/


















































































































































































































































































































































































































































Текст
СПРАВОЧНЙКПО РАДИОЛОКАЦИИ
3 «ей М®
СПРАВОЧНИК
ПО
РАДИОЛОКАЦИИ
СПРАВОЧНИК
по радиолокации
Перевод с английского
В ЧЕТЫРЕХ ЮМАХ
Том 1
«ОСНОВЫ РАДИОЛОКАЦИИ»
Том 2
«РАДИОЛОКАЦИОННЫЕ АНТЕННЫЕ УСТРОЙСТВА»
Том 3
«РАДИОЛОКАЦИОННЫЕ УСТРОЙСТВА И СИСТЕМЫ»
Том 4
«РАДИОЛОКАЦИОННЫЕ СТАНЦИИ И СИСТЕМЫ»
RADAR HANDBOOK
Editor-In-Chief
MERRILL I. SKOLNIK
McGRAW-HILL BOOK COMPANY 1970
СПРАВОЧНИК
по радиолокации
Редактор М. СКОЛНИК
Перевод с английского
под общей редакцией К. Н. Трофимова
В ЧЕТЫРЕХ ТОМАХ
Том 3
«РАДИОЛОКАЦИОННЫЕ УСТРОЙСТВА
И СИСТЕМЫ»
Перевод с английского
А. Я. БРЕЙТБАРТА, М. К. РАЗМАХНИНА,
П. К. ГОРОХОВА, В. В. ЛИПЬЯЙНЕНА
под редакцией А. С. ВИНИЦКОГО
МОСКВА «СОВЕТСКОЕ РАДИО» 1979
ББК 32.95
С74
УДК 621 396 96 (031)
Справочник по радиолокации. Под ред. М. Сколника.
Нью-Йорк, 1970: Пер. с англ, (в четырех томах) / Под об-
шей ред. К. Н. Трофимова; Том 3. Радиолокационные устрой-
ства и системы / Под ред. А. С. Виницкого. — М.; Сов. ра-
дио, 1978, 528 с., с ил.
Настоящая книга является третьим томом русского изда-
ния американского «Справочника по радиолокации», выпуска-
емого в четырех томах.
Третий том посвящен принципам работы и основам инже-
нерного проектирования радиолокационных устройств и си-
стем. Рассмотрены передающие, приемные и индикаторные
устройства. Систематизированы методы радиолокации и прин-
ципы построения РЛС с непрерывным излучением и частотной
модуляцией, с селекторами движущихся целей (включая само-
летную разновидность этих станций), импульсно-доплеровских,
РЛС, использующих метод сжатия импульсов. Содержится
материал по расчету и конструированию РЛС космических
объектов и радиолокационных маяков.
Справочник предназначен для специалистов промышлен-
ности, преподавателей и студентов вузов.
Табл. 38, рис. 297, библ. 435 назв.
Редакция литературы
по вопросам космической радиоэлектроники
С ' п°лписное 2402920000
© Перевод на русский язык. Издшельсызо «Советское радио»*
1979 г.
Содержание справочника
Том 1
ГЛ. 1. ВВЕДЕНИЕ В РАДИОЛОКАЦИЮ
ГЛ. 2. РАСЧЕТ ДАЛЬНОСТИ ДЕЙСТВИЯ РАДИОЛОКАЦИОННОЙ СТАН-
ЦИИ
ГЛ. 3. ТЕОРИЯ РАДИОЛОКАЦИОННЫХ СИГНАЛОВ
ГЛ, 4. ТОЧНОСТЬ ИЗМЕРЕНИЯ РАДИОЛОКАЦИОННЫХ ПАРАМЕТРОВ
ГЛ. 5. ТЕОРИЯ АВТОМАТИЧЕСКОГО ОБНАРУЖЕНИЯ
ГЛ. 6. ВЛИЯНИЕ МЕТЕОУСЛОВИЙ НА РАБОТУ РАДИОЛОКАЦИОННЫХ
СТАНЦИЙ
ГЛ. 7. ОТРАЖЕНИЯ ОТ ЗЕМНОЙ ПОВЕРХНОСТИ
ГЛ. 8. ОТРАЖЕНИЕ РАДИОЛОКАЦИОННОГО СИГНАЛА ОТ МОРСКОЙ
ПОВЕРХНОСТИ
ГЛ. 9. ЭФФЕКТИВНАЯ ПЛОЩАДЬ РАССЕЯНИЯ
ГЛ. 10. ШУМ ЦЕЛИ
ГЛ. 11. ЦИФРОВАЯ ОБРАБОТКА СИГНАЛОВ
Том 2
ГЛ. 1. ЛИНИИ ПЕРЕДАЧИ, ИХ ОСНОВНЫЕ ЭЛЕМЕНТЫ И УЗЛЫ
ГЛ. 2. ТЕОРИЯ АПЕРТУРНЫХ АНТЕНН
ГЛ. 3. ЗЕРКАЛЬНЫЕ И ЛИНЗОВЫЕ АНТЕННЫ
ГЛ. 4. ФАЗИРОВАННЫЕ АНТЕННЫЕ РЕШЕТКИ
ГЛ. 5. ФАЗОВРАЩАТЕЛИ ФАЗИРОВАННЫХ АНТЕННЫХ РЕШЕТОК
ГЛ. 6. АНТЕННЫЕ РЕШЕТКИ С ЧАСТОТНЫМ СКАНИРОВАНИЕМ
ГЛ. 7. АНТЕННЫЕ ОБТЕКАТЕЛИ
ГЛ. 8. РАДИОЛОКАЦИОННЫЕ СТАНЦИИ С СИНТЕЗИРОВАНИЕМ АПЕР-
ТУРЫ
ГЛ. 9. ЭЛЕКТРОМАГНИТНАЯ СОВМЕСТИМОСТЬ
Том 3
ГЛ. 1. РАДИОЛОКАЦИОННЫЕ ПЕРЕДАТЧИКИ
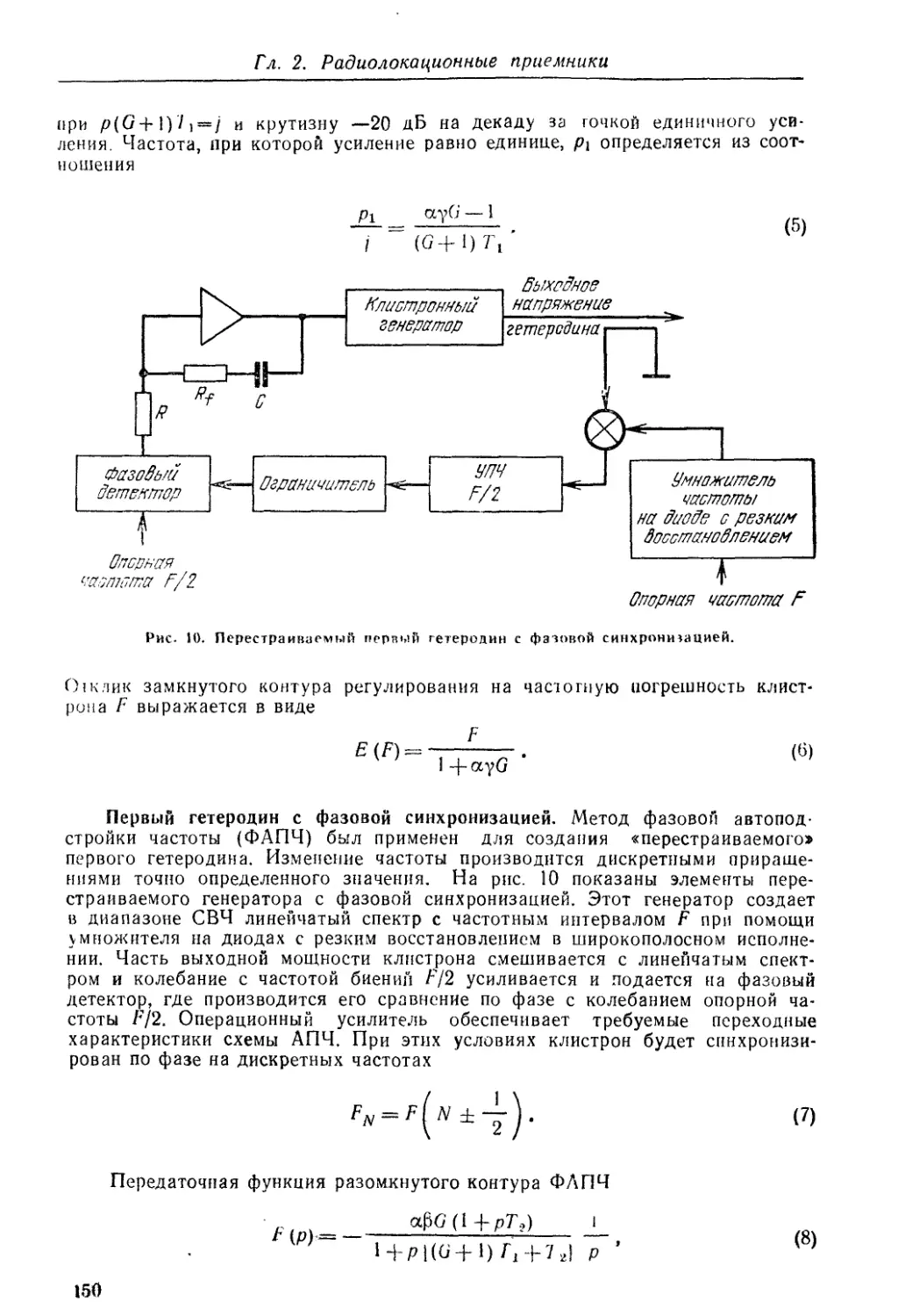
ГЛ. 2. РАДИОЛОКАЦИОННЫЕ ПРИЕМНИКИ
ГЛ. 3. РАДИОЛОКАЦИОННЫЕ ИНДИКАТОРЫ И СИСТЕМЫ ОТОБРАЖЕ-
НИЯ
в
Содержание справочника
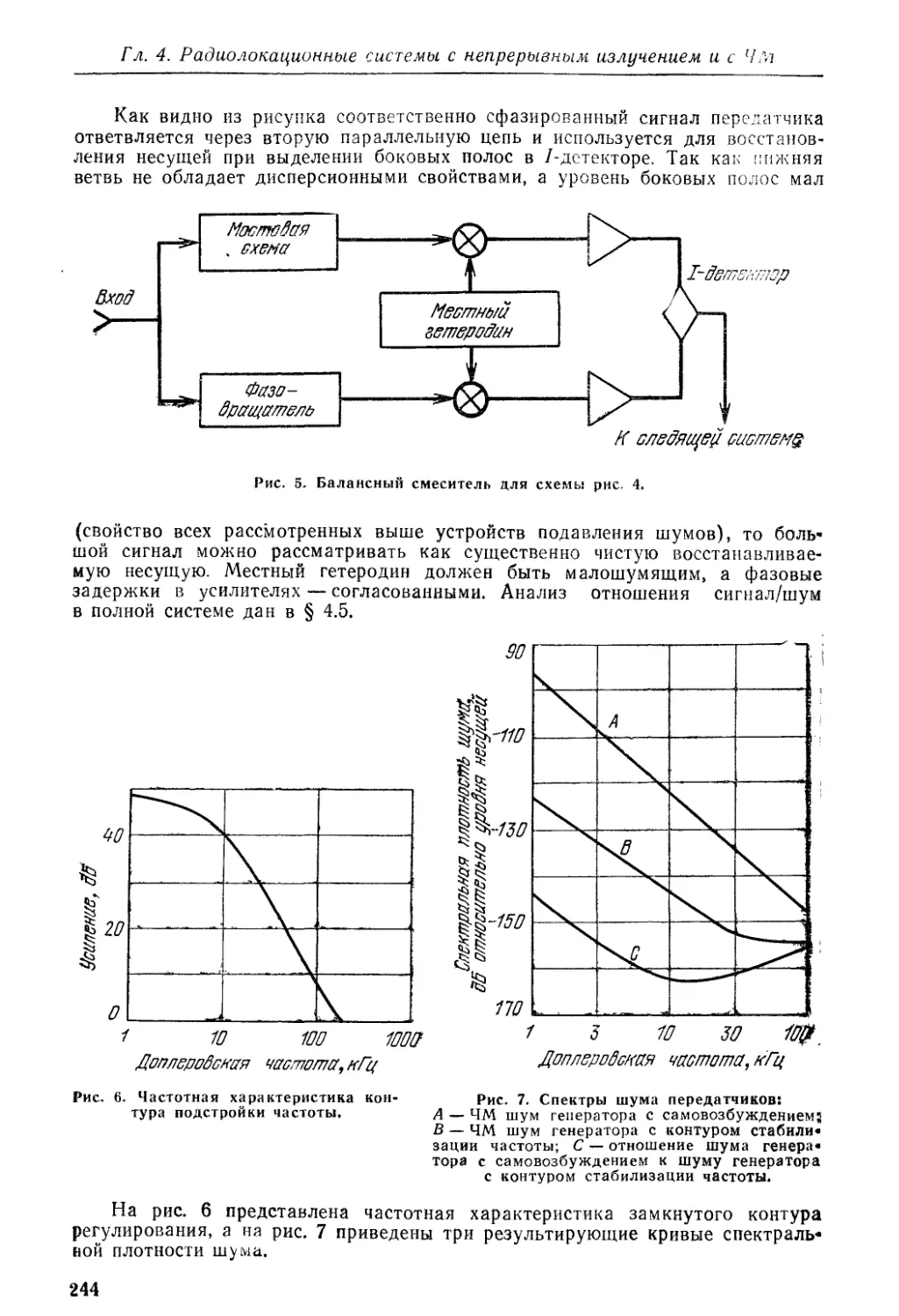
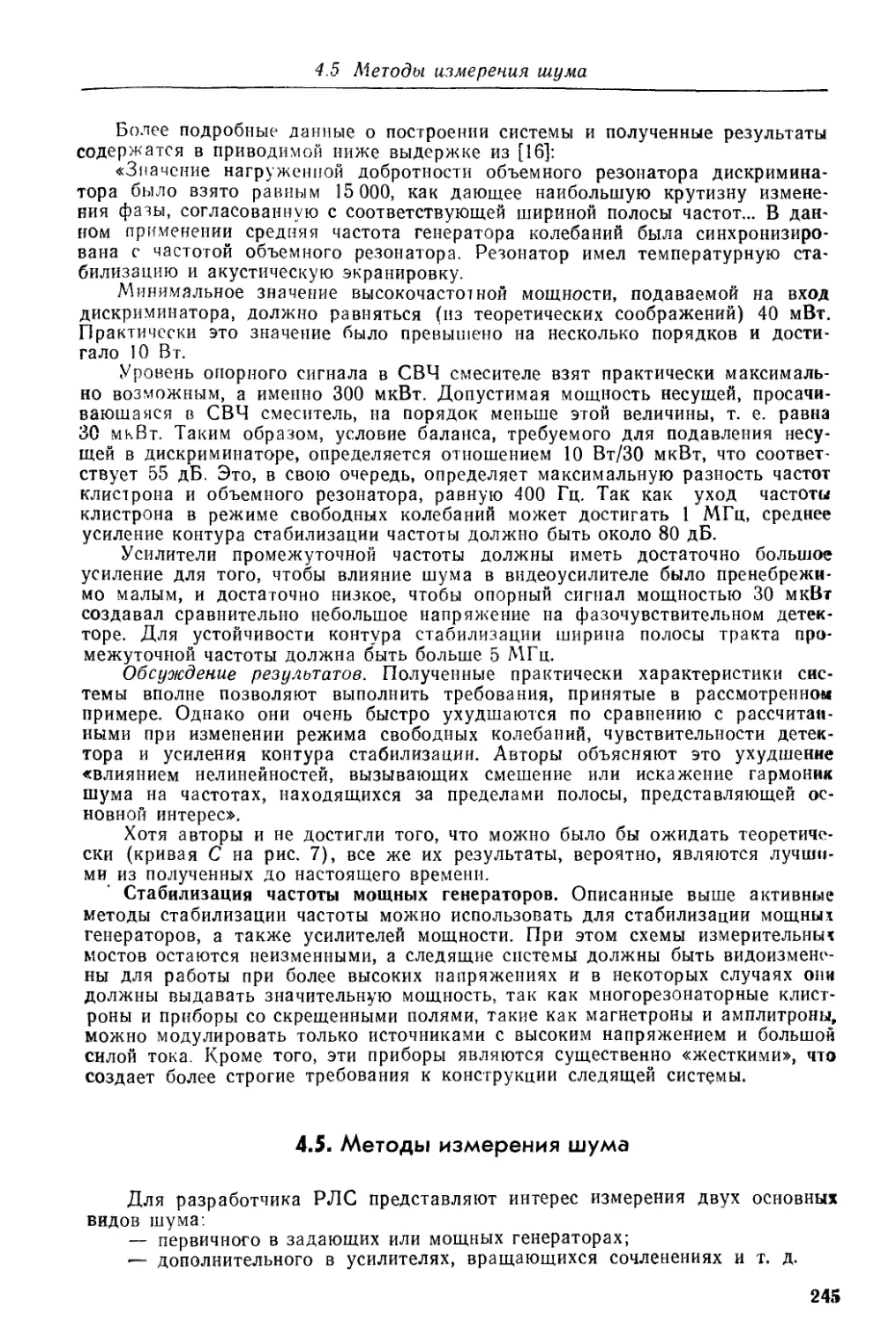
ГЛ. 4. РАДИОЛОКАЦИОННЫЕ СИСТЕМЫ С НЕПРЕРЫВНЫМ ИЗЛУЧЕНИ-
ЕМ И С ЧАСТОТНОЙ МОДУЛЯЦИЕЙ
ГЛ. 5. РАДИОЛОКАЦИОННЫЕ СИСТЕМЫ С СЕЛЕКТОРАМИ ДВИЖУЩИХ-
СЯ ЦЕЛЕЙ
ГЛ. 6. САМОЛЕТНЫЕ РАДИОЛОКАЦИОННЫЕ СИСТЕМЫ С СЕЛЕКТОРАМИ
ДВИЖУЩИХСЯ ЦЕЛЕЙ
ГЛ. 7. ИМПУЛЬСНО-ДОПЛЕРОВСКИЕ РАДИОЛОКАЦИОННЫЕ СИСТЕМЫ
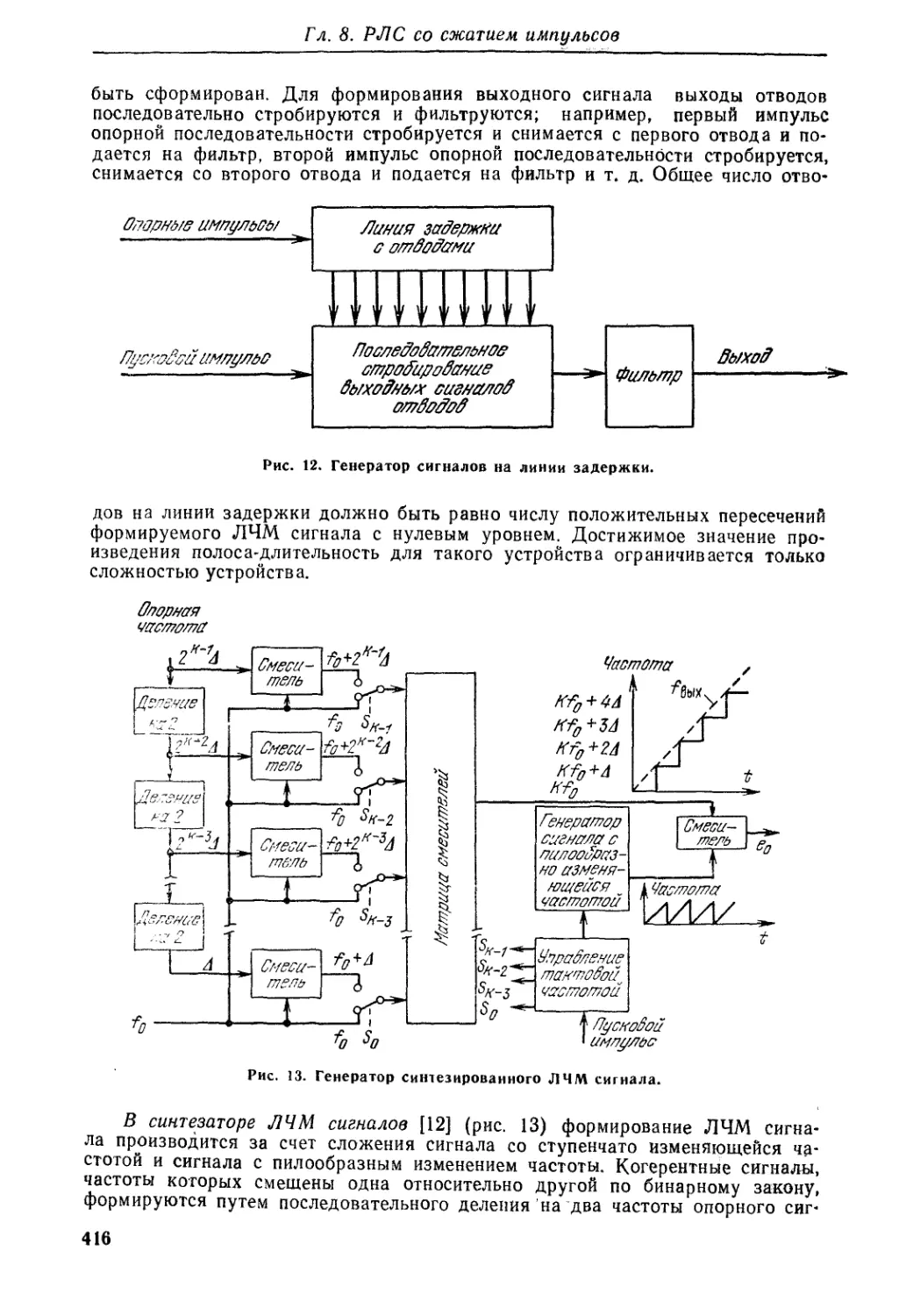
ГЛ. 8. РАДИОЛОКАЦИОННЫЕ СИСТЕМЫ СО СЖАТИЕМ ИМПУЛЬСОВ
ГЛ. 9. ПРИМЕНЕНИЯ БОРТОВЫХ РЛС НА КОСМИЧЕСКИХ ОБЪЕКТАХ
ГЛ. 10. РАДИОЛОКАЦИОННЫЕ МАЯКИ
Том 4
ГЛ. 1. РАДИОЛОКАЦИОННЫЕ СТАНЦИИ СОПРОВОЖДЕНИЯ
ГЛ. 2. РАДИОЛОКАЦИОННОЕ ОПРЕДЕЛЕНИЕ ВЫСОТЫ ЦЕЛИ
ГЛ. 3. ГРАЖДАНСКИЕ СУДОВЫЕ РАДИОЛОКАЦИОННЫЕ СТАНЦИИ
ГЛ. 4. РАДИОЛОКАЦИОННЫЕ СТАНЦИИ НАБЛЮДЕНИЯ ЗА ИСКУССТ-
ВЕННЫМИ СПУТНИКАМИ ЗЕМЛИ
ГЛ. 5. РАДИОЛОКАЦИОННЫЕ СТАНЦИИ НА ТВЕРДОТЕЛЬНЫХ ПРИБО-
РАХ
ГЛ. 6. ДВУХПОЗИЦИОННЫЕ И МНОГОПОЗИЦИОННЫЕ РАДИОЛОКАЦИ-
ОННЫЕ СИСТЕМЫ
ГЛ. 7. РАДИОЛОКАЦИОННАЯ АСТРОНОМИЯ
ГЛ. 8. ПАССИВНЫЕ СИСТЕМЫ
ГЛ. 9. ОПТИЧЕСКИЕ ЛОКАТОРЫ
Глава 1
РАДИОЛОКАЦИОННЫЕ ПЕРЕДАТЧИКИ
Т. Вейл
1.1. О выборе типа лампы высокой частоты
Передатчик является обычно самым большим, тяжелым и дорогим
устройством радиолокационной системы Он потребляет наибольшею часть
первичной мощности и требует наиботыието охлаждения, что также вызывает
увеличение габаритов, массы и сюимости системы Конструкция передатчика
в основном зависит от типа лампы высокой частоты, так что выбор ее явля-
ется очень важным при проектировании радиолокационной системы, к тому
же очень редко можно получить разработанную и испытанную лампу высокой
частоты, которая в полной мере удовлетворяла бы требованиям новой систе-
мы Опубликованы параметры окоте 1000 типов высокочастотных ламп, им-
пульсная мощностг. коюрых превышает 10 кВт. Однако, поскольку высоко-
частотная лампа определяется по крайней мере парой десятков нс зависимых
параметров, какой-либо из существующих типов ламп очень редко может
удовлетворить требованиям новой системы по всем наиболее важным пара-
метрам, таким, как, например, импульсная мощность, длительность импульса,
рабочая частота, ширина полосы, усиление, тип фокусировки, тип охлажде-
ния. Так как практически невозможно регулировать эти параметры, в случае
необходимости изменения едва ли не любого из них требуется разрабатывать
новый тип ламп.
Так как всегда существует тенденция разрабатывать радиолокационные
системы на уровне самых последних достижений, получается, что все раз-
работанные и испытанные лампы оказываются устаревшими. Поэтому боль-
шая часть новых радиолокационных систем проектируется в расчете на еще
не существующие высокочастотные лампы. Вместо реальной лампы пишутся
технические требования на лампу, которую рассчитывают разработать в при-
емлемые сроки, причем любая тенденция принять желаемое за реально
осуществимое приводит к опозданию в поставках. К тому же в разработках
высокочастотных ламп большую роль играет удача (и «черная магия»), так
что часто наилучшие намерения приводят к неразрешимым проблемам. Хотя
чаще всего такие проблемы возникают при разработке военных РЛС в силу
необходимости постоянно совершенствовать их параметры, при разработке
коммерческих РЛС также иногда стремление снизить стоимость или улучшить
параметры приводит к невозможности реализовать требуемую лампу.
В результате выбор типа лампы становится первостепенной, но сопряженной
с большим риском, задачей.
Большая часть этой главы посвящена вопросу выбора типа высокочастот-
ной лампы, так как эта сторона проектирования РЛС в существующей лите-
ратуре освещена хуже всего. В главе особое внимание уделено проблемам
использования и недостаткам каждого типа лампы, так как информацию
о достоинствах ламп, естественно, проще получить от заводов-изготовителей
Эта глава выполнит свое назначение, если правильно подскажет разработчику
перспективной радиолокационной системы те вопросы, которые он додже'
7
Гл. 1. Радиолокационные передатчики
поставить перед поставщиком ламп и разработчиком модулятора для полу-
чения наилучшего компромиссного решения.
Поскольку в большей части РЛС на частотах, превышающих 1 ГГц
(и несколько ниже), триоды и тетроды в качестве высокочастотных ламп не
используются, а информацию о них легко получить в результате их широкого
использования на белее низких частотах, этим типам ламп уделено незначи-
тельное внимание. Этот вопрос подробно освещен, например, в книге [2, С.
233—243]. Сравнение триодов и тетродов с другими типами СВЧ ламп в ка-
ком-либо частном случае применения может быть произведено методом, при-
нятым в табл. 4 (§ 1.4).
1.2. Лампы со скрещенными полями (типа М)
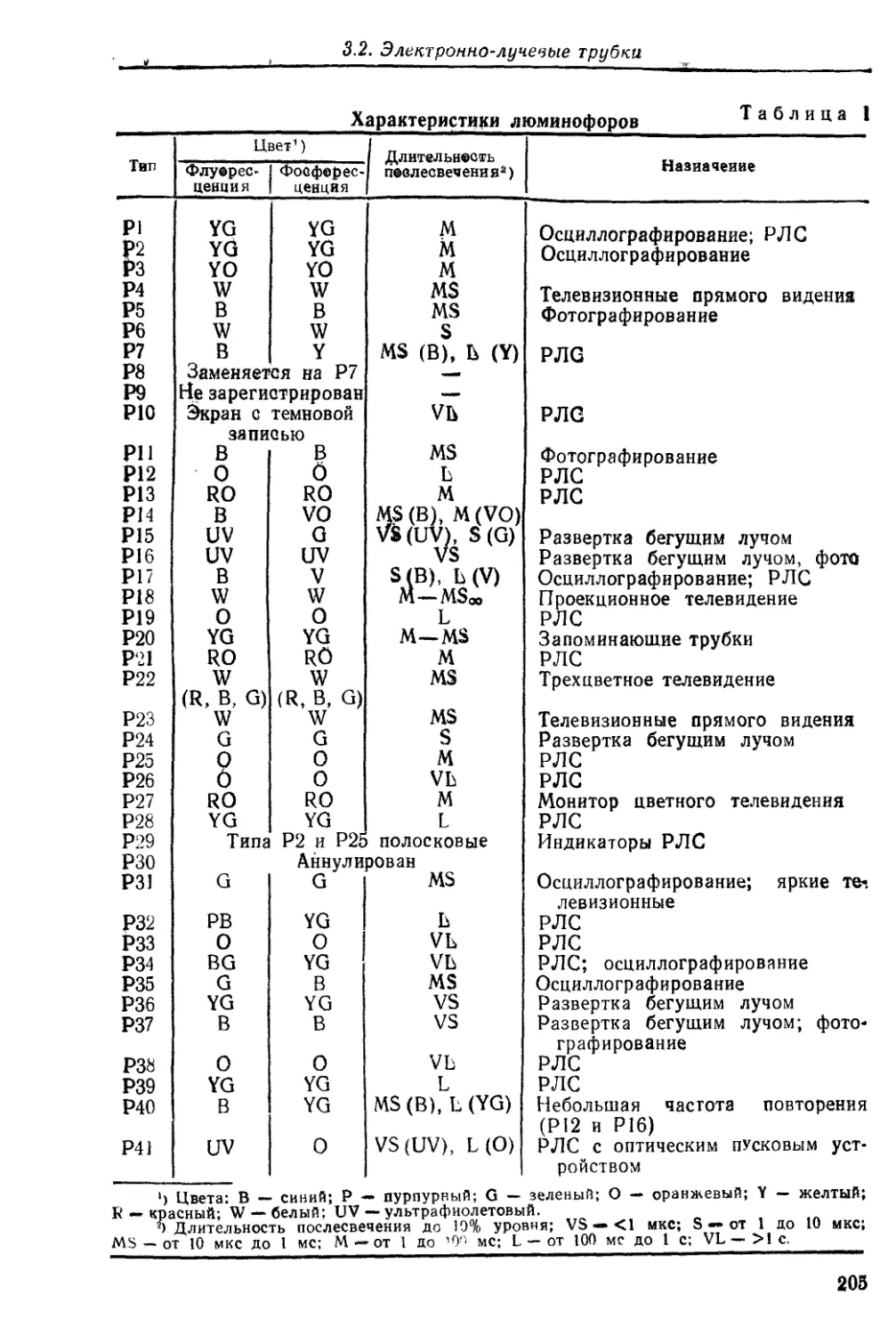
Как видно из табл. 1, семейство ламп со скрещенными полями получило
широкое развитие, начиная с первых дней радиолокации, когда магнетроны
были единственным типом устройства со скрещенными полями [1,37].
Таблица. 1
*) Генератор
1) инжектированный луч
2) распределенная эмиссия
А) кругогой
Б) линейный
МНН—магнетрон, настраиваемый напряжением
УСППВ—усилитель со скрещенными полями прямой
волны
УСППВИЛ —усилитель со скрещенными полями пря-
мой волны с инжектированным лучом фирмы GSF
УСПОВ —усилитель со скрещенными полями обрат-
ной волны
М-УОВ — усилитель обратной волны типа М
М-ГОВ — генератор обратной волны типа М
Взаимодействие' скрещенных полей. Лампы со скрещенными полями полу-
чили такое название потому, что электрическое поле Е и магнитное поле В
расположены под прямым углом. Они называются также «лампами типа М»
в соответствии с французским названием ТРОМ (tubes a propagation des
ondes a champs magn^tique— лампы с волной, распространяющейся в магнит-
ном поле) в противоположность названию «лампы типа О» от французского
ТРО (tubes a propagation des ondes — лампы с распространяющейся волной).
8
1 2. Лампы со скрещенными полями (типа М)
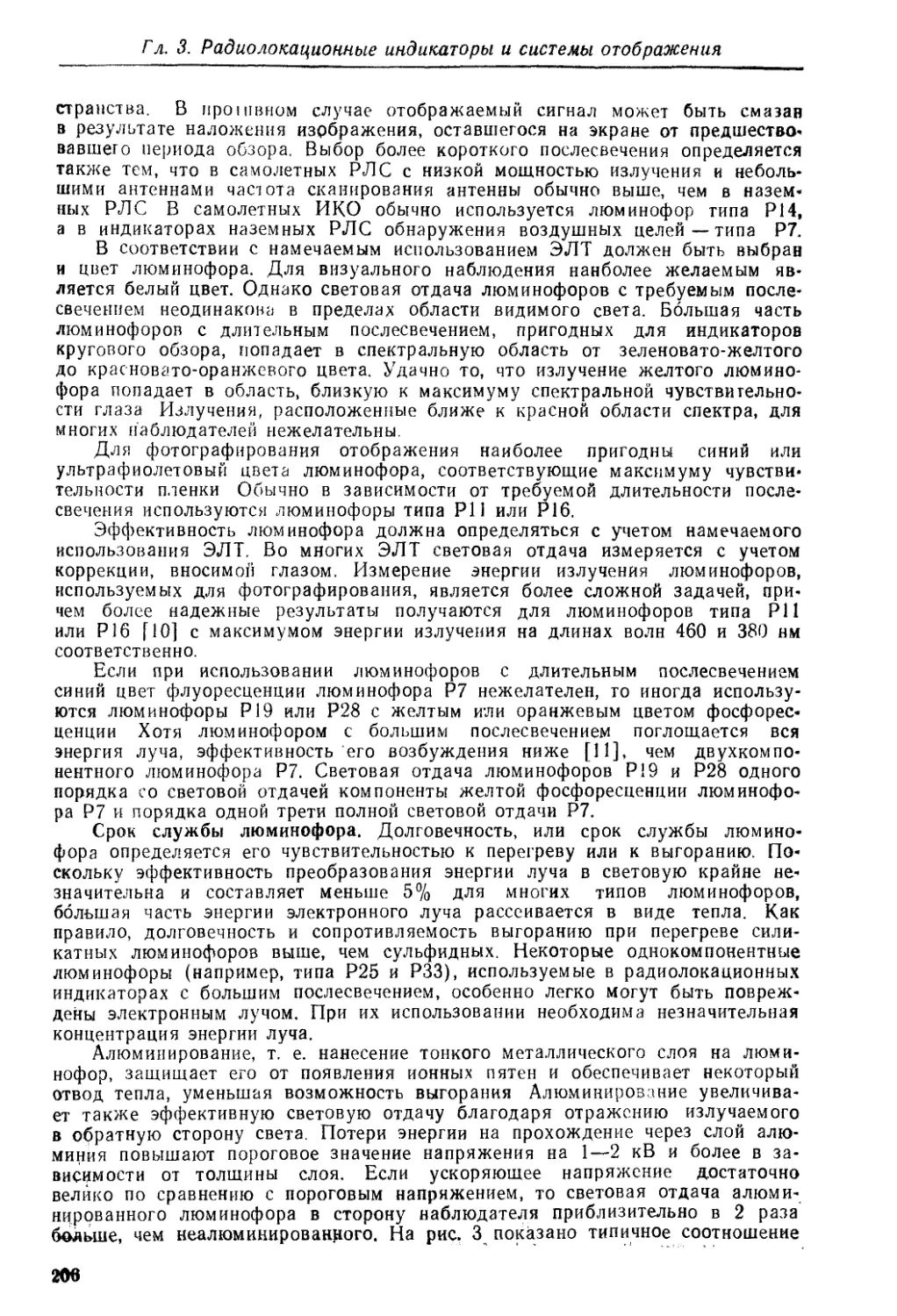
В лампах со скрещенными полями электроны, излученные катодом, уско-
ряются электрическим полем и приобретают большую скорость, однако чем
выше скорость, тем больше их траектории изгибаются магнитным полем.
В результате при заданном магнитном поле и в отсутствие поля высокой час»
а) круглая
лампа
д)Линвиная
лампа
Катод
б) Произвольная
форма
Рис. 1. Траектории электронов в лампах со скрещенными полями.
тоты на анодном блоке облако около катода не может распространяться по
направлению к аноду больше, чем на какое-то вполне определенное расстоя-
ние, так что ток через лампу будет отсутствовать. Максимальная скорость
электронов в облаке пропорциональна f/B, а направление перпендикуляре®
как электрическому, так и магнитному полю (рис. 1). Граница электронного
облака проходит по существу по эквипотенциальной линии. Это справедливо
для анода и катода как круглых (рис. 1, а), так и прямолинейных параллель»
Г л. 1. Радиолокационные передатчики
пых (рис. 1, б) или произвольных (в определенных пределах) форм
(рис I,в).
Если приложить теперь к анодному блоку поле высокой частоты, то те
элеюрэпы, которые должны испытать замедление, обусловленное их фазой
относительно ноля, отдадут часть своей энергии полю высокой частоты и со-
ответственно потеряют скорость. Такие замедленные электроны проникнут
в постоянное электрическое поле достаточно далеко, Ч10бы вновь приобрести
такую же большую <. корость Благодаря этому энергия постоянного электри-
ческого ноля преобразуется в энергию высокой частоты Кроме того, в резуль-
тате этого процесса электронное облако образует спицы пространственного за-
ряда (рис. 1, г) причем расстояния между ними соответствуют расстояниям
между максимумами напряженности поля высокой частоты вдоль анодного
блока. Вследствие взаимодействия скрещенных полей весь путь до анода мо-
гут пройти юлько тс электроны, которые отдали достаточно большую энергию
высокочастотному полю Благодаря этому эффективность устройств со скре-
щенными почями относительно высока.
Электроны с несоответствующей фазой получают дополнительную энер-
гию от поля высокой частоты, ускоряются и движутся обратно по направле-
нию к катоду. Некоторые электроны получают от поля высокой частоты на-
столько большую энергию, что проникают обратно в катод. Если коэффициент
вторичной эмиссии катода болипе единицы, возвращающиеся электроны могут
вызвать существенное увеличение эмиссии катода В то же время из-за обрат-
ной бомбардировки катод разогревается и эти потери уменьшают общий
к. п. д
Лампы со скрещенными нолями типа, изображенного на рис. 1, а, имеют
круглую форму и являются возвратными, так что электроны, не использован-
ные при первом пролете, могут быть использованы при последующем пролете
вокруг анодного блока Лампы типа, приведенного на рис. 1, б, называются
линейными (хотя они' могут являться частью круга) и являются невозвратны-
ми. Энергия, не переданная электроном полю высокой частоты при одном про-
лете мимо высокочастотного анодного блока, теряется. Эти неиспользованные
электроны собираются коллектором так же, как в лампах с прямолинейным
электронным потоком (типа О) (рис. 13.). Поэтому к. п д. невозвратных ламп
со скрещенными полями меньше, чем возвратных. Однако следует отметить,
что в случае отсутствия управляющего электрода или электрода смещения
только невозвратный усилитель со скрещенными полями сам выключается при
снятии возбуждения высокой частоты.
Катоды. В лампах со скрещенными полями используются разнообразные
конструкции катодов В магнетронах применяется подогревный цилиндриче-
ский катод, вся поверхность которого является эмиттирующей. В круглых уси-
лителях со скрещенными полями может быть использован либо кагод такой
же конструкции либо холодный катод, причем часть поверхности катода
иногда заменяется в области дрейфа управляющим электродом или электро-
дом смещения. В невозвратных усилителях со скрещенными полями элект-
роны, излученные катодом с конца, расположенного со стороны коллек-
тора, практически не могут взаимодействовать с высокочастотной вол-
ной, так что большая их часть теряется. Поэтому в таких лампах обычно
часть катода используется в качестве эмиттера, а остальная часть специально
выполняется неэмпттирующей путем исключения подогрева и использования
материала с небольшим коэффициентом вторичной эмиссии. Назначением
дополнительной неэмпттирующей части электрода, называемой «основой» ка-
тода, является обеспечение требуемой структуры постоянного электростати-
ческого ноля. Электроны могут вводиться также с помощью обычной элект-
ронной пушки, причем в этом случае «основа» занимает всю длину лампы.
Электронная пушка дает возможность применить управляющую сетку, обеспе-
чивающею большой коэффициент усиления, однако мощность при этом огра-
10
1.2. Лампы со скрещенными полями (типа М)
ничена из-за небольшой эмигрирующей поверхности. Для получения больших
мощностей необходимы большие эмиттирующие поверхности.
Подогрев катода в генераторах необходим для получения достаточной
для возникновения колебаний эмиссии. Так как во время работы происходит
бомбардировка катода электронами, часто необходимо снизить мощность поло*
грева в соответствии с коэффициентом заполнения импульсов во избежание
перегрева катода. Это называется программированием подогрева катода маг-
нетрона.
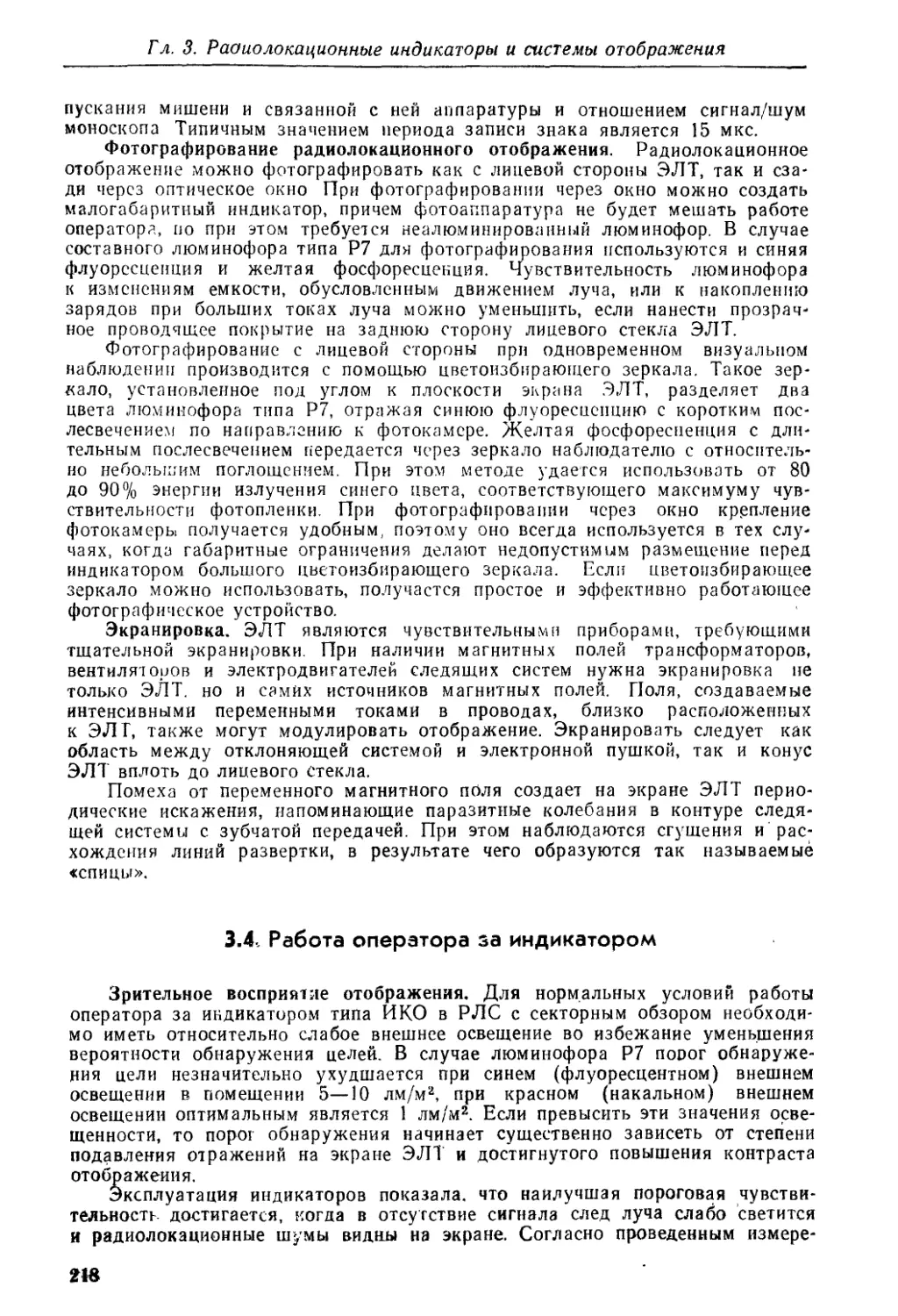
В усилительных лампах
в большинстве случаев мож-
но использовать холодный
катод. Даже в случае «вы-
сокого» вакуума в лампе
остается достаточно боль-
шое количество молекул га-
за (приблизительно 3-103
молекул/см3 при давлении
газа 1,33-10~в Па), так что
при значительной ВЧ мощ-
ности возбуждения основ-
ная часть молекул окажет-
ся ионизированной и часть
свободных электронов по-
падет на катод (другие
теории запуска при холод-
ном катоде базируются на
автоэлектронной холодной
эмиссии и поверхностном
резонансном высокочастот-
ном разряде). При соответ-
Рис. 2. Охлаждаемый водой катод усилителя со
скрещенными полями типа амплитрон.
ствующем материале като-
да возникает вторичная
эмиссия и полный ток като-
да нарастает очень быстро
(обычно менее чем за 5 нс). При большой средней мощности может потре-
боваться жидкостное охлаждение холодного катода во избежание его
перегрева (рис. 2), так как на катоде рассеивается около 5% выходной мощ-
ности [35].
Так как в холодном катоде отсутствует подогреватель, может показаться,
что он обладает бесконечным сроком службы. Однако коэффициент вторичной
эмиссии катода должен иметь определенное значение для обеспечения нор-
мальной работы, а так как явление вторичной эмиссии еще не до конца изуче-
но, получение достаточной долговечности в процессе производства является
сложной задачей. Известно, например, что некоторые материалы (такие, как
медь, осаждающаяся с анода в результате искрения) могут вызвать отравле-
ние катода и снижение вторичной эмиссии. Хотя в технологии изготовления
материалов достигнут значительный прогресс, долговечность лампы заданной
конструкции гарантируется только в пределах, подтвержденных испытаниями
на срок службы.
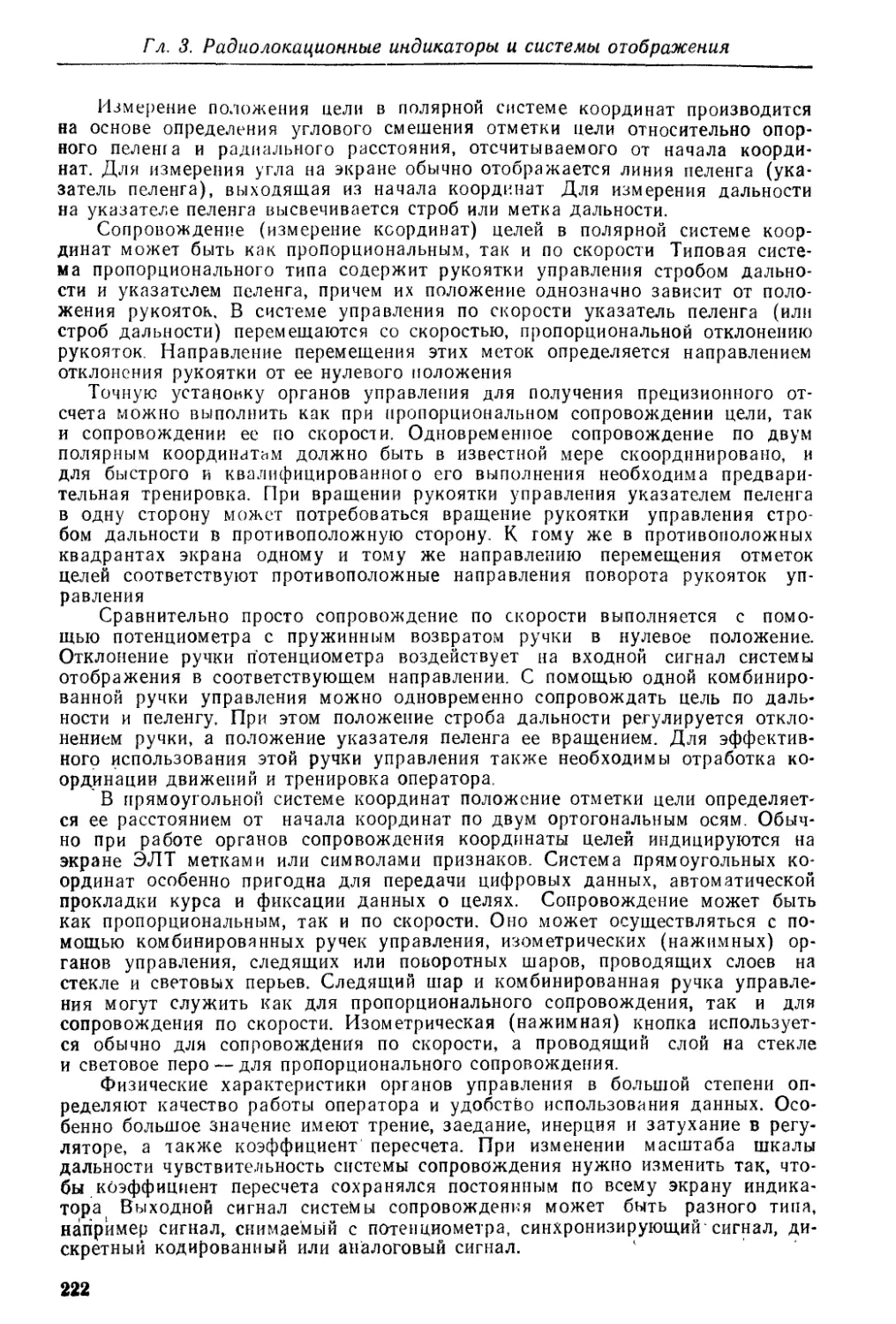
Замедляющие структуры. В результате скрещения электрического и маг-
нитного полей электроны следуют по траекториям, показанным на рис. 1, по
существу с постоянной скоростью. Для того чтобы электроны были правильно
взаимосвязаны с высокочастотными полями вдоль анодного блока, их скорость
должна быть согласована с фазовой скоростью ВЧ волны. При заданной мощ-
ности диапазон значений скорости электронов, которая должна быть согласо-
вана с фазовой скоростью ВЧ волны, распространяющейся вдоль анодного
блока, довольно узкий. Так как скорость электронов составляет незначитель-
11
Гл. 1. Радиолокационные передатчики
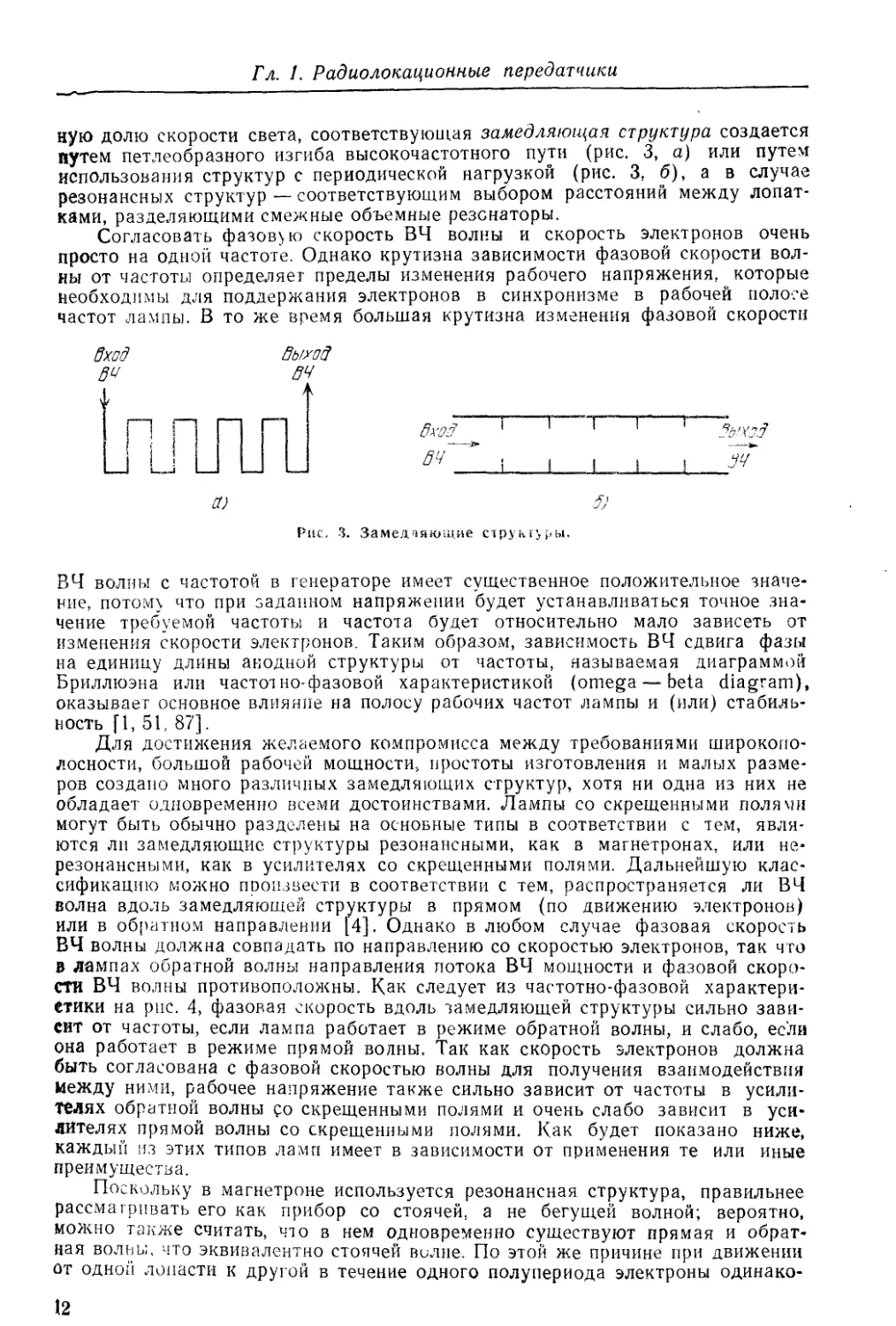
ную долю скорости света, соответствующая замедляющая структура создается
путем петлеобразного изгиба высокочастотного пути (рис, 3, а) или путем
использования структур с периодической нагрузкой (рис. 3, б), а в случае
резонансных структур — соответствующим выбором расстояний между лопат-
ками, разделяющими смежные объемные резонаторы.
Согласовать фазовою скорость ВЧ волны и скорость электронов очень
просто на одной частоте. Однако крутизна зависимости фазовой скорости вол-
ны от частоты определяет пределы изменения рабочего напряжения, которые
необходимы для поддержания электронов в синхронизме в рабочей полосе
частот лампы. В то же время большая крутизна изменения фазовой скорости
ЗхоВ
ВыхоЗ
1--т—
ВЧ ___i___L__L—_J_. .„J.
Рис. 3. Замедляющие структуры.
ВЧ волны с частотой в генераторе имеет существенное положительное значе-
ние, потом) что при заданном напряжении будет устанавливаться точное зна-
чение требуемой частоты и частота будет относительно мало зависеть от
изменения скорости электронов. Таким образом, зависимость ВЧ сдвига фазы
на единицу длины анодной структуры от частоты, называемая диаграммой
Бриллюэна или частотно-фазовой характеристикой (omega — beta diagram),
оказывает основное влияние на полосу рабочих частот лампы и (или) стабиль-
ность [1, 51, 87].
Для достижения желаемого компромисса между требованиями широкопо-
лосности, большой рабочей мощности, простоты изготовления и малых разме-
ров создано много различных замедляющих структур, хотя ни одна из них не
обладает одновременно всеми достоинствами. Лампы со скрещенными полями
могут быть обычно разделены на основные типы в соответствии с тем, явля-
ются ли замедляющие структуры резонансными, как в магнетронах, или не-
резонансными, как в усилителях со скрещенными полями. Дальнейшую клас-
сификацию можно произвести в соответствии с тем, распространяется ли ВЧ
волна вдоль замедляющей структуры в прямом (по движению электронов)
или в обратном направлении [4]. Однако в любом случае фазовая скорость
ВЧ волны должна совпадать по направлению со скоростью электронов, так что
В лампах обратной волны направления потока ВЧ мощности и фазовой скоро-
сти ВЧ волны противоположны. Как следует из частотно-фазовой характери-
стики на рис. 4, фазовая скорость вдоль замедляющей структуры сильно зави-
сит от частоты, если лампа работает в режиме обратной волны, и слабо, если
она работает в режиме прямой волны. Так как скорость электронов должна
быть согласована с фазовой скоростью волны для получения взаимодействия
Между ними, рабочее напряжение также сильно зависит от частоты в усили-
телях обратной волны со скрещенными полями и очень слабо зависит в уси-
лителях прямой волны со скрещенными полями. Как будет показано ниже,
каждый из этих типов ламп имеет в зависимости от применения те или иные
преимущества.
Поскольку в магнетроне используется резонансная структура, правильнее
рассматривать его как прибор со стоячей, а не бегущей волной; вероятно,
можно также считать, что в нем одновременно существуют прямая и обрат-
ная волны, что эквивалентно стоячей волне. По этой же причине при движении
от одной лопасти к другой в течение одного полупериода электроны одинако-
12
1.2. Лампы со скрещенными полями (типа М)
во взаимодействуют независимо от направления движения. Если пренебречь
явлениями второго порядка, то магнетроны правильно работают при любрй
полярности магнитного потока и, следовательно, любом направлении движения
электронов. Это вполне понятно, если учесть симметрию лампы.
В отличие от первых типов магнетронов, большая часть современных
ламп со скрещенными полями большой мощности рассчитана на интенсивно®
воздушное или водяное охлаждение. Конструирование анодных радиаторных
пластин или лопастей, обеспечивающих минимальную мощность охладитель*
ной системы, является особым искусством и выходит за рамки этой главы.
Рис. 4. Частотно-фазовые характеристики для режимов прямой (а) и обратной (б) воля.
Магнетроны. (Резонансные замедляющие структуры. Возвратные генерал
торы со скрещенными полями). Обычный магнетрон, получивший известносх>
во время второй мировой войны, продолжает широко использоваться в радис^
локационных передатчиках. Если он соответствует требованиям системы, еЙУ
всегда будет отдано предпочтение благодаря его дешевизне, малым габаритдр
и массе, небольшому напряжению и малому рентгеновскому излучений
а также высокому к. п. д. Однако он может оказаться непригодным в ряда!
случаев, например, если требуется:
1) когерентность от импульса к импульсу для подавления появляющихся
на последующей развертке сигналов и пр.;
2) более точная регулировка частоты, чем это можно получить с пр*
мощью органа настройки магнетрона с учетом всех допусков на мертвой ход,
тепловой дрейф, затягивание частоты, уход частоты и т. д.;
3) точный скачок частоты или скачок частоты в пределах импульса или
группы импульсов;
4) когерентность фаз при объединении на одном выходе высокочастотной
энергии нескольких ее источников;
5) формирование кодированных импульсов или импульсов специальной
формы (в случае магнетронов можно формировать импульс при перепаде уроа*
ней всего в несколько децибелл, однако даже при этом уход частоты можа>
помешать получить желаемые результаты);
6) обеспечение возможно малого уровня мощности паразитного излу-
чения.
В тех случаях, когда магнетрон принципиально может быть применен
можно рассчитывать на использование значительно более широких возмоэф
ностей, чем с магнетронами первых типов.
Органы настройки. Магнетроны большой мощности могут перестраиваться
13
Гл. 1. Радиолокационные передатчики
в основном в пределах 5 или 10%-ной полосы частот, а в некоторых случаях
до 25%• Обычно используемый индуктивный орган настройки типа «тернового
венца» (данные для диапазона L, т,- 1, гл. 1) должен для получения такой
перестройки перемещаться всего на несколько миллиметров, причем нужно
иметь возможность точно его устанавливать. Обычный механический привод
(дифференциальный ходовой винт, приводимый в действие червячной переда-
чей) Обладает очень низким к. п. д. и требуем большой мощности для быстрой
перестройки Другими используемыми вариантами являются гидравлический
привод, дроссельный привод или просто более эффективная зубчатая передача
В вариантах без зубчатой передачи для
регистрации положения органа настрой-
ки требуется следящее устройство. Гид-
равлический привод позволяет произво-
дить перестройку во всем диапазоне со
скоростью до 20 перестроек в секунду,
в то время, как скорость наилучшей зуб-
чатой передачи не превышает, по-види-
мому, 2 перестроек в секунду. Скорость
перестройки в случае дроссельного при-
вода составляет 200 перестроек в секун-
ду в небольшой части диапазона пере-
стройки и порядка 60 перестроек в се-
кунду во всем диапазоне. В системах ин-
дикации движущихся целей для орга-
нов настройки, не являющихся самобло-
кирующимися, необходим тормоз, чтобы
система настройки могла быть обесточе-
на для обеспечения должной стабильно-
сти частоты.
Вращающиеся органы настройки.
Магнетрон с вращающимся органом на-
стройки был разработан в 60-е годы
Ряс. 5. ц»ворог«ый орган настройки [g 20]. Над анодными объемными резо-
магнетрона. наторами размещается диск со щелями
(рис. 5), который при вращении по-
переменно создает индуктивную и емкостную нагрузку резонаторов (подобно
настроечной дроссельной заслонке) для увеличения и уменьшения частоты.
При этом можно получить очень высокую скорость перестройки, так как за
один поворот диска магнетрон перестраивается в пределах всей полосы в одну
и другую сторону столько раз, сколько резонаторов в анодном блоке. Диск
смонтирован в вакууме на подшипниках (разработанных для рентгеновских
трубок с вращающимся анодом), а его ось имеет магнитную связь с приводом,
находящимся вне вакуума. При 1800 об/мин лампа с 10 резонаторами пере-
страивается во всем диапазоне 300 раз в секунду. В том случае, когда
частота повторения импульсов модулятора и скорость перестройки несинхрон-
ны, частота передатчика будет меняться от импульса к импульсу по опреде-
ленному закону, определяемому биениями между частотой повторения импуль-
сов и частотой перестройки. Нерегулярные (псевдослучайные) скачки частоты
можно получить, изменяя частоту повторения импульсов или быстро изменяя
число оборотов мотора. Данные первого приближения для сопровождения по
частоте в тракте гетеродина приемника получаются от встроенного датчика
(обычно емкостного типа), расположенного на одной оси с диском. Недостат-
ками вращающихся органов настройки (кроме стоимости и массы) являются:
L Более низкая, чем в случае обычных органов настройки, средняя выход-
ная мощность, так как охлаждение вращающегося органа настройки является
более сложной задачей.
14
1.2. Лампы со скрещенными полями (типа М)
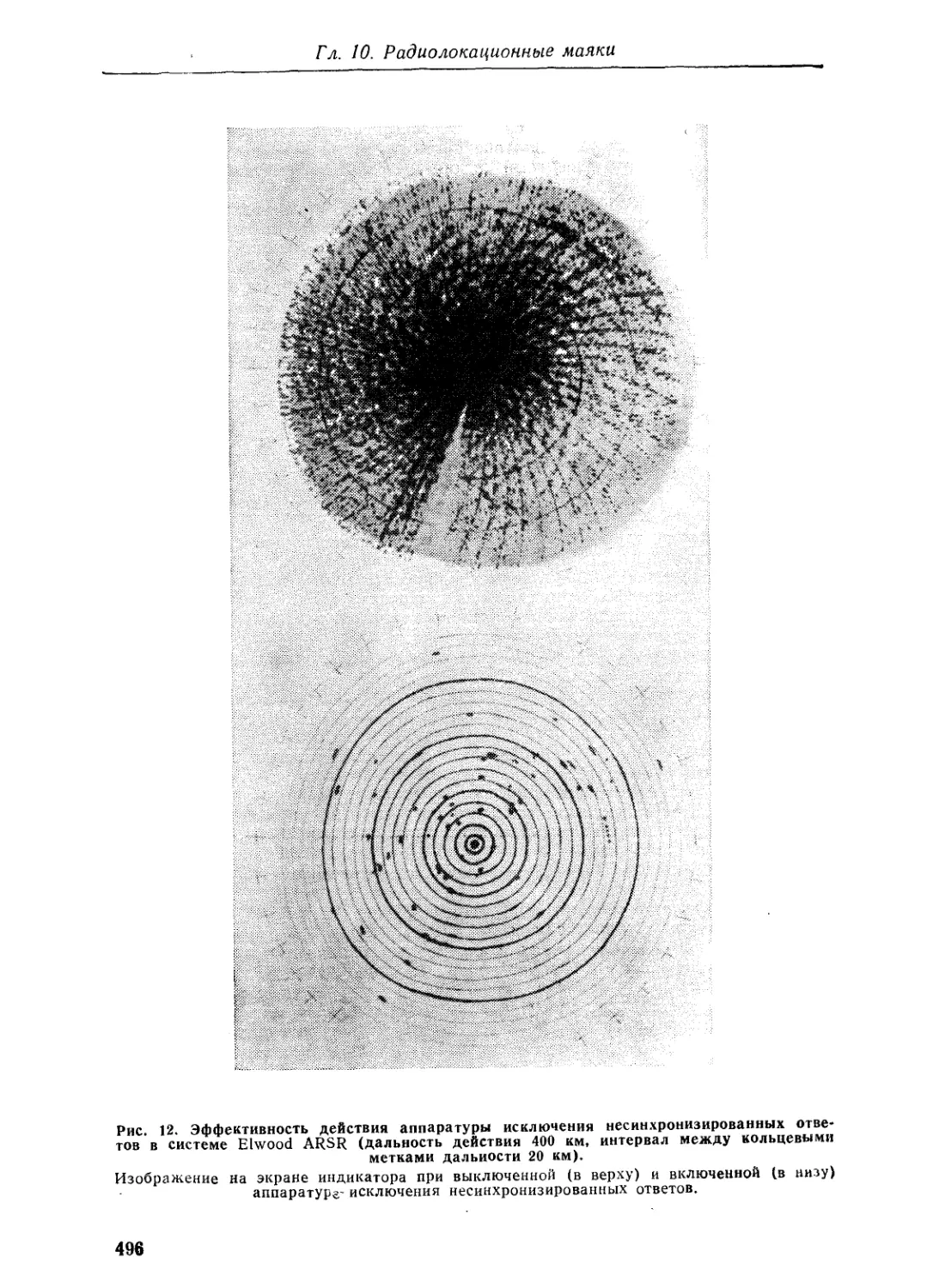
2. Не гарантируется точная настройка у границы диапазона перестройки.
Так как за каждый период перестройки перекрывается полностью весь диа-
пазон перестройки, а работа системы вне выделенного для нее диапазона
частот обычно недопустима, допуск на диапазон перестройки должен вклю-
чаться в зтот диапазон частот. В настоящее время еще не существует механи-
ческих приспособлений, которые позволили бы уменьшить перекрываемый
вращающимся органом диапазон перестройки. Однако это может быть осуще-
ствлено электронным путем, если синхронизировать частоту повторения
импульсов со скоростью перестройки по диапазону и изменять исходную
частоту повторения импульсов для получения требуемых пределов изменения
частоты передатчика.
3. В случае работы в системе обнаружения движущихся целей с фиксиро-
ванной частотой стабильность получается не столь высокой, как с другими
органами перестройки, из-за менее жесткого механического крепления и воз-
можного микрофонного эффекта. Для повышения стабильности в случае рабо-
ты с фиксированной частотой иногда применяется встроенный электромехани-
ческий тормоз.
Вобуляция. В тех случаях, когда для борьбы с пассивными помехами не
используется селектор движущихся целей, бывает целесообразно, чтобы часто-
ты заполнения всех зондирующих импульсов во время облучения цели разли-
чались по крайней мерена 1/Т (Т — длительность зондирующего импульса)
[16]. Так как при этом во избежание ухудшения приема все частоты заполне-
ния импульсов должны лежать в возможно более узкой полосе, такая быст-
рая перестройка называется вобуляцией (качанием) частоты Хотя оптималь-
ным является равномерный разнос частот зондирующих импульсов, можно
получить довольно равномерное распределение частот, не повторяющихся
в течение времени облучения цели, даже при простой синусоидальной пере-
стройке, если тщательно выбрать соотношение частот вобуляции и повторения
импульсов.
Существует несколько типов магнетронов с вобуляцией [26, 27]. При
постоянной частоте вобуляции хорошие результаты дает вибрирующий язычок,
помещенный в один или несколько резонаторов анодного блока и возбуждае-
мый электромагнитной катушкой. В другом типе применяется мотор, разме-
щенный вне вакуума и добавляющий небольшое поступательно возвратное
движение стандартному настроечному механизму, причем в случае необходи-
мости скорость вобуляции может регулироваться изменением скорости враще-
ния этого мотора. Для вобуляции используется также быстро вращающееся
устройство, размещенное в вакууме и аналогичное вращающемуся органу на-
стройки магнетрона, однако рассчитанное на меньший диапазон перестройки.
Для той же цели использовалась ньезокерамическая насадка, называемая
органом шепчущей настройки [19], выполнявшая роль преобразователя ее
собственных перемещений Во всех этих вариантах устройство, обеспечиваю-
щее вобуляцию, обычно является независимым, поэтому выход его из строя не
нарушает нормальной настройки.
Стабилизированные магнетроны. Стабильность частоты магнетрона при
возмущающих воздействиях зависит от нагруженной добротности QL Так как
к п. д. является произведением электронного к. п. д. на 1 — QlIQu, где
Qu — ненагруженная добротность, то увеличение Ql за счет уменьшения свя-
зи с нагрузкой приводит к уменьшению к. п. д. Таким образом, для увеличения
Qr необходимо, в первую очередь, увеличить Qu. Объем анодных резонаторов
ограничивает возможность увеличения Qu, поэтому необходимо использовать
внешний объемный резонатор. Наиболее распространенной конструкцией стаби-
лизированного магнетрона является коаксиальный магнетрон, в котором коль-
цевой объемный резонатор высокой добротности сильно связан с анодными
лопастями, укрепленными на стенке внутреннего цилиндра (рис. 6). На более
высоких частотах (выше диапазона X) более удобным устройством является
так называемый обращенный коаксиальный магнетрон (рис. 7), так как в слу-
15
Гл. 1. Радиолокационные передатчики
чае нормальной конструкции размеры резонатора оказываются слишком малы-
ми для размещения катода и анодного блока.
Такие конструкции [6, 51, 70] дают возможность увеличить стабильность
от 3 до 10 раз за счет снижения как ухода, так и затягивания частоты. Это
чрезвычайно важно на высоких частотах (в диапазонах X и К), на которых
уход и затягивание частоты могут оказаться больше ширины полосы частот,
соответствующей длительности импульса типовых РЛС. Стабилизация приме-
няется преимущественно на этих частотах также потому, что резонатор высо-
Рис. 6. Коаксиальный магнегрон [70].
кой добротности имеет в этом случае приемлемые размеры Повышение точно-
сти отсчета по шкале достигается в том случае, если должным образом
выполнены механические узлы. Однако тепловой дрейф может явиться серьез-
ной помехой из-за необходимости сильной связи между стабилизирующим
резонатором и анодной цепью и вследствие больших ВЧ токов, текущих
к резонатору и в резонаторе.
По сравнению с обычными магнетронами могут быть улучшены услов::я
индикации движущихся целей из-за более высокой стабильности частоты как
от импульса к импульсу, так и внутри импульса Однако ожидаемое улучше-
ние может оказаться нереализуемым, если вобуляция и шумы в момент за-
пуска каждого импульса не будут достаточно малы. Эти характеристики очень
сильно меняются для разных типов стабилизированных магнетронов и зависят
прежде всего от степени развязки различных типов волн и скорости нараста-
ния напряжения питания. Качество индикации движущихся целей для данного
типа лампы обычно падает при уменьшении длительности импульса, так как
влияние нестабильностей в момент нарастания импульса становится соответст-
венно более сильным:
Возможны некоторые комбинации перечисленных выше решений. Так,
например, довольно часто используются стабилизированные магнетроны с во-
буляцпен частоты [26|. С другой стороны, если только не будет разработана
совершенно новая конструкция, настройка с помощью вращающегося органа
16
1.2. Лампы со скрещенными полями (типа М)
не может 'быть совмещена со стабилизацией, так как частота определяез
стабилизирующим резонатором (а не лопастями или резонаторами в анода.о.:
блоке).
Иногда трудно определить, где кончается магнетрон и начинается остал'.
ное оборудование передатчика, как, например, в магнетроне с встроенным
гидравлическим приводом настройки или магнетроне со встроенным в него
устройством управления грубой подстройкой гетеродина. Так как магнетрон
заменяется много раз в течение срока службы системы, целесообразно, чтобы
как можно меньше разных приспособлений составляли неотъемлемую часть
Рис. 7. Обращенный коаксиальный магнетрон (упрошенное изображение):
а — поперечное сечение, б — общий вид
Отдор мощности о
торца резонатора.
Щели лопасти
связи
лампы. Так, например, предпочтительнее, чтобы нелинейный привод, преобра-
зующий нелинейную зависимость частоты от положения оси органа настройки
типового магнетрона в линейную, был несменяемой частью передатчика, а не
заменялся вместе с магнетроном, если только, конечно, срок службы привода
не слишком мал.
Общие проблемы. Классические проблемы, связанные с работой магнетро-
на, продолжают существовать, хотя в настоящее время они лучше изучены,
классифицированы и в большей степени поддаются решению Наиболее Тиши-
ными из них являются:
1. Искрение. Дуговой разряд между анодом и катодом, возникающий осо-
бенно при первом включении магнетрона, для небольшого (в процентном отно-
шении) количества импульсов является нормальным. Иногда этот вывод также
относится к смене типа колебаний и (или) пропуску импульсов. Модулятор
должен выдерживать искрение в течение коротких промежутков времени не
выключаясь и должен нормально работать сразу по окончании искрения.
2. Изменение типа колебаний. Если условия для возникновения волны
другого типа (других возможных рабочих частот) слишком близки к услови-
ям (уровню тока) возникновения волн требуемого типа, стабильную работу
магнетрона трудно обеспечить. Чтобы возникла волна требуемого типа, необ-
ходимо правильно выбрать скорость нарастания напряжения на катоде маг-
нетрона в пределах, определяемых пусковым временем лампы и ближайшими
типами волн. Так как пусковое время составляет приблизительно iQiJfo, очень
трудно и часто нецелесообразно добиваться работы мощных низкочастотных
магнетронов короткими импульсами. При очень медленном нарастании моду-
лирующего напряжения (и очень медленном спадании в копие импульса) так-
же может возбудиться волна, соответствующая более низкому аначению тока
(если он существует в лампе) [87].
1?
Гл. 1. Радиолокационные передатчики
3. Шумовые кольца. Слишком большое обратное напряжение, возникаю-
щее по окончании импульса, или даже небольшой повторный импульс, попа-
дающий на магнетрон, может вызвать шумовой сигнал, сравнимый с эхо-сиг-
налом ближних целей. Магнетроны ряда типов в этом отношении хуже, что
объясняется, по-видимому, различием токов утечки с концов, катода. Термин
«шумовое кольцо» принят в связи с тем, что шум появляется после зондирую-
щего импульса с одной и той же задержкой и образует кодыю на индикаторе
кругового обзора. В зависимости ©т требуемой наименьшей дальности обнару-
жения такая же трудность может возникнуть, если напряжение нормального
импульса спадает на магнетроне недостаточно быстро по его окончании.
Иногда для обеспечения достаточно малого времени спадания требуется
специальное устройство отсечения хвоста (см § 1. 12).
В маломощных устройствах это можно выполнить с помощью простого
нагрузочного сопротивления Эта группа проблем и способы решения сущест-
венно зависят от типа как лампы, так и модулятора.
4. Паразитный высокочастотный выходной сигнал Кроме полезной
выходной мощности магнетроны генерируют значительные паразитные шумы.
Характер и уровень их подобны приведенным в табл. 4 для ламп со скрещен-
ными полями, однако благодаря резонансным свойствам магнетрона шум,
частота которого значительно отличается от рабочей частоты, за исключением
ее гармоник, подавляется.
5. Утечка высокочастотной энергии с катодного стержня. Обычно в лам-
пах диапазона S с катодного стержня может излучаться значительная мощ-
ность в диапазоне метровых и дециметровых волн, а также на основной часто-
те и ее гармониках. Этот эффект существенно зависит от типа магнетрона,
а в случае его появления от расположения проводов, напряжения накала, маг-
нитного поля и пр. Хотя предпочтительнее подавлять утечку с катодного стер-
жня внутри лампы, иногда она с успехом улавливается или поглощается вне
лампы, а в ряде случаев с ней мирятся.
6. Дрейф. Частота магнетрона меняется в зависимости от температуры
окружающей среды (охлаждающего воздуха или жидкости) в соответствии
с температурным коэффициентом резонаторов и может также значительно
меняться в процессе разогрева. Даже после длительной работы любое измене-
ние положения органа настройки может вызвать дрейф, если в результате,
этого начнет меняться нагрев резонатора или органа настройки. Иногда могут
применяться устройства температурной компенсации.
7. Уход частоты. Изменение частоты магнетрона, обусловленное изменени-
ем анодного тока, называется уходом частоты [87]. Наблюдаемые при этом
изменения частоты от импульса к импульсу и внутри импульса должны под-
держиваться в пределах технических допусков на систему путем соответству-
ющего проектирования модулятора. Хотя в лампах с большим уходом частоты
трудности возрастают, требуемое при этом усложнение модулятора находится
в допустимых пределах.
8. Затягивание. Изменение частоты магнетрона, обусловленное изменени-
ем фазы несогласованной нагрузки, называется затягиванием частоты [87].
Однако благодаря широкой возможности использования ферритовых вентилей
затягивание редко- является серьезной проблемой при создании современных
радиолокационных передатчиков. Поэтому трудности, связанные с эффектом,
длинной линии [73], отошли в прошлое и представляют чисто академический
интерес, так как с помощью имеющихся вентилей можно в направлении от
магнетрона снизить эффективное рассогласование до уровня, обеспечивающего
невозможность перескока частоты.
9. Срок службы. Хотя короткий срок службы некоторых магнетронов
обусловлен их быстрым износом, значительная часть магнетронов выходит
быстро из строя из-за неправильной эксплуатации. В некоторых случаях в ре-
зультате соблюдения правил и соответствующего обучения операторов было
18
1:2. Лампы со скрещенными полями -(типа Л1)
достигнуто совершенно поразительное увеличение срока службы (см. § 1. 4)
Ж 93].
10. Срок службы органа настройки. В связи с требованием одновремен-
ного снижения цены и габаритов срок службы лампы может быть ограничен
усталостью материала сильсфона, который необходим в тех случаях, когда ре-
гулируется орган настройки, находящийся в вакууме. Чтобы срок службы
лампы не ограничивался из-за органов настройки, находящихся вне вакуума,
они должны иметь соответствующие подшипники и зубчатые передачи В ча-
С1НОСТИ, ограничение срока службы может быть обусловлено появлением
мертво! о хода.
Магнетроны, настраиваемые напряжением. В обычном магнетроне, анод-
ный блок которою содержит резонаторы высокой добротности, при увеличе-
нии анодного напряжения резко возрастает анодный ток и выходная мощ-
ность, однако частота изменяется очень мало. При уменьшении добротности
резонаторов завшимость частоты от скорости пролета электронных сгустков
у анода увеличивается. При достаточно низкой добротности можно получить
диапазон перестройки частоты путем изменения напряжения порядка 2:1 и
даже больше [30, 31, 51]. Так как для получения большого диапазона наст-
ройки изменением напряжения необходима низкая добротность, амплитуда
высокочастотного напряжения на аноде ограничена, что, в свою очередь, нак-
ладывает ограничение на количество электронов, которое может быть пра-
вильно сгруппировано. Поэтому должны быть приняты специальные меры
предосторожности для ограничения тока через лампу, что ограничивает вы-
ходную мощность Кроме того, при изменении частоты может в значительной
степени меняться выходная мощность. Магнетроны, настраиваемые напряже-
нием, широко используются в качестве источников непрерывных колебаний
мощностью от единиц до сотен ватт в тех случаях, когда требуется быстрая
линейная электронная перестройка частоты. К. п. д таких магнетронов выше,
чем у ламп обратной волны, а'их частотная перестройка осуществляется по
линейному, а не квадратичному закону. Л^агнетроны с настройкой напряжени-
ем используются в гетеродинах, сигнал-генераторах, радиовысотомерах и
станциях организованных помех и практически не используются в радиоло-
кационных передатчиках.
Усилители со скрещенными полями. Успешная разработка лампы ти-
па М и амплитронов в начале 50-х годов открыла широкие возможности для
разработок различных усилителей со скрещенными полями, широко используе-
мых в настоящее время от дециметрового диапазона до диапазона К. Благода-
ря высокому к.пд., малым размерам и низкому напряжению питания усилите-
ли со скрещенными полями особенно пригодны для передвижных и самолетных
установок, где требуется небольшая масса. Усилители со скрещенными поля-
ми обычно применяются в одном или двух последних наиболее мощных
каскадах усилительной линейки, причем для обеспечения требуемого коэффи-
циента усиления в предварительных маломощных каскадах применяются лам-
па бегущей волны или клистрон. По этим же соображениям усилители со
скрещенными полями можно с успехом использовать для увеличения выход-
ной мощности существующих радиолокационных систем.
. Соотношение между разными типами усилителей со скрещенными полями
показано в табл. 1, однако, как следует из табл. 2, они обладают существен-
но разными свойствами. Некоторые типы усилителей с повышенным коэффи-
циентом усиления пли с автоимпульсной модуляцией разработаны недавно и
поэтому выбор их ограничен.
Приборы обратной волны были использованы первыми (амплитроны), од-
нако в начале 60-х годов серьезными конкурентами стали приборы прямой
волны, которые при несколько более низком к.тг. д. обладают высоким коэф-
фициентом усиления и позволяют работать в режиме постоянного напряжения
(рассматриваемом ниже). Такой режим особенно пригоден для систем с быст-
рым переключением частоты, так как после изменения частоты не требуется
1»
Гл. 1. Радиолокационные передатчики
регулировка мощности модулятора для поддержания постоянной выходной
гл лцности, В приборах обратной волны напряжение, необходимое для полу-
чения заданного пикового тока, пропорционально частоте, однако эта зависи-
мость может быть автоматически учтена при работе линейного модуля юра
ити модулятора на вакуумной лампе в области постоянного значения тока.
В возвратном усилителе со скрещенными полями возвратные электрон-
Таблица 1
Мощные импульсные усилители со скрещенными полями
Характеристики Прямой волны Обратной волны
возврат- ные с распреде- ленной эмиссией невозвратные возврат- ные с распреде- ленной эмиссией невоз- вратные с инжек- тирован- ным лучом
с инжек- тирован- ным лучом с распре- деленной эмиссией
Наименование УОТ) УСППВ2) УСПП- ВИЛ3) Бима- трон Демат- рон Ампли- трон У СЛОВ4) Битер- митрон М-УОВ5)
Форма Круглая Линейная или круглая Круглая Линей- ная или круглая
Коэффициент усиления, дБ 10-16 Ю—30 | 7—18 6—18 3-20
Ширина полосы, % 10-15 10—25 | 10—15 8—12 30
К. п. д., % 30—60 20—50 | 30—40 40—80 25-50
Вносимые потери, дБ 1,5—3 | 1—4 0,5—2,0 1
Управляющий электрод Нет или выклю- чающий Управля- ющая сетка Не тре- буется Нет или выклю- чающий Управля- ющая сетка
Холодный катод (включе- ние высокой частотой) Есть Нет Есть Есть Нет
Самовыключение Есть6) Нет | Есть Нет Нет
Режим постоянного напря- жения Есть (1-2%) Есть (1—2%) Нет Нет
Использование в РЛС Широкое Редкое Широкое Редкое
Частота колебаний типа л Приблизительно на 15% выше рабочей полосы Приблизительно на 15% ниже рабочей полосы
') Усилитель со скрещенными полями.
2) Усилитель со скрещенными полями прямой волны.
3) Усилитель со скрещенными полями прямой волны с инжектированным лучом,
4) Усилитель со скрещенными полями обратной волны.
5) Усилитель обратной волны типа М.
6) При наличии смещающего электрода.
20
1.2. Лампы со скрещенными полями (типа М)
ные сгустки могут вызвать изменение частотной характеристики в зависимо-
сти от того, поступают ли они в фазе или в противофазе с высокочастотным
сигналом. На частотах, на которых сгустки поступают синфазно, коэффициент
усиления увеличивается в результате положительной обратной связи. Благо-
даря этому лампа с короткой замедляющей структурой (например, типа ам-
плитрона) может обладать умеренным усилением и высоким к. п. д. Однако
полоса пропускания ламп, в которых используется этот эффект, не превы-
шает 10% диапазона частот, в пределах
использован.
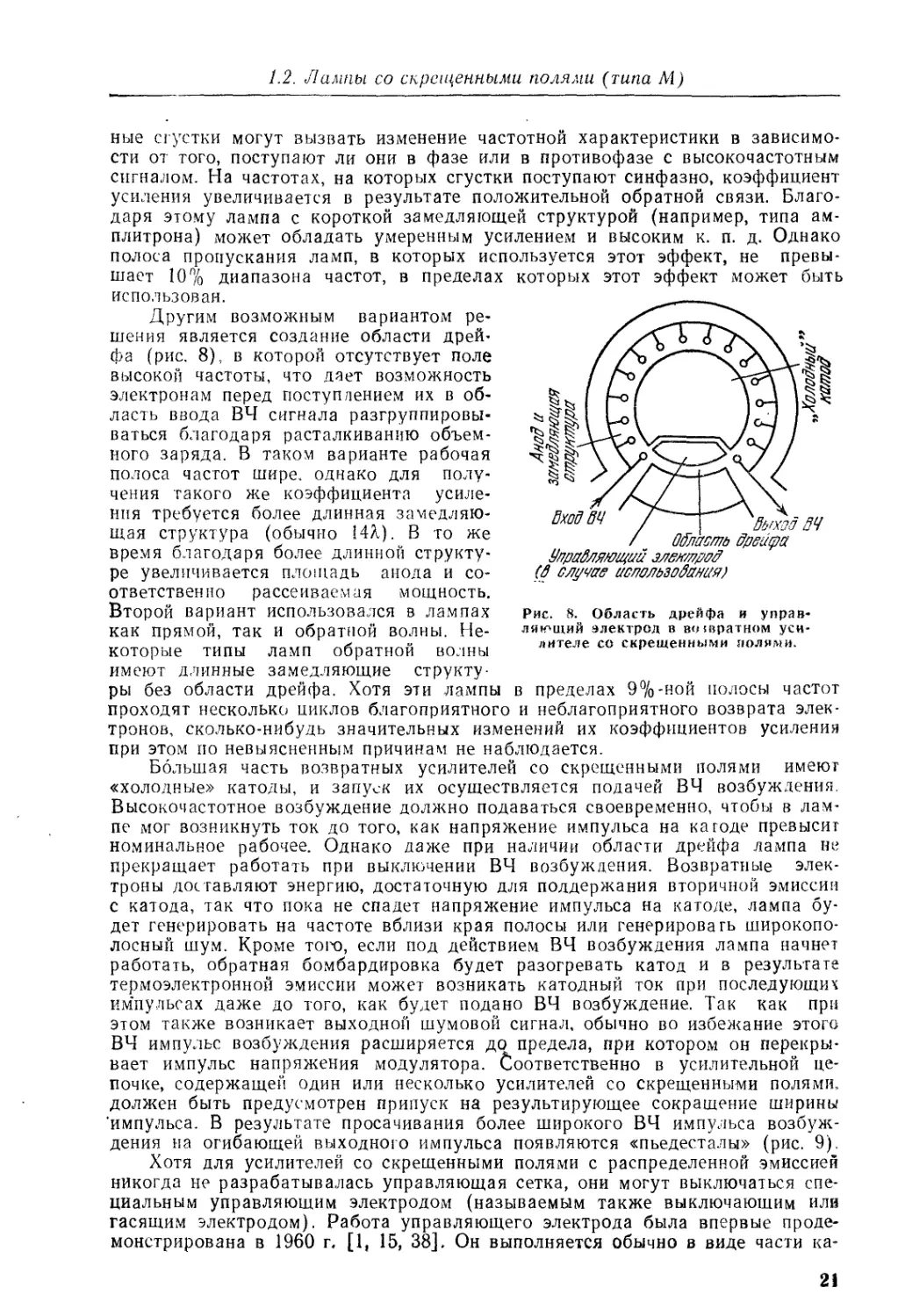
Другим возможным вариантом ре-
шения является создание области дрей-
фа (рис. 8), в которой отсутствует поле
высокой частоты, что дает возможность
электронам перед поступлением их в об-
ласть ввода ВЧ сигнала разгруппировы-
ваться благодаря расталкиванию объем-
ного заряда. В таком варианте рабочая
полоса частот шире, однако для полу-
чения такого же коэффициента усиле-
ния требуется более длинная замедляю-
щая структура (обычно 14?.). В то же
время благодаря более длинной структу-
ре увеличивается площадь анода и со-
которых этот эффект может быть
Управляющий злеюпрай
(3 случае аспользоЗания)
Рис. 8. Область дрейфа и управ-
ляющий электрод в возвратном уси-
лителе со скрещенными полями.
ответственно рассеиваемая мощность.
Второй вариант использовался в лампах
как прямой, так и обратной волны. Не-
которые типы ламп обратной волны
имеют длинные замедляющие структу-
ры без области дрейфа. Хотя эти лампы в пределах 9%-ной полосы частот
проходят несколько циклов благоприятного и неблагоприятного возврата элек-
тронов, сколько-нибудь значительных изменений их коэффициентов усиления
при этом по невыясненным причинам не наблюдается.
Большая часть возвратных усилителей со скрещенными полями имеют
«холодные» катоды, и запуск их осуществляется подачей ВЧ возбуждения.
Высокочастотное возбуждение должно подаваться своевременно, чтобы в лам-
пе мог возникнуть ток до того, как напряжение импульса на кагоде превысит
номинальное рабочее. Однако даже при наличии области дрейфа лампа не
прекращает работать при выключении ВЧ возбуждения. Возвратные элек-
троны доставляют энергию, достаточную для поддержания вторичной эмиссии
с катода, так что пока не спадет напряжение импульса на катоде, лампа бу-
дет генерировать на частоте вблизи края полосы или генерировать широкопо-
лосный шум. Кроме того, если под действием ВЧ возбуждения лампа начнет
работать, обратная бомбардировка будет разогревать катод и в результате
термоэлектронной эмиссии может возникать катодный ток при последующих
им'пульсах даже до того, как будет подано ВЧ возбуждение. Так как при
этом также возникает выходной шумовой сигнал, обычно во избежание этого
ВЧ импульс возбуждения расширяется до предела, при котором он перекры-
вает импульс напряжения модулятора. Соответственно в усилительной це-
почке, содержащей один или несколько усилителей со скрещенными полями,
должен быть предусмотрен припуск на результирующее сокращение ширины
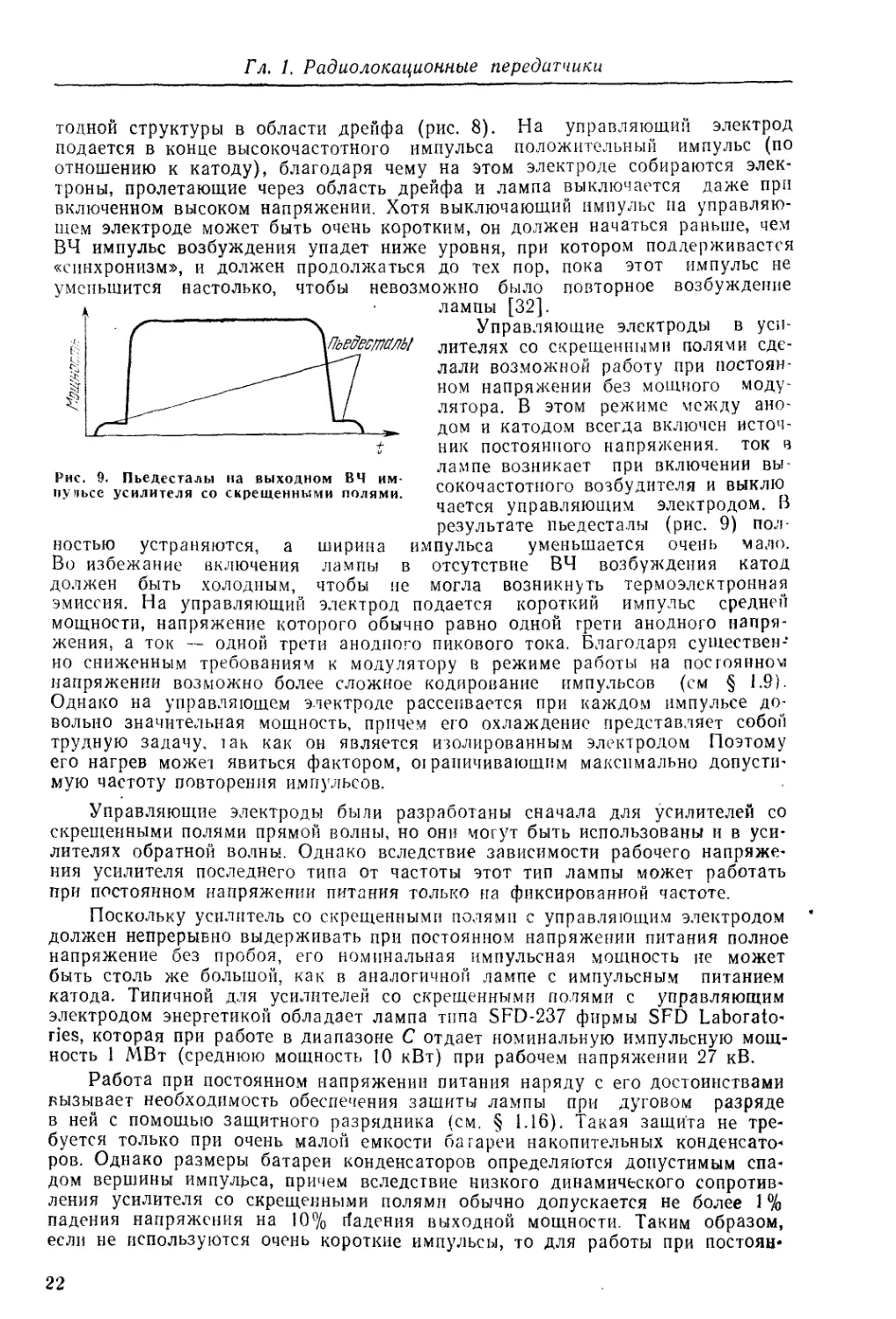
импульса. В результате просачивания более широкого ВЧ импульса возбуж-
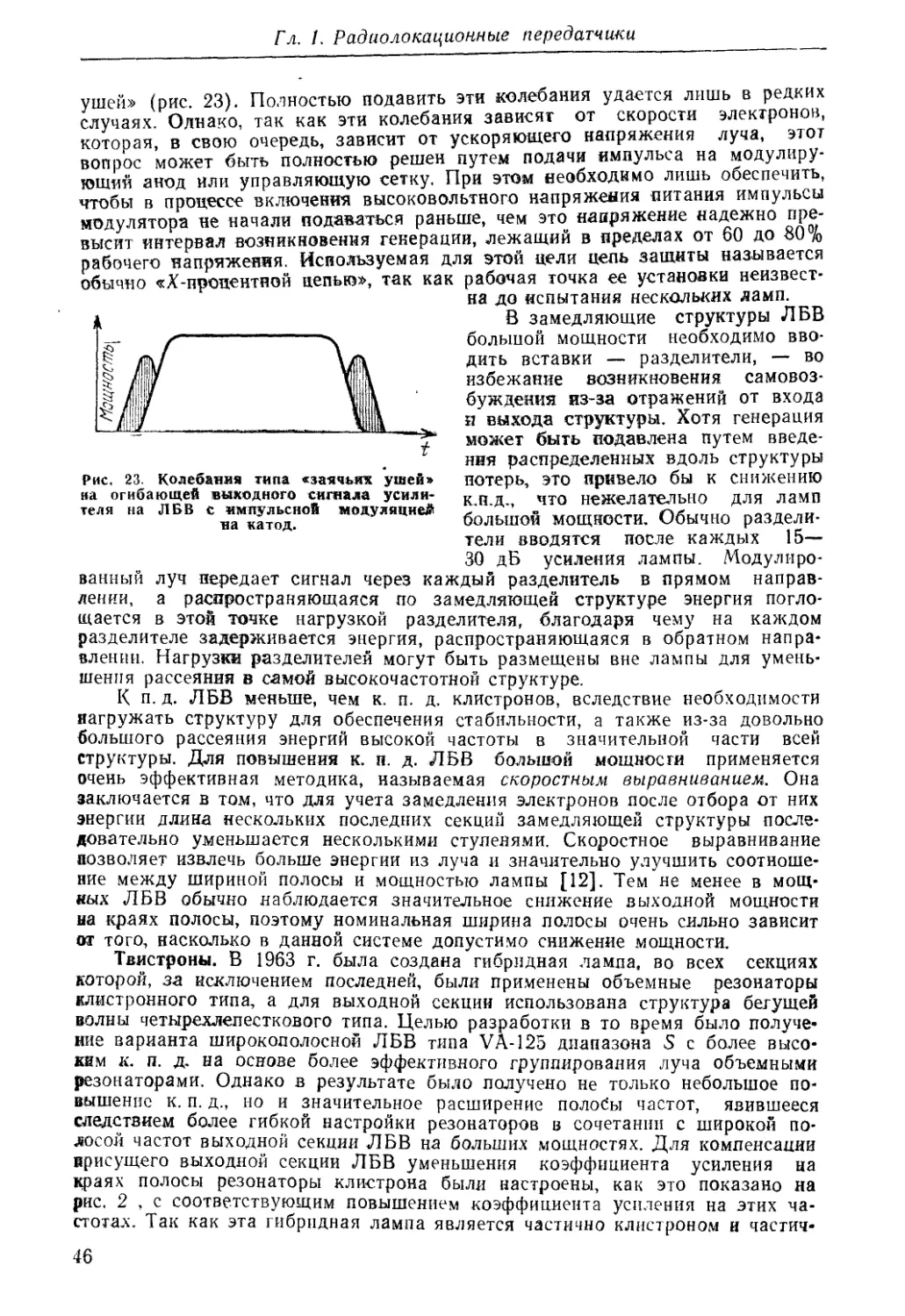
дения на огибающей выходного импульса появляются «пьедесталы» (рис. 9).
Хотя для усилителей со скрещенными полями с распределенной эмиссией
никогда не разрабатывалась управляющая сетка, они могут выключаться спе-
циальным управляющим электродом (называемым также выключающим или
гасящим электродом). Работа управляющего электрода была впервые проде-
монстрирована в 1960 г. [1, 15, 38]. Он выполняется обычно в виде части ка-
21
Гл. 1. Радиолокационные передатчики
годной структуры в области дрейфа (рис. 8). На управляющий электрод
подается в конце высокочастотного импульса положительный импульс (по
отношению к катоду), благодаря чему на этом электроде собираются элек-
троны, пролетающие через область дрейфа и лампа выключается даже при
включенном высоком напряжении. Хотя выключающий импульс па управляю-
щем электроде может быть очень коротким, он должен начаться раньше, чем
ВЧ импульс возбуждения упадет ниже уровня, при котором поддерживается
Рис. 9. Пьедесталы на выходном ВЧ им-
пупьсе усилителя со скрещенными полями.
«синхронизм», и должен продолжаться до тех пор, пока этот импульс не
уменьшится настолько, чтобы невозможно было повторное возбуждение
лампы [32].
Управляющие электроды в уси-
лителях со скрещенными полями сде-
лали возможной работу при постоян-
ном напряжении без мощного моду-
лятора. В этом режиме между ано-
дом и катодом всегда включен источ-
ник постоянного напряжения, ток в
лампе возникает при включении вы-
сокочастотного возбудителя и выклю
чается управляющим электродом. В
результате пьедесталы (рис. 9) пол-
ностью устраняются, а ширина импульса уменьшается очень мало.
Во избежание включения лампы в отсутствие ВЧ возбуждения катод
должен быть холодным, чтобы не могла возникнуть термоэлектронная
эмиссия. На управляющий электрод подается короткий импульс средней
мощности, напряжение которого обычно равно одной трети анодного напря-
жения, а ток — одной трети анодного пикового тока. Благодаря существен-
но сниженным требованиям к модулятору в режиме работы на постоянном
напряжении возможно более сложное кодирование импульсов (см § 1.9).
Однако на управляющем электроде рассеивается при каждом импульсе до-
вольно значительная мощность, причем его охлаждение представляет собой
трудную задачу, так как он является изолированным электродом Поэтому
его нагрев может явиться фактором, oi рапичивающим максимально допусти-
мую частоту повторения импульсов.
Управляющие электроды были разработаны сначала для усилителей со
скрещенными полями прямой волны, но они могут быть использованы и в уси-
лителях обратной волны. Однако вследствие зависимости рабочего напряже-
ния усилителя последнего типа от частоты этот тип лампы может работать
при постоянном напряжении питания только на фиксированной частоте.
Поскольку усилитель со скрещенными полями с управляющим электродом
должен непрерывно выдерживать при постоянном напряжении питания полное
напряжение без пробоя, его номинальная импульсная мощность не может
быть столь же большой, как в аналогичной лампе с импульсным питанием
катода. Типичной для усилителей со скрещенными полями с управляющим
электродом энергетикой обладает лампа типа SFD-237 фирмы SFD Laborato-
ries, которая при работе в диапазоне С отдает номинальную импульсную мощ-
ность 1 МВт (среднюю мощность 10 кВт) при рабочем напряжении 27 кВ.
Работа при постоянном напряжении питания наряду с его достоинствами
вызывает необходимость обеспечения защиты лампы при дуговом разряде
в ней с помощью защитного разрядника (см. § 1.16). Такая защита не тре-
буется только при очень малой емкости батареи накопительных конденсато-
ров. Однако размеры батареи конденсаторов определяются допустимым спа-
дом вершины импульса, причем вследствие низкого динамического сопротив-
ления усилителя со скрещенными полями обычно допускается не более 1 %
падения напряжения на 10% йадения выходной мощности. Таким образом,
если не используются очень короткие импульсы, то для работы при постоян*
22
1.2. Лампы со скрещенными полями (типа М)
ном напряжении питания требуется довольно большая батарея кондснса-
1 аров.
В обычном импульсном режиме работы магнетронов сопротивление моду-
ля юра ограничивает ток дугового разряда, причем дуга гаснет при прекраще-
нии импульса. Для ограничения тока дугового разряда до того, как сработает
защитный разрядник, и.для того, чтобы разрядник мог отвести ток на себя,
при постоянном напряжении питания между накопительным конденсатором
источника питания и лампой необходимо последовательно включить резистор
(или другого типа полное сопротивление).
В ма!нетроне с линейным модулятором лишь изредка происходят про-
пуски отдельных импульсов из-за дугового разряда, а в усилителе со скре-
щенными полями при постоянном напряжении питания дуговой разряд пол-
ностью нарушае! ею работу до тех пор, пока источник питания не будет
снова приведен в рабочее состояние. Поэтому при постоянном напряжении
писания допустимы значительно более редкие дуговые разряды. Так, напри-
мер. если при импульсном питании линейным модулятором магнетрона или
усилителя со скрещенными полями 0,1% импульсов сопровождается дуго-
вым разрядом, то будет пропущена лишь 0,1% импульсов, а система с усили-
телем со скрещенными полями, работающая при постоянном напряжении пи-
тания с частотой повторения импульсов 500 Гц, будет в этом случае выклю-
чаться каждые 2 с (в среднем). Для резкого снижения количества дуговых
разрядов следует с большой осторожностью подходить к выбору номиналь-
ной средней мощности усилителя со скрещенными полями, работающего при
постоянном напряжении питания.
Как только ВЧ возбуждение усилителя со скрещенными полями при по-
стоянном напряжении питания достигает уровня, при котором лампа возбуж-
дается, катодный ток чрезвычайно быстро возрастает; согласно измерениям
время нарастания составляет несколько наносекунд. Вследствие такого бы-
строго увеличения тока в проводах питания могут возникнуть ударные ко-
лебания, сопровождаемые паразитной фазовой и амплитудной модуляцией
в течение импульса. Одним из возможных решений является согласование
полного сопротивления кабеля питания с сопротивлениями, которые должны
бы(ь включены для защиты от дугового разряда (рис. 10). Индуктивность
накопительного конденсатора С1 должна быть очень незначительной.
Чрезвычайно быстрое нарастание импульса при подаче ВЧ возбуждения
вызывает столь же быстрое нарастание выходного сигнала высокой ча-
стоты, вследствие чего энергия далеко отстоящих боковых полос (в пределах
нескольких интервалов 11Т) больше, чем при более медленном нарастании
(см. § 1.8). (К моменту, когда составлялся этот справочник, еще не были раз-
работаны способы управления временем нарастания высокочастотного им-
пульса в усилителях со скрещенными полями при постоянном напряжении
питания).
В тех случаях, когда с возвратного усилителя со скрещенными полями
снимается ВЧ возбуждение до того, как выключающий импульс подан на уп-
равляющий электрод, возникает широкополосный шум большой мощности.
Такая же ситуация может возникнуть в процессе включения, если уровено
импульса ВЧ возбуждения достаточен для того, чтобы возник катодный ток,
но недостаточно велик для синхронизации мощного выходного сигнала с ча-
стотой возбуждения. Хотя эти значения могут значительно колебаться в за-
висимости ст конструкции лампы, обычно импульсная мощность, требуемая
для возбуждения катодного тока, составляет около 1 кВт, а в случае усилителя
со скрещенными полями большой мощности для надежной синхронизации
может потребоваться мощность источника ВЧ возбуждения порядка 50 кВт.
При этом период нарастания сигнала высокой частоты, в течение которого
лампа оказывается уже включенной, но не засиихрояизированной, может быть
довольно большим. Поэтому при постоянном напряжении питания быстрое
23
Гл. 1. Радиолокационные передатчики
нарастание импульса ВЧ возбуждения желательно для снижения уровня шума
на выходе лампы в течение периода запуска.
Важным свойством, присущим всем усилителям со скрещенными полями,
является то, что паразитный шум на выходе лампы в пределах рабочей
полосы частот всегда уменьшается, когда уровень ВЧ возбуждения возрастает
по отношению к его минимальному значению. Поэтому увеличенному отноше-
нию сигнал/шум соответствует более низкое усиление, а наиболее высокий
коэффициент усиления соответствует наименьшему отношению сигнал/шум. Та-
кое обратное соотношение между уровнем шума и усилением имеет очень
большое значение, так как обычно паразитный шум в полосе 1 МГц на выходе
усилителя со скрещенными полями должен быть на 30—60 дБ ниже полной
Рис. 10. Согласование соединительного кабеля для
усилителя со скрещенными полями, работающего
при постоянном напряжении питания.
выходной мощности.
Небольшие потери, вно-
симые в усилителях со скре-
щенными полями между вы-
сокочастотным входом и
высокочастотным выходом
в отсутствие напряжения от
модулятора, дают возмож-
ность легко осуществить
программированное ступен-
чатое изменение уровня вы-
ходной мощности цепочки
усилителей со скрещенными
полями [36]. В типичной
цепочке, состоящей из двух
каскадов усилителей со
скрещенными полями, перед
которыми включена лампа бегущей волны, можно создать три разных уров-
ня выходной мощности простой сменой модуляторов, на которые подается
импульс. Программирование уровня мощности особенно целесообразно в трех-
координатных РЛС обнаружения, так как дает возможность экономить по-
требляемую среднюю мощность, снижая импульсную выходную мощность
при больших углах места.
Программирование уровня мощности возможно также в усилителях со
скрещенными полями с управляющим электродом при постоянном напряже-
нии питания, как это было впервые продемонстрировано фирмой SFD в
1969 г. Напряжение на управляющий электрод подается в течение всего
импульса, и лампа не включается; в этих условиях отсутствует также пара-
зитный шум повышенной интенсивности. Однако вследствие различных тре-
бований к длительности импульса и времени нарастания обычно для выклю-
чения импульса и для поддержания лампы в выключенном состоянии на ин-
тервале просачивания мощности используются раздельные модуляторы упра-
вляющего электрода.
При программировании уровня мощности от импульса к импульсу для са-
мовыключающихся усилителей со скрещенными полями (без управляющего
электрода) добавляется переключающая лампа, эквивалентная импульсному
модулятору питания катода. В этом случае теряются все преимущества само-
выключающихся усилителей.
Благодаря небольшим потерям, вносимым усилителем со скрещенными по-
лями, мощность, отраженная на его выходе, попадает обратно через лампу на
ее вход; в ряде случаев поступающая на вход мощность, отраженная от вы-
хода, может даже превзойти мощность возбуждения. Таким образом, в це-
почке из усилителей со скрещенными полями необходимо устанавливать соот-
ветствующим образом рассчитанные вентили (см. § 1.5).
Благодаря малым потерям, вносимым усилителем со скрещенными полями
н в обратном направлении, можно включать антенный переключатель РЛв
24
1.2. Лампы со скрещенными полями (типа М)
перед усилителем и принимать эхо-сигиал от цели через усилитель с незначи-
тельными потерями на прием. На первый взгляд может показаться, что при
таком включении мощность, которую должен пропускать антенный переклю-
чатель, уменьшится в число раз, равное коэффициенту усиления усилителя.
Однако при правильном учете мощности, попадающей на вход усилителя
в обратном направлении в результате отражений в этом усилителе и рассогла-
сования нагрузки на его выходе, выявлено, что схема включения антенного
переключателя перед усилителем обладает очень незначительными преимуще-
ствами.
Кроме этого, некоторые рассмотренные выше проблемы, связывавшиеся
долгое время лишь с работой магнетронов, присущи также работе усилителей
со скрещенными полями. К ним относятся искрение, изменение типа колеба-
ний, шумовые кольца, паразитный высокочастотный выходной сигнал и высо-
ко (асгогная утечка. Существенное отличие усилителя со скрещенными полями
с импульсным питанием катода заключается в том, что изменение типа коле-
баний минимизируется при предельном увеличении скорости нарастания на-
пряжения. Так как высокочастотное возбуждение все время подается, возник-
новение требуемого типа колебаний не запаздывает во времени; однако коле-
бания типа л имеют конечное время возникновения и, если изменяющееся
напряжение достаточно быстро проходит интервал, в котором они могут воз-
никнуть, их энергия окажется незначительной. В правильно рассчитанном
усилителе со скрещенными полями при постоянном напряжении питания ко-
лебания типа л вообще не возникают, так как напряжение в течение всего
времени сохраняет полное свое значение.
Возвратные усилители со скрещенными полями обратной волны. Ампли-
трон фирмы Raytheon стал первым успешно используемым усилителем со
скрещенными полями. В наиболее распространенном типе таких усилителей
замедляющая структура очень похожа на структуру магнетрона, за исключе-
нием того, что она не является резонансной и разрезана так, чтобы можно
было обеспечить ее присоединение со стороны как входа, так и выхода [51,
65]. Амплитрон был также первым усилителем со скрещенными полями, ко-
торый работал с холодным катодом. При этом ток катода возникал за счет
мощности ВЧ возбуждения. Обнаружено это было случайно: амплитрон был
включен без подогрева и тем не менее работал. Был получен высокий к. п. Д-,
достигающий 80%, поэтому небольшая лампа могла работать с высокой
выходной средней мощностью. Для получения таких параметров иногда тре-
буется водяное охлаждение катода (см. рис. 2). Электрическая длина ампли-
трона чрезвычайно мала, обычно 600°, благодаря чему фазовый набег между
его входом и выходом очень мало меняется при переходе от холодного
(в отсутствие тока катода) к горячему режиму. Поэтому стабильность фазы
очень высокая, обычно 0,5° на 1% изменения тока анода.
Несмотря на малую электрическую длину лампа имеет достаточно боль-
шой коэффициент усиления, так как область дрейфа отсутствует, и рассчитана
так, что возвратные группы электронов повышают усиление. Коэффициент
усиления амплитрона в режиме максимальной выходной мощности обычно
составляет только 6—12 дБ, однако этого достаточно, чтобы к. п. д. пере-
датчика определялся по существу к. п. д. последнего каскада. При понижен-
ной мощности можно получить коэффициент усиления вплоть до 16 дБ, что
достаточно для каскада, предшествующего выходному. Были разработаны
также усилители со скрещенными полями обратной волны с длинной замед-
ляющей структурой и с областью дрейфа (фирмой SFD Laboratories). Им-
пульсная мощность такой лампы в диапазоне С (типа SFD-222) составляет
1 МВт при коэффициенте усиления 17 дБ в 6,5%-ной полосе и к. п. д. 45%.
Использование возвратного усилителя со скрещенными полями обратной
волны в качестве генератора. Амплитрон был использован также в качестве
самовозбуждающегося генератора — стабилитрона [65]. Стабилитрон состоит
из амплитрона с объемным резонатором, присоединенным к нагрузке на его
S5
Гл. I. Радиолокационные передатчики
входе, и с устройством рассогласования в точке соединения выходной на-
грузки. Рассогласование на частоте резонатора достаточно велико на обоих
концах для поддержания колебаний; колебания возбуждаются собственным
шумом лампы. В случае перестройки резонатора с целью изменения рабочей
частоты необходимо подстроить фазовращатель, чтобы поддерживать фауу
отраженного сигнала, необходимую для поддержания колебаний. Резонатор
и фазовращатель можно спарить для получения одноручечн.>й настройки
(они нс заменяются при смене лампы).
Кою а добротность резонатора достаточно велика, стабильность частоты
стабилитрона может быть выше стабильности частоты аналогичного магне-
трона. Однако чем выше добротность, тем длительнее время запуска, в тече-
ние которого лампа ведет себя как плохо стабилизированный генератор, так
как напряжение на резонаторе растет. Поэтому существует предельное значе-
ние добротности резонатора, выше которого эффективная стабильность, усред-
ненная в пределах длительности импульса, не увеличивается и может даже
уменьшиться. Существует, по-видимому, оптимальное значение добротности,
связанное с длительностью импульса, рабочей частотой и степенью связи
с резонатором. Другое практическое ограничение увеличения добротности
определяется размерами и стоимостью резонатора. Кроме того, повышение
добротности резонатора, работающего при большой мощности, увеличивает
опасность пробоя и (пли) возникновения рентгеновского излучения в вакуум-
ном резонаторе.
На более низких частотах уменьшение ухода частоты и затягивания ча-
стоты стабилитрона не дает выигрыша из-за шума при запуске Выигрыш,
получаемый по сравнению с магнетроном, должен оцениваться с учетом повы-
шения сложности конструкции, размеров и стоимости стабилитрона. Стабили-
зированные Магнетроны, разработанные после появления стабилитронов, обла-
дают теми же достоинствами, что стабилитроны, но являются более просты-
ми приборами.
Невозвратные лампы со скрещенными полями обратной волны. Генератор
обратной волны типа М (карсинотрон). Так как частота, при которой элек-
троны находятся в синхронизме с обратной волной, прямо пропорциональна
напряжению между анодом и катодом, можно создать генератор, управляе-
мый напряжением, в котором использовано усиление обратной волны. Наи-
более распространенный тип генератора обратной волны типа М был впервые
разработан в 1949 г. французской фирмой CSF (Всеобщая компания радио-
телеграфии), названный карсинотроном [51, 92]. В нем использованы инжек-
тированный луч, неэмиттирующая основа катода и круглая, но не возвратная
конструкция. В известном смысле генератор обратной волны типа М являет-
ся невозвратным нерезонансным аналогом магнетрона, перестраиваемого на-
пряжением. Мощность существующих генераторов обратной волны типа М
доходит до нескольких сот ватт непрерывного излучения в пределах 30%-ной
полосы частот, причем они широко применяются в станциях искусственных
помех и в качестве перестраиваемых напряжением источников мощных ко-
лебаний. Однако генераторы обратной волны типа М. большой мощности для
радиолокационных передатчиков не разрабатывались, так как выходная мощ-
ность таких генераторов сильно меняется при перестройке, а также из-за от-
носительной сложности и довольно низкого к. п. д.
Усилитель обратной волны типа М (битермитрон). Генератор обратной
волны типа М можно использовать также в качестве усилителя мощности,
так как потери, вносимые им, не превышают примерно 1 дБ. Если выходной
сигнал генератора обратной волны типа М подать на вход другого такого же
генератора, он будет вести себя как синхронизированный генератор и доба-
вит 3 дБ мощности Генератор, использованный в таком режиме, является
невозвратным усилителем обратной волны типа М, называемым битермнтро-
ном. Устойчивая синхронизация достигается в том случае, когда собственная
частота усилительной лампы достаточно близка к частоте возбуждения.
2&
1.2. Лампы со скрещенными полями (типа М)
Диапазон частот, в котором битермитрон синхронно работает при заданном
питающем напряжении, называется шириной полосы синхронизации. Хотя
может быть получено усиление, превышающее 3 дБ, вплоть до 20 дБ, ширина
полосы синхронизации оказывается при этом настолько незначительной, что
подобрать значения параметров битермитрона и канала возбуждения, которые
обеспечивали бы синхронную работу, становится очень трудно. Бптермитроны
не разрабатывались для радиолокационных передатчиков большой мощности
по существу по гем же причинам, что и генераторы обратной волны типа М.
Возвратные лампы прямой волны. Ряд особенностей возвратных усили-
телей со скрещенными полями прямой волны приобретает особенную значи-
мость для систем небольшой массы. Хотя их к. п. д. не столь высок, как
у амплитронов, он выше, чем у большей части ламп с прямолинейным элек-
тронным лучем (типа О) и у невозвратных усилителей обратной волны, а ко-
эффициент усиления обычно несколько больше, чем у амплитронов Так как
они являются устройствами прямой волны, рабочее напряжение, как это вид-
но из частотно-фазовой характеристики па рис. 4, практически не меняется
в пределах всей рабочей полосы частот. В них используются, как и в ам-
плитронах, холодные катоды, иногда охлаждаемые водой.
Действие управляющих электродов при постоянном напряжении питания
было впервые успешно продемонстрировано в лампах этого типа в 1960 г.
Слабая зависимость частоты от напряжения питания в лампе прямой волны
позволяет быстро менять частоту при постоянном питающем напряжении.
Так, например, рабочее напряжение усилителя со скрещенными полями прямой
волны меняется при неизменном токе приблизительно на 1% в 10%-ной поло-
се частот, а динамическое сопротивление может быть порядка 1% от стати-
ческого. Поэтому при питании от источника постоянного напряжения ток,
потребляемый лампой, будет меняться в пределах всей полосы частот не бо-
лее чем на 10%.
В 1968 г. в возвратных усилителях со скрещенными полями прямой волны
был осуществлен режим самовыключения [170] Это было выполнено на мо-
дифицированном усилителе со скрещенными полями типа SFD-237 с управля-
ющим электродом путем подачи на управляющий электрод постоянного на-
пряжения смещения, равного половине напряжения между катодом и ано-
дом. При таком использовании управляющего электрода он называется сме-
щающим электродом. Лампа включается и выключается при подаче и снятии
высокочастотного возбуждения, причем переходный режим длится не более
5 нс Исследование паразитного шума на спектроанализаторе показало, что
уровень его на 35—55 дБ меньше уровня, обычного для других типов усили-
телей со скрещенными полями. К. п. д. лампы составляет 35—45%. В отли-
чие от обычных усилителей со скрещенными полями ее анодный ток и выход-
ная мощность значительно меняются с изменением уровня ВЧ возбуждения.
Во включенной лампе электронный ток смещающего электрода достигает 25%
тока катода, так что практически лампа является только частично возврат-
ной. Перегрев смещающего электрода может ограничить предельно допусти-
мый коэффициент заполнения импульсов (а не частоту повюрения, как в уси-
лителях со скрещенными полями с управляющим электродом). В тех пределах,
в которых лампа позволяет работать в возвратном режиме, ее к. п. д. выше,
чем у дематрона.
Чувствительность по фазовой модуляции усилителей со скрещенными по-
лями прямой волны мала, однако не в такой степени, как амплитронов, бла-
годаря большей общей электрической длине ламп прямой волны. Типичным
для них значением электрической длины является 5000°, так что на 1 % изме-
нения тока фаза меняется приблизительно на 2° [38].
Невозвратные лампы прямой волны с инжектированным лучом. В конце
40-х годов [7, 22, 23] были выполнены работы по созданию невозвратных
усилителей со скрещенными полями прямой волны (ТРОМ), названных лам-
пами типа М (рис. 11). Этот вариант лампы имеет много общего с карспно-
27
Гл. 1. Радиолокационные передатчики
тронами, включая и его структуру. В лампе типа М используются инжектиро-
ванный луч, анод под сравнительно небольшим напряжением в качестве уп-
равляющего электрода и неэмиттирующая основа катода. Хотя по существу
Эта лампа является линейным прибором с плоским ленточным электронным
лучом, ей была придана круглая форма, более удобная для приложения маг-
нитного поля. Импульсная мощность лампы составляет 4 МВт при 10 кВт
средней мощности в 15%-ной полосе на частоте 3 ГГц. Рабочее напряжение
85 кВ, к. и. д. 50% и коэффициент усиления 15 дБ. Диаметр корпуса лампы
равен примерно 30 см, а масса без магнита около 40 кг [5]. Несколько позже
такое же устройство было использовано в качестве усилителя со скрещенными
полями средней мощности с коэффициентом усиления 30 дБ для возбуждения
।_______________________।
О 10 20 30 СМ
Рис 11 Невозвратный усилитель со скрещенными полями прямой волны (типа М) (51.
более мощных усилителей со скрещенными полями. Эта лампа получила
фирменное название биматрон (сокращение наименования beam-injection mag-
netron amplifier), и имела линейную форму (прямые параллельные анод и
основа катода), как показано на рис. 12.
Усилители со скрещенными полями с инжектированным лучом не пред-
ставляют особого интереса в качестве мощных выходных каскадов радиоло-
кационных систем, так как вследствие ограниченной эмигрирующей поверхно-
сти катода они должны работать при более высоких ускоряющих напряже-
ниях (и, следовательно, при более значительном рентгеновском излучении),
чем усилители со скрещенными полями с распределенной эмиссией. Благода-
ря этому характерные преимущества усилителей со скрещенными полями
перед лампами с прямолинейным электронным лучом (типа 0) в данном
случае снижаются. Достоинствами усилителей с инжектированным лучом в ка-
честве каскада промежуточного усиления являются его более высокий, чем
у других типов усилителей со скрещенными полями, коэффициент усиления и
удобства, создаваемые управляющей сеткой, а недостатком его — необхо-
димость в горячем каточе. По сравнению с лампой бегущей волны он меньше
и имеет более высокий к.п.д., однако его коэффициент усиления меньше,
а шум больше. Таким образом, параметры усилителя со скрещенными поля-
ми с инжектированным лучом являются промежуточными между параметра-
ми ламп бегущей волны • и типовых усилителей со скрещенными полями,
поэтому он может найти применение в ряде специальных случаев,
28
1.2. Лампы со скрещенными полями (типа М)
Невозвратные лампы прямой волны с распределенной эмиссией. В 1962 г.
при реализации программы создания сверхмощных устройств (см. § 1.7)
в США была начата разработка линейного усилителя со скрошенными по-
лями'прямой волны с распределенной эмиссией, названного дематроном (со-
кращенное distributed emission magnetron amplifier). В этой разработке воз-
врагные элекгроны были исключены, чтобы катодный ток не только появлял-
Выход
Ускоряющий
электрод
Вход
Замедляющая
структура
I—Соладителе
Скорость
распространения Волн
Основа
калсода
\Js Электронный луч
Электронная скорость
пушка электронод
Рис. 12. Бимагрон.
I Коллектор
ся при подаче высокочастотного возбуждения, но и прекращался с его вы-
ключением. К удивлению многих, разработка прошла успешно, и появилась
первая лампа с полностью автономной импульсной модуляцией, питаемая
постоянным напряжением. Существовали опасения, что, поскольку высоко-
частотная замедляющая структура лампы имеет большую длину, лампа прж
наличии отражений на входе и выходе сможет продолжать работать при сня-
Вход ВЧ
Выход ВЧ
Замедляющая структура
I Электронный
поток
Коллектор
Холодный катод
, высоко-
— долотный
КП
Неэмиттарующая
основа катода
Рис. 13. Демагрон с неэмпттирующей основой катода у выходного конца.
тии ВЧ возбуждения как генератор с самовозбуждением. Однако лампа аа»
дежно выключалась даже при подключении нагрузки, соответствующей КСВЦ
порядка 3. Поэтому не требуется ни управляющий электрод, ни какой бы тЖ
ни было модулятор; однако все замечания, относящиеся к режиму работы in
постоянном напряжении, сохраняют свою силу и в этом случае, включая нео£
ходимость в защитном разряднике.
Так как управляющий электрод отсутствует, частота повторения импуль-
сов не ограничена и без особого труда работа может производиться очень
сложными импульсными посылками, состоящими из коротких импульсов (см,
§ 1.9). Простота этого устройства достигается за счет пониженного по срав-
нению с возвратными усилителями со скрещенными полями к. п. д.а так каж
а»
Гл. 1. Радиолокационные передатчики
электроны, не отдающие всей своей энергии высокочастотной волне за один
яроход, собираются коллектором. Для того чтобы снижение к. п. д. было ми-
нимально возможным, эмиггирующий катод ае занимает всю длину лампы.
Около выходного конца лампы часть катода заменяется неэмиттнруюшей
основой Фрис. 13), так как электроны, излучаемые вблизи выходного конца,
имеют мало шансов на полное взаимодействие до того, как попасть на коллек-
тор Время спадания импульса сравнимо с временем нарас1ания и составляет
несколько наносекунд. Номинальная импульсная мощность дематрона тина
L3968 фирмы Litton составляет 100 кВт при коэффициенте заполнения 0,005
с 8%-ной полосой в диапазоне X и коэффициенте усиления 15 дБ. Номиналь-
ная импульсная мощность дема трона типа L5111 равна 1 МВт при коэффи-
циенте заполнения 0.005 с 10%-ной полосой в диапазоне С и коэффициентом
усиления 13 дБ. Длина этих ламп необычно велика для усилителей со скре-
Нис. 14. Блок из четырех дематронов. *
Видны линейная структура и небольшое поперечное сечение дематронов.
[ценными полями и составляет около 13 000 электрических градусов, однако
их чувствительность по фазовой модуляции тем не менее мала и обычно не
превышает Г на 1% изменения тока. Это объясняется, по-видимому, тем, что
большая часть структуры служит только для увеличения тока эмиссии до
уровня, при котором может появиться усиление. С этим отчасти связано и то,
что использованный тян замедляющей структуры не позволяет получить на
выходе лампы такую же среднюю мощность, какая характерна для других
типов усилителей со скрещеаными полями. Типичное значение к. п. д. для де-
матрона 30%.
Прямолинейная форма дематрона позволяет монтировать лампу вместе
с постоянным магнитом и соответствующей магнитной экранировкой в длин-
ном тонкостенном корпусе с относительно небольшим поперечным сечением
(рис. 14), благодаря чему они moiут быть очень плотно смонтированы в слу-
чае их использования в качестве элементов возбуждения фазированных ан-
тенных р.щеток.
39
1.3. Лампы с прямолинейным электронным лучом (типа О)
1.3. Лампы с прямолинейным электронным лучом (типа О) -
Как видно из табл. 3, разнообразие типов ламп е прямолинейным элек-
тронным лучом также достаточно велико. Чтобы луч не расходился ва всем
пути вдоль лампы, в лампах с прямолинейным электронным лучом исполь-
зуется магнитное поле, ось которого совпадает с осью луча (либо- электроста-
тические линзы на оси луча, как в клистроне с электростатической фокуси-
ровкой) В этих лампах вся потенциальная энергия электрического ноля пе-
редается электронам до того, как они попадают в поле высокой частоты;
эта энергия преобразуется в кинетическую энергию электронов В нростран-
Та&дица. 3
Примечание \УШЗ-»клиетрон с удлиненным пространством взаимодействия;
МИК — многолучевой клистрон; КЭФ — ллистрон с электроста шческой фокусировкой;
ЛБВ— л-гмпа бегущей волны: УОВ —усилитель обратной волны: ГОВ —.генератор обрат-
ной волны: МЛКБВ — миоголучевой клистрон бегущей волны
стве взаимодействия (в «корпусе» лампы) высокочастотные, поля замедляю-
щей структуры ускоряют или замедляют электроны в зависимости от их фазо-
вых отношений с высокочастотным полем, благодаря чему они группируются
в процессе дрейфа вдоль корпуса (термин «дрейф» может показаться стран-
ным в. применении к электронам, пролетающим со> скоростью, составляющей
заметную часть скорости света, однако все в мире относительно). Эти груп-
пы электронов, в свою очередь, наводят интенсивные высокочастотные поля
на конце замедляющей структуры, генерируя требуемую выходную ВЧ мощ-
ность. В процессе передачи энергии высокочастотному полю электроны- замед-
ляются [3J.
При прохождении их вдоль корпуса лампы все электроны улавливаются
коллектором независимо от того, отдали ли они всю кинетическую энергию
высокочастотному полю или нет. В действительности же электроны, которые
находятся не в фазе с полем, получают энергию от высокочастотного ноля
на выходном конце лампы, причем некоторые из них приобретают энергию,
соответствующую удвоенному рабочему напряжению лампы. Хотя эти ламиы
являются невозвратными, при использовании коллектора с пониженным, на-
пряжением в них возможно сохранение энергии.
При конструировании ламп с прямолинейным электронным лучам ма-
жет быть проявлена большая гибкость, так как формирование луча, взаимо-
действие с высокочастотным полем и рассеяние мощности происходит в раз-
31
Г л. 1. Радиолокационные передатчики
ных, практически взаимонезависимых пространствах. Такое разделение функ-
ций дает возможность генерировать с помощью этих ламп более высокую
Импульсную и среднюю мощность, чем с помощью любых других типов высо-
кочастотных ламп.
Электронные пушки. Хотя распределенная эмиссия, используемая в уст-
ройствах со скрещенными полями, здесь не используется, были достигнуты
большие успехи в разработках фокусирующих электронных пушек, в которых
цлощадь катода приблизительно в 100 раз больше площади сечения луча
6 пространстве взаимодействия (в «корпусе» лампы). Тем не менее лампы
Рис. 15. Зависимость ускоряющего напряжения и юка луча лампы с прямолинейным
электронным лучом от мощности луча и первеанса.
с прямолинейным электронным лучом должны работать при 6cyiee высоких
напряжениях, чем лампы со скрещенными полями, гак как даже в случае
очень высокой сходимости луча достижимое значение первеанса лампы отно-
сительно мало. Первеансом называется коэффициент К в формуле для эмис-
сии электронной пушки, ограничиваемой пространственным, зарядом, /=КЕ’3/2.
Для коэффициента К введена единица измерения «мнкроперв» (microperv),
причем 1 микроперву соответствует А=1-10~6. Для получения тока 1 А
в электронной пушке с типичным значением первеанса, равным 1 микроперву,
требуется 10 кВ, а для 31 А необходимо 100 кВ, Так как ток луча и напря-
жение пушки связаны нелинейным соотношением, для определения зависимо-
сти напряжения и тока лампы с прямолинейным электронным лучом от мощ-
ности луча и первеанса удобно пользоваться рис. 15.
Из-за более низкого к. н. д. лампы с прямолинейным электронным лучом
требуется более высокое напряжение, чем для усилителя со скрещенными
полями, так как для получения заданной ВЧ мощности входная мощность
должна быть больше. Типовой усилитель со скрещенными полями на 1 МВт
импульсной мощности потребляет пиковый ток 50 А при напряжении 40 кВ,
а ДЛя типовой широкополосной лампы с прямолинейным электронным лучом
требуется при той же выходной мощности напряжение 90 кВ при пиковом
токе 40 А. Предельное значение первеанса лампы с прямолинейным электрон-
ным лучом определяется допустимыми с точки зрения пробоя расстояниями
32
1.3. Лампы с прямолинейным электронным лучом (типа О)
между электродами и допустимой с точки зрения срока службы плотностью
тока катода [17]. В правильно рассчитанной лампе срок службы активиро-
ванного катода при плотности пикового тока, не превышающей нескольких
ампер на 1 см2, достигает 50 000 ч. Оксидные катоды имеют такой же срок
службы, однако их эмиссия падает к концу длинного импульса и они легче
разрушаются. Подогреватель катода чаще является причиной выхода лампы
из строя, чем потеря эмиссии, так как вольфрамовым подогревателям прису-
ще определенное время износа. Они кристаллизуются и теряют прочность
со скоростью, зависящей от рабочей температуры. Оксидные катоды в этом
отношении лучше, так как они работают при более низкой температуре.
Рис. 16. Электронные пушки для лампы с прямолинейным электронным лучом большой
мощности:
а — обычная пушка; б — магнетронная пушка [5].
В случае обычного сплошного луча несколько снижается к. п. д. из-за
более слабой связи между высокочастотной структурой и электронами в цен-
тре луча, а также из-за неодинаковой скорости электронов в луче, обуслов-
ленной его разгруппированием вследствие эффекта пространственного заряда.
Этот недостаток может быть в значительной степени устранен при использо-
вании полого луча, однако получить хорошую сходимость такого луча значи-
тельно труднее. Удачным компромиссным решением является «квазиполый»
луч (плотность которого убывает к центру) с первеансом 3 микроперва
в серийных лампах и 5,5 микроперв в экспериментальных [17].
Магнетронная инжекционная электронная пушка, изображенная на
рис. 16, была изобретена в 1947 г., однако до 1960 г. она не находила успешно-
го применения. По принципу устройства она отлична от обычной электронной
пушки (рис. 16). В магнетронной инжекционной пушке [5] кольцеобразное
облако пространственного заряда в запертом диоде магнетрона используется
в качестве действующего катода, а электроны ускоряются аксиальной состав-
ляющей электрического поля и образуют полый луч. В клистроне типа Х832
фирмы Eimac с магнетронной инжекционной пушкой было достигнуто значе-
ние первеанса, равное 7 микропервам, однако проектировать такое устройство
очень трудно. Наиболее сложной задачей является шум, ограничивающий
отношение сигнал/шум на выходе лампы. Шум в полосе 1 МГц на выходе
мощных ламп с прямолинейным лучом, в которых использованы обычные
электронные пушки, на 80—100 дБ ниже общей мощности на выходе (неза-
висимо от того, подается или нет высокочастотное возбуждение, хотя
33
Гл. 1. Радиолокационные передатчики
часто это отношение оказывается меньше из-за шума самого источника
высокочастотного возбуждения (см. § 1.5)). В дампах же с магнетронной
пушкой отношение сигнал/шум в полосе 1 МГц колеблется от 30 до 70 дБ
в зависимости от того,- насколько удачна конструкция пушки.
Так как катод не находится в пространстве взаимодействия, он практи-
чески не подвергается обратной бомбардировке; с другой стороны именно
поэтому в лампах с прямолинейным лучом невозможен режим работы с хо-
лодным катодом (см. § 1.2).
Рентгеновские лучи и экранировка. Рентгеновское излучение ламп с пря-
молинейным лучом значительно сильнее, чем усилителей со скрещенными по-
лями, так как проникающая способность рентгеновских лучей очень быстро
увеличивается при напряжениях, превышающих приблизительно 30 кВ. Рент-
геновское излучение ламп с прямолинейным лучом обычно увеличивается при
подаче ВЧ возбуждения, так как энергия части электронов возрастает в ре-
зультате неблагоприятного взаимодействия с высокочастотным полем. Наи-
большее рентгеновское излучение наблюдается на краю полосы, или при пе-
регрузке. В соответствии с приближенным эмпирическим правилом интенсив-
ность рентгеновского излучения на расстоянии 1 м составляет примерно
1Р/ч на каждый киловатт входной мощности луча при напряжении 140 кВ.
Во избежание опасного излучения ламп средней мощности с прямолинейным
лучом можно использовать внутренний свинцовый экран, однако для ламп
большой мощности обычно требуется внешний свинцовый кожух [88, 89].
Замедляющие структуры. Как и в устройствах со скрещенными нолями,
в лампах с прямолинейным лучом применяются замедляющие структуры раз-
ных типов, в соответствии с которыми лампы получают свои наименования,
как, например, многорезонаторный магнетрон, лампа бегущей волны (ЛБВ)
и т. д. Однако в последние годы различия между отдельными типами ламп
стали менее отчетливыми. Так, например, в лампах бегущей волны иногда
используется ряд связанных объемных резонаторов, а в клистронах начинают
применять для увеличения связи с лучом сдвоенные или строенные объемные
резонаторы, обеспечивающие «удлиненное взаимодействие». Имеется также по
существу гибридное устройство — твистрон В результате классификация
клистронов и ламп бегущей волны по категориям с ясными различительными
признаками является трудной задачей [18].
Фокусировка [5]. При прохождении плотного электронного луча через не-
большое отверстие в замедляющей структуре расталкивающее действие про-
странственного заряда должно приводить к расширению луча. В лампах
малой мощности это явление можно частично или полностью нейтрализовать,
если оставить в лампе некоторое количество газа. При этом положительно
заряженные ионы, образующиеся в результате столкновений молекул газа
с электронами, нейтрализуют пространственный заряд. Это называется ион-
ной фокусировкой. В лампах большой мощности ионная фокусировка не мо-
жет быть использована, так как при необходимых для нее давлениях газа
возникли бы пробои и (или) интенсивная ионная бомбардировка катода.
Кроме того, она не может быть использована в лампах с импульсным воз-
буждением, так как при включении луча образование ионов происходит
с запаздыванием.
В лампах большой мощности наиболее употребительной является магнит-
ная фокусировка. Теоретически наименьшее аксиальное поле, обеспечивающее
требуемую фокусировку при заданных напряжении и токе луча, называется
полем Бриллюэна. Это поле позволяет минимизировать мощность электромаг-
нита или размеры постоянного магнита. Однако при использовании поля
Бриллюэна необходимо, чтобы весь катод был вне магнитного поля, так как
пространство вблизи катода в этом случае очень чувствительно к внешним
магнитным полям, если только не предусмотрена его магнитная экранировка.
9 Название, введенное фирмой Varian Associates.
34
1.3. Лампы с прямолинейным электронным лучом (типа О)
Кроме того, при минимальной интенсивности поля диаметр луча может при
высоких уровнях ВЧ сигнала увеличиться почти в два раза, поэтому расчет-
ное значение диаметра луча должно быть вдвое меньше. Хотя поле Бриллюэ-
на (или близкое к нему) было успешно использовано во многих лампах боль-
шой мощности, его осуществление в известной мере критично.
Часто применяются поля, в два — три раза превышающие поле Бриллюэ-
на, так как при этом луч значительно меньше расширяется при подаче ВЧ
возбуждения. В этом случае катод должен частично находиться в магнитном
поле, что обычно осуществляется увеличением отверстия в полюсном наконеч-
нике магнита. Иногда для регулировки поля в пространстве катода, с целью
обеспечения более однородного потока электронов, за главным полюсным на-
конечником устанавливается соленоидная компенсационная катушка. С этим
видом фокусировки связаны различные наименования луча — иммерсионный,
ограниченный или однородный.
Требуемое магнитное поле можно создать с помощью внешнего соленои-
да, или, с целью минимизации мощности, подводимой к соленоиду, нанесени-
ем обмотки непосредственно на лампу. В больших лампах по экономическим
соображениям обычно применяются внешние соленоиды. При этом упро-
щается обслуживание, если приняты меры к тому, чтобы любая из ламп
входила в любой соленоид. В случае приобретения лампы и соленоида у раз-
ных поставщиков легко могут возникнуть трудности, связанные с определени-
ем юридической ответственности поставщиков за плохую работу лампы.
Большой интерес представляют постоянные магниты, так как они не тре-
буют ни расхода мощности, ни охлаждения. Отпадает также необходимость
в различных защитных устройствах, обеспечивающих невозможность включе-
ния лампы в отсутствие требуемого магнитного поля. Однако постоянные маг-
ниты сравнительно редко используются с мощными лампами с прямолиней-
ным лучем, так как их проектирование является сложной задачей, они неде-
шевы и для обеспечения точного управления фокусировкой луча регулировка
их менее удобна (длинный соленоид можно разделить на секции с независи-
мой регулировкой тока в каждой из них с тем, чтобы оптимизировать прохо-
ждение луча, усиление и стабильность). В случае применения одного посто-
янного магнита ему обычно придают для уменьшения количества магнитного
материала бочкообразную форму (с утолщением в средней части). Хорошим
примером является магнит для клистрона линейного ускорителя Стэнфордско-
го центра (рис. 32). Внешнее магнитное поле рассеяния бочкообразных маг-
нитов очень велико, причем любая попытка уменьшить его с помощью экрана
приемлемых размеров влияет на внутреннее поле, а внешнее поле соленоидов
незначительно, так как обычно используемая вокруг соленоида для замыка-
ния магнитного потока железная оболочка действует как экран. Кроме того,
в ряде случаев значительное повышение коэффициента полезного действия
в результате улучшенной фокусировки соленоидом полностью компенсирует
расход мощности на соленоид.
Лампы с прямолинейным лучом могут фокусироваться также с помощью
решеток или сборок из постоянных магнитов, как это описано в § 1.6 и по-
казано на рис. 31.
Возможна также периодическая фокусировка луча (в противополож-
ность непрерывной), осуществляемая рядом собирательных электронных линз
(см. стр. 48 о клистронах с электростатической фокусировкой). Требуемая
среднеквадратическая напряженность поля сравнима с полем Бриллюэна.
Хотя при этом диаметр луча в процессе прохождения через линзы все время
меняется (он всегда максимален в линзах и минимален между ними), воз-
можны приемлемые компромиссные решения. Так, например, поскольку луч
правильно фокусируется магнитным полем независимо от его полярности,
очень большие преимущества дает поочередное изменение полярности магни-
тов (рис. 17). При этом требуемое количество материала для постоянных
магнитов и внешнее поле уменьшаются на порядок. Лампа при таком bk.tkv
2*
35
Гл. 1. Радиолокационные передатчики
чении довольно чувствительна к внешним магнитным полям, но можно
применить экранировку, что обычно и делается. Кроме того, в процессе изго-
товления системы фокусирующее поле можно отрегулировать отбором или
юстировкой напряженности поля каждого из постоянных магнитов.
Одним из недостатков периодической фокусировки постоянными магнита-
ми является то, что периодическая система с малыми расстояниями между
Разрез по Х-Х
Мягкая ешль, омедненная S области
объемных резонаторов
Рис. 17. Периодический постоянный магнит, фокусирующий с чередующейся полярностью
магнитного поля (5].
Рис. 18. ЛБВ диапазона С с управляющей сеткой типа WJ-317 фирмы Watkins—Johnson
вместе с периодическим постоянным магнитом.
Вверху показано увеличенное изображение сетки.
36
1.3. Лампы с прямолинейным электронным лучом (типа О)
линзами не допускает значительного изменения тока луча и напряжения,
а с друI ой стороны близкое их расположение требуется во избежание боль-
ших колебаний диаметра луча. Поэтому в корпусе часто возникают большие
токи, особенно, если режим работы существенно отличается от расчетного.
Использование периодической фокусировки постоянными магнитами услож-
няет также проектирование лампы не только из-за изменений диаметра луча,
но и из-за того, что железные полюсные наконечники устанавливаются обыч-
но внутри трубки, а железо в 6 раз хуже проводит тепло, чем медь. Крона
того существует максимальный уровень мощности, при превышении которога
периодическая фокусировка постоянными магнитами не может быть приме-
нена. В диапазоне S получена импульсная мощность 1 МВт, причем как на
более высоких, так и на более низких частотах она уменьшается. Поскольку
для ламп с прямолинейным лучом с периодической фокусировкой постоянны-
ми магнитами требуется очень точная регулировка, они обычно поставляются
с укрепленными на них магнитами. Поэтому лампы и магниты раздельно не
заменяются.
В определенных пределах, как это будет ниже описано, возможна элек-
тростатическая фокусировка.
Управляющие электроды. В мощных лампах с прямолинейным лучом
может быть использована, как и в магнетронах, импульсная модуляция на
катод, однако для уменьшения размеров модулятора и потерь в нем более
целесообразно применение маломощного управляющего элемента. Идеальным
управляющим элементом является сетка с большим коэффициентом усиле-
ния, полностью включающая и выключающая ток луча при подаче на нее
небольшого импульсного напряжения. Такие сетки нашли широкое применение
в лампах с прямолинейным лучом малой мощности. Однако, поскольку для
получения высокого коэффициента усиления необходимо, чтобы проволоки
сетки были расположены в самом луче, существует предельная мощность, при
которой допустимо использование такой перехватывающей сетки. Этот пре-
дел определяется либо перегревом из-за слишком интенсивного перехвата,
либо тем, что из-за больших размеров сетки поток тепла должен пройти
слишком большой путь, пока он не достигнет охлаждаемого края. Кроме
того, так как сетка находится в луче, нарушается его однородность и затруд-
няется фокусировка. В результате оптимизации их размеров и конфигурации,
сетки с большим коэффициентом усиления были успешно применены на сред-
них уровнях мощности. На рис. 18 показана лампа бегущей волны диапазо-
на С на импульсную мощность 15 кВт и среднюю мощность 500 Вт и ее сет-
ка [21].
В 1964 г. разработана неперехвагывающая сетка [176, 177]. Исключи-
тельно малый перехват луча управляющей сеткой был достигнут путем раз-
мещения управляющей сетки в тени, создаваемой второй сеткой, называе-
мой защитной сеткой, расположенной у поверхности катода и работающей
при нулевом смещении. На рис. 19 показан общий вид лампы бегущей волны
диапазона С типа 634-Н с защитной сеткой [75] на импульсную мощность
75 кВт и среднюю мощность 2,6 кВт. Так как незначительному перехвату
соответствует небольшое рассеяние мощности на сетке, защитная сетка поз-
волит в дальнейшем применять сетки с большим коэффициентом усиления
даже в наиболее мощных лампах с прямолинейным лучом.
При составлении технических условий и конструировании мощных ламп
с прямолинейным электронным лучом с управляющей сеткой особое внимание
должно быть уделено поддержанию эмиссии сетки в допустимых пределах.
Это необходимо с точки зрения как режима модулятора, так и шума на вы-
ходе лампы в интервалах между импульсами. Эмиссия сетки возникает в ре-
зультате высокой рабочей температуры сетки, нагреваемой перехватываемы-
ми электронами и излучением катода. Хотя для уменьшения ее эмиссии сетка
обычно изготавливается из металла с большой работой выхода (пли покры-
вается таким металлом), существует опасность переноса на сетку материала
37
Гл. 1. Радиолокационные передатчики
катода при тренировке лампы или в процессе работы. Сетка или ее покрытие
могут быть также повреждены искрением.
В лампах, уровень выходной мощности которых слишком высок для того,
чтобы можно было использовать перехватывающую или защитную сетку, как
правило, применяются модулирующие аноды [41]. Так как лампа с прямо-
линейным лучом с модулирующим анодом выключается приблизительно при
нулевом смещении, обычно коэффициент усиления модулирующего анода
определяется как отношение всёго напряжения на лампе к размаху напря-
жения на модулирующем аноде относительно нуля, требуемому для полного
включения лампы. Если довольствоваться коэффициентом усиления модули-
Рис. 19. ЛБВ диапазона С с защитной сеткой типа 634-Н фирмы Hughes без соленоида.
Вверху показано увеличенное изображение защитной и управляющей сеток.
рующего анода, равным единице, то модулирующий анод должен иметь по
существу такую же конфигурацию, какую имела бы входная часть корпусе
в области дрейфа в отсутствие модулирующего анода. Поэтому такой моду-
лирующий анод всегда легко осуществим. Так как модулирующий анод не
является перехватывающим электроны устройством, достижимый коэффициент
усиления не превышает несколько единиц, однако по той же причине уровень
выходной мощности, при котором допускается применение модулирующего
анода, не ограничен.
Примером несколько необычной лампы со сравнительно высоким коэф-
фициентом усиления является лампа типа L3707 фирмы Litton, в которой ис-
пользована магнетронная инжекционная электронная пушка, позволившая
получить чрезвычайно высокий первеанс относительно модулирующего анода,
равный 24 микропервам, и коэффициент усиления модулирующего анода, рав-
ный 4,5. Эта лампа работает при ускоряющем напряжении 180 кВ и токе
185 А при напряжении на модулирующем аноде не выше 40 кВ. Коэффициент
усиления лампы равен 36 дБ при импульсной выходной мощности 10 МВт
и средней выходной мощности 30 кВт в 8%-ной полосе диапазона L без пере-
38
1.3. Лампы, с прямолинейным электронным лучом (типа О)
стройки. В связи с применением в ней магнетронной инжекционной пушки
разработчиками этой лампы были затрачены большие усилия на устранение
избыточных шумов. Так как высокие значения коэффициента усиления моду-
лирующего анода нелегко достижимы, разработчики модуляторов предпочи-
тают выбирать этот коэффициент равным единице, причем они могут в этом
случае использовать в качестве источника напряжения для коммутации моду-
лирующего анода существующий высоковольтный блок питания лампы. Так
как модулирующий анод не перехватывает электроны, он потребляет в тече-
ние импульса небольшой ток от модулятора, который, в основном, заряжает
и разряжает паразитную емкость модулирующего анода в начале и конце
импульса.
Если модулирующий анод в мощных лампах в результате неправильного
расчета электронной пушки подвергается значительной бомбардировке элек-
тронами, то даже небольшая часть мощного электронного луча может его
очень сильно нагреть, в результате чего он покоробится или распла-
вится либо начнет эмиттировать электроны в интервалах между
импульсами со всеми последствиями, отмеченными выше в связи с эмиссией
сетки. Иногда нагрев модулирующего анода может явиться результатом не
плохой электронной оптики, а эмиссии фокусирующего электрода, охватыва-
ющего горячий катод. Хотя эмиссия фокусирующего электрода должна ог-
сутсгвовать, она может возникнуть при его нагреве, особенно если на его по-
верхность попадает материал катода при тренировке лампы или эксплуата-
ции Поскольку электроны с фокусирующего электрода распространяются за
пределами расчетного диаметра луча, они обычно нагревают модулирующий
анод.
Коллекторы. Коллектор должен собрать отработавший луч и поглотить
остаточную энергию электронов без каких-либо повреждений [5]. После того,
как луч покидает область фокусировки и подходит к коллектору, вполне до-
пустимо его расширение вследствие расталкивания пространственным зарядом,
Чтобы плотность мощности рассеяния была в допустимых пределах, необхо-
димо предусмотреть достаточное расширение луча до бомбардировки поверх-
ности коллектора. В случае слишком большого давления газа в лампе ионы
газа нейтрализуют влияние пространственного заряда и уменьшают степень
расширения луча. Распределение луча по коллектору легко проконтролировать
в лампах с рабочим напряжением, превышающим 50 кВ, нанеся на коллек-
тор рентгеновскую пленку или регистрируя его изображение камерой-обску-
рой, изготовленной из свинца [74]. Создание экономичной системы охлажде-
ния коллектора является, как и в случае охлаждения анодов ламп со скре-
щенными полями, очень сложной задачей, и его рассмотрение выходит за рам-
ки задач этого справочника. Для достижения большого срока службы в
случае водяного или водо-гликольного охлаждения коллектора вода должна
быть во избежание коррозии очень чистой (без ингибиторов) [76, 77].
Хотя во многих типах ламп коллектор не изолирован от корпуса лампы,
такая изоляция желательна, так как позволяет измерять ток через корпус,
возникающий в результате перехвата корпусом луча. Даже небольшой доли
энергии луча достаточно для повреждения корпуса. Такая изоляция является
важным защитным средством. Так как корпус всегда оказывается заземлен-
ным через высокочастотный вывод (изоляция вывода высокой частоты
возможна, но трудно осуществима при высоком уровне мощности), для изме-
рения токов через корпус необходимо, чтобы положительный полюс высоко-
вольтного блока питания был изолирован от земли. Обычно это не представ-
ляет особых затруднений, однако соответствующая защита измерительных
цепей должна обеспечиваться в условиях дугового разряда и срабатывания
защитного разрядника. Типичная схема такого включения приведена на рис. 44
Резистор R5 служит для измерения токов через корпус, а через конденсатор
С2 положительный полюс высоковольтного блока питания заземляется в ин-
тервале подачи импульса.
39
Гл. 1. Радиолокационные передатчики
В лампах с прямолинейным электронным лучом с более низких! к. п. д.
лишь небольшая часть электронов отдает всю энергию высокочастотному
полю на выходе, так что почти все электроны достигают коллектора с боль-
шой скоростью. Поэтому и в этом случае предпочтительнее улавливать элек-
троны изолированным коллектором, положительное напряжение на котором
ниже напряжения на корпусе. Так может быть восстановлена часть первона-
чально приобретенной электроном энергии, а входная мощность лампы умень-
шена. Хотя этот способ позволяет значительно увеличить к. п.. д. лампы, для
этого требуются отдельные источники питания для корпуса и коллектора,
в результате чего усложняются измерительные и защитные устройства. (Со-
противление в цепи коллектора могло бы обеспечить понижение напряжения на
нем, однако это свело бы на нет восстановление энергии электронного луча.)
Работа с пониженным напряжением на коллекторе усложняет также проек-
тирование лампы, так как электроны, не попавшие на коллектор (а также
встречные электроны, излученные коллектором), улавливаются корпусом, в ре-
зультате чего увеличиваются токи через корпус и рассеиваемая на нем мощ-
ность. Так как целесообразность режима работы с пониженным напряжением
на коллекторе зависит от остаточной энергии электронов, он наиболее приго-
ден для ламп с низким к. п. д. и его использование нецелесообразно в лампах,
к. п. д. которых и без понижения напряжения на коллекторе достигает 40%
и выше. Теоретически можно получить к. п. д., равный почти 100%, с по-
мощью многоэлементного коллектора, захватывающего электроны при опти-
мальных напряжениях на элементах, однако при числе элементов, превышаю-
щем один или два, усложнение схемы обычно сводит на нет эти преимущест-
ва. Иногда предусматривается вторая секция коллектора, в основном для
защиты корпуса от бомбардировки вторичными электронами, называемая
в этом случае вторичным коллектором.
Следует отметить, что независимо от того, находится ли коллектор при
пониженном напряжении или он только изолирован, параметры высокочастот-
ных колебаний определяются только напряжением на корпусе, с чем связаны
высокие требования к его стабильности, в то время, как напряжение на кол-
лекторе может в известных пределах меняться и не будет серьезно влиять на
работу лампы. Это позволяет уменьшить размеры батареи конденсаторов,
определяющих спад выходного импульса высокой частоты, и в случае необхо-
димости стабилизации ускоряющего напряжения ограничиться маломощным
стабилизатором в блоке питания корпуса. При подаче ВЧ возбуждения рас-
пределение токов луча между корпусом и коллектором меняется со скоростью,
определяемой временем нарастания сигнала высокой частоты, которое может
быть очень коротким. Для такого мгновенного перераспределения токов кор-
пуса и коллектора должно быть предусмотрено соответствующее соединение
между коллектором и корпусом, либо достаточно хорошее согласование и
демпфирование кабелей питания. В противном случае легко возникает «звон»
напряжения и соответствующая недопустимая фазовая и амплитудная моду-
ляция выходного сигнала.
В любой лампе с изолированным коллектором может появиться утечка ВЧ
энергии через изоляцию коллектора Эта утечка может нарушить стабильную
работу линейки высокочастотных усилителей либо вызвать нестабильность
самой лампы. Так как внешнюю защиту довольно трудно создать, предпочти-
тельнее ограничить утечку соответствующей конструкцией лампы. В этом слу-
чае необходимо использовать стандартный метод измерения утечки, в част-
ности, вполне подходит общепринятый метод обнаружения утечки с помощью
обычного рупора любого типа.
Ионные насосы. В результате работы лампы со скрещенными полями
остаточные молекулы газа ионизируются и собираются на металлических по-
верхностях лампы, где ионы газа захватываются Даже «натекающий» маг-
нетрон часто может восстановить работоспособность, так как в процессе его
40
1.3. Лампы с прямолинейным электронным лучом (типа О)
(заботы давление газа будет снижаться. В лампах с прямолинейным электрон-
ным лучом такой эффект «откачки» проявляется значительно слабее.
Вакуумный насос вакион фирмы Varian Associates состоит из структуры
со скрещенными полями (без высокочастотных цепей), предназначенной спе-
циально для откачки газа. Такие устройства стали непременной принадлеж-
ностью больших ламп с прямолинейным лучом. Они не только поддерживают
требуемый вакуум, но и могут использоваться в качестве токовых индикато-
ров давления газа в лампе. Местные перегревы внутри трубки, вызванные
различными разрегулировками, можно быстро обнаружить по соответствую-
щему повышению давления газа до того, как оно станет катастрофическим.
При срабатывании защитного шунтирующего разрядника давление газа мо-
жет увеличиться, если дуговой разряд произошел в лампе. Неизменность дав-
ления газа указывает на то, что либо защита разрядником чрезвычайно эф-
фективна. либо дуговой разряд возник где-то в другом месте. Желательно,
чтобы в больших лампах с прямолинейным лучом ионный насос работал не-
прерывно, даже тогда, когда лампа перевозится или хранится на складе. Это
необходимо не только для поддержания вакуума, но и для быстрого обнару-
жения его ухудшения. В процессе хранения активная поверхность катода
играет роль «геттера», выполняя те же функции, что и ионный насос, но при
первом включении накала происходит резкое увеличение давления газа до тех
пор, пока ионный насос его не снизит.
Защитные шунтирующие разрядники. Так как только коллектор рассчи-
тан на поглощение всей энергии электронного луча, то некоторые условия мо-
гут привести к мгновенному разрушению лампы с прямолинейным лучом, если
мощность блока питания не ограничена, как это сделано в линейных модуля-
торах, или если мощность не отводится достаточно быстро через шунтирую-
щий разрядник (см. § 1.16). Наиболее частой причиной аварии является ду-
говой разряд в лампе, однако защитный разрядник может потребоваться и
в случае внезапного прекращения тока через соленоид, а также когда моду-
лятор почему-либо не выключит лампу по окончании импульса. Так, например,
может возникнуть дуговой разряд между модулирующим анодом и корпусом,
не вызывающий сам по себе большого тока, но создающий условия, при кото-
рых модулятор может не выключить лампу.
Если лампа в течение длительного времени не включалась (например,
после перевозки), то первое время после включения в ней обычно наблюда-
ются дуговые разряды (это особенно относится к мощным лампам с высоким
напряжением). При непрерывной работе частота возникновения дуговых раз-
рядов уменьшается, поэтому защитный разрядник срабатывает в системе,
на холящейся в эксплуатации, не чаще одного раза в день, а иногда одного
раза в неделю и даже еще реже.
Хотя некоторые типы ламп с прямолинейным лучом средней и даже боль-
шой мощности были успешно разработаны без использования каких-либо
защитных разрядников, их выход из строя оказывался более частым. По мне-
нию автора, защитный разрядник обязателен в тех случаях, когда энергия
разряда блока питания и модулятора через лампу при возникновении дугово-
го разряда превышает примерно 50 Дж.
К- п. д. на краю полосы частот. Поскольку возможны различные опреде-
ления выходной ВЧ мощности ламп с прямолинейным лучом, потребитель
должен подходить к определению к. п. д. лампы с известной осторожностью.
Для любой данной рабочей точки и частоты к. п. д. легко определяется как
отношение выходной мощности к входной мощности луча. (Мощность соле-
ноида, накала и системы охлаждения обычно при этом не принимается во
внимание, хотя можно показать, что в этом нет особой логики.) Однако у лам-
пы, в паспорте которой указывается выходная мощность 1 МВт с полосой
8%, мощность на краю полосы будет составлять лишь 0,5 МВт, если пользо-
ваться определением ширины полосы по половинной мощности. С точки зре-
ния системы в целом такая лампа обеспечит лишь 0,5 МВт выходной мощ-
41
Гл. 1. Радиолокационные передатчики
кости, так что для получения сопоставимых значений при определении к. п. д.
следует исходить из этой цифры. Большинство потребителей ламп с прямо-
линейным лучом предпочитают говорить о ширине полосы по уровню 1 дБ
(как это обычна принято для ламп со скрещенными полями) либо о наимень-
шей выходной мощности в пределах полосы частот, включая допуски на воз-
можные изменения мощности в этой полосе. Так как нормально достижимые
в полосе частот колебания мощности составляют около I дБ, лампа, которая
«может обеспечить к. п. д. 40%», имеет с точки зрения потребителя к. п. д.,
не превышающий 32%.
Ч увствительность по фазовой модуляции. Скорость электронов в клист-
роне определяет интервал времени, в течение которого сигнал проходит вдоль
луча от входа до выхода лампы. Когда на электрон воздействует заданная
разность потенциалов, его потенциальная энергия преобразуется в кинетиче-
скую. Так как кинетическая энергия пропорциональна квадрату скорости
(без учета релятивистского эффекта), скорость электрона пропорциональна
корню квадратному из приложенного напряжения. Соответственно при увели-
чении приложенного напряжения на 1% скорость возрастает на 0,5%, вслед-
ствие чего время пролета через активную область лампы уменьшается на
0,5%. Таким образом, для клистрона
йф dE
~Ф~ ’
где ф — полное запаздывание по фазе в лампе от входного до выходного
объемных резонаторов Обычные значения полного запаздывания по фазе
в клистроне заключены в пределах 1000—3000° (приблизительно от 3 до 91),
так что типичным значением чувствительности по фазовой модуляции являет-
ся 5—15° на 1% изменения напряжения.
Запаздывание по фазе в лампах бегущей волны определяется частично
временем пролета электронов и частично временем прохождения высокоча-
стотного сигнала вдоль замедляющей структуры. Поэтому запаздывание по
фазе в лампах бегущей волны изменяется медленнее, чем скорость электро-
нов. В типичной лампе бегущей волны процентное изменение запаздывания
составляет от половины до двух третей запаздывания в клистроне. С другой
стороны, электрическая длина ламп бегущей волны обычно больше и состав-
ляет (6—20)1, а иногда даже до 30 и 401; при этом чувствительность по фа-
зовой модуляции составляет 5—40° на 1% изменения напряжения.
Преобразование амплитудной модуляции в фазовую. В режиме, близком
к насыщению, средняя скорость электронов в лампе с прямолинейным лучом
уменьшается, вследствие чего запаздывание по фазе несколько увеличивается,
как это показано для типичной лампы на рис. 20. Крутизна кривой отражает
зависимость скорости изменения фазы от высокочастотного возбуждения. Это
явление называется преобразованием амплитудной модуляции в фазовую и оп-
ределяется обычно в градусах на 1 дБ. Оно имеет значение в случае совмест-
ного использования ламп разного типа (см. § 1.6), а также при необходимо-
сти поддерживать постоянство запаздывания по фазе, как, например, в систе-
мах индикации движущихся целей и системах сжатия импульсов.
Клистроны. Первой мощной лампой с прямолинейным электронным лу-
чом был клистрон на 30 МВт диапазона S, разработанный Стэнфордским уни-
верситетом в 1949 г. для линейного ускорителя [64]. Технология, разработан-
ная в связи с созданием этой лампы, послужила базой для быстрого разви-
тия целой отрасли ламповой промышленности. Первое десятилетие этого раз-
вития исчерпывающе освещено в ряде печатных работ [2]. В течение большой
части этого периода шел спор между сторонниками внешних объемных резо-
наторов и объемных резонаторов в вакууме. В случае внешних резонаторов
дампа состоит только из вакуумного пространства взаимодействия с двумя
42
1.3. Лампы с прямолинейным электронным лучом (типа О)
керамическими окнами с каждой стороны в качестве вакуумного уплотнения.
Объемные резонаторы крепятся на внешней стороне лампы, являются съем-
ными и могут быть повторно использованы при смене лампы. В варианте
с вакуумными резонаторами они являются неотъемлемой частью корпуса
лампы, причем герметичность обеспечивается самими стенками резонаторов.
Хотя лампы с внешними резонаторами могут оказаться экономичнее, если
учесть весь срок службы оборудования, и широко применяются в качестве
ламп средней мощности в дециметровом диапазоне и диапазоне L, их работа
Входная мощность (дб относительно 1 МВт)
Рис. 20. Зависимость фазового сдвша в лампе с прямолинейным элек-
тронным лучом от высокочастотного возбуждения (лампа (ипа VA-133
фирмы Varian) [12].
зависит от состояния поверхности пружинных лапчатых контактов, переда-
ющих интенсивные высокочастотные токи в резонаторы. Кроме того, в случае
внешних объемных резонаторов появляются дополнительные потери в кера-
мических окнах, расположенных внутри резонаторов. В мощных лампах мо-
жет также возникнуть на окнах спонтанная вторично-электронная эмис-
сия [5]. Этот эффект обусловлен тем, что рассеянные электроны, бомбар-
дирующие окно под воздействием высокочастотных полей, высвобождают
определенное количество вторичных электронов, достаточное для поддержа-
ния непрерывной электронной бомбардировки окна.
При разработке мощных клистронов для американской системы раннего
предупреждения о ракетном нападении BMEWS (Ballistic Missile Early War-
ning System) фирма Eimac встретилась с серьезными трудностями при созда-
нии лампы с внешними резонаторами. Был заключен параллельный договор
с фирмой Varian Associates, которая успешно разработала лампу типа VA-842
€ резонаторами в вакууме. Хотя фирма Eimac позднее добилась окончания
разработки варианта с внешними резонаторами (лампа типа Х626), полностью
выявились преимущества резонаторов в вакууме для очень больших мощно-
стей. Для этих же целей фирма Litton Industries разработала и производила
лампу типа L3403. Хотя все лампы для системы BMEWS, изготовленные тре-
мя фирмами, удовлетворяли техническим условиям, срок службы и режим
обслуживания их значительно различались.
Хорошо известны большой коэффициент усиления и высокая энергетика
многорезонаторного клистрона. Однако его полоса пропускания в середине
50-х годов не превышала 1%. Более широкие полосы достшались механиче-
43
Гл. 1. Радиолокационные передатчики
Рис. 21. Выходная цепь с удлиненным
пространством взаимодействия [63].
ской перестройкой объемных резонаторов; в некоторых случаях использова-
лась одновременная перестройка всех резонаторов одной ручкой. Хотя можно
расширить полосу частот, пожертвовав высоким коэффициентом усиления,
осуществить перестройку со взаимно расстроенными контурами в клистроне
значительно сложнее, чем в усилителе промежуточной частоты. Результирую-
щая частотная характеристика клистрона включает как произведения промежу-
точных значений коэффициентов усиления, так и произведения их максималь-
ных значений для отдельных резонаторов; при некоторых комбинациях наст-
ройки на выходе появляются интенсивные гармоники; значение коэффициента
усиления, полученное при широкой
полосе для слабого сигнала, не обес-
печивается в режиме насыщения.
На современных ЭВМ можно
рассчитать оптимальное сочетание на-
строек объемных резонаторов, благо-
даря чему ширина полосы клистрона
быстро начала увеличиваться. При
фиксированной настройке резонато-
ров была получена полоса пропуска-
ния по половинной мощности 8%, а
в редких случаях даже 11 % (клист-
рон фирмы Varian типа VA 812 С).
Возможность получения такой поло-
сы пропускания в клистронах опре-
деляется также частично повышени-
ем первеанса луча, однако в основ-
ном она обусловлена успехами, до-
стигнутыми в улучшении характери-
стик выходного объемного резонато-
ра, так как энергетическая полоса
пропускания не может быть больше
той, которая определяется способностью выходного резонатора извлекать
энергию из луча независимо от коэффициента усиления и мощности возбуж-
дения цепей на его входе. Поэтому в широкополосных клистронах однорезо-
наторные выходные цепи были заменены двух- и трехрезонаторными, а в не-
которых случаях цепями с удлиненным взаимодействием [63, 78], в которых
используется несколько пространств взаимодействия для извлечения энергии
из луча (рис. 21). Такую выходную цепь можно рассматривать как ряд после-
довательных и взаимосвязанных объемных резонаторов, в каждом из которых
осуществляется связь с лучом; поэтому в такой цепи имеется более одного
шанса извлечь энергию из луча, в результате чего увеличивается к. п. д. и
энергетическая полоса пропускания. Такое устройство оказалось также при-
годным для расширения полосы пропускания предоконечного объемного резо-
натора. Однако, поскольку в цепочке резонаторов удлиненного взаимодейст-
вия имеется связь между несколькими зонами, в каждой из которых осуще-
ствляется также связь с лучом, в лампе этого типа бывает трудно получить
колебания в режиме бегущей волны.
Хотя у клистрона с удлиненным взаимодействием большой к. п. д. (до
65%), неясно, будет ли он иметь в конечном счете какое-либо преимущество
перед лампой с выходными связанными резонаторами бегущей волны (типа
твистрона), в которой также предусмотрено удлиненное взаимодействие с лу-
чом. У твистрона шире полоса пропускания, а к. п. д. клйстрона с удлиненным
взаимодействием окажется, по-видимому, ниже в результате мер, принятых
для предотвращения генерации.
Лампы бегущей волны (ЛБВ). Маломощная спиральная ЛБВ является
наиболее широкополосным прибором. Ширина полосы ЛБВ больше октавы
благодаря тому, что фазовая скорость фактически постоянна на всех часто-
44
1.3. Лампы с прямолинейным электронным лучом (типа О)
тах. Однако для получения больших мощностей необходимо повысить уско-
ряющее напряжение, причем скорость электронов в мощных лампах стано-
вится слишком большой для спиральной структуры, так как при увеличении
шага спирали уменьшается связь высокочастотного колебания с лучом.
Пределом для спиральных ламп является напряжение 10 кВ и импульсная
выходная мощность несколько киловатт. При большей мощности возникает
проблема генерации на краю полосы, обусловленная особенностями частотной
характеристики соответствующей замедляющей структуры. Кроме того, вдоль
высокочастотной структуры могут распространяться как прямая, так и обрат-
ная волны, что создает возможность самовозбуждения на обратной волне.
Могут также во шикнуть в зависимости от используемой структуры другие
типы колебаний. В основном по этим причинам разработка мощных ЛБВ тре-
Рис. 22. Замедляющая структура четырехлепесткового типа.
бует больших затрат и поэтому отстала от разработки клистронов. Однако
в 1963 г. было выпущено некоторое количество импульсных ЛБВ на несколь-
ко мегаватт с резонаторами четырехлепесткового типа (cloverleaf circuit) [13]
(рнс. 22). Такая замедляющая структура может пропустить мощность, срав-
нимую с мощностью клистрона.
Замедляющие структуры для мощных ЛБВ состоят из спиралеобразных
структур (спираль со встречной намоткой или структура типа кольцо-стер-
жень) и связанных объемных резонаторов, одним из примеров которых яв-
ляется четырехлепестковая структура. При мощностях ниже 100 кВт ширика
полосы и к. п. д. структур типа кольцо-стержень выше, чем связанных резо-
наторов. При мощностях выше 100 кВт или немного ниже в случаях, когда
ограничивающим фактором является средняя мощность, преобладают связан-
ные резонаторы [12]. Для ламп с замедляющей структурой типа связанных
резонаторов характерен относительно небольшой коэффициент усиления яа
единицу длины, но, по-видимому, рабочая импульсная мощность для них яе
ограничена.
В тех случаях, когда в ЛБВ с замедляющей структурой типа связанных
резонаторов импульсное питание подается на катод, существуют моменты во
время нарастания и спада напряжения, когда скорость электронов синхронна
с граничной частотой (типа л) высокочастотной цепи, в результате чего обыч-
но возникает генерация. Эти колебания на фронте и спаде выходного импуль-
са имеют характерную форму, из-за которой они получили название «заячьих
45
Гл. /. Радиолокационные передатчики
Рис. 23. Колебания типа «заячьих ушей»
на огибающей выходного сигнала усили-
теля на ЛБВ с импульсной модуляцией
на катод.
ушей» (рис 23). Полностью подавить эти колебания удается лишь в редких
случаях Однако, так как эти колебания зависят от скорости электронов,
которая, в свою очередь, зависит от ускоряющего напряжения луча, этот
вопрос может быть полностью решен путем подачи импульса на модулиру-
ющий анод или управляющую сетку. При этом необходимо лишь обеспечить,
чтобы в процессе включения высоковольтного напряжения питания импульсы
модулятора не начали подаваться раньше, чем это напряжение надежно пре-
высит интервал возникновения генерации, лежащий в пределах от 60 до «0 h
рабочего напряжения. Используемая для этой цели цепь защиты называется
обычно «Х-процентной цепью», так как рабочая точка ее установки неизвест-
на до испытания нескольких ламп.
В замедляющие структуры ЛБВ
большой мощности необходимо вво-
дить вставки — разделители, — во
избежание возникновения самовоз-
буждения из-за отражений от входа
я выхода структуры. Хотя генерация
может быть подавлена путем введе-
ния распределенных вдоль структуры
потерь, это привело бы к снижению
к.п.д., что нежелательно для ламп
большой мощности. Обычно раздели-
тели вводятся после каждых 15—
30 дБ усиления лампы. Модулиро-
ванный луч передает сигнал через каждый разделитель в прямом направ-
лении, а распространяющаяся по замедляющей структуре энергия погло-
щается в этой точке нагрузкой разделителя, благодаря чему на каждом
разделителе задерживается энергия, распространяющаяся в обратном напра-
влении. Нагрузки разделителей могут быть размещены вне лампы для умень-
шения рассеяния в самой высокочастотной структуре.
К п. д. ЛБВ меньше, чем к. п. д. клистронов, вследствие необходимости
нагружать структуру для обеспечения стабильности, а также из-за довольно
большого рассеяния энергий высокой частоты в значительной части всей
структуры. Для повышения к. и. д. ЛБВ большой мощности применяется
очень эффективная методика, называемая скоростным выравниванием. Она
заключается в том, что для учета замедления электронов после отбора от них
энергии длина нескольких последних секций замедляющей структуры после-
довательно уменьшается несколькими ступенями. Скоростное выравнивание
позволяет извлечь больше энергии из луча и значительно улучшить соотноше-
ние между шириной полосы и мощностью лампы [12]. Тем не менее в мощ-
ных ЛБВ обычно наблюдается значительное снижение выходной мощности
на краях полосы, поэтому номинальная ширина полосы очень сильно зависит
от того, насколько в данной системе допустимо снижение мощности.
Твистроны. В 1963 г. была создана гибридная лампа, во всех секциях
которой, за исключением последней, были применены объемные резонаторы
клистронного типа, а для выходной секции использована структура бегущей
волны четырехлепесткового типа. Целью разработки в то время было получе-
ние варианта широкополосной ЛБВ типа VA-125 диапазона S с более высо-
ким к. п. д. на основе более эффективного группирования луча объемными
резонаторами. Однако в результате было получено не только небольшое по-
вышение к. п. д., но и значительное расширение полосы частот, явившееся
следствием более гибкой настройки резонаторов в сочетании с широкой по-
лосой частот выходной секции ЛБВ на больших мощностях. Для компенсации
присущего выходной секции ЛБВ уменьшения коэффициента усиления на
краях полосы резонаторы клистрона были настроены, как это показано на
рис. 2 , с соответствующим повышением коэффициента усиления на этих ча-
стотах. Так как эта гибридная лампа является частично клистроном и частич-
46
1.3. Лампы е прямолинейным электронным лучом (типа О)
но ЛБВ, она получила название твистрон [43]. В лампе тина VA-145 полу-
чена 14%-ная полоса по точкам половинной мощности или 12%-ная полоса
по уровню 1 дБ> в середине полосы к. н. д. равен 48% при коэффициенте
усиления 41 дБ. Хотя твистрон сложнее и дороже клистрона, его полоса ча-
стот при равных мощностях шире.
Многолучевые клистроны. В начале 60-х годов разработан многолучевой
клистрон с целью существенного увеличения первеанса по отношению к обыч-
ным клистронам [10, 71]. Благодаря использованию большого числа лучей
можно получить при заданном рабочем напряжении более значительный по
сравнению с однолучевой лампой ток луча и, следовательно, более высокую
Характеристика цепи возбуждения широкополосного клистрона
Рис. 24. Распределение усиления в гибридной лампе гипа ЛБВ-клистрон (гвистроне> 143].
выходную мощность. Высокочастотное возбуждение подается (рис. 25) на все
лучи через периодический волновод и усиливается рядом промежуточных оди-
наковых цепей. Выходная мощность собирается в выходном резонаторе, так-
же выполненном в виде периодической цепи.
С целью расширения полосы пропускания многолучевого клистрона была
предпринята попытка заменить резонансную периодическую структуру струк-
турой бегущей волны. Этот вариант называется многолучевым клистроном бе-
гущей волны, а не многолучевой ЛБВ, так как структура бегущей волны рас-
положена поперек, а не вдоль лучей. В последнем варианте ламп такого типа,
названном гибридным многолучевым клистроном бегущей волны, использо-
ваны, как это показано на рис. 26, структуры бегущей волны на входе и вы-
ходе и резонансные промежуточные структуры. Такое сочетание обеспечивает,
как и в твистроне, широкую полосу частот и возможность настройки. Ламиа
содержит, как это видно из рис 26, 13 электронных лучей, первеанс каждого
из которых равен 1,3 микропервам. Для обеспечения индивидуальной подст -
47
Гл. 1. Радиолокационные передатчики
ройки для каждого луча предусмотрены отдельные промежуточные объемные
резонаторы по четыре на каждый луч Полное сопротивление выходной струк-
туры бегущей волны постепенно уменьшается, чтобы каждому лучу соответ-
ствовало определенное напряжение, несмотря на увеличение уровня мощности
в выходной структуре. По этой же причине доля участия первых трех лучей
в формировании выходной мощности оказывается неполной, и они рассматри-
ваются как «наращивающие» лучи, обеспечивающие условия, необходимые
для полного извлечения энергии из остальных 10 лучей.
Для всех лучей многолучевого клистрона используется один соленоид,
благодаря чему мощность питания соленоида меньше, чем при простом соеди-
нении нескольких ламп. Кроме того, многолучевой клистрон можно отрегули-
ровать в процессе производства, так что изготовители оборудования могут
Рис. 25. Схематическое изображение многолучевого клистрона [10].
быть уверены в правильном согласовании составляющей его группы ламп.
При соответствующей подстройке объемных резонаторов гибридный много-
лучевой клистрон бегущей волны обеспечивает более плавную зависимость
фазы от частоты во всей рабочей полосе частот, чем однолучевая лампа. Если
такой клистрон предназначен для питания группы элементов фазированной
антенной решетки, он располагается вблизи, так как благодаря относительно
низкому напряжению его габариты могут быть сделаны достаточно малыми.
Основным недостатком многолучевого клистрона является его сложность.
Хотя при равной импульсной мощности его рабочее напряжение меньше, чем
однолучевой лампы, в случае пробоя в какой-либо одной секции все его сек-
ции должны быть немедленно выключены, то же необходимо сделать и при
появлении газа в одной из секций: при появлении его в одной из секций мгно-
венно нарушается вакуум всей лампы. В результате усложнение системы не
связано с реальным ее резервированием и обеспечение ее надежности может
оказаться серьезной проблемой.
Клистроны с электростатической фокусировкой. Полезной особенностью
электростатической фокусировки является то, что она не требует расхода
мощности и исключает использование тяжелого магнита. Лампы с одним
циклом электростатической фокусировки [46] (рис. 27) применялись начиная
с середины 40-х годов, однако из-за необходимости закрывать сетками об-
ласти дрейфа для получения высокого к. п. д. при неизбежно коротком луче
48
1.3. Лампы с прямолинейным электронным лучом (типа О)
большого сечения средняя мощность не могла быть больше нескольких сот
ватт в диапазоне S [2, 5, 44]. Одной из проблем в таких лампах являются
шумы, возбуждаемые колебаниями ионов, захватываемых между сетками.
Для повышения мощности и коэффициента усиления в 1962 г. была разрабо-
тана периодическая электростатическая фокусировка. В случае луча с боль-
шим первеансом фокусировка является очень сложной задачей, которая не
могла быть решена до появления современных вычислительных методов. Меж-
КоллекмддУ
Окна
.. Область нард- Область полного
v > щивания извлечении мощности
мощности '
В'ыхоВ
Нагрузка.
и и I ш 1 и I и
Bxoct
й___C3.fi
Нагрузка
Катоды
Взаимно
расстроенные1
резонаторы
Рис. 26. Схематическое изображение гибридной лампы типа многолучевого клистрона
бегущей волны [71].
ду соседними резонаторами (рис. 28) размещаются кольцевые электроды, на-
ходящиеся под потенциалом катода, которые образуют ряд электростатиче-
ских линз, обеспечивающих периодическую фокусировку, подобную периодиче-
ской фокусировке постоянными магнитами [11, 39. 44, 45]. Эти лампы обла-
дают очень малой массой на единицу мощности и коэффициентом усиления,
сравнимым с другими типами клистронов. Лампы имеют относительно высо-
кий к. п. д. по следующей ранее не упоминавшейся причине: медленные элек-
троны, которые отдали свою энергию высокочастотному полю, извлекаются
из луча вследствие отсутствия удерживающего магнитного поля. В результате
этого в корпусе выходного резонатора возникает довольно большой ток,
однако энергия этих электронов мала по сравнению с ускоряющим напряже-
нием. В лампах с магнитной фокусировкой эти электроны задерживаются
в луче и вызывают значительное снижение потенциала в нем, что является
причиной уменьшения к. п. д.
Другим преимуществом клистрона с электростатической фокусировкой
является то, что ионы, возникающие в результате соударения электронов луча
с молекулами остаточного газа, быстро извлекаются поперечными электри-
ческими полями, поэтому ни нестабильности, обусловленные колебаниями
ионов, ни ионная бомбардировка катода не могут возникнуть [45]. Благодаря
этим особенностям такая лампа в принципе является строго линейным
устройством, свободным от ряда эффектов второго порядка, свойственных
Другим типам лучевых ламп, и может быть использована для генерирования
Импульсов специальной формы (см. 1.8).
49
Гл. 1. Радиолокационные передатчики
Рабочее напряжение такой лампы относительно мало критично, так как
при изменении ускоряющего напряжения луча соответственно меняется на-
пряжение на электростатических фокусирующих линзах и траектории элек-
тронов почти не зависят от ускоряющего напряжения. Однако выходная
мощность, коэффициент усиления и полоса частот зависят от напряжения лу-
ча, поскольку с его изменением меняются ток луча и мощность, потребляемая
лампой.
Рис. 27. Клистрон с электростатической фокусировкой с одним циклом фокусировки^
а — схематическое изображение лампы (46]; б — внешний вид лампы.
50
1.3. Лампы с прямолинейным электронным лучом (типа О)
В процессе разработки клистрона с электростатической фокусировкой на-
пряжения на кольцевых электродах можно подобрать так, чтобы фокусировка
была оптимальной. В серийных же лампах могут быть соответственно изме-
нены диаметры колец для получения таких же результатов при напряжении
на кольцах, равном напряжению на катоде. Через линзовые кольца проходит
только ионный ток порядка нескольких микроампер. При разработке лампы
Рие. 28 Клистрон с электростатической периодической фокусировкой типа L-3975 фир-
мы Litton'.
а •— схематическое изображение лампы; 6 — внешний вад лампы.
Необходимо позаботиться о том, чтобы яе могла возникнуть обратная связь
ПО высокой частоте через фокусирующие кольца.
Одним из факторов, ограничивающих максимальную мощность клистрона
g электростатической фокусировкой, является опасность пробоя между коль-
Цевыми электродами и соседними резонаторами. Вторым фактором является
51
Гл. 1. Радиолокационные передатчики
максимальный первеанс луча, при котором может быть получена стабильная
фокусировка. Этот максимум определяется допустимым уменьшением длины
резонаторов и допустимым увеличением диаметра луча. Максимальная им-
пульсная мощность клистрона с электростатической фокусировкой при пер-
веансе порядка 1,5 микроперв и напряжении, ограниченном возможностью
пробоя, составляет 10 МВт в диапазоне L, 1 МВт в диапазоне S и 100 кВт
в диапазоне С. Ширина полосы частот клистрона с электростатической фоку-
сировкой не превышает 3%, однако диапазон перестройки составляет не
менее 15%.
Клистрон с электростатической фокусировкой чувствителен к внешним
магнитным полям, так как в силу отсутствия необходимости в магнитной
структуре он не имеет магнитной экранировки (как обычные клистроны).
Однако в случае необходимости экранировка легко может быть создана.
Масса клистрона с электростатической фокусировкой чрезвычайно мала
по сравнению с другими типами ламп с прямолинейным электронным лучом.
Масса лампы типа L-3975 фирмы Litton (рис. 28) при импульсной мощности
1 МВт и средней мощности 5 кВт на частоте 3 ГГц равна 36 кг; ускоряющее
напряжение 85 кВ при пиковом токе 27,5 А, коэффициенте усиления 36 дБ и
полосе частот по половинной мощности 90 МГц; к п. д. равен 45%. Хотя
в этой лампе нет модулирующего анода, клистроны с электростатической фо-
кусировкой в принципе можно выполнить с модулирующим анодом.
Клистрон с электростатической фокусировкой должен быть достаточно
коротким для осуществления фокусировки, вследствие чего его электрическая
длина необычно мала для лампы с большим коэффициентом усиления: при
усилении 30 дБ она не превышает 1000°. Благодаря этому чувствительность
по фазовой модуляции такой лампы составляет всего около 5° на 1% изме-
нения напряжения луча.
Поскольку фокусирующие ’линзы соединены с катодом, входная емкость
клистрона с электростатической фокусировкой в случае подачи импульсного
питания на катод значительно больше, чем у соответствующей лампы с фоку-
сирующим соленоидом. Общая входная емкость лампы типа L-3975 с пятью
фокусирующими линзами составляет приблизительно 90 пФ, из которых
15 пФ приходится на электронную пушку (сам катод) и по 15 пФ на каждый
линзовый электрод. Хотя в результате увеличенной емкости несколько возра-
стают потери в модуляторе, требуемая дополнительная мощность обычно на
порядок меньше потребляемой соленоидом.
Генераторы обратной волны и усилители обратной волны типа О.
В лампах с прямолинейным электронным лучом, как и в устройствах со скре-
щенными полями, возможен режим обратной волны (см. § 1.2). Так как фа-
зовая скорость в приборах обратной волны меняется с частотой, рабочая
частота лампы обратной волны с прямолинейным лучом меняется почти прямо
пропорционально скорости электронов и, следовательно, пропорционально
квадратному корню из напряжения луча. Генераторы обратной волны типа О
небольшой мощности нашли самое широкое применение в качестве широко-
диапазонных генераторов, управляемых напряжением, а также для гетероди-
нов и высокочастотных генераторов качающейся частоты. Варианты таких
ламп повышенной мощности для радиолокационных передатчиков не разра-
батывались, так как при отсутствии каких-либо преимуществ перед лампами
других типов они потребовали бы очень точных стабилизаторов высокого
напряжения для предотвращения частотной модуляции и дрейфа частоты.
Были изготовлены образцы усилителей обратной' волны типа О [68, 69]
для использования в качестве настраиваемых напряжением преселекторов и
усилителей с низким уровнем шума. Режим усиления достигался тем, что ток
луча поддерживался на уровне, при котором самовозбуждение еще не может
возникнуть. Лампа ведет себя в этом случае как частотно-избирательный
усилитель, настраиваемый напряжением, однако ее коэффициент усиления и
полоса пропускания сильно меняются в диапазоне частот перестройки напря-
S9
1.4. Сравнение ламп высокой частоты
жением. Это объясняется тем, что как коэффициент усиления, так и полоса
пропускания зависят от того, насколько близко рабочая точка расположена
к точке самовозбуждения, причем ток, при котором возникает генерация, не
остается постоянным в диапазоне перестройки. Создание усилителя обратной
волны типа О большой мощности невозможно, так как при большом токе
луча возникли бы колебания и он превратился бы в генератор обратной
волны типа О. Поскольку усилители обратной волны типа М, подобные ам-
плитрону (см. § 1.2), являются по существу синхронизированными генератора-
ми, мощный генератор обратной волны типа О также мог бы быть использо-
ван в качестве синхронизированного генератора, однако он не обладал бы
никакими преимуществами по сравнению с другими типами ламп. Как уже
отмечено выше, мощная ЛБВ обычно ведет себя при пониженном напряжении
как генератор обратной волны типа О.
1.4. Сравнение ламп высокой частоты
Анализ характеристик имеющихся ламп позволяет провести некоторые
обобщающие сравнения основных типов ламп [25]. Как правило, обобщение
таиз в себе известные опасности, так как всегда существуют исключения;
приводимые ниже сравнения должны рассматриваться с учетом этого обстоя-
тельства.
В табл. 4 приведены основные различия наиболее распространенных ти-
пов ламп. В некоторых случаях какой-либо фактор настолько однозначно
определяет выбор, что разработчик передатчика вынужден мириться с менее
существенными недостатками лампы. Однако более обычной является такая
ситуация, когда выбор может пасть на ту или другую лампу, так что окон-
чательный выбор производится на основании исследования стоимости, графи-
ка изготовления и характеристик системы Ниже даны некоторые примечания
к табл. 4
Напряжение определяет размеры и стоимость высоковольтного блока пи-
тания и модулятора, а также интенсивность рентгеновского излучения.
Коэффициент усиления. От коэффициента усиления зависит количество кас-
кадов и, следовательно, степень сложности усилительной линейки.
Полоса пропускания. В таблице приведена полоса пропускания без регу-
лировки органами настройки. Полоса пропускания лампы должна соответст-
вовать требованиям на систему, однако иногда полоса пропускания системы
выбирается согласно существующим или прогнозируемым возможностям
лампы.
Рентгеновское излучение влияет на массу передатчика, так как требуется
экранировка для защиты персонала (и чувствительных к излучению полупро-
водников).
К. п. д. очень сильно влияет на массу и стоимость передатчика, на требо-
вания к системе охлаждения и первичную мощность питания.
Ионный насос. В зависимости от точки зрения может рассматриваться
и как преимущество, и как недостаток (см. § 1.3).
Масса в табл. 4 приведена для самих ламп. Однако масса передатчиков,
в которых использованы лампы с прямолинейным электронным лучом, обыч-
но значительно больше массы передатчиков на усилителях со скрещенными
полями из-за требуемого соленоида и более низкого к. п. д. этих ламп.
Габариты. Замечания относительно размера аналогичны замечаниям, ка-
сающимся массы прибора.
Стоимость. В таблице приведены характеристики стоимости самих ламп.
Они относятся приближенно как к стоимости разработки, так и к стоимости
одной лампы.
Паразитные шумы. Роль паразитных шумов возрастает при росте числа
РЛС в выделенной для них полосе частот, чувствительности приемника и тре-
53
Гл. 1. Радиолокационные передатчики
Таблица 4
Мощные импульсные усилители
(сравнительные данные для одних и тех же частоты, импульсной и средней
__________________________выходной мощности)___________________________
Характеристика Лампы с прямолинейным электронным лучом Лампы со скрещенными полями 0
клистрон ЛБВ твнстрон возвратная (круговая) невозвратная (обычно линейная)
Напряжение Высокое (для 1 МВт требуется приблизительно 90 кВ) Низкое (для 1 МВт требуется приблизительно 40 кВ)
Усиление, дБ 30—70 6-20
Полоса пропускания, % 1—8 10—15 10-15
Рентгеновское излу- чение Интенсивное, но свинец обеспечивает надежную защиту Обычно не является проблемой
К. п. д., % 15—60 (обычно 30) (клист- роны с электростатической фокусировкой обычно 40) 30—75 (обычно 45) 20—50 (обычно 30)
Ионный насос Необходим в мощных лам- пах Самооткачка
Масса Большая (за исключением клистронов с электроста- тической фокусировкой) Малая
Габариты Большие Малые
Стоимость Средняя Высокая Низкая Средняя
Паразитные шумы 2>, дБ Обычно —90 (кроме маг- нетронов с инжектиро- ванным лучом) Обычно от —30 до —603)
Паразитные типы ко- лебаний Отсут- ствуют Типа л при на растании и спаде импульса; в слу- чае модуляции на анод отсутствуют При включении без ВЧ возбуждения выходные шумы полной мощности; при модуляции на ка- тод колебания типа л при нарастании и спаде импульса
54
1.4. Сравнение ламп высокой частоты
Продолжение табл. 4
Характеристика Лампы с прямолинейным электронным лучом Лампа с скрещенными ГЮЛЯМИ*)
клистрон ЛБВ твистрон возвратная (кругдвай) невозврат» на я (обычно линейна*)
Используемый дина- мический диапазон, ДБ 40—80 3—20
Управляющий элек- трод Нет или модулирующий анод. До пиковой мощно- сти 100 кВт защитная сетка 4) Нет или выключающий электрод
Самовключение Самовыключение Нет » Есть »§) Есть »
Магнитное поле До 1 МВт в диапазоне S постоянный магнит, в остальных случаях соле- ноид. Возможны бочко- образные магниты (стэн- фордский ускоритель) Постоянный магнит
Отношение динамиче- ского сопротивле- ния к статическому 0,8 0,05—0,2
Чувствительность по фазовой модуля- ции, град/% 5—40 Д£/£ 0,5—3 А///
’> Распределенная эмиссия; различие типов усилителей со скрещенными полями с
инжектированным лучом см. табл. 2
!) Для рабочей полосы частот шириной 1 МГц.
*J При увеличении ВЧ возбуждения шум уменьшается, так что шумы усилителей
Со скрещенными полями с более высоким усилением могут оказаться больше. Более низ-
кий уровень шума при большем возбуждении соответствует, таким образом, более низ-
кому коэффициенту усиления.
’) Ожидается, что мощность ламп с защитной сеткой будет возрастать.
s> С электродом смещения.
Примечание: Жирным шрифтом отмечены факторы, являющиеся доминирую-
щими в вопросе выбора типа лампы
бований к электромагнитной совместимости. Паразитные шумы следует раз-
делить на четыре типа:
/. Гармоники. Мощность гармоник на выходе ламп как с прямолинейным
лучом, так и со скрещенными полями составляет обычно на второй гармонике
—25 дБ (относительно мощности на основной частоте), на третьей —30 дБ
55
Гл. 1. Радиолокационные передатчики
и значительно меньше на более высоких гармониках. Хотя эти значения силь-
но меняются от лампы к лампе, большой разницы между лампами с прямо-
линейным лучом и со скрещенными полями не наблюдается. В тех случаях,
когда большая мощность гармоник на выходе недопустима, применяются
очень высококачественные, хотя и дорогие, фильтры на большую мощность.
2. Йаразитный шум в смежной полосе. Этот шум может явиться след-
ствием соседних типов колебаний в усилителях со скрещенными полями и
в лампах бегущей волны. Он обычно появляется в областях на несколько
процентов выше (в лампах прямой волны) или ниже (в лампах обратной
волны) рабочей полосы. Этот шум может быть резко выражен в лампах с им-
пульсной. модуляцией на катод и отсутствует в лампах с импульсной модуля-
цией на управляющий электрод (в усилителях со скрещенными полями в ре-
жиме постоянного напряжения или в лампах бегущей волны с импульсной
модуляцией на модулирующий анод). Если паразитные шумы в смежной по-
лосе не лежат в непосредственной близости к рабочей полосе, они легко от-
фильтровываются.
3. Паразитный шум в рабочей полосе. В табл. 4 приведен этот тип шума,
так как он больше всего влияет на работу системы и обычно его нельзя от-
фильтровать. Он может создавать помехи другим системам, либо снижать
степень подавления мешающих сигналов в селекторах движущихся целей или
боковых лепестков в устройствах сжатия импульсов в зависимости от назна-
чения электровакуумного прибора. Паразитный шум в рабочей полосе огра-
ничивает также возможность улучшения распределения энергии в спектре,
которое достигается формированием импульсов. Как показано в § 1.5, пара-
зитный шум в рабочей полосе можно уменьшить с помощью источника ВЧ
возбуждения
4. Межимпульсный шум. В отличие от перечисленных выше трех типов'
шума межимпульсный шум генерируется лампой в интервалах, в которых она
должна была бы быть полностью выключена, т. е. между импульсами. Этот
шум является серьезным недостатком, так как почти во всех типах радиоло-
кационных систем он попадает непосредственно на вход приемника и может
либо обусловить появление ложных целей, либо замаскировать истинную
цель. В лампах с импульсной модуляцией на катод высокое напряжение в ин-
тервалах между импульсами с лампы снимается, так что в этом случае поме-
хи отсутствуют, если только длительность спада импульса модулятора или об-
ратный ход не слишком велики (см. о шумовых кольцах в § 1.2). В усилите-
лях со скрещенными полями при постоянном напряжении питания или в лам-
пах с прямолинейным лучом, модулируемых по модулирующему аноду или
управляющей сетке, высокое напряжение остается на лампе в интервалах
между импульсами. При этом может возникнуть интенсивный шум, если не
исключено прохождение через лампу даже самого незначительного тока. По-
скольку во всех типах усилителей со скрещенными полями при постоянном
напряжении питания используются холодные катоды, ток в лампе не может
появиться до подачи ВЧ возбуждения. Для поддержания достаточно низкого
уровня шума (и усиливаемых входных сигналов) в лампах с прямолинейным
лучом ток луча должен надежно выключаться. Несмотря на то, что обычно
разность уровней импульсной выходной мощности и мощности шума прием-
ника достигает приблизительно 200 дБ, для большей части ламп требования
по межимпульсному шуму легко выполняются. Эта трудность возникает в ос-
новном у ламп с прямолинейным лучом с перехватывающей сеткой, так как
горячая сетка может излучать и вызывать остаточный ток луча даже после
выключения тока катода.
Паразитные типы, колебаний. Приведенные в таблице паразитные типы
колебаний являются наиболее часто встречающимися. В некоторых лампах
иногда эти типы колебаний полностью отсутствуют, а в лампах, не столь
тщательно рассчитанных, могут возникнуть другие типы колебаний, например
генерация на краях полосы, гармоники и'пр.
S6
1.4. Сравнение ламп высокой частоты
Используемый динамический диапазон. Как будет показано в § 1.8, ди-
намический диапазон и линейность имеют значение для формирования им-
пульсов.
Управляющий электрод определяет требуемый тип модулятора, в свою
очередь, определяющего габариты, массу, стоимость и сложность передатчика.
Самовключение характеризует способность лампы включаться при подаче
ВЧ возбуждения. Эта способность при наличии выключающего электрода
позволяет работать с некоторыми усилителями со скрещенными полями при
постоянном напряжении питания.
Самовыключение характеризует способность лампы прекратить проводить
ток при выключении ВЧ возбуждения без использования специального выклю-
чающего электрода. Сочетание самовключения с самовыключением позволяет
работать при постоянном напряжении без модулятора и, следовательно, без
ограничений по частоте повторения импульсов, присущих модулятору.
Магнитное поле. Требования к магнитному полю определяют размер,
массу и к. п. д. передатчика. В меньшей степени они влияют на стоимость и
обслуживание, а также на экранировку лампы.
Динамическое сопротивление характеризует скорость изменения тока лам-
пы при заданном изменении приложенного напряжения. Значение этого пара-
метра зависит от типа модулятора, причем он может влиять на размер бата-
реи конденсаторов высоковольтного блока питания, требуемый для того, что-
бы падение мощности во время генерирования импульса не превышало допу-
стимого значения. Подробнее см. в табл. 6.
Чувствительность по фазовой модуляции определяет те усилия, которые
должен затратить разработчик модулятора для выполнения требований,
предъявляемых к фазовой стабильности системы. Хотя чувствительность по
фазовой модуляции совершенно различна у ламп с прямолинейным лучом и
со скрещенными полями, этот параметр редко является решающим при выбо-
ре типа лампы высокой частоты. Однако, поскольку он влияет на размеры
фильтра высоковольтного блока питания или модулятора, он должен быть
учтен при определении габаритов, массы и стоимости всего устройства. Как
показано в § 1.10, при решении этих вопросов необходимо учитывать также
значение динамического сопротивления лампы и выбранного модулятора. Ис-
торически всегда оказывалось возможным добиться необходимого для систе-
мы индикации движущихся целей чрезвычайно низкого уровня внутренних
помех, предельное значение которого определяется шумом лампы (включая
шумы, возникающие в процессе запуска). В случае высокой степени фильтра-
ции в высоковольтном блоке питания модулятора даже классический магне-
трон типа 5J26 диапазона L со временем обеспечил в селекторе движущихся
целей с 2-мкс импульсами (типа ARSR-2) коэффициент подавления 40 дБ.
Согласно измерениям частотная модуляция от импульса к импульсу не пре-
вышала 2 кГц, а полный размах разброса времени запуска был меньше 20 нс.
В системах сжатия импульсов устранение «звона» на вершине импульса до-
стигается довольно легко, если используются модуляторы на вакуумных лам-
пах, но является сложной задачей, если используются модуляторы с длинной
линией как в лампах с прямолинейным лучом, так и в усилителях со скрещен-
ными полями, (см. § 1.10).
Срок службы. Вопросы выбора типа высокочастотной лампы не могут
быть полностью освещены без рассмотрения такого параметра, как срок
службы. Однако при сравнении типов ламп можно лишь отметить, что срок
службы как ламп с прямолинейным лучом, так и усилителей со скрещенны-
ми полями может быть и очень большим (доходящим в некоторых случаях
до 40 000 ч), и чрезвычайно малым в случае ошибочных компромиссных
решений при- разработке ламп, неправильного применения ламп или отсутст-
вия должного обслуживания в процессе эксплуатации. Для получения боль-
шого срока службы (не менее 10 000 ч) необходимо тщательно выбрать зна-
чение выходной мощности в зависимости от рабочей частоты, по возможности
57
Гл. I. Радиолокационные передатчики
не применять повышенной плотности тока катода и тщательно согласовывать
выбор лампы и относящегося к ней оборудования. Выбор параметров и ре-
жима лампы с достаточными запасами редко удается, так как современные
требования к параметрам и ограничения, обусловленные экономическими сооб-
ражениями, оставляют мало возможностей для того, чтобы в процессе разра-
ботки лампы уделить должное внимание вопросам надежности и эксплуатаци-
онных запасов
Во многих случаях небольшой срок службы ламп объясняется недально-
видной экономией при разработке остального оборудования. В работе [28]
описывается, как средний эксплуатационный срок службы магнетронов типа
QK 338 был удвоен в течение одного года без каких-либо изменений в самой
лампе в результате незначительного усовершенствования оборудования и со-
ответствующего обучения обслуживающего персонала. Точно так же в рабо-
те [42] рассматривается зависимость срока службы клистронов типа VA-842
от особенностей обслуживания и использованного оборудования. В 1967 г.
средний срок службы ламп типа VA-842S, применявшихся в передатчиках си-
стемы BMEWS, составлял 24 000 ч. С другой стороны, в технических требова-
ниях на большую часть ламв для военных установок предусматриваются ис-
пытания на срок службы от 500 до 1000 ч и не ставится вопрос о необходи-
мости увеличения срока службы, так что, вероятно, трудно ожидать, что
в этих условиях срок службы превысит 1000 ч.
1.5. Генератор или усилитель?
Выбор для передатчика генераторной или усилительной лампы является
одним из основных вопросов при разработке радиолокационной системы (см.
§ 5.13) Ниже приведены некоторые особенности передатчика, зависящие от
этого выбора или влияющие иа него.
Точность установки и стабильность несущей частоты. В передатчике на
генераторной лампе рабочая частота задается мощной выходной лампой, а не
независимым маломощным стабилизированным генератором, поэтому самое
серьезное внимание должно быть уделено выбегу частоты в процессе разогре-
ва, тепловому дрейфу, уходу и затягиванию частоты, мертвому ходу органов
настройки и ошибкам калибровки. В передатчике, в котором использована
линейка усилителей, точность поддержания частоты по существу определяется
маломощным стабилизированным кварцевым (или другого подобного типа)
генератором. Кроме того, частота усилительной линейки может быть мгновен-
ию изменена электронным переключением нескольких задающих генераторов
со скоростью, значительно превышающей скорость любого механического ор-
гана настройки
Когерентность. В системе с усилительной линейкой сигналы первого и вто-
рого гетеродинов могут формироваться с любой желаемой точностью, а при
использовании передатчика с самовозбуждением для настройки гетеродина
на требуемую частоту необходима ручная настройка или система автоматиче-
ской подстройки частоты (в случае применения предусилителя высокой ча-
стоты его настройку часто сопрягают с настройкой гетеродина). При исполь-
зовании передатчика с самовозбуждением должна быть предусмотрена син-
хронизация его с когерентным генератором ПЧ, так как иначе начальная фаза
каждого импульса передатчика будет случайна относительно фазы‘сигналов
первого и второго гетеродинов. В системе, содержащей линейку усилителей,
синхронизация когерентного генератора ПЧ автоматически обеспечивается
в процессе генерации сигнала. Кроме того, поскольку в передатчике, содержа-
щем линейку усилителей, когерентность фаз может поддерживаться в преде-
лах серии импульсов, возможно подавление пассивных помех методом чере-
сиериодного вычитания, а в системе с самовозбуждением такая компенсация
вассивных помех невозможна из-за модуляции по случайному закону
S8
1.5. Генератор или усилитель?
начальной фазы колебаний от импульса к импульсу. В линейке усили-
телей возможна также полная когерентность, при которой взаимно синхрони-
зированы частота повторения импульсов, промежуточная и высокая частота.
Это иногда необходимо для исключения гармоник частоты повторения им-
пульсов из доплеровских полос по промежуточной частоте и для других
целей.
Синхронизация генератора (называемая также внешней и фазовой син-
хронизацией). Для реализации всех преимуществ когерентной усилительной
линейки без ее усложнения большое внимание в течение длительного времени
уделялось вопросам синхронизации импульсного магнетрона маломощным ис-
точником высокой частоты. Одйако уже в 1950 г. было установлено, что для
получения надежной синхронизации мощность синхронизирующего сигнала
должна быть несоразмерно велика. Так, например, если мощность синхронизи-
рующего сигнала на 30 дБ меньше мощности магнетрона, случайная ошиб-
ка синхронизации составляет около 10°, а если всего на 15 дБ меньше, то
случайная ошибка синхронизации все еще остается порядка 1° [33]. Поэтому
такая система не представляет особого интереса.
Подготовка генератора. В середине 60-х годов был разработан вариант
синхронизации генератора, оказавшийся вполне пригодным. Хотя в этом слу-
чае для обеспечения фазовой когерентности также применяется синхронизиро-
ванный когерентный генератор, было обнаружено, что введение в магнетрон
небольшого сигнала высокой частоты непосредственно перед подачей импуль-
са существенно снижает шумы и дрожание импульса. Так было получено
уменьшение энергетического спектра шума на 30 дБ. Эта методика, в отличие
от методики непосредственной фазовой синхронизации, была названа подго-
товкой магнетрона [8]. Были использованы уровни сигнала подготовки от
—30 до —60 дБ, однако поскольку чем меньше мощность сигнала подготов-
ки, тем критичнее его соотношение с частотой магнетрона; по-видимому, наи-
более целесообразным минимальным уровнем следует считать —40 дБ. Сигнал
подготовки предварительно группирует электроны в лампе перед подачей
импульса, обеспечивая быстрое согласованное возникновение колебаний. Кро-
ме того, было найдено, что при этом скорость нарастания напряжения им-
пульса, подаваемого на магнетрон, может быть значительно увеличена без
опасности появления других типов колебаний, в результате чего улучшается
форма очень коротких импульсов. Эта методика позволяет использовать маг-
нетрон с высокочастотным источником сигналов подготовки, собранным на
интегральных схемах, в таких применениях, которые в ином случае принци-
пиально требовали бы использования линейки когерентных усилителей.
Нестабильности. Как показано в § 1.10 и 1.13, в системах с импульсными
генераторами с самовозбуждением и импульсными усилительными линейками
существуют разного типа нестабильности. Для генератора с самовозбуждени-
ем стабильность частоты от импульса к импульсу зависит от пульсации вы-
соковольтного питания, а внутриимпульсное изменение частоты определяется
наклоном вершины импульса и «звоном» на ней. Допустимые пределы таких
изменений приведены в табл. 3 гл. 5, однако эти требования могут быть сни-
жены, если синхронизация когерентного гетеродина будет основываться на
эффективном усреднении частоты передатчика в импульсном интервале.
В усилительной линейке пульсация высоковольтного питания определяет ста-
бильность фазы от импульса к импульсу, а наклон вершин импульса н
«звон» — внутриимпульсное изменение фазы. Достигнутые пределы этих изме-
нений также приведены в табл. 3. гл. 5.
Представляет интерес следующее компромиссное решение. Если усили-
тельная линейка используется совместно с синхронизированным когерентным
гетеродином ПЧ, изменения фазы от импульса к импульсу не имеют особого
значения (за, исключением тех случаев, когда используется подавление пас-
сивных помех методом череспериодного вычитания). Такой режим работы
особенно пригоден в том случае, когда к существующему импульсному гене-
59
Гл. 1. Радиолокационные передатчики
ратору радиолокационной системы с селектором движущихся целей добавлен
мощный выходной усилитель со скрещенными полями. Если при этом просто
изменить точку схемы, с которой снимается высокочастотное колебание для
синхронизации существующего когерентного гетеродина ПЧ, в добавленном
усилителе со скрещенными полями не потребуется фазовая стабильность от
импульса к импульсу.
Специальные соображения, относящиеся к усилительным линейкам. Ис-
пользование усилительной линейки с целью обеспечения когерентной работы
и быстрого переключения частоты, связано с рядом усложнений, некоторые
из которых рассмотрены ниже.
Согласование во времени. Так как времена нарастания сигналов отдель-
ных модуляторов различаются, пусковые устройства к каждому усилительно-
му каскаду должны быть обычно независимо отрегулированы, чтобы правиль-
ная синхронизация осуществлялась без существенной потери энергии луча.
В линейке, состоящей из усилителей со скрещенными полями, должны быть
предусмотрены допуски на сжатие ширины импульса, возникающее как ре-
зультат необходимого перекрытия сигналов возбуждения (см. § 1.2). Однако
согласование во времени не является сложной задачей, если линейка состоит
из одних усилителей с автоимпульсной модуляцией. Сказывается оно только
на форме спада импульса в усилителях со скрещенными полями с управляю-
щим электродом при постоянном напряжении питания.
Развязка. Каждый промежуточный каскад усилительной линейки дол-
жен иметь на выходе согласованную нагрузку даже в том случае, когда
КСВН входной цепи последующего каскада достаточно большой (как, напри-
мер, в типичном широкополосном клистроне) или когда отраженная мощность
велика в самом каскаде (как, например, в усилителях со скрещенными поля-
ми). Эта мощность является результатом рассогласования на выходе усили-
теля со скрещенными полями, которое приводит к распространению ее по
замедляющей структуре в обратном направлении. Так, например, нагрузка,
которой соответствует Хсви=1,5, отражает в обратном направлении—14 дБ
мощности. На некоторых частотах эта отраженная мощность складывается
с мощностью, отраженной внутри лампы, и может попасть на вход лампы
при уровне мощности, лишь на 8 дБ меньшем уровня полной, выходной мощ-
ности. Таким образом, отраженная мощность окажется на 2 дБ больше
мощности, подаваемой на вход лампы, даже при коэффициенте усиления уси-
лителя со скрещенными полями, не превышающем 10 дБ. Хотя, по-видимому,
это не помешает нормальной работе усилителя со скрещенными полями,
в этом случае на входе усилителя необходимо будет установить вентиль с раз-
вязкой порядка 16 дБ, чтобы снизить КСВН при наблюдении со стороны пре-
дыдущего каскада до КСви=1,5.
Согласование. Усилительные лампы обычно чувствительнее к рассогласо-
ванию на выходе, чем генераторные. Так как в настоящее время существуют
высококачественные вентили, иногда можно получить улучшенные параметры
усилителей, если выходной КСВН не превышает 1,1. Кроме того, для стабиль-
ной работы некоторых типов ламп (особенно усилителей со скрещенными по-
лями и большей части ЛБВ) требуется, чтобы согласование на выходе было
осуществлено в значительно более широком диапазоне частот, чем заданная
рабочая полоса.
Отношение сигнал/шум. В § 1.2—1.4 отмечено, что мощность шума на вы-
ходе усилительной лампы может быть значительной. При каскадном включе-
нии нескольких ламп отношение сигнал/шум на выходе не может быть боль-
ше, чем в наихудшем каскаде. Поэтому необходимо особо тщательно прове-
рять, имеет ли входной каскад достаточно малый коэффициент шума, так как
в противном случае на выходе всей усилительной линейки не будет достигну-
то требуемое превышение сигнала над шумом. Так, например, в маломощной
ЛБВ с мощностью входного сигнала 0,5 мВт и коэффициентом шума 35 дБ
отношение сигнал/шум в полосе 10 МГц будет не больше 64 дБ.
60
1.5. Генератор или усилитель?
В линейке из ламп с прямолинейным электронным лучом существует еще
одна причина, влияющая на отношение сигнал/шум. Когда лучи включены,
но ВЧ возбуждение не подано, как это бывает в начале и конце каждого
импульса или в интервалах импульсной посылки, шум на входе первого кас-
када усиливается с большим коэффициентом усиления, чем при полной
мощности на выходе. Это объясняется тем, что в каждой лампе линейки коэф-
фициент усиления при низком уровне сигнала на несколько децибел больше,
чем в режиме насыщения. Общая разность усилений обычно составляет около
12 дБ, так что уровень шума на выходе линейки при снятом возбуждении бу-
дет больше на эту же величину. При наличии такого шума в течение значи-
тельной части времени может ухудшиться подавление пассивных помех и
уровня боковых лепестков в системах сжатия импульсов. В зависимости от ха-
рактера пассивных помех при совместном использовании методик сжатия
импульсов и индикации движущихся целей требования к шуму могут ока-
заться строже, чем при раздельном использовании каждой из методик
(см. § 5.15).
Иная ситуация возникает на интервалах до и после полезного импульса
в линейке усилителей со скрещенными полями с импульсной модуляцией на
катод. Так как импульс ВЧ возбуждения должен перекрывать, как показа-
но в § 1.2, длительность выходного импульса, в выходном импульсе появля-
ются пьедесталы, обусловленные просачиванием более широкого импульса
возбуждения. Если пьедесталы не меняются от импульса к импульсу, они не
будут ухудшать подавление пассивных помех, а в случае их небольшой дли-
ны — влиять и на уровень боковых лепестков системы сжатия импульсов (см.
§ 1.10). К тому же в интервале появления пьедестала частота возбуждения
может смещаться за пределы полосы пропускания приемника, благодаря чему
пьедесталы не принимаются приемником; однако в усилителях со скрещенны-
ми полями обратной волны внезапное смещение частоты может явиться при-
чиной образования выбросов или провалов в выходном импульсе, поскольку
рабочее напряжение усилителя со скрещенными полями обратной волны ме-
няется с частотой. В случае использования двух параллельных усилительных
линеек пьедесталы могут быть сфазированы с помощью маломощного пере-
ключателя на 180° и поглощены в искусственной нагрузке, как показано
в § 1.6, так что будет передан только прямоугольный импульс. В случае уси-
лителей со скрещенными полями при постоянном напряжении питания пьеде-
сталы настолько малы, что ими обычно можно пренебречь.
Регулировка уровней. В многокаскадной линейке из ламп с прямолиней-
ным электронным лучом характеристики каждой лампы частично зависят от
характеристик всех предшествующих ламп. В частности, для получения посто-
янной выходной мощности в пределах рабочей полосы частот необходимо
тщательно определить степень ее постоянства для каждого каскада с учетом
допусков на непостоянство ее значения для предшествующего каскада. В про-
тивном случае характеристики линейки в целом могут оказаться очень плохи-
ми в полосе частот. Так, например, коэффициент усиления лампы в режиме
насыщения может быть постоянным в полосе и тем не менее выходная мощ-
ность можег очень сильно меняться в полосе при постоянной ВЧ мощности
на ее входе. Усиление в режиме насыщения изменяется путем изменения вход-
ного напряжения на каждой частоте до достижения точки максимальной
выходной мощности. Коэффициент усиления в режиме насыщения определяет-
ся в этой точке как отношение выходной мощности высокой частоты к вход-
ной. Если выходная мощность в режиме насыщения непостоянна в пределах
полосы частот, то коэффициент усиления в режиме насыщения имеет малое
отношение к постоянству выходной мощности в рабочей полосе при постоян-
ной входной мощности. Точно также постоянное усиление при слабом сиг-
нале не является еще признаком постоянства выходной мощности при силь-
ном сигнале. Поэтому обычно техническими требованиями должны предусма-
триваться такие испытания лампы, которые гарантировали бы необходимые
61
Г л. I. Радиолокационные передатчики
значения параметров системы в целом и допуски. Обычно для этого требует-
ся, чтобы для каждой лампы была определена характерная для нее «ком-
прессия», получаемая обычно в режиме насыщения или близко от него. Так,
например, если постоянство выходной мощности в полосе должно поддержи-
ваться в пределах ±1 дБ, несмотря на изменения входной мощности в пре-
делах ±2 дБ, компрессия составляет 2 : 1 (такое применение данного терми-
на связано , но не совпадает с определением разницы между коэффициентами
усиления при слабом сигнале и в режиме насыщения, которая также иногда
называется компрессией).
Так как разработка каскада на маломощной лампе проще, типичная ли-
нейка может состоять нз ЛБВ на 1 Вт с компрессией 3:1, ЛБВ на 10 кВт
с компрессией 2:1 и выходной лампы с прямолинейным электронным лу-
чом на 1 МВт с компрессией 1:1. Следует отметить, однако, что получение
компрессии 1 : 1 является трудной задачей, так как это накладывает ограни-»
чения на допустимые изменения как входной мощности, так и частоты. Есте-
ственно, что при задании распределения коэффициентов усиления и уровней
должны быть учтены все потери в аппаратуре между каскадами и допуски
на нес, а также допуски на параметры лампы. Нужно также учитывать ха-
рактеристики пассивных устройств, выравнивающих частотные характеристи-
ки ламп.
Регулировка уровней в линейке из усилителей со скрещенными полями
являема более простой задачей, так как избыток входной мощности совер-
шенно безвреден (избыточная мощность проходит через линейку и суммирует-
ся с выходной мощностью) [65]. Необходимо лишь во всех случаях обеспе-
чить достаточную входную мощность.
Распределение нестабильности. Допуски для каждого каскада многокас-
кадной линейки должны быть меньше допусков на нестабильность передат-
чика в целом, так как они могут суммироваться, причем в зависимости от
характера и источников нестабильностей они суммируются непосредственно
или случайным образом, а иногда могут взаимно компенсироваться. Обычно
следует подразделить допуск на нестабильность передатчика на несколько
допусков меньшей величины с последующим их распределением по каскадам
в соответствии с возможностями последних. Такое распределение нестабиль-
ности обычно необходимо для учета изменений частоты от импульса к им-
пульсу, внутриимпульсных изменений и иногда нелинейности фазовой харак-
теристики. Дрожание импульса определяется обычно одним каскадом, поэтому
допуск на него редко распределяется между каскадами.
Утечка энергии высокой частоты. На частоте передатчика усиления ти-
пичной линейки усилителей, помещенной в экранированную камеру или ком-
нату, может достигать 90 дБ. Поэтому совершенно очевидно, что во избежа-
ние самовозбуждения утечка с выхода на вход линейки должна быть ослаб-
лена по крайней мере на 90 дБ. Однако более жесткое требование сводится
к тому, чтобы сигнал утечки на входе линейки имел заданную степень «чи-
стоты» спектра по отношению к спектру полезного сигнала в этой точке, так
как сигнал утечки может подвергнуться в процессе распространения модуля-
ции за счет вращения вентилятора, вибрации системы и пр. Так как типичным
значением уровня «чистоты», необходимого в системах индикации движущих-
ся целей или сжатия импульсов, является 50 дБ, развязка между выходом и
входом линейки должна быть не менее 140 дБ. Получение такой развязки мо-
жет оказаться трудной задачей, так как утечка из типовых волноводных сое-
динений и коаксиальных разъемов имеет порядок — 60 дБ. В число возмож-
ных источников утечки в усилительной линейке входят также коллекторные
вводы в лампах с прямолинейным лучом и катодные стержни в усилителях
со скрещенными полями. Поэтому для успешного выполнения усилительной
линейки необходим тщательный контроль утечки ВЧ энергии. То же относит-
ся к утечке в интервалах между импульсами, могущей создавать помехи при-
ему (см. о межимпульсном шуме в § 1.4).
1.6. Объединение ламп и включение в антенную решетку
Надежность. Следствием сложности передающей усилительной цепочки
часто является пониженная против требуемой в соответствии с поставленной
задачей надежность. Поэтому обычно предусматриваются резервные каскады
или полностью резервные усилительные линейки, причем возможны различные
комбинации переключения. В зависимости от назначения установки переклю-
чение может быть ручным или автоматическим во избежание неизбежной
при ручном переключении задержки. Здесь возможен большой выбор средств,
требующий, однако, тщательного анализа и наложения определенных ограни-
чений, так как сложность и стоимость неправильно выбранных средств кон-
троля и автоматического переключения может очень легко выйти за допусти-
мые пределы. В расчеты надежности входит исследование различных сочета-
ний рабочих и резервных передающих линеек и различных вариантов схем
переключения [79, 80], однако расчет надежности систем выходит за рамки
этого справочника.
1.6. Объединение ламп и включение в антенную решетку
В ряде случаев для увеличения выходной мощности требуется несколь-
ко ламп. Начиная с середины 50-х годов для получения мощности, превыша-
ющей возможности одной лампы, часто используется включение двух и более
ламп. Примерно с 1960 г. было обращено серьезное внимание на возможность
повышения надежности путем использования более чем одной лампы, так как
вероятность выхода из строя системы в этом случае меньше, чем вероятность
выхода из строя одной лампы. Хотя при выходе из строя одной из ламп мощ-
ность на выходе уменьшается, причем могут ухудшиться и другие параметры,
система в целом может быть рассчитана таким образом, чтобы требования
к ней удовлетворялись при некотором количестве вышедших из строя ламп.
Соответствующие методики расчета и оценки взаимного влияния параметров
подробно рассмотрены в книгах по надежности [79, 80].
Объединение с помощью 3-дБ направленного ответвителя (или двойного
тройника). Как 3-дБ направленный ответвитель, так и двойной тройник яв-
ляются очень удобными устройствами для суммирования выходной мощности
двух ламп [34]. Выбор направленного ответвителя или двойного тройника
определяется их способностью работать при заданной мощности и соображе-
ниями удобства, однако результаты с точки зрения потребителя получаются
одинаковыми. Если выходные мощности обеих ламп одинаковы и сигналы по-
ступают в комбинирующее устройство при правильном их фазировании, на
выход комбинирующего устройства будет поступать полная мощность. Чем
хуже выполняются эти условия, тем большая мощность появится на четвертом
плече (с искусственной нагрузкой) комбинирующего устройства, так как
мощность на выходном плече
- 4- V Pt Р2 cos 0,
а мощность на четвертом плече
—*1" 2 — V Pi P-t cos 0.
При разности фаз выходных сигналов двух ламп, равной 90°, мощность как
на выходном, так и на четвертом плече равна половине полной мощности,
а при разности фаз 180° можно поменять роли выходного и четвертого плеча
для измерения мощности в искусственной нагрузке. Возможность эффектив-
«3
Гл. 1. Радиолокационные передатчики
ного сложения мощностей двух ламп в требуемом плече в пределах некото-
рой полосы частот без какой-либо подстройки зависит от «сопряжения фаз»
этих ламп. Это значит, что поскольку фазовый сдвиг в лампах может изме-
няться с частотой, это изменение в обеих лампах должно быть одинаковым
в пределах допусков, определяемых потерей мощности в четвертом плече.
Для облегчения задачи установления соответствующих допусков на рис. 29
приведены кривые мощности, рассеиваемой в четвертом плече (мощности по-
терь) для обычно представляющего интерес диапазона изменения параметров.
Из рисунка видно, что разность фаз имеет гораздо больше значения, чем раз-
ность мощностей.
Так как 3-дВ направленный ответ-
витель или двойной тройник можно ис-
пользовать также как делители мощ-
ности, две лампы обычно соединяются
параллельно по схеме, изображенной на
S)
Рис. 29.
ваемой
амплитуд и фаз двух совместно работа-
ющих ламп.
Зависимость мощности рассеи-
в четвертом плече, от разности
Рис. 30. Параллельное включение высоко-
частотных ламп или ламповых линеек:
а — делитель и сумматор мощности; б —
делитель мощности и сложение мощностей
в пространстве; в — параллельное
включение двух линеек.
гая возможная схема соединения, в которой выходные мощности ламп сум-
мируются только в пространстве, однако лампы эффективно работают в па-
раллель. На рис. 30, в приведено параллельное соединение двух полных
усилительных линеек, однако чем больше элементов содержит каж-
дая ветвь, тем вероятнее появление разности фаз между ветвями при изме-
нении частоты или температуры. Поэтому параллельного соединения целых
линеек, более трудного, чем параллельное соединение отдельных каскадов,
обычно избегают. Однако параллельное соединение целых линеек дает воз-
можность осуществить с помощью маломощного диодного или ферритового
переключателя фазы на 180° очень быстрое переключение суммированной
выходной мощности с нормального выходного плеча комбинирующего устрой-
ства на четвертое плечо для кодирования и формирования импульсов или для
переключения с одной антенны на другую.
64
1.6. Объединение ламп и включение в антенную решетку
Фазированные антенные решетки (ФАР). По способу использования вы-
сокочастотных ламп ФАР могут быть трех типов:
1. Питание всей антенной решетки производится одним генератором, при-
чем деление мощности для питания каждого элемента антенны производится
с помощью встроенной структуры или эквивалентной распределительной си-
стемы оптического типа. Чтобы избежать двойных потерь, связанных с ис-
пользованием двух комплектов мощных фазовращателей в антенной решетке
для раздельного отклонения луча по строкам и столбцам, ЭВМ, управляющая
отклонением луча, должна подавать на каждый фазовращатель команду,
включающую сумму команд по строкам и столбцам. В этом случае электрон-
но-вычислительная машина может также осуществлять коррекцию коллимации
и отклонений параметров, благодаря чему отпадает необходимость в механи-
ческой подстройке.
2. Одну лампу можно использовать для питания группы элементов антен-
ной решетки. Такая группа называется обычно подрешеткой. Делители мощ-
ности (небольшие встроенные структуры) распределяют энергию между эле-
ментами подрешетки, причем делители во всех подрешетках одинаковы. На
каждый мощный фазовращатель каждой подрешетки подается своя команда
отклонения луча, однако команды для всех подрешеток одинаковы, благодаря
чему уменьшается загрузка ЭВМ. На установленные перед каждой лампой
маломощные фазовращатели (или элементы временной задержки, если длина
импульса настолько мала по сравнению с размерами антенной решетки, что
в этом может появиться необходимость) подаются раздельные команды от-
клонения луча, однако их количество значительно меньше, чем для ФАР
типа 1.
3. Устройство, в котором каждый элемент антенны питается отдельной
лампой, позволяет осуществлять сдвиг фазы, необходимый для отклонения
луча, на сравнительно низком уровне мощности перед оконечными усили-
тельными лампами. Возможны различные схемы подачи команд отклонения
луча по строкам и столбцам, позволяющие упростить ЭВМ.
В ФАР типа 1 использование ламп близко к общепринятому, за исклю-
чением, может быть, очень значительной требуемой средней мощности. В та-
ких системах для повышения надежности применяется обычно не менее двух
параллельно включенных ламп. В зависимости от требуемой мощности и на-
дежности можно рассчитать оптимальное количество параллельно включенных
ламп. Большие размеры ламп не создают в этом случае каких-либо трудно-
стей. ФАР типа 1 подробнее рассмотрены в § 1.7.
. В ФАР типа 2, как и типа 1, средняя мощность на одну лампу относи-
тельно велика, однако, если количество подрешеток достаточно велико, чтобы
система имела требуемые характеристики при одной или нескольких вы-
ключенных подрешетках, требования к надежности источника высокой часто-
ты каждой подрешетки могут быть снижены, так что на каждую подрешетку
Включается одна лампа. Требования к идентичности ламп для ФАР типа 2
едавнимы с предъявляемыми для типа 3. Размеры ламп могут быть или не
$Ыть ограничивающим фактором в зависимости от размеров подрешетки,
В свою очередь, определяемых рабочей частотой и количеством элементов
В подрешетке. Оптимальное количество элементов в подрешетке зависит от
наличия соответствующих ламп и их допустимой выходной мощности, от соот-
ношения затрат при большом числе маломощных и небольшом числе мощных
ламп и в случае очень коротких импульсов от временных задержек в пределах
одной подрешетки. Чем больше мощность системы и чем короче импульс, тем
меньше оптимальный размер подрешетки.
В ФАР типа 3 средняя мощность на одну лампу невелика. Для получе-
ния высоких надежности и коэффициента готовности системы не требуется
высокая надежность каждой лампы. Допустимое число ламп, которые могут
-Одновременно выйти из строя, зависит главным образом от допустимого уве-
личения уровня боковых лепестков диаграммы направленности антенной
65
Гл. 1. Радиолокационные передатчики
решетки [90, 91]. Однако очевидно, что от среднего срока службы всех ламп
сильно зависят эксплуатационные расходы, обусловленные как стоимостью
заменяемых ламп, так и расходами по обслуживанию, связанному с их заме-
ной. Сравнительно сложное обслуживание, необходимое для ФАР типа 3,
требует, чтобы в системах такого типа замена ламп производилась без необ-
ходимости выключения всей системы. Размер ламп имеет для ФАР типа 3
большое значение, так как желательно располагать лампы непосредственно
за элементом антенны для уменьшения длины соединяющего их волновода,
благодаря чему снижаются расходы и увеличивается к. п. д. Если поперечное
сечение лампы больше пространства между элементами антенны, лампы дол-
жны быть расположены до-
Рис. 31. Магнитная структура для решетки из
усилителей на ЛБВ.
струкция магнитной системы, при
статочно далеко за антен-
ной решеткой, чтобы обес-
печить требуемое расстоя-
ние между ними. В этом
случае ВЧ энергия подво-
дится к элементам антенны
через волноводы или ВЧ ка-
бели. В некоторых случаях
такое расположение не яв-
ляется недостатком, напри-
мер, когда один комплект
ламп предназначен для пи-
тания через ВЧ переключа-
тель, встроенный на выходе
каждой лампы, нескольких
антенных полотен. С точки
зрения компактности их
монтажа линейная форма
памп обладает несомненны-
ми преимуществами (рис.
14). Во всяком случае для
более плотного размещения
ламп желательна такая кон-
которой обеспечивается их надежная экра-
нировка.
Другим возможным вариантом монтажа ламп является их размещение
в одной большой магнитной структуре, рассчитанной так, чтобы было обеспе-
чено требуемое расстояние между лампами и одинаковое номинальное значе-
ние напряженности магнитного поля для всех ламп (рис. 31). Интересным
примером такого решения является магнитная структура для ЛБВ типа
MAR-1 [72]. Это решение оказалось чрезвычайно удачным (хотя и нелегким),
однако для него характерно интенсивное внешнее магнитное поле за преде-
лами магнитной структуры, которое может влиять на соседнюю аппаратуру.
Такая трудность не возникает в случае раздельного выполнения магнитной
системы для каждой лампы.
В ФАР типа 3 необходимо, чтобы запаздывание по фазе во всех лампах,
а также их выходная мощность поддерживались одинаковыми во избежание
появления из-за фазовых ошибок чрезмерно больших боковых лепестков диа-
граммы направленности антенны. Начальные разбросы запаздывания по фазе
могут быть уменьшены, если тщательно контролировать производственные до-
пуски на лампу [52, 171], в ряде же случаев возможна регулировка манит-
ного поля ламп для приведения запаздывания по фазе во всех лампах к еди-
ному эталонному значению. Так, например, испытания дем а тронов показали,
что подстройка магнитного поля в нескольких точках вдоль лампы позволяет
согласовать лампы в пределах 5° в 8%-ной полосе частот. Кроме идентично-
сти с§одих ^обходимо обеспечить идентичность напряжений источников
питания всех Ламп, напряжений модуляторов (например, для ЛБВ с управ-
66
1.7 Выходная мощность высокочастотных ламп
лающей сеткой), магнитных полей (в случае использования соленоидов),
возбуждения высокой частоты и соответствующих высокочастотных элемен-
тов (например, ферритовых вентилей). Обычно необходимо составить распре-
деление допустимых разбросов значений этих параметров подобно распреде-
лению допусков по фазовой стабильности от импульса к импульсу и в меж-
импульсном интервале, рассмотренному в связи с усилительными цепочками
1.7. Выходная мощность высокочастотных ламп
Повышение мощности, отдаваемой ВЧ лампами, определялось в основном
потребностями РЛС военного назначения и соответствовало прогнозам разви-
тия данной отрасли техники Некоторые планы развития РЛС особенно силь-
но повлияли на ход работ по повышению выходной мощности ВЧ ламп.
Линейный ускоритель Стэнфордского центра. Программа развития линей-
ного ускорителя Стэнфордского университета непрерывно стимулировала раз-
работки ВЧ ламп. Первый клистрон большой мощности разработан в Стан-
форде в 1949 г. [64, 163]. При этом были достигнуты большие успехи в тех-
нологии создания катодов на высокую импульсную мощность, объемных резо-
наторов, окон, коллекторов и керамических уплотнений на высокое напряже-
ние, не считая усовершенствований в модуляторе. Высокочастотные структу-
ры, изобретенные в начале 50-х годов, продолжают преобладать в разработ-
ках мощных ЛБВ, как, например, спираль со встречной намоткой, взаимосвя-
занные объемные резонаторы и резонатор четырехлепесткового типа. В даль-
нейшем, так как разработчики настаивали на фокусировке клистронов 3-км
линейного ускорителя постоянными магнитами, электровакуумная промышлен-
ность успешно разработала систему с бочкообразным магнитом (рис. 32),
которая в противном случае вероятно не появилась бы для ламп такой боль-
шой мощности раньше, чем через 5—10 лет. Потребность в клистронах сна-
чала па 240 гнезд с перспективой увеличения до 960 стимулировала работы
четырех крупнейших компаний по производству клистронов, которые успеш-
но разработали взаимозаменяемые варианты клистрона Станфорда (рис. 32).
После начального периода отбора и отказа от наименее удачных вариантов
был достигнут средний срок службы клистронов не менее 7000 ч при номи-
нальной импульсной выходной мощности 21 МВт в диапазоне S. Подробнее
история Стэнфордского ускорителя описана в работах [29, 81] и в приведен-
ной в них литературе.
Программа частотного разноса. В конце 50-х годов командование проти-
вовоздушной обороны финансировало ряд программ развития радиолокации,
направленных на то, чтобы неприятель был вынужден расширить частотный
диапазон излучения источников искусственных помех, что привело бы к ослаб-
лению их действия, либо увеличению количества самолетных средств радиопро-
тиводействия. В этих программах было предусмотрено использование практи-
чески всех радиолокационных диапазонов и расширение частотных полос,
используемых в каждом диапазоне. Очевидным следствием этих программ
явился мощный толчок к разработке высокочастотных ламп большой мощно-
сти, в частности к созданию ламп для тех радиолокационных диапазонов,
которые раньше относительно слабо использовались.
Программы разработки сверхмощных ламп. В конце 50-х годов, когда
Стали уделять больше внимания фазированным антенным решеткам, многие
полагали, что во всех фазированных антенных решетках будет использована
бистема отклонения луча маломощными фазовращателями по строкам и
столбцам с последующим усилением сигнала усилительной лампой или уси-
лительной линейкой в каждом излучающем элементе (см. § ].6, ФАР типа 3),
и что поэтому дни больших «сверхмощных» СВЧ ламп сочтены. Эта TO4ifa
3*
67
Гл. 1. Радиолокационные передатчики
•л
зрения укрепилась после проведенных в это же время испытаний антенны®
решеток большой мощности с общей фидерной систехмой питания, выявивший!
сложность их применения и необходимость в жестких допусках. Однако мне*
ние специалистов радикально изменилось в результате разработок следую*
щих устройств:
Рис. 32. Клистроны для линейного ускорителя Стэнфордского центра (SLAC) и типовой
бочкообразный магнит.
1) мощных ферритовых и диодных фазовращателей, способных пропу-
скать мощность, соответствующую одному излучающему элементу, и имевших
достаточно малые потери;
2) ЭВМ с быстродействием, достаточным для выработки команд управле-
ния лучом для фазовращателей в каждом элементе антенной решетки, что
свизило преимущества отклонения по строкам и столбцам;
3) облучателей антенных решеток оптического типа («пространственного
витания»), более простых и дешевых, чем общая фидерная система
В результате небольшое количество ламп очень большой мощности может
витать всю антенную решетку. В тех случаях, когда имеется несколько антен-
ных полотен, не работающих одновременно, их питание производится от од-
ной лампы с помощью переключателя большой мощности.
В этом варианте мощность установки не лимитируется импульсной или
средней выходной мощностью одной лампы. Можно комбинировать, симме-
68
1.7. Выходная мощность высокочастотных ламп
трировать и коммутировать выходы нескольких мощных ламп, используя
существующий набор комбинирующих устройств и делителей, не сосредотачи-
вая всю мощность в одном канале. Точно так же, как первые п ответвлений
в общей фидерной цепи могут быть заменены 2 п мощными источниками ко-
лебаний (соответствующим образом сфазированных), антенная решетка мо-
жет облучаться несколькими рупорами, каждый из которых передает часть
общей энергии.
Таблица I
Программы разработок сверхмощных ламп
Основное задание: импульсная мощность 100 МВт, средняя 1 МВт
Компания GE Raytheon Varian Eimac Litton
'Тип лампы Многолуче- вой клистрон; многолуче- вой кли- строн бе- гущей волны Амплитрон Клистрон и ЛБВ Клистрон Усилителя со скрещен- ными поля- ми: биматрон дематрон
Условное обозначе- ние ZM6601 QK1224 — Х3030 —
Диапазон частот X S — X S
Заданный номинал — Средняя мощность 400 кВт — Средняя мощность 1 МВт Импульсная мощность 10 МВт. средняя 200 кВт _
Полученные результаты — Средняя мощность 425 кВт — Средняя мощность 510 кВт Заданна изменена
Технологи- ческие до- стижения Система охлажде- ния. Керамиче- ские детали Высокий первеанс Квазиполый луч Керамиче- ские окна Контур четырехле- песткового типа Высокое на- пряжение Клистрон с удлинен- ным прост- ранством взаимодей- ствия Дематрон (с автоим- пульсной модуляци- ей)
Источник [10,71] [82] — [63] [14.40]
от
Гл. 1. Радиолокационные передатчики
Имеется ряд причин, обусловливающих непрерывное стремление к увели-
чению мощности высокочастотных ламп. Хотя стоимость лампы при этом
существенно увеличивается, она составляет одну из наименее значительных
долей эксплуатационных расходов на систему. Даже расходы на электриче-
скую энергию для питания лампы в течение ее срока службы превышают
стоимость лампы. К тому же количество человеко-часов в год, требуемых для
1000000
Гр и оды и тетроды
1908г
Амплитрон
х-
Клистрм..
100000
.Лампы 1908г.
10000
Магнетроны
1997г. '
ЛОО
£
£
1ООО
100
Импульсный
генератор
'обратной
волны (типа О)
х
к
10
01
0,01 L
’х-
Сфера л
конкурен-
ции.
Кароинотрон
(типа OJ
TSepda- i Диодсогра-
тельнь/е I ничейным
устрой- I накоплением
ттда1908г\ объемного
|----у——заряда —
0,01 0,1 1 10 . 100 1000
Частота, ГГц
1
Рис. 33. Допустимая
средняя мощность высокочастотных ламп к 1968 г. |50j.
обслуживания системы с небольшим количеством мощных ламп, меньше, чем
в случае большого количества маломощных ламп (см. § 1.6). Кроме того,
стоимость оборудования на 1 кВт выходной мощности высокой частоты для
мощных ламп обычно меньше, чем для маломощных. В начале 60-х годов
были разработаны программы создания ряда сверхмощных усилительных
ламп. В них не предусматривалось сначала какое-либо определенное приме-
нение ламп, однако, как это и ожидалось, в результате разработок были соз-
даны технология, элементы электровакуумных приборов и вспомогательная
аппаратура, оказавшие, как это видно из табл. 5, громадное влияние на по-
следующие разработки мощных ламп (и, следовательно, РЛС).
Зависимость предельной мощности от частоты. Импульсная мощность
ламп высокой частоты была доведена до такого значения, при котором пре-
дел ставился пробоем в существующих волноводах даже в случае их напол-
70
1.8. Формирование импульсов для минимизации ширины спектра
нения газом SF6 под давлением в 128 кПа (12,5 атм). Поэтому для возмож-
но большего увеличения средней мощности в начале 60-х годов в радиолока-
ции появилась тенденция к увеличению коэффициента заполнения импульса
соответствующим формированием импульсов (например, методом сжатия
импульсов). В течение длительного времени фактором, лимитирующим повы-
шение мощности лампы, были высокочастотные окна (используемые для ва-
куумного уплотнения). После первых окон из стекла была разработана тех-
нология изготовления окон из алюминиевой керамики, а затем из бериллие-
вой Примечательно, что в результате этих разработок [5] номинальная спо-
собность окон работать при заданной мощности оказалась существенно
больше, чем это требуется. Хотя во многих случаях средняя выходная мощ-
ность лампы может быть настолько большой, что волновод даже из электро-
литной меди должен охлаждаться водой, предельная средняя мощность
ограничена все же самой лампой. Поэтому для характеристики состояния
разработок ламп высокой частоты при их сравнении принято указывать
достигнутое значение средней мощности (рис. 33) [18, 47—50]. Практически
для надежной работы системы эти значения следует несколько уменьшить.
Для сравнения на этом же рисунке приведены энергетические параметры
микроволновых полупроводниковых приборов, которые, как следует ожидать,
будут улучшаться. Однако разрыв между этими устройствами и вакуумными
лампами настолько велик, что еще в течение многих лет нельзя ожидать за-
мены в импульсных радиолокационных передатчиках вакуумных ламп полу-
проводниковыми приборами в качестве мощных источников колебаний. Особое
значение имеет также то обстоятельство, что вследствие небольшой тепловой
постоянной времени микроволновых полупроводниковых приборов их импульс-
ная мощность не может быть на много больше средней мощности. Конечно, при
соответствующем соединении большого количества маломощных полупровод-
ников или включения их в антенную решетку можно получить достаточно
большую мощность. Таким образом, полупроводники могут заменить лампы
в таких радиолокационных фазированных антенных решетках, в которых на
каждый элемент антенны включен отдельный усилитель (см. ФАР типа 3
§ 1.6), особенно в самолетных устройствах, когда на один элемент не тре-
буется большая мощность.
1.8. Формирование импульсов для минимизации ширины
спектра
По мере уплотнения высокочастотного спектра увеличивается внимание
к вопросам электромагнитной совместимости (см. т. 2, гл. 9). Хотя в поня-
тие электромагнитной совместимости входят все вопросы совместимости,
включая оптимальное географическое распределение частот, в этом справоч-
нике они будут рассмотрены лишь применительно к выбору тина лампы и ми-
нимизации ширины спектра, занимаемого передатчиком.
Уменьшение паразитных выходных сигналов. Как было показано в § 1.4,
выходные сигналы всех высокочастотных ламп содержат гармоники. Кроме
того, большей части ЛБВ и усилителей со скрещенными полями с импульс-
ной модуляцией на катод присущи паразитные выходные колебания в диапа-
зонах, смежных с рабочей полосой. Во всех лампах возникает шум или па-
разитные сигналы в пределах рабочей полосы, обычно от —30 до —60 дВ
в полосе 1 МГц в усилителях со скрещенными полями, и от —60 до —90 дВ
в лампах с прямолинейным электронным лучом.
Снизить гармоники, изменив конструкцию лампы, обычно почти невоз-
можно, однако очень легко отфильтровать гармоники (с ослаблением на 30—
60 дБ) с помощью современных фильтров на большую номинальную мощ-
ность. Паразитные сигналы в смежных полосах зависят от выбора лампы я
модулятора, однако они тоже могут быть в случае необходимости отфильтро-
71
Гл. 1. Радиолокационные передатчики
ваны СВЧ фильтрами на большую мощность. Применение фильтров для по-
давления паразитных сигналов и шума в рабочей полосе можно лишь в тех
случаях, когда частота системы фиксирована, либо имеется достаточно вре-
мени для настройки фильтров. Однако, поскольку в этом случае требуются
узкополосные фильтры высокой добротности, напряжение на которых во
много раз увеличивается, использование их ограничено системами небольшой
мощности.
Уменьшение ширины спектра, форма которого хуже определяемой выра-
жением (sin х)/х. Спектр идеального прямоугольного импульса определяется
известным выражением (sinx)/x, где х = л(/0 — f) Т; f0 — рабочая частота и
Ток луча
В1/ Возйркдвлие
Рис. 34. Использование стробированного высокочастотного возбуждения для исключения
фазовых искажений.
Показаны также потери мощности луча в интервалах фронта и спада импульса моду-
лятора.
Т — длительность импульса. Если принять в качестве номинальной полосы ча-
стот сигнала \/Т, то огибающая спектра будет падать на 6 дБ на каждую
октаву номинальной полосы до значения, равного собственному шуму пере-
датчика. В зависимости от характеристик лампы и модулятора реальный
спектр огибающей может оказаться шире идеального, что наблюдается чаще
всего в результате фазовой модуляции на конечных участках фронта и спада
реального импульса. В этих случаях следует соответственно исправить форму
фронта и спада импульса, либо (в лампах с прямолинейным электронным
лучом) не подавать возбуждение высокой частоты в этих интервалах, как это
показано на рис. 34. Хотя при этом немного уменьшается к. п. д. передатчика,
следует иметь в виду, что энергию за пределами полосы порядка 1/7, гене-
рируемую на участках фронта и спада импульса при наличии возбуждения,
нельзя использовать в приемнике [61].
Улучшение формы спектра по отношению к определяемой выражением
(sin х)/х методом формирования импульсов. Поскольку энергия спектра за
пределами ±1/7 относительно /о не используется в приемнике, для электро-
магнитной совместимости важно исключить излучение энергии за этими пре-
делами. К этому можно подойти, придав импульсам форму, отличную от
общепринятой и удобной прямоугольной формы, описываемыми ниже мето-
дами.
72
1 8. Формирование импульсов для минимизации ширины спектра
Импульсы со сформированными фронтом и спадом. Очень простым ме-
тодом является формирование прямоугольного импульса только в интервалах
его фронта и спада. При этом уменьшается энергия спектра на частотах, да-
леко отстоящих от /о, однако благодаря плоской центральной части импуль-
са сохраняется высокий к. п. д. передатчика. Прямоугольному импульсу соот-
ветствует наивысший к. п. д. передатчика и самый широкий спектр частот,
а для гауссова импульса ширина спектра имеет наименьшее значение, однако
к. п. д передатчика ухудшается. Поэтому часть полной длительности импуль-
са, которую целесообразно использовать для формирования фронта и спада,
зависит от выбранного компромисса между этими двумя крайними случаями.
Поскольку спектр треугольного импульса уменьшается на 12 дБ на октаву
полосы частот, считая от несущей, спектр симметричного трапецеидального
импульса с временем нарастания tT падает на 12 дБ на октаву полосы частот
1//г. Для более сглаженной формы, приближающейся к форме интеграла
вероятности, спектр за пределами полосы l/tr падает еще быстрее. Хотя на
практике достижимое улучшение ограничено в конечном счете фазовой моду-
ляцией передатчика в интервалах фронта и спада, все же можно получить
значительное улучшение. Так, например, при соответствующей форме входного
ВЧ сигнала передатчика на лампе с прямолинейным электронным лучом
ширину спектра по уровню —60 дБ можно уменьшить на порядок ценой сни-
жения к. п. д. передатчика на 25%.
Квазигауссовы импульсы. Гауссов импульс является импульсом с ная-
болвшей скоростью спада энергии боковых полос при заданной его эффек-
тивной длительности. Так как истинно гауссов импульс простирается от — со
до + оо, следует рассмотреть приближения типа cos2, cos4 и т. д. либо истин-
но гауссову форму, усеченную на некоторой конечной длительности. Влияние
таких аппроксимаций подробно рассмотрено в т. 2, гл. 9 и в работах [54,
58—60 и 62]. Обычно чем лучше аппроксимация, тем при большем удалении
боковых составляющих энергетического спектра от несущей частоты действи-
тельный спектр начнет отличаться от спектра идеального гауссова импульса.
Так, например, чтобы спектр импульса был подобен спектру идеального гаус-
сова импульса до уровня — 70 дБ, длительность аппроксимирующего усечен-
ного гауссова импульса должна быть в три раза больше его ширины по уров-
ню половинной мощности (при такой его ширине амплитуда у краев импуль-
са спадает приблизительно до 0,2%). Удовлетворительный результат дает
также аппроксимация cos6 [58].
Так как динамический диапазон в этих случаях должен быть порядка
60 дБ, магнетроны и усилители со скрещенными полями обычно непригодны
для систем с формированием импульсов (см. табл. 4).
Амплитудная нелинейность. Точное получение заданной формы импульса
при нелинейности амплитудных характеристик лампы и модулятора является
сложной задачей. Для получения спектра, соответствующего гауссову им-
пульсу даже до уровня —50 дБ, обычно требуется достаточно много кри-
тичных подстроек. Степень допустимой амплитудной нелинейности зависит от
требуемой чистоты спектра и характера нелинейности [58].
Фазовые искажения. Даже в том случае, когда требуемая форма импуль-
са может быть реализована, фазовые искажения ограничивают принципиаль-
но достижимое улучшение. Чрезвычайно удобным для исследования фазовой
модуляции является понятие квадратурного спектра, создаваемого квадратур-
ным импульсом. Если разложить выходной импульс высокой частоты на две
составляющие, одна из которых находится в фазе с ВЧ заполнением импульса
на его фронте и спаде, а другая сдвинута на 90° (находится в квадратуре),
го уровень энергии квадратурного импульса будет являться показателем глу-
бины фазовой модуляции в импульсном интервале [53, 55]. Эти составляющие
легко наблюдать с помощью синхронного детектора (рис. 35). Так как квад-
ратурный импульс существует только при наличии фазовой модуляции, он
короче полезного импульса и, следовательно, его спектр шире. Полный энерге-
73
Гл. 1. Радиолокационные передатчики
тический спектр состоит из спектра полезного импульса и менее интенсивного,
ЯО более широкого спектра квадратурного импульса. Поэтому уменьшение де-
виации фазы приводит к улучшению (сужению) спектрд, а наблюдение квад-
ратурного импульса позволяет непосредственно отслеживать уменьшение
девиации фазы в результате различных регулировок. В работе [58] приведены
подробные расчеты, позволяющие вычислить влияние фазовой модуляции
разной глубины. Для выполнения этих расчетов необходимо знать форму пе-
редаточной .характеристики лампы или ее фазовой характеристики, однако
яри грубых оценках можно исходить из того, что при плавных или медлен-
Рис. 85. Сдама испытания .лампы типа УА-840 для системы TACAN.
Для наблюдения квадратурного импульса использован синхронный детектор 153].
ных девиациях фазы порядка 0,’ рад форма спектра начинает значительно
отклоняться от формы спектра гауссового импульса только ниже уровня
—80 дБ. Этот уровень представляет, вероятно, наибольший интерес, так как
уровень внутренних шумов линейки ВЧ ламп тот же.
Изменения фазы могут зависеть от метода, выбранного для формирова-
ния огибающей импульса. Если модулируется напряжение луча клистрона, то
коэффициент усиления, полоса частот и фаза значительно меняются при из-
менении напряжения (Большая часть ЛБВ начинает генерировать при таком
методе модуляции, и поэтому здесь они не рассматриваются. Подходящими
являются триоды и тетроды, однако их рассмотрение выходит за рамки этой
главы.) Если модулируется только ток луча управляющей сеткой или моду-
лирующим анодом, фазовая модуляция уменьшается приблизительно в 10 раз,
оставаясь все же довольно значительной, а в результате изменений коэффи-
циента усиления появляется амплитудная нелинейность. Даже в том случае,
когда ток луча включается только в импульсных интервалах, а входные ВЧ
импульсы сформированы, при этом возникает фазовая модуляция в резуль-
тате преобразования амплитудной модуляции в фазовую, а также амплитуд-
иая нелинейность в результате насыщения выходной цепи. Кроме того,
яри реализации любого из этих методов сказываются неоднородности переда-
74
1.8. Формирование импульсов для минимизации ширины спектра
точной характеристики высокочастотных ламп,, являющиеся следств-ием таких
факторен второго порядка, как изменение преломления луча, колебания ионов,
и npi Таким образом, точное генерирование требуемой формы- импульса без
фазовых искажений каким-либо методом,, в- котором изменения вносятся че-
рез передаточную характеристику лампы, является трудно осуществимой за-
дачей.
Единственным исключением в этом отношении является клистрон с элект-
ростатической периодической фокусировкой, в котором практически отсутст-
вуют неоднородности. Благодаря отсутствию магнитных полей режим работы
Подстройка амплитуд
Рис. 36. Схема формирования импульсов путем фазирования и суммирования.
лампы плавно изменяется при изменении напряжения, а при появлении
положительных ионов они быстро улавливаются. При использовании этого
типа клистрона с электростатической фокусировкой в телевизионном передат-
чике дециметрового диапазона выявилась его необычно гладкая передаточная
характеристика.
Формирование импульсов с помощью- направленного ответвителя. Ввиду
амплитудных и фазовых искажений при формировании импульса в самой ВЧ
лампе представляет интерес исследование1 других методов генерирования им-
пульсов желаемой формы. На- рис. 36 показано1 как с помощью направленного
ответвителя (или двойного тройника) можно скомбинировать выходы двух
усилительных линеек для придания импульсу желаемой формы. Обе лампы
генерируют полную мощность на протяжении всего импульсного интервала,
требуется лишь их стабильная работа. Нулевое значение выходной мощности
75
Гл. 1. Радиолокационные передатчики
В начале и в конце импульса достшается такой регулировкой выходных сиг»
Налов ламп, при которой они полностью взаимно компенсируются в направ»
Венном ответвителе, а для получения полной выходной мощности они фази»
руются так, чтобы их мощности суммировались (однако шумы не коррелиро»
ваны, поэтому они всегда делятся поровну между выходным плечом и искус»
«таенной нагрузкой). Для достижения полной взаимной компенсации двух
Выходных сигналов необходимо очень хорошее согласование обоих каналов
ВО фазе и амплитуде. Для получения сигнала уровня —40 дБ необходимо
Вогласование по амплитуде порядка 1% и по фазе 0,6° (0,01 рад). Таким об-
резом данный метод не вносит каких-либо дополнительных искажений, однако
Ой очень критичен к балансировке и согласованию обоих каналов, что пред»
Ставляст особые трудности, когда каналы включаются и выключаются в на-
чале и конце каждого импульса. Параметры обоих фазовращателей также
довольно критичны, так что должна быть предусмотрена соответствующая
подстройка.
К. п. д. Независимо от выбранного метода формирования к. п. д. передат-
чяка со сформированными импульсами меньше, чем с прямоугольными.
В случае формирования импульса изменением напряжения луча в клистроне
модулятор на вакуумных лампах должен поглощать и рассеивать энергию,
соответствующую разности напряжений на клистроне и высоковольтном ис»
точнике питания. Значительно более высокий к. п. д. можно получить с линей-
ным модулятором со специальной схемой, синтезирующей требуемую форму
импульса, однако получение достаточно точной формы импульса с модулято-
ром этого типа является очень трудной задачей. Особенно трудно добиться
спада импульса до нуля из-за рассогласований и потерь в устройствах. Вооб-
ще согласование устройств большой мощности не так просто осуществить.
Этот метод формирования представлялся целесообразным только для незна-
чительных улучшений спектра в передатчиках на триодах и тетродах, однако
дальнейшие усовершенствования возможны [56, 57].
Может показаться, что клистроны пли ЛБВ, модулируемые с помощью
управляющей сетки или модулирующего анода, могут иметь высокий к. п. д.
К сожалению, однако, при низком уровне выходной мощности интенсивность
луча должна быть много больше ожидаемой, так как при малом токе луча
значительно снижается коэффициент усиления и (или) к. п. д. лампы. Поэтому
в течение всей длительности импульса ток луча должен быть достаточно
большим.
Если формируется входной ВЧ импульс, а луч полностью включен в тече-
ние всего импульса, то к. п. д. получается очень низким. Номинальное зна-
чение к. п д. лампы (в режиме насыщения) уменьшается в число раз, равное
отношению полной длительности формируемого импульса к длительности
импульса по половинной мощности, которое составляет обычно от 3:1 до
4:1. Совершенно очевидно, что такое же снижение к. п. д. имеет место при
формировании импульса направленным ответвителем.
Таким образом, наиболее важным вопросом при проектировании передат-
чиков со сформированными импульсами является выбор допустимого усечения
во времени, так как от этого непосредственно зависит к. п. д. »
В работе [9] был предложен интересный метод повышения к. п. д. клист-
рона, в котором формирование выходного импульса осуществляется путем
формирования входного ВЧ импульса. При очень небольшом уровне или пол-
ном отсутствии входного ВЧ напряжения на коллектор подается пониженное
напряжение (приблизительно на 90%, т. е. напряжение катод — коллектор
составляет одну десятую напряжения катод — корпус). При увеличении вход-
ного ВЧ напряжения напряжение на коллекторе увеличивается до уровня,
достаточного для фокусировки луча, и возрастает до полного значения к се-
редине импульса, когда входное ВЧ напряжение также достигает полного зна-
чения (рис. 37). Так используются все возможности режима пониженного
напряжения на коллекторе, так что к. п. д. клистрона, равное 35% при пря-
76
1.8, Формирование импульсов для минимизации ширины спектра
моугольной форме импульса, доходит до 26% при форме импульса, близ-
кой к гауссовой. Соответствующее импульсное напряжение коллектора
легко можно получить с помощью линейного модулятора, так как при этом
напряжение на коллекторе не критично. С помощью простого £С-фильтра
в качестве устройства формирования импульсов можно получить на коллекто-
ре полусинусоидальную форму импульса. Как было показано выше, лучшее
приближение к оптимальной гауссовой форме получается с помощью устрой-
ства, состоящего из согласно действующих и противодействующих сек-
ций [56, 57],
ИП
Рис. 37. Режим программированного уменьшения напряжения на коллекторе тля по-
вышения к.п.д. при усилении формированных импульсов.
Тасап — радионавигационная система тактического назначения. Наилуч-
шая из всех существующих систем формирования импульсов использована
в системе Тасап [174] В наиболее распространенном варианте системы при-
меняется клистрон диапазона L. на 37 кВт импульсной мощности с формиро-
ванием импульса на управляющей сетке. Сформированный приблизительно по
закону cos2 импульс пропускается через рассчитанный на большую мощность
фильтр высокой добротности (с потерями 1,5 дБ) с целью дальнейшею улуч-
шения спектра. Система удовлетворяет требованиям, согласно которым спектр
должен соответствовать гауссову до уровня — 60 дБ. Система работоспособ-
на, хотя критичным элементом является фильтр, который во избежание рас-
стройки должен иметь температурную роулировку или компенсацию. Из-за
большого рассогласования нагрузки при значительной расстройке фильтра
может быть также поврежден клистрон [54].
Экспериментальная система Тасап на лампе VA-840. Чтобы исключить
применение фильтра, рассчитанного на большую мощность, в 1964 г. был раз-
работан клистрон со специальными характеристиками [53, 55]. При разра-
ботке этой лампы, получившей обозначение VA-840, предусматривалось полу-
чение плавной передаточной характеристики и использование необычной не
перехватывающей луч отрицательно заряженной управляющей сетки с коэф-
77
Гл. 1. Радиолокационные передатчики
фициентом усиления 7 при небольшом фазовом сдвиге в интервалах вклю-
«ния и выключения луча. В результате при модуляции луча с соответству-
ющим сочетанием напряжений на сетке и аноде фазовая модуляция в преде-
лах импульса не превышала 20°. Кроме, того, лампа была рассчитана так,
чтобы зависимость выходной мощности высокой частоты от тока луча была
линейнее обычной, благодаря чему соответствующее формирование импульс*
ого тока луча обеспечивало требуемую форму огибающей ВЧ импульса.
Такое решение целесообразно потому, что создание линейного детектора вы-
сокой частоты с динамическим диапазоном 60 дБ для регулировки формы
огибающей практически не осуществимо. Придавая импульсному току луча
форму, очень близкую к гауссовой (с использованием нескольких корректи-
рующих подстроек), и регулируя входной ВЧ сигнал и настройку объемных
резонаторов с контролем квадратурного импульса по схеме, приведенной на
рис. 35, удалось добиться того, что спектр системы Тасап удовлетворял
в лабораторных условиях задаваемым требованиям без необходимости при-
менения фильтров высокой частоты, рассчитанных на большую мощность.
К сожалению, эта разработка не была доведена до конца, так как оказа-
лось невозможным заменить экспериментальную лампу с фокусирующим со-
леноидом лампой с фокусировкой постоянными магнитами. Тем не менее ре-
зультаты этого исследования окажутся полезными в будущем при разработке
передатчиков с регулируемым спектром частот по программе электромагнит-
ной совместимости. На основании предыдущего опыта представляется, что
прямая зависимость между током луча и выходным сигналом не требуется:
эта зависимость должна быть лишь достаточно плавной, так как для наблю-
дения синфазного импульса можно использовать синхронный детектор и осу-
ществить детектирование огибающей сигнала в очень большом динамическом
диапазоне. Так как для удовлетворения требований к спектру квадратурный
импульс должен иметь небольшую амплитуду, синфазные импульсы достаточ-
но хорошо отображают форму огибающей, что позволяет компенсировать не-
линейность передаточной характеристики лампы, непосредственно придавая
огибающей импульса на выходе лампы требуемую форму.
Следует ожидать, что интерес к формированию импульсов будет непре-
рывно расти, однако, вероятно, потребуется применение различных сочетаний
и комбинаций рассмотренных здесь методов формирования, прежде чем ока-
жется возможным широкое практическое использование сформированных им-
пульсов.
1.9. Проблема импульсных посылок
В современных радиолокационных устройствах все более желательной
является работа посылкой, состоящей из пачки очень коротких импульсов, что
позволяет получить высокую разрешающую способность как по дальности,
так и по скорости при одном коротком облучении цели. Такой режим работы
трудноосуществим в передатчике и существенно влияет на выбор ВЧ лампы.
В дальнейшем в качестве примера будет произвольно выбрана форма сигнала,
состоящего из 100 посылок в секунду с длиной посылки, равной 1 мс, причем
каждая посылка состоит из 1000 импульсов длительностью в 0,1 мкс, излуча-
емых через 1 мкс. Частота повторения импульсов в интервале посылки 1 МГц,
среднее значение частоты повторения 100 кГц, а среднее значение коэффици-
отта заполнения 0,01. В типовых РЛС с импульсными посылками должна
оЫть также йредусмотрена возможность одновременной работы импульсами
другой длительности, однако данный пример удобен для пояснения проблемы.
Лампы с прямолинейным электронным лучом. Когда для усиления опи-
санной выше импульсной посылки используется лампа с прямолинейным элек-
тронным лучом, к. п. д. лампы очень сильно зависит от двух факторов.
78
1.9 Проблема импульсных посылок
1. Если модулирующие импульсы подаются на катод или модулирующий
анод лампы (коэффициент усиления модулирующего анода принимается рав-
ным 1), то энергия расходуется за каждый импульс на заряд паразитной
емкости цепи до полного ускоряющего напряжения и на последующий раз-
ряд. Если интервалы между импульсами достаточно малы, выгоднее оставлять
луч включенным и примириться с соответствующей потерей энергии, чем рас-
ходовать энергию при каждом включении и выключении луча. Для клистрона
на 100 кВт с первеансом, равным 1 микроперву, ток луча 31 А и потребляемая
при включенном луче мощность 3,1 Дж/мкс. Если паразшная емкость (катода
при модуляции на катод или модулирующего анода при модуляции на моду-
лирующий анод) равна 500 пФ, накопленная на ней энергия 2,55 Дж. Вся эта
энергия теряется (если не используются чрезвычайно сложные схемы модула-
тора) при каждом разряде паразитной емкости и такая же энергия теряется
в модуляторной лампе при каждом заряде паразитной емкости, так что при
каждом включении и выключении лампы потери энергии составляют 5,1 Дж.
Совершенно очевидно, что не имеет смысла выключать клистрон в рассматри-
ваемом примере в течение интервала длительностью 0,9 мкс между импуль-
сами посылки Потеря энергии будет меньше, если не выключать клистрон,
хотя даже в этом случае потеря энергии будет в 10 раз больше, чем при
обычном .режиме работы клистрона с длинными импульсами.
2. Даже в случае выбора более «разумной» формы посылки (например,
пачки импульсов длительностью 1 мкс с интервалами 10 мкс), потеря энергии
при увеличении и уменьшении тока луча обусловлена конечной длительностью
фронта и спада импульса модулятора (см рис. 34) [115] Если пиковый ток
модулятора, расходуемый на заряд и разряд паразитной емкости цепи, состав-
ляет 50 А, то увеличение и уменьшение напряжения происходит в течение
1 мкс Так как ток луча меняется пропорционально напряжению в степени 3/2,
результирующая потеря энергии при линейном нарастании напряжения в те-
чение 1 мкс эквивалентна потере при полной мощности не за 0,5 мкс, а только
за 0,4 мкс. Тем не менее при учете времени как увеличения, так и уменьшения
напряжения полная энергия в луче будет соответствовать потерям при пол-
ной мощности за 0,8 мкс, т. е. 2,5 Дж. Таким образом, даже в случае им-
пульсов длительностью 1 мкс полезная энер1ия составит 3,1 Дж на импульс,
энергия, затраченная на заряд и разряд паразитной емкости, 5,1 Дж на им-
пульс и энергия, теряемая в луче, 2,5 Дж на импульс. Для значений параме-
тров, принятых для второго примера, независимо от к. п. д. самого клистрона,
к п. д всего устройства уменьшится в результате использования коротких
импульсов в (3,1 4-5,1ф-2,5)/3,1 или в 3,45 раза
Повышенный коэффициент усиления. При более высоком коэффициенте
усиления модулирующею анода можно, естественно, получить лучшие резуль-
таты. Потери энергии луча уменьшатся приблизительно в число раз, равное
коэффициенту усиления, а потери в паразитной емкости — в число раз, равное
приблизительно квадрату коэффициента усиления. Однако, как было отмече-
но в § 1.3, модулирующие аноды с высоким коэффициентом усиления редко
применяются.
Другое решение — использование управляющей сетки с высоким коэффици-
ентом усиления, которая, однако, не может быть использована в лампах боль-
шой мощности без защитной сетки (см. § 1.3), уменьшающей мощность,
рассеиваемую на управляющей сетке. Защитная сетка с коэффициентом уси-
ления порядка 40 применяется в лампах с импульсной мощностью приблизи-
тельно до 100 кВт, однако можно ожидать, что мощность ламп с такими
сетками будет быстро увеличиваться.
В некоторых системах возможна подгонка формы посылки, минимизиру-
ющая потери энергии в передатчике. Это приводит, естественно, к компромис-
су между к. п. д. передатчика и формой сигнала. Увеличение длительности
импульсов и уменьшение частоты их повторения позволяет увеличить мощ-
ность излучения в импульсе при заданной первичной мощности. Тем не менее
79
Гл. 1. Радиолокационные передатчики
трудности передачи идеальной формы сигнала при улучшенном к. п. д. сохра-
няются.
Потери энергии луча можно уменьшить, усложнив модулятор с тем, что-
бы в результате увеличения допустимого пикового тока ускорить заряд и
разряд паразитной емкости. Потери энергии в паразитной емкости также
могут быть уменьшены при разработке достаточно сложного модулятора,
в котором для заряда и разряда паразитной емкости использован метод
сохранения энергии. Такое усложнение допустимо в антенных решетках с не-
большим количеством модуляторов на всю систему. Это должно учитываться
при выборе размеров подрешетки и числа элементов антенны на одну высо-
кочастотную лампу (в § 1.6, ФАР типа 2).
Усилители со скрещенными полями. В случае использования для усиле-
ния пачек импульсов длительностью 0,1 мкс усилителей со скрещенными поля-
ми с импульсной модуляцией на катод возникает та же проблема снижения
к. п. д., но она стоит не столь остро благодаря более низкому рабочему на-
пряжению усилителей со скрещенными полями. Усилитель со скрещенными
полями, эквивалентный лампе с прямолинейным электронным лучом с рабо-
чим напряжением 100 кВ, работает при напряжении 40 кВ и пиковом токе
60 А. Поскольку потерн на заряд и разряд паразитной емкости пропорцио-
нальны квадрату напряжения, они уменьшаются в усилителе со скрещенными
полями в 6,25 раз по сравнению с клистроном на 100 кВ. Кроме того, так
как на усилитель со скрещенными полями все время должно подаваться вход-
ное ВЧ напряжение во избежание появления интенсивного шума на выходе
в процессе нарастания тока, участки увеличения и уменьшения тока луча
практически не «отсекаются». Однако из-за этого ухудшается форма импуль-
са. В качестве возможного варианта для сохранения требуемой формы им-
пульса частота сигнала в интервалах фронта и спада импульса может сме-
щаться относительно рабочей частоты либо сигнал может переключаться ка-
ким-либо электронным устройством на искусственную нагрузку (см. § 1.5 и
1.6). При этом вновь возникает проблема потери энергии луча, хотя эти поте-
ри не столь велики, как в случае лампы с прямолинейным электронным лучом.
Вследствие низкого динамического сопротивления усилителя со скрещен-
ными полями значительный ток возникает лишь при напряжении, составляю-
щем приблизительно 90% от рабочего напряжения. Однако при малой вели-
чине динамического сопротивления для ускорения разряда напряжения по
окончании импульса потребуется специальная схема «отсекания хвоста» им-
пульса, что позволит избежать паразитного шума в интервалах между им-
пульсами. Хотя через усилитель со скрещенными полями проходит очень не-
большой ток при напряжении, не превышающем 90% рабочего напряжения,
он может явиться причиной значительного шума на выходе. Типичная схема
отсекания хвоста и соответствующая форма импульсов показаны на рис. 38.
Значительное повышение к. п. д. можно получить с помощью усилителя
со скрещенными полями при постоянном напряжении питания, который вклю-
чается входным ВЧ напряжением и выключается управляющей сеткой, так
как заряд и разряд паразитной емкости не происходит при каждом импульсе
и можно осуществить очень быстрое включение и выключение лампы. Однако
энергия, потребляемая управляющим электродом от импульсного генератора,
не является незначительной. В усилителе со скрещенными полями на 40 кВ
при токе 60 А она достигает 0,1 Дж на каждое выключение импульса. Таким
образом, при работе с импульсами длительностью 0,1 мкс к. п. д. уменьшится
в отношении (0,24 + 0,1)/0,24 или в 1,4 раза. Хотя на управляющем элек-
троде рассеивается за каждый импульс небольшая доля этой энергии
(0,1 Дж), его нагрев ограничивает максимально возможное значение ча-
стоты повторения импульсов. Ко времени составления этого справочника до-
пустимая частота повторения для управляющего электрода не превышала не-
скольких килогерц. Поэтому частота повторения 100 кГц в рассмотренном
примере значительно превышает практически достигнутые результаты.
80
1.10. Tребования к стабильности передатчиков
Идеальным способом создания импульсных посылок является применение
усилителя со скрещенными полями с автоимпульсной модуляцией (например,
дематрона), так как в этом случае не требуется модулятор и не возникают
трудности, связанные с очень высокой частотой повторения импульсов. При
использовании усилителя со скрещенными полями с электродом смещения
также не требуется модулятор и отсутствуют ограничения по частоте повто-
рения импульсов, однако мощность источника напряжения смещения долж-
на быть относительно велика. Применению ламп с автоимпульсной моду-
ляцией как средству решения проблемы импульсных посылок уделяется очень
большое внимание, и можно ожидать,
что в случае успешной разработки
они найдут широкое применение. Од-
нако в ходе такой разработки потре-
буется решение ряда задач, связан-
ных со следующими особенностями
ламп с автоимпульсной модуляцией
(см. также § 1.6. ФАР типа 3):
1) к. п. д. усилителей со скрещен- •
ными полями с автоимпульсной мо-
дуляцией ниже, чем других типов
усилителей со скрещенными полями;
2) при постоянном напряжении
питания необходим защитный шунти-
рующий разрядник (за исключением
случаев, когда батарея конденсаторов
достаточно мала);
3) вследствие малого динамиче-
ского сопротивления усилителей со
скрещенными полями, при работе с
длинными импульсами для обеспече-
ния небольшого спада их вершины
необходима большая батарея конден-
ВН
Лампа-
отсекатель
хвоста
Лампа-
модулятор
Паразитные
емкости
•/Усилитель
со окрещенны-
ми полями
р включен Включен
м модулятор отсекатель
t
Рис. 38. Схема активной цепи отсекания
хвоста и соответствующая форма импуль-
сов.
саторов;
4) при разработке лампы требу-
ется обеспечить малую зависимость
рабочего напряжения от частоты, что-
бы уменьшить изменения мощности
в пределах рабочей полосы частот при постоянном напряжении питания;
5) отношение сигнал/шум меньше, чем в лампах с прямолинейным элек-
тронным лучом: в зависимости от требуемого усиления оно колеблется обыч-
но в пределах 30—60 дБ;
6) в тех случаях, когда с целью упрощения схемы
жения питает несколько ламп, их рабочие напряжения
согласованы во всей рабочей полосе частот;
один источник напря*
должны быть хорошо
. 7) при питании нескольких ламп от одного источника напряжения дуго-
вой разряд в одной из ламп выводит из строя всю группу ламп на время до
повторного включения источника питания, если не предусмотрены соответст-
вующие устройства для отключения лампы, в которой возник дуговой раз-
ряд [67]. Хотя для этого иногда используются плавкие предохраните-
ли [98], они очень неудобны, так как возникновение время от времени
дугового разряда является нормальным для высокочастотных ламп.
1.10. Требования к стабильности передатчиков
Селекторы движущихся целей с импульсной модуляцией. В табл. 3 гл. 5
приведены допустимые значения разного рода нестабильностей в селекторах
81
Гл. 1. Рад ио локационные передатчики
движущихся целей. На основании этой таблицы можно сделать следующие
выводы в отношении передатчиков [83]:
1) требования по временному дрожанию труднее выполнить в системах
с короткими импульсами;
2) требования по стабильности частоты от импульса к импульсу импульс*
ного генератора труднее выполнить при более высокой частоте излучения и
более длинных импульсах; это также относится к требованиям по стабильно-
сти частоты в пределах импульса;
3) требования по стабильности фазы от импульса к импульсу импульсной
усилительной передающей линейки не зависят от частоты излучения и дли-
тельности импульса; то же относится к стабильности фазы в пределах им-
пульса.
Другие соображения о выборе между генератором с самовозбуждением
и усилительной системой были изложены в § 1.5.
Для расчета допустимых пульсаций в цепи модулятора и допустимых
изменений напряжения или тока в пределах импульса должна быть известна
зависимость ухода частоты (пли фазы) от анодного тока или напряжения,
а также характер изменения анодного тока или напряжения при изменении
напряжения высоковольтного блока питания. Зависимость ухода частоты (или
фазы) от анодного тока или напряжения называется чувствительностью по
частотной (или фазовой) модуляции, типичные значения которой приведены
в табл. 6. В некоторых случаях в таблице указан диапазон возможных зна-
чений чувствительности, так как скорость, с которой меняется анодный ток
или напряжение при изменении напряжения высоковольтного блока питания,
зависит от относительных значений динамического сопротивления высокочас-
тотной лампы и модулятора. Следует отметить, что, хотя динамическое сопро-
тивление устройств со скрещенными полями очень невелико (обычно порядка
одной десятой статического сопротивления), благодаря согласованию внут-
реннего сопротивления линейного модулятора с номинальной нагрузкой изме-
нение тока на 1% изменения напряжения высоковольтного блока питания со-
ставляет всего около 2% вместо 10%, которые можно было бы ожидать.
Для ламп с прямолинейным электронным лучом с импульсной модуляци-
ей на управляющую сетку или модулирующий анод напряжение луча непо-
средственно определяется напряжением высоковольтного блока питания, так
что чувствительность по фазовой модуляции непосредственно связана с пуль-
сацией или спадом напряжения высоковольтного блока питания. Кроме того,
лампа будет обладать чувствительностью по фазовой модуляции к напряже-
нию на управляющем электроде (сетке или модулирующем аноде), однако
эта чувствительность обычно на порядок меньше (в градусах на процент из-
менения), чем чувствительность к изменению напряжения луча. В ряде случа-
ев чувствительность по фазовой модуляции к напряжению накала и магнитно-
му полю тоже может оказаться достаточно большой. Для получения доста-
точной для индикации движущихся целей стабильности частоты передатчика
необходим соответствующий контроль всех нестабильностей.
В результате тщательной разработки передатчиков с разными типами ВЧ
ламп была получена стабильность, обеспечившая коэффициент улучшения
селектора движущихся целей, равный 40 дБ. При некоторых ограничивающих
условиях была продемонстрирована стабильность, соответствующая коэффи-
циенту улучшения 60 дБ, однако при этом обычно начинают сказываться
ограничения, создаваемые другими элементами системы. (Этот вопрос рас-
смотрен подробно в § 1.4.)
Особенно трудные требования в части, касающейся передатчика, возни-
кают при неоднородных интервалах между импульсами в так называемом
селекторе движущихся целей с «качающейся частотой повторения импульсов»
(см. гл. 5). Хотя требования к стабильности передатчика обычно при этом
не меняются, их труднее выполнить, так как при изменении интервалов меж-
ду импульсами изменяется выходное напряжение модулятора,
82
110- T ребования к стабильности передатчиков
Таблица 6
Показатели стабильности
Отношения ди намического сопротивления к статическому Изменение тока или нап- ряжения на 1% измене- ния напряжения высоко- вольтного источника пи- тания %
Тип лампа Чувствительность по час' тотаой или фазовой мо- дуляции линейный модулятор модулятор низкого сопро тивления1) на вакуумной лампе или ра- ботающий при постоянном напряжении питания
Магнетрон = (0,0014-0,003) А/// 0,05—0,1 А/ 1 ~2 Ы — = 10—20
Стабилитрон или стабилизирован- ный магнетрон = (0,0002-7-0,0005) А/// 0,05—0,1 А/ = 2 / А/ —=10—20
Усилитель ео скре- щенными ПОЛЯМИ1. обратной вол- ны Аф = 0,4—1° на 1% А/// 0,05—0,1 А/ = 2 / -у-—10—20
прямой волны Аф=1,0—3,0° на 1% А/// 0,1—0,2 А/ = 2 / -^- = 5—10
Клистрон Аф/ф=0,5 (АЕ/Е) ф«5Х АфжЮ® на 1% АЕ/Е 0,67 - АЕ — = 0,8 Е АЕ V
ЛБВ Аф/ф = 1/з (А^/й). ф^15А Аф«20°на 1% АЕ/Е 0,67 АЕ Е “ °’ Е ==1
Триод или тетрод Аф = 0—0,5* на 1% А//7 1.0 AL-I / Т=1
‘) Параметры модулятора высокого сопротивления не приведены, так как его выход-
ное напряжение не зависит (в идеальном случае) от напряжения высоковольтного источ-
ника питания.
63
Гл. /. Радиолокационные передатчики
Основной причиной изменения выходного напряжения модулятора в ре-
жиме качающейся частоты повторения является изменение напряжения вы-
соковольтного блока питания от импульса к импульсу, обусловленное
неоднородным потреблением мощности от этого источника. В диапазоне рас-
сматриваемых здесь небольших изменений выходного напряжения ток /
источника питания через конденсатор фильтра С можно считать практически
постоянным, равным среднему значению, взятому за большой отрезок времени
(влияние пульсаций выпрямителя может быть рассмотрено отдельно). Поэто-
му изменение напряжения источника питания, обусловленное качанием часто-
ты повторения импульсов, определяется из выражения MJ = IЫ/С, где Д?—
изменение интервалов между импульсами. Эти колебания напряжения можно
сделать сколь угодно малыми, соответственно увеличив емкость конденсатора
фильтра, однако обычно такой прием «грубой силы» не применяется. Поэтому
в модуляторах систем с качающейся частотой повторения импульсов для
уменьшения колебаний напряжения от импульса к импульсу применяются
специальные регулирующие устройства (см. § 1.17).
В результате неоднородности интервалов между импульсами даже при
неизменном напряжении высоковольтного источника питания изменения могут
возникнуть в других элементах линейного модулятора. «Звон» зарядного
дросселя в интервалах между импульсами создает меняющиеся начальные
условия для последующего периода заряда; вследствие релаксации конден-
сатора схемы формирования импульсов (поглощение в диэлектрике) делители
напряжения в более длительных интервалах между импульсами разряжают
этот конденсатор в большей степени; восстановление импульсного трансфор-
матора меняется в зависимости от интервала между импульсами. Давление
газа в водородном тиратроне также может меняться в зависимости от интер-
вала между импульсами, что приводит к соответственным изменениям мо-
ментов зажигания, также ухудшающим качество индикации движущихся
целей. Неодинаковость интервалов между импульсами не сказывается лишь
на тех элементах системы, постоянная времени которых значительно больше
или меньше интервала между импульсами.
По существу маловероятно, чтобы при переходе от одинаковых к неоди-
наковым интервалам между импульсами можно было получить однородное
выходное напряжение модулятора из-за ряда факторов, которыми просто
пренебрегают в системах с одинаковыми интервалами. Степень сложности
решения этой задачи зависит от требуемой стабильности в интервалах между
импульсами. В крайнем случае требуется ввод соответствующего компенсиру-
ющего сигнала в цепь стабилизации. Такой сигнал формируется с помощью
пусковых устройств системы. При использовании передатчиков с усилительной
линейкой может оказаться, что колебания фазы от импульса к импульсу
проще скорректировать не в передатчике, а в приемнике (например, с по-
мощью синхронизированного когерентного генератора), если не требуется
производить компенсацию помехи методом черезпериодного вычитания.
Системы сжатия импульсов. В системах сжатия импульсов с линейной
частотной модуляцией (ЛЧМ) в сформированный сигнал могут быть внесены
искажения в высокочастотной части системы, в результате которых сжатые
импульсы на выходе приемника либо окажутся расширенными, либо будут
сопровождаться паразитными эхо-сигналами, называемыми временными бо-
ковыми лепестками [66, 85, 86]. Такие искажения появляются в результате
отражений или нелинейности по титуле и фазе (дисперсии) в канале
высокой частоты либо в процессе модуляции. Паразитный эхо-сигнал допу-
стим, если его уровень достаточно мал по сравнению с заданным допустимым
уровнем временных боковых лепестков; эхо-сигиал большего уровня допу-
стим лишь в том случае, если он влияет только на длительность импульса;
и, наконец, его уровень неограничен, если он полностью заключен в преде-
лах длительности сжатого импульса Эхо-сигнал, появляющийся в результате
отражения, не выйдет полностью за пределы сжатого импульса, если только
84
1.10. Требования к стабильности передатчиков
рн не окажется смещенным на всю длительность сжатого импульса. Такое же
Смещение эхо-сигнала возникает в результате нелинейности, если только
искажение не будет так быстро меняться с частотой, что в пределах ширины
спектра ЛЧМ импульса появится по крайней мере два периода его измене-
ния. Соответственно эхо-сигналы за пределами сжатого импульса не будут
появляться в результате искажения, возникающего в процессе модуляции,
если это искажение не меняется достаточно быстро во времени, чтобы появи-
лись два периода его изменения в пределах одного периода линейной ЧМ.
Хотя в обоих случаях на выходе приемника появляются одинаковые эхо-
сигналы, удобнее отдельно рассмотреть фиксированные искажения в канала
высокой частоты и зависящие от времени искажения, возникающие в процес-
се модуляции.
Отражения и нелинейности. Высокочастотная лампа может явиться источ-
ником серьезных искажений как сама по себе, так и в соединении с относя-
щейся к ней волноводной системой. Искажения, обусловленные самой лампой,
существенны в том случае, когда в состав лампы входят цепи настолько вы-
сокой добротности, что в пределах ширины спектра ЛЧМ импульса могут
возникнуть значительные амплитудные и фазовые нелинейные искажения,
однако это маловероятно, если полоса пропускания высокочастотной лампы
много больше ширины спектра ЛЧМ импульса. Искажения, обусловленные
самой лампой, появляются и в том случае, когда временная задержка сиг-
нала в лампе сравнима с длительностью сжатого импульса. При этом отра-
жения в самой лампе или высокочастотная утечка лампы могут явиться
причиной появления эхо-сигнала за пределами сжатого импульса. Кроме
того, в результате векторного сложения [86] сигналов, созданных такими
отражениями или утечками, появляется зависимость амплитудных и фазовых
нелинейных искажений от частоты. Поэтому во избежание возникновения
таких паразитных эхо-сигналов необходима соответствующая линейность
лампы по амплитуде и фазе.
Как выше было отмечено, нелинейность допустима, если она достаточно
мала или достаточно плавно меняется с частотой. Для того чтобы в преде-
лах девиации частоты импульсного ЛЧМ сигнала появилось два периода
изменения фазы, полная электрическая длина пути (в обоих направлениях)
отраженного сигнала (или сигнала утечки) должна меняться в пределах этой
девиации частоты на две длины волны. Поэтому в широкополосной лампе
высокой частоты вряд ли могут появиться два периода изменения амплитуды
или фазы в пределах ширины спектра ЛЧМ импульса, если только электри-
ческая длина лампы, выраженная в длинах волны ВЧ сигнала, по меньшей
мере не равна обратной величине относительной ширины спектра ЛЧМ им-
пульса. Так, например, ширина спектра ЛЧМ импульса, достигающая
50 МГц, составляет на частоте 5 ГГц всего 1%. Поэтому для того, чтобы
зависимость нелинейности, вносимой широкополосной высокочастотной лам-
пой, от частоты соответствовала бы двум периодам изменения в пределах
1% ширины полосы, электрическая длина лампы должна быть по меньшей
мере равна ЮОХ. Соответственно ЛЧМ с девиацией 50 МГц соответствует
длительность сжатого импульса (с обычными весовыми коэффициентами),
равная 40 нс, и полное время задержки в 100Х на частоте 5 ГГц равно
40 нс Однако, поскольку электрическая длина высокочастотной лампы редко
превышает ЗОХ, временные боковые лепестки в широкополосных лампах при
относительной ширине спектра ЛЧМ импульса, не превышающей 3%, не
могут достигать значительного уровня. Измерения, проведенные на неболь-
шом количестве, ламп, подтверждают это заключение. Так, например, перио-
дичность нелинейности по фазе в ЛБВ диапазона <S составляет около
80 МГц, а в ЛЁВ диапазона С — около 150 МГц.
Для ширины спектра импульсного ЛЧМ сигнала, превышающей несколько
процентов, в высокочастотных лампах [24] и других элементах передатчика
появляются значительные нелинейности. В тех пределах, в которых эти нели-
85
Гл. 1. Радиолокационные передатчики
нейности являются постоянными,, они могут быть скомпенсированы в устрой*
стве сжатия импульсов приемника с помощью параллельно включенного
компенсатора (или эквивалентного устройства). Однако такой метод. ком>
пенсацнн теряет свою эффективность при большом диапазоне изменений ра-
бочей частоты системы,, а также при больших доплеровских сдвигах.,. ©Суслов»*
ленных высокой радиальной скоростью цели [66].
Когда электрическая длина лампы достаточно мала и не может являться
причиной появления отчетливых временных боковых лепестков, имеющиеся
в ней рассогласования следует рассматривать совместно со связанной с ней
системой волноводов. Волноводы часто бывают достаточно длинными и при
интенсивных отражениях могут быть причиной появления больших боковых
лепестков. Это особенно следует учитывать при подключении усилителей со.
скрещенными полями, так как отраженный сигнал пройдет обратно через
усилитель, переотразится от его рассогласованного входа и усилится нри
повторном прохождении через усилитель. Таким образом, для отраженных
в волноводной системе и поступивших на выход усилителя со скрещенными
полями сигналов рассогласование на входе усилителя окажется увеличенным,
в число раз. равное коэффициенту усиления усилителя со скрещенными по-
лями. Очевидным решением является применение хорошего вентиля непосред-
ственно у выхода усилителя со скрещенными полями, благодаря которому
такие эхо-сигналы окажутся в пределах сжатого импульса.
В широкополосных системах со сжатием ЛЧМ импульсов измерениям
линейности в частотной области следует предпочесть непосредственные изме-
рения создаваемых лампой искажений короткого импульса. Если пропустить
через лампу очень короткий импульс (равный по длительности сжатому им-
пульсу или более короткий), то при наличии в лампе значительных отраже-
ний или нелинейностей рядом с коротким испытательным импульсом появит-
ся эхо-сигнал. Основной трудностью в таких измерениях является ограничен-
ное значение отношения сигнал/ш\м в реальных усилшельных линейках
(см. § 1.5). В лампе с прямолинейным электронным лучом модуляция луча
может выполняться при снятом ВЧ возбуждении, если на выход лампы
подается через циркулятор очень короткий измерительный импульс. Это по
существу является методом рефлектометрических испытаний во временной
области [175], который можно использовать для определения величины и
распределения отдельных рассогласований внутри лампы, однако, не далее
ближайшей области раздела или дрейфа. При этих испытаниях вход лампы
может быть наружен и благодаря этому улучшено отношение сигнал/шум.
Если испытывается ЛБВ, то при анализе результатов измерений следует учи-
тывать, что отраженные сигналы, проходящие в прямом направлении через
выходную секцию лампы, будут усиливаться. Возможна также проверка
различных схем включения входа и выхода лампы. Однако, как бы ни были
полезны и интересны такие испытания, очень важно подчеркнуть, что при
этом не учитываются искажения, вносимые модулятором (так же,, как зави-
сящие от времени изменения в самой лампе [52]).
Искажения, обусловленные модулятором. Независимо от ширины спект-
ра (3 импульсного сигнала с линейной ЧМ в интервале длительности импуль-
са Т может легко возникнуть несколько периодов амплитудной или фазовой
модуляции, обусловленной «звоном» модулятора или источника питания.
Поэтому необходимо, чтобы «звон» и внутриимпульсные пульсации модуля-
тора удовлетворяли требованиям, согласно которым при разложении в ряд
Фурье в интервале длительности импульса амплитуда составляющих с коли-
чеством периодов в интервале импульса от 2 до $Т была настолько мала,
чтобы удовлетворялись требования по уровню боковых лепестков [66], а со-
ставляющие более низких частот были достаточно малы, чтобы расширение
сжатого импульса не было значительным. При обычно требуемом уровне
боковых лепестков- 30—40 дБ, составляющая, один период которой соответ-
ствует длительности импульса, может быть в четыре раза больше граничной
86
1.12. Линейные модуляторы
составляющей, два периода которой укладываются на импульсе. Для спада
:или кривизны с периодом, превышающим длительность импульса, допускается
(фазовая модуляция не более 30° или -изменение высоты импульса на 1 дБ
.Если длительность «звона» или кривизны меньше длительности импульса, их
значение может быть соответственно "больше. Благоприятным обстоятельст-
вом является то, что допуски для обычных на фронте импульса «звона» или
кривизны больше, -чем для эффектов, существующих на всей длительности
импульса.
По этим же соображениям длительность пьедесталов, присущих линей-
кам из усилителей со скрещенными полями ‘(см. § 1.2 и 15), обычно настоль-
ко мала, что их влияние очень незначительно. Для минимизации ах влияния
частота, используемая на интервалах пьедесталов, должна соответствовать
плавному продолжению закона изменения частоты при линейной ЧМ (или
другом типе кодирования), используемого в основном импульсном интервале.
В любом случае энергия любого искажения, длительность которого столь же
мала, как длительность сжатого импульса, будет распределена во времени
в приемном устройстве сжатия импульсов, благодаря чему она уменьшается
в число раз, равное коэффициенту сжатия. Кроме того, пьедесталы всегда
расположены на концах импульса, где взвешивающая схема в приемнике
обычно создает значительное ослабление. Поэтому в системах сжатия им-
пульсов обычно можно пренебречь пьедесталами в линейках из усилителей
со скрещенными полями. Точно так же конечное время нарастания и спада
высокочастотного импульса, сравнимое с длительностью сжатого импульса,
не только допустимо, но даже желательно [84].
Модуляторы на вакуумных лампах обеспечивают форму импульсов, до-
статочно «чистую» для использования в системах сжатия импульсов с уров-
нем боковых лепестков от —30 до —40 дБ, в то время, как в случае линей-
ных модуляторов это трудно выполнимо из-за звона импульсного трансфор-
матора и свойств схемы формирования имяульсов с сосредоточенными пара-
метрами.
1.11. Выбор и сравнение импульсных модуляторов
разных типов
Здесь дано лишь общее описание и сравнение существующих методов
модуляции, так как расчеты импульсных модуляторов подробно освещены
в литературе [94—96]. В каждом частном случае обычно используются мо-
дуляторы различных типов, сравнительные достоинства и недостатки которых
приведены в табл. 7. Окончательный выбор производится на основе учета
соотношений между стоимостью, размерами, массой, к. п. д. и сроком служ-
бы. Большое разнообразие используемых типов модуляторов показывает, что
выбор в большой степени зависит от требований, предъявляемых к система,
и от типа высокочастотной лампы, на которую должна быть подана импульс-
ная модуляция.
Специальные методы измерения, связанные с применением импульсных
модуляторов, изложены в работах [94—96, 99 и 161], а нагрузки, предназна-
ченные для испытания импульсных модуляторов большой мощности, описа-
ны в [162],
1.12. Линейные модуляторы
Классический линейный модулятор подробно описан в литературе
[94—96]. Тииичная схема приведена на рис. 39. В этом типе ^модулятора
.коммутирующее устройство U1 (тиратрон, игнитрон, кремниевый управляе-
мый вентиль или искровой разрядник) служит только для того, чтобы вы-
звать и поддержать разряд схемы формирования импульсов, а форма и дли-
87
Cjm—tui цмини. данные модуляторов
Та&лжца 7
Модулятор Номер рисунка Возможности приспособления Возможности формирования импульсов по длительности Гладкость вершины импульса Необходимость в за- щитном разряднике Уровень напряжения модулятора
по коэффи- циенту за- воднения импульсов во чере- домито импульсов разной длитель- ности длинные короткие дуговой разряд в нагрузке дуговой разряд в комму- таторе
Линей- ный Тиратрон Кремние- вые управля- емые вентили 39 Ограничена зарядной цепью Отсут- ствует Сложная схе- ма формиро- вания импуль- сов Хорошие Имеются пульса- ции Отсутствует Средний Низкий
Магнитный 41 Ограничена временем восстанов- ления и заряда Большие кон- денсаторы и схема форми- рования То же Низкий
Гибридный маг- нитный с крем- ниевыми управ- ляемыми венти- ли! мп 42 То же То же 3
Гл. 1. Радиолокационные передатчики
Активный коммутатор
Продолжение табл. 7
Модулятор Номер рисунка | Возможности приспособления Возможности формирования импульсов по длительности Гладкость вершины импульса Необходимость в за- щитном разряднике Уровень напряжения модулятора
по коэффи- циенту за- полнения импульсов по чере- дованию импульсов разной длитель- ности длинные короткие дуговой разряд в нагрузке дуговой разряд в комму- таторе
Последова- тельный 43, а Не огра- ничена Имеется J [ревосходные; большая бата- рея конденса- торов Хорошие Хорошая Может быть Имеется Высокий
С емкост- ной связью 43, б Ограничена » Большой кон- денсатор связи » То же
С транс- форматор- ной связью 43, в э » Тяжелые; большие габа- риты э Довольно высокий
Модули- рующий ' анод 44 Не огра- ничена » Превосходные; большая бата- рея конденса- торов Отличные, но низкий к. п. д. б Превос- ходная Имеется » Высокий
Управляю- щая сетка. — То же То же Превосход- ные То же 3 ... Низкий
’) Если только через включающую и выключающую лампу не проходит очень большой пиковый ток или если коэффициент
усиления модулирующего анода невелик [115]; см. § 1.9.
со .... ......- . . .......... . ________ _______________. . ..-
1.12. Линейные модуляторы
Гл. 1. Радиолокационные передатчики
дельность импульса определяются исключительно пассивными элементами
схемы. Импульс заканчивается тогда, когда пассивные элементы разрядились
иасголько, что ток через коммутатор прекращается и восстанавливается его
способность выдерживать напряжение. Поскольку разряд прекращается сам
по себе, имеется возможность использовать простые коммутирующие устрой-
ства, однако это в то же время является наиболее слабым местом линейных
модуляторов. Коммутирующее устройство определяет только момент начала
разряда и не влияет на форму импульса. Хотя частота повторения импуль-
сов может изменяться с помощью диода, включенного последовательно
в цепь заряда [94], для изменения длительности импульса схема формиро-
L
Дроссель Зарядный
фильтра дроссель дУД
Рис. 39. Схема линейного модулятора.
вания импульсов должна коммутироваться соответствующими высоковольтны-
ми переключателями По этим же соображениям у импульса получается
обычно пологий спад, так как его форма зависит от всей энергии, накоплен-
ной в реактивных элементах, а нолучить хорошее согласование в условиях
таких- нелинейных нагрузок, как ВЧ лампа и паразитные емкости схемы,
очень трудно. Для получения требуемой формы импульса в случае такой
очень нелинейной нагрузки, как магнетрон часто требуются «притупляющие»
иля демпфирующие схемы [94, 97].
Для формирования импульсов с длительностью, превышающей 50 нс,
схемы с распределенными постоянными типа коаксиального кабеля обычно
Не применяются в силу их громоздкости. К сожалению, используемые в этих
«лучаях схемы формирования импульсов с сосредоточенными постоянными
ирнводят к появлению пульсаций. Обычно уровень пульсаций не превосходит
5%, а в случае очень тщательной настройки может быть доведен до 0,5%.
Габариты схемы формирования импульсов определяются в основном энер-
гией, приходящейся на один импульс (хотя габариты начинают расти и при
увеличении частоты повторения импульсов сверх 1 кГц).
Импульсные трансформаторы, применяемые для согласования практиче-
ски удобных номинальных значений параметров схем формирования им-
пульсов и коммутаторов с их нагрузкой, также вносят паразитные реактив-
ности <и пульсации [100]. Габариты импульсного трансформатора зависят
в основном от произведения импульсного напряжения на время при неболь-
шом коэффициенте заполнения и средней мощности при большом коэффици-
енте заполнения Существовавшее ошибочное мнение, что пределом для
коэффициента трансформации импульсного трансформатора является значе-
ние ГО: 1, было рассеяно успешной разработкой трансформаторов с коэффи-
циентом 100:1 [129]. Реальные предельные значения коэффициента транс-
формации определяются допустимыми для данной длительности импульса
максимальными и минимальными значениями полного сопротивления. При
80
1.12. Линейные модуляторы
слишком низком полном сопротивлении может оказаться невозможным полу-
чить требуемое время нарастания импульса из-за паразитных индуктивно-
стей схемы, хотя при тщательном выполнении можно добиться, как" показа-
ли исследования физики плазмы [96, 156, 157], исключительно. малой пара-
зитной индуктивности схемы. При слишком большом сопротивлении препят-
ствием для получения соответствующего времени нарастания может явиться
паразитная емкость. В пределах же допустимых значений полных сопротив-
лений первичной и вторичной цепей само отношение витков импульсного
трансформатора не создает каких-либо трудностей.
Обратное напряжение импульсного трансформатора должно поддержи-
ваться в определенных пределах, так как в противном случае некоторые типы
высокочастотных ламп смогут создавать шумовые кольца (см. § 1.2). В ряде
случаев используется диод для демпфирования обратного напряжения 1ДЗ
на рис. 39), однако сопротивление в демпфирующей цепи должно быть до-
статочно большим, чтобы исходное состояние импульсного трансформатора
полностью восстановилось до подачи следующего- импульса. При несоблюде-
нии этого условия сердечник импульсного трансформатора может насытить-
ся за несколько импульсов.
Питание цепи накала (если оно необходимо) высокочастотной лампы мо-
жет осуществляться либо через малоемкостный накальный трансформатор,
изолированный по высокому напряжению, либо через бифилярную вторичную
обмотку импульсного трансформатора, как это показано на рис. 39. Если ток
накала настолько велик, что требуется провод бифилярной обмотки импульс-
ного трансформатора несоразмерно большого диаметра, может быть приме-
нен понижающий автотрансформатор, находящийся под высоким напряжени-
ем. В случае питания цепи накала лампы постоянным напряжением ток
может подводиться через бифилярную обмотку. Если ток накала слишком
велик для этой обмотки, могут быть использованы понижающий трансфор-
матор, выпрямитель и фильтр, находящиеся под высоким напряжением. Так
как фильтр на большой ток и низкое напряжение имеет большие размеры,
более целесообразным может оказаться применение трифилярной вторичной
обмотки импульсного трансформатора. В этом случае при питании грехфаз-
ным током через трифилярную обмотку выполнение требований по пульсации
тока накала достигается либо незначительной фильтрацией, либо вообще
без нее.
Результатом работы линейного модулятора на несогласованную нагрузку
является остаточная энергия в схеме формирования импульсов по окончаний
импульса. Если нагрузка меньше требуемой для согласования (т. е. если
сопротивление нагрузки меньше полного сопротивления схемы формирования
импульсов с учетом- импульсного трансформатора), эта энергия проявляется
в виде напряжения обратной полярности на схеме формирования импульсов.
В известных пределах это дает дополнительное время для восстановления
коммутатора, однако для разряда этой энергии необходим обращенный
(ограничительный) диод (Д2 на рис. 39), чтобы напряжение заряда при
последующем импульсе не оказалось измененным.
Если правильно рассчитать ограничитель [172, 173], то даже при дуго-
вом разряде в нагрузке, когда модулятор замыкается накоротко, зарядное
напряжение увеличится при последующем импульсе всего на несколько про-
центов. Для этого требуется ограничительный диод на очень большой пико-
вый ток, особенно при большом коэффициенте заполнения импульсов. Во
многих выпущенных между 40-ми и 50-ми годами модуляторах ограничители
оказывались недостаточно удовлетворительными из-за относительно неболь-
шого тока вакуумных ограничительных диодов. Часто причину интенсивных
дуговых разрядов искали в плохом качестве высокочастотных ламп, тогда
как ошибка заключалась в том, что модулятор поддерживал начавшийся
разряд. Эффективность схемы ограничения легко проверить, контролируя
пиковое значение зарядного напряжения [99] при имитации дугового разряда
91
Гл. 1. Радиолокационные передатчики
в ВЧ лампе коротким замыканием, поэтому все линейные модуляторы долж-
ны быть испытаны таким способом. Необходимо предусмотреть, чтобы
в лампах со скрещенными полями мог время от времени возникать дуговой
разряд без запуска модулятора, и современные модуляторы обычно рассчи-
тываются так, что они не запускаются, если длительность дугового разряда
не превышает нескольких секунд. Индуктивные ограничители [94] редко ис-
пользуются, так как их параметры подгоняются к длительности только од-
ного импульса и такая схема не может ограничить обратное напряжение на
тиратроне непосредственно по окончании импульса.
При включении хорошо работающей ограничительной схемы так, как это
показано на рис. 39, увеличивается обратное напряжение импульсного транс-
форматора. Поэтому, а также для более эффективного ограничения обрат-
ного напряжения на тиратроне, ограничительная схема часто включается
параллельно схеме формирования импульсов либо со стороны тиратрона,
либо на противоположном конце. Такая схема называется концевым ограни-
чителем линии. При согласовании сопротивлений концевого ограничителя
линии и схемы формирования импульсов обратное напряжение на тиратроне
имеет наименьшее значение, но для увеличения времени деионизации тира-
трона некоторое обратное напряжение может оказаться целесообразным.
В тех случаях, когда сопротивление нагрузки линейного модулятора
больше, чем это необходимо для согласования, теоретически можно ожидать,
что амплитуды серии импульсов будут экспоненциально убывать вследствие
неполной деионизации тиратрона перед началом последующего периода за-
ряда. Это действительно наблюдается при чисто резистивной нагрузке,
в результате чего происходят «затяжной поджиг» тиратрона и запуск моду-
лятора. Однако наличие импульсного трансформатора в типичном линейном
модуляторе всегда обеспечивает четкую работу с нагрузкой, сопротивление
которой превышает сопротивление, соответствующее согласованной нагрузке.
Вследствие нарастания намагничивающего тока импульсного трансформатора
разряд в схеме формирования импульсов продолжается до изменения поляр-
ности напряжения (вероятно, за интервал времени, равный нескольким дли-
тельностям импульса), совершенно так же, как и в случае нагрузки, сопро-
тивление которой было бы меньше, чем у согласованной нагрузки.
Ток в цепи ограничителя часто измеряется и иногда используется в каче-
стве меры качества модулятора. Ток через ограничитель может меняться
в широком диапазоне, однако это еще не является свидетельством плохой
работы модулятора. Так как энергия в схеме формирования импульсов про-
порциональна квадрату напряжения, то току в ограничителе, обусловленному
рассогласованием, равному 10% полного тока модулятора, будет соответст-
вовать только 1% потери энергии. В то же время 10% току ограничителя,
являющемуся результатом дуговых разрядов в нагрузке в течение 10% всего
времени, будут соответствовать 10% потери энергии. Из этого примера ясно,
как здесь можно ошибиться.
Так как линейный модулятор работает обычно на согласованную нагруз-
ку или близкую к ней, небольшие изменения сопротивления нагрузки могут
быть исследованы исходя из того, что мощность, отбираемая от модулятора,
будет постоянной. Это справедливо при постоянном зарядном напряжении
схемы формирования импульсов, что, в свою очередь, требует наличия эф-
фективного ограничения. Точно так же при увеличении пикового разрядного
напряжения на 1% мощность на нагрузке увеличится на 2% независимо от
ее динамического сопротивления (см. табл. 6).
В линейных модуляторах наиболее используемым является резонансный
заряд, обеспечивающий более высокий к. п. д. Поскольку в случае неболь-
шой добротности зарядного дросселя усиление при резонансе снижается,
обычно считают (без должных оснований), что полученное усиление при
резонансе является мерилом к. п. д. зарядной цепи. Однако усиление при
резонансе зависит и от других факторов, таких, как эффективность ограни-
92
1.12. Линейные модуляторы
чителя и емкость конденсатора фильтра. К- п. д. зарядной цепи должен
поэтому определяться как произведение энергии, накопленной в схеме фор-
мирования импульсов, па частоту повторения импульсов, деленное на подво-
димую мощность. Обычно применяется последовательный диод, так что один
и тот же зарядный дроссель может быть использован для нескольких схем
формирования импульсов (разной длительности) и (или) при разных часто-
тах повторения импульсов. Расчет линейного модулятора представляет зна-
чительные трудности, если коэффициент заполнения импульсов превышает
несколько процентов, так как для деионизации тиратрона (или переключателя
другого типа) перед началом последующего увеличения зарядного тока
требуется некоторое время. Эффективным решением в этом случае является
задержка начала каждого периода заряда с помощью тиратрона (или друго-
го аналогичного устройства с управляемым запуском), используемого в ка-
честве последовательного диода [171].
Другой задачей, возникающей при большом коэффициенте заполнения,
является то, что зарядный ток схемы формирования импульсов, нормально
протекающий через первичную обмотку импульсного трансформатора, со-
ставляет настолько значительную долю импульсного тока, что им уже нельзя
пренебречь. Эту трудность можно обойти такой перестройкой схемы, чтобы
зарядный ток не проходил через импульсный трансформатор [107], однако,
в конечном счете, предельное значение коэффициента заполнения, лежащее
в пределах 10—50%, обусловлено недостатком времени либо для восстанов-
ления импульсного трансформатора (т. е. восстановления исходного состоя-
ния потока в сердечнике), либо для выравнивания зарядов секций с сосредо-
точенными параметрами схемы формирования импульсов перед ее разрядом.
Поэтому линейные модуляторы чаще всего используются при небольших ко-
эффициентах заполнения, не превышающих 0,005.
Форма спада импульса определяется совместным действием многих пара-
зитных эффектов, особенно когда нагрузкой является лампа со скрещенными
полями. Поэтому для получения крутого спада импульса часто требуется
устройство отсекания хвоста какого-либо типа. Это устройство подключается
к первичной или вторичной обмотке импульсного трансформатора и может
быть столь простым устройством, как параллельное нагрузочное сопротивле-
ние, и столь сложным, как активная схема с использованием ламп (рис. 38).
Промежуточными по сложности устройствами являются нагрузочные индук-
тивности, индуктивности с насыщением и различные сочетания устройств.
Быстрый спад импульса имеет особенно большое значение для получения
небольшого значения минимальной измеряемой дальности РЛС, для чего
требуются импульсы очень небольшой длительности. В этом случае наиболее
пригодной может оказаться нагрузочная индуктивность. Однако выбор опти-
мального хстройства отсекания хвоста определяется многими факторами,
в том числе и диапазоном требуемых длительностей импульсов.
Могут быть созданы различные схемы линейных модуляторов, в кото-
рых использовано несколько схем формирования импульсов для генерирова-
ния выходного импульса при другом значении сопротивления, чем то, кото-
рое коммутируется тиратроном [94, 163]. Иногда такая схема обладает опре-
деленными преимуществами, но при этом увеличивается стоимость схемы
формирования импульсов и усложняется задача получения хорошей формы
импульсов. Так как в этом случае напряжение на такой схеме имеет
в процессе нормальной работы обе полярности, очень трудно (если не невоз-
можно) добиться эффективной работы схемы ограничителя. В результате
в большей части модуляторов с несколькими схемами формирования наблю-
дается нескол1 ко повторных импульсов (паразитных выходных импульсов,
возникающих вслед за полезным импульсом), вызванных многочисленными
внутренними отражениями остаточной энергии в нескольких схемах форми-
рования импульсов. По этим соображениям модуляторы с несколькими схе-
мами формирования импульсов сравнительно мало применяются.
93
Гл. 1. Радиолокационные передатчики
Линейные модуляторы обычно обладают высоким к. п. д., но он может
быть снижен по разным причинам. Так, например, в случае коротких импуль-
сов значительные потери обусловлены паразитными цепями, сглаживающими
схемами и устройствами отсекания хвоста, а в случае длинных импульсов —
зарядным дросселем (либо он должен быть очень большим).
Коммутаторы. Наиболее распространенными коммутаторами в линейных
модуляторах являются водородные тиратроны. Они имеются на самые раз-
личные номиналы вплоть до 100 МВт импульсной и 200 кВт средней мощности
(на выходе модулятора). При небольшой пиковой мощности частота повто-
рения импульсов может достигать 50 кГц. Срок службы правильно эксплу-
атируемого тиратрона составляет от 500 до 5000 ч, а в облегченном режиме,
вероятно, до 50 000 ч. Правильная эксплуатация водородного тиратрона тре-
бует тщательного контроля характеристик, как, например, сопротивления
пускового устройства, скорости нарастания тока катода (di/dt), равномер-
ности охлаждения [94, 102—104, НО]. В случае коротких импульсов пропуск-
ная способность тиратрона ограничена его номинальной импульсной мощно-
стью (пиковым прямым напряжением еПп, умноженным на пиковый ток гп)
или его ра — фактором (еппХ'пХ/п, где fa — частота повторения импульсов),
являющимся мерой нагрева анода. В случае длинных импульсов или большо-
го коэффициента заполнения предел определяется номинальным средним зна-
чением тока катода. При небольшом коэффициенте заполнения предельное
значение может оказаться обусловленным среднеквадратическим током като-
да. Для каждою типа лампы можно рассчитать точку «пересечения» (по
длительности импульсов или коэффициенту заполнения) различных ограни-
чений, что помогает правильно выбрать тип тиратрона. Существенным огра-
ничением для тиратронов является нагрев анода, обусловленный потерями
при включении или мгновенной подаче обратного напряжения в конце импуль-
са, однако простые технические рекомендации тут еще не разработаны Тем
не менее мощность рассеяния на аноде можно снизить, уменьшив паразит-
ную емкость в цепи анода либо установив небольшой развязывающий дрос-
сель (L3 на рис. 39) между паразитной емкостью и тиратроном, либо с по-
мощью небольшой реактивной катушки насыщения, включенной последова-
тельно с анодом (L4 на рис. 39) [105].
Как правило, большие водородные тиратроны содержат наполненный
водородом баллон с независимым подогревателем — так называемый вакуум-
метрический диод. В каждом частном случае применения тиратрона
можно грубо определить его работоспособность или оценить оставшийся срок
службы путем «определения параметров вакуумметрического диода», т. е.
путем нахождения предельных значений напряжения на вакуумметрическом
диоде, при которых лампа еще удовлетворительно работает. При большом
напряжении на вакуумметрическом диоде (и, следовательно, при большом
давлении газа) лампа не сможет достаточно быстро деионизироваться (что
называется также перекрывающим разрядом, затяжным поджигом, дуговым
разрядом или забивающим поджигом) и будет запускать модулятор через
схему, перегруженную по току. При небольшом напряжении на вакууммет-
рическом диоде тиратрон может не запуститься (хотя это предельное значе-
ние не будет достигнуто первым, если имеется хорошее пусковое устройство),
либо его анод может перегреться до красного каления (при достаточно высо-
кой частоте повторения), либо, если частота повторения недостаточна для
перегрева анода, он может медленно включаться, что обычно обнаруживается
по закругленному фронту выходного импульса (это нежелательный режим
работы, обычно сопровождаемый появлением небольших голубых искр в об-
ласти между сеткой и анодом). Режим вакуумметрического диода должен
поддерживаться в середине интервала между этими предельными значениями,
т. е. если нижнее предельное значение на 16% меньше верхнего, напряжение
должно быть на 8% меньше верхнего предельного [165]. Это значение может
отличаться от «нормального» напряжения на вакуумметрическом диоде, оп-
94
1.12. Линейные модуляторы
ределяемого техническими требованиями армии и флота США для приемо-
сдаточных испытаний этой лампы [101]. Конец срока службы определяется
падением указанного интервала напряжений на диоде до нуля, если рань-
ше не наступит обеднение катода (недостаточная эмиссия). В лампе без
регулируемого вакуумметрического диода выход из строя наступает при
«работе без газа» с теми же симптомами, что и при малом напряжении на
вакуумметрическом диоде, если раньше не произойдет обеднение катода.
При напряжениях, превышающих 25 кВ, в водородных тиратронах появ-
ляется рентгеновское излучение, наблюдаемое в основном при включении
анодного тока, а в случае эмиссии сетки также в интервалах между
импульсами. Хотя уровень рентгеновского излучения ниже, чем в эквивалент-
ных модуляторах на вакуумных лампах [166], должна быть предусмотрена
экранировка (свинцом или свинцовым стеклом) для защиты обслуживающе-
го персонала.
В тиратронах старых разработок дрожание импульса, обычно обуслов-
ленное магнитным поле.м подогревателя катода, составляет от 10 до 20 нс.
При питании подогревателя постоянным током дрожание уменьшается до
б нс (если только качество пускового устройства не слишком низко или анод-
ное напряжение не слишком мало [167, 168]). В современных тиратронах
норма 5 нс выполняется даже при питании переменным гоком. В некоторых
тиратронах применяется с целью дальнейшего снижения дрожания «подго-
тавливающая» сетка, поджигаемая первой, после чего основная сетка вклю-
чается с исключительно малой временной задержкой и дрожанием.
Задержка зажигания водородного тиратрона после подачи пускового сиг-
нала обычно не превосходит долей микросекунды, однако она зависит от
напряжения на вакуумметрическом диоде, от времени и от других причин.
Когда требуется точное время зажигания, хорошим решением является выбор
тиратрона с подготавливающей сеткой.
В первых модуляторах широкое использование нашли предзажигаемые
разрядники [94—96, 139, 153]. В настоящее время они редко применяются
в качестве коммутаторов линейных модуляторов из-за большого дрожания и
ограниченного срока службы, но часто используются в качестве защитных
разрядников, так как в этом случае дрожание не имеет значения, срок служ-
бы резко увеличивается и в то же время большое значение имеет их очень
большая импульсная мощность (см. § 1.16).
В линейных модуляторах большой мощности иногда используются ртут-
ные игнитроны [106—111]. Хотя режим их работы достаточно критичен (осо-
бенно в отношении диапазона возможных изменений температуры охлажда-
ющей воды), большой интерес представляет высокая импульсная и средняя но-
минальная мощность этих устройств. Из-за большого количества электродов
они требуют более сложных пусковых и управляющих устройств, чем тира-
троны, однако при правильной эксплуатации срок их службы может быТь
неограниченным. Зажигание поджигающего электрода должно быть произве-
дено приблизительно за 10 мкс до начала прохождения анодного тока, чтобы
катодное пятно успело сместиться с этого электрода во избежание его по-
вреждения большим пиковым анодным током. К сожалению, пары ртути
являются очень тяжелым газом, поэтому из-за медленной его деионизации
предельное значение частоты повторения импульсов составляет 500 Гц, а
иногда даже меньше. Для ускорения деионизации игнитронов широко исполь-
зовалось большое сеточное смещение, но при напряжении, превышающем
несколько сот вольт, сокращался срок службы игнитрона из-за пробоев и
ионной бомбардировки в интервале восстановления. Поэтому игнитроны не
были использованы в Стэнфордском 3-км линейном ускорителе, хотя вначале
и предполагалось их применение [ПО, 135]. Вместо них были использованы
специально разработанные водородные тиратроны.
Кремниевые управляемые вентили в тех случаях, когда это возможно, яв-
ляются естественной заменой водородных тиратронов, так как во многом
96
Гл. 1. Радиолокационные передатчики
имеют сходные параметры [128, 129]. Как и все полупроводники, кремние-
вые управляемые вентили не выдерживают перегрузку, даже мгновенную,
поэтому допуски, связанные с достаточно большим допустимым временем
усреднения, присущим тиратронам, здесь невозможны. Так, например, при
использовании тиратронов увеличение нагрузки при дуговом разряде не име-
ет особого значения, так как в результате усреднения на1рузки оно практи-
чески не скажется на сроке службы. Для кремниевых управляемых вентилей
критерием выбора должны быть не нормальные рабочие условия, а наихуд-
шие возможные, включая ток при повреждениях источника питания, при
котором вентиль не успевает восстановиться или выходит из строя. При пра-
вильной же эксплуатации срок службы кремниевых управляемых вентилей
неограничен. Наиболее важными факторами, определяющими их применение
в импульсных модуляторах, являются скорость нарастания анодного тока
{dijdt), скорость нарастания анодного напряжения (dvjdt} и рассеяние мощ-
ности, в свою очередь, зависящее от ряда факторов, включая частоту повто-
рения импульсов, интенсивность пускового сигнала и значение dijdt.
В случае большой пиковой мощности очень полезно включение дросселя
насыщения [105], так как он позволяет распространиться области проводи-
мости па всю площадь перехода до того, как начнет протекать большой ток.
При это?«1 возможно и допустимо большее значение di/dt. Поскольку при на-
личии тока намагничивания дросселя анодный ток небольшой, что способст-
вует процессу распространения области проводимости, дроссель насыщения
иногда называют задерживающим. Кремниевые управляемые вентили, пред-
назначенные для импульсной работы, имеют следующие номинальные пара-
метры: пиковое напряжение 1000 В, скорость нарастания напряжения
dv[dt = 200 В/мкс, пиковый ток 1000 А, скорость нарастания тока difdt =
= 1000 А/мкс Для увеличения мощности можно соединить несколько венти-
лей. Для получения надежной работы в условиях максимального использова-
ния их возможностей пусковой сигнал должен подаваться одновременно на
все вентили. Характерным примером возможностей кремниевых управляемых
вентилей является модулятор, разработанный в соответствии с техническими
требованиями на клистроны Станфордского линейного ускорителя [129].
В модуляторе использованы 432 пары кремниевых управляемых вентилей, его
напряжение равно 256 кВ, ток 256 А (65 МВт импульсной мощности) при
средней мощности 75 кВт. Длительность импульса равна 3 мкс, а частота
повторения 360 Гц.
В линейных модуляторах были использованы также четырехслойные дио-
ды, но из-за их более низких показателей их применение было ограничено
пусковыми устройствами и другими устройствами малой мощности.
В конце 60-х годов был разработан вентиль обратной коммутации [178],
являющийся более мощным эквивалентом четырехслойного диода. Примене-
ние вентилей обратной коммутации аналогично применению кремниевых уп-
равляемых вентилей, за исключением некоторых важных отличий, рассматри-
ваемых ниже. Подобно четырехслойному диоду вентиль обратной коммута-
ции является двухполюсным устройством, запускаемым путем подачи напря-
жения, превышающего рабочее, с временем включения не более 0,1 мкс. Па-
раметры вентилей обратной коммутации аналогичны параметрам кремниевых
управляемых вентилей, за исключением того, что di/d/=10 000 А/мкс. Это
значение столь же велико, как для водородных тиратронов, и примерно
в 10 раз больше, чем для кремниевых управляемых вентилей. Это является
важным преимуществом вентилей обратной коммутации перед кремниевыми
управляемыми вентилями при использовании коротких импульсов. Поскольку
нормальный запуск вентилей обратной коммутации производится подачей на-
пряжения, превышающего рабочее, они естественно вполне пригодны для
последовательного включения и запуска (см. активные коммутаторы в § 1.15),
В отличие от кремниевого управляемого вентиля, вентиль обратной ком-
мутации является коммутирующим устройством в режиме обратной поляр-
96
1 1'2. Линейные
.модуляторы
•пости, а в другом направлении он проводит гок, как обычный диод. Поэтому
в линейном модуляторе вентиль Обратной коммутации работает также в ка-
честве ограничителя, однако без преимуществ, обусловленных последователь-
ный сопротивлением. Поэтому для быстрого гашения отражений, возникаю-
щих в цепи формирования импульсов, следует включить непосредственно на
один из концов длинной линии дополнительный согласованный ограничитель.
В то время, как восстановлению кремниевого управляемого вентиля способ-
ствует подача обратного напряжения, ускоряющего процесс разряда накоп-
ленной энергии, восстановление вентиля обратной коммутации начинается
лишь, когда ток через него в обоих направлениях уменьшится до заданного
малого значения. Так как для ускорения восстановления вентиля обратной
коммутации не может быть использовано обратное напряжение, время его
восстановления больше. Поэтому начало периода перезаряда в линейных мо-
дуляторах на вентилях обратной коммутации должно быть задержано, чтобы
вентиль обратной коммутации успел восстановиться после того, как токи,
обусловленные отражениями в схеме формирования импульсов и всплеском
обратного напряжения на импульсном трансформаторе, не уменьшаться
в достаточной мере. Однако, чтобы вентиль обратной коммутации мог восста-
новиться в интервале обратного напряжения, обычно появляющегося после
импульса, последовательно с ним можно включить специальный диод быстро-
го восстановления. Так как завершение последовательного запуска ряда
вентилей обратной коммутации зависит от подводимого к ним напряжения,
существует минимальное напряжение, при котором происходит запуск моду-
лятора на этих вентилях.
На протяжении всей истории развития линейных модуляторов требова-
ния к ним опережали возможности коммутаторов, поэтому постоянное внима-
ние уделялось использованию двух и более последовательно или параллель-
но включенных наиболее мощных коммутаторов для повышения импульсной
или средней мощности. Хотя были использованы самые различные схемы
включения, к ним ко всем применимы следующие общие замечания.
Последовательное включение. При последовательном включении двух или
более устройств (рис. 40, а) через них, естественно, проходит один и тот же
ток, и можно сделать так, чтобы в периоды отсутствия их проводимости на-
пряжение на них делилось поровну. Однако в процессе включения устройст-
во, которое включается последним, оказывается под полным напряжением и,
таким образом, находится в условиях, аналогичных устройству, состоящему
из одного коммутатора. Эксплуатация последовательно включенных тиратро-
нов показала, что их срок службы сравнительно невелик. Однако последова-
тельное включение кремниевых управляемых вентилей, по-видимому, окажет-
ся возможным в основном потому, что последние разработки, в которых
предусматриваются специальные компенсирующие устройства для обеспече-
ния правильного распределения напряжения в процессе включения, должны
скоро выйти из стен лаборатории.
Параллельное включение. Напряжение на нескольких параллельно вклю-
ченных устройствах с небольшими уравнительными сопротивлениями
(рис. 40,6), естественно, одинаково, причем токи в интервалах генерирования
импульсов также могут быть равномерно распределены. Однако первая вклю-
чившаяся лампа принимает на себя всю нагрузку, обусловленную паразитны-
ми емкостями и током нагрузки в интервале его нарастания. В случае
использования уравнительного дросселя (рис. 40, в) ток нагрузки всегда рав-
номерно распределен, но первая включившаяся лампа удваивает напряже-
ние на второй невключившейся лампе, поэтому доля мощности, рассеиваемой
на второй лампе при отпирании, соответственно увеличивается. Такие же
результаты получаются при параллельном включении нескольких ламп, свя-
занных через трансформаторы (рис. 40, г).
Если импульсная мощность соответствует номиналу одного коммутирую-
щего устройства, а средняя мощность или частота повторения импульсов
97
Гл. 1. Радиолокационные передатчики
больше, то можно соединить два (или более) устройства параллельно и отпи-
рать их поочередно. При этом мощность, рассеиваемая при отпирании, распре-
деляется правильно, но из-за задержки между запусками двух устройств
появляется дрожание с частотой, равной половине частоты повторения импуль-
сов. Кроме того, при такой схеме включения среднеквадратический ток в каж-
дом из N параллельных устройств в раз меньше полного среднеквадрати-
ческого тока, а не в Д' раз, как при одновременном запуске.
Рис. 40. Включение нескольких коммутаторов:
а — последовательное; б — параллельное; в — параллельное с уравнительным дроссе-
лем; г «- параллельное со связью через трансформаторы; д — параллельное включение
линейных модуляторов.
Поскольку последовательное и параллельное включение коммутирующих
устройств (особенно при использовании тиратронов) часто давало неудовлет-
ворительные результаты, серьезное внимание было уделено системам, в кото-
рых необходимый режим работы коммутаторов достигался бы даже ценой
усложнения системы. Наиболее простым и удачным решением является па-
раллельное включение линейных модуляторов, каждый из которых собран
по полной схеме (рис. 40, <?). При этом можно использовать общий импульс-
ный трансформатор так же, как и общий зарядный дроссель, хотя отдельные
лучше ограничивают ток конденсатора фильтра источника питания в случае
недостаточной деионизации тиратрона. При параллельном соединении моду-
ляторов ошибки временного распределения пусковых сигналов и неоднойре-
менный поджиг тиратронов приводят только к увеличению времени нараста-
ния выходного импульса, и лишь тогда, когда ошибки сравнимы с временем
нарастания. Независимо от того, согласована нагрузка или нет, через каждый
08
,, J J 3. Магнитные. мрдулрторы
тиратрон проходит только часть тока его нагрузки. При дуговом разряде
в нагрузке, ток одинаково' увеличивается в каждом тиратроне и в каждом
ограничителе. Если нагрузкой является лампа со скрещенными полями, рабо-
чий режим каждого параллельно включенного модулятора остается неизмен-
ным даже при выходе из строя нескольких модуляторов, однако ток нагрузки
уменьшается, Параллельное включение линейных 'модуляторов на тиратронах
используется часто. Наиболее интересным примером такого устройства яв-
ляется успешно работающий модулятор на кремниевых управляемых венти-
лях для клистронных генераторов стэнфордского линейного ускорителя,
в котором параллельно включено 432 отдельных линейных модуля, каждый
из которых содержит два кремниевых управляемых вентиля [129]. Для от-
ключения неисправных модулей используются плавкие предохранители, при-
чем каждый из модулей может заменяться при включенной системе.
1.13. Магнитные модуляторы
Базовая схема магнитного модулятора приведена на рис. 41 [2, 158, 1591.
Конденсатор С1 резонансно заряжается от силовой сети переменного тока.
Дроссель L2 насыщается, как только напряжение на С1 достигает пикового
значения, и энергия, накопленная в С1, резонансно передается на С2 через
насыщенный дроссель L2. При использовании наилучшего материала сердеч-
ника этот период может быть в 10 раз короче времени, необходимого для
заряда С1. Это отношение называется коэффициентом сжатия данного каска-
да магнитного модулятора. Для получения типичного коэффициента запол-
нения импульсов порядка 0,001 обычно требуется 3-4 каскада магнитного
сжатия. Каждому периоду напряжения сети соответствует один выходной им-
пульс, а если перед первым каскадом включен двухполупериодный выпрями*
Рис. 41. Схема магнитного модулятора.
тель (или эквивалентное устройство), то каждому периоду будет соответст-
вовать два импульса. Выходной каскад на рис. 41 является по существу
однозвенной схемой формирования импульсов, хотя конденсатор может быть
заменен многозвенной схемой формирования. Выходные характеристики в ос-
новном подобны характеристикам линейного модулятора.
Поскольку каждый конденсатор должен по очереди накапливать энер-
гию, размер магнитного модулятора почти прямо пропорционален энергии на
9S
Гл. 1. Радиолокационные передатчики
один импульс. В случае небольшой энергии на импульс размеры магнитного
модулятора чрезвычайно малы при большом к. п. д. Надежность магнитных
модуляторов исключительно высока. Однако выбор частоты повторения им-
пульсов ограничен частотой сети питания или кратными ей частотами.
Хотя схема магнитного модулятора, на первый взгляд, является очень
простой, его разработка требует высокой квалификации. Наиболее сложной
задачей является возвращение всех магнитных сердечников в исходное со-
стояние в интервалах между импульсами при надежном устранении пара-
зитных выходных сигналов в этих интервалах.
Запуск магнитного модулятора от внешнего пускового устройства невоз-
можен, поэтому момент запуска выходного импульса в каждом периоде на-
пряжения сети меняется с изменением этого напряжения, а также температу-
ры. Пусковой импульс может быть получен с помощью магнитного модуля-
тора точно е момент появления выходного импульса, но этот момент зависит
от напряжения сети. Мощность выходного сигнала также зависит от напря-
жения сети, как и в нестабилизированном линейном модуляторе.
Разработчик магнитного модулятора должен быть одновременно специа-
листом по модуляторам и конструктором трансформаторов Кроме того, вслед-
ствие взаимосвязи между параметрами конденсаторов и магнитных элементов
он должен иметь возможность следить за этой разработкой и в процессе ее
производства. По этим причинам магнитные модуляторы обычно поставля-
ются в собранном виде. Некоторые применения магнитных модуляторов см.
также в т. 4, гл. 4.
1.14. Гибридные магнитные модуляторы с кремниевыми
управляемыми вентилями
Ряд недостатков магнитных модуляторов может быть устранен путем
добавления кремниевых управляемых вентилей [129, 158, 160] (рис. 42).
Несмотря на колебания напряжения силовой сети выходная мощность срав-
нительно мало изменяется благодаря использованию экономичного и эф-
Пусковой импульс Основной
начала заряда пусковой импульс
\Ь1 9 9 ?
>F
квз
Формиро-
ватель ‘
импуль-
сов
Датчик
уровня и
генератор
пусковых
импуль-
КВ - кремниевый, варистор
Рис. 42. Схема гибридного модулятора с кремниевыми управляемыми вентилями.
фективного регулятора зарядного напряжения (см. § 1.17). Другим важным
преимуществом такой гибридной схемы является то, что частота повторения
импульсов не зависит от частоты сети питания и может регулироваться внеш-
ним пусковым устройством. Однако выходной импульс существенно запазды-
вав! относи>ельно пускового, и это запаздывание меняется на несколько про-
НЮ
1.15. Модуляторы с активным коммутатором
гейтов в процессе разогрева и при колебаниях температуры. Хотя эти изме-
нения много меньше, чем в чисто магнитном модуляторе, они слишком вели-
ки для использования этих модуляторов при индикации движущихся целей.
По сравнению с большей частью других типов модуляторов такой гиб-
ридный магнитный модулятор работает при более низких напряжениях, име-
ет меньшие габариты, прочнее и надежнее. По сравнению с модуляторами
только на кремниевых управляемых вентилях сочетание кремниевых управ-
ляемых вентилей с включенными за ними одним или двумя каскадами маг-
нитного сжатия дает большую импульсную мощность, чем такое же количе-
ство кремниевых управляемых вентилей, так как на выходе кремниевых уп-
равляемых вентилей длительность импульса больше, а импульсная мощность
меньше, чем у импульса на выходе такой комбинации Это преимущество
достигается ценой повышения дрейфа, дрожания импульса и усложнения
гибридного устройства.
1.15. Модуляторы с активным коммутатором
Разнообразие типов импульсных модуляторов с активным коммутатором
столь велико, что целесообразно разделить их на три категории: катодные
импульсные модуляторы, импульсные модуляторы в цепи модулирующего
анода и сеточные импульсные модуляторы. Катодные импульсные модуляторы
управляют полной мощностью луча высокочастотной лампы либо непосредст-
венно, либо через цепь связи. Импульсный модулятор анода должен обеспе-
чить размах напряжения, равный полному напряжению луча лампы, а ток
определяется только зарядом и разрядом емкостей схемы в начале и конце
импульса, так как модулирующий анод потребляет небольшой ток на протя-
жения импульса Импульсные модуляторы для высокочастотных ламп с управ-
ляющей сеткой выполняют те же функции, что и импульсные модуляторы
в цепи анода, однако, так как сетка — это управляющий электрод с боль-
шим коэффициентом усиления, размах выходного напряжения, создаваемый
сеточным импульсным модулятором, много меньше, что позволяет использо-
вать низковольтные детали и межсоединения.
До появления полупроводников эти типы модуляторов назывались моду-
ляторами на «жестких» лампах, так как в них использовались исключитель-
но вакуумные лампы. В модуляторах с активным коммутатором необходимы
коммутаторы, которые могут включаться и выключаться по желанию, так как,
в отличие от линейных модуляторов, коммутатор управляет как моментом
появления импульса, так и его окончанием. В модуляторах с активным ком-
мутатором импульс заканчивается при передаче в нагрузку только части на-
копленной модулятором энергии.
Единственными полупроводниковыми приборами, устройство которых
позволяет выключать их по желанию, являются транзисторы и выключаемые
кремниевые тиристоры, но их номинальная мощность значительно меньше, чем
у кремниевых управляемых вентилей. Поэтому стремление использовать по-
лупроводники для устройств большой мощности привели к разработке спе-
циальных схем выключения кремниевых управляемых вентилей в требуемый
момент с помощью других таких же вентилей. Хотя эти схемы могли бы быть
использованы и с водородными тиратронами и другими коммутаторами,
область применения которых обычно ограничивается линейными модулято-
рами, это не было сделано, по-видимому, потому, что приборы с горячими
катодами менее удобны, чем полупроводниковые.
Модуляторы с активным коммутатором обеспечивают, как правило, боль-
шую свободу выбора длительности импульсов и частоты повторения, вклю-
чая одновременное использование импульсов разной длительности и работу
импульсными посылками, поскольку импульс формируется на низком уровне.
Максимальная возможная длительность импульса в пределах допустимого
101
Гл. 1. Радиолокационные передатчики
спада вершины определяется емкостью накопительного конденсатора (и в слу-
чае его использования импульсным трансформатором). Так как энергия,
накапливаемая конденсатором, равна СЕ2)2, то для получения, например,
5%-ного спада напряжения конденсатор должен накопить энергию, в 10 раз
превышающую энергию, расходуемую в нагрузке за один импульс. В пере-
датчиках большой мощности, работающих длинными импульсами, емкость по-
лучается большой и, поскольку энергия, накапливаемая одним конденсатором,
практически не должна превышать 2 Дж, необходимо соединять последова-
тельно и (или) параллельно большое их количество. Такая совокупность кон-
денсаторов называется обычно батареей конденсаторов и часто использует-
ся в диапазоне от 10 до 1000 кДж. Так, например, в передатчике на 10 МВт
импульсной ВЧ мощности при длительности импульсов 100 мкс (1 кДж на
импульс) для получения спада напряжения, равного 4%, необходима батарея
конденсаторов на 10 кДж. При этом спад выходной мощности лампы с пря-
молинейным потоком составит около 13% (если не используется описываемая
ниже компенсации спада). Для ламп со скрещенными полями эта задача
усложняется по крайней мере в 4 раза из-за низкого динамического сопротив-
ления этих ламп (табл. 6)-
При тщательном учете паразитных индуктивностей и емкостей схемы
в модуляторах с активным коммутатором можно получить хорошую форму
импульсов, так как в этих модуляторах отсутствуют цепи формирования им-
пульсов, содержащие элементы с сосредоточенными параметрами, которые
ограничивают время нарастания и создают внутриимпульсные пульсации.
Так же, как линейные модуляторы, модуляторы с активным коммутато-
ром должны выдерживать возможные дуговые разряды в нагрузке без по-
вреждения. Поскольку усилитель со скрещенными полями, работающий
в режиме постоянного напряжения, или лампа с прямолинейным электронным
лучом с импульсной модуляцией на модулирующий анод или управляющую
сетку включены непосредственно на батарею конденсаторов, для защиты
лампы от разряда накопленной энергии при дуговом разряде необходим за-
щитный шунтирующий разряднйк (см. § 1.16). В случае катодного импульс-
ного модулятора сам коммутатор должен прерывать ток дугового разряда
в нагрузке, поэтому поджиг защитного -разрядника не обязателен, если дуго-
вой разряд не возникает в самом коммутаторе.
Катодные импульсные модуляторы. Схемы основных типов катодных им-
пульсных модуляторов с активным коммутатором приведены на рис. 43.
Триод является одним из возможных типов активного коммутатора, а лампа
с прямолинейным электронным лучом в качестве нагрузки одним из возмож-
ных типов высокочастотной лампы с импульсной модуляцией на катод, при-
чем это может быть либо генератор с самовозбуждением, либо усилитель со
скрещенными полями или с прямолинейным электронным лучом.
Номинальные значения параметров коммутатора (напряжение и пиковый
ток) в схемах А и Б равны номинальным значениям параметров нагрузки
[112, ИЗ]. В схемах В и Г номинальные значения параметров коммутатора
могут быть согласованы с нагрузкой соответствующим коэффициентом транс-
формации импульсного трансформатора [117]. Однако трансформатор иска-
жает форму импульса, а обратное напряжение на трансформаторе увеличи-
вает то напряжение, которое должен выдерживать коммутатор. В схеме В
[рансформатор имеет более сложную конструкцию, так как первичная обмот-
ка находится под высоким постоянным напряжением, в то время, как
в схеме Г задача упрощается благодаря конденсатору связи. Хотя схема 4
является самой простой, пусковое устройство в цепи сетки триода (или ана-
логичного коммутатора) находится под высоким напряжением, что услож-
няет обслуживание и требует применения средств подачи мощности и пуско-
вых сигналов на шину ,с высоковольтным «плавающим потенциалом», в то
время, как в схемах Б, В и Г пусковая схема находится под потенциалом
земли.
1U2
1.15. Модуляторы с активным коммутатором
Ряс. 43. Схемы катодных импульсных модуляторов с активным коммутатором.
А—в прямой связью; б —с емкостной связью; В —с трансформаторной связью; Г
с трансформаторной связью и разделительным конденсатором.
103
.Pju.I., Радиолокационные- передатчики
Надо нагельный конденсатор обозначен на всех схемах С1. В схемах Б
и Г конденсатор заряжается и разряжается под полным напряжением им-
пульса относительно земли, что усложняет конструкцию и увеличивает пара-
зитную емкость, включенную параллельно коммутатору. Поскольку одна из
составляющих энергии, рассеиваемой в коммутаторе, обусловлена разрядом
этой паразитной емкости в начале каждого' импульса, схемы Б и Г менее
пригодны при высокой частоте повторения импульсов, особенно если конден-
сатор С1 должен быть достаточно большим для правильного воспроизведе-
ния формы импульсов большой длительности.
Размеры модуляторов в схемах Б и Г больше, чем в схемах А и В по
трем причинам. Прежде всего, для уменьшения влияния импульсной на1руз-
ки на сеть питания необходим кроме С7 еще конденсатор С2. Во-вторых, во
избежание большого обратного напряжения на нагрузке при перезарядке С1
обычно необходимо добавить высоковольтный диод D1. В-третьих, следует
включить высоковольтный резистор и (или) дроссель R1 и L1 для ограниче-
ния потерь, обусловленных прохождением тока от источника питания через
коммутатор в интервале генерирования импульса, и, следовательно, обеспече-
ния быстрой перезарядки С1 по окончании импульса. Схемы Б, В и Г пред-
ставляют меньше возможностей выбора коэффициента заполнения импульса,
чем схема А, из-за наличия трансформатора в схемах В и Г и ряда компро-
миссных решений в схеме перезаряда, необходимых в схемах Б и Г. Вместе
с тем наличие пути для тока перезаряда в схемах Б и Г обеспечивает доста-
точно быстрый спад выходного импульса без дополнительной схемы отсека-
ния хвоста В схемах В и Г тот же полезный эффект создает ток намагни-
чивания трансформатора, однако в случае использования импульсов разной
длительности его действие эффективно лишь на самых длинных импульсах.
Таким образом, выбор оптимального активного коммутатора для импульсной
модуляции высокочастотной лампы на катод зависит от применения.
Мощность накала лампы (если необходим накал) может быть подведе-
на через малоемкостный накальный трансформатор, или через бифилярный
дроссель (обычно только в случае коротких импульсов), или в схемах В и Г
через бифилярную вторичную обмотку импульсного трансформатора.
Если активным коммутатором является электровакуумная лампа, следует
различать два основных режима работы. В наиболее часто используемом ре-
жиме на сетку подается достаточно большой сигнал, чтобы снизить напряже-
ние на аноде в импульсном интервале до возможно более низкого уровня.
Этому режиму соответствует наименьшая мощность рассеяния на коммута-
торе и наибольший к. п. д. Однако колебания напряжения источника питания,
обусловленные пульсацией выпрямителя, колебания напряжения в силовой
сети и спад напряжения на накопительном конденсаторе передаются непо-
средственно на нагрузку. Во втором режиме работы коммутатор использует-
ся как прибор «неизменного гока» путем ограничения сеточного возбуждения.
При этом влияние спада напряжения на батарее конденсаторов и колебаний
напряжения источника питания уменьшается в (Rp-]-Rl)IRl раз, где Rp —-
динамическое сопротивление анодной цепи коммутатора, a Rl — динамическое
сопротивление нагрузки (табл 6). Благодаря более высокому сопротивлению
анодной цепи тетроды больше подходят для режима «неизменного тока», чем
1риоды Однако в режиме «неизменного тока» любые колебания сеточного
возбуждения непосредственно передаются на ток в нагрузке, в го время как
в первом режиме колебания сеточного возбуждения сравнительно мало ска-
зываются В режиме «неизменного гока» сеточное возбуждение может быть
запрограммировано для уменьшения спада импульса. Например, можно так
подобрать линейное увеличение напряжения сеточного возбуждения, чтобы
полностью скомпенсировать падение напряжения на накопительном конден-
саторе в течение импульса [114].
Импульсные модуляторы в цепи модулирующего анода с прямой связью.
Схема основного типа данною модулягора приведена на рис. 44 [118—120,
104
}.1'5:Мо^уляторы с активным Коммутатором
124, 127]. Вместо изображенного на рисунке клистрона может быть исполь-
зован любой тип лампы с прямолинейным электронным лучом и с модулиру-
ющим анодом, а вместо триодов любой активный коммутатор соответствую-
щего типа. В течение импульса включающая лампа поддерживает на моду-
лирующем аноде потенциал, близкий к потенциалу земли, благодаря чему
клистрон включается, а в интервалах между импульсами с помощью резисто-
ра R3 на модулирующем аноде поддерживается отрицательное смещение от-
Рис. 41 Импульсный модулятор в цепи модулирующего анода с прямой связью.
носигельно катода клистрона и ток луча клистрона прерывается. Через вклю-
чающую лампу значительный ток проходит только в интервалах нарастания
импульса, когда происходит заряд паразитной емкости Cs модулирующего
анода (включая паразитные емкости всех связанных цепей, как, например,
распределительной шины на уровне напряжения включения), а через выклю-
чающую лампу только в конце импульса при разряде емкости Cs. Выключаю-
щая лампа может рассматриваться как схема отсекателя хвоста. Необходи-
мость в такой схеме в этом случае очень велика в основном из-за емкостной
нагрузки модулятора. Необходимость в резисторе R3 отпадает, если выклю-
чающая лампа включена в течение всего интервала между импульсами. Такая
схема без R3 целесообразнее, так как исключаются потери, обусловленные
рассеянием энергии на резисторе R3 в течение импульса, и обеспечивается
низкое сопротивление в пепи тока утечки модулирующего анода между им-
пульсами
В схеме с импульсным модулятором в цепи модулирующего анода можно
получить исключительно ровную верхушку импульса, так как клистрон при-
соединен непосредственно к батарее конденсаторов, а зависимость тока луча
клистрона от колебаний входного напряжения на сетке включающей лампы
йвляется зависимостью второго порядка малости. Возможность увеличения
Ш5
/ г .1. Радиолокационные. передатчики.
длительности импульсов ограничивается только размерами батареи конденса-
торов, однако при малой длительности импульсов снижается к. п я из-за
конечной длительности интервалов включения и выключения модулирующего
анода и расходуемой в этих интервалах энергии (см. § 1.9).
Включающая и выключающая лампы могут быть значительно менывей
мощности, чем коммутатор в схеме того же клистрона с импульсной моду-
ляцией на катод, так как величина и длительность токов через них меньше.
Однако подаваемая мощность и работа пусковых устройств должны зависеть
от двух уровней высокого напряжения, один из которых соответствует на-
пряжению высоковольтного источника питания (ИП) Е1, а другой — импульс-
ному напряжению модулирующего анода. Поскольку мощность рассеяния
в каждой лампе по существу равна CS(E1)ZI2, умноженной на частоту повто-
рения импульсов, желательно минимизировать Cs, особенно при высокой ча-
стоте повторения. Для модуляторов с незаземленной аппаратурой управления
были разработаны специальные высоковольтные лампы [120, 121, 1231 с не-
большим входным сеточным напряжением, однако сеточное напряжение
может сильно зависеть от эффекта Миллера [125]. Этот эффект наблюдается
в той или иной степени во всех модуляторах на электровакуумных лампах.
Для того, чтобы реализовать наилучшую форму импульса, необходимо
уделить большое внимание времени установления, по истечении которого им-
пульс на модулирующем аноде и напряжение на катоде можно считать «пло-
скими» (о влиянии модулятора см. § 1.10). «Плоская» форма и постоянство
напряжения на модулирующем аноде при изменениях параметров включаю-
щей лампы и напряжения на ее сетке могут быть обеспечены с помощью
фиксирующих источника питания и диода (рис 44) Можег потребоваться
также источник смещения для поддержания достаточно большого напряже-
ния на включающей лампе во время импульса во избежание появления боль-
шого сеточного тока. В тех случаях, когда допустимо небольшое положи-
тельное напряжение на модулирующем аноде относительно земли во время
импульса, сочетание источника смещения и фиксирующего диода позволяет
обойтись без фиксирующего источника питания. С другой стороны, если мо-
жет быть использована включающая лампа, сеточный ток которой будет
достаточно мал при наличии фиксирующего напряжения, можно использовать
фиксирующие источник питания и диод, исключив источник смещения.
Даже в том случае, когда импульсное напряжение на модулирующем
аноде быстро стабилизируется на конечном уровне, быстрое нарастание на-
пряжения на модулирующем аноде будет сопровождаться, большим спадом
напряжения на катоде клистрона, вызванным быстрым нарастанием тока луча
клистрона (и тока коммутатора) через дроссель L1. Если индуктивность
дросселя Lt в сочетании с паразитными емкостями схемы не полностью демп-
фирована сопротивлением луча клистрона, напряжение на катоде клистрона
вслед за участкам нарастания не стабилизируется, а начнет колебаться
(появится «звон») [169]. Полного демпфирования можно достичь при вклю-
чении сопротивления либо параллельно L1 (что допустимо и в том случае,
когда согласно требованиям завода-изготовителя включение L1 обязательно),
либо между катодом клистрона и распределительной шиной выключения на-
пряжения [126].
R5 и С2 образуют обычную цепь для измерения тока на корпус лампы
(см § 1.3).
Импульсные модуляторы в цепи модулирующего анода с трансформатор-
ной связью. Для того чтобы заземлить импульсные цепи и этим облегчить
их техническое обслуживание, для подачи сигнала на модулирующий анод
лампы с прямолинейным электронным лучом иногда используется трансфор-
маторная связь (рис. 45). Для устранения звона и обеспечения достаточно
плоской вершины импульса, подаваемого на модулирующий анод, часто тре-
буется включение гасящего резистора Rt и(или) фиксирующего диода Д1.
Поскольку модулирующий анод является в основном емкостной нагрузкой,
1!Ь
/./«& Модуляторыс активным коммутатором
обычно необходима выключающая лампа, а иногда и цепь гашения обратно-
го напряжения из и Д2. Вариант этой схемы на кремниевых управляемых
вентилях описан в работе (130].
Для литания трансформатора можно использовать также линейный мо-
дулятор, однако такое сочетание редко используется из-за его негибкости
и появления характерных пульсаций на вершине импульса, а также вследст-
вие ряда практических трудностей достижения удовлетворительного к. п. д.
Сеточные импульсные модуляторы. Если в высокочастотной лампе имеет-
ся управляющая сетка с большим коэффициентом усиления, импульсный мо-
дулятор аналогичен тем, которые используются в сеточных цепях коммута-
торов других типов модуляторов на электровакуумных лампах, и поэтому
здесь он не будет описываться. Можно использовать также модуляторы,
подобные изображенным на рис. 43—45, только здесь размах сигнала на
сетке должен быть много меньше полного ускоряющего напряжения луча.
Модуляторы такого типа особенно пригодны для формирования радиолока-
ционных импульсных посылок (см. § 1.9 и [115]), так как влияние паразит-
ных емкостей уменьшается пропорционально квадрату коэффициента усиле-
ния сетки.
Методы борьбы со спадом вершины импульса. Как уже отмечалось, раз-
меры батареи накопительных конденсаторов сильно зависят от допустимого
спада вершины импульса. Одним из рассмотренных выше методов работы,
при котором значительный спад напряжения на батарее конденсаторов ве
влечет за собой соответствующего спада вершины выходного импульса,
является работа в режиме «неизменного тока» коммутатора катодного им-
пульсного модулятора с линейным нарастанием входного напряжения ва
сетке. Несмотря на увеличение мощности потерь, этот метод может оказать-
ся целесообразным благодаря уменьшению размеров батареи конденсаторов.
Возможным вариантом является шунтирование нагрузки цепью, ток в кото-
рой со временем убывает. Простейшее устройство такого типа представляет
собой последовательную /?С-цепочку. Например, если RC вдвое больше дли-
тельности импульса, а сопротивление в 10 раз больше сопротивления нагруз-
ки, то 5%-ный спад напряжения батареи конденсаторов будет почти полно-
стью скомпенсирован ценой 7%-ной потери мощности Такой же результат
можно получить с помощью параллельной /?/.-цепи, включенной последова-
тельно с нагрузкой.
107
Гл. I. Радиолокационные передатчики
Еще одним возможным методом является выполнение батареи конденсат
торов в виде низкоомной цепочки формирования импульсов, для которой спад
напряжения преобразуется в прямоугольную ступеньку [114]. Например,
батарею конденсаторов, спад напряжения на которой был бы равен 10% при
нагрузке 1000 Ом и некоторой длительности импульса, необходимо было бы
выполнить в виде многозвенной схемы формирования импульсов с сопротив-
лением 50 Ом. При подаче импульсного напряжения на нагрузку напряже-
ние немедленно снижается на 5% (без постоянного спада), однако после это-
го оно не меняется в течение импульса (не считая пульсаций). В конце
импульса батарея конденсаторов окажется разряженной на 10%, но на нагруз-
ке все время будет поддерживаться неизменное напряжение. При этом,
в отличие от других методов компенсации спада, потери энергии будут
ничтожными. Недостатком этого метода являются негибкость схемы и пуль-
сации на вершине импульса. Хотя в большей части модуляторов с активным
коммутатором с целью упрощения используется решение «грубой силы» (до-
статочно большая емкость для получения приемлемого спада), в некоторых
специальных случаях из габаритных или экономических соображений может
потребоваться использование метода компенсации.
Методы связи с пусковым устройством. В ряде типов модуляторов с ак-
тивным коммутатором пусковые устройства возбуждают цепи, находящиеся
под высоким напряжением относительно земли. Поскольку генераторы ча-
стоты повторения импульсов обычно заземлены, в схеме связи с пусковым
устройством в некоторой точке должна быть предусмотрена развязка по
высокому напряжению. В табл. 8 приведены наиболее употребительные схе-
мы связи с пусковым устройством и их параметры [113, 118—120, 122, 124,
148]. Хотя часто для запуска и выключения модулятора достаточно иметь
очень короткие импульсы, рассматривались также различные методы связи,
обеспечивающие пропускание импульсов большой длительности. Ввиду слож-
ности испытания цепей связи под высоким напряжением необходимо пред-
усмотреть возможность их испытания при выключенном высоком напряжении.
Кроме того, поскольку дуговые разряды в нагрузке и поджиг защитного раз-
рядника сопровождаются интенсивными переходными процессами, цепи связи
с пусковыми устройствами должны либо их выдерживать, либо иметь соот-
ветствующую защиту.
Активные коммутаторы. Для импульсных модуляторов созданы электро-
вакуумные лампы с номинальными значениями напряжения до 200 кВ и
импульсной мощности до 60 МВт. Выбор ламп на напряжения, превышающие
30 кВ, должен производиться с особой осторожностью, так как периодические
пробои высокого напряжения являются в этих случаях такой же серьезной
проблемой, как в высокочастотных лампах. Для обеспечения надежной рабо
ты в полевых условиях следует брать минимальный коэффициент запаса 1,4
(и даже 2,0) по отношению к номинальным данным завода-изготовителя. Во
избежание повреждения лампы (а также других элементов устройства) при
дуговых разрядах, возникающих в процессе тренировки новой лампы, в неко-
торых схемах может потребоваться защитный разрядник [113, 117]. Значение
импульсной мощности должно выбираться из расчета приемлемого срока
службы лампы. Уменьшение номинального значения пикового тока оксидного
катода в случае длинных импульсов совершенно обязательно. Напряжение
сеточного возбуждения импульсных модуляторных ламп должно быть доста-
точно большим, особенно, если лампа работает в перенапряженном режиме.
Выбор входного сеточного напряжения должен производиться с учетом зна-
чительной нелинейности характеристики лампы в той области, где ток сетки
уменьшается из-за вторичной эмиссии и сопротивление сетки может оказать-
ся даже отрицательным. При большом коэффициенте заполнения импульсов
следует контролировать мощность рассеяния на управляющей и экранирую-
щей сетках и на аноде.
108
Схемы связи с пусковым устройством
Таблица 8
Вид связи Возможное число полярностей пуско- вого импульса Дрожание пускового импульса Длитель- ность пу- скового импульса V Емкость, добавля- емая на уровне подклю- чения Время на- растания пускового импульса Защита цепи пускового импульса от нестациоиар- ности напря- жения на уровне под- ключения. дБ Примечание
Прямая емкост- ная 2 Зависят от соот- ношения ампли- туды пускового импульса и пуль- сации на уровне подключения Малая Равна емкости конден- сатора связи Малое Не тре- буется Подключение возможно только при низком постоянном на- пряжении
Связь через кон- денсаторы и балансный трансформатор 2 Небольшие » То же ~т/20 40—80 Подключение при высоком на- пряжении опасно; исполь- зуется только при постоян- ном напряжении
Трансформатор- ная 2 » Неболь- шая ~т/20 Может быть >120 Большие размеры устройства, но может передавать в слу- чае необходимости сигналы большего уровня
На высокой ча- стоте fc 1 1/4fc Не огра- ничена То же ~1/Л- 40—80 То же
Оптическая 8 1 Небольшие То же Пренеб- режимая Малое Может быть >120 Необходим усилитель с боль- шим коэффициентом усиле- ния на уровне подключения, который должен быть хоро- шо заэкранирован. Необхо- дима точная регулировка
1.15. Модуляторы с активным коммутатором
Гл 1. Р ад ио локационные передатчики
Для получения специальных характеристик коммутаторных ламп было
создано несколько особых конструкций. В коммутаторной лампе типа инжек-
трон фирмы Litton [121] на 150 кВ использована специальная конструкция
высоковольтного клистрона. В коммутаторах на большую мощность фирмы
Machlett применена магнитная фокусировка, уменьшающая сеточный ток
и увеличивающая усиление по мощности [116].
Проникающая способность рентгеновского излучения при напряжениях,
превышающих 25—30 кВ, становится значительной. Так как ток проходит
через электровакуумные лампы (по крайней мере в начале импульса) при
большом напряжении на лампе, должна предусматриваться соответствующая
защита от рентгеновского излучения. Обычно защита рассчитывается на наи-
высшее рабочее напряжение и наибольшую частоту повторения импульсов или
на другие какие-либо условия, соответствующие максимальному уровню рент-
геновского излучения. Рентгеновское излучение может увеличиться в резуль-
тате нарушения условий нормального режима, например несоответствующего
сеточного смещения в интервалах между импульсами, неправильного режима
сетки при неполном выключении, или разогрева сетки, достаточного для по-
явления эмиссии при выключенном токе катода.
Полупроводниковые приборы в качестве активных коммутаторов в им-
пульсных модуляторах представляют большой интерес, так как срок их
службы при правильном использовании практически неограничен. Однако они
медленно внедряются, так как в условиях нестационарных процессов, кото-
рые безопасны для тиратронов и электровакуумных ламп, они могут выйти
из строя или могут ухудшиться их параметры. Наиболее тяжелыми условия-
ми являются дуговой разряд в нагрузке, зажигание защитного разрядника,
переходные процессы в сети питания и неправильная регулировка таких сов-
местно работающих устройств, как генератор пусковых сигналов.
В качестве активных коммутаторов были исследованы также транзисто-
ры [155], но при больших мощностях они оказались недостаточно экономич-
ными. Кроме того, в режиме насыщения длительность интервала их выклю-
чения чрезмерно велика.
Кремниевые управляемые вентили имеют обнадеживающие номинальные
данные и достаточно тщательно изучены; они постепенно начинают внедрять-
ся [130, 131]. Типичная схема модулятора с коммутатором на кремниевых
управляемых вентилях приведена на рис. 46. Вентиль КВ1 возбуждает им-
пульс и остается во включенном состоянии в течение большей части длитель-
ности импульса. Приблизительно за 20 мкс до окончания импульса возбуж-
дается вентиль КВ2 и вследствие резонансного разряда конденсатора С1
через L1 изменяется полярность напряжения на С1. Когда направление тока
в этой цепи изменяется, вентиль КВ2 запирается и ток проходит через Д1
и КВ1. Направление эюго тока таково, что общий ток через КВ1 умень-
шается, но ток через нагрузку не меняется, так как КВ1 еще не заперт. Если
ток резонансного разряда L1 и С1 достаточно велик, то ток через КВ1 ста-
нет равным нулю, так что создаются условия для восстановления как КВ1,
так и КВ2. В течение этого времени напряжение обратной полярности на
КВ1 может привести к увеличению напряжения выходного импульса, однако
для поддержания постоянства выходного напряжения можно применить
различные фиксирующие устройства, например R1 и Д2. Через некоторый
интервал времени, необходимый для восстановления способности КВ1 и КВ2
блокировать прямое напряжение (минимально около 10 мкс), возбуждается
КВЗ для выключения импульсного тока.
Недостатком такой схемы является то, что длительность импульса не
может быть меньше примерно 20 мкс, что определяется в основном мини-
мальным временем восстановления КВ1 и КВ2. Более короткие импульсы
можно получить (ценой уменьшения к п. д.), если L1 и С1 достаточно ве-
лики, чтобы отключить КВ1 даже при замкнутой накоротко нагрузке. В этом
случае КВЗ может выключить импульсный ток, когда вентиль КВ1 еще вклю-
HU
1.15. Модуляторы с активным коммутатором
чен, после чего вентиль КВ2 вернет КВ1 в исходное положение. С другой сто-
рону, если КВ1 является выключаемым кремниевым тиристором (ВКТ), то не-
обходимость в LI, Cl, КВ2 и Д1 отпадает, причем легко могут быть сфор-
мированы более короткие импульсы. Однако номинальная мощность выклю-
чаемого кремниевого тиристора обычно меньше номинальной мощности крем-
ниевого управляемого вентиля.
Для получения мощности, превышающей мощность одного кремниевого
управляемого вентиля или выключаемого кремниевого тиристора, они могут
быть соединены последовательно или параллельно. В последовательной цепоч-
ке необходимо обеспечить равномерное распределение напряжения и мощно-
Рис. 46. Модулятор с активным коммутатором на кремниевых управляемых вентилях.
сти, рассеиваемой при коммутации. Кроме того, крайне желательно одновре-
менное возбуждение всех элементов цепочки (многообмоточным пусковым
трансформатором или одновременной подсветкой фототиристоров и пр.) для
одновременного запуска всех устройств в цепочке. При одновременном воз-
буждении резервирование может быть осуществлено включением избыточных
элементов в цепочку. При этом в случае выхода из строя отдельных элемен-
тов система в целом не выключается, так как кремниевые управляемые вен-
тили при выходе из строя обычно замыкаются накоротко.
Используется также последовательный запуск последовательной цепочки,
при котором запуск одного или небольшого числа элементов (обычно бли-
жайших к земле) вызывает покаскадный запуск остальных. Однако в этом
случае на последних запущенных элементах падает большое напряжение
и (или) рассеивается большая мощность при коммутации. Кроме того, отпа-
дает возможность резервирования, так как при выходе из строя какого-либо
элемента нарушается процесс последовательного запуска.
Параллельное включение элементов также возможно, однако в случае
использования кремниевых управляемых вентилей сопротивление схемы на-
столько мало, что это может создать ряд неудобств. Равномерное распреде-
ление тока между параллельными элементами достигается обычно включени-
ем небольшого сопротивления последовательно с каждым элементом.
Параллельное включение выключаемых кремниевых тиристоров представляет
интерес, так как благодаря ограниченному току сопротивление их больше,
чем в случае кремниевых управляемых вентилей. Его следует предпочесть
последовательному из-за трудностей, связанных с запуском и выключением
выключаемых кремниевых тиристоров через пусковой трансформатор (обрат-
ное напряжение на выключающем триггере снова включает выключаемый
кремниевый тиристор). Типичная схема параллельного включения выключае-
мых кремниевых тиристоров приведена на рис. 47.
. .Модуляторы с коммутаторами на кремниевых управляемых вентилях и
выключаемых кремниевых тиристорах должны быть рассчитаны так, чтобы
111
Г л. 1. Радиолокационные передатчики
они могли выдерживать дуговые разряды в нагрузке. Одним из способов
является использование небольших сопротивлений и(или) индуктивностей
для ограничения тока, чтобы ток короткого замыкания в начальный момент
не превысил допустимого значения, после чего произошел бы поджиг защит-
ного разрядника и отвод через него тока. Другим способом (когда допусти-
мо уменьшение к. п. д.) является использование большого сопротивления,
ограничивающего ток короткого замыкания до уровня, выдерживаемого ком-
мутаторами, что позволяет модулятору работать в условиях периодических
дуговых разрядов в нагрузке. Так, например, сопротивления в схеме рис. 47
Генератор
пусковых
импульсод
Рис. 17. Модулятор с активным коммутатором на выключаемых кремниевых
тиристорах.
можно выбрать так, чтобы ток короткого замыкания был вдвое больше ра-
бочего, а рабочий ток через коммутаторы был в два раза меньше номиналь-
ного в нормальных условиях. Поскольку токи и напряжения на резисторах
равны току и напряжению на нагрузке в нормальных условиях, мощность
выходного импульса модулятора составляет лишь одну четверть произведе-
ния номинальных значений напряжений и токов коммутаторов, а максималь-
ное значение к. п. д. не превышает 50%. Тем не менее этот способ приме-
няется, так как небольшой к. п. д. часто допустим при модуляции на сетку
или модулирующий анод, и в то же время этот способ дает возможность
выдерживать дуговые разряды в нагрузке (между сеткой или модулирующим
анодом и катодом) без использования защитного разрядника или отключения.
Для согласования сопротивлений кремниевых управляемых вентилей и
выключаемых кремниевых тиристоров с более высоким сопротивлением нагруз-
ки часто целесообразной является трансформаторная связь. При этом необ-
ходимо принять меры, чтобы обратное напряжение на трансформаторе между
импульсами не помешало восстановлению начального потока в сердечнике
перед последующим импульсом.
Предельно допустимый режим часто определяется помимо пикового тока,
пикового напряжения и времени восстановления, такими параметрами крем-
ниевых управляемых вентилей, как dildt, dv/di и температура перехода (осо-
бенно при высокой частоте повторения импульсов [164]).
Устройства запуска кремниевых управляемых вентилей и выключаемых
кремниевых тиристоров часто необходимо экранировать и (или) соответству-
112
1.16. Защитные шунтирующие разрядники
ющим образом шунтировать, чтобы исключить ложный запуск, например,
в процессе запуска других цепочек или при поджиге защитного разрядника
в другом каскаде.
Вентили обратной коммутации менее пригодны для модуляторов с актив-
ным коммутатором, чем для линейных модуляторов (см. § 1.12), так как
последовательно с вентилем обратной коммутации нужно включать диод,
чтобы он мог восстановиться в течение интервала обратной полярности (ко-
торая для вентилей обратной коммутации является прямой полярностью).
В ряде случаев их использования может потребоваться диод на большой ток,
с быстрым запуском и быстрым восстановлением. Тем не менее иногда такая
схема может оказаться целесообразной, так как вентили обратной коммута-
ции имеют очень большое значение di/dt и возможность последовательного
запуска.
1.16. Защитные шунтирующие разрядники
Поскольку для повреждения высокочастотной лампы (или коммутатора)
при дуговом разряде достаточна энергия порядка 50 Дж, а энергия, накап-
ливаемая батареей конденсаторов, часто превышает 50 Дж, в схеме должна
быть предусмотрена возможность отвода этой энергии. Для линейных моду-
ляторов защитный разрядник обычно не требуется, так как в силу самого
принципа их устройства ток при коротком замыкании нагрузки не превышает
приблизительно двойного рабочего тока, а длительность импульса ограниче-
на номинальным значением независимо от режима коммутатора. Кроме того,
схема формирования импульсов в линейном модуляторе накапливает энер-
гию только на один импульс, а в модуляторах с активным коммутатором
накопленная энергия в несколько раз больше (см. § 1.15). Защитные разряд-
ники обычно необходимы во всех типах модуляторов с активным коммутато-
ром. Они также необходимы при использовании режима постоянного напря-
жения усилителей со скрещенными полями, которые присоединяются непо-
средственно к батарее конденсаторов подобно лампе с прямолинейным элект-
ронным лучом с импульсной модуляцией на модулирующий анод. Защитный
разрядник действует как массивная шина, непосредственно замыкающая на-
коротко источник питания [140]- Ниже указаны основные особенности работы
эффективного защитного разрядника [140, 142, 144, 169].
1. Для ограничения тока в момент дугового разряда до допустимого зна-
чения последовательно с нагрузкой вводится небольшое сопротивление
и (или) индуктивность, не нарушающие нормальной работы схемы. На схеме
рис. 44 для этой цели используется дроссель L1. Этот дроссель должен быть
включен перед защитным разрядником, чтобы не увеличивать индуктивность
цепи между защитным разрядником и нагрузкой (см. ниже п. 3).
2. Поджиг защитного разрядника при дуговом разряде в нагрузке осу-
ществляется или напряжением, возникающим при переходном процессе дуго-
вого разряда (самозапуск), или пусковым сигналом, появляющимся на по-
следовательно включенном резисторе или дросселе, или в специальном устрой-
стве, содержащем сигнализатор повреждения, и соответствующий генератор
поджигающего напряжения. Поджиг защитного разрядника должен проис-
ходить очень быстро, обычно за 2—3 мкс, а лучше еще быстрее.
3. Большая часть тока повреждения должна немедленно отводиться че-
рез защитный разрядник. Резистор R2 (рис. 44) включен для того, чтобы
для тока повреждения суммарное сопротивление в цепи защитного разрядни-
ка было меньше, чем сопротивление дугового разряда в нагрузке. Скорость
отвода тока повреждения зависит, от индуктивности цепи между защитным
разрядником и нагрузкой [149] и цепи самого разрядника.
4. Пиковый ток через защитный разрядник ограничивается до значения,
которое может выдержать батарея конденсаторов (и сам разрядник), с по-
113
Г л. L Радиолокационные передатчики
мощью резистора R1 (рис. 44). Сопротивление резистора R1 должно быть
ие меньше значения, при котором затухание цепи, состоящей из L1 [и (или)
паразитной индуктивности цепи], С1 и R1, было бы критическим, чтобы на
батарее конденсаторов не возникло обратное напряжение. Такое обратное
напряжение создает более тяжелые условия для работы конденсаторов и
может попасть на нагрузку, если защитный разрядник не обладает обратной
проводимостью.
5. Источник питания должен быть возможно быстрее выключен. Однако,
пока не будет разомкнута первичная цепь питания, источник питания продол-
жает работать в режиме короткого замыкания, и все его элементы должны
быть рассчитаны так, чтобы в течение срока службы они могли выдержать
тысячи таких коротких замыканий. Величина тока короткого замыкания за-
висит от сопротивления анодного трансформатора и цепи питания. В случае
использования электровакуумных выпрямителей создаются более благопри-
ятные условия для ограничения тока короткого замыкания, особенно если
это выпрямители с температурно ограниченной эмиссией. Контактор в первич-
ной цепи питания также должен быть рассчитан на прерывание тока корот-
кого замыкания много тысяч раз. Если используются специальные вакуум-
ные контакторы, выпрямители с управляющей сеткой [141], игнитроны [138]
или, наконец, кремниевые управляемые вентили, то ток короткого замыкания
может быть прерван значительно быстрее, чем в случае обыкновенных кон-
такторов. При быстром прерывании уменьшается нагрузка на первичную цепь
питания, которая рассчитывается на работу в условиях поджига защитного
разрядника без повреждений и без выключения других, защитных устройств,
повторное включение которых осуществляется вручную.
6. Чтобы ток короткого замыкания источника питания не мог вновь за-
рядить батарею конденсаторов по окончании разряда, защитный разрядник
должен повторно поджигаться до тех пор, пока не будет разомкнута пер-
вичная цепь питания. Защитный разрядник гаснет, как только напряжение
батареи конденсаторов снижается до значения, приблизительно равного
падению напряжения на защитном разряднике, после чего обычно начинается
новый заряд батареи конденсаторов. Поэтому частота повторных поджигов
определяется допустимым повышением напряжения при новом заряде. Обыч-
ными значениями являются несколько киловольт допустимого напряжения
заряда, частота повторных поджигов 300—1000 Гц и скорость размыкания
первичной цепи питания 10—100 мс.
7. Поскольку дуговой разряд может произойти в ненормальных услови-
ях или в процессе включения, желательно иметь возможность поджига за-
щитного разрядника при любом рабочем напряжении. Однако не все защит-
ные разрядники удовлетворяют этому требованию, а удовлетворяющие ему
обычно называются защитными разрядниками неограниченного диапазона.
8. Поджиг защитного разрядника должен происходить не только при ду-
говом разряде, но и в случае других неисправностей [144, 148]. Например,
в результате неисправности модулятора длительность импульса может ока-
заться чрезмерно большой, или в случае обесточивания соленоида чрезмерно
вырасти ток на корпус, или в результате неисправности стабилизатора на-
пряжения источника питания сильно увеличиться рабочее напряжение. При
этом допустимо, чтобы длительность поджига защитного разрядника состав-
ляла несколько микросекунд и даже больше.
9. Дуговой разряд и поджиг защитного разрядника сопровождаются
интенсивным-) процессами установления напряжения и тока. Все элементы
передатчика (и системы в целом) должны быть хорошо защищены от этих
бросков тока или напряжения во избежание ложного запуска, ложной инди-
кации, выключения других каналов и повреждения чувствительных деталей.
Поджиг защитного разрядника должен рассматриваться как одно из нор-
мальных условий работы оборудования, и его влияние должно учитываться
в технических требованиях на разработку.
114
1.16. Защитные шунтирующие разрядники
10 Поскольку поджиг защитного разрядника может произойти по мно-
гим причинам, а его возникновение является единственным признаком ’ неис-
правности, то заключение о том, что же именно явилось причиной поджига,
может оказаться трудной задачей Помочь может исследование каждой неис-
правной цепи, однако наиболее простым способом [117] является запуск
осциллографа при поджиге защитного разрядника и запись (на потенциало-
скоп или^ на пленку) сигналов, подаваемых на осциллограф через линию за-
держки. Запись показывает, что происходит непосредственно перед поджигом
и после него.
11. Поскольку последовательно с каждым конденсатором батареи кон-
денсаторов обычно включается резистор во избежание повреждений при
пробое конденсатора, иногда удобно увеличить сопротивление такого защит-
ного резистора до значения, при котором он сможет выполнять функции ре-
зистора R1 на рис. 44. В таком варианте включения резистор обозначен на
схеме как R.1
При этом обратное напряжение, возникающее на L1 в интервале спада
тока защитного разрядника (даже в случае передемпфирования разряда),
подается непосредственно на выпрямители высоковольтного источника пита-
ния, поэтому для исключения возможности прохождения большого тока через
эти выпрямители, необходимо включение дросселя L2 [138]. Индуктивность
дросселя L2 может быть меньше, чем у дросселя фильтра, но больше чем
у L1, так как доля тока защитного разрядника, «возвращающегося» через
выпрямители, пропорциональна отношению их индуктивностей. Для гашения
пульсаций в нормальном режиме работы может оказаться целесообразным
включение R4.
Как видно из табл. 9, существуют разные типы защитных разрядников.
Исторически первыми были использованы тиратроны и игнитроны, поскольку
в то время других типов ламп еще не было [112, 140]. Они менее удобны
из-за наличия термокатода в тиратроне и сложной схемы предзажигания
обычного игнитрона. Специально для использования в качестве защитных
разрядников созданы более простые игнитроны, состоящие только из ртутного
электрода, поджигающего электрода (игнайтера) и анода. Как тиратроны,
так и игнитроны могут быть повреждены при большой скорости нарастания
тока — порядка 10 кА/мкс.
Герметизированные управляемые газовые разрядники очень компактны
и удобны, но не допускают превышения их номинальных мощностей [146,
151] Вакуумные разрядники с плазменным управлением являются разрядни-
ками неограниченного диапазона (см. п. 7), однако во избежание сокращения
их срока службы не следует превышать номинального значения di/dt. Были
разработаны устройства такого типа и на высокие напряжения.
Шаровой искровой защитный разрядник [145] состоит из двух шаров
с игольчатым поджигающим электродом между ними. Для обеспечения уве-
ренного появления поджигающей искры в обоих промежутках между иглой
и шарами при всех условиях необходимо включение дополнительных индук-
тивностей в цепи нагрузки и самого разрядника, поэтому они менее эффек-
тивно (как было отмечено выше, п. 3) отводят энергию дугового разряда
в нагрузке, чем разрядники других типов [149].
Многозазорный искровой защитный разрядник был разработан в 1960 г.
[142] на основе исследований искровых разрядников, проведенных в Кали-
форнийском университете в 1952 г. [139]. При использовании разрядника
неограниченного диапазона не требовалось увеличения индуктивности цепи,
поэтому такой разрядник нашел широкое применение [117, 143, 147, 150, 169].
Хотя он несколько дороже других типов, его мощность практически не огра-
ничена и он обладает уникальной способностью самоподжига при дуговом
разряде в нагрузке. Хотя пусковое' устройство при этом сохраняется для
других целей (см. п. 8), самоподжиг делает многозазорный защитный разряд-
ник чрезвычайно надежным устройством. В нормальных условиях высокое
115
Защитные шунтирующие разрядники
Таблица 9
Тип разрядника Максимальное номинальное напряжение, кВ Номинальный ток и энергия Диапазон поджига Само- поджиг Поджи- гаемый электрод Отношение напряжения поджнга к номинальному Габариты Стоимость
Водородный тиратрон 40 1251) 5—10 кА 10: 1 Нет Отрица- тельный — 1/10 Малые Неболь- шая
Ртутный игнитрон 50 50 кА 50: 1 То же -1/50 » То же
Управляемый газовый фирмы EG и G 70 100 кА 4 кДж 3; 1 » Любой -1/3 » Средняя
Шаровой фирмы Energy Systems Не лими'1 и ровано Не лимити- рованы Неограниченный 2) » » — 1/2 Большие »
Многозазорный (N зазо- ров) То же То же «Неограничен- ный» (минимум 25 В) Есть » -1/2 » Высокая
Вакуумный с плазмен- ным управлением фир- мы GE 75 1501) 70 кА 15 кДж «Неограничен- ный» (минимум 300 В) Нет Отрица- тельный — 5 кВ (для всех номиналов) Малые Неболь- шая
’) В стадии разработки.
*) При включении последовательно с нагрузкой дросселя, который, однако, ограничивает к. п. д.
Гл. 1. Радиолокационные передатчики
1:16. Защи!ные шунтирующие разряди
ики
напряжение распределяется равномерно между всеми искровыми разрядни-
ками, в случае же внезапного возникновения нестационарного процесса
(в пусковом сигнале или при дуговом разряде) это распределение напряже-
ния нарушается и разрядники быстро поочередно пробиваются. При промежу-
точных значениях рабочего напряжения для некоторых типов многозазориых
разрядников характерна «опасная зона», в которой пробивается только часть
разрядников (несколько разрядников, расположенных ближе к заземленной
точке схемы, не пробиваются). Защитный разрядник в случае частичного под-
жига нагружает пусковое устройство столь значительно, что при обычном
пусковом устройстве процесс поджига не может быть доведен до конца, и
отвод энергии не происходит. При соответствующей конструкции [152] можно
добиться надежного самоподжига при всех напряжениях, превышающих
приблизительно 20% номинального значения, и при соответствующем пуско-
вом устройстве можно полностью исключить возможность появления опасной
зоны [152].
Самоподжиг не является абсолютным достоинством, так как поджиг за-
щитного разрядника может произойти и тогда, когда в этом нет необходи-
мости Например, в клистроне с модулирующим анодом дуговой разряд
между анодом и катодом в течение импульса приводит лишь к тому, что
передача импульса прекращается, поэтому поджиг защитного разрядника
не требуется. Однако в результате внезапного выключения тока луча клист-
рона в индуктивности между батареей конденсаторов и катодом клистрона
возникает нестационарный процесс и выброс напряжения вызывает процесс
самоподжига защитного разрядника. Причиной самоподжига может явиться
также быстрый спад импульсного тока луча в нормальных условиях.
Результаты испытаний защитных разрядников легко могут быть непра-
вильно истолкованы. Требования к поджигу для целей, приведенных в п. 2
и 8, могут быть совершенно различными, но обе группы требований должны
быть выполнены. Например, проверка времени поджига защитного разрядни-
ка в отсутствие дугового разряда в нагрузке не может еще являться доказа-
тельством того, что эффективный отвод энергии будет обеспечен и при дуго-
вом разряде в нагрузке. Методом качественного определения эффективного
отвода энергии является «испытание на станиоли» [144] путем измерения
размера отверстия в тонкой металлической пленке, образующегося в резуль-
тате дугового разряда. Количественную оценку можно осуществить измере-
нием полного заряда, протекающего через специально созданный дуговой
разряд в нагрузке [169], но при этом не учитывается энергия, накапливае-
мая в паразитной емкости цепи нагрузки. Кроме того, по причинам, изло-
женным в п. 9, такие измерения также трудно выполнимы. Тем не менее
после изготовления конкретного модулятора и защитного разрядника един-
ственными факторами, которые могут повлиять на эффективность защиты,
являются надежность и быстрота поджига. Поэтому для суждения о том,
изменилась или нет эффективность защиты, достаточно измерить время под-
жига защитного разрядника (моделируя дуговой разряд в нагрузке). По-
скольку скорость пробоя любого искрового разрядника подчиняется некото-
рому статистическому распределению (если только он не облучается доста-
точно интенсивно для поддержания определенного количества электронов),
измерения эффективности защиты для каждого разрядника должны быть
многократно повторены с целью оценки статистическою разброса этого па-
раметра [152]. Поскольку остаточная ионизация после пробоя может сохра-
няться в течение нескольких секунд, последовательные испытательные под-
жиги должны производиться с интервалами, исключающими получение непра-
вильных результатов.
Поджиг защитного разрядника в воздухе сопровождается большим (аку-
стическим) шумом, который можно уменьшить, поместив разрядник в закры-
тую камеру. Если шум недопустим, использование какого-либо из гермети-
зированных типов защитных разрядников сведет этот шум к «щелчкам».
117
Гл. 1. Радиолокационные передатчики
В случае необходимости многозазорный защитный разрядник можно образо-
вать из ряда отдельных герметизированных разрядников. Однако при этом
теряется возможность использования ультрафиолетового излучения, облуча-
ющего последующие разрядники после поджига предыдущих, и может уве-
личиться общее время поджига.
1.17. Стабилизаторы
Высокочастотные лампы должны обычно работать с точно определенным
значением пикового тока импульса с допуском в несколько процентов. Это
желательно для системы в целом, так как уменьшение выходной мощности
приводит к снижению качества системы, а увеличение — к перегрузке первич-
ной сети питания, к перегреву деталей и перегрузке системы охлаждения.
В случае ламп со скрещенными полями вблизи от рабочей точки могут воз-
никать другие типы колебаний, которых следует избегать. Для ламп с пря-
молинейным электронным лучом изменение тока луча влечет за собой быст-
рое изменение коэффициента усиления и ширины полосы частот. Поэтому
в большей части передатчиков необходим стабилизатор для поддержания
постоянства уровня выходной мощности модулятора при изменении напряже-
ния первичной сети питания (включая нестационарные процессы), частоты
повторения импульсов и длительности импульсов. В некоторых случаях ста-
билизатор может оказаться полезным или даже необходимым для уменьше-
ния пульсаций высоковольтного источника питания до уровня, требуемого
в системе индикации движущихся целей, поскольку пассивные LC-элементы
(если они используются) могут оказаться недопустимо большими. В табл. 10
приведены разные типы стабилизаторов и производится сравнение их пара-
метров.
Наиболее простыми из приведенных в табл. 10 являются стабилизаторы,
включаемые в первичную цепь. Феррорезонансные стабилизаторы служат
только для поддержания постоянства напряжения на первичной обмотке вы-
соковольтного анодного трансформатора. С помощью первичных стабилизато-
ров других типов можно не только выполнить эту функцию, но и управляя
ими через соответствующую цепь обратной связи, поддерживать постоянным
выходное напряжение высоковольтного источника питания или ток ВЧ лам-
пы. Кремниевые управляемые вентили (или игнитроны и тиратроны), хотя и
называются первичными стабилизаторами, могут использоваться и во вторич-
ной обмотке анодного трансформатора. Время реакции таких стабилизаторов
на изменения напряжения в силовой сети и в нагрузке практически не превы-
шает ‘Д периода частоты напряжения силовой сети в трехфазной системе
[138]. Быстрая реакция необходима во избежание чрезмерного увеличения
батареи конденсаторов, которая должна поддерживать выходное напряжение
в пределах заданного допустимого изменения до тех пор, пока не сработает
стабилизатор.
Для получения более быстрой реакции в выходной цепи высоковольтного
источника питания можно, как и в низковольтной цепи, последовательно
включить стабилизатор постоянного тока (последовательный стабилизатор)
[136, 137]. При этом легко достигается хорошая стабилизация, так как типо-
вые последовательно включаемые лампы большой мощности имеют высокую
проводимость Gm, а типовые высоковольтные усилители сигнала ошибки —
высокий коэффициент усиления р.. В случае заземления отрицательного полюса
высоковольтного источника питания последовательный стабилизатор вклю-
чается в выходной высоковольтный провод положительной полярности
(рис. 48, а). Когда требуется высокое напряжение отрицательной полярности,
стабилизирующая лампа включается в заземленный провод (положительной
полярности) между землей и источником питания, поэтому сам источник
питания оказывается незаземленным. Для уменьшения токов пульсаций, ко-
118
Стабилизаторы для модуляторов
Таблица 10
Тип стабилизатора Диапазон регули- ровки входного или выходного напря- жений, % К. П. д. Скорость реакции Точность, Подавление пульсаций Примечание
Стабилизация в первичной цепи Вариак с моторным при- водом 100 Очень высокий Очень низкая 0,3 Нет Движущиеся органы. Тяжелый
Феррорезонансный Стабилизирован- ное выходное напряжение Высокий Большая 1,0 Нет Тяжелый, на фиксиро- ванную частоту, толь- ко однофазный Может быть с прямо- угольной и синусои- дальной формой тока
Кремниевые управляе- мые вентили или иг- нитрон 100 Очень высокий (уменьшает коэффициент потерь) Средняя 0,1 Нет Небольшие габариты, повышаются пульса- ции, радиочастотные помехи
Только для линей- ных модуляторов Последовательный по- стоянного напряжения 100 Низкий Очень большая 0,01 Есть Используются лампы. Лампы должны выдер- живать пиковый ток заряда (в линейных модуляторах) или пи- ковый ток нагрузки (в модуляторах с актив- ным коммутатором)
1.17. Стабилизаторы
Продолжение табл. 10
Тип стабилизатора Диапазон регули- ровки входного или выходного напря жен ий. % К. а. д. Скорости реакции Точносп , Подавление пульсаций Примечание
Только для линейных модуляторов
Чодулятор на вакуум- ной лампе в режиме неизменного тока 100 НМлКИЙ Большая 1,0 Есть См. § 1.15
Демпфированный за рядный дроссель 30 Низкий Средняя 0,5 Нет Рис. 49, а. Лампы
С ограничением доброт- ности 30 Низкий Большая 1,0 Есть Рис. 49, б. Лампы или кремниевые управля- емые вентили
Последовательный триод и диод возврата энер- гии 100 Хороший » 1.0 Есть Рис. 50, а. Лампы. Цепь ограничителя может быть исключена
Последовательный диод и кремниевый управ- ляемый вентиль воз- врата 30 Хороший » 1 .0 Есть Рис 50, б. Лампы или кремниевые управля.- емые вентили
Или эквивалентные регулируемые трансформаторы (типа Powerstat, Inductrol и др.)
Гл. 1. Радиолокационные передатчики
1.17л Стабилизаторы
торые проходят через последовательный стабилизатор (рис. 48,6), необходи-
ма тщательная экранировка. Токи пульсаций появляются в результате раз-
личных емкостных паразитных связей, и в случае их чрезмерно большого зна-
чения возникают недопустимо большие пульсации выходного стабилизирован-
ного напряжения. Это особенно сильно проявляется при малых токах нагруз-
ки, когда токи пульсаций могут превзойти ток нагрузки, в результате чего
стабилизирующая лампа некоторое время оказывается выключенной.
а)
V
Рис. 48. Последовательные стабилизаторы постоянного напряжения для высоковольтных
источников питания с заземленным отрицательным полюсом (а) и с заземленным поло-
жительным полюсом (б). На рисунке показаны паразитные емкости.
Поскольку избыток входного напряжения падает на последовательном
стабилизаторе, то при работе в условиях больших колебаний напряжения
первичной силовой сети на нем рассеивается большая мощность. Поэтому,
если стабилизатор необходим в основном для уменьшения пульсаций, а не
нестационарных процессов в силовой сети, целесообразно использовать его
совместно с первичным стабилизатором. Первичный стабилизатор рассчиты-
вается обычно так, чтобы падение напряжения на последовательном стаби-
лизаторе было наименьшим, при котором обеспечивается требуемое умень-
шение пульсаций При таком сочетании получается отличная стабилизация
при более высоком к. п. д., чем в случае применения только последователь-
ного стабилизатора. Однако внезапное падение напряжения* сети пройдет
через последовательный стабилизатор раньше, чем первичный стабилизатор
успеет вернуть напряжение на нем в пределы рабочего диапазона. Если по-
следовательный стабилизатор предназначен только для снижения пульсаций,
а не для статической стабилизации выходного постоянного напряжения, он
называется иногда ограничш елем пульсаций.
121
Гл. 1. Радиолокационные передатчики
Перечисленные, выше тины стабилизаторов пригодны как для линейных
модуляторов и модуляторов с активным коммутатором, так и для усилителей
со скрещенными полями в режиме постоянного напряжения. Остальные типы
стабилизаторов пригодны только для одного или двух типов приборов.
Выходное напряжение модулятора на. электровакуумной лампе может
быть стабилизировано (см. § 1.15), если коммутатор будет работать в режиме
неизменного тока. В этом случае колебания выходного напряжения высоко-
вольтного источника питания распределяются в соответствии с соотношением
между сопротивлениями коммутатора и нагрузки. Стабилизацию можно до-
полнительно улучшить с помощью обратной связи, в результате которой все
колебания приходятся на коммутатор. Обратная связь может быть мгновен-
но действующей или с долговременным усреднением. Второй метод проще,
так как не требует широкополосного усилителя в пепи обратной связи, но он
менее эффективно снижает пульсации и спад импульса на вершине.
Выходное напряжение линейного модулятора можно стабилизировать
регулировкой напряжения резонансного заряда схемы формирования импуль-
сов. Поскольку усиление при резонансе зависит от добротности зарядного дрос-
селя, простейшим методом стабилизации заряда является демпфирование за-
рядного дросселя путем шунтирования его (или его добавочной вторичной
обмотки) анодным сопротивлением триода (рис. 49, а). Изменяя напряжение
смещения триода, можно анодное сопротивление и, следовательно, сопротив-
ление при резонансе менять так, чтобы напряжение резонансного заряда не
зависело от колебаний напряжения высоковольтного источника питания
Другой метод стабилизации зарядного напряжения, называемый ограни-
чением добротности [134], заключается в том, что шунтирующая лампа
остается выключенной до тех пор, пока напряжение в процессе заряда не
достигнет требуемого уровня, после чего она включается и прекращает про-
цесс заряда (рис. 49,6). Этому методу свойственна малая инерционность,
поэтому он может также уменьшать пульсации. В такой схеме могут быть
использованы разные типы ламп, кремниевые управляемые вентили, а также
изолированная вторичная обмотка, как на рис. 49, а. Диапазон стабилизации
при обоих методах ограничен, поскольку ток в зарядном дросселе должен
упасть до нуля к началу следующего периода заряда, так как в противном
случае нарастанпе выравнивающего тока приведет к насыщению зарядного
дросселя. Неиспользованная энергия, как и в последовательных стабилизато-
рах, пропадает, и к. п. д получается невысоким.
В стабилизаторе зарядного напряжения (рис. 50, а) энергия, остающаяся
в зарядном дросселе к моменту прекращения заряда, не теряется, а возвра-
щается в источник питания [132], Обычный последовательный диод заменен
триодом, поэтому заряд может быть прекращен путем запирания лампы. Так
как дроссель противодействует внезапному прекращению тока через него,
напряжение на нем начинает быстро возрастать, пока вторичная обмотка не
начнет возвращать накопленную энергию в источник питания через диод воз-
врата энергии. В результате увеличивается к. п. д„ а средний ток высоко-
вольтного источника при увеличении напряжения уменьшается. Предельно
возможное значение к. п. д. ограничено паразитными емкостями и индуктив-
ностью рассеяния между первичной и вторичной обмотками зарядного дрос-
селя, так как энергия, накопленная в индуктивности рассеяния, не возвраща-
ется в источник питания и должна быть поглощена в демпфирующем
устройстве, например типа R1 и Cl [133]. Вполне пригодным является коэф-
фициент трансформации 1:1, причем заряд может быть прекращен в любой
желательной точке интервала заряда
Второй тип стабилизатора зарядного напряжения, в котором использован
принцип возврата энергии, приведен иа рис. 50,6. Если в первом типе стаби-
лизатора используется активный коммутатор, выключаемый по желанию,, для
второго типа требуется коммутатор, включаемый но желанию, так что это
может CHTt либо лампа, либо кремниевый управляемый вентиль [128, 135,
122
’ 1.17. Стабилизаторы
158]'. Коэффициент трансформации этого зарядного трансформатора (заряд-
ного дросселя со вторичной обмоткой) ' должен быть больше чем i : 1 для
обеспечения прямого напряжения на кремниевом управляемом вентиле, и об-
ласть управления ограничена той частью периода заряда, когда к кремниевому
Вторичная
Датчик уровня
а усилитель
постоянного '
тока
Средний -
ток
нагрузки
/Первичная
Зарядный дросселе
Высоко- |
болотный
ИП I
Формирова-
тель
импульсов
б)
Рис. 49. Резонансные стабилизаторы напряжения для линейных модуляторов (диссипаг
тивного 1ипа):
а — демпфированный зарядный дроссель; б — ограничитель зарядного напряжения.
управляемому вентилю приложено прямое напряжение. Например, если от-
ношение витков вторичной обмотки к первичной составляет 3: 1, то как
только напряжение заряда схемы формирования импульсов достигает значе-
ния, в 1,33 раза превышающего напряжение высоковольтного источника пи-
тания, на кремниевом управляемом вентиле появляется прямое напряжение.
Начиная с этого момента заряд может быть прекращен в любое время заиу-
123
Гл. 1. Радиолокационные передатчик^
скбм кремниевого управляемого вентиля. При этом втдричноё’ напряжение
мгновенно падает до значения, равного напряжению высоковольтного источ-
ника питания, а трансформатор уменьшает напряжение на аноде последо-
вательного диода. Остаточная энергия дросселя возвращается затем в источ-
Рис. 50. Резонансные стабилизаторы напряжения для линейных модуляторов (с сохра-
нением энергии):
а—последовательный триод и диод возврата энергии; б — последовательный диод и
кремниевый управляемый вентиль возврата энергии.
ник питания через кремниевый управляемый вентиль. После того, как ток
через дроссель снизится до нуля, напряжение на дросселе также падает до
нуля и на кремниевом управляемом вентиле образуется обратное напряже-
124
1.18. Влияние высоковольтного источника и. первичной силовой сети
ние, позволяющее ему восстановиться. Так как максимальное напряжение
заряда обычно в 1,8 раза больше напряжения высоковольтного источника
питания, отношение числа витков 3 : 1 обеспечивает приблизительно 30%-ный
диапазон регулировки. Для увеличения диапазона регулировки нужно уве-
личить коэффициент трансформации, однако его предельное значение опре-
деляется тем-, насколько допустимо увеличение вторичного напряжения (и об-
ратного напряжения на кремниевом управляемом вентиле) в начале периода
заряда. Эта схема называется стабилизатором энергии [128, 135].
1.18. Влияние высоковольтного источника и первичной
силовой сети
Помимо обычных требований, связанных с разработкой высоковольтного
источника питания, к нему должны быть предъявлены специальные требова-
ния, обусловленные его использованием в импульсном передатчике.
Естественно, что мощность импульсного передатчика поступает в нагрузку
импульсами; однако желательно, чтобы мощность, поступающая к нему от
сети, была существенно постоянной. В результате биений между частотой
повторения импульсов и частотой напряжения силовой сети всегда имеют
место пульсации мощности, отбираемой импульсными передатчиками от сети.
В трехфазных силовых сетях биения вызывают либо одновременные пульса-
ции во всех грех проводах питания, либо разбаланс токов в межфазных про-
водах Для снижения влияния таких биений до приемлемого уровня часто
необходимо применять более сложный фильтр, чем необходимо только для
сглаживания пульсаций выпрямителя. Стабилизатор с быстрой реакцией мо-
жет дополнительно усложнить задачу, так как для поддержания постоянства
выходного напряжения фильтр должен отбирать мощность от сети питания
до стабилизатора.
Когда в селекторе движущихся целей применяется дестабилизированный
высоковольтный источник питания, пульсации после фильтра должны быть
достаточно малы, чтобы удовлетворить требованиям, предъявляемым к таким
системам (см. § 1.10). Хотя использование многозвенного фильтра выгоднее
при заданном уровне допустимых пульсаций, большой однозвенный фильтр
может оказаться лучшим решением, если наибольший интерес представляет
подавление низкочастотных составляющих пульсаций. Эти низкочастотные
составляющие появляются обычно в результате как разбаланса токов в трех-
фазной системе, так и наличия субгармоник в системе энергоснабжения, если
в ней используются генераторы с числом полюсов больше двух.
При использовании в высоковольтных источниках питания радиолокаци-
онных передатчиков LC-фильтров должны соблюдаться специальные меры
предосторожности. Если нет достаточного демпфирования при включении
системы, а также при подключении и отключении нагрузки, то будут возни-
кать очень большие провалы и всплески выходного напряжения, обусловлек-
ные переходными процессами [100]. Аналогичная проблема возникает, если
резонансная частота фильтра близка к частоте повторения импульсов или
к какой-либо составляющей спектра серии посылок, формируемых спецвычис-
лителем (см. ниже). Поскольку при увеличении демпфирования ухудшается
стабилизация и (или) к. п. д., желательно не создавать избыточного демпфи-
рования в добавление к уже имеющемуся в цепи высоковольтного источника
питания- Удобными элементами демпфирования, уже имеющимися в самой
системе, являются реактивное сопротивление силовой сети и реактивность
рассеяния анодного трансформатора, так как они мало влияют на к. п. д.,
хотя и ухудшают стабилизацию. При достаточно малом отношении L/C
в фильтре можно получить критическое затухание без дополнительных демп-
фирующих элементов Иногда по этим соображениям используется простой
фильтр, состоящий из одних конденсаторов.
125
Гл. 1. Радиолокационные передатчики
Высоковольтный источник питания передатчика должен быть рассчи1ан
так, чтобы он мог выдержать в течение срока службы большое число корот-
ких замыканий. В линейных модуляторах может возникнуть «затяжной под-
жиг» тиратрона (или коммутатора иного типа), а в модуляторах с ак-
тивным коммутатором дуговые разряды и поджиг защитного разрядника
являются обычными (см. § 1.16). Ток короткого замыкания длится до тех
пор, пока не будет разомкнута первичная цепь питания, поэтому все элемен-
ты высоковольтного источника питания должны быть на это рассчитаны.
Такие же кратковременные выбросы тока внезапно возникают, когда источ-
ник питания включается сразу на полную мощность, а не с постепенным по-
вышением напряжения с помощью вариака, регулятора напряжения на
кремниевых управляемых вентилях или других аналогичных устройств. Сеть
питания должна быть рассчитана и на работу в этих условиях, а контактор
в первичной цепи питания должен выдержать несколько тысяч коротких за-
мыканий в сети.
В современных радиолокационных системах, управляемых спецвычисли-
телями, особенно в многофункциональных системах, коэффициент заполнения
часто не является неизменным. Хотя структура серии импульсов, называемая
иногда шаблоном, обычно повторяется через определенные интервалы, назы-
ваемые основным циклом или периодом данных, частота повторения импуль-
сов, их длительность и коэффициент заполнения обычно сильно меняются
в пределах одного такого периода. В результате изменения потребления тока
от высоковольтного источника питания происходит изменение потребления
тока от первичной сети, сглаженное только эффективной постоянной времени
фильтра высоковольтного источника питания (включая влияние стабилизато-
ра напряжения в случае его наличия). Такие изменения потребления от
силовой сети называются ударами и могут создать серьезные трудности, если
потребляемая передатчиком мощность составляет значительную долю номи-
нальной мощности сети питания. Хотя биения между частотой повторения
импульсов и частотой напряжения силовой сети также вызывают колебания
потребляемой мощности, колебания, обусловленные изменением коэффициента
заполнения, сказываются обычно сильнее, так как длятся достаточно долго,
чтобы пройти через сглаживающий фильтр с небольшим ослаблением. Прямым
следствием является увеличение потребляемой от сети питания пиковой мощ-
ности и, следовательно, среднеквадратической кажущейся мощности, потреб-
ляемой передатчиком.
Коэффициент мощности сети питания, обусловленный передатчиком, опре-
деляется (как и в случае любой другой нагрузки) как отношение средней
активной потребляемой мощности (ватты) к среднеквадратической кажущей-
ся мощности (вольт-амперы). Так как кажущаяся мощность образуется из
среднеквадратического напряжения и среднеквадратического тока сети пита-
ния, любая причина, приводящая к увеличению среднеквадратического тока
при заданной средней мощности в нагрузке, снижает коэффициент мощности.
В импульсных передатчиках полный коэффициент мощности определяется
тремя факторами.
Первым фактором является обыкновенный сдвиг фаз между напряжени-
ем сети питания и потребляемым током. В обычном высоковольтном источни-
ке питания ток слегка отстает, например, из-за реактивного сопротивления
анодного трансформатора, и результирующий коэффициент мощности это
хорошо известный cos О, где О — угол между основными составляющими
напряжения сети питания и тока нагрузки. Второй фактор обусловлен нели-
нейными искажениями тока нагрузки, так как обычно нагрузкой является
выпрямитель. Эти искажения особенно велики в случае использования ста-
билизатора фазовых напряжений на кремниевых управляемых вентилях. Воз-
никающие при этом токи гармоник увеличивают среднеквадратическое значе-
ние тока, но не меняют потребление активной мощности, поэтому они тоже
уменьшают коэффициент мощности. Третьим фактором, менее всего обычно
126
Список, литературы
ожидаемым, являются колебания потребляемой мощности, обусловленные,
кан отмечалось выше, биениями с частотой повторения импульсов или изме-
нениями коэффициента заполнения в многофункциональной РЛС. В качестве
простого примера рассмотрим активную нагрузку • в 2 кВт, периодически
включаемую и выключаемую (с любой частотой) таким образом, что она
оказывается включенной в течение половины всего рабочего времени. «Спрос»
на мощность составляет 2 кВт, в то время, как средняя потребляемая мощ-
ность равна 1 кВт. Однако среднеквадрагический ток потребления составляет
0,707 от тока в случае непрерывной нагрузки, так что среднеквадратическое
значение потребляемой кажущейся мощности равно 1,414 кВА и коэффициент
мощности этой активной нагрузки (конечно, коммутируемой) равен 0,707.
Потребление кажущейся мощности увеличивается по мере увеличения нерав-
номерности потребления мощности передатчиком.
Из этих трех факторов, снижающих коэффициент мощности, только
первый может быть полностью скомпенсирован с помощью обычных конденса-
торов, корректирующих сдвиг фаз. Токи гармоник распределяются между
сопротивлением конденсаторов и сопротивлением источника в сети питания.
Фильтрация гармоник возможна, но экономически нецелесообразна Колеба-
ния мощности в нагрузке по существу нс зависят от конденсаторов. Для их
сглаживания нужны устройства с большой постоянной времени, как, напри-
мер, маховики на моторгенераторном агрегате [154]. Результатом воздейст-
вия этих трех факторов является то, что «современным» передатчикам при-
сущи необходимость в необычайно большой номинальной мощности силовой
сети и низкий коэффициент мощности. Это должно учитываться при разра-
ботке высоковольтных источников питания и при оценке величины требуемой
кажущейся мощности в первичной силовой сети.
Список литературы
1. Introduction to pulsed crossed-field amplifiers, SFD Laboratories, Ina,
Publ. 2.5M, June, 1967.
2. Skolnik, M. I. “Introduction to radar systems”, McGraw-Hill Book Com-
pany, N. Y„ 1962.
Сколник M. И. Введение в технику радиолокационных систем. М.,
«Мир», 1965.
3. Kornpfner, R. “The invention of the traveling-wave tube”, San Francisco
Press, San Francisco, 1964.
4. Chodorow, M. and C. Susskind. “Fundamentals of microwave electronics”,
McGraw-Hill Book Company, N. Y., 1964.
5. Gittins, J. F. “Power travelling-wave tubes”, American Elsevier Publishing
Company, N. Y., 1965.
6. Edwards, R. High power magnetrons, a state-of-the-art report, Electron.
Design News, September, 1965.
7. Warnecke, R. R. and P. Guenard. Some recent work in France on new ty-
pes of valves for the highest radio frequencies, Proc. IEE (London), pt. Ill,
v 100, p. 351—362, November, 1953.
8. Micronotes, v. 4, N 4, September—October, 1966, Microwave Associates,
Inc., Burlington, Mass.
9 Preist, D. H. On a new approach to achieve the spectrum requirements of
high power radar systems using klvstron power amplifiers, Eitel—Mac-
, Cullough File 6522, Apr. 1, 1963.
10 Dehn, R. A., J. J. Hamilton and J. S. Hickey. The multiple beam klystron,
Microwave J., v. 6, p. 68—72, February, 1963.
II Recent advances in the Litton electrostatically focused klystron, Litton
Industries Research Laboratory, San Carlos, Calif., Oct. 7, 1963.
12. Yocom, W. H. High power travelling-wave tubes, their characteristics and
' some applications, Miciuw-ve J., v, 8, p. 73—78, July, 1965.
127
Гл. I. Радиолокационные передатчика
13. Ruetz, J. A, and W. H. Yocom. High-power traveling-wave tubes for radar
systems, IRE Trans., v. MIL-5, p 39—45, April, 1961.
14. The Dematron crossed-field amplifier, Litton Industries Electron Tube
Division, San Carlos, Calif.
15. Handy, R. A. A DC-operated CFA chain for 1 MW, 5 kW at S-band, pre-
sented at Third Symposium on High-power Microwave Tubes, Fort Mon-
mouth, N. J., May, 1967.
16. Beasley, E. W. and H. R. Ward. A quantitative analysis of sea clutter
decorrelation with frequency agility, IEEE Trans., v. AES-4, p. 468—473,
May, 1968.
17. Staprans. A. The hollowish beam gun for high power microwave tubes,
paper 6.2, IEEE International Electron Devices Meeting, Oct., 27, 1966.
18. Hull, J. F. Microwave tubes of the mid-sixties, Proc. Natl. Electron. Conf.,
v. 21 p 37—41, 1965
19. Perkins, W. H. Improved methods for tuning microwave devices, paper 4.7,
IEEE International Electron Devices Meeting, Oct. 18, 1967.
20. Edwards. R. New magnetron shifts frequency fast, Electronics, v. 37,
p. 76—81, Apr. 6. 1964.
21. Application engineering note, Watkins—Johnson gridded high-gain C-band
traveling wave amplifier WJ-228, Watkins—Johnson Co., Document 100120,
April, 1964.
22. Clark, J W. J POM evaluation project, Varian Associates, Palo Alto, Ca-
liL, September, 1951, AST1A 155172
23. Wai песке, R. R., W. Kleen, A. Lerbs, O. Dohler and H. Huber. The mag-
netron-type traveling-wave amplifier tube, Proc. IRE, v. 38, p. 486—495.
May, 1950.
24. Andeison, L. B., W. A. Janvrin, C. Rowe and M. E. Schwartz. Determina-
tion of microwave-tube, transfer functions, Proc. IEE (London), v. 114,
p. 873—877, July, 1967
25. Edwards, R. E. and В. H. Smith. Which microwave source is for you?
Electron. Design, v. 13, p 22—27, Sept. 27, 1965.
26. Horrigan, J. and J. R. Martin. A ditherable frequency coaxial magnetron
having superior frequency tracking capabilities, Microwave J., v. 10, p. 16—
17. March. 1967.
27. Ditherer changes magnetron frequency, Electronics, v. 38, p. 152—154,
May 31, 1965.
28. Microwave and power tube reliability in the field. Raytheon Microwave
and Power Tube Div., Bull. AEB-14, August, 1961.
29. Neal, R. B. “The Stanford two-mile accelerator”, W. A. Benjamin, Inc.,
N. Y„ 1968.
30. Voltage tunable magnetrons. General Electric Power Tube Dept., Bull.
PT-68, 7.5M, December, 1962.
31. Weinstein, M. Voltage tunable magnetron — state of the art, Microwave J.,
v. 5, p. 162—166, October, 1962.
32. Cutoff electrode operation in CFA’s, Raytheon Bull. ENG-9, June, 1967.
33. Burnsweig, J., F. T. Hurt and L. H. O’Brien. Intra-spectral noise and trans-
fei functions of pulsed final power amplifiers, IEEE Electron Devices Mee-
ting, Washington, D C„ Oct. 29, 1964.
34. Operation of Amplitrons in parallel, Raytheon Bull. ENG-4, February,
1961.
35. Liquid-cooled cathode Amplitron for increased power capability, Raytheon
microwave and power tube operation, Waltham, Mass., May, 1963.
36. Clampitt, L. L. S-band amplifier chain, Raytheon Co., Waltham, Mass.,
NATO Conference on Microwave Techniques. Paris, France, Mar. 5, 1962.
37. Brown, L. E. Crossed-field forward wave amplifiers offer new advantages
for radar systems, Microwave J., v 7, p. 66—71, May, 1964.
38 Mangot, M. and H L. McDowell. Research and development on L-band
128
Список литературы
39
40
41
42
43
44
45
46.
47
48
49
50
51.
52
53.
54
55
56.
57
58.
59
60
61
62
63
crossed-field amplifier chain, SFD Laboratories, Inc., Union, N. J., Novem-
ber, 1963, ASTIA AD426729
Hechtel, J. R. and A. Mizuhara. New design concept reduces klystron
weight, Electronics, v 35, p. 36—37, Dec. 28, 1962.
Summary of technical results, X-band, 100-kW forward-wave structure
Dematron, Litton Industries Res. Dept., Tech. Note TN66—3, February, 1966.
Badger, G. M. W. A new method of modulating electron beams for pulse
applications arid linear amplitude modulation systems, IEEE Natl. Conv.
Record, v. 5, pt. 3 p. 82—90, March, 1957
VA-842 reliability study, Varian Tube Division, Reliability Group, Palo
Alto, Galli., December, 1962
LaRue, A. D. The Twystron hybrid TWT, Electron. Design News, v. 9,
p S-17-S-23, September, 1964
Promm er, A. J. New method for focusing klystrons, Electron. Ind., v. 23,
p. 152—153, 156—158, June, 1964.
Hechtel, J. R. and A. Mizuhara. A new type of high power microwave tube:
the electrostatically focused klystron amplifier. Microwave J., v. 8, p. 78—
83, September, 1965
Veronda, C. New pulse klystron amplifier for the 960 — 1215 megacycle re-
gion. Elec Eng v. 71, p. 686—689, August, 1952.
Sclater. N. Microwave tubes hold their own, Electron Design, v. 15, p. 17—
18, June 21. 1967
Eastman, L. F. Superpower tubes: their capabilities and limitations, Elect-
ronics. v 37, p 48—54, July 13, 1964
Barton, D. K. Radar system performance charts. IEEE Trans., v. MIL-9,
p 255—263, July—October, 1965.
Osepchuk, J. M. Toward a renaissance in microwave lubes, Microwave J.,
v 10, p. 18, 20, 22, 106—114, 116, September, 1967.
Okress, E. “Crossed-field microwave devices”, vs. 1 and 2, Academic Press
Inc., N Y„ 1961.
Clampitt, L. L., M Huse and W. Smith. Measurement of phase characte-
ristics of high power microwave tubes, IEEE Conv. Record, v. 11, pt. 3,
p 147—153, 1963
VA-840 Application Notes, Varian Associates, Palo Alto,Calif., November, 1963.
Ashley, J. R. and A. D. Sutherland. Microwave spectrum conservation by
means of shaped pulse transmitters, Sperry Electronic Tube Div., Rept.
NJ-2761 -0168, July, 1964.
The Varian VA-840 — a new klystron for TACAN service, Varian Associa-
tes. Palo Alto, Calif., Oct. 8, 1963.
Standing. A. F. The generation of high power sin2 video pulses, Fifth Sym-
posium on Hydrogen Thyratrons and Modulators, Fort Monmouth, N. J.,
May, 1958.
Rumanelli, J. A cos2coT pulse for radar application, Proc. Sixth Symp.
Hydrogen Thyratrons and Modulators, p. 127, May 17, 1960, AD254—102.
Cumming, R. С., M. Perry and D. H. Preist. Calculated spectra of distorted
gaussian pulses, Microwave J., v. 8, p. 70—75, April, 1965.
Cumming, R. C. The influence of envelope-dependent phase deviation on
the spectra of RF pulses, Microwave J., v. 8, p. 100—105, August, 1965.
Lundstrom, O. Notes on shaped pulses, Varian Associates. Palo Alto, Ca-
lif., May, 1965.
Miller, S. N. The source of spectrum asymmetry on high pow'er RF klyst-
rons, IEEE MIL-E-CON-9, p. 18—24, Sept. 22, 1965
Goldbarb, E. M. and R. C. Cumming. Interference reduction techniques for
pulsed transmitters, Energy Systems, Final Rept ECOM-01444-F, July,
1967, ASTIA AD820216.
Luebke, W. and G. Caryotakis. Development of a one megawatt CW klyst-
ron, Microwave J., p. 43—47, August, 1966.
129
Гл /. Радиолокационные передатчики
64 Chcdorow, М., Е. L. Ginzton, I. R. Neilson and S. Sonkin. Design and
periогшаnee of a high-power pulsed klystron, Proc. IRE, v. 41, p. 1584—
1602. November, 1953
65 Brown, W. C. Crossed field microwave tubes, Electronics, v. 33, p. 75— 79,
Apr 29, 1960.
66 Klauder, J.R., A. C. Price, S. Darlington and W, J. Albesheim. The theory
and design of chirp radars, Bell System Tech. J., v. 39, p. 745—808, July,
1960
67 Taylor, G. W. and S. Schneider. Energy control for microwave amplifier
arrays, IEEE Trans., v. AES-4, N5, p. 659—664, September, 1968.
68 Currie, M. R. and D. C. Forster. Low noise tunable preamplifiers for mic-
rowave receivers, Proc. IRE, v. 46, p. 570—579, March, 1958,
69 Nevins, J. E. and M. R. Currie. Experimental X-band preamplifier tubes
with 4,5 db noise figure, Proc. IRE, v. 47, p. 2015—2016, November, 1959.
70. Now to speak coaxial magnetrons, SED Laboratories, Inc., Bull. 1770,
2 5M September. 1967.
71. Dehn, R. A. and J. R. M. Vaughan. Status report on multiple beam klyst-
rons, Third Symposium on High-power Microwave Tubes, Fort Monmouth,
N. J., May 24, 1967.
72. Onusseit, H. F. Magnetic focusing structure for a phased-array transmitter,
Proc Natl. Electron. Conf., v. 20, p. 934—938, 1964.
73 Pritchard, W. L. Long-line effect and pulsed magnetrons, IRE Trans.,
v MTT-4, p. 97—110, April, 1956.
74 Personal communication from Armand Staprans, Varian Associates, Palo
Alto, Calif., June, 1966.
75. Forbess, R. A. An advanced type of non-intercepting grid for convergent
beam electron guns, IEEE International Electron Devices Meeting, Wa-
shington. D C., Oct. 21, 1965.
76 Reyling, G., F. Jensen and C. F. Clark. Cooling system design for scale
prevention in high powered klystrons, IRE Trans., v. PEP-6, p. 1—8, Sep-
tember, 1962.
77 Humphrey, H, J. The microwave cooling problem, Microwave J., v. 9,
p 103—108, March, 1966.
78 Chodorow, M. and T. Wessel-Berg, A high efficiency klystron with distri-
buted interaction, IRE Trans., v. ED-8, p. 44—55, January, 1961.
79 Htun, L. T. Reliability prediction tectniques for complex systems, Proc.
17th Ann. Natl. Aerospace Electron, Conf., p. 444—458, May 10—12, 1965.
80 Harrahy, D. J. and J. C. Green. Reliability of non-maintained and maintai-
ned systems with redundancy and switching. Proc. 22d Ann. Tech. Conf.
Exhibit ASQC, May 6—8, 1968.
81 Neal, R. B. Completion of construction and initial operation of the SLAC
accelerator, IEEE Trans., v. NS-14, p. 705—720, June, 1967.
82 Skowron, J. F., W. C. Brown and G. H. MacMaster. The super power CW
Amplitron, Raytheon Rept. Pt-584, Sept. 25, 1963.
83. Weil, T. A. Applying the Amplitron and Stabilotron to MTI radar systems,
IRE Natl. Conv. Record, v. 6, pt. 5, p. 129—130, 1958.
84 Cook, С. E. and J. Paolillo. A pulse compression predistortion function
for efficient sidelobe reduction in a high-power radar, Proc. IEEE, v. 52,
p. 337—389, April, 1964.
85 DiFranco, J. W. and W. L. Rubin. Analysis of signal processing distortion
in radar systems. IRE Trans., v. MIL-6, p. 219—227, April, 1962.
86. Read, J. Long line effect in pulse compression radar. Microwave J., v. 4,
p. 99—100, September, 1961.
87 Collins, G. B. (ed.). “Microwave magnetrons”, MIT Radiation Laboratory
Series, v 6. McGraw-Hill Book Company, N. Y., 1948
88 Braestrup, С. ,B. and HO. Wyckoff “Radiation protection”, Charles C.
Thomas, Publisher, Springfield, Ill., 1958.
U0
Список, литературы
89. X-ray protection, Natl Bur. Std. (U.S ), Handbook 60, 1955.
90. Allen, J. L. Array radars, a survey of their potential and limitations, Mic-
rowave J . v. 5, p. 67—69, May, 1962.
91. Hevesh, A. H. and D. J. Harrahy. Effects of failure on phased-array radar
systems, IEEE Trans., v. R-15, p. 22—32, May, 1966.
92. Application notes for M-type backward wave oscillators, Raytheon Bull
ENG-8, September, 1966.
93. Techniques for application of electron tubes in military equipment, WADC
Tech. Rept 58—446, v. 1, ASTIA AD 205363.
94. Glasoe, G. N. and J. V. Lebacqz (eds). “Pulse generators”, MIT Radiation
Laboratory Series, v. 5, McGraw-Hill Book Company, N. Y., 1948.
95. Lewis, 1. A. D. and F. H. Wells. “Millimicrosecond pulse techniques”.
M.cGraw-Hill Book Company, N. Y., 1954.
96. Frungel, F. B. A. “High speed pulse technology”, vols. 1 and 2, Academic
Press Inc, N. Y., 1965.
97. Main, J. H. A self-biased solid-state diode despiker, Proc. Eighth Symp.
Hydrogen Thyratrons and Modulators, p. 416—422, May, 1964 AD454—
991.
98. Weber, D. J. Phased array power modulator techniques, Proc. Eighth Symp.
Hydrogen Thyratrons and Modulators, p. 314—344, May, 1964, AD454—
991.
99. Weil, T. A. Pulse measurement technique, Proc. Eighth Symp. Hydrogen
Thyratrons and Modulators, p. 120—142, May, 1964, AD454—991.
100 Lee, R. “Electronic transformers and circuits”, 2d ed., John Wiley & Sons,
Inc., N Y„ 1955.
101. Martin, S. Operation of hydrogen thyratrons at conditions other than JAN
test, Third Hydrogen Thyratron Symp. Tech. Minutes, p. 118—126, May,
1953. ’ ’ :
102. Goldberg S. Design and measurement of hydrogen thyratron modulator
characteristics, Third Hydrogen Thyratron Symp. Tech. Minutes, p. 15—42,
May, 1953.
103. Lyuta, G. R. Use of the JAN hydrogen thyratron specification by equipment
manufacturers, Third Hydrogen Thyratron Symp. Tech. Minutes, p. 5—8,
May, 1953.
104. Zinn, M. H. Thyratron drive requirements and trigger circuits, Third Hyd-
rogen Thyratron Symp. Tech. Minutes, p. 43—48, May, 1953.
105. Eichenauer, C. J. A magnetic assist to hydrogen thyratron switch tubes,
Fourth Hydrogen Thyratron Symposium, 1955.
106 Zuvers, H. E. Ignitrons for modulator usage, High Power Modulator Col-
loq, 1957.
107. Pruitt, D. L. Superpower line type pulser using ignitrons, High Power Mo-
dulator Colloq., 1957.
108. Pohl, R. V. and H. E. Zuvers, Ignitrons as pulse modulators, Proc. Sixth
Syrnp. Hydrogen Thyratrons and Modulators, p. 128—138, May, 1960,
AD254—102.
109. Knight, H. de B. Ignitron switches in pulsing service, Proc. Sixth Symp.
Hydrogen Thyratrons and Modulators, p. 158—162, May, 1960, AD254—
102.
110. Turner, T. F. Modulator design problems in the proposed Stanford two-
mile accelerator, Proc. Sixth Symp. Hydrogen Thyratrons and Modulators,
p. 139—157, May, 1960, AD254—102.
111. Turner, T. F. and H. S. Butler. Performance of ignitrons in pulse service,
Proc Seventh Symp. Hydrogen Thyratrons and Modulators, p. 328—347,
May, 1962, AD296—002.
112. Hoover, M. Experimental superpower pulse modulator. High Power Modu-
lator CoRpq., 1957
113. Yingst, T. E. A 35-kV, 450-A millisecond-pulse hard-tube modulator circuit,
5* 131
Гл. 1. Радиолокационные передатчики
114
115
116
117
118
119
120
121.
122.
123
124
125
126
127
128
129
130
131
132
133
134.
132
Мое. Sixth Symp. Hydrogen Thyratrons and Modulators, p. 324—350, May,
I960, AD254—102.
Martinovitch, V, N. Hard tube modulator techniques that permit utiliza*
tion of minimum size capacitor banks, Proc. Seventh Symp. Hydrogen
Thyratrons and Modulators, p. 415—420, May, 1962, AD296—002.
Weinburg, E. F. and W. A. Vail. Modulator considerations for modulating
anode beam tubes in burst mode radars. Proc Seventh Symp. Hydrogen
Thyratrons and Modulators, p 421—435, May, 1962, AD296—002.
Doolittle, H. D., H. Langer, J. A. Randmer and B. Singer. A sixty-me-
gawatt hard-tube modulator. Proc Eighth Symp Hydrogen Thyratrons and
Modulators, p 254—261, May, 1964, AD454—991.
Ingwersen, P. A. A 200-MW hard-tube modulator. Proc. Ninth Modulator
Symp., p. 1—9, May, 1966, AD651—694.
Bullock, M. Description of experimental pulse modulator for the X-626 kly-
stron, High Power Modulator Colloq., 1957
Swanson, J. P. Modulator techniques for gridded klystrons and traveling
wave tubes, Proc. Fifth Symp. Hvdrogen Thyratrons and Modulators,
p. 260—274, May, 1958. AD650—899
Pappas, C. Some advances in the technology of modulating anode pulsers
for high-power klystrons Proc Seventh Symp Hydrogen Thyratrons and
Modulators, p. 361—387, May, 1962, AD296—002.
Fox, L. J. Design and application of the “Injectron”, Proc. Seventh Symp.
Hydrogen Thyratrons and Modulators, p. 360, May, 1962, AD296—002
Israel, H. M. Floating deck trigger coupling methods, Proc. Eightt Symp.
Hydrogen Thyratrons and Modulators, p. 143—152, May, 1964, AD454—
991
Fox, L. J. Development of a 325-kilovolt, high vacuum swutch tube, Proc.
Eighth Symp Hydrogen Thyratrons and Modulators, p. 262—276, May,
1964, AD454—991.
Grotz, G. Design consideration for 180 kV floating deck modulator, Proc.
Ninth Modulator Symp., p. 368—384, May, 1966, AD651—694.
Taylor, G. W Drive requirements for high-voltage low-grid-current tubes,
Proc. Ninth Modulator Symp., p. 269—277, May, 1966, AD651—694.
Main, J. H. Settling time considerations in floating deck modulators, Proc.
Ninth Modulator Symp., p. 390—397, May, 1966, AD651—694.
Main, J. H. A simplified floating deck modulator, Proc. Ninth Modulator
Symp , p. 385—389, May, 1966, AD651—694.
Jordan, R., C. Price and L. Swain. Two experimental semiconductor-mag-
netic pulse modulators, Proc. Seventh Symp. Hydrogen Thyratrons and
Modulators p. 240—259, May, 1962, AD296—002.
Thompson, B. J. Modular approach makes design of superpower solid sta-
te modulator practical, Proc. Ninth Modulator Symp., p. 354—367, May,
1966, AD651—694.
Lietzau, K. 40 kV semiconductor modulator, Proc. Ninth Modulator Symp.,
p 343—353. May, 1966, AD651—694.
Massey, R. P. High-voltage, high-speed, solid-state floating deck pulse
modulator, Proc. Ninth Modulator Symp., p. 398—424, May, 1966, AD651 —
694.
Weil, T. A. Pulsing circuit with return of energy to source, U.S. Patent
3,127,573, May 19, 1959.
Picard, D. J. A high efficiency charging regulator for line type modula-
tors, Proc. Fifth Symp. Hvdrogen Thyratrons and Modulators, p 223—
231, May, 1958, AD650—899"
Schonberg, R. G. High-power pulse system regulation, Proc. Sixth Symp.
Hydrogen Thyratrons and Modulators, p. 313—322, May, 1960, AD251—
102.
Список литературы
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149.
150
151
152
153
154
155
156
Smith, W. 1. The design of a modulator-power supply system for the Stan-
forit two-mile linear accelerator, Proc. Seventh Symp. Hydrogen Thyra-
trons and Modulators, p. 312—327, May, 1962, AD296—002.
Haley, J. T. Design of high stability electronic voltage regulators for
radar modulators, Proc. Fifth Symp. Hydrogen Thyratrons and Modulators,
p ?32 244, May. 1958, AD650—899
Smalley. К. M. A high voltage regulator for pulse loads, Proc. Ninth Mo-
dulator Symp., p. 492—512. May, 1966, AD651—694
Weil, I. A. A three megawatt fast response ignitron-regulated HVPS,
Proc. Ninth Modulator Symp., p. 445—463, May, 1966, AD651—694.
Gardner, A. L. et al. High power pulse line switching devices, final report,
Microwave Laboratory Institute of Engineering Research, Berkeley, Calif.,
Apr. 1, 1952. ASTIA. ATI 143796.
Parker, W. N. and M. V. Hoover. High-speed electronic fault protection for
power lubes and their circuitry, IRE Conv Record, v. 3, pt. 9, p. 10—15,
1955.
Mark, J. T. Improved power fault protection, Electron. Design, v. 6, p. 46—
49. Mar 5, 1958
Schneider, S., M. H. Zinn and A. J. Buffa. A versatile electronic crowbar
system, Proc. Seventh Symp. Hydrogen Thyratrons and Modulators,
p. 482—506. May, 1962, AD296—002.
Grotz, G. A 300-kV multigap crowbar, Proc. Seventh Symp. Hydrogen
Thyratrons and Modulators, p 507—520, May, 1962, AD296—002.
Morris, A. J. and J. P. Swanson. The high speed protection of microwave
tubes and systems, Proc. Seventh Symp. Hydrogen Thyratrons and Modu-
lators, p. 436—453, May, 1962, AD296—002.
Swanson, J. P. Infinite voltage range triggered arc gaps for crowbar app-
lication, Proc. Seventh Symp Hydrogen Thyratrons and Modulators,
p. 549—552, May, 1962, AD296—002.
Woolaver, L. B. The use of triggered spark gaps as crowbars, Proc. Se-
venth Symp. Hydrogen Thyratrons and Modulators, p 521—531, May,
1962, AD296—002.
Pappas, C. Fault sensing and protection for high power klystron trans-
mitters, Proc. Seventh Symp. Hydrogen Thyratrons and Modulators,
p. 361—387, May, 1962, AD296—002.
Yingst, T. E. Circuits to control and protect high-power modulator tubes,
Electronics, v 35, p 56—61, Jan. 12, 1962.
Taylor, G. W and S. Schneider. Inductance effects in energy-diverter cir-
cuits, Proc. Eighth Symp. Hydrogen Thyratrons and Modulators, p. 72—
81, May, 1964. AD454—991.
Dranchak, M. A. Electronic energy diverter (crowbar) design and applica-
tion, Proc. Eighth Symp. Hydrogen Thyratrons and Modulators, p. 82—
103, May, 1964, AD454—991.
Price, H. N. Triggered vacuum gaps, Proc. Ninth Modulator Symp., p. 122—
133, May, 1966, AD651—694
Weil, T. A. Multigap crowbar study. Raytheon Mem. TAW-502, May 6,
1968.
Chodorow, M and al. Stanford high-energy linear electron accelerator
(Mark III), Rev Sci. Instr., v. 26, p. 134—204, February, 1955.
Electrical transmission and distribution reference book, 4th ed., p. 731—733,
Westinghouse Electric Corp., Central Station Engineers, 1964.
Sloan, G. and J. V. Stover. Saturated switching properties of power tran-
sistors, Proc. Ninth Modulator Symp., p. 325—342, May, 1966, AD651 —
694
Chase, W. G. and H. K. Moore. “Exploding wires”, v. 3, Plenum Press,
N. Y, 1964.
133
Гл. 1. Радиолокационные передатчики
157 Ihennas, R. J An electronic scheme for measuring exploding wire energy,
ll;ГE Trans., v IM-16, p 51—62, March, 1967
I5h Coate, G. T. and L. R. Swain, Jr. “High-power semiconductor-magnetic
pul-w generators”, Research Monograph 39, The ,M I T Press, Cambridge,
Mass , 1966
159 Melville, W. S. The use of saturable reactors as discharge devices for pul-
se generators, Proc. IEE (London), V. 98, pt. 3, p. 185—207, May, 1951.
160 Cook, D. Solid-state magnetic modulators: questions and answers, Micro-
waves, v. 6, N5, p. 56—60, May, 1967.
161. Seminar on high pulse voltage and high average power measurements,
sponsored by National Bureau of Standards and Joint Tube Committee 13,
held at National Bureau of Standards, Washington, D. C., Apr. 14—15,
1965.
162. Weil, T. A. Thyrite dummy magnetrons and super-non-inductive resistive
loads Proc. Fifth Symp. Hydrogen Thyratrons and Modulators, p. 191—
197, May, 1958, AD650—899.
163 Woodrow, G. V. The multiple line modulator, Third Hydrogen Thyratron
Symp Tech. Minutes, p. 171 —175, May, 1953.
164. Gutzwiller, F. W. “SCR Manual”, 4th ed., p. 42—44, General Electric Co.,
Schenectady, N. Y„ 1967.
165. Personal communication from M. H. Zinn, USAECOM, Fort Monmouth,
N. J , June, 1968.
166. Schneider, S. and B. Reich. X-ray emission from high-voltage hydrogen
thyratrons. Proc. IRE, v. 43, N6, p 711—715, June, 1955.
167. Lemansky, I. System jitter requirements and jitter measuring equipment,
Hvdrogen Thyratron Symp. Tech. Minutes, p. 132—143, May, 1953.
168. Widman, F, W, Ertccio of driver voltage and source impedance and peak
anode charging voltage on pulse time jitter in the 5948 hydrogen thyra-
tron, Third Hydrogen Thyratron Symp. Tech. Minutes, p. 82—96, May,
1953
169 Schneider, S. and G. W. Taylor. Transients in high-power modulators,
IEEE Trans., v. ED-13, p. 977—984, December, 1966.
170 CFA’s for pulsed radar, a status report on the self-modulation of reentrant
circular format tubes, SFD Laboratories, Inc., Union, N. J., Apr. 5, 1968.
171. Zinn, M. H. Charging triode circuit, U.S. Army Signal Eng Lab Tech.
Mein Ml746, Mar 1, 1956.
172. Zinn, M. H. Analysis of clipper diode conditions, U.S. Army Signal Eng.
Lab. Tech. Mem. M1649, May 2, 1955.
173 Watrons, W. W. and J. J. McArtney. A gas clipper tube for high power
radar modulators. Proc. Fifth Symp. Hydrogen Thyratrons and Modulators,
May, 1958.
174. TACAN symposium issue, Elec. Comrnun., v. 33, Nl, p. 3—100, March,
1956.
175. Time domain reflectometry, Hewlett—Packard Co., Appl. Note 62, 1964.
176 Development of electron gun with non-intercepting grids. Fourth Quarter-
ly Progr. Rept., Electronics Command Contract DA 36-039 AMC-02270(E),
Sylvania Electric Products, Inc., Mountain View, Calif., Mar. 15, 1964 —
May 28, 1964.
177 Development of electron gun with non-intercepting grids, Final Rept.,
Electronics Command Contract DA 36-039 AA4C-02270(E), Microwave
Electronics Corp., Palo Alto, Calif., May 14, 1963 — Aug 30, 1965
178. Hill, R. A. and W. R. Ol.son Lightweight high-power modulator rmes RSR
switch device, Proc. Tenth Modulator Symp, p. 155 - 163, May, 19t38.
Глава 2
РАДИОЛОКАЦИОННЫЕ ПРИЕМНИКИ
Дж. Тейлор и Дж. Маттерн
2.1. Структурная схема радиолокационного приемника
Радиолокационный приемник предназначен для усиления отраженных от
целей сигналов РЛС и их фильтрации, при которой обеспечивается макси-
мальное различение' полезных отраженных сигналов и помех. К помехам
относятся не только шумы, возникающие в радиолокационном приемнике,
но и сигналы, принимаемые от галактических источников, соседних РЛС и
аппаратуры связи и, возможно, от источников преднамеренных помех. Часть
собственной излучаемой РЛС энергии, которая рассеивается нежелательными
целями (как. например, дождь, снег, птицы, насекомые, атмосферные возму-
щения, дезориентирующие отражатели), можно также классифицировать как
энергию помех. Если самолетные РЛС используются для измерения высоты
и картографирования, то другие самолеты являются нежелательными целями,
а земная поверхность — желательной целью. Основным назначением РЛС
является обнаружение самолетов, кораблей, наземных транспортных средств
или личного состава. Отражения от поверхности моря или суши в этих слу-
чаях классифицируются как помехи.
Имеются разные толкования того, какую часть тракта РЛС относить
к приемнику. В данной главе будут рассмотрены элементы структурной схе-
мы приемника, изображенной на рис. 1. Сигнал на вход приемника поступа-
ет с антенного переключателя, позволяющего использовать одну антенну
для совместной работы передатчика и приемника. Приемник осуществляет
фильтрацию сигнала, отделяя полезные отраженные сигналы от помех. Спо-
собы реализации этой его функции многообразны. Некоторые из них подробно
рассмотрены в других главах.
В гл. 4 рассматриваются РЛС с непрерывным (немодулированным) и
частотно-модулированным излучениями. В настоящей главе рассмотрение
ограничивается приемниками для импульсных РЛС, являющихся наиболее
распространенным типом станций. Импульсная РЛС излучает энергию им-
пульсами и принимают эхо-сигналы в промежутках между очередными излу-
чениями. Большое преимущество этих РЛС заключается в том, что ни проса-
чивающаяся энергия передатчика, ни очень сильные отраженные сигналы от
расположенных на близких расстояниях местных предметов не поступают на
вход приемника одновременно со слабыми эхо-сигналами от дальних целей.
Измерение времени запаздывания импульсного эхо-сигнала обеспечивает
к тому же мгновенное определение дальности до отразившей этот сигнал цели.
Гл. 5—7 (т. з), гл. 11 (т. 1) посвящены вопросам различения полезных
целей и помех на основе различия их скоростей или изменения фазы от од-
ного импульса к другому; рассматриваемый ниже приемник служит только
для получения одиночных импульсных сигналов в форме, пригодной для та-
кой дальнейшей более тонкой обработки.
В гл. 8 рассмотрены вопросы сжатия импульсов, а здесь будут лишь
кратко упомянуты возможности использования этого метода для повышения
эффективности различения полезных сигналов и похмех. Физически декодиро-
135
Гл. 2. Радиолокационные приемники
вание подобных импульсов может осуществляться либо в приемном устрой-
стве (см. рис. 1), либо после операций обработки, связанных с селекцией
движущихся целей (СДЦ) и сжатием импульсов (см. перечень возможных
выходных сигналов приемника в правой нижней части рис. 1). В гл. 1 и 2
(1. 4) описываются РЛС, используемые для слежения за целью и высотомет-
Входной эхо-оигнал
о антенного переключателя
К индикатору В индикатору На запись К НДЦ га Пч
ЭПР и схеме В РЛС с СДЦ
сжатия Сжатие
импульса импульса
Рис. 1. Общая структурная схема радиолокационного приемника:
ВРЧ — временная регулировка чувствительности, АПЧ — автоподстройка частоты:
АПФ — автоподстройка фазы; АЦП — аналого-цифровой преобразователь; ЭПР — экви-
валентная площадь рассеяния; СДЦ — селектор движущихся целей.
136
2.2. Шум. и динамический диапазон приемника
рии. Особенности приемников для выполнения этих функций, буду> лишь
кратко упомянуты в данной главе.
На рис. 1 показаны обычная последовательность операций обработки,
которые имеют место в любом радиолокационном приемнике, и все разнооб-
разие возможных выходных сигналов, хотя никакой реальный радиолокацион-
ный приемник не содержит все эти функциональные узлы или не формирует
все указанные выходные сигналы.
Почти все радиолокационные приемники строятся по супергетеродинному
принципу (см. рис. 1). Отраженный сигнал, подвергнутый незначительному
усилению или вообще без усиления, преобразуется в сигнал промежуточной
частоты (ПЧ) путем смешивания с сигналом гетеродина. Для получения ко-
нечной промежуточной частоты, обычно лежащей в пределах 0,1—100 МГц
(без необходимости преодоления серьезных трудностей, связанных с устране-
нием зеркальных или побочных каналов приема при преобразовании частоты),
может понадобиться не одна ступень преобразования. Дело не только в том,
что усиление на ПЧ более стабильно и реализуется проще, чем на СВЧ:
относительная полоса частот, занимаемая полезным эхо-сигналом, на проме-
жуточной частоте получается больше, а это упрощает фильтрацию. Кроме
того, частоту гетеродина в супергетеродинном приемнике можно менять вслед
за любым изменением частоты передатчика без подстройки фильтров ПЧ.
Указанные преимущества оказались настолько значительными, что конкури-
рующие типы приемников почти перестали применяться; поэтому далее будет
рассматриваться в основном только супергетеродинный приемник.
К приемникам других типов относятся суперрегенеративные, детекторные
с видеосигналом на выходе, перестраиваемые по радиочастоте приемники пря-
мого усиления. Суперрегенеративный приемник иногда используется в радио-
локационных маяках. При этом одна лампа может работать и как передат-
чик, и как приемник, а простота и компактность конструкции в этом случае
важнее, чем высокая чувствительность. Детекторный приемник также являет-
ся простым, но обладает очень низкой чувствительностью. Перестраиваемый
приемник прямого усиления имеет усиление только по принимаемой и видео-
частоте; хотя его шумовая температура может быть низкой, чувствительность
у него плохая, так как осуществить в нем фильтрацию обычных радиолока-
ционных эхо-сигналов при оптимальной ширине полосы пропускания, как
правило, невозможно. Такая фильтрация практически достижима лишь
в РЛС, излучающих сигналы со сравнительно большой относительной шири-
ной спектра.
2.2. Шум и динамический диапазон приемника
В приемниках возникает внутренний шум, который маскирует слабые
отраженные радиолокационные сигналы. Этот шум является одним из основ-
ных существенных факторов, ограничивающих дальность действия РЛС, и
поэтому данный вопрос подробно рассмотрен в т. 1, § 2.5. Анализ чувстви-
тельности РЛС в значительной степени облегчается, если вклад каждого эле-
мента в общий шум системы выражать через шумовую температуру, а не
через коэффициент шума (определения этих параметров и формулы, связы-
вающие их между собой, даны в т. 1, § 2.5).
Шумовая температура современных радиолокационных приемников сни-
жена до такою уровня, что она уже не оказывает доминирующего влияния
на выбор варианта построения приемника. Однако, как ни странно, шумовая
температура обычно называется первой из характеристик, задаваемых при
выборе и разработке радиолокационного приемника, хотя в РЛС крайне
редко испопьзуются приемники с очень низкой шумовой температурой, так
как это сопряжено с недопустимым ухудшением какой-либо другой характе-
ристики.
137
Г л. 2. Радиолокационные приемники
Стоимость редко выступает в качестве фактора, который приходится
учитывать при выборе малошумящего приемника: получаемая за счет этого
возможность снижения требуемого коэффициента усиления антенны или тре-
буемой мощности передатчика всегда дает экономию, намного превышающую
любые связанные с его использованием дополнительные расходы. Требования
к входным цепям приемника определяются такими более важными рабочими
характеристиками, как:
I) динамический диапазон и восприимчивость к перегрузкам;
2) полоса пропускания и пределы перестройки;
3) стабильность амплитудно- и фазочастотной характернаик;
4) требования к системе охлаждения.
При реализации требований низкой шумовой температуры и широкого
динамического диапазона приходится идти на компромисс. Введение усили-
теля высокой частоты до первого смесителя приводит к соответствующему
увеличению уровня шума системы на входе смесителя, вследствие чего влия-
ние шума самого смесителя становится незначительным. Даже если сам уси-
литель высокой частоты имеет более чем достаточный динамический диапа-
зон, у смесителя он соответственно уменьшается как показано в таблице:
Отношение шумовой температуры входных цепей к шумовой темпе- ратуре смесителя дБ 6 10 13,3
Вынужденное сужение динамическо- го диапазона смесителя, дБ 7 10,4 13,5
Повышение шумовой температуры си- стемы из-за шума смесителя, дБ 1 0,4 0,2
Определения, приведенные в § 2.5 т. 1, характеризуют шумовые парамет-
ры приемника в простой форме. Динамический диапазон, который представ-
ляет собой диапазон уровней сигнала, в пределах которого приемник должен
сохранять заданные характеристики, определить труднее. Для этого необхо-
димо задание трех параметров:
1. Минимальный, уровень полезного сигнала обычно определяется как
уровень входного сигнала, создающий на выходе приемника отношение сиг-
нал/шум, равное единице. Иногда его называют «минимальный обнаруживае-
мый сигнал».
2. Допустимое отклонение от заданной характеристики. Максимальный
сигнал — это сигнал, вызывающий некоторое заданное отклонение от ожидае-
мых рабочих характеристик. Для линейных приемников обычно за допустимое
отклонение принимается уменьшение на 1 дБ дифференциального усиления,
т. е. крутизны амплитудной характеристики — зависимости выходного напря-
жения от входного. Для приемников с ограничением или с логарифмической
характеристикой необходимо задавать допустимое отклонение выходного на-
пряжения. В приемниках с регулируемым усилением необходимо различать
мгновенный динамический диапазон и динамический диапазон, который ча-
стично достигается в результате программного изменения усиления.
3. Типы сигналов. При определении требований по динамическому диапа-
зону общий интерес представляют три типа сигналов: отраженные от распре-
деленных целей, отраженные от точечных целей и широкополосные шумопо-
добные организованные помехи. Если в РЛС используется фазово-кодирован-
ный сигнал, то элементы приемного тракта, предшествующие декодеру, огра-
ничивают динамический диапазон сигнала, отраженного от точечной цели,
не столь сильно, как сигнала, отраженного от распределенных отражающих
объектов; произведение ширины спектра на длительность кодированного им-
1S&
Таблица 1
Шумовые характеристики и динамический диапазон Ан теш:;. j Линия УВЧ Смеси- тель Фильтр Логариф- мический обнаружк - тель
Шумовая температура элемента, К Коэффициент передачи элемента 1), дБ 520 1300 300 24000
— —1,о| 25 —6 15
Обший коэффициент передачи до его входа, дБ =EE=l| — 1,0| 24 18 33
Вклад в шумовую температуру, отнесенный к антенне Результирующая ширина полосы но ВЧ Постоянная Больцмана Уровень узкополосного шума2) Система 838 К 80 75 | 660 ь 5 12
29,3 дБК
63,0 дБГц
92,3
— 198,6
—106,3 дБмВт — 10б|—107 | —82 | —88 | —73 | (—73)
Максимальный уровень сигнала 2) - - —5 | —16 4-5 (+?)
Динамический диапазон для распределенных целей 2), дБ Произведение полосы на длительность сигнала для то- чечной цели 2\ дБ Динамический диапазон для точечной цели 2>, дБ Полоса пропускания приемника 2>, МГц Отношение к общей полосе пропускания приемника 2) Пропускание широкополосной помехи 2), дБ Динамический диапазон при наличии широкополосной помехи 2\ дБ -1=. — 77 72 78 (80)
11 11 11 11 0 0
' : 88 83 78 (80)
— I — 200 | 100 2 2
“ —2Z1’ 100 50 1 1
~ — 20 17 0 0
57 55 78 (80)
') Немодулированный выходной сигнал — немодулированный входной сигнал на средней частоте, не кодированный импульс.
г) На выходе соответствующего элемента (за исключением величин в скобках, определенных на входе нелинейного элемента).
2.2. Шум и динамический диапазон приемника
Гл. 2. Радиолокационные приемники
пульса определяет дополнительный динамический диапазон, который декодер
может реализовать в случае точечной цели Наоборот, если в приемном трак-
те имеется чрезмерно широкополосный УВЧ, то его динамический диапазон
по отношению к помехе типа широкополосного шума может быть сильно
01 раничен
Выбор характеристик элементов приемного тракта. Для предотвращения
непредвиденного ухудшения шумовой температуры или динамического диапа-
зона приемника необходим тщательный выбор характеристик элементов его
тракта. Из-за недостаточного динамического диапазона радиолокационный
приемник становится уязвимым для помех, которые могут вызвать насыщение
или перегрузку, маскируя или подавляя полезные отраженные сигналы. Таб-
личная форма записи результатов расчетов (типичный пример подобной фор-
мы представляет табл. 1) позволяет быстро выявлять те элементы, которые
вносят значительный шум или ограничивают динамический диапазон. Типич-
ные значения приведены в данной таблице с целью иллюстрации.
При пользовании табл. 1 необходимо учитывать одно обстоятельс! во.
Динамический диапазон каждого элемента определяют сравнением уровней
максимального сигнала и шума системы на выходе данного элемента. В ос-
нове этого метода лежит предположение, что все операции по фильтрации
(сужение полосы пропускания и декодирование) выполняются данным эле-
ментом до перехода в режим насыщения. Те каскады приемника, которые
обеспечивают значительную фильтрацию, необходимо рассматривать как от-
дельные элементы; если несколько каскадов заменить при расчете одним
фильтром, то при этом указанное выше предположение может оказагься
ошибочным
2.3. Частотно-избирательные свойства приемника и его
элементов
Определения. Мгновенной полосой пропускания какого-либо элемента
называется полоса частот, в пределах которой данный элемент может одно-
временно усиливать два или более сигналов при заданном допуске по моду-
лю (а иногда и по фазе) коэффициента передачи. Диапазоном настройки
называется диапазон частот, в пределах которого данный элемент может
перестраиваться соответствующими органами механической или электронной
настройки без ухудшения заданных рабочих характеристик.
Наиболее важные характеристики. Обстановка, в которой РЛС должна
работать, характеризуется большим количеством источников электромагнит-
ных излучений, которые могут маскировать относительно слабые отраженные
сигналы, источником которых является собственное излучение РЛС. Невос-
приимчивость к таким помехам определяется способностью приемника подав-
лять внеполосные помехи (если помехи имеют узкие спектры) или быстро
восстанавливать свою чувствительность (если помехи по своему характеру
ближе к импульсным). Необходимо учитывать реакцию приемника как в ча-
стотной, так и во временной области.
Как правило, наиболее критичным узлом приемника, определяющим его
частотно-избирательные свойства, является тракт промежуточной частоты:
соответствующие вопросы рассмотрены в § 2.7. Однако нельзя не учитывать
высокочастотную часть приемника (например, просто полагая ее более широ-
кополосной). В § 2.2 было показано, как из-за ее чрезмерно широкой полосы
пропускания может уменьшиться динамический диапазон, если помеха имеет
характер широкополосного шума. Еще более вероятными являются внеполос-
ные сильные помехи, например от телевизионных станций или СВЧ радиоре-
лейных линий связи, которые в случае их попадания на вход смесителя могут
либо вызвать его перегрузку, либо пройти в тракт промежуточной частоты
по одному из побочных каналов преобразования.
140
2.4. Высокочастотная головка приемника
Идеальные смесители в супергетеродинном приемнике действую! как
перемножители, создающие выходной сигнал, пропорциональный произведе-
нию двух входных сигналов. Если исключить влияние нелинейностей и несим-
метрии, то такие смесители создают выходные сигналы только на двух часто-
тах, равных сумме и разности частот входных сигналов. Смесителей типа
перемножителей для преобразования высоких частот в промежуточные (хотя
они широко применяются на промежуточных частотах), как правило, нет.
Для этих целей широко используются диодные смесители. Частотно-преобра-
зовательные свойства диода обусловливаются нелинейностью его характери-
стики. Если характеристику задать степенным рядом, то только член второй
степени (квадратичный) обеспечивает требуемое преобразование. Остальные
члены создают побочные комбинационные составляющие, характеризующие
нежелательную способность диода преобразовывать внеполосные сигналы
в область промежуточных частот. Эффективность преобразования этих неже-
лательных частот, за исключением частоты зеркального канала, достаточно
низка, поэтому шумовая температура системы ухудшается незначительно, но
смеситель оказывается уязвимым для сильных внеполосных помех. Наилуч-
шим радиолокационным приемником считается тот, который имеет самую уз-
кую мгновенную полосу по высокой частоте, соизмеримую с шириной спектра
излучаемого сигнала, увеличенной на допуск на нестабильность, а также
хорошие частотную и импульсную характеристики.
Широкий диапазон настройки обеспечивает гибкость, необходимую для
отстройки от помех. Если помеха является преднамеренной (организованной),
то может потребоваться изменение частоты и от импульса к импульсу. Столь
быстрого изменения частоты при необходимом ограничении мгновенной поло-
сы частот можно достичь при использовании переключаемых фильтров СВЧ
или фильтров, построенных на железо-иттриевых гранатах с электронной
перестройкой. Каждый из этих способов сопряжен с некоторыми вносимыми
потерями и, следовательно, с дополнительным ухудшением шумовой темпера-
туры ради выполнения более важных требований.
2.4. Высокочастотная головка приемника
Структурная схема ВЧ головки. Высокочастотная головка радиолокаци-
онного приемника состоит из полосового фильтра или полосового усилителя
и включенного за ним понижающего преобразователя частоты. С помощью
последнего частота РЛС преобразуется в промежуточную частоту, на котором
физически реализуемы полосовые фильтры с надлежащими характеристиками
избирательности. Сам смеситель и предшествующие цепи являются широко-
полосными. Перестройка приемника в пределах, определяемых полосой про
пускания преселектора или смесителя, осуществляется изменением частоты
гетеродина.
Влияние характеристик ВЧ головки на работу РЛС. ВЧ головка влияет
на три характеристики некогерентной импульсной РЛС: шум, вносимый ВЧ
головкой, ограничивает максимальную дальность обнаружения; насыщение
ВЧ головки под воздействием сильных сигналов может ограничить минималь
ную дальность действия системы или ее способность работать в условиях
сильных помех; наконец, наличие побочных каналов приема у ВЧ головки
обусловливает чувствительность приемника к внеполосным помехам.
Работоспособность когерентной РЛС еще в большей мере зависит от
побочных каналов приема, образующихся при преобразовании частоты: у им-
пульсно-доплеровской РЛС ухудшается точность определения дальности
и скорости; у РЛС с селекцией движущихся целей ухудшается подавление
сигналов, отраженных от неподвижных объектов, а у РЛС со сжатием им-
пульсов и высокой степенью разрешения усиливаются боковые лепестки
HivHKiiH'i неопределенности по дальности.
141
Гл. 2. Радио юкационные приемники
Побочные каналы преобразования смесителей. Математическая модель
смесителя. Представление характеристики смесителя степенным рядом яв-
ляется наиболее полезным методом при расчете различных побочных явлений,
которые часто обнаруживаются. Ток i в нелинейном резисторе можно пред-
ставить степенным рядом по напряжению U на концах резистора:
1 = Яо + П1£/ + П2^24~Пз[у34~. . ,-\-anUn. (1)
Напряжение, приложенное к смесителю, равно сумме напряжения гетеродина
ZJie’^H и напряжения сигнала Яге’чМ:
-ЬЯ2е'“2< . (2)
Если уравнение (2) подставить в (1) и выполнить указанные операции, то
получим формулу для расчета спектра на выходе смесителя.
Номограмма комбинационных колебаний в смесителе. Результаты таких
расчетов были табулированы в нескольких формах, чтобы помочь разработ-
чику системы быстро определить, какие комбинации входных частот и полос
пропускания не дают сильных паразитных комбинационных составляющих
низкого порядка. Наиболее употребительная форма номограммы смесителя
[1] показана на рис. 2. Жирная линия показывает изменение нормированной
частоты выходного сигнала (Я—L)]H в зависимости от нормированной ча-
стоты входного сигнала L/H. Эта зависимость обусловлена комбинационными
составляющими первого порядка вида Н—L, которые возникают в основном
из-за квадратического члена в степенном ряду, аппроксимирующем характе-
ристику смесителя. Все прочие линии номограммы определяют комбинацион-
ные составляющие, обусловленные кубическим членом в степенном ряду и чпе-
нами более высокого порядка.
На номограмме очерчены контуры семи особенно употребительных обла-
стей. Метод применения номограммы проиллюстрируем на примере исполь-
зования области, помеченной буквой А и представляющей самую широкую
доступную полосу частот, свободную от комбинационных составляющих, со
средней частотой LfH—Q^Z. Доступная ВЧ полоса пропускания простирается
от 0,61 до 0,65, а соответствующая полоса пропускания по ПЧ — от 0,35 до
0,39. Однако на краях полосы пропускания по ВЧ создаются комбинацион-
ные колебания на ПЧ с частотами 0,34 (4Я—6L) и 0,4 (ЗЯ—4L). Любое
расширение мгновенной полосы пропускания по ВЧ приведет к перекрытию
полос ПЧ, которое невозможно исправить фильтрацией на ПЧ. Комбинацион-
ные составляющие частот 4Я—6L и ЗЯ—4L, как все паразитные комбина-
ционные составляющие на ПЧ, возникают из-за кубического члена степенного
ряда и членов более высокого порядка.
Полоса, свободная от паразитных комбинационных составляющих, в лю-
бой из обозначенных на номограмме областей составляет примерно 10% от
средней частоты, т. е. равна (Я—Поэтому в приемниках, где необхо-
димо иметь широкую полосу пропускания, требуется использовать высокую
промежуточную частоту, соответствующую средней частоте одной из этих
областей. Для ПЧ ниже (Я—£)/Я = 0,14 паразитные комбинационные колеба-
ния обусловлены членами чрезвычайно высокого порядка, и поэтому столь
малы по амплитуде, что ими обычно можно пренебречь.
Номограмма комбинационных колебаний наглядно демонстрирует также
появление побочных каналов приема. Один из наиболее сильно выраженных
побочных каналов соответствует точке В, где комбинационная частота вида
2Я—2L соответствует колебаниям на выходе смесителя, попадающим в полосу
пропускания по ПЧ, при нормированной частоте входного сигнала, равной
0,815. Все комбинационные частоты, вида N{H—L\ соответствуют потен-
циально опасным побочным каналам приема, с которыми трудно бороться.
142
2.4. Высокочастотная головка приемника
Колебания этих частот необходимо отфильтровывать по ВЧ, чтобы не допу-
стить их до входа смесителя.
Побочный канал приема, который невозможно рассчитать при помощи
данной номограммы, возникает, когда два или более входных сигнала, ча-
стоты которых лежат вне основного канала приема, в результате взаимной
модуляции создают сигнал на третьей частоте, лежащей в полосе пропуска-
Рис. 2. Номограмма комбинационных колебаний на выходе понижающего преобразова-
теля:
Н —высокая частота входного сигнала; L—низкая частота входного сигнала.
ния по ВЧ. Этот эффект обусловлен четными членами четвертого и более
высокого порядка в аппроксимирующем ряду. Влияние этого канала будет
заметным, например, когда
2/7—Л2 H — L
Н ~ Н
(3)
В некоторых вариантах смесителей уровень, взаимной модуляции уменьшают
путем подачи на смесительные диоды,..прямого смешения с целью уменьше-
ния кривизны участков их характеристики, . описываемых членами высоких
порядков в аппроксимирующем ряду.
U3
Гл. 2. Радиолокационные приемники
Балансный смеситель. Рассмотренные выше модель смесителя и номо-
грамма комбинационных колебаний позволяют рассчитать спектральные харак-
теристики несимметричного (с одним сигнальным входом) смесителя. В ба-
лансном смесителе эти характеристики видоизменяются за счет симметрии
схемы. Две наиболее распространенные схемы балансного смесителя показаны
на рис. 3, а, б.
В схеме рис. 3, а подавляются все комбинационные колебания по ПЧ
и побочные каналы приема по ВЧ, получаемые за счет четных гармоник ча-
Рис. 3. Балансный смеситель с инвертированным сигналом (а), с инвертированным гете-
родинирующим напряжением (б); смеситель с подавлением теркального канала (#)
стоты сигнала. Если фазовый сдвиг на ВЧ получается не путем временной
задержки, то частота гетеродина и все ее гармоники подавляются на сигналь-
ном входе. Важной особенностью балансного смесителя является также то,
что шумовые боковые полосы сигнала гетеродина, которые преобразуются
в промежуточную частоту, подавляются на выходе смесителя по ПЧ.
В схеме рис. 3, б подавляются все комбинационные колебания по ПЧ
и побочные каналы приема, получаемые за счет четных гармоник частоты
гетеродина Если высокочастотный фазовый сдвиг получается не путем вре-
менной задержки, частота гетеродина и ее нечетные гармоники подавляются
на сигнальном входе смесителя. Однако шумовые боковые полосы сигнала
гетеродина, преобразуемые в промежуточную частоту, данной схемой не по-
давляются.
Смесители с подавлением зеркального канала Несимметричный смеси-
тель имеет два канала приема, связанные с наличием квадратического члена
1 44
2.4. Высокочастотная головка приемника
в аппроксимирующем степенном ряду. Эти каналы расположены на частотах
выше и ниже частоты гетеродина, отстоящих от нее на величину промежу-
точной частоты Неиспользуемый канал, в силу его частотной симметрии
называемый зеркальным, подавляется в однополосном смесителе, схема кото-
рого показана на рис. 3, в. В гибридном узле на высокой частоте создается
разность фаз 90° между гетеродинирующими напряжениями, подаваемыми
на два смесителя, которые могут быть балансными Вследствие этого фазо-
вого сдвига выходные ПЧ напряжения смесителя имеют сдвиг по фазе +90°
Рис. 4 Шумовые характеристики ВЧ головок радиолокационных приемников.
в одной боковой полосе и —90° в другой. В гибридном узле на промежуточ-
ной частоте происходит дополнительный положительный или отрицательный
фазовый сдвиг на 90°, вследствие чего сигналы верхней боковой полосы
складываются на одном выходе и вычитаются на другом. В приемниках, где
используются широкие полосы пропускания, гибридный узел на ПЧ должен
быть неизбирательного типа.
Характеристики усилителей и смесителей. Шумовая температура. Наи-
более употребляемым показателем качества смесителя или усилителя является
его коэффициент шума. Однако понятие шумовой температуры оказалось
более удобным при определении шумовых характеристик мазера и некоторых
параметрических усилителей. На рис. 4 показаны типичные значения коэффи-
циента шума [2] и шумовой температуры для шести наиболее распростра-
ненных типов устройств СВЧ. Мазеры и охлаждаемые параметрические уси-
лители здесь не приведены ввиду их ограниченного применения. Кривые рис. 4
показывают постепенное повышение шумовой температуры с увеличением
рабочей частоты Балансный диодный смеситель широко используется ввиду
его большого динамического диапазона, и, хотя, как свидетельствует рис. 4,
обычно он не является особенно малошумящим устройством, разработка дио-
дов Шоттки позволила осуществить балансные смесители даже с более широ-
ким динамическим диапазоном и коэффициентами шума, сниженными до
5,5 дБ на частотах вплоть до 9 ГГц.
Динамический диапазон. Вторым важным показателем качества ВЧ голов-
ки является динамический диапазон, измеряемый в пределах от среднеквад-
ратического уровня шума до уровня сигнала, который уменьшает дифферен-
циальное усиление на 1 дБ. Поскольку среднеквадратический уровень шума
зависит от ширины полосы пропускания по ПЧ, эффективный динамический
145
Гл. 2. Радиолокационные приемники
диапазон сужается при расширении полосы пропускания по ПЧ. Динамиче-
ские диапазоны шести типов устройств СВЧ [2] показаны на рис. 5.
Кривые здесь продлены в область полосы пропускания по ПЧ, соответствую-
щую максимальной полосе пропускания по ВЧ, достижимой для данного уст-
ройства.
Балансный диодный смеситель, как видно из сравнения, обладает наи-
большим динамическим диапазоном при заданной полосе пропускания по ПЧ
Однако динамический диапазон смесителя, перед которым включен малошумя-
щий усилитель, сужается пропорционально коэффициенту усиления усилителя.
Рис. 5. Динамический диапазон устройств СВЧ.
Следовательно, коэффициент шума и динамический диапазон невозможно
оптимизировать одновременно. Решение этой задачи может быть найдено на
пути использования активного преобразователя [4, 51.
Примеры. Балансный диодный смеситель. Балансная' схема на диодах
(рис. 3, а,б) является типичной для большинства СВЧ смесителей. Гибрид-
ный СВЧ узел можно создать в волноводном коаксиальном или микрополос-
ковом исполнении, полоса пропускания такого узла обычно около 10% от
средней частоты. Волноводные смесители обеспечивают более широкие поло-
сы пропускания, а в случае смесителя на ортогональных типах колебаний реа-
лизуются полосы пропускания порядка 20% от средней частоты.
Контур ПЧ обычно выполняется на элементах с сосредоточенными пара-
метрами. Трансформация напряжения, необходимая для получения оптималь-
ного коэффициента шума, может быть осуществлена двухконтурным транс-
форматором или П-образными цепями. Контур не настраивается на макси-
мальную передачу мощности, так как при этом не обеспечивается минимум
шума.
Транзисторный СВЧ усилитель. Типичный каскад транзисторного СВЧ
усилителя [3] показан на рис. 6. В этом усилителе используется комбинация
цепей с сосредоточенными и распределенными параметрами. Цепи связи вы-
полняются на дисковых конденсаторах; если вывод необходимо заземлить по
высокой частоте, то используются конденсаторы проходного типа.z Коллектор-
ная цепь настраивается в широких пределах с помощью резонатора на петле-
146
2 5 Гетеродины
Вхойной
сигнал
Выходной
сигнал
Меандровый
Иикрополосковый
резонатор
образной микрополосковой линии. Согласующая секция петлеобразной микро-
полосковой линии обеспечивает соединение каскадов усилителя. Транзистор
с мезаструктурой в микромодульном исполнении (что позволяет монтировать
его методом погружения в расплав в отверстиях, высеченных в плате печат-
ного монтажа) уменьшает паразитную индуктивность до минимума. Усилитель,
состоящий из четырех каскадов этого ти-
па, имеет усиление 20 дБ в полосе частот
1100—2000 МГц. СВЧ транзисторы выпу-
скаются также в коаксиальном корпусе.
Усилители на таких транзисторах очень
напоминают ламповые усилители СВЧ.
Параметрический усилитель. Упро-
щенная схема двухполюсного парамет-
рического усилителя с отрицательным со.
противлением показана на рис. 7. Варак-
торный диод является общим для трех
резонансных контуров: резонатора на-
качки, холостого резонатора и сигнально-
го резонатора. Действие тока накачки
и холостого тока в варакторном диоде со
стороны сигнального входа проявляется
как отрицательное сопротивление. На плече 3 циркулятора появляется отра-
женная волна, превышающая по амплитуде падающую волну. Стабильность
усиления обеспечивается до тех пор, пока отрицательное сопротивление меньше
сопротивления источника. Устройства регулировки этого сопротивления ис-
. вч
дроссель
Смещение -U
Рис. 6. Транзисторный
литель.
СВЧ уси-
Входной
сигнал i
Настройка
цепи сигнала
Настройка
цепи накачки
Выходной сигнал
Рис. 7. Двухполюсный параметрический усилитель.
Вход цепи
накачки
пользуются для обеспечения усюйчивой работы в широком интервале темпе-
ратур. В параметрическом усилителе (ПУ) нетрудно получить усиление 20 дБ
на один каскад.
2.5. Гетеродины
Функции гетеродина. В супергетеродинном приемнике один или более ге-
теродинов и смесителей служат для преобразования частоты принятого отра-
женного сигнала в промежуточную частоту, удобную для реализации процес-
сов фильтрации и других операций обработки. Приемник можно перестраи-
вать, изменяя частоту первого гетеродина, но не затрагивая блока ПЧ прием-
ника. Последующие сдвиги по промежуточной частоте часто осуществляются
в приемнике с помощью дополнительных гетеродинов, как правило, с фикси-
рованной частотой настройки.
В импульсных передатчиках с внешним возбуждением те же самые гете-
родины также используются для формирования несущей частоты РЛС с тре-
буемым сдвигом относительно частоты первсго гетеродина. ,В импульсных
147
Гл. 2. Радиолокационные приемники
передатчиках с самовозбуждением, с их независимой несущей частотой
используется автоматическая подстройка частоты (АПЧ) для поддержания
требуемого частотного сдвига между несущей частотой и частотой первого
гетеродина.
Во многих РЛС первых поколений единственной функцией гетеродинов
было преобразование частоты принятого отраженного сигнала в заданную
Частота модуляции, кГц
Рис. 8. Спектры фазовой модуляции типичных источников сигналов диапазона С.
промежуточную частоту. В большинстве же современных радиолокационных
систем производится когерентная обработка серии отраженных от цели сиг-
налов. Гетеродины здесь фактически работают как времязадающие опорные
генераторы, при помощи которых измеряется запаздывание отраженного от
цели сигнала относительно излученного для извлечения информации о даль-
ности с точностью до малой доли длины волны. Такая обработка сигналов
требует высокой степени фазовой стабильности в передающем и приемном
трактах РЛС. Хотя эти методы обработки описываются в других разделах
справочника (гл. 5—7, т. 3 и гл. 8, т. 2), они здесь упомянуты, так как опре-
деляют основные гребования к стабильности приемника.
148
2.5. Гетеродины
Параметры первого гетеродина (стабильного гетеродина) оказывают на
результаты обработки сигнала большее влияние, чем параметры передатчика.
Последний гетеродин (когерентный) часто используется для внесения фазовых
коррекций, компенсирующих влияние движения платформы РЛС или измене-
ния фазы передатчика
Требования по стабильности первого гетеродина обычно определяют в
виде допустимого спектра фазовой модуляции. Источниками паразитной мо-
дуляции являются механические или акустические вибрации от вентиляторов
и электродвигателей, пульсации питающих напряжений и паразитные колеба-
ние.
9. Первый гетеродин, стабилизиро-
ванный полым резонатором.
ния и шумы, создаваемые в самом
первом гетеродине. Как правило, до-
пустимая девиация фазы уменьшает-
ся при возрастании частоты модуля-
ции, так как доплеровский фильтр
менее эффективен в подавлении этой
модуляции. В РЛС, имеющей двух-
импульсный селектор движущихся це-
лей, существует линейное соотноше-
ние между допустимой девиацией
фазы и периодом модуляции Их от-
ношение равно допустимой девиации
частоты (или «кратковременной абсо-
лютной нестабильности частоты», как
иногда называют этот параметр). Од-
нако этот параметр неадекватно ха-
рактеризует требования по стабиль-
ности фазы импульсно-доплеровских
РЛС и РЛС с селектором движу-
щихся целей, в которых когерентно обрабатываются более двух импульсов.
Спектр фазовой модуляции, адекватно описывающий нестабильность ча-
стоты, приведен на рис. 8 для нескольких типичных СВЧ генераторов [6, 7].
Эти кривые характеризуют результаты, которые следует ожидать в лабора-
торных условиях. При ударах и вибрациях фазовая модуляция может резко
увеличиться. Однако и при благоприятных условиях нестабилизированный
клистронный и большинство триодных генераторов непригодны для многих
радиолокационных применений. Хорошие результаты получают при использо-
вании клистронных генераторов, стабилизированных полым резонатором или
имеющих электронную стабилизацию. Применение цепочек умножителей ча-
стоты, особенно с малыми уровнями колебаний умножаемых частот,, обеспе-
чивает самый низкий уровень ближайших боковых колебаний и рекомен-
дуется для стабилизации клистронных генераторов.
Первый гетеродин, стабилизированный полым резонатором. В первом ге-
теродине на клистроне, стабилизированном полым резонатором (рис. 9),
используется схема АПЧ [8] для удержания частоты клистрона очень близко
к средней частоте дискриминатора. В контуре АПЧ содержится операционный
усилитель-интегратор, который имеет переходные характеристики, необходи-
мые для устойчивой работы схемы. Передаточная функция разомкнутого кон-
тура регулирования такой схемы
F(p) = _Z^-----------
l-j-p(GH-l)
(4)
где а — характеристика регулирования частоты клистрона, Гц/В; у — харак-
теристика дискриминатора, В/Гц; G — коэффициент усиления усилителя;
7( = /?С — постоянная времени;- p = j- (частота в рад/с). Характеристика кон-
тура регулирования будет иметь нулевую крутизну до точки разрыва фазы
149
Гл. 2. Радиолокационные приемники
при р(0 + 1)/1 = / и крутизну —20 дБ на декаду за точкой единичного уси-
ления. Частота, при которой усиление равно единице, Р\ определяется из соот-
ношения
pr ay(j — 1
(G+l)7\ '
Рис. 10. Перестраиваемый первый гетеродин с фазовой синхронизацией.
Oik лик замкнутого контура регулирования на частотную погрешность клист-
рона F выражается в виде
Г
Е (F) =-------.
1+ayG
(«)
Первый гетеродин с фазовой синхронизацией. Метод фазовой автопод-
стройки частоты (ФАПЧ) был применен для создания «перестраиваемого»
первого гетеродина. Изменение частоты производится дискретными прираще-
ниями точно определенного значения. На рис. 10 показаны элементы пере-
страиваемого генератора с фазовой синхронизацией. Этот генератор создает
в диапазоне СВЧ линейчатый спектр с частотным интервалом F при помощи
умножителя на диодах с резким восстановлением в широкополосном исполне-
нии. Часть выходной мощности клистрона смешивается с линейчатым спект-
ром и колебание с частотой биений F/2 усиливается и подается на фазовый
детектор, где производится его сравнение по фазе с колебанием опорной ча-
стоты F/2. Операционный усилитель обеспечивает требуемые переходные
характеристики схемы АПЧ. При этих условиях клистрон будет синхронизи-
рован по фазе на дискретных частотах
(7)
Передаточная функция разомкнутого контура ФАПЧ
apGfl ±рТ,)
H-P1(G+ 1)Л-|-72) Р ’
150
2.5. Гетеродины
где а — характеристика регулирования частоты клистрона, Гц/В; 0 — харак-
теристика фазового детектора, В/рад; G— коэффициент усиления усилителя;
T{ = RC — постоянная времени, с; T2=RfC— постоянная времени, с; /^/-(ча-
стота в рад/с).
Частотная характеристика этого контура регулирования будет иметь кру-
тизну — 20 дБ/декада в области от нулевой частоты до частоты, соответст-
вующей разрыву фазы при p[(G + 1) Tj 4-Т'г]—/ в сторону запаздывания, кру-
тизну —40 дБ/декада до частоты, соответствующей разрыву фазы при
РТг—] в сторону опережения, и крутизну —20 дБ/декада после точки, соот-
ветствующей единичному усиленгю. Частота, при которой будет единичное
усиление, приближенно определяется выражением
Pi ct$GT2
Ошибка замкнутого контура регулирования, обусловленная статической ча-
стотной погрешностью клистрона, равна нулю, а ошибка, обусловленная дрей-
фом частот клистрона dF/dt равна
dF/dT
a|3G
(Ю)
В системах, где полоса пропускания замкнутого контура р\ приближается
к 2л-10s, нестабильность клистрона определяется нестабильностью опорных
частот.
Первый гетеродин по схеме умножителя частоты. В импульсной РЛС,
передатчик которой построен по схеме импульсного усилителя с формирова-
нием когерентной несущей с помощью высокостабильного возбудителя, этот
возбудитель применяется и для прямого формирования частот первого (ста-
бильного) и второго (когерентного) гетеродинов. Число возможных вариан-
тов схем построения синтезаторов частоты для этих целей безгранично. Общая
структурная схема синтезатора частот, напоминающая многие реальные схемы
построения, дана на рис. 11. Все опорные частоты, включая несущую, полу-
чаются от высокостабильного опорного генератора. Частота этого генератора
умножается в нескольких ступенях на 2 и на 3, пока не будет получена тре-
буемая частота второго гетеродина. Частота первого гетеродина получается
из частоты второго гетеродина при помощи умножителя частоты, генерирую-
щего гармоники высокого порядка. Этот умножитель может состоять из
длинной цепочки удвоителей и утроителей частоты или из короткой цепочки
таких умножителей, за которой следует ступень умножения на варакторном
диоде или на диоде с резким восстановлением. Умножитель на диоде с резким
восстановлением предпочтительнее ввиду его более высокого к.п.д. В умножи-
теле этого типа легко можно получить коэффициент умножения частоты до
100 и более.
В системах, где частота сигнала не испытывает больших доплеровских
сдвигов, несущую частоту получают, складывая частоты первого и второго
гетеродинов. В тех системах, где ожидаются большие доплеровские сдвиги,
первый умножитель строится в расчете на создание ряда частот, отстоящих
друг от друга на частоту опорного генератора и расположенных симметрично
относительно частоты второго гетеродина. Сигналами управления, поступаю-
щими от следящей системы, производится включение сигнала той частоты,
которая наиболее точно корректирует несущую с учетом доплеровского сдвига.
Допустимая нестабильность фазы генератора опорной частоты обратно
пропорциональна произведению коэффициентов умножения (AZX/И), Лучшую
стабильность фазы можно получить, в-.генераторах более низких частот; это
1S1
Гл. 2. Радиолокационные приемники
позволяет удовлетворить возрастающие требования к стабильности фазы.
Оптимальное значение частоты лежит в диапазоне 1—5 МГц (частотные пре-
делы для кварцевых резонаторов, работающих с основным типом колебаний).
Фазовая нестабильность кварцевых генераторов в основном определяется
шумом. Наиболее стабильными являются генераторы, в которых кварц исполь-
зуется при такой схеме включения, что он действует как фильтр, подавляю-
щий большую часть шумов, создаваемых активным прибором, пропуская
Рис. 11 Синтезатор частот.
только узкий спектр шума. Кроме того, для подавления шумов активного при-
бора кварц возбуждают на частоте, лежащей выше предела, определяемого
требованиями долговременной стабильности. Чтобы избежать проблем, свя-
занных с паразитными комбинационными составляющими сигнала на выходе
смесителя, частоту повторения импульсов можно получать от общего опорного
генератора, используя делитель частоты.
Манипулируемый второй гетеродин. Когерентный генератор в РЛС с им-
пульсной модуляцией задающего генератора должен обеспечивать полную
компенсацию флюктуаций фазы передатчика. Для подобной автоматической
подстройки фазы (АПФ) широко используется манипулируемый второй гете-
родин (рис. 12). Опорную фазу ПЧ получают, смешивая малую долю выход-
ного сигнала передатчика с выходным сигналом первого гетеродина в смеси-
теле, управляемом синхроимпульсом. Импульсное напряжение разностной
промежуточной частоты усиливается, а затем вводится в резонатор второго
гетеродина непосредственно после гашения колебаний.
Временная диаграмма, приведенная на рис. 13. иллюстрирует последова-
тельность операций в манипулируемом втором гетеродине. Колебания в резо-
наторе второго гетеродина гасятся перед подачей на него синхроимпульса для
устранения всей предыдущей информации о фазе. В момент появления синхро-
импульса процесс гашения прекращается и колебание нарастает в фазе
с синхроимпульсом. Поэтому фаза колебаний второго гетеродина всегда
согласована с разностью фаз колебаний на частотах первого гетеродина
и РЛС.
Если излучаемый импульс имеет очень малую длительность, то для растя-
гивания синхроимпульса можно использовать фильтр. Синхроимпульс большей
длительности менее критичен к отклонениям фазы на участке спада излучае-
мого импульса и, кроме того, позволяет реализовать более высокую доброт-
ность Q колебательного контура генератора, что улучшает кратковременную
стабильность. Следовательно, манипулируемый второй гетеродин выбирается
на основе компромисса между его способностью быстро войти в синхронизм
152
2.5. Гетеродины
по фазе после передачи каждого импульса и способностью запомнить фазу
на продолжительное время
Второй гетеродин с фазовым сдвигом. Схему АПФ второго гетеродина
(рис. 14) можно также использовать для коррекции фазы от импульса к им-
пульсу, но применение резонаторов с более высокой добротностью Q обеспе-
чивает более высокую стабильность. Синхроимпульс растягивается фильтром,
в данном случае для согласования с временем установления схемы АПФ,
Гасящий импульс
Рис. 12. Манипулируемый второй гетеродин.
в которой используется фазосдвигающее устройство с электронной регулиров-
кой, предназначенное для согласования фазы колебаний кварцевого гетеро-
дина с фазой синхроимпульса. Схема АПФ включается электронным ключом,
который замыкается только на время действия синхроимпульса. В интервале
между последовательными импульсами напряжение фазовой коррекции сохра-
няется на интегрирующем конденсаторе С.
13 "ременная paCi/S-a манииулируем<>>о вюрою icicpoAii.-a.
153
Гл. 2. Радиолокационные приемники
Если схема АПФ фазируется так, что она всегда захватывает сигнал
в момент, когда импульс второго гетеродина отстает по фазе на 90е от синх-
роимпульса, то она будет реагировать на начальные запаздывания по фазе
в пределах 0—180° почти так же, как линейная схема. Однако реакция на
начальные фазовые ошибки в остальных двух квадрантах, особенно в их гра-
ничных точках —90° и +270°, будет очень медленной. Чтобы удержать запаз-
дывание по фазе первоначально в первых двух квадрантах, в схему АПФ
можно добавить квадратурный фазовый детектор и быстродействующее циф-
Рис. 14. Второй гетеродин с фазовым сдвигом.
ровое фазосдвигающее устройство. Далее для завершения коррекции дейст-
вует аналоговое устройство. Время подстройки I, необходимое для того, чтобы
схема АПФ уменьшила фазовую ошибку с л/2 до е, равно
Т , л
* = !°ge— ,
op 2е
(11)
где б — чувствительность фазосдвигающего устройства, рад/В; 3 — чувстви-
тельность фазового детектора, В/рад; T=RC — постоянная времени, с; а —-
остаточная фазовая ошибка, рад. Следует заметить, что процесс стробирова-
ния и запоминания фазы не влияет на частоту второго гетеродина и требо-
вания к стабильности ее минимальны.
В качестве альтернативного варианта построения второго гетеродина
можно было бы рассматривать гетеродин, синхронизируемый по фазе схемой
АПФ. В этом случае корректируется генератор, управляемый напряжением
(ГУН), а не регулируемое фазосдвигающее устройство. Однако при этом
могут быть затруднения с возвращением ГУН к исходной частоте после кор-
рекции фазы. Любые несовершенства в стробировании и запоминании фазы
приводят к фазовым и частотным ошибкам. В этой схеме реализуемая доб-
ротность Q даже ниже, чем в манипулируемом гетеродине.
АПЧ в РЛС с импульсной модуляцией задающего генератора. На рис. 15
показаны два способа АПЧ в таких РЛС. Сплошной линией в нижней части
схемы изображена схема АПЧ первого гетеродина. Здесь система АПЧ удер-
живает разность между частотами магнетрона и первого гетеродина равной
средней частоте частотного дискриминатора ПЧ. При учете импульсного ха-
рактера сигнала ошибки здесь применимы уравнения (4) — (6), полученные
164
2.5 Гетеродины
для первого гетеродина, стабилизированного полым резонатором. Поэтому
у необходимо определять по выходному отфильтрованному напряжению ди-
скриминатора, которое относительно свободно от частотных составляющих,
близких к частоте повторения импульсов РЛС. Если эта фильтрация осуще-
ствляется фиксирующей непью, то чувствительность дискриминатора резко
повышается и устраняются разрывы характеристики вносимого фильтром за-
паздывания. Но даже при этом уравнения системы АПЧ не применимы, когда
|р|=/п/8, где fn — частота повторения импульсов, так как характеристика
Рис. 15. Два способа авюматической подс1ройк» частоты.
группового времени запаздывания имеет разрыв при |р|=/п/2. На практике
это обстоятельство никогда не является существенным, поскольку систему
АПЧ необходимо делать очень инерционной, чтобы изменения частоты от им-
пульса к импульсу были чрезвычайно малы.
Второй способ применения системы АПЧ в РЛС с импульсной модуля-
цией задающего генератора изображен на схеме рис. 15 штриховыми линиями.
Он отличается от первого способа лишь тем, что напряжение сигнала ошибки
воздействует на магнетронный генератор посредством следящего электродви-
гателя (двигателя настройки). Так как двигатель создает разрыв прерывно-
сти характеристики времени запаздывания и вместе с тем интегрирует напря-
жение сигнала ошибки, то для устойчивой работы схемы в общем случае
требуется фазоопережающее звено.
Передаточная функция разомкнутого контура для этой схемы записы-
вается в виде
Р О m) (1 рТ2)
(12)
тле 6 — характеристика . регулирования .частоты, магнетрона, Гц/рал угла по-
ворота вала; у — характеристика "дискриминатора, В/Тц; G — коэффициент
155
Г а 2 Радиолокационные приемники
усиления усилителя; li-R^C— постоянная времени фазоопережпющего звена
попочки, с; T2—R4C — постоянная времени цепочки, вызывающей отставание
по фазе, с; Тт — постоянная времени двигателя, с; Кт — характеристика дви-
:агеля, радиан угла поворота вала/с/В; где G) — частота, рад/с. Система
АПЧ при правильном расчете должна иметь крутизну передаточной характе-
ристики —20 дБ/декада до точки разрыва фазочастотной характеристики дви-
гателя при pTm=j, крутизну —40 дБ/декада до точки разрыва фазочастот-
ной характеристики фазоопережающей цепочки при рТ\—j и —20 дБ/декада
от точки единичного коэффициента передачи контура до точки последнего
разрыва непрерывности фазочастотной характеристики при pT^—j в области
за точкой единичного коэффициента передачи.
Реакция замкнутого контура на частотную ошибку магнетрона теорети-
чески равна нулю (если статическим трением в двигателе и редукторе пре-
небречь), а реакция на скорость ухода частоты магнетрона dFjdt
Е
dF
dt
dFjdt
byCiKm
(13)
Здесь также справедливы замечания, касающиеся фильтрации выходного
напряжения дискриминатора и ограничений частотной характеристики контура
регулирования, обусловленных частотой следования импульсов
АПЧ магнетрона предпочтительней АПЧ первого гетеродина, так как
спектр магнетрона настолько широк, что небольшие отклонения несущей ча-
стоты, вызванные быстродействующей системой АПЧ, на работе системы
не сказываются. В случае АПЧ первого гетеродина фазовая ошибка, обуслов-
ленная частотной ошибкой, накапливается в течение всего периода повторе-
ния импульсов, что может вызвать, например, ухудшение качественных пока-
зателей индикатора движущихся целей при увеличении дальности до цели.
2.6. Усилители с автоматической регулировкой
усиления (АРУ)
Области применения. РЛС обнаружения принимает отраженные сигналы,
столь различные по уровню, что обычно динамический диапазон приемника
с фиксированным усилением оказывается недостаточным. Различия в уровнях
отраженных сигналов объясняются различиями эффективных площадей рас-
сеяния илей (ЭПР) метеорологических условий и дальностей до целей.
Однако влияние дальности до цели на уровень отраженных радиолокацион-
ных сигналов сказывается гораздо сильнее всех прочих причин.
Мощность отраженного радиолокационного сигнала, принимаемого от от-
ражающего объекта, изменяется обратно пропорционально четвертой степени
дальности или удвоенного времени распространения энергии зондирую-
щего радиолокационного сигнала до этого объекта. Влияние дальности на
мощность сигналов мешает измерению размера цели. Но определение размера
цели необходимо для различения эхо-сигналов от «полезных» целей и эхо-сиг-
налов от насекомых, атмосферных аномальностей или птиц (для которых
в некоторых случаях ЭПР лишь немного меньше, чем для реактивного истре-
бителя). Кроме того, характеристики многих радиолокационных приемников
подвергаются нежелательным изменениям, когда динамический диапазон при-
нимаемых сигналов превышает динамический диапазон приемника. Влияние
этих факторов ослабляется схемой так называемой временной регулировки
усиления (ВРУ), при которой усиление радиолокационного приемника ме-
няется во времени так, что уровень усиленных радиолокационных эхо-сигна-
пов не зависит от дальности до соответствующих целей»
156
2.6. Усилители с автоматической регулировкой усиления (АРУ)
В РЛС обнаружения часто используются антенны с диаграммой направ-
ленности вида «косеканс-квадрат», усиление в которой уменьшается при уве-
личении угла места. При такой диаграмме направленности ограничивается
мощность излучения на больших углах места, поскольку самолет, находящий-
ся под большим углом места, неизбежно должен быть на малой горизонталь-
ной дальности от РЛС и для его обнаружения нужна меньшая мощность.
Однако при больших углах места мощность эхо-сигналов становится незави-
симой от горизонтальной дальности и вместо этого изменяется обратно про-
порционально высоте в четвертой степени. Поэтому характеристика схемы
ВРУ, оптимальная для отраженных радиолокационных сигналов, приходящих
под малыми углами места, ограничивает дальность обнаружения на больших
углах места. Такая несовместимость требований к схеме ВРУ для предельных
значений угла места резко ограничивает ее практическую ценность.
Ограничение, налагаемое «косеканс-квадратной» диаграммой направлен-
ности антенны на эффективность схемы ВРУ, можно ослабить при более
реальном подходе к построению РЛС. Установлено, что антенна должна
излучать больше энергии под большими углами места, чем это обеспечивается
при диаграмме направленности вида «косеканс-квадрат». Это объясняется
двумя причинами. Во-первых, дальность обнаружения при больших углах
места ограничивается не шумами системы, а отражениями от местных пред-
метов, вызванными облучением последних более мощной низковысотной частью
главного луча. Во-вторых, применение противником средств радиопротиво-
действия (РПД) уменьшает одновременно как максимальную горизонтальную
дальность, так и максимальную высоту действия РЛС. Уменьшение макси-
мальной высоты действия РЛС является более серьезным фактором. Обе эти
причины заставляют отказаться от диаграммы направленности вида «косе-
канс-квадрат» в пользу такой диаграммы, при которой антенна излучает
больше энергии под большими углами места (см. § 5.20)-
Изобретение многолучевых РЛС (типа SPS-2, FPS-7, MPS-20, FPS-27
и т. д.), у которых зона видимости формируется из нескольких лучей, позво-
лило использовать схему ВРУ без ограничений, связанных с влиянием диа-
граммы направленности антенны. В этих РЛС на каждый луч имеется по
одному приемному каналу, и ВРУ можно применять в этих каналах незави-
симо. Следовательно, приемники для верхних лучей могут иметь максималь-
ное усиление на малых горизонтальных дальностях, тогда как приемники для
нижних лучей — только на большой дальности.
Однако схема ВРУ не может компенсировать различие уровней прини-
маемых сигналов, обусловленное различием ЭПР местных предметов. Если
преобладают отражения от «распределенных» местных предметов (от дождя,
от морской поверхности, от дезориентирующих искусственных отражателей
и т. п.), то применение автоматической регулировки усиления (АРУ) обеспе-
чивает дополнительное подавление радиолокационного фона, что улучшает
условия обработки принятых сигналов. -Для реализации АРУ напряжение
с выхода детектора приемника после усиления и фильтрации подается по це-
пям обратной связи на входы цепей регулировки усиления последовательно
включенных каскадов усилителя. Постоянная времени цепей АРУ выбирается
достаточно малой, чтобы обеспечить много операций по регулировке усиления
в течение одного периода следования зондирующих импульсов, но вместе
с гем и достаточно большой, чтобы получить приемлемое «усреднение» фона
на экране индикатора. Поэтому реакция АРУ всегда несколько запаздывает.
Мгновенная автоматическая регулировка усиления (МАРУ) — специали-
зированный способ, редко применяемый на практике. МАРУ сохраняет диф-
фепенциальное усиление каскада при воздействии незатухающей немодулиро-
ванной или медленно модулированной помехи, редко представляющей собой
серьезную опасность. В одном из вариантов ее реализации схема МАРУ по
пени обратной связи регулирует отрицательное смещение каскада до тех пор,
пока положительные выбросы мешающего сигнала не окажу 1ся на уровне
157
Гл 2. Радиолокационные приемники
нормальной рабочей точки регулируемого каскада. Время реакции этой систе-
мы выбирается очень малым, чтобы она могла отслеживать изменения уровня
помехи. Биения отраженного от цели сигнала с узкополосной помехой создают
флуктуирующий сигнал на выходе детектора огибающей, который необходимо
продетектировать детектором частоты биений («третьим» детектором), если
этот сигнал должен быть отображен на индикаторе кругового обзора. Ни АРУ,
ни МАРУ не находят широкого применения в современных РЛС обнаруже-
ния. В них ввиду его повышенной эффективности используется логарифмиче-
ский обнаружитель с постоянной частотой ложных тревог (см. § 2.8).
РЛС сопровождения. В отличие от РЛС обнаружения РЛС сопровожде-
ния по дальности обрабатывает только конкретный, заданный отраженный
радиолокационный сигнал. Этот отраженный сигнал имеет умеренные мерца-
ния от импульса к импульсу; однако в основном изменения уровня сигнала
происходят из-за изменений дальности цели. Качество работы автоматической
системы слежения сильно зависит от этого уровня, который должен оста-
ваться постоянным на входе измерителя сигнала ошибки по дальности или
по углу. Регулировка уровня эхо-сигнала, подаваемого на вход измерителя,
осуществляется впдоизменнной системой АРУ, регулирующее напряжение
в которой формируется из эхо-сигнала, захваченного стробирующей цепью
следящей системы. Критерии устойчивости таких систем автоматического
регулирования разработаны в рамках теории импульсных систем обратной
связи.
Характеристики регулирования. Усилитель в ВРУ с экспоненциальной
характеристикой регулирования. Для правильной работы схему ВРУ требуется
сформировать быстро меняющееся управляющее напряжение, компенсирую-
щее изменение уровня отраженных радиолокационных сигналов в зависимости
от дальности. Наиболее распространенным методом реализации ВРУ является
применение повторяющегося пилообразно изменяющегося напряжения, которое
подается на входы цепей регулировки усиления ряда последовательно вклю-
ченных каскадов усилителя. Полярность этого напряжения выбирается такой,
чтобы усиление приемника возрастало при увеличении дальности. Управляю-
щему напряжению придается такая форма, чтобы коэффициент усиления
приемника по мощности изменялся пропорционально времени в четвертой
степени или чтобы коэффициент усиления по напряжению изменялся пропор-
ционально времени в квадрате.
Точная форма управляющего напряжения зависит от характеристик регу-
лирования каскада с регулируемым усилением G{U} и числа каскадов N:
GN{U)^t2. (14)
Если вид функции G(U} известен, то (14) можно решить относительно управ-
ляющего напряжения, получив для него выражение в явном виде.
Устройства с регулируемым усилением многих распространенных типов
имеют характеристику регулирования, часть которой можно аналитически
представить в виде зависимости
G«Go№, (15)
где G — коэффициент усилении каскада по напряжению; U — управляющее
напряжение; К—постоянная величина; <?0 — коэффициент усиления при
(7=0. Когда объединяют большое число каскадов, в каждом из них исполь-
зуется лишь небольшой нижний участок его характеристики и принятое в (15)
приближение становится достаточно хорошим.
Схема твердотельного транзисторного усилителя, обеспечивающего харак-
теристики регулирования по экспоненциальному закону с высокой точностью
[9] в, динамическом- -диапазоне,-составляющем многие десятки децибел, * пэка-
158
2.6. Усилители с автоматической регулировкой усиления (АРУ)
зана на рис. 16. Если параметры транзисторов одинаковы, то коэффициент
усиления этого каскада определяется по формуле
Q =(JL&~q (.U/kT)
\ /
(16)
где q — заряд электрона; k — постоянная Больцмана; Т — абсолютная темпе-
ратура. Эта формула имеет высокую точность на участке характеристики ре-
гулирования от точки, где описываемый ею эффект маскируется токами утеч-
ки, до точки, где нарушается неравенство
и^и0.
Генератор управляющего напряжения
ВРУ экспоненциальной формы. Закон изме-
нения управляющего напряжения, обеспечи-
вающий экспоненциальную характеристику
регулирования, получается в результате ре-
шения уравнений (14) и (15) относитель-
но U(t):
(2 log/-log Go). (17)
В прошлом ограничение, налагаемое на
ВРУ диаграммой направленности антенны,
настолько ограничивало пределы ее работы
по дальности, что не было смысла приме-
нять точную ВРУ. Преобладающая форма
напряжения ВРУ показана на рис. 17 — эго
задержанное или ограниченное экспоненци-
Рис. 16. Усилитель с экспоненци-
альной характеристикой регулиро-
вания.
альное напряжение, три параметра которого
находятся под контролем оператора РЛС. Экспонента приближается к лога-
рифмической кривой только на интервале времени, составляющем 40—200%
постоянной времени цепи. В более новых РЛС, для которых максимальная
Время
Урпоень
” Напряжение
Рис. 17. Три регулируемых параметра
управляющего напряжения простой си-
стемы ВРУ.
РиС. 18. Метод синтеза функции log t.
дальность действия ВРУ достигает 330 км, управляющее напряжение столь
простой формы не применяется.
Метод синтеза . логарифмической характеристики регулирования log./
показан на рис. 18. С N генераторов напряжения, экспоненциальной формы
159
Гл. 2. Радиолокационные приемники
с постоянными времени, находящимися в определенном соотношении, подают-
ся на суммирующий усилитель, осуществляющий их сложение с равным весом,
обеспечивая на выходе напряжение, следующее логарифмическому закону на
большом интервале времени, т. е. в широких пределах изменения дальности.
Выходное напряжение такого синтезированного генератора описывается двумя
параметрическими уравнениями.
U0~N — (Л4 — I) —0,739,
(18)
^10Л' 1 RC.
(19)
0----------1--0
Рис. 19. Схема упрощенного
генератора log t.
Независимая переменная М может принимать только целочисленные значения
от 1 до У Смысл величины М заключается в определении каскада, напряже-
ние на выходе которого только что снизилось до уровня 1/е. Эти уравнения
точно описывают значения выходного напряжения в эти заданные моменты
времени; в интервалах между ними ошибка по
времени не превышает 5%.
Упрощенная схема генератора, основанного
на принципе объединения цепей с определен-
ным образом подобранными постоянными вре-
мени, показана на рис. 19. Эта схема применя-
ется в РЛС, где необходима регулировка уси-
ления во времени при отношении максимальной
дальности к минимальной менее 100.
Усилитель с ВРУ, имеющей линейную ха-
рактеристику регулирования. Если напряжение
сигнала Е> и управляющее напряжение U на
схеме рис. 16 поменять местами с изменением знаков на противоположные, то
характеристика регулирования усилителя станет линейной;
V R
Усиление ж---------,
Re Ш
(20)
где U — теперь отрицательное управляющее напряжение, приложенное к эмит-
терному резистору Re. Выполненные по такой схеме усилители в интегральном
исполнении обеспечивают приближенно линейные характеристики регулиро-
вания в диапазоне более 20 дБ.
Линейную характеристику регулирования можно также получить при
соответствующем использовании устройства с квадратичной характеристикой,
такого, как, например, полевой транзистор. Из других приборов, имеющих
нелинейную характеристику, пригодны некоторые электронные лампы с рез-
кой отсечкой и многоэлектродные электронные лампы, применяемые в каче-
стве модуляторных. Если усилительный каскад обладает линейной характе-
ристикой регулирования, то оптимальным будет управляющее напряжение
вида
(21)
Таким образом, два каскада усилителей с линейной регулировкой усиления
при управляющем напряжении простой пилообразной формы ибеспечиваюг
требуемую компенсацию зависимости мощности принимаемого сигнала от чет-
вертой степени дальности.
160
2.6. Усилители с автоматической регулировкой усиления (АРУ)
Схема ВРУ с обратными характеристиками. При одном необычном спо
собе регулировки усиления, который дает результаты весьма близкие к рас-
четным, используется ограничитель в качестве вычислителя отношения [10].
Как показано на рис. 20, широкополосный шумовой сигнал или внеполосный
немодулированный синусоидальный с эффективным значением U вместе с сиг-
налом Ef подается на вход широкополосного ограничителя. Вслед за ограни
чителем включен фильтр, согласованный со спектром сигнала. Если прене-
бречь затуханием в фильтре, коэффициент усиления на частоте сигнала равен
где а — выходной порог ограничителя. Эта формула достаточно точна при
Рис. 20. Регулировка усиления методом маскирования.
Такой способ регулировки можно трактовать как намеренное подавление
сигнала регулируемой помехой. Он применяется в приемниках с постоянной
частотой ложных тревог (§ 2.8), которые обнаруживают цели, только когда
уровни отраженных от них сигналов превышают помеху в заданное число
раз. Регулировки усиления других типов оказывают на приемники с постоян-
ной частотой ложных тревог незначительный эффект.
Оптимальное управляющее напряжение для ограничительного каскада
с регулируемым усилением имеет форму
a sin mt
(23)
Такое напряжение невозможно генерировать непосредственно, но можно полу-
чить, модулируя несущую частоты m подходящим видеосигналом. Можно
также поступить иначе и использовать два последовательно включенных кас-
када ограничения и фильтры для формирования функции, пропорциональной
1Д2 при заданном пилообразном напряжении высокой частоты формы
U^t sin pt.
ВРУ по высокой частоте. В СВЧ аттенюаторах с электронной регулиров-
кой в качестве шунтирующего элемента широко используется р—I—п-диод.
Такие аттенюаторы часто применяются для регулировки усиления в высоко
частотном тракте радиолокационных приемников, если необходимо расширить
динамический диапазон смесителя или УВЧ.
Требуемые характеристики контура АРУ. Контур АРУ приемника
(рис. 21) имеет коэффициент усиления, который нормально меняется в широ-
ких пределах в зависимости от входного сигнала. Поэтому для обеспечения
безусловной устойчивости контура регулирования при построении системы
выбирают характеристики I типа (с крутизной ската в области верхних ча-
стот —20 дБ/декада). Это удовлетворительное решение для многих примене-
ний, где допустима инерционная система АРУ. Более быстродействующие си-
стемы АРУ II типа нельзя использовать, если усиление по контуру не оста-
ется постоянным,
б Зак. 2247 161
Гл. 2. Радиолокационные приемники
Если закон регулирования в каждом каскаде с регулируемым усилением
является экспоненциальным, то дифференциальный коэффициент усиления
разомкнутого контура выражается соотношением
(24)
Все величины, входящие в (24), пояснены на рис.
дует, что если контур имеет усиление,
выходного сигнала постоянным, то
Первый Н-ц
каскад каскад
GPJ}=GozUi G(U)~Gozui
21.‘Из этого уравнения сле-
достаточное для поддержания уровня
коэффициент усиления контура также
не зависит от уровня входного сигна-
ла В этом случае существует значи-
тельный простор в выборе характери-
стик среза контура АРУ. Следова-
тельно, в системе АРУ, от которой
требуется быстрая реакция, должна
использоваться экспоненциальная ре-
гулировочная характеристика.
В моноимпульсной РЛС со срав-
нением уровней сигналов необходимо,
чтобы усилители с регулируемым уси-
лением были согласованными по амп-
литудно- и фазочастотным характери-
стикам. Большие фазовые погрешно-
сти могут привести к искажениям ин-
формации об угле цели. Однако зна-
чение имеют только относительные
фазовые ошибки.
2.7. Фильтрация
Фильтрация во всей радиолокационной системе. Фильтр служит основ-
ным средством, при помощи которого в приемнике осуществляется различение
полезных отраженных сигналов и помех многих типов. По своим характери-
стикам он может приближаться к устройствам одной из двух форм: к согла-
сованному фильтру — пассивной системе, частотная характеристика которой
комплексно сопряжена со спектром излучаемого сигнала, или к корреляцион-
ному смесителю — активному устройству, в котором производится сравнение
принимаемых сигналов с задержанной копией излучаемого сигнала. Предпо-
лагается, что инерционность фильтров приемника достаточно мала, поэтому
к моменту появления следующего импульса переходные процессы от преды-
дущего успевают затухнуть, т. е. отклик фильтров обусловлен лишь одним
излученным импульсом.
На самом деле большинство РЛС облучают цель серией импульсов, преж-
де чем главный лепесток диаграммы направленности полностью отойдет от
направления на эту цель, и в приемнике некоторым образом комбинируется
ряд принятых эхо-сигналов. Они могут обрабатываться интегратором, анало-
гичным согласованному фильтру в том смысле, что импульсная характери-
стика его должна соответствовать модуляции отраженного сигнала, произво-
димой сканирующей антенной. Принятые эхо-сигналы могут непосредственно
подаваться на индикатор кругового обзора, и тогда оператор визуально инте-
грирует отметки цели в секторе, который соответствует ширине главного
лепестка диаграммы направленности антенны. Чтобы отличить нужные целя
от ненужных, могут применяться различные доплеровские методы, включая
селекцию движущихся целей. Для всей радиолокационной системы эти опе-
162
2.7. Фильтрация
рации можно считать фильтрацией, но они рассматриваются в других главах
данного справочника. Здесь же рассмотрены те вопросы фильтрации в прием-
нике, которые связаны с отделением одиночного импульса от помех, хотя
будет учитываться, что проблема последующей фильтрации последователь-
ности эхо-сигналов от одиночной цели требует также рассмотрения вопросов
стабильности приемного фильтра.
В некоторой точке тракта радиолокационного приемника детектор соз-
дает выходное напряжение, являющееся некоторой функцией огибающей сиг-
нала ПЧ. Если эта функция является линейной, то такой детектор называется
детектором огибающей; логарифмические детекторы будут рассмотрены
в § 2.9. Отклик линейного детектора на слабые сигналы, которые незначи-
тельно превышают уровень шума, был предметом интенсивных исследова-
ний [11]. Различные пары частотных составляющих входного шума, которые
могут далеко отстоять от спектра полезного эхо-сигнала, могут взаимодейст-
вовать и в результате перекрестной модуляции создавать составляющие ча-
стоты биений на выходе детектора, лежащие в полосе полезного сигнала.
Аналогично в результате перекрестной модуляции с шумом некоторая часть
энергии полезного сигнала попадает за пределы желательной полосы частот.
Поэтому фильтрация после детектирования по огибающей менее эффективна,
чем додетекторная фильтрация. Все последетекторные цепи должны иметь
полосу пропускания в несколько раз шире спектра эхо-сигнала, а додстектор-
ную фильтрацию необходимо оптимизировать, как будет описано ниже.
Определения. Следует заметить, что не существует общепринятых опреде-
лений таких понятий, как длительность импульса и ширина спектра излучае-
мого сигнала, импульсная характеристика и полоса пропускания фильтров или
эквивалентные параметры антенны — ширины главного лепестка и ширина
спектра, обусловленная сканированием антенны. Смысл этих понятий необ-
ходимо пояснять.
Энергетические определения. Для обнаружения радиолокационных эхо-
сигналов на фоне шумов фундаментальными параметрами являются уровни
энергий излученного сигнала, шума приемника и отраженных сигналов,
принимаемых при сканировании цели антенной. Эти энергетические парамет-
ры определяют длительность прямоугольной функции времени, которая имеет
такое же максимальное значение и такую же энергию, как и соответствую-
щая реальная функция. Единственная цель такого подхода — связать макси-
мальное значение функции с более существенным параметром — энергией
Из перечисленных параметров легко измеряется только энергия импульса,
равная отношению средней мощности к коэффициенту заполнения импульсов.
Эту энергию можно использовать непосредственно в уравнении дальности
радиолокации, не определяя раздельно пиковую мощность и длительность
«энергетического» импульса. Шумовая, или энергетическая, полоса приемника
часто используется при 'теоретическом анализе, но редко задается в перечне
параметров РЛС; шумовую полосу даже нет необходимости включать
в уравнение дальности, если приемник приближается к согласованному
фильтру.
Определения по уровню —3 дБ. Чтобы сделать возможным непосредст-
венное измерение параметров по форме сигналов, развертываемых на экране
осциллографа или на ленте самописца, было принято определять ширину
функций либо на уровне половинной мощности (—3 дБ), либо на уровне поло-
винного напряжения (—6 дБ). Для функций, напоминающих колоколообраз-
ные гауссовы кривые, ширина на уровне —3 дБ является точным приближе-
нием к их энергетической ширине; частотная характеристика приемника
обычно отвечает этому условию достаточно точно. Огибающие импульсов
и спектров импульсов на выходе передатчиков обычно значительно откло-
няются от гауссовых.
Определения по уровню —6 дБ Хотя ширина главного лепестка диаграм-
мы направленности антенны (и принятых эхо-сигналов) часто определяется
163
Гл. 2. Радиолокационные приемники
по точкам, лежащим на уровне —3 дБ, это фактически определение по уров-
ню —6 дБ принимаемых эхо-сигналов при сканировании цели антенной; в тех
РЛС, у которых главные лепестки диаграммы направленности на передачу
и на прием неодинаковы, обычно задается ширина результирующего лепестка
на передачу и прием на уровне —6 дБ. В большинстве случаев при опреде-
лении формы импульсов в качестве параметров используют напряжения, при-
чем время нарастания и время спада определяются соответственно на уров-
нях 10 и 90%, а длительность импульса — на уровне 50% (—6 дБ). Анало-
гично частотные характеристики фильтров часто определяются частотными
интервалами между точками, лежащими на уровнях —6 и —60 дБ. В этой
главе будут в основном использоваться определения по уровню —6 дБ.
Таблица 2
Приближения к согласованным фильтрам
Форма импульса Фильтр Оптимальное значение произведения ширины полосы на длитель- ность Потери рас- согласования, дБ
—3 дБ -6 дБ энерге- тиче- ски й
Гауссова Гауссов полосовой Полосовой с прямоугольной частотной характеристикой 0,92 1,04 0,44 0,72 0,50 0,77 0 0,49
Прямоугольная » » » » Гауссов полосовой 5 резонансных контуров с оди- наковой настройкой 2 резонансных контура с оди- наковой настройкой Однополюсный фильтр Полосовой с прямоугольной частотной характеристикой 1,04 0,97 0,95 0,70 1,37 0,72 0,67 0,61 0,40 1,37 0,77 0,76 0,75 0,63 1,37 0,49 0,50 0,56 0,88 0,85
Прямоугольная с внУтриимпулъс- ной ЛЧМ Г ауссов 1.04 длительности по уровню —6 дБ эквива- лентного sin х/х импульса (0,86 ширины его спектра) 0,6
Совершенно независимо от степени его распространенности, имеется
несколько рациональных соображений в пользу употребления параметров,
определяемых по уровню -—6 дБ. Как указано в табл. 2, значение произве-
дения ширины спектра на длительность импульса, оптимальное для обнару-
жения импульса на фоне белого гауссова шума, при определении на уровне
—6 дБ не отклоняется существенно от единицы у большинства практически
используемых сигналов. Энергетические определения или по уровню — 3 дБ
приводят к разбросу оптимальных значений в широких пределах в зависи-
мости от формы импульса и полосы пропускания фильтра; при использовании
164
2.7. Фильтрация .
этих параметров невозможно сделать быструю оценку оптимальной ширины
спектра сигнала или полосы пропускания фильтра.
Распределенные отражения от местных предметов, дождя или облака
искусственных пассивных отражателей часто представляют более серьезную
помеху при обнаружении цели, чем шум. При пропускании через фильтр
и интегратор с оптимальными полосами пропускания принятый эхо-сигнал
растягивается по дальности и по угловым координатам; спектр же местных
помех на выходе приемника, будучи произведением спектра излученного сиг-
нала и частотной характеристики приемника, уже, чем каждый из них в от-
дельности. Поэтому ширина лепестка на передачу и на прием по уровню
—6 дБ и длительность импульса по уровню —6 дБ весьма точно аппрокси-
мируют протяженность радиолокационной ячейки, из которой «оптимальный»
приемник накапливает энергию помех.
Подведем итог по общей полезности определений параметров по уровню
—6 дБ: 1) в уравнение дальности для обнаружения цели на фоне шума не
требуется вводить импульсную мощность, длительность импульса или полосу
пропускания приемника; только при вычислении эффективности интегратора
необходимо знать число принимаемых импульсов (при этом общепринятым
является определение по уровню —6 дБ); 2) оптимальная ширина спектра
близка к величине, обратной длительности эхо-сигнала, если оба эти пара-
метра измеряются на уровне —6 дБ (это положение относится как к фильтру
приемника, так и к интегратору); 3) энергия помех от сигналов, отраженных
от местных предметов, дождя или облака искусственных пассивных отража-
телей. которая воспринимается приближенно согласованным приемником,
хорошо определяется длительностью импульса, измеренной на уровне —6 дБ,
и шириной лепестка диаграммы направленности на передачу и прием, также
определенной на уровне —6 дБ.
Приближения к согласованным фильтрам. Наиболее эффективным фильт-
ром для различения белого гауссова шума и полезных эхо-сигналов является
согласованный фильтр — пассивная цепь, частотная характеристика которой
есть функция, комплексно-сопряженная со спектром излученного сигнала.
Он может обрабатывать эхо-сигналы, пришедшие с любых дальностей. Кор-
реляционный смеситель — активное устройство, которое сравнивает прини-
маемые сигналы с задержанной копией излученного сигнала, математически
эквивалентен согласованному фильтру, но он реагирует только на эхо-сш
налы, приходящие с одной заданной дальности; вследствие этого его исполь-
зование в радиолокационных системах более ограничено.
Табл. 2 иллюстрирует относительные потери вероятности обнаружения,
возникающие в результате использования различных приближений к согласо-
ванному фильтру с целью упрощения аппаратуры или улучшения фильтрации
помех других видов. Оптимальные значения полос пропускания этих фильт-
ров также приведены в таблице в виде произведения полосы пропускания
фильтра ча длительность импульса. Обычно ширина полосы пропускания
может отклоняться от оптимального значения на 30—50%, прежде чем вероят-
ность обнаружения ухудшится дополнительно на 0,5 дБ. Эта довольно широ-
кая область «оптимальных значений» центрируется вблизи значения произ
ведения полосы на длительность, равного единице, для всех применяемых
фильтров, если использовать определения по уровню —6 дБ.
Обычно полосу пропускания радиолокационного приемника выбирают
несколько больше оптимального значения — с учетом возможного сдвига
между спектром эхо-сигнала и полосой пропускания фильтра, обусловленного
скоростью движения цели и допусками на точность настройки приемника.
Хотя из-за этого приемник становится более подверженным воздействию
узкополосных помех не на основной частоте настройки (рис. 22), зато для
него сокращается время, необходимое для восстановления чувствительности
приемника после воздействия импульсной помехи (рис. 23). Эти графики
также показывают, что с точки зрения хорошего подавления помех обоих
IGi
Гл. 2. Радиолокационные приемники
указанных типов форма частотной характеристики фильтра в полосе пропу-
скания даже важнее, чем ширина полосы пропускания. Следует избегать
применения фильтров с прямоугольной формой как частотной характеристики
в полосе пропускания, так и импульсной характеристики; чем точнее прибли-
жение данного фильтра к гауссову фильтру, тем лучше скаты характеристик
как в частотной, так и во временной области.
Последний пример в табл. 2 — радиолокационный сигнал с внутриим-
пульсной линейной частотной модуляцией (ЛЧМ) при прямоугольной оги-
бающей. Фильтр в таких РЛС выполняет дополнительную функцию — взве-
Рис. 22. Частотные характеристики полосовых фильтров.
шивапие спектра эхо-сигнала для подавления временных боковых лепестков
(«звона»), которые появляются на выходе декодера. Эти побочные выходные
импульсы позволяют «сильной» цели маскировать присутствие соседних более
«слабых» целей, что является источником своего рода собственных помех.
Гауссов фильтр с оптимальной полосой пропускания создает временные боко-
вые лепестки на уровне —20,5 дБ, и в РЛС с внутриимпульсной ЛЧМ обыч-
но используется полоса пропускания, меньшая оптимальной, для дальнейшего
уменьшения временных боковых лепестков.
Резюмируя, можно сказать, что точно так же, как низкой шумовой тем-
пературой радиолокационного приемника обычно жертвуют ради обеспечения
некоторых более важных характеристик (динамического диапазона, ширины
полосы пропускания и т. д.), фильгр приемника часто выбирают отличным от
согласованного фильтра с целью достижения более высокой защищенности
от помех, отличающихся от шума.
Проблемы фильтрации, связанные с побочными каналами приема при
преобразовании частоты. Приближение к согласованному фильтру, как пра-
вило, легче всего осуществляется на некоторой частоте, отличной от частоты
излучения РЛС. Оптимальная частота фильтрации зависит от ширины спект-
168
2.1. Фильтрация
ра эхо-сигнала и .характеристик составляющих элементов фильтра. Поэтому
в радиолокационном приемнике производится преобразование частоты эхо-
сигнала к средней частоте фильтра посредством одной или более ступеней
преобразования с использованием гетеродинов и смесителей.
Механизм возникновения побочных каналов приема при преобразовании
частоты описан в § 2.4. Частоты мешающих сигналов могут преобразовы-
ваться в требуемую промежуточную частоту, несмотря на то, что они доста-
точно далеко отстоят от частоты полезного эхо-сигнала на входе смесителя.
Способность приемника подавлять подобные помехи определяется фильтра-
цией до смесителя и качеством самого смесителя.
О
10
20
30
00
50
60
907.
7О°/.
7%
0,5 1 2 3056289
Произведение бремен ноге окнонения от максимума выходного
импульса на полосу пропускания по уровню-бдб (B^dt)
Рис. 23. Импульсные характеристики фильтров.
Зеркальный канал — наиболее опасный из побочных каналов приема, но
в смесителе, построенном по схеме подавления сигналов зеркального канала,
легко обеспечивается их подавление на 20 дБ. Фильтр может дополнительно
ослабить сигналы на частоте зеркального канала, прежде чем они достигнут
смесителя, если отношение входной и выходной частот смесителя не превы-
шает значения нагруженной добротности Q имеющихся фильтров Необходи-
мостью обеспечить заданную степень подавления сигналов зеркального капала
объясняется, почему в некоторых приемниках применяется двойное преобра-
зование частоты, а не непосредственное преобразование частоты эхо-сигнала
в конечную промежуточную частоту в одной ступени преобразования.
Прочие побочные комбинационные колебания становятся более опасными,
если отношение входной и выходной частот понижающего преобразователя
меньше 10. Номограмма побочных комбинационных колебаний (рис. 2) пока-
зывает, что существуют определенные значения отношения частот, которые
обеспечивают свободные от побочных комбинационных колебаний полосы
частот шириной примерно 10% от номинала промежуточной частот. Исполь-
зуя высокое значение первой промежуточной частоты, можно устранить ме-
шающее воздействие зеркального канала и обеспечить широкий диапазон
перестройки приемника, свободный от побочных колебаний. Тем не менее
167
Г л. 2. Радиолокационные приемники
необходимость фиЛьтР9ции до смесителя сохраняется, поскольку ближайшие
побочные каналы Приема имеют относительно низкий порядок и могут созда-
вать на выходе см^сителя сигналы больших уровней.
Помимо внеш^их Источников помех разработчик РЛС должен учитывать
внутренние источн)1КИ- РЛС с селектором движущихся целей и импульсно-доп-
леровские РЛС ос°бенно подвержены воздействию любых подобных колеба-
ний внутреннего пРоис^ождения, которые не когерентны, т. е. не имеют оди-
наковую фазу npji излучении каждого из импульсов. Из-за их некогерент-
ности действие побочного сигнала получается различным для каждого
эхо-сигнала и способность подавления помех от местных предметов ухуд-
шается.
В истинно коГеРентной РЛС все колебания, генерируемые на различных
частотах, в том цисле в промежутке времени между импульсами, так или
иначе формируют^ °Т единственного стабильного генератора. Когерентны
не только все полезные желательные колебания, но также и все возникающие
внутри РЛС побоЙНЬ!е нежелательные сигналы и они не влияют на подавле-
ние помех от местных Предметов.
Чаше всего, oAHa&o, РЛС с селектором движущихся целей и импульсно-
доплеровские РЛб бывают псевдокогерентными, как показано на рис. 24.
Второй гетеродин является опорным эталонным генератором для фазового
детектора и может использоваться как времязадающее устройство, с помощью
которого определяется период повторения импульсов. Второй гетеродин так-
же используется /ля формирования частоты передатчика, сдвинутой относи-
тельно частоты некоге6ентного первого гетеродина. Ни первый гетеродин, ни
передатчик некогеРентНы; их фазы различны для каждого излучаемого
импульса. Только в Тракте промежуточной частоты приемника эхо-сигнал
от неподвижной ц£ли в рабочей полосе частот когерентен (a=const, где а —
фаза эхо-сигнала, когда передатчик включен); практически все побочные
колебания на выходе смесителя некогерентны и создают флуктуирующий сиг-
нал на промежуточной частоте.
Единственная побочная составляющая, которая может быть когерентной
в псевдокогерентй°й ^ЛС, это колебание на зеркальной частоте. Спектр
импульсного сигнала Может иметь довольно широкие скаты и заходить в по-
лосу зеркального канала (см. рис. 24). Свернутый спектр на промежуточной
частоте имеет две составные части в пределах полосы пропускания согласо-
ванного фильтра, и, если относительная ширина полосы пропускания по ПЧ
велика, нежелатеЛьная зеркальная составляющая может иметь значительный
уровень. Только тогда, когда она когерентна, ухудшение степени подавления
помех от местных предметов не будет иметь места.
Рассмотрим псевДОкогерентную РЛС, в которой частота следования им-
пульсов формируется °т независимого источника. В этом случае фаза второго
гетеродина а меняется от импульса к импульсу и, хотя фаза эхо-сигнала от
неподвижной цел!’ в рабочей полосе частот меняется в той же мере, фаза
побочного эхо-сигнала по зеркальному каналу приема изменяется в проти-
воположную сторонУ- При этом степень подавления эхо-сигнала от неподвиж-
ной цели ограничиваетея уровнем побочного эхо-сигнала.
Очевидно, чтя общая фильтрующая способность РЛС, ее способность
усиливать желатеЛьные эхо-сигналы и подавлять нежелательные помехи может
ухудшаться из-за побочных каналов приема на различных этапах преобразо-
вания. Особенно подвержены такому ухудшению РЛС с селектором движу-
щихся целей и импульсно.доплеровские РЛС, которые могут не обеспечивать
ожидаемого улучшения степени подавления помех от местных предметов, если
сигнал второго гетеродина не имеет одной и той же фазы в момент излуче-
ния передатчиком каЩдого импульса. Все РЛС подвержены воздействию
помех не на основой частоте приема, которые, если их не отфильтровать до
достижения ими смесиделЯ; могут создать заметный выходной сигнал в основ-
ной полосе по ПЧ.
168
2.7. Фильтрация,
Способность РЛС с селектором движущейся цели и импульсно-доплеров-
ских РЛС подавлять помехи от местных предметов может ухудшиться, если
фильтр приемника не вполне стабилен. Основные характеристики приемного
тракта (коэффициент усиления, групповое время запаздывания, частотная или
3)
Рис. 24. Псевдокогерентная РЛС:
а «• структурная схема; б — ВЧ спектр эхо-сигнала; в — спектр эхо-сигнала по ПЧ,
169
Гл. 2. Радиолокационные приемники
импульсная характеристика) должны быть стабильны, чтобы их влияние на
каждый импульс принятого эхо-сигнала было одинаково.
Рассмотренные выше побочные каналы приема при преобразовании и про-
блемы, связанные с работой первого и второго гетеродинов, изложенные
в § 2.5, характеризуют лишь наиболее вероятные, встречающиеся в практике
источники нестабильности. Для более полного решения проблемы нестабиль-
ности необходимо уделить должное внимание и другим элементам прием-
ника. Вибрации или пульсации в цепях питания могут привести к модуляции
модуля и фазы коэффициента передачи (особенно в усилителях высокой ча-
стоты). Такая модуляция ухудшит степень ослабления помех от местных
предметов, если частота пульсаций не является гармоникой частоты повторе-
ния импульсов.
2.8. Некоторые соображения о приеме с постоянной
частотой ложных тревог
Определение. Многие РЛС работают в условиях, когда собственный шум,
создаваемый в приемнике, не является доминирующим источником помех.
Нежелательные эхо-сигналы от дождя и местных предметов и нежелательные
сигналы от других источников излучений часто превышают уровень шума
приемника. Эти источники помех могут полностью забить экран индикатора
РЛС или перегрузить ЭВМ, осуществляющую решения типа «да—нет»
с целью выявления эхо-сигналов, отраженных от целей, подлежащих обнару-
жению или сопровождению.
Дискретный процесс решения этой задачи обычно связан с установлением
порогов обнаружения на входе и выходе цифрового вычислителя. В каждой
точке можно определить вероятность обнаружения желательной цели и веро-
ятность ложной тревоги из-за шума или одного из упомянутых выше источ-
ников помех. Оператор, наблюдающий экран индикатора кругового обзора
(ИКО), принимает в некотором смысле сходное решение, и поэтому понятие
ложных тревог применимо к большинству радиолокационных систем. И опе-
ратор и цифровой вычислитель будут стремиться поддерживать частоты лож-
ных тревог на некотором приемлемом постоянном уровне путем автоматиче-
ского регулирования усиления в приемном тракте РЛС при изменении
интенсивности помех. Приемники, обладающие этим свойством, называются
приемниками с постоянной частотой ложных тревог или ПЧЛТ-приемниками.
Методы амплитудного различения. Для изменения коэффициента усиле-
ния приемного тракта РЛС можно использовать усилители с регулируемым
усилением (наподобие описанных в § 2.6), но их возможности по поддер-
жанию ПЧЛТ ограничены. Система ВРУ меняет усиление в соответствии со
средним ожидаемым уровнем отражений от дождя или местных предметов
на различных дальностях, но отклонения от этих ожидаемых уровней или
воздействие активных источников помех могут привести к нарушению нор-
мальной работы РЛС. Система АРУ будет стремиться поддерживать уровень
помехи постоянным [12], но такая система всегда инерционна и медленно
реагирует на изменение уровня помех. Например, системы автоматической
регулировки усиления по уровню шума (ШАРУ) производят стробирование
шума в нерабочих интервалах между излученным и принимаемым импульсами
и приводят обычно к неправильному решению о том, что данный уровень
помех характерен для всех дальностей.
Если селектируемая цель по своим физическим размерам мала по срав-
нению с размерами ячейки разрешения РЛС по дальности, а мешающие сиг-
налы распределены по протяженной зоне, большой по сравнению с размером
ячейки разрешения, то знание этих особенностей цели и помех можно исполь-
зовать для их различения. На выходе логарифмического обнаружителя на-
пряжение от подобных пространственно распределенных помех от местных
I7J
2.8. Некоторые соображения о приеме с постоянной чистотой ложных тревог
предметов можно разделить на две составляющие. Одна составляющая бы-
стро меняется с дальностью, и ее распределение вероятности и скорость флук-
туаций хорошо согласуются с распределением вероятности и скоростью флук-
туаций шума независимо от величины сигналов, отраженных от местных
предметов. Крони [13] показал, что среднеквадратическое значение выбросов
на выходе логарифмического обнаружителя для сигналов, подчиняющихся
релеевскому распределению в основной полосе частот, равно ал/У24, где а —
крутизна логарифмической характеристики, B/дБ; эта составляющая имеет
ПЧЛТ-характеристику для помехи этого типа. Другая составляющая напря-
жения меняется более медленно в зависимости от дальности, представляя
среднюю интенсивность помех от местных предметов или мешающих эхо-сиг-
налов на любой дальности; возможность получения ПЧЛТ-характеристики
зависит от того, в какой степени эта составляющая может быть подавлена
фильтром.
В приемнике с логарифмическим обнаружителем с малой постоянной вре-
мени (логарифмический МПВ-приемник) используется фильтр простейшей
формы, дифференцирующая цепь с малой постоянной времени. Некоторые его
недостатки можно устранить, применяя более сложный фильтр. Для разли-
чения этих двух типов приемников второй из них был назван логарифмиче-
ским ПЧЛТ-приемником.
Как показано на рис. 25, цепочку с малой постоянной времени можно
рассма1ривать как приближение к дифференцирующему звену или к комби-
нации интегрирующего и вычитающего звеньев. Вторая интерпретация явля-
ется более полезной, так как позволяет четко определить ее недостатки.
Назначение интегратора — запоминать медленно меняющееся напряжение, ха-
рактеризующее среднюю интенсивность помех от окружающих местных пред-
метов. Однако если постоянная времени приближенно соответствует длитель-
ности импульса, то «среднее» есть просто эхо-сигнал от местного предмета
из соседней ячейки дальности и точно так же шумоподобен, как исходный
сигнал, отраженный от местных предметов. Вероятность обнаружения ухуд-
шается, так как флуктуации на выходе вычитающего звена возрастают из-за
присутствия двух шумоподобных сигналов и из-за того, что некоторая часть
энергии сигнала, отраженного селектируемой целью, подавляется.
При большой постоянной времени ухудшение вероятности обнаружения
устраняется, но характерная для такого режима слишком замедленная реак-
ция недопустима. В каждой ячейке разрешения по дальности фронты сигна-
лов, отраженных от местных предметов, остаются видимыми, а на спадах
появляются тени. Задержки в интеграторе и указанный односторонний харак-
тер выборок из помехи от местных предметов ограничивают его способность
отслеживать изменения интенсивности помех от местных предметов.
Рис. 26 иллюстрирует более сложный фильтр логарифмического ПЧЛТ-
приемника. Узкополосный фильтр видеочастот с плавной и симметричной им-
пульсной характеристикой усредняет сигнал помехи в пределах около 10 ячеек
разрешения. Его выходное напряжение является приемлемым «средним»,
имеющим малую дисперсию по сравнению с входным напряжением, и эхо-
сигнал от одиночной цели создает незначительное его возмущение. Поэтому
вероятность обнаружения ухудшается в незначительной мере при вычитании
этого среднего из сигнала. В схеме имеется линия задержки, согласованная
по времени запаздывания с фильтром, так что выборка из помехи от местных
предметов является симметричной. Данная схема одинаково реагирует на
фронт и спад сигнала помех от местных предметов.
Характеристика ПЧЛТ зависит от способности фильтра отслеживать
любые изменения средней мощности помех. Длительность импульсного отклика
фильтра должна быть меньше длительности сигнала помех, соответствующего
протяженности обычной группы отражающих местных предметов, чтобы
ПЧЛТ-приемник быстро реагировал на изменяющуюся помеховую обстановку.
Если эхо-сигналы должны отображаться на экране ИКО, то обычно
171
Гл. 2. Радиолокационные приемники
в схему вводится антилогарифмическая цепочка для восстановления коит-
растности изображения и устранения снижения вероятности обнаружения,
связанного с логарифмическим сжатием. Грин [14] вычислил потери для
диаграммы направленности антенны гауссовой формы, сканирующей цель, при
обработке эхо-сигналов квадратичным интегратором. Если исключить антило-
гарифм ическую цепь, то потери по мощности при 100 облучениях цели за
время ее нахождения в главном лепестке составляют около 1 дБ; при 10 об-
лучениях они достигают 0,5 дБ. Цифровые интеграторы, в которых решение
Эка-сигнал по ВЧ
I
Логиоцвичинеснии
детехглор
U а-)
Эхо—сигнал по ПЧ
видеосигнал на индикатор
Рис. 26. Логарифмический ПЧЛТ-обнару-
житель для различения точечных и рас-
пределенных целей.
видеосигнал на инданаклор
Рис. 25. Логарифмический обнаружитель
с малой постоянной времени для различе-
ния точечных и протяженных целей.
о превышении сигналом порога принимается по каждому импульсу, не ухуд-
шают своих характеристик при использовании логарифмических обнаружи-
телей и поэтому не нуждаются в антилогарифмической цепочке.
Методы фазового различения. В ПЧЛТ-приемниках другого класса вся
информация об уровне эхо-сигналов полностью утрачивается вследствие
использования ограничителей с уровнем ограничения, лежащим .значительно
ниже нормального уровня шумов [15]. В этих приемниках различение полез-
ных эхо-сигналов и помех осуществляется исключительно по изменению во
времени фазовой структуры напряжения на выходе ограничителя — на основе
того, насколько хорошо она коррелирована с фазовым кодом излученного
импульса.
В тех РЛС, которые излучают последовательность простых импульсов,
характеристикой, позволяющей различать полезный эхо-сигнал от шума или
помех от местных предметов, является мгновенная частота, которая остается
постоянной на протяжении импульса независимо от значения несущей часто-
ты. Для улучшения этой способности различения и использования других
преимуществ сжатия импульсов часто применяют более сложные фазовые
коды излучаемых сигналов. На этом общем принципе основано широкое мно-
гообразие аппаратурных реализаций, каждая из которых обладает теми или
172
2.8. Некоторые соображения о приеме с постоянной частотой ложных тревог
иными преимуществами при подавлении помех определенных типов и недо-
статками в некоторых других помеховых ситуациях. Тем не менее всем им
присущи определенные обшие свойства, на которых целесообразно остано-
виться.
В отличие от методов амплитудного различения методы фазового разли-
чения не связаны с проблемой скорости реакции на изменяющуюся интенсив-
ность помех. Они чувствительны только к тому, насколько хорошо эхо-сиг-
нал соответствует заданной внутриимпульсной фазовой структуре, и для них
допустимы быстрые изменения уровня сигнала в широких пределах.
В принципе режим ограничения разрушает некоторую часть информации,
и в результате качество системы несколько ухудшается. Возможность обна-
ружения в шумах при ограничении ухудшается [16], но эти потери умень-
шаются до менее 1 дБ, если произведение полосы пропускания ограничителя
на длительность сигнала превышает 20. Аналогично ограничение уменьшает
способность к ослаблению помех от местных предметов у РЛС с селектором
движущихся целей, в которых сравнивают более чем два импульса, но имеют
менее 20 облучений цели за время ее нахождения в главном лепестке диа-
граммы направленности антенны,
Эти потери качества относятся к математически идеальному ограничите-
лю, т. е. такому ограничителю, который осуществляет нормирование ампли-
туды, не искажая фазовых соотношений. В той мере, в какой фазовый сдвиг
в ограничителе изменяется с амплитудой, ограничитель преобразует ампли-
тудный шум в фазовый. Если изменение амплитуды в пределах 1 дБ (12%)
преобразуется в эквивалентное изменение фазы в пределах 12% радиана (7°),
то амплитудный шум на входе создает фазовый шум на выходе, имеющий
эквивалентную энергию, и вероятность обнаружения уменьшается. Чтобы
эти потери были незначительными, крутизна амплитудно-фазового преобра-
зования не должна превышать 2°/дБ.
Увеличение произведения полосы пропускания на длительность сигнала
с целью сокращения потерь из-за ограничения приводит к другим последст-
виям. Чем больше полоса пропускания приемника (до перехода его в режим
ограничения) превышает ширину спектра излучаемого сигнала, тем более
подвержен приемник влиянию помех не на основной частоте приема или
мешающих сигналов, частота которых медленно изменяется [12]. С другой
стороны, если необходимо обеспечить хорошие импульсные характеристики
приемника [12], то нужно улучшить его способность к быстрому восстанов-
лению после воздействия импульса или организованной помехи, частота кото-
рой быстро изменяется.
По мере возрастания длительности эхо-сигнала в ограничительном кас-
каде в результате фазового кодирования, РЛС становится более уязвимой для
частичного перекрытия эхо-сигналов по времени [15]. Вследствие эффекта
подавления слабого сигнала сильным эхо-сигиалом вероятность обнаружения
слабого сигнала быстро уменьшается при увеличении относительного их пере-
крытия, если после звена согласованной фильтрации установлен обнаружи-
тель с фиксированным порогом обнаружения. Это уменьшение вероятности
обнаружения связано не с большим ухудшением отношения сигнал/шум для
слабого сигнала, а с подавлением и слабого сигнала и шума в чашеобразной
области, охватывающей временную длительность сильного сигнала. Влияние
этой чашеобразной помеховой области можно ослабить, если после прием-
ника с фазовым различением включить логарифмический обнаружитель
ПЧЛТ. Последний эквивалентен по своему действию системе АРУ, изменяю-
щей усиление, чтобы удалить «черный провал» или чашеобразную область,
возникающую из-за ограничения.
Этот пример иллюстрирует, как сочетание различных методов получения
ПЧЛТ часто может обеспечить защиту от помех многих видов, чем любой
одив отдельно взятой метод. Последовательность операций необходимо тща-
£73
Гл. 2. Радиолокационные приемники
тельно упорядочить, чтобы сохранить преимущества каждого метода, умень-
шив вместе с тем влияние различного вида помех.
2.9. Логарифмические усилители
Области применения. Моноимпульсные РЛС. Логарифмическим детекто-
ром называется устройство, выходной сигнал которого по видеочастоте про-
порционален логарифму огибающей входного сигнала ПЧ. Он часто исполь
зуется в моноимпульсных РЛС для выделения информации о точном угловом
положении разрешаемой цели. Принцип его работы легче всего пояснить для
случая гауссовой диаграммы направленности антенны, хотя диаграмма на-
правленности практически никогда не бывает вполне гауссовой. Рассмотрим
пару диаграмм направленности в форме ехр(—Кф2), направления максимумов
которых в одной главной плоскости разнесены на угол 0. Принимаемые сиг-
налы подаются на два канала приемника, каждый из которых содержит
понижающий преобразователь частоты и логарифмический детектор. Видео-
выходы детекторов включены по дифференциальной схеме, так что напря-
жения видеосигналов взаимно вычитаются, давая результирующий — разно-
стный сигнал, пропорциональный величине Кбф. Выходное напряжение вычи-
тающего звена линейно зависит от угла цели ф, и его можно непосредственно
использовать для коррекции углового положения антенны.
Логарифмическая моноимпульсная система создает более высокий уро-
вень углового шума вблизи направления электрической оси антенны, но менее
высокий уровень углового шума при больших угловых отклонениях от элект-
рической оси, чем суммарно-разностные моноимпульсные системы, обычно
применяемые в РЛС сопровождения. Поэтому она более распространена
в радиолокационных системах с многолучевой диаграммой направленности
антенны, которые пе должны обеспечивать сопровождение цели на направле-
ниях, близких к электрической оси антенны.
ПЧЛТ-приемник при наличии помех от местных предметов. Логарифми-
ческий детектор полезен для обеспечения постоянной частоты ложных тревог
при наличии шума, отражений от дождя, от поверхности моря и других поме-
хах переменной интенсивности. Этот случай применения рассмотрен в § 2.8.
Запись сигналов. Некоторые радиолокационные системы являются изме-
рительными устройствами, эхо сигналы в которых записываются для после-
дующего анализа или обработки. Если уровень сигнала изменяется в широ-
ких пределах, - то может понадобиться запись логарифма его амплитуды.
Число двоичных разрядов, необходимых для логарифмической записи, равно
,, , Динамический диапазон, дБ
N => Iog2--------------------------. (25)
Разрешающая способность, дБ
Характеристики. Точность. В логарифмических детекторах и усилителях
ПЧ используется кусочно-линейная аппроксимация логарифмической харак-
теристики. Для достижения наилучшего совпадения с логарифмической кривой
обычно стыкуют отрезки прямых с одинаковым отношением длин и изменяю-
щимся тангенсом угла наклона. Каждый отрезок прямой будет точно соот-
ветствовать логарифмической кривой в двух точках и иметь максимальную
ошибку приближения на его концах и посредине. Абсолютная величина ошиб
ки [17] возрастает при увеличении отношения длин отрезков. На рис, 27
показано, как эта ошибка меняется в зависимости от отношения длин отрез-
ков (называемого также усилением на отрезок). На практике стыки между
«линейными» отрезками не являются резкими и наилучшая подгонка к лога-
рифмической кривой может дать погрешность меньше теоретической,
174
2.9. Логарифмические усилители
Преобразование к логарифмическому виду можно также производить
в цифровой форме (после аналого-цифрового преобразования) при помощи
эквивалентного линейного приближения (линейной аппроксимации), В этом
случае отношение длин отрезков прямых соответствует основанию системы
счисления 2 и максимальная погрешность становится равной ±0,25 дБ.
Логарифмические детекторы и усилители часто разрабатываются с регу-
лировками в каждом каскаде. Это позволяет производить регулировку накло-
на и (или) длины отрезков с целью лучшей подгонки. При регулировке на
блок подают прецизионное экспоненциально затухающее колебание ПЧ с ге-
нератора сигналов. Блок регулируют до получения линейно-затухающего
выходного сигнала, что свидетельствует о правильности регулировки.
Рис. 27. Погрешность аппроксимации лога-
рифмической характеристики прямолиней-
ной характеристикой.
Рис. 28. Метод измерения полосы пропу-
скания логарифмического усилителя.
Динамический диапазон. Динамический диапазон логарифмического детек-
тора или усилителя зависит от числа линейных отрезков N и отношения их
длин Gi
Динамический диапазон = 20/V lg G.
(26)
Хорошо спроектированный логарифмический детектор может иметь динами-
ческий диапазон 80 дБ. достижимый при 9 каскадах при погрешности не более
±0,2 дБ.
Полоса пропускания. Полоса пропускания логарифмического детектора
или усилителя меняется в зависимости от уровня сигнала. Поэтому логариф-
мическое устройство обычно проектируют с большим запасом по полосе про-
пускания с учетом того, что перед ним будут установлены фильтры, которые
и обеспечат расчетную полосу пропускания приемника. Однако полосу про-
пускания самого логарифмического устройства при большом сигнале можно
измерить, используя метод, поясняемый рис. 28. Входное напряжение увели-
чивают от Ut до Ui+ (3 или 6) дБ, вследствие чего рабочая точка переме-
щается из А в В. Затем изменяют частоту сигнала в обоих направлениях,
чтобы найти те два значения частоты, которые соответствуют рабочей точ-
ке С. Такой же результат можно также получить, изменяя частоту до тех
пор, пока выходное напряжение не уменьшится на величину 3S или 6S,
где S — крутизна характеристики, B/дБ. В итоге рабочая точка окажется
в точке С'. Ввиду зависимости полосы пропускания от уровня сигнала лога-
175
Гл. 2. Радиолокационные приемники
рифмический усилитель, если возможно, необходимо настроить по сигналам
с уровнями, лежащими ниже порога ограничения, и при использовании в ка-
честве контролируемой его характеристики импульсного отклика.
Импульсный отклик усилителя измеряют при помощи импульсного сиг-
нала ПЧ, имеющего гораздо меньшие времена нарастания и спада, чем испы-
—>
Жлж’ 7
Усилители - ограничители
Аас.над У
Рис. 29. Логарифмический детектор:
а — структурная схема; б — модуль 9-каскадного логарифмического усилителя (регу-
лировка усиления каждой ступени расположена под транзистором).
тываемое логарифмическое устройство. Время нарастания — это время, необ-
ходимое для возрастания выходного напряжения от —205 до —5, а время
спада — это время, необходимое для уменьшения выходного напряжения si
—5 до —205. Из-за логарифмической формы характеристики время спада
является линейной функцией уровня входного сигнала и превышает время
нарастания.
Примеры логарифмических устройств. Логарифмический детектор. В ло-
гарифмическом детекторе хорошо известного типа используется последова-
176
2.9. Логарифмические усилители
тельное детектирование [18], при котором продетектированные выходные на-
пряжения с N одинаковых ограничительных каскадов суммируются, как пока-
зано на рис, 29,а. Если каждый каскад имеет при малом сигнале коэффи-
циент передачи G и уровень ограниченного выходного сигнала Е, то точки
пересечений аппроксимирующих отрезков будут находиться на кривой, опи-
сываемой выражением
где п— к.п.д. детектора, а Е«(Л4)—конкретные уровни входного сигнала,
которые соответствуют точкам пересечений линейных отрезков,
Et(M) = E/GM.
(28)
Независимая переменная М обозначает порядковый номер каскада, находя-
щегося на пороге насыщения, и принимает только целые значения от 1 до У.
Нелогарифмическое слагаемое в виде степенного ряда по 1/G оказывает
незначительное влияние на точность аппроксимации логарифмической кривой.
Последовательные приращения этого слагаемого при изменении М от 2 до N
равны E/GM~l. Таким образом, результирующее воздействие этого члена вы-
ражается в смещении выходного сигнала при очень малой потере в точности
аппроксимации логарифмической кривой при самых больших уровнях сигнала.
Типичный логарифмический детектор при его реализации по 9-каскадной
схеме (рис. 29,6) может иметь точность в пределах ±0,25 дБ, динамический
диапазон 80 дБ и полосу пропускания от 5 до 10 МГц на средней частоте
30 МГц. Однако в [19] описан 4-каскадный детектор с режимом последова-
тельного детектирования, имеющий полосу пропускания 640 МГц при сред-
ней частоте 800 МГц. Сообщается о достижении времени запаздывания им-
пульса, равного 2,5 нс.
Логарифмический усилитель. Логарифмический усилитель ПЧ можно
осуществить в виде N одинаковых последовательно включенных каскадов
с двумя уровнями усиления. В этом случае получается точная логарифмиче-
ская характеристика, если каждый усилитель имеет порог Ет, ниже которого
коэффициент усиления имеет фиксированное значение G и выше которого
дифференциальное усиление равно 1. Точки пересечения аппроксимирующих
отрезков лежат на кривой, описываемой уравнением
где Е,(Л4)—уровни входного сигнала, соответствующие точкам пересечения
отрезков прямых,
1 — м
Et{M) = ETG '
(30)
Независимая переменная Л4 — порядковый номер каскада, находящегося
на пороге насыщения; М принимает целые значения в пределах от 1 до У.
В случае логарифмического усилителя с двумя уровнями усиления все точки
пересечений прямолинейных отрезков лежат на логарифмической кривой.
Типичный логарифмический усилитель может иметь динамический диапа-
зон .80 дБ (получаемый при 9 каскадах) при результирующей полосе пропу-
177
Гл. 2. Радиолокационные приемники
екания не менее 5 МГц. Типичная точность аппроксимации — не хуже
±0,25 дБ в пределах динамического диапазона 70 дБ и не хуже ±1 дБ
в пределах полного динамического диапазона.
Принципиальная схема типичного каскада показана на рис. 30, а его
амплитудная характеристика — на рис. 31. Каскад представляет собой атте-
нюатор, зашунтированный ограничителем на последовательно включенных
Рис. 30. Схема каскада УПЧ с двойным
усилением.
Рис. 31. Характеристика напряжения кас*
када УПЧ с двумя уровнями усиления.
диодах, вслед за которым включен усилитель. При отсутствии входного сиг-
нала ток делится поровну между диодами ограничителя. Пороговые значения
достигаются тогда, когда через диод D2 либо проходит весь ток, либо ток
совсем не проходит. Если падениями напряжения на диодах можно прене-
бречь, то пороговый режим наступает при
Et = ET
(31)
Сигналы, превышающие по абсолютной величине порог ограничения, ослаб-
ляются в R/(R + Rj) раз (величина, обратная коэффициенту усиления усили-
теля). Следовательно, дифференциальное усиление в этой области равно 1.
Разделительные (блокировочные) конденсаторы используются здесь из-за
наличия напряжения смещения постоянного тока, что характерно для огра-
ничителя данного типа.
Цифровое логарифмирование. Учитывая тенденцию перехода к цифровой
обработке, следует остановиться на кусочно-линейной цифровой аппроксима-
ции, которую можно выполнить после аналого-цифрового преобразования.
Цифровое слово при двоичной системе счисления можно записать в виде
(32)
где М — место в ряду, левее которого все коэффициенты равны нулю. За-
метим, что М имеет по существу тот же смысл, как в предыдущих парагра-
фах. Логарифм числа Е по основанию 2 равен
1об!£=Л-М + 1оВ!Л+ ' - ++ . (33)
I 2 1 2 /
178
2.10. Ограничители
log? Е ~ N—M +
^N— М
~2~+ J
^0
2^"’
(34)
Целое число N—М становится характеристикой, а ряд (дробное число
в скобках) — мантиссой логарифма. Данное приближение имеет точность
в пределах ±0,25 дБ, если мантисса содержит не менее 4 разрядов.
Операционные логарифмические усилители. В логарифмических видеоуси-
лиюлях используется экспоненциальная характеристика диода. На рис. 32
показана принципиальная схема та-
кого усилителя с диодом, имеющим
логарифимическую характеристику,
а цепи обратной связи операционно-
го усилителя Если усиление усили-
тельного каскада очень велико, то
выходное напряжение становится рав-
ным
-М—
E9=K]g(Ef/R)
Рис. 32. Схема логарифмического ви-
(35) деоусилителя.
в пределах участка, где характеристика диода является логарифмической.
Одиночный каскад этого типа может иметь логарифмическую характеристику
в пределах нескольких десятков децибел по входному напряжению. Очевидно,
данный метод можно приспособить к случаю усиления по ПЧ, сделав харак-
теристику симметричной относительно нуля при помощи скрещенных диодов.
Взаимное замещение диода и резистора дает антилогарифмическую характе-
ристику. Вследствие этого данная схема часто применяется на выходе лога-
рифмического ПЧЛТ-приемника для восстановления контрастности эхо-сигна-
лов на экране ИКО.
Три фактора предопределяют более широкое использование этого метода:
1) наличие стандартных логарифмических схем, выпускаемых промышленно-
стью; 2) все возрастающая полоса пропускания, достижимая в операционных
усилителях; 3) простота этого метода.
2.10. Ограничители
Области использования, Перед любым фазовым детектором, даже таким,
который сам имеет характеристику ограничения, ставится один или несколько
ограничительных каскадов, если предполагается, что уровень входного сигнала
будет меняться в широких пределах. Так, например, ограничитель сопутствует
фазовому детектору в системах фазовой синхронизации, в РЛС с СДЦ, в мо-
ноимпульсных РЛС с сравнением фаз сигналов.
Как показано в § 2.8, ограничитель иногда используется для поддержа-
ния постоянной частоты ложных тревог при наличии изменяющейся помехи.
Полезный сигнал отделяется от мешающих сигналов при помощи фазового
кодирования.
Ограничитель также можно использовать для сравнения уровней двух
сигналов различных частот. Коэффициент передачи ограничителя по отноше-
нию к меньшему из двух сигналов обратно пропорционален уровню большего
сигнала, так что схема ограничителя действует как вычислитель отношения,
описанный в § 2.6.
Характеристики. Ограничитель — это цепь или комбинация сходных це-
пей, выходное напряжение которой постоянно в широком диапазоне уровней
входного сигнала. Выходной сигнал полосового ограничителя является сину-
179
Гл. 2. Радиолокационные приемники
соилальным, тогда как выходной сигнал широкополосного ограничителя по
форме приближается к прямоугольному.
Существуют гри основные характеристики ограничителей, относительная
значимость которых зависит от области использования. Это помехоустойчи-
вость (качество работы при наличии шума), равномерность амплитудной
характеристики и фазовая стабильность. Когда входной сигнал меняется
в достаточно широких пределах, все эти характеристики становятся важными.
Равномерность амплитудной и стабильность фазовой характеристик зависят
в основном от схемы и конструкции ограничителя и являются непосредствен-
ной мерой его качества.
Шум. Работа ограничителя при наличии шума характеризуется потерей
способности ограничивать сигналы, маскируемые шумами, и отличием отно-
шений сигнал/шум на его входе и выходе. В [20] приведена приближенная,
ио полезная формула для полосовых ограничителей, которая показывает влия-
ние ограничения на отношение сигнал/шум по мощности, когда сигнал и шум
присутствуют одновременно:
/А) = /А) АААА, (36)
\N )„ \ N J> 4/я + (5/Л), ’
(5 \ f S \ Г S \
— ) сж2| ) при ( 1 >1, (37)
А/ Д \ N Ji V N J; ’
при(‘Т") <<h (38)
\ N Jo 4 \ N Ji \ N Ji
Соотношение (37) объясняется тем, что ограничитель подавляет синфаз-
вую составляющую шума, оставляя только квадратурную его составляющую,
которая «конкурирует» с полезным сигналом.
Незначительное подавление слабых сигналов шумом в (38) приводит
к снижению вероятности обнаружения, которое можно отнести за счет
свойств ограничителя, при приеме с ПЧЛТ методами фазового различения
(см. § 2.8). Строго говоря, эти формулы неприменимы к случаю обнаружения
эхо-сигналов импульсной РЛС; они не связаны с распределениями вероятно-
стей смеси сигнал + шум и одного шума соответственно. Однако по мере
того, как произведение полосы пропускания ограничителя на длительность
сигнала возрастает, формула (38) все более точно определяет влияние огра-
ничителя на минимальный обнаруживаемый сигнал.
В [20] показана также связь между выходной мощностью а отношением
сигнал/шум на входе:
„ (5//V)i
~. (39)
4/n + (S//V)/ 1 '
Когда (S/A/)<>1, мощность выходного сигнала можно считать постоян-
ной; однако, когда мощность выходного сигнала можно считать
линейной функцией мощности входного сигнала. Это обстоятельство имеет
существенное значение при проектировании систем фазовой синхронизации
(ФАПЧ).
Равномерность амплитудной характеристики. Ни один однокаскадный
ограничитель не обеспечивает постоянство уровня выходного сигнала в ши-
роком динамическом диапазоне уровней входного сигнала. Одна из причин
этого станет ясной, если рассмотреть однокаскадный ограничитель, имеющий
180
2. Id. Ограничители
идеально симметричную характеристику ограничения при ±Е. Среднеквадра-
тическое значение выходного напряжения на пороге ограничения равно
Е/}!2 и возрастает до значения (4/л) (£У2), когда ограничитель входит в ре-
жим полного насыщения и выходной
сигнал становится прямоугольным.
В реальных ограничителях на рав-
номерность амплитудной характеристики
также оказывает влияние емкость Мил-
лера, связанная с накоплением зарядов
в транзисторах и диодах, и постоянная
времени /?С-цепей, которые вызывают
измен шие смешения в зависимости от
уровня сигнала. Поэтому, если требует-
ся хорошая равномерность амплитудной
характеристики, последовательно вклю-
чают два (или более) ограничительных
кзскэдз.
Стабильь сть фазовой характеристи-
ки. Нестабильность фазы сигнала (изме-
нение фазы сигнала в зависимости от
его уровня) на выходе ограничителя лег-
че измерить чем теоретически проана-
лизировать. В [21] сделаны некоторые
Рис. 33. Схемы ограничителей.
очень полезные выводы на основе серии
экспериментов с пятью обычными огра-
ничительными схемами. Показано, что
транзистор обеспечивает более высокое
общее качество работы в последователь-
ном варианте включения, когда влияние
накопления зарядов не наблюдается.
В ограничителях стандартных типов,
известных своей фазовой стабильностью,
заслуживают упоминания два общих мо-
мента. Во-первых, во всех случаях раз-
мах выходного сигнала можно выразить
как произведение фиксированного пере-
ключаемого тока на сопротивление; та-
кие ограничители получили наименование
переключающих ограничителей наличной
мощности. Во-вторых, паразитные изме-
нения фазы, вызываемые изменениями
амплитуды, v таких ограничителей обыч-
но прямо пропорциональны частоте, на
которой они работают; поэтому измене-
ния фазы в зависимости от уровня сиг-
нала лучше выразить в нс/дБ, чем
в гр ад/дБ.
Примеры ограничителей. Ограничи-
тель на лампе с отклонением луча
(рис. 33, а) по качеству ограничения
сравним с другими ограничителями. Он
ясно относится к переключающим огра-
ничителям наличной мощности, высокое
качество работы которых отчасти объяс-
няется малой емкостью Миллера. Четырехкаскадный полосовой ограничитель
этого типа на рабочую частоту 30 МГц [22] имел сдвиг точек перехода через
нуль не более 0,4 нс в пределах диапазона ограничения 80 дБ при практически
181
Г л. 2. Радиолокационные приемники
постоянном выходном сигнале. Лампа со стробируемым лучом, которую пред-
почитают из-за ее несимметричной схемы, не обеспечивает столь высокого
качества работы.
Ограничитель на последовательных диодах (рис. 33,6) также можно
отнести к типу переключающих наличную мощность, когда
Результаты, полученные в [21], свидетельствуют о том, что при больших
уровнях сигнала ограничителю этого типа присущи недостатки, обусловлен-
ные накоплением зарядов. Применение диодов на «горячих» носителях позво-
ляет улучшить этот хороший в прочих отношениях ограничитель. Амплитуд-
ная характеристика у него гораздо более равномерна, чем у ограничителя
с шунтирующим диодом.
Транзисторный ограничитель (рис. 33,в) также относится к типу пере-
ключающих наличную мощность. В этом случае схема включения в то-
ковом режиме позволяет транзистору работать без насыщения, а это является
условием, благоприятствующим хорошей фазовой стабильности. Трехкаскад-
ный ограничитель на рабочую частоту 10 МГц [22] имел сдвиг точек пере-
ходов через нуль не более 6 нс в диапазоне ограничения 50 дБ. Интегральные
схемы, в которых используется эта схема ограничителя, приводятся в ката-
логах.
Ограничитель на туннельном диоде (рис. 33, г) не относится к тину пере-
ключающих, но ввиду своих малых рабочих уровней сигналов хорошо под-
ходит для микроэлектронных схем. Резисторы Ri и R2 выбирают так, чтобы
в области, где туннельные диоды имеют отрицательное сопротивление, парал-
лельное соединение ТД и R являлось разомкнутой цепью.
Когда /?тд = —Ri,
R-гд
^тд + ^1
(40)
Диоды, включенные анодами навстречу друг другу, используются для
получения симметричной характеристики. Для уровней сигнала, лежащих
выше или ниже этой области отрицательного сопротивления, усилитель имеет
большое мгновенное усиление. В области отрицательного сопротивления цепь
с ТД «разомкнута» и мгновенное усиление каскада резко ограничено из-за
дегенерации.
Диапазон уровней входного сигнала, в пределах которого усиление кас-
када ограничено, равен примерно 6 дБ. Поэтому диапазон ограничения для N
включенных каскадов ограничителей на ТД этого типа составляет 6А/ [дБ].
В практике этот диапазон можно несколько расширить, уменьшив или уве-
личив значения R} и R2 в первых каскадах. Тогда эти каскады будут ограни-
чивать неидеально в диапазоне до 18 дБ, а жесткое ограничение будет обес-
печиваться последними 6-дБ каскадами. Восьмикаскадный широкополосный
ограничитель на туннельных диодах [23] на рабочую частоту 30 МГц имел
сдвиг точек переходов через нуль не более 1,5 нс при изменении уровня
входного сигнала в пределах 50 дБ.
2.11. Фазовые и синхронные детекторы
Определения и характеристики. Различие между фазовым детектором,
синхронным или фазочувствительным детектором и балансным смесителем
(балансным преобразователем) иногда бывает не вполне ясным. Это объяс-
няется сходством аналоговых устройств, которые выполняют названные функ-
ции. Общепринято, однако, считать что устройство используется в качестве
182
2.1 Г. 'Фазовые и синхронные детекторы
фазового детектора, когда только фазовая информация присутствует на вы-
ходе 'детектора, а в качестве синхронного детектора, когда на выходе имеется
как фазовая, так и амплитудная информация, и в качестве смесителя, когда
на выходе присутствует фазовая, амплитудная и частотная информация. Ин-
формация о доплеровском сдвиге частоты согласно этому определению исклю-
чается. •
Выходные характеристики фазового детектора обычно относятся к одному
на рис. 34. Примечательно то, что
Синусоидальная
из трех возможных классов, показанных
характеристика данного детектора не яв-
ляется неизменной. В [20] показаны три
случая, когда характеристика данного
детектора зависит от формы подаваемых
на него сигналов. Диодные детекторы не-
которых типов имеют
характеристику при
входных сигналах и
синусоидальную
сунусоидальных
характеристику
треугольной формы при входных сигна-
лах прямоугольной формы. В некоторых
случаях переход от характеристики тре-
угольной формы к синусоидальной про-
исходит при уменьшении уровня сигнала
или возникновении шума.
В некоторых высококачественных
системах, где необходимо сохранить мак-
симум информации, может использовать-
ся пара синхронных детекторов, работа-
ющих по квадратурной схеме. Работа та-
кого детектора
диаграммой:
Рис. 34.
Разнооль фаз,град
Характеристики фазового
детектора.
описывается следующей
Es Ер
2
Es sin (®/ |-0) ®
cos О,
(41)
ER
га/
Es sin (го/ 4-0) -» ®
Es Er
2
sin 0.
(42)
cos га/
Синфазный (/) и квадратурный (Q) режимы работы детектора описы-
ваются соответственно строками (41) и (42). Если детектор создает функцию
фазового угла треугольной, а не синусоидальной формы, то два выходных
сигнала все равно можно описывать как синфазную и квадратурную состав-
ляющие (будем отличать их обозначения «/» и «Q»). В этом случае детектор
работает скорее как фазовый, чем как синхронный детектор.
Области применения. РЛС с СДЦ Фазочувствительный детектор является
основным элементом почти всех радиолокационных систем с селектором дви-
жущихся целей. Он используется для обнаружения фазового сдвига вектора
эхо-сигнала, являющегося результатом движения цели за время между оче-
редными импульсами. Опорный сигнал подается на детектор от второго гете-
родина, обычно называемого когерентным ввиду когерентности его колебания
с излучаемым сигналом. Фазовый детектор позволяет запомнить эхо-сигнал
в виде видеосигнала или арифметического числа, представляющего вектор
эхо-сигнала.
133
Гл. 2. Радиолокационные приемники
Чтобы снизить стоимость и упростить эксплуатацию РЛС с СДЦ, пода-
вители помех в них часто обрабатывают только одну фазовую составляю-
щую. В таких подавителях «треугольная» «/«-составляющая используется для
больших эхо-сигналов, так как это уменьшает влияние «слепой зоны», появ-
ляющейся на фазовой характеристике по синфазной составляющей I вблизи
точки, где dEjdQ близка к нулю. Для эхо-сигналов ниже предельного* уровня
характеристика по «/«-составляющей преобразуется в характеристику по
/ составляющей, при этом возникают эффекты «слепой зоны». Синфазная
«/«-характеристика непригодна для подавителей, в которых используются три
Рис. 35. Структурные схемы систем измерения скорости:
а—метолом слежения за фазой; б — методом слежения за скоростью изменения фазы.
или более импульсов. Это вытекает из зависимости взвешивания от плавно
изменяющегося доплеровского вектора. В любом случае наилучшая помехо-
устойчивость достигается, когда используются обе составляющие — синфаз-
ная / и квадратурная Q.
Схемы слежения за фазой и скоростью изменения фазы. Фазовый детек-
тор используется для точного измерения скорости целей, сигналы которых
были отселектированы другими средствами. Высокая точность этого метода
объясняется используемым большим временным интервалом измерения. В ре-
зультате (А/+ 1)-го измерения радиальной скорости получают
V — / ^4-1 ~~(РтУ \
JV+1 “2м Гпи р
(43)
где с — скорость света; gj — угловая частота РЛС; q^-W-e по счету измере-
ние фазы; Тпи — период повторения импульсов. Для извлечения этой инфор-
мации в реальных системах требуется фильтр, каким, например, является сле-
дящее устройство в виде системы ФАПЧ.
На рис. 35,а показана схема фазовой системы слежения, в которой пред-
сказываемое значение фазы фр непрерывно сравнивается с измеряемым зна-
чением фазы фм. Информация о скорости извлекается из производной пред-
сказываемой фазы фр. Так как эта система слежения измеряет фазу, которая
эквивалентна дальности (расстоянию), то она ограничена по ускорению и по-,
этому не имеет широкого применения.
184
2.11. Фазовые и синхронные детекторы
На рис. 35,6 показана схема системы слежения за скоростью изменения
фазы, в которой предсказываемая разность фаз Дфр непрерывно сравнивается
с измеряемой разностью фаз Дфм. Это осуществляется при формировании
производной фазы на входе следящей схемы. В этом случае скорость прямо
пропорциональна предсказываемой разности фаз Дфр. Так как эта система
слежения измеряет скорость изменения фазы, которая эквивалентна скорости
движения цели, то она не ограничена по ускорению. Ошибки запаздывания
вносятся только следующей производной более высокого порядка — рывками.
а)
б)
Рис. 36. Структурные схемы моноимпульсного приемника со сравнением амплитуд (а)
и фаз (б).
Приемники моноимпульсных РЛС. В моноимпульсной РЛС пара рупор-
ных облучателей используется для формирования двух одинаковых лучей,
которые разнесены на очень малый угол. Два выхода антенны подключены
к четырехплечему гибридному кольцу с суммарным и разностным выходами.
Диаграмма направленности для разностного выхода будет иметь нуль точно
посредине между лучами, тогда как для суммарного выхода она в этом на-
правлении будет иметь максимум. Напряжения на этих выходах гибрид-
ного кольца называют разностным сигналом (Д) и суммарным сигналом (X).
На рис. 36,а показана наиболее распространенная структурная схема
моноимпульсной приемной системы со сравнением амплитуд. Схема АРУ,
работающая по усиливаемому в суммарном (X) канале сигналу, регулирует
коэффициенты усиления идентичных усилителей в обоих каналах обратно
пропорционально уровню сигнала в Х-канале- Усиливаемый сигнал разностною
канала (обозначаемый как «Д/Х») синхронно детектируется, чтобы сохранить
полярность (знак) фазы. Такой моноимпульсный приемник пригоден только
185
Г л. 2., Радиолокационные приемники
для РЛС и целей, которые характеризуются лишь незначительной вариацией
уровня эхо-сигнала от импульса к импульсу.
На рис. 36,6 показана структурная схема моноимпульсного приемника,
не имеющего указанного ограничения. В этом приемнике амплитудная инфор-
мация преобразуется в фазовую при помощи квадратурного гибридного
соединения. Выходные напряжения A±jB и ЛТ/В гибридного соединения
преобразуются в сигналы ПЧ и в конечном итоге сопоставляются по фазе
на фазовом детекторе. Фазовый детектор для такого приемника должен иметь
пилообразную характеристику; в этом случае его нормированное выходное
напряжение будет равно
2 arcsin (±Л//<),
где К=\А2±В2 — постоянная величина. Перемена полярности у В осуществ-
ляется фазовым манипулятором, необходимым для коррекции фазовых оши-
бок приемника. Эту функцию выполняет переключатель полярности, включен-
ный после детектора.
Запись Радиолокационные эхо-сигналы иногда записывают для после-
дующего анализа, выполняемого обычно на цифровой ЭВМ. Цифровая форма
записи исключает потерю информации при регистрации и, кроме того, обес-
печивает возможность непосредственного ввода ее в ЭВМ. Если динамический
диапазон эхо-сигналов достаточно мал, то можно записать сигналы синфаз-
ной / и квадратурной Q составляющих. Если динамический диапазон эхо-сиг-
налов велик, для минимизации числа разрядов можно использовать фазу
и логарифмическую амплитуду. В качестве примера рассмотрим систему, в ко-
торой требуется фиксировать 3%-ные приращения при записи сигналов, уро-
вень которых изменяется в пределах динамического диапазона 72 дБ. Для
записи синфазной и квадратурной составляющих необходимы два канала
с емкостью запоминающего устройства (ЗУ) по 17 бит в каждом канале,
тогда как запись фазы и логарифма амплитуды при таком же качестве тре-
бует ЗУ емкостью всего 8 бит в обоих каналах. Более подробное сравнение
позволяет произвести табл. 3.
Таблица 3
Сравнение двух методов записи
Параметр Запись син- фазной и квадратурной составляющих Записи фазы и логарифма амплитуды
Значащий разряд наибольший (старший) наименьший (младший) Отношение старшего разряда к млад- шему Число разрядов на канал 4000 1/32 128 000 17 2 рад 0,03 рад 256 8 72 дБ 0,28 дБ 256 8
Примеры фазовых детекторов. Детектор-перемножитель. Лампа со стро-
бируемым лучом и до некоторой степени лампа с отклонением луча исполь-
зуется в качестве перемножителей для получения произведения сигнала на
опорное колебание. Они обладают свойством самоограничения и постепенным
переходом от характеристик типа I к характеристикам типа «/» вблизи уров-
ня насыщения. Когда они используются как синхронные детекторы, их дина-
мический диапазон ограничивается высоким уровнем шумов приборов этого
186
2.11. Фазовые и синхронные детекторы
типа. Детектор-перемножитель этого типа можно также реализовать, исполь-
зуя перемножитель на полевом транзисторе, как предлагается в [24].
Балансный диодный детектор, (рис. 37, а) широко используется ввиду
его необычайно благоприятных характеристик. Если два синусоидальных сиг-
нала с одинаковой частотой о) и разностью фаз 0 подать на такой детектор,
то выходное напряжение аналитически можно будет записать в виде
Eo=K(cos0— cos2w/+Члены более высокого порядка). (44)
Я
Рис. 37. Схемы фазовых детекторов:
а — балансного диодного; б — детектора совпанений.
При указанных условиях характеристика детектора будет синусоидальной,
а пульсирующее выходное напряжение не будет содержать составляющей
основной частоты (о. Если позволяет полоса пропускания, то детектор будет
работать при входных напряжениях прямоугольной формы, вследствие чего
его характеристика примет треугольную форму.
Детектор этого типа поставляется промышленностью в модульной форме,
Модуль содержит пару балансных широкополосных трансформаторов и подоб-
ранные по допустимому разбросу параметров («согласованные») диоды на
«горячих» носителях. Такой детектор можно получить с развязкой между
выводами 35 дБ в диапазоне частот 3—100 МГц. Выпускаются модули с мак-
симальным частотным пределом 1 ГГц.
Теоретически динамический диапазон определяется максимальным отноше-
нием сигнал/шум на выходе. Практически же он обычно ограничивается оста-
точным разбалансом параметров схемы и их разбросом. При очень точном
изготовлении детекторы этого типа могут иметь полезный динамический диа-
пазон 50 дБ.
Фазовый детектор совпадений (рис. 37,6) обеспечивает выходную харак-
теристику треугольной формы. Когда Ев и Ея синфазны, вентиль типа И (S)
половину времени фиксирует совпадение, а вентиль типа И (А) — отсутствие
совпадения При этом условии на выходе будет максимальное отрицательное
напряжение. Когда Е8 и Ея не синфазны, существует обратное состояние и на
187
Г л. 2. Радиолокационные приемники
выходе получается максимальное положительное напряжение. Обычно в харак-
теристике треугольной формы наблюдается некоторое скругление ее экстре-
мумов. Однако благодаря использованию в каждом канале ограничителя на
туннельном диоде удалось построить детектор с очень острыми экстремумами
его выходной характеристики.
Пульсирующее выходное напряжение фазового детектора совпадений
содержит составляющую основной частоты. Более высокая частота пульсаций
получается при использовании вентильных логических схем типа ИЛИ, но при
этом возникают нежелательные напряжения смещения.
число
Рис. 38. Структурная схема цифрового фазового детектора.
Цифровой фазовый детектор (рис. 38) измеряет интервал времени между
точками перехода через нуль сигнала и опорного колебания в положительном
(или отрицательном) направлении. Пара детекторов перехода через нуль
в моменты пересечения нулевой линии соответствующими колебаниями фор-
мируют острые импульсы. Импульс опорного канала переводит бистабильный
триггер в состояние 1, а импульс сигнального канала сбрасывает его в со-
стояние 0. На интервале времени, когда триггер находится в состоянии 1,
стробируемый генератор выдает колебание тактовой частоты и счетчик про-
изводит измерение длительности этого интервала. Фильтрация осуществляется
буферных! регистром.
Разрешающая способность такого фазового детектора определяется отно-
шением тактовой частоты и промежуточной частоты сигнала. В РЛС сопро-
вождения со сгробом дальности ширину спектра сигнала после стробирования
можно значительно сузить, не ухудшая отношение сигнал/шум. Полученный
таким образом сигнал можно далее транспонировать на очень низкую про-
межуточную частоту, избежав тем самым свертывания спектра.
188
2.12. Аналого-цифровые преобразователи
В приемнике РЛС сопровождения на фильтр поступает сигнал, длитель-
ность которого мала по сравнению с временем реакции фильтра. Вследствие
этого фильтр начинает «звенеть» на своей собственной частоте, отклонение
(Да?) которой от номинального значения ((Щ) должно быть очень малым,
чтобы фазовый детектор с пилообразной характеристикой мог обеспечить
соответствие между точками 0 и 360° с точностью до младшего разряда. При
заданных допустимой средней частоте фильтра и предельной частоте работы
счетчика наиболее высокая точность достигается в том случае, если частоту
сигнала в детекторе переходов через нуль сделать равной их геометрическому
среднему.
Фазовый детектор этого типа можно сделать довольно точным. Однако,
как было отмечено в [20] применительно к аналоговому устройству, качество
сигнала должно быть высоким, чтобы обеспечить надежную работу триггера.
Узкополосный фильтр, который по существу производит выборку и запоми-
нает фазу, позволяет решить эту проблему.
2.12. Аналого-цифровые преобразователи
Области применения. Аналого-цифровые преобразователи (АЦП) находят
многочисленные применения в современных радиолокационных системах. Тен-
денция к переходу на цифровую обработку сигналов привела к спросу на
быстродействующие преобразователи, которые могут преобразовывать данные
в реальном масштабе времени.
РЛС с цифровой аппаратурой СДЦ (т. 1, § 11.5) — пример аппаратуры,
требующей подобных быстродействующих преобразователей. Здесь выходное
напряжение синхронного детектора дискретизируется с частотой не меньшей,
чем полоса пропускания приемника, и результат в цифровой форме запоми-
нается в цифровом ЗУ большой емкости (на ферритовых сердечниках, реги-
страх сдвига и т. п.). Данные считываются из ЗУ с целью сравнения с соот-
ветствующими эхо-сигналами, полученными от последующих зондирующих
импульсов РЛС. Гибкость этого метода позволила реализовать в аппаратуре
СДЦ такие характеристики реакции на скорость цели, какие до этого невоз-
можно было получить на базе аналоговых ЗУ.
Во многих РЛС сопровождения для кодирования эхо-сигнала, выделен-
ного стробом следящей системы, используется преобразователь. В этом слу-
чае универсальная ЭВМ производит все вычисления, необходимые для сле-
жения за целью, и формирует выходы по дальности и скорости. ЭВМ обес-
печивает также прецизионное сглаживание данных и требуемую стабили-
зацию.
Быстродействующие преобразователи используются для кодирования ин-
формации о высоте цели, получаемой от многолучевой РЛС. Это позволяет
производить арифметическую интерполяцию положения цели. Ошибки, кото-
рые могут возникнуть после преобразования, устраняются.
Другой областью применения преобразователей является цифровая запись.
Эта задача возникает тогда, когда необходимо анализировать большие объемы
данных или когда требуется проанализировать отдельное событие. В этом
случае кодированные данные записываются на магнитную ленту. Результаты
записи затем анализируются в произвольном масштабе времени с точностью,
определяемой ценой младшего разряда.
Форматы. Наиболее часто используемым цифровым форматом является
двоичное представление:
Д' _ 1 Д’ __ 9 N__3 о
£ = + •••+^2), (45)
18Э
Гл. 2. Радиолокационные приемники
где К — масштабный коэффициент; Е — аналоговое напряжение; N — число
двоичных разрядов; bt — состояние (0 или 1) i-ro двоичного разряда. Коди-
рованное слово обычно подается на универсальную ЭВ.М в последовательной
форме, а на специализированные быстродействующие ЭВМ — в параллельной
форме.
В асинхронных преобразователях некоторых типов, с которых кодирован-
ные данные считываются непрерывно, используется код Грея [25]. Этот код
позволяет все смежные переходы выполнить, изменяя только один разряд.
Использование кода Грея значительно уменьшает в подобных случаях абсо-
лютную величину ошибок, связанных с переходными процессами.
Для отрицательных уровней входных сигналов преобразователи в радио-
локационных системах обычно имеют формат в дополнительном двоичном
коде. Это упрощает как сам преобразователь, так и последующие вычисления.
При формате в дополнительном коде преобразователь начинает счет с наи-
большего отрицательного значения до нуля, а затем продолжает считать от
нуля до наибольшего положительного значения. Двоичный разряд, которым
обозначен знак числа, показывает, в пределах какой части шкалы должен
отсчитываться уровень поданного на преобразователь сигнала. Этот процесс
для дополнения 2 можно описать выражением
/^^(-^2W“1+^_i2A'-2 + ^_22A'_3 + ... + 6120)) (46)
а для дополнения 1
Д' — 1 N — 2
Е=М-\,(2 -D + &/v_12 +
/V_з
+ 6д,_22 4-... 4-^2°).
(47)
Дополнительный код для 1, как видим, имеет два двоичных значения
для 0, но путаницы можно избежать, если исключить то значение, при кото-
ром все Ьг равны единице.
Синхронизация. Преобразователи работают либо в синхронном, либо
в асинхронном режиме. В синхронном режиме преобразователь производит
выборки из аналоговых данных, декодирует и запоминает результат по коман-
де. Асинхронный же преобразователь постоянно следит за изменением ана-
логового входного сигнала, а выборка из цифрового выходного сигнала фак-
тически производится в оконечной аппаратуре. В асинхронном преобразо-
вателе необходимо использовать код Грея, чтобы избежать возможности
больших ошибок, если выборка придется на момент, когда происходит смена
разряда.
Рабочие характеристики преобразователей. Ширина спектра сигнала.
Цифровые данные, используемые в оконечной аппаратуре, всегда получаются
методом выборок. Ширина спектра этого «цифрового» сигнала ограничивается
половиной частоты выборки.
Разрешающая способность. Разрешающая способность преобразователя
определяется числом двоичных разрядов. Для //-разрядного преобразователя
разрешающая способность равна £'max/(22V—1), если преобразователь дейст-
вительно является монотонным, т. е. если его отклик на аналоговый линейно
нарастающий сигнал является равномерной прогрессией двоичных чисел. Та-
кая характеристика обычно реализуется при медленно изменяющемся анало-
говом входном сигнале, но требует проверки при импульсном характере вход-
ного сигнала.
2.12. Аналого-цифровые преобразователи
Дискретизация. Если ширина спектра сигнала столь велика, что аналого-
вое напряжение значительно изменяется от выборки к выборке, то мгновен-
ный сигнал может исказиться в результате процесса дискретизации [26].
Ошибка, обусловленная длительностью фронтов, возникает тогда, когда про-
цесс экспоненциального заряда не завершается. Совершенно независимая от
нее ошибка, обусловленная запаздыванием, возникает из-за изменения уровня
сигнала в течение времени выборки. Ток протекает через накопительный кон-
денсатор, вызывая падение напря-
жения //?, которое сохраняется,
когда ключ размыкается.
Дополнительная ошибка вно-
сится за счет конечного времени
размыкания ключа. Сигнал имеет
тенденцию усредняться на этом
интервале времени, а дискретизи-
рованное напряжение не соответ-
ствует точно напряжению в мо-
мент времени, когда ключ начина-
ет размыкаться. Время, необходи-
мое для размыкания ключа, иногда
называют апертурным временем.
Расчетные данные, определяю-
щие ошибки, обусловленные дли-
тельностью фронтов и запаздыва-
нием, представлены на рис. 39.
Практические схемы, имеющие по-
стоянную времени RC 3 нс и дли-
тельность строб-импульсов 50 нс,
использовались при быстродейству-
ющем аналого-цифровом преобра-
зовании Получающаяся в резуль-
тате ошибка, обусловленная дли-
тельностью фронтов, не превышает
0,001%, а ошибка, обусловленная
запаздыванием, на частоте сигнала
0,5 МГц равна 0,46%. Следует от-
метить, что большие ошибки ди-
скретизации не всегда неизбежны
в радиолокационных системах. На-
пример, в РЛС с СДЦ ошибка
Рис. 39. Зависимости погрешности строби-
рующей схемы от постоянной времени:
Д1 — последовательный диод; Д2 — об-
ращенный диод; ДЗ — диод демфирова-
ния обратного напряжения; ВЧД — дрос-
сель, уменьшающий влияние паразитных
емкостей; L4 — дроссель с биполярным от-
рицательным сопротивлением (при необ-
ходимости); Т1 — импульсный трансфор-
матор (с бифилярной вторичной обмот-
кой).
повторяется от цикла к циклу ска-
нирования и, следовательно, ее
можно исключить путем вычита-
ния в подавителе.
Типы преобразователей. Одно-
временный преобразователь. Как
следует из самого названия, в этом
преобразователе все операции про-
исходят одновременно. Как пока-
зано на рис. 40, а, ряд из 2N—1
компараторов принимают незави-
симые решения об абсолютной величине аналогового напряжения по от-
ношению к 2N уровням квантования. Логическая схема с 2N — 1 входами пре-
образует эти решения в А/-разрядное параллельное двоичное слово. Этот
метод обеспечивает наибольшее возможное быстродействие, однако стоимость
преобразователей этого типа с высокой разрешающей способностью, изготов-
ляемых на дискретных компонентах, чрезмерно высока.
ГО1
Г л. 2. Радиолокационные приемники
Преобразователь с последовательным приближением. При этом методе
в N-разрядном цифроаналоговом преобразователе создается напряжение, кото-
рое подается обратно на вход или сравнивается с аналоговым входным
напряжением. На рис. 40,6 показана структурная схема такого преобразова-
теля: используется N последовательных приближений, при которых двоичные
разряды включаются поочередно, начиная с самого старшего. Если напряже-
Опорное
.напряжение
N-разрядное
ддоичнре
число
f)
Рис. 40. Структурные схемы аналого-цифровых преобразователей (а) одновременного
(параллельного) действия и с последовательным приближением (б).
ние обратной связи, обусловленное состоянием «включено» («1») любого раз-
ряда, превышает входное напряжение, то этот разряд «выключается» (пере-
водится в состояние «выключено» — «О») в конце его интервала испытания;
в противном случае он остается «включенным». Таким образбм преобразова-
тель определяет наибольшее двоичное число, которое все еще оставляет на-
пряжение обратной связи меньшим, чем входное напряжение.
Этот преобразователь функционирует примерно в N раз медленнее, чем
182
2.12. Аналого-цифровые преобразователи
одновременный преобразователь. Однако степень его сложности возрастает
лишь в линейной зависимости от числа разрядов и преобразователи, имеющие
даже 15-разрядную разрешающую способность, экономически вполне осуще-
ствимы. Были получены скорости до I06 преобразований в секунду при 9-раз-
рядном разрешении (рис. 41), хотя обычно применяется быстродействие ближе
к 105 слов/с.
Рис. 41. АЦП с использованием последовательного приближения: вверху — схемные узлы
стробирования и синхронизации, внизу — схемные узлы преобразователя и буферно-
го ЗУ.
Последовательный преобразователь. В одной из форм последовательного
преобразователя (рис. 42) используется /V последовательно включенных оди-
наковых ступеней для реализации процеса кодирования. Работу г-й ступени
можно просто представить в виде выражения
£out=2x[Eln — 6,Х (опорное напряжение), (48)
( 1 при Ein>Ur,
Qj = <
( 0 при Е<п < Ur.
Однако этот преобразователь довольно редко строят по такой схеме. В бы-
стродействующих конструкциях между ступенями приходится вводить линии
задержки, чтобы скомпенсировать время 7', необходимое для каждого реше-
ния. В результате получается преобразователь, у которого быстродействие
соответствует скорости срабатывания одной ступени, но с фиксированным
193
Гл. 2. Радиолокационные приемники
временем задержки. Преобразователи этого типа могут иметь разрешающую
способность 8 или более разрядов и скорость до 107 преобразований в се-
кунду.
В другом варианте этой основной схемы преобразователя кодирование
осуществляется в формате кода Грея. В этом случае основная ступень рабо-
тает по видоизмененной логической схеме, но все ступени уже работают неза-
Т Задержка Т
N-разрядное двоечное шало
Рис. 42. Структурная схема последовательного АЦП
висимо друг от друга. Преобразователь такой формы имеет меньшее быстро-
действие, но .может быть дешевле и меньших размеров. Его разрешающая
способность может достигать 8 разрядов, а скорость — 106 преобразований
в секунду.
Преобразователи с пульсирующими напряжениями [25]. Преобразователь
с пульсирующими напряжениями (рис. 43) образуется из N неодинаковых сту-
пеней, но работает по такому же принципу, как последовательный преобра-
зователь. В первой ступени производится сравнение входного напряжения
с опорным напряжением, соответствующим половине шкалы квантования,
чтобы осуществить кодирование старшего разряда. Все остальные ступени
производят вычитание из этого входного напряжения всех предыдущих коди-
рованных аналоговых эквивалентов плюс очередной менее значащий аналого-
вый эквивалент. Кодирование начинается с наиболее значащего числа и по-
следовательно идет до наименее значащего. Ошибки кодирования можно
уменьшить, если ввести дополнительные схемные узлы, которые последова-
тельно фиксируют все решения, начиная со старшего разряда.
Исключительно высокая точность этого преобразователя достигается
в основном благодаря устранению резисторов и токовых ключей, присущих
последовательно включаемым усилителям последовательного преобразователя.
Преобразователи этого типа выпускались с разрешающей способностью 15 раз-
рядов и скоростью 8• 104 преобразований в секунду. Хотя можно было бы
получить более высокое быстродействие за счет использования линий задерж-
ки для компенсации времени решения каждого компаратора, эта процедура
гораздо сложнее, чем в последовательном преобразователе, и практически
сводит на нет указанное преимущество по быстродействию.
Разбивка на поддиапазоны. Одной из обычно используемых модификаций
194
2.12. Аналого-цифровые преобразователи
при построении преобразователей является метод разбивки на поддиапазоны
[25]. При этом методе в преобразователе осуществляется одновременное опре-
деление двух или более двоичных разрядов за один раз и эта операция
последовательно повторяется. Например, пятикаскадный преобразователь
Оперное напряжение
Ряс. 43. Принципиальная схема АЦП с использованием пульсирующего напряжения,
с 3-разрядными поддиапазонами имеет разрешающую способность 15 разря-
дов. Разбивка на поддиапазоны особенно эффективна для ограничения оши-
бок усилителей при последовательном методе преобразования.
Мультиплексирование преобразователей часто применяют в тех случаях,
когда скорость поступления данных превышает быстродействие одного пре-
образователя. Быстродействующая схема мультиплексирования позволяет
объединить W преобразователей и тем самым увеличить общую скорость
в N раз по сравнению со скоростью одного преобразователя. Мультиплекси-
рование двух или более каналов передачи данных на один преобразователь
применяется в тех случаях, когда преобразователь обладает большей скоро-
стью. чем необходимо для одного канала.
Список литературы
1. Brown, Т. Т. Mixer Harmonic Chart. — “Electronics Buyer’s Guide”,
p. R46, R47, June, 1954.
195
Гл. 2. Радиолокационные приемники
2. Levine, F. G. Survey of Semiconductor Devices. — “Microwaves”, v. 6,
April, p. 51—95, 1967; also v. 7, February, 1968.
3. Lauchner, J. K. Wide Band Microwave Transistor Amplifiers. — “Solid
State Design”, v. 6, № 12, p. 19—27, 1965.
4. Barber, M. R. A Numerical Analysis of the Tunnel-diode Frequency Con-
verter. — “Trans. IEEE”, v. MTT-13, p. 663—670, September, 1965.
5. Gambling, W. R., Mallick, S. B. Tunnel-diode Mixers. — “Proc. IEEE”,
v. 53, N /, p. 1311 — 1318, 1965
6. “Proc. IEEE”, v. 54, N 2, February, 1966, — Special Issue on Frequency
Stability.
7. IEEE—NASA Symposium on Short-term Frequency Stability, NASA Do-
cument SP-80, November, 1964.
8. Barton, D. K. “Radar Systems Analysis”, Prentice-Hall, Inc., Englewood
Cliffs, N. J., 1964.
Бартон Д. Радиолокационные системы. Пер. с англ. (Под ред. К. Н. Тро-
фимова). М., Воениздат, 1967.
9. Widlar, R. J., Giles, J. N. Designing with Off-the-shelf Linear Microcircuits,
Fairchild Application Bull. APP-124, January, 1966.
10. Rubin, W. L., Kamen, S. K. SCAMP — A Single-channel Monopulse Radar
Signal Processing Technique. — “Trans. IRE”, v. MIL-6, p. 146—152, Ap-
ril, 1962.
11. Rice, S. O. Response of a Linear Rectifier to Signal and Noise. —
“J Acoust. Soc. Am.”, v. 16, p. 164, 1944.
12. Galenian, J. C. Designing Radar Receivers to Overcome Jamming. —
“Electronics”, v. 36, May 17, 1963.
13. Croney, J. Clutter on Radar Displays. — “Wireless Eng.”, p. 83—96, April,
1956.
14. Green, B. A., Jr. Radar Detection Probability with Logarithmic Detec-
tors. — “Trans. IRE”, v. IT-4, March, p. 50—52, 1958.
15. Bogotch, S. E., Cook, С. E. The Effect of Limiting on the Detectability’of
Partially Time-coincident Pulse Compression Signals. — “Trans. IEEE",
v. MIL-9, January, p. 17—24, 1965.
16. Bello, P., Higgins, W. Effect of Hard Limiting on the Probability of Incor-
rect Dismissal and False Alarm at the Output of an Envelope Detector. —
“Trans. IRE”, v. IT-7, April, p. 60—66, 1961.
17. Solms, S. J. Logarithmic Amplifier Design. — “Trans. IRE”, v. 1—8,
p. 91—96, 1959.
18. Croney, J. A Simple Logarithmic Receiver. — “Proc. IRE”, v. 39, N 7,
July, p. 807—813, 1951.
19 Rubin, S. N. A Wide-band UHF Logarithmic Amplifier. — “IEEE J. So-
lid State Circuits”, v. 1, December, p. 74—81, 1966.
20. Gardner, F. M. “Phaselock Techniques”, John Wiley & Sons, Inc., New
York, 1967.
21. Calaway, W. The Design of Wideband Limiting Circuits, Electron. Design
News, v. 10, p. 42—53, December, 1965.
22. Wingrove, E. R. Phase Stable Limiting IF Amplifiers Using Beam Deflec-
tion Tubes, General Electric Co., work sponsored by Air Force, Contract
No. AF19(604) —1913.
23. Fumea, H. J. Get Low-power Efficiency with Tunnel Diode Limiters, Elect-
ron. Design, v. 13, p. 46—49, June, 1965.
24. Highleyman, W. H. and E. S. Jacob. An Analog Multiplier Using Two
Field Effect Transistors, IRE Trans., v. CS—10, p. 311—317, September,
1962.
25. Daley, F. D. Analog-to-Digital Conversion Techniques, Electro-Technol.
(N. Y.), v. 79, p. 34—39, May, 1967.
26. Barr, P. Voltage to Digital Converters and Digital Voltmeters, Electro-
mech. Design, v. 9, p. 301—310, January, 1965.
Глава 3
РАДИОЛОКАЦИОННЫЕ ИНДИКАТОРЫ И СИСТЕМЫ
ОТОБРАЖЕНИЯ
А. Берг.
3.1. Виды отображения
Радиолокационные индикаторы являются связующим звеном между ра-
диолокационной информацией и человеком-оператором. Радиолокационная
информация является в основном временной функцией дальности. Поэтому
для формирования отображения на экране используется главным образом
метод смещения отметки цели, пропорционального времени запаздывания эхо-
сигнала цели или дальности.
Сигнал может быть отображен либо путем отклонения луча в прямо-
угольной системе координат (как в осциллографе), либо в виде засветки
(модуляции луча по яркости) на экране. В большинстве случаев при форми-
ровании отметки используется модуляция луча по яркости, что позволяет
передать дополнительную информацию, например, об азимуте, угле места или
высоте цели. При этом виде модуляции обычным является отображение, ис-
пользуемое в индикаторе с полярной системой координат, так называемом
индикаторе кругового обзора (ИКО), дающем отображение типа географи-
ческой карты. Азимут радиолокационной цели отображается на ИКО угло-
вым положением отметки, а дальность — ее радиальным расстоянием. При
отображении в прямоугольной системе координат одна из координат может
отображать дальность, а другая — азимут, угол места или высоту. Возможен
вариант, когда одна из координат отображает азимут, а другая — угол места,
причем отображение может быть стробировано в определенном выбранном
интервале времени или дальности. Непрерывное увеличение объема пред-
варительной обработки радиолокационных данных позволяет использовать и
другие виды отображения. Во всех случаях методика отображения оптими-
зируется с целью повышения качества передачи информации оператору. На
рис. 1 показаны 15 методов отображения радиолокационных данных на экра-
нах индикаторов РЛС [1, 2] и соответствующие им типы разверток.
В развертках типов J, К, L, М и N, являющихся вариантами развертки
типа А, для формирования отметки используется модуляция отклонением
луча. Развертка типа J — модификация развертки типа А с расширенной
шкалой для обеспечения более точного измерения дальности. Развертки типов
С, D, Е, Н и I — модификации разверток основного типа В и типа Р (ИКО),
в которых используется модуляция по яркости. Развертка типа Е имеет два
варианта. При развертке, изображенной в левой части рисунка, функцией
дальности является угол места, а при развертке, изображенной в правой
части, — высота. Индикатор с разверткой этого типа называется индикатором
«дальность-высота». В ИКО начало развертки находится в центре экрана,
а в различных вариантах систем секторного обзора, соответствующих разным
специальным требованиям, начало развертки смещено относительно центра
экрана.
197
Гл. 3. Радиолокационные индикаторы и системы отображения
На одной и той же ЭЛТ могут быть одновременно реализованы разверг-
ми двух типов. В посадочной РЛС системы управления посадкой самолетов
С земли обычно применяется развертка типа В, расположенная над разверт-
кой типа Е. Координата дальности в обеих развертках отсчитывается но го-
ризонтали, а азимут и угол места по вертикали.
На экранах индикаторов вместе с радиолокационными данными для об-
легчения работы операторов могут воспроизводиться специальные метки,
Рис. 1. Методы отображения радиолокационных данных [1].
•> Дальность определяется по широкой азимутальной строке. 2) Отображение только од-
ного эхо-сигнала. Можно сделать так, чтобы при отсутствии сигнала пятно преобразо-
вывалось в окружность. 3) Отображение только одного эхо-сигнала. Пятно имеет
«крылья», длина которых обратно пропорциональна дальности. 4) Эхо-сигнал отображает-
ся двумя точками. По левой точке определяются дальность и азимут цели, а по пра-
вой — приближенно высота. в) Антенна с коническим сканированием. Эхо-сигнал имеет
форму окружности, радиус которой пропорционален дальности. Наиболее яркий участок
окружности характеризует отклонение направления на цель от оси конуса. ®) То же, что
н тип А, за исключением того, что шкала круговая. ’) Тип А с переключением диаграм-
мы направленности антенны. При равенстве отметок антенная система направлена на
цель. 8) То же, что и тип К, но отметки эхо-сигналов расположены зеркально одна под
другой. s) Тип А с селекторной ступенькой дальности нлн впадиной дальности. |0) Ком-
бинация типов К и М. *’) Дальность измеряется по радиусу от центра.
1*)8
3.2. Электронно-лучевые трубки
неподвижные или регулируемые метки дальности, стробы и линии постоянно-
го угла или высоты. Для дополнительной информации оператору или для мар-
кировки данных могут быть введены буквенно-цифровые данные, различные
знаки и символы.
3.2. Электронно-лучевые трубки
Электронно-лучевая трубка (ЭЛТ) является наиболее распространенным
устройством отображения в радиолокационных индикаторах. По сравнению
с другими средствами отображения ЭЛТ имеют простую регулировку их ха-
рактеристик, высокую разрешающую способность, хороший динамический
диапазон и простую аппаратуру Существует большое разнообразие типов
ЭЛТ [3, 4], причем их параметры могут быть оптимизированы в соответст-
вий со специальными требованиями к отображению радиолокационных
данных
ЭЛТ состоит из элемента, эмиттирующего электроны (катод), и устройст-
ва формирования электронного луча и управления им Электронный луч фо-
кусируется и направляется на экран, покрытый люминофором. Фокусировка
и регулировка положения луча (его отклонение) могут осуществляться как
электрическим, так и магнитным полем. Энергия электронного луча возбуж-
дает частицы люминесцентного экрана, излучающего эту энергию в виде света.
Цвет свечения, скорость нарастания или убывания излучения и световая от-
дача зависят от свойств люминофора.
В системах отображения специального назначения используются ЭЛТ
с запоминающим экраном [5, 6]. Запоминающая ЭЛТ прямого видения дает
очень яркое изображение- В других типах электростатических запоминающих
ЭЛТ используется электрическая запись и считывание. Такие устройства мо-
гут' применяться для накопления сигнала, преобразования вида развертки
с Целью получения более простых устройств с совмещенными изображениями,
совмещения сигналов от ряда датчиков на одном устройстве отображения,
увеличения визуальной яркости выходного изображения, а также для соче-
тания этих функций.
ЭЛТ с электростатическим отклонением, В этих ЭЛТ для отклонения
электронного луча используется электрическое поле. Отклоняющие электроды
(или пластины) смонтированы парами так, чтобы луч проходил между пла-
стинами. При наличии разности потенциалов между парными пластинами луч
отклоняется пропорционально напряженности возникающего между ними
электрического поля. Для отклонения луча в плоскостях как X, так и Y,
обычно вдоль луча последовательно монтируются две взаимно-ортогональные
пары пластин. Наименьшая аберрация (или дисторсия) луча и наибольшая
линейность отклонения достигаются при подаче на парные отклоняющие
пластины равных напряжений противоположных полярностей. Диафрагмы,
необходимые для уменьшения сечения луча, используются также для умень-
шения взаимодействия луча с отклоняющими полями и дефокусировки, обус-
ловленной отклонением. Симметричный отклоняющий электрод с перемежаю-
щимися парциальными электродами в плоскостях X и У, называемый деф-
лектроном, имеет общий цёнтр отклонения. Однако сложность конструкции
этою электрода и практически полученная невысокая его чувствительность
явились причиной ограниченного использования дефлектрона.
Отклонение электронного луча, выраженное в виде функции угла 0, оп-
ределяется выражением
Где р — напряженность однородного электрического поля между отклоняю-
щими пластинами; Ub — ускоряющее напряжение; /—протяженность откло-
няющего поля.
Гл. 3. Радиолокационные индикаторы и системы отображения
Таким образом, отклонение является обратной функцией ускоряющею
напряжения Для увеличения яркости пятна на экране ЭЛТ с электростати-
ческим отклонением при небольших отклоняющем напряжении и общей длине
трубки обычно используются ЭЛТ с послеускорением. В них луч отклоняется
при некотором промежуточном значении ускоряющего напряжения, после чею
ускоряющее напряжение доводится до полного значения. В таком устройстве
отклоняющая система находится под потенциалом, приблизительно равным
потенциалу земли или шасси, а электронная пушка — под отрицательным
потенциалом, равным промежуточному значению ускоряющего напряжения.
В упрощенной конструкции с послеускорением электрическое поле неодно-
родно, поэтому возникают неравномерное отклонение и дефокусировка луча
при отклонении. Для получения линейного поля послеускорения с целью
улучшения линейности отклонения и фокусировки луча, часто используется
спираль высокого сопротивления, расположенная внутри колбы между ано-
дами, находящимися под промежуточным и полным ускоряющими напряже-
ниями.
ЭЛТ с электромагнитным отклонением. В этих ЭЛТ для создания маг-
нитного отклоняющего поля используется электромагнит (отклоняющая ка-
тушка). Отклонение электронного луча, выраженное в виде функции угла 0,
определяется выражением
sin 0 — 77 Z
где Н — напряженность поля; I — протяженность однородного магнитного
поля; Ub — ускоряющее напряжение; elm — отношение заряда к массе элект-
рона.
Таким образом, чувствительность ЭЛТ с магнитным отклонением являет-
ся линейной функцией напряженности и протяженности магнитного поля и
обратно пропорциональна квадратному корню из ускоряющего напряжения.
Поскольку величина отклонения меняется обратно пропорционально квадрат-
ному корню из ускоряющего напряжения, преимущества послеускорения
в случае магнитного отклонения не столь велики, как при электростатическом.
При отношении полного ускоряющего напряжения к промежуточному, рав-
ном 2 : 1, номинальное значение магнитного поля в ]2 раз меньше требуемого
в случае применения одного ускоряющего анода с таким же напряжением.
Однако, так как линза, создаваемая полем послеускорения, обладает фокуси-
рующими свойствами, требуемое магнитное поле должно быть увеличено при-
близительно на 10%. Кроме того, во избежание затенения экрана горловиной
может потребоваться более короткая (менее чувствительная) отклоняющая
катушка. Поэтому в ЭЛТ с магнитным отклонением в основном использует-
ся один ускоряющий анод.
ЭЛТ с двойной системой отклонения применяется в некоторых специ-
альных случаях. Магнитное отклонение используется для направления луча
в какую-то определенную точку экрана, а с помощью электростатической
системы осуществляются небольшие его отклонения под малыми углами.
Отклоняющие электростатические пластины позволяют записать на экране
ЭЛТ в точке, в которую луч был направлен системой магнитного отклонения,
различные символы и знаки. Преимуществом такой дополнительной системы
электростатического отклонения является то, что она обладает широкополо-
сностью, требуемой для быстрой записи символов. Так как пластины электро-
статической системы отклоняют луч на небольшие углы, расстояние между
ними для получения высокой чувствительности по отклонению может быть
выбрано достаточно малым. В устройствах с двойной отклоняющей системой
с электростатическими отклоняющими пластинами, находящимися под полным
ускоряющим напряжением, соединительные провода могут быть выведены
200
3.2. Электронно-лучевые трубки
непосредственно на горловину. В ЭЛТ с электростатической фокусировкой и
с большим напряжением на фокусирующем электроде отклоняющие пластины
с небольшим углом отклонения могут находиться под потенциалом фокусиру-
ющего электрода.
Электронная пушка и отклоняющие пластины в такой системе могут быть
выполнены в виде единого узла с соединительными проводами, выведенными
через цоколь. При этом напряжение, под которым находятся элементы схе-
мы, включенные между ЭЛТ и широкополосным видеоусилителем, равно
фокусирующему. Когда электростатическое отклонение осуществляется в фо-
кусирующем поле, угол отклонения должен быть жестко ограничен для ми-
нимизации децентрировки луча относительно фокусирующей линзы и его
аберрации.
Колбы ЭЛТ. Большинство стеклянных колб ЭЛТ, используемых в радио-
локационных индикаторах, разрабатывалась и выпускалась для гражданского
телевидения. Конструкция этих колб должна была соответствовать таким
противоречивым требованиям, как создание возможно более плоского экрана
для удобства наблюдения, с одной стороны, и предельно возможное умень-
шение толщины стекла для уменьшения массы колбы. К тому же, как будет
показано в § 3.3, уменьшение кривизны экрана связано с увеличением нели-
нейности и искажением изображения. Для обеспечения достаточного запаса
их прочности колбы рассчитываются и испытываются на давление порядка
(3—5) • 102 кПа (3—5 атм).
В другом типе колб раструб изготовляется в виде металлического конуса,
заканчивающегося постепенно утончающимся кольцом, к которому привари-
вается под давлением лицевая плата. При этом увеличивается сопротивление
на имплозию, благодаря чему может быть использована относительно плоекяя
лицевая плата из довольно тонкого стекла. Металлический конус является
естественным экраном от магнитных и электростатических полей. Однако
конус находится под полным ускоряющим напряжением, так что для обес-
печения безопасности оператора и обслуживающего персонала он должен
быть соответствующим образом изолирован. Уменьшение массы и кривизны
экрана имеет особенно большое значение для трубок больших размеров. Так,
например, в трубке с экраном диаметром 40 см радиус кривизны экрана
обычной стеклянной колбы составляет 140 см, а в металлостеклянной —
320 см. В стеклянной колбе толщина лицевой платы в центре равна ~ 10 мм
и уменьшается к краям до 5 мм, в то время, как толщина платы металло-
стеклянной колбы приблизительно одинакова по всей поверхности и состав-
ляет около 6 мм. На рис. 2 показаны стеклянный и металлостеклянный ва-
рианты ЭЛТ диаметром 40 см.
Иногда появляется необходимость сфотографировать радиолокационное
изображение или спроектировать на него относительно статичную информа-
цию. Если это можно выполнить через заднее окно в колбе ЭЛТ, то помеха
работе оператора оказывается наименьшей. Для этого в отверстие с задней
стороны колбы монтируется (часто путем вплавления) оптическое окно. Для
ЭЛТ небольших размеров должны быть разработаны специальные колбы
с раструбом практически цилиндрической формы. В таких колбах сзади мож-
но вмонтировать до трех окон. Сохранение требуемых оптических параметров
окон в процессе их вплавления является довольно сложной задачей, поэтому
изготовление некоторого количества резервных окон дает возможность уве-
личить выпуск годных колб. В колбах больших размеров, диаметр экрана ко-
торых превышает 30 см, окно можно разместить на второй горловине колбы,
аналогичной основной.
Фокусировка. Поскольку луч на выходе электронной пушки является
расходящимся, для сведения луча в точку на экране необходимо сфокусиро-
вать его. Параметры фокусирующей системы являются функцией отношения
расстояния Q от фокусирующей линзы до экрана к расстоянию Р от фоку-
201
Гл. 3 Радиолокационные индикаторы и системы отображения
сирующей линзы до апертуры электронной пушки. Коэффициент увеличения
можно принять равным M — QIP.
Эффективность фокусировки электронного луча ограничивается фактора-
ми, не имеющими оптического характера. Максимальная разрешающая
способность луча является функцией плотности тока и эффективного ускоря-
ющего напряжения. Пространственный заряд накладывает определенные
ограничения на минимальный размер сечения луча. Сечение луча вблизи ка-
тода ЭЛТ увеличивается при увеличении тока эмиссии. Поэтому при увели-
чении тока луча электронной пушки размеры пятна на экране также увели-
Рис. 2. Стеклянная (а) и металлостеклянная (б) ЭЛТ с экраном диаметром 40 см и уг-
лом луча 70° и 53° соответственно.
чатся. Разрешающую способность можно повысить, увеличивая напряжение
на экранирующей сетке. В результате этого уменьшается эффективный раз-
мер. апертуры электронной пушки, однако при этом увеличивается требуемая
глубина модуляции напряжения на управляющей сетке
Другими факторами, ограничивающими разрешающую способность, яв-
ляются неодинаковые скорости электронов и несимметричность траектории
электронов относительно оси луча. Влияние неодинаковых начальных скоро-
стей электронов и распределения их траекторий в луче уменьшается при уве-
личении полного ускоряющего напряжения. Фокусировка в ЭЛТ отличается
от оптической также и тем, что в ЭЛТ фокусирующие поля не имеют резких
границ. Поэтому теоретические расчеты оптических приборов не могут быть
непосредственно применены к расчету устройств фокусировки электронного
луча.
Фокусировка ЭЛТ может быть электростатической или магнитной. Элект-
ростатические фокусирующие системы двух основных классов называются
бипотенциальной (четырехэлектродной) и унипотенциальной (трехэлектрод-
ной) пушкой. Бипотенциальная пушка является пушкой тетродного типа
с напряжением на фокусирующем электроде порядка 20—30% от ускоряю-
щего напряжения. Такая пушка обеспечивает высокую разрешающую способ-
ность при не очень значительной дефокусировке, обусловленной отклонением
луча. Из-за наличия на фокусирующих электродах апертур, ограничивающих
ток луча, может потребоваться регулировка напряжения фокусировки. Уни-
потенциальная пушка является триодом, фокусирующий анод которого (на-
ходящийся под потенциалом катода) расположен между двумя электродами,
Находящимися под потенциалом, равным' ускоряющему напряжению. Фоку-
сирующий анод не потребляет тока, поэтому унипотенциальная пушка удоб-
202
3 2. Электронно-лучевые трубки
на в iex случаях, koi да фокусировка осуществляется с помощью источника
с большим внутренним сопротивлением. Эта пушка обеспечивает невысокую
разрешающую способность и незначительную дефокусировку при отклонении
луча.
В ЭЛТ с магнитной фокусировкой [7] используется аксиальное магнит-
ное поле, концентричное с осью луча. Магнитное поле создается кольцеоб-
разным электромагнитом или постоянным магнитом, расположенным на гор-
ловине ЭЛТ. В случае постоянного магнита фокусировка осуществляется
с помощью регулируемого магнитного шунта или перемещением всего магни-
та вдоль оси луча. При магнитной фокусировке электроны, летящие под уг-
лом к магнитным силовым линиям, отклоняются по направлению, перпенди-
кулярному линиям магнитного поля. Поэтому, если осевая линия магнитного
поля не параллельна осевой линии луча, форма луча и соответственно пятно
на экране искажаются.
Осевые линии магнитного поля и луча должны, кроме того, совпадать
во избежание аберрации луча, обусловленной тем, что магнитное поле на
пути луча не будет симметричным и однородным.
Магнитная фокусировка обеспечивает более высокую разрешающую
способность при прочих одинаковых параметрах ЭЛТ. Это объясняется в ос-
новном тем, что магнитная фокусирующая катушка в силу необходимости
располагается дальше от электронной пушки, вследствие чего коэффициент
увеличения М имеет меньшее значение. Однако дефокусировка и, следова-
тельно, размер пятна на краях экрана в случае магнитной фокусировки ока-
зываются больше, так как диаметр пучка электронов в магнитной фокусиру-
ющей линзе больше, а поперечное сечение пучка на экране при малом отно-
шении Q/P изменяется в большей степени.
Люминофоры. Энергия электронного луча преобразуется в ЭЛТ в свето-
вую энергию с помощью люминофора. Люминофор является люминесцирую-
шим веществом, в котором энергия электронного луча передается электрону
кристаллофосфора, повышая его энергетический уровень. Вслед за возбуж-
дением электрон возвращается в исходное состояние, выделяя при этом квант
световой энергии. Период излучения люминофором света после возбуждения
называется длительностью послесвечения люминофора. Длительность после-
свечения может быть самой различной в зависимости от сочетания исходных
веществ для люминофора и технологии их обработки. Временная характери-
стика послесвечения может меняться от логарифмической до экспоненциаль-
ной. Характеристика послесвечения люминофора зависит от ряда переменных,
как, например, от ускоряющего напряжения, частоты повторения и длитель-
ности возбуждения, а также плотности тока электронного луча. В случае
применения люминофоров в ЭЛТ отнесение какого-либо из люминофоров
к категории пригодных для заданной длительности послесвечения является
трудной задачей вследствие нелинейности характеристик глаза и его способ-
ности приспосабливаться к различным уровням освещенности. Поэтому вы-
бор и использование люминофоров для визуального отображения должны
производиться по эмпирическим данным.
Проверка разных типов люминофоров была проведена объединенным тех-
ническим советом по электронным приборам электронно-промышленной ассо-
циации ’> [8] в процессе их регистрации. Основными регистрируемыми пара-
метрами являются: цвет, включая кривые спектрального распределения энер-
гии; координаты цветности Международного светотехнического комитета2);
характеристики послесвечения люминофора, построенные как кривые зависи-
мости световой отдачи от времени после снятия возбуждения. Потребителю
важно знать, что эта регистрация люминофоров с разделением их на серии
*) Joint Electron Device Engineering Council oi the Electronic industries Association.
г) IC1—International Commission on Illumination.
203
Г л. 3. Радиолокационные индикаторы и системы отображения
Pl, Р2 и т. д. не является результатом точного маркировочного контроля.
Люминофоры с несколько отличающимися параметрами могут быть маркиро-
ваны, как принадлежащие к одной и той же серии. В табл 1 приведены ос-
новные параметры зарегистрированных люминофоров.
Исходные материалы для люминофоров делятся на четыре основных
типа: сульфиды, силикаты, фтористые соединения и галоидные щелочи. Боль-
шая часть люминофоров изготовляется на основе сернистого цинка и силика-
та цинка. Обычно добавляется микроэлемент, так называемый активатор,
увеличивающий световую отдачу люминофора. Активатор может также ока-
зать влияние на послесвечение и спектральные характеристики люминофора.
Параметры люминофора зависят и от способов нанесения люминофора и его
обработки, а также от размеров зерна. В особых случаях, когда возможность
использования люминофора определяется каким-либо специфическим его пара-
метром, могут потребоваться подробные технические условия и тщательная
проверка характеристик. Такая проверка может включать измерение дли-
тельности послесвечения каждой из составляющих в многоцветных люмино-
форах, измерение световой отдачи и проверку цветности.
Нанесение люминофора на экран может быть выполнено разными спосо-
бами. Наиболее употребительным способом нанесения таких люминофоров,
как Р4, Р7 и т. д., является осаждение из жидкой высокодисперсионной сус-
пензии. По окончании процесса осаждения жидкость сцеживается из колбы.
В случае двухслойного люминофора (например, типа Р7) оба люминофора
осаждаются в последовательном порядке, начиная с желтого люминофора,
как люминофора с длительным послесвечением. После осаждения люминофо-
ра на люминесцентный экран может быть нанесена путем испарения алю-
миниевая подложка [9].
Для нанесения люминофора применяются также способы испарения и
напыления на поверхность экрана кристаллов люминофора. Испарение ис-
пользуется в основном для получения зерен небольших размеров (как, на-
пример, прозрачных люминофоров) или при необходимости тщательного конт-
роля толщины люминофора (как, например, в двухцветных ЭЛТ). Если
многоцветный люминофор наносится в виде определенной точной структуры
(как, например, в трехцветных телевизионных трубках с теневой маской), ис-
пользуется фотографический метод, при котором светочувствительный мате-
риал экспонируется через маску. Каждый дополнительный цветовой слой на-
носится в соответствующей ему структуре в последовательном порядке.
При выборе люминофора для радиолокационных индикаторов необходим
одновременный учет нескольких факторов: цвета, длительности послесвечения,
относительной светоотдачи, разрешающей способности и потенциальной дол-
говечности, т. е. срока службы в соответствии с заданными эксплуатационны-
ми требованиями.
В большинстве случаев использования ЭЛТ, когда требуется создать ви-
зуальное отображение, люминофор с послесвечением успешно выполняет
функции накопителя. Накопление помогает наблюдателю обнаружить цель
при наличии шумов и помех. Иногда при сопровождении воздушных целей по
ИКО желательно, чтобы длительность послесвечения была больше периода об-
зора пространства. При этом у отображения цели появляется длинный
«хвост», вызванный послесвечением, который может обеспечить информацию
об «истории» движения цели — ее относительном направлении движения и
скорости В некоторых системах отображения (например, в системе преобра-
зования радиолокационного изображения в телевизионное, применяемой в ап-
паратуре управления воздушным движением) времена накопления регулиру-
ются для обеспечения оптимального режима работы при получении инфор-
мации такого типа.
При использовании ИКО в таких устройствах, как самолетная навигаци-
онная РЛС, наблюдаемое оператором на экране индикатора изображение
должно почти полностью исчезать к началу каждого следующего обзора про-
204
3.2. Электронно-лучевые трубки
Характеристики люминофоров Таблица 1
Тип Цвет1) Длительность послесвечения2) Назначение
Флуорес- ценция Фосфорес- ценция
PI й Р4 Р5 Р6 Р7 Р8 Р9 РЮ РП Р12 Р13 Р14 Р15 Р16 Р17 Р18 Р19 Р20 Р21 Р22 Р23 Р24 Р25 Р26 Р27 Р28 Р29 РЗО P3J Р32 РЗЗ Р34 Р35 Р36 Р37 Р38 Р39 Р40 Р41 YG YG YO W В W в Заменяет Не зареги Экран с за пи В О RO В UV UV В W О YG RO W (R, В, G) W G § RO YG Типа G РВ О BG G YG В О YG В UV YG YG YO W В W Y ся на Р7 стрирован темновой СЬЮ В 0 RO VO G UV V W О YG RO W (R, В, G) W G О О RO YG Р2 и Р2£ Аннули G YG О YG В YG В О YG YG О м м м MS MS s MS (В), L (Y) V L MS L M MS (B), M(VO) VS(UV), S(G) S(B), b(V) M—MSoo L M—MS M MS MS s M V L M L полосковые эован MS L Vb V L MS VS VS V L L MS (B), L (YG) VS(UV), L (O) Осциллографирование; РЛС Осциллографирование Телевизионные прямого видения Фотографирование РЛС РЛС Фотографирование РЛС РЛС Развертка бегущим лучом Развертка бегущим лучом, фото Осциллографирование; РЛС Проекционное телевидение РЛС Запоминающие трубки РЛС Трехцветное телевидение Телевизионные прямого видения Развертка бегущим лучом РЛС РЛС Монитор цветного телевидения РЛС Индикаторы РЛС Осциллографирование; яркие те*, левизионные РЛС РЛС РЛС; осциллографирование Осциллографирование Развертка бегущим лучом Развертка бегущим лучом; фото- графирование РЛС РЛС Небольшая часгота повторения (PI2 и Р16) РЛС с оптическим пусковым уст- ройством
*) Цвета: В — синий; Р — пурпурный; G — зеленый; О — оранжевый; Y — желтый;
R - красный; W — белый; UV — ультрафиолетовый.
о Длительность послесвечения до 19% уровня; VS — <1 мкс; S от 1 до 10 мкс;
MS — от 10 мкс до 1 мс; М — от I до 1()п мс; L — от 100 мс до 1 с; VL >1 с.
205
Г л. 3. Радиолокационные индикаторы и системы отображения
странства. В прошеном случае отображаемый сигнал может быть смазав
в результате наложения изображения, оставшегося на экране от предшество-
вавшего периода обзора. Выбор более короткого послесвечения определяется
также тем, что в самолетных РЛС с низкой мощностью излучения и неболь-
шими антеннами частота сканирования антенны обычно выше, чем в назем-
ных РЛС В самолетных ИКО обычно используется люминофор типа Р14,
а в индикаторах наземных РЛС обнаружения воздушных целей — типа Р7.
В соответствии с намечаемым использованием ЭЛТ должен быть выбран
и цвет люминофора. Для визуального наблюдения наиболее желаемым яв-
ляется белый цвет. Однако световая отдача люминофоров с требуемым после-
свечением неодинакова в пределах области видимого света. Большая часть
люминофоров с длительным послесвечением, пригодных для индикаторов
кругового обзора, попадает в спектральную область от зеленовато-желтого
до красновато-оранжевого цвета. Удачно то, что излучение желтого люмино-
фора попадает в область, близкую к максимуму спектральной чувствительно-
сти глаза Излучения, расположенные ближе к красной области спектра, для
многих наблюдателей нежелательны.
Для фотографирования отображения наиболее пригодны синий или
ультрафиолетовый цвета люминофора, соответствующие максимуму чувстви-
тельности пленки Обычно в зависимости от требуемой длительности после-
свечения используются люминофоры типа Р11 или Р16,
Эффективность люминофора должна определяться с учетом намечаемого
использования ЭЛТ. Во многих ЭЛТ световая отдача измеряется с учетом
коррекции, вносимой глазом. Измерение энергии излучения люминофоров,
используемых для фотографирования, является более сложной задачей, при-
чем более надежные результаты получаются для люминофоров типа PH
или Р16 [10] с максимумом энергии излучения на длинах волн 460 и 380 нм
соответственно.
Если при использовании люминофоров с длительным послесвечением
синий цвет флуоресценции люминофора Р7 нежелателен, то иногда использу-
ются люминофоры Р19 или Р28 с желтым или оранжевым цветом фосфорес-
ценции Хотя люминофором с большим послесвечением поглощается вся
энергия луча, эффективность его возбуждения ниже [И], чем двухкомпо-
нентного люминофора Р7. Световая отдача люминофоров Р19 и Р28 одного
порядка со световой отдачей компоненты желтой фосфоресценции люминофо-
ра Р7 и порядка одной трети полной световой отдачи Р7.
Срок службы люминофора. Долговечность, или срок службы люмино-
фора определяется его чувствительностью к перегреву или к выгоранию. По-
скольку эффективность преобразования энергии луча в световую крайне не-
значительна и составляет меньше 5% для многих типов люминофоров,
большая часть энергии электронного луча рассеивается в виде тепла. Как
правило, долговечность и сопротивляемость выгоранию при перегреве сили-
катных люминофоров выше, чем сульфидных. Некоторые однокомпонентные
люминофоры (например, типа Р25 и РЗЗ), используемые в радиолокационных
индикаторах с большим послесвечением, особенно легко могут быть повреж-
дены электронным лучом. При их использовании необходима незначительная
концентрация энергии луча.
Алюминирование, т. е. нанесение тонкого металлического слоя на люми-
нофор, защищает его от появления ионных пятен и обеспечивает некоторый
отвод тепла, уменьшая возможность выгорания Алюминирование увеличива-
ет также эффективную световую отдачу благодаря отражению излучаемого
в обратную сторону света. Потери энергии на прохождение через слой алю-
миния повышают пороговое значение напряжения на 1—2 кВ и более в за-
висимости от толщины слоя. Если ускоряющее напряжение достаточно
велико по сравнению с пороговым напряжением, то световая отдача алюми-
нированного люминофора в сторону наблюдателя приблизительно в 2 раза
больше, чем неалюминированного. На рис. 3 показано типичное соотношение
206
3.2. Электронно-лучевые трубки
между свеюотдачами алюминированного и неалюминированного люми-
нофоров
Проводящий алюминиевый слой исключает также эффекты паразитных
емкостей и накопления зарядов Сопротивление большей части неалюминиро-
ванных люминофоров достаточно велико, чтобы из-за емкостных эффектов,
возникающих при движениях руки оператора вблизи от экрана ЭЛТ, изменя-
лось отклонение луча и искажалось изображение. Накапливающиеся на не-
алюминированном люминофоре заряды
могут также явиться причиной нели-
нейных искажений изображения.
Измерение разрешающей способ-
ное in. Разрешение, определяемое диа-
метром и формой пятна на экране
ЭЛТ, является одним из наиболее
важных параметров, подлежащих из-
мерению в радиолокационных инди-
каторах Распределение интенсивно-
сти свечения пятна, измеренное в
функции расстояния от центра пятна,
обычно является гауссовым. Размер
пятна достаточно произвольно прини-
мается равным его диаметру на уров-
не 50 %-ной интенсивности свечения
и при заданном токе катода прове-
ряется как в центре экрана, так и
вблизи края экрана. Следует отме-
тить, что ток катода не обязательно
является током, попадающим на лю-
минофор. В ЭЛТ с ограничивающими
апертурами ток луча, доходящий до
люминофора, может быть значитель-
но меньше тока катода, особенно при
относительно высоком уровне тока.
При подключении ограничивающих
апертур к ускоряющему электроду т.
Для измерения диаметра пятна
при достаточно большом токе записи
Рис. 3. Влияние алюминирования лю-
минофора на световую отдачу.
l на люминофоре равен току катода.
[12, 13] используют метод сжатия
растра, измерение щелевым анализатором и оптическим микроскопом. В ме-
тоде сжатия растра на ЭЛТ подается телевизионный растр с несоприкасаю-
щнмися строками. Размер пятна (или ширина линии) определяются методом
сжатия растра до слияния строк и образования ровного светового поля. Ши-
рина линии определяется в результате деления высоты растра на число
строк. По техническим условиям на ЭЛТ MIL-E-I ширина линии в центре
экрана ЭЛТ называется шириной А. В ЭЛТ с электростатическим отклоне-
нием ширина линии В измеряется по ортогонали к линии ширины А на рас-
стоянии от центра, равном 3/& диаметра экрана, без изменения фокусировки.
Таким образом проверяется влияние астигматизма на луч ЭЛТ. В ЭЛТ
с магнитным отклонением техническими условиями предусматривается изме-
рение ширины С линии, находящейся на расстоянии 3/в диаметра экрана от
центра последнего в той же плоскости, в которой лежит линия ширины А.
Опытный наблюдатель методом сжатия растра может определить одно-
родность световою поля при максимальных колебаниях его интенсивности
порядка 2% приблизительно на 65%-ном уровне гауссова распределения ин-
тенсивности свечения. Определенный таким образом размер пятна составляет
примерно 0,78 от значения, измеренного на 50%-ном уровне кривой распре-
деления
При любом методе определения размера пятна измерения, производимые
в центре экрана, являются в сущности измерениями параметров неотклонен-
207
Г л. 3. Радиолокационные индикаторы и системы отображения
ного пятна, которое имеет предельно достижимую в ЭЛТ фокусировку, так
как на него не влияют различные расфокусирующие воздействия, возникаю-
щие при отклонении луча. Ширина линии С зависит и от влияния на луч
отклоняющей катушки и от других дефокусирующих воздействий. Поэтому
в тех случаях применения ЭЛТ, когда разрешающая способность является
критичным параметром, ее нужно проверять вместе с элементами отклоняю-
щей системы.
При количественном методе измерения параметров пятна строка на экра-
не ЭЛТ проецируется через щель, ширина которой значительно меньше раз-
мера пятна, формирующего строку. Световой поток, проходящий через щель,
Быстрая
развертка
Перемещение щели огпно-^
сительно линии строчной
Выходной сигнал
щелевого анализатора
V
Линия
' строчной
/развертки ЭЛТ
Анализирую-
щая щель
Медленная развертка
Выходной
импульс от .
'''одной световой
выборки
Рис. 4. Измерение размера пятна щелевым анализатором.
фокусируется на фотоэлементе, выходное напряжение которого отображает-
ся на осциллографе. При непрерывном перемещении строки относительно
щели на экране осциллографа отображается ряд выборок строки, огибающая
которых соответствует форме пятна в направлении, нормальном к строке. При
повороте ЭЛТ относительно щели можно производить измерения при задан-
ных углах и определять форму или характер искажений пятна.
Развертка на экране ЭЛТ осуществляется так, что пятно движется па-
раллельно шели с большой скоростью, а перпендикулярно щели с малой ско-
ростью. Осциллограф синхронизирован с медленной (кадровой) разверткой
растра. Благодаря этому последовательно формируется серия выборок в на-
правлении, перпендикулярном направлению строчной развертки. На рис. 4
показан способ формирования выборок и выходной сигнал фотоэлемента.
Диаметр пятна вычисляется по скорости перемещения строки относительно
щели. Использование в щелевом анализаторе двух щелей с заданным рас-
стоянием между ними позволяет получить калибровочный коэффициент для
вычисления диаметра пятна. В этом случае скорость развертки может изме-
няться в соответствии с особенностями трубки, в то время, как калибровоч-
ный коэффициент остается неизменным, зависящим только от расстояния
между щелями.
Распределение интенсивности свечения пятна ЭЛТ, измеренное щелевым
анализатором, очень близко соответствует гауссову распределению. Можег
наблюдаться лишь небольшой разброс измеренных значений относительно
гауссова распределения в области больших яркостей, не превышающий 10%.
Это обусловлено частично конечными размерами измерительной щели, а так-
же рассеивающими свойствами люминофора и лицевого стекла колбы.
208
3.2. Электронно-лучевые трубки
Преимуществами метода измерения диаметра пятна щелевым анализа-
тором являются измерение абсолютных значений величин и удобство отсче-
та При этом в значительной мере исключается зависимость результатов из-
мерений от квалификации оператора и могут быть получены точные значения
диаметра пятна. Влияние аберраций и искажения формы пятна можно опре-
делить количественно.
Простым качественным методом определения разрешающей способности
является оптический метод — с помощью микроскопа с калиброванной окуляр-
ной сеткой. На экране ЭЛТ отображается пятно, диаметр которого оцени-
вается визуально по окулярной сетке. Сравнительно просто можно опреде-
лить как диаметр, так и форму пятна, при этом пятно должно быть неподвиж-
ным. Это достигается модуляцией подсветки луча в процессе развертки до
желаемого значения тока видеоимпульсом, длительность которого много мень-
ше периода развертки.
При использовании визуального метода результаты измерения зависят
от точности определения края пятна. Обычно диаметр пятна определяется
примерного 10%-ному уровню яркости, а не по 50%-ному, принятому
в большей части технических условий. При гауссовой форме пятна измерен-
ный таким образом диаметр пятна приблизительно в 2 раза больше номи-
нального. Визуальные измерения диаметра пятна в большой степени субъек-
тивны и могут значительно меняться от оператора к оператору. Тем не менее
микроскоп довольно часто применяется для относительных измерений, оценки
влияния астигматизма и аберрации, а также степени дефокусировки при от-
клонении луча.
Двухцветные электронно-лучевые трубки. ЭЛТ с одной электронной пуш-
кой и с двухцветным люминофором позволяют отображать информацию
о различных целях либо выделять особо важную информацию. Выбор цвета
свечения двухцветного люминофора производится путем модуляции энергии
луча в отличие от трехцветных телевизионных ЭЛТ с тремя электронными
пушками, в которых люминофор состоит из серий точек трех цветов. В двух-
цветных ЭЛТ люминофор нанесен в виде сплошного покрытия, поэтому для
них разрешающая способность не ограничивается размером точек и расстоя-
ниями между ними, как в трехцветных ЭЛТ.
В одном из типов двухцветных ЭЛТ цвет изображения на экране зави-
сит от потенциала электронного луча, в связи с чем необходимо прибегать
к модуляции ускоряющего напряжения. В типичном сочетании люминофоров
низкому напряжению соответствует красный цвет, а высокому — зеленый.
Оба цвета достаточно насыщены, что обеспечивает их отчетливое разделение
и высокий контраст отображения. Для регулировки цвета необходимо доволь-
но значительное изменение ускоряющего напряжения. Типичными значениями
являются 6 кВ для красного и 12 кВ для зеленого излучения. Модуляция
ускоряющего напряжения влечет за собой необходимость соответствующей
корректировки отклонения и фокусировки луча.
В ЭЛТ со спиральным ускоряющим анодом, установленным после от-
клоняющей системы, обеспечивается приблизительно 80%-ная развязка от-
клонения от ускоряющего напряжения и значительно уменьшается дефоку-
сировка. Почти идеальной развязки от влияния ускоряющего напряжения
в системе с послеускорением можно достичь с помощью сетчатого экрана,
размещенного между электродами, находящимися под ускоряющим напря-
жением отклоняющей системы, и электродами, находящимися под полным
ускоряющим напряжением. Однако такой сетчатый экран уменьшает яркость
изображения, которая зависит от его проницаемости для электронного луча.
Кроме того, такая ЭЛТ сложна в изготовлении.
В другом типе двухцветного люминофора цвет зависит от плотности
тока электронного луча. Здесь для цветового сдвига используются два лю-
минофора, причем по крайней мере для одного из них зависимость световой
отдачи от плотности тока существенно нелинейна. Цвет изображения при
209
Гл. 3. Радиолокационные индикаторы и системы отображения
небольшой плотности тока будет определяться люминофором А По мере
увеличения плотности тока и повышения световой отдачи люминофора /
цвет изображения будет приближаться к цвету люминофора В При боль-
шой плотности юка цвет изображения будет в основном определяться лю-
минофором В. Для этого типа люминофора предельно сдвинутые цвета менее
насыщены, чем при сдвиге цвета напряжением.
ЭЛТ с темновой записью (скиатрон) Единственный люминофор с тем-
новой записью — скотофор зарегистрирован как люминофор типа РЮ.
Отображение на этом люминофоре образуется в результате контраста между
отраженным и поглощенным светом, а не в результате светового излучения.
При облучении внешним источником света цвет этого люминофора в отсут-
ствие записи желто-белый При записи электронным лучом возникает погло-
щение света люминофором в некотором интервале частот, в результате чею
места записи кажутся темными при их освещении внешним источником света.
Частотный интервал поглощения относительно широк и лежит в области ви-
димого света с максимумом вблизи 560 нм.
Экран с темновой записью изображения обладает долговременной па-
мятью с временем хранения данных, доходящим до нескольких месяцев. Ос-
новной проблемой в процессе его использования является стирание
информации, требующее нагрева люминофора. Обычно это осуществляется
с помощью встроенного в колбу непосредственно за экраном нитеобразного
источника тепла или путем фокусировки на экране излучения инфракрасной
лампы большой интенсивности При наблюдении в условиях очень интенсив-
ного внешнею освещения нагрев люминофора может оказаться достаточным
для стирания изображения. Должны быть приняты меры по ограничению
максимального значения тока луча. Слишком большой ток при записи мо-
жет явиться причиной постоянного или квазипостоянного изменения состоя-
ния люминофора, которое в дальнейшем трудно устранить.
3.3. Конструкция индикаторов
В состав большей части индикаторов входят отклоняющая система, ме-
ханизм отслеживания пеленга антенны, блок развертки дальности, видеока-
нал, генераторы меток и системы хронизации и управления Может потребо-
ваться также аппаратура записи знаков и символов и фотографирования
экрана. Генерирование различных функций для управления положением луча
можно выполнить методами как цифровой, так и аналоговой обработки сиг-
нала. Методу цифровой обработки присуща универсальность системы инди-
кации, стабильность и высокая точность [14]. Методу аналоговой обработки
присущи легкость изменения характеристик и простота изготовления. На
рис. 5 показан внешний вид цифрового и аналогового индикаторов.
Индикатор типа AN/USA-26 (V) 1 (рис. 5, а), используемый для ото-
бражения пеленга антенны, является цифровым индикатором кругового об-
зора с ЭЛТ с экраном диаметром 30 см. Синусный и косинусный сигналы и
развертка дальности, включая ее смещение и растяжение, также генериру-
ются цифровым методом. Для ввода обработанных данных, включая знаки
и символы, с абсолютной точностью относительно радиолокационного изоб-
ражения индикатор может быть состыкован с цифровой ЭВМ. Индикатор
типа AN/SPA-25 (рис. 5,6) является аналоговым универсальным судовым
индикатором кругового обзора с ЭЛТ с экраном диаметром 25 см. Сигналы
пеленга антенны подаются от трехпроводного сельсина, а диапазон разверт-
ки дальности может плавно изменяться в пределах 1,8—550 км
Отклоняющие системы. В большей части радиолокационных индикаторов
используются системы магнитного отклонения Применяются как однокоорди-
натные, так и двухкоординатные (по X и У) отклоняющие системы. Одноко-
ординатная система вращается вокруг горловины трубки синхронно с враще-'
210
3.3. Конструкция индикаторов
нием антенны РЛС. Двухкоординатная система закрепляется на горловине,
а вектор угловой ориентации антенны разлагается на синусную и косинус-
ную составляющие.
Вращающаяся отклоняющая система применима только в радиолокаци-
онных индикаторах кругового (или секторного) обзора. При этом для систе-
мы слежения по азимуту и отклоняющей системы требуется меньше схем-
ных элементов. Сигнал отметки пеленга антенны может быть введен подсвет-
кой развертки дальности в момент, когда луч антенны ориентирован в нуж-
ном направлении. Для независимого введения отметки пеленга антенны и
Рис. 5. Индикаторы:
а — цифровой типа AN/USA-26 (V); б — аналоговый типа AN/SPA-25.
смещения всего отображения относительно центра экрана применяются от-
дельные концентрические катушки. При использовании концентрических кату-
шек необходимо во избежание экранировки внешней катушки, чтобы внутрен-
няя катушка была без сердечника, что, однако, снижает ее чувствительность.
С помощью двухкоординатной отклоняющей системы можно получить
отображение с любой требуемой структурой по координатам X и У. К ним
относятся общеупотребительная развертка ИКО, развертки типов В и С, их
модификации и развертка телевизионного типа. Отображения могут наклады-
ваться одно на другое поочередной коммутацией соответствующих сигналов
для создания, например/ центрированной индикации кругового обзора и сме-
щенной относительно центра экрана отметки пеленга антенны. Ввод данных
в виде символов и знаков может производиться в любом месте экрана.
Основными параметрами, характеризующими качество отклоняющих си-
стем, являются чувствительность по отклонению, индуктивность и скорость
отклонения. Другими параметрами являются точность соблюдения ортого-
нальности между отклоняющими катушками двухкоординатной системы,
остаточный магнетизм, связь между ортогональными катушками и дефокуси-
ровка, обусловленная отклоняющей системой.
Чувствительность системы по отклонению является функцией произведе-
ния L/2, где L — индуктивность катушки и / — ток, необходимый для откло-
нения луча на требуемый угол при заданном ускоряющем напряжении. Ток
отклоняющей катушки пропорционален синусу угла отклонения и квадратно-
му корню из ускоряющего напряжения. В пределах заданной конструкции
отклоняющей системы можно использовать разные катушки,. имеющие разные
211
Гл. 3. Радиолокационные индикаторы и системы отображения
индуктивность и относительную токовую чувствительность отклоняющей си-
стемы, однако при неизменном произведении Ыг. Скорость отклонения уве-
личивается у систем, рассчитанных на больший ток, так как при этом число
витков и распределенная емкость меньше.
Дефокусировка при отклонении зависит от степени неоднородности маг-
нитного поля и от полей рассеяния. Поля рассеяния на торцах отклоняющей
системы можно видоизменять путем экранировки. Однако такие экраны уве-
личивают постоянную времени системы
вают нелинейность быстрой развертки
Рис. 6. Соотношение между радиусом кри-
визны экрана ЭЛТ и расстоянием от цен-
тра отклоняющей системы до центра эк-
рана.
горловиной диаметром 20 мм. Однако
для ЭЛТ с узкой горловиной должно
магнитного отклонения и обусловли-
или увеличивают время, необходимо®
для отклонения луча в любое задан-
ное положение.
Если мощность, потребляемая от-
клоняющей системой, и масса элемен-
тов аппаратуры должны быть воз-
можно меньше, то целесообразно
применять трубки с горловиной не-
большого диаметра. Магнитное со-
противление катушки с железным
сердечником типа статора генератора
зависит от воздушного зазора или
диаметра горловины ЭЛТ. Диаметр
горловины большей части обычных
трубок имеет стандартное значение
36,5 мм. Имеются трубки с узкой
магнитное поле отклоняющих систем
иметь меньшую протяженность во из-
бежание попадания луча при отклонении на стенки горловины. Это снижает
чувствительность систем с большим углом отклонения луча приблизительно
на 20%.
ЭЛТ с узкой горловиной применяются в основном, когда требуется по-
вышенная разрешающая способность При уменьшенных размерах отклоняю-
щей системы обмотка состоит из меньшего числа секций, что затрудняет по-
лучение требуемого распределения магнитного поля и увеличивает нелиней-
ность и дефокусировку при отклонении Относительная разрешающая
способность электронной пушки ухудшается при уменьшении размеров ее
деталей, так как сферическая аберрация увеличивается с уменьшением диа-
метра магнитной системы, а заданные относительные допуски на центриро-
вание элементов пушки труднее выдержать.
Искажение изображения при магнитном отклонении. Сннус угла магнит-
ного отклонения луча пропорционален току через отклоняющую катушку,
если поле катушки линейно. Соотношение между радиусом кривизны экрана
ЭЛТ и отклонением, измеренным на плоской поверхности ОА, проведенной
через центр экрана ортогонально к оси ЭЛТ, приведено на рис. 6. Если ради-
ус кривизны экрана равен радиусу отклонения электронного луча, отклоне-
ние Yd пропорционально синусу угла отклонения 0 и является линейной
функцией тока отклоняющей катушки. В случае плоского экрана У'а пропор-
ционально тангенсу угла отклонения. Во многих типах ЭЛТ радиус кривизны
экрана больше (от 2 до 5 раз) радиуса отклонения и Yd пропорционально
функции, промежуточной между синусом и тангенсом угла отклонения. Когда
наблюдатель рассматривает отображение с конечного расстояния, проекция
на плоскую поверхность, соответствующая бесконечному расстоянию наблюде-
ния, может оказаться не очень точной в отношении линейности отображения.
Однако в случае малой кривизны экрана линейность отображения меньше за-
висит от расстояния наблюдения.
В ЭЛТ с однокоординатной магнитной отклоняющей системой (например,
типа вращающейся катушки) и в отсутствие корректировки тока отклонения
кривизна экрана является причиной появления нелинейности отображения.
212
3.3. Конструкция индикаторов
В двухкоординатных отклоняющих системах при большом радиусе кри-
визны или плоском экране возникают хорошо известные подушкообразные
искажения [15], являющиеся результатом суммирования отклоняющих сиг-
налов по осям X и У. Если отклоняющий сигнал по оси X поддерживается
постоянным и добавляется отклоняющий сигнал по оси У, увеличивающий
общий угол отклонения, то в результате суммирования угловых ошибок гп
осям X и У увеличивается полная ошибка. Подушкообразные искажения
можно скорректировать, придавая соответствующую форму магнитному полю
отклоняющей системы или корректируя ток питания этой системы. Корректи-
ровка магнитного поля осуществляется добавлением компенсирующих маг-
нитных полей в точках, расположенных под углом 45° к координатным осям
отклоняющей системы, или приданием требуемой формы магнитному полю
самой отклоняющей системы, однако в результате искажения формы магнит-
ного поля, обусловленного корректировкой подушкообразных искажений,
увеличивается дефокусировка луча при отклонении. При компенсации дефо-
кусировки чувствительность отклоняющей системы уменьшается по крайней
мере на 30%.
Всех этих трудностей можно избежать с помощью электронной корректи-
ровки сигналов, однако при этом возрастает сложность аппаратуры. В синх-
ронных системах отображения с постоянной скоростью развертки (например,
типа телевизионного растра) можно использовать частотоизбирательные
схемы. Для систем отображения, требующих переменной скорости развертки,
должны применяться схемы формирования сигналов, не зависящие от частоты,
например схемы формирования на диоде с низким сопротивлением. Полная
корректировка нелинейности и подушкообразных искажений требует коррек-
ции отклоняющего сигнала по оси X в зависимости от отклоняющего по оси У
и обратной зависимости при коррекции по оси У. Характеристики корректи-
рующих устройств должны выбираться в соответствии с данной геометри-
ей элт. 7 '
Возбуждение отклоняющих систем. Создание мощных транзисторов на
высокие номинальные напряжения с широкополосными частотными характе-
ристиками обеспечило разработку эффективных быстродействующих откло-
няющих систем. Для снижения требуемого напряжения питания транзистор-
ных отклоняющих генераторов обычно используются отклоняющие системы
на относительно большие токи с небольшой индуктивностью. При увеличении
требуемого отклоняющего тока полоса пропускания отклоняющей системы
заданного типа увеличивается в результате снижения ее индуктивности
и паразитных емкостей.
Полоса пропускания отклоняющей системы зависит также от параметров
схемы возбуждения, так как выходная емкость транзистора возбудителя до-
бавляется к емкости отклоняющей системы. Поэтому результирующая полоса
пропускания отклоняющей системы и возбудителя может оказаться значи-
тельно более узкой, чем собственно отклоняющей системы. При разработке
возбудителя отклоняющей системы серьезное внимание должно быть уделе-
но также учету падения напряжения, вызванного прохождением больших
токов через резистор отклоняющей системы.
Для уменьшения мощности, рассеиваемой в отклоняющей системе, раз-
работано несколько способов. Когда совместно с образованием низкоскорост-
ных разверток для отображения радиолокационной информации осуществ-
ляется быстрый ввод дополнительных данных, основным методом уменьшения
мощности рассеяния на выходном транзисторе является использование высо-
кочастотных транзисторов с небольшой выходной емкостью, обеспечивающих
заданное быстродействие.
Одним из возможных способов экономного расходования мощности от-
клоняющей системы является программное изменение напряжения источника
Питания соответственно скорости отклонения. Один из способов программно-
го изменения напряжения заключается в том, что последовательно с источни-
213
Г л. 3. Радиолокационные индикаторы и системы отображения
ком питания отклоняющей системы включается накопитель энергии в виде
дросселя или трансформатора. Дроссель проектируется так, чтобы в нужные
моменты он обеспечивал увеличенное напряжение питания. Период восста-
новления энергии на накопительном дросселе должен быть достаточно боль-
шим, что автоматически обеспечивает ограничение средней мощности рассея-
ния транзистора. Однако в такой системе возможность направления луча
в любую точку экрана оказывается ограниченной, если интервал между двумя
быстрыми отклонениями луча для ввода данных меньше интервала восста-
новления накапливаемой на дросселе энергии.
В другой системе программного изменения напряжения используется со-
четание высоковольтного и низковольтного источников питания отклоняющей
системы, в которых емкости конденсаторов достаточно велики для обеспече-
ния пикового тока нагрузки. В этом случае на интервале быстрого отклонения
луча отклоняющая система переключается с низковольтного источника пита-
ния на высоковольтный. Если не учитывать ограничений, обусловливаемых
параметрами переключающих устройств, в такой системе имеются неограни-
ченные возможности переключений луча при условии, что предельные значе-
ния мощности рассеяния не превышаются.
Минимизацию мощности рассеяния можно также осуществить методом
восстановления энергии. После того, как луч в типичном радиолокационном
индикаторе отклонится на всю длину радиолокационной развертки, энергия,
накопленная в отклоняющей системе, рассеивается на выходном транзисторе
схемы возбуждения и в гасящем сопротивлении. В двухтактной отклоняющей
системе с использованием одной из обмоток в качестве однотактного возбу-
дителя другая обмотка может служить в качестве выходной трансформатор-
ной обмотки для восстановления энергии. Однако преимущества метода вос-
становления энергии достигаются ценой значительного усложнения схемы.
Большая часть таких методов требует тщательной стабилизации усилителей
отклоняющей системы, чтобы они выдерживали быстрые изменения напряже-
ния питания в относительно широких пределах.
Антенный пеленг. Данные антенного пеленга передаются на радиолока-
ционный индикатор в виде сигнала трехпроводного сельсина или в виде циф-
рового сигнала. Цифровым сигналом может быть двоичное число, кодирую-
щее положение вала антенны, или серия импульсов, называемая импульсами
изменения азимута. Трехпроводный сельсин передает данные пеленга антенны
в виде векторной суммы сигналов каждого из трех проводов на частоте сети
питания переменного тока. Эти сигналы суммируются в приемном сельсине
индикатора, и вырабатывается сигнал ошибки, соответствующий ошибке угло-
вого положения приемного сельсина относительно антенного. Замкнутая сле-
дящая система поворачивает приемный сельсин до пропадания сигнала ошиб-
ки. В тех случаях, когда требуется высокая точность, может использоваться
двухскоростная система сельсинов. Для грубого отслеживания положения ан-
тенны служит сельсин, связанный с валом антенны зубчатой передачей с от-
ношением 1 . 1. Второй сельсин связан с валом антенны зубчатой передачей
обычно с отношением от 1 : 10 до I : 36.. Сначала система отслеживания по-
ложения антенны приводится в синхронное с антенной вращение грубым
сельсином Затем усилитель следящей системы переключается на скоростной
сельсин, который в связи с повышенным отношением зубчатой передачи сель-
син — антенна соответственно усиливает воздействие сигнала ошибки, благо-
даря чему отслеживание положения антенны осуществляется намного точнее.
Типичная ошибка односкоростной следящей системы лежит обычно в преде-
лах 0,15—0,5° при скорости вращения антенны 20 об/мин. В двухскоросгной
следящей системе ошибка может быть сведена к 0,05° и менее при 5 об/мин.
В РЛС с большими скоростями вращения антенны для поддержания точ-
ного слежения необходимо учитывать гак называемое скоростное напряжение
[16]. При вращении сельсина на нем развивается напряжение, являющееся
функцией скорости вращения. Скоростное напряжение зависит от часюгы
214
3.3. Конструкция индикаторов
опарного напряжения, коэффициента трансформации, добротности трансфор-
матора питания цепей управления и угловой скорости сельсина. Измерения,
произведенные в следящей системе индикатора при использовании двух сель-
синов с разными добротностями, дали разность показаний в 0,3° при скоро-
сти вращения 60 об/мин
При другом методе передачи антенного пеленга сигналы трехпроводного
сельсина суммируются в Т-образном трансформаторе Скотта, формирующем
два выходных сигнала, соответствующих синусной и косинусной составляю-
щим принятого сигнала. После детектирования в фазочувствительном детек-
торе получаются синусное и косинусное постоянные напряжения. Абсолютные
значения этих напряжений зависят от приложенного напряжения сельсина
Поэтому в случае колебаний напряжения источника питания или переходных
процессов в линии пропорционально им меняется абсолютное значение на-
пряжения выходных сигналов.
Для передачи цифровых данных антенного пеленга может быть использо-
ван преобразователь угол — код, преобразующий данные об угловом положе-
нии антенны в цифровой код, либо генератор импульсов изменения азимута,
который генерирует импульсы в соответствии с поворотом антенны. Числт
импульсов, генерируемых за один оборот антенны, равно 4096 или 8192. Эти
импульсы должны накапливаться для преобразования импульсного потока
в число, обозначающее угловое положение антенны. Возврат накопителя
в исходное положение производится опорным импульсом. Двухфазный гене-
ратор импульсов изменения азимута вырабатывает данные о направлении
вращения антенны. Поэтому метод генерирования импульсов изменения ази-
мута можно использовать и с антенной, работающей в режиме секторного
обзора
Генерирование синусной и косинусной функций углов поворота антенны
может осуществляться с помощью цифровой вычислительной аппаратуры.
Удобной аппаратурой является цифровой дифференциальный усилитель, в ко-
тором изменение данных о положении антенны производится малыми диск-
ретными приращениями. Чтобы скорость обновления синусной и косинусной
функций и значения накапливаемых ошибок поддерживались в пределах при-
емлемых допусков, должны учитываться скорость вращения антенны и ско-
рость вычислений. Точность вычислений в пределах 360° повышается при
соответствующей коррекции значений синуса и косинуса в тех точках квад-
рантов, в которых эти функции переходят через 1 и 0. Максимальная ошиб-
ка вычислений, обусловленная самим цифровым дифференциальным усили-
телем, при скоростях вращения антенны вплоть до 30 об/мин не превы-
шает 0,075°.
Видеосигнал и метки. Для формирования отображения на ЭЛТ требует-
ся подать на электронную пушку некоторую совокупность сигналов. Кроме
радиолокационного видеоимпульса на экране ЭЛТ должны быть отображены
метки дальности, символы, различные маркерные метки, а также подаваться
импульсы гашения обратного хода луча. Сигналы гашения и регулировки
уровня свечения обычно подаются на один из управляющих электродов ЭЛТ,
а видеосигнал с замешанными в него метками дальности и символами — на
другой Благодаря этому можно уменьшить требуемый динамический диапа-
зон цепей возбуждения. Иногда предусматриваются сигналы защиты люми-
нофора ЭЛТ от возможности выгорания при переходных процессах, обуслов-
ленных постоянными времени включения и выключения.
Граничная высокая частота полосы пропускания видеоканала опреде-
ляется требуемым разрешением данных цели и (или) знаков, граничная низ-
кая частота—допустимым спадом вершины длинных импульсов и разрешаю-
щей способностью, требуемой для наблюдения целей, расположенных вслед за
длительным эхо-сигналом. Спад вершины импульса или частотная характери-
стика в области низких частот задаются путем нормирования допустимого спа-
215
Гл. 3. Радиолокационные индикаторы и системы отображения
да длинного импульса и уменьшения усиления малого импульса, следующего
за длинным импульсом.
При подаче видеосигнала на катод разрешающая способность увеличи-
вается при большом токе луча благодаря возрастанию напряжения между
катодом и ускоряющей сеткой (G2). При этом конденсатор связи в цепи ка-
тода в случае прохождения через него тока катода должен удовлетворять
соответствующим требованиям по низкой частоте.
Смешение различных эхо-сигналов или эхо-сигналов и меток обычно це-
лесообразно производить неаддитивно, т. е. так, чтобы отображался наиболее
интенсивный сигнал, а не сумма сигналов. Такое смешение выполняется
обычно схемой ИЛИ диодного типа. Для поддержания хорошей линейности
при низком уровне видеосигналов желательно использование диода ,с возмож-
но меньшим пороговым напряжением.
В радиолокационных индикаторах обычно используются серия неподвиж-
ных калибровочных меток дальности и подвижная метка дальности или строб
для обозначения положения цели. Для выполнения требований по стабиль-
ности и точности разработаны методы генерирования меток.
Одним из методов управления положением подвижной метки дальности
является регулировка зарядного тока операционного усилителя с помощью
переменного сопротивления. При этом линейность и разрешающая способ-
ность определяются в основном характеристиками потенциометра, используе-
мого для изменения сопротивления. При другом методе датчик типа перемен-
ной магнитострикционной линии задержки обеспечивает чрезвычайно широ-
кий диапазон регулирования. Линейность и точность ее зависят от характе-
ристик электромеханического преобразователя и коэффициентов расширения
линии в диапазоне температур. Для генерирования меток может быть исполь-
зован также метод цифровых счетчиков. Стабильность при этом зависит от
стабильности синхронизатора, а разрешающая способность от его частоты.
Запись знаков и символов. Знаки и символы могут вводиться в отобра-
жение на экране радиолокационного индикатора методом разделения по
времени путем использования так называемого времени простоя РЛС между
окончанием одной развертки и последующим пусковым импульсом другой,
или путем выделения части времени, предназначенного для записи радиолока-
ционных данных. При большом количестве вводимых данных использует-
ся ЭЛТ с отдельной электронной пушкой для их ввода, что позволяет сни-
зить требования к скорости переключения. В ЭЛТ с двумя пушками вторая
пушка может непрерывно использоваться для ввода знаков и символов, бла-
годаря чему минимизируются требования к скорости переключения и записи.
Однако взаимная связь двух отклоняющих систем создает значительные
трудности в разработке ЭЛТ, а трапецеидальные искажения, возникающие
из-за смещения осей одной или обеих электронных пушек от радиального на-
правления относительно центра экрана ЭЛТ, должны быть скорректированы
для поддержания точности и линейности.
Запись знаков и символов может осуществляться методом формирования
фигурного сечения луча, координатным методом и методом растровой раз-
вертки [17]. В ЭЛТ с фигурным сечением луча устанавливается трафарет
с вытравленным набором знаков, образующих апертуры. С помощью специ-
альной отклоняющей системы (отклоняющей системы выбора знака) луч на-
правляется на выбранный знак. Апертура в диафрагме придает лучу требуе-
мую конфигурацию. Затем луч отклоняется основной отклоняющей системой
в заданную точку экрана ЭЛТ. При записи радиолокационного видеосигнала
луч проходит через свободное отверстие в знаковом трафарете. Так как это
отверстие ограничивает ток луча, динамический диапазон видеосигнала умень-
шается. Метод формирования фигурного сечения дает высокое качество
отображения знаков и позволяет использовать сложные символы. Для умень-
шения дефокусировки при отклонении обычно применяются ЭЛТ с относи-
тельно небольшим углом отклонения. В настоящее время фигурное сечение
216
3.3. Конструкция индикаторов
применяется как в обычных ЭЛТ — характронах, так и в зап ом и н а юш и х
ЭЛТ прямого видения — тайпотронах.
Для формирования знаков используются и различные модификации коор-
динатного метода. В общеупотребительном методе для формирования требу-
емого знака или символа используется ряд коротких отрезков прямой. Если
хранить в запоминающем устройстве каждый знак как уникальный набор
программируемых отрезков, сложность оборудования окажется чрезвычайно
большой. Однако обычно применяется координатная запись по заданной
структуре,^ когда изображение прочерчивается в соответствии с эталонной
структурой. При этом луч включается на тех фрагментах структуры, которые
образуют требуемый знак. Применение одной-единственной структуры для
отображения всех требуемых знаков может привести к неэффективному ис-
пользованию времени. С целью экономии времени записи применяется ряд
эталонных структур, каждая из которых служит для записи группы знаков,
мало отличающихся по конфигурации, с соответствующим кодированием под-
светки каждого знака. При таком подходе можно выбрать разумное соотно-
шение между общим временем записи знаков и числом структур. Примером
может служить модульная система отображения типа AN/USA-26(V) 1,
в которой для записи 64 знаков используется семь структур. В этой аппара-
туре время записи одной структуры составляет 4,1—5,6 мкс. Для повышения
разборчивости знаков, особенно таких сходных между собой, как В и 8,
в данной системе можно использовать скругление уголков путем наложения
одного отрезка на другой.
В методе программированного точечного отображения формирование
знаков производится с помощью одной общей точечной матрицы. Электрон-
ный луч перемещается из одного положения в другое по программе, соответ-
ствующей формированию требуемого знака. В случае постоянной скорости
отклонения луч может включаться в интервале перехода из одного положения
в другое, в результате чего получаются линии равномерной яркости. Возмо-
жен также вариант, в котором луч включается только в каждой точке.
В системе формирования знаков методом фигур Лиссажу генерируются
синусные и косинусные члены ряда Фурье с соответствующими фазовыми
соотношениями. Метод фигур Лиссажу дает очень хорошее начертание зна-
ков, но аппаратура получается сложной.
Существует также система формирования знаков методом растровой раз-
вертки, подобной упрощенной телевизионной развертке. В этом методе для
формирования знака развертка луча производится независимо от формы зна-
ка по всей отведенной для него площади. В одном из вариантов метода знак
запоминается в точечной матрице с числом элементов 7X5 или 9X7. Деко-
дирование знака производится синхронно с разверткой, благодаря чему луч
включается в соответствующих точках. Необходимая полоса пропускания си-
стемы отклонения в случае растровой развертки приблизительно в два раза
меньше, чем при координатном методе развертки по заданной структуре при
том же периоде формирования. Качество отображения и возможная слож-
ность конфигурации знака определяются заданными размерами точечной
матрицы. Поскольку для каждого знака производится развертка в пределах
всего растра, яркость знаков может оказаться меньше, чем при координат-
ной развертке по заданной структуре при равных токах луча и временах
отображения.
Для получения высококачественного отображения на экране обычной
ЭЛТ используется моноскопный знаковый генератор, с помощью которого
комбинируются растровая развертка и метод фигурного сечения луча. При
развертке протравленной знаковой матрицы моноскопа генерируется видео-
сигнал, возникающий в результате изменения вторичной эмиссии в соответст-
вии с конфигурацией знаков. Развертка в индикаторной ЭЛТ осуществляется
синхронно с разверткой в моноскопе, сигнал которого вводится в ЭЛТ, фор-
мируя отображение знака. Скорость развертки ограничивается полосой про-
217
Гл. 3. Рао ио локационные индикаторы и системы отображения
пускания мишени и связанной с ней аппаратуры и отношением сигнал/шум
моноскопа Типичным значением периода записи знака является 15 мкс.
Фотографирование радиолокационного отображения. Радиолокационное
отображение можно фотографировать как с лицевой стороны ЭЛТ, так и сза-
ди через оптическое окно При фотографировании через окно можно создать
малогабаритный индикатор, причем фотоаппаратура не будет мешать работе
оператора, ио при этом требуется неалюминированный люминофор. В случае
составного люминофора типа Р7 для фотографирования используются и синяя
флуоресценция и желтая фосфоресценция. Чувствительность люминофора
к изменениям емкости, обусловленным движением луча, или к накоплению
зарядов при больших токах луча можно уменьшить, если нанести прозрач-
ное проводящее покрытие на заднюю сторону лицевого стекла ЭЛТ.
Фотографирование с лицевой стороны при одновременном визуальном
наблюдении производится с помощью цветоизбирающего зеркала. Такое зер-
кало, установленное под углом к плоскости экрана ЭЛТ, разделяет два
цвета люминофора типа Р7, отражая синюю флуоресценцию с коротким пос-
лесвечением по направлению к фотокамере. Желтая фосфоресценция с дли-
тельным послесвечением передается через зеркало наблюдателю с относитель-
но небольшим поглощением. При этом методе удается использовать от 80
до 90% энергии излучения синего цвета, соответствующего максимуму чув-
ствительности фотопленки. При фотографировании через окно крепление
фотокамеры получается удобным, поэтому оно всегда используется в тех слу-
чаях, когда габаритные ограничения делают недопустимым размещение перед
индикатором большого цветоизбирающего зеркала. Если цветоизбирающее
зеркало можно использовать, получается простое и эффективно работающее
фотографическое устройство.
Экранировка. ЭЛТ являются чувствительными приборами, требующими
тщательной экранировки. При наличии магнитных полей трансформаторов,
вентиляторов и электродвигателей следящих систем нужна экранировка не
только ЭЛТ. но и самих источников магнитных полей. Поля, создаваемые
интенсивными переменными токами в проводах, близко расположенных
к ЭЛТ, также могут модулировать отображение. Экранировать следует как
область между отклоняющей системой и электронной пушкой, так и конус
ЭЛТ вплоть до лицевого Стекла.
Помеха от переменного магнитного поля создает на экране ЭЛТ перио-
дические искажения, напоминающие паразитные колебания в контуре следя-
щей системы с зубчатой передачей. При этом наблюдаются сгущения и рас-
хождения линий развертки, в результате чего образуются так называемые
«спицы».
3.4- . Работа оператора за индикатором
Зрительное восприятие отображения. Для нормальных условий работы
оператора за индикатором типа ИКО в РЛС с секторным обзором необходи-
мо иметь относительно слабое внешнее освещение во избежание уменьшения
вероятности обнаружения целей. В случае люминофора Р7 порог обнаруже-
ния цели незначительно ухудшается при синем (флуоресцентном) внешнем
освещении в помещении 5—10 лм/м2, при красном (накальном) внешнем
освещении оптимальным является 1 лм/м2. Если превысить эти значения осве-
щенности, то порог обнаружения начинает существенно зависеть от степени
подавления отражений на экране ЭЛТ и достигнутого повышения контраста
отображения.
Эксплуатация индикаторов показала, что наилучшая пороговая чувстви-
тельность достигается, когда в отсутствие сигнала след луча слабо светится
и радиолокационные шумы видны на экране. Согласно проведенным нзмере-
m
3.4. Работа оператора за индикатором
ниям чувствительность оператора на 3—5 дБ выше при слабом свечении следа
луча, чем при полностью погашенном луче. Одной из причин является то,
что для большинства ЭЛТ световая отдача в начале световой характеристи-
ки нелинейно зависит от напряжения на управляющей сетке. В этой облаши
характеристики действующее отношение сигнал/шум уменьшается вследствие
ее нелинейности.
Освещение в помещениях с радиолокационной аппаратурой должно быть
слабым и равномерно распределенным Источники света располагают так,
чтобы они не могли создавать отражений от лицевого стекла ЭЛТ в преде-
лах угла обзора оператора. Кроме того, во избежание ухудшения темновой
адаптации, источники света размещают так, чтобы в поле зрения оператора
не могли попасть яркие источники света или ярко освещенные поверхности.
Таким образом, в помещении для оператора лучше всего иметь темные мати-
рованные поверхности.
Слабое освещение порядка 1 лм/м2 следует предпочесть полной темноте.
Утомляемость и напряжение зрения оператора уменьшаются при слабом осве-
щении [18], Было найдено, что слишком большой контраст, например, при
полной темноте в помещении и полностью погашенном луче в отсутствие сиг-
нала увеличивает утомляемость оператора и вызывает чрезмерное напряже-
ние зрения. Небольшая освещенность дает возможность оператору при
погашенном экране производить записи и считывать вспомогательную инфор-
мацию, например положение и показания органов управления Кроме того,
при этом допускается более высокий уровень акустического шума и наблю-
дение за оборудованием осуществляется более эффективно. Период наиболее
продуктивной работы оператора составляет около получаса. Поэтому целесо-
образно, чтобы два оператора работали поочередно. Однако при этом необ-
ходимо, чтобы во время отдыха оператор не осуществлял наблюдения, так
как в этом случае эффект от отдыха существенно снижается.
Контраст. Качество восприятия радиолокационного отображения зависит
от контраста К, т. е. от соотношения яркостей создаваемого на экране отоб-
ражения и фона:
К = В^-В* |00%,
ВФ
где Вог — яркость отображения и В$ — яркость фона При вычислении конт-
раста учитывается также освещенность экрана, создаваемая внешними источ-
никами.
Контраст отображения ограничивается в ЭЛТ светом от внешних источ-
ников, отраженным стеклом экрана, и рассеянным в нем светом, излученным
люминофором [19]. Свет, излучаемый при формировании отображения, созда-
ет вокруг светового пятна на экране ореол (ряд концентрических колец). При
отображении на большой площади экрана ореол вызывает общую засветку
люминофора и снижает контраст.
Ореол возникает в результате зеркального отражения света, падающего
под углом, превышающим критический угол падения на границу раздела стек-
ла и воздуха. Свет от тех частиц люминофора, которые не имеют оптическо-
го контакта со стеклом, отражается от внутренней поверхности стекла на
люминофор и рассеивается, вследствие чего диаметр отображаемой точки
увеличивается. Свет от частиц люминофора, имеющих оптический контакт со
стеклом, падающий на внешнюю поверхность стекла экрана под критическим
углом полного внутреннего отражения (41° для обычного стекла), отражает-
ся на поверхность люминофора и, вновь отразившись от люминофора, обра-
зует световые кольца. Номинальное значение диаметра кольца зависит от
толщины стекла и определяется выражением
D = 474gOc,
2.19
Гл. 3. Радиолокационные индикаторы и системы отображения
где Т — толщина стекла и 0С — критический угол полного внутреннего
отражения.
Основным способом уменьшения влияния ореола является использование
в качестве стекла экрана нейтрального светофильтра. При этом передаваемый
свет ослабляется при прохождении через стекло фильтра один раз, а отра-
женный свет дважды на более длинном участке пути. В обычно используе-
мых светофильтрах коэффициент пропускания (нормально к поверхности) со-
ставляет 20, 31, 55 и 72%. Ореол можно также уменьшить, нанеся люмино-
фор на тонкую подложку на стекле. В трубках с высокой разрешающей спо-
собностью и с линейной разверткой эта проблема решается использованием
волоконной оптики для лицевого стекла. Если диаметр волокна достаточно
мал по сравнению с диаметром электронного пятна, то рассеяние света пол-
ностью отсутствует и разрешающая способность не ухудшается.
Зрительное восприятие отображения ухудшается также из-за отражения
света от поверхности раздела стекло — воздух. Отражение от каждой из по-
верхностей между наблюдателем и люминофором может доходить до 4% от
падающего света. Противоотражательное покрытие типа фтористого магния
может снизить отражение в спектре видимого излучения приблизительно до
2%, а специальные многослойные покрытия типов НЕА и HELR — до 0,5%
и ниже.
Фильтры с круговой поляризацией также являются эффективным средст-
вом борьбы с зеркальным отражением света внешних источников от стекла
экрана и, кроме того, эффективно снижают отражения от поверхности люми-
нофора. Хотя вследствие зернистости люминофора свет деполяризуется, обыч-
но от 20 до 35% всего отраженного света отражается зеркально. Поэтому
фильтр с круговой поляризацией компенсирует ухудшение контраста, вызван-
ное отражениями от люминофора, приблизительно так же, как нейтральный
фильтр. Имеются и другие эффективные сочетания люминофора и оптическо-
го фильтра [20].
Эффективным методом устранения отражений от внутренних поверхно-
стей, обусловленных внешними источниками, является размещение фильтра
непосредственно на лицевом стекле. Метод крепления защитных экранов,
обеспечивающих взрывобезопасность электронно-лучевых трубок в граждан-
ских телевизорах, освоен почти всеми заводами-изготовителями. Фильтры мо-
гут быть многослойными, одновременно улучшающими контраст и регулирую-
щими цвет.
Если допустимы наблюдения лишь в пределах ограниченного угла, то
хорошие результаты при интенсивном внешнем освещении дает мелкоячеи-
стый фильтр, выполненный в виде тонкостенной сотовой структуры и укреп-
ленный на лицевом стекле. Стенки сотов должны быть очень тонкими — тонь-
ше элемента разрешения ЭЛТ во избежание потерь при наблюдении. Угол
наблюдения и защита от внешнего освещения зависят от толщины и разме-
ров ячеек сотовой структуры. Дл;1 повышения эффективности фильтра стенки
ячеек нужно сделать черными и матовыми.
Для люминофоров Р7 и Р14 цветной светофильтр рассчитывается иногда
на подавление синей вспышки. Хотя светофильтры выполняют эту функцию,
операторы обычно при возможности снимают их. По-видимому, оператор
может визуально отличить эффект интенсивной синей вспышки. В некоторых
случаях при небольшом отношении сигнал/шум оператор может увеличить
вероятность правильного обнаружения цели, используя при этом кратковре-
менную синюю флуоресценцию наряду с длительной желтой фосфоресцен-
цией.
Потери разрешения из-за наложения . Хотя разрешающая способность
РЛС по угловым координатам обычно постоянна на всех дальностях, угловая
разрешающая способность радиолокационного индикатора является функцией
дальности. Поскольку электронное . пятно на экране ЭЛТ имеет конечные
размеры, при небольших дальностях оно может оказаться на ИКО шире по
220
3.4. Работа оператора за индикатором
азимуту, чем диаграмма направленности антенны. В результате отображения
на экране эхо-сигналов от потенциально разрешимых целей могут оказаться
наложенными одно на другое.
Диаметр электронного пятна в центре экрана меньше, чем на краях.
Обычно при одном и том же токе луча отношение диаметров в центре и на
краях составляет в высококачественной ЭЛТ 1 : 1,5, однако диаметр пятна
возрастает с увеличением тока луча. Интенсивность эхо-сигнала на малых
дальностях может быть выше, в результате чего диаметр пятна увеличится.
При увеличении напряжения видеосигнала наступает момент, когда появ-
ляется дефокусировка и отображение точки начинает расплываться, причем
при дальнейшем увеличении напряжения увеличивается диаметр, а не яркость
пятна. Разрешающую способность на малых дальностях можно улучшить ре-
гулировкой усиления по дальности или временной регулировкой усиления
(ВРУ), снижающей потери разрешения из-за наложения. Регулировкой уси-
ления по дальности можно поддерживать постоянство сигнала и даже умень-
шать его на малых дальностях, если чувствительность системы это позволяет.
Повышение разрешающей способности уменьшением тока луча дает извест-
ные преимущества, так как плотность ложных отметок и, следовательно, ве-
роятность их близкого взаимного расположения на малых дальностях значи-
тельно выше, чем на больших.
Можно использовать также пилообразное напряжение на управляющей
сетке ЭЛТ, линейно изменяющееся с дальностью. Хотя при этом сигнал
в центре экрана ЭЛТ попадает в нелинейную область с пониженным порогом
различимости, это не вызывает каких-либо трудностей, если отношение
сигнал/шум для целей, находящихся на малых дальностях, достаточно
велико.
Обновление знаков. Воспроизводимые знаки, если не считать запоминаю-
щих ЭЛТ, должны периодически перезаписываться или обновляться. При
записи данных со слишком малой частотой обновления появляется нежела-
тельное мелькание. Критическая частота, выше которой мелькание уже нс
воспринимается, зависит от послесвечения люминофора, а также от яркости
отображения. Для среднего наблюдателя и люминофора типа Р7 критическая
частота мелькания составляет приблизительно от 23 до 31 Гц при яркости
35 кд/м2 и от 30 до 43 Гц при яркости 170 кд/м2 [11, 21]. Разброс этих дан-
ных объясняется субъективным характером измерений, а также зависимостью
от методики измерения и условий, в которых ставился эксперимент.
Для минимизации мелькания можно рекомендовать в соответствии
с опубликованными данными частоту обновления данных для большей части
люминофоров, используемых в радиолокационных индикаторах, 30—40 Гц.
В некоторых индикаторах с ограниченной скоростью развертки критическая
частота обновления данных оказалась порядка 20 Гц. Однако при увеличении
объема и сложности данных чувствительность оператора к мельканию также
увеличивается, что заставляет предпочесть частоту обновления данных 30 Гц.
Можно ожидать, что при использовании только компоненты с длительным
послесвечением (желтой компоненты) люминофора Р7 мелькание уменьшит-
ся. Однако использование и синей и желтой компонент обеспечивает более
Отчетливое и простое считывание при перемещении в новое положение пакета
буквенно-цифровых данных: смазывание при перезаписи уменьшается, так как
в старом положении свечение быстро снижается до одной желтой фосфорес-
ценции, а данные в новом положении быстрее формируются благодаря боль-
шой интенсивности синей флуоресценции с коротким послесвечением.
Сопровождение отметок целей на экране И КО и определение их коорди-
нат. Органы ручного контроля или съема данных с ИКО используются опера-
тором для фиксации или измерения координат отметок целей на экране инди-
катора При сопровождении на экране отображаются стробирующий импульс,
символы признаков и другие метки. Измерение координат осуществляется
как в полярной, так и в прямоугольной системе координат.
221
Г л. 3. Радиолокационные индикаторы и системы отображения
Измерение положения цели в полярной системе координат производится
на основе определения углового смешения отметки цели относительно опор-
ного пеленга и радиального расстояния, отсчитываемого от начала коорди-
нат. Для измерения угла на экране обычно отображается линия пеленга (ука-
затель пеленга), выходящая из начала координат Для измерения дальности
на указателе пеленга высвечивается строб или метка дальности.
Сопровождение (измерение координат) целей в полярной системе коор-
динат может быть как пропорциональным, так и по скорости Типовая систе-
ма пропорционального типа содержит рукоятки управления стробом дально-
сти и указателем пеленга, причем их положение однозначно зависит от поло-
жения рукояток. В системе управления по скорости указатель пеленга (или
строб дальности) перемещаются со скоростью, пропорциональной отклонению
рукояток. Направление перемещения этих меток определяется направлением
отклонения рукоятки от ее нулевого положения
Точную установку органов управления для получения прецизионного от-
счета можно выполнить как при пропорциональном сопровождении цели, так
и сопровождении ее по скорости. Одновременное сопровождение по двум
полярным координатам должно быть в известной мере скоординировано, и
для быстрого и квалифицированного его выполнения необходима предвари-
тельная тренировка. При вращении рукоятки управления указателем пеленга
в одну сторону может потребоваться вращение рукоятки управления стро-
бом дальности в противоположную сторону. К тому же в противоположных
квадрантах экрана одному и тому же направлению перемещения отметок
целей соответствуют противоположные направления поворота рукояток уп-
равления
Сравнительно просто сопровождение по скорости выполняется с помо-
щью потенциометра с пружинным возвратом ручки в нулевое положение.
Отклонение ручки потенциометра воздействует на входной сигнал системы
отображения в соответствующем направлении. С помощью одной комбиниро-
ванной ручки управления можно одновременно сопровождать цель по даль-
ности и пеленгу. При этом положение строба дальности регулируется откло-
нением ручки, а положение указателя пеленга ее вращением. Для эффектив-
ного использования этой ручки управления также необходимы отработка ко-
ординации движений и тренировка оператора.
В прямоугольной системе координат положение отметки цели определяет-
ся ее расстоянием от начала координат по двум ортогональным осям. Обыч-
но при работе органов сопровождения координаты целей индицируются на
экране ЭЛТ метками или символами признаков. Система прямоугольных ко-
ординат особенно пригодна для передачи цифровых данных, автоматической
прокладки курса и фиксации данных о целях. Сопровождение может быть
как пропорциональным, так и по скорости. Оно может осуществляться с по-
мощью комбинированных ручек управления, изометрических (нажимных) ор-
ганов управления, следящих или поворотных шаров, проводящих слоев на
стекле и световых перьев. Следящий шар и комбинированная ручка управле-
ния могут служить как для пропорционального сопровождения, так и для
сопровождения по скорости. Изометрическая (нажимная) кнопка использует-
ся обычно для сопровождения по скорости, а проводящий слой на стекле
и световое перо — для пропорционального сопровождения.
Физические характеристики органов управления в большой степени оп-
ределяют качество работы оператора и удобство использования данных. Осо-
бенно большое значение имеют трение, заедание, инерция и затухание в регу-
ляторе, а также коэффициент пересчета. При изменении масштаба шкалы
дальности чувствительность системы сопровождения нужно изменить так, что-
бы коэффициент пересчета сохранялся постоянным по всему экрану индика-
тора Выходной сигнал системы сопровождения может быть разного типа,
например сигнал, снимаемый с потенциометра, синхронизирующий'сигнал, ди-
скретный кодированный или аналоговый сигнал.
222
3.4. Работа
оператора за индикатором
Комбинированная ручка управления представляет собой рукоятку, кото-
рую можно наклонять относительно исходного положения в направлении тре-
буемого перемещения метки. При пропорциональном сопровождении полно-
му отклонению ручки управления соответствует перемещение метки до края
экрана. Для точной установки метки может быть предусмотрен также вернь-
ер. После грубой установки метки система переключается в режим верньерно-
го регулирования вокруг положения грубого совмещения. Нужно предусмот-
реть также возможность отключения ручки управления после ее установки
в нужное положение, чтобы оператор мог прекратить сопровождение без
нарушения положения метки выбранной цели. При сопровождении по скоро-
сти такой ручкой направление перемещения метки определяется направлени-
ем наклона ручки, а скорость перемещения метки — степенью этого наклона.
Так можно обеспечить и грубое и точное совмещение метки.
В случае изометрической или нажимной кнопки сигнал сопровождения
пропорционален силе, приложенной к ручке, а не ее перемещению. В этом
устройстве отсутствуют ограничения, связанные с инерцией, заеданием и
трением, обычные для систем сопровождения, в которых используются ком-
бинированные ручки управления. Перемещению метки в пределах всего экра-
на соответствует относительно небольшой ход кнопки. Поэтому нажимную
кнопку очень удобно использовать для регулирования в тесных помещениях.
В системе сопровождения с помощью следящего (поворотного) шара ис-
пользуется шар диаметром от 7,5 до 12,5 см, поддерживаемый подшипника-
ми так, что он может быть свободно повернут в любом направлении. К нему
прижаты дисковые датчики для регистрации его перемещения по осям X и У.
Дисковые датчики управляют работой кодовых преобразователей положения
или скорости При пропорциональном сопровождении преобразователь может
быть снабжен устройством, возвращающим его в исходное положение по
окончании цикла определения координат. Операторы легко усваивают метод
сопровождения с помощью следящего шара в отношении как скорости вы-
полнения операций, так и точности его установки.
В системе с проводящим слоем на стекле используется прозрачное прово-
дящее покрытие экрана ЭЛТ Небольшое напряжение, прикладываемое попе-
ременно по каждой из осей к покрытию, индицируется или измеряется прово-
дящим карандашом, устанавливаемым в нужной точке поверхности. Коорди-
натные напряжения, зафиксированные на проводящем покрытии, используют-
ся для перемещения метки на экране индикатора, как бы замыкая контур
обратной связи с оператором. Такая система обеспечивает быструю грубую
установку метки, однако возможность точной установки существенно ограни-
чена, так как изменения координатных напряжений и перемещения метки
происходят в масштабе один к одному Кроме того, на проводящем слое
возникают царапины, и он быстро покрывается тонкой пленкой грязи.
В системе сопровождения цели с помощью светового пера координаты
положения цели определяются по свечению отметки сопровождаемой цели
методом считывания сигналов отклоняющей системы в момент получения
сигнала от светового-пера. С помощью светового пера можно легко и быстро
приближенно определить положение цели, однако бывает трудно различить
близко расположенные цели. В одной из модификаций этой системы свето-
вым пером регулируется положение строба Точное определение координат
цели осуществляется с помощью строба, состоящего из 4-х полустробов, об-
разующих симметричную структуру относительно перемещаемого по экрану
окончания светового пера. Эта система позволяет точно маркировать цель и
фиксировать ее положение.
Использование дополнительных данных. На радиолокационное отображе-
ние могут быть дополнительно наложены такие редко обновляемые виды ин-
формации. как карта и справочные данные Ввод данных производится либо
с помощью транспарантов, размещаемых над поверхностью экрана, либо оп-
223
Г л. 3. Радиолокационные индикаторы и системы отображения
тической проекцией на экран ЭЛТ диапозитивов, либо электронным смеше-
нием или суммированием данных с видеосигналом.
Транспарант. Транспарант с соответствующей картой или данными, нане-
сенными контрастной краской, размещается над экраном ЭЛТ. Недостатком
такой системы является уменьшение точности из-за параллакса, что ограничи-
вает возможность перемещения оператора. Ошибку, обусловленную парал-
лаксом, можно свести к минимуму с помощью отражательного устройства,
проецирующего изображение транспаранта на поверхность люминофорного
слоя. При этом необходимо, чтобы оператор сосредоточил наблюдение на
поверхности люминофорного слоя, а не на изображении транспаранта. В от-
ражательном устройстве используется сферическое полупрозрачное зеркало,
радиус кривизны которого вдвое больше радиуса кривизны люминофорного
слоя экрана ЭЛТ. Зеркало размещается посредине между поверхностями
люминофорного слоя и транспаранта Транспарант освещается внутренним
источником света, изображение проецируется на зеркало и воспроизводится
на люминофорном слое.
Проекторы. При оптической проекции диапозитивов на экран ЭЛТ про-
ектор располагается либо перед экраном, либо сзади ЭЛТ' при наличии оп-
тического окна. Использование фронтальной поверхности затруднено вследст-
вие ограничений на размещение аппаратуры и необходимости обеспечить
наблюдение отображения оператором. В случае значительного смещения про
ектора относительно продольной оси ЭЛТ появляются очень большие трапе-
цеидальные или нелинейные искажения изображения. Проекция с задней
стороны экрана ЭЛТ затрудняется из-за наличия электронной пушки. Элект-
ронную пушку следует располагать на оси ЭЛТ, так как информация, содер-
жащаяся в видеосигнале, имеет первостепенное значение. Поэтому проектор
приходится смещать относительно продольной оси ЭЛТ. Для одновременного
соблюдения таких условий, как небольшое расстояние и смещение относитель-
но оси, необходима широкоугольная проекция. Линзы и конденсор рассчиты-
ваются так, чтобы экран был равномерно освещен и отсутствовали яркие
пятна, создаваемые нитью накала источника света . в проекторе. Толщина
слоя люминофора подбирается с таким расчетом, чтобы угловое распределе-
ние рассеяния света спроецированного изображения было приблизительно
таким же, как и излучаемого люминофором света.
В случае применения ЭЛТ со сферическим экраном изображение проеци-
руется на поверхность экрана с нелинейными искажениями, обусловленными
смещением оси проектора относительно оси ЭЛТ. Эти искажения можно
скомпенсировать в самом диапозитиве проектированием исходного изображе-
ния с эквивалентного бесконечному расстояния, с задней стороны специально-
го экрана и фотографированием полученного на экране изображения из точ-
ки расположения проектора.
Ввод картографических данных по видеоканалу. Использование видеока-
нала является третьим способом ввода картографических данных в радиоло-
кационный индикатор. При этом методе диапозитив с изображением карты
сканируется синхронно с радиолокационным изображением на экране и полу-
ченный видеосигнал смешивается с радиолокационным видеосигналом. При
вводе картографических данных по видеоканалу можно применить систему
развертки бегущим лучом, управляемую теми же сигналами, которые исполь-
зуются в радиолокационном индикаторе. Фотокатод фотоумножителя разме-
щается в фокальной плоскости системы развертки и воспринимает свет бегу-
щего луча сквозь диапозитив. В случае смещения радиолокационного изобра-
жения относительно центра экрана можно предусмотреть следящую систему
для соответствующего смещения диапозитива. Изменение масштаба по коор-
динате дальности может производиться с использованием либо набора линз,
либо объектива с переменным фокусным расстоянием. Предельное увеличе-
ние диапозитива ограничивается допустимым увеличением размеров буквен-
но-цифровых знаков и ширины линий. Вообще целесообразно сохранять неиз-
224
3.4. Работа оператора ьа. индикат ором
менными размер знаков п ширину линий и менять масштаб, в котором чер-
тится карта.
Максимальная разрешающая способность устройства ввода картографи-
ческих данных по видеоканалу с разверткой бегущим лучом соответствует
приблизительно 150 кольцам дальности. Поэтому нецелесообразно рассмат-
ривать «крупным планом» небольшую часть радиолокационного изображения
при увеличенном масштабе по координате дальности, так как при этом соот-
ветственно ухудшается разрешение вводимых картографических данных.
При использовании нескольких индикаторных пультов с индивидуальными
масштабами по шкале дальности для каждого масштаба может быть пред-
усмотрено отдельное устройство ввода картографических данных. С целью
экономии оборудования для всех этих устройств могут быть использованы
общие силовой и высоковольтный источники питания.
Размеры индикатора. Был произведен ряд оценок оптимальных размеров
радиолокационных индикаторов разного назначения. Исследования парамет-
ров индикатора и зрительного восприятия данных оператором показали, что
качество работы оператора при условии поддержания одинаковой разреша-
ющей способности и отображения только радиолокационных сигналов мало
меняется при изменении диаметра изображения в пределах 12,5—30 см.
Вследствие больших эксплуатационных удобств и меньшей утомляемости
оператора предпочтительнее экраны диаметром от 25 до 30 см.
При произвольном распределении по всему экрану в дополнение к радио-
локационным сигналам буквенно-цифровых знаков и символов ограничиваю-
щими факторами являются разрешимый размер символа и перегрузка отобра-
жения данными. Минимальный размер символов является функцией мини-
мального воспринимаемого элемента при заданном расстоянии наблюдения.
Практически минимальный размер символа может быть ограничен разреша-
ющей способностью ЭЛТ. Когда для формирования требуемого символа до-
статочно 10 элементов разрешения, минимальный размер символа при наблю-
дении с расстояния 0,5 м составляет 1,25 мм [22]. Однако разрешающая
способность ряда выпускаемых ЭЛТ не позволяет получить символы с разме-
рами меньше 2,5 мм. При • формировании символов точечной матрицей мак-
симальный размер символа не должен превышать минимального более чем
в 3—5 раз во избежание появления зернистости его структуры.
Во многих применениях размер знаков и перегрузка данными ограничи-
вают возможности совмещенного отображения радиолокационных и траектор-
ных данных на экранах диаметром меньше 25—30 см. Операторы обычно
предпочитают экраны больших размеров — порядка 40 или 50 см. Способ-
ность оператора сосредоточивать внимание на участках изображения, пред-
ставляющих особый интерес, возрастает с увеличением размеров изображе-
ния. Другие причины предпочтительного выбора экранов больших размеров
являются, по-видимому, чисто психологическими.
Исследования возможностей оператора по ручному сопровождению це-
лей показали, что оператор может обеспечивать точное сопровождение двух
целей. По мере увеличения числа целей частота манипуляций при сопровож-
дении каждой цели и точность определения ее положения начинают падать.
При большом числе, целей у оператора появляется тенденция не обращать
внимания на перемещения меток тех целей, у которых нет явных изменений
наблюдаемой траектории или скорости движения. Основное внимание опера-
тора сосредоточивается на целях, параметры движения которых существенно
меняются. Это является признаком того, что оператор адаптировался к уве-
личению рабочей нагрузки и концентрирует внимание на наиболее важной
информации.
225
Г л. 3. Радиолокационные индикаторы и системы отображения
3.5. Специальные индикаторы
Аппаратура для работы при ярком внешнем освещении В число устройств
отображения радиолокационной информации в условиях интенсивного внеш-
него освещения входят телевизионные системы с преобразованием развертки
[23], запоминающие ЭЛТ прямого видения и ЭЛТ с темновой записью (со
скотофором)
Преобразование развертки. Для преобразования развертки обычно ис-
пользуется трубка с электрической памятью [24, 25], на которой радиолока-
ционная информация записывается методом обычной радиолокационной
развертки, например, используемой в индикаторах кругового обзора, а считы-
вается с использованием развертки других типов, например типа телевизи-
онного растра Индикатором оператора является в этом случае телевизион-
ный контрольный индикатор — монитор. В запоминающей ЭЛТ прямого
видения [26, 27] радиолокационная информация записывается на запоминаю-
щем слое, расположенном за люминофором, непрерывно облучаемым по все-
му полю потоком электронов, благодаря чему записанное изображение
становится видимым. При использовании скотофора в результате записи
электронным лучом происходит поглощение свега люминофором и запись ра-
диолокационного изображения получается темновой.
Обычно яркость телевизионного отображения, полученного методом пре-
образования развертки, составляет 170—-350 кд/м2. Рабочий цикл телевизион-
ного растра эквивалентен рабочему циклу радиолокационного растра ИКО,
соответствующего максимальной дальности, определяемой частотой повторе-
ния импульсов. Однако благодаря большой частоте повторения кадровой раз-
вертки глаз усредняет распределение яркости по телевизионному растру.
По изображению иа экране ИКО с люминофором Р7 оператор может
принять решение о наличии цели через время 0,25—1 с после того, как на
люминофоре был записан эхо-сигнал. К этому моменту яркость отметки пели
определяется фосфоресценцией с длительным послесвечением и составляет
около Ve максимальной яркости фосфоресценции, а яркость флуоресценции
с коротким послесвечением уже пренебрежимо мала. В результате яркость
изображения на экране ИКО с люминофором Р7 в моменты принятия реше-
ний о наличии целей может быть равна или меньше */го средней яркости те-
левизионного растра. Кроме того, для использования максимальной яркости
на экране ИКО оператор должен все время сосредоточивать свое внимание
на участке растра, примыкающем к линии развертки по дальности и враща-
ющемся вместе с ней.
Увеличение яркости телевизионного растра может обеспечиваться и рядом
других факторов. Рабочий цикл телевизионного растра сохраняется неизмен-
ным, в то время, как рабочий цикл ИКО уменьшается пропорционально
уменьшению отношения отображаемой дальности к периоду повторения им-
пульсов. В телевизионном контрольном индикаторе ускоряющее напряжение
можно увеличить для повышения яркости. Поскольку телевизионный конт-
рольный индикатор рассчитан на фиксированные частоты развертки, то это
позволяет применять отклоняющие системы резонансного типа и при неболь-
шой их мощности использовать относительно высокие ускоряющие напряже-
ния. Отклоняющая система ИКО должна обеспечивать требуемую скорость
развертки при малой дальности и в то же время иметь достаточную рабо-
чую мощность и допустимую мощность рассеяния при максимальных дально-
сти и рабочем цикле. Поэтому отклоняющая система может ограничивать по-
вышение ускоряющего напряжения сверх некоторого разумного предела.
Индикаторы с непосредственным отображением радиолокационных данных
обычно работают с ускоряющими напряжениями 7—10 кВ и в редких случаях
до 15 кВ. Индикаторы телевизионного типа могут работать с ускоряющими
напряжениями от 15 до 25 кВ.
226
3.5. Специальные индикаторы
В системах с преобразованием развертки можно получить более высокое
отношение сигнал/ш\м благодаря накоплению на запоминающей поверхности
Регулируя время спада заряда на запоминающей поверхности, можно воспро-
извести движение цели Системы с преобразованием развертки применяются
также, если нужно отобразить на одном индикаторе данные нескольких источ-
ников информации с различными скоростями передачи данных [28]. Эти
данные могут отображаться на индикаторе одновременно или выборочно
Недостатками преобразования развертки являются пониженная разрешающая
способность и ограниченная серая шкала (динамический диапазон сигнала)
запоминающей ЭЛТ
Разрешающая способность систем с преобразование;*! развертки соответ-
ствует приблизительно 800 телевизионным строкам, в то время, как в ИКО
она может доходить до 1500 строк. Число градаций серой шкалы запоминаю-
щей ЭЛТ не превышает 7, а в ИКО можно получить от 12 до 15. Максималь-
ная скорость записи запоминающей ЭЛТ также ограничена. Таким образом,
на малых дальностях в системе с преобразованием развертки приходится
жертвовать разрешающей способностью и числом градаций серой шкалы.
Была разработана также система преобразования развертки с видиконом
[29], в которой отображение с экрана ЭЛТ с коротким послесвечением и вы
сокой разрешающей способностью переносится на запоминающий видикон
Запись на ЭЛТ производится методом радиолокационной развертки, а види-
кон снимает копию отображения на ЭЛТ методом телевизионной развертки
Запоминающие ЭЛТ прямого видения. Яркость запоминающих ЭЛТ пря-
мого видения может превышать 3500 кд/м2. Поэтому такие ЭЛТ особенно
пригодны для индикаторов, работающих в условиях очень яркого внешнего
освещения, встречающихся, например, на командно-диспетчерских пунктах
аэродромов и в кабинах самолетов. Максимальная яркость индикатора яв-
ляется функцией тока системы облучения люминофора широким пучком,
ускоряющего напряжения и уровня насыщения люминофора. Разрешающая
способность запоминающих ЭЛТ прямого видения с экраном диаметром
12,5 см находится в пределах 3—5 линий/мм. В ЭЛТ с экраном диаметром
40—50 см разрешающая способность обычно составляет 2—3 линии,'мм. Число
градаций яркости серой шкалы не превышает 5—7. Скорость записи в таких
ЭЛТ также ограничена. Для быстрой записи в диапазоне малых дальностей
может оказаться необходимым примириться с пониженным значением макси-
мальной яркости и с ухудшенным разрешением запоминающей ЭЛТ.
Для обеспечения устойчивой работы запоминающей ЭЛТ прямого виде-
ния ее конструкция должна быть тщательно разработана. Между запомина-
ющими ячейками и люминофором легко возникают пробои, обусловленные
небольшими зазорами и относительно высокой разностью потенциалов. Рабо-
та ЭЛТ должна регулироваться таким образом, чтобы не возникло бистабиль-
ное состояние запоминающей поверхности, При этом состоянии поверхности
запись лучом большой интенсивности может сместить потенциал запоминаю-
щей ячейки вплоть до появления вторичной эмиссии и выхода ЭЛТ из-под
контроля а также вызвать порчу ячеек и люминофора.
ЭЛТ с темновой записью. В случае люминофора РЮ (скотофора) радио-
локационная развертка осуществляется обычным методом, однако визуаль-
ные параметры изображения определяются контрастом между записью и чи-
стым экраном, обусловленным поглощением света в люминофоре. Таким об-
разом, при скотофоре необходимо внешнее освещение, однако запись видна
в широком диапазоне уровней внешней освещенности. Диапазон контраста
в скотофоре очень ограничен, и скорость записи составляет от Vio ДО ‘/is ско-
рости для других люминофоров. Возбужденное состояние скотофора сохра-
няется в течение длительного времени, причем для стирания записи требует-
ся тепловая энергия. При стирании записи с помощью нитеобразного нагрева-
теля, расположенного за экраном, частота и скорость стирания могут ока-
заться недостаточными для многих радиолокационных индикаторов.
227
Гл. 3. Радиолокационные индикаторы и системы отображения
Индикаторы РЛС бокового обзора. РЛС бокового обзора обычно исполь-
зуются для картографирования земной поверхности Карта поверхности вдоль
пути самолета, несущего РЛС, записывается на пленку с помощью ЭЛТ
с однострочной разверткой. Так как пленка движется перед экраном ЭЛТ
в соответствии со скоростью полета самолета, формируется непрерывная кар-
та местности. Пленка может при этом одновременно проявляться для отобра-
жения карты на визуальном индикаторе в почти реальном масштабе времени
Для контроля пленки оператором в системе предусмотрена аппаратура для
просмотра пленки, позволяющая немедленно после проявления регулировать
систему в процессе работы.
Высокая разрешающая способность РЛС бокового обзора, определяемая
эффективной шириной диаграммы направленности и длительностью импуль-
са, обусловливает очень строгие требования к системе записи изображения.
Основным является разрешающая способность пленки, выраженная числом
пар линий на 1 мм при заданном уровне контраста, равном обычно 50%.
Разрешающая способность отображения зависит от ряда ограничивающих
факторов, в том числе от диаметра электронного луча, разрешающей способ-
ности линз и пленки. При использовании мелкозернистого люминофора ЭЛТ
могут обеспечить разрешение от 0,0075 до 0,025 мм [30, 31]. В ЭЛТ исполь-
зуются люминофоры PH и Р16 с ультрафиолетовым и синим свечением, так
как их максимальная световая отдача лежит в области максимальной чувст-
вительности пленки [32]. При этом наибольшее значение имеют абсолютная
эффективность люминофора и соотношение спектрального распределения его
энергии и спектральной характеристики пленки, а не световая отдача [10].
Постоянная времени люминофора должна быть незначительной и соответст-
вовать разрешающей способности и скорости протяжки пленки по отображе-
нию во избежание снижения контраста. Для поддержания одинаковой разре-
шающей способности в пределах всего изображения фокусировка обычно
должна изменяться с отклонением. Для достижения максимального разреше-
ния фокусировка должна быть нелинейной функцие"’ отклоняющего сигнала
в соответствии с геометрией ЭЛТ. При максимальной разрешающей способ-
ности измерения сфокусированного пятна обычным микроскопом могут не
дать нужной точности. Для получения оптимальных рабочих параметров
ЭЛТ иногда требуется фокусировка с помощью щелевого анализатора.
Для поддержания требуемой разрешающей способности по всей ширине
развертки при конструировании индикатора учитывается возможность появле-
ния внешних помех. К минимуму сводятся магнитные наводки, вызывающие
дрожание развертки, помехи от некачественного заземления и шумы в откло-
няющих сигналах. Обеспечивается, развязка между источниками сигналов от-
носительно большой амплитуды (например, видеосигналов) и отклоняющей
системой или источником ускоряющего напряжения. На экранирующие и за-
земляющие провода не должны наводиться сколько-нибудь значительные
сигналы. В ЭЛТ с высокой разрешающей способностью и при чувствительно-
сти усилителя отклоняющей системы, равной 0,4 В/см, сигналу в 1 мВ соот-
ветствует ширина двух линий.
Возможность увеличения плотности энергии электронного луча повыше-
нием ускоряющего напряжения и уменьшением диаметра луча лимитируется
старением люминофора [33]. Хотя люминофор Р16 стареет в условиях воз-
буждения, соответствующего более низкому уровню светового излучения, он
продолжает сохранять преимущество перед другими люминофорами в отно-
шении излучения света, наиболее пригодного для фотографирования. Усилия
по разработке люминофоров для фотографирования с очень малой выдержкой
направлены на улучшение характеристик старения и уменьшение тока луча
при повышении отдачи.
Регулирование оптики и механизма протяжки пленки должно быть согла-
совано с параметрами ЭЛТ. Разрешающую способность и линейность линз
следует согласовать с разрешающей способностью ЭЛТ и требуемой точно-
228
3.5. Специальные индикаторы
стыо и линейностью изображения на пленке. Для снижения требований к све-
товой отдаче ЭЛТ необходима максимальная эффективность оптического
тракта.
Индикаторы системы предотвращения столкновений с местностью. Для
РЛС систем предотвращения столкновений с местностью используются инди-
каторы различных типов, обеспечивающих необходимую информацию для
вождения самолета с заданным малым превышением над рельефом местно-
сти. На индикаторе обычно воспроизводятся данные о текущем превышении
над местностью и (или) данные по упреждающему управлению для обеспече-
ния заданного превышения над местностью впереди самолета. Воспроизводи-
мые на индикаторе данные обычно основываются на обработанной радиоло-
кационной информации и связываются с динамическими характеристиками
самолета.
В одном из типов индикаторов используется развертка типа Е (рис. 1)
со шкалой дальности по координате X и шкалой угла места по координа-
те Y, причем антенный луч осуществляет развертку в вертикальной плоско-
сти в направлении полета самолета. Радиолокационный сигнал, отраженный
от впереди лежащей поверхности и характеризующий соответствующее пре-
вышение над местностью, отображается в виде функции вектора скорости.
Указатель индицирует требуемый для поддержания заданного превышения
над местностью угол наклона вектора скорости в функции от дальности.
При обычной развертке типа Е на ближайшем отрезке траектории впереди
самолета индицируется завышенный наклон вектора скорости относительно
земной поверхности и значения угла оказываются преувеличенными. Однако
направление прихода отраженного от земной поверхности сигнала отобра-
жается на индикаторе относительно вектора скорости, поэтому оператор
имеет непосредственную информацию о требуемом угловом смещении векто-
ра скорости для поддержания заданного превышения над местностью. Даль-
ность, на которой наклон вектора скорости регулируется, легко может ме-
няться, так как рельеф местности отображается начиная от точки под само-
летом вплоть до максимальной дальности, охватываемой разверткой.
Недостатком развертки типа Е является отсутствие информации об изме-
нениях рельефа местности справа и слева от направления вектора скорости
самолета. Плоская развертка типа Е является вариантом развертки типа Е.
Отсчет при этой развертке проще, особенно на малых дальностях. В этой
развертке координата по углу места преобразуется пропорционально отноше-
нию требуемой высоты над плоскостью безопасного превышения к радиоло-
кационной дальности. Таким образом, рельеф местности отображается так,
как его видит наблюдатель, смотрящий на самолет со стороны. Считается,
что это обеспечивает более нормальные соотношения для оценки пилотом
превышения над местностью и устраняет преувеличенное отображение углов
на малых дальностях, наблюдаемое при развертке типа Е.
При развертке типа В воспроизводятся азимут и дальность до точки
пересечения с рельефом местности при выбранном угле места относительно
вектора скорости. Эта развертка не дает информации ни о превышении над
местностью для дальностей, меньших дальности до точки пересечения, ни об
относительной высоте местности за точкой пересечения. Однако она дает
информацию о рельефе местности справа и слева от направления вектора
скорости Вариантом индикатора с разверткой типа В является профилометр
поперечного типа, в котором координата дальности заменена на угломест-
ную. Возвышенность на местности в пределах стробированного интервала
дальности относительно самолета отображается по отношению к опорной
линии, представляющей заданную плоскость безопасного превышения. С по-
мощью этого индикатора летчик получает информацию о возвышенностях
на местности с обеих сторон отображения в пределах заданного строба даль-
ности. Информация о рельефе местности вне строба дальности не отобража-
ется, и изменения превышения в пределах самого строба не воспроизводятся.
229
Гл. 3. Радиолокационные индикаторы и системы отображения
В пределах выбранного интервала дальности отображается только самое
большое превышение. Информацию о превышениях на дв^х дальностях мож-
но получить с помощью двух стробов дальности.
Для отображения превышения над местностью применяется также ви-
доизмененный индикатор кругового обзора с секторной разверткой. В этом
индикаторе полярная диаграмма дальность — азимут преобразуется строби-
рующей функцией таким образом, чтобы исключить все радиолокационные
сигналы, отраженные в области, расположенной ниже выбранной плоскости
безопасного превышения. Поэтому на секторной развертке отображаются
очертания участков местности, расположенных выше этой плоскости. Однако
отсутствует информация как о высоте выступающих над этой плоскостью
участков, так и об уровне местности ниже этой плоскости. Такую информа-
цию можно получить лишь варьированием вектора скорости самолета или
изменением выбранной плоскости безопасного превышения.
Радиолокационные индикаторы с большим экраном. Если одна и та же
информация предназначена для нескольких человек, взаимодействие которых
определяется полученными данными, то применяются большие экраны. Этот
тип индикаторов особенно пригоден для командных операции, операций уп-
равления, а также для оценки сложившейся обстановки [34]. Большой экран
может оказаться не очень подходящим устройством для работы индивиду-
альных наблюдателей и оценки ими данных. Обычно оператор может суще-
ственно увеличить эффективность работы и возможности решения определен-
ной задачи, если он оптимизирует индикатор именно для этой цели. Так, на-
пример, при наблюдении за воздушным пространством или сопровождении
цели оператор выполняет такие операции по оптимизации параметров инди-
катора, как подбор масштабов, соответствующее смещение развертки отно-
с/гельно центра экрана и оптимизация воспроизведения данных, которые
могут значительно повысить качество выполнения оператором его функций.
При большом экране возможность такой оптимизации ограничена, так как
на экране должны быть отображены данные, необходимые для каждого из
наблюдателей.
На большом экране обычно отображаются обработанные данные и бук-
венно-цифровые знаки. Относительное расстояние между большим экраном
и наблюдателями может оказаться больше, чем в случае индивидуального
индикатора. Поэтому для достижения достаточной четкости размер буквенно-
цифровых знаков нужно увеличить пропорционально относительному увели-
чению расстояния до наблюдателя. Это ограничивает потенциально возмож-
ное количество отображаемых на большом экране данных.
Проверка способности оператора оценивать с требуемой точностью и
достоверностью отображаемые на большом экране данные для управления
самолетами [35] показала, что она такая же, как в случае применения ин-
дивидуального индикатора с ЭЛТ с эквивалентными разрешением, яркостью
и контрастностью Не наблюдалось также разницы в общей усталости и на-
пряжении зрения.
Проекционные устройства для больших экранов бывают разных типов
[36]: динамическая диапозитивная система, проектор цветной фотопленки
и светоклапанные системы. В динамической диапозитивной системе с помощью
следящей системы прорезается непрозрачный слой, нанесенный на стеклян-
ную пластину. Резец, записывающий на поверхности диапозитива требуемые
рисунки и знаки, передвигается по координатам X и Y. Весь диапозитив од-
новременно проецируется на большой экран. Вследствие небольшой скорости
отображения информации этот тип проекционной системы можно использо-
вать для отображения только обработанных данных, включая знаки, данные
опознавания целей, векторы и информацию о неподвижных местных объек-
тах. В результате взаимного наложения изображений с помощью нескольких
проекционных систем можно получить составные или многоцветные отобра-
жения. Диапозитив обеспечивает запоминание данных. Однако введение
230
3.5. Специальные индикаторы
имеющейся информации для считывания с нового диапозитива осуществляется
либо предварительной записью этой информации на новый диапозитив па-
раллельно с предыдущим диапозитивом, либо эти данные должны быть вновь
на него записаны.
Основой динамических индикаторных систем является фотохромная плен-
ка [37]. Фотохромное вещество является органическим красителем, темнею-
щим при облучении ультрафиолетовым светом и приобретающим снова про-
зрачность при тепловом или инфракрасном облучении. Этот процесс обратим,
причем его можно повторить сотни и более раз без заметной усталости веще-
ства. Регулируя тепловое или инфракрасное облучение пленки можно изме-
нять время восстановления ее прозрачности от долей минуты до нескольких
часов.
Облучение фотохромной пленки производится ЭЛТ с люминофором
с ультрафиолетовым свечением. Для переноса изображения с поверхности
люминофора на фотохромную пленку экран ЭЛТ изготовляется из стеклово-
локна. Между волоконной оптикой и фотопленкой помещается цветопзбира-
ющее зеркало, пропускающее ультрафиолетовое и отражающее видимое из-
лучение. Для того чтобы спроецировать изображение на большой экран,
пленка освещается сфокусированным лучом, который отражается от цветоиз-
бирающего зеркала через оптическую систему на этот экран. Изображение па
экране соответствует темному изображению на фотохромной пленке, запи-
санному на ЭЛТ. Поэтому записанные на пленке данные воспроизводятся на
спроецированном изображении темными линиями и в ряде случаев требуется
произвести инверсию изображения. Как правило, количество данных и эффек-
тивную полосу пропускания видеоканала ограничивает скорость записи на
фотохромных материалах с помощью ЭЛТ в качестве источника света. Од-
нако при записи на фотохромной пленке можно получить высокое разреше-
ние и большую яркость, а также многоцветные изображения.
В светоклапанпых системах используется преломление света при отраже-
нии от деформируемой среды. В одном из вариантов системы, именуемом
эйдофором, такой средой является масляная тенка, деформируемая в ре-
зультате заряда ее электронами Пленка находится в вакууме и подвергается
бомбардировке электронной пушкой. Распределение деформации на пленке
в соответствии с желаемым изображением получается в процессе развертки
электронного луча. Пленка облучается источником света через специальную
зеркально-щелевую оптику.
В отсутствие деформаций свет, падающий на среду, при отражении фо-
кусируется на зеркально-щелевом растре. В областях деформации свет пре-
ломляется так, что он проходит через растр и фокусируется на проекцион-
ном экране Такие параметры эйдофора, как яркость, контрастность, разре-
шающая способность, линейность, приблизительно эквивалентны параметрам
системы с преобразованием развертки Световая отдача достаточна для ис-
пользования в освещенных помещениях при условии, что свет, падающий
непосредственно на проекционный экран, ограничен. В процессе эксплуатации
необходимо через небольшие промежутки времени производить профилакти-
ческое обслуживание, так как масляная пленка в вакууме заражает катод
электронной пушки.
В одном из вариантов системы вместо масляной пленки в качестве де-
формируемой среды используется обратимая термопластическая пленка,
исключающая возможность заражения катода маслом [38]. Электронный луч
записывает на термопластике данные в форме электростатических зарядов.
Если материал нагрет до пластического состояния, силовое поле заряда соз-
дает соответствующую деформацию При охлаждении пленки деформация
сохраняется, поэтому можно использовать метод проекции через зеркально-
щелевую -оптику. Стирание изображения осуществляется нагревом пленки до
температуры, при которой сила поверхностного натяжения уничтожает дефор-
мацию, а увеличение проводимости вызывает рассеяние зарядов, благодаря
231
Гл. 3. Радиолокационные индикаторы и системы отображения
чему пленку можно снова использовать. В динамических индикаторных систе-
мах предусматривается аппаратура для поддержания пленки в пластическом
состоянии, что позволяет одновременно записывать и отображать информа-
цию так же, как в проекционных системах с масляной пленкой.
Для систем с термопластической пленкой и зеркально-щелевой оптикой
были разработаны разные типы оптической проекционной системы с исполь-
зованием отражательных призм. Можно рассчитывать, что эти системы поз-
волят увеличить оптическую отдачу и получить более высокую яркость при
высокой разрешающей способности.
Список литературы
1 Reintjes J. F. and Coate G. T. Principles of radar. 3d ed„ McGraw-Hill
Book Company, N. Y., 1952.
2. Soller T. et al. Cathode-ray tube displays. — “MIT Radiation Laboratory
Series”, v. 22, McGraw-Hill Book Company, N. Y., 1948.
Соллер T. “Электронно-лучевые трубки и индикаторы”. (В 2-х т.) Пер.
с англ. Под ред. А. Я. Брейтбарта. М., “Сов. радио”, 1949—50.
3. Darne F. R. Cathode-ray tubes. Electronic information display systems,
p. 87—109 Spartan Books, Inc., Washington, D. C., 1963.
4. Johnson A. D. and Cowden D. G. Considerations in specifying display
system CRT design objectives. — “Inform. Display”, 1967, May—June,
v. 4, p. 46—51.
5. Kazan B. and Knoll M. Storage tubes and their basic principles, John
Wiley & Sons, Inc., N. Y., 1952.
6. Jensen A. S., Smith J. P., Mesner M. H. and Flory L. E. Barrier grid sto-
rage tube and its operation. — “RCA Rev.”, 1948. March, v. 9, p. 112—
135.
7. Kaus P. E. Effect of magnetic deflection on electron beam convergence. —
“RCA Rev.”, 1956, June, v. 17, p. 168.
8. Optical characteristics of cathode ray tube screens, Electronic Industries
Association. — “JEDEC Publ. 16A”, 1966, January.
9. Spectral response characteristics of aluminized phosphors, ITT Industrial
Laboratories, Ft. Wayne, Ind.
10. Field H. P. and Anken R. H. Foot — lamberts and PH phosphors don’t
mix — “Proc. 6th Natl. Symp. Inform. Display”, 1966, Society for In-
formation Display Proceedings; available from Western Periodicals Com-
pany, 1300 Raymer St., North Hollywood, Calif.
11. Brydcn J. E. Some notes on measuring performance of phosphors used in
CRT displays. — “Proc. 7th Natl. Symp. Inform. Display”, 1966, Society
for Information Display Proceedings; available from Western Periodicals
Company, 1300 Raymer St., North Hollywood, Calif.
12. White L. E. Measuring spot size of high resolution cathode-ray tubes. —
“Electron Equip. Eng.”, 1959, August.
13. Hall R. E. Measurement techniques for cathode ray tubes. — “Electron.
Eng.”, 1967, January, p. 86—90.
14. Roth H. and Sherr S. General purpose display. — “Proc. 5th Natl. Symp.
Inform. Display”, 1965, p. 159—175, Society for Information Display Pro-
ceedings; available from Western Periodicals Company, 1300 Raymer St.,
North Hollywood, Calif.
15. Popodi A. E. Linearity correction for magnetically deflected cathode ray
tubes. — “Electron. Design News”, 1964, January.
16. Weiss G. Linear lumped parameter analysis of synchros. — “U.S. Naval
Ordnance Lab., NAVORD Rept. 3633”.
17. Poole H. H. Fundamentals of display systems, Spartan Books, Inc., Wa-
shington, D. C. 1966.
232
Список литературы
18 Riffenburgh R. S. Ocular fatigue in the radar operator. — “U.S. Armed
Forces Med. J.”, 1953, January, v. 4, N 1, p. 71—72.
19 Fink D. G. Television engineering handbook, McGraw-Hill Book Company,
N. Y„ 1957.
20. Lally К. P. Non-linear optical filters for high contrast displays. — “Proc.
7th Natl. Symp. Inform. Display”, 1966, Society for Information Display
Proceedings; available from Western Periodicals Company, 1300 Raymer
St., North Hollywood, Calif.
21. Turnage R. E., Jr. The perception of flicker in cathode ray tube displays.—
“Inform. Display”, 1966, May—June, v. 3, p. 40—52.
22. Whitman G. E. The determination of display screen size and resolution
based on perceptual and information limitations. — “Inform. Display”,
1965, July—August, v. 2, p. 15—19.
23. Wonnell T. S. and Miller W. E. Bright displays via scan conversion. —
“Natl. Res. Council, Natl. Acad. Sci. (U.S.), Publ. 595”, 1958, April.
24. Nagy G. T. Scan converter tubes and their applications. — “Inform. Dis-
play”, 1965, March—April, v. 2, p. 4—17 and May—June, N 3, p. 14—31.
25 Yaggy L. S. and Dodr N. J. A versatile high performance scan converter
storage tube. — “Proc. 9th Natl. Symp. Inform. Display”, 1967, p. 25—32.
26. Damon P. P. The multimode Tonotron. — “Proc. 5th Natl. Symp. Inform.
Display”, 1965, p. 177—190.
27. Lehrer N. H. Selective erasure and nonstorage writing in direct view half-
tone storage tubes. — “Proc. IRE”, 1961, March, v. 49, p. 567—573.
28. Harsh M. D. Multi-sensor displays — two approaches. — “Inform. Dis-
play”, 1966, September—October, v. 3, p. 24—33.
29. Myura A. J. and Babel P. S. Vidicon scan converter and super bright ra-
dar display. — “FAA Rept. RD 66—40”, 1966, July.
30. Moss H., Atti E., White L. and Cox G. High resolution cathode ray tube.—>
“Westinghouse Electric Corp., Rept. ASD-TDR-62-379”, Elmira, N. Y., 1962,
October, AD291824.
31. Wurtz J. E. High resolution cathode ray tubes for the system designer. —>
“Inform. Display”, 1967, May—June, v. 4, p. 39—45.
32. Pfahnl A. Properties of fast decay cathode ray tube phosphors. — “Bell
System Tech. J.”, 1963, January, v. 42, p. 181—201.
33. Elliott W. R. Limitations on high energy cathode ray tube beams with re-
gard to phosphor life. — “Proc. 6th Natl. Symp. Inform. Display”, 1966,
Society for Information Display Proceedings; available from Western Pe-
riodicals Company, 1300 Raymer St., North Hollywood, Calif.
34. Howard J. H. (ed.). Electronic information display systems. Spartan Books,
Inc., Washington, D. C., 1963.
35. Paul L. F. and Buckley E. F. Human factors evaluation of a large screen
radar display. — “FAA Report RD66-105”, 1967, March.
36. Darne F. R. Advances in techniques for large dynamic display devices. —
“Proc. 5th Natl. Symp. Inform. Display”, 1965, p. 1—23, Society for In-
formation Display Proceedings; available from Western Periodicals Com-
pany, 1300 Raymer St., North Hollywood, Calif.
37. Stetten K. J. Real time CRT photochromic projection display. — “Proc.
4th Natl. Symp. Inform. Display”, 1964, p. 59—72, Society for Informa-
tion Display Proceedings; available from Western Periodicals Company,
1300 Raymer St., North Hollywood, Calif.
38. Chafaris G. J. Surface deformable medium as applied to the generation of
projection displays. — “Proc. 8th Natl. Symp. Inform. Display”, 1967,
p. 45—55, Society for Information Display Proceedings; available from
Western Periodicals Company, 1300 Raymer St., North Hollywood, Calif.
233
Г л a г a 4
РАДИОЛОКАЦИОННЫЕ СИСТЕМЫ С НЕПРЕРЫВНЫМ
ИЗЛУЧЕНИЕМ И С ЧАСТОТНОЙ МОДУЛЯЦИЕЙ
В. Саундерс
4.1. Введение. Преимущества РЛС с непрерывным излучением
Основной принцип современной радиолокации заключается в излучении
импульсов энергии и измерении времени распространения этих импульсов от
передатчика до цели и обратно для определения ее дальности. Значительно
ранее было установлено, что непрерывное излучение энергии имеет опреде-
ленные преимущества при измерениях скорости, основанных на эффекте
Доплера, а при кодировании в той или иной форме может обеспечивать также
н измерение дальности цели
Можно отметить такие преимущества РЛС с непрерывным излучением,
как их очевидная простота и потенциально минимальное расширение спектра
излучаемого сигнала. Последнее преимущество упрощает проблему борьбы
с радиопомехами и облегчает разработку схем преселекции, фильтрации и дру-
гих на сверхвысоких частотах. Важным фактором является также простота
обработки принимаемых сигналов, так как в тракте промежуточной частоты
приемника требуется минимальная ширина полосы. При применении в РЛС
полупроводниковых приборов, получаемая от них импульсная мощность
обычно лишь не намного больше средней мощности. Поэтому применение
в таких РЛС непрерывного излучения имеет дополнительное преимущество,
особенно когда требуемую среднюю мощность можно получить от одного полу-
проводникового прибора
Еще одно очень важное преимущество РЛС с непрерывным (немодули-
рованным) излучением состоит в их способности однозначно определять ско-
рости целей, находящихся почти на любой дальности и летящих с любой
скоростью. В импульсно-доплеровских РЛС и в РЛС с селектором движу-
щихся целей (РЛС с СДЦ) такая возможность достигается только ценой зна-
чительного усложнения аппаратуры. Но РЛС с непрерывным немодулировэн-
ным излучением в принципе не может измерять дальность целей, а в РЛС
с непрерывным модулированным излучением приходится принимать те же
нежелательные компромиссные решения (например, связанные с неопределен-
ностью одновременных измерений дальности и доплеровской частоты), которые
характерны для когерентно-импульсных РЛС (см. гл. 5—7).
Так как в РЛС с непрерывным излучением требуемая средняя мощность
генерируется с минимальной пиковой мощностью и возможно изменение час-
тоты излучаемых колебаний в широком диапазоне, их работа труднее обна-
руживается разведывательной аппаратурой. Это особенно справедливо, когда
разведывательный приемник выдает сигнал для звуковой или визуальной ин-
дикации только при приеме импульсов с определенной структурой. РЛС, при-
меняемые полицией, и некоторые маломощные РЛС для обнаружения людей
также трудно разведать. Даже приемник с прерывателем (особенно в его
простейшей форме с. визуальной индикацией) может не дать предупреждаю-
щего сигнала при дальности, достаточной для своевременного предупрежде-
ния об облучении.
234
4.3. РЛС с не мод у лированным непрерывным излучением
Из всего сказанного не следует делать вывод, что РЛС непрерывного
излучения имеют только одни перечисленные достоинства и совершенно свобод-
ны от недостатков. Сложную проблему представляет непосредственное проса-
чивание энергии передатчика РЛС и сопутствующего ей шума в приемник. Это
было обнаружено на ранней стадии развития РЛС непрерывного излуче-
ния [1, 2J. Фактически вся история развития РЛС непрерывного излучения
связана с ^прекращающимися попытками разработки оригинальных методов
обеспечения необходимой чувствительности приемников при компенсации
влияния непосредственного просачивания энергии от передатчика.
4.2. Эффект Доплера
Подробное объяснение эффекта Доплера дается в большинстве учебников
физики, а применительно к радиолокации дано в книге М. Сколника [3], гл. 3.
Если передатчик и приемник РЛС расположены рядом, то доплеровская
частота /d определяется соотношением
fD = 2vrfT/c,
где fr — частота излучаемых колебаний; с — скорость ceeia, 3• 108 м/с; иг—ра-
диальная скорость цели относительно РЛС. При i»r = 300 м/с и fr, лежащей
в диапазоне X (10,7—11,7 ГГц), доплеровская частота будет около 20 кГц
или скорости 1 м/с будет соответствовать доплеровская частота около 60 Гц.
Простым пересчетом можно определить /d для других частот СВЧ диапазона
и других скоростей цели.
В ЧМ РЛС с непрерывным излучением с высокой частотой модуляции так
же, как и в импульсных РЛС, для выделения значений доплеровской частоты
необходимо, чтобы эта частота модуляции была по крайней мере в два раза
выше самой высокой ожидаемой доплеровской частоты, если нужно получить
однозначные измерения. Если частота модуляции будет ниже доплеровской
частоты, то возникают слепые скорости и неоднозначности. (Слепая скорость
определяется как относительная радиальная скорость пели, при которой эта
цель становится невидимой для РЛС.) Эти вопросы рассмотрены более по-
дробно в § 4.11 (см. также гл. 5—7 и [3]).
4.3. РЛС с немодулированным непрерывным излучением
Расширение спектра. Рассмотрим некоторнге вопросы, относящиеся к ра-
боте больших РЛС с непрерывным излучением, применяемых для «подсветка»
целей в полуактивных системах, для обнаружения целей и предупреждения
о их приближении. Весьма упрощенная структурная схема такой РЛС приве-
дена на рис. 1. Для объяснения принципа действия станции, излучаемый сиг-
нал можно рассматривать как незатухающие немодулированные колебания,
хотя иногда для кодирования или грубого определения дальности применяет-
ся амплитудная модуляция с небольшой глубиной или частотная модуляцая
с небольшой девиацией частоты. Частота модуляции выбирается за предела-
ми диапазона доплеровских частот, представляющих интерес, а соответствую-
щие схемы рассчитываются исходя из требования, чтобы они по возможности
не ухудшали основных шумовых характеристик РЛС.
Расширение спектра возникает также в связи с коническим сканирова-
нием. Предполагается, что частота сканирования лежит ниже любой измеряе-
мой доплеровской частоты. Тогда при выделении в аппаратуре РЛС сигнала
доплеровской частоты, частота конического сканирования проявится в ваде
его боковых составляющих с небольшой амплитудой. В последующем изложе-
нии эти вторичные эффекты в большинстве случаев не будут учитываться и
235
Г л. 4. Радиолокационные системы с непрерывным излучением и с ЧМ
будет приниматься, что передатчик РЛС излучает незатухающие немодулиро-
ванные колебания, а приемник не вносит нежелательной модуляции.
Шумы источников колебаний. Проблема шума связана в первую очередь
с самим источником СВЧ колебаний. Все клистроны, триоды, полупроводни-
ковые приборы и др. генерируют заметные боковые полосы шума в более
широком диапазоне, чем диапазон возможных доплеровских частот. Если ис-
точник колебаний не является совершенно неприемлемым по своим шумовым
характеристикам, то в этих боковых полосах шума можно разграничить сле-
дующие пары составляющих: составляющие, фазовые соотношения которых
Направленный
Мостобий Усилитель Смеситель
смеситель
Рис. 1. Структурная схема РЛС непрерывного излучения.
между собой и с основной составляющей несущей частоты таковы, что они
представляют амплитудную модуляцию (AM); составляющие, соответствую-
щие частотной или фазовой модуляции с небольшим индексом. Составляющие
шума с AM и определенным частотным смещением относительно несущей
обычно много ниже уровня соответствующих составляющих ЧМ. Кроме того,
для подавления составляющих AM шума можно применить балансные сме-
сители. ограничители и 1. д. Поэтому для РЛС с непрерывным излучением
более серьезное значение представляют шумы с ЧМ.
Уровень ЧМ шума усилителя на хорошем клистроне, возбуждаемого кли-
стройным генератором, с активным или пассивным стабилизатором частоты,
приблизительно на 133 дБ ниже уровня несущей в полосе шириной 1 ГцЧ,
смещенной на 1 кГц относительно несущей. При больших частотных смещени-
ях мощность шума уменьшается пропорционально примерно 1/f2. Соответ-
ствующий уровень AM шума Ъа 150—160 дБ ниже уровня несущей. Так как
сигнал местного гетеродина в РЛС с непрерывным излучением обычно форми-
руется из сигнала передатчика, то он также создает уровень шума того же
порядка. При таком низком уровне шума относительно уровня несущей по-
тери при фильтрации в приемнике значительной части энергии, отраженной
от цели, практически не имеют значения.
Практический интерес представляет энергия составляющих шума, попа-
дающих в приемник с просачивающимся сигналом передатчика, и шум меша-
ющих отражений от местных предметов. Если, кроме того, вибрации вызыва-
ют изменения длины пути или путей просачивания энергии из передатчика
в приемник, то дело усложняется, так как при этом появляются составляющие
линейчатого спектра, которые могут попасть непосредственно в диапазон
доплеровских частот.
’> В этой главе все данные приводятся к ширине полосы, равной 1 Гц.
В литературе это до сих пор не было принято, так как обычно использовалась
ширина полосы или исследуемой системы, или измерительной аппаратуры.
236
4.3. РЛС с немодулированным непрерывным излучением
Пассивные помехи. Вследствие нежелательных отражений от поверхно-
сти земли, дождя, местных предметов и других источников на вход прием-
ника поступает часть отраженной энергии передатчика вместе с боковыми
полосами шума. Предположим, что перед РЛС находится промышленный
район и ЭПР источников помех в этом районе равна 0,1 м2 на каждый квад-
ратный метр поверхности, облучаемой РЛС. Рассмотрим только площадь,
расположенную на расстоянии 2,5—3,5 км от РЛС (7? = 35 дБ), облучаемую
антенной с шириной диаграммы направленности 0,1 рад. Соответствующая
ЭПР источников помех при этом приблизительно равна 3- 103Х0,1ХЮ3Х0,1 =
= 3,0-104 м2 (о = 45 дБ).
Предположим теперь, что на некоторой большей дальности находится
цель, для приемлемой вероятности обнаружения которой с допустимой веро-
ятностью ложной тревоги требуется отношение сигнал/шум в полосе 1 кГц,
равное +22 дБ (с учетом коэффициента шума приемника, равного 10 дБ).
Если цель создает доплеровский сигнал с частотой 10 кГц, то уровень пассив-
ных помех не должен превышать —144 дБм’>+22 дБ= — 122 дБм при час-
тотном смещении относительно несущей, равном 10 кГц. Если уровень боко-
вых полос шума передатчика в полосе шириной 1 кГц на 103 дБ ниже несу-
щей, то уровень пассивных помех не должен превышать —19 дБм. Если уси-
ление G антенны РЛС равно 30 дБ, а мощность передатчика в диапазоне X
составляет +60 дБм, то должно выполняться неравенство
(мощность (G2) (А,2) (64л3) (о) (/?4)
передатчика)
— 19 дБм >+60 дБм +60 дБ -—30 дБ —33 дБ +45 дБ —140 дБ)
> —38 дБм,
т. е. имеется запас, равный 19 дБ.
Следует отметить что уровень шума передатчика был принят сравнитель-
но невысоким, а местные помехи учитывались только на дальности 3 км (не
учитывалась также их корреляция с зондирующим сигналом (см. ниже)).
Удобно выражать боковые полосы ЧМ шума передатчика другим спосо-
бом. Рассмотрим отдельную модулирующую частоту или линию fm в шуме
с максимальной девиацией частоты &FP. По формулам частотной модуляции
несущая имеет максимальную амплитуду /0(AFv/fm), а каждая из ближайших
боковых составляющих — максимальную амплитуду 7i(AFp/fTO) [4]. Если ар-
гумент функций Бесселя мал (каким он должен быть в рассматриваемом слу-
чае), то функции Бесселя можно аппроксимировать следующими выраже-
ниями:
7оРО~1, 7i(X)~X/2.
Тогда отношение среднеквадратических значений мощностей несущей и опноЛ
из первых боковых составляющих равно AF2p/4f2TO. Обычно представляет ин-
терес отношение мощностей в обеих боковых полосах ЧМ шума к мощноств
несущей:
AFp AFrms
= -------, (1)
2/m fm
где AFrms — среднеквадратическое значение девиации частоты.
При Fp = 1 Гц и частоте модуляции 10 кГц это отношение равно
1/2 (1/104)2 или.—-83 дБ относительно несущей. Использованный в предыду-
Теплот ой шум в полосе 1 кГц при температуре 20° С.
237
Гл. 4. Радиолокационные системы, с непрерывным излучением и с ЧМ
щсм примере передатчик с мощностью шума в двух боковых полосах, равной
—i03 дБ на частоте 10 кГц, имеет максимальную девиацию частоты 0,1 Гц.
Все эти значения справедливы только для конкретной ширины полосы — в
данном случае I кГц (Расчеты для полосы, равной 1 Гц, удобны только,
.когда требуется находить мощность шума в интересующей нас полосе частот
Для определенной РЛС.)
Представление о пиковом значении сигнала следует связывать только
с синусоидальными колебаниями. Для описания случайного шума правильнее
пользоваться средаеквадратическим значением. Но мощность шума для ука-
занны:-; частоты и ширины полосы эквивалентна мощности синусоидального
сигнала, имеющего определенное пиковое или среднеквадратическое значе-
ние [5].
Для выполнения дальнейших расчетов рассмотрим эффект корреляции.
Если передатчик РЛС создает ЧМ шум, то можно считать, что его частота
модулируется с различными частотами и небольшими девиациями. Для при-
мера рассмотрим одну конкретную частоту модуляции. Если это низкая час-
тота и задержка, соответствующая пути прохождения просачивающейся .мощ-
ности или сигнала пассивных помех, невелики, то при приходе такого сигна-
ла на вход приемника его частота будет почти такой же, как в момент излу-
чения зондирующего, сигнала. Это означает, что декорреляция мала. Более
высоким частотам спектра шума соответствует большая декорреляция. Кроме
того, этот эффект периодичен в зависимости от дальности; для любой часто-
ты синусоидальной модуляции создаваемый ЧМ шум сначала возрастает
с увеличением дальности, а затем при некоторой определенной дальности
убывает. Нулевые значения получаются при дальности R = nci2\m, где fm —
частота синусоидальной, модуляции; п — любое целое число.
Однако обычно приходится иметь дело с шумом, а не с синусоидальной
составляющей. Поэтому индицируемые дискретные нули в редких случаях
представляют интерес и для упрощения вычислений принимается, что сигнал
декоррелирован на частоте, близкой к fz=c/(8/?). Некоторые частоты, более
высокие, чем )z, не вызывают никаких проблем па определенных дальностях,
но частоты, близкие к ji, создают ряд трудностей. Кроме того, как показыва-
ют приводимые ниже формулы, девиация частоты преобразованного сигнала
может быть в два раза больше, чем девиация частоты зондирующего сигна-
ла (частота отраженного сигнала может возрастать в то время, как частота
зондирующего сигнала уменьшается).
Максимальное напряжение первой гармоники боковой полосы в спектре
промежуточной частоты ЧМ сигнала, смешанного с этим же сигналом, задер-
жанным на T—2R[c, равно
/ АЕр \
. «Pi = Ji 2 —---sin Ttfm Т ,
X. Im ]
а максимальное напряжение несущей [6]
= Jo ( 2
АЕр
f m
sin nfm T
В обеих формулах АЕР — максимальная девиация частоты. Так же, как и
ранее, функции Бесселя представляются аппроксимирующими выражениями:
JO(X)«1, Л’<1. Тогда отношение мощности одной боковой по-
лосы шума к мощности несущей равно
—8.
Р С
—-----sin л[т 7 ,
1т /
238
4.3. РЛС с смодулированным непрерывным излучением
и мощности двух боковых полос к мощности несущей
P2s _ / AFP
?с \ fm
sin nfm Т
(2)
Максимальное значение этого отношения равно 2(AFp//m)2. Это согласуется
С тем, что максимальная девиация промежуточной частоты в два ра.а боль-
ше девиации высокой частоты [см. уравнение (1)].
Для меньших значений fmT отношение мощностей двух боковых полос в
несущей принимает вид
P<-,s
-^-~2(ji\FpTF, nfmT<\. (3)
‘а
Эта формула показывает, что при постоянной AFP (это выполняется для
большинства клистронов) мощность коррелированного шума не зависит от
частоты и прямо пропорциональна дальности или Т.
Удобная кривая, дающая отношение мощности шума в приемнике к из-
меренной мощности шума в передатчике, приведена на рис. 2 и построена
по приближенным формулам (2) и (3). Штриховая часть кривой аппрокси-
мирована только по формуле (2). Если, как было принято выше, центр ЭПР
источника пассивных помех находится на дальности 3 км, то это соответ-
ствует 7=2-10-5 с. Представляет интерес частота модуляции 104 Гц. Тогда
fmT=Q,2, что находится за пределами области корреляции шума.
РЛС с немодулированным непрерывным излучением должна работать
при действии пассивных помех почти до нулевой дальности. Без эффекта кор-
реляции это было бы вообще невозможно. При данной ширине диаграммы
направленности (ДН) антенны ширина облучаемой площади, создающей
пассивные помехи, уменьшается пропорционально R. Но в уравнение дальности
радиолокации входит множитель I//?4. В результате этого сигналы пассивных
помех изменяются пропорционально 1/R3. Эффект корреляции показывает,
что при фиксированной частоте шума мощность боковых полос коррелирован-
ного шума уменьшается, пропорционально Д2 [уравнение (3)]. Отсюда следует,
что скорость возрастания мощности шума от пассивных помех пропорциональ-
на 1/Д. Интеграл, представляющий эту мощность, расходящийся, но имеются
два фактора, оказывающие существенное влияние на очень малых дальностях,
которые до сих пор не учитывались. Во-первых, пересечение ДН антенны,
расположенной на определенной высоте, с поверхностью земли дает площадь,
ограниченную гиперболой, а не сектор, как принималось выше. Во-вторых,
на очень малых дальностях поверхность, являющаяся источником пассивных
помех, находится в зоне Френеля антенны и формула усиления в дальней
зоне здесь неприменима.
При более тщательном анализе с использованием любого из этих факто-
ров можно показать, что интеграл сходится. В [7] выведена формула для
мощности шума в двух боковых полосах. Там принята граница зоны Фре-
неля, равная Rf=D2IX (где D — диаметр раскрыва антенны), за нижний пре-
дел интеграла. Эта формула при взятых ранее значениях параметров дает
мощность коррелированного шума от пассивных помех, равную -—117 дБ. Эга
мощность определена для предельного случая, когда одиночная антенна на-
ходится непосредственно на уровне поверхности земли и обращена в сторону
источника очень интенсивных пассивных помех (0,1 м2/м2).
Более практический подход к решению этой проблемы основан на учете
того, что при очень малых дальностях пассивные помехи и непосредственное
просачивание энергии от передатчика на вход приемника — почти эквивалент-
ные паразитные эффекты. Для получения максимальной чувствительности
239
Гл. 4. Радиолокационные системы с непрерывным излучением и с ЧМ
наземной РЛС непрерывного излучения следует применять две антенны. Это
снижает влияние как просачивающейся энергии, так и пассивных помех на
малых дальностях, поскольку в данном случае ни одна из близко расположен-
ных точек не может одновременно попасть в главный лепесток ДН передаю-
щей и приемной антенн. Кроме того, как будет показано ниже, обычно при-
меняется подавление просачивающейся энергии, а следовательно, и подав-
Рис.
2. Подавление шума вследствие эф-
фекта корреляции.
ление пассивных помех.
В проведенном рассмотрении при-
нималось, что сигнал местного гете-
родина в РЛС или получается из сиг-
нала передатчика, или синхронизиру-
ется с ним при помощи следящей си-
стемы, имеющей частотную характе-
ристику, достаточно широкую для пе-
рекрытия диапазона доплеровских ча-
стот и полосы шума, представляю-
щих интерес.
Микрофонный эффект. Этот эф-
фект может создавать дополнитель-
ные боковые полосы шума просачи-
вающейся энергии, а иногда и пассив-
ных помех. Если конструкция
аппаратуры достаточно массивна, то
микрофонный эффект проявляется
наиболее заметно на более низких ча-
стотах и его можно компенсировать
-с помощью следящей системы с об-
ратной связью Однако очень важно
также, чтобы СВЧ элементы, приме-
няемые в системе компенсации
влияния вибраций, а также в осталь-
ных СВЧ схемах, были достаточно
жесткими и прочными [8]. Обычно применяются конструкции в форме фрезе-
рованных блоков. В редких случаях, когда применяется одна антенна и ан-
тенный дуплексер или две близко расположенные антенны, как, например,
в мощных самолетных РЛС непрерывного излучения, проблемы механической
конструкции оказываются почти не разрешимыми. Даже в наземных РЛС вен-
тиляторы, электродвигатели, генераторные агрегаты, вращающиеся сочлене-
ния, кавитация в охлаждающей системе и др. создают большие трудности.
Сканирование и свойства целей. Расширение спектра сигнала РЛС не-
прерывного излучения может быть вызвано не только шумом передатчика и
микрофонным эффектом, но также свойствами целей и сканированием антен-
ны. Расширение спектра, вызываемое даже очень высокочастотным угловым
шумом таких целей, как, например, самолет, в общем случае не приводит
к тому, что значительная энергия будет содержаться вне нормальной полосы
доплеровских частот. Необходимость применения фильтра обычно опреде-
ляется условиями обнаружения или потребным временем облучения цели,
а не внутренней структурой отраженного сигнала. Но быстрое сканирование
антенны может вызвать значительное расширение спектра пассивных помех.
Если бы не специфическая форма типичной ДН антенны, переходные явления,
вызываемые мешающими отражениями при сканировании, имели бы более
серьезное значение.
В приближенном анализе принимается, что антенна имеет ДН гауссовой
формы и усиление в двух направлениях G2 = exp(—2,77602/02в), где 0 — угол,
измеряемый от оси ДН; 0В — ширина ДН на уровне половинной мощности
[3]. Для примера будет взята антенна, усиление которой в двух направлениях
падает на 3 дБ в точках +0,5°(0в = 1°). Если антенна сканирует со скоростью
240
4.4. Источники колебаний СВЧ
180° в 1 с, то для расчета потребуется знать преобразование Фурье от
е-“‘ ври а = 9-104. Эю преобразование имеет вид Дехр[—со2/(3,6-105)]; оно
снижается до 1/1000 (60 дБ) от максимального значения, когда
w2/(3,6-105)=6,9, й» 1575 и /«250 Гц.
Действительная форма ДН антенны создает менее благоприятные пере-
ходные явления, чем диаграмма гауссовой формы. Применение ограничения
сигнала в приемнике эквивалентно изменению формы ДН антенны. При
любой форме ДН антенны имеются определенные ограничения скорости ска-
нирования узким лучом. Обычно предельно допустимая скорость сканирова-
ния не достигается из-за механических ограничений, за исключением случаев
очень медленно движущихся целей, но при немеханических способах скани-
рования скорость его может ограничиваться переходными явлениями.
4.4. Источники колебаний СВЧ
Тракты «задающий генератор—усилитель мощности». Специфические тре-
бования к РЛС непрерывного излучения — применение электронных ламп
с очень низким уровнем шума, малошумящих источников питания, а часто и
стабилизации для снижения общего уровня шума системы. Теоретически лю-
бой из рассматриваемых в § 4.5 методов измерения ЧМ и AM шумов можно
модифицировать для создания следящей системы, снижающей уровень шума,
а практические соображения привели к разработке большого количества до-
полнительных цепей. Наиболее простая из них содержит высокодобротный
объемный резонатор, включаемый между клистронным генератором и усили-
телем мощности. Обычно применяются объемные резонаторы с добротностью
20 0Q0—100 000. Такой резонатор действует в основном как дополнительный
реактивный элемент, включенный параллельно с резонатором клистрона. При
использовании высококачественного отражательного клистрона с уровнем
мощности ЧМ шума на НО дБ ниже уровня мощности несущей в полосе
1 Гц, смещенной от несущей на 10 кГц, применение высокодобротного объем-
ного резонатора в качестве пассивного стабилизатора частоты снижает мощ-
ность этого шума до 130—135 дБ относительно уровня мощности несущей.
Это снижение мощности шума на 20—25 дБ достигается ценой потери полез-
ной мощности около 11 дБ; оно возможно на большей части частот, пред-
ставляющих интерес. Но этот метод не дает существенного снижения мощ-
ности AM шума на доплеровских частотах.
Следует помнить, что приведенные данные относятся только к стабиль-
ному задающему генератору и что на шум, генерируемый в усилителе мощ-
ности, примененный способ не оказывает никакого влияния. Кроме того, если
только сигнал местного гетеродина не подается с выхода усилителя мощно-
сти (чего, конечно, нельзя сделать в импульсной доплеровской РЛС), то шум
будет некоррелирован. Хороший усилитель мощности, питаемый от хорошо
стабилизированного источника питания, вносит немного дополнительного или
избыточного шума (см. рис. 9).
Активная стабилизация. Действие всех устройств активной стабилизации
в цепи «задающий генератор — усилитель мощности» основано на исполь-
зовании высокодобротного объемного резонатора в качестве опорного эле-
мента. Объемный резонатор должен быть изолирован от лампы и функцио-
нировать как измерительный прибор, не вызывающий затягивания, обуслов-
ленного частотной зависимостью его реактивной проводимости.
Ниже приводятся полезные уравнения для отражательных и пролетных
объемных резонаторов, взятые из [9]. Для согласованного отражательного
резонатора
Z—1 /6Q________Ж
Г= Z+l = 1 + /6Q " 1 + /26Ql’
241
Гл. 4. Радиолокационные системы с непрерывным излучением и с ЧМ
f__f
где Г — коэффициент отражения; 6 — —°-; Q и Ql — ненагруженная и на-
I о
груженная добротности резонатора, соответственно; Z — нормированное пол-
ное сопротивление, отнесенное ко входу резонатора.
Пролетный объемный резонатор имеет аналогичные характеристики, за
исключением того, что через него проходят как колебания несущей (Ue), так
Пролетный
резонатор
Источник
СвУ колебаний
Амплитудная
I
г.
3t/2
Квадратурный
детектор
(П- детектор)
Когерентный
детектор
(I- детектор)
Фазо-
вращатель
Следящая система
Усилитель
Рис. 3. Мостовая схема стабилизации частоты с пролетным резонатором (видеочастот-
ный вариант).
и боковые полосы (£7вь). Для этого резонатора выходное напряжение
_ 'Ji
3+/26Q
(оба коэффициента связи принимаются равными 1); Ui — входное напря-
жение. Применив простые алгебраические преобразования, можно показать,
что частотно-зависимые члены в уравнениях для Г и Uo подобны по струк-
туре. В системах со стабилизацией расстройка f—fo мала, поэтому уравне-
ния для отражательного и пролетного объемных резонаторов можно привести
к виду
Г «/26Q;
(4)
Hs6«2(-2/6Q).
(5)
Отсюда можно сделать вывод, что стабилизация в отношении уменьше-
ния б будет одинаково эффективна независимо от частоты. Но при этом не
учитываются два фактора: 1) объемный резонатор имеет линейную харак-
теристику только в конечном диапазоне частот, и более высокие частоты fm
могут создавать боковые полосы, находящиеся вне этого диапазона; 2) для
получения более высокой стабильности следящая система, включенная после
объемного резонатора, должна иметь характеристику, спадающую на более
высоких частотах.
Простые мостовые схемы стабилизации частоты можно построить непо-
средственно на основе характерных свойств отражательного и пролетного объ-
емных резонаторов. Мостовая схема с пролетным резонаторо.м представлена
на рис. 3.
— ^с+ U$b
242
4.4. Источники колебаний СВЧ
Фазовращатель в этой схеме регулируется так, что на квадратурный
Q-дегсктор поступают сигналы, находящиеся в квадратуре по фазе1*, и в пер-
вом приближении этот детектор чувствителен только к фазовой модуляции
Пели бы возникла необходимость стабилизации по отношению к амплитудной
модуляции, ее можно было бы осуществить только для AM на очень низких
частотах, например, создаваемой источниками питания. Такое требование мож-
но было бы легко выполнить, создав дополнительный сдвиг фазы на л/2 и
введя в схему стаоилизации когерен
тор) (на рис. 3 показан штриховой
линией).
Очевидный недостаток мостовой
схемы с пролетным резонатором со-
стоит в том, что несущая не подав-
ляется в СВЧ цепях. Так как полная
входная мощность ограничивается
из-за опасности повреждения кри-
сталлического смесителя и недопусти-
з1й амплитудный детектор (7-детек-
Одъемный Регулируемый
резонатор Выход аттенюатор
Рис. 4. Мостовая схема с отражательным
объемным резонатором.
мости выхода за пределы линейной
области при смешивании частот, уро-
вень мощности полезного сигнала, не-
сущего информацию, относительно
низок и этот сигнал оказывается соизмеримым с тепловым шумом, генери-
руемым кристаллическим смесителем.
Существует также вариант мостовой схемы стабилизации с пролетным
объемным резонатором, в котором используются два согласованных фильтра
промежуточной частоты, а также более сложные схемы, предложенные
в [10, 11]. В последней схеме объемный резонатор удачно используется и как
дисперсионный прибор, и как фильтр для подавления нежелательных боковых
полос. Преимущество отражательного объемного резонатора заключается
в том, что значительная часть мощности несущей поглощается, если передат-
чик настроен на частоту этого резонатора. Это устраняет многие трудности,
связанные с насыщением.
Особенно интересный вариант схемы предложен в [12]. Эта схема (рис. 4)
является основой лучших приборов для измерения ЧМ шума; она также при-
меняется н для стабилизации [13]. Это единственная мостовая схема, в кото-
рой обеспечивается отвод значительной части мощности несущей, что предот-
вращает насыщение смесительных кристаллов. Уникальной особенностью этой
схемы является балансный элемент, точно уравновешивающий отраженную от
резонатора мощность при резонансе.
При резонансе объемный резонатор становится почти идеальным погло-
тителем, а остаточная часть отраженной энергии поглощается регулируемыми
аттенюатором и короткозамыкателем. При изменении частоты объемный резо-
натор создает реактивную составляющую сопротивления, которая нарушает
баланс. В результате этого по меньшей мере при небольших девиациях по-
является сигнал в виде двух боковых полос с подавленной несущей. При очень
тщательной регулировке несущую можно подавить почти на 40 дБ в случае
применения мостов с ручной или статической балансировкой и на 60 дБ, если
Или объемный резонатор, или источник колебаний имеют электронную или
термическую подстройку. Устройства с ручной настройкой могут пропускать
мощность до 2 Вг, а устройства с настройкой следящей системой — до
1000 Вт. Балансный смеситель такого устройства показан на рис. 5.
О Наиболее чувствительный метод регулирования квадратурного детектора
состоит в намеренном введении амплитудной модуляции и сведении ее к ну-
лю с помощью фазовращателя. Максимизация чувствительности к частотной
модуляции дает менее точную регулировку.
243
Гл. 4. Радиолокационные системы с непрерывным излучением и с Ч 'л
Как видно из рисунка соответственно сфазированный сигнал передатчика
ответвляется через вторую параллельную цепь и используется для восстанов-
ления несущей при выделении боковых полос в /-детекторе. Так как нижняя
ветвь не обладает дисперсионными свойствами, а уровень боковых полос мал
Рис. 5. Балансный смеситель для схемы рис. 4.
(свойство всех рассмотренных выше устройств подавления шумов), то боль-
шой сигнал можно рассматривать как существенно чистую восстанавливае-
мую несущую. Местный гетеродин должен быть малошумящим, а фазовые
задержки в усилителях — согласованными. Анализ отношения сигнал/шум
в полной системе дан в § 4.5.
Доплеровская частота, кГц Доплеровская частота, кГц
Рис. 6. Частотная характеристика кон- рис. 7. Спектры шума передатчиков:
тура подстройки частоты. А — ЧМ шум генератора с самовозбуждением;
В — ЧМ шум генератора с контуром стабили-
зации частоты; С — отношение шума генера-
тора с самовозбуждением к шуму генератора
с контуром стабилизации частоты.
На рис. 6 представлена частотная характеристика замкнутого контура
регулирования, а на рис. 7 приведены три результирующие кривые спектраль-
ной плотности шума.
244
4.5 Методы измерения шума
Более подробные данные о построении системы и полученные результаты
содержатся в приводимой ниже выдержке из [16]:
«Значение нагруженной добротности объемного резонатора дискримина-
тора было взято равным 15 000, как дающее наибольшую крутизну измене-
ния фазы, согласованную с соответствующей шириной полосы частот... В дан-
ном применении средняя частота генератора колебаний была синхронизиро-
вана с частотой объемного резонатора. Резонатор имел температурную ста-
билизацию и акустическую экранировку.
Минимальное значение высокочастотной мощности, подаваемой на вход
дискриминатора, должно равняться (из теоретических соображений) 40 мВт.
Практически это значение было превышено на несколько порядков и дости-
гало 10 Вт.
Уровень опорного сигнала в СВЧ смесителе взят практически максималь-
но возможным, а именно 300 мкВт. Допустимая мощность несущей, просачи-
вающаяся в СВЧ смеситель, на порядок меньше этой величины, т. е. равна
30 мкВт. Таким образом, условие баланса, требуемого для подавления несу-
щей в дискриминаторе, определяется отношением 10 Вт/30 мкВт, что соответ-
ствует 55 дБ. Это, в свою очередь, определяет максимальную разность частот
клистрона и объемного резонатора, равную 400 Гц. Так как уход частоты
клистрона в режиме свободных колебаний может достигать 1 МГц, среднее
усиление контура стабилизации частоты должно быть около 80 дБ.
Усилители промежуточной частоты должны иметь достаточно большое
усиление для того, чтобы влияние шума в видеоусилителе было пренебрежи-
мо малым, и достаточно низкое, чтобы опорный сигнал мощностью 30 мкВт
создавал сравнительно небольшое напряжение на фазочувствительном детек-
торе. Для устойчивости контура стабилизации ширина полосы тракта про-
межуточной частоты должна быть больше 5 МГц.
Обсуждение результатов. Полученные практически характеристики сис-
темы вполне позволяют выполнить требования, принятые в рассмотренном
примере. Однако они очень быстро ухудшаются по сравнению с рассчитан-
ными при изменении режима свободных колебаний, чувствительности детек-
тора и усиления контура стабилизации. Авторы объясняют это ухудшение
«влиянием нелинейностей, вызывающих смешение или искажение гармоник
шума на частотах, находящихся за пределами полосы, представляющей ос-
новной интерес».
Хотя авторы и не достигли того, что можно было бы ожидать теоретиче-
ски (кривая С на рис. 7), все же их результаты, вероятно, являются лучши-
ми из полученных до настоящего времени.
Стабилизация частоты мощных генераторов. Описанные выше активные
методы стабилизации частоты можно использовать для стабилизации мощных
генераторов, а также усилителей мощности. При этом схемы измерительных
мостов остаются неизменными, а следящие системы должны быть видоизмене-
ны для работы при более высоких напряжениях и в некоторых случаях они
должны выдавать значительную мощность, так как многорезонаторные клист-
роны и приборы со скрещенными полями, такие как магнетроны и амплитроны,
можно модулировать только источниками с высоким напряжением и большой
силой тока. Кроме того, эти приборы являются существенно «жесткими», что
создает более строгие требования к конструкции следящей системы.
4.5. Методы измерения шума
Для разработчика РЛС представляют интерес измерения двух основных
видов шума:
— первичного в задающих или мощных генераторах;
— дополнительного в усилителях, вращающихся сочленениях и т. д.
245
Гл. 4. Радиолокационные системы с непрерывным излучением и с ЧМ
Измерение шума в задающих и мощных генераторах со стабилизаторами
или без них представляет собой сравнительно простую и ясную задачу. Для
этого можно использовать любую из описанных мостовых схем. Наиболее про-
стой из них является, вероятно, мостовая схема с пролетным объемным резо-
натором в варианте для видеочастот, приведенная на рис. 3 (Полное описание
этой схемы с чертежами, включая и схемы калибровки, можно пай in в [9,
14, 15].) Современные диоды с низким уровнем шума на низких частотах,
рассчитанные на мощность нескольких милливатт, позволяют создать аппа-
ратуру, достаточно чувствительную для измерения шума большинства источ-
ников колебаний. Ввиду того, что на кристаллические смесители поступает
почти вся мощность несущей, чувствительность схемы не будет такой высо-
кой, как чувствительность более сложных мостовых схем, но во многих слу-
чаях она оказывается вполне достаточной.
В основных приборах, имеющихся в продаже [16], применяется мостовая
схема с отражательным объемным резонатором. Разница между приборами
различных типов заключается в методе калибровки и наличии синхронизи-
рующего устройства в приборах последнего выпуска для синхронизации час-
тоты местного гетеродина и поддержания постоянного сдвига этой частоты
относительно частоты генератора. Эти особенности не влияют на основную
чувствительность мостовых схем, но делают более удобным их обслуживание.
В настоящее время широко применяется метод калибровки с частотной
модуляцией. В одном из приборов, в котором был реализован этот метод,
осуществляется модуляция колебаний источника колебаниями стабильного
кварцевого генератора и производится измерение ВЧ спектра. Модулирующее
напряжение постепенно повышается до тех пор, пока линия несущей не ис-
чезнет при индексе модуляции, равном 2,4. Затем напряжение источника по-
нижается до удобного значения, т. е. до такого, при котором сигнал еще
существенно превышает подлежащий измерению шум, и это напряжение слу-
жит в качестве эталонного для калибровки. В одном из вариантов прибора,
работающего по этому методу, анализатор спектра, используемый для иссле-
дования видеоспектра, применяется также в качестве, анализатора высоко-
частотного спектра при подаче напряжения калибровки. В [12] дано следую-
щее уравнение, определяющее предельную чувствительность прибора:
А₽ . / PnkTB /о
rn,s V Pi Qi’
где A^ims — среднеквадратическое значение девиации частоты; Qi — нагру-
женная добротность объемного резонатора; fo— частота СВЧ диапазона; Pt—-
входная мощность несущей; Fn — коэффициент шума СВЧ смесителя; kTB—
произведение постоянной Больцмана k на абсолютную температуру Т и ши-
рину полосы пропускания анализатора спектра В.
Как показывает данное уравнение, предельная чувствительность прибора
теоретически не зависит от частоты модуляции.
Однако при применении некоторых более ранних вариантов приборов та-
кого типа встречались определенные трудности измерения малых уровней ЧМ
из-за слишком высокого уровня низкочастотной AM местного гетеродина, ис-
кажавшей показания прибора. Эти трудности возникают вследствие того, что
в мостовых схемах трудно добиться подавления несущей более чем на 40 дБ.
Неподавленная часть несущей, а следовательно, и ее амплитудная модуляция
имеет неизвестную фазу. В зависимости от этой фазы неподавленного сиг-
нала боковые полосы амплитудной модуляции оказывают или не оказывают
влияние на результаты измерения мощности двух боковых полос при подав-
ленной несущей, которая в идеальном случае представляет значение ЧМ шума
на входе /-детектора. (Аналогичные трудности возникают и при высоком
уровне амплитудной модуляции источника колебаний.)
246
4.5. Методы измерения шума
Типичные значения чувствительности прибора для диапазона X при раз-
личной полосе пропускания анализатора спектра, характеризуемые средне-
жаадрагическими значениями девиации частоты в герцах, приведены в сле-
дудошей таблице:
Уровень мощности, мВт Полоса пропускания анализатора спектра
1 кГц 100 Гц 1 Гц
1,5 0,32 0,1 0,01
15 0,1 0,032 0,0032
150 0,032 0,01 0,001
1,5-103 0,01 0,0032 0,00032
Принимается, что при входной мощности 1,5 Вт баланс моста обеспечи-
вает подавление несущей на 40 дБ. В соответствии с теорией, приведенные
,значений чувствительности не зависят от частоты компонент шума, но непо-
средственно зависят от мощности, подводимой к мосту. При работе прибора
предельной чувствительности обычно не требуется, а подводимая мощность
должна быть небольшой во избежание повреждения диодов при подавлении
несущей в мостовой схеме. Имеющиеся в продаже приборы, как правило,
им&дт полосу пропускания анализатора спектра 100 и 1000 Гц. Данные, от-
носящиеся к полосе пропускания 1 Гц, приведены в таблице только для спра-
вок. Но полосу пропускания от 3 до 7 Гц имеют анализаторы спектра типов
GR1900 и НР302.
Кроме методов первичных измерений, основанных на применении объем-
ного резонатора в качестве опорного элемента, часто применяется метод срав-
нения двух одинаковых источников на фазовом мосте. Величина ЧМ шума
каждого источника считается при этом равной половине измеренного значе-
ния. Для синхронизации частоты обоих источников применяется низкочастот-
ная следящая система. Если частоты источников колебаний нельзя синхрони-
зировать обычным способом с помощью следящей системы, то можно при-
менить другой вариант, в котором частота одного источника смещена отно-
сительно частоты другого на 30—60 МГц и следящая система регулирует
частоту одного из этих источников так, чтобы это смещение сохранялось
постоянным.
• Методы измерения дополнительного или избыточного шума. Дополнитель-
ный или избыточный шум при не очень большом его уровне можно измерить
очень просто. Для этого требуется сравнительно малошумящий источник ко-
лебаний с частотой, соответствующей частоте усилителя или другого устрой-
ства и простой мостовой Q-метр. Так как мощность на оба плеча моста
подается от одного источника, то его ЧМ шум на детекторе Q-метра будет
коррелирован, если задержки в плечах моста приблизительно одинаковы.
Амплитудная модуляция, возникающая в источнике колебаний или усилителе^
может искажать результаты только в том случае, если ее уровень очень вы-
сок, например на 20 дБ или более превышает уровень ЧМ шума. Обычно
требуется, чтобы уровень амплитудной модуляции источника и исследуемого
элемента был тщательно измерен до измерения ЧМ шума. Для этого доста-
точно иметь простой амплитудный детектор.
Полная структурная схема моста для измерения дополнительного шума
очень низкого уровня показана на рис. 8. В схеме предусмотрен ответвитель
для контроля мощности и наблюдения спектра СВЧ сигнала с помощью сов-
ременного анализатора спектра, например типа HP 51/8551 В. Прямой участок
в средней ветви схемы представляет собой балансный элемент для подавле-
ния несущей. При его использовании мощность центральной спектральной
247
Гл. 4. Радиолокационные системы с непрерывным излучением и с Ч.’1
линии (несущей) может быть полностью подавлена до детектора Q-метра,
а на боковые полосы дополнительного шума, создаваемого в испытуемом при-
боре, он не оказывает влияния. Дополнительное ответвление в этой ветви
применяется для калибровки. С помощью диодного модулятора создается
энергия в боковых полосах, которую с помощью фазовращателя можно ком-
бинировать с энергией несущей так, чтобы воспроизводить амплитудную или
Рис. 8. Мостовая схема для измерения дополнительного ЧМ шума.
фазовую модуляцию. Первый нуль функции Бесселя нулевого порядка нельзя
использовать как калибровочную точку, так как создаваемая при этом ЧМ
имеет очень малую девиацию. Но отношение первой гармоники к несущей,
равное —20 дБ может быть установлено с помощью анализатора спектра.
Мост способен измерять дополнительный ЧМ шум с уровнем до —170 дБ
в полосе 1 Гц, смещенной относительно несущей на 10 кГц. Для этого должны
приниматься меры предосторожности, такие, как хорошая экранировка по-
мещения, монтаж элементов прибора на губчатой резине или других аморти-
заторах для сведения к минимуму микрофонного эффекта и устранение утеч-
ки через цепи заземления в низкочастотной части схемы. Определенные меры
требуются при проведении калибровки. Создаваемые в калибраторе боковые
составляющие амплитудной модуляции после отражения снова попадают
в возбуждающий каскад, а оттуда проникают в ветвь, содержащую детектор
Q-метра. Здесь они искажают ЧМ шум, поступающий на сумматор. Допол-
нительный изолятор позволяет свести этот эффект к пренебрежимо малой
величине, но при этом необходимо применять для калибровки сигнал с уров-
нем —80 дБ относительно несущей.
Кроме того, следует принимать меры по подавлению амплитудной моду-
ляции в возбуждающем каскаде, особенно в связи с тем, что усилитель рабо-
тает в режиме насыщения, а цепь сравнения — нет. Если это условие не вы-
полняется, то несущая сбалансируется в сумматоре, но там будет небаланс
для боковых составляющих амплитудной модуляции, что может исказить
показания детектора Q-метра.
Методы измерения, применимые к импульсно-доплеровским РЛС. Ввиду
сходства методов, техника измерения шума в импульсных передатчиках будет
изложена здесь только в общем виде. Мостовая схема типа, изображенного
иа рис. 4, при импульсных сигналах неприменима, так как она балансируется
248
4 5. Методы измерения шума
только для центральной линии спектра. Остальные линии спектра с огибаю-
щей (sinx)/x будут полностью не сбалансированными и создадут перегрузку
СВЧ детекторов и усилителя промежуточной частоты. Обычно для измерений
применяются основные мостовые схемы с пролетным объемным резонатором,
но они не подавляют несущей.
Измерение шума источников импульсных колебаний значительно сложней,
чем. источников незатухающих колебаний. Для структуры импульсного сигна-
ла характерна весьма значительная амплитудная модуляция, которая неиз-
бежно прямым и косвенным путями затрудняет измерение ЧМ шума. Факти-
чески ЧМ шум можно измерить только на частотах, не превышающих
половинного значения частоты повторения импульсов, и только при условии
применения узкополосных фильтров, включенных непосредственно за детек-
тором Q-метра. Измерение ЧМ шума с уровнем —ЮОдБ относительно несу-
щей в полосе I Гц, смещенной на 10 кГц от несущей, требует высокого уров-
ня техники.
Аналогичные трудности возникают при измерении дополнительного шума,
создаваемого импульсными усилителями. Некоторое увеличение чувствитель-
ности при измерениях можно получить путем генерации второго импульсного
спектра, в максимальной степени подобного генерируемому передатчиком, и
вычитания этих спектров. Схема измерения аналогична представленной на
рис .8, но в нее вводятся (один или более) импульсные модуляторы (на ри-
сунке они показаны штриховой линией) в балансирующих плечах. Удобным
прибором для переключения маломощных сигналов является модулятор на
р—i—«-диоде, но с таким модулятором трудно воссоздать точно форму им-
пульса, выдаваемого мощным усилителем. С другой стороны, довольно суще-
ственные фазовые искажения, создаваемые р—i—«-диодом на переднем фрон-
те импульса, повторяются от импульса к импульсу и создают энергию
в спектре только на гармониках частоты повторения импульсов, где произ-
водить измерения шума и без того совершенно невозможно.
При таком методе балансирования требуется применение современного
хорошего анализатора спектра для контроля выходного сигнала сумматора.
С помощью этого анализатора производится регулировка до сведения к ми-
нимуму мощности полного спектра импульса. Обычно балансированием можно
достичь подавления несущей только на 10—15 дБ. Однако это дает соответ-
ствующее повышение общей чувствительности. Несколько лучшие результаты
получаются, если включить модуляторы на р—i—n-диодах в цепь балансиро-
вания и в цепь усилителя и синхронизировать модуляторы так, чтобы их
рабочая область ограничивалась только центральной частью импульса пере-
датчика. Так как формы обоих импульсов определяются теперь в основном
параллельно включенными р—i—«-диодами, то легко достичь согласования их
спектров. Недостаток этого метода состоит в том, что дополнительный шум
измеряется только в части импульса передатчика, и если начальный участок
импульса вносит основной вклад в случайный шум, то этот эффект окажется
замаскированным. Шум, создаваемый самими р—г—«-диодами, был измерен
с использованием параллельных компенсирующих ветвей, содержащих только
р—i—«-диоды. Измерения показали, что этот шум значительно меньше шума
других источников.
Типичные результаты измерений дополнительного шума различных ис-
точников гармонических и частотно-модулированных колебаний [17, 18] пред-
ставлены на рис. 9. Кривые даны для частот до 150 кГц, но практически
часто представляют интерес значения ЧМ шума на частотах до 1/т (т —дли-
тельность импульса). Источники СВЧ колебаний на полупроводниковых при-
борах, в отличие от клистронных генераторов, создают белый ЧМ шум на
более высоких частотах [84]. Этот шум при работе импульсных доплеровских
РЛС переносится в область низких частот. Метод измерения с синхронизиро-
ванным источником, о котором упоминалось выше, можно удобно видоизме-
нить для измерения общего шума в этих РЛС. Следящая система рассчиты-
249
Гл. 4. Радиолокационные системы с непрерывным излучением и с ЧМ
вается так, чтобы она подавляла на входе фазочувствительного детектора
такую долю шума, которая правильно отображает эффект корреляции. Вы-
ходной сигнал детектора прерывается с такими же частотой повторения и
скважностью, что и у импульсов РЛС. Происходящее при этом наложение
спектров шума точно соответствует условиям работы стабильного задающего
генератора в составе РЛС. Частотная характеристика следящей системы типа
1/jf2 обеспечивает стабильную работу. Такая следящая система работает луч-
ше обычного узкополосного контура слежения с корректирующим усилите-
лем даже при измерениях в РЛС непрерывного излучения.
Рис. 9. ЧМ шум источников СВЧ ко-
лебаний:
Л—настраиваемый напряжением LC-re-
нератор с умножением частоты до ча-
стот диапазона X; S — генератор с
кварцевой стабилизацией и с цепочкой
умножителей частоты на варикапах до
частот диапазона X; В—генератор
с кварцевой стабилизацией и с умножи-
телем частоты до частот диапазона X
на диоде с резким восстановлением;
Г — усилитель мощности на компакт-
ном клистроне непрерывного излуче-
ния, работающем в диапазоне X (ва-
риант 1); Д — усилитель мощности на
компактном импульсном клистроне
диапазона X (вариант 1); Е — усили-
тель мощности на клистронах непре-
рывного излучения диапазона X (ва-
риант 2); Ж — усилитель мощности
на импульсных клистронах диапазо-
на X (вариант 2); .3 — усилитель на
клистроне с электростатической фоку-
сировкой 10-см диапазона; И—кри-
вая В рис. 7. Кривые Г — 3 представ-
ляют результаты измерений дополни-
тельного шума.
4.6. Приемники
Усиление на высокой частоте. Несмотря на ю, что усиление принятого сиг*
нала на высокой частоте при низком уровне шума кажется очень привлека-
тельным, оно не нашло широкого применения в РЛС непрерывного излучения.
Имеются полупроводниковые усилители с очень небольшим коэффициентом
шума для диапазона L (1700—1900 МГц), но для более высоких частот СВЧ
диапазона таких усилителей нет. Применяются параметрические усилители,
но они очень дороги и имеют недостаточно широкий динамический диапазон.
Лампы бегущей волны наряду с высокой стоимостью характеризуются срав-
нительно небольшим сроком службы. Во многих случаях определяющим фак-
тором, вынуждающим отказаться от применения усилителя высокой частоты
на входе приемника, является шум от непосредственно просачивающейся
энергии передатчика и от пассивных помех, уровень которого сравним с уров-
нем шума входного усилителя или превышает его.
Генерация сигнала местного гетеродина. Для получения требуемого от-
ношения сигнал/шум первое усиление в приемниках РЛС непрерывного излу-
чения обычно осуществляется на промежуточной частоте, равной, например,
30 МГц. Необходимый для преобразования частоты когерентный сигнал мест-
ного гетеродина можно получить с помощью различных косвенных методов.
К ним относятся использование простых и балансных модуляторов, однопо-
лосных генераторов или генераторов с фазовой синхронизацией.
Наиболее сложным, пожалуй, является применение однополосного гене-
ратора, так как подавление несущей и нежелательных боковых полос более
250
4.6. Приемники
чем на 20 дБ редко возможно, а это делает необходимым применение фильт-
ров для дополнительного подавления этих сигналов. Балансный модулятор
значительно проще, и он подавляет несущую не хуже, чем однополосный
генератор. Фильтр, необходимый для дополнительного подавления несущей,
обычно подавляет до нужного уровня и нежелательную боковую полосу без
добавления полюсов. Простой модулятор вряд ли можно считать менее слож-
ным, чем балансный модулятор. При этом нужен более узкополосный фильтр
ДЛЯ” дополнительного подавления несущей. Генератор с фазовой синхрониза-
цией полностью исключает необходимость фильтрации по высокой частоте,
но в этом случае требуется применение искусно спроектированной следящей
системы, чтобы ЧМ шум передат-
чика правильно воспроизводился в
сигнале местного гетеродина. Мо-
жет также потребоваться какое-
то поисковое устройство для пер-
воначального захвата и синхрони-
зации. Во всех этих методах необ-
ходимо применение генератора
промежуточной частоты. Требуе-
мая стабильность этого генерато-
ра не очень высока, так как эф-
фект от уходов его частоты сни-
жен в отношении (промежуточная
частота / частота принимаемого
сигнала СВЧ диапазона).
Другой подход к решению этой
Рис. 10. Балансный приемник, содержа-
щий гетеродин с плавающей' настройкой.
задачи состоит в применении гете-
родина со свободно плавающей настройкой [8, 13J. Этот подход подобен ме-
тоду использования местного гетеродина в мостовой схеме на рис. 4. При
этом нужен сдвоенный усилитель промежуточной частоты. Схема приемника
с таким гетеродином показана на рис. 10. Кажущаяся простота структурной
схемы обманчива. Местный гетеродин должен иметь автоматическую под-
стройку частоты, чтобы принимаемый сигнал всегда попадал в полосы пропус-
кания усилителей промежуточной частоты (УПЧ). Как показано на схеме,
в приемнике осуществляется наложение доплеровских частот. Чтобы избежать
этого, следует или применить квадратурный метод, или ввести второе смеще-
ние частоты в опорном канале. Второй способ менее привлекателен, так как
он нарушает симметрию, которая может потребоваться для уравнивания вре-
менных задержек, обеспечивающего компенсацию ЧМ шума местного гете-
родина. Даже в простейшем варианте симметрия получается далеко не пол-
ная, так как канал сигнала должен пропускать сигналы с широким диапазо-
ном амплитуд, а в опорном канале проходит только сигнал с постоянной
амплитудой.
Усилитель промежуточной частоты. Обычно применяются малошумящие
усилители промежуточной частоты по традиционной каскодной схеме. Ввиду
сравнительно высокого уровня пассивных помех и непосредственно просачи-
вающейся энергии передатчика, попадающих в УПЧ, его усиление принято
ограничивать значениями, обычно не превышающими 40 дБ. Это определяет
коэффициент шума и обеспечивает усиление полезного сигнала до уровня,
при котором влияние микрофонного эффекта становится менее заметным, а
опасность достижения насыщения и сопутствующей ему перекрестной моду-
ляции отпадает.
Поднесущие. Хотя доплеровская фильтрация может осуществляться на
несколько более высоких уровнях, желательно отфильтровывать сигналы пас-
сивных помех и просачивающейся энергии передатчика по возможности на
более низком уровне. К сожалению, нет фильтров с достаточно большой
добротностью, которые могли бы подавить пассивные помехи, например, на
251
Гл. 4. Радиолокационные системы с непрерывным излучением и с ЧМ
частоте 30 МГц без понижения уровня более низких доплеровских частот.
Даже с помощью кварцевых фильтров нельзя решить эту задачу.
Наиболее простой метод состоит в смешении выходного сигнала УПЧ
с сигналом, используемым во вспомогательной ветви. Это переводит проса-
чивающийся сигнал в постоянную составляющую, а сигнал от пассивных
помех — в постоянную составляющую и составляющие очень низких частот.
Многополюсные фильтры подавляют эти нежелательные сигналы при очень
небольшом подавлении самых низких доплеровских частот. Но при этом про-
исходит свертывание спектра полезного сигнала и сигналы приближающихся
Рис. 11. Приемник с квадратурным детектором.
к РЛС целей будут не отличимы от сигналов удаляющихся целей, а сопут-
ствующие им боковые полосы случайного шума будут попадать в основную
полосу пропускания усилителя. Кроме этой неоднозначности, которую в не-
которых случаях можно считать допустимой, характерное для такого режима
ухудшение- на 3 дБ отношения сигнал/шум может оказаться существенным
для мощных РЛС.
Существуют два альтернативных решения, которые находят широкое
применение. Первое состоит в применении для выделения доплеровской ин-
формации полосы поднесущих частот. Эта полоса не доходит до постоянной
составляющей и имеет такую центральную частоту, на которой добротность
кварцевых или электромеханических фильтров достаточно высока для эф-
фективной фильтрации (для кварцевых фильтров приемлемыми диапазонами
частот можно считать 0,1-—0,5 МГц или 1—5 МГц, для электромеханических
фильтров 0,1—0,5 МГц).
Второе решение состоит в применении квадратурного детектирования [19].
Структурная схема приемника с квадратурным детектором дана на рис. 11.
Требуемый фазовый сдвиг на 90° можно заменить двумя сдвигами на +45°
и —45° фазы сигнала постоянной частоты, поступающего на детектор от ге-
теродина Фазовые сдвиги на +45° и —45° в двух сигнальных каналах не-
обходимы для сохранения баланса в широком диапазоне частот.
Фазорная диаграмма для этого приемника представлена на рис. 12 (с целью
упрощения на ней не показано смещение на промежуточную частоту). Если
выходной сигнал смесителя 1 имеет опережающую на 90° фазу (цель при-
ближается к РЛС) и объединяется с сигналом смесителя 2, то эти сигналы
будут складываться в сумматоре и взаимно уничтожаться в вычитателе.
Можно показать, что сигнал удаляющихся от РЛС целей усиливается в вы-
читателе и ослабляется в сумматоре.
252
4.6. Приемники
промежуточной частоты. Недостаток
устранения сигналов
вторичных смесителей
ложных целей
и двух 45-гра-
t=0
Сигнал
1-го гетеродина
Сигнал
2-го гетеродина
1тО
Рис. 12. Фазорная диаграмма для прием-
ника с квадратурным детектором.
Преимущество приемника с квадратурным детектором состоит в том,
что полосы пропускания фильтров полностью симметричны и все элементы
фильтров могут быть идентичными. Кроме того, фильтры верхних частот,
имеющие большую крутизну характеристики, благоприятную для подавления
пассивных помех, легче рассчитать и построить для частот, близких к посто-
янной составляющей, чем для низкой
этого решения состоит в том, что дл:
необходимо поддерживать баланс двух
дусных фазовращателей в полной по-
лосе доплеровских частот.
Усиление. После подавления не-
желательных просачивающегося сиг-
нала и пассивных помех можно по-
лучить существенное усиление полез-
ного сигнала или на второй поднесу-
щей частоте или в случае примене-
ния приемника с квадратурным де-
тектором на самой доплеровской ча-
стоте. Для дополнительной фильтра-
ции нежелательных сигналов принято
применять фильтры, включаемые меж-
ду каскадами усилителя. Единствен-
ное тре;бование, которое должно при
этом /выполняться, состоит в том,
чтобы' при совместном осуществлении
усиления ,и полной фильтрации амп-
литуда нежелательных сигналов нигде не достигала уровня насыщения.
Гребенки доплеровских фильтров. В идеальном случае при обработке и
усилении сигналов не должно быть нелинейных операций. Можно еще до-
биться некоторого улучшения отношения сигнал/шум на несколько децибел
при' использовании когерентного сигнала и сужения полосы. В [20] показано,
что можно разделить данную полосу доплеровских частот на несколько
составляющих полос без повышения вероятности ложной тревоги. В РЛС же-
лательно было бы иметь результирующую полосу пропускания доплеровского
фильтра, ограниченную только временем облучения цели. Это условие может
быть реализовано в РЛС с быстрым обзором пространства, но в РЛС сопро-
вождения или подсветки целей полосы пропускания доплеровских фильтров
получились бы слишком узкими. Кроме того, сама цель вследствие влияния
эффектов мерцания и блестящих точек редко создает четко выраженную доп-
леровскую частоту, а образует спектр доплеровских частот. При выборе по-
лосы пропускания доплеровских фильтров следует также учитывать возмож-
ное расширение спектра доплеровских частот за счет кодирующих частот,
возникающих, например, при коническом сканировании. Типичная схема РЛС
диапазона X содержит необходимую гребенку двухполюсных доплеровских
фильтров со смежными полосами шириной 1000 Гц. (Оригинальный ме-
тод, позволяющий заменить п двухполюсных фильтров эквивалентными п+1
резонансными цепями, дан в [21].)
За каждым фильтром следует детектор и последетекторный интегратор,
постоянная времени которого согласована с временем облучения цели или
в случае РЛС сопровождения со скоростью выдачи данных следящей систе-
мой. В цепях, следующих за каждым детектором, устанавливается пороговый
уровень. При превышении сигналом этого уровня формируется напряжение,
сохраняющееся в течение некоторого времени до его считывания. В РЛС об-
наружения пороговые цепи обычно опрашиваются устройством считывания.
Такой способ характерен для обработки сигналов с помощью цифровой вы-
числительной техники.
РЛС со слежением по доплеровской частоте. Наборы доплеровских фильт-
253
Гл. 4. Радиолокационные системы с непрерывным излучением и с ЧМ
ров удовлетворительно работают в РЛС обнаружения и РЛС сопровождения
при обзоре. Но они обычно не используются для улучшения отношения
сигнал/шум в РЛС сопровождения или подсветки цели, так как проще при-
менить устройство слежения по доплеровской частоте (строб скорости). Обыч-
ная схема такого устройства идентична со схемой АПЧ в радиоприемниках
ЧМ сигналов. Для преобразования частоты анализируемого сигнала в про-
межуточную частоту по методу биений используются колебания генератора,
настраиваемого напряжением. В узкополосном усилителе промежуточной час-
тоты осуществляется фильтрация. Генератор с настройкой напряжением,
в свою очередь, управляется выходным напряжением дискриминатора, сое-
диненного с усилителем. На вход устройства слежения может подаваться
или исходный спектр доплеровских частот, как в приемниках со свертыванием
спектра или с квадратурным детектированием, или поднесущая, содержащая
всю доплеровскую информацию Хотя в следящем устройстве может выпол-
няться некоторая фильтрация пассивных помех, предпочтительнее удалять
эти помехи в предшествующем тракте. Это особенно важно в приемниках
с квадратурным детектором некоторых самолетных РЛС, где пассивные по-
мехи могут иметь довольно широкий спектр, так как из-за нелинейности сме-
сителя создаются гармоники нежелательных сигналов, которые могут непо-
средственно накладываться на сигнал цели в устройстве слежения.
Захватив сигнал цели, следящее устройство отслеживает соответствую-
щую составляющую доплеровского спектра частот. Его отклик ограничивает-
ся только шириной полосы следящей системы, рассчитанной с учетом ожи-
даемых маневров цели. Информация, необходимая для захвата отслежи-
ваемой цели, поступает от набора доплеровских фильтров (если они имеются)
при разомкнутом контуре слежения. Если доплеровских фильтров нет, то
можно подавать на настраиваемый напряжением генератор пилообразное или
треугольное напряжение для программированного поиска. Этот поиск прекра-
щается, когда на выходе зарегистрирован сигнал желаемой цели Для облег-
чения обнаружения и захвата цели могут применяться дополнительные ко-
дирующие сигналы.
Необходимо принимать меры к тому, чтобы настраиваемый напряжением
генератор не настраивался на частоту, при которой следящее устройство мо-
жет захватить просачивающийся сигнал или сигнал от пассивных помех.
В наземных системах эта задача легко решается установлением жестких
постоянных пределов для поискового напряжения. В самолетных системах,
работающих при наличии пассивных помех с изменяющейся частотой, тре-
буются более сложные решения.
Постоянная вероятность ложной тревоги. К любым современным РЛС
предъявляется требование сохранения постоянной вероятности ложной тре-
воги при наличии переменных уровней шума. В РЛС непрерывного излуче-
ния это требование легко выполняется при использовании наборов фильтров.
Энергия, поступающая в набор фильтров, органичивается или автоматической
регулировкой усиления или, когда это возможно, с помощью ограничителей
и установлением для цепей, следующих за фильтрами, порогового уровня,
соответствующего уровню во всей полосе. Типичный метод установления по-
рогового уровня состоит в подаче случайного шума на вход усилителя, выход
которого связан с набором фильтров. Порог для каждого фильтра и следую-
щих за ним цепей регулируется так, чтобы достигалась заданная вероят-
ность ложной тревоги. Затем уровень шума.изменяется и каждый выбранный
порог проверяется при этом уровне. Если ограничение осуществляется пра-
вильно, то вероятность ложной тревоги не должна изменяться. Однако при
отсутствии шума ограничения сигналов от целей не происходит, так как эти
сигналы не могут изменить общую энергию в широком доплеровском спектре
настолько, чтобы достигался уровень ограничения. Эти замечания относятся
также и к устройству слежения по скорости.
254
4.7. Минимизация просачивания сигнала
4.7. Минимизация просачивания сигнала
Все основные наземные РЛС непрерывного излучения имеют две антенны
для уменьшения непосредственного попадания сигнала передатчика в прием-
ник. Развязку между передатчиком и приемником можно еще улучшить при-
менением различных поглотителей или специальной цепи обратной связи, ко-
торая регулируется по фазе и амплитуде так, чтобы уравновесить просачи-
вающуюся энергию. В свободном пространстве такое решение оказывается
Рис. 13. Мостовая схема для компенсации просачивающейся энергии.
вполне достаточным. Но если РЛС сканирует неровную земную поверхность,
то энергия, отраженная от нее к приемной антенне, не будет оставаться по-
стоянной. Поэтому требуется динамическое устройство компенсации проса-
чивающейся энергии. Упрощенную схему и краткое описание такого устрой-
ства можно найти в [13]. Более полное описание дано в [8, 22].
Действие всех динамических устройств компенсации просачивающейся
энергии основано на синтезе правильных значений амплитуды и фазы сигна-
ла, взятого от передатчика, и использовании этого сигнала для уравновеши-
вания просачивающейся энергии. Для достижения независимой работы сле-
дящих систем вектор сигнала должен синтезироваться в ортогональных пря-
моугольных координатах. На рис. 13 приведена схема типичного устройства,
используемого в РЛС непрерывного излучения, в котором сигнал местного ге-
теродина получается от передатчика. Если в РЛС применяется балансный
метод формирования гетеродинирующего сигнала (рис. 10) для получения
255
Гл. 4. Радиолокационные системы с непрерывным излучением и с ЧМ
первой промежуточной частоты, то потребуется небольшая модификация дан-
ной схемы [8, 13].
Полоса пропускания усилителей следящей системы заключена в преде-
лах от постоянной составляющей до некоторой частоты, лежащей ниже по-
лосы доплеровских частот, представляющих интерес. Они реагируют на мед-
ленные изменения просачивающегося сигнала, не оказывая при этом влияния
на спектр доплеровских частот. Детальное описание механической конструк-
ции следящей системы дано в [8].
В [22] описан вариант устройства, иногда используемого в РЛС непре-
рывного излучения с одной антенной и антенным дуплексером. Это устрой-
ство представляет интерес с точки зрения применения в самолетных РЛС,
размещаемых в небольших обтекателях. К сожалению, опыт показал, что
передатчики таких РЛС могут иметь только ограниченную мощность. Кроме
того, следящая система не компенсирует отражения от антенны или антен-
ного переключателя с уровнем —20 дБ настолько, чтобы они не ухудшали
работу приемника.
Следует заметить, что компенсация просачивающегося сигнала СВЧ имё-
ет принципиальное значение для предотвращения насыщения и для сведения
к минимуму влияния AM шума. Вызываемый просачивающимся сигналом
ЧМ шум может компенсироваться в приемнике из-за эффекта корреляции.
AM и ЧМ шум, создаваемый пассивными помехами с малых дальностей,
также существенно снижается следящей системой, компенсирующей просачи-
вающуюся энергию, так как при подавлении несущей автоматически подав-
ляются и боковые полосы, независимо от их происхождения, в условиях, ког-
да интервал декорреляции мал. Пассивные помехи с больших дальностей
содержат существенно декоррелированные AM и ЧМ шумы, и попытка по-
давления их системой компенсации просачивающейся энергии может уве-
личить их девиацию в 2 раза или мощность в 4 раза [см. (3)].
4.8. Приемники систем наведения ракет
Между наземными РЛС непрерывного излучения с двумя параболиче-
скими антеннами и комплексами, применяемыми в полуактивных системах не-
прерывного излучения для наведения ракет, нет существенной разницы.
В обоих случаях передатчик, генерирующий незатухающие колебания, облу-
чает цель, а приемник, имеющий отдельную антенну, обрабатывает отражен-
ные от цели сигналы. Разница заключается только в методах использования
части энергии передатчика в качестве опорного сигнала для выделения доп-
леровских сигналов. Когда приемник расположен рядом с передатчиком,
опорный сигнал можно передать в приемник непосредственно по СВЧ кабелю.
Если приемник находится на ракете, то требуется СВЧ радиолиния связи.
Вследствие многопутного распространения, опорный сигнал может поступить
на ракету с низким уровнем, поэтому метод непосредственного гетеродини-
рования, имеющий большие преимущества при высоких уровнях сигнала,
в данном случае не применяется. Вместо него используется метод гетеродина
с плавающей настройкой (рис. 10) или генератор с фазовой синхронизацией.
Остальная часть бортовой аппаратуры ракеты может включать усилители
поднесущей, устройства слежения по доплеровской частоте, детекторы системы
сканирования, цепи обнаружения и т. д., аналогичные используемым в опи-
санных выше РЛС различных типов.
Упрощенная структурная схема приемника с квадратурным детектором
и балансным подавлением несущей может иметь вид, показанный на рис. 14.
Уместно отметить, что вследствие удаления ракеты от передатчика при-
емник на ее борту принимает относительный, а не абсолютный опорный сиг-
нал. Хотя на изменения его частоты реагирует система АПЧ, на сигналы,
выделяемые фазочувствительным детектором, этот эффект почти не оказывает
256
4.9. Различные типы РЛС с непрерывным излучением
влияния, т. е. доплеровские частоты для различных геометрических соотно-
шений будут такими же, как и в случае активной РЛС обнаружения непре-
рывного излучения. Поэтому к устройству слежения по доплеровской час-
тоте на ракете не предъявляется требование, чтобы оно выделяло доплеров-
Рис. 14. Структурная схема приемника полуактнвной системы наведения ракет.
ские частоты в той или иной абсолютной форме. Пассивные помехи пред-
ставляют, конечно, более трудную задачу для любой (активной или пассив-
ной) бортовой системы, так как они дают сигналы с широким спектром, от-
деленным значительным интервалом от постоянной составляющей.
4.9. Различные типы РЛС с непрерывным излучением
Существует несколько видов небольших РЛС с непрерывным излучением
для различных применений, где требуется сравнительно невысокая чувстви-
тельность. Все они построены по гомодинному принципу, когда генератор
передатчика служит одновременно и местным гетеродином. Сигнал передат-
чика поступает в первый смеситель приемника или по цепи непосредственного
соединения или, более часто, по управляемой цепи утечки.
Радиовзрыватели. Типовой радиовзрыватель представляет собой прибор
в виде гомодинной РЛС с непрерывным излучением [23—25], чувствительность
которой к изменению дальности выражается лишь в возрастании напряже-
ния доплеровских сигналов при приближении к земле или в изменении сиг-
нала, когда цель попадает в ДН антенны. Обычно в этом приборе исполь-
зуется один и тот же элемент в качестве генератора и смесителя — детектора.
Как правило, в радиовзрывателях применяется одна антенна для пере-
дачи и приема и поэтому подавление просачивающейся энергии представляет
большие трудности. Эти трудности менее ощутимы только в диапазоне СВЧ,
где отраженные сигналы от цели (самолета или наземного объекта) очень
сильные. Часто корпус снаряда, на котором установлен радиовзрыватель, ис-
пользуется в качестве антенны, но обычно применяется поперечный диполь или
рамочная антенна для устранения провала ДН в направлении полета снаряда.
Основные трудности, относящиеся к радиовзрывателям, связаны с тре-
бованиями обеспечения небольших размеров, длительного срока хранения,
низкой стоимости и надежной работы при больших ускорениях.
257
Гл. 4. Радиолокационные системы с непрерывным излучением и с ЧМ
За последние годы значительно возросла тенденция построения радио-
взрывателей полностью на полупроводниковых приборах и интегральных схе-
мах. Интегральная технология позволяет изготовлять сложные схемы с очень
небольшими размерами и массой, способные выдерживать ускорения более
100 000 g.
РЛС с непрерывным излучением для полиции. РЛС непрерывного излуче-
ния гомодинного типа находят широкое применение в полицейской службе
[26—27]. В таких РЛС сигнал местного гетеродина поступает в смеситель на
одном диоде по регулируемой цепи утечки. Усиление производится на допле-
ровской частоте. При частоте 10 525 МГц, выделенной Федеральной комиссией
связи США для полицейской службы, скорости транспорта 80 км/ч соответст-
вует доплеровская частота 1570 Гц, находящаяся в удобной полосе частот.
Для предотвращения попадания в счетчик случайных сигналов или шума
используется схема подавления. Три уровня усиления относительно уровня
подавления дают достаточное усиление для обнаружения автомашин на
ближних, средних и максимальных дальностях. Выходные сигналы усилите-
лей доплеровской частоты ограничиваются, дифференцируются и интегриру-
ются. Каждый импульс из дифференцирующей цепи вносит определенный
вклад в интегрируемый сигнал, и чем выше доплеровская частота, тем более
сильным получается выходной сигнал интегратора. Этот сигнал постоянного
тока воздействует на измерительный прибор или самописец, проградуирован-
ный в значениях скорости. Для калибровки приборов можно использовать
камертон.
РЛС для управления сигналами светофоров. В ФРГ разработано устрой-
ство для управления сигналами светофоров, заменяющее ручные приборы
управления. Это устройство действует по принципу гомодинной РЛС непре-
рывного излучения и имеет квадратурные смесители [19]. Оно позволяет раз-
личать автомашины, приближающиеся к светофору и удаляющиеся от него.
Приближающиеся машины вызывают генерацию сигнала, переключающего
сигналы светофора. Удаляющиеся машины не влияют на светофор.
Доплеровское устройство распознавания с сильным подавлением пассив-
ных помех. В [28] описано устройство, состоящее из коррелятора и интегра-
тора, которое может отличать поступательно-возвратное движение, совершае-
мое, например, ветвями деревьев, от одностороннего движения. В этом уст-
ройстве сдвинутые по фазе сигналы от двух квадратурных детекторов срав-
ниваются в электромеханическом корреляторе. Коррелятор состоит из двух
близко расположенных коаксиальных проволочных катушек. Возникающая
между катушками механическая сила измеряется датчиком, выходное напря-
жение которого интегрируется в течение возможно более длительного времени.
Достоинство электромеханического коррелятора состоит в том, что он пред-
ставляет собой действительно симметричное перемножающее устройство, от-
личающееся высокой линейностью. Он может работать при очень низких
уровнях сигнала, а также не переходит в режим насыщения при больших
уровнях сигнала. В реализованном варианте этого прибора введено низко-
частотное прерывание. При этом механическая конструкция коррелятора на-
меренно настраивается в резонанс с частотой прерывания.
Имеются также электронные корреляторы. Они не обладают такой вы-
сокой симметрией, как электромеханический коррелятор, но зато более ком-
пактны.
4.1©. РЛС с непрерывным излучением и с частотной модуляцией
Основное внимание в этом разделе будет сосредоточено на гомодинных
РЛС непрерывного излучения с ЧМ, т. е. РЛС, в которых модулируемый по
частоте генератор СВЧ колебаний служит одновременно как генератор пере-
датчика и как гетеродин приемника. Дополнительные сведения о РЛС с ЧМ
253
4.10. РЛС с непрерывным излучением и с ЧМ
можно найти в (3, 6]. Хорошее изложение теоретических основ ЧМ дано
в [4, гл. 12].
Существуют три основных метода анализа работы РЛС этого типа: фа-
збрные диаграммы, частотно-временные графики и анализ Фурье. Необходимо
уметь пользоваться в той или иной мере каждым из этих методов. При ана-
лизе РЛС с ЧМ и небольшой девиацией частоты наиболее полезным, вероят-
но, будет применение фазорных диаграмм. Для построения такой диаграммы
вначале строится большой фазор, представляющий несущую частоту. Этот
фазор принимается за опорный и считается стационарным. Более высокие
частоты представляются фазорами, вращающимися против часовой стрелки,
а более низкие — фазорами, вращающимися по часовой стрелке.
Рис. 16. Фазорная диаграмма, показывающая критиче-
ские дальности.
V
т
да
Рис. 15. Фазорная диаграм-
ма для РЛС непрерывного
излучения ЧМ.
Если метод фазорной диаграммы применяется в гомодинной РЛС с ЧМ,
то мгновенная фаза сигнала местного гетеродина (т. е. фаза сигнала пере-
датчика) принимается за фазу опорного фазора, а отраженные сигналы пред-
ставляются меньшими фазорами. Выходной сигнал смесителя пропорционален
проекции малого фазора на большой опорный фазор.
В качестве примера рассмотрим высотомер с ЧМ по треугольному закону.
В фазорной диаграмме этого высотомера (рис. 15) меньший фазор поочередна
вращается по часовой стрелке или в обратном направлении с постоянной
скоростью (за исключением точек изменения направления). Если размах этих
колебаний небольшой (т. е. если дальность до земли мала), то в зависимости
от фазы отраженного сигнала может возникнуть одна из двух ситуаций
(рис. 16). В случае, представленном диаграммой на рис. 16, а, будет иметь
место в два раза большее число периодов колебаний разностной частоты, чем
в случае рис. 16, б. Это приводит к возникновению так называемой критиче-
ской дальности в высотомерах с ЧМ. Это явление будет рассмотрено более
подробно позднее; здесь же интерес представляет сама форма фазорной диа-
граммы н процессы, которые она отражает.
Второй метод основан на построении диаграммы мгновенной частоты. На
этой диаграмме в частотно-временной плоскости строятся кривые для каждого
сигнала. Типичная диаграмма для высотомера с ЧМ по синусоидальному за-
кону приведена на рис. 17. Кривая А представляет поведение сигнала пере-
датчика (и местного гетеродина) в частотно-временной плоскости, а кривые
В и С — отраженные сигналы с различных дальностей. Расстояние между кри-
выми по вертикали (см. кривые D и Е) дает эвристическую картину харак-
тера изменений средней частоты разностного сигнала на выходе смесителя.
Это, конечно, упрощенное представление. Сигнал передатчика, отраженный
сигнал, а также их разность, являются периодическими сигналами. Отсюда
259
Гл. 4. Радиолокационные системы с непрерывным излучением и с ЧМ
следует, что не может быть континуума разностных частот, а имеются только
гармоники основной частоты модуляции. Диаграммы типа представленной
на рис. 17 наиболее полезны тогда, когда различные частоты рассматривае-
мых сигналов во много раз превышают частоту повторения. В этом случае
плотное множество гармонических составляющих можно рассматривать при«
ближенно как континуум частот. Такая диаграмма не позволяет обнаружить
дискретные ошибки в определении дальности, показанные на фазорной диа-
грамме.
Время
Рис. 17. Кривые для РЛС с синусоидальной ЧМ.
Наконец, имеется третий математический метод анализа, применение ко-
торого обычно ограничивается системами, в которых закон модуляции пред-
ставляет собой одну или сумму многих синусоид. Известны работы, в которых
дан точный или приближенный анализ частотной модуляции по треугольному
и пилообразному законам [29, 30], но эврастический подход часто оказывает-
ся более полезным.
4.11. Модуляция по синусоидальному закону
Пусть излучается ЧМ сигнал вида
sin I Йо ----- sin a>m t
\
где oim — частота модуляции; Qo—несущая частота; AQ/toTO — индекс моду-
ляций.
Отраженный от точечной цели сигнал будет иметь вид
Ре = Ue < sin Qo U — Т) -j-- sin wm (z — T)
IL wm J
260
4.11. Модуляция по синусоидальному закону
где ф — произвольный фазовый сдвиг при отражении; Т — временное запаз-
дывание отраженного сигнала. Чтобы учесть в явном виде эффект Доплера,
нужно представить запаздывание Т как функцию времени, т. е. Т=То+2о//с,
где и — скорость отражающего объекта; с — скорость света. После обычных
тригонометрических преобразований можно получить выражение для разно-
стного сигнала
г , Г I ^vt
U t COS Qg I T0 -j-
\ 0
— D cos (0m
T
t—---
2
г* „ 2AQ w,.n T
Здесь D =----------sin--------
2
Фазу отраженного сигнала ф можно в общем случае не учитывать. Тогда
разложение |*< в ряд Фурье дает [6]
14 — Ui I Л (^) cos Й0 То + i -f-
\ \ с 1
+ 2j ( — 1) Jn(D){sm
Hftdd '
/1С0 иг
—sin
/гсОщ м— g I—
(-lf/2 Jn(D) cos
neven
/гсот
Г / т
4-cos ncoml t~—
)-n°(r»+ )]})-
где Jn(D)—функция Бесселя /г-го порядка; nOdd и neven — нечетные и чет*
ные целые числа.
Обычно при наличии доплеровского приращения частоты спектр разност-
ного сигнала Цг имеет вид, показанный на рис. 18. Спектр не содержит час*
тоты модуляции или ее гармоник, но около каждой гармоники этой частоты
имеется пара боковых полос и одна полоса расположена около нулевой час-
тоты, соответствующей постоянной составляющей спектра. Амплитуда пары
боковых полос около n-й гармоники пропорциональна Jn(D), где D — мульти-
пликативная функция индекса модуляции и периодическая функция от про-
изведения частоты модуляции на временное запаздывание отраженного
сигнала Соответствующие значения 1п(Р) показывают, что амплитуда сиг-
налов двух боковых полос может восприниматься усилителем, настроенным
на данную гармонику частоты модуляции. На рис. 19 представлены типич-
ные величины сигналов боковых полос, которые могут иметь место в нави-
гационных РЛС (кривые А и В) ив высотомере с модуляцией по синусо-
идальному закону (кривая С).
Легко построить и другие аналогичные графики, пользуясь таблицами или
графиками функций Бесселя низшего порядка. Такие графики имеют следую-
щие особенности: все они периодические с периодом, кратным Т; кривая
функции Бесселя возрастает до некоторого значения аргумента, затем снова
падает до нуля и т. д. Все составляющие спектра симметричны относительно
261
Гл. 4. Радиолокационные системы с непрерывным излучением и с ЧМ
точек (|)тТ/2=лл; это значит, что запаздывание отраженного сигнала равно
целому числу периодов частоты модуляции. Если рассма!ривать только амп-
литуды составляющих спектра, то можно отметить дополнительные точки
симметрии при (От772=л/2, Зл/2, ... Поведение функции Бесселя 1п(Х)~Ахп
при х<1 показывает характер кривой в нулевых точках при Р=0 и дает
некоторое представление о способности системы подавлять просачивающийся
сигнал.
В проведенном выше анализе
принималось, что доплеровская
частота не превышает половинно-
го значения частоты модуляции
(От/2л, так как в противном слу-
чае боковые йолосы доплеровских
частот не будут иметь так легко
обнаруживаемых соотношений с
гармониками частоты модуляции.
Аналогичная ситуация возникает
в импульсно-доплеровских РЛС,
когда частота повторения импуль-
сов недостаточно высока по срав-
нению с доплеровскими частотами.
Наличие двух боковых полос око-
ло каждой гармоники частоты мо-
дуляция вызывает определенные
трудности в обработке сигналов,
которые рассматриваются в §4.16.
боковых полос, то можно ввести
Рис. 18. Спектры двухполосных сигналов для
2ло)т=106 Гц. Сплошные линии: 0 = 2,3; доп-
леровская частота 105 Гц. Пунктирные линии:
0=4; доплеровская частота 2 10s Гц.
Если желательно избежать этих двойных
некоторую смещающую частоту, достаточно высокую по сравнению с самой
высокой гармоникой частоты модуляции, имеющей значительную амплитуду.
Это устраняет наложение спектров.
Рис. 19. Зависимости отклика РЛС от дальности:
Л в В - доплеровских навигационных РЛС, работающих на третьей и четвертой гармо-
никах (fm = 10* Гц, индекс модуляции 2,4); С — высотомера фирмы Emerson Litton
(/в» = 2,510‘ Гц, индекс модуляции 5).
262
4.11. Модуляция по синусоидальному закону
Двойная синусоидальная модуляция. Сигнал, получающийся в результате
модуляции несущей двумя синусоидальными составляющими с различными
частотами, можно анализировать аналогичными математическими методами.
При наличии низкой доплеровской частоты пары боковых полос, образующиеся
у.гармоник низшей частоты модуляции, будут располагаться около гармоник
высшей частоты модуляции (рис. 20). Высота линии на этом рисунке харак-
теризует относительную интенсивность соответствующих пар доплеровских
боковых полос, примыкающих к каждой данной линии. В одном масштабе
нельзя представить на рисунке доплеровскую частоту 10 кГц, гармоники пер-
вой частоты модуляции (1 МГц) и гармоники второй частоты модуляции
(40 кГц). Можно показать (21J, что пара доплеровских боковых Полос, обра-
зующихся у n-й гармоники частоты модуляции 40 кГц, будет иметь вблизи
т-й гармоники частоты модуляции 1 МГц относительную амплитуду
/ 2AQ2 . ©2 Т \ / 2AQX
Jп I ~ I Jm ( sin
\ ©2 2 / у ©х
7
2
Для величин, указанных на рис. 20, синус в первых скобках этого выра-
жения можно аппроксимировать его аргументом, а функцию Бесселя — пер-
вым членом ее разложения в степенной ряд. Для построения картины спектра
было выбрано значение Г, дающее один из максимумов /3[(2AQi/©i)sin(©iT/2)]
и в то же время отражающее влияние низкой частоты модуляции. Следует
заметить, что такая простая диаграмма получается только, если доплеровская
частота мала по сравнению с низшей частотой модуляции, а самая высшая
гармоника этой частоты модуляции (являющаяся функцией от Г) не превы-
шает половину интервала между гармониками более высокой частоты моду-
ляции Если доплеровские частоты высоки, то двойная модуляция вообще не-
целесообразна.
263
Гл. 4. Радиолокационные системы с непрерывным излучением и с ЧМ
4.12. Модуляция по треугольному и пилообразному закону
Модуляция этого вида обычно анализируется с помощью частотно-вре-
менной диаграммы. В большинстве случаев временной интервал, соответст-
вующий разрыву непрерывности крутизны модулирующей функции, при
анализе не учитывается. Это вполне оправдано, так как данному интервалу
соответствует сравнительно небольшая доля отраженной энергии, распреде-
ленной в широкой полосе частот.
Обычно используемая аппроксимация для любого из этих видов моду-
ляции основана на построении подобных треугольников. На рис. 21 треуголь-
ник А представляет частоту сигнала, излучаемого типовым радиовысотомером,
треугольник В — частоту сигнала, отраженного от поверхности земли, С —
центр тяжести огибающей закона изменения разностной частоты в смесителе.
Обычно расстояния а—р и Р—у значительно превышают интервал между А
и В, т. е. длина волны, соответствующая частоте модуляции, велика по срав-
нению с любой измеряемой высотой. Если А/7 представляет собой полную
девиацию частоты, г — полупериод частоты модуляции, T=2R/c— временное
запаздывание отраженного сигнала, то Как отмечалось выше, это
выражение является приближенным; спектральной линии точно на этой час-
тоте может не быть. Типичными значениями для радиовысотометра могут быть
AF—100 МГц, т=Ы0’3 с (т. е. частота модуляции равна 500 Гц). При вы-
соте 3000 м, соответствующей запаздыванию сигнала на 2-Ю-5 с, спектр сиг-
нала разностной частоты располагался бы около центральной частоты 2 МГц.
Очевидно, что его линейчатой структурой при частоте модуляции 500 Гц мож-
но пренебречь. Даже на высоте 15 м спектр сигнала разностной частоты будет
иметь центральную частоту 10 кГц и его линейчатая структура не будет еще
сказываться.
Вычисления для модуляции по пилообразному закону можно провести
аналогичным образом. Разница заключается в том, что на интервале обрат-
ного хода генерируются более высокие частоты, а также в том, как прояв-
ляется влияние доплеровских частот. При модуляции по треугольному закону
доплеровские частоты, меньшие разностной частоты АЛ исключаются, так
как за один полупериод модуляции они разностную частоту увеличивают,
а за другой — уменьшают. При модуляции по пилообразному закону воз-
можно только или увеличение, или уменьшение разностной частоты, так как
частоты, генерируемые при переходном процессе во время обратного хода, не
попадают в полосу пропускания усилителя разностной частоты. Кроме того,
264
4.14. Кодовая модуляция
имеется разница в линейчатой структуре спектра, так как каждой гармонике
частоты повторения соответствует только одна боковая полоса, а не две [32].
Но этот вопрос не рассматривается здесь подробно, поскольку в данном слу-
чае основной интерес представляет структура линейчатых спектров, которые
весьма близки к сплошным.
Если модуляцию по треугольному или пилообразному закону рассмат-
ривать как способ формирования сигнала существенно постоянной разност-
ной частоты в смесителе, то легко видеть, что огибающая спектральных ли-
ний на выходе смесителя имеет форму (sinx)/x. Масштаб функции (sinx)4'.t
определяется отношением длительности одного интервала, на котором разно-
стная частота постоянна, к среднему периоду разностной частоты (кривая С
на рис. 21). В аналогичной ситуации синусоидальная модуляция дает менее
компактный спектр, расширяющийся асимметрично в сторону гармоник низ-
шего порядка.
4.13. Шумовая модуляция
Для ЧМ передатчика также используется напряжение шума с ограничен-
ной полосой. Можно показать, что в этом случае зависимость постоянной
составляющей выходного сигнала смесителя от временного запаздывания
имеет вид половины гауссовой кривой с максимумом при нуле (усеченная
гауссова кривая) [33]. Это становится понятным, если рассматривать про-
цесс приема как корреляционный, так как в РЛС непрерывного излучения
прн нулевом запаздывании корреляция максимальна, а при больших запазды-
ваниях сигнал становится декоррелированным. Наличие доплеровских частот
изменяет картину в том отношении, что максимальная корреляция будет
иметь место не для постоянной составляющей, а на доплеровской частоте.
Сама модучяция шумом с ограниченной полосой обычно нежелательна, так
как максимальный отклик получается на нулевой дальности. При этом начи-
нает сказываться мешающее действие просачивающегося сигнала.
Другой способ использования шумового сигнала для формирования нуж-
ного закона ЧМ описан в [34]. При рассмотрении в частотно-временной плос-
кости было замечено, что крутизна выходных кривых непосредственно связа-
на с частотами, образующимися в смесителе, а временное запаздывание
играет при этом роль коэффициента. При постоянном временном запаздыва-
нии функция плотности вероятности абсолютного значения производных от
выходных кривых (в частотно-временной плоскости) связана линейной зави-
симостью с функцией плотности вероятности разностных частот в смесителе.
На основании этого можно разработать процедуру, согласно которой исход-
ный гауссов шум подвергается нелинейной обработке для получения такой
формы модулирующего сигнала, которая создаст желательный спектр разно-
стных частот [6].
4.14. Кодовая модуляция
С появлением дешевых и компактных интегральных схем, особенно таких
нелинейных схем, как мультивибраторы и триггеры, стало возможным по-
строение регистров сдвига для генерирования кодов в небольших РЛС
[35, 36]. Эти коды, которые можно рассматривать как последовательности.
4-1 и —1 длиной 2n—1, обладают тем полезным свойством, что значение
кода, умноженного на себя н просуммированного прн нулевом запаздывании,
равно 2П—1, а при сдвиге по модулю Хг(0<Хг<2п—1) сумма произведений
не. превышает —1. Это можно показать на примере кодовой, послед од атель,-
ности длиной 7.
265
Гл. 4. Радиолокационные системы с непрерывным излучением и с ЧМ
Рис. 22. Функция корреляции для. кодовой последовательности, генерируемой 31-разряд*
ным регистром сдвига.
На рис. 22 показана функция корреляции для кодовой последовательности
длиной 31 дв. ед. как функция временного запаздывания.
В РЛС непрерывного излучения , кодовые последовательности использу-
ются для манипуляции фазы передаваемого сигнала, обычно при изменении
ее от 0 до 180°. Это осуществляется с помощью диодных или ферритовых
фазовращателей, включенных между передатчиком и антенной. Принимаемый
отраженный сигнал декодируется путем сравнения с соответственно задер-
жанным исходным кодированным сигналом.. В одних случаях задержанный
кодированный сигнал получается от регистра сдвига, в других — с помощью
высокочастотных или видеочастотных линий задержки.
Представляют интерес свойства кодированного сигнала, умноженного на
[[смодулированный сигнал задающего генератора или модулированный сиг-
нал передатчика. В обоих случаях генерируется видеосигнал с шириной спек-
тра, приблизительно соответствующей полосе частот, занимаемой одним раз-
рядом кода. Использование немодулированного высокочастотного сигнала
в смесителе приводит к переносу кода на видеосигнал без существенного из-
менения его структуры. Но использование в смесителе кодированного высоко-
частотного сигнала приводит к нарушению кода. Если имеется достаточно
протяженная цель, от которой может приходить более одного кодированного
эхо-сигнала с различными запаздываниями, то в этом случае при приеме вы-
деляются эхо-сигналы на видеочастоте, не соответствующие начальной кодо-
вой; последовательности. Например, если кодовая последовательность длиной
16 дв. ед. модулирует высокочастотный сигнал и затем смешивается с отра-
женным сигналом, запаздывающим' на 4 дв. ед., то выделяемый кодирован-
ный видеосигнал имеет запаздывание на' 3 дв. ед. относительно* ’ начальной
кодовой последовательности. Но, если запаздывание отраженного высокоча-
стотного сигнала равно 5 дв. ед, то видеосигнал имеет запаздывание на
10 дв. ед/ [36}, При необходимости определения дальности цели это потребо-
вало бы изменения монтажной схемы матрицы или генерирования и исполь-
266
4.16. Утечка
зевания эквивалентного произведения кодовых последовательностей на видео-
частоте (см. § 4.20).
Если полная длительность кодовой последовательности становится срав-
нимой с длиной периода высшей доплеровской частоты, создаваемой целью
£171 то возникает неоднозначность измерения. Как правило, в области отлич-
ных от нуля значений доплеровских частот возникают боковые лепестки,
высота которых возрастает до \^N вместо 1/N при неподвижных целях.
Имеются другие типы двоичных кодов, а также многоуровневые коды, «о
в РЛС непрерывного излучения чаще всего используются коды, получаемые
с помощью регистров сдвига. Более подробные сведения об этом, а также
библиография, приведены в [38].
4.15. Двойная модуляция
Возможно, а часто и полезно применять комбинации видов модуляции,
например, такие, как треугольная плюс синусоидальная, синусоидальная плюс
шумовая, треугольная плюс треугольная, треугольная плюс шумовая и т. *.
В общем случае один из видов модуляции создает при этом большую девиа-
цию частоты, а второй выбирается так, чтобы он вызывал перераспределение
частотного спектра в смесителе. Это достигается при условии, что индекс
модуляции второго сигнала мал или произведение общей девиации на вре-
менное запаздывание ДЕТ мало. Например, РЛС с модуляцией по синусои-
дальному закону с индексом 3, имеющая схему смеситель-усилитель, настро-
енную на третью гармонику частоты модуляции, даст периодически неодно-
значный отсчет дальности. Добавление модуляции по треугольному закону
с низкой частотой позволит выделять только первый максимум. Аналогично
можно в радиовысотомере с основной модуляцией по треугольному закону
ввести дополнительную неглубокую синусоидальную модуляцию. Это позво-
ляет получить сигнал переменного тока для следящей системы. Другие ва-
рианты будут даны в приводимых ниже описаниях систем.
4.16. Утечка
Во всех предыдущих разделах предполагалось, что в первом смесителе
приемника обрабатывается только полезный отраженный сигнал. Однако
практически это редко имеет место. Прямое просачивание энергии из передат-
чика в приемник обычно создает сигнал, который на несколько порядков
больше отраженного сигнала. Кроме того, трудно осуществить в передатчике
ЧМ без сопровождающей ее амплитудной модуляции. Первый смеситель фор-
мирует сигнал, содержащий все возможные суммы и разности полезного
отраженного сигнала, просачивающегося сигнала и составляющих нежела-
тельной амплитудной модуляции сигнала местного гетеродина и просачиваю-
щегося сигнала. Некоторую защиту от амплитудной модуляции сигнала мест-
ного гетеродина дает балансный смеситель, но только при условии, что проса-
чивающийся сигнал на входе смесителя меньше сигналов местного гетеро-
дина. Значительные трудности создают и другие комбинационные составляю-
щие сигналов.
Эффективность той или иной РЛС с частотной модуляцией в значительной
степени зависит от того, как в ней подавляется просачивающийся сигнал. На-
пример, при синусоидальной модуляции с индексом 3 и наличии после смеси-
теля усилителя с полосой пропускания, достаточной только для пропускания
доплеровских частот, группирующихся вблизи третьей гармоники ЧМ, проса-
чивающийся сигнал будет эффективно отфильтровываться. Все сигналы, пере-
носимые третьей гармоникой, определяются функцией Бесселя третьего поряд-
ка где О —функция от временного запаздывания нли дальности. Вре-
267
Гл. 4. Радиолокационные системы с непрерывным излучением и с ЧМ
менное запаздывание сигнала утечки обычно мало и тогда /зф) можно
аппроксимировать величиной D3I48. При малых D эта величина, очевидно,
мала. Система, настроенная на первую гармонику (или Л) действовала бы
менее благоприятно, так как Ji(D) ^D/2. Это очень сложный вопрос, осо-
бенно если запаздывание просачивающегося сигнала может быть значитель-
ным, составляющие нежелательной AM велики или микрофонный эффект соз-
дает боковые полосы, подобные боковым полосам доплеровских частот. Этот
вопрос является основным во всех работах, посвященных исследованию РЛС
непрерывного излучения с ЧМ [6, 39, 40].
4.17. Общие показатели работы РЛС непрерывного
излучения с частотной модуляцией
Из всего сказанного можно сделать вывод, что тепловой шум первого
смесителя редко является фактором, ограничивающим работу небольших го-
модинных РЛС с ЧМ. Новым в области проектирования РЛС этого типа
является тщательная разработка методов оценки их основных характери-
стик, основанных только на методике анализа, изложенной в т. 1, гл. 2. В об-
щем, можно сказать, что при наличии двух антенн с хорошей развязкой
между ними энергетический потенциал правильно рассчитанной и сконст-
руированной гомодинной РЛС с ЧМ может быть оценен в 20—30 дБ (см. т. 1,
гл. 2). Система, рассчитанная на прием эхо-сигналов только с больших даль-
ностей, имеет значительные преимущества перед системой, которая прини-
мает сигнал с небольшим запаздыванием.
4.18. Высотомеры
Высотомеры были первыми РЛС непрерывного излучения с ЧМ, нашед-
шими наиболее успешное применение. В первых моделях высотомеров приме-
нялась модуляция по треугольному закону, осуществляемая при помощи раз-
личных механических средств, например, движущихся, преимущественно не-
контактных, элементов в СВЧ резонаторе триодного генератора. Но при
этом трудно было обеспечить воспроизводимость модуляции и механиче-
скую надежность. Рассмотрим коротко принципы работы ЧМ радиовысотоме-
ров и некоторые современные варианты их реализации.
За исключением высотомеров фирмы Emerson-Litton, которые будут опи-
саны далее, во всех современных высотомерах применяется широкополосная
ЧМ с низкой модулирующей частотой. Сигнал разностной частоты, выделяе-
мый гомодинным приемником, имеет широкий спектр, состоящий из большого
числа близко расположенных спектральных линий. В общем случае разност-
ная частота определяется методом ограничения сигнала и счета «нулей».
Можно показать [41], что при достаточно общих условиях и сохранении по-
стоянства полной девиации частоты и временного запаздывания сигнала чис-
ло! нулей в разностном сигнале не зависит от формы модулирующего сиг-
нала. Обычно применяется модуляция по треугольному закону, так как она
дает наиболее компактный и легко усиливаемый спектр и компенсацию доп-
леровского эффекта.
При очень малых высотах проявляется постоянная ошибка, связанная
с эффектом критической дальности. Она состоит в квантовании высоты с ша-
гом ДЛ=с14&.Е, где AF — полная девиация частоты (это означает, что воз-
можна ошибка в отсчете переходов через нуль на 1, т. е. на 1/2 Гц). При
AF=100 МГц это дает 0,75 м. Но появляющиеся в результате этого нерегу-
лярности показаний высотомера часто оказываются незаметными, так как они
проходят, очень быстро и измерительный прибор не успевает реагировать
на них [42]...............
268
4.18. Высотомеры
Другая трудность, связанная с применением высотомеров этого типа —
сдвиг показаний, обусловленный не постоянной ошибкой, а тем, что некото-
рые удаленные участки местности могут создавать на входе ограничителя
более сильный сигнал, чем участки, находящиеся непосредственно под самоле-
том. Этот эффект нельзя компенсировать сужением ДН антенны, так как она
должна быть достаточно широкой, чтобы обеспечивать работу при всех изме-
Лредварительный
усилитель
Модулятор ИнУииатор Автопилот
Рис. 23. Структурная схема высотомера ALA-51A.
Для возбуждения прерывателей схем восстановления постоянной составляющей и авто-
матической подстройки частоты применяется сигнал в форме меандра с частотой 160 Гц.
нениях ориентации самолета. Особенно сильно этот эффект может прояв-
ляться при отражениях от волнующейся водной поверхности. Водная поверх-
ность непосредственно под самолетом может не давать больших отражен-
ных сигналов, тогда как скаты волн, облучаемые под большим углом к вер-
тикали, могут давать интенсивные отражения с более высокими разностными
частотами. Положение усугубляется обычно применяемым методом формиро-
вания частотной характеристики усилителя сигнала разностной частоты: для
компенсации ослабления вертикально приходящего полезного сигнала обрат-
но пропорционально квадрату высоты, этот усилитель имеет номинальную
частотную характеристику с нарастанием 6 дБ на октаву от низшей до выс-
шей частоты. Одно из решений состоит в применении упрощенного устрой-
ства слежения по частоте, ограничивающего усиление на более высоких ча-
стотах в соответствии с изменениями частоты сигнала, за которым осущест-
вляется слежение.
Высотомер ALA-51A [43] является типичным устройством, выполненным
полностью на полупроводниковых приборах (рис. 23). Передатчик состоит из
транзисторного генератора и усилителя-умножителя частоты. Центральная
269
Гл. 4. Радиолокационные системы с непрерывным излучением и с ЧМ
частота генератора 358,33 МГц. Колебания генератора модулируются по час*
тоте по треугольному закону путем изменения емкости перехода коллектор —
база транзистора. На этот переход подается также постоянное напряжение
для температурной стабилизации и автоматической подстройки частоты
(АПЧ). Выходной сигнал генератора усиливается, и частота его утраивается
в транзисторном утроителе, а затем повышается еще в 4 раза в умножителе
частоты на варикапе. Выходная мощность на частоте 4,87 ГГц равна
400 мВт при полной девиации частоты, равной 140 МГц. Частота модуляции
близка к 160 Гц.
Часть мощности сигнала от передатчика ответвляется в резонатор схемы
АПЧ и смеситель приемника. СВЧ линии от передатчика к антенне и от ан-
тенны к приемнику выполнены в виде полосковых линий и содержат несколь-
ко изоляторов в форме Y-цнркуляторов.
Приемник защищен ВЧ фильтром, включенным перед циркуляторами и
смесителем. Он усиливает сигнал разностной частоты до уровня, требуемого
для цепей двухстороннего ограничения и счета и имеет полосу пропускания
от 3,5 до 200 кГц со спадом частотной характеристики 6 дБ на октаву.
Следящий фильтр в приемнике представляет собой реактивный элемент,
образованный цепочкой из конденсаторов и резисторов. Он управляется на-
пряжением, снимаемым с диода АРУ на выходе приемника. Так как частот-
ная-характеристика приемника имеет подъем 6 дБ на октаву, то фильтр
является по существу схемой слежения за нижней границей спектра сигнала.
Например, пусть в приемник пришел средний сигнал, отраженный от поверх-
ности земли непосредственно под самолетом, и другой сигнал с большой
наклонной дальности, являющийся мешающим сигналом. Этот второй сигнал
получит дополнительное усиление, равное 6 дБ, и поэтому быстро повысит
общий уровень сигнала в приемнике. На диод АРУ поступит существенно
больший сигнал, и он перестроит следящий фильтр на более низкую частоту,
что будет способствовать подавлению нежелательного сигнала с большой
наклонной дальностью. При этом возникает очевидная трудность из-за посто-
янного изменения характеристик отражения от поверхности земли. Напри-
мер, покрытый снегом лес обладает большой поглощающей способностью,
а гладкая водная поверхность может действовать как металлическое зер-
кало.
Важной особенностью высотомера ALA-51A является наличие в его схе-
ме постоянной линии задержки, имеющей свой гомодинный приемник
В замкнутом контуре следящей системы, регулирующей крутизну скатов
треугольной функции ЧМ. Для снижения массы высотомера эта линия
задержки сделана относительно короткой, поэтому во избежание нежела-
тельных переходных процессов постоянная ошибка должна быть сглажена.
Это достигается небольшой вариацией длины скатов треугольной функции
^М. Предназначенный для этой цели воббулятор с частотой качания 31 Гц
синхронизируется прямоугольными колебаниями с частотой 160 Гц. Выходной
сигнал воббулятора складывается с синусоидальными колебаниями с часто-
Вй 160 Гц; суммарный сигнал ограничивается и преобразуется в колебания
ямоугольной формы с изменяющимся периодом. Эти колебания затем ин-
'угрир'уются для формирования требуемого напряжения треугольной формы,
модулирующего частоту передатчика.
Другая важная особенность высотомера ALA-51A, так же, как и боль-
шинства других современных высотомеров, состоит в применении автомати-
ческих контрольных приборов (мониторов). Эти приборы обеспечивают инди-
кацию таких величин, как номинал частоты в цепи калибровки, линейность
модуляции, наличие утечки в высокочастотных цепях и согласованность двух
счетчиков, измеряющих частоту выходных сигналов, поступающих в автопи-
лот и зспомогательный индикатор.. Кроме того, имеются различные-цепи для
обнаружения и анализа неисправностей. Эти цепи включаются летчиком при
проверке высотомера. ......... - . ‘
270
4.18. Высотомеры
Высотомер AL-101 [44, 45j аналогичен высотомеру AL-51A, но в нем кон-
тролируются другие параметры. Калибровочная линия задержки не исполь-
зуется непосредственно для регулирования девиации частоты передатчика,
а включается только при проверке летчиком работоспособности высотомера.
Верхняя частота среза фильтра с переменной полосой пропускания в прием-
нике регулируется выходным сигналом счетчика, а не АРУ. Поэтому в высо-
томере AL-1C1 не требуется сдвига в сторону более низких частот, как в вы-
сотомере ALA-51A, и чувствительность его к неравномерной отражательной
способности местности исключается.
В высотомере STR 70-Р английского производства также применяются
только полупроводниковые приборы. Он излучает мощность 150 мВт при мо-
дуляции по треугольному закону с частотой 300 Гц. Девиация частоты непре-
рывно увеличивается от 10 до 100 МГц при изменении показаний счетчика от
1500 до 150 м При высотах менее 150 м девиация постоянна и равна
100 МГц. Качание частоты модуляции с частотой 30 Гц применяется, в част-
ности, при малых высотах, так как высотомер предназначен для применения
не только на самолетах, но и на вертолетах. При расчете высотомера особое
внимание было обращено на обеспечение линейности и стабильности моду-
ляции по треугольному закону. Линия задержки для проверки работоспо-
собности высотомера не применяется.
Отличительной особенностью этого высотомера является применение
регулируемого фильтра режекции нижних частот, полоса режекции которого
расширяется с увеличением высоты. Достигаемое благодаря этому снижение
шума, создаваемого просачивающейся энергией, улучшает отношение сиг-
нал/шум на больших высотах. Верхняя частота среза этого фильтра также
регулируется, как в высотомере AL-101. Вместо обычной крутизны частотной
характеристики, равной +6 дБ на октаву, приборы этой фирмы имеют кру-
тизну 3 или 4 дБ на октаву, что обеспечивает лучшую работу высотомера на
малых высотах. Данный высотомер, как н другие, содержит различные кон-
трольные приборы.
В высотомере AHV3 французского производства в качестве источника
СВЧ колебаний применен триод с дисковыми впаями и объемным резонато-
ром, развивающий мощность 1 Вт. Модуляция с частотой 125 Гц осущест-
вляется перемещением неконтактного закорачивающего элемента в анодном
объемном резонаторе. Важным элементом высотомера является главная меха-
ническая следящая система, регулирующая девиацию частоты передатчика,
полосу пропускания и усиление усилителя разностной частоты. Положение
оси следящей системы дает непосредственный отсчет высоты и используется
для воздействия на другие элементы системы слепой посадки в заданной по-
следовательности. Девиация частоты уменьшается от 120 МГц при нулевой
высоте до 60 МГц при высоте 100 м. На высотах, превышающих 100 м, девиа-
ция регулируется следящей системой так, чтобы частота биений была посто-
янной и равной 10 кГц. Полоса пропускания полосового фильтра расширяется
от 600 Гц до 10 кГц при увеличении высоты от 0 до 100 м. Усиление также
повышается с увеличением высоты. Выбор скорости этого возрастания не
является критичным, так как разностная частота поддерживается постоян-
ной. В высотомере применена процедура поиска с самозапуском для уста-
новки начального положения главной следящей системы. Имеется линия
задержки, которая включается только при проверке высотомера. Этот высо-
томер имеет большую массу, чем другие высотомеры. Разрабатываются ва-
рианты этого высотомера на полупроводниковых приборах. В них будут
применены дополнительные контрольные цепи. Подробное описание высото-
мера AHV3 дано в [47].
Высотомер фирмы Emerson-Elmer [48] отличается по принципу действия
от других описанных высотомеров [48]. Основное отличие состоит в том, что
частота передатчика этого высотомера на полупроводниковых приборах моду-
лируется по синусоидальному закону, а следящая система устанавливает та-
271
Гл. 4. Радиолокационные системы с непрерывным излучением и с ЧМ
кую девиацию частоты, при которой энергия отраженного сигнала на второй
гармонике частоты модуляции максимальна. Это получается, когда девиация
частоты AQ, частота модуляции сот/2л и дальность сТ/2 имеют такие значе-
ния, при которых аргумент функции Бесселя второго порядка
2AQ com Т
D =----- sin -----
®т 2
соответствует максимуму функции J2(D) (см. § 4.11). Если wm и требуемое
значение D — 3,1 известны, то Т определяется с той же точностью, с которой
определена AQ.
Частота модуляции выбрана равной 25 кГц, чтобы избежать неоднознач-
ности отсчета при высотах от 0 до 1500 м. Для предотвращения периодиче-
ской потери сигнала при отсутствии доплеровских частот, применяется сме-
щение частоты на 405 кГц (см. § 4.6) в цепи между передатчиком и смесите-
лем [6,19]. При этом усиление происходит на частоте 405+2-25=455 кГц
и устраняется перекрытие спектров, т. е. с каждой гармоникой связана толь-
ко одна доплеровская частота. Для облегчения работы следящей системы по
поддержанию постоянной девиации частоты вводится качание частоты моду-
ляции 25 кГц с частотой 400 Гц. Сравнение фаз выходного сигнала детек-
тора и опорного сигнала с частотой качания показывает, в каком направле-
нии следует изменять девиацию частоты, чтобы значение функции /2 было
максимальным.
В одном из вариантов высотомера имеются линия задержки и дискрими-
натор для его непрерывной калибровки. Это усовершенствование фундамен-
тально улучшает работу высотомера, так как установлено, что передатчики
имеют тенденцию к изменению их чувствительности по девиации частоты,
а нескорректированное напряжение, создающее девиацию, оказывается недо-
статочно стабильным и точным для индикации девиации и высоты.
Высотомер содержит также набор контрольных приборов для автомати-
ческого контроля работы и проверки, осуществляемой летчиком. Имеется
также возможность введения неглубокой модуляции с частотой 50 кГц в до-
полнение к основной модуляции с частотой 25 кГц в случае пропадания
отраженного от земли сигнала на больших высотах. Действие дополнитель-
ной модуляции аналогично введению функции /ь и достаточно большой про-
сачивающийся сигнал при таком виде модуляции можно использовать для
проверки работоспособности передатчика и приемника в случае пропадания
отраженного от земли сигнала. Когда сигнал снова появляется, то будет
преобладать функция /2 и начнет действовать следящая система, которая
перед этим была установлена логическими схемами на высоту около 300 м.
После этого модуляция с частотой 50 кГц снимается.
4,19. Доплеровские навигационные РЛС
Первые доплеровские навигационные РЛС были импульсными системами
и представляли собой дальнейшее логическое развитие РЛС с селекторами
движущихся целей [49—51]. Передатчик такой РЛС излучал некогерентные
импульсы, но так как ДН антенны была многолучевой, то некогерентность
фаз устраняется при смешении сигналов с одинаковым запаздыванием. На-
пример, один луч был направлен под углом 45° к вертикали и вперед по тра-
ектории полета, а другой — под таким же углом, но назад. Доплеровские
частоты выделялись при последующем смешении и использовались для инди-
кации скорости самолета на траектории. (Для предотвращения наложения
спектров обычно применялось смещение частоты.) Использование двух лучей
имеет еще и другое преимущество. Можно показать [52], что если самолет
272
4.19. Доплеровские навигационные РЛС
попеременно то набирает высоту, то снижается, среднее значение доплеров-
ской частоты, выделяемой как разность частот сигналов от симметричных
лучей антенны, дает меньшие погрешности, чем при одном луче.
Если ось самолета не параллельна горизонтальной проекции траектории
его полета, то необходимо или соответственно изменить направление перед-
него и заднего лучей антенны или скомпенсировать влияние рыскания. В лю-
бом случае потребуется по крайней мере еще один дополнительный луч
I
блок слежения
по доплеров-
ской частоте
блок слежена
по доплеров-
ской частоте
_____№
блок слежения
по доплеров-
ской частоте
____Ж
блок слежения
по доплеров-
ской частоте
Фазовый
детектор
''
Антенный
переключатель
Рис. 24 Доплеровская навигационная РЛС с четырьмя лучами и следящими устройства-
ми для каждого луча.
антенны. Обычно используются два дополнительных луча. В общем случае
РЛС имеет четыре луча, расположенных симметрично относительно оси само-
лета и направленных под одинаковым углом к вертикали, причем два луча
направлены вперед—один вправо, другой влево, а два других направлены
назад (рис. 24). В зависимости от назначения РЛС и допустимой массы ап>
паратуры, там, где это возможно, вся многолучевая антенная система может
либо автоматически ориентироваться относительно горизонтальной проекции
траектории полета, либо стабилизироваться при помощи следящих систем.
В РЛС широкого применения обычно используются неподвижные антенны.
При использовании щелевых антенных решеток, возбуждаемых попеременно
с противоположных концов, формируются лучи, расположенные на равных
расстояниях от оси решетки и направленные вначале вперед, а затем назад.
В сочетании с несколькими СВЧ переключателями такая антенна образует
273
Гл. 4. Радиолокационные системы с непрерывным излучением и с ЧМ
компактную конструкцию, способную формировать четыре луча требуемой
формы [53].
Основной интерес представляют современные варианты навигационных
РЛС непрерывного излучения. Так как РЛС непрерывного излучения без мо-
дуляции или с ЧМ являются по своей природе когерентными, в них отсутст-
вует потребность в использовании пары лучей для компенсации случайных
рассогласований фазы сигналов. Поэтому, хотя обычно в РЛС непрерывного
излучения с ЧМ и используются пары таких лучей и вычитание сигналов
здесь будет рассмотрена РЛС с одним лучом и устройствами слежения по
доплеровской частоте. Ясно, что в случае четырех лучей потребуются четыре
(или две) пары устройств слежения и приемопередатчик будет поочередно
работать по каждому лучу (по каждой паре лучей). Для выработки навига-
ционных данных и представления их летчику потребуется ЭВМ или специали-
зированное вычислительное устройство. В первых доплеровских навигацион-
ных РЛС непрерывного излучения модуляция не использовалась и их чувст-
вительность на больших высотах понижалась из-за влияния просачиваю-
щегося сигнала [54, 55]. Эти РЛС никогда не выпускались промышленностью
серийно.
Большинство практически применяемых навигационных РЛС [40, 52, 56,
57] работает с ЧМ по синусоидальному закону и выделением в приемнике
третьей или четвертой гармоники частоты модуляции (рис. 24). Частота мо-
дуляции обычно близка к 1 МГц, а кривые чувствительности но дальности
подобны кривым Л и В на рис. 19. Индекс модуляции выбирается на основе
компромисса между значением, при котором получалась бы наибольшая
средняя мощность на выделяемой гармонике, и значением, до которого при
изменении частоты передатчика не превышалась бы допустимая AM [40, с. 137].
Для РЛС с выделением третьей или четвертой гармоник (/3 или /4) удовле-
творительным значением индекса модуляции можно считать 2,4. Это значение
легко установить по спектроанализатору, добиваясь нулевой линии несущей
в спектре.
Можно производить усиление одной или обеих доплеровских линий, свя-
занных с выделяемой гармоникой частоты модуляции. После усиления допле-
ровские сигналы восстанавливаются методом фазового детектирования с ис-
пользованием в качестве опорного сигнала третьей или четвертой гармоники
частоты модуляции. Пара боковых полос, связанных с определенной допле-
ровской линией, имеет зависящий от дальности набег фазы и при изменении
дальности выходной сигнал фазового детектора изменяется между синфаз-
ным и квадратурным его значениями. Средняя эффективность детектора при
усреднении по всем дальностям почти сводит к нулю дополнительную мощ-
ность, содержащуюся во второй доплеровской линии [40, стр. 143—144]. При
проектировании усилителя, следующего за фазовым детектором, становятся
очевидными преимущества симметричного расположения лучей антенны, так
как при этом выделяются все доплеровские частоты, определяемые движе-
нием самолета, а просачивающиеся сигналы легко удаляются фильтрами.
О Применение метода вычитания, аналогично используемому в импульс-
ных РЛС, позволяет в основном исключить влияние случайной ЧМ, созда-
ваемой клистроном передатчика [52]. Но, к сожалению, все такие системы
содержат смеситель, в котором смешиваются два сигнала с сопровождающим
их шумом. Насколько известно автору, не было проведено ни одного удовле-
творительного исследования сигналов, получающихся в результате такого сме-
шения, и содержания составляющих типа шум, умноженный на шум. Другой
метод исключения нежелательной ЧМ в передатчике при использовании од-
ного луча антенны основан на применении устройства слежения по частоте.
Этот метод в принципе прост, но представляет трудности с точки зрения ин-
женерной реализации. В настоящее время такой подход используется наибо-
лее широко.
274
4.19. Доплеровские навигационные РЛС
При использовании РЛС на вертолетах частоты сигналов утечки ближе к ча-
стотам полезных сигналов и расчет усилителя становится более трудным.
Основная система с выделением третьей или четвертой гармоники имеет
«провал», если h(P) или превращается в нуль. Это случается при
©тГ/2=пл, а если значение 2Д£2/о)т не меньше первого нуля функции
то и при других дальностях. Кроме того, если выделяются обе боковые поло-
сы, то эффективность фазового детектора падает до нуля три раза (или
четыре раза для Л) на каждом интервале до первого нуля /3. Некоторое
сглаживание этого эффекта обеспечивается благодаря тому, что каждый на-
клонный луч антенны одновременно облучает участки поверхности земли
С различными дальностями. Дополнительное сглаживание достигается в РЛС
RTA-12A изменением частоты модуляции при каждом переключении лучей
(Изменение частоты модуляции во время включения каждого луча не приме-
няется из-за переходных процессов.)
Но даже и эти меры оказываются недостаточными, чтобы избежать про-
падания полезного сигнала от центра луча на малых высотах. Поэтому
в РЛС RTA-12B при высотах менее 1500 м добавляется значительная доля
энергии четвертой и восьмой субгармоник частоты модуляции для осущест-
вления тройной модуляции [57]. Теорию двойной модуляции (§ 4.11) можно
распространить на тройную модуляцию, но это слишком трудная задача, так
как необходимо учитывать большое число не равных нулю членов вида
/a [fi (®Т)] J|3 [f2 (2<оТ)] Jv [UW)].
Для нахождения энергии на четвертой гармонике частоты 4<о (т. е. на часто-
те 16w) эти члены необходимо суммировать как фазоры.
Кроме рассмотренных РЛС серийного производства известны несколько
экспериментальных РЛС, разработанных для специальных применений. В не-
которых из них используются незатухающие колебания, в других применяется
ЧМ с невысокой частотой. В РЛС последнего типа первый провал смещается
за пределы их дальности действия, но при этом он становится более широ-
ким. Это также ограничивает высшую доплеровскую частоту, которую можно
обрабатывать однозначно. Необходимое сужение диапазона выделяемых доп-
леровских частот всегда может быть обеспечено путем увеличения угла
наклона лучей антенны, но это снижает точность измерения скорости. Для
навигации вертолетов ограничение наивысшей доплеровской частоты и появ-
ление провалов при дальностях более 3000 м несущественны. Поэтому целе-
сообразно применять в вертолетных РЛС частоту модуляции, близкую
К 50 кГц. Разработаны РЛС с выделением [58—60], одна из которых содер-
жит также и высотомер. Дальность определяется путем нелинейной обра-
ботки свернутого спектра Л и выделения второй гармоники. Как уже неодно-
кратно отмечалось. фаза таких членов всегда зависит от дальности, поэтому
дальность можно определить методом фазового детектирования с использо-
ванием в качестве опорного сигнала второй гармоники частоты модуляции.
Совершенно другой принцип построения навигационной РЛС, основан-
ный на корреляционной обработке сигналов от вертикальных лучей со сме-
щенными фазовыми центрами, описан в [61]. К сожалению, в этой РЛС
применяются незатухающие колебания, поэтому влияние просачивающегося
сигнала оказывается почти не устранимым. Более совершенным может быть
вариант такой РЛС с некогерентными импульсами [62].
.Остается рассмотреть еще один вопрос — о методе слежения за широким
спектром доплеровских частот; Теоретически для решения этой задачи может
быть-применен строб скорости (§ 4.6), но практически ее решают с помощью
более сложных устройств. Они включают элементы, действие которых зави-
сит- от .механической инерции, а также значительное количество цепей с оди-
ночными или сдвоенными фильтрами с применением в некоторых из них
275
Гл. 4. Радиолокационные системы с непрерывным излучением и с ЧМ
качания частоты. Описание этих устройств можно найти почти во всех источ»
никах, на которые были сделаны ссылки выше, а также в [63—72].
4.20. РЛС для обнаружения людей
Описание легкой РЛС непрерывного излучения на полупроводниковых
приборах с использованием регистров сдвига для генерирования кодирован»
ных сигналов дано в [73]. Эта РЛС предназначена для обнаружения движу-
щихся объектов, в том числе и людей. В различных вариантах исполнения
РЛС имеет массу без батарей 1 —1,4 кг. Сюда входит также масса слабона-
правленной антенны и головных телефонов для оператора. Так как просачи-
вающийся сигнал используется в первом смесителе, код претерпевает вначале
искажения (см. § 4.14), но затем он сравнивается с аналогично искаженным
кодом, получающимся в результате смешения на видеочастоте незадержан-
ного кодированного сигнала и сигнала, представляющего выбранную 25-мет-
ровую ячейку разрешения по дальности.
В дополнение к первичному кодированию вводится вторичная модуля-
ция. Полученный в результате этого сигнал с вторичным кодированием без
временного запаздывания используется аналогично декодирующему видео-
сигналу. Но отраженный от цели сигнал содержит как доплеровские состав-
ляющие, так и задержанный код вторичной модуляции. Поэтому декодер
определяет корреляцию двух сигналов на выбранной дальности, осуществляя
обработку не на доплеровских частотах, а выделяя двухполосный сигнал
с подавленной несущей, расположенный симметрично относительно частоты
вторичной модуляции. Фазовое детектирование этого сигнала с отфильтровы-
ванием составляющей с частотой вторичной модуляции создает в головных
телефонах оператора тон с доплеровской частотой, амплитуда которого зави-
сит от дальности (что неоднократно отмечалось в этой главе).
При правильном выборе частоты вторичной модуляции и ее фазы на
входе фазового детектора, можно рассчитать систему так, что она будет
иметь чувствительность по напряжению, линейно возрастающую с увеличе-
нием дальности (с точностью аппроксимации sin 0 — 0). Это используется для
ослабления мешающих отражений с малых дальностей, аналогично тому, как
автоматическая регулировка чувствительности во времени в импульсных
РЛС ослабляет сигналы от ближних целей. Такое ослабление чувствительно-
сти очень важно для РЛС непрерывного излучения с кодированием сигналов,
так как боковые выбросы кодированного сигнала ослабляются по напряже-
нию только в \/п раз (где п — число разрядов кода), тогда как мешающие
отражения при малых дальностях возрастают обратно пропорционально
дальности в третьей степени.
Функция неопределенности сигнала с вторичной модуляцией, несомненно,
имеет дополнительные пики по сравнению с функцией кодированного сигна-
ла, выдаваемого регистром сдвига, но если доплеровские частоты, представ-
ляющие интерес, сравнительно низкие, то эти пики, если только они не изме-
няют существенно отклика при нулевых доплеровских частотах, не оказывают
серьезного влияния.
Кроме РЛС с кодированными сигналами для обнаружения людей ис-
пользуются также РЛС непрерывного излучения с ЧМ по пилообразному
закону [74]. В них не выделяется сигнал доплеровской частоты, но с помо-
щью фильтров, настроенных на определенные дальномерные частоты биений,
выделяются два сигнала, которые затем детектируются и сравниваются Та-
кие РЛС подобны импульсным РЛС, осуществляющим селекцию движущихся
целей путем череспериодного вычитания импульсов, и отличаются от послед-
них тем, что вместо стробов дальности во временной области в них приме-
нены эквивалентные стробы дальномерных частот биений в частотной
области.
276
Список литературы
Существует еще множество прототипов рассмотренных РЛС, разрабо-
танных в соответствии с многообразными требованиями. Принцип действия их
определяется в основном применением одного или нескольких видов моду-
ляции (§§ 4.11—4.15). Подробные сведения о некоторых из этих РЛС можно
найти в [3, 6, 75, 82] и приведенных выше ссылках.
Список литературы
1. Hansen, W. W. in L. N. Ridenour (ed), “Radar System Engineering”, MIT
Radiation Laboratory Series, v. 1, chap. 5, McGraw-Hill Book Company,
N. Y., 1947.
2. Varian, R. H., et al. U.S. Patent 2,435,615, applied for Sept. 30, 1941.
3. Skolnik, M. I. “Introduction to Radar Systems”, McGraw-Hill Book Com-
pany, N. Y., 1962.
Сколник M. И. Введение в технику радиолокационных систем. М,
«Мир», 1965.
4. Arguimbau, L. В. “Vacuum-tube Circuits and Transistors”, p. 504—513,
John Wiley & Sons, Inc., N. Y., 1956.
5. Raven, R. S. Requirements on Master Oscillators for Coherent Radar, Proc.
IEEE, v. 54, p. 237—243, February, 1966.
6. Saunders, W. K. Post War Developments in Continuous-wave and Fre-
quency-modulated Radar, IRE Trans., v. ANE-8, p. 7—19, March, 1961;
p. 105, October, 1961.
7. Shreve, J. S. Clutter Spreading Due to Oscillator Instability in Low Ele-
vation Stationary Radars, Harry Diamond Labs., Internal Rept. R510-66-2,
February, 1966.
8. O’Hara, F. J., and G. M. Moore. A High Performance CW Receiver Using
Feed-thru Nulling, Microwave J., v. 6, p. 63—71, September, 1965.
9. Grauling, С. H., Jr., and D. J. Healy, III. Instrumentation for Measurement
of the Short-term Frequency Stability of Microwave Sources, Proc. IEEE,
v. 54, p. 249—257, February, 1966.
10. Bruck, G. G., et al. Frequency Stabilizing System, U.S. Patent 2,462,841,
filed March 18, 1946.
11 Grauling, С. H., Jr. Frequency Control System, U.S. Patent 2,917,713, field
May 11, 1956.
12. Marsh, S. B., and A. S. Wiltshire. The Use of a Microwave Discriminator
in the Measurement of Noise Modulation on CW Transmitters, Proc. IEE
(London), v. 109B, p. 665—667, May, 1962.
13. Harris, I. R., et al. Frequency and Amplitude Stabilization of Transmitters
for CW Radar, Proc. IEE (London), v. Ill, p. 1236—1240, July, 1964.
14. Kemanis, C. Noise Measurement Circuitry for PD Radar, Hughes Aircraft
Co. Interdepartmental Correspondence, ref. 2724.05/64, p. I—7, Sept. 5,
1963.
15. Kemanis, G. Noise Studies, Hughes Aircraft Co. Interdepartmental Corres-
pondence, ref. 2724.05/61, p. 1—55, Feb. 5, 1963.
16. Whitwell, A. L., and N. Williams. A New Microwave Technique for De-
termining Noise Spectra at Frequencies Close to the Carrier, Microwave J.,
v. 2, p. 27—32, November, 1959.
1-7 . Stable Transmitter Study, H. D. L. Rept. 2146, pp. 1—151, Harry Diamond
Laboratories, Washington, D. C., February, 1966. Also К. H. Sann: The
Measurement of Near-carrier Noise in Microwave Amplifiers, IEEE Trans.,
v. MTT-16, p. 761—766, September, 1968.
18 Stable Transmitter Study, Phase II, H. D. L. Rept. 6246, p. 1—45, Harry
Diamond Laboratories, Washington, D. C., June, 1966.
19. Kalmus, H. P. Direction-sensitive Doppler Device, Proc. IRE, v. 45, p. 689—
700, June, 1955; also U.S. Patent 2,934,756, April, 1960.
277
Гл. 4. Радиолокационные системы с непрерывным излучением и с ЧМ
20 Steinberg, В. D. in R. S. Berkowitz (ed.), “Modern Radar Analysis, Eva*
luation and System Design"’, pt VI, chap. 4, John Wiley & Sons., Inc,
N.Y, 1965.
21. Whitfield, G. R. A Small Quartz Crystal Filter Bank, Roy. Radar Eslab.
RJ 65/1/GRW5, August, 1962.
22. Harmer, J. D., and W. S. O’Hara. Some Advances in CW Radar Techniques,
Pric. Natl. Conf. Military Electron., Washington, D. C., p. 311—323, June,
1961.
23. Hinman, W. S., Jr., and C. Brunetti. Radio Proximityfuze Development,
Proc. IRE, v. 34, p. 976—986, December, 1946.
24. Selvldge, H. Proximity Fuzes, Electronics, v. 19, p. 104—109, February,
1946.
25. Bonner, E. J. The Radio Proximity Fuze, Elec. Eng., v. 66, p. 888—893,
September, 1947.
26. Ward, K. J. Techniques for Radar Speed Detection, Traffic Dig. Rev., Sep*
tember, October, November, 1966; reprint by Muniquip Corp., Elk Grove
Village, HI.
27. Manual for Electro-mafic Radar Speed Meter Model S-5, Laboratory for
Electronics Inc., Automatic Signal Division, Norwalk, Conn., rev. June,
1963.
28. Kalmtis, H. P. Doppler Wave Recognition with High Clutter Rejection,
IEEE Trans., SuppL, v. AES-3, p. 334—339, November, 1967.
29 Salzer, H. Formulas and Approximations for Spectra of Some Common FM
Functions, Diamond Ordnance Fuze Labs., Tech. Rept. 324, June, 1956,
AD131912.
30. Salzer, H. Spectrum for Unsymmeirical Triangular Modulation with App-
roximate Formulas, Diamond Ordnance Fuze Labs., Tech. Rept. 325, Janua-
ry, 1956. AD 216776.
31. Ismail, M. A. W. A Study of the Double Modulated FM Radar, disserta-
tion, Swiss Federal Institute of Technology, Zurich, 1955.
32. Peperone, S. J. Sidelode Suppression in a FM Altimeter, master thesis,
University of Maryland, College Park, Md., May, 1966; M. J. Withers:
Matched Filter for Frequency-modulated Continuous Wave Radar Systems,
Proc. 1EE (London), v. 113, p. 405—412, March, 1966; A. J. Hymans and
J. Lait: Analysis of a Frequency-modulated Continuous Wave Ranging
System, Proc. FEE (London), v. 107B, p. 365—372, July, 1960.
33. Horton, В. M. Noise-modulated Distance Measuring Systems, Proc. IRE,
V. 47, p. 823—828, May, 1959.
34. Private communication’, see also P. W. Boesch and К. E. Hardinger: Low
Altitude FM Altimeter, Diamond Ordnance Fuze Labs., Tech. Rept 470,
August, 1959, AD '225570.
35. Birdsall, I. G., and M. P. Ristenbatt. Introduction to Linear Shift Regi-
ster Generated Sequences, Univ. Michigan, Res. Inst., Tech. Rept. 90,
1958.
36. Craig, S. E., W. Fishbein, and О. E. Rittenback. Continuous Wave Radar
with High Range Resolution and Unambigoues Velocity Determination,
IRE Trans., v. MIL-6, p. 153—161 (especially p, 153—157), April, 1962.
37 Fowle, E. N. The Design of Radar Signals, The Mitre Corp., Bedford,
Mass, ESD-TR-65-97, June, 1965, AD 617711.
38. Chandler, J. P. An Introduction to Pseudo-noise Modulation, Harry Dia-
mond Labs., TM-64-4 (and references therein), January, 1964.
39 Pepper, W. H. Detection of Modulated Signals, Diamond Ordnance Fuze
Labs. Internal Rept. M 44.03-55-27, November, 1955.
40. Glegg, К. С. M. A Low Noise CW Doppler Technique, Proc. Natl. Conf.
Aeron Electron., Dayton, Ohio, p 133—144, 1958.
41. Luck, D. G. C, “Frequency Modulated Radar", McGraw-Hill Book Compa-
ny, N. Y„ 1949.
278
Список литературы
42. Sharpe, В. A. Aircraft Radio Altimeters, J. Inst. Navig., v. 3, p. 79—89
(especially p. 88), January, 1950.
43. Overhaul Manual, ALA-51A, Radio Altimeter 34-10-1, Bendix Corp., Bal-
timore, Md., November, I960.
44. AL-101 Radio Altimeter System, brochure 12.5 M-WP-3.67, Collins Radio
Ccr., Dallas, Texas.
4'5. Product Description AL-ЮГ Radio Altimeter System, 52T-0757386-00311 J,
p. 1—15, Collins Radio Co., Cedar Rapids, Lowa, March, 1965,
46. Microminiature Radio Altimeters STR-70 P, brochure B103I, issue |, Stan-
dard Telephones and Cables, ltd., London, England, May 1967; plus pri-
vate communications.
47. FouilToy, J. P. The Type AHV3 Frequency Modulated Radio Altimeter.
Philips Tele. Rev., v. 25, No. 4„ p. 164—185, March, 1965; also (in French)
LTJnde Elec.,, v. 44, No. 450, p. 878—889, September, 1964; plus private
communications.
48. Design Definition Document for the VS (X) Radar Altimeter, with correc-
tions to November, 1967, Litton Systems Inc., АМЕСОМ Division, Silver
.Spring, Md.
49. Tull, W. J. Self-contained Radio Navigation System, U.S. Patent 2,859,436,
filed March, 1946.
50. Dudko, G. K., and G. B. Reznikov. “Doppler Speed and Drift-angle Meters
for Aircraft”, p. 1—344 (bibliography of 116 items), Izdatel’stvo “Sovet-
skoye Radio”, Moskva, 1964. Translation by Air Force Systems Command,
Foreign Technology Division, AD 636612,
Дудко Г. К., Резников Г. Б. Доплеровские измерители скорости и угла
сноса самолета. М., «Сов. радио», 1964.
51. Fried, W. R. Doppler Radar for Guidance-Disign Techniques and Perfor-
mance (extensive bibliography to 1959), ARSJ., v. 29, No 12, p. 957—967,
December, 1959.
52. Brown, R. K., et al. A Lighweight and Self-contained Airborne Naviga-
tional System, Proc. IRE, v. 47, No. 5, p. 778—807, May, 1959.
53 instruction Manual, DRZ Doppler Radar System, Type ANA-12A-1 and
ANA 12C-1, Antenna, pt. 2 l.B 1012 D-l, Bendix Corp., Baltimore, Md.,
May, 1961..
54 Condie, M. A. Basic Design Considerations — Automatic Navigator
AN/APN-67. IRE Trans., v. ANE-4, p. 197—201, December, 1957.
55. Iverson, J. R. Advanced Doppler Navigation for U.S. Army, Aerospace
Eng., v. 17, p. 81—85, May, 1958.
56. Cordry, B. L. Doppler Navigational Radar Utilizing New Techniques, Proc.
East Coast Conf., ANE, Baltimore, p. 10.1—1 to 10.1—7, October, 1959.
57. Overhaul Manual RTA 12A/12B, Transmitter—Reseiver, Bendix Corp.,
RT-852/APN-I79, Baltimore, Bd„ March, 1961; June, 1966.
58 Clegg, X E., and J. W. Crompton. Low-power CW Doppler Navigation
Equipment, IEE (London) Conv. Radio Aids to Aeron. Marine Navig.,
p. 258—265, March, 1958.
59. Tollefson, R. D. Application of FM Techniques to Doppler Radar Sensors,
Proc. Natl. Conf. Aeron. Electron., Dayton, Ohio, p. 683—687, May, 1959.
60k Fried, W. R. An FM-CW Radar for Simulaneous Three Dimensional Velo-
city and Altitude Measurement, IEEE Trans., v. ANE-11, p. 45—57, March,
. 1964.
61 Dickey, F. R. The Correlation Aircraft Navigation — A Vertically-beamed
Doppler Radar, Proc. Natl. Conf. Aeron. Electron., Dayton, Ohio, p. 463—•
466, May, 1958.
62. Salerno, James. Pdlse Envelope Correlation Air Navigator, Inst. Aeron.
Sci., Paper 62—150, June, 1962.
279
Гл. 4. Радиолокационные системы с непрерывным излучением и с ЧМ
63. Guanella, G. Verfahren und Einrichtung zur Bestimmung von Wegunter*
schieden, Swiss Patent 220,781, filed August, 1942.
64 Clarke, W. W. H., and R. F. Nikkei. Mean Frequency Determination oi
Narrow Band Noise Spectre, Proc. IEE (London), v. 105, p. 364—370, May,
1955.
65. Kirner, E. O. A New Doppler Radar Frequency Tracker, Proc. East Coast
Conf. ANE, Baltimore, Md., p. 10.4—1 to 10.4—8, October, 1959. Also
Instruction Manual, Type DRA-12A, B, Tracker, pt. 2 1.B.1012, Bendix
Corp., Baltimore, Bd., May, 1966.
66. Clegg, J. E., and T. G. Thorne. Doppler Navigation, IEE (London), ConV.
Radio Aids to Aeron. Marine Navig., p. 233—247, March 27, 1958.
67. Berger, F. B. The Design of Airborne Doppler Velocity Measuring Sys-
tems, IRE Trans., v. ANE-4, p. 157—175, December, 1957.
68. Stryker, E. M. The Use of a Tuned Discriminator in Tracking a Doppler
Navigation Radar Spectrum, Proc. Natl. Conf. Aeron. Electron., Dayton,
Ohio, p. 228—231, May, 1959
69. McKay, M. W. The AN/APN-96 Doppler Radar Set, IRE Natl. Conv. Re-
cord, v. 6, pt. 5, p. 71—77, 1958.
70. Washburne, В. P. Microwave Navigation System, U.S. Patent 2,981,944,
filed April, 1956.
71. Berger, F. B., et al. Course and Speed Indicating System, U.S. Patent
2,908,903, filed October, 1951; U.S. Patent 2,869,117, filed September,
1948.
72. Tull, W. J., et al. Navigation System, U.S. Patent 2,869,118, filed May,
1947.
73. Frank, U. A., D. L. Kratzer, and J. L. Sullivan. The Twopound Radar,
RCA Eng., v. 13, No. 2, p. 52—54, August—September, 1967.
74. A Measurement Program Utilizing a Motion Indicating Radar,
DA-36-038-AMC-4267 (A), p. 1—61 plus Appendix, Keltec Industries, Inc.,
Alexandria, Va., February, 1967.
75. Gnanalingam, S. An Apparatus for the Detection of Weak Ionospheric
Echoes, Proc. IEE (London), v. 101, pt. Ill, p. 243—248, July, 1954.
76. Keep, D. N. Frequency Modulation Radar for Use in the Mercantile Mari-
ne, Proc. IEE (London), v. 102, p. 519—526, November, 1955.
77. Nilssen, О. K. A New Method of Range Measuring Doppler Radar, Proc.
Natl. Conf. Aeron. Electron., Dayton, Ohio, p. 402—408, 1961.
78. Nilssen, О. K., and W. D. Boyer. Amplitude Modulated CW Radar, IRE
Trans., v. ANE-9, p. 250—254, December, 1962.
79. Nilssen, О. K. New Methods of Range Measuring Doppler Radar, IRE
Trans., v. ANE-9, p. 255—265, December, 1962.
80. Boyer, W. D. A Duplex, Doppler Phase Comparison Radar, IRE Trans.,
v. ANE-10, p. 27—33, March, 1965.
81. Hooper, J., and H. Sullivan. A Space Rendezvous and Landing FM—CW
Radar System, Proc. Natl. Electron. Conf., Chicago, p. 245—248, 1963.
82. Withers, M. J., and J. A. Edwards. High Resolution FM—CW Radar for
Emergency-vehicle Guidance in Fog, IEE (London) Symp. Air Traffic
Control Systems Eng., Design, p. 19—21, March, 1967.. .
83. Grasso,’ G. Improvement Factor of a Nonlinear MTI in Point Clutter,
IEEE Trans., v. AES-4, p. 640—644, July, 1968.
84. Leeson, D. B. A Simple Model of Feedback Oscillator Noise Spectrum,
Proc. IEEE, v. 54, p. 329— 330, February, 1966.
Глава 5
РЛС С СЕЛЕКТОРАМИ ДВИЖУЩИХСЯ ЦЕЛЕЙ
В. Шредер
5.1. РЛС с СДЦ
Основной целью использования в РЛС селектора движущихся целей
(СДЦ) является режекция сигналов пассивных помех от неподвижных це-
лей, которые не представляют интереса (например, зданий, холмов или дере-
вьев), и выделение сигналов, отраженных от движущихся целей (например,
самолетов)J чтобы в дальнейшем эти сигналы использовать для обнаруже-
ния целей или для отображения радиолокационной обстановки на экране
индикатора. На рис. 1 показаны две фотографии экрана индикатора круго-
вого обзора (ИКО), которые иллюстрируют эффективность использования
СДЦ. Расстояние от центра экрана до его края соответствует 40 мор. милям
( — 74,1 км). Интервалы между окружностями на экране равны 10 мор. милям
(18,53 км). Верхняя фотография представляет собой обычное изображение на
экране индикатора при наличии пассивных помех от неподвижных отражате-
лей. На нижней фотографии показан результат режекции пассивных помех
с помощью СДЦ. Затвор камеры при фотографировании был открыт в течение
трех периодов сканирования антенны РЛС, поэтому отображение самолета
получено в виде трех последовательных отметок.
В настоящей главе рассматривается режекция пассивных помех с ис-
пользованием простой доплеровской дискриминации в наземных РЛС.
В гл. 6 исследуются более сложные системы, применяемые в бортовых само-
летных РЛС, а в гл. 7 — импульсно-доплеровские РЛС.
Рассмотрим некоторые типы селекторов движущих целей. В наиболее
широко распространенных устройствах — когерентных СДЦ — для выделения
движущихся целей на фоне пассивных помех используется доплеровский
сдвиг, свойственный сигналам, отраженным от движущихся целей. В импульс-
ных РЛС этот доплеровский сдвиг проявляется в виде изменения фазы
последовательно принимаемых импульсных сигналов (рис. 2). РЛС излучает
ВЧ импульс, который отражается от здания и самолета, затем — второй им-
пульс. Отражение от здания происходит точно через такое же время, как и для
первого импульса, однако отражение от самолета происходит через меньший
промежуток времени, так как за время, прошедшее между передачей первого
и второго импульсов, самолет несколько приблизился к РЛС. Точное значение
времени приема отраженного сигнала приемником РЛС не имеет принципи-
ального значения. Основное значение имеет разница времен прихода импуль-
сов. Это временное различие, которое для такой цели, как самолет, состав-
ляет несколько наносекунд, обнаруживается при сравнении фаз принимае-
мого сигнала и опорного сигнала гетеродина РЛС. Если цель неподвижна,
то относительная фаза последовательно принимаемых импульсов остается
неизменной. Если цель перемещается, то фазы принимаемых импульсов ме-
няются.
На рис. 3 показана упрощенная структурная схема одного типа когерент-
ного СДЦ. Сигнал ВЧ генератора поступает на импульсный усилитель, на
выходе которого формируются зондирующие импульсы. Он используется так-
281
Гл. 5. РЛС с селекторами движущихся целей
Рис. 1. Изображение на экране обычного ИКО (а) и ИКО с СДЦ (б).
282
5.1. РЛС с СДЦ
Импульс 1
Импульс 2
Импульс 3
Рис. 2. Фазовый сдвиг сигналов, отраженных от движущейся цели.
Рис. 3. Упрощенная структурная схема когерентного СДЦ.
283
Гл. 5. РЛС с селекторами движущихся целей
же и как опорный сигнал при определении фазы отраженных сигналов.
В течение интервала между передаваемыми импульсами фазовая информа-
ция хранится в линии задержки; при поступлении очередного импульса храни-
мое значение фазы предыдущего импульса вычитается из значения фазы при-
нятого сигнала. На выходе устройства сравнения фаз сигнал появляется
только в том случае, если принятый сигнал отразился от движущейся цели.
Структурная схема СДЦ. Развернутая структурная схема РЛС с СДЦ
показана на рис. 4. Данное устройство не так сложно и совершенно, как
описанные ниже СДЦ, но большинство характерных черт и параметров,
свойственных любому СДЦ, можно выявить и исследовать, рассматривая
приведенную структурную схему. Значения частот -и параметры линий
задержки, указанные на схеме, типичны для РЛС диапазона L с дальностью
действия 200 мор. миль (~370 км).
Как указано на схеме, в передатчике используется магнетрон. Так как
магнетрон является импульсным генератором, в котором отсутствует фазовая
когерентность между последовательно генерируемыми импульсами, то для
каждого передаваемого импульса необходимо обеспечить когерентный опор-
ный сигнал. Это достигается отведением части излучаемой мощности с по-
мощью направленного ответвителя, смешением этого сигнала с сигналом
стабилизированного опорного генератора (СОГ) и использованием получен-
ного сигнала для фазовой синхронизации когерентного гетеродина (КГ). При
этом КГ является опорным генератором для принимаемых сигналов. (Требо-
вания, предъявляемые к стабильности КГ и СОГ, рассматриваются в §5.13.)
Синхронизированный импульсный усилитель отключается незадолго до окон-
чания передаваемого импульса, так как во время спада импульсного напря-
жения, приложенного к магнетрону, последний генерирует шумовой сигнал и
этот шум может затруднить хорошую синхронизацию К.Г.
Принимаемые сигналы смешиваются с сигналами СОГ и усиливаются
в линейном усилителе с ограничением. Уровень ограничения на выходе уси-
лителя фиксирован, но на входе усилителя используется схема регулировки
коэффициента усиления в тракте ПЧ, что позволяет регулировать динамиче-
ский диапазон на выходе усилителя и тем самым осуществлять управление
динамическим диапазоном обрабатываемых в СДЦ сигналов.
Далее с помощью фазового детектора производится сравнение фаз при-
нимаемых сигналов и фазы сигнала КГ. Выходной сигнал фазового детекто-
ра определяется относительной фазой принимаемого сигнала и сигнала КГ,
кроме того, он зависит от амплитуды. принимаемого сигнала. Биполярный
видеосигнал на выходе фазового детектора несет информацию о фазе и
амплитуде принимаемого сигнала. Вид биполярного видеосигнала, сформиро-
ванного при приеме единственного передаваемого импульса, показан на
рис. 5. Если мы наблюдаем точечную перемещающуюся цель на фоне силь-
ных отражений от неподвижных предметов, то при приеме нескольких пере-
даваемых импульсов биполярный видеосигнал может иметь вид, показанный
на рис. 6.
Остальные блоки на структурной схеме рис. 4 отражают операции, кото-
рые необходимо произвести для обнаружения движущихся целей, чтобы они
могли быть выведены на экран индикатора или переданы на автоматиче-
ское устройство выделения целей. Биполярный видеосигнал модулирует
сигнал генератора несущей частоты (в данном случае показана амплитудная
модуляция, но в СДЦ может также использоваться и фазовая и частотная
модуляция). Промодулированный сигнал усиливается в возбудителе линии
задержки, который имеет два выхода. Сигналы с первого выхода поступают
на кварцевую линию задержки со временем задержки 2500 мкс. Прошедший
линию, задержки сигнал усиливается в усилителе, следующем за линией
задержки, и затем детектируется, что позволяет восстановить исходный моду-
лирующий сигнал! Со второго выхода возбудителя линии задержки сигнал
поступает на аттенюатор, затухание которого эквивалентно затуханию
284
Биполярный видеосигнал
Рис. 4. Развернутая структурная схема РЛС СДЦ.
5.1. РЛС с СДЦ
Гл. 5. РЛС с селекторами движущихся целей
в кварцевой линии задержки (около 60 дБ), и затем усиливается в усили-
теле, идентичном усилителю, стоящему после линии задержки перед детек-
тором. Отметим, что этот сигнал, который рассматривается как сигнал без
задержки, может быть, очевидно, взят с выхода фазового детектора. Однако
его не получают таким путем, потому что в каждом каскаде модуляции, уси-
ления и детектирования, которые проходит задержанный сигнал, присутст-
Систем
“ный шд.л
Рис. 5. Биполярный видеосигнал, сформированный за один период развертки.
ввласть оильвЫХ
^пассивных помех
вуют незначительные нелинейности, не позволяющие произвести хорошую
компенсацию в вычитающем устройстве, если незадержанный сигнал не прой-
дет по тракту с аналогичными нелинейностями. По этой причине тракты
с задержкой и без задержки стремятся сделать как можно более идентич-
ными.
Систем-^
]иыи шум”
Рис. 6. Биполярный видеосигнал, сформированный за несколько периодов развертки.
Овласть сильных
пассивных помех
Усилитель схемы АРУ воспринимает уровень постоянного напряжения
детектированной несущей и регулирует коэффициенты усиления усилителей
в канале с задержкой и в канале без задержки. Схема АРУ компенсирует
изменение коэффициентов усиления усилителей или изменение затухания в ли-
ний задержки. -
Задержанный сигнал проходит через короткую (триммерную) подстроеч-
ную линию задержки, затем задержанный и незадержанный сигналы сравни-
ваются в схеме вычитания. Выходом схемы вычитания является биполярный
сигнал, включающий в себя сигнал, соответствующий движущейся цели, шум
системы и некоторый небольшой добавочный сигнал (остаток), возникающий
из-за несовершенства компенсации сигналов пассивных помех в схеме вычи-
тания. Далее сигнал выпрямляется и усиливается видеоусилителем, коэффи-
циент усиления которого ‘моЖёт изменяться регуляторам усиления видеосиг-
286
5.2. Характеристики СДЦ при обнаружении сигналов от движущихся целей
налов СДЦ. ПсГсле ограничения сигнал поступает на ИКО или в устройство
автоматического выделения цели. Использование регулятора усиления видео-
сигналов СДЦ позволяет обеспечить динамический диапазон на выходе огра-
ничителя (отношение пикового значения сигнала к среднеквадратическому
значению шума) порядка 20 дБ, что необходимо для оптимального функцио-
нирования устройств ИКО.
Так как время между последовательно передаваемыми импульсами
должно быть в точности равно временной задержке в устройствах обработки
сигнала, то для управления триггерами передатчика также используется
кварцевая линия задержки. При этом, если вследствие тепловых воздействий
временная задержка сигналов меняется, то соответственно изменяется и вре-
менной режим работы передатчика. Под воздействием триггера колебания
генератора несущей частоты 20 МГц прерываются на 1 мкс. Этот отрицатель-
ный модулирующий импульс детектируется на выходе усилителя, следующего
за линией задержки, и используется для запуска триггерного регенератора,
который представляет собой самовозбуждающийся мультивибратор с собст-
венным периодом порядка 2700 мкс. Выходной сигнал триггерного регенера-
тора включает передатчик, строб синхронизированного импульса когерентного
гетеродина и буферный усилитель частоты 20 МГц. Так как при модуляции
несущей видеосигналом коэффициент модуляции составляет лишь 20%, а для
триггерных цепей он равен 100%, то присутствие видеосигналов и шумов си-
стемы не мешает точной регенерации триггерных импульсов.
Наличие подстроечной линии задержки в тракте задержки видеосигнала
необходимо для компенсации временной задержки в триггерных регенератив-
ных цепях.
5.2. Характеристики СДЦ при обнаружении сигналов
от движущихся целей
Частотная характеристика (отклик) СДЦ при обнаружении сигналов от
движущихся целей меняется в зависимости от радиальной скорости цели. Для
описанной выше схемы СДЦ отклик, нормированный к единичному коэффи-
циенту усиления мощности шумов, показан на рис. 7. Отметим, что отклик
имеет нуль при нулевой скорости (неподвижные цели) и при скоростях цели
±46, ±92, ±138, ... м/с. Эти скорости (называемые обычно слепыми скоро-
стями) соответствуют перемещению цели за время между излучениями после-
довательных импульсов на 0, 1/2, 1, 3/2, ... от X. Такое перемещение приводит
к тому, что принимаемый сигнал имеет фазовый сдвиг между последователь-
ными импульсами, равный 360° или кратный этому значению; при таком фазо-
вом сдвиге напряжение на выходе фазового детектора не изменяется. Слепые
скорости можно определить из соотношения
Ув=/(ХД/2) /=±0,1,2,...,
где Vb — слепая скорость; X — длина волны передаваемых сигналов; fr — ча-
стота повторения импульсов (ЧПИ). Рассматривая кривую на рис. 7, отметим,
что отклик на цели, скорость которых лежит посередине между слепыми ско-
ростями, превышает отклик нормального приемника.
По оси абсцисс, как показано на рис. 7, можно отложить и доплеровскую
частоту цели, которая определяется из соотношения
fd = 2VB/X,
где /а — доплеровская частота; Ул — радиальная скорость цели;
Из графика на рис. 7 можно заметить, что доплеровские частоты, соот-
ветствующие слепым скоростям, являются целыми кратными ЧПИ.
287
Гл. 5. РЛС с селекторами движущихся целей
5.3. Спектральные характеристики отражений от "неподвижных
целей
Спектр сигналов импульсного передатчика, излучающего периодическую
последовательность простых прямоугольных импульсов длительностью т,
показан на рис. 8. Спектральная ширина огибающей вида (sin U)HJ опреде-
ляется длительностью передаваемого импульса, первые нули имеют абциссы
Отклик, нормированный к отклику
нормального приемника
дВ
Равиильная скорость цели, м/с
Рис. 7. Отлив СДЦ для РЛС. работающей на частоте 1300 МГц с ЧПИ 400 имп/с.
f0± 1/т. Расстояния между отдельными линиями дискретного спектра равны
ЧПИ. Эти спектральные линии точно совпадают с частотами, соответствую-
щими слепым скоростям на рис. 7. Таким образом, при компенсации теорети-
чески должна иметь место полная режекция сигналов с идеальным спектром
(рис. 8). На практике, однако, спектральные линии сигналов, отраженных от
неподвижных объектов, расширяются за счет некоторого их перемещения (на-
пример, раскачивания деревьев при ветре) и перемещения антенны в скани-
рующих РЛС.
В [1] показано, что такие сигналы имеют гауссов спектр, который можно
описать с помощью стандартного отклонения ои. Это расширение спектра не
288
5.3. Спектральные характеристики отражений от неподвижных целей
позволяет осуществить идеальную режекцию сигналов от неподвижных объек-
тов в СДЦ.
В табл. 1 приведены стандартные отклонения о» для спектра пассивных
помех, составленные по результатам опубликованных работ.
Таблица I
Сводка данных о стандартном отклонении для спектра
пассивных помех по данным Бартона [2]
Источник пассивных помех Скорость вет- ра, м/с ст», м/с Источник
Редкий лес Безветрие 0,017 Барлоу [1]
Лесистые холмы 5,15 0,04 Голдстейн [3, с. 583—* 585]
10,3 0,22 Барлоу [1]
12,9 0,12 Голдстейн [3, с. 583— 585]
20,6 0,32 Голдстейн [3, с. 583]
Отражение от моря — 0,7 Вильтце [4, с. 226]
— 0,75—1,0 Голдстейн [3, с. 580— 581]
4—10,3 0,46—1,1 Хикс и др. [5, с. 831]
Ветрено 0,89 Барлоу [1]
Металлизированные от- — 0,37—0,91 Голдстейн [3, с. 472]
ражатели 12,9 1,2 1,1 Барлоу [1]
Дождевые тучи 1,8—4,0 Голдстейн [3, с. 576]
— 2,0 Барлоу [1]
В работе [6] показано, что уширение спектра отражений от дождя свя-
зано, в первую очередь, с наличием отражений от турбулентных образований
и от границ между областями с различными скоростями ветра (изменения
скорости ветра с высотой). Результаты измерений показывают, что среднее
значение уширения из-за турбулентности приблизительно равно 0^ = 1,0 м/с,
а значение ov — O,O4/?0ei [м/с] хорошо описывает среднее значение уширения,
связанного с воздействием изменения скорости ветра по высоте (при условии,
что дождь заполняет все вертикальное сечение луча). Здесь А?— дальность до
метеообразований, мор. мили; 0ei — ширина односторонней ДН на уровне по-
ловинной мощности в вертикальной плоскости, град. Таким образом, для
дождя, наблюдаемого с расстояния 25 мор. миль, при ширине луча по верти-
кали 4° Ог> должно быть равно 4,1 м/с; в этой величине преобладающим
является вклад отражений из-за перепада скоростей ветра. Дождь и металли-
зированные отражатели, кроме расширения спектра отраженных сигналов
из-за отмеченных причин, создают еще уширение за счет собственной средней
скорости, которую также необходимо принимать во внимание при разра-
ботке СДЦ.
Ширина спектра скоростей пассивных помех [м/с] не зависит от частоты
сигналов РЛС. Стандартное отклонение их спектра мощности оп равно
оп[Гц] = 2о»/Л,
289
Гл. 5. РЛС с селекторами движущихся целей
где X — длина волны излучаемых сигналов (в метрах, если о» в м/с).
Сканирование антенны также вызывает расширение спектра мощности
пассивных помех вследствие амплитудной модуляции отраженных сигналов ее
двусторонней ДН [2J:
Од == 0,265/г/п,
_ У
где /г — ЧПИ РЛС; п — длина n-пакета ‘X Это соотношение получено в пред-
положении о гауссовой форме луча, но оно по существу не зависит от реаль-
ной формы луча или функции распределения токов по апертуре.
5.4. Амплитудные характеристики пассивных помех
Для того чтобы точно предсказать характер функционирования СДЦ,
необходимо точно знать амплитудные характеристики сигналов от неподвиж-
ных отражателей, на фоне которых наблюдается цель. Амплитуда этих сигна-
лов зависит от размеров ячейки разрешения РЛС, частоты сигналов РЛС и
ЭПР отражателей (см. т. 1, гл. 6—8) Ожидаемую ЭПР неподвижных отража-
телей можно записать в виде произведения удельной ЭПР и характерного
размера объема или площади ячейки разрешения
Для наземных неподвижных отражателей при наблюдении целей наземной
РЛС средняя ЭПР
О Ап Ос = /?0а2 ~~ О°,
где Ан — площадь области, содержащей неподвижные отражатели, которая
попадает в луч РЛС; Р — дальность до области, занятой неподвижными отра-
жателями; 0а1 — односторонняя ширина луча в азимутальной плоскости на
уровне половинной мощности; с — скорость распространения электромагнит-
ных волн; т — длительность импульса РЛС; о0— удельная ЭПР (ЭПР на еди-
ницу площади) неподвижных отражателей
Для отражателей, находящихся в атмосфере, таких, как облако металли-
зированных отражателей или дождь,
— С1>
q=/?0az Н — Г],
где VB—объем области, занятой отражателями, которая понадает в луч
РЛС; Н—высота области, занятой отражателями (если эта область перекры-
вает вертикальное сечение луча, то где Ом—ширина луча в верти-
кальной плоскости); г) — ЭПР отражателей на единицу объема, (длина)-’.
Следует отметить, что для наземных неподвижных отражателей может
существенно изменяться при переходе от одной ячейки разрешения к другой.
Типичное распределение о® показано на рис. 9. Заимствованные из этого же
источника данные для о® и 7] приведены в табл. 2 (вследствие неточности
предсказаний о° и т| эти равенства не включают коэффициент формы луча
антенны. Результаты точных измерений этих величин для дождя можно найти
в [27]).
Кроме распределенных отражающих объектов существует большое число
объектов, которые следует рассматривать как точечные (например, радиовыш-
ки, антенны, водонапорные башни и здания). Типичные значения ЭПР таких
точечных объектов составляют от 103 до 104 м2. '
’’ Длина м-пакета — число принятых импульсов за время прохождения
ДН (по уровню половинной . _>щности) точечной цели.
290
5.5. Определения
На рис. 10.приведены фотографии отражений от неподвижных объектов,
полученные при введении аттенюатора в тракт приемника. (Дальность для
изображения на экране ИКО 55 км.) На каждой фотографии представлены
отражения от неподвижных объектов, которые превышают уровень минималь-
ного различимого сигнала (МРС) для РЛС на указанное значение, устанавли-
ваемое с помощью аттенюатора. Эти фотографии были сделаны для обзорной
РЛС с размерами ячейки разрешения 1,3°Х2 мкс в гористом районе Онтарио
(Канада). Особый интерес представляет фотография, где зафиксированы пас-
Рис. 9. Распределение удельной ЭПР наземных отражателей, типичное для сильных
пассивных помех в диапазоне 5 (по данным работы Бартона [7]).
сивйые помехи, уровень которых на 60 дБ выше уровня МРС. Отметим, что
изображение имеет очень пятнистую структуру, определяемую отражениями
как от крупных точечных, так и От распределенных отражающих объектов.
Существенно, что распределенные объекты на такой фотографии уже не имеют
очень большой протяженности. Склон горы на, дальности 18.5 км между 5'и
7 ч отображается1 лишь в виде линии. •
Если СДЦ не выделяет на экране ИКО сигнал от самолета на фоне горы,
то он это сделает в следующий период сканирования антенны, так как само-
лет переместится ближе или дальше. Разрешение на экране ИКО значительно
хуже разрешения специальных систем обработки сигнала, используемых в этой
РЛС. Поэтому кажущаяся на экране сплошной область распределенных отра-
жений от неподвижных объектов имеет много областей, где такие ртражения
слабы/но эти’области не видны да фотографиях. В этих областях цель можно
обнаружить, используя свойство, присущее РЛС с ,СДЦ. которое . получило
название различимости в просветах пассивных помех (определение его
дано в § 5.5).'
’’ 5.5. Определения
Коэффициент улучшения. Показателем качества функционирования СДЦ
являё1ся коэффициент улучшения /[8], определяемый через отношения мощно-
стей I=rQl!t, где г0 — выходное отношение мощности сигнала от цели к мощ-
ности пассивных помех, а г,— аналогичное отношение на входе, усредненные
по всем ркбростям1 целей. Такое'определение учитывает и ослабление пассив-
ных помех в СДЦ и средний выигрыш СДЦ Этот показатель является, таким
образом, показателем откпйка СДЦ на сигналы пассивных помех по отноше-
нию к усредненному отклику СДЦ на ст налы от целей Коэффициент улуч-
шёййй17 по Существу совпадает с введенным в [9] относительным коэффйииен-
Ю* 291
Таблица 2
Типичные значения удельной ЭПР пассивных отражателей [7]
Пассивные отражатели Удельная ЭПР X, м т). М“Т Условия Диапазон А., м Параметры отражателей для типичных условий
L 0,23 S 0,1 с 0,056 X 0,032
Наземные (за исключением точечных) 0,00032 (худшие 10%) —. о° [дБ] - —29 —24 —22 —20
Точечные ст= 104 м2 — о [м21 = Ю4 104 104 104
Море (Кв — баллы волне- ния по шкале Бофорта, Е — угол) о® [дБ]=—64 + 67<в-|- -]-sin Е [дБ] — X [дБ] Состояние моря 4 балла (волны высотой 2 м) Е=1° о° [дБ] = —51,5 —47,5 —44,5 —42,5
Металлизированные отра- жатели (при фиксирован- ном весе в единице объе- ма) т) = 310-8Х — Т] [м-1] = 7-Ю-9 з-ю-9 1,7.10-’ ю-8
Дождь (для интенсивности г, мм/ч) т] = 6-10-14 П-в х-4 (совпадающая поляризация) г — \ мм/ч v И [м-1]^ 2- 10-ю 5-10-9 5 10-8 5 10-7
О Амплитуды сигналов, отраженных от пассивных отражателей, меняются в широком диапазоне значений и зависят от многих
факторов, которые не могут быть точно отражены в одной таблице. Более подробные данные приведены в [т. 1, гл. 6—8]. (Прим,
ред. англ. ориг.).
Гл. 5. РЛС с селекторами движущихся целей
5.6. Вычисление коэффициента улучшения
том усиления G и зависит от характеристик имеющихся вокруг РЛС непод-
вижных объектов. Коэффициент улучшения / предпочтительнее устаревших
терминов «коэффициент компенсации» и «ослабление помех от неподвижных
отражателей», так как последние не всегда правильно и последовательно ис-
пользуются в литературе и, кроме того, они обычно не нормируются, что не
позволяет учесть средний выигрыш, даваемый компенсатором.
Различимость на фоне пассивных помех (РФП) является для РЛС мерой
возможности обнаружения сигналов от движущихся целей, на которые накла-
дываются сигналы пассивных помех. РЛС, имеющая РФП 20 дБ, может обна-
руживать летящий самолет на фоне пассивных помех, которые в 100 раз
сильнее сигнала от самолета. Следует отметить, что РФП нельзя непосредст-
венно использовать в качестве критерия сравнения двух РЛС, даже если они
работают в одних и тех же условиях и в одной и той же местности, так как
для каждой РЛС отношение полезный сигнал/пассивные помехи пропорцио-
нально размерам ячейки разрешения Таким образом, для того чтобы РЛС
с шириной луча 10° и длительностью импульса 10 мкс обладала такими же
характеристиками по обнаружению целей в условиях заданного окружения,
что и РЛС с шириной луча 1° и длительностью импульса 1 мкс, она должна
иметь РФП на 20 дБ выше.
Выраженный в децибелах РФП равен разности коэффициента улучшения
и коэффициента различимости пассивных помех Von (дБ).
Для тех радиолокационных систем, в которых функционирование СДЦ
ограничивается сканированием, реально принимать Von = 6 дБ. Следовательно,
если такая РЛС имеет 1—23 дБ, то РФП=17 дБ. Для РЛС, в которых функ-
ционирование СДЦ ограничивается не из-за сканирования, а вследствие воз-
действия шумоподобных нестабильностей системы, можно принять, что Von ра-
вен коэффициенту различимости Блэйка Vo (см.т. 1, гл. 2). Такое различие
в выборе значения Von объясняется тем, что при сканировании нескомпенсиро-
ванные остатки помех имеют тенденцию к коррелированности от импульса
к импульсу, а нескомпенсированные помехи, возникающие вследствие неста-
бильностей системы, имеют шумоподобный характер.
Различимость в просветах пассивных помех (РПП) является для РЛС
мерой ее способности обнаруживать цели в промежутках между областями
с сильными пассивными помехами за счет способности РЛС разрешать сигналы
от областей с сильными и слабыми помехами. РЛС с высоким разрешением
позволяет различить просветы между областями с сильными пассивными поме-
хами, в которых отношение полезный сигнал/помеха достаточно для обнару-
женйя цели, несмотря на то, что РФП для данной РЛС будет относительно
низкой. В РЛС с низким разрешением происходит усреднение пассивных помех
в пределах больших ячеек разрешения, большая часть которых содержит один
или более эффективно отражающих точечных объектов, и, следовательно,
РЛС будет обладать очень низкой РПП. Обладая высокой РПП, РЛС с вы-
соким разрешением обычно работают в условиях пассивных помех лучше, чем
это предсказывает анализ с использованием усредненных амплитудных харак-
теристик (§ 5.4) [35]
5.6. Вычисление коэффициента улучшения
Используя метод Бартона (см. [2, § 7.3]), можно получить следующие вы-
ражения для предельных значений /:
Л = 2| ' f \2 , 2лоп /
/г = 2( ' f \4 , (2) 2лоп /
293
Гл. 5. РЛС с селекторами движущихся целей
i f V
3 \ 2лап / ’
(3)
где /] —коэффициент улучшения СДЦ с когерентным компенсатором без
обратной связи с единственной линией задержки; /2 — коэффициент улучшения
СДЦ с когерентным компенсатором без обратной связи с двумя линиями
задержки’); /3 — коэффициент улучшения СДЦ с когерентным компенсатором
без обратной связи с тремя линиями задержки; оп— среднеквадратическая
ширина спектра мощности пассивных помех, Гц; [г—частота повторения им-
пульсов РЛС, Гц.
Рис. 10. Фотографии типичных отражений
Если подставить в соотношения (1) — (3) значения оп для модуляции,
возникающей вследствие сканирования (см. § 5.3), то предельные значения /
с учетом сканирования примут вид:
, п2 п4 п4
Г = ------ , /й = ------ , /„ .
1,39 3,84 3 16,0
Графики, изображающие эти зависимости, приведены на рис. 11.
При выводе данных соотношений предполагалось, что система линейна,
О Схемы компенсаторов с большим числом линий задержки см. в § 5.8.
294
5:6. Вычисление коэффициента улучшения
т. е. что огибающая напряжения эхо-сигналов в процессе сканирования антен-
ной точечной цели воспроизводит форму двухсторонней ДН по напряжению.
Это предположение о линейности системы на практике может быть не приме-
нимым для некоторых СДЦ, в которых за время прохождения цели диаграм-
мой направленности число принятых импульсов относительно мало. Этот
вопрос подробно рассмотрен в § 5.7.
Ограничения, связанные со сканированием, не относятся к системе, в кото-
рой можно осуществить ступенчатое сканирование (например, в фазированных
решетках). Существуют также способы уменьшения влияния сканирования
за счет соответствующего комбинирования суммарных и разностных диаграмм
направленности (эти способы для наземных РЛС рассмотрены в (10]; обсужда.
юте я Они в г л 6). Хотя экспериментальные исследования- показывают, что
такие способы с использованием единственного компенсатора обеспечивают
улучшение характеристик системы СДЦ на 6—12 дБ, они не нашли широкого
применения в наземных радиолокационных, системах. Это, видимо, связано
с тем, что на практике оказалось легче заменить одинарный компенсатор двух-
ступенчатым, чем обеспечивать идентичность двух приемных трактов, необхо-
димую для реализации суммарно-разностного способа уменьшения моДудЯции
при сканировании.
Ограничения, накладываемые на I вследствие воздействия собственных
флуктуаций’ пассивных помех, мояСно определить, подставив соответствующее
295
Гл. 5. РЛС с селекторами движущихся целей
Рис. 11. Теоретическое значение коэффициента улучшения СДЦ, связанное с модуляцией
из-за сканирования; гауссова диаграмма антенны; п — число импульсов, принимаемых
за время прохождения цели церез одностороннюю диаграмму направленности на уров-
не половинной мощности.
Металлизированные отражатели
Наземные Морские Дождь
Рис. 12. Зависимость коэффициента улучшения СДЦ от среднеквадратического разброса
скоростей перемещения пассивных отражателей для компенсатора с одной линией за*
держки (без обратной связи).
296
5.6. Вычисление коэффициента улучшения
значение оп в (1) — (3). Представив оп в виде Оп=2ои/Х, где о» — среднеквад-
ратический разброс скоростей отражателей, можно начертить графики, харак-
теризующие зависимость I от А и частоты повторения импульсов для различ-
ных типов пассивных помех. На рис. 12—14 приведены такие графики для
компенсаторов с одной, двумя и тремя линиями задержки. Значения Vb опре-
деляют первую слепую скорость РЛС или ту точку, где должна лежать первая
слепая скорость Vb для системы с изменением межимпульсных интервалов
Рис. 13. Зависимость коэффициента улучшения СДЦ от среднеквадратического разбро-
са скоростей перемещения пассивных отражателей для компенсатора с двумя линиям!
задержки (без обратной связи).
(ИМИ), если бы в ней не использовалось ИМИ. Данные для коэффициент»
улучшения, приведенные на этих графиках для дождя и облака металлизиро-
ванных отражателей, получены в предположении, что средняя скорость частиц
дождя и отдельных металлизированных отражателей скомпенсирована, так что
отраженные сигналы сконцентрированы вблизи центра полосы режекции ком-
пенсатора. Если только такая компенсация не осуществлена, как, например,
при использовании СДЦ с внешней когерентностью (§ 5.16), то использование
СДЦ может не дать выигрыша в случае дождя или облака металлизированных
отражателей.
Два других ограничения на величину / связаны с воздействием ИМИ о»
импульса к импульсу в сочетании с расширением спектра пассивных помех
вследствие сканирования и собственного движения отражателей. Эти ограни-
чения можно охарактеризовать с помощью графиков на рис. 15 и 16. Они при-
менимы к любым компенсаторам, как к одинарным, так и к многоступенчатым.
Способы определения этих ограничений и преодоления их за счет использова-
ния переменной во времени весовой обработки приведены в § 5.11.
29Т
Ptfc. ЛТ
29^
&p
Ограничения на приближет
действием ими от и»"-
структур ком пейсат<
w г»
:,vi/ /tffw
„.иженный коэффициент улучшения
импульса к импульсу в сочетании со
хоров 11дБ}—20 fog [О л/{у~Н1, V «•
од/минимальный период.
Сд П
CM“»P&*"»“e = .
- “•««; *« , —•
““вЧ».
5.7. Ограничения I вследствие использования ограничителей
5.7. Ограничения, накладываемые на коэффициент улучшения
вследствие использования ограничителей
Результаты экспериментальных исследований показали, что характери-
стики СДЦ в РЛС со сканирующими антеннами, имеющих большое число
линий задержки, существенно хуже предсказываемых приведенными выше
расчетами. Это вызвано тем, что- приведенная выше теория основана на пред-
положении о линейности системы. Как уже упоминалось выше, в большинстве
Рис. 16. Ограничения на приближенный коэффициент улучшения СДЦ, связанные с воз-
действием ИМИ ат импульса н импульсу и перемещения-ми пассивных отражателей.
Для всех структур иомпенсатеров 1 |дВ|—20 IbgНИЗЗДу*-!) (А/т/сгг)], у = максимальный
иериод/миннмальный период.
СДЦ перед компенсатором используется линейный усилитель с ограничением.
Обоснованием необходимости применения такого ограничителя является утвер-
ждение, что «было бы желательно так обрабатывать остаточные пассивные
помехи после компенсации, чтобы они при отображении на экран индикатора
были похожи на шум приемника как по уровню, так и по тонкой структуре»
[11, с. 646—6491
Пример того, как подбор уровня ограничения изменяет вид остаточных
пассивных помех, приведен на рис. 17. Интервал между масштабными коль-
цами на экране равен 9 км. На экране показаны отметки от нескольких птиц.
Остаточные пассивные помехи полностью перекрывают экран в окружности
радиусом «5,5 км, затем они убывают и почти полностью исчезают на даль-
ности 18 км. Для обеих фотографий коэффициент улучшения СДЦ 18 дБ, но
при использовании цепи управления коэффициентом усиления на ПЧ в СДЦ
перед ограничителем входной динамический диапазон (отношение пикового
значения сигнала к среднеквадратическому значению шума) в компенсаторе
Меняется от 20 дБ (рис. 17,а) до 14 дБ (рис. 17,6). Самолет, летящий на фоне
пассивных помех на дальности вплоть до «9 км нельзя обнаружить на левой
фотографии, как бы ни была велика его эффективная поверхность рассеяния.
На правой фотографии самолет можно обнаружить, если отношение эффектив-
2 99
Гл. 5. РЛС с селекторами движущихся целей
ных поверхностей рассеяния самолета и неподвижных объектов будет доста-
точно велико.
Воздействие ограничителя существенно для нормализации остаточных пас-
сивных помех и шумов. Однако его введение серьезно сказывается на коэффи-
циенте улучшения, достижимом в СДЦ с компенсатором с большим числом
линий задержки, на функционирование которого накладываются ограничения,
вызванные сканированием. Это происходит за счет увеличения спектрального
разброса пассивных помех, величина которых превосходит уровень ограниче-
ния. Часть дополнительных спектральных составляющих пассивных помех воз-
Рис. 17; Воздействие ограничителей.
никает вследствие резкого разрыва непрерывности огибающей отраженных
сигналов при достижении пассивными помехами уровня ограничения [33]. Про-
странственно-временные соотношения, характеризующие эти явления, приве-
дены на рис. 18 для РЛС, у которой за время прохождения цели ДН прини-
мает 16,4 отраженных импульса. Слева показана точечная цель, сигнал от
которой не превышает уровня ограничения, справа — точечная цель, сигнал от
которой на 20 дБ превышает уровень ограничения. Отметим, что для этого
примера значение / уменьшается на 12,8 дБ для двухступенчатого компенса-
тора и на 26,5 дБ для трехступенчатого. Точный результат такой компенсации
зависит от предполагаемой формы ДН антенны (в данном случае предполага-
лось, что ДН имеет вид функции sin UfU, усеченной по первым нулям).
Заметен спектральный разброс ограниченных распределенных пассивных помех
[31, 34]. На рис. 19 [31] показана зависимость ожидаемого коэффициента улуч-
шения для двух-, трех- и четырехимпульсного компенсатора от o/L — отноше-
ния среднеквадратического значения амплитуды пассивных помех к уровню
ограничения.
Уровень ограничения выбирается таким образом, чтобы остаточные пас-
сивные помехи напоминали шум приемника Если этого не сделать, то они
будут так забивать экран, что обнаружить цель в забитой ими области ока-
жется невозможным. (Сопровождение цели во время прохождения ею обла-
сти, забитой пассивными помехами, возможно при значительно более интен-
сивных остаточных пассивных помехах, чем ее обнаружение, но при обзоре или
при обнаружении экран должен быть чистым.)
300
5.7. Ограничения I вследствие использования ограничителей
Так как СДЦ построены таким образом, что динамический диапазон сиг-
налов, поступающих из ограничителя в компенсатор, может подбираться и
изменяться в значительных пределах с целью получения на экране хорошего
изображения, реальные характеристики часто значительно уступают расчетным
(и при этом пользователь может не знать причин различия).
Одним из примеров РЛС, в которой используется двойной компенсатор
и изменение периода повторения импульсов (ИМИ), является американская
1г-Ь2,2&
__ МГ
||р -
|| V-
о .
О LihIBHh иШИИШн П1Ш11Н
Рис. 18. Ограничение на коэффициент улучшения, связанное с воздействием
ограничителя.
РЛС ARSR-2. Основные параметры этой станции таковы: длительность им-
пульса 2 мкс, ширина луча в горизонтальной плоскости 1,2°, частота сканиро-
вания 5 об/мин, средняя частота повторения импульсов 360 имп/с, рабочая
частота 1315 МГц, отношение интервалов между импульсами 13 : 14 : 15. В РЛС
используется компенсатор с обратной связью с двумя линиями задержки.
Число отраженных импульсов п, принимаемых при сканировании с учетом ши-
рины ДН антенны (односторонней по уровню половинной мощности),
равно 14,4. Ограничения, связанные с нестабильностью аппаратуры, умень-
шают. значение / до 33 др. В соответствии с рис. 11 теоретическое значение
ограничений, вызванных сканированием, уменьшает / до 40,5 дБ. По данным
301
Гл. 5. РЛС с селекторами движущихся целей
Xtzasfrmgpiwmiim двухияпряююел wwewsamozct
/О
6)
50
53.
ЪО
20
'18
$01 sv/Zf„
Xvpimmepacwms, х&тб/#ех8Т№улъеязго m-me/tfimopa
Рис. П Зависимость ограничения на коэффициент улучшения от уровня ограничения и
Спектрального разброса рвсяреде'леиныи пассивных помех: ,
п ~ чмао отраженных имауаьеоя, пипайаюш,их -в ецвосторонаимв ширину луча мд .Уров-
не половинной мощности. '
Ж
5.8. Фильтры с большим числом линий задержки
ртк Ш огранвчевие, вызванное собственным перемещением наземных отража-
телей, уменьшает I до 55 дБ или менее. По данным рис. 15, ограничение,
вызванное ИМИ и сканированием (у—15/13—1,15), уменьшает I приблизи-
тельно до 46 дБ. По данным рис. 16, ограничение, вызванное ИМИ и собствен-
ными флуктуациями пассивных помех, уменьшает / до 54 дБ.
Учитывая эти составляющие, можем определить величину
1 1 1 1 1 1 #
Лэбщ ^стаб ^екан ^отраж /имИ(скан) /ими(фл1
В итоге получаем /Овщ = 32,1 дБ, причем доминирующим фактором является
нестабильность аппаратуры. Приведенный расчет является примером теорети-
ческого определения ограничений, накладываемых на характеристики функцио-
нирования СДЦ. На практике наблюдалось, что нестабильности в системе
могут возрастать до таких значений, что они ограничат / до 26 дБ, и при этом
качество изображения на экране не ухудшается. Незначительное ухудшение
отмечалось в тех случаях, когда нестабильности возрастали настолько, что
ограничивали / до 20 дБ (при этом нестабильность имитировалась разбалан-
сировкой схемы, устраняющей ИМИ и включенной перед компенсатором
с двумя линиями задержки Следовательно, эги частотные компоненты лежали
вблизи центра полосы пропускания компенсатора и не могли быть ослаблены
двухступенчатым компенсатором.)
Из этого эксперимента сделан вывод, что модуляция, создаваемая скани-
рованием, ограничивает такую важную характеристику AF-fSR-2, как коэффи-
циент улучшения СДЦ, до значения порядка 23 дБ, тогда как согласно линей-
ной теории СДЦ, в которой не учитывается влияние ограничителя, эта вели-
чина равна 40,5 дБ. Следует отметить, однако, что СДЦ в РЛС ARSR-2
в условиях реальных пассивных помех работает очень хорошо и ее характери-
стики на 7—10 дБ лучше, чем характеристики системы, работающей с одинар-
ным компенсатором.
5.8. Фильтры с большим числом линий задержки
Компенсаторы. Приведенная на рис. 4 и рассмотренная в 5.1 структур-
ная схема СДЦ описывает компенсатор с одной линией, задержки Для того
чтобы изменить частотную характеристику СДЦ и приспособить ее для обра-
ботки сигналов от целей е различными скоростями, можно каскадно соединять
большое число линий задержки и вводить обратную связь, соединяющую вы-
ход и вход линии задержки. Компенсаторы с большим количеством линий
задержки имеют более широкую полосу режекции пассивных помех, чем ком-
пенсаторы с единственной линией задержки. В эту более широкую полосу
режекции попадает большая часть спектра пассивных помех и гем самым до-
стигается увеличение коэффициента улучшения СДЦ, достижимое при данном
спектральном распределении пассивных помех.
На рис. 20—22 приведены зависимости коэффициента передачи от скоро-
сти для компенсаторов с одной, двумя и тремя линиями задержки. Приведены
также схемы компенсаторов и диаграммы расположения, нулей и полюеев
в Z-плоскости. Z-плоскость является для гребенчатого фильтра эквивалентом
S-плоскости [12, 13}, причем левая часть S-плоскости преобразуется во внут-
ренность единичного круга с центром в точке Z = 0. Нулевой частоте соответ-
ствует Z=l-f-/O. Условие устойчивости в этом случае сводится к требованию,
чтобы полюса передаточной функции в новых координатах лежали внутри
единичного круга. Нули при этом могут быть расположены произвольно.
Приведенные зависимости коэффициента передачи от скорости были вы-
числены на ЭВМ для сканирующей РЛС, в которой за одно сканирование
зез
Гл. 5. РЛС с селекторами движущихся целей
принимается 14,4 отраженных импульса. Предполагалось также, что ДН ан-
тенны имеет вид функции (sin U)jU, усеченной по первым нулям. Форма при-
веденных зависимостей, за исключением областей, очень близких к слепым
скоростям, по существу не зависит от числа отраженных импульсов, принятых
за один период сканирования, и от предполагаемой формы ДН антенны.
Линия
задержки 1/Z
Компенсатор „
а одной ланаеа
задержки
К1
Ноль в начале
координат,
полюс на оси х
на расстоянии Kf
от центра единичной
окружности
Рис. 20. Компенсатор одноступенчатый.
Ордината, обозначенная «коэффициент передачи», представляет собой от-
ношение значения сигнал/шум для отклика приемника с СДЦ к значению
сигнал/шум для отклика обычного линейного приемника при наблюдении од-
ного импульса, отраженного от одной и той же цели. Таким образом, все зави-
симости нормированы по отношению к среднему усилению при заданной струк-
туре компенсатора. Точка пересечения кривой с осью ординат представляет
выраженное в децибелах отрицательное значение I — коэффициента улучше-
ния системы СДЦ для точечного источника пассивных помех при использова-
нии линейной системы.
Так как данные зависимости характеризуют сигнал/шум для отклика на
единичный импульс, то внутренние потери в СДЦ, связанные с уменьшением
эффективного числа интегрируемых импульсов [32], здесь не учтены.
304
5.8. Фильтры с большим числом линий задержки
Эти потери могут иметь значения от 1,5 до почти 3 дБ, в зависимости от числа
отраженных импульсов, принятых системой. Если, кроме того, в СДЦ не ис-
пользуются квадратурные каналы, то возникают дополнительные потери от
1,5 до 3 дБ, которые также зависят от числа принятых импульсов.
Абциссы V/Vb представляют собой отношение скорости цели к слепой
скорости, соответствующей значению ХЛ/2, где К — длина волны РЛС, а /г —
0
-10
I -30
J-w
Э-
^-£7
0 0,2 0,0 0.6 0.8 1,0
y/vB
Bin
Компенсатор
с двумя линиями
задержки
Два ноля 8 начале координат,
полюса расположены, как
показано на рисунке расстояние
От центра единичной окружности*
« ^расстояние от начала
Ki+K?_
^ДйССОЗ-7 - •
Полюса показаны для KpO,5 ,Kz=O
Рис. 21. Двухступенчатый компенсатор.
средняя ЧПИ. Эту координату можно также рассматривать как отношение
доплеровской частоты к средней ЧПИ радиолокационной системы.
Схемы компенсаторов, которые рассматривались при вычислении этих гра-
фиков, воспроизводят схемы самого общего вида с прямыми и обратными
связями, однако они относительно легко реализуются в аналоговых системах.
Если, например, схема двухступенчатого компенсатора такова, что в первом
тракте задержки присутствует любая фиксированная разбалансировка, то она
может быть скомпенсирована во втором тракте задержки, Источник напряже-
305
Гл. 5. РЛС с селекторами движущихся целей
ния для обратной связи выбран таким образом, что если в усилителе цепи
обратной связи происходит какая-либо задержка сигнала, то ее можно ском-
пенсировать подстроечным элементом задержки, включаемым между этим
источником и схемой вычитания.
jy '
Z-nnоскость
е0 _ VZ~№z-2Kf
Компенсатор
с тремя тениями
пя задержки
Мин нуль в начале ноординат,
та нуля на единичной окружности
£ - аге саз Kt один полюс
на оси хг расстояние от центра ,
х два полюса на расстоянии от ценно.
под углами ±8
£=ДРС GOS
Расположение нулей и полюсов
показано для
Kl~D,98; KZ~D,71;
К-у—Щд;
Рис. 22. Трехступенчагый компенсатор.
Схема построения трехступенчатого компенсатора позволяет перемещать
два нуля вдоль границы круга в Z-плоскости. Результаты вычислений на ЭВМ
показывают, что перемещение нулей позволяет увеличить коэффициент улуч-
шения СДЦ только на 4 или 5 дБ по сравнению со схемой, когда все три нуля
расположены в начале координат, и, следовательно, это, видимо, не окупаем
усложнения схемы по сравнению с альтернативным подходом, заключающимся
в каскадном соединении двухступенчатого компенсатора (рис. 21) с одинар-
ным (рис. 20).
303
5.8. Фалыры с большим числом линий задержки
Интересно сравнить ширину полосы режекции для различных схем ком-
пенсаторов без обратных связей. Если отсчитывать ширину полосы на уровне
^-<6 дБ относительно нормального отклика, то режекции составляет 24% доп-
леровской полосы для одинарного компенсатора, 36% для двухступенчатого
и 45% для трехступенчатого. Рассмотрим, например, двухступенчатый компен-
сатор. Вырезание 36% волосы доплеровских частот является для систем огра-
ничением, так как при длительном усреднении будет принято только 64% сиг-
налов, отраженных за период сканирования Для сужения полосы режекции без
Уисоо импулымй за одно сканародание
Рис. 23. Ограничения на коэффипиенл -улучшения связанные со сканированием, для ком-
пенсаторов с обратной связью.
существенного ухудшения / можно использовать обратную связь. Если обрат-
ная связь, используется для .повышения коэффициента улучшения, то процент-
ная доля импульсов, принятых за период сканирования, существенно ухуд-
шается .. ...
На рис. 23 доказано влияние обратной связи на /. Эти кривые получены
с помощью ЭВМ* для ДН. антенны в виде функции (sin U)ju, усеченной по
первым нулям. Кривые, характеризующие работу системы без обратных связей,
как показано на графике, почти сливаются с теоретическими кривыми, полу-
ченными для гауссовой ДН (рис. 11) (Одна из кривых, характеризующих
влияние обратной связи на трехступенчатый комненсатор, уклоняется от пря-
мой, так как два из трех нулей не лежат в начале координат, а сдвинуты
вдоль границы единичного круга с целью получения оптимальных соотношений
для числа принятых на ширине луча импульсов, равного 14. Следовательно,
при' 40 отраженных импульсах яа ширине луча эти два нуля слишком далеке
отстоят от начала координат, чтобы быть очень эффективными.)
.Теоретически с помощью фильтров на;линиях задержки можно синтезиро-
вать почти любую форму зависимости коэффициента передачи от скорости [12].
Для каждой лары полюсов и пары нудей яа Z-плоскости необходимы две
диад.и задержки. Положение нулей определяется прямыми связями, а положе-
ние полюсов обратны ми связями Сложности, связанные с использованием каж-
дой линии задержки, и требование, чтобы все линии задержки были, точна
307
Гл. 5. РЛС с селекторами движущихся целей
согласованы, заставляют применять в большинстве практических аналоговых
систем не более трех трактов задержки. Цифровые методы (см. т. 1, гл. 11),
однако, позволяют реализовать более сложные фильтры, В работах [12, 13]
описан синтез более сложных фильтров.
Формирование нужной зависимости коэффициента передачи от скорости
можно выполнить за счет использования только прямых связей без применения
обратных. Принципиальным преиму-
ществом отказа от обратных связей
является получение отличной пере-
ходной характеристики компенсато-
ра, что является весьма важным об-
стоятельством в системах со ступен-
чатым сканированием. После того как
в системе со ступенчатым сканирова,-
нием и компенсатором с обратной
связью луч переместится в новое по-
ложение, может быть утрачено до
О 0,2 0,4 0,6 0,9 15 отраженных импульсов к тому мо-
Y/Vb менту, когда переходные колебатель-
ные процессы в компенсаторе снизят-
ein
3 полюса
-W
Рис. 24. Зависимость отклика
плоскость
Трехступенчатый
компенсатор
с прямыми связями
3 полюоа 3 центре единичного
круга, 2 нуля в начале координат,
1 нуль на оси х 3 точке - 1/К
Расположение полюсод и нулей
показано Злр
от скорости для компенсатора с прямыми связями.
ся до приемлемого уровня. Если использовать только прямые связи, то при
смещении луча теряются только три или четыре импульса. Недостатком систе-
мы, в которой для формирования нужной характеристики используются толь-
ко прямые связи, является необходимость дополнительных элементов задерж-
ки для каждого нуля, используемого для формирования отклика. Кроме того?
характерное снижение возможностей достижения большого коэффициента
улучшения связано с использованием нулей для формирования отклика. Это
может быть или не быть существенным в зависимости от спектрального
разброса пасивных помех и от числа нулей, используемых при компенсации.
На рис. 24 показаны зависимость отклика от скорости и диаграмма
в Z-плоскости для трехступенчатого компенсатора, в котором для формиро-
вания отклика использованы только прямые связи, и для сравнения показана
такая же зависимость для компенсатора с двумя задержками с обратной
связью. В компенсаторе с двумя линиями задержки потенциально можно прлу-
308
5.8. Фильтры с большим числом линий задержки
чить коэффициент улучшения на 5 дБ выше, чем у компенсатора с тремя ли-
ниями задержки со сформированным откликом вне зависимости от спектраль-
ного разброса пассивных помех.
Интеграторы. Синхронные интеграторы можно синтезировать, используя
линии задержки [12]. На рис. 25 показаны две структурные схемы синхронных
интеграторов на линиях задержки, которые имеют один и тот же частотный
Рис. 25. Структурные схемы двух
видов интеграторов на линиях задержки.
отклик. Двухконтурная схема является более предпочтительной, так как на
практике легче обеспечить ее устойчивость [13]. В видеоинтеграторах можно
использовать сигналы с амплитудной, частотной или фазовой модуляцией.
Амплитудная модуляция в общем случае не позволяет получить удовлетвори-
тельных результатов при коэффициентах обратной связи, превышающих 0,9.
В то же время при использовании частотной и фазовой модуляции можно
построить стабильные интеграторы с коэффициентами обратной связи, весьма
близкими к единице.
Синхронные видеоинтеграторы обычно применяются для интегрирования
обычных видеосигналов в радиолокационных системах. Существуют три основ-
ных соображения, оправдывающих введение таких интеграторов. В большин-
стве применений наиболее важным соображением является то, что при вклю-
чении интегратора перед ограничителем видеосигналов будет происходить
подавление случайных импульсных помех. Рис. 26 показывает эффективность
использования видеоинтеграторов в таких целях. Эти две фотографии с ИКО
были сделаны в радиолокационной системе ARSR-2. Случайные импульсные
помехи вводились с помощью направленного волноводного ответвителя. На
первой фотографии показаны обычные видеосигналы, на второй, сделанной
непосредственно после первой, показан эффект использования интегратора для
подавления импульсных помех.
Второй целью использования видеоинтегратора является облегчение задачи
усиления контрастности отметок от слабых целей на экране ИКО, Интегратор
не позволяет получить теоретическое улучшение по сравнению с оптимальной
комбинацией ИКО — оператор, но он позволяет усилить контрастность с помо-
щью следующей за интегратором пороговой схемы, что уменьшает утомление
оператора. Если комбинация ИКО — оператор не является оптимальной, то
использование видеоинтегратора с пороговой схемой уменьшает «потери из-за
усталости» [14]. которые в таких системах, как ARSR-2, могут достигать 3 дБ
и более, если на ИКО выводится информация от более чем одного луча, как
это часто делается в радиолокационных построителях вертикали.
Третья область применения видеоиитеграторов — использование их в си-
стемах с устройствами автоматического обнаружения, в которых для обнару-
жения цели необходимо, чтобы пиковое значение отклика цели превышало
некоторый фиксированный пороговый уровень.
На рис. 27 показана схема, в которой перед видеоинтегратором включена
схема ограничения, а за ним пороговая схема. Видеоограничитель ограничивает
динамический диапазон сигналов, поступающих в интегратор, до 10 дБ. Этим
достигаются две цели: во первых, единичные импульсные помехи не создают
на выходе интегратора заметного отклика и, во-вторых, сильные сигналы не
30»
Гл. 5. РЛС е селекторами движущихся целей
выхода? 1а границы динамического диапазона цепей интегратора, что привело
бы к их перегрузке. Пороговая схема на выходе интегратора позволяет устра-
нить проинтегрированное шумовое напряжение, что увеличивает контрастность
сигналов, отображаемых на экране индикатора.
Рис. 2(3. Эффективность использования видеоинтеграторов на линии задержки:
а — обычное изображение на акране ИКО ара случайных импульсных аомехах; б -
улучшенное изображение при использовании видеоинтегратора.
Коэффициент обратной связи К, позволяющий максимально улучшить
отношение (пиковое значение сигнала/среднеквадрэтическое напряжение шума}
для сканирующей РЛС, определяется из эмпирического соотношения
1,56/п,
где п — длина п-пакета. Это соотношение, показанное на рис. 28, было полу-
чено при моделировании на ЭВМ работы видеоинтегратора в чаетотно-вре-
Рис. 27. Схема включения вмдеоннтегратора а РЛС.
мениой области. При его выводе использовались следующие предположения:
ДН антенны имеет вид гауссовой функции, детектирование сигнала произво-
дится квадратичным детектором Точное значение используемого коэффициента
обратной связи не является критичным. На рис 28 показаны границы допусков
для ухудшения отношения (проинтегрированный еигнал/шум) иа 0J дБ. На
310
5.9. Компенсаторы на промежуточной частоте
рис. 29 показан график, характеризующий потенциально достижимое улучше-
ние отношения (пиковое значение сигнал/шум). Уравнение, определяющее
этот график, S/N = 10 log 0,427га также получено эмпирическим путем.
Рис. 28. Коэффициент обратной связи для
видеоинтегратора, используемого в скани-
рующей РЛС
Рис. 29. Потенциально достижимое улуч-
шение отношения (пиковое значение) сиг-
нал шум для видеоинтегратора, исполь-
зуемого в сканирующей РЛС.
Если видеоинтегратор применен в системе со ступенчатым сканированием,
во время перемещения луча петля обратной связи интегратора должна быть
разомкнута; в этом случае до перемещения луча в новое положение можно
использовать коэффициент обратной связи, равный единице (отпимальнын
выбор).
5.9. Компенсаторы на промежуточной частоте
Компенсация на промежуточной частоте (ПЧ) производится не путем об-
работки сигналов, преобразованных в фазовом детекторе в биполярные видео-
сигналы, а с. помощью обработки принимаемых РЛС сигналов на ПЧ.
Компенсаторы на ПЧ имеют ряд преимуществ по сравнению с видеоком-
пенсаторами: 1) обнаружение цели улучшается в среднем на 1,5—3 дБ в зави-
симости от числа принятых отраженных импульсов (обычно это соображение
не очень существенно, так как СДЦ используются на таких расстояниях, пря
которых, отношение, сигнал/шум. достаточно велико); 2) в. компенсаторах на
ПЧ. необходимый .динамический диапазон цепей с линиями задержки умень-
шается примерно на 14 дБ В видеокомпенсаторах используется несущая
частота с коэффициентом модуляции около 20% Более глубокая модуляция
приводит к недопустимым искажениям. В ПЧ-комненеаторах роль несущей
. играет промежуточная частота; это приводит к эффективному увеличению ди-
намического диапазона сигналов на 14 дБ; 3) в видеосистемах СДЦ допле-
ровский сигнал цели на выходе компенсатора имеет вид синусоидального
напряжения, выборки которого производятся с частотой повторения импульсов
радиолокационной системы.; Так как это напряжение синусоидально, то в мо-
мент выборки оно может быть близко к нулю Это явление получило название
слепой фазы. Слепые'фазы не представляют трудностей в видеокомпенсато-
рах, в которых производится усреднение нескольких последовательно приня-
тых отраженных сигналов В системах со ступенчатым сканированием, в кото-
рых луч антенны сохраняет свое положение до приема грех последовательных
импульсов (сравнение этих импульсов в грехимпульсных компенсаторах позво-
ляет получить на выходе один выходной сигнал) и затем сменяется положение
луча; слепые фазы могут существенно влиять на вероятность обнаружения.
ПЧ-кОмпеНсаторы не имеют слепых фаз; и, следовательно, использование их
в таких системах предпочтительно.
Гл. 5. РЛС с селекторами движущихся целей.
Существует два основных типа ПЧ-компенсаторов, которые обычно назы-
вают векторными компенсаторами и системами TACCAR. Система TACCAR,
которую иногда называют фазовым ПЧ компенсатором [15], представляет
собой значительно более простую систему, чем векторный компенсатор, однако
она в силу ее существенной нелинейности может быть использована только
в системах с единственной линией задержки. Для более сложных ПЧ-компен-
саторов используются векторные компенсаторы.
Система TACCAR. Первоначально система TACCAR была разработана
применительно к СДЦ для бортовой самолетной РЛС. TACCAR — сокращен-
ное название когерентной бортовой РЛС с усреднением пассивных помех по
времени, но это название обычно сохраняется и в тех случаях, когда система
используется в других целях. Применение системы TACCAR позволило полу-
чить хорошие результаты в корабельных радиолокационных системах и назем-
ных РЛС с СДЦ. При различных применениях система TACCAR может иметь
различные формы, и та форма ее, которая описана здесь с ее преимуществами
и недостатками, представляет собой систему, используемую в одном типе на-
земных РЛС, установленных на всей территории страны.
Принципиальной особенностью системы TACCAR является возможность
автоматически центрировать полосу режекции пассивных помех на их средней
доплеровской частоте. Следовательно, система способна режектировать сиг-
налы от облаков металлизированных отражателей, метеообразований или от
помех, создаваемых наземными объектами. Описанный вариант системы позво-
ляет режектировать сигналы от близко расположенных наземных источников
пассивных помех и от метеообразований или облаков металлизированных отра-
жателей при различных доплеровских частотах на дальностях, превышающих
расстояние от наземных источников помех. Эта система не позволяет, однако,
режектировать сигналы помех одновременно на двух различных доплеровских
частотах. Если, например, сигналы помех от облака металлизированных отра-
жателей накладываются на сигналы помех от наземных отражателей, то си-
стема TACCAR не может одновременно подавлять оба типа сигналов.
Вследствие способности системы TACCAR автоматически центрировать
полосу режекции пассивных помех на их средней доплеровской частоте, си-
стема может быть весьма полезной при использовании ее в качестве кора-
бельной РЛС, которая должна одновременно подавлять группу пассивных
помех, доплеровские частоты которых лежат в относительно узкой спектраль-
ной области.
Второй важной особенностью системы TACCAR является то, что она
позволяет режектировать случайные импульсные помехи. Отметим, что эта
особенность прямо противоположна свойствам обычных компенсаторов, в ко-
торых единственный мешающий импульс появляется в системе два или более
раза, в зависимости от того, является ли компенсатор простым (одинарным)
или более сложным.
Третья важная особенность: система TACCAR не реагирует на изменение
амплитуды пассивных помех. Таким образом, быстрые изменения амплитуды,
характерные для сильных пассивных помех (см. рис. 18), не приводят к появ-
лению на выходе системы TACCAR остаточных мешающих сигналов.
Структурная схема системы TACCAR показана на рис. 30. Эта система
используется совместно с магнетронным передатчиком, поэтому в данной схеме
необходим когерентный гетеродин (КГ), синхронизируемый с выходными сиг-
налами передатчика
Система функционирует следующим образом. Принимаемые ПЧ сигналы
усиливаются в линейном усилителе с ограничением, как и в большинстве СДЦ.
Динамический диапазон на выходе усилителя подбирается так, чтобы он был
приблизительно равен ожидаемому коэффициенту улучшения системы. Выход-
ной сигнал линейного усилителя с ограничением смешивается с сигналом КГ,
и получающийся сигнал подводится одновременно на вход линии задержки и
312
5.9. Компенсаторы на промежуточной частоте
в обход ее, как и в обычном компенсаторе. Эти сигналы затем подаются на
фазовый детектор.
Рассмотрим блок, обозначенный как «балансный фазовый детектор». Он
представляет собой диодный фазовый детектор, характеристики которого при-
ведены на рис. 31. Если относительные фазы двух сигналов на входах фазо-
вого детектора равны л/2, Зл/2, 5л/2 рад, то выходной сигнал отсутствует.
Запускающий ампулы?
Рис. 30. Структурная схема системы TACCAR.
йыхойнац Зайеосазнал СДЦ
Максимальный выходной сигнал получается в тех случаях, когда относи-
тельная фаза двух сигналов равна л, минимальный — при относительной фазе
О рад. Если сигналы, поступающие на детектор, равны по амплитуде, то харак-
теристика фазового детектора по форме приближается к идеальному треуголь-
нику. Если амплитуда одного из сигналов больше, то характеристика фазового
детектора имеет приблизительно синусоидальный вид, причем пересечение
нулевого уровня происходит при тех же самых значениях относительных фаз,
как было определено выше. Если один из сигналов исчезает или оба сигнала
исчезают, то сигнал на выходе детектора отсутствует. Фазовый детектор такого
типа обычно используется в когерентных видеокомпенсаторах [16].
Выходной сигнал этого фазового детектора подается на двухполупериод-
ный выпрямитель Сигнал на выходе последовательно включенных балансного
фазового детектора и двухполупериодного выпрямителя имеет вид, показан-
ный на рис. 32. Уровень этого сигнала зависит от относительных фаз двух
сигналов, но относительные фазы последовательно принимаемых сигналов опре-
деляются скоростью цели, если все другие параметры, такие, как длина линии
задержки, поддерживаются постоянными. Если относительная фаза сигналов
пассивных помех, поступаюших на этот фазовый детектор, равна л/2 рад, то
сигнал на выходе фазового детектора отсутствует. Это справедливо, даже
313
Гл. 5. РЛС с селекторами движущихся целей
если' амплитуды сигналов помех различны. Сигналы, относительная фаза кото-
рых на входах балансного фазового детектора равна зт/2, будут попадать
в полосу режекции системы.
Невозможно вырезать кварцевую линию задержки так точно, чтобы ее
длина отличалась от целого, кратного числу периодов, на л/2 рад на проме-
жуточной частоте, равной, например, 20 МГц. Поэтому необходимо предусмот-
реть возможность компенсировать любые ошибки в длине линии задержки.
Это осуществляется путем выборки выходного сигнала балансного фазового
Рис. 31. Характеристика балансного фазо-
вого детектора.
Рис. 32. Выпрямленный выходной сигнал
балансного фазового детектора.
детектора в периоды, когда сигналы пассивных помех сильны (скажем, в пре-
делах первых ,20 км для системы, подверженной воздействию помех от земной
или морской поверхности). Этот сигнал ошибки используется дтя управления
работой генератора, управляемого напряжением, который, в свою очередь,
управляет фазой импульса синхронизации КГ. Если говорить конкретнее, уп-
равляемый напряжением генератор вводит фазовый сдвиг в синхроимпульс
КГг который равен фазовой ошибке, вызванной тем, что длина линии задержки
не .точно .соответствует заданной. Отметим, что управляемый напряжением
генератор работает на той же промежуточной частоте, что и линия задержки.
(В полностью когерентной РЛС-управляемый напряжением генератор работает
на частоте и сигнал от него поступает непосредственно не смеситель,
заменяющий КП.) ...
Сигнал ошибки не только указывает на то, согласована ли точно длина
линии задержки,.но и содержит информацию о средних характеристиках пере-
мещения источников пассивных помех. Если источник помех перемещается
в радиальном направлении со скоростью Кв/4, то это проявляется в появлении
сигнала ошибки, точно такого же, как если бы существовала ошибка в длине
линии задержки, равная л/2 При этом сигнал ошибки, поданный на управляе-
мый напряжением генератор, -будет сдвигать полосу режекции в направлении
помех от отражателей, перемещающихся со скоростью Кв/4. -
Тогда с помощью 'этой замкнутой цели средняя скорость источников помех
в течение периода выборки будет центрироваться в полосе режекции системы
TACCAR. Если больше не производить никаких операций, то сигналы с теми
же самыми скоростями будут компенсироваться на всех дальностях. В зависи-
мости от применений постоянная времени этой замкнутой цепи будет прибли-
женно соответствовать 5—20 принятым отраженным импульсам; таким обра-
зом, она лежит в пределах десятков миллисекунд.
Когда пассивные помехи центрированы в положены, соответствующем
относительной фазе я/2, то абциссу выпрямленного выходного сигнала баланс-
ного фазового детектора можно переградуировать в значениях радиальной
скорости цели. В этом случае скорости отсчитываются относительно источника
пассивных помех (рис. 33). Из-вида этого графика можно заметить, что отклик
на сигналы от целей, двигающихся оо скоростью Ив/2, отсутствует, тогда как
в обычных СДЦ отклик на сигналы от целей с такими скоростями максима-
лен. По этой причине вводится второй фазовый детектор (см. рис. 30) —
небалансный фазрвый детектор, характеристика которого показана на рис. 34.
По традиции этот небалансный фазовый детектор выполняется на лампах
314
5.9. Компенсаторы на промежуточной частоте
6BN6, которые имеют две независимые управляющие сетки для управления
одним и тем же электронным потоком. Сетки действуют как пропускающие
(запирающие) элементы для электронного потока. Каждый ПЧ сигнал
подается на одну из сеток, и если относительная фаза сигналов равна 180°, то
первая или вторая сетка не пропускает поток электронов и ток отсутствует.
Если сигналы в фазе, то сетки пропускают максимально возможное число
электронов; -при промежуточных значениях относительных фаз интенсивность
сигнала имеет промежуточное значение. Эквивалентные фазовые детекторы
Рис. 33. Зависимость отклика от скорости
для балансного фазового детектора.
Рис. 34. Выходной сигнал небалансного
фазового детектора.
созданы при использовании в качестве пропускающих и запирающих элемен-
тов пары последовательно соединенных транзисторов. Когда на одном из вхо-
дов небалансвого фазового детектора сигнал отсутствует, то отсутствует
сигнал на выходе
Показанное на структурной схеме рис. 30 устройство фазового сдвига
на л/2 необходимо для того, чтобы обеспечить совмещение полос режекции
балансного н небалансного фазовых детекторов. Выпрямленный выходной сиг-
нал балансного фазового детектора
складывается с выходным сигналом
небалансного фазового детектора и в
результате получается отклик
(рис. 35). Таким образом, наиболее
важной задачей небалансного фазо-
вого детектора является заполнение
центральной части зависимости откли-
ка от скорости.
Отметим, что, изменяя амплиту-
ду сигнала любого фазового детек-
4 > 4
ЦС/Ш
24
тора на входе сумматора или ограни-
чивая любой сигнал, можно получить
Рне. 35. Зависимость отклика вт скореет«
в системе TACCAR.
почти любую желаемую форму зави-
симости отклика от скорости. На
рис. 36 показаны фотографии осциллограмм сигналов двух фазовых детекто-
ров и суммарного отклика. На рис. 37 показано, как можно модифицировать
форму зависимости отклика от скорости, чтобы улучшить режекцию при раз-
личных условиях. Эти кривые показывают отклик системы на сигналы от це-
лей, двигающихся с различными скоростями, но вследствие нелинейности про-
цесса фазового детектирования они в каждый момент применимы только для
одной цели. Режекцию пассивных помех можно сделать как угодно большой
с помощью расширения полосы режекции, но такое расширение одновременно
уменьшает потенциально достижимую в системе РПП. Если уровень суммар-
ной кривой повышен в точке Рв/2 путем увеличения коэффициента усиления
небалансного фазового детектора, то это должно увеличивать отклик на сиг-
налы от целей со скоростью Vя/2 при отсутствии пассивных помех, но при
наличии помех это не улучшает отклик на сигнал от цели. Кроме того, вслед-
ствие нелинейности работы фазовых детекторов система не даст отклика на
315
Гл. 5. РЛС с селекторами движущихся целей
случайные импульсные помехи. Если на оба входа фазового детектора одно-
временно не поступают сигналы, то выходной сигнал отсутствует.
Система TACCAR в рассмотренном виде обладает способностью центриро-
вать определенную доплеровскую частоту пассивных помех в центре полосы
режекции при любом азимутальном направлении. Иногда возникает необходи-
мость режектировать сигналы не на одной, а на большем числе доплеровских
Рис. 37. Зависимости отклика от ско-
рости в модифицированной системе
TACCAR:
а — режекция помех в узкой полосе;
б — режекция в средней полосе; в —
режекция в широкой полосе.
Рис. 36. Зависимость отклика от ско-
рости в системе TACCAR:
а — выходной сигнал балансного фа-
зового детектора; б — выходной сиг-
нал небалансного фазового детектора;
в — зависимость отклика от скорости
в системе TACCAR. Отметим, что (в)
является суммой сигналов фазовых
детекторов (а) и (б).
скоростей при данном азимуте. Это, например, случай, когда необходимо ре-
жектировать сигналы помех от расположенных вблизи наземных источников и
от метеообразований или облака металлизированных отражателей, находя-
щихся на большом удалении от РЛС. Для успешной работы в такой ситуации
система TACCAR включает в свой состав «быстрый фазосдвигатель» в тракте
316
5.9. Компенсаторы. на промежуточной частоте
.между КГ и смесителем, который включается на некоторой дальности, превы-
шающей расстояние до наземных источников пассивных помех (значение этой
дальности может выбрать оператор). Эта дальность выбирается путем откры-
тия строба, который дает возможность сигналу ошибки от балансного фазо-
вого детектора поступать на быстрый фазосдвигатель. Этот строб должен
быть закрыт в конце межимпульсного интервала. Под действием сигнала
ошибки фазосдвигатель вводит фазовый сдвиг, соответствующий перемещению
источника помех в интервале между передаваемыми импульсами.
Постоянная времени этой петли сигнала ошибки равна нескольким дли-
тельностям импульса (микросекунды), что не позволяет фазосдвигателю рабо-
тать достаточно быстро, чтобы компенсировать точечную цель, но позволяет
компенсировать большую часть сигнала от облака отражателей. При этом на
экран ИКО попадают отметки только от передней части облака протяженно-
стью порядка 2 км.
Реализация системы TACCAR не вызывает затруднений, так как в ней
отсутствуют требования точного амплитудного баланса каналов с задержкой
и без нее. Это означает, что в такой системе не нужны схемы АРУ, используе-
мые в других СДЦ. Отсутствуют также жесткие требования по точному вре-
менному согласованию линии задержки, так как управляемый напряжением
генератор обеспечивает компенсацию в пределах части периода ПЧ (предпола-
гается, что триггер основной системы запускается через ту же самую линию
задержки, как и в любом СДЦ, так что временной режим передатчика согла-
сован с режимом работы линии задержки). Требования к стабильности систе-
мы, к которым можно отнести ограничения на нестабильность частоты передат-
чика, на синхронизацию КГ и временное согласование между режимами рабо-
ты линии задержки и передатчика, такие же, как и в других СДЦ.
Для работы петли коррекции ошибок в системе TACCAR должен присут-
ствовать достаточно сильный сигнал пассивных помех. Обычно это не приводит
к затруднениям. В общем случае сигналы помех от морской поверхности на
небольших дальностях достаточно интенсивны, чтобы выполнять такую роль.
Средняя доплеровская частота помех от морской поверхности при данном
азимуте очень близка к доплеровским частотам помех от наземных источников
на том же азимуте (максимальное различие наблюдается на скоростях, соот-
ветствующих 1/8 скорости ветра [2]). Таким образом, настройка бортовой ко-
рабельной системы TACCAR на режекцию помех от морской поверхности
обычно приводит к компенсации помех от островов, расположенных на боль-
ших дальностях. В тех случаях, когда море зеркально спокойное и в систему
не поступает достаточно сильных сигналов помех, быстрый фазосдвигатель
можно использовать на меньших дальностях. В общем случае такой режим
работы не является предпочтительным, при этом на экране ИКО появляется
изображение любых отражателей на дальностях порядка 1—2 км от РЛС, что
особенно неприятно при движении вблизи группы островов. Если система
TACCAR применяется в радиолокационных системах со сжатием импульсов,
то несжатый передаваемый импульс может подавлять большинство сигналов
помех от расположенных вблизи объектов, благодаря чему результирующий
сигнал помех оказывается недостаточным для управления петлей системы
TACCAR.
Векторный компенсатор. Векторный компенсатор является в буквальном
смысле ПЧ-компенсатором. Его принципиальное отличие от системы TACCAR
состоит в том, что в нем производится вычитание ПЧ сигналов, а не сравнение
их в фазовом детекторе. Следовательно, появляется возможность использовать
две или более линии задержки, включенных последовательно. Для формирова-
ния сигналов ошибки, однако, фазовый детектор применять необходимо. При
одном из возможных методов реализации (рис. 38) для каждой линии задерж-
ки необходим управляемый напряжением генератор. Это позволяет использо-
вать различные промежуточные частоты и осуществлять частотное уплотнение
в единственной Лийии задержки. В векторном компенсаторе с большим числом
817
Гл. 5. РЛС с селекторами движущихся целей
линий задержки необходимо использовать переключение, чтобы сигналы помех,
отраженные от объектов, расположенных на дальностях нескольких первых
километров, могли бы поступать в каждую из линий задержки отдельно
и обеспечить формирование сигнала ошибки для каждого управляемого напря-
жением генератора.
Закрыт So дремя приема сиг нам3 от наземных отражателей, расположенных
в пределах пердых неснотких километров
Рис. 38. ВекТорнйб компенсатор с двумя линиями задержки.
. Схему, эквивалентную векторному .компенсатору, можно реализовать, ис-
пользуя, два видеокомпенсатора, работающих в квадратуре, и суммируя квад-
раты выхадныдвидеосигналов Квадратурное функционирование получается
при,использовании двух отдельных фазовых детекторов дли двух компенсато-
ЫТЧсигная
Рис. 33. Цифровой нектарный компенсатор.
ров, причем опорное напряжение КГ во втором фазовом детекторе будет сдви-
нуто по фазе на 90° по отношению к опорному напряжению КГ в первой'фазо-
вом детекторе. Цифровой векторный компенсатор с двумя квадратурными ка-
налами показан на рис. 39. '
318
5.10. Изменение межимпульсных интервалов (ИМИ)
5.10. Изменение межимпульсных интервалов (ИМИ)
Интервал между излучаемымй РЛС импульсами можно менять, что позво-
ляет смещать значения скорости цели, равные елевым скоростям СДЦ. Интер-
вал меняется либо от импульса к импульсу, либо от одного периода сканиро-
вания до другого. Каждый из методов имеет свои преимущества. Преимуще-
ством изменения интервала между импульсами от одного периода сканирова-
ния до другого является более простое построение системы и го, что помехи,
вызванные многотрассовым распространениям, компенсируются в СДЦ с уси-
лителем мощности Стабилизация передатчика, необходимая для хорошего
функционирования СДЦ с постоянным периодом повторения, связана с боль-
шими финансовыми затратами и увеличением массы системы. Однако стабили-
зация передатчика, необходимая для хорошего функционирования системы
с изменением периода от импульса к импульсу требует преодоления еще боль-
ших трудностей.
Однако в некоторых практических применениях изменение периода от
импульса к импульсу оказывается необходимым. Если, например, в системе
с изменением периода от сканирования к сканированию используется двойной
компенсатор без обратной связи, имеющий полосу режекции 36%, то 36% по-
лезных сигналов, которые принадлежат к рассматриваемой доплеровской
частоте, при каждом сканировании будут теряться. Иногда это может ока-
заться недопустимым. При изменении периода от импульса к импульсу можно
обеспечить хороший отклик на всех интересующих нас доплеровских частотах
при каждом сканировании. Кроме того, на тех же самых доплеровских часто-
тах можно получить лучший отклик, чем в системе, где период изменяется
от сканирования к сканированию Эго происходит вследствие того, что изме-
нение периода от импульса к импульсу модулирует доплеровский сигнал вз
частоте, близкой к частоте, на которой отклик компенсатора максимален. Изме-
нение периода от импульса к импульсу может ухудшить потенциально дости-
жимый коэффициент улучшения для некоторых систем, например для тех,
которые показаны на рис. 15 и 16, но для многих систем это ограничение не
является существенным или его воздействие можно исключить за счет исполь-
зования переменной во времени весовой обработки. Еще одним преимуществом
изменения периода от импульса к импульсу является то, что для большей части
применений нет необходимости использовать в компенсаторах обратную связь,
что существенно упрошает разработку компенсатора.
Формирование сигналов с ИМИ. Сигнал с двухпериодным ИМИ можно
сформировать с помощью короткой (относительно среднего интервала между
импульсами) линии задержки, которая включается или выключается из тракта
прохождения сигнала для чередующихся импульсов. Сигнал синхронизации
чередующихся импульсов передатчика проходит через ту же самую линию
задержки, следовательно, период повторения импульсов передатчика изме-
няется по тому же закону ИМИ Этот способ работы иллюстрируют рис. 40,а
и б. Две инкрементные линии приведены на рисунке лишь для удобства объяс-
нения На практике для выполнения обеих функций используется одна и та же
линия задержки. Синхронизирующие импульсы аолучаются прн циркуляции
импульса через основную линию задержки. Отношение измененных длин интер-
валов равно (Tc + Ts) : (Тс—Ts). Отметим, что сигнал со снятым ИМИ и инди-
каторные синхроимпульсы выходят с постоянной скоростью и, следовательно,
могут поступать в одинарный, двухступенчатый или трехступенчатый компен-
сатор без нх модификаций Отметим также, что так как индикаторные синхро-
импульсы имеют одинаковые интервалы, то не возникает трудностей совмеще-
ния индикаторов с другим оборудованием. (Некоторые индикаторы и системы
опознавания разрабатываются таким образом, что они не могут удовлетвори-
тельно работать при ИМИ ,в выходном видеосигнале РЛС.)
Сигналы с трехпериодным ИМИ можно получить с помощью гой же схе-
мы, чте и сигналы с двухпериодным ИМИ Единственное изменение касается
3!В
Гл. 5. РЛС с селекторами движущихся целей
временного режима работы электронного переключателя Временная диаграм-
ма для сигнала с трехпериодным ИМИ показана на рис. 40, в. Она основана
на предположении, что используется точно такая же схема, какая показана
на рис. 40, а, но переключатель остается в верхнем положении для двух им-
пульсов и затем перебрасывается вниз для одного импульса. Отношение дли-
тельности трех интервалов между импульсами равно (Тс—Ts) : Тс : (Tc-j-Ts).
(Частота индикаторных синхроимпульсов остается неизменной). Следователь-
а)
Тс Тс
Синхроимпульсы К - - - -Ч|1 1
Индикаторные Л, % . . .
синхроимпульсы Ч JZ - - — I - — -------1--------1------
Синхроимпульсы и -^4*- —Н I
передатчика.
5)
Синхроимпульсы Н Тс _ „р Ч________।________|_______
Индикаторные >pix н Т° т|-. >1 i |
ОиНХроиМПуЛЬСЫ *—1^.- - о. ------1-----1------
Синхроимпульсы Н- — >|-с——4*g — Ч__________I
передатчика
Рис. 40. Структурная схема системы с ИМИ (а); двухпериодное ИМИ с отношением
длин интервалов (Тс+Га) : (Тс — Ts) (б); трехпериодное ИМИ с отношением длин ин-
тервалов (Гс— Ts) : Тс : (Тс + Ts) (в).
но, если длина инкрементной линии задержки равна 1/7 длины основной линии,
то отношение межимпульсных интервалов в РЛС равно 6:7:8. Первая слепая
скорость равна 7 Vb, где Vb — первая слепая скорость системы без изменения
интервалов между импульсами, работающей с той же самой ЧПИ.
Обычно сигналы с изменением трех интервалов предпочтительнее сигналов
с изменением двух интервалов. Если СДЦ должен работать без слепых скоро-
стей по целям, имеющим скорости вплоть до некоторой заданной, то провалы
в кривой отклика для схем с изменением трех интервалов на 3 дБ меньше.
На рис. 41,а показана зависимость скорость — выходной сигнал для компен-
сатора с двумя линиями задержки без обратной связи в случае отношения
межимпульсных интервалов 63:65 при поступлении 10 отраженных импульсов
на ширине сканирующего луча антенны. Результаты для схемы с изменением
трех интервалов показаны на рис. 41, б, отношение межимпульсных интервалов
31 : 32 : 33.
320
, 5.10. Изменение межимпульсных интервалов (ИМИ)
В данном случае наиболее глубокие спады на 3 дБ меньше, чем для схемы
с изменением двух интервалов.
Изменение четырех или большего числа интервалов. Некоторые методы
реализации СДЦ позволяют использовать изменение четырех или большего
числа интервалов между импульсами, а также произвольно выбирать дли-
10
Рис. 41. Зависимость отклика от скорости:
а — отношение межимпульсных интервалов 63 : 65; б — отношение межимпульсных ин-
тервалов 31 ; 32 ; 33.
дельность интервалов между импульсами. В таких методах применяются запо-
минающие ЭЛТ для межимпульсного накопления биполярных видеосигналов
или цифровая техника с запоминающим устройством (ЗУ) с произвольным
доступом или ЗУ на регистрах сдвига.
Оптимальный выбор отношения между интервалами зависит от диапазона
скоростей, который не должен содержать слепых скоростей, и от допустимой
глубины первого нуля кривой зависимости отклика от скорости. Для многих
практических применений четырехпериодное ИМИ является наилучшим, и при
этом можно получить хороший набор отношений интервалов прибавлением
к первой слепой скорости (выраженной в единицах отношения V/Vb) чисел
__3( 2, —1, 3 или 3, —2, 1, —3. Так в системе рис. 42, где для первой сле-
пой скорости V/Vb = 28, отношение интервалов 25:30:27:31. (Чередуя
длинные и короткие интервалы, поддерживают скважность передатчика как
можно ближе к постоянному значению, обеспечивая в то же время оптималь-
ное значение отклика в точке, соответствующей первому нулю при V = VB.)
Если при изменении длительности четырех интервалов глубина первого нуля
остается все еще слишком большой, тогда необходимо изменять длительности
пяти интервалов. В этом случае отношение интервалов получается прибавле-
321
Гл. 5.
РЛС с се лекторами движущихся- целей'
иием к первой слепой скорости чисел—6, +5, -—4, +4, +1. На рис. 43 пока-
зан отклик при изменении длительности пяти интервалов. Глубину первого
нуля можно предсказать по данным рис. 49.
На рис. 44 и 45 показаны две другие кривые отклика, вычисленные для
изменения длительности четырех интервалов. Для радиолокационной системы,
у которой число принятых импульсов на ширину ДН мало, изменение дли-
Рис. 42. Зависимость отклика от скорости; двухступенчатый компенсатор без обратной
связи*, отношение межимпульсных интервалов-23 : 30 : 27 : 31.
тельноети более чем четырех или пяти интервалов не обеспечивает каких-либо
преимуществ, так как отклик, на отдельную конкретную цель будет зависеть
от того, какая часть импульсной последовательности придется на максимум
ДН при сканировании цели лучом Нежелательно, чтобы длительность интер-
Симметрични
относительно
V/Vg = 28,5
О 4 8 12 16 26 24 28 3Z
Г/Гд
Рис. 43. Зависимость отклика от скорости;, двухступенчатый, компенсатор без обратной;
связи, отношение межимпульсных интервалов 51 : 62 : 53 : 61 : 58.
валов менялась случайно (если только это не используется как средство элек-
тронного радиопротиводействия), так как при этом нули получаются глубже-,
чем в случае оптимального выбора четырех* йлй пяти интервалов.
Если отношение интервалов между импульсами' выражается в целых чис-
лах (/?(, /?2, Рз, Rn), то первая истинная слепая скорость характеризуется'
соотношением >
ЗТ2
5.10. Изменение межимпульсных интервалов (ИМИ)
Vb N
и кривая отклика симметрична относительно точки с координатой, равной
потоки не этого значения. Следовательно, прн отношении интервалов между
импульсами 25:30:27:31 первая истинная скорость лежит при V/VB = 28,25
fa кривая отклика симметрична относительно V/VB= 14,125.
~W--------1----1____L___!____I____I____I___!...„1... J____1___Г.. т । 4 _
О 2 и б 8 Ю п 74 У/Уд
Рис. 44. Зависимость отклика от скорости, двухступенчатый компенсатор без обратной
связи, отношение межимпульсных интервалов 11 : 18: 14Н 17.
Обратная связь и ИМИ от импульса к импульсу. Если используется ИМИ
от импульса к импульсу, то обычно нет необходимости применять для полу-
чения более плоской кривой отклика обратную связь. ИМИ приводит к появ-
0 2 Р б 8 10 12 74 У/Ид
Рис. 45. Зависимость отклика от скорости; двухступенчатый компенсатор без обратной
связи, отношение межимпульсных интервалов 53 : 58 : 65 : 59.
Эта кривая отклика простирается до V/Vb=53, не имея провалов более 5 дБ. Первая
слепая скорость V/Vb««56,25.
лению модуляции доплеровского сигнала на частоте, соответствующей макси-
муму отклика компенсатора,; или в0<ризи нее. Интенсивность этой модуляции
пропорциональна абсолютному значению доплеровской частоты цели. Таким
образом, для самолета, летящего со скоростью Ев, отклик компенсатора по
323
Гл. 5. РЛС с селекторами движущихся целей
существу не зависит от обратной связи. На рис. 46 показан график, характе-
ризующий влияние обратной связи на систему двойного компенсатора, прини-
мающего 14,4 импульса на ширину луча при отношении интервалов 6:7:8.
Указаны значения коэффициента обратной связи, использованные при построе-
нии графика отклика для системы без сдвига импульсов. Если вместо ИМИ
от импульса к импульсу используется ИМИ от сканирования к сканированию,
Рис. 46. Влияние обратной связи на зависимость отклика от скорости; двухступенчатый
компенсатор, отношение межимпульсных интервалов 6:7:8.
то среднеквадратический отклик для системы без обратной связи для трех
сканирований и для цели со скоростью Vb должен быть равен —12,5 дБ.
Результирующий отклик для ИМИ от импульса к импульсу равен, однако,
лишь —6 дБ в точке VB, что показывает преимущество ИМИ от импульса
к импульсу.
На рис. 47 показано различие откликов для компенсатора с двумя линия-
ми задержки без обратной связи и для компенсатора с тремя линиями задерж-
ки и с чебышевским откликом (используется такая же обратная связь, как
и при определении отклика, показанного на рис. 22). Различие между этими
кривыми не превышает 3 дБ, за исключением участков, соответствующих ско-
ростям 0,05 Vb — 0,25 Vb. Так как отраженные от большинства самолетов
радиолокационные сигналы заметно флуктуируют от сканирования к сканиро-
ванию, то использование более сложных компенсаторов в большинстве радио-
локационных обзорных систем практически не дает никаких преимуществ.
В некоторых системах с ИМИ применение обратной связи может позво-
лить достичь полезной цели — увеличения коэффициента улучшения системы.
Возможность получить при использовании обратной связи существенное улуч-
шение зависит в большой степени от того, что накладывает серьезные ограни-
чения на функционирование системы: отношение ИМИ или модуляция,
вызванная сканированием. Если ограничения связаны в первую очередь с мо-
дуляцией, вызванной сканированием, то применение обратной связи может
быть в некоторой степени полезно.
824
5.11. Ограничения коэффициента улучшения, связанные с ИМИ
5.11. Ограничения коэффициента улучшения, связанные с ИМИ
Графики на рис. 15 и 16 дают приближенное представление об ограниче-
ниях, накладываемых на / в связи с ИМИ от импульса к импульсу при ска-
нировании антенны или при перемещениях источников пассивных помех. Эти
данные были получены эмпирически.
Рис. 47. Зависимости отклика от скорости.
Отношение межимпульсных интервалов 12 : 16 : 13 : 18.
Компенсатор с большим числом линий задержки идеально компенсирует
линейную функцию вида V(t) —C-j-at, если определение выборочных значений
производится через равные интервалы времени, длительность которых не зави-
сит от константы с или коэффициента наклона а. Система с ИМИ при изме-
нении двух межимпульсных интервалов производит выборку линейной функ-
ции через неравные промежутки времени, следовательно, на выходе компенса-
тора появится остаточное напряжение, которое пропорционально коэффициен-
ту наклона а и обратно пропорционально у—h где у — отношение длительно-
стей интервалов Кажущийся доплеровский сдвиг частоты, связанный с этим
остаточным напряжением, будет соответствовать половине средней частоты
повторения системы и, таким образом, совпадать с частотой, где отклик ком-
пенсатора без обратной связи максимален.
Скорость изменения фазы или амплитуды сигналов пассивных помех для
сканирующей РЛС пропорциональна числу отраженных импульсов на ширину
луча п. Следовательно, ограничение значения / вследствие ИМИ (они полу-
чены с помощью моделирования на ЭВМ, используемого для определения
коэффициентов пропорциональности) будет иметь вид
2,5п
/ = 20 log—.
у —1
Графики этой зависимости показаны на рис. 15.
Эти графики, применимые ко всем компенсаторам с большим числом ли-
ний задержки, дают результаты, очень близкие к действительным ограниче-
325
Г л. 5. РЛС с селекторами .движущихся целей
ниям, которые были, получены экспериментально для большинства используе-
мых отношений интервалов. Приведем пример, характеризующий точность
этого соотношения. Система, принимающая 14,4 отраженных импульсов на
ширину луча, с тройной линией задержки, компенсатором без обратных связей
и отношением длительностей интервалов 6 : 9 : 7 : 8 имеет ограничения коэффи-
циента улучшения, связанные с ИМИ, достигающие 36,5 дБ. По кривым для
этих ограничений получаем 37,2 дБ. Отметим, что если последовательность
интервалов изменить и вместо 6 : 9 : 7 : 8 использовать 6 : 8 . 9 : 7, то реальные
ограничения достигали бы 41,1 дБ, что на 3,9 дБ меньше, чем значение, опре-
деляемое кривой. Это происходит из-за того, что пер-вичная модуляция при
отношении интервалов между импульсами 6 :9: 7 : 8 выглядит как цель, имею-
щая скорость, совпадающую с координатой максимума отклика, а при отно
шении длительностей интервалов 6:8:9:7— как цель, перемещающаяся со
скоростью, равной половине скорости, соответствующей максимуму кривой
отклика. Вследствие этого оказывается желательным усреднять скважность
передатчика на возможно более коротком интервале. Для практической систе-
мы следует, вероятно, выбирать отношение длительностей интервалов между
импульсами 6 : 9 : 7 : 8.
После того, как приведенное выше уравнение для ограничений / вследст-
вие сканирования и ИМИ получено, оказывается возможным определить огра-
ничения I вследствие перемещения источников пассивных помех и ИМИ. Если
подставить
/2=1,665ЛД/4ло®
(из [2], (3.26.) и (7.52)) в полученное выше уравнение, то
/ — 20 log.
\ у—I
2,5 1,665А/,
4hxj.v
где X — длина волны; Д—-средняя частота повторения импульсов; а® — сред-
неквадратический разброс скоростей элементарных пассивных отражателей.
Это уравнение приведено на рис. 16 для дождя и покрытого лесом холма при
скорости ветра 2 м/с. Такое ограничение коэффициента улучшения СДЦ не
зависит от типа применяемого компенсатора.
Переменная во времени весовая обработка. Ограничения коэффициента
улучшения, связанные с ИМИ от импульса к импульсу, можно устранить при
использовании в компенсаторе прямого тракта переменной во времени весо-
вой обработки вместо обычной «биномиальной» весовой обработки (1, —2, 1
для компенсатора с двумя линиями задержки; 1, —3, 3, —1 для компенсатора
с тремя линиями задержки). Использование переменной во времени весовой
обработки не оказывает заметного влияния на вид кривой частотного отклика
системы с СДЦ. Является ли применение переменной во времени весовой об-
работки, которая связана с дополнительным усложнением аппаратуры, жела-
тельным, зависит от того, являются ли ограничения, связанные с ИМИ, доми-
нирующими. Для компенсаторов с двумя линиями задержки ограничения,
связанные с ИМИ, часто сравнимы с основными показателями компенсатора
без ИМИ. Для компенсаторов с тремя линиями задержки ограничения, свя-
занные с ИМИ, обычно являются доминирующими.
Рассмотрим последовательность передаваемых импульсов и схему ком-
пенсатора (рис. 48). В течение интервала Tn,,когда принимаются отражения
от передаваемого импульса веса в компенсаторе с двумя линиями задерж-
ки должны быть равны ” '
с=7^Д.. в=_|_с>
IN — 1 !
326
5.11. Ограничения коэффициента улучшения, связанные с ИМИ
а в компенсаторе с тремя линиями задержки
А = 1:
С=1 +
Tn — 2 4- Tn — i
Tn-2
В~—С\ D=-l.
Эти значения весов получены в предположении, что компенсаторы идеально
компенсируют линейный си1нал У(/)=с+а/ при выборке с частотой ИМИ вне
зависимости от значений констант с и а. (Как говорилось в начале этого раз-
а;
бремя
б)
6}
Ри<д 48. Использование переменных'во времени весов:
а — последовательность импульсов; б — компенсатор’ с двумя линиями задержки: в
компенсатор с тремя линиями задержки.
дела, компенсатор с большим числом линий задержки и с биноминальной весо-
вой обработкой в системе без .сдвига импульсов идеальна компенсирует сигнал
(ф) Выбор А 4 в- обоих случаях произволен. В компенсаторе с тре-
мя линиями задержки выбор, .0-ь=—-1 исключает возможность внесения поправ-
ки второго порядка, которую- можно произвести, если D будет изменяться во
времени. Вычисления на ЭВМ показали, что в большинстве практических
систем необходимо изменять D. При использовании переменной во времени
весовой обработки веса обычно можно округлить до чисел, представление ко-
торых в двоичной форме имеет удобный вид (например, 2,75 вместо 2,69 или
2,5 вместо 2,6}.
327
Гл. 5. РЛС с селекторами движущихся целей
5.12. Глубина первого нуля в кривой частотного отклика
При выборе параметров системы полезно знать глубину первых несколь-
ких нулей, ожидаемых в кривой частотного отклика. Как рассматривалось
выше, использование обратной связи не оказывает существенного влияния на
глубину нулей. На эти значения не оказывает по существу влияния и тип при-
меняемого компенсатора (одинарный, двойной или тройной) или число отра-
Рис. 49. Приближенные значения глубины нулей в зависимости отклика от скорости
для СДЦ с ИМИ.
женных импульсов, принимаемых на ширину диаграммы при сканировании.
На рис. 49 пбказан график, приблизительно описывающий зависимость глубины
нулей от у — отношения максимального межимпульсного интервала к мини-
мальному.
5.13. Требования к стабильности радиолокационной системы
На потенциально достижимый коэффициент улучшения СДЦ оказывают
влияние не только движение элементов, порождающих пассивные помехи, но
и сканирование, нестабильности системы также накладывают ограничения. Эти
нестабильности складываются из: нестабильностей высокостабильного генера-
тора (когерентного гетеродина), изменения от импульса к импульсу частоты
передатчика в импульсном генераторе и изменения фазы от импульса к импуль-
су в усилителе мощности, неидеальности фазовой синхронизации когерентного
гетеродина опорным импульсом, из нестабильности временного положения и
амплитуды импульсов и рассогласования трактов с задержкой и без нее в ком-
пенсаторе. Эти эффекты подробно рассмотрены в [19, 20]
Рассмотрим вначале фазовые нестабильности. Если фазы последовательно
принимаемых импульсов по отношению к фазе когерентного гетеродина отли-
чаются, например, на 0,01 рад, то потенциально достижимое улучшение отно-
шения цель/помеха ограничивается 40 дБ. Поворот вектора помехи на
0,1 рад эквивалентен добавлению к нему вектора цели, уровень которого на
40 дБ ниже уровня помехи (рис. 50).
В СДЦ с. усилителем мощности (рис. 51) изменения фазы от импульса
к импульсу в передаваемых импульсах могут вноситься импульсным усилите-
328
5.13. Требования к стабильности радиолокационной системы
лем. Наиболее общей причиной появления фазовых искажений являются пуль*
сации высоковольтного питания усилителя мощности (см. § 1.9).
В системе с импульсным генератором (рис. 52) изменение частоты от им-
пульса к импульсу происходит в результате набега фазы за длительность пере-
даваемого импульса. Если когерентный гетеродин идеально синфазируется
к концу передаваемого импульса, то сум
ность передаваемого импульса 0,02 рад б
ние коэффициента улучшения в среднем
до 40 дБ. Изменение частоты от импуль-
са к импульсу в генераторах СВЧ диа-
пазона вызывается в первую очередь
пульсациями высоковольтного питающе-
го напряжения. При синхронизации
когерентного гетеродина в системе с им-
пульсным генератором фазовое различие
от импульса к импульсу б 0,01 рад огра-
ничивает коэффициент улучшения уров-
нем 40 дБ.
марныи фазовый набег за длитель-
удет ограничивать достижимое знача-
вектор цели
Рис. 5,0. Фазовая нестабильность.
Те ограничения коэффициента улуч-
шения, которые связаны с нестабильно-
стью системы и зависят от дальности,
являются результатом изменения частоты стабильного генератора и коге-
рентного гетеродина за время между передачей последовательных импульсов.
Ограничение коэффициента улучшения представляет собой различие в числе
радиан набега фазы генератора между моментами передачи и приема после-
довательных импульсов. Таким образом, коэффициент улучшения будет огра-
Рис. 51. Упрощенная структурная схема усилителя мощности.
ничен до 40 дБ, если 2лД/Т = 0,01 рад, где Д/ — изменение частоты генера-
тора в интервале между передачей импульсов и Т — время распространения
импульса до цели и обратно.
Нестабильность временного положения передаваемого импульса приводит
к ухудшению характеристик СДЦ, использующих фиксированные линии задерж-
ки. (Это единственное ограничение стабильности аппаратуры, не относящиеся
к цифровым СДЦ, в которых отсчет времени может вестись от начала про-
детектированной огибающей передаваемого ВЧ импульса.) Временные смеще-
ния импульса приводят к отсутствию компенсации его переднего и заднего
фронтов, амплитуда этих нескомпенсированных частей равна Д//т, где Д£—1
временное смещение и т—длительность передаваемого импульса. Общая мощ-
ность остаточных помех равна 2(Д//т)2, и, следовательно, предельное значение
коэффициента улучшения, связанное с временным дрожанием, равно / =
= 20 log т/(У2ДЦ. Оно полуйейо в предположении, что ширина полосы про-
нуснания» приемника согласована с длительностью передаваемого импульса.
32 9
Гл. 5. РЛС с селекторами движущихся целей
В системе со сжатием импульсов полоса пропускания приемника шире
в число раз, равное произведению ширины спектра «а длительность импульса
Bi. Следовательно, мощность остаточных помех в конце каждого импульса
возрастает пропорционально произведению Вх Предельное значение / для
системы сжатия ЛЧМ импульсов равно поэтому
/~20 log |т/( V2 Д' Т/Вг)].
Рис 52. Упрошенная* структурная схема импульсного генератора.
Для системы сжатия импульсов, использующей а качестве сигналов им-
пульсные последовательности, коэффициент 2 в приведенном выше соотноше-
нии необходимо умножить на число поды мпульсов в сигнале. Таким образом,
например, предельное значение 7 для 13 импульсного кода Баркера равно
7^20 log lT/(VFf3 Д/ ]/Гз)|.
Нестабильность ширины импульса приводит к возникновению вдвое меньших
остатков по сравнению с нестабильностью нх временного положения, и
/ = 20 log (t/APW- "|/Вт),
где APW —изменение ширины импульса.
Нестабильность амплитуды излучаемого импульса также вызывает огра-
ничение и приводит к предельному значению
7 ze 20 log {Л/ДЛ),
где А — амплитуда импульса и ДЛ — изменение амплитуды от импульса к им-
пульсу Это ограничение сказывается, несмотря на то, что в системе перед
компенсатором используется ограничение, так как в этом случае всегда при-
сутствует множество пассивных помех, которые не достигают уровня ограни-
чения. В большинстве передатчиков, однако, после того как удовлетворены
требования к стабильности частоты или к фазовой стабильности, амплитудная
нестабильность оказывается незначительной.
Предельные значения' потенциально достижимого улучшения в СДЦ све-
дены в табл, 3 Выше предполагалось, что на межимпульсном интервале про-
исходят изменения в пределах двойного амплитудного значения этих неста-
бильностей, что часто имеет место при работе СДЦ е ИМИ от импульса к им-
пульсу. Если известно, что нестабильности носят случайный характер, то
максимальные значения, входящие в эти соотношения, нужно заменить срёд-
неквадр этическими значениями на межимпульсном, интервале. Это приводит
по существу к результатам, идентичным приведенным в [8].
330
5.13. Т ребования к стабильности радиолокационной системы
Если нестабильности возникают с некоторой точно известной частотой
(•например, за счет пульсации высоковольтных источников питания), то отно-
сительное воздействие нестабильностей можно определить, найдя точку на кри-
вой частотного отклика СДЦ для цели на эквивалентной доплеровской часто-
те. Если, например, отклик на 6 дБ ниже максимального отклика, то ограниче-
ние / будет на 6 дБ менее строгим, чем указано в табл. 3
Таблица 3
Ограничения вследствие нестабильностей
Нестабильности от импульса к импульсу Ограничения коэффициента улучшения
Частота Передатчика
Частота СГ или КГ
Сдвиг фазы передатчика
Синхронизация КГ
Временное положение импульса
Ширина импульса
Амплитуда импульса
7 = 20 log [1/ (лА /т)]
/ — 20 log [1/(2лА /7 )]
/ =20 log (1 /Аф)
I =20 log (1/Аф)
/ =20 log [т/(/2 М VЯй]
I =20 log|д/(Л/’IF KBi)|
7 = 20 log (А/ \4)
Примечание. Af — изменение частоты от импульса к импульсу; г — длитель-
ность излучаемого импульса, Т — время распространения сигнала до цели и обратно;
Аф — изменение фазы от импульса к импульсу; А/— временное смещение, Йт — произ-
ведение ширины спектра на длительность импульса для системы со сжатием импульса
(для некодированного сигнала Вт = 1); АР1Г — изменение ширины импульса: 4 — ам-
плитуда импульса В; АД — изменение амплитуды от импульса к импульсу
Если нестабильности статистически не связаны друг с другом, то их можно
суммировать в квадратуре для определения суммарных ограничений, накла-
дываемых на функционирование СДЦ.
Внутриимпульсные изменения частоты'или1 фазы не оказывают мешающего
влияния на качество работы СДЦ при условий, что они точно повторяются от
импульса к импульсу. Единственным следствием этого является потеря чувст-
вительности, если фазовый набег за время передаваемого импульса или непра-
вильная настройка КГ или СГ приводят к существенной расстройке прини-
маемых импульсов относительно номинальной ПЧ. Если, допустим, за дли-
тельность импульса фазовый набег может достигать 1 -рад, го расстройка си-
стемы до значений 1/2 лт [Гц] не ухудшает характеристик функционирования
СДЦ.
Для того чтобы привести пример требований к внутри импульсной стабиль-
ности, рассмотрим РЛС с несущей частотой 3000 МГц, которая передает неко-
дированные 2-мкс импульсы й к которой предъявлено требование исключения
нестабильностей, ограничивающих коэффициент улучшения СДЦ на дальности
200 км до значений, меньших 50 дБ, что соответствует отношению напряже-
ний. 316: 1.
Изменение частоты передатчика (в случае использования импульсного
генератора) должно быть менее
Д/ =----— = = 504 Гц,
316лт 316л (л-10 &)
что соответствует стабильности порядка 2-10-7.
331
Гл. 5. РЛС с селекторами движущихся целей
Изменение фазы передатчика (в случае усилителя мощности) должно
быть менее
Дф= 1/316 = 0,00316 рад=0,18°.
Изменение частоты первого или второго гетеродина должно быть менее
316 (2л) (100-12,36-10~6) =0’4Гц’
что соответствует кратковременной стабильности 1-10~10 для первого гетеро-
дина и 1-10~8 для второго (предполагаем, что используется ПЧ 30 МГц).
Ошибка синхронизации КГ (в случае системы с генератором импульсов)
должна лежать в пределах Дф=0,18°.
Нестабильность временного положения импульсов должно быть менее
т 2 10-е
Л/~ 316 V2 УТ “ 316У2 Е=4’5’10 с*
Нестабильность длительности импульса должна быть менее
Изменение амплитуды импульса должно быть менее
ДЛ 1 п п
—— = ——= 0,00316 = 0,3 о/
л 316 0
Из перечисленных выше требований в тщательно разработанной системе
встречает затруднение выполнение требований стабильности СГ [29, 30] и точ-
ности синхронизации КГ. При практической разработке системы это приводит
к ограничению предельного значения коэффициента улучшения СДЦ вследст-
вие этих двух факторов до значений порядка 40 дБ.
5.14. Влияние шумов квантования на коэффициент улучшения
При применении в качестве компенсаторов СДЦ цифровых устройств
шумы квантования, которые вводятся аналого-цифровым преобразователем
(АЦП), ограничивают достижимый коэффициент улучшения СДЦ. Рассмотрим
обычную видеосистему СДЦ (рис. 53). (При реализации компенсаторов ПЧ
с помощью цифровых методов используются два видеоканала СДЦ, причем
во втором канале опорный сигнал сдвинут на 90°. Шумы квантования оказы-
вают одинаковое воздействие и на видеокомпенсатор и на ПЧ компенсатор.)
Так как пиковый уровень сигнала определяется характеристикой ограничителя
линейного усилителя, максимальный размах выходного сигнала фазового де-
тектора известен. АЦП разрабатывается таким образом, чтобы перекрывать
этот размах. Если в АЦП используется N бит и выход фазового детектора
лежит в диапазоне от —1 до +1, то интервал квантования равен 2/(2N—1).
Среднеквадратическое значение создаваемого АЦП отклонения уровня сигнала
332
5.15. Сжатие импульсов и СДЦ
равно 2/[(2л—1)У 12]. Это приводит к отклонению от импульса к импульсу на
2 V2 1
(2n — 1) Vl2 " (2^ — 1) УЦ5 *
Рис. 53. Цифровая реализация СДЦ.
Ограничение коэффициента улучшения СДЦ, которое вызывается рассмат-
риваемым эффектом при полном размахе сигнала фазового детектора, можно
найти, подставив полученное значение в следующее соотношение из табл. 3:
д 1 __
/ = 20 log — =20 log _у___=20,о8(2«_1)У1,5.
Так как амплитудг^сигналов, прошедших через фазовый детектор, в среднем
уменьшаю гея в У 2 раз, то среднее ограничение коэффициента улучшения
равно
/ = 20 log (2^ — 1) j/S =^20 log (2^ — 1) У0/75 (см. табл. 4).
Подставляя среднеквадратическое значение отклонения от импульса к им-
пульсу вместо ДЛ в приведенное выше соотношение, предполагаем, что ошиб-
ки квантования от импульса к импульсу независимы. Бреннан и Рид [26]
расчетным путем обнаружили «эффект сглаживания» (quieting effect), кото-
рый возникает, когда интервал квантования слишком велик по отношению
к изменениям пассивных помех от импульса к импульсу (это приводит к тому,
что несколько последовательных выходных импульсов АЦП имеют один и тот
же уровень), но такой эффект сглаживания не возникает при практически
используемых параметрах систем.
5.15. Сжатие импульсов и СДЦ
При использовании СДЦ в системах со сжатием импульсов функциони-
рование СДЦ может быть либо таким же, как и в системе, передающей экви-
валентные сжатым короткие импульсы, либо не лучше, чем в системе, переда-
ющей некодированные импульсы той же длительности. Вид источников пас-
сивных помех и внутренние нестабильности системы будут определять значе-
ния характеристик системы между указанными выше двумя экстремумами.
Если не принять мер для уменьшения нестабильностей системы, то СДЦ
в РЛС со сжатием импульсов может оказаться полностью неработоспособным
при наличии пассивных помех.
В идеализированном виде приемник со сжатием импульсов, сопряженный
с СДЦ, имеет вид, показанный на рис. 54, а. Если система сжатия импульсов
333
Гл. 5. РЛС с селекторами.дешкущихвя целей
Т абл и цд 4
Число двоичных знаков N Предельное зна- чение коэффици- ента улучшения 1 СДЦ, дБ
4 22,3
5 '28.6
‘6 84,7
7 40,8
8 46,9
9 52,9
Ю 59,0
11 . 65,0
12 71,0
работает идеально, то сжатый импульс должен .был бы выглядеть так, как ес-
ли бы передавался и принимался короткий импульс и СДЦ работал так, как
будто бы сжатия импульса не происходило вообще. На практике, однако,
сжатый импульс имеет .боковые лепестки на осигвремени, появление которых
вызвано двумя основными причинами
Первая заложена в структуре самой системы, компоненты которой могут
иметь нелинейную зависимость от частоты. Боковые лепестки будут стабиль-
ными, т. е. они сбудут точно’повторяться от -импульса к импульсу. Вторая
причина—нестабильности в системе, такие,
как двум чопорных гетеродинов, шумы
источников витания в передатчике, не-
стабильность временного положения им-
пульсов в -передатчике и шум в лампах пе-
редатчика. Эти ; боковые лепестки имеют
шумоподобный характер. Предположим, на-
s пример, что уровень шумолодобной состав-
ляющей боковых лепестков на 40 дБ ниже
пикового значения передаваемюго сигнала.
Эта шумоподобная составляющая .не будет
компенсироваться в СДЦ, и, следователь-
но, для всех зон пассивных помех, которые
превышают порог системы на 40 дБ и бо-
лее, на экране индикатора появятся оста-
точные сигналы. Если пассивные помехи
превышают порог на 60 дБ, то остатки пос-
ле .СДЦ превысят порог индикатора . на
20 дБ, что исключает эффективную работу
СДЦ (рис. МЛ).
Один путь, который позволяет достигнуть максимально эффективного
функционирования СДЦ, достижимого в пределах ограничений, накладывае-
мых нестабильностями дипаратуры ..и помехами, ’-показан ша рис. <55. (В по-
следующем изложении для представления всех возможных нестабильностей
системы, которые создают шумоподобные временные боковые лепестки при
сжатии .импульсов, вводится эквивалентный шум .прредатннка.)
.Ограничитель / настроен таким образом, что. динамический диапазон еиг»
налов >на его выходе равен разнице между максимальной мощностью .передат-
чика и. шумом передатчика в .полосе пропускания системы. Ограничитель 2
настроен таким образом, что динамический..диапазон сигналов на его выходе
равен ожидаемому коэффициенту улучшения СДЦ. Такая настройка .ограни-
чителей приводит к тому, что . каждый ; из .остатков, возникших вследствие
шума передатчика и других нестабильностей, таких, как шумы квантования
и собственное перемещение источников пассивных помех, станут равны тепло-
вому шуму фронта импульсов на выходе компенсатора. Это позволяет полу-
чить максимальную чувствительность без излишнего повышения вероятности
ложной тревоги. Эти ограничители могут настраиваться таким образом, что,
когда система находится в полевых условиях, они позволяют использовать ре-
альную стабильность как всего оборудования, так и пассивных помех и в го
же время точно управлять количеством ложных тревог ,нд выходе порогового
устройства.
Ограничитель / представляет собой очень эффективное устройство с по-
стоянным уровнем ложных тревог для борьбы с шумом передатчика, так как
он .подавляет шум прямо пропорционально интенсивности пассивных помех,
но не подавляет его в те моменты времени, когда пассивные помехи не очень
сильны. Следовательно, слабая цель, которая перекрывается зоной сильных
помех, распространяющейся на половину длительности несжатого импульса,
подавляется на 50%, а остальные 50% будут сжаты в системе сжатия (с по-
терями в 6 дБ) .и цель все-таки еще может быть обнаружена.
334
5Л&. Сжатие импульсов и СДЦ
Хотя ограничитель вызывает полное или частичное подавление некоторых
полезных целей в областях, перекрытых помехой, цели, которые могли бы быть
обнаружены другим способом на выходе системы при наличии только шумов-
передатчика и без использования органичителя не подавляются.
В качестве конкретного примера рассмотрим систему с коэффициентом
сжатия около 30 дБ и шумом передатчика при шумовой полосе системы
15 МГц приблизительно на 28 дБ ниже уровня мощности несущей (такие зна-
Длинный
рмпульс
Неплобой
шум
__ Сжатый Ограниченный
'импульс импульс
Остатки
Схема
сжатия
импульсод
Линейный
усилитель с
ограничением
Компенсатор ______________
ОДЦ Дыхойной
-------------'Оийеасигнал СДЦ
Местный гетеродин
Дранный импульс
Нестабильности
Ограниченный Остатки
импульс I
пш й1ум. Дни Шум.
Сжатый
импульс
; Нестабильности/йестабилЬ-" \Нестайиль-
' / нести-
ШЬ Шум
Же
Рис. 54. Приемник со сжатием импульсов, сопряженный с СДЦ:
а —идеальная, но труднодостижимая комбинация; б — влияние нестабильностей гетеро*
дива или передатчика.
чения считаются типичными [28]). Предположим, что коэффициент улучше-
ния СДЦ равен 30 дБ и ограничен движением источников пассивных помех
(собственным спектральным разбросом помех). При указанных выше- значе-
ниях параметров системы приемный тракт, который обеспечит максимально до-
стижимое качество функционирования системы, должен иметь параметры, ука-
занные на рис. 56. На вых'бде устройства сжатия шум передатчика равен или
меньше теплового шума и для распределенных и для точечных помех. Пико-
вые сигналы помех будут изменяться от 28 дБ выше уровня- тепловой* шума
для случайно распределенных отражателей и до 58 дБ выше уровня-тепловато
шума для сильных точечных’отражателей.
Так как ожидается, что компенсатор с СДЦ ослабляет помехи на. 30 дБ*
по отношению к тепловому шуму/ то второй ограничитель* предотвращает
превышение порога остатками от сильных пот Без. второго ограничителя.
385!
Гл. 5. РЛС с селекторами движущихся целей
сильные точечные отражатели, которые на входе компенсатора на 58 дБ выше
шума, дают остатки на 28 дБ выше шума на выходе ограничителя. Эти
сигналы не отличимы от отражений от самолетов.
Если шум передатчика на 15 дБ меньше, чем предполагалось выше, то
первый ограничитель можно настроить на 43 дБ выше теплового шума и по-
давление сигналов от целей существенно уменьшится. Тем самым обнаружи-
Рис. 55. Практическая реализация приемника со сжатием импульсов, сопряженного
с СДЦ.
ваемость целей повышается в зонах сильных помех и около них, даже несмо-
тря на то, что коэффициент улучшения СДЦ все еще ограничен 30 дБ из-за
собственного движения источников помех.
Подводя некоторые итоги, можно сказать, что шумоподобные боковые ле-
пестки, возникающие при сжатии импульсов, и длительность несжатого им-
Рис. 56. Пример приемника со сжатием импульсов, сопряженного с СДЦ.
пульса определяют, насколько эффективной может быть работа СДЦ в систе-
ме со сжатием импульсов. Существуют системы, в которых совместное воздей-
ствие шума передатчика и длинных несжатых импульсов не позволяет обнару-
живать самолет в областях, занятых наземными помехами или вблизи них.
С другой стороны, системы с низким уровнем шумов передатчика или с ко-
роткими несжатыми импульсами работали в таких ситуациях в высшей сте-
пени удовлетворительно.
5.16. СДЦ с внешней когерентностью
Иногда оказывается желательным создать СДЦ, который обнаруживает
цели за счет использования скорости относительного перемещения цели и рас-
пределенных помех, а не абсолютного значения радиальной скорости цели.
Часто желательно, например, обнаружить цель, движущуюся на фоне метео-
рологических образований или облака металлизированных отражателей. Ме-
теорологические образования перемещаются относительно РЛС ветром, но
цели движутся относительно этих метеобразований. Следовательно, будут
336
5.16. СДЦ с внешней когерентностью
происходить биения между вектором сигнала от цели и вектором сигнала от
метеобразований с относительной доплеровской частотой. Система, обеспечн-
ваюшая обнаружение такого сигнала, называется СДЦ с внешней когерент-
ностью. Схема простейшего СДЦ с внешней когерентностью приведена на
рис. 57.
Перегиб линейно-логарифмической характеристики устанавливается вы-
ше уровня шума на то значение, которое равно ожидаемому коэффициенту
улучшения СДЦ. Теоретически использование логарифмического усилителя
Рис. 57. Структурная схема СДЦ с внешней когерентностью.
обеспечивает постоянный уровень остатков, так как флуктуации сигналов по-
мех пропорциональны их амплитуде. Это справедливо для распределенных
помех, таких, как отражения от дождя или облака металлизированных отра-
жателей, но в общем случае неприменимо к помехам от наземных объектов,
которые претерпевают быстрые и значительные изменения амплитуды вследст-
вие действия изолированных точечных объектов, таких, как водонапорная
башня, или других искусственно созданных объектов.
Так как функционирование систем такого типа зависит от биений сигнала
от цели с сигналом помех, позволяющих обнаружить цель, то сигнал помех
обязательно должен присутствовать на входе системы. Различие между ин-
тенсивностями сигналов помех и сигна-
лов от цели должно быть меньше преде-
ла видимости под помехами (ВПП) дан-
ной РЛС. Цепи стробирования, которые
выбирают нормальный видеосигнал в от-
сутствие помех, частично помогают прео-
долеть указанное выше ограничение, но
существуют обычно большие зоны по-
мех, в которых их сигнал слишком слаб,
чтобы обеспечить обнаружение целей.
В такой системе необходимо обес-
печить большой динамический диапазон
входной сигналов
Рис. 58. Характеристика цепи свертки.
компенсатора. Чтобы уменьшить требования к динамическому диапазону
компенсатора, иногда между линейно-логарифмическим усилителем и компен-
сатором включают цепь свертки. Переходная характеристика этой цепи пока-
зана на рис. 58. Логика обработки сигналов после этой цепи такова, чго
единственным существенным воздействием иа входе компенсатора является
различие амплитуд сигналов от импульса к импульсу. Это справедливо для
одинарною компенсатора, но не справедливо для многоступенчатого компен-
сатора, который компенсирует сигналы с постоянной скоростью изменения
амплитуды На выходе многоступенчатого компенсатора появляется сильный
сигнал каждый раз, когда амплитуда сигналов помех проходит через точку
перегиба Поэтому такая цепь не должна использоваться в компенсаторах
с большим числом линий задержки.
Фазочувствительный СДЦ с внешней когерентностью. Один тип СДЦ
с внешней когерентностью, который свободен от только что рассмотренного
недостатка, показан на рис. 59. В этом устройстве фаза сигнала от цели
сравнивается с фазой сигнала помех в соседней ячейке дальности. Выбирается
ли эта соседняя ячейка впереди или сзади ячейки, где расположена цель, за-
337
Г л. 5.. РЛС с селекторами движущихся целей
висит от того, в какой из ячеек по дальности сигнал помех сильнее. Так как.
в данном случае сравниваются фазы, то не имеет значения то, что сигнал,
слишком интенсивен по сравнению с помехой. Если сигнал слаб, то по ВПП
накладываются приблизительно те же самые ограничения, как и для коге-
рентного СДЦ.
Рис. 59. С1рукгурнаи схема фазочуво висельною СДЦ с внешней когерентностью.
Когда' сигналы помех отсутствуют, шум системы, ограничивающийся
в опорном-канале, создает случайный опорный сигнал, который позволяет-
обнаруживать цели- в отсутствие помех? Если из системы удалить любую
Гис. bo. Изображения на экране ИКО:
а — для линейного видеотракта, б — для фазочувствительного СДЦ с внешней когерент-
ностью.
из коротких линий задержки и -опорный тракт без задержки, то система
будет откликаться либо на передюю, либо на заднюю границу пакета помех.
Если опорный .сигнал .берется и впереди и сзади сигнального канала, то более,
сильный опорный сигнал выделяется жестким ограничителем; таким образом,
338
5.19. Когерентный фильтр с памятью и автостробированием
^только точечные цели в областях, свободных от помех, и движущиеся цели
»»;фоне;помех выводятся на экран индикатора.
,:Э»а система имеет одну особенность. Цели на фоне помех растягиваются
цлжри лраза, так как фазовая информация »о целях присутствует, во всех трех
сигнальных трактах. В некоторых случаях это затрудняет точное определение
дальности, нов общем случае это облегчает идентификацию движущихся це-
-лей иа фоне помех, вероятно, повышая этим ВПП,
На рис. 60 показаны две фотографии изображения на экране ИКО такой
системы, работающей с единичным компенсатором и принимающей 16 отра-
женных импульсов на ширину луча Точечные цели вблизи края экрана с ази-
мутом 270° воспроизводятся, и два самолета, летящие на фоне помех, легко
распознаются.
5.17. Зональный селектор движущихся целей
Зональный СДЦ — это система обработки сигналов, в которой произво-
дится режекция целей, не перемещающихся в интервале между последова-
тельными сканированиями антенны. Режекция выполняется путем вычитания
сигналов, полученных на предыдущем сканировании, из принимаемых сигна-
лов. Это непрерывый процесс с запоминанием сигналов .либо на запоминаю-
щих ЭЛТ, либо в цифровых ЗУ (на магнитных барабанах или на сердечни-
тсах).
Зональный СДЦ не имеет слепых скоростей, за исключением нулевой ско-
рости, по он не обеспечивает обнаружения целей в зонах распределенных
помех. Такие СДЦ иногда используются после обработки сигнала, которая
«исключает все распределенные цели, во сохраняет все точечные цели (напри-
мер, после логарифмического приемника современным управлением частотой
или когерентного фильтра с памятью 4§<5.19)).
В некоторых системах недостаточное разрешение запоминающих ЭЛТ
ограничивает функционирование зонального СДЦ, >но при использовании менее
дорогих цифровых ЗУ можно обеспечить его .хорошее^функционирование.
5.Т8. Запоминание карты помех
В большинстве СДЦ оператор может использовать строб дальности,
который позволяет отображать нормальный видеосигнал за пределами неко-
торой выбранной дальности. Оператор устанавливает строб дальности так,
чтобы он лежал далее'зон всех фиксированных пассивных помех. 1 Следова-
тельно, существует значительная доля воны обзора, леждщая внутри строба
дальности, где помехи, отсутствуют, но где сигналы от целей могут ослаб-
ляться, либо когда цели проходят тангенциально к лучу РЯС, либо когда
они летят со слепыми скоростями. "Замирания целей в зонах, свободных от
помех,, можно избежать...если .запоминать карту помех, которая используется
.для введения в строб нормального видеосигнала в тех зонах, 'где распреде-
ленные помехи отсутствуют. Желательно, чтобы карта .помех непрерывно об-
новлялась для компенсации изменений условий распространения, поэтому
обычно для ее запоминания, ^используются запоминающие ЭЛТ.
5.19. Когерентный фильтр с памятью и -автхэстробированием
Когерентный фильтр с-памятью (К’ФП) представляет- собой один из -ви-
дов когерентного интеграторе; следовательно, он обеспечивает близкое
к 'оптимальному -улучшение отношения сигнал/шум, обеспечивая в то же
339
Гл. 5. РЛС с селекторами движущихся целей
время спектральный анализ на всех дальностях в реальном масштабе
времени. Соответствующее использование выходного сигнала КФП приводит
к автоматической идентификации и режекции распределенных целей незави-
симо от их перемещения относительно РЛС. На борту корабля невозможно
с какой-либо степенью определенности предсказать доплеровскую частоту
пассивных помех, так как сигналы помех могут приниматься и по главному
лучу и по боковым лепесткам. Метеорологические образования, перемещаю-
Выходной ПЧ сигнал
..... /
Настраиваемый
фазосовигатель
Выходной ПЧ сигнал
---------------------->
Рис. 62. Структурная схема когерентного
фильтра с памятью.
Рис. 61. Когерентный интегратор.
щиеся над земной поверхностью, одновременно создают две доплеровские ча-
стоты, которые должны режектироваться в РЛС. КФП с автостробированием
позволяет режектировать все сигналы от распределенных источников помех
одновременно, обеспечивая в то же время ВПП в зонах, занятых помехами.
Когерентный фильтр с памятью [17, 18]. Для краткого описания его ра-
боты рассмотрим когерентный интегратор (рис. 61).
Для любой конкретной доплеровской частоты существует настройка
фазосдвигателя, которая будет приводить к интегрированию сигнала на этой
доплеровской частоте. Если значение фазового сдвига изменяется (принимая
все возможные значения от 0 до 360°) за время приема импульса из задан-
ной ячейки дальности, в некоторый момент во время этого импульса создает-
ся ситуация, когда импульс будет интегрироваться (предполагается исполь-
зование непрерывной последовательности импульсов). Точный момент вре-
мени, в который будет иметь место интегрирование, укажет доплеровскую
частоту последовательности импульсов в пределах неопределенности, накла-
дываемой ЧПИ РЛС.
Выше пояснено, что делает КФП. Непрерывный сдвиг фазы реализуется
заменой переменного фазосдвигателя на смеситель с одной боковой полосой,
который питается от генератора с частотой, обратно пропорциональной
длительности импульса (рис. 62).
Отметим, что каждая циркуляция через смеситель увеличивает частоту
сигнала, пока фильтр не остановит дальнейшую рециркуляцию. Полоса про-
пускания фильтра выбирается с таким расчетом, чтобы время интегрирования
было равно времени наблюдения цели. Продетектированный выходной сигнал
КФП может иметь вид, показанный на рис. 63. Положение сигнала пассив-
ных помех в каждой ячейке дальности зависит от их доплеровской частоты.
Сигнал от цели появится в другом положении ячейки дальности, если его
доплеровский сдвиг отличается от доплеровского сдвига помех.
Автостробирование. Использование автостробирования, которое режек-
тирует цели с идентичной доплеровской частотой в последовательных ячейках
дальности, является простой, но весьма эффективной процедурой. Как пока-
зано на схеме автостробирования (рис. 64), сигнал от КФП детектируемся и
340
5.19. Когерентный фильтр с памятью и автострооированием
подается на последовательность линий задержки, длина каждой из них равна
временному размеру ячейки дальности. Сигналы для опорного тракта выби-
раются до и после сигнала сигнального тракта. Если сигнал появляется в сиг-
нальном тракте, а в соседеней ячейке дальности нет сигнала, который может
появиться в опорном тракте, то сигнал пропускается комбинацией «диффе-
ренциальный усилитель — ограничитель отрицательных импульсов». Если
однако, в соседней ячейке существует сигнал с тем же самым доплеровским
сдвигом, го сигнал компенсируется.
Рис. 64. Схема автостробирования.
Отметим, что такая цепь автостробирования, являясь аналоговой, способ-
на обрабатывать импульсы любой формы, которые могут поступить от К.ФП.
Если, например, вследствие воздействия нестабильностей в передатчике им-
пульс помех имеет боковой лепесток, то импульс в соседней ячейке дальности
будет иметь тот же самый боковой лепесток и, следовательно, цепь автостро-
бирования будет функционировать правильно.
Перед К.ФП с автостробированием, так же как и перед любым компен-
сатором системы СДЦ, должен быть включен линейный усилитель с ограни-
чителем, так как и здесь сохраняются ограничения из-за модуляции,
связанной со сканированием и нестабильностями системы. Эффективность
компенсации можно улучшить, увеличивая коэффициент усиления опорного
канала автостробирования, но это достигается только ценой увеличения
341
Гл. 5 РЛС с селекторами движущихся целей
ширины провалов режекции, точно так же, как и в двухступенчатом или
трехступенчатом компенсаторе.
На рис 65 приведены две фотографии изображения на экране индика-
тора пша .4, показывающие статическую ВПП с уровнем 20 дБ, полученные
с помощью КФП с автостробиро-
Рис. 65. Выходной сигнал схемы авто-
стробирования (вверху) и выходной
сигнал КФП (внизу); уровень статиче-
ской ВПП равен 20 д!>.
ванием Нижняя фотография по-
казывает сигнал КФП перед вы-
прямлением. верхняя — сигнал на
выходе схемы автостробирования.
Сигналы помех подаются с эхо-
резонатора, а сигнал цели — с ге-
нератора когерентных импульсных
ВЧ сигналов, которые вводятся
в волновод с помощью направ-
ленного ответвителя. Скорость
развертки индикатора равна
20 мкс/деление. Интенсивность сиг-
налов генератора на 20 дБ сла-
бее, чем интенсивность эхо-сиг-
налов помех на соответствующей
дальности.
КФП с автостробированием не
имеет слепых скоростей для це-
лей в зонах, свободных от помех,
и обеспечивает ВПП для целей
на фоне помех, даже если присут-
ствуют помехи со многими значе-
ниями доплеровских частот.
В связи с этим данная методика
оказывается весьма эффективной
для корабельных РЛС.
5.20. Некоторые соображения, относящиеся к РЛС с СДЦ
Разработка РЛС с СДЦ далеко не ограничивается разработкой прием-
инка. Все компоненты радиолокационной системы (передатчик, антенна),
а также их параметры должны проектироваться с учетом особенностей их
функционирования в РЛС с СДЦ Например, прекрасное устройство СДЦ не
будет обеспечивать удовлетворительного функционирования всей системы,
если только местный гетеродин РЛС не будет чрезвычайно стабильным, пе-
редатчик почти не будет’ иметь уходов частоты или фазы от импульса
к импульсу и если время облучения цели не будет достаточным для когерент-
ной режекции нежелательных сигналов.
При разработке радиолокационной системы с СДЦ необходимо пойти на
ряд компромиссов Одна из наиболее серьезных проблем связана с тем, что
полезные цели часто имеют меньшие радиальные скорости, чем нежелатель-
ные. Когда цель пролетает мимо РЛС, существует интервал времени, когда
доплеровская частота цели равна нулю и сигнал цели компенсируется. Этот
интервал можно минимизировать, придавая скоростному отклику специаль-
ную форму, ио только за счет уменьшения потенциально достижимого коэф-
фициента улучшения и увеличения отклика на нежелательные движущиеся
цели.
Существует два класса нежелательных движущихся целей, которые до-
ставляют больше всего беспокойства: это птицы и автомобили. Крупные
птицы (такие, например, как чайки, вороны или ястребы) имеют эффективную
342
5.20. Некоторые соображения, относящиеся к РЛС с СДЦ
Ряс. 66. Диаграмма направленности антенны РЛС ARSR-2 в вертикальной плоскости,
а—сравнение с косеканс-квадратиой диаграммой; б — рабочая зона.
площадь рассеяния около 0,01 м2 и летают в спокойной атмосфере со ско-
ростью от 20 до 30 миль/ч. Такие скорости полета в сочетании со скоростью
ветра 10—20 миль/ч приводят К тому, что птицы перемещаются со скоростя-
ми, совпадающими со скоростью максимального отклика СДЦ или близкими
к ней. Если в окрестности РДС летает одна такая птица на квадратную
343
Гл. 5. РЛС с селекторами движущихся целей
милю, то всего в районе радиусом 20 миль будет летать более тысячи птиц,
что может сделать невозможным наблюдение на экране ИКО. Один метод
борьбы с такими помехами, используемый в РЛС. обслуживающих движение
самолетов ФАА [21—23], описан ниже.
Для различения малых объектов (0,01 м2) и полезных целей — самолетов
(1 м2) можно использовать временную регулировку усиления (ВРУ). Если
ВРУ запрограммирована на зависимость энергии от дальности в четвертой
степени, то большинство сигналов, отраженных от птиц, исчезнет с экрана
ИКО, тогда как отражения от самолетов сохранятся. Использование ВРУ
в сочетании с косеканс-квадратной формой луча решает одну задачу, но соз-
дает другую: при этом исчезают полезные цели на высоких углах места.
Решение этой задачи заключается в повышении усиления антенны на высо-
ких углах места до значительно больших значений, чем те, которые соответст-
вуют косеканс-квадратной диаграмме. Это позволяет не только скомпенсиро-
вать влияние ВРУ, но и значительно увеличить отношение (полезный сиг-
нал)/помеха для целей на больших углах места, улучшая тем самым функ-
ционирование СДЦ. Диаграмма антенны РЛС ARSR-2 и ее рабочая зона
показаны на рис. 66.
Проблему легковых и грузовых автомобилей решить сложнее. Радиоло-
кационная эффективная площадь рассеяния автомобиля так же велика, как
и у полезных целей, и скорости движения автомобилей также попадают
в пределы рабочей характеристики большинства РЛС обслуживания воздуш-
ного движения. Если РЛС расположена так, что в ее поле зрения попадает
большой отрезок шоссе, что часто случается в густонаселенных районах, то
автомобили становятся главными источниками помех.
Один из методов решения проблемы помех от автомобилей указан в ра-
ботах [24 и 25]. На отражатель антенны, возбуждаемой рупором, снизу
этого рупора монтируется второй рупор, обеспечивающий прием сигналов
только на больших углах места. Энергия излучается только с помощью пер-
вого рупора. Второй рупор используется для приема сигналов, пришедших из
района в радиусе первых 20 миль, затем приемник переключается электрон-
ным переключателем на первый рупор для приема в течение остающейся ча-
сти интервала между импульсами. Использование второго луча на больших
углах места значительно повышает отношение (полезный сигнал)/помеха,
а также и отношение (полезный сшнал)/(сигнал от автомобиля). Этот.метод
позволяет решить и проблему птиц, так как птицы обычно наблюдаются на
низких углах места.
Список литературы
1. Barlow, Edward J. Doppler Radar, Proc. IRE, v. 37, p. 340—355, April,
1949
2. Barton, David K. “Radar System Analysis”, Prentice-Hall, Inc., Engle-
wood Cliffs, N. J., 1964. См. также Бартон. “Радиолокационные систе-
мы”. М., Воениздат, 1967.
3. Goldstein, Herbert. Sea Echo, the Origins of Echo Fluctuations, and the
Fluctuations of Clutter Echoes, in D. E. Kerr (ed.), “Propagation of Short
Radio Waves”, MIT Radiation Laboratory Series, v. 13, secs. 6.6—6.21,
p. 560—587, McGraw-Hill Book Company, N. Y., 1951.
4. Witse, J. C., S. P. Schlesinger, and С. M. Johnson. Back-scattering Cha-
racteristics of the Sea in the Region from 10 to 50 KMC, Proc. IRE, v 45,
p. 220—228, February, 1957.
5. Hicks, B. L., № Knabte, J. J. Kovaly, G. S. Newell, J. P. Ruina, and
C. W. Sherwin. The Spectrum of X-band Radiation Back-scattered from
the Sea Surface, J. Geophys. Res., v. 65, p. 828—837, March, 1960.
**
344
Список литературы
6 Nathanson, F. Е., and J. P. Reily. Radar Precipitation Echoes, IEEE Trans.,
v AES-4, p 505—514, July, 1968.
7. Barton, David K. Radar Equations for Jamming and Clutter, EASCON’67
Technical Convention Record, Supplement to IEEE Trans., v. AES-3,
p. 340—335, November. 1967.
8. Steinberg, Bernard D. in R. S. Berkowitz (ed.), “Modern Radar: Analy-
sis, Evaluation and System Design”, pt. VI, chaps. 1—4, John Wiley &
Sons, Inc., New York, 1966, См. также: “Современная радиолокация",
Пер. с англ. “Сов. радио”, М., 1969.
9. Emerson, R. С. Some Pulsed Doppler MTI and AMTI Techniques, Rand
Corp Rept. R-274, DDC Document AD 65881, March 1, 1954.
10. Grisetti, R. S., M. M. Santa, and G. M. Kirkpatrik. Effect of Internal
Fluctuations and Scanning on Clutter Attenuation in MTI Radar, IRE
Trans., v. ANE-2, p. 37—41, March, 1955.
Глава 6
САМОЛЕТНЫЕ РЛС С СЕЛЕКТОРАМИ ДВИЖУЩИХСЯ ЦЕЛЕЙ
М. Стаудаер
6.1. Использование принципов СДЦ в самолетных
радиолокационных системах
Самолетные радиолокационные станции дальнего обнаружения вначале
разрабатывались для использования их при обнаружении кораблей с само-
летов дальнего действия, входящих в состав авиационных патрулей. В конце
второй мировой войны в США были разработаны РЛС самолетной системы
раннего предупреждения (ССРП) (Airborne Early Warning — AEW), кото-
рые были предназначены для обнаружения низколетящих самолетов, прибли-
жающихся к кораблям на высотах, лежащих ниже зоны обзора судовых
РЛС. Преимуществом РЛС, устанавливаемых на борту самолета, является
увеличение максимальной дальности обнаружения воздушных и надводных
целей. Действительно, радиолокационный горизонт РЛС с антенной, установ-
ленной на высоте около 40 м, составляет всего 22 км, а для РЛС, установ-
ленной на самолете, летящем на высоте около 4 км, отодвигается до 230 км.
Потери патрулирующих судов вследствие атак японских самолетов, пило-
тируемых смертниками (камикадзе), явились причиной разработки автоном-
ных самолетных станций обнаружения и контроля воздушного пространства.
Этот тип станций в дальнейшем развился в систему барьерного авиационного
патрулирования для воздушной защиты континента.
Установленные на самолетах К2А (рис. 1) радиолокаторы ССРП исполь-
зовались в качестве первичного источника информации о воздушном напа-
дении. От этих РЛС, имеющих большое поле обзора, требовалось обнаруже-
ние целей типа небольших самолетов на фоне пассивных помех, вызванных
отражениями от поверхности моря и земли. Так как первичной задачей этих
Рис. 1. Самолет Е2А системы раннего предупреждения.
346
6.2. Зона действия
РЛС являлось обнаружение низколетящих самолетов, го луч этих станцвй
нельзя было поднять настолько высоко, чтобы исключить пассивные помех».
Для этого был разработан самолетный селектор движущихся целей (ССДЦ),
аналогичный СДЦ наземных РЛС (см. гл. 5).
Радиолокационные системы с ССДЦ использовались также для обнару-
жения целей и слежения за ними в системах управления огнем на истребите-
лях-перехватчиках. При таком применении система должна выделять цель
на фоне пассивных помех только в непосредственной близости от заране«
выбранной цели. Это позволяет оптимизировать систему так, что она будет
оптимально функционировать на той дальности и в том секторе, где располо-
жена цель. СДЦ используется также для обнаружения подвижных наземных
целей разведывательными самолетами и тактическими бомбардировщиками.
Такие пели имеют низкие скорости, и поэтому для создания существенного
доплеровского сдвига частоты требуются более высокие рабочие частоты
РЛС. Так как на практике обычно уровень пассивных помех достаточно высок,
то в этих системах могут эффективно использоваться методы СДЦ с внешней
когерентностью.
Необходимость обеспечить большую высоту носителей РЛС, их мобиль-
ность и высокие скорости перемещения в сочетании с ограничениями по габа-
ритам, массе и уровню потребляемой мощности выдвигают перед разработчи-
ком ССДЦ серьезные проблемы. Настоящая глава посвящена рассмотрению
особенностей радиолокационных систем с ССДЦ.
6.2. Зона действия
В общем случае необходимо, чтобы зона действия РЛС дальнего обна-
ружения охватывала в горизонтальной плоскости круговой сектор от 0 до
360°: При установке РЛС на самолете такую зону действия обеспечить труд-
но, так как при размещении антенны вне фюзеляжа самолета возникают
сложные проблемы, связанные с лобовым сопротивлением, ухудшением ста-
бильности и конструктивной прочности самолета. Для обеспечения широкой
зоны действия в вертикальной плоскости появляются трудности из-за иска-
жения и затенения диаграммы направленности антенны корпусом и верти-
кальными стабилизаторами самолета. Анализ тактических требований пока-
зывает, что необходимо обеспечить только ограниченный сектор обзора, одна-
ко, его обычно требуется располагать в любом положении относительно носа
самолета. Это связано с требованиями обеспечить обзор при смене курса на
обратный и больших углах сноса, вызванных сильным ветром, а также с необ-
ходимостью правильного расположения наблюдаемой полосы на поверхности
земли по отношению к направлению ветра, обеспечения обзора как в направ-
лении от станции, так и в обратном и в некоторых нештатных ситуациях.
6.3. Влияние передвижения носителя я его высоты
на функционирование СДЦ
Селектор движущихся целей используется для выделения движущихся
воздушных целей на фоне стационарной отражающей поверхности земли или
моря. Однако в случае установки РЛС на борту самолета источники мешаю-
щих отражений перемещаются относительно самолета В гл. 5 указывалось,
что можно компенсировать среднюю радиальную скорость пассивных рассеи-
вателей, используя такие, нацримерг, системы, как TACCAR.
На рис. 2 показано, что кажущаяся радиальная скорость источников пас-
сивных ггОмех равна Vr = — Vgcosa, где Vg— скорость движения носителя
относительно земли и а — угол между направлением на наблюдаемую точку
да поверхности земли и вектором скорости самолета На рис. 3 приведены
линии постоянной радиальной скорости на поверхности земли. С целью нор-
347
Гл. 6. Самолетные РЛС с селекторами движущихся целей
мирования графика предполагалось, что используется плоская модель земной
поверхности. Нормированная радиальная скорость Vn — Vr/Vg представлена
в виде функции от азимутального угла ф и нормированной горизонтальной
дальности RJH, где Н — высота полета самолета.
Вместо единственной доплеровской частоты помех, соответствующей по-
стоянной радиальной скорости (Ев на рис. 2), определяемой углом визирова-
ния антенны а, в приемное устройство РЛС поступает сплошной спектр доп-
леровских частот. Это приводит к тому, что форма частотного спектра на
некоторой дальности определяется формой зоны, образующейся при пересече-
Рис. 2. Геометрия использования само-
летной бортовой РЛС:
do — угол, определяющий направление
оси ДН антенны; а — угол визирова-
ния; 0 — полуширина луча; Vq — пу-
тевая скорость самолета: Vr — ради-
альная скорость точечной цели; У в —
проекция радиальной скорости на ось
ДН антенны; фо — азимут оси ДН ан-
тенны; ф — азимут; R — горизонталь-
ная дальность до точечной цели; Н —
высота полета самолета.
нии диаграммы направленности антенны с поверхностью, создающей пассив-
ные помехи, и распределением радиальной скорости внутри луча. Более того,
так как Vn меняется при изменении дальности при некотором фиксирован-
ном азимуте ф, то центральная частота и форма спектра зависят от дально-
сти и азимута ф0.
Если антенна направлена вперед, то доминирующим эффектом является
изменение центральной частоты, соответствующее изменению ао с дальностью.
Если антенна направлена вбок (поперек направления движения), то домини-
рующим эффектом является распределение радиальной скорости по ширине
луча. Эти эффекты получили названия эффект наклонной дальности й эффект
движения носителя соответственно.
Эффект наклонной дальности и смещение спектра доплеровских частот.
Кажущаяся осевая скорость источника помехи Ев есть составляющая векто-
ра путевой скорости, направленная вдоль оси антенны; она равна — Egcosa0-
Если бы поверхность, на которой расположены источники пассивных помех,
лежала в плоскости полета самолета, то эта составляющая была бы равна —
Vg cos фо и не зависела бы от дальности. Отношение реальной осевой скоро-
сти к указанной осевой скорости в плоскости долета называется нормирован-
ным отношением осевых скоростей (ООС) и определяется в виде
„ cos а0
ООС —:-------== cos фо,
cos фо
(1)
348
6.3. Влияние передвижения носителя и его высоты на функционирование СДЦ
где фо — угол отклонения оси антенны от горизонтали. На рис. 4 приведены
зависимости нормированного отношения осевых скоростей от наклонной
дальности для искривленной поверхности земли при различных высотах по-
лета самолета. Наблюдается очень резкое изменение этого отношения для
наклонных дальностей, меньших 30 км.
РиС* 3. Линии постоянной нормированной радиальной скорости Vr/Vg как функции от-
ношения дальность/высота RJH для самолета и азимута ф.
Для обеспечения максимальной режекции пассивных помех необходимо
совместить центр спектра помех с провалом (т. е. с областью минимального
отклика) передаточной характеристики фильтра ССДЦ. Этого можно добить-
Рис. 4. Зависимость нормированного отношения осевых скоростей (ООС) от разности
между наклонной дальностью Rs и высотой полета самолета Н для различных высот
полета.
349
Гл. 6. Самолетные РЛС с селекторами движущихся целей
нала на величину, равную средней доплеровской частоте спектра помех Так
как при перемещении РЛС центральная частота помех меняется в зависимо-
сти от дальности и азимута, то необходимо, чтобы фильтр (вернее, провал
его характеристики) отслеживал частоту доплеровского смещения при помо-
щи системы управления с замкнутым или разомкнутым контуром регулиро-
вания (эта система аналогична системе TACCAR f§ 5.9)).
Вследствие шумовой природы сигналов пассивных помех необходимо,
чтобы система управления обеспечивала перекрытие областей со слабыми сиг-
налами помех. Она также не должна реагировать на доплеровский сдвиг
истинной пели. Поэтому система уп-
равления обычно отслеживает изме-
нение азимута в некотором заданном
интервале радиолокационной дально-
сти. Максимальная дальность интер-
вала выбирается таким образом,
чтобы доминирующим в этом интер-
вале был сигнал пассивных помех.
Минимальная дальность выбирается
так, чтобы исключить сигналы, у ко-
торых средняя частота существенно
отличается от частоты полезных сиг-
налов в исследуемой области. В не-
Рис. 5. Влияние^ешибки^сдвига доплеров- которых случаях может оказаться
fr — частота повторения импульсов. необходимым использовать многокон-
турные системы управления, в кото-
рых каждый контур перекрывает заданный интервал дальностей, или обеспе-
чивать изменение ’сдвига частоты с дальностью. При любом конкретном зна-
чении дальности максимум режекции фильтра достигается на одной частоте,
а .центральная-частота спектра пассивных помех имеет -другое значение. Раз-
личие между этими..двумя значениями частоты приводит к появлению ошибки
сдвига доплеровской частоты. Характеристика фильтра и спектр помех для
такого случая показаны на рис. 5. Часть полосы пропускания фильтра, пере-
крываемая . спектром помех, при этом увеличивается, и коэффициент улучше-
ния уменьшается.
На рис. 6 показаны зависимости коэффициента улучшения одинарного
я двухступенчатого компенсаторов от отношения ошибки сдвига максимума
режекции к частоте повторения импульсов (ЧПИ) для различных значений
ширины спектра пассивных помех К счастью, спектр помех, связанный с дви-
жением -носителя, имеет малую ширину именно в переднем секторе зоны
обзора, где ©шибки сдвига максимальны. При ошибке сдвига, значение кото-
рой составляет одну сотую часть ЧПИ, коэффициент улучшения для двухсту-
пенчатого компенсатора равен 26 дБ при ширине спектра входных сигналов
помех, составляющей 3% от ЧПИ. Если несущая частота РЛС равна 10 ГГц,
ЧПИ 1 кГц и путевая скорость 1100 км/ч, то положение максимума режек-
ции необходимо устанавливать с точностью 0,55 км/ч или 0,0005 Vg.
Ввиду жестких требований и с учетом характера спектра, связанного
с движением носителя, параметры системы со сдвигом ЧПИ должны выби-
раться, в первую очередь, с точки зрения создания необходимой полосы ре-
жекции, а не для создания возможно более плоской характеристики в полосе
пропускания. Аналогично этому и фильтры на линиях задержки более высо-
кого порядка (с обратной связью или без нее) должны синтезироваться,
чтобы обеспечить качество режекции в полосе'заграждения. Предельным слу-
чаем является набор узкополосных фильтров;- 'каждый из которых имеет
узкую полосу пропускания, вся остальная спектральная область будет поло-
сой заграждения. 5
Эффект движения носителя Рассеиватели, создающие пассивные помехи,
имеют относительно самолетной РЛС радиальную скорость, которая отличает-
350
6.3. Влияние передвижения носителя и его высоты на функционирование СДЦ
ся от осевой скорости антенны на гой же самой дальности на величину:
Ve=Vr — VB=Vg cos а0 — Vg cos a== Vg[cos ao — cos (a0 -f- 0)] — V* sin 0 (2)
для малых значений 0 и угла наклона. ф0, где — горизонтальная состав-
ляющая вектора скорости, перпендикулярная к осевой линии антенны; & —
азимут линии визирования рассеивателя, или линии пересечения вертикальной
плоскости, содержащей линию визирования рассеивателя, с поверхностью зем-
ли. Соответствующая доплеровская частота равна
(3)
Рис. 6. Зависимость коэффициента улучшении /
симума режекции ое для различных значений
от нормированной ошибки сдвига мак-
ширины спектра пассивных помех ое.
Это явление приводит к возникновению спектра мощности пассивных помех,
связанного с движением носителя, причем этот спектр взвешивается двухсто-
ронней ДН антенны по мощности в горизонтальной плоскости. Истинный
спектр приближенно может быть описан гауссовым спектром:
Н (/) = е“1/2 Qd/°pmJL ^G4 (0)) (4j
где< G4(0)—двухсторонняя ДН антенны по мощности, равная С4(0)=ОД5
при 0<==&а/2, где 0д—ширина луча на. уровне половинной мощности, которая
приближенно) может быть задана как Х/a, а — эффективная апертура антен-
ны в горизонтальной плоскости. Таким образом,
— 1/2 (Vх/йО'рпР
е
= 0,25
ЭИ
Гл. 6. Самолетные РЛС с селекторами движущихся целей
или
Орт — 0,6 Кх/й,
(5)
где и а выражены в соответствующих единицах. Это значение меньше, чем
результаты, полученные другими авторами [7, 8]. Оно, однако, согласуется
с более точным анализом диаграмм излучения антенн и исследованием экс-
периментальных данных, которые выполнил автор.
Более точное значение параметра орт может быть получено при сопря-
жении исследуемой двухсторонней диаграммы по мощности с гауссовой ап-
проксимирующей кривой в точке диаграммы, определяемой стандартным откло-
Рис. 7. Зависимость I от доли го-
ризонтальной апертуры антенны,
на которую смещается носитель за
интервал времени между импульса-
ми VxTpja.
нением и, вычисленным с помощью ста-
тистических методов либо путем подбора
диаграммы с использованием численных
методов расчета. Коэффициент улучше-
ния I вычисляется с помощью усредне-
ния мощности получающихся нескомпен-
сированных остатков, что выполняется
посредством суммирования фазоров сиг-
налов при определенных значениях угла
0 между двумя нулями ДН антенны.
На рис. 7 показано влияние движе-
ния носителя на коэффициент улучше-
ния I системы СДЦ. Смещение на 5,4%
будет уменьшать коэффициент улучше-
ния СДЦ с двойной задержкой до 30 дБ.
При ЧПИ, равной 1000 Гц, и апертуре
антенны «4 м это соответствует скоро-
сти 180 м/с. Для системы с одной за-
держкой ограничение коэффициента
улучшения до 30 дБ будет происходить
при смещении 1,1%.
Компенсация движения носителя.
Вредное воздействие движения носи-
теля можно уменьшить с помощью фи-
зического или электронного смещения фазового центра антенны вдоль плос-
кости апертуры [1—3], что сокращенно называется методом СФЦА [10].
На рис. 8, а показано приращение фазы сигнала элементарного рассеива-
теля от импульса к импульсу, если его наблюдать из точки расположения
приемника РЛС. Амплитуда принимаемого сигнала £i пропорциональна ин-
тенсивности поля, определенной по двухсторонней диаграмме направленности
антенны Фазовое приращение равно
2r) = 2n/d Тр
2л1/х Гр sin 0
А
(6)
где fd — доплеровский сдвиг для рассеивателя (3);
Тр — длительность интервала между импульсами.
На рис. 8, б показан метод корректировки приращения фазы тр Для
этого используется идеализированный корректирующий сигнал, опережающий
принимаемый на 90° и отстающий от следующего принимаемого сигнала на
90°. Для точной компенсации должно выполняться следующее соотношение:
„ „ , п 2nVxTpsinO
Ес = tg 1] = 22 (0) tg------------ . (7)
Л
352
6.3. Влияние передвижения носителя и его высоты на функционирование СДЦ
Такой метод предполагает создание двухлепестковой диаграммы направ-
ленности антенны, аналогичной диаграмме моноимпульсной РЛС слежения.
.Применяются два приемника: один принимает суммарный сигнал 2(0). а дру-
гой— разностный сигнал А(0). Разностный сигнал используется для компен-
сации воздействия движения носителя.
Если система разработана таким образом, что для передачи используется
суммарная диаграмма 2(0), а для приема и суммарная 2(0) и разностная
$) После компенсации
Рис < Диаграмма фазоров для сигналов, отраженных от точечного рассеивателя при
движении носителя.
Д(0) диаграммы, тогда па определенной скорости, на которую рассчитывает-
ся система, принимаемый сигнал 2(0)А(0) может играть роль корректирую-
щего. Реальный корректирующий сигнал для аппроксимации Ес имеет вид
&'2(О)А(0), где k' — отношение коэффициентов усиления в суммарном и раз-
ностном каналах приемника.
Для равномерно облучаемой моноимпульсной антенной системы [4] раз-
ностный и суммарный сигналы находятся в квадратуре, а их амплитуды свя-
заны соотношением
/ nW X
А (0) =2 (0) tg I —-— sin 0 j,
(8)
где W — расстояние между фазовыми центрами двух половин антенны. Сле-
довательно, в идеальном случае, выбрав W'=2Vsc7'p и k'=l, получим полную
компенсацию.
На практике суммарная диаграмма выбирается, исходя из необходимых
ширины ее главного лепестка, коэффициента усиления и уровня боковых ле-
пестков, определяемых требованиями к системе обнаружения. В этом случае
разностная диаграмма А(0) синтезируется независимо, исходя из требования
обеспечить необходимое соотношение между расчетной скоростью носителя
и допустимым уровнем боковых лепестков. Эти две диаграммы можно реа-
лизовать, используя раздельные запитывающие структуры для двух групп
элементов антенны.
На рис. 9 показана зависимость идеализированного коэффициента улуч-
шения от нормированного смещения апертуры за межимпульсный интервал
для компенсатора с двухступенчатой задержкой. Показанный коэффициент
представляет собой коэффициент улучшения для точечного рассеивателя,
усредненный по ширине диаграммы между первыми нулями. В первом случае
отношение коэффициентов усиления оптимизируется для каждого значения
смещения от импульса к импульсу. В другом варианте компенсации опти-
мальное отношение коэффициентов усиления k' аппроксимируется линейной
функцией от перемещения носителя за ишервал времени между импуль-
сами kVv.
353
Гл. 6. Самолетные РЛС с селекторами движущихся целей
На рис. 10 приведена структурная схема системы с двойной задержкой.
Так как усиление антенны для излучаемого сигнала 2(0) одинаково для
обоих каналов,, то оно на схеме не показано. В системе с одной линией за-
держки отсутствует вычитающее устройство. На рисунке не показаны и обыч-
но используемые схемы для поддержания когерентности, баланса фазовых
соотношений и коэффициентов усиления, а также схемы синхронизации. Уп-
равляющий скоростной сигнал Vx является биполярным; он должен позво-
лять изменять знак сигнала А (6) в каждом канале на обратный, когда на-
правление линии визирования антенны
перемещается с левого борта самолета
на правый.
Гибридный усилитель (рис. 10) име-
ет два входа, на которые поступают сиг-
налы 2(0) и /А(0). Он усиливает сиг-
нал в канале А(0) в kVx раз по отно-
шению к сигналу в канале 2(0). На вы-
ходах усилителя формируются сумма и
разность двух усиливаемых входных сиг-
налов. Так как при использовании мето-
да смещения фазового центра антенны
осуществляется компенсация комплекс-
ного сигнала, то необходимо сохранять
как амплитудную, так и фазовую ин-
формацию. Поэтому описываемые опе-
рации производятся на высокой или на
промежуточной частоте. Если реализует-
ся синхронное детектирование и состав-
ляющие сигнала обрабатываются в раз-
дельных каналах, то можно использо-
вать компенсацию видеосигналов. Кроме
того, все операции должны быть линей-
ными вплоть до обработки суммарного
и разностного сигналов гибридным уси-
лителем. После такой схемы обработки
одиночных импульсов можно осущест-
вить двойную компенсацию с помощью
любого из методов обработки, рассмот-
ренных в гл. 5.
Мощность сигналов, принимаемых
Возможности самолетных систем по ре-
Рис. 9. Коэффициент улучшения I си-
стемы СДЦ, использующей метод сме-
щения фазового центра антенны в за-
висимости от доли горизонтального
расстояния между фазовыми центрами
W, на которую смещается носитель за
интервал времени между импульсами
JWjy/TK, 1^=0,172 а.
по боковым лепесткам ДН антенны.
жекции сигналов пассивных помех ограничиваются влиянием сигналов, прини-
маемых по боковым лепесткам ДН антенны. Полная азимутальная диаграмма
(в пределах 360°) воспринимает сигналы, соответствующие скоростям в диа-
пазоне от — Vg до +Vg. Схемы компенсации как бы смещают эти скорости
на величину, соответствующую составляющей скорости вдоль оси антенны Vв,
но общий диапазон доплеровских частот, соответствующий значению 2'Vg со-
храняется вследствие приема отраженных сигналов по боковым лепесткам.
Для самолетных систем с низкими и средними частотами повторения импульсов
эти доплеровские частоты могут перекрывать диапазон, ширина которого
в несколько раз превышает ЧПИ, так что мощность сигналов, принимаемых
по боковым лепесткам, может просачиваться в фильтр. Это ограничение за-
висит от угла, под которым направлена ДН антенны, от отклика фильтра
СДЦ и структуры боковых лепестков. Если боковые лепестки распределены
относительно равномерно в азимутальной плоскости, то качество функциони-
рования РЛС может быть определено путем оценки усредненной мощности,
принимаемой по боковым лепесткам.
354
64. Компенсация влияния движения при сканировании
Предельное’ значение коэффициента улучшения, обусловленное влиянием
боковых лепестков, равно
л
к J #40) de
—-л
41 limit = ~ * (9)
J & (0) d0
si
где пределы интегрирования в нижнем интеграле охватывают область вне
главного лепестка ДН. Влияние главного лепестка должно быть учтено при
оценке коэффициента улучшения, определяемого для случая движения носи-
теля. Постоянная К является коэффициентом нормирования шумов для фильт-
ра СДЦ (К=2 для одинарной задержки и 6 для двойной задержки). G4(Oj
есть двухсторонняя ДН антенны по мощности в горизонтальной плоскости,
Характеристики функционирования системы смещения фазового центра
антенны, рассмотренной в предыдущих разделах, можно анализировать,
используя ДН или эквивалентные функции распределения в апертуре [3].
При использовании ДН функционирование всей системы можно описать, либо
используя всю ДН, т. е. в пределах 360°, либо объединяя коэффициенты
улучшения для этой системы в главном лепестке и в области боковых лепе-
стков (это О-бъединение производится аналогично объединению параллельных
импедансов):
1 1 I
7— = —
1 total 41 ЧСФЦА
(10)
При использовании функции распределения в апертуре, учет воздействия
боковых лепестков является необходимой частью анализа. При этом должна
быть проявлена осторожность, так как если функции возбуждения решетки
или отражателя используются без учета весового воздействия элементарных
диаграмм или распределения возбуждения, то результаты компенсации
в главном лепестке могут быть искажены из-за наложения структуры боко-
вых лепестков.
6.4. Компенсация влияния движения при сканировании
На рис. 11, а показан типичный вид главного лепестка ДН антенны и
отклик на сигнал от точечного рассеивателя для двух последовательных им-
пульсов- при сканировании антенны. Из рисунка видно, что отраженные сиг-
355
Гл. 6. Самолетные РЛС с селекторами движущихся целей
налы отличаются на величину AG2(0). Это приведет к неполной компенса-
ции, что отражает воздействие сканирования Усредненное влияние этого
эффекта на коэффициент улучшения можно определить, интегрируя его диф-
ференциальное воздействие по главному лепесткуа
2 J IG (0) I2 d0
I _----------------------------------- для компенсатора G одной (Па)
scan !ч . задержкой,
J IG(U-f-/ pe)— G(0) I2d6
®»9о
/,,сап =—-----------2------------------- для компенсатора с (116)
f |О(е+М)-2О(в)+О(в-тр0>|ме авумя задержкаш’
-е«
где 0о — угол, при котором главный лепесток ДН спадает до нуля; G(0) —
двухсторонняя ДН по напряжению,
излучения
S) Апертур и
Ы*+Тр)
------*^а+Тр)
^Ъ(Т)
GZ(T)
6) Компенсация
фазоров
Рис, 11. Влияние сканирования антенны:
а —на ДН антенны благодаря кажущемуся изменению азимута рассеивателя 62—0|=ЙТр;
б — на функцию распределения в апертуре вследствие кажущегося движения рассеива-
теля Vi=xQ относительно элемента антенны, расположенного в точке х; в — компенса-
ция двух принимаемых фазоров при ступенчатом сканировании.
Чтобы исключить влияние сканирования с помощью обработки в частот-
ной области и определить соответствующую доплеровскую частоту, необхо-
димо исследовать кажущиеся скорости, наблюдаемые сканирующей антен-
ной. Каждый элемент антенной решетки или дифференциальный участок не-
прерывной апертуры можно рассматривать в качестве элементов, принимаю-
щих сигнал с доплеровским сдвигом, вызванным относительным движением
источников помех. Мощность, принимаемая таким элементом, пропорцио-
нальна значению функции Fz(x) (двухстороннее распределение мощности
в апертуре) в этом элементе.
В дополнение к скорости движения носителя каждый элемент восприни-
мает кажущуюся скорость источника помех, связанную с вращательным дви-
356
6.4. Компенсация влияния движения при сканировании
жением этого элемента (рис. 11,6). Эти кажущиеся скорости распределены
линейно по апертуре, что позволяет перейти от двухстороннего распределе-
ния в апертуре к распределению в частотной области. Результирующий спектр
мощности, связанный со сканированием антенны, имеет вид
0<,П <-у- , (12)
где 0 — скорость вращения антенны; а — горизонтальная апертура антенны.
Это, спектр можно аппроксимировать гауссовым распределением со стан-
дартным отклонением (§ 5.3), равным
fr 0 00
ос=>0,265 — = 0,265 —«0,265 --------- , (13)
п 0f) X
где X и а измеряются в одних и тех же единицах; 0а — ширина односторон-
ней диаграммы на уровне половинной мощности; п — число отраженных им-
пульсов, принимаемых антенной за один цикл сканирования. Аппроксимация
0а»Х/а позволяет получить распределение в антенне, обладающее приемле-
мыми уровнями боковых лепестков.
Можно заметить, то разностный отраженный сигнал равен
AG2 (6) ®
dG1 (0)
d6
A dG2 (0) А
де=—1ХвГр.
(14)
Это предполагает [2,5], что корректирующий сигнал должен быть противо-
положен AG2(0) (рис. 11, в). Одна половина корректирующего сигнала скла-
дывается с одним импульсом, а другая — вычитается из другого импульса,
поэтому
AG2 (0) ВТР d22(0) _
Корректирующий сигнал =---= —---—-----
d2(0) /1С>
= 0 Тр 2(0)———, (15)
do
где вместо G2(0) подставлено 22(0). РЛС излучает сигнал с помощью суммар-
ной диаграммы 2(0) и принимает сигнал с помощью разностной диаграммы
А(0), так что принимаемый сигнал пропорционален произведению этих двух
диаграмм. Если использовать сигнал, принимаемый разностной диаграммой
в качестве корректирующего, то
ЕС = Д (0)2(0). (16)
Сравнивая (15) и (16), видим, что для того, чтобы функция Ес аппроксими-
ровала форму корректирующего сигнала, разностные диаграммы должны
иметь вид
. d2 (0)
Д(0) = 0Гр —(17)
d0
Производная от суммарной диаграммы подобна разностной диаграмме: она
положительна в нуле главного лепестка (—0О), спадает до нуля на оси антен-
ны, затем становится отрицательной вплоть до 0О.
Обращаясь к рис. 10, заметим, что схема для компенсации эффекта ска-
нирования в основном аналогична схеме компенсации, применяемой в системе
смещения фазового центра антенны, за исключением того, что разностный
сигнал находится в фазе с суммарным сигналом и усиливается до уровня,
357
Гл. 6. Самолетные РЛС с селекторами движущихся целей
определяемого углом поворота антенны за интервал времени между им-
пульсами.
Необходимые сигналы (если не вводить в рассмотрение ДН для излуча-
емого сигнала 2(0), одинаковую для обоих каналов) имеют вид
2(0)±/0ТрД(0), где I — отношение коэффициентов усиления в двух каналах,
выбранное таким образом, чтобы максимизировать режекцию пассивных по-
мех. В отличие от системы смещения фазового центра антенны, здесь необ-
ходимый наклон разностной диаграммы можно определить, взяв производ-
ную от диаграммы сканирования. Этот метод известен как компенсация со
ступенчатым сканированием, так как в системе производится электронное
скачкообразное отклонение ДН антенны при приеме каждого следующего
импульса немного вперед или немного назад относительно ее оси. Поэтому
в каждой паре соседних отраженных импульсов один приходит с опереже-
нием, а другой с отставанием; это позволяет добиться такого эффекта, как
если бы антенна оставалась неподвижной.
На рис. 12 показана зависимость коэффициента улучшения от числа
импульсов на ширину ДН, полученная в [2J для компенсатора с одной ли-
нией задержки.
О 10 20 00
л-число имлулыю^лри-
нимаемых ни полуширину
Л О за оОно сканирование
Рис. 12. Зависимость коэф-
фициента улучшения I при
компенсации со ступенча-
Выбор компенсирующей диаграммы опре-
деляется требованиями к характеристикам
функционирования системы, типом используе-
мой в СДЦ фильтрации, скоростью носителя,
темпом сканирования и параметрами, характе-
ризующими обычные РЛС: разрешающей спо-
собностью, искажениями, коэффициентом уси-
ления, уровнем боковых лепестков и т. д.
Экспоненциальная диаграмма и соответствую-
щая разностная диаграмма, например, превос-
ходно используются в системе смещения фазо-
вого центра антенны с компенсатором на од-
ной линии задержки, но не удовлетворяют
требованиям при использовании их в компен-
саторах с двумя линиями задержки. Это про-
исходит потому, что компенсатор с одной ли-
нией задержки требует лучшего согласования
реальной и заданной диаграмм.! вблизи линии
визирования, а компенсатор, с* двумя линиями
задержки требует, лучшего согласования на
спадах диаграммы. Компенсация, со ступенча-
тым сканированием обычно требует, чтобы
максимумы разностной диаграммы были как
можно ближе к нулям суммарной диаграммы.
В работе [5] показано, что при компенса-
ции со ступенчатым сканированием коэффици-
ент улучшения компенсатора с одной линией
тым сканированием в ком-
пенсаторе с одной линией
задержки от числа отра-
женных импульсов, прини-
маемых в одном цикле ска-
нирования на полуширину
диаграммы. Диаграмма име-
ет вид (sin х) /х.
задержки увеличивается с увеличением числа
принятых при сканировании отраженных им-
пульсов со скоростью 20 дБ/декаду; при сту-
пенчатой компенсации со ступенчатым скани-
рованием типа «первой производной» ’> — со
скоростью 40 дБ/декаду; при компенсации типа
Компенсация, определяемая Дб2(0)/2, может осуществляться с по-
мощью разложения G2(0) в ряд Тейлора. Выше использовалась первая про-
изводная. Использование производных более высоких порядков позволяет по-
лучить лучший корректирующий сигнал,
358
6.5. Одновременная компенсация движения носителя и сканирования
«первая и вторая производная» — коэффициент улучшения компенсатора
с одной линией задержки увеличивается с возрастанием числа принятых при
сканировании отраженных импульсов со скоростью 60 дБ/декаду. Следова-
тельно, для наземных систем с характерной для них ограниченной скоростью
сканирования .следует улучшать компенсирующую диаграмму, а не использо-
вать компенсаторы более высокого порядка. .Для самолетных систем, однако,
характерны ограничения, связанные, в первую очередь, с движением носителя.
Для их хорошей работы в условиях помех от наземных рассеивателей необхо-
димо использование и более качественных компенсаторов и компенсирующих
диаграмм. >Е условиях помех, создаваемых поверхностью моря, на функцио-
нирование системы в основном влияет ширина доплеровского спектра или дви-
жение носителя, а не сканирование. Применимость системы смещения фазо-
вого центра антенны или компенсации со ступенчатым сканированием в этом
случае зависит от конкретных параметров системы.
6.5. Одновременная компенсация движения носителя
и сканирования
В ССДЦ, принимающих в течение цикла сканирования большое число
отраженных импульсов, сканирование представляет собой вторичное по зна-
чению ограничение для двойного компенсатора без компенсации диаграммы.
Однако характеристики функционирования системы смещения фазового цент-
ра антенны существенно ухудшаются при сканированйи. Это происходит
вследствие вызванной сканиро- ' ,
ванием модуляции разностной
диаграммы, служащей для ком-
пенсации движения носителя.
Так как при методе смеще-
ния фазового центра антенны
разностная диаграмма находит-
ся в квадратуре по отношению
к суммарной диаграмме с целью
компенсации фазовых ошибок,
та при ступенчатом сканирова-
нии разностная диаграмма син-
фазна с суммарной с целью
компенсации амплитудных оши-
бок, то оказывается возмож-
ным комбинировать эти два
метода с помощью соответству-
ющего масштабирования и ис-
пользования разностной диа-
граммы и в квадратуре, и в фа-
зе. Масштабный коэффициент
выбирается таким образом, что-
бы максимизировать коэффи-
циент улучшения в условиях
сканирования и движения но-
сителя.
На рис. 13 приведены гра-
фики коэффициента улучшения
СДЦ для компенсаторов г дву-
мя линиями задержки, постро-
енные с учетом сканирования и
Рис. 1.3. Коэффициент улучшения СДЦ I для
компенсатора с двойной задержкой с систе-
мой смещения фазового центра антенны и
со ступенчатым сканированием в зависимости
от числа длин волн, на которое перемещается
верхняя точка апертуры за интервал между
импульсами аОГр/2Л для различных значений
доли горизонтальной ширины апертуры, на
которую переместился самолет за интервал
'между импульсами, VxTp/a. где
а — горизонтальная апертура; А. —длина вол-
ны; То — интервал времени между импульса-
ми; 6 — скорость вращения антенны; Vx —
проекция путевой скорости самолета на плос-
кость, касательную к апертуре.
35»
Гл. 6. Самолетные РЛС с селекторами движущихся целей
движения носителя. Абцисса кривой представляет собой расстояние, на кото-
рое перемещается верхняя точка апертуры антенны за интервал времени
между импульсами. Этот параметр характеризует долю горизонтальной апер-
туры антенны, на которую смещается самолет при его горизонтальном движе-
нии в направлении, перпендикулярном оси антенны, за промежуток времени
между импульсами. Коэффициент улучшения равен
VXTP аёТр 17,8 X
I [дБ] « -19-20 log —--------—« 20 log . (18)
а 2Л v v Т 0
л р
Для сравнения приведены кривые, полученные без компенсации.
Рис. 14. Зависимость максимального коэффициента улучшения / от частичного относи*
тельного сдвига огибающей для типичных форм огибающей импульса:
Индекс 1 указывает на использование одной линии задержки, индекс 2 — на использо-
вание двух линий задержки. Форма импульса: а — прямоугольная; b — косинусная; с —
косинус-квадратная; d — треугольная; е — гауссова.
Графики коэффициента улучшения на рис. 9 для случая отсутствия ска-
нирования показывают, что при перемещении антенны, равном 0,35 расстоя-
ния между фазовыми центрами или 0,06 длины апертуры, можно получить
отношение компенсации 62 дБ. При сканировании антенной это значение
уменьшается. При скорости сканирования, соответствующей перемещению
верхней точки апертуры на 0,075 или менее, сканирующая система с компен-
сацией (рис. 13) работает лучше, чем некомпенсированная система без ска-
нирования.
6.6. Ограничения, накладываемые на коэффициент улучшения,
вследствие сдвига огибающей импульса
Доплеровская частота, возникающая вследствие наличия радиальной со-
ставляющей скорости самолета, приводит к появлению сдвига фаз между
последовательными импульсами РДС. На соответствующую величину задер-
360
6.7. Влияние множественности спектров
живается и огибающая импульса. В схеме TACCAR обычно производится
компенсация фазовой задержки на. ПЧ с помощью изменения фазы опорного
генератора непрерывных колебаний. Следовательно, на огибающую отдельно-
го ^импульса никакого воздействия не оказывается. Рассогласование времен-
ной задержки огибающей для различных импульсов приводит к появлению
остаточного сигнала, называемого иногда «шумом дальности».
На рис. 14 показано влияние этих остаточных сигналов на функциониро-
вание компенсатора с одной линией задержки. Идеализированная огибающая
прямоугольной формы дает пессимистическую картину такого воздействия.
Для большинства обычных представлений формы огибающей получаются при-
мерно те же самые результаты — 20 дБ/декаду.
Рис 14 показывает также влияние остатков на функционирование систе-
мы с двойной компенсацией. Для прямоугольной огибающей применение ком-
пенсатора с двойной задержкой позволяет улучшить результаты по сравнению
с компенсатором с одной линией задержки лишь на 1,8 дБ. Однако для форм
огибающих, более близких к реальным, улучшение оказывается существенным.
Треугольные и косинусные огибающие имеют скат порядка 30 дБ/декаду,
более гладкие огибающие (косинусквадратная и гауссова) — порядка
40 дБ/декаду.
6.7. Влияние множественности спектров
Самолетные радиолокационные системы дальнего обнаружения могут
работать на таких высотах, при которых радиолокационный горизонт будет
приблизительно соответствовать максимальной необходимой дальности обзо-
ра. Это приводит к тому, что во всем инспектируемом диапазоне дальностей
будут присутствовать пассивные по-
мехи от поверхности моря или земли.
Помимо рассеивающей поверхности
могут присутствовать и другие источ-
ники пассивных помех, например ме-
теообразования или облака металли-
зированных отражателей. В боль-
шинстве случаев эти источники
движутся со скоростями, определяе-
мыми средней скоростью ветра в верх-
них слоях атмосферы, и их средняя
доплеровская частота значительно
отличается от средней частоты меша-
ющих сигналов, отраженных от по-
верхности. Если фильтр СДЦ отсле-
живает частоту помех от поверхности,
то спектр сигналов от источников по-
мех с другой средней доплеровской
частотой попадает в полосу пропу-
скания фильтра СДЦ. Разность ско-
ростей в 40 км/ч соответствует в си-
стеме диапазона S 200 Гц, что может
совпадать с точкой оптимального от-
клика для системы с ЧПИ, равной
400 Гц. Вторичный компенсатор с од-
ной линией задержки может быть
подключен каскадно с первичным
компенсатором с одной или с двумя
линиями задержки Первичный ком-
пенсатор отслеживает среднюю часто-
Рис. 15. Зависимость коэффициента
улучшения СДЦ I для компенсатора
с двумя полосами режекции, отслежи-
вающего два спектра, от нормирован-
ного разнесения спектров &f/fr.
Нормированная ширина спектра
Ос//г=0,01.
361
Гл. 6. Самолетные РЛС с селекторами движущихся целей
ту помех от поверхности и режектирует их. Компенсатор с одной линией
задержки отслеживает другие источники помех и режектирует их. Так как
полоса пропускания одного компенсатора и полоса режекции другого пере-
крываются, то коэффициент улучшения СДЦ для каждого источника помех
зависит от их спектрального разнесения.
На рис. 15 показан коэффициент улучшения двойного компенсатора, ко-
торый состоит из двух одинарных компенсаторов, каждый из которых отсле-
живает один из спектров. Можно отметить, что при изменении разнесения
от 0 до ’А ЧПИ функционирование устройства ухудшается от значений, экви-
валентных двойному компенсатору, до значений, соответствующих одинарному
компенсатору на частоте, равной 1/г ЧПИ.
Тройной компенсатор включает компенсатор с двумя линиями задержки,
отслеживающий исходный спектр помех, и одинарный компенсатор, отслежи-
вающий спектр дополнительных помех. Функционирование первичного ком-
пенсатора изменяется от значений, соответствующих тройному компенсатору,
до значений, которые меньше соответствующих значений для двойного ком-
пенсатора. Функционирование вторичного компенсатора изменяется от значе-
ний, соответствующих тройному компенсатору, до значений, которые меньше
соответствующих значений для одинарного компенсатора.
Список литературы
1 Emerson, R, С. Some Pulsed Doppler MTI and AMTI Techniques, Rand
Corp Kept R-274, March 1, 1954. DDC Document AD 65881.
2 Dickey, F. R., Jr., and M. M. Santa. Final Report on Anticlutter Techni-
ques. General Electric Co Rept. R65EMH37, March 1, 1953.
3 Anderson, D. B. A Microwave Technique to Reduce Platform Motion and
Scanning Noise in Airborn Moving Target Radar, [RE WESCON Conv.
Record, v. 2, pt. 1, p. 202—211, 1958.
4 Shroeder, K. G. Beam Patterns for Phase Monoimpulse Arrays, Microwa-
ves, March, 1963, p 18—27.
5 Grissetti, R. S., M M. Canta, and G. M Kirkpatrick. Effect of Internal
Fluctuations and Scanning on Clutter Attenuation in MTI Radar, IRE
Trans, v ANE-2, p 37—41, March, 1955.
6 Gerge, T, S. Fluctuations of Ground Clutter Return in Airborne Radar
Equipment, Proc. IEE (London), v. 99, pt. IV, p. 92—99, April, 1952
7 . Dickey, F. R.f Jr. Theoretical Performance of Airborne Moving Target In-
dicators, IRE Trans., v. PGAE-8, p. 12—23, June, 1953.
8 Berkowitz, R. S, (ed ). “Modern Radar : Analysis, Evaluation and System
Design John Wiley & Sons, Inc., N. Y„ 1966.
Современная радиолокация (анализ, расчет и проектирование систем).
Пер. с англ, под ред. Ю. Б. Кобзарева. М., “Сов. радио”, 1969.
9 . Barton, D. К. “Radar Systems Analysis”, Prentice-Hall, Inc., Englewood
Cliffs, N. J., 1964.
Бартон Д. Радиолокационные системы. Пер. с англ, под ред. К. Н. Тро-
фимова. М., Воениздат, 1967.
10 Final Engineering Report on Displaced Phase Center Antenna, vol. 1,
March 26, 1956; vols. 2 and 3, April 18, 1957, General Electric Co., Sche-
nectady, N. Y, Contract AF 33(600)—24744.
Глава 7
ИМПУЛЬСНО ДОПЛЕРОВСКИЕ РЛС
Д, Муни, В, Скиллмен
7.1. Характеристики и применения
Терминология. В данной главе термин «импульсно-доплеровская РЛС»
относится к РЛС, характеризуемым следующими особенностями [1]:
— способностью работать с достаточно высокой частотой повторения
импульсов, при которой не возникает неоднозначности определения скорости
целей или источников пассивных помех, представляющих интерес;
— возможностью осуществления допплеровской фильтрации (выделения
доплеровских частот) по одной линии спектра импульса;
— возникновением неоднозначности при измерении дальности целей
и источников пассивных помех вследствие высокой частоты повторения им-
пульсов.
Применение. В основном импульсно-доплеровские РЛС применяются
в системах селекции движущихся целей, работающих в условиях интенсив-
ных пассивных помех от земной поверхности. Типичные применения таких
РЛС перечислены в табл. 1.
Таблица 1
Тип РЛС Требования Степень сложности оборудования
Самолетная, дальнего ружения обна- Большая дальность обнару- жения Точное измерение дально- сти Очень сложное
Самолетная станция хвата пере- Средняя дальность обнару- жения Грубое измерение дально- сти (как правило) Средняя слож- ность
Головка самонаведения про- тиворакетного снаряда Информация об истинной дальности не требуется Жесткие допуски на вибрации. Не должно быть сложным
Наземная станция уп ния оружием [3, 4 завле- Малая дальность обнару- жения Однозначное определение дальности (как правило) Простое
Метеорологическая ция [5—7] стан- Высокая разрешающая спо- собность по скорости и дальности Средняя слож- ность
363
Гл. 7. И мпульсно-доплеровскиг РЛС.
В данной главе рассматриваются преимущественно самолетные импульс-
но-доплеровские NIC, но основные принципы относятся также и к наземным
станциям.
Преимущества и недостатки. В табл. 2 дается сравнение характеристик
импульсно-доплеровских РЛС и доплеровских РЛС других типов.
Пассивные Пассивные помехи Пассивные помехи
помеха по линии Высоты /по главному луну
по Вековым sinx
лепесткам
Сигналов
f0 Частота
Рис. 1. CneKip пассивных помех и эхо-сигнала от цели при установке РЛС на горизон-
тально движущемся носителе.
Форма спектра импульсно-доплеровской РЛС. Спектр передаваемого сиг-
нала импульсно-доплеровской РЛС состоит из дискретных линий, соответст-
вующих несущей частоте fo и боковым частотам fo±ifR, где [и — частота
повторения импульсов (ЧПИ). i — целое число [2]. Огибающая спектра опре-
деляется формой импульса. Для обычно применяемых прямоугольных импуль-
сов спектр имеет форму (sinx)/x.
Участок пассивных помех Участок пассивных помех
по линии высоты —>41(«с— по главному лучу
Участок пассивных помех
по воковь/м лепесткам
(скорости сближения)
Участок пассив- {
ных помех по t
Вековым лепест- <
। кам (скорости t
' удаления) J
Участок,
своОовный от
пассивных помех
(скорости
, удаления)
сВоЛдныи
। от пассивных помех
I (скорости сближения)
I вогнал
। ГрЛ7 дискретной
] II вели
fo ^+^М8 ^+74пйх ^+7МВ+Уг Частота
fo~^
7f=~cos^
Л
л
f
Стах д
А
Рис. 2. Спектр сигнала, прошедшего через однополосный фильтр-
Спектр принятого эхо-сигнала от дискретного отражателя содержит ли-
нии, сдвинутые относительно линий спектра переданного сигнала на допле-
ровскую частоту, пропорциональную радиальной скорости цели V относитель-
но носителя РЛС. Доплеровский сдвиг для сигнала, прошедшего путь от
РЛС до цели и обратно, равен fd = 2V/X, где А. — рабочая длина волны РЛС.
Если Уд — путевая скорость носителя РЛС, ф — угол между вектором скоро-
сти и направлением на. небольшой участок земной поверхности, создающий
пассивные помехи, то доплеровский сдвиг для сигнала от этого участка равен.
384
7.1. Характеристики и применения
Таблица 2
Доплеровские РЛС других типов Импульсно-доплеровские РЛС
Преимущества Недостатки
С селекто- ром движу- щихся це- лей (с ли- нией за- держки) Точность измерения дально- сти не ухудшается из-за раз- мывания спектра пассивных по- мех, обусловленного скоростью движения носителя, или из-за больших углов между направ- лением сканирования и векто- ром скорости Улучшенная фильтрация сиг- налов от наземных неподвиж- ных и медленно движущихся целей Ширину полосы пропускания преддетекторного тракта мож- но согласовать с временем об- лучения цели Обнаружение ограничивает- ся только тепловыми шумами, а не пасивными помехами, при- нимаемыми боковыми лепест- ками (для целей, находящихся вне диапазона частот этих по- мех) Флуктуации пассивных по- мех от земной поверхности усредняются по многим неод позначным отсчетам дальности Радиальную скорость цели можно использовать для со- провождения Требуется более сильное по- давление пассивных помех, вследствие их наложения при неоднозначности по дальности Более жесткие требования к стабильности и спектральной чистоте передаваемых сигналов вследствие более сильного вли- яния пассивных помех при на- ложении Для получения информации об истинной дальности тре- буется более сложная аппара- тура Обнаружение целей на фоне мешающих отражений, прини- маемых боковыми лепестками, ухудшается при малых высо- тах носителя РЛС
Непрерыв- ного из- лучения Дальность обнаружения не ограничивается из-за прямого просачивания энергии передат- чика (влияние этого просачи- вания устраняется стробирова- нием во времени) Возможность использова- ния одной антенны для переда- чи и приема, так как требова- ние их развязки не предъяв- ляется Импульсные сигналы позво- ляют получать точную инфор- мацию о дальности Стробирование во времени вызывает потери на «затене- ние» вследствие неоднозначно- сти по дальности Слежение должно проводить- ся в условиях потери сигнала при «затенении» цели Необходимо принимать меры для устранения мешающих сиг- налов, создаваемых гармоника- ми частоты стробирования
Звв
Гл. 7. Импульсно-доплеровские РЛС.
fc — (2Vr/X) cos гр. На рис. 1 показан спектр импульса, отраженного от рас-
пределенной цели (например; поверхности’ земли или облаков) и от точечных
целей (самолетов, автомашин, танков, спутников и т. п.).
В импульсно-доплеровских станциях обычно используется только часть
этого спектра, связанная с одной спектральной линией (обычно соответству-
ющей несущей частоте). Эта часть спектра показана на рис. 2 для случая
горизонтального движения носителя РЛС со скоростью Рд. Область спектра,
Азимут цели или антенны, град-
Рис. 3. Изменение участков доплеровского спектра при наличии и. отсутствии пассивных
помех в зависимости от скорости цели и ее азимута при горизонтальном полете носи-
теля (ширина участков меняется с изменением условий).
свободная от влияния пассивных помех, определяется как участок, в котором
нет линий, соответствующих пассивным помехам от земной поверхности. Уча-
сток спектра шириной 2fcmax соответствует пассивным помехам на боковых
лепестках. Уровень мощности помех, принимаемой боковыми лепестками ан-
тенны на отдельных частотах, может быть меньше уровня шума.
Участок, соответствующий главному лучу, лежащий вблизи частоты
А»47мв, содержит отраженные сигналы от поверхности Земли, облучаемой
главным лучом антенны под углом сканирования гр. измеряемым относитель-
но вектора скорости Пассивные помехи по линии высоты обусловлены^ ме-
шающими отражениями от земной поверхности, находящейся непосредствен-
но под носителем РЛС. при почти вертикальном облучении. Эга< линия имеет
нулевой доплеровский сдвиг при отсутствии, вертикальной составляющей ско-
рости носителя. Эхо-сигнал от точечной цели находится на. частоте fo-Нмв + Гг
ври скорости, цели. VTl и угле гр между вектором скорости и линией визиро-
вания цели.
На рис. 3. показано изменение различных участков, спектра доплеровских
частот в зависимости от азимута антенны, или цели, измеряемого относи-
тельно горизонтальной составляющей вектора скорости. По оси ординат от-
ложена нормированная, радиальная скорость, цели (равная составляющей
скорости. по> линии визирования цели), поэтому участок спектра пассивных
помех по, главному лучу лежит вблизи нулевой скорости, а границы участков
спектра пассивных помех по боковым лепесткам при изменении азимута ан-
тенны меняются по синусоидальному закону.
366
7.1. Характеристики и применения
Неоднозначность и выбор частоты повторения импульсов. Так как, соглас-
но определению, доплеровская РЛС не должна иметь неоднозначности по
скорости, частота повторения импульсов должна быть достаточно высокой,
чтобы исключить перекрытие эхо-сигналов от целей на соседних спектраль-
ных линиях. Принимается, что однополосный фильтр приемника имеет фик-
сированную настройку относительно частоты пассивных помех по главному
лучу (рис. 4,а). Тогда, если максимальная частота сигнала от цели (отно-
Полоса пропускания
однополосного фильтра приемника
л Л ' Л
ZVff cos ф0
?мв~ J '
Рис. 4. Выбор частоты повторения импульсов для исключения неоднозначности по ско-
рое i и.
Однополосный фильтр приемника имеет фиксированную настройку относительно пассив-
ных помех по главному лучу (а) или частоты передатчика (б). (Изображенные штрихо-
выми линиями пики пассивных помех по главному лучу представляют максимальные
отклонения частоты этих помех-вследствие сканирования антенны.)
сительно земли) равна ±frmax, то минимальная частота повторения им-
пульсов
?R min=^^T max =4Vy fflax/^»
Характер изменения fumm в зависимости от Vrmax и 1 показан на рис. 5.
Если однополосный фильтр имеет фиксированную настройку относительно
рабочей частоты передатчика fo, то частота повторения импульсов должна
быть выше с учетом изменений частоты пассивных помех по главному лучу,
добавляющихся к частоте сигнала от цели, В этом случае (рис, 4,6) мини-
мальная частота повторения импульсов определяется по формуле
/I f f max
Ir rninmax4"'MB max 'MBmin = j •
2Vn (cos фщщ—cos фгках)
F- —----------;----------, (2)
Л
367
Гл. 7. И мпульсно-доплеровские РЛС.
где ipmin, tpmax — минимальный и максимальный углы сканирования, отсчи-
тываемые от вектора скорости.
Однозначно отсчитываемая дальность определяется выражением
= с/(2/я). Если выбрана минимальная частота повторения импульсов famin,
то максимальное однозначное значение дальности для случая, представлен-
ного на рис. 4, а, будет равно
Максимальная скорость цели ЛТтМ,км/ч
с К
max от/ ,
7 max
(3)
где с — скорость света. Это пока-
зано также на рис. 5.
Так как на время передачи им-
пульса приемник запирается, цель
в это время «затеняется» и не
будет видна. При высшем значе-
нии частоты повторения импуль-
сов (которое обычно и исполь-
зуется) цель может затеняться
несколько раз на интервале даль-
ностей, представляющих интерес.
Эти затенения случаются на даль-
ностях, кратных Йиша!.
Рис. 5. Зависимость однозначной даль-
ности и частоты повторения импульсов,
соответствующей однозначной скорости,
от максимальной скорости цели.
Базовая схема импульсно-доплеровской РЛС. Типичная структурная схе-
ма РЛС представлена на рис. 6. В нее входят схемы стробирования по даль-
ности, однополосный фильтр, цепи подавления пассивных помех по главному
лучу и набор фильтров обнаружения. На схеме показан только один прием-
ный канал, но могут применяться несколько каналов дальности для снижения
потерь от затенения целей и обеспечения измерения дальностей на частотах,
кратных часюте повторения импульсов в режиме слежения при обзоре. Для
непрерывного слежения за одиночной целью в схему могут быть также вклю-
чены системы слежения по скорости, дальности и углам.
Подавитель импульсов передатчика. Этот подавитель вместе с антенным
переключателем снижает энергию передатчика, просачивающуюся непосред-
ственно в приемник, до такого уровня, при котором боковые полосы шума
передатчика не могут ухудшить работу приемника.
Однополосный фильтр. Ширина полосы пропускания этого фильтра при-
близительно равна частоте повторения импульсов. Фильтр преобразует вход-
ные импульсные сигналы в непрерывный (незатухающий) сигнал. Обычно за
центральную частоту настройки фильтра берется спектральная линия несу-
щей частоты эхо-сигнала от цели, так как она содержит наибольшую мощ-
ность и не подвергается сдвигу при использовании различных частот повто-
рения импульсов.
Отношение сигнал/шум не ухудшается из-за однополосного режима, так
как ширина полосы шума также уменьшается. Преимущество применения
однополосного фильтра состоит в том, что фильтрация пассивных помех и сиг-
нала осуществляется легче на отдельной спектральной линии, чем по всему
спектру. Следует заметить, что все схемы временного стробирования должны
предшествовать однополосному фильтру.
368
7.2. Пассивные помехи импульсно-доплеровским РЛС
Фильтрация пассивных помех и обнаружение целей. Остальная часть при-
емника после схем стробирования по дальности и однополосного фильтра по
существу такая же, как в РЛС непрерывного излучения (гл. 4).
7.2. Пассивные помехи импульсно-доплеровским РЛС
Общие сведения. Форма спектра пассивных помех определяет потенци-
альную чувствительность РЛС к целям с различными доплеровскими часто-
тами. В общем случае спектр является функцией доплеровской частоты и
дальности. Но если частота повторения импульсов достаточно высокая, то
спектр становится независимым от дальности вследствие наложения пассив-
Индикатор
Усилитель
или
система
целеуказа-
ний
Генератор
переменной
частоты
устройства
слежения
за пассивными
помехами
Устройство
слежения за
*- пассивными
помехами
Генератор
перемен-
ной
частоты
устройства
слежения
лоонорости
^Устройство слеженйя\
' по игловым L
коораинатам |
Движение Положение
1_.
I Фильтр
стройов । _____________
\_^дстрайство слеженйс\
1 \_по дальности
К спев я щей
системе
антенны
К усилителю
'! х со стройиро-
ванием
по дальности
носителя антенны
т
т
I
Рис. 6. Типичная с1рукгурная схема импульсно-доплеровской РЛС.
369
Гл. 7. Импульсно-доплеровские РЛС.
пых помех и имеет форму, подобную форме спектра РЛС непрерывного из-
лучения (но-с меньшими амплитудами).
Пассивные помехи от земной поверхности для неподвижной РЛС. Функ-
ция плотности пассивных помех от земной поверхности при неподвижной и
идеальной импульсно-доплеровской РЛС представляется единичной спект-
Рис. 7. Линии постоянной доплеровской частоты (изодопЫ) и кольцевые линии, соответ-
ствующие ^гробам дальности, на поверхности земли (высота носителя РЛС равна
0>219 с//я).
ральной линией (после-стробирования по дальности и узкополосной фильтра-
ции), соответствующей частоте передаваемого сигнала. Мощность помех мож-
но вычислить так -же, как для импульсной РЛС, но эта мощность должна
суммироваться для всех участков неоднозначного отсчета дальности.
Пассивные помехи -от земной поверхности для движущейся РЛС [в].
Когда РЛС движется относительно земной поверхности со -скоростью Ид,
спектр пассивных помех расширяется вследствие этого движения и перекры-
вает диапазон с границами, смещенными вверх и вниз от несущей частоты
па доплеровскую частоту, соответствующую скорости РЛС, -как показано на
рис. 2 для случая горизонтального движения.
На рис. 7 показаны кривые постоянной доплеровской частоты или посто-
янного угла ф, называемые изодопами, а также кольцевые линии равной
дальности, представляющие несколько неоднозначных положений одного
370
7.2. Пассивные помехи импульсно-доплеровским РЛС
строба дальности. Этот рисунок иллюстрирует частный случай горизонталь-
ного движения. Функция плотности пассивных помех для стробируемого уча-
стка дальности определяется суммой отражений от заштрихованных участков
между двумя изодопами, разделенными единичным интервалом частот.
Пассивные помехи. Общие уравнения. Геометрическое построение (рис. 8)
удобно для интегрирования принимаемой мощности вдоль изодопы. Носитель,
Рис, 8. Геометрические соотношения для интегрирования мощности пассивных помех
вдоль изодоп.
на котором установлена Р’ЛС, движется со скоростью Уд относительно зем-
ной поверхности’ и находится на высоте Н. Вектор скорости направлен па-
раллельно оси х и образует угол D (угол наклона вниз) с местной горизон-
талью. Положение дифференциальной площадки dA, создающей пассивные
помехи, задано координатами: ф (угол изодопы) и а (угол наклона линии
визирования РЛС к площадке dA относительно' вектора скорости). Относи-
тельная скорость этой площадки Vs—Vr cosтр1
Приводимое/ ниже уравнение. (4) дает отношение C/.N«-. плотности пол-
ной мощности, на центральной спектральной линии в единичной ширине по-
лосы, принимаемой со всех неоднозначно, отсчитываемых дальностей при
стробе дальности, задержанном на Го относительно зондирующего импульса,
к мощности шума приемника в единичной ширине полосы. Это отношение как
функция нормированной скорости источника пассивных помех определяется
уравнением (4). Уравнение получено для плоской'1 модели земной поверхно-
сти в предположении о постоянстве отражательной способности пассивных
рассеивателей.
п—ап
=KD f [G (ф, а)]2 т2 !sin а ф-tg О
оф J (
' У \ 2 J 1 /2р
— —1 \ da,
<Vc) J J
(4)
371
Гл. 7. Импульсно-доплеровские РЛС.
где
_ (cosP)2[1-(Vc/Vr)2]
Kd “ 2 (4л)3 VR Н2 LkTa Fn xxG ?
Par — средняя мощность передатчика; L — потери в системе; k —
1,38-10'28 (Вт/Гц)/К; То—290 К; Fn— коэффициент шума приемника;
с — скорость света; y==<j°/sin ср — эффективная поверхность рассеяния источ-
ника пассивных помех на единицу площади проекции; о0 — эффективная
поверхность рассеяния источника помех на единицу облучаемой поверхности;
ф — угол наклона линии визирования РЛС к центру площадки, создающей
пассивные помехи, измеряемый относительно горизонтали;
ТR — тс, + х при TG—x<TR<FG,
те= . меньшему из (т, tg) при T(i <ТR <Т, -]-\х—tg| ?
Л,4-т0— TR при Tg + |t—тс | < TR < Г -4-т^,
0 при всех других значениях
Те — задержка строба дальности относительно зондирующего импульса;
тс,- ширина строба дальности в приемнике; т — длительность зондирующего
импкльса;
2/г 1
7 = ---------------------------------------------------------mod —.
* с[1 — (1/с/1/л)2]1/2 cos Z? {sin сс-Ь [(VK/IZC)2— lj-l/2tgD} fR
б(ф, a)—усиление антенны в направлении на площадку, создающую пас*
сивные помехи;
arcsin I — ---- при | D\ < ф < л — | D] t
\ tg гр /
л । при 0 < ф < D и D положительном,
2 I при л—I D | < ф < л и D отрицательном
л < при л—£)<ф<л и D положительном,
2 I при 0 < ф <D и D отрицательном.
Если частота повторения импульсов и дальность достаточно велики, так
что интервалы между зонами неоднозначного oiсчета малы по сравнению
с наклонной дальностью, то те2 можно заменить его средним значением т/ •
Тогда отношение полной мощности на центральной линии спектра к мощно-
сти шума приемника для любого строба дальности будет равно
|G (ф, a)]2 pin а-4-tg D
da,
(5)
где т2 =
, г \
'rx 1тл—”1 ПРИ tg > т,
ПРИ
\ ’J J
372
7.2. Пассивные помехи импульсно-доплеровским РЛС
В случае горизонтального движения D=0 и уравнение (5) принимает упро-
щенный вид
л
[G (ф, a)]2 sin2 ada,
о
(6)
где Ко — значение Kd при D=0.
Рис. 9. Спектр мощности пассивных помех как функция положения строба дальности.
Пассивные помехи по боковым лепесткам. Спектр пассивных помех от
облучения земной поверхности боковыми лепестками антенны можно вычис-
лить по уравнениям (4), (5) или (6), если известно усиление антенны на
боковых лепестках. Для предварительного расчета радиолокационной систе-
мы знание точного значения функции, характеризующей усиление антенны,
не требуется. Можно воспользоваться хорошим приближением, согласно кото-
рому антенна излучает на боковых лепестках изотропно с постоянным уси-
лением Gsl.
На рис. 9 графически представлено уравнение (4) с учетом стробирова-
ния по дальности для горизонтального полета, Gsi—const и коэффициента
импульсного заполнения при передаче и приеме, равного 0,2. Усредненные
спектры пассивных помех на боковых лепестках [уравнение (5)] для несколь-
ких значений угла наклона ® показаны на рис. 10. В случае горизонтального
движения, усредненный спектр можно найти из уравнения (6) в виде
лЛо т2 G\i
2
(7)
373
Гл. 7. Импульсно-доплеровские РЛС.
где SLC — средняя мощность пассивных помех на боковых лепестках.
Один из методов измерения дальности импульсно-доплеровской РЛС
с высокой частотой повторения импульсов состоит в применении линейной
частотной модуляции передатчика и гетеродина приемника со скоростью
изменения частоты /. Сигнал пассивной помехи в приемнике получает частот-
ный сдвиг, пропорциональный дальности, и полный частотный сдвиг oihoch-
тельно несущей равен
, 21/Я ,,/2/ И
(8)
Рис. 10. Спектр мощности пассивных помех при различных углах облучения.
Результирующее отношение плотности мощности пассивных помех на бо«
ковых лепестках к плотности мощности теплового шума (SLC/Nq) fm при
высокой частоте повторения импульсов и горизонтальном движении носителя
РЛС равно
_____. л/2
SLC \ — Р ______________jg((p, Лй}]2 sina ф cos ф</ср
No- /fm ™ е J {cos2 ф—/ЯХ (созес 1/2 '
где = — (Vc/Vb)2]-1; О(ф, Л с)’— усиление антенны, как функция
углов ф и Ас;
Ас — arccos
Vc— fHT (cosec ф)/с
cos ф
— азимут линии визирования.
Пассивные помехи по главному лучу. Спектр пассивных помех по глав»
ному лучу можно найти из уравнений (4), (5) или (6).
В случае высокой частоты повторения импульсов, горизонтального дви«
жения платформы, гауссовой формы главного луча антенны и угла наклона
374
7.2. Пассивные помехи импульсно-доплеровским РЛС
луча, большего его ширины, отношение плотности мощности пассивных помех
по главному лучу МВС к плотности мощности шума приемника равно
МВС\ , Л 1Л , Pavxl 13 ?0pSin2£sG2 (ф — фо)
—— = 1,9.10-4--------------------------------—• (10)
a LVRH2kxx TF(1 — cos2 Fg cos2 Лз)1/2
где С(ф—фо) —усиление антенны как функция угла, измеряемого от норма-
ли к изодопе; фо — угол линии визирования антенны относительно вектора
скорости; Ев — угол места линии визирования; As — азимут линии визирова-
ния; Ор — ширина луча (измеренная вдоль изодопы для максимума луча),
рад. Как видно из этого выражения, форма спектра определяется квадратом
усиления главного луча антенны, нормального к изодопам.
Так как главный луч облучает меньшую площадь на земной поверхно-
сти, чем боковые лепестки, то для справедливости уравнения (10) частота
повторения импульсов должна быть достаточно высокой, чтобы по крайней
мере одно, а лучше два и более неоднозначных положений строба дально-
сти попадали в пределы участка, облучаемого главным лучом антенны. Если
принять, что минимум один интервал между импульсами приходится на уча-
сток земной поверхности, облучаемой нижней половиной главного луча, то
минимальная частот повторения импульсов определится как
с sin Es sin {Es-}-Qe/2)
ra 1 n 2Hsin(£s4-0£/2)-sin Es 1 (1
где Qe — ширина луча в угломестной плоскости.
При гауссовой форме луча в плоскости ф отношение полной мощности
пассивных помех от главного луча к мощности шума приемника с шириной
полосы Bn>Bnmjo равно
=.2,85-10-4Рау г2 K2yBE&AGf sin2 Es(kxxG То Вп Fn Н2(12)
total '
где Qa — ширина луча в азимутальной плоскости, рад; Gt — максимальное
усиление антенны.
Минимальная полоса, в которой содержится почти вся мощность главно-
го луча, равна
8nmln = 1,520^ VR ^(1 -cos2 cos2 Es)1 /2, (13)
/ MBC \
\ N /
где Оф—ширина луча, измеряемая в плоскости, нормальной к изодопам, рад.
Фильтрация пассивных помех по главному лучу. В идеальном случае
фильтр пассивных помех по главному лучу должен иметь характеристику,
обратную спектру пассивных помех и шума, чтобы спектр на выходе этого
фильтра был равномерным. Однако практически вследствие некоторых по-
грешностей настройки фильтра требуется несколько более широкая его ча-
стотная характеристика (рис. Н).
Настройка фильтра пассивных помех по главному лучу может осуществ-
ляться замкнутым контуром слежения за частотой или с помощью вычисле-
ния частоты пассивных помех по скорости движения РЛС и положению ее
антенны.
Подавление переходных пассивных помех В некоторых случаях, напри-
мер, когда частота повторения импульсов изменяется для многократных из-
375
I л. 7. Импульсно-доплеровские РЛС.
мерений дальности при различных частотах повторения, можно считать, что
пассивные помехи включаются в начале периода приема и выключаются
в конце этого периода. Боковые полосы при такой прямоугольной форме
огибающей сигнала помех очень большие и могут простираться на область
сигнала от обнаруживаемой цели. Для снижения этого эффекта можно при-
менить один из двух методов.
Частота
Первый метод основан на применении весовой функции к принимаемому
сигналу до прохождения его через фильтр пассивных помех, что приводит
к уменьшению боковых полос модуляции. Уширение спектра может быть
определено с помощью преобразования Фурье от весовой функции.
По второму методу — методу гашения переходных процессов произво-
дится запирание выхода фильтра пассивных помех на время переходного про-
цесса на его выходе. В результате этого спектр, поступающий на фильтр об-
наружения, будет зависеть от характеристик запирающей цепи, времени
запирания и длительности периода приема.
Оба метода подавления боковых полос модуляции вызывают некоторые
потери в способности обнаружения, но так как модуляции подвергаются как
полезный сигнал, так и шум, эти потери обычно невелики.
Фильтрация пассивных помех на линии высоты. /Чешающие отражения
от земной поверхности непосредственно под самолетной РЛС называются
пассивными помехами на линии высоты. При зеркальном отражении от
гладкой поверхности эти помехи могут быть сильными. В случае импульсно-
доплеровской РЛС эти пассивные помехи попадают в область помех на
боковых лепестках. Так как помехи на линии высоты могут быть значительно
сильнее пассивных помех, вызванных диффузным рассеянием излучения на
боковых лепестках, и имеют относительно небольшую спектральную ширину,
их можно, как правило, отфильтровать с помощью отдельного режекторного
фильтра. Ввиду того, что пассивные помехи обычно имеют сравнйтельно по-
стоянную частоту, фильтр настраивается 1ак, что слежение за частотой помех
376
7.3. Временное стробирование
не требуется. В случае применения такого фильтра он может также подав-
лять сигнал с нулевой доплеровской частотой, просачивающийся непосредст-
венно из передатчика в приемник.
При достаточном динамическом диапазоне в тракте до входа гребенки
фильтров, возможно альтернативное решение, состоящее в том, что вместо при-
менения отдельного фильтра производится выключение тех фильтров гребен-
ки, в полосу которых попадают пассивные помехи на линии высоты.
7.3. Временное стробирование
Временное стробирование, или запирание приемника на определенное
время, позволяет подавлять сигнал, просачивающийся из передатчика, шум
его боковых полос и устранять влияние избыточного шума приемника на при-
ем полезного сигнала. Оно позволяет осуществлять стробирование по дально-
сти для сопровождения цели и производить измерения истинной дальности
при условии, что неоднозначность отсчета может быть исключена.
Подавление просачивающегося импульса передатчика. Одно из важных
преимуществ импульсно-доплеровской РЛС перед РЛС непрерывного излуче-
ния состоит в возможности временного бланкирования просачивающегося
сигнала передатчика, благодаря чему чувствительность приемника не ухуд-
шается из-за влияния боковых полос шума передатчика.
Частоты гармоник. Должны быть приняты самые тщательные меры для
предотвращения появления случайных мешающих сигналов на выходе систе-
мы. Например, если приемник с промежуточной частотой 30 МГц стробирует-
ся с частотой повторения импульсов НО кГц, то 272-я гармоника этой часто-
ты будет равна 29,92 МГц, а 273-я гармоника — 30,03 МГц. Любая из этих
гармоник может попасть в полосу пропускания доплеровских частот и по-
явиться на выходе. Хотя амплитуды гармоник частоты стробирования относи-
тельно малы, они могут быть сравнимы с полезным сигналом, так как строби-
рование осуществляется в первых каскадах приемника.
Стробирование и сопряжение. Одно из решений проблемы подавления
гармоник частоты стробирования состоит в применении балансной схемы
стробирования и таком сопряжении полосы пропускания тракта промежуточ-
ной частоты с частотой стробирования, при котором гармоники этой частоты
не попадали бы в полезную полосу пропускания. Другое решение заключает-
ся в таком сопряжении частоты стробирования с частотой фильтра пассивных
помех, при котором гармоники частоты стробирования попадали бы в центр
полосы запирания этого фильтра. Однако при таких решениях исключается
возможность работы РЛС с переменной частотой повторения импульсов, если
не считать режима работы, при котором частота повторения изменяется
только дискретными, точно известными ступенями.
Хотя сопряжение частоты повторения импульсов и полосы пропускания
тракта промежуточной частоты обычно бывает необходимо, сопряжение трак-
та высокой частоты, как правило, не требуется, так как мешающие гармоники
имеют в нем более высокий порядок и поэтому они значительно слабее. Кро-
ме того, переходные процессы стробирования на высокой частоте обычно
дополнительно ослабляются по амплитуде в цепях стробирования на проме-
жуточной частоте.
Просачивание сигнала передатчика. Коэффициент включения (отношение
длительностей включенного и выключенного состояний), требуемый для пол-
ного запирания просачивающегося сигнала передатчика, должен быть доста-
точно большим (значительно большим, чем может быть получен на высокой
частоте без существенных потерь). Поэтому обычно применяется комбиниро-
ванное стробирование на высокой и промежуточной частотах.
Уровень допустимого просачивающегося сигнала в цепях стробирования
может быть таким же, как уровень пассивных помех по главному лучу, при
377
Гл. 7. Импульсно-доплеровские РЛС.
наличии фильтра нулевой доплеровской частоты, подавляющего этот сигнал.
Если такого фильтра нет, то мощность просачивающегося сигнала должна со-
ставлять небольшую долю шума (в фильтре обнаружения).
Стробирование ло дальности устраняет .избыточный шум, маскирующий
полезный сйгнад, и позволяет осуществлять сопровождение цели по дально-
сти и измерение дальности. Стробирование по дальности очень сходно с вре-
мейным стробированием для подавления просачивающего сигнала передатчи-
ка. В простой одноканальной системе с коэффициентом импульсного запол-
нения 0,5, одна схема подавления импульса может выполнять обе функции.
В многоканальных системах с фиксированным положением строба дальности
обе функции может выполнять схема стробирования по дальности. Только
в РЛС сопровождение целей .с низким коэффициентом импульсного -заполне-
ния потребовались бы отдельные схемы стробирования по дальности и подав-
ления просачивающегося сигнала, так как строб дальности бывает необходимо
передвигать и за пределы передаваемого импульса. Если одна схема выпол-
няет обе функции, то коэффициент включения должен быть достаточно
большим для подавления просачивающегося сигнала; при наличии двух схем
такой высокий коэффициент для стробирования по дальности не требуется.
Разрешение ’неоднозначности отсчета дальности. Устранение неоднознач-
ности измерения дальности достигается применением модуляции передавае-
мого сигнала и определением фазового сдвига модуляции эхо-сигнала. Моду-
ляция может осуществляться изменением частоты повторения импульсов
(непрерывным или дискретным с определенными ступенями), изменением вы-
сокой (несущей) -частоты (линейная или синусоидальная частотная модуля-
ций); можно также применять ту или иную форму импульсной модуляции:
широтно-импульсную (ШИМ), фазо-импульсную (ФИМ) или амплитудно-
импульсную (АИМ).
Сравнение видов модуляции. Из перечисленных видов модуляции ШИМ
и ФИМ могут давать большие ошибки вследствие ограничения модуляции
принятого сигнала из-за «затенения» цели или из-за перекрытия сигналов,
а АИМ трудно осуществить конструктивно в передатчике и приемнике. Поэто-
му эти виды модуляции в, дальнейшем не рассматриваются. Сравнение
остальных видов дается в табл. 3.
Ни один из этих видов модуляции не является лучшим по всем показа-
телям, поэтому выбор следует производить в зависимости .от характера при-
менения РЛС и .налагаемых ограничений. В общем там. где требуется точное
измерение дальности, следует применять системы ,с многими частотами повто-
рения импульсов [10]; системы с частотной модуляцией можно применять
в тех случаях, когда важное .значение имеет простота аппаратуры, а системы
с непрерывным изменением частоты повторения импульсов вряд ли вообще
следует применять ввиду высокого уровня случайных мешающих .сигналов и
связанных с этим трудностей.
Измерение дальности с дискретным изменением частоты повторения им-
пульсов. Определение дальности с использованием нескольких (обычно двух
или трех) фиксированных частот повторения импульсов требует .последова-
тельного неоднозначного измерения дальности на каждой частоте повторения
с последующим .сравнением результатов измерения и устранением неодно-
значности.
Наличие многих целей .не вызывает трудностей при условии, что .сигналы
от них не попадают в одну полосу и один доплеровский фильтр. .Если это ус-
ловие не выполняется, то измерение дальности может быть произведено
только грубо с ошибками, так как при этом возможны многочисленные ком-
бинации неоднозначности измерений. Для .системы с а значениями частоты
повторения импульсов и Ь целями, полное число возможных отсчетов даль-
ности равно Ьа. Тем не менее для многих применений такая система являет-
ся, вероятно, лучшей системой измерения дальности.
378
7.3. Временное стробирование
Таблица 3
Параметр Изменение частоты повторения импульсов Частотная модуляция несущей
дискрет- ное непре- рывное линейная синусож- далыия
Точность измерения дальности Устранение мешающих сигналов от Высокая Низкая Низкая Хорошая
гармоник частоты повторения Отличное Очень плохое Отличное Отличное
Подавление пассивных помех Обнаружение цели на фоне пассив- » Хорошее Хорошее Хорошее
ных помех Число целей, индицируемых при на- личии многих целей » Плохое >
с другой скоростью Нет Нет Несколь- ко Нет
с той же скоростью Много Несколь- ко То же Несколь- ко
Импульсная мощность Высокая Низкая Низкая Низкая
Дальность действия Приемлемость скорости измерения Хорошая Отлич- ная . Хорошая Отличная
для режима обнаружения ' Да Нет Да Нет
Сопровождение при затенении цели Требуемое число приемников-со стро- бированием по-дальности Отлич- ное Отлич- ное Плохое Плохое
режим сопровождения 1 * . »
режим обнаружения Количество вспомогательного обору- Много ...
дования Неболь- шое Большое Очень неболь- шое Очень неболь- шое
Рис, 12 иллюстрирует принцип действия одноканальной РЛС сопровож-
дения по дальности с двумя частотами повторения импульсов; Эти частоты
выбраны такими, чтобы они имели общую частоту субгармоники \/Tv. Если
последовательности переданных импульсов с: разными частотами повторения
сравниваются в детекторе совпадений, то на его выходе выделяется эта ча-
стота субгармоники. Аналогично, если производится сопровождение цели по
дальности сначала с одной частотой повторения-, а- затем с другой, то при
сравнении стробов дальности выделяется- та же частота, не со' сдвигом’ во
времени, равным запаздыванию- сигнала от цели Тт< Измерение временного*
сдвига между двумя- сравниваемыми последовательностями импульсов дает
истинную дальность цели. При желании можно построить аналогичную систе-
му с тремя значениями частоты повторения импульсов. Получаемое при этом
преимущество состоит в увеличении однозначно измеряемой дальности.
В РЛС с сопровождением при обзоре неоднозначность по дальности
должна разрешаться за время облучения цели. Поэтому для сокращения до
379
Гл. 7. Импульсно-доплеровские РЛС.
минимума времени измерения применяются параллельные каналы приемника
со стробированием по дальности. Строб дальности в каждом канале устанав-
ливается на одно из возможных неоднозначных значений дальности или свя-
зывается с одной из ячеек обнаружения. При переключении частоты повто-
рения импульсов дальность до ячейки, содержащей цель, определяется не-
сколько раз за время нахождения ее в луче антенны.
Зондирующие импульсы
(частота повторения №1)
Принятые импульсы 0
(частота повторения N 1)
Зондирующие импульсы
(частота повторения N °2 )
Принятые импульсы о
(частота повторения №1)
Совпадение зондирующих
импульсов
Совпадение. принятых
импульсов
Рис. 12, Принцип измерения дальности при дв>х значениях частоты повторения
импульсов.
Частоты повторения импульсов связаны между собой отношениями близ-
ко расположенных простых целых чисел mi, т2 и т3 (габл. 4).
Система с тремя частотами повторения импульсов, равными 7-й, 8-й и 9-й
субгармоникам частоты 1/т дает однозначный отсчет дальности, в 7X9—
= 63 раза большей, чем система с одной частотой повторения (средней из
указанных трех частот).
На рис. 13 представлена зависимость максимальной однозначно отсчиты-
ваемой дальности от минимальной частоты повторения импульсов /«min и па-
раметра mi для случая, когда т^, т.2 и щ3 являются следующими друг за
другом целыми числами. Обычно желательно выбирать в пределах 8—50.
Как видно из рисунка, однозначно отсчитываемая дальность РЛС с двумя
частотами повторения импульсов ограничена, тогда как для РЛС с тремя
частотами повторения импульсов она изменяется в более широких пределах.
При выборе значения пи можно руководствоваться следующими сообра-
жениями:
1) для упрощения аппаратуры или минимизации времени захвата цели
mi должно быть малым, так как требуется максимальное число mi — 1 парал-
лельных каналов или последовательных положений строба;
2) вероятность затенения цели по крайней мере на одной частоте повто-
рения импульсов равна приблизительно 3/mt (для РЛС с тремя частотами
повторения), поэтому mi должна равняться 8 или более, так как дальность
нельзя будет измерить, если цель затеняется на каждой частоте повторения;
3) для получения большой однозначно отсчитываемой дальности
должно быть большим;
4) для хорошей разрешающей способности по дальности длительность
импульса т должна быть малой, т. е. пг} должно быть большим (изменение
дальности цели за время ее облучения требует, чтобы т была минимальной);
380
7.3. Временное стробирование
Таблица 4
Характеристика РЛС с двумя частотами повторения импульсов РЛС с гремя частотами повторения импульсов
Параметры определения дальности: mi, т.2 тЪ m'L
Максимальное число каналов со стро бированием дальности Частота повторения импульсов т,х — 1 Шу— 1
fft (согласованная система, т = т6) 1/тх т 11т.х Т
1/т2-с 1 /т3 с
?R3 .... 1 hna т
Максимальная однозначно отсчитывае’ ^е/2^т1п с/2^т}п
мая дальность /?тах
Максимальная длительность зонди рующего импульса т (т большое) с / с V/я
2 R 1R min 'iw 2^ПЙП ах/
Максимальный коэффициент импуль l/m2 1/т3
сного заполнения для передатчика d
Отношение высшей частоты повторе ния импульсов к низшей тх/т2 т\!та
Однозначно считываемая дальность, нм
Рис. 13. Зависимость однозначной отсчитываемой дальности системы с двумя и тремя
частотами повторения импульсов от параметра m, - 1 и минимальной частоты повторе-
ния импульсов для случая, когда т,, т, и являются последовательными целыми чис-
лами.
381
Гл. 7. Импульсно-доплеровские РЛС.
5) для минимизации коэффициента импульсного заполнения передатчика,
а следовательно,, и изменений его средней мощности при переходе от одной
частоты повторения импульсов к другой mi должно быть относительно
большим.
Теорему Chinese об остатках (Chinese remainder theorem) удобно ис-
пользовать для декодирования истинной дальности цели по нескольким неод-
нозначным измерениям в многоканальных системах обнаружения [11]. Осно-
ванный на применении этой теоремы метод расчета позволяет непосредствен-
но вычислить номер ячейки с истинной дальностью /?с по трем номерам ячеек
с неоднозначно отсчитанной дальностью Ль 42, Дз (или по двум номерам
для системы с двумя частотами повторения импульсов). (Номер ячейки
представляет собой дальность, выраженную в единицах длительности им-
пульса.)
Теорема для системы с тремя частотами повторения импульсов имеет вид
/?с ss (СИ 14-С2Л2+С3Лз) mod (пцтцтз),.
(14)
Это значит, что Рг равно остатку члена, заключенного в скобки, при делении
его на /711^2^3 столько раз, сколько возможно. Следовательно..
Постоянные Ci, Сч и С3 связаны с mi, т2 и т3 следующими
уравнениями:
Ci = b\m2m3^ (l)mod(mi)
(l)mod (m2)
Сз—Ъзтрпч^ (1)тоб(тз),
(15)
(Ш)
(17)
где bi — наименьшее положительное число, которое при умножении его на
m2m3 и делении на mi дает 1 как остаток (то же справедливо и для осталь-
ных Ь).
После того, как mi, тч и т3 выбраны, можно вычислить дальность по
уравнению (14), используя значения С и номера ячеек с неоднозначно отсчи-
танной дальностью (41, 42, А3), в которых обнаружена цель.
Определение дальности при непрерывном изменении частоты повторения
импульсов. В РЛС сопровождения одиночной цели неоднозначность по даль-
ности может быть разрешена, если изменять частоты повторения импульсов
так, чтобы отраженные от цели сигналы попадали в центр интервала между
импульсами. При этом можно использовать большой коэффициент заполне-
ния (0,333—0,5). Дальность вычисляется как
^R
(18)
Этот способ измерения дальности имеет невысокую точность из-за оши-
бок измерения производных. Если цель сопровождается при изменении даль-
ности в широких пределах, то необходимо предусмотреть средства, препят-
ствующие применению очень высоких частот повторения импульсов. Удобно
применять средства, позволяющие изменять частоту повторения не более чем
в отношении 2: 1. Когда достигается любой ив этих пределов частота повто-
рения или уменьшается в два раза или удваивается. Отраженный от цели
сигнал будет находиться приблизительна в центре интервала между импуль-
сами, и сопровождение целю можно продолжать. Преимущество этого способа
состоит в том, чго сигнал от цели никогда не заменяется просачивающимся
382
7.4. Сопровождение цели
импульсом передатчика, что облегчает сопровождение. Однако он имеет
очень существенный недостаток — возможность появления в полосе допле-
ровских частот случайных мешающих сигналов в виде гармоник частоты
повторения импульсов.
Линейная частотная модуляция. Линейная частотная модуляция несущей
может быть использована для измерения дальности, особенно в РЛС с сопро-
вождением при обзоре. Модуляция и демодуляция для определения дально-
сти осуществляются так же, как в РЛС непрерывного излучения, но передача
сигналов остается импульсной.
В типичной РЛС сопровождения при обзоре время облучения пели де-
лится на два подынтервала. На первом подынтервале частотная модуляция
несущей не осуществляется и производится измерение доплеровского сдвига
сигнала от цели. Если в ДН попадает более одной цели, то желательно ис-
пользовать большое количество стробов дальности для определенности
измерений. В течение второго подынтервала частота передатчика меняется
линейно в одном направлении со скоростью /. За время распространения сиг-
нала до цели и обратно частота местного гетеродина изменяется так, что
каждый сигнал от цели дополнительно к доплеровскому сдвигу получает
сдвиг, пропорциональный дальности. Для каждой цели определяется разность
частот А/ двух сигналов (эхо-сигнала и сигнала гетеродина) и дальность
вычисляется по формуле
сД/
Д = (19)
Л
Точность измерения дальности по этому методу обычно невысокая, ввиду
того, что А) определяется с малой точностью.
Синусоидальная частотная модуляция. Этот метод аналогичен использу-
емому иногда в РЛС непрерывного излучения. Разница состоит в сохранении
импульсного режима излучения сигналов. Применение этого метода целесо-
образно, в частности, в РЛС сопровождения одиночной цели как в режиме
непрерывного сопровождения, так и в режиме сопровождения во время пауз
при обзоре. Он не подходит для РЛС сопровождения при обзоре, так как
для измерения фазового сдвига синусоидальной модуляции требуется отно-
сительно большое время.
7.4. Сопровождение цели
РЛС может сопровождать или одиночную цель с использованием более
или менее обычных контуров слежения тю угловым координатам, дальности
и скорости, или многие цели в режиме сопровождения при обзоре.
Сопровождение одиночной цели. Сопровождение по скорости и угловым
координатам одиночной цели импульсно-доплеровская РЛС может осуществ-
лять так же, как РЛС непрерывного излучения, с помощью одноканального
узкополосного следящего фильтра доплеровских частот (см. § 4.6) и пере-
ключения луча антенны или моноимпульсной системы определения угловых
координат.
Моноимпульсную систему труднее реализовать в импульсно-доплеровской
РЛС ввиду необходимости согласования нескольких (обычно трех) приемных
каналов. Каждый из этих каналов содержит сложные фильтры подавления
пассивных помех, и все они должны быть согласованы по фазе, чтобы можно
было осуществить правильное сопровождение. Многополюсные фильтры пас-
сивных помех имеют очень большую крутизну характеристики зависимости
фазы от доплеровской частоты, поэтому согласование их связано с определен-
ными трудностями. Если используется переключение луча антенны в той или
383
Гл. 7. Импульсно-доплеровские РЛС.
иной форме, то требуется только один фильтр пассивных помех и таким путем
удается избежать согласования фильтров. Уширение спектра пассивных помех
по главному лучу вследствие модуляции при его переключении обычно
является допустимым, так как генерируемые при этом низкочастотные боко-
вые полосы амплитудной модуляции попадают в полосу пропускания фильтра
подавления пассивных помех по главному лучу.
Сопровождение по дальности осуществляется в основном так же, как
импульсными РЛС, за исключением того, что требуются два почти полных
двойных приемных канала с большим усилением для сопровождения с раз-
деленным стробом, так как стробирование по промежуточной частоте и одно-
полосная фильтрация осуществляются в каскадах, близких ко входу прием-
ника. Требуются также специальные меры для осуществления сопровождения
на межимпульсных временных интервалах неоднозначности и во время зате-
нения цели. Стробирование должно осуществляться так, чтобы свести к ми-
нимуму генерацию паразитных сигналов.
Стробирование по дальности с качанием строба. Из-за трудности согла-
сования характеристик двух раздельных приемных каналов сопровождение
с разделенным стробом почти не применяется. Один из возможных способов
обеспечения работы только с одним приемным каналом сводится к сопровож-
дению с качанием строба. Строб дальности модулируется по фазе низкоча-
стотным опорным сигналом, поэтому его положение слегка меняется в преде-
лах длительности импульса. Это качание модулирует энергию сигнала от
цели, в результате чего появляются боковые полосы амплитудной модуляции
по обе стороны от каждой спектральной линии этого сигнала. После детек-
тирования огибающей сигнал проходит через узкополосный фильтр слежения
за скоростью и с выхода его поступает на фазовый детектор, где он детек-
тируется сигналом гетеродина качающейся частоты в качестве опорного сиг-
нала. Таким образом получается сигнал ошибки, полярность которого зависит
от знака ошибки стробирования, а амплитуда—от амплитуды этой ошибки
(при малых ошибках). Для того чтобы этот способ был совместим со спосо-
бом переключения луча антенны, используемым для углового сопровождения
цели, частоты качания строба и переключения луча не должны находиться
в гармоническом соотношении.
Сопровождение на протяжении нескольких периодов повторения импуль-
сов можно осуществить, если применить систему слежения по дальности
с временной шкалой, превышающей длительность одного периода повторения
импульсов.
Сопровождение при затенении цели. Ввиду высокого порядка неоднознач-
ности РЛС должна справляться с возможностью потери цели при каждом
прохождении ее через затенение. Автоматические системы сопровождения
должны периодически возвращаться в режим обнаружения, если затенение
не может быть ими обнаружено и если не приняты предупредительные меры.
Наиболее рациональным решением является применение РЛС с несколь-
кими частотами повторения, определяющей истинную дальность цели. После
того, как определена истинная дальность цели, т. е. устранена неоднознач-
ность по дальности, переключение частоты повторения импульсов устраняет
влияние затенения цели. Начало затенения обнаруживается системой сопро-
вождения по дальности, отмечающей момент, когда строб дальности начинает
перекрывать зондирующий импульс. Тогда до того, как произойдет затенение,
производится переключение частоты повторения импульсов на новое значение.
На одной из частот повторения затенения не произойдет благодаря сопряже-
нию и подбору соотношения между этими частотами. Так как сопровождение
цели осуществляется по ее истинной дальности, никаких переходных процес-
сов не будет и сопровождение без затенения может продолжаться бесконеч-
но долго.
Система с непрерывным изменением частоты повторения импульсов также
позволяет осуществлять сопровождение без затенения целей, однако из-за
384
7.b. / реоования к оаоильноаи
влияния случайных мешающих сигналов эта система не получила должного
признания.
Другие системы определения дальности не могут сопровождать цели при
их затенении. Системы с частотной модуляцией недостаточно точны для пред-
сказания начала затенения. Если дальность точно неизвестна, то невозможно
предвидеть наступление затенения. В этом случае затенение обнаруживается
только после того, как оно произошло. Схема обнаружения цели отмечает
отсутствие сигнала от нее и принимается, что это обусловлено затенением.
Затем эта схема выдает команду на изменение частоты повторения импуль-
сов с тем, чтобы вывести цель из затенения.
Трудности, связанные с применением этого метода, обусловлены тем, что,
угловой шум цели 1> может вызвать циклическое изменение частоты повторе-
ния импульсов, вследствие чего нельзя точно предсказать, какая именно часто-
та может предотвратить затенение цели. Задачу можно упростить, если изве-
стен грубый отсчет дальности, определенный системой с частотной модуля-
цией. Это позволяет выбрать одну частоту повторения импульсов из несколь-
ких групп частот, каждая из которых соответствует определенной дальности.
Это сокращает время поиска частоты повторения, при которой не происходит
затенения цели.
Сопровождение групповой цели. Групповую цель можно сопровождать,
используя многоканальный приемник, каналы которого стробируются по
дальности с различным временным сдвигом так, чтобы был перекрыт полный
временной интервал между импульсами. Каждый канал содержит гребенку
фильтров, охватывающих все скорости, представляющие интерес. Следова-
тельно, при сканировании пространства антенной, все цели будут обнаружены
и их можно сопровождать по прерывистым данным. Для определения истин-
ной дальности время облучения цели разделяется на два или три подынтерва-
ла так, чтобы количество обзоров в каждом из них соответствовало требуе-
мому для работы цепей определения дальности. Это снижает дальность
обнаружения, так как полоса доплеровских, частот должна быть расширена
для согласования с подынтервалами облучения цели. Необходимость не-
скольких обнаружений цели для устранения неоднозначности по дальности
еще больше снижает дальность обнаружения. Однако этот способ позволяет
осуществлять автоматическое сопровождение при обнаружении, что было бы
невозможно для обычных РЛС в условиях сильных пассивных помех.
7.5. Требования к стабильности
Для достижения теоретически возможного подавления пассивных помех,
эффективного обнаружения целей импульсно-доплеровской РЛС и их сопро-
вождения опорные частоты, синхронизирующие сигналы и схемы обработки
сигналов должны быть достаточно стабильными. В большинстве случаев важ-
на кратковременная, а не долговременная стабильность. Долговременная ста-
бильность в основном влияет на точность измерения скорости или дальности
или на характер, паразитных сигналов (обусловленных гармониками частоты
повторения импульсов). Но в большинстве случаев нужная стабильность
легко достижима. Кратковременная стабильность характеризует изменения,
происходящие за время распространения сигнала до цели и обратно или за
время интегрирования сигнала. Наиболее жесткие требования в отношении
стабильности связаны с генерацией боковых полос паразитной модуляции
•Qi пассивных помех по главному лучу антенны, которые могут проявиться
как цели в схемах обнаружения целей. Поэтому отношение мощности пас-
сивных помех по главному лучу к мощности шума системы [ (345С/Л^)] total
V См. т. 1, § 10.1 {Прим, ред.)
385
Гл. 7. И мпудьсно-доплеровские РЛС.
согласно уравнению (12) является главным параметром, определяющим тре-
бования к стабильности [12] (для упрощения в табл. 5 это отношение приве-
дено к сокращенной форме С/N). Однако при низких частотах модуляции огра-
ничивающими могут стать другие факторы.
Виды паразитной модуляции. Принимаемый сигнал (сигнал от цели и
пассивные помехи) может подвергаться различным видам паразитной моду-
ляции, в том числе модуляции колебаний несущей частоты и модуляции им-
пульсов.
Модуляция несущей может быть амплитудной, совместной частотной и
независимой частотной. Совместной частотной модуляцией называется иден-
тичная модуляция частоты сигнала как передатчика, так и гетеродина прием-
ника; независимой частотной модуляцией называется модуляция одного из
этих сигналов или выходного сигнала первого смесителя в приемнике.
Модуляция импульсов может проявляться в следующих вариантах:
совместная ФИМ, независимая ФИМ, независимая ШИЛА, потеря импульса.
В этих случаях совместной модуляцией называется синфазная модуляция
импульсов передатчика и стробов дальности приемника или запирающих
стробов передатчика. Независимой модуляцией называется модуляция только
одного из этих видов импульсов. Однако, если такая модуляция имеет место,
на нее распространяются такие же требования, как и на совместную ФИМ.
Наблюдается также и АИМ, но ее влияние обычно незначительно, если вы-
полняются требования в отношении других видов модуляции.
Синусоидальная модуляция. Любой из этих видов модуляции может быть
вызван синусоидальными возмущениями, например пульсациями питающих
напряжений, наводками от силовых линий или синусоидальными вибрациями.
Дискретные боковые полосы на частоте модуляции и ее гармониках могут
появляться как у сигнала от цели, так и у пассивных помех. Так как прием-
ник импульсно-доплеровской РЛС является, по существу анализатором спект-
ра, то требования к РЛС наиболее удобно выражать в виде допустимого
уровня этих боковых полос модуляции.
Степень преобладающего влияния этих боковых полос зависит от значе-
ния боковой частоты. Для боковых частот выше /min боковые полосы пас-
сивных помех оказываются вне полосы пропускания фильтра подавления этих
помех (fmin—• минимальный частотный интервал между частотой настройки
фильтра обнаружения и границей спектра пассивных помех по главному
лучу). Уровень этого дополнительного спектра пассивных помех должен быть
ниже уровня шума, так как иначе эти помехи будут или обнаруживаться как
цель, или снижать чувствительность приемника на этих частотах.
Для боковых частот, заключающихся между Вп/2 и /min (Вп—полоса
пропускания преддекторного фильтра приемника), влияние боковых полос
может приводить к ухудшению отношения сигнала от цели к шуму или к соз-
данию сигналов ложных целей. Ухудшение отношения сигнал/шум объясняет-
ся тем, что энергия боковых полос не попадает в полосу пропускания фильт-
ра обнаружения. Эффект ложных целей обусловлен тем, что боковые полосы
модуляции при сильном сигнале от цели появляются в фильтрах обнаруже-
ния как слабые сигналы от дополнительных целей. Обычно этот эффект не
проявляется на частотах ниже 5ВП, так как крутизна скатов характеристики
фильтра оказывается недостаточно большой для того, чтобы боковые полосы
модуляции выделялись как сигналы от отдельных целей. Для боковых частот
ниже 1/Тт, где Tj — время последетекторного интегрирования сигналов,
боковые полосы паразитной модуляции сами по себе не вызывают никаких
трудностей. Но мгновенные отклонения частоты сигнала за время интегриро-
вания не должны быть больше ширины полосы преддекторного фильтра, ина-
че это вызовет ухудшение отношения сигнал/шум. Амплитуда сигнала также
не должна существенно модулироваться от одного периода интегрирования
к другому, так как это может привести к изменению чувствительности при-
емника.
38& .
357
Частота модуляции Критерий Фактор Q
1 0-т т{ Постоянство сиг- нала в течение Tt 0,1 Тi
1 ~ лТс Ухудшение отно- шения сигнал/ шум (0,1 i |)1/г
Уширение спект- ра пассивных помех (С/ЛОГ
(fь ibw) "Г" fbw) Ошибка сопро- вождения Км X (0 или т)
у 1 -s ~ O 1 1 to 03 Is Ухудшение отно- шения сигнал/ шум —
Уширение спект- ра пассивных помех [/•'X , xVKs/(c/yv)i
Та^бллгца б
Максимальная допустимая девиация
АИМ-бл АМ-М Модуляция несущей Импульсная модуляция
совместная ЧМ независимая ЧМ независи- мая ШИМ 6«z совместная ФИМ 6р независи- мая ФИМ бр
2 Q — — 2т^т1п Q ^min Q 31 fmT с 2TdminQ
— Q/Ttf m'Tc 2Q — — —
Никаких требова- ний Q/jiTc ‘2-frn Q Никаких требований (для естественного квантования)
‘ i Q!nTe 2fmQ
• 2 Q Никаких требований 2x<imln Q T^mlnQ 2T</mjnQ
Никаких требова- ний 2М0,Ш)’А Никаких требований (для естественного квантования)
'i fmQ
7.5. Требования к стабильности
Продолжение табл. 5. ПЛ . . - - — -
Частота модуляции Критерий Фактор С Максимальная допустимая девиация
АИМ-дд АМ-А1 Модуляция несущей Импульсная модуляция
совместная ЧМ независимая ЧМ V независи- мая ШИМ совмест- ная ФИМ независи- мая ФИМ бр
Вп . 2 /mln Ухудшение отно- шения сигнал/ шум — Никаких требова- ний /т(0,1 i 1)1/г Никаких требований (для естественного квантования)
Уширение спект- ра пассивных помех tmQ 2/mQ
~ fmln Ложные цели 3//<s/(niax SNR) 2Q fmQ 2fmQ 2tQ T(Q 2т<2
/mln и выше Уширение спект- ра пассивных помех VKS/(C/N) 2Q fmQ ^fmQ 2tQ tQ 2tQ
М —максимальная глубина аплитудной .модуляции fL —поднесущая частота слежения, Гц несущей . /bw — ширина шумовой полосы в контуре сопровож- — максимальная девиация при частотной модуля- дения, Гц ции, Гц —модуляционная чувствительность (отношение fm —частота модуляции, Гц глубины модуляции к ошибке определения ши Т,, — запаздывание для пассивных помех по главно- рины луча или длительности импульса) му лучу в двух направлениях, с — среднеквадратическая ошибка сопровождения, 611Z — максимальное изменение длительности импуль- обусловленная боковыми полосами модуляции са при ШИМ, с 0 — ширина луча антенны dmin —минимальный коэффициент импульсного запол- max SNR —максимальное отношение сигнал/шум, не визы- нения сигнала от цели при частичном затене- вающее действия автоматической регулировки нии (например, т/в/5) усиления или ограничения Ър —максимальная девиация при ФИМ, с t _целая часть от [(Вп/2) + /то]//т —коэффициент запаса для мощности боковых / —целая часть от (fmin + 8 полос модуляции относительно мощности шу- о^, — максимальная глубина АИМ ма в системе 1)
Гл. 7. ИмпульснО'доплеровские РЛС.
7.5. Требования к стабильности
Боковые полосы паразитной модуляции на частотах, близких к частоте
переключения луча антенны или к частоте качания строба дальности, должны
быть незначительными для предотвращения больших ошибок сопровождения
или избыточного шума.
С учетом всех этих ограничений вычислены допустимые значения синусо-
идальной модуляции при различных видах модуляции (табл. 5). При расче-
тах допуск на ухудшение отношения сигнал/шум принимался равным 0,1 дБ.
В этой таблице приведены различные диапазоны частот модуляции (не боко-
вых частот), соответствующие преобладающим эффектам от боковых полос
(эти эффекты указаны в графе «Критерий»). Для каждого эффекта дан фак-
тор Q, связанный с допустимыми максимальными значениями девиации,
указанными в других графах таблицы. Например, в случае независимой
ШИМ, при частотах модуляции, превышающих fmin, максимально допусти-
мая девиация для приемлемого уширения спектра пассивных помех равна
/ Ка \1 /2
6W/ = 2tQ = 2т —— . (20)
\ С / /V!
Коэффициент запаса /С выбирается таким, чтобы боковые полосы пассивных
помех нс превышали уровня шума приемника (Ks^l).
На рис 14 показаны типичные допустимые пределы для синусоидальной
модуляции по данным табл. 5. Значения Тс выбраны, исходя из того, чтобы
показать влияние пассивных помех на больших дальностях, что является
типичным для самолетных РЛС. При действии пассивных помех с малых
дальностей, что характерно для наземных РЛС, общие требования могут быть
существенно снижены.
Каждое из приведенных в табл. 5 значений относится к случаю, когда
действует только один источник модулирующих сигналов. Если считается воз-
можной многократная модуляция, то нужно ввести соответствующий умень-
шающий коэффициент, чтобы суммарные боковые полосы не выходили за
допустимые пределы.
Для приемников, которым предшествует фильтр подавления пассивных
помех по главному лучу, требования в отношении' уширения спектра пассив-
ных помех не являются основными. Ограничивающими факторами для них
на высоких н низких боковых частотах становятся отношение сигнал/шум
и возможность появления ложных целей.
Узкополосная шумовая модуляция. Хотя приведенные в табл. 5 данные
относятся к синусоидальной модуляции одной частоты, их можно отнести и
к случаю модуляции узкополосным шумом В этом случае приведенные
в таблице значения будут в У 2 раз больше допустимых среднеквадратиче-
ских значений для модуляции шумом с шириной полосы Вп- Такое прибли-
жение является достаточно хорошим для частот модуляции, значительно
превышающих бп/2, но на более низких частотах дает только ориентировочные
значения.
ФИМ и ШИМ. Значения для ФИМ и ШИМ (табл. 5) получены в пред-
положении естественного квантования [13], что является нормальным слу-
чаем. При естественном квантовании отклонение среза импульса определяется
амплитудой модулирующего сигнала в момент появления этого среза. Ввиду
временного запаздывания сигнала от цели или пассивных помех и стробиро-
вания по дальности, ФИМ может быть преобразована в ШИМ, которая ге-
нерирует более широкие боковые полосы. Большинство сигналов пассивных
помех или частично затеняются или оказываются вне строба дальности
Поэтому положение одного среза импульса в приемнике определяется пере-
даваемым импульсом, а второго среза — стробом дальности или запирающим
импульсом передатчика. Таким образом первоначальная ФИМ может быть
преобразована в ШИМ, в зависимости от частоты модуляции и временного
запаздывания пассивных помех.
389
Гл. 1. Импульсно-доплеровские РЛС.
||
11 0,001
II
s1!
В
0,0001
10
а)
Независимая г
модуляция
-\ Совместная
_ ''.модуляция
fnin ^0 Гц
Вп=ВООГц
Тс = $180 мкс
Гь = 9ЪГц
1/Т^вОГц
С/Н=70д5
Ks = ~10d5
kM-1
вЕ/д=1/50
ЙямГ"0,1
1/яТе
! 7%гп
Независимая
модуляция
Совместная
модуляция^
100 1000
Частота модуляции,Гц
10000
Рис. 14. Допустимые девиации при
синусоидальной йодуляции
а-* при ШИМ и ФИМ импульсов}
б = яри ЧМ несущей.
7.6. Дальность действия
Требования в отношении девиации (табл. 5) определены для наихудшего
случая, когда два модулирующих сигнала при совместной модуляции отли-
чаются по фазе на 180° или когда один срез импульса пассивных помех пол-
ностью затеняется при независимой модуляции.
Частотная модуляция. Совместная частотная модуляция позволяет сни-
зить требования к допустимой девиации на низких частотах, но зато эти
требования повышаются на 6 дБ на высоких частотах относительно требова-
ний при независимой частотной модуляции [14]. Это вызвано временным за-
паздыванием пассивных помех. Так как передатчик и гетеродин приемника
модулируются по частоте синхронно, то девиация частоты сигнала, образую-
щего промежуточную частоту, зависит от этого запаздывания.
Наложение импульсов. Хотя наложение импульсов не создает новых бо-
ковых полос (поэтому оно не включено' в табл. 5), наложение импульса на
модулирующий импульс передатчика также представляет интерес. Это объяс-
няется чувствительностью к фазовой модуляции ЛБВ без сеток, а также
клистронов, используемых в усилителях промежуточной частоты. Линейное
падение модулирующего напряжения вызовет сдвиг пика огибающей спектра
относительно несущей высокой частоты и уменьшение мощности полезного
(однополосного) сигнала:
Относительная потеря мощности
_1_
3
л Д£7 \а
3,6 U ) '
(21)
где — фазовая чувствительность передатчика (изменение фазы, град/из-
менение напряжения, %); AL//L7 — относительное падение напряжения моду-
лирующего импульса.
Случайная модуляция от импульса к импульсу. Кроме синусоидальной
модуляции и модуляции узкополосным шумом может иметь место еще и слу-
чайная модуляция от импульса к импульсу. Преобладающим эффектом, вы-
зываемым этой модуляцией, является попадание шума от пассивных помех
в фильтр детектора. При тех же обозначениях, что и в табл. 5, для этой
модуляции Q== [KBfRl(C/N)Bn]42, а допустимая среднеквадратическая глуби-
на амплитудной модуляции равна Q так же, как и фазовой модуляции (вы-
раженной в радианах). Для ФИМ или ШИМ с изменением положения одного
среза импульса допустимая девиация (выраженная в секундах) равна xQ.
7.6. Дальность действия
В т. 1, гл. 2 обсуждались общее уравнение дальности действия РЛС и
определение вероятности обнаружения нелей. В данном разделе полученные
в ней результаты будут модифицированы применительно к импульсно-допле-
ровским РЛС с учетом влияния однополосной фильтрации частоты повторе-
ния импульсов, затенения цели, многоканального приема, влияния режима
измерения дальности на критерий обнаружения, в том числе при наличии уг-
лового шума.
Уравнение дальности. В диапазоне доплеровских частот, тде сигнал не
попадает в полосу пассивных помех, дальность действия РЛС ограничивает-
ся только ее собственными шумами. Отношение сигнал/шум в фильтре обна-
ружения равно
\ R ) ’
(22)
где .V — дальность действия РЛС;
391
Гл. 7. Импульсно-доплеровские РЛС
RI PtG?^QDP
(^kT0FnBnL(M^\) (4apkT0FnBnL
Ro — дальность, при которой S/N= 1, Pt — импульсная мощность пере-
датчика, Dp— (Af4-l)ds2 /da, D^—df/ded, ds — isfe — коэффициент заполне-
ния сигнала от цели, стробированного по дальности, da — lefR — коэффициент
заполнения стробов дальности приемника, d—ifp— коэффициент заполнения
для передаваемых импульсов, тв— длительность принимаемого импульса от
цели, пропущенного стробами дальности, о — ЭПР цели, М — число смежных
стробов дальности равной длительности.
О
г
Принятый импульс
Зондирующий (
импульс \ । ।
Первый перекрытый
стров дальности
второй перекрытый
строе дельности
7/ъ
Рис. 15. Эффективный коэффициент заполнения для приемника при частичном перекры-
тии принимаемым импульсом двух стробов дальности:
Тв — время запирания приемника вследствие задержки восстановления' разрядника ан-
тенного переключателя; Tgi, Tgz — время задержки первого и второго стробов дально-
сти соответственно относительно зондирующего импульса; Та = Тп mod(l//B) — запазды-
вание принятого импульса, соответствующего неоднозначно отсчитанной дальности;
Tr = 2/?/С — запаздывание принятого импульса, соответствующего однозначно отсчитан-
ной дальности; т«1, т«2—участки принятого импульса, перекрываемые первым и вторым
стробами дальности, соответственно.
Так как в импульсно-доплеровской РЛС мощность принимаемого сигна-
ла используется только на одной спектральной линии (обычно на несущей
частоте), эффективная принимаемая мощность изменяется пропорционально
квадрату коэффициента заполнения сигнала ds. В общем случае ds отличает-
ся от коэффициентов заполнения для передатчика d и для приемника da
ввиду затенения сигнала цели импульсом передатчика или вследствие пере-
крытия стробов дальности принятым импульсом. Рис. 15 иллюстрирует общий
случай, когда принятый импульс длительностью т частично перекрывает два
строба дальности длительностью tg в РЛС с М стробами дальности.
При отсутствии стробирования по дальности однополосный фильтр, а за-
тем доплеровский фильтр пропускают непрерывный шум с мощностью
kToBnFn. Стробирование по дальности в приемнике уменьшает эту мощность
пропорционально коэффициенту заполнения стробов дальности de.
Время запирания приемника обычно несколько превышает длительность
импульса передатчика на время восстановления разрядника антенного пере-
ключателя.'На рис. 15 этому соответствует интервал тв с коэффициентом
заполнения dB — т>в{н.
Среднее отношение сигнал/шум. Ввиду возможного затенения цели зна-
чение Ro, определяемое уравнением (22), может заключаться в пределах от
нуля до максимальной дальности, в зависимости от точного положения сиг-
нала от цели в интервале между импульсами. Этому соответствует коэффи-
циент заполнения DP или £>av. Если частота повторения импульсов настолько
высока, что получаются многие неоднозначные значения дальности, запазды-
вание сигнала от цели можно рассматривать как случайную величину от
392
7.6. Дальность действия
обзора к обзору с равномерным распределением по интервалу между им-
пульсами. Приближенной мерой, характеризующей дальность действия РЛС
в этом случае, является среднее значение коэффициента заполнения, найден-
ное усреднением DP или Dav по интервалу между импульсами. Это среднее
значение характеризует средние потери, вызываемые затенением цели и пере-
крытием сигналом стробов дальности.
В случае М смежных стробов дальности одинаковой длительности, зани-
мающих весь интервал между импульсами, при длительности импульса пере-
датчика т и длительности восстановления разрядника_антенного переключа-
теля тв, средние значения коэффициентов заполнения Dav и Dp будут равны
^av
T/TG / 5М—1
------- ----------
М4-т/т0 у 12
2И4-т/т6.
/ 1
Ml — —
\ 3
т тв \
TG TG /
TG \ М—1
т /~ 12
G,
(23)
2 т
ТВ
при т6 < т < 2tg
1
( Л1 + т / TG
4
тв
т
при 2т0 < т;
(М + 1)(т/т0)
Dp=-------------—
М 4-т/т0
D
(24)
Графики коэффициентов потерь DP и Dav приведены на рис. 16. Коэф-
фициенты потерь имеют минимальные значения приближенно при t/tg = 1 и
постоянной средней мощности и при t/tg=1,8 и постоянной импульсной
мощности независимо от числа стробов дальности. Рисунок показывает, что
средние значения коэффициентов потерь не уменьшаются существенно при
М>5, так как при больших М потери из-за перекрытия стробов дальности
сигналом становятся преобладающими.
Хотя в приведенных выше соотношениях принималось, что стробы рас-
полагаются вплотную один к другому, средние коэффициенты потерь можно
снизить, если использовать перекрывающиеся стробы. Но это приведет
к усложнению аппаратуры.
Вероятность обнаружения. Если сигнал от цели является случайным от
одного обзора к другому и равномерно распределен по периоду между им-
пульсами, то среднюю вероятность обнаружения цели можно найти путем
первого усреднения вероятности обнаружения Рр на М+1 неоднозначно от-
считанных дальностях, имеющих одно и то же значение ds для первых двух
стробов дальности, в пределах которых может появиться цель. Для случая,
когда t=tg, эта средняя вероятность равна
ро(^,г,)= -/-г{ЛЛР0(Л)+/>оЛ)-ро(р1)р0(р«)1+₽о(р1>ро<М
/VI -j~ 1
(25)
где Ро(Г1)—вероятность обнаружения нефлуктуирующей цели при совпаде-
нии сигнала с первым стробом дальности при отношении сигнал/шум, равном
Гг Pd(F2) — вероятность обнаружения при совпадении сигнала от цели со
вторым стробом; (/?oi//?)4; F2==(/W?)4; Ло — отношение сигиал/шум
393
Гл. 7. Импульсно-доплеровские РЛС
при da=dG=d. Чтобы определить /?0 для каждого строба из (22), нужно
принять соответствующие значения коэффициентов заполнения в зависимости
от т3.
Последнее усреднение производится по длительности одного строба для
нахождения средней вероятности обнаружения нефлуктуирующей цели за
один обзор. Оно может быть выполнено различными способами, в зависимо-
сти от требуемого числа отдельных обнаружений цели за время ее облучения.
О
О 0,0 0,8 1,2 1,6 2,0 2,0 2,8 3,2 3,6
Отношение длительности зондирующего импульса
к длительности страда дальности Г/Та
Рис. 16. Коэффициенты потерь М смежных стробов дальности (de=0).
Обнаружение за один обзор. Если цель облучается только один раз за
время нахождения ее в луче РЛС, то требуется определить присутствие цели
за одно обнаружение. Средняя вероятность обнаружения находится с помо-
щью интегрирования Pd(Fo, ь) за длительность импульса:
'рр J PD xs)8ts.
О
(26)
Обнаружение за несколько обзоров. В этом случае цель облучается два
или три раза (имеется два или три интегрируемых сигнала) за время нахож-
дения ее в луче РЛС. Это имеет место, например, когда РЛС работает с не-
сколькими частотами повторения импульсов или с линейной частотной моду-
ляцией. За время нахождения в луче РЛС цель перемещается на незначи-
тельное расстояние и значение da будет одинаковым для всех облучений.
Среднюю вероятность обнаружения можно найти, определив вероятность
желаемого события (используя заданный критерий обнаружения) при фикси-
рованном значении da, а затем усреднив эту вероятность по длительности
импульса. Вычисленные таким способом средние вероятности при различных
критериях обнаружения приведены в табл. 6.
394
7.6. Дальность действия
Таблица 6
Режим работы РЛС Число интегри- руемых сигналов за время облучения цели Критерий обнару- жения (число обнаружений из всех возмож- ных) Средняя вероятность обнаружения за обзор PD(Fo) [PD (t) = PD (Ло, Ts)|
Нормальный поиск 1 1 1 — PD(t)dt TG J 0
Поиск с половинной ско- ростью 2 По меньшей мере одно из 2 1 ? — f {2pO(0- TG J 0 _[Po(/)]2}dZ
Определение дальности с использованием ча- стотной модуляции 3 По меньшей мере 2 из 3 1,<J — f {3[PD(0P- TG J 0 -2[Pd(/))3} dt
Определение дальности с использованием трех частот повторения им- пульсов 3 Все 3 1 XG — С[РО(/)]ЗЛ TG J 0
Флуктуирующая цель. Вероятность обнаружения цели за один обзор при
различных критериях обнаружения были выведены выше для нефлуктуирую-
щей цели, так как обычно принимается, что цель флуктуирует независимо от
обзора к обзору, а за время нахождения в луче антенны ее ЭПР остается
постоянной. Статистически среднюю вероятность обнаружения флуктуирую-
щей (имеющей угловой шум) цели за один обзор можно найти как
00
<PD(Fo)>=f PD (yF0) р (у) dy,
О
(27)
где р(у)—функция плотности вероятности флуктуаций ЭПР цели (здесь ис-
пользовано обозначение в угловых скобках, принятое в [15].) Для обычного
случая экспоненциального распределения флуктуаций ЭПР (или релеевского
распределения амплитуд)
(Т7о)> J Р0(уРо)^
о
(28)
3S5
Гл. 7. Импулъсно-доплеровские РЛС
Результирующая вероятность обнаружения флуктуирующей цели при /-м
обзоре Pct, усредненная по интервалу затенения, с учетом критерия обнару>
жения, равна
I ____________
Ре/ = 1 —П [1-PD (Fo)d, (29)
i=l
где i — номер обзора.
99,99
99,9
99,8
99
98
| 80
$
2,0
п-10™
10е
- Из источника
10'
О)
Зависимость
g(n,N) от О
,8
0,8_______i______i______
1 3 10 30 100
N=TiGn - чис. io интегрируемых
импульсов
| №
| 99
§
к •
I 29
g
«I 10
5
2
1
0,5
0,2
9,1
0,95
0,01
О)
Н^Т[вп-число интегрируемых
импульсов
" гилръвпу- число ложных тревог
~ p-число используемых фильтров
- обнаружения ----------
~ fya - интервал ложных тревог
д(п,Н)-срункция, п и N, определяется 0)____
0,8 0,9 1,0 1,1 1,2 1,3 g(ntN)j-
Рис. 17. Вероятность обнаружения нефлуктуирующей цели (l^N^lOO, 10в<7гС10’0),
Обобщенные кривые. В обобщенном виде были решены задачи обнаруже-
ния для различных случаев. Полученные результаты позволяют достаточно
быстро получить довольно точные ответы для большинства практических
задач.
Точность. Результаты основываются на очень близком сходстве графиков
Маркума [16] для широкого диапазона изменения параметров. Поэтому мож-
но пользоваться одним универсальным графиком Маркума (рис. 17). Он по-
строен по универсальной кривой, приведенной в [17], но данный график
относится к нефлюктуирующей цели. График дает точность в пределах 1 дБ
во всем диапазоне (и более высокую точность в большей части диапазона)
396
7.6. Дальность действия
количества интегрируемых импульсов N от 1 до 100, числа ложных тревог п от
10е до 1010 и вероятности обнаружения от 1 до 99,99%. Чтобы воспользоваться
графиками рис. 17, нужно сначала найти значение g(n,N) по рис. 17, б, а за-
тем, пользуясь этим значением, перейти от значений g(n, N) (R/Rq), найденных
на рис. 17, а, к значениям R/Ro или отношениям сигнал/шум.
Рис. 18. Средние вероятности обнаружения флуктуирующей цели за один обзор РЛС
с одним стробом дальности с учетом затенения и критерия обнаружения.
Дальность обнаружения одноканальной системы. G использованием это-
го обобщенного графика были найдены средние вероятности обнаружения за
один обзор для одноканальной системы с согласованными длительностями
импульсов и стробов дальности, коэффициентами заполнения в передатчике
0,46 и в период бланкирования 0,08. Эти средние вероятности обнаружения
представлены графически на рис. 18. Относительная дальность Rss/Ro, требуе-
мая для 85% результирующей вероятности обнаружения при широком диапа-
зоне скоростей сближения, представлена на рис. 19, где &R равно изме-
нению дальности за время между двумя обзорами. Кривые на рис. 19 построе-
ны для определенного значения коэффициента заполнения в период бланки-
рования, однако это значение не является очень критичным. Поэтому эти
кривые будут достаточно точными для времен восстановления разрядника
антенного переключателя, типичных для импульсно-доплеровских РЛС с высо-
кой частотой повторения импульсов.
Многоканальный прием. Такое же усреднение можно провести для мно-
гоканальной системы, но на результаты будет оказывать влияние число ка-
налов со стробированием .по дальности. Если число таких.каналов достаточ-
но велико, чтобы можно было пренебречь затенением, вызываемым импульсом
397
Гл. 7. Импульсно-доплеровские РЛС
передатчика, то следует учитывать только потери, обусловленные перекрыта*
ем стробов. Для этого случая применимы кривые, приведенные на рис. 2d
Единственный практический случай, не охваченный приведенными выше
графиками, это многоканальная система с. небольшим числом стробируемых
по дальности каналов. Он имеет одну дополнительную усложняющую особен*
Рис. 19. Обобщенные кривые дальности обнаружения флуктуирующей цели РЛС с од-
ним стробом дальности с учетом затенения и критерия обнаружения.
ность: если частота повторения импульсов переключается от обзора к обзору,
то число стробируемых каналов также меняется. Поэтому расчеты следует
производить отдельно для каждого обзора и табл. 6 становится более
сложной.
Случай ограничения дальности обнаружения пассивными помехами. Выше
предполагалось, что цель попадает в полосу доплеровских частот, в которой
Рис. 20. Обобщенные кривые дальности обнаружения флуктуирующей - цели РЛС со мно-
гими стробами дальности s учетом перекрытия стробов дальности, сигналом > цели и кри-
терия обнаружения,
398
Список литературы
ограничения накладываются только шумом (т. е. в полосу, свободную от
пассивных помех). Если цель попадает в участок спектра, где действуют пас-
сивные помехи по боковым лепесткам, то дальность обнаружения РЛС целей
будет уменьшаться [18], так как полная мощность, которую должен превы-
сить полезный сигнал, возрастает. Тем не менее полученные при этом анализе
результаты можно применить и к области пассивных помех по боковым лепе-
сткам, если трактовать Ro как дальность, на которой мощность сигнала равна
мощности пассивных помех по боковым лепесткам плюс шум.
Список литературы
1. Skolnik, М. I. “Introduction to Radar Systems”, sec. 4.5, McGraw-Hill
Book Company, N. Y., 1962.
Сколник M. И. Введение в технику радиолокационных систем. М„ «Мир»,
1965.
2. Goetz, L. Р., and J. D. Albright. Airborne Pulse-doppler Radar, IRE Trans.,
v. MIL-5, p. 116—126, April, 1961.
3. Range-only Radar for Forward Area Air Defense System, Lockheed Elect*
ronics Co., Rept., 23-1851, 100-3, April, 1960.
4. Fouche, Y., H. LeTacon, and J. Villepelet. Detection et defense basse alti-
tude, L’Onde Elec., v 47, p. 860—867, June, 1967.
5 Tripp, B. R., and R. R. Rogers. An Experimental X-band, Coherent Pulse
Doppler Radar: Design, Capabilities, and Applications (Cornell Aeronau-
tical Laboratory), Eleventh Annual Radar Symposium, Fort Monmouth,
N J. 1965.
6. Lhermitte, R. M. Probing Air Motion by Doppler Analysis of Radar Clear
Aii Returns, National Severe Storms Lab., Rept. 26, May, 1966.
7. Kinzer, G. VISTAR: A Pulse Doppler Airborne Weather Radar, Motorola
Final Rept., January, 1964.
8. Farrell J., and R. Taylor. Doppler Radar Clutter, IEEE Trans., v. ANE-11,
p 162—172, September, 1964.
9 Helgostam, L., and B. Ronnerstam. Ground Clutter Calculation for Airbor-
ne Doppler Radar, IEEE Trans., v. MIL-9, p. 294—297, July, October,
1965.
10. Skilman, W. A., and D. H. Mooney. Multiple High-PRF Ranging. Proc.
I960 IRE Conf. Military Electron., p. 37—40.
11. Ore, O. “Number Theory and Its History”, p. 246, McGraw-Hill Book Com-
pany, N. Y., 1948.
12 Goetz, L. P., and W. A. Skilman. Master Oscillator Requirements for Co-
herent Radar Sets. IEEE—NASA Symposium on Short Term Frequency
Stability, NASA-SP-80, November, 1964.
13 Black, H. S. “Modulation Theory”, p. 265, D. Van Nostrand Company, Inc.,
Princeton, N. J., 1953.
14. Barton, D. K. “Radar Systems Analysis”, p. 206, Prentice-Hall, Inc., Eng-
lewood Cliffs, N. J., 1964.
Бартон Д. К. Радиолокационные системы. М., Воениздат, 1967.
15. Meltzer, S. A., and S. Thaler. Detection Range Predictions for Pulse Dopp-
ler Radar, Proc. IRE, p. 1299—1307, August, 1961.
16 Marcum, J. I. A Statistical Theory of Target Detection by Pulsed Radar,
IRE Trans., v. IT-6, p. 59—267, April, 1960.
17. Swerling, P. Probability of Detection for Fluctuating Targets, IRE Trans.,
v. IT-6, p. 269—308, April, 1960.
18 Mooney, D., and G. Ralston. Performance in Clutter of Airborne Pulse
MTI. CW Doppler and Pulse Doppler Radar, IRE Intern. Conv. Record,
v. 9, pt. 5, p. 55—62, .1961.
Глава 8
РЛС СО СЖАТИЕМ ИМПУЛЬСОВ
Э. Фарнетт, Т. Говард, Г. Стивенс
8.1. Введение
Под сжатием импульсов подразумевается передача кодированного сиг-
нала большой длительности и такой вид обработки принятого эхо-сигнала,
который позволяет получить относительно узкий импульс. Большая длитель-
ность сигнала позволяет улучшить энергетические характеристики РЛС, а зна-
чит и вероятность обнаружения цели, сохранив разрешающую способность
по дальности, которая свойственна системам, использующим короткие им-
пульсы. При этом получаем еще и дополнительные преимущества. Передача
длинных импульсов позволяет более эффективно использовать возможности
аппаратуры РЛС в части обеспечения средней мощности. В этом случае мож-
но избежать необходимости формирования сигналов с высокой импульсной
мощностью. Среднюю мощность РЛС можно увеличивать, не увеличивая
ЧПИ и, следовательно, не. уменьшая интервал однозначного измерения даль-
ности цели. Возрастает также и разрешающая способность по доплеровской
частоте в данной системе. Кроме того, на функционировании РЛС меньше
сказывается воздействие мешающих посторонних сигналов, структура которых
отличается от используемых в системе кодированных сигналов.
Длинный импульс может быть сформирован из узкого импульса. Узкий
импульс содержит большое число частотных составляющих, между которыми
существуют строгие фазовые соотношения. Если относительные фазы между
частотными составляющими изменяются вследствие прохождения сигнала
через фильтр, искажающий фазовые соотношения, то в результате сложения
этих составляющих получается искаженный, растянутый импульс. Именно
этот растянутый импульс и используется в качестве передаваемого сигнала.
Принятый отраженный сигнал обрабатывается в приемнике с помощью фильт-
ра сжатия Этот фильтр восстанавливает относительные фазы частотных со-
ставляющих, поэтому на его выходе получается узкий, или сжатый, импульс.
Коэффициент сжатия импульса равен произведению длительности передавае-
мого импульса на ширину его спектра.
РЛС со сжатием импульсов является примером практической реализации
системы согласованной фильтрации. Кодированный сигнал можно предста-
вить в виде либо частотного Я (со) либо временного h(f) отклика кодирующе-
го фильтра. На рис 1, а показана схема, позволяющая получить кодирован-
ный сигнал с помощью возбуждения кодирующего фильтра Я(со) единичным
импульсом Принятый сигнал подается на согласованный фильтр, частотный
отклик которого Я* (со) является комплексно-сопряженным по отношению
к частотному отклику кодирующего фильтра На выходе согласованного
фильтра появляется сжатый импульс, вид которого определяется обратным
преобразованием Фурье произведения спектра сигнала Н(и>) на часто!ный
отклик согласованного фильтра Я*(со):
00
{/(0 = “~ f |Я (со) |2е'“'dco.
2л J
--00
400
8.1. Введение
6)
Рис. 1 Функциональная схема РЛС со сжатием импульсов, в которой используются:
а — сопряженные фильтры; б — временная инверсия; в — корреляция.
401
Гл. 8. РЛС со сжатием импульсов
В схеме рис. 1, а используются фильтры, которые взаимно являются сопря-
женными, так как один из них является фильтром растяжения, а другой —•
фильтром сжатия.
Можно иначе определить согласованный фильтр Фильтр является согла-
сованным с сигналом, если сигнал является обращенной во времени копией
отклика фильтра на единичный импульс. Это достигается применением
в фильтре сжатия устройства временной инверсии принятого сигнала
(рис. 1,6). При этом и для сжатия и для растяжения можно использовать
идентичные фильтры. Более того, и для растяжения и для сжатия может быть
использован один и тот же фильтр, если будет предусмотрена соответствую-
щая схема переключения при выполнении операций растяжения или сжатия,
т. е. при приеме и передаче.
Выходной сигнал согласованного фильтра можно выразить и через вре-
менной отклик кодирующего фильтра. Это выражение определяется сверткой
сигнала h(t) с импульсным откликом Л(—I) согласованного фильтра;
г/ (/) — J /г(г) /г (/—т) dr.
-е-00
Согласованный фильтр по существу выполняет корреляцию принятого и пе-
редаваемого сигналов. На практике для перекрытия всего рабочего диапазона
значений параметров используется большое число устройств задержки сиг-
налов и корреляторов. Следовательно, процесс осуществления корреляции,
выполняемый с помощью схемы, показанной на рис. 1, в, эквивалентен согла-
сованной фильтрации.
Выходной сигнал согласованного фильтра состоит из сжатого импульса
и некоторого числа откликов, соответствующих другим значениям дальности,
их называют боковыми лепестками по времени или по дальности. .Для умень-
шения этих боковых лепестков может быть использована амплитудная весо-
вая обработка выходных сигналов. Это нарушает условия согласования, что
приводит к ухудшению отношения -сигнал/шум на выходе согласованного
фильтра. При наличии доплеровского сдвига частоты необходимо использо-
вать набор согласованных фильтров, причем центральные частоты всех согла-
сованных фильтров должны отличаться, а их набор должен обеспечивать пе-
рекрытие всего диапазона ожидаемых доплеровских частот.
8.2. Факторы, определяющие выбор вида системы со сжатием
импульса
Выбор вида системы со сжатием импульсов определяется типом исполь-
зуемых сигналов и методами формирования сигнала и его обработки. Выбор
типа сигнала можно произвести на основании теории сигналов, развитой
в т. 1 гл. 3. К числу наиболее важных факторов, определяющих выбор того
или иного конкретного типа сигнала, относятся следующие факторы: даль-
ность действия РЛС, диапазон исследуемых доплеровских частот, уровень
боковых лепестков, гибкость (т. е. возможность варьировать некоторые пара-
метры сигнала, устранять влияние интерференции) и отношение сигнал/шум
(S/N). Методы реализации систем со сжатием импульсов можно разбить
на два основных класса: пассивные и активные.
Активное формирование сигналов производится с помощью фазовой или
частотной модуляции несущей; при этом реального растяжения сигнала во
времени не происходит. В качестве примера можно указать модуляцию в гене-
раторе, частота которого управляется напряжением. Пассивное формирование
растянутого во времени кодированного сигнала осуществляется с помощью
возбуждения некоторого устройства или схемы коротким ялшуль^м. Примером
402
8.2. Факторы, определяющие выбор вида, системы со сжатием импульса
может служить схема растяжения, состоящая из всепропускающих решетча-
тых структур. При активной обработке реализуется корреляция между приня-
тым сигналом и задержанными копиями передаваемого сигнала О. При пассив-
ной обработке реализуется согласованная фильтрация, причем в качестве
согласованного фильтра используется схема сжатия, сопряженная со схемой
растяжения. Хотя в некоторых радиолокационных системах возможно исполь-
зование комбинации и активных, и пассивных методов, в большинстве систем
И для формирования, и для обработки сигналов применяются одни и те же
методы; в пассивной системе, например, используется и пассивное формирова-
ние, и пассивная обработка сигнала.
Характеристики функционирования обычных типов систем со сжатием им-
пульсов приведены в табл. 1. Сравнение систем произведено в предположении,
что для извлечения информации из принимаемого сигнала производится обра-
ботка единственного импульса. Таким образом, характеристики РЛС при обра-
ботке большого числа импульсов не рассматриваются. Символы В и Т исполь-
зованы для обозначения ширины спектра и длительности передаваемого сиг-
нала соответственно. Потери из-за неравномерности, приводящие к снижению
отношения S)N для активной системы, вызваны неравномерностью или флук-
туациями уровня полезного сигнала, происходящими при перемещении цели
из одной ячейки разрешения по дальности в другую. Оценка уменьшения влия-
ния пассивных помех получена с учетом разрешения по доплеровской частоте,
а не по дальности. Сжатие импульсов позволяет улучшить разрешение по
дальности и тем самым улучшить защиту от помех. В'тех случаях, когда доп-
леровский сдвиг частоты мал и его нельзя использовать для селекции сиг-
нала цели на фоне пассивных помех, увеличение разрешения по дальности
является единственным средством решения этой задачи.
8.3. Линейная частотная модуляция
Формирование сигналов с линейной частотной модуляцией (ЛЧМ сигна-
лов) представляет собой наиболее простую задачу. Форма сжатого импульса
и отношение сигнал/шум для таких сигналов по существу не зависят от допле-
ровского сдвига частоты. Вследствие широкого применения ЛЧМ сигналов для
них было разработано большее число устройств формирования и обработки,
чем для любых других типов кодированных сигналов [1]. Основными недостат-
ками этих сигналов являются: 1) сильная взаимная связь параметров сигнала,
характеризующих дальность и доплеровский сдвиг, что может привести к ошиб-
кам в тех случаях, когда либо дальность, либо доплеровский сдвиг не изве-
стны или не могут быть точно определены; например, изменение доплеровского
сдвига приводит к кажущемуся изменению дальности и наоборот; 2) для
уменьшения уровня боковых лепестков- до приемлемого обычно необходимо
использовать весовую обработку. Для- ЛЧМ сигналов результаты временной
или частотной весовой обработки эквивалентны, при этом происходит умень-
шение отношения сигнал/шум, лежащее в пределах 1—2 дБ. Для пассивного
формирования и пассивной обработки ЛЧМ сигналов могут быть использованы
структурные схемы, приведенные на рис. 1, а или б; при этом можно при-
менять сопряженные схемы или одну и ту же схему. Для активного формиро-
вания и активной обработки ЛЧМ сигналов может быть использована струк-
турная схема, приведенная на рис. 1,.в.
Пассивные ЛЧМ устройства. Различные виды устройств, используе-
мых для пассивного формирования и обработки ЛЧМ сигналов, можно разде-
лить на два больших класса: 1) ультразвуковые устройства, в которых элек-
0 Активная обработка может реализовать сжатие сигнала как по време-
ни (корреляция), так и по частоте (согласованная фильтрация при следящем
приеме ЧМ сш налов). (Прим, ред.)
403
Таблица 1
Краткая сводка характеристик различных методов сжатия импульсов
Харак- теристики Линейная ЧМ Нелинейная ЧМ Фазовое кодирование
активная пассивная активная пассивная активная пассивная
Перекры- ваемый диапазон дально- стей Ограниченный диапазон дально- стей на одну схе- му активной кор- реляции Обеспечивает перекрытие всего диапазона даль- ностей Ограничивает- ся одной ячейкой разрешения на схему активной корреляции Обеспечивает перекрытие всего диапазона даль- ностей Ограничи- вается одной ячейкой раз- решения на схему актив- ной корреля- ции Обеспечива- ет перекрытие всего диапазо- на дальностей
Перекры- ваемый диапазон допле- ровских частот Перекрывают любой диапазон доп- леровских частот вплоть до ±В/10, но при этом вносятся ошибки изме- рения дальности. При больших доп- леровских сдвигах ухудшается S/N и возрастает уровень лепестков Необходимо использовать большое число доплеровских каналов, центральные частоты которых различаются на 1/Т [Гц]
Уровень боковых лепест- ков по дально- сти Для уменьшения уровня боковых лепестков ниже их уровня для функ- ции (sinx)/x на оси дальности необ- ходима весовая обработка Возможно получение достаточно низкого уровня боковых лепестков на оси дальности. Уровень боковых ле- пестков определяется параметрами сигнала, выбираемыми при разработ- ке Достаточно низкий уровень боковых лепестков. Для кода с N элементами этот уровень равев N~^
Возмож- ности измене- ния формы сигналов Ширину поло- сы и длитель- ность импульса можно изменить Для каждой схемы сжатия воз- можны единст- венные значения параметров Ширину полосы и длительность импульсов можно изменить Для каждой схемы сжатия возможны един- ственные значе- ния параметров Ширину полосы, длитель- ность импульсов и использу- емый код можно изменить
Гл. 8. РЛС со сжатием импульсов
Продолжение табл. 1
Харак- теристики Линейная ЧМ Нелинейная ЧМ Фазовое кодирование
активная пассивная активное пассивное активное пассивное
Возмож- ности подав- ления пассив- ных помех Плохие характеристики подавления Хорошие характеристики подавле- ния Хорошие характеристики по- давления
Отноше- ние сиг- яал/шум Уменьшается из-за весовой об- работки и нерав- номерности зави- симости потерь от дальности Уменьшается из-за весовой об- работки Уменьшается из-за неравномер- ности зависимо- сти потерь от дальности Уменьшение не происходит Уменьшается из-за неравно- мерности зави- симости потерь от дальности Уменьшение не происходит
Замеча- ния а о 1. Используется ограниченно 2. Формирова- ние сигналов не вызывает затруд- нений 1. Используется широко 2. Методы фор- мирования хоро- шо разработаны 1. Используется ограниченно 2. Формирова- ние сигналов вы- зывает затрудне- ния 1. Используется ограниченно 2. Методы фор- мирования край- не слабо разра- ботаны 1. Исполь- зуется широко 2. Формиро- вание сигналов чрезвычайно простое 1. Использу- ется ограничен- но 2. Формиро- вание сигна- лов вызывает умеренные за- труднения
8.3. Линейная частотная модуляция
Гл. 8. РЛС со сжатием импульсов
трический сигнал преобразуется в звуковую волну, 2) электрические устрой*
ства, использующие дисперсионные характеристики электрических схем. При
разработке таких устройств стремятся обеспечить выполнение следующих
основных требований: равномерность амплитудной характеристики во всей
полосе частот шириной В; линейный наклон характеристики задержки при
разностной задержке Т во всей полосе частот шириной В; минимум ложных
сигналов и минимум искажений, что обеспечивает низкий уровень боковых
лепестков; малые вносимые потери. Краткая сводка наиболее важных харак*
теристик таких устройств приведена в табл. 2.
Таблица 2
Характеристики пассивных устройств обработки ЛЧМ сигналов
Устройство В, МГц Т, мкс «5 j fo МГц Типичные потери ДБ Типичный уровень паразит* ных си г на* лов, дБ
Полосковая линия задержки: алюминиевая 1 500 200 5 15 —60
стальная 20 350 500 45 70 -55
Всепропускающая схема 40 1000 300 25 25 -40
Дифракционная линия задержки: перпендикулярная 40 75 1000 100 30 —45
на поверхностных волнах 40 50 1000 100 70 —50
клинообразного типа 250 65 1000 500 50 —50
Меандровая линия с изогнутой 1000 1,5 1000 2000 25 —40
лентой Волновод, работающий на часто- 1000 3 1000 5000 60 —25
тах вблизи частоты среза ЖИГ-кристалл 1000 10 2000 2000 70 -20
В ультразвуковом устройстве входной электрический сигнал вначале пре-
образуется в акустическую волну, распространяющуюся в среде со скоростью
звука, а затем с помощью обратного преобразования снова превращается
в электрический выходной сигнал. Так как волна распространяется со скоро-
стью звука, то ультразвуковые устройства обеспечивают большие времена
задержки, чем сравнимые с ними по размерам электрические устройства. Ос-
новным недостатком ультразвуковых устройств является неэффективное пре-
образование энергии в преобразователях, осуществляющих связь между элек-
трической частью устройства и акустической средой, что приводит к появлению
больших вносимых потерь. Наиболее широкое распространение получили сле-
дующие виды ультразвуковых дисперсионных устройств: полосковые линии
задержки, перпендикулярные дифракционные линии задержки, линии задерж-
ки на поверхностных волнах, клинообразные линии задержки и ЖИГ (железо-
иттриевый гранат) кристаллы. Дисперсионные характеристики полосковой
линии задержки и ЖИГ кристалла определяются дисперсионной природой
среды, в которой распространяется волна. В остальных трех типах устройств
используются недисперсиснные среды, и их дисперсионные характеристики
определяются дифракционными свойствами входных и выходных преобразова-
телей, поэтому они называются линиями задержки решетчатого типа.
406
8.3. Линейная частотная модуляция
Вход
АкустичесниЗ
поглотитель
Выход
Рис. 2. Полосковая линия задержки.
ВыхоВной
преобразователь
Распространение
Волны
ВхоВной
преобразователь
Полосковая линия задержки [2—5] изготовляется из длинной тонкой
полоски материала, причем преобразователи располагаются на противополож-
ных концах полоски. Схематическое изображение такой линии приведена
на рис. 2. Так как полоска должна быть очень тонкой (порядка нескольких
сотых миллиметра), то в качестве материала применяют металл, обладающий
большой прочностью. Единственными материалами, которые нашли широкое
применение для изготовления полосковых линий, являются алюминий и сталь.
Действие дисперсионной полосковой линии задержки основано на следующем
явлении: при распространении продольной акустической волны в такой среде
проявляется практически линейная за-
висимость задержки от частоты в зна-
чительном частотном диапазоне. Ши-
рина полоски не является критичес-
ким параметром, если только она
превышает значение, равное десяти
длинам акустической волны. В то же
время толщина полоски является
очень критичным параметром; она
должна приближенно равняться по-
ловине длины акустической волны
для центральной частоты линейного
участка зависимости задержки от ча-
стоты. Длина полоски линейно зави-
сит от требуемой разностной задерж-
ки, а полоса пропускания не зави-
сит от длины полоски. Разностная
задержка соответствует разности задержек для крайних частот спектра сиг-
нала; обычно она равна длительности растянутого импульса.
Так как толщина полоски является весьма критичным параметром, а точ-
ное изготовление тонких полосок является трудной задачей, то полосковую
линию обычно помещают в термостат, регулировка температуры которого
позволяет окончательно настроить линию на необходимую рабочую частоту.
Одна сторона полоски покрывается поглощающим материалом для предотвра-
щения отражений, которые могут возбудить в линии отличные от продольных
волны, что может привести к появлению паразитных колебаний. Если тре-
буется, чтобы линейность характеристики задержки лежала в пределах ±2%,
то ширина полосы частот полосковой линии постоянной толщины должна
составлять менее 10% центральной частоты. При необходимости обеспечить
большие значёния относительной ширины полосы можно использовать полоски
со ступенчато изменяющейся толщиной или создавать по длине линии допол-
нительные отводы. Так можно увеличить относительную ширину полосы до
50%, сохраняя при этом линейность характеристики задержки в пределах
±2%. Применение полосок со ступенчато изменяющейся толщиной позволяет
получить наиболее линейную характеристику, а применение отводов обеспечи-
вает самый низкий уровень паразитных отражений и наименьшую неравномер-
ность амплитудной характеристики во всей полосе частот.
Требования к уровню боковых лепестков определяют допуски на критич-
ные параметры, определяющие конструкцию линии. Например, для получения
уровня боковых лепестков по времени —30 дБ при относительной ширине по-
лосы 10% необходимо, чтобы изменения центральной частоты не превыша-
ли 0,1%. Уровень паразитных отражений возрастает при увеличении длины
линии, так как невозможно эффективно ограничивать ширину акустического
луча; это приводит к распространению в линии колебаний других типов.
Потери в линии возрастают пропорционально длине линии, а при увеличений
рабочей частоты— по квадратичному закону.
Алюминиевые полосковые линии задержки имеют самый низкий уровень
потерь, но центральная частота и ширина полосы для них не могут быть высо-
4 07
Гл. 8. РЛС со сжатием импульсов
кими. Для получения разностных задержек, превышающих 50 мкс, рабочие
частоты этих линий должны быть ниже примерно 5 МГц. Задержка для цен-
тральной частоты в алюминиевых линиях лежит в диапазоне 2,8—4 мкс/см.
Стальные полосковые линии задержки имеют высокие потери, но так как
они позволяют использовать более высокие центральные частоты, то в них
можно получить более широкие рабочие полосы частот. Типичные значения
потерь для стальных линий составляют от 70 до 80 дБ, а рабочие частоты
лежат в диапазоне 5—45 МГц. Задержки на центральной частоте для сталь-
ных линий лежат в диа-
пазоне 3,6—4,8 мкс/см.
В перпендикулярных
дифракционных линиях
задержки [3, 4, 6] исполь-
зуется недисперсионная
замедляющая среда (на-
пример, кварц). Для соз-
дания дисперсионных ха-
рактеристик на соседние
перпендикулярные друг
к другу плоскости образ-
ца наносятся неравномер-
ные решетки, которые и
представляют собой вход-
ной и выходной преобра-
зователи. Два соседних
элемента решетки выход-
ного преобразователя
формируют на выходе
максимальный сигнал
только в том случае, ко-
прво$разо&атель
(N элементов)
Рис. 3. Перпендикулярная дифракционная линия
задержки.
гда в результате интер-
ференции происходит сложение колебаний, возбужденных двумя соседними
элементами, решетки входного преобразователя. Расстояние между элемента-
ми решетки уменьшается по мере увеличения расстояния от вершины прямого
угла', образованного плоскостями, на которых нанесены решетки. Таким обра-
зом, в этом устройстве график зависимости задержки от частоты может иметь
только положительный наклон.
На рис. 3 показана перпендикулярная дифракционная линия задержки.
Здесь Ri — расстояние, определяющее задержку для самой низкой частоты,
a R2—расстояние, определяющее задержку для самой высокой частоты.
Ширина полосы устройства определяется конструкцией решеток, а задерж-
ка— размерами устройства. Ошибки в размещении элементов решетки приво-
дят к появлению фазовых ошибок, что обусловливает наличие амплитудных
выбросов и нелинейность зависимости задержки от частоты. Так как для неко-
торой определенной частоты существует много путей распространения межцу
различными элементами решеток, то существует тенденция к усреднению ам-
плитудных ошибок и ошибок во времени задержки. Из-за усреднения фазовых
ошибок наилучшая линейность характеристики задержки обеспечивается тогца,
когда в каждом преобразователе используется решетка с максимально возмож-
ным числом элементом. Если N—число элементов в передающей решетке,
а М — число элементов в приемной решетке, то число элементов ограничи-
вается следующими соотношениями:
1
Т (W-fl)
В
м <. N f /о Г,
408
8.3. Линейная частотная модуляция
где 7 — разностная задержка; В — ширина полосы; —центральная частота,
f, — низшая частота используемого спектра; /а — высшая частота спектра.
' Для достижения наиболее выгодного согласования между числом элемен-
тов в приемной и передающей решетках значение ширины полосы должно
лежать в пределах 10—50% центральной частоты. Хотя возможно создание
дифракционных линий задержки, потери в которых будут составлять всего
14 дБ, типичные линии задержки имеют потери порядка 30 дБ. Задержка на
центральной частоте для обычных линий не превышает 75 мкс, а для много-
вь/ходная решетка
Рис. 4. Линия задержки на поверхностных волнах.
угольных равна 225 мкс. Такое ограничение объясняется максимально дости-
жимыми размерами кварцевых образцов. В многоугольных линиях акустиче-
ская волна при прохождении от передающей решетки к приемной претерпе-
вает несколько отражений.
В дисперсионной линии задержки на поверхностных, волнах для создания
линейной зависимости задержки от частоты используются входные и выходные
решетки электродов, сформированные на одной и той же поверхности образца
недисперсионного материала [3, 4]. Такое устройство показано на рис. 4.
В этом устройстве в качестве входных и выходных преобразователей и в каче-
стве среды распространения используется пьезоэлектрическая пластинка. При
подаче электрического сигнала на преобразовательную решетку в среде возбуж-
дается поверхностная акустическая волна, и, наоборот, при наличии поверх-
ностной волны на выходной решетке преобразователей появляется выходной
электрический сигнал. Входная решетка, выходная решетка или обе решетки
одновременно образуются элементами, расстояние между которыми меняется
по квадратичному закону. Характер зависимости задержки от частоты для
такого устройства определяется размещением элементов решеток. Расстояние
между элементами входной решетки, образующими резонансную пару на опре-
деленной частоте, и элементами выходной решетки, являющимися резонанс-
ными на этой же частоте, определяет задержку для этого значения частоты.
Таким образом, изменяя ориентацию этих двух решеток, можно изменить
закон частотной модуляции и получить по желанию систему либо с нарастаю-
щей, либо со снижающейся частотой.
В клинообразной дисперсионной линии задержки для создания линейной
зависимости задержки от частоты используется клинообразный образец кри-
сталла кварца и частотно-селективная приемная решетка [4] (рис. 5) Входной
преобразователь имеет широкую полосу частот, а расстояние между элемен-
409
Гл. 8. РЛС со сжатием импульсов
тами приемной решетки меняется по квадратичному закону. Изменение ориен-
тации решетки будет соответствовать переходу от линейного нарастания ча-
стоты выходного сигнала к ее линейному уменьшению. Наклон характеристики
задержки определяется конфигурацией выходной решетки и углом клина.
Этот прибор крайне чувствителен к фазовым ошибкам, возникающим вследст-
вие неправильного размещения элементов решетки, так как для каждой из
частот существует лишь один путь распространения, позволяющий получить
выходной сигнал.
Рис. 5. Клинообразная линия задержки.
Дисперсионной характеристикой задержки в СВЧ диапазоне обладают и
кристаллы железо-иттриевого граната (ЖИГ) [5, 7) (рис. 6). Устройства на
ЖИГ-кристаллах не обладают линейной зависимостью задержки от частоты,
но их характеристики стабильны и легко воспроизводимы. Устройства на
ЖИГ-крист алл ах требуют внешнего магнитного поля, при этом ширина полосы
и центральная частота возра-
стают при усилении поля. За-
держка в таких устройствах
определяется длиной кристал-
ла. Максимальная длина кри-
сталла составляет «1,5 см, а
соответствующая максимальная
задержка равна «*10 мкс.
В генераторах ЛЧМ сигна-
лов, относящихся к классу
Входной
контакт
Стержень ЖМГ
Выходной
контакт
электрических схем, сигнал
Рис. в. Линия задержки на жнг-кристалле, проходит через электрическую
схему, имеющую линейную за-
висимость задержки от частоты. Наибольшее распространение в качестве ге-
нераторов ЛЧМ сигналов получили следующие устройства: «всенропускаю-
щие» схемы; меандровые линии с изогнутой лентой; волноводы, работающие
на частотах вблизи частоты среза. Всепропускающая схема представляет со-
бой низкочастотное устройство, состоящее из сосредоточенных элементов. Два
других устройства работают на более высоких частотах, и задержка в них
определяется распределенными параметрами.
41©
8.3. Линейная частотная
модуляция
Beenponyекающая схема временной задержки в идеальном виде представ-
ляет собой четырехполюсник, для которого коэффициент усиления постоянен
на всех частотах, а фазовый сдвиг квадратично зависит от частоты, что обес-
печивает линейную зависимость задержки от частоты [8, 9]. В таких схемах
входной импеданс равен выходному, поэтому для увеличения разностной
задержки можно каска дно соединять несколько схем. Показанная на рис. 7
всепропускающая мостовая Т-образная схема эквивалентна схеме лестничного
типа. Так как реализация Т-образной схемы проще, она обычно применяется
вместо схемы лестничного типа. Мостовая, схема характеризуется линейной
зависимостью задержки от частоты в
ограниченном диапазоне частот (рис. 8).
Для обеспечения линейности в большом
диапазоне используют каскадное соеди-
нение схем, причем каждую схему на-
страивают на несколько отличающиеся
частоты. В результате получается гре-
бенка частотных откликов,- показанная
иа рис. 9.
Точная настройка каждой схемы до-
стигается методом последовательного
приближения, но сама методика синтеза
в настоящее время является уже уста-
новившейся. Чтобы облегчить разработку
схем подобного типа, разработаны базо-
вые секции, состоящие из 1, 2, 3, 4 или
6 ступенчатых настроенных мостовых
Т-образных подсекций, с требуемой поло-
сой пропускания. Для получения, необхо-
димой задержки достаточна каскадно
соединить требуемое число таких базо-
вых подсекций. Нормированные харак-
теристики ступенчато настроенной схемы,
составленной из k мостовых Т-образных
подсекций, приведены в табл. 3. Эти
секции рассчитаны таким образом, что
Л=——
7 Vo
f - 2
1*~в^
i 16 \affJ 7
2 V-’
4 \aoi
неравномерность их характеристики за-
держки равна приблизительно 1%.
При разработке схемы с полосой
пропускания В и центральной частотой о
удовлетворять следующим соотношениям:
Рис. 7. Мостовая Т-образная схема (а)
и расположение полюсов и нулей (6).
параметры каждой секции должны
a0/1 = Bani
о0п=(»4 — Вхп,
®0П — а0п4"Ю0 п>
где <Хоп— коэффициент полосы пропускания для п-и секции; ©on — централь-
ная частота п-п секции. Выбрав значение R$ и зная приведенные выше пара-
метры, можно определить компоненты каждой схемы (рис. 7). Для уменьшения
вносимых потерь и минимизации разброса параметров компонентов значение
отношения B/fo должно быть достаточно близко к единице; обычно выбирают
«Г
Гл. 8. РЛС со сжатием импульсов
BJf0 85%. Разностная линейная задержка на одну секцию равна ЛГ/В,
а число необходимых секций определяют, поделив необходимое значение раз-
ностной задержки (АГ) на разностную задержку в одной секции. Средняя
задержка на секцию равна Т0!В. Необходимое число мостовых Т-образных
секций обычно равно 2ВДТ. На практике вследствие потерь в элементах ампли-
тудный отклик мостовых Т-образных схем не является строго постоянным
Характеристики мостовых Т-образных схем,
k Ошибка задержки в процен- тах от Д Г д/ (XI *1 а2
1 ±1,55 U,221 0,354 5,18 4,08
2 ±1,22 0,868 0,803 3,57 2,16 0,325 3,50
3 ±1,05 1,60 1,37 3,54 1,54 2,00 2,33
4 ±1,06 3,19 2,53 3,26 0,801 2,11 1,19
6 ±1,20 6,85 4,35 3,23 0,413 2,61 0,578
по частоте. Если добротность Q всех схем одинакова, то амплитудный отклик
в логарифмическом масштабе в основном повторяет характеристику разност-
ной задержки, умноженную на коэффициент 4w07Q- Если неравномерность
характеристики задержки превышает допустимые пределы, то последовательно
с основной схемой часто включают устройства для компенсации неравномер-
ности амплитуды и задержки.
Рис. 8. Зависимость задержки от частоты
для мостовой Т-образной схемы.
Рис. 9. Частотные характеристики четы-
рех Т-образных схем и результирующая
частотная характеристика.
Ленточная меандровая линия является высокочастотным аналогом низко-
частотной всепропускающей схемы [10]. Меандровая линия состоит из тонкой
проводящей ленты, изогнутой, как показано на рис. 10, и закрепленной между
двумя плоскостями Пространство между изгибами ленты и между лентой и
плоскостями заполняется диэлектриком. Центральной частотой линии является
та частота, для которой соответствующая длина волны в четыре раза превы-
412
8.3. Линейная частотная модуляция
шает длину линии. Задержка на один изгиб ленты определяется размерами
изгиба и расстоянием от основной плоскости. Для того чтобы обеспечить ли-
нейность зависимости задержки от частоты, последовательные изгибы ленты
изготавляют таким образом, чтобы они обладали различными характеристи-
ками. На рис. 10 показана меандровая линия с сужающимися к выходу изги-
бами. Число изгибов меандровой линии должно превышать В&Т.
Таблица 3
настроенных на смежные частоты
^8 а x-i «4 аь X, а
—0,462 0,652 1,89 2,85 1,57 0,677 — 1,13 1,00 2,08 . 0,788 —0,065 0,963 — 1,45 1,24
Разработку меандровой линии, имеющей заданную характеристику за-
держки, можно осуществить методом последовательного приближения, полно-
стью аналогичным методу, использованному для разработки всепропускающей
схемы, за исключением того, что во зависит от поперечного сечения изгиба.
При синтезе может быть использована та же методика, что и при синтезе все-
пропускающей схемы. Характеристика задержки для меандровой линии имеет
Рис 10. Сужающаяся меан-
дровая линия с изогнутой
ленюй.
периодический характер, она повторяется для соо, Зсо0, 5<оо, .... Следовательно,
частотное перекрытие в такой схеме должно быть ограничено соотношением
2 : 1. Вносимые потери возрастают при увеличении рабочей частоты и одина-
ковы во всей полосе пропускания В, если только задержка уменьшается с рос-
том частоты. Общая задержка такого устройства приблизительно равна
задержке для волновода, длина которого равна длине ленты.
Среди других СВЧ дисперсионных схем необходимо упомянуть волноводы,
работающие вблизи частоты среза и всепропускающие устройства на полоско-
вых линиях. Если секция прямоугольного волновода работает на частоте, пре-
413
Гл; 8. РЛС со сжатием импульсов
вышающей частоту среза, то временная задержка в волноводе уменьшается
с ростом частоты. В некоторой ограниченной области частот зависимость
задержки от частоты имеет линейный характер. Ширина используемого участка
частот и линейность, характеристики существенно улучшаются при использова-
нии переменной по длине сужающейся волноводной структуры.. Так как все-
пропускающие устройства на полосковых линиях являются высокочастотными
аналогами низкочастотных всепропускающих схем, то для их синтеза обычно
используются методы, аналогичные методам синтеза низкочастотных схем.
Активные ЛЧМ устройства. Для активного формирования ЛЧМ сигналов
могут быть использованы самые различные методы. Наибольшее распростра-
нение получили следующие устройства: генератор, управляемый напряжением
(ГУН); пилообразный модулятор; генератор на линии задержки; синтезатор
ЛЧМ сигналов.
Генератор, управляемый напряжением (ГУН), представляет собой устрой-
ство, генерирующее непрерывный сигнал, частота которого определяется при-
ложенным напряжением. В идеальном случае частота линейно зависит от
приложенного напряжения, но для большинства ГУН характерно отклонение
от линейного закона, превышающее 1%. Если на идеальный ГУН подается
линейно нарастающее напряжение, то он формирует ЛЧМ сигнал. Линейно
нарастающее напряжение можно получить при подаче на аналоговый интегра-
тор скачка напряжения После окончания генерации ЛЧМ сигнала интегратор
должен быть разряжен. Если характеристика ГУН обладает определенной
нелинейностью, то для ее компенсации можно изменять напряжение интегра-
тора в процессе формирования сигнала. Такое изменение управляющего напря-
жения позволит скомпенсировать нелинейность характеристики ГУН. Предва-
рительная компенсация такого типа используется довольно часто. Характе-
ристики некоторых типичных ГУН приведены в табл. 4. Для генератора с об-
ратной волной зависимость частоты от напряжения имеет экспоненциальный
характер, для всех других генераторов эта зависимость линейна. При необхо-
димости обеспечить когерентную работу ГУН нужно использовать фазовую
синхронизацию выходного и когерентного опорного сигнала.
Таблица 4
Характеристики генераторов, частота которых управляется напряжением
Тип управляемого напряжением устройства Диапазон, в котором может находиться центральная частота, % Макси- мальная девиация частоты в % от цент- ральной частоты Макси- мальная нелиней- ность ЧМ в % от девиа- ции Макси- мальная нестабиль- ность централь- ной частоты
£С-генератор Вплоть до 50 МГц ± 15 ±0,5 ±(ю-5—ю-’)
Кварцевый генератор ЮО^кГц—300 МГц ±0,25 ±1 ±(10-6—10-5)
Трехточечный генератор на арсениде галлия 60—2500 МГц ±2 ±2 ±1%
Перестраиваемый напря- жением магнетрон2) Ю0— 10 000 МГц ±50 ± 1 ±0,2%
Генератор обратной вол- ны 3) 2—18 ГГц ±20 ±0,34 ±0,2%
О Отклонение от экспоненциальной зависимости частоты от напряжения.
2 Необходимый диапазон управляющих анодных напряжений 750—3000 В.
> Необходимый'диапазон управляющих напряжений на спирали 400—1500 В.
414
8.3. Линейная частотная модуляция
Пилообразный модулятор [11] (рис. 11) формирует квадратичный сигнал,
который сравнивается с периодическим пилообразным сигналом, что позволяет
сформировать последовательность импульсов, расстояние между которыми
изменяется по квадратичному закону. Далее эта последовательность импульсов
фильтруется, что позволяет сформировать ЛЧМ сигнал, а затем подается
на умножитель частоты, что обеспечивает необходимое значение девиации ча-
стоты. Для формирования пилообразного сигнала используется опорная им-
пульсная последовательность, при этом выходной сигнал будет когерентен
этой опорной последовательности. Квадратичное напряжение начинает форми-
Опорные
имт/льсь/
Генератор
пилооГраз-
нь/х
нолнГанай
О Т
Рис. П. Пилообразный модулятор.
роваться в момент времени, соответствующий началу опорной импульсной
последовательности. Квадратичное напряжение и пилообразный сигнал срав-
ниваются, и в момент пересечения пилообразным сигналом уровня квадратич-
ного напряжения (при положительном наклоне пилообразного напряжения)
генерируется короткий импульс. Расстояние между этими импульсами в про-
цессе генерации возрастает; оно равно периоду опорной последовательности
плюс некоторая добавка. Так как величина этой добавки ограничивается дли-
тельностью периода опорной последовательности, то величина фазового изме-
нения для выходного сигнала ограничивается 360°.
Следовательно, значение произведения полоса-длительность для выходного
сигнала фильтра равно 2 или даже меньшей величине. Поэтому для формиро-
вания сигнала с большим значением произведения полосa-длительность необ-
ходимо умножение частоты. Наличие операции умножения частоты является
основным недостатком пилообразного модулятора, так как при этом уровень
паразитных сигналов по отношению к полезному сигналу возрастает пропор-
ционально коэффициенту умножения частоты.
Генератор сигналов на линии задержки с отводами (см. рис. 12) ана-
логичен пилообразному модулятору. Однако в нем фазовые изменения могут
быть больше 360°. На вход линии задержки подается последовательность рав-
ноотстоящих импульсов. Длина линии задержки равна интервалу между
импульсами. Отводы по длине линии задержки размещены неравномерно;
расстояния между отводами определяются положением точек пересечения ну-
левого уровня при положительном наклоне ЛЧМ сигнала, который должен
415
Гл. 8. РЛС со сжатием импульсов
быть сформирован. Для формирования выходного сигнала выходы отводов
последовательно стробируются и фильтруются; например, первый импульс
опорной последовательности стробируется и снимается с первого отвода и по-
дается на фильтр, второй импульс опорной последовательности стробируется,
снимается со второго отвода и подается на фильтр и т. д. Общее число отво-
Рис. 12. Генератор сигналов на линии задержки.
дов на линии задержки должно быть равно числу положительных пересечений
формируемого ЛЧМ сигнала с нулевым уровнем. Достижимое значение про-
изведения полоса-длительность для такого устройства ограничивается только
сложностью устройства.
Опорная
частота
Смеси-
Смеси- Го+2* ZA
теле 1
$к-2
Смеси А Гр+2К~3А
Смеси- А
--5Т
Частота
К
КГ0 + 4А
КГ0+ЪА
Гт0+2А
Kf0+A
rr0 L
?8ых.
____i__
Смеси-
тель
fO $0
Sh-2'
sk-3
Генератор
нагнала с
пилообраз-
но изменя-
ющейся
частотой
Управление
та/аповоу
частотой
Частота
т Пусковой
I импульс
1
§
е0
?о $к-з
Рис. 13. Генератор синтезированного ЛЧМ сигнала.
В синтезаторе ЛЧМ сигналов [12] (рис. 13) формирование ЛЧМ сигна-
ла производится за счет сложения сигнала со ступенчато изменяющейся ча-
стотой и сигнала с пилообразным изменением частоты. Когерентные сигналы,
частоты которых смещены одна относительно другой по бинарному закону,
формируются путем последовательного деления на два частоты опорного сиг-
416
8.4. Сигналы с нелинейной ЧМ
вала. Эти сигналы со смещенными частотами подаются в смесительную
матрицу, осуществляющую последовательное суммирование их частот в те
чение длительности формируемого импульса. Вследствие этого на выходе
матрицы формируется сигнал со ступенчатым изменением частоты. Этот сиг-
нал смешивается с сигналом, имеющим пилообразное изменение частоты,
период и размах которого совпадает с периодом и величиной частотных ступе-
нек, что и позволяет сформировать ЛЧМ сигнал.
Получающийся ЛЧМ сигнал не может иметь фазовых переходов в моменты,
когда частота изменяется скачком. Следовательно, длительность частотной
ступеньки должна содержать целое число периодов частоты, равной интервалу
между соседними ступеньками Д Кроме того, скачок частоты должен проис-
ходить в тот момент, когда фаза сигнала частоты Д проходит через нуль, так
как в этот момент все смещенные частоты находятся в фазе и они синхронны.
Подобным же образом и" фазовый набег пилообразной частоты должен быть
равен 2"л. Если п равно нулю, то фаза частоты fe+Д для сохранения коге-
рентности должна изменяться на л
8.4. Сигналы с нелинейной ЧМ
Сигналы с нелинейной ЧМ привлекают меньше внимания, хотя они и
имеют несколько довольно существенных достоинств. Они не требуют приме-
нения временной или частотной весовой обработки для подавления боковых
лепестков на оси дальности, так как вид модуляции сигнала специально выбн-
Йается таким образом, чтобы обеспечить необходимый амплитудный спектр,
ри таком подходе удается совместить прием на согласованный фильтр и
снижение уровня боковых лепестков. Поэтому можно избежать потерь в отно-
шении сигнал/шум, связанных с весовой обработкой при обычных методах и
вызывающих рассогласование фильтра. Если используется симметричная ЧМ,
а для уменьшения уровня боковых лепестков по оси частот применяется вре-
менная весовая обработка, то функция неопределенности для сигналов с нели-
нейной ЧМ будет весьма близка к идеальной. Для сигналов с симметричной
ЧМ частота обычно в течение первой половины длительности сигнала увели-
чивается (или уменьшается), а в течение второй половины длительности она
уменьшается (или увеличивается). Сигналы с несимметричной ЧМ получаются
при использовании одной половины процесса симметричного изменения частоты
(рис. 14). Однако для сш налов с несимметричной нелинейной ЧМ характерна
такая же сильная связь между значениями дальности и доплеровского сдвига,
«ак и для сигналов с несимметричной ЛЧМ.
Недостатками сигналов с нелинейной ЧМ являются: возрастание сложно-
сти систем; недостаточный уровень разработки устройств для генерации сиг-
налов с нелинейной ЧМ; необходимость подбора и разработки специальной
ДЛЯ каждого амплитудного спектра в тех случаях, когда необходимо обес-
печить требуемый уровень боковых лепестков. Вследствие большой крутизны
функции неопределенности сигналы с нелинейной ЧМ наиболее полезны в сле-
дящих системах и системах сопровождения, где значения дальности и допле-
ровского сдвига приближенно известны.
Многие устройства, используемые для формирования ЛЧМ сигналов,
могут быть применены и для формирования сигналов с нелинейной ЧМ. Наи-
более удобны следующие устройства: всепропускающие схемы; генератор, уп-
равляемый напряжением; генератор на линии задержки; линия задержки на
поверхностных волнах; клинообразная линия задержки. Широкое применение
получили в настоящее время только всепропускающие схемы и генератор,
управляемый напряжением.
Для получения зависимости задержки от частоты, которая требуется для
создания сшнала с заданной нелинейной ЧМ, необходимо специально разра-
батывать всепропускающую схему При этом для получения минимальных
ошибок используют комбинацию большого числа схем с различными централь-
417
Гл. 8. РЛС со сжатием импульсов
яыми частотами и значениями полосы пропускания, причем и центральные
частоты, 8 полосы пропускания выбираются методом проб и ошибок. При
использовании только одной группы схем могут быть сформированы сигналы
только с несимметричной ЧМ Для построения генератора сигналов с симмет-
ричной ЧМ необходимо применять схему генерации сигнала с несимметричной
Рее. 14. Характеристики сигнале» а нелинейное ЧМ, используемых при весовой обра-
ботке по Тейлору (уровень боковых лепестков —40 дБ).
ЧМ для формирования первой половины сигнала, устройство задержки в
устройство инверсии частоты для формирования второй половины сигнала.
Пример такого устройства показав на рис. 15. Для формирования сигналов
с симметричной ЧМ могут быть применены также и две несимметричные схе-
мы, имеющие зеркальную симметрию, и устройство задержки на время Т/2.
Рис 1В. Генератор сигналов с снммг«ри'мк>й нелинейной
Задержка производится либо в триггерном устройстве на входе второй схемы,
либо на выходе второй схемы.
В генераторе, управляемом напряжением, изменение управляющего напря-
жения во времени должно быть пропорционально требуемому изменению
частоты во времени Это управляющее напряжение подается на какой-ли&э
ГУН, данные о которых приведены в табл. 4, что и позволяет сформировать
сигнал с требуемой нелинейной ЧМ как симметрично, гак и несимметрично.
В генераторе на линии задержки необходимо обеспечить соответствующее
расположение отводов и правильный порядок съема сигналов с отводов; только
при выполнении этих условий можно сформировать необходимый сигнал. Для
формирования сигнала с заданной нелинейной ЧМ в линиях задержка »а
поверхностных волнах и в клинообразных линиях необходимо применять спе-
циально разработанные решетки преобразователей,
41Ь
8.4. Сигналы с нелинейной ЧМ
Если в приемной системе с согласованными фильтрами используются сиг-
налы с нелинейной ЧМ, то функцию неопределенности можно записать в виде
IX(G®d)| = -^-
00
J FT (®+й»й) FR (ю)е,(йГЛо,
— оо
где спектр передаваемого сигнала; Fr(<o)—частотный отклик при-
емника. Для приемника с согласованным фильтром даа предполагается извест-
ным и
F R (да) — Fj (co-j-co^)»
Следовательно,
Ft (да 4- Fr (co) = I FT (co I2.
Таким образом, отклик согласованного фильтра равен обратному преобра-
зованию Фурье от квадрата модуля спектра передаваемого сигнала. Отклик
также пропорционален автокорреляционной функции передаваемого сигнала.
Для получения диаграммы боковых лепестков тейлоровского типа (для
которой боковые лепестки на 40 дБ ниже главного максимума) изменение
частоты во времени для передаваемого сигнала с несимметричной ЧМ в поло-
се V- должно иметь вид (32)
/
/ ( ) = ^( -7- +У К/г sin
п~ I
2 л/г/
Т
где
/<!==—0,1145. К2 = 0,0396 К3=—0,0202 ^=0,0118,
/<5=-0,0082, /<8=0,0055, /<7=—0,0040.
Чтобы сформировать из него сигнал с симметричным изменением частоты,
необходимо в. зависимости частоты от времени /(0 Для первой половины сиг-
нала (/^Т/2) заменить Т на Г/2. Для формирования второй половины сигна-
ла (1^Т/2) в функции f(t) нужно заменить Т на 772 и t на Г/2—/.
8.5. Сигналы с кодированием по фазе
Сигналы с кодированием по фазе отличаются от ЧМ сигналов тем, что
в них длинный импульс разбивается на некоторое число более коротких
подымпульсов. Все подымпульсы имеют равную длительность; каждый подым-
пульс передается с определенным значением фазы. Фаза каждого подымпуль-
са выбирается в соответствии с фазовым кодом. Наибольшее распространение
получило фазовое кодирование, в котором используются бинарные фазовые
коды. Бинарный фазовый код представляет собой последовательность либо
1 и 0, либо +1 и —1. Фаза передаваемого сигнала изменяется попеременно
между значениями 0—180° в соотвегсгвии с чередованием элементов 1 и 0
419
Гл. 8. РЛС со сжатием импульсов
не половины амплитуды номинально
вательно, разрешение по дальности
или 4-1 и —1 в фазовом коде (рис. 16). Так как используемая частота в общем
случае некратна величине, обратно пропорциональной длительности подым-
пульса, то кодированный сигнал в общем случае претерпевает разрывы в точ-
ках обращения фазы.
При приеме сжатие импульса обеспечивается либо согласованной филь-
трацией, либо корреляционной обработкой. Ширина сжатого импульса на уров-
равна длительности подымпульса. Следо-
пропорционально длительности одного
элемента кода. Коэффициент сжатия ра-
вен числу подымпульсов в сигнале, т. е.
числу элементов кода.
Коды Баркера. Специальный класс
бинарных кодов составляют оптималь-
ные коды, или коды Баркера [13]. Их оп-
тимальность заключается в том, что
амплитуда пика автокорреляционной
функции равна N, а значение боковых
лепестков ^1, где N — число элемен-
тов или длина кода. Существует лишь
небольшое число таких оптимальных ко-
дов, они приведены в табл. 5. Отно-
лепестков к максимуму есть отношение
абсолютного значения максимального бокового лепестка к амплитуде основ-
ного пика автокорреляционной функции. Изменение знаков элементов кода
на противоположный для всех N дает коды, обладающие точно такими же
автокорреляционными функциями. Эти коды были бы идеальными кодами при
использовании их в РЛС со сжатием импульсов, если бы можно было полу-
чить такие коды большой длины. Однако до сих пор не найдено кодов Бар-
кера длиной более 13 элементов [14, 15]. В РЛС со сжатием импульсов,
в которой используются коды Баркера, максимально достижимый коэффи-
циент сжатия не превышает 13.
WWV
Рис. 16. Бинарный фазокодированный
сигнал.
шение пикового значения боковых
1 а б л и и а 5
Коды Баркера
Длина
кода N
Элементы кода
Относитель-
ный уровень
боковых ле-
пестков дБ
(—20 log N}
2 4- — >4-4-
3 4- 4- —
4 — 4- — 4* > 4- + + ~
5 4- + 4- — 4-
7 4- 4- 4- — — 4- —
11 4- 4- 4- — — — 4- — — 4- —
13 4- 4- 4- 4- 4- — — ~h4- — 4* — 4-
—6,0
-9,5
— 12,0
—14,0
— 16,9
—20,8
—22,3
Последовательности максимальной длительности представляют особый
интерес. Их структура аналогична структуре случайных последовательное:ей,
и, следовательно, они обладают необходимыми автокорреляционными функ-
циями. Их часто называют псевдослучайными последовательностями. Генера-
торы на регистрах сдвига с линейными обратными связями являются просты-
ми и удобными устройствами, позволяющими формировать псевдослучайные
420
8.5. Сигналы с кодированием по фазе
последовательности. Типичный генератор на регистре сдвига показан на
рис. 17. Все п каскадов регистра сдвига в начальный момент заполняются
единицами или некоторым набором 0 и 1. Частный случай заполнения регистра
набором из одних нулей не рассматривается, так как при этом генерируется
последовательность, состоящая из одних нулей. Выходы некоторых специ-
ально выбранных каскадов регистра сдвига суммируются по модулю 2 в
подаются на вход регистра. Сдвиг значений по каскадам регистра осущест-
вляется с темпом, определяемым тактовой частотой. При этом на выходе
любого каскада образуется бинарная последовательность. При соответствую-
Вь/ход
О
1
ЛраВила сложения
по модулю 2
Рис. 17. Генератор на регистре сдвига.
шем выборе обратных связей выходная последовательность будет являться
последовательностью максимальной длительности. Такая последовательность
является наиболее длинной последовательностью 0 и 1, которая может быть
сформирована в регистре до того, как последовательность начнет повторяться.
Длина максимальной последовательности равна Л/ = 2П— 1, где п — число
каскадов в генераторе на регистре сдвига. Общее число последовательностей
максимальной длительности, которые можно сформировать генератором
с п каскадами, равно
где pt — простые множители числа N. То, что для одного значения п суще-
ствует несколько различных последовательностей, может оказаться весьма
существенным при работе в условиях радиопротиводействия. Обратные связи,
обеспечивающие формирование последовательностей максимальной длитель-
ности, находятся с помощью исследования примитивных и неприводимых по-
линомов. Обширный список таких полиномов приведен в работе Петерсена [16].
В табл. 6 указаны длины и число последовательностей максимальной
длительности, которые могут быть сформированы генераторами на регистрах
сдвига с разным числом каскадов. Для каждого генератора приведен также
один из вариантов обратных связей, позволяющих получить последователь-
ность максимальной длительности. Для генератора из 7 каскадов на вход
следует подавать сложенные по модулю 2 сигналы 6-го и 7-го каскадов. Для
генератора из 8 каскадов на вход следует подавать сложенные по модулю 2
сигналы 4-, 5-, 6- и 8-го каскадов. Длина последовательности /V максимальной
длительности равна числу подымпульсов в последовательности, а также про-
изведению полоса-длительность для радиолокационной системы. Большие
значения произведения полоса-длительность можно получить с помощью ре-
гистра, имеющего небольшое число каскадов. Ширина полосы системы опреде-
ляется тактовой частотой. Изменение и тактовой частоты, и схемы соединения
обратных связей позволяет формировать сигналы, имеющие различную дли-
тельность, ширину полосы и значение произведения полоса-длительность.
При непрерывном функционировании регистра сдвига можно сформиро-
вав периодические сигналы. Апериодические сигналы получаются, когда
421
Гл 8. РЛС со сжатием импульсов
выход генератора замыкается после получения одной полной последовательно"
ста. Автокорреляционные функции для сигналов этих двух различных типов
имеют различия в структуре боковых лепестков. На рис. 18 приведены авто*
корреляционные функции периодических и апериодических сигналов для типич-
ной последовательности максимальной длительности из 15 элементов, полу-
ченной с помощью генератора на регистре сдвига, содержащего четыре кас-
када.
a) S)
Рис. 18 Автокорреляционные функции для периодических (а) и непериодических (б)
последовательностей.
Для периодического сигнала уровень боковых лепестков постоянен и
равен —1. Автокорреляционная функция имеет периодический характер с пе-
риодом Л/т, пиковое значение равно Л/, где Л/ — число подымпульсов в после-
довательности, ат — длительность подымпульса. Таким образом, отношение
пикового бокового лепестка к максимуму равно Л/-1,
Таблица в
Последовательности максимальной длительности
Число каскадов я Длина последова- тельности макс, длительности N Число последова- тельностей макс, длительности М Номера каскадов, охваченных обрат- ными связями
2 3 ! 2, 1
3 7 2 3 2
4 15 2 4 3
5 31 6 5, 3
6 63 6 6, 5
7 127 18 7, 6
8 255 16 8, 6, 5, 4
9 511 48 9, 5
10 1 023 60 10. 7
11 2 047 176 11, 9
12 4 095 144 12, 11, 8, 6
13 8 191 630 13, 12, 10 9
14 16 383 756 14, 13, 8. 4
15 32 767 1 800 15, 14
16 65 535 2 048 16, 15, 13, 4
17 131 071 7 710 17, 14
18 262 143 7 776 18, 11
19 524 287 27 594 19, 18, 17, 14
20 1 048 575 24 000 20. 17
422
8.5. Сигналы с кодированием по фазе
Для апериодического сигнала средний уровень боковых лепестков на вре-
менной оси равен —1/2. Структура боковых лепестков каждой половины авто-
корреляционной функции обладает относительно этого значения нечетной сим-
метрией. Периодическую автокорреляционную функцию можно рассматривать
как результат наложения последовательных апериодических автокорреляцион-
ных функций, каждая из которых смещена но временной оси на Nx. Вслед-
о)
Рис 19 Согласованный фильтр для фазокодированных cut налов на ПЧ я на видео-
частоте (б).
ствие нечетной симметрии апериодической функции структура боковых лепест-
ков периодической функции принимает вид постоянного уровня высотой — 1.
При выделении из периодической последовательности одной полной последо-
вательности это свойство постоянного уровня боковых лепестков пропадает.
Для апериодических сигналов при больших -V отношение максимального боко-
вого лепестка к пику автокорреляционной функции над всей плоскостью даль-
ность-доплеровский сдвиг достигает АН1/8.
Реализация согласованного фильтра и коррелятора. В приемнике с согла-
сованным фильтром переданный сигнал «запоминается и хранится» в самой
структуре фильтра. В качестве примера можно рассмотреть согласованный
фильтр на ПЧ для кодированных по фазе сигналов (рис. 19, а). Принимаемый
сигнал проходит через полосовой фильтр, согласованный с длительностью
подымпульса, и подается на вход линии задержки с отводами Расстояние
423
Гл. 8. РЛС со сжатием импульсов
между отводами равно длительности подымпульса. Фазовый сдвиг на каждом
отводе равен 0° или 180° в соответствии с фазовым кодом сигнала.
Линия задержки с отводами может работать и на видеочастоте. При этом
во избежание потерь в характеристиках обнаружения, средний уровень кото*
рых равен 3 дБ, нужно использовать и синфазный и квадратурный каналы.
Такая схема показана на рис. 19,6. Принимаемый сигнал с помощью квадра-
турных сигналов ПЧ опорного гетеродина преобразуется в биполярные видео-
Ммпульсь/, определяющие
момент Зь/дорна
Риг ?о Корреляция принимаемого сигнала с опорным chi налом, распространяющимся
по регистру сдвига.
сигналы синфазного и квадратурного каналов. Эти сигналы после НЧ фильтра-
ции подаются на идентичные согласованные фильтры видеочастоты Согласо-
ванный фильтр в каждом из каналов аналогичен фильтру, показанному на
рис. 19, а; он состоит из линии задержки с отводами на видеочастоте, причем
каждый отвод снабжен фазовращателем Возводя в квадрат выходные сигналы
синфазного и квадратурного согласованных фильтров и складывая полученные
значения, получаем выходной сигнал, соответствующий возведенному в квад-
рат сжатому импульсу.
При реализации такого устройства в цифровом виде линия задержки
с отводами заменяется регистром сдвига. Выходные сигналы отводов в этом
случае заменяются сигналами, снятыми с соответствующей стороны каждого из
каскадов регистра сдвига, причем выбор стороны каскада определяется соот-
ветствующим кодом Принимаемый сигнал на входе преобразуется в цифровую
форму. Существует несколько способов обработки отдельных бинарных симво-
лов. Один из методов состоит в том, что для каждого числа используется
отдельный регистр сдвига. При квантовании на 64 уровня в этом случае необ-
ходимо использовать шесть регистров сдвига. Выходы соответствующих каска-
дов регистра сдвига объединяются. Другой метод состоит в использовании
единственного регистра сдвига, работающего в шесть раз быстрее.
В корреляционном приемнике переданный сигнал задерживается и пере-
множается с принятым сигналом. Пример схемы такого приемника показан на
рис. 20. Задержка передаваемого опорного сигнала осуществляется с помощью
регистра сдвига Каждый последующий каскад регистра сдвига вносит допол-
нительную задержку, соответствующую элементу разрешения по дальности,
т. е. длительности одного подымпульса Число каскадов в регистре сдвига
должно совпадать с числом элементов кода. Выходной сигнал каждого каскада
регистра сдвига перемножается с принятым сигналом. Перемножитель может
иметь вид переключателя, который изменяет фазу подымпульсов принятого
сигнала на 0® или 180° в соответствии с опорным кодом, который проходит
через этот каскад регистра сдвига. Фильтр производит интегрирование выход-
ного сигнала за интервал времени, соответствующий длительности сигнала,
в конце периода интегрирования производится выборка выходного сигнала.
Тактовые импульсы, определяющие момент взятия выборки, можно получить
424
8.5. Сигналы с кодированием по фазе
с помощью другого регистра сдвига, в котором по каскадам последовательно
сдвигается единица, что позволяет сформировать строб для регистрации соот-
ветствующих каналов сигнала. Можно осущесгвигь также циркуляцию опор-
ного сигнала по соответствующему опорному регистру сдвига, соединив вход
и выход опорного регистра; это позволит перекрыть весь диапазон дальностей
исследуемых РЛС. Другой способ формирования опорного сигнала — непре-
рывная работа соответствующего генератора.
Фильтр
на под-
Линия задержки о олодадажи
Косинусная тина
Выход с нулевым
доплеровским
сдвигом
Синусная шина
I
Косинусная шина
Синусная шина
Выход т-го
доплеров-
ского
канала
выход 1-го
доплеров-
ского
канала
й
Рис. ?! Моделирование набора согласованных фильтров с помощью матрицы сопро-
тивлений.
Доплеровская коррекция. Обработка сигналов с доплеровским сдвигом
частоты осуществляется с помощью большого числа доплеровских каналов.
ПЧ сигналы или биполярные видеосигналы на входе доплеровских каналов
получаются смешением принимаемого сигнала с сигналами опорных гетероди-
нов, частоты которых разнесены на величину, соответствующую элементу раз-
решения по доплеровской частоте. Величина элемента разрешения по допле-
ровской частоте обратно пропорциональна длительности растянутого импульса.
Далее в схеме каждого доплеровского канала должен быть использован согла-
сованный фильтр, (рис. 19).
При другом подходе применяется единственный опорный гетеродин и на-
бор согласованных фильтров, настроенных на смежные доплеровские частоты.
Для обычно встречающихся диапазонов доплеровских частот, когда фаза за
время длительности подымпульса изменяется медленно, набор доплеровских
согласованных фильтров можно промоделировать с помощью матрицы сопро-
тивлений [17]. Для этого к схеме на рис. 19, а должны быть добавлены схемы
сложения, по одной схеме на каждый доплеровский канал (рис. 21). Для
суммирующей шины, соответствующей нулевому доплеровскому сдвигу, все
сопротивления имеют одно и то же значение. Значение сопротивлений для
косинусных суммирующих шин пропорциональны cos 2лтп/Л;, а значения со-
противлений для синусных суммирующих шин пропорциональны sin 2лтп/У,
где п — номер отвода; т — номер доплеровского канала; Л/ —общая длина
кода. Если при определении значения сопротивления оно получается отрица-
тельным, то фаза сигнала на выходе отвода сдвигается на 180е, Выходной
425
Гл. 8. РЛС со сжатием импульсов
сигнал каждой синусной шины сдвигается по фазе на 90° и затем складывается
с сигналом косинусной шины. При реализации аналогичной схемы на видеоча-
стоте обычно применяется схема, аппроксимирующая квадратурную структуру.
Она состоит из двухполупериодного выпрямителя, за которым следует схема
суммирования. Эквивалентная аппроксимирующая схема на ПЧ состоит из
детектора огибающей и последующей схемы сложения.
Многофазные коды. Использование сигналов, отдельные подымпульсы
которых имеют фазы, значения которых выбираются из достаточно большого
набора (а не только два значения 0 и 180°, как для бинарных кодов) также
возможно. В многофазных кодах Фрэнека [18] последовательность фаз подым-
пульсов определяется приведенной ниже матрицей
ООО
О 1 2
0 2 4
0 3 6
О ... 0
3 .. Р-\
6 .. 2(Р—1)
9 ... 3(Р-1)
0 s ... (Р-1)2
В этой матрице Р есть число градаций фазы, a N = P2—число подымпульсов
в кодированном сигнале. Последовательность кодирующих фаз получается при
записи друг за другом строк или столбцов этой матрицы. Фаза каждого
подымпульса определяется умножением некоторого основного фазового сдвига
на число из матрицы. Такой основной фазовый сдвиг обычно равен 2л/Р. Сле-
довательно, полученная из матрицы последовательность для Р=3 имеет вид
0,0,0,0,1,2,0,2,1, а фазы подымпульсов равны 0,0,0,0, 2л/3, 4л/3, 0, 4л/3 и 2л/3.
Автокорреляционная функция такой последовательности для периодиче-
ской ее структуры имеет нулевой уровень боковых лепестков по оси времени.
Для апериодической последовательности уровень боковых лепестков по оси
времени возрастает. При увеличении Р отношение максимального бокового
лепестка к главному пику стремится к (лР)-1. Это примерно на 10 дБ лучше,
чем характеристики бинарных кодированных сигналов такой же длины. Од-
нако характеристики многофазных кодов быстро ухудшаются при наличии
доплеровского сдвига частоты. При этом возникают боковые лепестки, макси-
мальные из которых достигают уровня от 30 до 40% главного максимума. Кро-
ме того, при больших доплеровских сдвигах частоты в других областях
плоскости дальность-доплеровский сдвиг возникают дополнительные выбросы.
Такие характеристики многофазных кодов при наличии доплеровского
сдвига частоты ограничивают область их применения ситуациями, в которых
доплеровский сдвиг мал или им можно пренебречь. Лучшие характеристики
функционирования при наличии доплеровского сдвига частоты можно обеспе-
чить при использовании кодов иной структуры. Последовательность фаз,
полученная из матрицы Фрэнка, начинается с нуля, затем в начале сигнала
изменения происходят медленно, и при приближении к концу сигнала скорость
изменений увеличивается. В этом отношении характер изменения фазы в таком
сигнале напоминает характер изменения фазы ЛЧМ сигнала. При этом полу-
чающийся в результате сигнал состоит из подымпульсов одинаковой длитель-
ности, но скачки фаз между соседними подымпульсами неодинаковы. Если
использовать подымпульсы неодинаковой длительности, но с равными скачка-
ми фазы, то получим лучшую аппроксимацию фазовой характеристики ЛЧМ
сигнала. Функция неопределенности в координатах дальность-доплеровский
сдвиг в таком случае больше походит на функцию неопределенности сигнала
с непрерывной ЛЧМ.
426
8.6. Сигналы с частотно-временным кодированием
8.6. Сигналы с частотно-временным кодированием
Сигналы с частотно-временным кодированием формируются с помощью
изменения несущей частоты радиолокационного сигнала от импульса к им-
пульсу. Сигнал при этом состоит из последовательности N импульсов, причем
несущая частота каждого импульса выбирается случайным или детерминиро-
Рие. 28. Формирование и согласованная фильтрация сигналов с частотно-временным ко-
пированием.
ванным образом из некоторого набора частот, перекрывающих рабочий диа-
пазон. Схема линии задержки с отводами (рис. 22) является идеализирован-
ной моделью, которая иллюстрирует возможность создания устройства, являю-
щегося одновременно и генератором сигнала, в согласованным фильтром.
427
Гл. 8. РЛС со сжатием, импульсов
Формирование сигнала осуществляется с помощью подачи импульса А
на вход широкополосной линии задержки с отводами. Полосовые фильтры
с центральными частотами fx, f2>... возбуждаются последовательно во времени
в соответствии с размещением отводов по мере распространения импульса по
линии. Импульсы несущей частоты, которые появляются на выходах отдельных
фильтров, подвергаются весовой обработке и сдвигу по фазе; затем они пода-
ются на суммирующую шину, на выходе которой формируется передаваемый
сигнал А'.
Прием на согласованный фильтр осуществляется при подаче принимаемого
сигнала В на противоположный вход той же самой линии Выходной сигнал
при этом формируется на второй шине, перед подачей на которую отдельные
сигналы претерпевают фазовый сдвиг, причем величина сдвига является сопря-
женной по отношению к сдвигу фаз при формировании сигнала. Декодирован-
ный сигнал (обозначенный на схеме как сжатый импульс В') обеспечивает
разрешение по дальности, соответствующее суммарному частотному диапазону,
перекрываемому частотными диапазонами всех импульсов. Типичный сигнал
такого класса состоит из N расположенных рядом импульсов длительностью т,
спектры которых имеют ширину 1/т и расположены настолько близко друг
к другу на оси частот, чтобы в суммарном спектре не было провалов. Так как
ширина спектра равна теперь Л'/т, го номинальная длительность сжатого им-
пульса равна т/N Эти соотношения представлены в табл. 7.
Таблица 7
Последовательность N близко расположенных импульсов
с близко расположенными на оси частот спектрами
Длительность сигнала Т Nx
Ширина спектра сигнала В N/x
Произведение полоса-длительность №
ТВ
Ширина сжатого импульса 1/В x!N=1j№
Если отдельные полосовые фильтры предназначены для формирования
и согласованного приема импульсов с прямоугольными огибающими, то необ-
ходимые передаточные функции можно получить с помощью схемы, показан-
ной внизу рис. 22.
Согласованный фильтр. Один из вариантов схемы практически реализуе-
мого согласованного фильтра показан на рис. 23. Он состоит из набора поло-
совых ВЧ фильтров, набора кварцевых линий задержки, которые для обеспе-
чения точной температурной стабилизации помешены в один и тот же преци-
зионный термостат и набора суммирующих шин, связанных с линиями пере-
дачи с помощью направленных ответвителей. Смешение иногда выполняется
отдельно в каждом частотном канале с тем, чтобы сместить спектры отдель-
ных импульсов в область частот 20—60 МГц, где удобно применять кварцевые
линии задержки. Смешение, используемое после прохождения сигналом блока
задержки переносит спектры сигналов в ВЧ часть спектра, где удобнее обра-
батывать сигналы, и восстанавливает исходное расположение каналов на оси
частот, если это расположение было изменено смешением, предшествовавшим
задержке. При этом формируется большое число доплеровских каналов, каж-
дому из которых соответствует суммирующая шина. Функционирование выход-
ной матрицы аналогично работе схемы формирования лучей, используемой
в антенных решетках (см. т. 2, §4.9). Доплеровский канал с номером п связан
с каждым частотным каналом с помощью направленного ответвителя в пере-
дающей линии на выходе канала. Точное расположение ответвителя в линии
428
8.6 Сигналы с частотно-временным кодированием
выбирается с таким расчетом, чтобы обеспечить нужные фазовые соотношения
перед сложением импульсов.
Активное формирование и корреляция. В активном генераторе сигналов
(рис. 24) применяется синтезатор частот или цепь умножителей для того,
чтобы обеспечить набор синхронизированных по фазе несущих при помощи
основного опорного генератора (генератора тактовой частоты). Эти несущие
Входной
ВЧ
сигнал
Прецизионный
термостат
,—। t—।
W !___A W
КварцеВые линии
задержки
Направленные
ответвители
п доплеровских
Выходов
Рис. 23. Согласованный фильтр для сигналов с частотно-временным кодированием.
частоты стробируются последовательно для формирования импульсов несущей
частоты, а затем суммируются для формирования передаваемого сигнала.
Цифровая схема, применяемая в устройстве, определяющем порядок строби-
рования, и синхронизируемая с помощью того же самого генератора тактовой
частоты, обеспечивает возможность изменения формы сигнала путем управ-
Рис. 24. Активное формирование и корреляция сигналов с частотно-временным кодиро-
ванием.
ления от внешнего устройства. Принимаемые сигналы коррелируются с за
держанной копией сигнала, которую формируют с помощью повторного запу
ска генератора сигнала в момент приема. Корреляция для одного элемента
разрешения по дальности обеспечивается смесителем и спектроанализатором,
которые выполняют функции набора параллельных доплеровских фильтров,
перекрывающих исследуемый диапазон доплеровских частот.
429
Гл. 8. РЛС со сжатием импульсов
8.7. Весовая обработка и компенсация
Процесс формирования сжатого импульса за счет выбора соответствую-
щей формы огибающей частотного спектра сигнала называется частотной весо-
вой обработкой Процесс формирования доплеровского отклика за счет изме-
§ения формы огибающей сигнала называется временнбй весовой обработкой.
Юновная цель весовой обработки в любой из областей (временной или частот-
ной) заключается в уменьшении боковых лепестков в другой области (соответ-
ственно, частотной или временной). Наличие боковых лепестков может
существенно ограничивать достижимое разрешение в тех случаях, когда при-
нимаемые сигналы существенно отличаются по амплитуде.
Парные эхо и весовая обработка. Проще всего описывать процесс весовой
обработки, используя теорию парных эхо [19—22]. Первые семь граф табл. 8
отражают последовательно усложняющиеся примеры применения преобразо-
вания Фурье, которые могут оказаться полезными при изучении частотной и
временной весовой обработки. В самой первой графе без номера приведены
основные формулы, определяющие пару преобразований Фурье. В последней
(рафе приведены характеристики парных эхо, вызванных фазовыми искаже-
ниями. Этот вопрос рассматривается в одном из последующих ' разделов.
Предполагается, что спектр б(/), соответствующий временной функции g(t),
Сосредоточен внутри частотного интервала от —В/2 до 4-S/2, где В —ширина
Полосы, Гц. Вне этого интервала энергией спектра можно пренебречь. Пары
преобразования (табл. 8) можно интерпретировать следующим образом:
Пара 1. Косинусоидальные изменения огибающей спектра используемых
частот приводят к появлению симметричных парных эхо на временной оси
по обе стороны от основного сигнала g(t), форма которого определяется одно-
значно видом спектра G(f). Эхо повторяют форму основного сигнала, один
из эхо-сигналов опережает основной сигнал на п/В,а другой отстает на ту же
величину; амплитуда обоих эхо-сигналов равна ап/2.
Пара 2. Прямоугольный спектр соответствующий равномерной
весовой обработке, приводит к возникновению сигнала, имеющего вид функции
(sinx)/x с высокими боковыми лепестками, В ряде случаев такие боковые лепе-
стки могут оказать вредное воздействие. Нормированный график этой функции
в логарифмическом масштабе приведен на рис. 25 (кривая 4). Все показанные
функции симметричны ОТНОСИтеЛЬНО /к=г О Ближний к главному максимуму
первый боковой лепесток лишь на 13,2 дБ ниже пикового значения главного
максимума, Скорость спадания амплитуды боковых лепестков очень низка.
Пара 3. За счет введения в частотной области косинусоидального измене-
ния огибающей с одним максимумом (л=1), получен сравнительно узкий
Спектр Используя пары 1 и 2, можем получить временную функцию
a»i(0 как Суперпозицию трех разнесенных во времени и взвешенных функций
вида (sin х)/х [22]. При соответствующем выборе коэффициентов Fj в полу-
чающейся функции можно обеспечить низкий уровень боковых лепестков на
временной оси. В частности, Fi = 0,426 соответствует весовой обработке по
Хэммингу [23—25], для которой временная функция показана в виде сплошной
кривой В на рис. 25.
Пара 4, В состав частотной весовой функции входит усеченный ряд Фурье,
содержащий п—1 косинусоидальных члена. Выбор п определяется требуемой
Длительностью сжатого импульса и необходимой скоростью спадания уровня
боковых лепестков, Используя пары 1 и 2 можно представить временную функ-
цию как суперпозицию 2(п—1) эхо-сигналов, распадающихся на п—1 симмет-
ричную пару. Если коэффициенты Fm выбраны так. что они определяют весо-
вую функцию Тейлора [22, 23, 26] 1Гтау(f), 0 если исходить из критерия малой
длительности основного максимума сжатого сигнала при заданном уровне
боковых лепестков, то можно получить временную функцию к>тау(О, обла-
дающую хорошими характеристиками разрешения. Применение тейлоровской
весовой обработки, рассчитанной для получения уровня боковых лепестков
430
8.7. Весовая обработка и компенсация
Таблица 8
Пары преобразований, связывающих сигналы парных эхо
и весовые функции
00 00
g(0= J 0(f) exp (/2л/$) di 0(f)— | д (Оехр (— j2nit) di
"WOO
п — выбросов амплитуды
Парные эхо
п/в й/в
G(f\l+an cos 2яп
в______ f
см [19-221
Высокие боковые лепестки (—13,2 дБ)
Равномерная весовая обраблка
^о(/) =
Низкие бфковые лепестки
431
Г л. 8. РЛС со сжатием импульсов
Продолжение табл. 8
00
?(<) = | G (f) exp (Unft) dj
«00
<?(() = j « (I) exp (»/>.
00
/ tn \
4- ®Tay 2 Г-
— — oo \ /
где Fo— 1, = лля Iml^n
И t m ' •«• m
Вевэвая обработка п® Тейлору
ГТау(/)-^о(/)Х
14-2 V Fm cos 2лm -1—
А В .
см. (22, 25 26Г
Iеорема взаимности
5. G(—О
git)
sin nfT
nfT
6. М)»
7. ^Tay
X 1 4- 2 Fm eos 2n/n —
m—\
^lay (t)— Fm a>(: 11 —
m=—x \ '
см. пару 4
n—выбросов фазы
Парные эхо
G (f) exp I jbn sin 2nn
\ ®
|bnl < 0,4 рад
см (19—22]
432
8.7. Весовая обработка и компенсация
—40 дБ, при п — 6 позволяет получить структуру боковых лепестков (рис. 25,
кривая С).
Пары 5—7. Теорема взаимности (графа 5) позволяет поменять местами
в таблице частотные и временные функции для каждой из рассмотренных
выше пар. При замене функций знак параметра t. должен быть изменен на
противоположный. Примерами могут служить пары 6 и 7, которые можно
Рис. 25. Сравнение формы сжатого импульса и структуры боковых лепестков, получае-
мых при использовании трех частотных весовых функций.
получить из пар 2 и 4 при замене Т [с] на В [Гц] и наоборот. Применение тей-
лоровской весовой обработки к паре 7 позволяет получить хорошее разреше-
ние по частоте, если выбор коэффициентов производится для заданного уровня
боковых лепестков.
Пара 8. См. ниже раздел «Амплитудные н фазовые искажения».
Сравнение весовых функций. Сравнение характеристик, получаемых при
различных частотных весовых функциях, приведено в табл. 9. При замене
433
15 Зак. 2247
Гл. 8. РЛС со сжатием импульсов
параметров эту таблицу можно использовать и для, сравнения временных
весовых функций (или весовой обработки распределения в апертуре антенны,
т. 2, § 2.5) Высота пьедестала Н во всех случаях определялась как амплитуда
весовой функции на краях полосы (/=±6/2) при условии, что функция нор-
мирована таким образом, что в центре полосы (/=0) она имеет единичную
амплитуду. Потери в отношении сигнал/шум вычислялись в предположении,
что амплитудный спектр передаваемого сигнала имеет прямоугольную форму.
Строка 1, однородная весовая обработка, соответствует согласованной
фильтрации без потерь в отношении сигнал/шум В других случаях исполь-
зуется весовая обработка за счет рассогласования амплитудных характеристик
приемника.
Таблица 9
Сравнение характеристик различных частотных весовых функций
Весовая функция Высота пье- дестала Н, % Уменьшена SIN, дБ Ширина главного максимума (-3 дБ) Макси- мальный уровень боковых лепестков, дБ Скорость спадания уровня бо- ковых ле- пестков, дБ/октава
) Равномерная 100 0 0,886/5 -13,2 6
2 Дольф — Чебышева . « _ 1,2/2? —40 Отсутст-
3. Тейлора (/1 = 8) 11 1.14 1,25/В —40 вует 6*)
4 Косинус в квадрате с пьедес- талом //]-( 1—Д) cos2 (л//В): а) Хэмминга 8 1,34 1,33/В -42,8 6
б) ^отношение сужения» 3:1 33,3 0,55 1,09/В -25,7 6
5. Cos2 (л// В) 0 1,76 1,46/В -31,7 18
6. Cos3 (л// В) 0 2,38 1,66/В -39,1 24
7. Cos4 (л// В) 0 2 88 1,94/В -47 30
8 Треугольная 1—2|/|/В 0 1,25 1,27/В —26,4 12
*) В области |/|>8/В.
Строка 2, дольфчебышевская весовая обработка [27], оптимальная в смысле
получения минимальной ширины основного максимума при заданном уровне
боковых лепестков. Однако для рассматриваемых непрерывных спектров функ-
ция Дольф — Чебышева физически нереализуема [22, 24, 25].
Строка 3, тейлоровская весовая обработка, является физически реализуе-
мой аппроксимацией дольф-чебышевской весовой обработки. Скорость спада-
ния временных боковых лепестков невелика в области В|/]</г—1, но спада-
ние составляет 6 дБ/октава при В|/|>й.
Строка 4, весовая функция типа косинус в квадрате с пьедесталом, после
нормирования и применения тригонометрических тождеств становится эквива-
лентной весовой функции в пареЗ табл. 8. Нормированная высота пьеде-
стала Н связана с коэффициентом сужения Fx соотношением И—(\—2В1)/(1-+-
-l-SFi). Функция Хэмминга позволяет получить самый низкий уровень боковых
лепестков, достижимый для функций, относящихся к строке 4 в табл. 9.
В строке 46, «отношение сужения» 3:1 (т. е 1/// = 3), функция аналогична
типичному распределению £ Чтение при уменьшении уровня мощности на
краях апертуры до значений порядка 10% [28].
434
8.7. Весовая обработка и компенсация
Максимальный уровень боковых лепестков', дб
-10 -15 -20 -25 -30 -35 -40 -45 -50
Максимальный уровень боковых лепестков, бб
5J
Максимальный уровень боковых лепестков, дб
Рис. 28. Зависимости коэффициента сужения и высоты пьедестала (а), ширины ежа iого
импульса (б), уменьшения отношения S/N (в) от максимального уровня боковых лепест-
ков.
№•
435
Гл. 8. РЛС со сжатием импульсов
Весовая функция вида косинус в квадрате без пьедестала (Я=0,
/3 = 1/2), приведенная в строке 5, может быть достаточно просто реализована
и обеспечивает более быстрое спадание боковых лепестков в дальней области.
Строки 6—8 представляют интерес главным образом с точки зрения обес-
печения скорости спадания боковых лепестков. Можно показать, что скорость
спадания связана с поведением частотной функции и ее производных в точках
среза/=±В/2 [29, 30].
Коэффициенты Тейлора Fm,
Использована следующая запись десятичных
Заданный уро- вень боковых ле- пестков, дБ -30 —35 —40
п 4 5 6
Ширина главного максимума (-3 дБ) 1,13/B 1,19/В 1,25/В
F\ f2 F3 F< F. F в f7 Fs Ft 0,292656 -0,157838 (—1) 0,218104 (—2) 0,344350 —0,151949(—1) 0,427831 (—2) -0.734551 (-3) 0,389116 -0,945245 (—2) 0,488172 (—2) -0,161019 (—2) 0,347037 (—3)
Сравнение весовых функций Тейлора и косинус в квадрате с пьедесталом.
На рис. 26, а приведены зависимости коэффициента сужения F^ и высоты
пьедестала Н от уровня максимального бокового лепестка для весовой функ-
ции косинус в квадрате с пьедесталом. В табл. 10 приведены коэффициенты
Тейлора Fm и значение ширины главного максимума при различных уровнях
боковых лепестков и значениях п [31]. Из таблицы видно, что при заданных
низких уровнях боковых лепестков Fi значительно больше Fm при щ>1, а это
означает, что закон косинус в квадрате с пьедесталом достаточно хорошо
аппроксимирует тейлоровскую весовую функцию. Однако для получения того
же уровня боковых лепестков по закону косинус в квадрате с пьедесталом
требуются несколько большие значения F{. Выбор F1 = 0,426 (Н = 0,08) соот-
ветствует использованию весовой обработки по Хэммингу, которая обеспечи-
вает самый низкий уровень —42,8 дБ, достижимый для этой функции.
Как видно из кривых на рис. 26, а дальнейшее увеличение Fi(H<0,08)
приводит к возрастанию уровня боковых лепестков. Для заданного уровня
максимального бокового лепестка весовая обработка по Тейлору теоретически
имеет некоторые преимущества в отношении ширины импульса и уменьшения
отношения S/N. На это указывают графики на рис. 26,6 и в. Использование
функций косинус в квадрате с пьедесталом упрощает анализ влияния допле-
ровского сдвига, фазовых искажений [22] и т. д. В ряде случаев эти функции
имеют некоторые преимущества, так как для них характерно меньшее число
эхо-сигналов.
436
8.7. Весовая обработка и компенсация
Тейлоровская весовая обработка ЛЧМ сигналов. Амплитудный спектр
ЛЧМ импульса с прямоугольной огибающей по оси времени не имеет строго
прямоугольной формы. Кроме того, и его фазовая характеристика не точно
согласована с линейной характеристикой групповой задержки согласованного
фильтра (§ 8.3) [22, 25, 32]. Это расхождение особенно заметно для сигналов
с малыми значениями произведения полоса-длительность. Следовательно, при
использовании весовой обработки, рассчитанной на достижение уровня боко-
Таблица 10
Eq=1,
дробей: —0,945245( — 2) =—0,00945245 -
— 40 —45 -45 -50
8 8 10 10
1,25/3 1,31/3 1,31/3 1,36/3
0,387560 —0,954603 (—2) 0,470359 (—2) —0,135350 (—2) 0,332979 (-4) 0,357716 (—3) —0,290474 (—3) 0,428251 ' 0,208399 (—3) 0,427022 (—2) —0,193234 (—2) 0,740559 (—3) —0,198534 (—3) 0.339759 (—5) 0,426796 —0,682067 (—4) 0,420099 (-2) —0,179997 (—2) 0,569438 (—3) 0,380378 (—5) -0,224597 (—3) 0,246265 (-3) -0.153486 (—3) 0,462719 0,126816 (—1) 0,302744 (—2) —0,178566 (—2) 0,884107 (—3) —0,382432 (—3) 0,121447 (—3) —0,417574 (—5) -0,249574 (-4)
вых лепестков, составляющего —40 дБ, нельзя на основе данной модели
решить эту задачу. Это происходит потому, что при расчетах была применена
упрощенная модель, предполагавшая наличие прямоугольного спектра и пара-
болической фазовой характерноi ики, которая может быть согласована с линей-
ной характеристикой групповой задержки.
. При наличии доплеровского сдвига происходит дальнейшее ухудшение
характеристик. Это показано на рис. 27, где изображена зависимость уровня
максимального бокового лепестка от доплеровского сдвига. При увеличении
произведения полоса-длительность характеристики приближаются к модели,
имеющей прямоугольный спектр и параболическую фазовую характеристику,
и уровень боковых лепестков в отсутствие доплеровского сдвига прибли-
жается к —40 дБ. Если требуется обеспечить уровень боковых лепестков
ниже —30 дБ, то для устранения влияния неадекватности используемой про-
стой модели применяют обычные методы компенсации, аналогичные тем,
которые рассмотрены в последнем разделе. На рис. 28 приведена зависимость
уменьшения отношения сигнал/шум от доплеровского сдвига. Для определе-
ния полного уменьшения этого отношения по сравнению со случаем согласо-
ванной фильтрации к значениям потерь (рис. 28) необходимо добавить 1,15 дБ
(см. рис. 26, в для весовой обработки по Тейлору).
Дискретная временная весовая обработка. Функция со ступенчато изме-
няющейся амплитудой, которая используется для уменьшения доплеровских
боковых лепестков, показана на рис. 29 Она симметрична относительна
437
Гл. 8. РЛС со сжатием импульсов
н§ч>ла координат. # — число ступеней на каждой стороне функции. В табл. 11
приведены функции со ступенчато изменяющейся амплитудой, оптимизирован-
ные по критерию минимального уровня максимального бокового лепестка для
Az=2, 3, 4 и б. Для сравнения приведен случай N=A, соответствующий пря-
моугольной огибающей. Для случаев N = 2, 3 и 4 данные таблицы очень
Рис. 27. Зависимость максимального
уровня боковых лепестков от доплеров-
ского сдвига для ЛЧМ сигналов.
близки к характеристикам ступенчатого
распределения в апертуре антенны [33],
оптимизированного по критерию макси-
мизации доли энергии, заключенной меж-
ду первыми нулями диаграммы направ-
ленности антенны.
Амплитудные и фазовые искажения.
Идеальный сжатый импульс должен
иметь амплитудный спектр, точно согла-
сованный с частотной весовой функцией,
специально подобранной для уменьше-
ния уровня боковых лепестков на вре-
менной оси. Его фазовый спектр должен
быть линейно связан с линейной харак-
теристикой групповой задержки во всем
диапазоне частот. Однако наличие ам-
плитудных и фазовых искажений приво-
дит к отклонению реального спектра от
идеального. Все элементы радиолокаци-
онного тракта являются потенциальны-
ми источниками искажений, которые мо-
гут внести свой вклад в суммарные иска-
Рис. 28. Зависимость уменьшения отноше-
ния S/N от доплеровского сдвига для ЛЧМ
сигналов.
жения радиолокационной системы. Ухудшение характеристик системы обычно
выражается в увеличении уровня боковых лепестков, и только в крайних слу-
чаях ухудшение приводит к уменьшению отношения сигнал/шум и увеличению
ширины сжатого импульса.
Принцип парного эхо полезен как при анализе искажений, так и при рас-
смотрении методов компенсации [34]. Пара 1 в табл. 8 иллюстрирует влияние
искажений типа наложения на амплитудный спектр одного косинусоидального
колебания, пара 8 — влияние наложения одной косинусоидальной компоненты
на фазовую характеристику; это пример фазовых искажений. Так же как
и наличие выбросов амплитудной характеристики, выбросы фазовой характе-
ристики вызывают появление парных эхо, у которых амплитуда и расположе-
438
8.7. Весовая обработка и компенсация
ние на временной оси относительно главного максимума определяются ампли-
тудой выбросов, выраженной в радианах, и числом выбросов п.
Если произведение полоса-длительность превышает значения порядка 100,
то для достижения уровня боковых лепестков порядка 1 % (—40 дБ) или
меньшего необходима крайне тщательная разработка фильтра и его изготов-
ление. Используя пары 1 и 8, можно сделать вывод, что эхо-сигналы, вызван’
ные искажениями и имеющие уро-
вень 1%, возникают при сущест-
вовании выбросов амплитуды с
уровнем 2% (0,17 дБ) или фазо-
вых выбросов в 0,02 рад (1,15°).
Так как выбросы часто не явля-
ются синусоидальными и по ряду
других причин, таких, например,
как временное перекрытие, эхо-
сигналы, обусловленные искаже-
ниями, не всегда удается характе-
ризовать максимальным уровнем
боковых лепестков Но разработ-
чики фильтров считают, что для
обеспечения уровня боковых ле-
Рис. 29, Временная весовая функция со
ступенчато изменяющейся амплигудой.
пестков —40 дБ необходимо, чтобы искажения амплитудных и фазовых харак-
теристик не превышали 0,1 дБ и 1° соответственно. Так как при большом зна-
чении произведения полоса-длительность подразумевается наличие большого
числа электрических секций задержки или необходимость создания сложного
Искаженнь/и
сжатый импульс
Рис. 30. Трансверсальный фильтр.
43В
Гл. 8f РЛС со сжатием импульсов
Оптимальные временные весовые функции
<v Максимальный уровень боковых лепестков, ДБ Ширина главного максимума (-3 дБ) а. а3
1 -13,2 0,886/7' 1
2 —20,9 1,02 Г 0,5 0,5
3 -23,7 1,08/7 0,35 0,35 6,30
4 —27,6 1,14/7 0,25 0,25 0,25
5 -29,6 1,16/7 0,300 0,225 0,235
ультразвукового устройства, то совместно с фильтром сжатия часто приме-
няются внешние компенсирующие устройства.
Коррекция. Для коррекции результирующих амплитудных и фазовых
искажений широко используется трансверсальный фильтр [35, 36]. Один из
возможных вариантов схемы трансверсального фильтра показан на рис. 30.
В него входит широкополосная недисперсионная линия задержки на ПЧ с от-
водами, устройства управления амплитудой и фазой сигналов в каждом отводе
и суммирующая шина. По нулевому отводу искаженный сжатый импульс по-
ступает непосредственно на суммирующую шину без коррекции по амплитуде
или по фазе, претерпевая лишь некоторую временную задержку. Другие от-
воды дают оператору РЛС возможность «выбрать» эхо сигналы, возникающие
вследствие искажений и имеющие произвольные амплитуды и фазы, на всем
интервале компенсации, равном общей длине линии задержки.
Таким образом компенсирующий фильтр, который приближает спектр
выходного сигнала к приведенному выше идеальному спектру, уменьшает
уровень боковых лепестков на временной оси до приемлемого низкого уровня.
Так как трансверсальный фильтр представляет собой средство, позволяющее
уменьшить уровень боковых лепестков, то исчезает необходимость в использо-
вании специального фильтра весовой обработки, так как частотная весовая
обработка (см. пары 3 и 4 в табл. 8) может быть выполнена в самом транс-
версальном фильтре. Для фазовой компенсации часто используют всепро-
пускающие схемы задержки во времени, причем процедура синтеза схемы
изменяется в соответствии с характеристиками измеренных искажений.
8.8. Оптический коррелятор
Для создания согласованных фильтров в радиолокационных системах
можно использовать и оптические методы. Пример схемы оптического корре-
лятора для РЛС со сжатием импульсов приведен на рис. 31. Монохроматиче-
ский пучок от источника света коллимируется и подается на транспарант
ультразвукового модулятора света (УМС). Принимаемый электрический сиг-
нал на ПЧ подается на преобразователь УМС, где он преобразуется в ультра-
звуковую волну. Ультразвуковая волна распространяется в УМС и погло-
щается на противоположном его конце. Коллимированный пучок света, падаю-
щий на УМС, пространственно модулируется ультразвуковой волной. Стацио-
нарная опорная маска представляет собой дифракционную решетку, соответ-
ствующую кодированному сигналу. При совпадении закона модуляции свето-
вого пучка и характеристик опорной маски происходит корреляция. Сжатый
импульс снимается с выхода фотодетектора.
440
8.8. Оптический коррелятор
Таблица 11
со ступенчато изменяющейся амплитудой
<3, «5 Ь, ь, bs 1>4 be
... 1 1 0,55
. « . 1 0,625 0,350
6,25 1 0,78 0,56 0,34
0,170 0,070 1 0,72 0,54 0,36 0,18
Аналогично можно обеспечить формирование растянутого импульса. Узкий
ПЧ импульс подается на УМС идентичной оптической системы или на второй
преобразователь того же самого УМС. Опорная маска представляет собой
дифракционную решетку, соответствующую обращенной во времени копии
принимаемого сигнала. По мере прохождения узкого импульса по УМС произ-
водится сканирование опорной маски, и на выходе фотодетектора появляется
растянутый импульс.
В настоящее время широко применяются различные модификации метода
(рис. 31). Для введения опорного сигнала в систему вместо маски иногда
используют второй УМС. Оптическую систему можно сделать чувствительной
к доплеровскому сдвигу. Одним из методов достижения такой цели является
использование вместо единственного опорного сигнала набора опорных сигна-
лов, имеющих доплеровский сдвиг. В этом случае выходной сигнал получается
с помощью решетки фотодетекторов или светочувствительной плоскости, подоб-
ной приемной электронно-лучевой трубке ТВ камеры. При этом оптические
корреляторы становятся двумерными фильтрами, так как они дают возмож-
ность измерять и дальность, и доплеровский сдвиг для большого числа целей.
Широкое распространение в качестве замедляющей среды в УМС полу-
441
Гл. 8. РЛС со сжатием импульсов
чили плавленый кварц и вода. На практике удается получить относительную
ширину полосы от 50 до 65%. Это относится и к твердой и к жидкой ереде.
Сложность оптической системы в общем случае не позволяет использовать
УМС длиной более 15 см. Однако некоторые УМС могут иметь и большую
длину, задержка в них достигает 100 мкс. Центральные частоты УМС лежат
в основном в диапазоне 10—130 МГц. Динамический диапазон УМС опреде-
ляется главным образом энергией светового потока, достигающей фотодетек-
тора. Использование ртутных дуговых ламп в качестве источников света
позволяет обеспечить динамический диапазон до 15 дБ С помощью ксеноно-
вых импульсных ламп можно получить динамический диапазон до 25 дБ, а при
использовании лазеров — расширить динамический диапазон до 40 дБ и выше.
Список литературы
1. Delay Devices for Pulse Compression Radar, IEE (London) Confer. Publ.
20, February, 1966.
2. Coquin, G. A., T. R. Meeker, and A. H. Meitzler. Attenuation of Longitu-
dinal and Flexural Wave Motions in Strips, IEEE Trans., v. SU-12,
p. 65—70, June, 1965. '
3. May, J. E., Jr. Ultrasonic Travelling-wave Devices for Communication,
IEEE Spectrum, v. 2, p. 73—85, October, 1965
4. Eveleth, J. H. A Survey of Ultrasonic Delay Lines Operating Below
100 Mc/s. Proc. IEEE, v. 53, p. 1406—1428, October, 1965.
6 Improved Delay Line Technique Study, RADC Tech Rept. RADC-TR-65-45,
May, 1965. ASTI A AD 617693.
, 6. Coquin, G. A., and R. Tsu. Teory and Performance of Perpendicular Dif-
fraction Delay Lines, Proc. IEEE, v. 53, p. 581—591, June, 1965.
7. Rodrigue, G. P. Microwave Solid-state Delay Line, Proc. IEEE, v. 53,
p. 1428—1437, October, 1965.
8. O’Meara, T. R. The Synthesis of “Band-pass”, All-pass, Time Delay Net-
works with Graphical Approximation Techniques, Hughes Aircraft Co. Res.
Rept. 114, June, 1959.
:9 . Peebles, P. Z., Jr. Design of a 1001 Linear Delay Pulse Compression
Filter and System, master thesis, Drexel Institute of Technology, Philadel-
i, . .phia, December, 1962.
10. Hewett, H. S. Highly Accurate Compression Filter Design Technique, Stan-
ford Univ. Electron. Lab., Tech. Rept. 1965—3, November, 1967. See also
H. S. Hewett: A Computer Design, 720 to 1 Microwave Compression Fil-
ter, IEEE Trans., v. MTT-15, p. 687—694, December, 1967.
11. Day, J. R. Serrasoid F—M Modulator, Electronics, v. 21, no. 10, p. 72—
76, October, 1948.
12. Peebles, P. Z., Jr., and G. H. Stevens. A Technique for the Generation of
Highly Linear FM Pulse Radar Signals, IEEE Trans., v. MIL-9, p. 32—
38, January, 1965.
13. Barker, R. H. Group Synchronizing of Binary Digital Systems, in W. Jack-
son (ed.), “Communication Theory”, p. 273—287, Academic Press Inc.,
New York, 1953
14. Stover, J. E., and R. Tury. Optimum Finite Code Groups, Proc. IRE (Cor-
respondence), v. 46, p 1649, September, 1958.
15. Turyn, R. On Barker Codes of Even Length, Proc. IEEE, (Corresponden-
ce). v. 51, p. 1256, September, 1963.
16. Petersen, W. W. “Error Correcting Codes”, Арр. C, The M. I. T. Press,
Cambridge, Mass., 1961.
17. Lerner, R. M. A Matched Filter Detection System for Complicated Dopp-
ler Shifted Signals, IRE Trans., v. IT-6, p. 373—385, June, I960
18. Frank, R. L. Polyphase Codes with Good Nonperiodic Correlation Proper-
ties, IEEE Trans, v. IT-9, p. 43—45, January, 1963.
442
Список литературы
19. Wheeler, Н. A. The Interpretation of Amplitude and Phase Distortion in
Terms of Paired Echoes, Proc. IRE, v. 27, p. 359—385, June, 1939.
20. MacColl, L. A. Unpublished manuscript referred to by H. A. Wheeler (see
Ref. 19, p. 359, footnote 1).
21. Burrow, C. R. Discussion on Paired Echo Distortion Analysis, Proc. IRE,
v. 27, p. 384, June, 1939.
22. KJauder, J. R., A. C. Price, S. Darlington, and W. J. Albersheim. The Theo-
ry and Design of Chirp Radars, Bell System Tech. J., v. 39, p. 745—808,
July, 1960.
23 Blackman, R. B., and J. W. Tukey. “The Measurement oi Power Spectra",
Dover Publication, Inc., N. Y.. 1958.
24. Temes, C. L. Sidelobe Suppression in a Range Channel Pulse-compression
Radar, IRE Trans., Mil. Elect., v. MIL-6, p. 162—169, April, 1962.
25. Cook, С. E., and M. Bernfeld. “Radar Signals, An Introduction to Theory
and Application”, Academic Press Inc., N. Y., 1967.
Кук Ч., Бернфельд M. Радиолокационные сигналы. Теория и применение.
Пер. с англ, под ред. В. С. Кельзона. М., «Сов. радио», 1971.
26 Taylor, Т. Г. Design of Line-source Antennas for Narrow Beamwidth and
Low Sidelobes, IRE Trans., v. AP-3, p. 16—28, January, 1955.
27. Dolph, C. L. A Current Distribution for Broadside Arrays Which Optimi-
zes the relationship Between Beam Width and Sidelobe Level Рос. IRE,
v 34, p. 335—348, June, 1946.
28 Ramsay, J. F. Fourier Transformation in Aerial Theory, Marconi Rev.,
v. 9, no 139, October—December, 1946
29 Cummings, R. С., M. Perry, and D. H. Preist. Calculated Spectra of Di-
storted Gaussian Pulses, Microwave J., p. 70—75. April, 1965.
30 Mason, S. J., and H J. Zimmerman. “Electronic Circuits, Signals and
Systems”, p. 237, John Wifley & Sons, Inc , N. Y., 1960.
31 Spellmire, R. J. Tables of Taylor Aperture Distributions, Hughes Aircraft
Co, Systems Develop. Lab. Tech Mem. 581, October, 1958.
32. Murakami, T. Optimum Waveform Study for Coherent Pulse Doppler, RCA
Final Report, prepared for Office of Naval Research, Contract Nonr
4649(00) (x), Feb 28, 1965 AD 641391.
33 Nash, R. T. Stepped Amplitude Distributions, IEEE Trans., v. AP-12,
p 515—516. July, 1964
34 DiFranco, J. V., and W. L. Rubin. Signal Processing Distortion in Radar
Systems, IRE Trans., v. MIL-6, p. 219—225, April, 1962.
35 Kallmann, H. E. Transversal Filters, Proc. IRE, v. 28, no. 7, p. 302—310,
July, 1940.
36. Pratt, W. R. Transversal Equalizers for Suppressing Distortion Echoes in
Radar Systems, Proc. Symp Pulse Compression Techniques, p. 119—128;
Rome Air Develop. Center, Rept. RADC-TDR-62 580, April, 1963.
Глава 9
ПРИМЕНЕНИЯ БОРТОВЫХ РЛС НА КОСМИЧЕСКИХ ОБЪЕКТАХ
Р, Феннер, Р, Бродерик
9.1. Введение
В космических системах Gemini, Apollo и Surveyor радиолокационные
станции являлись неотъемлемым звеном обеспечения космических полетов.
Методика использования РЛС в этих системах была такой же, как
и в авиации.
До разработки системы Gemini РЛС использовались главным образом
в качестве наземных средств сопровождения. В системе Mercury космический
корабль оборудовался только ответчиками диапазона С и S, работавшими
совместно с наземными РЛС запроса. С помощью системы Gemini в резуль-
тате использования комбинации РЛС с ЭВМ была осуществлена встреча
в космосе двух орбитальных космических кораблей. По мере развития косми-
ческих систем роль РЛС непрерывно растет. При посадке на Луну космиче-
ского корабля Surveyor в качестве средства обеспечения посадки использо-
вана доплеровская РЛС. В системе Apollo лунная кабина была оборудована
как РЛС системы встречи на орбите, так и доплеровской посадочной РЛС.
В космической технике находят также применение радиолокационные системы
бокового обзора, измерители характеристик рассеяния, радиолокационные
системы сопровождения без ответчика, высотомеры с высокой разрешающей
способностью и измерители скорости.
9.2. Системы встречи на орбите
Развитие радиолокационных систем для обеспечения космических поле-
тов с экипажем на борту началось с решения задачи по осуществлению
встречи в космосе, обычно выполняемой в два этапа. На первом этапе оба
космических аппарата (КА) вращаются по круговым орбитам вокруг опор-
ного тела, например Луны. При реализации типовой методики встречи на
лунной орбите КА / поднимается с лунной поверхности на круговую орбиту,
диаметр которой меньше диаметра орбиты КА 2 (рис. 1). Космический аппа-
рат, находящийся на внутренней орбите, совершает один оборот за меньший
промежуток времени, чем КА на внешней орбите, так как орбитальная ско-
рость связана обратной зависимостью с расстоянием до центра Луны, а диа-
метр внутренней круговой орбиты меньше.
Как только оба КА окажутся на круговых орбитах, начинается второй
этап маневра сближения (эллиптическая орбита перехода). Для выполнения
этого этапа с помощью РЛС системы встречи на орбите производится серия
измерений расстояния и угловых параметров линии визирования между дву-
мя КА. Результаты этих измерений вводятся в вычислительное устройство,
определяющее оптимальные момеш и точку вывода КА 1 на орбиту перехо-
да. Радиолокационные данные используются также для вычисления изменения
скорости (поправки AV), требуемого для преобразования круговой орбиты
444
9.2. Системы встречи на орбите
КА 1 в эллиптическую орбиту перехода, пересекающую орбиту КА 2. После
вычисления всех этих параметров может начаться вывод КА 1 на эллипти
ческую орбиту. В этой методике встречи на орбите круговые орбиты назы
ваются концентрическими траекториями. Число вводимых поправок А К зави-
сит от точности данных о дальности и (или) угловых координатах и непо-
средственно влияет на потребление горючего или требуемую массу горючего.
Рис. 1. Встреча на орбите космических аппаратов осуществляется путем перехода
с круговой орбиты на эллиптическую.
По мере приближения к заключительному этапу операции требуются данные
о скорости изменения дальности, так как очень трудно визуально оценить
скорости сближения без опорного ориентира. Поэтому РЛС системы встречи
на орбите должна давать точные данные о дальности и (или) \глах на боль-
ших расстояниях (поправки на переходном участке траектории) и о скоро-
сти изменения дальности на малых расстояниях.
В системе Gemini для внесения поправок на переходном участке траек-
тории применена радиолокационная система с ответчиком. Поправка опреде-
лялась бортовой ЭВМ по радиолокационным данным о дальности и углах.
Радиолокационные данные о дальности и скорости ее изменения были исполь-
зованы для проверки оптимальности выбранной эллиптической орбиты пере-
хода. На конечном этапе маневра сближения летчик-космонавт по показа-
ниям датчика скорости изменения дальности поддерживал скорость сближе-
ния между двумя КА в безопасных пределах.
В системе Apollo предусмотрено значительно большее количество этапов
использования системы встречи на орбите. На этапе посадки на лунную по-
верхность лунная кабина отделяется от командной и спускается на лунную
поверхность, командная кабина остается на орбите. По окончании исследо-
445
Гл. 9. Применения бортовых РЛС на космических объектах
взтельских работ на Луне взлетная ступень лунной кабины стартует и встре-
чается с находящейся на орбите командно» кабиной. Посадочная ступень
лунной кабины остается на Луне. Выполнение всей этой задач» делится на
несколько этапов.
Отделение. После отделения и увеличения расстояния между лунной
и командной кабинами до 150—300 м измерения дальности и скорости ее из-
менения позволяют экипажу произвести первую независимую проверку работы
основной системы управления и навига'ции, а также аварийной системы управ-
ления путем сравнения выходных данных этих систем с отображениями на
радиолокационных индикаторах дальности и скорости ее изменения системы
встречи на орбите.
Спуск по инерции По данным измерения скорости изменения дальности
на этапе снижения по инерции, произведенного немедленно после ввода в этот
режим, определяется значение AV ввода в режим снижения. Эти измерения
обеспечивают также возможность независимой проверки безопасности орбиты
в результате оценки ожидаемой минимальной высоты орбиты. Их можно
использовать, кроме того, для проверки работы основной системы управления
и навигации, а также аварийной системы управления. Раннее обнаружение
какой-либо неисправности позволяет своевременно начать переход на работо-
способные подсистемы. Сопровождение по ответчику командной кабины обес-
печивает получение данных о дальности, скорости изменения дальности
и угловых координатах линии визирования, вводимых для определения орби-
ты в ЭВМ системы наведения лунной кабины.
Спуск с работающим двигателем. Данные о дальности и скорости ее изме-
нения, полученные в результате сопровождения ответчика командной кабины,
сравниваются е данными основной системы управления и навигации, что
обеспечивает возможность контроля и своевременного обнаружения неисправ-
ностей.
Пребывание на Луне. При сопровождении ответчика командной кабины
с лунной поверхности получают данные о дальности, скорости ее изменения
и угловых координатах линии визирования, используемые для определения
положения точней посадку относительно орбиты командной кабины. По этим
данным вычисляются время и азимут пуска. РЛС системы встречи на орбите
лунной кабины сопровождает командную кабину на первом витке после отде-
ления и при подготовке к взлету с лунной поверхности снова сопровождает
командную кабину на предпоследнем перед пуском витке.
Набор высоты с работающим двигателем. Для определения параметров
орбиты в ЭВМ системы наведения лунной кабины вводятся данные о далп-
пости, скорости ее изменения и угловых координатах Линии визирования, изме-
ренные относительно командной кабины с помощью РЛС системы встречи
на орбите.
Набор высоты по инерции. В результате сопровождения Командной каби-
ны на этапе набора высоты по инерции вырабатываются входные данные
основной системы управления и навигации для определения орбиты и для
вычисления корректирующих маневров на переходном участке траектории.
В системе Apollo данные о дальности и скорости ее изменения могут вво-
диться в ЭВМ системы наведения вручную.'
Сближение. Данные РЛС системы встречи на орбите, введенные на этапе
сближения в основную систему управления и навигации, используются для
расчета маневров сближения. Эти данные можно с той же це^ью ввести вруч-
ную в аварийную систему управления. Сближение можно выполнить вручную,
используя отображенные на индикаторе данные о дальности, скорости изме-
нения дальности, угловых координатах и угловых скоростях.
Для сравнения в табл. 1 приведены параметры РЛС системы встречи на
орбите космических кораблей Gemini и Apollo. Дополнительные требования
к РЛС системы встречи на орбите лунной кабины космического корабля
(КК) Apollo сводятся к увеличению Зоны углового Обзора и дальности.
44Ь
9.2. Системы встречи на орбите
Таблица 1
Сравнение параметров РЛС системы встречи на орбите КК Apollo и Gemini
Назначение оборудования:
Gemini: обнаружение я сопровождение ЮК Agena по дальности, скорости
ее изменения « углам.
Лунная кабина Apollo:
Во первых, обнаружение и сопровождение командной кабины ио даль-
ности, скорости изменения дальности и углам;
во вторых, сопровождение с лунной поверхности командной кабины, на-
ходящейся на орбите, и управление наведением.
Параметр Gemini Лунная кабина Apollo
Частота Диапазон L Диапазон X
Дальность 450 км 750 км
Точность изме- . 0,1% или 23 м (За) в зави- Случайная ошибка 1% или
рения таль- симости от того, что боль- ±25 м (За) в зависимости от
ноете ше того, что больше, на дальне-
Скорость из- ± 150 м/с стях до 9000 м; 0,25% на дальностях, превышающих 9000 м. Систематическая ошибка; ±150 м на дальностях, пре- вышающих 94 км, и ±25 м на меньших дальностях ±1500 м/с
менения дальности Точность изме- ±5% или 0,3 м/с (Зо) в за- ’ Случайная ошибка ±0,3 м/с
рения скоро- . висимости от того, что или 1% (За) в зависимости
сти измене- больше от того, что больше.
ния дально- сти Угловой обзор >. ±25° в плоскостях танга-1 Систематическая ошибка ±0,3 м/с ±55® в плоскости рыскания
Угловая точ- жа и рыскания 8,5 мрад (За) в пределах 225° в плоскости тангажа Случайная ошибка 2 мрад
. ность ±8,5° от линии визирова (За)
ния с линейным увеличе- нием до 17 мрад (За) при ±25® Систематическая ошибка 8 мрад
447
Гл. 9. Применения бортовых РЛС-на космических объектах
9.3. РЛС как средство обеспечения посадки
В лунной кабине КК Apollo в качестве средства обеспечения посадки
используется доплеровская система. При этом данные о скорости и высоте
служат для корректировки данных инерциальной системы при приближении
КК к лунной поверхности. Обычно это осуществляется в диапазоне дально-
стей 12000—300 м. На основании этих данных ЭВМ определяет оптимальную
посадочную траекторию. Затем по данным ЭВМ КК выводится на посадоч-
ную траекторию с помощью двигателя спускаемого аппарата.
Рис. 2. Вертикальная проекция траектории снижения лунной кабины с работак>1ним
двигателем.
Начиная с 300 м управлять посадкой может как радиолокационная систе-
ма, так и летчик-космонавт. Управление КК Surveyor производилось радио-
локационной и инерциальной системами вплоть до мягкой посадки, причем
РЛС вырабатывала сигнал выключения двигателя спускаемого аппарата на
высоте 4,5 м, что давало возможность мягко опуститься на лунную поверх-
ность.
В лунной кабине КК Apollo кораблем управляют космонавты и доводят
его до точки зависания на высоте от 30 до 60 м. Ниже этой точки и до
момента мягкой посадки КК управляется по данным инерциальной системы,
корректируемым в соответствии с восприятием космонавтов. На рис. 2 изо-
бражена вертикальная проекция типичной траектории снижения с работаю-
щим двигателем лунной кабины КК Apollo. Вследствие некоторых ограниче-
ний (рассматриваемых ниже в этом разделе) данные высотомера можно
использовать только начиная с 7 км, а данные о скорости — начиная с 3,7 км.
Доплеровская или частотно-модулированная РЛС непрерывного излуче-
ния, используемая в качестве средства обеспечения посадки на Луну, должна
обеспечивать точные данные о высоте (от 1,5 до 3% высоты) в диапазоне
°опл°0() м А0 точки касания с лунной поверхностью для КК Surveyor и от
12 000 м до 150 м для КК Apollo. РЛС должна также давать точные данные
° СК7Рт?СсИ (°т До 3%) в диапазоне высот от 15 000 м до точки касания
для КК Surveyor и от 7200 м до 150 м для КК Apollo. В табл. 2 приведено
448
9.3 РЛС как средство обеспечения посадки
сравнение парамётров посадочных РЛС КК Surveyor и лунной кабины КК
Apollo
В самолетных доплеровских радиолокационных навигационных системах
калибровка аппаратуры производится при полете по горизонтальной траек-
тории над известной местностью. При использовании подобной аппаратуры
на космических аппаратах, наприм-ер, на этапе посадки на Луну в системе
Apollo, проверка РЛС должна производиться методом моделированных траек-
торий. Следует различать два типа траекторий, В случае КК Surveyor была
использована траектория вертикального спуска, а в качестве расчетной траек-
тории для более тяжелых КК с экипажем на борту (типа лунной кабины) —
используется более употребительная траектория накдопного спускд.
Траектория вертикального спуска позволяет использовать среднее значе-
ние коэффициента отражения, а в случае траектория, наклонного спуска кос-
мический корабль может пролетать над участками местности различного типа,
Т а б л и ц а 2
Сравнение параметров посадочных РЛС КК Surveyor и лунной кабины КК
Apollo
Назначение оборудования:
Surveyor: обеспечение навигационных данных для непосредственного
управления КК до мягкой посадки на Луну.
Лунная кабина Apollo: обеспечение данных для ввода коррекции в ЭВМ
системы наведения и для предоставления космонавту информации о ско-
рости и высоте.
Парамет,- Surveyor Лунная кабина Ар "По
Частота Диапазон Ки Диапазон X.
Пределы изменения высоты, м: измеритель скоро сти высотомер 15 000 12 000 0—7500 м 0—12 000 м
Пределы изменения скорости, м/с: vx V ±90 ±90 от ±0,3 до -±210 Индикатор ЭВМ ±150 от—600 до±150 ±60 ±150 ±60 от ±-900 до —150
Точность, %: измеритель скорости высотомер 3 5 1,5 1,4 1,5 1,4
Модуляция: измеритель скорости высотомер Непрерывное излуче- ние Частотно-модулиро ванное непрерыв- ное излучение Непрерывное излучение Час тотно-модули рован ное непрерывное излучение
441
Г л. 9. Применения бортовых РЛС на космически# объектах
что равносильно пролету обычной радиолокационной системы над гористой
и пустынной местностью в течение одного рейса. Для посадки выбирается
(по фотографиям с орбиты) относительно ровная площадка, однако траекто-
рия на этапе приближения к месту посадки может проходить над очень неров-
ной поверхностью с гористыми участками.
Необходимо учитывать влияние различного вида подстилающих поверх-
ностей на работу посадочной РЛС. Вследствие изменений дисперсии рельефа
поверхности, над которой проходит траекюрия спуска в процессе спуска
будет изменяться кривая зависимости эффективной площади обратного рас*
Рис. 9. Геометрические соотноше-
ния при облучении неровной по-
верхности со случайным распреде-
лением возвышенностей и впадин.
сеяния (ЭПР) от угла падения (диаграмма обратного рассеяния) [2]. Коэф
фициент обратного рассеяния /?(€), характеризуемый его средним значением
</?{0)>, и ДН антенны 6(в) определяются уравнениями
(0)>==<^(О); exp-(|U| 5];
G (0) — exp —2
0-9о
где S — крутизна кривой зависимости ЭПР от угла падения; 9 — угол паде-
ния; 0о — угол падения главного лепестка; 0В — ширина ДН; <> — ста-
тистическое среднее.
Коэффициент обратного рассеяния #(0) связан с на единицу облу-
чаемой поверхности <т° соотношением
/?(0) =
(у0
4л cos 0
Геометрические соотношения при облучении неровной поверхности показаны
на рис. 3.
Спектр плотности мощности Wrr(f) принятого сигнала, распределенный
относительно среднего значения доплеровской частоты f<in в полосе частот В.,
имеет вид 0
рг / /л
Wrr <R (0)> ( -Ц— ) ехр —
8 \ f-fa0 /
/
/d,
S4-2
В
где Ео напряжение переданного сигнала; J — частота.
450
9.4. РЛС системы встречи на орбите космического корабля Gemini
____________- ~ - — ----------------------------
Этот спектр является гауссовым, центр симметрии которого смещен на
величину, определяемую систематической ошибкой, обусловленной характером
местности и крутизной диаграммы обратного рассеяния S. Начальное значе-
ние коэффициента обратного рассеяния <#(0)> определяет отношение сиг-
нал/шум. При длине траектории в несколько сот километров происходят
изменения диаграммы обратного рассеяния (обусловленные изменениями вида
подстилающей поверхности) подобно тому, как это происходит при полете
над морем с различными состояниями водной поверхности.
С уменьшением высоты доплеровский сПеКтр становится не гауссовым.
При этом увеличиваются флуктуационные ошибки и вероятность срыва сопро-
вождения по частоте. Неизвестная неровная поверхность и колебания поло-
жения летательного аппарата относительно поверхности могут обусловить
захват по перекрестно связанным боковым лепесткам и эффект нулевой допле-
ровской частоты. Для уменьшения влияния всех этих факторов необходимо
до реального выполнения задания по исследованию планеты моделировать
возможные участки посадки, траектории подхода и ограничения, накладывае-
мые колебаниями положения летательного аппарата относительно поверх-
ности.
9.4. РЛС системы встречи на орбите космического корабля
Gemini
РЛС системы встречи на орбите КК Gemini разработана в качестве необ-
ходимого средства системы управления встречей на круговой орбите. РЛС
работала с ответчиком, измерение дальности производилось импульсным ме-
тодом, а для сопровождения по углам применена фазовая моноимпульсная
систёма.
Совместное использование РЛС и ответчика обеспечивает большую даль-
ность (до 450 км) при незначительной мощности передатчиков и большой
ширине диаграмм антенн с малым коэффициентом усиления как в РЛС, так
и в ответчике. Благодаря широкой диаграмме антенны масса, потребляемая
энергия и сложность аппаратуры оказываются значительно меньшими, чем
в случае остронаправленной антенны сопровождения. Ответчик на коопе-
рируемом объекте снижает требуемый динамический диапазон работы систе-
мы Все эти факторы, а также большое отношение сигнал/шум при работе
с ответчиком позволяют получить высокую точность сопровождения и изме-
рений. ' ' ' • '
В КК Gemini радиолокационная система дополнена цифровой ЭВМ, обра-
батывающей совместно радиолокационные данные и данные инерциальной
платформы корабля. Это освобождает РЛС от необходимости измерять угло-
вые скорости линии визирования цели, так как их можно вычислить без
использования гироскопов высокой точности, требуемых нормально в РЛС
для выполнения таких измерений.
Система излучает некогерентный импульсный сигнал при растворе диа-
граммы направленности антенны 70x70°. После приема импульса запроса
ответчик излучает ответный сигнал, задержанный во времени и сдвинутый
по частоте. Сдвиг частоты дает возможность отличить сигнал ответчика от
сигнала, отраженного на частоте РЛС. Поэтому можно исключить сигналы,
отраженные от цели и подстилающей поверхности, причем ответный сигнал
получается от точечного источника. Временная задержка между приемом
и передачей в ответчике была выбрана достаточно большой, чтобы ответный
сигнал при нулевой дальности появлялся после отпирания приемника. Бла-
годаря этому можно было сопровождать цель до нулевой дальности.
Одной из особенностей радиолокационной системы с ответчиком является
простота получения большого отношения сигнал/шум даже на относительно
больших дальностях. Отношение сигнал/шум не менее 16 дБ получается, при
импульсной мощности передатчика всего 1150 Вт (при средней мощности
451
Гл. 9. Применения бортовых РЛС на космических объектах
меньше 2 Вт). Поэтому оказалось возможным измерять дальность без стро-
бирования приемника По дальности. При этом вероятность обнаружения каж-
дого ответного сигнала превышает 96,5%.
Угловые координаты линии визирования цели определяются методом
интерферометра, измеряющего разность длин путей ВЧ сигналов до трех
приемных антенн. Эти три антенны расположены на двух взаимно-перпенди-
кулярных прямых в базовой плоскости крена, причем одна антенна находится
на пересечении этих прямых и является опорной антенной одновременно
Равносигнальная линия антенной системы,
параллельная оси крена космического корабля
Рис. 4. Антенная решетка.
в составе и азимутальной и угломестной пары антенн (рис. 4). Антенны рас-
положены на КК таким образом, что равносигнальная линия параллельна оси
крена, благодаря чему одна пара антенн находится в плоскости тангажа,
а другая — в плоскости рыскания.
На рис. 5 приведена структурная схема одного канала РЛС. Расстояние
между антеннами равно D, а разность длин путей ВЧ сигналов обозначена
на рисунке буквой X. Разность фаз <р двух принятых антеннами сигналов
соответственно равна
2л£)
ф — —-— sinO.
А
(1)
Поскольку D и 1 принятого сигнала являются известными константами, по
измеренной ф можно вычислить угол 9.
В некоторых интерферометрических системах сопровождения в один из
антенных каналов вводится ВЧ фазовращатель, поддерживающий с помощью
следящей системы ф, равным нулю. Измерение фазового сдвига с большой точ-
ностью является трудной задачей, одним из возможных решений которой
является выбор расстояния между антеннами, равного нескольким X. Как сле-
дует из (1), отношение угловой ошибки к ошибке измерения разности фаз
линейно уменьшается с увеличением расстояния между антеннами.
Однако при этом появляются другие трудности. При расстоянии между
антеннами D, равном нескольким X, внутри конуса обзора вокруг линии визи-
рования может оказаться несколько углов, которым соответствует один и тот
452
9.4. РЛС системы встречи на орбите космического корабля Gemini
же кажущийся фазовый сдвиг. В РЛС системы встречи на орбите возмож-
ность появления неоднозначности в пределах требуемого угла обзора исклю-
чается в результате близкого расположения антенн, а для точного измерения
разности фаз применяются линейные фазовращатели (являющиеся неотъем-
лемой частью самой антенны). В антеннах используется круговая поляриза-
ция. В любой данный момент времени геометрическое место концов электри-
ческого вектора волны с круговой поляризацией вдоль линии распростране-
ния волнового фронта имеет
вид спирали в пространстве.
При вращении передающей
(или приемной) антенны спи-
раль также вращается, что
эквивалентно физическому пе-
ремещению неподвижной ан-
тенны по оси спирали. Таким
образом, в случае идеальной
круговой поляризации антенны
получается идеальное линейное
соотношение между поступа-
тельным движением фазы вол-
нового фронта и вращением
антенны, поэтому вращающую-
ся антенну можно использовать
в качестве собственного фазо-
вращателя. Для поддержания
точности регулируется круговая
поляризация антенны, причем
коэффициенты эллиптичности
на осях порядка 0,2 дБ дают
ошибки, вызванные эллиптично-
стью, не превышающие 1 мрад.
Антенны с круговой поляриза-
цией имеют форму архимедо-
вой спирали и выполняются
в виде печатной платы на эпок-
сидных подложках, поэтому
достигается незначительная
инерция антенны. Антенна при-
Рис. 5. Струк1урная схема приемного блока
системы измерения угловых координат.
водится во вращение двигате-
лем следящей системы с небольшим крутящим моментом без зубчатой пере-
дачи, благодаря чему уменьшаются трудности, связанные с нелинейностью^
обусловленной трением и люфтами в зубчатой передаче.
Разделение импульса. Во избежание необходимости иметь два приемным
канала (но одному на каждую ось) и для увеличения скорости извлечения
информации каждый принятый импульс делится во времени для измерения
дальности и получения по одному двоичному разряду информации по углу
места и азимуту. Поскольку для определения направления угловые данные
должны быть измерены при обоих положениях фазового манипулятора, для
получения полной информации по углам необходимы два импульса. Фронт
импульса используется для измерения дальности, а также для запуска схемы
АПЧ и схемы последовательной выборки по углам (рис. 6). После измерения
дальности и селекции частоты в канале АПЧ включается азимутальная
антенна и образующийся при этом видеосигнал вводится в азимутальную сле-
дящую систему. Вслед за этим азимутальная антенна отключается и под-
ключается угломестная антенна, а выходной видеосигнал вводится в угло-
местную следящую систему. Как следует из рисунка при переходе на сопро-
вождение по угловым координатам время затухания переходных процессов.
453
Гл. 9. Применения бортовых РЛС на космических объектах
ИзмЕрекав дальности
по фронту
подстройка частоты
дальности
обусловленных коммутацией, должно быть достаточно малым. Таким образом,
в результате переключения по высокой частоте вырабатывается информация
для автосопровождения по дальности и по двум угловым координатам.
Измерение дальности и скорости изменения дальности. Запрашивающая
РЛС по получении ответного сигнала от ответчика измеряет время распро-
странения сигнала в обоих направлениях (за вычетом фиксированной задерж-
ки в самом ответчике) и выдает их
в виде аналоговых и цифровых вели-
чин, пропорциональных дальности до
цели. Цифровая информация вводит-
ся в ЭВМ космического
аналоговая используется
том.
Аналоговые данные о
вырабатываются с помощью генера-
тора развертки, наклон пилообразно-
го напряжения которого не меняется
в заданном диапазоне измеряемой
дальности. Для повышения чувстви-
тельности на малых дальностях диа-
пазон дальностей делится на три ди-
скретных интервала с разной крутиз-
ной развертки в каждом из них
(рис. 7). Точки перелома расположе-
ны на 0,9 и 9 км. Такая форма по-
зволяет использовать квазилогариф-
мические измерители дальности и ее
производной. Чувствительность на-’ин-
тервале средних дальностей в 10 раз больше, чем на интервале больших даль-
ностей, а на интервале малых дальностей в 9 раз больше, чем на интервале
средних, и в 90 раз больше, чем на интервале больших дальностей.
Развертка запускается фронтом зондирующего импульса. Крутизна пило-
образного напряжения мгновенно изменяется в точках, соответствующих 0,9
и 9 км.
корабля, а
космонав-
Измерение азимута
Рис. 6. Разделение во времени приняюго
импульса.
производится выборка в момент при-
хода ответного сигнала. Импульс
амплитудной выборки растяги-
вается, и результирующее напря-
жение постоянного тока подается
на индикатор дальности.
Аналоговый выходной сигнал,
соответствующий скорости измене-
ния дальности, получается путем
операционного дифференцирова-
ния аналогового напряжения сиг-
нала дальности. Для получения
требуемого соотношения между
отсчетами дальности и скорости
ее изменения выходное напряже-
ние дифференциатора формируем я
с помощью нелинейной схемы, фор-
мирования диодного типа. Усиле-
ние дифференциатора и цена деления шкалы дальности изменяются одновре-
менно так, чтобы выходное напряжение дифференциатора всегда соответство-
вало данной скорости изменения дальности на любом из трех интервалов
дальности Это достигается изменением усиления дифференциатора и кру-
тизны сигнала развертки дальности с помощью одной и той же логической
схемы. ' ’
Из пилообразного
напряжения
7.
Зависимость напряжения развертки
шкалы дальности от дальности.
Рис.
454
9.4. РЛС системы встречи на орбите космического корабля Gemini
Для получения точного цифрового отсчета используются быстродейст-
вующий цифровой счетчик и кварцевый генератор на 10 МГц в качестве эта-
лона времени Расстояние до цели определяется подсчетом числа периодов
генератора на интервале стробимпульса дальности. Фронт стробимпульса
дальности задержан относительно фронта зондирующего импульса на 2 мкс
(в соответствии с задержкой в ответчике), Стробимпульс выключается фрон
том ответного сигнала ответчика. Такая методика обеспечивает точность
порядка 0,1% от дальности или 25 м (в зависимости от того, что больше) при
расстоянии между КК вплоть до 450 км.
Устройство и работа системы. Радиолокационный запросчик излучает
импульсы длительностью 1 мкс с частотой повторения 256 Гц в диапазоне L.
Принятые ответчиком сигналы опознаются, после чего передатчик отпирается
и излучаются ответные импульсы длительностью 6 мкс. Принятые РЛС им-
пульсы обрабатываются по методу разделения во времени для измерения
дальности и углов. На рис. 8 и 9 приведены структурные схемы РЛС и ответ
чика КК Gemini При включении запрашивающей РЛС ответчик принимает
через дипольную антенну серию импульсов с частотой повторения 256 Гц.
Блок АПЧ периодически изменяет частоту гетеродина, обеспечивая прохож-
дение ее через заданную узкую полосу частот. При превышении видеоимпуль-
сом порога он поступает на обнаружитель достаточной амплитуды, а цепь
АПЧ стробируется для формирования выборки выходного сигнала дискри
минатора. После накопления в обнаружителе достаточной амплитуды
нескольких импульсов производится индикация опознавания и передатчик
отпирается, а контур АПЧ замыкается.
Переключатели 51 и S2 (рис. 8) находятся в таком положении, что им
пульсы длительностью 6 мкс, излучаемые ответчиком, принимаются РЛС
только через опорную антенну (рис. 4). На интервале измерения дальности
и захвата частоты схемой АПЧ интерферометрические измерения не произ
водятся Сдедует отметить, что в указанном на рисунке положении переключа-
телей двойной тройник находится в режиме резонансной линии, его второе
плечо открыто, а оконечная нагрузка отключена, При этом потери в двойном
тройнике уменьшаются до 0,7 дБ (вместо обычных 3 дБ).
. После того как сигнал введен в узкую полосу частот, включаются каналы
измерения углов и начинается процесс их измерения. При превышении порога
в узкополосном канале процесс., измерения дальности в цифровых и аналого-
вых устройствах прекращается. Кроме того, начинается процесс переключения
и задействования разных устройств в следующем порядке:
I) в цепь сопровождения по частоте вводятся данные АПЧ;
2) накопленная ранее информация об угловых координатах сбрасы-
вается;
3) включается с помощью ВЧ переключателей азимутальный интерферо-
метрический канал;
4) новая угловая информация вводится в азимутальный канал сопро-
вождения;
5) ВЧ переключатели перебрасываются в положение, соответствующее
измерениям угла места;
6) информация об угле места вводится в угломестный канал сопровож-
дения:
7) переключается фазовый манипулятор.
Выходной сигнал системы сопровождения по углам синхронно демодулн-
руется и подается на угловую следящую систему. При этом антенны сопро
вождения по углу места и азимуту поворачиваются так, чтобы уровень сиг-
нала ошибки упал до нуля. Данные об угловых координатах получаются
от угломерных кодирующих устройств, связанных зубчатой передачей с ан
тенной осью
В процессе всех этих операций обновляются аналоговые данные о даль-
ности и скорости ее изменения. Кроме того, цифровые данные о дальности
455
Г л. 9. Применения бортовых РЛС на космических объектах
456
9.5. Радиолокационное' системы космического корабля Surveyor
запоминаются в сдвиговом регистре. Если из ЭВМ КК не поступает запроса
на цифровую информацию о дальности и углах, накопленная информация
сбрасывается. В случае поступления запроса первыми вводятся в ЭВМ дан-
ные измерения дальности. Непосредственно вслед за этим считывается циф-
ровая информация с азимутального и угломсстного кодирующих устройств.
Устройство переключения антенн в ответчике используется для переклю-
чения с ДН дипольной антенны на ДН плоской спиральной антенны при
Система
Рис. 9. Структурная схема радиолокационного ответчика КК Gemini.
переходе линии визирования из одной ДН системы в другую. Если при изме-
нении положения линии визирования уровень сигнала падает ниже порога
обнаружителя достаточности амплитуды, переключение антенны происходит
автоматически. При пропадании по каким-либо причинам сигнала переклю-
чатель попеременно подключает ту и другую антенну до появления сигнала.
Как дипольная, так и плоская спиральная антенны могут быть также селек-
тированы по команде.
9.5. Радиолокационные системы космического корабля
Surveyor
Для посадки на Луну на КК Surveyor были предусмотрены две радиоло-
кационные системы. РЛС отметки высоты вырабатывала маркерный сигнал
включения автоматических устройств спуска КК. Радиолокационный высото-
мер и доплеровский измеритель скорости обеспечивали данные о трех компо-
нентах вектора скорости, о дальности, а также маркерные сигналы высоты
для управления полетом на этапах основного и прецизионного торможения
на конечном участке снижения.
457
Гл. 9. Применения бортовых РЛС на космических объектах
РЛС отметки высоты представляла собой импульсную РЛС на фиксиро-
ванную дальность, вырабатывавшую маркерный сигнал на заданной наклон-
ной дальности относительно лунной поверхности. Дальность, на которой появ-
лялась отметка, могла быть установлена предварительно в диапазоне высот
96—130 км. РЛС отметки высоты (рис. 10) работала на частоте 9,3 ГГц.
ЯусюЗоа
сиенал
3,5мкс,
350имп/с,
350имп/с,
32мкс,
• пелетон
Рис. 10. Структурная схема РЛС отметки высоты КК Surveyor.
Отметка дальности получалась с помощью двухканальной видеосистемы
с .расщепленным стробимпульсом. Первый и второй полустробы располага-
лись. впритык по обе стороны от заданного значения дальности, поэтому при
приближении КК к Луне на заданное расстояние сигнал, отраженный от лун-
ной, поверхности, распределялся в равной мере между полустробами. Мар-
керный сигнал формировался, если эхо-сигнал, принятый по главному лепест-
ку, имел одинаковую величину в обоих полустробах, причем его амплитуда
была,достаточна для превышения предварительно установленного порогового
значения. Сравнение сигналов в обоих полустробах осуществлялось в блоке
обработки видеосигнала.
Посде выработки метки высоты РЛС сбрасывалась с КК для обеспече-
ния минимально возможной массы корабля в момент касания лунной поверх-
ности. РЛС монтировалась в сопле тормозной двигательной установки с по-
мощью фрикционных зажимов вокруг фланца сопла и пружинных прокладок
между РЛС и фланцем. При включении тормозной; двигательной установки
газы, вырабатываемые воспламенителем, создавали давление, достаточное
453
9.5. Радиолокационные системы космического корабля Surveyor
для выброса РЛС из сопла. Питание РЛС, сигналы управления и телеметри
ческая информация передавались через отрывной штепсельный разъем между
КК и РЛС.
Вторая РЛС содержала доплеровский измеритель скорости, который рас-
считывал скорость вдоль осей X, Y a Z КК, и радиолокационный высотомер,
определявший наклонную дальность от 12 000 м до 4,5 м. Высотомер форми-
ровал также отметки дальности на 300 и 4,5 м. В состав РЛС входило пять
блоков ’(рис. 11 и 12): I) блок клистронных генераторов и модулятора, со-
стоящий из клистронов радиолокационного высотомера и доплеровского изме-
рителя скорости, источников питания клистронов и модулятора высотомера;
2) блок антенн высотомера и доплеровского измерителя скорости, форми-
рующий лучи 1 и 4 на передачу и прием, а также предварительные усили-
тели; 3) блок антенн измерителя скорости, формирующий лучи 2 и 3 на пере-
дачу и прием, и соответствующие предварительные усилители; 4) преобразо-
ватель данных, состоящий из электронных блоков преобразования сигналов
доплеровского сдвига в аналоговые сигналы постоянного тока и 5) соответ-
ствующие соединительные волноводы (на рисунке не показаны).
Радиолокационный высотомер и доплеровский измеритель скорости вклю-
чались на высоте 90 км над лунной поверхностью и выключались после
посадки. Доплеровские сигналы преобразовывались в аналоговые постоянного
тока, вводившиеся в систему управления полетом на этапах основного и пре-
цизионного торможения на конечном участке снижения Высотомер выраба
тывал на высоте 4,5 м сигнал выключения всех двигателей, создавая таким
образом условия для свободного падения на лунную поверхность.
Доплеровские сигналы скорости детектировались и усиливались каска-
дами с переменным коэффициентом усиления, составлявшим в зависимости
от интенсивности принимгаемого сигнала 40, 65 или 90 дБ. Выходными сиг-
налами предварительных усилителей являлись два сигнала доплеровской
частоты, сдвинутые по фазе на 90° в каждом луче. Эти сигналы передавались
в доплеровскую систему сопровождения по скорости, размешавшуюся в блоке
преобразования данных.
Доплеровские системы сопровождения в блоке преобразования данных
(Di и £>з на рис. II) работали совершенно одинаково. Частоты на выходе
каждой из систем сопровождения составляли сумму частоты 600 кГц и ча-
стоты, соответствовавшей доплеровскому сдвигу при сближении. Поскольку
КК Surveyor предназначен только для спуска, РЛС была рассчитана лишь
на скорость сближения.
В случае отсутствия доплеровского сигнала система сопровождения ра-
ботала в режиме поиска в диапазоне доплеровских частот 82—800 Гц (плюс
600 кГц) до выгорания топлива тормозного двигателя и 22—800 Гц (плюс
600 кГц) после выгорания. При обнаружении доплеровского сигнала система
сопровождения захватывала частоту сигнала и следовала за всеми ее изме-
нениями. Кроме того, сигнал захвата системы сопровождения являлся сигна-
лом подтверждения возможности работы. Система сопровождения опреде-
ляла также амплитуду сигнала, отраженного от лунной поверхности, и пере-
давала на наземную станцию телеметрическую информацию.
Выходные сигналы трех систем сопровождения (Z>i, D2 и Ds} комбиниро-
вались в блоке преобразования данных, в результате чего вырабатывалась
аналоговые данные о скорости вдоль осей X, Y и Z КК. Выходные сигналы
систем, сопровождения Dr и £)3 использовались также для корректировки дан-
ных высотомера, необходимость которой была обусловлена ошибкой по даль-
ности из-за доплеровского сдвига.
В высотомере была использована такая же аппаратура, как в обычной
частотно-модулированной РЛС непрерывного излучения. Частотно-модулиро-
ванный сигнал передавался на частоте 12,9 ГГц. Модуляция осуществлялась
с частотой 182 Гц и девиацией 4 МГц на высотах, превышающих 300 и,
и 40 МГц на меньших высотах. Передающая и приемная антенны системы
459
Гл. 9. Применения бортовых РЛС на космических объектах
^Антенна измерителя скорости^цоллерОв(;-
| А хгл I кая система
I -*^Г~—р“(Хл г сопровожде- ~|
I / Г о 1Л I нияД^
Елок преобразования данных
Л
Приемник
Предводитель-1
,ныйусилитель I
р. Преобразова-
тель У*
Гх, 750мВ/м/с
Сигнал
готовности
₽
Криоталличес- I I__________
--------- । Доплеровс—
кии смеситель
I Передаю -
| чин
Г
Клистрон,
источник
питания и
модулятор I
Передатчик
L доплеровского
измерит.ско-
— расти,13,5 ГГц
|.—:--------. — роста,?ь,ы / ц
| \Модулятор Н * НёредатчшП
। н г радиолокаци-
онного выси- I
онноговь/со-
томера,12,9ГГц
^Передатчик
I
। Приемник
I Передатчик
тг
I Приемник
Криоталличес -I
кий смеситель I
Предваритель -|
нь?й
усилитель
сопровож-
дения
Лг
Преобразо-
ватель
Сигнал
готовности
Уу,750мВ/м/с
Сигнал
готовности
'(Д^ДгЛ/) сигнал ।
Дг-
ПрограмДъ
Д3~ мирование\'Н~
VI
готовности ।
доплеровского
/ измерителя
-ф {сколости !
скорости ;
Щ,Д^,Дб).сигнал I
. готовности I
радиолокацией- I
нога высотомера |
_£) Хного дысотомера\
J Y сигнал |
\ условной готов-\
' ‘нооти доплеров-\
лилоп //ouoht/mD_1
I Доплеровс-
| кая система
]“ сопровожде-
ния Л?
ского измерите-,
ля скорости на !
вь/сотах,превь?- |
тающих 300м •
Преобразо-
ватель -^Уг,15Омв/м/о •
Сигнал
готовности
Генератор \*-300м
отметок
дальности
Р,5м
Доплеровс-
I Л *п /О ГА_______________ циплениоь-
—Qvix5 --------Г кая система
Антеннарадиолокационного\ сопродожде-
вь/сотомера и доплеровского \ ния Др.
измерителя скорости |
Змв/м
^(дальность
ватель
дальности
больше300м)
^60мВ/м
(дальность
—---- хщшомиыно сч ;
------------- меньше300м)
Сигнал готовности I
Рис. 11. Структурная схема радиолокационного высотомера и доплеровского измерителя
скорости КК Surveyor.
460
9.5. Радиолокационные системы космического корабля Surveyor
измерения дальности были смонтированы в антенном блоке радиолокацион-
ного высотомера и доплеровского измерителя скорости.
Частота преобразованного сигнала определялась биениями, возникавшими
в результате времейной задержки принимаемого сигнала относительно пере-
даваемого при заданной скоростиизменения частоты, и .дополнительной доп-
леровской частотой, обусловленной скоростью КК,.. Принимаемые сигналы
преобразовывались в .балансном„..смесителе. два выходных напряжения кото-
Рис. 12. РЛС системы посадки на луну КК Surveyor..
рого, сдвинутых по фазе на 90° одно относительно другого, подавались на
предварительные усилители. Усиление предварительных усилителей можно
было изменять в зависимости от интенсивности сигнала ступенями, равными
40, 60 и 80 дБ.
Выходные сигналы предварительных усилителей подавались на:рисунках
частотного сопровождения по дальности в блоке преобразования данных.
В системе сопровождения по дальности высотомерные сигналы с небольшим
дальномерным смещением и доплеровским сдвигом частоты преобразовыва-
лись в сигнал с частотой, равной сумме 600 кГц, частоты, определяемой даль-
ностью, и доплеровской поправки. Этот сигнал преобразовывался затем в ана-
логовый сигнал дальности постоянного тока.
Составляющая доплеровской частоты вносит ошибку в систему сопро-
вождения по высоте. Для компенсации этой ошибки с выходов доплеровских
систем сопровождения Di и Оз снимались сигналы скорости, Пропорциональ-
ные скорости КК. Эти сигналы вводились в преобразователь дальности и ис-
пользовались для компенсации ошибки, обусловленной, доплеровским сдвигом,
в данных о высоте.
Выходной сигнал преобразователя дальности вводился в генератор отме-
ток дальности, формируемых на высотах 300 м и 4,5 м.
Отметка высоты 300 м использовалась для изменения масштаба шкалы
дальности в аналоговых радиолокационных данных. Она вводилась также
461
Гл. 9. Применения бортовых РЛС на космических объектах
в систему управления полетом для соответствующей юстировки, связанной
с вменением масштаба шкалы дальности ниже 300 м. Отметка высоты 4,5 м
использовалась для выключения двигателей КК.
Для обеспечения информации о времени, когда система управления поле-
том может начать использование радиолокационных данных, вырабатывались
дискрётные выходные сигналы возможности надежной работы, формировав
шие'ся в результате комбинирования сигналов захвата различных доплеров
ских систем сопровождения. Для выработки сигнала возможности надежной
работы доплеровского измерителя скорости необходимо, чтобы все три си-
стемы сопровождения по скорости захватили сигнал и осуществляли сопро-
вождение. Для выработки сигнала возможности надежной работы радиоло-
кационного высотомера необходимо было, чтобы захватили сигнал и осуще-
ствляли сопровождение система сопровождения по высоте Dt и доплеровские
системы сопровождения по скорости Di и D3.
Чтобы обеспечить системе управления полетом возможность такой ориен-
тации КК, при которой РЛС работали бы оптимально, вырабатывался сигнал
условной возможности надежной работы доплеровского измерителя скорости.
Этот сигнал формировался из сигналов захвата для различных комбинаций
систем сопровождения. По этому сигналу система управления полетом опре
делала, какая из систем сопровождения не осуществила захват сигнала,
и ориентировала КК таким образом, чтобы сигнал, принимаемый антенной,
не захватившей сигнала системы, увеличился до значения, достаточного для
его захвата.
В процессе полета сигнал условной возможности надежной работы доп-
леровского измерителя скорости использовался для того, чтобы привести КК
в течку, где сигнал захватывался бы всеми системами сопровождения по
скорости Вслед за этим вырабатывался сигнал возможности надежной работы
датчика доплеровской скорости на высоте, превышающей 300 м.
9.6. Радиолокационные системы космического корабля Apollo
РЛС системы встречи на орбите представляла собой пространственно
стабилизированную РЛС сопровождения непрерывного излучения, предназ-
наченную для системы Apollo. РЛС была рассчитана на работу в любых тя-
желых условиях эксплуатации, встречающихся на Земле, в космосе и на Луне.
РЛС системы встречи на орбите являлась твердотельной когерентной РЛС
сопровождения, используемой в лунной, кабине для осуществления встречи
с командной кабиной на 150-километровой окололунной орбите. РЛС системы
встречи на орбите измеряла по сигналу ответчика командной кабины даль-
ность,’'ёкорость'изменения дальности, углы й угловые скорости относйтельно
командной кабины. Как в РЛС системы встречи на орбите, так и в ответчике
в качестве передатчиков использовались твердотельные варакторные умно-
жители частоты. Передача и прием осуществлялись в режиме непрерывного
излуФёййя.' С помощью гироскопов, укрепленных на антенном блоке РЛС
системы встречи на орбите, линия’визирования апертуры антенны стабилизи-
ровалась при колебаниях корпуса лунной кабины, что обеспечивало точные
измерения' ее угловых скоростей.
Для получения максимально возможной угловой чувствительности и точ-
ности'визирования в системе сопровождения по углам использовался ампли-
тудйый моно импульсный метод. Скорость изменения дальности определялась
в результате измерения двукратного доплеровского сдвига частоты сигнала,
принятого от ответчика. Дальность определялась при измерении временной
задержки ’между модулирующими функциями переданного и принятого сиг-
налов'. Для получения высокой точности измерения дальности использовалась
трезёгоновая система модуляцйи. Пространственная стабилизация и измерение
угловой Скорости линии визирования‘достигались с помощью включенных
462
9.6. Радиолокационные системы космического корабля Apollo
в следящую систему РЛС гироскопов, интегрировавших угловую скорость.
В РЛС была применена антенна Кассегрена с четырехрупорным облучателем.
В состав РЛС системы встречи на орбите входили антенный блок и блок
электроники (рис. 13). В антенном блоке из сигналов метрового диапазона
формировались модулированные сантиметровые волны, излучаемые в прост-
ранство. Ответный сигнал преобразовывался в сигнал промежуточной часто-
ты, подававшийся на блок электроники. Антенный блок захватывал и непре-
рывно сопровождал источник ответного сигнала.
Рис. 13. РЛС системы встречи на орбите лунной кабины.
Генератор с кварцевой стабилизацией частоты возбуждал передатчик
в антенном блоке и служил в качестве источника опорного сигнала для
приема и обработки ответного сигнала. Блок электроники обеспечивал также
питание следящей системы антенны.
На рис. 13 антенный блок расположен в центральной части устройства,
блок электроники — слева, а блок электроники ответчика справа. В антен-
ном блоке РЛС системы встречи на орбите азимутальная поворотная система
расположена на угломестной, а не наоборот, как это обычно принято. Выбор
такой конструкции был обусловлен необходимостью непрерывно сопровож
дать командную кабину по угловым координатам при ее пролете над Луной.
Благодаря этому следящая система не имела мертвой зоны, характерной для
систем крепления угломестного привода на азимутальном.
Работа РЛС системы встречи на орбите. На рис. 14 и 15 приведены опи-
сываемые ниже структурные схемы РЛС системы встречи на орбите и .свя-
занного с ней ответчика. Синтезатор частот в блоке электроники вырабаты-
вает требуемую частоту возбуждения передатчика (102, 425 МГц). Эта
частота преобразуется в частоту диапазона X (9832,8 МГц) в цепочке варак-
463
Гл. 9. Применения бортовых РЛС на космических объектах
к
I
к
I
I
Ии Ib ^llit A At У
I
I
s
I
*$Л iWb I*
1s ВЦ ш В
I ^1Ш1МЙ1...
I ?»| xmmg I -^ш£ I
s & § § ряи/архйро | дащжепа |
§ й & Й DgiUOnQduiQfi ^HWQQDd/t)g\
l&i BL ;r j
'»кп H
|ш
SK S
IS S § S'
°Q "з
t
$
CqCQ
8
Ва
4
Jp
I
I
§
I
is
I
§
§ Л
к
g il
5:'!
8?
I
ЙО1Й
<g § 5S.SK
* 43 kJ S K'S К \ / ____। ^ -c 'j
\ ашошйрь | к \/ *
\ QU an нар ' ’Хошпдх'рТ он tin над
-жадоРаоа кШыпдни -жод/Миао § §
йдшпроРшар 1ЯШ0Ш1ЁЬ одш-йиЩ §
птииппЬы/гИпп, Г1 N К-
11 aiuHHontitsi/figoig-^
1 -——ирнгпа-^д niQHdDM^ing j| |
апниарЬи
п/ашпипаб
aiQH
-waujnctngpgctu
п_ тнхашпозид
£
s
£ 1
Is
iiH
| s?
§
i
I
I
I
1
to
I
js
i
§
I
• г
L|i
’8
H‘S
$
к S
1 Н'
llfe\
J
II 1 i
111
$ &
$> fc
l!
s 8
III
1
is
<ъ
§
I
I
1
1
Ч> К
5? &
&§
I
£
S?
йошойзиноу
£9
fc
•&- §
J J
%, <5 S
S 'З S 4 -c
.H n
11
h
I
t
I
III
ill
^S S
464
9.6. Радиолокационные системы космического корабля Apollo
торных умножителей частоты (коэффициент умножения 96:1) и модули
руется по фазе тремя тонами (200 Гц, 6,4 кГц и 204,8 кГц), формируемыми
с помощью опорного счетчика в системе сопровождения по дальности. Фазо
модулированный сигнал поступает в антенну через циркулятор. Излученная
энергия, принятая ответчиком командной кабины, обрабатывается в нем так,
что сначала модуляция устраняется, частота смещается, затем модуляция
вводится вновь, после чего энергия излучается к антенне РЛС системы встре-
чи на орбите.
Энергия ответного сигнала ответчика принимается моноимпульсным че-
тырехрупорным облучателем. Если ответчик находится точно на линии визи-
рования антенны РЛС системы встречи на орбите, то энергия ответного
сигнала распределяется равномерно между всеми четырьмя рупорами. При
смещении ответчика относительно линии визирования равенство принятых
рупорами энергий нарушается. ВЧ сигнал проходит через циркулятор на мо-
ноимпульсный компаратор, в котором сигнал обрабатывается и формируются
требуемые суммарный и разностные сигналы. Три выходных ВЧ сигнала
компаратора подаются на смесители, где они смешиваются с частотой пере-
датчика, в результате чего формируются три сигнала промежуточной частоты
(40,8 МГц).
В зависимости от положения ответчика относительно линии визирования
РЛС системы встречи на орбите вырабатывается тот или иной сигнал ошибки
визирования антенны. Если линия визирования РЛС системы встречи на ор-
бите проходит непосредственно под ответчиком, вырабатывается сигнал ошиб-
ки визирования по координате У. Точно так же при расположении линии
визирования по одну из сторон относительно ответчика вырабатывается сиг-
нал ошибки визирования по координате X. В состав предварительных усили-
телей входят три канала: X (ось поворота), У (ось наклона) и суммарный
(опорный) канал. На вход канала X поступает разность сигналов двух смеж-
ных вертикальных пар рупоров облучателя (4 +Л) — (C+D), а на вход кана-
ла У — двух смежных горизонтальных пар (A+D)—(В + С). На вход сум-
марного канала подается сумма сигналов от всех четырех рупоров облуча-
теля (Д+В + С+О).
Выходные сигналы предварительных усилителей обрабатываются в при-
емнике в трех отдельных каналах. Фазомодулированный тремя частотами
суммарный сигнал промежуточной частоты (равной в этом канале 6,8 МГц)
подается на устройство сопровождения по дальности. В этом блоке прово-
дится в последовательном порядке сравнение фазы ответного сигнала на мо-
дулирующих частотах 200 Гц, 6,4 и 204,8 кГц с фазой опорного сигнала
эталонного счетчика, и полученные в результате данные по дальности вво-
дятся в устройство обработки данных. Сравнение фаз ответного и опорного
сигналов обеспечивает получение однозначных данных по дальности в диа-
пазоне 0,025—750 км. Выходные данные о дальности подаются на ЭВМ си-
стемы наведения лу иной кабины и на пульт космонавта.
Выходной суммарный сигнал приемника подается также на систему со-
провождения по частоте. Частота ответного сигнала ответчика непостоянна,
а меняется с изменением расстояния между лунной и командной кабинами.
Это изменение частоты является следствием доплеровского эффекта. В ре-
зультате измерения доплеровской частоты можно определить скорость изме-
нения дальности. Доплеровская частота определяется с помощью блока сопро-
вождения по частоте при непрерывном сравнении частоты принимаемого сиг-
нала (после ее преобразования в приемнике в промежуточную частоту
6,8 МГц) с опорной частотой. С помошью цепи фазовой автоподстройки ча-
стота генератора, управзяемого напряжением, в сис!еме сопровождения по
частоте поддерживается равной сумме опорной и доплеровской частот. В слу-
чае любого изменения доплеровской частоты соответствующим образом
меняется частота генератора, управляемого напряжением Скорость изменения
дальности определяется по мгновенному значению частоты генератора. Дан-
16 Зак. 2247 465
Гл. 9. Применения бортовых РЛС на космических объектах
ные о скорости изменения дальности вводятся в ЭВМ системы наведения
лунной кабины и на пульт космонавта.
Во избежание получения неточных данных составляющая доплеровской
частоты исключается из систем измерения дальности и ориентирования антен-
ны (каналов X и У приемника). Поэтому цепь, которая управляет частотой
генератора, управляемого напряжением, воздействует на ряд цепей прием-
ника. Благодаря этому цепь фазовой автоподстройки исключает доплеров-
скую частоту из систем измерения дальности и ориентирования антенны, про-
должая, однако, поддерживать частоту генератора, управляемого напряже-
нием, равной сумме доплеровской и опорной частот.
После тройного преобразования частоты до 1,7 МГц сигнал суммарного
канала сравнивается с сигналами каналов X и У, в результате чего вырабаты-
ваются сигналы управления приводами антенны, отрабатывающие ошибку
ориентирования антенны. Цепь автоматического ориентирования антенны на-
правляет линию визирования антенны РЛС системы встречи на орбите непо-
средственно на ответчик. Колебания корпуса КК компенсируются в цепи
автоматического ориентирования антенны с помощью контура гироскопической
стабилизации.
В результате ориентирования и стабилизации антенны положение антен-
ны точно соответствует направлению на ответчик относительно лунной каби-
ны. Выходные сигналы решающего устройства, характеризующие положение
антенны, подаются на ЭВМ системы наведения лунной кабины и на пульт
космонавта.
Работа ответчика. Ответчик расположен на командной кабине и осуще-
ствляет прием сигнала непрерывного излучения диапазона X, пришедшего от
РЛС системы встречи на орбите, облучающей командную кабину, и ретранс-
ляцию (но направлению к РЛС) фазокогерентного ответного сигнала. Основ-
ная несущая частота ответного сигнала смещается относительно частоты при-
нятого сигнала на 40,8 МГц, причем сигнал содержит те же составляющие
модуляции в определенных фазовых соотношениях с соответствующими со-
ставляющими принятого сигнала. Структурная схема ответчика приведена
на рис. 15.
Сигналы, передаваемые РЛС системы встречи на орбите, принимаются
блоком антенны ответчика и направляются в СВЧ циркулятор в СВЧ блоке.
Сигнал поступает на входное плечо циркулятора и направляется по часовой
стрелке на выходное течо, а с него на первый смеситель. Частота сигнала
(102 МГц) на выходе цепи фазовой автоподстройки несущей умножается на
96 в умножителе частоты, что соответствует частоте ответчика на передачу,
и подается через направленный ответвитель на первый смеситель.
Выходной сигнал смесителя (первая промежуточная частота 40,8 МГц)
усиливается предварительным усилителем в СВЧ блоке и подается на первый
УПЧ в блоке приемника. С выхода этого усилителя сигнал подается на вто-
рой смеситель, в котором он смешивается с сигналом цепи фазовой автопод-
стройки несущей с частотой 34 МГц, в результате чего формируется сигнал
второй промежуточной частоты 6,8 МГц.
Сигнал второй промежуточной частоты разветвляется на несколько кана-
лов. Один сигнал подается на обнаружитель порогового сигнала в цепи фазо-
вой автоподстройки несущей и является широкополосным входным сигналом.
Второй сигнал вводится в цепь АРУ приемника. Один из сигналов проходит
через фильтр с полосой пропускания 8 кГц и является узкополосным вход-
ным сигналом цепи фазовой автоподстройки несущей, где он подается на
балансный модулятор и обнаружитель порогового сигнала. Сигнал АРУ рас-
пределяется между предварительным УПЧ в СВЧ блоке и усилителями в бло-
ке приемника.
Ответчик работает непрерывно. В отсутствие сигнала от РЛС системы
встречи на орбите частота кварцевого генератора, управляемого напряже-
нием, в цепи фазовой автоподстройки несущей периодически изменяется
466
9.6. Радиолокационные системы космического корабля Apollo
в пределах узкой полосы частот порядка ±75 Гц вокруг центральной частоты
6,8 МГц. После умножения на 1440 получается частота 9792 МГц±108 кГц,
на которой работает передатчик. Выходное напряжение кварцевого генера-
тора, управляемого напряжением, усиливается и подается на умножитель ча-
стоты, приемник и когерентный детектор.
В обнаружителе порогового сигнала в цепи фазовой автоподстройки
несущей узкополосный сигнал с частотой 6,8 МГц сравнивается с широкопо-
лосным сигналом, в результате чего вырабатывается логический уровень для
логической части схемы обнаружителя и для генератора развертки. При
отсутствии сигнала на узкополосном входе широкополосный входной сигнал
вырабатывает на выходе обнаружителя порогового сигнала логический нуль,
при котором генератор развертки начинает качать частоту кварцевого гене-
ратора. Такой режим работы продолжается до тех пор, пока не будет принят
сигнал РЛС системы встречи на орбите и не появится узкополосный входной
сигнал на обнаружителе порогового сигнала, а также на балансном моду-
ляторе.
При этом в обнаружителе порогового сигнала вновь производится срав-
нение узкополосного и широкополосного входных сигналов. Если энергия узко-
полосного сигнала оказывается больше, чем широкополосного, на выходе
обнаружителя порогового сигнала появляется логическая единица, и качание
частоты кварцевого генератора прекращается. Генератор продолжает генери-
ровать, но на стабильной частоте. Часть выходного сигнала кварцевого гене-
ратора ответвляется на балансный модулятор, в котором он используется
в качестве опорного по отношению к узкополосному сигналу, подаваемому
с фильтра с полосой 8 кГц в приемнике.
Узкополосный и опорный сигналы сравниваются в балансном модуляторе.
С помощью балансного модулятора поддерживается равенство частоты и фазы
сигнала генератора, управляемого напряжением, и узкополосного сигнала про-
межуточной частоты 6,8 МГц, т. е. осуществляется фазовая синхронизация.
В случае любой ошибки на выходе балансного модулятора появляется сиг-
нал, изменяющий частоту генератора так, что ошибка исчезает.
Выходной сигнал диапазона X умножительной варакторной цепочки ис-
пользуется в качестве сигнала, излучаемого передатчиком ответчика, и сиг-
нала гетеродина первого смесителя. Уровень сигнала, подаваемого на первый
смеситель, уменьшается на 20 дБ с помошью направленного ответвителя в СВЧ
блоке. Выходной Сигнал умножителя, используемый на передачу, подается
через направленный ответвитель на волноводный фазовый модулятор, в кото-
ром принятые ранее от РЛС системы встречи на орбите три модулирующих
частоты восстанавливаются и модулируют передаваемый сигнал.
Модулированный выходной сигнал волноводного фазового модулятора
поступает в антенный волновод через циркулятор Передаваемая модулирован-
ная энергия подается на одно плечо циркулятора, проходит по часовой стрел-
ке до выходного плеча и передается в антенну. Использование циркулятора
в волноводной системе позволяет использовать антенну как на передачу, так
и на прием без сколько-нибудь существенного просачивания передаваемого
сигнала в приемные цепи Выходное напряжение постоянного тока детектора
измерителя мощности на выходе СВЧ блока дает возможность измерить пере-
даваемую мощность.
Кроме сигналов, подаваемых на цепь АРУ и цепи фазовой автоподстрой-
ки несущей, сигнал второй промежуточной частоты с выхода второго смеси-
теля поступает на когерентный детектор схемы выделения модулирующих ча-
стот. В когерентном детекторе используется сигнал генератора, управляемого
напряжением, с частотой 6,8 МГц в качестве опорного для установления ча-
стотной когерентности с сигналом, передаваемым РЛС системы встречи на
орбите..
Выходное напряжение когерентного детектора подается на три параллель-
но включенных канала, состоящих каждый из полосового фильтра и усили-
467
Антенна,
Контроль мощности
Напреем
9832,8МГц+
+допл.+ Зм. ч.
-'на передача
9792 МГц+
+ропл. + 3 м. ч.
‘ Д782МГц+долл.
АРУ
ПЧ 40,8 МГц+допл.4
+3 м. ч.
34 МГцйдопл.
Детектор
модуляционных
частот
204,8 кГц ।-------------
гл------- Термостат
Усиление |
Полосовой
ирегили- i_ iionooooou
ровна ; фильтр *
g л! фазы I \ на 204,8кГц I
хГц^сцлвние I [ Полосовой |
"Sff’T t
фазы j на 6,4 кГц I
фазы
I на 204,8кГц I
гоогц
на S,4 кГц I
Когерент-
ный
детектор
Источник
питания
4 258
+12 В
-128
6,8
МГцч-
хдопл.
Контроль АРУ
Приемник 1
1-ый
усилитель «4-
ПЧ
Усилитель АРУ,
фильтр с полосой
1 кГц и детектор
ЗЧМГцл
+допл.
Выходные~
буферный
а строби-
рующий
каскады
Фильтр ’
-* с полосой
вкГц
6,8 МГц+
допл.н 3 м.ч.
till
6,вМГц+ балансный
Ддопл. модулятор
♦
£
m
Режекторный
фильтр и
реле
Лозина
обнаруже- .
нияизвне-
ратор g
развертки
Развертка
блок фазовой |......... ——
абтоподотройки уцуцкация захвата
Фильтр с полосой
200кГц
♦
Влок
развертки
и пороговый
обнаружитель
Гл. 9. Применения бортовых РЛС на космических объектах
Рис. 15. Структурная схема ответчика КК Apollo.
частота/
9.6 Радиолокационные системы космического корабля Apollo
теля, соответствующих трем частотам, передаваемым РЛС системы встречи
•на орбите, 200 Гц, 6,4 кГц и 204,8 кГц. Два фильтра на более высокие
частоты помещены для повышения стабильности в термостат с температурой
7Г±0,5°С. В каждом канале одна из трех частот отфильтровывается, усили-
вается и направляется в фазовый модулятор в СВЧ блоке. В фазовом моду-
ляторе перед посылкой ответного сигнала обратно к РЛС системы встречи
на орбите осуществляется фазовая модуляция восстановленной несущей все-
ми тремя частотами.
Рис. 16. Посадочная РЛС КК Apolio.
В начало работы сигнал, принимаемый ответчиком, не модулирован.
После захвата фазы в цепи фазовой автоподстройки ответчика и последую-
щего захвата в системе сопровождения по частоте РЛС системы встречи на
орбите логическая схема в РЛС дает разрешение на модуляцию излучаемого
РЛС сигнала гремя частотами. Через небольшой интервал времени, в тече-
ние которого ЭВМ системы сопровождения по дальности РЛС системы встре-
чи на орбите заканчивает операции по формированию сигнала ошибки с ча-
стотой 200 Гц, логическая схема в РЛС системы встречи на орбите выключает
сигнал низшей частоты, поэтому сигнал, передаваемый РЛС, модулируется
двумя другими частотами. До тех пор пока в ответчике поддерживается коге-
рентность сигналов, две частоты (после их захвата), .модулирующие прини-
маемый сигнал, обрабатываются в ответчике и ретранслируются к РЛС
системы встречи на орбите на вновь образованной несущей.
В состав СВЧ блока включен генератор самопроверки. Разрешающее
самопроверку напряжение постоянного тока 12 В включает генератор путем
замыкания контакта переключателя в блоке управления. Для самопроверки
приемника выходное напряжение генератора с частотой 40,8 МГц подается
на предварительный усилитель в СВЧ блоке.
Посадочная РЛС. Посадочная РЛС лунной кабины (рис. 16) определяла
скорость и расстояние до лунной поверхности с помошью трехлучевого доп-
леровского измерителя скорости и радиолокационного высотомера. Данные
469
Гл. 9. Применения бортовых РЛС на космических обт,актах
о скорости и дальности обрабатывались и вводились в ЭВМ системы наве-
дения лунной кабины в виде последовательностей двоичных кодов и на пульт
космонавта в виде последовательностей импульсов и аналоговых постоянных
напряжении.
Посадочная РЛС, размещенная на спускаемой ступени лунной кабины,
была смонтирована в двух сменных блоках. Антенная система формировала
и направляла четыре узких СВЧ луча на передачу и прием. Для выполнения
этих функций она содержала две перемежающиеся фазированные антенные
решетки на передачу и четыре пары сдвоенных плоских решеток на прием.
Передающие решетки образовывали платформу, на которой были смонтиро-
ваны четыре СВЧ смесителя, четыре пары сдвоенных предварительных видео-
усилителей, два твердотельных СВЧ передатчика, частотный модулятор и ан-
тенно-поворотное устройство. Блок электроники содержал цепи, необходимые
для сопровождения, обработки, преобразования и масштабирования ответных
доплеровских сигналов и частотно-модулированного сигнала непрерывного
излучения, служивших для формирования данных о скорости и наклонной
дальности, вводимых в ЭВМ системы наведения лунной кабины и на пульт
космонавта.
Работа системы. Описание работы посадочной РЛС, приводимое ниже,
сделано в соответствии с рис. 17 и 18. СВЧ энергия твердотельного передат-
чика измерителя скорости излучается передающей антенной по направлению
к Луне. Отраженная энергия принимается на три отдельных приемных антен-
ны. Принятый сигнал с доплеровским сдвигом частоты делится так, чтобы
образова шсь пары сигналов в квадратуре, и смешивается с частью энергии
передатчика с помощью СВЧ диодов, образующих балансный смеситель.
Частота выходного сигнала балансных смесителей равна разности частот при-
нятого и переданного сигналов. Эта разность появляется в результате доп-
леровского сдвига, прямо пропорционального скорости лунной кабины отно-
сительно лунной поверхности.
Излучение передатчика высотомера модулировано по частоте пилообраз-
ным колебанием с помощью частотного модулятора. Частота повторения
пилообразного колебания составляет 130 Гц. СВЧ энергия передатчика высо-
томера поступает в передающую антенну высотомера. Сигнал, возвращаю-
щийся в приемную антенну, делится для образования пары сигналов в квад-
ратуре и подается .на балансные СВЧ смесители вместе с частью передавае-
мого сигнала. Разностная частота на выходе балансных смесителей содер-
жит составляющую, пропорциональную разности времен передачи и приема
модулированного сигнала, а также составляющую, равную доплеровскому
сдвигу. Доплеровский сдвиг нежелателен и должен быть скомпенсирован
в вычислителе дальности.
Сдвинутые по фазе на 90° выходные сигналы балансных смесителей трех
датчиков скорости и высотомера подаются на четыре усилителя звуковой
частоты. Во избежание искажений в состав каждого усилителя включена
логическая схема, изменяющая усиление от 87 до 55 дБ в зависимости от
уровня сигнала.
Выходные широкополосные сигналы усилителей звуковой частоты посту-
пают на входы систем сопровождения по частоте, размещенных в блоке
электроники. Системы сопровождения по частоте производят поиск сигнала
в диапазоне ожидаемых частот с помощью узкополосного фильтра и по обна-
ружении сопровождают сигнал с высокой степенью точности. Выходными дан-
ными системы сопровождения являются среднее значение частоты, равное
сумме частоты, соответствующей середине энергетического спектра доплеров-
ского или дальномерно-доплеровского сигнала, и опорной частоты 6М,4 кГц.
В системе сопровождения вырабатывается также ступенчатое напряжение по-
стоянного тока для индикации захвата в системах сопровождения.
Выходные сигналы системы сопровождения подаются на преобразователи
данных о скорости и дальности, в которых информация о векторе скорости,
470
9.6. Радиолокационные системы космического корабля Apollo
слученная по трем лучам, представляется в виде составляющих скороств
в собственной системе координат антенны. Составляющие скорости обозна-
чены, как Уха, Ута и Уха. Информация о скорости и дальности форми-
руется для использования как в ЭВМ системы наведения лунной кабины,
так и в индикаторах лунной кабины. Для формирования отображения m
Уравнения скорости
Рис. 17. Конфигурация лучей и углы
отклонения антенны посадочной
РЛС.
индикаторах предусматриваются аналоговые напряжения постоянного тока
для Уау и Ута и пачки импульсов для управления индикаторами дальности
и Уха (скорости изменения дальности). Для индикации знака пачки импуль-
сов, характеризующей Уха, предусмотрен дискретный сигнал постоянного
тока.
Данные О' скорости в антенной системе координат поступают в виде па-
чек импульсов, наложенных для облегчения индикации знака скорости на
471
Антем,чью /Глеи
1-и луч изме-
рителя
скорости [X
ни передачу
2-й луч
5
Ъ-йлуч
Ч-йлучизме-f+j]
рителя К у 7
скорости
на прием
F>
Блом
прсника
Контроль мотноете
Твердотельный
передатчик
измерителя
скорости
балансный
смеситель
в/1°1
Ufl^O'
Сдвоенный |J Устройство р
преаваритель- ~f* еопровожде- с
ныи усилитель i “Дттг_ —
гой твой -L. мдя пр чао -
Сдвоенный
ныд усилитель i
Звуковой
Преобразова-
тели данных
о скорости и
вычислители
Радиплока- К эвм
аионные
данные
Уха -------1----
£
£
2-йлуч
балансный
смеситель
Ъ-й луч
&Л.
балансный
смеситель
чисвпоа/ы ГН тотеПг
9,биГд~\ I
Ib!±90°
9,6кпГ\
\Л3101^ —Т
। I иноика-
•—- _________ \ция захватало част.Д^
Сдвоенный \АНотоойство\^ ??
ЖЖЯГ сопродожде- с JJz-
ныиУсилитель j „„ иг,,-
зД/новой -U
частоты i то те л 2
-- 4 I 'Иноика-
—_________ \иия захвата пл/аст. Д2
Сдвоенный L дстоойстдо\„
преаваритель- । солробождв- 7c~rZ13
1о'Лзвуковой ЛЬ L мия по час “
Устройство [л +о.
сопповожде- с к
9,5кГд |
Vx
haty +Д3)
/к
K(Si~^2)
ТДйДго-ана-
логовыйпре-
образоват.
V
Z
А
Преобразо-
ватель
данных
Луч бысо-
томера
на прием
балансный
смеситель
Ъ+Др1±90^
звуковой
частоты ГП тотвлз
" I I Индикадия
' \Уст-во час-' '
Сдвоенный i^i.
преаваритель- I*,
вы и усилитель । ‘
дс+
(дальность)
Лучвысо- к
тонера р
на передачу
Л
Антенне-поворотное устройство
Твердотельный
передатчик
высотомера
I Контроль мощности,
______ ^Ручная установка
Автоматическая
установка
VZ
К(П3-Д2)
Цифра-анал.
преобразив.
вычислитель
дальности
Дальность
Урд -скорость
поперечного
перемещения
скорость
поступа-
тельного
перемещения
I
я
Дальность
i'xp-скорость а
знак изм. дальн.
J \fp +Др -
частоты Уб\по дальнаити\ * *' L ” ” .п
"I | Рида кади я -K(JJj+l/2}\
! захбатаподальн. готовность"’канала скорости
Модулятор
А
$2
Из
Dif
здхМтипа дальн.
кТЛогйчёб'-
кая схема
* „готов-
эАностд’или
д „нет го-,
товнасти
Сигнал
Сигнал.,готовность”канала бальиооту № §-
багн.„нетготовности Ткан. окорёоти^ §
Сиги, „нет го/повнЪота "кин. дальн.
Индикация соложеная антенне/
Vf
v2
Дальность
К блокам антенны
и электроники
Само- |
Генератор у/роверка \кстдЧмик [
питания
само-
проверки
Рис. 18. Структурная схема посадочной РЛС КК Apollo:
Дь Да, Дз — индикация захвата по частоте, Д — индикация захвата по дальности.
Теле-
метрия
к
'. Применения бортовых РЛС на космических объектах
9.7. Дополнительные сведения
опорную частоту 153,6 кГц. Эти пачки импульсов и пачка импульсов даль-
ности подаются на преобразователь данных. Преобразователь данных сопря-
гается с ЭВМ системы наведения лунной кабины, принимая стробирующие
импульсы ЭВМ и используя эти сигналы для объединения и считывания дан-
ных о дальности и скорости в виде последовательностей двоичных чисел.
Радиолокационная информация, выраженная в виде последовательностей
двоичных чисел, подается на ЭВМ системы наведения лунной кабины.
Сигналы, характеризующие состояние РЛС, включающие сигналы готов-
ности каналов дальности и скорости, индикацию положения антенны и мас-
штаб по дальности, вводятся в ЭВМ системы наведения лунной кабины при
замыкании контактов отдельных реле. Источник питания посадочной РЛС
расположен в блоке электроники. Источник питания обеспечивает стабили-
зированные напряжения +25, —25, +4 и —2 В со стабильностью в 1%
и с незначительной пульсацией при пределах изменения первичного напряже-
ния питания постоянного тока от 25 до 31,5 В.
9.7. Дополнительные сведения
Надежность. При проектировании радиолокационных систем для КК учи-
тывается много факторов, связанных с пуском и полетом КК. Первым и, оче-
видно, наиболее важным является надежность. При изготовлении радиоло-
кационных систем КК Apollo были использованы радиоэлементы, состояние
которых можно было полностью проследить с момента их изготовления.
Кроме использования очень надежных деталей, каждая система перед отгруз-
кой включалась на 40—50 ч. Большинство систем к моменту отгрузки прора-
ботало более 250 ч, что позволяло выявить и удалить любую неисправную
деталь в системе и увеличивало надежность. Такая методика, предназначен-
ная для обеспечения надежности работы системы до отгрузки, предусматри-
вает тепловые циклы в вакууме, испытания на удар, на вибропрочность и тем-
пературные испытания.
Вследствие малых габаритов оборудования КК особое внимание уде-
ляется предстартовым проверке и обслуживанию. Ремонт такого оборудова-
ния в полевых условиях по существу невозможен. Если учесть те громадные
издержки, которые связаны с отсрочкой запланированного пуска, станет оче-
видной необходимость быстрого нахождения неисправного электронного обо-
рудования и его замены. В комплексе наземного оборудования также обес-
печивается возможность быстрого нахождения неисправного блока с тем,
чтобы этот блок или вся радиолокационная система могли быть заменены
резервными.
Испытания. При испытаниях радиолокационной системы для КК возни-
кает вопрос о натурном моделировании. В отличие от многих случаев приме-
нения радиолокации в авиации при разработке РЛС для КК с экипажем на
борту экономически неоправдано основывать программы их испытаний на
использовании полетов реальных КК. Задача заключается в том, как произ-
водить проверку характеристик системы: следует ли проводить натурную
проверку основных ее параметров (максимальной дальности, максимальной
скорости изменения дальности и (или) максимальной угловой скорости) или
имитировать условия реального полета с помощью самолета.
Решение состоит в сочетании обоих методов. Возможность применения
самолета в качестве испытательной установки для радиолокационных систем
КК достаточно ограничена. Компромиссным решением является оценка харак-
теристик системы с применением самолета в пределах его возможностей
и проведение испытаний с применением КК для определения только тех па-
раметров, которые невозможно проверить с самолетом.
Испытания радиолокационных систем КК как на земле, так и на самолете
осуществляются многими методами, используемыми при испытаниях самолет-
473
Гл 9. Примененич бортовых РЛС на космических объектах
ных систем управления огнем. Изменяя в заданном диапазоне направление
визирования, можно определить статическую угловую точность РЛС системы
встречи на орбите. Влияние корпуса КК как из-за эффекта поля ближней
зоны, так и из-за многократных отражений от корпуса можно исследовать
при установке антенны на полноразмерном макете той части КК, размеры
которой соответствуют диапазону углов прокачки линии визирования цели.
Для оценки динамических характеристик применяются летные испытания.
При разработке РЛС системы встречи на орбите КК Gemini существо-
вало убеждение, что вследствие широкой ДН антенны интерферометра резуль-
таты измерений при горизонтальном направлении визирования могут ока-
заться спорными из-за отражений от земли и многотрассовости распростра-
нения. Поэтому было предусмотрено визирование по вертикали при монтаже
РЛС на специально изготовленном наземном стенде. Для минимизации отра-
жений стенд был изготовлен из поглощающего материала. Над испытательным
стендом летал самолет с ответчиком на борту. Испытания проводились на
ракетном полигоне в Уайт Сэндс’е (White Sands Missile Range), на котором
можно было осуществить точное угловое сопровождение самолета. Радиоло-
кационные данные по угловой точности были сопоставчены с оптическими.
Результаты сравнения этих данных с данными визирования, полученными
при горизонтальном его направлении, показали хорошее совпадение.
При разработке системы Surveyor масштабная модель КА поднималась
аэростатом на высоту 300 м. При спуске КА раскрывался большой парашют,
уменьшавший скорость снижения до величины, ожидаемой над лунной по-
верхностью. Затем запускался двигатель спускаемого аппарата, который
управлялся радиоинерциальной системой до посадки аппарата. Испытания
проводились на специально подготовленной испытательной площадке на базе
военно-воздушных сил в Холломэне (Нью-Мехико), где можно было обеспе-
чить высокую точность данных оптического сопровождения.
Параметры радиолокационных систем лунной кабины КК Apollo оцени-
вались путем проверки качества визирования и летных испытаниях. Параметры
обеих систем оценивались в статике на дальностях прямой видимости. Для
оценки параметров посадочной РЛС она устанавливалась как на вертолете,
так и на реактивном самолете с высокими летными качествами. Самолет
выполнял полет на тех участках посадочной траектории лунной кабины, кото-
рые были в пределах его относительных летных возможностей. Задача встре-
чи на орбите не могла быть моделирована с помощью самолета из-за харак-
терных для нее скоростей и расстояний. Дополнительным требованием к РЛС
системы встречи на орбите являлось сопровождение командной кабины, дви-
жущейся по окололунной орбите, на этапе стоянки на лунной поверхности.
Такая ситуация моделировалась при полете самолета с ответчиком на борту
над РЛС системы встречи на орбите, смонтированной на макете лунной каби-
ны, находящейся на земле.
С целью проверки качества функционирования РЛС каждой конкретной
программы полета КК при создании системы Apollo была разработана мате-
матическая модель на базе технических условий на РЛС и эмпирических
данных^ полученных в результате наземных и летных испытаний. Модели
были проверены с помощью ЭВМ, причем промоделированы как посадка на
Луну, так и встреча на орбите. Результаты моделирования показали отсут-
ствие каких-либо ограничений, которые могли бы явиться результатом выхо-
да параметров РЛС за допустимые пределы.
Будущие применения. Применения РЛС при полете в космосе включают
использование РЛС системы встречи на орбите в качестве средства навигации,
а посадочных РЛС — для определения с помощью ЭВМ системы наведения
оптимальной посадочной траектории. При дальнейшем усовершенствовании
системы имеется возможность повышения ее разрешающей способности по
дальности и угловым координатам. Для решения проблемы встречи в космосе
с неизлучающим объектом потребуется РЛС, обеспечивающая без ответчика
474
9 7. Дополнительные сведения
очень высокую точность, необходимую для спасения КК, оказавшегося в ава-
рийной сипании или для встречи на орбите г неисправным спутником.
Использование радиолокационных систем для скругления орбит, а также
для уточнения положения КК относительно поверхности планеты в качестве
вспомогательного средства к инерциальным системам навигации позволит
создавать более дешевые и лы кие системы навигации. С помощью орбиталь-
ных РЛС бокового обзора можно будет составлять более точные карты
обширных земных районов, лунной поверхности и поверхностей других небес-
ных тел Кроме того, радиолокационные средства измерения характера обрат-
ного рассеяния от поверхностей разного типа найдут широкое использование
в геофизических исследованиях. Такие измерители характеристик рассеяния
используются на самолетах уже в течение нескольких лет. Их использование
на орбитальных КК позволит составлять карты распределения обратного рас-
сеяния для значительно больших площадей.
Глава 10
РАДИОЛОКАЦИОННЫЕ МАЯКИ
А. Аслей, Дж. Перри
10.1. Введение
Система радиолокационных маяков для управления воздушным движе-
нием ATCRBS включает наземную РЛС, посылающую запросы на оборудо-
ванные радиолокационными ответчиками самолеты. В этой системе наземная
станция и самолет связаны двусторонней линией передачи данных с раздель-
ными частотами для передачи запросов и ответов (рис. 1). Поскольку само-
леты являются кооперируемыми объектами, система маяков дает много преи-
муществ перед РЛС, работающей по отраженному от цели сигналу, назы-
ваемой далее первичной РЛС. В частности: 1) мощность импульсов самолет-
ного радиолокационного ответчика значительно больше мощности отражен-
н шо от самолета сигнала первичной РЛС; 2) отдельные частоты для запро-
сов и ответов исключают влияние отражений запросного сигнала от земной
поверхности и от метеорологических образований обратно к запросчику
3) влияние углового шума цели и зависимость дальности обнаружения от
изменения ЭПР цели исключаются, 4) кодирование запросов и ответов обес-
печивает опознавание дискретных целей и возможность автоматической пере-
дачи с самолета данных о его высоте.
Первоначально система радиолокационных маяков предназначалась для
увеличения энергии приходящих от самолета сигналов и различения самоле-
тов, оборудованных радиолокационными ответчиками, от самолетов без от-
ветчиков. Но позднее были введены усовершенствования в виде кодирования
сигналов запроса и ответов, как в упрощенной линии передачи данных.
Система радиолокационных маяков для управления воздушным движе-
нием была создана на основе применявшейся во время второй мировой войны
системы опознавания самолетов “свой—чужой’’. Передатчик наземного запрос-
чика работал в диапазоне L (1030 МГц), а самолетные ответчики — на ча-
стоте 1090 МГц.
В 1953 г. министерство обороны США предложило использовать эту
систему как общую систему управления воздушным движением с помощью
радиолокационных маяков для военной и гражданской авиации. Это давало
возможность гражданским и военным самолетам использовать один и тот
же частотный канал для передачи необходимой информации в систему управ-
ления воздушным движением и применять на самолетах совмещенную борто-
вую радиоаппаратуру. Объединенные усилия ведомств гражданской и воен-
ной авиации, принимавших участие в разработке системы радиолокационных
маяков для управления воздушным движением ATCRBS диапазона L, при-
вели к созданию в конце 50-х и начале 60-х годов достаточно совершенной
1) Как далее будет показано, запросный сигнал, переотраженный земной
поверхностно в направлении ответчика, а также ответный сигнал, переотра-
женный в направлении запросчика, существенно влияют на работу системы.
{Прим, ред)
476
10.2. Основные принципы построения системы
системы управления воздушным движением. Впервые в управлении воздуш-
ным движением стало возможным опознавание самолетов с указанием их
положения в трехмерном пространстве.
Большое количество агентств и пользователей системы требовали разра-
ботки приемлемых для всех стандартов. В результате всесторонних исследо-
ваний, оценок и компромиссных решений были разработаны национальный
стандарт США и стандарт Международной организации по гражданской авиа-
ции (ИКАО), а также рекомендации по их практическому применению.
Рис. 1. Система радиолокационных маяков управления воздушным движением.
Данная система реализована в США в начале 60-х годов. В 1967 г. было
завершено оборудование радиолокационными ответчиками всех реактивных
и военных самолетов В этом же году было введено обязательное требова-
ние, чтобы все самолеты, пользующиеся системой управления воздушным дви-
жением и летающие на высотах более 5500 м, имели радиолокационные ответ-
чики. Ожидается, что эта высотная граница будет непрерывно снижаться и
что в районах наиболее крупных и загруженных аэропортов требование нали-
чия бортового радиолокационного ответчика будет относиться ко всем само-
летам, входящим в зону действия системы управления воздушным движе-
нием.
10.2. Основные принципы построения системы
Система управления воздушным движением ATCRBS (рис. 1), часто на-
зываемая просто системой радиолокационных маяков, посылает на самолеты
с радиолокационными ответчиками сигналы запроса на частоте 1030 МГц
в виде пар импульсов, интервал между которыми зависит от того, посылается
ли запрос для опознавания самолета или для определения его высоты. Посы-
лаемый радиолокационным ответчиком самолета ответ (на частоте 1090 МГц)
содержит до 16 импульсов с интервалами между ними, кратными 1,45 мкс.
Два из этих импульсов всегда обозначают кодовую последовательность,
а остальные содержат закодированные данные. В общем, 12 положений им-
пульсов, передающих данные, позволяют получить 4096 отдельных кодовых
477
Гл Ю Радиолокационные маяки
комбинаций для опознавания, all — дают возможность передавать инфор-
мацию о высоте с приращением, равным 30 м, отнесенную к давлению
101 кПа (760 мм рт. ст.) в соответствии с принятой ИКАО стандартной атмо-
сферой. Положение сканирующей антенны и время, прошедшее с момента
посылки запроса до момента приема ответа, дают информацию об азимуте
и дальности самолета. Таким образом устанавливаются принадлежность (или
номер) самолета, его дальность, азимут и высота.
Предусмотрены специальные коды, пользуясь которыми летчик может
сообщать об аварии или нарушении связи; один из импульсов можно исполь-
зовать для специальной идентификации, когда один и тот же код опознавания
используется двумя или более самолетами, находящимися в зоне обзора на-
земной станции.
В табл. 1 приведены основные характеристики каналов запроса и ответа
системы радиолокационных маяков. Эта система иногда называется в лите-
ратуре системой Mark X селективного опознавания (для военной авиации)
или системой обзора со вторичными РЛС (для международной гражданской
авиации).
Нормально система работает совместно с первичной РЛС; антенна радио-
локационного маяка монтируется наверху антенны первичной РЛС. Излучение
сигналов запроса происходит с опережением относительно излучения им-
пульса РЛС, чтобы обеспечить временное согласование появления радиоло-
кационных отраженных сигналов и декодированных ответов радиолокацион-
ного ответчика на индикаторе кругового обзора РЛС. Частота повторения
импульсов запросчика или такая же, как у первичной РЛС, или, в случае
использования обзорной РЛС аэропорта, понижается в результате пересчета
до получения номинальной (300—400 Гц). Коды запроса определяют интер-
валы между импульсами ответного сигнала в зависимости от его функцио-
нального содержания. Например, код 3/А является общим кодом опознава-
ния для военной и гражданской авиации, а код С — кодом для автоматиче-
ской передачи данных о высоте. Обычно ответы на эти коды передаются по
принципу размещения импульсов одного ответного сигнала в интервалах
между импульсами другого ответного сигнала с отношением 1:1, чтобы
при каждом обзоре на-
запасе энергетического
данные о номере самолета и его высоте обновлялись
земной РЛС.
Дальность действия системы около 370 км при
потенциала 5 дБ. Уравнение дальности имеет вид
Pi Gi Gr
(1)
где Ri — дальность действия запросчика; А — длина
волны; Pi — мощность
передатчика; G/ — усиление антенны запросчика; Gr — усиление антенны
ответчика; Рт — мощность на входе приемника ответчика; L — вносимые по-
тери (в кабелях и разъемах).
В системе желательно иметь энергетический баланс, так как канал ответа
должен быть согласован по дальности действия с каналом запроса. Даль-
ность действия системы по каналу ответа определяется уравнением
1/ prC„Or , (2)
2л у р. L
где Rr — дальность действия канала ответа; Pr — выходная мощность пере-
датчика ответчика; Р, — мощность на входе приемника запросчика. Как
правило, канал ответа имеет больший запас энергетического потенциала, чем
канал запроса.
478
10 2. Основные принципы построения системы
Таблица 1
Характеристики системы радиолокационных маяков
Канал земля — воздух (запрос) Частота, МГц Поляризация Коды запросов (интервал между импульсами в паре импульсов Р}, Рь, мкс) 1 (для военной авиации) 2 (для военной авиации) 3/А (опознавания, общий для военной и граждан- ской авиации) В (для гражданской авиации) С (высоты, общий для военной и гражданской авиации) D (запасный, для гражданской авиации) Длительность импульса, мкс Импульс подавления запросов по боковым лепесткам Р2, мкс (следует за импульсом Pi в каждом коде) Типичная частота повторения импульсов, Гц Типичная скорость вращения антенны, об/мин Типичная выходная мощность (импульсная), кВт Типичная ширина луча антенны (на уровне 3 дБ), град Канал воздух — земля (ответ) Частота, МГц Поляризация Кодовая комбинация: два кадровых импульса (Fit F2), мкс 13 информационных импульсов между кадровыми импульсами Г, и Га и специальный импульс иденти- фикации (следует за импульсом F2 с интервалом 4,35 мкс) Интервал между импульсами ответа, мкс Длительность импульса, мкс Временные положения импульсов (относительно импуль- са fi), мкс: с. Ai с2 А-2 а4 X Bl Di в2 d2 В, Выходная мощность (импульсная), Вт 1030±0,2 Вертикальная 3±1,0 5±0.2 8±0,2 17±0,2 21 ±0,2 25±0,2 0,8±0,1 2±0,15 300—400 6—15 1-1,5 2,8—7 1090=4=3 Вертикальная 20,3 ±0,1 1,45 0,45±0,10 1,45 2,90 4.35 5,80 7,25 8,70 Не используется 11,60 13,05 14,50 15,95 17,40 18,85 500
478
Гл. 10. Радиолокационные маяки
Преимущества системы радиолокационных маяков реализуются не без
некоторых нежелательных эффектов. Если рассчитать по уравнению (1) даль-
ность запроса по боковым лепесткам (номинально с уровнем —24 дБ относи-
тельно максимума главного луча), то можно увидеть, что посылку ответа
с полной мощностью можно вызвать излучением по боковым лепесткам на
значительных расстояниях от наземной станции (рис 2) Это приводит к воз-
Рис. 2. Возникновение кругового эффекта на экране ЦКО при радиальном полете
самолета.
никновению так называемого кольцевого эффекта, вызывающего слияние
отметок ответных сигналов на экране индикатора кругового обзора (ИКО).
Следствием этого эффекта являются потеря точности измерения азимута, сни-
жение разрешающей способности и повышения влияния помех. Для канала
запроса разработана система подавления боковых лепестков, устраняющая
возможность запроса бортового ответчика по боковым лепесткам. На рис. 3
показаны временное положение и соотношение амплитуд импульсов в этой
системе. Импульс Р%, излученный всенаправленной антенной через 2 мкс после
излучения импульса Pit сравнивается в ответчике по амплитуде с Pi. Если
430
10.2. Основные принципы построения системы
Р2 превышает установленные пределы, что указывает на запрос по боковым
лепесткам, запрос подавляется в ответчике и ответ не излучается.
Отражения и многотрассовое распространение сигналов запроса могут
создавать не меньшие трудности, чем боковые лепестки. Отраженное излуче-
ние в пределах главного луча, даже если уровень его на 20—25 дБ ниже
уровня излучения, распространяющегося по прямому пути, может вызвать
Срабатывание ответчика. К счастью, система подавления боковых лепестков
Подавляет большинство отраженных сигналов запроса в области боковых
импульс)
Ненаправленная
(всенаправленная) антенна
Направленная антенна
Рис. 3. Форма ДН и
соотношение амплитуд в системе с подавлением запросов по боко-
вым лепесткам
лепестков, так как они приходят в ответчик с временным запаздыванием отно-
сительно импульсов Р\, Р2 и Р3, пришедших по прямому пути. Сравнение амп-
литуд Р\ и Р2 и последующее подавление запоздавших импульсов предотвра-
щает посылку ответа на отраженный сигнал ответчиком. Можно также син-
тезировать ложный боковой лепесток, если излучать импульс Pi всенаправ-
ленной антенной и обеспечивать в ответчике активное подавление всех отра-
женных сигналов. Недостатком этого способа является увеличение общего
временного интервала подавления в ответчике.
На систему радиолокационных маяков может также отрицательно влиять
перегрузка по запросам на одной частоте. Самолетный ответчик может нахо-
диться в зоне действия многих наземных станций и поэтому получать много
запросов. Цепь автоматического контроля перегрузки в ответчике защищает
его передатчик от перегрузки и обеспечивает уменьшение плотности ответов
в -системе в зависимости от силы принимаемых сигналов. Уровень, при кото-
ром начинает работать система защиты от перегрузок, устанавливается рав-
ным 1200 ответов в секунду. При превышении этого уровня понижается чув-
ствительность приемника и он не реагирует на слабые сигналы, как посту-
пающие по боковым лепесткам, так и мешающие отражения и сигналы наибо-
лее удаленных станций.
481
Гл. 10. Радиолокационные маяки.
В ответчике используется схема запирания, исключающая возможность
передачи перекрывающихся кодовых комбинаций в ответ на несколько одно-
временных запросов. После приема правильной пары импульсов запроса при-
емник ответчика запирается до окончания передачи ответа. Генерация ответа
на второй запрос не может начаться до окончания периода запирания.
Вероятность получения ответа на запрос конкретного запросчика составляет
Ра = [ exp (/SjS Т ) + /, Г|~1, (3)
где fsis — частота запросов по боковым лепесткам от всех других станций;
Тц — длительность строба подавления сигналов от боковых лепестков; f, — ча-
стота запросов от всех других станций; Т — время запирания приемника от-
ветчика.
10.3. Автоматическая передача данных о высоте
Ранние попытки использовать технику первичной радиолокации для полу-
чения данных о высоте самолетов в системах управления воздушным движе-
нием показали, что она не может удовлетворить всем требованиям, предъяв-
ляемым к этим системам. Это выражается в невозможности одновременного
выполнения требований по таким параметрам, как пропускная способность,
точность, разрешающая способность и скорость выдачи данных.
Кроме того, первичная РЛС определяет высоту самолета над местностью,
тогда как на самолете определяется барометрическая высота, которая пере-
водится в метры высоты в соответствии со статистической моделью атмо-
сферы. Таким образом, если самолет совершает, например, горизонтальный
полет по показаниям барометрического высотомера на приборной доске, РЛС
будет наблюдать его летящим на изменяющейся высоте в соответствии с кон-
туром равного давления над земной поверхностью. Но, к счастью, вторичная
РЛС успешно решает эту проблему благодаря характерным возможностям
линии передачи данных между наземной станцией и самолетом.
Вращение вала сельсина высотомера приводит в движение кодовый диск,
преобразующий угол поворота вала в параллельный двоичный код. Эта ин-
формация при последовательном преобразовании превращается затем в сооб-
щение определенного формата с кодово-импульсной модуляцией, содержащее
данные о высоте. Это сообщение модулирует сигнал передатчика ответчика.
Информация о высоте передается ответчиком каждый раз, когда принимается
правильно закодированный запрос (код С с интервалом между импульсами
21 мкс). Вызываемый запросом с кодом С ответ продолжается для передачи
данных о дальности и непрерывной индикации азимута. Это не оказывает
влияния на пропускную способность системы и скорость передачи двухкоор-
динатной информации о положении самолета
Барометрические высотомеры и датчики. Барометрический чувствительный
элемент представляет собой сильфонную систему, реагирующую на изменения
давления пропорциональным ему механическим смещением. Возрастание вы-
соты вызывает расширение сильфона, а уменьшение высоты — его сжатие.
Движение чувствительного элемента может непосредственно воздействовать
на датчик, однако это создало бы дополнительную нагрузку на чувствитель-
ный элемент и вызвало бы понижение его чувствительности и ухудшение
воспроизводимости показаний (вследствие механического гистерезиса и тре-
ния).
Идеальной высотомерной системой была бы система, состоящая из высо-
коточного элемента, чувствительного к давлению, и датчика, действие кото-
рого не требует затраты механической работы от чувствительного элемента.
Разработанные барометрические чувствительные элементы доведены до такой
482
10.3 Автоматическая передача данных о высоте
степени совершенства, когда дальнейшее повышение их точности труднодо-
стижимо, хотя и возможно создание новых и улучшенных датчиков, обеспе-
чивающих уменьшение трения и нагрузки на чувствительный элемент.
Цифровые кодеры. Цифровой кодер (с кодированием приращений) пре-
образует отсчеты высотомера в набор двоичных сигналов. Это наиболее
удобное кодирующее устройство для передачи данных о высоте и применение
его предусмотрено всеми стандартами на системы управления воздушным
движением. Этот кодер дает определенный код каждому приращению поло-
жения. Для каждого диапазона входных величин имеется соответствующий
8
Рис. 4. Упрощенное представление кодера, выдающего четырехразрялный сигнал в нату-
ральном двоичном коде.
Затененный сегмент 1 дает один бит при считывании оптическим, электрическим или
магнитным способом.
набор выходных цифровых сигналов. Кодер, дающий 4-разрядный сигнал
в натуральном двоичном коде, условно изображен на рис. 4. Заштрихованные
и светлые сегменты представляют двоичные i и 0 соответственно. Кодовые
Значения 1 и 0 могут считываться оптическим, магнитным или электрическим
способом. Последний способ является более предпочтительным по соображе-
ниям стоимости, размеров и надежности.
Неоднозначность положения. Это одна из нежелательных особенностей
цифровых кодеров. В натуральной двоичной прогрессии при приращениях
последовательных чисел или выборок возможно изменение нескольких двоич-
ных разрядов. Чтобы проиллюстрировать возникновение неоднозначности по-
ложения, можно рассмотреть случай, когда считывающие щетки в 4-разряд-
ном кодере находятся на соединении четырех сегментов 0111 сектора (7)
и четырех сегментов 1000 следующего сектора (8). При этом условии щетка
Старшего разряда сходит с непроводящего сегмента (0) и начинает контйктй-
483
Гл. 10. Радиолокационные маяки
ровать с проводящим сегментом (7); остальные три щетки переходят на не-
проводящие сегменты, но еще находятся в контакте с проводящими сегмен-
тами предыдущего кодового сектора. В этот момент все щетки оказываются
проводящими и вместо комбинации 0111 (7) или 1000 (8) будет считываться
комбинация 1111 (15), что соответствует 100%-ной ошибке.
Известны три эффективных метода исключения неоднозначности поло-
жения: логические системы; код с расстоянием единица; задержка. Примене-
ние последнего метода нежелательно, так как он не позволяет осуществ-
лять считывание при каждом положении вала, а применение логических
систем неэкономично.
Предпочтительный метод исключения неоднозначности положения связан
с модификацией прогрессии с натуральным кодом в так называемый код
с расстоянием единица, в котором при переходе от одного числа последова-
тельности к другому изменяется только один двоичный разряд. Этот код
применен в системе с вторичной РЛС.
Международный код. Код с расстоянием единица, принятый в качестве
международного, представляет собой гибридную комбинацию кода Грея
и пятизначного цикличного кода. В этой комбинации код Грея используется
для квантования высоты с приращением 150 м, а пятизначный — для под-
разделения этих приращений по 30 м. Комбинированный код позволяет пере-
давать данные о высоте с приращениями 150 или 30 м. Пятизначный код
определяется следующим образом:
Десятичная цифра (приращения по 30 м) Последний значащий разряд кода Грея Пятизнач- ный цикли- ческий код Десятичная цифра (приращения по 30 м) Последний значащий разряд кода Грея Пятизнач- ный цикли- ческий код
0 0 010 5 1 010
1 0 ПО 6 1 011
2 0 100 7 1 001
3 1 100 8 0 001
4 1 по 9 0 011
Используя группы импульсов ответа А и В (с интервалом 2,9 мкс) вме-
сте со специальным импульсом идентификации самолета в коде Грея с рас-
стоянием единица, можно передать информацию о высоте до 20 000 м с при-
ращением 150 м. Циклический пятизначный код, если он применяется, зани-
мает позиции кода С. Использование импульсов кода ответа D2 расширяет
диапазон передаваемых высот до 40 000 м, что позволяет удовлетворить тре-
бования работы до предельной высоты 30 000 м. (Код £>4 используется в ка-
честве дополнительного к специальному импульсу индентификации и передает
информацию о прирашениях на 30 м.)
Гибридный пятизначный циклический код привязан к опорной высоте
300 м — нормальной минимальной высоте, измеряемой высотомером.
Ошибки. Источниками ошибок автоматической передачи данных о высоте
в системе являются: приборы; датчик статического давления; кодер угла по-
ворота вала; квантование; ошибка из-за несоответствия показаний.
Приборные ошибки обусловлены различными механическими ограниче-
ниями, например нелинейностью мембран, гистерезисом, люфтами и т. д.
484
10.4. Антенные системы
Ошибка установки статического давления вызвана тем, что источник
этого давления создает в приборе давление, превышающее атмосферное. (Эту
ошибку можно рассматривать как состоящую из двух составляющих: постоян-
ной и переменной. Постоянная составляющая зависит от высоты, числа Маха,
угла атаки и может быть учтена при калибровке системы.) Переменная
составляющая включает в себя такие составляющие, как разброс значений
для самолетов одного и того же типа, ошибки при проведении испытаний,
изменение постоянной составляющей ошибки со временем.
Основными источниками ошибки кодера угла поворота вала являются
физические неточности: неточность нанесения кодовой маски на диск, смещение
или неточность установки щеточного контакта, эксцентриситет между цент-
ром кодовой маски и осью вращения, допуска на плоскостность диска.
Ошибка из-за квантования связана с эффектом квантования при цифро-
вом представлении высоты. Она может равняться ±15 и ±75 м для кодов
с приращениями 30 и 150 м соответственно.
Ошибка из-за несоответствия показаний характеризует несоответствие
показаний высотомера в кабине летчика и декодированного ответа на выход-
ном индикаторе у диспетчера, обусловленное влиянием различных факторов
в несовмещенных блоках каналов летчика и диспетчера. Большая ошибка
несоответствия делает необходимым использование голосовой связи между
летчиком и диспетчером, что в значительной мере снижает эффективность
автоматической передачи данных.
Режим полета обычно требует, чтобы высотомеры в кабине летчика кор-
ректировались по местному барометрическому давлению при высотах поле-
та ниже некоторой определенной границы и приводились к давлению 101 кПа
(760 мм. рт. ст.) выше этой границы. В автоматической системе данные всегда
приводятся к давлению 101 кПа, поэтому аппаратура, передающая и прини-
мающая запросы по коду С, должна вводить коррекцию в самолетах, летя-
щих ниже установленной границы. Если такая коррекция не делается, ошиб-
ка несоответствия показаний будет очень большой.
10.4. Антенные системы
Запросы наземной станции обычно передаются совмещенной антенной
системой, которая в-рашается вместе с антенной первичной РЛС. Это позволяет
коррелировать видеосигналы ответчиков с отраженными сигналами первичной
РЛС и воспроизводить их на одном индикаторе кругового обзора. Хотя
такая синхронизация сигналов при цифровой обработке сигналов ответчика
не является необходимой, практика совместного монтажа антенн маяка и РЛС
все еше сохраняется.
На рис. 5 показана антенна маяка AS-309, смонтированная на антенне
первичной аэродромной РЛС ASR-5. Эта антенна представляет собой решетку
вибраторов длиной 8,4 м, изготовленную с помощью печатного монтажа.
Ширина луча антенны в азимутальной плоскости на уровне 3 дБ равна, 2,5°,
уровень боковых лепестков —26 дБ. Такой монтаж антенны маяка требует
применения различных вращающихся волноводных соединений в пьедестале
антенны РЛС для передачи ВЧ сигналов.
Хотя ширина луча антенны маяка на уровне 3 дБ равна 2,5°, отметка на
экране индикатора кругового обзора имеет большую ширину, так как маяк
работает не по отраженному от цели сигналу. Усиление в системе регули-
руется так, чтобы полная ширина луча использовалась на максимальной
дальности. Поэтому на меньших дальностях имеется некоторый резерв уси-
ления. Это эквивалентно работе на все более низких точках спада характе-
ристики главного луча. Отсюда следует, что отметка цели на индикаторе
будет значительно шире на малых дальностях, если не вводится соответст-
вующая коррекция усиления. Средняя эффективная ширина луча, отображен-
485
Гл. 10. Радиолокационные маяки
пая на экране индикатора, приблизительно в два раза больше его ширины на
уровне 3 дБ.
Наиболее распространенный способ регулирования эффективной ширины
отображенного на экране луча состоит в применении регулировки усиления
приемника сигналов ответчика на наземной станции. Схема временной регу-
лировки усиления снижает усиление нгшемн^ч при гимн ш ответов самоле-
Рис. 5. Антенна маяка aS-309, смонтированная на
антенне аэродромной РЛС ASR 5.
тов, находящихся вблизи станции. Кривая снижения усиления согласуется
с кривой возрастания энергетического потенциала при уменьшении дальности.
При правильном согласовании кривых можно получить постоянную эффектив-
ную ширину луча для всего диапазона дальностей системы.
Но временная регулировка усиления уменьшает запас работоспособности
системы. Значительно лучший способ регулирования эффективной ширины
луча в запросчике состоит в использовании системы подавления запросных
сигналов по боковым лепесткам. Эффект сужения луча достигается подавле-
нием сигнала главного луча направленной антенны, когда в схеме сравнения
амплитуд импульсов Pt и Р2 начинается процесс подавления запросных сиг-
налов по боковым лепесткам.
Рис. 5 иллюстрирует один из способов реализации способа подавления
боковых лепестков с использованием существующей антенной системы. Все-
направленная антенна, смонтированная точно на высоте центра излучения
направленной антенны, излучает во всех направлениях импульсы для подав-
ления запросных сигналов по боковым лепесткам. Эта антенна должна иметь
такую же ДН в вергикальной плоскости, как и направленная анн-тпе чгибы
486
10.4. Антенные системы
согласование боковых лепестков в этой плоскости достигалось на всех углах
места, отсчитываемых от пункта расположения антенн. Для успешной работы
системы подавления запросных сигналов по боковым лепесткам в ответчике
должно поддерживаться определенное отношение энергии, излучаемой двумя
антеннами.
Лучший способ подавления запросных сигналов по боковым чепесткам —
применение антенной системы с суммарно-разностной диаграммой направлен-
ности. Эта антенна состоит из решетки разнесенных вибраторов, возбуждае-
мых в соответствии с положениями ВЧ переключателя, который включается
от управляющего импульса до начала генерации импульса Р2. Импульсы
запроса Р\ и Ръ, излучаемые направленной антенной, подаются в эту антенну
обычным способом и формируют суммарную ДН (рис. 6). Сразу после при-
хода импульса Р\ ВЧ переключатель переключается в положение, соответст-
вующее формированию разностной ДН. Импульс Р2, управляющий подавле-
нием запросных сигналов по боковым лепесткам, излучается при разност-
ной ДН.
Антенная система данного типа имеет два явных преимущества. Форму
провала в разностной ДН можно регулировать так, чтобы получить необхо-
димое сужение эффективной ширины луча, отображенного на экране индика-
тора из-за крутых спадов характеристики главного луча. Кроме того, им-
пульсы запроса Р\ и Р3 и управляющий импульс Р2 излучаются из одного
центра излучения. Это устраняет трудность согласования боковых лепестков
в вертикальной плоскости и, следовательно, сохраняет соотношение амплитуд
при любых углах места для правильного действия системы подавления запро-
сов по боковым лепесткам. В некоторых случаях применения антенны с сум-
марно-разностной ДН, необходимо устанавливать позади направленной ан-
тенны вибратор, излучающий энергию, достаточную для подавления заднего
лепестка суммарной ДН, чтобы импульс Р2 был равным импульсу излу-
чаемому направленной антенной, или превышал его.
Разработаны также антенны с совмещенным возбуждением, у которых
отражатель антенны первичной РЛС используется одновременно и как эле-
мент антенны маяка. Антенная решетка вибраторов, смонтированная на
возбуждающем рупоре первичной РЛС и связанная с передатчиком маяка,
облучает отражатель на волне диапазона L. Этот способ используется в ряде
военных РЛС, например, AN/TPS-1D и AN/FPS-8
Самолетные антенные системы, как правило, состоят из четвертьволновых
штырей с вертикальной поляризацией излучения и согласующих цепей. В боль-
шинстве самолетов они монтируются в нижней части корпуса, а в некоторых
487
Г л. 10. Радиолокационные маяки
военных самолетах в хвостовом обтекателе. Расположение антенны сущест-
венно влияет на работу системы, так как антенна взаимодействует с корпусом
самолета Форма корпуса самолета, расположение консолей двигателей и др.
факторы влияют на лепестковую структуру ДН антенны. Экранирование антен-
ны плоскостями крыла или корпусом самолета при его маневрах может при-
вести к потере ответа для наземной станции. Необходимость для военных
самолетов опознавания «свой—чужой» в воздухе еще более усложняет задачу,
так как для этого необходимо иметь обзор во всей сфере.
Для решения задачи сферического обзора используются два метода.
Первый заключается в применении двух антенн (устанавливаемых сверху
и снизу корпуса самолета или в его хвосте и на носу) и антенного переклю-
чателя. Радиолокационный ответчик подключается в каждой антенне с ча-
стотой 20—100 Гц, чем обеспечивается прерывистая передача ответов каждой
антенной. Это приводит к прерывистому отображению видеосигналов ответа
на индикаторе и потере данных или неточности отметки азимута в наземной
цифровой аппаратуре обработки сигналов.
При втором методе применяется система разнесения в виде ответчика
с двумя входами, двумя антеннами и сдвоенными входными цепями прием-
ника. Импульсы одного кода запроса принимаются двумя антеннами и срав-
ниваются по амплитуде на уровне видеосигналов, а ВЧ переключатель под-
ключает выход ответчика к той антенне, которая имеет более сильный вход-
ной сигнал. Таким способом обеспечивается сферический обзор и ответ пере-
дается антенной, обращенной к наземной станции. Эта система устраняет
потери мощности на 3 дБ и устраняет интерференцию по боковым лепесткам,
характерную для режима, когда обе антенны работали одновременно.
10.5. Структура радиолокационного ответчика
Хотя различные радиолокационные ответчики существенно отличаются
элементами схем, все они должны отвечать минимальным требованиям нацио-
нального стандарта США в отношении рабочих характеристик. В радиолока-
ционных ответчиках (рис. 7) используется обычная техника супергетеродин-
ного приема. Исключением является военный радиолокационный ответчик
AN/APX-72, в котором применяется радиоприемник с настройкой по высокой
частоте и кристаллический видеодетектор. Сигналы запроса на частоте
1030- МГц принимаются антенной ответчика, имеющей всенаправленную диа-
грамму в горизонтальной плоскости и ширину луча ±30° в вертикальной
плоскости. Из антенны ВЧ сигналы поступают в преселектор, представляю-
щий собой трехкаскадный фильтр из отрезков полосковой линии или объем-
ных резонаторов. Преселектор определяет избирательность приемника и пред-
отвращает прямое попадание импульсов передатчика в приемник. Вносимые
потери обычно составляют около 3 дБ на центральной частоте приемника.
В смеситель на полупроводниковом диоде поступают входной сигнал на ча-
стоте 1030 МГц и сигнал местного гетеродина на частоте 1090 МГц. Выде-
ляемые им колебания с промежуточной частотой 60 МГц усиливаются затем
в УПЧ до уровня, при котором достигаются необходимые чувствительность
и динамический диапазон.
Местный гетеродин обычно содержит настроенные цепи анода и сетки
с объемными резонаторами и генерирует колебания с частотой 1090 МГц.
LC-цепи изолируют ВЧ схему от источников питания. Выход гетеродина непо-
средственно связан со входом кристаллического смесителя.
Характеристики приемника должны соответствовать национальному стан-
дарту. Минимальный уровень срабатывания устанавливается равным 71 дБ
относительно 1 мВт на конце передающей-линии, соединенной с. антенной,
при номинальных допустимых потерях в кабельной самрлетной линии, равных
3 дБ. Этот минимальный уровень выбран из условия, что 90% принимаемых
488
10.5. Структура радиолокационного ответчика
запросов с этим уровнем вызывают генерирование ответных сигналов, если
амплитуды принятых импульсов Pi и Р3 номинально равны, а импульс подав-
ления ответных сигналов по боковым лепесткам Р2 не детектируется. Дина-
мический диапазон приемника обеспечивает воспроизведение амплитудных
соотношений для импульсов запроса и импульса управления подавлением
запросных сигналов по боковым лепесткам в интервале от 3 до 50 дБ относи-
тельно минимального уровня срабатывания. Это необходимо для того, чтобы
амплитудное сравнение в системе подавления запросных сигналов по боковым
лепесткам осуществлялось без ограничения в приемнике.
Антенна
Рис. 7. Структурная схема радиоотвегчика.
К приемнику также предъявляется требование подавления импульсов
длительностью 0,3 мкс и менее. Импульсы длительностью более 1,5 мкс не
должны вызывать подавления ответных сигналов в ответчике или генерации
сигналов в пределах эффективного динамического диапазона приемника.
Прием импульса вызывает срабатывание схемы подавления эхо-сигналов,
которая понижает чувствительность приемника на 9 дБ относительно амп-
литуды принятого импульса. Восстановление чувствительности приемника до
нормальной с отклонением в пределах 2 дБ должно происходить за 15 мкс.
Если понижение чувствительности приемника вызывается сигналами от
другого бортового оборудования самолета, она также должна восстанавли-
ваться с отклонением до 3 дБ от нормальной в течение 15 мкс. Возможным
источником таких сигналов может быть передатчик навигационной системы
Тасап.
Во всех ответчиках имеется цепь ограничения количества ответов, уста-
навливающая максимальное число ответов равным 1200 в 1 с. Эта цепь
автоматической защиты от перегрузки выполняет две функции. Во-первых,
она защищает передатчик ответчика от перегрузки вследствие повышения
коэффициента заполнения, что могло бы вызвать повреждения передатчика
из-за перегрева (нормальный коэффициент заполнения для ответчиков редко
превышает 1%). Во-вторых, эта цепь ограничивает количество ответов во всей
системе в определенной зоне, чтобы предотвратить перегрузку наземной стан-
ции мешающими сигналами или несинхронизованными ответами. Цепь авто-
матической зашиты от перегрузки не реагирует на слабые сигналы, а способ-
ствует устранению влияния сигналов от боковых лепестков и мешающих
отражений. Для различных ответчиков эти цепи рассчитываются по-разному.
В некоторых из’ них используются декодированные запросы для регулирова-
489
Г л 10 Радиолокационные маяки
ния усиления УПЧ, другие цепи реагируют на частоту запросов в видеоуси-
лителе.
Выход УПЧ соединен с видеодетектором и видеоусилителем. В этой точке
подключена цепь подавления выбросов, которая не пропускает импульсы
короче 0,3 мкс. Функцию подавителя выбросов выполняет логическая схема И
с короткой линией задержки.
Подавление запросных сигналов по боковым лепесткам выполняется
путем сравнения амплитуд импульса Pi, излученного направленной антенной,
и импульса Р2, излученного всенаправленной антенной. Характеристика цепи
подавления запросных сигналов по боковым лепесткам обеспечивает сравне-
ние уровней: Pi задерживается линией задержки на 2 мкс для сравнения с Р2.
Подавление осуществляется в соответствии со следующими правилами.
1. Радиолокационный ответчик должен излучать ответ при выполнении
следующих условий:
а) амплитуда импульса Ps от шчается от амплитуды импульса Pi не бо-
лее чем на —1 ... +3 дБ;
б) амплитуда импульса Р[ превышает амплитуду импульса Р2 более чем
на 9 дБ или импульс Р2 совсем не принят;
в) амплитуда принятого импульса правильного запроса более чем на
!0 дБ превышает амплитуду случайных импульсов, причем эти случайные
импульсы не воспринимаются как Pt, Р2 или Р3.
2. Радиолокационный ответчик должен выдавать ответы не более чем
на 10% запросов, превышающих минимальный уровень срабатывания, прн сле-
дующих условиях-
а) когда интервал между импульсами Р\ и Р2 отличается более чем на
±1 мкс от установленного для выбранного кода запроса;
б) при приеме любого одиночного импульса;
в) при приеме импульса Р2 с амплитудой, равной амптитуле принятого
импульса Pi или превышающей ее, и интервале между этими импульсами, рав-
ном 2±0.15 мкс.
Запирающие импульсы, генерируемые цепью подавления запросных сиг-
налов по боковым лепесткам, следуют с интервалом 35± 10 мкс и исполь-
зуются для запрещения запросов. Чувствительность восстанавливается спустя
2 мкс после окончания действия запирающего импульса.
Рис. is. Радиолокационный огвешик на кристаллах, блок управления и ангенна.
490
10.6. Блоки приемопередатчика запросчика
Запирающий импульс генерируется также в декодере, когда декоди-
руется принятый правильный запрос. Этот импульс предотвращает посылку
ответчиком ответов на другие запросы в течение 125 мкс. Такая длительность
запирающего импульса была выбрана первоначально для подавления запри
сов за счет отраженных импульсов самолетных запросчиков при действиях
военных самолетов над морем. Более короткие запирающие импульсы (35 мкс)
используются в радиоответчиках гражданских самолетов для запирания вх
на время подавления запросных сигналов.
Когда принятый правильный запрос декодирован, получающийся резуль-
тирующий видеоимпульс используется для синхронизации импульсов кода
ответа и запуска кодирующих схем. В ответчиках более ранней конструкции
для формирования кода ответа применялись линии задержки с отводами. Все
ответы содержат пару кадровых импульсов длительностью 0,45 мкс с интер-
валом между ними 20,3 мкс. Формат кодовых ответных сигналов опознава
ния выбирается на приборной доске в кабине летчика в зависимости от при-
нятого кода запроса. Выбор кода ответа (4 восьмеричных разряда) сопро-
вождается посылкой сигнала в линию задержки кодера, в котором выби-
раются соответствующие отводы этой линия. Для передачи данных о высоте
по сигналу, поступающему в кодер высоты после детектирования принятого
кода запроса С, производится выбор отводов линии задержки, соответствую-
щих высоте, определяемой датчиком высоты.
В радиолокационных ответчиках более новой конструкции (рис. 8) для
кодирования ответов вместо линий задержки арименяются регистры сдвиг)
на микросхемах. Принятые запросы приводят в действие регистр сдвига, ко
торый выдает кодированный ответ в соответствии с выбранным на приборной
доске кодом опознавания или кодом автоматической передача высоты. Син-
хронизация посылки ответов должна быть такой, чтобы ответ яа выход от-
ветчика поступил спустя 3±0,5 мкс после приема фронта имцульса Р&. Это
необходимо для правильной синхронизации ответов во всей системе. Суммар-
ное смещение импульсов должно поддерживаться в пределах ±0,1 мкс.
Последовательность кодовых комбинаций ответных импульсов поступает
в модулятор, где вырабатывается импульс возбуждения передатчика. Здесь
же обычно происходит окончательное формирование импульсов с уточнением
их амплитуды и длительности. Задающий генератор передатчика обычно со-
держит коаксиальные резонаторы проходного типа, и в нем применяется
планарный триод типа 2С39 или эквивалентный ему. Частота колебаний
задающего генератора равна 1090 МГц; модулирующие импульсы подаются
на сетку триода. Для ввода выходного сигнала в антенный кабель исполь
зуется небольшая петля связи.
Источники питания бортовых ответчиков имеют обычно напряжение 27 В
постоянного тока. Для питания некоторых ответчиков старого тина приме-
няются источники переменного тока с частотой 400 Гц.
10.6. Блоки приемопередатчика запросчика
Приемопередающая часть наземной станции системы ATCRBS состоит
из приемопередатчика и связанного с ним синхронизирующего кодера или
генератора пар импульсов. В отличие от передатчика и приемника первичной
РЛС приемопередатчик запросчика имеет небольшие размеры и выходную
мощность, не превышающую 1—1,5 кВт. Размеры стандартного приемопере-
датчика (рис. 9) часто бывают меньше 30x43x61 см, г. е. очень небольшие
по сравнению со шкафом генератора с выходной мощностью от 0,6 до 1 МВт
первичной РЛС с той же дальностью действия.
• Рис. 10 поясняет принцип действия наземного запросчика. От РЛС в при-
емо-передатчик запросчика поступают импульсы опережения запуска, син-
хронизированные гак, чтобы компенсировать задержку в генерировании пар
491
Гл. 10. Радиолокационные маяки
импульсов в ответчике, время распространения сигналов до ответчика и об-
ратно, время декодирования ответа в наземной станции. В приемопередатчике
генерируются импульсы Р\, Р^ и Рл в соответствии с выбранным кодом за-
проса и интервалами между импульсами. Синхронизированные импульсы Р\,
Р2 и Р3 с определенными интервалами между ними вызывают генерацию
в передатчике запросчика импульсно-модулированных сигналов. Эти сигналы
поступают в антенную систему через ВЧ переключатель, который направляет
импульсы запроса Р\ и Р3 в главную направленную антенну, а импульс Р2
во всенаправленную антенну системы подавления запросных сигналов по бо-
Рис. 9. Запросчик типа AN/TPX-28.
новым лепесткам. В случае применения антенны с суммарно-разностной ДН
импульсы Pi и Р3 поступают в суммарную систему, а импульс Р2 — в разност-
ную.
Пары импульсов обозначают код запроса и обеспечивают получение жела-
тельного ответа от бортового ответчика. Они также защищают от выдачи
ответных сигналов на случайные одиночные импульсы. Временная диаг-
рамма на рис. 10 показывает положение во времени импульсов запуска, не-
обходимое для того, чтобы декодированный видеосигнал ответа был синхро-
низирован с видеосигналом первичной РЛС. Время генерирования импульсов
опережения запуска различно для разных РЛС; однако оно должно быть
достаточным, чтобы при самом большом интервале между парой импульсов
в коде запросов (до 25 мкс) компенсировать задержку ответа или время
распространения сигналов около 3,0+0,5 мкс п время декодирования кадро-
вых импульсов ответа, равное 20,3 мкс. Следовательно, в этом случае мини-
мальное время опережения генерирования импульса запуска должно быть
не менее 48,3 мкс относительно зондирующего импульса РЛС. Нормально
это время равно 60 мкс и синхронизирующий кодер регулирует задержку
импульса Ру относительно импульса опережения запуска так, чтобы устано-
вить правильное временное положение импульса Р3 относительно зондирую-
щего импульса РЛС.
492
10.6. Блоки приемопередатчика запросчика
Синхронизирующий кодер устанавливает также отношение чередования
при передаче импульсов одного кода в интервалах между импульсами дру-
гого кода и отношение пересчета частоты следования запускающих импульсол
первичной РЛС. Управляющие сигналы для выбора кода запроса поступают
с пульта управления. Номинальная частота повторения импульсов обычно
равна 300 Гц, а отношения чередований для двух или трех кодов запроса 1 : I
Кодь/ запросов
Тип Применение
нова
Военная _]"[
7 авиация
~ военная _f]_
z . авиация
S/А УВД Л
3 мкс
ъппъпъ
- 8 мне
^ПГЮ ГИз
[*: /7мкс -
в увд П.. ЧППЪ_____________________TLZ1
С Высота П 1 П j?
Л Запасной
Импульсы
опережения
запусна
25 мне
H-h*---- 23,3 мне --------*4-.
Л___________________________TL
р Имлулы?
6 Запаздывание ответа
.оадиоответчика Змкс ыпРЛь
тлюс время декодирования^
' Возможные положения
импульсов
Интервал (мкс) между
передними фронтами
импульсов
Коды ответов рад соответчика
^JlKurL.riTLr’LmUlJbrirLJW_
1,45 4,35 7,25 10,15 1.3,0515,9518,85
О 2,9 5,8 8,7 11,6 14,5 П,4 29,3
20,3мко
_л_
24,65
дадробый импупьсСЛ^^СцАЛВ^В^В^КадроВый импульс
Мюзначения импульсов % „____£2
Рекомендуемые коды ——П31Л_11Л_П_И----------П__.
(4096 кодов)
Рис. 10. Временные диа!раммы для кодов запросов и ответов: УВД — управление воз-
душным движением, СИ И — специальный импульс идентификации.
или 1:1:1 (в некоторых военных системах применяются отношения 2:2:2
или 4:4:4 для упрощения annapaiypbi подавления помех).
Кроме того, синхронизирующий кодер выдает пусковой импульс, обес-
печивающий правильную коммутацию импульса Р% в ВЧ переключателе, и пус-
ковые импульсы, используемые во вспомогательном оборудовании при раз-
личных кодах запроса.
В цифровом кодере устанавливаются интервалы между импульсами для
выбранного кода запроса. Затем эти импульсы усиливаются и им придается
окончательная форма импульсов запроса длительностью 0,8 мкс. Задающий
каскад или модулятор обеспечивает импульсное возбуждение усилителей пе-
редатчика на объемных резонаторах.
Задающий генератор в передатчике запросчика (рис. 11) представляет
собой кварцевый генератор, частота которого повышается до 1030+0,2 МГц
493
Гл 10. Радиолокационные маяки
в цепочке каскадов умножения частоты. Например, если частота задающего
генератора равна 85,833 МГц то стандартная умножительная цепочка состоит
из каскадов с коэффициентами умножения 2x2X3. Колебания с выхода ум-
ножительной цепочки подаются в трехкаскадный усилитель мощности на объ-
емных резонаторах и планарных транзисторах, где они усиливаются до задан-
ной выходной мощности. В различных запросчиках применяются усилительные
каскады, собранные по схемам с общим катодом и общей сеткой.
Управление запросами
Рис. 11. Структурная схема запросчика.
Выход передатчика соединен непосредственно с антенным переключате-
лем. Принимаемые антенной сигналы ответчиков направляются в преселектор
приемника, защищающий его от прямого воздействия выходных импульсов
передатчика. Преселекторы представляют собой четырехсекционные фильтры
из' полосковых или объемных резонаторов, дающие ослабление по зеркаль-
ному каналу до 70 дБ. Выходные колебания преселектора смешиваются с ко-
лебаниями местного гетеродина в смесителе-предусилителе, в котором форми-
494
10.7. Аппаратура исключения несинхронизированных ответов
руется и усиливается сигнал промежуточной частоты 60 МГц. Далее следует
семикаскадный основной УПЧ с взаимно расстроенными контурами, видеоде-
тектор и видеоусилитель. Напряжение автоматической регулировки усиления
по времени подается на четвертный каскад УПЧ как напряжение смещения и
регулирует усиление в зависимости от дальности. Применение временной ре-
гулировки усиления особенно важно при отсутствии подавления запросных
сигналов по боковым лепесткам, так как выходная мощность ответчика рас-
считана на дальность действия 400 км и даже более. Эта мощность при малых
дальностях может привести к появлению ответов по боковым лепесткам.
В некоторых случаях это вызывает появление круговой отметки на индикаторе
и потерю азимутального направления на самолет. Уменьшение чувствитель-
ности приемника уменьшает вероятность появления подобных эффектов в за-
просчике.
Стробирование по дальности принятого видеосигнала также осуществ-
ляется в УПЧ. Регулируемый строб, определяемый пусковыми импульсами
выбранного кода, запирает вход приемника для сигналов, приходящих с даль-
ностей, меньших минимальной и больших максимальной для заданного ре-
жима
10.7. Аппаратура исключения несинхронизированных ответов
Когда система радиолокационных маяков работает в зоне с большой
плотностью воздушного ДЕШжения, в которой много станций и самолетов,
приемник определенной станции может принимать много несинхронизирован-
ных ответов, посылаемых самолетами по запросам других станций. Аппара-
тура исключения таких случайных несинхронизированных ответов подавляет
их на выходе наземного приемника методами корреляции или совпадения.
Рис. 12 иллюстрирует эффективность действия такой аппаратуры в зоне со
Средней плотностью движения.
Действие такой аппаратуры более раннего выпуска основывалось на при-
менении ультразвуковых линий задержки для сравнения импульсов ответа от
обзора к обзору. Отдельные импульсы, задержанные в линии задержки на
один период повторения, сравнивались с видеоимпульсами для последующего
периода повторения. Совпадающие импульсы пропускались далее, а несовпа-
дающие, т. е. несинхронизированные, — отфильтровывались. Основной недо-
статок аппаратуры с линиями задержки состоял в практической трудности
согласования задержки с селектором движущихся целей первичной РЛС. Эти
системы должны работать согласованно во всем диапазоне рабочих темпера-
тур, чтобы поддерживать синхронизацию с источником пусковых импульсов
первичной РЛС.
Применение запоминающих ЭЛТ устраняет этот недостаток, так как срав-
нение видеоимпульсов производится по времени после пускового импульса и
не зависит от частоты повторения. Наиболее эффективным оказывается при-
менение запоминающих ЭЛТ с барьерной сеткой. Пусковой импульс маяка
вызывает генерирование линейно нарастающего напряжения спиральной раз-
вертки, используемого для записи видеоимпульсов в заданных точках поверх-
ности мишени запоминающей трубки. Последующие пусковые импульсы
маяка того же кода запроса будут считывать эту информацию, г. е. действо-
вать как строб совпадения для текущего видеосигнала. Для осуществления
цикла запись — считывание без перекрытия потребовались две запоминающие
трубки на каждый код запроса. При трех кодах запроса применялось до
шести таких трубок.
В современной аппаратуре исключения несинхронизированных запросов
применяются запоминающие устройства в виде регистров сдвига на магнит-
ных сердечниках или на МОП-элементах запоминающих видеоимпульсы в за-
данном интервале разрешения дальности. Тонкопленочная технология позво-
495
Гл. 10. Радиолокационные маяки
Рис. 12. Эффективность действия аппаратуры исключения несинхронизированных отве-
тов в системе Elwood ARSR (дальность действия 400 км, интервал между кольцевыми
метками дальности 20 км).
Изображение на экране индикатора при выключенной (в верху) и включенной (в визу)
аппаратуре- исключения несинхронизированных ответов.
496
10.8. Декодирование и аналого-цифровое преобразование
ляет сделать эту аппаратуру микроминиатюрной и механически прочной. Эф-
фективность исключения несинхронизированных запросов находится в прямой
зависимости от интервала разрешения дальности, используемого для запо-
минания импульсных данных. Чем меньше этот интервал и чем короче строб
совпадения, тем выше эффективность.
10.8. Декодирование и аналого-цифровое преобразование
Декодеры и аналого-цифровые преобразователи принимают необработан-
ные видеоимпульсы ответов и готовят их для дальнейшей обработки и (или)
индикации Эти видеосигналы, отделенные или не отделенные от несинхро-
низированных запросов, можно направить непосредственно в декодер или
аналого-цифровой преобразователь, или передать в удаленный пункт обработ-
ки по СВЧ линии связи или по проводной линии.
Декодер нормально используется только совместно с обычным индика-
тором кругового обзора или с индикатором, в котором осуществляется пре-
образование развертки. Типичными функциями, выполняемыми декодером,
который сопряжен с индикатором кругового обзора, являются:
Работа в совмещенной системе. Из каждой пары кадровых импульсов
Pi и Рч ответа формируется одиночный импульс независимо от кодовой ком-
бинации.
Выбор самолета. Двойной импульс формируется из каждого ответа,
имеющего такой же код, как выбранный оператором.
Опознавание. Растянутый или расширенный импульс формируется из
каждого ответа, соответствующего выбранному ответу и содержащего спе-
циальный импульс идентификации.
Авария. Двойной растянутый импульс выделяется из ответов с кодом
7700; в зависимости от характера аварии могут также включаться визуаль-
ные или звуковые сигналы тревоги.
Необработанный видеосигнал. Выделенный в приемнике видеосигнал уси-
ливается и подается непосредственно на индикатор.
Активное считывание. Код или коды неизвестных целей на индикаторе
кругового обзора выводятся на цифровое табло, когда цель выделяется па
экране индикатора с помощью светового пера или механического маркера.
Декодер также устанавливает порог для видеосигналов и может еще выпол-
нять следующие функции: осуществлять частотную компенсацию в случае
применения коаксиальной передающей линии; декодировать и (или) переда-
вать пары импульсов запроса для целей синхронизации, индикации и запуска;
неаддитивно смешивать декодированные видеосигналы ответа с видеосигна-
лами РЛС; переводить коды в принятые октальный и децимальный форматы;
осуществлять логические операции по приближенному распознаванию иска-
женных импульсов.
Функциональная схема простейшего декодера приведена на рис. 13. Ви-
деосигналы после порогового и линейного усилителей поступают в линию за-
держки с временем задержки 24,65 мкс, имеющую отводы через интервалы
1,45 мкс. Линия задержки преобразует видеосигналы из последовательной
формы в параллельную. Необработанные видеосигналы проходят через линию
задержки и подаются в индикатор. В логическом вентиле И происходит
объединение кадровых импульсов для выполнения функции «работа в совме-
щенной системе». Кодовые переключатели подключают отводы линии задерж-
ки к логическому вентилю И или ИЛИ, в зависимости от того, должен ли вы-
бранный код содержать соответствующий импульс или нет. Выходной сигнал
«выбор самолета» генерируется в том случае, если выход вентиля И логи-
чески верный, а выход вентиля ИЛИ ложный и они совпадают с кадровыми
импульсами декодированного ответа. Если выходной сигнал «выбор само-
лета» совпадает с выделенным специальным импульсом идентификации, то
вырабатывается сигнал «опознавание».
497
Гл. 10. Радиолокационные маяки
Селекция сигналов с кодом «Авария» является заранее запрограммиро»
ванной функцией декодера. Необходимо, чтобы в хорошо рассчитанной сис*
теме прием последовательности кодов «авария» предшествовал их обнаруже*
нию и подаче сигналов тревоги.
Необработанные
видеосигналы
Работа
6 оовмещенной
системе
выделение
парных
импдльсов
\Авприяг
К визуальным и
► андстинесним
сигнализаторам
Рис. 13. Структурная схема пассивного декодера.
Предшествующее описание относилось к одноканальному пассивному Де-
кодеру (одноканальный — означает, что декодер может одновременно обра-
батывать только одни выбранный код ответа, а пассивный — что декодер не
может декодировать ответы с неизвестными кодами). Более типичными явля-
ются видеодекодеры, сгруппированные для обслуживания до 10 каналов. Все
каналы подводятся к каждому из блоков индикации, причем оператор может
498
10.8. Декодирование и аналого-цифровое преобразование
независимо выбирать до 10 дискретных кодов (не различаемых на индика-
торе).
Для активного декодирования с определением неизвестного кода, нор-
мально требуются две дополнительные линии задержки с задержкой 20,3 мкс.
Первая из них обычно соединяется последовательно с пассивной линией за-
держки (пассивная линия задержки выполняет функции, описанные выше).
Так как декодированный сигнал «работа в совмещенной системе» выделяется
пассивной линией задержки, он может быть воспринят чувствительным эле-
ментом (например, световым пером) и использован для считывания кода за-
держанного ответного видеосигнала при его прохождении через вторую ли-
нию задержки. С циклом активного считывания связаны две важнейшие функ-
ции, обеспечивающие правильность декодирования: распознавание искажен-
ных кодов и интегрирование или проверка кода.
Искаженным кодом называется код ответа, принятый конкретным деко-
дером в форме, отличающейся от кода переданного запроса. Распознавание
искаженных кодов определяется способностью логической схемы распознать
потенциальное нарушение кода. В этом определении введен термин «потен-
циальное», так как все логические схемы могут ложно распознавать некото-
рые неискаженные коды как неправильные. Возможны также такие ситуации,
когда действительно искаженный код не распознается как неправильный. Ло-
гика распознавания искаженных кодов запрещает детектирование потенци-
ально искаженных кодов или сигнализирует об их детектировании, что по-
вышает надежность определения неизвестных кодов, считываемых в цикле
активного декодирования.
Для большей гарантии правильного определения кодов обычно приме-
няется представление на цифровом индикаторе декодированных данных при
декодировании некоторой определенной последовательности идентичных кодов
ответа одного типа, принимаемых при последовательных обзорах. Эта функ-
ция, выполняемая активным декодером, называется интегрированием или
проверкой кода.
На .рис. 14 в упрощенном виде представлена структурная схема логики
распознавания или запрета искаженных кодов. Подлежащий считыванию код
показан во временном положении, частично перекрывающем как пассивную,
так и активную декодирующие линии задержки. Логика распознавания ис-
каженных кодов основана на допущении, что кадровые импульсы мешаю-
щего ответа детектируются. Следовательно, если наблюдать со стороны вхо-
да активной линии, то кадровые импульсы декодированных опережающего
или отстающего мешающих ответов (поступающих из логических вентилей
ИЗ и И2, соответственно) будут направляться в третью линию задержки (ли-
нию распознавания искаженных кодов) с интервалами, кратными 1,4 мкс,
относительно кадровых импульсов правильного ответа и размещаться между
ними. Таким образом, кадровые импульсы декодированных мешающих отве-
тов появятся на определенных отводах линии распознавания искаженных ко-
дов, когда полезный код находится в активной линии. Так как сигналы
с отводов третьей линии задержки, расположенных с интервалом 1,45 мкс,
объединяются в логическом вентиле ИЛИ2, с его выхода передается сигнал,
предотвращающий неправильное считывание.
Устройство, выполняющее операцию проверки кода, представляет
собой комбинацию регистров сдвига, в которых запоминаются и сравнива-
ются последовательные ответы с одним и тем же кодом. Для считывания
многих кодов от конкретной цели потребуется несколько наборов регистров
сдвига, управляемых кодом.
Если детектируемый код является кодом опознавания, то данные с вы-
хода регистров сдвига поступают в матрицу преобразования из восьмеричной
и десятичную форму до подачи их в цифровой индикатор. Наиболее слож-
ным является преобразование в десятичную форму ответа с кодом высоты
(код С). Рис. 15 иллюстрирует цифровую индикацию высоты.
4W
Гл. 10. Радиолокационные маяки
Некоторыми наиболее существенными недостатками описанного видео*
декодера являются; сравнительно большая протяженность отметки на экра*
не индикатора по азимуту, в несколько раз превышающая протяженность
отметок сигналов РЛС; добавление каналов неэкономично; данные неудобны
для цифровой системы слежения; для дистанционной передачи данных тре-
буется широкополосная линия.
Логический
вентиль
Пассивная линия
задержки
Логический
вентиль
ПЛИ 1
Логический
вентиль
ПЛИ 2
И декодирующей к а три ре
Логический
вентиль
И 3
Активная линия
задержки
распознавание
искаженных кодов
Желаемый код
Ан
F1 Опережающий FZ
метающий ответ | |
Декодированный кадровый
импульс опережающего
ответа
Декодированный кадровый
импульс отстающего
ответа
Отвод запрета активной
линии задержки
Выход логического
вентиля ИЛИ
до Отстающий
I 1 мешающий ответ [~~|
Рис. 14. Упрощенная схема логики
распознавания или запрета искаженных кодов*
•Многоканальный декодер, в форме аналого-цифрового преобразователя,
может устранить эти и другие недостатки. На вход этого преобразователя
поступают видеосигналы. Обрабатывая их, он выдает в реальном масштабе
времени цифровое сообщение о каждой цели за каждый обзор. Цифровое
сообщение содержит данные о положении цели в координатах (дальность-
азимут) или х—у, проверенный код опознавания, проверенный код высоты
500
10.8. Декодирование и аналого-цифровое преобразование
5 дополнительное количество информационных двоичных знаков для пере-
ачи других данных (например, о достоверном уровне проверки, авариях,
нарушениях связи, специальной проверке) и обозначений кодов.
В упрощенном виде аналого-цифровой преобразователь маяка (рис. 16|
достоит из блоков детектирования ответов, обнаружения цели и выдачи дан-
ных о цели. Блок детектирования ответов принимает видеосигналы маяка я
пусковые импульсы кодов запросов или пары импульсов и выдает дискрет-
ные цифровые сообщения об ответах, которые должны обрабатываться в бло-
Рис. 15. Цифровая индикация высоты.
ке обнаружения целей. Пусковые импульсы кодовых ответов декодируются
И (или) отделяются, если они не приняты как отделенные импульсы; в даль-
нейшем они используются для обозначения типа кодового видеосигнала
ответа.
Кодированные видеосигналы ответов перед подачей их в линию задержки
или регистр сдвига для преобразования из последовательной в параллельную
форму подвергаются калибровке. Калибровка состоит в установлении поро-
гового значения относительно уровня шума, устранении коротких импульсов
(с длительностью менее 0,3 мкс) и восстановлении фйрмы импульсов прием-
лемого видеосигнала с целью компенсации последствий дискриминации корот-
ких и длинных импульсов.
Калиброванный видеосигнал подается в линию задержки или в регистр
сдвига, время задержки которых соответствует длительности кодовой после-
довательности. Из задерживаемых сигналов выделяются выборки с интер-
валом 1,45 мкс. Эти выборки или сигналы, снятые с отводов линии задержки,
стробируются или считываются при декодировании кадровых импульсов от-
вета аналогично тому, как это осуществляется в описанном декодере видео-
сигналов. Декодированные кадровые импульсы могут также подаваться на
индикатор. Следует заботиться о том, чтобы кодовые импульсы, положение
которых находится в пределах поля допусков, были правильно стробированы.
При этом усилия направляются на обеспечение дискриминации случайных
импульсов, занимающих положение, близкое к кодовым импульсам.
Кодовые видеосигналы хранятся в регистре сдвига достаточно долго,
41 обы можно было обнаружить потенциальное искажение кода. Если в те-
чение этого периода принимается один или несколько ответов, то последний
из этих ответов стробируется и запоминается в параллельном регистре. Не-
зависимо от числа искажений в ответе первый и последний кадровые им-
пульсы дают достаточно надежные данные о положении цели.
501
Гл. 10. Радиолокационные маяки
Дополнительной функцией, выполняемой блоком детектирования отве-
тов, может быть цифровое определение. дальности. Счетчик дальности за-
пускается при приеме пускового импульса кода и отсчитывает небольшие доли
километра. Декодированные кадровые импульсы дополнительно к стробиро-
ванию. информационных импульсов выделяют выборки отсчетов счетчика
дальности и присоединяют эти данные к кодовым данным.
Включение оценки дальности в число функций, выполняемых аналого-циф-
ровым преобразователем, зависит от организации и типа запоминающего
Видеосигналы маяна
Пусковые импульсы} -
кодов запросов г
Отсчет
импульсов
азимута
(ОООвим-
блок детектирования ответов
Проверка выходных
видеосигналов
Данные
об
азимуте
пульсов Г
на обзор)
на
Северный
опарный
импульс
блок обнару- * Запоминающее
жения целей * устройство
блок выдачи данных о цели
Выходные
цифровые
сообщения
о целях:
I4
I
. Дальность
или X-Y
Азимут
Опознавание
Высота
► & Ч к
о ?
Рис. 16 Структурная схема аналого-цифрового преобразователя маяка.
устройства, применяемого совместно с блоком обнаружения целей. Известны
два основных вида организации запоминающих устройств: с динамическим
и постоянным распределением ячеек памяти.
В первом случае в запоминающее устройство вводятся данные о даль-
ности, кодовые данные, отметки ответа и отметка искаженного кода (если
искажение имеет место) и направляются в незанятую зону памяти, где может
размещаться слово или группа слов в порядке возрастания дальности. Поло-
жение слов, содержащих данные о дальности в запоминающем устройстве
с такой организацией, заранее непредсказуемо.
В отличие от этого для работы запоминающего устройства с постоянным
распределением ячеек памяти не требуется данных о дальности, так как каж-
дое слово в памяти имеет вполне определенное, заранее назначенное поло-
жение, соответствующее фиксированной дальности. Это значит, что t-oe слово
всегда закреплено за целями, появляющимися на дальностях между Rt и
А’г+А/?. Значение А/? зависит в принципе от времени обращения к запоми-
нающему устройству и максимальной дальности, и поэтому оно определяет
разрешающую способность по дальности. Точность можно повысить делением
участков дальности на отрезки и включением каждого такого отрезка в слово
данных. При записи данных в запоминающее устройство производится .после-
довательная адресация начиная с ^=0 так, чтобы кодовые данные вводились
в него в соответствии с приращениями дальности.
Независимо от вида применяемой организации запоминающего устрой-
ства блок обнаружения целей должен коррелировать последовательные от-
веты по дальности при последовательности обзоров за время облучения ска-
502
10.8. Декодирование и аналого-цифровое преобразование
нирующей антенной цели. Если текущий ответ коррелирован по наклонной
дальности с данными о цели, считанными из файла запоминающего устрой
ства (с допуском на динамическое распределение памяти), то можно считать,
что этот новый ответ пришел от той же цели (рис. 17).
Корреляция по дальности приводит к обновлению параметров «окна»—
устройства для обнаружения фронта и спада отметки азимута цели; проверке
кодовых данных соответствующего ответа; запоминанию данных об азимуте
при обзоре, если порог «окна» совпадает с передним краем отметки цели
Проверка кода может продолжаться до тех пор, пока отстающий край луча
антенны обнаруживается «окном». В это время азимут отстающего края луча
также может быть использован для цифрового расщепления луча (данные об
азимуте, обычно получаемые от 12-разрядного счетчика с приращениями,
равными 0,088°, синхронизируются с углом поворота основания антенны).
Азимуты опережающего и отстающего краев суммируются и сумма де-
лится на 2; из нее вычитается смещение для получения цифровой отметки
центра. Это смещение вводится для компенсации асимметрии, получающейся
при последующем детектировании опережающего и отстающего краев. Пусть,
например, обнаружение опережающего и отстающего краев должно произой-
ти на а—м и (N+b)—м обзорах соответственно, где N — число запросов на
один проход луча. Среднее из этих двух значений равно (N + а+Ь)/2. В иде-
альном случае центр цели должен соответствовать ((V+l)/2, поэтому требуе-
мое смещение равно (а+Ь—1)/2. Цифровая отметка цели часто определяется
в результате подсчета изменения числа импульсов за время прохождения луча
И вычитании половины отсчета значения азимута для отстающего края; учи-
тывается также и смещение.
Имеется некоторая неопределенность в значении азимута начала отметки
цели, которая равна смещению антенны от обзора к обзору. Дополнительная
неопределенность вводится процессом квантования азимута. Аналогичная не-
определенность имеется и в значении азимута конца отметки. Объединение
этих ошибок дает стандартное отклонение для отметки центра
где Ol — Oi — стандартные отклонения начала и конца отметки и
О; = У о| + о§ ,
где о2« и оЛ? — дисперсии равномерных распределений изменений от обзора
к обзору и ошибок квантования соответственно.
Другие факторы, влияющие на точность измерения азимута и не учтен-
ные в предыдущем анализе, включают общую надежность работы системы
(отношение числа ответов к числу запросов), ошибки визирования, исключе-
ния ложных ответов, механических передач, асимметрию ДН антенны и т. д.
Для определения начала, конца и центра тяжести отметки цели исполь-
зуются различные методы автоматического принятия решений. Два основных
из них — «скользящее окно» и последовательный обнаружитель.
Обнаружитель типа «скользящее окно» (рис. 18) накапливает определен-
ное число отраженных от цели радиолокационных сигналов в пределах каж-
дого разрешаемого интервала дальности за N предыдущих циклов сканиро-
вания по азимуту. Если число накопленных сигналов превышает заданное
значение (КД, то цель считается обнаруженной. Вслед за этим фиксируется
окончанье обнаружения цели, если число отраженных сигналов за N циклов
меньше второго заданного значения (Кг).
503
Запоминающее устройство с
произвольным одращением
Буферная сек-\ ф г яаннь,х
ция хранения I W!jn чанных
ответов | ° целях
Ответы из Блока
свора данных
Проверка
запоминающего
устройства
Регистр хранения ответов
Дальность
Код
Блок
J7f
Адрес
Команда
Информация
Управление адресацией
Страды информации
Управление Блоком^
однаружения целей
Страды соодщений
Род
ответа
Регистр целей
Даль- ность /?т Азимут Код координаты Хи проверка Код координаты Y и проверка "Окна*, на цели ит.д. Отсчет специальной проверки
вг
Выдача
данных
в Выходной
длок
Предварительная
установка OS
Смещение *”
Азимут
Сравнение и
Отщепленного ^0geflntwgog
луча
^Равенство дальностей К страдам | Qs
>/? mnffur>/irTfi.LT) 4-АР /5' ... вы
Логика управ -
ления„скользя-
щим окном”
Специальная
проверка
Hr *—„—>с точностью ±АП Бу 'информации (К страдам
"------ч—а------------------------— информации)
_ Су +Sr-OS
2
т
К устройству управления
Блоком овнаружения
целей
Счетчик
азимута
К устройству
управления Блоком
сднаружения целей
Предварительная
установка
Гл. 10. Радиолокационные маяки
Пт т/гЬплвпяп г импульсы _Т
^дадатя'ли*?в’
ния азимута V. Опорные cedSPfflil?
импульсы
Рис. 17. Структурная схема блока обнаружения цели.
10.8. Декодирование и цифровое преобразование
Последовательный обнаружитель делает отсчеты +а для каждого ус-
вешного ответа и —0 для каждого пропущенного ответа в пределах элемев-
тарного приращения дальности. Цель считается обнаруженной, если полный
Отсчет равен или превышает у (никогда н§ допускается отрицательный от-
счет). После обнаружения цели отсчеты сбрасываются и начинаются новые
отсчеты: +а для каждого неудачного или пропущенного ответа и —0 для
каждого успешного ответа. Окончание обнаружения цели фиксируется, когда
полный отсчет станет равным или превысит у- Центр цели определяется как
Рис. 18. Детектор типа «скользящее окно»:
а — квантование дальности и азимута; б — скользящие окна.
средняя точка (за вычетом смещения из-за несимметрии) между моментами
обнаружения и потери цели, полученными методами скользящего окна или
последовательного обнаружителя. ч
Если система обработки сигналов полностью характеризуется некоторым
числом дискретных состояний и условная вероятность перехода из любого
состояния (т) в другое состояние (п) не зависит от состояний системы, в ко-
торых она находилась до перехода в состояние т, то случайный процесс
перехода является марковским. Процессы обнаружения цели с использовани-
ем методов «скользящего окна» и последовательного обнаружителя можно
считать марковскими. Это позволяет провести непосредственный анализ ра-
боты такой системы.
При выработке критерия обнаружения необходимо принимать меры по
предотвращению возможности расщепления отметки цели по дальности или
азимуту. Расщепление проявляется в том, что одиночная цель может пред-
ставляться в виде нескольких целей. Расщепление по азимуту вызывается
преждевременным ложным решением о потере цели вследствие потери от-
ветов, за которой возникает новый, но также ложный передний край. Рас-
щепление по дальности происходит в том случае, когда цель во время на-
хождения в луче антенны в результате ее движения и (или) случайных из-
менений параметров системы переходит от одного постоянного набора репе-
ров дальности к ближайшему другому.
Функции блока обнаружения целей может выполнять или специализи-
рованная ЭВМ с жесткой программой, или ЭВМ общего назначения.
605
Гл. 10. Радиолокационные маяка
Блок выдачи данных о цели в аналого-цифровом преобразователе ^пред-
ставляет данные в определенном формате и передает их в другие устройства,
нлнриадср. в ЭВМ общего назначения, генератор индикаторного устройства
или коррелятор первичной РЛС.
10.9. Индикаторные системы
Индикаторное устройство представляет в конечном виде выходные дан-
ные системы ATCRBS и является устройством взаимодействия в системе
человек—машина. Удобно разделять индикаторные устройства на три оснок-
ных группы: обычные индикаторы кругового обзора; цифровые индикаторы;
частично или полностью синтезированные индикаторы.
Рис. 19. Индикатор кругового обзо-
ра для отображения видеосигналов
маяка и (или) отметок целей, об-
наруженных РЛС:
1 — необработанные видеосигналы;
2 — необработанные видеосигналы
и отметки цели; 3 — сигнал «Рабо-
та в совмещенной системе», 4 —
сигнал «Работа в совмещенной си-
стеме» и отметка цели; 5 — сигнал
«Выбор цели»; 6 — сигнал «вы-
бор цели» и отметка цели; 7 —
сигнал «опознавание» или специ-
альный импульс идентификации;
8 — сигнал «авария»; 9 — только
отметка цели.
Обычные видеоиндикаторы кругового обзора, как правило, работают
с .одноканальным или многоканальным декодерами, описанными выше, и ото-
бражают информацию в виде, показанном на рис. 19.
Необработанный видеосигнал редко индицируется и используется только
лля целей испытаний. Код ответного видеосигнала не может интерпретиро-
ваться глазом оператора. Этот сигнал только излишне загружает экран ин-
дикатора, так как занимает участок 3 км по дальности (20,0 мкс). Если не-
обработанный видеосигнал дополняется видеосигналом первичной РЛС, то
отметка радиолокационного сигнала совпадает с отметкой импульса Fj.
. Декодированный сигнал «работа в совмещенной системе» представляется
одной отметкой и показывает только, что кадровые импульсы ответа декоди-
рованы.
. Сигналы «выбор цели» являются отметками конкретных целей, соответст-
вующих кодам, которые набираются оператором вручную с помощью пере-
ключателей, установленных на панели. Двойная отметка может быть неодно-
значной, если два или более самолета используют один и тот же код и (или)
выбрано более одного дискретного кода. Интервал между отметками уста-
навливается равным около 2,5 мм и поддерживается регулированием интер-
вала между парными импульсами в соответствии с выбранной разверткой
дальности.
Сигнал «опознавание» является ответом на указание диспетчера пилоту
выдать специальный импульс идентификации (включается на 30 с) для раз-
решения неоднозначности выбора цели. Отвечающий самолет создает на экра-
не отметку, ширина которой в радиальном направлении равна интервалу
между отметками сигнала «работа в совмещенной системе».
зов
10.9. Индикаторные системы
Отметка самолета, посылающего специальный кодовый сигнал «авария>,
представляется на экране индикатора в виде двух широких линий.
Кроме неоднозначности индикации вредной характеристикой видеоивди-
кагора является значительная протяженность отметок в азимутальном на-
правлении, Типичное значение протяженности лежит в пределах 5—15° или
приблизительно равно удвоенной ширине луча антенны на уровне 3 дБ.
Вместе с видеодекодером используются также выносные цифровые ин-
дикаторы, о которых уже упоминалось выше (рис. 15). Вспомогательная нн-
дикация данных на цифровом индикаторе используется для определения кода
неизвестной цели, в частности самолетов, оборудованных аппаратурой для
автоматической передачи высоты.
Ввиду того, что для активного циклического считывания данных приме-
няется световое перо, следящий шарик или следящий указатель, индикация
кодовых данных задерживается на один цикл обзора между установкой ука-
зателя или светового пера в соответствующее положение и следующим облу-
чением цели. Кроме того, если применяется более одного вспомогательного
индикатора, то возникает неоднозначность идентификации цели на видео-
индикаторе и выносных индикаторах.
Недостатки в работе видеоиндикаторов и свойственные им ограничения,
а также специфически цифровой характер данных, выдаваемых аналого-циф-
ровым преобразователем, привели к созданию синтезированных индикаторных
систем, в которых цели представляются дискретными символами, снабжаемы-
ми дополнительными цифровыми и буквенно-цифровыми данными.
Разработано много конструкций индикаторов, методов н теорий индика-
ции. Типы индикаторов различаются в зависимости от того, индицируются ли
на них сигналы первичной РЛС или нет и если да, то преобразуются ли они
в цифровую форму. Далее различаются индикаторы со случайным и регуляр-
ным расположением символов целей и данных. И, наконец, в индикаторах
могут применяться различные методы знакогенерации. Следует отметить, что
здесь перечислены только наиболее важные особенности индикаторов.
Синтезированный индикатор с воспроизведением только сигналов маяка
наиболее удобно реализовать в форме индикатора со случайным расположе-
нием отметок. Электронный пучок индикаторной трубки отклоняется в по-
ложение х— у, где он высвечивает соответствующий знак (например, точку,
крест или кружок), отмечающий положение цели. После этого электронный
пучок слегка смещается относительно этой отметки и начинается цикл гене-
рации знака. Такой способ отображения информации характерен для неболь-
шого телевизионного растра точечного типа или штрихового формата. Элект-
ронный пучок затем бланкируется и отклоняется в новое положение, соответ-
ствующее любой другой цели.
Емкость такой системы является, в первую очередь, функцией скорости
обновления данных, времени отклонения и фиксации электронного пучка,
скорости воспроизведения знаков, числа знаков и длительности наблюдения
цели. Скорость обновления данных должна быть достаточно высокой, чтобы
изображение получалось ярким и без мельканий. Формат данных должен
быть по возможности ограниченным, чтобы их изображения не накладывались
одно на другое. Преимуществом индикатора со случайным расположением
данных является возможность регулирования физических размеров знаков,
что предотвращает перегрузку экрана индикатора. Характер движения цели
отражается индикацией ее положения лишь за некоторое заданное число пре-
дыдущих обзоров. По следу отметки диспетчер может определить направление
движения цели и грубо оценить ее скорость.
На рис. 20 дан пример индикатора со случайным расположением данных
и формированием знаков из матрицы точек. На рис. 20, а показано воздушное
движение в районе порта Атланта, оснащенном маяками. Числа около каж-
дой отметки пели означают ответ в коде типа 3. Черточки во всех форматах
(за исключением одного) означают, что данные о высоте были запрошены,
507
Гл. 10. Радиолокационные маяки
но ответы не получены, так как самолеты не оборудованы соответствующей
аппаратурой (период переоборудования). На расстоянии около 19 км к юго-
востоку от аэропорта один самолет сообщил высоту 1260 м.
На рис. 20,6 показаны две выбранные цели (представленные кольцевыми,
а не точечными отметками), сообщившие свою высоту 2400 и 3360 м. След
цели представлен отметками за четыре предшествующих обзора. Использова-
ние всеми самолетами одного и того же кода опознавания характерно для
более ранних этапов оперативного применения системы: до введения 4096 ди-
Рис. 20. Синтезированный индикатор с цифровым представлением данных опознавания
и высоты:
в g индикатор со случайным расположением символов, б — выбранные отметки целей
в указанием данных опознавания (identity), высоты (altitude) и следа цели (target
trail).
508
10.9. Индикаторные системы
скретных кодов опознавания использовалось ограниченное число кодов. В рас-
сматриваемом случае код 0400 является кодом для захода на посадку в соот-
ветствии с правилами полета по приборам.
Синтезированное представление данных системы радиолокационных мая-
ков совместно с видеосигналами первичной РЛС возможно как на индикато-
рах РЛС с применением преобразования развертки, так и на обычном инди-
каторе. В случае применения индикатора с преобразованием развертки смеше-
ние данных системы и видеосигналов первичной РЛС должно осуществляться
на телевизионном экране преобразователя развертки, если необходимо избе-
жать смазывания символов и знаков. К сожалению, смешение на телевизион-
ном экране предопределяет постоянство заданных размеров знаков, так как
телевизионный растр характеризуется определенным числом строк на 1 см,
а для воспроизведения каждого знака требуется минимум 7 строк. Но этот
недостаток компенсируется более ярким изображением на экране.
Использование времени обратного хода электронного луча, затемнение
отдельных участков развертки, комбинированное использование этих факто-
ров, применение двухпушечных индикаторных ЭЛТ и сжатие полосы видео-
сигналов — все это позволяет осуществить воспроизведение видеоданных
системы радиолокационных маяков на экране индикатора кругового обзо-
ра РЛС.
В принципе выбор решения определяется пропускной способностью сис-
темы, так как на индикаторе может отображаться только определенное ко-
личество целей и их следов с заданной скоростью обновления данных. При;
некоторых условиях времени обратного хода электронного луча оказывается
недостаточно для отображения большего количества целей и система будет
перегружена. Компромиссы, заключающиеся в снижении скорости обновле-
ния данных или уменьшения количества отображаемых целей, обычно непри-
емлемы.
Другое решение проблемы может состоять в сложении синтезированных
и необработанных видеосигналов на люминофоре индикаторной ЭЛТ, имею-
щей две независимые электронные пушки и один экран. Таким образом, для
синтезированного воспроизведения видеоданных в этом случае имеется единое
время и индикатор РЛС может выполняться как с преобразователем раз-
вертки, так и в виде индикатора кругового обзора обычного типа. Для ком-
пенсации смещения электронных пушек электромагнитные электронно-оптиче-
ские системы должны иметь коррекцию трапецеидальных и подушкообраз-
ных искажений. Применение ЭЛТ с плоским экраном значительно упрощает
цепи коррекции.
Способ увеличения времени для синтетического воспроизведения данных
состоит в запоминании одного полного хода развертки индикатора кругового
обзора и считывании его для индикации с более высокой скоростью. Этим
достигается заданная степень сжатия видеосигналов и определенная часть
первоначального времени, отведенного для воспроизведения радиолокацион-
ных данных, освобождается для синтетической индикации символов и знаков.
Ширина полосы пропускания индикатора при этом увеличивается пропорцио-
нально степени сжатия видеосигналов, а ток электронного пучка и (или) ус-
коряющее напряжение повышается для компенсации меньшего времени облу-
чения экрана ЭЛТ. Экспериментальная проверка этого способа дает обнаде-
живающие результаты, но требуется еще некоторое время для его более тща-
тельной обработки.
Цифровое преобразование данных первичной РЛС позволяет применить
полностью синтезированный индикатор. Проблема ограниченного ресурса вре-
мени для обеспечения желаемой пропускной способности еще остается и в
этом случае, что приводит к необходимости увеличения скорости отклонения
электронного пучка и записи знаков на экране. Наиболее важной задачей при
цифровом преобразовании радиолокационных данных является обеспечение
509
Гл. Ю. Радиолокационные маяки
резерва временя и пропускной способности с учетом вредного влияния шума
и пассивных помех.
Выше описаны аналого-цифровой преобразователь и индикаторы. В систе-
му отображения информации входит также специальный генератор, осуществ-
ляющий связь между аналого-цифровым преобразователем и собственно инди-
катором: функции генератора системы отображения информации может выпол-
нять специальный генератор или запрограммированная ЦВМ общего назначе-
ния.
На рис. 21 приведена типовая структурная схема генератора системы ото-
бражения информации. Данные от указанного преобразователя передаются в
генератор системы отображения информации непосредственно или через
соответствующее устройство сопряжения. Блок контроля цикла входных дан-
ных проверяет формат данных и направляет слова, содержащие сведения
о дальности, азимуте, опознавании и высоте, в соответствующие регистры.
Координаты дальность-азимут преобразуются в координаты х, у, данные
о высоте — в соответствующий код с введением барометрической поправки
высоты, если какая-либо из этих функций или все они не выполняются в ана-
лого-цифровом преобразователе.
Слова, содержащие информацию о координатах х—у, коде опознавания
и высоте, вводятся в запоминающее устройство, содержащее слово жизни це-
ли. Это слово определяет длительность времени, в течение которого цель будет
индицироваться как наблюдаемая, а также времени, когда она будет пред-
ставлена своим следом и когда совершенно исчезнет с экрана.
Данные из запоминающего устройства считываются с заданной скоростью
и вводятся в индикатор. Кодовые данные направляются в индикаторы и
в знаковый генератор. Данные о положении цели поступают в индикаторы
для цифро-аналогового преобразования и последующей подачи на отклоня-
ющую систему ЭЛТ.
В распоряжении диспетчера имеется цифровой фильтр на пульте управ-
ления, и оц может управлять потоком данных, поступающих на индикаторы
из генератора системы отображения информации. Например, диспетчер мо-
жет: осуществлять фильтрацию целей по высоте; назначать дополнительные
символы для выбранных целей; подавлять отметки от всех целей, кроме пред-
ставляющих интерес; выбирать данные для отображения иа индикаторах;
включать цепи генерации кода опознавания; регулировать длину следа цели.
Так как генератор системы отображения информации подготавливает все
данные о цели для индикации, а диспетчер может отфильтровывать данные,
не представляющие интереса, то один такой генератор может обслуживать
несколько индикаторов. Кроме того, поскольку все данные о целях поступают
на все индикаторы с заданной скоростью обновления информации, диспетчер
считывает данные о новых целях практически мгновенно при нажатии кнопки
переключателя.
Для индикации путевой скорости или буквенно-цифровых данных, иден-
тифицирующих самолеты, требуется применение ЦВМ общего назначения,
осуществляющей слежение за целями и необходимые вычисления. ЦВМ мо-
жет, например, установить равенство ответа 1234 кода А и ответа 24 в сис-
теме TWA, поэтому на индикаторе может быть высвечено TW24 вместо 1234.
В случае включения ЦВМ в систему отображения информации необхо-
димы определенные средства для связи человек—машина. Обычно такими
средствами являются датчик прямоугольных координат с шаровым управле-
нием и клавиатура. С помощью управляющего шара можно устанавливать
в определенное положение указатель на экране индикатора, что дает возмож-
ность ввода данных в индикатор; клавиатура используется для ввода команд
и данных.
5(0
Синхронизирующие импульсы cdSuau
Рис. 21. Структурная схема генератора системы отображения информации.
10S. Индикаторные системы
Гл. 10. Радиолокационные маяки
10.10. Военное использование и специальные применения
Система маяков ATCRBS явилась результатом развития применявшейся
во время второй мировой войны системы опознавания «свой—чужой». Усовер-
шенствование техники радиопротиводействия и применяемые противником
обманные действия сделали подобные системы не подходящими для обеспе-
чения надежного опознавания военных самолетов. Однако оказалось возмож-
ным приспособить эту технику к более сложным процедурам кодирования,
применяя множество кодов запросов и ответов, чтобы обеспечить высокую
степень надежности опознавания на основе ежедневной смены кода. Приме-
няются сложные оценивающие устройства, использующие статистические вы-
борки для анализа кода ответа и выдающие решения о принадлежности са-
молета, посылающего этот ответ. Системы этого типа разрабатываются непре-
рывно в течение нескольких лет. Вносимые в них изменения и усовершенство-
вания обычно засекречиваются.
Особые проблемы, связанные с надежностью опознавания, возникают
в случае опознавания «воздух—воздух». Это определяется следующим обсто-
ятельством. Выполнение функций управления воздушным движением зависит
в основном от эффективности связи «земля—воздух». Самолетная антенна
обычно располагается в оптимальной точке на самолете, чтобы обеспечить
хороший обзор земной поверхности. Но в случае опознавания «воздух—воз-
дух» запросы могут приходить под любым углом и идеальной была бы
сферическая ДН антенны. Была испытана антенная система с ВЧ переклю-
чателями, направляющими ВЧ энергию то в одну, то в другую антенну с ча-
стотой от 20 до 100 Гц. Установлено, что такая система имеет недостаток,
связанный с эффектом прерывания данных, принимаемых наземной станцией.
Лучшие результаты дает разнесенная система или ответчик с двумя входа-
ми, в котором две независимые антенны и две приемные системы дают оп-
тимальное перекрытие. Входные импульсы или запросы принимаются одной
или двумя антеннами. Уровни выходных сигналов двух приемников сравни-
ваются от импульса к импульсу; в результате срабатывает ВЧ переключатель,
направляющий ответ в антенну, принявшую более сильный входной сигнал.
Так устраняется эффект прерывания данных и обеспечивается перекрытие
всех четырех квадрантов. Трудности расчета оборудования при использовании
ответчика с двумя входами обусловлены требованием высокой точности вы-
равнивания амплитуд сигналов в двух приемных каналах, жесткими допус-
ками на синхронизацию каналов системы и возможным усложнением этого
требования из-за разницы во времени прихода сигналов от двух далеко раз-
несенных антенн на больших транспортных самолетах.
Операции по поддержке наземных войск существенно упрощаются при
использовании наземных ответчиков. Самолетные запросчики на одноместных
самолетах или на больших командных и управляющих самолетах могут за-
прашивать и получать ответы от небольших портативных ответчиков, нахо-
дящихся в передней полусфере. Кодирование ответов позволяет опознавать
отдельные цели, получать точную информацию об их местоположении, а так-
же определять характер выполняемых ими операций.
Проведение таких операций, как поддержка наземных войск, сбрасыва-
ние боеприпасов и других средств, спасательные операции, может быть зна-
чительно облегчено при использовании маяков.
Надежность обеспечения поддержки наземных войск авиацией и выпол-
нения некоторых операций «воздух—воздух» достигается операционными про-
цедурами. В случае операций «воздух—воздух» имеются четыре операционных
параметра, которые 1иожно коррелировать: сигнал опознавания, высота, по-
ложение в системе координат X, Y и время. Обманные действия очень за-
трудняются, если эти параметры использовать в специальной комбинации для
каждой конкретной операции.
512
10.10. Военное использование и специальные применения
РЛС наземного управления посадкой и точная посадочная РЛС работают
в диапазоне X (10700— 11 700 МГц). Две антенны осуществляют сканиро-
вание по азимуту и углу места для приема приходящих радиолокационных
сигналов от приближающихся самолетов и определения их положения отно-
сительно продольной оси взлетно-посадочной полосы и оптимального угла
места для посадки. Диспетчеры на наземных пунктах управления воздуш-
ным движением, пользуясь индикаторами азимута и угла места, могут давать
летчикам команды по радио о приближении к взлетно-посадочной полосе и
Рис. 22. Приемник диапазона X типа AN/ARA-62.
расстоянии до ее начала, отклонении по высоте от глиссады планирования
(выше-ниже) и отклонении курса относительно оси взлетно-посадочной по-
лосы. Так как для пространственного перекрытия зоны захода на посадку
РЛС должна вести обзор при малых углах места, возникают интенсивные
пассивные помехи от земной поверхности, которые часто мешают точному
определению положения самолетов. Мешающие отражения от метеорологи-
ческих образований также могут маскировать изображение на экране ин-
дикатора в наиболее критические моменты.
Для преодоления этих трудностей ВВС США разработали приемник диа-
пазона X, работающий совместно с существующими ответчиками системы
управления воздушным движением. Этот приемник типа AN/ARA-62
(рис. 22) с расположенной в носовой части самолета специальной антенной
AS-2124/ARA-62 принимает ВЧ импульсы посадочной РЛС, осуществляет их
селекцию по длительности и частоте повторения для устранения случайных
импульсов и вырабатывает пусковые импульсы синхронного ответа, поступа-
ющие на вход вспомогательного триггера самолетного ответчика системы
управления воздушным движением. Посылаемые ответчиком сигналы прини-
маются радиоприемником наземной станции (например, типа AN/GPA-8), где
они декодируются и смешиваются с видеосигналами посадочной РЛС для
отображения на индикаторе.
Индикация данных самолетных ответчиков свободна от пассивных помех,
создаваемых обратными отражениями от земной поверхности и метеорологи-
ческих образований, и наземный диспетчер получает четкую-информацию от
самолета в форме видеосигналов на экр-ане индикатора.
513
Гл. 10. Радиолокационные маяки
Угловая ширина отметки цели на экране остается равной ширине луча
посадочной РЛС, даже если для приема сигналов ответчика применяется
рупорная антенна диапазона L с широкой диаграммой направленности. Две
независимые идентичные схемы ключевой АРУ в приемнике AN/ARA-62 попе-
ременно регулируют усиление в каналах азимута и угла места. Эта особен-
ность помогает исключению сигналов от боковых лепестков на всех дально-
стях сопровождения самолета от входа его в зону аэропорта до посадки.
Дальнейшее усовершенствование приемного устройства наземной станции
и применение в нем техники цифрового преобразования, описанной в § 10.8,
дает дополнительное повышение точности определения положения самолета
по азимуту и углу места. Использование описанного выше обнаружителя
типа «скользящее окно» позволяет определять положение цели с точностью
до 0, Г. Отметка цели может воспроизводиться на экране синтезированного
индикатора и снабжаться дополнительными буквенно-цифровыми опознава-
тельными знаками. Использование маяков в наземном управлении посадкой
дает, в частности, для военной авиации не связанное с большими затратами
существенное улучшение безопасности полетов и повышение точности выпол-
нения самолетами всех маневров, связанных с посадкой.
Запросчики-ответчики системы радиолокационных маяков для управления
воздушным движением ATCRBS могут служить основой для создания на
самолетах, оборудованных специальными бортовыми запросчиками, устройств
предупреждения пилотов о приближении других самолетов. Усилия, направ-
ленные на разработку систем предупреждения столкновений, основаны на
совместном использовании частотно-временных методов. Но более простые
устройства предупреждения летчиков о грозящей опасности столкновений
могут представлять интерес с экономической точки зрения. При некоторых
ограничениях, накладываемых внешними условиями полета, например в слу-
чаях полета над океаном, простые приборы, сигнализирующие о приближении
других самолетов, могут быть особенно привлекательными, так как они не
требуют наземных средств.
По заказу Федерального управления авиацией США разработан индика-
тор дальность-высота для экспериментальной проверки принципов предупреж-
дения о столкновении. Установленный на самолете бортовой запросчик пи-
тает простой вибратор с рефлектором, смонтированный в переднем антенном
обтекателе самолета под антенной метеорологической РЛС. Диаграмма на-
правленности антенны запросчика позволяет перекрыть зону перед самолетом
протяженностью до 100 км и шириной 100° по обе стороны от центральной
линии. Устройство принимает ответы от всех самолетов, находящихся в этой
зоне. Частота запросов равна только 30 Гн, но она достаточна для обновле-
ния цифровой информации на индикаторе без мельканий. Принятый ответ
снабжается числом обозначающим дальность; чередующиеся коды опознава-
ния и высоты коррелируются и объединяются с отметкой дальности. Затем
производится сравнение принятого ответа о высоте с высотой запрашиваю-
щего самолета. Ответ самолета, находящегося в пределах зоны с определен-
ными высотами, отображается на индикаторе, находящемся на приборной
доске в кабине самолета Индикатор воспроизводит дальность и сигналы
опознавания двух ближайших самолетов. Можно создать и другие индика-
торы, используя ЭЛТ диаметром 12,5 см с прямоугольным экраном, на ко-
тором воспроизводится буквенно-цифровая информация. Экран индикатора
может иметь шкалу дальностей с показаниями, увеличивающимися от ею
низа к верху, с отображением данных о высоте и принадлежности самолета.
Он может иметь шкалу с отображением точек равной высоты и чисел, харак-
теризующих дальность и принадлежность самолета.
Можно представить многие другие применения системы радиолокацион-
ных маяков для управления воздушным движением как с получением допол-
нительных данных от наземных запрашивающих станций, так и с передачей
данных на эти станции. Любые дополнения системы должны оцениваться
514
Список литературы.
с точки зрения их влияния на работу всей системы и предотвращения ее пере-
грузки. Введение дополнительных функциональных данных в системе радио-
локационных маяков ATCRBS создает проблему для линии передачи данных,
а не для системы определения положения и опознавания самолетов. На оп-
ределенном этапе развития предпочтительнее переход к линиям передачи дан-
ных с дискретными адресами. Возможно, что это будет эволюционный про-
цесс, основанный на использовании существующего диапазона частот, выде-
ленного для радиомаяков.
Список литературы
1 Archer D. Н. R. Reply Probabilities in Secondary Surveillance Radar Sys-
tems. World Aviation., v. 33, p. 414—420, December, 1961.
2 Ashley, A. Code Configuration for Automatic Altitude Reporting via
ATCRBS, IRE Trans., v. ANE-8, p. 144—148, December, 1961.
3 Ashley, A. and F. H. Battle, Jr. A Synthetic Future Environment for Ana-
lysis ol Radar Beacon System Capacity, 1959 IRE Natl. Conv. Record,
pt 5, p. 13—25.
4 Ashley, A., and F. H. Battle, Jr, A Mathematical Analysis of the Perfor-
mance of the АТС Radar Beacon System, IRE Trans., vol. ANE-7, p. 77—
83, September, 1960; also in 1960 IRE Intern. Conv. Record, pt. 8, p. 140—
149
5 Ashley, A., and L. G. Cole: Performance of Certain Decisionmaking Tech-
niques in Radar Digital Data Processors, Proc Eleventh Ann. East Coast
Coni Aerospace Naviq. Electron., October, 1964.
6 . Ashley, A., and K. Wise: Techniques for Automatic Altitude Repording via
the АТС Radar Beacon System. Proc. Seventh Ann. East Coast Conf.
Aeron Navig. Electron., November, 1960.
7 . Biermann, R.: АТС Operational Uses for Automatic Altitude Reporting, IRE
Trans., vol. ANE-8, p. 137—138, December, 1961.
8 . Carnes, W. T. Introduction to Automatic Altitude Reporting for Air Tra-
ffic Control, IRE Trans., vol. ANE-8, p. 122—124, December, 1961.
9 . Crippen, David S.: The Air Traffic Control Radar System, IRE Trans.,
v. ANE-4, p. —15, March, 1957.
10 . Davis, H., and M. Setrin. Increasing the Traffic Capacity of Transponder
Systems, IRE Natl. Conv. Record, v. 6, pt. 80—93, 1958.
11 Fedde, C. D., and B. Majerus. An L-Band Air Traffic Control Transponder.
Proc. Natl. Aeron. Electron. Conf., Dayton, Ohio, p. 496—501, 1959.
12 Freibaum, J. Altitude Processing in the ATCRBS, IRE Trans., v. ANE-8.
p 149—152, December, 1961.
13 . Glover, B. W. Transponder Altitude Encoders for Air Traffic Control, Brit
Commun. Electron., September, 1960, p. 676
14 . Gray, F. Pulse Code Communication, U.S. Patent 2,632,058, March 17,
1953.
15 . Harris, К. E. Some Problems of Secondary Surveillance Radar Systems,
J Brit. IRE, v. 16, p. 365—382, 1956.
16 Hart, G., and H. Lamb. L-band Multipath Propagation in an Airborne
Pulsed System, 1959 IRE WESCON Conv. Record, pt. 1.
17 Holcombe, P. G., and J. S. Perry. Quantized Storage-tube Coincidence
Techniques for Beacon Systems, IEEE Intern, Conv. Record, Aerospace
Electronics II, 1963.
18 Hough, R., et al.: Project Beacon Report on the Task Force on Air Traffic
Control, Federal Aviation Agency, October, 1961.
19 Levell, D. Secondary Surveillance Radar, Wireless World, v. 81, p. 227—
230, May, 1954
20 Morgan, H. Thoughts on an Improved АТС System, IRE Trans., v. ANE-4,
p 3—6, March, 1957.
515
Гл. 10. Радиолокационные маяки
21. Porzitky, S. .Altitude Reporting on the ATCRBS — An Impatient Apprab
sal, IRE Trans., v. ANE-8, December, 1961.
22. Ridenour. L. N. “Radar System Engineering”, MIT Radiation Laboratory
Series, v 1, chap. 8, McGraw-Hill Book Company, N. Y., 1947.
23. Roberts, A. (ed.). “Radar Beacons”, MIT Radiation Laboratory Series, v. 3,
McGraw-Hill Book Company, N. Y., 1947.
24 Skolnik, M. I. “Introduction to Radar Systems”, McGraw-Hill Book Com*
pany, N. Y., 1962.
Сколник M. Введение в технику радиолокационных систем. Пер. с англ,
под ред. К. Н. Трофимова. М., «Мир», 1965.
25. Terrington, О. Altitude Telemetry in Conjunction with Air Traffic Cont*
rol. Brit. Commun. Electron., v. 7, p. 660—665, September, 1960.
26. Terrington, D. The Application of Altitude Telemetering to the ICAO Se*
condary Surveillance System, IRE Trans., v. ANE-8, p. 125—130, Decern*
ber, 1961.
27. Thaler, S, and D. L. Ashcroft. Radar Beacon System Performance, IRE
Trans., v. ANE-4, p. 6571, 1957.
28 Vickers, T. Coding Requirements for АТС Radar Beacon System, IRE
Trans., v. ANE-4, No. 3, p. 127—130, September, 1957.
29 Vickers, T., and D. Crippen. Problems and Applications of the АТС Radar
Beacon System, IRE Trans., v. ANE-2, p. 32—39, June, 1955.
30. Wise, K. The Air Traffic Control Radar Beacon System (ATCRBS), A Di*
gital Data Transmission and Processing System, Proc. Natl. Electron,
Conf., 1961.
31. Wise, K. ATCRBS Experimental Altitude Reporting Subsystem and De*
velopments, Proc. IRE, v. ANE-8, p. 139—144, December, 1961.
32. Woodson, W. Automatic Beacon Radar Identifies Aircraft, Electronics,
v. 34, p. 57—61, Feb. 10, 1961.
33. Air Traffic Control Transponder, Airlines Electronic Engineering Commit-
tee (AEEC)> Aeronautical Radio, Inc., March 1, 1962.
34. Report of the Seventh Session of the Communications Division of the In*
ternational Civil Aviation Organization, Doc. 8226—COM/552, Jan. 9 —
Feb. 9, 1962.
35 U.S. National Standard for Common System Component Characteristics
for IFF Mark X (SIF)/Air Traffic Control Radar Beacon (Secondary Sur-
veillance Radar) Systems SIF/ATCRBS (SSR), May 18, 1967. (Available
from Federal Aviation Administration).
Список сокращений
AM — амплитудная модуляция
АИМ— амплитудно-импульсная модуляция
АПФ —авгоподстройка фазы
АПЧ — автоподстройка частоты
АРУ — автоматическая регулировка усиления
ATCRBS — система радиолокационных маяков для управления воздушным
движением
АЦП — аналого-цифровой преобразователь
BMEWS— система раннего предупреждения о приближении баллистиче-
еких ракет
ВПП — видимость под помехами
ВРУ — временная регулировка усиления
ВРЧ — временная регулировка чувствительности
ГОВ — генератор обратной волны
ГУН — генератор, управляемый напряжением
ДН — диаграмма направленности
ЖИГ — железо-иттриевый гранат
ЗУ — запоминающее устройство
ИКАО — международная организация по гражданской авиации
ИКО — индикатор кругового обзора
ИМИ — изменение межимпульсных интервалов
ИП — источник питания
КА — космический аппарат
КВ — кремниевый варистор
КГ — когерентный гетеродин
КК —- космический корабль
КСВН — коэффициент стоячей волны напряжения
КУПВ — клистрон с удлиненным пространством взаимодействия
КФП — когерентный фильтр с памятью
КЭФ — клистрон с электростатической фокусировкой
ЛБВ — лампа бегущей волны
ЛЧМ — линейная частотная модуляция
МАРУ — мгновенная автоматическая регулировка усиления
М— ГОВ — генератор обратной волны типа М
МЛ К — мноюлучевой клистрон
МЛКБВ — многолучевой клистрон бегущей волны
MH1I — магнетрон, настраиваемый напряжением
МНВ — малая постоянная времени
МРС — минимальный различимый сигнал
М—УОВ — усилитель обратной волны типа М
МЧ _ модулирующая частота (в фазовом дальномере)
ООС — нормированное отношение осевых скоростей
ПМГ — подмагничивание
ПУ — параметрический усилитель
ПЧЛТ — постоянная частота ложных тревог
РПД — радиопротиводействие
РПП — различимость в просветах пассивных помех
617
Список сокращений
РФП — различимость на фоне пассивных помех
СДЦ — селектор движущихся целей
СОГ — стабилизированный опорный генератор
ССДЦ — самолетный селектор движущихся целей
ССРП — самолетная система раннего предупреждения
СФЦА — смещение фазового центра антенны
TACCAR — самолетная РЛС с осреднением пассивных помех по времени
ТАКАН — радиолокационная система тактического назначения
ТД — туннельный диод
УВЧ — усилитель высокой частоты
УМС — ультразвуковой модулятор света
УОВ — усилитель обратной волны
УПЧ — усилитель промежуточной частоты
УСП — усилитель со скрещенными полями
УСПОВ — усилитель со скрещенными полями обратной волны
УСППВ — усилитель со скрещенными полями прямой волны
УСППВИЛ — усилитель со скрещенными полями прямой волны с инжек-
тированным лучом
ФАПЧ — фазовая автоподстройка частоты
ФИМ—фазо-импульсная модуляция
ФМ — фазовая модуляция
ЦАП — цифро-аналоговый преобразователь
ЧМ — частотная модуляция
ЧПИ — частота повторения импульсов
ШАРУ — автоматическая регулировка усиления по уровню шумов
ШИМ—широтно-импульсная модуляция
ЭЛТ — электронно-лучевая трубка
ЭПР — эквивалентная площадь рассеяния
Предметный указатель
Автоматическая передача данных о высоте
482
Автоподстройка фазы (АПФ) 153
Автоподстройка частоты (АПЧ) в РЛС с
импульсной модуляцией задающего генера-
тора 154
Автоматическая регулировка усиления
(АРУ) 170
------по уровню шума (ШАРУ) 170
------ мгновенная 157
Амплитрон 19, 25
Аналого-цифровой преобразователь 189, 497
------, мультиплексирование 196
------ одновременный 191
------с последовательным приближени-
ем 192
------последовательный 193
------с пульсирующими напряжениями
194
------, разбивка на поддиапазоны 195
Анод модулирующий 38
Анодный блок 9
Апертурное время 191
Биматрон 20, 28
Битермитрон 20, 26
— ширина полосы синхронизации 27
Боковые лепестки, временные 84, 402
Варнак с моторным приводом 119
Вентиль 95
— кремниевый управляемый 95, ПО
— обратной коммутации 96
Весовая обработка сигналов 402. 430
------ временная 430
------ временная дискретная 437
------ равномерная 431
------ по Тейлору 432
------по Хеммингу 430
------ частотная 430
Вобуляция 15
Волноводы, работающие вблизи частоты
среза 413
Временная регулировка усиления (ВРУ) 158
-------по высокой частоте 161
------ с линейной характеристикой регули-
рования 160
-------с обратными характеристиками 161
------ с экспоненциальной характеристи-
кой регулирования 158
------, генерация управляющего напряже-
ния экспоненциальной формы 159
Высотомеры 268
— барометрические 482
Гармоники 55
Генератор 13
— возвратный со скрещенными полями 13
— • ЛЧМ сигналов на линии задержки с от-
водами 415
— обратной волны типа О 52
— системы -отображения информации 510
— высокостабильный опорный 151
— , подготовка 59
— , синхронизация 59
— , управляемый напряжением 314, 414
Гетеродин 149
— второй (когерентный) 149
— второй манипулируемый 152
— второй с фазовым сдвигом 153
— местный 250
---со свободно плавающей настройкой 251
— первый (стабильный) 149
---, стабилизированный полым резонато-
ром 149
с фазовой синхронизацией 150
по схеме умножителя частоты 151
Гомодин 257
Дальность 157
— горизонтальная 157
— действия импульсно-доплеровской РЛС
391
— обнаружения при одноканальном приеме
397
• при многоканальном приеме 397
—, определение при непрерывном измене-
нии частоты повторения импульсов 382
Декодер 497
— одноканальный пассивный 498
— активный 498
Дематрон 20, 29
Детектор 163
— диодный балансный 187
— огибающей 163
— перемножитель 186
— синхронный 182
— фазовый 182
--- совпадений 187
---цифровой 188
Дефлектрон 199
Диаграмма Бриллюэна 12
— направленности антенны 157
-----косеканс-квадратная 157
Диапазон динамический 138
--- приемника мгновенный 138
--- логарифмического детектора или уси-
лителя 175
Диапазон настройки 140
Диод 94
— вакуумметрический 94
— р—i—п 161
— четырехслойный 96
— Шоттки 145
Доплеровская коррекция при приеме фазо-
кодовых сигналов 425
Допустимая девиация частоты гетеродина
149
Допустимая девиация фазы гетеродина 149
Дроссель насыщения задерживающий 94
ЖИГ-кристаллы 410
Замедляющая структура 11
нерезонансная 12
петлеобразная 12
резонансная 12
--- с периодической нагрузкой 12
519
Предметный указатель
Запоминание карты помех 339
Запоминающее устройство 502
--- с динамическим распределением ячеек
памяти 602
---с постоянным распределением ячеек
памяти 502
Запись сигналов РЛС 174
«Заячьи уши» 46
Зеркальный канал приема 145
Игнитрон ртутный 95
Изменение межимпульсных интервалов
(ИМИ) 297, 319
Импульс 73
— квадратурный 73
— квазигауссов 73
— , методы борьбы со спадом вершины 107
— ов наложение 390
— ов основной цикл серии 126
— ов формирование с помощью направлен-
ного ответвителя 75
— со сформированными фронтом и спадом
73
— ов, шаблон серии 126
Индикатор, конструкция 210
— кругового обзора (ИКО) 197
---—, сопровождение отметок целей на
экране 221
------, органы сопровождения отметок це-
лей на экране 223
— радиолокационный 197
— —, оптимальный размер 225
---с большим экраном 230
--- с динамической диапозитивной систе-
мой 230
--- с проектором цветной фотопленки 230
---со светоклапаниой системой 230
— секторного обзора 215
Инжектированный луч 26
Инжектрон 110
Индикаторная система 506
--- радиолокационного маяка 506
---типа ИКО 507
---цифровая 507
--- синтезированная 507
Интегратор синхронный 309
Искажения амплитудные и фазовые 438
— , коррекция 440
Испытание на станиоли 117
Катод 10
— , основа 10
— подогревный цилиндрический 10
— , подогрев 11
— , программирование подогрева 11
— холодный 10
---.жидкостное охлаждение 11
Клистрон 42
— многолучевой 47
— — бегущей волны 47
------ гибридный 47
— многорезонаторный 43
— с электростатической фокусировкой 48
Карсинотрон 26
Когерентность 58
— полная 59
Код 419
— Баркера 419
— бинарный фазовый 419
— искаженный 499
— международный 484
— Грея 484
— многофазный Френка 426
—, последовательности максимальной дли-
тельности 420
— пятизначный цикличный 484
— с расстоянием единица 484
Цифровой кодер данных о высоте 48$
------, неоднозначность положения 488
Колебания типа Л 13
Коллектор 10, 39
— вторичный 40
— многоэлементный 40
Коммутатор 94
— активный 108
--- на полупроводниковых приборах НО
— , параллельное включение 97
— , последовательное включение 97
Компенсатор 303
— векторный 317
— , видео- 303
— , ПЧ 311
---фазовый 312
— двухступенчатый 303—308
— одинарный 303—308
— с прямыми связями 303—308
— с обратными связями 303—308
— трехступенчатый 303—308
— цифровой 318
Компрессия 62
КПД передатчика 76
КПД на краю полосы частот 41
Коррелятор 402, 423
— оптический 440
Коэффициент включения 377
Коэффициент Тейлора 436
Коэффициент улучшения 291
Лампа 12
— бегущей волны 44
---—, скоростное выравнивание 46
— , выходная мощность 67
— , динамическое сопротивление 57
— , дрейф электронов 31
— , объединение 63
— обратной волны 12
— , отражения и нелинейности 85
— , высоковольтный блок питания 39
— с прямолинейным электронным лучом
(типа 0) 31
।-----—.преобразование амплитудной мо-
дуляции в фазовую 42
— прямой волны 12
рентгеновское излучение 34, ПО
— сверхмощная 67
— со скрещенными полями (типа М) 8
------ возвратная 10
------ круглая 10
------ линейная 10
------ невозвратная 10
— стоячей волны 12
Линзы электростатические фокусирующие
50
Линия задержки 407
---алюминиевая 407
--- дисперсионная клинообразная 409
-- дисперсионная на поверхностных вол-
нах 409
--- дифракционная перпендикулярная 408
--- ленточная меандровая 412
--- многоугольная 409
--- полосковая 407
--- стальная 408
Логарифмирование цифровое 178
Луч иммерсионный (однородный) 35
Люминофор 203
— , активатор 2Q4
— , длительность послесвечения 203
— , срок службы 206
520
Предметный указатель
Магнетрон 17
— , Дрейф частоты 18
затягивание частоты 18
— . изменение типа колебаний 17
— , искрение 17
— , настраиваемый напряжением 19
— обращенный коаксиальный 15
—, паразитный высокочастотный выходной
сигнал 18
— , срок службы 19
— , уход частоты 18
стабилизированный 15
утечка ВЧ энергии с катодного стержня
18
— , органы настройки 13
---—с гидравлическим приводом 14
— с дроссельным приводом 14
с механическим приводом 14
•-----типа «тернового венца» 14
------вращающийся 14
------, срок службы 19
Магнит бочкообразный 35
Мазер 145
Маяки радиолокационные 476
---, система для управления воздушным
движением 476
— —, исключение иесиихроиизированных от-
ветов в системе 495
---, антенные системы 485
---, запросчик 491
---, подавление запросных сигналов по бо-
ковым лепесткам 486
Минимальный различимый сигнал (МРС)
291
Модулятор 86
— с активным коммутатором 101
— магнитный 99
— гибридный магнитный с кремниевыми
управляемыми вентилями 100
---, коэффициент сжатия каскада 99
— импульсный (выбор) 87
•--, в цепи модулирующего анода с травс-
форматорной связью 106
— — катодный 101
---, в цепи модулирующего анода с пря-
мой связью 104
---сеточный 101, 107
— линейный 98
---, параллельное включение 98
— , искажения 86
— пилообразный 415
Модуляция 260
— двойная частотная 267
— кодовая частотная 265
— линейная частотная 403
— , в импульсио-доплеровских РЛС 383
•— частотная по синусоидальному закону
260
.-----в импульсно-доплеровских РЛС
383
------ двойная 263
---по треугольному и пилообразному за-
кону 264
— паразитная несущей 386
------ совместная 386
------ независимая 386
------ узкополосная шумовая 389
--- импульсов 386
------ совместная 386
------ независимая 386
------ случайная от импульса к импульсу
391
— частотная шумовая 265
Насос вакуумный (вакион) 41
•— ионный 40
Неоднозначность отсчета дальности 378
----, разрешение 378
Нестабильность фазы генератора опорной
частоты 151
Нестабильность, распределение 62
Несущая частота, стабильность 58
----, точность установки 58
Обнаружение за одни обзор 394
— за несколько обзоров 394
—, вероятность 393
Обнаружитель последовательный 505
—- типа «скользящее окно» 503
Обработка весовая 326
----, переменная во времени 326
Обратное рассеяние поверхности, диаграм»
ма 450
----, коэффициент 450
Ограничитель 179
— концевой в линии 92
— на лампе с отклонением луча 181
— переключающий наличную мощность 181
— на последовательных диодах 182
— пульсаций 121
— транзисторный 182
— на туннельном диоде 182
Оператор, работа за индикатором 218
Ответвитель, 3-дБ направленный 63
Ответчик радиолокационный, структура 488
Отклоняющая система 210
---- однокоординатная 210
---- двухкоординатная 210
----, возбуждение 213
Отношение осевых скоростей, нормирован-
ное 348
Отношение сигнал/шум 60
----среднее 392
Отображение, зрительное восприятие 218
—, система 197
—, радиолокационное, фотографирование
218
Отсекания хвоста, устройство 93
Паразитные выходные сигналы, уменьше-
ние 71
Пассивные помехи от земной поверхности
369
--------для неподвижной РЛС 370
--------для движущейся РЛС 370
----по боковым лепесткам 371
---- по главному лучу 374
--------, фильтрация 375
----, спектр 289
----, различимость в просветах (РПП) 293
----, полоса режекции 303
--------, центрирование 312
Пеленг антенный 214
Первеанс 32
Подавление просачивающегося импульса
передатчика 377
Полоса пропускания мгновенная 140
— шумовая приемника 163
Побочные каналы приема при преобразо-
вании частоты 166
Поле Бриллюэна 34
Посылки импульсные 78
Потери разрешения целей из-за наложения
220
Преселектор 141
Прием с постоянной частотой ложных тре-
вог (ПЧЛТ) 170
ПЧЛТ-приемиик 170
----логарифмический 171
Приемник, высокочастотная головка 141
— детекторный 137
521
Предметный указатель
—, допустимое отклонение от заданной ха-
рактеристики 138
— с квадратурным детектором 252
— МПВ логарифмический 171
— линейный, максимальный сигнал 138
— прямого усиления 137
— радиолокационный 135
— системы наведения ракет 256
— супергетеродинный 137
— суперрегенеративный 137
— , типы входных сигналов 138
— , частотоизбирательные свойства 140
Проектор 224
Пусковое устройство, методы связи 108
Радиовзрыватель 257
Радиопротиводействие (РПД) 157
Развязка каскадов усилительной линейки
60
— между передатчиком и приемником 255
-------, динамическое устройство 255
Разделители 46
Фазовое различение 172
Разрядник вакуумный с плазменным уп-
равлением 115
— газовый герметизированный управляе-
мый 115
— защитный шаровой искровой 115
— — шунтирующий 44, 113
— многозазорный, опасная зона 117
— защитный многозазорный искровой 115
Распознавание в доплеровском устройстве
258
Расщепление отметки цели 505
------- по азимуту 505
------- по дальности 505
Регулировка уровней в многокаскадной ли-
нейке 61
РЛС бокового обзора 228
-------, индикаторы 228
—, влияние характеристик ВЧ головки на
работу 141
— доплеровская навигационная 272
— импульсно-доплеровская 363
-------, применение 363
-------, преимущества и недостатки 365
—-- ---, базовая схема 368
— космических объектов 444
— многолучевые 157
— моноимпульсная 162, 174
-» с непрерывным излучением 234
--‘—, преимущества 234
------- немодулнрованным 235
------- для полиции 258
------- для управления сигналами светофо-
ров 258
-------с ПЧЛТ 254
—------с ЧМ 258
- г- обнаружения 156
— самолетная 346
— с селектором движущихся целей (СДЦ)
281
— системы встречи на орбите 444
-------КК Gemini 451
-------КК Apollo 462
— со стробом скорости 253
— наземного управления посадкой 513
— посадочная точная 513
— посадки 448 • .
— со сжатием импульсов 400
— сопровождения 158
-- по дальности 158
Резонаторы объемные вакуумные 43
— — внешние 42 ' '
------отражательные 241
---пролетные 241
Самовключение 57
Самовыключение 27, 57
Селектор движущихся целей 82
------самолетный (ССДЦ) 346
—-------, компенсация влияния движения
при сканировании 355
--- — — со ступенчатым сканированием
358
-------, выбор компенсирующей диаграм-
мы направленности 359
--------, множественность спектров 361
--------, одновременная компенсация дви-
жения носителя н сканирования 359
--------, сдвиг огибающей импульса 360
--------, учет приема по боковым лепест-
кам 354
--------, эффект движения носителя 348
--------, эффект наклонной дальности 348
------, система TACCAR 312
------, влияние ограничителя на улучшение
299
------с внешней когерентностью 336
------, глубина нулей в кривой частотного
отклика 328
------зональный 339
------, коэффициент улучшения 82 291
------,структурная схема 284
---—.частотная характеристика 287
------, требования к стабильности 328
------фазоЧувствнтельный 337
------, цепь свертки 337
Сетка защитная 37
— неперехвЬтывающая управляющая 37
— подготавливающая 95
Сжатие импульсов 333
Сигнал с кодированием по фазе 419
Сигнал кодированный, активное формирова-
ние 402
---, пассивное формирование 402
— , коэффициент заполнения 392
— с нелинейной ЧМ 418
------несимметричной 418
------ симметричной 418
— фазокодовый апериодический 422
--- периодический 422
— с частотно-временным кодированием 427
------—, активное формирование и корре-
ляция 429
— полезный, минимальный уровень 138
Синтезатор частот 151
Синхроимпульс 152
Система барьерного авиационного патрули-
рования 346
— предотвращения столкновений с местно-
стью 229
— самолетная раннего предупреждения
(ССРП) 346
— селективного опознавания Mark X 478
— обзора со вторичными РЛС 478
— сжатия импульсов 84
— телевизионная с преобразованием раз-
вертки 226
Скиатрон 210
Скотофор 210 ’:
Слепые скорости 287
Смеситель 141
балансный с инвертированным сигналом
144
---с инвертированным гетеродинирующим
напряжением 144 ' ' '
•--диодный 146
— реляционный 162
522
Предметный указатель
—, математическая модель 142
—, номограмма комбинационных колебаний
142
— однополосный 145
—, побочные каналы преобразования 142
— с подавлением зеркального канала 144
Смещение фазового центра антенны
(СФЦА) 352
Согласование во времени 60
Сопровождение цели 383
--- групповой 385
--- при затенении 384
---по скорости 222
— — по скорости и угловым координатам
383
--- пропорциональное 222
Спектр разностного ЧМ сигнала 261
— сигнала импульсно-доплеровской РЛС 364
Спицы пространственного заряда 10
Стабилизатор 118
— с ограничением добротности 122
— первичный 121
— последовательный постоянного тока 118
— феррорезонансиый 118
— энергии 125
Стабилитрон 25
Стабилизация активная в цепи «задающий
генератор—усититель мощности» 241
— частоты, мостовая схема 242
---мощных генераторов 245
--- первого гетеродина 149
Стробирование временное 377
— по дальности 378
------ с качанием строба 384
Схема всепропускающая временной задерж-
ки 411
— отсекания хвоста 90
<— слежения за скоростью изменения фазы
185
--- за фазой сигнала 184
Такан 77
Тайптрон 217
Твистрон 46
Теорема Chinese об остатках 381
Типы колебаний паразитных 56
Тиратрон водородный 94
Тиристор кремниевый выключаемый 111
Траектория вертикального спуска КК 449
— наклонного спуска КК 449
Транспарант 224
Трансформатор импульсный 90
— Скотта Т-образный к сельсину 215
Тройиик двойной 63
Угол места 157
Ультразвуковые дисперсионные устройства
406
Умножение частоты на варакторном диоде
151
___ иа диоде с резким восстановлением
151
Управление воздушным движением 204
Усиление на высокой частоте 250
— дифференциальное 138
— на отрезок при кусочно-линейной ап-
проксимации логарифмической кривой
174
Усилитель с автоматической регулировкой
усиления (АРУ) 156
___ со скрещенными полями 19
------, область дрейфа 21
______обратной волны возвратный 25
------, пьедесталы на ВЧ импульсе 22
— логарифмический 174, 177
— - — операционный 179
— обратной волны гида О 52
— параметрический 145, 147
— промежуточной частоты 251
— СВЧ транзисторный 146
Усилительная цепочка, надежность 63
Ускоритель линейный 67
Утечка высокой частоты 62
Фаза слепая ЗН
Фазированная антенная решетка (ФАР) 65
------, подрешетка 65
Фильтр доплеровский, гребенка 253
— когерентный с памятью (КФП) 340
— согласованный 162, 400, 423
----, приближения к нему 165
— растяжения 402
— сжатия 402
Фильтрация додетекторная 163
— последетекторная 163
— в радиолокационной системе 162
Фокусировка ЭЛТ 201
— ионная 34
— магнитная 34
Фокусирующая лииза ЭЛТ, коэффициент
увеличения 202
— система 202
--- магнитная 202
--- электростатическая 202
Формирование импульсов 71
— сигналов с ИМИ 319
Характрон 217
Цепь Х-процеитная 46
Частота выборки цифровых данных 190
— поднесущая 252
— повторения импульсов, выбор для исклю-
чения иеоднозначиости по скорости 367
Частотный разнос, программа 67
Чувствительность по фазовой (частотной)
модуляции 42, 82
Шепчущая настройка 15
«Шум дальности» 361
— избыточный, измерение 247
— в задающем и мощном генераторах, из-
мерение 246
— в импульсно-доплеровских РЛС, измере-
ние 248
— квантования 332
---, влияние иа коэффициент улучшения
332
— межимпульсный 56
— паразитный в рабочей полосе 56
---в смежной полосе 56
— ЧМ в источниках СВЧ колебании 250
Шума коэффициент 137, 145
Шумовые кольца 18
Шумовая температура 137, 145
Электрод смещающий 27
— управляющий 22
— фокусирующий 39
Электромагнитная совместимость 71
Электронная пушка 10, 32, 201
--- бипотенциальная 202
— — уиипотенциальная 202
•---- магнетронная инжекционная 33
Электронно-лучевая трубка (ЭЛТ) 19»,
--- с двойной системой отклонения 209
---, аберрация луча 199
---, дисторсия луча 199
--- с волоконной оптикой 220
---запоминающая 495
523
Предметный указатель
— — —с барьерной сеткой 495
— —, искажение изображения при ма1 нит-
ном отклонении 212
— —, колба 201
— —, контраст отображения 219
, метки и символы 215
——.запись меток и символов 216
—----------методом фигурного луча 217
---------координатным методом 217
---------методом растровой развертки
217
-----------методом фигур Лиссажу 21Z
-----------моноскопным знаковым генера-
тором 217
—.обновление знаков на экране 221
----, отклоняющие пластины 199
----, подушкообразные искажения 213
---- с послеускорением 200
---- двухцветные 209
— — трехцветные 209
---, разрешающая способность 207
— —.измерение разрешающей способности
207
----, спираль высокого сопротивления 200
----, чувствительность по отклонению 211
— —, с электростатическим отклонением 199
----, с электромагнитным отклонением 20Q
Эффект Доплера 235
Эффект микрофонный 240
Эхо парное 430
524
Оглавление
Глава 1. Радиолокационные передатчики. Т. Вейл , 7
1.1. О выборе типа лампы высокой частоты...............7
1.2. Лампы со скрещенными полями (типа М ).............8
1.3. Лампы с прямолинейным электронным лучом (типа О) . . 3[
1.4. Сравнение ламп высокой частоты . . ............53
1.5. Генератор или усилитель? . ............... 58
1.6. Объединение ламп и включение в антенную решетку ... 63
1.7. Выходная мощность высокочастотных ламп...........67
1.8. Формирование импульсов для минимизации ширины спектра 71
1.9. Проблема импульсных посылок . ..............78
1.10. Требования к стабильности передатчиков ........ 8(
1.11. Выбор и сравнение импульсных модуляторов разных типов . 87
1.12. Линейные модуляторы ........... 87
1.13. Магнитные модуляторы ........... 99
1.14. Гибридные магнитные модуляторы с кремниевыми управляе-
мыми вентилями...................................100
1.15. Модуляторы с активным коммутатором.............101
1.16. Защитные шунтирующие разрядники . . . . . , . .113
1.17. Стабилизаторы .... ........................118
1.18. Влияние высоковольтного источника и первичной силовой
сети.............................................125
Список литературы....................................127
Глава 2. Радиолокационные приемники, Дж. Тейлор, Дж. Маттерн 135
2.1. Структурная схема радиолокационного приемника
2.2. Шум и динамический диапазон приемника..................
2.3. Часготно-избирательные свойства приемника и его элементов
2.4. Высокочастотная головка приемника......................
2.5. Гетеродины . .......................................
2.6. Усилители с автоматической регулировкой усиления (АРУ) .
2,7. Фильтрация .... .........
2.8. Некоторые соображения о приеме с постоянной частотой лож-
ных тревог .................................................
2.9. Логарифмические усилители..............................
2.10. Ограничители..........................................
2.11. Фазовые и синхронные детекторы........................
2.12. Аналого-цифровые преобразователи . ......
Список литературы . ......................
135
137
140
141
147
156
162
170
174
179
182
189
195
Глава
3. Радиолокационные индикаторы и системы отображения.
А. Берг.................................
197
3.1. Виды отображения.....................................
3.2. Электронно-лучевые трубки............................
3.3. Конструкция индикаторов..............................
3.4. Работа оператора за индикатором......................
3.5. Специальные индикаторы......................... . .
Список литературы . . . . ...................
197
199
210
218
226
232
525
Список литературы
Глава 4. Радиолокационные системы с непрерывным излучением
и с частотной модуляцией. В. Саундерс..........................
4.1. Введение. Преимущества РЛС с непрерывным излучением .
4.2. Эффект Доплера .... . . . .
4.3. РЛС с немодулнрованным непрерывным излучением . . ,
4.4. Источники колебаний СВЧ...............................
4.5. Методы измерения шума..................................
4.6. Приемники.............................................
4.7. Минимизация просачивания сигнала ........
4.8. Приемники систем наведения ракет......................
4.9. Различные типы РЛС с непрерывным излучением . . . .
4.10. РЛС с непрерывным излучением и с частотной модуляцией
4.11. Модуляция по синусоидальному закону
4.12. Модуляция по треугольному и пилообразному закону
4.13. Шумовая модуляция.....................................
4.14. Кодовая модуляция..................................
4.15. Двойная модуляция.....................................
4.16. Утечка.................................................
4.17. Общие показатели работы РЛС непрерывного излучения с час-
тотной модуляцией...........................................
4.18. Высотомеры............................................
4.19. Доплеровские навигационные РЛС.........................
4.20. РЛС для обнаружения людей.............................
234
234
235
235
241
245
250
255
256
257
258
260
264
265
265
267
267
268
268
272
276
Список литературы...........................................277
Г л a d а 5. РЛС с селекторами движущихся целей. В Шредер . ф281
5.1. РЛС с СДЦ......................................... .... 281
5«2. Характеристики СДЦ при обнаружении сигналов от движу-
щихся целей............................................. 287
5.3. Спектральные характеристики отражений от неподвижных
целей . . ...........................................288
5.4. Амплитудные характеристики пассивных помех .... 290
5.5. Определения . . •....................................291
5.6. Вычисление коэффициента улучшения.....................293
5.7. Ограничения, накладываемые на коэффициент улучшения
вследствие использования ограничителей .................... 299
5.8. Фильтры с большим числом линий задержки...............303
5.9. Компенсаторы на промежуточной частоте . . . . . .311
5.10. Изменение межимпульсных интервалов (ИМИ) .... 319
5.11. Ограничения коэффициента улучшения, связанные с ИМИ . , 325
5.12. Глубина первого нуля в кривой частотного отклика , , 328
5.13. Требования к стабильности радиолокационной системы . . 328
5.14. Влияние шумов квантования на коэффициент улучшения 332
5.15. Сжатие импульсов и СДЦ...............................333
5.16. СДЦ с внешней когерентностью....................... 336
5.17. Зональный селектор движущихся целей................ 339
5.18. Запоминание карты помех............................ 339
5.19. Когерентный фильтр с памятью и автостробированием . . 339
5.20. Некоторые соображения, относящиеся к РЛС с СДЦ . . . 342
С п исокл и тературы.....................................344
Глава 6. Самолетные РЛС с селекторами движущихся целей. М. Стау-
даер...................................................... 346
6.1. Использование принципов СДЦ в самолетных радиолокацион-
ных системах 346
6.2. Зона действия . . . 347
526
Список, литературы
6.3. Влияние передвижения носителя и его высоты на функциони-
рование СДЦ............................................. 347
6.4. Компенсация влияния движения при сканировании . . .355
6.5. Одновременная компенсация движения носителя и сканиро-
вания .................................................. .359
6.6. Ограничения, накладываемые на коэффициент улучшения,
вследствие сдвига огибающей импульса..................360
6.7. Влияние множественности спектров......................361
Список литературы . . . . .................362
Глава 7. Импульсно-доплеровские РЛС. Д Муни и В. Скиллмен . 363
7.1. Характеристики и применения .... 363
7.2. Пассивные помехи импульсно-доплеровским РЛС .... 369
7.3. Временное стробирование................................377
7.4. Сопровождение цели................................... 383
7.5. Требования к стабильности..............................385
7.6. Дальность действия.................................... 391
Список литературы...........................................399
Глава 8. РЛС со сжатием импульсов. Э. Фарнетт, Т. Говард, Г. Сти
вене................................................400
8.1. Введение............................................. 400
8.2. Факторы, определяющие выбор вида системы со сжатием им-
пульса ............................................... 402
8.3. Линейная частотная модуляция...........................403
8.4. Сигналы с нелинейной ЧМ................................417
8.5. Сигналы с кодированием по фазе.........................419
8.6. Сигналы с частотно-временным кодированием..............427
8.7. Весовая обработка и компенсация........................430
8.8. Оптический коррелятор..................................440
Список лтературы............................................442
Глава 9. Применения бортовых РЛС на космических объектах
Р. Феннер, Р. Бродерик .........
9.1. Введение....................................
9.2. Системы встречи на орбите...................
9.3. РЛС как средство обеспечения посадки................
9 4. РЛС системы встречи на орбите космического корабля Gemin
9.5. Радиолокационные системы космического корабля Surveyor
9.6. Радиолокационные системы космического корабля Apollo .
9.7. Дополнительные сведения....................... ...
Глава 10. Радиолокационные маяки. А. Аслей, Дж. Перри
10.1. Введение............................................
10.2. Основные принципы построения системы................
10.3. Автоматическая передача данных о высоте ....
10.4. Антенные системы....................................
10 5. Структура радиолокационного ответчика............
10.6. Блоки приемопередатчика запросчика..................
to.7. Аппаратура исключения несинхронизированных ответов
10.8. Декодирование и аналого-цифровое преобразование
10.9. Индикаторные системы.......................... ...
10 10. Военное использование и специальные применения
Слисок литературы.....................................•
Список сокращений......................................' •
Предметный указатель.....................................
444
444
444
448
451
457
462
473
476
476
477
482
485
488
491
4)5
497
506
512
515
517
519
527
Справочник по радиолокации. Под ред. М. Скол-
С74 ника. Нью-Йорк, 1970: Пер. с англ, (в четырех
томах) / Под общей ред. К. Н. Трофимова; Том 3.
Радиолокационные устройства и системы / Под ред.
А. С. Виницкого. — М.: Сов. радио, 1979. 528 с.,
с ил.
В пер. 2 р. 80 к.
Третий том посвящен принципам работы и основам инженерного
проектирования радиолокационных устройств и систем.
Справочник предназначен для специалистов, преподавателей и
студентов вузов.
С --- подписное 2402020000
046(01)-79
ББК 32.95
6Ф2.4
ИБ № 341
СПРАВОЧНИК ПО РАДИОЛОКАЦИИ
Под редакцией М. Сколника
Перевод с английского под общей редакцией
К. Н. Трофимова
Том 3
РАДИОЛОКАЦИОННЫЕ УСТРОЙСТВА
И СИСТЕМЫ
Под редакцией
А. С. Виницкого
Редактор В. М. Ларионова
Художественный редактор А. Н. Алтунин
- Обложка художника В. В. Волкова
Технический редактор А. А. Белоус
Корректор Л. А. Максимова
Слано в набор 23.12.77. Подписано29,12,78.
Формат 60Х90/1в. Бушгга'типографе*** № I
Литературная гарнитура Высокая печать.
Объем 33 усл п. л., 45,81 уч. изд. л.
Тираж 35 210 экз. Зак. 2247. Цена 2 р. 80 к.
Издательство «Советское радио», Москва, Главпочтамт а/я 693
Московская типография № 4 Союзполиграфнрома
Государственного комитета СССР
по делам издательств, полиграфии и книжной торювли
Москва 129041, Б. Переяславская, 46