управления — это получение из*
вне цели управления и формирование, на основе принципов
186
ГЛ. 1П. КИБЕРНЕТИЧЕСКИЕ СИСТЕМЫ И ИМИТАЦИЯ
исследования операций, критерия оценки субъектом своих дей-
ствий. Одновременно проводится изучение обстановки, т. е. изу-
чается процесс |(0.
Следующий шаг — это построение оптимальной программы.
На основе изучения внешней обстановки формулируется опре-
деленная гипотеза о природе функции |(0:
£ (0 *=&>(/), • (5.2)
где go(0—известная функция времени. Теперь задача опреде-
ления оптимальной программы может быть сформулирована как
задача оптимального управления: определить управляющие воз?
действия на систему, позволяющие ей достичь цели управления
с наилучшим (максимальным или минимальным — это зависит
от смысла критерия) показателем качества..
Кроме того, при решении задачи расчета оптимальной про-
граммы мы обычно используем вместо уравнений (5.1) некото-
рое упрощенное описание: это дает нам возможность относи-
тельно просто провести необходимые расчеты. Подобные упро-
щения глубоко мотивированы — мы об этом уже гово'рили и еще
не раз будем говорить.
Следующий этап — это управление программой. В силу того,
что: 1) предположение (5.2)—это лишь аппроксимация реаль-
ности, 2) для описания программы мы использовали прибли-
женные, упрощенные уравнения, 3) система оказалась подвер-
женной дополнительным силам, которые мы не приняли. во
внимание, 4) наши команды (управляющие воздействия) были
реализованы недостаточно точно, реальная траектория нашей си-
стемы будет отличаться от расчетной. Значит, если мы не вме-
шаемся в характер движения, то система не достигнет цели
управления. Поэтому мы должны проектировать систему об-
ратной связи, т. е. систему механизмов, способных реагировать
на отклонения от программы и формировать новые или изме-
нять программные управляющие воздействия так, чтобы ошибка
достижения цели управления была минимальной.
Итак, программный метод управления в технических (ре-
флексных) системах сводится к реализации трех этапов.
1. Предварительный анализ, изучение ситуации, в результате
которого вырабатывается определенный сценарий процесса (со-
вокупность сведений о внешней среде).
2. Расчет, в рамках данного сценария, программной траек-
тории.
3. Разработка механизмов обратной связи.
б) Общий случай кибернетических систем не-
рефлексного типа. Рассмотрим теперь кибернетическую
систему достаточно общего вида
x=f(x, иь .... uN, I, 0; (5.3)
§ 5. ПРОГРАММНЫЙ МЕТОД
187
где управления ui......находятся в распоряжении различ-
ных субъектов. Как мы уже говорили в начале главы, изучение
систем вида (5.3) можно вести только с субъективных позиций.
Условимся вести анализ с позиций субъекта номера 1. Значит,
если в тексте говорится «мы», то это означает «субъект но-
мер 1». В кибернетических системах вида (5.3) цель может уже и
не быть экзогенным фактором (заданным извне). В то же время
субъект, настраивающий систему управления космического ап-
парата, не сам изобретает цель: она ему задается, это для него
доктрина, и он не участвует в ее формировании.
Примечание. Последнее утверждение, конечно, не совсем точно. Ис-
следователь, анализируя возможность достижения цели управления, может
информировать «высший уровень», например, о невозможности достижения
цели. Другими словами, исследователь может проводить селекцию целей.
Что же касается самих целей, то они возникают как некоторая метацель —
дель более высокого уровня. Например, назначение орбиты, на которую дол-
жен быть выведен космический аппарат, преследует цели, которые не зависят
от инженера-проектировщика ракеты.
Иное дело — нерефлексные системы, например экономичен
ские. Как правило, цели должны быть выработаны внутри са-
мой системы, поскольку верхнего уровня, задающего цель, мо-
жет просто не оказаться, как в случае самостоятельной фирмы
или народнохозяйственного организма страны. Но как бы ни
была поставлена цель, она, начиная с некоторого момента, так-
же приобретает роль доктрины. Правда, в случае нерефлексных
систем эта доктрина является субъективным представлением
о цели того, кто ее формирует.
Я уже говорил о том, что у каждого организма существует
определенная объективная цель — сохранение и упрочнение соб-
ственного гомеостазиса. Но этот организм (система) функцио-
нирует в условиях, которые не только непрерывно меняются, но
и неизвестны субъекту. Значит, он никогда точно не знает своих,
объективно ему присущих целей. Поэтому те цели, которые он
назначает, отражают его субъективное представление. Напри-
мер, в качестве цели в экономике очень часто назначают доход»
В определенных условиях, например в рыночной экономике,
максимизация дохода гарантирует стабильность. Значит, те
цели, которые назначает фирма, ее руководитель, отражают его
субъективные представления о тех мероприятиях, которые не-
обходимы для максимизации дохода.
Но эти субъективные представления могут оказаться неточ-
ными (и даже неверными). Кроме того, ситуация может со вре-
менем измениться. Значит, и цели также должны быть изме-
нены. Поэтому процедура назначения целей в кибернетических
системах нерефлексного типа представляет собой верхнюю
петлю обратной связи, отслеживающей гомеостазис организма
188
ГЛ. III. КИБЕРНЕТИЧЕСКИЕ СИСТЕМЫ И ИМИТАЦИЯ
в целом. Назначение целей в экономической системе — это
своеобразный адаптационный механизм. В результате мно-
гократного повторения процедуры назначения целей и на-
блюдения за результатами снимается целый ряд неопределен-
ностей, устанавливается более ясное понимание целей. .
Но одновременно меняются и внешние условия, меняется ха-
рактер гомеостазиса. В этом вечном рассогласовании субъек-
тивного представления о целях с объективными потребностями
организма и состоит основная трудность в разрешении конфлик-
та на верхнем уровне. И эффективность функционирования ме-
ханизма адаптации организма во многом зависит от характера
процедур назначения целей, от того, насколько они бывают обо-
снованы. В этом и состоит одно из важнейших отличий управ-
ления в кибернетических системах от управления техническими
системами. Формирование целей превращается в самостоятель-
ную проблему и .требует создания специальной системы проце-
дур, о которых мы еще будем говорить, разбирая отдельные
примеры.
Этот первый этап (формирование целей) предполагает еще
формирование сценария. Но и здесь мы сталкиваемся с целым
рядом особенностей, отличающих рефлексные системы от не-
рефлекеных. В технических (рефлексных) системах мы также
составляем сценарий. Но этот сценарий ограничивается описа-
нием только внешней обстановки — вектор-функции £(/). В не-
рефлексных системах присутствуют еще и другие субъекты. Их
поведение нам неизвестно, но от него зависит и возможность
достижения наших целей, и сами цели. Поэтому сценарий дол-
жен включать наши предположения о действиях других субъ-
ектов. Формирование сценария превращается в сложную со-
циальную проблему. Некоторые особенности этой проблемы
были показаны на примере систем, обладающих иерархической
организацией, и на системах гермейеровского типа. После того
как назначены цели и сформирован сценарий, наша система
превращается в обычную рефлексную систему, и для ее анализа
можно использовать те методы и принципы, которые были раз-
виты для рефлексных систем.
Значит, следующий (второй) этап —это формирование про-
граммы. Но системы нерефлексного типа (в частности, эконо-
мические) бывают настолько сложны, что этап формирования
программы разбивается на два.
Расчет программы производится с помощью упрощенной сй^
стемы моделей. Это —важнейший элемент наряду с процедура-
ми выбора цели в организации верхней петли обратной связп.
Но для устойчивости функционирования организма в целом этой
петли обратной связи может оказаться мало. Поэтому в эко-'
комических системах выделяют еще третий этап планирова*
$ 5. ПРОГРАММНЫЙ метод
189
вия___расчет плана на более короткий срок, но с большей де-
тализацией параметров системы. Программа превращается в
долгосрочный план (специальным образом организованный).
Последний, четвертый этап — это этап реализации плана,
т. е. проектирование механизмов, реализующих многочисленные
«малые» петли обратной связи.
Такова общая схема. Проиллюстрируем ее на примере функ-
ционирования экономического организма страны или региона —
организма с Централизованной социалистической формой произ-
водственных отношений.
в) Формирование целей и прогноз в экономи-
ческих системах. Программный метод выступает как еди-
ное начало для анализа всего комплекса проблем управления
централизованной социалистической экономикой. Поэтому его
детализация, разработка эффективного аппарата, создание та-
кой его схемы, чтобы на каждом уровне иерархии специалист
мог работать с относительно небольшим объемом информации,
приобретает все большее значение для практики.
Мы указали четыре этапа реализации программного метода.
Конечно, подобное разделение весьма условно. И вообще, четко
отделить один этап от другого не так просто. Но как бы ни
была условна предложенная схема разделения на этапы, она
отражает многие существующие черты программного метода.
Попробуем пояснить содержание этих этапов на некоторых при-
мерах.
Проблемы, изучения ситуации и ее возможный прогноз удоб-
но разделить на два класса. К первому мы относим изучение
разнообразных внешних обстоятельств — изучение тенденций
развития международных отношений, международной торговли,
рынка, перспективы технического прогресса, перспективы раз-
вития или истощения запасов полезных ископаемых, особенно-
стей эволюции биосферы и т. д. В результате подобных иссле-
дований возникает несколько вариантов сценария. Заметим, чго
необходим в некотором смысле активный прогноз — мы должны
изучать не только характер изменения внешних факторов, но и
нашу способность влиять на их изменение. Ко второму классу
мы относим все проблемы, которые связаны с изучением воз-
можностей своего собственного экономического организма. В по-
следние-4 5—20 лет получили большое распространение прогно-
зы, основанные на различных экспертизах — на экспертных
оценках. Это — важное направление деятельности, и мы ему по-
святим специальную главу. Однако подчас возможности экспер-
тиз переоцениваются. В действительности, чем сложнее оказы-
вается проблема, тем менее надежными оказываются мнения
экспертов. И основой прогностической деятельности должны
быть в конечном счете математические модели. Но они должны
190
ГЛ. III. КИБЕРНЕТИЧЕСКИЕ СИСТЕМЫ И ИМИТАЦИЯ
иметь иную природу, чем те модели, с помощью которых ве-
дется управление. Прежде всего, эти модели должны быть отно-
сительно просты. Прогноз никогда не выделяет единственной
траектории — это не план и не программа. Напомним, что про-
гностическая деятельность относится к тому этапу, когда цели
еще не поставлены. Основная задача прогноза — это создание
ясного понимания возможностей развития, его перспектив. Мы
его трактуем как задачу построения в пространстве интересую-
щих нас параметров (или критериев) множеств достижимости.
Прогноз возможностей имеет своей задачей дать представле-
ние .о том, какие цели могут быть реально назначены, причем
обычно речь идет о конечном продукте. Но не только конечный
продукт может интересовать исследователя. Очень важную роль
играют различные социальные факторы. Например, любые пе-
рестройки пропорций, изменение структуры производства и т.д,
могут быть весьма болезненны, и субъект, изучающий ситуацию,
должен также все это иметь в виду. Исследователю следует за-
думываться и о будущем. Значит, он должен изучать не только
предельные возможности получения конечного продукта, но н
возможные мощности различных отраслей. Так или иначе, на
рассматриваемом этапе возникает целый ряд показателей (кри-
териев) /1, Ц, ..., Ik-
Далее мы составляем некоторую упрощенную математиче-
скую модель нашей кибернетической системы — описание функ-
ционирования экономического организма в агрегированных по-
казателях. Эта система может быть приведена к виду
У = Ф (У, и, I), • (5.4)
где у — фазовая переменная, и — управление. Заметим, что с
этой системой ассоциирован лишь один субъект и она не со-
держит никаких неопределенных факторов. Предполагается, что
исследование ведется в рамках того или иного сценария, в ко-
тором уже использованы все необходимые гипотезы. Это мо-
дель, изучающая внутренние возможности — возможности «на-
шего» управления.
Задача прогноза — для разных моментов времени построить
отображение множества наших управляющих возможностей Gu,
ue Gu, в пространство критериев Л. В результате в простран-
стве h мы получим некоторое множество й, каждая точка ко-
торого отвечает определенной стратегии использования управ- *
ляющих воздействий.
Множество Q естественно назвать множеством экономиче-
ских возможностей. Позднее мы будем заниматься оценкой
программ. Каждая программа требует определенной затраты
конечного продукта, т. е. определяет некоторую точку в про-
странстве критериев h. Если окажется, что эта точка принад-
. § 5 ПРОГРАММНЫЙ МЕТОД 1<Ц
лежит множеству Q, то экономические возможности организма
допускают реализацию подобной программы. Особое значение
приобретает та часть границы множества Q, которая является
паретовским множеством. На рис. 5.1 паретовской частью гра-
ницы является дуга АВ. По существу, нас будет интересовать
лишь небольшая часть множества Q,
примыкающая к паретовской границе. /г-—
Цели, как уже было сказано, огра- ( Ч.
жают субъективные взгляды лица, пред- \. 0 у.
ставляющего данный экономический' ор- \ \
ганизм, и, как правило, формулируются X. Is
не только в терминах конечного продук- -----\
та, сколько с помощью языка политики 0-------‘
или общеэкономических соображений.
Трансляция этих общих установок в си- Рис. 5.1.
стему понятий чисто экономических и их
выражение в терминах конечного продукта, разумеется, яв-
ляется компетенцией экспертов. Но деятельность этих экспер-
тов должна опираться на определенный инструментарий. Его
основой как раз и является служба прогнозов с использованием
системы грубых оценочных моделей.
г) Один условный пример. Предположим, что речь
идет о развитии производительных сил региона, в котором до-
бывается энергетическое топливо.
Обозначим через xi основные фонды отрасли, добывающей
топливо. Ее.динамика описывается следующим уравнением (все
величины даются в денежном выражении):
А = У\ + zi — «Л- ' (5-5)
Здесь у\ — внутренние инвестиции региона, Z\ — инвестиции
верхнего уровня (государства) или банковский кредит, Hi — ко-
эффициент амортизации.
Эта отрасль в единицу времени производит продукт Pi (из-
влекает ресурс в количестве Pi), объем которого определяется
формулой
Pi = «!(/) Л (хь Li, Q[), (5.6)
где Li — количество людей, занятых в отрасли, Qi — количество
уже извлеченного ресурса, причем
= (5.7)
«1(0—коэффициент, характеризующий эффективность техно-
логий— «экзогенный научно-технический прогресс». Он показы-
вает, как при прочих равных условиях повышается эффектив-
ность производства за счет усовершенствования технологий.
192
ГЛ. Ш. КИБЕРНЕТИЧЕСКИЕ СИСТЕМЫ И ИМИТАЦИЯ
Зависимость ai(0 определяется экспертом на основе опыта —
это экстраполяция опыта на будущее.
Зависимость Pi от Qi, т. е. зависимость количества ресурса,
извлекаемого в единицу времени, от объема уже извлеченного
ресурса, представляется убывающей выпуклой функцией
(рис. 5.2): по мере эксплуатации месторождения затраты труда
на добычу единицы ресурса непрерывно растут. Этот факт и
изображен на рис. 5.2.
В данном регионе существует еще одна возможность-произ-
водства ресурса (новая технология или новый бассейн). Но
прежде, чем эта новая возможность начнет давать реальный
продукт, необходимо в течение длитель-
ного времени вкладывать туда! капитал,
без отдачи в данный плановый период.
Развитие этой новой отр'асли (или тех*
нологии) будет описываться уравнением
для ее фондов •
x2 = y2 + z2, • (5.8)
где у2 — внутреннее, а г2 — внешнее ин-
вестирование.
Всю остальную промышленность ре-
гиона мы будем описывать' обычной
двухсекторной моделью. Фонды первого подразделения (произ-
водство средств производства) обозначим через Хя, а второго
(производство средств потребления) —через х4. Их динамика
описывается уравнениями
хз = Уз — х3х3, х4 = у4 — х4х4,
(5.9)
а производственные возможности — стандартными производ-
ственными функциями
Рз — а3 (0 /з (*3> ^з), Pi = а4 (0 fi (х4, Li), (5.10)
где аз(0 и а4(0—коэффициенты, характеризующие влияние
технического прогресса на производительность труда, LjhLh
количество рабочей силы, занятой в производстве этих подраз-
делений.
Для того чтобы создавать фонды в новой отрасли, необхо-
димы определенные трудовые ресурсы. Обозначим их через L2.
Очевидно, что L2 должно быть функцией суммарных инвестиций
у2 + z2> Т. е.
£2 = (DQ/2 + z2). • (5.11)
Эта функция существенно нелинейна и имеет вид, изображен*
ный на рис. 5.3. В самом деле, уже до начала освоения выде*
ленных средств должен возникнуть некоторый производственный
5 5. ПРОГРАММНЫЙ метод
193
коллектив — до тех пор, пока не возникла некоторая «критиче-
ская масса» коллектива, реальная производственная деятель-
ность начата быть не может.
Внутренние инвестиции региона у\, уг, Уз, У* определяются
объемом продукции первого подразделения:
Рз У\ =h Уз + Уз + Уь (5.12)
«•
И наконец, количество рабочей силы подчинено очевидному
ограничению:
Е (5.13)
i-1 х
где L (0 — суммарное количество рабочей силы в регионе.
Для того чтобы эта модель могла изучаться количествен-
-ными методами, она должна быть насыщена информацией.
Структура производственных функций определяется по ста-
тистическим данным. Коэффициенты а,(/)—это экспертный
прогноз. Что касается величины ' (
L(f)—прогноза динамики рабочей ——
силы, то это либо результат эксперт-
ного прогноза, либо результат рас- _ f
чета по демографической модели. У
Управляющими факторами здесь
являются инвестиции zi и рас-,
пределение рабочей силы Li. За? _________________________ г
дав эти величины как функции вре- 0 Уг*гг
мени, мы получим замкнутую мо- рис 53
дель. Система уравнений и ограни-
чений (5.5)—(5.13) позволит нам решить задачу Коши: по дан»
ным начальным условиям определить траекторию развития ре-
гиона— величины Xt (t).
Опишем теперь•интересы региона. Прежде-всего, руковод-
ство региона заинтересовано в обеспечении определенного уров-
ня жизни жителей региона. Его можно описать различным об-
разом, например в интегральной форме:
т *
(5.14)
о
где Т — срок прогнозирования. Вместо функционала (5.14) мож-
но взять и функционал
(5.15)
характеризующий количество потребительского продукта, выра-
батываемого на одного работающего, Условие Wi~>max также
7 Н. Н. Моисеев
194
ГЛ. III. КИБЕРНЕТИЧЕСКИЕ СИСТЕМЫ И ИМИТАЦИЯ
определит стремление обеспечить высокий жизненный уровень
населения. Далее, производство ресурса. Pi дает определенный
доход, который регион может расходовать на социальные нуж-
ды, на развитие региональной инфраструктуры (строительство
дорог, жилья и т. д.). Если все величины, входящие в систему
уравнений модели, даны в денежном выражении, то доход от
ресурса добывающей отрасли будет равен
т
w2 = (Pi — Zi) dt, (5.16)
о
поскольку внешние инвестиции могут рассматриваться как долг
банку.. Наконец, региональное руководство должно заботиться
и о будущем. Добывать ресурсы старым способом становится
все труднее и труднее. Необходимо менять технологию или на-
чинать эксплуатацию нового бассейна. Значит, в интересах ре-
гионального руководства такое использование управлений, ко-
торое обеспечивает
— х2 (Г)-> max. (5.17)
Таким образом, выбор стратегии, выбор управляющих воз-
действий определяется по меньшей мере тремя функционалами:
Wi, w2 и Wz. Исследовать ^свойства модели мы можем с по-
мощью серии задач оптимального управления. Например, может
быть предложена следующая система расчетов. Положим у2 =
= z2 = 0. Тогда W3 = 0. Положим еще i/i = Zi = 0 и Li=0.
Тогда Л = 0 и все ресурсы направляются во второе подразде-
ление. Этой стратегии отвечает абсолютный максимум функцио-
нала a>i (максимальное проедание своих ресурсов).
Другой крайний случай —это максимизация функционала
ш2. Здесь решение тоже несложно, так как это будет задача
со свободным правым концом для достаточно простой системы
дифференциальных уравнений. В плоскости (wi,w2), отметим
значения, соответствующие этим крайним случаям: wf и
(рис. 5.4). Разумеется, оба крайних случая не являются реаль-
ными— они только демонстрируют предельные возможности
производственного механизма.
Рассмотрим теперь функционал вида
w = Yio»i + y2w2. (5.18)
В плоскости (wi,w2) уравнению (-5.18) соответствует некоторая
прямая (см. рис. 5.4). Решим теперь задачу
й-> max.
Ее решение обозначим через й>+. Соединим точки oij1', w+ и
w+, w} прямыми. Получим некоторый четырехугольник, огра-
§ 5. ПРОГРАММНЫЙ метод
195
«цену» каждого из функционалов.
ничейный этими прямыми и осями координат. Этот четырех-
угольник дает приближенное описание множества экономиче-
ских возможностей при условии, что мы не будем создавать
мощностей новбй отрасли.
Уже полученные результаты представляются важными: они
показывают не только предельные возможности экономического
организма, но и условную
Мы видим, как измене-
ние значений одного из
функционалов меняет
значение другого. Теперь •
положим
Щз==₽о>О, (5.19)
т. е. зададим некоторое
фиксированное значение
объема мощностей новой
отрасли в конце плано-
вого периода. И снова
рассмотрим те три опти-
мизационные задачи, ко-
торые мы изучали при
а>з = 0. Эти задачи с условием
риметрическими ’ задачами, а
некоторая ломаная, которая на
Далее мы положим
(5.19) будут некбторыми изопе-
условию (5.,19) будет отвечать
рис. 5.4 изображена пунктиром.
— Pi > Ро
и нанесем точками новую ломаную и т. д.
В результате мы получим достаточно ясное представление
.не только о предельных возможностях экономики региона, но
и о том, каковы должны быть «жертвы» в величинах функцио-
налов twi и W2, обеспечивающие создание задела для будущего.
Для получения более наглядных результатов можно еще про-
вести серию подобных расчетов, рассматривая плоскости
(a»i, аУз) и (w2, а/3).
Пример, который мы рассмотрели, достаточно условен. Но
он демонстрирует одну важную особенность того этапа реали-
зации программного метода, который мы назвали изучением об-
становки и прогнозированием. Прогноз — это не сценарий. Это
исследование эволюции экономического организма в зависимо-
сти от того, какие стратегии при использовании наших воз-
можностей мы будем применять. Это очень важно — не прогноз
вообще, а прогноз в зависимости от выбранных управлений.
Примечание. Построение множеств экономических возможностей
(множеств достижимости), как правило, трудная проблема с алгоритмической
7*
196
ГЛ. ПТ. КИБЕРНЕТИЧЕСКИЕ СИСТЕМЫ И ИМИТАЦИЯ
и вычислительной точек зрения. Но требования точности здесь обычно бы-
вают не очень высокими, а интервал прогноза Т не очень велик. Поэтому
весьма перспективными представляются линеаризация задачи и построение
множеств достижимости в рамках линейной теории. Этот подход тем более
оправдан, что для линейных систем уже существуют эффективно работающие
программы построения множеств достижимости и их «визуализация», т. е. вы-
вод на дисплей их геометрических характеристик. Другими словами, суще-
ствует специальная система расчетов, пригодная для построения множеств
достижимости в задачах достаточно большой размерности — порядка 10—15 -
переменных (см.- [53]).
д) Программы. Программы, как уже было сказано, — это
совокупность мероприятий, обеспечивающих достижение конеч-
ных целей данного этапа развития (этапа долгосрочного плани-
рования). Очень важно понять, как формируются программы на
высшем, национальном уровне или уровне крупного региона.
Программы могут быть самого разного рода. Например:
1) Достижение заданного уровня потребления.
2) Достижение заданного уровня обороноспособности.
3) Программа социального развития.
4) Крупные научные программы, в том числе программа
освоения космоса, изучения океанского шельфа и т. д.
5) Программа освоения того или иного региона, например
Дальнего Востока или среднеазиатских пустынь.
6) Программа охраны окружающей среды.
Формирование каждой из программ требует своей системы
процедур, своих специфических методов анализа. Рассмотрим
некоторые из программ.
Достижение заданного уровня потребления.
Прежде всего надо научиться характеризовать заданный уро-
вень потребления. Это можно сделать разными способами.
Остановимся на самом простом.
Согласно А. Г. Аганбегяну, для этого целесообразнее всего
задать структуру спроса — вектор d, положительные компонен-
ты котброго нормированы каким-нибудь образом, например: -
и скаляр X— уровень потребления.
Вектор d, выраженный в каких-либо единицах, например в
единицах стоимости, показывает относительную потребность в
тех или иных товарах, точнее, в том или ином конечном про-
дукте.
Компоненты вектора d должны быть предметом глубокого
социологического анализа, причем надо учитывать динамику
потребностей — неизбежность изменения структуры спроса в те-
чение планового периода. Так что речь идет о предполагаемом'
составе потребностей на конец планового периода. Вопрос о за-
дании вектора d{T) осложняется еще и тем, что научно-техни-
5 5. программный метод
197
ческий прогресс непрерывно создает новые возможности потреб*
ления, новые продукты, новые материалы.
Проблема определения структуры потребностей очень слож-
на, она имеет и довольно серьезный философский аспект. Все
ли потребности, например, должны удовлетворяться, какие из
них наиболее важны? Ответы на эти вопросы нельзя получить"
ни с помощью рынка, ни с помощью института общественного
мнения. Всего этого недостаточно. Нужны комплексные иссле-
дования проблем человека, его интересов и потребностей, ди-
намики развития и т. д.
Но если структура потребностей определена, то целью про-
граммы будет выработка такой стратегии использования ресур-
сов, которая обеспечивает выполнение условия
А,->тах. (5.20)
Условие (5.20) будет выступать как один из возможных крите-
риев «оптимальности плана», но об этом речь будет ниже.
Программы социального развития, медицин-
ского обеспечения, образования и им подобные.
Особенность составления этих программ состоит в том, что мы
должны понять характер обратной связи —как влияет, напри-
мер, программа образования на общее поступательное движение
общества, в какой степени реализация этой программы обеспе-
чивает его стабильность. После этого наступает следующий
этап, относительно более простой, — расчет необходимых мате-
риальных затрат в терминах конечного продукта,
Подобные программы могут быть формализованы в тех же
терминах, что и программы потребления. Изучение потребно-
стей в конечном продукте нам позволит ввести вектор струк-
туры потребностей и интенсивность достижения заданной струк-
туры. Мы получим некоторую систему критериев типа (5.20).
Энергетические программы. Они занимают совер-•
шенно особое место в структуре программного метода. Под-
черкнем важнейшую особенность программного метода в эко-
номике. Программное планирование — это планирование от ко-
нечных целей, от конечного продукта, следовательно, количество
стали, меди, хлопка, т. е. любого промежуточного продукта, ко-
торое надо произвести, важно не само по себе. Оно есть след-
ствие расчета программ. Оно определяется, а не задается.
Однако среди подобных промежуточных продуктов есть один
уникальный — это энергия. Конечно,, часть энергии используется
населением в качестве конечного продукта. Но доля потребле-
ния электричества для бытовых нужд ничтожна. Поэтому элек-
троэнергия, подобно железной руде или стали, также выступает
прежде всего в_роли промежуточного продукта. Тем не менее
энергетика занимает особое положение и должна изучаться
198 гл. III. КИБЕРНЕТИЧЕСКИЕ СИСТЕМЫ И ИМЙТАЦИЯ
специально. И дело состоит, даже не в том, что энергетическая
база является основой национальной экономики. Создание энер-
гетических комплексов требует многих лет, существенно больше,
чем любой среднесрочный план. Поэтому создание энергетиче-
ских мощностей — это принципиально работа на будущее, и раз-
витие энергетики требует специальных программ.
Предположим теперь, что эксперты с их службами, с их
системами моделей и информационной базой сформулировали
некоторую серию программ. Они определили необходимые хо-
зяйственные, конструкторские и прочие мероприятия и, конечно,
указали ресурсы, которые необходимы для их реализации. Но
это лишь первый шаг формирования «генеральной програм-
мы»— общей программы развития данного экономического ор-
ганизма. Необходима еще увязка и согласование различных
программ.
В самом деле, все ресурсы, необходимые для реализации
программ, находятся «в одном котле». Возникает необходи-
мость распределения ресурсов по различным программам.
Проблема согласования програмиг~требует не только спе-
циальных процедур, но и специальных классов моделей, суще-
ственно отличных от тех, которые использовались для целей
прогнозу. Для решения задачи согласования программ тре-
буется, по меньшей мере, два разных типа моделей. Во-первых,
каждая программа — это некоторая 'совокупность работ, ну-
ждающихся в определенных затратах ресурсов, денег, рабочей
силы. Кроме того, многие из этих работ могут выполняться
лишь в определенной последовательности. Вот почему для их
описания наиболее удобен язык теории графов. Мы говорим,
что программа описана, если дан не только перечень работ, но
и построен граф взаимосвязанностей этих работ и определены
ресурсы, необходимые для их выполнения.
Но программа только потребляет ресурсы. Значит, описав
вариант программы, нам необходимо еще выяснить ее реали,-
зуемость, возможность обеспечить выполнение программы не-
обходимыми ресурсами, определить возможные сроки заверше-
ния работ и. т. д. Анализ, проведенный на этапе прогноза, для
этого недостаточен. Расчеты, сделанные при изучении возмож-
ных перспектив,—это предварительные оценки. Они служат
лишь ориентирами, позволяющими исключать из последующе-
го анализа заведомо нереализуемые варианты. Для расчета
возможных сроков завершения, для оценки реализуемости про-
граммы нужно значительно более «детальное рассмотрение эко-
номического процесса. Нужны модели, описывающие развитие
и функционирование различных отраслей экономики. Эти мо-
дели уже значительно более подробные, чем модели, исполь-
зуемые для прогнозных оценок. Для анализа реализуемости
§6. ПРОГРАММНЫЙ МЕТОД
199
программ я оценки возможных сроков их выполнения в ВЦ
АН СССР разработан класс моделей, получивший название
л-модели, по имени авторов ее первого варианта Ю. П. Ивани-
лова и А. А. Петрова [42].
е) л-модель. В основе л-модели лежит линейное условие
материальных балансов
z = x — Ax — w, (5.21)
где х—поток вектора совокупного продукта экономического
организма (производство продукта в единицу времени), г —ин-
вестиционная часть общего продукта, w — потребление, А —
матрица прямых затрат: ее элемент ац определяет количество
продукта отрасли I, которое необходимо для производства еди-
ницы продукта отрасли номера /.
Уравнение (5.21), как мы уже упоминали, называется урав-
нением Леонтьева. В скалярном виде это уравнение запишется
так
tn
Zi — Xi — ^aijXj — Wi, i—1.......п. (5.22)
Вместо понятия фондов, которое использовалось в моделях,
описанных в п. г), в л-модели вводится понятие мощностей
"£(/). Мощностью отрасли номера I мы будем называть то пре-
дельное количество продукта, которое может быть создано в
единицу времени. Зная технологию производства и объем фон-
дов в отрасли номера I, мы можем, рассчитать мощности, и
обратно.
Обозначим через прирост t-й мощности за год номе-
ра t. Тогда отрасль номера i в начале года номера t + 1 будет
располагать мощностью
Ы/+1)=ЫО + ио. (5.23)
Уравнение (5.23) задает изменение мощности во времени.
В л-модели введены понятия эффективной мощности &(f) и
прироста эффективной мощности £<(/). В зависимости от вида
функций и £,(/) может быть предложена целая серия ва- '
р и ан то в л-модели. Здесь мы рассмотрим самый простой.
Обозначим через 0{(^) мощность отрасли номера I, создание
которой началось в год номера t. Однако эта мощность не сразу
сможет начать производить продукцию — пройдет еще извест-
ное время, прежде чем она войдет в строй. Это время носит
название строительного лага. Оно складывается из времени, ко-
торое необходимо для строительства зданий и других произ-
водственных "площадей, из времени, которое расходуется на
размещение, монтаж и наладку" оборудования, и из времени,
200 ГЛ. III. КИБЕРНЕТИЧЕСКИЕ СИСТЕМЫ И ИМИТАЦИЯ
♦
которое расходуется на освоение мощности. Величина строп»
тельного лага — это некоторая характеристика отрасли. Будем
обозначать ее через тр и считать известной величиной. Тогда
прирост мощности в году номера t будет
Ь(0 = М*-П/). (5.24)
Однако завод или промышленный комплекс начинает выдавать
продукцию еще до полного введения его в строй. Ввод в строй
мощностей происходит постепенно, начинав с некоторого года
после начала строительства. Введем функцию а(/), показы-
вающую, какая доля мощности комплекса через t лет после'на-
чала его строительства уже дает продукцию. Характер этой
функции показан на рис. 5.5. Таким образом, предельные воз-
можности производства в отрасли но-
мера i в год номера t будут
МО = МО + МО, (5.25)
где прирост эффективной мощности
£,(/) определяется формулой
____ . "z-i
М0= £ ММ (*-«). (5.26)
$—0
Таким образом, величина МО опре-
деляет то количество продукта, кото-
рое может выпустить отрасль номера .
i за счет работы предприятий, Строительство которых еще пол-
ностью не завершено.
-Мощность отрасли определяет лишь ее предельные возмож-
ности. Это вовсе не означает, что продукт, который будет про-
изведен в год номера t, будет равен мощности, имеющейся в
отрасли. В действительности мы имеем лишь неравенство
_М0<М0 + &(0, П. (5.27)
Количество произведенного продукта является одним из управ-
ляющих факторов, и не больше. Условие (5.27) —это лишь одно
из ограничений. Нет никаких оснований требовать, чтобы мощ«
ности были загружены полностью.
Примечание. Требование полной загрузки мощностей может противо-
речить условиям баланса, поскольку для полной загрузки мощностей требуется
вполне определенное количество ресурса. А этот ресурс может понадобиться
для других целей. В сбалансированной экономике будут строиться, конечно,
лишь те мощности, которые необходимы и будут полностью загружены. Поэтому
в «нормальных» условиях недогрузка, мощностей не должна быть особенно
большой. Но поскольку мы ^ивем в вечно' изменяющемся мире, поскольку мы мо-
жем конкретизировать наши цели на относительно небольшое время вперед,
поскольку однажды введенные мощности смогут выдавать продукцию в течение
§ 5. ПРОГРАММНЫЙ МЕТОД
201
длительного времени, большего, чем срок планирования, то практически все-
гда будем сталкиваться ,с необходимостью недогрузки мощностей.
Вектор г(0 в уравнении |(5.22) назовем свободным продук-
том. Он расходуется на инвестиции и на создание запасов
z(0 = ^(0 + ?(^+l)-<7(0. ' (5.28)
Здесь —та часть свободного продукта, которая идет на
инвестиции, q(t) — уровень запаса на начало года номера t.
Далее в модель вводится ограничение на трудовые ресурсы
<£(/). (5.29)
i-i
Здесь L{t)—количество трудоспособного населения, ^ — тру-
дозатраты на производство единицы продукции.
Вектор потребления w в уравнении (5.22) также является
одним из управлений, которое должно быть ограничено снизу:
щ(/)>иГ(0. (5-30)
Определение величины w~(t) в (5.30) совершенно нетривиаль-
но. Оно требует глубоких социологических исследований.
Для того чтобы модель могла функционировать, необходимо
еще описать связь между затратами на создание новых мощно-
стей и уже строящимися мощностями.
Для описания затрат на создание новых мощностей в л-мо-
дели принята одна важная упрощающая гипотеза, которую мы
условимся называть гипотезой нормативных затрат. Она фор-
мулируется следующим образом.
Вектор затрат на создание новых мощностей 4 однозначно
определяется объемом мощностей, которые находятся в про-
цессе строительства:
„ Ч/-1
М0=Е Е */А(*-«), (5.31)
/-1 s==0
где fe/s —некоторые фиксированные числа — нормативы.
Смысл этой гипотезы совершенно очевиден. Если строитель-
ство некоторого завода или промышленного комплекса начато,
то оно должно непрерывно продолжаться, причем характер за-
трат в течение всего периода строительства должен быть строго
регламентирован.
. Разумеется, в реальной практике трудно обеспечить столь
четкую регламентацию использования выделяемых средств. Но
надо согласиться с авторами модели в том, что в исходные, ди-
рективные планы должны быть заложены некоторые оптималь-
ные способы реализаций проекта и оптимальные нормативные
сроки окончания строительства.
202
ГЛ. III. КИБЕРНЕТИЧЕСКИЕ СИСТЕМЫ И ИМИТАЦИЯ
Примечание, л-модель описывает процесс, который не является мар-
ковским. Модель содержит запаздывания (см. (5.31)), и поэтому начальное
состояние не определяет однозначно траекторию — необходимо учитывать еще
предыёторию процесса. i
Опишем теперь функционирование модели. Предположим,
что состояние экономического организма на конец года номера
t— 1 известно и известна также предыстория его развития в те-
чение последних п* лет, где
n* = шах 1)/.
' i
Тогда величины &(/—1), а следовательно, и мощности £<(/)
в конце года номера t определяются автоматически. В самом
деле, согласно формуле (5.24) величина t,i(t—1) однозначно
определяется теми мощностями, строительство которых нача-
лось в год номера t — тр, а величина определится тогда по
формуле (5.23).
Для того чтобы определить величину эффективной мощно-
сти &(/), мы должны задать еще величины 0,(1— s) — объемы
тех мощностей, строительство которых начато до года номера t.
Таким образом, величины 0,(f)—объемы тех мощностей,
строительство которых начнется в год номера t, — являются сво-
бодными параметрами, которыми мы можем распоряжаться для
целенаправленного развития .экономики. Если величины 0,(0
задайы, то величины затрат ii(t) также определяются одно-
значно по формуле (5.31). Таким образом, распределение за-
трат по отраслям определяется закладкой новых мощностей. Но
как только величины 0,(0 оказываются фиксированными, их
дальнейшее развитие, а следовательно, и та доля затрат, кото-
рая идет на реализацию начатого строительства, оказываются
однозначно определенными. Совокупный продукт x(f) также
оказывается одной из свободных функций. Его объем стеснен
только основным балансовым соотношением Леонтьева (5.22)
и ограничением (5.27).
Рассмотрим теперь уравнение (5.28), определяющее изме-
нение объема запасов. Если величина 0(0 фиксирована,' то
уравнениё (5.28) содержит еще одну произвольную функцию
z{t) (поскольку .2(0 определена), которую можно трактовать
как характеристику управления запасами.
К числу управляющих функций мы должны отнести также
и объемы потребления w(t), стесненные условиями (5.30).
Таким образом, л-модель не является замкнутой. В ней су-
ществует целый ряд управляющих функций. В описанном ее
варианте в качестве управлений выступают следующие функции»
1) объем совокупного продукта x(0i
2) объем потребления w(t)\
§ 5. ПРОГРАММНЫЙ МЕТОД
203
3) объем мощностей, строительство которых начато в год
номера Л —функция 0(0; /
4) доля свободного продукта, который идет на создание
запасов.
Распоряжаясь этими величинами, мы можем добиваться це-
ленаправленного развития экономики и решать разнообразные
оптимизационные задачи.
Главная из этих задач — определение срока завершения про-
граммы. конечно, будучи прямо поставленной, такая задача ка-
жется утопичной в силу ее сложности. В самом деле, программа
описывается графом и проблема ее скорейшего завершения сво-
дится к составлению оптимального расписания работ, в котором
ресурсные возможности определяются из уравнений л-модели.
Поэтому решение подобной задачи следует искать на пути при-
менения идей имитации и вариантных расчетов. Проблема оцен-
ки реализуемости программы, возможности сочетания решения
дискретной задачи составления оптимального расписания с ре-
шением уравнений л-модели — один из важнейших разделов
теории программного метода в экономике. В нашей книге мы
еще не раз будем возвращаться к этой проблеме.
Но кроме рассмотренной общей задачи существуют разно-
образные частные задачи оптимизации, которые очень полезны
на этапе выработки программ. Одна из них — это задача о пе-
рестройке пропорций.
Предположим, что в год номера Т мы хотели бы иметь
вполне определенную структуру пропорций (структуру мощно-
стей) :
gi(Г):6г(Г): ... :|„(Г) = Л1:Л2:- ...
или
1М = М1), /=!.•••..«• (5.32)
Тогда мы можем поставить задачу достижения условий (5.32).
Но управлениями при этом можно распорядиться по-разному,
поскольку условия (5.32) не выделяют единственного управле-
ния. В частности, мы можем потребовать, чтобы
- gi(T)-> max. (5.33)
Задача (5.33) — это задача достижения заданных пропорций в
экономике при максимизации уровня производства.
Имеет смысл и другая оптимизационная задача» на быстро-
действие: достичь заданных мощностей &(Т) за минимум вре-
мени. л-модель позволяет решать еще целый ряд оптимиза-
ционных задач, в том числе и традиционных, в которых целе-
вая функция характеризует потребление. х
Подчеркнем еще раз важность задач оптимизации структуры
экономики. Предположим, что экономический организм разви-
204
ГЛ. III. КИБЕРНЕТИЧЕСКИЕ СИСТЕМЫ И ИМИТАЦИЯ
вается с сохранением своих пропорций. Тогда можно говорить
о темпе роста и поставить, например, следующую задачу: рас-
порядиться имеющимися управляющими воздействиями так,
чтобы темп роста был максимальным. Решение подобных задач
может иметь весьма важные приложения. Например, с их по-
мощью можно оценить эффект полной автоматизации управле-
ния. Существующий темп роста дается статистическими орга-
нами и хорошо известен. Обозначим его через 0. Обозначим че-
рез р+ максимально возможный темп роста. Разность р+ — р —
это та верхняя оценка эффективности АСУ, больше которой мы
получить не сможем при данной структуре экономики. Для того
чтобы увеличить темп роста, необходимо изменить структуру
пропорций.
Количество задач, которые целесообразно решать на уровне'
выработки программ, может быть очень большим. Каждая из
них несет определенную информацию о свойствах экономиче-
ской) организма и делает более отчетливыми возможные резуль-
таты принятия решений^ общие свойства экономического меха-
низма.
. Успех подобных исследований во многом зависит от тех вспо-
могательных программ, которыми оснащена изложенная схема
использования л-модели. В настоящее время в ВЦ АН СССР
создана подобная система сервиса, ориентированная на исполь-
зование л-модели не очень высокой размерности.
ж) Проблема планирования и иерархия мо-
делей. Описанная в предыдущем пункте л-модель была пред-
назначена для анализа программ как инструмент в процедурах
их формирования. Такая модель не должна быть высокой раз-
мерности (не должна содержать много отраслей), поскольку она
предназначена для решения большого количества разнообраз-
ных вариационных задач, требующих, как мы знаем, весьма
трудоемких расчетов. Количество отраслей в л-модели может
быть порядка 15—20 и вряд ли больше. Но такая степень дета-
лизации совершенно недостаточна для нужд планирования на
короткие отрезки времени (до 5 лет).
В результате процедур формирования программ будут вы-
работаны системы показателей, контрольные цифры по важней-
шим конечным продуктам. Центральная задача конкретного
планирования — это выработка таких плановых заданий сле-
дующему уровню иерархии — отраслям, объединениям, которые
обеспечивали бы достижение контрольных показателей. Здесь
уже появляются более детализированные модели — система мо-
делей, естественно, делается гораздо богаче. В связи с этим
возникает вопрос: не может ли план оказаться в противоречии
с программой? "
§8. ПРОГРАММНЫЙ МЕТОД 205
Конечно, план не тождествен программе. Он является' ее
дальнейшим развитием, конкретизацией. В процессе планирова*
ния могут быть вскрыты и новые резервы и, наоборот, обнару-
жены «узкие места». Поэтому плановые сроки будут неизбежно
отличаться от директивного срока, полученного в результате
анализа программы. В конечном счете программа — это набро-
сок, проспект плана. Можно сказать, что контрольные показа-
тели программы — это его реперы, вехи.
При обсуждении программного метода часто говорят о его
несоответствии принципам оптимального планирования. Это
предубеждение настолько укоренилось, что его обсуждению сле-
дует посвятить известное время. Когда употребляют термины
«оптимальный план», «оптимальное планирование», то обычно
имеют в виду, что известна целевая функция, ибо без этого по-
нять, что значит оптимальный’ план, невозможно. Но в том-то
и заключается проблема, чтобы построить эту целевую функ-
цию. Если функция цели построена, то расчет плана превра-
щается в чисто техническую, оптимизационную проблему. Как
бы сложна она ни была — это уже вопрос математики. Что же
касается целей, то здесь на первый план выступают неформаль-
ные обстоятельства, использующие субъективные представлений
о целях экономического организма. Программный метод как
раз и направлен на организацию процедур, позволяющих доста-
точно обоснованно поставить эти цели, наметить программу.
В процессе формирования программы определяются необ-
ходимые количества конечного продукта в год номера Т — х,(Т).
На их основе может быть сформулирован критерий для построе-
ния системы оптимального планирования. В качестве целевой
функции может быть принята, например, следующая:
х (Т)
J = min-^. (5.34)
I Zi\‘)
Задача оптимального планирования будет теперь состоять в том,
чтобы выбрать управляющие воздействия, максимизирующие J.
Примечание. В первой главе мы уже сталкивались с критерием вида
(5.34) и выяснили, что он обладает одним важным свойством: если ограниче-
ния линейны, то задача
У-хпах
может быть сведена к -задаче линейного программирования. Это обстоятель-
ство весьма важно с практической точки зрения, поскольку на этапе плани-
рования в основном стремятся использовать линейные ограничения и свести
задачу к линейному программированию.
Практическая реализация- численной схемы оптимального
планирования — это всегда достаточно трудная вычислительная
задача. И основная трудность задачи —это ее размерность.
206
ГЛ. III. КИБЕРНЕТИЧЕСКИЕ СИСТЕМЫ И ИМИТАЦИЯ
Сегодня уже предложено много разных способов упрощения за-
дачи оитимального планирования. Обращаем внимание только
на две возможности.
1) Экономика трудно переносит «большие скачки» — резкое
изменение объема и номенклатуры выпуска продукта (другое
дело — измерение характера его использования). Поэтому, ис-
пользуя итерационные подходы, мы всегда можем иметь в ка-
честве хорошего первого приближения план выпуска предыду-
щего пятилетия.
’2) Целесообразно широкое использование экономических, ме-
ханизмов управления. Оно неизбежно приведет к возникнове-
нию иерархической структуры планирования, которая, в свою
очередь, резко упростит все процедуры расчета плана на верх-
нем уровне.
з) Реализация программ. Программный метод, как
уже подчеркивалось, — это целостная система взглядов на уп-
равление сложными кибернетическими системами со многими
субъектами, в том числе и экономическими системами. Предва-
рительный анализ (прогноз), выработка .программ, планирова-
ние — все эти этапы должны завершаться реализацией программ
и планов, т- е. созданием специальных механизмов реализации
(аналогов автопилота). В случае экономических систем наше
утверждение означает, что вместе с проектированием програм-
мы должны проектироваться и хозяйственные механизмы.
Это трудные проблемы, и они только недавно превратились
в объект научного анализа. Они охватывают широкий круг во-
просов: изучение структуры систем управления, выбор опти-
мального соотношения прав и ответственности отдельных звеньев
и уровней производственной иерархии, разработку принципов
проектирования новых и совершенствования уже существующих
мощностей и т. д.
В настоящее время много говорят об экономическом экспе-
.рименте. Однако, как ни важно эмпирическое начало в любом
исследовании, его всегда недостаточно, особенно в экономике.
Экономический эксперимент не только дорогостоящ, не только
затрагивает судьбы людей, но его очень трудно переносить на
другие объекты, распространять его выводы. Он обычно очень
конкретен. Поэтому в этой сфере теоретические исследования
особенно необходимы.
В первой главе, как и в этой, мы уже обсуждали некоторые
особенности управления в иерархических системах. Мне кажет-
ся, что информационный подход к анализу функционирования
экономических систем, который был описан, в сочетании с изу-
чением конкретной ситуации и социологическими исследова-
ниями может послужить основой для создания того важного на-
правления в экономико-математических исследованиях, кото-
§ 5. ПРОГРАММНЫЙ МЕТОД
207
рое будет посвящено проблемам создания экономических ме-
ханизмов.
В литературе иногда встречаются высказывания о том, что проблема
проектирования таких механизмов является специфической для плановой эко-
номики, поскольку в экономике рыночного типа основной тип механизма — ры-
нок — слагается стихийно. Это утверждение не очень точно. Конечно, рынок —
это стихия. И человеку трудно повлиять на его законы. Трудно, но не не-
возможно. Монополизация промышленного производства и торговли привела
к появлению целого ряда новых обстоятельств. В частности, начали формиро-
ваться — подчеркнем, целенаправленно формироваться — разнообразные меха-
низмы. Поэтому концепции экономических механизмов, развиваемые в этой
главе, и принципы их анализа могут быть использованы при изучении капита-
листической экономики.
С другой стороны, далеко не все механизмы плановой экономики яв-
ляются механизмами, созданными целенаправленно. Многие из механизмов,
действующих и во многом определяющих внутренние экономические процессы,
сложились стихийно. Этому много причин. И главная из них — сложность той
объективной реальности, с которой имеет дело исследователь. Жизнь любой
экономической системы определяется объективными законами и структурой
противоречий. Неточное их знание, на основе которого проектируется тот или
иной хозяйственный механизм, приводит к тому, чтобы механизм функциони-
рует не совсем так, как это предполагалось. В его действии проявляются
определенные элементы стихии — непредусмотренные эффекты.
Обсуждение подобных вопросов очень интересно и очень
важно для практики. Но в целом эта тема далеко выходит за
рамки нашей книги. Здесь нам важен следующий вывод — про-
ектирование механизмов, реализующих замысел, реализующих
программу, ничуть не менее важно,-чем сама программа и пла-
нирование. Совершенные механизмы хозяйственного управления
столь же необходимы любому организму, как и автопилот за-
пускаемому космическому аппарату. Отлично сконструирован-
ный аппарат, обладающий всем необходимым ресурсом, с пра-
вильно поставленной целью и. хорошо рассчитанной оптималь-
ной программой, но имеющий плохую систему коррекции, пло-
хой автопилот, никогда не достигнет тех целей, ради которых
он создавался.
Единство замысла, программы (и плана) и механизмов реа-
лизации—- это один из важнейших системных принципов, и он
нуждается в создании развитой теории. Определенные шаги в
направлении ее создания сделаны в последние 10—15 лет, и они
нашли отражение в этой книге.
и) К истории программного метода. Широкое
развитие и внедрение программного метода привело к появле-
нию довольно большой литературы, которая ему посвящена. Во
многих работах высказываются разнообразные суждения о его
происхождении и авторстве.
вия БГШИНСТВО из иих является> по моему убеждению, плодом недоразуме-
. дело в том, что возникновение программного метода часто связывают'
208
ГЛ. Ш. КИБЕРНЕТИЧЕСКИЕ СИСТЕМЫ И ИМИТАЦИЯ
с процедурой программирования и бюджетирования,, которая во времена пре»
зидента Кеннеди была введена в распределение военного бюджета США
тогдашним министром обороны Макнамарой. Метод составления бюджета,
введенный в министерстве обороны США в шестидесятых годах, решал до-
вольно специфическую проблему — упорядочение расходов различных родов
войск, выполнявших некоторые общие задачи. Значит, метод Макнамары ста-
вил своей задачей создание процедур, связывающих национальные цели стра-
ны со структурой военного бюджета. Таким образом, так же как и в опи--
санном выше программном методе, все планирование бюджета шло от конеч-
ных целей. Появление термина «программный метод» в США, конечно, стиму-
лировало интерес к нему и в нашей стране и содействовало его внедрению.
Но на развитие самого метода, его гносеологической и аппаратной стороны
те идеи и способы решения задач, которые были, предложены в США в пе-
риод Макнамары, практически никакого влияния не оказали.
Я постарался показать, что программный метод — это неко-
торая система взглядов, единая и стройная концепция управле-
ния в кибернетических системах весьма .общего вида. Это — си-
стема, позволяющая объединить формальные и неформальные
методы анализа для управления нерефлексными системами в
сложных ситуациях, когда непрерывно меняется внешняя обста-
новка, условия гомеостазиса организмов и приходится пере-
страивать структуру целей.
Формальная основа программного метода возникла в теории
систем рефлексного типа и, прежде всего, в технических систе-
мах, функционирующих в нестационарных условиях. Понятия
«программа», «оптимальная программа», «двухэтапная оптими-
зация» и многие другие понятия, важные для понимания смысла
программного метода, родились и начали использоваться в ме-
ханике космического полета на самой заре машинной эры.
К тому, чтобы перенести эту систему взглядов из технической
теории управления в проблемы управления экономическими ор-
ганизмами, адаптировать ее к новым задачам, все уже было го-
тово в конце пятидесятых годов. Была лишь необходима при-
чина, которая бы заставила специалистов По теории управления
заняться этой проблематикой. И такая причина появилась — это
неудачи использования идей оптимального планирования
в СССР.
В начале шестидесятых годов возникло интенсивное обсуж-
дение исходных посылок, принципов оптимального планирова-
ния и тех систем, которые предлагались различными авторами.
Главным объектом критики сделались принципы оптимальности.
Нам, специалистам в области теории управления и исследования
операций, казалось, что основная трудность состоит именно в
построении функции цели. Именно это должно быть главным со-
держанием экономического анализа. А математические методы
решения тех или иных задач — это было уже вопросом второ-
степенным. Произошло столкновение взглядов специалистов, за-
нимающихся традиционной тематикой экономико-математиче-
5 5. программный метод
209
ских исследований, и прагматически мыслящих специалистов в
области управления и исследования операций.
Для выработки альтернативной системы взглядов одной ана-
логии с технической теорией управления было мало. Надо было
их насытить экономическим содержанием. А для этого в первую
очередь необходимо было обратиться к изучению реальности,
к конкретной истории развития советской экономики.'
И, конечно, история нам сразу дала много весьма наглядных
примеров.
Пожалуй,1 самым наглядным примером, где наиболее вы-
пукло были видны основные черты программного метода, был
начальный этап восстановления советского народного хозяйства
после окончания Гражданской войны.
Партия поставила основную задачу — такого восстановления
промышленности, которое сделалось бы отправной позицией для
последующего быстрого развития страны, превращения ее из
страны аграрной в страну индустриальную.
Это была .доктрина — цель, поставленная партией. Как ее
достичь? Для этого был предложен и реализован целый ряд ме-
роприятий, целый ряд программ, как бы мы сегодня сказали.
Наиболее яркая из них, — конечно, план ГОЭЛРО, который
был назван В. И. Лениным второй программой партии.
Итак, план ГОЭЛРО — это лишь одна из программ. Она пе-
речисляла некоторые необходимые мероприятия, связанные с
восстановлением энергетики. И не просто восстановлением. До
революции в России было большое количество мелких, преиму-
щественно тепловых электростанций. Вместо них было решено
создать систему крупных районных электростанций, которые
смогли бы со временем стать основой единой 'энергосистемы
страны.
При изучении материалов, связанных с разработкой про-
граммы ГОЭЛРО, поражает тщательность и продуманность де-
талей. Стало ясно, что основная задача планирования и управ-
ления состоит не в оптимизации мифической целевой функции,
а в создании процедур, превращающих программные установки
партии, доктрины, которые формулируются на высшем уровне,
в конкретные хозяйственные мероприятия. И эта система про-
цедур должна охватывать все этапы — от создания научного
фундамента для выработки доктрины до ее реализации.
Таким образом, сам термин «программный метод» возник в СССР в связи
с разработкой процедур реализации программ- партии. Совпадение русской
терминологии с американской — это чистая случайность. Специалисты, кото-
рые участвовали в создании системы взглядов, альтернативных рекламируе-
мой тогда теории оптимального планирования, вряд ли знали об идеях Мак-
намары и уж, во всяком случае, не придавали им какого-либо значения.
210
ГЛ. III. КИБЕРНЕТИЧЕСКИЕ СИСТЕМЫ И ИМИТАЦИЯ .
§ 6. Имитация и машинный эксперимент
Мы уже несколько раз упоминали термины «имитация», «ис-
пользование модели в режиме имитации» и т. д. Интуитивно эти
понятия вполне очевидны. Но за ними стоит нечто большее, чем
интуиция. Сегодня имитация превратилась в одно из наиболее
важных и эффективных средств, которыми располагает систем-
ный анализ. Этим вопросам и будет посвящен данный параграф.
а) Метод Монте-Карло. В начале шестидесятых го-
дов в литературе на английском языке появился термин «simu-
lation». Он возник в связи с использованием метода Монте-
Карло для исследования процессов, зависящих от случайных
параметров или функций. Рассмотрим уравнение
x = f(x, t, g), (6.1)
где х — фазовая переменная, £ — случайный параметр, закон
распределения которого нам известен. Предположим, что речь
идет об изучении задачи Коши для этого уравнений: определить
траекторию системы (6.1), удовлетворяющую условию ч
X (0) = Т), (6.2)
где ц — некоторая случайная величина с известным законом
распределения. В этом случае фазовая траектория системы (6.1)
будет некоторой случайной функцией времени, а значение х(Т)
в некоторой фиксированный момент времени будет случайной
величиной. Пусть нас интересует распределение этой случай-
ной величины.
Примечание. Существует очень много технических задач, которые
сводятся непосредственно к задаче подобного рода. В частности, к ней сво-
дятся задачи баллистики:, зная свойства распределения случайных ошибок
выполнения начальных условий (ч) и свойства внешних помех (£), рассчитать
характеристики эллипса рассеивания.
Если функция / существенно нелинейна, то для решения дан-
ной задачи нет никаких,универсальных методов. Задача опреде-
ления свойств распределения случайного вектора х(Т) по за-
данным распределениям величин £ и ц относится к классу так
называемых задач нелинейной фильтрации. Для всего этого
класса задач пока не удалось создать каких-либо удовлетвори-
тельных методов решения.
Тем не менее в распоряжении вычислителя всегда есть один
прием, получивший название метода Монте-Карло.
, Предположим, что у нас есть функция
^=<р(1). (6.3)
где g — случайная величина с известным законом распределе-
ния, Датчик случайных чисел дает нам возможность построить
$ ИМИТАЦИЯ И МАШИННЫЙ ЭКСПЕРИМЕНТ
211
последовательность случайных чисел
£1» &2, • • •> &V
(6.4)
с нужным нам законом распределения. Проводя вычисления
с помощью формулы (6.3), мы можем получить и последова-
тельность значений
К1 = ф(^1), У2 = <р(Ь), ...i (6.5)
которая также будет представлять собой некоторую случайную
последовательность. Если мы проведем достаточно большое ко-
личество вычислений, то, обрабатывая последовательность (6.5),
мы сможем с любой степенью точности определить статистиче-
ские свойства случайной величины у и найти интересующий нас
закон распределения.
Описанный прием и получил название метода Монте-Карло.
Очевидно, что он может быть применен для решения задачи,
которая была поставлена в начале параграфа.
Снова с помощью датчика случайных чисел можно опреде-
лять последовательности чисел
.................. (6.6)
’ll, П2...........%.
для каждой пары чисел (^-, т]<) стандартным способом решать
задачу Коши (6.1), (6.2) и находить последовательность
Xl(T), х2(Т); ...
Этот прием анализа легко распространяется и на более слож-
ные случаи, когда уравнение (6.1) содержит не только случай-
ные параметры, но и случайные функции.
Распространение метода Монте-Карло на динамические си-
стемы и получило название «simulation», которое на русский
язык было переведено как имитация (точный перевод — симуля-
ция— имеет в русском языке иной смысл).
Отметим два обстоятельства. Во-первых, описанный прием
анализа можно рассматривать как экспериментальное определе-
ние статических характеристик случайного процесса x(t) с по-
мощью машинного эксперимента.
Во-вторых, приведенный способ исследования можно тракто-
вать как анализ динамического процесса (6.1) с помощью ва-
риантных расчетов.
‘Оба обстоятельства сыграли определенную роль в развитии
техники имитации.
6) О пднятии «имитационная система». Описан-
ный выше способ анализа сложных процессов с помощью ва-
риантных расчетов получил уже в середине шестидесятых годов
широкое развитие как в СССР, так и за рубежом.
212
ГЛ. III. КИБЕРНЕТИЧЕСКИЕ СИСТЕМЫ И ИМИТАЦИЯ
Вероятно, можно указать две причины успеха идей имита-
ции— два источника этого важнейшего направления в исполь-
зований ЭВМ, которое родилось в середине шестидесятых годов
накануне появления ЭВМ третьего поколения.
Первая — это та же причина, которая привела к появлению
новой дисциплины «системный анализ», — большая сложность
тех систем, исследование, анализ которых был выдвинут в по-
следнее десятилетия человеческой практикой (техникой, эконо-
микой, военным делом).
Я уже старался обратить внимание читателя на то, чем от-
личаются, задачи системного анализа от . тех задач, которыми
раньше занимались теория исследования операций и теория
управления. Традиционными были задачи, в которых цель счи-
талась заданной. Единственной проблемой в этих условиях ока-
зывалась задача отыскания пути достижения цели. В новых за-
дачах, которые постоянно стали возникать перед специалистами,
занимающимися исследованием. операций, объектом исследова-
ния сделались сами цели. .
Конечно, эта проблема отнюдь не является чисто математи-
ческой— она не может быть решена без экспертов. Но и одни
эксперты не смогут преодолеть той лавины информации, кото-
рую необходимо проанализировать. Симбиоз математики и экс-
перта — вот что стало на повестку дня «машинной математики».
Об этом мы уже говорили, и не раз. И первое, что оказывается
необходимым для реализации подобных идей, — это умение ор-
ганизовать серию вариантных расчетов: эксперту важно пред-
ставить себе характер изучаемого процесса, степень его «управ-
ляемости», характер предельных возможностей (множеств до-
стижимости), т. е. организовать многократно повторенный ма-
шинный эксперимент с моделью.
Для этой цели и должны быть созданы модели, имитирую-
щие реальность, имитирующие изучаемый процесс. Эксперт с
помощью этих моделей, с помощью серии специальна организо-
ванных вариантный расчетов получает те знания, без которых
вьТбрат^алытёрнатлВный вариант своей стратегии он не "может,
Этй~вЬзможноста ЭВМ‘~былй" очень быстро поняты специали-
стами, и в русском языке появились даже термины «имитацион-
ная модель» и «имитационное моделирование», а в английском
языке — термин «simulation modelling». Надо заметить, что если
английский термин имеет вполне четкий смысл, ибо симуляция
и моделирование не являются синонимами, то по-русски имита-
ционная модель — это нонсенс. Любая модель, в принципе, ими-
тационная, ибо она имитирует реальность.
Поэтому нужен был новый термин, который и возник доста-'
точно быстро.
$ 6. ИМИТАЦИЯ и машинный эксперимент
21»
Итак, основа имитации (смысл которой мы будем понимать
как анализ с помощью вариантных расчетов) — это математик
ческая модель. Если модель ошибочна или недостаточно точна,
то и говорить об имитации смысла нет. Известному естествоис-
пытателю прошлого века Т. Гексли принадлежит замечательная
фраза о математике, которая уподобляется жерновам — она пе-’
ремалывает любой продукт. Но из плевел муки получить нельзя,
даже при идеальных жерновах. То же можно сказать и о мо-
дели: она должна быть доброкачественной и правильно отра-
жать реальность, в противном случае изучение модели г—это
всего лишь математические упражнения. Но этого еще мало.
Должна быть надежной и доброкачественной исходная инфор-
мация. Это очевидно. Но и информации еще недостаточно. Не-
обходим определенный сервис. Система моделей должна быть
достаточно доступной исследователю, варианты должны прохо-
дить достаточно быстро, должна хорошо функционировать си-
стема визуализации результата (графическая, с помощью гра-
фопостроителя или дисплея, или цифровая). Должен быть пре-
дельно облегчен ввбд новой информации, переход к новому ва-
рианту и т. д. Другими словами, процесс имитации требует для
своего успешного завершения создания специальной системы —
так возник термин «имитационная система». Значит, имита-
ционная система — это совокупность моделей, имитирующих
протекание изучаемого процесса, объединенная со специальной
системой вспомогательных программ и информационной базой,
позволяющих, достаточно просто и оперативно реализовать ва: \
риантные расчеты. Имитационной системе присуща определен-
ная архитектура, и она должна быть снабжена четкими про-
цедурами ее использования.
Кроме того, имитационные системы начали создаваться в
связи с необходимостью решать сложные задачи оптимизации I
(в частности, оптимизации конструкций или хозяйственных pe-~J
шений). Представим себе, что мы имеем четко поставленную (
задачу: отыскать такой элемент х (вектор или вектор-функцию I
времени), который доставляет максимум некоторому функциона-/
лу №. Другими словами, пусть мы имеем математическую задачу
№(x)->max. I
х е X
Более того, предположим, что алгоритм ее решения нам изве-
стен и что этот алгоритм сходится и устойчив. Значит, математик
чёской проблемы решения этой задачи, кажется, не возникает.'
Но оказывается, что реальной возможности использовать этот,
алгоритм нет, ибо время, которое требуется ЭВМ для того,'
чтобы провести необходимые вычисления, лежит вне тех воз-
можностей, которыми мы располагаем.
214
ГЛ. III. КИБЕРНЕТИЧЕСКИЕ СИСТЕМЫ И ИМИТАЦИЯ
Подобная ситуация обычно возникает с задачами типа рас-
писаний. Решение этих задач бывает часто элементом опера-
тивного управления, например диспетчерского управления су-
дами в портах или другими работами. На решение подобных
задач у субъекта (диспетчера) бывают минуты, в крайнем слу-
чае часы. А точное решение задач подобного рода может тре-
бовать месяцев или даже лет непрерывной работы ЭВМ. В этой
ситуации у исследователя есть одна и только одна возмож-
ность: использовать интуитивные, эвристические приемы. Но
прежде чем принять решение, исследователь должен убедиться,
что его решение удовлетворительно, оценить его, сравнить с
другими решениями. А для этого, в свою очередь, он должен
вычислить значение 1Г(х), а возможно, и ряда других сопут-
ствующих критериев. Таким образом,, снова мы сталкиваемся
с необходимостью проведения в короткие сроки большого числа
вариантных расчетов.
Поскольку предложенное диспетчером эвристическое реше-
ние может оказаться не очень хорошим и нужно иметь воз-
можность проверить другие варианты, сравнить их, то он дол-
жен еще иметь в своем распоряжении способы уточнения ре-
шений. И хотя имитационная система являете^ весьма слож-
ным инструментом, исследователю обойтись без нее в подобных
ситуациях очень трудно.
Заметим, что использование имитационных систем в автома-
тизированных системах управления становится также все бо-
лее и более необходимым по мере того, как они из систем об-
работки данных постепенно превращаются в системы приня-
тия решений. В проблемах автоматизированного проектирования
они сделались основным инструментом проверки и сравнения
различных альтернативных вариантов, а часто и средством их
индуцирования.
Сегодня имитация, если понимать достаточно, широко этот
термин, становится постепенно основой инструментария систем-
ного анализа.
Есть еще одна причина, благодаря которой идеи имитации,
широкого использования имитационных систем сделались по-
пулярными и превратились в объект тщательного анализа,—
это появление ЭВМ третьего поколения'.
С точки зрения пользователя, ЭВМ третьего поколения от-
личаются не элементной базой — пользователю безразлично,
считает ли он с помощью транзисторов или больших интёграль-
ных схем, —и не быстродействием и памятью. Уже среди ЭВМ
второго поколения были машины, обладавшие достаточно хо-
рошими характеристиками памяти и быстродействия. Главное,
чем обладают системы третьего поколения по сравнению с ЭВМ
предшествующих типов, -г это терминальный сервис, т. е. си-
§ 6. ИМИТАЦИЯ И МАШИННЫЙ ЭКСПЕРИМЕНТ
215
стемы периферийных устройств и те операционные системы, ко-
торыми снабжены ЭВМ третьего поколения. Эти операционные
системы позволяют, достаточно просто организовать ввод и вы-
вод информации, визуализировать ее, организовать работу в ре-
жиме разделения времени и т. д.
Появление ЭВМ третьего поколения .дало возможность тех-
нической реализации идей имитации, которые появйлись еще
в эпоху предыдущих поколений ЭВМ. Именно это новое поко-
ление машин дало ту базу, без которой объединение ЭВМ и
человека, объединение строгих методов анализа и эвристиче-
ских приемов было невозможно.
в) Замечание об искусственном интеллекте.
В последние годы этот термин сделался весьма популярным. Он
Рис. 6.1.
возник в инженерных кругах в связи с использованием ЭВМ
для решения задач, нетрадиционных для математики.
По существу искусственный интеллект и имитационная си-
стема— это синрнимы. Пример архитектуры такой системы пред-
ставлен на рис. 6.1. Эта система обладает многими особенно-
стями, требующими комментариев.
Пользователем подобной системы может быть специалист-
нематематик — инженер, конструктор,' экономист, эколог, управ-
ляющий. Требовать от него определенного математического про-
фессионализма и даже знания алгоритмических языков вряд
ли имеет смысл. Чем доступнее и проще с точки зрения
216 ГЛ. 1П. КИБЕРНЕТИЧЕСКИЕ СИСТЕМЫ И ИМИТАЦИЯ
пользователя будет система (т. е. чем сложнее она будет устрое-
на с точки зрения математика), тем больше шансов на успех ее
использования. Именно на такого исследователя-непрофессиона-
ла п должны быть ориентированы имитационные системы. По-
этому разработка языка пользователе — это первый необходи-
мый этап создания системы. Поскольку первые имитационные
системы создавались математиками для собственного пользова-
ния, то проблема языка долгое время не возникала. В работах
инженеров по созданию искусственного интеллекта язык поль-
зователя был едва ли не главной проблемой.
Управляющая 'программа — мы ее называем часто внешней,
операционной системой, в отличие от внутренней операционной
системы — операционной системы ЭВМ, — это тот основной эле-:
мент имитационной системы, который ответствен за диалог.
Конструкция внешней операционной системы существенно за-
висит от той вычислительной системы, на которой реализуется
имитация.
С управляющей программой связаны банк моделей и банк
данных (информационный блок). На рис. 6.1 проведена стрелка
от банка, моделей к информационному блоку. Она символизи-
рует приоритет моделей перед информацией. Это замечание нам
потребовалось по следующей причине. В домашинную эру в .
проблемах управления, проектирования выработалось опреде-
ленное представление о необходимой информации. Переход к
новой технологии’ проектирования основан прежде всего на ис-
пользовании моделей. И именно анализ моделей дает те эф-
фекты, которые связаны с использованием вычислительной тех-
ники. Но если мы будем опираться на традиционную информа-
цию, то эффект использования ЭВМ окажется близким к нулю,
ибо это будет означать, что мы используем модели, для кото-
рых этой информации достаточно, т. е. весьма простые модели,
подобные тем, которые использовались ранее. Новая техноло-
гия проектирования требует нового мышления и новой инфор-
мационной базы.
Математики, которые начали заниматься имитацией, шли от
исследования конкретных процессов, от моделей. При создании
имитационных систем главным в деятельности математиков
было создание моделей и процедур (алгоритмов) их исследова-
ния. Только позднее они столкнулись и с необходимостью сер-
виса, управляющих программ, специального языка и т. д. Инже-
неры шли^с другой стороны. Прежде всего их интересовало со-
здание сервиса, управляющих программ, банков данных и т. д.
и т. п. Поэтому в работах по имитации в центре внимания были
модели, а в работах пб искусственному интеллекту — опера-
ционная система, языки, банки данных й т. д. Но по существу
это одно и то же, просто разные стороны огромной и бесконечна
217
$ 6. ИМИТАЦИЯ И МАШИННЫЙ ЭКСПЕРИМЕНТ
важной для человечества проблемы объединения интеллекта
человека с формализмом, реализация которого доступна мате-
матике, оснащенной вычислительным комплексом.
На нашем рисунке (см. рис. 6.1) есть еще один блок, кото-
рый показан пунктиром. Он требует определенных коммента-
риев.
Имитационные системы, которые сегодня уже работают или
создаются, — это весьма сложные конструкции, изучение кото-
рых требует не только высокого профессионализма, но и вре-
мени. Конкретному пользователю, вообще говоря, нет прямой
необходимости знать все детали системы. Инженер, проекти-
рующий двигатель самолета, может и не знать тех тонкостей,
которые необходимы конструктору фюзеляжа, и наоборот. Но
каждый из них должен во всех деталях представлять возмож-
ности, которые ему предоставляет имитационная система для
его личных нужд.
Для этих целей и служит блок «информация об имитацион-
ной системе». Он представляет собой некоторую древовидную
информационную систему, на концевых ветвях которой описаны
конкретные вопросы, интересующие проектировщика. Есть еще
одна причина, требующая создания подобного блока. Имита-
ционная система (если она не разового использования) необхо-
димо должна быть развивающейся. Она должна не только до-
пускать замену одних моделей другими, старых алгоритмов бо-
лее совершенными, но и иметь возможность дополнять перечень
своих функций, совершенствовать язык и т. д. Вот для этой
цели весьма полезна информация об имитационной системе, обо
всех деталях ее возможностей и конструкций. И эта информа-
ция должна быть легкодоступной;
Анализируя и сопоставляя работы в области искусственного
интеллекта и имитации, мы видим еще одно различие в осо-
бенностях работы инженеров и математиков.
Инженеры стремятся создать универсальные операционные
системы, системы, пригодные для работы с любыми типами мо-
делей, с весьма широким спектром пользователей. Благодаря
этому системы оказываются достаточно сложными и их трудно
использовать в практических задачах. Наоборот, математики,
нанимаясь имитацией, стремятся весь сервис сделать наиболее
приспособленным для решения данной конкретной проблемы
имитации, будь это автоматизированная система проектирова-
ния самолета или система моделей, предназначенная для ана-
лиза Пелопоннесской войны.
Будущее развитие этого направления во многом зависит от
того, как будут сочетаться эти две противоречивые тенденции.
г) Имитация и машинный эксперимент. С ими-
тацией связано использование машинного комплекса в качестве
218
ГЛ. III. КИБЕРНЕТИЧЕСКИЕ СИСТЕМЫ И ИМИТАЦИЯ
экспериментальной установки. Собственно говоря, подобное ис-
пользование ЭВМ началось еще в пятидесятые годы. В тот пе-
риод мы столкнулись с необходимостью изучать явления, кото-
рые было невозможно воспроизвести в земных условиях. К их
числу относится, например, процесс входа космического аппа-
рата в атмосферу со скоростями порядка многих километров в
секунду. Для изучения подобных процессов невозможно было
поставить ни натурный, ни лабораторный эксперимент. У иссле-
дователя оставалась единственная возможность — создать со-
вершенную математическую модель и с помощью этой модели
расчетным способом получить необходимые ’характеристики
изучаемого процесса.
Вот такое прямое использование ЭВМ в качестве экспери-
ментальной установки было характерно для пятидесятых и на-
чала шестидесятых 1;одов. Но уже в этот период наметилось но-
вое направление в области машинного эксперимента — исполь-
зование ЭВМ в режиме «диалога» с натурным экспериментом
не только для изучения свойств модели, но и для создания ма-
тематической модели.
В начале этой главы была отмечена феноменологическая ос-
нова любой математической теории. Конечно, в основе создания
теории почти всегда лежит какой-то эксперимент. Но этот экс-
перимент, тем более если он поисковый (когда экспериментатор
движется ощупью), может быть весьма несовершенен. Инфор-
мация, которую с его помощью может получить исследователь,
будет еще недостаточной для того, чтобы математическая мо-
дель, построенная на ее основе, была адекватна реальности.
Предположим тем не менее, что этот изначальный опыт позво-
лил сформировать математическую модель.
Тогда следующий шаг — это исследование полученной мо-
дели с помощью вычислительного комплекса — численный ана-
лиз модели. В результате мы обнаруживаем целый ряд свойств.
Некоторые из них, может быть, уже наблюдал эксперимента-
тор, некоторые оказываются совершенно новыми. Но делать ка-
кие-либо утверждения, а тем более предполагать открытие но-
вых свойств процесса, нового явления еще рано. Математиче-
ская модель, с помощью которой обнаружены эти особенности,
пока еще недостаточно достоверна, и результаты, полученные
расчетным путем, еще трудно принять на веру. Но эксперимен-
татору они тем не менее очень нужны. Они подсказывают ему
новые идеи. С их помощью он улучшает свою эксперименталь-
ную установку, они уточняют ему отдельные детали процесса
и т. д. В результате такого усовершенствования эксперимента
возникает новая математическая модель. Образуется итера-
ционная цепочка — диалог математика и экспериментатора. Опи-
§ 7. МОДЕЛЬ НАЗНАЧЕНИЯ ШТРАФОВ
219
санным путем получено много интересных и важных результа-
тов и в физике, и в инженерных науках.
Я употребил слово «диалог» и при этом не сделал ошибки.
Любой процесс исследования — это всегда диалог: задаются во-
просы, ищутся ответы. И физик-экспериментатор, и математик,
создававший и исследовавший модель с помощью численных
расчетов, действовали целенаправленно. Они задавали вопросы:
один задавал вопросы природе, ориентируясь на машинные рас-
чету, другой задавал вопросы своей машинной модели, ориен-
тируясь на результаты эксперимента. Но этот диалог был не
структуризован. .
В последние десять лет в естествознании, экономике, в инже-
нерных науках начал возникать еще один тип эксперимента,'
связанный не только с изучением явления, но и с выбором его
характеристик или исследованием широкого спектра разнооб-
разных зависимостей. Для подобного эксперимента, который
объединяет в себе оба рассмотренных типа эксперимента, и не-
обходимы имитационные системы с развитыми операционными
системами и терминальным обеспечением.
В ВЦ АН СССР, начиная с конца шестидесятых годов, до-
вольно много усилий было затрачено на развитие именно та-
кого эксперимента (см. [7]). Он требует уже развитого диалога
и разработки системы специальных процедур.
§ 7. Модель назначения штрафов за загрязнение
окружающей среды
В заключение рассмотрим пример кибернетической системы,
описывающей взаимоотношения руководства региона и пред-
приятий, которые находятся на его территории. Эти предприя-
тия по роду своей производственной деятельности загрязняют
окружающую среду (например, воду), и региональное руковод-
ство должно найти определенную стратегию во взаимоотноше-
ниях с предприятиями. Проведем анализ некоторой упрощенной
схемы этой ситуации и покажем место и необходимость имита-
ционной системы в подобных исследованиях.
Обозначим через Ф,- (t = 1,2, ..., N) фонды предприятий.
Их изменение будем описывать следующими уравнениями:
(7.1)
где Yt — инвестиции, а &— коэффициенты амортизации.
Каждое предприятие в единицу времени выпускает - продук-
цию в количествах.
Л = Л(Ф/)> 1=1....................(7.2)
где Fi — производственная функция.
220 ГЛ. III. КИБЕРНЕТИЧЕСКИЕ СИСТЕМЫ И ИМИТАЦИЯ
Предприятия производят не только полезный продукт, но и
вредный. Обозначим через щ поток загрязняющих веществ:
Уд, (7.3)
где Vi — затраты предприятий на совершенствование техноло-
гий или очистку воды в заводских условиях.
Мы условились рассматривать ситуацию, в которой функ-
ционируют N + 1 субъектов: N предприятий и субъект, пред-
ставляющий интересы региона, — региональное управление.
Последний имеет право облагать предприятия штрафом. Будем
считать, что штраф щ, пропорционален количеству сброшенных
загрязняющих веществ:
Wl==ciil=scfl{ph У/). (7.4)
Величина коэффициента штрафа с находится, естественно, в
распоряжении регионального управления. Все остальные управ-
ления, Vi и У/, находятся в распоряжении предприятий, в дея-
тельность которых регион вмешиваться не имеет права.
Условимся для простоты, что инвестирование происходит за
счет внутренних средств предприятия и что все капиталы рас-
ходуются только на инвестирование развития предприятий, на
создание системы искусственной очистки и уплату штрафа. Это
значит, что
F^d^Yi + Vi^Wi. (7.5)
Рассматриваемая система является - иерархической. Субъект,
представляющий региональное управление, находится в особом
положении. Он имеет возможность сообщать заранее цену за
загрязнение с. Поэтому мы проведем анализ с точки зрения
субъекта, представляющего региональное управление. Прежде
всего он должен сделать определенные гипотезы о поведении
(т. е. о целях) остальных субъектов. Более илц менее правдо-
подобной является следующее предположение: выбор управ-
ляющих воздействий, которыми распоряжаются предприятия,
определяется условием
/< = Vi + wt-+min. (7.6)
Поскольку в момент принятия решений производители (пред-
приятия) будут знать цену, которую они должны платить за
загрязнение, то их стратегии определяются из условий
Vt 4- сп( - Vt + cft (Ft (Фд, Vd min, i = 1...N, (7.7)
при ограничениях,
Vi + cti(Ft(&i), Уд^ЕДФд, (7.8)
л 1. МОДЕЛЬ НАЗНАЧЕНИЯ ШТРАФОВ
221
Решение задачи (7.7)., (7.8) позволяет субъекту, представляю-
щему интересы региона, определить те капиталовложения на
усовершенствование технологий и внутреннюю очистку, которые
затрачивают предприятия. Они, очевидно, будут зависеть толь-
ко от объема фондов Ф( и цены штрафа с. Решая задачу (7.7),
(7.8), мы найдем, что
Ф<). (7.9),
Тогда
Проведем иллюстративный расчет для предельно простой
ситуации. Пусть
pf = s^h. а^ + у^ = at + V(. .
_ clts^i
Wl~^- •
Используя эти выражения, составим целевую функцию (7.6):
cl. «,Ф,
b = V. + ^
(7.Ю)
Предположим, далее, что значение Vi, реализующее ее мини-
мум, лежит внутри интервала, который определяется условиями
(7.8). Тогда выбор предприятия мы сможем найти из условия
dVi •
функция Ji, определяемая равенством (7.10), имеет единствен-
ный минимум (рис. 7.1) Vi — VI Он определяется из уравнения
. V\ — — а,^
(7.Н)
(7.12)
222 ГЛ. HI. КИБЕРНЕТИЧЕСКИЕ СИСТЕМЫ И ИМИТАЦИЯ
Вычислим еще величины л/ и we.
П{ = —7=
ус
Wt — л/ cliSi^i-
(7.13)
(7.14)
Предположим теперь, что средства, полученные региональным
управлением за счет штрафов, расходуются на централизован-
ную очистку среды (воды). Тогда уравнение, характеризующее
изменение уровня загрязнения среды, можно записать в сле-
дующем виде:
х = 22 Я{ - f (х) - W (22 wt). (7.15)
Здесь f(x)—естественная очистка. Как правило, эта функция
вогнутая и имеет определенный порог насыщения (рис. 7.2): эф-
фективность очистки не может превзойти некоторого предела /*«
Примечание. В действительности дело обстоит еще сложнее и зави-
симость f(x) имеет гистерезисный характер. Предположим, что вначале шло
увеличение концентрации загрязняющих веществ, тогда интенсивность само-
очищения изменялась вдоль сплошной кривой до некоторого значения х = х.
После этого уровень загрязнения начинает падать. Но изменение интенсив-
ности уже не будет следовать сплошной кривой, а пойдет как-то иначе, на-
пример, вдоль кривой, изображенной пунктиром.
Функция W (22 — это количество вредных отходов, унич-
тожаемых централизованной очисткой. Условимся, что
W = ц 22 = НС 22 Л/.
Таким образом, уравнение (7.15) мы перепишем так:
х=22 «:(1 — Ис) — f (*)• (7.16)
Поскольку каждое предприятие в момент принятия своего ре-
шения будет „знать политику штрафов регионального управле-
ния, то региональное управление мджет считать, что V, опреде-
ляется формулой (7.9) и, следовательно, ..
ч,(с, ф,))=/;(ф„ с), <=i......и-,
тогда уравнение (7.16) примет вид
х=22(2(Фр c)(l-M-f(x). (7.17)
В том частном случае, который мы рассматриваем (для кото-
рого справедливы формулы (7.12)—(7.14)), мы будем иметь
х = £ _ р VZ) - f (х). (7.18)
§7. МОДЕЛЬ НАЗНАЧЕНИЯ ШТРАФОВ
223
Обсудим теперь мотивы, которыми может руководствоваться
региональное управление при назначении штрафа. Здесь может
быть много разниц ситуаций, и субъективные цели региональ-
ного управления могут быть весьма разнообразны. Обсудим не-
которые возможные варианты.
Прежде всего, региональное управление должно стремиться
к тому, чтобы качество среды не ухудшалось, т. е. чтобы
х(/)<0 V/ (7.19)
или хотя бы
X (/)-> min V/, (7.20)
если выполнение условия (7.19) невозможно.
Но не только критерии (7.19) или (7.20) отражают интересы
региона. Региональное управление заинтересовано также и в
промышленном развитии региона, которое обеспечивает стабиль-
ность жизни населения и отвечает его интересам. Этот критерий
можно формализовать различными способами. Например, мож-
но потребовать, чтобы
^-Хф<>0 (7.21)
ИЛИ
4'^ max. (7.22)
Критерий (7.20) мы можем переписать в следующем виде:
Е f* (Фр с) (1 - pc) - f (х) -> min (7.23)
или, для нашего частного случая,
71 (с) =2 VМ/Ф/ (^7 — И Vc) — f (*)-*• min. (7.24)’
г i
Преобразуем теперь критерий (7.22). Используя уравнение (7.1)
и. равенство (7.5), мы можем написать
е) —сП(Ф,. С)-М>,)^гаах.
(7.25)
Для рассматриваемого частного случая (7.25) будет таким:
12 (с) = 2 — 2 'y/.cliSi Ф/ — а} -> max, (7.26)
ГАеЛ* — ki.
Итак, мы пришли к двуккритериальной задаче:
Л (с)-* min, 72(c)->max.
224
ГЛ. III. КИБЕРНЕТИЧЕСКИЕ СИСТЕМЫ И ИМИТАЦИЯ
Рассмотрим зависимости (7.24) и (7.26). Они имеют вид, изо-
браженный на рис. 7.3. рбозначим через ё корень уравнения
7i(c) = 0 и через с** корень уравнения /2(с) = 0. Если окажется,
что ё < с*, то для любого с из интервала (ё, с*) будут выпол-
нены условия
х<о. ^£ф,>о,
т. е. в этом случае можно назначить такие штрафы за загрязне-
ние среды, которые будут обеспечивать, с- одной стороны, сни- .
жение уровня загрязнения, а с другой, не будут препятствовать
росту фондов. Для решения вопроса о назначении цены с сле-
дует построить множество Парето. В нашем случае это сделать
нетрудно. Из'равенства (7.26) мы найдем Vе как функцию
/г (с) и найденное значение подставим в (7.24). В результате
найдем зависимость
/( = ф(/2). (7.27)
Имея в своем распоряжении кривые, изображенные на рис. 7.3,
множества Парето легко построить и графически (рис. 7.4).
Характер множества Парето будет, естественно, зависеть от
фондов.
Если ё > с*, то области значений цены с, где одновременно
и х < 0, и У, Ф; > 0> не существуют. В этом случае мы либо
должны мириться с ростом загрязнения, если хотим, чтобы с те-
чением времени фонды росли, либо должны смириться с неиз-
бежностью затраты основного капитала (фондов) на преодо-
ление экологических трудностей, должны пойти на сокращение
производства.
Отметим еще одну любопытную особенность данной задачи.
Если- эффект самоочистки невелик (например, при малом уровне
загрязнения), то величина ё мало зависит от объема фондов:
с 1/р.
§ 7. МОДЕЛЬ НАЗНАЧЕНИЯ ШТРАФОВ
225
В то же время величина с* растет вместе с ростом фондов, при-
чем
с‘ = о(£фг)-
Таким образом, если вначале с > с*, то одним из рациональных
вариантов стратегии регионального управления будет следую-
щий. Пока промышленный потенциал региона низок, не следует
заботиться об окружающей среде. Когда же объем фондов до-
стигнет некоторой критической величины, которая легко вычис-
ляется из условия
с = с*,
надо начинать вводить штраф за загрязнение среды, причем по
мере роста промышленного потенциала величина штрафа долж-
на все время расти.
Мы рассмотрели ситуацию с двумя достаточно простыми це-
левыми функциями, характеризующими «локальную оптималь-
ность»: все субъекты стремятся максимизировать свою сиюми-
нутную выгоду. Но еще более естественна та ситуация, в кото-
рой субъекты планируют свои действия на ряд лет вперед. Так,
например, предприятие может стремиться к концу некоторого
периода максимизировать уровень, своих фондов. Оно готово
платить на первых порах штрафы за загрязнение среды и не
вкладывать деньги в очистные сооружения, имея в виду в сле-
дующем плановом периоде компенсировать эти дефекты. Точно
так же и регионально^ управление может иметь долговремен-
ные цели. В этих условиях такой простой анализ, какой был
проведен в этом параграфе, уже недостаточен, и мы должны ис-
пользовать методы имитации. '
Примечание. Но прежде чем начинать машинные эксперименты со
сложными моделями, всегда имеют смысл рассуждения, подобные тем, кото-
рые мы провели в этом параграфе: в процедурах имитации должен всегда
присутствовать анализ упрощенных моделей.
® Н. Н. Моисеев
Г л а в a IV
АСИМПТОТИЧЕСКИЕ МЕТОДЫ
В СИСТЕМНОМ АНАЛИЗЕ
(РЕГУЛЯРНЫЙ СЛУЧАЙ)
§ 1. Предварительное обсуждение
В предыдущей главе я подвел читателя к тому факту, что
имитация — техника человеко-машинных систем, объединяющая
интеллект исследователя с возможностями формального ана-
лиза, осуществляемого с помощью ЭВМ, т. е. синтез методов,
основанных на опыте,"интуиции, таланте человека и строгом ма-
тематическом анализе, — является основным инструментом си-
стемного анализа. Более того, системный анализ — это прежде
всего рациональное использование идей и техники имитации.
Системный анализ не превратился бы в самостоятельную дис-
циплину, не располагай мы сегодня возможностями эффектив-
ного экспериментирования с системами имитации.
Роль и место имитации в системных исследованиях сегодня
достаточно хорошо понимается весьма широким кругом иссле-'
дователей. Но, наряду с признанием решающей роли матема-
тического эксперимента и техники имитации, часто всю про-
блему сводят к чисто техническим задачам организации мас-
сивов данных, структуры операционной системы, входного языка
и т. д. Ну и конечно, всегда всеми подчеркивается необходи-
мость того, чтобы модель достаточно хорошо отражала реаль-
ность.
Как ни важны все эти элементы имитации, их недостаточно.
Эффективный машинный эксперимент невозможен без хорошей
математики, без специальной теории машинного эксперимента —
прямое использование имитацйонной системы бывает далеко не
всегда удобно и оправдано.
Трудностей, которые встречает математик, экспериментирую-
щий с имитационной системой, много, и они весьма разнооб-
разны. Далеко не всегда- они связаны с математикой. Например,
чем сложнее система моделей, тем труднее насытить ее непро-
тиворечивой информацией, обеспечить организацию вычисли-
тельного процесса и т. д. Но есть и чисто математические, вы-
числительные трудности.
В самом деле, для того чтобы система моделей давала опи-
сание, хорошо отражающее реальность, она необходимо должна
быть достаточно сложна. Но в таком случае каждый машинный
§ 1. ПРЕДВАРИТЕЛЬНОЕ ОБСУЖДЕНИЕ 227 ’
эксперимент будет требовать большой затраты машинного вре-
мени. А это означает, что провести большое количество экспе-
риментов — необходимое условие любого анализа — бывает
просто невозможно. х
Таким образом, первое, с чем неизбежно сталкивается ис-
следователь,— это ограниченность ресурса. Вычисления с по-
мощью моделей, имитирующих реальность, должны быть до-
статочно экономны. Решение этих вопросов невозможно без
привлечения теории разностных схем, в особенности если некото-
рые из моделей имитационной системы описываются уравне-
ниями в частных производных. Но мы будем считать, что спе-
циалист, создающий систему имитации и ее математическое
обеспечение, владеет основами вычислительной математики, и
заниматься конечномерными аппроксимациями мы в этой книге
не будем.
Итак, предположим (и всегда далее будем предполагать),
что переход к разностным уравнениям сделан наилучшим обра-
зом и выбраны наиболее экономные методы счета. .
Но этим отнюдь не исчерпываются вопросы чисто математи-
ческого характера. Существуют еще проблемы размерности,
разномасштабцости (различия характерных времен) различных
процессов, составляющих исследуемое явление, и многое другое.^
Все это ставит исследователя перед трудностями, которые
подчас кажутся непреодолимыми. Поэтому проблема упроще-
ния системы, замены одной модели другой', более доступной для
анализа, является едва ли не центральной задачей исследова-
теля. Известный специалист в -области теории систем и кибер-
нетики Р. Эшби считал, что теорию систем можно трактовать
как науку о том, как упрощать изучаемые системы.
Описание всех подобных возможностей выходит далеко за
рамки данной книги. Поэтому мы ограничимся демонстрацией
лишь нескольких специальных приемов, позволяющих не только
упростить систему, но и построить для некоторых частных слу-
чаев так называемые' «быстрые алгоритмы».
В этой и следующей главах мы остановимся йа обсуждении
различных особенностей решения тех классов задач Коши, с ко-
торыми часто сталкивается исследователь и которые обычно не
изучаются в университетских курсах анализа.
- Итак, мы начнем изложение с обсуждения задачи Коши, и
Для этого существует достаточно оснований. Как правило, за-
дача Коши, т. е. определение фазовой траектории при заданных
управлениях, заданных возмущениях и при заданных начальных
„ °виях> является центральным элементом практически любых
процедур имитации.
на\ожд^ Тогда> когда основная задача исследователя состоит в
Д нии оптимального управления или когда строятся мно-
8*
228 ГЛ. IV. АСИМПТОТИЧЕСКИЕ МЕТОДЫ
жество достижимости или множество Парето, решение задачи
Коши оказывается той основной вычислительной процедурой, на
которой основываются более сложные алгоритмы. Мы в этом
уже убедились во второй главе, когда обсуждали возможности
эффективного построения оптимальных управлений. Таким об-
разом, обсудив трудности, возникающие при решении задачи
Коши, мы в значительной степени продвинемся в понимании тех
сложностей, которые приходится преодолевать при организации
имитационных экспериментов.
Итак, центральная проблема, с которой сталкивается иссле-
дователь,— это большие затраты машинного времени для реше-
ния задачи Коши. Это бывает связано с целым рядом причин.
Перечислим некоторые из них.
а) Сложность операторов, описывающих изучаемый физиче-
ский процесс (их структура, отражающая сложные нелинейные
зависимости), и большое количество различных логических опе-
раций.
б) Наличие внутренних колебательных процессов, которые
принудительно навязывают малый шаг интегрирования.
в) Существование областей быстрого изменения какой-то
группы переменных (внутренних пограничных слоев).
г) Высокая размерность задачи.
Каждое из этих обстоятельств, замедляющее проведение вы-
числительного эксперимента, так или иначе уже изучалось в
анализе или прикладных исследованиях. И умелое использова-
ние соответствующих методов во многих случаях может ока-
заться решающим фактором успеха. Поэтому любым имита-
ционным экспериментам должен предшествовать некоторый
предварительный анализ систем, некоторая их предварительная
обработка. Предварительное исследование задачи начинается
с использования различных неформальных процедур.
Любой анализ более или менее сложной ситуации всегда
основывается на последовательном сжатии множества вариан-
тов, на отбраковке альтернатив, заведомо неконкурентоспособ-
ных. Это — естественный путь исследования, отвечающий, по-ви-
димому, к тому же чисто физиологическим особенностям чело-
веческого мозга, особенностям мышления человека и, может
быть, даже особенностям творческого процесса*). Его реали-
зация. часто опирается на интуитивные, неформальные (и ле
формализуемые) процедуры. Вместе с тем схема последователь-
ного анализа может во многих случаях опираться и на строгие
математические методы.
*) По этому поводу уместно вспомнить ответ Родена .на вопрос о том,
как он работал над своим «Мыслителем». Скульптор ответил: «Очень просто,
я взял глыбу мрамора и отсек от .нее все лишнее». Поэтому принцип после-
довательного сжатия альтернатив иногда называют принцип Родена.
§ 1. ПРЕДВАРИТЕЛЬНОЕ ОБСУЖДЕНИЕ
229
Так, широкое распространение получили идеи последователь-
ного анализа, которые имеют своим истоком еще работы
А. А. Маркова. В конечном счете они привели к созданию та-
кого мощного метода, как динамическое программирование, и
его обобщений типа метода ветвей и границ. С некоторыми из
таких методов мы уже познакомились во второй главе. О других
речь будет впереди. '
В результате применения «принципа Родена», реализация
которого носит, как правило, неформальный характер, происхо-
дит локализация задачи, остается некоторое более или менее
«небольшое» количество вариантов. Для их анализа требуются
уже иные методы.
Другой подход основан на идеях' выделения «близких» дви-
жений, на построении разнообразных теорий возмущений, ко-
торые позволяют сравнивать классы альтернатив, близких по
тому или другому признаку. В системном анализе такие ме-
тоды привели к появлению концепций «быстрых алгоритмов»,
«буферных систем», «поверочных расчетов» и т. д.
Общая схема этих приемов анализа более или менее проста.
Поскольку исходная система моделей обычно бывает доста-
точно сложна (во всяком случае настолько, что она исключает
возможность проведения большого количества экспериментов),
то ее заменяют упрощенной моделью, анализ которой (т. е. ре-
шение задач Коши, оптимизационных и прочих задач) уже не
требует больших затрат времени й может быть реализован за
р'азумные сроки. Алгоритмы анализа упрощенных моделей на-
зывают быстрыми алгоритмами.
Быстрые алгоритмы играют важнейшую роль в системном
анализе. Прежде всего, с их помощью проводится и дальней-
шая отбраковка возможных альтернатив. Как правило, с по-
мощью быстрых алгоритмов удается сформировать то множе-
ство вариантов, которое и предъявляется для имитационного
эксперимента на полной модели. Расчеты с помощью полной
модели мы называем поверочными.
Примечание. Между быстрыми и поверочными расчетами такая же
связь, как между инженерными расчетами, проведенными при проектировании
самолета, и его летными испытаниями. Как бы ни были хороши инженерные
расчеты по упрощенным моделям, они должны завершаться испытанием
натУРе»- Но в то же время, при всем возможном совершенстве, летные
пытания — эксперименты с полной моделью — чересчур дорогостоящее пред-
риятие, что'бы его использовать для выбора конструкции.
лиз?ТаК’ ®Ыст₽ые алгоритмы играют решающую роль в ана,
работы”^” И НесУт на основную нагрузку вычислительной
зультатыК° ^Ывает совершенно необходимо уметь уточнять рё-
этих расчетов, которые мы в дальнейшем условимся
230
ГЛ. IV. АСИМПТОТИЧЕСКИЕ МЕТОДЫ
Рис. 1.1.
называть оценочными, представлять себе возможные ошибки
или потерю точности, которые мы 'неизбежно допускаем, ис-
пользуя быстрые алгоритмы. Для этой цели и развиваются
специальные теории возмущений, которым посвящены IV, V и
VI главы. Системы расчетов с • помощью теорий возмущений
принято называть буферными системами. Таким образом, схема
расчетов, которые приходится проводить в процессе большого
имитационного эксперимента, имеет вид, представленный на
рис. 1.1. Стрелки указаны в
обе стороны. Это должно
означать, что в принципе
процесс имитации представ-
ляет собой некоторую спе- ,
^иально организованную
систему итераций.
Примечание. Создание лю-
бого крупного' проекта носит ие-
рархический характер. Сначала об-
суждается общий замысел, затем
начинается проектирование отдель-
ных элементов системы, но темне
менее схема, изображенная на
рис. 1.1, всякий раз повторяется
в той или иной форме.
Буферная система, так
же как и система оценочных
расчетов, — это важнейший
элемент системы процедур
в процессе имитации. С ее
помощью происходит не
только уточнение оценочных расчетов, но и осуществляется
еще один этап отсеивания неконкурентоспособных вариантов.
Основное же назначение буферной системы и расчетов, прово-
димых с ее помощью, — связать поверочные расчеты, т. е. экс-
перименты с полной моделью, с расчетами, проводимыми при
помощи быстрых алгоритмов.
• В этой главе мы начинаем изучение методов построения бу-
ферных систем. Здесь, помимо чисто алгоритмических задач
проведения расчетов, возникают вопросы и принципиального"
-характера. При использовании любых упрощенных схем ана-
лиза всегда остается проблема понимания условий, при выпол-
нении которых существует определенная .гарантия того, что
вместе с игнорированием некоторых второстепенных факторов
системы не потеряются те качественные особенности, ради ко-
торых проводится ее изучение.
Таким образом, предварительный анализ,- который пред-
шествует имитационным экспериментам, ставит целый ряд про-
§ 2. КЛАССИЧЕСКАЯ ТЕОРИЯ ПУАНКАРЕ 231
блем глубокого принципиального значения. Должна быть раз-
вита необходимая техника приближенного анализа й указаны
пути, позволяющие построить оценки и установить удовлетво-
рительность приближенного анализа.
Несмотря на все разнообразие изучаемых явлений, разно-
образие способов построения упрощенных моделей и буферных
систем, существует стремление унифицировать, канонизировать
соответствующие методы и приемы анализ?. В известной мере
это удается на основе использования общей теории малого па-
раметра. Эта теория, основа которой была заложена еще в
прошлом веке, посвящена следующей проблеме. Пусть дана си-
стема уравнений, содержащая параметр:
• F(x, х, t, s) = 0, - (1.1)
где F — вектор-функция той же размерности, что и вектор х,
и. пусть ее интеграл при 8 = 0 известен:
х° = х°а, с), , (1.2)'
где с — вектор произвольных, постоянных. Систему уравнений
F(x, х, t, 0) = 0 будем называть порождающей системой, а ре-.
шение (1.2) при том. или ином фиксированном значении с —
порождающим решением.
В каком соответствии находится порождающее решение с
решениями системы (1.1) при достаточно малых значениях па-
раметра, -сохраняет ли порождающее решенйе основные каче-
ственные особенности решения системы уравнений (1.1)? Как
построить (если это возможно) итерационную процедуру, по-
зволяющую'найти с любой степенью точности решение системы
(1.1), испо'льзуя информацию о порождающем решении? Как
строить приближенное решение, опираясь на порождающее ре-
шение, и оценивать точность приближенного решения? Вот ос-
новные вопросы, на. которые приходится давать ответы при со-
здании и использовании буферных систем. . .
Лю^ые методы, уточняющие порождающее решение, мы бу-
дем называть методами теории возмущений. Изложению неко-
торых аспектов этой теории и примерам, иллюстрирующим ее
использование в системном анализе, и посвящена данная глава.
§ 2. Классическая теория Пуанкаре
В этой книге мы ограничимся рассмотрением лишь тех си-
стем, которые могут быть разрешены относительно старших
производных, г. е. систем вида
x — f(x, t, в), , (2.1)
проведены*4 некотоРые факты, на основе которых могут быть
. F Разнообразные упрощения, облегчающие не только
232 ГЛ. IV. АСИМПТОТИЧЕСКИЕ МЕТОДЫ
качественный анализ, но и проведение имитационных экспери-
ментов. Поведение решения уравнения (2.1) при е->-0 назы-
вается его асимптотическим поведением, а анализ его свойств
при этом условии — асимптотическим анализом. Значит, основ-
ная задача теории возмущений — проведение асимптотического
анализа.
Первым и одним из основных результатов асимптотического
анализа является знаменитая теореме Пуанкаре. Она относится
к тому случаю, когда функция f—аналитическая функция не-
зависимой переменной х и параметра ё, и устанавливает анали-
тичность зависимости решения от параметра.
Для системы (2.1) поставим задачу Кощи: определить функ-
цию x(t, е), удовлетворяющую системе (2.1) и начальным усло-
виям
х(О) = Хо. (2.2)
Для того чтобы задача (2.1), (2.2) имела смысл; достаточно по-
требовать, чтобы правая часть уравнения (2.1) удовлетворяла
условиям, гарантирующим существование локальной разреши-
мости, например условию Липшица. Наряду с уравнением (2.1)
будем рассматривать порождающее уравнение
i = t, 0). (2.3) .
Для обоих уравнений будем рассматривать одну и ту же задачу
Коши (2.2).
В уравнении (2.1) сделаем замену переменной: x~z-\-y,
считая решение z\t) известной функцией. Вектор у будет удов-
летворять уравнению '
j/==f(z + //,/, e) -f(z,/, 0) (2.4)
и нулевым начальным условиям
У(О) = О. . (2.5)
Так как правая часть уравнения (2.4)—аналитическая функция
перемейных у и в, то мы можем разложить ее в ряд Тейлора
По этим переменным, считая их достаточно малыми по абсолют-
ной величине. Это позволяет переписать уравнение (2.4) в виде
разложения по степеням параметра е: ч-
^ = ^ + 8(l-)o + B(iZ’8’Z)- М
Здесь А — квадратная матрица первых частных производных:
д = ; р и х1 — компоненты векторов fax соответственно;
вектор (матрица-столбец) с компонентами
$ 2. КЛАССИЧЕСКАЯ ТЕОРИЯ ПУАНКАРЕ
233
qе _ совокупность членов более высокого порядка: разло-
жение функции В (у, в, t) начинается со • вторых степеней ее
аргументов у и в; матрица А и вектор вычислены при х = z,
е==0.
Полагая, что решение задачи Коши для порождающего урав-
нения известно, матрицы А и мы вправе считать извест-
ными функциями времени.
Решение уравнения (2.6) будем искать в виде ряда
(2.7)
i-i
Подставляя этот ряд в уравнение (2.6) и сравнивая коэффи-
циенты при одинаковых степенях параметра 8, получим систему
уравнений для определения функций ус.
yi = Ayi + А>
У2 — Ауъ + D2, (у
Уь = АУь +
В этих уравнениях Di = (-Ц-) — известная вектор-функция вре-
мени. Вектор-функция Z?2 содержит квадратичные, члены разло-
жения функции В (у, е, t) по у и 8, т. е. в нее входит только
функция у\ и не входят функции yi для i> 1. В самом деле,
функцию В (у, в, t) можно представить в виде
В (у, 8, /) = Вту2 4- Втуе +’BU82 + .... (2.9)
Пбдставляя в это выражение ряд (2.7), мы приведем (2.9)
к виду
В(у, 8,J) = 82(B0^ + B0l//1 + B11) + 83(...)+ ....
Очевидно, что любая функция D* зависит только от функций yi,
Для которых i < k.
Таким образом, если последовательно решать уравнения
(2.8), то функции Dk следует считать известными функциями
времени. Функции yi удовлетворяют нулевым начальным усло-
^(0) = 0. (2.10)
определение коэффициентов разложения решения
У‘(1)> сводится к последовательному решению за-
Да ТеШИ ДЛЯ системы (2-8).
перь мы. можем сформулировать теорему Пуанкаре.
5
234 ГЛ. IV. АСИМПТОТИЧЕСКИЕ МЕТОДЫ
Теорема Пуанкаре. I. Если общий интеграл порож-
дающего уравнения (2.3) известен, то решение системы уравне-
ний (2.8) может быть найдено при помощи операций диффе-
ренцирования и взятия квадратур.
II. Решение системы уравнений (2.1)—аналитическая функ-
ция параметра е, т. е. ряды (2.7) сходятся при достаточно ма-
лых по абсолютной величине значениях г и, следовательно,
представляют собой интегралы уравнений (2.1), разложенные
по степеням в.
Условимся называть некоторый ряд формальным решением,
если он формально удовлетворяет системе дифференциальных
уравнений, и будем называть этот ряд решением, если он схо-
дится в некоторой области значений параметра. Таким образом,
первая часть теоремы формулирует некоторые суждения о струк-
туре алгоритма построения формального решения. Вторая часть
теоремы утверждает, что формальное решение (2.7) является
решением. •
Ограничимся доказательством только первого из утвержде-
ний теоремы. Доказательство второго утверждения мы прово-
дить не будем: оно достаточно громоздко и приведено, напри-
мер, в [32]. .
- Пусть
z = F(t, С),
где С —(С1, ..., Сп)—произвольная-постоянная (вектор раз-
мерности п), есть общий интеграл порождающего уравнения
(2.^). Это значит, прежде всего, что функция F удовлетворяет
уравнению (2.3):
- '-^==£[F(/,C),/,0] (2.11)
при любом значении постоянной С. Через обозначим вектор:
' (212)
Вычислим
d э
dt = dt dCi дС1 dt ‘
Используем тождество (2.11):
Здесь df/dF — квадратная матрица:
dj _(dfi
dF \dF/J \dzfJ \dxJJo‘
§ 2. КЛАССИЧЕСКАЯ ТЕОРИЯ ПУАНКАРЕ ' 236
Отсюда очевидно, что
дР Л’
Таким образом, вектор-функция & удовлетворяет системе линей-
ных дифференциальных уравнений
для-любого индекса I. Система уравнений
й = Аи
называется уравнениями в вариациях для системы (2.1) и пред-
ставляет собой систему линейных дифференциальных уравне;
- ний с переменными коэффициентами. Никаких общих рецептов
для интегрирования уравнений с переменными коэффициентами
нет. Однако уравнения в вариациях обладают одним замеча-
тельным свойством, которое мы только что установили. Это
свойство мы можем сформулировать в форме следующей леммы.
Лемма. Если общий интеграл порождающего уравнения
известен, то частные решения уравнений в вариациях могут
быть выписаны в явном виде при помощи одной операции диф-
ференцирования в соответствии с формулой (2.12).
Итак, формула (2.12) определяет систему фундаментальных
решений уравнений в вариациях. Теперь решение задачи Коши
(2.8), (2.10) можно получить в квадратурах, используя метод
вариации произвольных постоянных. Приведем эти вычисления.
Система уравнений (2.8) ймеет вид • «
y = Ay + D, (2.13)
где D — известная функция времени. Решение будем искать
В виде *
y = Ya. , (2.14)
Здесь а,—некоторый неизвестный вектор, У —матрица фунда-
ментальных решений уравнений в вариациях: У = {£{}. Таким
образом,.
TT-AY. (2.15)
Дифференцируя (2.Р4) (с учетом (2.15)) и подставляя в (2.13),
.получим
ми Ya = D, (2.16)
а — Г_|О,
236
ГЛ. IV. АСИМПТОТИЧЕСКИЕ МЕТОДЫ
откуда окончательно
г/==к(/>
(T)D(r)dt + C*
где вектор С* — новая постоянная интегрирования.
Для того чтобы удовлетворить начальным условиям (2.10),
произвольную постоянную С* следует приравнять нулю. Итак,
, t
y—^Y(f)Y~l(x)D(x)dr. (2.17)
о
Матрица У(0У_,(т) называется матрицей Грина.
Первая часть теоремы Пуанкаре доказана полностью, по-
скольку выражение (2.17) получено путем дифференцирования
и взятия квадратур.
Теорема Пуанкаре служит источником разнообразных упро-
щений и в ряде случаев может быть основой для построения
быстрых алгоритмов, буферных систем и для декомпозиции за-
дачи, т. е. для замены одной задачи высокой размерности не-
сколькими задачами более низкой размерности. К числу подоб-
ных задач относятся так называемые слабо связанные системы.
Рассмотрим систему
x = f(x, еу), & = <р(у, ex), (2.18)
где х и у — векторы размерностей п и m соответственно. При
в = 0 эта система распадается на. две независимых системы:
• x = f(x, 0), ‘ (2.19)
У = <р(у, 0), (2.20)
построение траекторий которых сводится к последовательному
решению двух независимых задач Коши:
х(0) = хо, у(О),= уо. (2.21)
Последовательное решение задач (2.19), (2.21) и (2.20), (2.21),
размерность которых ниже размерности исходной задачи, зна-
чительно менее трудоемко, нежели решение исходной задачи
(2.18).
Способ решения задачи (2.19), (2.21) (или (2.20), (2.21))
может служить в качестве быстрого алгоритма. Имея в распо-
ряжении это решение, которое мы обозначим через х° и i/°, мы
можем на основе теоремы Пуанкаре оценить точность подоб-
ного приближения (по сравнению с точным решением системы-
(2.18)). Если точные решения мы обозначим через r(f) и y(t),
то очевидно, что
х=х° + О (в), у = у° + О (в)1, (2.22)
§ 2. КЛАССИЧЕСКАЯ ТЕОРИЯ ПУАНКАРЕ ' 237
т. е. погрешность вычислений будет иметь порядок е. Это зна-
чит, что она стремится к 0 одновременно с е. Получить более
точные оценки в подобных асимптотических теориях, как пра-
вило, не удается.
Для того чтобы получить более точное решение, мы можем
воспользоваться процедурой, которая была изложена выше; для
этого мы должны представить искомые функции в виде ’рядов
X = Х° + 8X1 4- е2Х2 + ....
. v=^ + lSl + ^+...
Ограничиваясь определенным количеством членов, мы получим
уточненные решения. Во многих практических задачах бывает
достаточно.ограничиться первыми двумя членами этих разло-
жений. В этом случае теория возмущений сводится к интегри-
рованию уравнений
+(£)/•
Вычисление следующего приближения требует линеариза-
ции исходных уравнений, а затем решения задачи Коши для ли-
нейных дифференциальных уравнений. Подобная процедура оп-
равдана, когда речь идет о «ручных» способах анализа. Но
ориентируясь сразу на применение ЭВМ, надо принять во вни-
мание тот факт, что для численного анализа нелинейные урав-
нения, которые записаны в более компактной форме, часто бы-
вают удобнее, чем линейные. Кроме того, сама процедура ли-
неаризации часто бывает весьма трудоемка и требует вычисле-
ния производных — операции, которая в ряде случаев приводит
к потере точности.. Поэтому для построения теории возмуще-
ний, т. е. системы расчетов, позволяющих уточнить приближе-
ния х° и у°, полученные при условии е == 0, следует- поступать
иначе и решать исходные задачи Коши, но для систем
x = f(x, гу°), у=у(у, ех°). (2.24)
’ Таким образом, система пересчетов, которую мы назвали бу-
ферной системой, в тех случаях, когда действуют условия тео-
ремы Пуанкаре, сводится к численному интегрированию двух
систем уравнений (2.24).
При изучении систем высокой размерности представляют
практический интерес далеко не все переменные. .Некоторые из
них (например y(t)), могут быть «паразитными» степенями сво-
боды. В подобной ситуации в буферную систему достаточно
включить только первую из систем (2.24).
238
ГЛ. IV. АСИМПТОТИЧЕСКИЕ МЕТОДЫ
§ 3." Некоторые примеры
а) Функционирование связанных между со-
бой популяций. Классическая модель Вольтерра, так на-
зываемая модель хищник — жертва, описывается системой диф-
ференциальных уравнений
Xi =» f (х2) Х{, х2 ==» ф (xt) х2. (3.1)
В основе этой системы лёжит простейшая модель динамики
популяций. Обозначим через-z(t) количество особей некоторой
популяции. Тогда простейшая форма описания изменения ее
численности имеет вид z = yz (3 2)
где у = а — 0; а носит название коэффициента рождаемости, а
0 — коэффициента смертности. Если эти коэффициенты постоян-
ны, то мы имеем известное утверждение об экспоненциальном
росте популяции. Уравнения типа (3.2) имеют смысл лишь
в том случае, когда число особей достаточно велико и функцию
z(t) можно считать непрерывной.
В рамках этого простейшего представления о динамике чис-
ленности популяции рассмотрим взаимодействие двух популя-
ций. Одну из них, численность которой Xi (t), назовем хищни-
ками. Примем, что величина у для этой популяции зависит от
количества особей другой популяции, численность которой x2(t)
и которую мы назовем жертвами. При этом положим, что ко-
личество особей популяции хищников определяет' только коэф-
1 фициент рождаемости, а коэффициент
смертности постоянен и определяется есте-
ственной смертностью от старости, т. е.
/ f (х2) = fi (х2) — ап. Коэффициент' ft (х2) —
/ -вогнутая функция х2 (рис. 3.1). При не
(----------—очень больших значениях х2 для функции
\ ~ J * fv справедлива линейная аппроксимация
Рис. 3.L f 1 (х2) = яi’2x2. Точно так же динамика чис-
ленности популяции жертв полностью опре-
деляется количеством хищников. Но при этом предполагается,
что ни одна особь популяции жертв не погибает- собственной
смертью, она используется для питания хищников. Что же ка-
сается коэффициента рождаемости,, то он не зависит от количе-
ства хищников и постоянен для данной популяции. Другими
словами, ,ф(Х1)= а22 —cpi(xi), причем Ф1(х0 также вогнутая
функция аргумента xi и для нее мы будем использовать ли-
нейную аппроксимацию <pi(-*4) = я21Хь Собирая эти результаты,
мы придем к системе уравнений
Xi = — ОцХ\ ai2x(x2, х2 = (Z2iXjX2 а22х2, (3.3)
известной как модель Вольтерра.
§ 3. НЕКОТОРЫЕ ПРИМЕРЫ
239
Мы не будем здесь обсуждать физического, точнее, биоло-
гического смысла этой модели. Она, конечно, весьма условна.
Тем не менее она описывает структуру трофических связей, от-
ражающих многие качественные особенности реальных процес-
сов обмена веществом. Модели типа (3.3) сыграли’огромную
роль в становлении математической теории биологических мак-
росистем. Они являются простейшими моделями взаимодей-
ствия популяций.
Очевидно, что уравнения (3.3) допускают стационарное ре-
шение
^1 =“ ^2~®п/а12- (3.4)
Если в некоторый момент времени t = to xi = x2 = ^2, то
и во все последующие моменты времени эти равенства сохра-
нятся.
Кроме того, стационарным яв-.
ляется тривиальное . решение х\ s
= х2 в 0. Других стационарных реше-
ний система (3.3) не допускает.
По своему физическому смыслу ве-
личины Xi, х2 неотрицательны, т. е.
изучение системы (3.3) имеет смысл
проводить только в первом .ква-
дранте.
Если начальные состояния не бу-
дут совпадать с величинами (3.4), го
траектории системы (3.3) будут периодическими функциями вре-
мени.’Докажем это утверждение.
Заметим прежде всего, что система (3.3) допускает первый
интеграл. Для того чтобы это показать, вычислим
itXa_ (агг — aat*i) х2
dxt ~ (ацхг —ап) х, ’
Переменные в этом уравнении разделяются, и мы легко нахо-
дим
ф (х2) = ai2x2 — ап In х2 = С — (a2iXi — «22 In Xi) =С — F (хО, (3.5)
где С—постоянная интегрирования.
• Рассмотрим функцию Ф(х2); она имеет вид, изображенный ‘
на рис. 3.2, и в точке Х2 достигает своего минимального значе-
ния Ф. Если С — F <z ф, то уравнение
ф(х2) = С-Г ’ .(3.6)
ни₽С?я дТельных корней не имеет. Если С — F > Ф, то у.равне-
' ’ ' имеет два положительных корня.
840
ГЛ. IV. АСИМПТОТИЧЕСКИЕ МЕТОДЫ
Аналогичную природу имеет- и функция F(xi). Обозначим
теперь через. С такое значение произвольной постоянной, что
ф = С —F(^i).
Так как функция F(xi) положительна и в точке xi = xi дости-
гает минимального значения, то для произвольной постоянной
С <_ С система (3.3) не будет иметь действительных траекто-
рий. Значению С = С на фазовой плоскости (хь х2) будет отве-
чать единственная точка с координатами Xi = Xi, х2 = х2. Для
С > С имеем неравенство
C-F(jet)>O; - (3.7)
каждому значению xi из некоторой окрестности точки Xi = xi
будут отвечать два положительных значения переменной х2
(рис. 3.3). Однако если значение
xi оказывается вне отрезка, опре-
деляемого условием (3.7), то зна-
чениям xi уже не будут отвечать
действительные значения пере-
менной х2. Концы отрезка, кото-
рому отвечают действительные
траектории, определяется • из
уравнения .
С-Г(Х!) = Ф,
Рис. з.з. оно имеет два положительных
корня: и х~ (см. рис. 3.3).
Итак, каждому значению С > 6 отвечает некоторая замкнутая
траектория на фаговой плоскости.
Структура фазовой плоскости показана на рис. 3.3. Точка
(0,0) также принадлежит семейству решений, но через нее
не проходит ни одна фазовая Траектория *).
В последующем изложении нам понадобится только та часть
фазовой плоскости, которая находится в окрестности точки
(xi,x2). Для описания траекторий в этой окрестности нам до-
статочно использовать линейное приближение. Конечно, его
можно получить и из интеграла (3.5), но проще это сделать не-
посредственно. Положим
X| = ^i + ^|, х2 = ^2 + ^2. (3.8)
Подставляя (3.8) в (3.3) и отбрасывая величины второго по-
рядка малости па отношению к gi и g2, получим
t.= ^, Ь = (3.9)
*) Структура модели и ее подробное исследование впервые были даны
еще в начале века В. Вольтерра. См. подробнее [3].
§ 3. НЕКОТОРЫЕ ПРИМЕРЫ
241
или
Ь + аМ ' (3.10)
где
®2 = ана22. (3.11)
Уравнение (3.10) дает
ii = 11. о cos (<о/ 4- а),
где £1, о и а — произвольные постоянные.
Система (3.9) имеет первый интеграл.
|2 .а21_|_^_а12_==с (з J2)
b «12«22 1 «21«11 ' 7
Формулы (3.10)—‘(3.12) дают правильное качественное и
количественное описание процесса функционирования рассмат-
риваемой системы популяций в том случае, когда начальное со-
стояние системы близко к точке (хь Л2)-
Предположим теперь, что мы имеем еще одну систему попу-
ляций хищник — жертва, функционирование которой описывает-
ся уравнениями
Ух = — ЬцУ\ + Ь\^У\У2, У2 — — ЬцУ1у2 + Ьззу2. (3.13)
В системе (3.3) все коэффициенты а,/ мы считали положитель-
ными. В данной системе коэффициент рождаемости жертвы —
величину &22 — будем считать отрицательной величиной. Подоб-
ная ситуация может возникнуть, если популяция у2 подвер-
гается эксплуатации, например, вылов рыбы пропорционален ее
количеству, причем с коэффициентом пропорциональности, боль-
шим коэффициента рождаемости, или если имеет место эпиде-
мия, или по каким-либо другим причинам. В этих условиях оче-
видно, что даже при отсутствии хищников (т. е. в условиях,
когда yi s 0) популяция у2 будет неограниченно убывать. Тем
более это будет иметь место при наличии хищников. Таким об-
разом,
lira у2 (0 = 0.
Но в этих условиях и количество особей популяции хищников
будет неограниченно убывать, поскольку, начиная с какого-то
момента, у2 будет настолько мало, у2 < у2, что bi2y2.< Ьц и
— f&a$L_4b СТ»\ Уравнения для у\ окажется меньше величины
' 11 Итак, в этих условиях любые решения си-
стемы ( .13) будут неограниченно убывать,
242 ГЛ. IV. АСИМПТОТИЧЕСКИЕ МЕТОДЫ
Предположим теперь, что две рассмотренные системы, (3.3)
и (3.13), связаны между собой, например, следующим образом:
Xi = — ацХ1'+ 012X1*2 + edj*i^2,
Х2 = — a2iXtX2 + 022*2 — ес\у{х2,
• г I t I j (3.14)
У i---ЬцУ\ + bl2yxy2 + sd2x2yx,
У2 = ~ b2iyiy2 + Ь2ау2 — ы2хху2,
т.е. система (3.14) описывает ту ситуацию, когда популяции
хищнико'в могут питаться обеими популяциями жертв.
Если параметр е мал, то для изучения порождающего реше-
ния мы можем принять его равным нулю ив качестве прибли-
женного решения принять решения предыдущих задач.
• Поскольку правые части системы уравнений (3.14) являются
аналитическими функциями параметра 8, то теорема Пуанкаре
применима, и мы вправе сделать следующие заключения.
1) Каковы бы ни были начальные состояния xi,0 и х2,0 пер-
вой системы популяций, изменения численности хищников и
жертв будут находиться в состоянии, близком к периодическим
колебаниям: увеличение числа хищников будет приводить к
уменьшению числа жертв, т. е. к сужению пищевой базы хищ-
ников, что однажды своим следствием будет иметь уменьшение
числа последних. А это, в свою очередь, позволит начать уве-
личибаться числу жертв, т. е. приведет к расширению пище-
вой базы хищников, а следовательно, и к возможности увели-
чения числа хищников й т. д.
2) Что касается второй системы популяций, то обе ее со-
ставляющие будут постепенно уменьшаться и неограниченно
стремиться к нулю при<х>.
Согласно оценкам предыдущего параграфа, эти заключения
будут тем точнее, чем меньше величина в. Другими словами, за-
менив численное решение задачи Коши для системы (3.14) ре-
шением двух задач Коши размерности в два раза меньшей, мы
получим количественные оценки фазовой траектории с ошибкой
тем. меньшей, чем меньше величина е. Этот результат, однако,
следует прокомментировать;
Дело в том, что при доказательстве теоремы Пуанкаре су-
щественно использовался тот факт, что анализ ведется для
фиксированного интервала времени. С* увеличением длины ин-
тервала оценки будут все время расползаться, и некоторые
важные качественные особенности изучаемых процессов мы
просто не сможем обнаружить с помощью развиваемой теории.
Наконец, теорема Пуанкаре формулируется в терминах асимп-
тотических теорий: она описывает поведение решений при
е->0. В действительности параметры всегда являются малыми,
но конечными, и возникает вопрос о границах применимости
§ 3. НЕКОТОРЫЕ ПРИМЕРЫ
243
теорий, о сой области значений параметров; в которой они ос-
таются достаточно малыми для того, чтобы были справедли-
выми качественные выводы, полученные на основании анализа
порождающих решений.
Если 622 < 0, то, как мы это видели, lim у2 == 0. Рассмотрим
/->00
этот предельный случай. Система (3.14) примет теперь вид
xi — — auXi -г «12X4X2,
= —«21X1X2 + «22X2 — вс ii/ix2, (3.15)
У1 = — bnyi + ed2x2yi.
Система (3.15) уже не имеет стационарных решений (за ис-
ключением того случая, когда-^- = , в которых все вели-
чины xi, у\ и х2 отличны'от нуля. Для изучения поведения
решений системы (3.15) при /->оо нужен специальный анализ.
В данном случае он может быть проведен следующим образом;
Перепишем первое и третье уравнения в следующей форме:
Xi/xi = — ап + «12X2, У\1У\ = — Z>n + ed2x2;
отсюда
ed2d (In xj — «12d (In yx) = (bltai2 — ealtd2)dt,
или
x^'lyx" = C exp (&ц«12 — sand2) t;
•тогда
yt = C*xf^ exp (- у). (3.16)
Из формулы (3.16) сразу следует, что если &ц«12— евц^гХ),
то lim у{ = 0, т. е. мы получаем результат, согласующийся с
/->00
Гем качественным выводом, который мы сделали на основании
анализа порождающего решения.
Если же мы имеем обратное неравенство, т. е. &ц«12 —
— 8and2<0, то картина качественно отлична: погибает первая
популяция хищников, а вторая популяция за’нимает ее место.
Таким образом, выводы, полученные на основе анализа с по-
мощью теоремы Пуанкаре, справедливы лишь при
8 < 8*==
^nQia
«11^2
(3.17)
случае еТИМ’ Что теоР5ма Пуанкаре справедлива не только в том
точно мК0Г?1 паРаметР 8 стремится к 0, но и когда он доста-
(3 17) Т Но Уловить эту границу и получить условия типа
244
ГЛ. IV. АСИМПТОТИЧЕСКИЕ МЕТОДЫ
Примечание. Формула (3.17) показывает, что роль малого параметра
в данной задаче играет не один параметр, а некоторая комбинация парамет-
ров, точнее, соотношение величин этих параметров.
б) Система с осциллирующим звеном. Предпо-
ложим, что мы имеем некоторую экологическую систему, со-
стояние которой описывается вектором z размерности п и си-
стемой хищник — жертва с очень малым периодом собственных
колебаний Т = 2л/<о. Это означает, что если бы система хищ-
ник-жертва была поставлена в стационарные условия, то пе-
риод 2л/со, где (о определяется формулой (3.11), был бы мал.
Понятие малости всегда более или менее условно. В данном
случае оно означает, что если мы удалим из экологической
системы пару хищник —жертва, то остальные переменные бу-
дут меняться медленно: характерное время изменения вектора z
много больше Т. Другими словами, мы изучаем поведение ко-
лебательной системы хищник — жертва на медленно меняю-
щемся фоне..
Мы будем предполагать, что и жизнедеятельность популяций
оказывает влияние на окружающую среду и среда оказывает
определенное влияние на функционирование системы хищник —
жертва.
Уравнения изучаемой системы мы представим в следующем
виде:
i — f(z,x,y),
i= — aux + ai2xy, (3.18)
У = — a2ixy + a22(z)y.
Величины йц, Й12 и й21 будем считать постоянными парамет-
рами. Это значит, что они не зависят ни от времени, ни от зна-
чений других переменных задачи. Что касается коэффициента
рождаемости 022 популяции, которая служит пищей популяции
хищников, то будем считать его зависящим от состояния среды.
Если z = const, то колебания количества хищников и жертв
Происходят около положения равновесия, которое, как мы
знаем, определяется формулами .
х = Л = й22/а21, y = d = au/at2.
Ограничимся рассмотрением того случая, когда величины х и у
не сильно отклоняются от стационарных значений И и Для
этого сделаем замену переменных
х = *-Нь 04 + k (3.19)
Линеаризуем два последних уравнения системы (3.18) относи-
тельно величин gi и £2- В результате мы получим следующую
§ 3. НЕКОТОРЫЕ ПРИМЕРЫ
245
систему уравнений относительно величин 5Ь Ь и г (ср. фор-
мулы (3.9)): i=/fe
___ Д 12^22 (^)
«21 ’
_______ Д21Д11 g
012
(3.20)
Уравнения (3.20) описывают эволюцию системы (3.18) в ок-
рестности стационарного состояния (3.4).
Система (3.20) сама по себе еще не содержит малого пара-
метра. Условие того, что период Т мал (или что частота <о ве-
лика), еще никак не отражено в системе. Поэтому в уравнениях
(3.20) сделаем еще одну замену переменных (замену Ван-дер-
Поля) : ____
gi = с cos ф, ii = —Vana22 сзшф- (3.21)
Здесь с и ф, которые впредь мы будем называть амплитудой
и фазой, — новые переменные, а равенства (3.21) — это фор-
мулы замены переменных. Сравнивая выражение для ti, полу-
ченное с помощью формул (3.21), со вторым из уравнений си-
стемы (3.20), мы можем найти выражение |2 через новые пере-
менные с, ф! __
?2==_^л/-^ с sin ф. ' (3.22)
ы а,2 V «22 Y '
- Продифференцируем первое из равенств (3.21) и приравняем
его второму. Мы получим условие совместности преобразований
(3.21):
с cos ф — сф sin ф = — Уаца22 с sin <Г* '(3.23)
Это есть уравнение первого порядка, связывающее две неизвест-
ные функции с и ф. Для того чтобы получить второе уравнение,
связывающее эти функции, мы продифференцируем равенство
(3.22) и приравняем его правой части третьего из уравнений
(3.20). После очевидных выкладок получим
'\/ «^ sin Ф + д/-^- Сф cos ф =
= ацс cos ф + 4- А/тг- а2гс sin ф. (3.24)
Z V а22
стве?сиУ уРавнений (3.23), (3.24) будем рассматривать в каче-
Разреша МЫ диФФеРенЦизльных уравнений относительно 6 и ф.
к я ее относительно этих величин и используя обозначе-
246
ГЛ. IV. АСИМПТОТИЧЕСКИЕ МЕТОЛЫ
ние со2 = ацО22> получим
<5 = sin2 ф, ф = <о +-^7-cos Ф sin ф.
2^22 Са22 -
Заменяя, наконец, в первом из уравнений системы (3.20) вели-
чины £1 и ?2 их выражениями через с и ф, мы приведем эту
систему к виду
i = F(z, с, ф),
^=4fi(z, с, ф)зш2ф, (3.25)
ф = <в + Ч^2 (г, с, ф) cos ф sin ф,
где смысл новых обозначений очевиден.
Система (3.25) полностью эквивалентна системе (3.20), но
она обладает следующими двумя особенностями. Во-первых,
функции F, 4fi и Тг являются периодическими функциями пере-
менной ф с периодом 2л. Во-вторых, в явном виде в систему
введена величина со, определяющая период регенерационного
цикла вольтерровского звена нашей экологической системы. По-
следнее весьма важно в том случае, который нас интересует:
когда © велике), то характерное время функционирования по-
пуляций значительно меньше характерного времени изменения
параметров окружающей среды.
Обозначим со = (о0й (z), где ©0 — начальное значение час-
тоты, и введем новое, «быстрое» время т:
т == <bq/. (3.26)
Будем считать величину со0 большой и введем малый параметр
е.= 1/соо- Тогда система (3.25) примет следующий вид:
dzldx = zF (г, с, ф),
dc/dx = z'¥l(z, с, ф)$т2ф, (3.27)
dq)dx = Q (z) + еТ2 (z, с, ф) cos ф sin ф.
В системе (3.27) уже в явном виде присутствует малый па-
раметр, причем правые части уравнений зависят от него анали-
тически, и формально мы можем использовать в этой задаче-
метод Пуанкаре представления решений в виде рядов:
z = zo + ezi+ ..., c*=co + eci-f- .... Ф = фо + еф1+ ... (3.28)
Если параметр 8 достаточно мал, то ряды (3.28) сходятся и
являются точным представлением решения системы уравнений
(3.27). Исследуем теперь вопрос о том, можно ли с помощью
этого метода получить эффективное решение задачи, т. е. в ка-
кой степени можно использовать ряды (3.28) для получения
ответа на вопросы, касающиеся эволюции окружающей среды и
§ 3. НЕКОТОРЫЕ ПРИМЕРЫ
247
влияния на ее характеристики жизнедеятельности данной си*
стемы двух популяций.
Подставляя ряды (3.28) в систему (3.27) и сравнивая коэф-
фициенты при одинаковых степенях параметра е, получим си-
стемы уравнений для. определения величий с, и ф/. Первое
‘приближение нам дает
z — zq = const, с = со = const, ф = Q (zo) т = и/. (3.29)
Это приближение вряд ли представляет собой интерес для ис-
следователя, изучающего постепенную эволюцию внешней сре-
ды. В самом деле, выражения (3.29) описывают, всего лишь ха-
рактер изменения одного йз Параметров вольтерровской си1
стемы в окрестности положения равновесия при постоянных ус-
ловиях внешней среды:
X с сод
------- (3.30)
. и это движение в силу постановки задачи нам известно заранее.
Следовательно, нам необходимо изучать, по меньшей мере, вто-
рое приближение.
Определение следующего приближения сводится к интегри-
рованию ‘линейной системы уравнений, правые части которых
содержат периодические функции от t с периодом 2л/©. Это
быстро колеблющиеся функции, характер изменения которых
и определяет величину шага численного интегрирования. По-
этому для изучения долговременных изменений параметров
внешней среды придется сделать очень много шагов по вре-
мени. Расчет будет не только трудоемким — большое количе-
ство шагов по времени ведет к накоплению ошибок.
Есть еще одна причцра, делающая описанную процедуру
> малоэффективной. Ряды (3.28) сходятся для любого конечного
t, но с увеличением t точность аппроксимации, достигаемая с
помощью рядов Пуанкаре, будет падать.
Таким образом, хотя прямое использование метода Пуан-
каре Ti возможно, оно вряд ли может быть полезно при иссле-
довании рассматриваемой задачи, главное содержание кото-
рой Изучение эволюции внешней среды на -большом отрезке
„Ремени- Для решения этой задачи метод малого параметра
нияГеН ?ЫТь существенным образом изменен. Как мы увидим
окажем<5жн<> Так видоизменить метод малого параметра, что он
мого КТСЯ весьма эффективным для исследования рассматривав-
248
ГЛ. IV. АСИМПТОТИЧЕСКИЕ-МЕТОДЫ
Задача, которую мы только что описали и к изучению кото-
рой еще вернемся в этой главе, относится к весьма широкому
классу задач, встречающихся в технике, экономике и сочетаю-
щих быстрые колебательные процессы с медленно изменяющим-
ся фоном. К числу задач такого рода относится, например, за-
дача исследования динамики космического аппарата, входя-
щего в земную атмосферу (см. [9]).
в) Периодические решения уравнения Дюф-
финга. При изучении процессов самой разной- физической
природы очень' часто возникает необходимость выяснения воз-
можности существования и особенностей периодических реше-
ний. Наиболее простыми формами состояния систем являются
стационарные. Следующие относительно простые формы состоя-
ния (и эволюции) систем — периодические. Начиная со времен
Кеплера периодические движения занимали всегда очень боль-
шое место в исследованиях математиков, физиков, астрономов.
Периодические или близкие к ним движения играют огромную
роль в физике, технике, где они часто являются определяю-
щими формами состояния. Теперь, как мы убеждаемся, они со-
ставляют содержание многих биологических, экологических и
экономических процессов. §ез преувеличения, можно сказать,
что содержание практически любых эволюционных изменений,
любого развития составляет повторяемость (или почти повто-
ряемость) огромного количества процессов, состояний и явле-
ний. Поэтому изучение периодических движений нр может
остаться вне арсенала математических средств, используемых
в системном анализе. Мы к этому вопросу будем возвращаться
неоднократна. В этом же пункте мы рассмотрим всего лишь
один вопрос: о возможности использования метода Пуанкаре
для исследования периодических движений.
Рассмотрим простейший пример — так называемое уравне-
ние Дюффинга-.
х + х-х3 = 0. (3.31)
Систематическое изучение нелинейных колебаний началось
с середины прошлого века. Уравнение Дюффинга было, ве-
роятно, первым (или одним из первых) примером существенно
нелинейных уравнений, позволившим выяснить целый ряд ка-
чественных особенностей колебательных движений нелинейных
систем, отличающих поведение этих систем от линейных.*
Уравнение (3.31) может быть проинтегрировано в явном
виде через эллиптические функции и до конца изучено анали-
тическими методами. Мы здесь поступим несколько иначе. Су-
ществование периодического решения уравнения (3.31) можно
установить достаточно просто с помощью чисто геометрических
построений, используя первый интеграл этого уравнения. Для
§ з. некоторые примеры
249
получения первого интеграла умножим обе части уравнения
(3.31) на х и перепишем его в виде
откуда
... , . ,. 1
XX-}-XX — хлх^=-$
dx2
dt
I I dx2
T'T dt
1 dx*
T dt
x = ± д/С-Ф(х),
(3.32)
где Ф(х) = х2— x4/2, С — произвольная постоянная.
Для того чтобы построить фазовый портрет уравнения ,Дюф-
финга, построим зависимость
Ф(х) (рис. 3.4) и положим С =
= Ci < Со, где Со = max {х2 —
— х*/2} = 1 /2. Тогда каждому
значению |х|< 1 отвечают, со-
гласно (3.32), два значения пере-
менной х. Совокупности этих зна-
чений отвечают две симметричные
кривые, которые образуют, как
показано на нижней части
рис;. 3.4, замкнутую эллипсовид-
ную кривую.
Если х > 4-1 или х < —1, то
этим значениям отвечают незам-
кнутые кривые. Если С = Со, то
этому движению соответствует се-
паратриса, отделяющая область
ограниченных периодических движений от неограниченных.
Таким образом, если начальное отклонение от положения
равновесия х == 0 мало, то оно порождает замкнутые траекто-
рии—периодические движения.
Заметим, что если рассмотреть уравнение
х 4- х 4- х3 = О,
то все траектории будут ограниченными замкнутыми кривыми —
решение не будет содержать неограниченных движений.
Но проведенными рассуждениями исследование не исчерпы-
вается. Нам надо найти еще .период колебания и зависимость
*(0- Для этого проинтегрируем уравнение (3.31). Это нетрудно
сделать, так как переменные в (3.31) разделяются, и решение
мы можем представить в эллиптических функциях (см. [9]).
“ Результате мы придем к довольно громоздким формулам. Но
можно получить и относительно простые приближенные выра-
ения. Попробуем воспользоваться для этого методом Пуан-
•аРе, рассматривая движения с достаточно малой амплитудой.
250
ГЛ. IV. АСИМПТОТИЧЕСКИЕ МЕТОДЫ
Уравнение (3.31) явно малого параметра не содержит. Им яв-
ляется начальное состояние системы — тот факт, что отклоне-
ние от положения равновесия мало. Его можно использовать
по-разному, и, в частности, с его помощью можно ввести пара-
метр. Цоложим х = е,у. После этой замены уравнение (3.31)
примет вид
y + y-e2z/’ = 0. . ' ' . (3.33)
В качестве начальных значений примем следующие:
/ = 0: у(0) = 0, y(Q) = a. (3.34)
Уравнение (3.31) не содержит слагаемых, зависящих явно-от
времени. Поэтому оно инвариантно относительно группы сдвига
t^i + c. (3.35)
Значит, мы можем всегда выбрать постоянную с так, чтоб#
были выполнены условия (3.34). Решение, удовлетворяющее
этим условиям, будет иметь вид у = y(t, а), т. е. содержать
одну произвольную постоянную; но в силу (3.35) мы можем
переписать его В виде
У = уЦ + с, а). (3.36)
*
Функция (3.36) содержит уже- две произвольные постоянные,
т.,е. является общим интегралом.
Подобными обстоятельствами в дальнейшем мы будем неод-
нократно пользоваться. Но в данном случае все обстоит еще
проще: мы знаем заранее, что любое решение уравнения
(3.31)—периодическое, если только е достаточно мало. По-
этому, для того чтобы выяснить возможности метода Пуанкаре
для эффективного расчета периодических решений, нам.доста-
точно взять любое из решений этого уравнения, в частности то,
которое определяется условиями (3.34). .
Попытаемся искать решение задачи Коши (3.33), (3.34)
в виде ряда .
i/ = l/o + ^/i4-e2z/2+ ... (3.37)
Для членов этого ряда мы получаем следующие уравнения:
& + 0о = °> ^1+^ = 0, jf2 + ^2 = ^o> ••• (3.38)
Из первого уравнения находим у0 = A cos t + В sin t, где А - и
В — произвольные постоянные.
Подчиним начальные значения условиям (3.34); тогда
В = 0, Л = а, и мы получим
у0 = а cos t.
s 3. НЕКОТОРЫЕ ПРИМЕРЫ
251
А поскольку выбором произвольных постоянных А и В условия
(3.34) уже удовлетворены,. то' остальные искомые функции
должны удовлетворять нулевым начальным условиям:
!/1(0) = 1/2(0) = Уз(0)= ... =0.
^(0) = //2(0) = ^3(0)= ... =0.
Поскольку'второе из уравнений (3.38) однородное, то, исполь-
зуя условия (3.39), находим, что
Для t/г (0 получаем уравнение
& +#2 = a3cos3/.
3 1
Но COS31 = -J COS t 4- j cos 3/, поэтому
y2 + У2 = j a3 cos 14- -~ a3 cos 3/. (3.40)
Частное решение уравнения (3.40) будем искать в виде
у2 — C\l sin £4“ С2 cos 3/.
Подставляя выражение у2 в уравнение (3.4,0) и сравнивая коэф-
фициенты при тригонометрических функциях одинаковой крат-
ности, находим
у2 — a3t sin ? — cos 3/.
Общее решение уравнения (3.40) мы представим в виде
у2 = У2 4- Л sin 14- В2 cos I
и подберем постоянные А2 и В2 так, чтобы удовлетворить усло-
виям (3.39). Легко видеть, что А2 = 0, В2 = а3/32. Итак» ре-
шение уравнения (3.40) будет следующим:
у2 — тг i sin t -т- (cos 3/ — cos t). * (3.41)
О oz
Продолжая аналогичные вычисления, найдем, что
Уз33 0,
У\ = а{1 sin t + а2Р cos 14- a3 cos 14- «4 cos 3/ 4- cos 5/, ^-42)
где вычисление "неопределенных коэффициентов не представ-
ляет трудностей.
Как показывают формулы (3.41) и (3.42), все слагаемые
Ряда (3.37), кроме первого, будут либо нулями, либо будут
содержать вековые слагаемые, т. е. слагаемые, растущие со
ременем. И ряд, полученный описанным способом, "согласно
ореме Пуанкаре будет сходиться на любом конечном отрезке.
252
ГЛ. IV. АСИМПТОТИЧЕСКИЕ МЕТОДЫ
времени. Таким образом, периодические решения уравнения
Дюффинга мы можей аппроксимировать с помощью метода
Пуанкаре с любой степенью точности рядом, состоящим из сла-
гаемых, которые, не являются периодическими функциями вре-
мени. Конечно, такое представление очень неудобно. С его по-
мощью мы не сможем изучить, например, зависимость пе-
риода колебаний от амплитуды и других важнейших характери-
стик изучаемого колебательного процесса. А поскольку период
решения будет отличаться от 2л — периода слагаемых ряда, то
определить период, даже приближенно, будет очень трудно
(если не невозможно). Таким образом, основное препятствие
в использовании подобного представления будет состоять в
том, что любой отрезок ряда, который мы будем использовать,
не будет периодической функцией времени.
Наконец, точность аппроксимации с увеличением времени
будет непрерывно ухудшаться, и по мере исследования про-
цесса нам придется использовать все большее количество чле-
нов ряда (3.37). '
Причина всех описанных трудностей состоит в том," что пе-
риод решения Т зависит от начальных условий, и уже порож-
дающее решение должно как-то учитывать этот факт.
Таким образбм, метод малого параметра Пуанкаре, будучи v
весьма сильным средством приближенного исследования, яв-
ляется далеко не универсальным и требует существенных мо-
дификаций для того, чтобы оказаться инструментом, пригодным
для решения многих прикладных задач, содержащих малые
параметры.
В следующих параграфах мы остановимся на таких вариан-
тах метода малого параметра, которые позволяют построить
эффективные решения двух последних из тех трех задач, кото-
рые были рассмотрены в этом параграфе.
§ 4. Метод Пуанкаре расчета
' автоколебательных и периодических решений
в квазилинейных системах
а) Схема метода. Проблема эффективного определения
периодических решений в нелинейных дифференциальных урав-
нениях— это самостоятельная и большая тема. Нашей целью
не является сколько-нибудь полное изложение существующих
теорий: мы хотим показать некоторые из модификаций теории
малого параметра, которые могут быть источниками идей при
исследовании сложных систем. Проблема выделения периодиче-
ских или близких к периодическим составляющих процесса, их
изучения и, что еще более важно, исключения их из последую-
щего рассмотрения — один из важных элементов системного
§ 4. МЕТОД ПУАНКАРЕ
253
анализа. К сожалению, в этой проблематике не создано пока
еще сколько-нибудь универсальных методов, и исследователю
важно представлять себе генезис идей, их постепенное разви-
тие. И- для этого, вероятно, достаточно расставить основные
вехи.
Поэтому в этом параграфе мы ограничимся лишь рассмотре-
нием знаменитого метода, предложенного Пуанкаре еще в
прошлом веке, 'который основывается на некоторых рассужде-
ниях, послуживших позднее отправной позицией для большин-
ства других теорий.
Рассмотрим общее квазилинейное уравнение второго по-
рядка
х + Z2x = в/7 (х, х). (4.1)
При 8 = 0 уравнение (4.1) описывает колебания математиче-
ского маятника с частотой <о(О) = Л и периодом 7’о = 2л/®(О).
При 8^=0 период решения уравнения (4.1) должен зависеть
от параметра s: Т = Т(ъ) = 2л/© (в), причем в силу непрерыв-
ной зависимости от параметра lim © (в) = ©(0) = Л. На этом
е->0
основании положим
<п(е) = ! , * » ---‘ (4.2)
1 I 61е I S2<> •••
и сделаем замену независимой переменной
* = T(l+gie + g2e2+ ...). (4.3)
Значению t=T отвечает значение т = 2л, т. е. период иско-
мого решения относительно новой переменной теперь уже не
зависит от в и равен 2л. Числа g'i заранее неизвестны и должны
быть определены в процессе построения решения. Перепишем
уравнение (4.1), сделав в нем замену переменной (4.3):
^2 + X (1 + g,8 + §гв2 + . . .)2 =
„р (r dx_ %_________\ l+gie + g2e*+ ...)*
г V’ dr 1+ gle + g2e2-b,... ) V
(4.4)
Поскольку уравнения (4.1) и (4.4) не содержат времени t, то
Уравнение (4.4) инвариантно относительно преобразования
+ и, как ^ы видели, для полного его исследования нам
Достаточно рассмотреть лишь следующую задачу Коши:
/ = 0: х(О) = хо(е), dx/dr = 0. (4.5)
Заметим,
известна.
что величина хо(е) в общем случае также заранее не-
254
ГЛ. IV. АСИМПТОТИЧЕСКИЕ МЕТОДЫ
Итак, мы прищли к задаче отыскания числа х0(е) и перио-
дйческого решения уравнения (4.4), которое порождается этим
начальным состоянием. Зато период этого решения мы знаем
заранее — он равен 2л.
Замена (4.3) замечательна тем, что, сохраняя аналитиче-
скую зависимость правых частей уравнения от параметра, т. е.
не нарушая условий применимости теоремы Пуанкаре, она
позволяет представить периодическое решение уравнения (4.4),
если оно существует, в форме ряда, каждый член которого яв-
ляется периодической функцией времени фиксированного пе-
риода 2л.
В силу сказанного отыскивать периодическое решение урав-
нения (4.4) будем в виде ряда по степеням s:
. х = У, e*x(fe) (т). (4.6)
^0
Подставляя ряд (4.6) в уравнение (4.4) и сравнивая коэффи-
циенты при одинаковых степенях 8, составим уравнения -для
отыскания функций x(i):
rf2„(i) 1 / \
В процессе интегрирования системы (4.7) будут появляться
произвольные постоянные. Мы должны распорядиться выбором
этих постоянных и неизвестных величин g\, g2, ... таким обра-
зом, чтобы решения уравнений были, во-первых, периодиче-
скими функциями от t с периодом 2л и, во-вторых, чтобы ряд
(4.6) удовлетворял начальным условиям (4.5).
В этом и состоит метод Пуанкаре отыскания периодических
решений. Если периодические решения существуют, то этот ме-
тод позволит нам найти эти периодические решения "в форме
рядов, все члены которых — периодические функции с одним
и тем же периодом 2л.
Из первого, уравнения системы (4.7) мы находим решение,
удовлетворяющее условиям (4.5):
х(0) = с cos т, # (4.8)
где с = х(О) = Хо. Подставляя (4.8) в (4.7), найдем, что
4- =-р- F (с cos т, — кс sin т) — 2gxc cos т. (4.9)
Для того чтобы уравнение (4.9) допускало периодические по т
решения с периодом 2л, необходимо и достаточно, чтобы его
.§ 4. МЕТОД ПУАНКАРЕ
255
правая часть была ортогональна cost и sinx. Эти условия дают
два уравнения для определения неизвестных постоянных с и
2л
J(c) = j F(c cosx, — ch sin т) sin т dx — 0, (4.10)
2л
(с) = J (с cos т> ~ sin т)cos т (4. 10
о
Первое , из этих уравнений представляет собой некоторое
трансцендентное уравнение для определения с — амплитуды по-
рождающего решения. Уравнение (4.10) может вообще не иметь
решений. Это будет в том случае, когда исходное уравнение не
допускает пеориодических решений, например, когда функция F
является диссипативной. Пусть F(x, x) = —kx. Тогда уравнение
(4.10) примет вид
2л w ‘ \
k J сЛ sin2t dr = Q. (4.10')
о
Никаких решений, кроме тривиального с==0, уравнение (4. IO7)
не допускает.
Трансцендентное уравнение (4.10) может .иметь конечное
число решений. И наконец, уравнение (4.10) может оказаться
тождеством, справедливым для любого значения с. Такая си-
туация имеет место всякий раз, когда «возмущающая» функция
F является консервативной. В самом деле, пусть F = F(x);
тогда
2Л *
J (с) = F (с cos т) sin т dr.
°
В этом случае F(ccost)—четная периодическая функция от г
с периодом 2л. Следовательно, она разлагается в ряд Фурье,
содержащий только, cos kr, а значит, в силу ортогональности
sin т и cos kx для любого k имеем
J (с) = 0.
Условимся в дальнейшем считать, что с — это отличный от нуля
корень уравнения (4.10) кратности единица*). В этом случае
Уравнение (4.11) определяет единственное значение коэффи-
циента gi(c). Таким образрм, алгоритм Пуанкаре позволяет
на этом шаге определить амплитуду порождающего решения и
*) Могут быть рассмотрены и более общие ситуации. Однако при. этом
?й*ет оказаться, что решение нельзя представить в виде ряда (4.6): функция
*"> должна быть представлена в виде ряда, расположенного по дробным
степеням параметра е.
256
ГЛ. IV. АСИМПТОТИЧЕСКИЕ МЕТОДЫ
первую поправку на частоту, т. е. полностью рассчитать нулевое
приближение.
Заметим, что в излагаемой модификации метода малого па-
раметра решение порождающего уравнения не может быть
определено на нулевом шаге, как это было в «прямом» методе
Пуанкаре. Эта особенность существенна, поскольку не каждое
решение порождающего уравнения дает периодические реше-
ния: периодические решения могут оказаться в окрестности
лишь исключительных решений порождающего уравнения. Если
ограничиться только первым членом в разложении {4.6), то мы
получим приближенное решение
1+"(е|е. (4.12)
Перепишем формулу (4.12) в виде
х(0) = с cos © (с) t, (4.13)
где
<4-14>
Полученное выражение уже несет очень важную информацию:
оно позволяет выяснить зависимость частоты от амплитуды. По
характеру этой зависимости колебательные системы разделяют
на грубые и мягкие. Если g\ (с) является монотонно убывающей
то с ростом амплитуды частота воз-
растает. Система в этом случае назы-
вается грубой (кривая II на рис. 4.1).
В противном случае система называет-
ся мягкой. Все эти результаты получе-
ны с точностью до О (е).
Для того чтобы получить следую-
щее приближение, мы должны выпи-
сать общее решение второго уравнения
системы (4.7). Он будет содержать две
новые постоянные; Одна из них может
функцией амплитуды,
быть определена из начальных условий, а вторая останется не-
определенной и может быть н'айдена только из условий разре-
шимости уравнения для х(2) и т. д.
При анализе первого' приближения мы получили условие
разрешимости (4.10), которое - является нелинейным уравне-
нием. При расчете следующих приближений условия разреши-
мости уже будут линейными уравнениями.
Продемонстрируем метод Пуанкаре на двух примерах.
б) Уравнение Дюффинга. В-предыдущем параграфе
мы уже рассматривали это уравнение. Мы показали, что все
решения уравнения
х + х-х3 = 0
(4.15)
5 4. МЕТОД ПУАНКАРЕ
257
в окрестности положения равновесия х и 0 являются периоди-
ческими. Что касается уравнения
х + х+х3 = 0, (4.15')
то любое его решение будет периодическим. Эти факты мы
установили, анализируя структуру фазовой плоскости геомет-
рическими методами. Но получить удовлетворительное количе-
ственное описание этих решений стандартным методом разло-
жения в ряд мы не смогли. Попробуем теперь использовать
для этой цели предлагаемый метод. Но сначала представим
уравнения (4.15), (4.15') в квазилинейной форме. Для этого
запишем уравнение
х + х — ± 8Х3. (4 15)
Уравнение (4.16) переходит в (4.15), (4.15') при 8=1. Заме-
тим, что это — еще один способ искусственного введения пара-
метра. Теорема Пуанкаре утверждает сходимость рядов, распо-
ложенных по степеням в, только для достаточно малых е. Но
«малость» в, по существу (мы уже убедились в этом в преды-
дущем параграфе), определяется некоторой комбинацией пара-
метров задачи. Возможность представления решения уравнения
(4.16) в форме рядов по 8 при в порядка 1 означает всего лишь,
что мы, выбираем достаточно малыми начальные значения.
В этом смысле искусственное введение параметра в систему
(4.16) вполне эквивалентно той замене переменных, которую мы
сделали, в предыдущем параграфе (см. уравнение (3.33)).
После замены (4.3) уравнение (4.16) примет вид
^r + »[l+2ei. + (2g2 + ^B>+:..]-
= ±ех>[1 +2g|S + (2g2 + g>)e!+ ...]. (4.17)
Подставляя в уравнение (4.17) ряд (4.6), мы придем к уравне-
ниям вида (4.7), которые в данном случае запишутся так
^- + х» = 0,
^- + x'» = ±^-2g1xml
(4.18)
Решение первого уравнения системы (4.18), удовлетворяющее
начальным условиям (4.5), будет иметь вид
х(0) = с cos т.
Второе уравнение примет вид
+ х0) = ± с3 cos3 т — 2gtc cos т. (4.19)
9 Н, Н. Моисеев
2 68
ГЛ. IV. АСИМПТОТИЧЕСКИЕ МЕТОДЫ
В нашем распоряжении — две произвольных постоянных с и gu
которые должны удовлетворять уравнениям (4.10) и <4.11). По-
скольку в данном случае «возмущающая сила» ±х3 является
консервативной, то уравнение (4.10) удовлетворяется тожде-
ственно по с, т. е., каково бы ни было начальное состояние
х(0) = с, оно порождает периодическое решение, — этот факт
согласуется с тем качественным выводом, который мы уже по-
лучили в предыдущем параграфе.
Рассмотрим теперь вопрос о величине gu Для этого проще
всего поступить следующим образом. Так как
cos3 т = 4 cos т 4- 4- cos Зт,
То уравнение (4.19) мы можем переписать в следующей форме:
+ х(1) = с (± Ц- — 2gi) cos т ± -у cos Зт. (4.20)
Для того чтобы уравнение (4.20) допускало периодическое ре-
шение, необходимо и достаточно, чтобы разложение в ряд
Фурье его правой части.не содержало cost и sinx. Отсюда
- сразу следует, что
gx = ±^c\ (4.21)
Таким образом, принимая в = 1, в первом приближении мы
находим интересующий нас периодический режим в виде
X == с cos © (с) t,
где
“M-T±W- <4-22’
причем знак «+» отвечает уравнению (4.15), а знак «—» —
уравнению (4.15'). Значит, если возвращающая сила имеет
вид —х + х3, то система оказывается мягкой. В случае, если
возвращающая сила равна —х — х3, система будет грубой.
Итак, в последнем случае вместе с ростом амплитуды коле-
баний будет расти и частота колебаний. Этот качественный
характер колебаний, можно было легко установить и без вы-
числений. В самом деле, вместе с увеличением амплитуды с
в выражении возвращающей силы —х —• х3 растет роль нели-
нейного слагаемого, рост которого увеличивает возвращающую
силу, а следовательно, и частоту.
В первом приближении периодическое движение описывается
гармонической функцией, так же как и в линейной теории маят-
ника. Но есть одно существенное отличие полученного резуль-.
_ тэта от линейной теории. Как показывает формула (4.22), ча-
$ 4. МЕТОД ПУАНКАРЕ
259
стота колебательного процесса зависит от амплитуды с. В слу-
чае уравнения (4.15') с ростом амплитуды растет частота.
в) ‘Уравнение Ван-дер-Поля. В качестве второго
примера, иллюстрирующего теорию периодических решений,
рассмотрим’ классическое уравнение Ван-дер-Поля, послужив-
шее источником многочисленных работ по теории колебаний:
х 4- 12х = в (1 — ах2) х.
Делая в нем замену переменных (4.3), мы получим уравнение
-^- + *(1 +2^в+ ...)== в(1 -ах2)-£ <»***+ . (4.23)
Отыскивая .его -решение в виде ряда
• X = Х(0) + 8Х(1) + 82Х<2) + . . .,
мы придем к следующей системе уравнений относительно
х<°), х<*>, ... :
zf2(0) m
________|_ у<°> — О
'dr2 х и’
d2x(1* , (1) 1 f. (0)»\ dx*® л (в) (4-24)
1F" + Х = Т V “ аХ ) -----’
Из первого уравнения системы (4.24), где функции x(i) удов-
летворяют условиям (4.5), находим •
х<0) = с cos т.
Преобразуя вто{рое уравнение, получим
+ х(1) = — у (1 — ас2 cos2 т) с sin т — 2giC cos т.'
Разложим правую часть этого уравнения в ряд Фурье. Для
этого заметим, что
cos2 т sin т = ~ sin < + j sin Зт._
В результате получим
+ л*1’= — у-| sintfl —-2у-) —-^г-sin Зт } — 2^с cos т.
(4.25)
Для. того чтобы уравнение (4.25) допускало периодические ре-
шения с периодом 2я, необходимо и достаточно, чтобы разло-
ение правой части в ряд Фурье не содержало первых гармо-
9*
260
ГЛ. IV. АСИМПТОТИЧЕСКИЕ МЕТОДЫ
ник, т. е. чтобы коэффициенты при sinx и cost были равны
нулю. Это дает два уравнения для определения с и gi, откуда
2^ = 0, с(1 -ас2/4) = 0.
Таким образом, gi = 0. Второе уравнение имеет три корня:
Ci = 0, c2 = 2/Va> с3 = —2/V'a- (4.26)
Таким образом, уравнение (4.25) имеет два стационарных ре-
жима. Один из них будет состоянием покоя х * 0, а второй —
это автоколебательный режим. Если ограничиться первым при-
ближением, то это движение будет описываться формулой
, 2
X — ± —-=- COS X.
•уа
Метод Пуанкаре отыскания периодических решений далеко
не универсален. Прежде всего, он позволяет изучать колеба-
тельные процессы только в квазилинейных системах, т. е. при
малых значениях е. Так, даже относительно Простое уравнение
Ёан-дер-Поля обладает целым рядом особенностей, которые не
могут быть изучены в рамках изложенной теории (например,
возможность существования периодических решений, близких
к разрывным колебаниям). . .
Далее, 'метод Пуанкаре ориентирован только на отыскание
периодических решений и с его помощью нельзя изучать про-
цессы установления движений, свойства устойчивости и т. д.
Наконец, этот метод хорошо разработан только для систем
второго порядка или для систем, имеющих «нормальную» струк-
туру, т. е. представленных в виде
х{ 4- = sf{ (хр ..., хп, х,.х„), I = 1.......п. (4.27)
1
Но приведение произвольной, даже квазилинейной, системы
- вида
2 + Az—e.F{z)
к виду (4.27) представляет собой самостоятельную задачу, от*
нюдь не простую с точки зрения вычислительной математики.
§ 5. Метод усреднения
В этой главе мы уже столкнулись с системами уравнений,
содержащими малый параметр, для которых прямое использо-
вание методов разложения решения в ряд по малому пара-
метру (хотя оно теоретически допустимо на основании теоремы
§ 5. МЕТОД УСРЕДНЕНИЯ
261
Пуанкаре) не приводит к каким-либо полезным для практики
результатам. Одна из таких систем имела следующий вид*):
х = е.Х(х,у,ъ),
У = со (х) 4- еУ (х, у, е), ' ' ’ ’
где х — некоторый вектор, у"— скаляр, а функции X и У —
периодические фуцкции с периодом 2л. В § 3 мы показали, как
системы вида (5.1) связаны с системами, содержащими осцил-
лирующие звенья. Трудности численного интегрирования систем
вида (5.1) вызваны тем, что в системе присутствуют «медлен-
ные» переменные х и «быстрая» у (т. е. переменная, произ-
водная которой имеет порядок 0(1), а не 0(e), как у х) и шаг
численного интегрирования навязывается быстрой переменной.
Вследствие этого интегрирование системы (5.1) приходится про-
водить с малым шагом — отсюда происходят все трудности чис-
ленного анализа систем вида (5.1) на большом отрезке вре- ,
мени: большие затраты машинного ресурса, потеря точности и
многое другое. Применение метода Пуанкаре, как мы уже ви-
дели, не снимает описанных трудностей.
Примечание. Заметим, что проблема измельчения шага при числен-
ном интегрировании является едва ли не самой большой трудностью, с кото-
рой сталкивается «машинный'математик». Р. Беллман говорил о «проклятии*
размерности». Не меньшую трудность представляет также наличие осцилли-
рующих слагаемых.
Для упрощения анализа систем вида (5.1) может оказаться
плодотворной идея, которую еще в начале тридцатых годов вы-
сказывали Н. М. Крылов и Н. Н. Боголюбов, — идея о разде-
лении медленных и быстрых движений. Наибольший интерес
для исследователя обычно представляет эволюция медленных
переменных, например изменение параметров среды в примере
§ 3. И если бы нам удалось выделить эти переменные, то мы
получили бы весьма экономный способ анализа наиболее инте-
ресных для нас "характеристик системы.
Но непосредственно этого сделать нельзя. Нельзя, например,
просто фиксировать в первом из уравнений системы (5.1) зна-
чение быстрой переменной, т. е. пренебрегать интегральным
эффектом быстро изменяющихся компонент системы нельзя.
Заметим, что благодаря взаимной связанности изменений обеих
переменных не только y(t), но и x(t) носит осциллирующий
характер.
Поэтому возникает идея об отыскании такой замены пере-*
менных, которая позволила бы отделить быстрые движения от
фазой ^истемы вида (5.1) обычно носят название систем с вращающейся
262
ГЛ. IV. АСИМПТОТИЧЕСКИЕ МЕТОДЫ
медленных. Но в общем случае найти точное преобразование,
в рамках которого эти движения были бы отделены друг от
друга, нельзя. Приходится искать преобразования, которые да-
вали бы приближенное, желательно асимптотическое решение
этой задачи. Такие преобразования отыскиваются в форме рядов
х = И + ги1{х,у) + е2и2(х,у)+
y = g + evi(x,y) + e,2v2(t, у) + ... ‘ '
Разработаны различные схемы процедур, позволяющих соста-
вить уравнения для х и у, которые уже не содержат осцилли-
рующих составляющих, и способы определения дополнительных
членов щ и vi. Теория преобразований типа (5.2) представляет
в настоящее время развитую главу прикладной математики.
Оказывается, в частности, что ряды (5.2) в общем случае яв-
ляются расходящимися, но при известных условиях они яв-
ляются асимптотическими. Последнее означает, что конечные
отрезки этих рядов могут быть использованы для аппроксима-
ции точного решения на большом интервале времени, порядка
1/е, и погрешность вычислений на таком интервале будет по-
рядка последнего отброшенного члена.
Мы оставим без обсуждения все эти достаточно глубокие
вопросы теории, ограничим изложение только техникой реали-
зации подобных преобразований и остановимся при этом на ис-
пользовании предложенной -автором схемы последовательных
приближений (см. [9]). Она более экономна с точки зрения
вычислений, чем использование рядов (5.2), и не требует вы-
полнения обременительных условий, непрерывности и диффе-
ренцируемости функций, входящих в уравнения.
а) Схема последовательных приближений. Пре-
образование переменных будем искать в виде
х = х + ей (х, у, в),
у=у4-8ц(х, у, в).
(5.3)
Потребуем, чтобы в результате такой замены переменных век*
тор-функция x(t) удовлетворяла системе уравнений, не содер-
жащей «быстрой переменной у (/). Точно так же потребуем,
йтобы и скалярная функция y(t) удовлетворяла уравнению, пра-
вая часть которого не содержит y(t). Другими словами, потре-
буем, чтобы новые переменные x\t) и ij(t) удовлетворяли урав-
нениям следующего вида:
k = еА (х, в),
t ч <5Л>
у = (0 (х) + 8D.(X, в).
'Функции А и В, входящие в эти уравнения, заранее неизвестны.
$ 5. МЕТОД УСРЕДНЕНИЯ
263
Если нам удастся найти интересующую нас замену пере-
менных, то мы придем к системе уравнений (5.4), которая зна-
чительно проще исходной. В самом деле, в системе (5.4) мед-
ленное движение, скорость которого имеет порядок 0(e), пол-
ностью отделено от быстрого, скорость которого имеет порядок
0(1). Поэтому система уравнений, определяющая вектор х,
интегрируется 'независимо от уравнения, определяющего ска-
ляр у. Поскольку производная х мала, а правая часть уравне-
ния для х не зависит от у, то оно может интегрироваться с
большим шагом по времени. Определив х, мы найдем перемен-
ную у с помощью квадратуры.
Эта операция достаточно экономна, так как нам придется
вычислять квадратуру от медленно изменяющейся функции
чо (х) + еВх(е).
Заметим, что функции х и у, удовлетворяющие «разделен-
ным» уравнениям, — это действительно новые переменные — они
не только не тождественны х и у, но и знания этих величин
еще недостаточно для определения исходных х и у. И в то же
время они отличаются от них, как показывают формулы -(5.3),
на величины порядка 0(e). Значит, и все взаимодействия про-
цессов x(t) и y(f) имеют такой же порядок. Если нам удастся
построить преобразование (5.3), то, изменив исходную систему
на величины порядка 0(e), мы снимем основную трудность ее
численного анализа.
После этих замечаний перейдем к описанию алгоритма, имея
в виду, что нам предстоит еще найти способы определения
функций А, В, и и V.
После того; как мы найдем величины x(t) и y(t), мы должны
еще'определить функции и(х, у, е) и v(x, у, в). При их опреде-
лении возможен большой произвол, устранить который мы мо-
жем, только введя некоторые дополнительные ограничения на
их выбор. Мы условимся их выбирать из числа функций, огра-
ниченных при ^(/)->оо. Такое ограничение естественно, по-
скольку оно позволяет при любых у считать величины ей и ev
‘малыми порядка 0(e).
Итак,' задача отыскания преобразования (5.3) состоит в
определении функций и(х, у, е), v(x, у, е), А (х, е) и В(х, е).. Для
определения этих величин подставим выражения (5.3), (5.4) в
уравнения (5.1). Сокращая на е, получаем
Л(х, в) + е-||-Д(х, в) + -||-(со(х)4-еВ(х, е)) = X(х+е«,^4-ео,е),
® (х) + еВ(i> е) + 8г Ае) + е-g-(о (х) + еВ (х, в)) = (5‘б)
. = <в (х-+ ей) + вУ (х + ей, у + еи, в).
264
ГЛ. IV. АСИМПТОТИЧЕСКИЕ МЕТОДЫ
Систему (5.5) мы будем изучать методом последовательных
приближений. Для этого перепишем ее в виде
* Ф =*S(x, у, и, v. А, В) —А (х, в),
(5 6)
(х) = h (х, у, и, v, А, В) — В (х, в),
где '
g(x, у, и, v, А, В) = Х(х + е.и, y + e.v, в) —в-^-Л — е-^-В,
. ®(х + еи) —<о(х) । v/- . _ . . до . до D
п= —-------2----— + Y(x 4- вы, у 4- во, e) — е-^-Л — 8-^-B.
Решение системы (5.6) будем проводить по следующей итера-
ционной схеме:
g, = g (х, у. a'*-1'. v<‘-Л|‘-1>, В1*-»). ,57>
й. = Л(х, у, а4'», а'-», Л1*-'1, В1*-11).
При использовании этих формул на первом шаге мы предпола-
гаем, что
ы<о> = и<°>==л(О)=в(О)=о.
/
Поэтому согласно формулам (5.7) уравнения первого прибли-
жения будут иметь вид
© (х) = X (х, у, 8) — Лп) (х, 8),
© (х) = Y (х, у, в) — Во> (х, 8).
Итак, задача отыскания искомого преобразования свелась к
последовательному решению систем уравнений в частных про-
изводных (5.7). Перейдем теперь к обсуждению этого процесса
и проведем его на примере системы (5.8). Все остальные си-
стемы уравнений, полученных из (5.7), имеют ту же структуру
и могут быть изучены по тому же образцу.
Рассмотрим первое из уравнений системы (5.8). Это урав-
нение в частных производных первого порядка, разрешенное от-
носительно производной неизвестной функции и1 (х, у, в) и не
содержащее производных по другому аргументу. Кроме того,
§ 5. МЕТОД УСРЕДНЕНИЯ
265
оно обладает еще одной особенностью: в его правой части со-
держится неизвестная функция Л(,)(х, е), которая должна быть
определена в процессе, исследования.
Интегрируя первое из уравнений системы (5.8) по у, по-
лучим
9
и(1) (х, у, 8) = j {X (х, у, е) — Л(1) (х, в)} dy + ф (х), (5.9)
Уч
где ф(х)—постоянная интегрирования, т. е. произвольная
функция переменой х. Для определения неизвестной функции
Л<'>(х, е) необходимо некоторое дополнительное условие. Оно
уже было нами сформулировано. В самом деле, мы условились
отыскивать решение в классе функций, удовлетворяющих усло-
вию ограниченности
lim | uw (х, у, в) | < оо
£?->ОО
для любых х. Под знаком интеграла в выражении (5.9) стоит
некоторая периодическая функция от у, поскольку X, по пред-
положению, периодическая функция от у, а Л(|)(х, в) от у не
зависит. Период этой функции по у равен 2л. Предположим
теперь, .что ее среднее значение за период 2л отлично от нуля,
т. е.
Уо+2я
Х-А"> = -±- \ [X (х, у, е) — А(1) (х, e)]dy = с (х) 0. (5.10)
9ч
Тогда, очевидно, что
lim и(1) (х, уо + 2лЛ, в) = Д™ 2я*с (х) = ± оо.
Выбор знака плюс или минус зависит от знака функции с(х).
Таким образом, для ограниченности функции и(1) необходимо
и достаточно, чтобы
с(х) = О (5.11)
для любого X.
Интеграл в уравнении (5.9) содержит одну неизвестную
функцию А(1)(х, в'). Условия (5.11) вполне достаточно, чтобы ее
найти. Так как
Ро+2л
с $ X (х, у, 8) dy — Л(1) (X, 8),
9»
266
ГЛ. IV. АСИМПТОТИЧЕСКИЕ МЕТОДЫ
то условие (5.11) дает ч
Л(1)(х, е) = Х(х, в), (5.12)
где * ’ ., _
#»+2л
Г==4- J X(x,y,t)dy.
в
Второе из уравнений системы (5.8) совершенно аналогично пер-
вому. Повторяя вычисления, мы получим окончательно следую-
щие квадратуры, представляющие искомые функции ы(1)(х, у, е)
~ 8 ат(х,у, е) = ^у Jj(x, у, e}dy — Ху — Уо ~ У t»(I> (X, у, е) = J Y (х, у, е) dy — Yy - - . — У а - + Ф1 (х), : (5.13) + Ф1 (х).
В выражения (5.13) входят функции <pi(x) и ф1(х), являющиеся
«постоянными» интегрирования. Может быть предложено много
различных способов выбора произвольных функций <pi (х) и
ф1(х). Однако оказывается, что точность приближенного реше-
ния не зависит от выбора этих функций. Таким образом, пре-
образование (5.3) не приводит к однозначному результату.
Примечание. Неединственность в построении асимптотических при-
ближений типична для всех асимптотических теорий. Эта неединственность
Означает только одно: существует целое семейство функций, приближающих
решение с одной и той же точностью, в том смысле, что разность точного
й приближенного решений стремится к нулю вместе с величиной в,- незави-
симо от того, какое из представлений семейства используется в качестве при-
ближенного решения.
Одним из условий для определения произвольных функций
<Pi(x) и ф1 (х) может быть требование, чтобы исходная система
(5.1) й разделенная система (5.4) удовлетворяли одним и тем
же начальным условиям. Из этого условия и формул (5.3) сразу
находим, что w(1)(xo, i/o, е) = О, о(,) (х0, уо, в) == 0, откуда следует,
что . . ' '
<р1(хо) = О, Ф1(х0) = 0. ’ (5.14)
Если, кроме того, х = х при у = уо, то <pi (х) = 0, ф1 (х) = 0.
В дальнейшем мы и будем, в основном, использовать формулы
(5.14). Остальные уравнения системы (5.7) исследуются анало-
гичным образом. Принимая во внимание равенства (5.14), мы
. $ Б. МЕТОД УСРЕДНЕНИЯ
267
j gn (х, у, в)dy — gk(х, в)И,
в,
S
\hk(x, у, z)dy — hk(x, е)у .
в.
можем для их решений получить следующие окончательные
формулы:
♦ $ gk(x, у, a)dy,
• г. • •
0+2Я
Bw(x, 8) = Л4(х,в)=^- \ hk(x, у, t)dy,
-(5.15)
u(W(x,^e) = ^Ly
»
o(W (х, у, в) = *
' ’ а ' в> (х)
Заметим, что формулы (5.15) содержат интегралы от быстро
меняющихся функций y{f), но интегрирование производится
всего лишь на одном периоде.
б) Построение приближенного решения. Пред-
ложенный итерационный процесс в общем случае расходится.
Однако конечное число итераций Дозволяет составить выраже-
ния, которые с определенной точностью аппроксимируют реше-
ние исходной задачи.
Теоремы, доказанные Н. Н. Боголюбовым и его учениками,
показывают, что агрегаты, полученные путем конечного числа
итераций, дают аппроксимацию на больших интервалах време-
ни— порядка 1/в. Перейдем теперь к обсуждению структуры
приближенного решения, получаемого с помощью формул (5.15).
Итак, предположим, что мы вычислили величины Л(п) и В(п).
Обозначим через хп функцию, которая удовлетворяет диффе-
ренциальному уравнению
^ = 8Л(п)(х„,8). (5. It)
После этого определим уп квадратурой
t
Уп = У (0) + $ {® (*«) + eB<n) (х„, в)} dt. (б. 17)
о
Подставим функции хп и уп в выражения (5.15) и определим
функции и Соотношения
х (0—хп (0 + 8uW) (хп, уп, в),
У (0 “ Уп (0 + e»W,) (*«» Уп,«)
268 ГЛ. IV. АСИМПТОТИЧЕСКИЕ МЕТОДЫ
мы примем в качестве приближенного решения исходной за-
дачи. Числа Ni и Nz должны быть также выбраны Йо опреде-
ленным правилам. Смысл этих правил состоит в том, чтобы в
приближенных формулах (5.18) не содержалось членов, которые
могли бы быть отброшены без потери точности. - ' '
Рассмотрим теперь простейшую аппроксимацию. Ограничи-
ваясь первыми членами, мы можем написать - .
х(/)=хь
причем '
Xi = вХ (хь в), ух — ю (jq) + вУ (хь в). (5.19)
Исследуем вопрос о точности приближения, даваемого фор-
мулами (5.19). Вычисляя Л(1), мы использовали уравнение, в
котором отброшен ряд членов 0(e): были сохранены те члены,
которые не содержали множителя е. Следовательно, мы сделали
ошибку в вычислении производной порядка 0(e), т. е. можно
написать _
i = e(X(x,e) + O(B)). (5.20>
Мы хотим использовать аппроксимацию (5.19) точного решения
на большом интервале времени — порядка 0(1/е). Следователь-
но, при определении хп по формуле (5.16) мы допустили ошибку
порядка ошибки при вычислении производной, т. е.
х^ + СЦе). (5.21)
Примечание. Заметим, что без нарушения точности можно уравне-
ние (5.20) заменить уравнением
Х = в(Х(х, 0) + О(е)).
Обратимся теперь ко второму из уравнений (5.19). Пред-
положим, что вектор х мы определили с погрешностью порядка
е; тогда величина <о(х) будет определена с той же погреш-
ностью:
®(х) = ®(х1)-|-0(8).
Следовательно, при интегрировании ю(х) на интервале, длина
которого имеет порядок О (1/е), имеем оценку
t t
J св (х) dt = j о (xi) dt -j- О (1).
о о
Значит, в подынтегральном выражении формулы (5.17) долж-
ны быть сохранены лишь те члены, порядок которых ниже, чем
порядок ошибки при вычислении хя. В том случае, когда n = 1,
в подынтегральном выражении должно быть сохранено только
первое слагаемое. Таким образом, второе .из уравнений (5.19)
§ 5. МЕТОД УСРЕДНЕНИЯ
269
написано с «избыточной» точностью. Его следует заменить урав-
нением
^1 = ®(Х1). (5.19')
Аналогично проводится оценка и более высоких приближении.
Например,
х = х2 + О (е2),
(я _ (5.22)
х2 — е А(2), у2 = & (х2) + еК.
Таким образом; расчет медленный движений на одном и том
же шаге итерационного процесса происходит с большей точ-
ностью (на один порядок), чем расчет быстрой переменной*).
В том случае, когда со не зависит от х, точности Ьпределения х
и у совпадают и верна вторая формула (5.19); что же касается
последнего из уравнений (5.22), то его следует заменить урав-
нением
^2 = ®(х2)4-еВ<2).
Точно так жё мы должны поступить и с вычислением функ-
ций и и о. Окончательно получим следующие формулы преоб-
разований. Для первого приближения имеем
х = хъ у = й.
Формулы второго приближения будут иметь вид
X = Х2 + eu(l) (xi; уь е), '
( у2, если ® = ®(х), ' ‘ '
У = \
( Уг + ev<1) (-^ь Уъ ®), если ® = const.
Для того чтобы рассчитать второе приближение, нужно про-
падать следующие вычисления.
1) Решить систему первого приближения:
х} = Х(хх,г), ^=®(xt).
2) По формулам (5.13) вычислить м(|) и
У . .
& К
У
°(1) “ МТУ 5 to to. — to, dPl‘
,_________ Ул
было) В прикладных задачах наибольший интерес представляет, как уже
в одноСКа3аН0, изУченЧе именно t медленных движений. Поэтому тот факт, что
жения цИ Т°М Же приближении более точно рассчитываются медленные дви-
’ не вызывает обычно никаких осложнений.
270
ГЛ. IV. АСИМПТОТИЧЕСКИЕ МЕТОДЫ
3) Составить выражения для gz и h?.
g2^t, 4i, e) =
“ X & + «П®, у I + 80®, в) — 8 X (хЬ в) — 8 Y (Х1, 8),
v«*l Uyl
щъ.и„.)=гfe W, -»»>_
db(1) yz- v de/1* v
-e-^-XfXbej-e^yfXbe).
4) Вычислить Л(2) и B<2>:
» #>+2я
Л®(xb e)=g-2(хь уье) = 2^- J g2(xuyi,e)dylt
ih
Й+2Я
В<2>(хь е)=Й2(xbyi, 8) = 2^- J hz(xb уь t)dyt.
s>
5) Проинтегрировать систему
“ *-Z
Г ®. fe) + вВ®, если в» = ® (х),
1 о + вВ®, если <о = const.
Мы вйдим, что’ с повышением номера приближения объем
вычислений резко возрастает. Поэтому в большинстве случаев
ограничиваются анализом только уравнений первого прибли-
жения, хотя можно указать примеры важных технических за-
дач, в которых наиболее важные для практики свойства обна-
руживаются только при изучении высших приближений*).
. Подведем .теперь некоторые итоги. Мы рассмотрели класс
систем вида (5.1), правые части которых являются периодиче-
скими функциями быстрой переменной у. Как уже говорилось,
этот класс весьма широк и часто встречается в приложениях.
Например, к нему принадлежат все системы вида
* = вХ(х,/,8), (5.24)
правые части которых являются периодическими функциями
времени t. Система уравнений (5.24) является частным случаем
системы (5.1). Для того чтобы в этом убедиться, достаточно
ввести быструю переменную у:
dy/dt—1. (5.25)
*) Например, вращательные движения тяжелого тела в гравитационном
поле. См. подробнее [9].
$ 5. МЕТОД УСРЕДНЕНИЯ
271
Мы можем применить к исследованию системы (5.24), (5.25)
изложенный алгоритм. Если требования точности позволяют
ограничиться первым приближением, то решение этой системы
сведется к решению усредненной системы *
k = гХ (х, в), (5.26)
где ’ .
т
X = у- X (х' у, в) dy,
о
Т — период X по у. Точное решение будет отличаться от при-
ближенного на величину порядка 0(e) при интегрировании на
интервале длины 1/е. При уменьшении е точность будет воз-
растать, так же как и'длина интервала, на котором проводится
исследование.
Но самое важное приложение рассматриваемой теории — это
системы с осциллирующими слагаемыми. В § 3 мы видели,
каким образом такие системы сводятся к виду (5.1). Мы еще
вернемся к системам с осциллирующими звеньями в конце этого
параграфа. Применение техники усреднения не только пони-
жает размерность системы, но — и это самое главное — сводит
исседование системы к анализу другой системы, которая опре-
деляется лишь переменными, изменяющимися медленно. Сле-
довательно, численное исследование таких<систем не встречает
существенных трудностей и может быть проведено весьма эко-
номно.
Изложенный метод усреднения допускает целый ряд важных
обобщений. В частности, в системах (5.1) оказывается возмож-
ным отказаться от условий периодичности правых частей по
быстрой переменной. Так, если функции X и Y—-почти перио-
дические, то аппроксимирующей будет следующая система
уравнений:.
+ а
. х — в lim -т- \ Х(х, у, в) dy,
а->оо м J
—а
+а
^ = ®4-elim-^- \ Y (х, у, е) dy.
а->оо •£
(5.27)
в) Об исследовании устойчивости с помощью
метода усреднения. Изложенный способ рассуждений
дает очень эффективный и гибкий метод анализа различных
систем. В частности, он позволяет решать целый ряд задач,
“”занных с отысканием периодических режимов, которым был
освящен предыдущий параграф. Приведем лишь один пример,
272
ГЛ. IV. АСИМПТОТИЧЕСКИЕ МЕТОДЫ
иллюстрирующий эти возможности. Рассмотрим уравнение
Ван-дер-Поля, которое мы изучали в § 4:
х + №х ==8(1— ах2) х, (5.28)
и сделаем замену переменных .
х — с cos <р, х = — ch sin ф. (5.29)
Дифференцируя первое соотношение и приравнивая второму,
получим
с cos ф — сф sin ф + кс sin ф = 0. (5.30)
Дифференцируя второе соотношение (5.29) и подставляя в
(5.28), получим
— сЛэшф-— А,сфсозф+сХ2созф = — 8с(1 — ас2соз2ф)Азшф. (5.31)
Разрешая систему (5.30), (5.31) относительно с и ф, получим
с = вс (1 — ас2 cos2 ф) sin2 ф,
» ф = Л, 4-8(1 — ас2 cos2 ф) sin ф cos ф.
Мы получили систему двух уравнений относительно с и ф,
эквивалентную исходному уравнению (5.28). Эта система со-
держит одну медленно меняющуюся переменную с и быстро из-
меняющуюся ф. Согласно методу усреднения, который мы рас-
сматриваем в этом параграфе, мы можем получить приближен-
ное решение системы (5.32), заменяя правые части системы их
значениями, усредненными по ф:
2л
с = ~^2СО82Ф) эт2фг/ф= -у- (1 —
° 2„ (5.33)
ф = А, 4-^(1 — аС2С082ф)8ШфС0$ф</ф = Л.
о *
Из уравнений (5.33) мы можем определить те движения, кото-
рые. происходят со стационарными амплитудами. Для этого до-
статочно приравнять нулю правую часть первого из уравнений
системы (5.33). Мы видцм, что уравнение
с(5г-1)==0 (5.34)
имеет три корня: Ci=0, с2,3—±2л/1/а, ,т. е. система Ван-дер-
Поля имеет два стационарных режима: состояние покоя с — 0 и
периодическое движение, которое происходит с периодом Т ==
= 2лД. Этот же результат мы получили в § 4 иным путем,
используя метод Пуанкаре. Но теперь мы можем изучить это
§ 5 МЕТОД УСРЕДНЕНИЯ
273
явление значительно более подробно, изучить «проблему уста-
новления», т. е. характер переходных процессов, а также ам-
плитудную устойчивость (или согласно терминологии, введенной
Пуанкаре, орбитальную устойчивость). Этим термином мы на-
зываем свойство близких движений сохранять значение ам-
плитуды.
Примечание. Термин «орбитальная устойчивость» идет из астрономии.
Рассмотрим, например, движение спутника Земли. Оно будет заведомо не-
устойчиво в смысле Ляпунова. В самом деле, рассмотрим еще один спутник,
который в начальный момент занимает положение на том же радиус-векторе,
но сдвинут относительно первого спутника на величину бг. Так как период
обращения зависит от радиуса, то периоды обращения этих спутников будут
отличаться на некоторую малую величину. Благодаря этому свойству их дви-
жение будет неустойчивым в смысле Ляпунова — положения спутников в про-
странстве с каждым оборотом будут все больше и больше отличаться друг
от друга, Но, будучи неустойчивым, движение тела в гравитационном поле
будет обладать орбитальной устойчивостью — орбиты близких спутников бу-
дут все время оставаться близкими.
Для исследования орбитальной устойчивости стационарных
решений уравнения Ван-дер-Поля положим
с = + (5.35)
где Ct — корни уравнения (5.34). Подставим это выражение в
первое из уравнений (5.33) и линеаризуем полученное выраже-
ние относительно 6с. После очевидных вычислений получим
бс = А[1_^1]дс. (5.36)
Если i = 1, т. е. Ct = 0, то 6с = в 6с/2, или 6с = 6с0 exp {st/2}.
Это значит, что с течением времени амплитуда будет расти,
и если в начальный момент 6с>0, то точка никогда не вер-
нется в начало, координат. Значит, нулевое решение уравнения
Ван-дер-Поля неустойчиво. _____
Пусть теперь сг = с2 = 2 V 1/«. Тогда Sc — —8 6с, т.' е. 6с =
= 6соехр {—80. Это значит, что с течением времени бс->0.
Если в силу каких-либо причин система выведена из состояния
движения по стационарной орбите, то с течением времени точка
вернется на исходную орбиту. Что же касается фазы <р, то зна-
чение этой переменной может измениться сколь угодно значи-
тельно, если только 1 зависит от х.
Конечно, подобные результаты не являются вполне строги-
ми. Все рассуждения мы вели, пренебрегая величинами порядка
®(в2), т. е. для того случая, когда бсо достаточно мало. Следо-
вательно, здесь речь идет не о полном исследовании устойчиво-
СТи в классическом смысле этого слова, когда мы изучаем по-
ведение решения при /-»-оо, а лишь об оценке поведения рёше-
«ия вблизи стационарных состояний системы.
274
ГЛ. IV. АСИМПТОТИЧЕСКИЕ МЕТОДЫ
Заметим, что именно подобная оценка и представляется осо-
бенно интересной при решении практических задач анализа
конкретных систем, тем более что при малых 6с0 й малых 8 эта
оценка справедлива на относительно больших интервалах вре-
. мени — порядка О(1/е).
Несмотря на всю ограниченность подобных рассмотрений,
они позволяют представить себе геометрию фазовой плоскости
уравнения Ван-дер-Поля. Траектория, начавшаяся вблизи .на-
чала координат, будет все время удаляться от него —ампли-
туда с будет все время расти. Но она не может превзойти ста-
ционарной амплитуды с = '\/21а. Таким образом, траектории,
начавшиеся внутри стационарной орбиты, будут наматываться
на нее изнутри. Что же касается
траекторий, начавшихся вне ста-
ционарной орбиты, то они также
будут стремиться к стационарно-
му состоянию, т. е. наматываться
на нее извне' (рис. 5.1).
Метод, использованный для
анализа уравнения Ван-дер-По-
ля, легко распространить и на
общий случай систем с вращаю-
щейся фазой. Рассмотрим систе-
му типа (5.1):
х = вХ(х, у),
у = о (х) + B.Y (х, у).
(5.37)
Рис*-&-1, Заменим эту систему «укорочен-
ной» системой, т. е. системой
уравнений, усредненных по у. Учитывая, что частота ® зависит
от х, в первом приближении получим
х = вХ(х)> у = со(х).
Для определения стационарных состояний, т. е. движений,
происходящих с постоянной «амплитудой» х, имеем уравнение
Х(л) = 0.
(5.38)
Уравнение (5.38)—это некоторое трансцендентное уравне-
ние относительно вектора х. Оно может вовсе не иметь решений,
оно может иметь дискретный спектр решений, оно может удов-
летворяться тождественно по х.
Предположим, что оно имеет по меньшей мере одно решение,
и обозначим через х* какой-либо из корней этого уравнения. Ис-
следуем орбитальную устойчивость движения с. амплитудой х*.
Для этого мы должны положить х = х*Ч-бх.и линеаризовать
S 8. МЕТОД УСРЕДНЕНИЯ
275
первое из уравнений системы (5.37) . В результате получим урав-
нение .
йх = вАйх, (5.39)
М л fdXl\
где А — матрица частных производных: А = ^—p-J, вычис-
ленных при х — х*.
Уравнение (5.39) — это линейное однородное уравнение с
постоянными коэффициентами, и- исследование поведения вели-
чин йх сводится к вычислению собственных чисел матрицы А.
В самом деле, будем искать решение уравнения (5.39) в виде
fix=aeeW. (5.40)
Подставляя (5.40) в (5.39), получим |А — ХЕ|=0. Характери-
стический определитель - •
|А-Х£| (5.41)
есть некоторый многочлен от %; для асимптотической устойчи-
вости решения необходимо и достаточно, чтобы корни этого
многочлена имели отрицательные действительные части. Необ-
ходимые и достаточные условия, которым должны удовлетво-
рять коэффициенты многочлена (5.41), чтобы он обладал ука-
занным свойством, даются критерием Гурвица (см., например,
ИЛ)).
Для исследования устойчивости уравнения (5.39) можно по-
ступить и по-другому. Умножим обе части уравнения (5.39) на
йх. Так как ’ •
(«* »»)—£>'>’
22 ан Ъх1 йх7 —
то (5.39) можно переписать в виде
d^dt == 2e (А йх, йх), (5.42)
где через р обозначен радиус сферы «вариаций»: P = V22 (йхг)2.
. Далее, заметим,, что
2 (А йх, йх) = J2 atf Ъх1Ьх! -f-
= 22 ru be1 = (/? йх, йх),
i. I
где ay — элементы матрицы А. Матрица R симметрична: =
*= «« + аН-
Итак, уравнение (5.42) имеет вид
dp4dt = в (/? йх, йх). (5.43)
следует> что для асимптотической устойчивости триви-
го решения уравнения (5.39) (т. е. для-того, чтобы р2->0
276
ГЛ. IV. АСИМПТОТИЧЕСКИЕ МЕТОДЫ
при /~>оо) достаточно, чтобы симметричная квадратичная фор-
ма Гпбх* бху была отрицательно определенной.
/./
Вспомним . теперь критерий Сильвестра: для того чтобы
квадратичная форма (/?бх,6х) была отрицательно определен-
ной, необходимо и достаточно, чтобы
<0, ... (5.44)
Из
Г23
Гзз
Г12
Г22
Г32
0,
0,
Г21
Г31
Таким образом, для асимптотической устойчивости решений
уравнения (5.39) достаточно, чтобы элементы матрицы А удов-
летворяли неравенствам (5.44). В пространстве параметроа
этого уравнения неравенства (5.44) определят некоторую об-
ласть, которую естественно назвать областью устойчивости.
Изложенный способ анализа устойчивости с использованием
критерия Сильвестра приводит к результатам, совершенно ана-
логичным тем, которые мы получили бы с помощью критерия
Гурвица.
г) Система с осциллирующими звеньями. Вер-
немся теперь к задаче, которую мы рассматривали в § 3. Там
мы изучали систему (3.20):
* - f (z, |ь |2)« t, = Ь |2 = - -“Чь (5-45)
Система (5.45) интересна в силу целого ряда причин. Прежте
всего, она представляет собой пример обширного класса систем,
в которых имеется элемент, совершающий при отсутствии внеш-
них воздействий колебательное движение. Кроме того, необходи-
мость изучения систем типа (5.45) возникает и при численных
исследованиях, казалось бы, совершенно «благополучных» си*
стём, в которых осциллирующие составляющие явно не выделе-
ны. Эти вопросы мы и рассмотрим в данном пункте.
Система (5.45) с помощью замены переменных (3.21)
£1 = с cos <p, ii = —Vanc22 с sin ф
сводится к следующей системе:
z — bF\ (z, с, ф),
с = eT’i (z, с, ф) sin2 ф, (5.46)
ф = Q (г) + вТг (z, с, ф) sin ф cos ф.
Мы видели (в § 3), что непосредственное применение для ана-
лиза этой системы метода малого параметра дает не очень
много. Но вместе с тем система (5.46) —это всего лишь частный
случай системы (5.1), асимптотические способы интегрирования
§ 5. МЕТОД УСРЕДНЕНИЯ
277
которой были изложены в этом параграфе. Если ограничиться
первым приближением, т. е. точностью порядка 0(e), то вмесго-
системы (5.46) мы можем рассматривать систему
z = sF| (z, с, ф) == zF (z, с),
c = e'F1(z, с, ф) sin2<p= e'P(z, с), . (5.47)
Ф — Q (z).
В этой системе быстрые переменные отделены от медленных,.,
и численное исследование системы (5.47) уже гораздо проще
анализа исходной системы (5.46).
Преобразование переменных и метод усреднения, которые
мы использовали для анализа системы (5.45), могут быть при-
менены для преодоления трудностей, связанных с появлением
высокочастотных осцилляций,, которые часто встречаются в вы-
числительных процессах. Рассмотрим этот вопрос подробнее.
Предположим, что мы изучаем систему вида
x = zf(x, t) (5.48>
и решаем для нее задачу Коши одним из стандартных числен-
ных методов. Параметр е портавлен множителем в правой части
системы, чтобы подчеркнуть тот факт, что производная фазовой
переменной х мала по абсолютной величине. Тем не менее мо-
жет оказаться, что шаг интегрирования, который выбирается
автоматически, начнет, дробиться. Если мы захотим вывесги
траекторию на графопостроитель или дисплей, то увидим вол-
нистую кривую с малыми длинами волн. Это обстоятельство
отражает внутренние свойства системы. Оно означает, что не-
которые ее собственные частоты велики, и хотя сам процесс
развивается медленно — производная имеет порядок е, — на его
фоне происходят мелкие осцилляции. Несмотря на то, что они
могут совсем не интересовать исследователя, он тратит на их
вычисление основное время работы ЭВМ. Эффективность даль-
нейшего анализа связана с тем, как мы сможем выделить и
-усреднить эти высокочастотные осцилляции.
Предположим, что в некоторый момент / = 0 мы вычислили
значение х(0) = х0- Положим
х — х0 + у (5.49) •
н представим (5.48) в форме
У — zAy + 8ф {у}, (5.50>
ГДе Д7\некот°Рая аппроксимирующая матрица, например:.
а <P(f/) = f(xo + !/, О—ЛУ- Высокочастотные ос-
цилляции могут быть связаны лишь с тем обстоятельством, чго
278 ГЛ. IV. АСИМПТОТИЧЕСКИЕ МЕТОДЫ
среди собственных чисел матрицы А существует, по меньшей
мере, два комплексно сопряженных числа М = а + ф, Х2 ==
= а —ф, у которых величина 0 имеет порядок О(1/в).
Введем линейную замену переменных
z = Су, (5.51)
которая приводит матрицу А к нормальной жордановой форме
(для простоты будем считать, что корни М и Х2— простые). То-
гда в новых, переменных система уравнений (5.50) будет иметь
вид
zi =. в [(а + Ф) z, + (zp ...» zn)],
= в [(а — ф) z2 + ф;(2р .... £„)],
z3 = в [X3z3 + ф; (zt.zrt)], (5.52)
^-•[^. + <(21.........Zn)J
Непосредственное использование переменных z< неудобно,
так как это комплекснозначные величины, но нетрудно перейти
к переменным, которые уже будут действительными. В самом
деле, положим т)1 = zi + z2, 42 = 1(21 — 22). В этих переменных
первые два уравнения нашей системы будут иметь вид
<|,-«[»Ч,+Рл2 + фГ(Ч1. п2.га.....О].
+ ......г.)]. ‘ 13ЗД
Таким образом, цепочкой линейных'преобразований наша си-
стема может быть приведена к такому виду, который допускает
использование переменных Ван-дер-Поля. Но сначала мы еще
введем обозначение 80 = <о и перепишем систему (5.53) в виде
f)i = 01)2 +еФь f|2 =.—«ни + вФ2. (5.54)
Затем положим
1)1 = с cos ф, т|1 —— cosih ф. -(5.55)
Продолжаем стандартные выкладки: продифференцируем пер-
вое из равенств (5.55) и приравняем его второму:
с cos ф — сф sin ф = — <ос sin ф. '5.56)
Далее из первого уравнения (5.54) найдем i)2:
П2 = 4- “ V Ф1 - - с sin ф - Ф1.
Дифференцируя это выражение и приравнивая его второму
уравнению системы (5.54), получим уравнение
— 6 sin ф — сф cos ф = -jj- Ф1 — <ос cos ф +’ вФ2. (5.57)
5 5. МЕТОД УСРЕДНЕНИЯ
279
Систему двух уравнений (5.56), (5.57) разрешаем относитель-
но с и ф. В результате получим
с = —+ Ф2) sinф,
8/ 1 ч (ЭД
Ф=® — - (дгФ1 + °2J cos<₽-
Уравнения (5.58} заменяют первые два уравнения системы
(5.52). Остальные уравнения этой системы мы можем перепи-
сать в виде
zt = еФь i = 3, 4, .... п, (5.59)
где
, ф/ = ф/(с, ф, z8, .;.,zn).
Система уравнений (5.58), (5.59) относится к рассмотрен-
ному классу систем типа (5.32), содержащих быструю перемен-
ную ф. Быстрая переменная ф входит в правые части этой си-
стемы только через тригонометрические функции соэф и зшф,
и» следовательно, правые части системы (5.58), (5.59) являются
периодическими функциями быстрой переменной ф с периодом
2л. Следовательно, для интегрирования этой системы может
быть использована техника усреднения. В данном случае ча-
стота ©*—величина постоянная, поэтому первым приближением
будет система уравнений
2Л
{4ф1+Ф2} sin<j)rf(p = eTi(c, z3, ... ,z„),
О
' 2л
ф = © — Л Ф1 + cos ф с/ф = © — еЧ'2 (с, z8, л.., z„), (5.60)
о
2л
*<= in Sф< =еЧГ< (Сг 2з» ••••’.
о
i = 3,4, ... ,п.
Итак, из правых частей системы (5.58), (5.59) исключена быст-
рая переменная ф, и мы можем интегрировать систему (5.60)
с большим шагом.
Конечно, переход от исходной системы (5.48) к системе
(5;60) предусматривает выполнение ряда преобразований, ко-
торые, как правило, достаточно сложны и требуют определенной
затраты машинного времени. Но полученная система может
оказаться настолько простой, что эти затраты полностью оку-
к у?Ся’ В практике ВЦ АН СССР были случаи, когда переход
усредненным системам позволял увеличить шаг численного
280
ГЛ. IV. АСИМПТОТИЧЕСКИЕ МЕТОДЫ
интегрирования во много тысяч раз. Благодаря этому не только
сокращалось время счета, но и практически исчезала та непред-
сказуемая погрешность в вычислениях, которая связана с аппа-
ратурой и которая неизбежно накапливается при большом вре-
мени вычислений.
Для выделения осциллирующей t компоненты из системы
(5.50) мы использовали алгоритм приведения линейной системы
к жордановой форме. В конкретных задачах следует стре-
миться избегать этой процедуры, поскольку она приводит к
комплекснозначным величинам и Требуется еще одна вспомо-
гательная операция для перехода к действительным величинам.
Кроме того, переход к жордановой форме связан с вычислением
всех новых переменных, а нам надо выделить лишь главную
осциллирующую составляющую. Поэтому следует пытаться вы-
делить эту составляющую, используя физические особенности
системы.
Можно предложить и другие способы. Например, пусть из-
вестно, что собственное число максимального модуля является
чисто мнимым. Тогда мы можем ввести новуйэ скалярную пере-
менную г, которая связана с переменными х уравнения
х — Ах (5.61)
линейными преобразованиями
z — (b, х), i = (с, х). (5.62)
Потребуем, чтобы, новая переменная z удовлетворяла диффе-
ренциальному уравнению второго порядка
z + ©2z = 0. (5.63)
Дифференцируя первое соотношение (5.62) и сравнивая со вто-
рым, получим
(Ь, Ах) ?= (с, х),
откуда
(х, 4*6-с) = 0. (5.64)
Поскольку уравнение .(5.64) должно выполняться для любых
X, то
с = АЧ. (5.65)
Дифференцируя далее второе соотношение (5.62) и подставляя
в (5.63), получим (с,4х)+®2(6, х) = 0, или (х,А*с — ©25) = 0,
откуда сразу находим' еще одну связь между векторами с и 6:
Л*с —®2& = 0.
Используя равенство (5.65), получаем окончательно
|(Д*)2 — ®2Е]6==0, • (5.66).
§ Б. МЕТОД УСРЕДНЕНИЯ
28Г
где Е — единичная матрица. Для того чтобы уравнение (5.66)
имело нетривиальное решение, необходимо и 'достаточно, что-
бы <л2 было корнем уравнения
|(Л*)2 - <й2£| = 0, (5.67}
причем нас интересует только тот корень, который имеет мак-
симальное абсолютное значение.
Определив й, находим Ъ, затем по формуле (5.65) — век-
тор с и с помощью формул (5.62) определяем связь между х
и г. Затем из системы уравнений (5.61) исключаем любые два
уравнения, например содержащие xi и хъ и включаем в систему
уравнение (5.63), а переменные xi и х2 находим из соотноше-
ний (5.62).
В зависимости от особенностей системы могут быть предло-
жены разнообразные модификации и упрощения изложенной
схемы. Наконец, следует иметь в виду, что нет необходимости
иметь точное значение со — нужно лишь выделить уравнение
типа (5.63) и найти связь вида (5.62).
И еще одно замечание практического характера. Упрощение
системы (5.48) было основано на анализе матрицы А, -возник-
шей в результате преобразования (5.49). Значит, мы выделяли
осциллирующую составляющую на основании анализа правых
частей системы в некоторый фиксированный момент времени.
Но с течением времени свойства системы меняются. И начав
интегрировать систему (5.60) с большим шагом, мы можем за-
тем столкнуться с явлением дробления шага и с появлением
новых осцилляций. Тогда счет должен быть остановлен и вся
процедура повторена вновь с использованием новой матрицы Д,
вычисленной по новым значениям фазовой переменной.
д) Системы.с вращающимися звеньями. Иссле-
дуем еще один класс. систем, для которых методы усреднения
являются эффективным инструментом анализа. Рассмотрим си-
стему вида
t = /?(g,z), z + f(z,O = 0. (5.68)
Здесь £ — вектор размерности N, г—скаляр. Функцию f(z,l)
для любого £ будем считать периодической функцией от z с
некоторым заданным периодом Т, причем
т •
= (5.69)
о
Будем предполагать также, что
i(0) = Q (5.70)
есть некоторое большое число.
282
ГЛ. IV. АСИМПТОТИЧЕСКИЕ МЕТОДЫ
В этих условиях систему (5.68) будем называть системой
с вращающимся звеном. Такие системы часто встречаются в
приложениях. Например, общая задача о движении спутника,
т. е. задача совместного исследования движения его центра
инерции и Движения относительно центра инерции, сводится во
многих случаях именно к системе с вращающимся звеном.
Фиксируем £ и рассмотрим движение, описываемое вторым
уравнением- системы (5.68). Умножим это уравнение на z:
zz + zf (z, I) = О,
или
z
о.
Введем обозначение
z
O(z,B)=Jf(a,g)da.
; * О
На основании свойства (5.69) имеем Ф(0, £) = Ф(Т, £) —
= Ф(—Т, g). Таким образом,
- . ^ = ±л/-2Ф(2Л)4-С, (5.71)
где С — пройзвольная постоянная, характеризующая энергию
системы. Структура фазовой плоскости показана на рис. 5.2.
Малым значением, энергии С отвечают замкнутые колебатель-
ные движения. Если С > Со, то для любого g система совер-
шает вращательные движения. Ее координата z с течением вре-
мени неограниченно растет. Характер изменения для больших
значений С функции z = z(t, £) при фиксированном £ показан
на рис. 5.3. .
В случае малых энергий звено z совершает колебательное
движение и ёго исключение из сйстемы может быть проведено
§ 6. СЛУЧАЙ НЕСКОЛЬКИХ СТЕПЕНЕЙ СВОБОДЫ
288
с помощью методов, которые были изложены в этом параграфе.
Как мы видим из рис. 5.3, изменение состояния элемента z
также носит осциллирующий характер. Но одновременно с ос-
цилляцией происходит и монотонное увеличение координаты.г.
Поэтому для использования техники усреднения понадобится
подход, несколько отличный от того, который мы использовали
для анализа систем с колеблющимся звеном.
Итак, будем считать величину й, определяемую равенством
(5.70), большой. Тогда, обозначив в = 1/й, сделаем замену не-
зависимой переменной t = es и, кроме того, положим i == й 4- х.
После подобных замен система (5.68) будет приведена к виду
А _ tR к. г), £ - - zf (5, Ц. = 1 + «. (5.72)
Если /? периодическая функция быстрой переменной г, то
система (5.72) есть частный случай .систем с вращающейся фа-
зой и мы можем использовать стандартную технику усреднения.
Заметим, что в первом приближении мы- получили
#—«®. . <5.73>
где
т х -
' о
т. е. изучаемое движение близко к равномерному вращению.
Если функция /?, не .будучи строго периодической функцией г,
является почти периодической или ограниченной колеблющейся
функцией переменной z, то техника усреднения тоже может быть
использована, но вместо усреднения по периоду Т мы должны
вычислять интегралы вида
> г
• ад = Нт ±Лх(1,2)(12.
Т+°° * J
§ 6. Случай нескольких осциллирующих степеней свободы
.!• Мы продолжим изучение систем вида
х=еХ(х, у,е), I/= <о(х) + еУ (х, у, г), (6.1)
LJ-W % и являются периодическими функциями перемен-
пеое^ В предыдущем параграфе мы рассмотрели случай, когда
вётствеНВая ^“величина скалярная. Как мы видели, это соот-
остицц* ситУаЦии, когда в системе есть лишь одна быстро
“Рующая степень свободы. В этом случае мы могли с
284
ГЛ. IV. АСИМПТОТИЧЕСКИЕ МЕТОДЫ
помощью преобразования Ван-дер-Поля свести изучаемую си--
стему к виду (6.1), где у — скаляр.
Если в системе имеется несколько колеблющихся или вра-
щающихся звеньев, то мы снова можем использовать преобра-
зование Ван-дер-Поля- (в случае колеблющихся звеньев) или
преобразование, аналогичное тому, которое мы использовали
при изучении систем с вращающимся звеном, и свести исходную
систему к системе вида (6.1).
Переход к нескольким вращающимся фазам, т. е. к систе-
мам, в которых изменение нескольких степеней свободы носит
осциллирующий характер, не является тривиальным, и. непо-
средственно перенести результаты предыдущего параграфа на
рассматриваемый случай не всегда Оказывается возможным.
Случай, когда быстрая переменная — вектор, требует развития
специального аппарата. Но прежде чем переходить к его изло-
жению, заметим, что к изучению систем вида (6.1), в которых
размерность вектора у больше единицы, приводит очень много
прикладных задач. По-видимому, простейшая из них —это за-
дача о колебании маятника с квазилинейной характеристикой
под действием периодической силы:
г + co2z(= zF (z, z, t), (6.2)
/
где F— периодическая функция времени с периодом 2л. Ис-
пользуя замену Ван-дер-Поля
z = х cos у,' г = — ха sin у
я полагая dt/dx — 1, приведем уравнение (6.2) к виду
-^=8X(x,fU), $- = <о + еУ(х,1/,0, ^-=1. (6.3)
Система (6.3) является частным случаем системы (6.1), по-
скольку ее правые части являются периодическими функциями
от у и t с одним и тем же периодом 2л. С подобными ситуация-
ми мы сталкиваемся не только при изучении механических си-
стем. Они встречаются в экологии, экономике и т. д.
Перейдем теперь к рассмотрению особенностей систе-
мы (6.1).
а) Системы с двумя быстрыми переменными.
Мы ограничимся рассмотрением только того случая, когда раз-
мерность вектора у равна двум. Все основные особенности, свя-
занные с переходом от скалярного случая к векторному, могут /
быть изучены на примере системы с двумя вращающимися
фазами.
§ 6. СЛУЧАИ НЕСКОЛЬКИХ СТЕПЕНЕЙ СВОБОДЫ
285
Итак, рассмотрим систему
х = е.Х (х, у, z, е),
у —о (х) + еУ (х, у, z, в), • (6.4)
2 = К (х) + 8Z (х, у, 2, 8),
где X, У, Z — периодические функции от скалярных переменных
у и г с периодами Tv — 2nll и Tz — ln/m соответственно.
Рассуждая, как и ранее, попытаемся найти такое преобра-
зование, которое позволит отделить медленные переменные от
быстрых и свести вычисление быстрых переменных к квадра-
турам. Положим
X = X + 8U (х, у, 2, в),
y~y + 6v(x, у, Z, 8), (6.5)
Z = Z + 8БУ (х, у, 2, 8),
где новые переменные удовлетворяют системе уравнений
х = гА (х, е)>
д = о (х) + еВ (х,е), (6.6)
2 = Л. (х) + еС (х,е),
s которой функции, входящие в правые части, заранее неиз-
вестны. Подставляя выражения (6.5) и систему (6.6) в систему
уравнений (6.4), получим следующую систему уравнений:
'^•®(*) + -^^(х) = Х(х,у,2,ъ)— Л(х, в) —
— 8-^Л(х, в) —8-^В(х, в) —8-^C(f, в)4-
4- {X (* + ей, у + во, г + ew, в) — X (х, у, z,e)},
“ И + > ад - ^-+ »> + Г (Д g, г, в) -
— В(х, в) — e~.4U,e) — в-й-В(*,в) — e^j-C(x, в)'+ <6’7>
+ {У (х 4- ew, у + ео, 2 + его, в) — У(х, у, z, в)},
(*) + -ЙтМх) = + z (х, у, 2, 8) -
~~ С (*• в) — е~ А (х, в) — е^-В (х, е) — е-^у-С(х, в) +
+ {Z (х + вы, у + во, z‘+ еш, е) — Z (х, у, г, в)}.
фе ^систе Н°МУ Тому* ка* мы это делали в предыдущем парагра*
» тему (6.7). будем исследовать методом последовательных
286 ГЛ. IV. АСИМПТОТИЧЕСКИЕ МЕТОДЫ
приближений. В качестве первого приближения рассмотрим
систему
+ (*) = *(*,& Z, в) — А(х, в),
-g-® (х) + -g-A (х) = Y (х, у, z,e) — B (х, в), (6.8)
^<o(x) + -|jA(x) = 2(x,i/, z, в) —С(х, в).
Последующие приближения будут иметь аналогичную струк*
туру. В этом параграфе мы ограничимся рассмотрением только
первого приближения. Так же как и в предыдущем параграфе,
где мы исследовали скалярный случай, реализация метода раз»
деления быстрых и медленных движений сводится к последова-
тельному интегрированию систем уравнений в частных производ-
ных первого порядка. Но при исследовании случая одной быст-
рой переменной мы имели систему уравнений, разрешенных
относительно производной по быстрой переменной. Других про-
изводных уравнения не содержали. Это позволило построить
решение прямым интегрированием. Теперь у нас две производ-
ные: по у и по г, и прием, использованный в предыдущем пара?
графе, применен быть не может.
Поскольку правые, части уравнений (6.8) являются перио-
дическими функциями быстрых переменных, для их анализа
естественнее всего использбвать метод Фурье.
Уравнения (6.8), помимо неизвестных функций й(х, у, г, в)’,
о(х, у, д,в), w(x, у, 2, в), содержат еще подлежащие определе-
нию функции А, В и С. Аналогично тому, как мы это делали
в предыдущем параграфе, для их определения мы введём тре-
бование ограниченности функций и, v и w при у-* со и z->oo.
б) Метод Фурье. Он основывается на возможности пред-
ставления. периодической функции f(y) переменной у с перио-
дом Т — 2л// в виде ряда
где коэффициенты f* вычисляются по формуле
т
(6.9)
о
Если f является функцией двух переменных: f = f(y,z)'—и она
периодическая с периодом Ty = 2si/l ао у и с периодом Т« =
§ 6. случа’й нескольких СТЕПЕНЕЙ СВОБОДЫ 287
= 2л/т по z, то ее разложение будет представлять собой уже
двойной ряд:
ft «4-00 s— 4-оо ' /
f(y,z)= S Е f^ly+зтг).
ftxa—ОО $е»—0О
' Рассмотрим первое уравнение системы (6.8). Функция
X (х, у, z, е) — периодическая по у и z с периодами Tg й Тг со*
ответственно. Поэтому мы можем представить ее в виде
ft,S«4-oo
X(x,y,z,z) — £ a^s(x,z)etw+smS\
oo
где коэффициенты разложения (x, e) определяются по фор*
мулам, аналогичным (6.9):
tv тг
a(ks (x, в) = =-U- ( ( X(x, y, z, в) e-WB+smz} dz. (6.9"
угХ Jo .
Следовательно, первое уравнение (6.8) можно переписать так:
-Ц-е4- -g- Л = (х,«)е*»** + ОЫ-А(х, в). (6.10)
Сумма в выражении (6.10) распространена на все индексы k, s,
не равные одновременно нулю. Коэффициент аоо вычисляется
по формуле
Tv Tg
а$(х, 8) = ^ $ J Х(х, ff, z, e,)dydz. (6.9")'
2 о о
Поскольку в правую часть уравнения (6.10) входит слагаемое
о<ю — А (х, е)’, не содержащее гармоник, то функция, производ-
ная которой равна правой части уравнения (6.10),-должна пред-
ставлять собой сумму двоякопериодической функции перемен-
ных у и S и линейной функции вида су 4- dz, производная кото-
рой равна а<ю — А(х, в). Другими словами, функция -и(х, у, z, в)
должна быть представима в виде ряда:
и У, z, в) = £ У, bks (х, в) 4. с (х, е) у 4- d (х, е) z.
' (6.11)
Суммирование в правой части этого уравнения распространено
все индексы k и а, не равные одновременно нулю. Подстав-
Ляя выражение (6.11) в уравнение (6.10) и сравнивая коэф-
283
ГЛ. IV. АСИМПТОТИЧЕСКИЕ МЕТОДЫ
фициенты при экспонентах с одинаковыми показателями, полу-
чим формулы
' . в)
bks (X, в) . (feZw + smX) , (6.12)
с(х, е) <а> (х) + d (х, е) Л (х) = (х, е) — А(х, в). (6.13)
Величина Ьоо(х,е) остается неопределенной. Для ограниченно-
сти и, как это следует из выражения (6.11), необходимо и до-
статочно, чтобы с(х, в) и d(x, в) были равны нулю. Но это мо-
жет быть тогда и только тогда, когда А(х, в) = аоо(х, в). Имея
в виду, формулу (6.9"). сразу находим, что А (х, в) = Я(х, в),
где усреднение проведено по обеим быстрым переменным:
' ГуТг
Х(х, е) = у-у- j Х(х, у, z, t>)dydz. (6.14)
v г о о
Если мы хотим, чтобы переменные х и х являлись решениями
одной и той же задачи Коши, то неопределенную величину
Ьоо(х, е) мы должны принять равной нулю.
Остальные уравнения системы (6.8) исследуются аналогич-
ным образом.
Итак, из анализа первого приближения находим
Л(х,е) = Х,
В (х.в) = Y 4- <вх и (х, у, г, в).
С (Я, в) = Z + кх v (х, у, г, в), (6.15)
«= Е I(Ш +’smZ)eXP*+ sm$ +
k.s^Q
£ t(«»+'Д>«рг+4*w.
k,s&0
W = E i (kZ + SmS) + a»'
Формулы (6.15) аналогичны тем, которые были получены в
случае одной быстрой переменной. Однако эти формулы имеют
смысл тогда и только тогда, когда ни ‘один из знаменателей
не равен нулю:
klat + smX ф 0. (6.16)
Заметим, что <о и X в общем случае — функции медленной
переменной х. Значит, в том случае, если в течение всего вре-
5 6. СЛУЧАИ НЕСКОЛЬКИХ СТЕПЕНЕЙ СВОБОДЫ 289
меня протекания изучаемого процесса условие (6.16) не будет
нарушено, существование второй быстрой переменной не вносит
каких-либо усложнений — мы должны проводить усреднение по
обеим быстрым переменным. Этот случай мы условимся назы*
вать нерезонансным.
в) Исследование главного резонанса. Резонанс-*
ной мы будем называть ситуацию, которая возникает в том
случае, когда «амплитуда» х оказывается в окрестности корня
уравнения
Ш(х) + з/пХ(х) = 0. (6.17)
Если «частоты» со и А, не зависят от х, то резонансом усло-
вимся называть явления, возникающие в системе тогда, когда
со и X связаны условием A/co4-smX=0, где k и s—любые целые
числа, положительные или отрицательные. Если, кроме того,
|Л| = |з|,т. е. '
Zco±mX = 0, (6.18)
то этот случай будем называть главным резонансом.
Изучение резонансных явлений сопряжено с целым рядом
глубоких математических трудностей. В этой книге мы ограни-
чимся изучением прстейшего случая главного резонанса в
условиях, когда со и X не зависят от медленной переменной х.
Величину Л* = Л/со + smk обычно называют расстройкой.
Условимся называть окрестностью резонанса такое соотношение
параметров, при котором величина расстройки h* мала: h* =
= ей. В окрестности резонанса также может быть построен про*
цесс асимптотического интегрирования. Однако в. этом случае
асимптотика будет иной, чем- та, которая дается формулами
Итак, положим X = la/tn 4- ehlrn и перепишем систему (6.4)
в виде
£ = вХ (х, у;г, в),
у = ® + еУ (х, у, г, в), (6.19)
*=^+в[2(х,^г’в) + Н
Напомним, что X,. У и Z —• это периодические функции от у и г
с периодами 2л// и 2л//п соответственно. ,
Вместо переменной у введем новую переменную 0, которую
обычно называют сдвигом фаз:
0- m
— ~Гг — У'
На основании системы (6.19) составим для нее’уравнение
6 = ва(х,у-2-0,г,в), (6.20)
10 Ht Н. Моисеев
290
ГД. IV. АСИМПТОТИЧЕСКИЕ МЕТОДЫ
где О имеет вид
»(x.i2-e,2.e)-{[z(xi2-e,2,e.) + A]i-
. — Y (х, y-z — 0, z,e)}.
Остальные уравнения системы (6.19) перепишем в следующем
виде:
х = ъХ ^х,-у z —- 0, z, 8^,
Итак, систему (6.19) можно теперь представить в следующей
форме:
х = еХ*(х, 0, z, е),
0 == &&* (х, 0, г, в), (6.21)
где смысл обозначений X*, О* и Z* очевиден. Функции X*,
и Z* являются периодическими функциями от г. Переменная г
входит в правые части системы (6.21) двумя способами: во-пер-
вых, самостоятельно и, во-вторых, в комбинации \m/l)z — 0.
Правые части системы (6.21)—периодические функции пере-
менной z, выступающей в своем первом качестве, с периодом
Т2 = 2л//П7 а также периодические функции комбинации
\m/l)z — 0 с периодом Ту = 2я/1. Следовательно, они являются
периодическими функциями переменной z, выступающей во вто-
ром качестве, с периодом
Т'= — Т=—.
2 m У m
Итак, оказывается, что функции X*, О* и Z*, рассматриваемые
как функции переменной z, имеют период 2я/т.
Скалярная величина 0 является медленно изменяющейся пе-
ременной. Поэтому система (6.21), в отличие от исходной си-
стемы (6.4), является системой с одной, а не с двумя вращаю-
щимися фазами, и, следовательно, ее изучение может быть про-
ведено методами общей теории, изложенной в предыдущем па-
раграфе. Если мы ограничимся уравнениями первого прибли-
жения, то мы будем иметь следующие формулы:
х — х, х = гХ* (х, 0, е),
А - -•/- * Ч (б-22)
0 = 0, 0 = еО (х, 0, е).
5 6. СЛУЧАЙ НЕСКОЛЬКИХ СТЕПЕНЕЙ СВОБОДЫ
291
Для определения быстрой переменной следует вычислить квад*
ратуру t _
z — Zq + Kt + е J Z* (х, б, z, в) di.
о
Усреднение в этих формулах проводится по периоду Тг, т. е.
2л/т
Х*(х, &,&) = -£- ( X* (х, 0, z, в) dz
. о
и т. д.
На этом исследование закончено. Мы изложили систему
процедур, позволяющих в условиях главного .резонанса, т. е,
когда частоты (о и X связаны условием
Z® ± тк = О (е), (6.23)
понизить порядок системы на единицу и заменить исходную си-
стему уравнений такой системой, решения которой изменяются
медленно. Изложенный метод автоматически распространяется
на случай, когда величины <о и к связаны соотношением
kla> ± srfik = О (е), (6.24)
где k и s — произвольные целые числа.
Если ш и к являются функциями х, то процедуры интегрц*
рования несколько осложняются, поскольку соотношения (6.23)
или (6.24) по мере изменения х могут нарушаться. Это значит,
что развитая здесь формальная теория справедлива лишь в
окрестности некоторых специальных значений х.
* * *
Теория, изложенная в этой главе, является одним из важ-
нейших инструментов упрощения систем. Мы рассмотрели тот
случай, когда изучаемая система является системой дифферен-
циальных уравнений. Не менее важное значение имеют и си- *
стемы, описываемые разностными уравнениями, которые не яв-
ляются разностными аппроксимациями дцфференциальных-
уравнений. Распространение изложенного аппарата исследова-
ния на разностные уравнения представляет большой теорети-
ческий и практический интересе
10*
Г л а в a V
ТЕОРИЯ ТИХОНОВСКИХ СИСТЕМ
(АСИМПТОТИКА СИНГУЛЯРНОГО ВЫРОЖДЕНИЯ)
*
§ 1. Некоторые вопросы общего характера
Одна из центральных задач анализа систем, как об этом
уже говорилось в предыдущей главе, — это задача упрощения
системы, представления модели изучаемого процесса в таком
виде, который допускает достаточно простой способ ее числен-
ной реалйзации на ЭВМ.
Трудности, связанные с численным анализом модели на
ЭВМ, определяются не только ее размерностью. Может быть,
еще более трудной оказывается организация вычислений, когда
в системе появляются процессы с малыми характерными вре-
менами, т. е. такие, которые описываются быстро изменяющи-
мися переменными. Очень часто анализ подобных моделей тре-
бует астрономических затрат машинного времени. Вот почему
обычно без надлежащих упрощений модели нельзя проводить
ее исследование. (
Но упрощение модели, замена одной системы уравнений дру-
гой не должны при этом сопровождаться потерей качественных
особенностей — модель должна сохранить свое соответствие ре-
альности. Конечно, любое отступление от точного описания не-
избежно приводит к тем или иным ошибкам. Но эти ошибки
должны быть «приемлемы» с точки.зрения целей исследования,
с точки зрения требований точности.
Вопрос о точности не так прост. Надо иметь в виду, чго
всякое усложнение модели сопровождается дополнительными
ошибками счета, в том числе и неконтролируемым «шумом» са-
мого вычислительного процесса. Ошибки, появившиеся за счет
упрощенного описания системы, могут с лихвой окупиться
уменьшением ошибок за счет сокращения количества вычисле-
ний. Практика численного анализа больших систем имеет много
подобных примеров.
Один из путей предварительного анализа моделей нам дает
изучение их асимптотических свойств по отношению к тем или
иным величинам, которые входят в модели. В предыдущей гла-
ве мы рассмотрели такие системы, в которые параметры входили
регулярным образом:
x = f(x,l, в),
§ I. НЕКОТОРЫЕ ВОПРОСЫ ОБЩЕГО ХАРАКТЕРА
293
т. е. функция f была аналитической функцией параметра е для.
достаточно малых значений в.
С помощью методов анализа подобных систем при 8->0 мы
рассмотрели широкий класс задач, среди которых были, в част-
ности, и системы с осциллирующими звеньями. Методы, разви-
тые в предыдущей главе, дают возможность исключать эти ко-
леблющиеся члены и, сохраняя основные качественные особен-
ности изучаемых процессов, значительно сокращать объем не-
обходимых вычислений. .
Рассмотренный класс систем обладал одной важной осо-
бенностью. При 8 = 0 система упрощалась, иногда распадалась
на отдельные уравнения, но пбрядок системы сохранялся, и та
задача Коши, которую мы пытались решить для изучаемой си-
стемы, сохраняла свой смысл, а изложенный класс методов,
позволяющих качественно упростить процедуру анализа, опи-
рался прежде всего на это свойство регулярности.
Но мбгут быть и другие ситуации, когда обращение в нуль
параметра е качественно изменяет" структуру системы и ее по-
—-рядок. Тогда те методы, которые были развиты в предыдущей
главе, непосредственно использованы быть не могут. Такие за-
дачи мы будем называть нерегулярными (или сингулярными).
Они отвечают существованию «пограничных слоев» — ситуации
достаточно типичной в системном анализе.
В этой главе мы остановимся на анализе-некоторых классов
нерегулярных случаев.
Возможности замены некоторой системы уравнений другой,
более простой системой часто бывают связаны с существова-
нием малых параметров при производных.
•Рассмотрим систему
x — X(x,y,f),e.y = Y(x,y,f), (1.1)
где х и у — некоторые функции размерности п и т соответ*
ственно.
Сформулируем для системы (1.1) следующую задачу Кошиз
t—t0, x(to) — xo, у(1о) — Уо- (1.2)
Численное решение задачи Коши (1.1), (1.2) представляет опре-'
деленные трудности. В самом Деле, при е->-0 производная
Функции у будет большой: у = О (1/е). Значит, переменная у
towT измеяяться быстро, и мы снова столкнемся со всеми тема
посоедСТЯМИ’ ° КОТ°РЫХ шла Речь в предыдущей главе. Но не-
системаЛНп° применить методы гл. IV невозможно', так как
котооые МБ имеет совсем другой характер, чем те системы^
н мы изучали в предыдущей главе. Представим второе
294
ГЛ. V. ТЕОРИЯ ТИХОНОВСКИХ СИСТЕМ
уравнение (1.1) в виде
у = у> = f <•*’у> *•
*
Правая часть этого уравнения уже не является аналитической
функцией параметра е, и представление решения в виде ряда по
степеням в смысла не имеет. ~ .
Тем не менее наличие малого параметра в системе (1.1)
позволяет рассчитывать на то, что существуют определенные
возможности ее упрощения. Естественное желание исследова-
теля— пренебречь производной вектора у, поскольку при нем
находится малый множитель и величина гу мала. При этом си-
стема (1.1) заменится системой
x = X(x,y,t), Y(x,y,t) = 0. (1.3)
Мы будем называть ее порождающей системой. Она уже каче-
ственно проще исходной. Прежде всего, ее порядок равен п,
а не/п + пг. Второе уравнение системы позволяет сразу опреде-
лить вектор-функцию y(t) как функцию х и t:
y(l) = if(x,t). (1.4)
Подставляя это выражение в первое уравнение системы (1.1),
получим
x^X(x,tf(x,t),t). (1.5)
Система (1.5) содержит только х, т. е. это система порядка п.
Ее численный анализ гораздо проще, чем анализ исходной си-
стемы, и не только потому, что порядок системы (1.5) меньше
порядка системы (1.1), — в,порождающей системе все перемен-
ные изменяются медленно, и мы можем вести интегрирование,
с большим шагом'.
Однако описанная процедура порождает целый ряд вопросов.
Прежде всего, вспомним, что для системы уравнений (1.1)
должна была быть решена задача Коши (1.2): определить
траекторию системы (1.1), удовлетворяющую условию (1.2).
С помощью порождающей системы (1.3) решить эту задачу
Коши мы не сможем, ибо начальное значение вектора у оказы-
вается вполне определенным: y(to) = У°(хо, to), и'в общем слу-
чае y°(xo,to)=£yo- Значит, для системы (1.1) могут быть сфор-
мулированы некоторые условия (не только начальные, но, на-
пример, и краевые), которые смысла для системы • (1.3) или
(1.5) не имеют.
Поэтому первый вопрос состоит в том, чтобы понять, в ка-
ком смысле решение системы (1.3) может быть близким к ре-
шению системы (1.Г). Иными словами, как, опираясь на реше-
ние порождающей системы (1.3), построить решение интере-
§ I. НЕКОТОРЫЕ ВОПРОСЫ ОБЩЕГО ХАРАКТЕРА 295
сующей нас задачи Коши (1.1), (1.2)? Этот вопрос, типичный
для любой- асимптотической теории, особенно труден в данном
случае, поскольку он не может быть решен в рамках классиче-
ской теории малого параметра. В самом деле, переход в->0
приводит к системе иного порядка, обладающей совсем иными
свойствами. Решение системы (1.1) уже не является непрерыв-
ной функцией параметра.
Анализ рассматриваемой проблемы приводит к целому ряду
новых вопросов, не имеющих аналога в теориях, о которых шла
речь в предыдущей главе. Прежде всего, заметим, что функция
у — уР(х, t) является корнем трансцендентного уравнения
У (х, у, 0 = 0. (1.6)
Поскольку это уравнение нелинейно, то мы можем столк-
нуться с самыми разными случаями:
а) уравнение (1.6) решений не имеет;
б) уравнение (1.6) имеет конечное число корней;
в) уравнение (1.6) имеет бесконечное число корней, и, в
частности, оно может оказаться тождеством. s
Таким образом, выбор корня уравнения (1.6), в окрестности
которого мы будем строить приближенное решение, — это само-
стоятельный и важный вопрос теории.
Как мы увидим ниже, с системами типа (1.1) инженеры
столкнулись еще в прошлом веке. Однако в самостоятельную и
развитую математическую теорию изучение систем вида (1.1)
превратилось сравнительно недавно, после классической работы
А. Н. Тихонова [68], которому принадлежит и основной резуль-
тат теории.
Примечание. Проблемы сингулярных возмущений возникали не только
в работах инженеров. Они занимали значительное место и в работах таких
известных математиков, как Г. Биркгоф, Я. Д. Тамаркин, и других. Однако
только фундаментальная теорема А. Н. Тихонова дала ключ к их единообраз-
ному анализу.
Мы не будем приводить точной формулировки теоремы
А. Н. Тихонова, а тем более ее весьма громоздкого доказатель-
ства, и ограничимся пояснением ее смысла.
Мы будем изучать только тот случай, Когда интересующий
нас корень fy°(x, t) уравнения (1.6)—изолированный для лю-
бых х и t. Это условие естественно, так как в противном
случае системе (1.5) очень трудно придать какой-либо опреде--
ленный смысл.
шем^вид11116 ДЛЯ векТ0Р'ФУнкции У из системы (1.1) перепи-
dy/dr = Y(x,y,t), (1.7)
Следуя терминологии, введенной А. Н. Тихо-
’ зовем систему (1.7) присоединенной. Величины х и t
296
ГЛ. V. ТЕОРИЯ ТИХОНОВСКИХ СИСТЕМ
в системе (1.7) считаются параметрами. В этой ситуации ко-
рень у°(х, t) будет стационарной точкой системы (1.7) —ее ста-
ционарным решением.
В качестве второго условия потребуем, чтобы стационарное
решение у°(х, t) было асимптотически устойчивым. Обозначим
через </(т, х, t) решение системы (1.7) с начальным условием
yo = y(O,x,t).
Мы будем предполагать, что, каково бы ни было начальное со-
стояние у0, принадлежащее достаточно малой окрестности точ-
ки i/°(x,/), при любых фиксированных хи! имеет место усло-
вие асимптота ческой устойчивости
.Нт^(т, х,/) = //°(х,/). (1.8)
Т->оо
Это условие также достаточно естественно, ибо в противном
случае трудно ожидать, чтобы стационарное состояние у°(х, t)
можно было использовать при аппроксимации решений систе-
мы (1.7). Системы вида (1.1) при условии, что стационарное
решение у°(х, t) асимптотически устойчиво, назовем тихонов-
скими.’
Для системы (1.1) мы условимся теперь рассматривать за-
дачу Коши (1.2) при <о = О:
х (0) = х0, у (0) = #0. (1.2')
Переходя к порождающей системе, мы отбросили второе из
условий (1.2). Естественно ожидать, что соответствие решений
порождающей системы и системы (1.1), которую мы будем на-
зывать возмущенной, в общем случае возможно лишь тогда,
когда на начальное значение переменной y(t) наложены опре-
деленные условия.’ Таким, еще одним, условием является тре-
бование, чтобы начальное состояние принадлежало области при-
тяжения корня y*(x,t).
Рассмотрим задаччу Коши (1.2'), (1.7) для присоединенной
системы уравнений. Поскольку величины хо и t выступают как
параметры, решение этой задачи мы обозначим через #(т, хо, 0)’:
0(О,*о,О) = уо. (1-9>
Условие притяжения — это условие близости решения
#(т, Хо, 0) к значению корня у°(х0,0). Согласно А. Н. Тихонову,
оно имеет вид
lim 0 (т, Хо, 0) = у° (х0, 0). (1.10)
t->oo
Очевидно, что условие асимптотической устойчивости корня
t/°(x,/) и условие притяжения не эквивалентны. Во всяком слу-
чае условие притяжения не следует из условия устойчивости.
$ I. НЕКОТОРЫЕ ВОПРОСЫ ОБЩЕГО ХАРАКТЕРА • 297
В самом деле, ведь требование асимптотической устойчивости
означает лишь одно: если начальные значения достаточно близ-
ки к </°(х, /), то решение системы уравнений (1.7) при т->оо
будет стремиться к £/°(х, t) для любых х и t. Отсюда совсем не
должно следовать, что решение присоединенной системы при
начальных значениях (1.2') будет как-то аппроксимировать ре-
шение задачи Коши для исходной системы уравнений (1.1): на-
чальное значение уо при t = 0 может сколь угодно отличаться
от значения у°(х0,0).
Рис. 1.1 иллюстрирует сказанное. На этом рисунке изобра-
жены траектории присоединенной системы уравнений при / == О,
x — xq. Еслй начальное значениеу0 принадлежит отрезку (уьуг),
то траектории стремятся цри т -*• оо (т. е. ।
при 8-»-0) к корню t/°(x0,0). Для достаточ-
но больших значений разности |«/0—у°(х, 0) | „
они могут вести себя как угодно. Сформу- 1
лированное требование означает, что на-
чальные условия должны принадлежать
области (У1, У2), которая в данном случае у°(хд,0)—-------•»
и является областью притяжения. Условие г
притяжения можно трактовать и несколько
иначе: условие притяжения накладывает
ограничения на выбор корня у°(х, t), если . у2-
только уравнение У(х, у, t)=0 имеет боль-
ше одного корня.
Заметим, что когда присоединенная си- рис.
стема. линейна, то в случае асимптотиче-
ской устойчивости ее стационарного состояния (которое при
этом является единственным) условием притяжения корня вы-
полняется автоматически. Поясним сказанное примером.
Пусть второе уравнение системы (1.1) является скалярным и
имеет вид
еу - — a-(x,t)y,
где а(х, /)>0 для любых хи t. Это уравнение имеет един-
ственное стационарное состояние </ = 0, которое устойчиво, по-
скольку решение присоединенного уравнения имеет вид
У (т) = Уо ехр {— а (х, /) -г}.
Для любого у0 и. любого t имеем lim г/(т) = О. Очевидно, что
°о
и условие притяжения (при / = 0) оказывается выполненным.
Кроме перечисленных условий, мы всегда будем предпола-
шим ЧТ° Задачи Коши для систем (1.1), (1.5) и- (1.7) разре-
мени И ВСе тРаектоРии на заданном конечном интервале вре-
принадлежат некоторой конечной области пространства.
298
ГЛ. V. ТЕОРИЯ ТИХОНОВСКИХ СИСТЕМ
В этих предположениях основное утверждение теоремы
А. Н. Тихонова состоит в том, что при в-»-0 решение задачи
Коши для возмущенной системы уравнений (1.1) с начальными
условиями (1.2') сходится к решению задачи Коши для поро-
ждающей системы (1.5) с начальными условиями
/=0, х(О) = хо, (1.2")
причем для вектор-функции х(0 сходимость равномерна по t
на любом конечном отрезке времени 0 t Т, а сходимость
для вектор-функции y(t) равномерна на отрезке 0 < а t < Т,
где а — любое сколь угодно малое положительное число.
Как мы видим, сходимости в точке t = 0 нет.
•Последнее обстоятельство мы могли предвидеть заранее,
поскольку решение порождающей системы уравнений никак не
связано с данными Коши для возмущенной системы (1.1).
Итак, теорема А. Н. Тихонова устанавливает условия, ко-
торые позволяют использовать решение уравнения (1.5) для
аппроксимации решения системы (1.1). Кроме того, эта тео-
рема дает оценку точности. Если через x(t, е) и y(t, е) мы обо-
значим решение задачи Коши (1.1), (1.2'), а через х°(/)’ и
У°(0—решение порождающей системы (1.3) при условии
(1.2"), то при выполнении условий теоремы имеем
x(f,e) = x°(/) + O(e) У/е[0,П.
у(А8)-»°(/) + 0(8) V/<=[a,H a>0. Ь '
Как уточнить оценку (1.11)? Можно ли получить равно-
мерное приближение на всем отрезке [О, Г] не только- по х, но
и по «быстрой» переменной у? Этим вопросам посвящены раз-
нообразные и многочисленные исследования, главным образом
учеников А. Н. Тихонова. Для того чтобы получить ответ на
эти вопросы, необходимы определенные итерационные процеду-
ры или представления решения в форме специальных рядов. Но
аналогии с регулярными методами малого параметра здесь нет,
И причина этого состоит в особенностях поведения решения в
окрестности начала координат. Оказывается, что решение мо-
жет быть представлено лишь в виде суммы
x = xi (/, е) +хп (/, е),
y==yi(t,e.) + ya(t,&), (1.12)
где первые слагаемые представимы в виде рядов, расположен-
ных по степеням параметра в, а функции хп и уа носят название
пограничных функций — они компенсируют невязку граничных
условий и расположены по отрицательным степеням парамет-
ра е.
§ 1. НЕКОТОРЫЕ ВОПРОСЫ ОБЩЕГО ХАРАКТЕРА
299
Термины «пограничная функция» или «функция погранично-
го слоя», как иногда ее называют, не совсем удачны. Функции
Хи(/, е), ya(t, в) компенсируют невязку между точным решением
y(t,z) и х°(/), y°(t) в окрестности / = 0, которая возни-
кает из-за того, что у°(хР, f)=£ у0. Компенсация невязки гранич-
ных условий — это лишь одна из задач, ради которых вводятся
функции пограничного слоя.
Техника построения рядов, представляющих функции по-
граничного слоя, нетривиальна. Здесь мы не будем сколько-ни-
будь полно излагать формализм, развитый на сегодняшний день
(см. [24]). Мы ограничим исследование анализом той ситуации,
когда нам достаточно пограничных функций, полученных с по-
мощью решения некоторых линейных дифференциальных урав-
нений. И в первую очередь мы сосредоточим наше внимание
на построении приближенного решения в виде
х = х°(0, y = lf(i) + yni^ (1.13)
где ' y„i — первый член разложения пограничной функции
yn(t, в). Представление (1.13) дает уже более точное прибли-
жение, нежели (1.11):
^ = ^ + ^п1(0 + О(е2) V/e=[a Т], а>0, (1.14)
или
SZ = jr° + */ni(0 + O(8) V/<=[0, Г], (1.14')
т. е. дает равномерную асимптотику с точностью 0(e) на всем
интересующем нас отрезке времени.
Основное внимание мы сосредоточим на том случае, когда
уравнение для быстрых переменных является линейным по у:
А(х, t)y + b(x, t, в). (1.15)
Этот случай представляет интерес для приложений. В самом
деле, рассмотрим снова систему (1.1) и предположим, что усло-
вия теоремы А. Н. Тихонова выполнены. Тогда решение х°(/),
!/°(0 порождающей системы дает (если в достаточно мало)
удовлетворительную аппроксимацию точного решения. Анализ
этого решения составляет первый этап исследования, и он зна-
чительно проще анализа решения исходной задачи. Но затем
возникает проблема уточнения найденного решения. Если оно
«достаточно хорошее», то естественно принять у = у° + у\ и ли-
неаризовать уравнение для у относительно yv.
в(^+^-) = У(х,^ + у1,0 = Л1и^,0!/14-бь (1.16)
где в разложении (1.16) мы учли, что t/° яв-
ляется корнем уравнения Y(x, у°, /) = 0. Так как dt^/dt — из-
300
ГЛ. V. ТЕОРИЯ ТИХОНОВСКИХ СИСТЕМ
вестная функция времени, то в результате мы получаем урав-
нение вида (1.15).
Итак, основное внимание мы уделим анализу системы вида
x = X(x,y,t), e.y = A(x,t)y + b(x,t,e,). (1.17)
Эта система качественно проще исходной системы (1.1). По-
строим для ее анализа теорию возмущений.
Прежде всего, второе из уравнений этой системы естествен-
но заменить таким:
в^ = Л(х0,/)у + 6(х°,/,8), (1.18)
где х°(/)—решение задачи (1.5), (1.2").
Далее, первое уравнение системы (1.17) можно линеаризо-
вать относительно у:
х=*Х1(х,/) + Х2(х,()у. (1.19)
И наконец, полагая enie* = x°-f-z и проводя еще .одну, линеа-
ризацию (по г), мы заменим уравнение (1.19) уравнением .
* = B(/)z + X2(*°,0y. (1.20)
Подобные приемы теории возмущений широко используются
в. технике, и их математический смысл совершенно ясен. Пер-
вым подобную схему анализа реализовал, вероятно, де Спарр,
капитан французской артиллерии, которому принадлежат пер-
вые исследования траекторий вращающегося артиллерийского
снаряда. Его работы, относящиеся к семидесятым годам про-
шлого столетия," не были связаны ни с какими математическими
построениями, и предложенные им приемы анализа уже в
XX веке были заново переоткрыты Биркгофом, Тамаркиным и
многими другими.
Несмотря на появление в XX веке глубоких математических
исследований систем вида (1.17), в артиллерийской науке про-
должали развиваться схемы расчета, предложенные еще
де Спарром. Лишь в тридцатых годах XX века, благодаря ра-
ботам профессоров Военно-воздушной инженерной академии
Им. Н. Е. Жуковского Д. А. Вентцеля и В. С. Пугачева, инже-
нерные и математические исследования слились в единое русло
(см. [65]).
В работе [34] была вскрыта тесная связь между теорией
сингулярных возмущений и отысканием минимакса
J = min max F (х, у). (1.21)
* у
Задачи такого типа мы рассматривали в § 4 гл. I, обсуждая
проблемы принятия решений в условиях неопределенности.
|1. НЕКОТОРЫЕ ВОПРОСЫ ОБЩЕГО ХАРАКТЕРА 301
Напомним, что решение задачи (1.21) расщепляется на ре-
шение так называемой внутренней задачи об отыскании
Ф (х) = max F (х, у) = Р (х, у (х)) (1.22)
у
и на решение внешней задачи о минимизации функции мак-
симума:
J = min ф (х).
. *
Предположим, что функцйя F(x, у} дважды дифференцируе-
ма по обоим аргументам, а внутренняя задача (1.22) однознач-
но разрешима для любых у. Тогда необходимое условие макси-
мума в (1.22) состоит в выполнении равенства .
^4^^==0. (1.23)
ду ~
Если считать, что матрица Fyy(x, у) всюду отрицательно опре-
делена, то функция у(х) дифференцируема и удовлетворяет
уравнению
• Руу(х, у(х))^ + Fyx(x,y(x))==Q._
Необходимое условие минимума функции ф(х) в точке х = х»
состоит, во-первых, в стационарности точки х„ т. е. в силу
(1.23) должно быть
- г® =fx(x„^) = 0, у, = у(х.),
и, во-вторых, в положительной полуопределенности матрицы
TV (х„, yj = Fxx (x„, у„) — Fху (хф, у,) Fyy (x„ Fyx (х„, yt),
т. е.
ЛГ(х., у.)>0.
Мы приходим к следующему выводу: для того чтобы точка
(х«, у») была решением задачи (1.21) (локальным миниму-
мом), достаточно, чтобы она была стационарной; т. е.
Рх(х„ y,) = Fy(x„ у,) = 0, (1.24)
и чтобы матрицы Fyy(x*,yJ, N(x»,yJ были положительно
определены. Предположим, что такая точка (х#, у*) существует.
Ставится вопрос: какой численный метод можно предложить
для ее отыскания? В работе [34] предлагается отыскивать пре-
дельные (при >оо) точки решений следующей задачи Коши:
^Г = — Рх(х,у), х(О) = хо,
du ' (1 -25)
е-2Г = Ру (х, у), у (0) = у0,
802
ГЛ. V. ТЕОРИЯ ТИХОНОВСКИХ СИСТЕМ
где е < 1 — малый параметр. Легко видеть, что эта система яв-
ляется частным случаем системы (1.1). Аналогом уравнения
(1.6) здесь является задача (1.22), которая редуцируется к ре-
шению уравнения (1.23). Имеет место следующая
Теорема. Пусть функция F(x,y) дважды непрерывно диф-
ференцируема в окрестности стационарной точки (х*,у*), мат-
рицы Fyy(x, у), N(x, у) положительно определены; тогда су-
ществует „ число в такое, что при любых 6 < в < в рёшенйя
системы (1.26) локально сходятся при t-+oo к точке (x»,yj.
Если в (1.25) считать е большим параметром (е^> 1), то
при выполнении достаточных условий локального максимина
решения системы (1.25) сходятся при 1->оо к точкам, являю-
Щимсй решением задачи об отыскании максимина:
max min F (х, у).
ух
Если функция F(x,y) строго выпукло-вогнутая, то в (1.25)
можно положить 8=1, и мы приходим к численному методу
Эрроу — Гурвица отыскания седловых точек.
Изложенный подход нашел широкое применение при реше-
нии задач нелинейного программирования и игровых за^ач.
§ 2. Линейная задача
В предыдущем параграфе мы рассказали о фундаменталь-
ной теореме А. Н. Тихонова. Она открывает очень интересные и
важные для системного анализа перспективы исследования
сложных систем, понижения их порядка и построения теории
возмущений, позволяющие развить приближенные, упрощенные
й экономные методы численного исследования. Эти методы
йозволяют на много порядков сократить машинное время, не-
обходимое для анализа таких систем, и Имеют очень широкую
область приложения, поскольку ситуация, когда перед произ-
водными части фазовых координат стоят малые множители,
весьма типична. Итак, пусть речь идет о системе, которая мо-
жет быть приведена к виду
х = X (х, у, t), ey = Y (х, у, t), (2.1)
Где х, у — векторы размерности п, пг соответственно.
Если условия теоремы А. Н. Тихонова выполнены, то уже
«нулевое приближение»
х° = X (х°, j/°, 0, Y (х°, у», 0 = 0 (2.2)
может быть использовано в качестве приближенного решения,
и при этом ошибка будет иметь порядок 0(e) всюду, за исклю-
чением начальной точки. Система (2.2) не содержит быстро ме-
§ 2. ЛИНЕЙНАЯ ЗАДАЧА
303
няющихся слагаемых, поскольку , вектор у, удовлетворяющий
уравнению
y = ^Y(x,y,t),
заменен корнем второго уравнения системы (2.2): •
>J°(U (2.3)
Развиты (см. [24]) методы, позволяющие строить на основе
решения системы (2.2) асимптотические ряды, которые позво-
ляют аппроксимировать решение задачи Коши для системы
(2.1) с начальными условиями
( = 0, х(О) = хо, 1/(0) = у0 (2.4)
равномерно на конечном интервале времени с любой степенью
точности. - Но для анализа конкретных систем — технических,
экологических, экономических — обычно бывает достаточно
ограничиваться теми или иными теориями возмущений. О них
мы говорили в конце § 1. Здесь мы рассмотрим некоторые ва-
рианты теории возмущений, связанные с анализом уравнения
ey = A(t)y + b(t, 8). (2.5)
В § 1 мы говорили об уравнениях вида (2.5) в связи с линеари-
зацией второго уравнения системы (2.1) в окрестности точки'
у = у°(х, t) при условии, что начальные значения t/°(xo, 0) и уо
близки. Но уравнения вида (2.5) имеют и самостоятельный ин-
терес. Обозначая Л=1/е, мы можем представить уравнение
(2.5) в виде
£ = M(/)j/ + M>(f, 1Д). (2.5х)
В таком виде уравнение (2.5) возникает в различных приклад-
ных задачах.
а) Однородные системы. Случай простых кор-,
ней. Мы будем рассматривать уравнения вида
у + KA(t)y = 0, (2.6)
где Х= 1/е, и изучать поведение решений системы (2.6) при*
%->ОО*).
Частные решения системы (2.6) будем искать в виде
(t ч
\ Лр (0 dt I z (Л, /), (2.7).
_________ о )
л в *ла.с,с“атРиваемая здесь система является частным случаем систем
* \ • х) у, подробно изученных еще Я. Д- Тамаркиным ([67]),
304 ГЛ. V. ТЕОРИЯ ТИХОНОВСКИХ СИСТЕМ
где ц'(!) — корень характеристического уравнения
|Л + р£| = 0. (2.8)
Корнями уравнения (2.8) будут некоторые функции вре-
мени. Мк будем рассматривать лишь тот случай, когда на всем
отрезке [0, Г] уравнение (2.8) имеет различные корни рД0
и нигде на рассматриваемом интервале времени [0, Т] функции
р<(0 не обращаются в нуль.
Новую искомую функцию я(Х, 0 будем искать в виде ряда
г (X, 0 ~я0 (0 + (/)•+... (2.9)
Цель анализа состоит в том, чтобы указать процесс, который
каждому корню уравнения (2.8) ставит в соответствие прибли-
женное (асимптотическое) выражение частного решения (2.7)
системы (2.6).
Подставляя (2.7) и (2.9) в уравнение (2.6) и сравнивая
коэффициенты при одинаковых степенях X, получим следующие
уравнения относительно искомых величин:
(Л4-ц£)2ь = 0, (2.10)
(Л + рЕ)21 = -г0 (2.11)
и т. д.
Так как и(0 — корень уравнения (2.8), то систем» (2.10)
разрешима и компоненты вектора яо могут быть определены
с точностью до произвольного множителя. Это утверждение
эквивалентно тому, что одна из компонент вектора 2q остается
неопределенной (например, я^), а остальные могут быть через
нее выражены.
Перепишем систему (2.10) в следующем виде!
(в22 4* Ц) Яо 4- ОгзЯО 4" • • • “ “* Й21Я0,
в32Я« + (ОЗЗ 4" Р) Ио 4* • • • == — Я31Я0, /о 1 о\
Я/12И0 4- ... 4- (вял 4" |*)2о “ — OnlHo.
Обозначим через Дп алгебраические дополнения элементов
первой строки определителя |Л 4-р£|> Тогда решение системы
(2,12) можно представить так;
2? = -|l|zo, fe = 2,3, (2.13)
Так как мы предположили, что все корни уравнения (2.8) про*
стые, то ранг матрицы А + цЕ равен п— 1. Следовательно, во
всяком случае один из миноров (л—1)-го порядка не равен
нулю. Не ограничивая общности, мы можем считать Дц^О.
t 2. ЛИНЕЙНАЯ задача
305
Рассмотрим тепёрь систему (2.11). Ее определитель в силу
выбора ц равен нулю, а ранг ее матрицы, как уже было ска-
зано, равен п— 1. Поэтому для разрешимости системы (2.11)
необходимо и достаточно, чтобы ранг ее расширенной марицы
(т. е. матрицы с добавленным столбцом свободных членов) так-
же был равен п— 1. Ранг матрицы А 4- цЕ равен n — 1, следо-
вательно, между элементами ее строк существует линейная
зависимость, которую, если воспользоваться разложением опре-
делителя |Л + ц£| по, элементам первого столбца, можно запи-
сать, например, следующим образом:
Oil + |*ш c2^21 4" Сз/Яц 4-... + СпПп\, (2.14)
где величины
ez = —(2.15)
Следовательно, для разрешимости системы (2.11) необходимо
и достаточно, чтобы между элементами столбца, стоящего в ее
правой части, также имела место зависимость (2.14).-Это озна-
чает, что
io = С2&о 4* ceio 4- . • • + (2.16)
Заменим z§ его выражением с помощью (2.13):
(2J7>
Д11 at \Дп/
В результате равенство (2.16) примет следующий вид:
-4"_(C2S7 + Cs5i+ •• + '“ si;) *•+
Нс4(кЮ + с>Ж)+---+с4(г7,)Н- (2.18)
Уравнение (2.18) — это линейное обыкновенное дифференциаль-
ное уравнение первого порядка относительно z£(/). Его можно
записать- в виде i'JJ (t)V (t) zj, откуда
t f \
1 I r V I
zo(/) = cexpM -jj (2.19)
" - _ 10 '
где c — произвольная постоянная.
Остальные члены разложения (2.9) определяются по той же
схеме: на каждом шаге нам приходится решать уравнение пер-
вого порядка, в результате чего будет появляться новая про-
извольная постоянная. Задавая эти постоянные тем или иным
-образом, мы фиксируем тем самым начальное состояние век-
т°ра, который определяет частное решение, соответствующее
выбранному значению корня характеристического уравнения.
306
ГЛ. V. ТЕОРИЯ ТИХОНОВСКИХ СИСТЕМ
» . А поскольку подобные рассуждения можно провести для
любого корня характеристического уравнения (2.8) и, по пред-
положению, все его корни различны, то изложенный процесс
позволяет построить полную систему линейно независимых ре-
шений исходной системы (2.6) и все эти решения могут быть
построены в форме квадратур.
Подведем некоторые итоги. Пусть исследуемая система
имеет форму (2.1) и условия теоремы А. Н. Тихонова выпол-
нены. Тогда на первом этапе мы строим решение системы
(2.2). Оно дает нам приближенное решение с точностью поряд-
ка О (в). Но это еще не то решение, которое нам нужно, -по-
скольку мы пока что смогли найти решение задачи Коши
только для переменной х. Что же касается величины у, то она
определяется из решения трансцендентного уравнения
Y(x,y, i) = 0. (2.20)
Это решение мы обозначали через х°(0» «/°(0- Но оно не обес-
печивает выполнения второго из начальных условий (2.4):
/ = 0,. у(О) = уо. (2.20')
Для того чтобы удовлетворить условию (2.20'), мы строим
пограничную функцию уп. Эта функция удовлетворяет линей-
ному уравнению -вида (2.5). Для того случая, когда b (t) = 0,
мы изложили способ построения общего интеграла этого урав-
нения. Подставляя его выражение в (2.20'), мы можем опреде-
лить произвольные постоянные и завершить построение погра*
ничной функции. Теперь мы получим решение в виде
* = х°(0, y = if(t) + ya(t). (2.21)
Первое выражение аппроксимирует точное решение равномерно
на [0, Т] с точностью О(е). Благодаря добавленному члену уп
функция y(t) обладает/тем же свойством и обеспечивает вы-
полнение начального условия (2.20').
Примечание. Приведенные рассуждения, строго говоря, имеют смысл
лишь тогда, когда все корни характеристического уравнения |Л + |аЕ|=0
имеют отрицательные действительные части, — только в этом случае выпол-
нено требование асимптотической устойчивости и справедлива теорема
А. Н/ Тихонова и, следовательно, формулы (2.21) дают необходимую аппрок-
симацию. Однако результаты, которые мы получили в этом пункте, можно
трактовать и иначе, вне связи с теоремой А. Н. Тихонова и исследованием
системы (2.1). Уравнение (2.6) представляется самостоятельным и важным
объектом исследования. Для этого уравнения изложенная процедура дает
способ построения асимптотических оценок. Оказывается, что любой конечный
отрезок ряда (2.9) может быть использован для этой цели. Введем обозна-
ЧеНИе z<*>(t, Л)-z0(о + Л-*Z1 (04- ... 4-Л-кгк(/).
§ 2. ЛИНЕЙНАЯ задача
307
( 4 )
Тогда функция =ехр | pdf ? z(ft>(/, Л) дает аппроксимацию соот-
ветствующего частного решения с точностью О(1/й5+1) при к-*-оо.
Рассмотрим теперь некоторые частные случаи.
б) Одно уравнение первого порядка. Рассмотрим
самый простой пример, когда система, определяющая погра-
ничные функции, сводится к одному скалярному уравнению
первого порядка. Этому случаю отвечает, например, система
х *= X (х, у, t), гу =*— а (х) у. (2.22)
Порождающей будет система 1
х° = Х(х°, 0, 0 /s0. (2.23)
с условием
х(.О) = хо. (2.24)
Решая численно задачу Коши (2.23), (2.24), мы найдем х° =
= х°(0- Подставляя х° во второе уравнение (2.22), мы построим
уравнение, которому должна удовлетворять функция погранич-
ного слоя «/п*
уа = — Ка (х° (0) ул = — Ад(/) уа, А = 1/в. (2.25)
В этом случае, очевидно, нам нет необходимости строить асим-
птотические приближения, поскольку уравнение (2.25) допу-
скает точное решение • х
( * 1
у а — С ехр | — й, а (т) dr >, *
I о )
где С = уо — У°(О) = Уо, и приближенное решение задачи Коши
х(О) = хо, у (О) = у0
для системы (2.22) имеет вид
( t \
x = x°(0> «/== «/п = #0 exp ] — xJa(T)drL
(.о )
Точное решение исходной задачи Коши мы можем представить
в виде
х = х°4-О(1/Х), у = Ул + от,
и это представление будет аппроксимировать точное решение
равномерно на всем отрезке [0, Г].
Если мы хотим вычислить медленную составляющую x(t) с
более высокой точностью, то мы должны изучить еще’ одну
возмущенную систему:
X = X(xV(x°,0 + i/B,0. = (2.26)
308
ГЛ. V. ТЕОРИЯ ТИХОНОВСКИХ СИСТЕМ
Прямое интегрирование системы (2.26) встречает очевидные
затруднения, так как производная функции уа велика. Поэтому
мы примем х = х° + z и линеаризуем систему относительно г
и f/п- Принимая во внимание выражение для уа, полуЧйм
к — La 4- CM exp к J й (т) dxl, (2.27)
(о J
где
1 = - МаТРИЦа‘‘ М ~ - ВеКТ0Р’ С “
Построим решение системы (2.27) методом вариации про-
извольных постоянных. Обозначим через Z(t) матрицу фунда-
ментальных решений однородной системы
z = Lz. (2.28)
Заметим, что интегрирование системы (2.28) не представляет
труда, поскольку правая часть (2.28) не содержит быстро ме-
няющихся функций. Принимая во внимание, что z(0) = 0, за-
пишем решение уравнения (2.27) в форме квадратур:
t , t к
z (/) — Z (/) J Z"\t) Ai (т) C exp | - к J d (s) ds I dx.' (2.29)
0 I 0 J
Вычисление интеграла (2.29) может встретить известные за-
труднения, 'однако без потери точности можно избежать необ-
ходимости его вычисления. В самом деле, проинтегрируем
(2.29) по частям:
/ г ( * ) 1
z(/) = Z(O<-j£ expЛJdds}Z-ЧОМ(0-2-40)44(0) +
L I о J J
t ' % ч ч
+ -£ (-L exp 1 -Н d ds 1 (Z'1 (т) М (т)) dtk
Ar J u I J I и» I
О ' О •* , '
Если мы проинтегрируем по частям второе слагаемое выраже-
ния, стоящего во внешних фигурных скобках, то легко обнару-
жим, что оно имеет порядок О (1/Х2). Таким образом,
t
z(f) = Z (0(- ^)[ехр {- к J й ds} Z"1 (0 М (0 - Z-* (0) М (0)] +
о
. +о(-£г)> (2.30)
§ 2. ЛИНЕЙНАЯ ЗАДАЧА
309
т. е. с точностью О(1Д2)- мы получили явное выражение для
«поправки» z(t). Выражение для z(t), как мы видим, уже не
содержит квадратур от быстро колеблющихся функций.
Таким образом, представив приближенное решение л*(1) &
виде суммы
X* = х° + Z,
где г определяется формулой (2.30), мы получим равномерную
аппроксимацию с точностью О(1Д2):
х = х°4-О(1Д2).
в) Случай системы двух уравнений первого
порядка. Рассмотрим теперь случай системы
У\ = Л [fluf/i + 012^1, '/2 = Л [a21^j + а^у2]. (2.31).
К системе (2.31) полностью применима та техника исследова-
ния, которую мы изложили для общей системы (2.6). Имея в
виду продемонстрировать некоторые особенности конечного ре-
зультата, ограничимся рассмотрением того простейшего случая,,
когда
а12 = —<в2(/), <j1| = a22=0, «2i — l>
т. е. рассмотрением системы
01 = —Л<о202, у2 = ‘ку{. (2.32).
Система (2.32), очевидно, эквивалентна одному уравнению вто-
рого порядка
j? + A,2<a2y = O. (2.33)
Решение, системы (2.32) будем искать в виде
^=ехр|л|цл|(2^4-1г<‘)+...),
!/2 = ехр|л(г^ + уг£>+...), ,
где ц— корень характеристического уравнения. В данном слу-
чае Ц1 = 1(0, Ц2 = —«•>.
Положим для определенности ц = pi = ко и проведем по-
дробные вычисления. Функции zJ0) и z£0) будут удовлетворять
уравнениям
i®z|0) + <o’z*0) = 0, — z^ + i<»z^0) = 0.
С помощью одного из этих уравнений мы можем выразить одну
из неизвестных функций через другую. Например,
2)0) = М0). (2.34)
310
ГЛ. V. ТЕОРИЯ ТИХОНОВСКИХ-СИСТЕМ
Для определения функций z{0), zip мы должны, согласно общей
схеме, рассмотреть уравнения второго приближения. Они имеют
вид
laz1/* + ®2z^ = — Яр, — zf1* + «oz^ = —
Для того чтобы эта система была разрешима, необходимо и
достаточно, чтобы ранг расширенной матрицы был равен нулю,
т. е. чтобы
откуда
М0) = -^0). (2.35)
Дифференцируя (2.34), находим
z’0» = Z(bz'°> +
Подставляя это выражение в равенство (2.35), получаем урав-
нение для определения z£0):
= — zd>zJ,0> —
откуда
z(°)=------------------------— z<°>.
* 2 2® 2 ’
.ИЛИ
{i z ч
— ? = Cexp{— In V®},
и окончательно:
2<® = С1^.
Таким образом, в первом приближении частные''решения си-
стемы (2е32) будут иметь вид
С ( с 1
У1Л=—т= ехр3 ± Ik \ &dt ?.
л/ш I J I
V V 0 '
Переходя к действительным выражениям, найдем
(2.36)
§ 2. ЛИНЕЙНАЯ ЗАДАЧА
ЗП
Интересно отметить связь излагаемых методов с так назы-
ваемым методом WBKJ (Wentzel, Brillouin, Kramers, Jeffreys) —
инженерным приемом расчета колебательных движений*). Ме-
тод ВКБ был предложен еще в прошлом веке. Рассмотрим
уравнение
0 + ^ = 0. (2.37>
Если бы функция со была постоянной величиной, то решение
уравнения (2.37) имело бы вид yit 2 = Ci, 2 exp {±мо/}. Ка-
жется, что при достаточно большом © поведение решений в том
случае, когда частота © зависит от времени, должно хорошо
описываться функцией *
exp s ± i © dt
I о
В самом деле, если величина © достаточно велика, то решения
уравнения (2.37) быстро осциллируют, и за один период функ-
ция ©(/) быстро измениться не сможет. Значит, в каждый от-
дельный момент времени линейно независимые рещения можно
аппроксимировать функциями
У\й = С1.2ехр {± М?)i},
где ©(#)—среднее значение ©(f) за одну осцилляцию. Исполь*
зуя эти наводящие соображения, будем искать решения урав*
нения (2.37) в виде
( • * 1
у 1,2 = exp j ± i (о dt ? z (/). (2.38)
v о J
Экспоненциальный множитель в (2.38) описывает быструю
осцилляцию. Поэтому можно ожидать, что функция z(f) ме-
няется медленно.
Дифференцируя дважды (2.38) и подставляя в (2.37), по-
лучим следующее уравнение относительно г:
z ± 2i&z ± i&z — 0. (2.39>
Член со второй производной z не содержит множителя <о; так
как по предположению z(f) меняется мало, то слагаемым z
в (2.39) можно пренебречь. После этого уравнение (2.39) пре*
вращается в уравнение первого порядка и легко интегрируется:
2 = с/^/&Ц), с = const.
) Метод WBKJ получил широкую известность в прикладной матема-
л РУССКОМ языке он имеет собственное название: метод ВКБ. Впредь '
ы и будем употреблять этот термин.
312
ГЛ. V. ТЕОРИЯ тихоновских СИСТЕМ
Таким образом, мы получаем следующее приближенное выра-
жение для линейно независимых интегралов’уравнения (2.37):
х с (с
</1.2 = Л7Л- exp < ± i \ © (/) dt
V<o (/) I J
Это и есть знаменитая формула ВКБ-метода. После перехода
к тригонометрическим величинам, получим (с точностью до
обозначений) формулы (2.36).
Приведенные рассуждения показывают, что при построении
приближенных формул типа (2.36) играет роль не сама вели-
чина параметра X, а соотношение величин % и со.
Интересно заметить, что формулы (2.36) можно получить
также, используя рассуждения, на которых основывается метод
усреднения.
г) Неоднородное уравне.ние. До сих пор мы рас-
сматривали тот случай, когда пограничная функция удовлетво-
ряет однородному уравнению. Теперь мы рассмотрим общий
случай уравнения (2.5), где &(/)^0. Представим это уравне-
ние в виде
у = к А (0 у + КЬ (/, 1Д), к = 1/е. (2.40)
Для того чтобы найти общее решение уравнения (2.40), нам
надо прежде всего построить асимптотические представления
частного решения. Это решение можно искать методом вариа-
ции произвольных постоянных," а затем последовательным ин-
тегрированием по частям отбросить слагаемые избыточной точ-
ности. Но можно и непосредственно искать решение в виде
ряда, расположенного по обратным степеням параметра X:
0(/Л) = 0,О)(О + Л“У1Ч^Т,+ ... (2.41)
Подставляя ряд (2.41) в уравнение (2.40) и сравнивая коэф-
фициенты при одних и тех же степенях параметра X, мы полу-
чим следующие выражения для определения членов ряда (2.41) э
- tp'—A-'t., = i« = -A-'dJ^. ...
(2.42)
•Формулы (2.42) позволяют вычислить последовательно любое
количество членов ряда.
Изложенная процедура носит не просто формальный харак-
тер: любой конечный отрезок ряда (2.41) дает асимптотическую
§ 2. ЛИНЕЙНАЯ ЗАДАЧА 31J
аппроксимацию частного решения уравнения (2.40), т. е.
0(/Д)“Л) + о(у),
1 /1ч (2ЛЗ)
9 (t. Л)=д® (0+т f' (0+О (jj),
Таким образом, изложенная процедура позволяет на задан-
ном конечном интервале времени аппроксимировать частное
решение с любой степенью точности. Вычисление членов ряда
(2.41) может быть проведено по конечным формулам*).
Предыдущие пункты этого параграфа были посвящены спо-
собам построения асимптотических представлений общего ин-
теграла однородной части уравнения (2.40). Обозначим эти ре-
шения через yi(tt X). Тогда общее представление пограничной
функции может быть записано в виде,
У (t, Л) - Е ctyt (/', X) + 9 (I, Л),-. (2 • 44>
где функции yi и 9 вычислены с одним и тем же порядком
точности по X. Постоянные Ci выбираются из условия
/ = 0, у(О) — Уо.
Итак, мы показали, каким образом можно строить погра-
ничные функции в общем случае линейных уравнений.
Однак© нам придется сделать одну существенную оговорку.
Развитая теория, как мы видели, дает возможность избежать
интегрирования быстро изменяющихся функций и выразить ин-
тересующие нас функции в форме простых квадратур. Кроме
того, она позволяет оценить точность. Но эти оценки далеко не
всегда бывают достаточными для практики. В самом деле, что
означает, например, равенство
х = х° + О(е‘)? (2.45)
Оно означает, что для любого t из некоторого конечного ин-
тервала времени имеет место оценка
|х-х°|<Се\
Таким образом, мы можем только гарантировать существова-
ние такой постоянной С, что для любого t е [0, Т] функция
Се* мажорирует абсолютную величину разности |х —х°|.
Значит, оценка (2;45) говорит только о скорости стремления
к. нулю разности х —х° при уменьшении е. Но постоянная С
остается неопределенной, и отсюда могут возникать' всякого
рода трудности. Об одной из них и будет сейчас идти речь.
Доказательство теоремы, дающей оценки (2.43), см. в [9].
314
ГЛ. V. ТЕОРИЯ ТИХОНОВСКИХ СИСТЕМ
Пусть свободный член в уравнении (2.40) является быстро
осциллирующим:
Ъ (0 = f (0 ехр | гр k (0 dt г.
Формально теория, изложенная в этом пункте, нам дает рецеп-
туру для построения частного решения, но это решение нельзя
будет использовать, ибо производные dyw/dt, входящие в пра-
вые части равенств (2.42), будут большими величинами — по-
рядка р, если только р достаточно велико. Конечно, при Х->оо
эффект «величины» р будет исчезать, но ведь решая конкрет-
ную задачу, мы всегда имеем дело с конечными 1 и р.
Для того чтобы показать особенности, с которыми может
встретиться исследователь, рассмотрим одно уравнение второго
порядка с осциллирующей правой частью, причем для опреде-
ленности положим, что р = %:
у + Чау + кЧ2у = X2f (0 exp 1 ik \k (0 dt >. (2.46)
'•о J
Частное решение уравнения (2.46) будем искать в виде
( t \
у = z (t, Л) exp s ik (0 dt ?.
Для функции z(t, X)’ получим уравнение
z + 2ikk (0 z + ikk (t) z - k2k2z +
+ 2a (i + ikk (t) z) + XWz = k2f (t). (2.47)
Предположим сначала, что z(t, к) — функция, которая из-
меняется медленно. Другими словами, примем, что она допу-
скает представление вида
z(f,X) = zb(0 + V*z1(/)+ ...
Подставляя это разложение в уравнение (2.47), получим урав-
нения для функций zi(t): .
(®2(0-^(0)zo = f(0, /оио.
. (2.48)
(со2 (0 — k2 (0) Zi = — iz0 (k — 2ak) — 2aikz0,
' Формулы (2.48) позволяют последовательно вычислить все
члены разложения функции z(t, к), если только на рассматри-
ваемом интервале времени k(t)^= со(0. Если же хотя бы в од-
ной точке t = t* интервала [О, Т] имеет место равенство &(/*) =
= ©(f), то изложенная процедура теряет смысл. Следователь-
S 2. ЛИНЕЙНАЯ ЗАДАЧА
315
но, в этом случае функцию «(/,%) уже нельзя считать медленно
изменяющейся. Но это вовсе не означает, что в этом случае
нельзя построить асимптотику. Она будет просто другая, т. е.
иной будет характер зависимости решения'от параметра. Для
построения этой новой асимптотики используем прием, анало-
гичный тому, который в предыдущей главе нам позволил за-
вершить изучение случая главного резонанса. Для этого вели-
чину расстройки, т. е. разность © — k, будем считать величиной
малой, связанной с параметром А соотношением
©2(0-Д:2(/) = 1-,Х(/). (2.49).
Функцию»2(/, А) будем теперь искать в виде
z (/, А) = Az0 + Zj 4-A~’z2 + ... (2.50)
Подставляя (2.49) и (2.50) в уравнение (2.47) и сравнивая коэф-
фициенты при одинаковых степенях А, придем к уравнениям
2iki0 + {ik + ^ + 2aki)zQ = f,
2ik^i + (ik + x + 2aki) Z\ = — z0 — 2az0,
Каждое из этих уравнений является линейным обыкновенным
дифференциальным уравнением первого порядка, и его решение
может быть получено в квадратурах. Так, частное решение пер-
вого из уравнений системы (2.51) имеет вид
t ( t i i
z0= (ф(Юехр| — Jq>(£)d? Hi, (2.52)
0 ^6 z
где
Hi) ^(1) + х(1) + МЕ)*(Ш
~ (£) ’ VW — 2t*(g)
Если ограничиться первым членом разложения, то частное ре-
шение уравнений (2.46) представляется в виде
!t \
1А$£(0<И- (2.53).
О '
Примечание. Если функции, входящие в уравнение (2.46), будут
постоянными величинами, то формула (2.52) переходит в известное выраже-
ние, описывающее резонансные явления в колебательных системах с постоян-
ными параметрами. Для. того чтобы в этом убедиться, положим /г = 0. Кроме
того, примем для простоты, что X =* 0, а = 0. Тогда <р = 0, и, принимая ва
внимание, что амплитуда возмущающей силы f постоянна, получим известную*
формулу резонансных колебаний:
У = А-^- <«Ч>
316
ГЛ. V. ТЕОРИЯ ТИХОНОВСКИХ СИСТЕМ
Используя асимптотическое представление решения уравне-
ния .(2.46), нетрудно рассмотреть и уравнение
( 1 ч
у + Ъау + №>2У = *7 (/) cos ] Л U (/) dt к
f * }
Представляя cos| Л k(f)dt г в виде
I о 1
( * )
cos s Л ( k (/) dt ? = 4
I J I ** *
vo '
exp s & \ k (0 dt ? + exp s — IK \
'•a / I о
и используя линейность задачи, положим у = yi + У2, где yi
и уг — частные решения уравнений
# ( 1 1
у+ 2ау + К2в>2у = K2f* (/) exp j IK J k (/) dt к
• V e )
у 4- 2ay + X2<n2y = №f* (/) exp
f(0 = f(0/2.
Итак, мы продемонстрировали процедуру построения асим-
птотических представлений частных решений неоднородных
дифференциальных уравнений для того случая, когда. внешние
силы являются осциллирующими функциями времени и система
имеет одну, степень свободы. Но все проведенные рассуждения
распространяются и на произвольные линейные системы вида
{t 1
^2.54)
о ’
где у и f — векторы размерности п, А — матрица
л‘(/Д) = Ло(/) + Л~1Л1(О + Л~2Л2(П+ ...
Если ни для какого fe[0, Г] k не равно р, где ц —корень
уравнения
| Ло-цЕ| = О,
то расчет частного решения уравнения (2.54) сводится к по*
следовательному решению системы алгебраических уравнений и
решение имеет вид ряда
^ = Уо(О + лЛ1(О+ .... (2.55)
§ 2. ЛИНЕЙНАЯ задача
317
Если для некоторых t е [О, Г] k равно ц, то мы имеем
•«резонансный» случай и расчет асимптотического представле-
ния частного решения требует численного решения некоторой
системы дифференциальных уравнений: это линейные уравнения
вида (2.51), которые, в отличие от исходного уравнения, не со-
держат быстро изменяющихся членов. Асимптотическое пред-
ставление решений в этом случае отличается от (2.55) и будет
иметь вид
y — tyo + yi + h *1/2+ ••• (2.56)
д) Пограничные функции .для медленных пе-
ременных. Вернемся снова к вопросу, который мы уже об-
суждали в п.- б) настоящего параграфа. Используя технику,
изложенную в п. г), покажем еще один способ построения по-
граничных функций для медленных переменных.
Рассмотрим уравнения системы (2.1) и предположим, что
решение системы (2.2) найдено. Это решение мы обозначили
через (х°, у°). Тогда, согласно нашей общей схеме, для построе-
ния пограничных функций мы линеаризуем систему (2.1) сле-
дующим образом:
А, = = s. (Пхп+в2(П!/п,
У (2:57)
= +O)==WK + M),
где bi = •—faf/dt. Рассмотрим'снова случай, когда у — скаляр;
тогда А (<).— —<* (0 ~ скалярная функция и
t
».=тНтг+с “р {- * $ °л}+° G0
\°
Подставляя это выражение в первое из уравнений (2.57) и от-
брасывая члены О(1Д2), получим.
+ (0(х4$- + Сехр{ - * (2-58)
о ’ •
где С — некоторая постоянная, которую мы можем определить
из начальных условий. Общее решение уравнения (2.58) можно
представить в виде
Хп = Хп 0> С ) + Хп1 + Хп2-
Здесь Хп(/, С*) — общее решение однородного уравнения
Так как 'это уравнение не содержит быстро изменяющихся пе-
318
ГЛ. V. ТЕОРИЯ ТИХОНОВСКИХ СИСТЕМ
ременных, то построение численных процедур его интегрирова*
ния не представляет труда; xni — частное решение уравнения
а Хп2 — частное решение уравнения
t
xnj = В, (0 хп2-]-СВ2 (/) exp { — ^ Jad*}. . (2.59)
о
Для интегрирования уравнения (2.59) можно использовать
асимптотические методы. Положим
t
хп2 = ехр | — Л z;
о
тогда z будет удовлетворять уравнению
z = Xaz + Biz + СВ2.
Асимптотическая аппроксимация его частного решения будет
иметь вид
CBt СВ2[а , 1 о 11 I
2------ХГ’-"^“|£^'+a B1Tj+•••’
и, следовательно,
t
_ - СВ, exp { - Л J a dl} ± В, у)]. (2.60)
О
Этот прием приближенного интегрирования может быть легко рас-
пространен на общий случай системы (2.1), когда у — вектор.
е) Случай кратных корней. В предыдущих пунктах
мы столкнулись с тем фактом, что при изменении характера
отдельных членов уравнения свойства приближенного решения
могут качественно меняться. Поэтому при построении прибли-
женных решений приходится учитывать тонкую структуру урав-
нений. Обсуждая способы построения общего решения однород-
ных систем дифференциальных уравнений, мы предполагали,
что корни характеристического уравнения различны на всем ин-
тервале времени [0, Г], т. е. не существует такой точки t = /*,
чтобы имело место равенство
И/ (П = Н/(О. i + (2.61)
Условие щ (/) #= р/ (/) V/ <= [0, Т] может оказаться обремени-
тельным. В инженерных задачах мы нередко сталкиваемся с
такой ситуацией, когда характеристическое уравнение имеет
кратные корни. Вспомним, например, что частоты сферического
§ 2. ЛИНЕЙНАЯ ЗАДАЧА
319
маятника равны между собой. Проблема асимптотических
представлений в общем случае многообразна и трудна, и мы не
будем заниматься ее подробным обсуждением. Мы остановимся
только на некоторых примерах, иллюстрирующих те особен-
ности, с которыми можёт встретиться исследователь систем в
случае кратных корней.
Рассмотрим однородную систему второго порядка
!/i 4“ А (ацг/1 + «121/2) + ЬцУ1 + bi2y2 — 0,
У2 + А («21^1 + «22У2) 4* Ъ2\У\ + &22У2 = О*
Структура приближенных решений системы (2.62)
определяться особенностями корней уравнения
I «11 + Н «12
I «21 «22 + Ц
(2.62)
будет
(2.63)
= 0.
(2.64)
До сих пор мы рассматривали лишь тот случай, когда оба
корня, gi(0 и р.а(О> различны на всем интервале времени,
В этом случае система (2.62) с помощью линейного преобра*
зования может быть приведена к канонической форме:
Zi + AgiZi + cnz( + cl2z2 = 0,
^2 + Ар222 4~ «21^1 4“ 622^2 — 0.
Если теперь pi = рг, то могут иметь место две разные кано-
нические формы, соответствующие различной структуре эле-
ментарных делителей.
а}. Когда элементарные делители простые, система может
быть также приведена к виду (2.64), где щ = Р2 = р:
Z1 + AJ1Z1 + CnZ! + c12z2 = о,
Z2 + Apz2 4“ C21Z1 + C22Z2 = 0.
0) Когда элементарные делители не простые, привести си-
стему (2.62) к виду (2.64) уже нельзя. Канонической будет
тогда следующая форма этой системы:
' Zi‘4-A,pzi + Az24-c11zi4-ci2Z2 = 0,
z2 + Ap.z2 + c2lzt + c22z2 = 0.
Оказывается, что структуры приближенных решений в этих
Двух случаях существенно отличаются. Рассмотрим сначала си-
стему (2.65). Ее решение будем искать в виде
г t 1 f t 1
z1==exp< — А^цЛ z2 = exp](2.67)
I 0 J 0 )
(2.65) ‘
(2.66)
320
ГЛ. V. ТЕОРИЯ ТИХОНОВСКИХ СИСТЕМ
После такой замены система (2.65) уже не будет содержать
параметра X:
*1 + СПХ1 + С12Х2 = 0,
*2 + CnXl + £22*2 =.0. (2,68)
На этом задача построения асимптотики для системы уравнений
(2.65) исчерпана: система (2.68) не содержит параметра К,
а интегрирование этой системы не встречает каких-либо труд-
ностей, поскольку правые части системы не содержат быстро
меняющихся слагаемых.
Обозначим через Хц и хц, i~l, 2, фундаментальные реше-
ния системы (2.68). Эти функции могут быть получены как
результат численного решения двух задач Коши со следующими
начальными условиями:'
I. Х11(0) = 0, II. х12(0)«=1,
*21(0)“ 1. Х2г(0) = 0.
Тогда асимптотическое представление общего интеграла систе-
мы (2.65), которое в данном случае совпадает с точным реше-
нием, будёт иметь, вид
!t ч
— X \ udi г (с реп 4- c2*i2),
о *
, f х • (2.69)
z2 = exp j — Л р dt > (ctx2I + СгХи),
Рассмотрим теперь уравнения (2.66). Изложенный прием
теперь, очевидно, неприменим, поскольку в результате преобра-
зования (2.67) полученная система будет содержать первые
степени параметра X, и, следовательно, правые части этой си-
стемы будут быстро изменяться, и численное решение ее будет
уже встречать определенные трудности. Все же на первом шаге
мы используем преобразование (2.67), после чего придем к си-
стеме
*14“ ЛХ2 + СцХ1 4- С12Х2 = 0,
Х2 4- ^21*1 4- ^22*2 = °' ' f
Сделаем еще одну замену переменных: xi = Л1/2и, х2 = v. В ре-
зультате этой замены мы приведем систему (2.70) к виду
й 4" Л1/2о 4- СцЦ 4~ Л 1/2С12п = 0, (2 71)
б 4-Л1/2с2(и 4-Си» = 0,
Система (2.71) уже относится к тому типу, который мы изу-
чали ранее, поскольку она содержит новый большой параметр
§ 2. ЛИНЕЙНАЯ ЗАДАЧА
321
Х* = Х1/2. Поэтому ее решение мы будем искать с помощью
стандартной схемы:
С * 1
« = ехрН|/2 Jod/?(«o4-V1/2«i+ ...),
' о '
( f 1
v = ехр | Х1/2 j © dt ? (оо + Х”1/2с»1 + .. ?),
I о '
где и — корень характеристического уравнения
I® 1 =и2_С21 = 0. (2.72)
Если <?21 0, то второе уравнение системы (2.71) интегри-
руется в квадратурах, после чего и общее решение первого
уравнения может быть рыражено в форме квадратур, причем
под знак интеграла будут входить только медленно меняющиеся
функции. Если же С21 й.О, то уравнение (2.72) имеет два раз-
личных корня, которые мы обозначим coi и юг- Коэффициенты
разложения Ut и vt вычисляются уже описанным способом по
явным формулам. Собирая полученные результаты, мы можем
представить оба линейно независимых решения системы (2.66)
в следующей форме:
2^ = ехр
А41 I dl
(2.73)
Таким образом, асимптотические представления приближенных
решений в этом случае будут содержать дробные степени пара-
метра 1. На этот факт (т. е. на то, что разложения по дробным
степеням могут возникать в случаях, когда элементарные дели-
тели не простые), по-видимому, впервые обратил внимание
Я. Д. Тамаркин (см. [67]).
Рассуждения, аналогичные проведенным для системы вто-
рого порядка, могут быть использованы и для анализа про-
извольной системы
у = А(1, К) у, (2.74)
где
А (/, Л) = V (Д<*'(0 + (0 + ... + (/) +
+ rs“1/7(/, Л)),
11 Н. Ji. Моисее®
ГЛ. V. ТЕОРИЯ ТИХОНОВСКИХ СИСТЕМ
а матрица H(t, К) ограничена при Х->оо, /е [О, Т]. Будем
называть рангом системы (2.74) число k — старшую степень
параметра X— и предположим, что некоторая функция р.(/) яв-
ляется кратным корнем характеристического уравнения
— рЕ|=0, но элементарные делители матрицы —
простые; Тогда преобразованием
• / t А
y(t, X) = expj X* Jp4//|z(Z, X) (2.75)
Vo '
мы перейдем к системе вида
i(t, = X)z(t, X), (2.76)
ранг которой будет на единицу меньше. Если ранг матрицы
был равен единице, то ранг системы (2.76) уже равен нулю,
т. е. в правой части этого уравнения нет слагаемых с положи-
тельными степенями X. Если, например! кратность корня ц
равна двум, а элементарные делители простые, то систему
(2.76) нужно интегрировать численно. В результате будут най-
дены два ее линейно независимых решения Z\ и z2, причем
корню р будут соответствовать два частных решения системы
(2М): ( ’ 1 f - 1
У! —exp | X j pdt >Zt, y2 = exp| X jpdZ ?z2. (2.77)
Если элементарные делители не простые, то дело может
• обстоять иначе. При замене переменных (2.75) не все члены
с высшей степенью параметра X оказываются компенсирован-
ными. В этом случае мы сталкиваемся с альтернативой: либо
коэффициенты уравнения (2.76) таковы, что после преобразо-
вания (2.77) коэффициенты при членах старшего ранга обра-
щаются в нуль, лцбо они в-нуль не обращаются. В первом
случае ранг системы* оказывается пониженным на единицу, и мы
можем продолжить дальше процесс выделения экспоненциаль-
ных множителей. Во втором случае мы также можем построить
асимптотические решения, но юни уже представляются в виде
рядов, расположенных по дробным степеням параметра X.
ж) Заключительные замечания. В этом параграфе
мы изложили лишь один из способов построения пограничных
функций, основанный на линеаризации уравнения для быстрой
переменной. При этом предполагается, что отклонения возму-
щенного решения- от порождающего малы, в том числе мала
начальная величина рассогласования данных Коши
. Уо — У°(хо, Q).
§2. ЛИНЕЙНАЯ задача
323
Последнее предположение может ограничить область примени-
мости развиваемой схемы вычислений. В настоящее время су-
ществуют и другие, более общие схемы построения погранич-
ных функций. Однако в практике инженерных расчетов пока
что используются только те методы, которые основаны на ана-
лизе линейных уравнений. С чисто вычислительной точки зре-
ния нелинейные алгоритмы еще очень плохо изучены.
Наконец, еще один аргумент, который делает особенно ин-
тересными для практики линейные теории возмущений, — это
возможность исследования статистически-х свойств системы.
Рассмотрим снова исходную систему
£=Х(х, у, t), e.y — Y(x, у, /) (2.78)
и ее порождающее решение х°(/), y°(t), которое является ре-
шением системы
х° = Х(х0, уЦх°, /), /),
где у° — корень уравнения Г(х°, у°, /) = 0.
Порождающее решение мы часто можем рассматривать в
качестве некоторого «основного» решения, которое опреде-
ляется фиксированными начальными условиями
х(О)==хо.
Что же касается величины уа—у — У°(х°, t), то она играет
роль «высокочастотного шума», порожденного рассогласовав
Нием начальных условий — вектором
Ь = Уо — У°(х0, 0).
Использование линейных- уравнений для описания функций
• пограничного слоя хп и уп позволяет представить эти функции
линейными операторами, действующими на вектор б. Для. лю-
бого t мы‘будем иметь выражения вида
уп(О = £1б, х„(0 = £Д (2.79)
где Li и Li — некоторые матрицы, элементы которых выра-
жаются либо с помощью явных формул, либо с помощвю про-
стых квадратур.
Простота описания функциональных связей 1/п(б) и хп(б)'
позволяет изучать статистические свойства траекторий, если
известны статистические свойства начальных отклонений б.
Например, для расчета матрицы вторых моментов вектора хп(0
нет необходимости решать дифференциальные уравнения — мы
можем ее определить с помощью явных выражений.
Deme ЗВИТ»?й здесь аппарат может быть использован и для
толы«)ИЯ бол|е сложных задач, когда система подвержена не
л₽й^„1Лучайным начальным отклонениям, но и постоянному
10 случайных возмущающих сил.
U*
324 ГЛ. V. ТЕОРИЯ ТИХОНОВСКИХ СИСТЕМ
§ 3. Примеры тихоновских и квазитихоновских систем
В § 1 мы рассматривали системы вида
х — Х(х, у, t), ti) — Y(x, у, f) (3.1)
и предполагали, что решение присоединенного уравнения
dyjdx — Y (х, у, I), (3.2)
в котором х и t считаются параметрами, асимптотически устой-
чиво. Такие системы мы назвали тихоновскими. Если начальные
условия к тому же принадлежат области притяжения корня у0
уравнения
Y(x, у°, /) = 0, (3.3)
то для системы (3.1) могут быть развиты эффективные прибли-
женные методы анализа. Эти условия могут оказаться чересчур
жесткими, в особенности условия асимптотической устойчиво-
сти решения присоединенного уравнения (3.2). С другой сто-
роны, отказ от этих условий исключает возможность построе-
ния асимптотических оценок, во всяком случае для достаточно
больших интервалов времени.
Но в конкретных практических задачах мы всегда имеем
вполне определенные, а не произвольные временное интер-
валы, поэтому кажется, что требование асимптотической устой-
чивости может быть тем или иным способом ослаблено. Напри-
мер, создается впечатление, что для реализации описанных
алгоритмов достаточно потребовать такого поведения траекто-
рий присоединенной системы, которое обеспечивало бы относи-
тельно малые отклонения уп на интересующем нас интервале
времени, если только начальные отклонения S были достаточно
малыми.
К сожалению, такие нечеткие и неточные формулировки не
могут служить основанием для построения каких-либо' матема-
тических теорий и получения строгих оценок. Тем не менее
возможность использования развитого аппарата для решения
практических задач при более слабых ограничениях представ-
ляется крайне важной. Подобные системы назовем квазитихонов-
скими. Для них при обосновании развиваемых процедур мы уже
не можем ссылаться на те или иные математические результаты.
Здесь мы вступаем в сферу интуиции, опыта и правдоподобных
рассуждений. Но отсутствие строгих результатов никак не сни-
жает практической значимости развиваемых методов.
В этом параграфе мы приведем два примера, которые в на-
стоящее время можно уже считать классикой. Они посвящены
динамике артиллерийского снаряда и оперенной ракеты. Не-
смотря на достаточно специальный характер рассматриваемых
$ 3. ТИХОНОВСКИЕ И КВАЗИТИХОНОВСКИЕ СИСТЕМЫ 325
систем, их изучение весьма назидательно. Оно не только пока-
зывает различие тихоновских и квазитихоновских. систем, но и
возможности их единообразного изучения.
Несмотря на то, что теория тихоновских систем оформил'ась
лишь в пятидесятые и даже шестидесятые годы, инженеры уже
в прошлом веке дали целый ряд примеров анализа систем
вида (3.1) и развили методы, не потерявшие своего значения
и_в настоящее время.
В этом параграфе мы рассмотрим, в частности, одну из пер-
вых изученных задач этого типа, так называемую общую задачу
баллистики артиллерийского вращающегося снаряда. По-види-
мому, первая попытка анализа особенностей движения снаряда
была предпринята еще в сороковых или пятидесятых годах про-
шлого века русским артиллеристом генералом Н. В: Майевским,
изучавшим относительное движение снаряда в предположении,
что траектория его центра массы — прямая. Однако в полной
постановке эта задача впервые была рассмотрена де Спарром
[66]. В этом параграфе мы воспроизведем в основных чертах
схему его анализа, опуская отдельные детали, представляющие
специальный интерес. Для того чтобы упростить выкладки, мы
будем считать, что артиллерийский снаряда вполне симметри-
чен и на него действует лишь один внешний момент аэродина-
мических сил (см. более подробно [28, 65]).
Одновременно с рассмотрением динамики вращающегося
артиллерийского снаряда мы будем рассматривать и движение
оперенной ракеты. Движение снаряда принципиально трехмер-
ное, движение ракеты, при известных условиях, может счи-
таться происходящим в плоскости (плоскости стрельбы).
а) Вывод уравнений движения. Движение артилле-
рийского снаряда описывается д^умя векторными уравнениями:
•уравнением количества движения и уравнением моментов. Пер-
вое из этих уравнений описывает движение центра массы, а
второе — движение относительно центра массы:
+ |. (3.4)
• <3-5)
Здесь г—радиус-вектор центра массы снаряда, g — вектор на-
пряженности гравитационного поля, R— вектор внешних сил,
л — вектор кинетического момента, L — вектор-момент внеш-
них сил.
Внешние силы R мы будем считать зависящими от скорости
Центра массы, угла нутации v (рис. 3.1)-и производных угловой
скорости вращения снаряда. Движение ракеты описывается та-
°и же системой уравнений. Только к числу внешних сил мы
326
ГЛ. V. ТЕОРИЯ ТИХОНОВ'СКИХ СИСТЕМ
должны отнести еще дополнительно реактивную силу Р, про,
порциональную расходу массы:
Р — ь
r — R dt *
Так как расход массы dm/dt = 'q(t) мы будем считать за-
данной функцией времени, то можно проводить рассмотрение
динамики ракеты в рамках системы (3.4), (3.5), считая массу
известной функцией времени.
При описании движения снаряда и ракеты возникают из*
вестные терминологические различия. Так, например, угол ну-
тации в теории ракет принято называть
1 - go углом атаки и т. д.
v 'j* Различают основную и общую зада-
чи баллистики (динамики). Основной за-
Jr дачей внешней баллистики называется
задача определения Траектории центра
/ //___________ массы снаряда в • предположении, что
\/0 /. ~~р угол нутации равен нулю. Последнее
/\/ означает, что основная задача внешней
. ' баллистики изучает движение артилле-
рийского снаряда в предположении, что
Рис. ЗЛ. он представляет собой материальную •
точку. При этом его траектория всегда
является плоской, если снаряд симметричен.
Кроме того, используется термин «.общая задача внешней
баллистики». В рамках общей задачи рассматривается движе-
ние относительно центра массы, т. е. проводится полное изу-
чение движения снаряда или ракеты как твердого тела.
Внешняя баллистика использует следующую гипотезу: дви-
жение относительно центра массы может быть изучено с боль-
шой степенью точности, если предположить, что. сам центр тя-
жести движется по траектории, которая является решением
основной задачи внешней баллистики. Эта гипотеза играет
важную роль, поскольку она позволяет разделить изучение
уравнений (3.4) и (3.5). Сформулированная гипотеза опреде-
лила в XIX—XX веках развитие математических методов внеш-
ней баллистики. Как мы увидим ниже, она является прямым
следствием того факта, что в реальных условиях система (3.4),
(3.5) является близкой к системе тихоновского типа.
Точно так же формулируется и задача внешне® баллистики
оперенной- ракеты. Но, в отличие от артиллерийского снаряда,
система уравнений, которая описывает движение ракеты, яв-
ляется классической тихоновской системой.
Приведем теперь систему (3.4), (3.5) к скалярному виду.
Для этого введем две системы координат — подвижную и не-
$ 8. ТИХОНОВСКИЕ И КВАЗИТИХОНОВСКИЕ СИСТЕМЫ §27
подвижную. Неподвижную систему координат OXYZ свяжем с
плоскостью «стрельбы» — той плоскостью', в которой лежит
траектория основной задачи внешней баллистики. Ось ОХ на-
правим вертикально вверх (против направления силы тяжести),
а ось OZ — вдоль пересечения плоскости стрельбы с горизон-
тальной плоскостью. Ось OY мы расположим в горизонтальной
плоскости так, чтобы система OXYZ была правой (рис. 3.2).
Подвижную систему координат Oxyz свяжем с центром
массы снаряда (см. рис. 3.1). Ось координат Ог направим вдоль
вектора скорости центра массы снаря-
да (ракеты). Оси Ох, и Оу лежат в
плоскости, перпендикулярной направ-
лению скорости (Ог). Их направление
мы свяжем с выбором осей неподвиж-
ной системы координат. Ось Ох мы на-
правим по пересечению вертикальной
плоскости XOY и плоскости, нор-
мальной к оси Ог. Ось Оу направим
перпендикулярно осям Ох и Ог
так, чтобы система Охуг была пра-
вой. Таким образом, ось Оу лежит
в горизонтальной плоскости YOZ. Система координат Охуг яв-
ляется подвижной и вращается относительно неподвижной си-
стемы координат с некоторой мгновенной угловой скоростью <в*.
Если бы движение центра тяжести происходило все время в
плоскости стрельбы, т. е. в плоскости XOZ, и, следовательно,
вектор скорости центра массы лежал бы в этой плоскости, то
угловая скорость 6* была бы равна нулю. Таким образом, вве-
денная нами подвижная система координат участвует лишь в
движении касательной к траектории снаряда, но не участвует
в его собственном движении. Составим теперь уравнение кине-
тического момента в подвижной системе координат. Для этого
обозначим через dR/dt производную кинетического момента R
относительно подвижной системы координат хОуг. Тогда урав-
нение (3.5) можно переписать в виде
+ = (3.6)
Обозначим через Q вектор мгновенной угловой скорости
снаряда, а через <о— вектор скорости собственного вращения
снаряда вокруг его оси симметрии, которую мы определим еди-
ничным вектором £°, Тогда
(3.7)
где ]®| абсолютная величина вектора со. Положим
Q e w 4* ©J. (3.8)
328
ГЛ. V. ТЕОРИЯ ТИХОНОВСКИХ. СИСТЕМ
Рассмотрим подробнее, что представляет собой вектор ®i.
Вращение снаряда можно считать состоящим из двух враща-
тельных движений: собственного вращения вокруг его оси сим-
метрии, определяемой вектором £°, и вращения вектора |°. Та-
ким образом, ©1 — это мгновенная угловая скорость вектора £°.
Величина d^/dt — это скорость конца единичного вектора
1°: dl°/dt = <01X t°. Но — единичный вектор, a <oi — его
. мгновенная угловая скорость, т. е. вектор на-.
] правленный перпендикулярно £°. Поэтому
I ‘ d^/dt — |(0i|t°, где т° — единичный вектор, ка-
[ сательный к годографу вектора £° (рис. 3.3), а
р |®i| — абсолютная величина вектора ®]. Так как
\ ' т° — единичный вектор, то
= <3-9>
Вектор (Ох мгновенной угловой скорости вра-
Рис. 3.3. щения вектора £° перпендикулярен, плоскости,
проходящей через вектор и вектор линейной
скорости его конца. Следовательно, направление вектора (0i сов-
падает с направлением вектора
В°Х-^- (3.10)
С другой стороны, оба вектора, входящие в это произведение,
перпендикулярны друг другу. Но
kx^l=iE°i|>-n<P.
где ф = л/2, а |£°| = 1. Поэтому
Kl=kx^|.
Сопоставляя это равенство с (3.9), мы видим, что
|*|=
Но так как вектор a>i и по направлению совпадает с вектором
(3.10), то *
(3.11)
Принимая во внимание выражения (3.7) и (3.8), мы можем
выражение для Q представить в форме
Q = |(o^° + ^°X^. (3.12)
5 3. ТИХОНОВСКИЕ И КВАЗИТИХОНОВСКИЕ СИСТЕМЫ
329
Мы выписали выражение для ©i в неподвижной системе ко-
ординат. Перейдем теперь к подвижной системе; для этого мы
должны заменить d^/dt его выражением
где |° обозначает вектор £° в подвижной системе координат.
Так как = то выражение (3.11)
примет вид
®1 = £°Х^ + <»‘-Ч0(10, ®*). (3.13)
Составим теперь выражение для кинетического* момента
где J— тензор инерции. Наш снаряд, по предположению, —осе-
симметричное тело. Следовательно, его характеристики опреде-
ляются двумя моментами инерции: Л—экваториальным и С —
полярным моментами инерции. Тогда очевидно, что
К = Л©1 + С<о. (3.14)
Используя теперь формулы (3,14) и (3.13), преобразуем урав-
нение (3.6): -
-I" (р. If) + <-} + c(^L р +1 и I } 4-
+ <»,х{с|»|Е« + л[рх^.-рй0,«>-)]}=л, (3.18)
Собирая подобные члены, получим
С (т ® I -$• +1 * I (°>* X 5°)) +
+ л{^0Х^--2^-(^®*)-&0(^,^) +
+ - (1°, ®*j (©• X £°)} = Ь. (3.16)
Момент L—это момент аэродинамических сил. Его можно с
большой степенью точности представить в виде суммы двух
слагаемых: L = Li -j- £2> где ц зависит от угла нутации и
его производных, а Л2—от собственной скорости вращения.
330
ГЛ. V, ТЕОРИЯ ТИХОНОВСКИХ СИСТЕМ
Ограничиваясь линейным приближением, обычно эти величины
представляют в виде
Ц = х(/) (г° х £°) + (0 (2° X £°), (3.17)
L2 = -£2(/)q = -Z>2(/)|w|£°. (3.18)
Первая составляющая суммы,стоящей в правой части (3.17),
называется опрокидывающим моментом: если бы снаряд не
вращался,, то под действием аэродинамических сил он Пере-*
вернулся бы. На рис. 3.4 точка О обозначает центр тяжести,
а точка А — центр приложения аэродинамических сил (центр
давления). Собственное вращение стабилизирует полет снаря»
да. У ракеты аэродинамический момент направлен в другую
сторону.' За счет существования стабилизатора центр црило»
жения аэродинамических сил смещен и находится за центром
тяжести Q (рис. 3.5). За счет этого" действие момента будет
направлено против возрастания угла нутации (угла атаки), так,
как показано стрелкой на рис. 3.5.
Вторая срставляющая в уравнении (3.17) носит название
демпфирующего момента. Она зависит от скорости изменения
угла нутации и всегда направлена против скорости изменения
угла нутации. Другими словами, коэффициент ki всегда отри»
цателен. Для упрощения выкладок мы не будем учитывать
демпфирующий момент, т. е. положим k\ = 0. Роль демпфи»
рующего момента совершенно аналогична роли трения. Это об»
стоятельство мы однажды используем.,
Итак, пусть А>1=0. Тогда из уравнения (3.16) легко выде»
лить' скалярное уравнение, описывающее изменение угловой
скорости со. В самом деле, умножив обе части уравнения (3.16)
скалярно на £°, получим
§ 3. ТИХОНОВСКИЕ И КВАЗИТИХОНОВСКИЕ СИСТЕМЫ 331
откуда »
-|<o| = <Boexp(--^-/). (3.19)
Таким образом, характер вращательного движения снаряда во-
круг своей оси может быть изучен независимо от остального
движения. Момент —это момент трения аэродинамиче-
ских сил. Мы- имеем явное выражение (3.19), показывающее,
что постепенно угловая скорость вращения стремится к нулю-.
Если kz = 0, то ' 2
со = const, (3.20)
т. е. в этих условиях наша система допускает первый интеграл
(3.20). Оперенная ракета (ракета, снабженная стабилизатором)
не вращается, и для любого момента времени мы имеем
' <о = 0. (3.20')
Так как мы предполагаем, что ракета обладает осевой симмет-
рией, то реактивные силы не создают момента, и движение ра-
кеты относительно центра массы описывается уравнением (3.16),
в котором следует положить со = 0.
Примечание. Поскольку мы пренебрегли действием демпфирующего
момента, то естественно пренебречь и эффектом уменьшения угловой скорости
вращения из-за трения о воздух, поскольку в обоих случаях мы имеем дело
С силами трения. Заметим только, что все те упрощения, которые мы делаем
цо мере изложения, никак не меняют качественных особенностей изучаемого
явления, они только сокращают объем выкладок.
Итак, примем da/dt = 0. Относительное движение снаряда
имеет три степени свободы. Об одной из них мы только что
говорили. Поэтому для того, чтобы полностью описать относи-
тельное движение снаряда, нам надо из общего векторного
уравнения (3.16) получить еще два скалярных уравнения. Пере-
пишем это уравнение в проекциях на оси подвижной системы
координат Ох и Оу. Обозначим через х, у и z проекции векто-
ра |° на оси подвижной системы координат. Тогда проекции
dtf/dt на эти оси будут dxfdt и dy/dt. Проекциями векторного
произведения 5° X на эти оси будут* •
.. d2z - d2y . d2x d2z
V'diF’ Z dt2 И Z dt2 X dt2 *
Рассмотрим теперь вектор co*; подвижная система координат
может совершать вращательное движение только вокруг осей
Ох и Оу, поэтому
где х°, —единичные векторы осей Ох, Оу? Вращение вокруг
си их приводит к изменению угла ф — угла, который образует
ззг
ГЛ. V. ТЕОРИЯ ТИХОНОВСКИХ СИСТЕМ
ось Ог (вектор скорости) с вертикальной плоскостью. Этот
угол условимся отсчитывать от вертикальной плоскости. Тогда
(О* = — -ф.
Аналогично
«С = 6,
где 0 — угол наклона вектора скорости к горизонту, Итак,
<в* = — фх° + 6у°. '
Теперь мы легко вычислим проекции остальных векторов и
произведения, входящие в уравнение (3.16):
со* X £° — 0zx° + &у° — (фу + бх) 2°>
= — фх° + 0у°, (5°, “*) = — фх + Оу, -
(£>, = - фх 4- бу, (2° X1°) = - ух° 4- ху°.
Умножим теперь уравнение (3.16) последовательно на х° и у0.
Используя полученные вспомогательные выражения, мы будем
иметь следующие два скалярных уравнения:
А (yz — уг) 4- Сах — 2 АХ (бу — фх) — Ах (бу — фх) — -
— Аф — Савг — AQz (ву — фх) = — х (/) у, (3.21)
А (хг — гх) 4- Сшу — 2 Ау (бу — фх) — Ау (бу — фх) 4-
4- А0 4~ Сшфх — Афг (бу — фх) = х (/) х.
Эти два уравнения совместно с интегралом (3.20) и условием
нормировки
полностью описывают движение снаряда или ракеты относи*
тельно центра массы.
Рассмотрим теперь систему (3.4) и перепишем ее в еле*
дующем виде:
#=»> (3.22)
(3.23)
где v — скорость движения центра массы
v = | v | г°.
§ 3. ТИХОНОВСКИЕ И КВАЗИТИХОНОВСКИЕ СИСТЕМЫ
833
Если речь идет об артиллерийском снаряде, то Я —это сила со-
противления воздуха. Она зависит от скорости центра массы v
и угла нутации v:
х R = R(v, v) — R(о, х, у).
Если мы изучаем движение невращающейся оперенной ракеты,
то уравнение (3.23) следует переписать так:
’ <3-23')
где Р — реактивная тяга; так же как и масса, величина Р
считается заданной функцией времени. Она направлена вдоль
оси ракеты:
и уравнение (3.23) мы будем за-
писывать так:
-£=£+<3-23")
где
до=!£!21.
tn(t)
Запишем уравнение (3.22) в про-
екциях ' на оси неподвижной си-
стемы координат.
Углы 0 и ф мы ввели соглас
тому, как изображено на
рис. 3.6. Поэтому, обозначив через X, У и Z проекции радиус-
вектора центра массы в неподвижной системе координат, мы
получим скалярные уравнения (здесь и ниже введено обозна-
чение v = | v |).
= о sin 0, = о sin ф. (3.24)
Так как (4г)2 + (4г)2-^ (”^г)2==у2’ то на основании (3.24)
мы получаем уравнение для Z:
= о д/ cos2 0 — sin2 ф . (3.25)
Скалярные уравнения (3.24) и (3.25) полностью эквивалентны
векторному уравнению, (3.22).
Перепишем теперь в скалярной форме уравнение (3.23). Для
этого умножим обе части этого уравнения скалярно на вектор
2 (вектор, определяющий направлений скорости). Так как век-
тор dtf/dt ортогонален г° и g — —|g|X° (Х° — орт оси ОХ), то
/ sin 0 + s _ g sin 0 + /?,. (3.26)
334
ГЛ. V. ТЕОРИЯ ТИХОНОВСКИХ СИСТЕМ
Далее запишем уравнение (3.23) в проекциях на оси Ох и Оу
(см. рис-. 3.6) г
dO __ _ geos0 Qt (х, у, X)
dt v ' mv
__ Qu (x, у, X) __D
dt mv *3‘
(3.27)
Уравнения (3.26),’ (3.27) эквивалентны векторному уравнению
(3.23), a Ri, Rz, /?з —проекции ускорений, создаваемых аэро-
динамическрй силой, на оси подвижной системы координат. Они
являются функциями всех основных переменных задачи:
Rt = Rt (и, tn, х, у, X). (3.28)
Функция R носит название лобового сопротивления, a Qi и
Qi— это составляющие подъемной силы. Они обращаются в
нуль при х — у = 0 и с большой степенью точности могут быть
представлены формулами
(3.28-)
В том случае, когда речь идет о движении ракеты, в урав-
нения должны быть включены составляющие реактивной силы.
Принимая, во внимание формулы (3.28'), уравнения (3.26),
(3.27) для ракеты мы будем писать в виде -
. -g-= - g sin 0 + ₽,-/(/) z, ' (3.26')
-^- = /?з —
(3.27')
Итак, движение вращающегося артиллерийского снаряда или
ракеты описывается системой уравнений (3.21), (3.24)—(3.27),
(3.26') и (3.27'). Это — сложная система нелинейных диффе-
ренциальных уравнений. Она представляет определенные труд-
ности для численного анализа, поскольку движение снаряда
(или ракеты) носит характер высокочастотного пространствен-
ного колебательного движения.
б) Введение параме.тра и нулевое приближе-
ние. Система уравнений, которую мы составили, при известных
условиях относится-к системам тихоновского типа либо похожа
на тихоновские системы. Для того чтобы в этом убедиться, в
систему уравнений необходимо ввести параметр и свести ее к
стандартному виду (3.1). Это сведение будет основано на не-
которых особенностях, движения снаряда или ракеты, вызы-
вающих быструю осцилляцию части фазовых координат. Про-
$ 3. ТИХОНОВСКИЕ И КВАЗИТИХОНОВСКИЕ СИСТЕМЫ 335
цессы движения вращающегося артиллерийского снаряда и ра-
кеты мы рассмотрим отдельно. Рассмотрим сначала движение
снаряда.
Высокочастотное колебательно-вращательное движение сна-
ряда вокруг центра массы вызывается действием' двух факто-
ров. Во-первых, существует большой опрокидывающий момент
аэродинамических сил, а во-вторых, компенсирующий его мо-
мент гироскопических с.ил. Из элементарной теории гироскопа
известно соотношение между коэффициентом.опрокидывающего
момента х и величиной гироскопического момента С®2, обес-
печивающее его устойчивое движение:
С®2 > х. - .
Таким образом, для устойчивого движения необходимо, чтобы
угловая скорость собственного вращения гироскопа и была
достаточно велика: • __
<о>й>=д/~, (3.29)
т. е. величины о2 и х должны быть* одного порядка. На основа-
нии этого положим
® = х = %2и2Л, ( (3.30)
где X — некоторый большой параметр. Далее, введем новые пе-
ременные:
х=Ка, у — к$, z — ky. (3.31)
Смысл замены (3.31) очевиден —мы изучаем движения сна-
ряда, которые характеризуются большой скоростью изменения
угла нутации.
Положим 8 = 1/1, тогда получим
вх = а, еу = 0, ei = у. (3.32)
Используя эти обозначения, уравнения (3.21) перепишем- в
следующем виде:
• М (уу — гр) — 2 Ла (бу — фх) — в Ах (бу — фх) —
— вЛф — Сцбг — еАбг (бу — фх)} — — Ап?у — Сца,
в {Л (аг — ух) — 2Л0 (бу — фх) — 8 Ау (бу — фх) +
+ вЛ0 + Сцфг — вЛфг (бу — фх)} = Ап2х — Ср-0. (3.33)
Для того чтобы привести систему (3.33) к стандартному виду,
мы должны еще исключить г и у при помощи условия норми-
ровки х2 4- р» -|- z2 == 1 и разрешить полученную систему от-
носительно производных а и 0. В результате мы получим уран-
336
ГЛ. V. ТЕОРИЯ ТИХОНОВСКИХ СИСТЕМ
нения вида (3.1). Однако мы этого делать не будем, поскольку
система (3.32), (3.33) и так достаточно удобна для анализа.
Положив 8 = 0, мы получим
а = 0, 0 = 0, Ап2 у + Ср<х = 0, Лп2х— Сц0 = О,
откуда следует, что в нулевом приближении х = у = 0, a z= 1,
т. е. ось снаряда совпадает с касательной траектории. Послед-
нее эквивалентно предположению о том, что относительным
движением снаряда мы можем в нулевом приближении пре*
небречь. Таким образом, при 8 = 0 (% = оо) мы приходим к ос-
новной задаче внешней баллистики — расчету траектории цент-
ра массы в предположении, что снаряд представляет собой ма-
териальную точку.
Итак, если начальные значения переменных х, у, %, у при-
надлежат области притяжения корня х = у = х = у = Ь и если
движение снаряда устойчиво, то система уравнений, описываю-
щих это движение, относится к системам тихоновского типа, и
решение нулевого приближения, -т. е. решение основной задачи
внешней баллистики, равномерно аппроксимирует траекторию
центра массы снаряда с погрешностью О(1Д),
Совмещая плоскость стрельбы с плоскостью XOZ, т. е. по-
лагая ф(0) = 0, на основании второго из уравнений системы
(3.27) находим, что в нулевом приближении ф(/) = 0. Отсюда
следует, что в нулевом приближении Y = 0, т. е. порождающая
траектория плоская. .
Подобным же образом мы можем провести рассуждения и
для случая ракеты. Уравнения (3.21) можно использовать для
описания движения ракеты относительно центра тяжести. Для
этого достаточно положить <в = 0 и учесть тот факт, что момент
аэродинамических сил теперь уже не опрокидывающий, а вос-
станавливающий. Поэтому в уравнениях (3.21) мы должны из-
менить знак х на обратный. В результате мы получим следую-
щую систему уравнений:
Л (yz — yz) — 2'Ах (Ьу — фх) — Ах (Ьу — фх) —
— Лф — AQz (Ьу — фх) = х (0 у, (3.34)
A (xz — zx) — 2 Ay (by — фх) — Ay (by — фх) +
+ Л0 + Сфх — Лфз (by — фх) = — х (/) х.
Движение оперенной ракеты относительно центра массы
представляет собой высокочастотное колебательное движение
сферического маятника под действием большого возвращаю-
щего аэродинамического момента. На этом основании мы снова
введем параметр
х = Л2п2Л
$ 3. ТИХОНОВСКИЕ И КВАЗИТИХОНОВСКИЕ СИСТЕМЫ 337
и сделаем замену (3.31). В результате придем к уравнениям*
в {Л (уч — z₽) — 2Ла (by — фх) — е Ах (Ьу — фх) —
— еАф — вЛбг (by — фх)} = Ап2у, (3.35)
в {A (az — ух) — 2Л0 (Ьу — 'флс) — вЛ (Ьу — фх) +
4- вЛ0 — вАфх (Ьу — фх)} — Ап2х.
Положив в уравнениях (3.32) и (3.35) 8 = 0, мы найдем, что
иа порождающем решении a = 0, 0 = 0, х = 0, у = 0, и при*
дем к тем же выводам, которые мы сделали при анализе урав*
нений движения вращающегося снаряда: в нулевом приближе*
нии траектория ракеты является плоской кривой, а ось ракеты
направлена вдоль скорости центра массы.
в) Вывод присоединенных си елем уравнений
в задачах динамици ракеты и вращающегося
снаряда. В этих задачах присоединенными уравнениями, по
терминологии А. Н. Тихонова, будут уравнения вращательного
(относительного) движения (3.33) (или (3.35)), в которых пере*
менных X, У, Z, v, 0 и ф считаются параметрами, принятыми
равными их значениям на порождающей траектории,' т. е. на
траектории, определяемой решением основной задачи внешней
баллистики. Это — система двух уравнений второго порядка от*
носителъно величин х и у — проекций единичного вектора оси
снаряда на оси подвижной системы координат. Коэффициенты
этой системы зависят от решения порождающей системы и,
следовательно, являются известными функциями времени. Для
ее приближенного решения мы воспользуемся предположением
о том, цто величины х и у малы, тогда система (3.33) может
быть заменена линейной системой. Малость величин х и у озна-
чает малость угла нутации, — это предположение не только ес-
тественно, но всегда выполняется в реальных конструкциях:
если угол нутации снаряда (или угол атаки при полете ракеты)
не мал, то его движение практически не может быть устойчи-
вым.
Заметим, что предположение малости тех или иных вели-
чин— это введение нового параметра, независимого от того па-
раметра в, который был введен в п. б). Итак, обозначив через б
некоторую малую величину, мы примем, что
х = О(б), у =0(6). (3.36)
Тогда очевидно (в силу нормировки x2+’f/2-|-'z®= 1), что
г== VI — х2 — г/2 —1 — О (б2). Производные х и у также будем
считать малыми первого порядка:
х=О(б), #=О(б). J
338
ГЛ. V. ТЕОРИЯ ТИХОНОВСКИХ СИСТЕМ
Тогда
Будем еще считать, что система, координат Охуг вращается мед-
ленно, т. е. что величины производных угловой скорости также
малы: . .
0=0(6), ф=о(6).
Используя эти еценки и опуская в уравнениях (3.21) все те
члены, порядок которых равен О (б2) и выше, получим
Ах + Са>у — MC — — AQ — Ссоф,
Ау — Сох — СсоО — Аф
или, введя параметр X согласно равенствам (3.30), перепишем
Эти уравнения в виде
Ах + СЛцу — №п2Ах » — АО — СХрф,
Ау — СХцх — №п2Ау = — СЛцЙ — Аф.’ (3.37)
Система уравнений (3.37)—это система связанных между со»
бой двух уравнений второго порядка, т. е. система линейных
дифференциальных уравнений четвертого порядка.
Проведя аналогичные оценки в системе (3.34), мы получим
систему линейных уравнений, описывающих относительное дви-
жение ракеты:
Ах + их = — АО, А у + ну = — Аф,
или, после замены (3.30),
х + Л2п2х = -0, у + А2п> = -ф. (3.38)
Итак, система (3.38)—это система двух 'линейных уравнений
второго порядка, которая распадается на два независимых урав-
нения. Таким образом, для изучения относительного движения
ракеты в рассматриваемом приближении нам достаточно изу-
чить только плоский случай.
г) Изучение присоединенной системы урав»
нений и пограничных функций в задаче о дви-
жении ракеты. Рассмотрим вопрос о применимости тео-
ремы А. Н. Тихонова к анализу уравнений движения ракеты;
Для этого нам достаточно рассмотреть лишь одно из уравне-
ний системы (3.38), например первое. В этом уравнении мы
должны положить t = const, 0 = const и переписать его в та-
ком виде (т = М)х
(3,39)
$ 8. ТИХОНОВСКИЕ И КВАЗИТИХОНОВСКИЕ СИСТЕМЫ
339
Уравнение (3.39) имеет общее решение
х — хо cos (пт + л), (3.40)
где хо и г] — произвольные постоянные. Таким образом, триви-
альное решение присоединенного уравнения (3.39) устойчиво
в смысле Ляпунова и не обладает асимптотической устойчи-
востью, т. е. формально теорема А. Н. Тихонова неприменима.
Но этот вывод — результат сделанных нами упрощений: мы
отбросили демпфирующий аэродинамический момент. Если бы
мы его учли, то присоединенное уравнение имело бы вид
-g-+,2a-g- + n2x = 0 (3.397
и его тривиальное решение было бы асимптотически устойчи-
вым, т. е. первое из условий теоремы А. Н. Тихонова было бы
выполнено^ Условие притяжения корня в данном случае выпол-
няется автоматически, поскольку присоединенное уравнение
линейно.
Итак, уравнения движения ракеты образуют классическую
тихоновскую систему и проблема поиска решения сводится к
построению пограничных функций, для чего нужно найти реше-
ние системы (3.38). Используя технику, развитую в § 2, мы мо-
жем получить представление этого решения в виде
. t V
х==—Дз- cosfx(n(s)ds + T)J — то « (3.41)
/
где С и т) — произвольные постоянные. Аналогичную формулу
Мы получим и для у:
* f г \**
ye-A=-cos(A,\n(s)ds + i)i)--7rr- (3.42)
- . \ n’ / АП
Имея в распоряжении приближенные.решения (3.41), (3.42), мы
можем построить пограничны^ функции для переменных о, 0
и ф. Рассмотрим уравнение (3.2г) для переменной ф:
= f(0</=q>2Wz/-
откуда
I / s \
ф== ф0-р. Cj \ qp2(s)—Дн-cosl A \ n(r)dx + t)i Ids —
о ¥«(s) \ J /
t
(3.43)
A J « (S)
340
ГЛ. V, ТЕОРИЯ ТИХОНОВСКИХ СИСТЕМ
Интегрируя по частям первое из слагаемых правой части выра?
жения (3.43), мы можем преобразовать это выражение к виду
* л
Г f I / 1 \
A sin Л \ п (т) dx + В cos к \ п (x)dx I + ОI —$ Ь
Совершенно аналогично могут быть вычислены и другие неиз-
вестные функции, входящие в системы (3.27') и (3.24).
Итак, общая задача баллистики оперенной ракеты сводится'
к численному интегрированию уравнений ее основной задачи и
к последующему вычислению поправок, которые необходимо
внести для учета влияния относительного движения на харак-
тер траектории центра массы (которая была вычислена в пред-
положении, что ракета представляет собой не твердое тело с
шестью степенями свободы, а материальную точку, число сте-
пеней свободы которой равно.трем). Как видно из формулы
(3.44), расчет поправок сводится к вычислению квадратур от
медленно меняющихся функций и расчету по конечным фор-
мулам.
д) Изучение присоединенного уравнения и
пограничных функций в случае вращающегося
артиллерийского снаряда. Этот случай несколько
сложнее, чем задача о движении ракеты. Тем не менее и в за-
даче о вращающемся снаряде мы можем провести вычисления
по той же стандартной схеме.
Система уравнений (3.37) ..которую мы перепишем в виде
х + 2кецу — rftix =
о о (3.45)
у — 2Херх — кпу — F2 (/),
где
е = •£-, Fi (/) = — 9 — 2еЛцф, F2 (/) = -* ф — 2еЛц9,
является системой четвертого порядка. Однако она может быть
сведена к одному уравнению второго порядка с комплексными
коэффициентами относительно • некоторой комплекснозначной
функции действительной переменной t.
Введем новую неизвестную
t = x + iy.
Умножим второе из уравнений системы (3.45) на i и сложим
с первым. В результате будем иметь
14- 2екц (у - ix) - - F (/),
где
F(t)~Fi(t) + iF2\l).
§ 3. ТИХОНОВСКИЕ И КВАЗИТИХОНОВСКИЕ-СИСТЕМЫ 341
Но —ix Ч- У = —поэтому окончательно систему (3.45) мы
приведем к уравнению второго порядка:
l-i2eknl-k2tii = F(t). (3.46)
Уравнение (3.46)—это линейное уравнение с переменными
коэффициентами, содержащее большой параметр. Для его изу-
чения можно использовать стандартные методы, изложенные в
§ 2. Но прежде чем переходить К вычислению пограничных
функций, выясним условия йрименимости теоремы А. Н. Тихо-
нова.
Присоединенное уравнение в данном случае имеет вид
iT-i ' dg „
•
где ц, Рил не зависят от т. Вводя новую переменную | = В+
. F (О
+ -^у> мы получим
2И^-п1 = 0. (3.47)
Поскольку уравнение (3.47) —это уравнение с постоянными
(по т) коэффициентами, то его решение можно искать в виде
i = Cent, *
где т] удовлетворяет характеристическому уравнению
т)2 — 2гецт) — п2 — О,
откуда __________
т] = 1ец ± V(«2 — е2ц2) • (3.48)
Равенство (3.48) показывает, что если условие
ё2]!2 п2 (3.49)
не выполнено, то среди корней характеристического уравнения
будет корень с положительной действительной частью И движе-
ние снаряда будет неустойчивым. Условие (3.49) (с точностью
до обозначений) совпадает с условием устойчивости в класси-
ческой теории гироскопа. Таким образом, одновременно мы про-
демонстрировали способ исследования устойчивости гироскопа.
Обозначив е2р2—п2 = а2 и считая условие устойчивости
(3.49) выполненным, перепишем выражение (3.48) в виде
‘ 2 = I (eg ± о). (3.50)
Следовательно, общий интеграл уравнения (3.47) имеет вид.
1 = Ciexp{i (ецЧ-а)т) + С2ехр {г (ец — о)т}. (3.51)
342 WI.’V. ТЕОРИЯ ТИХОНОВСКИХ СИСТЕМ
Отсюда следует, что тривиальное решение уравнения (3.47) яв-
ляется устойчивым по Ляпунову, но не является асимптотически
устойчивым. Следовательно, первое из условий теоремы
А. Н. Тихонова не выполнено.
Заключение об устойчивости тривиального решения присое-
диненного уравнения, описывающего движение снаряда, мы по-
лучили в предположении о том, что силами трения о воздух
можно пренебречь. К такому же заключению мы пришли и в за-
даче о движении ракеты. Но тем не менее ситуации здесь каче-
ственно различны.
Если мы учитываем дополнительно диссипативные силы в
задаче о ракете, мы приходим к уравнению (3.39'), которое опи-
сывает затухающие колебания математического маятника. Зна-
чит, в задаие о ракете более точный учет сил, действующих на
ракету, приводит к тому, что тривиальное решение присоединен-
ного уравнения оказывается не просто устойчивым, а асимпто-
тически устойчивым.
Если же мы будем учитывать силы трения в задаче о вра-
щающемся снаряде, то согласно формуле (3.19) угловая ско-
рость снаряда будет экспоненциально убывать и, следовательно,
необходимо настанет такой момент t = /*, когда условие (3.29)
нарушится. Значит, для любых о < & это приведет к экспо-
ненциальному росту угла нутации, в результате чего снаряд
перевернется и сойдет с Траектории.
Таким образом, движение артиллерийского снаряда принци-
пиально неустойчиво, и система уравнений, которая описывает
его движение, не является тихоновской. Однако нарушение ус-
ловий устойчивости может произойти при таких значениях вре-
мени t, которые заведомо превосходят время полета снаряда
До цели.
Таким образом, обосновать правомочность процедур асимп-
тотического интегрирования в теории движения артиллерий-
ского снаряда, сведя задачу- к анализу применимости теоремы "
А. Н. Тихонова, нельзя. Используя тем не менее изложенные
в этой главе методы, мы мржей рассчитывать только на интуи-
цию и опыт. А опыт показывает целесообразность и эффектив-
ность расчетов, проведённый по излагаемой схеме: уже более
ста лет все баллистические расчеты делаются на ее основе.
Примечание. Опыт баллистических расчетов и другие примеры ана-
лиза, основанного на использовании пограничных функций, показывают доста-
точно широкую применимость излагаемой здесь техники. Это дает основания
предполагать, что требование асимптотической устойчивости в теореме
А, Н. Тихонова можно как-то ослабить. Однако кйких-либо конкретных ре-
зультатов по этому поводу автору неизвестно.
'Перейдем Теперь к эффективному построению пограничных
функций, описывающих относительное движение артиллерий-
$ 3. ТИХОНОВСКИЕ И КВАЗИТИХОНОВСКИЕ СИСТЕМЫ
343
ского снаряда. Рассмотрим уравнение (3.46) и сделаем в нем
замену переменной
или, если считать
постоянной,
е=-4..-
( *
£ = gexp|i7,e pd/l
угловую скорость собственного вращения
(3 52)
После очевидных преобразований мы получим для новой пере-
менной дифференциальное уравнение .
(3.53)
Частное решение неоднородного уравнения, согласно результат
там § 2, можно представить в виде х
W(0 ’ ’ <3л54>
Построим теперь асимптотическое представление для линейно
независимых решений однородного уравнения
£ + A.W (/К = 0. ‘ (3.55)
Мы- уже несколько раз рассматривали уравнение типа (3.55),
Его общий интеграл имеет вид
[t -| - •
ik — и2 dt 4-
о
t
n2dt
О '
где Ci и Сг — произвольные постоянные. Возвращаясь к пере-
менной £, мы получим общее решение уравнения (3.46) в виде
ехр ik < ер/ + J Ve2p2 — п2 dt >4-
о
{t к
ер/ - ( л/efy2 — rf dt 14- •
- о - )
С,
i__________
Ve2|x2 —л2
(3.56)
И.з формул (3,56) сразу следует необходимое условие устойчи-
вости
е2р2>п2 (3.57)
344
ГЛ. V. ТЕОРИЯ ТИХОНОВСКИХ СИСТЕМ
для любого t е [О, Г]. В самом деле, если условие (3.57) не
выполнено, то одно из частных решений будет необходимо со-
держать экспоненту в положительной степени и вся рассмат-
риваемая теория теряет смысл — изучаемая система перестает
быть устойчивой.
Постоянные Ci и Сг в формуле (3.56)—это некоторые комп-
. лексные числа:
Ci = Сц 4* /С]2, Сг = Сц /Сгг- (3.58)
Исходное уравнение имело четвертый порядок, следовательно,
и произвольных постоянных мы имеем четыре: Сц, Ci2, Сц, С22.
Вернемся теперь к действительным переменным, используя
обозначения (3.58) и тот факт, что % — x-]-iy, F — F\-\-iF2.
Подставляя эти выражении в (3.56), используя формулы Эйле-
ра и сравнивая действительные и мнимые части в (3.56), мы
получим окончательно:
*ч г t _
х = + •«, С""~cos 1К' + $ ^eV-n‘dl I -
nj ^г_п2 L 0 J
* Г * *1
---4—— sin XI ер/ +-— «2 rf/1 +
— n2---------------------------‘ 0 *
Г t '
+ •5——----cos % I ep/ — VeV2- P2^|— -
' Ve2n2 —n2 l ° J
[t 1
ер/ — Ve2p2 — n2 dt I, (3.59)
'Vе H--нт 0
- t -
У = 22 Г A-2? +1———sin M 4Д Ve2p2 —П2 dt I +
K1 \e2\F - n2} i,-r--5. Lx J
Ve2g2 — n2 0
Г t -|
+ 4——----------cos XI ер/ + д/е2р2 — n2 dt I +
Ve2|X2 — rt2 k 0
Г t -1
4--——----------sin xl ep/— Ve2p2 — n2dt 14-
$ 3. ТИХОНОВСКИЕ И КВАЗИТИХОНОВСКИЕ СИСТЕМЫ 345
Формулы (3.59) можно переписать еще и так:
х = ^ + х1Ч-х2, у = у + У1 + У2,
где х и у — это частные решения:
*=Л2(еги2-п2)’ У= Л2(е2ц2—л2)’ .
a Xi и yi определяются формулами
[г
epi + Уе2ц2 — пг dt 4- <р I,
" (3.61)
yi = —4-------sin к I ep,t + Уе2^2 — и2 dt + <Р Г»
— л2 l 0
х2 — 5--------cos Л I ец1 — J У^р,2 — 4- Ф I,
^2-“2 °t (3.62)
#2=-4—--------sin к I ер/ — J Уе2ц2 — n2dt 4- ф I.
V е2р2 — n2 L о J
Здесь А, В, <р и ф —новые произвольные постоянные, связан-
ные с постоянными Сц формулами
Сц=ЛС08ф, С12 — СвШф, С21 = Всозф, С22=Вз1пф. '
Эти формулы показывают, что движение носика снаряда (точ-
нее, Точки пересечения единичного вектора £° с плоскостью,
перпендикулярной скорости' центра массы) описывает некото-
рую кривую, являющуюся суперпозицией двух вращательных
движений. Первое из них происходит по окружности радиуса
—— и имеет мгновенную угловую скорость ©i = X[ep4-
^Уе2}!2—"п2
4- Уе2р2 — га2]. Это движение называется быстрой прецессией.
Оно происходит вокруг точки, которая, в свою очередь, дви-
жется по окружности радиуса В . с мгновенной угловой
_____________________________Уе2ц2 — п2
скоростью со2 — Л [ер — Уе2р2 — n2 J. Это движение называется
медленной прецессией. Оно происходит вокруг точки с коорди-
натами X и у.
Таким образом, движение артиллерийского снаряда значи-
тельно сложнее, нежели движение ракеты: относительное дви-
жение ракеты подобно колебаниям сферического маятника.
346
ГЛ. V. ТЕОРИЯ ТИХОНОВСКИХ СИСТЕМ
Несмотря на большую сложность, точнее, громоздкость формул,
описывающих пограничные функции в случае движения сна-
ряда, расчет остальных элементов траектории не представляет
каких-либо принципиальных- трудностей. Например, поправки
для угла отклонения вектора скорости от плоскости стрельбы
вычисляются с помощью уравнения
== 1 и === ьи
dt mv v У ку>
откуда
t
- Ф = to + J k (0 [у 4- уi + у2} dt, (3.63)
о
где у, yi и yi определяются, формулами (3^60), (3.61) и (3.62).
Интегрируя выражение (3.63) по частям, мы легко получаем
формулы, аналогичные (3.44).
* *
*
В этой главе мы рассмотрели важный класс задач, в кото-
рых изучаются системы с различными временными масштабами.
Если эти системы удовлетворяют условиям теоремы А. Н. Тихо-
нова, то мы получаем с помощью методов этой главы доста-
точно эффективные способы их исследования. Порождающая си-
стема, которой соответствует е = 0, не- содержит быстро изме-
няющихся функций, и ее исследование численными методами ж
достаточно просто. Порождающая система уравнений описы-
вает, если угодно, фон исследуемого процесса — его медленно
изменяющуюся составляющую. Практически всегда этой инфор-
мации бывает недостаточно. Более того, подчас исследователя
как раз интересует быстро меняющаяся составляющая. Так, на-
пример, в экономике важной является проблема изменения тех
или иных показателей на общем медленно изменяющемся фоне.
В задачах, которые возникают в экологии, многие вопросы свя-
заны с кратковременными вспышками рождаемости или смерт-
ности отдельных популяций й т. д. Подобные явления требуют
изучения пограничных функций, и аппарат, развитый в этой гла-
ве, во многих из подобных случаев оказывается полезным.
Изложенная в этой главе схема упрощения систем уравне-
ний (и построение на ее основе быстрых алгоритмов) является
эффективным методом предварительной обработки задачи —
этапом, который необходимо должен предшествовать любому'
имитационному эксперименту,
Г л а в a VI
МЕТОДЫ ТЕОРИИ ВОЗМУЩЕНИИ В ЗАДАЧАХ
ОПТИМАЛЬНОГО УПРАВЛЕНИЯ
§ 1. Простейшие схемы теории возмущений
а) Предварительные з амеч а н и я. Одной из цент-
ральных задач системного анализа является проблема замены •
точной модели изучаемого процесса более простой моделью. Об
этом мы уже говорили и будем еще возвращаться к различным
вопросам, которые относятся к проблеме перехода к,простым
моделям и создания на их основе быстрых алгоритмов.
Эта проблема — многоплановая. А. Н. Крылов, один из круп-
нейших русских инженеров, основатель первой советской школы
вычислительной математики, любил повторять фразу, смысл
которой был примерно следующий: «Недостаточная точность
вычислений — это ошибка. Избыточная точность —это половина
ошибки». Следовательно, точность вычислений должна быть со-
гласована с точностью используемой информации, с возможно-
стями проведения эффективных расчетов и; самое главное, с
потребностями практики.
Другой аспект, проблемы —это быстрые алгоритмы, с по-
мощью которых делаются'первоначальный эскиз проекта, оцен-
ка и выбор множества допустимых решений, предварительная
оценка эффективности плана и т. д.
Еще одна группа вопросов связана с изучением точности
быстрых алгоритмов: в какой степени результаты, полученные
с помощью упрощенных моделей, соответствуют реальности.
Развитию аппарата, с помощью которого удается решать эти
проблемы, были посвящены две предыдущие главы. В этих гла-
вах мы изучали разнообразные вопросы, относящиеся к пове-
дению решений обыкновенных дифференциальных уравнений в
зависимости от изменения некоторых малых параметров. Од-
нако до сих пор мы обсуждали'воцросы анализа неуправляемых
систем, содержащих параметры, тогда пак проблемы зависи-
мости решений от параметров особенно актуальны именно в за-
дачах теории управления: часто замена одной оптимизационной
модели другой, более простой? может сократить объем вычисле-
ний на несколько порядков.
К сожалению, прямое использование изложенных выше ме-
тодов анализа асимптотических свойств решений не всегда воз-
можно в задачах оптимального управления. В таких проблемах
348 ГЛ. VI. МЕТОДЫ ТЕОРИИ ВОЗМУЩЕНИИ
«
возникают новые особенности и трудности, требующие адапта-
ции существующего аппарата к новому классу задач.
В этой главе мы рассмотрим некоторые примеры, иллюстри-
рующие эти особенности, причем основное внимание будем уде-
лять построению теории возмущений, т. е. процедурам, которые
позволяют уточнить решение, полученное при нулевых значе-
ниях параметров.
Сначала будем изучать лишь те управляемые системы, для
которых управляющее воздействие при нулевых значениях па-
раметра считается известным.
Рассмотрим конечномерную задачу оптимизации
f(x,s)->min (1.1)
и обозначим через хф(е) вектор, который является ее решением.
Здесь возможны два совершенно разных случая: на вектор х
не наложено никаких ограничений (или есть ограничения типа
равенств) и наложены ограничения типа неравенств. Рассмот-
рим первый случай. Пусть, для определенности, вектор х не
ограничен или принадлежит открытому множеству. Тогда век-
тор х» должен удовлетворять уравнению
А^>.| (1 2)
Решение уравнения (1.2) мы можем искать в виде ряда
X, (в) = X, (0) 4- 8X1 + 82Х2 4- ..
Так как ф(х»(0), 0) = 0, то вектор xi будет определяться фор-
мулой
Х1--{$(х.(0), °)- <L3> •
Заметим, что выражение x*(0)4-sxi с точностью до малых вто- •
рого порядка совпадает с формулой метода Ньютона, если при-
нять в качестве начального приближения х»(0). Покажем эта,
Положим х = х*(0)4-6х и перепишем уравнение (1.2), отбро*
сив малые порядка О[(6х)2]:
<р (х, в) = <р (х, (0), в) 4- 4? <*• $ 6х = °’
откуда
Ьх— — (х, (0), в)| ’ ф (х» (0), е).
Но % (х, (0), 8) = (х, (0), 0) 4- о (8) и Ф (X, (0), в) = ф (х, (0), 0) +
4- О(е), откуда и следует, что
х, (0) 4- 6х = х, (0) 4- exi 4- О (в2).
J I. ПРОСТЕЙШИЕ СХЕМЫ ТЕОРИИ ВОЗМУЩЕНИЙ
349
Таким образом, в этом (регулярном) случае теории возмущений
могут строиться стандартным способом разложения в ряд по
малому параметру. Если же, кроме того,-функция ф(х, в) яв-
ляется аналитической функцией параметра е, то ряды вида
х = х, + exi + 82х2 + . • •
сходятся для достаточно малых значений е. Таким образом,
малым значением е отвечают малые изменения величины х(в),
являющейся решением задачи (1.1).
Совершенно иная картина иМеет место тогда, когда вектор
х(е) ограничен условиями типа неравенств: проведенные выше
рассуждения становятся неприменимы. В самом деле, вектор
х = х,(0)-|- 8X1, где xi вычисляется по формуле (1.3), может
оказаться за пределами области, удовлетворяющей ограниче-
ниям, поэтому использование метода малого параметра в этой
ситуации требует разработки специальной техники (например,
введения функций штрафа). Еще большие трудности мы встре-
чаем в задачах оптимального управления. В настоящее время
известно лишь несколько классов задач управления, содержа-
щих параметры, для которых могут быть развиты регулярные-’
методы теории возмущений. Их изложение мы начнем с анализа
двух простейших примеров.
б) Слабоуправляемые системы. Этим термином
мы условимся называть системы, которые перестают быть уп-
равляемыми при нулевом значении параметра. Типичным пред-
ставителем таких систем является система
х = f(0) (х, 0 -г ef<n(x, t, и), (1.4).
где управление и фазовая траектория подчинены условиям
u^U, (1.5)
х(О) = хо. . (1.5')
Здесь 8 — малый параметр, a U — некоторое ограниченное мно-
жество.
Для этой системы рассмотрим задачу Лагранжа: определить
функции и(1) и x(f), удовлетворяющие условиям (1.4), (1.5),
(1.5') и доставляющие минимум функционалу
т т
J(u)=\F (х, и) dt = J {Я°> (х) 4- вЯ» (х,«)} dt, (1.6)
о о
где^Т—фиксированный момент времени. Фазовую траекторию
этой задачи будем искать в виде
Х = Х(0) + 8Х(,).
380 - ’гл. VI. МЕТОДЫ ТЕОРИИ ВОЗМУЩЕНИИ
Отбрасывая в уравнении (1.4) члены порядка 0(e), получим
для функции х°(/) систему уравнений
которая не содержит управления и для которой начальные
данные .
/ = 0, х(0) = хо
однозначно определяют траекторию х(0)(/). Уравнение для xw,
которое мы получим из (Г.4) отбрасыванием величин порядка
О (в2), имеет вид
F=f®xm+f™ (*“,», о (1.7)
и содержит управляющую функцию и, которая должна быть
выбрана из условия минимума функционала (1.6).
Функционал мы также преобразуем, удержав в нем линей-
ные члены относительно е: .
т
J == /<о> + eJ<o = (х<°>) dt 4-
• о
+ 4 (1.8)
О '
Итак, задача отыскания управления и е U и «поправки» к тра-
ектории xl(t) свелась к задаче отыскания минимума функцио-
- нала (1.8) при условии (1.7). Кроме того, функция %<’>(/) долж-
на удовлетворять нулевым начальным условиям
х(1)(0) = 0.
Рассмотрим эту задачу подробнее. Составим функцию Гамиль-
тона
и), (1.9)
где функция ф удовлетворяет уравнению
----+ . С'10»
Поскольку функция Гамильтона зависит от фазовой переменной
линейно, то уравнение для импульсов (1.10) не содержит
и может быть проинтегрировано независимо от уравнения
“(1.7).
' Особенности рассматриваемой задачи определяются в боль-
шой степени характером условий, которые заданы на правом
конце траектории. Мы остановимся на обсуждении только двух
крайних случаев: свободного конца и фиксированного конца
$ J. ПРОСТЕЙШИЕ СХЕМЫ ТЕОРИИ ВОЗМУЩЕНИЙ
351
траектории. В первом случае условие трансверсальности .нам
дает
ф(Г) = 0.
(1.11)
Во втором мы имеем условие на правом конце
х(Т) = хт,
(1.12)
где хт — заданный вектор.
В первом случае решение задачи Коши (1.10), (1.11) опре-
делит единственную функцию времени ф((), поэтому из прин-
ципа максимума Яфшах мы получим следующую задачу для
отыскания оптимального управления:
(ф,Л>) (х(0) /))-Я»(х<°>, и)-* max. (1.13).
и е U
В выражении (1.13) фазовая переменная х<*> отсутствует, т. е.
в этом случае мы находим решение задачи синтеза, поскольку
управление «(•) определяется независимо от значений вектор-
функции х<1>(/). Определив из условия (1.13) управление « =
— мы затем с помощью уравнения (1.7) определяем- фа-
зовую траекторию — функцию x(l)(f).
Примечание. При реализации машинного счета линеаризация задачи
и переход к систе'ме (1.7) могут привести к излишним затратам машинного
времени. Более простым может оказаться использование метода последова-
тельных приближений. Тогда на первом шаге после интегрирования уравнения
(1.10) мы рассматриваем уравнение
i = fw(x,0 + eP (х, u,t). (1.14)
Уравнение для импульсов ф содержит в этом случае фазовые переменные
и имеет вид *
' ф= - (X, t) ч- F® (х) + eF<*> (х, и). (1.15)
Заметим, что при интегрировании уравнения (1.15) следует положить всюду
х = х<°>, а члены с 8 опустить.
• Очень важным элементом анализа является оценка погреш-
ности, т. е. оценка разности между минимальным значением
функционала У* и тем его значением 1, которое мы получим опи-
санным способом приближенного вычисления. Заметим, что раз-
лйчные фазовые траектории (см.’ (1.4)) отличаются друг от
Друга на величины порядка 0(e), каковы бы ни были допу-
стимые управления и 6 U. Следовательно, и для функционала
У (и) , мы имеем такую же оценку:
У* = /+О(е). (1.16)
Однако, как показал А. А. Любушин [54]*), оценка (1.16) мо-
*) Общий случай задачи Майера для слабоуправляемых систем был рас-
смотрен Ф. Л. Черноусько [70].
352 ГЛ. VI. МЕТОДЫ ТЕОРИИ ВОЗМУЩЕНИЙ
жет быть существенным образом улучшена. Если для доста-
точно малых е решение уравнения (1.4) равномерно ограничено
для любых и е [/, то
Г = ] + о (в2).
Рассмотрим теперь второй случай — краевое условие (1.12).
Здесь ситуация оказывается значительно сложнее, поскольку
краевое условие для уравнения импульсов (1.10) отсутствует. ‘
Тем не менее- задача определения xw(t) и управления u(t)
проще исходной, поскольку уравнение для импульсов не содер-
жит фазовой переменной, следовательно, управление, которое
мы будем отыскивать с помощью условия (1.13), также явно
не будет зависеть от фазовой переменной. Эти обстоятельства
вносит известные упрощения в процедуру отыскания краевых
значений импульсов ф(0 (или ф(0)), обеспечивающих выпол-
нение условия (1.12).
Аналогично могут быть рассмотрены и другие оптимизацион-
ные задачи. Пусть, например, речь идет о задаче Майера с ли-
нейным функционалом
J = (c,x(T)).
Как известно, к задаче такого вида может быть сведена любая \
задача Майера. Для построения теории возмущений мы снова
положим
х = х(0)+ех(1) . (1.17)
И придем к задаче минимизации функционала А =(с,х(1)(Т))
при условии
Для отыскания управления мы будем иметь условие
(ф, f(1) (х(0>, м)) -* шах,
’ ueU ,
где
Ф = —Ф/х. Ф(7’) = — с.
Таким образом, и здесь мы находим управление независимо от
фазового вектора х<*>.
в) Другой подход к рассматриваемой задаче.
Исследуя слабоуправляемые динамические системы вида
x = f(x, ей), (1.18)
7 = /(х,еМ), (1.19)
мы использовали следующую процедуру расчета траектории и
управления: полагали справедливым представление (1.17),под-
ставляли его в уравнение (1.18) и функционал (1.19) и виде-
$ I. ПРОСТЕЙШИЕ СХЕМЫ ТЕОРИИ ВОЗМУЩЕНИИ 353
ляли члены, линейные по х(1). После этого составляли новую
вариационную задачу, в рамках которой мы находили управле-
ние и(0 и «поправку» к фазовой переменной xw(t). Но можно
поступать и иначе.
Рассмотрим систему (1.18), (1.Г9), где управление и фазо-
вая траектория подчинены условиям (1.5), (1.5'), а функционал
имеет вид
/ = Г(х(Г)). (1.20)
Для этой задачи составим функцию Гамильтона
Я = (ф,/(х,е«)) (1.21)
и уравнение для импульсов
ф=-4г=-^ <t22>
Искать решение будем в виде рядов
х* = х<°> + ех(1) + е2х(2) + ..., и = и<0) + е«(,) + в2а<2) + ...,
ф — ф<°) -|- еф<>) е2ф(2) _|_ t. ф
Подставляя эти ряды в уравнения (1.18), (1.22) и сравнивая
коэффициенты при одинаковых степенях е, получим уравнения,
которым удовлетворяют функции x(Z) и ф(/). В частности, для
функций х«» и ф(0) мы получим следующие уравнения:
i«»=f.(x<«),0), (1.23)
Ф<0)---/х(х(0),0)ф(0). (1.24)
Аналогично поступаем и с выражением для функционала:
Z = F(x«»(T))4-eJ1+82J2+ ...»
где
Jx=(c,^), с = (-|£-) , и т. д.
! 4 ах 'Х-Х®ХТ)
Функция ф удовлетворяет следующим условиям трансверсаль-
ности: ,
т ♦«-(<)„•
Так как
(irkr “ (1гХ_я(о) + 8 (^)я-х(о) ж<_° + • • * ’
f-T t-т
то для ф<°>(Т) мы получим, краевое условие
от—(£)_—»•
/-Т
12 Н. Н. Моисеев
ш
ГЛ. VT. МЕТОДЫ ТЕОРИИ ВОЗМУЩЕНИИ
Согласно (1.23) уравнение для ^°(t) не содержит управления
и однозначно определяет функцию х(0)(О по ее данным Коши.
Функция ф(0)(0 определяется только вектором Опреде-
лив х(0) и ф(0), мы находим управление м(0) из условия
. (Ф(0)»f (х(0), ?«.<0))) -* шах,
откуда следует, что управление и(0) не зависит от х(,). Таким
образом,, оба подхода дают в первом приближении один и тот
же результат. Тем не менее оба описанных способа анализа оп-
тимизационных задач с малым параметром не являются экви-
валентными. Так, например, составив систему уравнений (1.18),
(1.22), мы выпишем необходимое условие (если U—открытое
множество) в виде
5Г = 0' О'25’
Если правые части системы (1.18), (1.22) и уравнение (1.25)
аналитически зависят от параметра е, то мы оказываемся в ус-
ловиях, когда справедлива теорема Пуанкаре и можно предста-
вить фазовую траекторию и управление в виде сходящихся ря-
дов по степеням параметра е. Значит, в этих условиях разви-
ваемый метод анализа позволяет получить точное решение ис-
ходной оптимизационной задачи. В то же время схема рассуж-
дений, которая была изложена в п. б), дает возможность рас-
считать только первые поправки, т. е. построить простейший
вариант теории возмущений.
г) Локально оптимальные управления. В тео-
рии синтеза и в сложных системах управления большую роль
играют так называемые локально оптимальные управления.
Этим термином мы будем называть управления, которые выби-
раются в каждый данный момент времени из условия минимума
некоторой скалярной величины. Существует много различных
видов локально оптимальных управлений, мы приведем лишь
два примера. Предположим, что речь идет об управлении систе-
мой, движение которой.описывается уравнением
х — f (х,«),
? обозначим через, z = z(0 фазовую траекторию программного
Движения. Предположим еще, что в силу тех или иных обстоя-
тельств система сошла с программной траектории развития и
в некоторый момент t = t0 x(t0)=^=z(t0). Значит, мы должны
использовать корректирующее управление и так^ чтобы система
вернулась на программную траекторию. Введем скалярную
функцию
f - (1-26)
§ t. простейшие схемы теории возмущении
365
где R— некоторая симметричная положительно определенная
матрица, a y = z — х. Тогда локально оптимальным управле-
нием будет такое управление, которое в каждый момент вре-
мени минимизирует производную dF'/dt, т. е.
f <‘.27)
Функция (1.26) определяет «расстояние», которое отделяет ре-
альное положение системы от его программного значения. Та-
ким образом, смысл управления, определяемого условием (1.27),
совершенно очевиден: в каждый данный момент времени «мак-
симально уменьшить» это расстояние.
Еще один пример локально оптимального управления нам
дает теория терминального управления, т. е. управления по ко-
нечному состоянию. Предположим, что цель управления — дости-
жение некоторого вполнё определенного конечного состояния
х(7’) = хг.
Введем функцию, характеризующую «расстояние» до цели уп-
равления, в виде
F (х) = у [(х — хт), R (х — Ху)] (1.28)
и будем выбирать управление из условия
—>min. (1.29)
(Заметим, что задача с целевой функцией вида (1,28) возникает
также и при построении эффективных алгоритмов теории бы-
стродействия.)
Локально оптимальное управление, определяемое из условия
типа (1.29), и оптимальное управленце в задаче
t — Т, F(x)-+ min,
где F(x) определяется формулой (1.28), а изменение фазовой
переменной следует уравнению
x = f(x,u), (1.30)
в общем случае могут не иметь между собой ничего общего.
Тем не менее в случае задачи Майера для систем вида (1.18),
которые мы условились называть сл.абоуправляемыми, локально
оптимальные управления являются асимптотикой для оптималь-
ных управлений и могут быть использованы для приближенного
представления оптимальных управлений. Этот факт, по-види-
мому, впервые «экспериментально» обнаружил В. Н. Лебедев
1»2]. Решая сложные задачи оптимизации траекторий косми-
12»
356
ГЛ. VI. МЕТОДЫ ТЕОРИИ ВОЗМУЩЕНИЙ
ческих аппаратов, снабженных двигателем малой тяги (солнеч-
ный парус или электроядерный двигатель), он обнаружил, что
точное решение, которое требует многих часов машинного вре-
мени, хорошо аппроксимируется локально оптимальным управ-
лением. Расчет траектории аппарата, который управляется по
принципу локально оптимального управления, требовал не-
скольких секунд машинного времени, обеспечивая точность,
вполне соответствующую и требованиям практики, и точности
исходной информации.
Позднее этот факт был строго доказан Ф. Л. Черноусько
[70]. Проведем, следуя в основном Ф. Л. Черноусько, рассуж-
дения, показывающие, что локально оптимальные управления
являются аппроксимацией оптимальных управлений в тех слу-
чаях,'когда управляющие воздействия малы.
Итак, предположим, что управляемое движение описывается
уравнением (1.1В).-Считая, что функция f непрерывно диффе-
ренцируема по обеим переменным, перепишем уравнение (1.18)
в виде
х = / (х, 0) + eBu + О (в2), (1.31)
где В = (-2ЦЬЙ.) .
V ду- )yaD
и отбросим малые второго порядка.
Рассмотрим теперь уравнение
х = /(х,0),
которое’описывает неуправляемое движение. Будем считать, что
его общий интеграл имеет вид
х = Чг(/,с), (1.32)
где-'С—вектор произвольных постоянных. Выражение (1.32)
мы можем рассматривать в качестве формулы замены перемен-
ных. Переходя от переменной х к переменной с в уравнении
(1.31), Mli можем получить новое уравнение. Для этого вычис-
лим
- dV _ дЧ , дЧ de
dt ~~ dt + дс dt *
Но Чф, с)—это интеграл уравнения x = f(x, 0), т. е. функция
Т удовлетворяет этому уравнению тождественно по с:
Таким образом,
-7(^,0).
d*_________f ля 01-4- № —
dt ~ dt — / дс dt ’
Но, с другой стороны,
^ = /(х,0) + вВИ.
§ Т. ПРОСТЕЙШИЕ СХЕМЫ ТЕОРИИ ВОЗМУЩЕНИЙ 357
Таким образом, новая подсменная с удовлетворяет следующему
уравнению:
(1.33)
Выпишем теперь функционал:
F (х (Г)) = F OF (Г, с (Г))) = F* (с (Г)). (1.34)
Итак, мы свели исходную задачу к задаче минимизации функ»
цирнала (1.34) при условии (1.33) и при этом допустили ошибку
порядка О (в2). Решение последней задачи мы будем искать
в виде
с = со + ес1 + О (в2),
где Со — это некоторый постоянный вектор, a Ci удовлетворяет
уравнению .
<=(£).->• <1ЗД
Преобразуем функционал (1.34):
Пе(Г»-^(й) + (в(^Ц1 d (Dj + Ote2).'
Итак, мы пришли к задаче определения управления, достав-
, ляющего минимум функционалу
при условии (1.35). Составим для этой задачи функцию Га<
мильтона
и уравнения для сопряженных переменных
+(7)=-8(4£l)e_d
Отсюда сразу видно, что
Яя!_Ж) , Ви\ /
Из принципа максимума следует, что управление должно быть
выбрано из условия
' ((Ти.(^-)Д «“)-” <“’
* и е U
Построим теперь локально оптимальное управление для си»
стемы (1.33), помня, что при ее составлении мы допустили
ошибку порядка О (в2).
358
ГЛ. VT. МЕТОДЫ ТЕОРИИ ВОЗМУЩЕНИИ
Согласно сказанному, локально оптимальное управление бу-
дет определено из условия
dF*
~dF~*mm.
Но
<137>
Сравнивая выражения (1.36) и (1.37), мы видим, что они от-
личаются лишь множителем е.
Итак, для локально оптимального управления и* справед-
лива оценка
7(и‘) = /+ О(е2)',
где J — оптимальное значение функционала. Таким образом, ло-
кально оптимальное управление тем ближе к оптимальному,
чем слабее корректирующее управление, т. е. чем меньше в.
Итак, локально оптимальные управления — это один из важ-
ных инструментов для построения быстрых алгоритмов при ре-
шении задач оптимального управления. Использование локаль-
но оптимальных управлений не только дает способ построения
управления, близкого к оптимальному, для широкого класса за-
дач. Локально оптимальные управления могут еще служить в
качестве первого приближения в различных итерационных схе-
мах,. поскольку они являются допустимыми. Так как корректи-
рующие управления обычно малы, то локально оптимальные
управления могут использоваться и при проектировании систем
•обратной связи.
д) Использование метода прогонки. Варианты
теории возмущений, которые были изложены в предыдущих
пунктах этого параграфа, являются достаточно удобными для
решения задач со свободным концом. Но все необходимые рас-
четы крайне усложняются, когда координаты правого конца
траектории должны удовлетворять дополнительным условиям.
В этих задачах целесообразно модифицировать приведенные
выше рассуждения.
В гл. II был изложен один приближенный метод -решения
оптимизационных задач, который использовал процедуру, позво-
ляющую свести эти задачи к последовательности краевых задач
для линейных дифференциальных уравнений. А поскольку по-
добный класс краевых задач» допускает регулярные методы ре-
шения с помощью устойчивых прогоночных схем, то для тех
оптимизационных задач, которые можно свести ..к линейным
краевым задачам, мы получили эффективные численные ме-
тоды решения. Этот подход может быть использован и в зада-
чах управления, содержащих малые параметры.
$ Т. ПРОСТЕЙШИЕ СХЕМЫ ТЕОРИИ ВОЗМУЩЕНИЙ
359
Рассмотрим задачу минимизации функционала
т
f (и) ==^F (х, и, в) dt
о
при ограничениях
х — f (х, и, в),
х(О) = хо, х(Т) — хт.
(1.38)
(1.39)
(1.40)
v Никаких других ограничений на выбор управлений и фазовых
траекторий мы не накладываем. Это означает, что либо этих
ограничений на самом деле нет, либо в процессе формирова-
ния функционала /(м) мы ввели штрафные функции, с по-
мощью которых сняли эти ограничения. Спецификация краевых
условий (1.40) не является существенной. Рассуждения, которые
будут проведены ниже, легко распространяются и на другие
случаи задания терминальных ограничений. Функции F и f мы
будем считать дифференцируемыми функциями своих аргумен-
тов (нужное количество раз)*.
Предположим, что при 8 = 0 мы умеем решать задачу
(1.38) — (1.40). Это решение мы обозначим через г* и и*..Поло-
жим, далее,
х=х* + в^, а = м* + ео. (1.41)
Подставляя выражения (1.41) в уравнение (1.39) и удерживая
члены первого порядка относительно 8, получим уравнение от-
носительно у и v. •
$ = Ay + Bv + fR, (1.42)
где А
( dfW \
В = I —I — матрицы, a f. =
\ ди'" Jx-x*
и—и*
е-0
— вектор.
Функционал /(и) мы преобразуем несколько иначе. Подста-
вим в (1.38) выражения (1.41) и удержим в функционале (1.38)
члены до второго порядка малости включительно. Другими сло-
вами, мы представим функционал Ци) в виде •
/(и) = /*(«*)+в/(о, в)Ч-7,
где 7— совокупность членов, не зависящих от v. Вычислим ве-
личину Для этого разложрм функцию F(x, и, в) в ряд
360
ГЛ VI. МЕТОДЫ ТЕОРИИ ВОЗМУЩЕНИЙ
Тейлора, получим
F (х,и, в) = F (х* -F еу, и* + ev, е) =
0)+е(-9+£„+£)+4[(^)+
+ a*f и 4- a‘F v + Д£.1 + О (Л
’ дх де ' ди де де2 J + ' ' *
Поскольку производные вычислены при в = 0, то слагаемые
dF/de и d2F/de2 не содержат корректирующих управлений v
и поправок к фазовым переменным у и могут быть отброшены.
Следовательно, задача сведется' к минимизации функционала
г - -
7 (и, е) == jj {(а, у) + (b, с) + e[Q/, Сху) + (о, С2о) + (v, C3r/)]} dt.
(1.43)
. а
В выражении (1.43) приняты следующие обозначения: а и b —
dF . d2F . dF .
векторы с компонентами ai =—г + «—, Ьг = —г4-
F дх1 дх1 де 1 ди1
, d2F а r 1 / d2F \ r _ 1 ( d2F \ r _( d2F \ ,
ди‘ де ' 1 2 \ дх* дх*)' 2 2 \ ди1 ди* ) ’ 3 \dxz ди*)
+ (——Г1 — матрицы, причем ( )♦ означает транспониро-
\ ах‘ ди1 }
вание. Все эти величины вычислены при х = х*. и «е м* и 8 = 0.
Так как мы предположили, что при г = 0мы умеем решать
................. гранич-
должна
Так как мы предположили, что при а=»0 мы умеем
задачу (1.38)—(1.40), то функция х*(0 удовлетворяет
ным условиям (1.40). На этом основании функция y(t)
удовлетворять нулевым краевым условиям:
p(0) = z/(T) = 0. ' (1.44)
Итак, излагаемый вариант теории возмущений сводит отыска-
ние поправок к управлению о и фазовой траектории у к сле-
дующей оптимизационной задаче: определить минимум функ-
ционала (1.43) при ограничениях (1.42), (1.44). Это —задача
минимизации квадратичного функционала при линейных диффе-
ренциальных связях, которая хорошо изучена. Мы о ней под-
робно "говорили в гл. II: с помощью принципа максимума она
сводится к краевой задаче для линейной системы дифферен-
циальных уравнений. В самш; деле, составим функцию Гамиль»
тона задачи (1.42) — (1.44):
Я = (ф, Лр + В1>4-/в)-(ц, y)-(b, u) — s(y, Cty)~.
— в (», С2о) — в (v, Сзу).
§ I. ПРОСТЕЙШИЕ схемы ТЕОРИИ ВОЗМУШГПИИ 361
Уравнение, которому должен удовлетворять вектор импульсов,
будет следующим:
Ф =—= — Л*ф 4*'о Ч~ eCty 4- еСзо, (1-45)
У
где Ci==Ci + Cb Так как на управление мы не накладываем
никаких ограничений, то необходимое условие максимума функ-
ции Гамильтона будет иметь вид. - .
или
В’ф — Ь — еС3у — eC2v = 0, (1-46)
где Сг^Сг + Сг. Из уравнения (1.46) следует, что упрайление
и будет лйнейной функцией фазовой переменной у и импульса ф:
o = d4-D1^+D2,’l’» , (1-47)
где d, Di и D2 — известные функций времени (d— вектор, Di —
матрицы). Подставляя выражение (1.47) в уравнения (1.42) и
(1.45), мы получим систему линейных дифференциальных урав-
нений относительно у и ф вида
у-ЛиУ4-Л12ф + А, ' (148)
ф = АцУ + Лггф + /2.
Для этой системы уравнений мы должны решить краевую за-
дачу (1.44). В гл. 1Г была подробно изложена устойчивая
схема прогонки, с помощью которой задача (1.44), (1748) сво-
дится к задаче Коши и, следовательно, рещаетсй регулярным
способом. ‘
Примечания. 1. Мы сделали предположение о том, что при е = 0
известно точное решение исходной задачи. При решении прикладных задач
это предположение- обычно можно ослабить. Например, в качестве начального
Приближения х*, и* мы можем принять траекторию, которая переводит си-
стему не в точку хт> а в некоторую точку хТг Тогда для функции у вместо
Однородных условий (1.44) мы будем иметь
(* + zy)t = хТг
или
НП = (^-^т)/е. • (1.49)
Метод будет хорошо. работать, если величина (1.49) окажется «достаточно»
малой.
2. Поскольку развиваемая теория возмущений основывается на линеари-
зации задачи при конечном е (а не при бесконечно малом в), то, вообще
говоря, не очевидно, что всегда будет иметь место неравенство *
~ • J (и* + 80) < J (и*). (1.50)
Поэтому проверка условия (1.50) обязательна. Еслич окажется, что условие
(1.50) нарушено, то можно сделать попытку заменить управление и* + «о
862
ГЛ. VI. МЕТОДЫ ТЕОРИИ ВОЗМУЩЕНИЙ
управлением й = и* 4- ke.v, где k < 1. Но при этом, вообще говоря, могут
Нарушиться граничные условия. Таким образом, предлагаемый прием уточ-
нения оптимального управления не является (как и любая теория возмуще-
ний) универсальным.
3. Если f и F — аналитические функции-своих переменных, ~то на основе
изложенного может быть развита регулярная схема построения точного ре-
шения оптимизационной задачи. При этом то приближенное решение, которое
найдено с помощью метода, рассмотренного в этом пункте, может быть при-
нято в качестве первого приближения (а решение х*, и* — нулевого). Обозна-
чим это первое приближение через Xi и ui, т. е. Xi = х* 4- гу, ui — и* 4- во.
Обозначим еще точное решение нашей оптимизационной задачи через х** и
а**, а соответствующие значения функционала (1.38) через /*, Л и /**. Тогда,
используя теорему Пуанкаре, мы можем получить следующие оценки:
х* = х*’4-О (е), «*==«** 4-0(e), J* = Г» 4- О (в),
Xj = х’* 4-О (в2), «,=>«** 4- О (в2), У, =/*’4-0 (в2).
§ 2. Методы усреднения в задачах оптимального управления
а) Управляемые системы с вращающейся фа-
зой. Как мы видели в гл. IV, область применения методов ус-
реднения для анализа различных систем очень широка, и
прежде всего это системы с колеблющимися или вращающи-
мися звеньями. В гл. IV мы дали подробное изложение методов
расчета фазовых траекторий для систем, которые не содержали
управляющих воздействий.
В этом параграфе мы рассмотрим управляемые системы, ко-
торые содержат колеблющиеся или вращающиеся звенья. Рас-
сматривая вариационные задачи для таких систем, мы сталки-
ваемся с тем фактом, что л-система (или система уравнений
Л. С. Понтрягина), которую мы получаем, используя принцип
максимума, будет содержать- как быстрые, так и медленные
переменные. Эта особенность понтрягинской системы резко ус-
ложняет эффективное отыскание экстремумов, так как она по-,
рождает так называемые овражные эффекты. Поэтому про-
блема разделения быстрых и медленных движений в управляе-
мых системах еще более актуальна, нежели в системах неуправ-
ляемых.
Рассмотрим типичный пример управляемой системы с колеб-
лющимся звеном,/аналогичный тем примерам, с помощью кото-
рых мы демонстрировали алгоритмы разделения движений в
гл. IV. Обозначим через z(t) вектор, описывающий медленное
изменение «фона»:
z = eZ(z, а, и), (2.1)
где а — осциллирующая скалярная компонента, уравнение ко-
торой мы будем писать в виде
a + Q2(z)a = f(z, о). (2.2)
« 2. МЕТОДЫ УСРЕДНЕНИЯ
363
Здесь и и v — управления. Будем считать, что частота Q до-
статочнр велика. Примем, например, что
Q = <в/е. (2.3)
Введем переменные Ван-дер-Поля
а = х cos у, а = —Qx sin у. (2.4)
Условие совместности формул (2.4) имеет вид
' х. cos у — ху sin у = — Qx sin у. (2.5)
Дифференцируя второе из выражений (2.4) и подставляя ре-
зультат в уравнение (2.2), получим еще одно уравнений относи-
тельно хну: '
— xQ sin у — yQx cos у = Ох sin у + f (z, о) — О2х cos у. (2.6)
Разрешая уравнения (2.5) и (2.6) относительно х и j, мы
придем к системе уравнений
. f (z, v) . Q . ,
x==_' sm^— o-xsm y,
u u (27|
У = О — ( sin у cos yQ + --у--- соз^).
Используя соотношение (2.3) и принимая во внимание, что
a dQ dz z dco
q = <й=-37’
приведем систему (2.7) к виду
х = еХ (х, у, z, и, v), у = О + вК (х, у, z, и, о), (2.8)
где
v f(z,v). в/ .,~
x=s—-L^-Lsiny— — xsin2yz,
• Y = — ( sin г/, cos yazZ + (cos у ).
.После введения переменных Ван-дер-Поля уравнение (2.1)
примет вид.
z = eZ (г, х cos у, и). (2.9)
Если считать и и v заданными величинами, то система (2.8),
(2.9) относится к системам стандартного вида, где переменные
z и х —медленные, а // — быстрая, причем правые части си-
стемы уравнений (2.8), (2.9) являются периодическими функ-
циями от быстрой переменной у с периодом 2л.
Для системы (2.8), (2.9) могут формулироваться различные
вариационные задачи, при этом наиболее естественные и часто
встречающиеся постановки вариационных задач будут- содер-
864
' ГЛ. VI. МЕТОДЫ ТЕОРИИ ВОЗМУЩЕНИИ
жать прежде всего* функционалы от медленных переменных. На
таких задачах мы и остановимся. Не ограничивая общности, бу-
дем рассматривать задачи с линейным терминальным функцио-
налом.
Итак, мы будем изучать вариационные задачи вида
У(м) = (с, x(T))->min (2.10)
при ограничениях
х — еХ (х, у, и), */= ® (х) + еУ (х, */, ы), (2.11)
где х (медленная переменная) —вектор-функция размерности
п, а у — скалярная функция. Вектор с задан своими компонен-
тами с<')( причем не все = 0, поэтому на правый, конец тра-
ектории могут быть наложены дополнительные ограничения.
Примечание. Существенным обстоятельством здесь является то, что
управление может входить как в «быстрые», так и в «медленные» уравнения.
Так, например, если речь идет о системах типа самолет — автопилот, то упра-
вляющим воздействиям подвергается прежде всего быстрая переменная: по-
ворот рулей высоты, например, изменяет угол атаки, вокруг которого про-
исходят колебания самолета. Медленная переменная — траектория — также
изменится, . но это уже будет следствием изменения быстрой переменной.
В экономических или экологических системах, наоборот, чаще встречается си-
туация, когда мы воздействуем целенаправленно на медленно изменяющийся
фон, например меняем структуру инвестиций.
б) Прямое усреднение. Итак, пусть речь идет о ре-
шении задачи (2.10), (2.11). Первый и, вероятно, наиболее
естественный путь ее решения состоит в том, чтобы прежде, чем
искать экстремум функционала (2.10), попытаться по возмож*
ности упростить исходную задачу. Но на этом пути возникает
целый ряд специфических проблем. В самом деле, предположим
сначала,- что функция и —заданная функция времени (или фа-
зовых координат). Например, u = u(t). Тогда система (2.11)
примет вид
х = еХ (х, у, и (0) — вХ (х, у, /), 12)
У = ® (х) + еУ (х, у, и (/)) = и (х) + иУ\х, у, t).
Правые части системы (2.12) содержат в явном виде еще одну
быструю переменную — время, причем функции X И ? в общем
случае не являются периодическими функциями от t. Таким об-
разом, нельзя непосредственно использовать для анализа си-
стемы (2.Г2) тот аппарат теории разделения движений, который
был изложен в гл. IV. Необходимо существенно модифициро-
вать теорию и приспособить е.е к анализу систем уравнений
типа (2.12). Но можно поступить и иначе, введя дополнительные
ограничения на характер изменения управлений. Предположим,
§ 2. МЕТОДЫ УСРЕДНЕНИЯ
366
например, что управление и —медленно меняющаяся функция
времени (и медленной переменной):
н = в£/(х, /). (2.13)
Тогда система (2.11) —(2.13), хотя формально и не является
системой стандартного вида, может быть изучена методами
гл. IV. А именно, мы можем разыскивать переменные х,у в виде
X = X + eg (х, у, и), у = у + 81) (х, у, и), (2.14)
где х и у удовлетворяют уравнениям
х = бА(х, у, и), у = ©(х) 4- еВ(х, у, и). (2.15)
Используя преобразование (2.14) и формулы (2.15), мы можем
развить метод последовательных приближений, совершенно ана-
логичный тому, который был изложен в гл. IV. В результате
мы заменим исходную систему уравнений некоторой другой, в
которой проведено ус^днение по быстрой переменной у. Если©
зависит от х, то система первого приближения будет следую-
щей: __
х = еХ (х, и),
(2.16)
U — &U (t, х).
Если © не зависит от х, то для обеспечения одинаковой точ«
ности при определении всех переменных второе уравнение си-
стемы (2.16) должно быть заменено уравнением
= о + eF (х, «). (2.17)
Метод, который позволяет сводить исходную систему (2.11),
(2.13) к системе (2.16), естественно назвать методом частичного
усреднения. Если речь идет об исследовании системы (2.11),
(2.13), в которой функция U считается заданной функцией вре-'
мени, то схема частичного усреднения носит асимптотический
характер и ее обоснование не встречает каких-либо затруд-
нений.
Итак, предлагаемый путь исследования задачи оптимального
управления для системы (2.11) состоит в переходе от исходной
системы (2.11) к укороченной системе вида (2.15) или (2.16)
(уравнение для у может иметь вид (2.17)). Затем вариацион-
ная задача (2.10) решается уже при этих’, новых ограничениях.
В какой степени оправдана подобная операция? Ответ на
этот вопрос требует специальных и трудных исследований.
Прежде всего, заметим, что из близости решений систем (2.11),
366
ГЛ. VI. МЕТОДЫ ТЕОРИИ ВОЗМУЩЕНИИ
(2.13) и (2.16) не следует, в общем случае, близость соответ-
ствующих оптимальных значений функционала (2.10). В самом
деле, утверждение об .асимптотическом характере системы
(2,16) основывается на том предположении, что управление и
не только известная функция, но и имеет специальный вид, опи-
сываемый формулами (2.13), т. е. является медленно меняю-
щейся функцией времени. Что же касается исходной задачи оп-
тимального управления, то функция и, реализующая экстремум
функционала, может оказаться совсем иной природы. Кроме
того, система усредненных уравнений в первом приближении
может вообще не содержать тех или иных управляющих воздей-
ствий. Следовательно, говорить о строгом характере рассмот-
ренной процедуры частичного усреднения для решения задач-
оптимального управления нельзя, и нетрудно привести примеры, '
когда «описанная схема рассуждений приводит к определению
таких управлений и такого значения функционала, которые ни-
как не могут рассматриваться в качестве асимптотических при-
ближений. К сожалению, до настоящего времени нет каких-
либо работ, содержащих оценки функционала, вычисленного
с помощью процедуры частичного усреднения (в зависимости
от величины е).
Тем не менее существует довольно много конкретных задач,
которые успешно решались на основе усреднения исходных
уравнений по быстрой переменной у. Причина этого факта со-
стоит, прежде всего, в том, что экстремумы функционалов в
реальных задачах бывают, как правило, достаточно размыты,
и поэтому нет необходимости решать эти задачи с высокой точ-
ностью. Нб при этом, правда, должно быть выполнено одно
условие, исходная система уравнений должна' быть заменена
такой приближенной системой, в которой бы сохранились все
управляющие воздействия. Например, если управляемой яв-
ляется быстрая переменная у, а параметр со не зависит от х, то
мы можем ограничиться первым приближением. В противном
случае, т. е. когда <в = (о(х), нам уже потребуется использо-
вать второе приближение, поскольку в первом приближении си-
стема может оказаться неуправляемой. Если неуправляема бы-
страя переменная; то всегда можно использовать только первое
приближение.
Кроме того, мы видели, что усреднение имеет смысл лишь
тогда, когда управления представляют собой медленно меняю-
щиеся функции. Поэтому, решив задачу с помощью системы
(2.16), мы должны затем убедиться в том, что производные ис-
комых функций «(/) действительно малы. Если это так, то
можно надеяться, что управление, найденное при помощи ус-
реднения системы (2.11), есть некоторое допустимое управле-
ние, близкое к оптимальному по значению функционала.
§ 2. МЕТОДЫ УСРЕДНЕНИЯ
367
Но может быть и другая ситуация, когда производные уп-
равляющих функций окажутся большими.-Более того, они мо-
гут быть и бесконечно большими, поскольку оптимальные уп-
равления могут оказаться кусочно непрерывными. Поэтому в
подобных случаях необходимо рассмотреть аппроксимирующие
управления. Пусть, например, и — скаляр. Введем при помощи
уравнения
й = вф(0, (2.18)
где |<р| <₽*, новое управление <p(/), a u(t) отнесем к числу
фазовых координат. Предположим теперь, что вместо исход-
ной оптимизационной задачи мы можем эффективно решать за-
дачу оптимального управления, в которой в качестве искомых
управлений выступает функция <р(?), для любого значения ср*.
В результате получим значения функционала J как функции
величины <р*: •
/ = /(Ф*).
Если окажется, что функция /(ф*) не сильно изменяется вместе
с изменением ф*, а значение функционала У(ф*) мало отличает-
ся от найденного ранее с помощью системы (2.16), то исполь-
зуемая процедура усреднения представляется оправданной.
Примечание. Построение аппроксимирующих управлений с помощью
решения вспомогательных вариационных задач, разумеется, достаточно трудо-
емко. Но при этом можно использовать любую процедуру аппроксимации, тем
более что аппроксимируемое управление нами уже найдено. Единственное
условие при этом состоит в том, чтобы было выполнено неравенство
| й 1 < еф*. (2.19)
Итак, предположим, что мы перешли к усредненной системе
(2.16). Составим для этой системы необходимые условия в фор-
ме принципа максимума. Функция Гамильтона будет иметь вид
(для определенности мы рассмотрим тот случай, когда ш не за-
висит от х)
Н = в (ф, X (х, «)) + U + еЛУ (х, и), (2.20)
где ф— вектор импульсов, относящийся к переменной х, а % —
импульс, соответствующий переменной у. Поскольку функция
Гамильтона не содержит у, то Л=— дН/ду = Ъ, т. е. Х =
= const. Если, кроме того, терминальный функционал не содер-
жит у и на Х(Т) не наложено никаких условий, то %(7’) = 0>
следовательно, Х = 0. При этом функция Гамильтона Н не за-
висит от управления, которое входит в уравнение для быстрой
переменной, и представляется в виде
Я = в(ф,Т(х,ы)).
Значит, в этом случае задача сводится только к управлению
медленным движением. Следовательно, если мы предполагаем
368
ГЛ. VI. МЕТОДЫ ТЕОРИИ ВОЗМУЩЕНИИ
использовать управление быстрыми движениями в задаче рас-'
сматриваемого нами‘типа, то метод частичного усреднения при-
менен быть не может. Если же мы хотим управлять с помощью
функции и только медленным движением, а функционал имеет,
вид (2.10), т. е. J = (с, х(Т)), то'исходная вариационная За- -
дача сводится к следующей краевой задаче:
а = &х (х, и),
ф — — ефХх (х, и), (2.21)
х(0) = хо,- Ф (Т)= — с,
причем управление и определяется при помощи принципа мак-
симума _
(ф, X (х, и)) -> max. (2.22)
ие0«
Так как система уравнений (2.21) содержит только медленно
меняющиеся переменные, то процесс численного решения этой
задачи достаточно устойчив и может быть реализован, напри-
мер, с помощью схемы Крылова — Черноусько. При этом, если
исходная система уравнений имеет порядок п-|-1 (п — размер-
ность вектора медленных переменных), то размерность системы
(2.21) равна 2п.
в) Анализ понтрягинской системы. Можно по-
дойти к анализу рассматриваемой проблемы и с совсем иной
точки зрения. Вместо того, чтобы сначала упрощать систему, а
затем уже изучать задачи управления, можно сначала выписать
необходимые условия в форме принципа максимума, свести
исходную задачу к краевой, а затем приближенно решить по-
лученную краевую задачу с помощью, метода усреднения. В ча-
стности, такой подход рассматривался в работах [37,38].
Составим функцию Гамильтона для системы (2.11):
н = 8 (ф, X (х, у, и)) + Ал» + 8АУ (х, у, (2.23)
где ф и А. имеют тот же смысл’, что и в предыдущем пункте.
Управление и может быть определено из принципа максимума
Н (х> У, Ф> А., и) -* max, (2.24)
иеои
что нам дает
и — Ui (х, у, ф, А,, в). ’ (2.25)
Сопряженные переменные ф и А. удовлетворяют .уравнениям
ф = — ^ = —{«ФА’* + Ало* + еА,Ух},
лн (2.26)
* — &--------8{ф^4-А.У,}.
§ 2. МЕТОДЫ УСРЕДНЕНИЯ
369
Поскольку мы условилг_ изучать терминальный функционал
в форме (2.10), то условия трансверсальности имеют вид
а|)(Г) = -с, Л(Т) = 0. (2.27)
Систему
. дН . дН L дН ' 1 дН
х==дф’ У = дХ' ^ = -5Г’ х==-37
мы условились называть понтрягинской (или л-системой). Как
показывают формулы (2.26), для системы с вращающейся фа-
зой (2.11) л-система уже не является системой с вращающейся
фазой, поскольку импульс ф нельзя рассматривать в качестве
медленной переменной — правая часть уравнения для ф содер:
жит величину Хю*, которая может быть порядка единицы, л-си-
стему нельзя также рассматривать и как систему с двумя вра-
щающимися фазами, поскольку после замены управления его
выражением (2.25.) правые части системы (2.11), (2.26) не бу-
дут периодическими функциями импульса ф.
Тем не менее условия трансверсальности (2.27) (тот факт,
что %(Т) = 0) позволяют свести систему (2.11), (2.26) к стан-
дартному виду систем с вращающейся фазой. В самом деле,
поскольку мы рассматриваем автономные системы (не завися-
щие явно от времени), то функция Гамильтона является пер-
вым интегралом, т. е. вдоль траектории системы (2.11) выпол-
няется условие
- . Н (к, у, ф, %, в) = const.
Это условие мы можем переписать так:
Н (х, у, ф, X, е) |, = И (х, у, ф, %, е) |г.
В силу> условий трансверсальности (2.27) и с учетом (2.23) мы
будем иметь для любого и е Gu
Это означает, что значения функции Гамильтона в задачах опти-
мального^управления системами с вращающейся фазой имеют
порядок е. Поэтому мы можем представить выражение для
функции Н в виде
е (ф, X) -j- Лео + = eft, (2.28)
где Л — некоторая постоянная.
Условие (2.28) позволяет исключить переменную X:
X = С(А~УЦ = 8<7 (х, у, ф, ft, в), (2.29)
(О <5* •
т. е. X имеет порядок 8. Выражение (2.29) не содержит управ-
ления, поскольку мы предполагаем, что оно исключено с по-*
мощью формулы (2.25). Исключив управление из других урав-
370 ГЛ. VI. МЕТОДЫ ТЕОРИИ ВОЗМУЩЕНИИ
нений и используя формулу -(2.29), мы приведем систему (2.11),
(2.26) к виду
х — &Xi (х, у, ф, h, в),
у = (0 (х) + еУ! (х, у, ф, й, в), . (2.30)
♦ — — г (Ф, ХО — е®ж<7 + О (в2).
Система (2.30) уже является стандартной системой с вращаю»
щейся фазой. Ее порядок равен 2л + 1, и для этой системы мы
имеем следующие краевые условия:
х(О) = хо, 'У(®) = Уо, ty(T) = — c. (2.31)
Итак, с помощью первого интеграла Н — eh мы понизили по-
рядок системы на единицу, но при этом постоянная h заранее
неизвестна. Поэтому решение краевой задачи (2.30), (2.31) бу-
дет зависеть от h как от параметра: x = x(t,h), y=(t,h),
ф = ф(/, й). Меняя й, мы будем получать различные значения
функций х, у и ф. Для определения постоянной й можно со»
ставить уравнение
Н\т = Н(х(Т, й), у(Т, й), ф(Т, й), в) = й. (2.32)
Это — сложное трансцендентное уравнение, в котором значения
входящих в него функций определяются через решение краевой
задачи (2.30), (2.31). Как и для всякого трансцендентного
уравнения, можно ожидать, что условия его разрешимости мо-
гут оказаться весьма сложными. Но если предположить, что
исходная задача оптимального управления разрешима, то и
уравнение (2.32) должно иметь по меньшей мере одно решение.
Более того, как показано в работе [18], уравнение (2.32) всегда
допускает много решений. Это происходит вследствие осцилли-
рующего характера функции у.
Таким образом, краевая задача (2.30), (2.31) имеет не-
сколько 'решений. Значит, для определения решения задачи
оптимального управления нужно выбрать такой корень уравне-
ния (2.32), которому отвечает минимум функционала.
Поскольку система (2.30) является стандартной системой с
вращающейся фазой, то мы можем провести в ней усреднение по
у, т. е. заменить систему (2.‘30) системой
х = ъХ1(х, ф, й, в),
у = <о (х), (2.33)
ф = —8фХ1* (х, Ф, Й, 8) — 8СО*(х) q (х, ф, Й, 8)'.
Для системы (2.33) мы имеем краевые условия (2.31), причем
уравнение для у может быть проинтегрировано независимо от
§ 2 МЕТОДЫ УСРЕДНЕНИЯ
371
остальных. Таким образом, формально мы имеем краевую за-
дачу для системы, порядок которой равен 2п. Однако параметр
h остается неопределенным, и для его определения мы должны
еще решить трансцендентное уравнение (2.32). Тем не менее
ситуация существенно упрощается в силу того, что нам надо
определить решение этого уравнения с точностью до величин
порядка е. Как показано в упомянутой работе [18], значения
этих корней тоже отличаются на величину порядка е, т. е. нам
достаточно найти приближенное значение лишь для одного из
корней.
Если мы обозначим точное решение исходной задачи через
X, д, й,.ф, то изложенная процедура усреднения дает погреш-
ность, определяемую формулами
<е = х + 0(8),^ = ^-|-0(8), ф = ф + О(в), й = п + О(е), (2.34)
причем аппроксимация (2.34) равномерна на всем отрезке из-
менения независимой переменной t s [О, Т], а величина Т тем
больше, чем меньше е: Т = О(1/е).
В качестве примеров использования изложенного подхода
приведем решения двух простейших задач, взятых из цитиро-
ванных выше работ [37, 38]. Заметим при этом, что существен-
но упрощает процедуры усреднения свойство л-систем, согласно
которому для широкого класса задач (в которых существуют
скользящие и особые решения) усреднение можно производить
следующим образом: вначале усреднить функцию Гамильтона,
а затем воспользоваться гамильтоновой формой записи уравне-
ний, взяв в них в качестве функции Н ее усредненное значение.
1. Задача об оптимальном параметрическом
возбуждении. Колебательная система описывается уравне-
нием
а + (1 — ей) а = 0, (2.85)
где а — фазовая координата. На фиксированном интервале дви-
жения [О, Т] требуется найти управление u(t), удовлетворяющее
условию 0^и(0^1 и доставляющее в конечный момент Т
максимальное значение полной энергии системы
$(Л“т(аЧЛ + *2(П].
Используя переменные Ван-дер-Поля
a = xcosz/, a = —xsin#,
сведем уравнение (2.35) к стандартной системе
х = — гих cos у sin у, . .
у == 1 — ем cos2 у, * ' ’
372
ГЛ. VI. МЕТОДЫ ТЕОРИИ ВОЗМУЩЕНИИ
при ЭТОМ
g(T) = 4x2(T).
Таким образом, исходная задача эквивалентна минимизации ко-
нечной величины амплйтуды колебаний х(Г). Функция Гамиль-
тона для системы (2.36) имеет вид
Н = — ефхисоз у sin у + А — eAu cos2 у, (2.37)
а сопряженные переменные удовлетворяют системе
ф = ефы cos у sin у,
к = ехитр cos 2у — 2еки cos у sin у.
Для л-системы, состоящей из уравнений (2.36), (2.38), задаются
следующие краевые условия:
х(О) = хо, y(O)-j(o, Ф(Т) = -1, МЛ = 0. (2.39)
Из условия максимума функции Н, задаваемой формулой
(2.37), находим управление
и = 0 (— А — гф tg у). (2.40)
Здесь введена функция Хэвисайда: 0(г) = О при г < 0 и 0(z) =
= 1 при г > 0. Подставляя управление (2.40) в функцию Га-
мильтона (2.37) и усредняя ее по у, получим
2л
"-SrS +
0
Воспользуемся гамильтоновой формой записи уравнений. Учи-
’ тывая условия (2.39), получим, что в первом приближении
“%(/)з= 0, благодаря этому упрощается вид усредненной системы:
8 . , 8 : 8 ,
Х = -2ГХ’ =
Интегрируя эту систему с учетом (2.39), получим .
х(/) = хоехр(—ф(/) = —у (/) - г/0+(1 —t.
Подставляя найденное решение в (2.40), получим закон измене-
ния управления в форме синтеза:
M = 0(±tg#) = 0(=F^). (2.41)
Здесь в выражениях (2.41) верхний знак соответствует синтезу,
приводящему к оптимальному уменьшению, амплитуды, ниж-
нцй — к увеличению амплитуды.
• § 2. МЕТОДЫ УСРЕДНЕНИЯ
378
2. Оптимизация вращательных движений. Вра-
щательные движения математического маятника описываются
следующим существенно нелинейным уравнением:
у + и sin у = 0. . (2.42)
Требуется подобрать управление u(t) из интервала щ и иг
так, чтобы в конце движения угловая скорость вращений была
наименьшей. Считаем, что на протяжении всего процесса управ-
ления система совершает вращательное движение. Следуя
х используемому в предыдущих главах подходу, введем новые пе-
ременные х, т, Q соотношениями
-g—й + х, т = 4, 0-1,
где 8 1 — малый параметр; тогда получим следующую систе-
. му уравнение, эквивалентную (2.42):
dx . . du , .
j? = -eusiny, -^ = Ц-8Х.
Функция Гамильтона имеет вид
• ' Н — — еыф sin у + Л + Лех.
Выпишем закон управления, найденный из принципа максимума»
и усредненную функцию Гамильтона:
и = «10 (ф sin у} + «26 (— Ф sin у),
W = X(1 + 8x)--^-(w2-m1).
Л
Окончательное решение усредненной системы имеет вид
1 = /,_В + В, + ^.(„1^ад+0(^).
Описанный подход к решению оптимизационных задач получил
в настоящее время весьма широкое распространение как у нас,
так и за рубежом. И это понятно, так как решение оптимиза-
ционных задач для случаев, когда дифференциальные связи
(уравнения движения) описывают изменение быстро осцилли-
рующих величин, представляет практически непреодолимые
трудности для численного анализа. Без асимптотической обра-
ботки подобные задачи вряд ли могут быть доступными иссле-
дователям даже в том случае, если они будут иметь в своем
распоряжении вычислительную технику гипотетической мощ-
ности.
В этом параграфе мы изложили весьма конспективно лишь
некоторые из возможных схем, связанных с процедурами усред-
374 ГЛ. VI. МЕТОДЫ ТЕОРИИ ВОЗМУЩЕНИИ
нения в задачах оптимального управления. Используя конкрет-
ные особенности тех или иных уравнений, эти схемы можно мо-
дифицировать и усовершенствовать.-
§ 3. Сингулярные задачи оптимального управления
Предыдущая глава была посвящена методам анализа не-
управляемых систем, содержащих малый параметр при старшей
производной:
х — Х(х, у, t, в),
8у = У(х,у,/,8).
Поскольку центральный результат, на который опираются ме-
тоды расчета траекторий систем вида (3.1),— это теорема
А. Н. Тихонова, то такие системы, удовлетворяющие условиям
теоремы А. Н. Тихонова, мы условились называть тихоновски-
ми. В данном параграфе мы будем рассматривать системы,
аналогичное тихоновским, но содержащие свободные функции —
управления:
х = X (х, у, t, и, v, е), sy — Y (х, у, t, и, V, в). (3.2)
Здесь и и v — управления, которые находятся в распоряжении
субъекта, ассоциированного с системой. Такая форма записи
управляемой системы, содержащей параметр, удобна, поскольку
к ней может быть сведен широкий класс задач. Например, част-
ным случаем системы (3.2) являются системы вида
х = Х(х, у, t, и, в), гу — Y (х, у, t, v, в). (3.3)
‘Систематическое изучение систем вида (3.2) только начинается,
причем те математические исследования, которые содержат
строгие результаты, как правило, не дают эффективных алго-
ритмов, а эффективные алгоритмы, которые возникают при ре-
шении различны;: практических задач, не являются строго обо-
снованными. Имея в виду цели этой книги, мы остановимся
только на обсуждений вопросов эффективного расчета оптималь-,
ных управлений для систем типа (3.2).
Так же как и'в задачах оптимального управления системами
с вращающейся фазой, для решения оптимизационных задач
для систем (3.2) могут быть предложены два разных подхода.
Во-первых, можно сделать попытку сначала упростить исходную
систему и уже затем решать задачу оптимального управления
для этой упрощенной системы. Второй путь состоит в том, чтобы
сразу выписать л-систему и, используя, то обстоятельство, что
л-система будет содержать малые параметры, попытаться найти
приближенные способы решения возникающих краевых задач.
Рассмотрим последовательно оба подхода.
в 3. СИНГУЛЯРНЫЕ ЗАДАЧИ
375’
а) Прямое использование асимптотических
процедур. Напомним общую схему расчета траекторий тихо-
новских систем типа (3.1). Полагая 8 = 0, мы строим поро-
ждающую систему
х=Х(х, y,t, 0),. У(х,#,/, 0) = 0, (3.4)
затем из второго уравнения системы (3.4) находим у как функ-
цию хи/:
y(t) = У° <х, t),
после чего подставляем у°(х, /) в первое из уравнений систе--
мы (3.4):
х = Х(х, t/>(x,t), t, 0). (3.5)
Для системы (3.1) мы выписывали данные Коши:
х (0) = хо, у (0) = у0. (3.6)
Первому из этих условий мы можем удовлетворить, решая за-
дачу Коши для уравнения (3.5), в результате чего вычислим
функцию х°(/), по этой функции построим функцию
y0=y0(x?(t),t) (3.7)
и положим
y = y° + z. <3.8)
Подставив выражение (3.8) во второе из уравнений (3.1), мы
линеаризуем его относительно г. Обозначив в = 1/%, мы при-
ведем это уравнение к виду
z = АЛ (/, Л) z + Л/(/, Л), (3.9)
где матрица А и вектор f являются непрерывными и диффе-
ренцируемыми функциями параметра 1/А. Решая для уравне-
ния (3.9) задачу Коши с начальным условием
z(O) = ^-^(xo,O), ‘ (3.10)
мы удовлетворим второму из условий (3.6). Общий интеграл
уравнения (3.9), а следовательно, и решение задачи Коши (3.9),
(3.10) мы получаем в форме квадратур от медленно меняю-
щихся функций. Построив пограничную функцию г, мы можем
провести уточнение функции х(/). Для этого положим в первом
из уравнений системы (3.1)
x = x° + xb y = y° + z
и линеаризуем его относительно xi и г, при этом переменная Xi
должна удовлетворять нулевым начальным условиям:
х,(0) = 0. (3.11)
376 • ГЛ. VI. МЕТОДЫ ТЕОРИИ ВОЗМУЩЕНИЙ
Асимптотическое решение этой задачи также может быть по-
лучено в форме квадратур от медленно меняющихся функций.
Эту схему нетрудно перенести и на систему (3.2). Предпо-
ложим для определенности, что задача оптимального управле-
ния состоит в минимизации терминального функционала
/(и, о) = (с, х(Г))-*min. (3.12)
В качестве первого шага мы рассмотрим порождающее уравне-
ние ' 4
Y(x,y, t,u, v, 0) = 0. (3.13)
Его решение у будет некоторой функцией, зависящей не только
от фазовой переменной и времени, но и от управлений:
у — ^(х,м, о, t). (3.14)
Подставляя функцию (3.14) в первое из уравнений системы
(3.2) при 8=0, решаем задачу (3.12) при условии
х(О) = х0.
Примечание. Построение функции (3.14) может оказаться достаточно
сложным. Проще рассмотреть задачу
7 (и, »)-> min, i — X (х, у, t, и, v, 0) (3.15)
при условии (3.13), другими славами, включить функцию у в число управле-
ний, подчинив ее дополнительному условию типа равенства (3.13).
Решив задачу (3.13), (3.15), мы найдем функции x°(t),
i/°(0, «°(0 и о°(/). Первый вопрос, который здесь возникает,
состоит в том, чтобы узнать, насколько учет пограничных функ-
ций изменит величину функционала / (w°,’t>°). Этот вопрос очень
вал£ен с практической точки зрения. В самом- деле, порождаю-
щая система значительно проще исходной системы, число’ее
степеней свободы может быть значительно меньше, чем у исход-
ной системы, структура правых частей порождающей системы
также гораздо проще: они не содержат быстро изменяющихся
функций. Поэтому решение оптимизационных задач с помощью
порождающей системы может оказаться более простым. Все это
делает переход к порождающей системе очень интересным с
чисто прикладной точки зрения? Таким образом, проблема оце-
нок точности для найденных с помощью упрощенных алгорит-
мов управлений — это прежде всего вопрос, возникающий на
практике. Но он очень труден и на него редко можно дать более
или менее строгий ответ. Поэтому, найдя управления с помощью
быстрых алгоритмов, можно поставить относительно более про-
стую задачу: выяснить возможность и необходимость уточнения
найденного решения и°(0 и Для этого положим и =
v = v°(t) и полностью повторим процедуру построения погра-
§ 3. СИНГУЛЯРНЫЕ ЗАДАЧИ 377
ничных функций Xi(f) и г(£). Определив Xi(/), мы вычислим
«поправку»
Д7 = (с, х,(Т)). > (3.16У
Если величина AJ невелика, то вклад в функционал погранич-
ных функций, учитывающих второе краевое условие
y(0) = y0, (3.17)
невелик, и для расчета управлений нам достаточно использо-
вать порождающие уравнения.
Заметим, что величина Д/, определяемая формулой (3.16),
всегда неотрицательна. В самом деле, учет пограничных функ-
ций— это прежде всего учет дополнительных ограничений
(3.17), т. е. сужение множества допустимых стратегий.
Если величина Д/ > 0 достаточна велика, то управление
должно быть улучшено с учетом пограничных функций г и х\.
Для этого нужно положить
и = и° + бй, о = о0 + д»,
подставить эти выражения во второе из уравнений системы
(3.2) и линеаризовать это уравнение относительно величин z,
би и 6v. В результате мы получим линейную систему вида
г = A A (t, X) z + ХВ (/, X) би + КС (t, к) до 4- kf (t, к), (3'. 18)
где А, В и С — матрицы, a f — вектор, которые являются из-
вестными функциями времени. Переменная г должна удовле-
творять начальному условию (3.10). Общее решение уравнения
(3.18) может быть получено в явном виде. Обозначим через
•Z(t) матрицу линейно независимых решений уравнения .
z'=kA°(t)z,
где 4° — первый член разложения матрицы A (t, к):
4(/Д) = 4°(0+Х~Ч(0+... (3.19)
Представляя матрицы В, С и вектор f р форме, аналогичной
(3.19), и ограничиваясь первыми членами этих разложений, об-
щий интеграл системы (3.18) мы можем записать в виде
z = Zd — (Д0)-1 [В°ди + С°дп-f-f°], - (3.20)
где d — вектор произвольных постоянных, который должен быть
определен из условия (3.10). Однако в явном виде определить
его мы еще не можем, поскольку функции би и 6v заранее не-
известны. Подставим выражение (3.20) в первое из уравнений
системы (3.2), тогда получим уравнение,
х — X (х, yQ 4- Zd - (Д°Г* [Ва (и - и°) 4- С° (о - о0) 4- /°], и, о, /, е).
(3.21)
378
ГЛ. VI МЕТОДЫ ТЕОРИИ ВОЗМУЩЕНИИ
Для этого уравнения мы должны решить задачу оптимального
управления
/ (и, о) = (с, х (Г)) -* min
(3.22)
при дополнительном ограничении (3.10), которое нам позволит
определить вектор d.
При исследовании неуправляемых сйстем в подобной ситуа-
ции мы линеаризовали уравнение для переменной х, полагая
х — х° 4- хь Это имело смысл делать, поскольку решение за-
дачи Коши с начальным условием Xi(0) = 0 для полученной
линейной системы мы могли представить в виде конечных фор-
мул. Здесь же мы имеем дело с оптимизационной задачей. Про-
ведя линеаризацию, мы получим достаточно громоздкую линей-
ную систему. После применения принципа максимума и учета
ограничений вида
и — и°.+ би е Gu, v = о0 + 6v е Gv
мы придем к краевой задаче, которая снова .окажется нелиней-
ной. Поэтому в данной задаче линеаризация уравнения (3.21)
особого смысла jne имеет. Задачу (3.22) нужно решать численно
одним из прямых методов.
б) Использование в качестве управления фа-
зовой переменной. Этот прием был предложен практиче-
ски одновременно в целом ряде исследований, в которых изуча-
лись системы вида
х = Х(х, у, /), (3.23)
sy — Y (х, у, u, f),
причем авторы этих исследований обйчно не задум'ывались над
математическим содержанием возникавших проблем: перед
ними стояли интересные и важные технические задачи, сама'
постановка которых, казалось, определяла и метод их решения.
Путь, который избрала интуиция инженеров, как выяснилось,
приводил к результатам, вполне отвечающим требованиям, ко-
торые выдвигала развивающаяся техника.
В пятидесятые годы основное количество конкретных задач
теории оптимального управления поставляла ракетная техника.
Быстрое развитие динамики космических и других ракетных ап-
паратов было важным источником интереса к развитию методов
оптимизации. Покажем на примере содержание возникавших
здесь задач. Поскольку этот пример носит чисто иллюстратив-
ный характер, то ограничимся рассмотрением случая, когда дви-
жение плоское (рис. 3.1). На этом рисунке приняты следующие
обозначения: V—вектор скорости центра массы ракеты, |° —
единичный вектор ее оси. Угол а между вектором скорости и
осью ракеты называется углом атаки. Движение ракеты про-
§ 3. СИНГУЛЯРНЫЕ ЗАДАЧИ
379-
исходит под действием силы тяжести mg, направленной по от-
рицательному направлению оси х2, аэродинамических и реак-
тивной сил.
Аэродинамические силы имеют две составляющие: Rx и Ry,
причем Rx направлена против вектора скорости и является
функцией V2, а и х2:
Rx = Rx (V2, а, х2) == Rx ((х1)2 + (Я2, а, х2).
Сила Rx носит название силы лобового сопротивления. Вторая
составляющая аэродинамических сил, Ru, именуемая подъем-
ной силой, направлена перпендику- о ft>
лярно вектору скорости V. Она линей-
на по а:
Я, “*,((*')* H-W*2)*
Реактивная сила q направлена вдоль
вектора £°, а ее значение есть
_________________ , dm
Ч — Ъ ~аГ ’ Рис. 3.1.
где ki — некоторая постоянная величина (скорость истечения
газов). Таким образом, уравнения движения центра массы ра-
кеты мы можем записать в следующей форме (все выражения
в правых частях системы (3.24) —величины скалярные):
d2x*
т~^2~ = Rx cos 0 — Ru sin 0 4- q cos 0,
d2x\
«-^2- = /?xsin0 + /?j,cos0-f-^cosO, (3.24}
dm q
di ~ kr
Здесь
y2 ,
0 = arctg-p-. fl-==0-pa.
Вводя еще обозначения х1 = х3, х2 = х4, мы можем переписать
систему (3.24) в следующей форме, где смысл обозначений X3
и X4 совершенно очевиден:
X* = X3, X2 = X4,
х3 = Х3(х2, X3, х4,а), (3.25>
1 х4 = X4 (х2, х3, х4, а).
В этом примере мы будем считать q — расход массы — за-
данной величиной. Например, в ракетах с пороховым двигате-
лем она определяется законом горения пороха. Поэтому послед-
380 ГЛ. VI. МЕТОДЫ ТЕОРИИ ВОЗМУЩЕНИИ
нее из уравнений системы (3.24) не входит в (3.25), так как оно
интегрируется независимо от остальных,' и мы можем считать
массу ракеты т известной функцией времени: m = m(t). Си-
стема (3.25) не является замкнутой: она содержит еще одну пе-
ременную— угол атаки а. Для того чтобы описать его изме-
нение, мы должны составить уравнение движения ракеты отно-
сительно ее центра массы. Оно имеет вйд
= (3.26).
Здесь J — момент инерции, М — момент внешних сил. Мы будем
считать, что управление происходит за счет аэродинамических
рулей (или интерцепторов). Тогда момент М складывается из
суммы моментов аэродинамических сил Mi и управляющего мо-
мента рулей Мр. Реактивная сила момента не дает, поскольку
она направлена вдоль оси симметрии ракеты, которая проходит
через ее центр тяжести. .Для аэродинамического момента мы
имеем формулу
Mi = — k (х2, х3, х4).а, k > 0.
Управляющий момент Л/р пропорционален углу -поворота ру-
лей и:
Alp = kf (х2, х3, х4) и.
Таким образом, уравнение (3.26) мы можем переписать в виде
/ dt2 )— fta-j-kpii. (3.27)
где величина d20/d/2 имеет вид
d2e d2 . х*
dt2 ~ dt2 arctg x8
Проводя в последнем равенстве операцию дифференцирования
и заменяя производные по формулам (3.25), мы сможем выра-
зить величину &$/(№ в виде функции от фазовых переменных х*
и угла атаки а:
' -jjr = f (х1, х2, х3, х4, а).
Таким образом, уравнение (3.27) теперь можно переписать в
виде
j^^-ka + kpU-Jf. (3.28)'
аг
Итак, мы показали, что плоское движение ракеты может опи-
сываться системой вида (3.23). В самом деле, момент инерции /
§ 3. СИНГУЛЯРНЫЕ ЗАДАЧИ
381
мал. Это значит, что собственные колебания, описываемые урав-
нением
имеют малый период по сравнёнию со временем движения ра-
кеты. Положим
/ = г2а, 8<i — Р
и перепишем уравнение (3.28) в виде системы
еа = р, ер = —^-а-|- (3.29)
Итак, мы пришли к системе (3.25), (3.29). Единственным
управлением в этой системе является и — уго.л поворота рулей.
Управление действует только на те величины, котбрые относятся
ко втброй группе переменных, уравнения для которых содержат
малые параметры при старших производных.
Вернемся теперь к уравнениям (3.23). В многочисленных ра«
ботах по динамике космических аппаратов в пятидесятых и ше-
стидесятых годах изучались главным образом такие постановки
задач оптимального управления, в которых ракета считалась ма-
териальной точкой. Это значит, что вместо системы (3.23)
рассматривалось лишь одно первое уравнение:
х — Х(х,у,(). (3.30)
Но это уравнение не содержит управляющих функций, поэтому
в качестве управления использовалась фазовая переменная у,
которая в нашем примере была углом атаки. Физический смысл
подобной схематизации задачи управления очевиден: поскольку
момент инерции аппарата очень мал, а рули достаточно эффек-
тивны, то относительным движением можно пренебречь, считая,
что угол атаки тем или иным образом определяется (или за-
дается) как функция времени и эта функция может быть реа-
лизована. Последнее как раз и означает малость, момента инер-
ции— точнее, малость отношения момента инерции летательного
аппарата к моменту, создаваемому рулями. Поворот рулей, в
силу малости этого отношения, практически без запаздывания
изменяет значение угла атаки.
Если говорить о ракетах, то в рамках описанной схемы одной
из наиболее естественных постановок задач оптимального управ-
ления оказывается задача быстродействия. Но рассматривались
также и другие задачи. В результате решения задачи опти-
мального управления-для системы (3.30) находилась фазовая
переменная у:
У = У*М-
(3.31)
382
ГЛ. VI. МЕТОДЫ ТЕОРИИ ВОЗМУЩЕНИИ
Собственно говоря, этим, как правило, и ограничивались авторы
подобных исследований. В действительности надо было еще
проанализировать возможность реализации закона управления
(3.31). Для этого надо рассмотреть второе из уравнений си-
стемы (3.23), которое мы перепишем с учетом (3.31) в виде
е = Y (х*, у*, и, I). (3.32)
Здесь через %*(/) мы обозначили оптимальную траекторию.
Уравнение (3.32) —это уравнение для определения управляю-
щего воздействия u(t). Если уравнение (3.32) разрешимо, го
это и означает, что мы нашли решение задачи оптимального
управления. В самом деле, ведь смысл той процедуры, которую
мы реализовали, состоял в том, что мы сняли одно из ограниче,-
ний —второе из уравнений системы (3.23), т. е. расширили мно-
жество допустимых стратегий, а затем показали, что1 ограниче-
ние (3.23) выполнено. Заметим, что управление должно удов-
летворять еще одному ограничению вида
u(/)eG„,_ .(3.33)
и может оказаться, что среди элементов множества Gu нет
функций, которые удовлетворяют уравнению (3.32). Тогда воз-
никает задача аппроксимации функции y*(t) с помощью реше-
ния уравнения
t%=Y(x,y,u,i). (3.34)
Представляется возможной следующая схема расчета. Полагаем
х — х*, y = y* + z,
затем линеаризуем уравнение (3.34) по г, в результате получим
уравнение вида
— A(t,u)z+(3.35)
Для уравнения (3.35) мы решаем задачу
J (и) = z* (Г) -> min. (3.36)
> “еС“
Вопрос о структуре функционала (3.36) не очень прост — это
мера оценки качества приближения. По существу, единственной
характеристикой должен бы быть функционал исходной задачи,
но ее прямое решение обычно достаточно трудно и требует
развития итерационных методов. Решение вспомогательной ва-
риационной задачи (3.36) ка^ раз и может служить одним из
этапов подобной итерационной схемы.
§ 3. СИНГУЛЯРНЫЕ ЗАДАЧИ
333
Примечание. ‘Обозначим решение задачи. (3.36) через £. Если мы
теперь подставим в выражение функционала исходной задачи 1(у) вместо ве-
личины у* величину у* + 2, то, разумеется,
/(/ + *)>/(Л.
поскольку у* — оптимальное решение упрощенной задачи (3.30), т. е. Цу*) —
Нижняя оценка функционала исходной задачи. Вычисляя
Д7 = /(^ + ^)-7(Л,
мы получаем оценку аппроксимации по отношению к величине исходного
функционала. Вопрос о том, необходимы ли дальнейшие итерации, решается
исследователем системы, исходя из оценки величины Д/.
Таким образом, вопрос выбора функционала (3.36)—это
прежде всего вопрос удобства: функционал (3.36) должен быть
достаточно удобен для численного решения вариационной за-
дачи. Таким функционалом может быть и квадратичный функ-
ционал вида
т
J (и) = (z, z) dz. (3.37)
о
Надо заметить, что условие (3.33), особенно если Qu — замкну-
тое множество, осложняет процедуры численного счета; поэтому
целесообразно тем или иным способом снять это ограничение,
например заменить функционал (3.37) функционалом
•г
/ (и) = j [(z, z) 4- А, (и, /?«)] dt,
о
(3.38)
где R — положительно определенная матрица, например единич-
ная. Вариационная задача с функционалом (3.38) при ограниче-
ниях (3.35) имеет целый ряд особенностей, к обсуждению кото-
рых мы еще вернемся.
Итак, приближенный метод решения задач оптимального
управления для систем вида (3.23) сводится к реализации двух
этапов.
1. Сначала отбрасывается уравнение для у, а фазовая пере-
менная у превращается в новое управление, которое выбирается
так, чтобы доставить '‘функционалу задачи экстремальное зна-
чение.
2. Решается вспомогательная вариационная задача, дающая
возможность определить управление, наилучшим (в том или
ином смысле) образом аппроксимирующее оптимальное значе-
ние координаты у.
Имея в распоряжении такое решение, мы без особого труда
можем построить разнообразные приемы улучшения найденного
управления.
гл. VI. МЕТОДЫ ТЕОРИИ ВОЗМУЩЕНИИ
.С34
в) Анализ понтрягинской системы. В предыдущих
пунктах мы рассматривали методы решения задач оптимального
управления для систем, описываемых уравнениями вида (3.2).
Эти методы основывались на предварительных упрощениях этих
уравнений. Но можно подойти к этой проблеме; как мы знаем,
и по-другому: выписать сначала л-систему, свести задачу опти-
мального-управления к некоторой краевой задаче, а затем при
решении этой краевой задачи воспользоваться тем обстоятель-
ством, что л-система содержит параметры.
Рассмотрим систему
х = X (х, у, и, I, г), ey = Y (х, у;и, t, г) (3.39)
и будем выбирать управление и из условия
J = (с, х (Г)) —> min. (3.40)
Начальные значения примем в форме (3.6), а ограничения на
управления — в виде (3.33).
Составим функцию Гамильтона •
Я = (ф,Х)+,4-(<Р.П 43.41)
где ф и <р — импульсы,, удовлетворяющие уравнениям
ч дН v* . • 1 v*
М> = -57 = -^'1’-тУхФ,
дН v* u 1 V*
<Р----—------Ху^
которые естественно переписать в следующей форме: -
8ф = Т(х,^,ф,ф,/,8),
8ф = Ф (X, у, ф, ф, t, 8).
Функции ф и ф должны удовлетворять условиям трансверсаль-
ности
ф(Г) = — с, ф(Г) = 0. (3.43)
Итак, мы видим, что уравнения для сопряженных переменных
также.содержат малые параметры при производных. Исключим
управление с помощью принципа максимума:
8(ф,Х) + (ф, У)-* max, (3.44)
* иеОи
откуда
и = U (х, у, ф, ф, t, в).
§ 3. СИНГУЛЯРНЫЕ ЗАДАЧИ
383
Подставляя последнее выражение в системы уравнений (3.39) и
(3.42), получим систему уравнений
х = Х(х, у, <р, -ф, z-e)>
чу = У (х, у, ф, Ф,/, 8),
еф = Ф(х, у, ф, Ф, /,е),
8ф = Ф (х, у, ф, ф, I, 8).
(3.45)
Рассматриваемая задача оптимального управления сведена, та-
ким образом, к отысканию функций х, у, ф и ф, удовлетворяю-
щих системе (3.45) и краевым условиям
Численное решение краевой задачи (3.45), (3.46) может встре-
тить определенные трудности, поскольку все переменные, кроме
х, являются быстро изменяющимися. Обсудим возможные спо-
собы приближенного решения этой краевой задачи.
< Рассуждая по аналогии с предыдущим, составим порождаю-
щую систему. Положим
Y {х, у, ф, ф, t, 0) = О,
Ф (х, у, ф, ф, /, 0) = 0,
Ф (х, у, ф, ф, /, 0) — 0.
(3.47)
Систему (3.47) мы должны разрешить относительно «быстрых»
переменных у, ф и ф, получим
У = У0 (х, t), ф = ф°. (х, 0, ф = ф° (х, /).
Подставим эти функции в.первое из уравнений системы (3.45),
в котором примем 8=0:
х = Х(х, (х, /), ф° (х, 1), ф° (х, 0 t, 0) = Х° (х, /), (3.48)
и решим для уравнения (3.48) задачу Коши с~условием х(0) =
= Хо. Тем самым мы удовлетворим первому из условий (3.46).
Обозначим решение этой задачи Коши через х°(/). Согласно
общей теории, изложенной в гл. V, функция x°(t) дает равно-
мерную аппроксимацию точного решения х(0 на все интервале
времени t е [0, 7]:
Х(0 = Х°(/) + О(8).
Для того чтобы иметь равномерную аппроксимацию других
переменных с той же степенью точности, мы должны построить
13 Н. Н. Моисеев
386
ГЛ. VI. МЕТОДЫ ТЕОРИИ ВОЗМУЩЕНИЙ
еще пограничные функции. Повторим некоторые из рассуждений
предыдущей главы. Положим
У==У° + У1, ф = ф°4"фь Ф = Ф° + Ф1.
Подставим эти выражение. в последние три уравнения системы
(3.45) и линеаризуем правые части этих уравнений относи-
тельно величин yt, «pi и фь В результате мы получим (А = 1/е)
У\ = АДц (/, K)yi + ЛД12(/, А>)ф1 -h А.Л13 (/, А)ф1 4~A.fi (А А),
Ф1 = ЛД21 А.) У1 4~ A,^22 (t> Ф1 4~ А-Лгз (А Ф1 4~ Af2 (it А,), (3.49)
ф[ = АД31 (/, А) г/1 4- АЛ32 (/, А) ф] 4~ ^433 (/, А) ф( 4~ (А ^)«
Для системы линейных дифференциальных уравнений (3.49) мы
имеем краевые условия
</,(()) = г/о-Z/°(x°(O),O),
Ф1(Г) = -Ф°(П (3.50)
фДТ)=_с_фО(Г).
Краевая задача (3.49), (3.50) может быть решена, регулярным
способом с помощью метода прогонки. Однако непосредственная
реализация схемы прогонки оказывается достаточно трудной,
поскольку производные функций, входящих в систему (3.50), ве-
лики. Поэтому имеет смысл использовать некоторые особенности
системы (3.39), если она является тихоновской. Для того чтобы
можно было использовать аппарат предыдущей главы,' надо,
чтобы решение второго уравнения системы (3.39) при фиксиро-
ванных значениях всех переменных, кроме у, было асимптоти-
чески устойчивым. Отсюда следует, что собственные числа
матрицы Ац должны иметь отрицательные действительные ча-
сти. Но тогда собственные числа матрицы Ац будут иметь по-
ложительные действительные части, то же относится и к матри-
це Дзз. Другими словами, значения у будут убывать по времени
слева направо, а переменные ф и ф— справа налево. Поэтому
схема дальнейшего расчета выглядит следующим образом.
1. На основе теории, изложенной в гл. V, строим в явном
виде общий интеграл системы (3.49). Он будет содержать
п 4- 2т произвольных постоянных (га — размерность вектора х,
т — размерность вектора у).
2. Подставляем общий интеграл в условия (3.50). Мы полу-
чим п 4- 2т уравнений для определения произвольных по-
стоянных.
3. Поскольку часть условий будет выполнена слева при / =
= 0, а часть справа при t = Т, то система линейных уравнений
относительно произвольных постоянных будет содержать члены,
сильно отличающиеся друг от друга по величине, причем чем
§ 3. СИНГУЛЯРНЫЕ ЗАДАЧИ
387
больше К, тем больше будет это отличие. Так, например, члены,
содержащие собственные числа матрицы Ли, будут «машинны-
ми» нулями при t = Т, и ими можно будет пренебречь. Точно
так же члены, определяющие пограничные функции <pi и ф1
и зависящие от собственных чисел Матриц Д22, Дзз, будут очень
малыми при t = 0. Это позволит построить рациональные схемы
приближенного численного определения произвольных посто-
янных.
Таким образом, использование методов малого параметра и
техники анализа тихоновских систем дает возможность значи-
тельно упростить численные методы решения разнообразных за-
дач оптимального управления.
г) Задачи оптимальной коррекции в линейных
системах, содержащих большой параметр. В п. б)
данного параграфа было показано, каким образом возникает
задача оптимального управления для уравнений вида
ty = Y(y, t, и, 8). ' (3.51)
В этом пункте мы рассмотрим тот частный случай системы
(3.51), когда правая часть ее является линейной как по управ-
лению и, так и по фазовой переменной у:
y = KA(t, K)y + KB(t, k)u + kf(t, Л), (3.52)
где % = 1/8, А, В и f ограничены при Л-»-оо. Для уравнения
(3.52) мы рассмотрим задачу минимизации функционала типа
(3.38). Для того чтобы не усложнять выкладок, примем
Т
I=\l(y,y)A-li(u,u)]dt. (3.53)
о
Задача отыскания минимума функционала (3.53) при ограни-
чениях типа (3.52) возникала у нас как этап реализации про-
цедуры отыскания оптимального управления в задачах более
общего вида. Но подобные задачи имеют и самостоятельный >
интерес. В практике управления огромную роль играют так на-
зываемые задачи коррекции. Они сводятся к анализу систем ли-
нейных уравнений
dyldt = Ay-\-Bu + ^ . (3.54)
где матрицы А, В и вектор /—медленно изменяющиеся функ-
ции времени:
Л = Л(е,/), В = В(е,/) / = /(в,/).
Квадратичный функционал вида (3.53) возникает по разным
причинам.'В частности, это наиболее простой вид функционала,
Допускающего применение ‘аналитических методов или сводя-
13*
388 ГЛ. VI. МЕТОДЫ ТЕОРИИ ВОЗМУЩЕНИЙ
f
щего задачу к краевой, для которой могут быть использованы
регулярные процедуры численного решения (типа метода про-,
гонки). Интересный и важный класс задач с квадратичным
функционалом дают проблемы космической техники. Если кор-
рекция осуществляется с помощью идеально регулируемого
ядерного двигателя, то, как показано во многих работах, за-
траты энергии описываются функционалом квадратичного типа
(см. {35]). Таким образом, в подобных задачах минимизация
функционала вида
J=^(u,u)dt
о
означает, что выбран наиболее экономный способ коррекции.
Вернемся к задаче минимизации функционала (3.53) при
ограничениях (3-54). Производя в уравнении (3.54) замену не-
зависимой переменной т = в/ и полагая А = 1/е, мы приведем
систему (3.54) к виду (3.52). Составим функцию Гамильтона
для задачи (3.52), (3.53): '
И = (ф, ХАу + ХВи + Af) - (у, у) - р (и, а); (3.55)
тогда импульс ф удовлетворяет системе уравнений
ф = — ЛЛ*ф + 2у. (3.56)
Предположим,, что на выбор управления и не накладывается
никаких ограничений; тогда управление мы определим из усло-
вия дН/ди. = 0, где
dHfdu = АВ* ф — 2ри,
откуда
« = (3.57)
Подставляя выражение (3.57) в уравнение (3.52), получим
$ = АА# + |~ВВ‘ф + А/. ' (3.52')
Из вида формулы (3.57) можно заключить, что параметр р,
которым мы вправе распоряжаться, должен быть выбран так,
чтобы управление и было конечным при любых А. Другими сло-
вами, порядки величин Аир должны быть одинаковыми. Проще
всего принять А = р, тогда уравнение (3.52') примет вид
0 = АА^+|-АВВ‘ф4-АЛ (3.58)
§ 3. СИНГУЛЯРНЫЕ ЗАДАЧИ
389
Итак, мы пришли к краевой задаче для системы (3.56), (3.58),
Поясним некоторые особенности этой задачи» на простейшем
примере.
д) Иллюстративный пример. Рассмотрим тот часг*
' ный случай системы (3.56), (3.58), когда # —скаляр, и пере*
пишем ее в виде
у — ~ Kvy + trW'ty + kf, ip = hvty + 2y. (3.59)
А
Примечание. Величина v в уравнениях (3.59) должна быть положи*
тельной. Это предположение гарантирует выполнение условий теоремы
А. Н. Тихонова для неуправляемого аналога изучаемой системы.
Построим общий интеграл системы (3.59), используя тех*
нику асимптотического интегрирования. Рассмотрим сначала
однородную систему
0 = — Avw + т М2Ф, ф = А.У'ф + 2у. ' (3.60)
Решение этой системы будем искать в виде *
0 = ехр|Цш<//|(у14-~^2+ ...)•
“ < ' (3.61)
ф = ехр|Х + 7’1’2+
Подставляя, выражения (3.61) в уравнения (3.60) и собирая
члены при одинаковых степенях X, мы получим следующие си-
стемы алгебраических уравнений для определения неизвестных
функций yi и ф,-:
(e + vJ^-I^^Q, (®-v)i|>1 = 0, (3.62)
(® + V) Уч — -^62ф2 = — Уъ (“ — V) ф2 = — ф! + 2^, (3.63)
Рассмотрим систему (3.62). Это — однородная система двух
линейных уравнений. Для ее разрешимости необходимо и до*
статочно, чтобы функция © была корнем характеристического
уравнения. Это уравнение имеет два корня:
• ©I = — V, ©2 =, + V.
Рассмотрим сначала тот случай, когда © = ©i = —v. Тогда из
второго уравнения (3.62) получаем
2уф, =2 0.
390
ГЛ. VI. МЕТОДЫ ТЕОРИИ ВОЗМУЩЕНИИ
Так как v =#0, то
Ф1 = Фи = 0. (3.64)
В этом случае yi = уи— произвольная величина. Для ее опре-
деления мы должны рассмотреть уравнения (3.63), которые
в силу (3.64)’ перепишем так:
— у^1 = — Уп, — 2vip21 = 2ун. (3.65)
Для разрешимости системы (3.65) необходимо и достаточно,
чтобы у и удовлетворяло уравнению
Уи _ Ь*
Уп 2v ’
откуда
z t ч
011 = 0!ехр I — у (3.66)
I о '
Положим теперь ® = ю2 = +v. Так как в этом случае со — v =
= 0, то из вторЪго уравнения системы (3.62) следует, что
функция ф1 = ф 12 произвольна. Первое уравнение (3.62) позво-
ляет тогда выразить 0i2 через-ф12:
’ ^12 = Ф12 • (3.67)
Для определения ф12 мы должны использовать уравнения (3.63),
которые в данном случае будут иметь следующий вид:
. 2V022 — уЬ2ф22= — (77Ф12), — Ф12 + -57Ф12 = °-
(3.68)
Для того чтобы система (3.68) была разрешима, необходимо
и достаточно, чтобы
Ф12 = '^_Ф12> .
откуда *
ф12 = С2ехр j — Г (3-69)
I о '
а в силу (3.67)
(3'70)
v о '
Найдем теперь частный интеграл системы (3.59) с помощью
методов, рассмотренных в гл. V, Представим частное решение
§ 3. СИНГУЛЯРНЫЕ ЗАДАЧИ
391
в форме рядов, расположенных по отрицательным степеням па-
раметра X:
^=/+rV + r7+...,
$ = ф° + + *"V + • • •
Подставляя эти ряды в систему (3.59), мы сможем найти функ-
ции у1, ф‘. Заметим, однако, что для нахождения первых членов
этих разложений нам достаточно приравнять нулю правые ча-
сти системы (3.59):
z (3.71)
Ауф° + 2у° = 0.
Разрешая систему (3.71) относительно у0 и ф°, мы найдем сле-
дующие выражения:
= Av2 + Ьг •' Ф° = ~ + Ьг • (3#72)
Используя выражения для фп, ф]2, уи, уа, У и ф, мы полу-
чим выражения для общего интеграла системы (3.59) в виде
С t t X
I С 1 С б2 I
г/= Ci exp s — AA vdt — у j — dt ? + »
l о 0 '
X t t X
+ C2exp Ш vdt + ^-^-dt (77 + #, (3-73)
I 0 0 '
X t t X
ф = С2ехр< + +
I о 0 •)
Для определения постоянных Ci и C2 нужно использовать гра-
ничные условия. Рассмотрим тот случай, когда фиксировано не
только начальное состояние системы, но и конечное:
ИО) = Уо, У(Т) = ут. (3.74)
Подставляя формулы (3.73) в условия (3.74), мы получим
уравнения для определения постоянных Ci и С2:
С[ + С2 = уа — у (0),
' ( ' т т 1
Ciехр ] — A v d/ — 4А —dt ? +
<>о о ) (3.75)
z г Г X
+ С2 exp I к J v dt + у j dt !• = ут — у (Г).
V о 0 '
392
ГЛ. VI. МЕТОДЫ ТЕОРИИ ВОЗМУЩЕНИИ
Получить приближенное решение системы (3.75) можно в очень
компактной форме. Разрешая эту систему относительно Ci и
( т )
С2 и отбрасывая величины exp j — Л j v dt легко получим
I о '
—0(0),
С2~[УГ —ЛЛ]ехр1-Л^Л —<3'76^
'о о '
после чего мы выпишем общий интеграл (3.73) в следующей
форме:
!/“ (Уо — #(0))ехр< — Л ( vdt — i\^-dl J +
I v v 1
0 0 /3 77\
+ [yr-y(T)] + g, f
После того, как найдены y^w ф, по формуле (3.57) определяем
оптимальное управление. Задача решена полностью.
Мы подробно провели решение этой задачи, чтобы проде-
монстрировать возможности, которые открывает использование
асимптотических формул.
В заключение обратим внимание читателя еще на одну осо-
бенность рассматриваемых задач. Процедура решения требует
анализа собственных чисел матрицы Г — аЕ, где Е — единичная
, матрица, а матрица Г имеет вид
2)- 2
Легко доказать, что совокупность корней характеристического
уравнения
|Г —со£| = 0 (3.78)
представляет собой объединение совокупностей корней урав-
нений
|Л-©£| = 0 и | А 4- ©£ | = 0.
Одна из особенностей спектра матрицы Г состоит в том, что
если со =» р является корнем уравнения |Л — ©£| =0, а следо-
вательно, и корнем уравнения (3.78), то © — — р также является
корнем уравнения (3.78). Если уравнение |Л — ©£|=0 имеет
простыв корни р/, причем ни для одного’из корней не имеет ме-
ста равенство
Pi “ — И/, i !,
(3.79)
§3. СИНГУЛЯРНЫЕ ЗАДАЧИ 393
то мы можем использовать ту технику построения приближен-
ных решений, которая была тблвко что изложена. Если же среди
корней уравнения |Д — соЕ| = 0.есть два таких, которые удов-
летворяют равенству (3.79), то ситуация значительно ослож-
няется: уравнение (3.78) имеет в этом случае кратные корни.
А это означает,'что схема решения, которая была использована
в данном пункте, уже неприменима — асимптотические ' пред-
ставления должны содержать дробные снепени параметра %.
Некоторые.общие замечания, относящиеся к методам построе-
ния подобных представлений, были сделаны в конце предыду-
щей главц.
Условие (3.79) выполняется довольно часто. Например, если
система консервативна, то оно всегда имеет место. Это условие
выполнено и для гораздо более широкого класса систем. В са-
мом деле, достаточно, чтобы в системе было хотя бы одно коле-
бательное звено без'затухания, тогда уравнение |А —соЕ|=0
имеет два сопряженных чисто мнимых корня: ©t = гр, ®г =*
= —гр, й, следовательно, условие (3.79) оказывается выпол-
ненным. Таким образом, ситуации, когда асимптотические пред-
ставления . имеют характер рядов, расположенных по дробным
степеням параметра %, не являются такой уж редкостью,
Глава VII
ЭКСПЕРТИЗЫ И НЕФОРМАЛЬНЫЕ ПРОЦЕДУРЫ
§ 1. Предварительные замечания
В предыдущих главах уже несколько" раз обращалось вни-
мание на то, что при решении трудных проблем приходится
прибегать к неформальным способам анализа, что далеко не
всякая задача анализа системы или ее проектирования может
быть аккуратно поставлена математически. Успех исследова-
ния конкретной системы или качество создаваемого проекта во
многом зависят от того, насколько удачно исследователь сумел
вписать ₽ неформальную по существу процедуру создания про-,
екта формальные математические методы.
Более того, как неоднократно подчеркивалось, одна из основ-
ных задач системного анализа как дисциплины — научиться
объединять математические и неформальные методы анализа,
строгие способы исследования формализованных моделей с экс-
периментом, эвристическими, приемами, суждениями экспертов.
Но можно ли вообще ставить вопрос об объединении мате-
матических методов и методов, основанных на интуиции и опы-
те? Не является ли сама постановка вопроса противоречивой?
В самом деле, в традиционной математике только матема-'
тические результату, сформулированные в форме теорем,'счи-
таются бесспорными и окончательными, только они кажутся
достаточно убедйтельными. Математические методы — и только
они — дают однозначный вывод из исходных посылок, не допу-
ская альтернативных цепочек следствий. Все другие способы
анализа, основанные на интуицйи и аналогиях, не обладают по-
добной строгостью логических заключений. Любые утвержде-
ния, полученные не на основе математических методов, мате-
матик может ставить под сомнение —ему всегда нёдостает до-
казательств. Такова традиция.
Но эта традиция, которая выводит за кадр анализ исходных
посылок и, ограничивается только анализом следствий, сужаёт
естественные рамки деятельности и возможностей современной
математики и математиков, роль которых в жизни общества
непрерывно возрастает. Она приводит к уходу математика от
проблем, где, может быть, только он и сможет преодолеть труд-
ности, встающие перед исследователем.
§ I. предварительные замечания
395
Поэтому как альтернатива установившейся традиции возни-
кает иная точка зрения на цели и содержание математических
исследований. Тенденцию, которую мы наблюдаем, можно, на-
верное, охарактеризовать следующей фразой: математик во все
большей степени становится активным участником содержа-
тельных исследований конкретных процессов (биологических,
физических, экономических и др.). Происходит как бы возврат
к той традиции эпохи Возрождения, когда каждый крупный ма-
тематик был еще и философом, и естествоиспытателем. Но этот
новый виток спирали развития, конечно, происходит на каче-
ственно ином уровне наших знаний об окружающем мире п
при новых возможностях эмпирических исследований.
Необходимо отметить, что и в самой математике формальное
и неформальное всегда соседствуют и отделить эвристическую
часть исследования, основанную на интуиции и изучении'окру-
жающего мира, от формальных математических построений под-
час бывает "очень непросто. В самом деле, математика делает
однозначными, строго обоснованными любые следствия из ис-
ходных посылок. Но исходные посылки — аксиомы — происте-
кают из гипотез, которые лежат вне математики. Эти гипотезы
возникают как результат неформального мышления, как рбоб-
’ щение опыта и наблюдений. Значит, формальное и неформаль-
ное всегда присутствуют в исследованиях одновременно, пере-
плетаясь друг с дугой*). Математическая модель — это про-
дукт неформального мышления; в ней уже закодирована вся
» информация о природе, изучаемого процесса. А дальше мы
формулируем определенную алгебру, т. е. создаем систему
процедур, алгоритм, который определяет логическую цепочку
действий, позволяющих раскодировать ту информацию, которая
уже содержится в модели. Таким образом, одна из задач ма-
тематики— раскодивание информации, заложенной в модель-
ном описании, построение той логической цепочи последователь-•
ных рассуждений (т. е. алгоритма и его реалйзации), которую
традиционная для естественных наук неформальная манера
мышления сформировать не может**).
Но если формальные и неформальные методы анализа так
тесно связаны друг с другом, то законна и другая точка зре-
ния— их можно и не разделять, рассматривая их как элементы
единого целостного процесса исследования. Таким образом, фор-
мирование системы гйпотез (аксиом), т. е. создание модели,
можно не отрывать от методов ее исследования. Из’ этого
*) Об этом очень наглядно и красочно писал итальянский математик
Д. Пойа. См. [61].
**) Точнее, может, но для этого она должна быть формализована (фор-
мально описана на том или ином языке в виде канонических процедур).
396
ГЛ. VI!. ЭКСПЕРТИЗЫ И НЕФОРМАЛЬНЫЕ ПРОЦЕДУРЫ
принципа, как мы убедимся, будут следовать вполне опре-
деленные практические рекомендации.
Математическое описание, т. е. построение математической
модели, — процесс не однозначный. Несмотря на объективный
характер модели, в деятельности исследователя очень много
субъективного. Это и уровень детализации процесса, и выбор
языка описания, и многое другое. Построение модели всегда
опирается на систему гипотез, отражающих понимание иссле-
дователем изучаемого объекта. К этому надо еще добавить
степень точности модели. Обо всем этом мы уже говорили в
гл. III, когда обращали внимание на информационную сторону
проблемы. Существование определенных «степеней свободы» в
описании изучаемого процесса позволяет создавать модели, со-
ответствующие возможностям аппарата; т. е. возможностям тех
математических методов и вычислительных средств, которыми
располагает исследователь. Таким образом, процесс построения
математической модели неотделим от средств ее исследования.
Это утверждение — одна из основных аксиом системного ана-
лиза, и она в известной степени противоречит традиционному
разделению этих двух составных частей исследовательского
процесса. В самом деле, еще в XIX веке возникло достаточно
четкое представление о существовании двух независимых эта-
пов исследования: о составлении модели, т. е. математическом
описании изучаемого явления, и об исследовании самой модели.
Эта точка зрения наиболее отчётливо высказывалась А. М. Ля-
пуновым, который считал, что, коль скоро задача механики или
физйки сформулирована, дальше она должна рассматриваться
как задача математики. Этой точки зрения придерживается по-
давляющее большинство математиков, а тот взгляд на предмет
йсследования, который последовательно, проводится в этой кни-
ге, как мы видим, отличается от традиционного: математик, за-
нимающийся анализом сложной системы, никогда не должен
забывать о предмете анализа, о содержательном смысле иссле-
дования. Заметим, однако, что подобная точка зрения отнюдь
не нова. Кто-то из крупных ученых еще в прошлом веке ска-
зал: «Не тот хороший механик, кто умеет составлять уравнения
Движения, а тот, который умеет составлять такие уравнения, ко-
торые интегрируются» *). Этими словами в аллегорической фор-
ме высказана, по существу, та же самая мысль.
Итак, процесс исследования будет трактоваться нами как
единый процесс, объединяющий формальные и неформальные
методы анализа. Но, став на эту точку зрения, мы должны опре-
деленным образом организовать систему процедур, которые мы
*) Ряд авторов эти слова приписывает Н. Е. Жуковскому. Однако мне
не удалось найти тому документальных подтверждений.
5 1. ПРЕДВАРИТЕЛЬНЫЕ ЗАМЕЧАНИЯ
397
условимся называть неформальными- или эвристическими.
Смысл этих процедур — канонизация рассуждений, их упорядо-
чение, т. е. в конечном счете формализация. При описании этих
процедур всегда необходимо подчеркивать л выделять исполь-
зуемые гипотезы — предположения, которые не' вытекают из
более простых и ранее принятых. Четкое описание предположе-
ний, их отделение от последующих формальных построений дает
представление о достоверности получаемых результатов. Это —
еще один важный принцип системного анализа.
В этой главе мы сделаем попытку описать несколько клас-
сов различных неформальных процедур, которые широко ис-
пользуются в системном анализе, и тем самым проиллюстри-.
ровать разнообразные возможности, которые здесь возни-
кают,—для их систематического изложения еще не накоплено
достаточно опыта.
Необходимость неформального анализа возникает не только
в процессе формирования гипотез, но и при разработке мате-
матических методов, когда, например, точное решение задачи
существует, но его реализация требует огромных затрат машин-
ного времени. С некоторыми из подобных методов мы уже по- -
знакомились в предыдущих главах. Много новых проблем и ме-
тодов эвристического типа начинает возникать в связи с ис-
пользованием ЭВМ в качестве экспериментальной установки.
В гл. III, описывая структуру имитационных систем, мы уже
привели некоторые примеры эвристических процедур, исполь-
зуемых в процессе диалога человек — ЭВМ. Появление совре-
менной-вычислительной техники и систем имитации создало спе-
циальный инструмент синтеза формальных и неформальных
методов, но, подчеркиваю, этот синтез существовал всегда. Ими-
тационные системы' позволили создать лишь новые тйпы про-
цедур, и только (их примеры были приведены в гл. III). Но
методы системного анализа широко используют и другие эври-
стические процедуры принятия решений и информационные мас-
сивы, полученные с помощью интуиции, опыта и знаний иссле-
дователей, конструкторов и других лиц, которых мы условимся
в дальнейшем называть экспертами.
Использование экспертов — прямое обращение исследовате-
ля систем не к ЭВМ, как это было продемонстрировано при
описании имитационных систем,, а к человеку, эксперту, носи-
телю знаний, опыта, — дает еще один ракурс, еще одну точку
зрения на изучение неформальных процедур и их использование
в системном анализе. Эксперт как бы играет роль некоторого
прибора, который либо совершает предпочтительный выбор,
либо устанавливает значения коэффициентов, либо связывает
логической нитью причину и следствие и т. д. Таким образом,
обращение к эксперту — тоже некоторый своеобразный экспе-
398
ГЛ. vn. ЭКСПЕРТИЗЫ И НЕФОРМАЛЬНЫЕ ПРОЦЕДУРЫ
римент, и кажется естественным стремление уточнить его, по-
вторить, обратиться с одним и тем же вопросом к различным
экспертам, использовать не только индивидуальный, но и кол-
лективный опыт.
Использование коллективного опыта, его предпочтительность
в тех или иных ситуациях — это еще одна гипотеза, за которую
целиком отвечает исследователь систем. Использование кол-
лективных. экспертиз привело к различного рода голосова-
ниям, описанию и анализу которых посвящена большая лите-*
ратура.
Примерами одного класса традиционных процедур, исполь-
зующих коллективный опыт, являются различные экспертизы,
консилиумы, совещания и т. д. В зависимости от характера
ситуаций эти процедуры могут сильно отличаться друг от друга.
В одних случах основой подобных процедур может служить
дискуссия, в других она категорически не допускается. Напри-
мер, во время медицинского консилиума очень важно обсудить
все доводы, не упустить деталей, взвесить все за и против и т. д.
Поэтому процесс диагностирования болезни — это прежде всего
процесс развития дискуссии.
Подобная же ситуация возникает при отыскании сложных
проектных решений. В зарубежной литературе возник для опи-
сания одного из способов решения таких проблем даже специ-
альный термин ^мозговой штурм».
Другой пример «консилиума» описал Л. Н. Толстой в романе
«Война и мир» —совет в‘Филях. Каждый из генералов, пригла-
шенных к Кутузову, высказал свою точку зрения, предложил
свой вариант решения. При этом строго соблюдалась суборди-
нация: сначала выступали младшие генералы, затем генералы,
имеющие более высокий чин. Никаких дискуссий не допуска-
лось. Последним выступал главнокомандующий: Он выслушал
все мнения и сказал: «Я приказываю...» Решение было принято
«единогласно» — мнение Кутузова не обсуждалось.
В целом ряде ситуаций гипотеза о преимуществе коллектив-
ного мнения бывает просто неверна. И военные операции дают
этому многочисленные примеры. Наверное, Ганнибал никогда
не выиграл бы сражение при Каннах, если бы он пользовался
методами мозгового штурма.
Заметим, что мнение большинства отражает некоторые
«средние» мнения, следовательно, оно необходимо тогда, когда
мы хотим получить какие-то средние характеристики. Найги
же какое-то исключительное решение методом опроса вряд ли
возможно. В таких ситуациях подчас мнение одного талантли-
вого человека может значить существенно больше, нежели кол-
лективная , экспертиза. Это утверждение также не является
строгим: указать те условия, при которых мнение одного экс-
§ 1. ПРЕДВАРИТЕЛЬНЫЕ ЗАМЕЧАНИЯ 399
перта следует предпочесть коллективному суждению, вряд ли
возможно. Здесь опять царствует опыт.
Порядок проведения различных экспертиз и совещаний очень
часто регламентируется традицией (т. е. в конечном счете снова
опытом) и во многих отношениях представляет собой искусство,
т. е. определяется некоторой системой предположений (гипотез).
Однако постепенно и в эту область начинают проникать раз-
нообразные математические методы обработки информации, т. е.
формализованного описания.
Вероятно, один из первых примеров применения «математи-.
ческих методов» в экспертизах дали виноделы. С незапамятных
времен существует институт дегустаторов. Их задача — оценить
качество вина (обычно в баллах), ранжировать по качеству
различные вина и т. д. Простейшая обработка информации, ко-
торую осуществляет группа дегустаторов, — это расчет средней
оценки. Дальнейшее усложнение используемых процедур свя-
зано с введением «веса» отдельных экспертов. Это уже суще-
свенное усложнение традиционной процедуры. В самом деле,
«вес» эксперта может определяться не только опытом, но и
результатами его деятельности. Например, «вес» эксперта (при-
чем материальное поощренйе эксперта зависит от его «веса»)
считается тем меньшим, чем больше его мнение отклоняется от
среднего значения оценки.' Благодаря такому усложнению в
процедуры построения экспертных оценок вносится элемент обу-
чения. Процесс функционирования коллектива экспертов пре-
вращается в некоторый динамический процесс с обратной
связью, поскольку материальное благополучие каждого из
экспертов (т. е. его «вес») ставится в соответствие с результа-
том профессиональной деятельности. В последней время де-
лаются попытки дальнейшего усложнения подобных процедур.
Они связаны со стремлением учесть спрос и представляют собой
элементы адаптации «коллективного вкуса» дегустаторов к ме-
няющейся ситуаций.
Пример с дегустаторами является типичным примером про-
стых экспертиз, широко используемых для решения относитель-
но несложных вопросов. И сейчас уже существуют разнообраз-
ные методы организации экспертиз и получения' экспертных
оценок.
Еще один пример простых экспертиз дают разнообразные
инструкции по проверке исправности сложных технических си-
стем. В инструкциях всегда точно сказано, с чего надо начать
осмотр. Если обнаруживаются те или иные особенности функ-
ционирования некоторой системы, то в инструкции сказано, ка-
кие дополнительные наблюдения необходимо сделать, какие
профилактические мероприятия надо провести, или, наконец,
указывается действие, устраняющее неисправность. В результа-
400 ГЛ. VII. ЭКСПЕРТИЗЫ и неформальные процедуры
те человек, реализующий указания инструкции, может и не
знать, чем была «больна» ремонтируемая им система. Он ис-
правил ее, привел в соответствие со стандартом. Если речь идет
о сетях ЭВМ и энергетических системах, то иного и быть не
может: подобные, системы чересчур сложны для того, чтобы их
могла достаточно подробно знать вся та армия техников, кото-
рая занята обслуживанием. Инструкция составляется обычно
группой «сверхквалифицированных» специалистов с учетом опы-
та эксплуатации таких же или подобных систем; Но самое'
главное, состоит в непрерывном обновлении и уточнении ин-
струкции на основании той информации, которая поступает к
экспертам.
Описанные инструкции — это тоже экспертизы, и их возмож-
ности не исчерпываются только одними техническими система-
ми. Если рассматривать их как некоторую службу, то, навер-
ное, они могут быть использованы и в системах управления
народнохозяйственными комплексами, а может быть, даже и в
медицине; Во всяком случае, их внедрение во многом сократило
бы затраты на бесполезные часто анализы и время на установ-
ление правильного метода лечения, поскольку каждый рядовой
врач мог -бы опереться на самый совершенный опыт.
Все сказанное здесь почти очевидно, и тем не менее исполь-
зование идей, связанных с «инструкциями поиска неисправно-
стей», внедряется крайне медленно, особенно в медицине. При-
чина здесь не только в том, что составление и обновление
подобных инструкций требует определенной организаторской
деятельности. Трудности внедрения подобных методов часто
связаны с особенностями психологии исполнителей и пользова-
телей. Подобные обстоятельства приходится также иметь в виду,
§ 2. Некоторые примеры сложных экспертиз
Пример с виноделами относится к так называемым простым
экспертизам, в которых каждый из экспертов способен дать
окончательный и официальный ответ на поставленный вопрос.
Этот вопрос может быть и достаточно сложным. Важно, что
эксперт способен на него ответить, что компетенция эксперта
достаточна для того, чтобы его мнение можно было считать
убедительным и надежным, чтобы на его основе оперирующая
сторона могла принимать решения. Но часто возникают про-
блемы, для которых нельзя найти экспертов, способных дать
достаточно вразумительную и надежную оценку. Тем не менее
и в этих ситуациях могут быть использованы экспертизы и "экс-
пертные оценки. Для этого экспертизы должны быть специаль-
ным образом организованы. Проблема должна быть, определен-
ным образом препарирована, разбита на последовательность
§ 2. НЕКОТОРЫЕ ПРИМЕРЫ СЛОЖНЫХ ЭКСПЕРТИЗ
401
отдельных простых вопросов, уже доступных компетенции экс-
пертов. Мы организуем как бы серию экспериментов с экспер-
тами, позволяющих последовательно раскрыть содержание про-
блемы. В этом параграфе мы рассмотрим два примера, демон-
стрирующих чтехнику декомпозиции в процедурах организации
экспертиз.
а) Метод дерева целей. Задача прогнозирования си-
туаций (научных, технических, политических и т. д.) на основе
экспертных оценок — очень распространенная проблема. Если
объект прогнозирования достаточно сложен, то часто эксперт
не в состоянии дать достаточно определенного ответа на прямо
поставленный вопрос: в такой постановке вопрос оказывается
часто вне компетенции эксперта.
Условимся, например, что прогноз события А заключается
в ответе на вопрос: «Произойдет это событие за время Т
или нет?». Обычно эксперт на подобный вопрос не может дать
четкого ответа. Он будет говорить о «более или менее вероят-
ном» свершении события или говорить'о шансах и т. д. Поэтому
эксперту вопрос обычно задается в вероятностных терминах:
«Какова, по мнению эксперта, вероятность Р(Г) того, что со-
бытие А произойдет за время t Т?». Подобную оценку мы бу-
дем называть интуитивной вероятностью. Заметим сразу, что
к математическому понятию «вероятность» эта оценка имеет
весьма условное отношение, поскольку речь идет об одном-един-
ственном событии. Это просто'своеобразная форма нечеткого
представления экспертной информации. Но она, как мы.уридим
ниже, весьма удобна для решения практических задач.
Примечание. Принятие решения, подчеркиваю, однократного реше-
ния, на основе анализа интуитивных вероятностей следует рассматривать как
своеобразную гипотезу, вроде, например, такой: использование интуитивных
вероятностей в большинстве случаев дает хорошие практические результаты.
Вторая трудность связана с тем, что прогнозируемые собы-
тия достаточно сложны и компентенции эксперта недостаточно
для того, чтобы дать четкий ответ. В этом случае событие долж-
но быть расчленено, построено, как говорят, дерево целей, де-
рево элементарных событий, которые уже будут допускать экс-
пертные оценки описанного выше типа.
Предположим, например, что речь идет о прогнозе такого
события, как высадка людей на Марс в 2000 году. Это событие
(S) мы условимся называть заключительным. Каждый член
коллектива экспертов должен прежде всего перечислить собы-
тия Si, $2.....5*, от выполнения которых зависит свершение
или несвершение события S. В нашем примере событие Si мо-
жет быть созданием двигателя, обладающего требуемыми ха-
рактеристиками, событие S2 — созданием системы необходимого
402
ГЛ. VII. ЭКСПЕРТИЗЫ И НЕФОРМАЛЬНЫЕ ПРОЦЕДУРЫ
жизнеобеспечения, S3 — существованием околоземной станции
для сборки конструкций и т. д. Определим еще событие $7:
Sf = f(Slt S2, ... ,Sk),
где f — некоторая логическая функция от переменных S/. В про-
стейшем случае,/ образована с помощью одних только операций
конъюнкции, т. е. событие Sf состоит в одновременном появле-
нии событий Si, S2....Sif. Но, вообще говоря, функция / мо-
жет иметь и более сложную структуру. Если, например, сборку
корабля можно осуществить не только на околоземной стан-
ции, то вместо операции «и», может появиться операция «или».
В. М. Глушковым [31] для подобных ситуаций был пред-
ложен вариант анализа, согласно которому задача эксперта со-
стоит в том, чтобы оценить условную вероятность Pl (t) наступ-
ления ^события S за время, не превосходящее t, при условии,
что функция f принимает значение, равное единице, т. е. что
событие Sf состоялось. Это —заключительный этап экспертизы.
Ему предшествуют другие экспертные оценки, которые будут
делать, в общем случае, другие эксперты, задача которых —
определить вероятность события Sf.
Предположим сначала, что эксперты могут назначить безус-
ловные вероятности Р,(т) наступления событий Si в течение
времени t т. Тогда на этом процедура экспертизы заканчи-
вается, и мы можем перейти к обработке ее результатов. По-
кажем, как это делается для простейшего случая функции /.
Поскольку событие Sf состоит в одновременном свершении со-
бытий S,, то безусловная вероятность Р/(т) того, что оно на-
ступит за время при условии, что Si— независимые со-
бытия, будет равна
Pf(T) = P,(T)P2(T) ... РМ
Основная задача экспертов, как мы уже сказали, состоит
в том, чтобы определить условную вероятность появления со-
бытия S в течение времени t после наступления события Sf.
Усредняя (с учетом веса экспертов или без этого) оценки
экспертов, мы получим эту функцию. Обозначим ее через Q(t).
Теперь уже совсем просто подсчитать безусловную вероятность
наступления события S за время t /*:
I*
P(O = $Q(/-g)rfPf(y. (2.1)
' о
Если же для события S, эксперты не могут указать безус-
ловной вероятности Р,(т), т. ё. событие Sr для этого чересчур
сложно, то необходимо перейти к следующему шагу. Он состоит
в том, чтобы для этого события S(- указать события {S,/}, от
§ 2. НЕКОТОРЫЕ ПРИМЕРЫ СЛОЖНЫХ ЭКСПЕРТИЗ
403
наступления которых зависит появление события S,; затем вве-
сти событие состоящее в наступлении событий S/j. Если
эксперты способны оценить безусловные вероятности Рц(г) на-
ступления событий Si, за время / и условную вероятность
Qi (Г) свершения события S,- за время Т после наступления со-
бытия S?, то по формуле типа (2.1) мы подсчитаем безуслов-
ную вероятность наступления события St.
Если эксперты не могут оценить вероятностей Р/Дт), го
продолжаем процесс расчленения. В результате мы получаем
некоторое дерево событий (рис. 2.1). Однажды мы дойдем до
Рис. 2.1
такого слоя, в котором будут уже достаточно простые события,
доступные для экспертных оценок.
Подобный способ рассуждений давно утвердился в систем-
ном анализе. Пример вероятностных оценок — одна из многих
иллюстраций той технологии обработки экспертных данных, ко-
торая известна как использование дерева целей. Она сейчас
широко используется в планировании, при составлении больших
проектов и т. д. Центральный момент описанной схемы, как и
других вариантов метода дерева целей, — принцип расчленения
большой проблемы на отдельные частные. Что же касается са-
мих оценок, то это могут быть не только вероятности — это мо-
гут быть стоимости, надежности и т. д.
Примечание. Дерево целей имеет и самостоятельное значение в систем-
ном анализе. Оно представляет собой архитектурную схему проекта, а на-
глядность, которую обеспечивает представление информации о проекте в форме
дерева целей, является важнейшим качеством этого элемента технологии про-
ектирования.
404
ГЛ. VII. ЭКСПЕРТИЗЫ и неформальные процедуры
Итак, употребляя термины «дерево целей» или «метод де-
рева целей», мы имеем в вйду тот или иной способ расчленения
проблемы на отдельные элементы, представление проекта в
форме некоторого графа, независимо от физического, техниче-
ского или экономического содержания, которое мы вкладываем
в его элементы.
Использование метода дерева целей в соединении с экс-
пертными процедурами — один из основных способов организа-
ции схем декомпозиции. Место экспертных субъективных ве-
роятностей могут занимать разнообразные математические мо-
дели и оценки, полученные на основе формализованных методов
анализа. В такой форме метод дерева целей превращается в
весьма универсальный Инструмент прогноза. Например, с его
помощью могут быть проанализированы разнообразные между-
народные, политические, экономические, военно-экономические
ситуации. Конечно, в каждом конкретном случае должна быть
предложена своя система процедур, но общая схема анализа в
основных чертах будет сохранять свою силу.
Метод дерева целей,' разумеется,. далеко не единственная
форма декомпозиции, и к тому же* он применим лишь к опреде-
ленному классу задач.
б) Метод решающих матриц. Итак, успех сложной
экспертизы определяется прежде всего тем, как мы сможем
разложить сложную проблему на ряд простых. Здесь нет еди-
ных рецептов. Метод дерева целей, который был изложен в
предыдущем пункте, — это лишь'’один из многих приемов де-
композиции. Другой способ был предложен Г. С. Поспеловым
для такого класса задач, где нельзя использовать приведенные
выше рассуждения (см. по этому поводу книгу [64]). Рассмот-
рим предложенный им метод решающих матриц на примере
задачи распределения ассигнований на фундаментальные ис-
следования. В свое время это была реальная задача: возник
вопрос о том, каким образом оценить существующее распреде-
ление средств в стране на исследования фундаментального ха-
рактера и свести к минимуму субъективный элемент при реше-
нии этой проблемы, имеющей огромное значение. Эта задача
трудна по существу, так как из непосредственного опрбса ис-
следователей, занимающихся данной проблемой, очень сложно
извлечь какую-либо информацию, полезную для выработки
принципа распределения ассигнований. Лицу, планирующему
бюджет^-приходится преодолевать противоречие между есте-
ственными научными интересами ученого, которому его пред-
мет исследования представляется весьма важным, и интереса-
ми общества, которое может выделить на развитие науки лишь
вполне ограниченные средства. Интересы общества должны
быть представлены в форме некоторой программы, некоторого
$ 2. НЕКОТОРЫЕ ПРИМЕРЫ СЛОЖНЫХ ЭКСПЕРТИЗ 405 .
перечня целей, который и является отправной точкой всей ра-
боты. Это очень важное положение — без четко определенных
целей развития научной деятельности сама постановка вопроса
о сравнении различных принципов распределения ассигнований
лишена какого-либо смысла. Это одна из тех проблем, которые
по существу требуют применения .программного метода. Ему в
данной ситуации просто нет альтернативы. Итак, сначала цели.
• Они могут быть самого разного содержания. Некоторые из них
будут иметь чисто научный характер. Например, к 2000 году
должна быть произведена высадка на Марс и в Тускарорской
(Курило-Камчатской) впадине должна быть создана подводная
лаборатория. Другие цели могут носить экономический харак-
тер, например, создание термоядерных электростанций или пол-
ная механизация тех или иных технологических процессов.
Третьи — оборонный характер, допустим, создание надежной си-
стемы противоракетной обороны, и т. д.
Мы оставляем в стороне процесс выработки самой програм-
мы. По существу, это тоже некоторая процедура, которая опре-
деляется направлением развития научного потенциала страны.
Научный потенциал нужен не сам по себе. Научные цели, в
свою очередь, являются следствием некоторых других — общих
целей: политических, экономических, военных и т.-д. Мы не бу-
дем здесь’ обсуждать связей научных целей страны с общими,
«генеральными» целями и перечень работ — перечень научных
целей — будем считать заданным. Обозначим его через а; а —
это вектор с компонентами a1 (i = 1, 2, ..., па).
Процедура построения плана распределения ассигнований
предусматривает, что все компоненты вектора а взвешены, т. е.
значениям этих компонент приписаны определенные положи-
тельные значения. Их удобно тем или иным способом норми-
«а ”а
ровать. Например, мы можем принять У, <? = 100 или У.= 1.
i-l i-l
Дальнейшую процедуру привяжем к тому разделению ис-
следовательских работ, которое существует в нашей стране.
Традиционным является разделение на опытно-конструкторские
разработки, прикладные и фундаментальные исследованияу По-
этому следующий этап состоит в определении перечня опытно-
конструкторских разработок. Группа экспертов называет неко-
торый перечень р (вектор с компонентами 0‘) опытно-конструк-
торских разработок, призванных обеспечить достижение целей.
Однако теперь вряд ли возможно требовать от экспертов ’ за-
дания весов компонент вектора 0. В самом деле, из каких со-
ображений можно сопоставить разработку двигательной уста-
новки для космического корабля с созданием робота для меха-
низации ручной работы? Только связав эти опытно-конструк-
406
ГЛ. VII. ЭКСПЕРТИЗЫ И НЕФОРМАЛЬНЫЕ ПРОЦЕДУРЫ
торские разработки с перечнем а и весами работ этого перечня!
Для определения этих весов была предложена (см. [64]) сле-
дующая процедура. Опытно-конструкторские разработки, как
правило, служат сразу нескольким научным целям. Поэтому пе-
ред экспертом ставится относительно простая задача построе-
ния матрицы Л₽ = (а?/) значимости опытно-конструкторских ра-
бот. Элемент af{ — это положительное число, показывающее от-
носительное значение конструкторской разработки номера i для
целей номера /. Эти величины также определенным образом
нормируются. Например, можно принять У, а^~ 1. Теперь в
качестве веса конструкторской разработки номера i естественно
принять величину 0г= У, аца1. Таким образом, получаем фор-
♦ - 1
мулу*
₽ = Л₽а,
(2.2)
которая дает отображение множества научно-технических целей
на множество опытно-конструкторских разработок.
Для обеспечения опытно-конструкторских разработок долж-
ны быть проведены научные исследования прикладного харак-
тера. Перечень этих работ мы будем обозначать с помощью
вектора у. Теперь задача группы экспертов состоит в указании
перечня и составлении матрицы Av значимости прикладных ис-
следований.
Группы экспертов, составляющие матрицы Л& и Л? в общем
случае состоят из разных лиц, поскольку для решения указан-
ных вопросов требуется различная квалификация и различная
направленность научных интересов. Коль скоро матрица Av за-
дана, мы можем, рассуждая аналогично предыдущему, по-
строить отображение множества опытно-конструкторских разра-
боток на множество прикладных исследований:
У = Л^. (2.3)
После этого нам остается сделать лишь один шаг. Следую-
щая группа экспертов перечисляет возможные направления
фундаментальных исследований. Например, 61 — численные ме-
тоды в теории турбулентных течений, б2 — условия стабильно-
сти популяций при повышенной радиации, б3 — классификация
элементарных частиц и т. д.
Далее, та же группа экспертов (она может быть расшире-
на за счет привлечения специалистов в области прикладных
исследований) составляет матрицу А6 значимости соответствую-
щих фундаментальных исследований, необходимых для успеш-
ного завершения соответствующих прикладных исследований,
В результате получаем возможность построить отображение
§ 2. НЕКОТОРЫЕ ПРИМЕРЫ СЛОЖНЫХ ЭКСПЕРТИЗ 407
множества прикладных исследовании на множество фундамен-
тальных исследований:
б = Лду. (2.4)
Формулы (2.2) — (2.4) позволяют построить отображение
множества целей на множество фундаментальных исследований:
б = ЛвЛуЛра. (2.5)
Если веса компонент вектора а заданы, то мы можем вычис-
лить и веса компонент вектора б.
В результате описанной процедуры мы находим относи-
тельную роль отдельных фундаментальных исследований в
успешной реализации намеченной программы. Теперь распре-
делителю бюджета уже не представляет большого труда раз-
делить средства, выделяемые на фундаментальные исследовав
ния: он должен разделить их пропорционально весам компонент
вектора б.
Примечание. Конечно, вопрос о распределении ассигнований, даже
когда определены компоненты вектора 6, остается достаточно сложным. Так,
некоторые исследования бессмысленно начинать, если ассигнования окажутся
меньше некоторого минимума, нужного, например, для закупки необходимого
оборудования. В то же время некоторые исследования даже в том случае,
если их веса оказываются нулевыми, нельзя прерывать (или нарушать тради-
ции). Но тем не менее информация, которую нам дает определение весов век-
тора б,— это рациональная основа Втя решения задачи о распределении
ассигнований.
Метод решающих матриц уже давно вошел в арсенал ме-
тодов системного анализа, и с его помощью* решаются разно-
образные технические и народнохозяйственные задачи.
В гл. III мы обсуждали общую схему программного метода.
В применении к проблемам управления народнохозяйственным
организмом мы определили его как систему процедур, связы-
вающих общие положения центральной доктрины — программ-
ные установки Партии — с цепочкой народнохозяйственных ме-
роприятий, необходимых для их осуществления, и системой
механизмов, обеспечивающих выполнение этих мероприятий.
Таким образом, система мероприятий, требующая для своей ре-
ализации затрат ресурса, и распределение этого ресурса яв-
ляются важнейшими составными частями реализации программ-
ного метода. Проведение фундаментальных научных исследо-
ваний является одним из подобных мероприятий. Следователь-
но, список целей а, как уже говорилось, должен следовать из
общих программных установок, и их веса, которые мы считали
заданными, на самом деле могут быть выведены описанным
приемом из общих целей страны. Для этого нам надо добавить
лишь один «этаж» к описанной схеме решения задачи о рас-
408
ГЛ. VII. ЭКСПЕРТИЗЫ и неформальные процедуры
пределении бюджета на фундаментальные исследования. В свете
сказанного становится более или менее очевидным, насколько
метод решающих матриц, позволяющий экспертам работать с
относительно простыми задачами, важен для совершенствования
принципов программного управления. Сегодня нетрудно описать
большой класс задач, для которых может быть использован
метод решающих ^матриц. Это прежде всего задачи региональ-
ного развития.
«Построение» проекта или, точнее, генеральной схемы раз-
вития региона начинается с перечця целей. Часть из них носит
экзогенный (внешний) характер, а другая часть целей опреде-
ляется внутренними потребностями региона. Взять, к примеру,
бассейн Енисея, охватывающий Красноярский край, Тувинскую
автономную республику и Иркутскую область. Среди экзоген-
ных целей мы можем назвать создание базы гидроэнергетики
и сйстемы тепловых электростанций, обеспечение страны цвет-
ными металлами и т. д. Интересы собственно региона — сохра-
нение экологического равновесия, повышение жизненного'уров-
ня населения (обеспечение продуктами, жильем и т. д.). Эти
исходные программные установки — список а. Но для его реа-
лизации надо решить ряд вспомогательных проблем — создания
транспортной инфраструктуры, развития сельскохозяйственного
производства в Минусинском котловане, демографическую про-
блему и т. д. Это — список ₽. Проведение любой из работ спи-
ска р необходимо для многих целей, т. е. многих мероприятий
списка а.
Но до составления генеральной схемы развития бассейна
еще далеко. Первый шаг построения плана развития региона
это составление перечня мероприятий. Использование для этой
цели метода решающих матриц или его модификаций может
оказаться очень полезным. Построив с его помощью списки ра-
бот, мы определяем не только их очередность, но и значимость
для достижения конечных целей. 'Следующий этап — это уже
детализация работ в форме некоторого графа и составление
расписания работ на основе данных о необходймых ресурсах на
их выполнение.
в) Обсуждение и комментарий. Несмотря на суще-
ственное различие приемов обработки экспертных оценок, свя-
занных с использованием дерева целей и решающих матриц,
у них есть одна общая черта: сложный вопрос, на который мы
должны ответить, расчленяется на ряд более простых. Человек
способен проанализировать ситуацию лишь Тогда, когда тре-
буется учесть относительно небольшое число обстоятельств
(взаимных связей). Поэтому мнение эксперта будет более или
менее достоверным лишь в том случае, когда ему приходится
отвечать на сравнительно простые вопросы.
§ 3. ЭВРИСТИЧЕСКИЕ МЕТОДЫ 409
Если бы разным экспертам в 1959 г. предложили оценить
вероятность высадки человека на Луну в 1969 г., то ответы за-
ведомо были бы очень далеки от истины. В то же время, если
бы было проведено предварительное расчленение проблемы, на-
пример были бы названы основные этапы реализации програм-
мы «Аполлон», то применение методики, изложенной в начале
параграфа, дало бы значение вероятности, немногим меньшее
единицы.
Успех в реализации экспертной процедуры црямым образом
зависит, от того, как мы расчленяем проблему. Ведь достоин-
ство метода распределения бюджета состояло прежде всего в
умелом разделении проблемы. Вряд ли найдется хотя бы один
эксперт, который может высказать одновременно суждения об
относительной значимости исследований в области радиацион-
ной генетики, классификации элементарных частиц и создания
математической теории устойчивости движения газа. И в то же
время многие эксперты относительно легко ответят на вопрос
о роли информации, которая будет получена в результате ис-
следований фундаментального характера при решении некото-
рых прикладных задач.
Следует, однако, иметь'в виду, что никаких общих рекомен-
даций о способах разделения проблемы нет. Эта процедура
' определяется прежде всего природой задачи и квалификацией
лиц, подготовляющих проведение анализа: разделение сложного
вопроса на цепочку более простых —это всегда некоторая эври-
стическая процедура, требующая знаний и изобретательности.
Описанная формализация экспертных процедур не противо-
речит той общей концепции имитационных систем, которая была
изложена в гл. III,.—она является ее дополнением. Кроме того,
как уже подчеркивалось, организация диалога человек —ЭВМ—
это некоторая система процедур последовательного сжатия
множества альтернатив. Описанные схемы рассуждений могут
служить именно этой цели — они позволяют в первую очередь
отбросить заведомо негодные варианты решений и тем самым
помогают выделить те альтернативы, которые мы будем под-
вергать дальнейшему исследованию с помощью систем ими-
тации.
§ 3. Эвристические методы в дискретных задачах
В предыдущих параграфах речь шла об использовании не-
формальных процедур в проблемах, которые не формализованы.
- Применение рассмотренных методов декомпозиции исходной за-
дачи можно трактовать как этап формализации этой задачи.
Таким образом, мы получили некоторые алгоритмы, при реа*
410
ГЛ. VII. ЭКСПЕРТИЗЫ И НЕФОРМАЛЬНЫЕ ПРОЦЕДУРЫ
лизации которых эксперт должен рассматриваться как опера-
тор, действующий над полем определенной информации.
Конечно, до настоящей (с точки зрения традиционной ма-
тематики) формализации еще далеко. Но интерпретация эври-
стических процедур как некоторого алгоритма с операторами
«биологического» типа (когда оператором является человек),,
оказывается весьма плодотворной. Она позволяет дать едино-
образное описание различных человеко-машинных процедур.
До сих пор речь шла о применении эвристических процедур
для анализа ситуаций, которые не формализованы и где нет
четко поставленных математических задач. Но может оказать-
ся, что эвристические процедуры необходимы и в задачах, ко-
торые не только хорошо поставлены, но и не содержат каких-
либо принципиальных математических трудностей и, следова-
тельно, особого интереса с точки зрения традиционной
математики не представляют.- К их числу относятся, любые
задачи, требующие перебора конечного числа вариантов, — ко-
гда конечное число шагов (вычислений) заведомо приводит
к окончательному решению, т. е. задачи, в которых решение
всегда существует и путь его получения очевиден, но время,
которое требуется для его отыскания, оказывается настолько
большим, что исчезает всякий смысл использования получен-
ного решения. Между теоретической разрешимостью задачи и
практической реализацией алгоритма оказывается пропасть. То-
гда мы по необходимости вынуждены прибегнуть к эвристиче-
ским методам расчета. Но любые эвристические методы оказы-
ваются «хорошими», конечно, лишь для специальных классов
задач, выделить которые можно только с помощью опыта экс-
пертов. При анализе и проектировании систем мы очень часто
сталкиваемся с подобными ситуациями. В этом параграфе мы
рассмотрим несколько достаточно распространенных задач, свя-
занных с составлением расписаний.
а) Проблема составления расписания работ.
В планировании и проектировании огромную роль играют раз-
личные задачи теории расписаний — расписаний работ, необхо-
димых для реализации проекта.
О постановке задачи теории расписаний мы уже говорили
в первой главе. Напомним некоторые особенности этой задачи.
Предположим, что нам предстоит выполнить некоторый пере-
чень работ Pi, Рг, • •., Ру. Выполнение работ стеснено рядом
условий. Их можно разделить на две группы.
Условие (а). Работы должны вйполняться в определен-
ной очередности. Работа Pi не может начаться, если некоторый
список работ Р,ь ..., Pik не будет выполнен. Условие (а) —
это «логическое» условие: оно связывает работы ограничениями
типа графа. Этот граф ориентирован и не имеет петель.
§ 3. ЭВРИСТИЧЕСКИЕ МЕТОДЫ
411
Условие (Р). Это условие ресурсного типа. Обозначим че-
рёз Vi(t) поток вектора ресурса, направляемый на выполнение
работы Рь Тогда в силу ограниченности ресурса
n
(/)<»(/)• (3.1)
Z = 1
К числу условий (Р) относятся также и ограничения интеграль*
ного типа
т
(3.2)
о
где v/(t) —поток ресурса /-й компоненты вектора ресурса. Если
время дискретно, то ограничения (3.1) и (3.2) имеют соответ*
ственно следующий вид:
N
ZM4)<v(4), (3.3)
Х = 1
К
(3.4)
£ = 1
где tk — временной интервал номера k.
Рассмотрим сначала тот,случай, когда условия типа (0)’
сводятся к неравенствам вида' (3.1) или (3.3).
Если векторы v(t) нам заданы, то план реализации проекта
сводится к следующей задаче: для каждого интервала времени
t назвать перечень работ и доли ы'(0 этих работ, которые
-должны быть выполнены так, чтобы суммарное время выпол-
нения проекта было минимальным. Такое распределение ресур-
са, такое расписание мы будем называть оптимальным. Пред-
положим, что доли u‘(t) определяются в десятичной шкале,
а время дискретно. Тогда задача построения расписания, как
•уже отмечалось в § 2 гл. I, может быть решена простым пере-
бором, поскольку имеется лишь конечное число возможных ва-
риантов. Однако если число работ достаточно велико, то реали-
зация перебора практически невозможна из-за огромных затрат
необходимого машинного времени. Кроме того, нужно еще обес-
печить выполнение ограничений (а). Поэтому в задачах рас-
сматриваемого типа приходится применять эвристические ме-
тоды.
В настоящее время предложено много разных подходов к
приближенному решению задач теории расписаний. Важное ме-
сто среди подобных методов играют различные способы агреги-
рованного описания.
412
ГЛ. VH. ЭКСПЕРТИЗЫ И НЕФОРМАЛЬНЫЕ ПРОЦЕДУРЫ
Другой путь состоит в попытках ранжирования работ, в
приписывании работам определенных приоритетов. Если удается
дем или иным образом ранжировать работы, т. е. приписать им,
веса, и по этим весам определять порядок их выполнения, то
задача составления расписаний становится значительно’проще.
В 1960 г. автором был предложен вариант подобной эвристи-
ческой процедуры, которая со временем получила название ло-
- гического ранжирования. Она приписывает больший вес той ра-
боте, которая Иредшествует другим, т. е. от которой зависит на-
чало большого количества работ.
Поясним смысл подобной ранжировки на примере, который
нами уже рассматривался в гл. I в связи с обсуждением огра-
ничений (а), т. е. когда связи между работами’ описываются
графом, изображенным на рис. 3.1. Предположим, что работы
Рис. 3.1.
Pi, Рг и Рз завершают проект, что они- одинаково важны и им
поэтому естественно приписать один й тот же вес, равный, на-
пример, единице, поскольку они предшествуют единственной
«работе» — окончанию, йли этапу сдачщ или приемке проекта
Ро. Работы Р< и Рд предшествуют уже двум работам: Pi и Ро.
Поэтому работам Р4 и Р9 мы припишем вес, равный двум. Та-
кой же вес, очевидно, будет иметь и работа Р7, которая пред-
шествует двум работам: Рз и Ро. Работа Рз предшествует трем
работам: Рь Р2 и Ро. Ее вес будет равен трем. Работа Р6 пред-
шествует работам Р2, Рз и Ро. Ее вес также равен трем. Тот же
вес имеет и работа . Ре,' которая предшествует работам Р4, Pi
и, конечно, Ро. Работа Рю будет иметь вес, равный четырем,
так как она предшествует работам Ре, Р4, Pi, Ро. Работа Рц
предшествует шести работам: Рт, Рз, Ръ, Р\, Р2 и Ро. Работе Р12
мы также должны приписать вес, равный шести, поскольку она
• § 3. ЭВРИСТИЧЕСКИЕ МЕТОДЫ
413
предшествует работам Рю, Pg, Ре, Pi, Pi и Ро- Еше одна работа
имеет вес, равный. шести. Это — работа Рю, которая предше-
ствует работам Pl0, Р8, Р4, Pi, Р3 и Ро. Работа Рн имеет вес,
равный семи.
Проводить подсчет весов удобно с помощью таблицы 3.1,
смысл которой достаточно ясен и не требует комментариев. За-
метим, что этот подсчет легко проводится вручную и не требует
много времени. Таблицу 3.1 удобно составлять одновременно с
составлением графа взаимосвязанности работ, который приве-
. Дея на рис. 3.1.
' Таблица 3.1
Расчет весов работ, связанных графом, изображенным
на рис. 3.1
Pi Pi Pi Pi Pi Pi Pi Pi Pi P.O p.. P.a P.a P.4 2
Pi 0
Рх 1 1
Pi 1 1
Pi 1 1
Pi 1 ’ 1 * 2
Pi 1 1 1 - 3
Pi 1 1 1 * 3
Pi 1 1 - 2
Pi 1 1 1 - 3
Pi 1 1 2
Pxi 1 1 1 1 4
Pxx 1 1 J 1 1 1 6
Pxi 1 1 1 1 1 1 6
Pxi 1 1 1 1 1 1 6
Pxi 1 1 1 1 1 1 1 7
Итак, наши работы оказались*сгруппированными в несколь*
ко групп равного веса. Наиболее «тяжелой» оказалась группа
состоящая из одной работы Рц. Вес работ этой группы равен
414
ГЛ. VII. ЭКСПЕРТИЗЫ И НЕФОРМАЛЬНЫЕ ПРОЦЕДУРЫ
семи. Следующая по весу группа состоит из трех работ: Рп, P\z
и Pis. Вес этих работ равен шести. Следующая группа состоит из
одной работы Рю, и ее вес равен четырем. Группа из трех ра-
бот .Ръ, Ре, Р» имеет вес, равный трем. Группа, состоящая из
трех работ Р«, Рд и Р7, имеет вес, равный дбум, и самая «лег-
кая» группа, имеющая вес, равный единице, состоит из трех ра-
бот: Pi, Рд и Рз. Выполнение всех работ надо начинать с наи-
более «тяжелой» группы работ (в данном случае работы Ры),,
которая задерживает начало наибольшего количества работ.
Такое ранжирование работ удобно во многих отношениях,
но самой важной его особенностью является то, что работы,
принадлежащие к одной группе, независимы: их можно про-
изводить в любом порядке, в том числе и одновременно. Да-
лее, важной особенностью предлагаемой схемы ранжирования
является возможность объединять работы одного веса — это
следствие их независимости. В результате мы получаем некото-
рый линейный граф (рис. 3.2). Для данного примера это будет
Q? @6 Q3 @1 Pq
Г ' "Л-1---1---1---ч----Г—
Рис. 3.2.
граф с работами Ро, Qi, Q2, Qs> Q4, Qe и Q7. Работа Q, является
объединением всех работ с весом i. Все расчеты для графа та-
кой простой структуры уже никакого труда не представляют.
Итак, простейшую схему решения задачи составления рас-
писания можно представить в следующем виде.
I. Вычисляются веса отдельных работ, и исходный граф за-
меняется линейным.
2. Начинают вестись работы в группе наиболее «тяжелых»
работ (в данном случае начинаем с работ группы Q7), куда на-
правляются все ресурсы.
3. После окончания работ группы Q7 ресурсы переключаются
на группу работ Q6 и т.‘ д.
4. Внутри каждой группы решаются задачи оптимального
управления.
Примечание. В процессе практической реализации метода его легко
усовершенствовать. Так, например, если мы ведем работы с группой Qn и
при этом ресурс полностью не исчерпывается, то, планируя распределение ре-
сурса уже внутри отдельной группы работ, мы можем сдвинуть некоторые
работы, например объединить работы группы Qn с теми из работ группы,
Qn-i, которым работы из списка Qn не предшествуют и которые могут про-
изводиться одновременно. Например, работы группы Qj(Ph) могут быть объ-
единены с работами группы Q«(Pn, Рц, Pis)-
Изложенный метод можно было бы назвать методом снятия
логических ограничений. Это — лишь один из возможных спосо-
§ 3. ЭВРИСТИЧЕСКИЕ МЕТОДЫ
415
бов упрощения задачи. Конечно, подобные эвристические под-
ходы не дают возможности в общем случае получить точное,
действительно оптимальное решение. Но они всегда дают верх-
нюю оценку решения, и прикладное значение этого обстоятель-
ства трудно переоценить. В самом деле, предположим, что с
помощью изложенного метода мы определили некоторое квази-
оптимальное время окончания работ Т. Оно всегда не меньше,
чем точное оптимальное значение Т*, т. е. Г* Т. Далее, пред-
положим, что исследователь начнет искать новые эвристические
методы, которые, с его точки зрения, в большей степени соот-
ветствуют природе задачи, чем метод, описанный выше. Пусть
с помощью некоторого другого метода исследователю удастся
составить новый вариант расписания. Время окончания работ
согласно новому расписанию мы обозначим через 7’**. Так как
точная оптимизация в принципе невозможна, то будем иметь
оценку Т* С Т**. Если окажется, что Т** < Т, то новый метод
следует считать более предпочтительным, чем изложенный в
этом пункте.
Говоря о задачах составления расписаний, следует подчерк-
нуть еще одно обстоятельство. Ввиду неточности исходных по-
сылок, нето.чности нормативной базы, наличия неизбежных по-
мех и многих'других факторов, нами неучтенных, следует при-
знать, что в реальных задачах проектирования (где требуется
определить срок окончания проекта или его стоимость) особая
точность, как правило, и не требуется. Кроме того, найденный
вариант распределения ресурсов всегда может быть использо-
ван в качестве первого приближения для более точного расчета,
а уточнение может быть сделано с помощью значительно менее
трудоемких методов теории возмущений.
б) Вариационные задачи на графах. Рассмот-
рим теперь несколько более сложные задачи. Пусть имеется У
работ (процессов), связанных между собой логическим усло-
вием типа (а). Выполнение каждой из работ описывается не-
которым уравнением вида
xi = fi(xl,vi), /=1,2, (3.5)
где xi(t) —фазовый вектор, характеризующий состояние про-
цесса, а V/ — ресурс, необходимый для выполнения работы (или
протекания процесса). Управления vt подчинены условиям типа
(Р), т. е. условиям вида (3.1) или (3.2). Кроме того, на управ-
ляющие воздействия vi наложены ограничения
V/ s G{, (3.6)
где Gif-некоторые множества. Смысл ограничений (3.6) до-
статочно очевиден: например, если не подготовлен фронт работ,
нельзя в достаточной мере использовать технику.
416
ГЛ. VII. ЭКСПЕРТИЗЫ И НЕФОРМАЛЬНЫЕ ПРОЦЕДУРЫ
В качестве фазовых переменных могут выступать самые раз-
личные величины, например количество бетона, уложенного в
тело плотины, или количество перевезенных грузов. Но удобнее
всего использовать относительные величины. Например, х/ счи-
тать долей выполненной работы, если х,-— скалярная величина.
Если х,- — вектор, то в качестве долей будут выступать его
компоненты х{. При такой интерпретации фазовых переменных z
в момент окончания всех работ величины х{ будут удовлетво-
рять условиям
х{(Т)==1. (3.7)
Основная трудность по-прежнему состоит в необходимости удов-
летворить ограничениям типа (а). Опыт решения задач опти-
мального управления, казалось бы, подсказывает естественный
путь ее преодоления — использование метода штрафных функ-
ций. Рассмотрим тот случай, когда х/— скалярные функции.
Условия типа (а) будут представлять собой некоторую совокуп-
ность условий вида
х< (I) = 0, если X/ (/) < 1. (3.8)
Для условия (3.8) можно построить штрафную функцию, на-
пример, следующего вида:
= — xj)2> (3.9)
В самом деле, так как по.смыслу задачи все х,^0 и в силу
условия (3.7) х/ < 1, то функция (3.9) неотрицательна. Она
равна нулю, если х, =0 или X/= 1. Значит, она . отлична от
нуля в том и только в том случае, когда х,- ф 0 и одновременно
X/ < 1, т. е. когда условие (3.8) не выполнено. Функция (3.9)
дифференцируема, что упрощает использование ее в процедурах
решения оптимизационных задач.
Используя штрафные функции вида (3.9), мы вместо функ-
ционала J(v/) будем использовать функционал вида
т
/=7+JEv«(1-A:/)2rf/’ <31°)
О id '
где сумма распространена по вс,ем тем индексам /, /, для ко*
торых имеют место ограничения вида (3.8).
Примечание. На самом деле, количество штрафных функций можно
резко сократить. Достаточно рассматривать лишь «соседние» работы. Напри-
мер,' в случае, когда мы имеем дело с графом, изображенным на рис. 3.1,
мы должны ввести в функционал функции Ф12 и Фгз, но вводить функцию Ф13
нет необходимости, поскольку введение функции Фгз гарантирует, что работа
Рг не начнется, пока не закончится работа Рз, а наличие функции Ф12 га-
рантирует, что не начнется работа Pi, пока не закончится работа Рг, а следо-
вательно, и Рз.
s 3S ЭВРИСТИЧЕСКИЕ МЕТОДЫ
417
Введение штрафных функций в задачу с логическими усло-
виями сводит ее к обычной задаче оптимального управления. Во
всяком случае, формально. Но задача остается чрезвычайно
сложной.
Наличие условий типа (а) означает, по существу, необходи-
мость учета структуры создаваемого проекта, которая всегда
носит дискретный характер. Объединение дискретного харак-
тера структурных ограничений с непрерывным, динамическим
характером функциональных особенностей является типичным
для любых крупных проектов.
Снятие структурных ограничений с помощью штр.афных
функций'—важный инструмент системного анализа. Но когда
речь идет о задачах с высокой размерностью фазовых перемен-
ных, прямое решение задачи оптимального управления и со-
ставления на основе этого решения оптимального расписания
(оптимального плана использования ресурсов) кажется утопич-
ным. В действительности расчет оптимального плана должен
опираться на некоторую итерационную схему, первый шаг, ко-
торой должен быть относительно простым. Для построения пер-
вого приближения может быть использована схема снятия ло-
гических ограничений, которая была изложена в предыдущем
пункте. Посмотрим, к чему приведет эта схема в случае задачи
оптимизации функционала / при динамических условиях (3.5):
Обсудим сначала структуру тех функционалов, которые
имеет смысл рассматривать в задачах подобного рода. Прежде
всего, это время выполнения проекта Т. Задачи на быстродей-
ствие здесь вполне уместны: нужно так распределить ресурсы,
чтобы по возможности быстрее закончить проект (или ком-
плексную Программу), т. е. выполнить условия (3.7). Но задачи
на быстродействие отнюдь не являются единственным типом ва-
риационных задач, которые здесь возникают. В случае больших
проектов, таких, например, как строительство БАМа или круп-
ного энергетического комплекса, время их завершения лежит,
как правило, за пределами пятилетних, а тем более годичных
планов. Поэтому для планирования на заданный срок мы долж-
ны ставить задачу по-другому: за заданное время макси-
мально продвинуться в реализации перечня работ. Как форма-
лизовать эту задачу? Для подобных задач оказывается удоб-
ной принятая интерпретация фазовых переменных. Поскольку
все — величины безразмерные, то в качестве функционала J
может выступать их сумма:
/=Ш . (3.U)
1.1
Итак, мы приходим к следующей задаче: определить такой спо-
соб распределения ресурса, удовлетворяющий ограничениям
*/gl4 Н, Н, Моисем
418 • ГЛ. VII. ЭКСПЕРТИЗЫ И НЕФОРМАЛЬНЫЕ ПРОЦЕДУРЫ
вида (0), чтобы максимизировать функционал (3.11) за за-
данное время i* при условии, что фазовые переменные х{ удов-
летворяют динамическим условиям (3.5) и ограничениям (а).
В этой задаче условий на правый конец фазовой траектории не
накладывается. Можно поставить и другие задачи. Например,
работам могут быть приписаны «веса» или некоторые работы
должны быть обязательно закончены.
Снятие структурных ограничений на основе ранжирования
работ сводится, как мы видели, к разбиению всей совокупности
работ на группы работ, которые можно производить одновре-
менно. Предположим, что такое разбиение произведено. Тогда
МЫ имеем следующие группы.
Группа Qs самых «тяжелых» работ, имеющих максимальный
вес; работы, входящие в эту группу, обозначим через хн,
x2s, ...
Группа Qs-i работ, имеющих следующий вес, — xi,s_i,
Х2, s—1> • • •
Группа Qs-2 и т. д.
Поскольку все работы каждой из групп Qt должны закон»
читься одновременно, то мы имеем декомпозицию исходной ва-
риационной задачи на ряд отдельных задач оптимального
управления для работ, входящих в каждую из групп Qi. Таким
образом, для каждой из групп работ Q,- -мы должны найти
оптимальное распределение ресурсов между работами этой
группы.
Что же означает в этом случае понятие «оптимальное рас-
пределение ресурса»? Если речь идет" о задаче на быстродей-
ствие, т. е. о составлении такого расписания работ, при кото-
ром вся совокупность работ будет выполнена за минимум вре-
мени, то очевидно, что и после декомпозиции мы будем иметь
совокупность задач на быстродействие. В самом деле, поскольку
все работы каждой из групп должны заканчиваться одновремен-
но, то суммарное время выполнения всей совокупности работ Т
будет- равно сумме времен Т; выполнения работ списков Qi,
т. е.
Т = £ TL. - - (3.12)
i=i '
Следовательно, для новой задачи на быстродействие, которую
мы получили после того, как ранжировали работы и перешли
к ограничениям типа линейного графа, необходимыми и доста-
точными условиями оптимальности будут условия
7\->min, i=l..........з. (3.13)
$ 3. ЭВРИСТИЧЕСКИЕ МЕТОДЫ
41Ь
Итак, мы приходим к следующей совокупности s задач: опре-
делить минимум функционала (3.13) при условиях
. (3.14)
И(0)»0, х{(Т/) = 1, (3.15)
Е^с^О). (зле)
/
Эти задачи уже во много раз проще исходной. Прежде всего,
их размерность примерно в s раз меньше. Но это не главное
упрощение. Самое существенное состоит в том, что задачи
(3.13) — (3.16) уже не содержат логических ограничений (а)
и могут быть изучены стандартными методами.
Предложенная схема декомпозиции может быть использо-
вана и для задач управления с функционалом, отличным от
времени Т выполнения всей совокупности работ Пусть, напри-
мер, мы имеем дело с задачей планирования на заданном ин-
тервале времени 7, и ищем такое распределение ресурсов, ко-
торое обеспечивало бы в течение этого времени максимизацию
функционала
/“ЕхДг). (3.17)
i ,
Разбиваем снова наши работы на группы Qs, Qs_i, ... На-
помним, что работы группы Q, должны выполняться одновре-
менно, и пока все работы группы Q, не закончены, выполнение
работ группы Qi-1 не начинается. .
Если заданное время Т больше Ts — оптимального времени
завершения работ списка Qs, то оставляем то распределение
ресурса, которое мы получили, решая для группы Qs задачу
на быстродействие (3.13)—(3.16), и переходим к анализу сле-
дующей группы работ Qs-i.
Если T>.TS+ Ts-i, то и для выполнения работ списка Qs-i
мы сохраняем то распределение ресурса, которое получено из
задачи на быстродействие для работ этого списка.
Рассуждая подобным образом, мы придем однажды к не-
равенству (если только задача невырожденная и время плани-
рования Т не превосходит оптимального времени завершения
всех работ Г*)
t<Ts + Ts_l+..K.+ Ts_k. -(3.18)
Если имеет место неравенство (3.18), то мы поступаем сле-
дующим образом. Для- работ, принадлежащих спискам Qs,
Qs-i, .... Qs-h-i, мы сохраняем то распределение ресурсов, ко-
торое было найдено при решении соответствующих задач на
быстродействие. Для работ, принадлежащих списку Qs-ь, мы
420 ГЛ- VII. ЭКСПЕРТИЗЫ И НЕФОРМАЛЬНЫЕ процедуры
решаем следующую задачу'с фиксированным временем и сво-
бодным правым концом:
xLft(o)=o,
Е (ЗЛ9)
ls3s~k
J ==х Е %s— k (Т ~TS Ts _ i ... •’ Ts- 1) —* max.
i^Qs-k
‘ I
Итак, предлагаемая схема ранжирования работ позволяет за»
менить сложную задачу оптимального управления с ограничен
ниями типа графа совокупностью значительно более простых
задач.
в) Возможные схемы уточнения приближен*,
но го решении. Предлагаемые процедуры всегда опреде-
ляют некоторое допустимое решение —решение, удовлетворяю-
щее всем ограничениям, т. е. мы получаем лишь некоторую
оценку решения. В случае задачи на быстродействие — верхнюю
оценку необходимого времени. В случае функционала (3.17)—
его нижнюю оценку.
Рассмотрим теперь возможность уточнения полученного ре-
шения с помощью анализа системы (3.5) и метода штрафных
функций.
Итак, предположим, что мы решили задачу на быстродей-
ствие, т. е. распределили ресурс и составили расписание с по-
мощью метода логического ранжирования. В результате мы
определили управления Vi(t) и время Т.окончания всей сово-
купности работ. Обозначим через Т* оптимальное время: Т*
С т-
Зададим теперь некоторое время Т, которое было бы меньше ,
оптимального времени Т*. Выбор такого интервала времени мо-
жет оказаться'затруднительным, так как желательно, чтобы
отличие Т от Т* было не очень большим. Мы не' будем обсу-
ждать вопрос выбора величины Т и будем считать, что'некото-
рое Т < Т* нам задано. Согласно постановке задачи на быстро-
действие в конечный момент времени должны быть выполнены
условия (3.7). Так как Т < Т*, то не существует управления,
которое за время t = Т переводит систему, из начального со- .
стояния в состояние (3.7). Поэтому введем функционал /, ха-
рактеризующий расстояние до цели управления. Это можно
Сделать многими способами, например можно минимизировать
выражение
/ = Е(1-х|0)2. (3.20)
i
§ 3. ЭВРИСТИЧЕСКИЕ МЕТрДЫ
421
Примечание. Можно рассмотреть и функционал вида
t
и решать задачу его максимизации.
Для снятия логических ограничений мы используем штраф-
ные функции вида (3.9); тогда для решения вспомогательной
задачи воспользуемся функционалом (3.10), который с учетом
(3.20) перепишем в виде
? ?
/ = - 2 J £ (1 - х4 (/)) ft (Xi, vt) dt + A, J £ x2t (1 - x,r dt, (3.22)
0 i 0i,i
где X > 1. Функции штрафа в форме (3.9) не только позволяют
снять ограничения (а), но и выполняет еще одну миссию.
В силу выбора фазовых координат все х/ удовлетворяют усло-
виям
х,(/)<1. (3.23)
Функции штрафа (3.9) не допускают нарушения условий (3.23).
Итак, мы рассматриваем задачу минимизации за время
t — T функционала (3.22) при условиях
*1 = fi (xh v{),
ЕМ0<И, (3.24)
хг(О) = хо.
Задача (3.22), (3.24)—это задача со свободным правым кон-
цом. Мы считаем, что задача оптимального управления в усло-
виях ранжирования работ уже решена и функции хД/) и v°(t),
являющиеся ее решением, нами определены. Значит, мы имеем
хорошее первое приближение. Поэтому естественно использо-
вать для решения задачй (3.22), (3.24) один цз известных ме-
тодов, например метод последовательных приближений Крыло-
ва— Черноусько, изложенный в гл. II. Проведем соответствую-
щие рассуждения применительно к изучаемой задаче. Составим
функцию Гамильтона
н *= Е Фifi (Xi, vt) + 2 Е (1 - Xi) fi (xi, Vi) - к Ex?(l -xt)2. (3.25)
t . i i,f‘
Напомним, что последняя сумма в правой частй (3.25) рас-
пространена по всем тем индексам i и j, для которых работа
номера i непосредственно предшествует работе номера /.
14 Н, Н. Моисеев
422 гл. VII. ЭКСПЕРТИЗЫ И НЕФОРМАЛЬНЫЕ ПРОЦЕДУРЫ
Импульсы ipi должны удовлетворять уравнениям
* = - й - -+< й; + «л - 2 (1 - X,) й; +
" + 2А Е\ (1 - Xl)2 - 2Х Е" х2к (1 - xt), (3.26)
где сумма Е' распространена по индексам j тех работ, кото-
рым непосредственно предшествует работа номера I, сумма
Е" - *о тем индексам k, для которых работы Рк непосред-
ственно, предшествуют работе Р,. Поскольку мы рассматриваем
задачу со свободным концом, то импульсы tyi(T). удовлетво-
ряют нулевым условиям трансверсальности:
|((Т)-О.. . (3.27)
Первый шаг метода Крылова — Черноусько состоит в реше-
нии следующей задачи Коши:
= (3.28)
xf(O)=xo. • (3.28')
Решив задачу (3.28), (3.28'), мы восстановим траекторию xJ(O
и можем вычислить терминальные значения х?(Т). Одновре-
менно мы вычисляем и соответствующее значение функционала
/°. Заметим, что- управление, о®(/) является допустимым, и по-
этому траектория x°t(t) удовлетворяет всем ограничениям, в
том числе и. логическим ограничениям (а). Поэтому второе
слагаемое в (3.22) будет равно нулю. Теперь мы можем решить
. задачу Коши
х;(т) = х?(т),- Ф,(Т) = О
для систем уравнений (3.26), (3.28), в которых принято о£ = у?.
В процессе решения этой задачи Коши мы вычисляем и новое
управление v\. Для Stoto мы используем принцип максимума.
Задача определения нового управления сводится к решению за-"
дачи нелинейного программирования
н* = Е i?ifi (xt, vt) + 2 Е U — х{) fi (xt, Vi) -> max, (3.29)
где vi должны удовлетворять ограничениям E vi
Решив задачу (3.29) и определив новое управление мы
можем повторить описанную процедуру. В частности, мы можем
вычислить новое значение функционала Р. >
Если Р < 1°, то мы получили уточненное .значение управ-
ления. Но задача нелинейна и в общем случае может ока-
заться, что Р /°. Тогда мы должны поступить несколько
« 3. ЭВРИСТИЧЕСКИЕ МЕТОДЫ _
428
иначе. Введем величину Ду°(/п) = (и1— ий)/пг и примем 6’ =
= п° 4-До°(/п), после чего подберем т так, чтобы имело место
неравенство 71 < 1°.
Если Т и Т, связанные с оптимальным временем Т* двусто-
ронним неравенством
Т<Г<Т,
достаточно близки с точки зрения эксперта (например, иссле-
дователя системы), то на этом мы можем закончить вычисле-
ния: на участке (О, Т) мы примем управление у1, а для t>T —
управление v°. Если нам не удалось назначить Т достаточно
близко к Т, а это будет всегда, когда Т — Т* велико, то мы
должны еще раз повторить описанн^о процедуру для Tj > Т,
но при этом нужно стремиться выбрать Л < Т*.
г) Программный метод и задачи на.графах.
Задачи рассматриваемого в этом параграфе класса имеют
огромное прикладное значение, и прежде всего для реализации
программного метода управления, в математическом обеспече-
нии которого они должны занять важное место.
В самом деле, одна из центральных проблем программного
метода — это формирование программ, согласование программ,
их увязка между собой, разумное распределение ресурсов и
управление реализацией этих программ. Обычно принято вы-
делять- крупные программы развития—строительство новых
предприятий, экономических комплексов, развитие транспорт-
ной инфраструктуры, обороноспособности, образования .и т. д.
Как правило, эти программы представляют собой некоторые
списки работ, связанные между собой различными условиями
логического типа и, прежде всего, условиями типа графа. Для
каждой работы необходимо еще задать ее ресурсные характе-
ристики: если использовать терминологию предыдущего пунк-
та, то должны быть заданы функции Принято гово-
рить, что программа задана (сформулирована), если опреде-
лены ресурсные характеристики, и логические связи между ра-
ботами.
В этом параграфе мы считали ресурсные ограничения неко-
торым экзогенным (заданным извне) элементом. Но ресурс воз-
никает вследствие работы предприятий обеспечивающих отрас-
лей. Другими словами, есть два динамических процесса: один —
реализация программы, а другой — процесс создания необхо-
димых для обеспечения программы ресурсов. Оба эти процесса
тесно связань^ между собой. Таким образом, мы рассмотрели
лишь одну сторону этого сложного явления.
Конечно, пытаться сформулировать, а тем более решить
«в лоб» задачу оптимизации процесса выполнения программы
и обеспечения ее необходимым ресурсом представляется затеей
14*
424
ГЛ. VII. ЭКСПЕРТИЗЫ И НЕФОРМАЛЬНЫЕ ПРОЦЕДУРЫ
утопичной. Здесь необходимы разнообразные итерационные про-
цедуры. Элементами подобных итерационных процедур могут
быть описанные в п. б) .оптимизационные задачи на графах.
Еще одна проблема, занимающая важное место среди про-
цедур, реализующих программный метод, — это проблема управ-
ления реализацией программы. При изложении алгоритма со-
ставления расписания работ мы исходили из детерминирован-
ных уравнений (3.5). В действительности мы всегда сталки-
ваемся с тем фактом, что не все параметры процесса нам до-
статочно точно известны и не все внешние воздействия строго
детерминированы. Одним словом, система уравнений (3.5)
должна была бы быть заменена такой системой:
xt = fi (xit Vi, lt), (3.30)
где — неопределенный или случайный фактор. Поскольку
программное управление, на основе которого мы составили рас-
писание работ, было получено с использованием детерминиро-
ванных уравнений, то для управления реализацией программы
мы должны ввести корректирующую обратную связь.
Проблема управления работами, связанными условиями
типа ориентированного графа, является в некотором смысле
классической: она возникла еще в пятидесятые годы, и ей по-
священ не один десяток работ. В рамках этой проблемы воз-
никло много интересных способов организации корректирующей
обратной связи, среди которых особое значение приобрел метод
критического пути («pert-time»).
Предположим, что мы составили расписание работ. Тогда
каждой работе Pi будет отвечать свое время выполнения Т,.
Предположим теперь, что мы имеем мгновенную фотографию
«состояния» всего списка выполняемых работ, т. е. нам стано-
вятся известными величины хД/*), где /* — некоторый фиксиро-
ванный момент времени. В общем случае величины х/(Р) могут
отличаться от их программных (оптимальных) значений х,(/‘)
Это отличие как раз и возникает вследствие неучтенных или
случайных факторов.
«Состояние работ» хД/*) определяет некоторую совокупность
точек Pi на графе. И каждая из этих точек связан* с верши-
ной графа —с работой Ро — конечным числом путей, представ-
ляющих собой совокупность некоторого количества работ. По-
скольку время выполнения каждой из этих работ известно —
это величины Л, то мы можем подсчитать суммарное время
выполнения работ, лежащих на каждом из путей, — суммарное
время выполнения цепочки работ, соединяющих точки 0*( с
вершиной Ро. Среди этих цепочек найдется по крайней мере
одна, время выполнения работ которой, если следовать исход-
ному расписанию, будет максимальным. Эти цепочки принято
§ 3. ЭВРИСТИЧЕСКИЕ МЕТОДЫ
425
называть критическими путями. Именно они будут определять
окончательное время завершения всей совокупности работ и за-
держивать окончание проекта. Если нам удастся сократить вре-
мена выполнения работ, лежа'щих на критических путях, то тем
самым автоматически мы сократим время выполнения всей со-
вокупности работ. Это свойство критического пути и явилось
основой для создания первой системы управления разработками
(для возникновения метода «pert-time»). Идея такого управле-
ния' очень проста. Диспетчер следит не за всей совокупностью
работ, а только за работами, лежащими на критических пу-
тях. По информации о состоянии работ, которая к нему посту-
пает, он быстро рассчитывает критические пути, те временные
задержки, которые возникают, и добавляет ресурсы тем рабо-
там, которые задерживают выполнение всей совокупности работ.
Сегодня существует уже много способов расчета критиче-
ского пути, и соотве!ствующие программы включены в стан-
дартное математические обеспечение большинства ЭВМ.
Но наряду с методом критического пути может быть пред-
ложен и ряд других способов организации обратной связи.
В гл. II был изложен метод синтеза, который мы назвали мето-
дом скользящего плана. Он использует тот же алгоритм, с по--
мощью которого рассчитывалась оптимальная программа. По-
скольку в результате логического ранжирования работ и реали-
зации метода уточнения управляющих воздействий мы получаем
довольно экономные способы расчета программ, то эти проце-
дуры могут быть использованы и для управления реализацией
программы. Схема такой коррекции следующая.
1. Рассчитываем Оптимальную программу: находим управ-
ления и фазовую траекторию
2. Через некоторый интервал времени т, который являемся
параметром системы (и определяется чисто техническими об-
стоятельствами), мы производим измерение фазовых перемен-
ных Поскольку мы вели расчет с помощью уравнений
(3.5), а реальный процесс следовал уравнениям (3.30), то воз-
никает рассогласование:
д,(т) = хДт) — х\(х). (3.31)
Одновременно на этом этапе происходит уточнение возможных
неопределенностей, например, уточняется нормативная база.
Другими словами, система (3.5) заменяется более правдоподоб-
ной системой (3.30). С помощью уравнений (3.30) и с учетом
нового начального состояния х. (т) = х' (т) + бг (т) рассчиты-
вается новая программа и определяются новые управления.
3. Работы выполняются согласно новому расписанию в тече-
ние интервала времени (т, 2т) и т. д.
426
ГЛ. VII. ЭКСПЕРТИЗЫ И НЕФОРМАЛЬНЫЕ ПРОЦЕДУРЫ
Подобная схема, хотя и требует более совершенной вычис-
лительной техники, нежели схема расчета оптимальной про-
граммы, дает гораздо более полную информацию исследователю
и таким образом позволяет сделать управление значительно
более эффективным.
§ 4. Проблемы матричного синтеза
af*O постановке задачи и ее интерпретациях.
В этом параграфе мы рассмотрим систему, эволюция которой
описывается уравнениями с дискретным временем вида
*(/n+i) = /B(xп = 0, 1;,..., N, (4.1)
где и (tn) — это вектор управляющих воздействий, |(/л) — слу-
чайные факторы. Управляющие воздействия должны выбираться
из условия минимизации аддитивного функционала вида
N-1
1=^ Fn{xnt un) + FN(xN). (4.2)
n-0
‘ Начальное состояние системы /
х(1о) = хо (4.3)
является в общем случае также величиной случайной. Посколь-
ку правые части уравнений (4.1) содержат случайные функции
дискретного аргумента £(/л) и-начальное состояние системы хо
также случайно, то и функция x(tn) является некоторой случай-
ной вектор-функцией. Поэтому функционал (4.2) также носит
вероятностный характер. Мы будем далее считать, что речь
идет о минимизации математического ожидания этого функцио-
нала, т. е. о минимизации функционала вида
/ = /. (4.4)
Задачи вида (4.1) — (4.4). охватывают чрезвычайно широкий
круг вопросов, возникающих в системном анализе. При анализе
уравнений вида (4.1) необходимо учитывать и использовать
физические особенности изучаемых систем. В этом параграфе
мы будем изучать системы вида (4.1) в связи с изучением
проблемы управления каскадом водохранилищ.
Обозначим через xl(tn) количество воды в водохранилище
номера i в момент времени tn\ через и* (tn)—попуск воды в
период tn из водохранилища номера i в водохранилище номера
i-Hl; через Rl(tn)—боковую приточность, т. е. количество
воды, поступающее в реку между водохранилищами I и i 4- 1
за время tn; через Sl(tn) — количество воды, отбираемое из во-
§ 4, ПРОБЛЕМЫ МАТРИЧНОГО СИНТЕЗА
427
дохранилища номера I за то же время на хозяйственные нужды
и, прежде ’всего, на орошение. Величины ul(tn) и S‘(tn) яв-
ляются управлениями. Боковая приточность Rl(tn) —случайная
величина,-которая нами не контролируется. Основное балансо-
вое соотношение, которое определяет функционирование систе-
мы- водохранилищ, имеет вид
X 4+i) = xl (tn) + и1-' (tn) - и1 (tn) + Rl (tn) ~ sl (tn). (4.5)
Начальное состояние системы задается условиями
х'(0) = х'- (4.6)
Величины х1а считаются случайными. Выбор управляющих воз-
действий определяется целым рядом целей. К их числу отно-
сится количество выработанной электроэнергии, величина сум-
марного урожая с поливных земель и целый ряд других показа-
телей. Первый этап -анализа состоит в свертке этих критериев.
Мы не будем обсуждать соответствующие процедуры: о них мы
говорили в гл. I. Итак, будем считать, что функционал тем или
иным образом сформирован и имеет вид
j=ZZFt(x‘(tn), х1 ап_.), r1 (tn)) + ZZФг(s'(и, л*(tn)),
in in
(4.7)
где ^(tn)—случайная величина, характеризующая интенсив-
ность атмосферных осадков. Поскольку управление «(/л-i) мо-
жет быть выражено с помощью уравнения (4.5) через x(/n-i)
и x(tn), то функционал (4.7) может быть сведен к виду (4.2).
Примечание. В настоящее время существует много разных моделей
водохозяйственных систем, включающих в себя систему водохранилищ. Глав-
ное различие этих моделей между собой сводится к различному описанию
критериев эффективности, т. е. функций Fi и Ф/, поскольку • балансовые соот-
ношения достаточно стандартны. Они, правда, могут быть несколько видоиз-
менены за счет учета второстепенных факторов, например так называемого
«времени добегания» и т. д. Но все уточнения и усовершенствования модели
не изменят ее «класса принадлежности» — выбор управлений сводится к ана-
лизу задач типа (4.1)—(4.3).
Какие же проблемы теории управления при этом возни-
кают? Оказывается, проблемы, типичные для любой управляе-
мой системы: во-первых, выбор программы и, во-вторых, по-
строение системы корректирующих управлений, осуществляю-
щих обратную связь. Обсудим последовательно обе эти про-
блемы.
б) Выбор программного управлен и я. • Как следует
из общей схемы программного, метода, для решения поставлен-'
ной задачи нужно прежде всего задаться значениями случайных
и неконтролируемых факторов |‘(/п.) и х^О). В задачах управ-
428
ГЛ. VII. ЭКСПЕРТИЗЫ и неформальные процедуры
ления водохранилищами этих факторов, как мы видели, до*
вольно много. Это, прежде всего, начальный уровень воды в во-
дохранилищах. Он. может быть получен обработкой рядов на*
блюдений или задан с помощью экспертных оценок. То же са*
мое можно сказать о боковой приточности и количестве осад*
ков — необходим некоторый начальный прогноз.
Сегодня проблеме прогноза инженеры и исследователи при-
дают очень большое значение, ей посвящается много работ,
использующих весьма совершенный математический аппарат.
Мне кажется, что этот интерес инженеров к проблеме прогноза
не всегда оправдан, поскольку для нужд практики достаточно
использовать весьма грубые оценки. Я вижу, по меньшей мере,
еще три аргумента, обосновывающие это утверждение.
Во-первых, случайные процессы, о которых мы говорили,
носят нестационарный характер и, как правило, не очень точно
измерены. Обрабатывая наблюдения, мы не будем получать
достаточно надежных оценок, поэтому применение совершен-
ной математической теории будет лишь создавать впечатление
научной обоснованности статистических оценок.
Во-вторых, считая величины случайными и обрабатывая
эти величины с использованием тех или иных статистических
методов, мы делаем определенные допущения, отражающие
плохую изученность явлений, от которых зависят рассматривае-
мые нами случайные процессы. В самом деле, например, бо-
ковая приточность — следствие целого ряда факторов. Это и
водность прошлого года, и количество снега, выпавшего в те-
чение зимы, и количество воды, отобранное из водоносных го-
ризонтов, и т. д. Но мы не имеем удовлетворительных моделей,
описывающих связи подземной гидродинамики и поверхностного
стока, у нас нет и моделей формирования поверхностного стока,
мы не знаем многих других обстоятельств, которые определяют
'боковую приточность. Поэтому нужно тем или иным образом
ее параметризовать, для чего мы формулируем гипотезу'о том,
что боковая приточность — некоторый случайный процесс, и на
базе этой гипотезы ведем обработку эмпирической информации.
Может,ли считаться такая параметризация вполне обоснован-
ной? Конечно, нет. Но стоит ли тогда применять для этой па-
раметризации сколько-нибудь сложную и совершенную систему
обработки данных?
И наконец, в-третьих, напомним, что наша задача — полу-
чить лишь некоторую опорную траекторию, найти оптимальное
управление в некоторой «типичной ситуации». Вернемся теперь
к той «философии», на которой основана данная книга. Значе-
ния функционалов в «правильно» поставленных задачах не
очень чувствительны в окрестности своих экстремальных зна-
чений1 к малым изменениям управляющих воздействий. На этом
«4. ПРОБЛЕМЫ МАТРИЧНОГО СИНТЕЗА 429
в была основана идея быстрых алгоритмов, использующих для
определения управлений относительно грубые модели. В дай-
ной модели нет каких-либо явных малых параметров, которые
позволили бы построить асимптотическую теорию. Упрощение
же модели достигается за счет огрубления путем параметри-
зации входящих в нее величин и за счет упрощения схемы об-*
работки экспериментальной информации. Естественно, что упро-*
щенная схема служит лишь для определения программного
управления. Получив возможное, допустимое управление, мы
подставляем затем его в исходную «точную» систему (4.1) и
вычисляем функционал с полным учетом всех деталей процесса.
Но эта задача уже не может относиться к числу трудных, по-
скольку она сводится к решению задач Коши. Заметим, что все
это относится' только к некоторой заданной системе величин
КМ- -
Следующий после выбора программного управления шаг —
это анализ его устойчивости по отношению к исходной инфор-
мации. Имея в своем распоряжении управление u(tn), мы мо-
жем изменить в небольших пределах величины %(tn) и просле-
дить за изменением величины функционала J. Такие численные
эксперименты, которые не требуют больших затрат машинного
времени и усилий, весьма полезны, поскольку они позволяют
исследователю системы узнать пределы применимости того
управления, которое мы назвали программным. Эти пределы
будут заведомо не очень велики. Например, в рассматриваемом
примере управляющие воздействия — это прежде всего объемы
воды, направляемые на орошение и на обеспечение работы
электростанций. А они будут очень сильно зависеть от водности
года, от количества осадков и пр. Поэтому найденное программ-
ное управление —это всего лишь некоторая веха, от которой
впоследствии ведется отсчет.
в) Построение оператора обратной связи. Ре-'
шение задачи о программном управлении — не очень трудоем-
кая процедура. В нашем примере это задача оптимального
управления со свободным концом, и приближенный расчет
траектории потребует решения нескольких задач Коши. Поэтому
естественно использовать ту же схему расчета и для построения
оператора обратной связи методом скользящего плана.
Опишем процесс построения операторов прогнозирования.
Для построения программного управления мы использовали
прогноз величин которые отождествлялись с их средними
значениями. Но это была процедура выбора некоторых сред-
них, или, как принято говорить в этих случаях, «наиболее ве-
роятных», значений приточности и характеристик погоды — ве-
личин Теперь ситуация уже несколько иная. В начальный
момент времени мы знаем величину £(/о) и в общем случае
430 гл. VII. ЭКСПЕРТИЗЫ И НЕФОРМАЛЬНЫЕ ПРОЦЕДУРЫ
Эта информация позволяет дать новый прогноз
£о(/л):
ыи = Гой («о) к «=1,2, .... N. . (4.8)
(В частности, может быть использован краткосрочный прогноз
погоды и экспертная оценка боковой приточности.) Используя
оператор (4.8), т. е. новый прогноз, мы определяем новую про-
грамму и находим управляющую функцию и (./о), которую ис-
пользуем на первом временном интервале. В момент времени ’
t = t\ измеряем вектор фазовых переменных х(Л) и случайную
величину £(Л). Строим новый, прогноз
ми-гит^)], п=^2,з,
затем составляем новую программу и т. д.
Вопрос о построении операторов прогнозирования Г/ всегда
остается достаточно трудным. И по соображениям, которые я
высказал выше, здесь*вряд ли может помочь «большая мате-
матика». В то же время достаточно хороший прогноз нд бли-
жайший временной интервал или несколько временных интер-
валов может быть получен на основе экспертиз. Значит, мы
всегда можем ориентироваться на локальные свойства случай- '
ного процесса £(/„) и его средние («наиболее вероятные») зна-
чения. Конечно, описанная здесь схема является чисто эвристи-
ческой. Она вряд ли может быть строго обоснована, поскольку
нам не известны с достаточными деталями механизмы, обус-
ловливающие формирорание процесса При этом уровне.ин-
формированности вряд ли можно говорить о чем-либо большем,
чем «правдоподобность рассуждений».
Метод управления с помощью скользящего плана требует
совершенной вычислительной техники. Поэтому в практике во-
дохозяйственных систем широко используется другая схема ор-
ганизации оператора обратной связи — так называемые диспет-
черские графики. Оператор (человек), находящийся около во-
дохранилища номера I, наблюдает, его состояние в момент вре-
мени tn, т. е. наблюдает величину' хг(/я). В его распоряжении
есть график попусков ц‘(/п) и количеств воды S‘(M> которые
он должен сбросить из своего водохранилища. Этот способ
управления весьма прост. Он требует от персонала, .управляю-
щего каскадом, минимальной квалификации. График зависимо-,
сти и1 от х‘ задается в виде некоторой функции:
ui(/rt) = 4r(xi(U,U, (4.9)
рассчитывается заранее и обеспечивает существование петли
обратной связи. Однако такой способ управления имеет один
существенный недостаток:-управление водохранилищем номера I
выбирается только на основе информации о состоянии именно
§ 4. ПРОБЛЕМЫ МАТРИЧНОГО СИНТЕЗА 431
этого водохранилища. Как бы рациональны ни были соображе-
ния, с помощью которых составляются функции (4.9), тот факт,
что игнорируется взаимосвязанность всего каскада водохрани-
лищ, в значительной степени обесценивает этот подход. Попро-
буем оценить эту проблему с- точки зрения теории синтеза
управления.
Предположим, что система (4.1) линейна, а функционал
(4.2)—квадратичный. Тогда оптимальным корректирующим
управлением будет, как мы знаем (см. гл. II), линейная функ-
ция отклонений фазовых переменных от их средних значений:
д«(/„) = Л„дх(/„), (4.10)
где • •
дх (tn) — х (tn) — х° (/„), ди (tn) = й (tn) — и° (1п).
Здесь и° и х°— оптимальные программные управление и траек-
тория, полученные в предположении, что £ = t для любых tn;
An=(aij(tn))—матрица обратной связи, элементы ац(1п) —
коэффициенты усиления. Заметим, что в данной ситуации
управление u(tn) зависит только от x(tn), не зависит от преды-
стории процесса и от значений случайных векторов £(/я), но
каждая компонента вектора управления зависит от всех компо-
нент вектора х. Это — строгий результат, являющийся теоре-
мой *).
Но система (4.1) в общем случае нелинейна, а функционал
(4.2) не является квадратичным. Тем не менее мы будем-искать
корректирующее управление в форме (4.10). В общем случае
оно не будет оптимальным и будет тем ближе к оптимальному,
чем слабее нелинейности в уравнении (4.1), а функционал (4.2)
ближе к квадратичному. Но тем не менее это будет управление,
реализующее обратную связь. Управление в.виде (4.10) при
надлежащем выборе матриц Ап будет допустимым управлением,
т. е. удовлетворяющим ограничениям.
Итак, смысл матричного синтеза состоит в том, что мы разы-
скиваем управление в классе линейных функций от величин,
определяющих отклонение состояний системы от программной
Траектории. Эта ситуация является .типичной, для’ инженерных
задач теории управления.
Прежде чем переходить к описанию способов численной реа-
лизации линейного синтеза, остановимся на методах расчета
эффективности системы. Предположим, что управление в фор-
ме (4.10) нами найдено. Для оценки его эффективности нам •
следует определить математическое ожидание функционала J.
) Об этом мы уже говорили в гл. Г1.
432
ГЛ. VII. ЭКСПЕРТИЗЫ И НЕФОРМАЛЬНЫЕ ПРОЦЕДУРЫ
Теоретически для этого необходимо подставить управление в
уравнение (4.1): х
х(/„+1) = /л(х(/„),и0(/„) + Л„(х(/п)-х°(/„)), l(tn)), (4.11)
затем с помощью метода Монте-Карло задать систему векто-
ров %k(tn) и начальных условий x*(fo) и, решая соответствую-
щее число раз задачу Коши и вычисляя для каждой системы
tk(tn) величину
Л = / (xk (to), Ik (to), - - • Ла (6,-1) ) = Ш,
найти затем ее математическое ожидание
к
(4-12)
где К — общее число реализаций, a k — номер реализации. Под-
считаем величину К. Обозначим через s размерность вектора g,
а через т — размерность вектора, х. Тогда размерность вектора
£ будет
[d = sX^ + w. (4.13)
Обозначим еще через г число испытаний, необходимых из со-
ображений точности для каждой из компонент вектора Тогда
общее число испытаний К, которые надо провести для того,
чтобы с заданной точностью реализовать метод Монте-Карло,
будет
К = гт- (4.14)
Заметим, что каждое испытание — это решение задачи Коши.
Как показывают формулы (4.13) и (4.14), количество испыта-
ний потребует астрономических затрат машинного времени.
И даже для самых скромных задач вычислить значение 7 по
формуле (4.12) окажется невозможным.
Поэтому для оценки эффективности управления целесооб-
разно использовать анализ тестовых ситуаций, назначить кото-
рые может только эксперт.
Наконец, для функционала J можно ставить задачу мини-
мизации следующим образом. Считая управление заданным
формулой (4.10), в качестве новых управлений можно рассмат-
ривать величины x(to) и £(/п), подчинив их определенным усло-
виям вида l(tn)^ G(tn). Решая задачу
7(g)-> min,
мы сможем выяснить, каким образом корректирующее управле-
ние справляется с критическими ситуациями.
§ 4. ПРОБЛЕМЫ МАТРИЧНОГО СИНТЕЗА
433
Примечание. Изучение эффективности — это прежде всего визуали-
зация работоспособности системы. Она требует определенных усилий иссле-
дователя и больших затрат машинного времени, поэтому окончательная про-
грамма испытаний системы —это некоторый компромисс между затратами на
изучение свойств системы и глубиной понимания ее возможностей.
г) Численное решение задачи матричного син-
теза. Итак, мы будем искать управление в форме (4.10). Это
. позволит переписать исходные условия задачи (4.1), (4.2) в
виде
* (/e+i) = fa (х (ta), и" (Q + An (x (tn) - * (t„)), g (/„)), (4115)
W-l
X F„(x(/„), U°(/„) + 4n(x(/„)-x0O) + Fw(xy).(4.16)
«-0
Задача синтеза теперь формулируется следующим образом:
определить матрицы Ап так, чтобы обеспечить максимальное
значение функционала I, / = J, при условиях (4.15)-и началь-
ном условии x(to)=xo, где хо— некоторый случайный вектор.
, Неизвестными в этой задаче являются элементы матриц Ая*
Обозначим через т размерность вектора х, через k — размер-
ность вектора управлений и. Тогда количество неизвестных ве-
личин. au(tn) будет равно mX *Х N = К*. Число К* может
быть весьма значительным. Поэтому прямое определение вели-
чин ац из условий задачи стохастического программирования
может оказаться достаточно сложным. Следовательно, проце-
дуры численного расчета должны опираться на ту или иную
схему декомпозиции. Так как функционал (4.16) является ад-
дитивным, представляется рациональным использовать для чис-
ленного решения какую-либо из модификаций метода динами-
ческого программирования. >
Рассмотрим последний шаг процесса. Предположим, что си-
стема находится в состоянии х — Тогда ставится сле-
дующая задача: определить управление доставляющее
максимум функционалу
Ря(х((к))
при условии
= g(6v-i))« (4.17)
Используя это соотношение, перепишем выражение для /*•
в виде
In — Fn (In-i (х (/jv-i), и (/jy-i)» I (/w-i))) —
434 ГЛ. VII. ЭКСПЕРТИЗЫ И НЕФОРМАЛЬНЫЕ ПРОЦЕДУРЫ
Положим затем ч
£ (In-1) = %>° 4~ Л (^w—1)>
где g°(/jv_i) — прогнозное значение случайной*величины £(/jv-.i),
которое мы отождествляем с ее математическим ожиданием.
Таким образом, —некоторая центрированная случайная
величина. Рассматривая /!лг (х </дг-О» «(/лг-i), U^-i)) как функ-
цию аппроксимируем эту функцию параболой:
F*n ~ Ьо + Д]Т] + (т], В2т]),
и, следовательно,
4 = &о + (Л> #2Л)в m(^v-i))» (4>18)
где
^0 = ^w(XGw-l)’ W(Cv-l)> &°Cw-l))»
(n. == и(^-1). ^(^-^л'^-ОлЧ^О.
е -Здесь возникает ситуация, которая^ требует не только фор-
мального анализа. Поскольку нас интересует математическое
ожидание функции FN(x(tN)), то достаточно решить задачу
вида
IN-+ max • (4.19)
Эта задача не является особенно сложной, поскольку ее раз-
мерность равна k — размерности вектора управлений, а вели-
чина х(/дг-1) считается фиксированной. Но для решения зада-
чи (4.19) нужно знать матрицу ковариаций (матрицу вторых
моментов): . .
(4.20)
Мы уже обсуждали проблему обработки экспериментальных на-
блюдений. Для того чтобы определить программное управле-
ние, мы должны были найти математическое ожидание |, что,
как мы видели, уже само по себе является непростой пробле-
мой. Получить матрицу вторых моментов еще труднее. В на-
шем примере для этого надо ответить на вопрос о взаимном
влиянии боковой приточност.и в зоне водохранилища номера i
и в зоне водохранилища номера /. Еще труднее связать эти
явления с прогнозными .характеристиками, влияющими на бо-
ковую приточность, но весьма сложным образом, причем соответ-
ствующая зависимость определяется структурой водоносных го-
ризонтов, особенностями подземной гидродинамики и иными
факторами, т. е. в конечном счете сложной моделью взаимо-
§ 4. ПРОБЛЕМЫ МАТРИЧНОГО СИНТЕЗА 436
действий, растянутых в пространстве и во времени. Поэтому
определение дисперсионных характеристик на основании пред-
положений о том, что все процессы £(/л) являются чисто слу-
чайными, может приводить к большим ошибкам, чем даже про-
стое отбрасывание совместных математических ожиданий
Таким образом, исследователь стоит перед альтернативой:
либо игнорировать составляющую функционала /, зависящую
от вторых моментов, либо исходить, из экспертных оценок ^ве-
личин вторых моментов.
Выбрав любую из этих возможностей, мы придем к неко-
торой задаче оптимизации величин компонент вектора u(tN-i)
для заданных значений компонент вектора х(бу-ч), т. е. по-
строения синтезирующей функции
(4.21)
Функция (4.21) является обобщенным диспетчерским графи-
ком. Наблюдая состояние собственного водохранилища и полу-
чая информацию о состоянии других водохранилищ, диспетчер,
имея в своем распоряжении таблицу значений (4.21),'может
назначать величины попусков.
Примечания. 1. Я употребил термин «обобщенный график». В самом
деле, он качественно отличается от тех графиков, которые обычно исполь-
зуются, поскольку функция (4.21) описывает зависимость управляющих воз-
действий в зоне рассматриваемого водохранилища от состояния всех водо-
хранилищ каскада.
2. Если в распоряжении диспетчера есть ЭВМ, то он может действовать
более эффективно. Он знает величину 5(^-1), а не только состояние
Поэтому в уравнении (4.17) все величины известны и диспетчеру нет необ-
ходимости рассчитывать математическое ожидание. Он будет решать прямую
задачу максимизации функции FN(x(tN)). Эту особенность последнего участка
фазовой траектории следует иметь в виду при составлении конкретных ин-
струкций эксплуатационникам.
Вернемся теперь к задаче построения диспетчерского гра-
фика (4.21). Мы будем его аппроксимировать линейной функ-
цией
я (^v~i) = w°(/jv-i).+ (х (^v-i) — x°(^-i))> (4.22)
где u°, х° —управление и вектор состояния системы на про-
граммной траектории.
Перепишем уравнение (4.22) в скалярном виде:
«' (^-i) = uoi (^.1) + Е (/„_,) - х°' (4.22')
Рассмотрим задачу максимизации функционала (4.18). Под-
ставив представление (4.22') в выражение функционала (4.18),
видим, что оно является некоторой нелинейной функцией ко-
эффициентов усиления а,у и размерность этой задачи оптими-
зации равна т2. Однако, задача может быть упрощена, если
436
ГЛ. vn. ЭКСПЕРТИЗЫ И НЕФОРМАЛЬНЫЕ ПРОЦЕДУРЫ
воспользоваться специальной формой зависимости управления
о.т фазового вектора вида (4.22). Положим, например, что век-
тор х(/у-0 определен следующим образом:
X<(/W-l) = X0/(/W-l) + 6<,
х1 — если z=/=/, I, i — 1, .... m.
Тогда вектор управления который соответствует за-
данию вектора в форме (4.23), будет иметь следующие
компоненты: •
Е <«[*'('«-.)- V* -.)]
или в силу (4.23) '
(^_i) — wOs +
Решив т оптимизационных задач с условиями (4.23), мы най-
дем т* векторов y*(fo-i) (Л~1, .... /п). Полагая в уравне-
ниях (4.22) x(tjv-i) — x'itjf-i), получим следующую систему
уравнений:
u} = u01 + апб1,
U2=tto2_|_a2i6it (424)
(4.25)
(4.26)
__ иок
Поскольку величину 6* мы задали, а величины нами опре-
делены, то система уравнений (4.24) позволяет определить ко-
эффициенты усиления ац:
ui-u°i
ап — в»
Аналогично, полагая последовательно в уравнениях (4.22)
x(tN-i) — x2(tn-i), x(/y_i) = x3(/w_i) и т.д.,определим и осталь-
ные элементы матрицы Aw_i:
a'< = —F"
Перейдем теперь к анализу предпоследнего интервала, tn-2-
На этом этапе мы должны решить задачу максимизации функ-
ционала
1ц-1е а -1U Ua- i)> н (6v- i)) + Fn (х (1ц))
при условиях
= /л-2(х (^-2)» uVjv-2)> l(^JV-2))>
(4.27)
§ 4 ПРОБ ЛЕМЫ МАТРИЧНОГО СИНТЕЗА
437
где х (/iv-2) = Хы-2 — заданная величина. В этой задаче управ-
ление нам известно — это функция (4.21), линейная ап-
проксимация которой определена функциями (4.25), (4.26).
Таким образом, в задаче оптимизации функционала при
условиях (4.27) содержится только один неизвестный вектор
u(tN-i). Следовательно, эта задача ничем це отличается от той,
которую мы только что рассмотрели. Может быть, она будет
технически несколько сложнее из-за того, что вместо одного
конечноразностного соотношения (4.15) теперь их будет два.
Но основная размерность задачи — количество неизвестных
скалярных величин — остается той же. Решение оптимизацион-
ной задачи с условиями (4.27) особенно просто, если функции
fn-i, (ns будут линейными функциями управления и Fn, Fn-i
также будут линейными функциями своих аргументов. В этом
случае задача сведется к задаче линейного программирования.
Поскольку размерность задачи небольшая, то- расчет будет за-
нимать немного машинного времени.
• В случае существенно нелинейных связей можно воспользо-
ваться методом проекции градиентов. После двух-трех шагов
целесообразно линеаризовать задачу в окрестности найденного
приближения, а затем решать ее как задачу линейного про-
граммирования.
. Обсуждая процедуры выбора управления на последнем шаге
по времени, мы обратили внимание на то, что лицо, которое
управляет процессом (в нашем примере каскадом водохрани-
лищ), стремится максимизировать не функционал математиче-
ского ожидания, а значение функционала в каждом конкрет-
ном случае. Это позволяло использовать информацию о на-
блюдении величины Точно так же и в данном случае
диспетчер знает реализацию Кбу-г), и не только ее: он знает
все значения l(tN) для n=0, 1, ..., /V — 2. Это может ему
помочь дать реалистический прогноз и величины g(/w-i):
IjV-l = fjv-! (IGo), £(Л).&(^№2))-
Конечно, прогноз &1-1 не будет совпадать с той реализацией
величины которую мы будем наблюдать на следующем
временном, интервале. Но использование прогноза может ока-
заться более обоснованным, более точным, чем использование
представления о величине |(/п) как о случайно!*- процесс.
В результате решения т оптимизационных задач с усло-
виями типа (4.23) для системы (4.27) мы найдем синтез управ-
ления на временном интервале tn-2.
' t U (^-2)= UN-2 (Х (^JV-2))- (4.28)
При этом управление (4.28) мы определим в форме линейной
функции отклонений от программной траектории. После этого
438
ГЛ VII ЭКСПЕРТИЗЫ И НЕФОРМАЛЬНЫЕ ПРОЦЕДУРЫ
мы перейдем к выбору управления на временном отрезке tn-з
и снова придем к задаче, аналогичной рассмотренным, — опре-
делению максимума функционала 1ы-г, но теперь уже прй трех
ограничениях типа (4.27). Основная размерность задачи — ко-
личество неизвестных скалярных величин — снова остается той
же самой. Этот процесс будем продолжать до тех пор, пока мы
не исчерпаем всех временных интервалов.
Итак, мы изложили некоторый подход к задаче проектиро-
вания системы управления динамическими объектами типа ка-
ск.ада водохранилищ. В той схеме, которую мы рассмотрели,
соседствуют чисто эвристические соображения, связанные, на-
пример, с построением прогнозов, и вычислительные методы
динамического программирования. Подобный симбиоз эвристи-
ки и вычислительных методов является типичным для изучения
многих проблем системного анализа.
§ 5. Стохастические задачи
Стохастические задачи занимают’особое место в.системном
анализе. Я не сделал бы большой ошибки, если бы утверждал,
что любая «правильно» поставленная 'задача оптимизации яв-
ляется стохастической. Случайные факторы — случайные по су-
ществу, в силу их природы, или случайные -в силу нашего не-
знания причин, их порождающих, — присутствуют практически
в любой задаче. Другое дело, что мы часто игнорируем случай-
ный характер тех или иных параметров и, делая определенные
предположения, заменяем исходную стохастическую постанов-
ку задачи детерминированной.
Говоря о стохастических задачах управления, мы будем
иметь в виду такие задачи, в которых возникает проблема це-
ленаправленного использования некоторого ресурса, т. е. фор-
мирования стратегий использования этого' ресурса. Здесь мы
можем столкнуться с широким спектром различных ситуаций.
В одних случаях будет найдена нполне определенная детер-
минированная стратегия, например выбраны параметры кон-
струкции, подвергающейся воздействию случайных сил, а в дру-.
гих нужно будет найти некоторую стратегию, которая сама яв-
ляется случайной (как, например, в задаче поиска объекта,
движущегося случайным образом в некотором ограниченном
пространстве, или в задачах коррекции). Заметим, что приме-
нение стохастических методов может оказаться весьма полез-
ным и для решения вполне детерминированных задач .доста-
точно высокой размерности. В настоящее время проблемы сто-
хастической оптимизации превратились в развитое направление
прикладной математики, ей посвящено много первоклассных
S в. СТОХАСТИЧЕСКИЕ ЗАДАЧИ
439
исследований и разработано много эффективных численных
.методов стохастической оптимизации (см. [6]).
Изложение проблем стохастического программирования вы-
ходит далеко за рамки этой книги. Оно требует не только мно-
го места. Методы стохастической оптимизации требуют и спе-
циальной культуры, поэтому описание этих методов необходимо
сочетать с рядом специальных разделов теории вероятностей.
В этой книге мы остановимся только на- нескольких примерах,
показывающих место и возможности стохастических методов
оптимизации.
а) Методы случайного поиска. Предположим, что
— ------- . ---------- ----------задаче — отыскании экс-
речь идет о совершенно стандартной
-'гремума, например минимума, выпук-
лой функции f(x) (рис. 5.1) .-Эта функ-
ция имеет единс-твенный минимум. По-
этому, если ее топографический порт-
рет (поверхности уровня f(x) = const)
не содержит оврагов и имеет доста-
точно гладкий характер, отыскание
минимума не представляет никаких
принципиальных трудностей и может
быть реализовано с помощью, напри-
мер, градиентного спуска, общая схе-
ма которого описывается следующей
формулой:
xA+1 = xft — akf'(xk), (5.1)
где — точка, в которой- вычислялось значение функции
f(x), x*+f—новая точка, ак— скаляр, именуемый шагом. Он-
выбирается так, чтобы выполнялось условие
Если а* выбирается из условия '
f(xft — af(xft))-+min,
a
то схема (5.1) описывает так называемый метод наискорей-
шего спуска. На каждом шаге процесса (5.1) для его реализа-
ции нам надо вычислить ri производных df/дх1. Предположим
теперь, что размерность п вектора х достаточно велика. Пред-
положим, кроме того, что функция /(х) вычисляется более или
менее сложно; тогда численное определение производных-
df / (xk + eet) — f (xft) .
-ГТ(ха) =-----------------> i==
dxl e
где 8 — некоторое малое число, а е,— единичный вектор t-й ко-
ординатной оси, может’потребовать больших затрат машинного
440 ГЛ. VII. ЭКСПЕРТИЗЫ И НЕФОРМАЛЬНЫЕ ПРОЦЕДУРЫ
времени. И хотя метод будет сходиться при е->-0 и &->оо, его
реализация практически может оказаться неосуществимой.
В конце пятидесятых годов в ВЦ АН СССР начали прово-
диться эксперименты с использованием метода Монте-Карло
для решения подобных задач. Однако случайное выбрасывание
самого вектора х при его большой размерности приводило к
очень неэкономным процедурам. Поэтому мы стали комбини-
ровать метод градиентного спуска и метод Монте-Карло. В кон-
це концов мы остановились на следующем аналоге формулы
(5.1):
* г ____у ~ f "I" PS) f (•**) е /К ОЧ
Xk+i — xk — ak---jj g, (о. z)
где | —некоторый случайный вектор, а 0 — некоторый малый
скаляр, знак которого определяется требованием, чтобы раз-
ность f(Xk + ₽|)— была положительна. Схема (5.2)—это
обобщение метода покоординатного спуска, когда последова-
тельно фиксируются единичные векторы координатных осей
& = в], | = бг и т. д. и делается шаг по направлению одной из
координатных осей.
Если размерность задачи невелика, то метод градиентного
спуска всегда предпочтительнее метода покоординатного спу-
ска. Но по мере роста размерности относительная эффектив-
ность метода покоординатного спуска возрастает. Эффектно- ‘
ность численного метода, использующего большое количество
итераций, определяется двумя характеристиками метода — ко-
личеством итераций и затратами времени на одну итерацию.
По мере роста размерности соотношение' затрат времени на
одну итерацию становится все более и боЛее в пользу покоор-
динатного спуска. Конечно, количество итераций с ростом раз-
мерности у градиентного спуска росло медленнее, чем у по-
координатного, но в целом относительная эффективность по-
координатного спуска увеличивалась.
Определенную роль играло также правило выбора шага а*.
В покоординатном спуске также может быть предложен спо-
соб выбора шага, аналогичный методу наискорейшего спуска.
Но выбор шага из условия'
f(xft+i)~*min (5.3)
а
сильно увеличивает время одной итерации. Поэтому условие
(5.3) заменялось более простым условием:
f(xi+t)<fM. (5.. 4)
Выполнение условия (5.4) всегда может быть обеспечено вы-
бором достаточно малого а. Эксперименты с покоординатным
спуском были естественным этапом перехода к методам слу-
чайного поиска: осталось заменить вектор ei случайным векто-
§В. СТОХАСТИЧЕСКИЕ ЗАДАЧИ
441
ром g. Оказалось, что для задач большой размерности (п по-
рядка десятков) переход к случайному выбору направления g
(с помощью датчика случайных чисел) делает схему (5.2) еще
более эффективной. Этот факт подтвердили многочисленные
эксперименты. Позднее, когда была создана теория стохасти-
ческого программирования, оказалось, что схема (5.2) является
очень частным случаем метода стохастических квазиградиеп-
тов, предложенного Ю. М. Ермольевым. Как следует из общей
теории; которая была им развита, метод, использующий итера-
ционную процедуру (5.2), сходится для выпуклых функций, если
только выполнены следующие два условия:
'«*“*• О, £aft = °o.
(Подробнее см. упомянутую выше книгу [6].) Таким образом,
метод случайного поиска, т. е., по существу, стохастический ме-
тод, оказывается эффективным средством решения оптимиза-
ционных детерминированных задач.
Эксперименты, которые проводились в ВЦ АН СССР, от-
носились к тому периоду, когда метод случайного поиска как
один из частных приемов теории стохастической оптимизации
только начинал использоваться. Со временем такие методы по-
лучили дальнейшее развитие и сейчас занимают важное место
в арсенале численных средств решения оптимизационных задач
(см., например, [13]).
Если в детерминированных задачах отыскания локального
экстремума (или в одноэкстремальных задачах) стохастические
методы имеет смысл применять только тогда, когда за-
дачи имеют очень большую размерность или когда вычисление
значений функции требует больших затрат машинного вре-
мени, то в задачах отыскания глобального экстремума стоха-
стические методы не имеют альтернативы. •
В самом деле, любые детерминированные методы основаны
на анализе локальных свойств изучаемой функции. Находясь
в некоторой точке х и вычислив в»этой точке значение функции
f(xj, мы затем исследуем одним из возможных способов окрест-
ность точки х. Если мы обнаруживаем удовлетворяющие огра-
ничениям точки х1 такие, для которых f(x*)<f(x), то мы де-
- лаем следующую итерацию. Но этим способом мы можем най-
ти только локальный экстремум. Для отыскания глобального
экстремума нужны принципиально другие методы. И их нам
дают идеи случайного поиска — стохастические методы. В по-
следние годы применению этих методов в проблемах поиска
глобального экстремума уделяется большое внимание (см., на-
пример, [14]).
б) Стохастические задачи. Итак, до сих пор мы го-
ворили об использовании стохастических методов для решения
442
ГЛ VH ЭКСПЕРТИЗЫ И НЕФОРМАЛЬНЫЕ ПРОЦЕДУРЫ
детерминированных задач. Теперь обратим наше внимание на
существенно стохастические задачи, содержащие в своей по-
становке случайные величины или функции. Наиболее типич-
ным представителем подобных задач является задача отыска-
ния .минимума математического ожидания некоторой функции,
f(x, g)-»min '
X
при ограничениях
G(x, £)<0,
Г(х,|)<0 VI.
(5.5)
(5-6)
(5.7)
Математическое ожидание в (5.5) берется по переменной g,
которая считается случайной величиной или функцией, а ми-
нимизация происходит по переменной х, являющейся элемен-
том некоторого функционального пространства.
Ограничения задачи разбиты на две группы. Первая группа
ограничений (5.6) также имеет вид математического ожида-
ния по £. Здесь G— это некоторый оператор, который может
иметь достаточно сложную структуру. В частности, это может
быть система .уравнений, дифференциальных или разностных,
с помощью которой функциям x(t) и |(/) ставится в соответ-
ствие некоторая система терминальных функционалов РДх(Т)).
Ограничения (5.7)—детерминированные. Например, каковы
бы ни были случайные воздействия на самолет (порывы ветра
или флуктуации тяги двигателя), углы поворота рулей не мо-
гут превзойти определенного предела, который является кон-
структивной особенностью данного самолета. Точно так же в
задаче вывода космического аппарата на орбиту (пример, ко-
торый мы уже неоднократно использовали) функционалом за-
дачи‘будет точность вывода, т. е. функционал типа дисперсии
/ = ((х(Г)-хг), R(x(T) — xr)), (5.8)
f
а ограничения будут детерминированными: тяга двигателя p(t)'
и угол поворота рулей a(t) должны удовлетворять неравен-
ствам вида
0^р(/)=Ср+, а~^а(/)^а+ V/.
Характер ограничений (5.6), (5.7) и структура функционала
(5.5) делают задачу выбора элемента x(t), доставляющего
этому функционалу экстремальное значение, чрезвычайно слож-
ной,..причем основная трудность состоит в вычислении выра-
жений -(5.5), (5.6), даже если элемент x(t) задан. В самом
деле, если бы мы могли легко вычислить математические ожи-
дания в формулах (5.5) и (5.6), то задача, свелась бы к обыч-
§ 5. СТОХАСТИЧЕСКИЕ ЗАДАЧИ
443
ной детерминированной задаче оптимизации. Действительно, в
этом случае мы могли бы переписать ее в виде
• £) = /*(*)-*min, (5.5')
Щ7ГТ)=е*(х)<0. - (5.6А)
Таким образом, все особенности и трудности задачи (5.5) —
(5.7) состоят прежде всего в вычислении математических ожи-
даний. «Детерминированное» условие (5.7) только усугубляет
эти трудности.
Когда в шестидесятых годах исследователи столкнулись с
задачами типа (5.5) — (5.7), то первые попытки их решения
были связаны со стремлением перейти от стохастических задач
к детерминированным (т. е. вычислить математические ожи-
дания) с последующим использованием хорошо развитых ме-
тодов оптимизации. Эти попытки не привели к созданию до-
статочно универсального математического аппарата, хотя целый
ряд прикладных задач и удалось успешно решить. '
Довольно широкое распространение получили и разнообраз-
ные эвристические приемы решения стохастических задач, на
о'дном из которых мы остановимся.
Предположим, что при фиксированных значениях случайного
вектора % задача (5.5) — (5.7) может быть решена относительно
просто. Тогда рациональной кажется следующая схема. С по-
мощью датчика случайных чисел получаем некоторое значение
величины £ = gi. Решаем с помощью одного и« детерминиро-
ванных методов детерминированйую задачу
f(x, gi)->min,
G(x,il)<0! (5.9)
Пх.^ХО;
ее решение обозначим через хь Затем с помощью того же дат-
чика случайных чисел выбираем новое значение вектора £ =
= g2 и снова решаем детерминированную задачу оптимизации
типа (5.9). Ее решение обозначим через Хг и т. д. В результате
мы находим ряд величин
•^1» Х2..ХЦ
и в качестве искомого решения можем принять
N
х' = тгТ.х‘- ‘5-10>
/-1
444
ГЛ. vil. ЭКСПЕРТИЗЫ И НЕФОРМАЛЬНЫЕ ПРОЦЕДУРЫ
Таким образом, вместо того чтобы решать задачу minf(x, £),
____________________________________________ X
мы отыскали решение х* задачи х* — arg min f (х, I). Но в об*
X
щем случае операции взятия минимума и вычисления мате-
магического ожидания не перестановочны и выражение (5.10)
не является решением исходной оптимизационной задачи
(5.5) —(5.7).
Существо дела можно пояснить одним простым примером.
Рассмотрим задачу
f(x, £) = x2 + gx-*-min (5.11)
ири условии, что 5— центрированная случайная величина, т. е.
| = 0. Так как х — детерминированный вектор, то
f(x, l) = f*(x) = x‘ и т!пГ(х) = 0.
X
Проведем теперь вычисления, тем способом, который был
только что описан. Так как минимум функции f(x, £) = х1 4- |х
при фиксированном £ достигается при х = —5/2, то
minf(x, £) = —£2/4,
X
и, следовательно, математическое ожидание этой величины
имеет вид . .
minf(x, |) = — у а2 (5),
X
т. е. пропорционально дисперсии. Значит, чем больше диспер-
сия случайной величины 5. тем больше результат, полученный
эвристическим методом, будет отличаться от точного. Точно
так же нетрудно привести примеры, когда результаты, полу-
ченные обоими способами, совпадают. (Заметим, что в при-
мере (5.11) случайная величина входит в выражение функции
линейно.) Но какие-либо строгие результаты, позволяющие
оценить применимость (или точность) описанного эвристическо-
го метода, отсутствуют. Тем не менее замена задачи миними-
зации математического ожидания некоторой функции задачей
вычисления математического ожидания ее экстремумов яв-
ляется достаточно широко распространенным приемом решения
инженерных и экономических задач. Конечно, в общем случае
этим методом мы не получаем оптимального управления, опти-
мальной системы параметров. Но найденное эвристическим
путем управление часто бывает допустимым, т. е. удовлетво-
ряющим ограничениям (во всяком случае наиболее сложным
из них — детерминированным ограничениям вида (5.7)).
Г
| в. СТОХАСТИЧЕСКИЕ ЗАДАЧИ
445
Я уже не раз подчеркивал, что при выборе метода анализа
мы всегда оказываемся в условиях некоторого компромисса:
нужно найти сочетание двух требований — точности результата
и минимизации стоимости его получения. Поэтому тот факт,
что замена задачи минимизации математического ожидания за»
дачей вычисления математического ожидания минимума часто
на одном вариаН'
позволяет на много порядков уменьшить затраты машинного
времени, является достаточно весомым аргументом для выбора
описанного эвристического приема,. Наконец, фактически речь
здесь идет о выборе вида критерия, а в этом вопросе всегда •
присутствует большой произвол. Следует еще иметь в виду, что
решение, найденное описанным эвристическим приемом, может
оказаться удобным первым приближениём для построения тео-
рии возмущений или других итера-
ционных процедур.
в) Стохастическое обоб-
щение градиентного мето-
да. В настоящее время, как уже го-
ворилось, создано много весьма эф-
фективных схем численного расчета
для различных классов оптимизацион-
ных стохастических задач — метод сто-
хастической аппроксимаций, метод
стохастических квазиградиентов и мно-
гие другие. В данном пункте мы остановимся
те подобных методов, который является частным случаем об-
щей схемы, предложенной Ю. М. Ермольевым.
Итак, мы снова будем говорить о задаче (5.5) — (5.7), при-
чем заранее отбросим всякую надежду вычислить для фикси- ’
рованного х математическое ожидание функции fix, |). С дру-
гой стороны, мы рассмотрим класс таких задач, для которых
отыскание экстремума функции (5.5) при ограничениях (5.6)
и (5.7) в условиях, когда случайный параметр £ фиксирован,
не представляется сложным.
В предыдущем пункте мы попытались последнее обстоя-
тельство использовать непосредственно. Но можно поступить
и иначе, используя эту особенность рассматриваемой задачи
для построения некоторой процедуры спуска. С помощью дат-
чика случайных чисел определим вектор g = Для данного
фиксированного значения случайной величины £•= gi решаем
оптимизационную задачу (5.9) и находим вектор х — Xi
(рис. 5.2). Затем снова обращаемся к датчику случайных чисел
и определяем новое значение случайной величины | и,
решая снода задачу (5.9), находим новое значение вектора
X = Х2-
446 гл. VII. ЭКСПЕРТИЗЫ И НЕФОРМАЛЬНЫЕ ПРОЦЕДУРЫ
В качестве вектора х = х3, который будет получен на сле-
дующем шаге итерационного процесса, принимаем вектор, опре-
деленный по правилу
х2 = Xi + ai (х2 — Xi).
Затем мы снова определяем тем же способом вектор х = х3 и
находим следующую итерацию:
х3 = х2 + а2(х3 — х2),
. и т. д.
Эта схема, которая носит, как кажется на первый взгляд,
эвристический характер, на самом деле сходится к точному ~
решению исходной задачи (5.5) — (5.7). Конечно, для сходимо-
сти итерационной процедуры вида
xk+i = xk "Ь ak(.xk+\ xk), (5.12)
где хк+\ — решение детерминированной оптимизационной зада-
чи (5.9), в которой в'качестве В принято значение В = l*+i,
полученное с помощью датчика случайных чисел, необходимо
выполнение ряда условий. Важнейшие — это условия, накла-
дываемые на выбор шага а*, который должен уп четверить,
следующим требованиям*):
2ай = 0°’. Еа1<°°- ’ (5-13)
Предложенная итерационная схема не является релаксаци-
онной. Это значит, что в общем случае неравенства f*(x*+i)-<-
<f*(xfe), где f*(x) = f(x, В), не выполняются, т. е. по’ходу
реализации процедуры (5.12) мы будем не только прибли-
жаться к искомому значению вектора х, но и удаляться от
него. Этим стохастические методы существенно отличаются от
наиболее употребительных детерминированных методов. '
♦) Условия сходимости метода стохастической аппроксимации (5.13)
были впервые получены, по-видимому, Дворецким (теорему Дворецкого мож-
но найти, например, в [15]).
Глава VIII
НЕКОТОРЫЕ ПРОБЛЕМЫ АВТОМАТИЗАЦИИ
ПРОЕКТИРОВАНИЯ
§ 1. Некоторые общие вопросы автоматизации
проектирования
В этой главе термин «автоматизация проектирования» по-
нимается весьма широко: мы будем говорить о новой техно-
логии проектирования, основанной на использовании идей и
методов системного анализа. Объектами проектирования могут
быть и технические системы, такие, как самолет, ракетный ком-
плекс, корабль, и народнохозяйственные, экономические систе-
мы, например системы обустройства крупных нефтяных или
газовых месторождений, использования бассейнов рек и.т. д.
Сложность используемой и, главным образом, создающейся
техники, сложность используемых технологий, транспортных и
производственных связей непрерывно растет (принято гово-
рить об экспоненциальном росте характеристик сложности).
В этом и состоит особенность эпохи развития производственной
деятельности, которую обычно называют эпохой научно-техни*
ческой революции*).
Конструкции, которые создают инженеры, все в большей
степени используют знания, добываемые в смежных 'науках.
Объединение радиоэлектроники, тепловых процессов, газовой
динамики и многого другого при создании одной конструкции
является типичным для современного энергетического машино-
строения, ракетостроения, самолетостроения. Резкое усложнение
всевозможных производственных связей, технологий, переход
к новым материалам 'качественно усложняют работу проекти-
ровщика производственного комплекса, в результате чего его
сегодняшняя деятельность качественно непохожа на проектную
работу пятидесятилетней давности.
*) По моему мнению, термин «научно-техническая революция» не очень
удачен. После резкой смены технологий, которая произошла в первые после-
военные годы, темп развития научно-технического прогресса не снизился, не
вернулся к своим старым, довоенным значениям, а продолжает нарастать.
Научно-техническая Эволюция превратилась в естественное состояние разви-
вающейся техники и экономики.
448
ГЛ. VTH. АВТОМАТИЗАЦИЯ ПРОЕКТИРОВАНИЯ
По оценкам специалистов сложность продукции машино-
строения выросла в среднем в шесть раз за последние три де-
сятилетия. А как изменился арсенал средств, используемых
конструктором, и сами процедуры проектирования? Очень не-
много. Вот почему усложнение проектируемых конструкций
приходит в противоречие с традиционными принципами проек-
тирования, которые всегда предполагали, что главный конструк-
тор имеет возможность целостного представления о проекти-
руемой конструкции.
. Поскольку физиологические возможности человека ограни-
чены, а сложность создаваемых конструкций непрерывно ра-
стет, то очевидно, что однажды этот тезис перестает быть спра-
ведливым. В последние десятилетия мы начинаем все чаще
* сталкиваться с ситуациями, когда главный конструктор или
руководитель проекта уже не может эффективно вмешиваться
в процесс проектирования. Из творца, создателя конструкции
он превращается, в лучшем случае, в хорошего администра-
тора.
Поэтому на повестку дня выдвигается проблема принципи-
ального изменения всей технологии проектирования — проблема
автоматизации проектирования. Ее особенность — широкое ис-
пользование современных способов обработки информации и
представления ее в таком виде, который позволил бы кон-
структору, проектировщику до конца использовать свои твор-
ческие возможности. В последние годы этой проблеме уде-
ляется все большее и большее внимание, причем такое явление
характерно для всех индустриально развитых стран, создаю-
щих сложные образцы техники и реализующих проекты слож-
нейших народнохозяйственных комплексов. Постепенно автома-
тизация проектирования стала одной из областей наиболее
перспективного использования вычислительной техники и ме-
тодов междисциплинарных исследований процессов разной фи-
зической природы.
Обсуждая проблемы организации экспертиз, мы видели, что
успешный ответ на сложный Вопрос необходимо требует его
расчленения на отдельные, более простые. Точно так же и
сложный проект требует расчленения процесса проектирования
на проектирование отдельных подсистем и агрегатов, разделе-
ния обязанностей между различными конструкторами, проек-
тировщиками и исследователями-расчетчиками. Такое положе-
ние возникло уже давно: создание проекта самолета, крупной
водохозяйственной или технологической системы — это всегда
дифференцированный труд большого коллектива.
Но расчленение проблемы необходимо предполагает и об-
ратный процесс — процесс объединения, согласования характе-
ристик отдельных частей системы, синтеза, который Дает воз-
$ I. ОБШИВ ВОПРОСЫ
449
можность представить конструкцию в целом, оценить ее разно*
образные качества и соответствие замыслу.
Расчленение процесса проектирования поначалу не вызыва-
ло проблем. Возьмем, например, такую техническую систему,
как самолет. Проектирование планера естественным образом
отличается от выбора и проектирования двигателя. Аэродина-
мические и прочностные расчеты делают представители раз-
личных профессий и т. д. Такая же ситуация наблюдалась всю-
ду. И всюду постепенно возникали традиционные формы раз-
деления труда.
Долгое время и процесс синтеза проекта также не вызывал
особых проблем: по мере усложнения проектируемых конструк-
ций совершенствовались и методы проектирования. Но с тече-
нием времени все чаще эти традиционные методы проектиро-
вания стали давать сбои.
Прежде всего, начали недопустимо удлиняться сроки проек-
тирования. Но это было бы еще полбеды. Хуже то, что на
испытания стали поступать конструкции, все менее и менее
соответствующие замыслу, и у конструктора до начала испыта-
ний не оказывалось возможности достаточно хорошо проверить,
насколько созданные им машина или технологический комплекс
соответствуют замыслу. В результате — неизбежные переделки,
резкое удорожание конструкции и удлинение сроков реализации
замысла до десятилетий. А это означает, что в строй вводится
конструкция (или технология) уже устаревшая, отвечающая
техническому уровню минимум десяти — двадцатилетней дав-
ности.
Анализируя эти явления, мы убеждаемся в том, что основ-
ные трудности связаны с синтезбм, с увязкой всего много-
образия особенностей будущей конструкции. Эти трудности
растут экспоненциально вместе с ростом размерности, т. е. коли-
чества параметров, которые определяют конструкцию. Квали-
фикация проектировщиков здесь мало чем может помочь:
традиционная технология в принципе не может справиться с
возрастающей сложностью проекта, и надо менять технологию
проектирования.
Возникновение и формирование концепций автоматизиро-
ванного проектирования происходило примерно по .следующей
схеме.
Сначала дачали автоматизировать чертежные работы — эту
очень трудоемкую часть любого процесса проектирования. По-
явились чертежные автоматы. Они, конечно, оправдали затра-
ченные средства. Однако ничего принципиально улучшающего
проект или ускоряющего его окончание они не внесли, да и не
могли внести.
450 ГЛ. VIH. АВТОМАТИЗАЦИЯ ПРОЕКТИРОВАНИЯ
Одновременно шло шир'окое внедрение м практику инженер--
ных расчетов (например, прочностных, гидравлических, аэро»
динамических характеристик и т. д.) методов машинной ма-
тематики. Эти методы существенно усовершенствовали разно-
образные процедуры проектных расчетов, свели к минимуму
возможные ошибки, повысили общую культуру проектирования,
однако также не привели к какому-либо существенному сокра-
щению сроков проектирования.
Надо заметить, что с использованием ЭВМ для проведения
инженерных и плановых расчетов были связаны большие на-
дежды. Но они во многом не оправдались. Конечно, в этом
была вина не ЭВМ, а специалистов, которые еще не научились
их использовать. Фактически долгое время ЭВМ играли роль
больших арифмометров*). С их помощью быстрее и точнее
решались отдельные инженерные задачи, но серьезно повлиять
на судьбу проекта, заметно ускорить окончание работы и
улучшить ее качество они еще не могли.
Следующий этап — создание автоматизированных рабочих
мест конструктора. Это — уже новый уровень мышления. Рабо-
чие места оказывались непосредственно связанными с ЭВМ,
которая заменила конструктору, традиционную линейку или
арифмометр, появились простейшие дисплеи, позволившие кон-
.структору реализовать обратную связь с ЭВМ. Идея автомати-
зированных рабочих мест появилась в конце шестидесятых го-
дов, одновременно с появлением систем разделения времени.
С их внедрением также было сцязано немало надежд. И хотя
эти надежды далеко не все оказались оправданными, затраты
на создание автоматизированных рабочих мест, конечно, вполне
окупились результатами. Одно то, что они потребовали зна-
чительного повышения квалификации и общей эрудиции кон-
структора, уже давало многое. Еще одним важным следствием
появления автоматизированных рабочих мест было внедрение
идей диалога ЭВМ — конструктор. Это была, важная характе-
ристика определенного этапа развития идей автоматизирован-
ного проектирования. До сих пор с ЭВМ работал математик — ’
это он решал задачи, в которых нуждался конструктор. Теперь
же сам конструктор получал возможность сидеть за-терминалом
электронной машины. Это не могло не сказаться на качестве
проектов.
Однако и автоматизация- рабочих мест конструктора, которая-
произошла в ряде стран в начале семидесятых годов, также не
решила основной проблемы. Сроки между возникновением , за-
. *) Сейчас’подобное представление о роли и задачах ЭВМ тоже достаточ-
но широко распространено не только среди инженеров и экономистов, но и
математиков.
§ t. ОБЩИЕ ВОПРОСЫ 451
мысла конструкции и ее реализацией по-прежнему оставались
значительными. Конструкции (или их опытные образцы), предъ- ,
являемые к испытаниям, требовали в процессе испытаний мно-
гочисленных и трудных доделок, а подчас и существенного'из-
менения.
Во всех тех ситуациях, когда проверочных испытаний не
существует, например при создании промышленных комплек-
сов, дефекты проекта (которые просто невозможно обнаружить
до тех пор, пока замысел не реализован) могли оборачиваться
подчас трагедией. Да иначе и быть не мбгло, ибо рабочие ме-
ста конструктора — это лишь часть общей системы проектиро-
вания.
Стала очевйдной необходимость создания взаимоувязанном
системы проектирования, включающей и систему программ для
инженерных расчетов, и автоматизированные рабочие места, и
разнообразные диалоговые процедуры, и, конечно, автоматиза-
' цию всех графических работ. Сейчас во многих странах ведется
интенсивная работа в области создания и ввода в строй подоб-
ных автоматизированных систем проек.арования.
Пока еще рано подводить итоги, говорить о результатах
эксплуатации таких систем и об их эффективности. С их вво-
дом связывают большие надежды, поэтому автоматизирован-
ное проектирование переживает определенный бум. Именно в
связи с этим мне хотелось бы предостеречь' против некоторых
иллюзий — создание полноценных систем автоматизированного
проектирования потребует еще‘многих лет работы и больших
.усилий.
Прежде всего, для них необходима весьма совершенная-вы-
числительная техника совместно с развитой системой ее кол-
лективного использования. Системы проектирования, как они
задумываются сегодня, требуют коллективного использования
банков данных, систем моделей и программ. Их эксплуатация
потребует большого количества уникальных (по объему храни-
мой информации) магнитных дисков, специальных наборов тер-
минальных устройств и т. д. Наконец, создание специализиро-
ванного математического обеспечения потребует также многих
и многих лет упорной работы многочисленных коллективов вы-
сокой квалификации: по современному представлению, любая
система автоматизации проектирования — это прежде _дсего
сложнейшая имитационная система. .Поэтому ожидать быстрого
появления полноценных систем автоматизированного*проекти-
рования не следует. Реально их появления можно ожидать в
середине следующего десятилетия.
Из этой оценки должен следовать один важный практиче-
ский вывод: системы должны создаваться с таким расчетом,
чтобы они могли вводиться в строй постепенно, по мере готов-
452
ГЛ. VIII. АВТОМАТИЗАЦИЯ ПРОЕКТИРОВАНИЯ
ности отдельных элементов, блоков, т. е.. так, чтобы эксплуа-
тация отдельных частей системы могла начинаться задолго до
завершения всей системы. Это — важный-принцип. Он позволит
сэкономить не один миллион рублей. Но его реализация по-
требует не только специальной организации программного обес-
печения, но и специальной организации работы пользователей —
групп конструкторов и проектировщиков.
Теперь относительно проблемы диалога. Сегодня все соглас-
ны с тем, что система автоматизированного проектирования —
некоторая специальная диалоговая система, что диалог чело-
век— ЭВМ должен занимать центральное место в процессе
проектирования. Но, к сожалению, многие считают, что орга-
низация диалога не содержит научной проблематики и сводится
прежде всего к решению чисто технических вопросов создания
специальных терминальных устройств и хорошего математиче-
ского обеспечения — пакетов программ для решения инженер-
ных задач. Это — глубокая ошибка. И если она не будет устра-
нена своевременно, то создание систем автоматизированного
проектирования может привести к разочарованию и неуспеху.
Конечно, без хороших вычислительных машин не будет хо-
роших систем автоматизированного проектирования. В еще
большей степени это относится к системам математического
обеспечения. Но, в конечном счете, все это лишь технические
устройства — инструмент. Надо еще удоеть им пользоваться.
Чем сложнее инструмент, тем труднее им пользоваться, тем
выше должна быть научная культура пользователя. Опыт соз-
дания и эксплуатации ЭВМ это полностью подтверждает.
Я уверен, что мировой уровень инженеров, создающих вычис-
лительные комплексы, сети ЭВМ и другие аксессуары элек-
тронной вычислительной’ техники, зйачительно выше мирового
уровня пользователей. Это означает, что используется лишь
незначительная доля тех возможностей, которыми обладают со-
временные ЭВМ.
Поясним содержание некоторых трудностей, которые встают
перед специалистами, которые занимаются проблемами ис-
пользования ЭВМ в проектировании. Предположим, что в на-
шем распоряжении есть совершенный вычислительный ком-
плекс и с его помощью мы хотим определить (выбрать) ха-
рактеристики создаваемой конструкции. Но эффективность лю-
бой сложной конструкции, будь то промышленный комплекс,
самолет или водохозяйственная система, определяется тысяча-
ми различных параметров. Не будем же мы перебирать все
возможные сочетания этих параметров в режиме слепого диа-
лога! Любая ЭВМ, даже гипотетической мощности, для этого
окажется чересчур слабой Значит, прежде всего, должен бьпь
экономный способ ор1анизации поиска наилучшего варианта.
$ 1< ОБЩИЕ ВОПРОСЫ
453
По существу, сказанное и означает необходимость создания
специальной системы правил и алгоритмов, которые составят
основу новой технологии автоматизированного проектирования
сложных объектов. Без создания новой технологии системы
автоматизированного проектирования, подобно автоматизиро-
ванным рабочим местам, будут полезным инструментом, кото-
рый, конечно, усовершенствует процесс проектирования, но
вряд ли внесет в него те изменения, которые его качественно
улучшат.
Итак, центральная задача в создании систем автоматизиро-
ванного проектирования — это разработка новой технологии
проектирования. И, конечно, разработка такой технологии уже
начата во многих КБ и проектных организациях, где создаются
и начинают использоваться подобные системы. Приспособление
конструкторов, проектировщиков к новой технике, использова-
ние нового математического обеспечения — элементы этой ро-
ждающейся технологии. Но ее создание носит в значительной
стёпени интуитивный характер и не превратилось пока в целе-
направленные совместные исследования инженеров-проктиров-
щиков и математиков.
С чего должна начинаться подобная деятельность? Такой
вопрос автор этой работы задал однажды одному из наших ве-
дущих конструкторов самолётов, покойному ныне П. О. Су-
хому. Ответ был совершенно однозначный: «Вы, машинные ма-
тематики, должны помочь прежде всего мне — генеральному
конструктору. Вместе со мной вы должны разработать такую
методику проектирования, которая позволяла бы уже на самых
ранних этапах проектирования достаточно правильно выбрать
основные параметры конструкции и оценить различные харак-
теристики ее эффективности и на протяжении всего процесса
проектирования контролировать изменение этих характеристик
так, чтобы в результате предъявить к испытаниям конструкцию,
уже не требующую доводок; Ошибку, которую допустит кон-
структор при «завязке» проекта, уже не исправить совершен-
ством инженерных расчетов и чертежными автоматами».
я думаю, что эти принципы — основополагающие. И их реа-
лизация может действительно решающим образом улучшить
существующее положение с проектированием сложных объек-
тов. В то же время надо отдавать себе отчет в том, что задача
эта далеко не проста и потребует создания специального ап-
парата.
Теперь сделаем несколько замечаний о «теории» неформаль-
ных процедур и ее применимости к проектированию сложных
технических конструкций. Создание сложны^ технических кон-
струкций, подобных производственному комплексу, самолету,
•электронной машине,—это прежде всего творческий акт, и он
454 ГЛ. VIH. АВТОМАТИЗАЦИЯ ПРОЕКТИРОВАНИЯ
не может быть никогда, до конца формализован. Этот факт мы
будем считать аксиомой и из нее будем исходить. Следует заме-
тить, что целый ряд специалистов как за рубежом, так и у нас
полагают, что акт творчества в проектировании в значительной
степени может быть заменен специально организованной си-
। стемой обработки статистического материала. Статистическая
обработка параметров существующих (или возможных) кон-
струкций, конечно, очень важна, и ее ни в коем случае не сле«
дует недооценивать. Но ее недостаточно в принципе. Исполь-
зование только одного статистического материала позволяет
создать конструкцию, .лишь имеющую аналоги в отдельных
технических решениях, т. е. подобную (или близкую) уже су-
ществующим. Действительно оригинальные конструкции, тре-
бующие качественно новых технических [$ешений, конструкции
, завтрашнего дня всегда требуют нетрафаретного мышления,
’ смелости и таланта. Получать их на основе статистики невоз-
можно — это тоже постулат, который мы примем. Но приняв в
качестве постулата невозможность полной формализации, надо
сделать и следующий шаг—-понять место и значение .формаль-
ных методов, т. е. методов, использующих математическое опи-
сание решаемых задач, понять, чем и как они могут быть по-
лезны конструктору, как они должны быть объединены с не-
формальными процедурами.
Сегодня проблемы изучения и организации эвристических
процедур привлекают внимание широкого круга специалистов,
и им посвящена огромная литература. И уже возникло опре-
деленное понимание принципов, которые лежат в их основе. Мы
об этом говорили в предыдущей главе, где были приведены не-
которые примеры. Большой вклад в эту важную область был
сделан Ю. Б. Гермейером [4, 5], который развил новую систему
взглядов на содержание неформальных процедур и оценки, по-
лучаемые с их помощью. Ю. И. Журавлев [41] предложил
некоторую общую схему формализации множества эвристиче-
ских процедур и выбора среди них наилучшей. Г. С. Поспелов
(см: [64]) и В. М. Глушков 131] дали примеры удачного при-
менения принципов декомпозиции для решения сложных про-
блем оценки перспектив развитая. Одним словом, уже сегодня
существует достаточно прочная- основа в накопленных знаниях
и понимании предмета, позволяющая строить эвристические,
процедуры не только интуитивно. 1
При проектировании сложных конструкций важнейшим яв-
ляется принцип разделения, о котором мы подробно говорили
в предыдущей главе. Заметим, что этот принцип—принцип де-
композиции— лежит, по существу, в основе всех технологий
проектирования, если речь идет, конечно, о достаточно сложных
конструкциях. И это легко понять, так как конструктор, как
$ Т. ОБЩИЕ ВОПРОСЫ
455
бы талантлив он ни был, может оперировать только с относи-
тельно небольшим объемом информации (параметров, крите-
риев и т. д.). Поэтому вся технология проектирования должна
быть такой, чтобы каждому отдельному субъекту — участнику
процедуры — приходилось решать только относительно простые
задачи. Весь успех'в конечном счете зависит от этого, и при-
меры предыдущей главы были призваны это проиллюстриро-
вать. Здесь же необходимо отметить еще одну особенность. Эго
разделение — декомпозиция — должно быть приспособлено и к
сборке — синтезу. К сожалению, никаких общих рекомендаций
здесь нет. В каждом отдельном случае иерархическая структу-
ра задач, решаемых проектировщиками, и внутренние связи
между задачами должны изучаться, и проектироваться Специ-
альным образом.
Поясним сказанное на примере проектирования самолета,
хотя многое из того, что будет говориться ниже, справедливо
для любых сложных конструкций. На вершине рассматривае-
мой иерархии находится главный конструктор машины, и пёред
ним стоит проблема такого выбора (назначения) параметров,
который бы обеспечил решение задач, поставленных заказчи-
ком. Если речь идет о пассажирском самолете, то заказчик —
Министерство гражданской авиации (ГВФ). Он хочет, напри-
мер, иметь самолет для грунтовых аэродромов, который был бы
лучше тех, которые он сегодня эксплуатирует, — ЯК-40, АН-24
и. т. д. Если речь идет об истребителе, то заказчик хочет иметь
самолет, который был бы лучше существующих истребителей
(в частности, побеждал бы в бою существующие истребители).
Задача так и должна ставиться — это естественная постановка
на естественном языке. Сформировать же некоторый функцио-
нал F(x), зависящий от всех параметров самолета х, максими-
зация которого гарантировала бы решение задачи, никакой ма-
тематик или конструктор не в состоянии. Более того, в реально-
сти функционал F(x) зависит не только от конструктивных
параметров самолета х, но и от большого количества неопреде-
ленных факторов у е У, характеризующих среду, в которой са-*
молет будет функционировать (к факторам у относятся и кон-
структивные параметры объектов противодействия противника).
Таким образом, F = F(x, у).
Тем не менее объективно такой функционал существует до-
статочно часто, во всяком случае всегда, когда технический
уровень промышленности и уровень знаний законов функцио-
нирования конструкции позволяют в принципе создать подобу-
ный самолет, т. е. если поставленная задача разрешима. В са-
мом деле, если будут представлены две конструкции, то эксперт
(заказчик, генеральный конструктор), проведя всесторонние
испытания, сможет выбрать лучшую. Условия, когда это
456 ГЛ. VIII. АВТОМАТИЗАЦИЯ ПРОЕКТИРОВАНИЯ
возможно, мы будем называть условиями компетентности. Они
означают, что у нас (точнее, у заказчика или конструктора)
есть представление о том, что значит «лучше»; Только в этих
условиях имеет смысл решать задачу, и только в этих условиях
мы можем выбрать лучшую конструкцию. Если заказчик или
конструктор не могут из двух образцов выбрать лучший, то это
означает, что либо эти конструкции равноценны, либо наш кон-
структор не удовлетворяет требованиям компетентности, — в
обоих случаях математик ничем не может помочь.
Таким образом., перед главным конструктором стоит, вообще
говоря, непосильная задача выбора вектора параметров х,
обеспечивающих максимум некоторой свертки Ф(х) функцио-
нала F(x, у) по у, который мы не можем не, только выписать
в явном виде, но и описать на формальном языке.
Тем не менее попытаемся представить себе возможные пути
решения этой непосильной задачи. Кажется, что для этого мы
можем использовать идеи имитации. Рассмотрим оба типа са-
молетов, о которых шла речь; сначала обсудим ситуацию с ис-
требителем. Предположим, что мы создали систему, имитирую-
щую бой двух истребителей. Закладывая в ЭВМ параметры
проектируемого и какого-либо из существующих самолетов-ис-
требителей, мы разыгрываем серию боев нашего будущего са-
молета с машиной, с которой мы собираемся его сравнить.
В результате набираем необходимую статистику. Она нам и
покажет, какой из самолетов <$лучше». В самом деле, ведь речь
идет о завоевании господства в воздухе. И если оказалось, что
большее количество боев выиграл проектируемый самолет, то
это и будет, означать, что он лучше существующего.
С самолетом для гражданского воздушного флота дело бу-
дет обстоять несколько сложнее: там нет никакой явной харак-
теристики «качества» самолёта. Но проведя серию имитацион-
ных экспериментов, мы дадим возможность эксперту, если си-
туация отвечает гипотезе компетентности,- выбрать более пред-
почтительный вариант.
Значит, имитационная система в принципе позволяет срав-
нивать варианты и отбирать наилучший. А это и означает воз-
можность поиска максимума функционала без знания его яв-
ного выражения. Однако это лишь «принципиальная» возмож-
ность использования имитационной системы как инструмента
оптимизации. Рассмотрим этот вопрос подробнее Как бы ни
-был талантлив и опытен конструктор, первоначальный вариант
самолета не будет достаточно хорошим. И перед конструктором
возникает типичная задача улучшения его параметров, т. е.
замены одной системы параметров другой. А для этой цели
имитационная система без надлежащего «интеллекта», т. е. не
оснащенная специальной системой процедур, практически бес*
§ 1. ОБЩИЕ ВОПРОСЫ
457
полезна. Для того чтобы в этом убедиться, попробуем оценить
необходимый ресурс машинного времени, например, в проблеме
выбора параметров истребителя; условимся, что «проигрыва-
ние» одного боя занимает на машине не меньше одной минуты,
тогда набор необходимой статистики — это уже несколько ча-
сов машинного времени. Значит, один акт имитационного экс-
перимента займет несколько часов машинного времени. А сколь-
ко же потребуется конструктору провести подобных актов,
прежде чем он получит конструкцию, Которая его удовлетво-
рит?
Перёд конструктором стоит задача улучшить параметры са-
молета. Часть этих параметров он может изменять, варьиро-
вать, опираясь на собственный опыт, интуицию. Но изменение
одного параметра изменяет другие. Вся картина начинает
«плыть». И чем сложнее конструкция, тем хуже работает ин-
туиция. Вопрос: «Как выбрать новые параметры, чтобы само-
лет сделался «лучше?» — оказывается чересчур сложным даже
для талантливого конструктора. В итоге вместо направленного
поиска мы приходим 'к простому перебору,.требующему, быть
может, тысяч итераций, т. е. такой затраты машинного вре-
мени, которая лежит, конечно, за • пределами любых возмож-
ностей. И этот вывод никак не связан с качеством ЭВМ. Он
остается справедливым и для гипотетических сверхмощных
ЭВМ. Он определяется природой задачи, ее уровнем сложно-
сти. В этом и состоит ахиллесова пята имитации, если ее рас-
сматривать в качестве инструмента оптимизации.
Имитационная система — это, в принципе, машинный ана-
лог испытательного полигона. Имитационный эксперимент, ко-
нечно, на порядок дешевле летного или любого натурного экс-
перимента. Но всего лишь на порядок: использовать, имита-
ционную систему, так же как и систему летных испытаний, для-
коренного совершенствования конструкции невозможно. Ими-
тационная система — это прежде всего инструмент проверки,
может быть, очень незначительного улучшения. Сам по себе та-
кой факт, конечно, очень важен: прежде чем начать испытание
в натуре, мы можем проэкспериментировать с машинной мо-
делью— операция бесконечно более дешевая. Но тем не менее
создание имитационной системы — еще не решение проблемы.
Значит, для действительно эффективного использования
имитационной системы и всей системы автоматизированного
проектирования необходимо вернуться к тому, о чем говорилось
в начале этого параграфа. Необходимо учитывать тот факт,
что и главный конструктор обладает определенными и вполне
ограниченными психофизиологическими возможностями обра-
ботки информации. Следовательно, необходима декомпозиция
проблемы. Последнее означает, что требуется система проце-
15 Н. Н, Моисеев
45S
i-л. VHI. АВТОМАТИЗАЦИЙ ПРОЕКТИРОВАНИЯ
дур, позволяющая конструктору, и прежде всего главному кон-
структору, оперируя с ограниченной информацией, вести на-
правленный поиск оптимальных параметров конструкции.
§ 2. Некоторые варианты схемы проектирования
а) Вспомогательные функционалы, парето в-
ский анализ. Обсуждение процедур автоматизированного
проектирования мы начнем с высшего уровня — уровня глав-
ного конструктора. Как уже было сказано, конструктор может
мыслить относительно небольшим числом параметров Ff, j =
= 1, 2....п. И эти параметры, как Правило, являются агре-
гатами, т. е. некоторыми функциями конструктивных парамет-
ров самолета х‘, i = 1..N, причем п N. В реальных усло-
виях п никогда не превосходит десятка, N —это многие ты-
сячи.
Как следует из опыта организации и использования нефор-
мальных. процедур, агрегированные характеристики, которыми
мыслит эксперт, всегда достаточно индивидуализированы. Это,
конечно, не значит, что системы автоматизации проектирования
должны быть строго индивидуальны. Отдельные блоки системы,
общая схема операционной системы САПР*), структура бан-
ков данных, основная часть математического обеспечения
должны быть стандартизированы. Но не может не приниматься
во внимание тот факт, что главный конструктор машины по-
своему думает о ней, имеет собственные оценки и критерии,
отличные от тех, которые имел бы другой главный конструктор.
Будучи достаточно универсальной, система автоматизированно-
го проектирования должна настраиваться на определенное кон-
структорское бюро или проектную организацию. Это значит, что
Входной язык САПР должен быть расширяемым и определен-
ная часть математического обеспечения должна специально
создаваться на основе тех требований, которые формулирует
главный конструктор.
Не следует, конечно, и переоценивать роль этого индивиду-
ального элемента.' Существует целый ряд характеристик кон-
струкции (самолета, в частности), которые являются общепри-
нятыми. Например, для самолета Fi(x)— это максимальная
скорость, F<i{x)—маневренность (минимальный радиус вира-
жа), Fs(x)—потолок и т. д. Но, кроме того, в зависимости от
характера проектируемого самолета и особенностей мышления
конструктора могут возникнуть и специфические параметры.
Например, если речь идет о пассажирском лайнере или транс-
портном самолете, то может возникнуть потребность в расчете
*) САПР — системы автоматизированного проектирования.
§ 2. ВАРИАНТЫ СХЕМЫ ПРОЕКТИРОВАНИЯ
459
прочностных или экономических характеристик. Перестройка
математического обеспечения в этом случае не будет носить
принципиального характера, поскольку эти характеристики
практически всегда вычисляются в одном из блоков имитацион-
ной системы.
Очень важно еще, чтобы расчет агрегированных характери-
стик был достаточно простым, с тем чтобы он мог быть прове-
ден с помощью математического обеспечения, которое содер-
жится в отдельных блоках системы. Примером таких расчетов
является расчет тактико-технических характеристик (для само-
лета это летно-технические характеристики — ЛТХ), который
на БЭСМ-6 занимает сейчас секунды машинного времени. Сле-
довательно, через несколько лет, когда произойдет замена стан-
дартных БЭСМ-6 на ЭВМ более высокого быстродействия, этот
расчет станет еще менее трудоемким.
Простота такого расчета возникает вследствие того, что
вспомогательные функционалы с точностью, которая необходи-
ма главному конструктору, зависят, как правило, лишь от не-
большого количества «существенных» параметров. Отсюда сле-
дует возможность разбить конструктивные параметры на две
группы: /
х = (Дх‘),
где — вектор «существенных» параметров и его размерность
невелика (это обычно десятки переменных), а х*— вектор всех
остальных переменных и размерность этого вектора — тысячи.
Следовательно, зависимость F/(x) имеет вид
F^^F^tx'), (2.1)
где е — некоторый малый параметр, такой, что на уровне глав-
ного конструктора всегда можно положить
Fi&ex^Fffr'O). (2.2)
Примечание. Возможность представления (2.1) позволяет развить и
* использовать всю ту технику теории возмущений, о которой говорилось в
главах IV, V и VI.
Из сказанного следует еще один важный вывод: решить за-
дачу оптимизации вида
^Дх)»^/^, 0)->тах . (2.3)
вполне реально. Это не требует тех фантастических затрат ма-
шинного времени, о которых шла речь в предыдущем пара-
графе.
Множество X в выражении (2.3) — это множество «возмож-
ных» параметров, т. е. допустимых современным уровнем тех-
ники и технологии, а также концепцией компоновочной схемы.
15*
460
ГЛ. VIII. АВТОМАТИЗАЦИЯ ПРОЕКТИРОВАНИЯ
Заметим, что определение множества X, т. е. системы огра-
ничений,— один из труднейших этапов всего процесса проек-
тирования — требует весьма высокой конструкторской квалифи-
кации. Это — одна из важнейших неформальных процедур
процесса автоматизированного проектирования.
Итак, первый этап декомпозиции состоит в назначении не-
которого набора функционалов, которые, с точки зрения глав-
ного конструктора, достаточно полно характеризуют конструк-
цию, с тем чтобы среди возможных вариантов отобрать те,
которые будут подвергнуты дальнейшему анализу. Другими
словами, выделяются функционалы, сверткой которых может
быть тот функционал качества, который мы не можем описать
формально. Наши дальнейшие усилия будут теперь направлены
на развитие процедур, которые бы нам позволили сделать вы-
бор конструкции путем сравнения между собой вариантов, яв--
ляющихся элементами паретовского множества, построенного
на этих функционалах. Назначение этих функционалов — акт
неформальный, но на их основе развивается определенный фор-
мализм. Следующий этап — это выделение существенных пере-
менных, представление функционалов Г/ в форме (2.1). Их
описание в подобной форме означает изучение тонкой структу-
ры этих функционалов — это результат глубоких исследований.
Прежде чем переходить к описанию следующего этапа —
организации и использования процедур оптимизации (2.3), со-
ставляющих основу для построения паретовского множества, —
обратим внимание на одно обстоятельство, с которым неизбеж-
но приходится иметь дело при создании сложных проектов.
Г- Изучению проблем «оптимизации конструкций», точнее, изу-
| чению возможных компромиссов (т. е. паретовской оптимиза-
' ции) всегда предшествует этап выбора «архитектурной схемы»
будущей конструкции. В случае самолета — это выбор компо-
новки. Вариантов компоновки не так уж много — высоконесу-
щий моноплан, схема «летающее крыло», схема с тремя дви-
гателями и т. д., т. е. возможные варианты компоновки состав-
ляют некоторое конечное множество. Задавшись вариантом
«архитектурной схемы» будущей конструкции, мы начинаем
анализировать и подбирать (тем или иным способом — об этом
мы будем говорить позднее) значения параметров. И может
оказаться, что среди множества возможных параметров, отве-
чающих данной схеме (это множество может быть и непрерыв-
ным, и дискретным), мы не находим такого сочетания, которое
могло бы нас удовлетворить. Тогда мы меняем компоновку,
т. е. «архитектурную схему» будущей конструкции.
Примечания. 1. Это явление — изменение структуры — относится к
тому же классу явлений, которые впервые начали изучаться Пуанкаре еще
в прошлом веке. Их теория получила название теории бифуркаций (см. по
$ 2. ВАРИАНТЫ СХЕМЫ ПРОЕКТИРОВАНИЯ
461
этому поводу [19]). Классическим примером бифуркаций является смена
форм равновесия в задаче Эйлера о равновесии стержня. Критические значе-
ния параметра — величины внешней сжимающей нагрузки — отвечали соб-
ственным числам некоторой краевой задачи, т. е. решениям некоторой оптими- ‘
заццонной задачи^ В расматриваемом случае смена архитектурных форм про-
исходит тогда, когда в процессе изменения параметра (векторного) дости-
гается его оптимальное значение. В последние годы подобные явления сдела-
лись предметом пристального внимания исследователей. Обобщение теории
бифуркаций Пуанкаре часто называют .теорией катастроф (см., например,
[20]). Я думаю, что этот модный термин не очень удачен, ибо речь идет
прежде всего о бифуркациях, т. е. ветвлении решений. Кроме того, введение
нового термина как бы игнорирует всю предысторию вопроса, и у неискушен-
ного читателя может возникнуть неверное представление о новизне и ориги-
нальности новой теории.
2. Изучаемая ситуация имеет также определенное значение для общеси-
стемных исследований, поскольку она является наглядной демонстрацией
единства и противоречивости формы и содержания: структурного и функцио-
нального начал. Именно с этих позиций можно трактовать теорию бифурка-
ций Пуанкаре. Математика до сих пор занималась изучением структур и осо-
бенностей их функционирования независимо: с одной стороны, современная
геометрия (и топология), а с другой стороны — анализ, математическая фи- ‘
зика и т. д. Изучение и проектирование сложных систем ставит,, как мы ви-
дим, задачу создания аппарата, способного объединить эти два начала. Я ду-
маю, что теория бифуркаций Пуанкаре может быть исходной позицией для
построения эффективных методов численного анализа подобных ситуаций.
Вернемся теперь к обсуждению дальнейших процедур па-
ретовского анализа — выбора параметров х, реализующих ком-
промисс:
Л W шах.
Задав функционалы Flt мы должны теперь указать некоторую
процедуру описания. паретовского множества, построенного в
пространстве этих функционалов. Для этого мы будем исполь*
зовать решения оптимизационных задач (2.3).
Вектор х, реализующий решение задачи (2.3) для функцио-
нала Ft, будем обозначать через &. В результате решения этой
задачи будут найдены числа Ао = Л(&). Эти числа характе-
ризуют предельные возможности самолетов, допустимые в рам-
ках, данной компоновочной схемы совремённым уровнем тех-
ники и технологии.
Самолет, обладающий параметрами = можно на-
звать рекордистом г-го типа. Это может быть самолет макси-
мальной дальности, максимальной маневренности, максималь'
ной высотности, максимальной грузоподъемности и т. д. В ис-
следовании операций существует понятие идеальной схемы, или
идеального решения. Самолеты-рекордисты являются аналога-
ми этих идеальных и не реализуемых на практике схем, описы-
вающих предельные возможности конструкции по какому-либо
из параметров.
462
ГЛ. VHI. АВТОМАТИЗАЦИЯ ПРОЕКТИРОВАНИЯ
Разумеется, ни один из этих самолетов-рекордистов не будет
пригодным для решения тех задач, ради которых он проекти-
руется. Но в реальном самолете необходимо должны сочетаться
основные качества рекордистов. Реальная конструкция — гар-
мония основных характеристик самолета. Реальный самолет
должен сочетать в себе и способность быть маневренным, и
способность подниматься на большую высоту, быстро летать,
быть экономичным и т. д. Эта «гармония» определяется, ко-
нечно, его назначением, его боевыми или коммерческими зада-
чами, а вот структура, сочетание этих характеристик в значи-
тельной степени зависят от опыта и таланта главного конструк-
тора.
Итак, будем считать, что критерии А нам назвал главный ’
конструктор, а значения Ао мы вычислили. Составим новую це-
левую функцию,' точнее, некоторое семейство целевых функций,
зависящее от векторного параметра %:
W (X, Л) = max к1 ( F^~Fi-^} (2.4)
Выясним смысл формулы (2.4). Выражение
всегда положительно и меньше единицы. Оно показывает, на-
сколько реальный самолет хуже рекордиста номера i по пока-
зателю Pi, причем чем больше это выражение, тем больше от-
личается самолет с параметрами X = {Xs} от рекордиста но-
мера /. Выражение «
Ft9 - F{ (X)
max —
i Fio
показывает, по.какой из характеристик и насколько наш само-
лет дальше всего от идеальной схемы.
Если бы мы нашли такой вектор Х»еЛ, который решал бы
задачу
, Fl0 - Fi (X)
“ max ‘ - -> mm,
i Fi0
то это означало бы, что мы нашли совокупность параметров Хф,
которые определяют самолет, наиболее близкий к рекордистам,
если считать, что бее характеристики равноценны. Но мы
знаем, что для самолетов разных назначений роль различных
характеристик различна. Положительные числа к1 определяют
относительную значимость этих характеристик для решения за-
дач, ради которых заказывается самолет. Чем больше величи-
на к1, тем важнее для нас характеристика А. Вектор к = (Л*)]
§ 2. ВАРИАНТЫ СХЕМЫ ПРОЕКТИРОВАНИЯ 463
называют вектором концепций самолета. На него естественно
наложить ограничения:
п
V>0, Z=l, ...,n, £v = l. (2.5)
. /=1
Второе из условий — это обычное условие нормировки. Пока-
жем теперь, как может быть использовано семейство функцио-
налов W(x,X).
Прежде всего вспомним, что мы говорили о паретовском
оптимуме. Он означает, что та наилучшая конструкция, которую
мы предполагаем выбрать, находится среди элементов, принад-
лежащих множеству Парето, построенному на функционалах
Pi. Это означает также, что функционал задачи является сверт-
кой этих критериев. Функционалы №(Д%) как раз и являются
необходимой сверткой, поскольку, перебирая параметры К,
удовлетворяющие условиям (2.5), и разыскивая для них точки
IF (£, Л)->тах, мы и получим все точки множества Парето.
к
Более того, мы получим так называемые полуэффективные ва-
рианты, содержащие в себе и все точки множества Парето.
Таким образом, предположение о том, что функционалы Л
достаточно полно характеризуют конструкцию, привело нас к
тому, что ее следует искать среди точек паретовского множе-
ства, построенных с помощью функционалов W (Л, X),.
Но пока отложим изучение паретовского оптимума и обра-
тим внимание на тот факт, что анализ функционалов вида
IF (£ 1) может оказаться весьма полезным инструментом и в
тех случаях, когда функционал задачи,, т. е. критерий, который
оценивает выбор параметров конструкции, нам известен, но вы-
числяется достаточно сложно.
Итак, предположим сначала, что главный конструктор знает
йа формальном уровне тот смысл, который надо вкладывать в
понятие «оптимизация конструкции». Это значит, что он может
для каждого вектора дать формальный способ определения
значения функции Ф(-С), максимум которой при ЛеХ дает
нам наилучшую конструкцию. Мы видели, что для истребителя
подобная функция может быть определена — это процент вы-
игранных боев на достаточно большом количестве "эксперимен-
тов. Поскольку модель одиночного боя вполне формализована,
то значение функции Ф(х) определяется с помощью некоторого
алгоритма. Однако в предыдущей главе мы заметили, что пря-
мое решение задачи
Ф(Л)-*тах (2.6)
может оказаться практически невозможным вследствие большой
размерности' вектора £ и того обстоятельства, что для фикси-
464
ГЛ. VIII. АВТОМАТИЗАЦИЯ ПРОЕКТИРОВАНИЯ
рованного Л однократное вычисление критерия Ф(^) может
потребовать больших затрат машинного времени.
Используя же функционал (2.4), можно значительно упро-
стить процедуру (2.6). Предположим, что мы зафиксировали
вектор %==Х Функционал №(Л, %) составлен из небольшого
числа функционалов А.(£) (напомним, что i = 1, 2, ,,,, п, при-
чем число п невелико, и каждый из Л(^) вычисляется просто).
Поэтому мы можем решить задачу
№(*,!)-> max. (2.7)
Результатом решения задачи (2.7) будет вектор Л% — Л (к),
т. е. вектор оптимальных параметров для заданной концепции
самолета к — X
Теперь с помощью задачи оптимизации (2.6) мы можем по-
строить функцию
ТГ (Л) = U7 (je (Л), Л), - (2.8)
которая является решением задачи
№(Л, X)->max - (2.9)
х е X
для любых X, удовлетворяющих ограничениям (2.5), т. е. для
любых концепций проектируемого самолета^'
Вернемся теперь к нашей задаче (2.6). В этой задаче мы
должны были отыскать максимум функционала Ф на множе-
стве X. Заменим ее другой, аппроксимирующей задачей:
Ф (.£)-> max . (2.10)
X е ТО»
Эта запись означает, что мы разыскиваем вектор Л, доставляю-
щий максимальное значение критерию Ф(^) на множестве ре-
шений задачи (2.9), т. е. на множестве Парето. Множество
{£(%)} значительно уже исходного, но каждый вектор Ле
ж {Л(Л)}, очевидно, удовлетворяет условию ЛеХ.
Итак, задачу (2.6) мы заменили задачей (2.10), которую
можно переписать так:
Ф(^(Х)) = Ф(Л)->тах. (2.11)
Задача (2.11) уже качественно проще исходной, поскольку
размерность параме/ра к гораздо меньше размерности вектора
Л. Напомним, что размерность к равна количеству критериев
Ft — числу, которое обычно не превосходит десятка.
Представим себе теперь общую схему процедур проектиро-
вания на уровне главного конструктора.
§ 2. ВАРИАНТЫ СХЕМЫ ПРОЕКТИРОВАНИЯ 465
1. Задаем функционалы А(^) (акт существенно неформаль-
ный).
2. Формируем функционал Н7(ДХ) '(это — последователь*
ность строгих процедур).
3. Строим функцию jO(X), для чего в пространстве X строим
сетку с узлами %* и для каждого X = X* решаем задачу (2.7).
4. Решаем задачу (2.11) и находим «оптимальное значение»
X = X*.
5. По заданному X = X* определяем параметры конструкции
х* = к (X*) и переходим к следующему этапу проектирования.
В этой системе процедур есть два обстоятельства, на кото-
рые следует обратить внимание читателя.
Во-первых, определение экстремального значения функции
Ф(Х), которое в силу большой размерности вектора к и слож-
ности вычисления самой функции практически оказывается не-
возможным, мы заменили задачей отыскания максимума Ф(£)
на некотором другом, более узком множестве {i(X)}. Во-вто-
рых, структура этого множества не является следствием только
формальных преобразований. Она основывается на выборе «су-
щественных» функционалов, т. е. на субъективном представле-
нии конструктора о том, что самолет, оптимальный по крите-
рию Ф(^), должен быть среди тех самолетов, которые описы-
ваются условием
W (Д X) -> max
при некотором значении X, которое, разумеется, заранее неиз-
вестно.
Итак, если функционал Ф(х) составлен явно, то в принципе
при оптимизации конструкции (т. е. после задания компоно-
вочной схемы) мы можем обойтись и без экспертных процедур.
В. этом случае возникает лишь математическая задача исследо-
вания условий, при которых изложенная процедура двухэтап-
ной оптимизации обеспечивает достаточно хорошую аппрокси-
мацию оптимальной конструкции. Это — самостоятельная про-
блема, и мы ее обсуждать не будем. По существу, мы могли
бы рассматривать двухэтапную оптимизацию как отыскание
максимума функции Ф(£) на множестве Парето, построенном
с помощью функционалов А(Д. Для построения этого множе-
ства нам достаточно взять какую-либо свертку критериев А,
например ту функцию W(Д X), которую мы построили, и, решая
задачу (2.7), найти функцию .fj=i(X). Тогда множество тех
значений F}, которые определяются формулами
А = АЩХ)), (2.12)
466
ГЛ. VIII. АВТОМАТИЗАЦИЯ ПРОЕКТИРОВАНИЯ
будет некоторой гиперповерхностью в пространстве критериев
Fi, а формулы (2.12) будут его параметрическим описанием.
Заметим, что вместо свертки W с таким же успехом мы
могли бы использовать и простейшую линейную свертку
^(Jf, c)=Zq с{>0, £ci=l,
i i
Выбор функционала W в проблеме проектирования самолета
был обусловлен исключительно соображениями наглядности и
удобства интерпретации. В задачах автоматизации проектиро-
вания других объектов может оказаться более удобным ис-
пользовать и другие типы сверток.
В конкретных, реальных ситуациях все оказывается несколь-
ко сложнее, чем было описано, поскольку никакого функционала
Ф(х) в явном виде составить не удается. Главный конструктор,
который мыслит только категориями конструкции, может лишь
сравнивать концепции самолета. Для этого в его распоряжении
есть имитационная система. Она выступает на сцену, когда
паретовский анализ, завершен, когда множество Парето по-
строено. В этих условиях, т. е. когда в наличии имеется лишь
небольшое число имитационных экспериментов, конструктор
должен выбрать концепцию, наилучшим образом (с его точки
зрения) соответствующую исходному замыслу. Задача матема-
тиков, проектирующих САПР, — в максимальной степени облег*
чить этот поиск, организовать наиболее простую его схему.
Например, можно поступить следующим образом. В простран-
стве возможных концепций строится сетка с узлами X*, причем
шаг сетки должен быть согласован с главным конструктором.
В той области пространства концепций X, где наиболее вероят-
но ожидать успеха, шаг должен быть мельче.
Примечание. Подчеркнем, что конструктор на этом этапе формаль-
ного анализа выступает как активный его участник, без которого построить
рациональную организацию диалога конструктор — имитационная система не-
возможно.
Для каждого из векторов X* решается задача (2.7) и со-
ставляется множество хк = £(кк). Такое множество можно на-
звать множеством прототипов. Для каждого из прототипов (и
только для них) организуется имитационный эксперимент, ре-
зультат которого мы условно обозначим через Ф (£*)• Эти ре-
зультаты и предъявляются главному конструктору. Он сам (или
вместе с заказчиком) производит первую отбраковку. В ре-
зультате в пространстве концепций возникает некоторое множе-
ство S.
Итак, в рамках излагаемой схемы количество необходимых
имитационных экспериментов относительно невелико и согла-
5 2. ВАРИАНТЫ СХЕМЫ ПРОЕКТИРОВАНИЯ
467
совано с возможностями их реализации на вычислительном
комплексе.
Заметим, что, в отличие от традиционного метода проекти-
рования, прорабатывается сразу целая серия вариантов. После
первой отбраковки остается еще несколько вариантов, которые,
по мнению экспертов, могут претендовать на то, чтобы быть
принятыми за основу для дальнейшего проектирования. Эти
варианты, каждому из которых отвечает свой вектор Л*, под-
вергаются дальнейшему, более детальному анализу. Если кон-
структор и заказчик остановятся на некотором варианте кон-
цепции X = X*, то мы говорим, что прототип выбран. Если же
главный конструктор после ряда итераций такой выбор сделать
не может, это означает, что либо множество критериев f/ было
слишком узким и его надо расширить, либо неудачно выбрана
компоновочная схема, либо в рамках технических и технологи-
ческих возможностей, которыми располагает промышленность,
нужную конструкцию создать нельзя.
После того, как прототип выбран, переходят к следующему
этапу проектирования. Но прежде, чем его обсуждать, оста-
новимся еще на одном важном частном случае.
б) Случай, когда существует доминирующий
функционал. До сих пор мы ориентировались на изучение
того случая, когда нет формализованного критерия, когда оцен-
ка качества проекта — это субъективное представление экспер-
та. Мы рассмотрели также ситуацию, в которой можно соста-
вить систему формальных процедур, позволяющих вычислить
функционал. Но вычисление значения этого критерия было
столь, трудоемким, что его нельзя было использовать непосред-
ственно для определения оптимальной системы параметров кон-
струкции. В обоих случаях мы использовали систему вспомо-
гательных критериев и проводили анализ паретовского мно-
жества.
Введение вспомогательных «существенных» критериев, кото-
рые не входят непосредственно в постановку задачи, — это очень
важное изобретение, позволившее сделать эффективным диалог
человек — ЭВМ, т. е. сделать эффективным использование си-
стемы имитации. Эта идея принадлежит П. С. Краснощекову
(см. [48]). Далее, мы использовали свертку этих критериев.
Вопрос о структуре этой свертки уже менее принципиален. Тот
или иной выбор свертки критериев, определяется, как правило,
соображениями удобства. Описанная схема, несмотря на ее
эффективность и удобство, конечно, не является универсальной,
и при анализе других конкретных ситуаций она может быть
сильно изменена. Даже паретовский анализ не всегда является
обязательным элементом проектирования. В самом деле, весьма
распространенным свойством объекта проектирования является
468 ГЛ. VIII. АВТОМАТИЗАЦИЯ ПРОЕКТИРОВАНИЯ
существование некоторого доминирующего функционала, и весь
анализ конструкции должен быть привязан к изучению вариан-
тов в окрестности его оптимума.7
Предположим, что проект характеризуется показателями
Jo(x), ..., Jn(x), а конструктор (проектировщик) стре-
мится выбирать параметры конструкции (проекта) —вектор х —
так, чтобы обеспечить выполнение условий
Л(х)->тш, i = 0, 1, 2, N. (2.13)
X
Кажется, что в этой ситуации наиболее естественным яв-
ляется использование паретовского анализа. Но может ока-
заться, что на один из показателей наложено ограничение спе-
циального вида. Обозначим через xq решение задачи
Jo (х)-»-min. (2.14)
Пусть новое ограничение состоит в том, что на выбор х нало-
жена условие вида
Jo(x)<(l-W)J0(xo), (2.15)
где 0 <. k 1. В качестве функционала Jo обычно выступает
стоимость проекта. Тогда условие (2.15) означает, что, каковы
бы ни были значения остальных показателей Ji(x), /г(х), ...
..., /я(х), стоимость проекта не должна превосходить величи-
ны его наименьшей возможной стоимости Jo(xo) на 100 k%.
Этот случай очень типичен. Большое количество народнохозяй-
ственных проектов относится к рассматриваемому типу. Напри-
мер, в’ проблеме составления проекта обустройства (системы
эксплуатации, бурения, транспортировки продукции, ее пер-
вичной обработки и т. д.) нефтегазового региона важнейшей
характеристикой^ является стоимость. И первая задача проек-
тировщика— определить стоимость «идеального» проекта
Jo(xo) *).
Определив минимальную величину /о и систему парамет-
ров— вектор хо, который реализует этот «оптимальный» про-
ект,— мы вычислим в точке х0 остальные характеристики:
Ji(xo), /2(^0), ..., Jw(xo). Они должны быть предъявлены экс-
перту, который будет заведомо неудовлетворен значениями
найденных показателей. Значит, «рекордист» по стоимости, т. е.
самый дешевый проект, должен быть забракован. Он не будет
удовлетворять заказчика по другим показателям. Но от пре-
дельной стоимости Уо(хо) мы далеко отступить не сможем, нас
лимитируют выделенные деньги. Поэтому в окрестности точ-
ки хо надо тем или иным образом построить сетку точек, ко-
*) В этой ситуации число k обычно не превосходит 0,05.
5 2. ВАРИАНТЫ СХЕМЫ ПРОЕКТИРОВАНИЯ
469
торым соответствуют близкие значения функционала Jo.
В. Р. Хачатуров, автор системы автоматизированного проек-
тирования обустройства нефтяных и газовых месторождений,
предлагает строить эту сетку, опираясь на решение задачи
(2.14), при условии
7о(х) = (1+Ш(хо), (2.16)
где в зависимости от ситуации числа 'kt k берутся равными
0,01; 0,02; ... На гиперповерхностях (2.16) задается сетка xs
и для точек xs вычисляются .значения показателей J,(xs), i —
= 1, 2, ..., N, которые предъявляются эксперту, после чего из
множества точек xs выделяется некоторое подмножество ва-
риантов для последующего анализа, а остальные варианты ис-
ключаются из рассмотрения.
Разумеется, могут быть предложены и другие способы по-
строения множества вариантов в окрестности точки хо. В част-
ности, может иметь смысл и паретовский анализ, который све-
дется к изучению той части множества Парето, которая удов-
летворяет условию (2.15).
Мы изложили здесь схему диалога. Его организация во мно-
гом напоминает ту, которая была использована при проектиро-
вании .самолета, только вместо паретовского множества было
рассмотрено множество близких вариантов. Заметим, что в про-
цессе диалога могут возникнуть новые ограничения (в частно-
сти, неформального характера) и новая информация. Все это
легко включить в предлагаемую схему.
в) Еще один пример декомпозиции. При реали-
зации процедуры, описанной в предыдущем пункте, мы неиз-
бежно встретим одну трудность, типичную для любого проек-
та,— размерность задачи. Поэтому, прежде чем проводить про-
цедуры оптимизации или анализа компромисса (или диалог),
необходимо упростить задачу, провести ее декомпозицию, раз-
работать систему быстрых алгоритмов. В п. а) для этой цели
мы ввели «существенные» функционалы и «существенные» пе-
ременные, которые позволили От задач, размерность которых
была порядка многих тысяч, перейти к задачам размерности
десятка (или десятков). Изложенный путь является далеко не
единственным, могут быть предложены и другие способы, но
всякий раз они тем или иным образом связаны с организацией
иерархии задач в проекте. Поясним сказанное примером проек-
тирования системы обустройства нефтеносного региона.
Предположим, что речь идет о проекте обустройства си-
стемы нефтяных месторождений А, Б, В, Г, Д (рис. 2.1) (см.
[57, 69]). Какие задачи должен решать проектировщик гене-
ральной схемы? Прежде всего, у него есть определенная цель —
обеспечить выполнение плана поступления нефти в центральный
470
ГЛ. VIII. АВТОМАТИЗАЦИЯ ПРОЕКТИРОВАНИЯ
нефтепровод аа'. Этот план является некоторым экзоген-
ным элементом. Он задан данному региону исходя из общих
потребностей страны в нефти в виде некоторой функции
Q = Q‘W, /е[/0, Г], (2.17)
где to — момент начала добычи нефти, Т — конец планового пе-
риода. В условиях, которые типичны для добычи нефти или
газа, отрезок времени Т — to обычно равен 20—30 годам.
Примечание. Функция (2.17) строится в результате предварительной
проработки вопроса добычи нефти в плановых органах или на уровне руко-
водства отраслью. Однако в процессе создания проекта и уточнения информа-
ции эта функция может быть уточнена и даже изменена. Будем считать, что
функция Q*(t) — суммарная
добыча нефти —нам задана. Тогда один из
функционалов задачи должен быть связан с
обеспечением плановой добычи. Он может
быть принят, например, в виде
Т
A = j(Q‘-Q)2^. (2.18)
«о
Заметйм, что превышение плано-.
вой добычи может оказаться не толь-
ко полезным, но и невыгодным: оно
может ускорить истощение месторож- '
дений и нарушить соотношение мощ-
ностей по добыче, транспортировке и
первичной обработке нефти, т. е. в конце концов привести к
неоправданным потерям.
Задача проектировщика состоит в том, чтобы определить
плановые задания производства отдельным месторождениям
Qa> Qb, • • • > Qfl> создать проект сети нефтепроводов, соеди-
няющих месторождения с центральным нефтепроводом, опре-
делить очередность строительства, наметить пункты сбора и
первичной обработки нефти, спроектировать систему закачки
воды для поддержания пластового давления, определить места
кустования скважин и режим их разбуривания, спроектировать
систему электропитания и т. д. В результате должна быть вы-
дана документация на все необходимое оборудование, вся -его
спецификация, включающая тысячи наименований. Все это мно-
жество величин должно быть выбрано так, чтобы не только
обеспечить выполнение условия Ji min, но и достичь мини-
мума стоимости, т. е. минимума функционала Jo, и, кроме того,
минимизировать значения многих других показателей, которые
характеризуют качество проекта.
Разумеется, составление проекта, выбор параметров потре-
буют определенной иерархии, проектирования «по этажам»,
s 2. ВАРИАНТЫ СХЕМЫ ПРОЕКТИРОВАНИЯ
471
Верхним этажом, очевидно, должна быть генеральная схема,
в которой каждое из месторождений выступает как отдельный
объект. Но такое выделение верхнего уровня имеет смысл лишь
тогда, когда каждое из месторождений описывается относитель-
но небольшим количеством параметров. Но как это сделать,
если количество скважин на более или менее крупном место-
рождении исчисляется тысячами? Очевидно, что без специаль-
ной формы агрегирования, объединения величин здесь не обой-
тись.
Способ агрегирования подсказывает сама особенность за-
дачи. Поскольку количество скважин очень велико, то вместо
рассмотрения отдельных скважин как самостоятельны^ объек-
тов будем рассматривать их как распределения или, что то же
самое, считать число скважин Ni(t) на том или ином место-
рождении непрерывной и дифференцируемой функцией време-
ни. Тогда изменение числа скважин будет описываться системой
дифференциальных уравнений вида
. (2.19)
где Ni — число скважин на месторождении номера I, щ— век-
тор ресурса, выделенный на разбуривание месторождения но-
мера i (количество буровых бригад, затраты денег или мате-
риальных ресурсов). Введем величину qi(t)—дебит отдельной
скважины на месторождении номера I. Эта величина опреде-
ляется многими факторами, но главные из них — это количе-
ство скважин Ni и количество уже добытой нефти Q,-. Таким
образом, закон изменения величины qt может быть парамет-
ризован в виде
qi^gANi.Qi). . . (2.20)
Величина q, зависит еще от многих факторов: , от способа экс-
плуатации, от уровня того пластового давления, которое под-
держивается закачкой воды, и • т. д. Но на в'ерхнем уровне
проектирования, когда нам надо представить себе лишь общие
контуры проекта, мы считаем, что все эти факторы, выбор ко-
торых находится в нашем распоряжении, определены некото-
рым «оптимальным» образом (точнее, наверное, не оптималь-
ным, а директивным образом).
Подобный прием параметризации весьма широко распро-
странен в проектировании или долгосрочном планировании.
Так, например, в л-модели Ю. П. Иванилова и А. А. Петрова
(см. [42]) основным управляющим параметром является мо-
мент начала строительства, а затем предполагается, что коль
скоро строительство ‘началось, то средства на его продолжение
рыделяются вполне однозначным образом, хотя они являются
ГЛ. VIII. АВТОМАТИЗАЦИЯ ПРОЕКТИРОВАНИЯ
472
управлениями и, в принципе, могут быть выбраны и по-друго-
му. Смысл подобного директивного задания некоторых управ-
ляющих функций совершенно очевиден: они выбираются при
оптимизации некоторого вспомогательного критерия, например
при определении темпов выделения средств на завершение
строительства отдельных предприятий проектируемого народ-
нохозяйственного комплекса. Таким, критерием может быть
стоимость строительства отдельного предприятия комплекса.
Это — следствие более или менее очевидного предположения,
что в большинстве случаев начавшееся строительство пред-
приятия надо продолжать возможно интенсивнее — достаточно
разумный способ управления с точки зрения комплекса в целом.
Вернемся к уравнению (2.20). Функции gi(Ni,Qi) являются
выпуклыми убывающими функциями своих переменных: чем
меньше осталось нефти под землей (т. е. чем большее количе-
ство Qi ее лзвлечено), тем труднее становится ее добывать, и
каждая новая скважина оказывается все менее эффективной.
Для построения функций gi(Ni, Qi) необходимо изучить отдель-
ное месторождение и условия его будущей эксплуатации. Имея
в распоряжении функции gi(Nt, Qi), мы можем'составить и
уравнение для изменения величины Qi:
^-^qiNl^gi(Ni,Qi)Nt. (2,21)
Итак, в результате принятых гипотез мы получили простейшее
описание одного месторождения с помощью двух уравнений
(2.19) и (2.21).
Таким образом, если регион имеет k месторождений, то мы
можем описать его функционирование с помощью системы 2k
дифференциальных уравнений. Между собой эти уравнения
связаны только тем фактом, что выбор управлений Ui не неза-
висим. Управления связаны условиями вида
, (0 = ^(0 (2.22)
i
или
т
Z\ust(l)dt = Us. (2.23)
о
Условие, (2.22) очень- важно — это, как правило, ограничение
на трудовые ресурсы: например, W(t)—это количество буро-
вых бригад, т. е. основной фактор, задерживающий рост тем-
пов развития региона. Величина Vs в условии (2.23)—это сум-
марное количество тех или иных материалов, которые мы мо-
жем израсходовать на строительство, или суммарное количе-
ство денег и т. д.
5 2. ВАРИАНТЫ СХЕМЫ ПРОЕКТИРОВАНИЯ
473
Теперь мы можем поставить задачу оптимизации: так рас*
пределить ресурсы ut(t), чтобы обеспечить минимум функцио-
нала (2.18). В результате решения этой задачи мы можем
определять желаемые темпы наращивания мощностей добычи
на тех или иных месторождениях и, в частности, моменты на-
чала бурения скважин каждого месторождения, порядок их
ввода в строй и т. д.
Интересно отметить одну важную особенность этих вариа-
ционных задач — они всегда вырожденные. Это означает, что
их решение образует некоторое многообразие в пространстве
управляющих воздействий. Неоднозначность решения вариа-
ционных задач на верхнем этаже проектирования—очень важ-
ное свойство .обсуждаемой схемы. Дело в том, что, проектируя
отдельные элементы системы, проектировщики будут иметь
определенную свободу действий, поскольку добиться оптими-
зации функционалов вида (2.18) можно бесчисленным множе-
ством способов, Вместо жестко фиксированных «оптимальных»
значений управляющих воздействий проектировщики должны
обеспечить выполнение только определенных соотношений ме-
жду ними.
Мы обсуждали пока задачу распределения ресурсов, обес-
печивающих только добычу нефти. Но исходная задача более
сложна: мы должны не только обеспечить добычу, но и до-
ставку нефти в магистральный нефтепровод. Величина Q(f),
стоящая в выражении (2.18), — это то количество нефти, кото-
рое мы должны отправить потребителям. Но для того, чтобы
добытое количество нефти было отправлено в магистральный
нефтепровод, нужно еще создать систему внутрирайонного
транспорта нефти — соединить нефтепроводами отдельные ме-
сторождения с магистральным нефтепроводом. Эти нефтепро-
воды образуют некоторый ориентированный граф. Значит, вы-
бор стратегии строительства будет стеснен не только ограниче-
ниями по объемам ресурса, но и логическими связями (усло-
виями типа (а)), о которых шла речь в предыдущей главе.
На первый взгляд кажется, что задача проектирования си-
стемы транспорта нефти и задача распределения ресурсов для
добычи нефти могут быть разделены. В самом деле, районная
система нефтепроводов должна быть наиболее дешевой, т. е.
суммарная длина труб должна быть наиболее короткой, — мы
должны построить граф, соединяющий заданные вершины, при-
чем так, чтобы суммарная длина ребер была минимальной.
Коль скоро подобная задача решена, то архитектурный облик
системы транспортировки нефти становится заданным и тем са-
мым условия (а) оказываются снятыми. Но в действительно-
сти ситуация оказывается' более сложной. Дело в том, что мы
стремимся еще минимизировать функционал .(2.18).. Нам
474
ГЛ. VIII. АВТОМАТИЗАЦИЯ ПРОЕКТИРОВАНИЯ
необходимо так организовать работы, чтобы отклонение от
плана Q*(t) было минимальным, а стремясь построить граф
кратчайшей длины, мы можем настолько затянуть строительство
нефтепроводов, что станет невозможным вовремя начать экс-
плуатацию нефтяных месторождений и обеспечить своевремен-
ную добычу необходимого количества нефти. Поэтому обе за-
дачи должны решаться совместно.
Другое дело, что при организации системы последователь-
ных процедур расчета мы можем отправляться от варианта
транспортного графа, которому соответствует наиболее дешевая
система нефтепроводов (наиболее короткая). Но и в этом слу-
чае задача распределения ресурсов должна выглядеть значи-
' тельно сложнее той задачи, которую мы обсуждали в этом
пункте, поскольку в число работ, обеспечиваемых одним и тем
же суммарным ресурсом, мы должны включить и все те работы,
которые необходимо выполнить для строительства системы неф-
тепроводов. Кроме того, мы не сможем полностью избавиться
и от ограничений типа (а). В самом деле, одним из важней-
ших параметров, характеризующих трубопровод, является диа-
метр трубы. Но диаметр трубы определяется расходом горюче-
го, которое мы предполагаем пропустить через трубу, т. е. по-
рядком и темпом освоения нефтяных месторождений региона.
Итак, даже при заданной топологии системы транспорта нефти
наша задача остается достаточно сложной и нестандартной, по-
скольку она объединяет непрерывные составляющие (разверт-
ку во времени характера использования ресурсов) и дискрет-
ные составляющие (выбор параметров нефтепроводов). Нако-
нец, задав структуру графа минимальной длины L и решив для
него задачу оптимального распределения ресурса, мы должны
будем еще сопоставить это решение с другими, которые мы
можем получить, используя граф большей длины.
Примечание. Упрощающим обстоятельством является тот факт, что
проекты, которые имеет смысл рассматривать, не могут отличаться от наибо*
лее дешевого на величину, превышающую несколько процентов их стоимости.
В этом пункте мы рассмотрели совершенно новый прием по-
строения быстрых алгоритмов. Если все предыдущие примеры
были так или иначе связаны с анализом зависимости свойств
модели от параметров и построением соответствующих теорий
возмущений, то в рассматриваемом случае никаких явных па-
раметров нет. В то же время описанный прием, который можно
назвать методом континуализации задачи, имеет много разно-
образных аналогий. Так, например, в механике жидкости и газа
известна модель Больцмана, описывающая движение частиц
газа в некотором объеме. Если частиц достаточно много, то уже
це имеет смысла следить за судьбой каждой из частиц и вво-
§2. ВАРИАНТЫ СХЁМЫ ПРОЕКТИРОВАНИЯ
476
дятся новые агрегированные характеристики: плотность, ско-
рость, температура и т. д. Возникает новое агрегированное, опи-
сание— механика сплошной среды. Оно, конечно, гораздо ме-
нее точное, в нем уже исчезает возможность регистрировать со-
стояние отдельных молекул, но зато оно на много порядков
проще? Нечто аналогичное проделали и мы, стремясь получить
агрегированное описание месторождения в целом. Такое рас-
смотрение чересчур грубо для технического проекта обустрой-
ства отдельного месторождения, в котором мы должны дать
описание функционирования каждой скважины. Но оно доста-
точно подробно, чтобы определить моменты начала эксплуата-
ции того или иного месторождения, распределение буровых
бригад по месторождениям, сделать трассировку нефтепроводов
и т. д.
г)'Иерархия уровней проектирования и бу*
ферные системы. До сих пор мы обсуждали только про-
цедуры, осуществляемые на верхнем уровне проектирования.
В результате мы сможем получить некоторый эскиз будущего
проекта (иногда употребляют термины «облик изделия» или
«предварительная схема»). Бесспорно, это важнейший, этап
проектирования. Завязка проекта определит всю судьбу изде-
лия. Ошибки на этом уровне уже невозможно исправить.
В первом пункте этого параграфа мы продемонстрировали
возможности; которые дает паретовский анализ. Подчеркнем
еще раз значение изложенного. Мы все время развиваем идеи
диалога, вся система описанных процедур направлена лишь на
одно: помочь конструктору избежать лишней работы, анализа
бесперспективных вариантов, последовательно сужая мно-
жество претендентов на. решение. Но тот инструмент, который
мы описали, .имеет важное значение не только для проектиро-
вания новых систем. В самом деле, с помощью изложенных
процедур мы всегда можем оценить уже созданные проекты,
и если они не относятся к числу паретовских, то указать спо-
собы их усовершенствования. И наконец, схема рассуждений
может быть использована не только на уровне главного кон-
структора. Она полезна и при проектировании отдельных агре-
гатов системы. Итак, предположим, что облик самолета сфор-
мирован. Это значит, что выбрана компоновочная схема и те
параметры Д от которых зависят значения функционалов Л
(см. формулу (2.1)).
На следующем этапе начинается проектирование отдельных
частей самолета: фюзеляжа, моторных отсеков, электрообору-
дования и т. д. Каждый из этих объектов сам по себе является
достаточно сложной системой и определяется большим числом
различных характеристик. Формализовать понятие «оптималь-
ный фюзеляж» так же трудно, как и понятие «оптимальный
476
ГЛ. VIII. АВТОМАТИЗАЦИЯ ПРОЕКТИРОВАНИЯ
самолет». Поэтому мы можем подойти к его проектированию
с тех* же позиций, которые нам позволили развить концепцию
проектирования облика самолета, только теперь речь будет идти
об облике фюзеляжа, двигателя и т. д. И снова появляется не-
обходимость в назначении вспомогательных критериев, но те-
перь это будут совершенно другие показатели, характеризую-
щие вес, надежность, технологичность и т. д.
Обсуждая особенности процедур верхнего уровня, мы отме-
тили особое значение системы конструкторских, проектировоч-
ных ограничений — множества X. Это — квинтэссенция инже-
нерного опыта и инженерной квалификации. То же самое надо
сказать и о системе ограничений при проектировании отдель-
ных частей самолета, отдельных его агрегатов, только теперь
к числу конструкторских ограничений должны быть добавлены
еще и те значения параметров Д которые мы определили при
проектировании облика самолета.
Предположим теперь, что отдельные самолетные агрегаты
спроектированы. На этом этапе могут возникнуть определенные
трудности согласования решений, принятых на уровне главного
конструктора и конструкторов, проектирующих отдельный ча-
сти самолета. Конструктор фюзеляжа может не вписать- свою
конструкцию в жесткие рамки ограничений по весу изделия
в целом и по геометрическим параметрам. Конструктор двига-
телей не сможет,, например, обеспечить .требуемую зависимость
мощности от высоты или скорости и т. д. Поэтому, если собрать
все отдельные технические решения в единый проект, то его
облик будет очень далек от того, который представлял себе
главный конструктор в самом начале.
Завершив работу над формированием облика, т. е. выбрав
параметры Л, мы -уже можем представить себе облик самолета
с большим числом подробностей. Целесообразно иметь про-
грамму, которая смогла бы нарисовать этот самолет в разных
проекциях. Главный конструктор теперь видит свою будущую
конструкцию. Если на следующем этапе проектирования, когда
уровень детализации проекта будет значительно более глубо-
ким, снова вернуться к графическому изображению самолета,
то мы даже визуально увидим целый ряд несогласованностей.
Необходима система разнообразных пересчетов. Эту систему
мы называем буферной системой. Она состоит из многих от-
дельных программ, каждый раз очень специализированных.
Например, функционалы (2.1) мы можем вычислить теперь го-
раздо точнее, ибо на втором уровне мы знаем большинство ве-
личин х* и можем рассчитать новые значения функционалов
Р/(х)«?/(Д ех*), (2.24)
§ 2. ВАРИАНТЫ СХЕМЫ ПРОЕКТИРОВАНИЯ 477
где х* — уже некоторые известные величины, а не нули, как
мы считали при реализации процедур формирования облика.
Значит, величины критериев Fj(x), вычисленные по формулам
(2.24) и (2.3),.будут различны.
В этой ситуации естественно развить некоторый вариант
теории возмущений. Например, следует зафиксировать найден-
ное значение параметров х* = х*, рассмотреть систему функцио-
налов Ffl — Fj (Д ex*), зависящих снова только от Д и повто-
рить все те расчеты, которые были сделаны при формировании
облика. Мы получим новое паретовское множество и, следова-
тельно, новые варианты прототипов. Это будет уже уточненное
множество, учитывающее значения параметров х*, которые мы
в начальном варианте анализа просто отбросили.
Подобная система пересчетов, дает возможность уточнить
концепцию. Но могут быть и другие системы пересчетов. Пред-
положим, например; что конструктор фюзеляжа не смог «впи-
саться в систему ограничений» или оказалось, что геометриче-
ские формы крыла не могут быть обеспечены необходимыми
качествами прочности. Значит, в этом, случае параметры х,
реализованные для данного прототипа, будут отличаться от
расчетных: xi =# х. Но это означает, что изменятся (ухудшат-
ся) все летно-тактические характеристики самолета. И первая
задача, которая здесь возникнет, — это оценка потерь, пересчет
всех характеристик Г/(Д) с учетом поправок, внесенных на
нижних уровнях. Мы оцениваем допустимость изменения па-
раметров Если окажется, что их изменение меняет летно-
тактические характе’ристики в допустимых пределах, то можно
переходить к следующему уровню проектирования. В противном
случае эти пересчеты — лишь один из этапов диалога.
Таким образом буферная система несет разнообразную на-
грузку. Она позволяет уточнить характеристики создаваемой си-
стемы и служит средством организации диалога между проек-
тировщиками. Структура буферной системы весьма индивидуа-
лизирована, и высказать в связи с ней какие-либо общие реко-
мендации трудно. Но поскольку буферная система организует
диалог, то одно условие всегда для нас будет обязательным —
это наличие хорошей управляющей программы (вспомогатель-
ной операционной системы), обеспечивающей простоту обраще-
ния с вычислительной системой.
Мы говорили о проектировании самолета. По существу, все
сказанное сохраняет свою силу и для автоматизированного про-
ектирования любой сложной технической системы — корабля,
ракетного комплекса, сложной технологической линии, ком-
плексного химического производства и т. д. Конечно, структура
алгоритмов и система критериев — все будет иным. Но общий
478
ГЛ. VIII. АВТОМАТИЗАЦИЯ ПРОЕКТИРОВАНИЯ
подход, расчленение проблемы, паретовский анализ, способы
организации диалога с помощью имитационной системы сохра-
нят свою силу.
В этой главе мы обсуждали и другую проблему — проблему
проектирования системы эксплуатации и обустройства нефтега-
зового региона. Здесь мы также сталкиваемся с аналогичными
трудностями. Определив на «верхнем уровне» структуру всей
системы и ее основные параметры — сроки и темпы разбурива-
ния (добычи) отдельных месторождений потоки выделяе-
мых ресурсов, —мы можем., приступить к составлению проектов
обустройства отдельных месторождений. Параметры, которые
были определены на верхнем уровне, будут исходными данны-
ми (или ограничениями) для проектов обустройства отдельных
месторождений.
Примечание. К сожалению, сегодня в инженерной практике основное
внимание уделяется проектированию объектов именно нижнего уровня, а на
рассмотрение региона в целом пока направлено недостаточно усилий. Цапри-
мер, в случае добычи нефти с большой степенью детализации прорабатыва-
ется система транспорта внутри месторождения, режимы бурения и поддер-
жания пластового давления и т. д. Оценка же комплекса в целом, анализ
взаимосвязи региона, способов и темпов извлечения нефти или газа с эконо-
мическим развитием страны осуществляется, как правило, на интуитивном
уровне, без использования глубоких численных проработок. Если при проек-
тировании технических систем типа самолёта стало традиционным вести ана-
лиз «сверху вниз» — от общего замысла к проектированию конкретных дета-
лей,— то при проектировании хозяйственных комплексов мы часто сталки-
ваемся с обратной картиной — отлично проработанные детали при весьма не-
глубокой проработке общего замысла. Мы уже говорили о недопустимости
подобного подхода.
* # *
Этими замечаниями я заканчиваю главу об автоматизации
проектирования. Сегодня автоматизация проектирования, если
ее понимать достаточно широко, — это одно из важнейших при-
ложений системного анализа. Мы рассмотрели два примера
проектирования конкретных систем. Они в некотором смысле
являются двумя крайними случаями*). Но тем не менее имеет-
*) Мы говорили о проблемах проектирования действительно сложных си-
стем, требующих междисциплинарных исследований и привлечения для за-
вершения проекта самой разнообразной информации. В настоящее время до-
вольно много внимания уделяется проектированию устройств радиоэлектро-
ники, печатных плат и т. д. Несмотря на всю алгоритмическую сложность,
эти устройства просты, ибо их функционирование может быть описано в рам-
ках относительно простых и, главное, однотипных по своей физической при-
роде моделей. Автоматизация проектирования подобных систем значительно
проще. О них мы здесь не говорим, хотя многое из того, о чем говорилось
в этой книге, может быть использовано и для проектирования подобных си-
стем.
§ 2. ВАРИАНТЫ СХЕМЫ ПРОЕКТИРОВАНИЯ 479
ся много общего в проектировании систем автоматизации. Это
общее позволяет рассматривать весь процесс автоматизирова-
ния как некоторый, специальным образом организованный, диа-
лог. И организация диалога человек — ЭВМ есть главное в си-
стемах САПР. Показать, что диалог—это своеобразный алго-
ритм, построение которого требует высокого профессионализма,
показать, что это и есть краеугольный камень всей автомати-
зации проектирования, — было нашей главной задачей.
ЛИТЕРАТУРА
Основная
1. Веллман Р., Кал аба Р. Квазилинеаризация и нелинейные краевые
задачи. — Мл Мир, 1968.
2. Вентце ль Е. С. Введение в исследование операций. — Мл Сов. радио,
1964.
3. Вольтерра В. Математическая теория борьбы за существование.
Мл. Наука, 1978. »
4. Г е р м е й е р Ю. Б. Введение в теорию исследования операций. — Мл
Наука, 1971.
5. Г е р м е й е р Ю. Б. Игры с непротивоположными интересами. — Мл Нау-
ка, 1976.
6. Е р м о л ь е в Ю. М. Методы стохастического программирования.*— Мл
Наука, 1976.
7. Моисеев Н. Н. Математика ставит эксперимент. — Мл Наука, 1979.
8. Моисеев Н. Н. Элементы теории оптимальных систем. — Мл Наука,
1975. -
9. Моисеев Н. Н. Асимптотические методы нелинейной механики.— Мл
Наука, 1981.
10. Моисеев Н. Н., И в а н и л о в Ю. П., Столярова Е. М. Методы опти-
мизации.—Мл Наука, 1978.
11. Понтрягин Л. С., Болтянский В. Г., Гамкрелидзе Р. В.,
Мищенко Е. Ф. Математическая теория оптимальных процессов. — Мл
Физматгиз, 1961.
12. Пугачев Б. С. Основы автоматического управления. — Мл Наука, 1968.
13. Р а с т р и г и н Л. Н. Системы экстремального управления. — Мл Наука,
1974.
14. Стронги н Р. Г. Численные методы в многоэкстремальных задачах.—
Мл Наука, 1978.
15. Уайлд Д. Дж. Методы поиска’экстремума. — Мл Наука, 1967.
Дополнительная
16. Абрамов А. А. О переносе граничных условий для систем линейных
обыкновенных дифференциальных уравнений. — ЖВМ и МФЯ 1961, № 3.
17. Айзекс Р. Дифференциальные игры.— Мл Мир, 1967.
18. Акуленко Л. Д., Черноусько Ф. Л. Метод осреднения в задачах
оптимального управления. — ЖВМ и МФ, 1975, 15, № 5.
19. Андронов А. А., Л е о н т о в и ч Е. А., Гордон И. И., Майер А. Г.
Теория бифуркаций динамических систем на плоскости. — Мл Наука, 1967.
20. Арнольд В. И. Теория катастроф..— Природа, 1979, № 10.
21. Bertalanffy L. Theoretische Biologie. — В , 1932.
22. Богданов А. А. Теория организации, или Тектология. — Мл 1913.
ЛИТЕРАТУРА
431
23. Б е й к о М. Ф , Б е й к о И. В. Об одном новом подходе к решению нели-
нейных краевых задач. — Укр. матем. журнал, 1978, 20, № 6.
24. Васильева А. Б., Бутузов Н. Ф. Асимптотические разложения ре-
шений сингулярно возмущенных уравнений. — М.: Наука, 1973.
25. В а т е л ь И. А О математических моделях стимулирования в экономи-
ке. — В кн.: Проблемы управления экономическими целенаправленными
системами. Новосибирск: Наука, 1975.
26. В а тел ь И. А., Дранев Я.Н. Об одном классе повторяющихся игр
с неполной информацией в двухуровневой экономической системе. — В кн.:
Труды межд. конференции «Моделирование экономических процессов».
М.: ВЦ АН СССР, 1975.
27. В а т е л ь И. А., Е р е ш к о Ф. И. Математика конфликта и Сотрудниче-
ства.— М.: Знание, 1973.
28. В е н т ц е л ь Д. А., Ш а п и р о -Я. М. Внешняя баллистика. — М.: Оборон-
гиз, 1939, т. II.
29. Г а н т м а х е р Ф. Р. Теория матриц. Изд. 2-е. — М.: Наука, 1967.
36. Г е р м е й е р Ю. Б., В а т е л ь И. А. Игры с иерархическим вектором ин-
тересов. — Тех. кибернетика, 1974, № 3.
31. Глушков В. М. О прогнозировании на основе экспертных оценок.—
Кибернетика, 1969, № 2.
32. Г о л у б е в В. В. Лекции по аналитической теории дифференциальных
уравнений. Изд. 2-е. — М., 1950.
33. Горелик В. А. Иерархические системы с ромбовидной структурой. —
В кн.: Тезисы докл. III Всес. конф, по исслед. операций. Горький, 1978.
34. Грачев Н. И., Евтушенко Ю/ Г. Применение метода сингулярных
возмущений для решения минимаксных задач. — ДАН СССР, 1977, 233,
№ 3.
35. Г р о д з ов ск и й Г. Л., Иванов Ю. Н., Токарев В. В. Механика
космического полета с малой тягой. — М.: Наука, 1966.
36. Д а н и л о в -К. П., Шварц С. С. О биологических макросистемах. —
В кн.: Наука и человечество. М.: Знание, 1975.
37. Евтушенко Ю. Г. Приближенный расчет задач оптимального управ-
ления.— ПММ, 1970, 34, № 1,
38. Evtushenko Ju. G. Approximate calculation of optimal control by ave-
raging method. Lecture notes in mathematics, 112. — Springer-Verlag, 1970.
39. E p e ш к о Ф. И., 3 л о б и н А. С. Оптимизация линейной формы на эффек-
тивном множестве. — В кн.: Численные методы нелинейного программиро-
вания. Харьков, 1976. (Труды II Всесоюзного семинара.)
40. Е р у г и н Н. FL Книга для чтения по общему курсу дифференциальных
уравнений. — Минск: Наука и техника, 1979.
41/ Журавлев Ю. И. Корректные алгебры над множествами некорректных
(эвристических) алгоритмов. I. — Кибернетика, 1977, № 4. *
42. И в а и и л о в Ю. П., Петров А. А. Динамическая модель расширения
и перестройки производства (л:-модель), — Кибернетику — на .службу
коммунизму, вып. 6. М.: Энергия, 1971.
43. Колмановский В. Б., Моисеев Н. Н., Черноусько Ф. Л. Об
одном способе управления стохастическими системами. — Тех. киберне-
тика, 1979, № 3.
44. Кононенко А. Ф. Теоретико-игровой анализ двухуровневой иерархи-
ческой системы управления. — ЖВМ и МФ, 1974, №5.
45. Кононенко А. Ф. Теория управления и иерархические структуры.—
В кн.: Проблемы- управления экономическими целенаправленными систе-
мами. Новосибирск: Наука,J975.
46. Кононенко А. Ф. О равновесных позиционных стратегиях в неанта-
гонистических дифференциальных играх. —ДАН СССР, 1976, 231, № 2.
47. К о н о н е н к о А. Ф. О многошаговых конфликтах с обменом информа-
цией.-ЖВМ и МФ, 1977, № 4.
482
ЛИТЕРАТУРА
48. Краснощеко? П. С., Морозов В. В., Федоров В. В. Декомпози-
ция в задачах проектирования. — Тех. кибернетика, 1979, № 2.
49. Красовский Н. Н. Теория управления движением. — М.: Наука, 1968.
50. Крылов И. А., Ч е р н о у с ь к о Ф. Л. О методе последовательных при-
ближений для решения задач оптимального управления. — ЖВМ и МФ,
1962, № 6.
51. Кукушкин Н. С. Бескоалиционные игры трех лиц с фиксированной
иерархической структурой. — ЖВМ и МФ, 1979', № 4.
52. Лебедев В. Н. Расчет движения космического аппарата с малой тягой.
(Серия: Матем. методы в динамике космических аппаратов.) — М.: ВЦ
АН СССР, 1968, № 5.
53. Лотов А. В. О понятии обобщенных множеств достижимости и их по-
строении для линейных управляемых систем.—ДАН СССР, 1980, 250, №5.
54. Л ю б у ш к и н А. А. Сходимость метода малого параметра для слабо-
управляемых оптимальных систем. — ПММ, 1978, 42, № 3.
55. Методы системного анализа в проблемах распределения водных ресур-
сов.— IISA, Вена, 1974. Т. I. .
56. Михалевич В. С. Последовательные алгоритмы оптимизации и их при-
менение. — Кибернетика, 1965, № 12.
57. М о и с е е в Н. Н., X а ч а т у р о в В. Р. Автоматизация проектирования
освоения новых нефтедобывающих районов. — В кн.: Тезисы докладов
советсдо-финского симпозиума «Автоматизированные системы проектиро-
вания». М.: ВЦ АН СССР, 1977.
58. Молодцов Д. А. Адаптивное управление в повторяющихся играх.—
ЖВМ и МФ, 1978, № 1.
59. О х о ц и м с к и й Д. Е. К теории движения ракет. — ПММ, 1946, 10, № 2.
60. П а н т л А. Методы системного анализа окружающей среды, — М.: Мир,
1979.
61. Пой а Д. Математика и правдоподобные рассуждения. — М.: Наука, 1975.
62. П о н о м а р е в В. М. Методы последовательной оптимизации в задачах
управления. — Тех. кибернетика, 1967, № 2.
63. Пономарев В. М., П т у ш к и н А. И. Последовательная оптимизация
дискретной системы управления. — Тех. кибернетика, 1967, № 3.
64. Проблема программно-целевого планирования и управления/Г. С. Поспе-
лов, В. Л. Вен, В. М. Солодов, В. В. Шафранский, А. И. Эрлих. — М.:
Наука, 1980.
65. Пугачев В. С. Общая задача о движении вращающегося артиллерий-
ского снаряда в воздухе.— В кн.: Труды Военно-воздушной академии
им. Н. Е. Жуковского, 1940, № 70.
66. De Spar re. Sur le rtiouvemeht des projectiles oblongs. — Paris: Impre-
tnerie Nationale,. 1893.
67. Тамаркин Я. Д. О некоторых общих вопросах теории дифференциаль-
ных уравнений и о разложении функций в ряды. — Петроград, 1917.
68. Тихонов А. Н. Системы дифференциальных уравнений, содержащие ма-
лые параметры при производных. — Матем. сборник, 1952, 31 (73), № 3.
69. Хачатуров В. Р. Построение имитационной системы для планирования
развития нового нефтедобывающего района.— В кн.: Труды межд. кон-
ференции «Моделирование экономических процессов». М.: ВЦ АН СССР,
1975.
70. Черноусько Ф. Л. Некоторые задачи оптимального управления с ма-
лым параметром. — ПММ, 1968, 32, № 1.
71. Чет а ев Н. Г. Устойчивость движения. Работы по аналитической меха-
нике. - М.: Изд-во АН СССР, 1962.
72. Шатрове кий Л. И. Об одном численном методе решения задач опти-
мального управления. — ЖВМ и МФ, 1962, № 2.
73. Ш м а л ь г а у з е н И. И. Основы дарвинизма. — М., 1960.
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
Аванпроектирование 8
Адаптивного управления проблема
182
Аддитивная функция 111
Активный партнер 44
Алгоритм «киевский веник» 112
Алгоритмы быстрые 59, 229
— поверочные 59
Асимптотическая устойчивость 62,
296 -
Асимптотических процедур ис-
пользование 375
Аэродинамических сил момент 329
Бифуркаций теория 460
Буферная система 230, 475
Быстрая прецессия 345
Быстродействия проблема 102
Быстрые алгоритмы 249
Ван-дер-Поля переменные 245, 363
— уравнение 259, 272
Вариационные задачи на графах
415
В вариациях уравнение 295
Вектор запаса 201
— затрат 201
— потребления 201
— свободного продукта 201
Вероятность интуитивная 296
Возмущенная система 296
Вольтерра модель хищник —жерт-
ва 238
Гамильтона функция 86, 91, 99,
103, 350, 353, 357, 360, 367, 368,
384, 388
Гарантированная оценка 41
Гарантированного наилучшего ре-
зультата принцип 41
Гарантирующая стратегия 41
Гермейера — Вателя теорема 161
Гермейера система 158
— теорема 169
Главный резонанс 289
Гомеостазис 140
Градиентный спуск 439
Грина матрица 117, 236
Грубая система 256
Движение ракеты плоское 378
Двухэтапная оптимизация 78
Двухэтапной оптимизации схема
78
Дерева целей метод 401
Дерево событий 403
Демпфирующий момент 330
Децентрализации степень и эффек-
тивность 173
Динамика артиллерийского снаря-
да 324
— иерархических систем 178
— оперенной ракеты 324
Динамического программирования
. схема 111
Диспетчерский график 430
Дюффинга уравнение 248
Жорданова форма матрицы 278
Задача внешней баллистики об-
щая 322
------- основная 322
-— динамики вращающегося снаря-
да 377
--- ракеты 337
- Коши 88, 96, 101, 243, 303
— Лагранжа 349
•— Майера 352
484
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
Задача матричного синтеза 433
— об ирригации и складировании
19
---оптимальном параметриче-
ском возмущении. 37 Г
— о выводе на орбиту космиче-
ского аппарата 74
— — перестройке пропорций 203
— оптимального управления син-
.гулярная 374
— оптимальной коррекции 387
— о развитии производительных
сил региона 191
— распределения ассигнований на
фундаментальные исследования
404
--- ресурсов в системе с иерар-
хией 162
--- удобрений 18
— со свободным концом 99
— составления расписаний 22
— транспортная 17 -
Задачи вариационные на графах
415
— с повторением 132
Запаса вектор 201
Затрат вектор 201
Иерархия 150
Иерархическая веерная структура
154
— ромбовидная структура 157
— система 150
— структура управления 150
Иерархических систем динамика
Иерархической организации схема
154.
Имитационная система 213
Имитация 210
— и машинный эксперимент 217
Инерции тензор 329
Интуитивная вероятность 401
Искусственный интеллект 215
Исследователь операции 17
Квазилинеаризации метод 98
Квазитихоновские системы 324
Кибернетическая система 147
Кибернетические системы нереф-
лексного типа 176
Классификация математических
моделей 146
Кобба — Дугласа производствен-
ная функция 165
Коллективный опыт 398
Контрольные показатели 31
Корректирующее управление 81
Коши задача 88, 93, 101, 293, 303
Коэффициент рождаемости 238
— смертности 238
Критериев свертка 289
Критерий Гурвица 275
— качества 72
— Сильвестра 64, 276
Критического пути метод 424
Крылова —.Черноусько метод 101
Леонтьева модель 143
Линейная свертка 31
Линейный синтез 116
---оптимальный 118
Логическое ранжирование 412
Локально оптимальные управления
354
Математических . моделей класси-
фикация 146
Матрица Грина 117, 236
Матричного синтеза проблема 426
Медленная процессия 345
Метод ВКБ 313
— градиентного спуска 109
— дерева целей 401
— квазилниеаризации 98
— - критического пути 424
— Крылова — Черноусько 101
— кусочно-программных управле-
ний 127
— Монте-Карло 210, 440
т- наискорейшего спуска 439
т- прогонки 93, 358
— пристрелки 88
программный в нерефлексных
системах 185
-------рефлексных системах 186
— редукции к линейной задаче 91
— решающих матриц 424
— скользящего плана 126
— снятия логических ограничений
414
— стохастической аппроксимации
446
— усреднения 260
---в задачах оптимального уп-
равления 362
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
485
Метод усреднения для исследова-
ния устойчивости 271
— Фурье 286
— Шатровского— Брайсона 100
Методы построения множества Па-
рето 36
— расчета оптимальных программ
84
— решения задач со свободным
концом 99
— случайного поиска 439
— эвристические 409
Метрика в пространстве целевых
функций 33
Множество достижимости 37
— Парето 34-
— экономических возможностей
190
Модель 137
— Вольтерра хищник — жертва
238
— Леонтьева 143
— назначения штрафов за загряз-
нение среды 219
Момент аэродинамических сил 329
— демпфирующий 330
— опрокидывающий 330
Мощность отрасли 199
— - эффективная 199
Мягкая система 256
Неоднородное уравнение 312
Неопределенность природная 40
— целей 28
Обратная связь 141
Обратной связи оператор 115
Ограничения критериальные 16
— физические 16
Операция 1Г
— элементарная 108
Оперирующая сторона 14
Опрокидывающий момент 330
Оптимального управления задача
сингулярная 374
Опыт коллективный 398
Парето вектор 34
— компромисс 34
— множество 34
Паретовский анализ 458
Партнер активный 44
Перенос граничных условий 92
Поверочные расчеты 229
Пограничная функция 298
Пограничные функции в задаче о
движении ракеты 338
-------случае вращающегося
снаряда 340
— — для медленных переменных
317 .
Порождающая система 231, 294
Порождающее решение 231
Последовательных приближений
схема 262
Потребления вектор 201
Прецессия быстрая 345
— медленная 345
Принцип максимума Понтрягина
86
— наилучшего гарантированного
результата 41
— Нэша 53
— Парето 35
— устойчивости 50
Природная неопределенность 40
Присоединенная система 295
Пристрелки метод 88
Притяжения условие 296
Проблема адаптивного управления ,
182
— быстродействия 102
— планирования 204
— Рауса — Гурвица 63
— синтеза 114
— штрафа и поощрения 48
Прогонки» метод 93, 358
'Программа 196, 197
Программная траектория 78
Программного метода история 207
Программное управление 78
Программный метод в нерефлекс-
ных системах 185
-------рефлексных системах 186
Программ реализация 206
Производственная функция Коб-
ба-Дугласа 109
Пуанкаре теория классическая 231
Равновесия ситуация 49, 52
Ракеты движение плоское 378
Ранжирование логическое 412
Расстройка 289
Расчленения принцип 403
Рауса — Гурвица проблема 63
Реализация программ 206
486
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ'
Редукция задачи оптимального уп-
равления к конечномерной зада-
че 106
Резонанс 289
— главный 289
Решающих матриц метод 404
Решение порождающее 231
Свертка критериев 463
— линейная 31
Свободного продукта вектор» 201
Сдвиг фаз 289
Седловая точка 50
Сильвестра критерий 64, 276
Синтез в задачах с квадратичным
функционалом 120
— линейный 116
— оператора обратной связи на
основе прогноза 124
— оптимальный 118
Система буферная 230, 475 f
— возмущенная 296
— Гермейера 158
— грубая 256
— иерархическая 150
— имитационная 213
— кибернетическая 148
— мягкая 256
— порождающая 231, 294
— присоединенная 295
— с вращающейся фазой 261,274
---------- управляемая 332
---вращающимся звеном 282
---двумя быстрыми переменны-
ми 284
— слабоуправляемая 349
— с осциллирующим звеном 244
---осциллирующими звеньями
276
— тихоновская 296
— управляемая стохастическая 76
Системный подход 130
Систем теория 130
Системы слабо связанные 236
— управляемые 71
Ситуация равновесия 49
Скользящего плана метод 126
Случай кратных корней 318
— простых корней 303
Событий дерево 403
С последовательным включением
переменных функций 107
Стратегия гарантирующая 41
Структура иерархическая веерная
154
Структура иерархическая ромбо-
видная 157
Схема ' двухэтапной оптимизации
78
—- последовательных приближе-
ний 262
' — Эйлера 85, 89
Схемы динамического программи-
рования 111
— иерархических организаций 154
Тензор инерции 329
Теорема Гермейера 169
— Гермейера — Вателя 161
— Пуанкаре 233
— Тихонова 298
Теория бифуркаций 460
— организации 134
— Пуанкаре классическая 231
— систем 130
Тихоновская система 298
Траектория программная 78
Трансверсальности условия 87
Управление корректирующее 81
— программное 78
— с помощью штрафов и поощ-
рений 164
Управления 70
— локально оптимальные 354
— цель 72
Управляемая система стохастиче-
ская 76
Управляемые системы 71
---рефлексного типа 142
Уравнение Ван-дер-Поля 259, 272
— в вариациях 235
— Дюффинга 248
— неоднородное 312
Условие притяжения 296
Условия трансверсальности 87
Усреднение прямое 364
Усреднения метод 260
---в задачах оптимального уп-
— равления 362
Устойчивости принцип 50
Устойчивость асимптотическая 296
— орбитальная 273
Формирование целей 189
Функция аддитивная 111
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ'
487
Функция Гамильтона 86, 91, 99,
103, 350, 353, 357, 360, 367, 368,
384, 388
— поведения рефлексного типа
144
— пограничная 298
— с последовательным включе-
нием переменных 107
— штрафная 416
Фурье метод 286
Шатровского — Брайсона метод
100
Штрафа и поощрения проблема 48
Штрафная функция 416
Эвристические методы 409
Экспертизы 397
— сложные 400
Элементарная операция 108
Элементарные делители матрицы
319
Целенаправленное использование
ресурса 171
Цель управления 72
л-модель 198
Никита Николаевич Моисеев
МАТЕМАТИЧЕСКИЕ ЗАДАЧИ
СИСТЕМНОГО АНАЛИЗА
Редакторы
Ё. AL Столярова, Е. Ю Ходан
Технический редактор
В. И. Кондакова
Корректоры
Т. С. Плетнева, О, М. Кривенко
ИБ № 11741
Сдано в набор 18.03.81. Подписано к печати 18.11.81.мТ-27766. Формат 60Х90’/1в- Бумага
тип. № 3. Литературная гарнитура. Высокая печать. Условн. печ. л. 30,5. Уч.-изд, л. 30,26.
Тираж 21 000 экз. Заказ № 1068. Цена 1р. 30 к.
Издательство «Наука»
Главная редакция физико-математической литературы
1170J1, Москва, В-71, Ленинский проспект, 15
Ленинградская типография № 2 головное предприятие ордена Трудового Красного Зна-
мени Ленинградского объединения «Техническая книга» им. Евгении Соколовой Союз-
полиграфпрома при Государственном комитете СССР по делам издательств, полиграфии
и книжной торговли.
198052, г. Ленинград, Л-52, Измайловский проспект, 29.