/






























































































































































































































































































































Автор: Борзов А.Б. лобанов Б.С.
Теги: электротехника телевидение радиотехника информационные технологии
ISBN: 978-5-7013-0151-9
Год: 2011




Текст
АВТОНОМНЫЕ
ИНФОРМАЦИОННЫЕ
И УПРАВЛЯЮЩИЕ
СИСТЕМЫ
в 4 томах
АВТОНОМНЫЕ
ИНФОРМАЦИОННЫЕ
И УПРАВЛЯЮЩИЕ
СИСТЕМЫ
в 4 томах
Труды кафедры «Автономные информационные
и управляющие системы» МГТУ им. Н.Э. Баумана
Под редакцией доктора технических наук,
профессора А.Б. Борзова
AUTONOMOUS INFORMATION
AND CONTROL SYSTEMS
in 4 volumes
Proceedings of department «Autonomous information
and control systems» of Bauman Moscow State
Technical University
Under edition of doctor of technical sciences,
professor A.В. Borzov
Том 4
Москва
2011
СБОРНИК НАУЧНЫХ ТРУДОВ
КАФЕДРЫ «АВТОНОМНЫЕ ИНФОРМАЦИОННЫЕ
И УПРАВЛЯЮЩИЕ СИСТЕМЫ»
МГТУ ИМ. Н. Э. БАУМАНА
И
ФГУП «ЦЕНТРАЛЬНЫЙ
НАУЧНО-ИССЛЕДОВАТЕЛЬСКИЙ
РАДИОТЕХНИЧЕСКИЙ ИНСТИТУТ
ИМ. АКАДЕМИКА А.И. БЕРГА»
в 5 томах
COLLECTION OF PROCEEDINGS
OF DEPARTMENT «AUTONOMOUS INFORMATION
AND CONTROL SYSTEMS»
OF BAUMAN MOSCOW
STATE TECHNICAL UNIVERSITY
AND CENTRAL RESEARCH INSTITUTE
OF RADIO ENGINEERING
NAMED AFTER A. I. BERG
in 5 volumes
Moscow
2011
УДК 621.396.96
ББК 32.94
А 18
Авторы (Т. 1-4):
Ю.М. Астапов, А.Б. Борзов, А.К. Ефремов, В.Н. Жураковский, В.И. Козлов,
В.А. Ковригин, Л.В. Лабунец, К.П. Лихоеденко, Б.С. Лобанов, С.В. Микаэльян,
И.В. Муратов, Г.Л. Павлов, Н.С. Соболева, С.В. Суворов, В.Б. Сучков,
В.К. Хохлов, Б.И. Шахтарин
Рецензенты;
Р.П. Быстров, д-р техн, наук, проф.; ЛМ. Самсонов, д-р техн, наук, проф.
Сборник научных трудов кафедры «Автономные информационные и управляющие системы»
МГТУ им. Н. Э. Баумана и ФГУП «Центральный научно-исследовательский радиотехнический
институт им. академика А. И. Берга»: В 5 т.; под ред. А. Б. Борзова, Б. С. Лобанова.
Автономные информационные и управляющие системы: В 4 т. / Ю.М. Астапов, А.Б. Борзов,
А.К. Ефремов [и др.]; иод ред. А.Б. Борзова - М.: ООО НИЦ «Инженер», ООО «Онико-М», 2011.
Т.4.-332 с.
Рассмотрены вопросы исследования и проектирования обширной группы механизмов и узлов
взрывателей. На основе анализа типовых тактико-технических требований, предъявляемых к взрыва-
телям, рассматривается постановка задач проектирования с учетом конечной цели — создания изделия,
наилучшего в боевом, конструктивном и эксплуатационном отношениях. Даны рекомендации по разра-
ботке научно обоснованных математических моделей динамических воздействий в различных услови-
ях эксплуатации взрывателей. С единых методических позиций рассмотрены вопросы проектирования
аналоговых и дискретных механических систем, а также их кинематического анализа и оптимизации
на основе критерия совместимости требований по безопасности и надежной взводимости. Предложены
новые методы расчета КДЦ и систем предохранения и рассмотрены перспективные варианты их пос-
троения. Проектирование и испытания взрывателей и их отдельных узлов рассмотрены как комплекс-
ная иаучно-техпичсская проблема. Кратко изложены вопросы, связанные с компьютерными аспектами
проектирования.
Для инженеров и научных работников, специализирующихся в области бортовых информационных
систем военного назначения, устройств обработки сигналов, проектирования боеприпасов и средств
поражения, а также студентов и аспирантов, обучающихся по направлению 220400 «Управление в тех-
нических системах» по профилю АИУС («Автономные информационные и управляющие системы») и
специальности 170100 «Боеприпасы и взрыватели».
Some problems of analysis and designing of a wide group of fuze mechanisms and devices are considered.
The process of designing based on tactical and technical requirements is mainly aimed al developing a fuze,
ultimate in usage, structure and handling. Scientifically based mathematical models of environmental dynamic
factors are proposed. The issues of designing analog and discontinuous movement type mechanical systems
are slated as having a common methodical base, Kinematic analysis and optimization of complex mechanical
systems are carried out using a criterion of safely and reliable arming requirements compatibility. New methods
of designing contact type target sensors as well as safety/ armins systems and perspective ways of development
are also indicated. The processes of designing and subsequent testing of fuzes and their components are defined
as an intricate scientific and technical problem. A brief consideration of some aspects of computer aided
designing is also presented.
The book is intended for engineers and scientific researchers specializing in the field of a radar-location,
antennas and microwave technics, onboard information systems of military and conversion assignment, as well
as for students and post-graduates training on a direction 220400 «Control in technical systems» on profile
«Autonomous information and control systems» and^pccialily 170100 «Ammunition and fuzes».
ISBN 978-5-7013-0151-9 J P P ЛЛЛУ ©Авторы, 2011
ISBN 978-5-7013-0159=5 (т.4) / -- --.Ж У/ © OOO НИЦ «Инженер», 2011
t © ООО «Оиико-М», 2011
СОДЕРЖАНИЕ
Введение..........................................................8
Глава 1 Общие вопросы проектирования.............................11
1.1 Основные понятия и определения...........................11
1.2 Общие тактико-технические требования.....................14
1.3 Особенности процесса проектирования......................17
Глава 2 Динамические воздействия в условиях эксплуатации.........19
2.1 Параметры ударного процесса при случайном падении боеприпаса...21
2.2 Выстрел из ствольной системы.............................26
2.2.1 Соотношения между элементами поступательного
и вращательного движения снаряда..........................26
2.2.2 Прямая задача внутренней баллистики..................30
2.2.3 Учет процесса врезания ведущего пояска в нарезы.....43
2.2.4 Примеры расчета.....................................47
2.3 Динамические воздействия на траектории артиллерийского
и реактивного снарядов.......................................52
2.3.1 Сила сопротивления воздуха..........................52
2.3.2 Силы инерции на траектории вращающегося снаряда.....61
2.3.3 Силы инерции на активном участке траектории
реактивного снаряда.......................................67
2.4 Взаимодействие боеприпаса с преградами...................72
2.5 Вероятностные модели динамических воздействий............79
Глава 3 Теоретические основы проектирования инерционных
предохранителей...................................................84
3.1 Элементы системы предохранения...........................85
3.2 Приближенное описание закона перегрузки
при выстреле (пуске).........................................91
3.3 Коэффициенты взводимости.................................92
3.4 Кинематический анализ и оптимизация механических
систем взрывателей...........................................97
3.4.1 Обобщенный подход к анализу и синтезу механизмов....99
3.4.2 Коэффициент полезного действия.....................100
3.4.3 Обобщенное выражение для КПД.......................103
3.5 Типовая математическая модель механической системы./....105
3.6 Эмпирические условия безопасности и надежной
взводимости.................................................113
Глава 4 Проектирование инерционных предохранительных механизмов
аналового типа...................................................117
4.1 Максимальное перемещение системы при случайном
падении боеприпаса в служебном обращении.....................117
4.2 Условие безопасности в служебном обращении...............122
4.3 Влияние конечных параметров ударного процесса
на фактическую высоту безопасного падения....................125
4.4 Условие надежной взводимости при выстреле
из артиллерийской системы....................................128
4.5 Единые условия безопасности и взводимости для взрывателей
к артиллерийским системам. Условие совместимости.............137
4.6 «Минимальные» характеристики артиллерийской
системы......................................................143
4.7 Исследование взведения механизма на ЭВМ..................145
4.8 Проектирование аналоговых механических систем
взрывателей для PC...........................................147
4.9 Оптимальное проектирование накольно-
воспламенительного механизма.................................152
Глава 5 Проектирование инерционных предохранительных механизмов
дискретного типа.................................................159
5.1 Механизмы с зигзагообразным пазом........................160
5.2 Математическая модель ДМС................................164
5.3 Условие надежной взводимости ДМС.........................165
5.4 Условие безопасности ДМС в служебном обращении...........169
5.5 Условия совместимости для ДМС; «минимальные»
характеристики системы.......................................175
5.6 Проектирование ДМС для ствольных систем..................177
Глава 6 Системы предохранения для взрывателей
к вращающимся боеприпасам........................................185
6.1 Математическая модель центробежного механизма............186
6.2 Тангенциальные предохранительные механизмы...............192
6.3 Использование падения угловой скорости снаряда
на траектории................................................202
6.4 Роторные предохранительные механизмы.....................204
Глава 7 Контактные датчики цели..................................214
7.1 Механические КДЦ.........................................215
7.1.1 Расчет КДЦ..........................................216
7.1.2 Предельные возможности инерционного КДЦ.............222
7.1.3 Бокобойный механизм.................................225
7.2 Электромеханические КДЦ .................................228
7.2.1 Пьезоэлектрический КДЦ..............................229
6
1.22 Пьезоиндукционный контактный датчик цели.............240
7.2.3 Магнитоупругий КДЦ..................................250
Глава 8 Испытания взрывателей....................................259
8.1 Воспроизведение ударных воздействий......................261
8.2 Вопросы испытаний на вибропрочность......................276
Глава 9 Перспективные принципы построения систем
предохранения и КДЦ..............................................284
9.1 Микроэлектромеханические системы.........................284
9.2 Возможность использования элементов струйной техники
(пневмоники) во взрывателях...............................288
Глава 10 Компьютерные аспекты проектирования.....................299
Приложение 1. Интегрирование системы уравнений
внутренней баллистики............................................309
Приложение 2. Характеристики артиллерийских систем...............311
Приложение 3. Типовой механизм взрывателя........................312
Приложение 4. Оценка ошибки от усреднения силы сопротивления
предохранителя...................................................316
Приложение 5. Сравнение результатов расчета различными способами.317
Литература.......................................................323
7
ВВЕДЕНИЕ
Среди элементов выстрела особой сложностью отличаются взрыва-
тели.,. Это сложные автоматические устройства с десятками, а иногда
сотнями мелких деталей высокой точности, работающих в сложной кине-
матической и огневой связи и при этом в условиях колоссальных инерцион-
ных нагрузок, воздействующих на них в момент выстрела и при достиже-
нии боеприпасом цели.
И.И. Вернидуб. На передовой линии тыла. -
М.: ЦНИИНТИКПК, 1994. - С.12
Вопросам проектирования механических и электромеханических взры-
вателей посвящены известные работы таких выдающихся ученых в области
теории боеприпас ной техники, как В.И. Рдултовский [1], М.Ф. Васильев [2],
ГМ. Третьяков [3], В.В. Руднев, Г.С. Батуев. Вместе с тем приходится констати-
ровать, что данная теория не может считаться разработанной исчерпывающим
образом. Современный подход к проектированию, базирующийся на исполь-
зовании средств вычислительной техники, позволяет отказаться от некоторых
устаревших и упрощенных методов расчета и ввести в рассмотрение более
строгие математические модели. Однако это не исключает необходимости раз-
работки более простых алгоритмов, без применения которых зачастую не удает-
ся получить конечные зависимости, пригодные для прямого использования при
проектировании.
В материалах 4-го тома нашли отражение результаты, полученные при
выполнении ряда НИР под руководством доцента каф. СМ-5 Ефремова А.К. в
направлении исследований систем предохранения и контактных датчиков цели
взрывателей, а также его многолетний опыт чтения лекций по профилирующим
дисциплинам студентам старших курсов в МГТУ им. Н.Э. Баумана.
Рассматривается круг вопросов, связанных с проектированием систем
предохранения и контактных датчиков цели (КДЦ) взрывателей. Такой выбор
направленности материалов объясняется тем, что функционирование данных
механических (или электромеханических) устройств обусловлено интенсив-
ными внешними воздействиями, возникающими при выстреле (пуске) или при
встрече боеприпаса с преградой. Это дает возможность подойти к проектирова-
нию систем данного класса с единых теоретических и методических позиций.
Следует отметить, что аналогичные по природе воздействия в служебном обра-
щении являются одним из существенных дестабилизирующих факторов.
В главе 1 даются основные определения и понятия; проанализированы ти-
повые тактико-технические требования. Формулируется постановка задач про-
ектирования с учетом конечной цели - создания изделия, наилучшего в боевом,
конструктивном и эксплуатационном отношениях. Подчеркивается роль обос-
8
нованного назначения запасов по показателям боевых качеств изделия с учетом
фактора неопределенности условий эксплуатации.
Материалы главы 2 позволяют создавать научно обоснованные математи-
ческие модели динамических воздействий в различных условиях эксплуатации
взрывателей. Достаточно подробно рассмотрен процесс выстрела из ствольных
артиллерийских систем; соответствующие уравнения внутренней баллистики
представлены в безразмерной форме за счет использования соответствующих
нормирующих величин, что удобно при решении задач на ЭВМ. Предлагаемое
описание силовой характеристики ведущего пояска снаряда позволяет более
строго анализировать процесс взведения механизмов взрывателей в процессе
врезания пояска в нарезы. Кратко описаны воздействия, возникающие на тра-
ектории. Приближенное представление силовой характеристики преграды (на
основе кусочно-линейной зависимости и учета переменной площади сечения
снаряда на начальном этапе проникания) позволяет выявить параметры перед-
него фронта закона перегрузки, что необходимо для оценки работоспособности
КДЦ. при взаимодействии боеприпаса с преградой.
В главе 3 проанализированы разновидности элементов систем предохране-
ния и их силовые характеристики и дана их сравнительная оценка. Предложены
способы приближенного описания законов перегрузки при выстреле (пуске).
Излагается методика кинематического анализа сложных механических систем
(МС) взрывателей, причем в качестве количественного критерия структурной
оптимальности МС используется мгновенный к.п.д. (идея проф. Г.С. Батуева).
Указан алгоритм поиска сочетания параметров, обеспечивающего максимум
КПД. Здесь же обоснована обобщенная математическая модель механической
системы, совершающей поступательное движение. Проанализированы тради-
ционные (эмпирические) условия безопасности и надежной взводимости, ука-
заны неучитываемые ими факторы.
В главах 4 и 5 рассмотрены вопросы, относящиеся к проектированию
аналоговых и дискретных МС, т.с. таких, которые совершают непрерывное
или прерывистое движение в процессе взведения. Сформулированы единые
условия безопасности в служебном обращении и надежной взводимости при
выстреле (пуске). Введено понятие совместимости этих важнейших требо-
ваний, т.е. сформулированы условия, при выполнении которых указанные
требования могут быть удовлетворены одновременно. Как известно, это цен-
тральная проблема проектирования МС взрывателей. Благодаря этому уда-
ется обосновать допустимые сочетаний параметров МС, а также определить
«минимальные» динамические характеристики ствольной и реактивной сис-
тем. Как наглядный пример возможности оптимального проектирования на
основе максимизации соответствующей целевой функции рассмотрен такой
распространенный механизм, как накольно-воспламенительный. Изложена
методика моделирования процесса взведения при выстреле из артиллерийс-
кой системы на ЭВМ.
9
Глава 6 посвящена механизмам взрывателей для вращающихся боеприпа-
сов. Рассматривается математическая модель механизма центробежного типа,
согласованная с системой уравнений внутренней баллистики. Впервые излага-
ется методика проектирования «тангенциальных» и роторных предохранитель-
ных механизмов, достоинством которых является повышенная степень безопас-
ности в обращении и возможность замены пиротехнических узлов как элемен-
тов механизмов дальнего взведения.
В главе 7 рассмотрены некоторые вопросы проектирования контактных
датчиков цели. Сделана попытка оценить предельные возможности инерцион-
ного КДЦ, приведена методика определения чувствительности бокобойного
механизма и выбора его оптимальных параметров. Предложен новый подход к
расчету пьезоэлектрического преобразователя, с учетом волновых процессов,
что более адекватно отображает условия импульсивного нагружения преобразо-
вателя при встрече боеприпаса с преградой. Рассмотрена возможность создания
пьезоиндукционного преобразователя как источника тока, а не заряда.
В главе 8 рассмотрены некоторые аспекты испытаний взрывателей как
неотъемлемого этапа проектирования и отработки взрывателей с использовани-
ем методов математического и физического моделирования. Особое внимание
уделено специальным методам ударных испытаний - «частичным» и эквива-
лентным. Показано, что при прогнозировании поведения объекта испытаний в
заданных условиях эксплуатации может оказаться эффективным метод ударного
возбуждения. Предлагается энергетический критерий эквивалентности испыта-
ний на вибропрочность.
В главе 9 рассматриваются перспективные принципы построения систем
предохранения - микроэлектромеханические системы (МЭМС) и элементы
струйной техники (пневмоники) во взрывателях.
Глава 10 посвящена компьютерным аспектам проектирования и органи-
зации учебного процесса.
Работа посвящена памяти профессора Германа Семеновича Батуева, кото-
рого автор считает своим учителем. Учтены замечания и предложения, выска-
занные автору ныне покойным проф. В.В. Рудневым.
История возникновения кафедры СМ-5 МГТУ им. Н.Э. Баумана и развития
ее научных школ, в частности, в области проектирования механических и элек-
тромеханических систем взрывателей, описана в книге, посвященной 50-летию
кафедры [4] *. Основные концепции работы изложены в докладе автора на науч-
но-технической конференции [5].
1 См. также часть раздела «Боеприпасы», относящуюся к кафедре СМ-5, написанную автором,
в кн.: Научные школы МГТУ имени Н.Э. Баумана. История развития / Под род. И.Б. Федорова,
ЮС. Колесникова. - М. - Изд-во МГТУ, 1995 и 2005.
10
Глава 1
ОБЩИЕ ВОПРОСЫ ПРОЕКТИРОВАНИЯ
1.1 Основные понятия и определения
Как известно, задача поражения цели любого типа распадается на три
этапа, а именно:
- доставка боеприпаса к месту расположения цели;
— обеспечение достаточно мощного взрыва боевой части (БЧ);
- управление действием БЧ для обеспечения максимальной эффективно-
сти поражения цели.
Первый этап - транспортный; эффективность второго этапа определяется
характеристиками заряда БЧ. «Ответственность» за реализацию третьего, т.е.
решающего, этапа возложена на взрыватель, что и предопределяет его особую
роль в составе боеприпаса. Первые два этапа находят четкое отражение в схе-
ме построения взрывателя и определяют его конструктивные особенности.
Взрыватель - это автоматическое устройство, предназначенное для управле-
ния действием боеприпаса. Управляющая функция взрывателя состоит в приведе-
нии в действие боеприпаса в некоторой, оптимальной по отношению к цели, точке
траектории, включая точку встречи (контакта) с целью или преградой. Положение
этой точки определяется с помощью различных физических факторов, а также по-
средством отсчета пройденного пути (длины отрезка траектории) или времени дви-
жения боеприпаса. Важно отметить, что во взрывателе любого типа происходит
обработка информации (воспринимаемой автономно или поступающей извне) по
определенному, заранее заданному алгоритму и выдача соответствующей исполни-
тельной команды. Взрыватель, таким образом, обладает свойствами автономной
информационной и управляющей системы.
Обобщенная структурная схема взрывателя включает в себя следующие
основные части: инициирующую (или сенсорную) систему (ИС); огневую цепь
(ОЦ) и систему предохранения (СП).
Под сенсорной системой подразумевается совокупность датчика цели (сенсо-
ра), т.е. источника первичного сигнала, и системы обработки его для выделения ин-
формативных признаков цели и формирования управляющей команды для испол-
нительной системы. СС должна обеспечивать избирательность (селективность) дей-
ствия взрывателя в зависимости от типа и физических свойств цели и условий
встречи боеприпаса с ней. Повышения эффективности СС можно добиться
применением многоканальное™ (комплексированности). При настройке каналов
должны быть использованы различные принципы действия и подсистемы с учетом
соответствующих рабочих воздействий. Особое значение при этом имеет создание
микропроцессорных устройств для обработки сигналов от сенсоров. С теоретиче-
11
ской точки зрения решение сводится к синтезу оптимального механического (в об-
щем случае - электромеханического) «фильтра», что, очевидно, возможно, если па-
раметры рабочих и помеховых воздействий чем-то различаются (по уровню и/или
по длительности - временные признаки процессов порождают различие в спек-
тральных характеристиках). В результате должен быть обоснован алгоритм (опера-
тор) преобразования входного воздействия в команду для исполнительной системы.
Теоретическая структура «фильтра» должна быть реализована конструктивно с по-
мощью звеньев различного типа. Это сложная научно-техническая задача.
Специфику взрывателя с точки зрения принципа его действия определяет
ИС как активная составная часть, которая включает в себя датчик цели — чувстви-
тельный элемент (сенсор), реагирующий на те или иные физические (информа-
тивные) признаки цели. ИС должна вырабатывать команду на запуск ОЦ, которая,
являясь пассивной составной частью, представляет собой совокупность последо-
вательно срабатывающих огневых и (или) детонационных элементов. На выходе
ОЦ происходит формирование команды на подрыв БЧ в виде соответствующего
импульса - детонационного или огневого (луч, «форс» пламени) в зависимости от
типа боеприпаса. Во втором случае, по исторически сложившейся терминологии,
имеем «трубку». По выражению В.И. Рдултовского, «взрыватель состоит из труб-
ки и детонирующего устройства» [1]. Различают контактные, дистанционные,
неконтактные и командные взрыватели.
Взведением взрывателя называют процесс перехода в состояние готовности к
срабатыванию, т.е. к формированию и выдаче выходного импульса. Взводимость -
свойство взрывателя взводиться при заданных условиях. Безопасность - свойство
взрывателя не взводиться и не срабатывать преждевременно (в служебном обраще-
нии, при выстреле, на траектории и в производстве).
На рисунке 1.1 показаны возможные варианты построения ОЦ, элементы ко-
торой обозначены следующим образом: КВ(ЭВ) - капсюль(электро)-
воспламенитель; 3 - замедлитель; КД(ЭД) - капсюль(электро)-детонатор; ПЗ - пе-
редаточный заряд; Д - детонатор; У - усилитель; П(ВЗ) - петарда (вышибной за-
ряд). Пунктирные линии означают, что данный элемент может находиться в меха-
низме изоляции, выключаемом во время взведения (при этом происходит замыка-
ние огневой цепи). Различают взрыватели предохранительного, полупредохрани-
тельного и непредохранительного типа в зависимости от структуры ОЦ и конструк-
тивных мер по взаимной изоляции ее элементов друг от друга в служебном обра-
щении.
Назначение СП — двоякое: с одной стороны, обеспечивать безопасность
взрывателя в условиях служебного обращения и на различных этапах примене-
ния, а с другой - подготовить его к исполнению управляющей функции, т.е. обес-
печить надежное взведение. Отметим, что требования безопасности (которая
должна быть безусловной, т.е. 100 %-ной) и взводимости (безотказности) проти-
12
воречат друг другу, и одновременное удовлетворение этих требований - доста-
точно сложная задача. Именно поэтому вопросы, связанные с проектированием
системы предохранения, являются центральными в предлагаемой книге.
I
(б) ю
I
(г) (д) 1
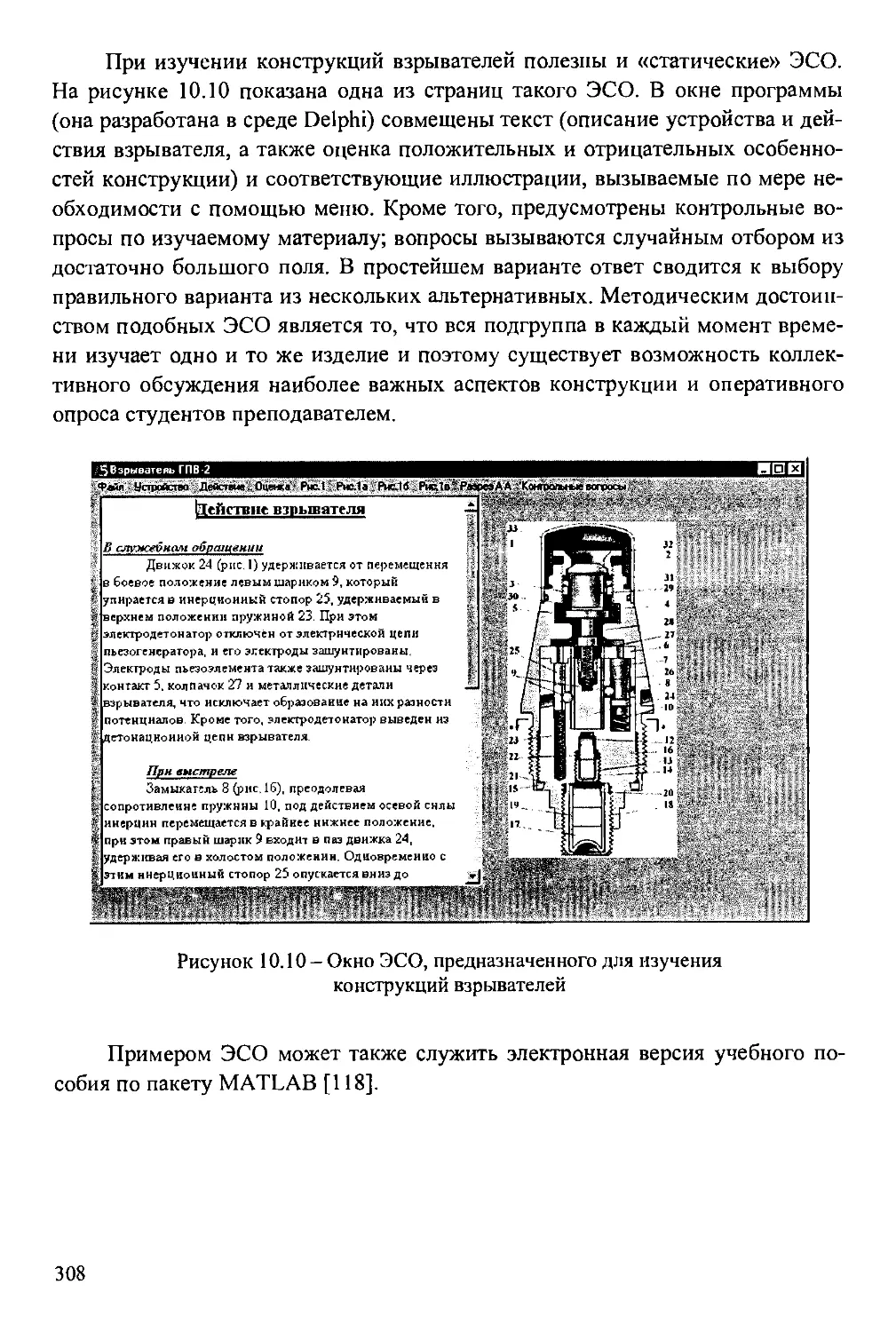
Рисунок 1.1 — Варианты структуры огневой цепи взрывателя:
а — вариант с установками на различное действие; б -взрыватель полупредо-
хранительного типа; в— взрыватель непредохранительного типа; г— взрыватель к сна-
ряду малого калибра; д- огневая цепь «трубки»
Широчайшее применение в конструкциях взрывателей находят механи-
ческие системы (МС), т.е. такие, которые включают в себя подвижные звенья
(детали). Эти системы сохранят свое значение и в обозримом будущем, что
объясняется рядом причин, основные из которых приведены ниже.
1. Безопасность взрывателя предохранительного и полупредохранительного
типа, как правило, обеспечивают путем разрыва (размыкания) ОЦ в служебном об-
ращении с последующим восстановлением (замыканием) ее в процессе взведения.
Эта задача наиболее эффективно решается при использовании соответствующих
механизмов изоляции капсюлей друг от друга, которые содержат перемещающиеся
при взведении элементы. МС - основа контактного датчика цели, механизма даль-
него взведения и самоликвидации, программно-временных устройств.
2. Для обеспечения взведения механизмов и узлов взрывателя при вы-
стреле и срабатывания при встрече с преградой можно использовать такой
мощный физический фактор, как возникающие в этих условиях силы инерции
(перегрузки) большой интенсивности.
3. Для МС характерны высокая степень сохраняемости свойств при дли-
тельном хранении, повышенная устойчивость к дестабилизирующим воздей-
13
ствиям - электромагнитным, радиационным, климатическим, а также деше-
визна и относительная простота конструкции.
4. Механический, т.е. подвижный элемент - чувствительное звено микро-
электромехапической системы (МЭМС) как весьма перспективного компонен-
та взрывателя (см. разд. 9.1).
Отметим и присущий именно механическим системам принципиальный
недостаток. Известно, что силы инерции могут возникать и в условиях слу-
жебного обращения (падение боеприпаса на преграду той или иной прочности,
вибрация при транспортировании и т.п.). «Одинаковость» физической приро-
ды взводящих (при выстреле) и вредных, т.е. дестабилизирующих воздействий
в обращении порождает такую специфическую трудность, как необходимость
одновременного удовлетворения (совместимости) противоречивых требований
по безопасности и взводимости, причем оптимальным (с учетом ограничи-
вающих условий) образом.
Семейство МС весьма обширно и включает в себя, помимо собственно меха
нических узлов, и такие как аэродинамические, газодинамические, пневматически'
и другие устройства. МС основа отдельного класса взрывателей - механических
Совокупность МС с электрическими цепями образует специфический класс — элек-
тромеханические системы (ЭМС). Механические и электромеханические узлы вхо-
дят в конструкцию специального функционального блока неконтактных взрывате-
лей - предохранительно-исполнительного механизма (ПИМ), или в более общем
случае предохранительно-исполнительного блока (ПИБ).
1.2 Общие тактико-технические требования
Как известно, основные требования к объекту проектирования, в том
числе и к взрывателю, фиксируются в техническом задании (ТЗ). Цель ТЗ -
обеспечить разработку такой конструкции, которая была бы наилучшей (оп-
тимальной) в боевом, техническом и эксплуатационном отношениях. Эти
свойства необходимо оценивать на базе соответствующих количественных
критериев, обоснование которых представляет собой весьма сложную науч-
ную задачу.
При выполнении требований ТЗ конструкторы стремятся к максимально
возможному использованию уже существующих и апробированных решений.
Поэтому обращает на себя внимание такая особенность взрывателей, как их
большая конструктивная устойчивость во времени. Указанная особенность
вполне объяснима: каждая, даже относительно небольшая, модификация кон-
струкции взрывателя (и вообще боеприпаса), направленная на улучшение его
характеристик, дается ценой значительных усилий. При этом зачастую трудно
установить причины нештатного поведения взрывателя при интерпретации
результатов, полученных при испытаниях.
14
Основные разделы ТЗ:
— назначение взрывателя, тактико-технические и конструктивные требо-
вания к нему;
- сведения о боеприпасе и физических факторах, которые могут быть ис-
пользованы для взведения;
- условия эксплуатации боеприпаса;
- требования по надежности и порядок их подтверждения;
- дополнительные, специфические требования;
- перечень документации, представляемой после завершения отработки
взрывателя.
Конкретные требования ТЗ весьма многообразны, тем не менее, можно
выделить общие технические требования (ОТТ), предъявляемые к взрывате-
лям всех типов.
Безопасность. Данное требование обусловлено тем, что преждевремен-
ное срабатывание взрывателя, обусловленное конструктивными, производст-
венными или эксплуатационными причинами, может вызвать катастрофиче-
ские последствия. Установить же конкретную причину непросто, поскольку
взрыватель - это изделие разового действия. Отметим, кстати, что в связи с
этим велика роль стендовых (лабораторных) контрольных испытаний при все-
мерном сокращении объема натурных (полигонных) испытаний.
Количественной мерой безопасности в служебном обращении является
высота безопасного падения /7, т.е. максимальная высота, при падении с кото-
рой в конструкции взрывателя еще не возникают остаточные изменения, спо-
собные вызвать преждевременное срабатывание. Величина Ну указываемая в
ТЗ, - одна из важнейших количественных характеристик взрывателя. Кон-
кретные значения фактической высоты безопасного падения (Нф) зависят от
ряда факторов, основными из которых являются:
- падение в укупорке или с боеприпасом;
— механические свойства преграды;
- ориентация взрывателя относительно направления сил инерции, возни-
кающих вследствие удара боеприпаса о преграду;
- кинематическая структура механической системы как элемента систе-
мы предохранения.
Наихудшее, с точки зрения безопасности, сочетание указанных факторов
применительно к механической системе может быть обосновано теоретически.
Введем в рассмотрение такой важный количественный показатель, как коэф-
фициент запаса по безопасности
(1.1)
15
Безопасность проверяют, проводя испытания по специальным програм-
мам, которые учитывают конкретные особенности боеприпаса и условия его
эксплуатации.
При транспортировании наиболее неблагоприятно воздействуют механи-
ческие возмущения в виде вибрации и ударов. Указанные воздействия могут
вызывать резонансные явления - намины (например, в механизмах с зигзаго-
образным пазом) и остаточные деформации жестких предохранителей. Безо-
пасность при выстреле (пуске) обеспечивается исключением возможности
преждевременного срабатывания взрывателя в процессе самого выстрела (при
движении боеприпаса по каналу ствола или по направляющим), а также на на-
чальном участке траектории. Эта задача решается с помощью специальных
устройств — механизмов дальнего взведения и блокирующих механизмов (сра-
батывающих при аномальном поведении боеприпаса). Безопасность также
необходимо обеспечить при прохождении снаряда через автоматику орудия и
при заряжании (досылании). Безопасность в производстве гарантируется тща-
тельной разработкой технологического процесса и строгим его соблюдением,
контролем качества изготовления деталей, механизмов, узлов и взрывателя в
целом со стороны ОТК и военной приемки.
Надежность (безотказность) и максимальная эффективность дей-
ствия. Требуемый характер функционирования взрывателя в условиях бое-
вого применения определяется надежной взводимостью при выстреле (пус-
ке), а также надежным действием ИС и ОЦ при встрече боеприпаса с це-
лью. Взрыватель должен надежно взводиться при наименее благоприятных
параметрах выстрела, например, при минимальном уровне динамических
воздействий (сил инерции), а также при максимальном сопротивлении эле-
ментов системы предохранения и наибольшем значении коэффициента тре-
ния. Эффективность функционирования взрывателя не должна ухудшаться
в результате воздействия на него внешних дестабилизирующих факторов
(механических возмущений, температуры, влажности, давления и т.п.). Еще
раз подчеркнем важность испытаний, цель которых проверить показатели
надежности взрывателя в процессе разработки. Иногда в ТЗ включают та-
кой трудно проверяемый практически показатель, как вероятность безот-
казной работы (ВБР).
Простота конструкции и удобство в эксплуатации. Данная группа
требований сводится главным образом к исключению каких-либо сложных
манипуляций со взрывателем перед стрельбой; кроме того, нежелательна ус-
тановка на походное предохранение. Предварительные операции должны быть
предельно упрощены (установка на то или иное действие, времени дистанци-
онного подрыва и т.п.). Ясно, что требуется твердое знание правил обращения
со взрывателем и боеприпасом.
16
Сохраняемость боевых свойств при длительном хранении. Выполнение
этого требования обеспечивается главным образом надежной герметизацией,
которая не должна нарушаться при различных физико-химических воздействи-
ях. Существуют специальные виды испытаний на герметичность.
Производственно-экономические требования. В конструкции взрыва-
теля должны быть реализованы оптимальные соотношения показателей на-
дежности, простоты конструкции и минимальных габаритов. Детали взрывате-
ля должны быть полностью взаимозаменяемыми (отсюда — большая роль рас-
четов размерных цепей, чаще всего на максимум-минимум), иметь максималь-
но возможные допуски на изготовление и правильно функционировать при
минимальной чистоте обработки. Изготовление в массовом производстве
должно быть ориентировано на наиболее совершенные, дешевые и прогрес-
сивные методы обработки, допускающие максимально возможную автомати-
зацию производства. Особое значение имеют меры по стандартизации и уни-
фикации элементов, узлов и механизмов.
1.3 Особенности процесса проектирования
Как уже отмечалось выше, конечной целью процесса проектирования
является создание оптимальной во всех отношениях конструкции взрывате-
ля. Ясно, что говорить об оптимальности можно лишь при наличии системы
соответствующих количественных критериев. С учетом большого числа тре-
бований, предъявляемых к взрывателю, зачастую противоречащих друг дру-
гу, создать методику, базирующуюся на многокритериальной оценке показа-
телей, практически невозможно. Поэтому более широко распространен ме-
тод параметрической оптимизации, т.е. выбор наивыгоднейших параметров
при заданной общей структуре системы. Что же касается структурной опти-
мизации, то, применительно к механической системе, решение данной зада-
чи возможно на основе кинематического подхода.
Характерной особенностью процесса проектирования взрывателя являет-
ся фактор неопределенности, порождаемый рядом причин. Работоспособность
и надежность взрывателя в значительной (а иногда - в решающей) степени
зависят от воздействий внешней среды, особенно механической природы (си-
лы инерции, волновые процессы, аэродинамические возмущения и т.п.). Взры-
ватели часто разрабатывают параллельно с боеприпасом, динамические харак-
теристики которого остаются неизвестными даже после завершения отработ-
ки; к тому же некоторые характеристики систем и боеприпасов, второстепен-:
ные для их разработчиков, очень важны для конструктора взрывателя (напри-
мер, процесс врезания ведущего пояска в нарезы, нутационные и прецессион-
ные колебания снаряда, удар о преграду и т.п.). Это зачастую вынуждает раз-
17
работников взрывателей «вторгаться» в смежные научно-технические области
и проводить самостоятельные исследования.
При строгой постановке задач проектирования условия выстрела (пуска),
полета и встречи с целью (преградой) должны описываться с позиции теории
вероятностей, однако соответствующие статистические характеристики изуче-
ны крайне недостаточно по вполне понятным причинам. Следует отметить,
что вопрос о применении методов статистического моделирования при иссле-
довании поведения боеприпасов вообще является дискуссионным: например,
неясно, как обосновать наихудшие условия функционирования изделия с веро-
ятностной точки зрения даже при достаточно большом объеме эксперимен-
тального материала. Поэтому такие условия обычно формулируют в детерми-
нированной трактовке.
С учетом сказанного большое значение приобретает обоснование запасов
по основным показателям:
- как отмечено выше, достоверные сведения о силах, действующих на
взрыватель в условиях эксплуатации, в период разработки либо вообще отсут-
ствуют, либо заданы приблизительно;
- при эксплуатации взрывателя и боеприпаса возможно возникновение
аварийных ситуаций, которые заранее трудно предвидеть и учесть в ТЗ;
- при отработке изделия невозможно проверить его функционирование при
всех возможных сочетаниях факторов, размеров деталей и колебаний их свойств;
- проектируемый взрыватель должен быть максимально устойчив к из-
менению условий работы, вызванному развитием техники.
Методика обоснования необходимой степени запаса при проектировании
взрывателей теоретически разработана недостаточно полно. Особенно важны
запасы по таким показателям, как безопасность в служебном обращении и на-
дежная взводимость при выстреле (пуске). Конкретные значения запасов уста-
навливают лишь в результате проведения испытаний в полигонных и лабора-
торных условиях, что требует больших затрат времени и материальных
средств. По изложенным причинам приходится принимать вынужденно не-
строгие допущения, вследствие чего расчеты динамики узлов взрывателя за-
частую носят приближенный характер.
С учетом большого конструктивного разнообразия узлов взрывателей
целесообразно разработать подход к проектированию, основанный на некото-
рой обобщенной классификации типовых систем взрывателя. В этом случае
появляется возможность обоснования (пусть даже частного, а не универсаль-
ного) критерия, с помощью которого, с учетом принимаемых допущений,
можно выбирать оптимальный вариант конструкции.
Вопросы, относящиеся к конструкции взрывателей и расчету их меха-
низмов, изложены в работах [2, 3, 6-8].
18.
Глава 2
ДИНАМИЧЕСКИЕ ВОЗДЕЙСТВИЯ
В УСЛОВИЯХ ЭКСПЛУАТАЦИИ
Кратко рассмотрим необходимые положения теоретической механики [9].
Поведение элементов конструкции взрывателей изучают в неинерциальной (под-
вижной, связанной с боеприпасом) системе координат. Согласно кинематической
теореме Кориолиса, абсолютное ускорение свободной материальной точки (м.т.)
д=де+аг+ак, (2.1)
где ае - переносное ускорение; аг - относительное ускорение; ак - кориоли-
сово (поворотное) ускорение.
В общем случае
ае = aQ+aJ + ае ,
где d0 =dV/dt - абсолютное ускорение полюса (начала подвижной системы
координат); V— скорость боеприпаса; аевр = £ х г - вращательное ускорение;
аеос = со х (со х г) - осестремительное ускорение; со - переносная угловая
скорость; z-dtb/dt — угловое ускорение; г - радиус-вектор;
ак = 2со х v = 2covsin(co, v) - кориолисово ускорение; v-dr/dt - относи-
тельная скорость м. т.
При расчетах часто используют понятие перегрузки, определяя ее как аб-
солютное ускорение, отнесенное к ускорению силы тяжести g, т.е. п = a[g\
иногда перегрузку обозначают к. Согласно второй аксиоме динамики,
та — mgn — F,
где F - равнодействующая всех действительных (активных) приложенных к
м.т. сил, и, следовательно, перегрузку можно определить как отношение внеш-
ней силы к силе тяжести материальной точки, т.е.
п - F/mg.
С учетом (2.1)
та,. — F — тёк — та. = F + Фр + Ф,. (2.2)
Здесь Фе и Фк - переносная и кориолисова силы инерции, направлен-
ные в стороны, противоположные направлениям соответствующих ускорений.
Если спроектировать уравнение (2.2) на оси координат, то получим уравнение
относительного движения материальной точки в проекциях.
Для несвободной материальной точки
19
та = F + Ry (2.3)
где R - равнодействующая реакций связей.
Переписывая (2,3) в виде
F + R - та = F + R +Ф =0,
получаем систему сил, эквивалентную нулю. Данная формула является мате-
матическим выражением принципа Даламбера: при движении материальной
точки активные силы, реакции связей вместе с силой инерции точки
(Ф = —та ) образуют равновесную систему сил. Это дает возможность свести
задачу динамики к задаче статики в относительном движении.
Особый интерес представляет случай, когда снаряд совершает прямоли-
нейное поступательное движение, например в канале ствола орудия. При та-
ком режиме движения направление вектора со не меняется, и поэтому осест-
ремительное ускорение совпадает с нормальным аеп, а вращательное - с каса-
тельным (тангенциальным) асг, т.е.
а = а0 + а г + аеп + ает + ак
Соответственно, уравнение относительного движения материальной (не-
свободной) точки будет иметь вид
та. = F + R + Ф0 + ФСП +ФСТ + Фк.
Введем обозначения для сил инерции, возникающих при прямолинейном
движении снаряда:
Фо = -та0 = S - сила инерции от переносного поступательного движе-
ния снаряда; ее также называют «линейной» силой инерции или «силой инер-
n dV
ции от линейного ускорения»; по модулю данная сила S = т---.
dt
Ф” = -та" = С - центробежная (нормальная) сила инерции;
С = mh($2, где А - кратчайшее расстояние до оси вращения.
Ф" = -та" = Т - касательная (тангенциальная) сила инерции;
1
1 - тп —.
dt
Ф* — ~шак — К - кориолисова сила инерции; К = 2mcovsin(co, у).
Видно, что кориолисова сила инерции отсутствует в двух случаях: если
боеприпас не вращается (со = 0) или если векторы со и V - коллинеарные.
Для взведения узлов взрывателя при выстреле используют главным обра-
зом силы инерции Sn С.
20
Из приведенных выражений для сил инерции следует, что для их ко-
личественной оценки необходимо знать законы изменения во времени эле-
ментов движения снаряда: V3 to, dV/dt}d(n/dt. Представление детали (эле-
мента конструкции) в виде м.т. не всегда правомерно: например, при вра-
щении детали необходимо учитывать ее конфигурацию и распределенность
массы в пространстве.
При описании динамических воздействий как некоторых функций времени
целесообразно руководствоваться их классификацией, основанной на математиче-
ских признаках. Выбор той или иной математической модели воздействия зависит
от имеющихся исходных данных. По своей природе реальные силы инерции - слу-
чайные нестационарные процессы, но построению наиболее строгой (в виде слу-
чайного процесса) модели препятствует трудность накопления большого числа
реализаций. Поэтому на практике распространены детерминированные модели.
Однако в ряде случаев статистическое моделирование динамических процессов на
основе принятия тех или иных гипотез вполне возможно.
2.1 Параметры ударного процесса при случайном падении боеприпаса
Как указывалось в гл. 1, количественной мерой безопасности в слу-
жебном обращении является высота безопасного падения, фактическое зна-
чение которой Нф зависит от ряда факторов, в том числе от механических
свойств преграды. В данном разделе рассмотрим параметры ударного про-
цесса, возникающего при случайном падении боеприпаса. Очевидно, что
наихудшим является случай, когда направление возникающих в результате
удара сил инерции совпадает с направлением взводящих сил инерции при
выстреле (пуске).
Предположим, что боеприпас падает с высоты Н, приобретая скорость в
момент встречи с преградой Ис = ^j2gH . Параметры ударного процесса оп-
ределяются силой сопротивления преграды Рп , которая зависит от деформа-
ции донной части боеприпаса и преграды X в точке контакта; зависимость
Pn(jf) назовем силовой характеристикой. С целью упрощения последующих
выкладок предположим, что указанные деформации являются локальными
(«местными»), т.е. сосредоточены в зоне контакта боеприпаса с преградой.
Кроме того, будем считать, что боеприпас - твердое (недеформируемое) тело
массой q, в этом случае перемещение его центра масс будет равно деформа-
ции в зоне контакта.
С учетом указанных допущений уравнение движения боеприпаса массой
<7 при ударе о преграду можно записать в виде
21
dV тл dV
q---= qV---= -Pn .
7 dt 7 dX
(2.4)
Уравнение (2.4) можно представить по-разному, в зависимости от того,
в какой форме задана правая часть. При «динамической» форме представле-
ния задана зависимость и в результате решения уравнения (2.4) тре-
буется определить законы изменения элементов движения во времени. Ин-
тегрируя по X, получаем
(2.5)
Е< о
где Ес = qV^/2 = qgH -кинетическая энергия боеприпаса. Принимая V- 0,
найдем максимальную контактную деформацию из соотношения
О
Соответственно, Ртах = Рп (^тах) и ктах = Ртлх /(qg).
Элементы движения снаряда при упругопластическом ударе о прегра-
ду показаны на рисунке 2.1. Ударный процесс распадается на две фазы:
активную и пассивную. Во время первой фазы (нагружение) сила сопротив-
ления возрвстает до максимального уровня, деформация содержит две со-
ставляющие - упругую и пластическую. В момент достижения максималь-
ной силы сопротивления (и перегрузки) т происходит обращение скорости
в ноль. В пределах пассивной фазы (разгрузки) (т < t < /у) происходит вос-
становление упругой компоненты, сопровождающееся изменением знака
скорости; в конце удара снаряд отскакивает от преграды, приобретая ско-
рость Гот.
Важной количественной характеристикой ударного процесса является
коэффициент восстановления скорости:
в обобщенной форме характеризующий механические свойства соударяющих-
ся тел в зоне контакта. Теоретический диапазон значений этого коэффициента:
О < к < 1, причем к = 0 соответствует абсолютно неупругому (пластическо-
му) удару, а К = 1 - упругому.
22
(в)
Рисунок 2.1 - Элементы движения боеприпаса при падении на преграду:
а - перегрузка; б— скорость; в- контактная деформация
Запишем уравнение движения в «кинематической» форме:
d2X
dr
dV i(\
~r = -gk(t),
dt
(2-6)
полагая закон k(t) известным. Интегрируя выражение (2.6), получаем для ак-
тивной фазы
v = К -gф(г)Л = К -, (2.7)
о о
где t = t / т; к = к / ктах. Далее,
f ?
X = vd - gW’ р?рЙИ • (2.8)
о о
Поскольку при t = т V = О, X = Jfmax , из (2,7) и (2.8) получим следую-
щие соотношения:
К =AgkmaxT;
(2.9)
23
^max = - cskmy = Bgkmy = (В/л)гст, (2.10)
где
A = /*(<>*-; сф = >f; вф = A - cr
0 0 0
В этих выражениях т4ф, 5ф и Сф - безразмерные коэффициенты, зави-
сящие только от формы закона перегрузки Д/) в пределах длительности пе-
реднего фронта. Например, при линейном законе [ k(t) = ктах • (t / т), 0 < t < т,
или ЦГ) = i, 0 < t < 1 ] Аф = 1/2; Сф =1/6; Ц, = 1/3.
Во время пассивной фазы согласно (2.6)
V = -g]k(tyn;x=х_ - g'fdi JtfcX
т т т
Отсюда, в частности, следует, что
|гот| = g ]k(t)dt.
Т
Найдем площадь под кривой перегрузки k^t). Из приведенных выше вы-
ражений следует, что
= (2.и)
О g g g
Предположим, что снаряд падает с фиксированной высоты
(Н = cons/; Vc = cons/), а изменяется прочность (податливость) преграды. Кроме
того, если считать, что коэффициенты формы также изменяются слабо, то из формул
(2.9) и (2.10) можно получить следующие пропорциональные соотношения между
конечными параметрами ударного процесса: т ~ кгппх ~ / / т .
Очевидно, что по мере возрастания прочности преграды максимальная де-
формация в зоне контакта будет уменьшаться и в пределе стремиться к нулю (этот
предельный случай соответствует соударению твердых тел), т.е. длительность
удара т —> 0 , и в пределе knjax —> оо. Однако площадь под кривой перегрузки
остается практически постоянной и равной Vjg, поэтому указанный предель-
ный закон перегрузки можно считать пропорциональным дельта-функции, т.е.
к( t) = 5(z). (2.12)
g
24
Здесь учтено известное свойство дельта-функции:
00
'„)<#=1.
— 00
Характер изменения законов перегрузки показан на рисунке 2.2. В таб-
лице 2.1 приведены значения основных параметров ударных процессов, полу-
ченные при сбрасывании снарядов, обращенных донной частью в сторону пре-
грады различного типа. Эти данные в целом соответствуют закономерностям
ударного процесса, выявленным выше. Конкретное значение коэффициента
восстановления к зависит от ряда факторов (конфигурация донной части и
материал снаряда, прочностные свойства снаряда и преграды в зоне контакта и
т.п.). В таблице 2.2 приведены средние значения к, полученные при сбрасы-
вании снарядов различного калибра на чугунную плиту стандартных размеров
и твердости. В целом коэффициент восстановления уменьшается с увеличени-
ем калибра. Если отсутствуют конкретные сведения, то рекомендуется прини-
мать к ~ 0,3 при q > 24 кг и х* ~ 0,4 - при ^<24 кг.
Рисунок 2.2 - Зависимость законов перегрузки от прочности преграды
Таблица 2.2 — Экспериментальные значения коэффициента восстановления к
d, мм q, кг Дм
1.0 2.0 3.0 4.0 5.0
76 6,3 0,53 0,49 0,52 0,51 0,48
100 16 0,38 0,46 0,50 0,49 —
122 24 0,27 0,36 0,40 — —
25
2.2 Выстрел из ствольной системы
Для количественной оценки сил инерции, возникающих при выстреле
(движение боеприпаса при этом считают прямолинейным), и для исследова-
ния процесса взведения взрывателя необходимо знать законы изменения во
времени элементов движения боеприпаса. Соответствующие исходные дан-
ные можно получить с помощью методов внутренней баллистики - науки,
изучающей движение снаряда в канале ствола под действием силы давления
пороховых газов. Математически задача сводится к решению системы диф-
ференциальных уравнений, описывающих движение боеприпаса и механизма
(узла) взрывателя.
Прямая задача внутренней баллистики - построение законов изменения
во времени давления в канале ствола давления р, скорости V и перемещения
снаряда / для системы с известными характеристиками. В настоящее время
решение этой задачи реализуется на ЭВМ.
В классической внутренней баллистике считается, что до окончания вре-
зания ведущего пояска снаряд остается неподвижным, т.е. горение заряда про-
исходит в постоянном объеме. Этот период выстрела называется пиростатиче-
ским. Движение снаряда начинается при давлении в зарядной каморе, которое
называют давлением форсирования и принимают равным р0=П0/5, где
По - сила сопротивления ведущего пояска, соответствующая полному вреза-
нию; 5- площадь сечения канала ствола. Фактически этот процесс более сло-
жен, причем силы инерции при этом могут быть настолько интенсивными, что
способны вызвать взведение узлов взрывателя.
Различают два периода пиродинамики: первый - до конца горения заря-
да, второй (адиабатическое расширение образовавшихся пороховых газов)- до
вылета снаряда из канала ствола.
2.2.1 Соотношения между элементами поступательного и вращательного
движения снаряда
Для вычисления сил инерции, возникающих при выстреле, необходимо
располагать количественной характеристикой элементов поступательного и
вращательного движения снаряда. В нарезной артиллерийской системе между
ними существует жесткая функциональная связь, определяемая типом нарезки
канала ствола.
Канал ствола состоит из ведущей части (нарезной или гладкой) и за-
рядной каморы. Конструктивные особенности последней зависят от способа
заряжания. Внутренняя поверхность канала нарезного ствола состоит из на-
резов прямоугольного профиля и полей с гранями (рисунок 2.3). Поля наре-
26
зов вдавливаются в ведущий поясок и образуют на нем выступы; последние,
двигаясь по нарезам под действием пороховых газов, сообщают снаряду
вращательное движение, что обеспечивает гироскопическую устойчивость
снаряда на траектории и повышение кучности боя. Площадь сечения канала
ствола с учетом нарезов: s-nsd2, где d- калибр; ns = 0,805...0,830; для
гладкого ствола, очевидно, ns -Tt/4,
Рисунок 2.3 - Сечение канала нарезного ствола:
a, ширина и глубина нареза; Ь- ширина поля; калибр
Рассмотрим сначала развертку ствола с нарезкой постоянной крутизны,
которая наиболее распространена в отечественной артиллерии (рисунок 2.4).
Здесь /7Н- угол наклона нарезки; Т|н - длина хода (шаг) нарезов в калибрах.
Видно, что
ltd _ я
Пн ’
Обозначим Хк и Ук перемещения точки на поверхности снаряда вдоль
оси канала ствола и по окружности соответственно. Тогда
\
пХк
Пн
Окружная скорость
dYK ad я dXK я ТЛ
dt 2 dt пн
27
откуда угловая скорость снаряда
со =
2jLV = 2itfc=—,
x\Hd Jc 30
(2-13)
где fc -частота вращения снаряда, Гц; N- число оборотов / мин.
Рисунок 2.4 - Развертка ствола с нарезкой постоянной крутизны
Угловое ускорение
Jco 2п dV
£ =----=-----------.
dt т| Hd dt
Видно, что угловая скорость достигает максимального значения у дуль-
ного среза, когда V = V^, т.е.
2л __
Прогрессивную нарезку, т.е. нарезку переменной крутизны, применяют
для уменьшения давления на боевые грани полей со стороны ведущего пояска
на участке наибольшего давления. В плоскости развертки ствола эту нарезку
описывают уравнением параболы:
У = М2-
28
Введем следующие обозначения (рисунок 2.5): Хо, у0 - координаты нача-
ла нарезки; 07-начальный угол наклона; 02 - выходной угол наклона (у дуль-
ного среза); очевидно, что =х — х0; YK =у — у0. Текущий угол наклона
нарезки к оси канала ствола определяется из соотношения
tgP! = = 2ках = 2кн (х0 + ,
ах
'gPi = 2к„ха; tgP2 = 2кн (х0 + 7Д) = tgP! + 2кн1л,
где /д - путь снаряда в канале ствола до дульного среза (длина нарезной час-
ти). Полагая величины Р], Р2 и h известными, находим
/8рг -zgp tggf
21. ' tgP, - tgP, ’ -tgP2-tg₽,
Рисунок 2.5 — Развертка ствола с прогрессивной нарезкой
Далее
Гк = У - Уо = < (х2 - х2) = 2ких0ХК + кнХ2 = ХКtgP, + —2 tg<31 X2
29
Дифференцируя, получаем выражение для окружной скорости:
w = — = = vtgP + !gp2 - tgpj х у
‘ dt 2 ' 1а
Пусть
tgP] = —-; tgp2 = ——,
Пн1 Пн2
где Т|н1 и Т|н2 - входная и выходная длины хода нарезки, соответственно. Отсюда
Т]н2 Пнг)
CD =------ Ч----------- 1----—
I Пн,/
(2.14)
Нетрудно видеть, что при Хк =/д выражение для й)д совпадает с (2.13),
причем вместо т]н фигурирует «выходной шаг нарезки» Т]н2:
2л
CD =------И .
д _ д
Пн2
Дифференцируя (2.14), находим выражение для углового ускорения снаряда:
J(o 2л пн2 + х —V
dt Л ПнД
Таким образом, при прогрессивной нарезке £ зависит от всех элементов
поступательного движения (, V, dV/dt), изучением которого и занимается
внутренняя баллистика.
Ниже рассматриваются некоторые вопросы внутренней баллистики, не-
обходимые для построения математической модели выстрела из артиллерий-
ской системы и, соответственно, для изучения поведения механизмов взрыва-
теля во время движения снаряда по каналу ствола.
2.2.2 Прямая задача внутренней баллистики
Система «снаряд - пороховой заряд - ствол» представляет собой термодина-
мическую машину, в которой тепловая энергия, выделяемая при горении пороха,
трансформируется в кинетическую энергию снаряда и откатных частей орудия.
Поэтому изучение процесса образования пороховых газов и их действия в канале
ствола - одна из важнейших задач внутренней баллистики [10-12].
Состояние пороховых газов как реальных газов описывается следующим
характеристическим уравнением:
RT
Р =-----> (2.15)
w-a
30
где р - среднебаллистическое давление, Па; w - удельный объем, м3/кг; Т -
абсолютная температура; R - газовая постоянная, Дж/(кГ’Град); а - ково-
люм, т.е. объем, пропорциональный объему молекул газа (предел, к которому
стремится удельный объем при бесконечно большом давлении), м3/кг.
Известны два вида пороха:
- дымный порох, представляющий собой механическую смесь калиевой
селитры (75 %), серы (10 %) и древесного угля (15 %); его применяют в кап-
сюльных втулках, воспламенителях, замедлителях, усилителях и пиротехниче-
ских предохранителях;
- бездымный порох (порох коллоидного строения): пироксилиновый и
нитроглицериновый.
Основные баллистические характеристики пороха:
- «сила пороха» f, Дж/кг; для бездымного пороха, сгорающего без остат-
ка, f = RT], где - температура взрывчатого превращения (температура
горения), К; /характеризует работу, которую могут совершить пороховые газы
при охлаждении до 0 К;
- коволюм а, м3/кг;
— плотность 5 , кг/м3.
- форма и размеры порохового зерна (наименьший размер принято обо-
значать 2q);
- коэффициент скорости горения пороха щ .
Значения этих характеристик приведены в таблице 2.3.
Таблица 2.3 - Характеристики порохов
Порох J-10'3, кг/м3 10’5 Дж/кг а • 103 м3 /кг и, -Ю10 м/(Па*с)
Дымный 1,5...1,9 2,7...3,4 0,4...0,7 8,2...9,1
Пироксилиновый 1,56... 1,62 8,9...9,8 0,98... 1,02 6,1...9,1
Нитроглицериновый 1,56... 1,63 9,8... 12,8 0,75...0,85 10,2...20,4
Важную роль играет также плотность заряжания:
& = mjW0,
где ты - масса заряда, кг; Wo - объем зарядной каморы, м3.
Пиростатика. Рассмотрим процессы, протекающие при горении пороха в по-
стоянном объеме. Уравнение состояния пороховых газов (2.15) запишем в виде
31
RT RT\ T f T
w - a w - a Г| w-aTj
(2.16)
При горении заряда в постоянном объеме образующиеся пороховые газы
внешней работы не производят, тепловые потери на нагрев стенок каморы
пренебрежимо малы. Кроме того, процесс весьма скоротечен и поэтому можно
считать, что Т « Тх. Тогда, согласно (2.16),
Р
w-a
Введем величину
где (тш)сг - масса сгоревшей к данному моменту времени части заряда. Оче-
видно, что 0< \|/ < L Объем несгоревшей части заряда
)cr ]/5 = [тш (7 - v)]/5 ;
свободный объем зарядной каморы, соответственно,
удельный объем пороховых газов
° х
w =----------S----
и, наконец, давление
______________________________________________
Р ~7,г w„(7-v) ’ (2.17)
ИС.----«V--_ ат у V >
О g (От
Введем несколько так называемых приведенных длин, которые опреде-
ляются как высота цилиндра заданного объема с площадью основания, равной
площади сечения канала ствола (с учетом нарезов):
W
приведенная длина зарядной каморы: /0 = —;
л*
приведенная длина свободного объема в начале горения заряда:
приведенная длина свободного объема в конце горения:
/, = (wo - ата)~ = 10(1 - ад);
Л*
приведенная длина текущего свободного объема:
32
о
0 5
п>
К <>;
а»7юу - = 10 ^(/-\|/)-а\|/Д =
о
ДЛ
5,
л*
С помощью выражения для (2.17) можно представить в виде
При \|/ = 1 получаем полное пиростатическое давление:
7-аД’
т.е. максимальное давление при горении пороха в замкнутом объеме. Введем
безразмерное давление
(2-18)
где аы = (7 — Д/б)/(7 — аД) . При учете воспламенителя обычно считают, что
после инициирования он мгновенно создает максимальное давление рй, т.е.
sly
Принимая ~р = р0 = р$1Р, с помощью формулы (2.18) найдем значение
Р = А4
V = Vo ’ соответствующее концу пиростатического (и началу пиродинамиче-
ского) периода выстрела:
\Ро )
Закон газообразования. Процесс горения пороха разделяют на следую-
щие фазы:
1) зажжение - сообщение заряду начального импульса;
2) воспламенение - распространение пламени по всей поверхности заряда;
3) собственно горение - распространение пламени внутрь зерна.
33
При теоретических расчетах обычно используют геометрический закон
горения, в основе которого лежат следующие допущения:
- воспламенение пороха в замкнутом объеме происходит мгновенно;
- горение идет параллельными слоями, т.е. зерно за единицу времени (dt)
обгорает по всей поверхности на одну и ту же величину (de);
- пороховые зерна совершенно одинаковы, горят в одинаковых условиях
и однообразно;
- давление во всех частях заряда одинаково (на самом деле оно распреде-
лено по длине заснарядного объема).
Эти допущения дают возможность рассматривать не все зерна заряда, а
лишь одно из них. Принимая второе из этих допущений, введем скорость го-
рения, которую (применительно к бездымному пороху) обычно описывают
следующей эмпирической зависимостью:
de
и = — = ихр, (2.19)
dt
где их - единичная скорость горения пороха (при р=\ \ или коэффициент
скорости горения. Отсюда
t
е - щ J*pdt.
о
В момент окончания горения (t = ) е — ех; соответственно,
е, = их \pdt = щ1к,
О
^к
где Zk = ^pdt = eju, - конечный импульс. Введем еще одну величину, харак-
о
теризующую горение пороха, - относительную толщину сгоревшего слоя
z = е/ех, причем, очевидно, что 0 < z< 1. Учитывая (2.19), получаем
dz р
--- (2.20)
Зависимость \y(z) носит название закона образования пороховых газов и
в общем случае имеет вид кубического полинома:
\\f(z) = + H-pijZ2), (2.21)
где параметры Kj зависят от геометрических параметров зерна и могут
быть определены из соотношения \|/ = 7 — A/Aj . Здесь Л и Л] _ текущий и
34
начальный объемы порохового зерна. С учетом малости щ на практике часто
пользуются двухчленной зависимостью:
y(z) = kz(/ + Xz),
(2.22)
причем к и X находят из условия равенства значений \|/, вычисляемых по
(2.21) и (2.22), при z=l и z=0,5:
( 2А,! +3|Л1
к - к, ;Л, = —1.
I 2) 2-ц,
Пиродинамика. Пиродинамика изучает процессы, протекающие при пе-
ременном объеме, приращение которого (s/) обусловлено перемещением сна-
ряда. Справедливо общее уравнение состояния в виде (2.16), т.е.
Р = -^.
w- а Т\
В данном случае нельзя считать, что Т = 7], как в пиростатике, поскольку по-
роховые газы совершают работу, сообщая снаряду кинетическую энергию q V2 /2.
Удельный объем пороховых газов:
= ---------8--------,
T_= £
T, - Ж0 r, (2.23)
8
Входящее в эту формулу отношение температур нужно выразить через
элементы движения снаряда и относительную массу сгоревшей части заряда
\|/ (или z).
В произвольный момент горения согласно первому началу термодинамики
dQ~dU + Jtbh ,
где dQ — элементарное количество теплоты, подводимой к системе; dU- удельное
изменение внутренней энергии газа; drBH - элементарная внешняя работа.
Принимаем dQ = 0, т.е. пренебрегаем теплообменом со стенками канала
ствола (адиабатический, или изоэнтропический, термодинамический процесс).
Тогда для массы сгоревшей части заряда \|/С0 можно записать соотношение
<ЛВН = -dU = -m^C^dT, (2.24)
где Cw —теплоемкость при постоянном объеме; dT-приращение температуры.
35
Из термодинамики известно, что СР = Cw + R, где СР - теплоемкость
при постоянном давлении. Отсюда
R = cP-cw = cw(y-]) = cwe.
(2.25)
Здесь у = СР / Cw - показатель адиабаты; 0 = у — 1. Величины Ср и Cw
(в общем случае зависящие от температуры газа) считают постоянными в те-
чение всего выстрела и равными некоторым средним значениям. Тогда (2.24) с
учетом (2.25) можно переписать следующим образом:
ВИ е
Интегрируя, получаем
_ m^R, T\_ma\}/RTX( T'\_m<i^f( Т >
г„ ——{Т-Т,}——
Подставим сюда отношение температур из (2.23):
0^вн = fay-ps(l + lv),
(2.26)
(2.27)
и в результате получим основное уравнение пиродинамики, которое имеет
смысл уравнения баланса энергии при выстреле. Оно также известно как урав-
нение Резаля. Используя уравнение (2.28), находим
p = (2'28)
Таким образом, давление в пиродинамике меньше пиростатического из-
за двух факторов: работы, совершаемой пороховыми газами, и возрастания
объема заснарядного пространства.
Работа пороховых газов. Из выражения (2.26) следует, что максималь-
ная работа, которую потенциально могут совершить пороховые газы, опреде-
ляется двумя условиями \|/ = 1 (полное сгорание) и Т = О К (охлаждение до
абсолютного нуля):
(Тви)тах=^- (2.29)
и
Полезной (основной) является составляющая работы, затрачиваемая на
сообщение снаряду кинетической энергии в поступательном движении:
Кроме того, часть энергии пороховых газов затрачивается на совершение
так называемых учитываемых второстепенных работ: вращательное движение;
ведение снаряда по нарезам (трение); перемещение продуктов горения и не-
сгоревшей части заряда; перемещение откатных частей орудия; теплоотдача к
36
стенкам канала ствола; - врезание ведущего пояска в нарезы; прорыв газов
через зазор между снарядом и стенками канала ствола; преодоление сопротив-
ления воздуха и вытеснение воздушного столба.
К числу неучитываемых работ относят упругое деформирование, вибрацию,
разгар и износ ствола; соударения снаряда со стенками канала ствола; волновые
процессы (термодинамические и механические) и др. Из всех этих второстепенных
работ лишь некоторые можно оценить теоретически и то приближенно. Обычно
считают, что эти работы пропорциональны То, т.е. ts = ф)т0; тогда
^К2 , .V2
= Ы— (2.30)
£ £
Величину ф = 1 + называют коэффициентом второстепенных ра-
Ti = Т0 7 + S(Pi =(РТ0 =(Р
т_„
On
бот. Можно также считать, что работа пороховых газов затрачена на сообще-
ние той же скорости снаряду большей массы, равной <pq. Отсюда второе назва-
ние <р- коэффициент фиктивной массы или просто коэффициент фиктивности.
Подставив (2.30) в (2.28), получим
0(р<?И2
р" Л7+7Т
(2.31)
Пусть V = Ипр - предельная скорость снаряда, которая может быть дос-
тигнута при полном выделении энергии пороховых газов; тогда, с учетом
(2.29), можно записать
(2.32)
= = <Р?Рпр
тах 0 2
откуда
у = \2jm^
пр у 0ф<?
Определение коэффициента фиктивности. Во внутренней баллистике
существует следующее выражение для коэффициента фиктивности:
. т.л
Я
где коэффициент />ср определяется геометрией зарядной каморы и нарезной
части ствола. Обычно принимают Z>cp - 1/3 •> что соответствует коэффициенту
уширения каморы, равному 1,0. Параметр
37
= 7 + + tgp(/Tp + tgp), (2.33)
где Q0T — масса откатных частей; коэффициент трения между ведущим
пояском и боевой гранью поля нареза (рекомендуется принимать = 0,176 );
н = (2РнЛ02; ри =ylAJ<i - радиус инерции; Аос - осевой момент инерции.
Поскольку величины, входящие в (2.33), не всегда известны полностью,
на практике применяют некоторые эмпирические рекомендации [11,12]: для
гаубиц = 1,06; для пушек: при 25 < /д/</ < 40 Ку = 1,05 ; при /д/d > 40
Ку = 1,03. Эти рекомендации основаны на относительной длине ствола ору-
дия /дД/. Автором был проведен анализ характеристик ряда артиллерийских
систем. В результате вычисления коэффициента Ку по формуле (2.33) по-
строены его зависимости от 1д/с1 для пушек и гаубиц. Усредненные кривые,
показанные на рисунке 2.6, можно описать с помощью следующего эмпириче-
ского соотношения (полученного методом наименьших квадратов):
= «> • ехр[- а2(/д /d)a> ]. (2.34)
Рисунок 2.6-Зависимость коэффициента К от отношения l„ / d :
1 - гаубицы, 2- пушки
Значения входящих сюда параметров (аи а2, а3) приведены в таблице
2.4; в таблице 2.5 даны характерные значения параметра ц для основных ти-
пов артиллерийских снарядов.
38
Таблица 2.4 —Эмпирические параметры
Система 5/ &2
Пушка 2,42 0,783 0,0229
Гаубица 1,206 0,0892 0,129
Таблица 2.5 - Значения параметра ц
Тип снаряда Б г О, ОФ ф БК
И 0,464 0,535 0,55 0,59 0,65
Первый период пиродинамики. Согласно классической теории, движе-
ние снаряда начинается при давлении, равном давлению форсирования ,
причем время обычно отсчитывают от начала движения снаряда, а не от мо-
мента воспламенения заряда. Уравнение поступательного движения снаряда, с
учетом изложенного выше, можно записать в виде
. QtyqV2
dy fiw---------------------------------J-
<$q— = sp =------------
dt
(2-35)
(2-36)
Таким образом, получим следующую систему уравнений внутренней
баллистики во время данного периода:
dV dl TZ dz p
<pq--= sp; — = V; — = —.
dt dt dt /k
Введем следующие безразмерные величины:
F = -;7 = — ;1 = -;р=~
Т V„„ L Р
Здесь Ln T- некоторые характерные баллистические параметры. Тогда
система (2.36) приобретает вид
Ф^пр dV _ L di rz - dz PT _
-----= srp;----------- = К/ ; — =----p.
T di T di np dt IK
Поскольку величины L и T произвольны, их можно выбрать, приняв ус-
ловия, упрощающие систему (2.37), например:
у» у Пр ’
(2.37)
откуда
L = V Т.
sP 1р
39
Тогда выражение для L можно преобразовать:
£ = _ ад) = -^-S1(7 _ аД)^к = - zo(7 - аД).
s/Д V sfmm oV 7 0W 0 oV 7
Преобразуем теперь множитель в третьем уравнении из системы (2.37):
PT = 1 cpfffr'np _ уд 12^ПШ ГГ
7к 9<рд NB9’
где В = ———------параметр Н.Ф. Дроздова.
С учетом всех этих преобразований систему (2.37) можно записать в виде
dV _ dl — dz _ I 2
= p: = Рл —
di di di \ BQ
(2.38)
Для нахождения безразмерного давления р воспользуемся формулой (2.31):
т>ы=[р(/-аД)]|у-(г)?|
h I §J LI §J J k I §J LI sj v т
С учетом (2.38) получим
= £ = v-(F)2
p P 2- ( д • (2.39)
— I +а„ -fa,4 - 7 hi/
Q <B \ / T
Систему (2.38), дополненную выражением для давления (2.39), нужно
решать при следующих начальных условиях (t = 0):
/ = 0; V — 0; z — z0 (\|/ = \|/0). Длительность первого пиродинамического
периода определяется моментом времени (fk), когда (т.е. концом горе-
ния); при этом I = lK'9 V = Кк ; р = рк. Скорость снаряда в конце горения за-
ряда можно определить аналитически: согласно (2.38), можно записать
dz _ _ I 2 _ dV
dt~ PVB9~ di ’
откуда при z=l получим
К=(1~гМве)/2.
или в размерном виде
Г, =(/-*»)—.
40
Это значение скорости можно использовать для контроля правильности
вычислений.
Во многих случаях требуется знать уровень максимального давления в
канале ствола (например, максимальная перегрузка пропорциональна этому
давлению). Воспользуемся выражением для давления (2.39). Опуская проме-
жуточные выкладки, приведем окончательный результат в виде вспомогатель-
ной функции, пропорциональной производной давления:
at az V и
Изменение знака этой функции в процессе вычислений будет свидетель-
ствовать о прохождении кривой давления через максимум (рисунок 2.7, а),
после чего можно воспользоваться интерполяцией (например, линейной) в
пределах очередного шага интегрирования. Если указанный «аналитиче-
ский максимум» отсутствует, максимум давления соответствует моменту
окончания горения (рисунок 2.7, б). Возможен также и такой вариант — го-
рение не заканчивается в момент вылета снаряда из канала ствола, т.е. при
/ = /д z</(\|/<7).
Рисунок 2.7 - Законы давления при выстреле:
а— 76-мм пушка; б— 82-мм миномет (стрельба на полном заряде)
t, МС
Второй период пиродинамики. Во время этого периода происходит
адиабатическое расширение образовавшихся пороховых газов. В этом случае
z- 1, и из системы (2.38) исключается уравнение газообразования:
dV
dt
(2.40)
Решение этой системы уравнений ведется до момента времени, когда
41
(2.41)
Работа пороховых газов как параметр выстрела. Из термодинамики
известно, что элементарная внешняя работа газа выражается следующим обра-
зом: Лтвн = spdX = spVdt, откуда
Лвн rz
--— — spV.
dt
Это выражение справедливо в течение как первого, так и второго пиродина-
мического периода. Учитывая уравнение движения снаряда <$q(dV/ dt) = sp,
запишем dv3n—(pqVdV^ откуда получим уже известное соотношение
= g>qV2/2.
Ранее было выведено выражение для максимальной работы пороховых газов:
max 0 2
Используя эту величину как нормирующую, определяем безразмерную
работу
V
К
= (йУ-
(2.42)
Ч=-Ь-
т
vmax
Соответственно, (2.40) приобретает вид
•Чах ^вн = spVjTp_
Т dt пр *
Поскольку sPVnpT = ipqVnp = 2ттах ,
^- = 2Vp.
Таким образом, оперируем либо размерной, либо безразмерной систе-
мой уравнений внутренней баллистики, дополнив ее дифференциальными
уравнениями (2.41) или (2.42), соответственно. Следует отметить, что это
дает эффект, например, при рассмотрении процесса врезания ведущего поя-
ска, особенно когда отсутствует аналитическое выражение для работы де-
формирования пояска (см. ниже).
Вычисление перегрузки.При расчете взрывателей оперируют силами
инерции, значения которых определяются соответствующими ускорениями
или перегрузками. Так, при поступательном движении снаряда имеем
, / \ 1 dv Рпр dV К _ sp sP _ _
kW = —Т = =-----=-----р = К^р>
g dt gT dt gT <pqg qqg
sP V
IS np
где A =------— —— — «предельная» перегрузка.
g>qg gT
42
О табличном методе. До появления современной вычислительной тех-
ники прямую задачу внутренней баллистики решали с помощью известных
таблиц ГАУ, однако при этом возникала неопределенность на начальном уча-
стке кривой давления (и перегрузки), поскольку первая счетная точка по оси
времени могла составлять до 60 % длительности переднего фронта. На эту
неопределенность указывал проф. В.В. Руднев. Недостатком данного метода
являлось то, что таблицы были составлены для стандартных значений ряда
баллистических параметров, и их практически нельзя было использовать при
иных значениях этих параметров. В настоящее время с учетом широкой дос-
тупности ЭВМ обычно реализуют численный метод (один из вариантов кото-
рого изложен выше), а табличный утратил значимость.
2.2.3 Учет процесса врезания ведущего пояска в нарезы
Период форсирования рассматривают в том случае, если отказываются
от классической интерпретации выстрела, базирующейся на понятии давле-
ния форсирования р0. В артиллерии термин «форсирование» (от forcer — фр.)
имеет двоякий смысл: геометрический (превышение диаметра ведущего поя-
ска диаметра канала ствола с учетом нарезов) и физический (процесс вреза-
ния ведущего пояска в нарезы). Период форсирования длится от момента
начала движения снаряда до полного врезания ведущего пояска в нарезы.
Благодаря реализации ряда конструктивных мер создается кратковременное
воздействие на снаряд, чтобы получить более напряженное, ускоренное дви-
жение его при выстреле [13].
Диаметр ведущего пояска определяют по формуле [14]
Ап = d + 2tn +Аф,
где tn - глубина нареза; Дф - форсирование (оно составляет тысячные доли
калибра d), обеспечивающее надежную обтюрацию канала ствола (исключаю-
щую прорыв пороховых газов вперед) и радиальное давление, необходимое
для плотного сцепления ведущего пояска с корпусом снаряда.
Силовая характеристика П(/) ведущего пояска обычно имеет такой вид:
сначала сила сопротивления П нарастает до максимального уровня По (полное
врезание), а затем резко падает и постепенно уменьшается к дульному срезу.
Определение реальной силовой характеристики ведущего пояска (кривой вре-
зания) - сложная техническая задача, поскольку соответствующие измерения
необходимо производить непосредственно во время выстрела. Результаты ста-
тического продавливания снаряда через матрицы в виде казенной части ствола
не соответствуют действительным зависимостям, поскольку при выстреле
происходит радиальная деформация стенок канала ствола, что несколько
уменьшает сопротивление пояска. Давление форсирования ро = По/5 колеб-
43
лется в пределах широкого диапазона (20...50 МПа); стандартное значение
часто принимают равным 30 МПа.
Адекватное описание периода форсирования имеет большое значение:
известно, что механизмы инерционного типа могут взводиться именно во вре-
мя врезания ведущего пояска. Несмотря на малость перемещения снаряда
(0 < I < /в) возникающие ускорения (и соответственно силы инерции) могут
оказаться значительными. В некоторых случаях неучет данного периода при
расчете может привести к ошибочным выводам о характере функционирова-
ния узлов взрывателя.
Строгий подход к рассмотрению процесса врезания изложен в работе
[13], однако для практического применения его требуется большой набор не
всегда известных исходных данных. Ниже приведен упрощенный подход,
основанный на аналитическом описании силовой характеристики ведущего
пояска и ряде допущений. Этот подход тем не менее позволяет выявить
принципиальные особенности данного сложного процесса.
Известно представление силовой характеристики ведущего пояска (через
/>о) в виде линейной зависимости [12]:
п(/)=пн+(п,-пн)1 (2.43)
1в
однако и в этом случае имеется некоторое начальное сопротивление Пн и,
соответственно, начальное давление рн - Щ /s. Более адекватно следующее
описание силовой характеристики [15]:
. ч П1кк1 + (Пп-П)-,0<1<1
П(/) = н вп V ° НЧ’ в (2.44)
0,1>1в
Эта зависимость асимптотически стремится к выражению (2.43), по-
скольку при х > 3,0 th(x) ~ 1,0 . Дифференцируя (2.44), получаем
= П' = АпПн_ + П0~Пн
dl ch2kj lB
Уравнение касательной в начале координат:
п'(о)=<п,/+2^-/.
В
Приравнивая это выражение и (2.43), найдем перемещение /р = ЦвП/в, соответ-
ствующее точке пересечения обеих прямых (рисунок 2.8): кВ11 = 1, откуда
44
Рисунок 2.8 — Аппроксимация силовой характеристики ведущего пояска:
/-n = nH+(/-nH)l;^-n = n„thl+(/-nB)^
'р *в
Параметр цвп является мерой крутизны силовой характеристики ведуще-
го пояска в начале координат: чем он меньше, тем больше параметр £вп, и,
следовательно, тем быстрее происходит слияние силовых характеристик, опи-
сываемых (2.43) и (2.44). Если в процессе врезания не учитывать второстепен-
ные составляющие работы пороховых газов, т.е. принять ф ~ 1,0, то уравнение
движения снаряда можно записать следующим образом:
dV dV „/Л
q----qV —
dt dl
(2.45)
где
/wal/ -0тпы
4/+/J
В данном случае целесообразно использовать работу пороховых газов как од-
ного из параметров выстрела. С учетом уравнения движения (2.45) можно записать:
Jtbii = spdl = spVdt — qVdV + П(/)с//,
т.е.
/
Твн =г0 + <[П(/>/ = Т0 +Чр.
о
где твр - работа врезания. С помощью выражения (2.44), произведя интегриро-
вание, получим
45
Ttp=n„/t,lnfchll+n° ПЧг-
\ Si J
Приведем уравнение движения (2.44) к безразмерному виду, используя
при нормировке те же величины, что и ранее:
= <2.46>
где
п(/)== p0[nHthl + (/- П,,)Х
X / $р ГО I ' ”1]
L в в.
Поскольку
2
Ф7^Пр = Ф7^пР
уравнение (2.46) можно записать в виде
f = <₽b-n(7)],
(2.47)
причем
- - V “ гвн
Р = Л + у~_------------
-7+дг-(^-;к
и
Аналитическое выражение для безразмерной (относительной) работы
можно получить с учетом того, что
Ф?^ = sPL
Tmax 2 2 ’
т.е.
Таким образом, полная система безразмерных уравнений, описывающих
процесс врезания, будет иметь вид
= ф[р - n(/)J- 4 = = 2pV; = р Д- (2.48)
Си Си Си Си N пи
Решение ведется до момента времени, когда I = 1В‘, можно считать, что
после этого сила сопротивления ведущего пояска мгновенно падает до нуля.
Затем решают обычную систему уравнений внутренней баллистики, но при
иных начальных условиях.
46
2.2.4 Примеры расчета
Объект исследования - 76-мм дивизионная пушка образца 1942 г. (ЗИС-З).
Ее основные характеристики: Щ = 1,484 * 10-3 м3; 5 = 0,4688 • 10“2 м2;
1Д = 2,686 м; q= 6,2 кг; нарезка - постоянной крутизны; 0 = 7° 9'45”; Т|н = 25;
ход снаряда при врезании ведущего пояска /в = 0,033 м.
Заряд: порох пироксилиновый семиканальный 9/7 (2q = 0,9 мм); = 1,08 кг.
Принимаем стандартные значения ряда внутрибаллистических параметров:
а = 1 • 10~3 mVkt; 5 = 1,6 • 103 кг/м3; f= 9,3 • 105 Дж/кг; р0 = 30 МПа; 0 = 0.2.
Известно [11, 12], что при стрельбе трубчатым порохом с одним каналом по-
лучаются практически те же результаты, что и при стрельбе порохом с семью кана-
(2е1
лами при том же заряде и при отношении толщин сводов , = 0,75, т.е.
(2^ Друб
условная толщина свода трубчатого пороха будет равна 2е| =1,2 мм. Эквивалент-
ные параметры двухчленного закона газообразования, соответственно: к =1,108;
X = -0,097. Для пороха 9/7 /к = 9,26 • 105 Пас [11], что соответствует коэффици-
енту скорости горения ц = = 6,5-1О"1ом/(Пас). Таким образом, все исход-
ные данные для расчета известны.
Сначала проведем предварительные вычисления.
Коэффициент фиктивности (см. табл. 2.4):
ф = 2,42 • ехр[- 0,783 • (2,686 / 0,07б)°'0229]+ = 1,093;
плотность заряжания:
Д - = -1-8- 1-°3- = 0,728 103 кг/м3;
Wo 1,484
параметр Н.Ф. Дроздова:
в . = (o.^SS lQ-’ -Q^-lO’y =
qqmj 7,1093 -6,.2- 9,3 10s 1,08 ’ ’
приведенная длина зарядной камеры:
Wo 1,484-Ю"3
10 = — =------------г = 0,317 м.
5 0.,688*10~2
Затем вычислим значения констант, используемых при нормировке урав-
нений внутренней баллистики.
Полное пиростатическое давление:
47
Р = = 9±io5^Z28-..^з^2486 МПа;
1-иД 1-1-1Q-3-0,728-Ю3
предельная скорость снаряда:
V = 2-9,3-ю5 4,08 _1217 м/с-
пр Ощ у 0,2-1,093-6,2
характерные баллистические длина и время:
L = ^/0(l-ciA) = -^-0,3/7-(1-J-Ю~3-0,728-Ю3)=0,862 м;
0,2
L_ = 0,862 40/ = g 10-з c.
UH
Ниже представлены результаты, вычислений. Необходимые пояснения к
ним можно найти в приложении 1.
На рисунке 2.9 показаны безразмерные кривые давления, скорости и пути, по-
строенные с помощью табличного и численного методов (классическая задача). Вид-
но, что эти кривые существенно различаются по форме, особенно в пределах перед-
него фронта, а также по положению максимума давления. Неопределенность началь-
ного участка табличных кривых, как отмечалось выше, может обусловить ошибку
при исследовании взведения механизмов взрывателя. Вместе с тем, интегральные
характеристики выстрела достаточно близки, о чем свидетельствуют данные, приве-
денные в таблице 2.6. Длительность пиростатического периода —1.33 мс.
Рисунок 2.9 - Безразмерные кривые функции времени: а -табличный метод;
численный метод; /-р/ртах = к/к^ ; 2- V/V^ ; 3- 1/Ц
48
Таблица 2.6 - Сравнение результатов, полученных с помощью
табличного и численного методов
Параметр Табличный метод Численный метод
МС 2,371 2,297
4» МПа 233 232
Лпах 16400 16350
К,, м/с 202 214
1т, М 0,158 0,174
/д ,МС 7,538 7,392
Уд, м/с 660 661
На рисунке 2.10 показаны зависимости давления и скорости от пути сна-
ряда; эти кривые практически идентичны.
Рисунок 2.10 - Безразмерные кривые функции перемещения снаряда:
/ ~Р /Ртах = к/ктах ; 2 - У/Уд
Далее рассмотрим результаты внутрибаллистического расчета с учетом вреза-
ния ведущего пояска. В таблице 2.7 приведены параметры выстрела в характерные
моменты времени (Пн = 0,7;цвп =0,05). На рисунке 2.11 показаны соответст-
вующие безразмерные кривые. Следует отметить скачок перегрузки в конце вреза-
ния, обусловленный падением силы сопротивления ведущего пояска до нуля. Кро-
ме того, обратим внимание на то, что давление в канале ствола в момент окончания
49
врезания более чем в 5 раз превышает давление форсирования (напомним, что в
классической модели врезание завершается именно при этом давлении). Соответст-
венно, велика и перегрузка (около 11000), что свидетельствует о возможности взве-
дения взрывателя к этому моменту времени.
Таблица 2.7 — Элементы движения снаряда с учетом врезания
ведущего пояска в нарезы
Этап выстрела 4 мс р, МПа к Vt м/с /, м Z
Воспламенение 0,0 4,0 308 0,0 0,0 0,0
Конец врезания 2,75 160 10040 11300 62,1 0,033 0,136
Максимум давления 3,75 252 17740 216 0,167 0,376
Конец горения заряда 7,22 91,7 6470 615 1,73 1,000
Дульный срез 8,68 56,8 4003 686 2,686 —
Рисунок 2.11— Безразмерные кривые
(врезание ведущего пояска в нарезы):
' - Р/Р... ; 2- к/к„,; 3- V/ V, .4- //4 ; 3- г
Зависимость силовой характеристики ведущего пояска от параметра ц пока-
зана на рисунке 2.12: наглядно видна роль этого параметра как меры крутизны на-
чального участка силовой характеристики. О влиянии параметра цвп на элементы
движения снаряда можно судить по кривым, показанным на рисунке 2.13: по мере
возрастания крутизны силовой характеристики (т.е. уменьшения цап) формируется
все более заметный «S-образный» начальный участок законов скорости и, особенно,
перегрузки (рисунок 2.14). Наличие такого участка подтверждается и эксперимен-
тальными исследованиями (М.А. Шлеенков). На закон давления параметр цвп
практически не влияет, что объясняется малым перемещением снаряда на пути вре-
зания ведущего пояска. Закон изменения силы сопротивления ведущего пояска во
времени показан на рисунке 2.15.
50
Рисунок2.12 “Силовые характеристики ведущего пояска (Пн
р. МПа
к
Рисунок 2.13 - Начальный участок кривых при врезании:
Пн = 0,7 ; цвп от 0,01 до 0,1
а -давление; б— перегрузка; в— скорость снаряда
Рисунок 2.14 — «^образный» начальный участок кривой
перегрузки при врезании
— >МПа
Рисунок 2.15 - Изменение силы сопротивления ведущего
пояска во времени
2.3 Динамические воздействия на траектории артиллерийского
и реактивного снарядов
2.3.1 Сила сопротивления воздуха
При расчете механизмов и узлов взрывателя сила сопротивления воздуха
представляет интерес как первопричина возникновения силы набегания, спо-
собной вызвать несанкционированное перемещение элементов системы пре-
дохранения на траектории и, соответственно, преждевременное срабатывание.
Силы инерции, обусловленные аэродинамическими факторами, используют и
как рабочие: известны конструкции механизмов, действие которых основано
на падении поступательной или угловой скорости снаряда. Во взрывателях для
реактивных снарядов и авиабомб применяют механизмы дальнего взведения (а
также генераторные устройства) с ветрянками и турбинками, приводимыми во
вращение набегающим потоком воздуха.
52
Во внешней баллистике обычно пренебрегают периодом последействия
пороховых газов и вводят условную начальную скорость Уо, которую приво-
дят к дульному срезу; различие скоростей Ид и Vo весьма мало (от 2 до 4 %).
Сложный процесс последующего движения в воздухе схематизируют: сначала
рассматривают движение снаряда как движение материальной точки, на кото-
рую действуют аэродинамическая сила и сила тяжести, а затем - как движение
твердого быстровращающегося тела (при этом возможно исследование нута-
ционных и прецессионных колебаний снаряда, имеющих гироскопическую
природу) [16, 17].
На рисунке 2.16 показана схема сил, приложенных к снаряду на траекто-
рии: qg - сила тяжести; R - равнодействующая аэродинамических сил, т.е.
сила сопротивления воздуха. Эта сила приложена в центре давления С, не сов-
падающем с центром массы О. Расстояние между этими точками определяется
по формуле Гобара [16]:
h = ht+0,57hr-0,16d,
где hf - расстояние между центром масс снаряда и основанием головной час-
ти; hv — длина оживальной (или конусной) головной части.
Рисунок 2.16 - Силы, приложенных к снаряду на траектории
3 обозначен угол атаки, т.е. угол между осью снаряда и касательной к
траектории в данной точке (на касательной лежит вектор скорости снаряда
V); 0 — угол между вектором скорости и горизонтом. Если силу 7? перене-
сти в центр масс О и одновременно приложить к этой точке уравновешиваю-
щую силу (-7?), то возникает пара сил, которая создает опрокидывающий
момент (его учитывают при изучении движения снаряда как твердого тела).
Сила 7?, приложенная в центре масс, раскладывается на две составляющие:
7?v - силу лобового сопротивления (она лежит на касательной к траектории и
53
направлена в сторону, обратную по отношению к скорости) и Ry - подъем-
ную силу. В дальнейшем рассматриваем упрощенную схему приложения ука-
занных сил, полагая 5 = 0 и считая, что сила R направлена по оси снаряда; в
этом случае RY = R и R = 0.
Структуру фундаментального выражения для силы лобового сопротив-
ления можно получить с помощью теории подобия и размерностей, лежащей
в основе методов физического моделирования [18, 19]. Эти методы внешне
достаточно просты. Однако академик Л.И. Седов предупреждал, что «при-
менение методов теории подобия и размерности к новым задачам требует от
исследователя известного опыта и проникновения в сущность изучаемых
явлений» [18]. Задача конструирования выражения для силы сопротивления
воздуха очень наглядна с точки зрения иллюстрации процедуры организации
физического моделирования объекта исследования. При этом реализуется
несколько этапов.
1. Обоснование системы из п определяющих параметров (а/л...,ал), т.е.
физических величин, характеризующих протекание процессов на реальном
объекте (прототипе); на этом этапе велика роль научного опыта и интуиции
исследователя, поскольку необходим компромисс между числом параметров и
степенью схематизации исследуемого объекта; учитывая нестационарность
изучаемых процессов, в число определяющих параметров включают текущее
время L
2. Составление из определяющих параметров т независимых безразмер-
ных комплексов (инвариантов, критериев подобия); число этих комплексов
устанавливается П-теоремой, согласно которой т= п— к, где к- число неза-
висимых единиц измерения (для механической системы к=3 - килограмм,
метр, секунда): кря2,...,яот.
3. Составление р безразмерных комплексов, включающих в себя опреде-
ляемые параметры и являющихся некоторыми функциями комплек-
сов Я/:
П, =Ф/(я, я„); П2 = ф,(я„.ПР =ФР(я, я,„).
Конкретный вид функций можно установить лишь эксперимен-
тально, однако, если выполнены условия подобия модели и прототипа (т.е.
равны числовые значения безразмерных аргументов):
Л/ = idem,...,nw = idem
то можно утверждать, что значения функций ср,...^ одинаковы независимо
от их конкретной структуры:
54
П2 = idem,...,np = idem
Именно это дает возможность переходить от условий лабораторного экс-
перимента с моделью к реальным условиям для прототипа, причем простей-
шим пересчетом (при известных масштабах определяющих параметров). Дей-
ствительно, представим Ле условие подобия в виде
П, = Ьп1.л,.п = Ьы^, (2.49)
где Д - комплекс, составленный из определяющих параметров и имеющий
размерность, обратную размерности bf; индексы «м» и «п» относятся к модели
и прототипу, соответственно. Поскольку Д - комбинация из параметров в
соответствующих степенях, выражение (2.49) может быть преобразовано в
соотношение между масштабами этих параметров (^ = ani/aMi ), что и дает
возможность производить пересчет с модели на прототип, т.е.
А,-
Следует, однако, отметить, что условия полного подобия не всегда мо-
гут быть выполнены на практике. В этом случае методика моделирования
должна предусматривать корректировку получаемых результатов с учетом
неполноты подобия; такая ситуация возникла, например при моделирова-
нии удара о воду [20].
В рассматриваемой задаче система определяющих параметров такова: d-
калибр снаряда как характерный геометрический параметр; V — его скорость;
р - плотность воздуха в данной точке траектории; а - скорость звука в этой
же точке; Ц - динамический коэффициент вязкости. Кроме того, «по умолча-
нию» предполагается, что должны быть геометрически подобны формы го-
ловных частей снарядов, что обеспечивает примерно одинаковое обтекание
встречным потоком воздуха («скрытый» определяющий параметр). При физи-
ческом моделировании чаще используют кинематический коэффициент вязко-
сти V = р/р, имеющий единицу измерения м2/с. Согласно П-теореме, можно
составить /77=5-3 = 2 независимых безразмерных комплексов, которые хо-
рошо известны, а именно:
V Vd
я, = — = М - число Маха; п2------= Re - число Рейнольдса.
a v
Определяемым параметром является сила сопротивления воздуха /?; без-
размерная комбинация, включающая в себя эту искомую силу и соответст-
вующие (по размерности) определяющие параметры, - функция приведенных
выше я-комплексов:
55
(2.50)
(2.51)
Выражение (2.50) обычно записывают в виде
tf = £y--5-£(M,Re),
где pV2 /2 - скоростной напор; 5 = nd214 - площадь миделевого сечения
снаряда;
Л(м, Re) = -<D(M,Re)
Я
Экспериментально установлено, что при малых скоростях можно пренебречь
влиянием числа Маха, а при больших (т.е. для артиллерийского снаряда) - числом
Рейнольдса, и поэтому зависимость от Re обычно не учитывают, т.е.
£(M,Re)« &(м).
Эту зависимость определяют опытным путем для снарядов некоторой
типовой, «эталонной» формы; функцию &(м) называют коэффициентом ло-
бового сопротивления и обычно обозначают С*. Таким образом, формулу
(2.51) можно записать в виде
К=£у-»С,(М). (2.52)
В действительности подобие процессов обтекания снарядов воздушным
потоком чаще всего не обеспечивается из-за различия конфигурации головной
части, и для того чтобы иметь возможность использовать имеющиеся опытные
данные вводят коэффициент формы снаряда:
, с,(м)
с,(м)„
учитывающий неполноту условий подобия. Этот коэффициент считают посто-
янным для всего диапазона скоростей снаряда, хотя, строго говоря, он является
переменным. Для геометрически подобных снарядов, очевидно, i- 1. Форму-
лу (2.52) преобразуют и получают выражение для «ускорения силы сопротив-
ления воздуха»
(2.53)
q
Далее вводят функцию
Л^сЛм)„.
q 2 4
(2-54)
R
//(/) = -£-,
Ро
56
где Y- высота, а р0 - плотность воздуха на поверхности Земли (в точке вы-
стрела). Кроме того, для получения значений соответствующих величин, более
удобных для практических расчетов, вводят множитель
р»н-ю3
Рон-1О3’
где р0// = 1,206 кг/м3 - плотность воздуха на поверхности Земли для нормаль-
ных артиллерийских условий. Тогда (2.54) можно записать в виде
у = /^?М0^2^я(у)^ро„Г2.10-3Сх(м)эт =cH(Y)F(v), (2.55)
Я Роя 8
в этом выражении фигурирует баллистический коэффициент
id2 • 103 р0 id2 IO3 i
С ---------L_LL_ -------- - ---
q рОи q c4d
Здесь принято, что р0 ~р0//; кроме того, введен коэффициент относи-
тельной массы («поперечная нагрузка») Cq = q/d3 , где калибр в децимет-
рах. Видно, что баллистический коэффициент (а следовательно, и сила сопро-
тивления воздуха) изменяется обратно пропорционально калибру.
Функция
~474 10-‘V!C,(M)„ (2.56)
О
носит название «закона сопротивления воздуха». Законом сопротивления так-
же часто называют зависимость сх(м).
Исторически первым был закон Сиаччи (1896 г.), обобщавший результа-
ты опытов со снарядами, имеющими длину головной части от 0.9 до 1,3 клб.
Этот закон описывается следующей аппроксимирующей формулой:
Г(и) = 0,2002Г - 48,05 + д/(0,1648Г-47,95)2 +9,6 + °>0442^(Г ~3^) }
V 371+ (Jz/200) ° { 3
достоинством которой является непрерывная зависимость от скорости, что
удобно при решении задачи на ЭВМ, и поэтому данный закон до сих пор
применяют при расчете траекторий. Известно, что для современных снарядов,
имеющих дальнобойную конфигурацию, коэффициент формы по отношению
к закону Сиаччи в среднем близок к 0,5.
Перед Великой Отечественной войной был разработан закон 1930 г.,
однако затем выявился ряд его недостатков — он не обеспечивал достаточ-
ной точности при расчете траектории с большими начальными скоростями
57
снаряда по отношению к функции 1930 г. сильно колеблется при различных
скоростях. Эти работы были закончены в 1943 г., и новая функция
получила название функции (закона сопротивления воздуха) 1943 г. Функ-
ция составлена на основе обработки результатов стрельб снарядами даль-
нобойной формы, вследствие чего современные снаряды имеют по отноше-
нию к функции 1943 г. коэффициент формы 43, близкий к 1. При установ-
лении функции 1943 г. была обнаружена ошибка функции Сиаччи, заклю-
чающаяся в том, что при скоростях свыше 1400 м/с она линейна, хотя на
самом деле зависимость Сх(м) близка к квадратичной. На рисунке 2.17
показаны эти три закона.
Рисунок 2.17 — Зависимость Сх от числа Маха для законов сопротивления воздуха:
/ — Сиаччи; 2- 1943 г.; 3- 1930 г.
Закон 1943 г. принят в качестве основного как в СССР, так и в России, и
применительно к нему проводятся все баллистические расчеты. Известные
способы описания закона 1943 г. задают его дискретно (таблично) или по под-
диапазонам. Например, в [21] имеется следующая рекомендация:
/(0 = 0,7454-1 (Г4 - V1, V< 256м/с (М< 0,75)
./(0 = 1,2315-Ю”4 • И, V> 1410м/с (Л/> 4,14)’
предполагающая пересчет с закона Сиаччи внутри диапазона с помощью соот-
ветствующих значений коэффициента согласования. Важно отметить, что пе-
реходный множитель заметно зависит от скорости, так что усреднение его в
пределах того или иного диапазона скоростей может привести к ошибкам рас-
58
чета в другом диапазоне. Известно, что коэффициенты формы для современ-
ных снарядов (ОФ), отвечающие закону 1943 г., изменяются в пределах от 0,9
до 1,1 [10]. Эмпирического описания в виде единой непрерывной функции
скорости в пределах всего диапазона изменения числа Маха, подобного закону
Сиаччи, закон до сих пор не имел. Поэтому на практике часто предпочитают
использовать именно закон Сиаччи, но при некотором коэффициенте формы /*
определяемом по известным условиям стрельбы. Ошибка при расчете траекто-
рии для других условий стрельбы связана с тем, что коэффициент формы,
строго говоря, зависит от скорости снаряда.
Автором предложен такой способ коррекции закона Сиаччи и приведе-
ния его к закону 1943 г. [22]: определив по табличным данным (дискретную)
зависимость коэффициента формы от скорости, затем аппроксимировать ее
как некую непрерывную функцию скорости . После этого пересчет произ-
водится следующим образом:
FM = Q(yyF(v), (2.58)
где
<(м)=
0,618 -0,0616 МЛЛ - 0,292 М8'88, М < 0,90
0,58 М’0 9 + 0,052 М , 0,9 < М < 4,0
(2.59)
Параметры аппроксимации найдены в среде пакета MathCAD с помощью
функции genfit, относящейся к произвольной комбинации аппроксимирующих
формул; поиск числовых значений параметров осуществляется автоматически
методом наименьших квадратов, исходя из некоторых ориентировочных на-
чальных значений (guess values).
Результаты реализации этой идеи показаны на рисунке 2.18, откуда вид-
но, что аппроксимирующая кривая (Cx)Siacc. • (^я(м) в целом близка к таблич-
ной зависимости. Таким образом, предлагается следующее эмпирическое опи-
сание закона 1943 г.:
С(м)UHJ)
' 1,2315 10~4 v2, М>4,0'
(2.60)
Отклонение результатов расчета по (2.60) от табличных с практиче-
ской точки зрения пренебрежимо мало: лишь в районе (Сх\пах оно состав-
ляет около 3 %..
59
0.8
Рисунок 2.18 —Приведение закона Сиаччи к закону 1943 г.:
/- (Cx)Siacci; 2-табличный закон 1943 г, (CX)4J (треугольники);
3-переходный множитель = (Сх )4J /(Сх )Siacci (ромбики); 4-эмпирическая ап-
проксимация зависимости переходного множителя от скорости С,а (Л/);
5- коррекция закона Сиаччи (Сх )Siacci • Qa (Л/)
Уравнение движения снаряда. Составим систему уравнений, описы-
вающих движение снаряда, который рассматриваем как материальную точку
(т.е. без учета гироскопических факторов); угол атаки считаем равным нулю.
Скорость снаряда представим в виде
V =iVx+]Vy =iu + ]w,
dX dY
где у =U =-----= PcosG ; = W =----= PsinQ - проекции скорости на оси
х dt у dt
координат Хи У. Соответственно
I--------------------------------- W
V = ^U2 + W2 ;0 = arctg —.
Запишем уравнение движения снаряда в проекциях на оси координат Хи У:
d2X du _ Q d2Y dw _ . _
4 dt2 dt 4 dt2 dt
или, с учетом (2.54) и кинематических соотношений,
dU т п dW т. n dX тт dY 1гг
---= -Jcos0; -----= -Jsin0-p; ------U; — = W (2.61)
dt dt dt dt 1 ’
60
Ускорение силы сопротивления воздуха вычисляя.п с помощью формулы
(2.55). Начальные условия (при t = 0):
у = у0; Q = eQ; X = 0;Y = 0; U = UQ = Kocos0o; W = Wo = KosinGo.
В ряде случаев (например, при проектировании дистанционных взрыва-
телей) представляет интерес длина отрезка траектории S, которая находится из
следующего соотношения:
(2.62)
dS
dt
Недостатком системы (2.61) является то, что скорость снаряда У и угол
наклона касательной 0 вычисляются раздельно. Произведем преобразование
этой системы: учитывая выражения для Un W, запишем
^(7 n dV Tz . n dQ r n
---------------------= cos0-----HsinO— = -Jcos0;
dt dt dt
dW . ^dV _ dQ _ . n
--------------------------------= sinO— + HcosO— = -Jsin0 - g
dt dt---------------------------dt
Умножим первое из этих уравнений на cos#, второе — на sin# и сло-
жим их почленно:
(2.63)
— = -J-gS,n0.
Затем умножим первое из уравнений (2.63) на — sin0, второе - на cos0 и
вновь сложим почленно:
V- = -gcos0.
Таким образом, получаем следующую систему дифференциальных урав-
нений движения снаряда:
dV _ . n dQ gcos0
---= -J - #sin0; — = - - ;
dt 6 dt V
dX „ n dY TZ. n dS TZ
---= KcosO; — = Hsm0; — = V
dt dt dt
(2.64)
2.3.2 Силы инерции на траектории вращающегося снаряда
Силы инерции данного класса обусловлены вращением (в общем случае
- сферическим движением) снаряда как свободного твердого тела, к которому
приложены аэродинамические воздействия и сила тяжести.
Силы инерции, обусловленные падением угловой скорости снаряда.
Сначала рассмотрим только собственное вращение снаряда (относительно
продольной оси) без учета гироскопических эффектов. Для быстровращающе-
61
гося снаряда характерен момент поверхностного трения, благодаря которому
уменьшается (падает) угловая скорость вращения и, соответственно центро-
бежная сила инерции, приложенная к деталям механизмов взрывателя. Данный
эффект иногда используют для построения механизмов самоликвидации. Из-
вестна идея создания счетчика числа оборотов снаряда, которое находится в
определенном соотношении с длиной отрезка траектории (т.е. с дальностью);
такой счетчик может найти применение в высокоточных дистанционных взры-
вателях [4]. При этом очевидно необходимо знать закон изменения угловой
скорости на траектории (п(С)-
Поверхностное трение связано с распределением касательных напряже-
ний на боковой поверхности снаряда. Это распределение и, следовательно,
момент трения рассчитывают на основе теории пограничного слоя с учетом
вихреобразования. Момент силы поверхностного трения, выделенный из глав-
ного момента аэродинамических сил, определяют по формуле [16, 17]
j j 1
Г = —• 103 Н(У)Укт(М)ы,
g
где kY(y/a) - аэродинамический коэффициент; 1С - длина снаряда.
Уравнение собственного вращательного движения снаряда (относительно
продольной оси) будет иметь вид
А ^ = -Г
ос dt
где Лос - осевой момент инерции. Интегрируя это уравнение, с учетом (2.65)
получим
(2.65)
co = coo exp
d3lc'1- = ехр -
d3lc 103
oc
ОС
где (По - начальная (дульная) угловая скорость; Лг(к)= И&г(м) - функция,
аналогичная по смыслу закону сопротивления, но применительно к моменту
трения. Если эта функция известна, то, решая систему уравнений внешней
баллистики (2.64), можно определить зависимости /(/) и И(/) и, соответст-
венно, закон изменения угловой скорости на траектории. При этом в систему
уравнений необходимо дополнительно включить производную
На практике обычно пользуются упрощенными формулами [17]. Напри-
мер, формула Roggla имеет вид
62
c
A?
широко известна теоретическая формула Н.А. Слезкина:
A J
^ОС О
Г d3l
со(/) = со^ехр - 0,075
a(t) = coflexp - 0,03
= сооехр - 0,03
dl0'8
t ;
^(') . (2.66)
В этом случае в систему уравнений внешней баллистики следует вклю-
чить производную
_ у0,8
dt
М.Ф. Васильев, рассматривая механизмы, срабатывающие вследствие падения
поступательной скорости снарядов, отмечал трудности при их разработке. Оцени-
вая возможность использования падения угловой скорости, он показал, что при
реализации этого принципа возникает заметный разброс времени срабатывания,
особенно из-за влияния трения [2],
Касательное ускорение, согласно (2.66), запишем в виде
-y]v08dt\
О У
jr0.8 I
— = -со„уГ exp
dt
где
/ = 0,03
dl0’8
Это отрицательное угловое ускорение порождает соответствующую ка-
сательную силу инерции («окружную силу набегания»), которая мала по уров-
ню, и ею при расчетах обычно пренебрегают.
Нутационные и прецессионные силы инерции. Вращение снаряда -
способ обеспечения его гироскопической устойчивости на траектории, т.е. способ-
ности противодействовать силовым факторам, которые стремятся изменить поло-
жение продольной оси в пространстве, а именно: силе сопротивления воздуха и
опрокидывающему моменту. Кроме того, возникают: упомянутый выше момент
трения, уменьшающий частоту собственного вращения; момент, уменьшающий
угловую скорость оси снаряда в колебательном движении около центра масс, и сила
Магнуса, которая смещает центр масс снаряда в поперечном направлении.
Артиллерийский снаряд получает вращение вследствие ведения его по
нарезам в канале ствола, турбореактивный снаряд (ТРС) - вследствие истече-
ния газов из косо поставленных сопел. Частота вращения должна быть такой,
чтобы продольная ось непрерывно «следила» за направлением движения цен-
тра масс, отклоняясь от последнего в пределах допустимых углов [14].
63
Теория нутационных и прецессионных колебаний в строгой постанов-
ке довольно сложна, поэтому здесь приводятся лишь некоторые краткие
сведения. Положение снаряда в пространстве определяют следующим обра-
зом. Точку выстрела фиксируют в некоторой неподвижной системе коорди-
нат OXYZ. В центре масс снаряда Спомещают начало двух прямоугольных
систем координат: Cx/yiZf и С^Г]^. Оси первой из них параллельны осям
неподвижной системы координат; ось Ct* направлена по оси симметрии
снаряда, а оси Cq и лежат в экваториальной плоскости. Положение сна-
ряда относительно системы координат CxjyiZi обычно задают с помощью
углов Эйлера: v, 3 и ф (рисунок 2.19).
Рисунок2.19-Углы Эйлера
Угол, образуемый вертикальной плоскостью (CxiyJ) и плоскостью дейст-
вия опрокидывающей пары называют углом прецессии (v). Угол между
осями Cxi и CZ, представляет собой угол отклонения и называется углом нута-
ции (3). Наконец, угол, образуемый линией пересечения экваториальной плос-
кости с плоскостью опрокидывающей пары и осью СУ], обозначается ф и носит
название угла собственного вращения снаряда. Соответственно, угловая ско-
рость вращения снаряда будет представлять собой сумму угловых скоростей
прецессии, нутации и собственного вращения:
со = v' + S' + cp'.
64
Исследование системы кинематических уравнений позволяет сделать
вывод, что движение оси снаряда можно рассматривать как быстрое кони-
ческое движение около некоторой оси, совершающей медленное кониче-
ское движение около другой оси, представляющей собой касательную к
траектории.
Наибольшая угловая скорость оси снаряда Qm - на начальном участке
траектории, причем она зависит от наибольшего значения угла отклонения 5т
и угловой скорости прецессии:
Q =5 v'.
При оценке сил инерции, возникающих в отдельных частях снаряда и
обусловленных колебаниями его оси, пользуются формулой для осестреми-
тельного ускорения, наибольшее значение которого [14]
/ \ (A nV У
(а") = -тс .° § г ,
\ е /max г, _ _ j m Д ’
пл ;
где Вэкв - экваториальный момент инерции; гд - удаление детали от центра
масс снаряда. Соответствующая центробежная сила инерции может действо-
вать на детали как головных, так и донных взрывателей; для борьбы с этой
паразитной силой принимают такие конструктивные меры, как контрпредо-
хранительные пружины, удерживающие ударные механизмы, и жесткие пре-
дохранители (звездки), фиксирующие бокобойные шайбы и предотвращающие
перемещение в поперечном направлении.
Различают осевую и радиальную составляющие нутационного ускорения
(перегрузки); структура этих колебаний сложна и (при наличии эксцентриси-
тета детали) представляет собой высокочастотное (собственное) колебание с
огибающей, имеющей частоту нутации. Известны экспериментально получен-
ные данные для 130-мм снаряда (при 5т = 15°): осевые перегрузки достигают
20..30, а радиальные - 70. По другим данным эти перегрузки могут достигать
сотен единиц.
На нисходящей ветви траектории, где снаряд совершает «остаточные»
прецессионные колебания, перегрузки имеют апериодический характер, и их
уровень уменьшается к точке падения. Установлено, что и геликоидальное
движение центра масс снаряда может влиять на параметры перегрузок, дейст-
вующих на детали механизмов взрывателя.
Сила давления воздушного потока. Как отмечалось выше, силу реак-
ции от встречного воздушного потока можно использовать для взведения пре-
дохранительных механизмов головных взрывателей различного типа (ветря-
нок, турбинок, поршней и др.). Отрицательное влияние этого фактора в том,
что он способен затруднить взведение механизмов или вызвать преждевре-
65
менное срабатывание. Отношение удельного давления воздуха рв на вершину
головного взрывателя к атмосферному рй в данной точке траектории можно
вычислить по формуле Рэлея [6]:
Р»
Р.
1667
На мембрану действует сила, определяемая избыточным давлением
зв(рв-ра),
где 5В - площадь выступающей части взрывателя.
Действие дождя. Взаимодействие атмосферных осадков (дождя, снега,
града) со взрывателем принято рассматривать как мгновенный удар о непод-
вижную преграду (мембрану в головной части) капли, имеющей скорость,
равную скорости удара, т.е. схема удара является обращенной [6]. Если кине-
тическая энергия капли больше энергии, необходимой для деформации мем-
браны, преодоления сопротивления контрпредохранителя и воспламенения
капсюля, то произойдет преждевременный разрыв снаряда на траектории, по-
скольку взрыватель находится во взведенном состоянии.
Интенсивность дождя определяют высотой воды, накапливаемой в еди-
ницу времени в эталонном сосуде - плювиографе. Параметры дождевых ка-
пель не имеют строго определенного значения. По данным Главной геофизи-
ческой лаборатории средние значения максимальных диаметров капель тако-
вы: для обложных дождей - 1,4 мм; для ливневых дождей - 2,2 мм; - для гро-
зовых дождей -3,2 мм.
Можно привести конкретный пример, иллюстрирующий опасность удара
капли дождя: капля диаметром 3 мм и массой 0,014 г при скорости снаряда
1000 м/с обладает энергией около 7 Дж. В то же время, для срабатывания КВ
необходима энергия порядка 0,1 Дж; для прорыва стальной мембраны толщи-
ной 0,13 мм - до 0,3 Дж; для преодоления сопротивления пружинного контр-
предохранителя, например РГМ-6 - 0,1 Дж. За время полета на мембрану мо-
жет попасть несколько десятков капель.
Создание «всепогодных» взрывателей, обеспечивающих несрабатывание
в дождь (без существенного уменьшения чувствительности при контакте с
целью), - сложная техническая задача.
66
2.3.3 Силы инерции на активном участке траектории реактивного снаряда
Различают два участка траектории реактивного снаряда (PC): активный и
пассивный. На активном участке PC подвергается действию силы тяги Р ,
силы сопротивления воздуха R и переменной силы тяжести . На пассив-
ном участке действуют лишь две последние силы, а также силы, связанные с
управлением (далее эти силы не рассматриваются).
В момент схода с направляющих PC имеет скорость Ид от 10 до 150
м/с, в конце активного участка - максимальную (Р^пах). Для PC характерны
относительно малые осевые ускорения, что обусловлено небольшим давле-
нием в ракетной камере (не более 60 МПа, а обычно от 8 до 25 МПа) и боль-
шой длительностью горения топлива и, соответственно, действия силы тяги
(от долей до единиц и даже десятков секунд) при длине активного участка от
50 до 1000 м и более. Можно привести такие характерные значения макси-
мальных перегрузок:
- жидкостные управляемые ракеты - от 5 до 10;
- пороховые PC - от 15 до 100;
- противотанковые неуправляемые PC - от 200 до 400;
- управляемые противотанковые PC - от 10 до 20.
Относительная малость перегрузок — важнейшая особенность реактивных
систем с точки зрения проектирования предохранительных механизмов взры-
вателей, затрудняющая одновременное выполнение требований по безопасно-
сти в обращении и надежной взводимости при пуске.
Пороховые PC могут быть оперенными невращающимися, оперенными
проворачивающимися и вращающимися (ТРС). Рассмотрим упрощенную схе-
му сил, приложенных к PC на активном участке траектории, полагая, что век-
торы сил тяги и сопротивления воздуха лежат на касательной к траектории
(рисунок 2.20).
У равнение движения PC получают из уравнения динамики тела перемен-
ной массы (уравнение И.В. Мещерского [9]);
dV
q----
4 dt
где F— равнодействующая всех внешних сил; q - q(t) — переменная масса;
^отн = W - V ~ относительная скорость истечения продуктов горения топлива
(газа); W— абсолютная скорость истечения; \dq/dt\ = GceK- секундный (массо-
вый) расход топлива; иногда пользуются понятием «весового» расхода
(2-67)
отн
dt
сек ’
67
V
Рисунок 2.20 - Упрощенная схема сил, приложенных к PC на активном
участке траектории
В проекциях на касательную к траектории уравнение движения (2.67)
приобретает вид
dV
q----= Р- R- <?gsin0 £ Р. (2.68)
dt
При такой форме записи уравнения движения силами сопротивления
воздуха и тяжести пренебрегают, учитывая их лишь при более строгих рас-
четах.
«Стендовая» тяга, развиваемая двигателем, — это равнодействующая
сил давления воздуха и истекающих газов, приложенная к неподвижной
ракете, которая находится в невозмущенной среде (на стенде). Ее вычисля-
ют по формуле
P = WomG№K + Sc(pc-pa), (2.69)
где 5С- площадь выходного сечения сопла; рс- давление газов в этом сече-
нии. Преобразуем (2.69):
= Ссе1Л, (2.70)
где We - эффективная скорость истечения. Обычно атмосферным давлением
пренебрегают, учитывая его малость по сравнению с рс; второе слагаемое в
скобках составляет от 10 до 15 % первого, соответственно эффективная ско-
рость практически равна относительной. Из (2.70) видно, что тяга возрастает с
уменьшением давления окружающей среды и максимальна в безвоздушном
пространстве.
68
$с(Рс-Ра)
Р = G
сек
W
отн
GceK
Если отнести тягу к секундному расходу, то получим удельную тягу, или
удельный (единичный) импульс:
z Р ^GnKWe_We
УД 2еек G№Kg g ‘
У современных ракетных двигателей удельная тяга составляет от 200 до 300 с,
т.е. эффективная скорость истечения - соответственно от 2000 до 3000 м/с.
Переменность массы учитывают, вводя q0 - начальную (стартовую) мас-
су, qT- массу топлива и qn — пассивную массу. Очевидно, что q0= qT+ qn. На
активном участке траектории dq/dt<0 , т.е.
откуда
о
В конце активного участка (обозначим его длительность Та ) будем иметь
К
^4o~\G^dt.
о
В общем случае С7сек - величина переменная, однако ее часто считают по-
стоянной, имеющей среднее значение. Поэтому
4^ = Qo~G^t^qo ,
к .
(2-71)
где ЦК = qTlqo-
Подставив (2.70) и (2.71) в упрощенное уравнение движения (2.68), полу-
чим закон перегрузки на активном участке траектории:
1 dV Р GWKWe
. t
gq0 —
&(/) =---------—’
g dt gg(t)
gr.fl-A.y
(2.72)
с начальным значением
ёТл
Соответственно,
*0)
^нач
, t
/-Цк-----
• к гр
1 а
t
т.
нач
69
Последнее приближенное соотношение записано с учетом относительной
малости параметра цк. Таким образом, расчетный закон перегрузки оказывает-
ся близким к линейному, превышение над уровнем кнач в конце активного уча-
стка невелико, поскольку относительная конечная масса цк для одноступенча-
тых ракет заключена в диапазоне от 0,15 до 0,35 [23]. Используя (2.72),
получим выражение для скорости PC в конце активного участка:
Реальные законы перегрузки, естественно, будут отличаться от расчетно-
го закона (рисунок 2.21) [24].. Рабочий режим составляет большую часть ак-
тивного участка и характеризуется примерным постоянством давления в ра-
кетной камере. С практической точки зрения начальный участок, соответст-
вующий движению PC по направляющим, можно не учитывать и считать, в
силу малости приращения перегрузки в пределах активного участка траекто-
рии, что ее закон является прямоугольным. Такое допущение упрощает прак-
тические расчеты, связанные с исследованием взведения узлов взрывателя.
Рисунок 2.21—Характерная кривая давления порохового ракетного двигателя:
т„ — время набора рабочего давления; Tj — полное время переходного процесса
(выход на рабочий режим); Т2~ время догорания и свободного истечения
газов из двигателя
Для пороховых PC характерна сильная зависимость устойчивости горе-
ния, а также максимума давления и длительности горения заряда от его на-
чальной температуры, влияющей на скорость горения пороха. Поэтому и силы
инерции, действующие на детали взрывателя, могут значительно изменяться.
Существуют следующие эмпирические зависимости [12]:
^тахр) " j - /5°) ’ к('°)” k(+15°)L М Лг
Приближенно считают, что изменение температуры заряда на 1° приво-
дит к изменению максимального давления пороховых газов на 1%, т.е. прини-
70
мают =0,01 . Отсюда видно, что при повышенной температуре давление
возрастает, а время горения уменьшается; при пониженной температуре - на-
оборот, но площадь под кривой давления, характеризующая конечный им-
пульс пороха, остается примерно постоянной.
Вращение ТРС обеспечивается с помощью косо поставленных сопел,
причем зависимость угловой скорости со от скорости снаряда в поступа-
тельном движении V близка к линейной. Следует отметить, что частота
вращения ТРС может быть соизмеримой с частотой вращения артилле-
рийского снаряда, что порождает достаточно мощную центробежную силу
инерции. Однако из-за большой длительности активного участка каса-
тельная сила инерции оказывается пренебрежимо малой. Например, для
ТРС типа М-14-0Ф максимальная касательная сила инерции почти в 1000
раз меньше центробежной.
В таблице 2.8 приведены характеристики пороховых PC периода Ве-
ликой Отечественной войны, а в таблице 2.9 - характеристики некоторых
ТРС (из этой таблицы видно, что температура слабо влияет на число оборо-
тов ТРС в конце активного участка траектории. Особенностью ТРС являет-
ся то, что обычно наблюдается два максимума перегрузки, причем повтор-
ное возрастание ее обусловлено увеличением давления на частицы топлива
под действием центробежной силы.
Таблица 2.8 - Характеристики реактивных снарядов
Характеристика Снаряд
М-8 М-13 М-31
Калибр, мм 82 132 300
Длительность активного участка, с 0,5 0,7 0,9
Средняя тяга, кН 4,5 20,0 25,0
Средняя перегрузка 56 47 27
Скорость схода, м/с 50 70 35
Максимальная скорость, м/с 315 355 255
Таблица 2.9 - Характеристики ТРС
Снаряд Is- лтал Та, с Мт-, об/МИН-
+50°С -40°С +50°С -40°С +50"С -40°С
М-14-ОФ 99 53 0,46 0,81 21300 21200
М-24-Ф 60 26 0,53 1,1 6830 6430
М-24-ФУД 52 25 1,0 1,8 8310 7710
С-1 160 110 0,66 1,0 11100 10400
71
2.4 Взаимодействие боеприпаса с преградами
При исследовании функционирования КДЦ взрывателей необходимо ко-
личественно описывать силы инерции, порождаемые взаимодействием бое-
припаса с преградами различного типа.
Различают следующие виды взаимодействия боеприпаса с преградами
[25]: мгновенно-контактное (взрыв боевого заряда происходит в результате
срабатывания КДЦ мгновенного действия, а энергия взрыва расходуется на
разрушение объектов на поверхности преграды) и ударно-проникающее (удар
боеприпаса о преграду и внедрение в нее на заданную глубину (взрыв боевого
заряда происходит в результате срабатывания инерционного КДЦ). Движение
боеприпаса в преграде, на которое не влияют ее размеры, называют проника-
нием, а движение, связанное с разрушением тыльных слоев преграды и выхо-
дом боеприпаса, - пробиванием. Особым случаем является кумулятивное дей-
ствие боеприпаса.
Если рассмотреть взаимодействие головной части боеприпаса с прегра-
дой, можно получить параметры входного воздействия и затем изучить про-
хождение упругой импульсной волны напряжения до места размещения сен-
сора. Формирование исполнительного сигнала происходит в несколько эта-
пов [26]:
1) динамическое взаимодействие головной части БП с целью и возникно-
вение волн механического напряжения, причем наиболее энергоемки продоль-
ные волны;
2) распространение волн по корпусу и элементам конструкции БП;
3) прохождение волн через чувствительный элемент КДЦ и преобразова-
ние этого воздействия в выходной (механический или электрический) сигнал
датчика.
Процесс проникания боеприпаса в сплошные среды разбивают на три ос-
новных этапа [27].
1. Внедрение боеприпаса на глубину, равную длине головной части L.
Этот этап характеризуется изменением площади контакта со средой, возраста-
нием силы сопротивления до максимума, падение скорости боеприпаса отно-
сительно невелико. С точки зрения расчета КДЦ этот этап имеет решающее
значение, потому что срабатывание КДЦ должно происходить именно в его
пределах.
2. Площадь контакта боеприпаса со средой остается практически посто-
янной, однако скорость все время уменьшается, поэтому сила сопротивления
преграды также непрерывно снижается, за боеприпасом образуется канал (ка-
верна), который в средах малой прочности схлопывается. В ряде случаев
ограничиваются рассмотрением стационарного движения боеприпаса во время
второго этапа, пренебрегая начальным участком.
72
3. В случае преград конечной толщины, если скорость боеприпаса доста-
точно велика, существует и третий этап - сквозное пробивание.
Получению достоверных сведений о динамике взаимодействия боеприпаса с
преградой препятствует исключительная трудность непосредственного (прямого)
измерения параметров этого сложного процесса и адекватного теоретического его
описания. Поэтому на практике широко применяют эмпирический подход, позво-
ляющий достаточно быстро оценить конечные параметры ударного процесса. При
этом используют соотношения, связывающие характеристики боеприпаса (массу
q и калибр а), физико-механические свойства среды и скорость встречи Vc. В
фундаментальной работе А.Я. Сагомоняна [28] рассмотрены теоретические ас-
пекты процесса внедрения твердых тел в жидкую среду и грунты. Известны спе-
циализированные прикладные программы, позволяющие проследить развитие
этого процесса как пространственного [29, 30].
Снаряд в момент встречи с преградой обладает кинетической энергией
Д = Я V/2 • Обычно считают, что вся энергия расходуется исключительно на
преодоление сопротивления преграды. Это одна из теоретических предпосы-
лок при установлении закона сопротивления сплошных преград, причем дан-
ное положение тем ближе к истине, чем податливее преграда, прочнее снаряд
и меньше скорость встречи.
Рассмотрим два способа приближенного представления силовой характе-
ристики преграды. При этом удается выявить параметры первого этапа вне-
дрения боеприпаса (максимальный уровень силы сопротивления и перегрузки
и длительность переднего фронта). В дальнейшем ограничимся случаем встре-
чи БП с преградой типа грунта.
При одномерной постановке задачи
P = P(X,V\ (2.73)
где Р- сила сопротивления преграды; Хи V- перемещение и скорость бое-
припаса соответственно.
Для грунтов траекторию в среде можно считать прямолинейной, если уг-
лы встречи от нормали заключены в диапазоне от 20 до 30°. Широко известен
трехчленный закон Г.И. Покровского [24, 27]:
P = 'ks(aV2 +ЬУ + с), (2.74)
где X - коэффициент формы головной части боеприпаса; s -площадь миделе-
вого сечения; а, b ,с~ эмпирические коэффициенты, зависящие от динамиче-
ских, вязких и прочностных свойств преграды, соответственно. При таком
описании начальный этап не учитывается: сила сопротивления максимальна в
начальный момент удара, т.е. Рт = P(V^\ при последующем движении бое-
припаса скорость и, соответственно, сила сопротивления уменьшаются и при
проникании боеприпаса на полную глубину /п обращаются в 0. При прямоли-
73
нейной траектории боеприпаса в преграде (рисунок 2.22) глубина проникания
h = ZncosG0, где 0О - угол встречи от нормали; при отсчете угла встречи отно-
сительно поверхности преграды его обозначают Gc.
Рисунок 2.22 - Схема проникания снаряда в преграду
Таким образом, уравнение движения боеприпаса в процессе взаимодей-
ствия его с преградой можно записать в виде
(2.75)
При расчете КДЦ удобно оперировать перегрузкой
/ . 1 dv
n(f) = - —
g dt
Интегрируя уравнение (2.75), имеем
gq
—= ГС
dt
T^pdx
О
и, приняв V - 0 , получаем важное соотношение
А.
Ee = \PdX,
О
(2.76)
физический смысл которого очевиден: энергия боеприпаса затрачивается на
совершение работы, связанной с преодолением сопротивления среды.
Наиболее известные эмпирические формулы (относящиеся ко второму
этапу внедрения) могут быть выведены из формулы (2.74), если в ней удержи-
74
вать те или иные члены. Значения параметров, входящих в эти формулы, мож-
но найти, например, в [3, 6, 24, 27]. Эмпирические формулы обычно исполь-
зуют для определения /п. Эти формулы сведены в таблице 2.10. Известна так-
же формула Жакоб-де-Марра:
j0,75i 0,7
V =к d h
0,5
Ч
Это минимальная скорость встречи, необходимая для пробития брони
толщиной h при ударе по нормали к поверхности; кп - коэффициент, характе-
ризующий прочностные свойства брони.
Таблица 2.10 —Эмпирические формулы для определения !п
Название формулы Выражение для 1„ Примечание
Березанская d2 klf- коэффициент свойств прегра- ды; Г 1,0 при L < l,5d n[l,5i\puL<2,5d
Забудского- Маиевского 2sa с j
Вуича т^орт - гДе Л, = q/s ; е 1 7 (Т 2#] J т— поправочный коэффициент для трех классов преград: грунт, клад- ка, дерево; корректировка парамет- ров: а = ajnr, с - cjm
Петри d2 f(Vc ) - функция скорости удара (от 40 до 420 м/с)
Аппроксимация силовой характеристики преграды. Возможность вы-
явления параметров переднего фронта на основе использования /п можно обос-
новать следующим образом. Значения /п рассчитывают по эмпирическим фор-
мулам, в которых фигурируют параметры, найденные в результате обработки
экспериментальных данных и, следовательно, интегрально учитывающие весь
ход протекания ударного процесса при взаимодействии боеприпаса с преградой,
в том числе (что особенно важно) и первый этап внедрения. Иначе говоря, пер-
вый этап как бы «зашифрован» в величине /п, и эту информацию необходимо
тем или иным способом извлечь [31].
Предположим сначала, что сила сопротивления преграды является функ-
цией только перемещения снаряда (при известных законах движения БП при
внедрении в преграду эту взаимосвязь можно выявить) и может быть описана
кусочно-линейной зависимостью:
75
(2.77)
Эта зависимость отображает указанные опытные факты. Величина Рм
априорно неизвестна, но может быть найдена с помощью энергетического
соотношения (2.76), из которого следует, что кинетическая энергия удара рав-
на площади под силовой характеристикой, т.е.
mZi — 77 ®4naxZi ’
2 2
откуда
<70 Р 0
= ‘ с п — т = с
2> "шах 1 *
qg gi
(2.78)
Аналогичный результат получен в работе [24], однако авторы, используя
энергетическое соотношение (2.76), не фиксируют положение максимума силы
сопротивления до максимума,, принимая (в наших обозначениях)
р=рт(/-ж),
т.е. сила сопротивления максимальна в момент встречи боеприпаса с прегра-
дой, как это и следует из формулы (2.74).
Запишем для первого этапа уравнение (2.75), учитывая (2.77):
Л2 +^°х °’
где
о» = = V,/^
. Решение этого уравнения имеет вид
X- —s-sin= JLL sinCLf; V= VcosfiLf.
U V H C U
Ь20
Принимая X = L , найдем длительность переднего фронта г :
В этой формуле т0 = L]VC- время внедрения боеприпаса на длину го-
ловной части, при свободном движении. Скорость боеприпаса в конце первого
этапа
с
4
76
Наконец, находим закон перегрузки в пределах переднего фронта:
Ж) = X') = ~7=7Sin По'= "max = "max •
qg gjHl V L smQor
Второй подход основан на предположении, что в описании силовой ха-
рактеристики влияние элементов движения боеприпаса в (2.73) может быть
учтено раздельно. Для этого запишем данную зависимость в виде [31]
Р = Х5ф(У)^(г), (2.79)
где X = X/L - относительное перемещение боеприпаса на начальном этапе
(0< JT<1,O). Функция характеризует относительное изменение пло-
щади сечения боеприпаса при возрастании силы сопротивления до максимума
во время данного этапа, причем 0 < 1,0, При Х> 1 будем иметь
Р = Xsy(r),
т.е. зависимость, отображающую стационарный процесс внедрения во время
второго этапа.
Введем безразмерные скорость боеприпаса V = И/Ис и текущее время
t ~ t/T . Величину Топределим из условия
у = у . у =
с dt Т dt 9
приняв Т = L/Vc - т() . Тогда уравнение движения боеприпаса можно записать
в следующем виде
dV -dV XsL (-х (1Л
<2'80>
Рассмотрим Березанскую формулу, которая выводится из (2.74) при
учете только вязкой составляющей, т.е. принимаем
^(v) = bv = bvcv.
Нетрудно видеть, что
XsL
Таким образом,
77
Будем иметь следующие зависимости:
dt
п О
п
/
где - скорость в конце переднего фронта закона пе-
о
регрузки. Видно, что полная глубина проникания (при V = 0 )
Х„ = !.+ \-\^X}dX L.
О
(2.81)
превышает эмпирическую на некоторую долю длины головной части. Зависи-
мость может быть вычислена из соотношений
dX
t =
" /-у |ф(-4й-
о
_ dX
Длительность переднего фронта
т J
о ,
1 о
Если, например, считать, что головная часть коническая, то (jf)2,
тогда
у =^-
dt
— X <1
31.
/„I з)
Зависимость i(x) (в пределах переднего фронта):
78
/, Jl + aX + (aX)2
-In-------=——
3 1-aX
аХ^З
2 + aX
где a = 3yjL/(3lj .
Наконец,
Например, при ln - 3L т = 1,24.
Результаты данного раздела использованы при расчете контактного
датчика цели кассетного боевого элемента (см. гл. 7).
2.5 Вероятностные модели динамических воздействий
Наиболее строгой математической моделью реального динамического
воздействия в условиях эксплуатации боеприпасов явилась бы модель в виде
случайного процесса. Однако реализации такого подхода препятствует отсут-
ствие представительного объема исходных статистических данных, что объяс-
няется вполне очевидными трудностями их получения, поскольку необходимо
проведение прямых измерений в полигонных условиях. Такие испытания тре-
буют больших материальных расходов и разработки специальных измеритель-
но-регистрирующих средств, способных надежно функционировать при ин-
тенсивных внешних воздействиях. Реальные воздействия следует рассматри-
вать как нестационарные случайные процессы, однако общий математический
аппарат исследования таких процессов пока отсутствует. Поэтому излагаемый
ниже материал следует рассматривать лишь как основу теоретически возмож-
ного подхода к применению вероятностного аппарата при описании реальных
динамических воздействий.
Современные методы статистического моделирования основаны на при-
менении ЭВМ и сводятся к реализации следующих этапов [32, 33]:
- генерирование случайных чисел а, равномерно распределенных в ин-
тервале (0,1), с помощью специального «датчика случайных чисел»;
- получение случайных величин £, подчиняющихся более сложным за-
конам распределения /(<£);
- вычисление с помощью величин, характеризующих модель, и стати-
стическая обработка результатов.
При организации статистического моделирования приходится учитывать
ряд факторов. ЭВМ в принципе не может создавать идеальные последовательно-
79
сти случайных чисел, потому что она оперирует только конечным множеством
чисел, поэтому получающиеся последовательности по существу детерминирова-
ны (используются формулы и алгоритмы) и носят название псевдослучайных.
Поэтому важными характеристиками программного генератора и показателями
его качества являются длина периода и длина отрезка апериодичности.
Рассмотрим генерирование случайных величин, подчиняющихся нор-
мальному закону распределения. Воспользуемся приближенным методом,
основанном па «правиле трех сигма»: для нормально распределенной случай-
ной величины все рассеивание (с точностью до долей процента) укладывается
на участке т ± За, где л? - математическое ожидание; ст — среднее квадрати-
ческое отклонение [34].
Предположим, что случайная величина X- нормальная, а ее возможные
значения заключены в интервале Xj < Х< %,. Тогда приближенные значения
математического ожидания и среднего квадратического отклонения можно
оценить по формулам
х. + х? х7 -х.
т = —-----ст = —-----
2 6
Если ввести нормированную случайную величину £> = (х —w)/a, то
возможные значения ЛГможно вычислить с помощью соотношения
х=/и + ^а. (2.82)
Таким образом, задача сводится к генерированию случайных нормально
распределенных чисел £ с математическим ожиданием, равным 0, и единичной
дисперсией. При существовании генератора равномерно распределенных слу-
чайных чисел а алгоритм последующих преобразований определяется форму-
лой [32]
Согласно центральной предельной теореме, случайная величина, вычис-
ляемая по этой формуле, асимптотически нормальна с параметрами (0,1).
Особенно удобным является значение п = 12, поскольку при этом
12
П(/2) = £а/-6- (2.83)
/=/
Обычно считают, что т|^2^ практически нормальна; улучшим качество
моделирования, вводя нелинейную поправку:
20п* ’ J
Таким образом, получаем формулу для вычисления
80
5 = ^“>=n('J,+-^[(nl"))’-inM] (2.84)
Программы вычисления нормальных чисел являются стандартными в ал-
горитмических языках: например, в Турбо Паскале имеется функция
Random(Range: word), которая возвращает вещественное число в диапазоне
(0,1), если аргумент функции опущен (если указан, то число в диапазоне от О
до Range-1).
В заключение кратко рассмотрим вариант использования метода кано-
нических разложений для описания воздействий как нестационарных слу-
чайных процессов. Достоинством метода, разработанного В.С. Пугачевым
[35], является существенное упрощение преобразования воздействия, при-
ложенного к динамической системе, поскольку задача сводится к исследо-
ванию преобразования детерминированных процессов. Основная идея ме-
тода заключается в том, что центрированный случайный процесс представ-
ляют в виде разложения
£(')=^0-^0=Evm(')' (2-85)
где mx(t) - математическое ожидание; vf - случайные коэффициенты с мате-
матическими ожиданиями, равными 0 (т.е. центрированные случайные вели-
чины); <р( (/) - детерминированные функции, называемые координатными.
При таком представлении отражается двойственность свойств случай-
ного процесса: случайная величина при t = ^и детерминированный процесс
(отдельная реализация) при фиксированном значении vz. Корреляционная
функция случайного процесса с учетом (2.86), может быть представ-
лена в виде
(2.86)
где М- оператор вычисления математического ожидания; Д. = — дис-
персия /-го коэффициента; = A/|v,vJ - корреляционный момент /-го и /-го
коэффициентов; — сечения случайного процесса.
Если предположить, что ki} = 0, т.е. коэффициенты разложения (2.85)
некоррелированы между собой (статистически независимы), то вторая сумма в
(2.86) обратится в 0, и тогда
81
{t,, t2 ) = X ('/ )ф. ('2) (2.87)
Данное выражение носит название канонического разложения корреля-
ционной функции. Ему соответствует каноническое разложение процесса,
которое внешне совпадает с (2.85), однако коэффициенты vf должны быть не
только центрированными, но и некоррелированными между собой. Если в
(2.87) принять tx = Д = 7, то получим каноническое разложение дисперсии:
Примером канонического разложения может служить разложение ста-
ционарного случайного процесса, в котором роль координатных функций вы-
полняют гармонические функции sin со; /и cos соД
В.С. Пугачевым показано, что координатные функции должны удовле-
творять условию
7 о
7 г °
=-\а№№,
i а
где а.(/) - некоторые функции, которые должны быть выбраны так, чтобы vi
были некоррелированными; а<7<0 - интервал разложения. Кроме того,
функции и ^ (7) должны удовлетворять условию биортогональности;
0,i*j
Теоретически существует бесконечное множество возможных пар со-
четаний этих функций, однако в конкретной ситуации обычно руково-
дствуются практическими соображениями. Стационарный процесс не имеет
ярко выраженных тенденций развития во времени, и поэтому логичен вы-
бор именно гармонических функций в качестве координатных. Если же
речь идет о процессе нестационарном, то координатные функции должны
быть затухающими во времени и содержать в общем случае знакоперемен-
ные компоненты.
Весьма перспективными представляется использование некоторых спе-
циальных функций. Так, метод канонических разложений оказался эффектив-
ным при исследовании трансформации ударных возмущений в реальных кон-
струкциях [36], причем в качестве координатных были использованы полино-
мы Лагерра [37]:
82
в частности,
L„(x) = l; L, (х) = -х +1; L2(x)-x2 -4х + 2; L3 (х) = -х3 + 9х2 - 18х + 6; L4(x) = х4 - 16х3 + 72х2 — 96х + 24;
Следует отметить, что даже использование неканонического разложения
(2.86) упрощает исследование динамических систем по сравнению с общим
подходом.
83
Глава 3
ТЕОРЕТИЧЕСКИЕ ОСНОВЫ ПРОЕКТИРОВАНИЯ
ИНЕРЦИОННЫХ ПРЕДОХРАНИТЕЛЕЙ
Поскольку дальнейший материал относится главным образом к меха-
ническим системам (МС), дадим основные понятия из теории механизмов и
машин [38].
Механизмом называют систему тел, предназначенную для преобразова-
ния движения одного или нескольких твердых тел в требуемые движения дру-
гих твердых тел. Важно, что устройство, в котором преобразование (транс-
формация) движения отсутствует, механизмом не является. Твердые тела, вхо-
дящие в состав механизма, называются звеньями. Если в составе механизма
имеются жидкие или газообразные тела (звеньями они не считаются), то его
называют, соответственно, гидравлическим или пневматическим. Механизмы
могут быть плоскими и пространственными. В каждом механизме имеется
стойка, т.е. неподвижное звено (оно может быть связано с подвижным основа-
нием), относительно которого перемещаются остальные звенья.
Из подвижных звеньев выделяют входные и выходные звенья. Входным
называют звено, которому сообщается движение, преобразуемое механизмом в
требуемые движения других звеньев. Выходное - это звено, совершающее
движение, для выполнения которого предназначен механизм. Кроме того, в
динамике механизмов существует разделение звеньев на ведущие и ведомые в
зависимости от знака элементарной работы действующих на звено сил.
Соединение двух соприкасающихся звеньев, допускающее их относи-
тельное движение, называется кинематической парой (КП); для того, чтобы
элементы КП находились в постоянном соприкосновении, пара должна быть
замкнута геометрическим или силовым способом. Кинематические пары клас-
сифицируют по различным признакам:
1. Одноподвижные (вращательная, поступательная), двухподвижные (ци-
линдрическая), трехподвижные (сферическая), четырех- и пятиподвижные.
2. Низшие (контакт соприкасающихся звеньев по поверхности) и высшие
(контакт в точке или линии) пары.
Возможны и такие КП, в которых два или несколько движений связаны
друг с другом функционально, т.е. вполне определенной зависимостью; в этом
случае независимым является только одно из возможных движений (например,
винтовая пара). Проф. Г.С. Батуев, занимавшийся кинематическим анализом
механизмов взрывателей, предложил называть такие пары связанными. Доба-
вим, что целесообразно ввести и количественную характеристику подобной
пары, а именно функцию (или коэффициент) связи.
84
При работе механизма его звенья перемещаются и, как сказано выше, в каж-
дый момент времени занимают определенное положение относительно стойки.
Обобщенными координатами механизма называют независимые параметры (угло-
вые и линейные), однозначно определяющие положение механизма в пространстве.
Числом степеней свободы механической системы (и механизма) называют число
независимых возможных перемещений системы, т.е. число обобщенных координат.
Свободное твердое тело, как известно, имеет 6 степеней свободы; для звеньев, вхо-
дящих в КП, число степеней свободы меньше вследствие наложенных связей.
Специфической особенностью механизмов взрывателей является то, что они
включаются в работу автоматически, т.е. без непосредственного участия человека
- их взведение и последующее функционирование у цели происходит в результа-
те воздействия внешних сил, возникающих в условиях боевого применения взры-
вателя. Кроме того, число степеней свободы отдельных звеньев может быть пере-
менным, поскольку зависит от условий, в которых находится взрыватель. Для
обеспечения безопасности в служебном обращении на детали, от которых зависит
взведение при выстреле (пуске), накладываются связи, уменьшающие число сте-
пеней свободы либо до 0, либо до 1 (при выполнении соответствующих условий,
исключающих вероятность преждевременного срабатывания). Конструктивно эти
связи обеспечиваются элементами системы предохранения (пружины, стопоры,
инерционные втулки, поворотные диски и т.п.). Таким образом, взведение взры-
вателя с точки зрения кинематики представляет собой не что иное, как снятие
связей с соответствующих деталей; ясно, что при неполном снятии связей возмо-
жен отказ взрывателя при встрече боеприпаса с целью.
Таким образом, знание сил, возникающих в условиях эксплуатации, и их адек-
ватное количественное описание имеют первостепенное значение при исследовании
поведения механизмов взрывателей. Отметим, что эти силы имеют двоякую природу:
рабочую - при выстреле (пуске) и дестабилизирующую в условиях обращения.
3.1 Элементы системы предохранения
Безопасность взрывателя на различных этапах эксплуатации обеспечивается
элементами системы предохранения (ЭСП), соединенными с деталями, от которых
зависит действие взрывателя, и имеющими различное конструктивное оформление.
Освобождение этих деталей, т.е. взведение, происходит под действием сил инерции
при выстреле; вместе с тем их необходимо надежно удерживать от перемещения (или
ограничивать его в допустимых пределах) в условиях служебного обращения.
Таким образом, ЭСП, неизбежно обладающие некоторой подвижностью,
должны по-разному реагировать на воздействия одинаковой природы (силы
инерции), т.е. система предохранения должна обладать свойствами селектив-
ности (избирательности). Можно сказать, что система предохранения по суще-
ству представляет собой механический фильтр, который должен, с одной сто-
85
роны, наилучшим образом «пропускать» рабочее воздействие при выстреле, а,
с другой - в максимальной степени «подавлять» дестабилизирующее («поме-
ховое») воздействие в обращении. Из этого следует, что при проектировании
рассматриваемых систем вполне возможно применение некоторых методов,
разработанных в радиотехнике, в частности, в теории оптимальной фильтра-
ции. Ясно, что эта задача («фильтрации») разрешима лишь в том случае, если
указанные воздействия чем-либо различаются.
Зависимость силы сопротивления ЭСП R от его осадки X, т.е. 7?(Х), на-
зовем силовой характеристикой (СХ). Обычно предусматривается некоторое
начальное сопротивление
Л. = Л(Х„).
где Хо - начальная осадка (поджатие). Перемещение удерживаемой детали х
обычно отсчитывают от Хо , т.е.
х = X - Хо.
В дальнейшем под силовой характеристикой будем подразумевать глав-
ным образом зависимость /?(х). Коэффициент жесткости, Н/м, или просто
жесткость определяют следующим образом:
dR dR
с - — = —.
dk dx
Различают две основные разновидности ЭСП - упругие (ЭСПУ) и жест-
кие (ЭСПЖ), имеющие как достоинства, так и недостатки.
Особенностью ЭСПЖ (чеки, разрезные кольца, лапчатые предохрани-
тели, звездки и др.) является то, что при нагружении они получают остаточ-
ные (пластические) деформации и поэтому после снятия нагрузки первона-
чальную форму не восстанавливают. Отсюда - невозможность 100 %-ного
контроля характеристик в процессе производства, что неизбежно приводит к
большому их разбросу. Достоинством же является способность развивать
большие силы сопротивления при относительно малых перемещениях удер-
живаемой детали. Сопротивление ЭСПЖ проверяется выборочно: контроли-
руется 0.5... 1 % партии, но не менее чем от 25 до 30 шт.; допускается разброс
сопротивления до ±40% среднего значения. В современных взрывателях
ЭСПЖ применяют сравнительно редко, за исключением случаев, где они
незаменимы. СХ ЭСПЖ определяют экспериментально; в общем виде они не
могут быть описаны аналитически, и поэтому при проектировании исполь-
зуют различные аппроксимации.
На рисунке 3.1 показаны СХ ряда жестких предохранителей взрывателей:
видно, что их формы могут существенно различаться.
86
Я,кН
Рисунок 3.1 - Силовые характеристики жестких предохранителей
(правая ось ординат относится к поз.4и 5)\
/ - Т-6; 2-КТМ-1; 3- АМВ-5; 4- РГМ; 5- РГМ-2
В конструкциях взрывателей встречаются ЭСПУ различного типа; это -
в основном пружины - плоские и витые (цилиндрические и конические),
спиральные и заводные. Достоинством этих элементов является то, что после
снятия нагрузки восстанавливается исходная конфигурация узла, благодаря
чему проще выполнить требование безопасности в обращении, а, кроме того,
возможен полный (100 %-ный) контроль характеристик в процессе произ-
водства.
Теории упругих элементов приборов и машин посвящено много работ,
например [39]. Ограничимся рассмотрением характеристик цилиндрической
витой пружины как наиболее распространенного типа ЭСПУ. Ее СХ достаточ-
но близка к линейной и описывается известной формулой Рело:
R-
Gd4 . Gd4 .
-----Г А —----г К.
64nr3 8nD3
(3.1)
где G— модуль упругости второго рода (модуль сдвига); d- диаметр проволо-
ки; л - число рабочих витков; D = 2г - средний диаметр пружины.
Из (3.1) видно, что жесткость пружины
dR Gd4
С=----~------7 = const. (3.2)
dk 8nD3
В действительности СХ пружины обладает нелинейностью из-за изме-
нения диаметра D и угла подъема винтовой линии при нагружении: при рас-
87
тяжении наблюдается возрастание силы сопротивления по отношению к ли-
нейной зависимости, при растяжении - уменьшение. При практических рас-
четах нелинейностью обычно пренебрегают; ее учитывают в основном при
проектировании прецизионных измерительных приборов. Погрешность
формулы Рело не превышает 5 %. Допуск на сопротивление пружины обыч-
но составляет до ± 20 % среднего.
Из формул (3.1) и (3.2) вытекает следующее соотношение:
R = сХ = с(Х0 4- х) = сХ0 + сх = 7?0 + сх (3.3)
На рабочих чертежах СХ цилиндрической пружины изображают так, как
это показано на рисунке 3.2. Высоту пружины в собранном механизме Но
определяют расчетом соответствующей размерной цепи на максимум-
минимум. Следует отметить, что величина //^считается фиксированной и при-
водится на чертежах без указания допуска. С учетом заданного допуска на Rkh
Нсв, принимая предельные сочетания этих величин, получим варианты СХ,
которые соответствуют «слабой» и «сильной» пружинам. Используя чертеж
пружины, определяем номинальную жесткость:
Я
с-----------,
н - я
иь к
а также ее предельные значения:
г* — (Я )min . г1 _ (Я )тах
min (14 ) _ 14 ’ тах (14 \ —14
\Яв/тах Я св /min “к
Рисунок 3.2 - Силовая характеристика цилиндрической пружины:
//св — высота пружины в свободном состоянии; —высота пружины в собранном
механизме; Нк — контрольная высота; Rк-контрольное сопротивление
88
Проф. Г.С. Батуев предлагал при контроле пружин ориентироваться на
среднее (в пределах пути взведения) сопротивление /^р, которое определяется
в общем случае следующим образом:
7 а
ЛсР=-/Л(^- (3,4)
Подставив сюда СХ пружины (3.3), получим
Яср = *о + = са(у/сж + 0,5),
Z V ^7
где Жсж = ^о/а - относительное начальное поджатие.
(3-5)
Приведенная масса пружины. При расчете динамики приборов и ма-
шин собственной массой пружин часто пренебрегают, учитывая только их
жесткость. Такой подход вполне приемлем, если массы деталей и пружин не-
соизмеримы. Однако масса пружины во взрывателе может вполне оказаться
соизмеримой с массой удерживаемой детали: например, масса КВ как ударни-
ка накольно-воспламенительного механизма (оседающего при выстреле) мо-
жет составлять 0,11 г (53-КВ-006). Поэтому необходимо оценить присоеди-
ненную (участвующую в движении) массу пружины.
Если пружину представить в виде системы, состоящей из массы, равной
массе пружины /ппр, и невесомой упругой опоры жесткостью с, то частота соб-
ственных колебаний такой системы
(3.6)
Винтовая цилиндрическая пружина представляет собой пространствен-
ный кривой брус, т.е. систему с распределенными параметрами. Точное опи-
сание пружины как колебательной системы отсутствует, и поэтому на практи-
ке пользуются приближенными методами расчета. При малых углах подъема
винтовой линии пружину можно заменить эквивалентным прямым стержнем:
его длина принимается равной длине пружины /пр; площадь сечения S и мо-
дуль упругости Е находятся из условия равенства масс и жесткостей (см. ни-
же). При вычислении спектра собственных частот £ систем с распределенными
параметрами обычно используют формулу Релея/
о
«к
(3.7)
89
где /(^) - форма упругой линии (распределение смещений по длине эквива-
лентного стержня); - площадь сечения; ц||01(£) - погонная масса. В на-
шем случае S = const; цпог = тп?Пп?\ функцию /(^ ) выбирают с учетом выпол-
нения соответствующих граничных условий. В рассматриваемой задаче можно
ограничиться учетом только низшего (первого) тона колебаний, для которого,
согласно закону Гука [40]:
где
Л/ — £/лр — 1пр £ — 1пр .
Здесь Р— сжимающая сила; е - относительная деформация; продольная
жесткость стержня (принимаемая равной жесткости исходной пружины):
ES
с = —.
Таким образом, ) = е. Подставив выражения для /(£ ) и f(£) в (3.7), получим
Сравнивая это выражение с (3.6), заметим, что коэффициент приведения
массы пружины по первому тону колебаний эквивалентного стержня равен
1/3. Вклад последующих тонов быстро уменьшается и практически ими можно
пренебречь. Из изложенного следует, что параметры эквивалентного стержня
можно выбрать исходя из условий;
где рм - плотность материала, откуда
^пр Р М ^Пр
или, с учетом (3.6), со0/пр = ам, где аи
звука в материале стержня.
™пр>
<^пр
= у/Е/ры - скорость распространения
90
3.2 Приближенное описание закона перегрузки при выстреле (пуске)
Для дальнейшего потребуются приближенные математические модели,
описывающие законы перегрузок при взведении механизмов взрывателей при
выстреле из артиллерийской системы и при пуске реактивного снаряда.
Выстрел из артиллерийской системы. Выше (см. разд. 2.2) изложен
материал, позволяющий количественно описать процесс выстрела из артилле-
рийской системы в результате решения прямой задачи внутренней баллистики.
Перегрузку определяют из уравнения движения снаряда:
1 dV sp
—Т = > (3.8)
g dt <pqg
откуда видно, что она пропорциональна давлению в канале ствола. Подразумевается
классическая трактовка процесса выстрела, согласно которой движение снаряда на-
чинается при давлении, равном давлению форсирования. Соответствующий закон
давления показан на рисунке 3.3. Для упрощения теоретических выкладок линеари-
зуем закон перегрузки, для чего через точки pQ и рт проводим прямую линию до
пересечения с осью времени, так что закон давления будет иметь вид
т
причем условная длительность переднего фронта (находится из подобия соот-
ветствующих треугольников)
т =-----Д
где
Соответственно,
^>qg т
^тах
Т
^тах
= SP™
<s>qg
(3-9)
(3.10)
(З.И)
максимальная перегрузка.
Скорость снаряда в момент времени / = т при законе перегрузки (3.10)
будет
= ^g£maxT.
о
Эта скорость, очевидно, несколько больше той, которая соответствует исход-
ной кривой давления, но можно считать, что таким образом (хотя и весьма прибли-
женно) учитывается процесс врезания ведущего пояска в нарезы.
91
Рисунок 3.3 - Приближенное представление закона давления
в пределах переднего фронта
Закон перегрузки на активном участке траектории PC. В разд. 2.3 отмеча-
лось, что данный закон для упрощения расчетов, связанных с исследованием взведе-
ния узлов взрывателя, вполне допустимо описывать как прямоугольный:
k(t) = кт = const, 0 < t < Та, (3,12)
где Та - длительность активного участка траектории.
При таком представлении, очевидно, не учитывается передний фронт
(участок нарастания, который обычно завершается в пределах пусковой уста-
новки), что приводит к некоторому занижению расчетного времени взведения
механизмов взрывателя. В то же время, следует учесть отсутствие достовер-
ных сведений о законах перегрузки и других факторах. Поэтому модель вида
(3.12) представляется вполне обоснованной.
3.3 Коэффициенты взводимости
Выше было показано, что с помощью методов внутренней баллистики
можно вычислять элементы движения боеприпаса в канале ствола и, следова-
тельно, количественно оценивать возникающие при выстреле силы инерции.
Обратим теперь особое внимание на их максимальные значения, учитывая, что
при проектировании механизмов и узлов взрывателя вводят запасы, находя-
92
щиеся в тех или иных соотношениях именно с максимальными уровнями сил
инерции.
Коэффициент линейной взводимости. Основная взводящая сила инер-
ции, которая обусловлена поступательным движением снаряда (см. разд.2):
5 = т----=
dt
где, согласно (3.8), закон перегрузки
g dt <pqg
Таким образом, сила инерции S (как и перегрузка) пропорциональна давле-
нию в канале ствола. Важное значение при проектировании имеет отношение
которое называют коэффициентом линейной взводимости; это - максималь-
ная сила инерции от поступательного движения снаряда, действующая на
деталь (материальную точку) единичной силы тяжести; одновременно это
максимальная перегрузка при выстреле. Из (3.13) видно, что кх можно
вычислить независимо для каждой артиллерийской системы по ее известным
характеристикам. Наихудшие, с точки зрения взводимости, условия, очевид-
но, соответствуют минимально возможному значению кх: для унитарного
заряжания - это стрельба при пониженной температуре, для раздельно-
гильзового или картузного - минимальный заряд; в случае миномета -
стрельба на основном заряде.
Поскольку s—nsd2, q—C^d3 из (3.13) получим
. nd'pm пср„
К _ s /гл __ s" m
Отсюда видно, что коэффициент линейной взводимости обратно пропор-
ционален калибру системы. При известном значении kj можно найти макси-
мальную силу инерции:
5,пах =
Коэффициент центробежной взводимости. Центробежная сила инер-
ции пропорциональна скорости снаряда в квадрате:
С - mh(&2 = mh
'2nV'
Максимальное значение этой силы
93
Gnax = ’
Для того чтобы исключить влияние конструктивных параметров меха-
низма взрывателя, Стах делят на mghy в результате чего получают коэффици-
ент центробежной взводимости:
С со2
(3 14)
wg/? g
В отличие от к}, это величина размерная (1/мм, 1/см); к2 — максималь-
ная центробежная сила инерции, действующая на деталь единичной силы тя-
жести, которая удалена от оси вращения на единичное расстояние. При из-
вестном значении к2 можно найти
Стах = •
Коэффициенты запаса по взводимости устанавливают некоторые уровни
соответствующих сил инерции, при которых должно гарантированно происхо-
дить взведение; стандартное значение коэффициента запаса для осевой силы
инерции 2/3, для центробежной - 0.75... 0.80.
Следует обратить внимание на то, что максимумы указанных сил инер-
ции достигаются в разные моменты времени: Smax - в момент максимума дав-
ления (в конце переднего фронта), а Стах - у дульного среза. По мере движения
снаряда по каналу ствола соотношение между этими силами инерции изменя-
ется в пользу С. Временной (фазовый) сдвиг между максимумами сил инерции
используют, обеспечивая последовательное взведение механизмов, содержа-
щих две ступени, одна из которых взводится под действием осевой силы инер-
ции, а вторая - под действием центробежной силы.
Значения коэффициентов взводимости, а также и другие характеристики
ряда типичных артиллерийских систем можно найти в приложении 2.
Соотношение между осевой и касательной силами инерции. При на-
резке постоянной крутизны (см. разд. 2.2.1) касательная сила инерции опреде-
ляется соотношением
Т = mh ~ = mh
dt
2п \dV
Г|н^J dt
2nh
Vl
Видно, что эта сила пропорциональна осевой силе инерции и, следова-
тельно, давлению в канале ствола, а отношение этих сил
Т 2nh
S x\Hd'
Теоретически максимально возможное значение данного отношения со-
ответствует 2h = d, т.е.
94
При р„ = 5...9° (T/S)max = 0,09...0,16, т.е. сила Тотносительно мала. По-
этому она обычно играет роль паразитной силы, способствующей возникнове-
нию силы трения, например в гнездах центробежных стопоров. Вместе с тем,
существует идея об использовании тангенциальной силы как взводящей. Со-
ответствующие механизмы, если их удастся создать, будут обладать повышен-
ной степенью безопасности в служебном обращении, поскольку возникнове-
ние касательной силы инерции, соизмеримой по уровню с действующей при
выстреле, практически невозможно. Вопросы проектирования подобных меха-
низмов, названных «тангенциальными» (проф. В.В. Руднев называл устройст-
во подобного типа «ступенью Т»), рассматриваются в гл. 6.
Коэффициент набегания. Выше (см. разд. 2.3.1) было выведено выра-
жение для ускорения силы сопротивления воздуха:
J = - = cH(Y)F(yY
q
Рассмотрим движение детали массой m внутри гнезда, соосного со сна-
рядом, не учитывая для простоты силу сопротивления со стороны контрпредо-
хранителя. Если ось снаряда составляет угол 0 с горизонтом и совпадает с век-
тором абсолютной скорости, т.е. лежит на касательной к траектории, то урав-
нение движения детали в проекциях на касательную будет иметь вид
dv dV . _
m — = -m--------mgsmj,
dt dt
т.е.
^ = ~^--gsin0. (3.15)
dt dt
Для определения ускорения снаряда dV/dt составим уравнение его дви-
жения (также в проекциях на касательную к траектории):
dV „
q------ —R - <?gsin0,
dt
или
dV , о
— = -J-gs,„e.
(3.16)
Подставив (3.16) в (3.15), получим выражение для ускорения в относи-
тельном движении детали:
dv _ -
dt
95
(3.17)
которое равно ускорению силы сопротивления воздуха и направлено в противопо-
ложную сторону, т.е. в сторону движения снаряда. Соответствующая сила инерции:
5 — mJ,
и называется силой набегания. С помощью отношения максимального зна-
чения этой силы к силе тяжести детали получаем еще один коэффициент
взводимости:
С Т п
к ° max 17 max *vmax
3 mg g qg '
Отсюда видно, что k3 характеризует максимальную силу сопротивле-
ния воздуха, которая имеет место при дульной скорости снаряда, т.е. в пе-
риоде последействия; он называется коэффициентом силы набегания или
просто коэффициентом набегания. Подобно ускорению силы сопротивле-
ния воздуха, коэффициент к3 изменяется обратно пропорционально калиб-
ру. На рисунке 3.4 показаны траектория и закон изменения Jig для 152-мм
снаряда.
Рисунок 3.4 — Траектория (а) и закон изменения ускорения силы
сопротивления воздуха (б) для 152-мм артиллерийского снаряда
(система «Мета»: q -43,6 кг; 1^ = 835; 0О=45°)
Коэффициент силы давления на выступающие детали. Коэффициент
взводимости выступающих подвижных частей взрывателя к4 определяют как
к -jAPi-p*'}
4 mg
96
где Sj - площадь поверхности выступающей детали; т— ее масса; ръ - удельное
давление на головную часть взрывателя (определяется по формуле Релея - см.
разд. 2.3.2); рг - атмосферное давление в данной точке траектории.
Данный фактор используют при разработке взрывателей, содержащих
механизмы (главным образом, самоликвидации), которые срабатывают в ре-
зультате падения поступательной скорости и, следовательно, силы давления
воздуха. Примеры таких конструкций можно найти в книге М.Ф. Васильева
[2], где отмечается, что создание механизмов дальнего взведения, основанных
на этом принципе, затруднено из-за сильного влияния допусков на размеры
деталей и разброса характеристик пружин.
3.4 Кинематический анализ и оптимизация механических систем взрывателей
Выше, при рассмотрении основных технических требований, уже отмечались
важнейшие из них - обеспечение безопасности и надежной взводимости при вы-
стреле. Обоснование путей одновременного удовлетворения этих взаимно противо-
речивых требований - по существу, центральная проблема теории проектирования
механических систем взрывателей. Соответствующие расчеты являются обязатель-
ными на этапах эскизного и, особенно, технического проектировании взрывателя.
Отмечалось также, что научные основы подобных расчетов нельзя считать оконча-
тельно разработанными. Созданию строгой теории препятствуют такие факторы,
как большое разнообразие конструкций механизмов взрывателей и принципов их
действия, а также отсутствие достоверных сведений об условиях эксплуатации
(служебное обращение и боевое применение).
Наиболее актуальной для теории проектирования представляется задача соз-
дания обобщенного подхода к расчету механизмов, в минимальной степени зави-
сящего от конкретной конструктивной реализации. Вполне очевидно, что при этом
необходима соответствующая классификация механизмов взрывателей с разбиени-
ем их по максимально укрупненным признакам. Классификация может
основываться на функциональных или на кинематических признаках механизмов.
Первый из принципов обычно используют в существующих работах, например [2,
3, 6]. В них последовательно рассматривают механизмы различного назначения с
изложением методов их расчета. Однако при таком подходе нет обобщенности,
отсутствует типовая математическая модель механизмов.
Обобщенная модель динамической системы показана на рисунке 3.5, где W
обозначен оператор, который функционально связывает внешнее воздействие У(^)
и реакцию и зависит от структуры системы. Применительно к механическим
системам взрывателей У(/) - взводящая сила инерции, a - закон движения
исполнительного элемента (взводящейся детали), т.е. перемещения и (или) скоро-
97
сти. На эти элементы движения накладываются соответствующие ограничения:
например, ударник накольно-воспламенительного механизма, переместившись на
заданное значение рабочего хода (пути взведения), должен приобрести скорость
(т.е. кинетическую энергию) не менее заданной (обеспечивающей 100 %-ное вос-
пламенение капсюля). Таким образом, возможна трактовка узлов и механизмов
взрывателя как пороговых устройств с привлечением соответствующих, в том числе
вероятностных, методов проверки выполнения условия X > X лор .
\z(t)
Y(t) ' x(t)
Рисунок 3.5 - Обобщенная модель динамической системы
Пунктиром на рис. 3.5 обозначены «помеховые» воздействия Z(f), на-
пример в условиях обращения (условно совмещенные во времени с F(z)). При
синтезе системы У(/)и X(t) те или иные характеристики считаются заданны-
ми, и задача сводится к выбору такой структуры МС, которая обеспечит за-
данное преобразование в , т.е. к выбору оператора И7 с учетом на-
ложенных ограничений и «помехи». Этот оператор должен быть наилучЩим
из возможных вариантов, т.е. оптимальным согласно тому или иному количе-
ственному критерию [41]. Отсюда видна еще одна возможность обобщенного
подхода к проектированию: на основе рассмотрения системы предохранения и
ее элементов как (в общем случае нелинейных) механических «фильтров».То
есть в принципе существует возможность использования методов теории ав-
томатического управления [42] и оптимальных систем изоляции от внешних
воздействий [43].
Процедура оптимизации является по существу двухступенчатой, поскольку
сначала выбирают структуру (И), а затем оптимальное соотношение между пара-
метрами системы в рамках этой структуры (параметрическая оптимизация).
Заслуживает определенного внимания попытка создания обобщенного
подхода, изложенного в работах [Fan Ningjun, Ma Baohua. Establishment of the
Basic Theory of Fuze Safety Systems //J. of Beijing Institute of Technology. - 1993.
-V. 2.-N. 2.-Р.153-160].
Взведение в них трактуется как динамический процесс, во время которо-
го происходит постепенное изменение состояния системы предохранения,
98
количественно характеризуемое с помощью «функции взведения» Л(/), при-
чем 0< А< 1. Вводится понятие критического состояния СП (в момент вре-
мени /с), когда прерывание процесса взведения и его продолжение равноверо-
ятны; соответственно, командная («детонационная») функция:
О, t < /с
i-4.)
1, / > /с
количественно характеризует необратимый процесс взведения при t > tc. Не-
достатком данного подхода является его абстрактность (универсальность);
практическому применению препятствует то, что на этапе проектирования
невозможно оценить относительную степень значимости отдельных элементов
СП. По этой причине крайне трудно обосновать целевую функцию при опти-
мизации механических систем взрывателей (см. разд. 4.9), а также и запасы по
основным показателям.
3.4.1 Обобщенный подход к анализу и синтезу механизмов
Одним из возможных путей придания черт обобщенности методам рас-
чета механизмов взрывателей является подход, основанный на их кинематиче-
ских признаках, естественно, с учетом специфических требований, предъяв-
ляемых в конкретных ситуациях. Г.С. Батуев, выдвигая эту идею, предлагал
сравнить два механизма, имеющих различное функциональное назначение, но
идентичную кинематическую структуру: центробежный и бокобойный
механизмы (рисунок 3.6). Это - трехзвенные механизмы с поступательным
движением звеньев, образующих «связанную» кинематическую пару с жест-
кой связью движений звеньев углом а. Стойкой обоих механизмов является
корпус взрывателя; кроме того, имеются ведущие (бокобойная шайба, центро-
бежный движок) и ведомые (ударник, центробежный стопор) звенья. Ведущее
(входное) звено, перемещаясь под действием взводящей силы инерции (возни-
кающей в рассматриваемом примере при встрече боеприпаса с преградой под
малым углом к ее поверхности или при выстреле), обусловливает требуемое
движение ведомого звена; характер функциональной связи движений опреде-
ляется углом давления а.
99
Рисунок 3.6 - Кинематически подобные механизмы:
а- центробежный движок; б- бокобойный механизм
Классификация механических систем. По характеру движения МС
можно разделить на две большие группы:
- аналоговые, т.е. механические системы с непрерывным движением
(аналоговые механические системы - АМС) в пределах пути взведения;
- дискретные - механические системы с прерывистым движением (дис-
кретные механические системы - ДМС).
По характеру преобразования (трансформации) движения ведущего звена
в движение ведомого звена:
- поступательное движение —> поступательное;
- поступательное движение —> вращательное;
- вращательное движение поступательное;
- вращательное движение —> вращательное.
Наконец, по числу ступеней (фаз) взведения: однофазные; двухфазные;
трехфазные.
Однофазные (иногда их называют однотактными) механизмы взводятся
под действием одного силового фактора, например только силы инерции 5или
пружины. В двухфазных (двухтактных) механизмах реализуется, как правило,
последовательное воздействие двух взводящих факторов: например, 5и С; 5и
упругая сила и т.п. Трехфазные механизмы встречаются редко.
3.4.2 Коэффициент полезного действия
Силы, приложенные к звеньям механизма, разделяют на:
- движущие (элементарной работе, совершаемой ими, приписывают по-
ложительный знак);
100
- силы сопротивления, которые, в свою очередь, подразделяют на силы
полезного сопротивления (на преодоление которого и предназначен механизм)
и силы вредного сопротивления.
Силами полезного сопротивления в механизмах взрывателей являются
силы инерции ведомого звена в относительном движении, поскольку именно
эти силы свидетельствуют о процессе преобразования движения ведущего
звена в движение звена ведомого.
При исследовании динамики механизмов со сложной кинематической струк-
турой одно из звеньев выбирают в качестве звена приведения . В наиболее общем
виде уравнение движения такого звена можно записать следующим образом:
d2z
где ап -приведенная мера инерции (масса или момент инерции); z- обобщенная
координата (угловое или линейное перемещение); Q" - приведенная обобщенная
движущая сила; Q" - приведенная обобщенная сила сопротивления.
Приведенные обобщенные силы могут иметь смысл либо сил как тако-
вых, либо моментов, в зависимости от характера движения звена. Уравнением
вида (3.18) может описываться движение как ведущего, так и ведомого звена; в
дальнейшем они будут отмечаться индексами «/» и «2», соответственно.
Функционирование реального механизма сопровождается потерями, ко-
торые количественно характеризуются работой сил вредного сопротивления
(главным образом силы трения). Относительная работа движущих сил, исполь-
зуемых по прямому назначению (т.е. на преодоление полезных сил сопротив-
ления ведомым звеном), можно охарактеризовать мгновенным коэффициентом
полезного действия (КПД)
П - ^пс2 - ^пс2^2 - Snc2V2^ _ 6nc2V’
Д-ТТГ-- ”, -7;—77-7:----------------Не -nv, (3.19)
dAai Q^dzi Q^vidt Q^vi
где dA^z - элементарная работа полезной силы сопротивления на ведомом
звене; - элементарная работа движущей силы, приложенной к ведущему
звену; = dzj dt к = dzj dt - обобщенные скорости ведущего и ведомого
звеньев, соответственно.
Из (3.19) видно, что преобразование движения количественно характе-
ризуется передачей как силового (Г)^), так и скоростного (T]v) факторов.
Оптимальным можно считать такое сочетание параметров системы, при ко-
тором обеспечивается максимальное значение КПД. В этом случае передача
силы и скорости от ведущего звена на ведомое будет осуществляться наи-
101
лучшим образом, т.е. при минимальных потерях. Таким образом, приходим к
выводу о возможности использования КПД как своеобразного критерия оп-
тимальности, т.е. кинематического совершенства механизма. Именно в этом
заключается суть идеи проф. Г.С. Батуева. При такой постановке задачи
энергетический смысл КПД имеет второстепенное значение.
Принципиальный вид кривой КПД т| (рисунок 3.7) можно представить,
рассмотрев бокобойный механизм, который показан на рис. 3.6. Проведем
качественный анализ зависимости КПД от угла давления а. Очевидно, что
при а = 0° движение механизма физически невозможно вследствие закли-
нивания его. Если этот угол постепенно увеличивать, то движение станет
возможным лишь при некотором значении а = ас, это - угол самоторможе-
ния, который зависит от параметров системы и, главным образом, от коэф-
фициента трения. Второй предельный режим - холостого хода - возникнет
при а = 90® : в этом случае звенья только соприкасаются, и между ними дей-
ствует сила трения, но преобразование движения ведущего звена не проис-
ходит - признаком этого является обращение КПД в О, В интервале
ас<а<90® КПД достигает максимального значения; соответствующее
сочетание конструктивных параметров механизма считаем оптимальным с
кинематической точки зрения. При этом влияние дестабилизирующих фак-
торов (трения, перекосов деталей и т.п.) проявляется в наименьшей степени.
При изменении коэффициента трения, например, в большую сторону проис-
ходит увеличение угла самоторможения и уменьшение значений КПД, при
уменьшении коэффициента трения - наоборот. Таким образом, существует
некоторая область, в пределах которой следует назначать угол давления с
учетом возможного разброса коэффициента трения.
Рисунок 3.7 - Кривая КПД для бокобойного механизма
102
3.4.3 Обобщенное выражение для КПД
Обратимся к формуле (3.19). Элементарная работа силы полезного со-
противления, преодолеваемой ведомым звеном:
Лг).
dl,
элементарная работа движущих сил, приложенных к ведущему звену:
^41 = •
Подставляя эти выражения в (3.19), получим
т] = —diL
^Лс2 =
2 ’
(3.20)
Предположим, что рассматриваемые звенья образуют связанную
кинематическую пару, тогда между zx и z2 будет существовать зависи-
мость z2 = t^{zx где W~ оператор, имеющий смысл функции связи. Соот-
ветственно,
dzi =jy';d =w'd zi । w'(dz\
dZ\ dt2 dt2 \ dt)
Функцию W , связывающую элементарные перемещения звеньев, назо-
вем коэффициентом связи. Далее:
d2z ( dz Y
W' 1 + w\ —
dt1 I dt .
= (wy
dt2
1 + Г
W'
~dP
Qa,
Таким образом, мгновенный КПД выражается через элементы движения
ведущего звена. Запишем уравнение движения последнего в виде
*nl J/2
(3.21)
тогда
in
cl
W"
d~z}
Ht2
Дп1 0Д1 \
Рассмотрим случай, когда f7' = ^=const, т.е. Wtt = 0. Такие
ЙД
(3.22)
связанные
КП встречаются в конструкциях чаще всего; коэффициенты обычно выражают-
ся тригонометрическими функциями угла давления. Из (3.22) будем иметь
103
г, °2 в;, g, '
aill 2д1 Ч бд1у
(3.23)
Проанализируем структуру полученного выражения. Отношение
а21ап\ зависит от конструктивных параметров механизма; величины (?д1 и
Q^j обычно пропорциональны одному и тому же силовому фактору, на-
пример, силе инерции (перегрузке) при выстреле, т.е. их отношение также
зависит от структуры механизма. Выражение в скобках в формуле (3.23)
можно рассматривать как некоторую функцию времени Vn(/), конкретный
вид которой можно выявить лишь если задан закон внешнего воздействия;
тогда, решая уравнение движения (3.21), будем иметь зависимость z;(/).
Поскольку сила сопротивления зависит главным образом от обобщен-
ной координаты zj9 то и она становится некоторой функцией времени. По-
этому перепишем (3.23) в виде
П = (3.24)
где
В = (^2 . у (3 25
п а О Оп k
Unl ь/д!
Конкретный вид функции в общем случае неизвестен, однако с
точки зрения нахождения максимума КПД это значения не имеет, поскольку
задача теперь сводится к поиску такого сочетания параметров механизма, при
котором максимальным становится значение коэффициента как одного из
сомножителей Г). Тем самым гарантируется максимально возможное значение
КПД в каждый момент времени независимо от вида функции \|/ п (/).
Таким образом, при заданной структуре механизма будет известен коэф-
фициент В^> после чего необходимо найти такое сочетание параметров, при
котором В^ = ,т.е. максимум-максиморум.
Рассмотрим конкретный пример. Приведем выражения для КПД в зави-
симости от характера преобразования движения ведущего звена, т.е. запишем
выражение (3.20) для тех случаев, которые указаны в классификации видов
трансформации движения (см. разд. 3.4.1) и отображены в таблице 3.1, Здесь
П - поступательное движение, В - вращательное.
104
Таблица 3.1 - КПД при различных видах трансформации
движения ведущего звена механизма
Z1 Z2 a2 Qi
п=>п X У dy dx m2 P\ d x zn,—- Л2 dt1 P УД1
п=>в X dy dx ъ P\ I £1 ,2 2 dt1
в=>п X dx d(p d2ip m2 J Л- dt
в=>в 1 2 d^, h J d241 f2 2 dt2
3.5 Типовая математическая модель механической системы
Чтобы процедура вычисления КПД была более наглядной, рассмотрим
конкретный пример механической системы. Обобщенное уравнение движения
при этом получает конкретизированное представление, а соответствующую
математическую модель системы принимаем в качестве типовой для дальней-
ших выкладок.
Уравнение движения. Расчетная схема механизма показана на рисунке 3.8:
это трехзвенный механизм, кинематически подобный рассмотренным выше (см.
рис,.3.6). Введем следующие обозначения: щ и - массы ведущего и ведомого
звеньев (учитывающие массы соответствующих пружинных предохранителей), т.е.
стопоров; 7?хп и^ -сопротивления предохранителей, направленные по осям хи
у, соответственно; а —угол давления. Рассматриваем взведение данного механизма
под действием силы инерции, направленной по оси х(в сторону, противоположную
направлению ускорения dV/ dt). Специфика данного механизма в том, что испол-
нительным является не ведомое, а ведущее звено.
Вращение боеприпаса не учитываем, полагая, что взведение происходит в
пределах переднего фронта кривой перегрузки, и поэтому силы инерции, порож-
даемые вращением боеприпаса, относительно малы. Кроме того, пренебрегаем си-
лой тяжести звеньев и их перекосом, а также закручиванием пружин.
105
Рисунок 3.8 — Расчетная схема типового механизма
В качестве звена приведения выбираем ведущее звено. Для того чтобы
вывести уравнение его движения, последовательно рассмотрим оба звена; схе-
ма сил, приложенных к звеньям, также показана на рис. 3.8.
Уравнения равновесия ведущего звена в относительном движении можно
записать следующим образом:
d2x dV ( . х
т,—г = т\-------ДЛ, - AMcosa + /.sinal-У?
'dt2 ' dt 3 3 Л ’ хп,
N3 = TVj (sina - /jeosa)
откуда
m\ ~7T = m\ - Лхп - [Q - ffi >osa + (/1 + /з H • (3.26)
at at
В этом уравнении фигурирует неизвестная пока сила реакции , кото-
рую можно найти с помощью уравнения равновесия ведомого звена и с учетом
взаимосвязи между перемещениями звеньев:
106
-^-у-= 7У( (sina - /icosa)--R -/jTVj
dt
N2 - m2 + Nj (cosa + /jSina)
Нетрудно заметить, что коэффициент связи
C = -^ = - = ctga,
dx х
(3.27)
т.е.
d2y
dt2
d2x
Используя это соотношение, из (3.27) получим
d2x dV
/»2ctga—у + f2m2 — + Ryn
__________at__________at______
(7 - /1/2 )sina - (/] + f2 )cosa
Выражение для силы реакции TV, подставим в (3.26); после соответст-
вующих выкладок будем иметь
"»i(7 + ^ctga)^f = + AR \ (3.28)
at at
где E, = w,/m,;
A = (7 ~ /1/3 )c°sa + (/i + /з )sina = (7-./i/3)+(./i + /зХба
(7 - fJz )sina - (/, + f2 )cosa (/ - fj2 )tga - (/1 + /2) ’
Если принять / - /2 - /3 = /пр - tgp^ , где /пр - приведенный (усред-
ненный для всех пар соприкасающихся поверхностей) коэффициент трения, а
- угол трения, то выражение для А упрощается:
( 2\ 1 + - -^-tgg
А = ----= ^ё-^Р-ТР = ctg(a _ 2 ) (3.29)
(l-/np)tga-2/np 2tgPip tgar-tg2pTp
l-tg2ar
Проанализируем полученное уравнение движения (3.28). Если сравнить
его с общим выражением (3.18), то нетрудно заметить, что обобщенная мера
инерции ап в данном случае имеет смысл приведенной массы:
тп - т\ + ^ctga),
107
т.е. наблюдается ее возрастание по сравнению с «натуральной» массой тпх.
Коэффициент при dV/dt - также некая приведенная масса:
"’о =m\l-Afn^\,
эта величина определяет приведенную обобщенную движущую силу:
П" dV
at
которая, таким образом, может быть меньше «просто» движущей силы, приложен-
ной к ведущему звену, т.е. силы инерции от поступательного движения снаряда:
„ <. dV
Отсюда, кстати, наглядно видно, что, как и отмечалось выше, обе эти силы
пропорциональны одной и той же функции времени (dY/dt), т.е. их отношение
зависит только от параметров механизма. Приведенная сила сопротивления:
Q^R^+ar^.
Рассмотрим это выражение более подробно:
Qc = Л)Хп + С1Х + Х^Оуп + Ьу) = R0n + СпХ =
где RQn = ДОхп + ЛЯОуп; сп = с, + /lc2ctga.
(3.30)
Здесь RQn - приведенное начальное сопротивление; сп - приведенный
коэффициент жесткости. В дальнейшем зависимость 7?п(х) будем называть
приведенной силовой характеристикой системы предохранения; в общем виде
она может включать в себя и характеристики жестких предохранителей.
Таким образом, с учетом введенных обозначений, уравнение движения
(3.28) можно записать в виде
аг at
Вполне очевидно, что такой вид будет иметь уравнение движения лю-
бой детали, совершающей поступательное движение под действием осевой
силы инерции. Выражения для фигурирующих в этом уравнении величин
(приведенных масс и параметров силовой характеристики) будут зависеть от
конкретной кинематической структуры рассматриваемой механической сис-
темы. Поскольку (3.31) обладает достаточной степенью общности, в даль-
нейшем его будем использовать как типовую математическую модель меха-
нической системы. Оговоримся, что оно применимо либо в случае невра-
щающегося боеприпаса, либо, если влиянием вращения боеприпаса во время
взведения можно пренебречь.
108
Преобразуем уравнение (331), подставив в него выражение для 7?п(х) из
(330):
d2x
или
d2 х
—- + ®о1Л = МкиЛМ0-*ОпЬ (3’32)
dt
I с
где со0п = —— - условная приведенная частота собственных колебаний;
, R0n - т0
^)П=—— ~ начальная «настройка»; цкнн =—- =----------— - кинематиче-
mog тп 1+Afytga,
ский параметр системы.
Условность частоты собственных колебаний объясняется тем, что рас-
сматриваемая система, строго говоря, нелинейна из-за начального сопротив-
ления и ограничителя хода. Аппарат теории линейных колебательных систем
при решении (332) тем не менее применим, поскольку поведение системы
исследуется в пределах однократного рабочего хода (пути взведения) при
импульсивном внешнем воздействии, после отрыва от опоры. Нелинейность
системы проявляется при знакопеременном воздействии — в этом случае она
должна рассматриваться с позиции достаточно сложной теории виброудар-
ных систем [44].
Из выражения для кинематического параметра видно, что он сущест-
венно зависит от структуры механизма: в зависимости от выбранных пара-
метров он может быть равен 0 или даже быть отрицательным (т0 <0)~ как
видно из (3.32), движение механизма при этом невозможно. Если исключить
из механизма ведомое звено, приняв ^ — 0 и /пр — 0ь то кинематический
параметр становится равным 1, что является признаком «вырождения» кине-
матически сложной системы, т.е. превращения ее в простейшую кинематиче-
скую пару. Кроме того, при этом и все приведенные параметры превращают-
ся в «натуральные», в чем нетрудно убедиться, обратившись к соответст-
вующим выражениям. В целом же, чем сложнее структура механизма, тем
меньше числовое значение кинематического параметра цкин .
Коэффициент полезного действия. С помощью примера проиллюстрируем
практическое применение понятия КПД. Воспользуемся формулой (3.23):
109
2 т2 т0
т| = ctg а—-—-
w„ т}
dV
т° dt .
Согласно (3.25),
5 = ctgV цкин = ctg2a^7 • (3.33)
Z+H^ctga
С помощью этого выражения нетрудно определить условия, при которых
возникают два предельных режима работы механизма и происходит обраще-
ние параметра т.е. КПД в 0. Видно, что, во-первых, это имеет место при
a = 90° - режим холостого хода и, во-вторых, при
1 - Af£ = 1 - ctg(a - 2pv )• f„fi = 0.
Отсюда найдем угол:
ас =-2Ртр + arctg(/nP%)’
который зависит не только от угла (и коэффициента) трения, но и отношения
масс ведомого и ведущего звеньев — т2/тх. Данный вариант, соответст-
вующий обращению в 0 кинематического параметра, соответствует режиму
самоторможения.
В интервале ае < 0 < 90° КПД приобретает максимальное значение, ко-
торое и соответствует оптимальному сочетанию параметров системы. Из (3.33)
видно, что в данном случае максимум-максиморум значения КПД, будет зави-
сеть только от коэффициента трения. Процедура оптимизации в рассматри-
ваемом примере будет двухступенчатой, поскольку локальные максимумы
могут быть найдены последовательно - по % и a.
Итак,
дв (1 + ^ctgaXv - 2Afnfi)~ ^ctga(/ - Afnp$ = Q
dt, (/ + /l^ctga)2
откуда после преобразований получаем квадратное уравнение относительно
V+2—^—^ ——=о
Actga Л'/^ctga
и, соответственно,
£>ор1
/lctga|J| fap J
110
После подстановки в (3.33) получим локальный максимум по %:
Следующий этап оптимизации, т.е. нахождение аорГ, аналитически не
реализуется. Если ввести вспомогательную величину
и=
V f-P
то условие д{Вцта1. ) [ди = 0 порождает уравнение 4-го порядка относительно ir
и4 + 4и3 4
пр
которое можно решить только численно. В результате находим значение
w = uopt и, соответственно,
Значения оптимальных параметров механизма приведены в таблице 3.2,
На рисунке 3.9 показана зависимость 5п(а) при = 1,0 и различных
значениях коэффициента трения; на рисунке 3.10 — та же зависимость, но
при фиксированном значении коэффициента трения (fnp -0,2) и различ-
ном отношении масс. Наконец, на рисунке 3.11 показана зависимость -Snmax
от а при различных значениях коэффициента трения. Эти данные доста-
точно наглядно иллюстрируют методику кинематической оптимизации ме-
ханической системы.
Таблица 3.2 - Оптимальные параметры механизма
/пр 0,1 0,15 0,20 0,25 0,30 0,35 0,40
(Xopi, ° 35,9 40,9 45,2 49,2 52,8 56,4 59,7
^opt 0,938 0,746 0,604 0,496 0,409 0,339 0,280
Popt 0,206 0,253 0,291 0,321 0,348 0,370 0,390
max 0,370 0,252 0,173 0,119 0,082 0,056 0,037
111
В 04
Рисунок 3.9 - Зависимость BtJ(a) при £ = 1,0 и различных значениях /пр
Рисунок 3.10 - Зависимость В^усх) при /1|р = 0,2 и различных значениях £
Рисунок 3.11 - Зависимость
[в^тах)^ от а при различных значениях fnp
112
3.6 Эмпирические условия безопасности и надежной взводимости
Эти условия выводятся для структурно простейшей механической систе-
мы, т.е. такой, в которой отсутствуют кинематические связи. Уравнение по-
ступательного движения подобной системы можно записать в виде
(3.34)
где
о dV , / х
S = т----= mgkyt)
dt
- сила инерции, возникающая либо в служебном обращении (при падении
боеприпаса на ту или иную преграду), либо при выстреле. В качестве ха-
рактерного значения силы сопротивления предохранителя выберем макси-
мальное [2, 3], т.е. то, которое соответствует перемещению удерживаемой
(взводящейся) детали на величину рабочего хода, т.е. пути взведения а.
Обозначим это сопротивление /?в. Учитывая разброс характеристик предо-
хранителей, предположим, что данное сопротивление заключено в пределах
диапазона от(/?в)т|п =/?, до (/^)тах = 7^ .Формулировка рассматриваемых
условий сводится, очевидно, к установлению допустимых соотношений
между уровнем перегрузки и характерной силы сопротивления системы
предохранения.
Условие безопасности в служебном обращении. С точки зрения безопасно-
сти в служебном обращении, согласно (3.34), должно быть выполнено условие
5max =mgk^ <*,,
ИЛИ
Я, 7
—->ктах- (3.35)
771g
Решающее значение при такой формулировке условия безопасности име-
ет обоснованное назначение максимальной перегрузки &тах . В результате мно-
гочисленных опытов, проведенных главным образом В.И. Рдултовским, было
установлено, что для жестких предохранителей можно принять — 2000, а
для жестких =1500. При опытах охолощенные снаряды сбрасывали с
различной высоты на преграды переменной прочности (податливости). Таким
образом, объединяя оба типа предохранителя, можно записать (3.34):
% J2000
mg [1500
(3.36)
113
Данный подход обладает недостатками, так как не учитывает ряд важных
факторов:
- кинематическая структура и динамика механизма;
- заданная высота безопасного падения Н;
- механические свойства преграды (коэффициент восстановления ско-
рости к);
- путь взведения (рабочего хода) а.
Следует также иметь в виду, что эмпирическое условие безопасности
обосновывали для взрывателей устаревших конструкций, т.е. для меньших
значений высоты безопасного падения и путей взведения по сравнению с со-
временными изделиями. Отсюда - вывод о необходимости разработки иной
методики, свободной от указанных недостатков.
Взводимость при выстреле. Вновь обратимся к уравнению (3.34). С
точки зрения надежности взведения, очевидно, должно быть выполнено
условие
^шах = «Лах = mgk\ > R1 ’
которое ужесточают, вводя коэффициент запаса по взводимости £в < 7, т.е.
условие надежной взводимости записывают в виде
-^-<*в(4кп- (3.37)
mg
Коэффициент линейной взводимости также выбирают минимальным,
т.е. условие (3.37) записано для наихудшего сочетания факторов, влияющих
на процесс взведения. Стандартное значение £ъ обычно принимают равным
2/3 [2, 3]. Недостатки эмпирического подхода, отмеченные выше, сохраня-
ют свою силу и в данном случае. Особо подчеркнем отсутствие учета дина-
мики механической системы, т.е. временного фактора, поскольку механиз-
мы взрывателя, будучи системами колебательными, как отмечалось выше,
избирательно реагируют на воздействия с различными временными призна-
ками (например, существенное значение имеет длительность переднего
фронта закона перегрузки т).
Вместе с тем, из эмпирического условия надежной взводимости вытекает
хотя и тривиальный, но весьма существенный для дальнейшего вывод о том,
что ограничение по уровню перегрузки, при котором должно гарантированно
произойти взведение, равносильно ограничению по времени взведения /в.
Поэтому условие надежной взводимости во временной трактовке:
/в<т (3.38)
К этому условию вернемся позже.
114
Единые условия безопасности и взводимости. Соединив неравенства
(3.36) и (3.37), получим
2000}
1500} mg
min
(3.39)
т.е. единые условия безопасности и надежной взводимости при выстреле. С
их помощью можно обосновать такое минимальное значение перегрузки
при выстреле, при котором еще могут быть одновременно удовлетворены
оба условия. Примем отношение Rj(mg} равным его минимальному зна-
чению, т.е. 2000 для жестких предохранителей и 1500 - для упругих, а ко-
эффициент запаса Ев равным его стандартному значению, т.е. 2/3. С учетом
того, что для жестких предохранителей допускается разброс характеристик
до 40 %, можно записать
о
2000-1,4<-U) . ,
откуда (^)min > 4200. Получив этот результат, М.Ф. Васильев [2] констати-
ровал, что нормальный расчет пределов сопротивления предохранителей
возможен лишь в случаях, когда взрыватель предназначен для орудий,
имеющих коэффициент взводимости от 4200 и выше. Так определяется од-
на из важных для проектирования характеристик системы, названных
автором «минимальными». Для упругих предохранителей, принимая раз-
брос равным 20 %, получим
1500-1,2<-(£) . ,
’ J X “ /Щ1П ’
т.е. (Aj)min > 2700. Комментарий М.Ф. Васильева таков: сравнение с
числом 4200 для жестких предохранителей указывает на преимущество
пружин, обеспечивающих при прочих равных условиях безопасность и
взводимость механизмов в большей степени, нежели предохранители же-
сткого типа. Однако это относится главным образом к предохранителям,
взводящимся при выстреле. В других случаях (предохранители к ударни-
кам мгновенного действия, деталям, перемещающимся при ударе снаряда
о преграду) преимущество имеют жесткие предохранители, поскольку
требуют меньшей затраты энергии в момент действия и обеспечивают
точное расстояние между капсюлями и жалом и т.п.
Таким образом, констатируя ряд недостатков, присущих эмпирическому
подходу, воспользуемся некоторыми идеями, заложенными в него, дополнив
их теоретическим обоснованием и развитием.
115
Пример
Рассмотрим накольно-воспламенительный механизм (НВМ) взрывателя
МГ-57 (приложение 3), который и в дальнейшем будет использован как типо-
вой. Для данного механизма
_gg_ = 2,28• 101 = j 14о; lk = — • 25140 = 16760.
mg 0.,04-9,8 3 1 3
Таким образом, эмпирическое условие взводимости выполнено, при-
чем с большим запасом. Что же касается безопасности в служебном обра-
щении, то, если руководствоваться прежней рекомендацией для упругих
предохранителей:
1500<^,
wg
то оно не выполнено. Ниже вновь вернемся к этому механизму и покажем, что
в действительности, если подойти к оценке безопасности с современных пози-
ций, она будет обеспечена. Это достаточно убедительный пример необосно-
ванного суждения о качествах изделия, если руководствоваться устаревшими
представлениями.
116
Глава 4
ПРОЕКТИРОВАНИЕ ИНЕРЦИОННЫХ
ПРЕДОХРАНИТЕЛЬНЫХ МЕХАНИЗМОВ
АНАЛОГОВОГО ТИПА
В разд. 3.5 была обоснована типовая математическая модель инерционного
механизма. Теперь используем ее при разработке методики проектирования анало-
говых механических систем (АМС), имея в виду, что вопросы обеспечения безопас-
ности в обращении и взводимости при выстреле должны рассматриваться ком-
плексно, с учетом структуры механизма и динамических характеристик системы
(артиллерийской или реактивной). В излагаемой ниже методике основное внимание
уделяется однофазным (однотактным) механизмам, которые, в частности, могут
являться первой ступенью двухфазного механизма (и в этом случае имеют решаю-
щее значение с точки зрения его функционирования).
Теоретическая сложность задачи состоит в необходимости оптимального
решения в условиях взаимно противоречивых ограничений.
4.1 Максимальное перемещение системы при случайном падении
боеприпаса в служебном обращении
Обратимся к выражению (3.32), которое является типовой математиче-
ской моделью структурно-сложного механизма:
^4 + ®0п* = ^Оп]-
at
Предположим, что k(t) - закон перегрузки при падении боеприпаса на
ту или иную преграду. Соотношения между параметрами возникающего при
этом ударного процесса были проанализированы выше (см. разд. 2.1).
Для дальнейших выкладок воспользуемся операторным методом, в осно-
ве которого лежит интегральное преобразование Лапласа [45]:
^(5) =£{х(/)}= je’" x(t)dt,
О
где 5- комплексный оператор; А-символ преобразования. Как известно, X(s)
носит название изображения, a - оригинала, причем существуют такие
символические соотношения:
X(s)> х(/); х(/) : X(s).
Приведем изображения производных первого и второго порядков:
117
d2x
dt2
= ?
\dx
L* —
[dt
Здесь л(#) и V(#) - начальные значения хи его производной. Применим
преобразование Лапласа к обеим частям уравнения движения системы, полагая
начальные условия нулевыми:
,s~ + co:
^Оп
5
(4.1)
где учтено, что
(4.2)
5
Из (4.1) найдем изображение перемещения звена приведения:
|_СО0п 5 +СО0п СО0п 5 5 + СО0п J
При нахождении оригинала, т.е. x(f), воспользуемся известными из опе-
раторного исчисления соотношениями
~2 7 sinco^;
! t
О о
Второе из них составляет содержание теоремы свертки; таким образом,
из (4.2) получаем
X(t) = Кин£
(4.3)
t
v0) = МкиЛ J^(0)cos(o0n(t - 0>У0
(4.4)
[£(0>inoOn(r-0>-^(7-cosoOnr) ,
“on 0 “On J
а, дифференцируя по времени, находим закон изменения скорости звена:
— sinco0l/ •
_ о Ю0п
Формулы (4.3) и (4.4) справедливы при любом законе k(t). Приняв
/ = /у, найдем значения элементов движения в конце воздействия:
ху = х(/у}' vy = v(/y). Они являются начальными для следующего этапа -
свободного движения, уравнение которого получается из (3.32), если из правой
части исключить закон перегрузки:
(Л Л 2 1
^Г+Ю0пХ = -Мкин^0п-
at
118
Величина, фигурирующая в правой части этого уравнения
Il ak — СТ ^Оп — ^п^Оп — (л2 у
Нкнн^Г^Оп S ^Оп^Оп 5
где к0п=/?0п/сп- приведенная начальная осадка системы предохранения.
Таким образом:
$ Х 2 2 л /л сх
/ГГ Ю0пХ = “ЮОгЛоп • (4-5)
at
Введем разностное время f = t — /у ; тогда решение уравнения (5.5) будет
иметь вид
х - C;cosco0nf 4- C2sinco0nf - kOn;
v = “onGcos^on^'- “onGsinco0nf.
Постоянные интегрирования найдем из начальных условий для данного
этапа движения (при / = О х = ху; v = vy ):
ХУ ~ “ ^0п’ Vy ~ Ю0п^2 •
Следовательно,
X = (ху + kOn )cos<o0/ + sin<o0/ - kOn ’
^Оп
V = vycosco0/ - со0п (ху + kOn )sinco0/.
С помощью этих выражений можно найти максимальное перемещение:
vy
V V Ю0п у
Задачей последующего исследования является нахождение теоретически
максимального значения (хтах) тах, т.е. определение таких значений ху и уу, ко-
торые максимизируют хтах. Тогда условие безопасности можно сформулиро-
вать следующим образом:
max
Оп
(4.6)
Hmax Lx <а- (4-7)
В общем виде, при произвольном законе перегрузки k(t), решение задачи
невозможно, и поэтому необходимо принять упрощенную математическую
модель воздействия. Наиболее простая модель - прямоугольный импульс с той
же площадью и длительностью, что и реальный закон перегрузки. Согласно
(2.11), можно записать
о S
(4-8)
119
т.е.
Л(г) — кт = const, 0 < t < ty,
(4.9)
или
где кт определяется по (4.8). Если подставить эту функцию в формулы (4.3) и
(4.4), то при t— ty получим выражения для перемещения и скорости системы в
конце эквивалентного ударного процесса:
V — ~ ^Оп ) (i _ РП<гт / 1 — .^кин^т ~ ^Оп ) *п 2 ^Оп^у .
Лу “ 2 V Си^ШОп‘у/ 2 м11 И ’
Ю0п Ю0п
yv - ---^On)sjn(О i
«Оп
Множитель в формуле для ху :
^кин^(^-^Оп). v
2 Хст Л0п >
«Оп
где
„ Рки А __ mogkm
Лст 2
«Оп
представляет собой «статическое» (приведенное) смещение, вызванное посто-
янной по уровню силой, равной mQgkm . Получим:
Ху =(хсТ -\Jj-COSi)bat )= =
Чп 2
— = кт - Ч >inaVy = sinfiV =
Чп <°0п
= Ркин£Уу(7-£оп)з1ПЧЛ = ЦкХ + К)(^ ~ 4 ) sin(°0n?y
<°0п °Му ®Оп ®Оп/у
120
Здесь кОп = k^Jk^ Подставим выражения для ху и уу из (4.10) в (4.6):
Xmax =7[(XcT-^0n)(7-COS®0n/y)+\n]'’ + [(Хст “^0п^Оп^уР "Ч =
^ОП + G ; sin - 2
. “оЛ
2
(4.11)
Видно, что подкоренное выражение будет максимальным при —> 0
(Уст —>оо)и^у—>0, поскольку lim(sin а/л) = 1, т.е.
РкиЛ(7 + К)
(4-12)
Указанное сочетание предельных параметров ударного процесса соответ-
ствует случаю, проанализированному в разд. 2.1, - боеприпас и преграда счи-
таются твердыми, недеформируемыми телами, а закон перегрузки описывается
формулой (2.12):
£(f)=£UA]s)5(z)
g
Такой ударный процесс, естественно, физически невозможен. Однако
можно сделать вывод о том, что для механических систем рассматриваемого
класса, т.е. аналоговых (совершающих непрерывное движение в процессе взве-
дения) наиболее опасен случай падения боеприпаса на преграду наибольшей
прочности (стальную, чугунную или бетонную плиту), когда длительность
ударного процесса минимальна, а уровень возникающей перегрузки максима-
лен. Как известно, общепринятая методика испытаний взрывателей на безопас-
ность в служебном обращении как раз и предусматривает сброс с заданной вы-
соты на чугунную плиту стандартной твердости (НБ = 100 ± 10 ).
Из формул (4.10) следует, что при ty —> 0 будем иметь следующие пре-
дельные значения элементов движения в конце ударного воздействия: Лу —> 0
и Уу —> Цкин^о(^ 4- к). Это значит, что взводящееся звено, оставаясь непод-
вижным, скачкообразно приобретает конечную скорость, совершая после это-
го свободное движение. К аналогичному выводу можно прийти с помощью
общего подхода к решению данной задачи.
121
4.2 Условие безопасности в служебном обращении
Формула (4.12) для максимально возможного перемещения АМС вклю-
чает в себя и высоту падения, поскольку JZ = y]2gH- Следовательно, с учетом
неравенства (4.7) можно вывести ограничивающее условие, которому она
должна удовлетворять. Имеем:
jC + — • 2gH\xKm2(l + к)2 - ХОп < а,
N сп
ИЛИ
— • ^Мкнн (7 + к)2 < а(ХОп +
сп V 2)
откуда
я I П 2) _ aRm (4.13)
Шин (/ + K)2m0g
Шин (/+p)'Xg
Здесь учтено выражение (3.5) для среднего (в данном случае - приведен-
ного) сопротивления предохранителя в пределах пути взведения:
7?сп = с„а(\исж +0.5), (4.14)
Нетрудно заметить, что я/?сп — —приведенная работа деформирования
системы предохранения. Влияние входящих в формулу (4.13) величин на сте-
пень безопасности в служебном обращении вполне соответствует физическим
представлениям. Следует обратить особое внимание на роль кинематического
параметра: чем он меньше, т.е. чем сложнее структура механизма, тем выше
степень безопасности.
Введем важную для дальнейшего величину
т.е. (4.13) можно также записать:
Нкин(7 + к)2
(4-15)
(4.16)
Для простейшего механизма, как показано выше (см. разд. 3.5), кинема-
тический параметр цкт/ = 1, а приведенные параметры превращаются в «нату-
ральные», т.е. формула (4.13) приобретает вид
я7? Е
___________
(7 + к)2 mg (7 + K)2mg
(4.17)
122
Это выражение совпадает с формулой (3.27) в работе [6]. Следует отме-
тить, что в книге М.Ф. Васильева [2, с. 34] в знаменателе аналогичного по
смыслу выражения ошибочно фигурирует (1 + л*2).
Величину в правой части (4.13) и (4.16), назовем фактической высотой
безопасного падения, которая определяется конкретным сочетанием конст-
руктивных параметров механизма, и обозначим Нф . Коэффициент запаса по
безопасности
= Н^ =2gH^
Н v02
(4-18)
Подставляя сюда выражение для Нф, определяемое по (4.16) и (4.13), и
используя (4.14), получаем две формы записи Ех [см. также (1.1)]:
2Sakcn
Я. =
МкИН(^ + к)-’И0-’
(4-19)
Мкии(7 + к)Г0
Таким образом, те недостатки, которые были отмечены при рассмотре-
нии эмпирического подхода к оценке безопасности (см. разд. 3.6), устранены.
Вместе с тем целесообразно прямо сопоставить эмпирический и предлага-
емый подходы. Согласно (3.35), для номинального значения сопротивления в
конце взведения можно записать:
(4.20)
где ктак принимается равным либо 2000, либо 1500, в зависимости от типа пре-
дохранителя. Поскольку эмпирическое условие относится к простейшему ме-
ханизму, обратимся к формуле (4.17). Выразим 7?с через 7?в:
и подставим в (4.17):
ч. . //(/ + к)г
/ Г0-(/ + к)г
+ OCOq
Н(1 + к)2
(4.21)
Сравним полученное выражение с (4.20): величину в правой части (4.21)
можно рассматривать как аналитическое выражение для расчетного уровня
123
перегрузки в служебном обращении £тах. Видно, что, как и следовало ожи-
дать, эта величина зависит от заданной высоты безопасного падения, механи-
ческих свойств преграды (через к), колебательных свойств механизма со0 и
пути взведения а. Более того, зависимость правой части от а имеет экстре-
мум типа минимума, который нетрудно найти:
d
da
откуда
со0
Подставив это выражение для а в (4.21), получим
—> (*„ L. = г°ю"(/+к)=+к). Ж=(7+
mg g \ g у mg
Более перспективно использование как характерного именно среднего, а
не максимального сопротивления. Тогда, например, из (4.16) будем иметь:
7 *с Мкнн^С^ + КУ ЦКННИ/ + КУ
. _ с > "кнн \ / ___ "кнн и \__/ 22)
wog a 2ga ’
а для простейшего механизма — соответственно,
д Я. . //(/->-к)г
mg а
Приняв к = 0,4, получим простое неравенство:
а
Например, при Н=3 ми а = Ю мм кс> 600 .
В заключение подчеркнем, что выражение для фактической высоты
безопасного падения соответствует теоретически наиболее неблагоприятному
случаю, когда ударный процесс обладает предельными параметрами. Очевид-
но, что выведенное условие безопасности обладает скрытым запасом, по-
скольку реальное ударное воздействие имеет конечные параметры - по уров-
ню и главное по длительности. В работе [6] также отмечено, что результат
расчета по формуле типа (4.17) оказывается заниженным по сравнению с
опытными данными, поскольку в этой формуле не отражено время приложе-
ния инерционной нагрузки, т.е. действительная высота безопасного падения
выше. В следующем разделе дается количественная оценка данного эффекта.
124
Пример
Для НВМ взрывателя МГ-57, принятого в качестве типового (приложе-
ние 3) будем иметь
aRc _ 4,65 • 10'3 1,6
Ф (1 + K)2mg (1 + 0.4)2- 0,204 -10~3- 9,8 ’ ’
т.е. коэффициент запаса по безопасности:
Н 19
Е 2^ = bL = Ot63<l.
1 Н 3,0
Было показано(см. разд. 3.6), что эмпирическое условие безопасности
для этого механизма также не удовлетворяется. Однако данная ситуация пока-
зательна в том смысле, что за счет скрытого запаса фактическая высота безо-
пасного падения оказывается больше (см. пример в след. разд.).
Воспользуемся этим примером еще и для того, чтобы подсчитать величину
)min = ®о(^ + — = 1'2 Ю3 1,4 = 1314.
\ max /min v \ /д| л о
V g у у л
Кстати, путь взведения, соответствующий этому минимуму перегрузки,
оказывается равным
(1 + /гХ/2^_1,472-3.9,81О-!
a —------------—------------z-----— о.уэ мм,
со0 1,2 103
т.е. почти вдвое больше штатного.
4.3 Влияние конечных параметров ударного процесса
на фактическую высоту безопасного падения
Обратимся к выражению для максимального перемещения системы в служеб-
ном обращении (4.11) и потребуем, чтобы было выполнено условие (4.7):
После ряда преобразований получаем
Н < Н& ~ Яф0 ' ~ ~~
7-^0п
(y/2) Т
sin(y/2)
(4.23)
где у = <О0п/у - безразмерный частотно-временной параметр, а //ф0 обозначе-
на фактическая высота для предельного случая, вычисляемая по (4.13). Видно,
125
что множитель при этой величине больше единицы, что и подтверждает ска-
занное выше (см. разд. 3.6.3) о скрытом запасе по безопасности.
Однако выражение (4.23) нуждается в дополнительных преобразованияхс
учетом того, что величина
к _ ^Оп _ _ £CiA()i/y _ ^ОгЛог/у _ ^QiAonY
кт ^(7 + К) Vo(I + K)mog ЦкнЛ(7 + к) НкНЛ(7 + К)
также зависит от //(через Vo ). Подставив £Опв (4.23), получим неравенство,
которое должно быть разрешено относительно Н\ очевидно, что фактическая
высота безопасного падения в этом случае будет зависеть от длительности
ударного процесса ty. Опуская достаточно громоздкие выкладки, приведем
окончательный результат:
^(r)sin^+J7 + ^(r)sin2^ ’ ’ (4-24)
ЯФ0 [sin(y/2) 2 V 2J
где г = ДОп /7?сп = 2усж /(/ + 2усж ); q(r) = .
Из (4.24) видно, что при у —> 0 (fy —> О) Нф —> Л/ф0 независимо от г,
при г ~ 0 (т.е. в отсутствие предварительного поджатия)
Яф . Г (уЛ) Т
Lsin(r/2).
В табл. 4.1 приведены результаты вычислений по формуле (4.24) при различ-
ных значениях г и у. Анализируя данные этой таблицы, отметим, что возрастание
фактической высоты безопасного падения при некоторых параметрах механизма и
соответствующей длительности ударного процесса может быть достаточно замет-
ным. Возрастание у можно также трактовать и как увеличение частоты собственных
колебаний <УОп при фиксированной длительности /у .
В частном случае, когда у = Л, Нф/Нф^ = ; при у —> 2тс
нф/нфа —> оо , Последний вариант соответствует ситуации, когда механизм
после удара возвращается в исходное положение, т.е. этап свободного движе-
ния отсутствует.
Зависимость, аналогичную по смыслу соотношению (4.24), можно также
вывести с использованием понятия коэффициента динамичности при типовой
форме внешнего воздействия (не только в виде прямоугольного импульса)
[20]. Этот вариант здесь не рассматривается.
126
Таблица 4.1 - Отношение Нф/Нф0
г у/л
0,1 0,2 0,3 0,4 0,5 0,6 0,7 0,8 0,9 1,0
0 1,008 1,034 1,077 1,143 1,234 1,357 1,523 1,746 2,049 2,467
0,1 1,025 1,068 1,130 1,216 1,329 1,478 1,673 1,930 2,273 2,742
0,2 1,044 1,108 1,192 1,303 1,445 1,626 1,858 2,159 2,554 3,084
о,з 1,066 1,155 1,268 1,410 1,589 1,812 2,093 2,451 2,914 3,525
0,4 1,093 1,212 1,361 1,546 1,774 2,055 2,403 2,839 3,394 4,112
0,5 1,126 1,285 1,483 1,726 2,024 2,387 2,831 3,379 4,064 4,935
0,6 1,169 1,384 1,652 1,982 2,384 2,872 3,464 4,184 5,068 6,168
0,7 1,231 1,530 1,910 2,382 2,961 3,662 4,506 5,519 6,739 8,225
0,8 1,333 1,784 2,377 3,132 4,067 5,203 6,561 8,172 10,08 1.2,34
0,9 1,568 2,426 3,634 5,234 7,254 9,720 12,66 16,10 20,08 24,67
Пример
В примере, рассмотренном в предыдущем разделе, было установлено,
что для типового механизма (НВМ взрывателя МГ-57) условие безопасности в
служебном обращении не выполняется (Е} < 1). Продолжим этот пример и
покажем, насколько существенным может оказаться скрытый запас, обуслов-
ленный конечностью параметров ударного процесса при падении боеприпаса
на преграду. Согласно табл. 2.1, при падении на преграды наибольшей проч-
ности (чугунная плита, бетон) длительность ударного процесса ty заключена в
пределах довольно широкого диапазона - от 0,2 до 2,0 мс; частота собствен-
ных колебаний механизма — 1200с}, частотно-временной параметр
у = motv - от 0,24 до 2,4. Кроме того,
= (г) = г = 0.57, . =
R. 1,60 2^1-0,57
Воспользовавшись формулой (4.24), получим значения от 1,12
до 3,66. В предыдущем разделе найдено значение Нф(] = 1,9 м, т.е. соста-
вит от 2,12 до 6,96 м. Этот пример довольно нагляден как иллюстрация эффек-
та, обусловленного конечностью параметров ударного процесса. Можно сде-
лать и такой вывод: если условие безопасности выполнено для предельного
случая, то оно тем более выполняется при учете скрытого запаса.
127
Условие надежной взводимости при выстреле из артиллерийской системы
Уравнение движения механизма в безразмерном виде. Эмпирическое
условие взводимости сформулировано в виде неравенства (3.36):
R.
mm
mg
Целесообразно ввести в рассмотрение временной фактор, поскольку
при этом можно учесть динамику процесса взведения механизма. Поэтому
условие надежной взводимости (3.37) записано именно во временной трак-
товке (рисунок 4.1):
(4.25)
для ужесточения данного условия можно ввести запас по времени взведения:
Рисунок 4.1 - Ограничение времени взведения
Обоснована типовая математическая модель механизма в виде обобщен-
ного уравнения движения в форме (3.31):
W = (Д
аг at
или (3.32):
- *0п ] •
at
128
Напомним, что такая форма записи уравнения движения не учитывает
влияние сил инерции, обусловленных вращением снаряда. Основным факто-
ром, препятствующим взведению механизма, является сила трения, порождае-
мая центробежной силой инерции при наличии эксцентриситета относительно
оси вращения снаряда. Однако в момент максимума давления (и перегрузки)
скорость снаряда составляет от 30 до 30 % дульной; поэтому центробежная
сила, пропорциональная И, составляет примерно 0.1...0.25 от максимальной.
Если же механизм имеет конструктивный эксцентриситет, то необходимо спе-
циальное рассмотрение вопроса (см. ниже).
В дальнейшем уравнение движения в виде (3.32) будем считать «строгой» ма-
тематической моделью. Однако помимо нее также используют и упрощенную мо-
дель, основанную на усреднении силовой характеристики в пределах пути взведе-
ния, т.е. на замене силовой характеристики /?п(х) величиной 7?сп:
d2x
т» - Rcn (4.26)
at
Способ усреднения сопротивления предохранителей был предложен в
свое время еще Г.М. Третьяковым, который показал, что ошибка расчета при
этом не превышает 5 % (обычно от 2 до 3 %) [3]. Принимая во внимание это
мнение, вместе с тем отметим необходимость более тщательного рассмотре-
ния данного вопроса, поскольку ошибка в конечном итоге зависит от частот-
но-временных соотношений между параметрами механизма и воздействия (см.
приложение 4). Условие безопасности в обращении (4.16) включает в себя
именно среднее сопротивление. Требования же по безопасности и взводимости
в совокупности должны ограничивать величину /?сп (или Лсп) снизу и сверху,
соответственно, определяя тем самым диапазон допустимых значений.
Закон перегрузки будем полагать линеаризованным в пределах переднего
фронта: согласно (3.10),
к(!) = к„^-,0<1<т (4.27)
т
причем, как видно из (3.11), ктах = к}. При поверочных расчетах после выбора
параметров механизма более строго оцениваем его функционирование, решая
совместно систему уравнений внутренней баллистики и движения механизма.
Приближенные законы изменения элементов движения снаряда
определяем, записывая его уравнение движения в виде
— = gk(t) = t,
dt т
откуда
129
v =
2т
6т
При t = т получаем оценку скорости и пути снаряда в момент максиму-
ма перегрузки:
= 7 Я^тах1т = 7 ^тах (4-28)
2 о
В общем случае
vm = = gkmaxT = Agkmaxi;
° i i (4.29)
L = g = gkn,a.J2 = Bgk^2-
0 0 0 0
где t ~t/x; к = k/kmax . Аналогичный прием был применен при рассмотрении
соотношений между параметрами ударного процесса в служебном обращении
(см. разд. 2.1). Важно отметить, что величины (gkmaxx2) и (gkmaxx) являются
мерами пути и скорости снаряда в момент максимума перегрузки, а А и В -
коэффициенты, зависящие от формы закона k(t) . Из (4.28) видно, что для
линейного закона эти коэффициенты равны 1/2 и 1/6 , соответственно.
Итак, имеем описание механизма в виде уравнения движения, записы-
ваемого одним из двух возможных способов:
|Нк„н£М')-*оп]-®опх
где
» + С-а
п 1\Пп Ч------- 2
k _ ^сп . °”________, qmon (4.31)
Лсп — — — Л,Оп Т
Wog mbg 2Мкин£
Преобразуем уравнения (4.30). Первое из них (строгое) будет иметь вид
d2
t
где V = о)0пт - безразмерный частотный параметр, связывающий колебатель-
+ V"X = Мкин^тах^ W)- ^0п ] (4.32)
ные свойства механизма и временной признак воздействия; £0п=&опАтаХ •
Введем безразмерное перемещение звена приведения
х
X ~--------7-
Skmax^
130
КИН
Тогда (4.32) можно записать так:
d2x
W + v-x =
Преобразуя аналогичным образом второе из уравнений (4.30), получим
^=Яин1Хй-4п]
где кт = kaJkmm , причем из (4.31) следует, что
Г г av2
^сп - ^Оп + ~
2К„,.
где а = a/(gkmmx2). Безразмерная скорость
v
тах^
(4.33)
(4.34)
(4.35)
v =
При принятом способе нормировки закон перегрузки, с учетом (4.27),
k(t) = ?, 0 < t < 1.0. (4.36)
Условие безопасности в безразмерном виде. Для дальнейшего
преобразуем условие безопасности в служебном обращении, используя приня-
тый способ нормировки. Из (4.19) будем иметь
где
V, JlgH
gkmwx gkmmx ’
Введем еще одну безразмерную величину, имеющую важное значение
для последующих выкладок:
/, = (/ + к)го = + . (4.38)
^тахТ
Этот параметр включает в себя основные исходные данные для проекти-
рования механизма, а именно - динамические характеристики системы
(^аг,т), требование по безопасности (//), а также характеристику свойств
преграды (к ). Учитывая (2.11), запишем
131
kmaS о
в то же время, из (4.29) следует, что
k т —
&тах^ л
о
соответственно,
b = А--
(439)
о
Здесь и — законы перегрузки при падении боеприпаса в об-
ращении и при выстреле, соответственно.
Таким образом, условие безопасности (4.37) можно представить в виде
2^сп
Е,=\
ц. Ь2
Г* КИН
(4.40)
I
Первое из соотношений перепишем следующим образом:
К - Нкин^
(4-41)
сп ~—
2а
Данное неравенство и будем рассматривать в дальнейшем как условие
безопасности для механической системы аналогового типа. Следует отме-
тить, что, несмотря на использование при нормировке параметров системы
(£таг,т), фактически условие безопасности от них не зависит: оно приведе-
но к тому же «масштабу», что и уравнение движения при выстреле, что
позволит в дальнейшем сформулировать единые условия безопасности-
взводимости.
Вывод условия надежной взводимости Условие надежной взводимости
(3.37) в безразмерном виде запишем в соответствии с (4.25):
'в
(4-42)
ИЛИ
(4-43)
132
Отметим, что при линейном законе перегрузки = ед. Таким образом,
задача сводится к нахождению времени взведения механизма tBJ на которое
затем необходимо наложить ограничение в форме (4.42) или (4.43).
Обратимся сначала к «строгому» уравнению (4.33), принимая линейный
закон перегрузки (4.36):
(4.44)
Движение механизма очевидно начнется в момент времени, когда правая
часть этого уравнения станет неотрицательной, т.е. при t0 = кОп, или
В общем случае этот момент времени, согласно (4.33), находим из условия
(4 ) = ^Ол *
Введем разностное время t' = t -10 \ тогда (4.44) примет вид
2-
+ V X — Цкнн/ ,
)
а его решение:
х = C,cosv? + C.sinv? + ; v = -CyVsinv? + C.cosv? + —
V V
Учитывая начальные условия (при ? = 0 х = 0; v = 0), найдем постоян-
ные интегрирования
С/ - 0; С2 = -Ьщ.
V"
и, соответственно,
х = v = - cos v?).
V V"
Для нахождения необходимо принять х = а :
- = ЬЦн. _ sin . (4.45)
v
Соответствующее значение скорости звена (в конце взведения)
vB = (/ - cos vt*). (4.46)
v
133
Определив Ц, проверим выполнение условия (4.42), т.е. t'3 + ксп < 1; кроме то-
го, может потребоваться проверка и значения скорости vB (например, в случае на-
кольно-воспламенительного механизма). Однако найти аналитическое выражение
для времени взведения не удается: формулы (4.45) и (4.46) можно использовать лишь
при известных параметрах механизма при численном решении задачи.
Поэтому обратимся к упрощенной математической модели механизма в
виде (4.34). Из этого уравнения следует, что время начала движения
- г г av2
L = к = ч-----------.
О СП ОП
^Нкин
Здесь использовано соотношение (4.35); видно, что время начала движения не-
сколько отличается от того, которое соответствует «строгой» модели, на величину
7(2/-..). однако это отличие обычно невелико с практической точки зрения.
Вновь введем разностное время Т = 1 — ?0 = 1 — ксп ; уравнение (4.34) запишем в
виде
____ 7/ ,
,2 ~ Нкин^ ’
его (при тех же начальных условиях, что и выше) интегрируем непосредственно:
_ Цкин(/')2 - ЦКНН(''У
2 ’ ~ б
откуда
/ ба
з-----
V Нкин 2
= 'в - Кп = } V» = —
V Нкин 2
Обратившись к условию (4.42), можно записать
(4-47)
ба
СП
V Икин
т.е.
СП
ба
(4.48)
ба
Цкин^^тах^
= kj • I — з
ба
(4.49)
V Н КИН
Переходя к размерным величинам, получим
/? п
_сп_ < Т
^тах
Неравенство (4.48) или, в развернутом виде, (4.49) можно трактовать как усло-
вие надежной взводимости ДМС при выстреле из артиллерийской системы, которое
134
представляет собой ограничение, накладываемое сверху на среднее сопротивление
системы предохранения в пределах пути взведения. Вполне очевидно, что его нужно
выполнить и при наиболее неблагоприятном сочетании параметров, т.е.
Сравнивая (4.49) с эмпирическим условием взводимости (3.37),
заключаем, что выражение, фигурирующее в скобках, имеет смысл коэффици-
ента запаса по взводимости:
1 I 6а
s»=H----------ГТ’ (4-50)
определяемого по среднему (а не максимальному) сопротивлению. Однако выпол-
нение условия (4.48) или (4.49) лишь гарантирует перемещение взводящейся детали
на заданную величину рабочего хода (пути взведения). Если же дополнительно
наложено ограничение и на скорость, то в соответствии с (4.47):
ба
з-----
1 ^КИН
(4-51)
где vmin—некоторое пороговое значение скорости. Типичным примером по-
добной ситуации может служить назначение величины vmin как минимальной
скорости ударника накольно-воспламенительного механизма, обеспечиваю-
щей 100 %-ное срабатывание капсюля-воспламенителя при выстреле. В ре-
зультате обработки многочисленных опытных данных предложена следующая
эмпирическая формула:
2
^>£oexp(-O.lv„),
где — скорость накола; Ео —величина, характеризующая чувствитель-
ность КВ к наколу и равная (в среднем) 90 мДж. Если в этой формуле принять
уя = vmin , то неравенство превращается в уравнение относительно vmin :
2
^^min __ р p-0-lvmin
2 0
которое решается численно (таблица 4.2). Количественной мерой эффективно-
сти накольно-воспламенительного механизма является коэффициент запаса по
скорости накола:
(4-52)
V
£2
Vmin
135
Таблица 4.2 - Значения
ш, г 0,1 0,2 0,3 0,4 0,5 0,6 0,7 0,8 0,9 1,0 1,5 2,0
Vn>im м/с 17,5 14,4 12,8 11,7 10,9 10,3 9,75 9,32 8,95 8,63 7,46 6,71
Если записать «скоростное» условие (4.51) в развернутом виде, то
получим соотношение
2 v .
max > в пип
'Г 9
(4-53)
которое может быть использовано по-разному в зависимости от того, какая величи-
на известна. При известных параметрах механизма (4.53) по существу определяет
класс артиллерийских систем, динамические характеристики которых гарантируют
срабатывание механизма при выстреле. Иначе говоря, неравенство (4.53) можно
применять при решении задачи унификации механизмов взрывателей.
Объединяя (4.48) и (4.51) запишем окончательно:
~ 7 । 6а I6а I2v
ксп <1 - d—; d— > (4-54)
V Нкин V ^КИН V ^КИН
Пример
Вновь обращаемся к НВМ взрывателя МГ-57. Находим безразмерные па-
раметры(дт = 1 ):
a 4,65-Ю’3 ,
a =------- =------------------г = 2,23 -10 ;
gkj2 9,8-25200-2,912-10'6
4,65-10’3
ксп = К = =---------И----------- = 0,0318 ;
mgk, 0,204-10’3-9,8-25200
V&F = ^6-2,23-10‘3 = 0,237 ; 1 -Зл/б^ = 1 - 0,237 = 0,763 > 0,0318.
Таким образом, первое из неравенств (4.54) выполнено с большим запа-
сом. Теперь проверим, выполняется ли условие 100 %-ного воспламенения
капсюля. Для ударника массой m — 0,204 г минимальная скорость накола КВ
vm,n =14.4 м/с. Далее
v 14,4
- = _mm_ =------------------ = 0 02 '
m,n gkj 9,8-25200-2,91-10’3
7^ = 72-0,02 =0,2 <0,237,
т.е. срабатывание накольно-воспламенительного механизма при выстреле га-
рантируется.
136
4.5 Единые условия безопасности и взводимости для взрывателей
к артиллерийским системам. Условие совместимости
Неравенства (4.54) и (4.41) в совокупности
< I-№2 Ж > Ж (4.55)
1 Мкин V Ь^КИН V Мкин
можно рассматривать как единые условия безопасности в служебном обраще-
нии и надежной взводимости при выстреле из артиллерийской системы при-
менительно к механической системе аналогового типа.
В случае простейшего механизма цкин = 1 и, как отмечалось выше (см.
разд. 3.5), приведенные параметры превращаются в «натуральные»:
i2 __ ___ ______ ______
— <кс<1~ 34бЪ; 34бЪ > ^2vmm (4.56)
2а
При необходимости учета разброса параметров неравенства (4.55) и
(4.56) следует записывать для наиболее неблагоприятных их сочетаний. На-
пример,
Приведенные соотношения можно непосредственно использовать при
выполнении поверочных расчетов механизмов с известными конструктивны-
ми параметрами. Оценивая полученный результат, констатируем, что даже в
упрощенной постановке (с учетом сделанных допущений) удается исключить
все недостатки, свойственные эмпирическому подходу.
Перейдем теперь к рассмотрению круга вопросов, связанных с синтезом
АМС. Прежде всего, введем величину
6а
z = 1> (4.58)
V Нкин
которая имеет смысл разностного времени взведения, т.е. z = t[ = Fa — ксп, как
показано выше. Используя (4.58), преобразуем неравенства (4.55):
с2 - l~2V
— <кт<1-г; z> zmin = . —- (4.59)
Z N Нкин
где с = by/з .
137
Обратимся к первому из этих соотношений: видно, что требования по
безопасности и взводимости выполнимы одновременно (т.е. совместимы),
если по крайней мере
или
ГЗ
ZxJy(l-z), (4.60)
поскольку только в этом случае возможен выбор некоторого значения ксп,
удовлетворяющего обоим требованиям. Полученное неравенство, несмотря на
свою простоту, позволяет получить ряд полезных результатов. График функ-
ции, фигурирующей в правой части (4.60), показан на рисунке 4.2. Эта функ-
ция обращается в ноль при z— 0 и z— 1, достигая максимума при значении z,
определяемое из условия
—[/(l-zll-Sz2 -4г3 =0,
dzV V 7J
т.е. при z= 3/4 . Подставив это значение в (4.60), получим
А<^' (4'61)
138
Таково предельное значение параметра b , при котором требования по
безопасности и взводимости еще могут быть удовлетворены одновременно.
Поэтому назовем неравенство (4.61) условием совместимости указанных тре-
бований [46]. Ясно, что если £>3/16, АМС нельзя применять, и основные
требования, предъявляемые к ней, в принципе не могут быть удовлетворены
одновременно. Иначе говоря, в конструкции взрывателя необходимо преду-
сматривать устройства, обеспечивающие выполнение указанных требований
раздельно.
Обратимся к выражениям для параметра Ь, полученным выше [(4.38) и (4.39)]:
(7 + K.\[2gH __ л J
Skmax^ ।
(4-62)
о
где в случае линейного закона перегрузки при выстреле А— 1/2, т.е. получаем
следующее соотношение между площадями под кривыми перегрузок:
О О о
Из выражения для b (4.62) видно, что условие совместности выполнить
тем проще, чем мощнее орудие (т.е. чем больше ктах = и г) и чем меньше
высота безопасного падения, что вполне понятно физически.
Таким образом, условие совместимости по существу устанавливает
предельно допустимые соотношения между динамическими параметрами
системы, высотой безопасного падения Н и свойствами преграды, выбран-
ной как типовой при проверке безопасности взрывателя в служебном обра-
щении.
Очевидно, что если условие (4.61) выполнено, будем иметь диапазон
zJ < z < Z-,, где z; и z, определяем в результате численного решения уравнения
z4 -z* +с2 = 0, (4.63)
получающегося из (4.59), если приравнять левую и правую части первого из
неравенств. Значения и z2 могут быть также определены графически, если
провести горизонтальную линию на уровне Д которая будет иметь две точки
пересечения с кривой функции — z)/3 (см. рис. 4.2). Следовательно,
величины Zj и z2 зависят от значения параметра 6, который играет важней-
шую роль с точки зрения принятия решения о приемлемости (или неприемле-
мости) АМС.
139
Возможно несколько вариантов принятия решения в зависимости от со-
отношения между zIt z2, zmin и величиной z, причем последняя должна нахо-
диться в интервале от до :
1) : любое значение zb пределах указанного интервала «скоро-
стному» требованию удовлетворяет;
2) : должно быть выполнено условие < z< ;
3) : «скоростное» требование невыполнимо.
Что касается выбора конкретных значений £С11, то необходимо ввести в
рассмотрение некую целевую функцию для последующей оптимизации пара-
метров механизма. Однако обоснование этой целевой функции и соответст-
вующих количественных критериев - довольно сложная задача. Один из воз-
можных алгоритмов оптимизации предложен автором применительно к на-
кольно-воспламенительному механизму [41].
Можно, кроме того, реализовать метод, основанный на использовании
«золотого сечения» [47, 48], алгоритм которого сводится к следующему. Сна-
чала делим диапазон zt < z < zf в пропорции
Z\ ^2 ^opt
Z2 — ^opt Zopt — Z\
в результате чего получаем квадратное уравнение:
а2 - а -1 = 0,
где
а = Z2 ~Zopt = <+л/5 = ] б18
Zopt - Z\ 2
откуда
01 1
Z t =-----Zj +------z2 = 0,6/8zj + 0,382z2. (4.64)
1 + а 1 + a
Затем, обращаясь к (4.59), вычисляем границы диапазона ксп :
оптимальное значение определяем по формуле, аналогичной (4.64), т.е.
(1СП)= 0,618lcn] +о,382£сп2 (4.65)
Результаты вычислений даны в таблице 4.3.
140
Таблица 4.3 - Оптимизация параметров механизма методом «золотого сечения»
ь с = Ьу[3 Z1 Z2 Zopt *74. 1 zopt
0 0 0 1,0 0,382 0 0,618 0,2360
0,02 0,0346 0,1105 0,9988 0,4498 0,0132 0,5502 0,2183
0,04 0,0693 0,1802 0,9951 0,4915 0,0404 0,5085 0,2192
0,06 0,1040 0,2425 0,9889 0,5276 0,0736 0,4724 0,2259
0,08 0,1380 0,3018 0,9796 0,5607 0,1080 0,4393 0,2346
0,10 0,1730 0,3607 0,9668 0,5922 0,1441 0,4078 0,2448
0,12 0,2080 0,4210 0,9495 0,6228 0,1791 0,3772 0,2548
0,14 0,2420 0,4852 0,9259 0,6535 0,2098 0,3465 0,2620
0,16 0,2770 0,5580 0,8917 0,6855 0,2382 0,3145 0,2673
0,18 0,3120 0,6565 0,8300 0,7228 0,2578 0,2772 0,2652
3/16 0,3250 0,7500 0,7500 0,7500 0,2500 0,2500 0,2500
ь v-jl + 2у Et
0 7,128 ОО
0,02 5,358 16,6
0,04 4,697 5,42
0,06 4,292 3,07
0,08 3,996 2,17
0,10 3,764 1,70
0,12 3,557 1,42
0,14 3,352 1,25
0,16 3,150 1,12
0,18 2,901 1,03
3/16 2,667 1,00
Имея оптимальные значения kcn и z, выберем соответствующие парамет-
ры механизма, причем некоторые из них должны быть известными (заданны-
ми). Так, можно записать:
т т av2 av2(w +0,5)
Кп = *оп + -----= ——-------------L; (4.66)
кин Цкии
кроме того, согласно (4,58), z3 — 6а!\\.к^п и, таким образом,
141
Из (4.67) получим
4>У(7 + ^ИСж)
12
(4.67)
1 I
zopl vM7+2VcJ’
(4.68)
т.е,, задавшись \|/сж , найдем v, а затем
юо„
В табл. 4,3 приведены значения v^Jl + 2\|/сж = ^12\kcn )ор1/^р , а также
коэффициента запаса по безопасности Д , который вычисляют по формуле
(к ) Z3
, _ v^cn/opl^opt
С2
вычисления возможны лишь при заданной кинематической структуре механизма
(некоторые конструктивные параметры могут быть известны, например, из эскиз-
ного проекта). Здесь мы на этих вопросах не останавливаемся, поскольку они доста-
точно подробно рассматриваются в других известных работах. Например, в работе
[49] изложена методика проектирования цилиндрических пружин сжатия, приме-
няющихся в инерционных механизмах, с помощью ЭВМ.
Пример
Для НВМ МГ-57 имеем:
Ъ = =0i0I5<± = 0JS75 .
gk,r 9,8 25200 2,91 10 16
«Глобальное» условие совместимости выполнено, т.е. оба требования
могут быть в принципе удовлетворены одновременно. Далее вычисляем
с = b/з =0,015-/з =0,026
и с помощью уравнения (4.63) находим
zl~0,0901;z2 =0,9993.
Из примера в разд. 4.4 известно z — - 0,23 7 и zmin = = 0,2 ;
поскольку zmin > zIf то должно выполняться неравенство zmin < z < z2, что
мы и имеем для рассматриваемого механизма:
0,2 <0,237 <0,9993.
142
Отсюда заключение - накольно-воспламенительный механизм взрывате-
ля МГ-57 должен гарантированно срабатывать при выстреле из пушки С-60,
Необходимо отметить, что вычисления в нашем сквозном примере проведены
для номинальных значений параметров.
4.6 «Минимальные» характеристики артиллерийской системы
В разд. 3.6, при рассмотрении эмпирического подхода, были определены
значения минимального значения к}, при котором могут быть удовлетворены
требования по безопасности и взводимости; эти значения оказались равными
4200 и 2700 для жестких и упругих элементов системы предохранения, соот-
ветственно. Попытаемся рассмотреть этот вопрос теоретически и определить
такие динамические характеристики артиллерийской системы (kj и т), при ко-
торых указанные основные требования еще могут быть удовлетворены одно-
временно. Назовем такие характеристики минимальными.
Согласно условию совместимости (4.51), с учетом (4.38), можно записать:
t (J+kK , 3 ,
gk^ J6’
откуда
16 +
з g
(4.69)
т.е. получаем ограничение, накладываемое на динамические характеристики
системы с точки зрения безопасности в служебном обращении. Для того чтобы
иметь раздельные ограничения для к} и г , очевидно, необходимо располагать
дополнительным неравенством. Обратимся, например, к табл. 4.3, из которой
следует, что, с точки зрения оптимизации механизма, безразмерный параметр
zne может быть больше 0,75. Следовательно, можно потребовать, чтобы этот
параметр удовлетворял неравенству
6a 3
--------Т
4
(4.70)
откуда
, 128 a
к}т >-----------.
Таким образом, получаются два ограничения, накладываемые на произ-
ведение к}т \ более жестким, очевидно, является первое из них, и поэтому
можно потребовать, чтобы
143
16 (7 + к)го 128 а
3 g 9 цкин£Т ’
ИЛИ
8 а
Т> 3 ЦкииИ0(7 + к)
Подставив это выражение в (4.69), будем иметь
> 2^тЛ2(1 + кУ = 4цктН(1 + к)2 = , ч
ag а
(4.73)
Величины (к])т1П и xmin являются минимальными динамическими харак-
теристиками артиллерийской системы. Соотношения (4.71) и (4.72) могут быть
использованы при решении проблем унификации механических систем взры-
вателей. Если, кроме того, учесть требование по скорости взводящейся детали,
то должно быть выполнено и условие (4.53).
Неравенства (4.71) и (4.72) можно объединить, разрешив их относитель-
но параметров механизма, т.е.
^1 МКИН
Для простейшего механизма, при к = 0,4, из (4.72) получим
7 8Н
kj >----.
а
Если принять =4200, в соответствии с рекомендацией, вытекаю-
щей из эмпирического подхода, то, например, при Н=3 м должно быть
a > 5,7 мм.
Пример
Для НВМ МГ-57 имеем
f \ 4*3*142
U, L, =-Н- = 3060 <25200;
V ,mw 4,65 10~3
проверяем выполнение условия (4.53):
2v3min_ 2-14,43 б
9 ga2 9-9,8-4,652 -10~6
L = 25.200. = 8,64• 106 с'> 3,13 • 106 с'.
т 2,91-10~3
144
4Л Исследование взведения механизма на ЭВМ
В разд. 2.2 рассмотрена математическая модель выстрела из артиллерий-
ского орудия, которая представляет собой систему уравнений внутренней бал-
листики, приведенных к безразмерному виду. Эти уравнения описывают дви-
жение снаряда во время первого и второго пиродинамических периодов с по-
мощью (2.38) и (2.40):
dV _ dl - dz _ ГТ
-a=p:di=V;di=p^'
где, согласно (2.39),
_ = р_ = у - (И2 ;
Р Г1 + а~^а~1^
И
Л-V.
dt dl If + dt
0
Для того чтобы исследовать поведение механизмов взрывателя более
строго, чем это было принято при рассмотрении условия надежной взводи-
мости, необходимо численно решать уравнение движения механизма со-
вместно с уравнениями внутренней баллистики. При этом очевидно не воз-
никает принципиальных трудностей при учете факторов, обусловленных
вращением снаряда. Однако уравнение движения механизма должно быть
приведено к тому же «масштабу», что и внутрибаллистические уравнения,
т.е. его необходимо преобразоватьс помощью тех же нормирующих вели-
чин.
Проиллюстрируем процедуру подготовки к решению задачи на ЭВМ, ис-
пользуя типовую математическую модель механизма в виде (3.32)
d2x
— + со-’пх = HK„Hg[fc(0 ~ kOn ].
at
Прежде всего, это уравнение представим в виде системы из дифференци-
альных уравнений первого порядка:
^ = ЦкинЖ0-^оп]-“оп*-' ^ = V- (4-74)
at at
Введем следующие безразмерные величины:
Преобразуем (4.74):
145
= МкннЖО- ^Оп]- ®O„^; у = PnpV-
Учитывая, что L ~ VnpT, и имея в виду понятие предельной перегрузки,
запишем:
кпр
К,р
gT’
тогда
-4 = Мкии\к(0- кОп]- (со0птУх; ~^=v,
dt dt
где
_ К __ 1^
к - - -к - —°п
К “ ъг >К0п ~ „ •
^пр пр
В разд. 2.2 было показано, что к =р', введем обозначение для частотно-
временного параметра v = a>QnT, Тогда уравнение движение механизма при-
обретает следующий окончательный вид:
^- = Мкнн(р-^оп)-^х; ^ = v.
at at
Отсюда видно, что связь с уравнениями внутренней баллистики реали-
зуется вследствие того, что в (4.75) фигурирует давление в канале ствола р,
(4-75)
а последнее, в свою очередь, зависит от элементов движения снаряда и про-
цесса газообразования. Таким образом, задача сводится к совместному ре-
шению системы уравнений (2.38), (2.40) и (4.75) на ЭВМ. В процессе вычис-
лений необходимо контролировать выполнение традиционных для внутрен-
ней баллистики условий (максимум давления, конец горения); останов счета
при х — а — a)L.
В работе [50] рассматриваются две модели выстрела из миномета - с уче-
том и без учета перетекания пороховых газов в заминное пространство; первая
из этих моделей позволяет построить начальный участок закона перегрузки
при выстреле. В результате совместного решения системы из уравнений вида
(4.75) с уравнениями внутренней баллистики на ЭВМ удалось более строго
исследовать процесс взведения инерционного предохранительного механизма
взрывателя, предназначенного для надкалиберной мины, и оценить степень его
соответствия предъявляемым требованиям.
Сравнение результатов исследования механизма взрывателя различными
способами приведено в приложении 5.
146
4.8 Проектирование аналоговых механических систем взрывателей для PC
Предыдущий материал относился к ствольным системам, общей особенно-
стью которых с точки зрения проектирования является возможность представления
закона перегрузки при выстреле в виде линейной функции времени. Рассмотрим
теперь этот же круг вопросов применительно к реактивным системам.
Силы, действующие на активном участке траектории PC, были описаны выше
(см. разд. 2.3.3). Напомним, что наиболее характерной особенностью реактивной
системы является малость перегрузок. В связи с этим в конструкциях взрывателей
применяют предохранители меньшего сопротивления, что порождает трудности,
связанные с необходимостью обеспечения безопасности в обращении.
Можно констатировать, что аналоговые механизмы находят ограниченное
применение во взрывателях к PC — главным образом, к относительно мощным сис-
темам, уровень перегрузки которых исчисляется десятками или сотнями единиц.
Эти механизмы часто используют лишь для взведения взрывателя на активном уча-
стке траектории, а безопасность обеспечивается применением других устройств
(например, аэродинамических или центробежных - в ТРС).
Предположим, что закон перегрузки на активном участке может быть
представлен в виде прямоугольного импульса:
= ктт = К = const> О < t < Та (4.76)
Данная модель вполне приемлема для ориентировочных расчетов (см. разд.
2.2.3). Вновь воспользуемся типовой математической моделью АМС (3.30):
mn^ = mogk(t)-Rn(x\,
at
предположим сначала, что
Яп(х) = const =
т.е. усредним силовую характеристику системы предохранения. Тогда с уче-
том (4.76) уравнение движения можно записать в виде
» 2 — ^кин£>^тах ^сп ) ’
at
ИЛИ
d2x _dv_
if-\2 ~ J7 Мкин
(4.77)
где, по аналогии с артиллерийской системой, введены обозначения:
i = —;х =------—-;v =-----—;ксп = ———.
Га Лах^а ^max^a W0^max
Интегрируем (4.77) при нулевых начальных условиях:
147
V = |X„(l - >, X - к«).
Принимая х = а, найдем время и скорость взведения механизма:
h = J----Т \: = 72"Мкии(;-^сп) • (4.78)
УМгккиУ-М
Условие надежной взводимости, очевидно, сводится к тому, чтобы про-
цесс взведения завершился в пределах интервала времени, составляющего
некоторую долю (9) длительности активного участка Та, т.е. FB <&. Тогда
получим следующее условие:
СП
(4-79)
(4.80)
2а
МкиЛ2
Отсюда видно, что коэффициент запаса по взводимости:
_ 1 2"
е’~ н 9J'
Следует отметить, что более свободное ограничение ( ?в < 1, т.е. tB < Та)
приводит к нереальным с практической точки зрения параметрам механизма.
Что же касается величины &, то она может быть достаточно малой, и ее мож-
но обосновать.
Условие безопасности, очевидно, остается в силе (поскольку оно выведе-
но именно для АМС), и поэтому можно сразу записать единые условия безо-
пасности и взводимости:
Мкии£2 , 2а
2а МкниЗ
Следует отметить, что условие безопасности (левая часть двойного нера-
венства), имея такой же внешний вид, как и раньше, т.е. (4.41), отнормировано
по параметрам закона перегрузки на активном участке траектории.
Для того чтобы методика проектирования имела «унифицированный»
вид (по аналогии с артиллерийской системой), введем обозначение
_ 2а
и тогда (4.81) приобретает вид
с2 V
(4-81)
(4-82)
z
где с = Ь/&. Условие совместимости:
(4.83)
148
Видно, что правая часть обращается в 0 при z, равном 0 и 1, достигая
максимума при z=0,5,T.e.
Ь 1
с = — < —.
9 2
Отсюда следует, что коэффициент запаса по взводимости:
9 > Smin = 2b = ^-° (4.84)
Это соотношение дает возможность оценить порядок величины 9.
Диапазон допустимых значений z определяется координатами точек пе-
ресечения горизонтальной прямой на уровне с, с кривой — z), т.е. из
уравнения
z2 - Z+ с2 - 0,
Применяя подход, основанный на методе «золотого сечения», получим
соответствующие оптимальные значения, приведенные в таблице 4.4.
Таблица 4.4 - Оптимальные параметры АМС (PC)
с %ор1 ^lZoP< СП ^qpt 1 %ор1
0,00 0,3820 0,0000 0,2361 0,6280
0,05 0,3826 0,0065 0,2399 0,6274
0,10 0,3844 0,0261 0,2512 0,6256
0,15 0,3874 0,0645 0,2699 0,6226
0,20 0,3919 0,1021 0,2954 0,6181
0,25 0,3978. 0,1571 0,3271 0,6122
0,30 0,4056 0,2219 0,3642 0,5944
0,35 0,4157 0,2947 0,4053 0,5943
0,40 0,4292 0,3728 0,4484 0,5808
0,45 0,4486 0,4514 0,4896 0,5514
0,50 0,5000 0,5000 0,5000 0,5000
149
Перейдем к определению «минимальных» динамических характеристик
PC. Рассуждая по аналогии с артиллерийскими системами, запишем два нера-
венства, вытекающие из условия совместимости и методики оптимизации:
_ b _ (7 + к)И0 1 _ 2а _ 2а 1
С~ &gkmaxTa ~2' Z~ цкнн&2 “ 2 ’
Отсюда получаем два ограничения:
> ? > __1е_
' max а ‘
Поскольку первое из них должно быть выполнено безусловно, потребу-
ем, чтобы
2^(7 + к)> 4а
откуда
~ ~ 2а
> ^min — от/ / у V (4.85)
НкинШ/4-K)
Соответственно,
1с >(к } _МкннГ/(7 + к)2 _2цкиня(/ + к)2
*max > <Лтах Jmin “---------- “---------------• (4*86)
ag а
Из полученной формулы видно, что (&max )min от & не зависит; кроме того, при
прочих равных условиях значение (&max )min вдвое меньше того, которое соответст-
вует артиллерийской системе-(4.72). Объединив (4.85) и (4.86), запишем
~"[' + к)~’ < — < »г.(1 + *M2gH .
^max Цкин
Из формулы (4.86) видно, что величина (^max)min может быть понижена
двумя способами: усложнением кинематической структуры (уменьшением ки-
нематического параметра ц), увеличением пути взведения а, а также сочета-
нием обоих способов. Кроме того, возникает идея - для уменьшения габаритов
заменить поступательное движение взводящейся детали винтовым. Поскольку
при большом угле поворота требуется уже не цилиндрическая, а спиральная
пружина, возникает простое решение: заменить чисто винтовое (непрерывное)
движение винтовым по участкам, т.е. перейти на возвратно-вращательное (пре-
рывистое) движение. В этом и заключается принцип механизма с зигзагообраз-
ным пазом; данный механизм широко применяется, он является представителем
класса дискретных механических систем. Механизмы этого типа применяют во
взрывателях не только для PC, но и для минометов.
150
Учет колебательных свойств механизма. Продолжим рассмотрение
АМС. Выше условия безопасности и взводимости выводили без учета колеба-
тельных свойств механизма, поскольку силовую характеристику системы пре-
дохранения усредняли. Теперь обратимся к основной (строгой) математиче-
ской модели (4.33); с учетом принятого способа описания закона перегрузки
уравнение движения механизма будет иметь вид
^у + ^х = цкнн(7-ЛОп);
его решение (при нулевых начальных условиях) таково:
- _ MkhhG? ^OnJ fj _ cOsvjQ = .?ELkhh G-
V' V
• 2 V/
sin ---
2
V = Нкиил----2nJsinvf
V
Приняв x = a , найдем время взведения
- 2
tB =— arcsm v
v
Потребуем, чтобы было выполнено условие tB < &, т.е.
V&/2
2а
On
(4-87)
(4.88)
H™9 Lsin(W2).
Порядок величины 19 можно оценить следующим образом. Из (4.87)
видно, что смещение взводящейся детали не может быть больше
2цкнн(/ — ^оп)/у2 ’ эт0 максимальное смещение достигается при t = л/v , т.е.
& < л/v. Ранее было показано, что
av2
2цкин
Выразим отсюда &011 и подставим в (4.88); после ряда преобразований по-
лучим
^сп = ^Оп
2а 2
СП
(4.89)
где
(v9/2)
Y tg(v$/2)
151
Видно, что при V—>0у—>7.0, и неравенство (4.89) приобретает вид
(4.79). Это - наихудший с точки зрения взводимости случай, поскольку правая
часть неравенства (4.89) минимальна. По мере возрастания у функция у
асимптотически стремится к 0, т.е. диапазон допустимых значений Лсп расши-
ряется.
Можно показать, что функция у влияет на «минимальную» длительность
активного участка траектории:
Т >Т =---------________
И™,8Г„(/ + к)'
В то же время, выражение (4.86) сохраняет силу.
4.9 Оптимальное проектирование накольно-воспламенительного механизма
Изложенная выше методика выбора параметров АМС (на основе метода
«золотого сечения») не в полной мере удовлетворяет принципам оптимизации,
поскольку отсутствует целевая функция как таковая и, соответственно, обос-
нованный количественный критерий. Условия, определяющие границы облас-
ти допустимых значений z (z} < z < z2), таковы (> 1 и tB < 1), что в ряде
случаев приводят к чрезмерным запасам, особенно по безопасности в обраще-
нии. Если речь идет о проектировании механизма, который при взведении
лишь должен переместиться на величину рабочего хода (в обращении переме-
щение естественно должно быть меньше), то любое значение z внутри указан-
ного интервала этим требованиям удовлетворяет, и неясно, какое именно зна-
чение следует считать наиболее приемлемым, т.е. возникает характерная для
взрывателей ситуация неопределенности.
Однако в случае накольно-воспламенительного механизма (НВМ) задача
становится более определенной, поскольку должно быть принято во внимание
дополнительное условие — 100 %-ное воспламенение капсюля, что возможно
лишь при некоторой, минимально необходимой для этого скорости (кинетиче-
ской энергии) накола. Иначе говоря, при габаритном ограничении механизм
должен обладать наибольшими возможными запасами как по безопасности в
обращении, так и взводимости при выстреле. Эти требования, очевидно, про-
тиворечат друг другу и, следовательно, мы имеем типичную задачу оптимиза-
ционного проектирования, которая сводится к обоснованию вида целевой
функции и соответствующего критерия.
Процедура оптимизации достаточно подробно изложена в [47, 48]. В ма-
тематическом смысле задача сводится к максимизации (минимизации) вещест-
венной функции /(х) TV-мерного векторного аргумента х = (xpx2,...,xN),
152
компоненты которого удовлетворяют системе уравнений Д(л)=0 и набору
неравенств, а также ограничены сверху и снизу, т.е. > x-L\ Функция
/(х) и носит название целевой функции.
В дальнейшем будем считать, что кинематический параметр цкин =7,
т.е. рассматриваем механизм простейшего типа. Ограничения, учитываемые
при проектировании НВМ, сводятся к следующему:
1) безопасность в служебном обращении: согласно (4.40),
(4.90)
2) условие надежной взводимости:
- запас по скорости накола:
v v
Е. =
v v
min min
(4.91)
- ограничение по длительности процесса взведения (срабатывания НВМ):
tR < т, или ~tB < 1. (4.92)
Может быть также задана некоторая доля длительности переднего фронта 8,:
3) конструктивное ограничение: а < [а];
4) д ополнительные ограничения.
С точки зрения виброустойчивости (главным образом, при транспорти-
ровании) может быть наложено ограничение на частоту собственных колеба-
ний; в некоторых случаях необходимо ориентироваться на штатные (стандарт-
ные) конструктивные элементы (например, пружинные предохранители опре-
деленной жесткости, ударники и т.п.).
Из сказанного следует, что оптимальным будет такое сочетание парамет-
ров механизма (а, т, с, ^сж), которое в пределах перечисленных ограничений
будет обеспечивать наибольшую возможную степень безопасности в обраще-
нии (Ej) и наибольший запас по скорости накола (ТГ2). Оптимум вполне мо-
жет существовать, в чем можно убедиться, проведя следующий упрощенный
качественный анализ.
Пусть путь взведения а задан; тогда основные показатели качества НВМ
будут определяться частотно-временным параметром V = со0т и относитель-
ным начальным поджатием предохранителя \|/сж. Можно выделить следую-
щие предельные случая. При V—>0 (с—>0)^ —>0, а скорость ударника,
очевидно, достигает максимально возможного значения, т.е. Е2 = (Д)тах • Во
153
втором предельном случае у—>оо (с—>оо, т—> 0) 2^ —> 0,/jj —> оо, по-
скольку движение невозможно. На рисунке 4.3 показаны зависимости Е] и Ег
от частотно-временного параметра v; видно, что может существовать некото-
рый диапазон (vI < v < v2), в пределах которого как Е}, так и Е2 больше 1.
Рисунок 4.3 - Зависимость Е1 и Е2 от частотного параметра v
Отсюда следует вывод о том, что может быть принят некоторый количе-
ственный критерий (показатель качества механизма) П, обращающийся в 0 в
указанных предельных случаях и достигающий максимума внутри соответст-
вующего интервала значений конструктивных параметров • Таким
образом, если
то задача сводится к нахождению абсолютного максимума (Птах)тах путем
последовательного исключения :
Возникает вопрос, как обосновать структуру функционала n(^,...,^N).
Применительно к НВМ выражение для П можно записывать по-разному, на-
пример П = П(т,а,с,\|/Сж)= П(уда/Па,с,\|/Сж), поскольку vmin определяется
массой ударника т, или П - П(со0,а,\|/Сж); наконец, при использовании сис-
темы безразмерных величин П = n(v, ). В принципе возможны две
формы представления мультипликативная: и аддитивная. В обоих случаях
154
возникает неопределенность, связанная с выбором (назначением) показателей
степени коэффициентов веса. Применительно к НВМ с учетом сказанного вы-
ше показатель качества можно представить, например, в виде
П =
а с учетом (4.90)
П =
(4.93)
Для учета функциональных связей связей между параметрами механизма
необходимо использовать соотношения, вытекающие из уравнения движения
(4.44) при //кии = 1
a =-^-(vFB'-sinvFB');
v„ = -^(/-cosw;),
V
(4.94)
(4.95)
где 7в' = tB - к0, причем
77 — 2
Из (4.94) и (4.95) видно, что выразить vH в явном виде через а и v не
удается. Введем обозначение
W = vf; ;
примем далее, что время взведения tB = £ < 1, т.е.
W _ 2
G = ~ + V c*av = £>
V
откуда
U - £V •
Таким образом, объединяя это выражение с (4.90), (4.94) и (4.95), полу-
чим следующую систему исходных соотношении:
z— \2
£,=(! + >„ 1^1
\ b J
— з
av =H-sinw (4.96)
uv2 = 1 -cosh
sv = w + ^CJKav3 =w + ^C3K(w-sinw)
Возвращаемся к выражению (4.93); с учетом (4.96) будем иметь:
155
п=вд=1±>ь.(гУ(1-«»
b b [м + усж\u - sin w)f
Видно, что в правой части полученного выражения фигурирует множи-
тель в виде функции, зависящей от и и:
п = = С+2ч/сж X1 -cos »Хц -sin ц)2
еб [« + Vc<(«-sin w)]6
Эту функцию можно рассматривать как целевую: ее максимальное зна-
чение соответствует максимуму произведения Е^и минимуму £ (мера бы-
стродействия механизма). Далее находим такое значение и, которое (при за-
данном усж), обеспечивая максимум П7, будет оптимальным. С помощью
соотношений (4.96) можно найти оптимальные значения соответствующих
конструктивных параметров механизма.
Имеем:
d?7- - [w + (и - sinw)]6 [(и - sinw)2sinw + 2{и - sinwX? - cosw)2]-
ди
- б\и + \|/СЛ- (w - sinn)]5[7 + \|/СЛ, (7 - cosw)](7 - cosn)(w * sinw)2 =
= [и + \|/ сж (и - sin и)]5 (м - sin w){[w + \|/ сж (и - sinw)J(w - sinw)sinM +
+ 2(7 - cosh)2]- б[1 + Ye»' (7 — cosw)](w - sinn)(7 - cosw)}
Знак производной определяет выражение в фигурных скобках:
П2-[м + \|/сж.(м- sin«)][(« - sinw)sinM + 2(7 - cosw)2]-
- б\1 + \|/ сж (7 - cos м)](м - sin и\1 - cos и).
Оптимальное значение uopt можно найти (численно) из условия П2 =0;
это значение будет очевидно зависеть от \|/сж. Теперь выведем соотношения,
удобные для решения различных вариантов задачи проектирования НВМ. За-
висимость иор1 от Х(/сж становится известной, и поэтому в последующих пре-
образованиях выделим функции, зависящие от и и \|/сж .
Обратившись к (4.96), прежде всего выразим произведение
- А
av = bl------— ;
с помощью второго из соотношений (96) находим
и - sin и )д/7 + 2\|/
сж
(4.97)
v
и соответственно
156
a
и - sin и
(4.98)
По аналогии,
V.
7 - cos и
bJT, (и - sin и ^1+2^^ ’
и + \|/ (и - sin и )
(4.99)
(4.100)
£
сж
В таблице 4.5 приведены результаты, полученные с помощью ЭВМ; ис-
пользованы следующие обозначения:
а
Al - av3 - и - sin и; А2 -
и - sin и
АЗ =
А5 =
А7 =
= у! (и- sinu\]l + 2усж
1 - cos и ( \
;-------—. = ; /4o = 8V = M + \|/tar(M-Slnwl;
и - smuyjl + 2у сж
м + \|/ сж (м - sin w )
J(w - sinw)^ + 2\|/м.
/44 = v Hv2 - 1 - cos и;
v
V„
£
Таблица 4.5 - Оптимальные параметры НВМ
V Uopt Al Al АЗ 44 Л5 46 47
0,0 2,2789 1,5192 0,8113 1,2326 1,6504 1,0863 2,2789 1,8489
0,1 1,9903 1,0770 0,8404 1,0862 1,4073 1,1928 2,0980 1,9315
0,2 1,7646 0,7833 0,8779 0,9627 1,1926 1,2868 1,9212 1,9957
0,3 1,5909 0,5911 0,9143 0,8647 1,0201 1,3644 1,7682 2,0449
0,4 1,4554 0,4620 0,9467 0,7873 0,8848 1,4274 1,6402 2,0832
0,5 1,3472 0,3721 0,9747 0,7254 0,7783 1,4789 1,5333 2,1136
0,6 1,2589 0,3072 0,9988 0,6750 0,6932 1,5214 1,4432 2,1382
0,7 1,1853 0,2587 1,0196 0,6331 0,6240 1,5570 1,3664 2,1584
0,8 1,1229 0,2215 1,0376 0,5977 0,5669 1,5870 1,3001 2,1753
0,9 1,0692 0,1924 1,0533 0,5674 0,5192 1,6128 1,2423 2,1896
1,0 1,0223 0,1690 1,0671 0,5410 0,4786 1,6351 1,1913 2,2019
157
Выбор соответствующих комплексов зависит от исходных данных при
проектировании. При известных Ь (этот параметр можно считать заданным) и
Ех параметры механизма определяются однозначно, если задать \|/сж. В пер-
вом приближении можно принять = 1 (в этом случае, как показано выше,
все равно присутствует скрытый запас по безопасности). Например, при
Е{ = 1 и \|/сж = 0,5 будем иметь (см. табл. 4.5):
“=(«)«. =0.9747b4b:
0.7255
V = V = ------- ’
v. =(v.Ln =l-4789b;
Пример
Вновь используем взрыватель МГ-57 (см. прил.З). Ранее уже было пока-
зано, что параметры этого механизма нельзя считать оптимальными (в частно-
сти, с точки зрения безопасности). Поэтому поставим задачу следующим обра-
зом: при максимально возможном сохранении штатных конструктивных пара-
метров улучшить общие характеристики механизма. Нетрудно показать, что
при сохранении массы ударника (ш = 0,2 г) и пути взведения (а — 4,65 мм)
эту цель достигается увеличением жесткости пружины предохранителя до
с =630 Н/м, те. более, чем в 2 раза. При этом запасы становятся равными: по
безопасности Е^ =1,3 и по взводимости Д =1,28 при относительном началь-
ном поджатии \|/сж = 0,6.
158
Глава 5
ПРОЕКТИРОВАНИЕ ИНЕРЦИОННЫХ
ПРЕДОХРАНИТЕЛЬНЫХ МЕХАНИЗМОВ
ДИСКРЕТНОГО ТИПА
Характерной особенностью механических систем дискретного типа, т.е. та-
ких, которые совершают прерывистое движение, является то, что в процессе взве-
дения происходит циклическое нарушение плавности движения взводящейся дета-
ли, что сопровождается частичным поглощением энергии, сообщаемой взводящей
силой, т.е. либо силой инерции, либо силой упругого предохранителя (в механизме
дальнего взведения). Дискретные механические системы (ДМС) обычно встречают-
ся в конструкциях взрывателей для PC, характерной особенностью которых являет-
ся малый (по сравнению с артиллерийскими системами) уровень перегрузок на
активном участке траектории, иногда - в минных взрывателях. Вместе с тем, путем
реализации принципа прерывистого движения удается одновременно обеспечить и
выполнение требования безопасности. Считается, что для ДМС в служебном обра-
щении наиболее опасны воздействия, близкие к траекторным, т.е. имеющие относи-
тельно большую длительность. Ниже будет показано, что, хотя в большинстве слу-
чаев подобная точка зрения справедлива, иногда большую опасность могут пред-
ставить и кратковременные импульсивные воздействия. Отсюда следует, что усло-
вие безопасности в обращении должно быть сформулировано иначе, чем в случае
АМС. Можно выделить следующие фазы движения ДМС в пределах одного цикла
процесса взведения:
- совместное движение ведущего и ведомого звеньев (при их контакте,
т.е. при кинематической связи);
- нарушение контакта;
— раздельное движение;
- восстановление контакта (и кинематической связи), сопровождающееся
ударом и потерей скорости звеньев.
Таким образом, прерывистый характер движения взводящейся детали
можно обеспечить только с помощью механизма с кинематическими связями
(кинематический параметр цкн11 </). С теоретической точки зрения такой
механизм — довольно сложный объект исследования, поскольку из-за цикличе-
ского нарушения и восстановления кинематической связи отдельные фазы
движения приходится рассматривать раздельно, с учетом трудно определяе-
мых начальных условий. Поэтому целесообразно попытаться разработать уп-
159
рощенную методику проектирования, основанную на конечных расчетных
зависимостях. Наиболее известны в этой области работы Г.С. Батуева и В.В.
Руднева, а также некоторые другие. Вопросы, связанные с проектированием
ДМС, рассматриваются в работе [51].
ДМС могут быть как одно-, так и двухфазными, причем первые - это
предохранительные механизмы, а вторые - механизмы дальнего взведения;
конструктивно они часто объединены.
5.1 Механизмы с зигзагообразным пазом
Схемы построения предохранительных механизмов с зигзагообразным
пазом (МЗП) можно разделить на три основные группы:
1) взводящаяся деталь (ведущее звено) совершает поступательное и воз-
вратно-вращательное движение;
2) взводящаяся деталь совершает поступательное движение, а ведомое звено
(баланс) - возвратно-поступательное (или возвратно-вращательное) движение;
3) поступательно-вращательное (винтовое) движение взводящейся детали
и возвратно-вращательное движение «баланса».
Существует МЗП «двойного действия»: при оседании инерционной втул-
ки (гильзы) штифт скользит по одному пазу, а при подъеме — по другому (на-
пример взрыватели ДК-2, ДК-4). Эти варианты построения МЗП обладают
разными возможностями с точки зрения варьирования кинематического пара-
метра //кин. Недостатком МЗП является возможность появления наминов (ос-
таточных деформаций) на поверхности паза в служебном обращении вследст-
вие ударов и тряски, что, в частности, объясняется сравнительно слабой пру-
жиной предохранителя. Для исключения возникновения наминов первый уча-
сток паза часто делают прямым в продольном направлении.
На рисунке 5.1 показан типичный взрыватель с МЗП - ГК-2, который
предназначен для кумулятивных и осколочных мин к 82-мм и 107-мм безот-
катным орудиям.
Рассмотрим механизм, построенный по схеме (1), когда инерционная
гильза, имеющая зигзагообразный паз на боковой поверхности, совершает
поступательное и возвратно-вращательное движения, а направляющий штифт
неподвижен относительно корпуса изделия. Данный механизм по существу
представляет собой дискретную винтовую пару.
160
Рисунок 5.1 - Взрыватель ГК-2:
/-предохранительный колпак; 2 - корпус; 3 - шарик; 4 - оседающая гильза;
5-реакционный ударник; 6- пружина; 7-втулка; 8- шарики; Р-жало;
10-инерционный ударник; // -контрпредохранительный колпачок; 12-направляю-
щая втулка; 13 - капсюль-детонатор; 14— хвостовик; 15- бокобойное кольцо;
16— лапчатый предохранитель; /7—передаточный заряд
Расчетная схема механизма показана на рисунке 5.2. В дальнейшем бу-
дем пренебрегать влиянием периодического закручивания пружины при вра-
щении инерционной гильзы, а также (для упрощения выкладок) ее перекосом.
Поведение механизма рассматриваем во время взведения при выстреле (пус-
ке). Составим уравнения равновесия в поступательном и вращательном дви-
жении гильзы (в пределах >го участка прерывистого движения):
яг - т - 7? - 7V(cosa + /sina)
d2 dt (5,1)
I —p- = 7Vr(sina - /cosa),
где zn, 7- масса и момент инерции гильзы; N- сила реакции, нормальная к поверхно-
сти паза; f— коэффициент трения; г- средний радиус гильзы; a - угол наклона колена
паза; =/?(х)-силовая характеристика предохранительной пружины.
161
Рисунок 5.2 - Расчетная схема механизма с зигзагообразным пазом
Коэффициент кинематической связи (между поступательным и враща-
тельным движениями гильзы), очевидно, равен (см. разд. 3.4)
сАр _ ctga
dx г
т.е.
t/’cp _ r d2x _ ctga d2x
j ? j 2 ' * (^-Д)
dt~ dt r dt
Рассматривая инерционную гильзу как тонкостенный цилиндр, можно
принять I = тг2. Используя второе из уравнений (5.1) и учитывая (5.2), полу-
чим выражение для нормальной силы реакции
d2x
wctga ——
N =----------dt_
sina - ycosa
и подставим его в первое из уравнений (5.1):
т(1 + Actga)^-^- - т^-~ R , (5.3)
V ’ dt2 dt
162
где
А = cqsa + ySina = njgp®a = (a _ j.
sina - /cosa tga - tgp
Ртр = arctg/’ - угол трения.
При сравнении (5.3) с типовым уравнением (3,30) можно заметить, что в
данном случае
mQ = т; - т(1 + /4ctga) = m[l + ctg(a - p^Jctga],
т.е. кинематический параметр
= то = 1
/ип Z + ctgfa-p^tga (5.4)
Спецификой рассматриваемого варианта МЗП является то, что инерци-
онная гильза одновременно выполняет роль ведущего и ведомого звеньев.
Количественной характеристикой процесса трансформации поступательного
движения гильзы (обусловленного внешней перегрузкой) во вращательное
(вследствие взаимодействия паза со штифтом) является КПД. Выше было
выведено обобщенное выражение для КПД (3,23), в котором коэффициент
Вц определяют с помощью формулы (3.25). В данном случае
«2 = 1 « тг2; ап1 = тп = т(1 + Jctga); (% = (?, =
dt
т.е.
в = ,2 а2 QI _ ctg2a
” «щ 2д| / + ctg(a-P11,)ctga'
Отсюда видно, что Вп (т.е. КПД) обращается в ноль при a = л/2 (холо-
стой ход) и при a = ac =ртр (самоторможение). Оптимальное значение a
(при котором КПД достигает максимума) находится, как обычно, из условия
дВ^1д& = 0, которое в результате преобразований приобретает вид кубиче-
ского уравнения:
tg3a- — tg2a- — = 0.
2 2
Результаты численного решения этого уравнения приведены в таблице
5.1. Графики зависимости Вц и Цкин от угла давления при некоторых значени-
ях коэффициента трения показаны на рисунке 5,3,
163
Таблица 5.1 - Оптимальные параметры МЗП
f 0,1 0,2 0,3 0,4 0,5
аорь° 23,06 30,48 36,16 40,91 45,0
f^opt 0,117 0,170 0,205 0,231 0,250
(2?*max) max 0,645 0,490 0,384 0,308 0,250
5.2 Математическая модель ДМС
Общий вид уравнения движения взводящейся детали МЗП совпадает (в
пределах рассматриваемого /-го участка) с (3.31), т.е.
Wn =т° lit ~Rn =т°8к^ ~/?п W ’
это уравнение в зависимости от формы представления силовой характеристики
предохранителя приобретает вид (4.30)
= ЬкиЛМО - ^0п ]- <°0п*
df2 1Икин^[^0)-^сп]
или в безразмерном виде
d2x = [мки„[^~)-^оп
(5-6)
где нормировку проводят как и раньше (см. разд. 4.8). Учитывая, что данная груп-
па механизмов предназначена для систем с малыми к\у т.е. для PC, принимаем
допущение, что закон перегрузки в пределах длительности активного участка
траектории Та является прямоугольным, т.е. описывается формулой (4.76):
164
k(t) = const = к ,0<t<Ta.
Соответственно, уравнения (5.6) приобретают вид
d2x _
d^2 1мл-Д;-^сп)
Специфика ДМС заключается в том, что уравнение движения взводящей-
ся детали должно решаться последовательно от участка к участку с учетом
соответствующих начальных условий.
Учитывая относительную малость длительности этапа нарушения и после-
дующего восстановления кинематической связи между ведущим и ведомым
звеньями по сравнению со временем взведения, будем считать, что этот этап
протекает мгновенно. Эффект падения скорости ведущего звена вследствие кон-
тактного соударения с ведомым звеном будем количественно характеризовать с
помощью условного (расчетного) коэффициента восстановления км, считая его
постоянным во время взведения. Это означает, что если скорость взводящейся
детали в конце (/—1)-го участка равна Vj.j, то в начале /-го участка ее
принимают равной .
Таким образом, начальные условия для /-го участка таковы: при t = t^
v = Кмум ’ xi-i = ’ гДе перемещение детали в пределахУ-го уча-
стка (в продольном направлении). Соответственно, возможна и ступенчатая
форма представления силовой характеристики, когда в пределах /-го участка
принимается /?п(х) = const = 7?ni. В общем случае величины До, могут быть
различными, однако в дальнейшем для упрощения будем полагать, что
Ляг = const = а/п , где л — число участков прерывистого движения; а - полный
путь взведения. В этом случае, очевидно, хм — (i — 1 )Ля.
5.3 Условие надежной взводимости ДМС
Условие надежной взводимости ДМС формулируется так же, как и АМС,
т.е. (см. разд. 4.8) /в < &, или /в < &Га. Следовательно, задача сводится к оп-
ределению времени взведения, для чего воспользуемся упрощенной математи-
ческой моделью (5.7):
d2x dv _dv /, г \
~ ~ V “ Икин V ~ сп /* (5-8)
d\t) dt ах
Рассмотрим движение системы в пределах /-го участка прерывистого движе-
ния (начальные условия указаны выше). Интегрируем (5.8) сначала по времени:
165
V = Км Vi-1 + Нкин (1 - Kn )0 - 'i-I ) .
а затем — по перемещению:
V = 7(Км V1 У + X7 - Кп - Хм ) .
Соответственно, для конца участка будем иметь
л- - - V--K и,
Дб = f \ (5.9)
Цкнн(7-^сп?
и
*, =7(киуиУ+2(/-^)дг, (5.10)
поскольку X; — xi_1 = Да = const согласно принятому допущению.
Таким образом, полное время взведения:
7в=2>’- (5.11)
1=1
Выведем рекуррентную формулу для скорости в конце /-го интервала
времени Д^ , затем получим выражение Д^ и, наконец, воспользуемся выра-
жением (5.11). Начальные условия для первого участка (этот участок является
аналоговым): при ? = 0 ~v— 0, т.е.
= 72НкИн(7-^сП)Дя • (5.12)
Перейдем теперь ко 2-му участку; начальные условия для него таковы:
при t = = ДГ(, v = kMvx. С учетом (5.12), можно записать:
V2 = 7(км^1У +2цкнн(7-^п)д« = Vi77 + (km)2 ;
соответственно,
V3 = ViV7 + KM +(КмУ
(5.13)
=V1V7 + KM
Выражение под корнем представляет собой сумму / членов геометриче-
ской прогрессии со знаменателем, равным к^. Обратимся теперь к формуле
(5.9); согласно (5.13) и (5.12), будем иметь
166
(5.14)
В этом выражении 7ВИ = д/2а/[ркин (7 - kcn jj - время взведения при чисто
непрерывном движении, что видно из формулы (4,76). Подставив (5.14) в
(5.11), получим
(5.15)
т.е. функция f[n, км) количественно характеризует эффект перехода на дис-
кретный принцип построения механизма. Рассмотрим два частных случая.
Чисто прерывистое движение: км = О
Это случай, когда скорость взводящегося звена в конце очередного уча-
стка обращается в 0, т.е. соударение звеньев является «абсолютно неупругим».
Из (5.15) видно, что
Дл,0) = -4— • п - 4~п ;
yjn
соответствующее время взведения = /вп = Гвнл/й будет теоретически макси-
мально возможным.
Чисто непрерывное движение: км = 1
В этом случае имеем «абсолютно упругое» соударение, при котором по-
тери скорости взводящегося звена не происходит. При вычислении значения
функции Дл,1) необходимо раскрыть неопределенность типа 0/0 :
.. 1-Y ., /У1 . %-У ., /V 1 — 1 . .
hm------= hm-------= /; lim-----= hm---------= i~ 1.
Y-»l 1 — % j >1 J — X 1
Следовательно,
1 n
и
167
Иначе говоря, при км = 1 tB = /ви, что и следовало ожидать, поскольку в
отсутствие потери скорости взводящейся детали ее движение становится не-
прерывным, т.е. аналоговым.
Таким образом, фактическое значение времени взведения будет заключено в
пределах диапазона /вн < FB < /вп . Поскольку значение коэффициента восстановле-
ния к*м обычно неизвестно, в первом приближении можно принять
/•/ \ Г I \ АпА + f(n,o) 1 + у/п
Ап, Км ) = /ср (П, км ) = . (5.16)
Из таблицы 5.2 видно, что среднее значение функции /(и,/См) примерно
соответствует км = 0,4. На рисунке 5.4 показаны графики этой функции.
Таблица 5.2 - Функция f(nt kM )
п к 2
0,1 0,2 0,3 0,4 0,5 0,6 0,7 0,8 0,9 1,0
1 1,0 1,0 1,0 1,0 1,0 1,0 1,0 1,0 1,0 1,0 1,0
2 1,347 1,287 1,233 1,186 1,144 1,107 1,075 1,047 1,022 1,0 1,207
3 1,622 1,522 1,431 1,348 1,273 1,205 1,144 1,090 1,042 1,0 1,366
4 1,857 1,726 1,606 1,495 1,392 1,297 1,210 1,131 1,061 1,0 1,500
5 2,065 1,909 1,765 1,630 1,504 1,385 1,274 1,172 1,080 1,0 1,618
6 2,255 2,076 1,911 1,755 1,608 1,469 1,336 1,212 1,100 1,о 1,725
7 2,429 2,231 2,046 1,872 1,707 1,549 1,397 1,252 1,118 1,0 1,823
8 2,592 2,375 2,174 1,983 1,801 1,626 1,455 1,291 1,137 1,0 1,914
Рисунок 5.4 - Графики функции f \п, Км
168
Используя формулу (5.15) и традиционное для PC ограничение времени
взведения, запишем:
'в = J к 1 rtn’Км)< а ’
V ^КИН \ ^пс /
откуда
---^т/Ч«>км)> (5.17)
Нкин^
или при усреднении функции f(n, км )
+ <518)
Пример
Рассмотрим предохранительный механизм (с зигзагообразным пазом)
взрывателя В-5, который предназначен для неуправляемого авиационного PC
С-5 (km = 170 ;ТЛ = 1,1 с при -5(Р С). Механизм построен по схеме (1) (см.
разд. 5.1); его параметры таковы: п — 3;a — 14,1 мм; m = 18,6 г; с = 134 Н/м;
Ro = 7,84 Н; а = 45°. Имеем:
R =7,84+ 134-14’1 10—
‘ 2
- = 8,78 Н; кс =-----------= 48.17;
с 18,6 10~3 9,8
14,110 in-6 А / + л/З j эхгх:
= 7-10 ; /(,7jKJ = —— = 1,366.
&
к ^17 = 0
с 170 9,8-170-1,12
Значения кинематического параметра, вычисленные по (5.4), а также со-
ответствующие значения времени взведения приведены в таблице 5.3.
Таблица 5.3 - Результаты расчета МЗП взрывателя В-5
f 0,05 0,1 0,15 0,20 0,25 0,30
ц 0,475 0,450 0,425 0,400 0,375 0,350
4, мс 9,634 9,900 10,18 10,50 10,84 11,22
5.4 Условие безопасности ДМС в служебном обращении
Условие безопасности ДМС имеет вид
my< п (5.19)
где Шу — число участков прерывистого движения, которые преодолеет взводя-
щаяся деталь в результате удара боеприпаса о преграду при падении его с той
или иной высоты (в пределах Шу участков происходит полное поглощение
169
энергии удара). Движение детали распадается на два этапа: во время воздейст-
вия ударного импульса длительностью ty и последующее свободное движение.
Условие безопасности при кратковременном воздействии. В пределах
первого участка система ведет себя подобно аналоговой. Поэтому, если счи-
тать, что /у —> 0, то, как было показано в разд. 4.1, система, оставаясь непод-
вижной (а^,—>0) скачкообразно приобретает конечную скорость
Акин + к*) = v0. Соответствующая кинетическая энергия, сообщаемая
взводящейся детали, затем гасится циклическими соударениями с ведомым
звеном. Рассмотрим свободное движение этой детали, которое описывается
следующим уравнением:
d2x dv
1.2 ~ V~T ~ ‘“М’кин^сп •
dt dx
Интегрируя это уравнение для 1 -го участка, получим
ъ = - 2Нки„^спд«;
для 2-го:
Ъ = 7(КмЬ)2 -2Мкин^спД° = л/Км^-(7 + Км)-2Нкнн^спД« ’
для 3-го:
-^кин^спАа =У(км) -
и, наконец, для произвольного - >го участка:
м
• 2кеМ,> =
м • 2КнМп Д«-
7-Км
(5.20)
Условие для нахождения числа участков, соответствующих полному по-
глощению энергии удара, очевидно: у. = 0 при i = т.е.
2 К / 2 \~тч t @
v0 = —г • К) - 4 кл • - ’
1 Км п
ИЛИ
• 2%и = ф(™у,км)- 2МкнМпЯ;
с учетом (5.19) получим
<р("У км) = - • • [(<Г - 7]=< ф(и,км) = - • . [(k2m)~"-1
п 7-к ак„ п 1-к;. L
170
откуда
7^" - v ' <Р(П' км ) = Яо 1 ф(»> км ),
(5.21)
где Но - фактическая высота безопасного падения для АМС - формула (4.16). При
кы —> 0 ф(и,0) —> оо ; этот теоретический случай имеет вполне очевидный смысл:
после однократного импульсивного воздействия независимо от его энергоемкости
скорость взводящейся детали обращается в 0 в конце первого же участка, т.е. она
дальнейшего движения не совершает. В то же время, как и следовало ожидать,
ф(я,7) = 7 (возникающая неопределенность легко раскрывается по правилу Лопи-
таля). В безразмерной форме неравенство (5.21) можно записать:
Мкин^ 7~
2аф(и,км)
Значения функции ф(н,км) приведены в таблице 5.4.
(5-22)
Таблица 5.4 - Функция ф (л, к м)
п К
0,1 0,2 0,3 0,4 0,5 0,6 0,7 0,8 0,9
2 50,5 13,0 6,06 3,62 2,50 1,90 1,52 1,28 1,12
3 217 45,2 15,4 7,00 3,83 2,40 1,67 1,25
4 377 72,6 21,2 8,23 3,93 2,20 1,41
5 363 68,2 18,5 6,61 2,96 1,59
6 228 43,0 11,4 4,02 1,80
7 780 102 20,1 5,52 2,05
8 249 36,0 7,67 2,34
Условие безопасности при воздействии конечной длительности.
Уравнение движения механизма:
^ = HKHHgWO-£cn]>
at
где t) - закон перегрузки при ударе боеприпаса о преграду. В общем виде
эта задача не решается. Поэтому, как это делали в разд.4.1, будем считать, что
k(t) = const = кт, 0 < t <. ty,
причем кт находится из условия
]k(t)dt = = kmty. (5.23)
о S
171
Таким образом, уравнение движения ДМС можно записать в виде
d2x dv ~dv ( ~ \
JT? = = V “77 = Икни V ~ «сп )
dt dt dx
(5.24)
где
~ t ~ V V ~ х ~ к.п
G skmty V0(l + *) gkmty km
Уравнение (5.24) внешне совпадает с уравнением (5.8), использованным
при выводе формулы для времени взведения на активном участке траектории
(5.15). Поэтому последнюю можно непосредственно использовать для нахож-
дения числа участков прерывистого движения ту, преодолеваемых взводя-
щейся деталью. Итак, принимая 4=1, т.е. /в = ty и используя (5.15), получим
j = J "Л"
где
~ а
(5'25)
С учетом условия безопасности (5.19) и выражения (5.25) можно записать
поскольку f(n, км ) — функция, возрастающая при увеличении п ; таким образом,
Подставим сюда выражение ty, определив его из (5.23):
Разрешим это неравенство относительно Н:
(5.26)
где Но имеет такой же смысл, как и в (5.21). Обратим внимание на то, что
функция Лсп(/ -&сп) имеет экстремум: ее максимальное значение равно 1/4 и
172
соответствует =0.5. Поскольку правая часть неравенства (5.26) при этом
минимальна, то это наиболее неблагоприятный с точки зрения безопасности
случай, и поэтому данный показатель ДМС должен оцениваться с помощью
следующего неравенства:
(5.27)
которое и является условием безопасности в служебном обращении. Ясно, что
если оно выполнено для наихудшего случая, то тем более будет удовлетво-
ряться в любых других случаях. Таким образом, количественной мерой эффек-
та, обусловленного применением ДМС, по сравнению с аналоговыми меха-
низмами является множитель при Но. Следует, однако, иметь в виду, что дан-
ное соотношение справедливо лишь при п > 1. В известной литературе при
выводе формулы для высоты безопасного падения часто принимают =0,
что соответствует «чисто прерывистому» характеру движения. В этом случае
(см. разд. 5.4) Дл,0)= yfn , т.е., согласно (5.27),
tf<4zrtf0. (5.28)
В соответствующей формуле В.В. Руднева коэффициент при Но равен
3.6 , т.е. присутствует поправка в виде множителя 0.9, учитывающая отличие
км от 0. Однако и в этом случае высота безопасного падения оказывается су-
щественно завышенной. Если принять функцию /(я,км) равной ее среднему
значению, то (5.27) будет иметь вид
Н < (1 + Н 0 . (5.29)
Например, при л = 4 фактическая высота, вычисленная по (5.28), оказы-
вается равной 16HQ , а по (5.29) - 97/0, т.е. в 1,8 раза меньше.
Представляя (5.27) в безразмерном виде, получим
Ркии^2 Г
(5.30)
При выводе данной формулы число участков прерывистого движения ту
определяли для конца ударного воздействия ty, т.е. без учета последующего
свободного движения. Дополнительное число участков можно вычислить, с
помощью скорости vy при t ~ty и формулы (5.20) (в последней v0 — vy). Од-
нако проведенные расчеты свидетельствуют о том, что, как правило, взводя-
щаяся деталь дополнительно преодолевает лишь один участок прерывистого
173
движения. Поэтому данный фактор можно приближенно учитывать при усло-
вии безопасности в виде
<п — \.
(5.31)
В этом случае
/ \ 1 + yjn~l
Л^км)=—~2—;
соответственно, в формулы (5.21) и (5.27) вместо п необходимо подставить п -1.
Таким образом, получены формулы для фактической высоты безопасного
падения для воздействий типа импульсов бесконечно малой и конечной дли-
тельностей. Степень опасности того или иного воздействия определяется тем,
в каком соотношении между собой находятся функции (р(л, rM) и 4/2(л, кД
поскольку они фигурируют как множители при Но в (5.21) и (5.27), Значения
4f\n, rw) приведены в таблице 5.5.
Таблица 5.5 - Функция 4/*2(н, клг)
п к
о,1 0,2 о,3 0,4 0,5 0,6 0,7 0,8 0,9
2 7,258 6,625 6,081 5,626 5,235 4,902 4,622 4,385 4,178
3 10,52 9,266 8,191 7,268 6,482 5,808 5,235 4,752 4,343
4 13,79 11,92 10,32 8,940 7,750 6,729 5,856 5,117 4,503
5 17,06 14,58 12,46 10,63 9,048 7,673 6,492 5,494 4,666
6 20,34 17,24 14,61 12,32 10,34 8,632 7,140 5,876 4,840
7 23,60 19,91 16,74 14,02 11,66 9,598 7,806 6,270 5,000
8 26,87 22,56 18,90 15,73 12,97 10,58 8,468 6,667 5,171
При сравнении таблиц 5.4 и 5.5 нетрудно заметить, что при относи-
тельно малых значениях коэффициента восстановления более опасно дли-
тельное воздействие, а по мере приближения к 1 (т.е. превращения движения
взводящейся детали в непрерывное) — короткое, что соответствует физиче-
ским представлениям.
Пример
Вновь обратимся к взрывателю В-5 (разд. 5.4). Принимаем коэффициент
восстановления скорости для преграды к = 0,3 . В таблице 5.6 даны значения
Но , а также фактической высоты безопасного падения.
174
Таблица 5.6 — Высота безопасного падения для взрывателя В-5
f 0,05 0,1 0,15 0,20 0,25 0,30
Икин 0,475 0,450 0,425 0,400 0,375 0,350
Hq , М 0,846 0,893 0,946 1,005 1,072 1,148
По (5.29) 6,310 6,665 7,061 7,501 8,001 8,568
к»= 0 10,15 10,72 11,35 12,18 12,86 13,78
к„=0,2 7,839 8,274 8,766 9,312 9,933 10,64
км=0,4 6,149 6,490 6,876 7,305 7,792 8,344
к., = 0,6 4,914 5,187 5,494 5,837 6,226 6,668
Км =0,8 4,020 4,244 4,496 4,776 5,094 5,456
5.5 Условия совместимости для ДМС; «минимальные» характеристики
системы
Ранее условия надежной взводимости и безопасности в служебном обращении
были рассмотрены раздельно. Поэтому соединяем неравенства (5.17) и (5.30):
Акин< Л <1__________2^
83/2(zj,/rM) с“ //кин192
В результате получаем единые условия безопасности - взводимости для
механизмов дискретного типа. Следуя принятой ранее методике, вводим обо-
значение
(5.32)
(5.33)
2а
Преобразуя соответствующим образом левую часть двойного неравенст-
ва (5.32), получим
с2
z
(5.34)
где
(5.35)
b
с = —
29
Неравенство (5.34) внешне совпадает с тем, которое было ранее выведено
для АМС — (4.83). Поэтому остаются в силе все последующие рассуждения в
разд. 4.8. В частности, справедливо условие совместимости:
Ь 1 b
с = — < —, т.е. —
2& 2 9
(5.36)
175
Кроме того, нетрудно получить выражения для «минимальных» характе-
ристик системы. Как обычно, имеем два неравенства, которые должны быть
удовлетворены:
----—<1; z=-------7- f -------г—* f \п.к\<—.
g^T» n^gk^S1 2
Отсюда
>
кТ >
m а
4а/2(и,км)
Мкин^2
Поскольку первое из этих неравенств является более жестким, необходи-
мо потребовать, чтобы
(7 + к)К0 4а/2(п,кы)
g& vKmg&2T
откуда
T.lrl 4af‘
' ц„Л('+к)э’
Соответственно, используя условие совместимости, получим
I ^(1 \ + + _____1_
” 4agf’(n,Kj a 4f(n.t
(5.37)
(5.38)
Если сравнить это выражение с (4.86), нетрудно заметить, что (при прочих рав-
ных условиях) минимальная перегрузка по сравнению с АМС уменьшается в
4 У3 (п, /см ) = (1 + л/л У раз. Подставляя в (5.38) приближенное выражение доя функ-
ции f (и, /см ), получим полезное с точки зрения проектирования соотношение:
4/+^) ’
которое дает возможность обоснованно выбирать число участков прерывисто-
го движения:
2
(5-39)
п> (/ + к)
У
В заключение отметим, что решающее значение с точки зрения выбора
принципа построения механизма имеет числовое значение параметра:
Ь =
176
Было показано, что если Ь/& < 0,5, то применим механизм аналогового типа
(АМС); при 0.5 < Ь/$< 7- механизм дискретного типа (ДМС). Если же b/& > 1,
то требования по безопасности в обращении и надежной взводимости при пуске не
могут быть удовлетворены одновременно с помощью единой механической систе-
мы. Иначе говоря, эти требования могут быть удовлетворены только раздельно,
например путем сочетания инерционного предохранительного механизма и аэроди-
намического устройства (ветрянки или турбинки).
5.6 Проектирование ДМС для ствольных систем
Выше отмечалось, что механизмы дискретного типа встречаются во взрыва-
телях не только для реактивных систем (преимущественная область их примене-
ния), но и для ствольных, например минометов. Это объясняется тем, что уровень
перегрузки при выстреле из миномета может оказаться значительно меньше, чем
при выстреле из нарезной системы, и поэтому трудно обеспечить безопасность в
служебном обращении. Известны конструкции взрывателей для мин (например,
М-6, М-12) и кумулятивных гранат (ГК-1, ГК-2, ДК-2, ДК-4), в которых использо-
ваны механизмы с зигзагообразным пазом. Изложенная выше методика проекти-
рования ДМС для PC неприменима, поскольку закон перегрузки при выстреле из
ствольной системы не может считаться постоянным по уровню.
Необходимость в применении ДМС возникает в том случае, если не вы-
полняется глобальное условие совместимости для системы артиллерийского
типа, т.е. если окажется, что
t . 3
gkxx 16
Таким образом, необходимо исследовать функционирование ДМС при
воздействии, закон изменения во времени которого является, например ли-
нейным (5.27):
k(t) = кх‘ — ,0 <t < т,
т
или в безразмерном виде
k(t) = t,O<t £1.0.
Математической моделью вновь выберем уравнение движения в виде (4.34):
d2x dv -dv - х
-^ = -37 = ^ = Нкину-М- (5.40)
d(t) dt dx
Будем решать это уравнение по участкам прерывистого движения,
принимая такие же начальные условия, как и в случае PC. Рассмотрим сна-
чала 1-й участок. Время начала движения очевидно равно = ЛСП; введем
177
разностное время t' — t — /0 = t — кси . Интегрируя (5.40), получим следую-
щие соотношения:
V‘ ' 2
п
ГбДа
Д^ =л1-----
1 Акин
^-(ДГ, )2; \а = - = 2W (д^ )3 J^L
6 v, • ДГ,
1 I 6а
—/=-з----,
W V^KHH
(5-41)
где Д/, = Г, -10.
Переходя теперь к /’-му участку, введем разностное время t' = t - , пе-
реписывая соответствующим образом уравнение (5.40):
d2x dv _dv >.
_ i-l
-Лсп = ; AZj = i- Итак, из (5.40) получаем
. Акин
1 2
где aj =
(?)2 + 2a,. х = л;., + ки v^ t'+^
О
у = кы К
(5-42)
(5.43)
Для конца /-го участка:
Ч = К-1 + ~[(Д(')2 + 2а;Д/'
- V, = Да = гЛ_,Д< + ^г-[(Д^ )3 + 3
О
Таким образом, задача сводится к тому, чтобы решить (численно) куби-
ческое уравнение (5.43) относительно Д^, а затем, подставив его значение в
(5.42), найти V;. Однако эту процедуру можно упростить и даже составить
вспомогательные таблицы, соответствующим образом преобразовав выраже-
ния (5.42) и (5.43). Для этого воспользуемся соотношениями (5.41) для 1-го
участка. Прежде всего подставим в (5.42):
Акин Й
2 = (Д<)2
и разделим обе части получающегося выражения на :
(5.44)
Затем подставим в (5.43)
178
и™, = Ад
« -far
и разделим обе части на Да :
j = + Гд^. Y + 3 £j_. рч Y
Да ^Д/,) Д/, ^ДЛ>
Подставляем сюда
Да =
з
из (5.41) и получаем окончательно
(5.45)
Таким образом, элементы движения ДМС выражены через характеристи-
ки первого участка движения, которые в свою очередь зависят от конкретных
параметров механизма и вычисляются с помощью (5.41). Уравнения (5.44) и
(5.45) позволяют составить таблицы для vjv} и Д^/Д/( в зависимости от чис-
ла участков прерывистого движения и коэффициента восстановления км.
Проиллюстрируем процедуру вычислений для начальных участков. Для
1-го участка = v0 — 0 ; ОС] = 0; из (5.45) получаем
ДА
Д/,
= 1; Д/" = Д/(;
из (5.44)
4 = 1;^=к-
Для 2-го участка:
Й-
й
используя уравнение (5.45):
'Д£|’
>
При заданном км можно
ветственно,
J£ = 1.£z.=А1 = 1.
Й ’ А/, AZ
^4|-1=о.
вычислить Д^/Д/,, а с помощью (5.44) - соот-
+ зр
д«
Ji
+ 3/fM
(- \2 / _
ДЛ 1 J М
Д7, J
179
Таким образом определяют начальные условия для вычислений на 3-м
участке и т.п. Продолжая эту процедуру дальше, можно найти Д^/Д^ для
произвольного участка, причем единственным переменным параметром явля-
ется коэффициент восстановления км. Суммируя, получим
' Дл
УД/: _ -
М 1
Д/, Д/j Д/]
Принимая /= л, т.е. tn = ,получим выражение для времени взведения:
Г~В -^ = Ч/(/7,Км),
Д/,
откуда
г / ч 1бДа т- м/(/7,к) I ба
h = *сп + Км М-------- = ^сп + \Г 1--------
1 МкиН V Нкин
По аналогии можно получить
4 = 4 = ^км);
V1 V!
(5.46)
соответственно,
/ ба
з------
V U 77
V г*кии
Значение этой скорости может представлять интерес, например при
оценке эффективности накольно-воспламенительного механизма.
Условие надежной взводимости при выстреле формулируется точно так
же, как и для АМС, т.е. согласно (4.42); с помощью (4.46) можно записать:
VR =
В ’ М/
; \ =vB-g^.
(5-47)
' \ ба
----
\ Мкин
СП
(5.48)
где
/ ч \|/(/7, км)
= (5.49)
V77
Можно показать, что \|/j(п>1) = 1.0. Значения функций \|/1(/7, км) и
^(/7, км) приведены в таблицах 5.7 и 5.8. Средние значения вычислены сле-
дующим образом:
у, (/7,0) + у, (/7,7)
о *
2
180
Таблица 5,7 - Функция v|/j (л, к н)
л Ку (Vl)cp
0 о,1 0,2 0,3 0,4 0,5 0,6 0,7 0,8 0,9
2 1,216 1,186 1,157 1,131 1,106 1,084 1,064 1,045 1,029 1,014 1,108
3 1,371 1,322 1,276 1,233 1,192 1,154 1,118 1,084 1,054 1,025 1,186
4 1,496 1,434 1,375 1,319 1,266 1,215 1,167 1,121 1,077 1,037 1,248
5 1,602 1,530 1,461 1,395 1,332 1,271 1,212 1,154 1,100 1,048 1,301
6 1,696 1,615 1,537 1,463 1,392 1,322 1,254 1,187 1,122 1,059 1,348
7 1,780 1,690 1,606 1,525 1,446 1,370 1,294 1,218 1,143 1,070 1,390
8 1,857 1,761 1,670 1,582 1,498 1,414 1,331 1,248 1,164 1,080 1,428
Таблица 5.8 - Функция £ (л, к м)
Л Км
0 0,1 0,2 0,3 0,4 0,5 0,6 0,7 0,8 0,9 1,0
2 1,347 1,331 1,326 1,330 1,344 1,366 1,397 1,435 1,480 1,531 1,587
3 1,563 1,538 1,527 1,530 1,549 1,585 1,640 1,716 1,814 1,935 2,080
4 1,730 1,698 1,682 1,683 1,703 1,745 1,815 1,919 2,066 2,263 2,520
5 1,869 1,831 1,812 1,811 1,830 1,875 1,953 2,078 2,265 2,538 2,924
6 1,990 1,947 1,925 1,922 1,941 1,987 2,070 2,208 2,429 2,775 3,302
7 2,097 2,051 2,025 2,020 2,039 2,086 2,174 2,321 2,568 2,981 3,659
8 2,194 2,145 2,116 2,110 2,128 2,176 2,266 2,422 2,690 3,163 4,000
Л 2 3 4 5 6 7 8
Ср 1,467 1,822 2,125 2,396 2,646 2,878 3,097
Чтобы получить единые условия безопасности и взводимости, можно
воспользоваться неравенством (5.30), соединяя его с (5.48):
\ < Сп < 1 - V, («' К м ):,1^ .
8°f («, Kj Мии
Следуя принятой в данной работе методике, введем обозначение
(5.50)
z = \|/] (и, к)- з
V Нкин
соответственно (5,50) приобретает вид
С1 -г
181
что внешне совпадает с (4.59), причем
с —
ьЯ . «•„„ . 24”.ч)
FM’ ь «'s,2U’4.)
Используя (5.51), получим и условие совместимости (см, разд.4.5)
Zj<F(/7,km)~. (5.51)
10
Расчеты свидетельствуют о том, что функция F(n, км) слабо зависит от своих
аргументов: в пределах принятых выше диапазонов значений п и числовые значе-
ния этой функции изменяются от 2,0 до 2,23, т.е. с достаточной степенью точности
можно считать, что F(n, км ) ~ 2.0. Поэтому (5.51) можно записать в виде
6<|. (5.52)
Этот результат можно интерпретировать следующим образом. Если
взрыватель предназначен для ствольной системы, то, с помощью числового
значения параметра b уже на начальном этапе проектирования можно сделать
вывод о структуре предохранительного механизма. Действительно, если
Ь< 3/16, то согласно (4.61) возможно применение АМС; если 3/16 <Ь< 3/8, -
ДМС и при Ь> 3/8 требования по безопасности и надежной взводимости могут
быть удовлетворены лишь раздельно.
Опуская соответствующие преобразования, приведем окончательные вы-
ражения для «минимальных» характеристик системы:
г>^п =7-------V ’ V' км)• г(н,Км) = (imin)и -2^(н,км); (5.53)
к >(к \ = + к)______L____= [(& 1 1_____1 (5 541
’ l Jmin а 4f\n,KK) К ( }
Здесь (xmin)H и - минимальные характеристики системы, опре-
деленные для механизмов аналогового типа (АМС). В частности, минимальная
перегрузка может быть уменьшена в 4 /*(/7,^) = (1 + раз. Этот вывод
аналогичен сделанному выше применительно к механизмам взрывателей для
PC. Можно показать, что при выборе числа участков прерывистого движения
можно воспользоваться следующей формулой:
Г I------ -12
2(1+ к) Ьшь.
у акх
(5.55)
182
Пример
Рассмотрим предохранительный механизм с зигзагообразным пазом
(МЗП) взрывателя М-6 (рисунок 5.5), предназначенный для 82-мм осколочных
и дымовых мин. Параметры механизма: п = 3; т = 4,45 г; a = 7 мм;
Ro — 4,2 Н; с = 172 Н/м; a = 45°, Проверка Безотказность действия проверя-
ют стрельбой на зарядах ~ основном и третьем; для наихудших условий вы-
стрела с точки зрения взводимости кх — 1000 ; т = 5,3 • 10~3 с. Безопасность в
обращении проверяется путем сброса с высоты Н = 3 м на чугунную плиту в
сборке массой 6,5 кг (к = 0,4 ).
Рисунок 5.5 - Взрыватель М-6:
1 - передаточный заряд;2 -движок; 3 - предохранительная гильза; 4-предохрани-
тельная пружина; 5—шарик; —предохранительный колпачок; 7—мембрана;
8 - грибок; 9 - ударник; 10-опорная втулка; //-капсюль-детонатор;
/2 —проволочная чека; 13— тесьма; 14 — взводящая пружина
Прежде всего, вычислим параметр
1,442-9,8-3
9.8• 103 5 10~3
= 0,219;
поскольку 3/16 < 0.219 < 3/8, решение о необходимости использовании МЗП
обоснованно. «Минимальная» перегрузка, согласно (5.54), при цкин = 0,5:
183
2
rv = 225 < kt = 1000.
feL=-^r
7-10-’
Проверим выполнение требований по безопасности и взводимости (5.50):
R = 4.2 + 172- = 4,8 Н; ке =-—3-----= 110 ;кс = = 0,11
с 2 с 4,45 10~3 -9,8 с 1000
a =-----L/2----- = 0,0292 ;f(n, к ) = = 1,366;
9,8-103-2510~6 4 кии' 2
Y/(«^)s(V/V = 1.186;
V^b1 = 0,5-0.2192 =0055.
8af2(n,KH) 8- 0,0292 -1.3662 ’ ’
( Г^~ / 7 0,0292 . ...
км к----=1 -1'186^—тт— = °>164;
VMkhh V 0.5
таким образом, единые условия безопасности и взводимости выполнены.
Вычислим еще фактическую высоту безопасного падения для соответст-
вующей АМС:
. 7-lQ-3110
0.5-1.42
= 0,786
м.
Благодаря реализации принципа дискретного движения взводящейся де-
тали фактическая высота безопасного падения становится равной
1,3662 * 0t786 = 5,87 м,
что почти вдвое больше указанной в ТЗ.
184
Глава 6
СИСТЕМЫ ПРЕДОХРАНЕНИЯ ДЛЯ ВЗРЫВАТЕЛЕЙ
К ВРАЩАЮЩИМСЯ БОЕПРИПАСАМ
Выше рассматривались вопросы проектирования систем предохранения,
при функционировании которых силы инерции, порождаемые вращением бое-
припаса, либо отсутствуют, либо пренебрежимо малы (например в пределах
переднего фронта осевой перегрузки). В данном разделе внимание будет уде-
лено системам, которые взводятся под действием именно таких сил. К их чис-
лу относятся механизмы центробежного типа (взводящаяся деталь перемеща-
ется поступательно в радиальном направлении), а также поворотные (вра-
щающиеся) устройства взрывателей.
Силы инерции, обусловленные вращением боеприпаса, описаны выше
(см. введение к разд. 2; 2.2.1; 3.3.
Рассмотрим сначала вопрос об условиях, при выполнении которых мож-
но пренебречь влиянием центробежной силы даже при эксцентриситете отно-
сительно оси вращения. Наиболее типичный пример — инерционный механизм,
взводящаяся деталь которого перемещается при выстреле вдоль оси боеприпа-
са, а, поднимаясь после спада осевой силы инерции, производит то или иное
требуемое действие. М.Ф. Васильев [2] рассматривает фазу подъема и условие,
при котором сила сопротивления упругого предохранителя 7?й превысит силу
трения, обусловленную центробежной силой:
R* > /Cmax = fmSekl ,
где е — эксцентриситет; f~ коэффициент трения. Получаем ограничение на
величину эксцентриситета:
fmglq
Этот простой пример иллюстрирует случай вредного (паразитного)
влияния центробежной силы на функционирование узла взрывателя. Эксцен-
триситет может быть как конструктивным, так и технологическим. В первом
случае он обусловлен невозможностью расположения механизма по оси сна-
ряда, а во втором — допусками на изготовление и определяется в результате
расчета размерных цепей.
Основной вид механизма, для взведения которого используют центро-
бежную силу инерции, - это центробежные предохранители (ЦП), которые до
выстрела удерживаются пружинами или пороховыми запрессовками. Досто-
инством ЦП является повышенная степень безопасности в служебном обраще-
нии. Процесс взведения обычно начинается на заметном удалении снаряда от
185
зарядной каморы, а завершается в районе дульного среза (или даже во время
периода последействия пороховых газов), и поэтому при расчете функциони-
рования таких механизмов на ЭВМ вполне допустимо использование класси-
ческой внутрибаллистической модели выстрела (не учитывающей врезание
ведущего пояска). ЦП обычно удерживают инерционные детали (например,
ударники); следует, однако, отметить, что при выстреле в точках контакта воз-
никают интенсивные контактные силы, способные вызвать деформации дета-
лей и их заклинивание и в конечном итоге отказ.
Традиционные методы проектирования механизмов данного класса [2, 3,
6] мы не рассматриваем. Внимание уделено новым вопросам - в частности,
построению математической модели, согласующейся с внутрибаллистической
моделью. Впервые в отечественной литературе излагается теория «тангенци-
альных» и роторных предохранительных механизмов, обеспечивающих повы-
шенную степень безопасности в служебном обращении.
6.1 Математическая модель центробежного механизма
Расчетная схема механизма типа центробежного стопора (предохраните-
ля) показана на рисунок 6.1.
Рисунок 6.1 — Расчетная схема центробежного предохранителя
186
Уравнение движения стопора (по оси х , нормальной к оси вращения)
имеет вид
= = C-/?(x)-/7V, (6.1)
dt1 dt V
где С — m(r0 + x)a>2 - центробежная сила; W= ^S2 +(Т + - нормальная
сила реакции (равнодействующая сил инерции в плоскости, нормальной к оси
гнезда ЦП); г0 - начальное удаление центра масс стопора от оси вращения; со
dV
- угловая (переносная) скорость снаряда; Л = пг---сила инерции, обуслов-
dt
m ( \d($
ленная поступательным движением снаряда; 1 = m\r0 4- х)--- - касательная
dt
сила инерции; К = 2mcovsin(co, у)- крриолисова сила инерции (в рассматри-
ваемом случае векторы и v взаимно перпендикулярны,т.е. К
Принимая 7?(х) = Rg + сх , запишем (6.1) в виде
dco _ ~]2
----+ 2еуу
dt
dv /
dx
— = у
dt
Здесь фигурируют известные из предыдущих разделов величины:
И. = ^;®. = К.
mg V m
Предположим, что канал ствола имеет нарезку постоянной крутизны. То-
гда, согласно (2.13),
2я __ dco 2ti dV
w =-----И; ----------------
t]nd dt r^d dt
и, соответственно,
(6.2)
dx
— = v
dt
М.Ф, Васильев, получив уравнение типа (6.2), констатировал, что вслед-
ствие нелинейности оно не интегрируется в конечном виде, но в частном слу-
чае «может быть решено при помощи одного из методов приближенного вы-
187
числения дифференциальных уравнений» [2]. Для упрощения решения он
предлагал заменить геометрическую сумму сил алгебраической:
2лг{] dV
dt
в результате получается линейное дифференциальное уравнение с переменны-
ми (изменяющимися во времени) коэффициентами, т.е. параметрическое:
d2 х л dx
—- + 2и------Q2at= Дл,
dt2 dt
г r\l 2 2 f*dCt)
где и = fo; Q = (O - - f------;
dt
Это уравнение аналитически не решалось (а пригодная для этого вы-
числительная техника в то время отсутствовала), поэтому М.Ф. Васильев
предлагал решать его по участкам, в пределах каждого из которых коэффи-
циенты считались постоянными (равными средним значениям). Видно, что
величина Q2 может быть как отрицательной (в начале движения), так и по-
ложительной (по мере возрастания угловой скорости и ускорения снаряда). С
точки зрения теории устойчивости динамических систем (критерий Рауса —
Гурвица) в первом случае система устойчива, во втором — неустойчива (т.е.
движение механизма происходит более резко), поскольку изменяется знак
коэффициента при х.
Приведем уравнение (6.2) к безразмерному виду, используя для нормировки
величины, введенные при рассмотрении процесса выстрела (см. разд. 2.2.2), чтобы
иметь возможность решать уравнение движения совместно с уравнениями внутрен-
ней баллистики в «едином масштабе». Напомним основные соотношения:
= у = = = ; L= И Г=-/0(1-аД).
Т р у 9<pq gT qqg р р в V 7
Введем известные из предыдущего безразмерные величины:
t _ х _ v
t = х = —; v =-------.
Т L Vnp
В результате соответствующих подстановок и преобразований уравнения
(6.2) приобретают следующий вид:
dt
(63)
— = V,
at
188
где r0 = г0/L; d = d/L; k0=-^--, v = «>0Т; кроме того, учтено, что
^"Р
dY _ р
—— = р = — .
dt Р
Элементы движения механизма можно вычислить с помощью совместно-
го решения систем уравнений (6.3) и (2.37), а затем (второй период пиродина-
мики) - (2.39). Момент начала движения определяется исходя из условия
dv/dt>0. Если взведение не завершилось в канале ствола, то оно продолжа-
ется в периоде последействия. При этом можно считать, что давление порохо-
вых газов (и ускорение снаряда) мгновенно падает до нуля (р = 0 ), а скорость
постоянна и равна дульной (V = const — Уд)- Соответственно, система (6.3)
упрощается:
dx _
— = v
dl
(6.4)
Пример
Рассчитаем центробежный стопор взрывателя ДБР (рисунок 6.2), пред-
назначенного для бронебойных снарядов среднего калибра. Для предотвра-
щения взведения ЦП в канале орудия служат верхняя и нижняя гильзы, меж-
ду которыми помещена пружина. При выстреле верхняя гильза оседает, пре-
пятствуя выходу ЦП из зацепления с инерционным ударником. После спада
осевой силы инерции гильза поднимается вверх и освобождает путь для ЦП.
В случае торможения снаряда в канале ствола обе гильзы смещаются вперед,
запирая ЦП.
Испытания взрывателя проводят стрельбой из полевой 130-мм пушки М-
46 на уменьшенном (т^ = 6,8 кг) и полном (т^ —13 кг) зарядах; основные
характеристики орудия: Wo — 1,858-10~2 л/; /д = 5,952 м; s — 1,394 • 10~2
д^; q = 33,4 кг; qfI- 30. Параметры механизма: m = 0,307 г; a = 1,25^?,
мм; r0 = 4,28^j/2 мм; Нсз ~6_о75 мм; Нк = 2.0 мм; RK от 0,4 до 0,7 Н;
(7?к)ср = 0,55 Н; Но = 2,Цо'4253 мм. Внутрибаллистические характеристики счи-
таем стандартными (разд. 2.2.2); параметр НФ. Дроздова для уменьшенного
заряда В = 0,806 ; для полного В = 1,92.
189
Рисунок 6.2 — Взрыватель ДЕР:
/ —трассер; 2-контрпредохранительная пластинка;3-бокобойная шайба;
4 - центробежный стопор; 5 ~ предохранительная пружина; 6 - втулка;
7—тетриловый детонатор; 8 — капсюль-детонатор; ^ — замедлитель; 10 — поршень
с жалом; //-втулка; 12-контрпредохранительная пружина; 13-ударник;
/^/-гильза верхняя; /5-капсюль-воспламенитель; /^-пружина;
/7-гильза нижняя; 18 ~ обтюрирующее свинцовое кольцо
На рисунке б.З показаны законы перемещения ЦП для обоих зарядов при двух
значениях коэффициента трения, полученные в результате расчета на ЭВМ с
помощью системы уравнений (б.З). Видно, что взведение происходит в пределах
спадающего участка закона перегрузки в канале ствола или во время периода по-
следействия. Заметно существенное влияние коэффициента трения: при f — 0,2
взведение завершается в периоде последействия на удалении от дульного среза,
соответственно, 0,532м (полный заряд) и 0,558м (уменьшенный).
190
Рисунок 6.3 - Элементы движения центробежного предохранителя:
а ~ стрельба на полном заряде; б- стрельба на уменьшенном заряде;
в- закон перегрузки; 1 - скорость ЦП; 2— перемещение ЦП
191
6.2 Тангенциальные предохранительные механизмы
Тангенциальным предохранительным механизмом (ТПМ) назовем меха-
низм, взводящийся под действием касательной (тангенциальной) силы инер-
ции. Ранее (см. разд. 3.3.3) уже отмечалась привлекательность идеи об исполь-
зовании касательной силы в качестве взводящей, поскольку соответствующие
предохранительные механизмы будут обладать повышенной степенью безо-
пасности в служебном обращении [52].
Принципиальная возможность создания ТПМ подтверждается известны-
ми из практики случаями проворота колец дистанционных пиротехнических
взрывателей, что приводит к сбивке установленного времени действия. Этот
эффект рассматривается М.Ф. Васильевым как вредный, им сформулированы
условия, при которых эффект не будет проявляться [2]. В.В. Руднев называл
механизмы данного класса «ступенью Т».
Оценка тангенциальной силы инерции в служебном обращении. Повы-
шенная безопасность ТПМ объясняется тем, что возникновение касательной силы,
соизмеримой по уровню с той, которая имеет место при выстреле, практически
невозможно. Для того чтобы оценить порядок этого соотношения, рассмотрим наи-
более неблагоприятный случай, а именно — раскручивание снаряда, предварительно
обмотанного невесомой «нитью» (рисунок 6.4). Это - предельный случай скатыва-
ния снаряда с наклонной плоскости без скольжения.
Рисунок 6.4 - Раскручивание снаряда в условиях обращения
Имеем два уравнения, описывающих движение снаряда: поступательное
192
d2x
Я-^g-N,
где TV-сила натяжения «нити», и вращательное относительно продольной оси:
г<?<р ~ д( </Y d2(p = d_
di1 2I2J di1 2’
где осевой момент инерции I можно приближенно принять равным моменту
инерции сплошного цилиндра, a d— калибр. Далее:
dx _ d(p d d2x _ d2 q> d qd2x
и, соответственно,
d2 x 2 d2(p
4 g
3 d
(6.5)
Здесь 8C - угловое ускорение в служебном обращении. При выстреле
(нарезка постоянной крутизны)
2я dV
rind dt
и, в частности,
s =
*max *
r/ad
Рассмотрим отношение обоих угловых ускорений:
у =
*твх Зя ‘
(6.6)
Видно, что оно тем меньше, чем меньше длина хода нарезов и чем боль-
ше осевая перегрузка при выстреле. Иначе говоря, применение ТПМ наиболее
эффективно во взрывателях к быстровращающимся снарядам, входящих в
боекомплект мощных артиллерийских систем. Например, при //н=25и
= 25000 = 0,212-IO"3.
Проведем также приближенную сравнительную оценку тангенциального
и центробежного механизмов. Падая с высоты Нн раскручиваясь, снаряд, со-
гласно (6.5), приобретет угловую скорость:
Q=±lgH (6.7)
d\ 3
193
При выстреле максимальная угловая скорость снаряда:
со
max
2 яг
поскольку центробежная сила, действующая на взводящуюся деталь, пропор-
циональна квадрату угловой скорости, то мерой степени безопасности центро-
бежного механизма может быть отношение
<Ютах /
4
Зя2 Ид2
(6.8)
Например, при 77=3 м и = 1000 м/с = 0,245 • 10 2, т.е. тангенциаль-
ный механизм оказывается почти на порядок более безопасным, чем центробеж-
ный. Следует, впрочем, отметить, что рассмотренный случай является чисто теоре-
тическим; реальные уровни сил инерции, обусловленных вращением снаряда (на-
пример, при скатывании с наклонной поверхности), будут еще меньше.
В принципе возможен и такой вариант возникновения касательной силы
инерции: резкое торможение предварительно раскрученного (как описано вы-
ше) снаряда в результате падения на преграду и ударного взаимодействия с
ней (при этом действует интенсивная сила трения за счет сцепления боковой
поверхности снаряда с поверхностью преграды). Рассчитать теоретически этот
случай довольно трудно, однако ориентировочная оценка все же возможна.
Если считать, что угловая скорость снаряда в пределах длительности удара
ty изменяется по линейному закону, то, с учетом (6.7), соответствующее угло-
вое ускорение (по модулю) будет
_Q= 4 fgff
£у \ ~ з ’
а его отношение к , соответственно
'у V g
Например, при ty = 1 • 10“3 с это отношение равно 958 , т.е. отрицательное ус-
корение при ударе оказывается на порядок больше, чем при раскручивании снаряда,
однако его отношение к ускорению, которое имеет место при выстреле, составит
= = 958-0,212 10 3 =0,203,
^тах
т.е. в 5 раз меньше. Следовательно, и с учетом данного фактора применение
ТПМ перспективно.
194
Теория тангенциальных предохранительных механизмов. Основным
конструктивным элементом ТПМ должна очевидно быть некая деталь, пово-
рачивающаяся при выстреле на заданный угол под действием тангенциальной
силы инерции и обладающая продольной массовой симметрией (чтобы отсут-
ствовала паразитная центробежная сила инерции). Представим условно эту
деталь в виде однородного кольца (рисунок 6.5). Из этой схемы видно, что
сила инерции S, обусловленная поступательным движением снаряда, в данном
случае становится вредной, вызывая трение на опорной поверхности поворот-
ного кольца. Кроме того, эффективному функционированию механизма будет
препятствовать и центробежная сила, возникающая вследствие технологиче-
ского эксцентриситета кольца относительно оси вращения (конструктивный
эксцентриситет не допускается) и порождающая радиальную силу трения,
причем эта сила может быть весьма интенсивной с учетом того, что ТПМ по-
тенциально наиболее эффективны в быстровращающихся снарядах.
Рисунок 6.5 — Расчетная схема тангенциального предохранительного механизма
Движение поворотного элемента ТПМ (кольца) в дальнейшем будем рас-
сматривать без учета сил со стороны удерживаемых им деталей и влияния
центробежной силы. Уравнение относительного вращательного движения эле-
мента массой т будет иметь вид
dt2 dt dt т₽
(6-9)
195
где 0 и П - относительные угол поворота и угловая скорость поворотного
элемента; со - переносная угловая скорость снаряда; / = ^p2dm - момент
(т)
инерции (данный и последующие интегралы вычисляют по всему объему те-
ла); р - удаление элементарной массы dm от оси вращения;
rdV г _ „
= J--- Jpam — момент силы трения, возникающей на опорной поверх-
dt у .
(^)
ности под действием осевой силы инерции.
Напомним, что при постоянной нарезке
t/co _ л dV
dt rrr dt
• n
(6.10)
где r = d/2 - полукалибр. Как известно, I = трц, где р0 - радиус инер-
ции, т.е.
(6.11)
Момент силы трения представим в виде
плечо силы трения.
(6.12)
где ртр
= — fpt/m - приведенное
т А
(т)
Уравнение (6.9) с учетом (6.10 - 6.12) можно записать следующим об-
разом:
dt яр 0 dt
(6.13)
Из (6.13) видно, что полезный эффект от касательной силы инерции проявля-
ется в тем большей степени, чем меньше коэффициент трения и плечо силы трения
и чем круче нарезка (т.е. чем меньше ее шаг Г|н), а также чем большей инерционно-
стью обладает поворотный элемент (т.е. чем больше радиус инерции р0). Этот вы-
вод соответствует и простым физическим представлениям. Следует отметить, что
на свойства ТПМ масса поворотного элемента не влияет, поскольку угол поворота
зависит только от кинематических характеристик ствола (калибра и шага нарезки),
коэффициента трения и распределения массы элемента, т.е. его конфигурации и,
следовательно радиуса инерции.
196
Введем обозначение:
У = 1--------
Я/70
(6.14)
Относительный поворот «кольца» в принципе возможен, если выполня-
ется условие, которое назовем условием физической реализуемости ТПМ, т.е.
^<1. (6.15)
Заметим, что для исключения возможности проворота (как в случае дис-
танционного кольца) необходимо выполнить обратное условие, т.е. V < 0.
Уравнение движения (6.13) можно записать двояким образом:
</со nv dV
— - v— =-----------,
dt dt T|r dt
(6.16)
откуда следует, что
_ nv TZ Q nv ,
Q -----V = vco; 0 =--/ = vcp .
hz nz
Таким образом, угол поворота оказывается пропорциональным пути снаряда,
т.е. ТМП играет роль двойного интегратора закона перегрузки k(f), поскольку
/ и
/=gpujX^x.
о о
Если зафиксировать (измерить экспериментально) угол поворота «коль-
ца» 0Д у дульного среза, то с помощью (6.16) можно найти значение параметра
v = ^,
а затем и фактический (приведенный) коэффициент трения с помощью (6.14).
Предельные возможности ТПМ соответствуют случаю, когда v = 1 ( /= 0 или
р0 —> со): согласно (6.16), относительный угол поворота ТПМ равен абсолют-
ному углу поворота снаряда (ТПМ остается неподвижным в пространстве).
Полное число оборотов снаряда при выстреле
w=^.=A.
2л v\ttd
очевидно определяется числом шагов нарезки в пределах длины канала
ствола.
Характеристики ряда типичных артиллерийских систем приведены в
таблице 6.1. Видно, что минимальное число оборотов совершает снаряд при
197
выстреле из наиболее короткоствольного орудия - мортиры; при выстреле из
30-мм пушки 2А42 для БМП - более трех оборотов. Таким образом, теорети-
чески ТПМ может совершать более одного полного оборота при движении
снаряда по каналу ствола, что обеспечивает хорошие потенциальные функ-
циональные характеристики. Однако фактически угол поворота оказывается
значительно меньше из-за сильного влияния силы трения на опорной поверх-
ности. Поэтому максимально допустимые значения коэффициента трения (при
заданном конструктивно угле поворота) должны удовлетворять некоторым
ограничивающим условиям, которые рассматриваются ниже.
Таблица 6.1 - Число оборотов снаряда в канале ствола
Характе- ристика ГШ-23Л 2А42 З/п 1939 г. М-42 С-60 ЗИС-З Д-48
d, мм 23 30 37 45 57 76 85
4 м 0,9 2,27 2,089 2,709 3,624 2,686 4,949
Пн 25 23,85 30 25 35 25 35
N 1,56 3,17 1,88 2,41 1,82 1,41 1,66
Характе- ристика БС-3 М-30* МЛ-20 М-64 2А44 С-33* С-43
dt мм 100 122 152 152 203 210 280
4 м 4,748 2,227 3,590 4,0 9,909 5,294 4,23
Пн 30 20 25 25 25 20 20
N 1,58 0,912 0,944 1,05 1,95 1,26 0,755
Примечание. * гаубицы; МЛ-20 - гаубица-пушка; С-43 - мортира;
остальные орудия — пушки
Предположим для упрощения выкладок, что поворотное кольцо ТПМ яв-
ляется цилиндрическим, тогда
т - яуй(г22 - /;2} dm - yhpdpd&,
где h — высота кольца; г\ и г2 - внутренний и наружный радиусы, соответст-
венно; у — плотность материала; & — полярный угол (0 < & < 2л).
Имеем
В выражении для коэффициента v (6.14) фигурирует отношение Ртр/Ро ,
причем с точки зрения надежности взведения ТПМ это отношение должно
быть минимально возможным. Для поворотного элемента в виде цилиндриче-
ского кольца, согласно (6.17)
198
Ар_2д/2 1-UM)3
Z’o 3 [l-(/i/r2)2 71 + UA2)2
Это отношение изменяется в весьма узких пределах: от 0,94 (при
7]” = 0, т.е. для диска радиусом г2) до 1,0 («вырождение» поворотного эле-
мента), т.е. с практической точки зрения можно принять ртр/р0 = 1-0. Это
отношение оказывается близким к 1 и для осесимметричных тел более
сложной конфигурации. В этом случае
лРо
V = 7
(6.18)
т.е, условие физической реализуемости (6.15) приобретает вид
Лл . 7
лр0
откуда можно найти предельно допустимое значение коэффициента трения:
=tg₽A-
Г
(6.19)
Принимая р0 = Г09 получим теоретически максимальное допустимое (с
точки зрения физической реализуемости) значение fmax = tgPH .
Однако более жестким, чем просто условие физической реализуемости
(принципиальной возможности поворота как такового), является ограничение,
вытекающее из заданного конструктивно угла поворота 0О . Согласно (6.16)
(6.20)
од=у<рд >Оо,
откуда с учетом (6.18) и габаритного ограничения
( а ‘
I в°
Пн г <рд>
Данное неравенство позволяет вычислить максимально допустимое зна-
чение коэффициента трения при известных конструктивных параметрах ТПМ
и орудия в зависимости от заданного угла поворота. Сравнивая (6.20) с усло-
вием физической реализуемости в виде (6.19), видим, что оно накладывает
более жесткое ограничение на допустимое значение коэффициента трения из-
за множителя (/ - 0О /фд ).
Например, для пушки ГШ-23Л, при р0/г = 0,8 ; 0О = л/4 будем иметь:
согласно таблице 6.1, фд = 2л • 1,56 и соответственно
199
— =------------“ U,U6 .
(P* 4-2^1,56
Находим допустимое значение коэффициента трения:
0,8 (1-0,08)-^ :
25
Если руководствоваться условием физической реализуемости (6.19):
f< — -0,8 = 0,1.
25
Другой пример - гаубица М-30 (при тех же геометрических параметрах
механизма):
<рл = • 0,912; =----------= 0,137; f< -°Д37)-^ = 0д08
(рл 4-2-0,912 20
Допустимое значение коэффициента трения оказалось несколько больше,
чем в предыдущем примере, вследствие большей крутизны нарезов. Это зна-
чение уменьшается при уменьшении радиальных размеров поворотного эле-
мента. Оно также уменьшается, если учесть влияние дополнительной силы
трения, обусловленной эксцентриситетом поворотного элемента относительно
оси вращения. Эта сила возрастает к дульному срезу, препятствуя его поворо-
ту во все большей степени.
Данные по коэффициентам трения для некоторых материалов приведены
в таблице 6.2 [53]. Они свидетельствуют о том, что необходимые значения f
вполне реальны. Однако при выборе материала необходимо учитывать и дру-
гие, специфические для взрывательной техники, факторы.
Таблица 6.2 - Коэффициенты трения некоторых материалов
Материал f
На основе фторопласта 0,009... 0,072
Самосмазывающийся 0,05... 0,12
Прессованная древесина 0,065...0,18
Углеродные и углепластики 0,063...0,10
Бронзовые сплавы 0,006...0,18
Фторопласт в чистом виде не применяют из-за низких механических ка-
честв, поэтому в него вводят соответствующие добавки. Перспективным счи-
тается использование чистого или модифицированного фторопласта в виде
тонкой пленки, наносимой на более твердые материалы. Комбинированная
200
лента имеет стальную основу, на которую наносят пористый порошок из брон-
зы, а верхний слой ленты насыщают чистым фторопластом или в совокупно-
сти с другими материалами (графитом, металлическими порошками, твердыми
смазочными материалами). Достоинство фторопласта - устойчивость к воз-
действию агрессивных сред.
Самосмазывающиеся материалы на основе полиамидов ПАМ-15-69 и
ПАМ-15-67 работают при температуре от -196 до +250 °C и в условиях глубо-
кого вакуума, обладают хорошей радиационной и химической стойкостью.
Недостатки — хрупкость и высокая стоимость.
Прессованная древесина обладает высокой несущей и демпфирующей
способностью, низкой стоимостью, простотой изготовления. Недостатки -
склонность к разбуханию и низкая термостойкость.
Углепласты - антифрикционные материалы, содержащие углерод, рабо-
тают при повышенных температурах и в агрессивных средах, однако хрупки.
Металлические антифрикционные материалы используют при изготовле-
нии биметаллических элементов или тонких пленок на жесткой основе. Бабби-
ты (подшипниковые сплавы на основе олова и свинца) обладают невысокой
твердостью и температурой плавления. Применяют также сплавы на основе
цинка, алюминия, меди (бронзы). Известны комбинированные биметалличе-
ские ленты — стальная основа с порошкообразным слоем бронзы, насыщаемым
твердыми смазочными материалами, полимерами или органическими вещест-
вами. Известно, что с помощью эффекта избирательного переноса в устано-
вившемся режиме достигают коэффициенты трения от 0,002 до 0,008 (сплавы
на медной основе).
Таким образом, показано, что создание тангенциального механизма, обеспе-
чивающего повышенную безопасность взрывателя в служебном обращении и обла-
дающего хорошими показателями надежности, вполне возможно. Однако требуют-
ся дополнительные исследования, посвященные поиску оптимальных конструктив-
ных схем, а также выбору антифрикционных материалов, которые бы удовлетворя-
ли жестким требованиям, предъявляемым к взрывателям.
В книге В.И. Рдултовского [1] есть такое замечание: «Трубки, приводи-
мые в действие силой тяжести, основаны на том, что одна какая-либо деталь
не принимает участия во вращении всего снаряда, в то время как все осталь-
ные части трубки вращаются вокруг его оси при выстреле. Это создает отно-
сительные перемещения деталей, приводящие к освобождению ударника через
определенный промежуток времени по вылете снаряда из орудия. Расчеты и
опыты показали, что в настоящее время эта категория механизмов не обеспе-
чивает однообразного и надежного действия». По-видимому, это замечание
можно отнести и к тангенциальным механизмам, на работу которых будут
существенно влиять разбросы коэффициентов трения и эксцентриситет отно-
201
сительно оси вращения. Влияние этих факторов должно быть учтено при про-
ектировании введением соответствующих запасов, чтобы гарантировать на-
дежное взведение при наихудших условиях выстрела.
Влияние такого неконтролируемого фактора, как трение, можно сущест-
венно уменьшить путем создания варианта ТПМ, не имеющего опорной по-
верхности. Одно из возможных конструктивных решений - торсионный под-
вес массосимметричного поворотного элемента. Вредному влиянию центро-
бежной силы, стремящейся отклонить подвес в радиальном направлении, бу-
дет противодействовать осевая сила инерции, тем самым способствуя про-
дольной устойчивости системы.
6.3 Использование падения угловой скорости снаряда на траектории
М.Ф. Васильев [2], рассматривая механизмы самоликвидации, которые
срабатывают на траектории в результате падения поступательной скорости
снаряда, отмечает большие трудности, связанные с обеспечением дальнего
взведения, вследствие сильной зависимости от допусков деталей и сопро-
тивления пружин. И далее: «что касается принципа падения вращательной
скорости снаряда, то его использование еще более затруднительно по тем
же причинам». Смысл этих высказываний сводится к тому, что на функ-
ционирование механизмов указанного типа сильно влияет разброс характе-
ристик указанных, а также и других факторов (например, коэффициента
трения). Однако автору представляется, что при рациональном подходе к
проектированию это влияние можно свести к минимуму, в частности вве-
дением соответствующих запасов.
Работа механизмов данного класса происходит в три этапа: взведение
(при возрастании угловой скорости и, соответственно, центробежной силы,
под действием которой происходит перемещение элементов механизма), ожи-
дание (элементы механизма занимают предельное положение) и срабатывание
вследствие падения угловой скорости до некоторого порогового уровня.
При расчете большое значение имеет адекватное количественное описа-
ние закона ®(Z). Чаще всего на практике пользуются формулой Н.А. Слезкина
(2.66), причем входящий в нее закон изменения скорости снаряда может быть
найден в результате решения системы дифференциальных уравнений, описы-
вающих его движение (см. разд. 2.3).
О существовании определенного интереса к таким механизмам свидетель-
ствует наличие ряда патентов: например, известна конструкция взрывателя с
механизмами дальнего взведения (роторного типа) и самоликвидации.
Обратимся к рисунку 6.6 (патент США, № 3585935 от 22.06.71): в обойме 5 на-
ходятся шарики, отделенные друг от друга сепараторами и опирающиеся на
коническую поверхность втулки 5. При выстреле шарики под действием возрас-
202
тающей центробежной силы двигаются в радиальном направлении, преодолевая
сопротивление предохранительной пружины 6 и перемещая обойму вверх, до
упора. В случае промаха на траектории, вследствие падения угловой скорости
снаряда центробежная сила постепенно уменьшается; в некоторый момент вре-
мени под действием пружины ударник, преодолевая силу трения в точках кон-
такта шариков со втулкой и обоймой, перемещается в обратном направлении и
накалывает КД (к этому моменту времени ротор, полностью развернувшись,
устанавливает капсюль вдоль оси снаряда).
Рисунок 6.6 - Конструкция взрывателя с механизмами дальнего взведения
(роторного типа) и самоликвидации:
1 — корпус; 2 -ударник с жалом; 3 - обойма; 4 -шарики; 5-втулка с конической вы-
емкой; 6 — пружина механизма самоликвидации; 7—дно гнезда (упор); 8 — полость;
-Р—детонатор; 10 — втулка; //-ротор; 11,а-отверстие для прохода жала после взве-
дения; 12— капсюль-детонатор с передаточным зарядом; 13 -утонение;
14-разрезная втулка; /5-спиральная лента; 16-разрезное кольцо;
/7-фиксатор; /7,а -сферическая поверхность; /^ — опорная перемычка
Принципиальных трудностей, связанных с составлением математиче-
ской модели механизма и расчетом, не возникает. Однако, по мнению М.Ф.
Васильева, следует более тщательно оценивать зависимость функциониро-
вания механизма от разброса размеров деталей, параметров силовых харак-
203
теристик пружин и коэффициента трения, При выборе углов давления (как
в приведенном примере) может быть реализована методика кинематической
оптимизации (см. разд. 3.4).
6.4 Роторные предохранительные механизмы
Данный раздел подготовлен в соавторстве с Ю.С. Саратовым [54].
В зарубежных взрывателях к малокалиберным артиллерийским бое-
припасам применяют роторные предохранительные механизмы (РПМ).
Ротор представляет собой поворотное тело с конфигурацией, близкой к
сферической. В роторе размещается один из элементов огневой цепи — чаще
всего, капсюль-детонатор (КД). В служебном обращении ротор удержива-
ется с помощью соответствующих элементов системы предохранения таким
образом, что ось КД образует с продольной осью снаряда некоторый на-
чальный угол. При выстреле сначала происходит освобождение ротора, т.е.
снятие наложенных на него связей, а затем — разворот в такое положение,
что ось КД совмещается с осью вращения боеприпаса и реакционного
ударника, замыкая тем самым огневую цепь. Длительность разворота опре-
деляет время дальнего взведения, сопоставимое с тем, которое обеспечива-
ют пиротехнические устройства.
К числу недостатков РПМ можно отнести заметное влияние на время (и
дальность) взведения разброса силы трения и конструктивных параметров
(например, технологического эксцентриситета оси взрывателя относительно
оси вращения боеприпаса, зазора между ротором и стенками камеры и т.д.),
имеющих случайный характер.
Одна из конструкций взрывателя с РПМ показана на рисунке 6.7 (па-
тент Франции № 2402857, м.к. F42C, 15/00, 1975). В служебном обращении
ротор фиксируется реакционным ударником, который входит в специаль-
ную выточку в роторе и поджимается пружиной механизма самоликвида-
ции. Освобождение ротора происходит после подъема ударника, т.е. после
того, как под действием центробежной силы повернутся стопоры, а шарики
механизма самоликвидации сместятся в радиальном направлении по на-
клонным поверхностям, сжимая пружину. Известны и другие конструктив-
ные варианты систем удержания ротора в обращении и фиксации его поло-
жения во взведенном состоянии.
204
Рисунок 6.7 - Конструкция взрывателя с РПМ
В дальнейшем предполагается, что безопасность РПМ в обращении обес-
печена соответствующими конструктивными мерами. РПМ — достаточно
сложный объект с точки зрения теоретического исследования, и поэтому при-
нимаем ряд допущений:
- зона контакта ротора со стенкой камеры, обеспечиваемого смещением
центра масс относительно оси вращения боеприпаса, рассматривается как то-
чечная (в действительности эта зона представляет собой площадку);
- силы трения, которое считаем сухим, приводятся к равнодействующей,
приложенной в точке контакта ротора со стенками камеры;
- при движении снаряда в канале ствола орудия ротор удерживается эле-
ментами системы предохранения и освобождается в периоде последействия,
причем в этот момент времени абсолютная угловая скорость ротора равна уг-
ловой скорости снаряда, которую будем полагать постоянной в пределах вре-
мени взведения РПМ;
- контактные силы на опорных поверхностях, обусловленные продоль-
ной силой инерции при движении снаряда по каналу ствола и на траектории,
не учитываются.
205
Рисунок 6.8 иллюстрирует принятую последовательность углов поворота
ротора: \|/ — 0 — ф (углы прецессии, нутации и собственного вращения, соот-
ветственно). Углы определены в системе OXYZ, вращающейся с угловой ско-
ростью Q вокруг оси 2Г(последняя совпадает с осью 2Гинерциальной системы
отсчета). Вектор относительной угловой скорости можно представить в виде
со = уК + 0/, + = (dxi + G)yj + <$zk ,
где К - орт оси 2Г; — орт линии узлов (первое промежуточное положение
оси /); к - орт оси / в ее положении после конечного поворота; <ох, а>у, а>2 -
проекции со на оси системы координат OXYZ, связанной с ротором. Абсо-
лютная угловая скорость ротора равна со + Q .
Рисунок 6.8-Последовательность поворотов ротора
Запишем кинематические уравнения Эйлера [9] для указанной выше по-
следовательности поворотов:
= Osiiup - фзшОсозф
cov = фзшбзшф + ОсОБф ; ,
= ij/COsO + ф
или
206
co sincp - co coscp
\i/ = —------------------
sinO
0 = coxsincp + co^coscp
Ф = coz + (cDTcoscp - co^sincpjctgO
(6.21)
Расчетная схема РПМ показана на рисунке 6.9. Представим ротор в виде сфе-
ры с центральным сквозным цилиндрическим каналом радиуса Г, в котором нахо-
дится элемент огневой цепи взрывателя. Будем условно считать, что этот элемент
равномерно заполняет канал, т.е. представляет собой цилиндрическое тело массой
ткн = 2nRr2pk (р* - средняя плотность). Направим координатную ось z ось вдоль
оси канала. Для того чтобы гарантировать надежный контакт ротора со стенками
(на рис. 6.9 - в точке Л), необходимо предусмотреть смещение центра масс: пред-
положим, что оно создается «высверливанием» выемки соответствующей конфигу-
рации. Расположим ее по оси Ох, которая, как ось симметрии, будет являться глав-
ной центральной осью инерции ротора; видно, что координата центра масс ротора
|хс| = ОС. Начальное значение угла нутации Оо, т.е. угла между осью канала с КД
и продольной осью снаряда, задается конструктивно.
Рисунок 6.9 - Расчетная схема РПМ
207
Задача сводится к исследованию относительного движения твердого тела
вокруг неподвижной точки (центра масс сплошной сферы, лежащего на оси
вращения боеприпаса). Разворот ротора происходит относительно стенок ка-
меры вследствие его проскальзывания в точке контакта под действием момен-
та сил инерции. Математически целью исследования РПМ является определе-
ние момента времени (дальнего взведения), когда угол нутации станет равным
О, а также длины соответствующего начального участка траектории, т.е. уда-
ления снаряда от точки выстрела. В дальнейшем будем полагать, что освобож-
дение ротора, т.е. снятие связей, наложенных системой предохранения, проис-
ходит мгновенно.
Сначала рассмотрим вопросы, связанные с геометрией масс системы.
Если, например, выемка представляет собой цилиндр радиусом гди длиной
2гв,то
= Ы 2тсг/(/? - гя)р
R mR
где т — масса ротора (с учетом канала, элемента огневой цепи и выемки); р -
плотность материала. В дальнейшем полагаем ус = zc = 0.
Осевой момент инерции сплошной сферы:
Л 2
J о = ’
где р - ее масса, т.е. Jо - (8/1р . Определим теперь мо-
менты инерции ротора (ОХ и СЖ— главные оси инерции как перпендикуляр-
ные к плоскости симметрии). Нетрудно получить следующие выражения:
где £ = r/R ; 8В = гв /R\k = (р- pk}/p~\- pj р\ кроме того,
(6.22)
Динамические уравнения Эйлера для относительного движения [9]
208
dt
d<oy
~dT
dmz
dt
Mz
J7.
dQx
dt
dby
dt
d£lz
dt
(6.23)
dmx _ M x
M
где Mx, Mv и Mz — моменты действующих сил относительно осей подвиж-
ной системы отсчета;
Проекции вектора переносной угловой скорости на связанные с ро-
тором оси:
Qх = -QsinOcos ф ; = QsinOsincp ; Qz = Qcos 0 .
Разделим обе части уравнений (6.23) на О.2 и введем безразмерное время
t = Clt (это, очевидно, угол поворота боеприпаса, отсчитываемый от момента
начала взведения РПМ). Отнесем величины, имеющие смысл угловых скоро-
стей, к Q, например,
0 dO <70 — 1 da> d(a>x/£l) da)
Q d(£lt) dt Q2 dt d{flt) dt
Тогда уравнения (6.23) можно представить следующим образом:
= М, + к, (а, + п, + аг)-
I И I
d<nv ~ / — V~ ~ \ dQ.v
Mv + k (шх +QJ-—
at at
Mz +МЙЛ +4v)--^
I I
“z
“z
(6.24)
~ Mx ~ ~ Mz
где Mr -----M7 =----------------------
x JXQ.2 y JyQ.2 z JZQ.
= -sin0cos cp ;
= sin0sincp ;
(6.25)
=—- = cos0.
209
Вид соотношений (6.21) сохраняется и в безразмерной форме:
й sin <р - c5 vcos 0
V =--------------------
sm 0
0 = raisin <р + raycos <р ,
<р = u)z + (coAcos <р - й „sin <p)ctg 0
(6.26)
ci
где 0 = —; <р - . Дифференцируя (6.25) и используя (6.26), получаем
= <psin0sin<p - 0cos0cos<p - fizsin0sin<p - й„со80
dQ. ~
= 0cos0sin<p + <psin0cos<p = <nz sin 0cosq> + <ntcos0
dCl7 ~ Л ~ \
.z- = -0sin0 = -sin0 • (co^smip + coycos<p).
У
(6.27)
Перейдем к определению моментов Мх, Му и Mz. Равнодействующая
сил сухого трения, приложенная в точке контакта А (см. рис. 6.9):
v
VA
где vA jvA — единичный вектор, определяющий направление линейной скорости и
следовательно силы трения. Нормальная сила реакции TVs точке А равна центробеж-
ной силе инерции (R^ —главный вектор сил инерции от переносного ускорения):
Д' - - тО.2 |ac|cos 0 = тО.2 R£ Ccos 0 .
Момент силы трения:
m„(f)=ta*f =
ГА Х VA ГАХ УА л
—------ = - fn£l R^c —--------- COS0 . (6.28)
V
Уа
Относительная скорость точки А'.
к
i
Ъ = « х гА =
az
- 7? sin О
О
- 7?cos0
oj^sin©) i + (o\sin0- ojzcos0)y + (o^cos©)#]
и соответственно
210
rA*VA= - R:os0
VA*
J к
0 -7?sin$
VAy VAZ
(6.29)
= R- [^(sM '1+(Уа£0*9~ VAX™9) J- VAy(C0S9) *] =
= J^Q. • {[(tw^sin# - S^cosfl^infl] i + coyj+ [(S^os# - S^sin^os#]
4
Модуль скорости точки A:
vA = Rd®? + (<^л-sin в - <ozcos 0)2 =
f--------------:------------2 ’ (630)
= R£lJ(O2y + (tf\sin 0 - £OzCOS 0)2
Подставляя (6.29) и (6.30) в формулу (6.28), получаем
Mo(f)= fh£l2R2Cc В = fn£L2R2^c (вх7 + Byj + Bzk\ (6.31)
где
1 (5xsin0 - cozcos0)sin20
Bx =------1 ~ " ==r>'
2 Ja2y + (a\sin0- 5zcos0)2
S„cos 0
g _ _ У_______________ ,
^Jai2 + (a*vsin 0 - ft?zcos 0)2
n (Xvsin 9 ~ Sizcos #)cos 2 0
Bz = I ~ ~ \2 '
J®2 + (ft^sin 0 - <5zcos 0)
Безразмерные моменты силы трения относительно координатных осей,
входящие в систему уравнений (6.24):
~ mCf] fh£l2R2CcBx 5 т В
х~ JXQ.2 " Joj£l2 “2 т0 jx
и по аналогии
«£)=5 jn Л =
у JyCl2 2hcmi)Jy z JZQ.2 2 m. jz
где и отношение m/m0 определяют по (6.22).
211
Таким образом, получаем полную систему безразмерных дифференциальных
уравнений, в которых все величины, необходимые для расчета, определены:
dip _
dt sin#
d0 „ .
— -(о^трл-(оусозр
^z = (oz H-^cosp-S^in^jctg#
da> ~ ( 1 \
r = A/v+£v S S^+-sin26fcin^ +(Х;+1)й;cos#+(^-l)S^sinftin^
dt A y 2 J
(6.32)
2 J y
SA-IsilCfto^-fe+lfei^o^+fc-lkcos9
dt
dt
Решение системы (6.32) зависит от начальных условий (при Z=0
0 = 0О,\|/ = <р = 0), геометрических параметров ротора (^с, £, £д), соотношения
плотностей к=\ — рк)р и значения коэффициента трения £ Как указывалось
выше, целью расчета является определение времени дальнего взведения, которое
завершается в момент совмещения главной центральной оси инерции ротора с осью
вращения боеприпаса (0 = 0). Следует отметить, что система (6.32), будучи без-
размерной, является универсальной: для определения конкретных значений време-
ни (и дальности) взведения РПМ достаточно с помощью его нормированных гео-
метрических параметров и угловой скорости боеприпаса fl, пересчитать:
^дв ~ ^дв/^ • Что же касается дальности взведения, то ее можно принять равной
Хдв ~ где Vo - дульная скорость снаряда.
Допущение о постоянстве угловой скорости боеприпаса в пределах вре-
мени взведения РПМ представляется оправданным несмотря на то, что в дей-
ствительности вследствие сопротивления воздуха она несколько падает. Оцен-
ка, проведенная на основе использования формулы Н.А. Слезкина [17], свиде-
тельствует о том, что на начальном участке траектории уменьшение угловой
скорости снаряда не превышает (1...2)%, т.е. с практической точки зрения
пренебрежимо мало.
212
Приведем некоторые результаты исследования математической модели РПМ.
На рисунке 6.10 показаны зависимости б(/), полученные при f = 0,025...0,20;
£д = £ = 0,25; к— 0,75; 0О = л/б. Принято, что Q « 8400 с’1; X/ » 960 м/с (30-
мм пушка 2А42). Анализируя графики, сделаем следующие основные выводы.
1. Разворот ротора при принятых исходных данных гарантирован, а
дальность взведения составляет примерно от 60 до 80 м, что соответствует
требованиям ТЗ, поскольку известно, что взрыватель к боеприпасам пушки
2А42 должен обеспечивать дальнее взведение в пределах от 20 до 100 м.
2. При развороте ротора угол нутации стремится к 0 асимптотически, т.е. до-
вольно трудно зафиксировать момент завершения процесса взведения из-за его «раз-
мытости». Поэтому за время дальнего взведения можно условно принять то его зна-
чение, которое соответствует 0 = 0,01 (примерно 0,6°). Это дает возможность про-
водить сравнительную оценку степени влияния на 1ДВ различных факторов.
е
0.6
Рисунок 6.10- Зависимость законов 0{t) от коэффициента трения ( 0Q = л-/6 )
Проведенное исследование носит приближенный характер. Вместе с тем
показано, что роторный механизм при соответствующем выборе его парамет-
ров способен обеспечивать надежное взведение.
Большой эффективностью может обладать система предохранения, реа-
лизующая одновременно принципы построения тангенциального и роторного
механизмов.
213
Глава 7
КОНТАКТНЫЕ ДАТЧИКИ ЦЕЛИ
Академик А.А. Харкевич отмечал: «можно без преувеличения сказать,
что преобразование энергии является основой техники» [55]. Этот процесс
также характерен и для взрывателей: в их структуру входит специальный эле-
мент - датчик цели, который предназначен для преобразования входного сиг-
нала той или иной физической природы, содержащего информацию о цели, в
команду на запуск огневой цепи (см. разд. 1.1). Частным случаем такого уст-
ройства является контактный датчик цели (КДЦ), т.е. преобразователь меха-
нического входного воздействия, возникающего в результате непосредствен-
ного соприкосновения (контакта) боеприпаса с целью (преградой). Результа-
том такого преобразования может быть либо накол КВ или КД жалом ударни-
ка (механический КДЦ), либо формирование электрического сигнала (элек-
тромеханические КДЦ). Сведения о сенсорных системах боеприпасов и мето-
дах их расчета можно найти в работах Г.А. Сулина [26,56].
Устройства, предназначенные для замыкания или размыкания электриче-
ской цепи (реакционные или инерционные замыкатели), которые не преду-
сматривают преобразование входного механического воздействия, не рассмат-
риваются.
Ранее (см. разд. 2.4) были изложены способы описания сил, возникаю-
щих при взаимодействии боеприпаса с целью; их можно использовать при
оценке характера функционирования КДЦ и при выборе их параметров.
КДЦ как преобразователи (в общем случае - электромеханические),
можно различать по ряду признаков [56, 57]:
- по виду входного механического воздействия: сила реакции прегра-
ды (КДЦ мгновенного действия); сила инерции, обусловленная отрицатель-
ным ускорением боеприпаса при взаимодействии с преградой (КДЦ инер-
ционного действия); волна упругого напряжения (волновые КДЦ); возмож-
ны также КДЦ комбинированного типа, например, КДЦ двойного действия
с возможностью установки на то или иное действие (чаще всего - мгновен-
ное или инерционное);
- по физическому принципу преобразования входного воздействия: пье-
зоэлектрические (пьезогенераторы), магнитоупругие, магнитоэлектрические,
тензорезисторные, емкостные и др.;
- по структуре: одноэлементные, многоэлементные и дублированные.
Основные требования, предъявляемые к КДЦ, сводятся к следующему:
- вероятность безотказной работы;
- высокое быстродействие;
214
- надежное срабатывание в широком диапазоне скоростей встречи бое-
припаса с целью (до 1400 м/с) и углов от нормали (от 10 до 90°);
— устойчивость к дестабилизирующим воздействиям (механическим,
климатическим, электромагнитным, радиационным);
- возможность проверки функционирования в приведенных (т.е. в лабо-
раторных, стендовых) условиях.
К числу важнейших характеристик КДЦ относят их массово-габаритные
параметры, а также параметры входного и выходного сигналов1, помехоустой-
чивость, чувствительность и др. Важное значение имеют динамические харак-
теристики КДЦ, а в ряде случаев - погрешность преобразования входного воз-
действия. Иногда при проектировании КДЦ вводят запасы по тем или иным
показателям качества (например, по виброустойчивости). Следует отметить,
что функционирование КДЦ зависит от условий встречи боеприпаса с целью, а
также от назначения боеприпаса и особенностей его конструкции.
7.1 Механические КДЦ
М.Ф. Васильев отмечал, что ударные механизмы инерционного и мгно-
венного действия составляют наиболее обширную и вместе с тем наименее
исследованную группу механизмов трубок и взрывателей [2]. Необходи-
мость реализации конкретного вида действия определяется спецификой бое-
припаса, а более конкретно - требуемым быстродействием, т.е. временем
срабатывания /с при контакте с преградой. Если (. < 1 мс, то обеспечивается
мгновенное (осколочное) действие; такие взрыватели применяют главным
образом в осколочных снарядах малого калибра наземной, зенитной и авиа-
ционной артиллерии, а также в кумулятивных снарядах всех калибров. По-
скольку мгновенное действие осуществляется прямым использованием силы
реакции преграды, КДЦ может быть расположен только в головной части
взрывателя. Взрыватели инерционного действия вызывают разрыв снаряда
(фугасного, осколочно-фугасного) после некоторого углубления в преграду;
время срабатывания tc в среднем составляет около 5 мс; инерционные КДЦ
могут применяться как в головных, так и в донных взрывателях. Однако Г.М.
Третьяков отмечает, что при этом не обеспечивается ни осколочное, ни пол-
ное фугасное действие, и поэтому инерционные КДЦ обычно применяют в
совокупности с замедлителями или с механизмами установки на замедление
[3, 6]. При установке на замедленное действие подрыв снаряда происходит
после полного заглубления в преграду или пробития ее (фугасный, бетоно-
1 Сигнал в данном случае понимается в обобщенном смысле, т.е. это может быть не только электрический
сигнал как таковой, но и любой физический процесс на входе или выходе устройства, например механиче-
ское воздействие.
215
бойный, бронебойный снаряд), либо при стрельбе на рикошет; время сраба-
тывания при этом может возрасти до 10...50 мс. В современных механиче-
ских взрывателях к снарядам среднего и крупного калибров предусматрива-
ется несколько установок на различное время срабатывания при встрече с
преградой. Распространены также КДЦ двойного действия.
В зависимости от устройства ударников, КДЦ мгновенного действия раз-
деляют на две группы: механизмы с ударным стержнем, выступающим за пре-
делы корпуса взрывателя, и механизмы с мембраной, изолирующей ударник от
давления воздуха (и осадков) на траектории. Примеры механизмов обоих ти-
пов, а также механизмов двойного действия приводит в своей книге М. Ф. Ва-
сильев, иллюстрируя эти примеры расчетами процесса взведения.
Важнейшей характеристикой взрывателей мгновенного действия является
их чувствительность, т.е. способность срабатывать при встрече снаряда с целевой
преградой наименьшей прочности (картонные, фанерные или дюралюминиевые
щиты соответствующей толщины) при наименьшем угле встречи. Большое значе-
ние имеет уменьшение времени срабатывания tc. КДЦ данного типа также при-
меняют во взрывателях не только для осколочных и осколочно-фугасных снаря-
дов, но и для кумулятивных: высокое быстродействие при этом требуется потому,
что необходимо передать детонационный импульс к детонатору, расположенному
в донной части разрывного заряда, а также обеспечить наибольшую эффектив-
ность бронепробития с учетом положения фокуса кумулятивной струи. Повыше-
нию чувствительности КДЦ способствуют такие физически очевидные меры, как
уменьшение массы ударника, увеличение диаметра его верхней части (площади
контакта с преградой), уменьшение расстояния между жалом ударника и капсю-
лем, уменьшение сопротивления предохранительной пружины (без ущерба для
безопасности в обращении) и понижение порогового уровня энергии, необходи-
мой для надежного срабатывания капсюлей.
7.1.1 Расчет КДЦ
Теоретическое исследование функционирования КДЦ при встрече бое-
припаса с различными преградами затруднено из-за исключительной слож-
ности протекающих физических процессов. Вместе с тем, задача расчета
КДЦ инерционного типа может быть решена хотя бы в приближенной поста-
новке с учетом возможности количественного описания силы сопротивле-
ния преграды на основе использования соответствующих эмпирических
формул и предложенного способа описания закона перегрузки (см. разд.
2.4.3). Особое значение имеет оценка предельных функциональных возмож-
ностей инерционного КДЦ, поскольку в ряде случаев из-за ограниченности
этих возможностей приходится отказываться от механических КДЦ: типич-
216
ная ситуация — разработка взрывателя для снаряда со «сплющивающейся»,
т.е. относительно малопрочной, боевой частью - уровень сил инерции, воз-
никающих при встрече снаряда с бронированной целью, оказывается недос-
таточным для обеспечения надежного срабатывания взрывателя.
Рассмотрим инерционный КДЦ простейшего типа, состоящий из ударни-
ка массой /п, контрпредохранительной пружины и капсюля. Уравнения движе-
ния боеприпаса и ударника при встрече с преградой имеют вид
dV TZ dV п dv dV п
q = qV = “Л; m—--m--------------Rn-cx,
4 dt dX " dt dt °
где 72g - начальное сопротивление пружины; с-ее жесткость.
Введя перегрузку боеприпаса, определяемую по (2.78), уравнение движе-
ния ударника можно записать следующим образом:
^ + й>оХ = g[n(t)-n0],
dt
где п0 = Rol(mg) ю0 = Jc/m .
Полная система уравнений, необходимая для численного решения дан-
ной задачи, будет иметь вид
= V,^=g[ii(x)-n0]-a)20x^= v.
dt dt dt dt
Видно, что движение ударника начнется в момент времени /0, опреде-
ляемый начальной «настройкой», т.е. из условия n(z0)=n0. Этому соответ-
ствует заглубление боеприпаса которое, очевидно, тем больше, чем
больше о* Следует отметить, что величина /п в подобных вычислениях име-
ет чисто расчетный смысл, поскольку срабатывание КДЦ произойдет при
заглублении боеприпаса, соизмеримом с длиной головной части. Условие
надежного срабатывания КДЦ имеет вид
^н/^in
где vH - скорость ударника в момент накола; vmjn - минимальная скорость,
обеспечивающая 100 %-ное срабатывание капсюля.
Рассмотрим конкретный пример: боеприпас - кассетный боевой элемент
(КБЭ, представление о конструкции которого дает рисунок 7.1 [58]. Парамет-
ры изделия таковы d= 0,084 м; <7=7,8 кг; длина головной части
L= 2,5 d = 0,21 м; расчетная (целевая) преграда — грунт средней плотности;
скорость встречи с преградой от 90 до 200 м/с; угол встречи 0О < 40°, т.е. тра-
екторию КБЭ в преграде можно считать прямолинейной).
217
Рисунок 7.1 — Кассетный боевой элемент:
/ - взрыватель; 2-блок готовых поражающих элементов;
3- разрывной заряд; 4-стабилизатор
Параметры инерционного КДЦ, входящего в состав взрывателя к КБЭ:
масса ударника т= 1,4 г (v^jn = 7,7 м/с); жесткость упругого контрпредохра-
нителя с = 32 Н/м; начальная осадка Ло = 0,3 мм; расстояние между жалом и
капсюлем а = 7 мм. Для расчета полного пути КБЭ в преграде воспользуемся
Березанской формулой. Принимаем среднее значение коэффициента преграды,
т.е. -12 • 10"6, а коэффициент формы Лп ~ 1,0; тогда
1 = = 12-10~6-7 8-5 = 236 2
п d 0,0842
=-у = 7,6921/
Сначала используем кусочно-линейную аппроксимацию силовой харак-
теристики, согласно (2.78) и (2.80):
^тпах
4*)=
Основные параметры ударного процесса приведены в таблице 7.1. Отме-
тим, что эти параметры достаточно близки к указанным в ТЗ на КБЭ - расчет-
ный уровень перегрузки при встрече с преградой типа грунта со скоростью
около 120 м/с задан равным 1000. В таблице 7.2 даны результаты исследования
функционирования КДЦ в указанных условиях нагружения, через tc обозна-
чено время срабатывания (от момента начала контакта). Видно, что срабатыва-
218
ние КДЦ в данном случае происходит на спадающем участке кривой перегруз-
ки (7с/т0 > 1), хотя и на небольшом удалении от максимума. В случае более
прочной преграды при одинаковой скорости встречи длительность переднего
фронта практически не изменяется (она имеет порядок т0), но возрастает пи-
ковый уровень перегрузки, т.е. увеличивается энергоемкость начального уча-
стка кривой перегрузки. Поэтому срабатывание КДЦ будет происходить в
пределах длительности переднего фронта.
Таблица 7.1 - Параметры ударного процесса при встрече КБЭ с преградой
Va м/с /, м Птах т, мс Т/То Г(т)/Гс
90 1,194 692 2,408 1,032 0,907
100 1,326 768 2,160 1,028 0,917
110 1,459 845 1,958 1,026 0,925
120 1,592 922 1,791 1,023 0,931
130 1,724 1000 1,650 1,022 0,937
140 1,857 1076 1,530 1,020 0,941
150 1,990 1152 1,426 1,018 0,945
160 2,122 1229 1,335 1,017 0,949
170 2,255 1306 1,255 1,016 0,952
180 2,388 1383 1,184 1,015 0,955
190 2,520 1460 1,121 1,014 0,957
200 2,653 1536 1,064 1,013 0,959
Таблица 7.2 - Параметры срабатывания КДЦ
Vc , м/с tc, мс 4/го м/с К/! ^min
90 2,450 1,018 8,470 1,098
100 2,283 1,057 9,075 1,177
НО 2,142 1,094 9,633 1,249
120 2,021 1,129 10,16 1,318
130 1,916 1,161 10,67 1,383
140 1,824 1,192 11,14 1,444
150 1,743 1,222 11,59 1,503
160 1,670 1,251 12,03 1,560
170 1,606 1,279 12,46 1,616
180 1,546 1,305 12,86 1,667
190 1,493 1,332 13,27 1,720
200 1,443 1,356 13,64 1,768
219
На рисунке 7.2 показаны элементы движения КБЭ при указанной в ТЗ
скорости встречи с преградой Vc = 120 м/с. Следует отметить, что закон пере-
грузки в пределах переднего фронта практически линейный, т.е. соответствует
принятой аппроксимации (вследствие относительно малого падения скорости);
этот факт может быть использован при приближенном описании закона пере-
грузки в пределах переднего фронта, например, при оценке чувствительности
бокобойного механизма и оптимизации его параметров [41].
V, м/с
Х,М
Рисунок 7.2 — Элементы движения КБЭ при встрече с преградой
На рисунке 7.3 приведены элементы движения ударника КДЦ, а также
для сравнения начальный участок кривой перегрузки. В целом результаты
проведенного расчета свидетельствуют, что в заданных условиях встречи КБЭ
с целевой преградой надежное срабатывание КДЦ гарантируется. Таким обра-
зом, предложенный подход несмотря на простоту позволяет получить вполне
адекватную оценку работоспособности КДЦ инерционного типа.
220
Рисунок 7. 3 - Элементы движения ударника КДЦ:
а -скорость; б- перемещение; в - начальный участок кривой перегрузки
В разд. 2.4 было показано, что силовую характеристику преграды можно
также представить в виде (2.74):
р = M>(J)v(r).
Там же приведены соотношения, получающиеся при применении Березанской
формулы, в частности при конической головной части боеприпаса, т.е. cpf-Y) = (-Л")".
Для рассмотренного выше КБЭ (при Vc = 120 м/с) имеем: /п = 1,592 м; L— 0,21
м; Т— L/Vc = 1,75 • 10"3 с; К— Vj^gl^ 7 • 103. В результате моделирования
процесса взаимодействия боеприпаса с преградой построены законы изменения пере-
грузки (рисунок 7.4), скорости (рисунок 7.5, а) и текущего заглубления (рисунок 7.5,
б). Сравнивая эти графики с полученными выше (с помощью кусочно-линейной ап-
проксимации, рис. 7.2), заметим близость основных параметров, что подтверждает
принципиальную приемлемость обоих подходов.
221
Рисунок 7.4 - Закон перегрузки при встрече КБЭ:
а - с преградой, б’-передний фронт
Рисунок 7.5 - Элементы движения КБЭ:
а -скорость; б’-заглубление
Отметим, впрочем, что задача рассматривалась в упрощенной постанов-
ке, и требуется разработка методики расчета КДЦ при пространственном дви-
жении боеприпаса в преграде на основе более сложной математической моде-
ли ударного процесса при взаимодействии боеприпаса с преградами различно-
го типа (а не только грунта).
7.1.2 Предельные возможности инерционного КДЦ
Предельные возможности инерционного КДЦ определяются минимальной
энергоемкостью закона сил инерции при встрече боеприпаса с преградой, при
которой еще обеспечивается надежное срабатывание. Необходимость рассмотре-
ния данного вопроса обусловлена тем, что, как отмечалось выше, при относи-
тельно малопрочной головной части боеприпаса уровень сил инерции может ока-
заться недостаточным для надежного действия взрывателя с инерционным КДЦ.
В этом случае приходится отказываться от механического взрывателя и использо-
вать КДЦ иного типа - электрический или электромеханический.
222
Типичным примером такого боеприпаса может служить танковый бронебойно-
фугасный (сплющивающийся) снаряд [6]. Снаряд имеет тонкостенный корпус, сна-
ряжен пластическим ВВ и оснащен донным взрывателем. При ударе о броню корпус
снаряда сплющивается, вследствие чего контактная поверхность увеличивается и
может составить от 1.5 до 2.0 калибров. Взрыв происходит в момент наибольшего
(оптимального) сплющивания снаряда. Нагрузка имеет явно выраженный импуль-
сивный характер: длительность нарастания и спада может измеряться
микросекундами, поэтому велика роль волновых процессов, в частности, с точки
зрения отколов с тыльной стороны брони, обеспечивающих поражающий эффект.
Наибольшая трудность связана с необходимостью синхронизации момента опти-
мального подрыва и времени срабатывания взрывателя, особенно при высоких ско-
ростях встречи.
Вполне очевидно, что расчет КДЦ при таких условиях нагружения, когда
возрастает влияние волновых процессов, представляет собой весьма сложную
задачу. Поэтому проведем лишь качественный анализ, приняв ряд допущений. В
дальнейшем будем полагать боеприпас твердым телом, за исключением зоны
контакта с преградой, где возникают локальные пластические деформации. В
этом случае получаемые результаты будут характеризовать поведение КДЦ «в
среднем», т.е. без учета относительного влияния волновых наложений [20].
Уравнение движения боеприпаса в процессе взаимодействия с преградой
можно записать в виде
ал.
что дает
N о
где E^qV^/2 - кинетическая энергия боеприпаса в момент встречи с пре-
градой; /^(х) — силовая характеристика зоны контакта. Поскольку
можно записать:
о
-Ц
2F J
о
V = VC 1
-М?,{ХИ),
О
откуда падение скорости боеприпаса, соответствующее деформации X:
1 х
А V = Vc - V = -у .
223
Допустимая деформация (обозначим ее Хд) определяется двумя факто-
рами: прочностью боевого заряда и оптимальностью условий бронепробития.
Из (7.1) следует, что и падение скорости боеприпаса к моменту подрыва заряда
также не должно превышать определенного значения:
\ /Д TZ J 11 '
ЧК О
Перегрузка боеприпаса, соответственно,
Лд=——•
Яё
Параметры инерционного КДЦ должны быть выбраны с таким расчетом, что-
бы срабатывание происходило при перегрузке, не превышающей , и при времени
нарастания /д ~ . Помимо этого, КДЦ должен удовлетворять и традицион-
ным требованиям: габаритным (ограничение допустимого перемещения) и энерге-
тическим (100%-ное воспламенение капсюля). Введя закон перегрузки боеприпаса
n(t), запишем его уравнение движения в кинематической форме:
at
Теоретические предельные возможности инерционного КДЦ оценим, по-
лагая ударник свободным, т.е. рассматривая его движение в отсутствие контр-
предохранительной пружины:
at
Складывая почленно (7.2) и (7.3), получаем
dt
(7.2)
(73)
т.е.
V + v = const = Vc,
откуда следует, что
Предположим, что закон перегрузки (в пределах допустимого интервала
времени) является линейным, т.е.
224
Интегрируя (7.3), получаем
X<,)=7^ а; *к)=(Д0д =^ёпЛ > Knin
О 2
откуда
Х£,)=|(ДГ)Л >а.
Объединяя оба неравенства, имеем
Из скоростного ограничения можно найти минимальную требуемую мас-
су ударника:
zn^-^exp^O.l^J.
К-
mm
Подчеркнем еще раз, что проведенный анализ является приближенным и
может быть использован лишь при ориентировочных оценках. Для повышения
точности результатов необходимо располагать адекватным описанием кон-
тактной силовой характеристики однако, это самостоятельная и чрез-
вычайно сложная научно-техническая проблема.
7.1.3 Бокобойный механизм
Назначение бокобойного механизма (БМ) — обеспечить срабатывание КДЦ
при встрече снаряда с преградой под малым углом к поверхности. Бокобойный
механизм содержат, например, взрыватели ГК-2 (см. рис. 5.1) и ДБР (см. рис.6.2).
Цель проектирования - разработка механизма наибольшей чувствительности, т.е.
поиск такого сочетания параметров, при котором уровень перегрузки, обеспечи-
вающей 100 %-ное срабатывание, был бы минимален, без понижения безопасно-
сти в обращении и на траектории.
Схема механизма показана на рис. 3.6. Предположим для простоты, что век-
тор (отрицательного) ускорения боеприпаса при встрече с преградой направлен
по нормали к оси боеприпаса, вдоль которой перемещается ударник. В этом слу-
чае можно воспользоваться результатами, полученными при обосновании типо-
вой математической модели (см. разд. 3.5). Приняв инерционный ударник веду-
щим звеном, запишем его уравнение движения в виде (3.31):
d2x
dt
(7.5)
225
где =m,(l + X£g«); Л = tg(a-2pTp); ^ = w2/w,; т0 = т^-fnp)\
Р-гр = arctg/*np - угол трения; а - угол давления; тх - масса ударника; т2 -
масса бокобойной шайбы; Лп(х) = Лхп 4- AR^ ; Лхп - сопротивление контрпре-
дохранительной пружины; Ryn — сопротивление жесткого предохранителя
шайбы (типа звездки).
Обычно Лхп « Лун, поскольку контрпредохранитель противодействует
относительно малой по уровню силе набегания, а предохранитель бокобойной
шайбы должен предотвратить ее смещение под действием нутационной силы
инерции на траектории.
Предположим вновь, что в пределах переднего фронта закон перегрузки
может быть представлен в виде линейной функции времени:
(7-6)
т
Основное требование, предъявляемое к бокобойному механизму, сводится к
следующему: ударник, переместившись на расстояние между жалом и КВ, должен
обладать такой скоростью накола (кинетической энергией), которая обеспечивала бы
100 %-ное воспламенение капсюля. Если условия безопасности БМ в обращении и на
траектории выполнены, то можно воспользоваться формулировкой условий надеж-
ной взводимости применительно к выстрелу из артиллерийской системы (см. разд.
4.4) с учетом идентичности требований в обоих случаях по существу. Заменяя приве-
денную силовую характеристику предохранителей Rn средним значением R^, запи-
шем неравенства (4.48) и (4.51):
(7.7)
Фигурирующий здесь кинематический параметр:
Щ, 1 + A^ga
(7-8)
В отличие от упомянутой методики, параметры ударного процесса (итах и Т )
считаются неизвестными и должны быть определены, а параметры механизма -
выбраны с таким расчетом, чтобы значение nmax было минимально возможным (что
обеспечивает максимальную чувствительность механизма). Переходя от безразмер-
ных величин к размерным, из (7.7) получим два неравенства:
Т>„ I
"max. / z \3 ’ L 0 3 ’ (7.У)
V Z^KHH^VAnax min
226
Таким образом, допустимые значения т заключены внутри области, гра-
ницы которой определяются максимальной перегрузкой. Минимальное ее зна-
чение, которое как раз и является мерой чувствительности бокобойного меха-
низма, можно найти, если приравнять правые части неравенств (7.9):
Видно, что эта величина содержит две составляющие: «статическую»,
которая определяется приведенным средним сопротивлением предохраните-
лей, и «динамическую», т.е. зависящую от требуемой энергии накола (через
vmin). Расчеты свидетельствуют о том, что «динамическая» составляющая
составляет до 50 % (wmax)mjn . Поскольку формула (7.10) включает в себя все
конструктивные параметры, можно ставить задачу об оптимизации бокобой-
ного механизма, т.е. минимизировать .
В данном случае возможна «двойная оптимизация», поскольку дополни-
тельным критерием может служить и КПД. С помощью последнего в виде (3.24)
выражение для коэффициента BtJ нетрудно получить из формулы (3.33):
= Ctg2a|-^ . (7.11)
1 + А ctga
где £ = — A' = ctg(a-2p ).
/и2
Тогда остаются в силе результаты, полученные в разд. 3.5. при исследо-
вании КПД иллюстративного механизма. В частности, оптимальное отноше-
ние масс (при a = 45°):
7 ( I—Т ( I—Г
fe')opt=— J7 + --7 =А jJ+-1
л IV j J \V J 7
Поскольку необходимо учитывать и другие специфические требования,
предъявляемые к БМ, окончательное решение будет носить компромиссный
характер.
Пример
Рассмотрим бокобойный механизм взрывателя В-24, предназначенного
для турбореактивных снарядов М-24Ф. Параметры механизма: масса инер-
ционного ударника тх = 4,7 б г; масса бокобойной шайбы т2-7 г; расстоя-
ние между жалом и КВ a = 3,6*^ мм; угол давления a = 45° ; сопротивле-
227
ние жесткого предохранителя (звездки) Ry - от 21,6 до 53,9 Н Сопротивле-
ние контрпредохранительной пружины RK достаточно мало (от 0,29 до 0,39
Н), что соответствует коэффициенту набегания к3 от 3,4 до 4,6) и при оцен-
ке чувствительности БМ может не учитываться. Минимальная скорость на-
кола vmin = 5,1 м/с. Результаты вычислений для номинальных параметров
механизма (и среднего значения kcn) даны в табл. 7.3. Фактическая эффек-
тивность механизма выше вследствие влияния центробежной силы инерции
при взаимодействии боеприпаса с преградой.
Таблица 7.3 - Параметры срабатывания бокобойного механизма
/пр Дкип Лея (Anax)min (л;1/лъ)Ор1
0,1 0,481 910 1020 1930 1,538
0,2 0,291 1880 1690 3570 0,597
0,3 0,033 20600 14700 35300 0,221
Видно, что чувствительность бокобойного механизма сильно зависит от
коэффициента трения, для которого характерен большой разброс значений,
что может привести и к отказу взрывателя при встрече боеприпаса с мало-
прочной преградой типа грунта. Отметим также, что фактическое отношение
масс /т2 - 0,594 практически совпадает с оптимальным при f = 0,2.
7.2 Электромеханические КДЦ
Весь предыдущий материал относился к механическим системам взрыва-
телей. Однако необходимо констатировать, что механические взрыватели,
обладая рядом несомненных достоинств, не всегда способны удовлетворить
все требования ТЗ. Это, главным образом, относится к обеспечению высокого
быстродействия при поражении таких целей, как объекты бронетанковой тех-
ники, с помощью кумулятивных и бронебойно-фугасных снарядов, имеющих
малопрочную головную часть. Этот недостаток механических взрывателей
можно устранить использованием электрической энергии.
Структурная схема такого взрывателя показана на рисунке 7.6 [57].. Пер-
вое электрическое взрывное устройство предложено в России академиком Б.С.
Якоби в 1834 г. Основы теории электрических взрывателей впервые разрабо-
тал Г.М. Третьяков [59]; он же еще в начале 40-х годов выдвинул идею ис-
пользования пьезоэффекта в КДЦ взрывателей.
228
Рисунок 7.6 — Структурная схема электромеханического взрывателя:
ИП— источник питания (внешний или автономный); 3- замыкатель цепи (инерцион-
ный или реакционный) или коммутирующее устройство; ИЭ- исполнительный эле-
мент (электровоспламенитель, мостиковый или искровой электродетонатор); Н— на-
копитель (аккумулятор энергии), заряжаемый от ИП\ СП- элементы системы
предохранения; ОЦ- огневая цепь
Основные достоинства электрических (электромеханических) взрывателей
сводятся к тому, что они способны обеспечивать высокую чувствительность и
мгновенность действия (при заметном снижении степени зависимости от скоро-
сти встречи) и создания адаптивных к скорости встречи взрывателей; кроме
того, уменьшается число подвижных элементов, а электрические цепи допуска-
ют 100 %-ный контроль.
Вместе с тем включение электрических цепей в конструкцию взрывателя
порождает и специфические трудности — например, необходимость борьбы со
статическим электричеством и блуждающими токами, способными вызвать
преждевременное срабатывание исполнительного элемента, особенно повы-
шенной чувствительности. В связи с этим в электрическую цепь вводят ком-
мутирующие и шунтирующие элементы, которые в результате взведения
должны быть отключены к моменту срабатывания взрывателя.
Электромеханическим можно называть взрыватель, включающий в себя
как механические, так и электрические элементы и предназначенный для обес-
печения контактного (главным образом) или дистанционного действия (что
отличает взрыватель данного типа от ПИМ неконтактных взрывателей). Схема
огневой цепи таких взрывателей была рассмотрена в разд. 1.1.
7.2.1 Пьезоэлектрический КДЦ
Пьезоэлектрические преобразователи (ПП) - устройства, в которых
проявляется пьезоэффект, т.е. взаимообратимое преобразование механи-
ческой и электрической энергии. ПП широко используют как в устройствах
общетехнического назначения (датчики ускорения, давления, силы; стаби-
229
лизированные генераторы; фильтры; приемники и генераторы ультразвуко-
вых колебаний; звукосниматели, динамики и т.п.), так и в специальных уст-
ройствах. В настоящее время созданы интегральные ПП, действие которых
основано на распространении поверхностно-акустических волн [60]. В об-
ласти теории ПП классической считается работа академика А.А. Харкевича
[55]; вопросам проектирования и применения ПП посвящено много работ,
например [57, 61-66].
Рисунок 7.7 - Пьезоэлектрический взрыватель:
/ - детонатор; 2-передаточный заряд; 5-движок; 4-изоляционная втулка;
5-инерционный стопор; 6-центральный контакт; 7-пьезогенератор;
<?-замыкатель; ^-контактный колпачок; 10 - электродетонатор
ПП применяют как чувствительные элементы КДЦ взрывателей для ку-
мулятивных снарядов и гранат. ПП располагается в головной части взрывателя
и воспринимает силу реакции преграды, а в зависимости от расположения де-
тонирующего узла взрыватели подразделяют на головные (типа ГПВ — рису-
нок 7.7 [6]) и головодонные (ВП-9, ВП-16, ВП-22 и др.), в которых электриче-
ская связь между обеими частями взрывателя организуется через корпус бое-
230
припаса. Достоинством этих взрывателей является способность создавать ко-
роткие (единицы микросекунд) электрические импульсы большой интенсив-
ности при небольших габаритах и автономности, а также лучшее (по сравне-
нию с механическими взрывателями) действие по броне при больших углах
встречи от нормали. Одним из трудновыполнимых требований, предъявляе-
мых к пьезовзрывателям, является избирательность, т.е. способность отличать
целевую преграду (ОБТ) от нецелевой (экраны, сетки, ветки).
Поражающее действие кумулятивного снаряда определяется энергией
боевого заряда, формирующего поток продуктов детонации, а не кинетиче-
ской энергией боеприпаса. Однако скорость встречи имеет большое значение
с точки зрения оптимизации бронепробития при необходимости совмещения
фокуса кумулятивной струи с поверхностью брони. Таким образом, в состав
взрывателя должно входить устройство, анализирующее конкретные условия
встречи и процесс взаимодействия боеприпаса с целью и вырабатывающее
команду на подрыв боевого заряда, что придает взрывателю свойства адап-
тивной системы.
Количественно пьезоэффект характеризуется взаимообратимым соответ-
ствием между механическими и электрическими величинами. Пьезоэлектриче-
ские свойства проявляют как кристаллические материалы, так и поляризован-
ная керамика [63]. Существует 32 кристаллографических класса; из 21 класса,
не имеющего центра симметрии, в 20 классах наблюдается пьезоэффект, при-
чем можно выделить 10 полярных, имеющих особую полярную ось (электри-
ческий дипольный момент). На кристаллах этого класса электрический заряд
может возникать не только при приложении механического напряжения, но и
при объемном нагревании (пироэффект [57]). Физическая природа пьезоэф-
фекта в кристаллах и в керамике несколько различна [65, 66].
Рассмотрим методику расчета ПП с ориентацией на наиболее харак-
терный для КДЦ режим нагружения, а именно: интенсивный ударный про-
цесс, возникающий при взаимодействии боеприпаса с преградой [57]. Как
уже отмечалось выше, этот процесс характеризуется высокой скоростью
встречи и кратковременностью (единицы и десятки микросекунд), вследст-
вие чего большое значение приобретают волновые процессы в корпусе бое-
припаса и в самом ПП. Предлагаемая методика относится к случаю, когда
высота пьезоэлемента (ПЭ) соизмерима с геометрической длиной волны ме-
ханического напряжения.
Полная система уравнений, описывающих упругие и электромагнитные
процессы в ПП, представляет собой совокупность волнового уравнения и
уравнений Максвелла с учетом взаимосвязи между ними. В общем виде ука-
занная система уравнений обычно неразрешима, и поэтому предлагается уп-
рощенный метод, ориентированный на пьезокерамику.
231
Состояние пьезокерамики в процессе нагружения можно охарактеризо-
вать величинами, имеющими механическую (напряжение а , деформация С,) и
электрическую (индукция Du напряженность поля Е) природу, т.е.
D = D(E, ст); $ = Q(E, ст),
откуда
dD~—dE +—do = a,,dE + ando\ dC = — dE +—do = a?.dE + а„Лт•
Ж oo дЕ do
Для малых приращений (AD - D ; Л£ = £; Ла = а; &Е = Е ) с учетом
принципа взаимности коэффициентов (ар = а2/ = d- пьезомодуль) получим
уравнения электромеханической связи
D = zE + d-a; Q = d-E + —
(7.12)
где £ = £г£0- абсолютная диэлектрическая проницаемость; £0 = 8,85 *10 12
Ф/м - электрическая постоянная; £г - относительная диэлектрическая прони-
цаемость; К- модуль упругости 1-го рода.
Кроме того, как известно, D ~гЕ + Р, где Р~ электрическая поляриза-
ция, причем в отсутствие поля (пьезоэлемент закорочен) Р = D. Из уравнений
связи (7.12) видно, что
D
67 £=0
сг=О
(7.13)
67 £=0
Е
Соотношения (7.13) при Е = 0 характеризуют прямой пьезоэффект, а при
а = 0 — обратный. Направления поляризации и механического напряжения мо-
гут не совпадать, а напряжения — носить характер растяжения, сжатия или сдви-
га. Пьезомодуль, механическое напряжение и деформация в общем случае -
тензорные величины, так как свойства пьезоэлектрика связаны с кристаллогра-
фической анизотропией [65], d = dtJ.. Поскольку индукция может быть опреде-
лена как поверхностная плотность электрического заряда q, уравнение прямого
пьезоэффекта, согласно (7.13), будет иметь вид
os F
где F = as - приложенная сила. Именно этой формулой чаще всего пользу-
ются на практике при расчете ПП. Однако при этом предполагают напряжен-
но-деформированное состояние и электрическое поле однородными (равно-
мерно распределенными).
(7.М)
232
На рисунке 7.8 показана эквивалентная схема ПП применительно к КДЦ,
где ПП рассматривается как генератор заряда. Срабатывание ИЭД происходит
после достижения на его электродах потенциала £/, достаточного для проби-
тия межэлектродного искрового промежутка, причем
и = ± = Е^>и .
с с
где Umin — некоторый пороговый уровень, определяющий чувствительность
ИЭД. Рассматривая ПЭ как плоский конденсатор высотой Д можно записать:
Рисунок 7.8 - Эквивалентная схема ПП:
Сп - собственная емкость ПЭ; Сш - шунтирующая емкость (паразитная или специ-
ально включенная); ИЭД- искровой электродетонатор
(7.15)
Отсюда видно, что при £ = const выходной сигнал ПП будет пропор-
ционален закону приложенного механического напряжения. Вместе с тем экс-
периментально установлено, что в действительности относительная диэлек-
трическая проницаемость £г зависит от су и Е, причем в наибольшей степени
проявляется зависимость от напряженности электрического поля Е. По дан-
ным НИТИ, указанная зависимость близка к линейной:
£r^£ro+Y^> (7.16)
где 8^ - начальное значение в отсутствие поля; у - эмпирический коэффициент.
При однородном поле
Е- —;
h
233
с помощью. (7.16) и (7.15), получим
° 1 + —р
<*0
(7.17)
2
. Бл8го ^п^гп
где X = ; ст,, = -2-^
hd ° yd
— «характеристическое» механическое напряжение.
Если принять £г = 8^, то из (7.15) следует, что
тт hd о
U =-----п = —,
£Ю£0
т.е. Р = Х(//а = 7.Из формулы (7.17) можно найти
1 + 4— -1
и, соответственно,
и=^-
2Х
(7.18)
1 + 4-1-1 .
у
Отсюда видно, что при достаточно малых значениях механического на-
пряжения (4о/о0 «1 )Р ~ 1.0.
Предположим теперь, что электрическое поле распределено вдоль ПЭ
постоянного сечения (в КДЦ взрывателей чаще всего применяют цилиндриче-
ские или сегментные пьезоэлементы), а механическое напряжение (в данный
момент времени) постоянно. Ниже показано, как это напряжение может быть
вычислено с учетом волнового процесса. В общем случае
дх
если U = U(t,x\ В фиксированный момент времени U = U(x), т.е.
dU \ dU
Е =---=------,
dx h dx
(7.19)
где х = x/h , причем 0 < х < 1.0. Подставим (7.19) в (7.16), используя вве-
денные ранее обозначения:
₽~1 + 2_£!3 ’ (7.20)
ст0 dx
234
Интегрируя это дифференциальное уравнение, получим
—-/(₽)=-₽-;»(/-₽). (7.21)
а
Поскольку из (7.21) нельзя выразить Р в явном виде, задача сводится к
обратной: задаваясь о, находим функцию /(0), а затем (численно) Р и, соответ-
ственно, потенциал на выходе ПП (таблица 7.4 ):
[7 = ^.
X
Таблица 7.4 - Функция /(₽)
ЛР) 0,1 0,2 0,3 0,4 0,5 0,6 0,7 0,8 0,9 1,0
р 0,383 0,507 0,598 0,650 0,698 0,737 0,770 0,798 0,821 0,841
При /'(р)>4.0 (су <О.25суо) р = 1.09 т.е. U = о/к. Изложенная мето-
дика предполагает равномерное распределение механического напряжения
вдоль ПЭ. При волновом характере процесса нагружения это условие наруша-
ется, т.е. необходимо учитывать зависимость СУ = Су(/,х). В этом случае
U = U(t,х) и, соответственно,
dU 1dU
дх h дх
Для упрощения решения задачи введем эквивалентное механическое
напряжение аэ, считая его постоянным в пределах ПЭ в рассматривае-
мый момент времени (рис. 7.9). Для вычисления суэ примем следующую
расчетную схему: боеприпас будем рассматривать как однородный «стер-
жень», а ПП - как некую «вставку» (см. рис.7.9), согласованную с ним по
волновому сопротивлению Учитывая кратковременность процесса соуда-
рения боеприпаса с преградой, пренебрегаем отражением волн от свобод-
ного торца, т.е. рассматриваем только прямую волну (режим бегущей
волны). Процессы в этой системе можно описать с помощью волнового
уравнения [67]:
д2и 1 д2и
где и = u(t,x) ~ смещение соответствующего (плоского) сечения; с = л]К/р -
скорость распространения волны (скорость звука) [60].
235
Рисунок 7.9 - Упрощенная расчетная схема пьезопреобразователя
Если известен закон изменения силы (или напряжения) на входном
(ударном) торце стержня а(/) то, как следует из теории колебаний упругих
однородных стержней, напряжение в произвольном сечении ПЭ:
су(/,х) =
Соответственно, в общем виде:
(7.22)
Преобразуем это выражение, введя безразмерные величины:
х2 г-х,
Ч '“*2
(7.23)
где т0 = hjc - время прохождения волны сжатия вдоль ПЭ; t ~t/x^ . Прини-
мая в (7.20) а = аэ, получаем следующее решение данного дифференциально-
го уравнения:
/(/?)=—Ал=-/?-1п(1-/7), (7.24)
где Дх = х2 — Х1. Можно показать, что напряженность электрического поля
Сравнивая это значение с пороговым, можно судить о надежности сраба-
тывания ПП.
Обозначим ty длительность ударного импульса; тогда его геометриче-
ская длина будет cty. Можно выделить три основные фазы нагружения ПЭ
(рисунок 7.10).
236
Рисунок 7.10 - Фазы волнового нагружения пьезоэлемента
Первая фаза: пьезоэлемент нагружен частично: х, = 0; х2 = ct; х( - 0
x2“F; Дх=/;0</<1;
стэ(0= р(т(ЛМ;/(₽) = —(7.25)
0 Пэ
Вторая фаза: пьезоэлемент нагружен по всей высоте (cty >h):x{ =0 ;
х2 = h; х( = 0; х2 = 1,0; Дх = 1,0; 1 < t < ty\
°,
(0 = |п(тЖ/(Р) = £1
i-1
(7.26)
Данная фаза является основной, так как в ее пределах достигается мак-
симум потенциала на выходе ПП. Для весьма короткого импульса (cty < h)
аэ (F) = J g(t0^ = const.
0
237
При укорочении импульса постоянного уровня напряжение аэ очевидно
уменьшится, что приведет к снижению уровня выходного сигнала (это явление
наблюдалось на практике).
Третья фаза: постепенная упругая разгрузка пьезоэлемента (волна сжатия
выходит из него и начинает распространяться вдоль «стержня»): Xj = c(t — Zy);
x2=h; x^-i-ty;x2 -1.0; Дх = 1-/+/у; ty <F<1 + Fy;
7y
CT,(0= H^X;/(P)=—O-'+'y)- (7-27)
r-l аэ
Эта фаза представляет лишь теоретический интерес.
Характеристическое напряжение а0 можно вычислить при известных
параметрах пьезокерамики [63-66]. В частности, для титаната бария (BaTiO3),
применяющегося в КДЦ взрывателей, в среднем </33 = 500-10~12 Кл/Н;
- 1,2 * 103; у = 2,7 • 1СГ3м/В. При этих значениях <т0 = 18,9 МПа.
Рассмотрим пример расчета эквивалентного механического напряжения.
Предположим, что входное напряжение изменяется по линейному закону:
1у
Согласно выражению (7.23), будем иметь
<гэ = ^0. = <Tm Дх [2t - (х, + х2)].
Ч 1-Х2
Используя (7.25)-(7.27), получим для «длинного» импульса (?у >1.0)
°™
и для «короткого» (1у < 1.0 )
(F)2,0<F<1.0
< 2t -1,1.0<F<Fy
('yMMVy^l + 'y
(O2,o<f<4
(д,)2 = const,Fy <F< 1.0 .
Графики законов изменения потенциала на выходе ПП для двух импуль-
сов механического напряжения одинакового уровня, но различной длительно-
сти показаны на рисунке 7.11. Наглядно видно, что при резком уменьшении
238
длительности импульса может значительно уменьшиться уровень выходного
сигнала КДЦ. Изложенная методика может быть распространена на случай,
когда необходимо учесть дополнительную (шунтирующую) емкость.
Рисунок 7.11 - Законы потенциала на выходе ПП: ty = 0,5 (/); 2,0 (2)
Кратко остановимся на методах определения входного механического
напряжения. В разд. 2.4 рассматривались вопросы проникания боеприпасов в
преграды различного типа. В данном случае речь идет о взаимодействии бое-
припаса со сравнительно малопрочной головной частью с жесткой преградой
типа брони. Сложность аналитического описания этого процесса, отсутствие
достоверных сведений о физико-механических свойствах материалов при ди-
намическом (высокоскоростном) нагружении, а также соответствующих изме-
рительно-регистрирующих средств - основные трудности, возникающие при
попытке решения данной задачи. В рамках одной из НИР, выполненной под
руководством автора, проведены эксперименты по статическому и динамиче-
скому (на копре «Массет») нагружению головной части взрывателя типа ВП-
16. При этом были впервые применены генераторные магнитоанизотропные
преобразователи (см. разд. 7.6). В результате удалось получить эмпирическое
выражение для контактной (усредненной) силовой характеристики:
Рп =ЬХп, (7.28)
где Ь = 1,84 • 106 Н/м11 ; п = 0,73 . Потерей скорости боеприпаса на начальном
этапе деформирования головной части можно пренебречь, что дает возмож-
ность вычислить контактную силу как функцию времени, полагая X = Vct:
Pn(t,x} = bV"tn , (7.29
239
(7.30)
соответственно, напряжение сжатия ПЭ:
5 V с J
С учетом определения эквивалентного напряжения (7.23) и выражений
(7.29) и (7.30) можно записать
1 тгП '“Ч
= J(
Эквивалентное напряжение в пределах двух фаз нагружения ПЭ, соглас-
но (7.25) и (7.26):
t-
(7.31)
0-mx1
Л+/г
(7.32)
где cm = б(Ист0)п /[(7 + w)v] (таблица 7.5).
Таблица 7.5 - Зависимость <тт от скорости встречи
Кс, м/с 200 300 400 500 600 700 800 900 1000 1100
От, МПа 48,3 65,0 80,1 94,3 108,0 120 133,0 145,0 156,0 168,0
Данная методика является приближенной, однако полученные с ее помо-
щью результаты все же дали возможность оценить ожидаемую работоспособ-
ность пьезоэлектрического КДЦ в заданных условиях встречи боеприпаса с пре-
градой. Расчетное значение напряженности электрического поля сравнивалось с
пороговым значением Бп = 3 кВ; было показано, что время срабатывания ПП
составляет от 5 до 16 мкс. Кроме того, установлено, что время срабатывания
заметно уменьшается лишь в диапазоне скоростей встречи от 50 до 500 м/с, а при
дальнейшем возрастании практически не изменяется. Это объясняется сильным
сжатием во времени импульса механического напряжения.
7.2.2 Пьезоивдукционный контактный датчик цели
Пьезоэлектрический КДЦ (ПКДЦ) относится к числу высокочастотных
(собственная частота — до сотен килогерц) преобразователей внешнего меха-
нического воздействия и способен обеспечить высокое быстродействие, что
важно при поражении объектов бронетанковой техники. В настоящее время,
в связи с необходимостью микроминиатюризации взрывателей, разрабаты-
вают новые варианты КДЦ, согласованные с характеристиками низковольт-
ных микропроцессорных элементов электронных схем обработки, для нор-
240
мального функционирования которых первичный преобразователь должен
генерировать ток не менее 1...2 мА. Одним из путей решения данной задачи
является использование пьезоэлектрического преобразователя при организа-
ции его работы в индукционном режиме. При нагружении пьезоэлемента
происходит перемещение зарядов вдоль его оси, в результате чего в окру-
жающем пространстве образуется магнитное поле, которое и может быть
использовано для формирования рабочего сигнала, снимаемого с катушки
индуктивности.
Рисунок 7.12 — Пьезоиндукционный преобразователь:
/-опорная втулка; 2 -сердечник; 5—пьезоэлемент; 4 -каркас; 5-обмотка
Схема конструкции пьезоиндукционного преобразователя (ПИП) показана
на рисунке 7.12 [56]. Данный принцип построения КДЦ заслуживает большого
внимания несмотря на некоторое усложнение конструкции по сравнению с тра-
диционным ПКДЦ, поскольку появляется возможность создания генератора тока,
работающего на омическую нагрузку. Кроме того, в принципе возможно создание
КДЦ двойного действия, устанавливаемого с помощью соответствующего пере-
ключателя при выстреле, т.е. пьезопреобразователь работает либо в традицион-
ном режиме (на искровой электродетонатор), либо как генератор тока. Перспек-
тивным можно считать также использование ПИП в измерительных устройствах
— как датчика скорости или ускорения, хотя в этом случае к преобразователю
241
предъявляются дополнительные требования: широкий динамический диапазон;
линейность характеристик в пределах измеряемого диапазоне; повышенная ус-
тойчивость к воздействию внешних факторов и т.п.
При разработке ПИП как эффективного чувствительного элемента КДЦ
необходимо решить следующие основные задачи [68]:
- разработать математическую модель, адекватно описывающую слож-
ные физические процессы при динамическом нагружении преобразователя и
формировании выходного сигнала;
- количественно описать законы механических воздействий, возникаю-
щих в возможных условиях применения ПИП;
- определить оптимальное сочетание геометрических и электрических
параметров преобразователя, обеспечивающее генерирование сигнала макси-
мальной энергоемкости с учетом габаритных ограничений и эксплуатацион-
ных характеристик исполнительных элементов.
Целесообразно исследовать два варианта нагружения ПИП: при встрече с
преградой (т.е. при реакционном или волновом инициировании электрическо-
го сигнала), а также инерционного (при выстреле, с целью зарядки накопителя,
- автономный источник питания).
Конструкцию, показанную на рис. 7.12, можно с достаточной степенью
точности представить функционально как совокупность трех взаимодейст-
вующих между собой частей: механической (нагрузка и воспринимающий ее
пьезоэлемент); электромагнитной (электромагнитное поле вокруг пьезоэле-
мента) и электрической (электрическая цепь, включающая катушку индуктив-
ности и омическую нагрузку) - рисунок 7.13.
В генераторных КДЦ взрывателей, как известно, применяют пьезокера-
мику (в основном титанат бария и цирконат-титанат свинца - ЦТС), необхо-
димые свойства которой придают путем поляризации в сильном электриче-
ском поле. Путем специальной обработки керамических пьезоматериалов и
придания определенной формы изделиям можно целенаправленно обеспечи-
вать необходимые рабочие характеристики. Благодаря высокой технологично-
сти и экономичности процесса изготовления пьезокерамика во многих облас-
тях применения заменила природные пьезокристаллы.
Описание процессов в ПИП предполагает исследование параметров
электромагнитного поля и акустических колебаний в пьезоэлектрической
среде на основе системы соответствующих уравнений (электродинамики,
акустики и пьезоэффекта). При этом принимают ряд допущений [55, 63, 69]:
рассматривают ПЭ как непрерывную сплошную среду, в линейном прибли-
жении; пренебрегают действием электромагнитных сил, сил тяжести, тепло-
вых и магнитных эффектов и дисперсией диэлектрической проницаемости;
242
не учитывают магнитное поле токов и свободные заряды; электрическое по-
ле считают квазистатическим.
Рисунок 7.13 - Функциональная схема ПИП
В этом случае для получения дифференциальных уравнений, описываю-
щих динамические свойства пьезопреобразователей, используют уравнение
движения:
а/2 дх,
(7.33)
которое представляет собой закон Ньютона для элемента упругой деформи-
руемой среды. Здесь - вектор смещения частиц; 7L - тензор напряжений,
дивергенция которого определяет объемную силу Ff. Тензор 7L связан с тен-
243
зором деформаций SkJ уравнением состояния, которое для пьезоэлектриков
при малых деформациях (линейное приближение) имеет вид измененного за-
кона Гука. Последний включает в себя упругие напряжения, создаваемые элек-
трическим полем с помощью пьезоэффекта:
та = ciJldSld - eiJkEk, (7.34
где eijk — пьезоэлектрические коэффициенты; Ек — напряженность электриче-
ского поля.
Уравнения (7.33) и (7.34) необходимо дополнить системой уравнений
электродинамики (Максвелла). Скорость акустических волн значительно (в
105 раз) меньше скорости электромагнитных волн, и поэтому при расчетах
электрических полей, сопровождающих акустические волны, скорость элек-
тромагнитных волн можно считать бесконечно большой, что эквивалентно
пренебрежению вихревой частью электрических полей, т.е.
OXj
(7.35)
где Ф - потенциал электрического поля. В этом приближении из всей систе-
мы уравнений Максвелла достаточно использовать лишь условие отсутствия в
диэлектрике свободных носителей заряда:
= 0,
(7.36)
где Д - индукция электрического поля, связанная с Ек и соотношением
Д = qA + • <737)
С помощью соотношений (7.33) - (7.37), дополненных соответствующи-
ми электрическими и механическими граничными условиями, можно получить
требуемую зависимость вектора смещения, упругого напряжения или дефор-
мации в любой точке пьезоэлектрика от времени. Однако аналитическое ре-
шение возможно только в случае простого входного воздействия и при суще-
ственных упрощениях математической модели ПЭ. Поэтому наиболее целесо-
образно решать данную систему уравнений численно на ЭВМ.
Центральным в механизме работы ПИП очевидно является процесс фор-
мирования магнитного поля вокруг пьезоэлемента. Один из подходов к иссле-
дованию данного процесса основан на представлении пьезоэлемента как ана-
лога «металлического проводника» - идея А.В. Капустяна [68]. Основное до-
пущение при этом сводится к тому, что средняя скорость движения зарядов в
ПЭ принимается равной скорости распространения звука в материале ПЭ, т.е.
244
скорости волны механической деформации, порождаемой нагрузкой, которая
приложена к рабочему торцу. Тогда можно записать следующие соотношения:
I = jS; J = neav = qviB; I = qv№Sm ,
где /— общий ток; у - плотность тока; 5- площадь сечения проводника (в нашем
случае - площадь основания цилиндрического ПЭ, т.е. 5 = 5ПЭ); п — число «сво-
бодных» электронов; q- общий заряд; v3B - скорость звука в материале ПЭ.
Движение электронов в ПЭ - сложный физический процесс, но с точки
зрения рассматриваемой модели будем трактовать его как виртуальный, по-
скольку решающее значение имеет сам факт движения электронов, а не его
конкретный характер. Рассмотрим, далее, одномерную модель ПЭ. «Статиче-
ское» уравнение прямого пьезоэффекта, как сказано выше, имеет вид
qx ~ dx XF*. Для элементарного участка ПЭ с учетом
dq(x,t)=dn- dF(x,t}
можно записать:
dl{xft)- dq{x,t)v33Sn^ — ^33dxxSn3dF{x,t)
i i
p/(x,z)=v3Bt7u5n3 pF(x,/)-v3/H5n3Fs(0’
о 0
где Fz(t) — некоторое усредненное по длине ПЭ воздействие (в данный мо-
мент времени).
Напряженность магнитного поля вокруг прямого длинного провода
где а — расстояние от проводника до точки, в которой измеряют магнитное поле.
Теперь распространим это соотношение на ПЭ конечной длины, рас-
сматривая его условно как бесконечный провод (краевые эффекты учтем
далее); кроме того, примем а равным расстоянию от оси ПЭ до среднего ра-
диуса катушки, т.е.
а = ^1Гпэ >
где кх составляет от 1,0 до 2,0; 5^ = . Тогда
Согласно законам магнитного поля, Ф = TV&S^cosa;# = , где а -
угол между проводником (т.е, осью ПЭ) и нормалью контура (нормалью к попе-
245
речной площади сечения витков катушки); 5^ = яп2 = Л'(А:1гпэ)2- средняя пло-
щадь витка. Поскольку а ~ 0, Ф = jijIqATZS'k , где N— число витков катушки.
В электрической цепи индукция катушки
(7.38)
где к2 - коэффициент, учитывающий взаимодействие магнитного поля ко-
нечного ПЭ с катушкой конечных размеров: при 2/^э Jq = 0,5 . Пред-
полагается, что высота катушки, имеющей W витков, равна высоте ПЭ h.
Кроме того, ЭДС
,й=®0 = ^, (7.39)
7 dt dt J
где
К - -LlLl()JV£. ~.
г г и к Л t ЗВ ПЭ
Из этого выражения наглядно видно, какие параметры и как влияют на
уровень генерируемой ЭДС.
Рисунок 7.14- Электрическая схема замещения ПИП
Рассмотрим простейшую электрическую схему замещения ПИП (ри-
сунок 7.14), которая описывается следующим уравнением с учетом выра-
жения для ЭДС (7.39):
J2/11
d? rdt ° L™ L dt ’
(7.40)
246
где i - мгновенное значение тока; t = L/R - постоянная времени;
со0 = i/4lc- частота собственных колебаний; R, L и С - сопротивление,
индуктивность и емкость катушки, соответственно.
Характер реакции системы на сигнал, пропорциональный производной
внешней нагрузке, будет зависеть от соотношения между членами в левой
части уравнения (7.40). Если доминирует второй член (относительно мала час-
тота собственных колебаний и /(/) - медленная функция времени, то, очевид-
но, реакция будет пропорциональна закону нагрузки:
т.е. будет носить «статический» характер. При относительно высокой частоте
собственных колебаний
*(0~
к dFL(t)
£COq dt
и получаем «динамический» режим работы, при котором статическая калиб-
ровка преобразователя (используемого как измерительное средство) невоз-
можна; следует отметить, что при повышении собственной частоты может
резко уменьшиться чувствительность преобразователя. Наконец, при домини-
ровании высшей производной
L о
т.е. преобразователь превращается в «импульсомер».
Таким образом, потенциально, вследствие соответствующего выбора па-
раметров ПИП может выступать как «усилительное», дифференцирующее или
интегрирующее звено по току. В общем же случае реакция ПИП будет содер-
жать «статическую» компоненту, пропорциональную закону нагрузки, и со-
ставляющую, которая существенно зависит от колебательных свойств преоб-
разователя и ширины спектра внешнего воздействия, после окончания которо-
го возникает процесс разрядного типа:
z(r) = iyexp
где /у =i(ty).
Как видно из (7.40), в простейшем случае катушка представляет собой
ТгАС-фильтр. Параметры последнего зависят от частоты электрического сигна-
ла, и поэтому в каждом конкретном случае необходимо проверять примени-
247
мость указанных ниже формул. Сопротивление катушки можно определить по
формуле сопротивления металлического проводника:
R=s 4N(r'+rJ
d2
где 8 - удельное сопротивление металла; N - число витков катушки; г2 и Г\ -
внешний и внутренний радиусы катушки, соответственно; d — диаметр прово-
локи. Индуктивность катушки L - по формуле (7.38).
Емкость катушки индуктивности С оценить достаточно сложно. Для
приближенного расчета воспользуемся формулой определения емкости элек-
трически последовательно соединенных коаксиальных круговых колец [70]:
2 1
° d 2 °
где d- расстояние между кольцами (диаметр проволоки); Со - емкость уеди-
ненного кольца:
Со=8£-£-ог2 1-0.03^-
I Г2.
1-0.08
£ и - диэлектрическая проницаемость межвиткового вещества (воздух,
шелк и т.д.) и вакуума, соответственно.
Следует подчеркнуть, что выражение (7.40) является приближенным: закон
F(x,/) определяется доя элементарного объема и отличен от закона силового воз-
действия Р(х,/). При определении закона можно, по-видимому, воспользо-
ваться понятием эквивалентного механического напряжения, считающегося посто-
янным в пределах участка пьезоэлемента длиной х2 — х} < h (разд. 7.4):
dx,
к а)
где пределы интегрирования определяются по-разному в зависимости от фазы
волнового нагружения.
На базе НИТИ проведены эксперименты по изучению свойств пьезоин-
дукционного преобразователя. Испытания проводили на ударном копре «Мас-
сет». При опытах использовали стандартный пьезоэлемент цилиндрической
формы 10x10 мм из керамики ЦТС-19. Конструкцию преобразователя
варьировали изменением геометрических параметров катушки индуктивности,
а также числа витков, материала и диаметра сечения проволоки. В некоторых
опытах уровень тока на выходе катушки индуктивности достигал десятков и
даже сотен миллиампер. Одна из полученных при опытах осциллограмм пока-
248
зана на рисунке 7.15. Условия эксперимента: удар с 15-го зуба. Характеристи-
ки катушки: тип проволоки - никелевая, в шелковой обмотке; диаметр прово-
локи 0,25 мм; число витков 60(2, высота катушки 18 мм; внутренний радиус
намотки 6 мм; внешний радиус намотки 12 мм.
Тек
.JL
ТТН’"
• Stop
М Pos: 100,0jus
CURSOR
•] Type
J
iVolMge
L...............
b
Source
1
1
CHI
delta
615.4V
i-
r
Cursor 1
0.00'v
t...
Cursor 2
l .....
Рисунок 7.15- Осциллограмма выходного сигнала ПИП
Следует отметить удовлетворительную (с практической точки зрения)
степень совпадения результатов экспериментов и теоретических расчетов;
расхождение по уровню выходного сигнала и частоте не превышало 30%.
Кроме того, получено достаточно хорошее соответствие расчетных парамет-
ров ударных процессов на копре «Массет» с паспортными (см. гл. 8).
Была проведена оценка возможности работы ПИП на исполнительные
элементы - стандартные мостиковые электродетонаторы и электровоспламе-
нители (ГОСТ В84-1537-78 и ГОСТ И84-1538-78). При подключении к элек-
трической цепи ПИП исполнительного элемента (ИЭ) электрическая схема
замещения изменяется (рисунок 7.16). Энергия, выделяемая на ИЭ с сопротив-
лением 7?иэ , определяется по известной формуле:
Э=Ятр!«кЛ,
о
где tn - полная длительность процесса (срабатывание исполнительного эле-
мента может произойти и в пределах этой длительности).
249
Рисунок 7.16 — Схема замещения ПИП при работе
на исполнительный элемент
Как пример можно привести следующие данные: при ударе с 10-го зуба
(максимальная перегрузка 21000, длительность ударного процесса 0,1 мс)
энергия, выделенная на электродетонаторе ЭД-10, оказалась равной 0,48 мДж
(по паспорту минимальная энергия срабатывания составляет 0,2 мДж, т.е.
обеспечивается достаточный запас).
7.2.3 Магнитоупругий КДЦ
Принцип действия магнитоупругих преобразователей (МУП) основан
на изменении магнитных свойств ферромагнетика вследствие упругих на-
пряжений и деформаций, возникающих при приложении внешней нагрузки.
Изменения магнитных свойств, обусловленные электромагнитной индукци-
ей, вызывают появление электрического сигнала в обмотках, уложенных в
магнитопроводе. Поэтому МУП используют в измерительной технике, а
также как источник сигнала для исполнительной электрической цепи. МУП
применяют главным образом как силоизмерители благодаря ряду сущест-
венных преимуществ по сравнению с другими типами преобразователей
[61, 62, 69]:
- достаточно высокий уровень выходного сигнала;
— простота конструкции и технологии изготовления, высокая надежность;
— монолитный магнитопровод, обладающий высокой прочностью;
— простота схемы измерительного тракта и возможность использования
стандартных аппаратуры и приборов.
К числу недостатков МУП можно отнести заметную нелинейность ха-
рактеристики и трудность калибровки, особенно преобразователей генера-
торного типа (см. ниже). Впрочем, указанные недостатки несущественны для
использования МУП как чувствительного элемента КДЦ, поскольку в этом
250
случае решающее значение имеют такие факторы, как уровень и мощность
выходного сигнала, а также возможность работы со стандартными исполни-
тельными элементами (ЭВ и ЭД).
Конструктивно МУП в традиционном исполнении включает в себя три
основных элемента:
— магнитопровод, выполненный из магнитомягкой стали; он может быть
монолитным или шихтованным, т.е. набранным из пластин;
- уложенную в магнитопроводе первичную обмотку (обмотку возбужде-
ния), подключаемую к источнику переменного или постоянного тока;
— вторичную (измерительную) обмотку, выходной сигнал которой посту-
пает на схему обработки (или регистрации).
На практике реализуют два принципа преобразования: параметрический
и генераторный. Механизм действия параметрических МУП проявляется в
изменении магнитной проницаемости у, при этом магнитное поле «канализо-
вано», а его форма остается практически постоянной [62]. Различают дрос-
сельные и трансформаторные преобразователи, это - наиболее распространен-
ные в промышленности типы магнитоупругих датчиков [71].
Количественно магнитоупругий эффект оценивают отношением прираще-
ния проницаемости к действующему механическому напряжению: (Лц/ц)/а .
В дроссельном преобразователе вследствие приращения магнитной про-
ницаемости изменяется индуктивное сопротивление обмотки:
ЛА ~Ам-
А И ’
что приводит к соответствующему падению напряжения на резисторе. С
помощью дополнительной обмотки (подмагничивания) выбором соответст-
вующей рабочей точки удается добиться большей линейности характери-
стики.
В трансформаторном МУП отсутствует гальваническая связь между це-
пями питания и измерения; напряжение на выходе определяется магнитным
потоком Ф2 (который зависит от числа витков w7) и соотношением магнит-
ных сопротивлений стержней преобразователя:
Rm = —.
m pS
При воздействии силы У7магнитное сопротивление центрального стержня
увеличивается (при положительной магнитострикции), поток Ф3 уменьшает-
ся, а Ф2 возрастает. Известны также дифференциально-трансформаторные
251
схемы построения МУП. Источники питания первичной обмотки могут быть
как постоянного, так и переменного тока.
Особую группу составляют так называемые магнитоанизотропные пре-
образователи (МАП); для них характерно изменение формы магнитного поля
при приложении механической нагрузки. МАП, особенно монолитные, отли-
чаются высокой надежностью и долговечностью, способностью работать в
сложных атмосферных условиях и, что особенно важно, при интенсивных
динамических нагрузках.
Наиболее распространена схема МАП с двумя крестообразно располо-
женными обмотками (рисунок 7.17). Плоскости первичной и вторичной w2
обмоток, уложенных в отверстиях магнитопровода, пересекаются под углом
45° к направлению действия силы. В механически ненапряженном состоянии
обмоткой возбуждения создается магнитное поле, характеризуемое индукцией
2? При изотропности материала магнитопровода плоскость вторичной обмотки
потоком не пронизывается, и выходной сигнал отсутствует. При нагружении
МАП магнитная проницаемость в направлении действия силы уменьшается, а
в перпендикулярном — увеличивается, вследствие чего магнитопровод стано-
вится анизотропным по отношению к магнитному потоку. Поле деформирует-
ся, что сопровождается поворотом вектора индукции и, соответственно, наве-
дением ЭДС во вторичной обмотке.
Наибольший интерес с точки зрения использования в КДЦ взрывателей
представляют МУП генераторного типа, исследованию которых посвящен
цикл работ, выполненных кафедрой СМ-5 МГТУ им. Н.Э. Баумана [72, 73].
Схема генераторного МУП порказана на рисунке 7.18 [62, 71].
Первичная обмотка служит для создания в магнитопроводе магнитного
потока; если последний однороден, то магнитный поток
Ф = BS = pHS , (7.41)
где Н— напряженность магнитного поля; 5- площадь магнитопровода в сече-
нии, нормальном к вектору потока. Магнитопровод является одновременно и
чувствительным элементом МУП, воспринимая внешнюю силовую нагрузку.
Во вторичной обмотке наводится ЭДС.
252
Рисунок 7.17 — Типичная схема магнитоанизотропного преобразователя
Рисунок 7.18 -Генераторный магнитоупругий преобразователь:
а - с разомкнутым магнитопроводом; б"— с замкнутым магнитопроводом;
1 — магнитоупругий чувствительный элемент;^— обмотка;
5 — внешняя (замыкающая) часть магнитопровода
с7Ф < dH „d^\
dt dt \ dt dt J
(7.42)
где w— число витков.
253
Предположим, что зависимость магнитной проницаемости от нагрузки Р
может быть представлена в виде [62, 71]
+ (7.43)
где /лл — начальная проницаемость; кх — коэффициент, зависящий от свойств
материала и типа магнитострикции (может быть как положительным, так и
отрицательным). Соответственно,
c/u. , dF
— £ Ц.Л,------------------------------.
dt dt
Подставив (7.44) и (7.43) в (7.42), получим
dF dH
— + ц —
dt dt
(7.44)
dF ^dH
dt dt
е --wS
(7-45)
2
где к2 = [i.wSkx. Из (7.45) видно, что возможны два режима работы МУП. При
квазистатическом режиме F = const, поэтому
e = -k2F—. (7.46)
dt
При использовании МУП как измерительного средства закон возбуж-
дения первичной обмотки обычно является гармоническим, т.е.
Н = //osin(Q/) ,и тогда
е = -£2^0FQcos(Q/). (7.47)
Амплитуда ЭДС, наводимой во вторичной обмотке, оказывается пропор-
циональной нагрузке F; иначе говоря, происходит амплитудная модуляция
высокочастотного несущего сигнала, и закон F(t) выполняет роль огибающей
этого сигнала. Очевидно, что несущую частоту нужно выбирать с учетом ожи-
даемого спектра измеряемого процесса.
Из (7.45) следует, что при измерении быстропротекающих процессов
может существенно возрасти роль составляющей ЭДС, пропорциональной
производной внешней силы и являющейся в данном режиме паразитной.
При Н = Но — cons/ (7.45) принимает вид
, тг dF , dF
е = -FFL — = к —.
° dt dt
(7.48)
Видно, что в этом случае выходной сигнал будет пропорционален не са-
мой нагрузке, а ее производной, и следует предусматривать возможность ин-
тегрирования его. Отметим, что в этом режиме невозможна статическая ка-
либровка преобразователя, а динамическая калибровка затруднена из-за отсут-
ствия надежного эталонного силоизмерительного устройства. Область приме-
нения существующих генераторных преобразователей - динамические изме-
254
рения, когда требуются компактные и прочные датчики, причем последние
могут быть изготовлены и на месте.
Уравнение упрощенной схемы замещения (рисунок 7.19) с учетом (7.48)
имеет вид
. dF ^dU
dt dt
¥U ,
(7.49)
где Т = L/R - постоянная времени, т.е. мы имеем инерционное (апериодиче-
ское) звено. Общее решение (7.49) при произвольном законе силы F(t) можно
записать следующим образом:
Рисунок 7.19 - Эквивалентная схема генераторного МУП
Первая составляющая, пропорциональная F(t), является основной, а
вторая характеризует текущую ошибку измерения. Последняя тем меньше, чем
больше постоянная времени (при этом снижается уровень и основной состав-
ляющей, но в меньшей степени). Можно показать, что если
F = ^msin
то максимальная ошибка измерения
Искажение результата измерения зависит от отношения tу/Т — чем оно
меньше (т.е. чем больше 7), тем меньше и ошибка измерения (таблица 7.6).
255
Таблица 7.6 — Зависимость ошибки измерения |S|, от постоянной
времени обмотки ty IT
ty/T 0,001 0,01 0,1 0,5 1,0 2,0
|5|, % 0,064 0,633 6,06 25,6 43,5 72,3
Таким образом, для повышения качества интегрирования следует уве-
личивать постоянную времени. Этот вывод противоречит общепринятым
представлениям, согласно которым по мере уменьшения длительности про-
цесса ошибка измерения возрастает из-за искажающего влияния собствен-
ных колебаний системы [20]. В данном случае это влияние вообще может
быть исключено, если обеспечить согласование магнитопровода и опоры
преобразователя по волновому сопротивлению. Из (7.49) видно, что по мере
возрастания Трассматриваемая система приближается по своим свойствам к
интегратору. Иначе говоря, сама обмотка (при соответствующем выборе ее
параметров), обладая реактивным (индуктивным) сопротивлением, способна
играть роль интегратора. Этот вывод подтверждается опытами, проведенны-
ми кафедрой СМ-5, в том числе и при исследовании динамического нагру-
жения КДЦ.
В экспериментах использовали МАП с кубическим магнитопроводом
(со стороной 30 мм) с двумя крестообразно уложенными обмотками. Магни-
топровод изготавливали из магнитомягкого материала - электротехнической
стали Э1 (железокремниевый сплав), которая обладает высокой прочностью
и недефицитна, а также из сплава 44НХТЮ [71]. При этом оценивали воз-
можность регистрации ударных процессов.
Сначала исследовали влияние тока подмагничивания первичной обмотки
(постоянного) и длительности подачи тока на эту обмотку, при этом было от-
мечено явление асимптотической стабилизации уровня выходного сигнала
(после 15... 18 ударов).
В последующих опытах первичную обмотку изъяли. Такой вариант МАП
наиболее перспективен при использовании в КДЦ взрывателя вследствие воз-
можности применения недефицитных магнитомягких материалов и простоты
конструкции. Магнитопровод может иметь практически любую конфигура-
цию, и его можно встраивать непосредственно в головную часть взрывателя.
Возможны два варианта включения магнитоупругого генератора:
- автономный источник питания, заряжающий при выстреле (под дейст-
вием осевой силы инерции) накопитель (конденсатор), срабатывающий при
встрече с преградой в результате замыкания электрической цепи;
- КДЦ, генерирующий сигнал при ударе боеприпаса о преграду.
256
В обоих случаях электрический сигнал подается на мостиковый (не ис-
кровой!) электродетонатор. При таком применении генератора мощность сиг-
нала должна составлять 0.2...0.8 мДж. Проведенные исследования свидетель-
ствуют о принципиальной возможности выполнения этого требования. Линей-
ность характеристики при этом особой роли не играет.
В работах [72, 73] обоснована математическая модель генераторного эф-
фекта в металлах. Его механизм в упрощенной трактовке таков. В результате
приложения механической нагрузки (У происходит поляризация материала
магнитопровода, и появля- ется нестационарное электрическое поле с напря-
женностью Е, которое вызывает магнитное поле, а магнитный поток наводит
ЭДС U в обмотке преобразователя. Таким образом, получается «трехзвенная»
модель механизма, от которой с помощью метода А.А. Харкевича [55] можно
перейти к традиционной, однозвенной, модели:
ct = zhE + zi2/
U = z2[E + z22Z J
где zJ2 = z2J можно трактовать как своеобразный пьезомодуль. Успешной реа-
лизации такого подхода препятствует необходимость экспериментального
определения феноменологических коэффициентов z/7, а также заметная нели-
нейность при интенсивных воздействиях. Прямой эффект при выполнении
ряда условий можно описать линейным соотношением [73]:
U = k'F,
где к'— коэффициент, который зависит от механических и магнитных
свойств материала, а также от параметров электромагнитного преобразова-
ния. Этот коэффициент можно определить экспериментально - при динами-
ческой калибровке преобразователя (это достаточно сложная проблема, по-
скольку требуется эталонный преобразователь, способный фиксировать ин-
тенсивные воздействия малой длительности; из-за этого область надежной
калибровки существенно сужается).
В ходе дополнительных опытов (М.Ю. Лаврушин) было обнаружено, что
ЭДС, наводимая в обмотке, содержит дополнительную составляющую, кото-
рая не зависит от напряженности магнитного поля.
Как отмечено выше, генераторный МУП был использован при иссле-
довании динамической силовой характеристики головной части пьезовзры-
вателя (см. разд. 7.2.1). Благодаря уникальному свойству этого преобразо-
вателя - способности интегрировать входное силовое воздействие - уда-
лось зарегистрировать ударные импульсы длительностью в микросекунд-
ном диапазоне. Кривая, полученная с помощью МУП, гладкая и легко под-
дается обработке, в то время как на сигнале от пьезоакселерометра изме-
257
ряемый процесс «замаскирован» собственными колебаниями датчика.
«Фильтрующие» свойства МАП наглядно иллюстрируются рисунком 7.20,
на котором показаны осциллограммы, полученные одновременно с помо-
щью МАП и пьезодатчика.
Рисунок 7.20 -Осциллограммы ударных процессов, полученные
с помощью МАП (верхние кривые) и пьезодатчика (нижние кривые)
Установлено, что в диапазоне значений контактной силы, соответст-
вующем срабатыванию КДЦ (до 70 кН), характеристика МУП практически
линейна.
Генераторный МУП также с успехом применяли при исследовании за-
преградных динамических процессов при взаимодействии индентора (пули) с
элементом системы индивидуальной бронезащиты [74—76], что позволило
более обоснованно судить об эффективности такой системы.
258
Глава 8
ИСПЫТАНИЯ ВЗРЫВАТЕЛЕЙ
Вопросы проектирования, отработки и испытаний взрывателей, их от-
дельных узлов и элементов должны решаться в тесной взаимосвязи, комплекс-
но. Правильность принятых конструктивных решений можно подтверить
только проведенными испытаниями, т.е. помещенем объекта в среду, в макси-
мально возможной степени соответствующую условиям эксплуатации и вос-
производящую возникающие в этих условиях воздействия. Механические воз-
действия могут иметь двоякую природу, будучи рабочими (например, взводя-
щие силы инерции) или дестабилизирующими и вызывать несанкционирован-
ное поведение изделия (отказ). Поэтому представляется целесообразным хотя
бы кратко рассмотреть круг вопросов, относящихся к научному обоснованию
методов испытаний. При этом ограничимся только механическими испыта-
ниями, учитывая особую роль именно этих воздействий при функционирова-
нии систем предохранения и контактных датчиков цели.
Вопросам организации и проведения испытаний вообще и механических,
в частности, посвящено достаточно много работ [20, 77-91].
Окончательную оценку нового изделия можно сделать лишь в результате
проведения натурных (полигонных) контрольных испытаний, что сопряжено с
большими затратами времени и материальных ресурсов. Поэтому высока роль
испытаний в искусственно создаваемых (лабораторных, стендовых) условиях.
Однако в подавляющем большинстве случаев обеспечить адекватность условий
стендовых испытаний и реальных условий эксплуатации не удается. По этой при-
чине большую роль играют расчетно-экспериментальные методы прогнозирова-
ния работоспособности объекта в ожидаемых условиях; ряд задач успешно реша-
ется на основе методов физического и математического моделирования.
Организация испытаний представляет собой весьма сложную научно-тех-
ническую задачу, для успешного решения которой необходимо (рисунок 8.1):
— тщательно изучать все многообразие факторов, характерных для усло-
вий эксплуатации, с помощью современной измерительно-регистрирующей и
вычислительной техники;
- создавать испытательное оборудование, способное в максимально воз-
можном объеме воспроизводить факторы внешней среды; важное значение
при этом имеет построение адекватных математических моделей воздействий;
— разрабатывать научно обоснованные методики испытаний и обработки
получаемых при этом результатов;
- вносить необходимые изменения в конструкцию с целью удовлетворе-
ния всем требованиям ТЗ.
259
I-------------------------------------------------------------------------------------------------------------------------------------------------------------------------------1
Рисунок 8.1 — Общая схема организации и проведения испытаний
Укажем основные трудности, связанные с организацией испытаний на
механические воздействия:
— отсутствие достоверных сведений о параметрах и характеристиках ре-
альных механических воздействий из-за исключительных трудностей измере-
ния и регистрации воздействий в реальных условиях эксплуатации взрывате-
лей, это самостоятельная, весьма сложная научно-техническая задача;
- отличие параметров механических воздействий, фигурирующих в ТЗ, от ре-
альных; это приводит к тому, что результаты испытаний в условиях, указанных в
ТЗ, не всегда гарантируют работоспособность изделия в реальных условиях;
- даже при наличии достоверной исходной информации в подавляющем
большинстве случаев воспроизвести весь комплекс реальных механических
воздействий в лабораторных условиях не удается из-за ограниченных техниче-
ских характеристик испытательного оборудования;
- сложность построения адекватных математических моделей воздейст-
вия и испытуемой конструкции; эти модели, согласованные по базисным
функциям, необходимы как для обоснования условий лабораторных испыта-
ний, так и для решения задач прогнозирования.
В практике испытаний различают две основные группы механических воздей-
ствий - удары и вибрации, а для их воспроизведения разрабатывают соответствую-
щее испытательное оборудование - ударные и вибрационные стенды. Более тонкая
классификация воздействий базируется на их характерных математических призна-
ках (см. разд. 2). Испытанием называют экспериментальное определение количест-
венных или качественных характеристик свойств объекта: как результата воздейст-
вия на него; при его функционировании; при моделировании объекта и (или) воз-
действий. В ходе механических испытаний оценивают:
260
- прочность изделия, т.е. его способность выполнять свои функции и со-
хранять параметры в пределах норм после воздействия механических факто-
ров (различают ударо- и вибропрочность);
- устойчивость — то же, но во время воздействия (ударо- и виброустойчи-
вость).
Для получения сопоставимых результатов испытаний разработаны реко-
мендации, регламентирующие степени жесткости (в зависимости от интенсив-
ности внешних факторов - от I до VIII) и единые методы испытаний, а также
требования к испытательному оборудованию. Например, для однократных
(одиночных) ударных нагрузок предусмотрены диапазоны: по уровню — от 4
до 3000^, а по длительности - от 0.2 до 60 мс.
8.1 Воспроизведение ударных воздействий
Теоретической основой методов воспроизведения является положение о
том, что между заданными параметрами ударных нагрузок и условиями их
воспроизведения в лабораторных условиях (т.е. характеристиками испыта-
тельного оборудования - стендов) существует достаточно жесткая взаимо-
связь. Только указав эту взаимосвязь, можно обоснованно подойти к назначе-
нию условий проведения эксперимента.
Рисунок 8.2 - Блок-схема ударного стенда
Одним из основных в теории воспроизведения является понятие пере-
грузки, которая в общем случае определяется так: к — a/g, где а — абсолют-
ное ускорение. Требуемый закон перегрузки кЦ) может быть создан на удар-
ном стенде двумя способами: разгона или торможения объекта испытаний, т.е.
при положительном или отрицательном его ускорении (рисунок 8.2). Таким
образом, уравнение движения объекта массой Q при испытании на ударном
стенде можно записать в динамической форме (см. разд. 2.1)
261
Q^- = QV^- = ±P, (8.1)
at aX
или в кинематическойО
^-=±^(0> (8-2)
at
где P— либо движущая сила, либо сила сопротивления тормозного устройства
(поглотителя кинетической энергии предварительно разогнанного объекта);
k(t) = P/(Qg). При первой форме записи уравнения движения закон перегруз-
ки подлежит определению, при второй он считается заданным.
При рассмотрении метода торможения могут быть использованы общие
соотношения, связывающие основные параметры ударных процессов, которые
были получены выше (см. разд. 2.1). В частности, если удар носит упругопла-
стический характер, справедливы соотношения (2.9) и (2.10), с помощью кото-
рых (при заданной форме закона перегрузки) можно оценить требуемые усло-
вия воспроизведения, а именно - скорость разгона объекта:
V0 = Agk max Т
и путь торможения
= = (В/лУ„т,
где (таблица 8.1)
А= jk(t )di; С = fdt'j к В = А- С (8.3)
0 0 0
Таблица 8.1 — Коэффициенты Л, В и С для типовых законов ударных перегрузок
Закон ВД, о< t< 1.о A c В
1.0 1.0 1/2 1/2
1 1/2 1/6 1/3
GT 1 v + 7 1 (v + ?XV + 1 v + 2
. я - sm — t 2 — = 0,637 Я (2Y 2> - 1 \ = 0,232 \лД nJ - = 0,405
. 2 К - sin — t 2 2 - — = 0,149 4 n2 - + = 0,351 4 n2
te‘~' e-2 = 0,718 3-e = 0,282 2q-5 = 0,436
262
Нетрудно показать, что при воспроизведении аналогичного закона пере-
грузки методом разгона объекту потребуется сообщить такую же скорость
( Vo), а путь разгона
Zp=ror-ZT.
Например, при линейном законе перегрузки к (F) = F, 0 < t < 1.0,
Уй =\skmmr-,LT =|g£maxr2 =|ror;Z = |g£maxr2 =
2 5 5 О 2
Каждый из этих методов обладает как достоинствами, так и недостатками.
Количественной мерой возможностей ударных стендов как испытательных
средств являются максимальная скорость (К)тах и максимальные пути разгона
(-£р)тах и торможения (£т)тах- Эти величины определяют предельные эксплуа-
тационные характеристики стендов, имеющие решающее значение при выборе
условий лабораторного эксперимента [20]. Существуют следующие ограничи-
вающие зависимости (рисунок 8.3):
(ZJ (к0)
х т/тах _ — . s \ 0 /тах _ —
^тах ~ (,)’ Agkmm ~ (2)’
координаты точки пересечения которых
. _ В (r«)L т _ Л (£,)„
<0) = 5(к,).„
определяют границы допустимых диапазонов воспроизводимых параметров
ударных воздействий. Обычно предельная скорость более жестко ограничена
либо высотой свободного сброса, либо мощностью специального разгонного
устройства [86-90].
0 (kma*)min к(о) (кщак)тах ктах
Рисунок 8.3 - Предельные эксплуатационные характеристики ударного стенда
263
Копер «Массет». В отрасли хорошо известны такие установки для удар-
ных испытаний взрывателей, как копер «Массет» и серия стендов типа ПУР
(пневматические установки Г.С. Рыбакова). Копер «Массет» - традиционное
средство испытаний взрывателей и их отдельных узлов (главным образом, на
взводимость и ударную прочность). Установка позволяет создавать перегруз-
ки, соизмеримые по уровню с реальными (десятки тысяч единиц). Однако то-
ждественность поведения элементов конструкции изделий в стендовых и ре-
альных условиях применения исключена из-за различия продолжительности
воздействия (доли миллисекунд на копре и единицы миллисекунд при выстре-
ле из артиллерийской системы). Однако такие испытания считаются стандарт-
ными, и в ТЗ на разработку новых изделий часто указывается именно макси-
мальный уровень ожидаемых в условиях эксплуатации перегрузок.
При теоретическом исследовании ударных процессов рассматривают два
варианта контактного взаимодействия тел. Теория Герца [92, 93] относится к
случаю статического сжатия упругих тел с криволинейными поверхностями,
описываемыми уравнениями второго порядка. Контакт двух тел рассматрива-
ется как задача, эквивалентная задачам электростатики, а решение получено в
форме потенциала, описывающего напряжения и деформации вблизи точки
контакта в функции геометрических и упругих свойств тел, без учета инерции
материальных частиц и пластических деформаций в этой зоне. Вместе с тем,
результаты расчета оказываются достаточно близкими к экспериментальным,
если длительность ударного процесса велика по сравнению с наибольшим
периодом свободных колебаний тел. Количественно указанное соотношение
определяется формулой академика А.Н. Крылова, которая в преобразованном
виде приведена в [20].
Закон Герца описывает взаимосвязь между контактной силой Ри сближением
соударяющихся тел (т.е. локальной упругой деформацией, или смятием) а:
Р=кау1\ (8.4)
где коэффициент к зависит от свойств материалов тел и кривизны их поверх-
ностей в зоне контакта. Для сферических поверхностей с радиусами Rx и Р2:
^=4 I А-/,2 , I-/Y1 '
з у л; + л, е2 )
где Е\, Е2 и //j , //2 - соответственно модули упругости и коэффициенты
Пуассона материалов обоих тел. В частности, если материалы обоих тел оди-
наковы (Ех = Е2 = Е, j-ц = ц2 - ц), то
к_ 2Е I
"3(1-/?)^+^
264
Для металлов в среднем ц = О,ЗО. Наконец, при ударе о плоскую по-
верхность (R2 —> со , = R)
, 2E4R
к =—7--г
Испытания на ударных стендах организуются таким образом, что в зоне
контакта устанавливают некоторый специальный формирователь (крешер),
деформация которого является упругопластической. Фазы такого удара описа-
ны ранее (см. разд. 2.1). Силовую характеристику зоны контакта можно
описать следующим эмпирическим соотношением [20, 94]:
а = ЬР\ (8.5)
которое является обратным по отношению к закону Герца (8.4), для которого
Запишем уравнение движения тела массой /п во время активной фазы в
«динамической» форме (2.4) с учетом (8.5):
d2a dv dv п - —
dr dt da
Интегрируя, получаем
(8.6)
da
1+л Г-
П ----------- L Л „
--------а п = и 11------------т------г Ра ,
I иЛ с и . -Л
где Ео = /2- кинетическая энергия тела в момент удара. Принимая
находим максимальную деформацию:
(8-7)
и=0,
1 + п _ -
----ЕйЬп
п
п
1+л
Соответственно, максимальные значения контактной силы и перегрузки
составят:
ЧА = Г1+д ДА. к = д
A A b ) ’ mg'
Из (8.7) также следует соотношение
Д=Т~—(8.8)
1 + П
265
Длительность переднего фронта т находится из условия V— 0 (при этом
деформация и контактная сила достигают максимальных значений). В работе
[20] показано, что
vor [— 1 + Зл
— NK—f
«т 2(1 +Л
где Г(х) - гамма-функция. Для численного решения уравнения удара (8.6) его не-
обходимо преобразовать в систему дифференциальных уравнений первого порядка:
(8.10)
mlf
Введем безразмерные величины:
а _ v - t
а =-; v = —; t = —
и преобразуем уравнения (8.10):
Потребуем, чтобы было выполнено условие Т тогда множи-
тель в правой части первого из уравнений (8.11):
ртт pmam _ 1+л
mvn 2Еа 2п
Таким образом, получаем следующую систему безразмерных дифферен-
циальных уравнений:
Начальные условия: при t — 0 и= 1, а = 0; расчет ведется до момента
времени г = /ат (й=0).
Изложенную методику можно использовать для расчетной оценки пара-
метров удара на копре «Массет», причем при испытаниях возможна реализа-
ция обоих вариантов формирования параметров ударного процесса в результа-
те нормального удара твердого тела (молота) о преграду (наковальня).
Деформируемым элементом может быть крешер определенной конфигурации
или прокладка из того или иного материала (упругопластический удар), а при
упругом соударении - зона контакта молота и наковальни.
266
Паспортные характеристики копра «Массет» (для стандартной процеду-
ры испытаний, т.е. для упругого удара), приведены в таблице 8.2. Здесь ty-
длительность ударного процесса, т.е. продолжительность контакта молота с
наковальней. Для проверки адекватности методики теоретической оценки па-
раметров удара были проведены эксперименты в этих же условиях (опыты в
НИТИ проводил А.В. Капустян при исследовании пьезоиндукционного преоб-
разователя — см. разд. 7.2.2).
Таблица 8.2 - Паспортные параметры ударных процессов
на копре «Массет»
Номер зуба vQ, м/с к лт ty, мс
от до от до
5 3,54 6500 11000 0,10 0,14
10 5,3 10000 18000 0,09 0,12
15 9,0 29000 44000 0,06 0,10
20 13,8 49000 73000 0,05 0,09
23 19,0 60000 83000 0,05 0,07
Упругий удар: 7?=150мм; к~ 0,567-1011 Н/м3^2, т.е.
Ь — 6,72• 10“8м/Н2/3; собственная масса молота /77=0,64кг. Расчетные па-
раметры ударного процесса, приведенные в таблице 8.3, практически сов-
падают с паспортными. Полная длительность процесса fya2r, поскольку
кривая перегрузки симметрична относительно максимума.
Таблица 8.3 - Расчетные параметры ударных процессов
Номер зуба мм т, мс 2т ~ t , мс ктах
5 0.125 0.052 0.104 12760
10 0.173 0.048 0.096 20700
15 0.264 0.043 0.086 39080
20 0.372 0.040 0.080 65260
23 0.481 0.037 0.074 95780
Упругопластический удар. Для стальных конических крешеров эмпири-
ческий показатель степени в аппроксимации (8.5) п ~ const = 0.6. Значения
параметра b приведены в таблице 8.4, а результаты расчета — в таблице 8.5.
267
Таблица 8.4 — Эмпирический параметр b для конических крешеров
Угол конусности, град. Ь, м/Н"
60 6,483-1 О'6
90 4,195 10'6
120 2,848-1 О’6
135 1,703-10’6
Таблица 8.5 — Расчетные параметры упругопластических ударных процессов
Номер зуба &тах» ММ т, мс If лти атаЛ1 мм т, мс If лтах
р = 60° р= 120°
5 1,469 0,600 1160 0,878 0,359 1940
10 1,988 0,542 1925 1,189 0,324 3220
15 2,957 0,475 3730 1,768 0,284 6240
20 4,075 0,427 6370 2,437 0,255 10650
23 5,179 0,394 9500 3,097 0,236 15880
Р = 90° р=135°
5 1,119 0,457 1530 0,637 0,260 2680
10 1,514 0,413 2530 0,862 0,235 4440
15 2,253 0,362 4900 1,283 0,206 8600
20 3,104 0,325 8360 1,767 0,185 14680
23 3,945 0,300 12460 2,246 0,171 21890
При использовании прокладок из различных материалов коэффициент п
не может считаться постоянным. В [20, 94] приводятся усредненные значения
динамических эмпирических параметров (таблица 8.6). Как пример приведем
ориентировочные параметры ударного процесса на копре «Массет» для мед-
ной пластины (таблица 8.7),
Таблица 8.6 - Эмпирические параметры
Деформируемый элемент 7?, мм п 6,м/Нп
Алюминиевая пластина, 5 = 2 мм 140 0,86 1,43-1О’8
Медная пластина, 5 = 2 мм 0,86 0,304 1О8
Латунная пластина, 5 = 2 мм 0,85 0,329-Ю8
Декапир, 5=1,1 мм 250 1,18 2,21 -10"
Алюминиевая пластина, 5 = 1 мм 1,19 3,39-10 11
Алюминиевая пластина, 5 = 3 мм 1,22 5,62-10"
Свинцовая пластина, 5 = 40 мм 1,19 0,21 10'8
268
Таблица 8.7 - Параметры ударного процесса для медной пластины
Номер зуба ММ т, мс кт
5 0,072 0,0310 19320
10 0,104 0,0301 29820
15 0,170 0,0289 52700
20 0,252 0,0280 83450
23 0,338 0,0273 117700
Частичное воспроизведение ударного воздействия. Существует вари-
ант испытаний, когда полное воспроизведение заданного закона перегрузки не
требуется. Такой случай характерен для испытаний взрывателей на взводи-
мость при выстреле. Например, инерционные предохранительные механизмы
завершают взведение в пределах переднего фронта закона перегрузки; соот-
ветственно, условие взводимости было записано в виде (4.25), т.е. /в < г . По-
этому при испытаниях можно ограничиться воспроизведением лишь той (ра-
бочей) части кривой , ъ пределах которой происходит срабатывание ме-
ханизма. Для выделения этого участка необходимо предварительно провести
теоретический анализ поведения исследуемого изделия.
Достоинство частичного воспроизведения очевидно — требуется менее
мощная испытательная установка. В этом нетрудно убедиться, проведя не-
сложные выкладки. Действительно, пусть перегрузка, соответствующая сраба-
тыванию (взведению) механизма, составляет некоторую долю от максималь-
ного уровня:
К = £в^тах = £в^1 J
при этом время /в =£tr. Следует отметить, что взаимосвязь между е^и
определяется формой закона k(t). Если реализуется метод торможения, то,
согласно (8.3), будут иметь место такие соотношения:
К, = =Bagk{T2,
где
е, с, i
Л = В, - 4.S, -С,;С. =
О 0 0
При линейном законе перегрузки ев = et; соответственно,
£2
А = —^в=—-,вв = ^.
2 6 3
269
Отсюда видно, что
^Ов _ _ 2. ^тн _ 3
L
к0 -Чп
Например, при стандартном значении = 2/3
_^=4. Д^ = _8_
И 9’ Д 27’
т.е. требуемая скорость удара уменьшается примерно в 2 раза, а путь тормо-
жения - более чем в 3 раза, что обеспечивает большой эффект с точки зрения
энергетики испытательной установки. Требуемые условия проведения по-
добного эксперимента должны назначаться с определенным запасом с уче-
том возможного разброса параметров испытуемых систем взрывателя и за-
кона перегрузки.
Следует отметить, что при ударных испытаниях объектов относитель-
но большой длины могут возникать продольные упругие волны, способные
затруднить регистрацию закона внешнего воздействия. Показано [20, 95, 96],
что отношение амплитуды волновых наложений к уровню «статического»
закона ускорения может быть представлено в виде
п Т.
х = -
4 г
где Т1 = 2//с — период основного тона колебаний; I — длина тела, рассматри-
ваемого как однородный стержень; с - скорость распространения звука в ма-
териале; т —длительность переднего фронта ударного импульса.
Эквивалентные ударные испытания. При ограниченных эксплуата-
ционных характеристиках испытательного оборудования возможна поста-
новка вопроса о проведении испытаний в иных, отличных от заданных, ус-
ловиях, но при тех же конечных параметрах поведения исследуемого объек-
та. Испытания должны проводиться на основе использования соответствую-
щего количественного критерия, устанавливающего «одинаковость» (экви-
валентность) поведения объекта в реальных и лабораторных условиях, соот-
ветственно. При обосновании критерия необходимо теоретически исследо-
вать реакцию системы на заданное воздействие с помощью математической
модели объекта. Реакция же может носить различный физический характер в
зависимости от цели испытания.
Многие практические задачи могут быть успешно решены на основе уп-
рощенного подхода, когда конструкция объекта представлена в виде линейной
колебательной системы с одной степенью свободы [20, 78, 84, 86], описывае-
мой следующим уравнением (начальное значение восстанавливающей силы и
демпфирование для упрощения задачи не учитываются):
270
^ + co2Qx=gk{i).
dt
Количественной мерой реакции такой системы на импульсивное воздей-
ствие является коэффициент динамичности
х
Г, __ max
где - максимальное смещение системы; X = gkm„ - статическое сме-
щение (см. разд. 4.1). Зависимость кА от собственной частоты (или безразмерного
параметра, связывающего частоту собственных колебаний и характерный времен-
ной признак воздействия) называют ударным спектром. В [20] приведены ударные
спектры, построенные для ряда типовых форм импульсивных воздействий с учетом
демпфирования и начального сопротивления упругого элемента.
На рисунке 8.4 показан ударный спектр для полусинусоидального импульса:
v - 2(j)or
Рисунок 8.4 —Ударный спектр для полусинусоидального импульса
Видно, что существует такое значение этого параметра, при котором сме-
щение системы максимально (ударный резонанс); это означает, что условия лабо-
раторного эксперимента могут оказаться более неблагоприятными (при одинако-
вом уровне перегрузки), чем реальные условия (например выстрел), поскольку
длительности реальных ударных воздействий больше тех, которые характерны
для испытаний. Известны случаи из практики, когда из-за неудовлетворительных
результатов испытаний изделий на прочность в лабораторных условиях (при том
271
же уровне перегрузки, но меньшей длительности переднего фронта) были сдела-
ны необоснованные выводы об аналогичном поведении объекта при выстреле с
соответствующим изменением конструкции (которое по существу не требова-
лось). Кроме того, нетрудно заметить, что одному и тому же значению коэффици-
ента динамичности могут соответствовать разные значения параметра и (и
v2); это означает, что одинаковое смещение системы (при определенной собст-
венной частоте) можно обеспечить при разной длительности воздействия: при
большей (реальные условия) и меньшей (на стенде). Таким образом, методика
эквивалентных испытаний может основываться на неоднозначности частотного
параметра при фиксированном значении коэффициента динамичности (при этом
реальное и стендовое воздействия должны быть близки по форме).
Рассмотрим еще один иллюстративный пример. Предположим, что в ре-
зультате анализа процесса взведения предохранительного механизма взрыва-
теля при выстреле установлено значение скорости Ув взводящейся детали по-
сле перемещения ее на путь взведения а. Пусть испытательная установка та-
кова, что закон создаваемой на нем перегрузки является прямоугольным:
k(t) = const = кт, 0 < t < /и.
Следует отметить, что известны конструкции реальных стендов, способ-
ных воспроизводить законы перегрузки, близкие к прямоугольным [100-102].
Поставим следующую задачу: подобрать такие параметры закона воспроизво-
димой перегрузки (&т/и), которые обеспечивали бы расчетную скорость
взводящейся детали. Для решения этой задачи можно воспользоваться полу-
ченными ранее результатами. Так, принимая в формулах (4.3) и (4.4) \\,КИИ = 1 ;
- 0; О)0п = О)0 и t = tn , запишем:
<*Vh .
2 ’
х„
= x(tU ) = *ст (7 - C0SC0(A ) = ^„Sin2
= % mnsinoVu = zxciKSin——cos
LT U U И CT U
Теперь необходимо принять хи = VB’ т0ГДа нетрудно найти тре-
буемые параметры стендового закона перегрузки:
2 дсоп , v2 + (асоп У
tH =— arctg—кт = -°-7 .
ю0 vB 2ga
На практике указанные параметры необходимо назначать с учетом воз-
можных разбросов; кроме того, реальный ударный импульс, считающийся пря-
моугольным, всегда имеет участки нарастания и спада. Таким образом, при ука-
занной постановке задачи эквивалентность условий нагружения устанавливается
272
по интегральным (конечным) параметрам процесса. Эквивалентность в функ-
циональном смысле (с точки зрения закона движения взводящейся детали), есте-
ственно, не соблюдается.
Прогнозирование поведения объекта по результатам лабораторного экс-
перимента. Общая постановка задачи такова: руководствуясь теми или иными тео-
ретическими предпосылками, можно создать некоторую математическую модель
реального объекта с помощью его идентификации, т.е. принятия решения об отне-
сении объекта к динамическим системам того или иного класса. Если считать по-
строенную модель инвариантной как в лабораторных, так и в реальных условиях, то
ее реакцию на реальное воздействие можено рассчитать с последующим суждением
о работоспособности исследуемой системы.
Проиллюстрируем принципиальную возможность прогнозирования на
примере использования метода ударного возбуждения [20]. В основе метода
лежит предположение о том, что исследуемая конструкция может рассматри-
ваться как система линейная. В этом случае инвариантной характеристикой
объекта может быть ее комплексный коэффициент передачи.'
где = |jy(jo))| - амплитудная частотная характеристика (АЧХ);
б(о)) = arg Jy(jo)) - фазовая частотная характеристика (ФЧХ).
Как известно, существует соотношение
»'(/«>)=
где jy(s)- передаточная функция (s - оператор Лапласа). Обозначим внешнее
воздействие, приложенное к системе, у(/)л а соответствующую реакцию —
x(z). При импульсивном воздействии реакция будет носить характер переход-
ного процесса. Можно показать, что
»»'(>)=
где /^(уо^и /^(усо)— комплексные спектры соответствующих процессов,
которые вычисляют по формуле прямого преобразования Фурье:
F(/co)=
-co
Процесс $(/) восстанавливают по формуле обратного преобразования:
У 4-00
s(r)=— .
J
273
При вычислениях пределы интегрирования конечны: это фактическая
длительность анализируемого процесса и практическая ширина спектра. Та-
ким образом, комплексный коэффициент передачи (частотные характеристи-
ки системы) можно определить не только традиционным способом (при мо-
ногармоническом воздействии), но и при возбуждении произвольным, на-
пример ударным воздействием — отсюда и название метода. Его достоинство
в том, что Ж(/со) можно найти в любых условиях ударного нагружения объ-
екта испытаний; при этом все специфические особенности конструкции как
сложной колебательной системы оцениваются автоматически. Этот подход
оказывается особенно эффективным при исследовании объектов, обладаю-
щих большими массой и габаритами. В частности, с помощью этого метода
удалось определить частотные характеристики буксового узла железнодо-
рожного вагона [20, 86].
Суть метода проста: при известном законе воздействия в реальных усло-
виях эксплуатации можно вычислить его спектр а затем — спектр
реакции:
^(л>)=р’уМ^М
и, соответственно, саму реакцию как функцию времени с помощью обратно-
го преобразования Фурье. Поскольку спектры процессов определяются чис-
ленно, большое значение имеет правильный выбор шага дискретизации Л/.
В этом случае теорема Котельникова (относящаяся к процессам с ограничен-
ным спектром, т.е. полигармоническим) неприменима. Можно показать [97-
99], что при выборе шага дискретизации можно руководствоваться следую-
щим условием:
<2 / 68
~лV/+28’
где /г — частота, ограничивающая ширину спектра; 5 - допустимая относи-
тельная погрешность. Например, при 5 = 0,1 fvt±t < 0,215 ~ 1/5 . В работе [84]
рекомендуется выбирать шаг Л/, равным трети периода высшей частоты, од-
нако ошибка при этом составит около 30 %, что неприемлемо.
Метод ударного возбуждения был успешно реализован при оценке рабо-
тоспособности пьезоэлектрического КДЦ; последний предназначен для отпи-
рания исполнительной цепи, в которую включен электрозапал, при прямом
контакте авиационной ракеты с целью (дублирующий канал). Схема экспери-
мента в лаборатории показана на рисунке 8.5: объект испытаний (макет раке-
ты) подвешивался на тросах длиной 3 м; система нагружалась путем удара о
массивную стальную плиту. При этом фиксировались сигналы от двух датчи-
ков одновременно: реакционного (контактная сила) и инерционного.
274
Рисунок 8.5 - Схема лабораторного эксперимента (метод ударного возбуждения):
/7-стальная плита; /^-реакционный (пьезоэлектрический) датчик;
ИД-инерционный датчик; У77Г-усилитель постоянного тока;
ЭО-электронный осциллограф; ФП-фотоприставка; ЗГ-генератор
сигнала звуковой частоты; БП-блок питания
Рисунок 8.6 - Расчетный уровень сигнала на выходе пьезоэлектрического КДЦ
при встрече ракеты с преградой
В результате проведения серии экспериментов удалось определить ком-
плексный коэффициент передачи, который функционально связывает внешнее
силовое воздействие на ракету с выходным сигналом КДЦ. Целевой преградой
являлись листы из дюраля толщиной 2 и 4 мм. Для расчета КДЦ необходимо рас-
полагать законом сопротивления преграды в реальных условиях встречи; при-
ближенная силовая характеристика была определена пересчетом результатов ста-
тического продавливания образцов (при этом использованы положения теории
подобия и размерности). Результаты исследования показаны на рисунке 8.6. На-
275
пряжение отпирания исполнительной цепи составляет от 60 до 120 В; видно, что
при толщине 3 = 2 мм и высоких скоростях встречи срабатывание КДЦ не га-
рантируется. В то же время, при 3 = 4 мм оно обеспечено в пределах всего диа-
пазона скоростей встречи. Отметим, что данный вывод принципиально согласует-
ся с известными результатами полигонных испытаний.
Физическое моделирование при ударных испытаниях. Физическое мо-
делирование — эффективный инструмент научного исследования [18-20]. Метод,
основан на положениях теории подобия и размерностей и проиллюстрирован
ранее, на примере установления структуры формулы для силы сопротивления
воздуха (см. разд. 2.3.1). Некоторые задачи, связанные с испытаниями взрывате-
лей, также могут быть успешно решены на основе такого подхода. Физическое
моделирование, например, успешно применено при изучении удара твердых осе-
симметричных тел при входе в воду, причем показано, как данную задачу можно
решить в случае неполного подобия с соответствующей корректировкой полу-
ченных результатов. Весьма эффективны испытания обращенным способом (на
ракетном треке), поскольку прямое изучение процесса взаимодействия боеприпа-
са с преградой сопряжено с большими техническими трудностями, однако усло-
вия такого испытания должны быть выбраны не произвольно, а на основе теории
подобия и размерностей. Чтобы грамотно интерпретировать получаемые резуль-
таты и производить пересчет на реальные условия встречи, необходимо прибег-
нуть к искусственному утяжелению объекта испытаний [20].
Конечные параметры упругопластического удара, часто реализуемого на ис-
пытательных стендах [20, 100], могут быть найдены независимо друг от друга, если
задать безразмерный комплекс, выполняющий роль критерия подобия:
mg\bg)
Например, при п = 0,6 (коническая конфигурация деформируемого элемента)
0,62(#r)>i'=0,9(#am.)n! =O,83(Am,J-' =П-°’И.
8.2 Вопросы испытаний на вибропрочность
Вопросы обеспечения вибропрочности конструкций имеют большое
практическое значение, в том числе и для взрывателей, и соответствующие
испытания в процессе отработки изделий предусматриваются.
Основные результаты исследования закономерностей усталостного раз-
рушения обобщены в [101-103]. Наиболее распространен подход, основанный
на использовании кривых (линий) Велера, устанавливающих зависимость на-
пряжения разрушения от количества циклов изменения нагрузки. Усталостные
свойств различных материалов определяют с помощью стандартных образцов.
276
Согласно теории линейного накопления усталостных повреждений (гипотеза
Майнера), условие появления трещин записывается в виде
<812)
где п —число циклов при амплитуде напряжения суа ; N— число циклов, соот-
ветствующих моменту возникновения трещин при той же амплитуде напряже-
ния. Известные экспериментальные данные не опровергают правило линейно-
го суммирования как статистическую гипотезу [101].
При испытаниях на вибропрочность актуальна проблема установления
условий эквивалентности нагружения конструкции в реальных и лабораториях
условиях, обеспечивающая «одинаковость» ее поведения. Авторы [83] связы-
вают действующие напряжения и ускорения линейной зависимостью и ориен-
тируются на резонансную частоту f} конструкции, представленной в виде
колебательной системы с одной степенью свободы. В этой работе исходными
также являются кривые Велера и линейный закон накопления повреждений. В
[103] при установлении эквивалентности предлагается заменять действитель-
ное усталостное повреждение при случайном процессе нагружения (пренебре-
гая «реализационным рассеянием») средним значением и считать детермини-
рованным.
Указанные подходы не позволяют решить основную инженерную
задачу- прогнозировать вибропрочность конструкции в реальных условиях ее
эксплуатации. Эти недостатки сводятся в основном к следующему:
1) результаты испытаний стандартных образцов в большинстве случаев
невозможно распространить на реальные конструкции;
2) кривые Велера не учитывают частоту возмущения, а имеющиеся сведения о
влиянии частоты нагрузки на усталостную прочность крайне недостаточны.
3) основной характеристикой усталостной прочности является напря-
женное состояние образца, однако взаимосвязь между амплитудами напряже-
ния и ускорения может быть установлена не всегда, что также затрудняет пе-
ресчет на реальные условия эксплуатации конструкции. Я.Б. Фридман, отме-
чая повышение усталостной прочности в области магах и средних частот, свя-
зывает это явление с увеличением скорости деформирования и нагружения по
мере возрастания частоты [104].
Иной подход к оценке усталостной прочности конструкции можно
обосновать следующим образом. Любую конструкцию с точки зрения виб-
ропрочности можно охарактеризовать некоторым пороговым (критическим)
состоянием. Разрушение (выход из строя) конструкции происходит в том
случае, если при циклически изменяющемся воздействии произойдет пре-
вышение указанного порогового состояния в результате накопления оста-
277
точных (усталостных) эффектов. Таким образом, решающим является не
механизм развития этих эффектов, а сам факт выхода конструкции из строя.
Такую модель усталостного разрушения назвают феноменологической: мера
повреждения v (0< v<l) вводится аксиоматически. Обычно считают, что
мера подчиняется кинетическому уравнению:
^ = /(v,S), (8.13)
at
где 5*(/) - характеристика нагрузки. Вид функции /(v, S') можно выявить опыт-
ным путем. При выполнении определенных условий (8.13) приобретает вид
f & 1
.Шг1' <814)
w r„(s) -долговечность при базовом испытании с S ~ const.
Задачи оценки усталостной прочности можно также решить с помощью
теории надежности («кумулятивная» модель отказов) и выбросов (минималь-
ное время выхода вектора v за пределы заданной области О) [101].
Момент разрушения зависит от параметров воздействия и свойств систе-
мы. Следовательно, задача сводится к выбору такого критерия, который объе-
динял бы характеристики воздействия и конструкции независимо от их специ-
фических особенностей. Единственно возможным в этом смысле является
энергетический критерий, включающий в себя энергию воздействия до разру-
шения конструкции Э [105]. Последняя же определяется однозначно при воз-
действии а(/) любого вида при известном времени до разрушения (долговеч-
ности) Тр, Действительно, при детерминированном воздействии
тР
Э= (8.15)
о
а при полигармоническом (периодическом)
Э=^Гр, (8.16)
____ 1 Г со , .
где а2(/) ZW/2) - средняя (за период 7) мощность воздей-
Т Q 4=1
ствия, а ск - амплитуда £-ой гармоники. Очевидно, что число циклов измене-
ния воздействия до разрушения # = fjTpy где частота основной
гармоники. Моногармоническое воздействие a{t) = :
Э=^Тр; N = f0Tp. (8.17)
278
При нестационарном случайном воздействии
ТР
Э= (8.18)
О
где Z)(f) = o2(/) - дисперсия. Наконец, при стационарном возмущении (дис-
персия как мера мощности процесса постоянна)
3=DTp. (8.19)
Следовательно, энергия до разрушения может служить обобщенной ха-
рактеристикой порогового состояния конструкции, определяется однозначно
при любом характере воздействия и интегрально учитывает все специфиче-
ские особенности как воздействия, так и конструкции, и, следовательно, дает
косвенное описание напряженного состояния. Отсюда же следует и вывод о
принципиальной возможности обоснования эквивалентных условий нагру-
жения конструкции. Критерием усталостной прочности может быть некото-
рый комплекс, зависящий от Э, количественные значения которого должны
быть инвариантными для нагрузок различного вида при выполнении соот-
ветствующих условий. Выявление структуры такого критерия представляет
собой весьма сложную задачу. Значение Э «при прочих равных» условиях
многократных опытов будет неизбежно обладать разбросом, расчетным мо-
жет быть среднее или «наивероятнейшее» значение.
Очень важен вопрос о влиянии спектральных особенностей воздейст-
вия. Например, при стационарном воздействии время до разрушения Тр бу-
дет существенно зависеть (при одинаковой дисперсии) от структуры спек-
тральной плотности S(cd). Ее специфические особенности могут быть оха-
рактеризованы с помощью спектрокорреляционной функции (СКФ), пред-
ложенной в работе [106]:
00 .со
у/(Д<у)= - &co}S((o)d(o = —dr. (8.20)
—оо 2тг _с0
СКФ соответствует следующее интегральное преобразование:
00
^(т-)= ^(Д^е^^Д®), (8.21)
-00
где — корреляционная функция нагрузки. Показано, что СКФ улавливает
достаточно тонкие различия в форме S(co).
Энергетический подход дозволяет преобразовать некоторые из известных
соотношений в теории усталостной прочности. Например, закон линейного
накопления повреждений (8.12) можно представить в виде
279
где Эк - энергия воздействия длительностью 4; 3(Jk) - энергия разрушения
на частоте fk. Соответственно, выражение (8.14) можно записать:
J дао]
(8.23)
В работе О.Ф.Трофимова [107] дана количественная оценка накопления
повреждений, основанная на сопоставлении энергетической структуры слу-
чайных процессов:
42
(8.24)
00
где тк = — моменты спектральной плотности. С учетом того, что
о
оо оо
S(co)d(o = -^(о), л?4 = = X/V(o),
о о
выражение (8.24) можно представить в виде
= const.
(8.25)
Предлагаемая оценка накладывает определенные ограничения на вид
корреляционной функции, которая, в частности, должна быть четырежды
дифференцируемой в начале координат. Этому условию, как известно, удовле-
творяют процессы достаточно узкого класса. Если ввести нормированную по
дисперсии корреляционную функцию р(т) = k(x)/D, то H(o)=Dp"(o) и
к/У — Dp/V(б); соответственно
-РТ -2
о р
= const.
(8.26)
Видно, что энергия разрушения непосредственно входит в этот комплекс,
в принципе являющийся разновидностью критерия усталостной прочности при
стационарном случайном воздействии. Если принять р(т) = ехр(— р2т), то
pz/ (р) = -2$2 и р/и (о) = 72р4 и соответственно:
V р'”(о)
а критерий (8.26) приобретает вид ЭР = const. Адекватность соотношений
подобного типа должна быть подтверждена экспериментально.
280
Некоторые предварительные данные получены в процессе исследования
усталостной прочности специальных образцов при гармоническом воздейст-
вии (В.В. Сергеев). Чувствительными элементами образцов были резисторы
типа МЛТ-2 в специальных сборках - они закреплялись на платах по несколь-
ко штук и включались в индикаторную электрическую схему. Признаком вы-
хода из строя является усталостное разрушение одного из выводов резистора -
при этом фиксируется время от начала нагружения до разрушения Тр. В опы-
тах определяли зависимость между Тр и параметрами гармонического возму-
щения - частотой /и амплитудой ускорения на столе вибростенда ат, Число
циклов нагрузки до усталостного разрушения образца N= fTp. В таблице 8.8
приведены результаты обработки данных, соответствующих амплитуде виб-
роускорения ат~ 17,5g: znT-(7"р)ср - математическое ожидание Тр.\ сг^ -
дисперсия Тр; Э= —
- «наивероятнейшее» значение энергии раз-
рушения. Значения коэффициента вариации Gyhny, приведенные в таблице,
близки к тому, которое характерно для закона распределения Релея:
— = J--1 = 0,522.
m V я'
Таблица 8.8-Результаты виброиспытаний
4 Гц тт, с ст2, с2 с ат/тт Э, с
100 601 8,29 104 289 0,480 481 7,36 104
150 236 1,495-104 122 0,517 189 2,89 104
175 320 2,94-104 171 0,534 256 3,92-104
200 1003 18,1 -104 425 0,423 802 12,2 104
В качестве «наивероятнейшего» принято значение Тр., соответствующее
максимуму этого закона, т.е.
= J^- = 0,8.
mT у п
На рисунке 8.7 (см. разд. 8.1) показаны кривые (7^) (/); видно, что они име-
ют четко выраженный минимум в районе резонансной частоты образца (150 Гц). На
фиксированной частоте, но при различных уровнях виброускорения значения Тр
значительно различаются (на резонансе примерно в 2 раза). Для проверки приемле-
281
мости энергетического подхода указанные кривые были пересчитаны в зависимость
3(j). Полученные при этом точки оказались достаточно близкими, что позволило
построить единую (усредненную) кривую, показанную на рис. 8.8. Разброс расчет-
ных точек на частоте 150 Гц составляет ±17%.
Рисунок 8.7 - Зависимости )я (/): ат = 17,5 g (/);' 10 g (2)
Рисунок 8.8 — Усредненная зависимость Э(/)
282
Таким образом, даже на основании этих ограниченных данных можно
сделать вывод о том, что энергия воздействия до разрушения, по крайней мере
при гармоническом законе, действительно инвариантна на данной частоте и
поэтому может быть использована при формировании критерия усталостной
прочности. Внешним признаком такой возможности является «стягивание»
кривых ТД/) в единую кривую 3(f). Этот факт позволяет оценить ожидае-
мую долговечность при заданном уровне действующего ускорения ат или по
требуемой долговечности найти допустимый уровень виброускорения.
Еще большие перспективы могут быть в том случае, если для однотип-
ных по конфигурации образцов нормированные по 3mJn и f0 кривые будут
либо совпадать, либо несущественно различаться в пределах рабочего диапа-
зона частот. Если построить зависимость 3/ 3min от Л = f / fQ , то при совпа-
дении нормированных кривых достаточно будет, определив резонансную час-
тоту испытуемого образца, экспериментально оценить длительность воздейст-
вия до разрушения на этой частоте. Уровень воздействия может быть
произвольным (с учетом инвариантности энергии до разрушения), но не дол-
жен очевидно быть меньше того, который соответствует пределу выносливо-
сти a_j. Обозначим эту величину (ят)_7 (не исключено, что она зависит от
частоты виброускорения), найдем ее с помощью выражения для нормирован-
ной средней линии Велера, несколько преобразовав его:
а ) =_____________
т /-1 / _ . . Z \ 1/2 ’
2-10б>
а также воспользовавшись имеющимися экспериментальными данными. В
описанных выше опытах на резонансной частоте 150 Гц (я,„)_7 оказывается
равным 6,46g и 10,3g. Различие можно, по-видимому, объяснить нелинейно-
стью зависимости между амплитудами напряжений на выводах испытуемого
образца и действующего ускорения.
Таким образом, на основе энергетического подхода можно интегрально
описать свойства воздействия и конструкции, если абстрагирроваться от на-
пряженного состояния (учитываемого косвенно). Конкретный вид критериев
усталостной прочности зависит от специфических особенностей конструкции
и воздействия и может быть научно обоснован лишь при накоплении доста-
точного объема экспериментальных данных.
283
Глава 9
ПЕРСПЕКТИВНЫЕ ПРИНЦИПЫ ПОСТРОЕНИЯ
СИСТЕМ ПРЕДОХРАНЕНИЯ И КДЦ
9.1 Микроэлекгромеханические системы
Появление микросистемной техники обусловлено возможностью, при
относительно небольших затратах на разработку технологии, разрабатывать
устройства, обладающие новыми, ранее недостижимыми функциональными
возможностями. Таковыми являются микроэлектромеханические системы
(МЭМС, MEMS - Micro-Electro-Mechanical Systems) - конструктивно и
функционально законченные устройства на одном кристалле, способные реа-
гировать на факторы внешней среды (сенсоры), преобразовывать и обраба-
тывать входной сигнал с использованием электронных средств и выдавать
команду на исполнительное устройство [108]. Такие системы также называ-
ют мехатронными. Существует принципиальная возможность совмещения
технологических процессов изготовления МЭМС и КМОП СБИС. Известно,
что МЭМС способны выдерживать весьма интенсивные внешние механиче-
ские воздействия (до десятков тысяч g).
Из сказанного следует, что применение МЭМС во взрывателях весьма пер-
спективно, поскольку они функционально совместимы с основными блоками
структурной схемы, и такие работы ведутся. В качестве конкретного примера мож-
но назвать «интеллектуальный» (адаптивный к условиям встречи с целью) МЭМС-
взрыватель (MEMS Fuze), разработанный Технологическим институтом штата
Джорджия, США. Сообщается (http://lenta.ru/news/2007/! 2/24/vzryv/), что этот
«микровзрыватель» способен обеспечить высокую надежность и эффективность
действия боеприпаса, а также полную безопасность.
Ниже кратко рассматриваются возможные пути создания перспективных
взрывателей нового поколения с улучшенными тактико-техническими характери-
стиками на основе внедрения МЭМС и соответствующей элементной базы [109].
Известные МЭМС разделяют на два класса: микроприводы (устройства,
включающие подвижные элементы, или звенья, и управляемые электрическими
сигналами) и микродатчики (первичные чувствительные элементы, сенсоры),
реагирующие на заданные физические признаки внешней среды и выдающие
сигнал для последующей обработки. Область применения элементов МЭМС
постоянно расширяется. До конца девяностых годов большинство МЭМС,
имеющих в своем составе различные датчики и приводы, изготавливались по
одной из известных технологий: объемной или поверхностной микрообработки
кремния, а также методом литографии. Под микрообработкой понимают фор-
мирование трехмерных микроскопических механических структур внутри
284
кремниевой подложки или на ее поверхности, что позволяет изготавливать
МЭМС с размерами в долях миллиметров. Затем были разработаны трехмерные
технологии изготовления МЭМС с использованием новых материалов. В ре-
зультате открываются большие возможности для построения микроустройств
принципиально нового типа. Из таких материалов, как монокристаллический и
поликристаллический кремний, нитрид кремния и т.п., формируют разнообраз-
ные механические микроструктуры: подвесы, диафрагмы, пружины, шестерен-
ки, подстроечные элементы и огромное число других миниатюрных механиче-
ских устройств. Внутри МЭМС организуется электрический контур управления,
состоящий из токопроводящих полимеров и электродов.
Проанализировав структурную схему взрывателя, выделим несколько
потенциальных областей применения элементов МЭМС.
1. Простейшие элементы: выполненные по технологии микрообработки:
дискретные RLC-элементы логических схем, а также микробалочки и диски.
2. Микродатчики (сенсоры): особый класс устройств, осуществ-
ляющих управление действием взрывателя:
- контактные датчики цели (КДЦ) как элементы сенсорной (инициирую-
щей) системы;
- микродатчики физических полей (электрического, магнитного, радиа-
ционного, теплового, деформаций, перемещений и т.п,): определение при-
знаков цели, диагностика окружающего пространства и состояния узлов
самого боеприпаса, анализ условий хранения и транспортирования БП;
- датчики положения Солнца (или ИК-излучения) как элементы коор-
динаторов цели;
- микрогироскопы: ориентация вращающихся боеприпасов на траектории;
— микродатчики давления: ориентирование боеприпаса на траектории
по силе и направлению потока среды;
— газоанализаторы: определение таких характеристик окружающей сре-
ды, как химический состав, плотность, влажность и т.п., что имеет большое
значение при длительном хранении взрывателей;
— ключи (электростатические, тепловые, магнитные): элементы сен-
сорной системы, а также исполнительные элементы логической схемы или
системы предохранения;
- микроакселерометры: элементы системы предохранения или источни-
ки сигналов для интеграторов (в дистанционных взрывателях);
— микрозеркала: элементы следящих оптических систем.
3. Приводы поступательного и вращательного движения для переме-
щения деталей и исполнительных узлов взрывателя; они могут быть вы-
полнены на пьезоэлектрическом, электростатическом, магнитном или теп-
ловом принципах действия.
285
4. Покрытия: слои, сформированные на несущей конструкции или не-
посредственно в ней, способствующие улучшению теплоотвода, повыше-
нию поверхностной прочности; могут использоваться при регистрации внеш-
них и внутренних полей и для целенаправленного изменения коэффициента
трения между подвижными звеньями конструкции.
5. Элементы питания: МЭМС-устройства, работающие в трансформа-
торном режиме, в которых чувствительный элемент датчика преобразует один
вид энергии в другой, передавая ее специальному считывающему устройст-
ву. С помощью данных устройств может осуществляться питание электриче-
ских схем взрывателя, например, преобразование в электрическую энергию
механического перемещения деталей механизма, внешней перегрузки, тепло-
вой энергии с поверхности боеприпаса, а также энергии физических полей.
КПД данных преобразователей, согласно некоторым имеющимся данным,
составляет примерно 15...45 %.
6. Перестраиваемые микрополосковые антенны с изменяемой диаграм-
мой направленности, а также аналог фазированных антенных решеток,
выполненных на диэлектрических подложках. Примерные рабочие диапазоны
данных устройств составляют 50 ГГц ... 10 ТГц.
Таким образом, применение МЭМС во взрывателях весьма перспек-
тивно, поскольку потенциально обеспечивается более эффективное, по
сравнению с традиционными решениями, выполнение основных тактико-
технических требований.
Вместе с тем, требуется проведение дополнительных исследований для
создания теории и методов проектирования МЭМС. Прежде всего, необходи-
мо обосновать наиболее целесообразные и практически оправданные варианты
нового исполнения основных функциональных узлов взрывателя как изделия,
обладающего наилучшими эксплуатационными и конструктивными качества-
ми. Однако уже сейчас можно утверждать, что благодаря использованию уст-
ройств микросистемной техники различного типа можно существенно (в де-
сятки раз) улучшить габаритно-массовые параметры, в 1,5...3 раза увеличить
срок службы изделий; существенно повысить надежность систем, чувстви-
тельность инициирующей системы взрывателя и точность обработки сигналов;
обеспечить практически полный контроль за внутренним состоянием взрыва-
теля в служебном обращении и при хранении.
Следует особо подчеркнуть, что и в самых совершенных современных
взрывателях сохранится роль механических систем, которые, в частности, не-
заменимы как устройства изоляции элементов огневой цепи друг от друга.
Как пример можно привести электронный взрыватель для 40-мм прот-
ивоминного вращающегося боевого элемента с фугасным разрывным зарядом,
время дальнего взведения 50 мс (определяется электронным таймером), время
286
самоликвидации 4 с. Огневая цепь включает в себя чувствительный инициатор
(электровоспламенитель мостикового типа) с пороговой энергией срабатыва-
ния около 3,8 мДж и микродетонатор (на подложке, поры которой заполнены
азидом меди). Основным элементом системы предохранения (рисунок 9.1) яв-
ляется центробежный движок, удерживаемый в обращении двумя последова-
тельно срабатывающими стопорами: инерционным (освобождает движок при
выстреле) и командным (для подачи команды, возможно, используется опто-
волоконная линия). Конструкция предохранительного механизма показана на
рисунке 9.2. Имеются сведения об использовании источников питания, акти-
вируемых осевой силой инерции при выстреле и заряжающих накопительные
конденсаторы.
Командный стопор
Инерционный стопор
Рисунок 9.1 - Схема предохранительного механизма взрывателя
к 40-мм снаряду
Рисунок 9.2 — Конструкция предохранительного механизма
с центробежным движком
287
Можно назвать ряд патентов США, например:
— техническое предложение, относящееся к МЭМС-взрывателю: подвиж-
ный движок с микродетонатором, замыкающий огневую цепь в результате по-
следовательного воздействия осевой и центробежной сил инерции определен-
ного уровня (№ 7552681 от 30.06.2009);
- МЭМС-движок как элемент механизма изоляции элементов микроогне-
вой цепи (№ 7040234 от 09.05.2006, № 7007606 от 07.03.2006);
— гибридное предохранительное устройство электронно-электромехани-
ческого типа включает механический элемент, обеспечивающий взведение
устройства (№ 7464648 от 16.12.2009);
- МЭМС-«затвор» как составной элемент электронной системы предо-
хранения (№ 7412928 от 19.08.2008).
При исследовании и выборе параметров подобных устройств можно
применять методы проектирования механических систем взрывателей, по-
скольку традиционное требование о совместимости требований по безопасно-
сти и взводимости остается в силе.
9.2 Возможность использования элементов струйной техники (пневмоники)
во взрывателях
Одним из перспективных принципов построения взрывателей может
быть использование элементов струйной техники, или пневмоники (ЭСТ).
Эти элементы основаны на принципе взаимодействия струй между собой и
с твердыми стенками каналов, позволяют создавать логические схемы и
реализовывать функции, свойственные электронным схемам, имея по срав-
нению с ними ряд существенных преимуществ, в частности, такие, как про-
стота конструкции и повышенная устойчивость к внешним дестабилизи-
рующим воздействиям различной природы. Предварительный анализ сви-
детельствует о том, что наиболее перспективно применение ЭСТ в таких
функциональных узлах взрывателя, как системы предохранения и про-
граммно-временные устройства [НО].
Общая характеристика элементов струйной техники. Рабочим телом
в системах автоматики чаще всего служит воздух, но можно применять и дру-
гие газы с нужными параметрами - давлением, температурой, влажностью и
др. Работа ЭСТ основана на использовании трех аэродинамических эффектов
[111-113]: взаимодействия свободных струй (потоков) рабочего тела; турбули-
зации струи; взаимодействия струи со стенкой канала соответствующей кон-
фигурации (эффект Коанда).
С энергетической точки зрения ЭСТ могут быть разделены на две боль-
шие группы.
288
1. Активные элементы, требующие для своей работы источник питания:
а) пропорциональные: взаимодействие и столкновение свободных тур-
булентных струй, вихревое движение струи, комбинированного действия;
б) дискретные: взаимодействие и столкновение свободных турбулент-
ных струй, прилипание струи к стенке, отрыв потока от криволинейной стен-
ки; фокусирование, индуктирование и турбулизация струи, кромочный эф-
фект, комбинированного действия.
2. Пассивные элементы, для работы которых используют энергию только
входных сигналов:
а) регулируемые: дроссели (ламинарные, турбулентные, смешанного
типа), камеры (проточные и непроточные), комбинированные (резонаторы);
б) нерегулируемые: дроссели (ламинарные, турбулентные, смешанного
типа), камеры (проточные и непроточные), сопла (дозвуковые и сверхзвуко-
вые), комбинированные (резонаторы и фильтры), каналы.
В пропорциональных (аналоговых) ЭСТ параметры выходной струи из-
меняются непрерывно с изменением параметров входной (управляющей)
струи. Основными первичными функциями аналоговых активных элементов
являются усиление мощности и давления, сравнение двух величин. В дискрет-
ных ЭСТ выходные сигналы принимают одно из двух возможных значений - 1
или 0 (да — нет), определяемых входным сигналом. Основными первичными
дискретными элементами являются реле, элементы памяти, генераторы коле-
баний, логические элементы (операции НЕ, ИЛИ, И и др.). Пассивные элемен-
ты (сопротивления, емкости, индуктивности, фильтры) также могут выполнять
простейшие логические операции (И, ИЛИ) и сравнение сигналов.
Турбулентные свободные (не стесненные стенками) струи жидкости или газа
характеризуются поперечными составляющими скоростей движения частиц. По-
скольку пограничные слои струи подтормаживаются, осевая составляющая скоро-
сти по мере удаления от оси асимптотически приближается к 0. Турбулентная струя
(рисунок 9.3) состоит из двух частей: ядра постоянных скоростей (конус, имеющий
своим основанием выходное сечение сопла) и пограничного слоя. Участок струн, в
котором имеется ядро постоянных скоростей, называется начальным; остальная
часть струн — основной участок, представляющий собой сплошь пограничный слой.
При взаимодействии двух струн, вытекающих из каналов, они перемешиваются, в
результате чего образуется струя с соответствующим углом раствора / .
В пропорциональном струйном усилителе используют принцип взаимно-
го обмена количеством движения между двумя взаимно перпендикулярными
потоками, в результате чего достигается пропорциональное усиление. В одном
каскаде достигаются коэффициенты усиления по мощности порядка 10, а по
давлению - 5...7; недостатком этих ЭСТ является заметная нелинейность, а
также сравнительно невысокое отношение «сигнал / шум».
289
Рисунок 9.3 - Структура турбулентной струи:
Do - диаметр выходного отверстия круглого сопла; а и /?-углы раствора внешней
границы струи и границы ядра постоянных скоростей, соответственно; Хн = 5Z90 —
длина начального участка; JV-расстояние по оси от выходного отверстия сопла;
S - расстояние от выбранной точки до границы ядра постоянных скоростей или до оси
струи на основном участке; b -ширина пограничного слоя
Вихревой усилитель расхода или мощности может также выполнять
функцию струйного регулируемого сопротивления, причем управляющим воз-
действием в нем является падение давления в вихре. Коэффициент усиления
по мощности может достигать 500.
В цифровом усилителе (рисунок 9.4) используется эффект Коанда, т.е.
естественное прилипание свободной струи к прилегающей стенке. При пода-
че давления питания во входное отверстие 1 выходной поток появляется в
отверстиях 4 или 5, в зависимости от направления управляющего сигнала
(поступающего через отверстие 3 или 2, соответственно). Усилитель является
двухстабильным.
Рисунок 9.4 — Схема и входная характеристика дискретного усилителя
290
ЭСТ, реализующие логические функции, относятся к классу дискретных; их
предельные состояния соответствуют «1» или «О». ЭСТ данного типа по принци-
пу действия могут быть как активными (У, У*, П), так и пассивными (И, ИЛИ, К).
Активные элементы требуют подвода питания и имеют положительные обратные
связи: в элементах «У» и «У*» положительная обратная связь относительно слаба
и служит лишь для устойчивого поддержания струи питания в отклоненном со-
стоянии при постоянном воздействии входных сигналов.
В элементе «П» положительная обратная связь настолько велика, что поддер-
живает струю в отклоненном состоянии (запоминает) и при исчезновении входного
сигнала; для возвращения сигнала в первоначальное (прямолинейное) состояние
необходимо подать сигнал в канал сброса (стереть память). Пассивные элементы не
требуют питания и не имеют положительной обратной связи.
Преимущества ЭСТ:
1) отсутствие подвижных звеньев, что, с точки зрения применения во
взрывателях, может обеспечить высокую степень безопасности в условиях
служебного обращения; этому также способствует способность ЭСТ выдержи-
вать интенсивные ударные воздействия (до сотен и тысяч g);
2) повышенная надежность в эксплуатации по сравнению с другими эле-
ментами аналогичного назначения, что определяется правильностью выбора
геометрических параметров, качеством изготовления и тщательностью очист-
ки рабочего тела от посторонних примесей; следует отметить, что последнее
требование порождает специфическую для взрывателей трудность (см. ниже);
3) практически неограниченная долговечность, поскольку ЭСТ могут быть
изготовлены из металла или керамики, благодаря чему выполняется одно из требо-
ваний к взрывателям - сохраняемость свойств при длительном хранении;
4) дешевизна - используются недефицитные материалы и прогрессивные
технологические процессы: прессование, штамповка, литье под давлением,
травление и т.п. (т.е. примерно те же, что при изготовлении печатных плат).
5) отсутствие защитных устройств и блокировок, поскольку рабочим те-
лом в ЭСТ общего типа является воздух низкого давления.
6) ЭСТ не подвержены (в отличие от электронных схем) влиянию радиа-
ции и электромагнитных воздействий, могут работать в широком диапазоне
температуры окружающей среды. Известно, что при воздействии нейтронного
облучения интенсивностью 1О13...1О14 нейтр/см2 полупроводниковые элементы
выходят из строя, в сопротивлениях и конденсаторах происходят необратимые
изменения, разрушаются уплотнения в пневматических и гидравлических эле-
ментах; ЭСТ, изготовленные из неорганических материалов, способны выдер-
жать интенсивность облучения до 1019...1021 нейтр/см2; ЭСТ из ситалла и ке-
рамики могут работать при температуре до 5000° С и выдерживают тепловые
удары, выводящие из строя электронные элементы.
291
Современные ЭСТ обладают достаточно малыми габаритами: они способны
сохранять работоспособность при уменьшении диаметра каналов до 0,12 мм, и в
принципе возможно создание миниатюрных ЭСТ с размерами до 2x2x1 мм. Кро-
ме того, один струйный элемент способен функционально заменить несколько
электронных элементов (примером может служить струйный триггер, аналогом
которого является интегральная микросхема), а плотность монтажа сопоставима с
плотностью монтажа известных электронных элементов.
Необходимо, однако, отметить, что ЭСТ нельзя сравнить с электронными
элементами по быстродействию: скорость передачи информации в струйных
схемах ограничивается скоростью распространения звука в рабочей среде, и
поэтому быстродействие составляет единицы килогерц.
С точки зрения потенциального использования во взрывателях, ЭСТ обла-
дают и существенным недостатком, поскольку для их работы требуется достаточ-
но мощный надежный источник питания (потока рабочего тела), включающийся
при выстреле. С учетом требуемой длительности хранения более перспективен
вариант генераторный, а не аккумуляторный источник питания. Ниже рассматри-
ваются некоторые возможные варианты построения такого источника питания.
Основные элементы струйного взрывателя. С помощью анализа структур-
ной схемы взрывателя можно заключить, что использование пневматического сиг-
нала для инициирования огневой цепи нецелесообразно из-за недостаточно высо-
кой скорости распространения и трудности формирования исполнительного сигна-
ла. По-видимому, наиболее перспективно использование ЭСТ в системе предохра-
нения, которая и условиях обращения без подвода питания не функционирует и к
тому же выдерживает, как отмечалось выше, весьма интенсивные перегрузки.
Существует возможность сопряжения струйных узлов с пневматическими
(силовыми): восстановление (замыкание) огневой цепи при выстреле, т.е. снятие
ступени предохранения (взведения), реализуется с помощью механизма, приводи-
мого в действие пневматическим сигналом, причем боеприпас может быть как
вращающимся, так и невращающимся. Таким образом, возможно создание комби-
нированного функционального устройства - струйно-механического типа.
Наиболее обоснованным представляется струйный вариант программно-
временного устройства (ПВУ), которое должно обеспечить последовательную
выдачу команд в соответствии с заданной программой [НО]. В общем случае
структура ПВУ однотипна и состоит из датчика времени, собственно про-
граммного устройства и дополнительных устройств (установка нуля, пуска,
установки программы и т.п.). Обобщенная функциональная схема ПВУ
показана на рисунке 9.5. Первичная хронометрическая информация о текущем
времени t поступает от датчика времени в программное устройство, где в со-
ответствии с установленной программой По(/) и сигналами объекта управле-
ния ах,...,ап вырабатывается программа I"l(z). Для нескольких установленных
292
программ n^(z) в многоканальном ПВУ на выходе вырабатываются
программы П^(/),...,П^^(г). Если программная функция П(/,ар...,ап) и ее
параметры ах,...,ап определены в двоичном коде, а время t- в виде конечного
набора шагов (дискрет) времени то тем самым программная функция
определена как временная логическая функция. В частном случае, когда про-
граммная функция П(^ар...,ап) не зависит от параметров объекта управле-
ния, она вырождается в чисто временную программу П0; это может быть и в
отсутствие сигналов от объекта управления. Еще более простое устройство
получается, когда по установленной временной программе необходимо вы-
полнить только одну команду, т.е. ПВУ вырождается в реле времени.
Рисунок 9.5 - Струйное программно-временное устройство
Одним из основных блоков ПВУ различных типов от реле времени до ПВУ с
гибкой программой является датчик времени, который может быть аналоговым,
дискретным и дискретно-аналоговым. Аналоговые струйные датчики времени раз-
рабатываются на основе измерения времени с помощью пневматических камер и
называются камерными часами. Камерные часы (рисунок 9.6) состоят из проточной
камеры 1 с дросселями на входе 3 и на выходе 4, канала питания 2, управляющего
канала 5 и струйного порогового элемента А При подаче давления в канал питания
2 в камере устанавливается избыточное давление р0, а струя, исходящая из камеры
через дроссель 4, под действием струи из управляющего канала 5 отклоняется и не
поступает на вход £ струйного элемента 6. Поэтому струя из сопла питания 9, под
действием подпора в канале 7, поступает в выходной канал 10. В момент снятия
питающего давления на вход <?поступает струя, вытекающая из камеры через дрос-
сель 4, в результате чего струйный пороговый элемент переключается и появляется
сигнал на выходе 11. Избыточное давление в камере падает и, когда оно уменьшит-
ся до некоторого значения pt, происходит срабатывание струйного элемента, т.е.
струя переключается из выходного канала 11 в канал 10.
293
Известны струйные камерные часы, рассчитанные на интервалы времени
от долей до десятков секунд. Однако погрешности в работе камерных часов,
обусловленные влиянием температуры и давления окружающей среды на рас-
ходные характеристики дросселей и параметры рабочей среды, очень велики и
могут даже превышать 50 %. При использовании различных способов компен-
сации влияния температуры и давления окружающей среды удается снизить
погрешность работы камерных часов до ± 5 % .
Рисунок 9.6 - Струйные камерные часы
Значительно меньшей погрешностью обладают струйные датчики време-
ни дискретного действия. Их разрабатывают по общепринятой схеме «генера-
тор + счетчик». Они состоят, как правило, из генератора опорных интервалов
времени, формирователя импульсов, делителя частоты и счетчика импульсов.
Генераторы опорных интервалов времени для струйных ПВУ можно строить
на аналоговых либо дискретных струйных элементах с линиями задержки в
цепях обратной связи, а также на струйных элементах в сочетании с механиче-
скими колебательными системами.
Рисунок 9.7 - Струйный генератор
294
Струйный генератор (рисунок 9.7) состоит из бистабильного струйного
элемента 1 и двух цепей обратной связи, выполненных в виде последова-
тельно включенных дросселей 3, 4(<£ 7) и камер 2(5), соединяющих выходы
8(9) струйного элемента с его управляющими входами 10(11). Использова-
ние в струйных датчиках времени дискретного действия механических коле-
бательных систем, в частности камертонных или твитронных, позволяет
уменьшить погрешность отсчета, времени до 0,05% в широком диапазоне
температур, но в отсутствие механических воздействий.
Струйные ПВУ могут также содержать задатчики программы, состоящие
из запоминающих устройств (ЗУ) и блока установки памяти либо коммутации,
и логические преобразователи. ЗУ на струйных элементах в зависимости от
объема памяти компонуются в полную или частичную матрицу с основными
входами и выходами для установки элементов в исходное положение.
Синтез логических преобразователей, представляющих собой комби-
национные схемы, т.е. схемы без элементов памяти, осуществляется наибо-
лее простыми методами, например графоаналитическими. С учетом специ-
фики струйных элементов строить схемы необходимо таким образом, что-
бы сеть коммуникаций была максимально простой, без петель и пересече-
ний, поскольку межэлементные коммуникации выполняются в виде каналов
в плоских платах. Для последовательных схем состояние выхода определя-
ется не только комбинацией значений входных сигналов, но и последова-
тельностью их поступления.
Варианты струйных источников питания. Для питания струйного
взрывателя необходимо обеспечить избыточное давление порядка 1...2 кПа,
требуемое для устойчивой работы ЭСТ. Ниже рассмотрены некоторые воз-
можные варианты источников питания, за исключением баллонного. В по-
следнем случае требуется обеспечить длительное хранение баллона со сжатым
воздухом при весьма высоком давлении (из-за большого требуемого объема
рабочего тела и жесткого габаритного ограничения), а, кроме того, вскрывать
его при выстреле, т.е. данный (аккумуляторный) вариант источника питания,
по-видимому, следует признать неперспективным.
Пиротехнический генератор. Принцип действия генератора таков: под
действием силы инерции, возникающей при выстреле из артиллерийской сис-
темы, срабатывает накольно-воспламенительный механизм. Образующийся
форс пламени инициирует горение пиротехнической запрессовки, в результате
чего образуются газы, накапливающиеся в замкнутом объеме. При достижении
заданного давления происходит прорыв отверстий, открывающих доступ к ка-
налам питания элементов струйной схемы. При этом может быть предусмот-
рена очистка (фильтрация) газов от твердых частиц; в структурную схему сис-
темы может также входить промежуточная камера (ресивер) как накопитель
295
очищаемых газов. Газы, однократно пройдя по каналам элементов, как и в
дистанционном взрывателе, должны отводиться в атмосферу. Таким образом,
режим питания струйных элементов, в отличие от традиционного, является
нестационарным (импульсным), и требуется разработка соответствующей ме-
тодики расчета. При этом очевидно могут быть использованы методы внут-
ренней баллистики. Упрощенная расчетная схема включает в себя камеру го-
рения, ресивер и собственно струйную систему, сообщающуюся с окружаю-
щим пространством. Объем последней примерно соответствует объему кана-
лов и камер струйной схемы; в упрощенной расчетной схеме рабочая часть
системы может быть представлена в виде эквивалентного пневматического
дросселя. Сопротивление прохождению рабочего тела через схему может быть
условно учтено за счет выбора соответствующих значений коэффициентов
расхода на входе и выходе «дросселя». Вполне очевидно, что конкретные зна-
чения этих коэффициентов могут быть определены только экспериментально,
т.е. расчетная оценка работоспособности генератора будет ориентировочной.
Пиротехнический состав как источник рабочего тела должен удовле-
творять ряду требований: генерация достаточного объема газов в отсутствие
пламени, слабая зависимость процесса горения от внешнего давления, мини-
мальный объем примесей в рабочем теле и т.д. В этом смысле внимания за-
служивает трубочный пиротехнический состав марки ТО-34, поскольку он
обладает достаточно высокой газообразующей способностью (около 1100
см3/кг при температуре горения), а объем твердых продуктов горения, т.е.
шлаков минимален (порядка 50%). Недостатком пиротехнических составов, с
точки зрения использования в генераторах струйных взрывателях, является
резкое уменьшение объема генерируемых газов при падении температуры до
нормальной (например, для ТО-34 - почти в 5 раз).
Можно выделить два этапа работы генератора:
1) ииростатический - от начала горения в замкнутом объеме до момента
достижения давления соответствующего прорыву отверстий в рабочей ка-
мере; расчет ведется по обычной методике;
2) перетекание газов в камеру расширения (при ее наличии) и в каналы
питания струйных элементов.
Горение пиротехнического состава может и не завершиться до окончания
работы струйной схемы. Расчет рабочих процессов во время данного этапа —
сложная теоретическая задача, поскольку необходимо совместно решать сис-
тему дифференциальных уравнений, описывающих (помимо горения пороха)
прохождение рабочего тела через камеры и каналы ЭСТ. Эта задача здесь не
рассматривается. Ограничимся тем, что приведем формулу для подсчета мас-
сового расхода газа через отверстие из камеры с давлением р\ в пространство с
противодавлением рг
296
/+0
е
1 г < С = ——
dY ' 4 <2 + 0
где С, — р2/Р\ > 5-площадь отверстий; kQ - коэффициент потерь.
Аэродинамический генератор. Работа данного генератора основана
на использовании в качестве рабочего тела набегающий поток воздуха, что
обеспечивает доступность и естественность рабочего тела и возможность
работы струйной схемы в прямоточном режиме. Однако работоспособность
источника питания определяется внешнебаллистическими характеристика-
ми боеприпаса и зависимостью параметров атмосферы от высоты над по-
верхностью Земли. Кроме того, поступающий из атмосферы воздушный
поток нуждается в кондиционировании, особенно при стрельбе в сложных
метеоусловиях (в воздухозаборник генератора могут попадать капли дождя,
частицы града или снег).
О состоянии воздуха можно судить по данным, приведенным в [114].
Распределение частиц по высоте определяется по эмпирической формуле:
( V U
лн =«oexpl --Н
где л0 - число частиц в 1 см3; у-скорость падения частицы; к— коэффициент
турбулентности; Н - высота, км. Известно, что 405 < у/к < 750 , а скорость
падения частиц можно вычислить с помощью формулы Стокса.
Центробежный способ очистки воздушного потока от капель воды
заключается в следующем: поток поступает в приемный канал, имеющий эксцен-
триситет относительно оси боеприпаса и вовлекается во вращательное движение.
В конечном итоге капля встречается со стенками канала и, «прилипая» к ним,
очищает воздушный поток. На рисунке 9.8 показаны силы инерции, действующие
на каплю (в неинерциальной системе координат): С = тгт2 - центробежная;
К = 2т<йч - кориолисова, где т - масса капли; г - радиус-вектор; v— относи-
тельная скорость; со - угловая (переносная) скорость боеприпаса.
При исследовании функционирования генератора на траектории данная
система должна быть дополнена системой уравнений внешней баллистики, а
также законом распределения частиц по высоте. Были проведены расчеты тра-
екторий капли внутри приемного канала диаметром 4 мм и с аналогичным
эксцентриситетом относительно оси вращения при случайных координатах
начального положения капли (при входе в канал). Результаты математического
297
моделирования свидетельствуют о том, что длина пути капли в продольном
направлении до соприкосновения со стенками канала может оказаться несо-
вместимой с реальными габаритами взрывателя. Иначе говоря, при стрельбе в
дождливую погоду указанный способ очистки воздушного потока может ока-
заться неэффективным. Вместе с тем, с учетом достоинства данного источника
питания для струйного взрывателя необходимо рассмотреть иные способы
кондиционирования, например с помощью специального воздухозаборника.
Рисунок 9.8 - Схема центробежной очистки струи
Движение капли в канале описывается следующей системой уравнений:
^=«>(<« + 24
Таким образом, ЭСТ обладают рядом преимуществ по сравнению с тра-
диционными узлами взрывателя, в том числе и электронными. Однако сущест-
вует сложная научно-техническая задача - необходимость создания эффектив-
ного и надежного источника питания, причем наиболее перспективны два ге-
нераторных варианта - пиротехнический и с забором воздуха из набегающего
потока. Кроме того, нужна специализированная миниатюрная элементная база
и обоснование параметров ЭСТ на основе математического и физического мо-
делирования, Следует отметить дополнительное достоинство ЭСТ — принци-
пиальную возможность интеграции с элементами МЭМС на основе сходной
технологии изготовления.
298
Глава 10
КОМПЬЮТЕРНЫЕ АСПЕКТЫ ПРОЕКТИРОВАНИЯ
В настоящее время существует необходимость в подготовке специалистов,
способных производить фундаментальные, поисковые научно-исследовательские и
проектные работы в области перспективных систем управления средствами пора-
жения, владеющих методами математического моделирования и умеющих приме-
нять средства автоматизированного проектирования. В связи с этим чрезвычайно
важное значение приобретает всемерное внедрение в учебный процесс современ-
ных форм обучения, основанных на широком использовании вычислительной тех-
ники. В данной главе кратко рассматриваются некоторые аспекты использования
компьютерной техники в учебном процессе - в данном случае, применительно к
изучению конструкций взрывателей и теории их проектирования.
Ранее мы подчеркивали необходимость разработки максимально обоб-
щенной методики проектирования систем взрывателей (см. разд. 1.3, 3.4). Дос-
тоинством такого подхода, в частности, является то, что он допускает форма-
лизацию алгоритмов проектирования и, следовательно, обеспечивает эффек-
тивность применения вычислительных средств, реализующих эти алгоритмы
программно [41]. Несколько примеров решения задач проектирования с ис-
пользованием ЭВМ приведено в разд. 2.2.4, 2.5, 4.5, 4.7, 4.9, 6.1, 7.2.1
Далее рассматриваются некоторые вопросы, связанные с разработкой ин-
терактивных электронных средств обучения (ЭСО). Интерактивность ЭСО
сводится, главным образом, к тому, что обучающийся получает возможность
гибко влиять на вводимые параметры объекта и анализировать его реакцию.
При этом, чтобы исключить грубые ошибки, на значения параметров могут
быть наложены соответствующие ограничения, так что при выходе за их пре-
делы формируется предупреждающий сигнал. Это - важный элемент про-
граммы, поскольку студенты, особенно младших курсов, плохо «чувствуют
цифру», т.е. не представляют себе реальные числовые значения вводимых па-
раметров. Наиболее сложным элементом ЭСО, с точки зрения разработки, яв-
ляется модуль проверки и оценки знаний обучающегося.
За последнее время приобретают все большую популярность электронные
книги (e-books) [115], возможность создания которых предусматривают современ-
ные компьютерные программные и математические пакеты. Например, в MATLAB
современных версий (начиная с 5.0) встроена программа Notebook [116], предна-
значенная для создания так называемых М-книг с интерактивными страницами.
Удачным примером интерактивной разработки может служить справоч-
ная система математического пакета MathCAD, оформленная в виде электрон-
ной книги (Центр ресурсов - Resource Center) [117]. В нее включены нагляд-
299
ные («живые») фрагменты, позволяющие пользователю изменять числовые
значения параметров задач, приводимых в качестве примеров, и проследить,
как это влияет на результат. Существует возможность создания собственных
электронных книг в этой среде. Недостатком MathCAD является то, что нельзя
вводить исходные данные «по приглашению» (этого недостатка лишен
MATLAB). Кроме того, возникают некоторые трудности при непосредствен-
ном включении в текст сложных математических выражений.
Возможность создания электронных гипертекстовых документов, в том
числе в Web-формате, предоставляют программы пакета MS Office (Word, Ex-
cel). Важное значение в организации современного учебного процесса имеет
разработка виртуальных лабораторных практикумов, предусматривающих не
только выполнение тех или иных заданий, но также тестирование обучающе-
гося и оценку уровня его подготовленности. Все эти вопросы в настоящее вре-
мя приобретают все большую актуальность.
Примерами ЭСО могут служить гипертекстовые электронные версии
данной книги в нескольких форматах: текстового редактора Word, PDF и
HTML (в разработке последнего варианта принимали участие студенты На ри-
сунке 10.1 показан фрагмент варианта в формате PDF (окно программы Adobe
Acrobat). Слева видна система навигации в виде совокупности гипертекстовых
закладок, обеспечивающих быстрый доступ к нужным разделам книги и воз-
врат в точку вызова. На рисунке 10.2 - тот же фрагмент в формате HTML (в
окне поисковой системы - «браузера» MS Internet Explorer).
НИЕЗ
Q Adobe Acrobat - |Е_Вook.pdl|
Сосяшны и тнтляпмыв датчики ия/ш взрымтв/юО
S-02 ДИНАМИЧЕСКИЕ: ±
Г*1 Введение
•-02.I. Параметры уд
й-02.2 Выстрел из ci
i Н 02.2 I. Соотноа|
; Й- 0 2.2 2. Основная
• [ Пиростатикь
’ 1 !"О Закон гзоосВ
• Г’О Пиродинам!
• i -0 Основное у!
I I - 0 Работа пор й
j i -0 ОпределенЦ
< ! ’ "О Первый пв|В
j --0 Второй пер Ц
I | ~0 Работа пор“
I I —0 Вычислени
1 । 1—0 Табличный
• г-Q 2.2 3 Учет про
(6»
Рмс. ЗЛО. Беарвмтерныа фмаые а фукм* перемещен» снаряда:
S-02.3. Динамически!.
a jaw ( * • • *“
Ил ргк 2 10 гюкамны ишгси*х->и ллегенц» и сьорскпг ат гт>тн стрела, ми кри-
вое практически идентичны
Далее рассмотрим рет>лыаты ж-трнйах'игстичесмио расчета с учетом ирсииие
ведущего иоаска В табл 2 7 приведены параметры выпрела в характерные моменты
времени {11,/П, •«".?! *0.03)
Та&лнца 2 7. Элементы дшгжешга смрада с учетом вргланг'* ведущею
Рисунок 10.1,- Фрагмент электронной версии книги
в окне программы Adobe Acrobat
300
На рис.2.10 показаны зависимости давления и скорости от пут снаряда, эти
кривые практически идентичны.
Далее рассмотрим результаты внутрибаппистического расчета с учетом
йп»?амио aanuiiiArn nriorifa R табл 7 7 ппияйррны папамйтг>к| ямгтгмьпа r XJ
Рисунок 10.2 — Фрагмент электронной книги в формате HTML
Компьютерная визуализация. Одним из актуальных является направ-
ление, связанное с использованием современных средств компьютерной гра-
фики для визуализации процессов, возникающих в условиях эксплуатации и
боевого применения взрывателей. При этом появляется возможность непо-
средственно «наблюдать» динамические процессы, характерные для функ-
ционирования узлов и механизмов конструкции, и гибко анализировать влия-
ние основных конструктивных параметров на протекание этих процессов.
Средства визуализации могут также оказаться полезными при подготовке пре-
зентационных материалов по разработкам новых изделий.
Общая постановка задачи визуализации очевидна: имея комплект рабо-
чих чертежей конструкции - объекта визуализации и располагая достаточно
мощными компьютерными средствами, разработчик создает конечный про-
дукт - видеоролик (ВР), записанный в оптимальном формате на удобном но-
сителе и отображающий основные процессы, подлежащие изучению. Про-
смотр готового ВР реализуется с помощью средств мультимедиа, позволяю-
щих воспроизводить звук и видеоизображение; в простейшем случае это -
стандартный проигрыватель Windows Media Player.
Примерная схема процедуры визуализации показана на рисунке 10.3. За-
дача приведения объекта в движение как таковое принципиальных затрудне-
ний не вызывает, поскольку соответствующая технология широко известна и,
при необходимом программно-аппаратном обеспечении, реализуется сравни-
тельно просто. Однако объекту, как правило, сообщается лишь равномерное
движение, в то время как в реальной конструкции законы движения элементов
301
узлов и механизмов зависят от законов внешних воздействий (в случае взры-
вателя - это силы инерции различного типа, а также силы реакции и сопротив-
ления элементов системы предохранения). Иначе говоря, законы движения
узлов и механизмов в значительной степени индивидуализированы, и для по-
лучения правильного представления о динамике процессов, возникающих при
взведении взрывателя во время выстрела (пуска) и при взаимодействии бое-
припаса с преградой, указанные законы должны быть заданы программно и
затем введены в пакеты визуализации.
Рисунок 10.3 - Схема компьютерной визуализации
302
Таким образом, возникает необходимость программного сопряжения за-
дающего устройства и пакета визуализации. Математической основой задающего
устройства является система дифференциальных уравнений, описывающих ви-
зуализируемый узел (механизм) и соответствующее внешнее динамическое воз-
действие: при выстреле - внутренней баллистики, на траектории - внешней бал-
листики, при встрече с преградой - силы ее сопротивления. Задача усложняется
тем, что должно происходить одновременное решение систем уравнений, отно-
сящихся к разным узлам, которые к тому же могут взаимодействовать между со-
бой. Следует отметить, что в настоящее время появляются программные пакеты
со встроенными средствами программного управления движением (например,
ProEngineer, ANSYS и др.), которые, в частности, реализуют конечно-элементное
моделирование конструкций сложной конфигурации.
Ранее (см. разд. 4.7) приведен пример составления системы дифференци-
альных уравнений для исследования взведения механизмов взрывателя при
выстреле из артиллерийской системы; система этих уравнений приведена к
единому «масштабу», т.е. преобразована с использованием соответствующих
нормирующих величин. На основе такого подхода в работе [50] проанализиро-
ван процесс взведения инерционного предохранительного механизма взрыва-
теля, предназначенного для надкалиберной мины, и оценена степень его соот-
ветствия предъявляемым требованиям.
Программное и аппаратное обеспечение. Рекомендуемые программные
продукты работают с общими форматами данных, что позволяет использовать
их в комплексе.
Пакет AutoCad- один из самых популярных, удобных и доступных паке-
тов для работы с чертежами; его используют для создания первичных трех-
мерных моделей деталей; изучение этого пакета предусматривают учебные
программы технических вузов.
Пакет 3D~Studio Мах (далее - МАХ) предназначен для создания трех-
мерных моделей сложных деталей и узлов (создание первичных видеофайлов).
Это программный комплекс моделирования, визуализации и анимации объек-
тов, также разработанный фирмой Autodesk. Он позволяет импортировать
файлы AutoCad^ а переход к операционной системе Windows ХР обеспечил
резкое повышение производительности, расширение возможностей (встроен-
ная сетевая поддержка, мультипроцессорная обработка, многопоточность и
т.п.) и адаптацию под конкретные нужды пользователя. Вместе с тем возрас-
тают требования к аппаратному обеспечению, поскольку необходимо выпол-
нять сложные вычисления, связанные с показом тонированных изображений и
с визуализацией как таковой.
Adobe Premiere применяется при монтаже первичных видеофайлов, по-
зволяет интегрировать в одном ВР видеофайлы с титрами, эффектами, звуком;
303
кроме того, пакет поддерживает различные видеоформаты (.av/j .mov, .mpeg и
др.) с дополнительными параметрами записи и кодирования.
Полученный файл записывают на компакт-диск, обеспечивающий на-
дежную сохранность информации.
Основные требования предъявляются в порядке важности к процессору,
оперативной памяти, жесткому диску, видеокарте. Не останавливаясь на этом
вопросе подробно, ограничимся лишь констатацией того очевидного факта,
что нужна достаточно мощная машина, обладающая необходимыми аппарат-
ными и программными ресурсами для работы с графикой.
Этапы процесса создания видеоролика сводятся в основном к следующе-
му: 1) изучение рабочих чертежей и принципов функционирования основных
узлов и механизмов объекта (в частности, взрывателя) в условиях эксплуата-
ции (боевого применения); разработка предварительного сценария видеороли-
ка с разбиением на основные эпизоды (фазы);
2) создание упрощенных трехмерных моделей деталей с учетом их вза-
имного расположения (AutoCAD);
3) экспорт деталей в МАХ; более подробная проработка предварительно-
го сценария; доводка и уточнение взаимного расположения деталей и задание
параметров их движения;
4) доработка сценария с учетом расположения камер; выбор дополни-
тельных разрезов и прозрачных деталей; добавление плавных переходов; за-
пись результатов проекта с выбранных камер в видеофайлы (МАХ);
5) монтаж видеофайлов с плавными переходами и титрами (по необходимо-
сти) в единый видеофайл и его экспорт с нужными параметрами (Adobe Premiere);
6) кодирование видеофайла.
Пример решения задачи визуализации. Приведем результаты визуали-
зации процессов функционирования взрывателя МГ-32 для снарядов к 30-мм
пушке 2А42 (рисунок 10.4). Блок визуализации был составной частью инте-
рактивной обучающей программы, созданной в среде Delphi (программу раз-
рабатывали инженеры М.Ю. Дубинкин и А.С. Труфанов); ее теоретической
основой послужили материалы настоящей книги. Программа включала в себя
несколько разделов (вкладок) (рисунок 10.5). На рисунке 10.6 показано окно
вкладки «Расчет» (видны исходные данные для расчета и результаты, пред-
ставленные в табличной форме), а на рисунке 10.7 - графики элементов дви-
жения снаряда в канале ствола. Программа позволяет визуализировать функ-
ционирование основных узлов взрывателя при выстреле, на траектории и при
встрече с преградой. На рисунках 10.8 и 10.9 показана «раскадровка» отдель-
ных фаз работы накольно-воспламенительного механизма. Для управления
этим режимом используют традиционные по назначению «кнопки» («Воспро-
изведение», «Стоп», «Перемотка»).
304
Рисунок 10.4 —Взрыватель МГ-32:
1 -капсюль-воспламенитель; 2 — скоба; 3-центробежный движок; 4 —жало;
5-пороховая запрессовка; ^-предохранительный стопор; /-пиротехническая за-
прессовка цепи самоликвидации; #-красномедная лента; 9-оседающая втулка
^.Внутренняя баллистика ВИЯЕЗ
Файл Расчеты Справка
«>ые тактике-
-.нчвекие требования
* 9-*?Риб4«*1и.1мчви>мй
er njur и ?А4?
2 Расчет макольно-?
воспламенитель-
3 Расчет центробе*ны«
ГР*
I tte
: F чмет уоармо*
*н«ди» [>а»*гге «iioro
л
Ь Расчет
гредоирамителяТ J **'
। *| Описание | R ргечн ] Графики " | &1 Ввдторолк |
ТШ^ТРИБ/^ЦШСТИЧЕСЮГИ РАСЧЕТ 30-ММ ПУШКИ
2А42
Исходные данные для расчета:
- объем зарядной каморы -0.125'*2,
-площадь сечения канала ствола с учетом нарезов s - 0.733'10~3 м2;
-длина нарезной части ствола 4 “2.27 м;
- масса снаряда (ОФЗ) q - 0.389 кт;
- нарезка - постоянной крутизны, т) - 24 ;
-заряд из семиканального пороха бГ7П-5БПфл: 2ef -0.68 мм, о; -0.12 кт;
к “Z.Otf;Z(, Па’с -
Принимаем стандартные значения ряда внутрибаллнстических
параметров:
of - Г 10~3 м3/кг. <3 = 1,6 /О'кгУм3; J-9.3'103 Дж/кг. р0 " 29.4 МПа;
6-02 .
Предварительные вычисления (в программе реализуются
1
4
Рисунок 10.5 - Интерфейс интерактивной программы для изучения
конструкции взрывателя МГ-32
305
НОВ
Файл Расчеты Справка
(Ь Внутренняя баллистика
Г| Опием* й Расчет | Грая** и | ^0 Видеоролик |
r Исходные данные—
Единые тактике-
тежичеояе требовался
’ 1. Вн^грибаллистический
расчет пушки 2А42
2. Расчет какольно-
воспламенитель-
ного механизма
3. Расчет центробежных
предскрамттельньк
механизмов
каайр |дй1 |м)
зарядной камдрьс I1 [м*]
Ппо-лааь течения |п 733е-3 Гм3!
канала ствола р.оэеа |м j
Длина нарезной f Гол? М
• части ствола: I4,4' iMJ
Длина хода нарезок: |24 [клб]
Масса снаряда: |0.38)" ... (кг]
Масса порохе: j 0.12 [кг] .
Импу/ь>с пороха: |5.4е5 [Пас]
Тип системы: |пушка
Шагинтегрыровашя: |\0 ( ]
Вьпопнить расчет|
4. Расчет ударно-
преджрашгельного
механизма
f Вмугрибашмстическне параметры"]
’ [стандартные "П
5. Расчет
лиротеямческого
предохранителя
|М*/кг| К. |: |г I г
о| (w/м3] pot |- Не- (Па]
| и* |Дж/кг] ft|« (]
С) Новый расчет |
twe 1 k 1 v.m/c I I.M I г | W
0.0000 15032,100 10,000 10,0000 10.0123 [О.ОО
0,0427 6088370(2,320 0,0000 0.0148 20,25
0,0853 7358,565 5,126 0,0002 0.0179 44.74
0,1280 8876.854 8,514 0.0005 0.0217 74,30
0,1707 .10682,11612,597 0.0009 0.0262 109,93
0,2133 12813,018 17.501 0,0016 0,0316 152,73
0,2560 15305.49S 23,372 0.0024 0,0381 203.96
0.2986 18188,273 30.367 0,0036 0.0458 265.00
0.3413 21476,775 38.653 0,0051 0.0549 337,31
0.3840 25165.805 48,400 0,0069 0.0657 422.37
0,4266 29221.597 59,769 0.0092 0.0782 521,53
0.4693 33574,74? 72.901 0.0120 0.0927 636,13
0.5120 38116.12С 87,399 0.0155 0.1032 767.07
0.5546 42698.179 104.812 0,0196 0.1279 914,66
0.5973 47143.681 123.621 0.0244 0.1486 1078.79
0.6399 51262.104 144,228 0,0301 0.1714 1258.63
0.6826 54871.705 166,453 0.0368 0,1959 1452 62
0.7253 57822.652190,066 0.0444 0,2219 1658,64
0,7679 60015.631 214.753 0.0530 0.2451 1974.07
0.8106 ;61411,244 240.190 0.0627 0,2772 2096.06
Рисунок 10.6 - Окно вкладки «Расчет»
Рисунок 10.7 - Графики элементов движения снаряда
306
IО Проигрыватель Windows Med»
Файл Вид Воспроизвести Сервис Справка
Рисунок 10.8 - Начальный кадр (окно приложения Windows Media Player)
Рисунок 10.9 —Фазы функционирования иаколыю-воснламенитслыюго
механизма взрывателя МГ-32
307
При изучении конструкций взрывателей полезны и «статические» ЭСО.
На рисунке 10.10 показана одна из страниц такого ЭСО. В окне программы
(она разработана в среде Delphi) совмещены текст (описание устройства и дей-
ствия взрывателя, а также оценка положительных и отрицательных особенно-
стей конструкции) и соответствующие иллюстрации, вызываемые по мере не-
обходимости с помощью меню. Кроме того, предусмотрены контрольные во-
просы по изучаемому материалу; вопросы вызываются случайным отбором из
достаточно большого поля. В простейшем варианте ответ сводится к выбору
правильного варианта из нескольких альтернативных. Методическим достоин-
ством подобных ЭСО является то, что вся подгруппа в каждый момент време-
ни изучает одно и то же изделие и поэтому существует возможность коллек-
тивного обсуждения наиболее важных аспектов конструкции и оперативного
опроса студентов преподавателем.
/^Взрыватель ГПВ-2 ЯОВ1
Фамп УсцмЛлво Л^йствив Оци*а Pwc 1 Рис 1а Рис 16 PhrId РазрезАА Конгршшде деткны
• |Дснствис взрывателя ~
В служебном обращении
t Движок 24 (рис. 1) удерживается от перемещения
| в боевое положение левым шариком 9, который
< упирается в инерционный стопор 25, удерживаемый в
г верхнем положении пружиной 23. При этом
Ц элекгродетонатор отключен от электрической цепи
пьезогенсрагора, и его электроды зашунтнрованы.
| Электроды пьезоэлемента также зашунтнрованы через
| контакт 5, колпачок 27 и металлические детали _
ж взрывателя, что исключает образование на иих разности
® потенциалов Кроме того, электродетонатор выведен из
Ц детонационной цепи взрывателя.
Прн выстреле
В Замыкатель 8 (рис. 16), преодолевая
|| сопротивление пружины 10, под действием осевой силы
инерции перемещается в крайнее нижнее положение,
при этом правый шарик 9 входит в паз движка 24.
® удерживая его в холостом положении. Одиовр» м*нн« с
К этим инерционный стопор 25 опускается вин * м v|
Рисунок 10.10-Окно ЭСО, предназначенного для изучения
конструкций взрывателей
Примером ЭСО может также служить электронная версия учебного по-
собия по пакету MATLAB [118].
308
ПРИЛОЖЕНИЯ
Приложение 1
Интегрирование системы уравнений внутренней баллистики
В разд. 2.2.2 были выведены системы дифференциальных уравнений,
описывающих первый и второй периоды пиродинамики - (2.37) и (2.40), соот-
ветственно. В разд. 2.2.3 изложен один из способов учета процесса врезания
ведущего пояска в нарезы. Однако использование времени в качестве незави-
симой переменной не всегда удобно, поскольку при интегрировании конечные
(для отдельных периодов выстрела) значения времени неизвестны. В связи с
этим в ходе счета, на каждом шаге интегрирования, приходится непрерывно
проверять выполнение тех или иных условий. Поэтому более целесообразно в
качестве переменной интегрирования использовать не время, a z (первый пе-
риод пиродинамики) и путь снаряда I (второй период). Исходные системы
уравнений необходимо соответствующим образом преобразовать.
Классическая задача внутренней баллистики
В пределах первого периода пиродинамики переменная интегрирования
- z; диапазон ее изменения Zq < z< 1, причем zff находится сразу:
~ Vo
а\Ро
Система уравнений будет иметь вид
dV _ /вё dl _V [ВО dt _ 1 [ВО
dz у 2 ’ dz р \ 2 dz р У 2
где
В результате решения этой системы находятся величины, используемые
как начальные для второго периода пиродинамики: FKJ/K и Кк. Параметры вы-
стрела в момент достижения максимального давления (перегрузки) определя-
ют из условия обращения в 0(точнее — изменения знака) функции, пропорцио-
нальной давлению:
dz V 0
309
В пределах второго периода пиродинамики диапазон изменения пере-
менной интегрирования: lK < I < /д. Система преобразованных уравнений:
р dt _ 1
7ГУ
где
-/+1
е
Сформированные массивы данных (матрицы) преобразуются для полу-
чения законов элементов движения снаряда как функций времени.
Учет врезания ведущего пояска в нарезы
В периоде форсирования использовать в качестве переменной интегри-
рования путь снаряда (с известным диапазоном 0 < I < /в) не удается из-за
неопределенности, обусловленной тем, что начальное значение скорости сна-
ряда равно 0, т.е.
dt 1
—- = — —> ОО .
dl V
Поэтому используем искусственный прием, принимая в качестве пере-
менной интегрирования z и контролируя текущее значение пути снаряда; вы-
числения проводим до момента времени, когда 1 > /в. Получающиеся при
этом значения параметров движения являются начальными для следующего
периода выстрела.
Преобразованная система уравнений имеет вид
dV Г, п(/)1 [ВО dr - [во di V [во
---= ф 1 ; — = 2УЛ—; — = — J—;
dz [_ р J V 2 dz V 2 dz р\ 2
^L-L я®
dz р\ 2
где
-Z+a-(a-/)v(z)
Последующий алгоритм решения аналогичен описанному выше для
классической задачи, причем для периода горения порохового заряда
zg<z<\, где zg соответствует окончанию процесса врезания ведущего
пояска.
310
Приложение 2
Характеристики артиллерийских систем
№ Система И'о.м3 5, М2 /д,м <?, кг й), кг м/с В
1 23-мм пушка ГШ-23Л 3,95-10'5 4,32-10'2 0,90 25 0,174 0,037 720 3,6
2 30-мм пушка 2А42 0,125-10’3 7,37-Ю’2 2,27 24 0,392 0,119 970 3,1
3 37-мм зенитная пушка 0,263 -10’3 0,111-10'2 2,09 30 0,732 0,21 910 2,4
4 45-мм противо- танковая пушка М-42 0,51 10’3 0,164-10’2 2,71 25 1,44 0,36 835 2,0
5 57-мм зенитная пушка С-60 1,51 -10'3 0,266-10’2 3,62 35 2,8 1,19 1000 2,5
6 76-мм зенитная пушка 1931 г. 2,815 10'3 0,469 10'2 3,462 28 6,61 1,82 830 1,9
7 76-мм дивизионная пушка ЗИС-З 1,48-10'3 0,469 10‘2 2,68 25 6,2 1,08 680 2,5
8 85-мм полевая пушка Д-44 3,87-10’3 0,583 -10 2 3,59 35 9,54 2,4 800 1,8
9 100-мм полевая пушка БС-3 7,98-10'3 0,818-10’2 4,75 30 15,6 5,5 900 1,9
10 122-мм корпусная пушка А-19 9,89-10’3 1,195-10’2 4,737 25 21,77 5,715 760 2,2
И 122-мм гаубица М-30 3,7 10’3 1,195 Ю’2 2,23 20 21,7 2,075 515 1,8
12 130-мм полевая пушка М-46 18,58 10 3 1,394-Ю'2 5,95 30 33,4 13,0 930 1,9
13 152-мм гаубица- пушка МЛ-20 12,5-10’3 1,88-10’2 3,59 25 43,6 7,56 650 1,8
14 203-мм пушка 2А44 63,7-10’3 3,39 10'2 9,91 25 110 44,8 960 2,0
15 210-мм гаубица С-33 36,5-10-3 3,59 10’2 5,29 20 134 23,0 625 2,0
16 280-мм мортира С-43 19,1 -10’3 6,24-10 2 4,23 20 246 9,88 360 2,0
311
Приложение 3
Типовой механизм взрывателя
В качестве типового рассматривается накольно-воспламенительный ме-
ханизм (НВМ) взрывателя МГ-57, предназначенного для снарядов к зенитной
пушке С-60 (рисунки П. 1, П.2).
Разрез по рр
Рисунок П. 1 - Взрыватель МГ-57
(фрагмент рисунка из альбома рабочих чертежей):
1 -ударный стержень; 2-жало; 3-корпус; 4- мембрана; 5- поворотный диск;
б--капсюль-детонатор; 7-втулка поворотного диска; 9-жало боковое; 10-пружина;
//-капсюль-воспламенитель; 12— пробка; 13— шпилька кольца самоликвидатора;
77- кольцо самоликвидатора; 20— колпачок; 22- крышка; 26— дополнительный гру-
зик; 27, 32, 35— кольца; 33— гайка
312
Рисунок П.2 — Накольно-воспламенительный механизм
(фрагмент рисунка из альбома рабочих чертежей):
7-втулка поворотного диска; .9-жало боковое; 10-пружина;
11 - капсюль-воспламенитель; 12 — пробка; 26-грузик
Характеристики орудия (см. прил.2): объем зарядной каморы
Ио = 1,51 * 10-3 м3; длина ствола /д = 3,62 м; площадь сечения канала ствола (с
учетом нарезов) 5=2,66-10“3 м2; масса снаряда #=2,8 кг; масса заряда
тт =1,19 кг; длина хода нарезов Т|я = 35; путь снаряда при врезании веду-
щего пояска /в =25 мм; коэффициент фиктивности ф = /,/6; параметр Н.Ф.
Дроздова В~ 2,4 .
В результате внутрибаллистического расчета определены основные па-
раметры выстрела: максимальное давление в канале ствола /7^ = 300МПа;
максимальная перегрузка ^пах = = 25200; длительность фронта
(п=2,62'103 с; дульная скорость Т£ = 1000 м/с. Давление форсирования
принято равным стандартному, т.е. р0 = 30,0 МПа.
313
Условная длительность переднего фронта определяется по формуле (3.9):
т =______________Ьи_____= 2,62-10_____ з
i-(po/pJ 1-(зо,о/зоо) 2’911и с'
Проверка на безопасность в служебном обращении производится путем
сбрасывания взрывателя головкой вверх в спецсборке с высоты 3 м на чугун-
ную плиту твердостью Н3 = 100 ± 10. Таким образом, высота безопасного па-
дения Н = 3 м; принимаем коэффициент восстановления скорости к равным
ОД поскольку <7 <24 кг.
Ударник НВМ состоит из капсюля-воспламенителя 53-КВ-006 (МГ-8)
массой 0.11 г и дополнительного грузика массой 0.084 г.
Параметры предохранительной пружины (рисунок П.З): масса
тп — 0.03г; высота в свободном состоянии = 13_j j мм; контрольная вы-
сота Нк — 9 мм; сопротивление на контрольной высоте Rk —1.03...1.32 Н
(среднее значение Rk = 1.18 Н).
Рисунок П.З -Характеристика предохранительной пружины
314
В результате расчета соответствующих размерных цепей определены
путь взведения (расстояние между жалом и капсюлем) а — 4.65to j4 мм и вы-
сота пружины в собранном механизме мм. Масса оседающих
частей (с учетом приведенной массы пружины):
т= 0.11 + 0.084 + - • 0.03 = 0.204 г.
3
Математической моделью НВМ является уравнение движения ударника
при выстреле:
^ + a20x = g[k(t)-k0].
at
Силовая характеристика пружины Л(х) = Ro + сх.
Номинальные параметры механизма:
— жесткость:
с =
Rk
нсв-нк
1.18103
13.0-9.0
= 295 Н/м;
— начальное сопротивление предохранительной пружины:
= <{Нсв - Но ) = 295 • (13.0 - 9.9) • 10"3 = 0.914 Н;
— параметр «настройки»:
л-А-_________2£14____= 457.
mg 0,204 -1О3 -9,8
— среднее сопротивление на пути взведения:
7?с = ^ + —0.914+ -9-'4-5'10 3 =1.60 Н;
с 2 2
— нормированное среднее сопротивление:
,, Л 1,6
- 3 -800;
mg 0,204-10"3 -9,8
— сопротивление в конце взведения:
7^ = 7^ + са = 0.914 +295-4.65-10”3 = 2.28 Н;
— условная частота собственных колебаний:
“о
----°- = 1200с’1; f0 = = 191 .Гц;
0.204 2it 2п
С помощью эмпирической формулы находим i^!n = 14,4 м/с.
Эти параметры используются в примерах расчета.
315
Приложение 4
Оценка ошибки от усреднения силы сопротивления предохранителя
В разд. 4.4 со ссылкой на работы Г.М. Третьякова отмечалось, что
ошибка расчета, обусловленная усреднением силы сопротивления предо-
хранителя, не превышает 5 %. Вместе с тем указывалось, что эта ошибки
зависит от частотно-временных соотношений между параметрами механиз-
ма и закона перегрузки. Рассмотрим этот вопрос на примере простейшего
механизма, безразмерное уравнение движения которого записывается в од-
ной из форм (цкин =1):
<У2х _ - у2х
Предположим, что закон перегрузки - линейный; тогда решение указан-
ных уравнений будет иметь вид
-sinvF,')
где = t — к^; f2= t — kc. Принимая x=a , получаем уравнения для нахож-
дения соответствующего времени взведения:
-4(vF;-sim<)
- V
Первое из уравнений аналитически относительно времени взведения не
разрешается. Поэтому разлагаем функцию синуса в ряд и удерживаем в разло-
жении два первых члена: sin ф = ф — (7/3/)ф3. Тогда
В то же время, для усредненной силовой характеристики
hl = <+'в2
т.е. расхождение между значениями времени взведения
^h ~ hl h\ ^0 “
316
Если считать /в1 «истинным» значением времени взведения, то количе-
ственной мерой погрешности, обусловленной усреднением силы сопротивле-
ния предохранителя, может быть отношение
Д/в 0,5av2 0,5av2
FB, к0 + yav2 + 34&5
Переходя к размерным величинам, получим
<; =
0.5
Отсюда видно, что (при фиксированном значении \|/ погрешность расче-
та возрастает при увеличении пути взведения, длительности переднего фронта
и особенно условной частоты собственных колебаний, а также уменьшении
уровня перегрузки при выстреле.
Для НВМ взрывателя МГ-57 (см. прил. 3) будем иметь:
А, = НСй - Но = 13,0 - 9,9 = 3,1 мм;
Ч» =
= 0,667;
= 0,0531 =5,31 %,
т.е. полученный результат практически совпадает с оценками Г.М. Третьякова.
Приложение 5
Сравнение результатов расчета различными способами
Сравнение различных методов расчета представляет большой практиче-
ский интерес, поскольку при этом можно оценить ошибку, обусловленную
применением упрощенных математических моделей. Объектом расчета выбе-
рем простой механизм (для которого ц=1), а именно - накольно-
317
воспламенительный механизм взрывателя МГ-57; параметры механизма и ха-
рактеристики зенитной пушки С-60 приведены в прил.З.
Более конкретно сравнению подлежат результаты расчетов на основе
следующих моделей:
1) «строгая»:
^ + v2J = r(F)-r0n,
at
или с усредненной силовой характеристикой:
d2x
= kty-kca,
при линейном законе перегрузки при выстреле
Д/) = 7,0 < t < 1.0;
2) «строгая» в сочетании с уравнениями внутренней баллистики (см.
разд. 3.7.7), с учетом и без учета процесса врезания ведущего пояска.
Большое значение имеет «настройка» механизма, определяемая на-
чальной силой сопротивления предохранителя, а точнее - ее соотношение с
уровнем перегрузки в момент времени, от которого отсчитывается движе-
ние снаряда. При использованиии классической внутрибаллистической мо-
дели выстрела начало выстрела определяют давлением форсирования, т.е.
перегрузкой:
к
Ф<7£
Физически же начальная перегрузка будет определяться давлением вос-
пламенителя (ф = 2)
к =
^ив ’
которая значительно меньше £н0. Таким образом, классическая модель
может дать приемлемые результаты лишь при относительно большом началь-
ном сопротивлении предохранителя, когда движение механизма начнется при
давлении, большем, чем давление форсирования.
Известны следующие параметры механизма:
- безразмерные начальное и среднее сопротивления предохранителя:
к0 = ----= 0,0181; кс = =-------—-------= 0,0318;
0 mgkt 0,204-9,8-25,2 mgkt 0.,04 • 9,8 • 25,2
- частотно-временной параметр:
v = <уот = 1,2-103 -2,91-Ю’3 =3,492;
— безразмерный путь взведения:
318
4,65 -10~3
a = —z---------- = 2,229 IO'3;
9,8 25,2 103 2,912 10~6
— безразмерная минимальная скорость накола:
v 14,4
V . = -Im!"- =-----------122Z----------= 002
m,n якл 9,8 - 25,2 -103 - 2,91-10~3
1. «Строгая» модель при линейном законе перегрузки
d2x
= t-k0;
at
решение этого уравнения имеет вид (см. разд. 3.7.4)
х = [yt9-sinv/'); v = -^-(/-cosv?),
V V
где i9 = t - Fo = t - kQ. Принимая x = a , находим:
vfB = 0,8386; = °—-8- - 0,2401;
B B 3,492
7B =0,2401 + 0,0181 =0,2582;
Л = 0,2582 • 2,91 = 0,7514 мс;
VB
VB
Ег
=--------(/ - cosO,<$3S(5) = 0,02718;
3.4922 v ’
= 0,02718 • 9,8 • 25,2 2,91 = 19,49 м/с;
v 19,49
= -^ = = 1,354.
vmin M,4
mm ’
2. Усредненная силовая характеристика, линейный закон перегрузки
d2x
dt1 ' кс'
Решение этого уравнения:
О 2
где Г = t - kc.
При x = а будем иметь:
319
Ц = V6-2,229 10“3 = 0,237;
iB =0,237 + 0,0318 = 0,2688; tB = 0,2688 • 2,91 = 0,7822 мс;
vR = —-0.2372 =0.02808;
в 2
20 1
v = 0,02808 • 9,8 25,2 • 2,91 = 20,1 м/с; Е7 = = 1,398.
° 2 14,4
3. «Строгая» модель в сочетании с уравнениями внутренней баллистики
На рисунке П.4 показаны законы перегрузки при выстреле, полученные с
помощью программ art.m и artfor.mcd, соответственно.
(б)
Рисунок П.4 — Законы перегрузки при выстреле из пушки С-60:
320
я-без учета врезания; б- с учетом врезания (Пу = 0.7;//п =0.05)
Классическая система уравнений внутренней баллистики
Совместно решается система уравнений (2.37)-(2.39) и (4.75). Элементы
движения ударника показаны на рисунке П.5.
к
Рисунок П.5 — Элементы движения ударника (без учета врезания):
а - перегрузка; б- перемещение; в-скорость
С учетом врезания ведущего пояска
Совместно решается система уравнений (2.47) и (4.75). Элементы движе-
ния ударника показаны на рисунке П.б (Пя = 0,7; — 0,05).
321
Рисунок П.6 — Элементы движения ударника (с учетом врезания):
а -перегрузка; перемещение; в-скорость
Основные параметры движения ударника НВМ, рассчитанные четырьмя
способами, приведены в таблице П.1. Здесь рв и £в - соответственно, давление
и перегрузка в конце взведения (т.е. в момент накола КВ).
Анализируя полученные данные нетрудно заметить, что во всех случаях
надежное срабатывание механизма гарантируется (£*2 > 1). Однако при расчете
по наиболее строгой физически модели выстрела приходим к выводу о том,
что взведение завершается в пределах периода врезания ведущего пояска в
нарезы (давление в конце врезания 132 МПа, что в 4,5 раз больше стандартно-
го давления форсирования; длительность процесса врезания 2,43 мс; длитель-
ность переднего фронта 3,916 мс; -27330),
Таким образом, несмотря на близость интегральных характеристик процесса
срабатывания механизма, истинный ход протекания этого процесса может оказать-
ся искаженным, особенно при относительно малом уровне начальной настройки.
322
Литература
1. Рдултовский, В. И. Исторический очерк развития трубок и взрывателей от
начала их применения до конца мировой войны 1914-1918 гг. / В.И. Рдултовсий. -
М. : Оборонгиз, 1940. - 272 с.
2. Васильев М. Ф. Теория проектирования трубок и взрывателей /М.Ф. Ва-
сильев. — 3-е изд — М. : Воениздат, 1946. — 287 с.
3. Третьяков, Г.М. Боеприпасы артиллерии /Г.М. Третьяков. - М. : Воениз-
дат, 1947. — 536 с.
4. Кафедре «Автономные информационные и управляющие системы» - 50 лет
/ Сост. А.К. Ефремов. — М. : Изд-во МГТУ им. Н.Э. Баумана, 2006. - 152 с.
5. Ефремов, А. К. Вопросы проектирования систем предохранения и контактных
датчиков цели /А.К. Ефремов: Тезисы докладов научно-технической конференции. -
21-23 ноября 2000 г. - В 2-х ч.-М.: Изд-во МГТУ им. Н.Э. Баумана, 2000. - С. 166. Ч. 1.
6. Прохоров, Б. А. Боеприпасы артиллерии /Б.А. Прохоров. - М. : Машино-
строение, 1973.-512 с.
7. Дорофеев, А. Н. Взрыватели ракет /А.Н. Дорофеев. - М.: Воениздат, 1963. - 87 с.
8. Мерилл, Г. Исследование операций. Боевые части. Пуск снарядов. — Осно-
вы проектирования управляемых снарядов / Г. Мерилл, Г. Гольдберг, Р. Гельм-
гольц. - М. : Изд-во иностр, лит., 1959. - 595 с.
9. Курс теоретической механики: учеб, для вузов / В.И. Дронг [и др.]; под ред.
К.С. Колесникова. - М.: Изд-во МГТУ им. Н.Э. Баумана, 2000. - (Серия Механика
в техническом университете: Т. 1).
10. Баллистика ствольных систем /В.В. Бурлов [и др.]; под ред. Л.Н. Лысенко
и А.М. Липанова.-М. : Машиностроение, 2006. -461 с.
11. Проектирование ракетных и ствольных систем: учеб, для втузов / Под ред.
Б.В. Орлова. - М. : Машиностроение, 1974. - 828 с.
12. Серебряков, М. Е. Внутренняя баллистика ствольных систем и пороховых
ракет: учеб, для втузов /М.Е. Серебряков -3-е изд.. - М.: Оборонгиз, 1962. - 703 с.
13. Чурбанов, Е. В. Внутренняя баллистика периода форсирования: учеб, по-
собие /Е.В. Чурбанов. — Л. : ЛМИ, 1983. - 94 с.
14, Физические основы устройства и функционирования стрелково-пушечного,
артиллерийского и ракетного оружия: учеб, для вузов. Физические основы устройства
и функционирования стрелково-пушечного и артиллерийского оружия /Под ред.
А.А. Королева и В.Г. Кучерова. - Волгоград : ВолгГТУ, 2002. — 560 с. — Ч. 1.
15. Ефремов, А. К. Исследование взведения взрывателя при выстреле с учетом
врезания ведущего пояска снаряда в нарезы / Техн, отчет о НИР «Фундаментальные
проблемы создания автономных информационных и управляющих систем (АИУС)».-
Шифр «Кедр-5». - Этап 1. Математическое моделирование и анализ характеристик
АИУС (Промежуточный). - 2009. - ГР № 01200964825. - С. 109-126.
16. Дмитриевский, А. А. Внешняя баллистика: учеб, для вузов /А.А. Дмитри-
евский, Л.Н. Лысенко - 4-е изд. - М. : Машиностроение, 2005. - 608 с.
323
17. Дмитриевский, А. А. Внешняя баллистика: учеб, пособие для вузов/
А.А.Дмитриевский. - М. : Машиностроение, 1972. - 584 с.
18. Седов, Л. И. Методы подобия и размерностей в механике /Л.И. Седов -
9-е изд. - М. : Наука, 1981.- 448 с.
19. Шаповалов, Л. А. Моделирование в задачах механики элементов конст-
рукций /Л.А. Шаповалов. — М. : Машиностроение, 1990. - 288 с. (Б-ка расчетчика).
20. Инженерные методы исследования ударных процессов / Г.С. Батуев [и др.]
— 2-е изд. — М. : Машиностроение, 1977. — 240 с.
21. Правдин, В. М. Баллистика неуправляемых летательных аппаратов /В.М.
Правдин, А.П. Шанин. — Снежинск : Изд-во РФЯЦ — ВНИИТФ, 1999. —496 с.
22. Ефремов, А. К. Сверхдальнобойная пушка «Колоссаль» /А.К. Ефремов И
Изв. РАРАН. - Юбилейный выпуск. — 2008. - № 4(58). - С. 113-127.
23. Фсодосьев, В. И. Основы техники ракетного полета: учеб, пособие для
втузов /В.И. Федосьев. — М. : Наука, 1979. - 496 с.
24. Куров, В. Д. Основы проектирования пороховых ракетных снарядов /
В.Д. Куров, В.Д. Должанский. — М. : Оборонгиз, 1961. — 294 с.
25. Ионов, В. Н. Прочность боеприпаса при взаимодействии с преградой
/В.Н. Ионов. - М. : Машиностроение, 1979. - 423 с.
26. Сулин, Г. А- Теоретические основы расчета сенсорных систем: учеб, по-
собие /Г.А. Сулин- СПб. : БГТУ («Военмех»), 2000. - 64 с.
27. Андреев, С. Г. Основы конструкции и действия боеприпасов. - Ч. 1: Тео-
рия и расчет / С.Г. Андреев, А.Ф. Овчинников, В.Н. Охитин. - М. : ЦНИИНТИ и
ТЭИ, 1989.- 155 с.
28. Сагомонян, А. Я. Проникание (проникание твердых тел в сжимаемые
сплошные среды) /А.Я. Сагомонян. -М. : Изд-во Моск, ун-та, 1974. - 300 с.
29. Велданов, В. А. Расчет характеристик пространственного проникания тел
в сопротивляющиеся среды /В.А. Велданов, А.П. Наумов. - М. : Изд-во МГТУ им.
Н.Э. Баумана, 2000. — 24 с.
30. Пакет программ «Динамика-2» для решения плоских и осесимметричных
нелинейных задач нестационарного взаимодействия конструкций со сжимаемыми
средами /В.Г. Баженов [и др.] И Математическое моделирование. - 2000. - T.I2. -
№ 6. - С. 67-72.
31. Ефремов, А. К. Приближенный закон перегрузки при встрече боепри-
паса с преградой и расчет контактного датчика цели взрывателя /А.К. Ефремов
И Боеприпасы и высокоэнергетические конденсированные системы. — 2010. -
№ 1.-С. 9-15.
32. Ермаков, С. М. Статистическое моделирование: учеб, пособ. для вузов
/С.М. Ермаков, Г.А. Михайлов - 2-е изд. - М. : Наука, 1982. - 296 с.
33. Советов, Б. Я. Моделирование систем: учеб, для вузов /Б.Я. Советов,
С.А. Яковлев. - М. : Высшая школа, 1985. - 271 с.
34. Вентцель, Е. С. Теория вероятностей /Е.С. Вентцель - 3-е изд,- М. : Нау-
ка, 1964. - 576 с.
324
35. Пугачев, В. С. Теория случайных функций и ее применение к задачам ав-
томатического управления /В.С. Пугачев. — М. : Физматгиз, 1962. - 883 с.
36. Ефремов, А. К. Математическое моделирование нестационарных случай-
ных процессов /А.К. Ефремов, В.С. Январев И Новые методы проектирования,
контроля и испытаний приборных устройств: Межвузовский сб. научных трудов. -
Рязанский радиотехнический институт, 1977. - С. 78-79.
37. Кузнецов, Д. С. Специальные функции /Д.С. Кузнецов. - М. : Выс. школа,
1965.-423 с.
38. Теория механизмов и механика машин: учеб, пособ. для вузов / Под ред.
К.В. Фролова - 4-е изд. - М. : Изд-во МГТУ им. Н.Э. Баумана, 2002. (Серия «Ме-
ханика в техническом университете»: Т.5). - 664 с.
39. Андреева, Л. Е. Упругие элементы приборов /Л.Е. Андреева. - М. : Ма-
шиностроение, 1981.- 392 с.
40. Феодосьев, В. И. Сопротивление материалов: учеб, для втузов /В.И. Фе-
досьев — 10-е изд. — М.: Изд-во МГТУ им. Н.Э. Баумана, 2000. — 544 с. (Серия
«Механика в техническом университете»: Т. 2).
41 Ефремов, А. К. Оптимизация механических систем взрывателей /А.К. Еф-
ремов И Оборонная техника. - 2000. - № 1/2. - С. 80—86.
42. Ройтепберг, Я. Н. Автоматическое управление: учеб, пособие для вузов
/Я.Н. Ройтенберг. - 3-е изд. - М. : Наука, 1992. - 576 с.
43. Вибрация в технике: Справочник: в 6 т. - М.: Машиностроение. Т. 6: За-
щита от вибрации и ударов /Под ред. К.В. Фролова. -1981. - 456 с.
44. Кобринский, А. Е. Виброударные системы (Динамика и устойчивость)
/А.Е. Кобренский, А.А. Кобренский. - М. : Наука, 1973. - 592 с.
45. Жевержеев, В. Ф. Специальный курс высшей математики для втузов:
учеб, пособие /В.Ф. Жевержеев, Л.А. Кальницкий, Н.А. Сапогов. — М. : Высшая
школа,1970. -416 с.
46. Ефремов, А. К. Совместимость требований по надежной взводимости и
безопасности для инерционных предохранительных систем аналогового типа /
А.К. Ефремов И Оборонная техника. - 2001. - № 1 -2. - С. 65 - 70.
47. Батищев, Д. И. Методы оптимального проектирования: учеб, пособие для
вузов /Д.И. Батищев. — М. : Радио и связь, 1984. — 248 с.
48. Хог, Э. Прикладное оптимальное проектирование: Механические системы
и конструкции /Э. Хог, Я. Арора. - М. : Мир, 1983. - 478 с.
49. Проектирование на ЭВМ инерционных механизмов: учеб, пособие /
Г.В. Петрунин [и др.]. - Пенза : ПГТУ, 1993. - 58 с.
50. Ефремов, А. К. Исследование взведения взрывателя при выстреле из мино-
мета /А.К. Ефремов [и др.] И Оборонная техника. - 1996. — № 3. - С. 22 — 26.
51. Ефремов, А. К. Инерционные предохранительные системы дискретного
типа /А.К. Ефремов И Там же. - 2002. - № 11. - С. 29 — 34.
52. Ефремов, А. К. Тангенциальные предохранительные системы взрывателей
для вращающихся боеприпасов /А.К. Ефремов И Там же. - 2004. — № 5. - С. 30 - 35.
325
53. Крагельский, И. В. Узлы трения машин: Справочник (Основы проек-
тирования машин) /И.В. Крагельский, Н.М. Михин. - М. ; Машиностроение,
1984.-280 с.
54. Ефремов , А. К. Исследование роторного предохранительного механизма
для взрывателей к вращающимся артиллерийским снарядам /А.К. Ефремов,
Ю.С. Саратов, П.Г. Сурин // Оборонная техника. - 2002. — № 1-2. — С. 41 —45.
55. Харкевич, А. А. Теория преобразователей: Избр. тр. в 3 т. /А.А. Харке-
вич.-М. : Наука. Т.1Д973.-С. 52-217.
56. Сулин, Г. А. Сенсорные системы боеприпасов: учеб, пособие /
Г.А. Сулин - СПб. : БГТУ (Военмех), 1998. - 79 с.
57. Ефремов, А. К. Электромеханические преобразователи специального на-
значения: Учеб, пособие / А.К. Ефремов, В.И. Козлов;под ред. А.К. Ефремова. -
М. : Изд-во МГТУ им. Н.Э. Баумана, 1994. - 41 с.
58. Средства поражения и боеприпасы: учеб. / А.В. Бабкин [и др.]; под ред.
В.В. Селиванова. — М.: Изд-во МГТУ им. Н.Э. Баумана, 2008. — 984 с.
59. Третьяков, Г. М. Основы теории проектирования электрических трубок и
взрывателей /Г.М. Третьяков. - М. : Издание Артакадемии РККА им. Дзержинско-
го, 1939. - 410 с.
60. Дьеласан, Э. Упругие волны в твердых телах. Применение для обработки
сигналов /Э. Дьеласан, Д. Руайе / Пер. с франц. - М. : Наука, 1982. - 424 с.
61. Проектирование датчиков для измерения механических величин /Под ред.
Е.П. Осадчего.-М. Машиностроение, 1979.-480 с.
62. Бауманн, Э. Измерение сил электрическими методами : Пер. с нем. /
Э. Бауман,— М. : Мир, 1978. — 430 с.
63. Аронов, Б. С. Электромеханические преобразователи из пьезоэлектриче-
ской керамики /Б.С.Аронов. - Л. : Эпергоатомиздат, 1990. — 272 с.
64. Пьезоэлектроника/А.А. Ерофеев [и др.].-М. : Радио и связь, 1994.— 240 с.
65. Ерофеев, Н. К. Пьезоэлектрические преобразователи: учеб, пособие /
Н.К. Ерофеев. - Л. : ЛМИ (Военмех), 1988. - 45 с.
66. Ерофеев, Н. К. Измерительная информационная техника: учеб, пособие
/Н.К. Ерофеев. -Л.: ЛМИ (Военмех), 1990. - 293 с.
67. Ильин, М. М, Теория колебаний; учеб, для вузов /М.М. Ильин, К.С. Ко-
лесников, Ю.С. Саратов; под ред. К.С. Колесникова. -2-е изд. - М. : Изд-во МГТУ
им. Н.Э. Баумана, 2003. -272 с. (Сер. Механика в техническом университете: Т.4).
68. Ефремов, А. К. Пьезоиндукционный контактный датчик цели /А.К. Ефремов,
А.В. Капустин, В.Н. Федоров И Оборонная техника. - 2005. -№ 4/5. - С. 49-55.
69. Ленк, А. Электромеханические системы: Системы с распределенными пара-
метрами: пер. с нем /А. Ленк; под ред. Б.А. Потемкина. - М.: Энергоиздат, 1982. - 472 с.
70. Иоссель, Ю. Я. Расчет электрической емкости /Ю.Я. Иоссель, Э.С. Коча-
нов, М.Г. Струнский. - 2-е изд. - Л. : Энергоиздат, 1981.
71. Шишкинский, В, И. Магнитоанизотропные монолитные силоизмерители
/В.И. Шишкинский. - М.: Машиностроение, 1981. - 80 с.
326
72. Ефремов, А. К. Пьезомагнитодинамический эффект в металлах /А.К. Еф-
ремов, А.В. Лаврушин, А.В. Смирнов// Вопросы проектирования приборных уст-
ройств. - Тр. МВТУ, № 446; М. : МВТУ, 1986. - С. 41-49.
73. Ефремов, А. К. Энергетическая модель пьезомагнитодинамического эф-
фекта в металлах /А.К. Ефремов, М.Ю. Лаврушин И Там же, № 493. - М.: МВТУ,
1987.-С. 13-20.
74. Оценка эффективности средств индивидуальной бронезащиты на основе
исследования запреградных эффектов /А.К. Ефремов [и др.] И Оборонная техника.
-1996. - № 3. - С. 38-44.
75. Методика оценки эффективности средств индивидуальной защиты/
А.К. Ефремов [и др.] И Вопросы оборонной техники. Науч.-техн. сб. - Серия 15.
Композиционные неметаллические материалы в машиностроении. - М. : Вып.
1(113)-2(114). - 1996. - С. 29-35.
76. Материалы и защитные структуры для локального и индивидуального
бронирования / В.А. Григорян [и др.]; под ред. В.А. Григоряна. — М. : Изд-во Ра-
диоСофт, 2008. - 406 с.
77. Бегларян, В. X. Механические испытания приборов и аппаратов
/В.Х.Бегларян. - М. : Машиностроение, 1980. - 223 с.
78. Вибрации в технике: Справочник: в 6 т. - М. : Машиностроение, 1981.Т.5:
Измерения и испытания /Под ред. М.Д. Генкина. —496 с.
79. Надежность и эффективность в технике: Справочник: в 10 т. - М. : Маши-
ностроение, 1989. Т.6: Экспериментальная отработка и испытания /Под ред.
Р.С. Судакова, О.И. Тескина. — 376 с.
80. Надежность и эффективность в технике: Справочник: в 10 т. - М. : Маши-
ностроение, 1987. Т.9: Техническая диагностика /Под ред. В.В. Клюева, П.П. Пар-
хоменко. — 352 с.
81. Надежность и эффективность в технике: Справочник: в 10 т. — М. : Маши-
ностроение, 1990. Т.10: Справочные данные по условиям эксплуатации и характе-
ристикам надежности / Под ред. В.А. Кузнецова - 336 с.
82. Испытательная техника: Справочник: в 2 кн. / Под ред. В.В. Клюева. - М. :
Машиностроение, 1982.
83. Ленк, А. Механические испытания приборов и аппаратов: пер. с нем. /
А. Ленк, Ю. Ренитц. — М. : Мир, 1976. — 270 с.
84. Харрис, С. Справочник по ударным нагрузкам /С. Харрис, Ч. Крид. - Л. :
Судостроение, 1980. - 359 с.
85. Ротационные методы испытаний приборных устройств /Л.М. Самсонов
[и др.]. -М. : Машиностроение, 1981. - 133 с.
86. Ефремов, А. К. Испытания приборных устройств: уч. пособие /А.К. Еф-
ремов, В.И. Козлов, С.В. Коршунов: в 3 ч.; под ред. М.П. Мусьякова, А.К. Ефре-
мова.—М. : Изд-во МГТУ им. Н.Э. Баумана, 1983(ч.1), 1986(ч.2), 1990(ч.З).
87. Проблемы стендовых механических испытаний приборных устройств
/А.К. Ефремов [и др.] И Тр. МВТУ № 502. - Современные проблемы машино-
327
строения (К 50-летию Машиностроительного факультета). - М. : МВТУ им.
Н.Э. Баумана, 1988.-С. 95-104.
88. Испытательные стенды для воспроизведения однократных импульсных воз-
действий: Обзор/А.К. Ефремов, [и др.]. -М.: ЦНИИНИТИ и ТЭИ, 1988.—48 с.
89. Ефремов, А. К. Исследование схемы ротационной машины для воспроиз-
ведения интенсивных ударных импульсов / Методы и средства испытаний изделий
/А.К.Ефремов, А.Н. Спицын, В.В. Сергеев. - Материалы конференции. - Об-во
«Знание» РСФСР. - МДНТП, 1977. - С.94-97.
90. Ефремов, А. К. Пневматическая установка для испытания крупногабарит-
ных изделий / Методы и средства испытаний изделий /А.К. Ефремов, В.А. Михай-
лов. -Там же. - С.97-105.
91. Ефремов, А. К. Системы защиты конструкций от импульсных механиче-
ских воздействий /А.К. Ефремов, Н.Н. Стмоненко. - М. : Изд-во МГТУ им.
Н.Э. Баумана, 1997. — 52 с.
92. Гольдсмит, В. Удар. Теория и физические свойства соударяемых тел: Пер.
с англ. /В. Гольдсмит. - М. : Стройиздат, 1965. - 448 с.
93. Пановко, Я. Г. Введение в теорию механического удара /Я.Г. Пановко. -
М. : Наука, 1977.-232 с.
94. Батуев, Г. С. Соударение массивных тел при упругопластических дефор-
мациях в зоне контакта / Расчеты па прочность /Г.С. Батуев, А.А. Федосов,
А.К. Ефремов: Сб. статей. Вып. 10.-М.: Машиностроение, 1964. - С. 363-389.
95. Ефремов, А. К. Критерий для оценки степени влияния волновых процес-
сов при продольном упругопластическом ударе /А.К. Ефремов, А.В. Смирнов//
Изв. вузов. Машиностроение. - 1970. -№ 8. - С. 34-39.
96. Ефремов, А. К. Экспериментальное исследование влияния волновых про-
цессов при упругопластическом ударе /А.К. Ефремов, А.В. Смирнов И Там же. -
1972.-№7.-С. 19-24.
97. Ефремов, А. К. О выборе интервала дискретизации непериодических
процессов при численном определении спектров /А.К. Ефремов, А.В. Смирнов И
Там же. — 1970. - № 9. — С.65-70.
98. Ефремов, А. К. Анализ точности вычисления спектральных характери-
стик непериодических процессов /А.К. Ефремов, В.М. Марков, А.В. Смирнов /
Методы, метрологические характеристики и средства испытаний изделий. - Мате-
риалы конференции. - Об-во «Знание», РСФСР. - МДНТП, 1974-С. 13-21.
99. Ефремов, А. К. Методика измерения динамических процессов неперио-
дического характера / Методы и средства испытаний изделий на надежность /
А.К. Ефремов, В.М. Марков. - Там же. - 1972. - С. 120-125.
100. Батуев Г. С. О подобии процессов при упругопластическом ударе /
Г.С. Батуев, А.К. Ефремов И Изв. вузов. Машиностроение. -1974. - № 9. - С. 18-21.
101. Болотин, В. В. Случайные колебания упругих систем /В.В. Болотин. - М. :
Наука, 1979. — 336 с.
328
102. Когаев, В. П. Расчеты при напряжениях, переменных во времени /
В.П. Когаев. — М. : Машиностроение, 1977. - 232 с. (Б-ка расчетчика).
103. Гусев, А. С. Сопротивление усталости и живучесть конструкции при
случайных нагрузках /А.С. Гусев. - М. : Машиностроение, 1989 . — 248 с.
(Б-ка расчетчика).
104. Фридман, Я. Б. Механические свойства металлов /Я.Б. Фридман: в 2 ч. -
3-е изд. — Ч. 2. Механические испытания. Конструктивная прочность. — М. : Ма-
шиностроение, 1974.— 368 с.
105. Ефремов, А. К. Об энергетическом критерии вибропрочности /А.К. Еф-
ремов И Вопросы проектирования приборных устройств. - Тр. МВТУ, № 345. —
М. :МГТУ им. Н.Э. Баумана, 1981 - С. 90-105.
106. Ефремов, А. К. Оценка структуры спектральной плотности стационарно-
го случайного сигнала И Изв. вузов. Машиностроение. — 1977. — № 11. — С. 34-40.
107. Статистические вопросы прочности и динамики машин: Тез. докладов
совещания. - Рига, РПП, 1976.
108. Распопов, В. Я. Микромеханические приборы: учеб, пособие для вузов
/В.Я. Распопов. — М. : Машиностроение, 2007. - 400 с.
109. Ефремов, А. К. Перспективы использования микроэлектромеханических
систем во взрывателях /А.К. Ефремов, А.В. Капустян И Боеприпасы и высокоэнер-
гетические конденсированные системы. - 2008. — № 1. - С. 52-54.
ПО. Ефремов, А. К. Программно-временные устройства на струйных элемен-
тах /А.К. Ефремов, В.Н. Кощеев И Тр. МВТУ, № 391. — М. : МГТУ им. Н.Э. Бау-
мана, 1982.-С. 67-75.
111. Залманзон, Л. А. Теория элементов пневмоники /Л.А. Залманзон. —
М. : Наука, 1969.-507 с.
112. Елимех, ТО. П. Струйная автоматика /И.М. Елимех,Ю.П. Сидоркин. -
Л. ; Лениздат, 1972. - 211 с.
113. Элементы и устройства струйной техники / А.В. Богачева [и др.]; под ред.
Ф.А. Короткова. — М. : Энергия, 1972. — 96 с. (Б-ка по автоматике. — Вып. 478)
114. Курс метеорологии /Под ред. П.Н. Тверского. - Л. : Гидрометеоиздат,
1951.-308 с.
115. Буль, В. А. Электронные издания: учеб, пособие для вузов. - СПб. :
БХВ-Петербург, 2003. - 560 с.
116. Потемкин, В. Г. Инструментальные средства MATLAB 5.Х /В.Г. Потем-
кин - М. : ДИАЛОГ-МИФИ, 2000. - 336 с.
117. Макаров, Е. Г. Инженерные расчеты в MathCAD: Учебный курс /
Е.Г. Макаров. — СПб. : Питер, 2003. —448 с.
118. Ефремов, А. К. Интегрированная система автоматизации математиче-
ских и научно-технических расчетов и моделирования динамических систем
MATLAB: учеб, пособие /А.К. Ефремов. - М. : Изд-во МГТУ им. Н.Э. Баумана,
2003.-80 с.
329
СВЕДЕНИЯ ОБ АВТОРЕ:
Ефремов Альберт Константинович - кандидат
технических наук, доцент кафедры «Автономные
информационные и управляющие системы» (СМ-5)
МГТУ им. Н.Э. Баумана, почетный работник ВПО РФ,
тел. 8-(499)-263-68-59.
Область научных интересов: проектирование электро-
механических систем взрывателей, исследование
и воспроизведение динамических воздействий
Научное издание
Сборник научных трудов
кафедры «Автономные информационные и управляющие системы»
МГТУ им. Н. Э. Баумана и ФГУП «Центральный научно-исследовательский
радиотехнический институт им. академика А.И. Берга»
В 5 томах
Под редакцией Л. Б. Борзова, Б. С. Лобанова
Ю, М. Астапов, А. Б, Борзов, А. К. Ефремов, В. Н. Жураковский,
В. И. Козлов, В. А. Ковригин, Л.В. Лабунец, К П. Лихоеденко, Б. С. Лобанов,
С. В. Микаэлъян, И. В. Муратов, Г. Л. Павлов, Н. С Соболева, С. В. Суворов,
В. Б. Сучков, В. К Хохлов, Б. И. Шахтарин
АВТОНОМНЫЕ ИНФОРМАЦИОННЫЕ
И УПРАВЛЯЮЩИЕ СИСТЕМЫ
В 4 томах
Под редакцией А К Борзова
Том 4
Отв. за выпуск В, Б. Сучков, В. В, Багров
Редактор Т. А. Зайцева
Компьютерная верстка Л. А. Алексенко
Художник В. В. Демкин
Подписано в печать 30.03.2011. Формат 70 х 100/16. Усл. псч. л. 26,975.
Тираж 300 экз. Заказ 15
ООО НИЦ «Инженер»
119034, Москва, Курсовой пер., 17
Тел. (985) 233 2798
ООО «Онико-М»
105005, Москва, Лефортовская наб., 1