/



















































































































Текст
7 О , h 4-1
пД?.
ЫДОВ, А. А. СОСНОВСКИЙ,
4/32
И. А. ХАИМОВИЧ
АВИАЦИОННАЯ РАДИОЛОКАЦИЯ
СПРАВОЧНИК
Под редакцией П. С. ДАВЫДОВА
Омское г бхничес-
кое j . гд
ушяла smsWeha
и X
УДК 629.7.658.2(083)
Давыдов П. С, Сосновский А. А, Хаимович И. А. Авиационная
радиолокация: Справочник. — М.: Транспорт, 1984, 223 с.
В справочнике изложены сведения о принципах построения
радиолокационных систем (РЛС), основных параметрах РЛС и
методах их выбора и расчета.
Рассмотрены типовые радиоустройства, входящие в состав РЛС:
антенны, передатчики, приемники, оконечные устройства аналогового
и дискретного типа. Приведены структурные ’схемы и параметры
основных видов наземных и бортовых РЛС, используемых в граж-
данской авиации. Рассмотрены также особенности эксплуатации
РЛС, методы и средства технической диагностики, организационные
основы технического обслуживания.
Предназначен для инженерно-технического состава, связанного
с эксплуатацией радиолокационных средств обеспечения полетов.
Ил. 154, табл. 25, библиогр. 40 назв.
Рецензент Н. И. Рыболов
Заведующий редакций В. С. Захаров
Редактор И. В. Мариян
„ 3606040000—236
Д ~ 049<01)—84 М6-М
© Издательство «Транспорт:», 1984
Глава 1. ОБЩИЕ СВЕДЕНИЯ О РАДИОЛОКАЦИОННЫХ
СИСТЕМАХ
1.1. РАДИОЛОКАЦИОННОЕ ОБЕСПЕЧЕНИЕ ПОЛЕТОВ
Управление полетом современного летательного аппарата (ЛА) осуществля-
ется на борту и на земле и требует разнообразной информации об условиях поле-
та. Основными источниками этой информации являются наземные и бортовые
радиоэлектронные устройства и системы, обеспечивающие полет. С помощью ра-
диоэлектронных систем получают информацию об окружающей ЛА воздушной
обстановке, координатах различных объектов, метеообразованиях, траекториях
полетов, а также командную информацию (рис. 1).
Наземные радиоэлектронные системы включают в свой состав радиолокаторы
трассовые (ТРЛ), аэродромные (АРЛ), посадочные (ПРЛ), вторичные ВРЛ, ме-
тео-навигационные (МРЛ), обзора летного поля (ОЛП), радиосистемы ближней
навигации (РСБН), дальней навигации (РСДН), аппаратуру радиопосадки
(РСП), автоматические радиопеленгаторы (АПР), радиомаяки (РМ), системы пе-
редачи данных и трансляции радиолокационного изображения, средства техниче-
ского обслуживания и ремонта радиоэлектронного оборудования (РЭО).
Бортовые радиоэлектронные устройства состоят из бортовой радиолокацион-
ной станции (БРЛС), доплеровского измерителя скорости и угла сноса (ДИСС),
радиовысотомера (РВ), самолетного ответчик-маяка (СОМ), бортовой аппаратуры
РСБН, РСДН, радиокомпаса, приемного устройства радиомаячной системы по-
садки. Радиолокационные системы (РЛС) — это технические средства получения
информации об удаленных объектах путем приема отраженной (или переизлу-
ченной) электромагнитной энергии. Они предназначены для решения следующих
задач: измерения координат ЛА, высоты полета, путевой скорости, угла сноса,
обнаружения на маршруте встречных ЛА и препятствий, метеообразований.
РЛС контролируют полет ЛА относительно наземных ориентиров на трассе, в
зоне аэродрома, при заходе на посадку, предоставляют диспетчеру, управляюще-
му полетом, необходимую информацию, включая данные о бортовом номере, вы-
соте полета и остатке топлива на борту.
Основные методы получения информации об удаленных объектах: облуче-
ние объекта зондирующим сигналом £3онд(0 и прием отраженного сигнала
(рис. 1.2) £Отр(0 (активная радиолокация), облучение объекта зондирующим сиг-
налом, который принимается бортовым радиоустройством, преобразуется и излу-
чается в виде ответного сигнала £отв (/) (вторичная радиолокация или активная
радиолокация с активным ответом).
Измерение координат объектов в радиолокации осуществляют в сфериче-
ской системе (рис. 1.3). За центр координат принимают место установки РЛС.
Координатами объекта наблюдения являются наклонная дальность D, радиус-
вектор, а — азимут объекта (долгота), Р — угол места объекта (угол между пло-
скостью радиуса-вектора и горизонтальной плоскостью).
Электромагнитные волны генерируются в передающем устройстве, направ-
ленно излучаются антенной А, распространяются в пространстве, отражаются
от встречных объектов, через антенно-фидерное устройство поступают в прием-
ник и после преобразования и выделения информации об объекте в оконечное
устройство. Для радиолокации используют следующие свойства электромагнит-
ных полей (ЭМП): конечную скорость распространения в свободном пространст-
ве, равную с = 3-108 м/с, отражение радиоволн от объектов, прямолинейное рас-
пространение фронта волны в однородной среде, возможность направленного
излучения и приема радиоволн, эффект Доплера — эффект изменения частоты
колебаний при относительном перемещении приемника и передатчика.
3
1.1. Система радиообеспечения поле-
тов
Рис. 1.2. Схема активной РЛС с ак-
тивным ответом
Дальность до объекта D находят измерением временного сдвига tD зондирую-
щего и принимаемого отраженного сигнала, так как скорость, распространенная
ЭМД, принимается постоянной: = 2D/c. Для определения угловых координат
используют направленные свойства антенны РЛС. Скорость перемещения объек-
та относительно РЛС определяют с помощью эффекта Доплера.
Структурная схема РЛС в обобщенном виде представлена на рис. 1.4. Работа
РЛС синхронизируется специальным устройством Синхр. Синхронизирующие
импульсы запускают импульсный модулятор ИМ, имеющий стабильный период
повторения Тп. Импульсы модулятора подаются в импульсный генератор СВЧ
(ИГСВЧ), генерирующий короткие мощные радиоимпульсы. Последние через
антенный переключатель АП, который служит для развязки цепей приемника
и передатчика, поступают в антенну и излучаются в пространство. Отраженный
от объекта радиоимпульс принимается антенной, далее через антенный переклю-
чатель поступает в смеситель См. После смесителя преобразованный по частоте
радиоимпульс промежуточной частоты ПЧ детектируется, смешивается с импуль-
сами генератора меток дальности ГМД и подается на управляющий электрод элек-
тронно-лучевой трубки (ЭЛТ), на экране которой воспроизводится в виде яркост-
ного пятна.
Одновременно с модулятором от синхронизатора запускается блок разверт-
ки оконечного устройства — визуального индикатора ВИ, на выходе которого
4
Рис. 1.3. Сферическая система коор-
динат
Рис. 1.4. Структурная схема РЛС:
Синхр. — синхронизатор; ИМ — импульс-
ный модулятор; ИГСВЧ — импульсный ге-
нератор СВЧ; АП — антенный переклю-
чатель; А — антенна: См — смеситель;
МГ — местный гетеродин; АПЧ —блок ав-
топодстройки частоты; АРУ — автоматиче-
ская регулировка усиления; Д — детектор;
ВУ — видеоусилитель; ГПИ — генератор
прямоугольного импульса; ГЛИТ —гене-
ратор линейно изменяющегося тока;
ССО — система селекции; СДПТ — устрой-
ство дискретного преобразования и транс-
ляции сигнала; ОС — отклоняющая систе-
ма; БВА—блок вращения антенны
генерируются импульсы линейно изменяющегося тока /рдит длительно-
стью 1глит (0 = 2£)В0СП/с, где Рвосп — воспроизводимая в ОУ дальность.
Под действием линейно возрастающего тока /ГЛцТ (/) магнитное поле откло-
няющей системы ЭЛТ радиально перемещает электронное пятно. В момент при-
хода отраженного сигнала линия развертки подсвечивается, и облучаемый объект
воспроизводится на экране в виде яркого пятна. Для обзора заданной зоны про-
странства узкий луч антенны перемещается. Синхронно и синфазно с направлен-
ным излучением антенны перемещается линия развертки на экране ЭЛТ. Изо-
бражение на экране маркируетсяметками по дальности и азимуту, что позволяет
измерить координаты объекта.
Классификация РЛС производится согласно ГОСТ, нормам Международной
организации гражданской авиации (ICAO), наставлению по производству поле-
тов гражданской авиации (НПП-78). В основу классификации РЛС положены:
место установки, функциональное назначение, дальность действия, метод обзо-
ра окружающего пространства, количество измеряемых координат и диапазон
частот.
По месту установки РЛС подразделяют на бортовые и наземные. Бортовые
РЛС по функциональному назначению делят на метеонавигационные, доплеров-
ские измерители скорости и угла сноса (ДИСС), радиовысотомеры РВ, радиолока-
торы бокового обзора (РЛСБО), самолетные ответчики (СО).
Наземные РЛС подразделяют на первичные и вторичные. Первичные по функ-
циональному назначению делят на следующие группы:
радиолокаторы трассовые обзорные ОРЛ-Т (вариант А) с дальностью обзора
— 400 км;
трассовые и аэроузловые обзорные ОРЛ-ТА (вариант Б) с дальностью дей-
ствия — 250 км;
аэродромные обзорные ОРЛ-А (варианты Bl, В2 и ВЗ) с дальностью дейст-
вия соответственно 150, 80 и 45 км;
посадочные радиолокаторы ПРЛ (радиолокаторы обзора летного поля ОЛП;
метеорологические радиолокаторы МРЛ; комбинированные обзорно-посадочные
радиолокаторы ОПРЛ).
По виду излучаемого сигнала различают РЛС с непрерывным зондирующим,
со сложным зондирующим и с импульсным зондирующим сигналами. Большин-
ство РЛС, применяемых в ГА, используют импульсный зондирующий сигнал,
ДИСС и РВ — непрерывный модулированный зондирующий сигнал.
По методам обзора пространства различают РЛС кругового и секторного
обзора. К РЛС кругового обзора относятся все наземные РЛС за исключением
ПРЛ, к РЛС секторного обзора — бортовые РЛС и ПРЛ.
По диапазонам частот РЛС подразделяют на миллиметровые (РЛС ОЛП),
трехсантиметровые (бортовые и посадочные РЛС), дециметровые (ОДРЛ, ТРЛ).
1.2. ХАРАКТЕРИСТИКИ РАДИОЛОКАЦИОННОЙ ИНФОРМАЦИИ
Уравнение радиолокации определяет зависимости между излучаемой мощ-
ностью, параметрами сигнала, свойствами среды и объекта отражения, парамет-
рами РЛС и энергией принимаемого сигнала.
Плотность потока электромагнитной энергии, облучающей объект,
По — (Ризл /обл G д 4 л D2 ,
где Риэл — излучаемая мощность; /обл — время облучения объекта (длитель-
ность полезного сигнала); G^ — коэффициент направленного действия пе-
редающей антенны; D — дальность между РЛС и объектом; А — коэффи-
циент, учитывающий условия распространения радиоволн.
Энергия, отраженная от цели в сторону РЛС, Еотр = гДе — эф-
фективная отражающая поверхность объекта (ЭОП), полностью характеризую-
щая отражающие свойства объекта относительно зондирующего сигнала.
Энергия полезного сигнала на входе РЛС (при приеме)
^с.прм = ^изл ^обл а А/(4л)-DA ,
где SA — площадь раскрыва (эффективная) приемной антенны.
б
Для ВРЛ энергия, принимаемая ответчиком,
^прм.о — ^изл-з ^обл-о ^а-з ^а-о 4лО2
Энергия сигнала, полученная в ответ на запрос,
^прм-з — ^изл.о ^облз 4лИ2 .
Индексы «з» принадлежат параметрам запросчика, индексы «о» — парамет-
рам ответчика. Принимаемая энергия £с.прм = kD~* убывает пропорционально
четвертой степени дальности. Поэтому принимаемый сигнал имеет весьма малую
мощность.
Наряду с полезным сигналом в приемном тракте РЛС действуют собственные
шумы, которые характеризуются коэффициентом шума приемника
= (^С^пОвХ^с/?ш)вых >
где Рс/Рш—соответственно отношение мощности сигнала к мощности шума
на входе и выходе приемного тракта в полосе его пропускания Д^прм-
Мощность собственных шумов приемного тракта
Рщ “ -'^ш kTпрм»
где k — постоянная Больцмана, равная 1,38* 10“23 Вт/(Гц-град); Т — абсолют-
ная температура входных цепей приемника, К-
Помимо шумов из окружающей среды в приемный тракт проходят помехи
различного типа: хаотические импульсные, внеполосные излучения различных
радиосистем, радиошумы космоса, радиоизлучение Солнца и др.
Полезный сигнал вследствие изменения ракурса объектов при их перемеще-
нии меняется по амплитуде случайным образом (стохастически) — флюктуи-
рует. Другим источником флуктуаций является стохастическое изменение па-
раметров среды, в которой распространяются зондирующий и отраженный сиг-
налы. В результате этих воздействий детерминированный сигнал приобретает
стохастическую составляющую.
Шумы и помехи, проходя через узкополосные цепи приемного тракта РЛС
(узкополосные относительно ширины спектров шумов и помех), сглаживаются,
и их форма на выходе приемника оказывается близкой к форме сигнала. Шумы и
помехи могут изменить параметры сигнала, содержащие полезную информацию,
что приводит к ошибкам обнаружения объектов и погрешностям определения ко-
ординат.
Помимо указанных воздействий в радиолокационном тракте возникают энер-
гетические потери, обусловленные неидеальностью реальных конструкций РЛС
(наличие затуханий, сопротивлений, паразитных емкостей, утечек) и процессов
формирования зондирующего сигнала и использования антенных устройств. Эти
потери учитываются в уравнении радиолокации различными коэффициентами,
которые задают или определяют опытным путем.
Радиолокационные объекты описываются следующими характеристиками:
эффективной отражающей поверхностью (ЭОП), статистическим законом распре-
деления значений ЭОП, спектром флуктуаций амплитуды (мощность отражен-
ного сигнала), законом распределения амплитуды (мощности) отраженного сиг-
нала, спектром флуктуаций фазового фронта отраженного сигнала.
ЭОП характеризует отражающие свойства объекта, которые зависят от гео-
метрических размеров, конфигурации, материала, длины волны, направления
облучения и поляризации волны:
Sq = sGq Sr,
где е — коэффициент поляризации; G = f (X) — коэффициент направленности
отраженного сигнала; Sr — геометрическая площадь.
Точный расчет составляющих, входящих в формулу, затруднен, поэтому на
практике So определяют экспериментально из соотношения So 4лО2£,рлс/£'о,
где £рлс и Ео — энергия электромагнитного поля РЛС и объекта.
Радиолокационные объекты по методу определения ЭОП подразделяют на
элементарные, ЭОП которых определяют аналитически, и сложные. Элементар-
ные объекты — шар, пластина, вибратор, уголковые отражатели, линза Люне-
7
Рис. 1.5. Зависимость распределения
амплитуд сигналов, отраженных от
различных объектов от отношения
‘сигнал/шум
берга и другие тела простейшей конфи-
гурации, а сложные — реальные объек-
ты отражения. Сложные объекты, в
свою очередь, подразделяют на точечные
и распределенные. Точечными называ-
ются объекты, для которых выполняет-
ся условие: наибольший размер объекта
по дальности /0 < сти/2, по азимуту
/оА < 6а£>, где 0а — ширина ДНА.
Точечные объекты практически не
увеличивают длительность отраженно-
го сигнала и не меняют ширину его
спектра. Объекты, для которых не вы-
полняются эти соотношения, имеют
распределенную ЭОП. Объекты с рас-
пределенной ЭОП могут быть поверх-
ностными (земная и водная поверхно-
сти) и объемными (гидрометеоры — об-
лака, дождь, снег, туман).
Элементарные объекты (элементарные отражатели) несмотря на простоту
геометрических форм имеют сложные по конфигурации диаграммы переизлуче-
ния падающей электромагнитной волны в общем случае осциллирующей формы,
зависящей от геометрических размеров, длины волны и направления облучения.
Для шара радиусом г 50 = 144 (лИА,4) — для малых значений г/X. По мере
роста r/Х наблюдается ряд резонансных областей и при r/Х > 1 So — №. Для
квадратной металлической пластины площадью Sr = а2, облучаемой потоком
энергии под углом сс, ЭОП
So — 4л52/Х2 cos а
sirl (2ла/Х) sin а
(2ла/Х) sin а
представляет многолепестковую функцию. При а > X и нормальном облучении
пластины (а = 0) So > Зг.
Появление в составе сложной цели элементарного отражателя, располо-
женного нормально к фронту облучения, может существенно изменить значение
ЭОП реального объекта. Такой отражатель называется «блестящей точкой».
Для уголкового отражателя с квадратными гранями (длина ребра a) S =
= 12ла4/Х2, при треугольных гранях 30 =* 4ла4/ЗХ2. So ~ const в пределах
квадранта. Уголковые отражатели используют в качестве искусственных марке-
ров наземных объектов.
Объекты, с распределенной ЭОП (реальные объекты) имеют сложную геоме-
трическую конфигурацию, которую можно представить, как совокупность то-
чечных и элементарных отражателей. При движении объектов их расположение
по отношению к фронту облучающей волны непрерывно меняется, поэтому зна-
чение ЭОП So (t) подчиняется статистическим закономерностям.
Дифференциальный закон распределения ЭОП такого объекта
W (S0) = So4exp (So/So)>
где So — среднее значение ЭОП.
Средняя эффективная отражающая поверхность летательных аппаратов
имеет следующие значения: ЛА МВЛ — 3—5 м2, среднемагистральные ЛА —
20—40 м2, широкофюзеляжные ЛА — 30—80 м2.
Плотность вероятностей амплитуд сигналов (рис. 1.5), отраженных от
объекта с распределенной ЭОП, хорошо аппроксимируется законом Релея
1Г (£/)=(/и<гш) ехр ( — А2/2о^))?
и при наличии постоянной составляющей (блестящие точки) — распределением
Райса (обобщенный закон Релея)
(С/)=ехр [-(t/2 + A2)/2q2] /0(А(//2а*),
8
где А —амплитуда стабильной составляющей;
Zo (А(7/о2) — модифицированная функция Бесселя первого рода, нулевого
порядка.
Отраженный сигнал также характеризуется либо спектральной плотностью
флуктуаций, либо автокорреляционной функцией 30. Спектральная плотность
т
G (f)=lim Г-11 A (f) I2, где Л (/) = J U (/) exp ( — jot) dt —
_________________________________у
форма спектра отраженного сигнала, Т — интервал наблюдения.
Автокорреляционная функция сигнала R (т) = U (/) U (t + т) =
1 г
= lim — U (t) U (t + т) dt является мерой статистической связи значений
2Т ±т
функции U (t). Чем больше значение автокорреляционной функции на времен-
ном интервале т, тем. меньше вероятность значительного изменения напряжения
U (t) за это время. Чем больше корреляционная связь, тем функция U (/)
меньше флуктуирует. Между спектральной плотностью и автокорреляционной
функцией существует следующая зависимость:
G(f) = 4§ R (т) cos Zitfxdx и R (т)—J G (/) cos 2nfxdf.
о о
Автокорреляционная функция отраженного сигнала вычисляется непосред-
ственно из осциллограммы наблюдений случайного процесса: осциллограмма раз-
бивается на ряд дискретных значений t — нА, где п = 1, 2 ... N — Т/А. Ин-
тервал А берется таким, чтобы функция U (t) мало изменялась.
Автокорреляционная функция
лг —m
R(m)=(\/N—m) J] Un Un+m .
n = 0
Здесь tn — 0, 1,2, ..., M <; 0,2A, при tn > M формула не верна.
Сигналы, отраженные от объекта с распределенной ЭОП, также флуктуи-
руют по амплитуде и фазе и зависят от удельной эффективной отражающей по-
верхности Зуд = с^п, где п — количество отражателей на единицу площади
или объема, Oj — эффективная поверхность одного отражателя. Среднее значе-
ние распределенной ЭОП 30 = ^удб (S), где б (3) —элемент разрешения, опре-
деляемый геометрическими размерами площади проекции зондирующего сигнала
на облучаемую поверхность.
Для объемно-распределенной цели 30 = Зуд6 (V), где 6 (V) — объем зон-
дирующего сигнала. Для характеристики поверхности объекта используется
коэффициент обратного отражения у = Зуд/sin ф, где ф — угол облучения.
Значение у зависит от степени шероховатости поверхности, длины волны и угла
облучения (рис. 1.6).
Элемент разрешения для импульсной РЛС
б (S) = сти£>0а/2 cos ф.
В объемно-распределенных объектах (например, туман, дождь) ох ~ 1,8 X
X 104г®/Х4, где гк — радиус капли.
Таким образом удельная отражающая поверхность Зуд зависит от интен-
сивности дождя (рис. 1.7). Формула для расчета элемента разрешения по
объему имеет вид б (У) — лстн2)20а0ум^8.
При расчетах 50 необходимо учитывать, что антенны РЛС, как правило,
излучают и принимают радиоволны одной линейной поляризации (вертикаль-
ной или горизонтальной). Вследствие появления составляющей с поперечной
поляризацией при отражении возникают энергетические потери. При облуче-
нии самолета линейно-поляризованной волной X = 10 см, потери энергии при
приеме составляют около 10 дБ.
9
Рис. 1.6. Зависимость коэффициента
обратного отражения от угла облуче-
ния при различных видах земной по-
верхности:
1 —лес; 2 — почва; 3 — бетон
Рис. 1.7. Зависимость удельной отра-
жающей площади дождя от его ин-
тенсивности
С/прм = COS {2л/ t— (Ро 4
dD a2 Р \
с \ ' ’ dt dt2 /
Информация об объекте и его координатах заложена в амплитуде, фазе и
частоте принимаемого сигнала. В общем виде зондирующий сигнал
U3 (/) = ит cos Ф (0,
где Um — амплитуда; Ф (/) = 2л/ (0 / — фаза; / (0 — закон изменения частоты;
фн — начальная фаза.
Отраженный сигнал
^прм (0 = cdJтп (0 cos [2л/ (t) (/ 4) фотр]»
где /0 = 2D (t)/c; D (0 — изменение дальности по линейному закону; a — ко-
эффициент, учитывающий затухание амплитуды сигнала при увеличении
расстояния и влиянии условий распространения радиоволн.
С учетом разложения D (t) в ряд в окрестностях точки £)0
Фотр|•
dD d2D
~dt~ а dt2 Л р
В фазовых отношениях сигнала заложена информация о дальности до объекта
отражения Do, скорости его движения Vp и ускорении.
При приеме на направленную антенну из сигнала (/прм (0 можно выделить
информацию о направлении вектора фронта падающей радиоволны. Антенну
РЛС можно представить состоящей из п элементарных вибраторов (рис. 1.8),
в каждом из которых фазовый сдвиг по отношению к соседнему составляет Acpj —
= (2л/Х) (dA/n) sin а и определяется длиной антенны dA, длиной волны к -- <//
и углом смещения объекта а относительно оси антенны. Пр-и а — О направление
на объект совпадает с осью антенны, поэтому все сигналы, принимаемые отража-
телями, имеют один и тот же фазовый сдвиг и суммируются синфазно. На выходе
антенны амплитуда сигнала (/лрм = Umax- При смещении объекта на угол а
сигналов появляются фазовые сдвиги Афь поэтому амплитуда результирующе-
го сигнала уменьшается: i/npM = A (<z). При а — 90° = пл сигналы, при-
нятые соседними вибраторами, суммируются в противофазе и t/npM = 0.
Зондирующий сигнал может представлять модулированное колебание
U1n (0 = Uq [1 + (Um/U0) cos 2nFM/J, тогда огибающая принимаемого сигнала
будет иметь фазовый сдвиг по отношению к огибающей излученного сигнала
ДФ -2лГм (t— to) [20 (0!с\,
в котором содержится информация о дальности до объекта и его скорости.
10
Если модулирующее напряжение — дискретная функция времени, напри-
мер, импульс или серия импульсов
^прм (0 = U тн (t—nTa) cos (2л/(«И+ф).
где Umn — амплитуда; Тп — период повторения импульсов, то амплитуда и
фаза принимаемого сигнала будут иметь временной сдвиг
^прм (0 ~[(^ If)) cos [2п/ —FдОП t—-ф] .
Фазовые сдвиги связаны с расстоянием до цели неоднозначно в силу перио-
дичности фазовой функции, в реальных системах их очень трудно фиксировать.
Временной сдвиг амплитуды принимаемого импульса сигнала </тп — tDj
технически фиксировать проще. Поэтому импульсный зондирующий сигнал яв-
ляется основным типом сигнала, используемого в РЛС.
Импульсный зондирующий сигнал позволяет разделить во времени процессы
излучения зондирующего сигнала и приема отраженного и использовать одну
антенну для излучения и приема.
Преимуществами импульсного сигнала также являются: высокая разрешаю-
щая способность по дальности; схемотехническая простота технической реализа-
ции импульсных синхронизаторов, фиксаторов временного сдвига импульсов;
отличие формы импульса от формы шумового всплеска при больших отношениях
сигнал/шум. Недостаток импульсного сигнала — низкая энергия = Рити,
компенсирующаяся в РЛС формированием зондирующего сигнала, который
состоит из нескольких пи импульсов:
пи
^3 (0 = — пг^п)-
i= 1
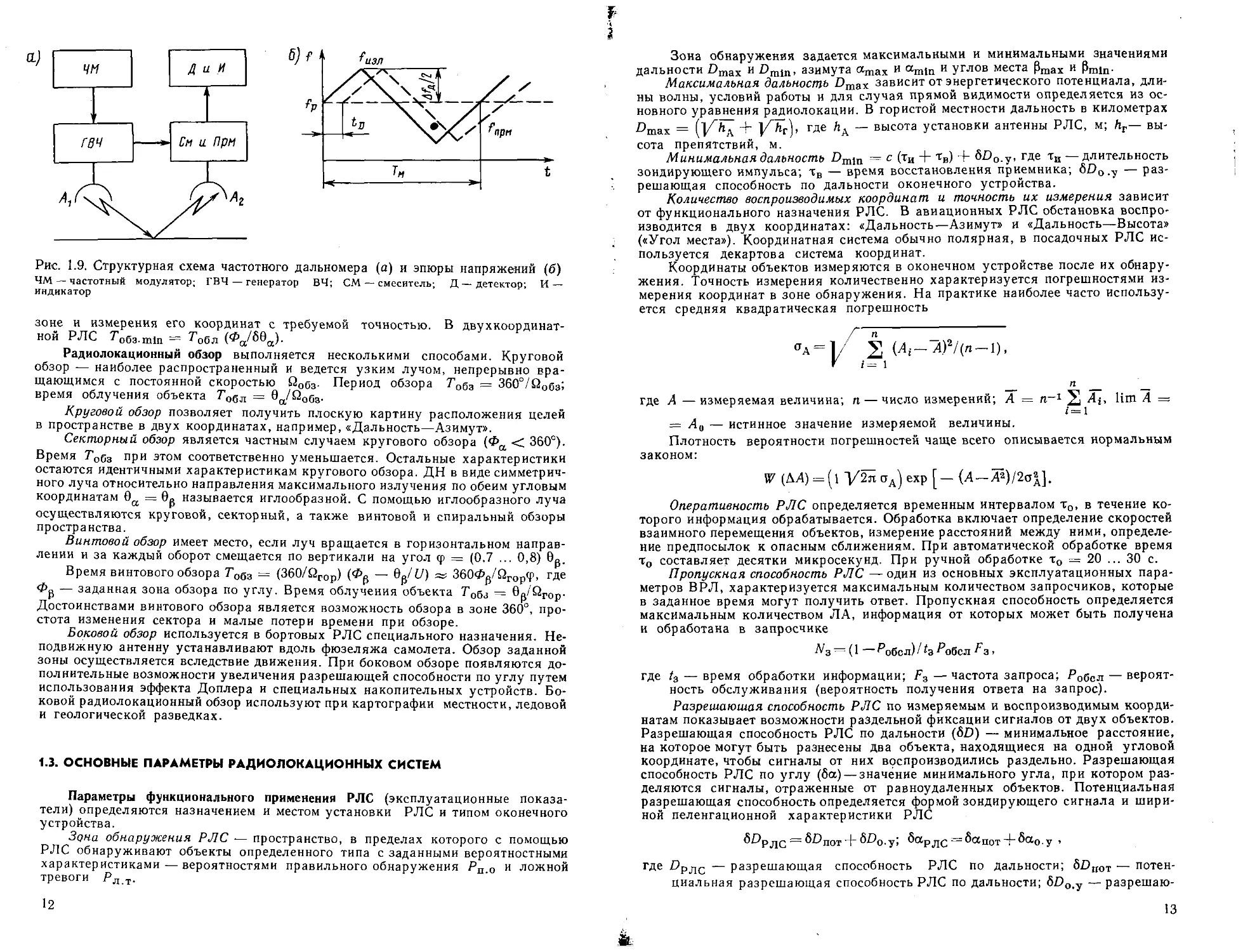
Для измерения одной координаты объекта (например, высоты полета) может
использоваться частотно-модулированный зондирующий сигнал. В РЛС этого
типа применяют частотный модулятор, приемник прямого усиления, а в каче-
стве оконечного устройства — измеритель частоты, представляющий последова-
тельное соединение ограничителя амплитуд и счетчика импульсов; РЛС имеет
две антенны. Метод получения информации о дальности до объекта поясняется
рис. 1.9.
Радиолокационный обзор — последовательное облучение всех точек задан-
ной зоны для получения информации о координатах объектов в зоне РЛС. В ре-
жиме обзора работают все типы РЛС за исключением ДИСС и СО.
Параметр обзора характеризуется минимальным и максимальным значения-
ми дальности действия РЛС и ^тах> азимута amln и атах, и угла места
Pmin и Ртах» и периодом обзора Т0бз- При ат1п = 0 атах — 360°, обзор на-
зывается круговым, а радиолокатор — РЛС кругового обзора.
Каждая отдельная точка зоны обзора облучается в течение времени ГобЛ >
Э* = 2Отах/с. За время Тобл от объекта отражается 8—20 импульсов.
Совокупность отраженных от объекта
импульсов носит название пачки им-
пульсов. Форма пачки импульсов опре-
деляется пеленгационной характери-
стикой антенны РЛС.
Минимальный период обзора
^обл- mln ~ Т’обл
где Фа и Фр — зоны обзора по азиму-
ту и углу места.
Время Т'обл — * 22?тахпи/с, где
количество импульсов в пачке, которое
определяется из условия уверенного
обнаружения объектов в заданной
Рис. 1.8. Схема формирования сигна-
ла на выходе антенны: а — угол сме-
щения цели
Рис. 1.9. Структурная схема частотного дальномера (а) и эпюры напряжений (б)
ЧМ— частотный модулятор; ГВЧ — генератор ВЧ; СМ — смеситель; Д—детектор; И —
индикатор
зоне и измерения его координат с требуемой точностью. В двухкоординат-
ной РЛС Т’обз.пИп = ^обл
Радиолокационный обзор выполняется несколькими способами. Круговой
обзор — наиболее распространенный и ведется узким лучом, непрерывно вра-
щающимся с постоянной скоростью Q063- Период обзора Т0б3 — 360°/Йобз1
время облучения объекта Гобл — 0a/QO63.
Круговой обзор позволяет получить плоскую картину расположения целей
в пространстве в двух координатах, например, «Дальность—Азимут».
Секторный обзор является частным случаем кругового обзора (Фа <С 360°).
Время T063 при этом соответственно уменьшается. Остальные характеристики
остаются идентичными характеристикам кругового обзора. ДН в виде симметрич-
ного луча относительно направления максимального излучения по обеим угловым
координатам 0а = 0^ называется иглообразной. С помощью иглообразного луча
осуществляются круговой, секторный, а также винтовой и спиральный обзоры
пространства.
Винтовой обзор имеет место, если луч вращается в горизонтальном направ-
лении и за каждый оборот смещается по вертикали на угол ср = (0,7 ... 0,8) 0^,
Время винтового обзора Тобз = (360/Qrop) (Ф^ — 0у U) 360Фр/Йгор(р, где
Фр — заданная зона обзора по углу. Время облучения объекта Toq3 — 0р/ЙГор-
Достоинствами винтового обзора является возможность обзора в зоне 360°, про-
стота изменения сектора и малые потери времени при обзоре.
Боковой обзор используется в бортовых РЛС специального назначения. Не-
подвижную антенну устанавливают вдоль фюзеляжа самолета. Обзор заданной
зоны осуществляется вследствие движения. При боковом обзоре появляются до-
полнительные возможности увеличения разрешающей способности по углу путем
использования эффекта Доплера и специальных накопительных устройств. Бо-
ковой радиолокационный обзор используют при картографии местности, ледовой
и геологической разведках.
1.3. ОСНОВНЫЕ ПАРАМЕТРЫ РАДИОЛОКАЦИОННЫХ СИСТЕМ
Параметры функционального применения РЛС (эксплуатационные показа-
тели) определяются назначением и местом установки РЛС и типом оконечного
устройства.
Зона обнаружения РЛС — пространство, в пределах которого с помощью
РЛС обнаруживают объекты определенного типа с заданными вероятностными
характеристиками — вероятностями правильного обнаружения Рп.о и ложной
тревоги Рл т.
12
Зона обнаружения задается максимальными и минимальными значениями
дальности Ртах и ^min> азимута атах и amtn и углов места £тах и Pmln.
Максимальная дальность £>тах зависит от энергетического потенциала, дли-
ны волны, условий работы и для случая прямой видимости определяется из ос-
новного уравнения радиолокации. В гористой местности дальность в километрах
^max — + , где Лд — высота установки антенны РЛС, м; hr— вы-
сота препятствий, м.
Минимальная дальность = с (ти + тв) + &D0.y, где ти — длительность
зондирующего импульса; тв — время восстановления приемника; 6D0,y — раз-
решающая способность по дальности оконечного устройства.
Количество воспроизводимых координат и точность их измерения зависит
от функционального назначения РЛС. В авиационных РЛС обстановка воспро-
изводится в двух координатах: «Дальность—Азимут» и «Дальность—Высота»
(«Угол места»). Координатная система обычно полярная, в посадочных РЛС ис-
пользуется декартова система координат.
Координаты объектов измеряются в оконечном устройстве после их обнару-
жения. Точность измерения количественно характеризуется погрешностями из-
мерения координат в зоне обнаружения. На практике наиболее часто использу-
ется средняя квадратическая погрешность
СТА =
А)2
1).
п
где А —измеряемая величина; п — число измерений; А — п-1 2 Нт А =
Z=1
— Ао — истинное значение измеряемой величины.
Плотность вероятности погрешностей чаще всего описывается нормальным
законом:
W (ДА) = (1 1/2эт оА) ехр [ — (А —А2)/2о^].
Оперативность РЛС определяется временным интервалом т0, в течение ко-
торого информация обрабатывается. Обработка включает определение скоростей
взаимного перемещения объектов, измерение расстояний между ними, определе-
ние предпосылок к опасным сближениям. При автоматической обработке время
т0 составляет десятки микросекунд. При ручной обработке т0 = 20 ... 30 с.
Пропускная способность РЛС —один из основных эксплуатационных пара-
метров ВРЛ, характеризуется максимальным количеством запросчиков, которые
в заданное время могут получить ответ. Пропускная способность определяется
максимальным количеством ЛА, информация от которых может быть получена
и обработана в запросчике
Пз = (I ^обсл)/Робсл Fз >
где /3 — время обработки информации; F3 — частота запроса; Р0бсл — вероят-
ность обслуживания (вероятность получения ответа на запрос).
Разрешающая способность РЛС по измеряемым и воспроизводимым коорди-
натам показывает возможности раздельной фиксации сигналов от двух объектов.
Разрешающая способность РЛС по дальности (6D) — минимальное расстояние,
на которое могут быть разнесены два объекта, находящиеся на одной угловой
координате, чтобы сигналы от них воспроизводились раздельно. Разрешающая
способность РЛС по углу (6а) — значение минимального угла, при котором раз-
деляются сигналы, отраженные от равноудаленных объектов. Потенциальная
разрешающая способность определяется формой зондирующего сигнала и шири-
ной пеленгационной характеристики РЛС
^РЛС = ^ПОТ + ^O.yJ SttpjiQ =6апот + ^аО.у *
где Ррлс — разрешающая способность РЛС по дальности; 6Dn0T — потен-
циальная разрешающая способность РЛС по дальности; 6Ро>у — разрешаю-
13
&
щая способность по дальности оконечного устройства; 6арлс — разрешаю-
щая способность РЛС по угловой координате; 6апот — потенциальная раз-
решающая способность РЛС по угловой координате; 6а0 у — разрешающая
способность оконечного устройства РЛС по угловой координате.
Для прямоугольного импульса 6Dn0T — cvn/2.
Для колоколообразного импульса
6Dn0T = с I *0,5и I ~ сти V2 In 2/л = 0,6бти с-
Разрешающую способность 6а по угловой координате а вычисляют по формуле
5а . 0,79а, где 0а — ширина ДНА в плоскости угла а на уровне 0,5. Разрешаю-
щая способность оконечного устройства зависит от его типа.
Тип оконечного устройства определяется функциональным назначением
РЛС. ОУ подразделяют на визуальные индикаторы обстановки, цифровые инди-
каторы и •устройства связи с ЦВМ — аналого-цифровые преобразователи. Ви-
зуальные индикаторы обстановки выполняются на ЭЛТ. Их параметры, по су-
ществу, определяют основные эксплуатационные характеристики РЛС — ра-
бочую зону, точность измерения, разрешающую способность и др. Обстановка
воспроизводится в декартовой или полярной системах координат.
Надежность — свойство объекта выполнять заданные функции, сохраняя
чо времени значения установленных эксплуатационных показателей в заданных
пределах, соответствующих заданным режимам работы и условиям использова-
ния, технического обслуживания, ремонта, хранения и транспортирования. На-
дежность — комплексное свойство, определяемое безотказностью, долговечно-
стью, ремонтопригодностью и сохраняемостью. Каждая из этих составляющих
в свою очередь определяется набором показателей.
Технические параметры РЛС определяются инженерными решениями, приня-
тыми на этале создания системы, параметрами функционального назначения
и методом измерения координат.
Длина волны \ выбирается в зависимости от назначения РЛС в диапазонах
от 8 мм до 1 м. Диапазон радиоволн влияет на энергетический потенциал РЛС,
тип генератора СВЧ и конструкцию антенны.
Импульсная ЕИ и средняя энергия £ср передатчика находятся из основного
уравнения радиолокации, зависят от типа модуляции зондирующего сигнала,
длительности ти и периода повторения Та зондирующих импульсов.
Длительность зондирующего импульса ти определяется разрешающей спо-
собностью РЛС по дальности.
Форма диаграммы направленности антенны G (а) влияет на разрешающую
способность «5а и время облучения объекта.
Чувствительность приемного тракта £прмт1п 11 степень его оптимизации
зависят от технико-экономических возможностей конструирования и производ-
ства РЛС. Чем выше чувствительность, тем меньше £прм mln» т- е- та мини-
мальная энергия принимаемого сигнала, при которой его можно обнаружить на
фоне шумов с заданной вероятностью.
Совокупный параметр РЛС представляет собой параметр, однозначно свя-
занный с другими детерминированными зависимостями, например, с помощью
основного уравнения радиолокации. Совокупный параметр — вектор, допустимые
пределы которого могут характеризовать работоспособность РЛС.
Взаимосвязь технических и эксплуатационных параметров наиболее полно
проявляется через основное уравнение радиолокации, которое для активной им-
пульсной РЛС имеет вид
Чпрм—нрД
^^ГП2Х / Л л-»-\ С t &
(4л)- Ьпрм mln ът Ъ2
где Ри — импульсная мощность; пи — число принимаемых импульсов; —
эффективная площадь антенны; Ппрмпрд — к- п- Д- тракта прием-передача;
?2> Сз — коэффициенты потерь, обусловленные соответственно энерге-
тическими преобразованиями, конструктивными особенностями, действиями
оператора РЛС.
14
t Рис. 1.10. Форма реальной диаграммы
’ направленности РЛС
Рис. 1.11. Зависимость коэффициен-
та километрического затухания уКмз
от длины волны и состояния атмо-
сферы:
1 — туман. 0,032 г/м3, видимскть 600 м;
2 - дождь. 0,25 мм/ч. моросящий; 3 —
туман, 0,32 г/м3, видимость 150 м; 4 —
д-тятъ — 1 мм/ч, слабый; .5 - --
4 мм/ч, сильный; 6 — туман, 2,3 г/м3, ви-
димость 30 м; 7 — дождь, 10 мм,/ч, очень
сильный
Максимальная дальность Dnv.x задается для определенных значений вероят-
ностей обнаружения Рц.о и ложной тревоги Рл.т.
Входящие в основное уравнение радиолокации параметры связаны между
собой и эксплуагацищ1.;ь.;-».л параметрами следующими зависимостями:
6^ ---4л6\/А2;
где — раскрыв антенны.
бес -- О, / Од - 60л, /1 и - -- ( Т,
где — скорость обзора заданной зоны по угловой координате;
£дрм min — QA’m kT,
где Q — отношение сигнал/шум на выходе оптимального приемника, определяе-
мое вероятностями РП.С! и Рл.т: Nut — коэффициент шума приемника; k—
постоянная Больцман?, равная i -38-10—23 (Вт/град-Гц), Т — абсолютная
температура, К,
ги — - (^РЛС ^оу) 'с .
где й^рлс ” Разрешающая способность РЛС по дальности: бРоу — разре-
шающая способность оконечного устройства.
При расчетах максимальной дальности необходимо учитывать, что для ма-
лых значений угла места ДНА становится лепестковой (рис. 1.10) вследствие ин-
терференции прямых радиоволн и волн, отраженных от поверхности земли. Чис-
ло лепестков связано с высотой расположения антенны над отражающей поверх-
ностью /ц: п.л—2А4/А. угол максимума нижнего лепестка ДНА ₽mIn -- Л/4/ц.
Дальность действия РЛС в атмосфере зависит от длины волны и погодных
условий:
D.„ax ;= Do’exP ( - 0,1 15уКМ.3 Оп1ах),
где укм.з — коэффициент километрического затухания является функцией А и
состояния атмосферы (рис. 1.11).
Задаваясь значениями £)mas, можно из графика (рис. 1.12) получить
значение для Do. Зная Ртах из расчета основного уравнения, по графику
(рис. 1.12) определяют соответствующее уменьшение дальности РЛС при изме-
нении погодных условий.
15
Рис. 1.12
Рис. 1.12. Номограмма для определения
Рис. 1.13. Зависимость энергии излучения
Рис. 1.13
максимальной дальности действия РЛС
передатчика от длины волны
Зона однозначного отсчета дальности зависит от величины Тп и может быть
получена из соотношения Do = сТп/2,5.
Влияние длины волны на дальность действия РЛС определяется с помощью
уравнения радиолокации
4 / Ризл ти Дд 50 т|прм,прд
max |/ (4л,)2 Впрм mln X2
где А — коэффициент, учитывающий условия распространения в атмосфере
и зависящий от X.
Для каждого значения £>так существует оптимальная длина волны XOpt,
при которой излучаемая мощность минимальна (рис. 1.13). Если % < Xopt> не-
обходимая энергия излучения начинает быстро возрастать.
ICAO рекомендует для трассовых и аэроузловых РЛС использовать диапа-
зон волн 23 см, для аэродромных РЛС — 10 или 23 см.
Коэффициент шума приемника в полосе его пропускания ДЕпрм позволяет
количественно оценить шум приемника
(Ес/£щ)вх/(^с/ Щвых-
Чувствительность приемника по мощности
^прм mln — &р прм>
где £р — коэффициент различимости, который зависит от вероятностей Рп.о
и ^л.т и энергетических потерь в приемном тракте.
Величина kT определяет тепловую энергию флуктуаций электронов, вели-
чина ?црм характеризует степень оптимальности структуры приемного тракта
или те энергетические и, в конечном счете, информационные потери, которые воз-
никают в приемнике, реальном по сравнению с приемником, имеющим оптималь-
ную структуру 1 <1 £прм < 00 • Составной коэффициент
бпрм— 5прм1 £прм2 £прмз • • • >
где £прм1 — потери во входных цепях; |прм2 — потери в УПЧ; £прмз — потери
детектирования и т. д. Рекомендации по выбору величины |прм см* в 1-6.
Точностные параметры радиолокационных измерителей характеризуются
погрешностями измерений, источниками которых являются все элементы РЛС
16
входящие в структурную схему (см. рис. 1.4). При анализе и расчете параметров
РЛС принято учитывать ограниченное число источников: синхронизатор (о^синхр)»
среду распространения радиоволн (ор), объект отражения (оц), сигнал, шум
приемника, тракт воспроизведения (ств), измерительный тракт (аи), погрешности
работы оператора (ооп). Погрешность, зависящую от формы сигнала и шумов
приемника, называют потенциальной погрешностью измерений (опот).
Суммарная погрешность измерения координаты дальность
аРЛС = V СТсинхр +°£ + сгц + а1 + аи+СТоп + апот
вычисляется как геометрическая сумма отдельных составляющих, где потенци-
альная погрешность измерения дальности оцот = f ('VcW'Q- Зависит от длитель-
ности сигнала тс и отношения сигнал/шум Q.
Количественные значения составляющих погрешностей измерений, в свою
очередь, зависят от многих меняющихся факторов. Ориентировочные значения
составляющих погрешностей измерения дальности, характерные для РЛС при
Dmax = 400 км, следующие: псинхр =25 м; ор = 30 м; оц = 15 м; ов = 150 м;
ап = 25 м; погрешности интерполяции: ооп1 = 330 м; погрешность из-за неиде-
альной фокусировки ооп = 300 м. Суммарная погрешность ОрЛС — 500 м,
что составляет ~ 1,25% от Dmax. Из приведенных данных следует, что основная
доля погрешностей измерения определяется оконечным устройством и операто-
ром, обслуживающим РЛС.
Погрешность измерения угловых координат
(п \
2 )
1=1 /
Составляющие суммарной погрешности измерения угловой координаты оп-
еделяются следующими факторами: неточностью совмещения электрической
оптической осей антенн О]^; трактом передачи угловой информации о2; дискрет-
ным числом импульсов в пачке сг3; трактом формирования меток азимута о4;
способом выделения огибающей Os; визуальным съемом угловой информации (ин-
терполяцией) сгб; нелинейностью развертки <т7; неточностью воспроизведения от-
метки о8; неидеальной фокусировкой о9; шумами приемного тракта и формой оги-
бающей о10.
Погрешность о10 называется потенциальной. Потенциальная погрешность
%»r = ™ («)1W где f (а) — пеленгационная характеристика антенны.
Ориентировочные значения перечисленных погрешностей: ох = 5', о2 = 3',
о3 = 2,5', о4 = 5', Os = 3', Os = 10', о7 = 5', о8 = 14', о9 = 5'. Потенциаль-
ная погрешность РЛС о10 = оПог = 15'. Результирующая погрешность при из-
мерении азимута <*ардс ~ 25'.
1.4. СТАТИСТИЧЕСКИЕ ХАРАКТЕРИСТИКИ РЛС
Статистический подход к расчету и выбору параметров РЛС необходим для
оценки оптимальности полученного результата, т. е. для получения потенциаль-
ных характеристик — точности измерения, вероятности обнаружения, разрешаю-
щей и пропускной способностей.
Потенциальные характеристики связаны с Рпрм min — минимальной мощно-
стью, с (Рс/Рш) —максимизацией отношения сигнал/шум при Рпрд = const.
Предельные соотношения для характеристик РЛС реализуются статистическими
методами анализа и синтеза трактов РЛС.
Основные статистические характеристики радиолокационного приема сле-
дующие: Рп.о — вероятность правильного обнаружения; Рл.т — вероятность
ложной тревоги; Рпр — вероятность пропуска; Рц.н — вероятность правильно-
го необнаружения, а также aD, aa, Оу — среднеквалпатичрсvua погрешности
измерения координат и скорости; 6D, х и д%И$|ОДр££Мэ4^я способность
РЛС в условиях шумовых воздействий. ’ *' т
г Д *«’*•'*•* *• •
Рис. 1.14. Схема для вычисления от-
ношения правдоподобия
Статистическая неопределенность
оценки параметров полезных радиоло-
кационных сигналов на фоне шумов и
помех выдвигает задачи оптимального
обнаружения, разрешения сигналов и
измерения их параметров, содержащих
информацию о координатах объекта.
Задача обнаружения и оценка эффек-
тивности ее решения имеют особо важное значение в системах автоматичес-
кой обработки радиолокационной информации.
Обнаружение сигналов — процесс ТГр'инятия решения о наличии или от-
сутствии объекта в каждом элементарном разрешаемом объеме РЛС. При обнару-
жении преполагается, что на входе приемника действует напряжение U (/) =
= (0 + Un (О’ представляющее собой смесь сигнала Uc (/) и помехи Un (/),
в частном случае помеха может быть белым шумом 1/п (t) = (/). Составляю-
щие сигнала Uc (/) = Um cos [со0 (t — tD) — ср] следующие: Um — амплитуда,
<оо — частота и ср — фаза в общем случае могут быть случайными величинами
и описываться статистическими закономерностями. В силу случайного характе-
ра параметров сигналов и помех процесс обнаружения всегда оказывается сто-
хастическим.
При обнаружении сигналов могут приниматься только альтернативные ре-
шения: сигнал есть или сигнала нет. Если сигнал поступил на вход приемника,
то решение о его наличии называется правильным обнаружением, и вероятность
этого решения Рп.о- При поступлении сигнала может быть принято неправильное
решение о его отсутствии, такое решение называется пропуском сигнала с ве-
роятностью Рпр. В случае отсутствия сигнала на входе приемника, за сигнал мо-
жет быть принята помеха. Это ошибочное решение называется ложной тревогой,
вероятность его принятия Рл.т. Если сигнала на входе приемника нет, то реше-
ние об его отсутствии называется правильным необнаружением.
Решение о наличии или отсутствии сигнала с наилучшими показателями
(минимальным риском принятия решения) принимается в схеме оптимального
приемника.
Оптимальный приемник (рис. 1.14) производит с входным напряжением
U (/) две операции: вычисляет максимум отношения правдоподобия I (U) и срав-
нивает его с порогом /0. При / (U) > /0 принимается решение о наличии сигнала,
при I (U) < /0 об его отсутствии.
Отношение правдоподобия представляет собой функцию
/ (U) = №СП (U),
где 1Р'СП (U) и (U) — плотности вероятности одной и той же реализации
принимаемых колебаний при условии наличия сигнала и помехи (СП) или
только одной помехи (П).
Если на входе приемника действует помеха в виде нормального белого шума
в детерминированный сигнал Uc (/), то плотность вероятности
аи)ехр { — (6’--Ц-р/га*},
плотность вероятности при отсутствии сигнала
I ?7Ыл)ехр { —2а£} ,
где <у2 — дисперсия помехи.
Отношение правдоподобия принимает вид
/ ((/) - k exp [ — (Шс — Ц?)/2а2],
Монотонная функция от этого отношения
In [<• (Г/)] - k (UU<~ ^)/2пи.
1 я
Максимальное значение этой функции соответствует условию
max
k f (UUK-Ul)dt
t
= max [k (Pn.o— lo Рл.т)],
при выполнении которого обеспечиваются заданные статистические характери-
стики приема — вероятности правильного обнаружения Рп>0 и ложной тревоги
Рл. т.
Т
Энергия принимаемого сигнала Ес = \ U* (/) dt предполагается известной
о‘
и тогда информационной операцией при оптимальном приеме оказывается опе-
т
рация вычисления корреляционного интеграла Z — \ U (t) Uc (/) dt.
b
Корреляционный интеграл Z определяет алгоритм оптимальной обработки
радиолокационного сигнала в приемном тракте (рис. 1.15), который имеет наилуч-
шие статистические характеристики. Решение о наличии сигнала принимается,
если на выходе приемника значение корреляционного интеграла превышает по-
рог Zor т. е. Z > Zo.
Оптимальное измерение параметров радиолокационных сигналов состоит
в определении алгоритма их обработки на выходе оптимального приемника, при
реализации которого дисперсия оценки параметра а* — °а* = аа*тт имеет ми-
нимальное значение.
Отношение правдоподобия для сигнала Uc (/) с фиксированным значением
параметра а (£/) имеет вид
b (U/a) = 1ГСП (U/a)/Wn (U).
Функция потерь — условный средний риск ошибки измерений
+ °°
г [а* (U)/U] = J [а* (Г/)— а]2 1Г (а/19 da ,
где a* (U) — оценка параметра; W (а/U) — апостериорная плотность вероят-
ности распределения параметра а при условии приема реализации U (/).
Оптимальная оценка параметра достигается при г [a* (U)/U] — min, для
чего производную drlda приравнивают нулю: — {г [a* (U)/U]} 0, откуда сле-
da
дует, что
+ °°
оь*пт (С7) = J" air (а/U) da.
Таким образом оптимальная по критерию минимума среднеквадратичной
погрешности оценка a*pt представляет собой математическое ожидание измеряе-
мого параметра, соответствующее огибающей апостериорной плотности вероят-
ности W(a/U).
Плотность вероятности
W (а/U) = kW (a) I (U/a),
где W (a) — априорная плотность распределения параметра a; I (t//a) — услов-
ное отношение правдоподобия.
Выражение для определения алго-
ритма обработки радиолокационного
сигнала в оптимальном измерителе
(ряс. 1.16) имеет следующий вид:
С (а* — a) W (а) / (t//a) da при
Рис. 1.15. Схема оптимального прием-
ника сигнала на фоне некоррелиро-
ванного гауссова шума
19
* UU/aTj (a^-^W^KU/cC)
Рис. 1.16. Схема оптимального изме- |
рителя параметров радиолокационно- '
го сигнала:
npMopt — оптимальный приемник; Ум —
умножитель; Инт — интегратор; ГЛИН —
генератор линейно изменяющегося напря-
жения
Рис. 1.17. Зависимость плотности ве-
роятности корреляционного интегра-
ла от напряжения сигнала
Схема измерителя, реализуемая по алгоритму оптимальной обработки,
должна быть построена на принципе слежения за измеряемым параметром.
Статистические характеристики обнаружения устанавливают связь между
отношением сигнал/шум на выходе вычислителя корреляционного интеграла и
вероятностями правильного обнаружения и ложной тревоги.
Вероятности
СО со
^п-о = J ^c-n(Z)<iZ, ^л.т= J U7n(Z)JZ,
7 7
пор ^пор
где 1ГС.П (Z) — плотность вероятности распределения значений корреляцион-
ного интеграла при наличии сигнала; 1ГП — та же плотность при отсутствии
сигнала (рис. 1.17).
Если на вход оптимального приемника поступает сигнал с известными пара-
метрами на фоне нормального шума, то вероятности
^.0 = 0,5 р + Ф (Ес ZnOp)/
^л т = 0,5 [1 — Ф (Znop/^z)],
где Ф (у) — интеграл вероятности; о2 — эффективное значение флуктуаций
корреляционного интеграла; Znop — значение порога обнаружения;
Е о^^) 1/2 = 9= У2£'с/Л'о — отношение сигнал/шум по напряжению на
выходе коррелятора.
Зависимости q2 Q = /(Рд.о> ^л.т) называют характеристиками обнаруже-
ния (рис. 1.18).
Статистические характеристики сигналов и помех определяют состав струк-
турных схем оптимальных приемников и измерителей и их основные параметры.
Для зондирования окружающего пространства используют непрерывные сигна-
лы (ДИСС) и импульсные сигналы большой скважности. Отраженные сигналы
при этом также являются непрерывными и представляют собой пачки радиоим-
пульсов большой скважности. Параметры этих сигналов изменяются во времени.
Модель отраженного сигнала записывается следующим образом:
U (t) =--У^ки1Пк(1) cos [ш0 (/ — /D)-F<p^(O],
k
20
где k — количество импульсов в пачке: — случайные величины, характери-
зующие флуктуации амплитуд импульсов; Umk (t—tD) — амплитуда k-го
импульса (U-mh = Um) в пределах длительности импульса и (/т = 0 в про-
межутках между импульсами); ср^ — случайная фаза импульса.
В зависимости от статистических закономерностей распределения парамет-
ров различают:
некогерентные пачки импульсов, у которых фазы <р^ = £ (/)—независимые
случайные величины с плотностью распределения W (ср) = 1/2л,
когерентные пачки импульсов, имеющие регулярную закономерность измене-
ния фазовых соотношений импульсов в пачке, в частности <р^ = q>2t = ... =
= ф« = ф5;
дружно флуктуирующие по амплитуде пачки, для которых справедливо
= е2 = ... = — отсутствие флуктуаций импульсов внутри пачки, при этом
сами пачки являются флуктуирующими, т. е. плотность распределения амплитуд
IFe=(8/6E)exp(-e2/2^)
распределена по закону Релея, где — дисперсия флуктуаций амплитуд;
независимо флуктуирующие пачки импульсов, у которых величины рас-
пределены по закону Релея в пределах пачки.
Флуктуационные помехи возникают из-за теплового движения электронов
в проводниках, дробового эффекта, наведенных колебаний в антенне, движения
электронов в земном и космическом пространстве и представляют стационарные
случайные процессы. Основными характеристиками флуктуационных помех яв-
ляются законы распределения помехи и ее составляющих, энергия помехи —
Еи и корреляционные связи. Мгновенные значения помехи Un (/) = Um (t) cosX
X [co0 / + (/)] распределены обычно по нормальному закону, флуктуации ам-
плитуды описываются законом Релея, а фаза распределена равновероятно.
Корреляционная функция флуктуационной помехи 7? (т) = Un (/) Un (t — т)
имеет вид высокочастотного колебания, амплитуда которого убывает по мере
увеличения интервала т.
Т
Корреляционная функция шума 7?ш (т) = lim T~r | Um (/) С/ш (t —т) dt
7->о б
(здесь Т — интервал наблюдения) связана со спектральной плотностью шума
00
= J (т) ехр(—
—00
соотношением No (/)
2л/т) йт.
Белый шум с равномерным спектром
является основным видом флуктуацион-
оо
ной помехи; /гаах оо; | R (т) du =
-------------------------00
= N0/2 — площадь, охватываемая кри-
вой корреляционной функции, не зави-
сит от величины /тах. При возрастании
/шах корреляционная функция сжимает-
ся по оси абсцисс и растягивается по
оси ординат, в предельном случае
оо
Я (t) = (JV0/2)=6 (т); f 6 (т) = 1, где
— оо
б (т) — дельта-функция. Белый шум
представляет собой некоррелированный
(б-коррелированный) случайный про-
цесс.
Хаотические импульсные помехи
(ХИП) —это последовательность радио-
Рис. 1,18. Характеристики обнаруже-
ния радиолокационного сигнала с
полностью известными параметрами
21
Таблица 1.1
Зависимости параметра у и ширины спектра флуктуаций АЛ от вида объекта
отражения
Отражающий объект V AFno.i. Гц
fo = 3OOO МГц /О=9000 МГц
Дождевые облака 2,3-1015 95 285
Морская поверхность при ветре 1,41-101С 38 115
Холмы, поросшие густым лесом, при скорости ветра 32 км/ч 2,3-1017 10 28
Холмы, поросшие редким лесом 3.9-1019 2,5 7
импульсов определенной частоты, у которых амплитуда, длительности и межим-
пульсный интервал изменяются случайным образом. ХИП характеризуется сред-
ними значениями длительности импульсов т, паузой между ними 7\ и числом пе-
ресечений, формирующим шумовым напряжением порогового уровня Агср:
т =(л/У— Ро [1 —Ф (у/1/2)] exp (v2/2) ;
Т^ = (л/'|/ — pi') [1 +Ф (у/ехр (г/2/2) ;
^ср=(1/л) У^ехр{-уЧ2}
d2p (т)
где pg = —; р (т) — коэффициент корреляции шума; Ф (у) — инте-
ат2 т = о
грал вероятности.
Синхронные импульсные помехи — помехи от близко расположенных РЛС,
попадающие в приемный тракт. Частота повторения импульсов таких помех
^п-п Fn не равна частоте повторения РЛС, а форма и длительность импульса
помехи близка к форме и длительности зондирующего сигнала: (/п > Стс. По-
мехи создают характерные мешающие сигналы на экранах визуальных индика-
торов РЛС.
Коррелированные помехи от неподвижных и медленно перемещающихся объ-
ектов создают местные предметы, поверхность моря, гидрометеоры (облака,
дождь, град, снег). Сигналы, отраженные от этих объектов, нарушают работу
РЛС, так как их интенсивность на 30—80 дБ может превышать уровень собствен-
ных шумов приемного тракта. Результат воздействия коррелированных помех—
перегрузка приемников и индикаторов и, как следствие, пропуск полезных сиг-
налов.
При облучении неподвижных распределенных целей монохроматическим
зондирующим сигналом с частотой /0 отраженный сигнал представляет сумму
сигналов от отдельных элементарных отражателей, имеющих амплитуду
частоту <оу, фазу фу, доплеровское смещение частоты
Изменение взаимной ориентации элементарных отражателей приводит к ам-
плитудным и фазовым флуктуациям сигнала Vn (t). Энергетический спектр флук-
туаций хорошо аппроксимируется кривой Гаусса G (/) = ехр {—у (///о)2}-
Значения параметра у и ширины энергетического спектра, как функции типа от-
ражающего объекта, приведены в табл. 1.1.
1.5. ОПТИМАЛЬНЫЕ ПРИЕМНИКИ РАДИОЛОКАЦИОННЫХ СИГНАЛОВ
Структурные схемы оптимальных приемников строятся на основе алгорит-
ма обработки сигналов, определяемого из отношения правдоподобия. Вид отно-
шения правдоподобия I (U) и корреляционного интеграла Z (U) зависят от формы
принимаемого сигнала, наличия в принимаемом сигнале неизвестных параметров,
типа мешающих воздействий.
22
Рис. 1.19. Схема оптимального
приемника для сигнала с неиз-
вестной начальной фазой:
Ум — умножитель; И нт — интегра-
тор; Кв — квадратор
Для сигнала с полностью известными параметрами
In = 2Z/JV0 — Е/ЛГ0>
где Уо — спектральная плотность шума.
Оптимальный приемник является вычислителем корреляционного интегра-
ла (рис. 1.19). Такой приемник имеет самые информативные характеристики обна-
ружения (см. рис. 1.18). ।
Для сигнала с неизвестными параметрами обобщенное выражение для отно-
шения правдоподобия имеет вид
ОО 00
Z[t/(/)/Pi--. Рп]= f ... Г ((51- • Pn.) ехр ( —£CAVO) ехр (2''.V0) г (У z
— оо — 00
X (t, pl . . . pn dPi- . .dpn)»
где pi ... pn — случайные нефиксируемые параметры; W (рг ... pn) — априор-
ная плотность распределения случайных параметров; £с — энергия сиг-
нала; Уо — спектральная плотность шума.
Оптимальный прием сигнала с неизвестной начальной фазой может произ-
водиться путем вычисления корреляционного интеграла или на основе оптималь-
ного фильтра. Коррелятор оптимального приемника (см. рис. 1.19) вычисляет
корреляционный интеграл Z, который для сигнала с неизвестной начальной фа-
зой имеет вид
Т т
где Zi = J U (/) Um с (t) cos (о0 ^2 ’-J U (О с (0 sin 03о tdt.
о о
Othotjjc'php правдоподобия
2л
I ^ехр ( — Ес 'Af0) (1 /2л) J ехр [(2Z'.Vy) cos — О)]
о
-ехр
где /0 — модифицированная функция Бесселя первого рода нулевого порядка
При построении алгоритма обработки операция вычисления I может заме-
няться операцией вычисления In (/) In /у i2Z/A'o) - - £С/ЛГО, операция выдисле
ния /с (2Z/A'O) может быть заменена операцией линейного детектирования, харак-
теристика линейного детектора близка к характеристике /0 (U) = f (U).
С учетом этих замен:
In /0 (2Z/A^0) ~ — (2Z/AV)2 для Z/?v0< 1;
4
In /0 (2Z/Ar0) 2Z//V0 для Z/A<0 » 1.
Статистические характеристики приема определяются выражениями:
оо оо
Рп. о- f W'cnKW; Ря. т- f WK(U)dU,
7 7 С
^ПОр ^КОр
23
Рис. 1.20. Характеристики обнаружения сигнала с неизвестными параметрами:
а — сигнал с флуктуирующей начальной фазой; б — сигнал с флуктуирующей амплитудой и
фазой;-------сигнал полностью известен
где юс.п (О') -Оо“ыхехр (^3 + ^с)/2о|Ь1Х] Io (Umc О/авых);
Urnd ^вых ~ У2ЁТГ„ = q — отношение сигнал/шум на выходе коррелятора в
момент времени тс ~r tQ; овыХ — дисперсия шума на выходе коррелятора.
Из кривых обнаружения (рис. 1.20) следует, что для обнаружения сигнала
с неизвестной начальной фазой (при заданных значениях Рп.о, Рл.т) требуются
большие значения отношения сигнал/шум, чем для сигнала с известными! пара-
метрами.
Структура оптимального фильтра определяется корреляционным инте-
т
гралом Z = ) U (t) Uc (t) dt, который представляет собой с точностью до по-
о
стоянного множителя напряжение на выходе линейного фильтра, отклик которо-
го (/) на единичный импульс (6-импульс) согласован с функцией Uc (/):
со
^вых = J £/ (0 П (() dt.
---------<30
Если т] (f) = CUG (i0 — t), где t0 — временное запаздывание, то фильтр с
такой импульсной характеристикой дает в момент времени тс-/'^о значение кор-
реляционного интеграла Z (t). Такой фильтр называется оптимальным. Импульс-
ная характеристика его полностью определяется формой сигнала 1/с (/) и пред-
ставляет зеркальное отображение относительно прямой /0/2. Частотная характе-
ре
ристика оптимального фильтра К (w)opt = J Л (0 ехР (— dt = Cg* (<о) X
-------------------------------------------00
X exp (— /gjo0 с точностью до постоянного множителя С и множителя, опреде-
ляющего временное запаздывание t0, полностью совпадает с комплексно сопря-
женной спектральной плотностью сигнала. Модуль частотной характеристики
фильтра совпадает с амплитудно-частотным спектром сигнала, а фазо-частотная
характеристика фильтра имеет обратный наклон. Комплексная сопряженность
частотной характеристики приводит к тому, что взаимные фазовые сдвиги между
спектральными составляющими сигнала компенсируются, в момент времени
тс +уо все составляющие спектра сигнала Uc (/) суммируются в фазе и сигнал
достигает своего максимального значения 0выхтах — СЕс.
Дисперсия шума на выходе оптимального фильтра
оо
авых = (1/2л) f 5m(w)|K(w)|2d(o = (/V0C2/2)£c.
— ес
Отношение сигнал/помеха q — 1/вых (тс X- tQ) /овьгх ~|/ 2Ес/А/0 являет-
ся максимальным из всех возможных. Отношение сигнал/шум на выходе любого
фильтра не может быть больше, чем на выходе оптимального.
Таким образом, операцию вычисления корреляционного интеграла Z мож-
но заменить операцией оптимальной фильтрации по схеме рис. 1.21. Одно из ос-
24
новных свойств оптимального фильтра — его нечувствительность к изменениям
начальной фазы принимаемого сигнала.
Для сигнала с флуктуирующей амплитудой корреляционный интеграл Z
имеет то же значение, что и для сигнала с неизвестной начальной фазой.
При приеме сигнала с неизвестной амплитудой и начальной фазой остается
операция вычисления корреляционного интеграла Z, изменяются только извест-
ные значения Ес и No, которые учитываются при определении порога обнаруже-
ния Znop. Структура приемника остается такой же, как для сигнала с неизвест-
ной начальной фазой (см. рис. 1.19).
Плотность вероятности огибающей U (/) на выходе оптимального фильтра
при фиксированной амплитуде
wc. п ((//£) = (1//а’ых) ехр[—((/2 + ^с)/2о*ь1Х] !0 (Wmc^Lx).
Плотность вероятности огибающей сигнала и шума
П (t/-) = 2^/(olbIX+^c) exp [-W(2oiblx + ^c)]
ИЛИ при б//<7* Y = S
Pn. 0= J 2S/(2 + ?2)exp[-S2/(2 + ?2)]dS = exp[-S2/2(l+92/2)];
S.
Рл. T= J exp (—52/2)б/5 = ехр (—Sg/2).
so
Из этих соотношений следует, что Рц.о = Кривые обнаружения
для сигнала с флуктуирующей амплитудой и неизвестной начальной фазой
(см. рис. 1.20) показывают, что для обнаружения сигналов с флуктуирующей
амплитудой энергия принимаемого сигнала должна быть увеличена в 10—100 раз.
Структура и показатели опти-
мального приемника для обнаружения
когерентной пачки радиоимпульсов оп-
ределяются сигналом, который пред-
ставляет последовательность из пи ко-
герентных радиоимпульсов с амплиту-
дой Um, несущей частотой ?0, периодом
повторения ТП и начальной фазой
Этот сигнал по структуре аналогичен
сигналу с неизвестной начальной фазой.
Корреляционный интеграл Z = '\/zf+Z|
определяет алгоритм оптимального
приема.
Оптимальный приемник строится
по схеме, состоящей из двух каналов
(рис. 1.22, а). В каждом канале прини-
маемый сигнал перемножается с квадра-
турной составляющей, интегрируется в
пределах одного импульса, суммирует-
ся в пределах длительности пачки, воз-
водится в квадрат, суммируется с квад-
ратурной составляющей второго канала
и сравнивается с порогом (операцией
извлечения корня можно пренебречь).
Оптимальный фильтр может быть
реализован с помощью набора одиноч-
ных фильтров Ф^ каждый из которых
настроен на частоту fo + где
1 = К 2, ... 7\1/ти, с полосой пропуска-
Рис. 1.21. Схема фильтра, согласо-
ванного с одиночным радиоимпуль-
сом (а), и временные диаграммы, по-
ясняющие его работу (б):
УВ — устройство вычитания; УРК — узко-
полосный резонансный контур
25
Рис. 1.22. Схема оптимального приемника для обнаружения когерентной пачки
импульсов:
а — с коррелятором; б —с оптимальным фильтром; в—с гребенчатым фильтром; Ум — ум-
ножитель; Кв — квадратор; Ф — фильтр; Дет — детектор; СФ — фильтр, согласованный с
радиоимпульсом; ГФ — гребенчатый фильтр
ния 1//1иГп (рис. 1.22, б. в) или как последовательное соединение двух фильтров:
Фх — оптимального для одиночного импульса в пачке и Ф2 — гребенчатого.
Статистические характеристики и кривые обнаружения когерентной пачки
радиоимпульсов такие же, как для сигнала с неизвестной начальной фазой.
Структурная схема оптимального приемника некогерентной пачки строит-
ся на базе коррелятора (рис. 1.23, а) или оптимального фильтра (рис. 1.23, б).
Характеристики обнаружения, т. е. зависимость Ри,0 ~ f (у2, Рл.т), те
же, что и для сигнала с неизвестной начальной фазой и флуктуирующей амплиту-
дой. Однако для случая некогерентного накопления энергия одного импульса
где т] = 1 + 2 (Vnw — 1) /yZ2 In (1/Рл.т) — функция потерь некогерентного на-
копления вызываемых неизвестными амплитудами и фазовыми соотноше-
ниями.
Оптимальный прием сигналов на фоне коррелированных помех является осо'
бым режимом работы РЛС. Источники коррелированных помех—это отражения
зондирующих импульсов от местных предметов, земной поверхности, гидрометео-
ров. Обычно эффективная поверхность источника помехи Son > 50Ц намного
превышает площадь цели, которая маскируется помехой.
Алгоритм оптимальной обработки сигнала на фоне коррелированной помехи
определяется отношением правдоподобия I (U) —
— In — Ec/N0,
где /0 — функция Бесселя первого рода, нулевого порядка от выражения е.
Функция
«и
е=- У, (oc; + Pi)exp ( —/7Дф).
/ — 1
Рис. 1.23. Схема оптимального приемника некогерентной пачки на базе корреля-
тора (а) и оптимального фильтра (б):
Ум — умножитель; И нт — интегратор; Кв — квадратор; СФ-1 — фильтр, согласованный с
радиоимпульсом; ЛЗ-- линия задержки; ГФ — гребенчатый фильтр
26
Рис. 1.24. Схема оптимального
приема сигнала на фоне сильно
коррелированных помех
где Дер — разность фаз принимаемых полезных сигналов в каждом периоде пов-
торения; а/ ир/ — коэффициенты, характеризующие корреляционную связь
сигналов на выходе двух линейных фильтров, оптимальным образом обраба-
тывающих сигналы, принятые за t-й период.
Для ли = 2
^1/1 ^112
(1-Г2)
где г — коэффициент корреляции; Z — корреляционный интеграл. Алгоритм
вычисления отношения правдоподобия сводится к квадратурной схеме одно-
кратного череспериодного вычитания (рис. 1.24).
Если фазовый набег отраженного сигнала от периода к периоду Л<р=^О, то
е2 = 2 (1 — cos Л<р) [(Zxl~Zx2y + (Zyi —Zy,)2]/(1 — г2).
а отношение сигнал/шум p ~ ECUI (1 — cos Дер) (1 — r2) En.
Полезный сигнал на фоне коррелированной помехи выделяется при наличии
межпериодного фазового набега Дер = ЙДОПЛ обусловленного эффектом Допле-
ра> т. е. движением цели.
Погрешности измерения на выходе оптимальных приемников параметров
сигнала называются потенциальными и зависят только от формы сигнала и отно-
шения сигнал/шум.
Погрешность измерения дальности характеризуется дисперсией измерения
временного сдвига т
а2пот = 1/(?Д/2,
(Z-T0)]2dt
где ~------------ — эффективная ширина
I т0)Л
спектра сигнала; U'c = dU^ т0 — временной сдвиг.
Если сигнал имеет колоколообразную форму
(7С (Z) = L'mcexp (—л(2/т2),
то Д/э = Улфи; Q2EC/Na = qi пи;
Сттпот=ти/?ТЛ^
Погрешность измерения угловой координаты определяется методом пеленга-
ции, формой пеленгационной характеристики и отношением сигнал/шум. В об-
щем случае дисперсия
^п=1/£?Ра.
где — параметр, связанный с шириной спектра AFa и скоростью обзора
формулой: ра = А^/Ад.
При колоколообразной аппроксимации ДНА
Д^ = Ул/7'а = уяОА/0А-
где — ширина ДНА; 0^ = kMd^.
27
Минимальная средняя квадратическая погрешность измерения угла а
Разрешающая способность сигнала на выходе оптимального приемника
характеризует потенциальную разрешающую способность РЛС и зависит в ос-
новном от формы сигнальной корреляционной функции /? (т). Между разрешаю-
щей способностью и погрешностью измерений существует зависимость о£от =
= 1/Q | R" (0) где вторая производная корреляционной функции
^"(0) = ~- \
£с J
Из формулы следует, что кривизна R (т) определяет точность измерений.
Чем шире спектр, тем больше точность измерений, так как «острый» пик
сигнала позволяет зафиксировать его максимум с меньшей погрешностью. По-
этому в большинстве РЛС зондирующими сигналами являются короткие им-
пульсы (ти = 0,1; 0,5; 1; 2; 3 мкс).
1.6. РАСЧЕТ ЭНЕРГЕТИЧЕСКОГО ПОТЕНЦИАЛА
И ОСНОВНЫХ ПАРАМЕТРОВ РЛС
Выбор эксплуатационных и технических параметров производится с учетом
заданных величин, определяющих место установки и условия работы РЛС (как
правило, предельные), характеристик объектов и вероятностей — Рп.о, Рл.т>
£>тах. сектора обзора по азимуту (или углу места); 6D, 6а, 60 —разрешающей
способности по воспроизводимым координатам, погрешности измерений коорди-
нат, внешних связей РЛС и условий сопряжения с другими системами, специаль-
ных требований к выходным сигналам.
Указанные величины задаются исходя из требований обеспечения безопас-
ности, регулярности и экономичности полетов и из рациональных технических
решений при их реализации. Зависимости ЭП и ТП противоречивы, поэтому при
проектировании оптимальные или близкие к ним решения принимаются чаще
всего при определенных компромиссах. Выбор и расчет основных параметров
выполняют в такой последовательности: по заданным ЭП рассчитывают показа-
тели РЛС с оптимальной структурой передатчика, приемника и оконечного уст-
ройства; оценивают возможности технической реализации оптимальных струк-
тур. Как правило, оптимальные структуры заменяют квазиоптимальными, ко-
торые оказываются проще в реализации, определяют числовые значения коэф-
фициентов потерь от замены оптимальных структур, затем рассчитывают энерге-
тический потенциал РЛС — импульсную (Ри) и среднюю Рср мощности. Техниче-
скую реализуемость оптимальных структур и алгоритмов следует оценивать с
точки зрения надежности и эксплуатационной технологичности.
Квазиоптимальные структуры играют важную роль при выборе ЭП и ТП
РЛС. Примером такой структуры является фильтр, форма амплитудно-частотной
характеристики задается, а максимум отношения сигнал/шум обеспечивается
подбором ширины полосы пропускания. При этом Ucl Ulu оказывается несколько
меньше оптимального на 15—20%. Заменяя оптимальный фильтр фильтром
с прямоугольной полосой пропускания шириной AF = 1,37/ти, получим на
выходе PC/PJU = 0,82Q, т. е. энергетические потери составят всего 1 дБ.
При приеме реальных радиоимпульсов с огибающей, аппроксимируемой
кривой Гаусса (7 (/) _ Al~at проигрыш от замены оптимального фильтра ква-
зиоптимальным уменьшается.
В общем случае технические решения не могут обеспечить реализацию по-
тенциальных характеристик РЛС, т. е. Лрлс (/) = Мпот(0» гДе ЛПот W —
ol ?нка потенциальных характеристик, а | — коэффициент потерь (£ > 1, | =
т
~ S Si)- При расчете параметров РЛС следует учитывать как можно больше
составляющих коэффициента
Потенциальные характеристики РЛС определяются параметрами зондирую-
28
щего сигнала и собственными шумами приемного тракта. К ним относятся:
бЬп0Т; 6а — потенциальная разрешающая способность РЛС по дальности и по
азимуту; па — среднеквадратические погрешности измерения координат;
£"прм min — чувствительность приемного тракта.
Расчет потенциальных характеристик производится по формулам:
= сти/2, ~ 6DIJOI;-1 6DnpM б£)Оу.
где бРпрм — ухудшение разрешающей способности за счет ухудшения шумов
приемного тракта; б£)оу — разрешающая способность оконечного устройст-
ва;
бсХ-пОТ =0
где 0А — ширина ДНА;
aD = ctH/2}/<2-
где Q — отношение сигнал шум на выходе оптимального фильтра;
na^X/dA|/jiQ,
где — раскрыв антенны;
Епрм min — QEjji»
где Еш — энергия шума на выходе оптимального фильтра.
Величина Q определяется из характеристик обнаружения (см. рис. 1.20),
при этом следует учитывать характер флуктуаций отраженного сигнала, который
зависит от типа радиолокационной цели, и вид зондирующего сигнала. Напри-
мер, отраженный от ЛА сигнал представляет собой пачку дружно флуктуиру-
ющих некогерентных радиоимпульсов.
Величина Q может быть определена аналитическим путем при условии, что
заданные вероятности Рл.т <0,1 и Рпр <0,1.
Для дружно флуктуирующей пачки когерентных импульсов
Q = [Vln т+ In (1 /Рл. т) + "[/in (1 /РПр)12
где m = 1(Пгаах—Dmin)/6£)pjic] (Да/6а)—число возможных пачек импуль-
сов; Аа — зона обзора по угловой координате.
Средняя энергия пачки из ли когерентных импульсов
£ср
где Elai — средняя энергия одиночного импульса, Ес$ = ли£11П-.
При приеме дружно флуктуирующей пачки некогерентных импульсов для
значений пИ > 1 отношение сигнал/шум
Q = 2£ср/Л'ш = 1/21п(1,'Рл. т-2,8)/( 1 -РП. 0)
Для всех значений ли
Qep= [In (1/Рл. T)rlnw+(VXi-l)] 1/2 In (1/Рл. т)—21п/п/(1—Рп0).
. Формула точна при nu = 1 и пи » 1 > для промежуточных значений результат
несколько завышен, но не более чем на 2 дБ.
При отражении зондирующего сигнала от объекта с быстро меняющейся
ЭОП (например турбовинтовой самолет) могут иметь место независимые флук-
туации импульсов в пределах одной пачки. Для этого случая 2£ср/ Аш (ах +
+ а2) [У^п + (ах + 2а2)]/3,
а,1 = У2 In (1/Рл. т) +2 In /и —2,8;
а2 = У21л’(Т/Рл. т) —2,8.
29
Рис. 1.25. Зависимость потерь при не-
когерентном накоплении от числа
импульсов
Рис. 1.26. Зависимость потерь при
дискретной обработке сигнала от
числа импульсов:
Потери в отношении сигнал/шум реальной РЛС возникают во всех элемен-
тах трактов приема и передачи, а также при распространении энергии. Наиболь-
шие потери в приемно-индикаторном тракте. Коэффициент потерь в нем
^прм ~ к ёдпск ьк« о £в. у Sb. и *
где £н.к — коэффициент потерь при некогерентном накоплении; £дпск — ко-
эффициент потерь, связанных с дискретной обработкой; 0 — коэффициент
потерь, возникающих при замене оптимального накопителя квазиоптималь-
ным; £b.v — коэффициент потерь, возникающих при замене оптимального
приемника одиночного импульса квазиоптимальным; £в.и — коэффициент
потерь в визуальном индикаторе.
Потери некогерентного накопления вызваны применением некогерентной
обработки когерентного сигнала. Последний широко используется в ТРЛ и
ОРЛ, однако в силу сложности технической реализации когерентное накопление
часто заменяется некогерентным — последетекторным. Возникают потери,
которые при расчете учитываются коэффициентом
£н. к.-2 Vn^/[-|/21nm + 2 1n(l /P.-1. т-2,8) + 1/2 In (1//^р —2^)].
Потери возрастают с ростом лп (рис. 1.25), при па > 1 £н.к ~ "]/пи. откуда
следует, что разделение непрерывного сигнала на последовательность некоге-
рентных импульсов с точки зрения потерь невыгодна. При уменьшении Рл.т и
РПр проигрыш в энергии сигнала уменьшается.
Потери возникают, если в тракте применяется цифровая обработка, и учи-
тываются коэффициентом потерь дискретной обработки (квантования) |диск
(рис. 1.26, 1 — дискретное накопление п ~ 1; 2 — то же, п ~ nopt; 3 — не-
когерентное накопление). Решение о наличии отраженного сигнала принима-
ется при условии, что из п0 на выходе квантователя формируется п импульсов.
Пачка обнаруживается при удовлетворении критерия «£ из п». Оптимальное чис-
ло накапливаемых импульсов nopt = ПбД/ли.
Коэффициент £к.о учитывает потери при квазиолтимальной обработке сигна-
ла. Техническая реализация оптимального фильтра для пачки достаточно слож-
на (см. рис. 1.23). Проще реализовать квазиоптимальный фильтр на базе рецир-
кулятора (рис. 1.27, а). Схема рециркулятора может работать на видеочастоте
или на радиочастоте. Эффект накопления в рециркуляторе зависит от коэффи-
циента обратной связи
/%’1 V
1
\ х = 1 /
где — энергия суммарного сигнала на выходе накопителя-рециркулятора;
£1И — энергия одиночного импульса.
30
Отношение сигнал/шум на выходе накопителя
Рвых — 7ie
выигрыш в отношении сигнал/шум при накоплении р —(1 — + —
График £/Вых/(/вх = пи) показывает, что существует опти-
мальное значения выигрыша в зависимости от для определенного числа
ди (рис. 1.27, б).
Накопитель на рециркуляторе имеет потери по сравнению с оптимальным на-
копителем, которые учитываются коэффициентом
Вко — яи/Р — пи (1 ^р)' ^1 0
С изменением формы огибающей пачки импульсов выигрыш накопления мо-
жет меняться (табл. 1.2).
Таблица 1.2
Эффективность накопления для различных форм огибающей пачки импульсов
Показатель Форма огибающей пачки импульсов
прямоугольная косинусная косинус* квадратная треугольная
Ртах 0,82-пи [0,5]* 0.59 пи [0,5] 0 ,5 п1Г [0,5] 0,52ли[0,5]
fyopt 1,24 I ,31 1- L2 1,1
Ли [0 >5) Ли [9,5] ган[0,5] «и [0,5]
* «и [0,5] — количество импульсов в пачке, превысивших уровень 0,5 от максимального
значения импульса.
Коэффициент £ву характеризует потери, вызванные заменой в приемнике
оптимального фильтра для одиночного импульса квазиоптимальным, согласо-
ванным со спектром сигнала только по полосе пропускания. Потери в отношении
сигнал/шум для различных фильтров приведены в табл. 1.3.
При этом выполняется условие Д/фТи _= 2ДГВуТи, где Д/ф — полоса филь-
тра ПЧ; Д/7 — полоса видеоусилителя.
Рис. 1.27. Накопитель импульсов на рециркуляторе:
а — структурная схема; б зависимость коэффициента накопления от числа накапливаемых
импульсов
31
Таблица 1.3
Потери отношения сигнал/шум для различных квазиоптимальных
фильтров в приемном тракте
Радиоимпульс Фильтр А/ф/Тн Тву
Прямоугольный Идеально-прямоугольный 1,37 1,21
Гауссов 0,72 1,26
Гауссов Гауссов 0,44 1,00
Прямоугольный Одиночный резонансный контур 0,40 1,24
Два резонансных контура 0,613 1Д4
Пять резонансных контуров 0,672 1,12
Если приемный тракт не согласован с импульсом по полосе, то получают от-
ношение рд^ = А/ПрМ/Д/с при Д/ПрМ >• Д/с и рд^ = А/с/А/прм при А/ПрМ<С А/с»
вычисляют эффективное количество импульсов пэ = рд^и, после чего по графи-
ку потерь в детекторе £дет = f («и) (рис. 1.28) определяют потери £дет — £ву.
Коэффициент £в.и учитывает потери в визуальном индикаторе, которые воз-
никают при использовании ЭЛТ с яркостной отметкой, причина которых —
разное время накопления полезных сигналов и шума. Методика вычисления этих
потерь совпадает с вычислением потерь £ву, но вместо рд^ следует использовать
величину Рразв = (Ти^разв + dn) иразвТп, где dn — диаметр пятна, иразв =
= /развс/2£>вос — скорость перемещения пятна; с — скорость распространения
радиоволн, £в.и = £дет (для пэ = рразвПи)- Потери в ВИ могут быть учтены ко-
эффициентом to = 1,5.
Импульсная мощность РЛС определяется максимальной дальностью Dmax,
потерями, возникающими в приемном тракте и при распространении радиоволн.
Эти потери зависят от длины волны X (см. рис. 1.13). После выбора длины волны
рассчитывают: ?км.з— коэффициент километрического затухания; 5Д — эф-
фективную площадь антенны; — к. н. д. антенны; пи— число накапливаемых
импульсов, Тобз — время обзора; Ти — период повторения зондирующих им-
пульсов; ти— длительность зондирующего импульса; ^прмтш — чувствитель-
ность приемника для заданных значений вероятностей Рп.о и Рл.т-
Зная атмосферные условия, коэффициент укм.з и заданную дальность
£>rnax а* находят величину £тах.
Импульсная мощность
Ри =^тах ^прм min (4зт)3/Ти X2 So Y)u_n.
В формуле для расчета Ри можно заменить к.н.д. бд = 4л5^/Х2.
При обнаружении объектов с малой ЭОП можно использовать К обзоров и
соответственно вероятность 1 —(1 —Рц-о)^ возрастает по биномиально-
му закону. Вероятность Рп.о при расчетах, как правило, задается равной 0,9.
Вероятность ложной тревоги Рл.т необходимо свести к минимуму. Допускаем,
что ложная тревога возникает 1 раз за 1000 обзоров (1 раз в час). Если число ин-
формационных элементов в одном обзоре tn — mDma ~ Ю5, то вероятность
^л.т X “ т^л-т1» ^л-Ti = Рл.т d т’ P^-ti = 10"\
Рис. 1.28. Зависимость потерь
детектирования от числа им-
пульсов
32
Последняя величина должна задаваться при расчете технических характе-
ристик РЛС.
Показатель энергетического потенциала PI определяет класс бортовых ме-
теонавигационных РЛС.
Расчет потенциала выполняют в соответствии с ГОСТ 17732—80:
PI — 10 1g Ри 20 1g Стах ~г 20 1 g ти А\ц ~г ьи ‘ьр »
где Рп — абсолютное значение импульсной мощности на выходе передатчика,
Вт; Gmax — наименьшее значение коэффициента усиления антенны в направ-
лении максимального излучения; ти — абсолютное значение длительности
зондирующего импульса на уровне 0,5, мкс; ТУщ—коэффициент шума прием-
ника, дБ; £и— коэффициент потерь при визуальной индикации; £р — ко-
эффициент, учитывающий отражающие свойства гидрометеоров; — ко*
эффициент потерь, вызванных неоптимальностью приемного тракта.
Коэффициент потерь визуальной индикации
1 g 0Г]1ааз,
где <хаз — зона обзора по азимуту; Fn — частота повторения импульсов; 0 —
ширина ДН в азимутальной плоскости, градус; А — коэффициент, равный
3 для индикаторов на ЭЛТ с послесвечением и 5 для индикаторов с телеви-
зионным воспроизведением.
Коэффициент потерь неоптимального тракта принимают равным нулю
при условии ДГпрм 1,5ти, в остальных случаях £п = 5 1g (ДГ'прм'Ги/К5)•
Коэффициент £р принимает различные значения в зависимости от режима
работы РЛС. При полете с дозвуковой скоростью и обнаружении гидрометеоров
£р = 9, при обзоре пространства с целью обнаружения прохода между грозами
£р =— 3, обнаружение гидрометеоров на сверхзвуковой скорости осуществляет-
ся при gp = 1. Формула для Р/ справедлива, если потери в радиопрозрачном
обтекателе менее 1,5 дБ и суммарные потери в антенно-волноводном тракте не
более 2 дБ.
Расчетная максимальная дальность обнаружения в километрах £)тах =
= antilog {[(PI) — 9,2]/40).
По расчетным значениям показателя потенциала и дальности действия РЛС
можно установить класс РЛС:
Класс............................................
(Р/).............................................
В m а х, К М . ...............................
2 Зак. 1683
12 3 4
119 111 101 90
500 350 200 100
• 33
Глава 2. АНАЛОГОВЫЕ И ДИСКРЕТНЫЕ УСТРОЙСТВА РЛС
Z1. АНТЕННО-ФИДЕРНЫЕ УСТРОЙСТВА
Зеркальные антенны состоят из слабо направленного излучателя и зеркаль-
ного отражателя. Зеркала представляют собой параболоиды вращения. Направ-
ленные свойства антенны в горизонтальной (т. е. по углам ф) и в вертикальной
(т. е. по углам 0) плоскостях определяются размером раскрыва антенны da в со-
ответствующей плоскости и амплитудным распределением поля по раскрыву.
В зависимости от соотношения фокусного расстояния F и раскрыва da ан-
тенны различают длиннофокусные и короткофокусные антенны. Антенна счита-
ется длиннофокусной при < 1 и короткофокусной при da!AF > 1.
Ширина ДН антенны на уровне половинной мощности
а0 5 — 60X/da (1 + ada/4F),
где а — угол в вертикальной или горизонтальной плоскости, в которой дается
значение раскрыва da антенны; а — постоянный коэффициент, равный 0,5,
если плоскость Е совпадает с плоскостью поляризации излучаемой волны,
и равен 0,2, если плоскость Н нормальна плоскости Е.
Если размеры раскрыва антенны в обеих плоскостях одинаковы, то антенна
формирует симметричную ДН, которая при раскрыве антенны, имеющем форму
круга, представляет собой тело вращения с равной шириной ДН в обеих пло-
скостях. Для получения ДН сложной формы (например, cosec а или cosec2 а)
зеркальные антенны выполняют с отражателями специальных профилей и облу-
чателем в виде системы из нескольких облучающих элементов. Для уменьшения
влияния земной поверхности на форму ДН в наземных РЛС используют отража-
тели (рефлекторы) двойной кривизны.
Основная характеристика антенны — амплитудная ДН Е (ср, 0). ДН в го-
ризонтальной или в вертикальной плоскостях строят в полярных или прямоуголь-
ных координатах и нормируют к максимальному значению Етах напряженности
поля: Fqth (ф) = Е (ф)/£тах при = const или Fqth (6) = £ (^У^тах ПРИ
ф = const. При определении излучаемой или принимаемой мощности Р исполь-
зуют номированную по мощности ДН
(а) = (sin а/а)2,
где а — 1,4 (2а0/а0(5), а угол а0 отсчитывается от максимума ДН. Для ап-
проксимации основного лепестка ДН по мощности используют выражения
fP (а) = ехр [— 0,7 (2а0/а015)2] или fp (а) = cos2 [л- 2а0/(4а0>5)].
К числу основных параметров антенн относят коэффициент направленного
действия Ga и коэффициент усиления Gy. Коэффициент направленного действия
(КНД) характеризует способность антенны концентрировать энергию в направле-
нии излучения и связан с шириной ДН в радианах в горизонтальной фОг5 и вер-
тикальной 0О,5 плоскостях соотношением Ga = 4л/(фО|50о>5). Если фи>5 и 0Of5 вы-
ражены в градусах, то Ga = 3500О/(фО(50о>5). Последнее соотношение часто ис-
пользуют для практических расчетов. В общем случае КНД может быть найден
по площади раскрыва антенны 5а и коэффициенту использования раскрыва ан-
тенны ks из выражения Ga 4л/г5£а/Х2. Значение для обычных антенн со-
ставляет 0,4—0,7.
Коэффициент усиления антенны характеризует направленные свойства ан-
тенны с учетом всех имеющихся в антенне потерь энергии: Gy -- T]Ga, где т| —
к. п. д. антенны, равный в зависимости от типа последней 0,95—0,98.
34
Реальная ДН (рис. 2.1) имеет иска-
женную форму и боковые лепестки,
уровень которых зависит от распределе-
ния амплитудного и фазового полей по
раскрыву антенны, краевых эффектов
(«переливание» энергии через края отра-
жателя), расположения и формы облу-
чателя, влияния местных предметов и
других факторов. Чем равномернее рас-
пределение поля по раскрыву антенны,
тем уже главный лепесток, но выше
уровень боковых лепестков.
Уровень t-го бокового лепестка
определяют в децибелах, используя
соотношение
-20 0 20 ЬО 60 80 100 120 КО 160 <f?
Рис. 2.1. Диаграмма направленности
антенны в горизонтальной плоскости
Bi = 10 log (Pi/P0),
где Ро и Pi — мощности в максимуме соответственно основного и f-ro лепест-
ков.
Уменьшения боковых лепестков достигают выбором соответствующего за-
кона распределения поля по раскрыву. Задача получения оптимальной ДН те-
оретически решается с помощью полиномов Чебышева. Однако практическая ре-
ализация этого метода затруднена различными факторами конструктивного ха-
рактера: конечными размерами облучателя, неточносью изготовления отражате-
ля и других элементов антенны, неравномерностью покрытия отражателя, на-
личием радиопрозрачных обтекателей антенн и т. п.
В табл. 2.1 представлены параметры ДН при различных видах распределе-
ния поля по раскрыву. Для удобства сравнения значение КНД антенны при
равномерном распределении поля по раскрыву принято за единицу и приведены
относительные значения G0TH КНД антенн других типов. Размер раскрыва ан-
тенны da дается в той плоскости, в которой определяется ширина ДН
Таблица 2.1
Параметры ДН при различных видах распределения поля по раскрыву
зеркальной антенны
Вид распределения Параметры ДН
ботн ao.Ua'a//,), градусы Blt дБ
Равномерное £(«) = 1 1 51 —13
Косинусное £(«) = cos rt (ла/2) п— 1 0,81 70 —23
п — 2 0,67 83 —32
л = 3 0,57 95 —40
Параболическое £(а) = 1 — (1—б) а2 6 = 0,8 0,99 53 — 16
6 = 0,5 0,97 56 —17
6 = 0 0,88 66 -21
Щелевые антенны (антенные решетки) состоят из отдельных излучающих эле-
ментов, определенным образом расположенных по отношению друг к другу.
Такие антенны имеют существенно меньшие размеры, чем зеркальные, и позво-
ляют реализовать электрическое управление положением ДН в пространстве
(электронное сканирование). Примером щелевой антенны служит антенна вто-
2*
35
ричного радиолокатора (рис. 2.2), предназначенная для излучения сигнала за-
проса в двух диапазонах частот. Антенна состоит-из п излучателей, объе-
диненных в т излучающих устройствах. В состав каждого излучающего устрой-
ства входят четыре рупорных излучателя и делители мощности. Излучаемые сиг-
налы через делитель мощности поступают на суммирующие входы кольцевых мо-
стов и далее на делители мощности излучающих устройств для распределения по
рупорным излучателям.
Направленные свойства щелевых антенн определяются числом и взаимным
расположением излучающих элементов. Основные параметры ДН рассчитывают
по формулам:
ширина ДН
фо,б = hf(Nx &х) » %,5 ’ &уУ>
коэффициент направленного действия
max = х Nу ,
где Nx и Ny — число излучающих элементов в горизонтальной и вертикальной
плоскостях соответственно; dx и dy — расстояние между этими элементами
в соответствующей плоскости.
Антенные переключатели (АП) предназначены для поочередного подключе-
ния приемного и передающего трактов импульсных РЛС к одной антенне и умень-
шают мощность излучаемого зондирующего сигнала, поступающую непосредст-
венно на вход приемного тракта, в необходимое для нормальной работы этого
тракта число раз (т. е. обеспечивают требуемую величину развязки приемного
и передающего трактов). Применяют АП двух типов: коммутационные и на не-
обратимых элементах. Антенные переключатели имеют следующие параметры:
развязка приемного и передающего трактов, дБ . 60—80
время восстановления исходного состояния, мкс . . . 0,1 — 1
максимальные потери мощности, дБ..................... 1,5
коэффициент стоячей волны напряжения................. 1,2—1,3
Коммутационные АП состоят из резонансного элемента и газоразрядного
прибора, включаемых в волноводный тракт (рис. 2.3, а) и основаны на резком
изменении сопротивления АП под действием СВЧ сигнала. Разрядники могут
включаться в определенные участки волноводного тракта как последовательно,
так и параллельно.
Входные сопротивления ZBX полуволновых и четвертьволновых отрезков
волновода зависят от нагрузки волновода ZH и его волнового сопротивления рв:
ZBX (0,5/гХ) = ZH;
ZBX[0,5(2M-l) X] = pg/ZH; п = 1 , 2, 3...
Поэтому, комбинируя такие отрезки и меняя ZH, можно построить схему, которая
будет блокировать передающий или приемный тракт при изменении уровня про-
~ щирующих импульсов разрядник Р-1
пробивается и колебания, генерируе-
мые передатчиком, проходят в антен-
ну. Разрядник Р-2 также пробивает-
ся и закорачивает линию в точках 3 —
3. При этом сопротивление в точках
2— 2 резко увеличивается, достигая в
идеальной линии бесконечно большого
значения. После окончания зондирую-
щего импульса первоначальное значе-
ние сопротивления разрядников Р-1
и Р-2 восстанавливается и входное
сопротивление в точках.?—3 резко воз-
растает, блокируя тракт передатчика.
При этом вся мощность принятого ан-
тенной сигнала поступает на вход
приемного тракта.
ходящей мощности, при излучении
Сз
е:
Рис. 2.2. Антенна щелевого типа:
/ — излучающие устройства; 2, 3, 5, 6 —
делители мощности; 4— кольцевые мосты
36
Рис. 2.3. Антенные переключа-
тели:
а — коммутационного типа: б—
ферритовый Прд — передатчик:
А — антенна: Прм — приемник:
Сд. В — сдвоенный волновод;
ЩМ — щелевой мост; Пгл — погло-
титель
Антенные переключатели на необратимых элементах находят широкое
применение в РЛС сантиметрового диапазона. В них используют ферритовые фа-
зовые циркуляторы. Входящие в состав таких циркуляторов ферритовые элемен-
ты сочетают в себе свойства ферромагнитного материала и диэлектрика. Их
удельное сопротивление составляет 104— 108 Ом• см, а диэлектрическая проницае-
мость в сантиметровом диапазоне волн — 5—20. Магнитная проницаемость фер-
рита зависит от направления волны. При сильных постоянных магнитных по-
лях наступает магнитный резонанс, при котором вся проходящая СВЧ энергия
поглощается ферритом. Резонансная длина волны ^рез = (0,035 Н)~Ч где Н —
напряженность магнитного поля, А/м.
Ферритовый антенный переключатель состоит из двойного Т-образного раз-
ветвителя, сдвоенного волновода с ферритовыми вставками, щелевого моста, по-
глотителя и постоянного магнита (см. рис. 2.3, б). Подводимая к плечу Я мощ-
ность разделяется на две одинаковые части и передается на выходы 1 и 2. Мощ-
ность, подаваемая в плечо Е, также разделяется на две части, но подается на
выходы 1 и 2 в противофазе. Два одинаковых по мощности и фазе сигнала на
входах 1 и 2 складываются и поступают на выход Н. Одинаковые по мощности,
но противоположные по фазе сигналы после сложения поступают на вход Е.
Развязка между плечами Е и Н составляет 20—30 дБ. В режиме излучения зон-
дирующих импульсов почти вся мощность попадает в антенное устройство. Часть
мощности просачивается в плечо £, но включенный в него разрядник поджигает-
37
ся в момент излучения зондирующего сигнала, создает режим короткого замыка-
ния и не пропускает колебания передатчика в приемный тракт. При приеме от-
раженных сигналов сопротивление разрядника восстанавливается, и сигналы
проходят в сторону приемника беспрепятственно.
Предельная пропускаемая мощность — один из важнейших параметров ан-
тенн и волноводного тракта. Она зависит от электрической прочности облучате-
лей и волноводов и градиента электрического поля в линии (волноводе) при ре-
жиме бегущей волны. Для воздуха при атмосферном давлении, ионизации и тем-
пературе, соответствующих нормальным (лабораторным) условиям, значение
пробивного напряжения составляет 3 кВумм. Для повышения электрической
прочности волноводов, а следовательно, и для увеличения предельной пропус-
каемой мощности волноводы заполняют осушенным воздухом при избыточном
давлении или специальным газом (элегазом) с электрической прочностью до
9 кВ/мм.
Поляризационные свойства антенных устройств определяются законом изме-
нения во времени направления вектора напряженности электрического поля
в плоскости, перпендикулярной направлению распространения волны.
Антенны РЛС могут излучать волны с линейной, круговой или эллиптиче-
ской поляризацией. Волна любой поляризации может быть представлена двумя
ортогональными составляющими: когерентными линейно-поляризованными вол-
нами Ех и Еу, сдвинутыми друг относительно друга по фазе на угол ф. Если
Етх = Ету и ф = 90°, то возникает волна с круговой поляризацией. В РЛС
обычно применяют антенны с линейной вертикальной или горизонтальной поля-
ризацией.
При работе РЛС в сложных метеоусловиях для защиты приемного тракта от
сильных сигналов, отраженных от гидрометеоров (дождя, снега и т. п.), исполь-
зуется физический эффект, заключающийся в неодинаковом отражении волн с
различной поляризацией от объектов с неодинаковыми размерами в горизонталь-
ной и вертикальной плоскостях. С этой целью линейно-поляризованные (допу-
стим вертикально поляризованные) волны, создаваемые излучателем, преобразу-
ются специальным поляризующим устройством в волны с круговой поляриза-
цией. При отражении от симметричных целей (например, от дождевых капель)
поляризация не меняется, изменяется лишь направление вращения вектора Е.
Отраженная волна, проходя поляризующее устройство, вновь преобразуется в
волну с линейной поляризацией, но вектор Е этой волны повернут в пространст-
ве на 90е (в нашем примере он расположен горизонтально). Поэтому этот вектор
не наводит э. д. с. в излучателе и отраженный сигнал не попадает в приемный
тракт. Если цель несимметрична, отраженная волна имеет эллиптическую поля-
ризацию и при повторном прохождении через поляризующее устройство преоб-
разуется в линейно-поляризованную волну, вектор Е которой повернут в про-
странстве на угол, не равный 90°. Такой вектор можно разложить на вертикаль-
ную и горизонтальную составляющие, одна из которых (в данном случае верти-
кальная) воздействует на излучатель. Наведенная в излучателе э. д. с. поступа-
ет на вход приемника.
В качестве поляризующих устройств (поляризаторов) используют поляри-
зационные решетки, устанавливаемые перед антеннами, волноводные скрутки
с фазовращателями, ферритовые волноводные вставки и другие устройства, по-
зволяющие управлять поляризацией проходящих через них волн. Поляризато-
ры позволяют ослабить мешающие отражения от гидрометеоров примерно на
25 дБ при ослаблении сигнала, отраженного от самолета, на 6—8 дБ.
Сканирование ДН в процессе обзора пространства, т. е. изменение положе-
ния ДН в пространстве по заданному закону, производится в РЛС с помощью
либо электромеханических устройств, либо электрических методов. Наибольшее
распространение получили антенны с электромеханическими приводами, кото-
рые придают антенне вращательное или возвратно-поступательное движение и
тем самым изменяют положение луча ДН в пространстве. В радиолокаторах
с такими антеннами информация о текущем положении луча ДН передается
в устройства обработки информации или на индикаторные устройства сельсин-
ной следящей системой. В антенном приводе формируются и необходимые для
обработки и индикации азимутальные метки, отметка «Север», стробирующие
импульсы и другие подобные сигналы, перечень и вид которых зависит от типа
радиолокатора.
38
Наиболее сложным из используемых является привод вращения антенн в
обзорно-посадочных РЛС. Антенный механизм имеет два вала: на вертикальном
располагается антенна курса (антенна кругового обзора), на горизонтальном —
антенна глиссады. Антенный механизм приводится в движение от электродвига-
теля с переключаемым количестом полюсов, частота вращения вала которого
имеет два значения: 2840 и 390 об/мин.
Во вращающихся элементах антенно-волноводного тракта важное место за-
нимают сочленения для соединения подвижных и неподвижных частей волновод-
ных или кабельных линий. Во вращающихся переходах возбуждается волна с
осевой симметрией, поэтому в сочленениях используют либо круглые волноводы,
либо коаксиальные линии. Место перехода от прямоугольного волновода к круг-
лому согласуется с помощью резонансных колец. Вращающиеся части круглых
волноводов сочленяются с помощью дроссельно-фланцевых соединений.
Электрическое сканирование в щелевых антеннах (антенных решетках)
осуществляется путем перераспределения амплитуд и фаз токов, питающих от-
дельные элементы антенны. В антенной решетке, состоящей из п излучателей,
расположенных на расстоянии d друг от друга, направление максимума излуче-
ния (максимума ДН) перпендикулярно плоскости равных фаз поля, создавае-
мого этими излучателями. Когда все излучатели возбуждаются токами, имею-
щими одинаковые фазы, положение максимума ДН перпендикулярно линии рас-
положения излучателей. Если фаза тока, питающего излучатели, изменяется на
Дер от излучателя к излучателю, например, в сторону увеличения фазы, то на-
правление максимума ДН составит с перпендикуляром к линии расположения
вибраторов угол
9 — arc sin [(ХхДф/2л4) — nk-Jd],
где — длина волны питающих излучатели колебаний.
Так как фазовый сдвиг Дф токов, питающих излучатели, зависит от частоты
f0 питающего тока, длины линии / между излучателями и фазовой скорости
Уфаз распространения волны питающих колебаний, т. е. Д<р = 2л70//7фаз, то для
управления положением луча ДН достаточно изменять по определенному закону
либо частоту /0, либо длину линии /, либо фазовую скорость волны Уфаз-
2.2. ПЕРЕДАЮЩИЕ УСТРОЙСТВА РЛС
Структурная схема. Радиопередающее устройство (РПрдУ) включает
(рис. 2.4) задающий генератор, модулятор, генератор СВЧ. В зависимости от по-
строения генераторной части передатчики подразделяют на однокаскадные (око-
нечный каскад и возбудитель совмещены,
ся магнетрон) и многокаскадные с выход-
ным усилителем мощности, в качестве
которого используются пролетные клис-
троны, лампа бегущей волны (ЛЕВ)
или амплитроны.
Модуляция СВЧ колебаний произ-
водится в оконечных каскадах или до-
полнительно в нескольких предоконеч-
ных каскадах передатчика. В большин-
стве РПрдУ применяется анодная мо-
дуляция. Модулятор обычно вырабаты-
вает импульс, мощность которого доста-
точна для управления оконечными кас-
кадами передатчика. В многокаскадных
РПДУ задающий генератор использует-
ся для формирования сигналов опорной
промежуточной частоты /п.ч и гетеро-
динной частоты /гет.
Технические параметры РПрдУ оп-
ределяют параметры радиолокаторов:
в качестве генератора СВЧ использует-
Рис. 2.4. Радиопередатчик с много-
каскадным генератором СВЧ:
ЗГ — задающий генератор; ЭУЧ - элек-
тронный умножитель частоты; ПМ—под
модулятор; М — модулятор; У - уенли
тель; ОУ — оконечный усилитель; ВВ —
высоковольтный выпрямитель
39
средняя излучаемая мощность Рср = Тп 1 J Р (Z) dt, где Р (t) — изменение
излучаемой мощности во времени; Тп — период повторения импульсов; значение
Рср у различных радиолокаторов лежит в пределах от 0,2 до 10 кВт и зависит от
дальности действия РЛС;
форма и длительность зондирующих импульсов. Обычно стремятся в целях
повышения точности и разрешающей способности РЛС использовать короткие
прямоугольные импульсы с крутыми фронтами. Средняя крутизна фронта им-
пульса равна 0,8Ртах/Гф, где /ф — длительность фронта (обычно порядка деся-
тых долей микросекунды). Длительность зондирующих импульсов имеет значе-
ние от 0,4 до 3,5 мкс;
диапазон и скорость перестройки частоты. Отношение диапазона перестрой-
ки частоты Д/п к среднему значению частоты /ср, т. е. относительный диапазон
перестройки частоты A/nz/cp составляет 1 —10%. Скорость перестройки частоты
в пределах Д/п составляет от 1 до 3 с;
стабильность частоты характеризуется температурным коэффициентом ча-
стоты /Q = Д/у/А/ и коэффициентами электронного смещения частоты Кс =
Д/у/Д/а или Кс = Afy/&Ua, где А/у — уход частоты; Д/ — интервал возможных
изменений температуры; Д/а и A’t/a — диапазон изменений анодного тока и
анодного напряжения генератора СВЧ;
коэффициент полезного действия г| = ^ср'^пот» гДе ^пот — потребляемая
передатчиком мощность, к. п. д. передатчиков РЛС лежит в пределах 0,05—0,25.
Импульсные модуляторы предназначены для управления колебаниями вы-
сокочастотных генераторов. Для запуска модуляторов служат импульсы, фор-
мируемые в подмодуляторах. Они могут использоваться для синхронизации РЛС.
Принцип действия модулятора состоит в том, что в интервале между синхро-
импульсами на накопительном элементе (конденсатор, линии) накапливается
энергия. После прихода пускового импульса от подмодулятора коммутирующий
элемент подключает каскад генератора СВЧ к накопительному элементу, который
частично или полностью разряжается через магнетронный генератор. После окон-
чания импульса длительностью тп цепь разряда разрывается и начинается заряд
накопительного элемента (рис. 2.5). Постоянная времени разряда накопитель-
ного элемента определяется эквивалентной емкостью накопительного элемента
СЭкВ > ‘ти'/(-Ям + Яг) In (1 — r^e Ям и Яг — сопротивления модулятора
и генератора; 6 — относительное изменение напряжения в конце действия моду-
лирующего импульса. Значение 6 определяется из соотношения б = &Ua!Ua,
где Д(7а — изменение анодного напряжения, a Ua — начальное значение этого
напряжения, и зависит от требований к форме зондирующих импульсов и к ча-
стоте колебаний тока в анодной цепи магнетрона. Постоянную времени разряда
находят по формуле траз = СэкВ (Ям Яг). Предельная коммутируемая моду-
лятором импульсная мощность равна ЯкОм-доп^ ^и(^адоп - ^идоп), гДе
^адоп и доп — допустимые значения соответственно импульсного тока в це-
пи разряда, анодного напряжения и напряжения в импульсе.
По типу накопительного и коммутирующего элемента принята следующая
классификация импульсных модуляторов.
Модулятор с частичным разрядом емкостного накопителя выполняется на
конденсаторах емкостью СЭкВ. В качестве коммутирующего элемента применяют
модуляторную электронную лампу. Мощность запускающих импульсов до
1 кВт. Модулятор имеет к. п. д. 40—70%.
Модулятор с полным разрядом накопителя строят на одной или двух линиях
задержки (рис. 2.6). В качестве коммутирующего элемента применяют электрон-
ные лампы или газоразрядные приборы. Процесс формирования импульса в мо-
дуляторе с одной линией задержки начинается в момент открывания коммутатора
(зажигания тиратрона). Если сопротивление нагрузки 7?н равно волновому
сопротивлению линии рл, то протекающий через нагрузку ток U:1 шахЛ^нН"
+ рл), где t/лгаах — максимальное напряжение на линии. Напряжение на на-
грузке 6/н = 0ЛС%тах скачком уменьшается и по линии слева направо распро-
страняется волна, которая отражается от конца линии и, двигаясь в обратном на-
правлении, продолжает разряжать конденсаторы линии. При достижении вол-
ной левого конца линии процесс формирования импульса заканчивается, так как
40
Рис. 2.5. Структурная схема импульс-
ного модулятора:
УЗап — узел запуска; ПМ — подмодуля-
тор; 14 — модулятор; МГ — магнетронный
генератор; ЕН — емкостный накопитель;
ВВ — высоковольтный выпрямитель
конденсаторы Сл линии задержки успе-
вают полностью разрядиться. Пока раз-
рядная волна распространяется вдоль
линии, ток в линии i = а напряже-
ние на ее входе £и = 0,5(/л тах « £а>
где £а — напряжение источника пита-
ния. Длительность формируемого моду-
лятором импульса равна ти = 2тл>3,
где тл,3 — время задержки в линии.
В рассматриваемом модуляторе ши-
роко применяют водородные тиратроны,
малое время ионизации которых
(« 0,05 мкс) обеспечивает большую
крутизну переднего фронта импульса.
Линия задержки выполняется на 4 — 5 ячейках с волновым сопротивлением 50 Ом.
Выход модулятора трансформаторный, коэффициент трансформации равен 3—5.
Модулятор с полным разрядом накопителя на двух, линиях задержки при-
меняют в тех РИДУ, оконечные каскады которых выполнены на мощных усили-
тельных СВЧ приборах, так как такие модуляторы позволяют получать модули-
рующие импульсы большой амплитуды. Сопротивление нагрузки линий задержки
(см. рис. 2.6, б) выбирается равным /?н _ 2рл. При этом первая и вторая линии
оказываются несогласованными. В момент зажигания тиратрона (замыкания
ключа К) в схеме возникают волны, распространяющиеся в обоих направлениях.
В результате происходящих в схеме процессов формируется импульс с амплиту-
дой £ти = 2£а и длительностью ти = 2тлз. Таким образом, возможно либо уве-
личение в 2 раза амплитуды импульса по сравнению с модулятором, имеющим на-
копитель на одной линии задержки, либо уменьшение в 2 раза напряжения вы-
соковольтного источника.
Магнитный модулятор представляет собой безламповый импульсный моду-
лятор с полным разрядом емкостного накопителя.
Схема магнитного модулятора (рис. 2.7) состоит из зарядного контура, в ко-
торый вводит дроссель-трансформатор Др-1 и группа конденсаторов С-1; перво-
го сжимающего каскада (конденсатор С-1, тиристорный ключ Т-1 и Т-2 и нели-
нейный дроссель Др-2); второго сжимающего каскада (С-2, магнитный комму-
татор на линейном трансформаторе Тр и формирующей линии ЛЗ, согласующий
трансформатор, подключенный к магнетронному генератору). Источник питания
схемы — напряжение сети 115 В, 400 Гц. При подаче питающего напряжения в
зарядном контуре возникает колебательный процесс. В конце первого периода
колебаний напряжение на С-1 достигает t/max = £7Вх1/2Кдр’где £др = 1,25
— коэффициент трансформации дросселя. В этот момент тиристорный ключ Т1
открывается и накопленное за время tY напряжение передается на накопитель
С-2 второго сжимающего каскада.
Рис. 2.6. Модуляторы с полным разрядом накопителя:
а — на одной ЛЗ; б — накопительный элемент на двух ЛЗ; I — водородный тиратрон; 2
и 3 — демпфирующие диоды; ЗИ — запускающий импульс
41
Накапливаемая в С-2 энергия управляет магнитным состоянием сердечника
трансформатора Тр, выполняющего роль коммутатора. Когда напряжение на
конденсаторе С-2 достигает максимума, сердечник Тр переходит в насыщенное со-
стояние, индуктивное сопротивление обмоток падает, и конденсатор С-2 разря-
жается через формирующую линию и согласующий импульсный трансформатор.
В результате этого процесса в цепь катода магнетрона поступает импульс отри-
цательной полярности с амплитудой итя^7 ... 8 кВ и длительностью ти —
= 2 ... 3,5 мкс. В схеме обязательно выполнение условия рлК£р — где /?н —
сопротивление магнетрона в момент генерации СВЧ импульса; Ктр — коэффи-
циент трансформации.
Импульсные генераторы СВЧ РЛС выполняются на магнетронах, клистро-
нах и амплитронах.
Магнетронные генераторы нашли наиболее широкое применение в выход-
ных каскадах РЛС. Их преимущества — небольшие габариты и масса, а также
высокий к. п. д., позволяющий получать мощность в импульсе мощности до
0,5 МВт. Рекомендуемая номинальная крутизна фронта импульса модулятора от
80 кВ/мкс (в дециметровом диапазоне радиоволн) до 230 кВ/мкс (в восьмимилли-
метровом диапазоне радиоволн). Для стабильности генерируемой частоты необ-
ходимо, чтобы ДЦа 0,05UQ. Для устранения нежелательного влияния измене-
ний нагрузки на качество работы магнетрона в волноводный тракт включают
различного рода развязывающие вентили, поглощающие отраженные радио-
волны.
Условия работы РЛС требуют генерации высокостабильных колебаний (в ре-
жиме СДЦ), а также возможности перестройки частоты излучения (для обеспече-
ния помехозащищенности). Частота генерации магнетрона может меняться меха-
ническим или электронным путем. Механическая перестройка резонансной ча-
стоты осуществляется введением в щель резонатора настроечной пластины (уве-
личивается емкость) или настроечного штыря (уменьшается индуктивность).
Пределы перестройки частоты составляют 10—15% от номинального значения.
Один из методов изменения настройки путем электронного смещения ча-
стоты предусматривает управление анодным напряжением или током. Перестрой-
ка частоты возможна при отклонениях Ua (/) от UQ — номинального по произ-
вольному закону. Недостаток этого способа — изменение рабочего режима магне-
трона и некоторое ухудшение к.п.д.
В режиме СДЦ для борьбы со слепыми скоростями с периодом примерно 1 с
меняют частоту повторения импульсов и их несущую частоту. Для этого син-
хронно с изменением меняют амплитуду модулирующих импульсов. С этой
целью в одну из фаз питания высоковольтного выпрямителя включают рабочую
обмотку дросселя с насыщением. Периодически размыкая и замыкая цепь управ-
ляющей обмотки этого дросселя (например, с помощью реле), меняют сопротив-
Рис. 2.7. Схема магнитного модуля-
тора:
Др-1 —зарядный дроссель-трансформатор;
Т-J, Т-2, Т-3—тиристоры; УЭ — управляю-
щий элемент; Др-2— добавочный дрос-
сель: Тр — импульсный трансформатор;
ЛЗ — формирующая линия задержки:
МГ • магнетронный генератор
ление цепи рабочей обмотки, а следова-
тельно, и амплитуду модулирующих
импульсов.
Клистронные генераторы находят
широкое применение в мощных оконеч-
ных каскадах РПрдУ. Импульсная мощ-
ностьэтих генераторов достигает 30 МВт.
Клистроны работают в режиме генера-
ции с внешним возбуждением (в усили-
тельном режиме). Применение ь выход-
ном каскаде РПрдУ усилительных кли-
стронов позволяет сформировать истин-
но-когерентную последовательность зон-
дирующих радиоимпульсов и исполь-
зовать ее преимущества при первичной
обработке информации (когерентное
накопление и СДЦ).
Клистроны используют в двухка-
нальных РПрдУ трассовых и узловых
РЛС для одновременного облучения
дальней и ближней зон обзора окружаю-
42
Гпч=30МГи,
Вых.З -------1 г---------1 1
г-Ш Ы
Ж Л-, ШМПИП
ГГ2=1330МГц
ЬЫХ.1 --------~|
ЫМГц * Сп~3 *
гич
ЭУЧ +-ДМ -* СМ-1 ~ЧМ +0У
Вых. 1 ----------!
им
ИМ
ВЫХ. У
ВЫХ. 5
С^ЗООМГц
ИМ
“Т
Рис. 2.8. Структурная схема двухка-
нального РИДУ:
Г — генератор; См-1, См-2, См-3 — смеси-
тели; ДМ — делитель мощности; ГОЧ —
генератор опорных частот; ЭУЧ — элек-
тронный умножитель частоты; УМ — уси-
литель мощности; ГПЧ — генератор про-
межуточной частоты; ОУ — оконечный уси-
литель; ИМ — импульсный
ПМ — подмодулятор
модулятор;
СМ~2 + УМ ~0У
ГгЧЗШц
щего пространства. Вариант схемы двух-
канального РПдУ приведен на рис. 2.8.
В этой схеме вырабатываются два ста-
бильных гетеродинных сигнала с ча-
стотами /Г1 и /г2 и опорный сигнал про-
межуточной частоты /п-ч- Колебания
промежуточных частот приемного уст-
ройства стабильны по частоте, когерент-
ны по фазе вследствие кварцевой ста-
билизации генератора опорной частоты
60 МГц. В качестве умножителей ча-
стоты используют умножительные кли-
строны, у которых выходной резона-
тор настроен на одну из высших гармо-
ник частоты возбуждения. Сигнал /Г1
после умножителя поступает на дели-
тель мощности. С выхода делителя одна
часть сигнала используется в -качестве
напряжения гетеродина, вторая подает-
ся на третий смеситель для получения
сигнала fr2 второго гетеродина, третья
часть подается на первый смеситель
для получения сигнала = /Г1 + fn,4.
Аналогичным образом формируется
сигнал с частотой /2. Сигналы с частотами и /2 после смесителей поступают
в усилители мощности, а затем в оконечные усилители.
В оконечных каскадах используется комбинированный способ модуляции
клистронов — анодная модуляция в сочетании с модуляцией входным сигналом.
Импульсы отрицательной полярности подаются на оконечные и предварительные
усилители. Для уменьшения напряженности поля в волноводном тракте импуль-
сы двух передатчиков сдвигаются на несколько микросекунд. Каналы РПрдУ
работают с разными периодами повторения Тп и генерируют импульсы разной
длительности, мощности и амплитуды (Тп1 = 24 мс, РИ1 = 2,8 МВт, т1П — 3,6 мкс,
Тп2 = 1,3 мс, Ри2 = 1,8 МВт, тИ2 = 1,8 мкс). Сигналы, принятые по второму ка-
налу, обрабатываются в системе СДЦ. Генерируемые радиоимпульсы имеют вы-
сокую степень когерентности: фаза колебаний за период повторения изменяется
не более, чем на 3,5°, нестабильность выходной мощности менее 0,5%.
Амплитронные оконечные каскады (амплитроны) применяют в мощных мно-
гокаскадных РПДУ с оперативной перестройкой частоты, а также с внутриим-
пульсной частотной или фазовой модуляцией. С помощью амплитронов получают
мощность до 5 МВт при к. п. д 55—80% . Для работы амплитронов требуются срав-
нительно низкие напряжения (мощность ~ 1,5 МВт вырабатывается при напря-
жении питания 30—40 кВ). Амплитроны обладают высокой фазовой стабильно-
стью (до 5% на 1% изменения питающего напряжения) и широкополосностью до
10% относительно средней частоты сигнала. Неравномерность частотной характе-
ристики не превышает 6—10%. Коэффициент усиления амплитрона доходит до
7—10 дБ.
В амплитронных передающих устройствах (рис. 2.9) усилительная цепочка
составлена из последовательно включенных ламп бегущей волны и амплитронов.
Рис. 2.9. Радиопередаю-
щее устройство на ам-
плитроне:
Ампн — амплитрон; Вит—
вентиль; ЛБВ — лампа бегу-
щей волны; УЭ — управляю-
щий элемент; М — модуля-
тор; ЗГ —задающий генера-
тор; 2Р — сумматор мощно-
стей; АП — антенный пере-
ключатель; Прм — прием-
ник; АФУ — антенно-фидер-
ное устройство
43
Второй и третий каскады выполнены на амплитронах, работающих в режиме
сравнительно большого усиления, но малого к. п. д. Для устранения паразитных
возбуждений (амплитроны в отличие от других электронных ламп обладают как
прямой, так и обратной проводимостью) усилительные каскады разделены фер-
ритовыми вентилями.
Для уменьшения уровня шума передатчика модуляция осуществляется во
всех усилительных каскадах, причем, длительность модулирующего импульса в
последующих каскадах меньше, чем в предыдущих. Это позволяет подавать вы-
сокое напряжение в момент, когда на входы амплитронов поступает мощность
возбуждения, достаточная для работы в режиме стабильного усиления. Полу-
ченные при этом СВЧ импульсы имеют несколько растянутые фронты и срезы.
2.3. АНАЛОГОВЫЕ РАДИОПРИЕМНЫЕ УСТРОЙСТВА РЛС
Принцип построения РПУ определяется типом РЛС, в которой это устрой-
ство применяется.
В некогерентных РЛС применяются РПУ (рис. 2.10), которые состоят из ка-
налов приема отраженных сигналов и канала автоматической подстройки ча-
стоты (АПЧ). В канал отраженных сигналов входят усилитель СВЧ, преселек-
тор, смеситель, гетеродин, предварительный и основной усилители промежуточ-
ной частоты (УПЧ) и амплитудный детектор. РПУ псевдокогерентных РЛС
(см. рис. 2.10, а), кроме указанных каналов, имеют канал формирования опор-
ного сигнала с когерентным гетеродином. Последний вырабатывает опорное на-
пряжение промежуточной частоты, фаза которого определяется фазой излучае-
мого зондирующего сигнала.
В истинно-когерентных РЛС применяют двух- или трехканальные РПУ
(см. рис. 2.12, б). Каналы идентичны по своей структуре, работают на разных не-
сущих частотах и имеют в составе дополнительно к перечисленным устройствам
направленные ответвители, фильтры сосредоточенной селекции и усилители про-
межуточной частоты с жестким амплитудным ограничением. Направленные от-
ветвители используют для введения в приемный канал шума от специального
генератора для контроля чувствительности приемных каналов. Необходимый
С)
НаИКО
fl
ОтНВЦ
Три
ФНЧ
а нпо
К антенне
71 АП |
Пу I
ВУ
От антенны
7ЙГ\
ж]
|/?у НТНйн/7У/7У|
| \упчк
мг
т
им
УПЧ - 1/Г
АПЧ *
।
УЗ р-| ЧДСК
к УСДЦ
г-3-.Х
ФСС I Запуск
1 I 1 ШАРУ
упчо
ЗД
Запуск
УПЧ
6УПЧ
♦ fr
ОтПрд
f/iw
ШАРУ^УПЧ^^ВА,
| ФСС I
~упчМувчо
ФД
ВУ
Вых. А
Вых К
Вых. А
ФД
АД
I
I
Рис. 2.10. Структурные схемы РПУ:
а — псевдокогерентная РЛС; б — истинно когерентная РЛС; ФВЧ — фильтр высокой часто-
ты; ФП — фидерный переключатель; УВЧ — усилитель высокой частоты; ПС — преселектор;
См — смесители; ПУПЧ — предварительный УПЧ; АД — амплитудный детектор; БУ — видео-
усилитель; ИКО — индикатор кругового обзора: Гет — местный гетеродин; АПЧ — автопод-
стройка частоты; КГ — когерентный гетеродин; ФД — фазовый детектор; ЧДск — частотный
дискриминатор; ЭД — электродвигатель; МГ — магнетронный гетеродин; ИМ — импульсный
модулятор: СУ — согласующее устройство; ВАРУ — временная автоматическая регулиров-
ка усиления; ШАРУ — шумовая АРУ; Трн — тройник; НО — направленный ответвитель;
ФСС — фильтр сосредоточенной селекции; УСДЦ — устройство селекции движущейся цели
44
коэффициент усиления обеспечивается каскадами широкополосных УПЧ, а тре-
буемые избирательность и полоса пропускания — фильтрами сосредоточенной
селекции. Частотные характеристики таких УПЧ не зависят от изменения пара-
метров отдельных усилителей и от паразитных обратных связей.
Усилитель СВЧ предназначен для повышения уровня принимаемого сигнала
перед подачей его на смеситель с целью увеличения отношения мощностей сиг-
нала и шума в приемном тракте. Основными параметрами усилителя являются
коэффициент усиления; широкополосность, характеризумая отношением полосы
пропускания усилителя к средней частоте его настройки; динамический диапазон
и коэффициент шума. В зависимости от частоты усиливаемого сигнала и требова-
ний к параметрам приемного тракта в усилителях СВЧ применяют малошумящие
транзисторы (МТ), тунельные диоды (ТД) и лампы бегущей волны (ЛБВ). Наи-
более предпочтительны ЛБВ, обладающие большой широкополосностью, срав-
нительно небольшим коэффициентом шума и позволяющие легко перестраивать
усилитель, хотя усилители на ЛБВ требуют больших мощности источника пи-
тания и стабильности питающих напряжений и отличаются сильной зависимо-
стью фазового сдвига сигнала от значений питающих напряжений.
Основные параметры усилителей СВЧ в зависимости от типа активного эле-
мента имеют следующие значения:
МТ ТД ЛБВ
Диапазон рабочих частот, ГГц . не более 3 0,5—10 0,25—100
Коэффициент усиления, дБ . . . 15—25 17 25...35
Широкополосность, % .... 10—20 40 65
Динамический диапазон, дБ . . 100. 30 60...90
Коэффициент шума, дБ ... . 2—7 7 1,5...12
Преселектор (СВЧ фильтр, настроенный на среднюю частоту принимаемого
сигнала) предназначен для подавления шума на частотах, примыкающих к ча-
стоте зеркального канала. Коэффициент передачи преселектора в рабочей поло-
се частот близок к единице, а в полосе частот зеркального канала — значитель-
но меньше единицы. Конструкция преселектора определяется диапазоном рабо-
чих частот РЛС, в сантиметровом диапазоне преселектор представляет собой
объемный резонатор.
Смесители предназначены для преобразования СВЧ сигнала в сигнал про-
межуточной частоты. В радиолокаторах применяют балансные смесители, вклю-
чающие два диода и элементы их связи с внешними цепями. В качестве таких эле-
ментов в РЛС сантиметрового диапазона используются четырехплечевые СВЧ
мосты, к двум плечам которых подключаются диоды, а на два других плеча по-
ступают принимаемый сигнал и сигнал гетеродина.
Гетеродин представляет собой генератор СВЧ сигнала, частота которого от-
личается от излучаемой на значение промежуточной частоты. В некогерентных
и псевдокогерентных РЛС гетеродин является элементом РПУ, а в истинно-ко-
герентных РЛС — частью передающей аппаратуры.
В когерентных РЛС вследствие высоких требований к стабильности частоты
гетеродин выполняется с задающим кварцевым генератором (с последующим ум-
ножением частоты) или на клистронном или транзисторном генераторе со стаби-
лизирующим внешним высокодобротным резонатором (добротность до 20 000).
В клистронных гетеродинах оптимальная связь с резонатором устанавливается
с помощью аттенюаторов. Наиболее перспективными считаются гетеродины на
диодах Ганна.
Усилители промежуточной частоты выполняют функцию основного усиле-
ния и выделения (селекции) принимаемых сигналов. Амплитудно-частотная ха-
рактеристика УПЧ обычно согласуется со спектром одиночного импульса. Эта.
а также и амплитудная характеристика УПЧ фактически определяют соответст-
вующие характеристики РПУ. В когерентных каналах радиолокаторов с СДЦ
применяют УПЧ с жестким амплитудным ограничением, что позволяет эффектив-
но подавлять узкополосную помеху с медленно меняющейся амплитудой. В ам-
плитудных каналах СДЦ используют УПЧ с логарифмической амплитудной ха-
рактеристикой (ЛАХ), дающей возможность сжать динамический диапазон сиг-
нала и предотвратить насыщение приемника. Усилители с ЛАХ эффективны при
45
V1
W
Тр7
V.I
9>-----1
5
Я—t---1
0,707 \—
-н*з
я я
Рис. 2.11. Принципиальная схема фа-
зового детектора (а) и его характе-
ристика чувствительности (б)
т«1
0,50
0,25
В] Зфд
Кд
Зтг/2 <р
7L/Z 71
0
флуктуациях амплитуд мешающих напряжений, плотность вероятности которых
подчиняется закону Релея, например, при флуктуациях сигналов, отраженных
от метеообразований.
При полосе пропускания, превышающей 1 —1,5 МГц, в УПЧ применяют оди-
наковые одноконтурные каскады, настроенные на промежуточную частоту, а при
больших значениях полосы пропускания — усилительные схемы с одноконтур-
ными попарно расстроенными каскадами. Для уменьшения шунтирующего дей-
ствия входных сопротивлений в УПЧ на транзисторах используют неполную
связь входа и выхода транзистора с межкаскадными колебательными системами.
Фазовые детекторы предназначены для преобразования сигналов промежу-
точной частоты в видеосигналы, амплитуда которых зависит от разности фаз вход-
ного и опорного сигналов (рис. 2.11). Различают два режима работы фазовых де-
текторов: ключевой и детекторный. В ключевом режиме Гтвх/Гтоп= m < 1,
где £/пгвх и Um on— амплитуды соответственно входного и опорного сигналов.
Напряжение на выходе фазового детектора при этом иф.д ~ Um вх cos ср, где
<р — разность фаз подаваемых на детектор сигналов. Наибольшее применение по-
лучил балансный фазовый детектор с мостовой нагрузкой. Основным недостатком
ключевого фазового детектора является неравномерность чувствительности детек-
тора Зф.д — \dиф.д/dtfl в диапазоне 0 <^ср 2л. В детекторном режиме Uт Вх
~ Um on, а напряжение на выходе иф.д = K^Um BxUn( оп, где К-л— коэффи-
циент передачи фазового детектора. В рассматриваемом режиме чувствитель-
ность балансного фазового детектора меняется не более, чем на 30%, что являет-
ся преимуществом такого режима.
Автоматическая регулировка усиления (АРУ) предназначена для защиты
РПУ от перегрузки и поддержания заданного уровня выходного сигнала РПУ при
значительных изменениях амплитуды сигналов на входе приемного тракта. В ра-
диолокаторах применяют временную (ВАРУ), мгновенную (МАРУ) и шумовую
(ШАРУ) автоматические регулировки усиления.
ВАРУ предназначена для защиты приемного тракта от перегрузки пассив-
ными помехами на малых дальностях и осуществляется во всех каскадах предва-
рительного УПЧ (кроме первого). Схема ВАРУ запускается синхронизирующи-
ми импульсами РЛС и формирует управляющий усилением отрицательный им-
пульс, спадающий по экспоненциальному закону.
Принцип действия МАРУ состоит в подаче продетектировавного сигнала
помехи с выхода каскада УПЧ через цепь обратной связи на вход этого каскада.
Коэффициент усиления каскада при этом уменьшается с возрастанием амплитуды
помехи. Постоянная времени цепи обратной связи МАРУ больше длительности
полезных сигналов, чем обеспечивается слабое влияние МАРУ на усиление по-
лезных сигналов. Однако МАРУ не защищает приемный тракт от сильных импуль-
ных помех, и после воздействия такой помехи для восстановления чувствитель-
ности приемника требуется определенное время.
ШАРУ применяется для ограничения уровня шума приемника и стабилиза-
ции вероятности ложной тревоги. Шумовой сигнал на схему ШАРУ поступает
46
Ч чд ЕОг-
управления
Рис. 2.12. Структурная схема АПЧ
(АПЧ) предназначена для обеспечения
за 100—150 мкс до начала зондирующего
импульса, т. е. с того участка дально-
сти, на котором наличие сигналов пас-
сивных помех или полезных сигналов
практически исключено. Напряжение
шума сглаживается фильтром схемы
ШАРУ, запоминается на весь рабочий
интервал периода повторения и через
усилитель постоянного тока подается
на первые каскады УПЧ.
Автоматическая подстройка частоты
равенства промежуточной частоты ее номинальному значению. В некогерентных
РЛС с помощью схемы АПЧ подстраивается гетеродин радиолокатора, а в псев-
докогерентных — магнетронный генератор.
Сигнал в схему АПЧ (рис. 2.12) подается через отдельный УПЧ от специ-
ального смесителя, на который поступают часть излучаемого сигнала и сигнал
местного гетеродина. Чувствительньш элементом схемы АПЧ служит частотный
детектор ЧД, частота настройки которого соответствует номинальной промежу-
точной частоте (ПЧ). Когда частота подаваемого на схему АПЧ сигнала отлича-
ется от номинальной, на выходе ЧД возникают импульсы, полярность и амплиту-
да которых зависят от знака и значения рассогласования между реальной и но-
минальной ПЧ. Эти импульсы усиливаются в видеоусилителе ВУ и в одном из
униполярных видеоусилителей ВУ-1, ВУ-2 и поступают на пиковые детекторы
(интеграторы) ПД-1 и ПЛ-2. Постоянные напряжения с ПД вычитаются друг
из друга в схеме сравнения СС. На выходе СС формируется управляющий сигнал,
который используется либо для изменения напряжения на отражателе клистрона
(или для управления частотой другого генераторного прибора) гетеродина, либо
для управления механизмом перестройки частоты магнетрона.
Полоса пропускания УПЧ, питающего схему АПЧ, должна примерно в
2 раза превышать полосу пропускания частотного детектора. Последняя выбира-
ется из условия А/ч.д (2—4)/ти, где ти — длительность зондирующих импуль-
сов радиолокатора. Коэффициент автоподстройки схемы АПЧ характеризуется
отношением общей нестабильности частот передатчика и гетеродина к остаточ-
ной расстройке реального и номинального значений ПЧ. Допускается значение
остаточной расстройки 0,1—0,2 МГц.
2.4. ОКОНЕЧНЫЕ УСТРОЙСТВА РЛС
Визуальные индикаторы (ВИ) предназначены для воспроизведения радио-
локационной обстановки, т. е. для отображения в определенном масштабе обна-
пуживаемых радиолокатором объектов. Чаще всего применяют двухмерные ВИ,
воспроизводящие радиолокационную обстановку в координатах угол—дальность.
К числу двухмерных ВИ относятся индикаторы кругового (ИКО) или секторно-
го обзора, телевизионные и знаковые ВИ.
На экране ВИ траектория движения зондирующего импульса в пространст-
ве моделируется перемещением сфокусированного пятна по экрану ЭЛТ со ско-
ростью Vp = cMD, где с — скорость распространения радиоволн; MD— масштаб
по дальности, представляющий собой отношение отклонения /э пятна на экране
ЭЛТ к соответствующей ему дальности (Л1D = Z3/Z)). Перемещение пятна вдоль
экрана ЭЛТ называется разверткой по дальности, а скорость Кр — скоростью
развертки по дальности. Вращение антенны моделируется в ВИ развертыванием
луча по угловой координате (в простейших индикаторах — ИКО — вращением
линии развертки по дальности синхронно с вращением антенны).
В визуальных индикаторах, как правило, используется полярная система
координат (в ИКО) и декартовая система координат (в индикаторах секторного
обзора и индикаторах телевизионного типа).
Выходные параметры ВИ определяют соответствующие параметры радиоло-
катора в целом. К числу важнейших выходных параметров ВИ относятся разре-
шающая способность и точность определения координат целей.
47
т
Разрешающая способность РЛС по дальности &D — 6£)ПОТ4- 5 $£Ч+
i = 1
где 6DnoT — потенциальная разрешающая способность; 6D/ — член, характе-
ризующий ухудшение разрешающей способности в t-м элементе радиолокатора;
б£)и — разрешающая способность индикатора. Значение 6£)И зависит от диаметра
dn пятна на экране ЭЛТ, масштаба по дальности т. е. 6£>и = djMD.
Разрешающая способность по угловой координате зависит от разрешающей
способности ЭЛТ: | —djdn, где d3 — диаметр экрана ЭЛТ, от воспроизводимой
на экране дальности DB и коэффициента использования экрана Кэ (обычно ~
л; .0,8). Разрешающая способность по угловой координате бср = 57,3/9/(Кэ^£>п).
Точность измерения координат объектов характеризуется средней квадра-
тической погрешностью:
0-2 = j/a* от + а2ас + ст®,
где а„от — дисперсия, характеризующая потенциальную точность радиолока-
тора; 6рас — дисперсия погрешностей, вызываемых условиями распро-
странения радиоволн; — дисперсия погрешностей отсчета координат по
экрану ЭЛТ.
Определяющим в этом выражении является значение а^, зависящее от от-
ношения сигнал/шум. Индикатор на ЭЛТ представляет собой некогерентный на-
копитель импульсных сигналов. Такой накопитель увеличивает отношение мощ-
ностей сигнала и шума по сравнению с одиночным импульсом в КИНд = (1 '—
— рПи) (1 + Р)/(1 — Р) раз, где ли — число импульсов в пачке. Входящая в это
выражение постоянная р зависит от периода повторения зондирующих импульсов
Тп, времени послесвечения экрана Где, экрана ЭЛТ и находится по формуле
р — ехр (— Тц/Тдс)- При числе импульсов в пачке ли 10 ... 50 коэффициент
улучшения отношения мощностей сигнала и шума (коэффициент накопления ин-
дикатора) может быть приближенно определен как Кинд = У^и-
Индикаторы кругового обзора выполняют на ЭЛТ с длительным послесве-
чением экрана и электромагнитным управлением перемещением луча. Непод-
вижная отклоняющая система индикатора (рис. 2.13) состоит из двух катушек,
размещенных на горловине ЭЛТ. Магнитные оси катушек сдвинуты на 90 . Че-
рез катушки пропускаются токи
= / (0 sin £2вр i'k2 = I (0 cos ^вр
где ЙВр — угловая скорость вращения антенны радиолокатора.
Ток I (t) изменяется по линейному закону:
I (/) = 7^/Тр, 0 < t < Тр,
где /т — амплитудное значение тока; Тр — период развертки, равный времени
задержки сигнала, отраженного от объекта, находящегося на максималь-
ной дальности. Токи iK1 и iK2 создают магнитные потоки, управляющие по-
ложением пятна на экране ЭЛТ.
Координаты х и у пятна на экране ЭЛТ определяются как
X = ftp,,,, у = /l2lK2,
где Л1>2 — коэффициенты пропорциональности.
Полярные координаты пятна при этом
£> (0 = <р (0 = arctg а (/),
где/2=И гк1+‘к2; tga = x/i/ = tg Йвр t.
Таким образом, угловое положение развертки определяется угловым поло-
жением антенны РЛС.
48
Рис. 2.13. Схема формирования ра-
диально-круговой развертки в ИКО
Рис. 2.14. Тракт формирования раз-
вертывающих напряжений с фазовым
расщеплением линейно изменяющих-
ся напряжения (а) и тока (б):
ГПИ — генератор прямоугольного импуль-
са; ГЛИН генератор линейно изменяю-
щегося тока; У — усилитель-ограничитель;
УЛИТ — усилитель линейно изменяющего-
ся тока; ОС — отклоняющая система;
СИ — синхронимпульс; КК — ключевой
каскад; ДФМ — дифференциальный фазо-
вый мост; МДр — магнитный дроссель;
ВТ — вращающийся трансформатор
Радиально-кругово я развертка формируется в схеме блока развертки
(рис. 2.14, а), основными элементами которой являются генератор линейно-из-
меняющегося напряжения ГЛИН и фазорасщепляющее устройство — вращаю-
щийся трансформатор ВТ, ротор Р которого поворачивается синхронно и синфаз-
ное валом антенны с помощью специальной сельсинной передачи. Напряжения
на выходе статорных обмоток СО равны
(0 = kU т cos
^2 (0 — т. sin QBp^,
где k — коэффициент пропорциональности; Um — амплитуда питающего ротор
ВТ напряжения.
Генераторы импульсов линейно-изменяющегося тока (ГЛИТ), состоящие из
усилителей-ограничителей У и усилителей линейно-изменяющегося тока УЛИТ,
работают каждый на свою отклоняющую катушку ОК. Составляющие последо-
вательности линейно-изменяющихся импульсов, пропорциональные синусу и
косинусу угла поворота антенны, могут быть получены и после ГЛИТ. В такой
схеме (рис. 2.14, б) обмотки ВТ подключаются непосредственно к катушкам от-
клоняющей системы ОС.
Линейная развертка луча воспроизводит наклонную дальность D до объекта.
Для отклонения пятна на экране ЭЛТ, пропорционального горизонтальной даль-
ности
£>г = Гг»2 —HI,
где — высота подъема антенны РЛС, закон изменения развертывающего
тока должен соответствовать выражению
f p (О — Im с G1 — ^о) У" 1 +^вр tQ I (Ji —to)/ 2Dr,
49
Рис. 2.15. Знаковый индикатор на
характроне:
ФИП — формирователь импульсов подсве-
та; УВЗ — усилитель выбора знака; ССЗ —
схема сдвига знаков в формуляре; УАС —
усилитель адресной системы; ПКН — пре-
образователь «код— напряжение»; С —
синхронизатор; ПКТ — преобразователь
«код — ток»; ФК — фокусирующая катуш-
ка; ОК — отклоняющая катушка
Рис. 2.16. Структура знака, сформи-
рованного методом кусочно-линейной
аппроксимации
где — амплитуда тока; с — ско-
рость распространения радиоволн;
tr—текущее время одного периода
развертки; /0 — момент начала
развертки.
Для более точного учета кривизны
земной поверхности закон изменения
тока развертки по дальности должен
быть геперболическим.
Телевизионные индикаторы позволя-
ют повысить яркость и радиолокацион-
ного изображения. С этой целью радио-
локационное изображение преобразует-
ся в телевизионное путем многократ-
ного воспроизведения записанного в
пределах одного цикла обзора про-
странства изображения. Наиболее часто
телевизионное изображение формирует-
ся считыванием радиолокационного изоб-
ражения с экрана ЭЛТ передающей
телевизионной трубкой с последующим
его отображением на телевизионном
индикаторе, а также путем записи сиг-
налов РЛС на мишень запоминающей
ЭЛТ и считывания потенциального
рельефа электронным телевизионным
лучом. Преобразование видимого изоб-
ражения с экрана РЛС осуществляется
с помощью специальных видиконов со
временем запоминания около 2 мин и
разрешающей способностью изображе-
ния в 1500 строк.
Телевизионное изображение без
промежуточного воспроизведения фор-
мируется на трубках типа графекон.
Видеосигналы от РЛС (импульсы цели,
синхроимпульсы, метки) поступают на
модулятор записывающего электронного
прожектора графекона. Синхроимпуль-
сы синхронизируют формирование им-
пульсов подсвета прямого хода радио-
локационной развертки.
На считывающую часть преобразо-
вателя с генератора синхроимпульсов
поступают импульсы для синхронизации
строчной и кадровой развертки, В кана-
лах разверток генерируются пилооб-
разные токи, соответствующие телеви-
зионному стандарту. Эти токи, проте-
кая через отклоняющую систему считы-
вания, формируют телевизионный счи-
тывающий растр. Развертки содержат
525, 625 и 1125 строк.
Знаковые индикаторы позволяют
отображать на экране дополнительную
информацию в виде букв, цифр или сим-
волов. Знаковая информация формиру-
ется либо на ЭЛТ типа характрон, либо
на ЭЛТ с послесвечением. В последнем
случае используется растровый или
функциональный метод.
В характроне знаки формируются путем прохождения электронного луча
через знаковую матрицу — тонкую пластину с отверстиями, имеющими соот-
ветствующую знакам конфигурацию. Для отображения знака луч с помощью
двух пар выбирающих отклоняющих пластин (рис. 2.15) направляется в тот уча-
сток матрицы, где расположено нужное знаковое отверстие. Луч, имеющий кон-
фигурацию знака, с помощью компенсирующих отклоняющих пластин возвра-
щается на продольную ось трубки. Адресная магнитная отклоняющая система
выводит луч, а следовательно, знак в заданную точку экрана. Этот пресс повто-
ряется при выборе каждого знака. Определенное количество знаков объединяет-
ся в формуляр.
Схема управления характроном состоит из преобразователя «код—напря-
жение» для выбора знака, генератора развертки адресной системы, генератора
ступенчатого напряжения сдвига знаков и схемы формирования импульсов под-
света.
Растровый метод основан на формировании знаков из отдельных элемен-
тов в виде точек и штрихов. Качество знака определяется количеством элементов
изображения: числом п строк в знаке и числом tn элементов каждой строки. Для
четкого изображения знака достаточно п = 7 и /и = 5. В аппаратуру, реализу-
ющую растровый метод, входят знакогенераторы, состоящие из схемы формиро-
вания растра, устройства памяти для хранения информации о форме знака и схе-
мы управления импульсами подсвета. Недостатком растрового метода является
трудность получения высокого качества изображения и знаков различной слож-
ности. Кроме того, требуется весьма стабильная синхронизация знакового гене-
ратора.
Функциональный метод формирования знаков состоит в том, что траекто-
рия луча на экране описывает форму требуемого знака. Для каждого отдельного
знака закон отключения луча и управления подсветом индивидуальные. Две па-
раметрические связанные функции х (/) и у (/) могут описать любой знак. Если
эти функции связать с токами Iх = kx (t) и ly ~ ky (/) (k — коэффициент про-
порциональности), которые протекают через отклоняющую систему, то на экра-
не ЭЛТ будет вычерчен требуемый знак. Наиболее простым способом генерации
подобных функций является способ отклоняющих напряжений ступенчатой фор-
мы. Каждому знаку соответствуют две ступенчато-изменяющиеся функции Ux
и Uy, которые генерируются импульсными устройствами дискретного типа. Им-
пульсы подсвета имеют также вид дискретных ступеней, и весь знак формирует-
ся отдельными светящимися точками. Для получения цельного отображения зна-
ка увеличивают количество составляющих его элементарных функций.
Широкое распространение получил также способ формирования знаков с
помощью кусочно-линейных отклоняющих напряжений. Контур каждого дис-
кретного участка знака воспроизводится вектором напряжения, имеющим опре-
деленную длину и наклон. Знак представляет собой кусочно-линейную аппрок-
симацию (рис. 2.16) его идеального начертания.
2.5. СЕЛЕКЦИЯ ДВИЖУЩИХСЯ ЦЕЛЕЙ
Системы СДЦ в импульсных РЛС предназначены для выделения слабых
сигналов, отраженных от движущихся с большой скоростью объектов, на фоне
сильных сигналов, отраженных от объектов, перемещающихся с относительно ма-
лыми скоростями. Такие системы широко применяются в наземных радиолокато-
рах ГА.
Структурная схема СДЦ реализует алгоритм выделения сигналов на фоне
коррелированных помех (см. рис. 1.24), ее работа и основана на эффекте Допле-
ра. Вследствие этого эффекта сигнал, отраженный от движущейся цели, имеет
частоту заполнения радиоимпульса /отр, отличную от частоты /изл излучаемого
зондирующего импульса: f0Tp - /пзл (1 ± 2Ур/с), где Кр — радиальная ско-
рость. т. е. составляющая скорости цели в направлении распространения электро-
магнитной энергии, а с—скорость распространения радиоволн. Разность указан-
ных частот называют доплеровской частотой ~ /изл 2vp/c. Эффект Доплера
приводит к тому, что разность фаз высокочастотного заполнения соседних стра-
же: гых импульсов будет <р -- 2л/г17'п, где Тп — период повторения импульсов.
51
В радиолокаторе с СДЦ этот фазовый сдвиг импульсов в пределах принимаемой
пачки преобразуется в изменение амплитуды импульсов. Сигнал, отраженный
от движущегося объекта,
«с (0 = U тс COS [(00/ + ф (/)],
где ф (/) — текущий сдвиг фаз, обусловленный эффектом Доплера, подается на
детектор.
На этот же детектор поступает опорный сигнал Uo (/) = Umo cos со0/, с ча-
стотой со0, равной частоте излучаемого радиолокатором сигнала. Векторная сум-
ма этих двух сигналов
=VU'f,l0 +Ufnc + 2Um0 Umc cos ip (0 .
Если (7mo > UmCi то режим детектирования будет линейным и напряжение на
выходе детектора
[V Ц2п0 + ^е И- um0 Umc COS 4) (0/Т/ +...],
где Лд — постоянная, характеризующая детектор.
После фильтрации постоянной составляющей и высших гармоник продетек-
тированное напряжение = k^Umo cos ф (Z)/~|/l + /и2, где m = l/mc/ L7mo —
коэффициент модуляции. Если цель неподвижна, то ф (/) = const (или медленно
меняющаяся величина) и импульсы на выходе детектора имеют постоянную ам-
плитуду. При движении цели набег фазы в пределах пачки из Пц импульсов
ф (/) = Йд (пи — 1) Тп и амплитуда импульсов меняется с доплеровской ча-
стотой £$д. Спектры импульсной последовательности на выходе детектора, соот-
ветствующие сигналам, отраженным от неподвижных и движущейся целей, пред-
ставлены на рис. 2.17.
Выделение сигнала движущегося объекта производится путем подавления
спектральных составляющих на частотах nFn, где Ап —частота повторения им-
пульсов; л = 1, 2, 3, ... Обычно такое подавление осуществляется с помощью уст-
ройств череспериодного вычитания сигналов, получаемых с выхода детектора.
Эта операция эквивалентна пропусканию сигнала через фильтр с амплитудно-
частотной характеристикой вида
Al (/СО ) — Uвых/t/Bx — [^ВК UИХ Аз (/®)]^ВХ= 1 Аз (/О) ,
где /Сз (/со) — передаточная функция канала, задерживающего сигнал; (7ВХ и
(7Вых — комплексные амплитуды сигнала на входе и выходе фильтра (устройства
череспериодного вычитания).
Так как в одном из каналов устройства череспериодного вычитания сигнал
задерживается на Тп, то Х3 (/со) = ехр (— /(оТп). Тогда амплитудно-частотная
характеристика | (/со) | = 2|sin (соГп/2) |, т. е. компенсирующее устройство
подавляет составляющие спектра, кратные частоте повторения.
Формирование амплитудно-модулированной последовательности видеосигна-
лов, отраженных от движущегося объекта, осуществляется двумя способами.
Рис. 2.17. Спектр отраженных сигналов на выходе детектора:
а—объект неподвижный; б - движущийся и неподвижный объекты
52
В когерентных РЛС зондирую-
щий сигнал является когерентной
последовательностью радиоимпуль-
сов, в качестве опорного использует-
Рис. 2.18. Череспериодный компенсатор:
ФД — фазовый детектор: ИМ — импульсный
модулятор; ГВЧ— генератор ВЧ; КП—квар-
цевый преобразователь: Ат — аттенюатоо.:
УЛЗ — ультрозвуковая линия задержки; У —
усилитель; Д — детектор; СВ — схема вычи-
тания
ся напряжение задающего генерато-
ра опорной частоты (см. рис. 2.8).
Сравнение фаз (t) и Uc (t) про-
изводится на промежуточной часто-
те в фазовом детекторе, с выхода
которого сигнал поступает на пода-
витель помехи (череспериодный ком-
пенсатор ЧПК).
В некогерентных РЛС формируется опорный квазикогерентный сигнал
(см. рис. 2.10, а). Специальный генератор — когерентный гетеродин, работаю-
щий на промежуточной частоте, в момент излучения зондирующего импульса
фазируется от передатчика. Когерентный гетеродин генерирует колебания про-
межуточной частоты, фаза которых определяется фазой колебаний передатчика.
Напряжение с когерентного гетеродина и напряжение сигнала подаются на
фазовый детектор. Напряжение сигнала предварительно ограничивается по
амплитуде для сжатия динамического диапазона и устранения паразитной ам-
плитудной модуляции сигналов неподвижных объектов, возникающей из-за вра-
щения антенны.
Напряжение на выходе фазового детектора при неподвижном объекте и при
стабильности частот магнетрона, местного гетеродина и когерентного гетеродина
остается постоянным от периода к периоду, и видеосигналы имеют постоянную
амплитуду. При движении объекта огибающая видеоимпульсов меняется, что и
является признаком его движения.
Аналоговые устройства череспериодной компенсации (ЧПК) выполняют
на ультразвуковых линиях задержки (УЛЗ) и вычитающем устройстве (рис. 2.18).
Аттенюатор и усилитель в тракте незадержанного канала нужны для обеспечения
идентичности по коэффициенту передачи и по фазовым сдвигам обоих каналов.
Импульсы на выходе схемы вычитания могут иметь разную полярность, поэто-
му они с помощью двухполупериодного детектора превращаются в однополярные
для вопроизведения на индикаторе с яркостной отметкой.
Работа устройства ЧПК возможна только при равенстве времени задержки
линии и периода повторения зондирующих импульсов. Для выполнения такого
равенства одна и та же линия задержки используется как для формирования по-
следовательности импульсов, следующих с определенным периодом, так и для
задержки сигналов на этот период. Поэтому часть элементов устройства ЧПК
обычно входит одновременно и в состав схемы синхронизации радиолокатора.
Из амплитудно-частотной характеристики устройства ЧПК следует, что сиг-
налы, имеющие доплеровскую частоту Рд = nFn, где Fn — частота повторения
импульсов, а п = 1,2, 3, ..., будут подавляться наравне с сигналами, отраженны-
ми от неподвижных объектов. Скорости объектов, соответствующие этим часто-
там, называются слепыми: Ксл 0,5гГд//Изл = 0,5£дХизл. Для устранения
влияния слепых скоростей в РЛС с СДЦ либо изменяют Fn (вобуляция частоты
повторения), либо одновременно излучают сигнал на двух различных несущих
частотах.
Увеличение степени подавления помехи достигается использованием компен-
саторов из двух последовательно соединенных схем однократного вычитания.
Амплитудно-частотная характеристика такой системы | (/w) I = Wi (Z®)!
X (/to) | = 4 sin2 (иГпУЗ) обеспечивает лучшую компенсацию флуктуирую-
щей помехи вследствие увеличения ширины полосы подавления.
Эффективность СДЦ зависит от дестабилизирующих факторов, а также флук-
туаций параметров сигналов и опорных напряжений. Сигналы неподвижных це-
лей подавляются устройством ЧПК неполностью и на выходе остается напряже-
ние AU, вызываемое нескомпенсированными остатками этих сигналов. Эффектив-
ность СДЦ характеризуется коэффициентом компенсации помехи и коэффи-
циентом подпомеховой видимости сигнала Кпв.
Коэффициент компенсации помех определяется отношением напряжения
А(7и сигнала, отраженного от неподвижного объекта, на выходе устройства ЧПК
к амплитуде Un того же сигнала на входе устройства ЧПК: КЕ = | AUп/ Uп | и
53
зависит как от внутренних, присущих самому радиолокатору факторов, так и от
внешних причин. Значение коэффициента компенсации помех, определяемое
внешними факторами, Кк.Вцеш — — (25 ... 30) дБ, а определяемое внутренними
факторами — К к вн= 0,5KK.Bnem-
К основным внутренним факторам, ухудшающим качество СДЦ и увеличи-
вающим /Сквн’ относятся нестабильности частот передатчика, местного гетеро-
дина и когерентного гетеродина. Допустимое значение Хк. вн.доп’ определяемое
этими факторами, позволяет обосновать требования к стабильности частоты,так
как (/(к вн)тах = Аф, где Дф—изменение разности фаз, вызываемое нестабильно-
стью частоты. Если принять, что Дфдоп = 0,03 рад, то допустимые скорости
ухода частоты Vj = df/dt за период повторения импульсов составят для мест-
ного гетеродина и когерентного гетеродина
У/к.г У/ м.г=^ [2°0/Dmax Ч ’’ ~ |2007^“ I1 ,
где /п — время задержки сигнала, принимаемого с максимальной дальности
*411 ах
радиолокатора; а для передатчика V/ прд — [200ти7'11]-1, где ти — длительность
зондирующего импульса. Отсюда относительные нестабильности частоты за пе-
риод повторения не должны превышать следующих значений: для местного гете-
родина 2-10~9; для когерентного гетеродина—2* 10~7; для передатчика — 10~6.
К основным внешним факторам, ухудшающим эффективность СДЦ, отно-
сятся флуктуации отраженных от неподвижных целей сигналов; доплеровские
сдвиги частоты, появляющиеся при медленных перемещениях таких, например,
относительно неподвижных объектов, как грозовые облака; изменение амплитуд
импульсов при вращении антенны, а также и другие факторы, вызывающие из-
менение амплитуды или фазы отраженных от неподвижных целей сигналов. Со-
ответствующий коэффициент подавления помех может быть найден из соотноше-
ния
00 | оо
А’к.внеш вых ' Рвх — J Sn (/) К1 (/) df I | Sn (/) df ,
О I о
где Рвх и Рвых — мощности помех на входе и выходе устройства ЧПК; 5П (Л
— энергетический спектр помех; К (Л — амплитудно-частотная характери-
стика устройства ЧПК.
При использовании однократной ЧПК для помехи с энергетическим спектром
(О’ Sn0 exp [-Gt (f/Ш,
где Sno — максимальная спектральная плотность помехи; а — постоянный
коэффициент.
Коэффициент Кк.внеш — 2{1 — ехр [— ((л/0Тп)2/а]}. Если (л/0Тп2)/а « 1
(медленные флуктуации сигнала помехи), то Кк.онеш~ 2 (л/0Тя)2/а. Для устрой-
ства СДЦ с двойной ЧПК коэффициент подавления /Ск.внеш = 12 (л/0Гп)4/а2,
При вращении антенны радиолокатора в энергетическом спектре ширина каж-
дой составляющей увеличивается пропорционально скорости вращения антенны
(скорости обзора). Коэффициент подавления амплитудных изменений сигнала,
вызванных данным фактором. Кк.внеш= 2.8 TV0,5’ где — число импульсов,
принятых от объекта за время его облучения, определенное по ширине ДН на
уровне половинной мощности.
Следует иметь в виду, что устройства ЧПК не подавляют внутренние шумы
приемного тракта (некоррелированная помеха) и коэффициент подавления внут-
ренних шумов для однократной ЧПК равен 2, а при двойной ЧПК — 6 (т. е.
шум на выходе устройства ЧПК увеличивается соответственно в два и шесть раз).
Поэтому устройства СДЦ целесообразно применять в радиолокаторах только на
тех участках дистанции, где ожидаются помехи от неподвижных объектов, и от-
ключать эти устройства на других дальностях.
Коэффициент подпомеховой видимости определяется отношением мощностей
помехи от неподвижного объекта Рп-вх и сигнала Рс.вх на входе устройства СДЦ
при условии, что мощность сигнала Рс.вых и помехи Рп.вых на выходе этого
устройства равны:
^П-В —-Рц.ВХ Рс.ВХ~ РП ВХ РП.ВЫХ Рс-ВЫХ'Рс-ВХ Рц.ВЫХ ЛмЫХ’
54
f т. e. Кп.в определяется коэффициентом передачи этим устройством мощности
полезного сигнала Кс и коэффициентом компенсации помехи /Ск. При нахожде-
нии /Сп.в пользуются усредненным значением сигнала на выходе двухтактного
детектора
L/д 4л | sin л Лд Тп | Uтс вы
При скорости объекта, соответствующей Лд = 0,5 Лп (когда составляющие спект-
ра полезного сигнала располагаются точно посередине между частотами повто-
рения зондирующих импульсов) Кд 4л~1(7тс, а коэффициент передачи сигна-
ла равен /<с = (^д/^щсвых)2 = 16л-2 коэффициент подпомеховой видимости
достигает максимального значения /Сп.в =- 0,064 М02 5 или в децибелах Кп-в-
= 20 1g 0,25 ^0,5. Так, при числе импульсов в пачке /VOt5 = 20 коэффициент
подпомеховой видимости составляет 14 дБ. Это означает, что движущийся
объект будет обнаружен, если уровень мощности отраженного сигнала на 14 дБ
меньше мощности мешающих отражений.
2.6. ЦИФРОВАЯ ОБРАБОТКА РАДИОЛОКАЦИОННОЙ ИНФОРМАЦИИ
Методы цифровой обработки сигналов обладают рядом преимуществ по
сравнению с аналоговыми. Основными из них являются: возможность длитель-
ного накопления слабых сигналов (т. е. простота организации памяти системы с
любым динамическим диапазоном сигналов); высокая точность и простота выпол-
нения арифметических операций с сигналами; возможность оперативного (гиб-
кого) изменения программы обработки сигналов, что позволяет создавать адап-
тивные устройства и системы. Кроме того устройства, реализующие цифровые
методы, имеют высокую надежность, а также сравнительно малые массу и габа-
ритные размеры. Эти преимущества цифровых устройств позволяют реализовать
на их основе сложные адаптивные радиолокационные системы, создание которых
было бы невозможно при использовании аналоговых устройств обработки сиг-
налов. Цифровые методы обработки широко применяются в устройствах обнару-
жения сигналов, измерения координат объектов, автосопровождения воздушных
целей по углам и по дальности, в устройствах СДЦ, а также и в других устрой-
ствах современных радиолокаторов. Такие устройства отличаются высокой ста-
бильностью и экономичностью.
Развитие и внедрение цифровых методов обработки стало возможным благо-
даря совершенствованию цифровых вычислительных машин (ЦВМ) и использо-
ванию в них современной микроэлектронной элементной базы. Устройства, ре-
ализующие цифровые методы, оперируют с дискретными сигналами, т. е. с
последовательностями модулированных по амплитуде импульсов, полученных
дискретизацией по времени непрерывных (аналоговых) сигналов. Длительность
таких импульсов Тд.и выбирается много меньшей, чем интервал дискретизации Т.
т. е. интервал времени между двумя соседними импульсами, соответствующими
исходному аналоговому сигналу. Кроме того, в устройствах цифровой обработ-
ки применяется квантование аналогового сигнала по уровню, при котором этот
сигнал заменяется ступенчатым сигналом, состоящим из ряда дискретных уров-
ней. соседние значения которых отличаются на величину Д(7К. называемую уров-
нем квантования. Чем меньше Т и Дб/К. тем ближе по своим свойствам цифро-
вой и исходный аналоговый сигналы.
В результате дискретизации и квантования аналоговый сигнал преобразует-
ся в числовую (кодированную) последовательность с определенной степенью точ-
ности. описывающую этот сиг-
нал.
основных
Ш U W р ЦЛП -* СИ
Цифровой фильтр — один из
вных элементов устройств
цифровой обрабокти сигналов
(рис. 2.19), осуществляющий пре-
образование формы сигнала по Рис. 2.19. Структурная схема цифрового
заданному алгоритму. Импульс- фильтра
55
ный элемент ИЭ дискретизирует входной непрерывный сигнал и (t), превращая
его в последовательность амплитудно-модулированных импульсов uT(f) с ин-
тервалом дискретизации t. Аналогово-цифровой преобразователь АЦП кван-
тует эти импульсы по амплитуде, в результате чего осуществляется переход
к числовой последовательности Вычислительное устройство ВУ преобра-
зует последовательность 2 Хп в 2 Уп, которая в цифроаналоговом преобразова-
теле ЦАП и сглаживающем устройстве СУ преобразуется, если это необходи-
мо, в выходной аналоговый сигнал ивых (О-
Дискретизация сигнала и (t) может рассматриваться как результат умноже-
ния и (0 на периодическую последовательность N стробирующих импульсов, сле-
дующих с периодом повторения Т
N—1 jV— 1 Д'— 1
^T(t) = u(O 2 b(t—kT)=^ у, и (kt) 6 (/—kl) У U§(k),
где 6 (Z)— дельта-функция; —бесконечно короткий импульс в k-Pi точке на
оси t.
Выборки непрерывного сигнала в дискретные моменты времени кТ называют-
ся решетчатой функцией и обозначаются и (к), где к ~ t/T — целочисленная без-
размерная величина. Например, если и (Z) = at (t 0), то и (к) = аТк.
Математический аппарат анализа решетчатых функций представляет собой
дискретный аналог дифференциального и интегрального исчислений и является
аппаратом конечных разностей и сумм. Так, например, если Уи есть скорость из-
менения некоторого сигнала и (Z), т. е. Уи = du (t)ldt, то выражение для этой
скорости в конечных разностях имеет вид У = Au (k) = и (k + 1) —
— и (k). Аналогично производной r-го порядка соответствует конечная разность
того же порядка
Дг и (fe)_и (^+1) — Д'^1 и (0-У ( —1/ С1ги (/? + /• — /),
z—0
где С1Г = г! /(г!(г — /)’) — число сочетаний из г по i.
Обратная разность 1-го порядка Az/ (t) -= Au (k — 1) = и (k) — и (k —1).
В общем случае Аг и (k) = У (— 1)' С1 и (k — 1).
Метод z-преобразований используется в цифровой технике при анализе
схем, предназначенных для решения дифференциальных уравнений в дискрет-
ной форме. Так, например, при анализе схемы накопителя на рециркуляторе
(рис. 2.20) входной сигнал может быть выражен через выходные сигналы рецирку-
лятора
uux (k) ~ и (k) = р и (k — 1),
где Р — коэффициент обратной связи,
или в другой форме
ИВХ (^)/Р — Aw (k)~ и (k) (Р — 1)/р.
Вычислитель, осуществляющий эту операцию, должен иметь три регистра памя-
ти: для uBX (k), и (k) и р, образовывать произведение р и (k — 1), суммировать
его с содержимым регистра uBX (k) и запоминать в регистре и (к).
Рис. 2.20. Структурная схема
накопителя на рециркуляторе
56
оо
Спектр решетчатой функции ит (0 ~ 2 и (кТ)& (/—kT) имеет вид S (со) —
Л =— оо
оо
= 2 u(kT) ехр (—/to/сТ), а дискретное преобразование Лапласа от решетчатой
К — — ОО
функции ит (/), существующей только при положительных t, записывается как
оо оо
У “ (kT) ех₽ (—= 2 ехр (~р kT)>
k=0 k=Q
где оператор р = а + / со.
Z —преобразование полу чается введением оператора z ~ ехр (рГ). Переход
к z-преобразованию позволяет получить рациональные функции переменной
z при обращении с рядами, содержащими трансцендентные функции р, что
упрощает решение ряда задач.,
Задержке на интервал дискретизации в плоскости комплексного переменного
р соответствует ехр (— рГ) = z-1.
z-преобразование единичной импульсной решетчатой функции
u (^) = 6j (Л) =
при
при k =£ О
со
записывается как z (а:)] = 2 (k)z~K
к = 0
единичной решетчатой функции
6i (0) z° = 1;
и (&) = 1
( 1 при k > О
{ 0 при k С 0;
равноz [1 (&)] = Z/ (z — 1);
экспоненциальной решетчатой функции
. f ехР {—^Т} при £ > 0
U (я) = s
( 0 при k < 0
имеет вид
z[u(&)]=z/[z — ехр (—аТ)]. Эта функция сходится при
lz| > ехр (— аТ).
Обратное z-преобразование позволяет получить решетчатую функцию по
известному выражению z-преобразования (оригинала):
1 d
“ FFF(г)]
Обратные z-преобразования х (z) для различных функций х (/) имею? сле-
дующие значения:
X (/)...! (/) t /2 e at sin to t cos to t
X (k)... 1 (k) k № e-akT sinwfeT cos to kT
X (г)... — x~ 1 Z (г— z (гф!) z z sin ш T I)2 (z— I)3 2 e~aT z3—2zcostoT+l
Z2 — Z COS to Т
Z2 — 2z cos coT-j- 1
57
Передаточные функции линейной дискретной системы определяются линей-
ными разностными уравнениями:
U (fc) +&i и (k — 1) 4- b2 и (k~ 2) j- ... bN хи (k. — /V) =
нвх (k) цвх (k — 1) 4 ... ам uBX (k — М).
z [и (k — n)\ z n Z [«BX (6)1-
Обозначив z [nBX (&)] / X * (г); z |и (/г)] b* (г) ,
получаем выражение для передаточной функции
.м । / У \
К* (г) - =>'* (г) X* |г) 2 а1 г~ ‘ 2 b‘Z '+ 1 •
^-1 I \i — l /
Передаточной функцией ^-преобразования может служить не всякая дроб-
но-рациональная функция, так как физическая реализуемость требует, чтобы
степень z в числителе была меньше степени z в знаменателе.
Амплитудно-частотная характеристика какого-либо устройства может быть
представлена как модуль К* (z) при Z -= ехр (jwT), когда изображающая точка
движется по единичной окружности в z-плоскости:
К (ыу) К* (г) |г ехр (jwT)
|е'”'-гпМ“г-г«| Р“г-г.м| ,
“I || ,/»Г _г„, I... | ,1~г_2p„|
где г0 и гр — расстояния нулей и полюсов К * (г) до произвольной точки на ок-
ружности.
Цифровые фильтры, в которых реализуется передаточная функция в виде от-
ношения полиномов, называются рекурсивными. Особенностью схемы является
наличие обратной связи с задержанными выходными сигналами или промежуточ-
ными вычисленными переменными (рис. 2.21).
Схема состоит из двух последовательно соединенных фильтров. Передаточная
функция
М I / N \
Х*(г)=2 2 bizi + 1
Z = 1 I \i = l /
i = кТ на входе действуют сигналы uBX (к), «вх (& — 0» «вх (к — 2)... uBX (k —
— Af), и (k — 1), и (к — 2) .... и (к — А), которые запоминаются в элементах
памяти, в результате чего имеются все необходимые данные для вычисления u(k).
Когда и (к) определено, иъх(к — А1) и и (к — А) сбрасываются, и запоминаются
другие величины, необходимые для следующего счета. Поменяв первый и вто-
рой фильтры местами и выполнив промежуточные вычисления W (fe) _. ивх (fe) —
Рис. 2.21, Структурная схема рекурсивного цифрового фильтра
58
N M
— 2 к7 (^ — о, u (k) 2 m* — /)’
Z—l i=a
можно реализовать схему рекурсивного
фильтра, имеющего меньший объем па-
мяти.
Нерекурсивные цифровые фильтры
имеют передаточную функцию вида
М
К* (z) -z 2fliz\ bi = Ей соответ-
ствует разностное уравнение и (k) =
м
—- 2 я* цвх № —i), которое реализуется
Рис. 2.22. Структурная схема сдвига-
ющего регистра
на линии задержки с равномерно рас-
положенными отводами.
Цифровой интегратор может быть выполнен на основе рекурсивного фильтра,
если установить весовой коэффициент = 1, а все остальные В/ = 0. При Вх<1
схема преобразуется в интегратор с экспоненциально-затухающим откликом
(типа RC — интегратора ст = 771п Вг).
Для преобразований двоичных чисел (преобразования параллельного кода
числа в последовательный и наоборот, хранения чисел, сдвига чисел при умноже-
нии и т. п.) используются цифровые устройства — регистры сдвига. Они содер-
жат элементы задержки входных сигналов на один такт. При этом значение сиг-
нала, хранящегося в i — 1 разряде в следующем такте сдвинется в разряд i.
В схеме сдвигающего регистра (рис. 2.22) последовательный код числа Xi пре-
образуется в параллельный код У = {z/i-.. Ут), считывание которого осущест-
вляется специальным сигналом (/с.
Погрешности, сопровождающие преобразования в цифровых фильтрах,
определяются шумами квантования и шумами округления. Погрешность кванто-
вания е (/) = и (/) — uBX (t) представляет собой последовательность отрезков
прямых линий с переменной крутизной, амплитуда которых ограничена значе-
нием Д(7к^2 и может рассматриваться как случайный процесс со средней мощно-
т
стью Рш.к = 'С’-1 I (ДUK/2t)2t2dt ~ Д^/2/12. Отношение мощностей сигнала и
ое
шума квантования на выходе АЦП зависит от числа уровней квантования L.
При гармоническом сигнале это отношение равно РС!РШ1.= 1,5 1. Для оцен-
ки указанного отношения при известном числе разрядов кода г можно восполь-
зоваться выражением Рс/Рш.к — ехр (2г). Последнее выражение определяет ди-
намический диапазон АЦП, который составляет 10 1g (Р^^ш-н) = Ю-2г 1g 2^
= 6г, т. е. 6 дБ на разряд кода.
Шумы округления возникают вследствие того, что значение исходного ана-
логового сигнала заменяется на ближайшее целое число, соответствующее опре-
деленному уровню квантования. Эти шумы вызывают погрешность округления,
которая, как и погрешность квантования, может быть представлена в виде некор-
релированного случайного процесса с дисперсией Д£/£/12.
2.7. ЦИФРОВЫЕ УСТРОЙСТВА
Однопороговый обнаружитель с двумя уровнями квантования (рис. 2.23)
предназначен для обнаружения пачки импульсов, предварительно прошедших
через АЦП с двумя уровнями квантования (т.е. пачки бинарно квантованных сиг-
налов). Сигнал радиоприемного устройства РПУ поступает на пороговое устрой-
ство ПУ-1. При превышении входным сигналом порога квантования Цо запуска-
ется генератор стандартных импульсов ГСП, который вырабатывает сигнал «1».
Стандартный импульс после селектора дальности СД поступает в накопитель Н и
далее. Результат накопления во втором пороговом устройстве ПУ-2 сравнива-
ется с порогом znop. Количество каналов обнаружения определяется числом эле-
ментов разрешения по дальности в пределах максимальной дальности действия
59
радиолокатора. Интервал дискретизации в данном обнаружителе равен периоду
повторения импульсов в пачке.
На практике находят применение цифровые обнаружители, функционирую*
щие в соответствии с алгоритмом: начало пачки фиксируется по наличию k еди-
ниц в m-импульсных позициях (или к единиц в к-позициях), а конец пачки —
по наличию п нулей (импульсов) подряд. При этом критерий начала пачки явля-
ется одновременно и критерием ее обнаружения. Такие обнаружители обозна-
чаются «к/т — л» или «Л/k — п». Начало и конец пачки фиксируются для опре-
деления азимута обнаруженной цели. Систематическая погрешность измере-
ния Дфсист = 0,5(/п — 1 + п) Д(р, где Дер — угол между соседними азимуталь-
ными линиями.
Энергетические потери сигнала при цифровом бинарном обнаружении по срав-
нению с аналоговым обнаружителем составляют 1 дБ при неравновесном накопле-
нии; 1,5 дБ — при равновесном и 3,5 дБ для программы «к из к» (при числе им-
пульсов в пачке пи = 5... 50, вероятность правильного обнаружения Рп.о = 0,5
...0,9 и вероятность ложной тревоги Рл.т = 10~2...10~6).
Порог обнаружения выбирается по заданной вероятности ложной тревоги
(критерий Неймана-Пирсона). Оптимальное значение порога приближенно со-
ставляет гпор = 1,5~|//ги-
Характеристики обнаружения (рис. 2.24) показывают, что наилучшие ре-
зультаты достигаются при критерии «3/4», хотя и при других критериях получа-
ются близкие результаты. Характеристики построены для числа импульсов в пач-
ке /ги = 11 и вероятности ложной тревоги Рл<т = 2-Ю-4. Близкие результаты
возможны и при других пи. При оценке азимута цели наименьшие погрешности
при данном отношении мощностей сигнала и шума q достигаются в обнаружителе
«3/3 — 2» и «4/4 — 2».
Цифровой обнаружитель с «движущимся окном» используется в радиолока-
торах кругового обзора. Для накопления энергии пачки в таком обнаружителе
Рис. 2.23. Структурная схема од-
нопорогового обнаружителя пачки
импульсов
Рис. 2.24. Характеристики обна-
ружения и оценки параметров
дискретных сигналов:
а — вероятность обнаружения пачки;
б — оценка азимута пачки, /—«3/4—2»:
3 — «4/4—2»; 2 — «2/3—2»; 4 ~ «3/3—2»
60
Рис. 2,25. Структурная схема цифро-
вого измерителя дальности
Рис. 2.26. Схема нерекурсивного
фильтра первого порядка
запоминаются все отраженные импульсы, соответствующие каждому элементу
разрешения по дальности. По мере перемещения объекта информация по дально-
сти должна обновляться. Для этого импульсы цели, записанные в N разрядном
регистре, сдвигаются после каждого периода повторения в одну сторону, а на ос-
вободившееся место вводится вновь принятый импульс (импульс, записанный при
первом, самом раннем зондировании, отбрасывается). С помощью регистра памя-
ти реализуется «движущееся окно», пропускающее N импульсов и синхронно с
вращением ДН антенны перемещающееся по азимуту. Такой накопитель явля-
ется средством борьбы с импульсными помехами, поскольку сигнал присутствия
объекта вырабатывается при накоплении в счетном устройстве N/2 импульсов
цели. Импульс помехи, как бы он ни был велик по амплитуде, не обладает такой
протяженностью.
Порог на входе цифрового обнаружителя t/0 = стш *]/— 2 In Рд.т. Веро-
ятность ложной тревоги сильно зависит от значения порога. Например, умень-
шение нормированного порога Dnop (Dnop = t/0 /сгш) на 1 дБ увеличивает Рл.т
в 10 раз. Для стабилизации ложной тревоги применяют схему ШАРУ. Импульсы
на входе схемы ШАРУ, превысившие порог Uo, подсчитываются и управляют на-
пряжением, регулирующим коэффициент усиления УПЧ. При этом стабилизиру-
ется вероятность Рл.т.
Цифровые измерители дальности (рис. 2.25) основаны на преобразовании вре-
менного интервала в число импульсов, а затем в код. Основой измерителя явля-
ется генератор счетных импульсов ГСП, который может работать как непрерыв-
но, так и запускаться в момент излучения зондирующего импульса. Последова-
тельность импульсов от ГСИ поступает на схему И, которой управляет триггер.
Этот триггер в момент запуска передатчика радиолокатора открывает схему И.
через которую счетные импульсы подаются на счетчик Сч. Триггер переводится
в состояние, соответствующее запиранию схемы И, отраженным импульсом с вы-
хода приемника. Счетчик подсчитывает число импульсов за время tD = 2D/с
где D — измеряемая дальность, и преобразует это число в соответствующий код.
Точность измерения определяется значением дискрета ДРд = 0,5 сТ. От.
куда средняя квадратическая погрешность измерения с учетом независимости
времени tL) и значения дискрета интервала дискретизации Т равна ад =
= 0.4ДРд. В рассмотренной схеме возможно измерение дальности только одной
цели.
Цифровые устройства СДЦ выполняют как на нерекурсивных, так и на
рекурсивных фильтрах. На нерекурсивных фильтрах осуществляется однократ-
ная и двукратная череспериодная компенсация помехи. Операции однократной
ЧПК в схеме нерекурсивного фильтра 1 порядка (рис. 2.26) соответствует разност-
ное уравнение и (к) — цВх (&) — u (k — 1), г-преобразование которого имеет
вид У* (z) . X* (z) —z-1 X *(z). Передаточная функция фильтра К* (?) =
= (z — l)/z. Оператор г"*1 определяет задержку на один период повторения им-
пульсов Тп. Схема двукратной ЧПК соответствует рекурсивному фильтру 2-го
порядка с передаточной функцией Д* (?) = (г — 1)2/г2.
Устройство ЧПК. осуществляющее гребенчатое режектирование помехи,
Может быть выполнено на рекурсивном фильтре. В рекурсивном фильтре 1-го
Порядка увеличивается ширина и улучшается прямоугольность зоны режекции.
Амплитудно-частотная характеристика такого фильтра К (со) = Д/2 sin ((оГп/2) X
+ Р2 — 2р cos соТд. Импульсная характеристика фильтра Д* (г) =(z—1)/
61
Рис. 2.27. Цифровая СДЦ
l(z — P), где P — коэффициент обрат-
ной связи. Раскладывая выражение
для импульсной характеристики филь-
тра в ряд, можно получить №*(z) --
=2 где коэффициенты ряда
к=0
определяются следующими выраже-
ниями: g (0) 1; g (1) = — (1 — Р);
g (2) = — Р (1 — Р); ... Таким образом-
для реализации данной импульсной ха-
рактеристики достаточно иметь всего один элемент задержки неоднократно про-
пуская через него импульс, поступающий по цепи обратной связи с выхода
этого элемента.
Возможная структурная схема цифрового устройства СДЦ приведена на
рис. 2.27. На вход устройства с фазового детектора ФД поступает последователь-
ность видеоимпульсов, модулированных по амплитуде (при движении цели).
В импульсном элементе ИЭ осуществляется дискретизация сигнала стробирую-
щими импульсами и фиксация амплитуды в пределах строба дальности. Выбор-
ки сигнала должны производиться по крайней мере один раз за время, соответст-
вующее длительности импульса.
В аналого-цифровом преобразователе АЦП для каждого элемента дальности
формируется цифровое слово, содержащее информацию об амплитуде и знаке
импульса на его входе. Это слово поступает в устройство памяти УП и с каждым
тактовым импульсом, соответствующим интервалу дискретизации, перемещается
на следующую импульсную позицию. Через период задержанные цифровые сло-
ва считываются с устройства УП и в цифровой форме вычитаются в вычитающем
устройстве ВУ из текущих значений кода на выходе АЦП. Рассмотренный про-
цесс идентичен аналоговой ЧПК.
За каждый период Тп число цифровых слов m = (2£>П1ах.'с)/7\ где Dmax —
максимальная дальность действия радиолокатора; Т — интервал дискретизации
сигнала. Объем устройства памяти при этом определяется как В = mr, где г —
число разрядов в слове, формируемом АЦП. Число уровней квантования по ам-
плитуде ~ (t/max— t/min)' At/, где ^тах — максимальная амплитуда им-
пульсов на входе АЦП; t/min — минимальная амплитуда этого импульса, выби-
раемая обычно равной шагу квантования At/. Шаг квантования определяется
дисперсией шума на входе АЦП (АЛ7 — стш). Дисперсия шумов квантования
равна At/2/12, а их мощность на выходе устройства ЧПК Рш.к “ А(72/6. так как
в вычитающем устройстве складываются два некоррелированных шумовых про-
цесса.
При выборе шага квантования из условия А(7 = ош, число разрядов кода
г равно ближайшему целому от log2 (С^шах^ш) — log2 Д, где Д — динамичес-
кий диапазон сигнала на входе схемы АЦП. Отношение динамического диапазо-
на, выраженного в децибелах, к числу разрядов двоичного кода составляет
20 1g Д/1оё2Д — 6 дБ/разряд.
Поскольку при квантовании по уровню с шагом At/ _ аш компенсация
происходит с точностью до этого уровня, то коэффициент компенсации помехи
зависит от отношения уровня сигнала к числу разрядов и не может быть боль-
ше, чем Кк — 20 1g Д/1^2Д = 6 дБ/разряд.
Цифровая аппаратура первичной обработки радиолокационной информации
(АПОИ) (рис. 2.28) устанавливается между РЛС (аналоговым выходом ее прием-
ного тракта) и подсистемой сбора и обработки радиолокационной информации.
В АПОИ весь процесс обработки радиолокационной информации делится на сле-
дующие функционально законченные операции:
обнаружение полезных сигналов и формирование отметок радиолокационных
объектов. При обнаружении сигналов выносится однозначное решение: «Есть
сигнал» — «Нет сигнала». Оптимальное решение принимается на основе критерия,
обеспечивающего минимальное количество неправильных решений;
определение координат радиолокационных объектов, в процессе которого
производятся статистические оценки дальности до объекта, его угловых коорди
62
нат и радиальной скорости движения цели (по доплеровскому сдвигу частоты),
В качестве критерия оптимальности определения координат объекта принимает-
ся минимум погрешности оценки.
Эти операции выполняют при обработке сигналов, полученных в каждом
(одиночном) периоде (цикле) обзора.
Совокупность этих операций называется первичной обработкой радиолока-
ционной информации.
В квантователе осуществляются фильтрация шумов, стабилизация порога
квантования, преобразования сигнала с выхода видеоусилителя приемного трак-
та РЛС в цифровую форму и проверка его по длительности. Дискриминатор дли-
тельности импульса пропускает только те дискретные видеоимпульсы, длитель»
ность которых лежит в определенном интервале тП1щ — ттах. Эта операция
выполняется путем счета тактовых импульсов. Квантизатор формирует импульсы
одинаковой длительности и амплитуды, осуществляет привязку видеоимпульсов
к соответствующим дискретам дальности, определяет элемент точной дальности
в пределах данного дискрета, наличие видеоимпульса в последней части дискре
та и осуществляет формирование сигнала.
В схеме обнаружения (детектирования) помех ДП анализируются плотно-
сти импульсных сигналов. В регистре СР одновременно с поступлением видеоим
пульсов в схему ДДИ осуществляется запоминание дискрета дальности и эле-
ментов точной дальности.
В схеме управления уровнем шума вырабатываются сигналы управления
порогом, для чего анализируется плотность и минимальная длительность ттщ,
СИ — синхронизатор; БМ — блок меток; ССП — схема привязки плотности; Кв — квантователь;
ПУ — пороговое устройство; ДДИ — дискриминатор длительности импульсов; Кв — кванти-
затор; СРег—регистр сдвига; УВ — устройство вывода; УУШ — управление уровнем шума;
ВОК — видеоокно; «И» — логические схемы типа «И»; СчО — счетчик отметок; УЛТ — схе-
ма установки уровня ложных тревог; УС — устройство сравнения; ЦАП — цифроаналоговый
преобразователь; У ОМ — устройство обработки меток; ЗУ — запоминающее устройство;
ДОК — схема «движущегося окна»; СТАМ — счетчик азимутальных меток; ВАвычисли-
тель азимута; СКД—схема квантования дальности; БОЗУ — буферное оперативное запо-
минающее устройство; ТИ—тракт идентификации; ТСОИ-- тракт считывания и обработки
информации; ТПИ — тракт передачи информации
63
сигналов, поступающих через «видеоокно шума», которое формируется в конце
развертки дальности (чтобы исключить влияние местных предметов). Затем сиг-
налы подаются на СЧО и схему сравнения. В ЦАП вырабатывается аналоговый
сигнал, поступающий на пороговое устройство. В устройстве обработки меток
анализируются квантованные видеоимпульсы на наличие корреляции в ряде
последовательных разверток, т. е. обнаружение и измерение центра (азимута)
пачки квантованных сигналов.
Отметки смежных разверток коррелируются в цифровом обнаружителе с
«движущимся окном». Вычислитель азимута определяет середину пачки. Тракт
идентификации служит для приведения в соответствие координат одного и того же
объекта, полученных от первичной и вторичной РЛС. Идентифицированные ко-
ординаты записываются в память буферного ОЗУ, из которого информация посту-
пает в тракт считывания, где преобразуется в последовательный код и по узко-
полосной линии связи транслируется в систему УВД.
Для контроля работоспособности АПОИ в ее состав включается тракт функ-
ционального контроля. В нем вырабатываются имитационные сигналы от ЛА с за-
данными координатами и дополнительной информацией. Если информация ими-
татора по любому из информационных трактов не проходит, вырабатывается сиг-
нал отказа и осуществляется переключение на резервный комплект. Для прове-
дения настроечных и регулировочных работ в составе АПОИ имеется специаль-
ный контрольный радиолокационный индикатор.
Глава 3. ОБЗОРНЫЕ РАДИОЛОКАТОРЫ СИСТЕМ УПРАВЛЕНИЯ
ВОЗДУШНЫМ ДВИЖЕНИЕМ
3.1. ПРИНЦИПЫ СТРУКТУРНОГО ПОСТРОЕНИЯ АВТОМАТИЗИРОВАННЫХ
СИСТЕМ УПРАВЛЕНИЯ ВОЗДУШНЫМ ДВИЖЕНИЕМ
Назначение АС УВД — повышение эффективности использования воздуш-
ного пространства, т. е. увеличение его пропускной способности при заданном
уровне безопасности полетов ЛА, сокращение эксплуатационных расходов в ре-
зультате повышения производительности системы, и снижение нагрузки на дис-
петчеров при растущей интенсивности полетов. Данные системы обеспечивают
автоматизированный сбор и обработку информации, необходимой для оптимиза-
ции процессов УВД.
Состав АС УВД (рис. 3.1) складывается из оборудования центра управления
ЦУВД и территориально разнесенных источников информации о планируемой и
текущей обстановке. Согласно рекомендациям ICAO в качестве основного источ-
ника информации о текущей обстановке в таких системах должны использовать-
ся первичные и вторичные обзорные радиолокаторы. Первичный ПРЛ и вторич-
ный ВРЛ радиолокаторы совместно с аппаратурой первичной обработки информа-
ции АПОИ составляют радиолокационный комплекс РЛК, связанный с ЦУВД
аппаратуру трансляции информации АТИ. В состав оборудования ЦУВД
•кодят вычислительный комплекс ВК, комплекс отображения информации КОИ
: устройства ввода текущих планов полета ТПП.
Радиолокаторы снабжают ЦУВД информацией о дальности, азимуте и опо-
навательном индексе ЛА, а также дополнительной информацией, необходимой
ля УВД. Их располагают на радиолокационных позициях, которые могут быть
далены от остальных элементов системы, расположенных в центре УВД, на
асстояние нескольких десятков километров.
АПОИ выполняет функции обнаружения целей и выделения радиолокаци-
нных сигналов на фоне помех, измерения координат ЛА и преобразования полу-
ченной информации в вид (цифровой код), удобный для трансляции на вычисли-
тельный комплекс АС УВД или на контрольно-диспетчерский пункт КДП.
АТИ предназначена для передачи радиолокационных данных с территори-
ально разобщенных РЛК на ВК, распределения этой информации, а также для
осуществления телефонной связи, связи с ЛА и т. п.
ВК состоит из ЦВМ, с помощью которых выполняют обработку планов поле-
тов и вторичную обработку радиолокационной информации. В результате вто-
ричной обработки определяют траекторию движения ЛА, вектор его скорости и
упрежденное местоположение, а также
получаемой от РЛК к координатам
ЛА. В этом же комплексе осуществ-
ляется третичная обработка инфор-
мации, получаемой от территориаль-
но разнесенных радиолокаторов. В
процессе этой обработки сигналы
всех радиолокаторов приводятся к
единой системе координат и единой
системе времени и создается объеди-
ненное (синтезированное) изображе-
ние радиолокационной обстановки в
контролируемой зоне воздушного
пространства.
Комплекс отображения инфор-
мации состоит из индикаторных
привязку дополнительной информации,
Рис. 3.1. Структурная схема автома-
тизированной системы УВД
3 Зак. 1683
65
устройств, устанавливаемых на рабочих местах диспетчеров. В крупных АС
УВД информация отображается, как правило, в цифровой форме, в менее
сложных информация о координатах ЛА — обычно в аналоговой форме, а до-
полнительная информация — в цифровой
Воздушное пространство СССР разделено на районы трассовых и внетрас-
совых полетов и районы аэродромов (для полетов по воздушным коридорам и в зо-
нах взлета и посадки ЛА). Количество выполняемых функций и структурная
сложность АС УВД зависят от размеров контролируемого ВП и интенсивности
воздушного движения, поэтому АС УВД обычно привязывают к определенным зо-
нам ВП.
ВП разделяют на следующие зоны:
А — зона с неизменной, как правило, высотой полета (радиус до 500 км,
максимальная высота до 18 000 м);
Б — зона с изменяющейся (в основном) высотой полета (радиус 100—170 км);
В — зона предпосадочного маневрирования (радиус 40 км, переходной эше-
лон 1200—1500 м);
Г — посадочная прямая (удаление от начала взлетно-посадочной полосы
18—20 км);
Д — зона руления.
3.2. НАЗНАЧЕНИЕ И ТИПЫ ОБЗОРНЫХ РАДИОЛОКАТОРОВ
Назначение ОРЛ — обнаружение и определение дальности и азимута ЛА в
зоне действия радиолокатора, а также получение дополнительной информации
с борта ЛА для служб УВД. В соответствии с решаемыми задачами и принятой
терминологией различают первичные и вторичные ОРЛ.
Первичные ОРЛ позволяют обнаружить и определить наклонную дальность
и азимут ЛА методом активной радиолокации, используя отраженные от них сиг-
налы радиолокатора, работают в импульсном режиме с высокой (100 —1000)
скважностью. Круговой обзор контролируемого пространства проводится
вращающейся антенной с острой ДН в горизонтальной плоскости.
В зависимости от дальности действия различают следующие типы первичных
радиолокаторов (табл. 3.1):
Таблица 3.1
Основные параметры первичных ОРЛ
Параметр ТРЛ-А ТРЛ-Б АРЛ-1 АРЛ-2
Дальность действия, км Период обновления информации с це- 400 250 160 100
ли, с Разрешающая способность: 12 12 6 4
по дальности, м 1000 1000 500 350
по азимуту, градус Допустимая погрешность по дальне- 1,5 1.5 2 2
сти, м 1000 1000 500 350
трассовые радиолокаторы, вариант А (ТРЛ-А) с дальностью действия
> 400 км, обеспечивающие информацию о ЛА, находящихся, в основным, в зо-
нах А и Б;
трассовые радиолокаторы, вариант Б (ТРЛ-Б) с дальностью действия 250—
400 км, обеспечивающие информацию о ЛА, находящихся, в основном, в зонах
Б и А;
аэродромные радиолокаторы, вариант В1 (АРЛ-1) с дальностью действия
160 — 250 км, обеспечивающие информацию о ЛА, находящихся, в основном,
в зонах Б и В;
66
аэродромные радиолокаторы, вариант В2 (АРЛ-2) с дальностью действия
100-160 км, обеспечивающие информацию о ЛА, находящихся, в основном, в зо-
нах В и Б.
Эти радиолокаторы имеют много общих черт, в ряде случаев выполняют ана-
логичные операции и поэтому их структурные схемы часто идентичны. Основные
их отличия обусловлены различным тактическим назначением.
В радиолокаторах первых двух категорий используют диапазон волн 23 см,
а второй — 10 или 23 см.
Вторичные ОРЛ служат для определения наклонной дальности и азимута ЛА
а также для получения с ЛА дополнительной информации (бортовой номер, вы-
сота полета, остаток топлива и др.) для служб УВД методом активной радиоло-
кации с активным ответом, используя сигнал бортового ответчика, генерируемый
каждый раз, когда ответчик принимает сигнал запроса наземного радиолокатора.
Вторичные ОРЛ отличаются, в основном, только дальностью действия, состав-
ляющей для ТРЛ — 400, а для АРЛ — 100 км.
Вторичные ОРЛ, применяемые в СССР и странах СЭВ, излучают сигналы за-
проса на частотах 835; 837,5; 840 и 1030 МГц и принимают сигналы ответа на
частотах 730; 740; 750 и 1090 МГц. Частоты 1030 и 1090 МГц соответствуют меж-
дународным нормам ICAO и являются обязательными. Остальные частоты ис-
пользуют в зависимости от конкретных требований к данному радиолокатору.
Конструктивное исполнение первичных и вторичных ОРЛ обычно в виде от-
дельных, не связанных изделий, которые используют автономно или совместно.
В последнем варианте оба радиолокатора объединены общей системой синхрони-
зации и общим приводом антенных систем. Имеются также первичные радиолока-
торы со встроенным вторичным каналом. Первичный и вторичный каналы таких
радиолокаторов имеют ряд общих элементов (антенную систему, синхронизатор
и др.). Основные элементы радиолокатора (иногда и антенная система) резерви-
руют для обеспечения надежности (например, среднее время наработки на отказ
во вторичных радиолокаторах составляет не менее 2500 ч).
3.3. СТРУКТУРНАЯ СХЕМА И ТИПЫ СИСТЕМ ВТОРИЧНОЙ
РАДИОЛОКАЦИИ
Структурная схема системы вторичной радиолокации (СВРЛ) состоит из вто"
ричного радиолокатора ВРЛ и самолетных ответчиков СО (рис. 3.2), совокупность
которых и образует рассматриваемую систему. В такой системе ВРЛ выполняет
функцию запросчика. Сигналы запросов и ответов отличаются кодами и несущи-
ми частотами, что позволяет уменьшить влияние отраженных от окружающих
ВРЛ местных объектов сигналов на работу ВРЛ.
Состав оборудования ВРЛ и его функциональные связи с устройствами пер-
вичного радиолокатора зависят от степени автономности ВРЛ. Последний может
использоваться как в автономном режиме, так и совместно с ПРЛ.
Автономная работа ВРЛ заключается в следующем. Синхронизирующий
сигнал, вырабатываемый в устройстве управления и сихронизации УУС, запус-
кает шифратор Ш, который выдает код запроса. Формат кода определяется типом
и видом СВРЛ и режимом работы
СВРЛ. Полученный код использует-
ся для модуляции передатчика Прд.
Модулированные колебания Прд
через фидерный тракт ФТ поступают
в антенную систему АС и излучают-
ся в пространство. Поскольку ВРЛ
применяется не только для получе-
ния дополнительной информации с
ЛА, но и для определения коорди-
нат последнего, антенна ВРЛ имеет
остро направленную ДН. Обзор
Рис. 3.2. Структурная схема системы
вторичной радиолокации
воздушного пространства осущест-
вляется при вращении антенны
ВРЛ.
3*
67
Принятый самолетным ответчиком СО сигнал запроса усиливается и детекти-
руется в приемнике Прм. Полученный видеосигнал подается на дешифратор Дш,
где определяется содержание запроса, в соответствии с которым шифратор Ш фор-
мирует код ответа. На шифратор поступают данные о высоте полета, остатке топ-
лива, бортовом номере и другая информация от бортовых датчиков БД. Код от-
вета подается на модулятор Прд, который вырабатывает кодовомодулирован-
ные колебания, излучаемые антенной А в пространство. Антенна ответчика долж-
на быть ненаправленной. Сигнал ответа принимается антенной ВРЛ, усиливает-
ся и детектируется в приемнике Прм, дешифруется в Дш и поступает на аппара-
туру первичной обработки информации АПОИ, устанавливаемую на КДП или в
центре УВД.
Совместная работа ВРЛ и ПРЛ обеспечивается подачей с ПРЛ синхронизи-
рующего сигнала для запуска ВРЛ, в качестве АПОИ обычно используется со-
ответствующая аппаратура первичного радиолокатора.
Типы СВРЛ отличаются видом, информативностью кода и значением несу-
щей частоты сигналов запроса и ответа. В настоящее время широко использует-
ся международная система вторичной радиолокации ATCRBS х, работающая в
соответствии с рекомендациями и стандартами ICAO, и отечественная система.
В этих системах на запрос ВРЛ отвечают все ответчики, находящиеся в пределах
ДН радиолокатора (т. е. примерно на одном азимуте). При этом возможны ситуа-
ции, когда ответчик находится в зоне действия нескольких ВРЛ, что сопровожда-
ется его перегрузкой и, как следствие, уменьшением вероятности ответа на за-
просный сигнал основного для данной зоны ВРЛ. При небольших различиях в
координатах (дальность, азимут) двух или нескольких ЛА возможно наложение
ответных сигналов, транслируемых с этих ЛА, что снижает эффективность СВРЛ
в условиях интенсивного воздушного движения.
Существенно большей эффективностью обладает перспективная дискретно-
адресная СВРЛ, получившая название DABS1 2. В системе DABS каждому ЛА
присвоен выделенный для него адресный код и поэтому на запрос ВРЛ отвечает
только тот ответчик, которому соответствует посылаемый код запроса. Назем-
ные станции DABS обеспечивают опрос самолетов, оборудованных обычными от-
ветчиками, а ответчик DABS отвечает запросчикам существующей международ-
ной СВРЛ. При разработке DABS, кроме устранения указанных недостатков
СВРЛ, предусматривается реализация моноимпульсного метода определения ази-
мута, позволяющая повысить точность углометрии, а также расширение функ-
циональных задач системы.
3.4. КОДЫ СИСТЕМ ВТОРИЧНОЙ РАДИОЛОКАЦИИ
Формат кодов, применяемых в СВРЛ для запросов бортовых ответчиков и при
передаче сигналов ответов, определяется типом СВРЛ. В существующих СВРЛ
два вида кодов: код УВД, рекомендуемый стандартом стран СЭВ, и международ-
ный код, соответствующий нормам ICAO для систем типа ATCRBS. Перспек-
тивным является код системы DABS.
В системах ATCRBS и отечественных системах УВД код запроса состоит из
групп импульсов, временная расстановка и количество которых определяется ха-
рактером запрашиваемой с ЛА информации и методом, используемым для по-
давления в ответчике ложных сигналов, принятых по боковым лепесткам ДН ан-
тенны наземного радиолокатора.
Сигнал ответа ЛА на запрос ВРЛ состоит из координатного и информацион-
ного кодов. Координатный код представляет собой последовательность импуль-
сов, используемую для измерения времени начала передачи сигнала ответа при
определении дальности и азимута ЛА. Информационный код представляет собой
последовательность импульсов, отображающую передаваемую информацию. В со-
1 ATCRBS — Air Traffic Control Radar Beacon System (СВРЛ, используе-
мая в целях УВД).
2 DABS — Discrete Address Beacon System (СВРЛ с индивидуальной адре-
сацией запросов).
68
tK,
Рис. 3.3. Код УВД при запросе
бортового ответчика
2мкс
я^.0
6
Рис. 3.4. Координатный код УВД
при ответе бортового ответчика:
а — сигнал «Бедствие» (код OKI);
б — сигнал «Шасси выпущено» (код
ОК5)
L__________L.
1 - -J_। J—I ц - т у
0 2 4 6 8 10 t,MKC
0 2 4 6 8 10 12 74
став информационного кода входят ключевые импульсы, определяющие вид
передаваемой информации.
Отечественные бортовые ответчики обеспечивают прием сигналов запросов,
соответствующих как стандартам стран СЭВ (режим «УВД»), так и нормам ICAO
(режим «RBS»).
Код УВД регламентируется стандартом СТ СЭВ 1823—79 стран СЭВ и по
структуре кодов запроса и ответа отличается от рекомендованного ICAO кода
большей информативностью и помехоустойчивостью.
Сигнал запроса состоит из двух импульсов Рг и Р3 (рис. 3.3), интервал /к,3
между которыми определяет смысловое содержание кода (табл. 3.2), и импульса
подавления Р2, излучаемого через 2 мкс после импульса Рг, Для ответчиков граж-
данских ЛА допускается отсутствие ответов на сигнал запроса с кодом ЗКЗ.
Параметры кодов запроса (СТ СЭВ 1823—79)
Таблица 3.2
Код запроса Кодовый интервал /к, мкс Информационное содержание ответных сигналов
ЗК1 9,4 Индивидуальный номер ЛА (ИС № 1)
ЗК2 14 Высота полета и запас топлива (ИС
№ 2)
зкз 23 Вектор скорости (ИС № 3)
ЗК4 19 Только координатные сигналы
Сигнал ответа содержит координатные и информационные сигналы. Коор-
динатные сигналы (рис. 3.4) состоят из двух импульсов PKi и РК3, кодовый ин-
тервал /к.о между которыми определяет координатный код. Всего предусмотре-
но шесть координатных кодов OKI —ОК6 (7К.О соответственно равны 14, 11т
18, 22, 9 и 6 мкс). Первые четыре кода служат для ответов на сигналы запроса
ЗК1 —ЗК4. Включение в координатный код импульса РК2 позволяет передавать
сигналы «Бедствие» или Шасси выпущено». Импульс РК2 сигнала «Бедствие»
передается совместно с кодами OKI — ОК5 и опережает импульс РК3 на
6 мкс. При передаче сигнала «Шасси выпущено» импульс РК2 отстает от им-
пульса PKi на 6 мкс, при этом используется код ОК5.
Информационные сигналы (рис. 3.5) состоят из трех ключевых и 20 информа-
ционных импульсов, обозначаемых соответственно РКИ и РИ. Стандартом СЭВ
предусмотрены три информационных кода: ОКИ1, ОКИ2 и ОКИЗ, отличающих-
ся интервалами между импульсами координатного и информационного кодов
(табл. 3.3). При всех видах кодов интервал между ключевым импульсом РКИ3
и первой позицией информационных импульсов равен 4 мкс.
69
0К1 ИС
10 2?
РК1 РКз рки, рки,’ т Зр ‘у' ' Ze
0 0 L, П П И) Иг Из Hit И$ Hg И? И8 Иэ И10 Иц Иц Ии М X X —Ц X X X X X X—— X——X X X х X ’X—
9 74 74 22,5 30,5 ^2,5 I 8,5 | 8 | П I 4 50,5 4 | 4 58,5 66,5 7k,5 82,5 90,5 Цмкс
0КИ2 ИС №2
1д 2д
Рис. 3.5. Структура кодов УВД сигнала ответа:
а — код ответа на запрос бортового номера; б — код ответа на запрос высоты и остатка
топлива (д — декады, р —разряды кода)
Информационные импульсы обеспечивают передачу 20 двоичных разрядов
информации. Для этой цели служат 40 импульсов на 80 временных позициях,
обозначаемых Иг — Ияо и отстоящих друг от друга на 4 мкс. Для передачи каж-
дого из 20 разрядов используются четыре временных позиции. Для разряда с
с номером Г, где i = 1, 2. 3, ..., 20, используются позиции И2г-+39 и
И21+40, на которых располагаются два импульса информационной посылки. При
формировании кода применен режим активной паузы, т. е. импульсы передаются
не только при наличии «1» в данном разряде кода, но и при передаче символа «0».
Если значение кодовой посылки в данном разряде (/) есть «1», то импульсы рас-
полагаются на позициях и И2^ + 39, если это значение «0», то — на позициях
И2г и И2г+4о (Рис- 3.6). Таким образом, для повышения достоверности каждое со-
общение передается дважды на один запрос.
Информация о бортовом номере ЛА передается информационным словом
№ 1 (ИС № 1) в ответ на запрос кодом ЗК1. Для передачи используют натураль-
ный двоично-десятичный пятидекадный четырехразрядный код (табл. 3.4). Зна-
чение десятичной цифры в декаде определяется суммой весов разрядов, у которых
импульсы размещены на информационных позициях, соответствующих передаче
«1» кода. Применяемый код обеспечивает передачу любого из 100 000 номеров, со-
стоящих из пяти цифр от 0 до 9 включительно.
Информация о высоте полета и остатке топлива передается информационным
словом № 2 (ИС № 2) в ответ на запрос кодом ЗК2. Для передачи сообщения о вы-
соте полета используют разряды от 1 до 14 натурального двоично-десятичного
четырехразрядного кода, что позволяет передавать данные от 10 до 30 000 м с
дискретом в 10 м. Разряд 15 служит для передачи признака барометрической вы-
соты: значение «1» этого разряда соответствует абсолютной, а «0» — относитель-
ной высоте. Отрицательное значение абсолютной барометрической высоты (0...—
300 м) передается группой разрядов от 1 до 8, при этом разряды 8. 13 и 14 име-
ют значение «0», а разряды от 9 до 12 — значение «1». Разряд 16 используется
для передачи сигнала «Бедствие» (при
этом значение разряда 16 должно быть
«1») совместно с установкой в соответ-
ствующую позицию импульса РК2-
Данные о запасе топлива передают
в процентах от полной вместимости ба-
ков с использованием разрядов от 17 до
20 информационного кода с дискретом
5% при остатке топлива до 50% вклю-
чительно и с дискретом в 10°Ь при ос-
татке топлива свыше 50%. Для этой
цели используют разряды пятой декады
ИС № 2.
Таблица 3.3
Интервалы между импульсами
сигналов ответа, мкс
Информа- ционный код РК> и РКИ, РКИ, и РКИ2 РКИ. и РКЙ3
ОКИ1 8,5 8 12
ОКИ2 24 8 8
ОКИЗ 10 12 4
70
Таблица 3.4
Кодирование бортового номера, высоты полета, запаса топлива и вектора
скорости в коде УВД
Декада Разряд Бортовой номер ЛА (ИС № 1) Высота полета и запас топлива (ИС Ае 2) Вектор скорости (ИС № 3)
Высота, м Запас топ- лива1, % Аргумент, градус -Модуль, км/ч
1 1 I 10 1 —
2 2 20 — 2 —
3 4 40 — 4 —
4 8 80 — 8 —
2 5 10 100 —. 10
6 20 200 — 20 —
7 40 400 — 40
8 80 800 — 80 —
3 9 100 1000 — 100 —
10 200 2000 — 200 —
11 400 4000 — — 10
12 800 8000 —. — 20
4 13 1000 10 000 —— — 40
14 2000 20 000 -—. — 80
15 4000 Признак высоты — 100
16 8000 Сигнал « Бедствие» — 200
5 17 10 000 —. 5(10) — 400
18 20 000 — 10(20) — 800
19 40 000 —. 20(30) — 1000
20 80 000 —. 40 — 2000
1 Значения в скобках соответствуют передаче сведений о запасе топлива, превышаю-
щем 50%.
Информацияо векторе скорости передается информационным словом № 3 (ИС
№ 3) в ответ на запрос кодом ЗКЗ. Данные об аргументе вектора скорости (от 0 до
360° с градацией 1°) передаются натуральным двоично-десятичным кодом с исполь-
зованием разрядов от 1 до 10 включительно. Такой же код используют и для пере-
дачи данных о модуле вектора скорости (от 0 до 3500 км/ч с градацией 10 км/ч)
с помощью разрядов 11—20.
Международный код регламентирован организацией ICAO.
Сигнал запроса может кодироваться четырьмя кодами: А, В. С и D (рис. 3.7).
Каждый код должен состоять из импульсов и Р3, временной интервал между
которыми определяет назначение кода. Коды А и В предназначены для опознава-
ния ЛА. По запросу этими кодами бортовой ответчик сообщает рейсовый номер
ЛА. Код С является сигналом запроса высоты полета. По получении сигнала за-
—и--х---u—х--х--и—х • • • х-х--u—х---u—х---х--u—х—-
/ Z 3 4 5 6 7 J5 45 4/ 42 45 44 45 45 47 И
1 I 3 ц 5 6 7 39 45 4/ 42 4J' 44 45 45 47 И
Рис. 3.6. Передача сообщений 110 (я) и 001 (б) младшими разрядами в режиме
с активной паузой
71
проса, содержащего код С, бортовой ответчик передает на землю показания ба-
рометрического высотомера, отрегулированного на стандартное давление
1,013-105 Па. Код D зарезервирован для использования в перспективных СВРЛ.
Смысловое содержание этого кода пока не установлено. Применение кодов А
и С является обязательным для всех новых СВРЛ.
В состав кодовой посылки сигнала запроса, как правило, включается им-
пульс подавления Р2, следующий при любом виде кода через 2 мкс после излуче-
ния импульса Pt. Этот импульс предназначен для работы трехимпульсных систем
подавления ложных сигналов запроса, излучаемых ВРЛ по боковым лепесткам
ДН антенны. Очередность следования кодов запроса устанавливается прог-
раммным устройством ВРЛ или диспетчером. При программном управлении за-
просные коды меняются в смежных периодах повторения сигналов запроса.
Сигнал ответа состоит из координатного кода, представляющего собой два
опорных импульса Fr и F2 (рис. 3.8), следующих с постоянным временным интер-
валом 20,3 мкс между ними. Информационный код состоит из 12 импульсов, раз-
мещаемых в интервале между опорными импульсами. Информационные импуль-
сы разбиты на группы (декады) Л,В, С и D, каждая из которых содержит по три
импульса At, А2, Л4, В2 и т. д. Для размещения информационных импульсов
предусмотрено 13 кодовых позиций, расположенных через каждые 1,45 мкс после
импульса Уд. Центральная позиция X зарезервирована для использования
в перспективных системах УВД. В коде ответа предусмотрена дополнительная
позиция (через 4,35 мкс после импульса F2) для передачи специального импульса
опознавания SP1 по требованию с земли.
Информация о номере рейса ЛА передается ответчиком, работающим в режи-
ме «RBS» с помощью натурального двоично-десятичного четырехдекадного трех-
разрядного кода с базой 20,3 мкс. Декады А, В, С и D предназначены соответст-
Pl Pz ' Рз
П , , ,
0 2 45 8 10 IZt.MW
l.—11------------
L1J I ; i : [ 1 J1
О 2 I) 6 8 10 12 14 18 185,м™
L---------21 — --^Рз
Рис. 3.7. Международные коды
запроса типа А, В, С и D
Рис. 3.8. Международные коды от-
вета:
> №
Й .
I
С Ц__
nV? ,
0 2 4 6 8 10 12 14 1618 20 t,wc
L__ 25
г~~
. 0 2 4 6 8 10 12 14 16 18 20 22 248^0.
а — общая структура кода; б — цена
градаций кода «Номер рейса»; в — код
I номера рейса (732); г — код высоты
4- полета (99 850 футов)
a)i^_ 20,3 4,35
Of Aj A? Cif Ац X 8f В? B? D? Bi/ JOk SP1
а. П П □ П ППППППППП Ъ LL
0 7Л5 2.3 4,35 5,8 7,25 8,7 10,15 11,8 13,05 14,5 15,95 17,4 18,85 20,3 24,05 t,MKC
б) F, Cj A-j C2 Az 0ц Aif Bi Di B2 Bz Bt* D14 spi
ПППППП ПППППП i LL
(10) (WOO) (2D) (1000) W WOO (WO) (1) (200) (2) (ООО) (0) t,MXC
LL П П П П П П i LL
2/’ П П П П П i
(0-W00) (300-000) (1-500) (3-31000) t
72
венно для передачи тысяч сотен, десятков и единиц. Максимальное число, кото-
рое может быть записано подобным образом, будет 7777. Так как при трехразряд-
ном коде передача чисел 8 и 9 невозможна, то общее число номеров рейсов соста-
вит 4096. Отсутствие какого-либо информационного импульса на соответствую-
щей позиции означает передачу символа «0» в данном разряде кода (например,
при передаче номера райса 732 будут отсутствовать все импульсы, кроме
^2» ^4» ^*1» ^2 и
Информация о высоте полета ЛА передается ответчиком в режиме «RBS»
с помощью циклического кода Гиллхема, представляющего собой совокупность
рефлексного трехдекадного кода Грея (табл. 3.5) и специального трехразрядяого
рефлексного кода цифровой емкостью в 5 единиц с градациями по 100 футов или
30, 48 м (табл. 3.6). При этом, если в соседней декаде высшего порядка записаны
четное число или ноль, то в предыдущей декаде низшего порядка число записы-
вается натуральным кодом Грея, если в соседней декаде высшего порядка запи-
сано нечетное число, то в декаде низшего порядка число записывается зеркаль-
ным кодом Грея. Натуральный специальный код используется при отсутствии
записи в соседней старшей декаде или при записи в ней четного числа, в против-
ном случае используется зеркальный код.
Таблица 3.5
Перевод десятичных чисел в натуральный и зеркальный коды Грея
Десятичное число Код Десятичное число Код
натуральный зеркальный натуральный зеркальный
0 000 100 4 110 010
1 001 101 5 111 011
2 011 111 6 101 001
3 010 по 7 100 000
Специальный трехразрядный рефлексный код
Таблица 3.6
Высота, футы Код Высота, футы Код
натуральный зеркальный натуральный зеркальный
0—100 001, 100 300—400 ПО 011
100—200 011 по 400—500 100 001
200-300 010 010 — —= р—1
Декады D, А и В используют для передачи рефлексного кода Грея, а декаду
С — для передачи специального трехразрядного рефлексного кода. Цена града-
ций в декаде D — 32 000, в декаде А — 4000, в декаде В — 500 и в декаде С —
100 футов. Нумерация разрядов в декадах обратная, т. е. — первый раз-
ряд, О2 — второй, — третий и т. д. Отсчет ведется от так называемой оста-
точной высоты 1200 футов. Пример кодирования высоты приведен на рис. 3.8, г.
Передача специальных сообщений предусмотрена нормами ICAO при запросе
кодами А и В. Кодовая комбинация сигнала ответа 7700 соответствует аварийно-
му состоянию ЛА, 7600 — отсутствию радиосвязи, 7500 — незаконному вме-
шательству в действия экипажа. Коды 0000 и 2000 зарезервированы для регио-
нального использования. Соответствующие кодовые комбинации для передачи
номера рейса не используются.
Код DABS позволяет адресовать запрос только одному ЛА. При запросе с
наземного ВРЛ передается сложный код. Сигнал запроса передается сложным ко-
дом (рис. 3.9), который состоит из трех импульсов: Рх, и излучаемых ос-
73
56 или Ш
ПО) t,MKC
i?lJf j4f) J !
1 iOU 1011 \Oil iOi i0i П0М i0i И0
i 1 > I * 1 J—1- ----L . I H I 4- *
Рис. 3.9. Структура сигналов системы DABS:
а — сигнал запроса; б — импульс подавления при запросе; в — сигнал ответа; г — пример
передачи кода 0010... 001
новной антенной, и импульса подавления Рь, передаваемого с помощью дополни-
тельной ДН. Импульс Рь служит для подавления в ответчике сигналов, приня-
тых по боковым лепесткам основной ДН. Информационная часть сообщения мо-
жет содержать 24 различных вида запрашиваемых данных. Основные элементы
передаваемого на борт сообщения — код запрашиваемой информации, с которого
начинается сигнал запроса, различного рода команды, данные и адрес сообще-
ния, которым заканчивается сигнал запроса. Информационная часть сигнала за-
проса передается импульсом Р6, который содержит две продолжительные посыл-
ки, предназначенные для подстройки по фазе гетеродина бортового ответчика, и
поле данных, состоящее из 56 или 112 разрядов, предназначенных для переда-
чи содержания сигнала запроса. Для кода адресования используют 24 разряда.
Применяется код адресования с исправлением ошибок путем проверки на чет-
ность. Код позволяет создать примерно 16 млн. индивидуальных адресов.
Значения разрядов кода («О» или «1») передаются с помощью фазовой моду-
ляции, при которой символу «0» соответствует фаза несущей частоты ф -- 0, а
символу «1» —ф = 180е (или наоборот). Благодаря принятой структуре кода и
фазовой манипуляции помехи со стороны системы DABS существующим ответчи-
кам, работающим в режиме «RBS». исключаются. В режиме циркулярного (об-
щего) вызова в системе DABS передается код, соответствующий международному
(А или С), в котором за импульсом Р3 излучается через 1,5 мкс (отсчет по перед-
ним фронтам импульсов) дополнительный импульс
Сигнал ответа в системе DABS (предусмотрено 24 варианта) состоит из ко-
ординатного кода, представляющего собой группу из четырех импульсов, и ин-
формационного кода. Последний, как и код запроса, имеет 56 или 112 разрядов,
но в каждом из них предусмотрены две «импульсные» позиции (режим с активной
паузой). В сигнале ответа повторяется код запрашиваемой информации, переда-
ется основное сообщение и в заключение повторяется код адресования. При
передаче информационного кода также применяется фазовая манипуляция. При-
нятая структура сигнала ответа и фазовая манипуляция при передаче данных ис-
ключают помехи со стороны ответчиков DABS существующим системам УВД.
74
3.5. ПОДАВЛЕНИЕ СИГНАЛОВ БОКОВЫХ ЛЕПЕСТКОВ
В СИСТЕМАХ ВТОРИЧНОЙ РАДИОЛОКАЦИИ
Системы вторичной радиолокации подвержены влиянию синхронных помех,
возникающих вследствие передачи и приема сигналов ВРЛ по боковым лепест-
кам ДН. Хотя антенны ВРЛ имеют уровень боковых лепестков на 15—30 дБ,
меньший уровня основного лепестка ДН, существует вероятность того, что от-
ветчиком будет принят сигнал запроса, излучаемый по боковому лепестку ДН,
что приведет к искажению угломерной информации и перегрузке ответчика. По-
этому в ВРЛ используют специальные методы подавления либо сигналов запро-
са, принятых ответчиком по боковым лепесткам ДН(подавление по запросу), либо
сигналов ответа, принятых ВРЛ по боковым лепесткам (подавление по ответу),
либо оба метода совместно. Реализация этих методов требует специальной формы
ДН радиолокатора и включения в кодовую посылку запроса или ответа допол-
нительных импульсов.
Методы подавления боковых лепестков по запросу (ПБЛЗ) предназначены
для предотвращения запуска самолетного ответчика сигналами запроса, излуча-
емыми боковыми лепестками антенны наземного радиолокатора и основаны обыч-
но на использовании автоматических инерционных регулировок усиления в от-
ветчике или на сравнении амплитуд принимаемых сигналов. Большей эффектив-
ностью обладает второй из указанных методов, получивший широкое распрост-
ранение в СВРЛ. Метод ПБЛЗ, основанный на сравнении амплитуд, требует
включения в состав ВРЛ дополнительного канала, состоящего из передатчика и
антенны подавления. Излучаемый антеннами ВРЛ сигнал запроса СЗ содержит
t Рис. 3.10. Временная структуре
сигналов запроса ВРЛ:
а — двухимпульсный код; б —трехнм.
пульсный код; 1 — ответчик отвечает;
2 — ответчик может отвечать или не
отвечать; <3—ответчик не отвечает;
КЗ — код запроса
Рис. 3.11. Возможная форма дна
граммы направленности основной
антенны (1) и антенны подавле
ния при д'вухимпулысной ($i м
трехимпульсной системе по
давления боковых лепестков л<->
змцихгс
75
Рис. 3.12. Структурная схема двухимпульсной системы подавления боковых ле-
пестков по запросу (а) и графики напряжений в ее характерных точках для слу-
чаев, когда ЛА находится в направлении максимума (б) и бокового лепестка (в)
диаграммы направленности основной антенны (код запроса номера рейса; ин-
тервалы времени в микросекундах; масштаб по оси времени не выдержан)
Рис. 3.13. Структурная схема трехимпульсиой системы подавления сигналов бо
ковых лепестков по запросу (а) и графики напряжений в ее характерных точках
для случаев, когда ЛА находится в направлении максимума (б) и боковых ле
пестков (в) диаграммы направленности основной антенны (интервалы времени в
микросекундах, масштаб по оси времени не выдержан)
два или три импульса (рис. 3.10). В зависимости от структуры СЗ различают двух
импульсные и трехимпульсные системы ПБЛЗ.
Двухимпульсная система ПБЛЗ основана на применении антенны подавле-
ния, ДН которой (рис. 3.11) охватывает главный и боковые лепестки ДН основ
ной антенны радиолокатора. Основная антенна излучает импульс запроса Р3, а
антенна подавления — Pt (см, рис, 3.10), Если обозначить амплитуды излучае
мых сигналов в целях наглядности также символами Р± и Р3, то в направлении
главного лепестка основной антенны должно выполняться условие P3’^Pi —
-- I дБ, а для всех остальных направлений — Р3 Р3 — 11 дБ При выполне
нии последнего условия ответчик должен запираться стробоимпульсом.
Принятые антенной А (рис. 3.12) ответчика СЗ проходят обработку в прием
нике Прм и поступают одновременно на формирователь импульсов ФИ и форми-
76
рователь стробирующего импульса ФСИ. Первый из них при подаче на вход
принятых сигналов Рг и Р3 вырабатывает импульсы определенной амплитуды и
длительности, которые подаются на дешифратор кода Дш. Устройство ФСИ со-
держит схему сравнения и накопитель Н. При поступлении на ФСИ импульса
накопитель заряжается до значения, соответствующего амплитуде этого им-
пульса. Постоянная времени разряда накопителя равна ~ 700 мкс, что намного
превышает кодовый интервал (17 или 21 мкс) кода запроса. Через 17 или 21 мкс
на накопитель подается импульс Р3 принятого СЗ.
Если амплитуда импульса Р3 превышает напряжение на накопителе, что со-
ответствует нахождению ЛА на направлении максимума основной ДН (положе-
ние А на рис. 3.11), то на выходе СС появляется второй импульс СЗ. Имшльсы с
СС подаются на схемы И дешифратора. В зависимости от кода СЗ одна из схем
И открывается и на шифратор номера ШН или высоты полета ШВ выдается за-
пускающий импульс, под действием которого ответчик вырабатывает сигнал от-
вета. Если амплитуда импульса Р3 меньше напряжения на накопителе, что соот-
ветствует нахождению ЛА вне главного лепестка ДН основной антенны (положе-
ние Б на рис. 3.11), то СС не срабатывает и схемы И не пропускают сигнал за-
пуска на шифраторы ответчика. Сигнал ответа в этой ситуации не излучается.
Для восстановления чувствительности схемы по окончании приема СЗ нако-
питель через 25 мкс после приема импульса Рх разряжается сигналом с линии за-
держки ЛЗ. Кроме того, предусмотрен разряд накопителя бланкирующим им-
пульсом передатчика Прд, что позволяет снять заряд, появившийся в результа-
те просачивания на вход Прм излучаемого ответчиком сигнала.
Недостаток двухимпульсной системы ПБЛЗ — слабая помехоустойчивость
и необходимость повышения мощности передатчика, работающего на антенну по-
давления. Последнее объясняется тем, что амплитуды импульсов Рх и Р3 в Прм
должны быть соизмеримы, а это при слабо направленной антенне подавления
возможно только при увеличении излучаемой мощности.
Трехимпульсная система ПБЛЗ рекомендуется ICAO в качестве основной и
отличается от двухимпульсной системы формой ДН антенны подавления (3 на
рис. 3.11) и форматом СЗ. Основная антенна излучает импульсы Рх и Р3, а антен-
на подавления — импульс подавления Р2- Амплитуда импульса Р2 в направле-
нии главного лепестка основной антенны
импульсов Рх и Р3. Для всех направле-
ний вне сектора главного лепестка ДН
обязательным является условие Р2
В трехимпульсной системе ПБЛЗ
(рис. 3.13) принятый сигнал от антенны
А после приемника Прм подается на
схему сравнения СС и накопитель Н
устройства формирования стробирую-
щего импульса, работа которых анало-
гична работе соответствующих элемен-
тов двухимпульсной системы. Постоян-
ная времени накопителя вибирается та-
ким образом, чтобы за 2 мкс напряжение
на нем упало меньше чем на 9 дБ. На
выходе СС вырабатываются импульсы
постоянной длительности и амплитуды
каждый раз, когда амплитуда посту-
пившего на схему сигнала превышает
напряжение на накопителе. Линия за-
держки ЛЗ имеет отвод, с которого
снимаются задержанные на 2 мкс им-
пульсы СС. Задержка на 2 мкс соответ-
ствует временному интервалу между им-
пульсами и Р2, который для всех
кодовых комбинаций постоянен. Им-
пульсы с СС подаются на схему И-3
формирования импульса запрета де-
шифратора Дш.
всегда меньше на У дь амплитуды
Рис. 3.14. Возможная форма диаграм-
мы направленности антенны ВРЛ
и антенны подавления (2j при
подавлений сигналов боковых ле-
пестков по ответу
77
Если ЛА находится в пределах главного лепестка ДН основной антенны, то
импульс имеет амплитуду меньшую, чем напряжение на накопителе, поэтому
па выходе СС импульс, соответствующий Р2, отсутствует и задержанный импульс
Pt через схему И—3 не проходит. Импульс запрета не вырабатывается, поступа-
ющие с линии задержки ЛЗ импульсы открывают одну из схем И-1 или И—2
(в зависимости от кода запроса) и на шифратор номера ШН или высоты ШВ вы-
дается запускающий импульс, под действием которого ответчик вырабатывает
сигнал ответа.
Если ЛА находится в зоне действия боковых лепестков ДН, то амплитуда
импульса Р2 достаточна для запуска СС и на выходе последней формируется трех-
импульсный код. Второй импульс этого кода совпадает с задержанным на 2 мкс
импульсом Ру. в результате чего срабатывает схема И—3, выдавая импульс за-
пуска ждущего мультивибратора ЖМВ. Мультивибратор генерирует импульс за-
прета длительностью 25 мкс, который запирает ячейки И дешифратора, импульс
запуска ответчика не вырабатывается и ответный сигнал на ложный импульс за-
проса ответчиком не излучается.
Методы подавления боковых лепестков по ответу (ПБЛО) предназначены для
устранения ложных сигналов ответа, принимаемых от бортовых ответчиков
ЛА по боковым лепесткам ДН основной антенны наземного радиолокатора, и ис-
пользуют сравнение амплитуд сигналов, поступающих по основному и дополни-
тельному каналам радиолокатора. Дополнительный канал, называемый каналом
подавления, имеет свою антенну (антенна подавления) и отдельный приемный
тракт. Уровни принимаемых сигналов сравниваются либо вычитанием амплитуд
этих сигналов (амплитудная система ПБЛО), либо преобразованием амплитуд-
ных соотношений в фазовые с последующим использованием фазовых различий
сигналов для определения того, каким из лепестков ДН (главным или боковым)
принят сигнал ответа (фазовая система ПСБО). Антенна подавления должна
иметь ДН, охватывающую все боковые лепестки ДН основной антенны и имею-
щую минимум в направлении главного лепестка ДН основной антенны радиоло-
катора (рис. 3.14).
Амплитудная система ПБЛО основана на вычитании видеоимпульсов ка-
нала подавления из видеоимпульсов основного канала (рис. 3.15). Принятые од-
новременно антеннами основной АО и подавления АП сигналы ответа усиливают-
ся и детектируются в приемниках Прм н подаются на устройство вычитания. Ес-
ли ответчик находится в пределах главного лепестка ДН основной антенны, то
видеоимпульсы на выходе основного канала превышают по амплитуде соответст-
вующие видеоимпульсы канала подавления. Получающиеся в результате вычи-
тания положительные импульсы проходят через ограничитель Огр на дешифра-
тор Дш радиолокатора, а затем на устройства обработки и индикации. При на-
хождении ответчика в зоне действия боковых лепестков ДН основной антенны ви-
деоимпульсы на выходе УВ имеют от-
рицательную полярность и через ОГР
не проходят. При этом радиолокатор
не получает информации, принятой по
боковым лепесткам ДН. Эта система от-
личается простотой реализации, но ее
применение сопровождается уменьшени-
ем дальности действия радиолокатора
из-за ухудшения отношения сигнал/шум
при вычитании. Кроме того, в системе
требуется линейность и идентичность
амплитудных характеристик приемни-
ков обоих каналов в динамическом диа-
пазоне более 45 дБ.
Фазовая система ПБЛО основана
на фазовой «окраске» сигналов, приня-
тых по главному и боковым лепесткам
ДН антенны радиолокатора. Сущест-
венным достоинством фазовой системы
является отсутствие жестких требова-
ний к амплитудным характеристикам
приемников.
Рис. 3.15. Структурная схема ампли-
тудной системы подавления сигналов
боковых лепестков по ответу (а) и
графики напряжений в ее характер-
ных точкдх для случаев, когда ЛА
находится в направлении максимума
(б) и боковых лепестков (в) диа-
грамм направленности основной ан-
тенны
78
Рис. 3.16. Структурная схема фазовой системы подавления сигналов боковых ле-
пестков по ответу (а) и векторные диаграммы сигналов для случаев, когда ЛА
находится в направлении максимума (б) и боковых лепестков (в) диаграммы
направленности основной антенны
Принятые антеннами основной АО и подавления АП сигналы (рис. 3.16)
усиливаются по высокой частоте в раздельных УВЧ и преобразуются на проме-
жуточную высоту в смесителях См, на которые подается напряжение от общего
гетеродина Гет. Преобразованные на промежуточную частоту сигналы основной
антенны Uo и антенны подавления (7П поступают на суммирующее и вычитающее
устройства, где образуются соответственно суммарный и разностный сигналы с
амплитудами соответственно Uc и Независимо от сдвига фаз ф сигналов Uo и
и Ua фазовый сдвиг напряжений Uc и Ul} будет меньше 90°, если Uti > U(1,
что имеет место при нахождении ответчика в пределах главного лепестка ДН ос-
новной антенны, и более 90°. когда Uo < Uu, т. е. ответчик находится в зоне дей-
ствия боковых лепестков. Различие в фазовом сдвиге 5 сигналов Uc и Up позво-
ляет определить, каким из лепестков основной антенны принят сигнал ответа, и
выделить только тот сигнал, который принят по главному лепестку основной
антенны радиолокатора.
Суммарный и разностный сигналы усиливаются в УПЧ и подаются на фазо-
вый детектор ФД, причем суммарный сигнал используется в качестве опорного.
Напряжение на выходе ФД равно t/ф.д^Кф.д UcUp cos?, где Кф.д — коэффи-
циент передачи ФД. Поэтому при | < 90° видеосигналы на выходе ФД имеют по-
ложительную полярность и проходят через ограничитель Огр на дешифратор Дш
радиолокатора, а затем на систему обработки и индикации. Если В > 90° (сиг-
нал ответа принят боковыми лепестками АО) видеосигналы имеют отрицатель-
ную полярность и не пропускаются ограничителем Огр на устройства дальней-
шей обработки сигналов.
3.6. СТРУКТУРНАЯ СХЕМА ОСОБЕННОСТЕЙ И ПАРАМЕТРЫ
ПЕРВИЧНЫХ РАДИОЛОКАТОРОВ
Структурная сема ПРЛ (рис. 3.17) состоит из следующих основных элемен-
тов: антенной системы АС с механизмом привода МПА и датчиком угловых поло-
жений антенны ДУА; фидерного тракта ФТ; передатчика Прд с устройством ав-
томатической подстройки частоты АПЧ; приемника Прм; аппаратуры выде-
ления сигналов АВС (в ряде радиолокаторов объединяемой с приемником в про-
цессор сигналов); синхронизатора Сх; тракта трансляции сигналов ТТС к внеш-
ним устройствам обработки и индикации; контрольного индикатора КИи встроен-
ной системы контроля ВСК.
Антенная система предназначена для формирования ДН. имеющей в гори-
зонтальной Плоскости ширину 1—2°, а в вертикальной —- 30—40°. Малая шири-
на луча в горизонтальной плоскости обеспечивает получение высокой разрешаю-
щей способности радиолокатора по азимуту. В вертикальной плоскости ДН час-
то имеет форму, подчиняющуюся закону cosec2 0. где 0 — угол в вертикальной
плоскости (угол места). Это сделано для уменьшения зависимости мощности при-
нимаемых сигналов от дальности до ЛА.
79
Антенные системы большинства радиолокаторов имеют два облучателя, один
из которых обеспечивает обнаружение ЛА под малыми углами места. Особен-
ность ДН в вертикальной плоскости— резкий срез ее нижней части для умень-
шения помех от местных объектов, расположенных вблизи от места установки
антенной системы радиолокатора. Обычно в радиолокаторах имеется возможность
изменения положения максимума ДН в вертикальной плоскости в пределах от
нуля до нескольких градусов относительно горизонтальной плоскости. В антен-
нах предусматривают устройства для изменения поляризации излучаемых и при-
нимаемых колебаний. Применение круговой поляризации позволяет ослабить
на 15—20 дБ сигналы, отраженные от метеообразований.
Отражатель антенны по форме близок к усеченному параболоиду вращения
и выполнен из металлической сетки для уменьшения ветровой нагрузки. Иногда
с этой же целью, а также для защиты антенных узлов от воздействия осадков ан-
тенную систему помещают под радиопрозрачный купол (обтекатель). Наличие
обтекателя приводит к потерям электромагнитной энергии и некоторому сниже-
нию дальности действия радиолокатора. На отражателе антенны монтируют ан-
тенну вторичного радиолокатора или предусматривают место для нее. Антен-
ную систему радиолокатора поднимают по возможности выше над поверхностью
земли (например, устанавливают на специальной вышке) для того, чтобы окру-
жающие антенную систему объекты не препятствовали обзору под малыми угла-
ми места.
Механизм привода антенны обеспечивает равномерное ее вращение с целью
кругового обзора контролируемого радиолокатором воздушного пространства.
Частота вращения антенны составляет 6 об/мин в ТРЛ и 12 об/мин в АРЛ. Уве-
личением скорости обзора в АРЛ обусловлено необходимостью более частого об-
новления информации о положении ЛА в аэродромной зоне.
Датчики угловых положений антенны предназначены для получения сигна-
лов, несущих информацию о текущем положении ДН в горизонтальной плоско-
сти. Они выдают дискретные или непрерывные сигналы, которые используются
в простейшем случае для получения соответственно угловых меток и азимуталь-
ной развертки в индикаторах кругового обзора (ИКО), а в более сложных выход-
ных устройствах —для вычисления азимута ЛА. Датчики механически связаны с
осью вращения АС радиолокатора.
Фидерный тракт служит для переключения антенны на излучение или при-
ем сигналов, распределения высокочастотной энергии между облучателями антен-
ны, потребителями и контрольно-измерительными устройствами.
Передатчик предназначен для получения высокочастотных импульсов дли-
тельностью 1—3 мкс, питающих облучатели антенны. Частота, на которой рабо-
тает передатчик, зависит от назначения радиолокатора. В ТРЛ для уменьшения
влияния на дальность действия метеоусловий обычно используют частоты
~ 1,3 ГГц (X = ~ 23 см), а в АРЛ,
дальность действия которых меньше,
а следовательно, и меньше поглощение
энергии на трассе распространения
радиоволн, могут использоваться более
высокие частоты, например, ~2,8 ГГц
(X —~11 см). Унификации высокоча-
стотных элементов ТРЛ и АРЛ спо-
собствует применение колебаний с ча-
стотой ~ 1,3 ГГц в обоих радиолокато-
рах. Для уменьшения влияния флук-
туаций отраженного сигнала на вероят-
ность его обнаружения, а также увели-
чения числа импульсов, отраженных от
цели за один обзор, иногда применяют
два передатчика, работающих одновре-
менно на близких частотах, которые
отличаются на 50 — 100 МГц. Это позво-
ляет увеличить дальность обнаружения
примерно на 25%.
Длительность и частота повторения
Рис. 3.17. Обобщенная структурная
схема первичного радиолокатора зондирующих импульсов зависят от на-
80
значения радиолокатора. В радиолокаторах с большой дальностью действия
(ТРЛ) применяют импульсы длительностью ~ 3 мкс, следующие с частотой пов-
торения 300—400 Гц, а в АРЛ — длительность импульсов может быть меньше
1 мкс при частоте повторения 1000 Гц. Мощность передатчиков составляет 0,5—5
МВт.
Устройство автоматической подстройки частоты предназначено для под-
держания постоянной частоты генерируемых магнетроном колебаний с точностью,
обеспечивающей нормальную работу устройства СДЦ. В качестве источника
опорных колебаний в устройствах АПЧ используют стабильный местный гетеро-
дин приемника. Точность автоподстройки составляет несколько сот килогерц.
Снижения влияния автоподстройки частоты на работу устройства СДЦ дости-
гают уменьшением скорости автоподстройки до единиц мегагерц в секунду.
Приемник выполняет функции усиления и преобразования принятых сигна-
лов, а также вырабатываемых передатчиком колебаний для обеспечения работы
устройства АПЧ и фазирования когерентного гетеродина устройства СДЦ.
Особенность приемников ПРЛ — наличие усилителя высокой частоты на мало-
шумящих транзисторах или лампе бегущей волны (ЛБВ), позволяющего снизить
коэффициент шума приемника и тем самым увеличить дальность действия радио-
локатора. Средний коэффициент шума приемников 2—4 дБ, а чувствительность
около 140 дБ/Вт. Приемник выполняют по супергетеродинной схеме с однократ-
ным преобразованием частоты. Промежуточная частота обычно равна 30 МГц,
коэффициент усиления УПЧ не менее 25 дБ. В некоторых радиолокаторах для
борьбы с флуктуациями принимаемых сигналов, отрицательно влияющими на ра-
боту СДЦ, применяют усилители с ограничением сигналов по амплитуде или с ло-
гарифмической амплитудно-частотной характеристикой.
Для сужения динамического диапазона сигналов, поступающих на аппара-
туру первичной обработки, в приемниках используют АРУ с дискретной или
плавной регулировкой, а также ВАРУ, повышающую коэффициент усиления
УПЧ на больших дальностях. Вследствие этого зависимость амплитуды выдава-
емых приемником сигналов от дальности уменьшается.
С выхода УПЧ сигналы идут по каналу амплитудного детектирования для
получения обычного видеосигнала и по каналу фазового детектирования (т. е.
по каналу СДЦ).
Аппаратура выделения сигналов выполняет функцию обнаружения полезного
отраженного от ЛА сигнала на фоне различных помех. Наибольшей интенсивно-
стью обладают помехи от неподвижных наземных объектов в радиусе 35—40 км
от радиолокатора. Аппаратурные средства борьбы с этими помехами включают
устройства управления ДН, формирующие при соответствующей комбинации сиг-
налов, принятых по облучателям антенной системы, «провалы» в ДН; ВАРУ,
уменьшающее усиление на малых дальностях; устройства запирания приемного
тракта на время приема сигналов, приходящих с указанных дальностей, и др.
Эффективным средством выделения сигналов движущихся целей (ЛА) на
фоне отражений от неподвижных объектов являются устройства СДЦ.
Они выполняются как по простейшей аналоговой схеме череспериодного од-
нократного вычитания, так и по более сложной и эффективной цифровой схеме с
квадратурными каналами, содержащими двухкратные устройства череспериодной
компенсации. Коэффициент подавления помех от неподвижных объектов в сов-
ременных устройствах СДЦ достигает 40 дБ. Для борьбы со слепыми скоростями
применяют смену частот повторения, позволяющую вывести первую слепую ско-
рость за пределы диапазона возможных радиальных скоростей ЛА. Устройства
СДЦ способствуют также подавлению помех от метеообразований. Однако пере-
мещение этих образований не позволяет получить при СДЦ коэффициент подав-
ления отраженных от них сигналов более 15 дБ. Другим средством борьбы с от-
ражениями от метеообразований является применение круговой или эллиптичес-
кой поляризации. Однако при этом уменьшается мощность полезных сигналов
на 6—8 дБ, а следовательно, дальность действия радиолокатора сокращается
примерно на 30%.
Для борьбы с помехами в ПРЛ применяют адаптивные устройства, которые
определяют распределение помех в зоне действия радиолокатора и управляют
ДН, коэффициентом усиления приемника и стробированием последнего в зави_
симости от наличия и интенсивности помехи в данном элементе разрешения ра
диолокатора, а также определяют области целесообразного использования СДЦ
81
Кроме того, в АВС входят устройства для борьбы с несинхронными помехами.
В таких устройствах используют корреляционные методы, когда достоверность
сигнала определяется по совпадению временных положений импульсов, напри-
мер в смежных периодах повторения.
Выходными устройствами АВС являются обнаружители сигналов часто со
схемами, позволяющими стабилизировать вероятность ложной тревоги на уров-
не 10_(!.
Вероятность правильного обнаружения в рассматриваемых радиолокаторах
составляет 0,8—0,9. Кроме обработки сигналов, АВС часто выполняет функцию
выделения из обрабатываемых сигналов информации о метеообразованиях и
преобразования ее в двоичный код для передачи в центр УВД. Аппаратура выде-
ления сигналов в современных первичных радиолокаторах представляет собой
специализированный цифровой процессор.
Синхронизатор предназначен для запуска в определенной очередности ос-
новных устройств радиолокатора: передатчика, устройства ВАРУ в приемнике,
индикатора, а также для соответствующих переключений режимов радиоло-
катора, например смены частот повторения.
Элементы синхронизатора могут входить в аппаратуру первичной обра-
ботки информации АПОИ или быть связанными с ее устройствами, что, в
частности, необходимо для поддержания периода повторения равным времени
задержки сигналов в устройстве СДЦ.
Тракт трансляции сигналов преобразует входные сигналы АВС в форму,
удобную для передачи на КДП для индикации или дальнейшей обработки в ап-
паратуре АПОИ в центре УВД. В простейшем случае в состав этого тракта вхо-
дят сумматоры, где объединяются некоторые сигналы перед их трансляцией, и
усилители сигналов, включенные на входе кабельной линии связи. В радиоло-
каторах, входящих в состав АС УВД, в таких устройствах информация преобра-
зуется в цифровой код. Эти устройства могут схемно или конструктивно входить
в АВС.
Контрольный индикатор служит для наблюдения радиолокационного изоб-
ражения при наладке и во время эксплуатации радиолокатора и является сред-
ством визуального контроля функционирования последнего.
Таблица 3.7
Основные параметры зарубежных первичных радиолокаторов
Параметр 1 ARSR-3 (США) I i LAR-II 1 (Нидерланды) SRE-M5 (ФРГ) TR-23K , (Франция) 1 . _ । TR-23MA 1 (Франция) 1 SRE-A8 (ФРГ) ATCR-33 (Италия)
Максимальная дальность (ЭОП-3 м2) 445 370 370 296 148 122 102
Максимальный угол места, градус 40 45 40 40 40 40 40
Период обзора, с 6; 12 5; 12 12 4 4 4 4; 5
Ширина ДН в горизонтальной плоскости, градус 1,25 i ,5 1 ,05 1 ,7 1 ,7 1 ,35 1 ,45
Длина волны, см 23 23 23 23 23 20 10
Излучаемая мощность. МВт 5,0 0,15 2,5 3,5 0,5 0,8 0,5
Длительность импульса. мкс 2,0 34; 68* 2,5 1 ,6 1,3 1,0 1 ,0
Частота повторения. Гц 350 350; 660 400 750 750 1000 1000
Размеры отражателя антен- ны, м: длина 12,8 10,5 14,5 9,0 9,0 5,0 5,5
высота 6,9 7,0 9,0 5,0 5,0 3,5 2,5
* Используется сжатие импульса, обеспечивающее разрешающую способность по
дальности 90 м.
82
Система встроенного контроля предназначена для непрерывной автоматиче-
ской проверки основных параметров радиолокатора, сигнализации об отказе от-
дельных его элементов и указания места отказа. В наиболее совершенных радио-
локаторах встроенным контролем охвачены все элементы радиолокационного
тракта, за исключением антенной системы.
Основные параметры некоторых зарубежных первичных радиолокаторов при-
ведены в табл. 3.7.
3.7. СТРУКТУРНАЯ СХЕМА, ОСОБЕННОСТИ И ПАРАМЕТРЫ
ВТОРИЧНЫХ РАДИОЛОКАТОРОВ
Структурная схема ВРЛ — многоканальная. В зависимости от выполняе-
мых функций выделяют основной канал и канал подавления сигналов боковых
лепестков. Кроме того, в соответствии с диапазоном рабочих частот и принятым
форматом сигналов имеются два канала приема: канал УВД,, работающий на час-
тотах отечественного диапазона, и канал RBS, работающий на частотах между-
народного диапазона. Для передачи сигналов запроса на частотах отечественного
диапазона используют передатчики первичного радиолокатора, работающего сов-
местно с данным ВРЛ. В последнем случае сигналы боковых лепестков подавля-
ются только по ответу.
В состав структурной схемы ВРЛ входят следующие основные элементы
(рис. 3.18): антенная система АС; фидерный тракт ФТ; передающие устройства
основного канала Прд-0 и канала подавления Прд-П; приемные устройства
ПУ RBS и ПУ УВД; устройство выбора режимов УВР; синхронизатор Сх и
встроенная система контроля ВСК. Оборудование радиолокатора связано ка-
бельной линией с аппаратурой АКДП, установленной на КДП.
Антенная система предназначена для формирования в общем случае трех
ДН в горизонтальной плоскости: основной (или суммарной), подавления боко-
вых лепестков по запросу и подавления боковых лепестков по ответу (или раз-
ностной диаграммы). Соответственно в состав АС входят антенны: основная АО,
подавления по запросу АПЗ и подавления по ответу АПО. Однако схо-
жесть форм ДН антенн АПЗ и АПО поз-
воляет объединить их в одно устройство.
Дальнейшее упрощение антенной систе-
мы достигается использованием антен-
ных решеток, которые при соответст-
вующем питании обеспечивают получе-
ние как суммарной, так и разностной
ДН. В таком варианте функции всех
трех антенн может выполнять общее ан-
тенное устройство.
Основная антенна формирует в го-
ризонтальной плоскости ДН шириной
2—2,5°. Ширина этой ДН определяет
разрешающую способность и точность
ВРЛ по азимуту. В вертикальной плос-
кости ДН имеет ширину 40—50°. Антен-
ны подавления формируют в горизон-
тальной плоскости ДН, охватывающие
все боковые лепестки ДН основной
антенны. Поскольку диаграмма АО
обычно излучает часть энергии и в зад-
нюю полусферу, ДН антенн подавления
должна также охватывать и задние ле-
пестки основной антенны. Одна из
основных задач при формировании ДН
антенн подавления — подбор уровня
излучаемых или принимаемых сигналов,
необходимого для качественной работы
систем подавления.
Рис. 3.18. Обобщенная структурная
схема вторичного радиолокатора
83
При обзоре воздушного пространства АС вращается в горизонтальной плос-
кости с частотой 3—15 об/мин с помощью отдельного механизма привода антен-
ны МПА. Так как ВРЛ обычно работает в общей радиолокационной системе с
первичным радиолокатором ПРЛ, синхронность вращения антенных систем обо-
их радиолокаторов достигается путем передачи сигналов угловой информации на
МПА от устройств первичного радиолокатора. Часто антенную систему ВРЛ
устанавливают непосредственно на антенне первичного радиолокатора. В таком
варианте отдельного МПА не требуется, и вращение обоих антенн осуществляется
от общего привода.
Наиболее часто применяют АС в виде горизонтальных решеток, составлен-
ных из рупорных излучателей, помещенных в фокальной плоскости параболи-
ческого отражателя. Размеры решетки зависят от требуемой ширины ДН в го-
ризонтальной плоскости. В трассовых ВРЛ используют антенные решетки длиной
8—9 м, в ВРЛ с меньшей дальностью размеры решетки сокращаются до 3—4 м.
Антенны ВРЛ должны излучать и принимать сигналы как горизонтальной
(при работе радиолокатора в режиме «УВД»), так и вертикальной (в режиме
«RBS») поляризации и работать на частоте 1030 МГц при передаче в международ-
ном диапазоне волн и на частотах 1090 и 740 МГц (средняя частота) в режиме
приема.
Фидерный тракт состоит из антенного переключателя АП и фидерных уст-
ройств ФУ. Антенный переключатель должен обеспечивать развязку передаю-
щего и приемного трактов на 60—80 дБ, обладать малыми потерями (1,1 —1,3 дБ)
и работать при мощности излучения 20—30 кВт. Время срабатывания АП поряд-
ка единиц наносекунд. В состав ФУ входят вращающиеся переходы, обеспечива-
ющие передачу сигналов между сканирующей АС и основной аппаратурой ВРЛ.
Конструктивно к ФТ относятся фильтры Ф, служащие для разделения по часто-
те сигналов каналов УВД и RBS. В фидерный тракт входят аттенюаторы, с по-
мощью которых подбирается уровень мощности при регулировке системы подав-
ления сигналов боковых лепестков радиолокатора. Сравнительно низкие частоты
ВРЛ (максимальная частота соответствует длине волны 30 см) позволяют вы-
полнять ФТ на коаксиальных линиях.
Передающее устройство состоит из двух идентичных по схеме передатчиков,
работающих на частоте 1030 МГц (международный диапазон). Передатчик основ-
ного канала Прд -О вырабатывает сигнал, состоящий из импульсов Рг и Р3 и
кодовой группы сигнала запроса, а передатчик канала подавления Прд-П выра-
батывает сигнал, содержащий только импульсы Р2, необходимые для работы уст-
ройства подавления в бортовом ответчике.
Передатчики ВРЛ выполняют по схеме с внешним возбуждением. Задающий
генератор ЗГ, служащий также и гетеродином приемного устройства ПУ RBS,
представляет собой маломощный генератор со стабилизацией частоты с помощью
кварцевого резонатора и следующий за ним умножитель частоты, например, в во-
семь раз. Усилитель мощности УМ передатчика может быть выполнен на пролет-
ном клистроне или другом электронном приборе. Передатчики с усилительными
пролетными клистронами обеспечивают выходную мощность в несколько десятков
киловатт. В полупроводниковых вариантах передатчиков применяют усилитель-
ные модули на мощных транзисторах с выходной мощностью 300—400 Вт. Изме-
няя число модулей, можно варьировать мощностью ВРЛ, а следовательно, и даль-
ностью его действия. Модульная конструкция способствует повышению надежно-
сти ВРЛ, так как выход из строя одного из модулей приводит только к снижению
дальности действия радиолокатора. Так, например, при восьми модулях отказ
одного из них уменьшает мощность примерно на 0,5 дБ и сокращает дальность
действия примерно на 6%.
Модуляторы М передатчиков ВРЛ выполняют по обычным схемам. В частно-
сти, возможно управление питанием усилителей мощности или запирание про-
межуточных каскадов усиления. В рассматриваемой обобщенной схеме ВРЛ
в состав передатчика условно включен шифратор Ш, вырабатывающий кодовые
последовательности для модуляции сигналов запроса. Управление кодами осу-
ществляется устройством выбора режимов УВР.
Приемный тракт ВРЛ состоит в общем случае из четырех приемников, об-
разующих два приемных устройства: ПУ RBS — для сигналов международного
диапазона (1090 МГц) и ПУ УВД — для сигналов отечественного диапазона
(730—750 МГц). В каждый из ПУ входят два приемника: основного канала ПО
84
1
и канала подавления боковых лепестков по ответу ПП. Приемники ПУ RBS и
ПУ УВД практически идентичны, выполнены по супергетеродинной схеме и от-
личаются только высокочастотной частью, рассчитанной на определенный частот-
ный диапазон, и схемой преобразователя частоты. В качестве гетеродина в при-
емниках ПУ RBS используется ЗГ передатчика Прд-О, а в ПУ УВД имеется об-
щий для приемников ПО и ПП гетеродин.
Приемники обладают чувствительностью около 87 дБ (относительно 1 Вт)
и коэффициентом шума около 8. Значение промежуточной частоты (ПУ RBS)
60 МГц, полоса пропускания УПЧ около 10 МГц. УВЧ в приемном тракте ВРЯ
отсутствует, что объясняется большим уровнем сигналов ответа. Эффективная
ВАРУ применяется только в приемниках основного канала для предупреждения
амплитудного ограничения сигналов, поступающих с малых дальностей, кото-
рое может нарушить работу устройств подавления, В приемном тракте прини-
маемые сигналы стробируются по дальности для исключения отметок от целей,
находящихся от ВРЛ на расстояниях, превышающих расчетную дальность дей-
ствия первичного радиолокатора, совместно с которым работает данный ВРЛ.
На выходе каждого из ПУ включено устройство ПБЛО, где реализуется амп-
литудный или фазовый метод подавления ложных сигналов, а полезные сигналы
преобразуются в форму, удобную для трансляции на КДП.
Синхронизатор управляет запуском УВР и передатчиков, а также ВАРУ
в приемнике, и может представлять собой автономное устройство,
генерирующее последовательность синхроимпульсов с постоянным периодом
повторения, или устройство преобразования синхросигналов, поступающих с
ПРЛ, совместно с которым работает ВРЛ. Частота следования поступающих от
ПРЛ синхроимпульсов при определении дальности по сигналам ВРЛ уменьшает-
ся в последнем в два-три раза, что позволяет устранить неоднозначность опре-
деления дальности. Неоднозначность может возникнуть из-за того, что дальность
действия ВРЛ значительно больше, чем у ПРЛ. Синхронизатор управляет также
бланкированием в приемном тракте ВРЛ сигналов ответа за пределами расчет-
ной дальности действия ПРЛ. Таким образом устраняются ложные отметки от
целей, находящихся на больших дальностях, на общих индикаторных устройст-
вах обоих радиолокаторов.
Встроенная система контроля предназначена для непрерывной автоматичес-
кой проверки параметров ВРЛ и выдачи сигналов о состоянии аппаратуры на
КДП, а также для переключения аппаратуры на резервный комплект в аварий-
ных ситуациях. С целью повышения надежности резервируются все основные эле-
менты ВРЛ, за исключением антенной системы. Соответственно контрольные сиг-
налы КС выдаются (и принимаются от них) на все основные элементы радиолока-
тора.
Аппаратура КДП выполняет функции декодирования сигналов ответов, по-
давления несинхронных помех и преобразования сигналов в форму, требуемую
для внешних устройств (например, индикаторных). Декодируют информацию де-
шифраторы Дш, рассчитанные на коды, используемые в системах вторичной ради-
олокации. Декодированные сигналы поступают на устройство подавления несин-
хронных помех УПНП, которое селектирует сигналы по частоте повторения.
Все сигналы, частоты повторения которых не соответствуют частоте повторения
Таблица 3.8
Основные параметры зарубежных вторичных радиолокаторов
Параметр CPS-390 (Велико- британия) PTR-826 (Велико- британия) RS-770-200 (Франция) AN/UPX- 50 (США)
Излучаемая мощность, кВт 2 10 5 0,2-2
Частота повторения, Гц Ширина полосы пропускания приемки- 150 ЮОО 200-450 Нет св. Нет св.
ка. МГц 10 11 10 8
Чувствительность приемника, дБ/Вт - 115 — 115 -118 —87
85
импульсов запроса ВРЛ, подавляются этим устройством. В тех случаях, когда
ВРЛ используется совместно с ПРЛ, вместо АКДП декодирование и дальнейшее
преобразование сигналов производятся в общей для обоих радиолокаторов ап-
паратуре первичной обработки информации.
Устройство трансляции сигналов усиливает и преобразует полученные от
УПНП видеосигналы перед трансляцией их на АПОИ.
Основные параметры некоторых зарубежных ВРЛ приведены в табл. 3.8.
3.8. ВЫНОСНАЯ АППАРАТУРА ОБРАБОТКИ И ОТОБРАЖЕНИЯ
РАДИОЛОКАЦИОННОЙ ИНФОРМАЦИИ
АПОИ решает задачу выделения полезной информации, определения коорди-
нат ЛА по данным как первичного, так и вторичного радиолокаторов и представ-
ления информации в виде, удобном для передачи на КДП или в вычислительный
комплекс системы УВД. При этом обнаружение полезных сигналов выполняется
устройством обработки, входящим в состав радиолокатора.
В обзорных радиолокаторах применяется АПОИ отечественного производст-
ва, а также аппаратура (экстрактор) типа СХ-1100 шведской фирмы «Stansaab»,
поставляемая для АС УВД «Теркас». Размещают АПОИ вместе с оборудованием
первичного и вторичного радиолокаторов. Аппаратура выполнена на цифровых
процессорах или специализированных ЭВМ. Для связи АПОИ с центром управ-
ления применяют узкополосные кабельные линии, а при большом удалении от
центра управления — широкополосные радиорелейные линии.
Аппаратура АПОИ состоит из каналов КП и КВ соответственно первичного
и вторичного радиолокаторов, общего канала КО, синхронизатора Сх и встроен-
ной системы контроля ВСК (рис. 3.19).
Канал ПРЛ содержит селектор видеосигналов СВ, в котором из смеси сигна-
лов, поступающих от первичного радиолокатора ПРЛ, выделяются сигналы, со-
ответствующие отражениям от ЛА или метеообразований. После устройства кван-
тования Кв преобразованные в цифровую форму сигналы от целей подаются на
аппаратуру определения координат ОКП первичного канала. Коды, соответ-
ствующие координатам ЛА, поступают в суммирующее устройство СУ об-
щего канала. Квантованные сигналы отражений от метеообразований направля-
ются на построитель карты метеобразований КМ, где определяются границы этих
образований и формируются соответствующие им сигналы для последующей
передачи в связанную с АПОИ аппара-
Рис. 3.19. Обобщенная структурная
схема аппаратуры первичной обра-
ботки информации
туру. Эти сигналы подаются на буфер-
ное запоминающее устройство ЗУМ, а
с него в блок памяти БП общего канала.
Канал ВРЛ имеет дешифратор Дш,
в котором выделяется информация, со-
держащаяся в сигналах, полученных от
вторичного радиолокатора ВРЛ. После
проверки кодов в устройстве ПК коор-
динатная информация направляется в
аппаратуру определения координат
ОКВ. Данные о координатах ЛА пода-
ются затем на суммирующее устройство
СУ общего канала. Дополнительная ин-
формация, извлеченная из сигнала от-
вета (бортовой номер ЛА. его высота
и др.), поступает на буферное запоми-
нающее устройство ЗУД вторичного
канала, а затем в БП.
Общий канал объединяет в сумми-
рующем устройстве СУ информацию,
полученную от КП и КВ, и формирует
данные о координатах ЛА на основании
единичных измерений первичного и
вторичного радиолокаторов. В блоке
86
памяти БП накапливается вся информация, вырабатываемая АПОИ (коорди-
наты ЛА, данные, полученные во вторичному каналу, а также данные о метео-
обстановке). Эта информация в выходном устройстве ВУ приводится к виду,
удобному для дальнейшего использования и для передачи по линиям тран-
сляции данных ЛТ.
Синхронизатор вырабатывает синхроимпульсы СИ, управляющие временными
процессами во всех устройствах АПОИ.
Встроенная система контроля служит для непрерывного автоматического
контроля функционирования рассматриваемой аппаратуры.
Аппаратура отображения информации представляет собой выходное звено
системы УВД. от качества работы которого зависит эффективность действий дис-
петчеров УВД. Применяемые для отображения информации индикаторы отли-
чаются по принципу работы, виду выдаваемой информации, типу развертки и ря-
ду других признаков.
Наибольшее распространение получили индикаторы темновые, телевизион-
ного типа и синтезированных сигналов.
Темновые индикаторы на ЭЛТ с длительным послесвечением предназначены
для отображения аналоговой информации и выполняются в виде ИКО. Поло-
жительные качества этих индикаторов — простота и низкая стоимость, однако
малая яркость и нестабильность изображения ограничивают их применение.
Для повышения информативности темновых индикаторов используют аппара-
туру, позволяющую сформировать цифровой формуляр, в котором отображаются
полученные от ВРЛ данные о ЛА, и привязать этот формуляр к отметке цели на
экране индикатора.
Индикаторы телевизионного типа позволяют существенно увеличить яркость
и стабильность радиолокационного изображения. Однако они требуют специаль-
ных и сложных устройств преобразования информации радиолокационных сигна-
лов в телевизионные, что увеличивает стоимость аппаратуры и усложняет ее
эксплуатацию.
Индикаторы синтезированных сигналов, выполненные на ЭЛТ радиолокаци-
онного типа, отображают информацию, получаемую не непосредственно от радио-
локаторов, а синтезированную ЭВМ. Входящая в состав аппаратуры ЭВМ обра-
батывает информацию от первичного и вторичного радиолокаторов, объединяет и
запоминает ее и по определенной программе выдает на индикатор. Отличитель-
ные особенности индикаторов — высокая разрешающая способность; большая
яркость и универсальность; объединение координатной и буквенно-цифровой ин-
формации, а также возможность управления положением центра отображаемой на
экране области и объединения на экране одного индикатора информации, полу-
чаемой от нескольких территориально разнесенных радиолокаторов. Такие инди-
каторы используют в новых системах АС УВД.
3.9. НОРМЫ НА ПАРАМЕТРЫ ПЕРВИЧНЫХ РАДИОЛОКАТОРОВ
Нормы ICAO регламентируют параметры обзорных первичных радиолокато-
ров, относящихся к группе аэродромных (ниже условно обозначенных АРЛ-А
и АРЛ-Б). Параметры зоны действия установлены для самолетов с эффективной
отражающей поверхностью 15 м2. Оговоренные в документах ICAO параметры
ПРЛ имеют следующие значения:
АРЛ-А АРЛ-Б
Дальность действия, км 46 185
Высота обнаружения, км Угол обзора, градус: 3 24
в горизонтальной плоскости 360 360
в вертикальной » ... . 0.5—30 0,2—30
Вероятность правильного обнаружения .— 0.9
» ложной тревоги . . . . -— ю-7
Погрешность измерения (о):
дальности (большая из величин) . 0.03D или 0.01 D
150 м
87
азимута на максимальной дальности Р,
градус .... 2 0,5
Разрешающая способность: по дальности (большая из величин) 0,01 или —
по азимуту, градус 230 м 4 1,25
Период обзора, с . ’ . 4 10
Нормы СЭВ определяют параметры первичных радиолокаторов, предназна-
ченных для управления воздушным движением в СССР и странах СЭВ, и установ-
лены стандартом СТ СЭВ 2772-80. Основные параметры обзорных ПРЛ должны
соответствовать указанным в табл. 3.9, при этом параметры зоны обзора соот-
ветствуют объектам с эффективной площадью рассеивания 5 м2, вероятности
правильного обнаружения не менее 0,9 для аэродромных и не менее 0,8 для
трассовых радиолокаторов и вероятности ложной тревоги 10-6.
Таблица 3.9
Основные параметры обзорных радиолокаторов (стандарт СТ СЭВ 2772—80)
Параметр ТРЛ-А ТРЛ-Б АРЛ-1 АРЛ-2
Дальность действия, км максимальная 400 250 160 100
на высоте полета 4500 м 240 200 160 100
» » » 1000 м 120 110 90 70
минимальная 5 5 1,5 1,5
Высота обнаружения, км 20 20 12 7
Зона обзора, градус: в горизонтальной плоскости 360 360 360 360
в вертикальной плоскости 45 45 45 45
Погрешность измерения (о) по индика- тору: дальности, м 1000 1000 500 350
азимута, градус 1 1 1 1
Разрешающая способность: по дальности, м 1000 1000 500 350
по азимуту, градус 1,5 1 >5 2 2
Период обновления информации, с 12 12 6 4
Длина рабочей волны, см 23 23 23 или 10 23 или 10
Радиолокаторы должны допускать встраивание вторичного радиолокационно-
го канала и работу как с линейной, так и круговой поляризацией излучаемых
сигналов. Коэффициент эллиптичности при круговой поляризации должен быть
не менее 0,8. От устройств СДЦ, входящих в состав радиолокаторов, требуется
коэффициент подпомеховой видимости не менее 24 дБ. Допустимая неравномер-
ность скоростной характеристики в диапазоне скоростей от 50 до 3000 км/ч не бо-
лее 10 дБ.
Сигнал углового положения антенны радиолокатора должен выдаваться в ви-
де : 4096 импульсов на один оборот антенны, а также импульса «Север» или 6432
импульсов на один оборот антенны, а также двух сигналов, определяющих по-
лярность (изменение полярности) функций sin QBpZ и cos QBp^ где ^вр — уг-
ловая скорость антенны.
Стандартом предусмотрены следующие нормы на внеполосные каналы излу-
чения и приема: уровень излучений вне рабочей полосы частот в диапазоне % ±
± 30% на 60 дБ ниже уровня мощности излучения на основной частоте /0, чув-
ствительность каналов побочного приема ниже чувствительности основного кана-
ла на 50 дБ для зеркального канала, а для остальных каналов в диапазоне /0±
± 30% на 70 дБ или более.
88
Требуемое время наработки на отказ не менее 500 ч при времени восстанов-
ления 30 мин. Технический ресурс радиолокаторов не менее 80 000 ч в течение
10 лет эксплуатации и хранения.
Аппаратура обзорных радиолокаторов должна выполнять свои функции и
сохранять параметры в пределах установленных стандартом норм при рабочих
температурах от — 10 до +50 °C при работе внутри помещений, а при работе вне
помещений — при температурах от — 40 до +50 °C. Кроме того, аппаратура
должна сохранять свои параметры после прекращения воздействия предельных
температур от — 50 до + 65° С, а также при относительной влажности воздуха до
98% при температуре до +25 °C. Антенные системы радиолокаторов должны вы-
полнять свои функции при воздействии воздушного потока со скоростью до 30 м/с
и выдерживать вне эксплуатации воздействие воздушного потока с максималь-
ной скоростью до 50 м/с.
Предусматривается питание радиолокаторов от силовой сети с напряжением
220/380 В при допустимой нестабильности напряжения ± 10% и при частоте
(50±1) Гц.
3.10. НОРМЫ НА ПАРАМЕТРЫ ВТОРИЧНЫХ РАДИОЛОКАТОРОВ
Нормы ICAO регламентируют параметры ВРЛ, приведенные в табл. 3.10.
Кроме того, в документах ICAO оговорен допустимый разброс параметров, фор-
мируемых в радиолокаторе импульсов: кодового интервала между импульсами
и Р3 — ± 0,2 мкс; интервала между импульсами Рх и Р2 — ± 0,15 мкс;
длительности импульсов Plt Р2 и (рис. 3.20) — 0,8 ± 0,1 мкс; длительности
фронта Тф всех импульсов 0,05—0,1 мкс и времени спада тсп (импульсы Р2 и
Р3) — 0,05 — 0,2 мкс.
В двухимпульсных системах подавления основных лепестков по запросу ам-
плитуда импульса Рг в антенне ответчика должна превышать амплитуду импуль-
са Р3 не менее чем на 11 дБ во всех азимутальных углах, кроме тех, которые ох-
ватываются основным лепестком ДН, где амплитуда импульса Рх может превы-
шать амплитуду импульса Р3 не более чем на 1 дБ. В трехимпульсных системах
подавления амплитуда импульса Р2 в антенне ответчика должна быть равна или
быть больше амплитуды импульса Plt принятого по наибольшему боковому ле-
пестку антенны, излучающей импульс Рх, и иметь уровень на 9 дБ ниже амплиту-
ды импульса Рх в пределах желаемого сектора запроса.
Регламентируются следующие допустимые параметры импульсов сигнала
ответа, принимаемого ВРЛ: длительность импульса ти = 0,45 ± 0,1 мкс; дли-
тельность фронта Тф = 0,05...0,1 и спада тсц = 0,05...0,2 мкс; интервал между
временными позициями информационного кода 1,45 мкс. Допуск на временный
интервал для каждого импульса сигнала ответа составляет ± 0,1 мкс. Рекомен-
дуемая скорость передачи сигналов ответа составляет 1200—1500 ответов в се-
кунду.
В запросчике обязательно контрольное устройство для определения и сигна-
лизации отклонений параметров ВРЛ за пределы установленных допусков.
Мощность, излучаемая ВРЛ, обеспечивающая указанные в табл. 3.10 зна-
чения зоны обзора, должна составлять
0,5—1,5 кВт в импульсе в зависимости
от коэффициента усиления антенны,
мощность излучаемого импульса подав-
ления 0,5—9 кВт в зависимости от ши-
рины ДН антенны подавления в верти-
кальной плоскости и коэффициента ее
усиления.
Нормы СЭВ на ВРЛ, регламенти-
рованные стандартом СТ СЭВ 1823—79,
приведены в табл. 3.10.
Вторичный радиолокатор должен
обеспечивать совместную работу с пер-
вичным при поступлении от последнего
импульса запуска, импульса «Север» и
Рис. 3.20. Форма импульсов сигнала
запроса вторичного радиолокатора
(Тинт — интервал между импуль-
сами)
89
Таблица 3.10
Основные параметры вторичных радиолокаторов
Параметр Нормы ICAO СТ СЭВ 1823—79
Дальность действия, км: максимальная 370 120; 200; 400*
минимальная 1,85 2
Зона обзора в вертикальной плоскости, градус 0,5—0,45 0,5—45
Разрешающая способность: по дальности, м Не регламенти- 1000
по азимуту, в единицах ширины ДН рована (HP) 1,2
Ширина ДН в горизонтальной плоско- сти, градус 3,0 2,5
Относительный уровень боковых лепест- ков, дБ —24 - 22
Коэффициент подавления боковых ле- пестков по ответу, дБ HP 70
Диапазон частот, МГц: сигнала запроса, I - международ- ный 1030+0,2 1030±0,2
сигнала запроса, II—стран СЭВ — 835; 837,5;
сигнала ответа, I — международный 1090±3 840 (допуск ±0,3) 1090±3
» » II— стран СЭВ .— 730; 740;
Излучаемая мощность в импульсе Рз. дБ/Вт, не более, в диапазоне: I 52,5 750 (допуск ±1,8) 50
II — 72
Поляризация колебаний в диапазоне: I Вертикальная Вертикальная
II •— Горизонтальная
Максимальная частота повторения, Гц 450 500
Чувствительность приемного устройства (при отношении с/ш=1). дБ/Вт 120 — 122
Относительный уровень побочных излу- чений, дБ 76 —60
Относительная чувствительность кана лов приема, дБ: побочных -60 70
зеркальных нр 50
* Зависит от типа ВРЛ.
сигналов углового положения антенны первичного радиолокатора. Максимальная
допустимая погрешность углового положения электрической оси антенны ВРЛ от-
носительной электрической оси антенны первичного радиолокатора в горизон-
тальной плоскости не более 8' при встроенном варианте и 30' при автономном
От вторичного радиолокатора требуется выдача на аппаратуру декодирования
и обработки сигнала «Видео» по каналу приема на одной из частот 730, 640 и 750
МГц или на частоте 1090 МГц; импульсов кода запроса и импульса «Север»
Регламентируемая вероятность получения достоверной информации не ме-
нее 0,9 при нахождении двух ЛА на одном азимуте с расстоянием между ними
4 — 50 км при интенсивности потока сигналов запроса не более 150 в секунду или
90
при нахождении двух ЛА на одном азимуте с расстоянием между ними более 50 км
и интенсивности потока сигналов запроса не более 450 в секунду.
Стандартом предусматриваются следующие параметры сигналов запроса и
подавления: длительность ти импульсов Рх, Р2 и Р3- (0,8±0,1) мкс (см. рис, 3.20)
при длительностях фронта Тф 0,05 — 0,1 мкс и спада тсп ~ 0,05 — 0,2 мкс,
интервал между импульсами Ру и Р2—(2 ± 0,15) мкс, точность выдерживания ко-
довых интервалов запросных кодов ± 0,2 мкс.
Амплитуда импульсов Р2 должна быть не менее чем на 9 дБ меньше амплиту-
ды импульса Рг в пределах основного лепестка ДН, в остальных секторах ампли
туда импульса Р2 меньше амплитуды импульса PY не более чем на 1 дБ.
Импульсы сигнала ответа по параметрам не отличаются от импульсов сигнала
запроса. Интервалы между импульсами координатного кода, а также этими им-
пульсами и импульсом РК2 и между ключевыми импульсами требуется выдержи-
вать с точностью ± 0,2 мкс. Исключение составляет код ОКИ1, для которого
указанный в стандарте интервал между импульсами РКз и РКИТ равен (8,5 ±
±0,5) мкс; интервал между ключевым импульсом РКИ3 и первой информа-
ционной позицией равен (4±0,2) мкс, а между временными позициями инфор-
мационных импульсов — (4 ± 0,1) мкс.
Аппаратура систем ВРЛ должна иметь наработку на отказ не менее 2500 ч
и технический ресурс 80 000 ч работы в течение 10 лет. В составе ВРЛ обязатель-
на аппаратура встроенного контроля для автоматического контроля работоспо-
собности оборудования и автоматического переключения на резервный комплект
при выходе из строя основного. Оперативный контроль характеристик ВРЛ дол-
жен осуществляться с использованием контрольного ответчика и встроенной
контрольно-измерительной аппаратуры. Предусматривается питание ВРЛ от
трехфазной сети переменного тока с напряжением 220/380 В при недопустимой
нестабильности напряжения ± 10% и при частоте (50± 1) Гц.
Аппаратура должна выполнять свои функции и сохранять параметры в соот-
ветствии с требованиями стандарта при рабочих температурах от — 10 до ±50сС
при размещении внутри помещения и от —40 до ±50 °C — при размещении вне
его, а также после прекращения воздействия предельных температур от —50 до
4’65 °C. На функционировании аппаратуры не должно отражаться увеличение
влажности воздуха до 98% при температуре окружающей среды до ± 25°С. На-
ружные устройства ВРЛ должны выдерживать воздействие воздушного потока
со скоростью до 30 м/с в рабочем состоянии и до 50 м/с — в нерабочем состоянии.
3.11. ТРАССОВЫЙ РАДИОЛОКАТОР «СКАЛА»
Назначение — получение информации о ЛА, используемой в районных
АС УВД, либо в неавтоматизированных центрах УВД.
Состав радиолокатора: первичный и вторичный радиолокационные каналы
(рис. 3.21). Антенно-фидерные устройства этих каналов, передатчики и приемни-
ки, часть аппаратуры обработки информации и устройств синхронизации устанав-
ливают непосредственно на радиолокационной позиции. Остальное оборудование,
включающее аппаратуру обработки, отображения информации. \ правления
радиолокатором и синхронизации его работы размещается в центре УВД или на
КДП. Связь между аппаратурой, установленной на радиолокационной позиции
и в центре УВД или на КДП. осуществляется по узкополосной кабельной линии
или по широкополосной радиорелейной линии. Основная аппаратура радиолока-
тора. за исключением антенно-фидерного тракта, резервирована. Радиолокатор
питается от трехфазной сети переменного гока напряжением 220/380 В с часто-
той 50 Гц (резервный источник питания — дизель-генератор) Потребляемая
мощность равна 150 кВт
Первичный радиолокационный канал имеет следующие особенности:
двухлучевую ДН (рис 3.22) в вертикальной плоскости, обеспечивающую оп-
тимизацию зоны обзора, разделение зоны обзора на ближнюю и дальнюю:
различные несущие частоты трех приемо-передающих устройства;
амплитудную’и фазовую обработки сигналов в приемных устройствах;
истинно когерентный метод построения устройства СДЦ и цифровой способ
его выполнения:
91
Рис. 3.21. Структурная схема радио-
локатора «Скала»:
ПРК — первичный радиолокационный ка
нал; ВРК - вторичный радиолокационный
канал; АО — основная антенна; ОН — об-
лучатель нижний (канала индикации вы
соколетящих самолетов); ОВ — облуча
толь верхний (основного канала радиоло-
катора); ФТфидерный тракт; Пол—
поляризационные устройства; ВП •— вра-
щающиеся переходы; АП — три антенных
переключателя; БСМ — блок сложения
мощностей; Прд 1, 2, 3 — передатчики;
Прм-1, 2, 3 — приемники; ЦСДЦ — цифро-
вое устройство СДЦ; КУ —- контрольное
устройство (самолетный ответчик типа
СОМ-64); А 1, 2 — антенны контрольного
устройства; АВК — антенна вторичного
канала; ППУ - приемопередающее уст-
ройство, используемое в режиме <RBS»;
Прм - приемное устройство, используемое
в режиме «УВД»; Соп •--= устройство со-
пряжения; КИ контрольный индикатор;
ФЗО — устройство формирования зоны
обнаружения; АПОИ — аппаратура пер
вичной обработки информации; Ком
коммутатор; 1ПРЛ — широкополосная ра
диорелейная линия; УПЛ узкополосная
линия передачи ния радиолокатора;
режим 2 — режим трехканальной
работы, одновременно работают все три
приемопередающих устройства. Частота повторения зондирующих сигналов в
двух каналах равна 330 Гц, а в третьем канале — 1000 Гц. Сигналы с частотой
повторения 1000 Гц обрабатываются устройством СДЦ, зона действия которой
в данном режиме 130 км.
Вторичный радиолокационный канал обеспечивает получение координат-
ной и дополнительной информации от ЛА, оборудованных ответчиками, работаю^
щими в режимах «RBS» или «УВД». Формат сигналов вторичного канала при за-
просе ЛА соответствует нормам ICAO, а при приеме — нормам ICAO или оте*
чественным в зависимости от режима работы бортового ответчика («RBS> или
использование мощных усилитель
ных клистронов в передающих устрой
ствах.
Зона обнаружения первичного ка-
нала разделена на четыре участка
(рис. 3.23), границы которых маркиру-
ются импульсами К1, К2 и Аб- Эти им-
пульсы вырабатываются в контрольном
ИКО и управляют коммутацией в видео-
тракте и аппаратуре обработки инфор-
мации с целью формирования зоны обна-
ружения. Участок / имеет протяжен-
ность 30 — 40 км. На этом участке ин-
формация извлекается из сигналов, по-
лученных по верхнему лучу ДН и про-
шедших обработку в устройстве СДЦ.
Для ослабления сигналов, отраженных
от местных объектов, в приемном тракте
используется ВАРУ.
Участок // соответствует дально-
стям, на которых существенно сказыва-
ются отраженные сигналы от местных
объектов, принимаемые по нижнему ле-
пестку ДН. На этом участке информа-
ция извлекается из сигналов, принятых
как верхним, так и нижним лучами ДН.
Обработке в устройстве СДЦ подверга-
ются только сигналы нижнего луча. Уро-
вень регулировки устройством ВАРУ
сигналов нижнего луча на 10—15 дБ
больше, чем сигналов верхнего луча ДНв
Участок III — промежуточные дальности
обнаружения целей. Здесь используют-
ся сигналы только от верхнего луча и
устройство СДЦ отключается. Участок
IV перекрывает максимальные дально-
сти. На этом участке сигналы поступают
только по нижнему лучу, минуя СДЦ.
Режимы работы первичного канала
радиолокатора:
режим 1 — режим двухканальной
работы, используются два приемо-пере-
дающих устройства, третье находится в
резерве. Частота повторения зондирую-
щих импульсов равна 330 Гце Для
уменьшения влияния слепых скоростей
на эффективность СДЦ применена вобу-
ляция частоты повторения. Дальность
действия СДЦ (390 км) охватывает в
этом режиме почти всю зону обнаруже-
92
Рис. 3.22. Диаграммы направлен-
ности антенной системы (7 — ниж-
ний, 2—верхний лучи) и зона
обнаружения (t?) радиолокатора
«Скала»
Рис. 3.23. Участки зоны обнару-
жения радиолокатора «Скала»:
I — нижняя ДН; 2 — верхняя ДН
«УВД»). Структурная схема и параметры аппаратуры вторичного канала радио-
локатора «Скала» аналогичны автономному ВРЛ типа «Корень-АС».
Основные параметры радиолокатора «Скала»1 имеют следующие значения:
Максимальная дальность действия1 2, км при высоте полета
ЛА:
20 км............................ 400/450
10 км ............................. 340
6 км.................•..*«. 250
Максимальная высота обнаружения, км .... . 20
1 Числитель соответствует ПРК, знаменатель — ВРК^ значение без дроб-
ной черты — обоим каналам.
2 В первичном канале по самолетам (соответственно высотам полета):
Ту-144; Ту-154. Ил-62; Ту-154, ТуЧ34.
93
Сектор обзора, градус:
в горизонтальной плоскости ........................... 360
в вертикальной v . 0,5—45
Вероятность нравплыино обнаружения 0,8
Вероятность ложной ipvHoiii I0*6
Погрешность измерения (о> но индикатору:
дальности, км , . 1000
азимута у гл мцн 40
Погрешность (сп при сьеме информации г .АПОИ:
но дальности м. на ржх гоннии.
до 250 км ... . . ................. 250
более 250 км . . .. о . ................. 300
по азимуту, угл мни.................................... 8
Разрешающая способность по индикатору:
по дальности, м ... .... .................1000
по азимуту на дальности более 100 км, град . 2,5/3,5
Разрешающая способное^» прм съеме информации с
АПОИ:
по дальности, м....................................... 650
по азимуту на дальности более 100 км, градус 2/3,5
Период обзора, с.........................................10 иля 20
Коэффициент подавления сигналов неподвижных целен
при СДЦ. дБ..............................................40/—
Антенно-фидерный тракт первичного канала состоит из антенны, формирую
щей заданные ДН, и фидерного тракта, в который входят коммутационные, рас-
пределительные и разделительные устройства.
Антенна первичного канала параболического типа имеет рефлектор разме-
ром 15Х 10,5 м и два рупорных облучателя: нижний служит для формирования
верхнего луча ДН, а верхний — для формирования нижнего луча ДН. Форма
ДН в вертикальной плоскости — coses2 0, где 0 — угол места. Включенные в
фидерный тракт поляризационные устройства позволяют плавно изменять поля-
ризацию излучаемых колебаний от линейной до круговой, что способствует умень-
шению интенсивности сигналов, отраженных от метеообразований.
Антенна первичного канала имеет следующие основные параметры:
Ширина ДИ в горизонтальной плоскости на уровне 3 дБ
от максимума, градус..................................1+0,15
Коэффициент усиления, дБ.
нижнего луча ................. 36
верхнего т « 35
Относительный уровень боковых лепестков, дБ -20
Антенна вторичного канала, аналогичная антенне ВРЛ типа «Корень-
AC». установлена над рефлектором параболической антенны первичного канала.
Обе антенны имеют общий привод вращения и помещены под радиопрозрачным
к\ полом-обтекателем для уменьшения ветровой нагрузки и защиты от атмосфер
пых воздействий. Антенна вторичного канала обеспечивает сектор подавления
сигналов по боковым лепесткам в пределах 0 — 360е на дальностях свыше 5 км
Фидерный тракт содержит: вращающиеся сочленения, через которые осу
ществляется передача высокочастотной энергии от аппаратуры радиолокатора к
совершающим круговое движение антеннам радиолокатора; блок сложения мощ-
ностей передатчиков, антенный переключатель для развязки приемного и пере-
дающего трактов и вспомогательные устройства, служащие для подключения
контрольно-измерительной аппаратуры.
Передающее устройство первичного канала предназначено для генерации
мощных высокочастотных импульсов, питающих антенну радиолокатора, а так
же формирования сигналов для приемных устройств и аппаратуры обработки
сигналов
Три передатчика, входящих в передающий тракг. аналогичны по структуре
«ой схеме, но отличаются несущей частотой, мощностью и частотой повторения
94
вырабатываемых колебаний. Сигналы несущей частоты получаются в результа
те преобразования частоты задающего генератора промежуточной частоты, име
ющего кварцевую стабилизацию. Этот генератор служит также источником ко
герентных колебаний при СДЦ. В качестве усилителя мощности использован
усилительный клистрон, периодически опираемый с помощью модулятора. Мо
дулятор с полным разрядом накопителя выполнен в виде пяти отдельных модулей,
включенных параллельно.
Основные параметры передающего устройства имеют следующие значения-
Импульсная мощность, МВт.................. 3,6
Длительность импульса, мкс 3,3±0,3
Частота повторения импульсов, Гц 310,5; 323; 333; 375;
931,5; 969 и 1000
Приемное устройство первичного канала усиливает принимаемые сигналы
преобразует их в форму, удобную для дальнейшей обработки-, а также ослабляет
отраженные от метеообразований сигналы.
В состав приемного устройства входят три двухканальных приемника, ани*
логичных по схеме, но работающих на разных несущих частотах. Один канал
приемников используется для приема сигналов по верхнему лучу, а второй по
нижнему лучу ДН Выходные сигналы промежуточной частоты подаются с при-
емников на устройство СДЦ, а видеосигналы — на формирователь зоны обнару-
жения
Для стабилизации частоты ложных тревог в приемниках применено сжатие
динамического диапазона отраженных от метеообразований сигналов до уровня
собственных шумов приемника в логарифмическом видеоусилителе. Исключение
постоянной составляющей, прошедшей через логарифмический усилитель сигна-
лов, достигается использованием дифференцирующего звена. Динамический дна
пазон, требуемый для сохранения контрастности изображения на ИКО и устра
нения снижения вероятности обнаружения, связанного с логарифмическим ежа
тием, восстанавливается в усилителе с антилогарифмической амплитудно-чаепп
ной характеристикой. Эти элементы составляют схему подавления, которая
включается дистанционно по желанию оператора.
Приемное устройство имеет следующие основные параметры:
Коэффициент шума, дБ................................. 4,8
Промежуточная частота, МГц........................ . 35
Ширина полосы пропускания, МГц . .................O,6ztOJ
Коэффициент подавления сигналов, дБ:
по зеркальному каналу _........................ 60
от метеобразований..................................15-20
Динамический диапазон, дБ:
амплитудного канала................................ 20
когерентного канала ........ 42
Цифровое устройство СДЦ имеет два квадратурных канала. Опорные напря
жения на фазовые детекторы подаются от стабилизированного с помощью квар
цевого резонатора генератора промежуточной частоты передающего устройства
со сдвигом по фазе друг относительно друга на 90°. Фазовые детекторы включены
на входе усилителя промежуточной частоты (когерентного канала) приемника
Видеосигналы с фазовых детекторов преобразуются в восьмиразрядный пнф
ровой код и поступают на цифровую схему череспериодной компенсации, а гяк
же на схему подавления сигналов, отраженных от метеообразований. Затем сиг
налы вновь преобразуются в аналоговую форму и направляются в устройство
формирования зоны обзора.
Устройство СДЦ имеет следующие основные параметры
Дальность действия, км. при частоте повторения:
330 Гц . 130
1000 Гц . . .....................................390
Коэффициент подавления сигналов от неподвижных целей. дБ 40
95
112. ТРАССОВЫЙ РАДИОЛОКАТОР ATCR-22
Назначение — определение дальности и азимута ЛА с выдачей информации
в АС УВД «Теркас». При использовании в составе системы «Теркас» на радиоло-
кационной позиции, кроме основного оборудования радиолокатора, устанавлива-
ют сопряженный с ним ВРЛ типа <Корень-АС», сдвоенный комплект АПОИ,
а также устройства трансляции информации в центр управления.
Состав: антенная система, два основных блока: приемник-процессор и пере-
датчик, а также оборудование, предназначенное для питания радиолокатора,
контроля и управления, кондиционирования и других вспомогательных целей.
Все блоки радиолокатора резервированы, что дополнительно обеспечивает воз-
можность работы радиолокатора в двухчастотном (двухканальном) режиме. Ра-
диолокатор ATCR-22. за исключением магнетрона и тиратрона передатчика, вы-
полнен на полупроводниковых приборах. Обработка видеосигналов осуществля-
ется цифровым процессором.
Оборудование радиолокатора размещают в стационарном помещении, над
которым устанавливают антенную систему. Информация в центр УВД трансли-
руется по кабельной (узкополосной) или радиорелейной (широкополосной) ли-
нии. Радиолокатор питается от трехфазной сети переменного тока с напряжением
220/380 В и частотой (50±5) Гц через стабилизатор напряжения. Допустимая не-
стабильность напряжения сети ± 10%.
Основные особенности:
двухлучевая ДН в вертикальной плоскости (рис.З 24), нижняя часть которой,
соответствующая малым углам места, автоматически оптимизируется с целью
уменьшения помех от местных объектов;
большой динамический диапазон приемного тракта, обеспечиваемый мало-
шумящим УВЧ и адаптивным аттенюатором помех и способствующий повыше-
нию эффективности СДЦ;
квадратурная цифровая СДЦ с устранением слепых скоростей;
устройство подавления метеопомех, которое включается автоматически по
сигналам датчика метеопомех;
автоматический выбор с помощью адаптивного датчика помех, видеосигна-
лов, прошедших или не прошедших обработку в устройстве СДЦ;
постоянство вероятности ложных тревог в обнаружителе радиолокатора;
расширение зоны обнаружения (рис. 3.25) путем перехода на двухканаль-
ную работу с разносом несущих частот зондирующих сигналов.
Основные параметры радиолокатора ATCR-22 имеют следующие значения:
Максимальная дальность действия1, км:
в одноканальном варианте ..........................
в двухканальном » .......................
Максимальная высота обнаружения, км....................
Сектор обзора, градус:
в горизонтальной плоскости ........................
в вертикальной » .......................
Вероятность правильного обнаружения....................
» ложной тревоги.................................
Длительность импульса, мкс............................
Ширина основной ДН в горизонтальной плоскости, градус
Период обзора, с.......................................
Несущая частота, МГц .... -................
Коэффициент подавления сигналов неподвижных целей
при СДЦ, дБ ........
Потребляемая мощность, кВА:
без системы охлаждения ............................
с системой »
Условия нормальной работы аппаратуры:
температура, °C . .........
366
397
30
360
0—40
0,9
10-»
3
1,2
10
1240—1355
39
22
24,75
0...+50
1 По цели с ЭОП 10 м2.
96
Рис. 3.24. Диаграмма направ-
ленности антенны типа G-14
в вертикальной плоскости:
/ — основная ДН; 2 — дополнитель-
ная ДН (G — коэффициент усиле-
ния)
Рис. 3.25. Зона обнаружения
радиолокатора ATCR-22:
/, 4 — в одноканальном режиме; 1,
3 — в двухканальном режиме: /,
2 — дополнительная ДН; 3, 4 —
основная ДН
влажность, %, при температуре:
35° С............................................... 95
35—50° С............................................... 80
Условия нормальной работы антенной системы:
температура, °C........................................—40... + 70
влажность, % . .............................до 100
Максимальная допустимая скорость ветра (при невраща-
юшейся антенне), м/с..................................... 21
Антенно-фидерный тракт состоит из антенны типа G-14, формирующей две
ДН в вертикальной плоскости; опорно-поворотного устройства; вращающегося
перехода; устройства съема угловых данных; двухчастотного антенного раздели-
теля (диплексера), обеспечивающего одновременную работу двух передатчиков
на различных несущих частотах и развязку между каналами не менее 20 дБ;
антенного переключателя (дуплексера); волноводного тракта и дополнительных
устройств, необходимых для подключения контрольно-измерительной аппара-
туры и ввода сигналов встроенного контроля радиолокатора
Антенна радиолокатора ATCR-22 имеет два рупорных облучателя,располо-
женных в фокальной плоскости отражателя, выполненного в виде усеченного
4 Зак. 1683
97
От ВРЛ
От PS
Рис. 3.26. Структурная схема радиолокатора ATCR-22:
АС — антенная система; ВФТ — волноводно-фидерный тракт; ВСК — встроенная система
контроля; KI. КН —канал I. II приемника-процессора; Прд — передатчики; М — модулято-
ры; Сх — синхронизатор: ФП—фиксатор помех; ААП — автоматический аттенюатор помех;
УПЧ — усилитель промежуточной частоты; ЦСДЦ — цифровое устройство СДЦ; АЦП —
аналого-цифровой преобразователь; КДН — компенсатор дрейфа нуля АЦП; ЭМ — экстрак-
торы модуля- ПМП — подавители мстеопомех; КП — картограф помех: Сел —• селектор:
АРУ — автоматическая регулировка усиления: ДМ — датчик мстеопомех; Обн — обнаружи-
тель; СУ — суммирующее устройство: КМ —экстрактор контура мстеопомех: ЦАП — циф-
роаналоговый преобразователь: ВРЛ — вторичный радиолокатор; АПОИ — аппаратура пер-
вичной обработки информации
параболоида вращения размерами 13,7X6,8 м. Для уменьшения ветровой на-
грузки отражатель имеет решетчатую конструкцию. Возможно размещение ан-
тенны под радиопрозрачным колпаком-обтекателем. Частота вращения антенны
составляет 6 об/мин. Предусмотрено ручное управление положением антенны в
угломестной плоскости, позволяющее изменять наклон антенны от 0 до +4°.
На отражателе имеется приспособление для крепления антенны ВРЛ. Антенна
может устанавливаться на башне высотой до 25 м.
На входе рупорных облучателей включены устройства с дистанционным уп-
равлением, позволяющие выбирать один из двух видов поляризации излучаемых
колебаний: линейную или круговую.
Антенна формирует основную (нижнюю) диаграмму направленности (ОДН)
и дополнительную (верхнюю) диаграмму (ДДН), угол между максимумами кото-
рых составляет 4,5°(см. рис. 3.24). Форма ОДН в вертикальной плоскости соот-
ветствует cosec20, где 9 — угол места. Крутизна нижней части ОДН (соответст-
вующей малым углам места) может изменяться. Когда максимум ОДН соответ-
ствует углу места 2°, типовые значения крутизны составляют 3,5 дБ/град при
О 0°;"б,5 дБ/град при 0 ~ — Г и 8,5 дБ/град при 0 = — 2°.
Основные параметры антенны следующие:
ОДН ДДН
Ширина ДН по уровню 3 дБ, градус:
в горизонтальной плоскости .... 1,2±0.15 1,2±0.2
в вертикальной » .... 4±0.8 5±0,6
Коэффициент усиления, дБ.................. 36,5 36
Относительный уровень боковых лепестков.
дБ ....................................—26 —28
Передатчик радиолокатора ATCR-22 (рис. 3.26) выполнен на магнетроне,
имеющем систему температурной стабилизации в виде замкнутой петли с цирку-
ляцией водяного пара. Предусмотрена также автоподстройка частоты магнетро-
на. Модулятор передатчика состоит из схемы формирования импульса и разряд-
98
ного устройства. Схема формирования имеет зарядный трансформатор, вторич-
ная обмотка которого шунтируется включаемым при разряде накопителя крем-
ниевым управляемым вентилем. Последний предотвращает колебания высокого
напряжения, подаваемого на магнетрон. Второй передатчик со своим модулято-
ром аналогичен первому и используется при двухчастотной работе радиолокато-
ра или в качестве резервного.
Основные параметры передатчика следующие:
Импульсная мощность, МВт.................................. 1,8
Средняя мощность, кВт................................. 2,25
Длительность импульса, мкс...............................3±0,3
Средняя частота повторения импульсов1, Гц ... . 430±21,5
Относительный уровень побочных излучений на гармониках
несущей частоты, дБ...................................—40
Приемник — цифровой процессор представляет собой сочетание устройств
аналоговой и цифровой обработки сигналов. Аналоговая обработка производит-
ся на высокой и промежуточной частотах в приемнике, а цифровая обработка —
на видеочастоте в процессоре.
Усилитель высокой частоты с коэффициентом шума - 2,7 дБ и коэффициен-
том усиления более 28 дБ размещен в фидерном тракте. Фильтр преселектора
имеет полосу пропускания (7±1,5) МГц и обеспечивает подавление по зеркаль-
ному каналу не менее 60 дБ. Принимаемые сигналы от основного и дополнитель-
ного облучателей усиливаются в отдельных каналах УВЧ. Динамический диа-
пазон УВЧ около 90 дБ.
Фиксатор помех — устройство, которое автоматически комбинирует сигна-
лы, принимаемые по ОДН и ДДН таким образом, чтобы уменьшить влияние
помех от местных предметов и «ангелов». С этой целью зона обзора разбивается
на 64 азимутальных сектора (по 5,6°) и 16 зон по дальности (шириной по 1/32
максимальной дальности или — 11 км). С помощью специальной логики в па-
мять устройства при первых трех оборотах антенны (т. е. во время адаптации
фиксатора помех) заносятся данные о сигналах, превышающих нормальный
динамический диапазон полезных отражений. Эти сигналы считаются помехами,
и данные об их положении по азимуту и дальности запоминаются. Применение
при первых обзорах различных комбинаций сигналов, принятых по ОДН и
ДДН, позволяет также определить ту комбинацию, при которой помехи ска-
зываются наименьшим образом, и использовать ее при дальнейших «рабочих»
обзорах. Так, например, можно получить разностный сигнал от ОДН и ДДН,
при котором на очень малых углах места появляется глубокий провал резуль-
тирующей ДН, позволяющий на определенных азимутах существенно умень-
шить помехи от местных объектов, находящихся в данных азимутальных
направлениях.
Приемник имеет стабилизированный кварцевым резонатором местный гете-
родин, с помощью которого осуществляется преобразование частоты принимае-
мых сигналов на промежуточную частоту, равную (30-1-0,5) МГц.
Усилитель промежуточной частоты выполняет функцию преобразования и
усиления принятых сигналов, а также сигналов, необходимых для АПЧ магнет-
рона и фазирования когерентного гетеродина устройства СДЦ. Усилитель име-
ет АРУ, а также и ВАРУ, которая может быть включена при необходимости.
Коэффициент усиления УПЧ около 60 дБ при динамическом диапазоне 30—50 дБ.
Кроме того, принятые сигналы усиливаются в предварительном УПЧ не менее
чем на 25 дБ (ширина полосы усилителя 12—20 Мгц).
Автоматический аттенюатор помех сравнивает выходные сигналы прием-
ника с фиксированным порогом ограничения, при котором достигается задан-
ная эффективность СДЦ. Диапазон вводимого затухания около 40 дБ. При необ-
ходимости динамический диапазон сигналов уменьшается до значения, обеспе-
чивающего нормальную СДЦ. Такая процедура проводится для каждой ячейки
дальности, и ослабление вводится только в тех ячейках, где помеха превосходит
1 Используются шесть различных периодов повторения, связанные друг
с другом следующим соотношением: 128011 600. 1344/1536/1408/1472.
4* 99
порог ограничения, и только на значение, достаточное для перевода сигнала в об
ласть линейного усиления. Рассматриваемое устройство обеспечивает увеличение
коэффициента подпомеховой видимости при СДЦ примерно на 10 дБ, доводя его
значение до 30 дБ. С аттенюатором помех объединены два фазовых детектора
квадратурных каналов СДЦ.
Цифровая СДЦ с динамическим диапазоном около 40 дБ построена по схеме
двукратного череспериодного вычитания и оперирует с сигналами, прошедшими
аналого-цифровой преобразователь. Десятиразрядный код, соответствующий по-
ступающим с фазовых детекторов сигналам, обрабатывается в двухквадратурных
каналах и с выхода второго вычитающего устройства подается на экстрактор
модуля. Экстракторы модуля предназначены для восстановления амплитуды
сигнала, очищенного от помех, вызываемых отражениями от неподвижных объ-
ектов (т. е. сигнала с выхода устройства СДЦ). а также амплитуды сигнала с по-
мехами (нормального видеосигнала).
Подавите ib метеопомех построен по схеме «логарифмический усилитель —
звено с малой постоянной времени — усилитель с антилогарифмической ампли-
тудно-частотной характеристикой» и предназначен для подавления сигналов от
метеообразований, спектр которых достаточно широк для того, чтобы эти сигна-
лы были отселектированы при СДЦ. В усилителе с логарифмической характе-
ристикой флуктуации сигнала, вызванные помехой, приводятся к постоянному
значению. Постоянная составляющая видеосигнала, обусловленная помехами,
не пропускается схемой с малой постоянной времени. Поэтому в случае приве-
дения флуктуаций сигнала к уровню-; равному уровню собственных шумов при-
емного тракта, обеспечивается постоянство ложных тревог радиолокатора как
при отсутствии метеопомех, так и при их появлении. Усилитель с антилогариф-
мической характеристикой восстанавливает динамический диапазон сигнала, что
необходимо, например, для повышения контрастности изображения на экране
электронно-лучевого индикатора.
При отсутствии метеопомех усилитель с логарифмической характеристикой
вносит потери ~2 дБ и поэтому применять его в этих условиях не рекомендуется.
Картограф помех предназначен для управления селектором, через который
на дальнейшую обработку поступает либо нормальный видеосигнал (при отсут-
ствии помех), либо сигнал, прошедший СДЦ. Картограф помех запоминает поло-
жение областей, где появляются сигналы от местных объектов или от метеообра-
зований, в пределах всей зоны действия радиолокатора и обеспечивает в зависи-
мости от помеховой обстановки выдачу сигнала на селектор. В состав картогра-
фа помех входят датчик помех и блок памяти с 2048 ячейками (соответствуют
64 азимутальным секторам и 32 кольцам дальности). Датчик помех анализирует
~ 200 элементов разрешения в пределах каждой ячейки блока памяти. Входные
сигналы сравниваются с пороговым значением, соответствующим отсутствию
помех. Количество превышений порога запоминается. Если плотность помех
превосходит заранее установленный уровень, через селектор разрешается про-
хождение сигнала с устройства СДЦ.
Датчик метеопомгх представляет собой устройство, которое по сигналам от
картографа помех определяет наличие помех в обрабатываемом видеосигнале.
Если имеются метеопомехи, то включаются подавители этих помех.
Экстрактор контура метеопомех предназначен для обозначения на инди-
каторе границ метеообразований. В его состав входит счетчик, который подсчи-
тывает количество выходных бинарных сигналов датчика метеопомех, соответ-
ствующих наличию помех в данной области. Счетчик имеет 16 384 ячейки, соот-
ветствующие 64 кольцам по дальности и 256 азимутальным секторам. Если сумма
для каждой ячейки превосходит предварительно установленный порог, считает-
ся, что в соответствующем элементе зоны действия радиолокатора имеются по-
мехи от метеообразований. Номер этой ячейки запоминается. Загрузка памяти
экстрактора производится за один оборот антенны. В последующих циклах об-
зора с блока памяти экстрактора выдаются соответствующие сигналы для ука-
зания контура области помех на индикаторах.
Обнаружитель выполнен по цифроой схеме с «движущимся окном» и имеет
два пороговых устройства. Оба порога автоматически выставляются нормализа-
тором ложной тревоги. В нормализаторе используется такое же разделение зоны
действия на 1024 элемента, как и в фиксаторе помех. Сигнал, поступающий на
нормализатор, проходит предварительно через обнаружитель с «движущимся
100
/
окном», подобный основному обнаружителю, но имеющий фиксированные поро-
ги. Нормализатор подсчитывает и запоминает количество ложных тревог в каж-
дом элементе. Если это количество ложных тревог превышает заданное значение
нормализатор увеличивает порог в основном обнаружителе. Так как изменение
углов наклона ОДН, осуществляемое с помощью фиксатора помех, резко умень-
шает количество «ангелов», а это количество, кроме того, изменяется со 'време-
нем, фиксатор помех периодически выключается (примерно на время,-соответст-
вующее 10 об. антенны) для обновления памяти нормализатора ложных тревог.
Пороги основного обнаружителя при этом устанавливаются с помощью вспомога-
тельного устройства памяти, куда записывается распределение «ангелов» по уг-
лам и дальностям без учета изменения угла наклона ОДН.
Аппаратура встроенного контроля предназначена для непрерывной провер-
ки работоспособности радиолокатора и выдачи сигналов об аварии или о необхо-
димости проведения определенных операций при обнаружении ненормального
состояния оборудования. Эта аппаратура позволяет проконтролировать основ-
ные параметры работающего оборудования и осуществить поиск неисправного
элемента. Контролю подвергаются все элементы радиолокатора, кроме антенны.
3.13. АЭРОДРОМНЫЙ РАДИОЛОКАТОР ДРЛ-7С
Назначение — обнаружение и определение координат ЛА в зоне аэропорта,
а также получение информации для служб УВД на частотах международного и
отечественного диапазонов, выделенных для бортовых ответчиков.
Состав радиолокатора— первичный и два вторичных канала. Один вторич-
ный канал работает на частотах, регламентированных ICAO (международный ди-
апазон частот и код сигналов), а второй — на частоте отечественного диапазона
по сигналам, принятого в СССР и странах СЭВ формата. В состав этих каналов
ДРЛ-7С (рис. 3.27) входит антенная система с механизмом привода, фидерный
тракт, передатчики и приемники первичного и вторичного каналов, аппаратура
синхронизации, трансляции и отображения, контрольный индикатор, а также
вспомогательные устройства и устройства питания. Радиолокационная часть ап-
паратуры полностью резервирована. Переход на резервный комплект автомати-
ческий или по командам с блока управ-
ления.
Аппаратуру ДРЛ-7С размещают в
двух автоприцепах и аппаратном кузо-
ве автомобиля. На каждом из прицепов
установлена антенная система радио-
локатора с механизмом привода. В при-
цепах находятся распределительные
щиты, преобразователи и передатчики
вторичного канала. В аппаратной смон-
тирована остальная аппаратура ра-
диолокатора, связанная с аппаратурой,
расположенной на КДП, кабельной ли-
нией длиной до 3 км. На КДП выне-
сен основной индикатор и блок управ-
ления.
Источником питания ДРЛ-7С слу4-
жит трехфазная электросеть перемен-
ного тока с напряжением 380 В и ча-
стотой 50 Гц либо резервная электро-
станция. Аппаратура ДРЛ-7С питает-
ся напряжением 230 В с частотой 400 Гц
от преобразователя.
Режимы работы радиолокатора:
режим «Пассив»—используются все
передатчики и приемники ДРЛ. Аппа-
ратура первичного канала выполняет
функции обзора пространства и получе-
Рис. 3.27. Структурная схема радио-
локатора ДРЛ-7СМ:
Пр- преобразователь напряжения; ПВК--
передающее устройство вторичного кана-
ла; РЩ — распределительный щит; АФУ —
антенна основного канала и фидерный
тракт; МПА - механизм привода антенн;
ЭС — аварийная электростанция; Прд-П —
передатчик первичного канала; ПУ-11. В —
приемные устройства первичного и вто-
ричного каналов: АСТО -- аппаратура
синхронизации, трансляции и отображения;
ФТ - фидерный тракт; РУУ распреде-
лительное и управляющее устройства:
К Л — кабельная линия; УДП командно-
диспетчерский пункт
101
ния сигналов, отраженных от всех целей (подвижных и неподвижных) в пределах
зоны действия этого канала. Аппаратура вторичного канала обеспечивает запрос
и получение ответных импульсов от ЛА, оборудованных ответчиками, работаю-
щими в диапазоне частот, регламентированном ICAO. Кроме того, один из пере-
датчиков этого канала излучает импульсы, с помощью которых в бортовом ответ-
чике подавляются сигналы, излучаемые по боковым лепесткам ДН основной ан-
тенны (подавление по запросу). В приемном устройстве вторичного канала в ре-
зультате обработки ответных сигналов, принятых антеннами ДРЛ, подавляются
сигналы, принятые по боковым лепесткам ДН основной антенны (подавление по
приему);
режим <-СДЦ» — работают все передающие и приемные устройства ДРЛ и
дополнительно включается устройство СДЦ. Поэтому на индикатор проходят
только те сигналы первичного канала, которые отражаются от движущихся це-
лей в том диапазоне дальностей, где действует это устройство:
режим «Актив»-— работает только передатчик пассивного канала, излучаю-
щий парные импульсы запроса бортовых ответчиков, работающих на частотах
оте чественного диапазона. Передатчики вторичного канала отключаются. В этом
режиме приемник пассивного канала обеспечивает обнаружение отраженных
сигналов, а также ответных сигналов вторичного канала, для чего в нем предус-
мотрены устройства декодирования этих сигналов. Приемник вторичного канала
служит для подавления сигналов, принятых по боковым лепесткам основной ан-
тенны.
Основные параметры радиолокатора ДРЛ-7С следующие:
Дальность действия1, км:
при высоте полета 1000 м:
по первичному каналу ............................ 6—50
по вторичному » ............................6—65
при высоте полета 3600 м:
по первичному каналу..............................20—70
по вторичному » ............................20—120
Максимальная высота обнаружения, км........................ 15
Сектор обзора, градус:
в горизонтальной плоскости ........................... 360
в вертикальной » (рис. 3.28) .... 1 —15
Погрешность изменения (о):
дальности, % от масштаба индикатора .... 1,5
азимута, градус.......................................±1,5
Разрешающая способность:
по дальности, % от масштаба индикатора ... 2
по азимуту, градус...................................... 9
Период обзора, с............................................ 6
Потребляемая мощность, кВ-А:
всей аппаратурой....................................... 45
в том числе аппаратурой КДП........................... 10
Условия нормальной работы:
температура, °C........................................—10...+ 50
влажность при температуре +35° С, % 98
Антенная система состоит из основной антенны и антенны подавления, ук-
репленной на отражателе основной антенны, и обеспечивает круговой обзор по
азимуту. Возможен наклон антенной системы в вертикальной плоскости на
угол 5—9°. Частота вращения антенн 10 об/мин.
Основная антенна работает в режиме приема и передачи и представляет собой
усеченный параболоид вращения, облучаемый комбинированным облучателем.
Отражатель антенны выполнен в виде металлической сетки с прямоугольными
ячейками 15x20 мм. Такая конструкция обеспечивает работу антенны при до-
статочно больших ветровых нагрузках. Комбинированный облучатель состоит
1 По самолету Ил-18 при положении антенны под углом места (5 Д 0.5)
102
Рис. 3.28, Зоны обнаружения радиолокатора ДРЛ-7СМ:
а —в пассивном режиме (самолет типа ЛИ-2): о-в активном режиме: / — верхняя антен-
на; 2 — нижняя антенна: 3 — по каналу ответа: 4—по каналу подавления; 5 — по первым
боковым лепесткам
из трех волноводных элементов. Первый волноводный элемент имеет сечение
250 X 150 мм и в зависимости от возбуждаемой в нем волны может излучать
электромагнитные колебания с горизонтальной или вертикальной поляриза-
цией. Остальные два облучателя сечением 90X 200 мм излучают вертикально
поляризованные колебания.
Антенна подавления работает только на прием и представляет собой волно-
водную щелевую решетку из вертикального ряда щелей, прорезанных на широ-
кой стенке волновода. Волновод выполнен из металлической сетки с размерами
ячеек 20X20 мм. Для расширения ДН в вертикальной плоскости имеется коль-
цевой излучатель с экраном. Волновод и кольцевой излучатель питаются колеба-
ниями одинаковой мощности
Значения параметров основной антенны (АО) и антенны подавления (АП):
АО АП
Ширина ДН (рис. 3.29) на уровне 3 дБ от максимума, градус: в горизонтальной плоскости .... 4 80—85
в вертикальной » .... 7 12
Коэффициент усиления, дБ 27.4 10-12
Относительный уровень боковых лепестков. дБ ... — 17 Нет св.
Поляризация излучаемых колебаний в режи- мах: «Пассив», «СДЦ» Горизон- Верти-
«Актив» . . . ...... тальная Вертикаль- кальная То же
ная
Фидерный тракт (рис. 3.30) состоит из передающей и приемной частей. Общий
элемент этого тракта — антенный переключатель, через который колебания пере-
датчика первичного канала поступают на облучатель О-2 основной антенны, а
также на устройство АПЧ. Направленный ответвитель предназначен для под-
ключения измерительных приборов, а ненаправленный — для отвода части
мощности в канал подстройки частоты магнетрона. С помощью вращающегося
перехода энергия от элементов ФТ подается на сканирующую антенну.
Передающая часть фидерного трактй включает элементы питания излуча-
ющих антенн вторичного канала. От передатчика подавления боковых лепест-
ков по запросу энергия поступает через аттенюатор на направленный ответви-
тель, который делит эту энергию на две равные части и распределяет получен-
ные колебания между облучателями О-1 и О-4 основной антенны. Сигналы', вы-
рабатываемые передатчиком запроса, через аттенюатор подаются на облучатель
О-З. Аттенюаторы служат для регулировки излучаемой мощности в целях по-
103
давления сигналов, излучаемых по боковым лепесткам, как по запросу, так и по
ответу и для установки требуемой дальности действия вторичного канала.
Приемная часть фидерного тракта содержит элементы фильтрации и регули-
ровки мощности принятых сигналов. Сигналы, принятые облучателем 0-2 ос-
новной антенны, через антенный переключатель поступают на фильтры, с помо-
щью которых разделяются по частоте сигналы первичного и вторичного каналов.
Ферритовый переключатель предназначен для предохранения УВЧ приемного
тракта от мощного сигнала передатчика, просачивающегося через антенный пере-
ключатель в начальный момент включения. Сигнал включения ферритового пере-
ключателя подается через 10 - 30 с после подачи высокого напряжения на маг-
нетрон. Аттенюатор в цепи принятого сигнала ответчика служит для регулиров-
ки уровня этого сигнала при настройке системы подавления по ответу.
Передающее устройство состоит из передатчика первичного канала и двух
передатчиков вторичного канала (рис. 3.31). Передатчик первичного канала
предназначен для получения колебаний при работе ДРЛ как в режиме обзора,
так и при запросе бортовых ответчиков на частоте отечественного канала. Пере-
датчики вторичного канала обеспечивают запрос ответчиков на частотах между-
народного диапазона и подавление сигналов по боковым лепесткам основной
антенны ДРЛ по запросу.
Передатчик первичного канала (рис. 3.32) состоит из магнетронного генера-
тора с механизмом настройки, модулятора и подмодулятора и обладает выходной
мощностью 230 кВт. Запускается передатчик синхроимпульсами от блока транс-
Рис. 3.29. Диаграммы направленности антенны радиолокатора ДРЛ-7С:
а — ДН основной антенны в горизонтальной плоскости; б —диаграмма основной антенны в
вертикальной плоскости; в - ДН антенны подавления в горизонтальной плоскости; г — ДН
антенны подавления в вертикально!! плоскости;
J — диаграмма подавления по запросу: 2 - ДН при приеме сигналов; 3 - диаграмма излу-
чения; 4-- диаграмма излучения сигнала запроса; .5— ДН по ответному сигналу; 6— ДН
по сигналу запроса; 7 — ДН подавления по запросу
104
Рис. 3.30. Структурная схема антен-
но-фидерного тракта радиолокатора
ДРЛ-7С:
ПА—-антенна подавления; ОА — основная
антенна: О — 1... О — 4 — облучатели ос-
новной антенны; НО — направленные от-
ветвители; Ат - аттенюаторы; Прд-В1 —
передатчик сигнала запроса вторичного
канала; Прд-В2 — передатчик сигнала по-
давления по запросу вторичного канала;
ВП—вращающийся переход; ПУ-В —при-
емное устройство вторичного канала;
ИА — измерительная аппаратура; Прд-П —
передатчик первичного канала; АП — ан-
тенный переключатель; ННО — ненаправ-
ленный ответвитель; АПЧ — устройство
автоматической подстройки частоты магне-
трона; ФВЧ, ФНЧ — фильтры верхних и
нижних частот; РЩ — распределительный
щит; ФП — ферритовый переключатель;
УВЧ — усилитель высокой частоты;
ПУ-П — приемное устройство первичного
канала
Рис. 3.31. Структурная схема од-
ного канала радиолокатора
ДРЛ-7С:
АФУ — антенно-фидерное устройство;
ПА—антенна подавления; Прд-П -
передатчик первичного канала; ПВК. —
передающее устройство вторичного
канала; ФУ — фидерное устройство;
УВЧ — усилитель высокой частоты;
ПУ-П — приемное устройство первич-
ного канала; МПА — механизм приво-
да антенны; ПУВ — приемное устрой-
ство вторичного канала; ФБ — фазовый
блок; СДЦ — устройство селекции дви-
жущихся целей; УЧПВ — устройство
череспериодного вычитания; Комп.
П — комплект П; РУУ — распредели-
тельное и управляющее устройство;
КДП — командно-диспетчерский пункт;
КИ — контрольный индикатор; БТЗ —
блок трансляции и запуска: УОС —
устройство обработки сигналов
ляции и запуска. Подмодулятор содержит блокинг-генератор, формирующий
импульсы амплитудой 850 В, которые подаются на модулятор, и схему выбора
режимов работы передатчика в соответствии с режимом работы ДРЛ. В модуля-
торе формируются мощные импульсы амплитудой 20 кВ для питания магнетро-
на и используется частичный разряд емкости накопительного конденсатора через
специальные электронные лампы. Механизм настройки частоты магнетрона ра-
ботает по сигналу устройства АПЧ, а также допускает ручную установку час-
тоты .
Передатчики вторичного канала идентичны (рис. 3.33). В их состав входит
возбудитель, содержащий стабилизированный кварцевым резонатором задающий
генератор частоты 85,833 МГц, умножитель частоты в 12 раз и усилитель мощ-
ности. При этом стабильность несущей частоты 1030 МГц равна ±Ю~4. Феррито-
вый вентиль, включенный на выходе возбудителя, служит для уменьшения влия-
ния на стабильность возбудителя мощных выходных каскадов передатчика. Уси-
лители на выходе передатчика увеличивают мощность в 20 раз, доводя ее до 800
Вт. Модулятор, на который подается код запроса, запирает выходные каскады
возбудителя и передатчика при отсутствии модулирующих сигналов. Запускаю-
щий сигнал подается с блока трансляции и запуска через распределительный
ЩИТ.
Основные параметры передатчиков первичного (Прд-П) и вторичного (Прд-В)
каналов имеют следующие значения:
Прд-П Прд-В
Импульсная мощность, кВт............ 230 0,8
Длительность импульса, мкс............. 1 или 2 0,8
105
Частота повторения импульсов, Гц, в
режимах:
«Пассив» и «Актив»............... 495—550 495—550
760—840 380—420
«СДЦ»............................ 1021 — 1129 435,8—481,6;
510—549,5
Передатчик первичною канала в режиме «Пассив» вырабатывает импульсы
длительностью 2 мкс, а в остальных режимах — 1 мкс. При этом в режиме «Ак-
тив» излучаются парные импульсы по 1 мкс каждый с кодовым расстоянием 14
мкс. Этот передатчик может работать на восьми фиксированных частотных кана-
лах.
Приемное устройство состоит из первичного и вторичного каналов.
Приемное устройство первичного канала предназначено для усиления и пре-
образования отраженных сигналов, а также сигналов, обеспечивающих работу
АПЧ и фазирование когерентного гетеродина схемы СДЦ, входящей в состав
приемника. Перед подачей на приемник отраженные сигналы предварительно
усиливаются в УВЧ, работающем на ЛБВ. В приемном устройстве использовано
однократное преобразование частоты. В режиме «Актив» сигналы ответа допол-
нительно декодируются в приемнике. Устройство СДЦ реализует псевдокоге-
рентный метод с однократным вычитанием сигналов. Фазирование когерентного
гетеродина осуществляется от магнетрона передатчика.
Основные параметры приемного устройства первичного канала следующие:
Коэффициент шума, дБ...................................6—9
Коэффициент усиления УВЧ, дБ.........................25—30
Чувствительность, дБ/Вт в режимах:
«Пассив»............................................136
«СДЦ»..............................................133
Промежуточная частота, Мгц.............................30
Приемное устройство вторичного канала, кроме усиления и преобразования
ответных сигналов, выполняет также функцию подавления сигналов боковых
лепестков основной антенны по ответу. С этой целью прием сигналов ответа ЛА
ведется с помощью основной антенны и антенны подавления. Выходные сигналы
всех каналов приемника поступают на каскад совпадения, на выходе которого
присутствуют только сигналы, принятые главным лучом основной антенны. Чув-
ствительность приемного устройства равна 117 дБ/Вт.
Устройство обработки сигналов подавляет несинхронные помехи и комму-
тирует видеосигналы с выхода приемника и устройства СДЦ. Для подавления
несинхронных помех используют метод сравнения временных положении
двух сигналов в смежных периодах повторения импульсов. Сигналы задер-
живаются на период повторения и подаются на каскад совпадений, на другой
вход которого поступают незадержанные сигналы. На индикаторы проходят
Рис. 3.32. Структурная схема пере-
датчика первичного канала радиоло-
катора ЦРЛ-7СМ:
ВП — вращающийся переход; МГ — магне-
тронный генератор; МН - механизм на-
стройки; АПЧ — устройство автоматической
подстройки частоты: М модулятор;
ПМ - подмодулятор; БТЗ — блок транс-
ляции и запуска
Рис. 3.33. Структурная схема пе-
редатчика вторичного канала ра-
диолокатора ДРЛ-7СМ:
ВП - вращающийся переход; У-1, 2 —
усилители; ФВ - ферритовый вентиль;
Воз - возбудитель; М — модулятор;
Р1Ц — распределительный щит
106
I
только те из сигналов, положение которых на временной оси соответствует вы-
бранному периоду повторения зондирующих импульсов ДРЛ.
Блок трансляции и запуска является общим для первичного и вторичного
каналов. Здесь формируются импульсы запуска всех устройств радиолокатора.
Для получения синхроимпульсов используют линии задержки устройства СДЦ
или внутренние генераторы данного блока. Кроме того, в этом блоке усиливаются
видеосигналы перед подачей их на кабельную линию.
Индикаторные устройства ДРЛ-7СМ дают радиолокационное изображение
воздушной обстановки в зоне действия радиолокатора. В состав ДРЛ входят
контрольный и основной индикаторы. Последний устанавливают на КДП. Оба
индикатора идентичны и относятся к классу ИКО. В блоках индикаторов выра-
батываются напряжения развертки, импульсы подсвета ЭЛТ во время рабочего
хода развертки и метки дальности и азимута. Здесь же размещены также органы
управления радиолокатором и некоторые вспомогательные устройства. Для за-
пуска генератора масштабных меток по дальности служит синхроимпульс от
блока трансляции и запуска. Метки дальности соответствуют 5, 10 и 50 км. Ин-
дикаторы имеют три масштаба дальности: 45, 90 и 150 км. При формировании
азимутальных меток, следующих через 10 и 30°, используются сигналы от
фотоэлектронного датчика, связанного с осью вращения антенной системы ДРЛ
и вырабатывающего сигналы через каждый 10 и 30° поворота антенной системы
ДРЛ. Исходные сигналы для получения развертывающих напряжений посту-
пают на блок индикатора от сельсина-датчика, ротор которого вращается
синхронно с антенной ДРЛ. Питается сельсин напряжением частоты 1,5 кГц.
Распределительное и управляющее устройство конструктивно объединено
с распределительным щитом и совместно с последним предназначено для управ-
ления (местного и дистанционного с КДП) аппаратурой радиолокатора, а также
для коммутация и распределения управляющих команд и выходных сигналов
радиолокатора. Устройство допускает выбор комплекта радиолокатора и его
режима; регулировку усиления приемника: включение и выбор источника пи-
тания и выполнение других операций. Кроме того, аппаратура распределитель-
ного щита обеспечивает автоматический переход на резерв и индикацию режимов
работы аппаратуры, в том числе и индикацию отказавшего устройства ДРЛ.
3.14. АЭРОДРОМНЫЙ РАДИОЛОКАТОР ATCR-44
Назначение — определение дальности, азимута и выдача информации в
АС УВД «Теркас».
Состав радиолокатора, его приемник-процессор, а также вспомогательное
оборудование идентичны составу и соответствующим устройствам радиолокато-
ра ATCR-22. В радиолокаторе ATCR-14 может использоваться антенна типа
G-14, как и в радиолокаторе ATCR-22.
Основные параметры радиолокатора ATCR-44 соответствуют аналогичным
параметрам радиолокатора ATCR-22, за исключением следующих:
Максимальная дальность действия, км:
в одноканальном варианте ............................ 173
в двухканальном » 213
Максимальная высота обнаружения, км.........................16
Период обзора, с.............................................5
Указанные параметры зоны обнаружения (рис. 3.34) соответствуют антенне
типа G-14 и цели с ЭОП 10 м2 при вероятности правильного обнаружения 0.9 и
вероятности ложной тревоги 10~6. Меньшая дальность действия радиолокатора
ATCR-44 позволяет уменьшить мощность передатчика и изменить параметры
зондирующих сигналов, а также применить другую, более простую антенну типа
G-21. При этом зона обнаружения радиолокатора сокращается (рис. 3.35).
Антенна типа G-21, формирующая две ДН в вертикальной плоскости: ос-
новную (ОДН) и дополнительную (ДДН), отличается более простой кон-
струкцией и меньшими размерами (13,8x3 м) отражателя, составом облуча-
телей и характеристиками поляризаторов.
Ю7
Рис. 3.34. Зона обнаружения радиолокатора ATCR-44 с антенной типа G=14 (по
цели с ЭОП=10 м2):
/, 4 — в одноканалыюм режиме; 2, 3 — двухканальном режиме; 1, 2 — дополнительная ДН:
3,4 — основная ДН
Рис. 3.35. Зона обнаружения радио-
локатора ATCR-44 по цели с ЭОП =
= 2 м2 при использовании антенн
типа G-21 (/, 2) и G-14 (3, 4):
1, 2 — основная ДН; 3, 4 — дополнительная
ДН
В. качестве облучателей используют объединенную конструкцию из восьми
рупоров, размещенных в фокальной плоскости отражателя. Поляризаторы
обеспечивают плавное изменение поляризации сигналов от линейной до кру-
говой. Механический привод антенны позволяет получить (в зависимости от
предъявляемых требований) частоту вращения 5— 10; 6— 12 или 7,5 —
15 об/мин. Основные параметры антенны имеют следующие значения:
ОДН ДДН
Ширина ДН в горизонтальной плоскости, градус . . 1,25 1,25
Коэффициент усиления, дБ........................ 32,5 31
Относительный уровень боковых лепестков, дБ . —25 —25
Передатчик радиолокатора ATCR-44 выполнен на магнетроне с воздушным
охлаждением и имеет следующие основные параметры:
Импульсная мощность, МВт................................ 0,45
Средняя мощность, кВт................................... 0,45
Длительность импульса, мкс...........................1.25+0,125
Средняя частота повторения импульсов, Гц ... 930+47
Потребляемая мощность, кВ-А.............................. 5,5
108
3.15. АЭРОДРОМНЫЙ РАДИОЛОКАТОР «ИРТЫШ»
Назначение — определение координат ЛА и получение от бортовых ответ-
чиков дополнительной информации для аэродромных АС УВД.
Состав радиолокатора — первичный (ГТК) и вторичный ВК каналы
(рис. 3 36), которые имеют отдельные антенно-фидерные, передающие и прием-
ные устройства, а также аппаратуру обработки информации. Общими для обоих
каналов являются механизм привода антенны, датчик угловых меток, устройство
синхронизации, а также аппаратура управления и контроля. Аппаратура пер-
вичного и вторичного каналов полностью резервирована, за исключением фидер-
ных устройств и антенны вторичного канала. Питание радиолокатора осуществ-
ляется от трехфазной сети переменного тока с напряжением 2^0'380 В и часто-
той 50 Гц или от резервного источника питания.
Основные параметры радиолокатора «Иртыш»
ПК ВК
Дальность действия, км, при высоте полета:
1200 м.........................................3—80 110
(5—50)*
6000 м.................................... 13—125 200
(17—80)
10 000 м.................................. 18—150 200
(26—90)
Разрешающая способность:
по дальности, км.............................0,9— 3,0 1,0
по азимуту, градус......................... 4(7) 3,5
Потребляемая мощность, кВ-А:
аппаратурой радиолокатора .... 60
» КДП..................................... 10
Первичный канал радиолокатора обеспечивает работу радиолокатора в пассив-
ном режиме и получение информации как без СДЦ, так и прошедшей обработку
в устройствах СДЦ. На индикатор кругового обзора и АПОИ сигналы, отражен-
ные от ЛА, находящихся в ближней зоне (до 55 км), выдаются с устройства СДЦ,
в средней зоне (55—90 км) — как от устройства СДЦ. так и непосредственно с
выхода видеоусилителя приемника. В дальней зоне (от 90 км до границы обнару-
жения) устройство СДЦ не используется. Антенная система первичного канала
резервирована.
Фидерный тракт первичного канала служит для фильтрации и коммута-
ции сигналов, развязки приемного и передающего трактов, обеспечения одно-
временной работы двух приемо-передающих каналов на одну антенну, а также
переключения на резервные передающие и приемные устройства.
Передающее устройство первичного канала генерирует одиночные высоко-
частотные импульсы с частотой повторения 500 Гц, а передающее устройство
канала СДЦ — с переменной частотой повторения 1250, 833 и 1000 Гц. Третье
передающее устройство используется в качестве резервного. Импульсная мощ-
ность передатчика первичного канала равна 150 кВт. В передающих устройствах
применена АПЧ по стабильному гетеродину приемного тракта
Приемное устройство выполняет функции усиления и преобразования отра-
женных сигналов, а также сигналов, необходимых для работы АПЧ и СДЦ.
В приемном устройстве пассивного канала предусмотрена ВАРУ, исключающая
перегрузку приемника при обработке сигналов, отраженных от находящихся
на небольших дальностях ЛА и от местных объектов. В приемном устройстве
канала СДЦ используется однократная череспериодная компенсация сигналов
от неподвижных объектов. Дополнительное приемное устройство служит резер-
вом для основных. Чувствительность приемных устройств составляет 1 — 28дБ/Вт,
Уровень нескомпенсированных при СДЦ сигналов от местных объектов — не бо-
бее 10%.
* В скобках указаны параметры радиолокатора с резервной антенной.
109
Рис. 3.36. Структурная
схема радиолокатора
«Иртыш»:
ПК - первичный канал;
ВК - вторичный канал;
0А основная антенна:
РА — резервная антенна:
АВ — антенна вторичного
канала: ДУМ — датчик уг-
ловых меток; МПА основ-
ной механизм привода ан-
тенн; МПР резервный ме-
ханизм привода антенны;
КУ — коммутатор передаю-
щих устройств первичного
канала-; ФТ-П - фидерный
тракт первичного канала:
ПУ-П - • приемное устройст-
о
а:
во первичного канала;
Прд-П - передающее устройство первичного канала; Прд-С — передающее устрой-
ство первичного канала в режиме СДЦ: Прд-Р — резервное передающее устройство
первичного канала; СОФ — аппаратура синхронизации, обработки и формирования
сигналов первичного канала: ИКО — индикатор кругового обзора; ФТ-В — фидерный
тракт вторичного канала; ППА-1,2 — приемопередающая аппаратура вторичного ка-
нала (два комплекта): УДП — устройство декодирования и преобразования сигна-
лов: УТ — устройство трансляции сигналов; КДП — командно-диспетчерский пункт;
АПОИ — аппаратура первичной обработки информации
Устройство синхронизации, обработки и формирования сигналов вырабаты-
вает синхроимпульсы для аппаратуры радиолокатора, а также преобразует по-
ступающие на него видеосигналы в код, поступающий на дальнейшую цифровую
обработку. Здесь же предварительно подавляются несинхронные помехи. Обра-
ботанные сигналы транслируются на КДП и .АПОИ. Кроме того, видеосигналы
подаются на контрольный IIKO, размещенный в аппаратной радиолокатора.
Вторичный канал радиолокатора имеет четыре режима запроса «RBS» и два
режима запроса «УВД». Последовательность чередования режимов запроса мо-
жет выбираться дистанционно. Антенна вторичного канала установлена на ан-
тенне первичного канала, причем максимумы ДН этих антенн совмещены. В со-
став фидерного тракта входят фильтры и коммутирующие элементы, обеспечива-
ющие работу передающих и приемных устройств вторичного канала. Для работы
в режиме «RBS» имеются два комплекта приемопередающей аппаратуры, часто-
ты и сигналы которой соответствуют международным нормам. Импульсная мощ-
ность передатчиков вторичного канала равна 20 кВт, а чувствительность прием-
ников— 110 дБ/Вт. Для приема сигналов, соответствующих принятым в стра-
нах СЭВ нормам, используется дополнительное приемное устройство. Сигналы
с выходов приемников вторичного канала декодируются, очищаются от помех и
преобразуются в цифровую форму. Цифровые сигналы транслируются на АПОИ.
3.16. ВТОРИЧНЫЙ РАДИОЛОКАТОР «КОРЕНЬ-АС»
Назначение— получение дополнительной информации и определение коор-
динат ЛА по ответным сигналам бортовых ответчиков в аэродромных и трассовых
системах УВД (используется международный формат сигналов или формат,
принятый в СССР). Радиолокатор «Корень-АС» можно использовать как автоном-
ный ВРЛ или совместно с первичными. В последнем случае обеспечивается син-
хронный обзор пространства обоими радиолокаторами путем установки задан-
ного азимута антенны ВРЛ в пределах 0—360° и синхронизация вращения его
антенной системы.
Состав (рис. 3.37): антенно-фидерная система, приемо-передающая аппара-
тура международного диапазона систем вторичной радиолокации, приемное ус-
тройство сигналов отечественного формата, аппаратура декодирования и преоб-
разования информации, устройства синхронизации и кодирования сигналов,
а также аппаратура контроля (в том числе и контрольный ответчик типа СОМ-64),
а также аппаратура управления и питания радиолокатора. Радиолокатор
110
питается от трехфазной сети переменно-
го тока напряжением 220'380 В с часто-
той 50 Гц. Электронная часть аппа-
ратуры питается постоянным напря-
жением 27В, стабилизированным с точ-
ностью ±5%.
Режимы работы радиолокатора:
режим «RBS» предназначен для по-
лучения информации от ЛА, оборудо-
ванных ответчиками, которые исполь-
зуют сигнал международного формата
(соответствующий требованиям ICAO).
В этом режиме работают приемо-пере-
дающие устройства радиолокатора.
Приемное устройство для сигналов оте-
чественного диапазона не используется;
режим «УВД» предназначен для ра-
боты с ответчиками, которые использу-
ют сигналы с принятым в странах СЭВ
форматом. В этом режиме сигналы за-
проса излучаются на частоте 1030 МГн,
сигналы ответа принимаются на часто-
тах отчественного диапазона;
режим «RBS» «УВД» использу-
ется, если возможен прием сигналов от-
вета на частотах как международного,
так и отечественного диапазона.
Основные параметры радиолокатора
«Корень-АС» имеют следующие значе-
ния:
Рис. 3.37. Структурная схема вторич-
ного радиолокатора «Корень-АС»:
КО контрольный ответчик (типа
СОМ-64); АС-- антенная система; АП —
антенные переключатели-, БДМ - блок де-
лителей и мостов; КМ - кольцевые мосты;
УМ - усилители мощности,- MBA - меха-
низм вращения антенны; ПУ-1 — приемное
устройство сигналов международного дна
пазона; ПУ-2—приемное устройство сиг-
налов отечественного диапазона: М • - мо-
дуляторы; СПА — сервопривод антенны;
АДП - аппаратура декодирования и пре-
образования сигналов; Воз — возбудитель;
ПРЛ - первичный радиолокатор; III —
шифратор; АПОИ — аппаратура первичной
обработки информации; КА - контрольная
аппаратура: ГР — генератор режимов
Дальность действия, км, при высоте полета 20 км , . 450
Сектор обзора, градус:
в горизонтальной плоскости ....................... 360
в вертикальной » ........................0,5- -45
Вероятность получения информации:
правильной........................................ 0,9
ложной........................................... Ю 3
Погрешность измерения (о):
дальности, м...................................... 300
азимута, угл. мин.................................. 8
Разрешающая способность:
по дальности, м................................ 650
по азимуту, градус............................... 3,5
Динамический диапазон подавления сигналов боковых ле-
пестков ДН, дБ:
по запросу............................................ 50
по ответу ........ .... 70
Потребляемая мощность, кВт . .................. 20
Условия нормальной работы антенной системы:
температура. °C...................................—50..+50
относительная влажность при температуре 40 °C, % . 98
Условия нормальной работы аппаратуры:
температура, °C.......................................5—50
относительная влажность при температуре 30 °C. % 95
Антенная система радиолокатора состоит из двухдиапазонной антенны, меха-
низма вращения и сервопривода и представляет собой рупорную решетку,
образующую антенну типа «линейный ряд». В каждом из 42 рупорных излу-
чателей установлены перпендикулярно друг другу два возбудителя, что иозво-
111
ляет получить вертикальную поляризацию поля излучаемых колебаний в режи-
ме «RBS» и горизонтальную — в режиме «УВД».
Излучатели питаются через кольцевые мосты. Путем суммирования токов
формируется основная ДН по запросу и ответу, а при противофазном распреде-
лении токов — ДН канала подавления с минимумом излучения в направле-
нии главного максимума основной ДН (рис. 3.38). ДН канала подавления сигна-
лов боковых лепестков в задней полусфере основной антенны радиолокатора
формируют две дополнительные антенны (одна по запросу и ответу в режиме
«RBS», а другая — по ответу в режиме «УВД»). Основная и дополнительные ан-
тенны имеют общий параболический отражатель.
Сервопривод вместе с механизмом вращения антенны позволяет синхрони-
зировать азимутальное вращение антенн первичного и вторичного радиолокато-
ров. С этой целью в сервоприводе сравниваются сигналы углового положения
указанных антенн, получаемые как с датчиков первичного радиолокатора, так
и с механизма вращения антенны ВРЛ. Сигнал рассогласования усиливается в
электромашинных усилителях мощности и используется для управления вра-
щением антенны ВРЛ.
Антенна ВРЛ радиолокатора «Корень-АС» имеет следующие параметры
(в режимах «УВД» и «RBS»):
«УВД» «RBS»
Ширина ДН на уровне 3 дБ от максимума, градус:
в горизонтальной плоскости.................3±0,3 2-?-0,2
в вертикальной » ................ 70 36
Коэффициент стоячей волны напряжения на входах
передающих трактов, дБ.........................2,5 2,5
Фидерный тракт радиолокатора «Корень-АС» имеет четыре канала: основной
приемопередающий канал и приемопередающий канал подавления сигналов
боковых лепестков, работающие на частотах международного диапазона, а
также два приемных канала (основной и подавления), предназнченные для ра-
борты на частотах отечественного диапазона. В фидерный тракт входят кольце-
вые мосты, делители мощности, вращающиеся переходы, аттенюатор, антенные
переключатели и вспомогательные высокочастотные элементы. Аттенюатор пред-
назначен для внесения затухания в основной канал с целью подбора соотношения
Рис. 3.38. Диаграммы направленности антенны радиолокатора «Корень-АС» в
горизонтальной (а) и в вертикальной (б) плоскостях:
1—2 ДН — основного канала на частотах 1030 и 740 МГц; 3—4 ДН - канала подавления
на частотах 1030 и 740 Мгц; 5 — на частоте 740 МГц; 6' — на частоте 1030 МГц
сигналов, необходимого для эффективного подавления сигналов боковых ле-
пестков, Суммарные потери в фидерном тракте, зависящие от длины фидеров, при
типовом размещении антенны ВРЛ на мачте не превышают 6,5 дБ на частотах оте-
чественного диапазона и 7,5 дБ на частотах международного диапазона.
Передающее устройство радиолокатора работает на частоте 1030 МГц и
предназначен для получения сигналов запроса в режимах «RBS» и «УВД». Пере»
датчики имеют общий возбудитель, колебания которого через модуляторы
подаются на усилители мощности. Импульсная мощность на выходе усилителя
не менее 20 кВт. На каждый из модуляторов, управляющих усилителем мощ-
ности, через коммутационную схему поступают кодовые последовательности;
соответствующие режиму работы радиолокатора. Функцию кодирующего
устройства выполняет шифратор, управляемый генератором режимов. Генера-
тор синхронизирует работу радиолокатора. Частота повторения сигналов запро-
са составляет 150—500 Гц. Передатчики и приемники, используемые в режиме
«RBS», объединены в общее приемопередающее устройство.
Приемные устройства, работающие в режиме «RBS», построены по суперге-
теродинной двухканальной схеме. Развязка в 40 дБ на частоте запроса между
передатчиками и приемниками достигается с помощью полосовых фильтров.
После полосовых фильтров сигналы рапределяются между «суммарным» и «раз-
ностным» каналами. В приемном устройстве предусмотрена схема АРУ, а также
ВАРУ. Автоматические регулировки усиления предупреждают перегрузку
приемных каналов сильными сигналами ответа и стабилизируют выходное на-
пряжение этих каналов. Приемное устройство, работающее в режиме «УВД»,
аналогично рассмотренному, за исключением высокочастотной части.
Приемные устройства имеют следующие основные параметры:
Частота принимаемых сигналов, ГГц
Чувствительность, дБ/Вт....................
Полоса пропускания, МГц . . . ...
Динамический диапазон подавления сигналов
боковых лепестков по ответу, дБ . . .
Динамический диапазон принимаемых сигна-
лов, дБ:
по входу ..................................
по выходу .............................
«RBS» «УВД»
1,09 0,74
—120 —125
9,5±1 9,5±1,5
70 70
70 70
6 6
Аппаратура декодирования и преобразования информации (групповая аппа-
ратура) предназначена для декодирования сигналов ответа, перевода данных о
высоте полета в режиме «RBS» в метры, подавления несинхронных помех, конт-
роля собственной работы, преобразования видеосигналов в цифровой код для
трансляции на АПОИ, а также для управления радиолокатором. Эта аппарату-
ра может устанавливаться на КПД или в центре управления.
Аппаратура контроля позволяет выполнять регламентные проверки радио-
локатора, а также текущий контроль его работы с помощью имитации сигналов
ответа в режимах «RBS» и «УВД».
3.17. ВТОРИЧНЫЙ РАДИОЛОКАТОР SIR
Назначение — получение дополнительной информации и определение коор-
динат ЛА по ответным сигналам, соответствующим нормам JCAO.
Радиолокатор SIR (Selenia, Италия) является представителем нового поко-
ления ВРЛ, выполненных полностью на полупроводниковых приборах и шире
ко использующих цифровую технику при обработке сигналов и управления ра-
диолокатором
Состав: антенная система, фидерный тракт, передающее и приемное устройст*
ва, встроенная система контроля параметров, а также аппаратура управления и
устройство питания. Все оборудование резервировано, за исключением антен-
ной системы. Радиолокатор питается от сети переменного тока с напряжением
НЗ
220 В и частотой 50 Гц через преобразователь напряжения. Требуемая стабиль-
ность напряжения сети ±10%. Потребляемая мощность равна 200 ВА.
Основные особенности радиолокатора SIR следующие:
полное соответствие рекомендациям ICAO;
управление выходной мощностью по заданной программе в зависимости от
углового положения антенны ВРЛ для снижения мощности, излучаемой в на-
правлении эффективных местных отражателей;
использование только полупроводниковых приборов;
модульная конструкция и глубокий охват встроенным контролем, облегчаю-
щие ремонт радиолокатора и устранение отказов;
высокая надежность, характеризуемая средним временем наработки на отказ
(одного канала) 2500 ч и временем устранения неисправности 10 мин.
Дальность действия радиолокатора в зависимости от размеров применяемой
антенны 430—600 км.
Антенная система. Радиолокатор может работать с любыми антеннами, ис-
пользуемыми в ВРЛ. Наиболее употребительные антенны формируют суммарную
и разностную ДН (рис. 3.39). Все применяемые антенны широкополосные, пред-
назначенные для работы на частотах 1010—1110 МГц. Поляризация излучаемых
колебаний вертикальная. Рекомендуются антенны, условно обозначаемые в
дальнейшем А-1, А-2 и А-3. Их основные параметры следующие:
А-1
Ширина ДН на уровне 3 дБ относительно
максимума, градус;
в горизонтальной плоскости .... 7
в вертикальной » .... 50
Относительный уровень боковых лепестков,
дБ:
в передней полусфере ...... -26
в задней » ...... —26
Габаритные размеры антенн, м:
длина........................................2,85
глубина...................... 0,47
высота................................. 0,49
А-2 А-3
4,5 28 2,35 50
—24 —25
—28 —28
4,16 8,2
0,46 0,47
0,63 0,52
Рис. 3.зч направленности антенны рйлнолокатсщи SIR (длина ан
тенны ^ 3 ь горизонтальной плоскости (ь одном направлении):
; = умм-йрнэя ДН: ? - pa tHOCThd'h ДН
114
Рис. 3.40. Структурная схема радио-
локатора SIR:
АС — антенная система; ПК — переклю-
чатель комплектов; Комп. II—комплект
II; НО — направленный ответвитель;
УПЧ —усилитель промежуточной частоты-.
ГР — генератор режимов; ВСК — встроен-
ная система контроля; ФНЧ — фильтр
нижних частот; См — смеситель; М — мо-
дулятор; УМ—• усилитель мощности;
Цирк — циркулятор; Ф — фильтр; ЗГ — за-
дающий генератор; УЧ — умножитель ча-
стоты ; АД П — а ппа ра тура декодирова яия
и преобразования сигналов: Ддетектор:
КДП — командно-диспетчерский пункт;
АПОИ — аппаратура первичной обработ-
ки информации
I На КДП/АЛОН
Фидерный тракт (рис. 3.40) обеспечивает подключение работающего канала
к антенне, ввод контрольного сигнала во входную цепь радиолокатора и раз-
вязку приемного и передающего трактов.
Передатчик радиолокатора использует в качестве задающего генератора ста-
билизированный кварцевым резонатором генератор, вырабатывающий колеба-
ния с частотой 128,75 МГц. После восьмикратного умножения частоты эти ко-
лебания подаются на модулятор, код для которого формируется генератором
режимов. Усилитель мощности выполнен в виде модулей с выходной мощностью
около 0,5 кВт. При восьми модулях мощность передатчика равна 3,4 кВт, а
при четырех — 1,8 кВт. При полном отказе всех модулей к антенне может быть
подключен модулятор, при этом излучаемая мощность составляет 150—300 Вт.
Выходная мощность передатчика может быть снижена ступенями (на 3, 6 или
12 дБ) в заданных азимутальных секторах для уменьшения влияния отражений
и боковых лепестков ДН антенны. Передатчик содержит фильтры, ослабляющие
внеполосные излучения. С их помощью мощность, излучаемая на второй гар-
монике, уменьшается на 25, а на третьей — на 40 дБ. Частота повторения им-
пульсов равна 150—400 Гц.
Приемник выполнен по супергетеродинной схеме с одним преобразованием
частоты. Промежуточная частота равна 60 МГц и образуется при смешении при-
нимаемого сигнала с колебаниями задающего генератора. Фильтр на входе при-
емника вместе с переселектором обеспечивает подавление помехи по зеркальному
каналу не менее чем на 100 дБ. В приемнике имеется ВАРУ, причем возможна
индивидуальная установка глубины автоматической регулировки усиления на
восьми участках, перекрывающих весь диапазон запаздываний сигнала ответа..
Полоса пропускания приемника составляет 8—10 МГц, чувствительность—
— 87 дБ/Вт при отношении мощностей сигнала и шума 8 дБ.
Аппаратура декодирования и преобразования расшифровывает приходящий
сигнал ответа, преобразует его в цифровой код, предварительно исключая все
импульсы, длительность которых меньше 0,35 мкс, и усиливает сигналы перед
подачей их в кабель для трансляции на КПД или центр управления. Здесь же
осуществляется бланкирование сигналов для исключения тех из них, которые
соответствуют ЛА, находящимся за пределами зоны однозначного измерения
дальности первичным радиолокатором.
Аппаратура встроенного контроля позволяет осуществлять текущий контроль
параметров один раз за каждый период повторения сигналов запроса перед за*
пуском передатчика и вырабатывает сигналы о несоответствии параметров радио»
локатора заданным нормам.
115
Глава 4. РАДИОЛОКАТОРЫ ПОСАДОЧНЫЕ И ОБЗОРА
ЛЕТНОГО ПОЛЯ
4.1. НАЗНАЧЕНИЕ
Посадочные радиолокаторы (ПР) предназначены для контроля положения и
управления ЛА, находящимися на посадочной прямой, т. е. в зоне Г воздуш-
ного пространства (см. § 3.1) и представляют собой, как правило, автономные
первичные радиолокаторы, информация которых непосредственно используется
диспетчерами аэродрома. Они выдают информацию об отклонении ЛА в гори-
зонтальной и вертикальной плоскостях относительно номинальной траектории
захода на посадку и о расстоянии до номинальной точки приземления. Обычно
их используют как дополнительное средство, контролирующее процесс захода
ЛА на взлетно-посадочную полосу (ВПП) по радиомаячным системам посадки и
резервирующее эти системы при выходе последних из строя или при отсутствии
на ЛА курсо-глиссадного оборудования. При использовании ПР в качестве са-
мостоятельного средства посадки полученная информация служит основой
для управления ЛА по командам с земли во время захода на посадку до визуаль-
ного контакта экипажа с наземными ориентирами.
Все посадочные радиолокаторы имеют раздельные курсовые и глиссадные
антенны и работают в режиме секторного обзора, излучая импульсы с высокой
скважностью. Для ПР выделен диапазон частот 9250—9450 МГц (длина волны
~ 3,2 см). Основные параметры ПР регламентированы ICAO.
Радиолокаторы обзора летного поля (РОЛП) дают информацию о ЛА, нахо-
дящихся на высоте менее 50 м или перемещающихся по рулежным дорожкам
аэродрома (зона Д), и служат также для обнаружения и определения (идентифи-
кации) отдельных объектов (например, автомобилей, групп людей, крупных
животных), находящихся и движущихся по летному полю. Применение РОЛП
особенно эффективно в плохих метеоусловиях и на крупных аэродромах. Ин-
формация, получаемая от РОЛП, используется диспетчерами КПД и стартовых
командных пунктов (СКП).
РОЛП должны обеспечивать высокую степень аналогии воспроизводимой
на индикаторах диспетчеров информации и реальной обстановки на аэродроме,
а также в прилегающем к нему районе воздушного пространства. Они представ-
ляют собой первичные радиолокаторы, которые работают в импульсном режиме
с высокой скважностью и осуществляют круговой или секторный обзор. Даль-
ность действия РОЛП, соответствующая максимальной высоте полета в конт-
ролируемой зоне воздушного пространства (50 м), составляет ~!0 км. Для РОЛП
выделен миллиметровый диапазон волн и самая коротковолновая часть сантимет-
рового диапазона. Параметры РОЛП не регламентированы.
4.2. СТРУКТУРНАЯ СХЕМА, ОСОБЕННОСТИ И ПАРАМЕТРЫ
ПОСАДОЧНЫХ РАДИОЛОКАТОРОВ
Состав ПР включает в себя два канала: канал курса и канал глиссады.
Канал курса служит для получения информации о линейных отклонениях
ЛА от оси ВПП — линии курса (ЛК)
Канал глиссады вырабатывает информацию о линейных отклонениях ЛА от
номинальной траектории захода на посадку и вертикальной плоскости — ли =
нии глиссады (ЛГ)
1 16
Структурная схема ПР (рис. 4.1) состоит из следующих основных элементов:
антенно-волноводного тракта АВТ; передатчика Прд; приемного устройства ПУ;
устройства череспериодного вычитания сигналов УЧПВ, осуществляющего
селекцию движущихся целей; синхронизатора Сх; тракта передачи сигналов
ТПС; устройства обработки сигналов УОС, а также контрольного КИ и ос-
новного (ОН) индикаторов.
Антенно-волноводный тракт служит для излучения и приема электромагнит
ных колебаний в пределах заданного сектора пространства, изменяя поляризации
этих колебаний для ослабления влияния на характеристики ПРВ мешающих
отражений, а также для передачи высокочастотных сигналов к антенне или от нее.
Кроме того, в АВТ формируются для индикаторов ПРВ угловые отметки обозна-
чения определенных положений антенн и сигналы угловой информации.
Основные элементы АВТ — антенна курса АК и антенна глиссады АГ созда-
ют узкие в одной и широкие в другой плоскости ДН, с помощью которых осу-
ществляется обзор пространства. Ширина ДН антенны курса в горизонтальной
плоскости фк ~ 0,5 °, а в вертикальной (0К) — несколько градусов (рис. 4.2).
Антенна сканирует в горизонтальной плоскости в пределах заданного сектора
курса СК с частотой Гс.к. Антенна глиссады имеет ДН в горизонтальной плос-
кости шириной фг порядка нескольких градусов, а в вертикальной — шириной
0Г — 0,5 °. Антенна сканирует в вертикальной плоскости в пределах заданного
сектора глиссады СГ с частотой Гс,г. При сканировании АК и АГ обеспечивается
обзор секторов, выделенных штриховкой на рис. 4.2. Антенны допускают поворот
ДН изменения положения оси сектора обзора в пространстве.
Характерной особенностью ПР является поочередная работа антенн, что
позволяет использовать для каналов курса и глиссады общий передающий и
приемный тракты и облегчить раздельную индикацию положения ЛА относитель-
но линий курса и глиссады. Антанны передают и принимают сигналы в течение
интервалов работы /р.к и /р.г, соответствующих движению антенн с постоянной
угловой скоростью (рис. 4.3) в пределах углов фт1п — фтах в горизонтальной
(для АК) и 6П11п — Отах в вертикальной (для АГ) плоскостях. К волноводному
тракту антенны подключаются вращающимся антенным переключателем ВАП.
Во время переключения /Г1 антенны не излучают и не принимают энергии.
В большинстве ПР применяется механическое сканирование антенны,
С механизмом привода МПК или МПГ соответствующей антенны (см. рис. 4.1)
связаны датчики угловой информации ДУК и ДУГ, вырабатывающие сигналы
для формирования разверток индикаторов и угловых отметок определенных
положений антенн.
В некоторых зарубежных ПР (например, AN/TPN-25) применяют антенны
типа фазированных решеток, состоящих из нескольких сотен (до 800) излучаю-
щих элементов. В таких антеннах положением ДН в пространстве управляют
электронным способом с помощью ЦВМ, что обеспечивает точность установки
ДН ± 0,02 мрад (примерно 0,07 угл.мин). При использовании электронного
сканирования информация об угловом положении антенны выдается с ЦВМ, ко
торая управляет положением ДН.
Сигналы для развертки луча индикатора по азимуту (канал курса) или углу
места (канал глиссады) формируются сельсинами-датчиками, роторы которых
связаны с механизмом поворота соответствующей антенны. Формируются два
вида сигналов: синусоидальное напряжение частотой 10 кГц, модулированное
по амплитуде в соответствии с законом сканирования антенн (угловая информа-
ция), и напряжение гашения индикаторов в нерабочем секторе антенн, которое
меняется в соответствии с углом наклона АК в вертикальной и АГ в горизонталь-
ной плоскостях. Поэтому на экране индикатора высвечиваются только секторы,
соответствующие данному углу установки антенн (заштрихованным секторам на
рис. 4.2}. Напряжение питания сельсинов подается с устройства обработки сиг-
налов УОС. Промодулированные напряжения сельсинов-датчиков также посту
пают на усилитель угловой информации УУИ, а затем транслируются на КДП..
Угловые метки вырабатывают фотоэлектронные датчики, связанные с
механизмом поворота антенн. Основу каждого датчика составляет сегмент с тре-
мя узкими прорезями, перемещаемый механизмом поворота антенны между ис
точником света и фотодиодом. Сегменты датчиков угловых меток каналов курса
и глиссады устанавливаются таким образом, чтобы получить метки, соответствую-
щие линиям So, и S20 в канале курса и линиям Го, Г, и Г|0 в канале глиссады
117
Рис. 4.1. Обобщенная структурная схема посадочного радиолокатора
Рис. 4.2 Секторы обзора антенн посадочного радиолокатора
118
(рис. 4.4). Эти линии проходят через точку установки антенны ПР и точку, на-
ходящуюся на заданной траектории посадки (ЛК или ЛГ) на удалении О, I и
20 км от расчетной точки приземления (ТП).
Сигналы датчиков после усилителя угловых меток УУМ по кабельной линии
КЛ поступают на УОС, а затем на основные индикаторы ПР. Кроме того, эти сиг-
налы подаются на КИ. Коммутатор К, работающий синхронно с вращающимся
антенным переключателем ВАП, служит для подключения сигналов угловой
информации каналов курса и глиссады к общему тракту передачи сиг-
налов.
В состав АВТ входит также антенный переключатель АП, отключющий при-
емный тракт на время излучения зондирующего импульса, и аттенюатор Ат. че-
рез который часть мощности излучаемого сигнала ответвляется в приемное уст-
ройство, где используется для автоподстройки частоты магнетронного генератора
передатчика и фазирования когерентного гетеродина устройства СДЦ.
Конструктивно АК и АГ обычно представляют собой зеркальные антенны с
отражателями специальной формы или в виде части параболоида вращения.
Вблизи от облучателей антенн в волноводном тракте расположены поляризаторы
Пол, позволяющие с помощью помещаемой внутрь волновода диэлектрической
пластины изменять поляризацию излучаемых колебаний от линейной до круговой
и подавлять отраженные от гидрометеоров сигналы.
Передатчик содержит магнетронный генератор МГ, модулятор М и механизм
настройки магнетрона МН. Магнетрон генерирует зондирующие импульсы дли-
тельностью порядка десятых долей мик-
росекунды с мощностью 50 — 300 кВт.
Особенностью передатчика, связан-
ной с применением в ПР устройства
СДЦ, является работа с двумя частота-
ми повторения импульсов. Для преду-
преждения ухода частоты генерируе-
мых магнетроном колебаний из-за из-
менения режима магнетрона применя-
ются специальные меры, например из-
менение выходного напряжения моду-
лятора в такт со сменой частоты пов-
торения импульсов.
Для обеспечения постоянства ча-
стоты зондирующих колебаний при тем-
пературных изменениях параметров ма-
гнетрона частота последнего подстраи-
вается по местному стабильному гетеро-
дину СГет с помощью устройства АПЧ,
входящего в состав приемного тракта.
Исполнительным устройством АПЧ
служит механизм настройки магнетро-
на. Этим механизмом можно управлять
и вручную.
Модулятор передатчика выполнен
по схеме с накопителем энергии и им-
пульсным тиратроном в качестве раз-
рядного элемента. Запускающие им-
пульсы подаются на тиратрон от син-
хронизатора (при работе с СДЦ) или от
входящего в состав модулятора гене-
ратора импульсов.
Как правило, ПР работают на одной
фиксированной частоте. Однако, иногда
для борьбы со слепыми скоростями,
свойственными устройствам СДЦ, при-
меняют поочередное излучение на двух
несущих частотах.
Приемное устройство содержит
три функциональные цепи: устрой-
Рис. 4.3. Зависимость углового поло
женин центра диаграммы направлен-
ности антенн курса (а) н глиссады
(б) от времени и временная диаграм-
ма работы антенного переключате-
ля (в)
Рж 4.4. Направления, соответствую-
щие угловым меткам канала курса
(а) и канала глиссады (б)
П9
ство АПЧ магнетрона; канал основного усиления принимаемого сигнала и
входные цепи устройства СДЦ.
Для управления частотой генерируемых магнетроном колебаний в смесителе
СМ-1 устройства АПЧ выделяется разностная частота, номинальное значение ко-
корой равно промежуточной частоте приемника. На СМ-1 колебания подаются
от магнетрона через аттенюатор Ат и стабильного гетеродина СГет, собранного
на клистроне со стабилизирующим частоту объемным резонатором. Сигнал раз
постной частоты поступает на усилитель-ограничитель промежуточной частоты
УОПЧ, а затем на частотный дискриминатор ЧД, настроенный на промежуточ-
ную частоту. Сигнал ошибки по частоте управляет механизмом настройки маг-
нетрона. Поскольку полоса пропускания АПЧ обеспечивает подстройку только
при уходах частоты магнетрона, не превышающих ±5 МГц, в ПР иногда предус-
матривают устройство поиска по частоте. Точность подстройки частоты магне-
трона составляет ±0,25 МГц. Для устранения влияния подстройки частоты маг
нетрона на работу устройства СДЦ скорости подстройки снижаются до значения,
не превышающего 2 МГц/с.
Канал основного усиления сигнала содержит смеситель СМ-2, на который
подаются отраженные сигналы с АП и колебания СГет, усилитель промежуточной
частоты УПЧ и амплитудный ограничитель АО. При работе ПРЛ в режиме без
СДЦ сигналы с УПЧ детектируются (на схеме детектор включен в УПЧ) и через
суммирующее устройство СУ подаются на индикаторы. При использовании СДЦ
сигналы поступают на АО, где устраняются амплитудные флуктуации, ухудшаю-
щие работу устройства СДЦ. Приемники современных ПР имеют коэффициен-
ты шума 3,3 — 12 дБ и усиления по основному каналу 80 — ПО дБ.
Устройства СДЦ большинства ПР относятся к классу аналоговых псевдоко-
герентных с однократным череспериодным вычитанием сигналов. В некоторых
ПР применяют цифровые устройства СДЦ с двукратным череспериодным вы-
читанием сигналов.
Находящийся обычно в приемнике когерентный гетеродин КГ устройства
СДЦ запускается синхроимпульсами ПР перед началом генерации магнетрона
и фазируется колебаниями магнетрона, поступающими на него из УОПЧ устрой-
ства АПЧ Колебания КГ с частотой, равной промежуточной частоте, использу-
ют в качестве опорных при фазовом детектировании принятых сигналов, которые
поступают на ФД с амплитудного ограничителя.
Устройство череспериодного вычитания предназначено для задержки сиг-
нала на период повторения импульсов и образования разности задержанных и
незадержанных импульсов. В ПР обычно применяют два периода повторения
Тщ и Ли» которые переключаются от импульса к импульсу. При Тп1=416 мкс и
7'1)а 500 мкс слепые скорости в диапазоне 160—600 км/ч практически исклю-
чены. При переменном Ти в состав устройства СДЦ входят две ультразвуковые
линии ЛЗ-1 и ЛЗ-2 для задержки сигналов на ТП1 и ТП2, которые работают на
частоте 15 МГц. Видеоимпульсы с ФД подаются на модулятор линии МЛ и
далее в виде амплитудно-модулированных колебаний с несущей частотой 15 МГц
на ЛЗ. Сигналы с ЛЗ-1 и ЛЗ-2 через коммутатор К поступают на УВЧ, детектор
Д1, а затем на устройство вычитания УВ. Коммутатор управляется синхроим-
пульсами ПР так, что в одном такте работы ПР время задержки составляет
Тщ. а в другом — TWi, УВЧ служит для компенсации затухания сигнала в ЛЗ.
С модулятора линии снимается также незадержанная последовательность
импульсов, которая после детектора Д-2 поступает на УВ. Такое построение трак-
та прохождения сигналов облегчает получение идентичных по форме импульсов
на входе УВ Для этой же цели служит и устройство автоматической регули-
ровки усиления АРУ, работающее по разности амплитуд задержанных и неза-
держанных сигналов и выравнивающее эти амплитуды изменением коэффициента
усиления УВЧ С выхода УВ сигналы подвижных целей в виде модулированной
по амплитуде импульсной последовательности поступают в режиме работы с
СДЦ на суммирующее устройство СУ Коэффициент подавления помех от не-
подвижных целей н СДЦ составлеч 20—25 дБ.
CuHxpuHu.januip служи! для получения импульсов, управляющих работой
ПР, а также конгрольных импульсов, предназначенных для настройки устройст-
ва СДЦ В распространенных аналоговых СДЦ равенство времени задержки
в ЛЗ и периода повторения 7'п зондирующих импульсов достигается включением
в цепь формирования синхроимпульсов тех же ЛЗ, что и в устройстве СДЦ.
120
Рис. 4.5. Геометрические величины, используемые для формирования линий кур-
са (а) и глиссады (б) на экране индикатора
Основной элемент синхронизатора — блокинг-генератор БГ имеет частоту
собственных колебаний много меньше частот повторения импульсов ПР. При
включении синхронизатора первым импульс БГ через формирователь импульсов
ФИ поступает на модулятор линии МЛ, а затем на одну из линий задержки ЛЗ,
После усиления в УВЧ и детектирования этот импульс вместе с отраженными
сигналами, поступившими на МЛ от ФД, подается на амплитудный селектор
АС, где выделяется больший по амплитуде импульс БГ, который и образует пер-
вый циркулирующий в петле синхронизации импульс. Этот импульс через стро-
бирующий каскад запускает БГ. При этом формируется второй циркулирующий
импульс и т. д. Циркулирующие импульсы, временная расстановка которых
определяется задержкой в соответствующей ЛЗ, используются для синхрони-
зации передатчика и других элементов ПР. Стробирующий каскад СК после
генерации очередного импульса БГ запирается импульсом мультивибратора
МБ на время, большее половины периода повторения синхроимпульсов. Такая
мера предотвращает запуск БГ случайными импульсами, возникшими, например,
из-за коммутационных процессов.
Тракт передачи сигналов обеспечивает трансляцию сигналов, необходимых
для работы выносных индикаторов, устанавливаемых обычно на КПД. На КПД
транслируются видео- и синхроимпульсы, угловые метки и напряжения с сель-
синов, несущие информацию об угловых положениях АК и АГ. В аппаратную
ПР с КДП передается переменное напряжение частотой 10 кГц для питания
сельсинов-датчиков угловой информации. Трансляция осуществляется по
кабельной линии длиной до 3 км.
Видеоимпульсы с выхода ПУ (при работе без СДЦ) или с УЧПВ (при работе
с СДЦ) поступают на суммирующее устройство СУ, куда подаются и синхро-
импульсы с модулятора передатчика. СУ коммутирует и усиливает в зависи-
мости от выбранного режима видеоимпульсы, соответствующие всем или только
движущимся целям, и смешивает их с большими по амплитуде синхроимпуль-
сами. Полученный суммарный сигнал видео- и синхроимпульсов поступает
после усиления в кабельном усилителе КУ по кабельной линии на устройство
обработки сигнала УОС, установленное на КДП.
Устройство обработки сигналов располагается на расстоянии до 3 км от
аппаратурной ПР и содержит блоки, выделяющие и коммутирующие подаваемые
с аппаратной сигналы, а также вырабатывающие вспомогательные сигналы для
индикаторов КДП и для аппаратуры ПР. УОС управляет работой ПР и контро-
лирует ее. Для выделения синхроимпульсов применяют амплитудные селекторы,
так как эти импульсы в 2 раза превосходят видеоимпульсы по амплитуде.
Один из основных узлов УОС — аналоговый вычислитель линий, отобра-
жающих на индикаторах заданные траектории посадки в вертикальной и го-
ризонтальной плоскостях, и линий равных отклонений от этих траекторий
Необходимость применения вычислителя обусловлена сложной конфигура-
цией отображаемых на индикаторах кривых, что является следствием смеще-
ния антенн ПР относительно оси ВПП и расчетной точки приземления ТП
(рис. 4.5). Для получения сигналов, необходимых для формирования указанных
линий, используют соотношение, связывающее расстояние от АК до текущей
точки А на ЛК в горизонтальной плоскости Ок Da.K z sinip. где Ьа.к — рас-
стояние от оси ВПП до АК, Ф — текущий угол поворота АК относительно
линии, параллельной оси ВПП. Подобное уравнение связывает расстояние
АГ до точки Б на линии глиссады ЛГ в вертикальной плоскости Dr —- £)а>г <
121
X sin 0 / sin (0O — 0), где Z>a.r — расстояние от АГ до расчетной точки при-
земления ТП; 0 — текущий угол поворота АГ относительно линии горизонта:
0О — заданный угол наклона глиссады. Сформированные в УОС сигналы по-
даются на основные индикаторы КДП.
Индикаторные устройства отображают необходимую для контроля посад-
ки информацию. В состав ПР входят основные индикаторы ОИ, устанавливае-
мые на рабочих местах диспетчеров КДП, и контрольный индикатор КИ, разме-
щаемый в аппаратной ПР. В состав каждого из индикаторов входит электронно-
лучевая трубка ЭЛТ; видеоусилитель, сигналы с выхода которого управляют
яркостью ЭЛТ; каскады формирования напряжений развертки по углу и даль-
ности, а также источники питания и вспомогательные устройства. На прямоуголь-
ном экране ЭЛТ формируются изображения рабочих секторов каналов глисса-
ды и курса при данном угловом положении антенн ПР и отметки, соответствую-
щие ЛА, находящимся в данных секторах (рис. 4.6)= Изображения воспроизво-
дятся в прямоугольных координатах «угол места — наклонная дальность» и
«азимут — наклонная дальность».
Каксады формирования развертки по углу представляют собой усилители
постоянного тока, на вход которых подается напряжение угловой информации с
УОС. Это напряжение получается в результате детектирования сигналов частоты
10 кГц, передаваемых с сельсинов-датчиков углового положения антенн ПР.
Фаза колебаний частоты 10 кГц при выделении сгибающей определяется ключе-
выми фазовыми детекторами, управляемыми импульсами, которые формируются
из синусоидальных напряжений возбуждения сельсинов. Так как рабочие участ
ки секторов сканирования антенн соответствуют движению антенн с постоянной
угловой скоростью, то выделенные огибающие сигналов сельсинов-датчиков
представляют собой линейно изменяющееся (пилообразное) напряжение с пе-
риодом, равным периоду сканирования антенны. Это напряжение после усиле
ния используется для вертикального отклонения луча ЭЛТ.
Каскады формирования развертки по дальности запускаются задержанными
синхроимпульсами и вырабатывают отклоняющие напряжения экспоненциальной
формы. С помощью задержки синхроим-
пульсов начало развертки (отметка нуле-
вой дальности) совмещается сточкой, со-
ответствующей расчетной точке призем-
ления ЛА. Экспоненциальный закон из-
менения напряжения горизонтальной
развертки позволяет получить нелиней-
ный масштаб по дальности с растянутым
начальным участком. При этом облегча-
ется контроль положения ЛА на завер-
шающем этапе захода на посадку Счи
тывание информации облегчается нали-
чием одно- и пятикилометровых меток
дальности. Последние соответствуют
удалению 0, 5, 10, 15 и 20 км от ТП, от-
личаются от километровых большей
яркостью и используются в качестве
опорных.
Для контроля положения ЛА на
экране основных индикаторов высвечи-
ваются линии, соответствующие задан-
ному положению ЛГ и ЛК, и линии
равных отклонений от них. На экране
ЭЛТ индицируются также моменты про-
хождения АК или АГ линий So, и
S20 или Vo, и У2Й (сМ- Рис 4.4).
С этой целью используют снимаемые с
датчиков ДУГ и ДУК угловые метки,
на которые накладываются синхро-
импульсы. Первый по времени синхро
импульс, совпадающий с импульсом
угловой метки, включает на время
Рис. 4.6. Изображение на экране ин-
дикатора посадочного радиолока-
тора:
j номинальная точка приземления: 2
линия курса; 3 - линии равных отклоне
ннй; 4 отметка, соответствующая ЛА;
» линия 52о; 6 линия Su / линия
5»; 8 — линия Vo. 9 линия Г\; in ли
пня глиссады; II - линия V..o 12 Io ки-
лометровые метки (соответственно I. 2. .<
и 4 кв); 16- 18 пятикилометровые метки
соответственно 5. Hi и 15 км
122
Рис. 4.7. Схема размещения посадочного радиолокатора согласно нормам 1САО
при углах сканирования по курсу от +10 до —10° (а) и от +5 до —5° (б):
А — точка пересечения границы сектора сканирования с осью ВПП; Б — точка касания ЛА
поверхности ВПП (расстояния даны в метрах)
~250 мкс вспомогательный генератор частоты 6 МГц, напряжение которого
подается на ЭЛТ и высвечивает на экране горизонтальную линию.
Основные индикаторы полу чают сигналы от УОС, расположенного на КДП,
и отображают всю информацию, необходимую для работы диспетчера. Конт-
рольный индикатор предназначен для контроля работоспособности ПР.
В аппаратуре индикатора осуществляются те же преобразования сигналов, что
и в УОС, за исключением формирования ЛГ и ЛК и линий равных отклонений.
На этом индикаторе отображаются только отметки от ЛА, находящиеся в секторе
обзора ПР, и угловые метки.
Основные параметры ПР определены документами ICAO и имеют следующие
значения:
Зона действия:
дальность по ЛА с эффективной площа-
дью не менее 15 м2, км............................ 17
по азимуту, град................................. 20
по углу места, град............................... 7
Погрешность определения дальности до точки
приземления (Зо)..............................30 м + 3% расстояния
до ЛА
Погрешность определения отклонений (За):
от линии курса..............................0,6% расстояния до ПР
плюс 10% фактическо-
го линейного отклоне-
ния от ЛК или 9 м*
от линии курса в точке приземления . . 9м
от линии глиссады.........................не более 0,4% расстоя-
ния до ПР плюс 10%
фактического линейного
отклонения от заданной
траектории снижения
или 6 м*
Разрешающая способность:
по дальности, м..................................... 120
» азимуту, град........................... 1,2
» углу места, град................................. 0,6
Минимальный темп обновления информации на
экранах индикаторов, с ....................... 1
Согласно рекомендациям ICAO ПР должен быть установлен таким образом,
чтобы обеспечивался сектор обзора, вершина которого находится на оси ВПП на
расстоянии 150 м рт номинальной точки приземления (рис. 4.7). Ширина сектора
в азимутальной плоскости должна быть +5° относительно осн ВПП, а по углу
места - 1 ... - 6‘. Смещение точки установки ПР относительно оси ВПП долж-
но составлять 120 -185 м.
* В зависимости от того, которая из величин больше.
123
Таблица 4.J
Основные параметры зарубежных посадочных радиолокаторов*
Параметр AN/TPN-18A (США) CR-62 (Великобри- тания) AN/TPN-25 (США) AN/TPN-22** (США) РР-2Ф (ЧССР)
Зона действия: по дальности, км 85 41 ,6 37 20,4 20
» азимуту, градус Нет св. ±10 20 Нет св. -10...±20
» углу места, градус 35 -1...Н 6 15 8 -1... [-9
Разрешающая способность: по дальности, м Нет св. 60 1,5*** Н ет св. 120
» азимуту, градус 1 0,8 0J43 1 1 ,0
> углу места, градус 0,8 0,6 0,072 1 0,6
Ширина ДН антенны курса, градус: по азимуту 1,1 0,5 0.25 0,98 1 ,0
» углу места 1 ,8 Нет св. 1,4 Нет св. 1,4
Ширина ДН антенны глисса- ды, градус: по азимуту 3,2 » » 1 .4 » » 1 ,4
» углу места 0,8 0,5 0,25 0,98 1,0
Излучаемая мощность, кВт 200 Нет св. 325 120 150
Длительность импульса, мкс Нет св. » » I 0,3 0.45
Частота повторения, кГц. 1 ,2 » » 3 4.2-6 2; 2,4
* Все радиолокаторы работают на волне, длиной 3 см.
** Используется плоская антенная решетка с частотным сканированием по углу места
и с фазовым управлением по азимуту,
*** Применены внутриимпульсмая модуляция и сжатие импульсов.
Основные параметры некоторых зарубежных ПР даны в табл. 4.1
4.3. ОСОБЕННОСТИ И ПАРАМЕТРЫ РАДИОЛОКАТОРОВ ОБЗОРА
ЛЕТНОГО ПОЛЯ
Высокая разрешающая способность как по дальности, так и по азимуту,
позволяющая получить картографическое отображение контролируемой зоны,
близкое к визуально наблюдаемой диспетчером обстановке. Повышение разре
шающей способности по дальности достигается уменьшением длительности зон-
дирующих импульсов до нескольких десятков и даже единиц наносекунд. При
этом не возникает обычная для радиолокаторов с большой дальностью действия
проблема увеличения импульсной мощности передатчика с укорочением зон-
дирующего импульса. Для получения требуемого разрешения в азимутальной
плоскости применяют антенны с узкой ДН, ширина которых составляет деся-
тые доли градуса. Возможно также использование моноимпульсной техники и
определение угловых координат целей по разностной ДН.
Высокие требования к ширине ДН антенны РОЛП могут быть удовлетворены
только при использовании в данном радиолокаторе более коротковолнового диа-
пазона. Поэтому РОЛП работают в диапазоне радиоволн 0,8—1,2 см. Применение
более коротких волн ограничено ростом потерь при их распространении и умень
шением дальности действия радиолокатора при плохих метеоусловиях, когда на*
добность в таком радиолокаторе особенно велика Кроме того, в миллиметровом
диапазоне труднее генерировать колебания высокой мощности. Возникают
сложности и при конструировании АВТ миллиметрового диапазона. Низкие тре
I 24
Таблица 4.2
Основные параметры зарубежных РОЛ П
Параметр ASTRE (Франция) ASDE (Нидерлан- ды) ASDE-3 (США)
Максимальная дальность (ЭОП=^3 м2), км 15 10,2 Нет св.
Сектор по углу места, град 0—15 —20™0
Период обзора, с 2 1 1
Ширина ДН в горизонтальной плоско- сти, град 0,3 0,25 0,25
Длина волн, см Излучаемая мощность, кВт 1,19 1,8 1,8
30 60 10
Длительность импульса, мкс 0.04 0,05 0,003
Частота повторения, кГц 10,0 4,096 Нет св.
бования к точности, так как диспетчеру обычно важно определить только коли-
чество и характер целей, находящихся на летном поле. Это позволяет упростить
обработку сигналов в радиолокационном тракте.
Повышение помехоустойчивости РОЛП по отношению к помехам, вызывае-
мым отражениями от метеообразнований, достигается применением круговой
поляризации излучаемых колебаний. При этом мощность мешающих сигналов
ослабляется в несколько сотен раз (максимальный коэффициент подавления до
25 дБ). Специальные меры СДЦ, как правило, в РОЛП не применяются, хотя
известны подобные радиолокаторы с доплеровскими фильтрами для выделения
сигналов от подвижных объектов (например, французский РОЛП типа Coral).
Высокий темп обновления информации, который достигается увеличением
скорости обзора. Период обзора заданного сектора в азимутальной плоскости со-
ставляет единицы секунд, частота повторения зондирующих импульсов 4 —
10 кГц.
Вид и качество отображаемой на индикаторе информации определяют экс-
плуатационные возможности РОЛП. В современных РОЛП применяют индика-
торы телевизионного типа с синтезированием изображения. В состав таких радио-
локаторов (например, ASDE-3 производства США) входит цифровой преобразо-
ватель радилокационной развертки в телевизионный растр. Этот индикатор
позволяет передавать восемь градаций яркости и дает устойчивое изображение,
которое диспетчер может наблюдать при нормальном дневном освещении. Для
формирования картографической информации (границ ВПП, рулежных дорожек,
стоянок и т. д.) используют управляемый микропроцессором блок памяти.
Повышение надежности РОЛП достигается широким применением полупро-
водниковых приборов и резервированием аппаратуры (исключая антенную сис-
тему). Благодаря таким мерам обеспечивается средняя наработка на отказ одно-
го комплекта аппаратуры до 1500 ч, что соответствует значению коэффициента
готовности 99,9 %.
Основные параметры зарубежных РОЛП приведены в табл. 4.2.
4.4. ПОСАДОЧНЫЙ РАДИОЛОКАТОР РП-ЗГ
Состав радиолокатора РП-ЗГ (фирма «Tesla», ЧССР): антенны с волновод-
ным трактом; передатчик и приемник с устройствами АПЧ и СДЦ; синхрониза-
тор; устройства трансляции сигналов; контрольный индикатор и устройство
управления, а также устройство обработки сигналов и основные индикаторы
(рис. 4.8) Все основные элементы РП-ЗГ, включая антенны и волноводный тракт,
резервированы.
Каждая из антенных систем, состоящая из антенн курса и глиссады с меха-
низмами качания и поворота, и часть волноводного тракта, смонтированы на
стойке, расположенной возле аппаратной РП-ЗГ. Пр иемно-передающа я аппара-
тура, аппаратура СДЦ и контрольный индикатор размещены в аппаратной, на-
125
Рис. 4.8. Структурная схема
посадочного радиолокатора
РП-ЗГ:
АС антенная система; КДП •
командно-диспетчерский пункт;
ВТ — волноводный тракт; У — уси
лители; УОС — устройство обра
ботки сигналов; Прд -передатчик:
Сх — синхронизатор; КИ - кон
трольный индикатор; И-1, 2 — ос
новные индикаторы; АПЧ - устрой
ство автоматической подстройки
частоты магнетрона; СДЦ - устрой-
ство селекции движущихся целей;
СУ — устройство сложения сигна
лов; Прм - приемник; УУ — устрой
ство управления; ПУ пульт уп-
равления; Комп. II — комплект II
холящейся возле антенн ПР. Устройства обработки сигналов и основные ин-
дикаторы расположены на КПД и связаны с аппаратной кабелем длиной до
3 км. Источником питания РП-ЗГ является трехфазная электросеть переменного
тока напряжением (380^38) В и частотой (50±2,5) Гн, электронная часть радио-
локатора питается напряжением 115 В, 400 Гц. Питающее напряжение стаби-
лизировано с помощью магнитного стабилизатора.
Основные параметры радиолокатора РП-ЗГ имеют следующие значения:
Дальность действия, км..................... 20
Сектор обзора в горизонтальной плоскости,
градус;
в направлении от ВПП................... 10
» » к ВПП . ... 20
Сектор обзора в вертикальной плоскости, гра-
дус ....................................... -Г.+ 9
Длительность цикла сканирования, с 1.34
Разрешающая способность каналов:
курса, градус.............................. 0,8
глиссады, градус................................. 0,6
дальности, м..................... 150
Погрешность измерения линейного отклонения
ЛА от номинальной траектории (Зп):
на индикаторе курса . 0.6% расстояния от
ПР до ЛА плюс 10%
его линейного отклоне-
ния от оси ВПП или
9 м '
» » глиссады..........................0,4% расстояния от
ПР до ЛА плюс 10%
его линейного отклоне
ния от оси ВПП или
6 m s:
Погрешность измерения дальности (Зо) » ±3% измеряемого рас-
стояния или 30 м?:
Подавление отражений от неподвижных це-
лей, дБ .................
Потребляемая мощность, кВ-А:
с отоплением .............
без отопления.....................
Нормальные условия рабош'
температура. °C
относительная влажность при 40 °C, %
максимальная скорость ветра. :мД-
20
40
27
60.. + 45
95
28
В зависимости от того, которое из значений больше.
126
Рис 4.9 Диаграммы направленности антенн посадочного радиолокатора РП И
антенны курса в горизонтальной (и) и вертикальной (б) плоскостях я антенны । лигсалы н
Вертикальной td) н горизонтальной (г) плоскостях
Антенная система РП-ЗГ состоит из антенны курса АК и антенны глиссады
АГ, которые полностью резервированы Обзор пространства осуществляется
ими поочередно. Частота качания антенн составляет 0,764 или 0,56 Гц в завися
мости от типа двигателя привода антенн, диапазон угловых качаний АК — 52°
а АГ — около 16е, рабочий сектор АК по азимут) 30°, а АГ по углу места - 10-
Ориентация ДН у АК вертикальная, у АГ - горизонтальная (рис. 4,9).
Кроме основного электропривода качания антенны, в каждом hi антенных
комплектов имеются вспомогательные приводы, дающие возможность ди-
127
Рис. 4,10. Структурная схема антен-
ю-волноводного тракта посадочного
радиолокатора РП-ЗГ:
ОАК, РАК — основная и резервная антен-
ны курса; ОАГ, РАГ — основная и резерв-
ная антенны глиссады; Пол — поляризато-
ры; ВП — вращающиеся переходы; ВАП —
вращающиеся антенные переключатели;
АП — антенные переключатели; ЭБ — эхо.
боксы; НО — направленные ответвители;
РЗП — разрядники защиты приемников;
Цирк — циркуляторы; ГШ — генератор шу-
ма; ЭН — эквивалент нагрузки; ННО —
ненаправленные ответвители; АПЧ — уст-
ройство автоматической подстройки часто-
ты магнетрона; Прм — приемники; ФВ —
ферритовые вентили; ИМ — измеритель
мощности; Прд — передатчики
станционного изменения углового по-
ложения антенны в плоскости скани-
рования, а также наклона АК в вер-
тикальной плоскости в секторе 22,5е
и поворота АГ в горизонтальной пло-
скости в секторе 25°. При изменении
направления посадки углы поворота
АК и АГ составляют 170° и 172°.
Максимальное время поворота равно
170 с.
В радиолокаторе РП-ЗГ применены
параболические антенны с рупорными
облучателями. Два облучателя АГ и
четыре АК обеспечивают хорошее ис-
пользование раскрыва антенны (80—
90 %) и малый уровень боковых ле-
пестков. Функциональная поверхность
отражателя А К представляет собой
часть параболоида вращения. Требуе-
мая форма ДНА в вертикальной плос-
кости достигается синфазным сложеним
двух лучей (от четырех облучателей),
пересекающихся на уровне —6 дБ.
Функциональная поверхность отража-
теля АГ имеет более сложный про-
филь. Отражатели изготовлены из двух
слоев слоистого стеклопластика с по-
мещенной между ними дырчатой алю-
миниевой пластиной. Функциональные
поверхности отражателей покрыты
слоем напыленного цинка и полиуре-
тановым лаком. Для изменения поля-
ризации излучаемых колебаний слу-
жит тефлоновая пластинка, помещен-
ная вблизи облучателя внутрь прямо-
угольного волновода и имеющая при-
вод от электродвигателя.
Антенная система имеет следующие параметры:
АК АГ
Ширина ДНА в горизонтальной плоскости, градус: на уровне — 3 дБ 0,62 5
» » —10 дБ 1,15 20
Ширина ДНА в вертикальной плоскости, градус: на уровне — 3 дБ 5 0,44
» » — 10 дБ 7 0,77
Уровень боковых лепестков. дБ — 19 —25
Коэффициент усиления, дБ 39,7 36,4
Коэффициент эллиптичности поляризации излуча- емых колебаний, не более 1,12 1,12
Волноводный тракт (рис. 4.10) содержит антенные переключатели для под*
ключения аппаратуры к рабочему и резервному комплектам антенн, подключе-
ния к работающей антенне одного из двух комплектов аппаратуры, а также для
коммутации АК и АГ во время рабочего цикла сканирования. Кроме обычных
волноводных элементов, в состав тракта входят ферритовые вентили, включен-
ные на выходе магнетронного генератора и служащие для развязки передающего
и приемного каналов, а также для обеспечения постоянства нагрузки магнетро
на при сканировании антенны, что способствует повышению стабильности час-
тоты магнетрона и улучшениюСДЦ. В волноводном тракте имеются измеритель-
ные приборы, которые подключаются к рабочему комплекту для измерения ко
128
эффициента шума приемника (генератора шума), выходной мощности (измери-
тель мощности) и контроля работы устройства СДЦ (эхо-резонатор).
Передатчик РП-ЗГ выполняет функции генерирования СВЧ-колебаний,
получения модулирующих импульсов и обеспечения синхронизации радиоло-
катора при отказе синхронизатора. В качестве генератора используется им-
пульсный магнетрон с устройствами согласования нагрузки и подстройки часто-
ты. Частота генерируемых колебаний может устанавливаться вручную и автома-
тически, в последнем случае используется устройство АПЧ. В модуляторе при-
меняется мощный тиратрон, через который происходит разряд накопительной
линии. Модулятор запускается от синхронизатора или внутреннего генератора
импульсов (блокинг-генератора). Последний используют при отсутствии внеш-
них запускающих сигналов. Модулятор вырабатывает для магнетрона импульсы
амплитудой 4,5—7 кВ и мощностью до 800 кВт. Передатчик имеет следующие
параметры:
Частота генерируемых колебаний, МГц . . . . 9250—9450
Пределы автоматической подстройки частоты генериру-
емых колебаний относительно значения, установленного
вручную, МГц......................................... 0,5
Скорость автоматической подстройки частоты генерируе-
мых колебаний, МГц/с................................... 2
Импульсная мощность, кВт.................... 120—160
Длительность излучаемого импульса, мкс................. 0,45
Частота повторения генерируемых импульсов, кГц:
в режиме без СДЦ....................................2±0,1
» » СДЦ..........................................2 и 2,4
Приемник и устройство СДЦ выполняют функции выделения принимаемых
сигналов на фоне помех, усиления сигналов и селекции сигналов, отраженных от
подвижных целей.
Приемник выполнен по схеме с однократным преобразованием частоты.
Источником гетеродинирующего напряжения как для основного канала, так и
для каналов АПЧ и СДЦ служит маломощный клистронный генератор, частота
которого меньше номинальной частоты магнетрона на значение промежуточной
частоты. Генератор имеет стабилизирующий частоту объемный резонатор и
питается от стабилизированного источника. Усиление основного канала прием-
ника регулируется эффективной схемой ВАРУ. Сигналы основного канала уси-
ления после УПЧ подаются на суммирующее устройство для передачи на КДП
(режим без СДЦ), а также на фазовый детектор устройства СДЦ. Сигналы с
выхода усилителя-ограничителя второго канала приемника на промежуточной
частоте поступают в устройство АПЧ магнетронного генератора, а также фа-
зируют когерентный гетеродин устройства СДЦ.
Устройство СДЦ выполнено по псевдокогерентной схеме с фазированием
когерентного гетеродина от магнетронного генератора на промежуточной частоте.
Для компенсации сигналов от неподвижных целей применяют однократное уст-
ройство череспериодного вычитания. Уменьшение влияния слепых скоростей
достигается изменением частоты повторения от импульса к импульсу. Приемник
и устройство СДЦ имеют следующие параметры:
Коэффициент шума приемника, дБ............................ 12
Промежуточная частота, МГц............................50±0,35
Полоса пропускания, МГц................................... 3,2
Коэффициент усиления линейной части, дБ .... 105
Коэффициент подавления неподвижных целей, дБ . 20
Коэффициент надпомеховой видимости, дБ .... 14-34
Интервал скоростей ЛА, свободный от слепых скоростей,
км/ч................................................. 260—600
Затухание сигналов в ультразвуковых линиях задержки,
дБ.................................................... 60
Рабочая частота ультразвуковых линий задержки, МГц . 15
5 Зак. 1683 129
Синхронизатор обеспечивает синхронную работу передатчика и индикаторов,
а также всех переключающих целей, кроме коммутаторов, связанных с механиз-
мом привода антенн.
Основные элементы синхронизатора — блокинг-генератор и линии задерж-
ки, обеспечивающие работу устройства СДЦ.
Устройство трансляции сигналов на КДП состоит из устройства сложения
сигналов, усилителей и кабельных линий. По кабельным линиям, кроме основ-
ных сигналов, транслируется с устройства обработки сигналов (с КПД) напряже-
ние частотой 10 кГц для питания сельсинов-датчиков угловых положений антенн.
Устройство управления допускает местное (с аппаратной РП-ЗГ) и дистан-
ционное (с КДП) включение и выключение радиолокатора, выбор направления
посадки, переход на резервный комплект аппаратуры, включение СДЦ, вклю-
чение ВАРУ, подстройку частоты магнетрона, изменение поляризации, управле-
ние усилением приемника.
Через это устройство передаются на КДП- сигналы о состоянии и режиме
работы радиолокатора.
Устройство обработки сигналов служит для выделения, усиления и коррек-
ции передаваемых с аппаратной РП-ЗГ сигналов, а также для подачи этих сиг-
налов на основные индикаторы КДП. Кроме того, в этом устройстве формируются
сигналы для получения на экранах основых индикаторов изображений линий
курса и глиссады и линии равных отклонений от заданной траектории посадки,
а также отметки дальности и угловых положений антенны.
Система индикации состоит из контрольного индикатора, размещаемого в
аппаратной РП-ЗГ, и основных индикаторов, расположенных на КДП. К уст-
ройству обработки сигналов могут быть подключены до пяти индикаторов с мак-
симальным удалением от этого устройства до 200 м. Один из индикаторов обыч-
но находится возле устройства обработки сигналов и является контрольным,
остальные размещены на рабочих местах диспетчеров.
На всех индикаторах отображаются рабочие секторы курса и глиссады с
находящимися в пределах этих секторов ЛА, метки дальности через 1 и 5 км и
метки угловых положений антенн. Изображение дается на одной ЭЛТ, в верхней
части экрана которой отображается сектор глиссады, а в нижней — сектор кур-
са. На основных индикаторах, кроме того, индицируются линии глиссады, кур-
са и равных отклонений.
Индикация осуществляется в координатах «угол—дальность» ( типа В) с
нелинейным масштабом по дальности. Масштаб изображения по дальности ра-
вен 10, 15 или 20 км.
Частота обновления информации определяется скоростью сканирования ан-
тенны и составляет примерно 0,75 или 0,56 Гц.
4.5. ОБЗОРНО-ПОСАДОЧНЫЙ РАДИОЛОКАТОР ОПРЛ-4
Назначение — контроль воздушной обстановки в районе аэродрома и по-
лучение информации об отклонении ЛА от номинальных линий курса и глис-
сады для обеспечения посадки ЛА по командам с земли.
Состав радиолокатора ОПРЛ-4 производства фирмы «Tesla» (ЧССР): канал
кругового обзора и каналы посадки (каналы курса и глиссады), в которые
входят антенны с волноводным трактом, передатчик и приемник с устройствами
АПЧ и СДЦ, устройство трансляции сигналов и устройство управления, а также
устройство обработки сигналов, обзорный и посадочные индикаторы. Основное
радиолокационное оборудование размещено в аппаратной, на которой смонти-
рованы антенны ОПРЛ. Устройство обработки сигналов, индикаторы и аппа-
ратура контроля и управления находится на рабочих местах диспетчеров КДП
и связаны с аппаратной кабелем длиной до 3 км.
Источником питания ОПРЛ-4 служит трехфазная сеть переменного тока
частоты (50±2.5) Гц с напряжением 380 В при допустимой нестабильности —
20 ... -г 10 %, либо резервная электростанция. Переключение на резервное пи-
тание производится автоматически при уменьшении напряжения сети на 20% от
номинального значения.
130
Основные
параметры радиолокатора имеют следующие значения
Дальность действия1 канала кругового обзора
км:
в ясную погоду........................
при дожде интенсивностью 4 мм/ч
Дальность действия канала посадки .
Сектор обзора (рис. 4.11), градус, каналов:
кругового обзора в вертикальной плоско-
сти ......................................
курса в вертикальной плоскости . .
» в горизонтальной плоскости
глиссады в горизонтальной плоскости
» в вертикальной плоскости
Частота вращения антенны канала кругового
обзора и курса, об/мин ....................
Скорость сканирования антенны глиссады (ко-
личество качаний за 1 с) при частоте вра-
щения, об/мин, антенны каналов кругового
обзора и курса:
15........................... . . .
30....................................
Разрешающая способность по угловым коорди-
натам, градус каналов:
кругового обзора .....................
курса ................................
глиссады..............................
Разрешающая способность по дальности, м,
каналов:
35
30
15
3—42
0-25
±15
±10
-1 - + 7
15 или 30
2
1,5
1,0
2
4
кругового обзора ....... 300
посадки................................ 200
Погрешность измерения (о):
азимута на индикаторе кругового обзора,
град.................................... 1,5
линейного отклонения ЛА от изображения
посадочной линии на индикаторе, % это-
го отклонения......................... 10
дальности.................................±3% измеряемого рас-
стояния или 30 м* *
Погрешность линейного отклонения изображе-
ния посадочной линии на индикаторе от
истинного ее положения (а):
по курсу ..................
по глиссаде ....................
Подавление отражений от неподвижных це
лей, дБ.................................
Потребляемая мощность, кВ-А:
с отоплением аппаратной ....
без отопления » ..............
Нормальные условия работы:
температура, °C..................... . .
относительная влажность при 40 °C, %
максимальная скорость ветра, м/с
±0,6% расстояния от
ЛА до ОПРЛ или 10 м*
±0,4% расстояния от
ЛА до ОПРЛ или 10 м*
20
12
5
±50 (антенная
система)
98
28
1 По самолету с ЭОП 20 — 30 м2 при вероятности правильного обнаружения
90%.
* В зависимости от того, которая из величин больше
5* 131
Рис. 4.11. Зоны обнаружения обзорно-посадочного радиолокатора ОПРЛ-4 в
вертикальной (а) и в горизонтальной (б) плоскостях:
Н — высота полета; D — дальность; L — боковое отклонение ЛА от осн ВПП
Антенная система ОПРЛ-4 состоит из антенны курса (АК) и антенны глис-
сады (АГ). Обзор пространства антеннами осуществляется поочередно. Антенны
развернуты таким образом, что АГ работает в то время, когда АК повернута
в сторону, противоположную сектору посадки. Круговой обзор пространства
производит АК, формирующая для этой цели специальную ДН. Скорость обзо-
ра составляет 25 или ЗОоб/с. Антенна глиссады сканирует в вертикальной плос-
кости со скоростью 2 или 4 качания в секунду в зависимости от частоты вращения
АК. Рабочий сектор АК по азимуту составляет 360° (канал кругового обзо-
ра) и 20° (канал курса). Рабочий сектор АГ в вертикальной плоскости равен
8°. Время поворота антенной системы из одного крайнего положения в другое
не более 6 мин, а время поворота АГ при смене посадочного курса на обратный
не более 1 мин.
Как АК, так и АГ имеют двойные рупорные облучатели и усеченные па-
раболические отражатели из алюминиевого листа. Курсовая антенна формирует
верхнюю либо нижнюю ДН. Верхняя ДН образуется при работе нижнего ру-
пора, а нижняя — верхнего. Рупоры коммутируются волноводным переключате-
лем, который одновременно с присоединением одного из волноводов к рупору
подключает второй рупор к согласованной нагрузке. Поляризацию излучаемых
колебаний изменяют поворотом возбуждающего прямоугольного волновода по
отношению к выходному квадратному волноводу, питающему рупорные излуча-
тели.
Поляризатор АГ неподвижный, и антенна постоянно излучает эллиптичес-
кие поляризованные колебания. Поляризатор АК с электромеханическим приво-
дом позволяет плавно изменять положение прямоугольного волновода и соответ-
ственно управлять поляризацией излучаемых колебаний. Параметры антенной
системы следующие:
АК1 АГ
Ширина ДН (рис. 4.12) в гори-
зонтальной плоскости, градус:
на уровне —3 дБ..................(0,6—0,75)/(0,6—0,85) 6
» » - 10 дБ .... (1,1—1,3)/(1,0 1,8) 13
Ширина ДН в вертикальной пло-
скости, градус:
на уровне —3 дБ.............. 4,3/4,3 0,65—0,8
> » —10 дБ ... . — 1,2—1,4
Уровень боковых лепестков, дБ . —20/—20 —22
Коэффициент усиления, дБ . . . 40/38 37,5
Коэффициент эллиптичности по-
ляризации излучаемых колеба-
ний, не более..................... 1/1 0,96
1 Числитель — нижняя, знаменатель — верхняя ДН, форма ДН примерно
cosec2 0, где 0 — угол места.
132
Рис. 4.12. Диаграммы направленности антенн обзорно-посадочного радиолокато-
ра ОПРЛ-4:
а — ДН антенны курса в горизонтальной плоскости; б — ДН антенны курса в вертикальная
плоскости; в —ДН антенны глиссады в вертикальной плоскости; г ДН антенны глиссады
в горизонтальной плоскости; 1 — при максимуме нижней ДН; 2 - при максимуме верхней
ДН; 3—нижняя ДН; 4 - верхняя ДН
Волноводный тракт ОПРЛ-4 (рис. 4.13) содержит волноводный переключа-
тель для коммутации рупорных облучателей АК и ряд циркуляторов и направ-
ленных ответвителей для перераспределения энергии излучаемых и прини-
маемых колебаний и подключения измерительных приборов (измеритель мощно-
сти и генератор шума). Генерируемые магнетроном передатчика высокочастотные
импульсы проходят через циркулятор в направленный ответвитель, который
Делит мощность поступающих колебаний так, что 90 % мощности проходят к
133
Рис. 4.13. Структурная схема обзорно-посадочного радиолокатора ОПРЛ-4:
АВТ — антенно-волноводный тракт: К—• коммутаторы; АГ — антенна глиссады: МПГ — ме-
ханизм привода антенны глиссады: МПК — механизм привода антенны курса; АК — антенна
курса; Пол—поляризаторы; ДУГ -• датчик углов антенны глиссады; ДУК — Датчик углов
антенны курса; Цирк — циркуляторы; НО — направленные ответвители; ВП — волноводный
переключатель; РЗП — разрядники защиты приемных каналов; Ф —фильтры; Ат — аттенюа-
тор; ИМ — измеритель мощности; ГШ — генератор шума; Прд — передатчик; М — модуля-
тор; МГ—магнетронный генератор; МН — механизм настройки магнетрона; ГСП — генератор
синхроимпульсов; В. Сх — устройство выбора синхронизации; Прм — приемник; С. Гет.—
стабильный гетеродин; См — смесители; УПЧ — усилители промежуточной частоты; УВЧ —
усилитель высокой частоты (лампа бегущей волны); ФД — фазовые детекторы; ЧД — частот-
ный детектор; УИЛ — усилитель измерительной линии; КГ — когерентный гетеродин; ТПС —
тракт передачи сигналов; УПУИ — устройство передачи угловой информации; КУ — кабель-
ный усилитель; ПВ — переключатель видеосигналов; ЛУ — логическое устройство: СУ —
суммирующий усилитель; СДЦ — устройство селекции движущихся целен; УЧПВ — устрой-
ство череспериодного вычитания; Сх — синхронизатор; КДП — командно-диспетчерский пункт:
ИКО — индикатор кругового обзора; УОС — устройство обработки сигналов: ИП - индика-
тор посадочный
облучателю АК и 10 % к облучателю АГ. Часть высокочастотной энергии через
аттенюатор поступает в приемник, где используется для работы устройства
АПЧ магнетрона, а также для фазирования когерентного гетеродина уст-
ройства СДЦ. Принимаемые сигналы через разрядники защиты приемника и
фильтры, служащие для подавления шумов на зеркальном канале, поступают в
приемный тракт. Работа приемника и устройства СДЦ контролируется эхо-
боксом, который можно подключить к направленному ответвителю вместо ге-
нератора шума.
Передатчик ОПРЛ-4 генерирует СВЧ колебания, вырабатывает модулирую-
щие импульсы и синхронизирует радиолокатор при отказе синхронизатора.
В качестве генератора используют импульсный магнетрон с устройствами со-
гласования нагрузки и подстройки частоты.Частота генерируемых колебаний мо-
может устанавливаться вручную и автоматически с помощью АПЧ. В модуляторе
применяется мощный тиратрон и зарядный дроссель, настроенный в резонанс
с конденсаторами накопительной линии. Модулятор запускается от синхрони-
затора или внутреннего генератора синхроимпульсов. Последний включается
автоматически устройством выбора синхронизации при пропадании нескольких
импульсов с синхронизатора. Передатчик имеет следующие параметры:
134
Частота генерируемых колебаний, МГн ...... 9250—9450
Пределы автоматической подстройки частоты генерируе-
мых колебаний относительно значения, установленного
вручную. МГц............................................ ±5
Импульсная мощность, кВт................................... 150
Длительность излучаемого импульса, мкс................... 0,5
Частота повторения генерируемых импульсов. кГц, в ре-
жиме:
без СДЦ............................................... 2
с СДЦ................................................2 и 2,4.
Приемник и устройство СДЦ выполняют функции выделения принимаемых
сигналов на фоне помех, усиления и селекции сигналов, отраженных от по-
движных целей.
Приемник выполнен по двухканальной схеме с однократным преобразова-
нием частоты. Один канал служит для усиления сигналов, принимаемых АК. а
другой — АГ. В качестве гетеродина как в основных каналах усиления, так и
в каналах АПЧ и СДЦ используют маломощный генератор на диоде Ганна с
объемным стабилизирующим высокодобротным резонатором. Отличительная осо-
бенность приемного канала, связанного с АК, использование усилителя высокой
частоты на лампе бегущей волны, обеспечивающий усиление 18 — 27 дБ при
коэффициенте шума 6 дБ. Усилители промежуточной частоты основных каналов
имеют логарифмическую амплитудно-частотную характеристику и ВАРУ.
Сигналы с выходов УПЧ приемных каналов детектируются (детекторы на
схеме включены в УПЧ) и поступают на переключатель видеосигналов, а с по-
следнего — на суммирующее устройство (режим работы без СДЦ) для трансля-
ции на КДП. Непродетектированные колебания промежуточной частоты пода-
ются с УПЧ на фазовые детекторы устройства СДЦ.
Устройство СДЦ выполнено по псевдокогерентной схеме с фазированием
когерентного гетеродина от магнетронного генератора на промежуточной часто-
те. Для компенсации сигналов от неподвижных целей применяется однократное
череспериодное вычитание. Выделенные сигналы движущихся целей подают-
ся на переключатель видеосигналов, а с него в режиме работы с СДЦ — на сум-
мирующее устройство. Уменьшенное влияние слепых скоростей достигается
изменением частоты повторения от импульса к импхльсу, для чего используют
коммутацию отводов ультразвуковой линии задержки.
Коммутатор совместно с логическим устройством и переключателем видео-
сигналов обеспечивает следующие режимы работы: без СДЦ; с СДЦ в канале кру-
гового обзора и канале курса; с СДЦ, попеременно в канале курса или канале
глиссады. Кроме того, логическое устройство служит для стробирования прием-
ного тракта по дальности, выделяя участок, соответствующий примерно 200 м,
а также преобразует синхроимпульсы перед подачей их на суммирующее устрой-
ство тракта передачи сигналов на КДП.
Цепи приема контролируют усилители измерительной линии. Контроль-
ный сигнал, имеющий форму последовательности импульсов по 0,5 мкс, следую-
щих через 20 мкс. формируется ультразвуковой линией задержки, входящей в
этот усилитель. Приемник и устройство СДЦ имеют следующие параметры:
Коэффициент шума приемника. дБ........................... 6,5
Промежуточная частота. МГц . 30
Полоса пропускания, МГц................................. *3,2
Динамический диапазон логарифмического усилителя про-
межуточной частоты, дБ................................. 50
Динамический диапазон ВАРУ. дБ........................... 30
Коэффициент усиления линейной части, дБ .... 77—80
Коэффициент подавления неподвижных целей. дБ . . . 20
Интервал скоростей ЛА. свободный от слепых скоростей,
км/ч . . . . ................................160—600
Затухание сигналов в ультразвуковых линиях задержки,
дБ...................... .............................. 60
Рабочая частота ультразвуковых линии задержки. МГц . 30
135
Синхронизатор обеспечивает синхронную работу передатчика и индикато-
ров, запуск ВАРУ и управление работой логического устройства радиолокато-
ра. Для получения синхроимпульсов используют ультразвуковую линию уст-
ройства СДЦ.
Тракт передачи сигналов служит для преобразования, сложения и усиле-
ния сигналов, транслируемых на выносную часть ОПРЛ-4, расположенную на
КПД. В суммирующем устройстве образуется суммарный сигнал, состоящий
из видеоимпульсов с приемных каналов или с устройства СДЦ и синхроимпульсов.
Этот сигнал после усиления транслируется по кабелю на КДП. Для передачи
угловой информации служит специальное устройство, в котором вырабатыва-
ется напряжение частоты 10 кГц для возбуждения сельсинов-датчиков и усили-
ваются полученные от них сигналы перед подачей в кабельную линию. Сигналы
сельсинов используются для развертки лучей ЭЛТ индикаторов по угловым
координатам.
Для формирования на индикаторах угловых меток и линий курса и глисса-
ды в этом же устройстве сигналы датчиков угловых положений антенн преоб-
разуются в последовательный код перед передачей их по кабелю на КДП. Пе-
редаются следующие сигналы: угловые метки каналов курса и глиссады через
каждый 1° поворота или сканирования соответствующей антенны; две после-
довательности по 20 импульсов для формирования на индикаторе линий курса
или глиссады, импульсы следуют через каждый 1° поворота или сканирования
соответствующей антенны; угловые метки для индикатора кругового обзора
через каждый 30и поворота антенны курса. Кроме того, по кабелю передается
на КДП опорное напряжение частотой 10 кГц.
Устройство управления обеспечивает местное (с аппаратной ОПРЛ-4) и
дистанционное (с КДП) включение и выключение радиолокатора; выбор на-
правления посадки; выбор ДН антенны курса; включение СДЦ; включение
ВАРУ; изменение поляризации, управление усилением приемника. Через это
устройство передаются на КДП сигналы о состоянии и режиме радиолокатора.
Устройство обработки сигналов служит для выделения, коррекции, де-
кодирования и усиления передаваемых с аппаратной ОПРЛ-4 сигналов, а также
для подачи соответствующих напряжений и импульсов, необходимых для раз-
вертки индикаторов. Кроме того, в этом устройстве формируются сигналы для
получения на экране посадочного индикатора изображений линий курса и глис-
сады, метки дальности и угловые метки.
Индикаторы ОПРЛ-4 предназначены для отображения как посадочной
информации, так и информации, получаемой при круговом обзоре. Поэтому
имеются два индикатора: посадочный и кругового обзора, которые устанавлива-
ют на расстоянии до 10 м от устройства обработки сигналов.
Посадочный индикатор служит для отображения рабочих секторов курса
и глиссады с находящимися в пределах этих секторов ЛА, заданных линий курса
и глиссады, а также линий равных отклонений от заданной траектории. Мас-
штаб развертки по дальности нелинейный, с растянутым начальным участком
шкалы. Метки дальности следуют через 1 и 5 км, угловые метки на индикаторе
глиссады — через 1° в пределах сектора в 8°, а на индикаторе курса — через
3е в пределах сектора в 30°.
Индикатор кругового обзора отображает воздушную обстановку в зоне дей-
ствия ОПРЛ-4. Угловые метки следуют через 30° поворота АК. метки дально-
сти — через каждые 10 км (возможно включение километровых меток). Индици-
руемая дальность 50 км. Индикатор кругового обзора используют также для ди-
станционного измерения угла поворота атенной системы ОПРЛ-4, соответствую-
щего заданному курсу посадки. С этой целью на ИКО подается на время измере-
ния угловая информация от сельсинов-датчиков установочного угла антенной
системы. Темп обновления информации на индикаторах 2 или 4 раза в секунду.
4.6. РАДИОЛОКАТОР «ОБЗОР-1»
Назначение — обзор летного поля для получения информации о ЛА и дру-
гих объектах, находящихся на рулежных дорожках, стоянках и в других местах
аэродрома.
136
Рис. 4.14. Структурная схема радио-
локатора обзора летного поля:
А — 1,2 — антенны радиолокатора; MBA —
механизм вращения антенн; НО — направ-
ленный ответвитель; АПЧ — устройство
автоматической подстройки частоты; МГ —
магнетронный генератор; Гот — гетеродин;
БС — балансный смеситель; М —• модуля-
тор; УФИ — устройство формирования за-
пускающих импульсов; ПУПЧ — предвари-
тельный усилитель промежуточной часто-
ты; ПМ — подмодулятор; ВАРУ — схема
временной регулировки усиления; УПЧ —-
усилитель промежуточной частоты; УУК —-
устройство управления и контроля; СУ —
согласующее устройство; ВУ — видеоуси-
литель; ВИ — выносные индикаторы;
ОИ — основной индикатор
Состав (рис. 4.14): антенная система; волноводный тракт; механизм привода
антенны; передающее и приемное устройства: устройство формирования запус-
кающих импульсов; согласующее устройство, а также индикаторы и устройства
управления, контроля и питания радиолокатора. Антенная система и высоко-
частотные элементы радиолокатора устанавливаются на вращающемся основании
и могут размещаться на высоте до 40 м.
Радиолокатор <-Обзор-1» работает в миллиметровом диапазоне радиоволн
(длина волны около 9 мм) и может использоваться как в режиме кругового,
так и секторного обзора. При секторном обзоре из-за уменьшения отображаемой
на индикаторе площади возрастает разрешающая способность радиолокатора.
Питание радиолокатора производится от трехфазной сети переменного тока
напряжением 380 В с частотой 50 Гц через преобразователь частоты. На аппа-
ратуру радиолокатора от преобразователя подается напряжение 220 В с частотой
427 Гн.
Основные параметры радиолокатора следующие:
Дальность действия, км:
максимальная .......................................... 8
минимальная (при высоте антенны 35 м)................0,1
Сектор обзора в вертикальной плоскости, градус . . 18
Период обзора, с.........................................1,7
Разрешающая способность по дальности, % от масштаба ин-
дикатора ................................................ 1
Разрешающая способность по азимуту, град:
в режиме кругового обзора........................0,8
» » секторного »....................................0,53
Ослабление сигналов, отраженных от гидрометеоров, дБ . 8—25
Потребляемая мощность, кВт............................... 3,7
Антенная система состоит из передающей и приемной антенн. Использова-
ние отдельных антенн для излучения и приема сигналов исключает из схемы
волноводного тракта коммутационные элементы и уменьшает минимальную
дальность действия радиолокатора.
Передающая и приемная антенны идентичны и состоят из рупорного облу-
чателя, отражателя, форма которого соответствует части параболоида вращения,
и поляризационной решетки. Горизонтальный размер отражателя— 2,3 м, а
вертикальный — 0,3 м. Облучатель выполнен в виде секториального рупора,
установленного в фокусе отражателя (фокусное расстояние отражателя 0,69 м).
Пластины поляризационной решетки могут изменять свое положение относи-
тельно плоскости раскрыва облучателя в пределах 90 — 45°, при этом поляри-
зация излучаемых колебаний изменяется от линейной до круговой.
1 37
Рис. 4.15. Диаграммы направленности антенн радиолокатора обзора летного по-
ля в горизонтальной (а) и в вертикальной (б) плоскостях
Диаграммы направленности антенн (рис. 4.15) в вертикальной плоскости
имеют форму, близкую к косекансной (cosec 0, где 0— угол в вертикальной
плоскости). Антенны имеют следующие параметры:
Ширина ДН по напряженности поля на уровне 0,2 от максиму-
ма, град:
в горизонтальной плоскости ............................. 0.25
в вертикальной » 1,5
Относительный уровень боковых лепестков, %....................12
Коэффициент усиления, дБ......................................49
Частота вращения, об/мин......................................36
Волноводный тракт имеет отдельные передающий и приемный каналы. Ко-
эффициент бегущей волны волноводных каналов не менее 0,7, В передающем
волноводном тракте установлен направленный ответвитель, через который про-
ходит сигнал в схему АПЧ гетеродина приемника.
Механизм привода антенны обеспечивает вращение колонны привода ан-
тенн. В колонне привода установлен блок датчиков следящей системы, синхро-
низирующей вращение антенн и отклоняющих катушек индикаторных устройств.
Следящая система имеет следующие параметры:
Частота вращения отклоняющих катушек, об/мин ... 36
Погрешность при установившейся частоте вращения отклоня-
ющих катушек, град........................................2
Динамическая погрешность, град..........................0,2
Время вхождения в синхронизм, с.........................10—12
Передатчик предназначен для получения мощных высокочастотных импуль-
сов с несущей частотой около 36 ГГц. В состав передатчика входят: генератор,
модулятор, подмодулятор и выпрямители.
В генераторе используется магнетрон типа МИ-88М, особенностью которо-
го является то, что генерация колебаний начинается с момента, когда напряже-
ние на магнетроне составляет 70—80 % номинального значения. Поэтому дли-
тельность модулирующего импульса должна быть в 2 раза больше длительности
генерируемого высокочастотного импульса.
В модуляторе применена схема с частичным разрядом накопительного
конденсатора и импульсные тетроды типа ГМИ-5, соединенные параллельно.
Во входной части подмодулятора использован блокинг-генератор в режиме само-
возбуждения с внешней синхронизацией частоты от устройства формирования
запускающих импульсов. Длительность импульсов, подаваемых на выход под-
модулятора, равна 0,1 мкс. Передающее устройство имеет следующие параметры:
138
Частота генерируемых колебаний, ГГц....................... . 36,8
Импульсная мощность, кВт.....................................24
Длительность импульсов, мкс:
формируемых в модуляторе................................0,1
генерируемых высокочастотных............................0,05
Частота повторения импульсов, Гц............................ 6500
Устройство формирования запускающих импульсов прездназначено для
синхронизации работы элементов радиолокатора. Оно вырабатывает синхроим-
пульсы, которые запускают передающее устройство, схемы формирования раз-
вертки и меток дальности индикаторных устройств и устройство ВАРУ, управ-
ляющее коэффициентом усиления УПЧ приемного устройства.
Приемник преобразует и усиливает принимаемые сигналы и сигналы, ис-
пользуемые для АПЧ гетеродина. Высокочастотная часть приемного устройства
состоит из гетеродина и двух балансных смесителей, выход одного из которых
подключен к предварительному усилителю промежуточной частоты (ПУПЧ),
а второй служит входным каскадом тракта АПЧ.
Полоса пропускания ПУПЧ составляет 32 МГц, его коэффициент усиления
около 50.
Отраженные от целей высокочастотные сигналы после понижения их час-
тоты в смесителе до значения промежуточной частоты поступают на УПЧ. Для
расширения динамического диапазона приемного устройства наряду с линейным
режимом предусмотрен логарифмический режим работы УПЧ. УПЧ имеет по-
лосу пропускания 30 МГц и коэффициент усиления примерно 3000. В тракте
УПЧ протяженные отраженные сигналы дифференцируются, что снижает яр-
кость отметок на экранах индикаторов, включенных на выходе приемника. Для
выравнивания яркости отметок от ближних и дальных целей в устройстве ВАРУ
вырабатывается изменяющееся по экспоненциальному закону напряжение,
регулирующее усиление первого каскада УПЧ.
Основным каскадом устройства АПЧ является дискриминатор, выполненный
на двух симметрично расстроенных относительно промежуточной частоты 60 МГц
контурах. Разностный сигнал с выхода дискриминатора управляет частотой
клистронного генератора. Диапазон подстройки не менее 60 МГц. Параметры
приемного устройства следующие:
Чувствительность при отношении сигнал/шум = 2, дБ/Вт . . . 105
Промежуточная частота, МГц..................................60
Полоса пропускания, МГц.....................................30
Динамический диапазон входных сигналов, дБ:
в линейном режиме........................................25
в динамическом ».........................................60
Согласующее устройство служит для согласования сопротивления вход-
ных цепей индикаторов с выходом приемника.
Индикаторное устройство состоит из четырех индикаторов (один основной
и три—выносных) типа ИКО. Основной индикатор размещается рядом с аппара-
турой радиолокатора, а выносные индикаторы могут быть удалены от радиоло-
катора на расстояние до 150 м.
Предусмотрены три режима работы индикаторов: кругового обзора с мас-
штабами 1, 2, 4 и 8 км; секторного обзора и кольцевого. При кольцевом обзоре
просматриваются определенные участки аэродрома в укрупненном масштабе,
а следовательно, с более высокой разрешающей способностью. В состав каждого
из индикаторов входят следующие каналы: формирования прямоугольных им-
пульсов, соответствующих четырем масштабам развертки (1, 2, 4 и 8 км); раз-
вертки с вращающейся отклоняющей системой; формирования меток дальности
(100, 250 и 500 м) и канал видеоусилителя, где видеосигналы смешиваются с
импульсами масштабных меток дальности, усиливаются и подаются на ЭЛТ
индикатора.
Устройство управления и контроля обеспечивает местное и дистанционное
(с КПД) включение и выключение радиолокатора, а также контроль режимов
работы его устройств.
139
Глава 5. БОРТОВЫЕ РАДИОЛОКАЦИОННЫЕ УСТРОЙСТВА
5.1. МЕТЕОНАВИГАЦИОННЫЕ РАДИОЛОКАТОРЫ
Назначение — обнаружение находящихся в передней полусфере ЛА опас'
ных для полета зон активной грозовой деятельности и мощной кучевой облач-
ности с повышенной турбулентностью и определение их полярных координат
(азимута и дальности); получение радиолокационной карты земной поверхности
перед ЛА для облегчения ориентации экипажа по характерным наземным ориен-
тирам; обнаружение горных массивов и отдельных горных вершин и определение
достаточного для безопасного полета превышения ЛА над ними; измерение
угла сноса ЛА при полете над сушей. Указанная информация выдается экипажу
ЛА на визуальном индикаторе.
Классификация метеонавигационных радолокаторов (МНРЛ) основана на
различиях максимальной дальности (Отах) и показателя энергетического по-
тенциала PI радиолокатора в режиме обнаружения гидрометеообразований.
МНРЛ разделяют на следующие классы
I класс— PI ~ 119 дБ, Dmax = 550 км, предназначен для установки на
сверхзвуковых, дальних и средних магистральных самолетах;
II класс— PI = 111 дБ, Ощах = 350 км— ближние магистральные и тя-
желые самолеты местных воздушных линий (МВЛ);
III класс — Р1 = 101 дБ, Отах = Ю0 км— легкие самолеты МВЛ и
вертолеты;
IV класс — PI 90 дБ, Отах = 100 км— вертолеты.
Состав МНРЛ — антенна, приемопередатчик и индикатор, совмещенный с
пультом управления. Антенну устанавливают в носовой части ЛА для обзора
передней полусферы.
Обобщенная структурная схема МНРЛ (рис. 5.1) содержит все элементы, не-
обходимые для работы радиолокатора в импульсном режиме в выделенном для
МНРЛ диапазоне радиоволн вблизи 3,2 см.
Антенна МНРЛ предназначена для получения требуемой ДН. В режиме об-
наружения опасных гидрометеобразований (режим «Метео») применяется сим-
метричная узкая ДН «карандашного» типа. В режиме обзора земной поверхно-
сти (режим «Земля») часто используют так называемую косекансную или «веер-
ную» диаграмму. Коэффициент усиления антенны при такой ДН изменяется по
закону, близкому к cosec2 ct, где р — угол в вертикальной плоскости, отсчиты-
ваемый от продольной оси симметрии антенны, что позволяет уменьшить
зависимость мощности отраженных сигналов от дальности и получить равнокон-
трастное изображение местности на экране индикатора.
Конструктивно антенны МНРЛ выполняют в виде параболоида вращения с
диаметром 200— 1160 мм (в зависимости от типа ЛА), в фокальной плоскости ко-
торого находится облучатель. Для получения «веерной» ДН вводится отклоняю-
щий электромагнитную энергию подвижный козырек или дополнительный отра-
жатель специального профиля. Его выполняют из армированного горизонталь-
ными проводниками стекловолокна и для перехода на «веерную» ДН меняют по-
ляризацию излучаемых колебаний с вертикальной (при которой дополнительный
отражатель не оказывает влияния на ДН) на горизонтальную.
В зарубежных МНРЛ наибольшее распространение получили плоские фази-
рованные щелевые антенны, имеющие больший (на 1—1,5 дБ) коэффициент на-
правленного действия и существенно меньший уровень боковых лепестков, чем
параболические антенны.
140
П П
Рис. 5.1. Обобщенная структурная
схема метеонавигаиионного радиоло-
катора:
А — антенна; ПП — приемопередатчик;
АП — антенный переключатель; Прд—
передатчик; МПСА — механизм привода и
стабилизации антенны; Прм — приемник;
И — индикатор; УС — устройство согласо-
вания; Вн С — внешние системы; ДПП —
датчик пространственного положения са-
молета
Механизм поворота и стабилиза-
ции онтеннь! служит для управления
сканированием антенны в горизонталь-
ной плоскости, а также для наклона ее
в вертикальной плоскости. Сканирова-
ние антенны осуществляется автомати-
чески, а наклон антенны изменяется по
желанию экипажа с помощью ручных
органов установки антенны. Устрой-
ство стабилизации предназначено для
поддержания луча ДН в выбранном по-
ложении при эволюциях ЛА. Находит
применение система раздельной стаби-
лизации по осям, при которой ось ази-
мутального поворота антенны поддер-
живается вертикальной при угловых
колебаниях ЛА, и косвенная система
стабилизации, при которой совмещение
луча с горизонтальной плоскостью
достигается перемещением его в вер-
тикальной плоскости. Необходимые
для стабилизации антенны сигналы
получают от датчиков пространствен-
ного положения ЛА (например, от инерциальных систем и устройств).
Передатчик МНРЛ обычно магнетронный. Мощность его, как правило, не
превышает 10 кВт. Длительность зондирующих импульсов составляет 1 — 6 мкс.
В некоторых зарубежных МНРЛ на больших дальностях используются импуль-
сы большой длительности (несколько микросекунд), а на малых дальностях дли-
тельность импульсов уменьшается примерно до 1 мкс.
Главным достижением в области передающих устройств МНРЛ за последние
годы явился полный переход на полупроводниковую элементную базу. Полу-
проводниковые передатчики строятся по схеме «высокостабильный задающий
генератор — умножитель частоты» и вырабатывают мощность до 125 Вт в им-
пульсе. Уменьшение энергии излучаемых сигналов компенсируется применением
импульсов с длительностью до 20 мкс, сложением мощностей нескольких усили-
телей (достигается мощность до 1 кВт), а также совершенствованием приемного
устройства радиолокатора.
Приемник МНРЛ супергетеродинного типа, обычно с одним преобразовани-
ем частоты. В приемниках часто применяется ВАРУ, увеличивающая коэффици-
ент усиления с дальностью и обеспечивающая независимый от дальности уровень
сигнала на выходе приемника. Применение ВАРУ особенно целесообразно при
обзоре земной поверхности антенной с узкой ДН. Средний коэффициент шума
приемников МНРЛ 8 дБ. Улучшение стабильности несущей частоты и увеличе-
ние длительности излучаемых импульсов позволяет сузить полосу пропускания
приемника. Для повышения чувствительности в зарубежных МНРЛ последних
выпусков применяют кварцевую стабилизацию частоты гетеродина и малошумя-
щий входной каскад на арсениде галлия. Эти меры позволяют уменьшить коэф-
фициент ’пума приемника до 5 дБ.
Для сжатия динамического диапазона входных сигналов с тем, чтобы при-
близить его к динамическому диапазону управляющих напряжений ЭЛТ иног-
да применяется логарифмическая амплитудная характеристика усилителя про-
межуточной частоты приемника (рис. 5.2, и)
Видеоусилитель МНРЛ предназначен для усиления видеосигналов до уров-
ня, необходимого для работы ЭЛТ или другого типа выходного устройства ра-
диолокатора.В ряде МНРЛ в видеоусилителе осуществляется ограничение сигна-
лов по уровню для приведения всех сравнительно слабых сигналов к одному, а
сильных — к другому уровню. Такие видеоусилители имеют специальную ам-
плитудную характеристику с двумя уровнями ограничения (рис. 5.2, б) и назы-
ваются трехтоновыми, так как они обеспечивают получение на экране индикато-
ра изображения с тремя световыми тонами, соответствующими отсутствию сигна-
ла, слабым и сильным сигналам, отраженным от земной поверхности. Для выде-
ления среди облачности зон, опасных для полета, амплитудная характеристика
141
Рис. 5.2. Амплитудные характеристики тракта приема (о), видеоусилителя (б)
и график зависимости выходного напряжения приемника от времени (в):
1 — логарифмическая характеристика УПЧ; 2 — амплитудная характеристика видеоусилите-
ля; стрелками показано возможное изменение характеристики
видеоусилителя может изменяться таким образом, чтобы сильные сигналы от об-
ласти грозовой активности подавлялись при усилении (рис. 5.2, в). При такой
амплитудной характеритике области грозовой активности отображаются на ин-
дикаторе в виде темных участков, окруженных яркими зонами, соответствующи-
ми отражениям от облачности. Подобный вид индикации называется контурной.
В современных зарубежных МНРЛ для унификации приемопередатчиков,
т. е. обеспечения возможности применения индикатора любого типа, на выходе
приемника устанавливают аналогоцифровой преобразователь. Сигналы кванту-
ются по амплитуде и каждому диапазону интенсивностей осадков соответствуем
выходной сигнал определенной амплитуды, а следовательно, и определенный
код. Кроме того, производится дискретизация сигналов по времени в соответст-
вии с разрешающей способностью МНРЛ по дальности и азимуту.
Индикатор МНРЛ является основным устройством, с помощью которого
экипаж получает информацию от МНРЛ. Наибольшее распространение получили
монохроматические индикаторы с темновой индикацией на ЭЛТ с послесвече-
нием. Обычно используется секторная развертка луча ЭЛТ. Так как в таких ин-
дикаторах каждому уровню сигнала соответствует своя яркость свечения изоб-
ражения, то для определения степени опасности гидрометеообразования необхо-
димо сравнение на экране всех градаций яркостей. Этот недостаток устраняют
применением контурной индикации.
В современных индикаторах зарубежных МНРЛ применяется телевизион-
ный тип развертки луча, обеспечивающий большую яркость и стабильность изоб-
ражения. Существенным прогрессом в области индикаторной техники является
использование в индикаторах цифровых устройств памятки и обработки сигна-
лов, а также использование цветной индикации, где каждому диапазону уров-
ней отраженного сигнала соответствует свой цвет изображения (обычно трехцвет-
ное). Кроме того, в индикаторах наметился переход от координат «угол — даль-
ность» к прямоугольной системе координат, что позволяет дополнительно отобра-
жать различную информацию, хранящуюся в блоке памяти индикатора или по-
лучаемую от других систем, т. е. появилась возможность реализации многофунк-
ционального индикатора.
Параметры МНРЛ регламентируются действующими стандартами и нормами.
Параметры отечественных М.НРЛ определяются нормами летной годности
самолета (НЛГС-2) и ГОСТ 17732-80 (табл. 5.1). В зависимости от типа самолета
они несколько меняются, но остаются в пределах, приведенных в указанных до-
кументах. Дополнительно для МНРЛ I класса оговариваются следующие пара-
метры при раздельной стабилизации антенны по осям: наибольший угол крена
антенны, равный 40е; наибольший суммарный угол тангажа и ручного наклона
антенны 25° и динамическая погрешность системы стабилизации при скорости
изменения крена 20°С и скорости изменения тангажа 5°/с, которая не должна
превышать 1°.
Хотя точность определения координат наземных обтектов существующими
нормами не оговаривается, она должна быть такой, чтобы погрешность опреде-
ления местоположения не превышала 3—4 км. Это требование соответствует до-
пустимой погрешности определения дальности 1,5—2% от измеряемого расстоя-
ния, а азимута — не более 1°.
1 42
Таблица 5.1
Основные параметры МНРЛ (ГОСТ 17732—80)
Параметр Класс МРЛ
I II Ш IV
Угол обзора в горизонтальной плоско- сти, градус ±100 ±60 ±45 ±60
Расчетная дальность обнаружения гид- рометеообразований, км 550 350 200 100
Расчетный показатель потенциала ра- диолокатора, дБ 119 111 101 90
Частота обзора в горизонтальной пло- скости, Гц 0,5 0,2 0,2 0,2
Наибольший угол ручного наклона, ДНА, градус ±14 ±14 ±14 ±14
Наибольший угол стабилизации антен- ны с косвенной стабилизацией, гра- дус 35 35 20 35
Динамическая погрешность системы косвенной стабилизации при скорости крена 20% и скорости изменения тан- гажа 5%, градус 2 2 2,5 2,5
Погрешность совпадения азимутальных шкал индикаторов и антенны, градус: при значении угла менее 20 и более 340° 1 1 2 1
более 20 и менее 340° 1 ,5 2 3 2
Максимально допустимая погрешность совмещения, градус: оси ДН со строительной осью ан- тенны 0,5 0,5 1 ,5 0,5
шкалы регулятора наклона со шка- лой наклона антенны 1 1 2 2
Относительная погрешность калибровки по дальности, % 5 5 5 5
Нелинейность развертки по дальности. % 20 20 20 20
Количество меток дальности в рабочей части экрана 5 -к 2 5±2 4 ±2 4 ±2
Максимальная продолжительность не- прерывной работы, ч 24 10 10 10
Основные параметры МНРЛ американских фирм
Таблица 5.2
МНР л Дальность действия, км Сектор скани- рования. гра- дус ; Количество ; сканиров | в минуту Угол наклона антенны, градус Излучаемая мощность, кВт Длительностъ импульсов, мкс Потребляе- мая мощ- ность, Bi Масса, кг
Primus-90 540 ±80 Нет св. ±14,7 10,0 3,5 и 6 Нет св. 20
RDR-160 300 ±45 16 ±15 6,0 3,5 96 7
RDR-1400 430 ±60 12 ±15 10,0 0,5 96 14,1
WXR-250 450 ±60 14 ±15 5,0 Нет св. 98 10,5
WXR-700 600 ±90 Нет св. ±40 0,125 до 20 Нет св. Нет св.
KWX-60 280 ±45 ^30 ±12 3.0 Нет св. 95 11,8
143
Параметрызарубежных МНРЛ (табл. 5.2) регламентируются региональными
стандартами и нормалями. Наиболее высокие требования, которым должны
удовлетворять перспективные МНРЛ, содержатся в вводимой в настоящее время
нормали Arinc-708. Этой нормалью предусматривается, что главная функция
МНРЛ должна заключаться в обнаружении и определении координат гидро-
метеообразований. Параметры МНРЛ в соответствии с нормалью Arinc-708 име-
ют следующие значения:
Дальность действия, км.....................
Сектор обзора, градус:
в горизонтальной плоскости ....
в вертикальной плоскости ..............
Число сканирований в минуту ...............
Точность стабилизации антенны при скорости
изменения тангажа и крена по 20°/с в каж-
дом направлении, градус ...................
Число элементов разрешения по дальности .
Точность индикации (6):
дальности. % от измеряемого расстояния
азимута, градус........................
Диапазон частот. МГц.......................
Стандартная антенна ..................
Допустимый уровень боковых лепестков, дБ
Масса, кг.............................
9—590
±90
±14
15
±0,5
128, 256 или 512
±4
±2
9345±20
9375±20
5400
Плоская решетка,
диаметром 762 мм
—21
27—32
5.2. МЕТЕОН АВИГ АЦИОННЫЙ РАДИОЛОКАТОР «ГРОЗА»
Назначение — обнаружение областей активной грозовой деятельности с
определением наиболее опасных для полета зон грозового фронта и обзор земной
поверхности. МНРЛ «Гроза» устанавливается практически на всех самолетах
гражданской авиации. В зависимости от типа самолета применяют следующие
модификации радиолокатора: «Гроза-154», «Гроза-62», «Гроза-40» и др.
Состав «Грозы»: антенный блок; блок стабилизации и управления антенной;
приемопередатчик; индикатор, а также вспомогательные устройства, предназна-
ченные для коммутации основных блоков аппаратуры. Антенный блок размеща-
ется в носовом отсеке самолета под обтекателем и жестко закреплен на специаль-
ном кронштейне. Приемопередатчик и блок стабилизации и управления антенной
монтируют на единой амортизационной раме. Индикатор устанавливают в ка-
бине экипажа. Индикатор совмещен с устройством управления радиолокатором.
В состав различных модификаций МНРЛ «Гроза» могут входить: один индикатор
и один приемопередатчик; два индикатора и один приемопередатчик; один инди-
катор и два приемопередатчика. При этом назначение, принцип действия и схемы
МНРЛ остаются без изменения.
Основные режимы работы радиолокатора — «Земля», «Метео», «Контур»
и «Снос».
Режим «Земля» используется для получения радиолокационной карты мест-
ности. Форма ДН веерная. Для того, чтобы амплитуда отраженных сигналов не
зависела от дальности до объекта, используется ВАРУ и логарифмический УПЧ.
Видеоусилитель в этом режиме трехтоновый. Для коррекции искажений радио-
локационного изображения, вызываемых отличием горизонтальной дальности
от наклонной и расширением отметок на экране от удаленных целей малоразмер-
ных объектов вследствие конечной ширины ДН антенны, применяется гипербо-
лическая развертка луча на экране индикатора.
Режим «Метео» служит для обнаружения и определения координат гидро-
метеообразований. Радиолокационное изображение представляет собой гори-
144
зонтальный разрез грозовой облачности плоскостью полета и дает возможность
качественно судить о степени опасности гидрометеообразований. Опасными при-
пято считать те из них, которые обнаруживаются на дальностях свыше 100 км,
так как факт их обнаружения свидетельствует о сильной турбулентности ат-
мосферы в этих образованиях. В режиме «Метео» ось антенны гиростабилизиро-
вана. При малых амплитудах сигналов логарифмическая амплитудная характе
ристика УПЧ остается линейной.
Режим <и Контур* позволяет оценить степень опасности гидрометеообразова-
ний. Обработке подвергаются сигналы, отраженные, от образований, находящих-
ся на дальностях 40—-60 км. Слабым сигналам соответствует линейный участок
амплитудной характеристики УПЧ, а сильным-— логарифмический, кроме гоп»,
видеоусилитель в этом режиме ограничивает сильные сигналы, пришедшие, на
пример, от зон с сильной грозовой активностью. Поэтому сигналы, амплитуда
которых превышает уровень ограничения в приемном тракте, не дают изображе-
ния на экране индикатора МНРЛ, и гидрометеообразование на этом экране име-
ет контур, по ширине которого можно оценить интенсивность осадков, а следова-
тельно, и турбулентности. Чем выше градиент осадков в облачности, тем уже кон-
тур ее изображения.
Режим «Сносу» предназначен для грубого измерения угла сноса самолета.
Измерение основано на эффекте Доплера, который проявляется в амплитудной
флуктуации сигнала на выходе приемного тракта, вызванной биениями между
отдельными составляющими доплеровского спектра сигнала. Частота биений за-
висит от скорости полета и курсового угла. При совпадении путевой линии с осью
ДН частота биений будет минимальной (единицы герц). На экране индикатора
частота биений характеризует ч’астоту яркостной модуляции линий развертки.
Угол сноса определяют при ручном перемещении антенны по минимуму частоты
яркостной модуляции и отсчитывают по азимутальной шкале индикатора МНРЛ.
Параметры основных модификаций МНРЛ «Гроза» приведены в табл.
5.3 и 5.4.
Основные эксплуатационные параметры МНРЛ «Гроза»
Та б л и ца 5.3
Параметр <Гроза 40» < Гроза -154» <Г роза-62>
Угол обзора в горизонтальной плоско
сти. градус Дальность обнаружения, км: ±100 ±100 ±100
грозовых очагов 130 200 200
промышленных центров 160 250 2.50
крупных городов 330 350 300
незастроенных участков суши 100 150 170
водных ориентиров 100 150 170
Частота обзора в горизонтальной пло скости. Гц Угол наклона антенны в вертикальной 0.17 0,21 0,2—0,23 0.17 0.2
плоскости. градус Погрешность измерения угла сноса, гра ±2(1 ±10 10
дус Потребляемая .мощность: 1,5 1.5
от грехфазной сети 200 В 400 Гц.
В А 500 390 390
от сети 36 В 400 Гц. В-А 10 17 17
от сети постоянного тока 27 В, Вт 90 80 85
Масса, кг 40 45 50
Антенна МНРЛ «Гроза» формирует одну из двух ДН: «карандашного» типа
и «веерную» (рис 5 3). Для управления формой ДН используют ферритовый фа-
зовращатель, установленный в волноводе, идущем к облучателю антенны
145
Рис. 5.3. Диаграмма направленности
антенны МНРЛ «Гроза» в вертикаль’
ной плоскости:
/ - • узкая («карандашная» ) ДН. 2 ши
рокая («веерная») ДН: показаны только
первые боковые лепестки узкой ДН
«Гроза»:
АБ антенный блок: ДУГ)- датчик >т
ловых положений антенны ЭДВА -ы«-ь
тродвигатель нраш.ения антенны: РВ'1
решающий вращающий* я трансформа гор.
Пр — преобра-юнагель. А - антенна'.
ЭДНА -»лектродни1 атель наклона ;-нпрн
ны; БС.У - блок стабилизации н упран-н
ния антенной; ФФВ ферритовый фазе
вращатель; ВТ --вращающийся трансфор
матор: УСА —- устройство стэбнлнлаЦик
антенны: Цирк - циркулятор .МГ - ма»
нетронный генератор: Р разрядник
УРУ - Устройство регулировки ХСНДеНИ*
(ВАР?* и ручная регулировка» Ат аги-
нюатор. М • модулятор: См- , меснтели
Г ет гетеродин: АПЧ устройство ..аъ-
магической Подстройки частоты iетеродн
на, ПУПЧ предварительный »ПЧ
упч ~~ усилитель промежуточной частоты.
ПП приемопередатчик; АГ‘ - - устройство
рнзнерткн; ЭЛТ — злектронно л\чейая
трубка: ВУ —видеоусилитель’ С*. енн
уроннчатор- И - индикатор
(рис. 5.4). Рефлектор имеет и профиль
двойной кривизны и при смене поляри-
зации формирует «карандашную» ДН
(поляризация вертикальная) или «веер-
ную» (поляризация горизонтальная).
При обзоре земной поверхности спе*
циальный механизм через каждый пе-
риод обзора переключает ДН с «каран^
дашной» на «веерную» и обратно. Антен-
на сканирует в горизонтальной плос-
кости и гиростабилизирована по крену
и тангажу.
Передатчик магнетронного типа без
стабилизации частоты. Модулятор пере-
датчика магнитно-терристорный, запус-
кается и синхронизируется от бортовой
сети переменного тока, частота которой
определяет частоту повторения зондн«
рующих импульсов. В момент запуска
передатчика модулятор вырабатывает
старт-импульс, управляющий синхрони-
затором радиолокатора.
Приемник супергетеродинного типа
имеет гетеродин, выполненный на лам-
пе обратной волны. Частота гетеродина
подстраивается по частоте излучаемого
зондирующего сигнала устройством
АПЧ. В приемнике использованы пред
варительный УПЧ и основной. Послед
ний имеет логарифмическую амплитуд-
ную характеристику с линейным на
чальным участком.
Индикатор собран на ЭЛТ с боль-
шим послесвечением, магнитным управ-
лением и неподвижной отклоняющей си-
стемой. В последних модификациях
МНРЛ ’Гроза» в индикаторе использо-
ваны плавный переменный масштаб
изображения и ЭЛТ типа потенциалов-
коп с большим послесвечением и па-
мятью. Для измерения дальности на эк-
ране ЭЛТ индикатора воспроизводят* я
метки, следующие, через 10, 25 или 50 км
в зависимости от выбранного масштаба
дальности, равного соответственно 30 и
50 125 или 200 и 250 км. Возможно плав-
ное изменение масштаба развертки по
дальности в диапазоне 50—200 км В
индикаторе вырабатывается специаль-
ный импульс линейно изменяющегося
напряжения, который подается на видео-
усилитель для выравнивания свечения
линии развертки. Импульс подсвета
ЭЛТ индикатора запирает видеоусили-
тель на время обратного хода разверт-
ки Видеоусилитель в зависимости от
режима работы МНРЛ формирует еле*
дующие амплитудные характеристики:
с двумя уровнями ограничения (режим
«Землям, линейную «режим еМетео») и
< ограничением сильных сигналов (ре-
жим Конту р»).
146
Основные технические параметры МНРЛ «Гроза»
Параметр Гроза-40 Гроза-154 Гроза-62
Частота ВЧ-импульса, МГц 9370 9370 9370
Мощность в импульсе, кВт, не менее 9 9 9
Длительность импульса, мкс 2 3,5 3,5
Частота повторения импульсов, Гц 400 400 400
Чувствительность приемника по пропа- данию сигнала, дБ/мВт, не менее 100 100 100
Нелинейность развертки, % — 20 20
Ширина ДН по уровню 0,5, градус 4,2 3 3-4
Форма ДН в вертикальной плоскости Промежуточная частота, МГц Полоса пропускания УПЧ, МГц 30 Веерная 30 30
1.2—2,2 1,8—2 1.8
5.3. ДОПЛЕРОВСКИЕ ИЗМЕРИТЕЛИ СКОРОСТИ
Назначение — измерение составляющих вектора скорости ЛА относительно
земной поверхности для определения местоположения ЛА методом отчисления
пути, а также для выдачи экипажу информации, необходимой для пилотиро-
вания.
Классификация доплеровских измерителей скорости (ДИС) основана на коли-
честве измеряемых составляющих вектора скорости и на виде излучаемых ДИС
колебаний. В зависимости от количества составляющих вектора скорости
различают доплеровские измерители вектора полной скорости и изме-
рители путевой скорости и угла сноса. По виду излучения различают ДИС с из-
лучением непрерывных немодулированных или частотно-модулированных коле-
баний и ДИС с излучением импульсных колебаний. ДИС последнего типа не на-
шли широкого применения.
Доплеровские измерители вектора полной скорости применяют для управ-
ления полетом ЛА в вертикальной и горизонтальной плоскостях. Наибольшее
применение находят они на вертолетах. В некоторых типах таких ДИС возможно
измерение высоты полета.
Доплеровские измерители путевой скорости и игла сноса измеряют вектор го-
ризонтальной скорости и угол сноса ЛА или продольную и поперечную состав-
ляющие этого вектора. Наибольшее применение находят на самолетах, где ис-
пользуются в качестве основного датчика автономной навигационной системы от-
числения пути.
Доплеровские измерители скорости с излучением непрерывных немодулиро-
ванных колебаний обладают наибольшей энергетической эффективностью, т. е.
максимально используют излучаемую мощность. В таком ДИС отсутствует эффект
слепых высот, свойственный всем ДИС с периодической модуляцией и приводящий
к пропаданию входного сигнала при высотах полета, на которых время распрост-
ранения сигнала кратно периоду модуляции или величине жестко связанной с
этим периодом. Кроме того, ДИС с непрерывными немодулированными колеба-
ниями наиболее прост по построению
Доплеровские измерители с частотной модуляцией имеют меньшую на
6 дБ по сравнению с ДИС с немодулированными колебаниями энергетическую
эффективность, однако применение частотной модуляции при относительной
простоте аппаратуры позволяет уменьшить требования к развязке передающего
и приемного трактов ДИС
Частотный диапазон доплеровских измерителей скорости составляет 8.8—
- 9,8 ГГц и 13,25- 13,4 ГГц
Принцип действия ДИС основан на эффекте Доплера. Хнгенной системой
ЦИС формируются совпадающие в пространстве передающая и приемная ДН,
Рис. 5.5. Положение одного из лучей
диаграммы направленности ДПС
и углы, определяющие это положение
Рис. 5.6. Системы координат, ис-
пользуемые при определении состав-
ляющих вектора скорости
имеющие обычно 3—4 луча. Эффект Доплера проявляется в изменении частоты
принимаемых отраженных колебаний относительно частоты излучаемых колеба-
ний. Разность этих частот называется доплеровской частотой или доплеровским
сдвигом частоты Гд
где /изл, /пр — частоты излучаемых и - принимаемых колебаний; Хн ~ Хизл —
длина волны; VD — радиальная скорость, т. е. составляющая скорости ЛА
в направлении распространения электромагнитной энергии.
Проекция вектора скорости V на направление излучения (рис. 5.5, 1 —
продольная ось ЛА; 2 — след луча ДН наземной поверхности; 3— горизон-
тальная ось плоскости), совпадающая с осевой линией какого-либо луча ДН,
равна VD = — Vr cos (Г0 — £с) cos Во + Кв sin Во.
Доплеровская частота, измеряемая ДИС,
^д“2 [Ип cos (Го-Рс) cos Во — Ив sin Во] А”1,
где Рс — угол, равный сумме углов аэродинамического скольжения рск и сноса
ветром рв, т. е. угол между продольной осью ЛА и вектором путевой скоро-
сти. Вектор путевой скорости Кп совместно с горизонтальными составляю-
щими воздушной скорости V и скорости ветра W составляют так называе-
мый навигационный треугольник скоростей.
Вектор путевой скорости измеряется в связанной системе координат XYZ
(рис. 5.6), оси которой совпадают с продольной, поперечной и вертикальной осями
ЛА. Для перевода составляющих вектора путевой скорости VXt Vy и V2, изме-
ренных ДИС, в горизонтальную систему координат с осью Хг. совпадающей с
проекцией продольной оси ЛА на горизонтальную по отношению к земной по-
верхности плоскость, необходимо повернуть систему XY Z вокруг оси Z на угол
тангажа О и вокруг оси X на угол крена у. Соотношения, связывающие состав-
ляющие вектора путевой скорости в системах координат XYZ и Хг Fr Zr имеют
вид-
cos fl t V)t sin fl cos yJ- sin fl sin y;
Vu Ya sin fl +- 1Л, cos fl cos у - V cos fl sin y:
V£^ - sin у ! V_ cos у
4>
При горизонтальном полете, когда Ив = 0, доплеровская частота равна
/тд = 21/п^1 cos Тл fnax cos <Го - ₽с)- где cos 7л cos (Г0 — 0С) cos 8П:
Гдшах 2 VnXn 1 cos Во. Величина Лд тах в килогерцах при обычных дли
ДИС установочных углах До составляет 0,783- 10~3 /н^п- где /н - сЛн’ измеря
ется в гигагерцах, a Vn - в километрах в час. На средних частотах диапазонов
ДИС /?дгпах — 7,3 Vu или 10,4 Vu килогерц. Выражение cos ул^0.5 ГдАнУ,;1
характеризует изочастотную линию ИЧЛ (см. рис. 5.5), г. е линию на земной по-
верхности, которая соответствует доплеровскому сдвигу -= const. По этой
линии скользит точка М при изменении положения луча и постоянном угле
Наибольшее применение получили системы лучей, показанные на рис. 5.7
В самолетных ДИС все лучи имеют одинаковые установочные углы «
вертикальной плоскости и разные установочные углы Го в горизонтальной.
Обычно Г04 -= - Г ох- Соз и Г С 01 + 180°. Для ДИС характерны следующие
значения установочных углов: Б() 60...75°; Го - 15...45°.
Для каждого из лучей:
A^'ccs (Го —Ро) cos 80 —2VB Ан~ 1 sin Во;
Fat = —2V„ 1 cos (Го +Рс) cos Во—2VB К” ' sin Во;
Гдз= —2V„ ги 1 cos (Го — Ро) cos Во- 2УВ X."1 sin Во;
Гд4 =2Ии Х“* cos (Г0 + рс) cos Во — 2VB Хн 1 sin Во.
Состав ДИС — обычно два основных блока: высокочастотный (ВЧБ) и
низкочастотный (НЧБ). В комплект ДИС часто включают также индикатор, на
котором отображаются данные о скорости и угле сноса. В состав ВЧБ входит
антенная система и приемопередатчик.
Измеритель частоты и вычислительное
устройство входят в НЧБ.
Обобщенная структурная схема
ДИС (рис. 5.8) состоит из элементов,
выполняющих функции получения, из-
лучения и приема сигналов, выделения
и измерения доплеровских частот и оп-
ределения составляющих вектора ско-
рости.
В подавляющем большинстве ДИС
передатчиком Прд формируется коге-
рентный высокочастотный сигнал, кото-
рый направляется в передающую антен-
ну А-1, также служит опорным сигна-
лом при выделении доплеровских частот
в приемнике Прм. Антенна А-1 имеет
ДН, состоящую из трех или четырех лу-
чей. Сигналы, соответствующие этим
лучам, излучаются одновременно или в
определенной последовательности. От-
раженные от земной поверхности сиг-
налы принимаются антенной А-2, имею-
щей такую же ДН, как и А-1, и анало-
гичный закон коммутации лучей ДН.
Сигналы с А-2 поступают в Прм, где
усиливаются и преобразуются, в ре-
зультате выделяются доплеровские ча-
стоты сигналов, принятых по каждому
из лучей ДН антенной системы или паре
таких лучей Измеритель частоты ИЧ
вырабатывает напряжения, пропорцио-
нальные доплеровским частотам, а так-
же импульсные сигналы, частота лок-
Рис. 5.7. Наиболее распространенные
варианты расположения лучей в мно-
голучевых ДИС (проекция на гори-
эонтальную плоскость):
а - четырехлучевая Х-система (ДИСС-3);
б - трехлучевая система (ДИСС-013)
ВЧ6 НЧ6
Рис 5.8 Обобщенная «тгрук гурн.-у
схема диелеронскиго измерителя гк<е
рос । и
торения которых равна Аналоговые
сигналы с ИЧ поступают на ВУ, ко-
торое вычисляет скорость и угол сноса
для индикаторов и для ЦВМ навигаци-
онного комплекса ЦВМ НК- На ЦВМ
НК могут подаваться импульсные сиг-
налы непосредственно с ИЧ.
Антенная система ДИС, работаю-
щих в режиме излучения непрерывного
зондирующего сигнала, состоит из двух
отдельных передающей и приемной ан-
тенн, расположенных водной плоскости
и строго ориентированных относительно
продольной оси ЛА. Электрическая ось
антенной системы должна совпадать
(или быть параллельной) строительной
(продольной) оси ЛА с точностью не
хуже ±15', а плоскость АС должна
совпадать с горизонтальной плоскостью
с точностью не хуже ± 0,5°. Столь вы-
сокие требования к точности установки
АС — следствие того, что антенная си-
стема является измерительным элемен-
том ДИС и установочные углы лучей
АС входят в уравнения, определяющие
Рис. 5.9. Диаграммы направлен-
ности волноводно-щелевой антенны
(ДИСС-013) в плоскости, перпенди-
кулярной продольной оси ЛА (1), и
в плоскости угла у (2); углы 0 от-
считываются от оси ДН
измеряемые скорость и угол сноса.
Наибольшее распространение получили плоские волноводно-щелевые ан-
тенны, представляющие собой ряд расположенных в одной плоскости волноводов,
в обращенных наружу стенках которых прорезаны щелевые отверстия, через
которые излучается электромагнитная энергия. Количество волноводов и их дли-
на зависят от допустимых размеров АС, площадь которой обычно не превышает
0,2—0,4 м2 (длина антенны вдоль продольной оси ЛА около 450 мм, а общий раз-
мер передающей и приемной антенн в поперечном направлении -около 500 мм).
В большинстве ДИС антенную систему выполняют неподвижной и жестко свя-
занной с корпусом ЛА, помещают в вырез в обшивке фюзеляжа и закрывают сна-
ружи радиопрозрачным обтекателем. В некоторых образцах ДИС обтекатель по-
ставляется вместе с ВЧБ для уменьшения погрешностей ДИС и улучшения раз-
вязки приемного и передающего трактов (т. е. уменьшения мощности передат-
чика, просачивающейся в приемный тракт).
Количество лучей ДН и их взаимная ориентация зависят от числа и располо-
жения щелей волноводно-щелевой антенны. Как правило, все лучи ДН форми-
руются с помощью одной антенны (передающей или приемной). Находят приме-
нение АС с ДН «карандашной» формы и с изочастотными ДН. Для антенн с
«карандашными» лучами ширина ДН лежит в пределах 3—6 °.
Волноводно-щелевым антеннам свойственны изочастотные ДН, проекции лу-
чей которых на земной поверхности располагаются вдоль изочастотных линий
(см. рис. 5.5). Ширина ДН изочастотной антенны 3—5° в плоскости, перпендику-
лярной изочастотной линии, и 5—10° в плоскости, совпадающей с этой лини-
ей (рис. 5.9). При такой форме ДН сужается спектр принимаемого сигнала и по-
вышается точность ДИС. Особенностью волноводно-щелевых антенн является
зависимость положения луча ДН в пространстве от частоты излучаемых колеба-
ний. Поэтому изменение этой частоты (например, при смене генераторного при-
бора передатчика) приводит к дополнительным погрешностям ДИС. Для
устранения этого недостатка применяют частотно-независимые антенны, у кото-
рых закон изменения направления лучей при уходе несущей частоты подобран
таким образом, что доплеровская частота отраженных сигналов в определенном
диапазоне не зависит от рабочей длины волны
К особенностям АС относится требование к развязке между передающей и
приемной антеннами, связанное с работй ДИС в непрерывном режиме. Развязка
должна составлять 80 90 дБ в ДИС с излучением немодулированных колебаний
а 40—50 дБ в ДИС. использующих частотно-модулированные сигналы. Такой
уровень развязки обеспечивается применением отдельных антенн и уменьшен»
150
ем возможных связей между ними. С этой целью АС должны обладать малыми бо*
новыми лепестками (их относительное значение должно быть 20—25 дБ). Кроме
того, принимаются меры по уменьшению отражений от конструктивных элемен-
тов, находящихся в поле антенн (например, покрытие этих элементов поглоща-
ющими электромагнитную энергию материалами).
Передатчики когерентных ДИС должны обладать высокой стабильностью
частоты генерируемых колебаний, низким уровнем шумов генераторов и высокой
виброустойчивостью. Необходимость этих мер определяется высокими требова-
ниями к точностным характеристикам ДИС. В качестве генераторных приборов
в передатчиках находят применение магнетроны, клистроны и полупроводнико-
вые приборы. Высокая эффективность режима непрерывного излучения позволя-
ет использовать генераторные приборы с мощностью0,1—5 Вт. При этом сущест-
венно сокращаются масса и габаритные размеры передатчика. Для уменьше-
ния потерь энергии в волноводном тракте передатчики (а также и приемники)
объединяются с АС в конструктивно единый высокочастотный блок. Эти потери
имеют особое значение в ДИС из-за малой излучаемой мощности и высокой час-
тоты излучаемых колебаний (потери в волноводах на длине волны ~ 2,3 см,
соответствующей основному рабочему диапазону ДИС, составляют 0,13—
0,15 дБ/м или 3%/м).
Наилучшими характеристиками обладают полупроводниковые передатчи-
ки (табл. 5.5), которые выполняют по одной из следующих схем: с задающим
сравнительно низкочастотным полупроводниковым генератором и умножением
частоты или с генератором несущих колебаний на лавинно-пролетных диодах или
на диодах Ганна. Первая из этих схем отличается наивысшей стабильностью
частоты, низким уровнем шума и высокой надежностью, однако она более слож-
на и имеет низкий к. л. д. Другие схемы более просты, также имеют низкий
уровень шума и высокую надежность и дополнительно обладают приемлемым
(до 5%) к. л. д. В этих схемах для стабилизации частоты применяют высокодоб-
ротный внешний контур.
Таблица 5.5
Параметры передатчиков ДИС с непрерывным излучением
Передатчик К.п.д.. % Макси- мальное напряже ние пита- ния, В Отноше- ние мощ- ностей сигнала и шума’, ДБ Относительная температурная нестабильность частоты2 Масса, кг
Магнетронный 1 300— 3000 120 — (2,0...2,6) • 10“5 7
Ил истронный Полупроводнико- вый с умноже* 10—15 600 140 ( 2,25... +75) 105 Нет св.
нием частоты Полупроводники вын на СВЧ 2 Нет св. 130 ±(10- 7...10-«) 0,9
диодах 5 100 145 510~б Нет ев.
' Мощнсх-ть шума соответствует фильтру с полосой 1 Гц и частотой настройки fn + 1 кГц
2 На Г изменения температуры.
В передатчиках ДИС с частотной модуляцией используют либо клистрон-
ные, либо полупроводниковые генераторы. Частотная модуляция осуществля-
ется изменением напряжения на отражательном электроде клистрона или пита-
ющих напряжений диодов. При умножении частоты частотная модуляция про-
изводится изменением напряжения смешения одного из умножительных диодов,
что приводит к изменению параметров соответствующего колебательного кон-
тура умножителя. Такие передатчики должны дополнительно обеспечивать не-
обходимый индекс модуляции, иметь минимальную паразитную амплитудную
модуляцию и допускать изменение (вобуляцию) частоты модуляции.
151
Приемники ДИС с излучением непрерывных колебаний выполняют по одно,
канальной или многоканальной схемам. В одноканальном приемнике сигналы,
принимаемые по каждому из лучей ДН (или по двум диаметрально противополож-
ным лучам) обрабатываются последовательно во времени. При этом приемный
тракт подключается к соответствующему выходу приемной антенны с помощью
коммутатора. В многоканальных приемниках каждому лучу ДН соответствует
свой приемный канал и коммутация сигналов на входе приемника отсутствует.
Исключение коммутатора способствует повышению надежности и точностных ха-
рактеристик ДИС, но приводит к усложнению приемного тракта. Такое услож-
нение при современной элементной базе не вызывает существенного увеличе-
ния массы и габаритных размеров ДИС. Многоканальные приемники находят
широкое применение в ДИС последних выпусков.
Одноканальные или многоканальные приемники (каналы которых идентич-
ны) выполняют по супергетеродинной схеме с двойным преобразованием часто-
ты (рис. 5.10). Непосредственное получение во входном смесителе «нулевой»
промежуточной частоты (применявшееся ранее) сопровождается увеличением
уровня шума в приемном тракте из-за шумов смесителя. Так как шумы смесите-
ля уменьшаются обратно пропорционально частоте, то при усилении сигнала на
достаточно высокой промежуточной частоте удается уменьшить их примерно на
К) дБ и тем самым повысить чувствительность приемника.
Отличительной особенностью приемников ДИС является способ формирова-
ния колебаний второго гетеродина. Для исключения влияния нестабильности
частоты гетеродина на точность измерения скорости и угла сноса гетеродинные
сигналы получают от одного источника с частотой /г — /н — /пр- В балансном
смесителе БС-I в результате преобразования отраженного сигнала с частотой
fr /н £ и первого гетеродинного сигнала образуется сигнал промежуточ-
ной частоты /с - fr — /пр i Лд. В балансном модуляторе БМ выделяется
нижняя боковая чистота спектра модулированных колебаний fn — fr ~ /пр»
которая используется в качестве частоты гетеродина при втором преобразовании.
С выхода БС-2 сигналы с доплеровской частотой = |fup ± Гд — /пр| посту-
плю! на усилитель низкой частоты УНЧ и измеритель частоты ИЧ.
При таком преобразовании знак доплеровской частоты теряется, что не по*
зноляет определить направление вектора скорости. Этот недостаток, несущест-
венный в самолетных ДИС, недопустим в вертолетных. Поэтому в последних
вместо БС=2 применяют квадратурный смеситель (рис. 5.11), выходные сигналы
которого щ - cos Од (?) и «2 — cos (Од/ ± 0,5 л). Фазовый сдвиг-- 0,5 л со
ответствует положительной доплеровской частоте, а 4 0,5 л— отрицательной.
Таким образом, информация о знаке
заключена в относительном сдвиге од-
ного из выходных сигналов относитель-
но другого и используется в последую*
щих устройствах обработки сигналов.
Входным каскадом приемников
ДИС служит обычно балансный смеси-
тель. который позволяет примерно на
15 дБ снизить шумы, поступающие по
гетеродинному каналу. Этого достаточ-
но для получения требуемых шумовых
характеристик в приемнике с двойным
преобразованием частоты (в приемнике
с «нулевой» промежуточной частотой
необходимо подавление шумов на 30—
35 дБ, что трудно осуществимо). Кро-
ме того, предъявляются и жесткие тре-
бования на шумовые характеристики
гетеродина. Уровень собственных шу-
мов последнего должен быть равен
130 дБ/мВт.
Динамический диапазон выходных
сигналов ДИС может достигать 100 дБ
в зависимости от высоты полета и вида
земной поверхности. При этом усили-
Рис 5)0 Структурная схема прием
ника ДИ( ( <• двойным преобразова-
нием чатготы
Рис. 5..IL Струмурвая схема квад-
ратурного смесителя
152
тельный тракт приемника должен не
искажать спектр принимаемого сигна-
ла и поддерживать на выходе уровень
полезного сигнала в пределах, необхо-
димых для нормальной работы измери-
теля частоты. Поэтому требуется высо-
кая равномерность амплитудно-частот-
ной характеристики этого тракта в
Рис. 5.12. Структурная схема прием-
ника ДИСС с частотно-модулирован-
ными колебаниями
пределах полосы пропускания, а в
самом тракте необходимо применять
ограничители сигналов или устрой-
ства автоматической регулировки усиления АРУ. Ограничители сигнала
используют тогда, когда измеритель частоты построен по схеме счетчика
числа переходов сигнала через нуль (счетчик числа нулей), а АРУ — когда при-
меняется следящий узкополосный измеритель частоты. Полоса пропускания
усилителя промежуточной частоты УПЧ зависит от диапазона изменения
г. е. от возможных значений составляющих вектора скорости, и имеет значе-
ния порядка нескольких десятков килогерц. Для повышения эффективности АРУ
напряжение автоматической регулировки подают иногда и входные каскады
УНЧ.
При излучении частотно-модулированных колебаний приемник ДИС должен
выделять требуемую гармонику частоты модуляции которая используется
затем для получения F^. Поэтому такой приемник (рис. 5.12) отличается от
обычных приемников частотно-модулированных сигналов. В качестве гетеродин-
ного сигнала в балансном смесителе БС-1 используется часть мощности передат-
чика, состоящего из генератора модулирующей частоты ГМЧ, частотного моду-
лятора ЧМ и генератора высокой частоты ГВЧ. На выходе БС действует так
называемый преобразованный сигнал, из спектра которого с помощью усилите-
ля промежуточной частоты УПЧ, настроенного на п-ю гармонику частоты FM,
выделяются колебания с частотами nFM ± Гд. Высокое значение частоты Гм
(порядка единиц мегагерц) способствует уменьшению шумов БС в диапазоне уси-
ливаемых частот. На синхронный детектор СД поступают колебания с опорной
частотой nFM, полученные в умножителе частоты УЧ. Сигналы частоты Гд с СД
через усилитель низкой частоты УНЧ поступают на измеритель частоты ИЧ.
При частотной модуляции на 20—25 дБ уменьшается динамический диапазон
входных сигналов УПЧ, что дает возможность снизить требования к АРУ при-
емника. Полоса пропускания УПЧ определяется не диапазоном доплеровских
частот, а вобуляцией частоты модуляции, применяемой для устранения свойст-
венных ДИС с периодическим модулирующим сигналом слепых высот и имеет
величину порядка 1 МГц.
Характерная особенность приемников ДИС с двойным преобразованием
частоты — малый коэффициент усиления УПЧ (500—1500 при немодули-
рованных и около 200 при частотно-модулированных колебаниях). Эта осо-
бенность является следствием просачивания прямого сигнала передатчика во
входные цепи приемника и возможности перегрузки этим сигналом приемника
при большом усилении последнего. Основное усиление осуществляется в УНЧ.
К особенностям приемников ДИС с непрерывным излучением колебаний от-
носится и тот факт, что коэффициент шума, а следовательно, и чувствительность
приемника, зависит от коэффициента паразитной модуляции (вследствие вибра-
ций высокочастотных элементов ДИС) просачивающегося прямого сигнала пере-
датчика. Для уменьшения уровня шумов, вносимых передатчиком, применяют
малошумящие генераторы высокой частоты и увеличивают развязку передающе-
го и приемного трактов до значения не менее 70 дБ при немодулированных коле-
баниях и 45—50 дБ при частотно-модулированных колебаниях. Для уменьшения
вибрационных шумов повышают жесткость конструкции элементов антенно-вол-
новодного тракта, применяют виброустойчивые генераторы и электронные при-
боры и другие подобные меры, которые обеспечивают глубину паразитной амп-
литудной модуляции просочившегося сигнала 10-6 - 10~7. С учетом принимае-
мых мер коэффициент шума приемников с «нулевой» промежуточной частотой со-
ставляет примерно 17 дБ, а с двойным преобразованием частоты — 9,5 дБ (на
частоте 20 кГц). При этом пороговая чувствительность соответственно равна
— 140 и —150 дБ/Вт.
153
Измерители частоты ДИС предназначены для получения информации о до-
плеровских частотах, принятых по отдельным лучам ДН, и могут выдавать эту
информацию либо в виде напряжения постоянного тока, пропорционального F%,
либо в виде последовательности импульсов, повторяющихся с частотой F^. В по-
следнем случае сигналы на входе и выходе измерителя имеют одинаковые частоты,
но сигнал на выходе, прошедший через узкополосный измеритель,имеет сущест-
венно более низкий уровень шума и пригоден для непосредственного использо-
вания в вычислителе. В современных ДИС применяют следящие измерители
частоты, отличающиеся, в основном, видом чувствительного к частоте элемента
(частотного дискриминатора).
Основной особенностью всех измерителей частоты является измерение сред-
ней или средней квадратической частоты смеси сигнала и шума, поступающей на
вход. Вследствие участия в формировании отраженного сигнала некоторой пло-
щадки на земной поверхности, ограниченной диаграммой направленности антен-
ны, принимаемый сигнал имеет случайный характер и соответственно сплошной
спектр. При диффузно отражающей поверхности этот спектр симметричен отно-
сительно центральной частоты Рдо, подлежащей измерению, и имеет огибающую,
зависящую от формы соответствующего луча ДН антенны ДИС. Ширина этого
спектра при горизонтальном полете ЛА АЛД = 1,41 КпХ1Г1Лу sin ул, где Ду —
ширина ДН по половинной мощности в плоскости, содержащей угол ул (см.
рис. 5.5). Это приводит к тому, что колебания измеряемой частоты Рд0 в чистом
виде невозможно выделить из принимаемого случайного сигнала, поэтому изме-
рения всегда сопровождаются флуктуационной погрешностью, зависящей толь-
ко от самого сигнала (от ширины его спектра). Кроме того, при наличии шумов
приемника измеритель реагирует на среднюю или среднюю квадратическую час-
тоту смеси сигнала с шумом, что дополнительно снижает точность ДИС. Послед-
ний недостаток устраняется при узкополосных измерителях частоты, в которых
перед дискриминатором включается фильтр с полосой пропускания, примерно
равной ширине спектра сигнала. Любое искажение огибающей спектра сигнала
приводит к смещению средней или средней квадратической частот и сопровожда-
ется погрешностью, называемой погрешностью смещения. При равномерной
амплитудно-частотной характеристике приемного тракта причиной такой погреш-
ности является отражающая поверхность, коэффициент обратного рассеива-
ния которой зависит от угла падения электромагнитной волны.
В состав дискриминаторов устройств, предназначенных для измерения час-
тоты Т^до, входят либо счетчики числа переходов через нуль, либо различного
типа частотные дискриминаторы.
В измерителе частоты со счетчиком числа переходов сигнала через нуль
(рис. 5.13) сигнал с УНЧ приемного тракта поступает на схему узкополосной
фильтрации измерителя. Здесь спектр доплеровских частот с помощью смесите-
ля См-1 и управляемого генератора УГ переводится на некоторую опорную час-
тоту, например, /оп = 70 кГц. На частоту /Оп настроен узкополосный фильтр
УПФ. В смесителе См-2 выделяется частота Рд0. Колебания со См-2 поступают
на формирователь импульсов ФИ, вырабатывающий импульсы стандартной ам-
плитуды и длительности каждый раз, когда напряжение сигнала проходит через
нулевой уровень с положительной, н
Рис. 5.13. Измеритель частоты со
счетчиком числа переходов сигнала
через нуль
пример, производной. Эти импульсы под-
считывают счетчик СИ, выходное на-
пряжение которого запоминается ин-
тегратором И, входящим в схему сло-
жения СС.
Схема переключения режимов СПР
при включении измерителя, когда
спектр сигнала не попал еще в полосу
пропускания УПФ, подает на электро-
двигатель ЭД напряжение от внешнего
источника. Двигатели связан с потен-
циометром отработки ПО и изменяет
напряжение, управляющее частотой УГ
до тех пор, пока на выходе смесителя
См-2 не появится сигнал, свидетель-
ствующий о грубом совмещении цен-
154
тральной частоты спектра сигнала с
полосой пропускания УПФ. После это-
го измеритель переходит в режим слеже-
ния за этой средней частотой. Пропор-
циональное Ад0 напряжение с интегра-
тора И сравнивается в устройстве срав-
нения УС с напряжением ПО и получен-
ная разность (сигнал ошибки) исполь-
зуется для управления ЭД, который,
изменяя частоту /оп, поддерживает доп-
леровский спектр в полосе УПФ. На
ПО подается постоянное напряжение
Uon. Выходными сигналами измерителя
являются либо импульсы, следующие
с £д, либо напряжение U (Ад), пропор-
циональное Ад.
В таком следяющем измерителе цепь
обратной связи не замкнута по входно-
му сигналу ИЧ. Поэтому необходимо
расширять полосу пропускания УПФ,
Рис 5.14. Структурная схема следя-
щего измерителя частоты с квадра
турно-фазовым дискриминатором
что ведет к снижению точности и увеличению требуемого отношения сигнал/
шум. Для обеспечения относительной погрешности измерения, не превышающей
0,4%, отношение мощностей сигнала и шума должно быть 5—10 дБ..
Если в ДИС используется общий приемный тракт для обработки сигналов
всех лучей, то в измеритель частоты включается столько СС, сколько сигналов
поступает на вход приемника. Эти схемы переключаются одновременно с пере-
ключением лучей антенной системы.
Значительно лучшими характеристиками обладают следящие измерители
частоты, работающие по входному сигналу частоты Одним из широко приме-
няемых вариантов таких измерителей является измеритель частоты с квадратур-
но-фазовым дискриминатором (рис. 5.14). С помощью балансного смесителя БС
и опорного генератора ОГ. входящих в состав преобразователя частоты ПЧ.,
спектр сигнала переносится на частоту /0 /оп — Ад, где /оп — частота ОГ,
равная, например, 500 кГц. Со смесителя сигнал со средней частотой /0 посту-
пает на схему формирования квадратурных сигналов На смесители См-1 и См-2
подаются колебания с частотой fy.r от управляемого гетеродина УГ. Колебания,
поступающие на См-1, предварительно сдвигаются по фазе на 90е. Фильтры Ф-i
.и Ф=2 выделяют составляющие разностных частот/р /0 - Частота /р при
работе следящей системы мала, так как при этом /у.г /0 В состав фильтров
Ф включены фазосдвигающие цепи. Этим достигается дополнительный сдвиг по
фазе на + 45° в фильтре Ф-1 и на —45‘ в Ф-2 При /0 > /у.г сигналы н, и и2 на
выходе смесителей См-1 и См-2 имеют фазовые сдвиги соответственно — 90е и 0
Поэтому после фильтров Ф фазы этих сигналов одинаковые При /0 < />рГ фазы
сигналов и, и равны соответственно 90' и 0f После фильтров эти сигналы
отличаются по фазе на 180' Полоса фильтров Ф изменяется в зависимости от
скорости полета, что требуется в связи с расширением спектра сигнала при боль
ших скоростях. Переключение осуществляется с помощью частотно-пороговой
схемы ЧПС.
Напряжения с фильтров поступают на фазовый детектор ФД. являющийся
чувствительным элементом замкнутой системы, следящей за частотой Ад0. На-
пряжение на выходе ФД (сигнал ошибки) зависит от фазовых соотношений пода
ваемых на ФД сигналов, а следовательно, и от соотношения частот /0 и /\.г
Сигнал ошибки положителен при /у > /у.г, отрицателен при /0 < и равен
нулю при /(| /у.г Сигнал ошибки усиливается в УСО-1, входящем в состав
дискриминатора Диск, и поступает на управляемый генератор Одновременно
сигнал ошибки проходит УСО-2 и подается на демодулятор Дм. который входит
в схему обнаружения сигнала доплеровской частоты
При отсутствии доплеровского сигнала на выходе фильтров Ф-1 и Ф 2 вклю-
чается режим поиска, когда демодулятор Дм не работает и напряжение на ин-
теграторе И-2 близко к нули» Схема переключения режимов СПР подает через
УСО-1 постоянное напряжение на интегратор И 1. где оно возрастает и вызыва-
ем увеличение частоты генератора I Режим поиска продолжается до тех пор.
155
пока частота /р не станет близкой к средней частоте полосы фильтров Ф-1
и Ф-2.
Демодулятор Дм работает на частоте захвата - 15—20 Гц. Генератор
захвата ГЗ вырабатывает импульсные колебания с частотой Г3, которые исполь-
зуются для модуляции частоты генератора Г, в качестве опорных для Дм и для
синхронизации устройства управления ДИС. Вследствие модуляции частоты ге-
нератора Г на выходе ФД всегда (даже при /0 _ /у.г) присутствуют колебания
с частотой FЗ.г Демодулятор Дм при этом вырабатывает постоянное напряжение.
Это напряжение интегрируется в И-2 и при достижении определенной величины
переводит измеритель через СПР в режим слежения
В режиме слежения на УСО-1 подается сигнал ошибки с ФД. Сигнал ошиб-
ки равен нулю, когда /у.г~- Zo> т- е- /у.г = /ол ~ откуда следует, что час-
тота УГ может быть использована для выделения в смесителе См-3 частоты Гд„
Сигнал смесителя в формирователе ФИ преобразуется в последовательность им-
пульсов, следующих с частотой Fд. Эти импульсы поступают на вычислитель.
Инструментальная погрешность следящего измерителя частоты (JF ~.
----- 0,1 et. 0,2%; пороговое отношение сигнал/шум по мощности не хуже 0 дБ.
Вычислительные устройства ДИС предназначены для преобразования до-
плеровских частот, поступающих от измерителей частоты, и вычисления угла
сноса и путевой скорости или трех составляющих вектора скорости. При изме-
нениях угла крена и тангажа в больших пределах для преобразования вычис-
ленных значений составляющих вектора скорости из связанной системы коорди-
нат в горизонтальную в вычислитель вводятся значения этих углов от датчиков
пространственного положения ЛА. Находят применение как аналоговые, так
и аналого-цифровые вычислительные устройства. Максимальные инструмен-
тальные погрешности (Зо) у аналоговых вычислителей по углу сноса составляют
25', а по путевой скорости — около ±0,6%. У аналого-цифровых вычислителен
эти погрешности соответственно равны 20' и ±0,5% Максимальная погрешность
вычисления составляющих вектора скорости в горизонтальной системе коорди-
нат около ±0,4%
5.4. ДОПЛЕРОВСКИЙ ИЗМЕРИТЕЛЬ ДИСС-3
Назначение — измерение путевой скорости и угла сноса самолетов.
Состав: высокочастотный и электронный блоки, вычислитель, индикатор
и блок питания. Для предполетной и послеполетной проверки служит пульт
контроля (в состав бортовой аппаратуры не включен). Измеритель ДИСС-3
выпускают в двух вариантах: ДИСС-ЗП и ДИСС-ЗА. Первый из них не имеет ин-
дикатора путевой скорости и угла сноса.
Основные параметры ДИСС-3 следующие:
Диапазон измерения: путевой скорости, км/ч ... угла сноса, градус 200 -300 ±25с
Погрешность измерения (2<т): путевой скорости, % oi 1% . угла сноса/ ... Диапазон рабочих высот, м . Вид излучения .......... 07% 30 20 20 000 Непрерывное немод\ли-
Мощность передатчика. Вт , Чувствительность приемника. дБ/мВг Развязка между передающим и приемным трактами. дБ Число лучей ....... Частота коммутации лучей, Гц рованнос 5 103 «0 4 5
1 Эти изменения усредняются в основном кольце слежения за часштой и не
оказываю! влияния на измерение F
156
Л к ЕМ, ЛУп
Рис. 5.15. Структурная схема высокочастотного и электронного блоков доплеров-
ского измерителя ДИСС-3 (выделена одна из двух замкнутых систем слежения
за доплеровской частотой);
А-1, А-2 — передающая и приемная антенны; ВЧБ — высокочастотный блок; К —коммута-
торы; БС — балансные смесители; УПЧ — усилители промежуточной частоты; УНЧ«—усили-
тель низкой частоты: Гет — гетеродин; АРУ — автоматическая регулировка усиления; ДС—
детекторная секция; ФВн — ферритовый вентиль; ГВЧ — генератор высокой частоты; ФВ —
фазовращатель; УС — узел стабилизации частоты; ЭБ — электронный блок; См—смесители;
УПФ — узкополосный фильтр; ПУ — полосовой усилитель; ФИ — формирователь импульсов;
СЗ — схемы захвата; ГК — генератор контроля; СИ — счетчик импульсов; СС — схемы сле-
жения; И = интеграторы; П - сигнал «Память»; ВУ -- вычислитель: ПУп — пульт управле-
ния; ПК пульт контроля; НВ — навигационный вычислитель; Уп. С — управляющий сигнал
Высокочастотный блок конструктивно объединяет антенную систему, пе-
редатчик и приемник (рис. 5.15).
Антенная система состоит из двух волноводно-щелевых частотно-незави-
симых антенн, применение которых исключает влияние изменения частоты магне-
трона передатчика на масштабный коэффициент. Многощелевые волноводы ан-
тенн работают в режиме стоячей волны. Каждая из антенн в зависимости от фазы
(О или л) питающего напряжения одновременно формирует два даиметрально
противоположных луча (1 и 3 или 2 и 4). Соответствующие выводы антенн под-
ключаются к передатчику и приемнику коммутаторами. Установочные углы лу-
чей Г0 - 45' и Во 60°. Ширина ДН в плоскости углов равна ~4,5°, а в
плоскости, перпендикулярной продольной оси ЛА, — около 7°.
Передатчик представляет собой магнетронный генератор со специальными
устройствами стабилизации частоты: электронным стабилизатором анодного
напряжения, фильтрами напряжения накала и объемным резонатором, выпол-
няющим функцию подстроечного элемента при отклонении частоты магнетрона
от собственной частоты резонатора. Защита магнетрона при больших значениях
коэффициента стоячей волны волноводного тракта осуществляется ферритовым
вентилем. Мощность генерируемых колебаний контролируется детекторной сек-
цией
Приемник собран по супергетеродинной схеме с двойным преобразованием
частоты В качестве гетеродина используют клистронный генератор. Сигнал
доплеровской частоты от соответствующей пары лучей после второго преобра-
зования выделяется и усиливается в УНЧ. коэффициент усиления которого ре-
гулируется схемой АРУ.
Электронный блок предназначен для выдачи в вычислитель ДИСС и в со-
пряженные с ним бортовые системы сигналов, несущих информацию о допле-
ровских частотах, сигнала памяти и сигналов для синхронизации коммутаторов
ДИСС Сигнал «Память» свидетельствует о недостаточном для точной работы
ДИСС уровне входного сигнала. При переходе в режим «Память» в ДИСС нс-
157
пользуются последние измеренные значения Рд. Основными элементами данного
блока являются схемы узкополосной фильтрации и измерения частоты, схемы
захвата и слежения, устройство управления и генератор контроля.
Схема узкополосной фильтрации состоит из фильтра, настроенного на час-
тоту *70 кГц с полосой пропускания, примерно равной максимальной ширине
спектра сигнала, и преобразователей частоты, переносящих спектр на частоту
70 кГц и обратно в область низких частот. Гетеродином служат управляемые
генераторы схем слежения за доплеровской частотой..
Схема измерения частоты построена по принципу счета числа переходов
через нуль и служит для получения пропорционального частоте сигнала по
с гоя иного тока для управления генератором схем слежения и импульсного
сигнала для сопряженных с ДИСС систем. Частота следования импульсов равна
доплеровской частоте.
Схемы захвата предназначены для перевода блока из режима поиска в ре-
жим слежения и для получения сигнала «Память» при малом уровне доплеров-
ского сигнала на выходе схемы узкополосной фильтрации.
Схемы слежения вместе с соответствующими интеграторами замыкают цепи
обратной связи при слежении за доплеровской частотой и вырабатывают про-
порциональный доплеровский частоте сигнал постоянного тока для вычисли-
теля ДИСС
Генератор контроля служит для получения колебаний двух частот, имити-
рующих доплеровский сдвиг в режиме «Контроль».
Вычислитель представляет собой аналоговое электромеханическое устрой-
ство и предназначен для получения пропорциональных путевой скорости и уг-
лу сноса напряжений постоянного гока. На вычислитель с электронного блока
поступают два напряжения, пропорциональные средним квадратическим зна-
чениям доплеровских частот от соответствующих пар лучей ДИСС. При перехо-
де ДИСС в режим «Память» информация о путевой скорости и угле сноса по-
ступает от навигационного вычислителя. При полете над морем изменяется ко-
эффициент передачи в цепях вычисления скорости и тем самым частично компен-
сируется погрешность смещения.
5.5. ДОПЛЕРОВСКИЙ ИЗМЕРИТЕЛЬ ДИСС-013
Назначение - определение путевой скорости и утла сноса самолетов
Состав доплеровского измерителя: высокочастотный и низкочастотный бло-
ки и индикатор
Основные параметры ДИСС-013 следующие:
Диапазон измерения:
путевой скорости, км/ч ................
угла сноса, градус ......
Погрешность измерения (2а)
путевой скорости1. % oi I/,,
угла сноса/ .
Диапазон рабочих высот, м ..... .
Вид излучения ..........
Мощность передатчика. Вт . .
Чувствительность приемника. дБ/мВт
Развязка между передающим и приемным
трактами. дБ . ..............
Число лучей . , . .
Частота коммутации лучей. Гц
1«0 1300
±30
0,25/0,4%
15 20
10 -15000
Непрерывное частотно
модулированное
0,3
--109
50
3
3
1 В числителе по импульсному выходу, в знаменателе - по аналоговое
му выходу.
15м
Рис. 5.16. Структурная схема высокочастотного и низкочастотного блоков допле-
ровского измерителя ДИСС-013 (выделена одна из трех замкнутых систем еле
жения за доплеровской частотой):
ВЧБ — высокочастотный блок А-1, А-2 — передающая и приемная антенны, К - коммутато-
ры; БС - балансный смеситель; УПЧ усилитель промежуточной частоты. СД синхрон
ный детектор; УНЧ -- усилитель низкой частоты; АРУ - автоматическая регулировка уси
ления; НО КЧ — направленный ответвитель контроля частоты; НО - направленный ответ
витель; НО КМ направленный ответвитель контроля мощности: УЧ умножитель часто
ты; В - вентиль; ГВЧ — генератор высокой частоты; ГМЧ — генератор модулирующей ча
стоты; УВ -устройство вобуляции частоты, НЧБ - низкочастотный блок; УС - устройств»*
слежения; ПЧ — преобразователь частоты-, УГ управляемые гетеродины; ВУ вычислитель.
Дек — дискриминатор; УУ -устройство управления; ВСК —встроенная система контроля.
П — сигнал включения памяти; И индикатор; Морс сигнал от переключателя «Суша
море»
Высокочастотный блок (рис. 5.16) конструктивно объединяет антенную
систему, передатчик, приемник и высоковольтный выпрямитель.
Антенная система состоит из двух волноводно-щелевых антенн, волноводы
которых работают в режиме бегущей волны. Приемная и передающая антенны
формируют по три луча с Х-образным расположением. Уход частоты питающего
напряжения вызывает изменение положения лучей этих антенн. Знаки угло-
частотной зависимости для приемной и передающей антенн противоположны и
антенная система оказывается частотно-независимой. Все три луча антенной
системы фомируются поочередно. Установочные углы лучей Го - 35 и
= 64°. Ширина ДН в плоскости углов ул равна ~4,5°, а в плоскости, перпен-
дикулярной продольной оси самолета, 10°.
Требуемая развязка передающей и приемной антенн из-за применения час
тотной модуляции снижена до —50 дБ
Передатчик представляет собой частотно-модулированный генератор на
клистроне. Для уменьшения влияния на генератор антенно-волноводного трак
та используют вентиль в виде трехплечевого ферритового циркулятора. Для конт
роля мощности генерируемых колебаний применен направленный ответвитель
Частотная модуляция осуществляется путем подачи на отражатель клист-
рона синусоидального напряжения. Среднее значение модулирующей частоты
равно 1 МГц. Модулирующая частота изменяется по пилообразному закону
(вобуляция частоты) на ±(150—200) кГц синхронно с коммутацией лучей ан
тенной системы. Для поддержания индекса модуляции постоянным при вобуля-
ции напряжение, подаваемое на отражатель клистрона, прямо пропорциональ-
но модулирующей частоте.
Приемник служит для обработки сигналов от всех лучей и собран по схеме
с двойным преобразованием частоты. Сигнал усиливается на частоте 3 МГп (З я
гармоника модулирующей частоты) На балансный смеситель подается часть
мощности излучаемых колебаний. Для второго преобразования на синхронный
Детектор подается напряжение частотой 3 МГц, которое формируется путем огра
ничения модулирующих колебаний с последующим выделением третьей гармо
ники Схема АРУ обеспечивает постоянство напряжения на выходе приемного
тракта.
159
ж
Низкочастотный блок содержит устройства слежения и управления, вычис-
литель и встроенную систему контроля.
Устройство слежения представляет собой трехканальный узкополосный
следящий измеритель частоты и состоит из преобразователя частот и дискрими-
натора, общих для всех трех каналов, и трех коммутируемых синхронно с луча-
ми антенной системы управляемых гетеродинов.
Это устройство обеспечивает поиск и обнаружение спектра доплеровского
сигнала; захват и слежение за этим спектром; выдачу в вычислитель ДИСС и
навигационный вычислитель последовательностей импульсов, частоты следо-
вания которых равны средним доплеровским частотам по каждому из лучей,
а также выдает в вычислительные устройства и на индикатор сигнал «Память».
Устройство управления синхронно переключает лучи антенной системы и
коммутаторы каналов устройства слежения, а также синхронизирует напряже-
ние вобуляции. Для запуска устройства управления используется сигнал с ге-
нератора частоты захвата дискриминатора устройства слежения.
Вычислитель представляет собой аналоговое электромеханическое устрой-
ство и предназначен для получения напряжений, пропорциональных путевой
скорости и углу сноса, которые подаются на индикатор ДИСС. В вычислителе
предусмотрен режим «Память», в котором запоминаются и подаются на
индикатор последние значения путевой скорости угла сноса.
При полете над морем переключателем «Суша-море», расположенным на
индикаторе, изменяют режим работы вычислителя. При этом вычисленное зна-
чение путевой скорости увеличивается на 1,3% относительно того, которое со-
ответствует результатам измерения доплеровских частот.
Встроенная система контроля проверяет работоспособность измерителя
по имитированным доплеровским сигналам, соответствующим двум значениям
путевой скорости и угла сноса.
Индикатор ДИСС-013 служит для считывания результатов определения
путевой скорости и угла сноса, включения ДИСС и перевода его в режим
«Контроль», Кроме того, на индикаторе имеется переключатель «Суша-море».
Функционально индикатор представляет собой часть вычислителя ДИСС. С по-
мощью потенциометрических датчиков формируются два напряжения постоян-
ного тока, пропорциональные путевой скорости и углу сноса, которые подаются
в аналоговые устройства, сопряженные с ДИСС.
5.6. САМОЛЕТНЫЕ ОТВЕТЧИКИ
Назначение — автоматическая передача диспетчеру информации, необхо-
димой для управления движением ЛА. Ответчики передают сигналы ответа на
запросные сигналы, излучаемые вторичными радиолокаторами (или встроенными
вторичными каналами обзорных радиолокаторов) и составляют вместе с послед-
ними систему вторичной радиолокации.
Классификация ответчиков основана на различиях выполняемых функций.
Различают три типа ответчиков. Ответчики I типа предназначены для работы с
запросными кодами ЗК1-ЗК4 (см. §3.4), т. е. с кодом УВД. Ответчики II типа
реагируют на запросные коды, принятые ICAO. Ответчики III типа могут ис-
пользовать как код УВД, так и международный код, и имеют два основных ре-
жима работы; «УВД» и «RBS». В некоторых ответчиках предусмотрен также ре-
жим работы с вторичными посадочными радиолокаторами.
Состав самолетного ответчика: приемопередатчик, дешифраторы и шифра-
торы и пульт управления. Антенная система совместно с ответчиком не постав-
ляется. Состав оборудования зависит от класса ответчика, возможных режи-
мов его работы и от типа ЛА, на котором он установлен. К основным типам от-
ветчиков, используемых в СССР, относятся СОМ-64, CO-70, СО-72М, СО-77 и др.
Для повышения надежности оборудование ответчиков, за исключением
антенной системы и пульта управления, часто дублируется. Наметилась тен-
денция объединения всех устройств ответчика (кроме антенн) в моноблочную
конструкцию. Этот подход и применение методов микроминиатюризации дают
существенное уменьшение массы и габаритных размеров ответчика, а также сни-
жение потребляемой мощности ответчика и увеличение надежности
160
Обобщенная структурная схема
самолетного ответчика (рис. 5.17) пре-
дусматривает прием сигналов запроса
вторичного радиолокатора (ВРЛ) антен-
ной системой АС. Принятые сигналы
через разделительный фильтр РФ, пред-
назначенный для развязки передающе-
го и приемного каналов по частоте, по-
ступают в приемник Прм. Здесь сигна-
лы преобразуются, усиливаются и де-
тектируются, после чего направляются
в устройство подавления УПБЛ сигна-
лов, излучаемых по боковым лепесткам
ДН антенны ВРЛ. УНБЛ представляет
собой входной элемент блока шифра-
тора БШ. Отселектированные сигналы
запроса, принятые в пределах главно-
го лепестка ДН радиолокатора, через
ограничитель загрузки ОЗ поступают
на дешифратор Дш, а после декоди-
рования — на шифратор координат-
ного сигнала ШК- Полученный в ШК
координатный код управляет пере-
датчиком Прд ответчика. Кроме того,
в Дш определяется смысловое содер-
жание кода запроса. Полученные при
АС
Рис. 5.17. Обобщенная структурная
схема самолетного ответчика
этом сигналы через делитель частоты
запуска ДЧЗ подаются на шифратор информационных сигналов ШИ. Инфор-
мационный код также поступает на Прд. Выработанные Прд высокочастотные
ответные сигналы с помощью антенной системы АС излучаются в пространство.
Для управления ШИ служит кварцевый калибратор КК- В шифраторе инфор-
мационных сигналов используются данные от бортовых датчиков БД, выдаю-
щих информацию о высоте полета (барометрический высотомер или система
воздушных сигналов), остатке топлива (топливомер) и др. В ответчике преду-
сматривается встроенная система контроля ВСК.
Антенная система предназначена для приема и излучения сигналов. Одни
и те же антенны служат как для приема сигналов запроса, так и для передачи
сигналов ответа. Эти антенны должны обладать ненаправленной ДН в горизон-
тальной плоскости. Исключение составляют антенны приема сигналов вторич-
ного посадочного радиолокатора, для которых достаточно рабочего сектора
±90° в этой плоскости. В вертикальной плоскости ДН антенны должны допус-
кать работу ответчика в пределах углов ±30° относительно горизонтальной
плоскости (±45° для высокоманевренных ЛА). Невозможность получения не-
направленной ДН с помощью одной антенны приводит к необходимости дуб-
лирования антенн на некоторых ЛА. Кроме того, различие несущих частот
каналов УВД и RBS (а также и посадочных радиолокаторов) вынуждает приме-
нять отдельные антенны для каждого из частотных диапазонов.
Разделительный фильтр предназначается для исключения прямого про-
хождения сигнала передатчика в приемный тракт и предотвращения шунтиро-
вания антенны в режиме приема малым выходным сопротивлением передатчи-
ка. Этот фильтр (бесконтактный антенный коммутатор) выполняется обычно на
полосковых линиях и представляет собой сочетание направленных фильтров и
ответвителей.
Приемник обычно супергетеродинный с одним преобразованием частоты и
стабилизированным с помощью кварцевого резонатора гетеродином. Кварцевая
стабилизация требует последующего умножения частоты задающего генератора
гетеродина. Особенностью приемника является большой (>50 дБ) динамичес-
кий диапазон входных сигналов, принимаемых как от близкорасположенных,
так и удаленных ВРЛ. Для устранения перегрузки в приемниках применяют
усилители с логарифмической амплитудной характеристикой. УВЧ в прием-
никах отсутствуют. Для уменьшения искажений импульсов сигнала запроса
расширяют полосу пропускания усилителя промежуточной частоты до .^10 МГц
6 Зак. 1683
161
Устройство подавления сигналов боковых лепестков выполняет функцию за-
щиты ответчика от ложных срабатываний при приеме сигналов запроса, излу-
чаемых боковыми лепестками ДН антенны ВРЛ. В современных ответчиках
(в зависимости от режима их работы) применяют как двухимпульсные, так и
грехимпульсные системы подавления сигналов боковых лепестков по запросу
(см. § 3.5).
Ограничитель загрузки защищает передатчик ответчика от перегрузки при
большом числе ответов в единицу времени. С ростом числа ответов в единицу вре-
мени средняя мощность передатчика может превысить допустимый для данно-
го генераторного прибора предел (наступает перегрузка передатчика), что со-
провождается нарушением теплового режима передатчика и искажениями сиг-
налов. Кроме того, ограничитель загрузки исключает срабатывание ответчика
от попадающих в приемный тракт сигналов других бортовых систем и от помех,
создаваемых собственным передатчиком. Данное устройство запирает вход
шифратора ответчика и устраняет возможность излучения сигнала ответа. Для
управления шифратором служат импульсы бланкирования от собственного пе-
редатчика ответчика (импульсы кодовых последовательностей, модулирующих
передатчик) и от других бортовых передатчиков, а также сигнал с накопителя.
Последний выдает напряжение, пропорциональное частоте следования сигна-
лов ответов. При определенном числе (например 2000) ответов в секунду выда-
ется сигнал, запирающий шифратор на несколько запросных циклов.
Для предупреждения перегрузки передатчика ответчика может также ис-
пользоваться АРУ приемника. При этом регулирующее напряжение прямо
пропорционально частоте следования сигналов запроса. Поэтому при большом
числе запросов коэффициент усиления приемника уменьшается и ответчик от-
вечает только на сильные сигналы запроса, поступающие от самых близких к
ЛА радиолокаторов. Ограничение загрузки, основанное на запирании шифра-
тора, не представляет такого приоритета ВРЛ, находящимся на сравнительно
небольших дальностях от ЛА.
Дешифратор служит для декодирования кода запроса и выдачи сигналов
на включение шифраторов координатного и информационного сигналов. В за-
висимости от типа ответчика в его состав может входить дешифратор кодов
УВД или RBS или оба дешифратора Декодирование осуществляется с по-
мощью линий задержки и логических схем.
Шифраторы координатного и информационного кодов предназначены для
получения кода ответа и выполнены на линиях задержки и соответствующих
логических схемах. Одним из основных требований к тракту декодирования
запроса — кодирования ответа является постоянство задержки сигнала в от*
ветчике, т. е. постоянство времени между передним фронтом импульса Р3 сигна-
ла запроса и передним фронтом первого импульса сигнала ответа. Нестабиль
ность этой задержки непосредственно отражается на точности измерения даль
ности до ЛАв Так, при нестабильности задержки в ответчике 0,1 мкс дальне
.мерная погрешность равна 15 м.
Делитель частоты запуска служит для уменьшения примерно на порядок
частоты запуска шифратора по сравнению с частотой поступления сигналов
запроса. При этом уменьшается загрузка передатчика ответчика и облегчается
раздельная индикация (на индикаторе диспетчера) ЛА. находящихся на одном
азимуте и небольшом расстоянии друг от друга. В данном устройстве исполь
зуются обычные триггерные схемы деления частоты следования импульсов
Кварцевый калибратор формирует серию кратковременных импульсов с
периодом повторения, определяющим временные позиции кодовых посылок
сигнала ответа. Основными элементами калибратора являются стабилизиро-
ванный с помощью кварцевого резонатора генератор, линия задержки и логи
ческая схема.
Передатчик служит для получения сигналов ответа на всех предусмотрен
ных в данном ответчике несущих частотах. В состав передатчика входят задаю
щий генератор, управляемый модулятором н усилитель мощности. Передатчик
имеет органы настройки на требуемую фиксированную несущую частоту.
Встроенная система контроля проверяет работоспособность ответчика
С этой целью в шифраторах формируется контрольный код. правильное!’
прохождения которого по тракту ответчика является свидетельством работе
способности последнего, Место ввода контрольного кода определяет глубин*
162
встроенного контроля. В простейшем случае проверяется только работа шиф-
раторов и дешифраторов.
Параметры бортовых ответчиков определяются стандартами и нормалями.
Параметры отечественных бортовых самолетных ответчиков (СО) регла-
ментированы стандартом СТ СЭВ 1823—79. Этим стандартом устанавливают-
ся параметры сигналов ответа (см. § 3.4) и требования к бортовому оборудова-
нию систем вторичной радиолокации.
При работе с ВРЛ ответчик должен выдавать сигналы ответа не менее чем
на 90% сигналов запроса (коэффициент ответа Кот ~ 0,9) в динамическом диа-
пазоне 50 дБ при условии, что амплитуда принятых импульсов и Р3 боль-
ше на 9 дБ амплитуды импульса Р2, принятого через 1—3 мкс после импульса
Pl. Чувствительность приемника для ограничения числа ответов, а следователь-
но, и исключения перегрузки передатчика, должна уменьшаться не менее чем
на 30 дБ при числе сигналов ответа, превышающем на 50% выбранное значе-
ние. Последнее устанавливают в пределах 500—2000 в 1 с. Если число от-
ветов меньше указанного на 10%, допускается уменьшение чувствительности
не более чем на 3 дБ.
Число срабатываний ответчика не должно превышать 10% от числа сигна-
лов запроса, если интервалы между импульсами Рх и отличаются от предус-
мотренных для данного вида кода более чем на 1 мкс.
Для защиты ответчика от запросных сигналов, принимаемых во время пе-
редачи сигнала ответа, предусматривается запирание ответчика на время не
более 125 мкс после передачи последнего импульса сигнала ответа (защитное
время). Ответчик должен запираться при приеме кода, в котором амплитуда
импульса равна или превышает амплитуду принятого импульса Рх при дина-
мическом диапазоне сигналов запроса до 50 дБ. Время запирания ответчика
при этом должно составлять (35±Ю) мкс.
Ответчик должен одновременно принимать сигналы запроса на частоте
(1030,0±0,2) МГц и на одной из частот: (835±0,3), (837,5±0,3) и (840±0,3) МГц.
Требуемая чувствительность приемника (при /Сот ~ 0,9), на первой из этих
частот не хуже —104 дБ/Вт, а на остальных частотах не хуже —84 дБ/Вт. При-
нимаемые сигналы с амплитудой 0—6 дБ относительно минимального запускаю-
щего ответчик сигнала и длительностью менее 0,3 мкс не должны вызывать пере-
дачу сигнала ответа и запирание ответчика. Ответчик также не должен реаги-
ровать и на любой одиночный импульс длительностью более 1,5 мкс. Допускает-
ся время восстановления чувствительности приемника до 3 дБ от минимального
уровня после приема сигнала с амплитудой, на 50 дБ превышающей этот
уровень, не более 15 мкс.
Нестабильность времени задержки между передним фронтом импульса Р3
сигнала запроса и передним фронтом первого импульса сигнала ответа не дол-
жна превышать 0,1 мкс при работе кодами УВД и 0,2 мкс при работе между
народным кодом.
Ответчик должен передавать сигналы на одной из частот: (1090,0 ±3,0),
(730,0±1,8), (740,8±1,8) и (750,0± 1,8) МГц. Требуемая импульсная мощ-
ность передатчика 300—800 Вт. При работе в режиме «УВД» длительность всех
импульсов сигнала ответа должна быть равна (0,8±0,2) мкс, а в режиме «RBS» —
(0,45±0,1) мкс. Длительность фронта и спада импульсов сигнала ответа должна
выдерживаться соответственно 0,05—0,1 и 0,05—0,2 мкс. Изменение амплиту-
ды любого импульса сигнала ответа по отношению к первому импульсу не дол-
жно превышать 1 дБ. Ослабление уровня побочных излучений должно быть не
менее 60 дБ. Допустимое затухание в антенно-фидерном устройстве составляет
6 дБ на всех рабочих частотах.
Ответчик должен иметь встроенные устройства ручного и автоматического
контроля работоспособности с выдачей сигнала исправности на пульт управ-
ления ответчиком. Должна быть предусмотрена дублированная работа двух
комплектов с оперативным переключанием с одного из комплектов на другой.
Регламентируемая наработка на отказ составляет 300 ч, а технический ресурс
До первого капитального ремонта — 10 000 ч.
Электропитание ответчика должно осуществляться от бортовых электри-
ческих систем с переменным напряжением 115 В (отклонение ±5%), частотой
400 Гц (отклонение ±5%) и постоянным напряжением 27 В (±10%). Допуска-
ется эксплуатация ответчика при температурах в диапазоне ±60° С (предель-
6*
163
ная температура —60 и +80° С) и при относительной влажности 98% (при 40° С).
Возможно понижение атмосферного давления до 0,2 - 104 Па.
Параметры зарубежных самолетных ответчиков регламентируются регио-
нальными стандартами и нормалями, основной из которых является Arinc-572,
которая заменяется в настоящее время нормалью Arinc-718. Согласно этим нор-
малям ответчик должен соответствовать следующим требованиям.
Ответчик должен выдавать сигналы ответа с коэффициентом /(От > 0,9,
когда в течение (2±0,7) мкс после приема импульса Рг не принимается никакой
импульс или амплитуда импульса Р3 меньше амплитуды импульса Рг не более
чем на 1 дБ. Сигнал ответа генерируется также в следующих случаях: ампли-
туда импульса ₽! больше амплитуды импульса Р2 на 6 дБ; амплитуда импуль-
сов сигнала запроса превышает на 10 дБ амплитуду случайных импульсов, при-
нимаемых за импульсы Р2 или Р3; амплитуда принимаемого сигнала нахо-
дится в пределах 0—50 дБ относительно минимального уровня запуска ответ-
чика. Число сигналов ответа в 1 с должно быть равно 500—1200.
При подавлении сигналов боковых лепестков необходимо запирать ответ-
чик (не менее чем в 99% случаев), когда в диапазоне 3—50 дБ относительно ми-
нимального уровня запуска ответчика амплитуда принимаемого импульса Р2
равна или больше амплитуды импульса Р1У а импульс Р2 следует на Рг с интер-
валом (2±0,15) мкс. Время запирания ответчика в этом случае не более
(35± 10) мкс, считая от заднего фронта импульса Р2.
Допустимое число срабатываний ответчика не более 10% от числа сигналов
запроса, если интервал между импульсами Pt и Р3 отличается от номинально-
го более чем на 1 мкс или принимается одиночный импульс с амплитудой, не
соответствующий нормальным условиям сигнала запроса. Защитное время
ответчика не больше 125 мкс.
Регламентируемая частота сигналов запроса равна (1030±0,2) МГц. Тре-
буется номинальная чувствительность приемника (при КОт = 0,9) не хуже
—106 дБ/Вт. Избирательность по соседнему частотному каналу характеризует-
ся уменьшением чувствительности при расстройке, которая составляет 3 дБ при
расстройке на ±3 МГц и 60 дБ при ±25 МГц. Чувствительность приемника по
зеркальному и другим побочным каналам приема должна быть не более —60 дБ
относительно минимального уровня запуска ответчика. Допустимое время вос-
становления чувствительности приемника после приема сигнала с амплитудой,
на 50 дБ превышающей минимальный уровень запуска, не более 15 мкс, сред-
няя скорость восстановления чувствительности приемника (по линейному за-
кону) не менее 3,5 дБ/мкс.
Ответчик должен передавать сигнал ответа на частоте (1090±3) МГц при
импульсной мощности передатчика 500—1000 Вт (27—30 дБ/Вт). Длительность
импульсов сигнала ответа должна быть (0,35—,0,55) мкс, а длительность их
переднего фронта и спада соответственно (0,05—0,1) и (0,05—0,2) мкс. Требу-
ется ослабление уровня побочных излучений на менее чем на 60 дБ относитель
но пикового значения мощности сигнала. Максимальные потери в АФТ не
должны превышать 3 дБ.
Таблица 5.6
Основные параметры американских самолетных ответчиков
Ответчик Код Излучаемая МОЩНОСТЬ, Вт Масса, кг Особенности
RT-359A А, С 125 1,36 пп*
TDR-950 А, С 250 0,91 пп*
TRA-63A А, В, С. D 500 5,44 А-572**
621А-6А А. В, С, D 700 5,9 А-572**
КХР-755 А, С 750 2,2 DY***
* ответчик установлен на приборной панели кабины,
** ответчик соответствует нормали Arinc-572;
*** ответчик с дистанционным урпавленнем (установлен вне кабины пилотов).
164
Ответчик должен иметь автоматические устройство встроенного контроля
с передачей в высокочастотный тракт приемника имитированных сигналов за
проса с уровнем —100 дБ/Вт. Скорость контрольных запросов не более 450 за
1 с.
Регламентируемые значения массы составляют: антенны 0,4—0,8 кг. бло
ка ответчика 2,4—6 и пульта управления 0,4—0,8 кг.
Электропитание ответчика предусмотрено от сети с номинальным напря-
жением 115 В (с нестабильностью ±10%), частотой 300—1000 Гц.
Параметры некоторых самолетных ответчиков американских фирм при
ведены в табл. 5.6.
5.7. САМОЛЕТНЫЙ ОТВЕТЧИК СОМ-64
Назначение — работа в системах вторичной радиолокации, использую*
щих как международный код, так и код УВД.
Состав ответчика СОМ-64; антенное устройство; блок разделительных
фильтров; приемопередатчик; дешифраторы кодов УВД и RBS; блок шифратора
«УВД»; шифратор «RBS»; преобразователь высоты: встроенная система контро-
ля и пульт управления.
Режимы ответчика СОМ-64 соответствуют типу используемого кода.
Режим «УВД-» предназначен для передачи координатного кода и коодн-
рованных сигналов, содержащих информацию о бортовом номере ЛА. текущей
высоте его полета и остатке топлива, по сигналам запроса, кодированным ко-
дом УВД.
Режим «RBS» предназначен для передачи координатного кода и кодиро-
ванной информации о номере рейса и высоте полета ЛА по сигналам запроса,
код которых соответствует международному коду RBS.
Основные параметры ответчика СОМ-64 следующие:
«УВД» «RBS»
Приемный тракт:
Частота настройки, МГц.................... 837,5 1090
Чувствительность, дБ/Вт .... —84 104
Динамический диапазон, дБ .... 50 50
Система подавления сигналов боковых лепест-
ков ......................, трех- двух-
импульсная импульсная
Передающий тракт:
Частоты, МГц.............................. 730, 740 1090
750, 760
Импульсная мощность, Вт................... 325—1200
Длительность импульса, мкс................ 0,8 0,45
Антенная система ответчика СОМ-64 состоит из двух антенн (рис. 5.18)
типа ДРД-2 с синфазным питанием Обе антенны расположены на киле само-
лета и используются в режиме «УВД». Для приема и передачи сигналов на час-
тотах международного диапазона (режим «RBS») служит штыревая антенна
типа AM, размещаемая, например, на нижней обшивке в средней части фюзе-
ляжа самолета. Антенны соединяются коаксиальным кабелем с блоком раз
Делительных фильтров.
Блок разделительных фильтров (антенный коммутатор) предназначен для
разделения сигналов запросов, имеющих различные несущие частоты, и пода
Чи этих сигналов на соответствующий преселектор приемника, а также для
распределения сигналов ответа, получаемых от передатчика ответчика между
соответствующими по диапазону антеннами.
Приемное устройство ответчика СОМ-64 состоит из основного приемника,
работающего в режимах «УВД» и «PBS», и приемника, используемого для работы
с вторичными посадочными радиолокаторами. Основной приемник имеет два
преселектора, настроенных на частоты 837,5 МГц (режим «УВД») и 1030 МГн
165
Рис. 5.18. Структурная схема само-
летного ответчика СОМ-64:
А-1 — антенны типа ДРД-2; А-2 — антенна
типа AM; БРФ — блок разделительных
фильтров; Прд — передатчик; ВСК —
встроенная система контроля; ПУ — при-
емное устройство; ПР — переключатель
режимов («УВД» — RBS»); ДШ УВД —
дешифратор и шифратор кода УВД;
ОЗ/ПР — ограничитель загрузки и пере-
ключатель режимов («УВД» — «RBS»);
БШ УВД — блок шифратора, работающий
в режиме УВД; ТМ — топливомер; ПВ—
преобразователь высоты; БВ — барометри-
ческий высотомер; ДШ RBS — дешифра,
гор — шифратор международного кода
близкая
к логарифмической амплитудная
(режим «RBS»). Полоса пропускания
преселектора на этих частотах соответ-
ственно 15—25 и 25—30 МГц.
Сигналы с преселектора поступают
на общий смеситель. Гетеродин гене-
рирует колебания с частотами 861,9 и
1005,6 МГц для преобразования сигна-
лов в режимах «УВД» и «RBS». Эти
частоты отличаются от несущих частот
принимаемых сигналов на одно и то же
значение 24,4 МГц. На эту частоту
настроен усилитель промежуточной ча-
стоты приемника. В состав гетеродина
входят: задающий генератор, частота
которого (около 47,9 МГц) стабилизи-
рована с помощью кварцевого резона-
тора; утроитель частоты; усилитель
мощности и оконечный умножитель ча-
стоты в 6 и 7 раз.
Усилитель промежуточной частоты
выполнен по схеме резонансного уси-
лителя с попарно расстроенными кас-
кадами. Полоса пропускания усилителя
около 7 МГц. Сигналы, снимаемые с чет-
вертого, шестого и восьмого (последне-
го) каскадов УПЧ, детектируются и
усиливаются в видеоусилителях. Затем
они поступают на сумматор через линии
задержки, компенсирующие задержку
сигналов промежуточной частоты в со-
ответствующих каскадах. Видеоусили-
тели работают в режиме ограничения.
При этом с ростом сигнала ограничение
наступает сначала в последнем видео-
усилителе, а затем во втором и первом.
В результате сложения амплитудных
характеристик усилителей достигается
характеристика УПЧ. Поэтому ди
намический диапазон принимаемых сигналов сжимается, но сохраняется содер
жащаяся в амплитуде сигналов информация о правильном или ложном запросе
Чувствительность приемника составляет —84 дБ/Вт в режиме «УВД» и
—104 дБ/Вт в режиме «RBS».
Передатчик ответчика СОМ-64 преобразует видеоимпульсы , соответст
вующие выбранному коду сигнала ответа, в радиоимпульсы одной из пяти фик
сированных несущих частот. В состав передатчика входят модулятор, высоко
частотный тракт и устройство перестройки частоты. В высокочастотном тракю
передатчика генерируются и усиливаются колебания несущей частоты, кою
рые проходят фильтр нижних частот и через коаксиальный выход поступаю
на блок разделительных фильтров. Модулятор управляет работой высокочас-
тотного генератора в соответствии с кодированными сигналами, подаваемым!
с шифраторов. Передатчик перестраивается с одной фиксированной частою
на другую механическим устройством с электроприводом. Основные его лара
метры следующие:
Импульсная мощность, кВт , ............. 325—1200
Фиксированные частоты, МГц, в режимах;
«УВД»........................................... 730, 740,
750, 760
«RBS»............................................ 1090
Длительность импульса, мкс, в режимах:
«УВД» , . ......................... 0,8
«RBS» ....................................... . 0.45
166
Время включения, с....................................25—100
Время перестройки на заданную фиксированную частоту,
мин.................................................. 1
Время перехода из режима «УВД» в режим «RBS», мин 4
Блок шифратора УВД предназначен для декодирования принимаемого
в режиме «УВД» сигнала ответа, определения его информационного содержа-
ния, выработки координатного и информационного (зависящего от содержа-
ния запроса) кодов, а также для подавления сигналов, принятых по боковым
лепесткам ДН антенны вторичного радиолокатора, и ограничения загрузки
ответчика. В канале УВД применена трехимпульная система подавления сиг-
налов боковых лепестков по запросу. Сигнал запроса декодируется с помо-
щью линии задержки с отводами и логических схем на диодах, которые под-
ключены к выводам линии задержки. В режиме «УВД» формирование сигна-
ла начинается в шифраторе координатного кода и продолжается схемой, фор-
мирующей ответы на запросы о бортовом номере или текущей информации.
При запросе бортового номера одновременно запускаются шифратор коорди-
натного кода и схема формирования кода бортового номера.
Ограничитель загрузки служит для запирания шифратора УВД (а также
и шифратора RBS) при поступлении бланкирующих импульсов с бортовых пе-
редающих устройств или при превышении частотой ответов установленного для
данного ответчика предельного значения (150—2100 ответов в секунду).
Дешифратор и шифратор RBS служат для декодирования сигнала запроса
и формирования ответного кода в режиме «RBS». В состав дешифратора входят
линия задержки, логические схемы, а также схемы усиления и распределения
импульсов. Дешифратор позволяет декодировать коды Л, В и С, В состав этого
блока входит также двухимпульсная система подавления сигналов боковых ле-
пестков по запросу. По принципу работы данный дешифратор и шифратор ана-
логичен соответствующему устройству, используемому в режиме «УВД».
Преобразователь высоты предназначен для преобразования аналогового па-
раметра, соответствующего текущему значению высоты полета в код. Информа-
ция о высоте полета вырабатывается системой воздушных сигналов или баромет-
рическим высотомером и выдается в виде значения относительного сопротивле-
ния. В преобразователе используется следящая система и преобразователь типа
«угол поворота — код». Выходной сигнал преобразователя представляет собой
четырехдекадный двоично-десятичный код с градациями через каждые 10 м
высоты. Максимальная погрешность преобразования 30 м. Скорость отработки
высоты следящей системой преобразователя равна 150 м/с.
Встроенная система контроля формирует сигналы, эквивалентные кодам зап-
роса в режимах «УВД» и «RBS». Устройство проверяет работоспособность
дешифраторов, шифраторов и приемника.
5.8. САМОЛЕТНЫЙ ОТВЕТЧИК СО-70
Назначение — работа в системах вторичной радиолокации, использующих
только международный код, в качестве устройства дублирующего ответчик
СОМ-64. Аппаратура СОМ-64 автоматически выключается при включении ответ-
чика СО-70.
Состав ответчика СО-70 (рис. 5.19): антенно-фидерное устройство; приемо-
передатчик; шифратор; блок сопряжения и пульт управления.
Основные параметры ответчика СО-70 следующие:
Режим работы ......................................«RBS» (коды
А, В и С)
Частота настройки, МГц:
приемного тракта . . ..... 1030
передающего тракта ......... 1090
Промежуточная частота. МГц . ...... 24,4
Потребляемая мощность*
по сети 1)5 В, 400 Гц. ВА 80
по сети 27 В. Вт . ..................... . . 20
167
Рис 5.19.. Структурная схема ответ-
чика СО-70:
АФУ — антенно-фидерное устройство;
ПП приемопередатчик. Прм — приемник:
Прд передатчик; УС — устройство со-
пряжения: Ш -шифратор: ПУ пульт уп-
равления; СВС - система воздушных сит
налов
Антенно-фидерное устройство состо-
ит из антенны типа АМ-001 и фидерных
линий, связывающих антенну с блоком
приемо-передатчика. Антенну устанав
ливают под фюзеляжем примерно в 1 м
от подобной антенны ответчика СОМ-64.
Приемопередатчик выполняет функ-
ции усиления, преобразования и детек-
тирования принимаемых сигналов и по-
лучения высокочастотных сигналов от
вета. Особенностью приемного тракта
является использование усилителя про*
межуточной частоты с логарифмичес-
кой амплитудной характеристикой. Для
исключения влияния бортового радио-
локатора на работу приемного тракта,
последний запирается (бланкируется)
импульсами, поступающими с этого ра*
диолокатора.
Блок сопряжения предназначен для обработки видеосигналов, вырабаты
ваемых в приемном тракте, и формирования кодированных сигналов, которые
подаются в шифратор ответчика.
Шифратор выполняет функции декодирования поступивших с блока сопря*
жения сигналов и формирования кода ответа, содержащего информацию о номе-
ре ЛА или высоте полета. Код, соответствующий номеру ЛА, устанавливается
на пульте управления. Данные о высоте полета, поступающие от системы воз-
душных сигналов, кодируются в устройстве преобразования, входящем в сос-
тав шифратора.
5.9. САМОЛЕТНЫЙ ОТВЕТЧИК СО-72 М
Назначение — работа в системах вторичной радиолокации, использующих
и код УВД, и международный.
Состав комплекта аппаратуры ответчика СО-72 М (рис. 5.20): антенно-фи
дерное устройство, основной блок ответчика; блок преобразования информации,
блок коммутации, устройство набора номера; приставка бланкирования и пульт
управления Аппаратура СО-72 М может устанавливаться на самолете как в оди
парном. гак и в сдвоенном комплекте.
Режимы работы ответчика СО-72:
«УВД» - основной режим работы с отечественными неавтономными вторич
ны-ми радиолокаторами Ответчик принимает сигнал на частотах 837,5 и 1030 МГн
и излучает сигналы ответа на частоте 740 МГц;
s РСП» аналогичен режиму «УВД» и отличается от него только повышенной
до —84 дБт чувствительностью приемного тракта;
хЛ'ВД-ЛЬ соответствует стандарту СТ СЭВ 1823 - 79. В этом режиме ответ
чик принимает сигналы только на частоте 1030 МГц и излучает сигналы от-
вета на частоте 1090 МГц. Коды н передаваемая информация такие же. как
в режиме «УВД»
«А» — «RBS», сигнал ответа, на частоте 1090 МГц содержит информацию <
номере самолета и выдается при запросе кодом А зарубежным ВРЛ или отечест-
венным ВРЛ типа «Корень АС». Запрос передается на частоте 1030 МГц.
«АС» — режим работы ответчика на тех же частотах., что и в режиме «А>
обеспечивающий передачу информации о высоте полета при запросе кодом С н
номера самолета при запросе кодом А:
уЗнцк» - предназначен для опознавания самолета на экране индикаторе
кругового обзора наземного радиолокатора. В этом режиме не передается ин
формация о высоте полета, номере самолета и остатке, топлива:
'Авария» - предусмотренный для передачи сигнала о бедственном поло
женин на борту самолета:
168
«Готовность» — режим, в котором ответчик работает во время руления пе-
ред вылетом самолета. В этом режиме сигналы ответа не передаются;
«Контроль» — режим проверки работоспособности ответчика от встроен-
ной системы контроля, имитирующий сигналы запроса.
Основные параметры ответчика СО-72М в перечисленных выше режимах
имеют следующие значения:
Приемный тракт
Частота настройки, МГц, в режимах:
«УВД»........................
«УВД-M», «А» и «АС»
Чувствительность, дБ/Вт:
в режиме «УВД» ....
на частоте 837 МГц
» » 1030 МГц
в режимах «УВД-M», «А», «АС»
Динамический диапазон, дБ
Система подавления сигналов боковых
ков......................
лепест
Передающий тракт:
Частоты, МГц, в режимах:
«УВД»................................
«УВД-M», «А», «АС»...................
Импульсная мощность, Вт..................
Длительность импульса, мкс, в режимах:
«УВД», «УВД-М».......................
«А», «АС»............................
Время непрерывной работы ответчика, ч
Мощность, потребляемая ответчиком от сети:
837±2,5; 1030+2,5
1030±2,5
—65+6
-104 ±8
—104±®
50
Трехимпульсная
740+1,8
1090+3
300—800
0,8±0,2
0,35—0,55
12
100
50
постоянного тока с напряжением (27±
±3) В, Вт............................
переменного тока 115В, 400Г ц, ВА
Антенно-фидерная система состоит из антенн типов АЗ-027 и АМ-001, фи-
дерного тракта и направленного ответвителя с детекторной секцией. Антенны
АЗ-027 и АМ-001 имеют в горизонталь-
ной плоскости близкие к круговым ДН
с провалами в диаграммах не более 0,4
от максимального значения напряжен-
ности поля.
Антенна типа АЗ-027 предназначе-
на для приема и передачи сигналов с
горизонтальной поляризацией поля в
режимах «УВД» и «РСП» и состоит из
Двух резонаторов, каждый из которых
возбуждается несимметричным вибра-
тором, и симметрирующего устройства.
Резонаторы устанавливают симметрич-
но на правой и левой сторонах киля
самолета.
Антенна типа АМ-001 представ-
ляет собой вертикальный четвертьвол-
новый несимметричный вибратор и
устанавливается под фюзеляжем.
Направленный ответвитель с де-
текторной секцией предназначен для
контроля мощности передающего уст-
ройства и частоты генерируемых им
колебаний, а также для подключе-
кия контрольно-измерительной аппа-
ратуры.
Рис. 5.20. Структурная схема основ-
ного комплекта ответчика СО-72М:
АФУ _ антенно-фидерное устройство;
ОБО — основной блок ответчика; ПУ —
пульт управления; БПИ — блок преобразо-
вания информации; БК—блок коммута-
ции; ИВ — информация о высоте; УВ —
устройство высокочастотное; УПЧ — усили-
тель промежуточной частоты; Дш — де-
шифратор; Ш — шифратор; УНН — устрой-
ство набора номера; ФВ — ферритовые
вентили; ГВЧ — генераторы высокой часто-
ты; М — модуляторы; пМ — подмодуля-
тор; ПБ — приставка бланкированная;
БН — бланкирующие импульсы; ТМ — дат-
чик топливомера
169
Основной блок ответчика принимает, усиливает, декодирует сигналы запро-
са с форматом УВД и RBS, а также вырабатывает код ответа и формирует вы-
сокочастотные сигналы ответа. В этот блок, кроме устройств электропитания,
входят следующие элементы: высокочастотное устройство, усилитель промежу-
точной частоты, шифратор, передающее устройство и ферритовые вентили.
Высокочастотное устройство разделяет по частоте сигналы диапазонов
837,5—740 МГц и 1030—1090 МГц, преобразует выделенные сигналы на проме-
жуточную частоту и подавляет сигналы побочного приема и паразитного излу-
чения на гармониках основной частоты. Дополнительными элементами высоко-
частотного устройства являются элементы коммутации и контроля работы пере-
датчиков и проверки чувствительности приемников. Параметры его следующие:
Чувствительность, дБ/Вт, по каналам:
1030 МГц . ...................................—104±®
837,5 МГц...........................................— 84±® или
-66±2
Подавление сигналов побочного приема, дБ, по каналам:
1030 МГц............................................... 60
837,5 МГц.............................................. 50
Подавление паразитного излучения передатчиков, дБ, по
каналам:
740 МГц................................................ 30
1090 МГц............................................... 30
Минимальное уменьшение чувствительности приемника при
переходе из режима «УВД» в режим «УВД-M», дБ 50
Максимальные потери в передающем тракте, дБ . . . 1,5
Усилитель промежуточной частоты, помимо усиления, частотной селекции
и детектирования, выполняет функции сужения динамического диапазона прини-
маемых сигналов и уменьшения чувствительности приемного тракта при сигнале
«Ограничение загрузки», поступающем от шифраторов. Его параметры:
Промежуточная частота, МГц.......................... 96,25±0,7
Максимальный коэффициент усиления, дБ .... 99±2
Полоса пропускания, МГц, на уровне:
—3 дБ........................................... 10,5
—60 дБ.......................................... 50
Минимальное уменьшение усиления при сигнале «Ограни-
чение загрузки», дБ.................................. 30
Минимальная глубина ручной регулировки усиления, дБ . 12
Шифратор декодирует сигналы запроса и формирует коды ответа в соот
ветствии с режимом работы ответчика. Параметры кода ответа соответствуй
принятым в кодах УВД и RBS значениям.
Передающее устройство вырабатывает высокочастотные сигналы ответа
используя в качестве модулирующих сигналы шифратора. Передающее устрой
ство содержит два передающих канала на частоты 740 и 1090 МГц. Генератора
высокой частоты выполнены в модульном исполнении на генераторных лампах
ГИ-48. Подмодулятор общий для обоих каналов. Параметры передатчика:
Импульсная мощность, Вт................................ 300—800
Несущая частота, МГц, в режимах:
«УВД», «РСП»........................................... 740±1,8
«УВД-M», «А», «АС»............................... 1090+3
Длительность импульсов, мкс, в режимах:
«УВД», «РСП», «УВД-М»...........................0,8+0,2
«А», «АС»......................................... 0,45±0,1
170
Ферритовые вентили предназначены для уменьшения реакции антенно-фи-
дерного устройства на высокочастотные генераторы в целях повышения ста-
бильности частоты генерируемых колебаний.
Блок преобразования информации предназначен для получения кода, ха-
рактеризующего передаваемую ответчиком информацию. В ответчике СО-72М
используются преобразователи информации типа БПИ-2М-15 и БПИ-2М.
Преобразователь информации Б П И-2М-15 преобразует значение высоты
полета в следующие сигналы:
в режимах «УВД». «РСП» и «УВД-М» — в параллельный 14-разрядный
потенциальный двоично-десятичный код;
в режиме «АС» — в параллельный ll-разрядный потенциальный двоично-
циклический код.
Принцип работы блока заключается в аналого-цифровом преобразовании
значения высоты, снимаемого с потенциометрического датчика барометричес-
кого высотомера, с помощью следящей системы и преобразователя импульсного
кода в потенциальный. Блок контролируется встроенной системой контроля,
имитирующей высоту 630—680 м и выдающей световой сигнал на переднюю па-
нель блока. Параметры блока БПИ-2М-15 следующие:
Относительное сопротивление потенциометрического датчика вы-
соты, %:
при выдаче сигнала высоты 300 м..........................8,4
» » » » 15 000 м.......................90
Количество градаций передаваемых значенией высоты:
при двоично-десятичном коде (цена градации 10 м) . . . 1500
при двоично-циклическом коде (цена градации 100 футов) . 492
Максимальная погрешность преобразования относительного со-
противления в код, число градаций, в режимах:
«УВД», «РСП», «УВД-М»....................................±2
«АС».....................................................±1
Минимальная скорость отработки высоты, м/с.................200
Преобразователь информации БПИ-2М отличается от БПИ-2М-15 наличием
дополнительной функции преобразования в код текущих значений запаса топ-
лива. Кроме того, в БПИ-2М используется цифровой способ преобразования те-
кущего значения высоты полета, который заключается в сравнении напряже-
ния, поступающего с датчика высоты, с линейно-нарастающи.м напряжением.
Счетчик числа градаций включается в момент равенства этих напряжений.
В БПИ-2М текущее значение запаса топлива поступает от топливомера в
виде 4-разрядного параллельного двоичного кода и передается соответствую-
щими разрядами параллельного кода второго слова сигнала ответа. Параметры
блока БПИ-2М, рассчитанного на максимальную высоту 30 000 м, следующие:
Относительное сопротивление датчика высоты, %:
при выдаче сигнала высоты 300 м...........................9,2
» » » > 30 000 м.......................90
Цена градаций в режимах:
«УВД», «РСП», «УВД-М», м...................................10
«АС», футы......................................... 100
Максимальная погрешность преобразования относительного со-
противления в код, число градаций, в режимах:
«УВД», «РСП», «УВД-М»....................................... ±2
«АС»......................................................±1
Блок коммутации подключает к блоку преобразования информации выход
высотомера, соответствующий либо относительной высоте при работе ответчика
в режимах «УВД», «РСП» или «УВД-М», либо абсолютной высоте в режиме «АС»
ответчика.
Устройство набора номера предназначено для установки индивидуального
пятизначного номера ЛА. Номер кодируется 20-разрядным двоично-десятич-
ным кодом.
171
Приставка бланкирования выполняет следующие функции: формирует им-
пульсы бланкирования других бортовых устройств на время работы передатчи-
ка ответчика; осуществляет сложение, ограничение и преобразование импульсов,
бланкирующих ответчик СО-72 М; связывает топливомер с блоком преобразова-
ния информации ответчика.
Пульт управления служит для включения ответчика, выбора режима его
работы, одного из двух комплектов ответчика (при сдвоенной комплектации),
набора четырехзначного номера ЛА при работе в режимах «А» и «АС», а также
включения контрольного режима для проверки работоспособности ответчика.
Кроме того, пульт управления используется в качестве индикатора состояния
ответчика, для чего на пульте предусмотрено световое табло.
5.10. САМОЛЕТНЫЙ ОТВЕТЧИК СО-77
Назначение — работа в системах вторичной радиолокации, использующих
международный код. Сигнал ответа СО-77 содержит координатную информацию,
а также сведения о номере и высоте полета самолета.
Состав комплекта аппаратуры ответчика СО-77 (рис. 5.21): антенно-фидер-
ное устройство, основной блок ответчика и пульт управления. Аппаратура СО-77
может устанавливаться на самолете как в одинарном, так и в сдвоенном комплек-
те. При сдвоенной комплектации дублируются все устройства, кроме пульта
управления и антенной системы.
Основные режимы ответчика СО-77:
«А» — режим передачи номера самолета;
«АС» — режим передачи информации о высоте полета самолета в ответ на
запрос кодом С и номера в ответ на запрос кодом А;
«Знак » — режим передачи сигнала индивидуального выделения отметки
данного самолета на экране индикатора кругового обзора наземного радиоло-
катора;
«Готовность» — режим работы ответчика при рулении перед вылетом само-
лета. Для уменьшения внутрисистемных помех в этом режиме ответчик сигналов
не излучает.
«Контроль» — режим проверки работоспособности ответчика устройством
встроенного контроля.
Основные параметры ответчика СО-77 имеют следующие значения:
Приемный тракт
Частота настройки, МГц................................ 1030+0,2
Чувствительность, дБ/Вт............................—104±4
Динамический диапазон, дБ............................... 50
Система подавления сигналов боковых лепестков . . Трехимпульс-
ная
Передающий тракт
Частота, МГц...................................... 1090+3
Импульсная мощность, Вт........................... 300—800
Длительность импульса, мкс.........................0.45±0,1
Состав передаваемой информации.....................Соответствует
нормам ICAO
Время непрерывной работы ответчика, ч 12
Мощность, потребляемая ответчиком от сети постоян-
ного тока с напряжением 27 В, Вт................ 100
Антенно-фидерное устройство состоит из антенны, фидерного тракта и от-
ветвителя с детекторной секцией.
Антенна типа АМ-001 предназначена для приема и передачи сигналов с
вертикальной поляризацией поля и представляет собой вертикальный четверть-
волновый несимметричный вибратор. ДНА в горизонтальной плоскости близка
к круговой с провалами не более 0,4 от максимального значения напряженно-
сти поля. Антенну устанавливают в середине нижней части фюзеляжа самолета.
172
Ответвитель с детекторной сек-
цией предназначен для контроля мощ-
ности передатчика и частоты генери-
руемых им колебаний, а также для
подключения контрольно-измеритель-
ной аппаратуры.
Основной блок ответчика преобра-
зует несущую частоту в промежуточ-
ную, усиливает и детектирует эти сиг-
налы, а также кодирует ответную ин-
формацию и использует полученный
код для формирования высокочастотных
сигналов ответа, которые генерируются
в этом же блоке. В состав основного
блока входят следующие элементы:
приемное устройство, шифратор, преоб-
разователь напряжения в код и пере-
дающее устройство.
Приемное устройство разделяет
принимаемые сигналы и сигналы, посту-
Рис. 5.21. Структурная схема одно-
комплектного варианта ответчика
СО-77:
АФУ — антенно-фидерное устройство;
ОБО — основной блок ответчика; ФНЧ —
фильтр низких частот; О — ответвители;
КГ — контрольный гетеродин; Ц - цирку-
лятор; Прд — передатчик; Прм — прием-
ник; Ш — шифратор; ПУ —пульт управ-
ления; ПНК — преобразователь напряже-
ния в код; БИ — бланкирующие импульсы;
ИВ — информация о высоте
пающие от передатчика; усиливает и
детектирует принятые сигналы, а также
выполняет контрольные функции по оперативной проверке приемника и пере-
датчика. В приемном устройстве находится фильтр нижних частот, подавляю-
щий излучение передатчика на гармониках основной частоты и селектирующий
побочные каналы приема.
Принимаемые и передаваемые сигналы разделяются циркулятором, после
которого включен управляемый бланкирующим импульсом аттенюатор, защи-
щающий приемный тракт от попадания мощных импульсов, излучаемых пере-
датчиком. Этот же аттенюатор используется для уменьшения чувствительности
приемного тракта при перегрузке ответчика.
Канал промежуточной частоты приемника состоит из усилителя с линейной
амплитудной характеристикой, фильтра сосредоточенной селекции и усилителя
с логарифмической характеристикой. При проверке приемного тракта исполь-
зуется контрольный гетеродин, генерирующий импульсы напряжения, подавае-
мые на вход циркулятора.
Основные параметры приемного устройства следующие:
Уровень сигнала на выходе при входном сигнале —108 дБ/Вт,
В........................................................0,5
Уровень шума на выходе, В..................................0,2
Полоса пропускания по уровню —3 дБ, МГц..................±1,5
Динамический диапазон, дБ...............................50
Глубина регулировки затухания аттенюатором, дБ ... 40
Минимальная глубина ручной регулировки усиления, дБ 15
Потери сигнала в высокочастотном тракте, дБ .... 2
Шифратор декодирует принимаемые сигналы и формирует ответные коды,
которые определяются режимами работы ответчика («А» или «АС»).
В шифраторе подавляются сигналы запроса, принятые по боковым лепест-
кам ДН антенны вторичного радиолокатора, бланкируются цепи шифратора при
подаче соответствующих импульсов от других бортовых устройств, а также фор-
мируются бланкирующие импульсы, запирающие приемные тракты других бор-
товых радиосистем при работе передатчика ответчика.
Параметры шифратора соответствуют рекомендациям Arinc-572.
Преобразователь напряжения в код вырабатывает потенциальный цикли-
ческий код Грея—Гилхэма при подаче на него сигнала, пропорционального вы-
соте полета. Этот сигнал подается в виде относительного сопротивления потен-
циометрического датчика. Параметры преобразователя напряжения в код такие;
Номинальное значение сопротивления потенциометрическо-
го датчика, кОм.....................................2.5—7,5
173
Относительное сопротивление датчика, %, на высоте:
О.....................................................10±0,15
30 000 м..........................................90±0,34
Цена градаций, футы:
параллельный 8-разрядный циклический потенциаль-
ный код Грея......................................... 500
параллельный 3-разрядный рефлексный потенциальный
код Гилхэма.......................................... 100
Максимальная погрешность преобразования
относительного сопротивления в код, м.................±30
Передающее устройство состоит из подмодулятора, на вход которого посту-
пает кодированная последовательность импульсов от шифратора, модулятора и
генератора высокой частоты на лампе ГИ-34. Параметры передающего устройства
следующие:
Импульсная мощность, Вт................................. 300—800
Несущая частота, МГц....................................... 1090+3
Длительность импульсов, мкс..............................0,45±0,1
Максимальная неравномерность амплитуд импульсов в пе-
редаваемой последовательности, %............................ 20
Пульт управления одиночного комплекта СО-77 обеспечивает включение
ответчика, выбор режимов его работы, а также включение встроенной системы
контроля для проверки работоспособности ответчика. На пульте управления рас-
положено световое сигнальное табло, а в пульте — устройство набора в двоич-
но-десятичном коде четырехзначного номера самолета. Пульт управления сдвоен-
ным комплектом имеет те же элементы, что и пульт одиночного комплекта, и,
кроме того, переключатель комплектов ответчика.
Глава 6. ОСОБЕННОСТИ ТЕХНИЧЕСКОЙ ЭКСПЛУАТАЦИИ РЛС
6.1. ОСНОВНЫЕ ПОКАЗАТЕЛИ
Техническая эксплуатация РЛС представляет собой систему инженерно-
технических и организационных мероприятий, обеспечивающую высокую на-
дежность техники, т. е. сохранение заданных характеристик на протяжении
установленных ресурсов и сроков службы. Техническая эксплуатация РЛС
включает: техническое обслуживание и ремонт РЛС (ТОиР); организационное
обеспечение технического обслуживания; подготовку РЛС к применению по
функциональному назначению, выбор и поддержание наивыгоднейших режимов
работы; научно-исследовательские работы в области технической эксплуатации
РЛС.
Необходимость технической эксплуатации РЛС обусловлена изменением во
времени технических и функциональных характеристик (одной или нескольких)
вследствие деградационных процессов, происходящих в элементах и деталях.
Деградационные процессы вызываются процессами старения и изнашивания,
электрическими перегрузками, механическими и кинематическими воздействия-
ми. Старение и изнашивание — результат сложных физико-химических процес-
сов, протекающих в элементах структуры РЛС. При старении магнитодиэлектри-
ки изменяют свою магнитную проницаемость. В непроволочных резисторах про-
должается кристаллизация проводящего слоя,что приводит к его медленному
уплотнению и уменьшению сопротивления. В бумажных герметизированных
конденсаторах снижается сопротивление диэлектрика из-за старения изоляции,
у герметизированных диэлектрических конденсаторов нарушается герметич-
ность. В электронных лампах уменьшается крутизна и ток эмиссии, у транзи-
сторов увеличивается коэффициент шума.
Электрические нагрузки в случае недопустимого их изменения в процессе
эксплуатации приводят к нарушению температурного режима, электрическим
пробоям, отказам при включении-выключении аппаратуры вследствие переход-
ных процессов.
Механические воздействия — это удары, вибрации, ускорения и звуковые
давления. Вибрации и удары приводят к преждевременному изнашиванию эле-
ментов радиоаппаратуры, появлению усталостных явлений или разрушения. Под
действием вибраций нарушается первоначальная настройка регулируемых ра-
диоэлементов. Действие звукового давления на элементы РЛС аналогично дей-
ствию вибрации, так как оно возбуждает механические колебания деталей и уз-
лов. В электронных лампах и транзисторах возникает микрофонный эффект, мо-
жет происходить возбуждение корпуса радиоэлемента.
Климатические воздействия изменяют физические и механические свойства
материалов и конструкций РЛС, вызывая отклонения параметров элементов от
номинальных значений. Колебания температуры ускоряют процессы старения,
увеличивая интенсивность отказов элементов. При повышенной влажности ус-
коряется коррозия (контакты), снижаются диэлектрические свойства и сопротив-
ление изоляции, увеличиваются потери в контурах, увеличивается сопротивле-
ние резисторов. Деградационные процессы изменяют параметры элементов ра-
диоэлектронных схем, а следовательно, технические и функциональные характе-
ристики РЛС (рис. 6.1).
Под воздействием деградационных процессов изменяется коэффициент шу-
ма приемника, а следовательно его чувствительность и дальность действий
РЛС. В общем виде влияние деградационного процесса можно описать изме-
нением во времени функционала качества Uz (рис. 6.2).
175
Рис. 6.1. Зависимость параметров
РЛС от коэффициента шума:
1 — Ртах(/); 2 — Рпрм щ1п(/)
Рис. 6.2. Зависимость от времени
функционала качества РЛС:
Uo, Un. в, Un. н, t/д. в, t/д. и — номиналь-
ное, предотказные верхнее и нижнее и пре-
дельно-допустимые верхнее и нижнее зна-
чения функционала: 1—объект в исправ-
ном состоянии; 2 — объект в работоспо-
собном состоянии; 3— объект отказал
Работоспособность —состояние си-
стемы, при котором она способна выпол-
нять свои функции, сохраняя значения
заданных параметров в пределах, уста-
новленных нормативно-технической до-
кументацией. Неработоспособность —
состояние, при котором значение хотя
бы одного заданного параметра не соот-
ветствует требованиям документации.
Событие, заключающееся в нарушении
работоспособности, называется отказом.
Процесс поддержания состояния рабо-
тоспособности в установленных преде-
лах неразрывно связан с системой тех-
нического обслуживания и ремонта.
Техническое обслуживание — это
комплекс операций по поддержанию
работоспособности РЛС при использо-
вании по назначению, хранению и
транспортировке.
Ремонт — это комплекс операций
по восстановлению исправности или ра-
ботоспособности РЛС и восстановлению
ресурсов системы в целом или ее сос-
тавных частей.
Система ТОиР — представляет со-
вокупность взаимосвязанных средств,
документации и исполнителей, необхо-
димых для поддержания и восстанов-
ления качества изделий, входящих в
эту систему
ТОиР представляет из себя систе-
му управления техническим состоянием
РЛС в определенных условиях эксплуа-
тации. В зависимости от значений при-
нятого признака технического состоя-
ния РЛС формируются управляющие
воздействия.
Система правил управления техническим состоянием в процессе ТО (ремон-
та) носит название стратегии ТОиР, которая реализуется в следующих видах:
техническое обслуживание в стационарных условиях, оперативное техническое
обслуживание, базовое техническое обслуживание, выполняемое в ремонтно-
эксплуатационных мастерских или на аэродроме постоянного базирования;
транзитное техническое обслуживание.
При ТО РЛС используют следующие методы:
централизованный — ТО выполняется персоналом и средствами одного
подразделения или предприятия, поэтапный — комплекс операций расчленя-
ется на отдельные этапы и распределяется по видам меньшей трудоемкости с со-
хранением установленной периодичности операций,
посистемный — организация и специализация исполнителей осуществля-
ются по функциональным системам.
Условия выполнения ТО, включающие перечень и периодичность выпол-
нения операций и значения эксплуатационных характеристик применяемых
средств, определяют режим ТО.
Планово-предупредительная система эксплуатации и ремонта, принятая в
гражданской авиации СССР, в том числе для радиолокаторов, заключается в том,
что основной объем работ по техническому обслуживанию (ремонту) планируют
заранее и включают в единый план авиапредприятия. Цель планирования — ор-
ганизация комплекса технических мероприятий для предупреждения отказов
РЛС в процессе их функционального использования, обеспечения высокой на-
дежности изделий авиационной техники и максимальной эффективности ее ис-
пользования.
176
Планово-предупредительная система предусматривает: планирование ра-
бот, определение трудовых затрат, материальное обеспечение ТО, проведение,
учет и контроль за своевременным и качественным выполнением работ, а также
трудовых затрат.
Вне плана в систему ТОиР входит восстановление внезапно отказавших из-
делий радиоэлектронного оборудования РЭО.
Планово-предупредительная система включает: профилактические осмотры,
работы по диагностике и контролю технического состояния, настроечные и регу-
лировочные работы, профилактические мероприятия в течение заданного перио-
да. Планово-предупредительная система ТОиР базируется на регламентном ме-
тоде ТОиР. Он состоит в том, что специальным документом «Регламентом» опре-
делены периодичность проведения работ по ТО и их объем. Периодичность за-
висит от многих факторов, основными из которых являются: назначенный ресурс
и срок службы РЛС, влияние работы РЛС на безопасность и регулярность воз-
душного движения, стратегия и метод ТО.
РЛС как объект технического обслуживания принадлежат к классам восста-
навливаемых и ремонтируемых систем, работоспособность и исправность которых
подлежат восстановлению в случае возникновения отказа или повреждения.
РЛС по своей конструкции — сложные структуры, состоящие из блоков и
устройств, которые также подлежат восстановлению. Элементы, узлы и детали
отдельных блоков (микросхемы, микромодули, транзисторы, резисторы, конден-
саторы) относятся к классу невосстанавливаемых объектов.
Для РЛС, как ОТО характерны следующие особенности:
разнохарактерность физических процессов, протекающих в различных уз-
лах, блоках и трактах РЛС (энергетические преобразования, генерирование ра-
диочастот, механические перемещения, усиление электрических сигналов):
частотный диапазон сигналов от 0 до 1010 Гц;
динамический диапазон напряжений, токов и мощностей 190 дБ;
объем информации на выходе отдельных РЛС до 107 бит;
большая структурная сложность блоков, деталей, узлов;
высокая степень безотказности отдельных элементов и относительно невы-
сокая безотказность изделий в целом;
возникновение в РЛС внезапных отказов, являющихся следствием медленно
протекающих деградационных процессов;
изменение контролируемых параметров в процессе эксплуатации, который
может привести к возникновению постепенных отказов;
воздействие различных помех — проблема электромагнитной совместимости
другими изделиями РЭО на борту и на земле;
автономность РЛС как датчиков информации;
наличие демонтируемых и стационарных частей;
взаимозаменяемость отдельных блоков, предусмотренная эксплуатационно-
технической документацией;
необходимость использования в процессе ТО контрольно-измерительной
аппаратуры и контрольно-измерительных приборов.
Отказ элемента в одном из блоков РЛС может привести к возникновению от-
каза всей системы, а может вызвать только неисправность (повреждение) вслед-
ствие воздействия устройств, стабилизирующих выходные параметры, как пра-
вило, определяющие работоспособность.
Свойство объекта непрерывно сохранять работоспособность в течение не-
которой наработки называют безотказностью.
Безотказность РЛС характеризуется набором показателей.
Для невосстанавливаемых изделий вероятность безотказной работы Н (t) —
вероятность того, что в изделии не возникнет отказ в пределах заданного интер-
вала времени
Н (t) = Р {/ < Т}, t > 0.
Соответственно, вероятность отказа
Q (0 = 1 — Р {/ > Т] = 1 — Н (/).
177
Если функция Q (/) дифференцируется, то безотказность характеризуется плот-
ностью вероятности возникновения первого отказа:
/ (/) = dQ (t)/dt = — dH (t)fdt; H (/) = J f (tydt-,
0
средняя наработка до первого отказа
= I' tf (t)dt = I Н (t)dt.
‘о vo
Интенсивность отказов X (?) — условная плотность вероятности возникновения
отказа невосстанавливаемого изделия РЭО, определяемая для данного момента
времени при условии, что до этого момента отказ не возник
t
X it) / (t)/H (/); Н (t) ~ ехр {—I X
b
Для восстанавливаемых изделий показателями безотказности являются:
наработка на отказ — отношение наработки восстанавливаемого изделия к
математическому ожиданию числа его отказов в течение этой наработки
Л’
Т„= 2
i = 1
где ti — момент r-го отказа в г-м объекте; N — числи эксплуатируемых объек-
тов; г — число отказов за время t.
Моменты возникновения отказов в восстанавливаемом изделии формируют
поток отказов, характеризуемый ведущей функцией Q (/) = М (г, t), которая
является математическим ожиданием числа отказов г за время t.
Если наработка между отказами описывается экспоненциальным распре-
делением с параметром, то Q (?) = X (/).
Интенсивность потока отказов
со (Z) = lim Л4 [г (t, t + А?)]/Л/ Q' (г).
Для ординарных потоков без последействия интенсивность совпадает с па-
раметром потока отказов. При экспоненциальном распределении ш (?) = X.
Для практических расчетов наиболее часто используются законы распреде-
ления вероятности безотказной работы;
экспоненциальный
f (/) X ехр (—X/); Н (/) — ехр (— X/) = ехр (—to/); X — со = const;
нормальный
f (0 = (1/У2л с() ехр [ — (t — Т0)2/2а(г];
/- (0= V5 ехр [ —(/— Г0)2]2сг2/{-1/й<т( [1— Ф —
Н (0 = 0,5 {1 - Ф [ (/ - T0) ' V2^i},
где Ф (?) — интеграл вероятностей;
Вейбулла
f (Z) = (fe/r0) < ехр (—Z2/T0), X (() = *?-’/Г»; Я (/)= ехр (-?/?„),
где k > 1.
Распределение Вейбулла действует в начальный период работы РЛС и ха-
рактеризует вероятность возникновения приработочных отказов, экспоненци-
альный закон надежности описывает вероятность возникновения внезапных от-
казов и нормальный закон характеризует вероятности отказов, обусловленных
деградационными процессами, в первую очередь, старением.
178
Долговечность РЛС задается количественными значениями различного вида
технических ресурсов или сроков службы. Техническим ресурсом называют вы-
работку РЛС от начала эксплуатации (или возобновление ее после ремонта) до
предельного состояния. В практике эксплуатации используют:
назначенный ресурс — суммарную наработку объекта, по достижении ко-
торой эксплуатация должна быть прекращена независимо от состояния;
средний ресурс до капитального ремонта — наработку от начала эксплуата-
ции до первого ремонта;
средний ресурс между ремонтами;
гамма-процентный ресурс — наработку изделия, в течение которой объект
не достигнет своего предельного состояния с заданной вероятностью у про-
центов.
Срок службы — календарная продолжительность эксплуатации от ее нача-
ла до наступления предельного состояния. Различают средние сроки службы
до списания, до 1-го ремонта, между ремонтами и гамма-процентный срок служ-
бы. Составляющие срока службы до первого капитального ремонта следующие:
Т.ъ — среднее суммарное время эксплуатации РЛС в течение срока службы;
Т'о.э — среднее суммарное время, когда РЛС находится в состоянии ожидания
и хранения;
Тт о2 — среднее суммарное время, затрачиваемое на ТО,
7’ср2 = 7'э + 7'°-э + 7’т.о2’ Тср^ = ^н.р—Т’т.ох/^т.о) [аЧ-(1 — а) *н.э] +^.(,2,
где Гн.р — назначенный ресурс; &нэ = Лэ/^нэ; &т.о = а — часть вре-
менного интервала, когда РЛС применяется по функциональному назначе-
нию; Хэ, Анэ, Хт.о — значения параметра потока отказов в соответствующие
временные интервалы Тэ, Тцэ> 7\0.
Сохраняемость РЛС характеризует безотказность в условиях хранения и
транспортирования. Срок сохраняемости — количественная характеристика,
определяемая календарной продолжительностью хранения, в течение и после
которой значения заданных показателей остаются в установленных пределах.
Сохраняемость группы однотипных РЛС оценивают средним сроком сохраняемо-
сти или гамма-процентным.
Ремонтопригодность — комплексное свойство РЛС, как сложного объекта,
характеризует его эксплуатационную технологичность. При отработке РЛС на
технологичность при ТО в соответствии с ГОСТ 19152—80 следует учитывать
такие показатели, как контролепригодность, восстанавливаемость, доступность,
легкосъемность, взаимозаменяемость, стандартизация и унификация составных
частей, восстанавливаемость составных частей, приемственность технологичес-
ких процессов ТО и ремонта, эргономические характеристики, безопасность вы-
полнения ТОиР.
Контролепригодность РЛС — приспособленность к опеределению техни-
ческого состояния заданными средствами. Она определяется набором показате-
лей диагностирования, которые приведены в § 6.2.
Восстанавливаемость РЛС характеризуют следующие показатели:
вероятность восстановления работоспособности за заданный временной ин-
*вр 1
тервал Рв.р (0 = J /в.р (t)dt. Если /в.р (/) = ~----- ехр (— //7’в.р.ср)> то
О 7 в.р.ср F
^В.р (0 = ехр (//Тв.р. ср); среднее время восстановления работоспособности
оо
Тв.р.Ср = | (t)dt. Если /в.р (/) подчиняется экспоненциальному закону, то
о
восстановление осуществляется заменой отдельных узлов. По статистическим
Данным
гДе ^в.рл — время, затрачиваемое на обнаружение и устранение t-ro отказа; п —
количество восстановлений, проведенных за интервал времени;
179
среднее время проведения ТО
т
^т.о.ср— У, ^T.oi*
m — количество операций при выполнении одного обслуживания; /т.ол —
средняя продолжительность i-й операции;
суммарная продолжительность ТО
~ 2 ^т-ог ~Л'т.о (0 ^т-о.ср »
i = l
где N = ^/тт.о = 1, 2, ...; jVt.o (0 — количество технических обслуживаний
эксплуатируемых РЛС за время t.
Средняя оперативная трудоемкость ТО
Ff L.
f=l/=1
где Fi — количество исполнителей ТО данного вида; Li — количество операций
в ТО данного вида; tji — среднее оперативное время, затрачиваемое /-м
исполнителем на выполнение /-й операции ТО данного вида.
Среднее оперативное время
tfi = m~^ 2 Z/O*’
где т — общее число наблюдений, tfij — оперативное время, затрачиваемое
/-м исполнителем на выполнение 1-й операции в /-том наблюдении.
Средняя оперативная стоимость технического обслуживания данного вида
^T.oi = “к ^з.ч1»
где CT.3j — стоимость оперативных трудозатрат при проведении ТО; C3.4j —
стоимость запасных частей; См$ — стоимость материалов;
коэффициент доступности
Ka.T.o=S(To>/(S<T°» + S<B’)>
где —основная трудоемкость ТО; — вспомогательная трудоемкость,
как часть оперативной трудоемкости, определяемая трудозатратами на вы-
полнение вспомогательных операций при ТО;
коэффициент легкосъемности
Ял^’/Здм.
где 5дМ — оперативная трудоемкость монтажно-демонтажных работ; 5^ — то
же на прототипе;
коэффициент взаимозаменяемости
Кв — 5ДМ/(5дМ + 5П),
где Sn — оперативная трудоемкость приемочных, регулировочных и настроеч-
ных работ при замене сборочных единиц и деталей.
180
Коэффициент унификации Ку —
отношение количества унифицирован-
ных сборочных единиц и деталей, не
входящих в сборочные единицы, к обще-
му числу составных частей изделия
(без стандартизированных крепежных
деталей).
Коэффициент стандартизации Кс
определяется аналогично коэффициен-
ту унификации.
Комплексные показатели надежности
количественно характеризуют процесс
ТО, который представляет последова-
тельную смену технических состояний
системы в соответствии с принятой
стратегией. Согласно алгоритму про-
цесса ТО (рис. 6.3) РЛС пребывает в
состояниях: функционального исполь-
зования, ожидания ТО, режима техни-
ческого диагностирования и контроля,
поиска места отказа и восстановления.
При этом РЛС может находиться в со-
стоянии исправности, работоспособно-
сти или отказа. Ориентированный граф
перехода РЛС в различные состояния
представлен на рис. 6.4.
Комплексные показатели надежно-
сти характеризуются коэффициентами
готовности, технического использова-
ния, оперативной готовности, а также
продолжительностью ТО, трудоем-
костью ТО и стоимостью ТО, которые
могут быть представлены своими сум-
марными значениями, т. е. затратами на
заданную наработку.
Коэффициент готовности — веро-
ятность того, что РЛС окажется работо-
способной в произвольный момент вре-
мени кроме планируемых периодов:
КГ (1) = Р (/),где Р (/) — вероятность,
момент /. Если наработка на отказ То v
Применение по
назначению .
РЛС ^^Диа г н ости к а
рабСотоспо^Д* контроль/^
собна
\РЛС нера&ото
способна
^оосстаноблени^^ш-
Рис. 6.3. Алгоритм процесса техниче-
ского обслуживания
Рис. 6.4. Состояния РЛС в процессе
технического обслуживания:
И — исправное; Р — работоспособное; Д —
диагностирование: К — контроль; Ож —
ожидание; В — восстановление
что РЛС окажется работоспособной в
время восстановления Тв — распреде-
лены по экспоненциальному закону, то
КГ (0 = ITJ(TO~^TB)] {1+(Гв/70) ехр [-(Г0 + Гв) Гв]}.
При/—> оо и при То Тв, что выполняется на практике,/<г = Т0/(Т0-р Тв);
коэффициент простоя Кц = Гв/ (То + Тв).
Коэффициент оперативной готовности — вероятность того, что РЛС, нахо-
дясь в режиме ожидания, окажется работоспособной в произвольный момент
времени и, начиная с этого момента, будет работать безотказно в течение заданно-
го интервала времени /р
Ког (tp) Кг Р Gp) •
Коэффициент технического использования учитывает время, затрачиваемое
на выполнение ТО:
(О
Т£ (О + (0 (О^Т.0
где (/) — математическое ожидание времени пребывания РЛС в работоспособ-
ном состоянии за период времени /; лр (/) — математическое ожидание числа
отказов за время /; т (i) — математическое ожидание числа ТО; ТТ.О —
среднее время ТО.
181
Время пребывания РЛС в работоспособном состоянии
. N
Т-<'У S '-Д',
i=~. 1
где N — количество РЛС; — суммарная наработка i-ro объекта за время t.
По статистическим данным коэффициент технического использования
N
^т.и= 2 j'V^pa6i>
i = 1
где Трабх — продолжительность эксплуатации, состоящая из интервалов вре-
мени работы, ТО и восстановления.
В случае, если 7фабг для каждой РЛС различна,
где
ti — случайное время работы (восстановления ТО) за время между (I — 1)-м
и i-м отказами; п — количество отказов аппаратуры за суммарное время
п
т — количество ТО за время t.
i= 1
Лт.и То/(^о ~ 7'в '’ Т'т о),
т
Т^,о = 2/т os/n — средний объем работ по ТО, приходящийся на один
i = 1
отказ аппаратуры.
Коэффициент Кти наиболее полно отражает объем ТО. Его составляющая
Тв зависит от количества отказов, т. е. непосредственно определяется процес-
сом перехода РЛС из работоспособного в неработоспособное состояние. Состав-
ляющая Тт.о отражает процесс перехода РЛС из исправного состояния в неис-
правное (но работоспособное) состояние. Цель ТО РЛС, в которой не зафикси-
рован отказ, предотвратить его в будущем, выявить возможные неисправности,
возникший отказ, провести работы по восстановлению системы.
Стратегии технического обслуживания подразделяют следующим образом.
Стратегия обслуживания по наработке состоит в том, что перечень и перио-
дичность выполнения операций ТОиР определяются значениями наработки из-
делия с начала эксплуатации или после капитального или среднего ремонта.
Стратегия обслуживания по состоянию заключается в том, что перечень и перио-
дичность выполнения операций по ТОиР определяются фактическим состоянием
изделия РЭО в момент начала ТО.
Стратегия ТО РЛС по наработке реализуется на базе метода ТОиР по ре-
сурсу, при котором объемы работ планируют и назначают фиксированными и вы-
полняют через определенные интервалы наработки (календарного времени).
Ресурс устанавливают для совокупности объектов или для отдельного объекта,
исходя из условий обеспечения заданного уровня надежности.
В процессе периодического обслуживания по наработке выполняют все ви-
ды работ, предусмотренные планово-предупредительной системой ТОиР, в объе-
ме, определяемом регламентом. Главная задача состоит в выявлении и устране-
нии неисправностей, а также тех отказов, которые не привели к прекращению
функционирования РЛС и не проявились в явной форме. ТОиР по наработке ха-
рактеризуются периодом проведения ТО — Т-р.
Оптимальный период проведения ТО, направленного на предотвращение по-
степенных отказов.
Т’р opt — 2ТТ-О^П-О»
где Хп.о — интенсивность постепенных отказов в РЛС, которые обнаруживаются
в процессе выполнения ТО.
182
Стратегия ТОиР РЛС по состоянию реализуется на базе технического
обслуживания по состоянию с контролем уровня надежности и технического
обслуживания по состоянию с контролем параметров.
Техническое обслуживание по состоянию с контролем уровня надежности пре-
дусматривает эксплуатацию подконтрольных РЛС до тех пор. пока фактический
уровень безотказности одного из наименее надежных устройств со (t) не станет
ниже заданного. Если со (/) > со3, то исследуются причины отказов, и вырабаты-
вается комплекс организационно-технических мероприятий. Предпосылками
этого метода являются: исчезновение связей в сложной системе между временем
ее эксплуатации и вероятностью возникновения отказов отдельных элементов,
слабое влияние на характеристики надежности профилактических работ при
экспоненциальном законе распределения вероятности безотказной работы.
Условия эффективного применения этого ТО следующие: отказы не влияют
на безопасность воздушного движения; вероятность безотказной работы РЛС
подчиняется экспоненциальному закону; надежность агрегата РЭО позволяет
обеспечить выполнение требований по регулярности полетов и экономической эф-
фективности ; конструкция РЛС (или агрегата) обладает достаточной эксплуата-
ционной технологичностью (легкосъемность, доступность, взаимозаменяемость),
индикация отказа осуществляется бортовыми или наземными средствами при не-
больших трудозатратах в заданное время. Обслуживание по состоянию с контро-
лем надежности целесообразно применять для механических узлов РЛС, магне-
тронных генераторов, кристаллов смесителя и других узлов и элементов.
Количественным показателем, характеризующим стратегию ТО с контролем
надежности, может служить заданная вероятность Рзад наступления верхнего
предела отказов пвп0
П = "вп.о е-“ста1ЛГа
Р3~ (Юстан NTa)n — ,
п = 0
где (Остан — запланированный параметр Потока отказов; N — количество конт-
ролируемых объектов; а — количество однотипных агрегатов объекта; Т —
наработка объекта; п — наблюдаемое количество отказов.
Задаваясь значением вероятности Рзад (например 0,975) и решая уравнение
численным методом, можно сравнить фактическое значение п с величиной пВп.о-
Если п <z лвп.о объекты могут эксплуатироваться до отказа.
Техническое обслуживание по состоянию с контролем параметров заключа-
ется в периодическом или непрерывном контроле параметров, определяющих
техническое состояние РЛС и ее отдельных трактов; по результатам контроля
периодически принимают решение о необходимости и объеме работ по регули-
ровке, настройке и замене. При возникновении отказа РЛС (отдельные узлы)
направляются в ремонт. Если объект находится в работоспособном состоянии,
то он используется по функциональному назначению.
ТОиР по состоянию с контролем параметров представляет совокупность
правил по определению режимов и регламента диагностирования РЛС и приня-
тию решения на основе полученной в результате диагностирования информации
о фактическом состоянии эксплуатируемого объекта. Основа реализации ТОиР
по состоянию с контролем параметров—режим технического диагностирования.
Режим технического диагностирования — совокупность, включающая диагности-
ческие параметры, периодичность проверок и упреждающие допуски на пара-
метры, позволяющие осуществлять контроль технического состояния и прини-
мать соответствующие решения.
Расчет и сопоставление коэффициента технического использования Кт.и
для методов ТО по ресурсу и по состоянию, многочисленные статистические экс-
перименты показали, что метод обслуживания по состоянию с контролем пара-
метров оказывается наиболее эффективным из рассмотренных, так как имеет
самое высокое значение Кт.и. Для уяснения этого утверждения представим неко-
торую систему изделий, которая находится в состоянии эксплуатации. При ТО
по состоянию после отработки периода Тпр выполняется определенный объем ра-
бот. С помощью диагностирования можно выделить неисправные изделия и под-
вергнуть их регулировке, можно выделить и локализовать отказавшие блоки
183
м
Рис. 6.5. Условия для применения метода обслуживания РЛС по техническому
состоянию
для их последующего ремонта. Чем глубже оценивается состояние, тем более
эффективным оказывается метод.
Предусмотренные регламентом операции по обслуживанию (осмотры, ре-
гулировки, замены, демонтаж, монтаж и др.) заменяются менее емкими по тру-
дозатратам, но более информативными операциями диагностики и контроля.
Основным условием эффективного применения метода обслуживания по состоя-
нию с контролем параметров являются требования обеспечения безопасности
и регулярности полетов (рис. 6.5).
Расчет показателей технического обслуживания РЛС по статистическим
данным осуществляется в такой последовательности.
Расчет безотказности . Показателями безотказности РЛС являются нара-
ботка на отказ и вероятность безотказной работы на временном интервале t,
t + т. Наработка на отказ То = t/Q (/), где Q (t) — ведущая функция — мате-
матическое ожидание числа отказов восстанавливаемого объекта в течение вре-
мени /. При расчете предполагается, что отказы элементов независимы. Тогда
ведущая функция
Й(0= 'Ч«/Т(о0.
/=1
где П/ — число элементов t-го типа; N — число типов элементов в объекте;
— наработка на отказ элементов /-го типа (или среднее время до пер-
вого отказа) равна
| < N \
1 / 2 n‘iT'> •
I \/ = 1 /
Вероятность безотказной работы
Р(/, т) =
1 = 1
(°-) 1 00
где Р : 1 (/, т) = ;-- J [1 — Fi (х)] dx; Fi (х) — функция распределения;
4cp.i т
184
Р;П*> — вероятность безотказной работы п элементов t-го типа; /ср1 — сред-
няя наработка до отказа t-ro элемента.
Для экспоненциального закона распределения
P(t, Г + т)--=ехр ( — kt).
Для нормального закона
I оо х т/а
= ‘ У '.. f
I £ j \ v ;
a > 0; a > 0; 3o < a; a/a — v.
Расчет комплексных показателей надежности производится для различных
ситуаций и условий. РЛС состоит из п блоков, отказы блоков независимы, отказ
каждого блока приводит к отказу блоков РЛС. При диагностировании отказ об-
наруживается с вероятностью единица, восстановление работоспособности или
ТО принимаются тождественными замене объекта новым. Условные обозначения
в расчетных формулах: о2 — дисперсия наработки объекта до отказа;, т —про-
должительность выполнения задачи; тт.о — средняя продолжительность ТО;
Тт.о— периодичность ТО; 7'пр — периодичность проведения проверки рабо-
тоспособности с целью обнаружения отказа; тпр — продолжительность про-
верки работоспособности.
Ситуация 1. Работоспособность РЛС восстанавливается только при
возникновении отказа. Коэффициент оперативной готовности при экспонен-
циальном распределении Р (/) = ехр (—t/T^),
Ко.г = ехр ( —т/Т0)/(1 + ТВ/ТО);
Кг- 1/(1 + ТВ/ТО).
Ситуация 2. По достижении фиксированной наработки Г, определяемой
от момента последнего восстановления или технического обслуживания, если до
момента Т не было отказа, проводят техническое обслуживание. При отказе вое-
Т
станавливается работоспособность. Для этой ситуации Ко г - I Р (t Т x)dt/X
о
т
У. | У Р (t)dt + (Г.го - Тв) Р (Г) + Гв].
о
При Р (t) ехр (—/ То) Ког -- ехр ( -т То) |1 — ехр (— т То)1 (I —
— ехр (—т/ Т0)]4-(Тт.о — Т в) ехр (— ТT0)i То 4 Тв/ То)); Кт.и.
- То/ ( (Тт.о - Тв) ехр (—-Т Т0) u Тв]
Ситуация 3. В РЛС с периодичностью Т™ проверяют работоспособ-
ность. По достижении фиксированной наработки т, определяемой от момента
последнего восстановления или техобслуживания, если до момента Т не было от-
каза. проводят ТО. Т кратно Тпр. При отказе восстанавливается работоспособ-
ность. При этом
(Т \ / (Ту7пр)
«о.г - | P(ty x)dt / (Тт.0-Тв)Р7’ + Гв+(7'Цр + тпр) 2 F(K7'|1p).
\Ь // к---О
При экспоненциальном законе распределения
Ко.г - *<Т0 ехр ( • т То) |1—ехр ( - Т То)1} {(Тт.о — Гв) ехр ( - Т/То) I-
+ Тв -t- (Тпр тцр) 11 ехр ( - Т / 7 о)] /11 -- ехр (— Тпр, То)|).
Выражение для Кт.и получаем при т 0.
185
Ситуация 4. Работоспособность проверяют с периодичностью Тпр.
В случае возникновения отказа работоспособность объекта восстанавливается.
При отсутствии отказа выполняют ТО. От момента возникновения отказа до его
обнаружения объект неработоспособен и коэффициент оперативной готовности
Ко. г
Гпр
f P(t\x)dt
о
ГпрЧ-Тв+(Гт.0-Гв)Р(ГПр)].
При Р (/) exp ( — t/T0)
Ко-г {То ехР (— т;То) [1 — exp (— Tnp/Tg)]} / [Тпр + Тв +
+ (Т’т.о Гв) ехр (— Т’пр/Т’о)] J
Кт.и — находим из выражения К0.г при т ™ 0.
6.2. ТЕХНИЧЕСКАЯ ДИАГНОСТИКА И КОНТРОЛЬ СОСТОЯНИЯ РЛС
Функциональные задачи диагностики и контроля заключаются в управле-
нии состоянием РЛС в соответствии с определенным алгоритмом. Поскольку для
контроля исправности, работоспособности и поиска места отказа необходимо
знать фактическое техническое состояние РЛС и ее отдельных блоков, контроль
технического состояния всегда содержит техническое диагностирование.
Система диагностирования и контроля (СДК), реализующая процесс тех-
нического диагностирования включает: объект технического диагностирования
(ОТД) средства диагностики и контроля, устройства их сопряжения, персонал,
техническую документацию. Цель диагностики и контроля — определение вида
технического состояния для управления ими и поддержания эксплуатационно-
технических характеристик РЛС в заданных пределах. Таким образом, СДК
предназначены для решения одной или нескольких задач — проверка исправно-
сти РЛС, работоспособности РЛС и функционирования РЛС, поиск места воз-
никновения отказа (локализации дефекта) в РЛС.
Системы технического диагностирования и контроля классифицируют по
ряду признаков, определяющих их назначение, задачи, структуру, состав тех-
нических средств. По степени охвата они подразделяются на локальные и общие.
Локальными называются системы, решающие одну или несколько перечисленных
задач, общими — решающие все поставленные задачи диагноза.
По характеру взаимодействия ОТД со средствами СДК подразделяются на
системы с функциональным диагнозом, в которых решение задач диагностики
осуществляется в процессе функционирования ОТД по своему назначению, и
системы с тестовым диагнозом, в которых решение задач диагностики осуществля-
ется в специальном режиме работы ОТД путем подачи на него тестовых си-
гналов.
По используемым средствам технического диагностирования СДК подраз-
деляются на системы:
с универсальными CpID (например, ЦВМ);
со специализированными Ср1р (стенды, имитаторы, специализированные
ЦВМ);
с внешними CpID (CpID и ОТД конструктивно отделены друг от друга):
с встроенными CpID (Ср1Г) и ОТД конструктивно представляют одно изде-
лие авиационной техники).
По степени автоматизации СДК подразделяются на автоматические, в ко-
торых процесс получения информации о техническом состоянии ОТД осуществ-
ляется без участия человека; автоматизированные, в которых получение и обра-
ботка информации осуществляется с частичным участием человека; неавтома-
тизированные (ручные), в которых получение и обработка информации осуществ-
ляются оператором
Структура и показатели системы технического диагностирования н контроля
РЛС представлены на рис. 6.6.Процесс диагностирования распадается на ряд
186
операций. Первой операцией является
определение сигналов, параметры кото-
рых характеризуют состояние РЛС; эти
параметры называются диагностически-
ми. Выведение диагностических пара-
метров из РЛС осуществляется посред-
ством датчиков сигналов. Диагности-
ческие параметры транслируются че-
рез линии связи в средства ТД. Второй
операцией процесса диагноза является
Рис. 6.6. Структурная схема диагно-
стики и контроля:
ОТД — объект технического диагностиро-
вания; ДДП — датчики диагностических
параметров; ЛС — линии связи; К —ком-
мутаторы; П — преобразователи; ИП —
измерительный прибор; УО — устройство
отображения; Д— дискриминатор; УД~
устройство ввода допусков; УИД — устрой
ство индикации и документирования вида
технического состояния; УУ — управляю
щее устройство; ГСС — генератор стнмули
рующих сигналов; ПУ — прогнозирующее
устройство
преобразование сигналов к виду, удоб-
ному для ввода в измерительное устрой-
ство. Последовательная подача диагно-
стических параметров на вход измери-
тельного устройства осуществляется с
помощью коммутаторов. В измеритель-
ном устройстве реализуется третья —
главная операция процесса — измере*
ние параметра с заданной точностью.
На выходе измерительного устройства
формируется информация о техничес-
ком состоянии. В дискриминаторе из-
меренные параметры РЛС сравнива-
ются с полем допусков (четвертая операция), на выходе формируется инфор-
мация о виде технического состояния (например, работоспособна РЛС или нет).
Как результат работы целого ряда функциональных устройств, за каждым
из которых стоит конкретная схемная реализация, воздействия на эти устройст-
ва щумов и помех различной природы, решение о виде технического состояния
РЛС принимается с ошибками.
Ошибки диагностирования допускаются вследствие большой погрешности
измерений, неработоспособности средств диагностики и контроля, метода приня-
тия решения о виде технического состояния, т. е. совокупность выбранных па-
раметров. На погрешность измерения влияют аддитивные и мультипликативные
помехи, возникающие в РЛС как следствие изменения электромагнитных полей,
шумы в каналах связи и цепях коммутации, погрешности преобразования и из-
мерительного прибора. Техническое состояние средств диагностирования, ко-
торые являются электронными системами, зависит от их надежности. Принятие
решения о техническом состоянии РЛС в СДК, в свою очередь, зависит от по-
грешности сравнения, выбора поля допусков на диапазон изменения диагности-
ческих параметров, быстродействия СДК, погрешности набора стимулирующих
сигналов.
Погрешность принятия решения о состоянии РЛС в СДК определяется со-
стоянием контура контроля параметров, под которым понимают совокупность
функционально связанных устройств, входящих в информационную систему
диагностики и контроля, формирующую контролируемый сигнал и обеспечиваю-
щую контроль параметров этого сигнала.
Основные параметры, определяющие качество работы СДК. следующие.
PJ вероятность, что объект диагностирования находится в работоспо-
собном состоянии PJ - 1 — Ру - Р§;
- вероятность, что средства ТД находятся в работоспособном состоя-
нии. Pi J — Pi - Р£;
Ад- границы допусков на изменение диагностических параметров;
Рщ - - а - вероятность ошибки диагностирования вида (1, 2)—вероятность сов-
местного наступления двух событий: ОТД работоспособен, а в ре-
зультате диагностирования считается находящимся в неработоспо-
собном состоянии (Рп вероятность правильного определения
работоспособного состояния). Ошибка вида (/, 2) называется ошиб-
кой первого рода,
Р21 вероятность ошибки диагностирования вида (2t /)-- вероятность
совместного наступления двух событий: ОТД — неработоспособен,
а в результате диагностирования принимается решение, что он на-
187
ходится в работоспособном состоянии (Р22 — вероятность правиль-
ного определения неработоспособного состояния). Ошибка вида (2, /)
называется ошибкой второго рода;
D — вероятность правильного диагностирования — полная вероятность
того, что в СДК определяется то технические состояние РЛС, в ко-
тором она действительно находится: D = 1 — Р12 — Р21;
тд — средняя оперативная продолжительность диагностирования — ма-
тематическое ожидание оперативной продолжительности однократ-
ного диагностирования;
— средняя стоимость диагностирования;
5Д - - средняя оперативная трудоемкость диагностирования;
L — глубина поиска дефекта — характеристика поиска дефекта, зада-
ваемая указанием составной части ОТД, с точностью, до которой
определяется место дефекта.
Достоверность результата диагностирования и контроля D = Dn£)M-
Методическая достоверность DM зависит от совокупности контролируемых
параметров (насколько полно они отражают состояние РЛС), методики конт-
роля и принятых критериев оценки состояния РЛС выбора поля допусков. Ин-
струментальная достоверность Dn зависит от статистических характеристик
измеряемых параметров и каналов связи, погрешностей измерений и алгорит-
ма контроля.
Расчет показателей диагностирования выполняют в соответствии с
ГОСТ 23564—79.
Вероятности ошибок аир определяют по формулам:
k k
а Pi.i pi £ Р1РЬ..! 2 РЧР2,1Р1.2.Р
k k
1=1 1=1
где PJ — априорная вероятность нахождения объекта диагностирования в ра-
ботоспособном состоянии; Р^ — априорная вероятность нахождения средст-
ва диагностирования в состоянии Z; РТ2 ( / — условная вероятность того, что
в результате диагностирования объект диагностирования считается нахо-
дящимся в неработоспособном состоянии при условиях, что он находится в
работоспособном состоянии и средство диагностирования в состоянии /,
2 z = условная вероятность получения результата «объект диагности-
рования находится в неработоспособном состоянии» при условии, что сред-
ство диагностирования находится в состоянии I; Р& 2 ~ условная вероят-
ность нахождения объекта диагностирования в работоспособном состоянии
при условиях, что получен результат «объект диагностирования находится
в неработоспособном состоянии» и средство диагностирования находится в
состоянии /; Р% — априорная вероятность нахождения объекта диагности-
рования в неработоспособном состоянии; 2 } — условная вероятность
того, что в результате диагностирования объект диагностирования считается
находящимся в работоспособном состоянии при условиях, что он находит-
ся в неработоспособном состоянии и средство диагностирования находится
в состоянии /; Р& t --- условная вероятность получения результата «объ-
ект диагностирования находится в работоспособном состоянии» при усло-
вии, что средство диагностирования находится в состоянии I: Р2 * ,—
условная вероятность нахождения объекта диагностирования в неработо-
способном состоянии при условиях, что получен результат «объект диагно-
стирования находится в работоспособном состоянии» и средство диагности-
рования находится в состоянии I
188
Если состояние объекта диагностирования определяет совокупность п неза-
висимых диагностических параметров, вероятности ошибок Р1>2 и Р2 i
следующие:
k Г п п
П Л,- П (Pv-avl)
/=1 [v = I V—1
k Г п п
S I П (Pv avj + Pv l) П (Л> av l)
Z = 1 Lv=l v=l
где Оу L — вероятность совместного наступления двух событий; диагностичес-
кий параметр v находится в поле допуска, но считается находящимся вне
поля допуска при условии, что средство диагностирования находится в со-
стоянии Z; pvj — вероятность совместного наступления двух событий: ди-
агностический параметр v находится вне поля допуска, а его считают нахо-
дящимся в поле допуска при условии, что средство диагностирования нахо-
дится в состоянии /; Pv — априорная вероятность нахождения диагности-
ческого параметра v в поле допуска.
Если состояние объекта диагностирования определяет совокупность неза-
висимых диагностических параметров и средство диагностирования находится
в работоспособном состоянии, вероятности ошибок следующие:
Р1Л = РЧ
п п
П Ру— П (Р— ачд)
v= 1 v=1
+ ^3 П Ру,
V=1
^2,1 = Р1
п п
П (Р v aV,l+Pv,l) (Р v av,i)
.V— 1 V= 1
+Р1
где Pz — вероятность безотказной работы средства диагностирования.
Если при диагностировании диагностический параметр v = 1, 2, п не
проверяют, то l = О, PV1 “ 1- Pv.
Вероятность правильного диагностирования
т т т
D= ?>РцР>-
1 = 1 1 = 1 1V//=1
Оценка вероятности правильного диагностирования
т т т
^2^-2 2^.
1=1 » = HV//=d
Если состояние объекта диагностирования определяют совокупностью п не-
зависимых диагностических параметров и средство диагностирования различа-
ет 2П состояний объекта диагностирования, вероятность правильного диагности-
рования
k п
D—^PZ П (l—av i Pv i).
l = \ v=i
В тех случаях, когда можно пренебречь возможностью скрытых отказов
п
средства диагностирования D — П (1 — av t — Pv i)-
v=i *
Величины av и pv могут быть получены из номограмм
av = h(nx. П- Пб),
где — относительная параметрическая погрешность измерения; т)6 — отно-
сительная допусковая погрешность; т) — относительная величина допуска.
189
Рис. 6.7 Зависимости вероятности
ошибки uv от погрешности измере-
ния
Рис. 6.8. Зависимость вероятности
ошибки Рош от погрешности измере-
ния
В свою очередь “ d/ox, - d/6, q — 6/ох, где d ~ Зои — максималь-
ная ошибка измерения; 2о — поле допуска измеряемого параметра; 26 = UB—
-4/н ™ разности верхнего и нижнего предела измеряемого параметра.
Номограммы для определения av при различных значениях т)х, Т|, т|6 при
ведены на рис. 6.7.
Вероятность 0V - Рош — av, где Рош /2 (т]х, т), т]б) приведена на номограмме
рис. 6.8. С правой стороны номограмм приведены значения вероятностей avo и
Риш. о для случая одностороннего допуска измеряемого параметра. Номограммы
построены для ситуаций, когда разброс измеряемого параметра и погрешность
измерительного прибора описываются равновероятным распределением.
Средняя оперативная продолжительность диагностирования
т т k
ч- 2 - 2 pat S
i =• 1 i 1 I = 1
где Pf априорная вероятность нахождения объекта диагностирования в
состоянии /; т; средняя оперативная продолжительность диагностирова-
ния объекта, находящегося в состоянии I; — оперативная продолжитель-
ность диагностирования объекта, находящегося в состоянии i при условии,
что средство диагностирования находится в состоянии I.
Величина т/ включает продолжительность выполнения вспомогательных
операций диагностирования и продолжительность собственно диагностировав
и и и
Оценка средней оперативной продолжительности диагностирования по ста-
тистическим данным
Л’ гп
де оперативная продолжительность диагностирования объекта, нахо-
дящегося в состоянии / при g-м испытании.
190
Средняя стоимость диагностирования
т т k
2 cip? 2 poi 2 c^p<i>
i = 1 Г = 1 / = 1
где Ct — средняя стоимость диагностирования объекта, находящегося в состоя-
нии i; Citi “ стоимость диагностирования объекта, находящегося в состоя-
нии i, при условии, что средство диагностирования находится в состоянии I
Величина Ci включает амортизационные затраты диагностирования, затра-
ты на эксплуатацию системы диагностирования и стоимость износа объекта диаг
ностирования.
Средняя оперативная трудоемкость диагностирования
т т k
5д = 2 2 Р? 2
i-- 1 1=1 /= 1
где Sfl,i — средняя оперативная трудоемкость диагностирования при нахожде
нии объекта в состоянии i; 5Д, г,/ — оперативная трудоемкость диагностиро
вания объекта, находящегося в состоянии I при условии, что средство
диагностирования находится в состоянии /.
Оценка средней оперативной трудоемкости диагностирования по статисти-
ческим данным
N т
2 2 ^д, t,gp?,
где — оперативная трудоемкость диагностирования объекта, находяще
гося в состоянии I при g-м испытании.
Показатели контролепригодности являются характеристиками РЛС, как
объекта технического диагностирования. Их совокупность определяет контро
лепригодность ОТД. К показателям контролепригодности следует относить
Кп.п — коэффициент полноты проверки исправности (работоспособ-
ности);
Кп.п = Хк/к0— отношение суммарной интенсивности отказов, в контролируе
мых составных частях ОТД к суммарной интенсивности отка-
зов всех составных частей;
Кг.п— коэффициент глубины поиска дефекта, Kr.u = F/R, где F -
число однозначно различимых состояний РЛС, с точностью до
которых локализуется отказ, R — общее число составных час-
тей, с точностью до которых требуется локализовать дефект,
L — длина теста диагностирования, определяемая числом тестовых
воздействий;
^в—Т'усв ± ^мдР — среднее время подготовки изделия к диагностированию, как
сумма времени установки и снятия измерительных преоб-
разователей и др.устройств и монтажно-демонтажных работ,
необходимых для подготовки изделия к диагностике;
SB Sycn н 5'мдр — средняя трудоемкость подготовки изделия к диагностиро -
ванию;
Ку.с - коэффициент унификации устройств сопряжения ОТД со
средствами СДК. Кус ~ Ky/Ne - отношение числа уни-
фицированных устройств сопряжения к их общему кол имеет-
ву;
Ку.н коэффициент унификации диагностических параметров.
Ку.и 6у'6п~ отношение числа унифицированных параметров к общему
числу параметров, используемых при диагностировании;
К-|.д коэффициент трудоемкости подготовки ОТД к диагностик
рованию, Кт.д (5Д — 5В)/5Д.
Модели объектов технической диагностики представляют сложный ОТД в
таком виде, который позволяет решать задачи диагностирования (или одну
них) и одновременно оценивать качество диагностирования
ИН
Диагностирование сложных устройств начинается с составления диагности-
ческой модели — описания, позволяющиего учесть и представить в наглядной
форме внешние и внутренние параметры устройств РЛС и их влияние на выходные
сигналы и функциональные характеристики. Цель моделирования — формали-
зация методов построения алгоритмов диагноза. Формальное описание может
быть выполнено в аналитической, векторной, графической и табличной формах.
Модели классифицируются на явные и неявные. Явная модель — это сово-
купность формальных описаний исправного объекта, неявная содержит какое-
либо одно формальное описание состояния объекта, модели его неисправностей
и правила получения по этим данным других интересующих нас описаний состоя-
ний. Чаще всего модель задается в виде описания исправно работающей РЛС,
которая состоит из радиоустройств непрерывного, дискретного и гибридного
видов. Поэтому при моделировании используют модели этих трех типов.
Одна из составных частей диагностических моделей всех типов — элементар-
ная проверка Совокупность элементарных проверок представляется полем
П(л1...лп). Каждая элементарная проверка характеризуется одиночным воз-
действием на ОТД и одиночным (хотя и многозначным по результату) ответом
на это воздействие.
Аналитические виды моделей, используемые в качестве основных для опи-
сания РЛС, — аналитические модели задаются в виде уравнений. Например,
связывающее технические и эксплуатационные характеристики РЛС
_ (4л)а прм ^прм D*_____
Р и — — ' “.
Пи Лпрм Ппрд
В общем случае ОТД рассматривается как преобразователь входных вели-
чин X в выходные У. Аналитическая модель У=АХ, где А оператор, характери-
зующий преобразования, связанные с процессами, протекающими в объекте.
Реальные устройства в составе РЛС можно описывать линейными дифференциаль-
ными уранениями:
U Yh=h (0>
где LjYj^Y^ +ajnj_iYp-'+...+aJ0YJ (j=l,2...k)-
линейный оператор порядка л/ Уj— выходная функция; fj (/)— входная
функция.
При использовании для описания ОТД дифференциальных уравнений усло-
вия работоспособности описывают в наиболее общем виде. Для построения мо-
дели этого типа необходимо знать большее число параметров, поэтому при прак-
тических расчетах в качестве диагностической модели непрерывного объекта
рассматривают характеристическое уравнение системы
апРп+ an_tPn~l + ..,+ajP+ao,
где Р*— полюса характеристического уравнения,
Изменение состояния такой структуры вызывает перемещение полюсов в
декартовой системе координат. Типичными представителями непрерывных уст
ройств в РЛС являются усилительные блоки, охваченные обратными связями,
тракты с АРУ и автоподстройки частоты.
Функциональная диагностическая модель (ФДМ) составляется на основе
функциональной схемы РЛС или отдельного устройства и строится по следующе
му правилу: отдельные блоки (узлы) модели—• блоки функциональной схемы
имеющие несколько входов, но только по одному выходу. Если у блока несколько
выходов, которые нельзя объединить, то в модели его представляют двумя или
большим числом блоков в зависимости от числа выходов (рис. 6.9). Связи межд\
блоками указаны линиями, стрелки обозначают направление прохождения сит
нала. Функциональная модель удобна для представления дискретных объектов
структур с дискретной цифровой обработкой информации. Множество состоянии
192
Рис. 6.9. Диагностические модели:
а — структурная схема тракта развертки РЛС; б — функциональная диагностическая
модель; в — ориентированный граф тракта развертки РЛС; ГПИ — генератор прямо-
угольного импульса; ГЛИН — генератор линейно изменяющегося напряжения; ГЛИТ —
генератор линейно изменяющегося тока; УИП — усилитель-инвертор импульса подсвета
модели М описывается множеством состояний структурных блоков игх, т2, ...М.
При анализе ОТД с помощью функциональной диагностической модели предпо-
лагается, что отказал один блок.
Функциональная диагностическая модель —- базовая структура для построе-
ния графических моделей и матриц состояний объекта. Несмотря на формализа-
цию структуры ФДМ ее построению всегда должен предшествовать инженерно-
логический анализ ОТД.
Г рафическая диагностическая модель строится на основе теории графов. ОТД
представляется множеством входов А (ах, ... ап) и множеством выходов
4/ (их ...пт). Граф— это множество точек, соединенных линиями. Точки назы-
ваются вершинами, линии со стрелками ориентировки — дугами.
Ориентированный граф (рис. 6.9, в) структурной схемы (рис. 6.9, а)
состоит из множества вершин X (х± ...xs), множества дуг V = { (ххх2), (ххх3),
(х2х4) ..}.
Теория графов позволяет формально преобразовывать один граф в другой,
упрощать многочисленные связи, а следовательно, в отдельных случаях миними-
зировать число вершин, отражающих структуру графа, а следовательно, число
контролируемых блоков.
Матрица состояний — один из наиболее общих видов диагностических мо-
делей дает полное описание множеств состояний М (т^ ... тп), проверок
П (лх ...л/j), сигналов U (их Матрица состояний (табл. 6.1) строится на ос-
нове функциональной диагностической модели (рис, 6.9, б).
Таблица 6.1
Матрица состояний
Состояния Проверки
Ui и2 и3 t/5
мо (1111 1) 1 1 1 1 1
Mi (0 1 1 1 1) 0 0 0 0 0
м2 (1 0 1 1 1) 0 0 0 0 0
М3 (110 1 1) 1 1 0,’ 0 1
м4 (1 1 1 0 1) 1 1 0 0 1
м5 (1 1 1 1 0) 1 1 1 1 0
7
А
В состоянии Мо система работоспособна, результат всех проверок — Uh
обозначается «1». При отказе 1-го блока система принимает состояние и все,
проверки дают отрицательный результат «О». В состоянии проверки £7lt U2
U5 дают результат «1», а проверки I)и — отрицательный «О». Матрица сос-
тояний — формализованный документ. Если в объекте нет обратных связей, то
определенное состояние объекта соответствует определенному состоянию матри-
цы.
Проведя все положенные проверки, можно не только определить отказ, но и
отказавший блок модели, а следовательно, и функциональной схемы. Наличие
в структуре ОТД и модели обратных связей создает в строчках матрицы одина-
ковые позиции, которые характеризуют неразличимые состояния. Это ограни-
чивает использование матрицы для описания непрерывных объектов, охваченных
обратными связями.
И нформационная модель ОТД синтезируется на основе представлений о
процессе диагностирования как процессе получения информации о состоянии
объекта. Состояние объекта определяется совокупностью диагностических пара-
метров Hi ... Перед началом диагностирования неопределенность знаний о
k
состоянии объекта описывается энтропией = 2 (w/> М). где / (и;. Л4) —
z = 1
количество информации в параметре ui о состоянии Л4 ОТД. Каждый из диагно-
стических параметров щ несет определенное количество информации о М.
1 (Ui, М) — Н (M/tii-i) — Н (M/ui), определяемое разностью условной
энтропией, до контроля параметра tij и условной энтропией после определения
параметра щ.
Суммарное количество информации равно или близко к исходной неопреде-
k
ленности V 1 (ui> М) — (М). Тогда оказывается справедливой следующая
i = 1
последовательность информационного описания: I (ult Л4) = (М)— Н
I (и2, М) = Н — Н (М/и^, и2) ... I (uk М) - Н (М ... uk-i) ~
— Н (М/^ ...Uk).
Модели ОТД используются для решения задач выбора совокупности пара-
метров для определения работоспособности, составления алгоритмов поиска
места отказа, прогнозирования.
Определение работоспособности РЛС — основная задача диагностики и
контроля. Состояние работоспособности нельзя смешивать с состоянием функцио-
нирования. Наличие четкого изображения обстановки на экране визуального
индикатора иногда приводит к вынесению ошибочного решения о якобы работо-
способности изделия — ошибка диагностирования 1 рода. Определение работо-
способности сопровождается измерением параметров и сопоставлением их с до-
пусками, определяемыми технической документацией.
Условия работоспособности формируются на основе анализа диагностичес-
кой модели или при экспериментальных исследованиях реального объекта. Они
определяются как ограничения на изменение динамических и статических ха-
рактеристик или совокупности параметров и зависят от структуры ОДК.
Выбор параметров для определения работоспособности объектов с непре-
рывной структурой осуществляется на базе модели непрерывного линейного
объекта. Линейные непрерывные объекты удобно описывать передаточной функ-
цией, коэффициенты которой связаны с параметрами объекта технического диаг-
ностирования— функцией К (р). Типичный представитель непрерывного ОТД—
тракт АПЧ (рис. 6.10), схема которого состоит из смесителя См, частотного детек-
тора ЧД, управителя У и управляемого гетеродина Гет. Работоспособность ОТД
Т
может быть оценена интегральной функцией R = | [До)н (/) — Асо Сум-
b
марный коэффициент усиления К -- #чдЯу /Сгет- ОТД представляет собой ли-
нейную систему второго порядка. Диагностическая модель системы описывается
передаточной функцией К (р) = К,- [ (р4- cxj (р а2) X] К. (Т2р2 4- р —
-н 1), где а1 и а2 — постоянные, ах — 1/7\;
а2 — ЬТ2, 7”i и Т2— время установления переходного процесса; В.— коэф-
фициент затуха ния, характеризующий процесс установления динамического рав-
194
Рис. 6.10. Диагностическая модель непрерывного объекта:
а— функциональная схема АПЧ РЛС: б — диагностическая модель тракта АПЧ; См — сме-
ситель; ЧД — частотный детектор; У — усилитель; Гст — гетеродин
новесия в системе; Т —- 1/п = (с^ —- (cC]Ct2 ~г Л)с — период собственных
колебаний системы.
Задаваясь конкретными значениями од — 2 и а2 = 4 из выражения для
К (р) = Ki [ (р 4 2) (р + 4) + К], получаем характеристическое уравнение
вида р- + 6р + 8 -г К, корни которого р1г2 = —3 ± ~|/1 — К, зависят от ко-
эффициента усиления. Положение векторов (корней) на комплексной плоскости
в зависимости от значения Л' будет меняться и характеризовать временные ха-
рактеристики объекта. Из формулы для К (р) следует, что р112 — —£(оц +
± /«пД/1 — S2 и cos 0 (У g2(On + (1 — ь2')шп) = т. е. коэффициент
затухания количественно равен косинусу угла 0, определяющему положение
корней характеристического управления в комплексной плоскости. Допусти-
мые перемещения корней pt и р2 соответствуют допустимым значениям и £2
в соответствующих узлах ОТД. Из приведенных формул следует, что с увеличе-
нием К уменьшается и наоборот. Коэффициенты К и Е зависят от внутренне-
го состояния узлов — значений элементов схемы. Предельные значения диагно-
стического параметра определяют из выражения
2 / I м \
К = П Ргг I Г ро П у ’
где pz, Гр — радиусы-векторы нулей и полюсов передаточной функции; z и р —
порядок полиномов в числителе и знаменателе передаточной функции;
N — число кратных корней.
Для рассматриваемого примера рг ---= —3 + /2, р2 = —3 + /3, тогда
ГР1 I р, 2 I I 3 /2 2| - у'ГТУ у'.Т;
г р2 --1 р-2 + 21-|-з + /з - 21 - У ГГ+ - У io;
+3-| + 4 4 | — | — 3-1-/2 4 4| -УТ + 2^=У5‘;
гР4 I Р-2 4 41-1-3 + /3 + 4 | - У+ГК - У Го-
Нижнее и верхнее значения К2 ~ 10, предельные значения коэффициента
усиления — 5 определяют диапазон изменения коэффициента усиления, при
котором диагностируемое устройство АПЧ остается работоспособным.
Если контролируется только один параметр, то диагностическая модель ли-
нейного непрерывного объекта описывается уравнением Ln (X) - F (х, X), где
Ln— дифференциальный оператор порядка л, примененный к элементу х (/),
X •— изменение контролируемого параметра. Решение этого уравнения: х (t, X)
00
= Л'о (0 (/)Х^. РЯД *h сходится при малых изменениях параметра. Для
объекта, представленного на рис. 6.10, а, характеристическое уравнение
Р2 6р -4- 8 =- 0, и при = 10 условие работоспособности имеет вид
1 (0)1- |р/(Ч1<б,— 2, ; 1,2.
Допустимые заменения К - Ко + X определяют следующим образом:
находят возмущенное характеристическое уравнение
Р1 4- 6р -г [8 + (К + X)] 0.
7*
195
•Г
Рис. 6.11. Диагностическая модель РЛС:
а — структурная схема передающего и индикаторного тракта
РЛС; б — функциональная диагностическая модель передающе-
го и индикаторного тракта РЛС; в — ориентированный граф
функциональной диагностической модели; Син — синхронизатор;
Прд — передатчик; ВВ — высоковольтный выпрямитель: ВТ —
вращающийся трансформатор; ГМ — генератор меток; ГЛИН —
генератор линейно-изменяющегося напряжения; ГПТ — генератор
пилообразного тока; ГПИ — генератор прямоугольного импульса
Корни возмущенного уравнения представляют рядом
Pj W = Pjo + Pji
Подставляют корни в характеристическое уравнение, заменяя его числен-
ным значением
(Pjo + Pji ^ + •••)2 + 6 (pj0 +'pjyK +...)+ 18 + X = 0.
Приравнивают коэффициенты при к в левой и правой частях уравнения:
ZpjoPji + 6Pji +1 = 0. Так как pj0 = pj (0) = —3 — 3/, то | рц | = 0,07 и
| XI < Sj/pj! = 2z0,07 = 28,6.
Возможность предложенных оценок следует проверить, определив справед-
ливость неравенства | X | < р^ где р}—радиус сходимости ряда. Если число
контролируемых параметров больше одного, то расчетные формулы усложня-
ются и для решения такой задачи рекомендуется пользоваться методикой, опи-
санной в [15].
Выбор параметров для проверки работоспособности дискретных объектов
может быть произведен методом графоаналитического моделирования. Инструк-
ции по эксплуатации РЛС рекомендуют проводить проверку изделий на соответ-
ствие нормам технических параметров (НТП) в контрольных точках принципи-
альной схемы. При оптимизации режимов диагностики и контроля число прове-
рок может быть существенно сокращено путем определения минимально доста-
точной совокупности блоков и узлов, подлежащих контролю. Причем, эту опе-
рацию можно выполнить на базе эксплуатационного авиапредприятия. Такой
выбор минимальнодостаточной совокупности диагностических параметров лег-
ко осуществить, применяя теорию графов.
Объект диагностирования представляют функциональной диагностической
моделью. Для ФДМ строится ориентированный граф, вершинами которого яв-
ляются внешние выходы блоков. Каждая пара вершин соединяется дугами, если
внешний выход блока ФДМ служит входом другого устройства, имеющего свой
внешний выход. Дугами соединяют вершины, представляющие собой блоки,
включаемые последовательно. Из теории графов следует, что совокупность вер-
шин графа системы, образующих внешне устойчивое множество, полностью ото-
бражает ее состояние и содержит минимальное число вершин. Внешне устойчи-
вым называется такое множество вершин, в которое заходят непосредственно
дуги из всех остальных вершин. В качестве примера произведем выбор сово-
купности контролируемых точек тракта синхронизации РЛС (рис. 6.11, а). По
заданной функциональной схеме составляем ФДМ, содержащую 10 внешних
выходов (рис. 6.11, б). На основе ФДМ строим ориентированный граф
(рис. 6.11, в). Минимальное количество параметров для контроля работоспособ-
ности (внешне устойчивое множество) выбирают следующим образом:
размыкаем вершины 5, 4, 7, 8 и 9, 10, соединенные двумя дугами;
из всего множества вершин выбираем те, в которые «втекают» дуги. В данном
’‘’ Примере таковыми являются 2, 6, 9 и 10;
так как вершины 9 и 10 связаны между собой, выбор выходов 9 или 10 для
контроля работоспособности равноценен;
работоспособность следует контролировать, измеряя параметры в точках 2,
6, 9 или 10.
Выбор параметров по матрице состояний для оценки работоспособности
дискретных объектов применяют, если структурная схема ОТД не очень сложна.
Для этого матрица состояний (табл. 6.2) строится по следующим правилам: каж-
дая строка имеет номер, соответствующий значению выхода, каждому столбцу
соответствует номер функционального элемента структуры. Поскольку выбран-
ная совокупность параметров должна зависеть от состояния всех функциональ-
ных элементов, этому требованию удовлетворяет набор параметров, имеющих
знак «+» на пересечении со всеми столбцами таблицы, т. е. 2, 6, 9 или 2, 6, 10.
Для окончательного выбора из двух совокупностей параметров следует исполь-
зовать критерий минимизации времени диагностики и контроля.
Таблица 6.2
Матрица зависимости выходных параметров от состояния функциональных
элементов
Номер выхода Номер блока ФДМ
1 9 3 4 5 6 / 8 9 1 0
«1
«2 Г — -Ц
“Г*
+ —ц
«5
«6 + ....
ц7
«8 -L. “Г"
«9 'Т I ~Г
Ы10 — "Г -г "Г • у — - “Г
Выбор совокупности параметров для определения работоспособности инфор-
мационным методом осуществляется по информационной модели ОТД, которая
позволяет выделить минимальную совокупность параметров, содержащую пол-
йую информацию о состоянии всей системы. В качестве функции предпочтения
одной проверки другой принимается количество информации, которое предостав-
ляет эта проверка относительно работоспособного состояния ОТД: -+ Л4р=
== Р (Mp/n,j)/P (Мр). При условии, что Р (ftjlMp) 1, погрешностями опреде-
ления состояния пренебрегаем.
Количество информации
- Мр -log3-------------------i-----------
1 — S P(Mj)P [лу/.М7]
/ = 1
196
197
Рис. 6.12. Матрица состояний для проверки работоспособности информационным
методом
Функцию предпочтения вида log2 {Р (Мр/л/)/Р (Мр)} можно заменить
.V
функцией (Мр)Р [л/Мр]}тах- Тогда для определения функции предпочте
/ = 1
ния удобно использовать матрицу состояний. Количество нулей в столбцах про-
верок характеризует количество блоков (состояний), связанных с результатами
этой проверки. Нули матрицы аналогичны проверкам л; и функция предпочтения
п
приобретает вид (л/) = { 2 ? (Му) ' I I Jmax, гДе "р (М/) — сумма
j = 1
роятностей состояний для нулей в /-й строке, т. е. Р (Мj) в данном случае —
роятность отказа /-го блока. Если вероятности состояний неизвестны, то
ве-
вс
ви ь
функции предпочтения (лу) = {2 I ^O^Dmax является суммой нулей в /-г
/ = 1
строке матрицы состояний.
Процедура выбора совокупности параметров информационным методом дл
объекта рис'. 6.11, а следующая. Для каждой строки матрицы вычисляют функ
пию 1Г'\ или 1Г2 Первой для контроля работоспособности выбирают ту проверку,
в строке которой №2 max. По результатам проверки матрицу состояний деля
на две части (рис. 6.12). В первую входят состояния, для которых результате!
проверки дали положительные результаты, во вторую — состояния, для коте
рых результаты проверки дали отрицательные решения. Дальнейшему анализ
подвергается первая часть, для которой составляется новая матрица, содержи-
тая непроверенные состояния (Л1;-~-1). Для нее аналогичным образом строить
198
функция предпочтения и процедура повторяется до тех пор, пока не будет опре-
делено состояние уИ0.
Если при диагностическом анализе необходимо учитывать стоимости про-
w
1<верок, то функция предпочтения 1F3 = { 2 (Му) | | С (л7-)} -* max.
" ' /=1
Методы оценки работоспособности РЛС позволяют выбрать необходимые
; контрольные точки и минимизировать их количество. При этом возникает вторая
задача: выбрать контролируемые параметры выходных сигналов и определить
пределы их изменения.
Выбор допусков параметров для контроля работоспособности производится
в следующей последовательности.
Если входное воздействие на функциональный блок РЛС известно, то параметры
выходного сигнала t/BblX (0 = f I t/BX W, р (/)] являются функциями входного
сигнала и схемных параметров элементов устройства, участвующих в формиро-
вании t/вых W- Эксплуатационные характеристики РЛС (дальность действия,
точность измерения координат) зависят, в свою очередь, от значений совокупно-
сти выходных параметров {t/BbIX (7)}, определяющих множество состояний РЛС
— {Mj}. Учитывая, что значения параметров элементов схем в течение эксплуа-
тации претерпевают изменения, отклонения параметров выходного сигнала
Aaj — [t/BblX (t, ax ... ап)1 определяются как Дау Д£2 ... =
k
— S да-j (0! ...₽;)Л₽;,д₽;.
i= 1
Выражение Уу = dctj/dfii называется функцией чувствительности параметра
выходного сигнала U (t) относительно внутреннего параметра рг-.
В качестве контролируемых параметров объектов с непрерывной структурой
следует использовать амплитуду Um(t) и фазу Ф (/) выходного сигнала или соо-
ответственно амплитудно-частотный 5 (/) и фазочастотный Ф (/) спектры. Для
дискретных устройств — огибающую импульсного сигнала на выходе t/Bbix(0
нт— временной сдвиг между началом входного и выходного сигналов.
Для принятия решения о работоспособности РЛС должны быть установлены
требованиями на пределы отклонения ее параметров и параметров функциональ-
ных устройств. При этом, зная допустимые отклонения эксплуатационных ха-
рактеристик, можно определить допустимые отклонения технических параметров.
Если эксплуатационный параметр L зависит от нескольких переменных — тех-
нических параметров L = ср (t/x ...t/m), то предельное значение относительной
погрешности функции нескольких переменных (dL)np = У^и^ t/x Y2dU2/ U2^~
+ ... + УndUn1'Un, где У1 -..Уп— коэффициенты, показывающие степень влия-
ния аргументов на погрешность функции.
Для нахождения допустимых погрешностей аргументов используют принцип
db\ dUo dUn
равных влияний, т. е. y1-g—^ у2-д—^ = ... = Уп~у—“• В качестве примера
определим пределы отклонения технических параметров, входящих в основное
Уравнение радиолокации (6t)max) Дальность действия РЛС
^шах ~~К у Ри ти Лпрм min V
Примем, что Цпрд= Лирм = Д а влиянием возможных изменений величин пц и
1 на Dmax пренебрегаем, тогда
dD 1 ( dP" j. 2 dSA d^ dE^ )
maX k Pn SA ' n EnpM } ’
dPi, 1
77 -= (^max)np < 10%; — = — (6Omax)np < 5 % ;
v = T 5 %: c 10 0(1
7 4 4 ппрм
В условиях эксплуатации маловероятно одновременное изменение всех па-
раметров, поэтому предельные значения их изменений могут быть взяты несколь-
ко больше расчетных.
Поиск места отказа в РЛС требует значительных временных затрат и боль-
шого количества контрольно-измерительной аппаратуры. При поиске места от-
каза основное значение имеет алгоритм (программа) поиска, позволяющий ми-
нимизировать материальные и временные затраты. Процедура поиска места от-
каза — составная часть общей процедуры восстановления работоспособности
системы, в которую входят: фиксация отказа — определение перехода РЛС в
неработоспособное состояние; локализация отказа до сборочной единицы, под-
лежащей замене; замена отказавшей сборочной единицы; контроль состояния
отказавшего узла блока; проверка работоспособности системы после восстанов-
ления.
В общем виде задача поиска места отказа формируется как задача опреде-
ления целесообразной последовательности выполнения логических операций в
измерительных, в результате которых устанавливают, в каком состоянии Afj из
всего множества М находится РЛС.
Определение места и причины возникновения отказов по характерным призна-
кам широко используют на практике. В инструкции по эксплуатации РЛС, как
правило, обширный раздел посвящен признакам отказов того или иного вида и
методам их локализации. К инструкции по технической эксплуатации РЛС при-
лагают таблицы, составляемые на основе инженерного опыта, испытаний маке-
тов и опытных образцов в процессе эксплуатации. Таблицы составляют для от-
дельных устройств РЛС (приемника, передатчика, антенны); они содержат при-
знак проявления отказа и причину его возникновения.
Поиск места отказа по критерию «время-безотказность» выполняют, если
известны вероятности отказов отдельных блоков РЛС и время, необходимое
для проверки каждого блока. Программа, реализующая минимальное значение
среднего времени поиска, определяется упорядоченной последовательностью от-
ношений qi^i > > • > qn^n-
Информационный метод поиска места отказа основан на предварительном
диагностическом анализе РЛС, составлении функциональной диагностической
модели и матрицы состояний. Каждая проверка л^ содержит информацию
/лг- -> М — Н (М) — Н где средняя условная энтропия, при которой
контролируется т элементов с вероятностями отказов qi
т+\
т
где Qnf = 2 Ум м 2=2 — I logs + (1 — <2яг) 'og-2 (1 ~QXi) |.
J=l
Проверку, которая дает наибольшее количество информации, определяю
1
из условия d(Izii Mpdt, Qji^ ~% ЧТ0 означает, что проверка л^ должна контро-
лировать такие состояния, сумма вероятностей отказов которых приближается
к 0,5.
Функция предпочтения по матрице состояний, соответствующая максимум:
информации Wt = {1>Р (Afj)| <0>| — SP (Mj) min. где («0»)
(«1») количество нулей и единиц в i-й строке матрицы состояний. Если вероятно-
сти отказов блоков неизвестны, то функция предпочтения —
= {2|<с0^>|— 2|<С1^>|}- Матрица состояний (рис. 6.13) составлена для синхро-
низатора РЛС (см. рис. 6.11, я). В качестве первой выбирают проверку, дающую
min (1Г5). Выбор следующей проверки определяется результатами предыдущей
Строят две новые матрицы, вычисляют функции предпочтения W&. Процеду-
200
|^а повторяется до тех пор, пока множество состояний М не будет разделено на
состояний, определяемых задаваемой глубиной поиска места отказа.
При необходимости учитывать стоимости каждой проверки функция пред-
почтения Г6 = {С (л-) \£Р (М,)|<0»| — ZP (М)<1>>|1).
Метод половинных разбиений широко применяют в радиолокационных
устройствах, имеющих последовательную структуру. Он является частным слу-
чаем общего информационного подхода. Если в структурной схеме блоки соеди-
нены последовательно и qt ~ то проверку начинают с середины тракта,
После чего в зависимости от результата правую и левую части также делят на
две половины и т. д.
Прогнозирование технического состояния РЛС как техническая задача фор-
мулируется следующим образом: состояние РЛС (или отдельного блока) неста-
бильно во времени, что проявляется в изменении совокупного параметра U (/).
На известном временном интервале 0—tn параметр U (!) принимает значения
U(!a), U(h) & (Л1). Необходимо найти параметр U (/) в последующие моменты
Времени Zn+1, /п+2 определить состояния системы М (/л+1) (?п+т) и
спрогнозировать интервал будущей работоспособности 7\ — Т.2.
Математический путь прогнозирования базируется на основе применения
теории численного анализа, случайных функций, вероятностей и игр. Прогно-
зирование технического состояния с помощью численного анализа выполняют
при условии, что зависимости U (!) и М (t) — монотонные функции.
Для решения задачи прогноза вместо контролируемой функции U (I) выби-
рают такую функцию Ви (/), что в одинаковые моменты времени U (t[)~- Ви (ti).
Чаще всего функция Ви (!/) — алгебраический многочлен. Для этого случая
ic. 6.13. Оптимальный алгоритм
поиска места отказа в РЛС
201
задача экстраполяции формулируется так: по заданным значениям {U (/п)ч
U (/j) ...U (6i)} необходимо найти многочлен, у которого Ви (t(i) U (/0),
Ви (t}) и (Z,), причем Ви (tn) — и (tn) < е„, В (tn — 1) — U (t„ — 1) < е2.
где Ej ...е7(— заданные величины. По известным значениям многочлена можно
найти неравенства:
Ви (Gi+i) U (6»+i) Ви (tn+rn) U (tn+m) рп;
где U + ...U (tn+m) — прогнозируемые значения функции U (/). Многочлен
обычно имеет вид: Ви (/) = а0 — axt о2/2 4- ... antn.
Неизвестные коэффициенты at получаются в результате решения системы
из п 4- 1 уравнений с п 4- 1 неизвестными. На практике в зависимости от вид;
многочлена могут, в частности, использоваться формулы Лагранжа, Ньютона
Метод, основанный на теории случайных функций, предполагает, что слу-
чайные функции параметров РЛС в прогнозируемом временном интервале явля
ются квазистационарными. Задача прогнозирования в этом случае может быт:
решена методом линейной экстраполяции случайных функций, использующее
корреляционный анализ. Случайная стационарная функция У (/) задается зна-
чениями У (t—/)-где 1, 2, необходимо предсказать значения У (t 4~ т).
Прогнозируемое значение в общем виде имеет следующий вид-
^прог (/J- m) - f |У (/- 1), У (/- 2) ...У (/- п)].
Наилучший для экстраполяции формулой будет та, для которой
(Ут,п - Л4|У (/ m) — fW (/— 1), У (/ — 2) ...У (/— л)]|2 - min
Метод прогнозирования состояния РЛС на основе теории вероятностей со
стоит в отыскании значения вероятности работоспособного состояния для любо
го заданного момента времени. Если прогнозирующий параметр распределен п<
нормальному закону, то
Н (t) = И {Аи и (I) < А,,} - [Ф (Ab-ucv (r)/cr (/) V2~) - Ф (~Аи ~ ^рС). ) ,
\ \ч V .
п п
где t/ep (0 = Si/; (/)/«: о'2 (0 - S [О; (/) - 17с|) (/)? (п - 1); Лв и Л„-пр;-
i = 1
дельные значения контролируемого параметра.
Если реализация U (/) аппроксимируется прямой линией, то Н (?)
--- 0,5 {1 - Ф [ ((/ср (Г) - А„ о (ПУД ), и по заданному уровню безотказност:
Яд0П определяют /Прог— время, по достижению которого выполняют профи-
лактическую замену узлов, оказывающих влияние на прогнозирующий пара-
метр .
Метод прогнозирования при форсированном режиме работы заключается
том, что аппаратура исскусственно вводится в режим, вызывающий ускорены
изменение прогнозирующего параметра. При этом оказывается возможным ы
явление скрытых неисправностей, предпосылок к отказам и неявных отказе:
Закон изменения прогнозирующего параметра У (/) при наличии скрытого д>
фекта и переходе аппаратуры в форсированный режим меняется. Отклонен:1
У (/) начинает превышать допустимое, что фиксируется, как дефект. Если ж
значения У (/) в нормальном и форсированном режимах близки друг к другу, :
делают заключение, что на прогнозируемом временном интервале Гпрог отказ
по параметру У (/) не произойдет. Одной из широкораспространенных реализ<
ций этого метода является прогнозирование состояния электронных ламп путей
снижения напряжения накала.
6.3. СРЕДСТВА ТЕХНИЧЕСКОЙ ЭКСПЛУАТАЦИИ РЛС
Измерительные приборы общего назначения включают в свой состав:
генераторы СВЧ, работающие в диапазоне частот, излучаемых РЛС (д.' <
БРЛС— 9—10 ГГц); нестабильность частоты ГСВЧ за 15 мин составляет 1 МГ: .
202
Рис. 6.14. Структурная схема цифро-
вого вольтметра (а) и эпюры напря-
жений (б);
ГТИ — генератор тактовых импульсов;
ГЛИН — генератор линейно-изменяющего-
ся напряжения; УС-1 — устройство срав-
нения I: УС-2 — устройство сравнение II; Тр — триггер; КС — каскад совпадения; ГСП —
генератора счетных импульсов; ЭСч — электронный счетчик; ЦИ — цифровой индикатор
пределы регулирования выходной мощности 90 дБ'мВт; нестабильность уровня
мощности — 0,1 дБ; режим работы импульсный или меандр; диапазон длительно-
сти импульса — 0,5—6 мкс (для ОЛП 0,01 — 2 мкс); диапазон частот повторения —
60—70 Гц;
частотомеры с диапазоном измерения частот РЛС, работающие при мощно-
сти входного сигнала 0,2—5 мВт и длительности импульса 0,5—6 мкс. Диапазон
•частот частомера электронно-счетного типа 0,5—10000 кГц и напряжение вы-
ходного сигнала 0,5—50 В;
генераторы импульсов, генерирующие импульсы длительностью 0,01 —
10 мкс. с частотой повторения 60—500 Гц и диапазоном задержки импульсов
' 0—4000 мкс:
микроомметры, позволяющие измерять сопротивления в диапазоне 4—
400 мкОм с погрешностью измерения ±10%;
электронные осциллографы, имеющие следующие основные параметры: по-
•s лосу пропускания 0—10 МГц; минимальный коэффициент отклонения
15 мВ/дел; развертки 0,1 — 4000 мкФдел; входное сопротивление 0,5 МОм; по-
• грешность измерения временных интервалов— 5%;
цифровые вольтметры, используемые для измерения постоянных и перемен-
ных напряжений РЛС. В основе их работы лежит импульсно-временное преоб-
разование. Структурная схема прибора (рис. 6.14) поясняется эпюрами напря-
жений. Напряжение измеряется циклами. Генератор тактовых импульсов ГТИ
. запускает генератор линейно-изменяющегося напряжения (ГЛИН), генератор
. счетных импульсов сбрасывает показания счетчика предыдущего цикла.
; Измеряемое напряжение Ux и опорное подаются на соответствующие входы
двух сравнивающих устройств, на другие входы подается напряжение от ГЛИН.
В момент, когда (7ГЛИН (0 — U(}, срабатывает первое сравнивающее устройство,
и триггер переключается из положения «0» в положение «1», отрывая своим им-
пульсом временной селектор. В момент, когда £/Глин (0 = ^н> срабатывает вто-
рое сравнивающее устройство и переводит триггер в состояние с0», закрывая се-
лектор. В результате счетчик фиксирует пачку счетных импульсов в количестве
N = Л?.ч At = Асч (б, — /j). Из эпюр видно, что — U(i = At • tg (3, поэто-
му измеряемое напряжение Ux — .V tg (V (FC4 J C/o). Величины FC4, tg £ и
-- Uq являются постоянными параметрами вольтметра, шкала которого градуиру-
ется в вольтах. В качестве цифрового индикатора вольтметра используют ряд
. нз цифровых газоразрядных ламп типа ИН.
Радиолокационный измерительный прибор (РИП) является одним из наи-
; более широкораспространенных измерительных приборов комбинированного ти-
у па, предназначенных для комплексной проверки импульсных РЛС. В зависимо-
< сти от диапазона волн имеет ряд модификаций: ГК4-19А (рис. 6.15) работает в
$ 3-сантиметровом диапазоне, ГК4-32— в 10-сантиметровом диапазоне.
203
Генерация СВЧ колебаний осуществляется на отражательном клистроне
К-27, смонтированном в генераторной камере. Колебания клистрона модулиру-
ются импульсами типа «меандр». Прибор имеет четыре режима работы; переход
из одного режима в другой осуществляется с помощью волноводных переключа-
телей ВП-1 и ВП-2. В первом режиме-генерации стандартных сигналов контро-
лируется начальный уровень мощности и значения частоты. Колебания из гене-
раторной камеры через аттенюатор поступают в термисторную камеру, которая
вместе с термисторным мостом и стрелочным индикатором является измерителем
мощности. По пути к термисторной камере часть СВЧ энергии ответвляется и
подается на резонансный волномер. Перестраивая волномер по минимуму показа-
ний стрелочного индикатора, определяют частоту генерируемых колебаний. При
измерении частоты модулированных колебаний используется индикатор осцилло-
графического типа, на вертикальные пластины ЭЛТ подается осциллографичес-
кая метка. Во втором режиме работы прибора ГК4-19А СВЧ энергия подается на
выход прибора через предельный аттенюатор, обеспечивающий регулировки мощ-
ности в диапазоне 2,5— 100 дБ.
В третьем режиме измеряют мощность и частоту внешних колебаний.
Четвертый режим— режим анализа спектра.
Чувствительность приемного тракта измеряют в режиме ГСС. Прибор
ГК4-19А синхронизируется контролируемой РЛС. СВЧ — энергия с его выхода
поступает в приемный тракт РЛС, параметры сигнала выбираются близкими па-
раметрам сигнала РЛС. Выходной сигнал прибора контролируют по экрану
РЛС, устанавливая его уровень таким, чтобы он примерно соответствовал
среднему уровню шумов, т. е. предельной чувствительности, выраженной в де-
цибеллах относительно 1 мВт.
Проверку полосы пропускания (частотной характеристики) приемника РЛС
выполянют по прибору ГК4-19А, работающему в режиме качающейся частоты.
Частотно-модулированный сигнал с выхода прибора подается на вход приемни-
ка, а выходной сигнал детектора прием-
ника, форма которого соответствует ам-
плитудно-частотной характеристике, по-
ступает на входной разъем прибора и
через усилитель вертикального откло-
нения — на осциллографический инди-
катор. На экране последнего наблюда-
ся аплитудно-частотная характери-
стика приемника. Полосу пропускания
измеряют с помощью частотной метки,
которая формируется на выходе детек-
тора волномера.
Этот прибор применяют также в ка-
честве анализатора спектра радиосиг-
налов. При этом ширину спектра можно
измерять в пределах 2—20 МГц. Чув-
ствительность анализатора спектра не
менее —30 дБ относительно 1 мВт.
Контрольно-поверочная аппаратура
РЛС предназначена для технического
обслуживания отдельных типов РЛС в
условиях эксплуатации или лабора-
торий.
Прибор контроля технического со-
стояния РЛС «Гроза» ГР-НА (рис. 6.16)
используется для проверки работоспо-
собности в пред- и послеполетных усло-
виях, а также для поиска места отказа
и позволяет проверить: питающие на-
пряжения, работоспособность системы
гиростабилизации, ток магнетрона,
мощность передатчика, старт-импульс,
ток кристалла канала АПЧ, ток сме-
сителя канала УПЧ, напряжение выхо-
Рис. 6.15. Структурная схема генера-
тора ГК4-19:
АС — анализатор спектра; ОИ — осцилло-
графический индикатор; СИ — стрелочный
индикатор; ГК -- генераторная камера;
М — модулятор; ТМ — термисторный мост;
ТК—термисторная камера; УАт — устано-
вочный аттенюатор; ВП-1 и ВП-2—волно-
водные переключатели; СЦ — смесительная
камера; САт — согласующий аттенюатор;
ПрАт —• предельный аттенюатор; УЧМ -
усилитель частотной метки: В — волномер
204
f fta АПЧ и чувствительность приемного
тракта. Погрешность измерений прибо-
>{гра ГР-ПА составляет: при измерении
•постоянных напряжений ±4%, пере-
.. менных напряжений ±20%, старт-им-
пульса ±5%, чувствительности прибо-
ра 3 дБ.
Излучаемая мощность РЛС контро-
лируется измерением напряжения, сни-
маемого с термопар, расположенных в
измерительной секции волноводного
тракта РЛС.
Чувствительность приемника про-
веряется сравнением мощности собст-
венных и суммарных шумов на выходе
приемника. Суммарные шумы форми-
руются путем подачи на вход шумов от
ГШП (полупроводниковый генератор
шума). Контролируемая мощность ГШП
подбирается такой, что амплитуда шу-
мов на выходе удваивается. В ГР-НА,
калиброванном на минимальную чув-
ствительность, суммарные шумы с по-
мощью делителя приводятся к значению
собственных шумов, таким образом,
показания измерительного прибора в
обоих режимах должны оставаться оди-
Рис. 6.16. Схема контрольно-прове-
рочного прибора Гр-НА:
ПАТ — переменный аттенюатор: ГШ — ге-
нератор шума; БП — блок питания:
Квых — коммутатор выхода: Д — детектор:
У — усилитель: К.Р — контрольный разъем:
БГ — блокинг-генератор; СПИ — схема из-
мерения старт-импульса: Квх — коммута-
тор входа; МкА — микроамперметр; Пк —
панель контроля
наковыми. Чувствительность приемника измеряют при выключенном высоком
напряжении. Для имитации старт-импульса РЛС включают блокинг-генератор
в автоколебательный режим, детектор, усилитель и схему измерений старт-им-
пульса. Конструктивно прибор ГР-НА выполнен в виде переносного монобло-
ка с панелью управления.
Прибор КАСО-1 является имитатором сигналов наземных РЛС и предназна-
' чен для проверки на работоспособность самолетных радиомаяков-ответчиков в
-.условиях аэродрома или лаборатории. С помощью имитатора контролируют ра-
ботоспособность супергетеродинного приемника и видеоусилителей ответчика,
работу дешифратора ответчика на разных кодах, мощность передатчиков, ответ-
ные кодовые сигналы ответчиков, правильность кодирования цифровой инфор-
мации, точность отработки блока преобразования ответчиков, схему подавления
боковых лепестков. По стрелочному прибору на передней панели выполняется
Индикация измерения несущей частоты передатчиков, проверка годности тран-
зисторов видеодетекторов и питающих напряжений.
Основные эксплуатационно-технические параметры следующие: несущая
-частота запросных сигналов 837,5±0,5 МГц; мощность запросных сигналов не
менее 7 мкВт в импульсе; нестабильность временных интервалов в запросных
Кодах не более ±0,2 мкс; погрешности допускового контроля импульсной мощ-
“.Вости не хуже 50%; измерительная способность при контроле ответных кодов
Интервалов и информационных посылок ±(0,3 ...1,2) мкс; погрешности измере-
ний — электрического эквивалента датчиков высоты не более ±0,05%, несущих
частот ответчиков не более ±500 кГц, интервала переменной высоты ±10%, пи-
тающих напряжений ±5%.
' По принципу действия прибор имитирует запросные импульсы РЛС, кото-
-рые поступают на вход ответчика, а с выхода снимаются, принимаются и контро-
лируются ответные коды. Принятые от ответчика ВЧ сигналы в приборе детекти-
руются, формируются по длительности и амплитуде, декодируются и оценива-
ются по составу и временному положению импульсов для определения правиль-
ности ответа.
2 Функциональные блоки прибора КАСО-1 следующие (рис 6.17): шифратор,
Сформирующий запросные видеоимпульсы; контрольный генератор, который мо-
дулируется импульсами шифратора и выдает импульсы запроса на ВЧ; смеси-
Шль ВЧ-сигналов, который получает от контрольного генератора импульсы за-
проса и передает их на ВЧ-разъем, подключаемый к объекту контроля. Ответные
К 205
к'
1
ВЧ-сигналы ответчика поступают на
ВЧ-разъем, далее на смеситель, волно-
мер, служащий для измерений несущей
частоты ответных импульсов, детектор
и дискриминатор амплитуды (если ам-
плитуда ответных импульсов превы-
шает заданный уровень, то ответный
сигнал имеет достаточную мощность).
На дешифратор прибора поступают ви-
деоимпульсы, которые декодируются и
распределяются по соответствующим
выходам. Если интервал координатного
кода находится в пределах допуска, на
одном из выходов дешифратора появля-
ются широкие импульсы, широкие им-
пульсы на другом выходе сигнализиру-
ют о наличии кодов ключа информа-
ции. Импульсы цифровой информации
транслируются в схему контроля ин-
формации, в которой осуществляется
Рис. 6.17. Структурная схема имита-
тора КАСО-1:
Ш — шифратор; КГ — контрольный генера-
тор;' ВЧР — высокочастотный разъем:
Дк — дискриминатор; Д — детектор: В —
волномер; СИ — стрелочный индикатор:
Дш — дешифратор; СКИ — схема контроля
информации; РП — регистр памяти; СКП —
схема контроля приемников; ИВ — инте-
гратор высоты; СЛ — сигнал запроса видео-
усилителей ответчиков; U2 — модуляция;
U3 — ВЧ-запрос; U4 — сигнал мощности:
U5 — сигнал видсометки; U6 — сигнал
«ключа»; U7— сигнал годности информа-
ции; иь — сигнал от дешифратора; U^ —
сигнал годности приемников ответчиков;
Ul0— выходные сигналы приемников ответ-
чиков
контроль наличия неопределенности в
разрядах и правильность расстановки
импульсов во времени. В случае несо-
ответствия временных интервалов зада-
ваемым допускам на выходе схемы по-
являются импульсы, сигнализирующие
об отказе ответчика. На схему инди-
кации приходят сигналы от дискрими-
натора мощности, дешифратора, схемы
контроля информации и контроля при-
емника и видеоусилителей. Одновремен-
ное появление сигналов на входах по-
казывает, что мощность, координатный
и ключевой коды находятся в допус-
тимых пределах, информация закоди-
рована правильно, приемник и видео-
усилители функционируют нормально.
Имитатор ВЧ-сигналов ДИСС предназначается для измерения чувствитель-
ности приемного тракта путем сравнения мощности собственных шумов прием-
ника с мощностью модулированного по амплитуде сигнала передатчика. Входное
устройство (рис. 6.18) включает калибровочный аттенюатор для установки на-
чального уровня мощности (1 мВт) и фазовращатель для компенсации фазового
сдвига. В состав модулятора входят балансный модулятор, генератор модули-
рующих колебаний низкой частоты и индикатор установки балансной модуляции.
Модулированные колебания поступают для установки начального уровня на
вход измерителя мощности и на вход измерительного аттенюатора. Уровень мощ-
ности на входе приемника определяется суммой затуханий направленного ответ-
вителя, измерительного аттенюатора и соединительных элементов. Погрешность
измерений чувствительности должна быть в пределах ^3 дБ.
Имитатор спектров доплеровских сигналов используется для проверки низко-
частотных трактов ДИСС. Принцип действия имитатора состоит в переносе узко-
полосного шумового спектра, сформированного на ВЧ в область НЧ (рис. 6.19).
В формирующем устройстве синтезируется узкополосный спектр с определенной
среднеквадратической частотой и шириной. В выходных фильтрах и усилителе
спектр комбинационных составляющих высших порядков подавляется. Ограни-
читель преобразует шумовой спектр в последовательность прямоугольных шу-
мовых импульсов для запуска счетчика импульсов, подключенного к имитатору.
Эксплуатационно-технические характеристики имитатора следующие: диа-
пазон значений среднеквадратических частот спектра составляет 2—32 кГц при
полосе 400—3600 Гц; точность выдаваемых частот не хуже 0,5%; погрешность
измерения не более ±0,1%; амплитуда спектра высших гармоник вблизи нуля
частот не более 2?^ от амплитуды полезного сигнала.
206
$
Встроенные средства диагностики и контроля (ВСДК) предназначены для
определения состояния работоспособности (состояния неработоспособности) и
поиска места отказа или потери работоспособности. По своему составу и назна-
чению ВСДК классифицируются по степени охвата объекта — на локальные и
общие; по взаимодействию с изделием РЭО — на устройства с функциональным
или тестовым диагностированием; по степени автоматизации — на автоматизи-
рованные. автоматические и неавтоматизированные.
ВСДК по выполняемым функциям относятся к системам технического диаг-
ностирования, являясь неотъемлемой частью изделия РЭО. Основная их задача —
контроль работоспособности на борту. Функции ВСДК при определении исправ-
ности изделия после восстановления или ремонта носят вспомогательный харак-
тер. При лабораторных проверках изделия РЭО ВСДК являются объектом диаг-
ностики и контроля, как неотъемлемая часть изделия.
Вид технического состояния изделия РЭО ВСДК дожен определяться на ос-
нове измерения всех параметров сигналов, определяющих состояние работоспо-
собности в соответствии с нормативно-технической документацией, сравнения
этих параметров с допусками, определяемыми нормами технических параметров
и принятия однозначного решения о виде технического состояния - работоспо-
собности или отказе. При определении состояния отказа ВСДК указывает смен-
ный ремонтируемый блок (тракт, узел), в котором произошел отказ.
По возможности ВСДК следует конструктивно выполнять в виде отдельно-
го блока, легко отсоединяемого от РЛС — объекта технического диагностирования
для диагностики и контроля и устранения дефектов, но может разрабатываться
как ВСДК, может представлять совокупность локальных устройств для контроля
отдельной или нескольких составных частей изделия РЛС. ВСДК должно соот-
ветствовать требованиям, установленным государственной системой промыш-
ленных приборов и средств автоматизации (ГСП) и государственной системой
обеспечения единства измерений.
При работе в автоматическом режи-
ме ВСДК фиксирует возникновение от-
каза, запоминает этот факт и трансли-
рует информацию об отказе. Необхо-
димо предусматривать возможность со-
пряжения ВСДК с внешними системами
диагностики и контроля — переносны-
ми или лабораторными установками.
Надежность ВСДК должна быть выше
надежности объекта диагностирования.
ВСДК ДИСС позволяет проверить
инструментальную точность определе-
ния путевой скорости и угла сноса и
основные параметры передатчика и при-
емника— мощность генератора СВЧ
(по значению тока кристаллических
смесителей), исправность модулятора
(по наличию и значению напряжения
гетеродина), работоспособность УПЧ и
УНЧ (проверкой напряжения шума).
Рис. 6.18. Схема имитатора высоко-
частотных сигналов ДИСС:
Ат — аттенюатор; ФВ — фазовращатель;
БМ — балансный модулятор: ГМЧ - гене-
ратор модулирующей частоты; ИБ — ин-
дикатор баланса; НО — направленный от-
ветвитель; ИМ — измеритель мощности;
И Ат —- измерительный аттенюатор
Работоспособность и точность из-
мерительного тракта, в который входят
УНЧ, синхронизатор, вычислитель и ин-
дикатор, проверяют в процессе решения
тестовых задач. Схема выдачи контроль-
ных задач состоит из двух кварцевых
генераторов, генерирующих сигналы с
частотами 4080 Гц и 6850 Гц, что соот-
ветствует определенным значениям пу-
тевой скорости и угла сноса. При ре-
шении контрольной задачи напряжение
с выхода кварцевого генератора через
коммутатор подается на УНЧ. Кон-
трольная частота отслеживается изме-
Рис. 6.19. Схема имитатора:
ГШ — генератор шума; УФ — устройство
формирования; Гет — гетеродин; См - сме-
ситель; Ф1, Ф2 .. ,Фп — набор фильтров;
У — выходной усилитель; Огр — - ограничи-
тель; ИП — измерительный прибор
207
рителем частоты и выдается на вычислитель путевой скорости и угла сноса. По
полученным значениям скорости и угла сноса судят о работоспособности изме-
рительного тракта ДИСС. Микроамперметр схемы ВСДК позволяет проверять
напряжения вторичных источников питания.
Стендовая аппаратура для проверки настройки и ремонта блоков РЛС пред-
назначена для работы с отдельными блоками и типами РЛС, осуществляет ком-
мутацию внешних цепей и измерительных приборов, источников питания, по-
дачу тестовых сигналов, индикацию технического состояния испытуемого блока
или системы. В состав стендовой аппаратуры входят измерительные и осцилло-
графические приборы общего назначения.
Стенд для проверки бортовых РЛС (рис. 6.20) включает в себя блоки про-
веряемого комплекта (Бл-1—Бл-4), измерительные стендовые приборы (ИП-1,
ИП-3) и измерительные приборы для регулировки (ИП-4). Стенд позволяет пове-
рять и настраивать блоки РЛС в отдельности, контролировать техническое со-
стояние сопоставлением показаний эталонного комплекта РЛС и поверяемого.
Конструктивно стенд представляет собой металлическую каркасную конст-
рукцию в виде стола с панелью приборов. Стол предназначен для размещения по-
веряемой РЛС, дополнительных приборов и приспособлений для проведения
работ по ТО. На приборной панели размещают измерительные приборы, предох-
ранители, переключатели, индикаторные лампы, секундомеры и другие устрой-
ства. Блоки РЛС, подключаемые к стенду с помощью штепсельных разъемов,
Рис. 6.20. Структурная схема стенда
для проверки РЛС
Рис. 6.21. Зависимость стоимости
проверки от количества операций:
1 — неавтоматический контроль; 2 — полу-
автоматический контроль; 3 — автоматиче-
ский контроль
соединяются реле по схеме внешних сое-
динений, аналогичной схеме соединений
на самолете. Питание стенда осущест-
вляется от стандартных источников.
Автоматизированные средства ди-
агностики и контроля РЛС (АСДК)
применяют в связи с возрастающей
сложностью техники, плотностью и
скоростью передачи информационных
процессов.
Автоматизация средств контроля
позволяет:
снижать трудоемкость при диагно-
стике и контроле;
повышать достоверность (объектив-
ность) получаемой информации;
проводить диагностику и контроль
по алгоритмам, обеспечивающим макси-
мальную эффективность при минимуме
затрат;
получать документ о техническом
состоянии РЛС (документирование тех-
нического состояния);
систематически накапливать инфор-
мацию (создание генетического поля)
о состоянии РЛС;
прогнозировать техническое состо-
яние РЛС;
переходить на техническое обслу-
живание по состоянию с контролем
уровня параметров.
Структурная схема АСДК соответ-
ствует схеме технической диагностики
и контроля (см. рис. 6.6), но устрой-
ства, входящие в структуру (коммута-
тор, измерительный прибор, дискрими-
натор), являются автоматическими, а
устройство управления дополняется про-
граммным устройством.
Автоконтроль позволяет существен-
но сократить затраты на контроль
208
сложных типов РЭО, к которым отно»
сятся РЛС (рис. 6.21).
Система АТЕС (Automatic Teet
Eeyipment Complex) представляет со-
бой комплексную систему проверки со-
стояния бортовых систем РЭО, в том
числе и РЛС, на базе универсаль-
ной ЭВМ. Структурная схема АТЕС
(рис. 6.22) включает ЦВМ 1700 СД, уст-
ройства коммутации и связи, источник
питания, измерительно-преобразова-
тельные схемы, генераторы стимули-
рующих и управляющих сигналов (по-
стоянное напряжение 0 — 100 В при то-
ке 0—5 А, переменные напряжения 0—
20 В частоты 400 Гц, частот от 50 Гц до
1 мГц через 0,01 Гц). В схеме использо-
ваны: имитатор синхроимпульсов, зам-
кнутый синхропередатчик, сигнал-гене-
ратор, импульсный генератор, потен-
циометрический имитатор, имитатор
цели РЛС на СВЧ, генератор звуко-
вой частоты, генератор контроля ан-
тенн. Переключение стимулирующих
сигналов и коммутация осуществляются
матричным коммутатором.
Комплекс стендового оборудования
для обслуживания РЭО в лабораторных
условиях предназначен для проверки,
регулировки, профилактических работ,
отыскания и устранения отказов и не-
исправностей при техническом обслу-
живании изделий бортового радиоло-
кационного, радионавигационного и
связного оборудования в лабораториях
технической диагностики, АТБ и АРЗ.
При использовании по назначению
комплекс выполняет электропитание от-
дельных блоков РЛС; коммутацию цепей
питания, измерения и управления, обес-
печивающих заданную последователь-
ность проверки и отыскания неисправ-
ности в блоках РЛС; регистрацию изме-
ряемых параметров, а также другой
предусмотренной ТЗ информации; инди-
кацию результатов проверки и сигнали-
зацию функционирования блока; опре-
деление виброустойчивости РЛС при
проведении их ремонта и оценка тех-
нического состояния.
Комплектацию комплекса стендо-
вого оборудования для АТБ и АРЗ
устанавливают в зависимости от типа обслуживаемых ЛА (номенклатуры из-
делий РЭО) и их количества, с учетом показателей надежности комплекса.
Комплекс стендового оборудования включает следующие составные части:
стенд технического обслуживания; вибростенд для технического диагностирова-
ния в условиях динамических нагрузок; программно-управляющее устройство
(ПУУ); устройство регистрации и документирования; набор контрольно-изме-
рительной аппаратуры общего назначения; систему электропитания комплекса
и другие вспомогательные устройства и техническую документацию.
Стенд технического обслуживания предназначен для компоновки основных
агрегатов^ связанных с деятельностью оператора, и состоит из рабочего места
Рис. 6.22. Схема системы контроля
АТЕС:
ЦВМ — цифровая вычислительная машина;
УС — устройство связи с ЦВМ; ИППТ —
источник питания постоянного тока;
ИППер — источник питания переменного
тока; ОИПТ-1 — опорный источник посте
янного тока 1; ОИПТ-2 — опорный истом
ник постоянного тока 2; ЦС-1 — цифровой
синхропреобразователь 1; ЦС-2 — цифро-
вой синхропреобразователь 2; ЦС-3 —
цифровой синхропреобразователь 3; ИС
источник сигналов переменного тока:
ИРС — источник радиосигналов; ИСНЧ =>
источник сигналов низких частот; И — ин
дикатор; =U — постоянное напряжение;
~ I) — переменное напряжение; Фм —фа-
зометр; ФчВ — фазочувствительный вольт
метр; Су — сервоусилитель; Втт — ватт
метр; ИИМ — измеритель импульсной
мощности; ИО — импульсный осциллограф:
Сч — счетчик; О —• осциллограф; Пер -= пе-
реключатель; ДА — дальномерная аппара
тура; СОМ —ответчик УВД; ДИСС — дог
леровская система; PC — УКВ радиостан-
ция; НП — навигационный приемник;
ГП — глиссадный приемник
209
оператора, мест для установки объекта технического обслуживания (ОТО) к из-
мерительно-коммутационного пульта (И КП), устройств ввода данных и управле-
ния и индикации измеряемых параметров, обеспечивающих отображение необ-
ходимого объема информации для оценки оператором правильности хода контро-
ля, настройки и работы объекта технического обслуживания. Коммутация цепей
измерения, стимулирования, индикации, сигнализации и электропитания при
ТО объекта должна осуществляться автоматически по командам, поступающим
с ПУУ или устройства ввода данных.
Программно-управляющее устройство выполняет: полуавтоматическое про-
граммное управление процессом измерения, сравнение измеряемого параметра с
его допустимыми значениями; вывод данных о параметрах и результатах срав-
нения на устройство индикации и на устройство регистрации и документирова-
ния, отбор информации для ввода в ЭЦВМ управления качеством продукции.
Функции ПУУ могут выполнять управляющие ЭВМ, имеющие небольшие габа-
риты, простые и удобные в управлении.
6.4. ОРГАНИЗАЦИОННО-ТЕХНИЧЕСКОЕ ОБЕСПЕЧЕНИЕ
ТЕХНИЧЕСКОЙ ЭКСПЛУАТАЦИИ РЛС
Эксплуатационно-техническая документация РЛС является составной ча-
стью отраслевой руководящей документацией, которая включает:
постановления съездов КПСС, ЦК КПСС и СМ СССР по вопросам развития
народного хозяйства, транспорта и связи, воздушного транспорта, государствен-
ные и отраслевые стандарты, приказы министра гражданской авиации СССР
указания заместителей министров;
наставление по производству полетов (НПП);
Правила технической эксплуатации наземных средств радиотехнического
обеспечения и связи (ПТЭ РТОС);
наставление по технической эксплуатации воздушных судов (НТЭ ВС ГА):
регламенты технического обслуживания и технологические указания по
выполнению регламентных работ;
технические описания, инструкции по эксплуатации и другие виды поно-
мерных документов РЛС.
Наземные РЛС обслуживаются в системе эксплуатации радиотехнического
оборудования и связи (база ЭРТОС), бортовые — в системе инженерно-авиаци-
онной службы (НАС).
НПП основной нормативный акт МГА СССР, регламентирующий орга-
низацию, обеспечение и выполнение полетов, а также управление воздушным
движением. В НПП изложены определения, цели; задачи; структура; классифи-
кация ВС, экипажей, аэропортов, метеоминимумов; организация летной работы;
обеспечение полетов- штурманское, информационное, метеорологическое, ин-
женерно-авиационное, аэродромное, радиосветотехническое, медицинское; ох-
рана перевозок. Приведены данные по планированию и обеспечению планов по-
летов, управлению вылетом и прилетом самолетов, а также в зоне подхода к аэро-
дрому и на трассах, по выполнению полетов и др
ПТЭ PTQC-ГА определяют планирование технической эксплуатации
средств радиотехнического оборудования и связи, ввод в эксплуатацию, прове-
дение технического обслуживания и ремонта, подготовку и допуск инженерно-
технического состава к самостоятельной работе, материально-техническое
снабжение, порядок проведения доработок, ремонта и списания средств радио-
электронного оборудования, выполнение правил техники безопасности и охраны
труда на объектах.
Для всех видов наземного радиоэлектронного оборудования, в том числе и
РЛС, устанавливается планово-предупредительная система технического обслу-
живания. ПТЭ устанавливают комбинированный способ определения сроков
проведения ТО. при котором периодичность обслуживания зависит от наработки
и календарного срока службы РЛС.
Объем работ по ТО и сроки их проведения определяются четырьмя формами
210
Форма № I регламентирует ежедневное ТО для предотвращения посте-
пенных отказов и включает в себя внешний осмотр, проверки основных пара-
метров по ВСДК и функционирования оборудования;
Форма № 2 определяет трудоемкое периодическое ТО через 750±25 ч
наработки РЛС;
Форма № з — периодическое ТО после 2250+<5 ч наработки;
Форма №4 — сезонное ТО. проводимое через каждые полгода.
Формы периодического ТО характеризуются большим объемом работ по
детальному обследованию технического состояния наземных РЛС и контролю
их на соответствие НТП для выявления возможных отказов и неисправностей
оборудования. ТО РЛС проводится согласно регламентам по технологическим
картам технического обслуживания.
НТЭ ВС ГА определяет основные положения и общие правила эксплуата-
ции ЛА и установленного на них оборудования, в том числе бортовых РЛС. Рег-
ламентирует организацию технической эксплуатации и технического обслужи-
вания, контроль работы авиационной техники в полете, обеспечение сохранности
и основные правила ухода за авиационной техникой, отправки ее в ремонт и по-
лучение из ремонта, состав эксплуатационно-технической документации и пра-
вила ее ведения.
Планово-предупредительная система ТОиР, действующая для бортовых сис-
тем, предусматривает следующие виды ТО:
оперативные виды (по формам А, Б, В, Г), выполняемые после прилета са-
молета и перед вылетом;
периодические (трудоемкие) виды ТО, выполняемые с определенной перио-
дичностью (по формам № 1 — 4) в зависимости от налета часов и наработки наи-
более ответственных систем; периодические формы ТО охватывают весь комплекс
работ, выполняемых по системам планера. Работы по формам возрастающих номе-
ров включают работы, выполняемые по предыдущим формам. Помимо этих ос-
новных видов различают ТО: при хранении, сезонное, специальные виды, выпол-
няемые после полета в зонах грозовой активности и резонансных явлений.
«Регламент технического обслуживания» является основным документом,
который определяет перечень работ по ТО и периодичность их выполнения в
процессе эксплуатации. Он предусматривает все виды ТО, составляется по еди-
ной форме и включает следующие разделы: введение, общие указания, указания
по охране труда и мерам безопасности, формы и периодичность ТО.
«Технологические указания по выполнению регламентных работ» (по техни-
ческому обслуживанию) — основной документ, который определяет последова-
тельность и порядок, способы и технические условия на выполнение регламентных
работ при ТО, текущем ремонте и замене. Технологические указания определяют
перечень инструментов и расходных материалов, необходимых для выполнения
регламентных работ и порядок контроля отдельных операций. Технологические
указания издают в виде набора технологических карт по каждой самостоятель-
ной операции.
Регламент и технологиеские указания разрабатывают отдельно для каждого
типа самолета или отдельных наземных систем РЭО. Часть II регламента ЛА со-
держит данные по всем видам РЛС, устанавливаемым на нем. Регламенты перио-
дически переиздаются. В них вносят исправления и дополнения. Поэтому в
практической деятельности необходимо пользоваться последним изданием. Рег-
ламенты по ТО отдельных систем включают технологические указания по выпол-
нению работ и издаются в виде единого документа.
При выполнении ТО на все виды регламентных работ выписывают карту-
наряд, определяющую перечень работ, которые должны быть выполнены, и фак-
тически выполнены, персональную ответственность за качество выполненных
работ.
Формупяр — основной документ РЛС, как изделия авиационной техники, в
котором отражается его работа и техническое состояние. Он выдается заводом-
изготовителем радиооборудования данного типа, может состоять из нескольких
частей. В формуляр вносят данные: по наработке изделия РЭО; все изменения
в оборудовании (замена агрегатов, блоков, узлов); выполнение периодических
форм TOj ремонта; продление ресурсов; выполнение доработок и специальных
указаний соответствующих служб МГА; режимы работы РЛС.
211
Записи в формуляре делают на основании карточки учета ресурса, карты-
наряда на ТО, акта технического состояния и акта на проведение доработки
авиационной техники.
Организация работ по техническому обслуживанию РЛС осуществляется
инженерно-техническим персоналом, который прошел курс специальной подго-
товки (в вузах, училищах и др. учебных заведениях). Помимо общетехнической
подготовки каждый специалист обязан изучить конкретный тип РЛС и правила
ее технической эксплуатации. Это изучение проводится на заводе-изготовителе,
в учебно-тренировочном отряде, на курсах повышения квалификации при вузах
ГА. После окончания общетехнической подготовки и изучения конкретного ти-
па РЛС (и др. оборудования) специалисты проходят стажировку на эксплуата-
ционных предприятиях (или заводах). Руководство стажировкой по вводу в
строй приказом по авиапредприятию возлагается на ответственного руководи-
теля из числа наиболее опытных инженеров. По окончании стажировки произ-
водится проверка знаний и практических навыков стажеров.
Основанием для оформления допуска к самостоятельному техническому
обслуживанию служат удостоверение об изучении конкретного типа авиатехни-
ки и справка о выполнении программы стажировки. Допуск к самостоятельно-
му ТО — документально оформленное разрешение на организацию и выполне-
ние работ по обслуживанию авиатехники ----- производится приказом руководи-
теля предприятия. Сведения о допуске к обслуживанию авиатехники записы-
вают в свидетельства специалистов с указанием (для специалистов лабораторий)
соответствующих видов работ, которые могут выполняться на изделиях любых
типов.
Техническое обслуживание наземных РЛС основано на календарно-парамет-
рическом методе. Инженерно-технический состав регулярно контролирует па-
раметры. Если значение параметра вышло за допустимые пределы, то производят
регулировку, восстановление или текущий ремонт аппаратуры. Профилактичес-
кие мероприятия, которые могут вызвать приработочные отказы, заменяют ра-
ботами по проверке основных параметров на соответствие НТП. Этот вид входит
в ежедневное ТО и работы, производимые после 750 ч наработки РЛС.
ТО включает осмотр РЛС и проверку ее работоспособности. Содержание
профилактических работ во многом определяется ее схемой и техническими ха-
рактеристиками. Рассмотрим примерное содержание регламентных работ, кото-
рые проводятся на РЛС. В процессе определения работоспособности прове-
ряют первичный и вторичный источники питания, питающие напряжения, режи-
мы питания приемных устройств, работоспособность АПЧ, чувствительность
приемных устройств, работоспособность передатчика по форме зондирующего
импульса, работоспособность аппаратуры опознавания по встроенному прибору.
Проверку работоспособности индикаторной аппаратуры начинают с блоков пи-
тания, затем контролируют качество радиолокационной развертки и изобра-
жения от местных предметов, проверяют правильность расположения местных
предметов и регулировку масштабов дальности. Трудозатраты на ежедневные
регламентные работы составляют 3,5 чел-ч.
Перечень регламентных работ по формам Ф-2, Ф-3 и Ф-4 включает свыше
40 позиций, основные из которых следующие:
осмотр системы АФУ;
проверка состояния автоматов, элементов сопряжения схемы с магнетроном,
импульсных трансформаторов, токосъемника, камер разрядников, реле;
проверка работоспособности шкафа управления, работы блокировок, точ-
ности горизонтирования, электронных приборов, горизонтальных продольных
осей отражателей:
измерение чувствительности приемника, частоты гетеродина, коэффициента
шума, частоты магнетрона:
ориентирование антенной системы и другие работы.
Полный перечень работ приведен в «Регламенте ТО обзорных РЛС с рас-
пределенной трудоемкостью».
Техническое обслуживание бортовых РЛС при оперативных формах предус-
матривает внешний осмотр и проверку функционирования РЛС. При внешнем ос-
мотре проверяют состояние наружных антенн (необходимо убедиться в их чисто-
те и исправности). Вскрывают обтекатель антенны ДИСС и проверяют состояния
и крепление блоков радиоэлектронной аппаратуры, состояние и контровку
?!•>
штепсельных разъемов, состояние жгутов и высокочастотных кабелей, корпуса
обтекателя и лакокрасочного покрытия. Снимают обтекатель антенны РЛС и
проверяют сцепление двигателя вращения антенны с коронной шестерней, ра-
боту механизма вращения, внешнее состояние блоков РЛС. В кабинах пилота и
штурмана, отделении бортпроводников, технических отсеках проверяют внеш
нее состояние и крепление РЭО. щигков управления, контрольных приборов и
указателей, выключателей, переключателей, ШР, защитных оболочек кабелей
(необходимо убедиться в надежности присоединения разъемов и антенных вво
дов к аппаратуре, а также в отсутствии повреждений, загрязнений, коррозии и
нарушении лакокрасочного покрытия).
Для проверки функционирования РЛС включают радиолокатор, проверя
ют питающие напряжения с помощью контрольного блока Гр-11 А, наличие раз
верток, меток дальности во всех положениях переключателя режима работы,
функционирование по отражению от местных предметов. Доплеровскую air
паратуру ДИСС-013 проверяют на работоспособность с помощью системы встро-
енного контроля. Работоспособность радиовысотомера проверяют по отклонению
стрелки-указателя высоты на встроенном имитаторе, при этом должна срабаты-
вать сигнализация опасной высоты. Самолетный ответчик проверяют на функ-
ционирование нажатием кнопки «Контроль» на пульте управления. Работоспо
собность СО проверяют контрольной аппаратурой KACOI или КАСОН.
Периодические формы технического обслуживания бортовых РЛС предус-
матривают снятие с самолета основных блоков и проверку их в лаборатории на
НТП.
После ТО и проверки на соответствие НТП снятые РЛС устанавливают на
самолет, где с рабочих мест членов экипажа проверяют их функционирование;
при этом необходимо убедиться в нормальной работе органов управления, при
боров контроля и сигнализации, в наличии индикации и подсвета.
Структура технической эксплуатации РЛС охватывает различные эксплуа-
тационные службы.
Службы. ЭРТОС — основное поизводственное объединение, на которое воз-
ложено обеспечение технической эксплуатации наземного радиоэлектронного
оборудования, включая РЛС. Главная задача службы ЭРТОС — обеспечение
потока ЛА системами и средствами УВД, действующими с высокой степенью
безотказности и минимальными затратами на единицу продукции, в качестве
которой выступает информация. Основными датчиками информации служат РЛС.
В отраслевом авиапредприятии службы ЭРТОС представлена подразделе-
нием, которое называется базой ЭРТОС. В состав ее входят: узел радиолокации
и радионавигации, организационно-технический отдел, ремонтно-эксплуатаци-
онные мастерские (РЭМ), центр коммутации сообщений, узел связи. В состав
узла радиолокации и радионавигации входят группы ТО обзорных РЛС, радио-
локационных систем посадки, вторичных РЛС. В состав РЭМ входят группы:
трудоемких регламентных работ, технического обслуживания устройств отобра-
жения на КДП и др. видов оборудования. Возглавляют базу ЭРТОС начальник
базы и главный инженер.
Организационная структура базы ЭРТОС предполагает разделение труда по
руководству производственными работами между инженерно-техническим пер-
соналом узлов, участков РЭМ и командно-диспетчерским пунктом (КПД).
Основные задачи базы ЭРТОС следующие: обеспечение системы УВД необ-
ходимыми средствами, в первую очередь РЛС, содержание средств УВД и исп-
равном состоянии, планирование использования систем и средств УВД, их ТО,
ремонт и доработки, учет и анализ отказов и предпосылок к ним в средствах
УВД, разработка и проведение мероприятий по повышению безотказности, дол-
говечности, ремонтопригодности. Подготовка и допуск инженерно-технического
состава к ТО конкретных типов РЛС.
Инженерно-авиационная служба (ИДС) осуществляет руководство техни-
ческой эксплуатацией авиатехники, в том числе бортовых РЛС, в процессе ко-
торой организует и осуществляет ТО
Главная задача НАС состоит в инженерно-авиационном обеспечении поле-
тов, под которым понимают:
содержание ЛА в исправном состоянии в соответствии с установленными
нормативами;
213
работу по обеспечению высокого уровня безопасности, регулярности поле-
тов и культуры обслуживания пассажиров;
организацию авиатехнической подготовки инженерно-технического состава,
проверку технических знаний и практических навыков, а также допуск личного
состава к ТО ЛА;
проведение практических занятии и стажировки на авиационной технике
специалистов летного и преподавательского состава:
своевременное выделение и качественную подготовку назначаемых специа-
листов инженерно-технического состава для проведения теоретических занятий
с летным составом;
оснащение технических классов летных отрядов, УТО и АТБ наглядными
учебными пособиями;
планирование использования ЛА, их ТО, ремонта, специальных осмотров
и конструктивных доработок авиационной техники;
анализ причин отказов авиационной техники, разработку и внедрение меро-
приятий по их предупреждению;
своевременную подготовку ЛА к полетам согласно плану полетов;
разработку и осуществление мероприятий по обеспечению сохранности ЛА
на земле.
Организационно-структурным подразделением И АС в авиапредприятиях
является АТБ, которая организуется в соответствии с типовым положением.
В состав АТБ входят следующие цеха: оперативных видов ТО; периодических ви-
дов ТО; лабораторной проверки А и РЭО (в крупных АТБ предусмотрены два
цеха для авиационного и радиоэлектронного оборудования); текущего ремонта,
обслуживания бытового оборудования и др. Цехи состоят из лабораторий. Ла-
бораторию возглавляюет старший инженер, смену в лаборатории— инженер.
Бортовые РЛС проходят проверку, настройку и регулировку в радиолокацион-
ной лаборатории.
В АТБ осуществляется ТО РЛС ЛА, находящихся в ведении АТБ непосред-
ственно в аэропорту базирования, учет и анализ отказов и неисправностей изде-
лий авиатехники, нарушений регулярности полетов из-за отказов РЭО и РЛС,
обеспечение нормативной исправности всех ЛА и устанавливаемых на них РЛС
и сокращение их простоев по техническим причинам, организация планомерной
технической подготовки и повышение квалификации инженерно-технического и
летного состава.
Для повышения качества ТО РЭО инженерно-технический состав АТБ раз-
рабатывает и изготавливает стенды и др. вспомогательные устройства диагности-
ки и контроля техсостояния.
СПИСОК ЛИТЕРАТУРЫ
1. Авиационная электросвязь. Международные стандарты и рекомендации.
Приложение 10 к Конвенции о международной гражданской авиации. Том I,
ч. I и 2, ICAO, июль 1972. 173 с.
2. Автоматизация самолетовождения и управление воздушным движением
П. А. Агаджанов, В. Г. Воробьев, А. А. Кузнецов, Е. Д. Маркович.—М.: Транс-
порт, 1980. 357 с.
3. Б а к v л е в П. А. Радиолокация движущихся целей. М.: Сов. радио,
1965. 226 с. “
4. Бартон Д., Вард Г. Справочник по радиолокационным измере-
ниям. Пер. с англ. Под ред. М. М. Вейсбейна. М.: Сов. радио, 1976. 392 с.
5. Васин В. В., Ст е л а н о в Б. М. Справочник-задачник по радиоло-
кации. М.: Сов. радио, 1977. 320 с.
6. Гнеденко Б. В., Беляев Ю. К., С о л о в ь е в А. Д. Матема-
тические методы теории надежности. М.: Наука, 1965. 524 с.
7. ГОСТ 13377—75. Надежность в технике. Термины и определения: Вза-
мен ГОСТ 13377—67. Введ 1.07.1975. Группа ТОО.
8. ГОСТ 20738—75. Надежность в технике. Расчет комплексных показате-
лен надежности восстанавливаемых объектов. Введ. 1.07.1977. Группа Т59. 18 с.
9. ГОСТ 19460—74. Надежность в технике. Расчет показателей безотказ-
ности невосстанавливаемых объектов. Введ, 1.01.1975. Группа Т59. 16 с.
10. ГОСТ 17732—80. Радиолокаторы метеонавигационные авиационные,
бортовые. Классы и основные параметры. Технические требования, методы испы-
таний: Взамен ГОСТ 17732—72. Введ. 1.07. 1981; срок действия до 1.07.1986 г.
Группа Э52. 58 с.
11. ГОСТ 24212—80. Система технического обслуживания и ремонта авиа-
ционной техники. Термины и определения. Введ. 1.07. 1981. Группа Д00. 16 с.
12. ГОСТ 18322—78. Система технического обслуживания и ремонта тех-
ники. Термины и определения: Взамен ГОСТ 18322—73. Введ. 1. 01. 1979. Груп-
па ТОО. 14 с.
13. ГОСТ 19152—80. Система технического обслуживания и ремонта техни-
ки. Ремонтопригодность. Состав общих требований: Взамен ГОСТ 19152—74.
Введ. 1.07.1981. Группа Т51. 5 с.
14. ГОСТ 22952—78. Система технического обслуживания и ремонта тех-
ники. Методы расчета показателей контролепригодности по статистическим дан-
ным. Введ. 1.07.1979. Группа Т51. 32 с.
15. ГОСТ 20427—75. Техническая диагностика. Общие положения о поряд-
ке разработки систем диагностирования.
16. ГОСТ 20911—75. Техническая диагностика. Основные термины и опре’
деления. Введ. 1.07.1975. Группа ТОО. 14 с.
17. ГОСТ 23563—79. Техническая диагностика. Контролепригодность объ-
ектов диагностирования. Введ. 1.01.1980. Группа Т51. 12 с.
18. ГОСТ 23564—79. Техническая диагностика. Показатели диагностиро-
вания. Введ. 1. 01. 1980 г. Группа Т51. 16 с.
19. ГОСТ 24029—80. Техническая диагностика. Категории контролепри-
годности объектов диагностирования. Введ. 1.01 1981. Группа Т51. 8 с.
20. Д а в ы д о в П. С. Техническая диагностика авиационного радио-
электронного оборудования. М.: РИО МИИГА, 1979. 84 с.
215
21. Игнатов В. А., Маньшнн Г. Г., Костанов с кий В, В
Элементы теории оптимального обслуживания технических изделий. Минск:
Наука и техника, 1977. 256 с.
22. К о л ч и н с к и й В. Е., М а н д у р о в с к и й И. А., Констан
1 и н о в г к и й М. Н. Автономные доплеровские устройства и системы навига-
ции летательных аппаратов. Под ред. В. Е. Колчинского. М.: Сов. радио, 1975.
432 с
23. к \ д р и ц к и й В. Д.,Синица М. А., Ч инаев П. И, Автома-
тизация контроля радиоэлектронной аппаратуры. Под ред. П. И. Чинаева, М..
Сов. радио, 1977. 256 с.
24. К у з н е н t) в А. А., Д у б р о в с к и й В. И. Эксплуатация радио-
оборудования аэродромов и трасс. М.; Транспорт. 1980. 224 с.
’25 . Кузьмин С. 3. Основы цифровой обработки радиолокационной
информации. М.: Сов. радио, 1973. 432 с.
26. Лихарев В. А. Цифровые методы и устройства в радиолокации.
М. Сов. радио, 1973. 256 с
27. Михайлов А. В., Савин С. К- Точность радиоэлектронных
устройств. М. Машиностроение. 1976. 214 с.
28. М о з. * а л е в с к и й А. В., Г а с к а р о в Д. В. Техническая диагно-
стика М.: Высшая школа, 1975. 207 с.
29- Н о виков В. С. Техническая эксплуатация и надежность авиаци
он лого радиоэлектронного оборудования. М.;: Транспорт, 1973. 232 с.
30. Основы технической диагностики. Под ред. П. П. Пархоменко, М:.
Энергия, 1976. 463 с.
31. Перевезен ц ев Л.Т.,Зеленков А. Г.,Огарков В.Н.
Радиолокационные системы аэропортов. Под ред. Л. Т. Перевезенцева. М.:
Транспорт, 1981, 378 с.
32. Радиолокационные системы летательных аппаратов. Под ред. П. С. Да-
выдова. М.: Транспорт, 1977, 352 с.
33. Радиолокационные устройства (теория и принципы построения). Под
В. В, Тригорина Рябова. М.г Сов. радио, 1970. 680 с.
34. Радионавигационные системы летательных аппаратов. Под ред.
ред. П. С. Давыдова. М.; Транспорт, 1980. 448 с.
35. Радиопередающие устройства. Под ред. В. В, Шагильдяна. М.: Связь,
1980. 328 с.
36. С а в и ц к и й В. И. Автоматизация процессов управления воздушным
движением. М.: Транспорт, 1977. 112 с.
37О Справочник по радиолокации. Под ред. М. Сколника. Пер. с англ.
Т I—IV. М.: Сов. радио, 1970.
38. Справочник по радиоэлектронным устройствам. Т. 1. Под ред.
Дв Пв Линде. М.: Энергия, 1978. 440 с.
39. Теоретические основы радиолокации. Под ред. В. Е. Дулевича, 2-
изд. перераб. и доп., М,: Сов. радио, 1978, 608 с. е
40. Т и х о н о в А. П. Радиолокационное оборудование самолетов и его
эксплуатация. М.: Транспорт, 1980. 248 с.
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
Автоматизированные системы управления
воздушным движением (АС УВД) 65
Автоматическая подстройка частоты
(АПЧ) 47
— регулировка усиления (АРУ) 46
Азимут объекта 3. 5
Алгоритм процесса ТО 181
Амплитрон 43
Аналого-цифровой преобразователь (АЦП)
56. 59
Антенна радиолокационная 4, 5
— — зеркальная 34
----параметры ДН 35
----подавления боковых лепесков 77, 83
----поляризационные свойства 38
---- щелевая 35
Аппаратура контрольно-проверочная 204
— первичной обработки информации
(АПОИ) 65
----канал ВРЛ 86
----ПРЛ 86
----цифровая 62
Аттенюатор автоматический 99
База эксплуатации радиотехнического обо-
рудования и связи (БЭРТОС) 213
Безотказность 178
Вероятность:
ложной тревоги 18, 20
ошибки диагностирования 187, 188
правильного диагностирования 189
— обнаружения 18, 20
пропуска цели 18, 20
Видеоусилитель 44
Временная автоматическая регулировка
усиления 46
Время обзора 12
Выпрямитель высоковольтный 39
Высота полета 5
Вычитание череспериодное 27, 53
Гаусса закон 18, 32
Генератор:
импульсный СВЧ 42
импульсов прямоугольных 49
линей но-изменяющегося напряжения 49
---- тока 5
магнетронный 42
масштабных меток 4
Гетеродин:
когерентный 44
местный 44, 45
Гидрометеоры 15
Граф 193
Графекон 50
Дальность действия 3. 4
---- в атмосфере 15
---- максимальная 13
---- минимальная 13
— измерение цифровое 61
Датчик:
метеопомех 100
угловых положений антенны 80
фотоэлектронный 117
Дельта-корреляция 21
Дельта-функция 21
Детектор:
амплитудный 44
фазовый 46
частотный 47
Дешифратор 162, 167
Диагностика техническая 186
Диаграмма направленности антенны
(ДНА) 34
----- косеканская 140
-----косеканс-квадратная 144
----- сканирование 38
Диапазон частот 6
Дискриминатор 187
Дисперсия оценки 19
Длина волны 14, 16
Длительность:
импульса зондирующего 14
пачки импульсов 28
сигнала 4
Долговечность 14, 179
Документация эксплуатационная 210
Доплеровские измерители скорости
(ДИС):
антенная система 150
вычислительные устройства 156
измерители частоты 150
классификация 147
назначение 147
обобщенная структурная схема 149
передатчики 151
приемники 152
принцип действия 147
состав 149
Доплеровский измеритель скорости и
сноса:
ДИСС-3, высокочастотный блок 157
— вычислитель 158
— параметры 156
— состав 156
— электронный блок 157
ДИСС-013. встроенная система контроля
160
— высокочастотный блок 159
— вычислитель 159
— индикатор 160
— параметры 158
— состав 158
Доплера эффект 4, 51, 147, 148
Зона обнаружения 12
Измерения радиолокационные, методы 4.
8, 10, 12
Измеритель оптимальный 20
Имитатор ы:
ВЧ сигналов ДИСС 206
сигналов наземных РЛС (КАСО-1) 205
217
Импульсы 4
— информационные 70
— эффективность накопления 31
Индикаторы:
визуальные 47, 87. 146
— параметры 47
знаковые 50
контрольный 82
кругового обзора 47. 136
посадочного радиолокатора 122
секторного обзора 47. 130, 136
синтезированных сигналов 87
темновые 87
телевизионные 50. 87
Инженерно-авиационная служба (И АС)
213
Инструкция по эксплуатации 210
Интеграл корреляционный 19, 23, 25
Интеграторы:
импульса 25, 26
пачки импульсов 25
Информация:
о бортовом номере самолета 70
о векторе скорости » 71
о высоте полета » 70, 73
о номере рейса 72
о запасе топлива 70
Информация радиолокационная, характе-
ристики 6
Калибратор кварцевый 162
Канал:
глиссады 116
курса 116
радиолокационный первичный 92
— вторичный 92
Картограф помех 100
Квантование 55, 59
Клистрон 42
Код:
Грея 73. 174
DABS 73
международный 71
рефлексный 73
систем вторичной радиолокации 68
------формат 68
УВД 69
Гиллхема циклический 73, 174
Кодирование 71
Коммутатор:
системы контроля 187
- СДЦ 135
Компенсатор
Комплекс:
вычислительный 65
отображения информации 65
Контролепригодность 179
Контроль встроенный ВРЛ 87
----ПРЛ 83
Координаты объекта воспроизводимые 13
- точность измерения 13
Коэффициент:
взаимозаменяемости 180
готовности 181
доступности 180
затухания километрический 15
компенсации помех 53
корреляции 27
легкосъемности 180
накопления 31
— индикатора 48
направленного действия (КНД) 6, 36
обратного отражения 9
оперативной готовности 181
подпомеховой видимости 54
полезного действия (к. п. д.) 14. 40
потерь 14. 30
стандартизации 181
технического использования 181
усиления 44, 46
шума приемника 15
Кривые обнаружения 24
218
Лампа бегущей волны 45
Лепестки боковые ДН 35
------ подавление по запросу 75
-------- по ответу 78
Линия:
задержки 26, 31
— ультразвуковая 53
развертки 4. 49
Луч 4
Магнетрон 42
Масштаб индикатора 48
Матрица состояний 193
Мгновенная автоматическая регулировка
усиления (МАРУ) 46
Место установки РЛС 12
Модели диагностические:
аналитические 192
графические 193
типа матрицы состояний 193
функциональные 192
Модуляторы импульсные:
магнитные 41
с полным разрядом накопителя 40, 41
с частичным » > 40
Модуляторы частотные 12
Мощность:
излучаемая 6
импульсная 14, 32
пропускная предельная 38
рассеиваемая 6
средняя излучаемая 40
Надежность, комплексные показатели 181
— РЛС 14, 125
Накопитель импульсов 31, 56
----на ЭЛТ 48
Наставление по производству полетов
(НПП) 210
— по технической эксплуатации воздуш-
ных судов (НТЭ ВС) 211
Нормы технических параметров (НТП)
212
Обзор радиолокационный:
боковой 12
винтовой 12
круговой 12
параметры 11
секторный 12
способы 12
Обнаружитель:
аналоговый 19
цифровой однопороговый 59
— с «движущимся окном» 60
Обработка:
аналоговая квазиоптимальная 28
— оптимальная 18, 22
первичная 63
цифровая 55
— методы 55
— первичная 62
Объекты радиолокационные 7
Ограничитель загрузки 162
Оперативность РЛС 13
Осциллограф электронный 203
Ответвитель направленный 169
Ответчик самолетный:
СОМ-64, антенная система 165
— антенный коммутатор 165
- встроенная система контроля 167
— дешифратор 167
- параметры 165
- передатчик 166
- приемное устройство 165
— преобразователь частоты 167
- режимы 165
- - шифратор 167
СО-70, антенно фидерное устройство 168
блок сопряжения 168
параметры 167
— приемопередатчик 168
— шифратор 168
СО-72, антенно-фидерная система 169
— блок коммутации 171
-- основной 170
--преобразования информации 171
— параметры 169
— приставка бланкирования 172
— пульт управления 172
— режимы 168
— устройство набора номера 171
СО-77, антенно-фидерное устройство 172
— блок основной 173
— параметры 172
— пульт управления 174
— режимы 172
Отказ 176
— поиск места информационный 200
-------по критерию «время — безотказ-
ность» 200
------- по методу половинных разбиений
201
Отношение:
правдоподобия 18, 23
сигнал/шум по напряжению 20
-----мощности 15
Отражатели:
уголковый 8
элементарный 8
Отражение:
гидрометеорами 15
диффузное 7
зеркальное 7
поверхностью земли 9, 10
Оценка параметра 19
---- оптимальная 27
Ошибка диагностирования 187, 188
Параметры:
диагностические 187
сигналов, оптимальное измерение 19
технические 14
точностные 16
функционального применения 12
эксплуатационные 12, 14
Пачка импульсов:
когерентная 21. 26
некогерентная 22, 27
Передатчики РЛС:
структурная схема 39
технические параметры 40
форма импульса 40
Переключатели антенные:
коммутационные 36
на необратимых элементах 37
ферритовые 37, 38
Период повторения импульсов 11
Периодичность технического обслужива-
ния 177
Плотность вероятности 8
— потока электромагнитной энергии 6
Поверхность отражающая эффективная 7
Погрешность измерения:
дальности 27
на выходе оптимального приемника 27
потенциальная 17
суммарная 17
угловой координаты 27
Подавитель метеопомех 100
Показатели:
надежности комплексные 181, 182
энергетического потенциала 33
Поляризатор 119
Помехи:
коррелированные 21. 26. 27
синхронные импульсные 22
флюктуационные 21
хаотические импульсные 21
Порог обнаружения 19, 26, 27
Потенциал энергетический 28. 29
Потери: _
входных цепей 30
детектирования 32
дискретной обработки 30
некогерентного накопления 30
Преобразователь системы диагностики и
контроля 187
— высоты 167
— информации 1 71
Преселектор 45
Прибор контроля радиолокатора «Гооза»
(гр-ИА) 204
Приборы:
измерительные общего назначения 202,
203
— радиолокационные 203, 204
Привод вращения антенны 38. 79, 80
Приемник оптимальный 22. 23, 24, 27
— чувствительность 16
Прием оптимальный на фоне коррелиро-
ванных помех 26
Приставка бланкирования 172
Пропускная способность РЛС 13
Пространство воздушное 66
Процессы деградационные 175
Радиоволны, затухание 15
Радиолокатор:
аэродромный АРЛ-1 66
— АРЛ-2 67
— ATCR 44
--- антенна 107
---параметры 107
— — передатчик 108
--- состав 107
— ДРЛ-7СМ. антенная система 102
--- блок трансляции и запуска 107
---индикаторные устройства 107
---параметры 102
•--передающее устройство 104
---приемное устройство 106
---распределительное и управляющее
устройство 107
---режимы 101
— состав 101
--- устройство обработки сигналов 106
---фидерный тракт 103
— «Иртыш»:
--- вторичный канал 110
--- первичный канал 109
---параметры 109
--- состав 109
вторичный «Корень АС», антенная си-
стема 111
--- аппаратура контроля 113
--- аппаратура декодирования и пре-
образования информации ИЗ
---параметры 111
---передающее устройство 113
---приемные устройства ИЗ
---режимы 111
---состав 110
---фидерный тракт 112
— антенная система 114
— — аппаратура встроенного контроля
------ декодирования и преобразования
115
--- передатчик 115
--- приемник 115
---состав 113
---фидерный тракт 114
метеонавигационный «Гроза-154» , ан-
тенна 145
--- индикатор 146
---параметры 145. 147
--- передатчик 146
--- приемник 146
---режимы 144
--- состав 144
«Обзор-1», антенная система 137
— волноводный тракт 138
— индикаторное устройство 139
— параметры 137
219
— передатчик 138
— приемник 139
— состав 137
ОПРЛ-4, антенная система 132
— волноводный тракт 133
— индикаторы 136
— параметры 131
— передатчик 134
— приемник и устройство СДЦ 135
— синхронизатор 136
— состав 130
— тракт передачи сигналов 136
— устройство обработки сигналов 136
— устройство управления 136
посадочный РП-ЗГ, антенная система
127
---- волноводный тракт 128
----параметры 126
— — передатчик 129
----приемник и устройство СДЦ 129
---- синхронизатор 130
---- система индикации 130
---- состав 125
трассовый ATCR-22, антенно-фидерный
тракт 97
---- аппаратура встроенного контроля
101
---- особенности 96
----параметры 96
---- передатчик 98
----приемник-цифровой процессор 99
----состав 96
— «Скала», антенно-фидерный тракт 94
---- вторичный канал 92
----параметры 93
---- первичный канал 91
--------зоны обнаружения 92
--------режимы 92
----состав 91
----цифровое устройство СДЦ 95
Радиолокаторы:
вторичные (ВРЛ) 67
— автономные 67
— нормы 1САО 89
СЭВ 89
— параметры 85
— структурная схема 83
метсонавигационные 140
— классификация 33
— назначение 140
— обобщенная структурная схема 140
— параметры 142, 143. 144
обзора летного поля (РОЛИ) 116
------ особенности 124
------ параметры 125
обзорные первичные (ОРЛ) 66
---- параметры 66
первичные (ПРЛ):
— параметры 82
----нормы ICAO 87
------СЭВ 88
— структурная схема 79
посадочные (ПР), назначение 116
— параметры 123, 124
— состав 116
— структурная схема 117
трассовые, вариант А(ТРЛ-А) 66
----Б(ТРЛ-Б) 66
— параметры 66
Радиолокация 3
— принципы 3
Развертка:
линейная 49
радиально-круговая 49
телевизионная 50
Разветвитель волноводный 37
Разрешающая способность:
оконечного устройства 48
по дальности 13
по угловой координате 14
на выходе оптимального приемника 28
Разрядник 36
Райса закон 8
Регистр сдвигающий 58, 59
Рслея закон 8
Ремонт 176
Ремонтопригодность 179
Рециркулятор 31, 56
Сектор обзора И, 12
Селекция движущихся целей (СДЦ):
структурная схема 51
устройства аналоговые 52
— цифровые 61
эффективность 53
Сигнал:
алгоритм обработки 19
запроса 69. 72. 74
зондирующий 10
— импульсный 11
ответа 69. 72. 74
Сигналы:
. информационные 69
когерентные 23, 25
обнаружение 18
радиолокационные 3
Синхронизация 50
Система:
антенная первичного радиолокатора 79
— вторичного — 83
вторичной радиолокации (СВРЛ) 67, 68
--- дискретно-адресная 68
координат сферическая 5
отклоняющая 4. 49
подавления боковых лепестков ДН 76,
77, 78
технического обслуживания и ремонта
(ТО и Р) 176
Скорость радиальная 4
Смесители 4. 44, 45
Соединение волноводное 39
Сопротивление волновое 37
Сообщения специальные 73
Состояние неработоспособное 176
Сохраняемость 179
Спектры 52
Средства диагностики и контроля:
автоматизированные 208
встроенные 207
Средства технической эксплуатации РЛС
202, 203. 204
Станции радиолокационные:
наземные 3
бортовые 3
классификация 6, 33
потенциальные характеристики 28
техническая диагностика и контроль 186
техническая эксплуатация 175
----средства 202. 203, 204
Стенд проверки бортовых РЛС 208
Сумматор 23. 24, 26
Счетчик 61. 63
Темп обновления информации 125
Температура входных цепей 7
Техническая эксплуатация:
виды 21 1
назначение 175
структура 213
Техническое обслуживание (ТО):
методы 176
оперативное 211
периодическое 211
показатели, расчет 184
по состоянию 183
Техническое описание 210
Техническое состояние 176
----- прогнозирование 201. 202
Тракт:
волноводный 37
обработки информации 10
передачи 4
приема 4
трансляции сигналов 82
220
Тревога ложная 20
Трубка электронно-лучевая 4, 47, 48, 49
Уравнение радиолокации основное 6
Усилители:
линейно-изменяющегося тока 49
логарифмические 45
оконечные 43
промежуточной частоты 45
СВЧ 45
— параметры 45
Устройства:
адаптивные 81
автоматической подстройки частоты 81
оконечные 47
передающие 39
— параметры 39. 40
приемные аналоговые 44
трансляции сигналов 86
цифровые 59
— первичной обработки 62. 63
— селекции движущихся целей 61
череспериодной компенсации 53
Фильтр:
гребенчатый 26
квазиоптимальный 28
— потери 32
разделительный 161, 165
оптимальный 24
цифровой 55, 58
Фиксатор помех 99
Формат кодов 68
Флюктуация, ширина спектра 22
Функция автокорреляционная 9
Характеристики:
фильтров импульсные 24
логарифмическая 45
обнаружения сигналов 21, 24
помех 20. 21
сигналов 20
статистические РЛС 17
Характрон 50
Цели радиолокационные распределенHWv
7
Центр управления воздушным дни же ч нем
(ЦУВД) 65
Частота •"
доплеровская 148
измерение 154
Частотомер 203
Экстрактор контура мстеопомех 100
Энергия полезного сигнала 6
ОГЛАВЛЕНИЕ
Глава 1. Общие сведения о радиолокационных системах............... 3
1.1. Радиолокационное обеспечение полетов............. 3
1.2. Характеристики радиолокационной информации ... 6
1.3. Основные параметры радиолокационных систем ... 12
1.4. Статистические характеристики РЛС................17
1.5. Оптимальные приемники радиолокационных сигналов 22
1.6. Расчет энергетического потенциала и основных пара-
метров РЛС............................................28
Глава 2. Аналоговые и дискретные устройства РЛС...................34
2.1. Антенно-фидерные устройства......................34
2.2. Передающие устройства РЛС........................39
2.3. Аналоговые радиоприемные устройства РЛС.........44
2.4. Оконечные устройства РЛС.........................47
2.5. Селекция движущихся целей........................51
2.6. Цифровая обработка радиолокационной информации 55
2.7. Цифровые устройства..............................59
Глава 3. Обзорные радиолокаторы систем управления воздушным
движением.........................................................65
3.1. Принципы структурного построения автоматизирован-
ных систем управления воздушным движением.............65
3.2. Назначение и типы обзорных радиолокаторов .... 66
3.3. Структурная схема и типы систем вторичной радиоло-
кации ............................................... 67
3.4. Коды систем вторичной радиолокации.............. 68
3.5. Подавление сигналов боковых лепестков в системах
вторичной радиолокации .............................. 75
3.6. Структурная схема, особенности и параметры первич-
ных радиолокаторов .................................. 79
3.7. Структурная схема, особенности и параметры вторичных
радиолокаторов ...................................... 83
3.8. Выносная аппаратура обработки и отображения радио-
локационной информации................................86
3.9. Нормы на параметры первичных радиолокаторов . . 87
3.10. Нормы на параметры вторичных радиолокаторов . 89
3.11. Трассовый радиолокатор «Скала»..................91
3.12. Трассовый радиолокатор ATCR-22..................96
3.13. Аэродромный радиолокатор ДРЛ-7С................10)
3.14. Аэродромный радиолокатор ATCR-44...............107
3.15. Аэродромный радиолокатор «Иртыш»...............109
3.16. Вторичный радиолокатор «Корень-АС» . . . 110
3,17. Вторичный радиолокатор SIR ........... 113
Глава 4. Радиолокаторы посадочные и обзора летного поля . . . .116
4.1. Назначение......................................116
4.2. Структурная схема, особенности и параметры посадоч-
222
них радиолокаторов.................................. 116
4.3. Особенности и параметры радиолокаторов обзора летно-
го поля............................................. 124
4.4. Посадочный радиолокатор РП-ЗГ . . . ............125
4.5. Обзорно-посадочный радиолокатор ОПРЛ-4..........130
4.6. Радиолокатор «Обзор-1»...... 136
Глава 5. Бортовые радиолокационные устройства ... ...... 140
5.1. Метеонавигационные радиолокаторы ...............140
5.2. Метеонавигационный радиолокатор «Гроза».........144
5.3. Доплеровские измерители скорости ...............147
5.4. Доплеровский измеритель ДИСС-3................ 156
5.5. Доплеровский измеритель ДИСС-013................158
5.6. Самолетные ответчики.......................... 160
5.7. Самолетный ответчик СОМ-64.................... 165
5.8. Самолетный ответчик СО-70.......................167
5.9. Самолетный ответчик СО-72М..................... 168
5.10. Самолетный ответчик СО-77......................172
Глава 6. Особенности технической эксплуатации РЛС ...............175
6.1. Основные показатели . . .........175
6.2. Техническая диагностика и контроль состояния РЛС 186
6.3. Средства технической эксплуатации РЛС...........202
6.4. Организационно-техническое обеспечение технической
эксплуатации РЛС.....................................210
Список литературы................................................215
Предметный указатель........................................... 2)7
Павел Семенович Давыдов
Андрей Ананьевич Сосновский
Изндор Аронович Хаймович
АВИАЦИОННАЯ РАДИОЛОКАЦИЯ
Предметный указатель составила И. В. Мариян
Переплет художника Н. Н. Аникушина
Технический редактор Т. А. Захарова
Корректор-вычитчик С. Н. Пафомова
Корректор С. Б. Назарова
ИБ № 2442
Сдано в набор 01.07.83. Подписано в печать 29.06.84 Т-15216
Формат 60 X 907t6- Бум. тип. № 2. Гарнитура литературная. Офсетная печать. Усл. печ. л. 14
Усл. кр.-отт. 14 Уч.-изд. л. 22,48. Тираж 7500 экз. Заказ 1683. Цена I р. 40 к.
Изд. № 1-2-1/17 № 1532
Ордена «Знак Почета» издательство «ТРАНСПОРТ», 107174. Москва, Басманный туп., 6а
Московская типография № 4 Союзполиграфпрома при Государственном комитете СССР
по делам издательств, полиграфии и книжной торговли,
129041, Москва, Б. Переяславская ул., 46