











































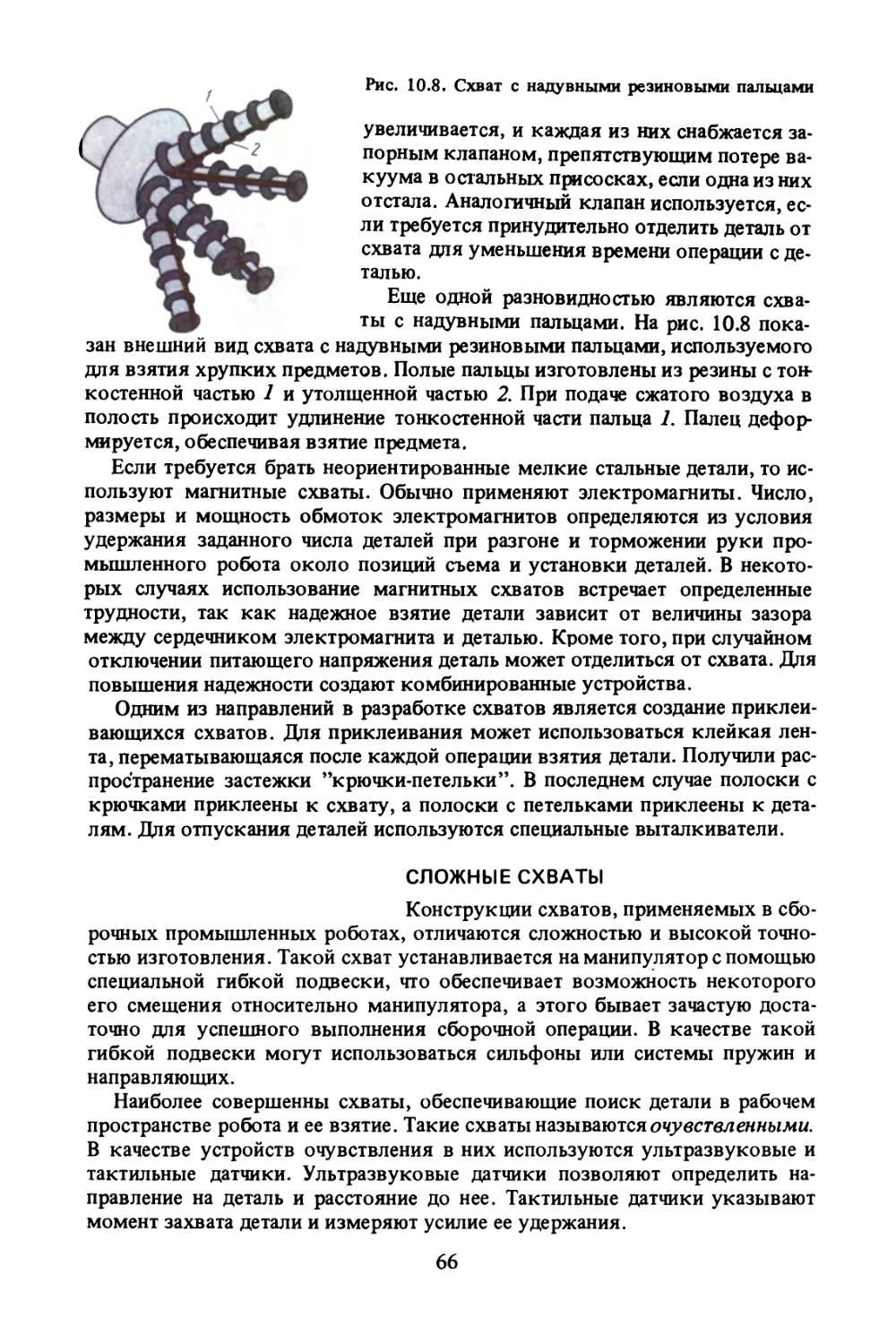





























































Автор: Егоров Ю.Н. Голубев Н.Л.
Теги: детали машин передачи (механические) подъемно-транспортное оборудование крепежные средства смазка кибернетика электроника робототехника
ISBN: 5-256-00297-X
Год: 1990

Ю. Н. Егоров Н. Л. Голубев
Уроки
НАУЧНО-ПОПУЛЯРНАЯ БИБЛИОТЕКА ШКОЛЬНИКА
НАУЧНО-ПОПУЛЯРНАЯ БИБЛИОТЕКА ШКОЛЬНИКА
□ [3 □ □ ®
Москва Радио и связь 1990
Ю. Н. Егоров Н.П Голубев
Уроки РОБОТОТЕХНИКИ
Scan AAW
ББК 32.816 ЕЗО
УДК 621.865.8
Рецензенты: канд. техн, наук Э. В. Мысловский, д-р техн, наук Н. Д. Дубовой
Редакция литературы по электронной технике
Егоров Ю. Н.» Голубев Н. Л.
ЕЗО Уроки робототехники. - М.: Радио и связь, 1990. — 152 с., ил. -(Межизд. серия ’’Научно-популярная библиотека школьника”)
ISBN 5-256-00297-Х.
В популярной форме рассказано об истоках возникновения робототехники, устройстве роботов и их основных узлов (манипуляторов,приводов, схватов). Особое внимание уделено электронным органам управления - процессорам, осуществляющим программу действий, запоминающим устройствам, телевизионным датчикам, ультразвуковым приемникам и излучателям и другим устройствам, представляющим ’’органы чувств” робота. Описано место роботов в современном автоматизированном производстве. Рассмотрено применение специализированных роботов на подводных работах, в атомной энергетике, в космическом пространстве.
Для старшеклассников; может быть полезна широкому кругу читателей.
2302030000-094 Е----------------72-90
046 (01)-90
ББК 32.816
ISBN 5-256-00297-Х
©Егоров Ю.Н., Голубев Н.Л., 1990
ОТ АВТОРОВ
Роботы - вершина научно-технического прогресса, воплощение новейших достижений механики, электроники и кибернетики. С каждым годом расширяется сфера использования роботов на заводах и фабриках, в шахтах, в сельском хозяйстве, в атомной энергетике, в космосе, под водой — прежде всего там, где условия неблагоприятны для человека.
Внедрение устройств робототехники на этих производствах позволяет улучшать условия труда, устранять профессиональные заболевания, вызываемые запыленностью, загазованностью, повышенным шумом, вибрацией, различными излучениями и многими другими факторами.
Основной целью нарастающего внедрения робототехники является повышение экономической эффективности производства в целом. Роботы обеспечивают высвобождение рабочих и окупаются за два-три года и быстрее. Внедрение микропроцессоров в устройства управления позволяет снижать начальные капитальные вложения.
Автоматизация труда в обществе влияет на его социальную структуру. Растет процент рабочих мест, требующих высокой квалификации. С ростом производительности труда происходит перераспределение трудовых ресурсов в пользу непроизводственных отраслей.
Резко возрастает доля интеллектуального труда, уменьшается противоречие между физическим и умственным трудом.
Огромное роциально-психологическое значение имеет то, что человек из исполнителя при машине, совершающего около нее однообразные малоквалифицированные ручные операции, превращается в оператора, в командира машин, наблюдающего за их исправной работой и осуществляющего наладку и профилактику. Такая работа становится психологически престижной для современной молодежи. Она побуждает человека повышать деловую квалификацию, а вместе с тем и общую культуру.
Устройство роботов непрерывно совершенствуется, их возможности растут. Сможет ли человек использовать эти возможности в полной мере? Решить этот вопрос призвана современная молодежь.
Эта книга предназначена для молодежи, в первую очередь для учеников старших классов средней школы, учащихся профессионально-технических училищ и техникумов, так как она дает некоторый комплекс сведений по робототехнике, изложенных по возможности кратко и в доступной форме.
Г-» -> J
УРОК 1. РОЖДЕНИЕ РОБОТОТЕХНИКИ
ИДЕЯ СДЕЛАТЬ ЧЕЛОВЕКА БОЛЕЕ СОВЕРШЕННЫМ
С давних пор люди живут надеждой сделать человека более совершенным. Но как? Во-первых, развитием его физических способностей. Вспомним, например, о древнегреческих Олимпийских играх. Во-вторых, применением приспособлений, позволяющих воспользоваться энергией внешних источников: ветром, течением воды^ излучением солнца, электричеством и т. д.
Понимая слабость человеческого организма, они пытались создать подобие человека, но из менее нежного и уязвимого материала. Предания об этом дошли до нас в мифах древней Греции, где упоминаются золотой человек, служивший Зевсу и охранявший огонь, созданная Пигмалионом каменная Галатея. Возможно, прообразами таких устройств послужили реальные соединения механизмов, копировавших действия человека. Однако их описания не дошли до наших дней.
О ДОСТИЖЕНИЯХ АНТИЧНОЙ НАУКИ И ТЕХНИКИ
Изобретений Архимеда, Аристотеля и Терона Александрийского было достаточно для того, чтобы первый робот появился две тысячи лет тому назад. Однако создается впечатление, что античное общество почти не было заинтересовано в доведении изобретений до практического использования. Одна из причин — дешевизна труда рабов. В то же время для культовых целей и развлечений создавались сложные автоматы. Например, римский поэт Клавдиан упоминает о приборе, изготовленном Архимедом (ок. 287 — 212 до н. э.). Прибор имел форму стеклянного шара с изображением небесного свода, на котором воспроизводилось движение всех известных в то время небесных светил. Шар вращался непрерывно сам.
Еще в Греции возникло понятие ’’машина”. А знаменитый римский архитектор Витрувий (I в. до н. э.) сделал следующее определение рычажной машины: "Машина есть взаимно связанное соединение деревянных частей, обеспечивающее наибольшую выгоду при поднятии тяжестей. Она приводится в действие искусственно . . . ” Если отбросить слово ’’деревянных”, то это определение относится к современному балансирному манипулятору. Балансирные манипуляторы облегчают труд рабочего, поднимающего детали большой массы. По-видимому, первыми робототехниками можно назвать Аристотеля (384 —322 до н. э.) и Архимеда, которые раскрыли связь между силами, воздействующими на плечи рычага. Первое применение рычага как основного элемента точных механизмов разнообразных автоматов приписывается Герону Александрийскому (ок. I в.). Ему же принадлежит со
общение об использовании зубчатых колес в книге ’’Механические проблемы”. Там приведен рисунок водяного автомата с двигающейся фигуркой птицы (рис. 1.1).
С помощью колесика 1 механизм приводился в рабочее состояние. При этом одновременно поднимался из сосуда 2 с водой пустотелый массивный колпак 3. При опускании колпака под действием собственного веса захваченный им над водой воздух выходил через свисток 4. Птица при этом вращалась, издавая трель.
Наиболее известный автомат, разработанный Тероном Александрийским, поражал воображение современников. Этот автомат предназначался для открывания дверей храма (рис. 1.2).
При разжигании огня в жертвеннике воздух герметичной полости 1, соединенной с круглым резервуаром 2, расширялся и вытеснял из него воду в бадью 3. Бадья перевешивала груз 4, и ворота храма открывались. Когда огонь гас, воздух охлаждался, вода втягивалась из бадьи в резервуар. Груз перевешивал бадью, и ворота храма закрывались.
СРЕДНИЕ ВЕКА
Уровень развития индийской, китайской, арабской механики в средние века был весьма высок. Например, в 1206 г. механик араб ал-Джазари в ’’Книге о познании хитроумных механических приспособлений” объяснял принципы устройства разных автоматов. Эта книга состояла из шести частей и содержала подробное^описание разнообразных гидравлических машин, насосов, водяных часов, музыкальных автоматов со сложной механикой фигур и т. д. Но особенно интересен период, на-
Рис. 1.1. Водяной автомат с двигающейся и поющей фигурой птицы
Рис. 1.2. Устройство Терона Александрийского для автоматического открывания дверей храма
зываемый эпохой Возрождения, когда математику, механику и астрономию, как и в ’’античные” времена, стали относить к разряду благородных наук. Благоприятные условия для возрождения традиций античной механики создались в Италии. Там работали многие инженеры Возрождения. Наиболее известен Леонардо да Винчи (1452 — 1519), приложивший усилия к разработке применимых к нуждам общества механизмов. В процессе их усовершенствования он искал также путь к снижению трудоемкости современных ему технологий. Рукописи Леонардо да Винчи содержат массу замыслов и идей, ряд из которых был реализован только через 250 лет после его смерти. Это автоматическая прядильная машина, устройство для стрижки овец, машинка для изготовления иголок. Эти проекты имели своей целью увеличение степени механизации производственных процессов. При изучении трудов Леонардо да Винчи может возникнуть вопрос: почему он не осуществил свои планы создания различных машин? По-видимому, Леонардо да Винчи, подробно изучивший геометрию и механику по античным сочинениям, понимал, что находится почти в том же положении, что и механики античности. В пору его деятельности еще не сложились условия для применения новых технических решений.
ПОЗДНЕЕ СРЕДНЕВЕКОВЬЕ И НОВАЯ ИСТОРИЯ
Автоматы, измеряющие время, были первыми автоматами, созданными для практических целей. Чем сильнее развивались производительные силы общества, тем более точно требовалось отсчитывать время. Развитие торговли в поздние века привело к тому, что человечество стало весьма подвижным. Возникла потребность в механических часах, которые можно было бы возить с собой. Известно, что механические часы появились еще в VI в. нашей эры. В XI в. их совершенствование привело к появлению циферблата и часовой стрелки.
Галилео Галилей (1564 — 1642) предложил использовать маятник в часах, вывел законы равновесия сил в механизмах, сформулировал принцип изохронности (постоянства периода) колебаний маятника, фактически создал основу теории колебаний.
На базе разработок Галилео Галилея в 1657 г. известный нидерландский физик и механик Христиан Гюйгенс (1629 — 1695) построил маятниковые часы. Но он обратил внимание на их главный недостаток — чувствительность к изменению положения оси маятника и к сотрясениям корпуса. В течение нескольких лет Христиан Гюйгенс, совершенствуя маятниковый, создал в итоге балансовый механизм, который теперь устанавливается во всех современных механических часах. Принцип действия балансового механизма отличается от принципа действия маятникового тем, что центр тяжести ’’баланса” лежит на оси вращения. Это создает нечувствительность к сотрясениям и толчкам.
Часы становятся первейшей принадлежностью судоводителей, путешественников, лиц, занятых в промышленности.
Со временем размеры часового механизма все уменьшаются. Часовое дело становится самой передовой отраслью. Вершиной мастерства часовщи-
Рис. 1.3. Писец Пьера и Анри Дро
ков явилось создание механизмов, позволявших имитировать некоторые движения людей и животных. Этим механизмам придавали внешний вид живых существ, а с помощью множества рычагов, шестеренок, барабанов со штырями, пружин осуществлялись движения.
Создание сложных механических систем предполагало и проведение больших предварительных расчетов.
Даже сейчас изучение и восшанов-ление • работоспособности механических человекоподобных игрушек вызывает значительные трудности.
В XVIII в. было построено много прекрасных механических кукол. Лучшие из них вошли в историю. К ним относятся автоматы французского механика Жака де Во-кансона (1709 - 1782): флейтист, который играл 12 различных пьес и по-настоящему дул во флейту,
а тоном звучания управлял с помощью пальцев; бронзовая утка, поражавшая современников тем, что она выполняла в точности все движения птицы. Известные игрушки были построены отцом и сыном Пьером и Анри Дро — швейцарцами. Были созданы часы, механизм которых приводил в действие целую сцену с большим числом движущихся фигур.
С большим искусством они мастерили человекоподобные устройства, способные выполнять разнообразные действия. Особенно известна одна из его кукол - писец (рис. 1.3); ее можно было даже запрограммировать таким образом, чтобы она писала любой текст, правда, не более чем 40 букв.
Россию также не обошло увлечение созданием механических игрушек. Энтузиастом этого увлечения в начале прошлого века стал Антон Маркович Гамулецкий. В 1827 г. на Невском проспекте в Петербурге им был открыт ’’Храм очарований, или механический, физический и оптический кабинет”.
Чудеса в этом храме начинались прямо на лестнице. Над ее верхней площадкой парила позолоченная фигура женщины с валторной в руке, и, если кто-нибудь входил на площадку лестницы, она подносила инструмент к губам и начинала играть, шевеля пальцами естественным образом. У входа в
зал стояли механические слуги, которые кланялись входившему и казались совершенно живыми. В зале стоял волшебный диван. Если кто-нибудь садился на него, то открывалась боковая дверь, звучала музыка, слуга-автомат выносил поднос с напитками и ставил его на стол перед гостями. Во всех помещениях храма происходили чудеса: лаяли механические собаки, ползала неживая змея, черная кошка выгибала спину и терлась о ноги посетителей. Предприятие Гамулецкого производило удивительное впечатление. Он проявил незаурядную выдумку, глубокие знания и колоссальное упорство.
Вопросы к уроку 1
1. Вспомните определение машины, сделанное римским архитектором Витрувием.
2. Кого можно было бы назвать первыми робототехниками?
3. Вспомните о роли Леонардо да Винчи в создании проектов технических устройств.
4. Каковы роли Галилея и Гюйгенса в развитии механических автоматов?
УРОК 2. РАЗВИТИЕ РОБОТОТЕХНИКИ
РОБОТЫ-ИГРУШКИ
Устройства, копирующие человеческие действия, в разные времена назывались по-разному. Во времена Древней Греции это были автоматы, в эпоху позднего средневековья - человекоподобные игрушки (андроиды), а после 1920 г., когда была написана пьеса ’’R.U.R.” (Россумовские универсальные роботы) чешским писателем Карелом Чапеком, механические люди стали называться роботами.
Попытки создать человекоподобные игрушки, действующие автономно, возобновились в XX в. Быстрыми темпами развивается электроника, разрабатываются пневмо-, гидро- и электроприводы. На новой элементной базе конструируются роботы-игрушки, обладающие способностью приспосабливаться к изменяющимся внешним условиям. Они уже обладают простейшими органами чувств, ана логичных человеческим: слухом, зрением, осязанием, могут передвигаться, выполнять простые операции и даже разговаривать. Так, робот американского инженера А. Вексли управлялся с помощью свистка и даже мог произносить отдельные звуки. Робот австрийца А. Губера управлялся по радио, мог передвигаться, говорить и выполнять некоторые операции.
В СССР первый робот был построен в 1936 г. пятнадцатилетним школьником В. Мацкевичем, впоследствии известным советским изобретателем. Его робот ”В2М” был одним из наиболее популярных экспонатов на Всемирной выставке в Париже в 1937 г.
Рис. 2.1. Робот-экскурсовод
Этот этап современной робототехники был ознаменован созданием многих интересных конструкций, которые играли не только развлекательную роль, но и применялись для практических целей.
Робот англичанина Дениса Уёстона, вооруженный телевизионной системой, радиоприемником и радиопередатчиком для дистанционного управления, выполняет до 180 команд, прогуливает по улице ребенка в коляске, не ошибаясь в маршруте.
Робот ’’Сепулька” советских инженеров Марка Александрова и Марка Горохова проводит экскурсии в Политехническом музее в Москве, сопровождает посетителей от экспоната к экспонату, отвечая на вопросы любознательных. Аналогичную роль выполняет японский робот-экскурсовод (рис. 2.1).
Конструированием роботов-игрушек занимаются как юные энтузиасты, так и люди достаточно солидного возраста.
В 1966 г. преподаватель техникума Б. Н. Гришин из г. Калуги создает автоматический робот-секретарь ”АРС”. Такой робот отвечает на телефонные звонки, в определенное время включает телевизор, радиоприемник, следит за освещением, поддерживает постоянную температуру в квартире, встречает гостей, предлагая прохладительные напитки. На станции юных техников г. Щелково Московской области в 1969 г. ребята построили кибернетический робот-гигант, который экспонировался на Всемирной выставке ’’ЭКСПО-70” в Японии.
Японский художник-изобретатель С. Мицуно конструирует десять кукол-роботов, представляющих ’’полноразмерные” копии человека, которые ведут себя совершенно естественно. Среди них куклы-роботы ’’Томас Эдисон” и ”Мерилин Монро”. Движения живого человеческого тела и лица имитируют около 80 электромагнитов, управляемых по определенной программе.
Приведенные примеры показывают, что это не только забавные игрушки, они представляют своеобразный сплав инженерной мысли и Искусства народных умельцев.
ПРАКТИЧЕСКАЯ РОБОТОТЕХНИКА
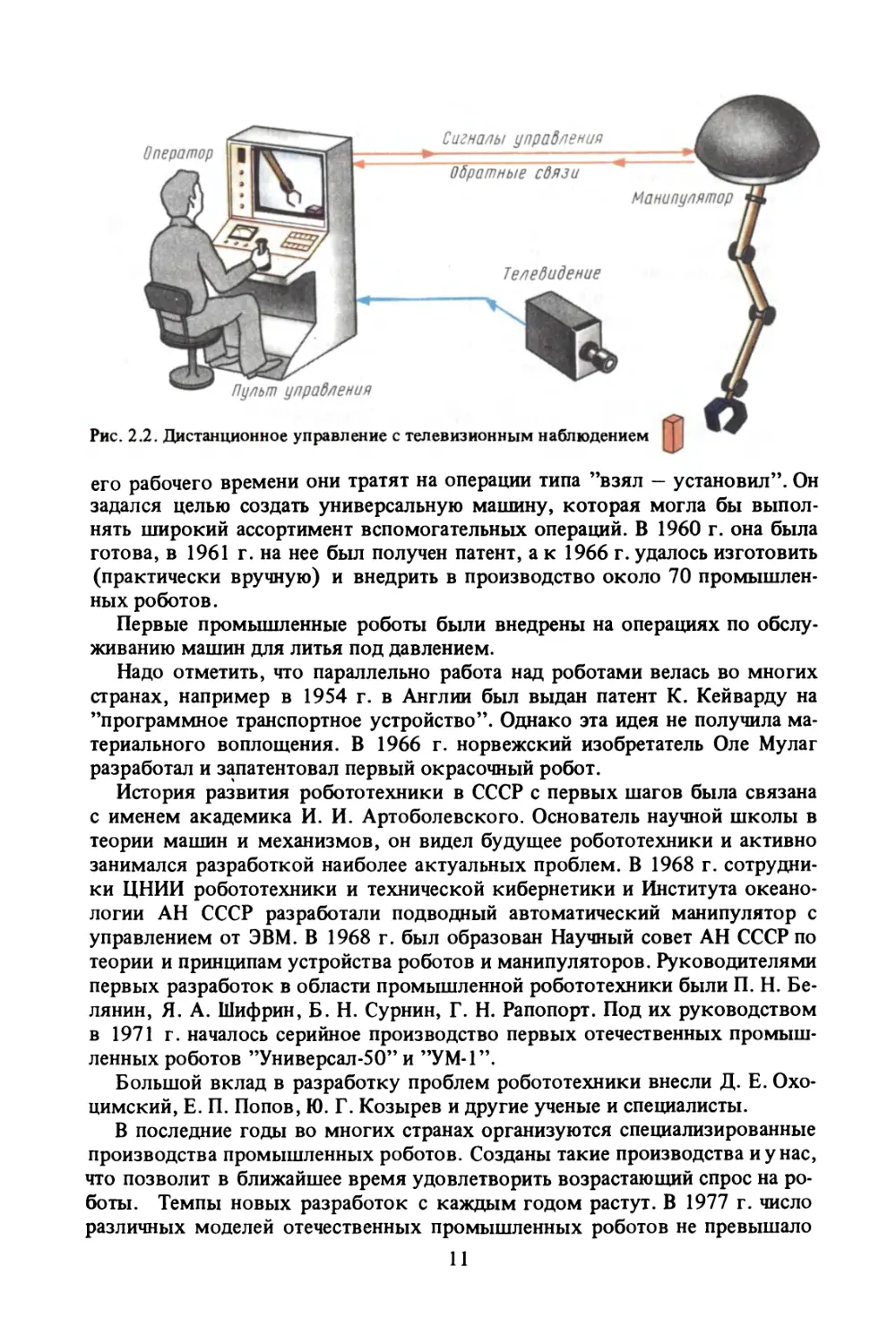
Начало практической робототехнике было положено созданием устройств для работы с радиоактивными материалами. В 1946 г. был создан копирующий манипулятор. С его помощью оператор мог, глядя через прозрачный экран, работать с сосудами, наполненными радиоактивными материалами. Комната, где помещались исполнительные механические руки, была изолирована от внешнего пространства, а оператор находился в безопасной зоне. Современные копирующие манипуляторы могут располагаться на больших расстояниях от человека-оператора, вне непосредственной их видимости. Наблюдение в таком случае производится телевизионными камерами, а управление — с помощью различных управляющих устройств (рис. 2.2).
Идея создания первого общепромышленного робота возникла в начале 50-х годов. Американский изобретатель Джордж Девол, наблюдая за работой квалифицированных рабочих, был поражен тем, что большую часть сво-
Оператор
Рис. 2.2. Дистанционное управление с телевизионным наблюдением |
его рабочего времени они тратят на операции типа ’’взял — установил”. Он задался целью создать универсальную машину, которая могла бы выполнять широкий ассортимент вспомогательных операций. В 1960 г. она была готова, в 1961 г. на нее был получен патент, а к 1966 г. удалось изготовить (практически вручную) и внедрить в производство около 70 промышленных роботов.
Первые промышленные роботы были внедрены на операциях по обслуживанию машин для литья под давлением.
Надо отметить, что параллельно работа над роботами велась во многих странах, например в 1954 г. в Англии был выдан патент К. Кейварду на ’’программное транспортное устройство”. Однако эта идея не получила материального воплощения. В 1966 г. норвежский изобретатель Оле Мулаг разработал и запатентовал первый окрасочный робот.
История развития робототехники в СССР с первых шагов была связана с именем академика И. И. Артоболевского. Основатель научной школы в теории машин и механизмов, он видел будущее робототехники и активно занимался разработкой наиболее актуальных проблем. В 1968 г. сотрудники ЦНИИ робототехники и технической кибернетики и Института океанологии АН СССР разработали подводный автоматический манипулятор с управлением от ЭВМ. В 1968 г. был образован Научный совет АН СССР по теории и принципам устройства роботов и манипуляторов. Руководителями первых разработок в области промышленной робототехники были П. Н. Белянин, Я. А. Шифрин, Б. Н. Сурнин, Г. Н. Рапопорт. Под их руководством в 1971 г. началось серийное производство первых отечественных промышленных роботов ”Универсал-50” и ”УМ-1”.
Большой вклад в разработку проблем робототехники внесли Д. Е. Охо-цимский, Е. П. Попов, Ю. Г. Козырев и другие ученые и специалисты.
В последние годы во многих странах организуются специализированные производства промышленных роботов. Созданы такие производства и у нас, что позволит в ближайшее время удовлетворить возрастающий спрос на роботы. Темпы новых разработок с каждым годом растут. В 1977 г. число различных моделей отечественных промышленных роботов не превышало
80, к 1980 г. было свыше 100 моделей роботов, а к 1982 г. — более 200 моделей.
В 1982 г. было заключено Генеральное соглашение по промышленной робототехнике между странами — членами СЭВ, на основании которого развиваются специализация и кооперация в области создания, производства и применения средств робототехники. Ввод в действие мощностей по производству промышленных роботов обеспечит увеличение парка роботов в стране предположительно до 100 тыс. шт. к 1990 г. Уже в настоящее время потребность только в простейших промышленных роботах первого поколения, по самым осторожным подсчетам, превышает 100 тыс. шт. и соответствует высвобождению не менее 250 тыс. рабочих, занятых главным образом тяжелым, монотонным и опасным трудом.
СОВЕРШЕНСТВОВАНИЕ РОБОТОВ
На первом этапе развития современной робототехники роботы представляли собой простые, легко перестраиваемые автоматические манипуляторы, работающие по жесткой программе. Такие роботы являлись по сутй автоматами с заданной программой, но в отличие от них имели механическую руку-манипулятор, приводимую в движение гидравлическим или электромеханическим приводом. С помощью манипу-
лятора, обладающего гибкостью человеческой руки, робот мог перемещать детали, производить сварку, окраску в пределах определенной рабочей зоны. Но эти операции он выполнял только при неизменных, заранее заданных положениях оборудования, инструмента, заготовок. Робот не мог взять деталь, положенную произвольно, не мог оценить ее конфигурацию, т. е. он не в состоянии оценить изменение обстановки и принять соответствующее решение. Такие роботы относят к роботам первого поколения (рис. 2.3).
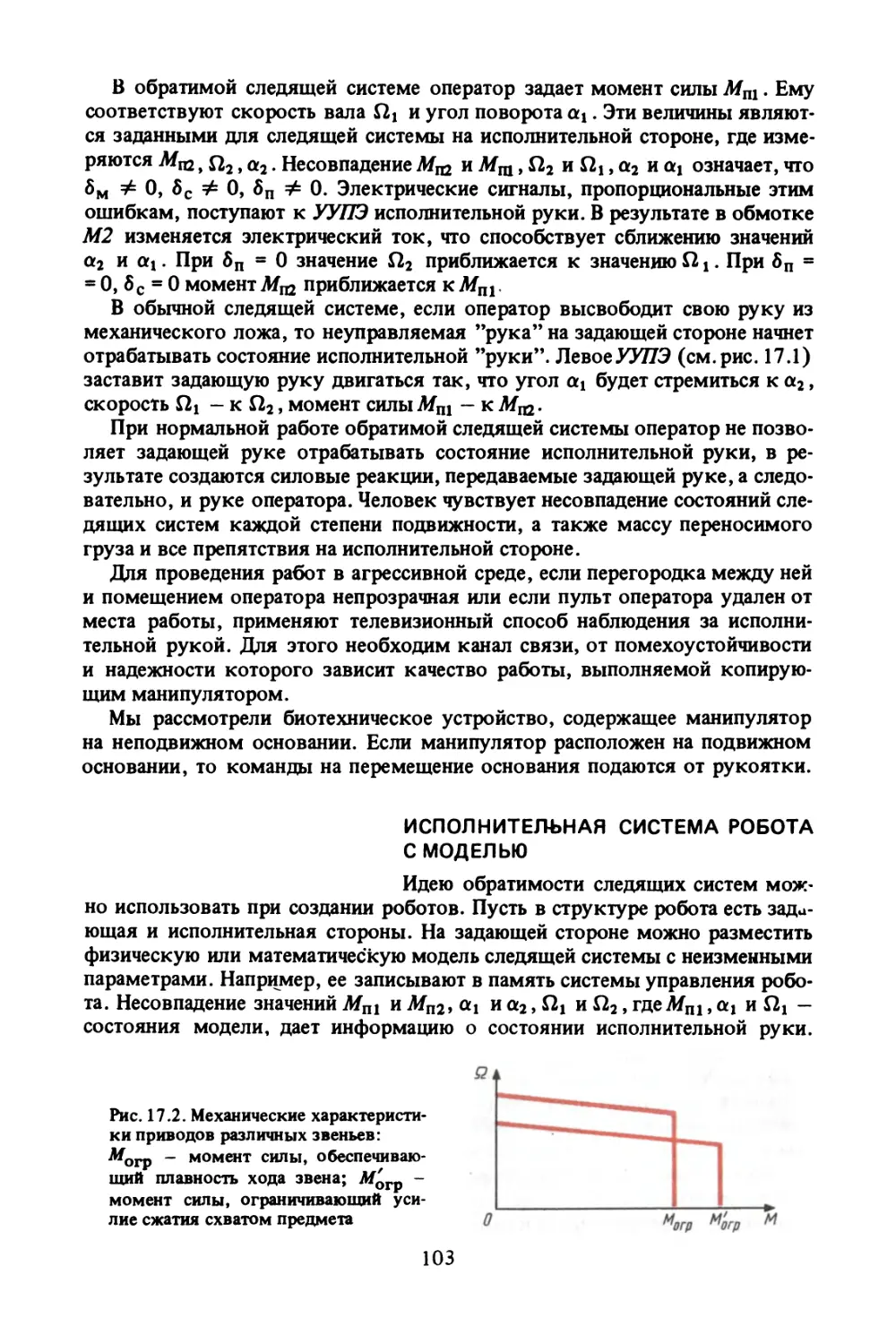
Они широко применяются в автомобильной промышленности при сварке и окраске кузовов автомобилей, в машиностроении на операциях штамповки и загрузки-разгрузки металлорежущего и литейного оборудования, для сборки различных узлов и т. д. На рис. 2.4 приведен пример использования робота при окраске деталей автомобиля.
Идея создания очувствленного робота первоначально была выдвинута в 1958 г. американским кибернетиком К. Шенноном, работавшим в Массачусетском технологическом институте. Аспирант института Г. Эрнст предло-
Рис. 2.4. Робот окрашивает деталь автомобиля
Рис. 2 5. Схват манипулятора Эрнста
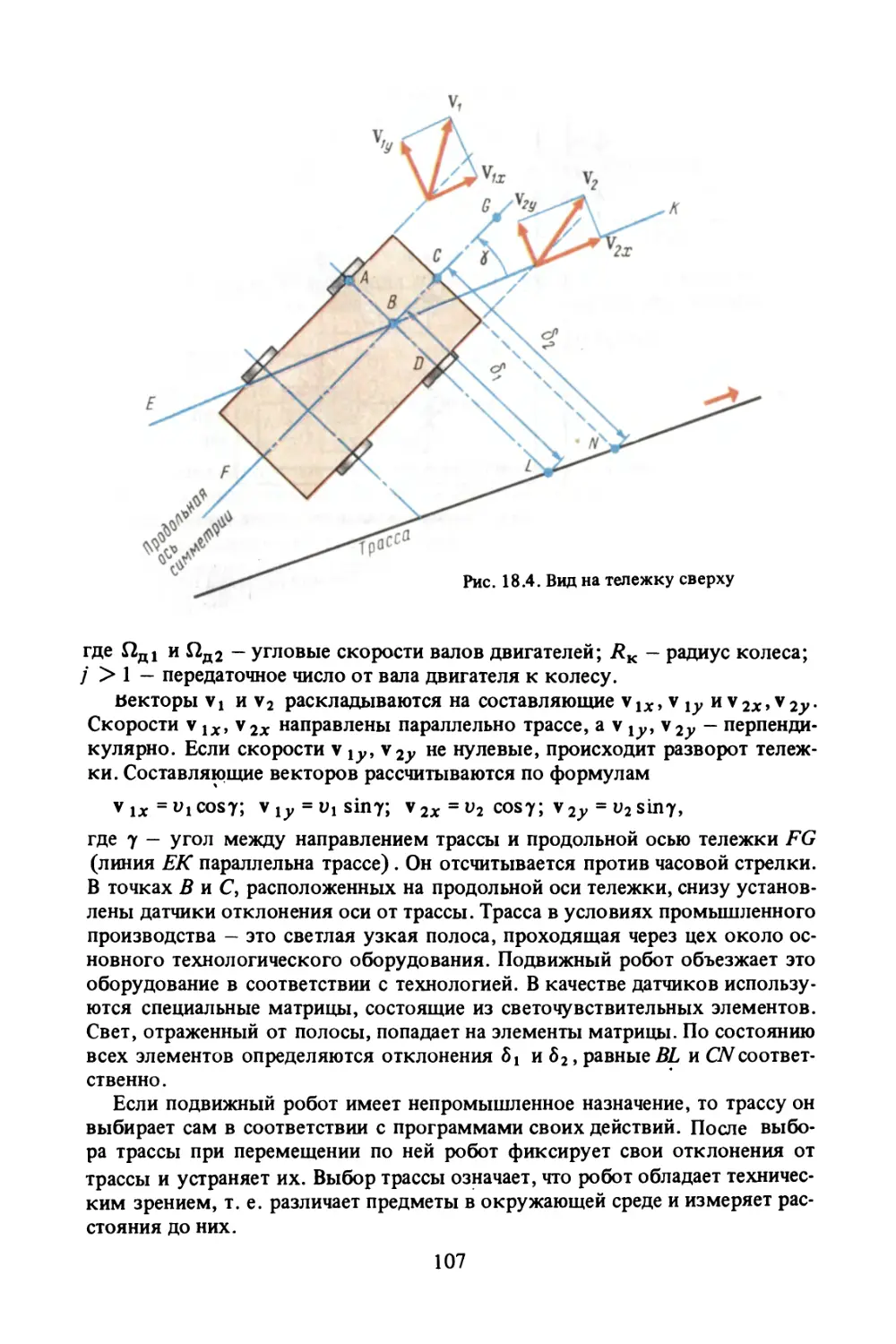
жил реализовать эту идею, опираясь на достижения в создании копирующих манипуляторов, и сконструировал очувствленную руку-манипулятор. В качестве управляющей системы он использовал ЭВМ. Звенья манипулятора приводились в движение с помощью электромоторов, а конфигурация руки оценивались датчиками потенциометрического типа. Сам манипулятор обладал пятью степенями подвижности, еще одну степень подвижности -ротацию (вращение вокруг собственной оси) — имел схват. Схват (рис. 2.5) был механическим двухпальцевым, и
на нем было смонтировано несколько датчиков. Датчики 1 позволяли определить положение предмета, датчики 2 — его наличие между пальцами и степень сжатия. На внешней стороне пальцев стояли контактные датчики 3 и фотодиоды 4. Датчики 2 сигнализировали о том, что рука наткнулась на препятствие. Фотодиоды 1 позволяли обнаруживать препятствие еще до соприкосновения с ним. Информация от всех
Рис. 2.6. Участок сборки (а)с тактильным адаптивным роботом и этапы сборочной операции (б):
- конвейер с основной деталью; 2 — устройства подачи деталей; 3 — основной манипулятор; 4 — вспомогательный
Q) манипулятор
Начало посадочной
работы
5)
Завершение посадочной работы
датчиков передавалась в ЭВМ. Рука Эрнста собирала разбросанные по поверхности стола кубики и укладывала их в ящик.
Роботы, оснащенные комплексом сенсорных средств (тактильными, визуальными и другими сенсорами), позволяющих получать информацию об изменяющихся свойствах внешней среды, относят к роботам второго поколения. Такие очувствленные роботы могут выполнять различные операции в условиях заранее неизвестных изменений окружающей обстановки, приспосабливаться к ним. Функции оператора сводятся к оценке обстановки, принятию общего решения и вы
даче роботу целевых указаний на языке команд. При этом последовательность работы исполнительных устройств робот выби-
рает сам, непрерывно адаптиру-
ясь к окружающей среде и к своему внутреннему состоянию (рис. 2.6).
Дальнейшее развитие робототехники шло путем усовершенствования функциональных возможностей роботов за счет вне- 2 дрения систем управления на базе микроЭВМ, использования средств очувствления. Большой задел в этом направлении был сделан еще в период с 1960 г. по 1970 г., когда во многих стра- 3 нах создавались экспериментальные установки — так называ
Рис. 2.7. Робот ’’Шейки”: 1 — антенна радиоканала;
2 — дальномер; 3 — телекамера; 4 — бортовое вычислительное устройство;
5 — блок управления телекамерой; 6 — датчик и, предупреждающие столкновение; 7 — направляющее колесо; 8 — приводное колесо
емые интегральные роботы, содержащие манипуляторы, управляющие ЭВМ, различные средства очувствления и общения с человеком-оператором. Такие роботы относят к роботам третьего поколения. Роль человека в управлении ими сводится лишь к принципиальному анализу обстановки, принятию решений, носящих обобщенный характер, и выдаче целевых указаний.
Роботы третьего поколения обладают высокими информационными возможностями, достаточными для реализации самостоятельного пространственного перемещения. Они могут планировать свои действия. Одним из первых роботов такого типа стал робоТ ’’Шейки” (рис. 2.7) Стенфордского исследовательского института (США). Этот робот был снабжен телевизионной камерой, приводами колес и управлялся с помощью ЭВМ, обмен информацией с которой осуществлялся по радио. Этот робот был безруким, поэтому его возможности ограничивались тем, что он мог передвигать какой-либо предмет, толкая его бампером в нужное место. Но путь к решению этой задачи робот выбирал сам. Робот обеспечивал выполнение задания, даже если оно было сформулировано в самом общем виде голосом человека-оператора. В СССР аналогичные задачи решались при разработке известного дистанционно управляемого робота ”Луноход-1”.
Создание роботов, обладающих способностями человека, — интеллектуальных роботов связано с решением проблемы ’’управление — интеллект”. К решению этой проблемы идут не одним путем. Два сравнительно независимых метода — нейрокибернетический и семиотический (метод исследования знаковых систем) — дают разные и интересные результаты.
Нейрокибернетический метод основывается на моделировании механизмов работы нервной системы, для которой характерна иерархическая обработка информации. Именно такой принцип положен в основу действия ней-роподобных структур, управляющих транспортными роботами.
Решение сложных задач автономного самостоятельного, целенаправленного действия робота требует своеобразного соединения процессов восприятия, формирования понятий, обобщения, планирования действий, реализации поведения. Такой робот должен осмысливать информацию, сравнивать ее со своими знаниями и действовать исходя из сравнения.
Умение столь высокого уровня реализуется семиотическими методами, с помощью которых формируют внутреннее представление, устанавливая отношения между понятиями и свойствами таких отношений. Робота как бы учат обобщать, формируя понятие более высокого уровня из простых, а для этого в него вводят знания с различными уровнями детализации. Именно семиотическому подходу к проблеме искусственного интеллекта мы обязаны появлением роботов, понимающих наш человеческий язык в пределах определенной темы и способных давать ответы.
Вопросы к уроку 2
1. Кто построил первый ообот в СССР?
2. Назовите наиболее известных робототехников за рубежом и в нашей стране.
3. Расскажите о руке Эрнста.
4. Перечислите этапы совершенствования роботов.
УРОК 3. ПЕРСПЕКТИВЫ РОБОТОСТРОЕНИЯ
ПРОБЛЕМА "ЧЕЛОВЕК - РОБОТ"
Совершенствование роботов в недалеком будущем повлияет на многие стороны жизни человеческого общества. Если у людей появятся в достаточном количестве роботы — его неутомимые помощники, то польза от этого будет заключаться не только в изобилии продуктов труда, произведенных роботами: человек в любой сфере общественного производства будет заниматься более интеллектуальным трудом. Однако пока еще не совсем ясны все последствия, к которым приведет процесс совершенствования роботов. Конечно, эти последствия будут не менее существенными, чем последствия овладения атомной энергией и изобретение ЭВМ. Ученые уже приступили к оценке уровня опасности роботов для людей в будущем. На вопрос: опасны ли роботы? — следует ответить: да.
А какие опасности существуют?
Роботы, как автомобили или самолеты, к сожалению, являются источниками повышенной опасности. Проблема обеспечения безопасности людей при массовом внедрении роботов стоит очень остро. В Японии уже не раз происходили трагедии, связанные с неуправляемыми действиями роботов. Во всех случаях администрация предприятий обвиняла пострадавших в нарушении правил техники безопасности. Сенсорные системы сорременных роботов содержат датчики безопасности, запрещающие движения роботов при появлении человека вблизи. Тем не менее соседство с роботом, особенно крупным, создает дополнительную психологическую нагрузку работающим.
Наибольшее недоверие люди будут испытывать к интеллектуальным роботам. Ведь после обучения их людьми роботы развиваться будут сами: изменится их долговременная память, выработаются утверждения, которые человеком не были сообщены. Действия роботов поэтому станут в чем-то неожиданными.
Существует опасность ухода в будущем какой-то части интеллектуальных роботов из-под контроля людей, если они будут способны самостоятельно обеспечивать свое питание и создавать себе подобных. Научно-фантастическая литература уже описывает параллельное существование людей с подчиненными им роботами и роботов, живущих независимо, возникновение антагонистических отношений между двумя названными кланами жителей Земли.
Вопросы безопасности труда людей в связи с использованием промышленных роботов рассматриваются в двух аспектах:
обеспечение безопасности людей при эксплуатации роботов; применение роботов как средства повышения безопасности производства. Первый аспект учитывает тот факт, что при определенных условиях роботы могут представлять собой источник повышенной опасности для людей. Причины этого следующие:
нарушение механической прочности робота;
отказы в системе управления робота;
отказы в исполнительной системе;
2 Зак. 820 17
ошибки в программировании устройств робота и в их настройке ;
потери объекта манипулирования;
нарушение обслуживающим персоналом правил эксплуатации роботов.
Последняя причина означает неразрешенный вход персонала в рабочую зону робота. Это особенно опасно, если отсутствуют индивидуальные средства безопасности самого персонала. Далее, обслуживающий персонал может нарушить инструкцию по эксплуатации робота, превысив массу манипулируемого груза над предельной грузоподъемностью. Наконец, условия эксплуатации в совокупности могут не соответствовать предусмотренным в паспорте робота (например, его эксплуатируют не в помещении, а под дождем и при порывах ветра). Можно говорить и о нервно-эмоциональном факторе у персонала как о причине аварий.
Мероприятия по обеспечению безопасности людей должны быть предусмотрены на всех этапах создания роботов и последующей эксплуатации. Для примера можно назвать следующие требования:
1) робот должен удерживать предмет при отключении питания робота от источника энергии;
2) если при программировании и наладке роботов необходимо пребывание персонала в их рабочих зонах, то для этих режимов предусмотреть снижение скоростей звеньев робота;
3) пульт управления роботом должен давать информацию о срабатывании защитах, о состоянии робота;
4) обслуживающий персонал обязан проверять исправность оборудования и устройств защиты перед началом рабочего дня.
Безопасность производства достигается повышением надежности роботов при проектировании и во время изготовления. Кроме того, важно снабдить каждый робот развитым устройством диагностирования, надежность которого должна быть на порядок выше надежности робота.
Каждое более позднее поколение роботов является более сложным по устройству. А усложнение сопровождается обычно уменьшением надежности. Следовательно, чем совершеннее робот, т. е. чем ближе он к интеллектуальному роботу, тем значительнее должны быть мероприятия по обеспечению надежности, осуществляемые конструктором.
Перечислим способы повышения надежности роботов: использование элементов в облегченных режимах;
защита элементов от кратковременных и длительных перегрузок; резервирование элементов робота.
Поясним названные способы. Недоиспользование возможностей материалов достигается завышением в 1,5 ... 2 раза номинальных мощностей элементов при проектировании робота. Это следует из проведенных многочисленных расчетов надежности устройств, которым соответствует минимум суммарных денежных затрат в течение всего срока службы робота.
Устройства защиты не допускают кратковременных и длительных перегрузок элементов и опасных внешних воздействий. Резервирование элементов эквивалентно первому способу — недоиспользованию возможностей материалов. На практике применяют разнообразные приемы по созданию той или иной избыточности с помощью резервирования. Например, устройства
управления некоторых промышленных роботов получают питание от своих автономных всегда заряженных аккумуляторов электроэнергии. Питание силовых частей производится от другого источника энергии.
СОВЕРШЕНСТВОВАНИЕ ПРИВОДОВ
В современных роботах, как правило, применяются источники энергоснабжения трех типов: электрические,гидравлические и пневматические. Электрические приводы работают на двигателях постоянного или переменного тока. Каждым звеном робота управляет отдельный электродвигатель. Многие изготовители роботов отдают предпочтение электрическим приводам, поскольку они бесшумны, потребляют относительно мало энергии и обеспечивают высокую точность перемещения механических узлов робота.
В гидравлических приводах движущее усилие создается жидкостью, например маслом, нагнетаемым под высоким давлением через трубки. Гидравлический привод, однако, имеет серьезный недостаток: его трубки могут давать течь. Насос гидравлического привода потребляет энергию не только во время работы, но и когда бездействует. Это вызвано необходимостью поддерживать давление жидкости. Таким образом, гидравлические системы обычно расходуют больше энергии, чем электрические. С другой стороны, гидравлические приводы позволяют поднимать грузы большей массы, и поэтому ими, как правило, оснащаются роботы, предназначенные для тяжелых работ.
Устройства с пневматическими приводами приводятся в движение сжатым воздухом. Но они не обеспечивают достаточной точности управления при сложных маневрах. Кроме того, такие механизмы создают сильный шум, а в их воздуховодах могут возникать течи. Пневматические приводы чаще всего применяют в тех случаях, когда робот выполняет требуемые операции посредством ряда прямолинейных перемещений.
Высокие требования к точности и быстродействию работы робота заставляют искать оригинальные решения в разработке новых типов двигателей. Результатом разработок явилось создание электродвигателей постоянного тока с гладким якорем и дисковым ротором, линейных магнитоэлектрического типа, двухкоординатных линейных шаговых двигателей на магнитовоздушной подвеске, а также пьезо- и виброприводов.
Совершенствование структур электрических приводов ведет к слиянию электродвигателей и подвижных органов роботов. Ранее существовавшие передаточные механические связи между ними (редукторы) должны исчезнуть. Известен вариант распределенного электропривода с поверхностными электромашинами. Подвижное звено робота армировано активной решеткой из проводников. Решетка — распределенная обмотка двигателя. Это звено своей цилиндрической или сферической поверхностью или плоскостью перемещается относительно другого звена. Поверхность одного звена — статор, а поверхность другого — ротор. Электрический ток, протекающий в каждом проводнике активной решетки, переключается своей микросхемой. Каждому сочетанию всех токов проводников соответствует движение поверхности ротора вдоль поверхности статора к своему установившемуся положению. Отдельные ячейки двигателя, распределенного в звене робота,
Рис. 3.1. Схема распределенного электропривода:
1 — подвижная часть; 2 — неподвижная часть; 3 — якорь
представляют собой асинхронные, либо синхронные, либо постоянного тока электромашины. На рис. 3.1 приведена схема распределенного электропривода.
Габаритные размеры распределенного электропривода должны быть повышенными. Однако этот недостаток устраним. Уже предложены варианты
высокочастотной электромеханики, в которых ’’поверхностные” электромашины выполняются по ’’принципу наличия третьих обмоток”, предназначенных для компенсации магнитных потоков рассеяния. В результате габаритные размеры увеличиваются незначительно.
Итак, названа одна из перспектив роботостроения — слияние механических частей и двигателей. У гидравлических и пневматических роботов это слияние практически существует. Для электромеханических роботов наибольшая гибкость в управлении нагрузками микрообъемов может быть достигнута распределенностью двигателя в объеме робота.
Рассуждая далее, приходим к роботу на искусственных мышцах. Если его подвижный орган построен из избыточного числа искусственных мышц,
то выход из строя части их означает, что орган можно продолжать эксплуатировать. Но кроме выигрыша в надежности робота появляется огромное число возможных состояний подвижного органа. Можно будет совершать такие движения, которые для роботов с сегодняшними механическими руками немыслимы. Появится возможность воспроизводить удивительные механизмы живой природы, свойственные, например, насекомым, пресмыкающимся, рыбам, птицам. На их основе человек сможет конструировать сложные, комплексные механизмы. Наконец, человек будет в состоянии предложить механизмы, не имеющие аналогов в живой природе, составив их из искусственных мышц.
Создание искусственных мышц зависит от специалистов физической химии, микроэлектроники, от инженеров-технологов. Один из вариантов такой мышцы показан на рис. 3.2. Для ее сокращения нагревают адсорбент 7 с помощью спирали 6. Для этого на концах направляющих элементов 5, 4 создают между контактами 7, 2 разность потенциалов. Из адсорбента выделяется вещество, подобное газу, и деформирует оболочку 5, сближая направляющие 3, 4, и мышца сокращается. После снятия разности потенциалов адсорбент охлаждается и мышца возвращается в исходное состояние. Другая мышца — это малой мощности движитель, состоящий из большого числа (например, из нескольких тысяч) параллельно включенных элементов, т. е. импульсных движителей — волокон, объединенных в пучки. Требуемое изменение во времени мышечного усилия обеспечивается после-
Рис. 3.2. Искусственная мышца привода робота:
1,2— электрические контакты; 3,4 — направляющие элементы мышцы; 5 — оболочка; 6 — спираль нагревателя; 7 — специальный наполнитель-адсорбент
довательным включением двигательных единиц. Двигательную единицу образуют группы возбужденных волокон. Мощность, развиваемая мышцей, при постоянном управляющем воздействии максимальна при средних значениях силы и скорости и стремится к нулю при стремлении к максимуму силы или скорости. Если копировать мышцу человека, то надо иметь в виду, что среднее значение мощности, развиваемой ею, составляет примерно 20 Вт.
Каждой мышце должна соответствовать мышца-антагонист. Если данная мышца сгибает сустав, то мышца-антагонист - разгибает. Получаем возможность осуществления реверсов в движении сустава. Когда одна из мышц, сокращаясь, осуществляет движение одной части сустава по отношению к другой части в данном направлении, то другая мышца растягивается, подготавливаясь к выполнению движения в противоположном направлении.
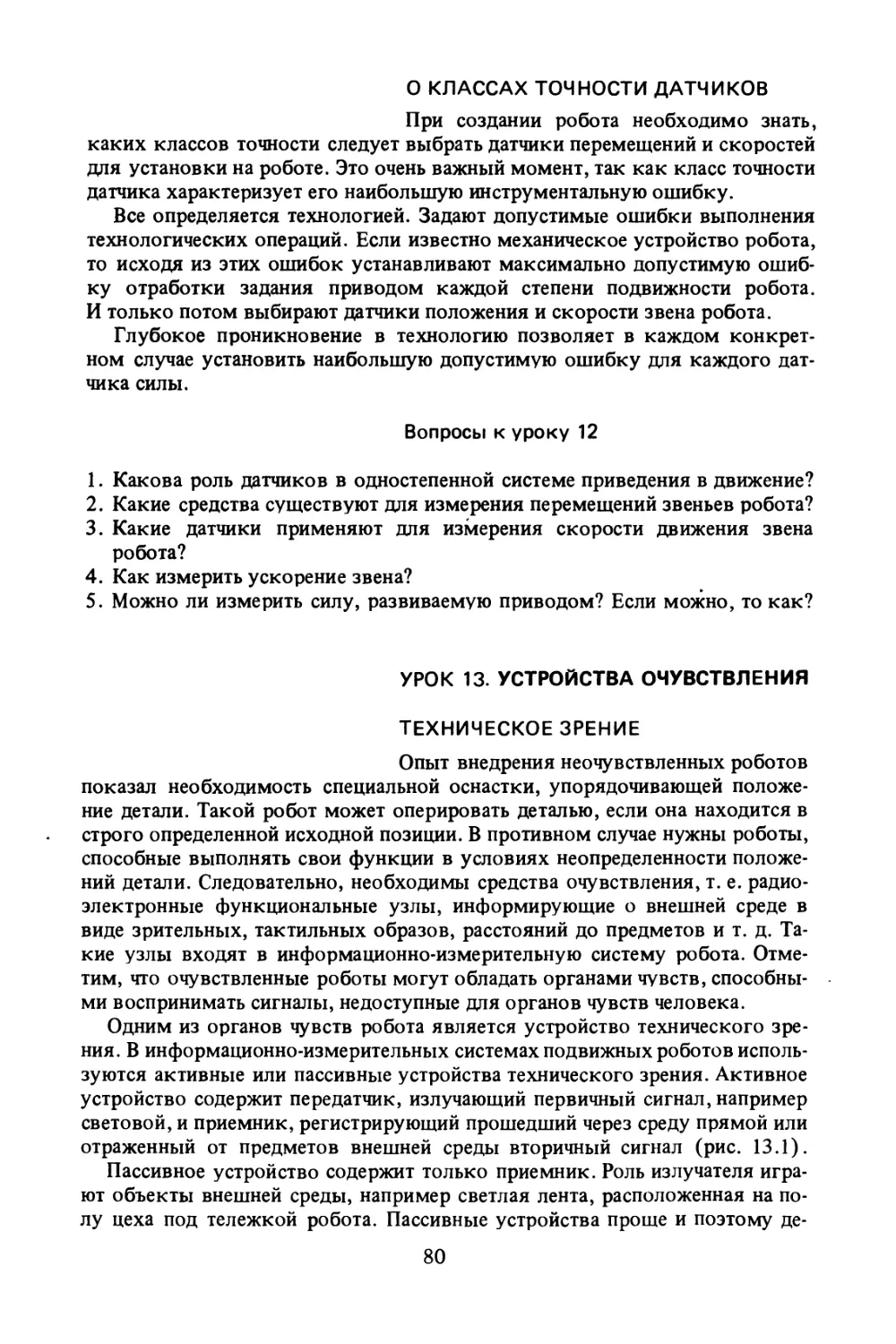
УСТРОЙСТВА ТЕХНИЧЕСКОГО ЗРЕНИЯ
Видеть — значит воспринимать полученную информацию. Известны следующие представления о механизме зрительного восприятия: пассивное получение информации о распределении света в окружающей среде; активное возбуждение эталонных состояний распознающей части устройства, когда в совокупности эталонных состояний появляется образ наблюдаемого предмета. В соответствии с более совершенным представлением Гельмгольца восприятие — это взаимодействие сигналов датчиков с образами, хранящимися в памяти. Речь идет об экстраполяции образов. Очевидно, что механизм зрительного восприятия соответствует всем трем представлениям. Сегодня еще не ясно, как в распознающей части устройства технического зрения будет происходить взаимодействие сигналов датчиков и образов, а также образов между собой. Вообще алгоритмический аспект этого наиболее труден. Отыскание алгоритмов неразрывно связано с реализуемостью структур устройств технического зрения.
В настоящее время принимаются попытки воссоздания основных особенностей трехмерных сцен с помощью одного или нескольких двухмерных изображений, например голограмм. Но анализ получаемой человеком визуальной информации для техники пока чрезвычайно труден из-за непомерно большого ее объема. Он требует для* обработки от 1 до 100 млрд, операций в секунду. Поэтому пока не может быть и речи об обработке таких объемов информации в реальном масштабе времени. Однако, даже располагая
произвольным временем, в системе технического зрения невозможно всегда правильно интерпретировать получаемую визуальную информацию. Это объясняется тем, что обработка визуальной информации представляет собой сложный процесс, протекающий не столько в форме логических суждений, поддающихся алгоритмизации, сколько в виде подсознательных условно-рефлекторных процессов. В сознании человека имеется обобщенный образ каждого предмета, что облегчает его идентификацию с конкретно воспринимаемым объектом, несмотря на различные освещенность, фактуру и окраску предметов, их взаимное расположение, размеры. Человек может распознать границы отдельных предметов и отнести их к обобщенному классу понятий. В этом ему помогают бинокулярность зрения, восприятие цветовой окраски, аккомодация глаза, возможность изменить место обзора, высокая разрешающая способность и огромный диапазон чувствительности глаза, наличие в сетчатке рецепторов, реагирующих на движение.
В настоящее время ведутся работы по созданию устройств для обработки многообразной визуальной информации в реальном масштабе времени. Ученые пытаются осуществлять параллельную обработку больших объемов информации. Например, используют идеи американского ученого Ф. Розенблатта, предложившего модель зрительного восприятия и распознавания — персептрон. Это устройство работает в двух режимах: обучения и распознавания. В режиме обучения учитель предъявляет персептрону предмет и сообщает, к какому классу он принадлежит. По этим данным строится решающее правило внутри персептрона. В режиме распознавания персептрону предъявляются разные предметы, которые он классифицирует.
Из исследований устройств зрения животных известно следующее. Импульсы светочувствительных клеток сетчатки глаза преобразуются сначала двумя последовательно расположенными слоями клеток. Они принадлежат сетчатке и называются ганглиозными клетками. Импульсы по зрительному нерву, образованному аксонами клеток, идут в мозг. В результате предварительной обработки зрительной информации в сетчатке глаза ганглиозными клетками ее объем уменьшается на два порядка. Эта обработка имеет целью выявить те особенности внешней среды, которые наиболее существенны для формирования поведения, и в частности для оперативной реакции организма на различные изменения во внешней среде. Например, у лягушки имеются четыре типа ганглиозных клеток, ориентированных соответственно на выявление границы света и тени, движущейся такой границы, темных мест и выпуклого края темного предмета. Эти признаки важны для лягушки при ловле насекомых и для восприятия опасности. Если движущийся объект велик, то лягушка спасается, убегая. У кошки, которая, охотясь, долго следит за своей жертвой, готовясь к прыжку, важны ганглиозные клетки, ориентированные на усиление контрастности изображения. Ганглиозные клетки разных типов равномерно распределены по всей сетчатке. Аксоны клеток тянутся к зрительной коре мозга, где не воспроизводится копия наблюдаемой сцены, а возникает пространственно-временная картина соответствующих признаков. Представление о внешнем мире с позиции возможных реакций организма формируется на более высоком уровне на основе сопоставления зрительной и других видов сенсорной информации (слуховая, тактильная и т. д.).
Эти сведения из живой природы уже используются конструкторами роботов.
Так, адаптивная система распознавания образов (рис. 3.3), построенная по типу нейронных сетей мозга, обрабатывает изображение примерно тех же размеров и разрешения, что и кадр на экране домашнего телевизора с сеткой 512 X 512 элементов изображения. Каждый логический компонент системы (на практике они представляют собой стандартные микросхемы запоминающих устройств с произвольной выборкой — ЗУПВ) принимает информацию от восьми датчиков (соответствующих элементам отображения), которые расположены в произвольных узлах сетки. Процесс обучения системы распознавания довольно прост: ее наводят на отображаемый объект и нажимают клавишу ’’обучение”, которая соединена со всеми произвольно расположенными элементами общим числом 30 тыс.
В результате ’’обучения” каждый логический элемент приобретает способность выдавать двоичную единицу только в том случае, если на него поступает одна и та же последовательность из восьми двоичных цифр. Однако для разных изображений на экране одна и та же последовательность обычно не повторяется. Даже если сами изображения идентичны, то все равно вследствие интерференции, а также влияния других факторов двоичная информация на входе претерпевает некоторые изменения. Система каждому новому изображению присваивает определенное количество очков, которое по сути показывает, насколько новое изображение соответствует заученному. Такая система за доли секунды способна распознать человеческие лица и даже отличить* улыбающееся лицо от хмурящегося.
Сигналы, поступающие от других нейронод
Выходная
линия
6)
Рис. 3.3. Адаптивная система распознавания образов, созданная по типу нейронных сетей:
а — нервная клетка (нейрон) ; б — элементарное запоминающее устройство с произвольной выборкой; в — четыре соединенных запоминающих устройств с произвольной выборкой, образующие одноуровневую нейронную сеть
УСТРОЙСТВА ПАМЯТИ РОБОТА
Запоминание — это процесс организации состояния множества элементов. В наиболее грубом виде, на макроуровне, состояния элементов памяти — это положения движков потенциометров, роторов трансформаторов и т. д. Стремление создать устройство памяти, сравнимое по емкости с аналогичными устройствами у животных и человека, приводит к признанию необходимости управлять взаимным расположением каких-то весьма малых элементов на микроуровне. Речь может идти, например, об управляемой форме нитей, спиралей, о взаимном расположении частиц. Наиболее надежным способом закрепления достигнутого взаимного расположения микроэлементов является химический способ.
Надо снабдить роботы надежными и малогабаритными устройствами организуемой памяти. Сегодня память организуется и хранится на основе ферромагнитных элементов, она может быть представлена комбинацией электрических зарядов в полупроводниковом устройстве. Память можно соз дать и на основе химических процессов. А как организована память у человека? На этот вопрос биохимические теории отвечают, что основное значение в хранении мозгом информации принадлежит изменениям химического состава нуклеиновых кислот и белков соответствующих нейронов. Экспериментально было показано, что нервное возбуждение живого существа изменяет состав рибонуклеиновой кислоты. Это ведет к образованию структуры белка, соответствующего данному возбуждению. Под влиянием нервного возбуждения возникает новый белок, являющийся материальным следом — отпечатком опыта. Когда снова возникает сходное возбуждение, оно активирует этот белок.
Изучение нейрохимических механизмов памяти ведется в настоящее время специалистами с точки зрения белкового синтеза, а также с целью выявления значения разных веществ, осуществляющих передачу возбуждения в нервной системе. Законченной теории процессов памяти еще нет. Представление о механизмах кратковременной и долговременной памяти все еще носит характер гипотез. Точно можно сказать, что дело не только в химических процессах. Процессам памяти соответствуют разнообразные механизмы, расположенные на разных уровнях мозга. Здесь восприятие устройством памяти поступающей информации, процесс ее закрепления и переработки, последующее хранение, воспроизведение. По-видимому, в наиболее совершенных роботах память будет реализована наиболее надежным химическим способом.
Деление памяти на кратковременную и долговременную соответствует живой природе. Известно, что кратковременная память легкоранима, когда происходит фиксация следа событий памяти. Если мозг подвергается сильному электрическому раздражению, химическому воздействию или механической травме, то фиксация нарушается и человек забывает события, непосредственно предшествовавшие этому воздействию. По мнению исследователей, на все события, происходящие за 30 ... 60 мин и более до неблагоприятного воздействия, память сохраняется, так как они прошли период фиксации (консолидации) . После того как этот период завершился, информация сохраняется очень прочно. Никакие внешние физические и химичес-
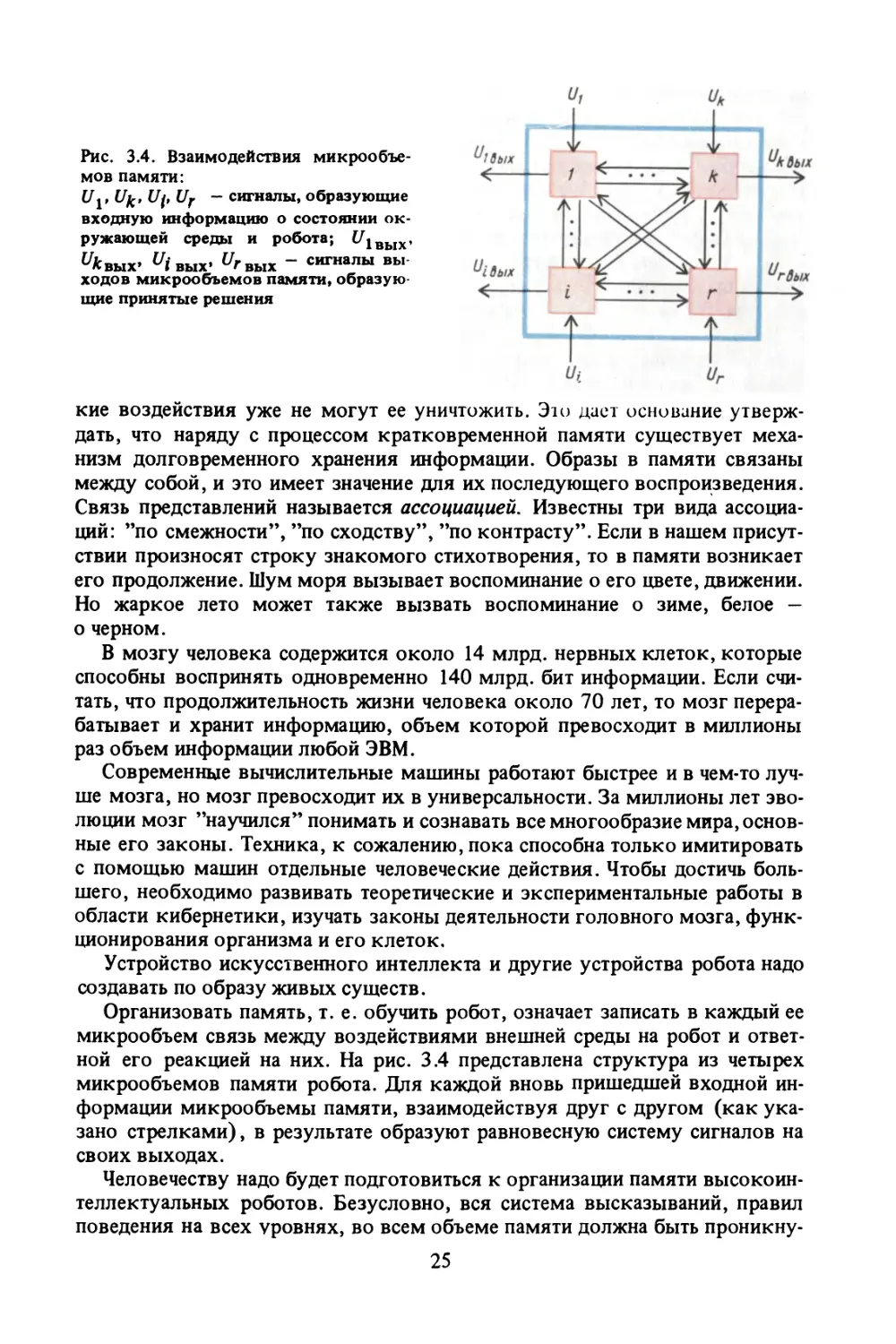
Рис. 3.4. Взаимодействия микрообъемов памяти:
t/p Ufa, Uj, Ur — сигналы, образующие входную информацию о состоянии ок* ружающей среды и робота; ^1вых, ^вых' ^вых> иГвых - сигналы вы ходов микрообъемов памяти, образующие принятые решения
кие воздействия уже не могут ее уничтожить. Эю дает основание утверждать, что наряду с процессом кратковременной памяти существует механизм долговременного хранения информации. Образы в памяти связаны между собой, и это имеет значение для их последующего воспроизведения. Связь представлений называется ассоциацией. Известны три вида ассоциаций: ”по смежности”, ”по сходству”, ”по контрасту”. Если в нашем присутствии произносят строку знакомого стихотворения, то в памяти возникает его продолжение. Шум моря вызывает воспоминание о его цвете, движении. Но жаркое лето может также вызвать воспоминание о зиме, белое — о черном.
В мозгу человека содержится около 14 млрд, нервных клеток, которые способны воспринять одновременно 140 млрд, бит информации. Если считать, что продолжительность жизни человека около 70 лет, то мозг перерабатывает и хранит информацию, объем которой превосходит в миллионы раз объем информации любой ЭВМ.
Современные вычислительные машины работают быстрее и в чем-то лучше мозга, но мозг превосходит их в универсальности. За миллионы лет эволюции мозг ’’научился” понимать и сознавать все многообразие мира, основные его законы. Техника, к сожалению, пока способна только имитировать с помощью машин отдельные человеческие действия. Чтобы достичь большего, необходимо развивать теоретические и экспериментальные работы в области кибернетики, изучать законы деятельности головного мозга, функционирования организма и его клеток.
Устройство искусственного интеллекта и другие устройства робота надо создавать по образу живых существ.
Организовать память, т. е. обучить робот, означает записать в каждый ее микрообъем связь между воздействиями внешней среды на робот и ответной его реакцией на них. На рис. 3.4 представлена структура из четырех микрообъемов памяти робота. Для каждой вновь пришедшей входной информации микрообъемы памяти, взаимодействуя друг с другом (как указано стрелками), в результате образуют равновесную систему сигналов на своих выходах.
Человечеству надо будет подготовиться к организации памяти высокоинтеллектуальных роботов. Безусловно, вся система высказываний, правил поведения на всех уровнях, во всем объеме памяти должна быть проникну
та идеей подчинения роботов людям. Алгоритмическое обеспечение таких роботов, запреты, записанные в их памяти, должны быть прямо-таки пронизаны человеколюбием, осторожным обращением с человеком, предупредительностью. Идея сохранения жизни самого робота формируется так: ”Я должен жить, пока этого требуют люди, я перестану жить тогда, когда люди прикажут”. Сохранение жизни любого другого человека контролируется высказыванием, многократно записанным в памяти: ’’Если приказано каким-либо человеком осуществить угрозу жизни другому человеку, то этот приказ выполнять нельзя, это ошибка”. Поэтому потребуются разработка и введение в память робота высказываний-защит, которые ограничат его поведение.
Можно предположить, что человечество однажды преодолеет барьер — психологическую нагрузку — и привыкнет к повседневному общению с совершенными роботами. Доверие к роботам появится у человечества тогда, когда устройства искусственного интеллекта станут столь надежными, что будут нормально функционировать при условии, что все остальные части робота разрушены.
Роботы войдут в быт человека: будут убирать помещения, готовить еду, работать на садовом участке, участвовать в играх. Роботизируются промышленность, сельское хозяйство, научные исследования. Также важны социальные последствия роботизации труда — уменьшение численности людей (а может, и полная их замена), занятых тяжелым физическим трудом.
Вопросы к уроку 3
1. Какие опасности существуют в связи с будущей роботизацией труда?
2. Перечислите способы повышения надежности роботов.
3. Расскажите об идее создания роботов на основе искусственных мышц.
4. Что известна о принципах узнавания предметов, наблюдаемых живыми организмами?
5. Какой способ хранения информации наиболее надежен?
УРОК 4. РОБОТЫ В ГИБКИХ ПРОИЗВОДСТВЕННЫХ СИСТЕМАХ
ГИБКИЕ АВТОМАТИЗИРОВАННЫЕ ПРОИЗВОДСТВА
Основным направлением применения роботов в промышленности являются гибкие автоматизированные производства.
История гибкой автоматизации промышленности началась с появления металлорежущих станков с числовым программным управлением (ЧПУ). Они представляют собой основное технологическое оборудование с быстросменяемыми программами действия. По существу, в механообработке станки с ЧПУ являются основой для создания гибких автоматизированных производств с помощью роботов. Эти производства уже позволили уменьшить число занятых людей примерно в 10 раз, в 2 ... 3 раза сократить производственные площади.
Распространение в мире гибких автоматизированных производств представляет важнейший этап развития промышленного производства. Следующий этап — добавление автоматизированной технологической подготовки производства.
Гибкостью производства называется его способность быстро и без существенных затрат труда и средств переналаживаться на изготовление новой или модернизированной продукции по новой технологии.
Создание гибких производств стало возможным благодаря появлению достаточно производительных ЭВМ и микроЭВМ, обладающих большими объемами памяти и относительно низкой стоимостью, разработке достаточно эффективных управляющих программ для станков с ЧПУ и для роботов. Технологической основой для создания гибких производств явилось внедрение групповой технологии.
Групповое производство - это производство, организованное по принципу объединения в участки, линии разнородного оборудования, обеспечивающего полную обработку группы деталей. Существуют различные системы классификации деталей. Детали объединяют в группы таким образом, чтобы любая из них могла быть обработана выбранным набором технологических операций. Во внимание принимаются габаритные размеры деталей, определяющие типаж оборудования и размеры оснастки.
Создание гибкого производства начинается с определения перечня деталей, которые предназначены для изготовления. Далее разрабатываются функциональная, технологическая и информационная структуры гибкого производства и конфигурация вычислительной сети с распределением решаемых в ней задач. Затем разрабатываются алгоритмическое и программное обеспечение и создаются компоновочные схемы, содержащие конкретное оборудование. Весьма тщательно выбираются для деталей общие признаки на простановку размеров, признаки на выбор исходных заготовок.
Технологическая оснастка для группового производства должна быть простой и быстро переналаживаемой. И кроме того, должна быть решена за
дача ее унификации. Под унификацией понимается использование ограниченного количества приспособлений (пресс-форм, штампов, инструментов), которое, однако, обеспечивает быструю переналадку оснастки для обработки любой детали из группы.
Конечной целью разработки и внедрения гибких производств является резкое увеличение производительности труда. Можно получить увеличение отдачи станков, т. е. повышение их производительности на 80 . . . 200%, и сократить время их обслуживания на 60 ... 70%. Такое гибкое автоматизированное производство позволит в дальнейшем создать заводы-автоматы, работающие круглосуточно без участия людей.
РОБОТИЗИРОВАННЫЕ ТЕХНОЛОГИЧЕСКИЕ КОМПЛЕКСЫ
Основу гибких автоматизированных производств составляют роботизированные технологические комплексы. Они представляют собой совокупность технологического оборудования, промышленных роботов и средств оснащения, функционирующих в автоматическом режиме при выполнении технологических операций.
Классификацию роботизированных комплексов принято осуществлять по выполняемому технологическому процессу: например, если робот устанавливает радиоэлементы на печатную плату, то это комплекс сборки; если робот сваривает детали, то это комплекс сварки, и т. д.
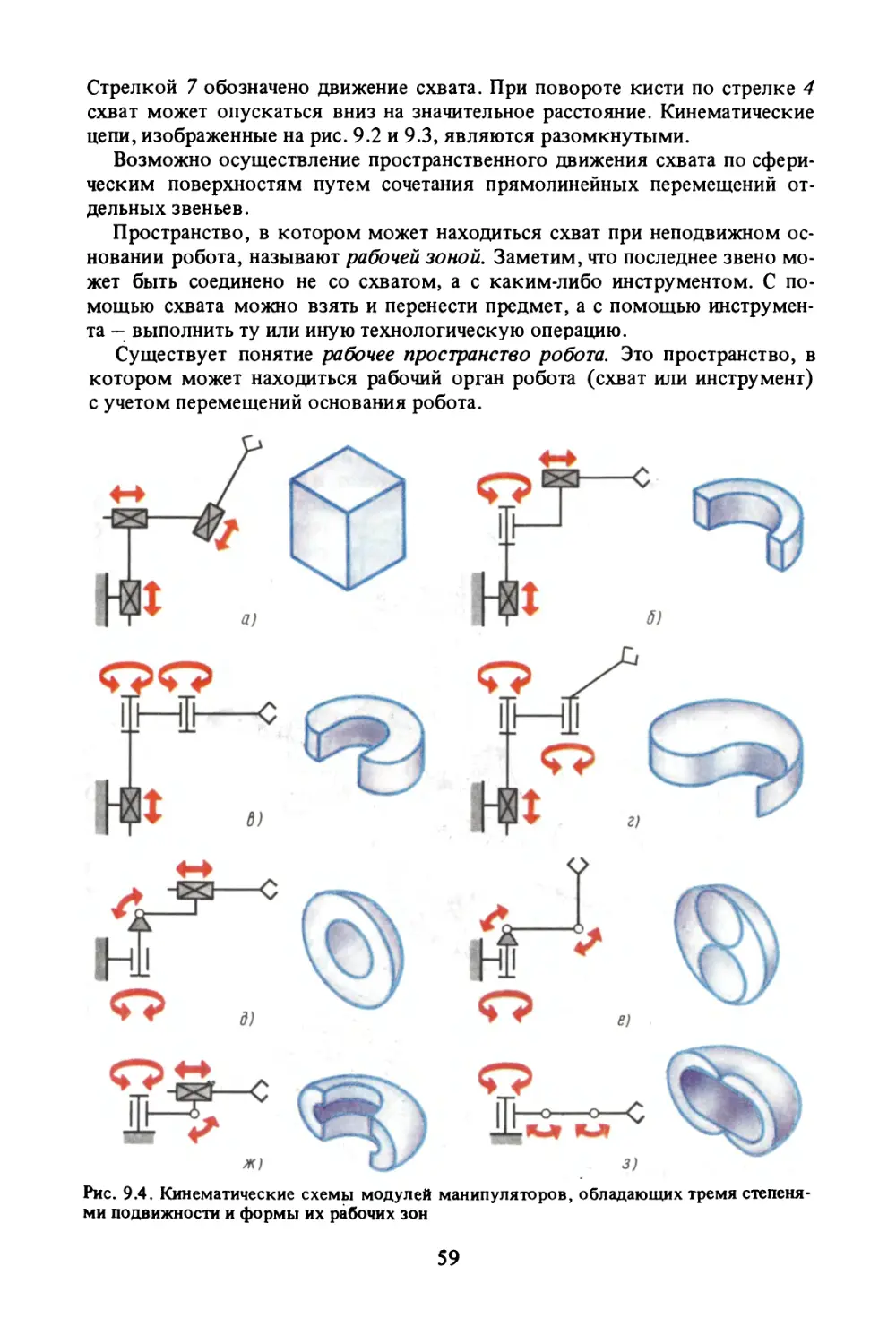
Рис. 4.1. Гибкий производственный модуль:
1 — видеосистема; 2 — детали; 3 — робот; 4 — транспортная тележка
Рис. 4.2. Гибкий производственный модуль для обработки цилиндрических деталей: 1 — робот; 2 — опорная система; 3 — схват робота; 4 — токарный станок; 5 — транспортер ; 6 — тара с заготовками и деталями
В роботизированном технологическом комплексе промышленные роботы обеспечивают загрузку и разгрузку технологического оборудования материалами, заготовками, изделиями и т. п. или непосредственно выполняют технологическую операцию.
Средства оснащения комплекса могут представлять собой устройства накопления заготовок, ориентации, метрологического обеспечения, учета выдачи изделий, обеспечивающие его работу в автоматическом режиме.
Рис. 4.3. Линия автоматической сборки кабин: 1 — кабина автомобиля; 2 — транспортный поддон; 3 — робот, наносящий мастику;
4 — робот, устанавливающий узлы кабины
Роботизированный технологический комплекс состоит, как правило, из нескольких гибких производственных модулей, каждый из которых выполняет одну технологическую операцию.
В состав такого модуля входят единица технологического оборудования и один промышленный робот (рис. 4.1).
Промышленный робот, подсоединенный к видеосистеме, может произвести выборку беспорядочно уложенных деталей и передать их на транспортеры для дальнейшей обработки или уложить в промежуточные накопители. Оборудованный соответствующим сменным инструментом робот может быть использован для операций механической обработки, таких как снятие заусениц, обрезка металлических и пластмассовых листовых материалов, сверление, болтовое крепление деталей, нанесение клеев и герметиков.
Гибкие производственные модули для изготовления деталей, имеющих форму цилиндра, строятся на базе токарных станков с ЧПУ с многоинструментальной револьверной головкой или развитой автоматизированной системой смены инструмента. Отличаются такие производственные модули в основном роботом, осуществляющим загрузку заготовок в патрон станка и выгрузку из него изделия, и вспомогательным устройством. Различают модули со встроенным роботом, с роботом портативного типа, обслуживающим один или два станка, а также модули с универсальным роботом.
В зависимости от сложности различных технологических операций могут применяться роботы любого рода — программные, адаптивные, интеллектуальные. Необходимо обоснованно решить, где достаточно использовать простые программные, а где желательно установить адаптивные роботы с конкретными видами очувствления. На рис. 4.2 приведен гибкий производственный модуль с роботом портативного типа, обслуживающим один станок.
Несколько роботизированных гибких производственных модулей, связанных между собой транспортными средствами и системой управления, могут быть объединены в роботизированную технологическую линию (рис. 43).
Для связи различных гибких модулей и технологических линий применяются автоматические напольные тележки и подвесные транспортные устройства. Напольные тележки могут перемещаться по рельсам и без них. Например, вдоль линии станков могут быть нанесены две ярко-белые полосы с расстоянием между ними, несколько меньшим ширины тележки. В пе-
редней части ее, внизу установлены фотоматричные ’’глаза”. Они следят за белыми полосами при движении тележки и передают сигналы уклонений в автоматическую систему управления движением. Тележка движется по заданным адресам станков и других агрегатов цехового оборудования. У каждого технологического модуля робот снимает с тележки те детали, которые этому модулю предназначены. Обработанные детали упорядоченно складываются роботом и отвозятся тележкой по следующему адресу. Существуют системы напольных безрельсовых автоматических тележек, двигающихся по проложенному в полу высокочастотному кабелю.
Подвесные транспортные устройства, двигающиеся по направляющим, например по двутавровой балке, выполняют аналогичные рабочие функции.
Номенклатура обрабатываемых изделий и быстрота переналадки робототехнического комплекса являются показателями его эффективности. Каждый робототехнический комплекс характеризуется предельными значениями этих параметров, вне рамок которых данный комплекс оказывается экономически невыгодным. Это означает, что в некоторых случаях следует отказаться от роботизации производства и применять специальные автоматы. В общем случае в робототехническом комплексе предполагается
Рис. 4.4. Роботизированный комплекс сборки печатных плат
Рис. 4.5. Робототехнический комплекс точечной сварки
наряду с устройством централизованного управления наличие местных устройств управления. Такая система управления может быть одноуровневой, когда сигналы управления, поступающие из центра, и сигналы, вырабатываемые местными устройствами управления, комбинируются на одном уровне, и многоуровневой (иерархической), когда местные устройства управления подчинены центру.
Соответствующим образом решаются вопросы, связанные с выбором и компоновкой технологического оборудования и оснастки, поэтому робототехнические комплексы могут значительно отличаться один от другого.
В роботизированном комплексе сборки печатных плат (рис. 4.4) необходимые для сборки детали поступают из магазинного питателя J, состоящего из 40 ячеек и трех вибробункеров 2. Робот 3 устанавливает поступающие детали на плату 5, осуществляя при этом контроль и отсеивание бракованных деталей в специальный накопитель 4. Управление роботизированным комплексом производится системой с числовым программным управлением 6. Такой комплекс предназначен для сборки нескольких типоразмеров печатных плат.
Технологический комплекс точечной сварки на сборочных операциях в автомобилестроении решен совсем по-иному. Здесь применено несколько универсальных роботов, оснащенных сварочными головками (рис. 4.5).
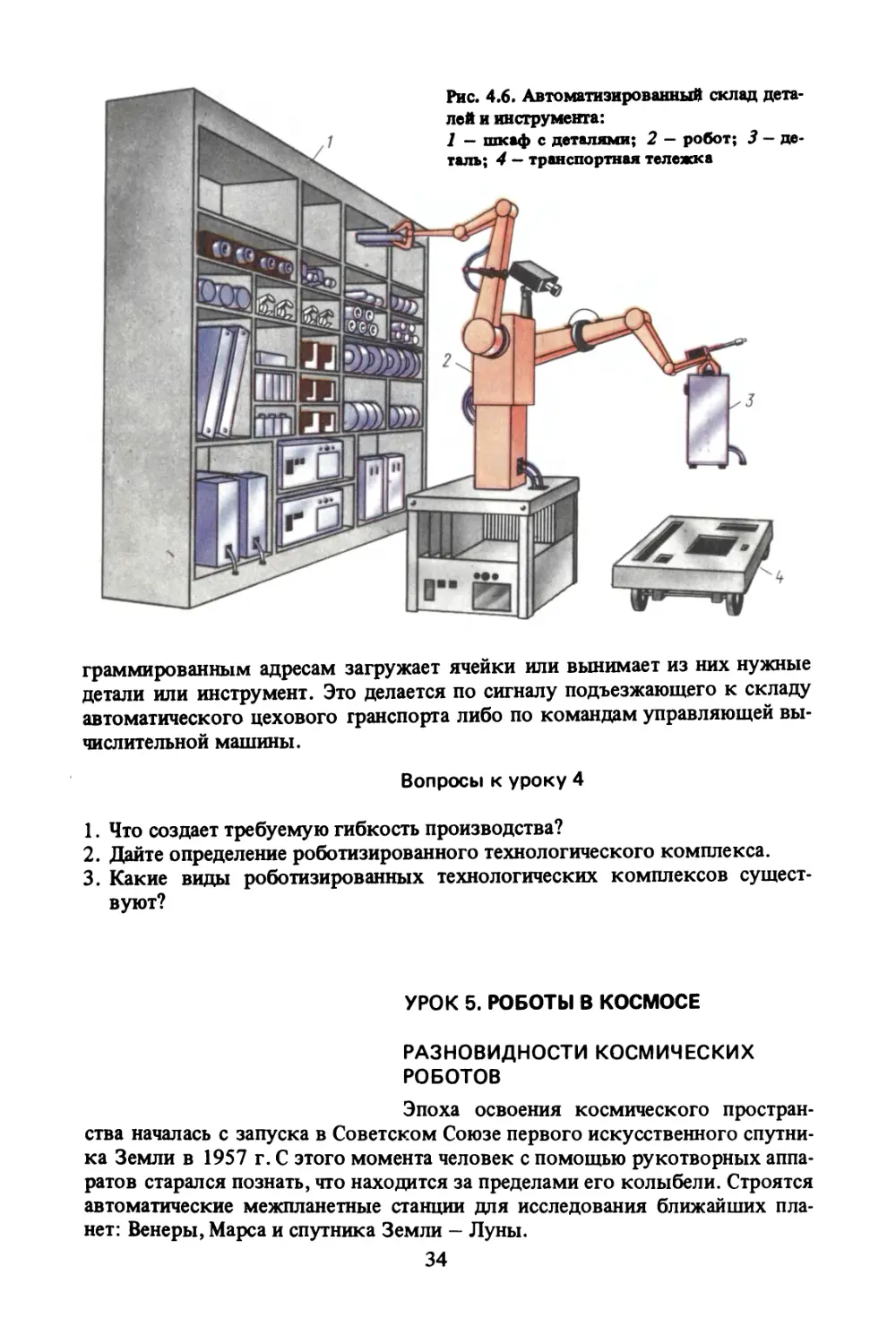
Одной из разновидностей роботизированного технологического комплекса является автоматизированный склад, имеющий ячеистую структуру (рис. 4.6) . Ячейки расположены по стене горизонтальными и вертикальными рядами. Каждая ячейка имеет свой кодовый номер и содержит строго заранее определенные детали или инструмент. Складской робот по запро-
3 Зак. 820
33
граммированным адресам загружает ячейки или вынимает из них нужные детали или инструмент. Это делается по сигналу подъезжающего к складу автоматического цехового транспорта либо по командам управляющей вычислительной машины.
Вопросы к уроку 4
1. Что создает требуемую гибкость производства?
2. Дайте определение роботизированного технологического комплекса.
3. Какие виды роботизированных технологических комплексов существуют?
УРОК 5. РОБОТЫ В КОСМОСЕ
РАЗНОВИДНОСТИ КОСМИЧЕСКИХ РОБОТОВ
Эпоха освоения космического пространства началась с запуска в Советском Союзе первого искусственного спутника Земли в 1957 г. С этого момента человек с помощью рукотворных аппаратов старался познать, что находится за пределами его колыбели. Строятся автоматические межпланетные станции для исследования ближайших планет: Венеры, Марса и спутника Земли — Луны.
Первая в мире автоматическая межпланетная станция ”Луна-1”, запущенная в 1959 г., имела массу 361,3 кг. На ней размещались радиоаппаратура, телеметрическая система, комплекс приборов и другое оборудование. Приборы предназначались для изучения интенсивности и состава космических лучей, газового компонента межпланетного вещества, метеоритных частиц, корпускулярного излучения Солнца, межпланетного магнитного поля. Проведенные измерения дали ценные сведения о радиационном поле Земли и о космическом пространстве. Впервые были зарегистрированы сильные потоки ионизированной плазмы — солнечного ветра.
К сентябрю 1973 г. в СССР была запущена в сторону Луны уже 21 автоматическая станция, в том числе и ’’Луна-17”, доставившая на поверхность Луны лунный самоходный аппарат ”Луноход-1”. В США выполнены программы ’’Рейнджер”, ’’Лунар Орбитер”, ’’Сервейр” и ’’Аполлон”.
Автоматическая межпланетная станция ’’Венера” в 1966 г. впервые доставила на поверхность планеты спускаемый аппарат, в котором находились радиосистема, научная аппаратура, источники питания.
На поверхность Марса в 1971 г. опустился советский автоматический аппарат ”Марс-3”, а в 1976 г. совершила посадку американская орбитальнопосадочная станция ’’Викинг”, передавшая фототелевизионное изображение поверхности.
Таковы первые этапы освоения околоземного пространства.
Долгое время в центре внимания специалистов стоял вопрос: как лучше исследовать космос - посылая туда человека или призвать на помощь робота? Сторонники роботов ставили во главу уже вопросы безопасности и снижения себестоимости работ при проведении исследований по той или иной программе. Противники видели преимущества использования человека в его исключительных способностях. В действительности, при освоении космоса всегда предпочтительно различное сочетание пилотируемых и непилотируемых исследовательских систем.
Перечислим некоторые специфические условия эксплуатации роботов в космосе. Это вакуум, значительная радиация, резкие изменения температуры, невесомость. Специфичны условия атмосфер и поверхностей планет (перепады температур, давление, особенности рельефа, пыльные бури и т. п.).
Такие специфические условия ставят задачу специализации роботов.
Первая разновидность космических роботов — это информационные роботы. Будучи доставленными на поверхность планеты, они исследуют окружающую среду, перемещаются по поверхности со сложным рельефом, производят съемку, берут пробы грунта.
Роботы второй разновидности устанавливают непосредственно на космическом корабле и называют роботами-манипуляторами.
Третья разновидность космических роботов — это монтажники, сварщики, ремонтники. Они перемещаются по конструкциям.
Роботы четвертой разновидности доставляют к космическим кораблям из космоса спутники для ремонта, переносят грузы на большие и малые расстояния.
Одним из первых информационных роботов для проведения большого комплекса научных исследований на поверхности Луны был ’’Луноход-1” (рис. 5.1). Он проработал на поверхности Луны с 17 ноября 1970 г. по 4 ок-
Рис. 5.1. Лунный самоходный аппарат ”Луноход-1”
тября 1971 г. и прошел 10 км 450 м. Луноход состоит из двух частей: приборного отсека и колесного шасси. Масса ”Лунохода-1” 756 кг. Герметичный приборный отсек имеет форму усеченного конуса. Корпус его изготовлен из магниевых сплавов, обеспечивающих достаточные легкость и прочность. Верхняя часть отсека используется как радиатор-охладитель в систе ме терморегулирования и закрывается крышкой. В период лунной ночи крышка закрывает радиатор и препятствует излучению тепла из отсека. В течение лунного дня крышка открыта, элементы солнечной батареи, расположенные на ее внутренней стороне, обеспечивают подзарядку аккумуляторов, питающих бортовую аппаратуру электроэнергией.
В приборном отсеке размещены системы терморегулирования, электропитания, приемные и передающие устройства радиокомплекса, приборы системы дистанционного управления и электронно-преобразовательные устройства научной аппаратуры. В передней части расположены: иллюминаторы телевизионных камер, электрический привод подвижной остронаправленной антенны, служащей для передачи на Землю телевизионных изображений лунной поверхности, малонаправленная антенна, обеспечивающая прием радиокоманд и передачу телеметрической информации, научные приборы и оптический уголковый отражатель. По левому и правому бортам установлены: две панорамные телефотокамеры, четыре штыревые антенны для приема радиокоманд с Земли в другом диапазоне частот. Для подогрева газа, циркулирующего внутри аппарата, служит изотопный источник тепловой энергии. Рядом с ним расположен прибор для определения физикомеханических свойств лунного грунта.
”Луноход-1” детально обследовал лунную поверхность на площади 80000 м2. Для этого с помощью телевизионных систем было получено 200 панорам и свыше 20 тыс. снимков поверхности. Более чем в 500 точках по трассе движения изучались физико-механические свойства грунта, а в 25 точках проведен анализ его химического состава.
Американская автономная орбитально-посадочная станция ’’Викинг” (рис. 5.2), в отличие от ”Лунохода-1”, не имеет транспортной платформы. Она состоит из орбитального блока, производящего исследования с орбиты вокруг Марса, и посадочного блока, совершающего мягкую посадку на поверхность планеты. Манипулятор вытягивался на расстояние 240 см, забирал грунт и засыпал его в четыре полости, расположенные в верхней части; отсюда образцы грунта поступали в автоматизированные аналитические ’’лаборатории” и камеры, где выращивались биологические культуры. Манипулятор состоял из двух металлических полос, которые в неразвернутом состоянии наматывались на барабан. Ковш на конце манипулятора мог вибрировать, благодаря чему мелкие частицы грунта проходили через сито, а более крупные камешки задерживались в нем и не засоряли бортовые минилаборатории, где проводился анализ образцов. Манипулятор проработал более двух лет, на протяжении которых поддерживалась связь со спускаемыми аппаратами.
1 2
3 45 6
Рис. 5.2. Автоматическая орбитально-посадочная станция ’’Викинг”: 1 — антенна с низким коэффициентом направленности; 2 — камера для первичной передачи информации; 3 — релейная антенна; 4 — рентгене люминесцентный рупор; 4 — рентгенолюминесцентный рупор; 5 — блок обработки биологических образцов; б — сейсмометр;
7 — антенна для прямой передачи; 8 — датчики; 9 — очистная счетка
электромагнита; 10 — газовый хроматограф; 11 — тормозной двигатель; 12 — выдвигающая стрела; 13 — головка грунтозаборника
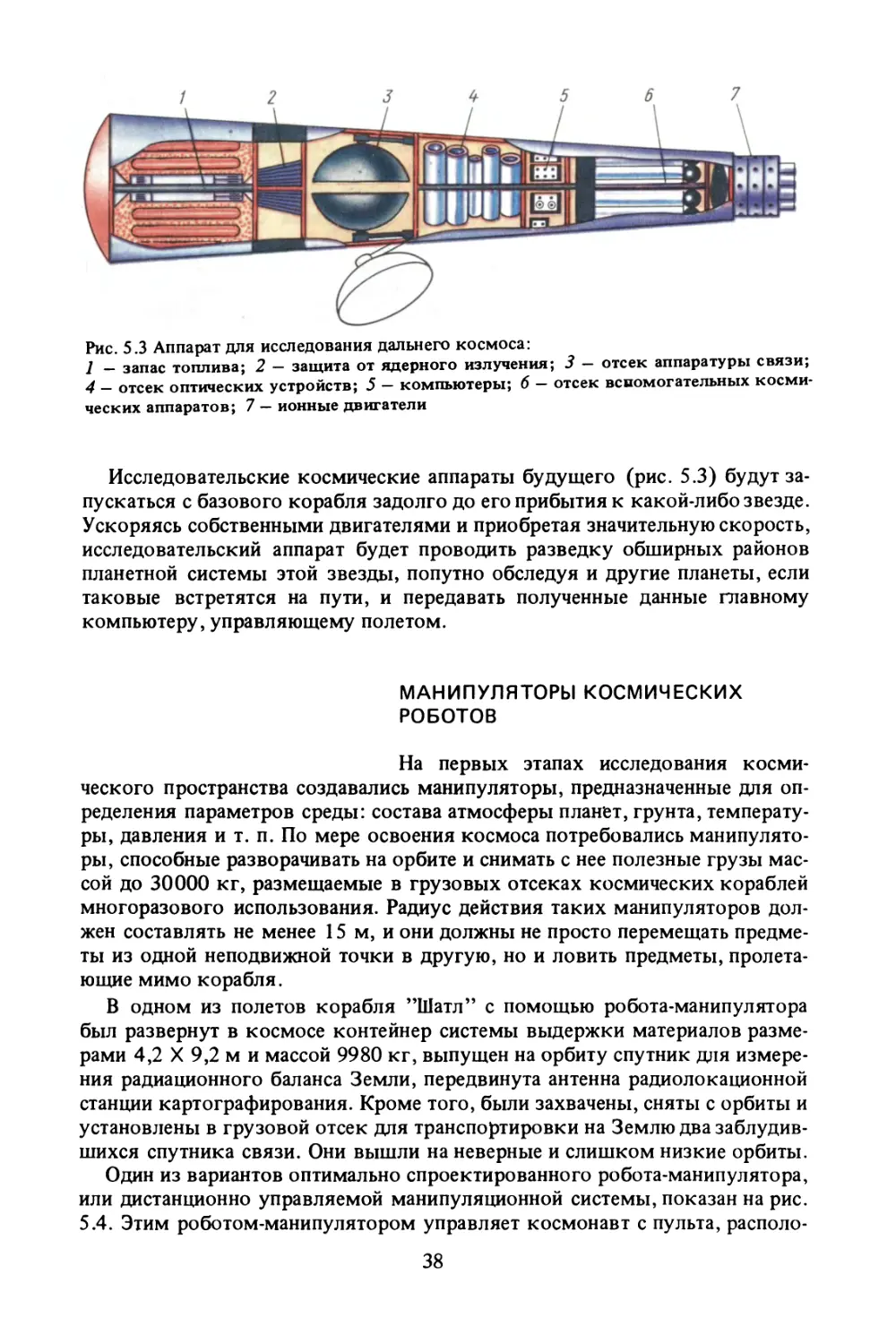
Рис. 5.3 Аппарат для исследования дальнего космоса:
1 - запас топлива; 2 - защита от ядерного излучения; 3 - отсек аппаратуры связи;
4 - отсек оптических устройств; 5 - компьютеры; 6 - отсек вспомогательных космических аппаратов; 7 — ионные двигатели
Исследовательские космические аппараты будущего (рис. 5.3) будут запускаться с базового корабля задолго до его прибытия к какой-либо звезде. Ускоряясь собственными двигателями и приобретая значительную скорость, исследовательский аппарат будет проводить разведку обширных районов планетной системы этой звезды, попутно обследуя и другие планеты, если таковые встретятся на пути, и передавать полученные данные главному компьютеру, управляющему полетом.
МАНИПУЛЯТОРЫ КОСМИЧЕСКИХ РОБОТОВ
На первых этапах исследования космического пространства создавались манипуляторы, предназначенные для определения параметров среды: состава атмосферы планет, грунта, температуры, давления и т. п. По мере освоения космоса потребовались манипуляторы, способные разворачивать на орбите и снимать с нее полезные грузы массой до 30000 кг, размещаемые в грузовых отсеках космических кораблей многоразового использования. Радиус действия таких манипуляторов должен составлять не менее 15 м, и они должны не просто перемещать предметы из одной неподвижной точки в другую, но и ловить предметы, пролетающие мимо корабля.
В одном из полетов корабля ’’Шатл” с помощью робота-манипулятора был развернут в космосе контейнер системы выдержки материалов размерами 4,2 X 9,2 м и массой 9980 кг, выпущен на орбиту спутник для измерения радиационного баланса Земли, передвинута антенна радиолокационной станции картографирования. Кроме того, были захвачены, сняты с орбиты и установлены в грузовой отсек для транспортировки на Землю два заблудившихся спутника связи. Они вышли на неверные и слишком низкие орбиты.
Один из вариантов оптимально спроектированного робота-манипулятора, или дистанционно управляемой манипуляционной системы, показан на рис. 5.4. Этим роботом-манипулятором управляет космонавт с пульта, располо-
Рис. 5.4. Робот-манипулятор, устанавливаемый на кораблях многоразового пользования:
1 - блок управления поступательным движением; 2-пульт управления и индикации; 3 - иллюминатор;
4 — блок управления вращательным движением; 5 —
компьютер; 6, 7 — кабели; 8 — сочленение; 9 — со-
членение подъема-опускания; 10 — плечо манипулятора; 11 — сочленение сгибания локтя; 12 — предплечье манипулятора; 13 — сочленение сгибания кисти; 14 — сочленение отведения кисти; 15 — сочленение вращения кисти; 16 — рабочий орган
женного в кабине корабля. Пульт оснащен двумя ручными органами управления, а также двумя телекамерами и двумя иллюминаторами, позволяющими видеть, что происходит в открытом космосе и грузовом отсеке.
Предусмотрены пять режимов управления роботом-манипулятором: автоматический режим (компьютер выполняет программу, заложенную в него либо на Земле, либо в космосе экипажем); ручной с ’’наставником” (оператор ’’пилотирует” рабочий орган, а компьютер формирует соответствующие команды, подаваемые на звенья манипулятора); ручной по каждому отдельному звену (каждое звено управляется своим ключом); прямой и резервный прямой (оператор посылает команды, формируемые с помощью переключателей, по кабелям, соединенным непосредственно со звеньями, минуя компьютер).
Следующим крупным шагом вперед явилось бы создание автономного модуля-робота, снабженного несколькими манипуляторами и предназначенного для сбогрки крупногабаритных конструкций на орбите. Такой модуль позволит осуществлять сборку, ремонт. Он сможет перемещать конструкции с помощью манипуляторов и перемещаться с конструкциями с помощью двигателей на значительные расстояния от базового корабля.
Роботизированные космические аппараты для технического обслуживания базовых кораблей, исследовательских и спутников связи могут работать и без человека на борту.
Автоматический либо дистанционно пилотируемый обслуживающий модуль (рис. 5.5), снабженный четырьмя манипуляторами, выполняет операции по программе бортового компьютера либо управляется человеком-оператором с борта базового космического корабля или с Земли. Два манипулятора служат для захвата спутника, а два других выполняют ремонтные работы.
Ведущиеся ныне разработки в области искусственного интеллекта показывают, что в перспективе многие функции по обработке данных и сбору информации, которые в настоящее время осуществляются наземной аппаратурой, могут выполняться автономно космическим кораблем-роботом. На Землю же будет поступать лишь нужная пользователям информация. Это
2
5 6
Рис. 5.5. Дистанционно пилотируемый обслуживающий модуль:
1 — маневровые двигатели; 2 — телекамеры; 3 — стыковочный манипулятор;
4 — рабочий манипулятор; 5 — телекамера; 6 — схват; 7 — теплозащита; 8, 9 — фара; 10 — рабочие органы; 11 — запасные части; 12 — стыковочный манипулятор; 13 — антенны систем связи
означает, что робот сможет самостоятельно решать, какие данные следует сохранять, обрабатывать и отправлять на Землю.
Впереди создание интеллектуальных роботов, обученных совершать разнообразные действия в заранее неизвестной обстановке и способных к са-моремонту и взаимопомощи, что значительно увеличит продолжительность их жизни в космическом пространстве.
Изложим идею робота-паука с универсальными конечностями. Его ступни, они же кисти рук, используются и для перемещения, и для выполнения работ с помощью инструментов. Возможна одновременная работа двух-трех конечностей, что важно для саморемонта. Он сможет осмотреть, отремонтировать, смонтировать конструкцию. Если это паук-интеллектуал, то он мыслит, вспоминая все, чему был обучен человеком или роботом-оператором, и самостоятельно принимает решения об изменении ранее принятой им программы действий, изменяет походку. Исчерпав свои интеллектуальные возможности, паук перемещается в центр связи с человеком, которому подчинен. Здесь он получает мыслительную подзарядку: советы, предписания. Затем, уйдя из центра, он продолжает работать.
ОСОБЕННОСТИ ПРОЕКТИРОВАНИЯ КОСМИЧЕСКИХ РОБОТОВ
Для работы в космосе желательно расширить рабочую зону робота. Это заставляет проектировщика удлинять звенья манипулятора робота. Если взять типичный пример манипулятора, вытянутого в линию, то его длина составит 10 ... 20 м и более. Ограничение же по массе диктует условие: звенья должны быть легкими. Однако длинный манипулятор с легкими, т. е. достаточно тонкими, звеньями представляет собой систему механических тел, склонную к колебаниям. Его собственная частота колебаний составляет 0,01 ... 0,02 Гц. Любые управляющие воздействия в виде изменяющихся движущих сил в суставах вызывают помимо желаемых движений звеньев манипулятора еще и колебания их. Они затрудняют качественное выполнение заданных операций механической рукой и работу человека-оператора. Причина колебаний — упругие деформации изгиба длинных звеньев. Собственная частота колебаний зависит от конфигурации манипулятора, массы груза, переносимого схватом. Весьма желательно в процессе создания манипулятора позаботиться об обеспечении его жесткости. Следующее средство для уменьшения амплитуды колебаний руки — обоснование закона совместного управления звеньями манипулятора, т. е. требуется найти удачный закон движения звеньев манипулятора, учитывающий упругие деформации.
Получить наилучший закон управления звеньями космического манипулятора — задача большой важности. Ведь может оказаться в некоторой ситуации, что манипулятор не успокаивается, т. е. не избавляется от упругих колебаний в течение часа после того, как им уже не управляют. Это означает, что управление было неправильным.
В зоне слабых притяжений планет возникает состояние невесомости. Следовательно, движущие силы в суставах робота для получения той же динамики, что и в.земных условиях, должны вызвать желаемые ускорения звеньев без компенсации сил тяготения. Нужны другие по абсолютной величине движущие силы. Но ведь производство космических роботов происходит на Земле. Возникает вопрос: как воспроизвести те движения роботов, которые имеют место в условиях невесомости?
Если истинные движения требуется обязательно воспроизводить, то прежде всего надо решить энергетическую задачу. Следует рассчитать с учетом сил тяготения мощности приводов, устанавливаемых в земных условиях. Ясно, что космическая конструкция манипулятора робота с длинными звеньями может оказаться непригодной из-за недопустимо больших сил, которыми надо воздействовать на звенья. Тогда придется сделать другой манипулятор, а это означает, что задача о воспроизведении движений космического робота становится весьма сложной: нагрузки другие, манипулятор другой. Где выход из создавшейся ситуации? Выход — в умении найти соответствующий закон управления движением звеньев земного робота и в умении реализовать этот закон. Здесь возможны два пути.
Первый путь следующий. Рассчитывают движения манипулятора космического робота. Эти движения в виде программы заданных движений вводят в память системы управления земного робота. Затем синтезируют алго
ритм устройства управления исполнительной системы земного робота, задаваясь желаемым качеством отработки задания.
Второй путь иной. Исследовав устройство манипулятора земного робота, рассчитывают воздействия сил тяготения на его звенья. Затем синтезируют устройство компенсации влияния этих сил. Отдельно синтезируют алгоритм привода звеньев робота, реализуемый совместно с алгоритмом компенсации. В алгоритме привода учитывают, что параметры земного и космического манипуляторов робота отличаются. Надо сказать, что второй путь характеризуется тем. что воздействие сил притяжения компенсируется явно. А для первого пути компенсации влияния сил тяготения на движения манипулятора скрыта внутри алгоритма привода земного робота.
Конечно, тот и другой путь воспроизведения движений космического манипулятора в земных условиях должен дать близкие результаты.
Вопросы к уроку 5
1. Перечислите разновидности космических роботов.
2. Назовите особенности манипуляторов космических роботов.
3. Какие способы воспроизведения движений роботов в космосе существуют здесь, на Земле?
УРОК 6. УСТРОЙСТВА РОБОТОТЕХНИКИ ПОД ВОДОЙ
ОСОБЕННОСТЬ ПРИМЕНЕНИЯ
Одна из областей применения устройств робототехники — исследование и освоение мирового океана на больших глубинах, спасательные работы.
Роботы, действующие под водой, — это один из типов автоматизированных аппаратов, применяемых для разнообразных целей. Подводные аппараты, оснащенные различными манипуляторами, датчиками, собирающими подробную информацию об окружающей среде, и бортовыми компьютерами, обрабатывающими эту информацию, могут быть обитаемыми с экипажем в два-три человека, необитаемыми с теле- или дистанционным управлением и полностью автономными. Такие аппараты выполняют осмотр проложенных под водой трубопроводов, кабелей, мест кораблекрушения. Подводные аппараты могут оказать помощь в добыче полезных ископаемых, так как обширные участки мирового океана содержат большие месторождения таких металлов, как кобальт, марганец, запасы нефти и газа.
Работа под водой сопряжена для человека с большим риском и требует значительного количества надводных средств для обеспечения жизнедеятельности работающего. В этих случаях предпочтительны дистанционно управляемые аппараты — биотехнические системы, позволяющие исключить присутствие людей в опасной подводной среде.
Подводные роботы могут производить осмотр, управление различным инструментом при работе под водой, навигацию, поиск и связь. Конструкция роботов может быть весьма разнообразной. Это крабоподобные созда
ния, ползающие по дну океана и предназначенные для закапывания кабелей или для добычи полезных ископаемых. Роботы, напоминающие осьминогов, могут использоваться для осмотра, технического обслуживания и ремонта сложных подводных конструкций, например буровых установок или затонувших судов. Дельфиноподобные роботы способны быстро перемещаться в толще воды и проводить визуальный осмотр, наблюдение и гидрографическую съемку.
Нахождение устройств робототехники в жидкой среде весьма усложняет решение задач по сравнению с обычными наземными условиями. Это усложнение можно объяснить возмущением жидкости при пересечении ее горизонтальных слоев роботом, его манипулятором, биотехническим устройством или его частью. Суть возмущения в том, что некоторая часть кинетической энергии движущихся .тел передается жидкости.
Итак, есть разница в эксплуатации устройств робототехники на Земле в помещении и под водой. Если в первом случае нас не волнует воздействие движущейся воздушной массы на механическую часть устройства, то во втором случае воздействие движущейся жидкости весьма существенно. Заметим, что расчет возмущения жидкости, а затем вызванных им волн представляет сложную задачу. Понятно, что чем плавнее и медленнее движения устройств робототехники, тем меньше и последующее ответное воздействие среды.
БИОТЕХНИЧЕСКИЕ УСТРОЙСТВА
Управление аппаратами, действующими автономно, может производиться при непосредственном участии человека-оператора, как это происходит на обитаемом подводном аппарате (рис. 6.1). Телеуправляемые манипуляторы отличаются от обычных роботов тем, что каждое их действие в данный момент копирует движения человека-оператора, находящегося на значительном расстоянии от них (рис. 6.2). Здесь речь идет о сложных биотехнических устройствах, так как действия человека-оператора проявляются дважды: в системе ’’оператор — подводный аппарат” и в системе ’’оператор с задающей рукой — копирующий манипулятор”.
Рис. 6.1. Обитаемый подводный аппарат ’’Бивер” (США) с манипуляторами
Рис. 6.2. Принципиальная схема необитаемого подводного аппарата робота с дистанционным управлением:
1 — оператор; 2 - базовое судно; 3 — управляемый аппарат
Остановимся на системе ’’оператор — подводный аппарат”. Сначала охарактеризуем задающие и исполнительные органы подводных аппаратов. Для таких аппаратов характерны разнообразные режимы маневрирования, сопровождающиеся как значительными изменениями скоростей и направлений движения, так и удержанием аппарата в заданной точке пространства во время работы биотехнического устройства с манипулятором. Управление движениями подводного аппарата осуществляется с помощью рулей, поворотных двигателей и неподвижных двигателей, число и взаимное расположение которых обеспечивает желаемое направление движения аппарата (рис. 6.3).
Управление с помощью рулей осуществляется преимущественно на буксируемых или автономных аппаратах при достаточно больших скоростях движения. На малых скоростях,; когда эффективность рулей мала, можно использовать схемы с подруливающими винтовыми двигателями, расположенными неподвижно на аппарате. Но в большинстве случаев движение и маневрирование осуществляются поворотами двигателей. Оператор при этом также управляет скоростью движения аппарата. Удержание его в заданной точке пространства с большой точностью обычно затруднено.
В подводных аппаратах выделяют задающие органы дискретного и непрерывного действия, одноканальные и многоканальные. Органы дискретного действия — кнопки, клавиши, тумблеры. Пример органа непрерывного дей
ствия — педаль. Обычно педали используются для воздействия на один двигатель, поэтому такой командный орган можно назвать еще одноканальным. Педали применялись на первых образцах подводных аппаратов. Надо сказать, что они имели серьезный недостаток. Значительная часть времени непроизводительно расходовалась оператором на перенос ног с одной педали на другую (либо рук с одной рукоятки на другую). В последнее время в распоряжении оператора появились командные комплексные рукоятки или рычаги, связанные с несколькими двигателями одновременно, — многоканальные. Линейное перемещение такой комплексной рукоятки пропорционально тяговому усилию, направленному в определенную сторону. Добавим, что данные рукоятки могут перемещаться оператором в любую сторону.
Предъявление информации оператору о движении и пространственном положении подводного аппарата производится с помощью индикаторных устройств, которые можно разделить на символические и пикториальные. В индикаторах первого типа показывается значение какого-либо одного параметра и отсутствует наглядное сходство с отражаемыми условиями. В индикаторах второго типа предъявляемая информация показывает геометри-
лениях; 9 — контейнер с телеметрической аппаратурой; 10 — гидравлический привод; 11 — фотокамера; 12 — схватножницы; 13 — корзина для сбора образцов; 14 — телекамера; 75 — копирующий манипулятор; 16 — стереоскопическая телекамера; 17, 18 — фары
Рис. 6.3. Подводный аппарат ” Дол фин” (Япония):
1 — базовое судно; 2 — буксировочный кабель; 3 — гидролокатор; 4 — ответчик; 5 — пенопластовые блоки; 6,7, 8 — гребные винты для перемещения в различных направ-
18
17
16—
15
Рис. 6.4. Экзоскелетон
ческие соотношения в отображаемой ситуации. Приведем пример поступления информации к оператору от индикатора пикториального типа. Заданное оператором направление движения воспроизводится на телевизионном экране в виде бесконечной курсовой дорожки, разделенной поперечными темными полосами. Скорость перемещения темных полос вдоль дорожки дает представление о скорости поступательного движения, а ее деформация или перемещения по экрану информируют об изменении направления движения или пространственной ориентации управляемого объекта. Вместо того чтобы следить за показаниями приборов', достаточно смотреть на экран и
стремиться вести подводный аппарат по лежащей на экране ’’дороге”. Такое устройство обеспечивает оператора информацией о пространственном положении аппарата, его скорости и направпе-
нии движения.
Проводятся работы по максимальному использованию ориентировочных рефлексов человека-оператора, управляющего подводным аппаратом и манипулятором. Например, создается эффект присутствия тем, что изображение с телекамеры, находящейся на кордановом подвесе в прозрачной пластиковой сфере аппарата, поступает в шлем оператора, в котором расположены видеомониторы для каждого глаза, создающие бинокулярное восприятие. Известно также поступление заданий аппарату от головы оператора, при этом аппарат поворачивается тоже. Смещается и изображение на экране монитора в зависимости от поворота головы. Эти нововведения облегчили также работу системы ’’оператор — манипулятор”.
Биотехническое управление в более полном виде по сравнению с системой ’’оператор — копирующий манипулятор” реализуется в устройстве, получившем название экзоскелетон (рис. 6.4). Для подводных работ экзоскелетон представляет собой скафандр. Шарнирные соединения его снабжены приводами, управляемыми биотоками мышц человека, облаченного экзоскелетоном. Если сокращается какая-либо мышца, участвующая в управле
нии, то соответствующее перемещение начинается через несколько миллисекунд. Основное назначение скафандра-экзоскелетона заключается в придании человеку больших сил, обычно не свойственных ему. Например, человек, находящийся в таком скафандре, легко поднимает балку массой 200 кг
и переносит ее по дну водоема.
ПЕРЕХОД К СОЗДАНИЮ РОБОТОВ
Как перейти от биотехнического устройства к роботу? Что надо сделать? Биотехническое устройство — это система ’’человек внутри или вне подводного аппарата — подводный аппарат”. Это также система ”человек внутри или вне подводного аппарата — манипулятор с исполнительной системой”. Если человек остается, а это сегодня всегда имеет место, то возможны варианты: 1) переход к роботу, интерактивно
управляемому человеком; 2) переход к интеллектуальному роботу, длительно действующему как автономное устройство.
Один из ответов на поставленный вопрос прост: надо добавить устройство управления, которое, воспринимая от человека целеуказания, обеспечит затем действия механической части до следующего целеуказания. Тогда получим, например, робот — подводный аппарат с манипуляторами.
Применение подводных роботов весьма перспективно. Производство работ в водоемах опасно, а на большой глубине и невозможно для человека. Более того, задачи, связанные с выполнением подводных работ, весьма сложны. В ряде случаев искусственный интеллект обязателен. Органы чувств подводных роботов — тактильные, телевизионные. Применяются ультразвуковые датчики, гидролокаторы, навигационные приборы.
Интеллектуальные роботы используются под водой для монтажа и сборки конструкций, работ на подводных плантациях, для исследований. На рис. 6.5 показан робот, шагающий по ровной горизонтальной площадке, электропитание или некоторая информация к которому поступают по кабелю с поверхности водоема от базового плавающего средства. Окружающая среда под водой для роботов может быть неопределенной. Организуя долговременную начальную память робота, можно предполагать варианты окружающей обстановки в будущем. При этом не требуется точных и всеобъемлющих моделей внешней среды. Представим, что роботу надо обойти неподвижное или даже движущееся препятствие, а от скорости и направления обхода зависит, возникнет опасная ситуация или нет. Достаточно проклассифицировать среду некоторым несложным способом, например: опасно, не опасно, прохожу, не прохожу, достижимо, не достижимо, можно пробовать один из способов передвижения и т. д. В память такого робота перед его эксплуатацией записывают классификацию внешней среды.
Вопросы к уроку 6
1. Назовите особенность применения устройств робототехники под водой.
2. Какие две разновидности биотехнических устройств подводой известны вам?
3. Какой путь существует к переходу от биотехнических подводных устройств к роботам?
Рис. 6.5. Робот, шагающий по дну океана: 1 — базовое судно; 2 — робот; 3 — мини-пулятор робота
УРОК 7. РОБОТЫ В БЫТУ
ВЫПОЛНЯЕМЫЕ В ДОМЕ РАБОТЫ
Академик В. М. Глушков в 1980 г. сделал оптимистическое заявление корреспонденту журнала ’’Техника молодежи” Г. Федорову: ”Я думаю, что к концу нашего столетия или же в начале будущего появится домашний робот, который в ваше отсутствие сделает все по дому в соответствии с заданной программой. К концу века появится и универсальный интеллектуальный робот, слушающийся вашего голоса, не требующий программирования и сам прекрасно понимающий, что от него нужно”. Правда, В. М. Глушков опасался дороговизны таких устройств.
Какие же работы могут быть поручены домашним роботам? Это мойка посуды, натирание полов, уборка пыли, стирка, приготовление пищи (рис. 7.1). Задания для интеллектуального робота: уход за больным, сложная уборка в квартире, перестройка жилья в более отдаленном будущем. Мы пока еще не дали точного определения тому, что такое робот. Но, забегая вперед,заметим, что каждого робота обязательно отличает способность совершать механические действия. Человек может по-разному запрограммировать робота в начале его эксплуатации, в связи с чем и действовать он начнет по-разному. Перечисленные выше домашние работы предполагают указанные его свойства.
ПРОСТЫЕ И СЛОЖНЫЕ РОБОТЫ
К простым роботам отнесем специализированные дешевые устройства: роботы-пылесосы, роботы, натирающие полы, посудомойки, прачки. Ясно, что таким помощникам необходимы органы чувств: если нет зрения, то есть хотя бы осязание. Информация, полученная от тактильных датчиков, указывающая на наличие препятствия, позволит подвижным частям робота обойти его.
Сложная уборка в доме требует более совершенного очувствления, которое позволит обучать робота распознаванию окружающей среды: узнавать предметы и определять их пространственное взаимное расположение (рис.
а) 5)
Рис. 7.1. Так изобразил художник роботов, выполняющих домашнюю работу: а — робот-пылесос; б — робот-прачка
7.2). Речь идет о том, что в памяти робота хранится правило классификации предметов и сцен, сформулированное и записанное его учителем.
После того как окружающая среда распознана и робот определил текущую ситуацию, ему требуется принять решение. На самом высоком уровне управления домашнего робота принимается решение о том, какую работу сейчас надо выполнять. Если это известно, то следующий уровень (более низкий уровень в иерархии управления) решает, какую последовательность действий во времени надо совершить в ближайшей к роботу зоне пространства. Например, эти действия могут означать перемещение подвижного робота в некоторую точку, взятие и закрепление в схвате орудия труда и занятие в данном месте исходной по
Рис. 7.2. Предназначенный для работы по дому робот RB5X (США)
зиции. Далее опять принимается решение, сколько и каких действий необходимо в рабочем цикле сейчас, когда рабо-
та начинается. И так далее.
Заметим, что теоретические задачи, относящиеся, например, к механике руки, одинаково сложны для применения робота в промышленности и в домашней обстановке. Известной и часто непросто решаемой задачей является следующая: в каком направлении и каким по интенсивности и величине должно быть движение каждого механического звена руки, чтобы ее концевое звено приблизить к выбранной цели, не натолкнувшись на препятствия? Такую задачу решает следующий, более низкий в иерархии управления уровень. И только после того как решение получено, другой (исполнительный) уровень управления вырабатывает систему команд на приводы. Эти команды являются функцией слов, поступивших от более высокого уровня и сигналов датчиков состояния подвижных частей. Дело в том, что’каждое механическое звено в данный момент времени находится в каком-то положении, обладает той или иной скоростью, а также ускорением. Для каждого сочетания значений положений скоростей, ускорений требуется своя величина воздействия на каждый привод. Только при этом условии можно добиться наилучших динамических свойств робота в конкретной ситуации при выполнении сложной домашней работы.
Современные технические средства позволяют создать также устройства управления исполнительного уровня, которые придают системам приведения в движение звеньев свойства обучаемости и адаптации. Говоря проще, возможно организовать на все время эксплуатации робота процесс автоматической коррекции состояния памяти исполнительного уровня робота. В нем постоянно совершенствуется содержание этой памяти по заданному правилу, что означает изменение динамических свойств в сторону оптимальных. Под наилучшей динамикой понимается такая, при которой любые принятые к исполнению роботом движения являются одновременно и быстрыми, и плавными (без рывков), и точными по реализации цели. Практически отсутствуют или являются приемлемыми по амплитуде колебания звеньев, вызванные упругостью конструкции.
4 Зак 820 49
ПЕРЕСТРОЙКА ЖИЛИЩА
Разговор о перестройке вашего жилища роботом является сегодня фантастическим. Однако известны проекты человеческих жилищ, которые предусматривают эту перестройку, начинаемую однажды по вашему желанию, которое отражено в программе, предлагаемой роботу (вводимой в его память) .
Известны идеи биоархитектуры. Жилища, в которых биоархитекторы рекомендуют проживать людям в будущем, совсем непохожи на нынешние. Геометрия жилища по определенной программе непрерывно изменяется (размеры, формы). Изменяется ваша ячейка, являющаяся частью большого дома. И роботы в современном представлении могут не понадобиться, ибо программа изменения геометрии жилища заложена в самом материале, из которого дом изготовлен. Однако в данном случае можно назвать сам такой дом роботом. Продукция действий такого робота — его объем, формы. Механические действия налицо, только они направлены не на манипуляцию с каким-то предметом, а на изменения самого себя.
Представим, что человек в состоянии влиять на программу действий этого своеобразного робота, т. е. на программу роста материала жилища в пространстве и во времени. Тогда каждой программе соответствует свое жилище. Данный робот перепрограммируем. Эти идеи владеют умами некоторых архитекторов, но, конечно, они, даже если правильны, будут воплощены в жизнь не скоро. Они, безусловно, поражают воображение. Известна, правда, истина нашего времени: самые фантастические проекты в течение века становятся теперь реальностью.
Вернемся к высказываниям академика В. М. Глушкова. Он считал реальностью конца нашего века следующее: ”... Раннее утро. Весь дом еще крепко спит. В квартире прохладно. Но вот, подчиняясь чьему-то приказу, начинают нагреваться стены. А через несколько минут включается на кухне электроплита. Проходит какое-то время, и закипает кастрюлька с уложенными еще с вечера яйцами или сосисками, начинает шипеть чайник. В комнате загорается огромный — во всю стену — экран телевизора, раздается тихая музыка. И только после этого, если хозяева квартиры не просыпаются сами, звучит сигнал к пробуждению.
На стене перед взором проснувшегося рассвет на Волге или где-нибудь в горах. Медленно выползает из-за горизонта ярко-красный диск солнца. И чем выше оно поднимается, тем золотистее становятся его лучи. В комнате тепло, потолок светится все ярче и ярче. Нежная музыка постепенно становится все громче и бодрее. Завтрак готов. Пора вставать”.
Вопросы к уроку 7
1. Назовите простые и сложные домашние роботы.
2. Какие уровни иерархии управления можно представить себе, если рассуждать об интеллектуальном домашнем роботе?
3. Что вам известно о связи представлений в биоархитектуре и в робототехнике?
РОБОТ И ЕГО
УРОК 8. ЧТО ТАКОЕ РОБОТ?
ОПРЕДЕЛЕНИЯ. СТРУКТУРЫ РОБОТОВ
Два свойства характеризуют робот. Во-первых, он самостоятельно совершает механические действия. Во-вторых, в отличие от любого автомата, работающего по неизменяемой программе, его можно перепрограммировать. Итак, можно просто ответить на поставленный вопрос: робот — устройство, самостоятельно совершающее механические действия, которое можно перепрограммировать.
Все роботы принято делить на два класса: неочу ветвленные и очувствленные. Если робот очувствлен, то он по одной программе распознает состояния внешней среды, а по другой программе действует. В памяти робота записана связь между конечным числом указанных состояний и конечным числом действий.
Предположим, что в распознаваемой внешней среде взаимное расположение одних и тех же предметов оказалось неожиданно новым. В памяти робота не содержится указаний, как надо действовать, чтобы выполнить порученные операции с заданным качеством. Поэтому память содержит еще одну программу, позволяющую роботу научиться успешно действовать в подобных случаях. Эта программа постепенно восполнит пробел в программе действий. Если данное расположение предметов будет повторяться, то однажды робот приобретет желаемое качество. Процесс самосовершенствования действий робота называют адаптацией, а робот, обладающий таким свойством, — адаптивным. Понятие ’’адаптация” означает приспособление. Следовательно, адаптивный робот можно называть также приспосабливающимся.
Среди адаптивных роботов наиболее совершенны интеллектуальные роботы. Предлагаем читателю два определения:
интеллектуальный робот — устройство с искусственным интеллектом, совершающее механические действия;
искусственный интеллект — свойство технического устройства преобразовывать хранящиеся в его памяти высказывания в новые высказывания, которые никогда ему не сообщались.
Совокупность хранящихся в памяти высказываний, а также накопленных роботом во время его эксплуатации образует программы, по которым робот распознает состояния внешней среды и действует, адаптируясь. Выработка программ происходит по правилу, записанному в памяти. Иногда это правило называют метапрограммой. Она управляет интеллектуальным процессом.
Кроме механических роботов существуют биотехнические устройства. Каждое такое устройство есть система человек—техническое устройство или животное—техническое устройство. Здесь живой организм непрерывно управляет техническим компонентом системы. В этом заключено существенное отличие его от робота, самостоятельно совершающего механические действия. Роботы и технические компоненты биотехнических устройств вместе образуют устройства, которые условно назовем устройствами робототехники.
Рис. 8.1. Структурная схема интеллектуального робота:
ИИС — информационно-измерительная система; УКП — устройство кратковременной памяти; УИИ — устройство искусственного интеллекта; СУР — система управления робота; УУИС — устройство управления исполнительной системы; ПКП — прямые каналы приводов; МЧ — механическая часть; РУР — речевое устройство робота; УВВ — устройство ввода-вывода; ДУ — диагностирующее устройство
Рассмотрим структуру интеллектуального робота (рис. 8.1).
Стрелками, обозначенными номерами 1-11, показаны потоки информации и управления:
1 — информация о состояниях внешней среды;
2 — текущая информация, повторяющая информацию 1, а также накопленная в устройстве кратковременной памяти;
3 — управление работой информационно-измерительной системы по программе, выработанной устройством искусственного интеллекта;
4 — информация, поступающая для преобразования в звуковые сигналы;
5 — высказывания, записываемые человеком в долговременную память робота;
6 — команды на входе системы управления;
7 — информация о состоянии исполнительной системы и ее механической части;
8 — управление, содержащее заданные движения механической части, сформированное системой управления робота;
9 — управление на входах прямых каналов приводов — задание сил, развиваемых двигателями;
10 — информация о текущих положениях и скоростях звеньев механической части и силах, развиваемых двигателями;
11 — управляемое питание двигателей.
Механическая часть представляет собой систему связанных подвижных звеньев, установленную в общем случае на подвижном основании либо подвешенную. Каждое звено соединено через передаточный механизм со своим двигателем, расположенным на предыдущем звене, считая от основания. В передаточном механизме установлены датчики положения и скорости звена, датчик движущей силы.
Система подвижных звеньев на конце снабжена схватом. Получили механическую руку — манипулятор. Информация о положении и скорости каждого звена механической части, а также о силах, развиваемых двигателями, поступает в устройство управления исполнительной системы в направлении, указанном стрелкой 10, Устройство управления исполнительной системы состоит из двух частей: устройств управления верхнего и нижнего уровней. К верхнему уровню задание поступает от системы управления робота, а нижний уровень воздействует управлением 9 на прямые каналы приводов. Устройство управления нижнего уровня, в свою очередь, состоит из нескольких независимо работающих устройств управления, каждое из которых получает свое задание от верхнего уровня и воздействует на свой канал привода, т. е. на состояние одного звена механической части.
Каждый прямой канал привода, действующий независимо от других, содержит устройство сравнения заданной и действительной сил, преобразователь энергии источника питания с элементами управления на входе, двигатель и передаточный механизм. Прямой канал и обратная связь от датчика движущей силы образуют привод. Он создает движущую силу, приложенную к звену механической части. Благодаря наличию обратной связи по движущей силе привод представляет собой контур автоматического регулирования движущей силы. В нем действительная движущая сила непрерывно стремится к заданной, вырабатываемой устройством управления нижнего уровня исполнительной системы. Привод, объединенный с данным устройством и охваченный обратными связями по положению и скорости своего звена, назовем одностепенной системой приведения в движение. Все одностепенные системы приведения в движение совместнр с устройством управления верхнего уровня исполнительной системы образуют исполнительную систему. Заметим, что для подвижного робота в структуре исполнительной системы можно выделить две части: одна относится к манипулятору (манипуляторам) , а другая — к подвижному основанию робота.
Устройство искусственного интеллекта получает информацию от устройства кратковременной памяти, которое предназначено для временного хранения информации. Продолжительность хранения должна быть такой, чтобы устройство искусственного интеллекта успело запомнить выбранную информацию и переписать ее в память для длительного хранения.
Про информационно-измерительную систему кратко можно сказать, что это глаза и уши робота. Речевое устройство необходимо для более эффективного общения робота с человеком. С помощью устройства ввода-вывода человек записывает в долговременную память робота те высказывания, которые считает необходимыми. Если это устройство снабжено дисплеем, то имеется возможность вывести часть содержимого памяти на экран. К диагностирующему устройству информация поступает в направлении, указанном стрелкой 7. Получив ее, устройство делает вывод о том, исправен ли робот, а также указывает на место неисправности. Эта информация может поступать на табло диагностирующего устройства и наблюдаться визуально.
На рис. 8.2 показана структурная схема промышленного робота, представляющая собой часть рассмотренной структуры. Здесь цифрами 1-7 обозначены:
1 — текущая информация информационно-измерительной системы;
2 — ввод программ в управление робота;
3 — управление исполнительной системой;
4 — информация для диагностического устройства;
5 — управление прямыми каналами приводов;
6 — обратные связи по положениям, скоростям, движущим силам;
7 — воздействие на двигатели (управляемое питание).
На практике наряду с термином ’’система управления робота” пользуются также термином ’’система программного управления”, имея в виду, что речь идет о промышленном роботе. Объединенные в одном устройстве СУР, УУИС и ПКП назовем просто устройством управления, если речь идет об управлении в роботе вообще и не называется конкретный уровень иерархии управления.
В промышленном роботе диагностирующее устройство может отсутствовать. У наиболее простых роботов нет информационно-измерительной системы. На рис. 8.3 показана структурная схема вырожденного робота, являющаяся частью Схемы, изображенной на рис. 8.2. Особенностью данной структуры является наличие обратной связи, несущей информацию о состояниях
Рис. 8.2. Структурная схема промышленного робота
Рис. 8.3. Структурная схема простого промышленного робота
конечных выключателей, фиксирующих положения звеньев механической части. Информации о текущих положениях и скоростях звеньев нет, поэтому отсутствует устройство управления исполнительной системы. Силы, развиваемые двигателями, не контролируются. Приводы разомкнуты.
РАБОТА УСТРОЙСТВА
ИСКУССТВЕННОГО ИНТЕЛЛЕКТА
Это устройство содержит большое число одинаковых элементов памяти, каждый из которых хранит одно высказывание. Очередной цикл действия всей памяти начинается с появления противоречия между выработанной ранее целью и полученными результатами выполнения операций роботом. Интеллектуальный процесс снимает противоречия, вырабатывая новые совокупности высказываний из большого числа долговременно хранимых высказываний. Отдельные микрообъемы памяти взаимодействуют друг с другом по определенному правилу. Процесс протекает всегда в соответствии с так называемым гомеостатическим принципом, который означает, что взаимодействие микрообъемов представляет собой последовательный во времени перебор вариантов объединения высказываний, продолжающийся до тех пор, пока не наступит устойчивое состояние устройства. Устойчивое состояние — состояние непротиворечивости всех высказываний.
Заметим, что требуемое число хранимых в памяти простых высказываний может быть весьма большим. Оно связано с тем, насколько подробно желает различать состояния внешней среды и состояния робота его создатель. С такой же подробностью будет различать состояния и робот. Для того чтобы уменьшить объем памяти, проектировщики обращаются к живой природе, пытаясь понять, как в ней достигается экономия в числе требуемых высказываний, предназначенных для хранения в памяти. Например, можно говорить об объединении степеней подвижности робота. Что это такое? Подвижность или свобода — это возможность двигаться. Если данное звено механической части имеет возможность перемещаться относительно соседнего звена, вращаясь в одной плоскости или перемещаясь вдоль одной линии, то говорят, что робот имеет одну степень подвижности.
Пусть механическая часть содержит десять подвижных звеньев и каждое из них имеет одну степень подвижности. Тогда робот обладает десятью степенями подвижности. Представим, что хранимые в памяти робота высказывания не допускают независимости друг от друга перемещений звеньев разных степеней подвижности, а отражают их объединения в группы. Для данного высказывания внутри группы все движения связаны между собой по неизменному закону. Если известен характер одного движения, то известно, куда и сколь быстро в отдельные моменты времени должны совершаться остальные движения в рассматриваемой группе. Такое объединение нескольких степеней подвижности называют синергией. Уменьшение числа хранимых высказываний приведет к тому, что каждый цикл интеллектуального процесса будет совершаться быстрее. Вообще совокупность высказываний — что-то вроде критической массы радиоактивного вещества, но действующей обратно: при недостаточном числе запомненных устройством
высказываний робот не сможет успешно действовать. Интеллектуальный робот, действуя неправильно, может быстро прекратить свое существование, будучи предоставленным самому себе.
О ВЗАИМОДЕЙСТВИИ ЧЕЛОВЕКА И РОБОТА
Человек руководит роботом не постоянно, а лишь в отдельные моменты времени. Например, требуется остановить робот и ввести в его память новые программы действий, т. е. обучить. Либо речь идет об общении человека и работающего робота, когда человек указывает ему новые цели функционирования и корректирует его поведение с помощью весьма емких по смыслу высказываний. Говорят, что в этом варианте робот работает в режиме интерактивного управления. Интерактивное управление, в свою очередь, называют иногда супервизорным, подчеркивая тот факт, что за действующим роботом наблюдает сам человек (супервизор) .
Создание интеллектуальных роботов связано с одновременной разработкой и способов общения с ними человека. Эта разработка представляет собой в настоящее время важную часть научных исследований, проводимых независимо в разных странах.
Вопросы к уроку 8
1. Что такое робот?
2. Что такое интеллектуальный робот?
3. Что такое искусственный интеллект?
4. Что такое промышленный робот?
5. Что вам известно об общении человека и робота?
УРОК 9. МАНИПУЛЯТОРЫ
КИНЕМАТИЧЕСКИЕ СХЕМЫ МАНИПУЛЯТОРОВ
На рис. 9.1 показана упрощенная кинематическая схема руки человека. Большое число степеней подвижности обеспечивает разнообразие ее движений.
Манипулятор — механическая рука, рука робота. Обычно его кинематическая схема еще проще. Звенья манипулятора получают движения от передаточных механизмов, расположенных между звеньями и двигателями. Соединение механических звеньев составляет кинематическую цепь. Соприкасающиеся звенья допускают те или иные относительные движения. Говорят, что два таких звена манипулятора образуют кинематическую пару. Каждая кинематическая пара характеризуется номером своего класса: от единицы до пяти.
Кинематическая пара 5-го класса обладает одной степенью подвижности, обеспечивающей вращение около некоторой оси либо поступательное дви-
5 Зак. 62G
57
Рис. 9.2. Кинематическая схема манипулятора (руки робота)
жение вдоль оси. Такую ось называют осью кинематической пары. Соответственно кинематическая пара 1-го класса имеет пять степеней подвижности.
На рис. 9.2 приведена кинематическая схема руки робота (кинематическая цепь), которая имеет семь степеней подвижности. Вращение руки в шарнирах 1, 2, 3 используется для переноса предмета в заданную точку, а вращение в шарнирах < 5, б - для ориентирования предмета в точке. С помощью схвата 7 рука удерживает предмет. Шарниры 1-6 соединены стержнями. Схват перемещается в сферической системе координат.
В схеме манипулятора на рис. 9.3 три движения по стрелкам 1, 2, 3 используются для переноса детали в цилиндрической системе координат. Кисть может совершать три движения ориентации по стрелкам 4, 5, 6.
Рис. 9.3. Кинематическая схема манипулятора
Стрелкой 7 обозначено движение схвата. При повороте кисти по стрелке 4 схват может опускаться вниз на значительное расстояние. Кинематические цепи, изображенные на рис. 9.2 и 9.3, являются разомкнутыми.
Возможно осуществление пространственного движения схвата по сферическим поверхностям путем сочетания прямолинейных перемещений отдельных звеньев.
Пространство, в котором может находиться схват при неподвижном основании робота, называют рабочей зоной. Заметим, что последнее звено может быть соединено не со схватом, а с каким-либо инструментом. С помощью схвата можно взять и перенести предмет, а с помощью инструмента — выполнить ту или иную технологическую операцию.
Существует понятие рабочее пространство робота. Это пространство, в котором может находиться рабочий орган робота (схват или инструмент) с учетом перемещений основания робота.
Рис. 9.4. Кинематические схемы модулей манипуляторов, обладающих тремя степенями подвижности и формы их рабочих зон
КИНЕМАТИЧЕСКИЕ СХЕМЫ МОДУЛЕЙ
Можно попытаться создать несколько разнообразных механизмов с тремя степенями подвижности, а затем собрать из них манипуляторы. Такие механизмы назовем модулями. Возможны разнообразные варианты модулей; некоторые из них показаны на рис. 9.4. Здесь же приведены формы их рабочих зон.
Заметим, что целесообразный вариант кинематической цепи манипулятора определяется основной технологической задачей робота. Например, для холодной штамповки манипуляторы выполняют работающими в прямоугольной (рис. 9.4, а) или цилиндрической (рис. 9.4, б - г) системе координат. Манипуляторы для дуговой сварки обычно перемещаются в прямоугольной системе координат. Манипуляторы, обслуживающие металлорежущие станки, работают в цилиндрической или сферической (рис. 9.4, д-з) системе координат.
Пусть манипулятор сочетает в себе два или три варианта. Каждому манипулятору будут соответствовать свои форма и размеры рабочей зоны — пространства, в котором может находиться схват, и свой набор возможных
движений схвата. Модульный подход в создании кинематических схем иллюстрируется также рис. 9.5, на котором изображена конструкция промышленного робота с двумя модулями. Движения первого модуля обозначены цифрами 1, 3, 6, а движения второго - цифрами 2, 4, 5. Робот предназначен для применения в технологическом комплексе металлообработки.
МАНИПУЛЯТОР С МЕХАНИЗМАМИ
ПЕРЕДАЧИ ДВИЖЕНИЙ ЧЕРЕЗ СУСТАВЫ
Совершенно иная идея конигруирования механической руки проиллюстрирована на рис. 9.6. Эта идея не имеет аналога в живой природе. Механическая рука имеет три сустава. Неподвижная стойка 0 и подвижные звенья 1-7 соединены между собой кинематическими парами 5-го класса. Двигатели вынесены за стойку 0 и расположены вне руки. Движения от них передаются к входным вращающимся элементам выше стойки 0. Движения от двигателей к суставу 1 передаются через суставы 3 и 2. Движения к суставу 2 передаются от двигателей через сустав 3. Каждому суставу соответствуют две степени подвижности, т. е. для трех суставов получаем шесть степеней подвижности. Вал 7 связан со схватом (седьмая степень подвижности). Все механизмы одного сустава содержат конические дифференциальные передачи и взаимно связаны. Звенья 1-7 образуют единую зубчато-рычажную систему.
В суставе 1 расположен конечный механизм изгиба и вращения кисти и механизм передачи движения схвата. Сустав 2 имеет конечный механизм изгиба и вращения локтя, передаточные механизмы схвата и изгиба и вращения кисти. Сустав 3 имеет конечный механизм изгиба и вращения плеча и передаточные механизмы. Вращению кисти соответствует вращение элемента 5 вокруг вертикальной оси, а изгибу кисти — вращение элемента 5 вокруг оси сустава 7 в плоскости, перпендикулярной рисунку. Аналогичные движения локтя соответствуют вращениям элемента 5, а для плеча аналогично перемещается элемент 2. На рисунке цветом выделены передачи движений изгибов сверху вниз от начала руки к суставам.
Рис. 9.6. Кинематическая схема копирующего манипулятора с механизмами передачи движений через суставы
ОБ ИСКУССТВЕННЫХ МЫШЦАХ
На основе искусственных мышц можно построить манипулятор. В общем случае искусственная мышца состоит из некоторого числа микроэлементов, соединенных друг с другом. Микроэлементы — это либо пневмоэлементы, либо элементы, наполненные специальной жидкостью. Вся масса микроэлементов крепится к длинной гибкой жиле. К каждому микроэлементу может быть приложен (либо снят) электрический потенциал. От этого зависит состояние микроэлемента: сжат он или растянут. Каждой комбинации состояний микроэлементов соответствует свое состояние мышцы, а состояние всех мышц определяет состояние манипулятора. Фактически здесь идет речь об объединении манипулятора (механической части) и приводов в одно целое.
На основе искусственных мышц можно сконструировать, например, схват с пальцами.
Вопросы к уроку 9
1. Сколько степеней подвижности у кинематической пары 5-го класса?
2. Какие системы координат известны вам?
3. В чем заключается модульный принцип построения манипуляторов.
4. Объясните идею устройства манипулятора с передачей движений через суставы.
УРОК 10. СХВАТЫ
ОТ СХВАТОВ АВТООПЕРАТОРОВ
К СХВАТАМ МАНИПУЛЯТОРОВ
По мере совершенствования технологических процессов станки и конвейерные линии стали оснащаться средствами малой механизации. Они позволяли отделять деталь от массы аналогичных и подавать ее с определенной ориентацией в заданную позицию. Труд рабочего значительно упростился, а производительность труда увеличилась. Позднее потребовалось увеличить точность установки деталей без снижения темпа производства. Тогда наступил предел человеческих возможностей, и конструкторы были вынуждены создать устройства, которые могли захватить деталь и перенести ее в требуемое положение. Эти устройства назвали автооператорами. Схваты автооператоров были строго специализированы, поэтому взятие и перенос детали другой формы были невозможны. Для выпуска других деталей требовалась полная переделка всего оборудования. Но при крупносерийном производстве затраты на разработку и создание специальных автооператоров быстро окупаются.
Автооператоры в настоящее время применяются весьма широко. Их можно увидеть практически на любом станке типа ’’обрабатывающий центр”. Но схват автооператора может работать только с базовой поверхностью инструмента и даже отдаленно не напоминает руку человека. А когда началось внедрение роботов, то это привело к необходимости создания схватов, отличающихся более широкими возможностями, и тут конструкторы обратились к структуре руки человека.
Если пытаться изучить руку человека, то можно обнаружить в ней много степеней подвижности. Кисть, например, имеет 19 степеней подвижности. Этим определяется ее поразительная приспосабливаемость к предметам различной формы в процессе их захвата.
При разработке любого схвата необходимо знать особенности захватываемых деталей. Все множество изделий, выпускаемых на Земле, можно разбить приблизительно на 600 типов. У технологов есть методика разбиения некоторого множества изделий на группы в зависимости от формы поверхности. При разработке новой конструкции схвата прежде всего полезно изучить накопленный другими опыт их создания. Кроме того, необходимо учитывать, что сложность конструкции схвата определяется и особенностями операций с деталями. Часто оказывается, что при незначительном изменении формы деталей существенно упрощаются конструкция схвата и процесс перемещения детали.
ТИПЫ СХВАТОВ МАНИПУЛЯТОРОВ
Для захватывания и удержания деталей схватам роботов помимо непосредственного движения зажима-разжима добавляют ориентирующие степени подвижности. Число ориентирующих степеней подвижности может достигать трех в сложных и дорогих многофункциональных контурных роботах, применяемых преимущественно на сварке и окраске изделий. Большинство промышленных роботов имеет одну до
полнительную степень подвижности схвата — модуль сдвига или модуль винтового движения — для введения переносимой детали в патрон зажимного приспособления станка.
Многие современные пневматические роботы оснащаются сдвоенным схватом. В качестве примера можно привести схват промышленного робота Kaufeld, разработанного в Швеции. С помощью сдвоенного схвата возможны одновременные снятие готовой детали и установка новой заготовки на станке. На рис? 10.1 изображен сдвоенный схват, стрелками показаны дви
жения схвата.
Схваты, которые зажимают деталь за внешний или внутренний диаметры с помощью металлических губок, в настоящее время наиболее распространены. Обычно в качестве привода такого схвата используются пневмоцилиндр или мембрана, а сама конструкция позволяет производить замену пальцев, присоединяемых к губкам и приспособленных для зажима конкретной детали. Движение поршня пневмо цилиндра или штока, соединенного с мембраной с помощью различных механизмов, преобразуется в движение пальцев. Движение пальцев может осуществляться как вращение вокруг неподвижных осей или иначе.
На рис. 10.2 показан вариант схвата для взятия детали за внешний диаметр. Усилие Q воздействует на шток схвата, элементы 3 движутся навстре-
Рис. 10.1. Конструкция сдвоенного схвата
Рис. 10.2. Конструкция схвата с пневмоприводом для взятия детали за внешний диаметр
чу при вращении вокруг оси 2, преодолевая сопротивления пружин 1. Здесь же показано применение губок 4 в виде надувных подушек, что необходимо для взятия хрупких предметов.
На рис. 10.3 показан вариант пневматического схвата для взятия детали за внутренний диаметр.
На рис. 10.4 проиллюстрирована идея реализации самоориентирующегося схвата. Под действием силы Q элементы схвата 2 расходятся для взятия детали, а после снятия силы сходятся под действием пружин 7, удерживая ее.
С целью унификации в гидравлических промышленных роботах для привода схвата используется гидропривод (рис. 10.5), позволяющий плавно регулировать усилие зажима в зависимости от массы переносимой детали.
Для повышения универсальности схвата можно увеличить число пальцев, что даст возможность захватывать детали сферической формы. С этой же целью пальцы могут управляться отдельными приводами, например как схват для круглых деталей фирмы Fanuk. Этот схват может зажимать детали диаметром от 20 до 210 мм и, кроме того, обеспечивает снижение погрешности установки центра детали с 1 до 0,01 мм. Такая конструкция дает возможность захватывать деталь, вращающуюся в патроне токарного станка.
Можно повысить эффективность схватов промышленных роботов, зажимая и перенося сразу несколько деталей. Такое решение применяется при внедрении роботов в крупносерийное производство.
Другая разновидность схватов — вакуумные. Принцип их работы состоит в том, что между поверхностью детали и прижатой к ней плоскостью схвата создается разрежение. Важным требованием к рабочей поверхности вакуумного схвата является точность изготовления. Средняя стоимость вакуум-
Рис. 10.3. Конструкция схвата для взятия детали за внутренний диаметр: 7 — пружина; 2 — ось; 3 — элемент схвата; 4 — деталь
Рис. 10.4. Самоцентрирующийся схват
Рис. 10.5. Робот, предназначенный для работы с тяжелыми деталями; оборудован гидравлическим схватом клещевого типа
ных схватов значительно ниже стоимости механических схватов; они обеспечивают взятие детали за одну поверхность. Основным конструктивным элементом вакуумных схватов являются присоски (рис. 10.6), которые изготовляются из эластичных полимерных материалов. Их конструкция определяется размерами и формой захватываемой детали, условиями окружающей среды, уровнем вакуума. Каждая присоска 4 оборудуется клапаном. Шарик 3 прижимается потоком воздуха к уплотнителю 1 и отключает присоску. Деталь 5 при этом удерживается остальными присосками. Штуцер 2 соединяется с клапаном управления.
На рис. 10.7 показана трубка Вентури, обеспечивающая создание вакуума. Она позволяет получить разрежение с помощью воздуха высокого давления 2 из пневмосети. Пониженное давление 3 возникает в самом узком сечении трубки. Поток воздуха 4 выводится в атмосферу. Полость присоски с помощью пневмошланга соединяют с трубкой со стороны сечения 1, Для надежного удержания деталей вакуумными схватами число присосок
Рис. 10.7 Трубки Вентури
Рис. 10.6. Конструкция вакуумного схвата
Рис. 10.8. Схват с надувными резиновыми пальцами
/ увеличивается, и каждая из них снабжается за-
I/ iT ijrL z порным клапаном, препятствующим потере ва-
куума в остальных присосках, если одна из них
I отстала. Аналогичный клапан используется, ес-
ли требуется принудительно отделить деталь от схвата для уменьшения времени операции с де-^ck талью.
Еще одной разновидностью являются схва-
<0 ты с надувными пальцами. На рис. 10.8 пока-
зан внешний вид схвата с надувными резиновыми пальцами, используемого для взятия хрупких предметов. Полые пальцы изготовлены из резины с тонкостенной частью 1 и утолщенной частью 2. При подаче сжатого воздуха в полость происходит удлинение тонкостенной части пальца 1. Палец деформируется, обеспечивая взятие предмета.
Если требуется брать неориентированные мелкие стальные детали, то используют магнитные схваты. Обычно применяют электромагниты. Число, размеры и мощность обмоток электромагнитов определяются из условия удержания заданного числа деталей при разгоне и торможении руки промышленного робота около позиций съема и установки деталей. В некоторых случаях использование магнитных схватов встречает определенные трудности, так как надежное взятие детали зависит от величины зазора между сердечником электромагнита и деталью. Кроме того, при случайном отключении питающего напряжения деталь может отделиться от схвата. Для повышения надежности создают комбинированные устройства.
Одним из направлений в разработке схватов является создание приклеивающихся схватов. Для приклеивания может использоваться клейкая лента, перематывающаяся после каждой операции взятия детали. Получили распространение застежки ’’крючки-петельки”. В последнем случае полоски с крючками приклеены к схвату, а полоски с петельками приклеены к деталям. Для отпускания деталей используются специальные выталкиватели.
СЛОЖНЫЕ СХВАТЫ
Конструкции схватов, применяемых в сборочных промышленных роботах, отличаются сложностью и высокой точностью изготовления. Такой схват устанавливается на манипулятор с помощью специальной гибкой подвески, что обеспечивает возможность некоторого его смещения относительно манипулятора, а этого бывает зачастую достаточно для успешного выполнения сборочной операции. В качестве такой гибкой подвески могут использоваться сильфоны или системы пружин и направляющих.
Наиболее совершенны схваты, обеспечивающие поиск детали в рабочем пространстве робота и ее взятие. Такие схваты называются очувствленными. В качестве устройств очувствления в них используются ультразвуковые и тактильные датчики. Ультразвуковые датчики позволяют определить направление на деталь и расстояние до нее. Тактильные датчики указывают момент захвата детали и измеряют усилие ее удержания.
Известны датчики касания, контактного давления, проскальзывания. Они могут быть выполнены в виде матриц, устанавливаемых на внутренних поверхностях пальцев. Тактильные датчики должны иметь высокую прочность, износостойкость, противостоять температурным перегрузкам. Их изготовляют на основе тензорезисторных, пьезоэлектрических, электромагнитных, емкостных и магнитоупругих преобразователей, а также микровыключателей, струйных пневматических элементов, электропроводящих полимеров и углеродных волокон.
Вопросы к уроку 10
1. В чем отличие схватов манипуляторов роботов от схватов автооператоров?
2. Перечислите типы схватов.
3. Что вам известно о схвате с надувными пальцами?
4. Расскажите об очувствленных схватах.
УРОК 11. ПРИВОДЫ
ЭНЕРГЕТИКА ПРИВОДОВ
В робототехнике применяются электрические, гидравлические и пневматические приводы. В электроприводах электрическая энергия, поступающая от источника, преобразуется в механическую работу. В гидро- и пневмоприводах в работу преобразуется энергия жидкости или газа, находящихся под давлением. Для подачи жидкости или газа нужны насосные станции.
Сравним названные приводы. Если требуется мощность двигателя в десятки или сотни ватт, то наиболее удобен для использования электропривод: его масса и размеры приемлемы для практики роботостроения.
Если же двигатель для развития требуемого усилия должен иметь мощность в несколько киловатт при такой же скорости перемещения его подвижной части, то электропривод уступит по массе и размерам гидроприводу. Конечно, надо помнить, что насосная станция при этом в расчет не берется. Объясняется это тем, что гидродвигатель может быть нагружен силой, превышающей его номинальную силу во много раз. Чем больше нагрузочная способность двигателя, тем с меньшими его размерами можно выполнить заданный технологией цикл движения звена робота. Поэтому особенно мощные роботы — гидравлические. Если же говорить о замене повсеместного труда рабочих трудом роботов, то в большинстве случаев потребуются такие характеристики, которые имеют электрические роботы (десятки — сотни ватт).
Большинство реализованных пневматических приводов — это маломощные исполнительные устройства, работающие в двухпозиционном режиме. Их грузоподъемность значительно ниже, чем у гидравлических, а возможности по регулированию движущих сил и скоростей ниже, чем у электрических приводов.
ЭЛЕКТРОПРИВОДЫ
На рис. 11.1 изображена простейшая схема электропривода. На валу электродвигателя М развивается момент силы, если по его обмотке протекает ток. Напряжение источника питания (7П представляет собой синусоидальную функцию времени Un = t/msin cot. Поэтому при включении транзистора VT1 ток в двигателе протекает снизу вверх за счет действия только положительной полуволны синусоидального напряжения t/n. При включении транзистора VT2 ток протекает сверху вниз вследствие действия отрицательной полуволны источника. Пульсации тока в обмотке двигателя являются недостатком этой схемы: соответственно току пульсирует и момент силы, развиваемый приводом. Пульсации сил вызывают, в свою очередь, пульсации ускорения и скорости перемещения звена робота.
В рассмотренной схеме сигналы управления поступают в виде электрических потенциалов ко входам усилителей DI, D2. Эти потенциалы обозначены через Ui и U2. Если Ux = U2 = 0, то транзисторы VT1 и VT2 заперты действием потенциалов смещения добавочных источников — Uc и +С/с. Транзистор VT1 отпирается при Ux< 0, a VT2 при U2 > 0. Если же одновременно их < 0 и U2 > 0, то по обмотке электродвигателя протекает переменный ток. Тогда и момент силы электродвигателя представляет собой знакопеременную периодическую функцию времени. Падения напряжений на резисторах Яш1 и Яш2 используются в качестве сигналов обратных связей, пропорциональных токам, протекающим в эмиттерах транзисторов VT1 и VT2. Дроссель £др сглаживает ток в обмотке двигателя.
Если усилители D1 и D2 — аналоговые микросхемы, то, очевидно, они могут включить или выключить очень маломощные транзисторы. Обычно в
обмотках электродвигателей большинства роботов протекают электрические токи, равные нескольким амперам. Поэтому в схеме, изображенной на рис. 11.1, потребуется вместо транзисторов VT1 и VT2 включить составные транзисторы или дополнительные усилители. Их базы соединим с выходами усилителей D1' и D2 соответственно.
Рассмотрим схему электропривода, изображенную на рис. 11.2. Она содержит усилители на транзисторах VT1 - VT6. Диоды VD1 — VD4 шунтируют транзисторы VT1 - VT4, защищая их от действия электродвижущей силы самоиндукции. Ток, протекающий в обмотке электродвигателя М, сглаживается дросселем L , что уменьшает пульсации момента силы. Базы транзисторов VT2, VT4 —VT6 соединены с выходами усилителей DI — D4 и с резисторами R3 — R10, согласующими входные и выходные сопротивления транзисторов и усилителей. Потенциалом смещения — Uc дополнительного источника эти транзисторы запираются, если потенциалы команд управления Uy — U4 равны нулю. В этом режиме к базам транзисторов VT1 и VT3 поступает потенциал +[7П от источника питания схемы через резисторы R1 и R2 соответственно. Ток через электродвигательМ может протекать либо через элементы VT1, £др, Яш, VD3 либо через элементы VT3, RuliLJjp, VD1, что зависит от направления тока электродвигателя в момент времени, когда указанный режим наступил (Ui — 1Ц равны нулю). Известно, что в данном случае момент силы электродвигателя является тормозным. Электродвигатель начнет развивать движущий момент силы, если включить транзисторы VT1 и VT4 и выключить VT2 и VT3 либо включить VT2 и VT3,
выключив VT1 и VT4. В первом варианте ток в обмотке электродвигателя будет протекать слева направо, а во втором — справа налево, замыкаясь через источник питания. Чтобы создать это состояние, потребуется включить транзистор VT6 и выключить VT5 в первом варианте, а во втором — наоборот. Команды управления в первом варианте: Uy = О, С/2 = 0, < 0, •
U4 < 0, и во втором: Ux <0,U2< О, U3 = 0,U4 = 0. При включенном транзисторе VT5 запирается VT1, и наоборот. Аналогично запирается транзистор VT3 при включении VT6, и наоборот. С резистора снимается падение напряжения, пропорциональное току электродвигателя, и используется для создания контура регулирования тока, Рассмотренная схема характеризует
ся меньшими пульсациями момента силы электродвигателя, ускорения и угловой скорости вала по сравнению с предыдущей схемой.
Электрические схемы приводов на рис. 11.1 и 11.2 имеют в своем составе двигатели постоянного тока. Наряду с ними применяются и электродвигатели переменного тока: асинхронные и синхронные. За последние годы находят применение, в том числе и в робототехнике, так называемые вентильные электродвигатели. Это двигатели постоянного тока, не имеющие механического коллектора и щеток. Их заменил специальный коммутатор на транзисторах или тиристорах. Коммутатор переключает обмотки статора электродвигателя в моменты времени, определяемые частотой вращения вала. Для задания моментов переключения используется датчик угла поворота вала. Асинхронные, синхронные, вентильные электродвигатели обычно содержат трехфазную обмотку на статоре. Поэтому их питание осуществляется с помощью трехфазных схем.
На рис. 11.3 изображены три фазные обмотки двигателя: W4, W5, W6, соединенные в звезду в точке О. Остальная часть схемы предназначена для изменения тока в фазной обмотке W4. Напряжение на обмотке W3 трансформатора TV1 равно напряжению источника питания. Пропускать ток через обмотку W4 в пазных направлениях можно, включая транзистор VT1 либо
VT2. Команды на переключение VT1 и VT2 поступают извне к точкам 4 и 5 в виде отпирающего или нулевого потенциала. Ток через обмотку W4 замыкается через элементы VD4, W4, VT2, W3, VD6, малое сопротивление резистора R2, обмотку W2 трансформатора TV2, тиристор VD1 либо через элементы VD5, R2, W2, VD1, VD3, W3, VTL Сопротивление резистора R1 велико, и поэтому током через него пренебрегаем. Трансформатор TV2 имеет две обмотки: первичную W1 и вторичную W2. Активное сопротивление обмотки W1 намного больше сопротивления резистора R2.
Рис. 11.3. Схема электропривода переменного тока
Часть схемы, состоящая из элементов Rl, R2, R3, Wl, W2, VD1, VD2, предназначена для защиты элементов остальной части схемы от больших токов, например от тока короткого замыкания. Предположим, что обмотка W4 случайно закорочена. Тогда быстро начнет нарастать ток через резистор R2, а также обмотку W1. На обмотке W2 появится электродвижущая сила, так как трансформатор TV будет трансформировать напряжение из первичной цепи (WJ) во вторичную цепь (И2). Обмотка W2 включена так, что электродвижущая сила уменьшит ток в тиристоре VD1 до порогового значения, после чего он запрется. Это приведет к выключению тока в обмотке HW. Затем, после окончания действия электродвижущей силы, тиристор снова откроется. Если опять закоротить обмотку W4, то ток через элементы R2 и W1 начнет нарастать вновь с большой скоростью и, прежде чем он достигнет недопустимо большого значения, тиристор VD1 запрется. Таким образом, тиристор VD1 периодически будет отпираться и запираться до тех пор, пока существует аварийное состояние схемы.
Для того чтобы получить трехфазную схему питания обмотки W4, надо к точкам 6 и 7 подсоединить такие же две схемы, но с обмотками W3 второй и третьей фаз трансформатора TV1. Аналогично осуществляется питание обмоток W5 и W6 с помощью своих транзисторов от тех же трех одинаковых схем. В обмотках W4 — W6 электродвигателя в каждый момент времени можно создать свой ток, переключая транзисторы.
ГИДРОПРИВОДЫ
На рис. 11.4 изображен один из вариантов гидроприводов. Движение, совершаемое выходным элементом 1 привода, создается в гидроцилиндрах 2. Направление движения зависит от состояния
масла слиО масла
гидрораспределителей 4 (золотников) положение подвижной части каждого из них изменяется устройством управления, входящим в структуру исполнительной системы (с помощью электромагнита 5).
Все гидроприводы принято делить на два вида: с дроссельным и объемным управлением. Гидроцилиндры (либо моторы) в устройствах первого вида работают от насосов постоянной производительности. Недостатками являются небольшой коэффициент полезного действия (КПД), затруднения в передаче энергии жидкости на большие расстояния. Приводы с объемным управлением содержат цилиндры или моторы, питаемые от реверсивных насосов переменной производительности, и характеризуются высоким КПД. Эти гидроприводы целесообразно применять для больших выходных мощностей (более 5 кВт).
Гидропривод, схема которого изображена на рис. 11.4, относится к устройствам с дроссельным управлением. При смещении подвижной части гидрораспределителя 4 в любую сторону площадь поперечного сечения одного рабочего окна увеличивается, а другого — уменьшается. В результате в одну полость гидроцилиндра 2 приток жидкости увеличивается, а в другую — уменьшается. Так изменяется скорость выходного элемента 1.
ПНЕВМОПРИВОДЫ
На рис. 11.5 показан вариант пневматического привода. Возвратно-поступательное движение штока пневмоцилиндра 2 через передачу рейка — шестерня 3 передается непосредственно на шестерню 4, На оси шестерни закреплен электромагнитный тормоз 5, который создает тормозной момент силы и поглощает кинетическую энергию движущихся масс привода при остановке. Тормозной момент силы на валу шестерни 4 регулируется изменением электрического напряжения на обмотке тормоза. Направление движения штока пневмоцилиндра 2 зависит от положения подвижной части пневмораспределителя 7, управление которым осуществляется с помощью электромагнитов.
Рис. 11.5. Устройство пневмопривода
МЕХАНИЧЕСКИЕ ХАРАКТЕРИСТИКИ ПРИВОДОВ
Мы рассказали об устройстве различных приводов. Важно также и то, какая механическая характеристика у привода, т. е. зависимость скорости перемещения выходного элемента привода от силы статического сопротивления ему.
Пусть создается вращательное движение. Под механической характеристикой понимают зависимость Пп = /(Л7С), где Пп — угловая скорость вращения выходного вала привода; Мс — момент силы статического сопротивления на рассматриваемом валу.
От вида функции Пп = f(Mc) зависит, какие законы движения Пп(0 (I — время) в состоянии воспроизвести вращательный привод, а какие — нет. Для линейного двигателя под механической характеристикой привода понимают зависимость Кп =/(Fc), где Кп — линейная скорость выходного элемента привода; Fc — сила статического сопротивления.
Коэффициент полезного действия определяет потери энергии в приводе. Его максимум соответствует номинальному режиму эксплуатации. Номинальный режим — это номинальная нагрузка, скорость, мощность, упоминавшиеся выше.
На основе приводов с помощью устройств управления и обратных связей изготовляют одностепенные системы приведения в движение роботов, имеющие свои механические характеристики. Механическая характеристика привода может быть жесткой, если при изменении силы Fc в установившемся режиме движения скорость Кп изменяется незначительно (рис. 11.6, кривые 7). Такая характеристика хороша для перемещения предмета с постоянной скоростью. Если речь идет о сборочных операциях, то необходимо иметь некоторую податливость привода внешним рабочим усилиям (рис. 11.6, кривые 2). Наконец, если требуется прижать предмет к вертикальной плоскости либд раздавить его, то движение или отсутствует, или незначительно. Данной технологии удовлетворяют кривые 3 на рис. 11.6.
У подвижных роботов наилучшему передвижению колес по неровной поверхности соответствуют механические характеристики приводов семейства 2 на рис. 11.6.
В качестве примера рассмотрим совместную работу привода и устройст-
ва управленйя (рис. 11.7). Устройство управления вырабатывает сигнал U3, пропорциональный заданной силе F3. В устройстве сравнения производится операция вычитания сигналов заданного и поступающего от датчика усилия. Результат сравнения сигналов 6 воздействует через прямой канал привода на звено робота и одновременно выравнивает действующие значения силы F, развиваемой приводом, угловой скорости Пп и угла поворота выходного вала с заданными.
Рис. 11.6. Механические характеристики приводов
Рис. 11.7. Структурная схема одностепенной системы приведения в движение:
УУ — устройство управления; ПКП — прямой канал привода; ДУ, ДС, ДП — датчики усилия, скорости и положения
От правила управления приводом зависит тип механической характеристики, а также поведение системы приведения в движение в динамике.
Вопросы к уроку 11
1. Какой тип привода наиболее подходит для робота, заменяющего ручной труд человека?
2. Поясните работу схем электроприводов, изображенных на рис. 11.1 — 11.3.
3. Что такое механическая характеристика привода? Какие требования технология предъявляет к механической характеристике привода?
4. Как осуществляется коррекция действия привода в одностепенной системе приведения в движение?
УРОК 12. ДАТЧИКИ СОСТОЯНИЯ РОБОТА
Датчик — выносной преобразователь контролируемых величин (линейного перемещения или угла поворота, скорости и ускорения, давления, температуры и т. п.) в сигналы, удобные для измерения, передачи, хранения и воздействия на управляемые процессы.
Датчики состояния робота входят в замкнутые одностепенные системы приведения в движение. Звено каждой степени подвижности робота приводится в движение своей замкнутой системой. В ней сравниваются заданное и действительное перемещения звена, заданная и действительная скорости его движения. Как правило, на выходах датчиков перемещения и скорости действуют электрические сигналы, пропорциональные измеряемой величине. Например, электрический потенциал выхода путевого датчика пропорционален линейному перемещению или углу поворота звена робота. Потенци
ал выхода датчика скорости пропорционален измеряемой скорости движения звена.
Благодаря наличию датчика в одностепенной системе приведения в движение осуществляется сравнение заданной и измеренной датчиком величин, а результат сравнения воздействует на двигатель и, как следствие, на состояние звена робота, ускоряя или замедляя его в зависимости от того, что требуется.
ПОТЕНЦИОМЕТРЫ
На низкоскоростных валах редукторов, расположенных между двигателями и манипуляторами, можно установить потенциометры. На рис. 12.1, а показано, что перемещение звена через механическую связь (штриховая линия) преобразуется в перемещение движка потенциометра Яд. Измеряемому (действительному) перемещению звена пропорционально напряжение С/д. Если включить два потенциометра, как показано на рис. 12.1, б9 то с помощью задающего потенциометра R3 мы сможем задавать перемещение звена робота в виде напряжения U3. Несовпадение U3 и С/д означает, что их разность ДС/не равна нулю. Кроме того, полярность ДС/ соответствует одному из неравенств: U3 > С/д, С/д > U3. Итак, схема с двумя потенциометрами дает возможность сравнить заданное и действительное перемещения звена робота (линейные перемещения или углы поворота).
ВРАЩАЮЩИЕСЯ ТРАНСФОРМАТОРЫ
К другому типу датчиков перемещений — датчиков углов поворота — относятся вращающиеся трансформаторы. Применяя их, получают электрические напряжения, пропорциональные sina, cosa или самому углу поворота вала а. Конструктивно вращающиеся трансформаторы выполняют так же, как и асинхронные двигатели с фазными роторами, причем число фаз равно двум. На рис. 12.2 показаны обмотки статора и ротора трансформатора. Концы обмоток статора обозначены через
а) б)
Рис. 12.1. Схемы включения потенцио-
метров
Рис. 12.2.'Схема вращающегося трансформатора
A i, A 2 и B2, B2, а концы обмоток ротора — через Cif С2 nDi}D2. На схеме образована общая точка соединением концов А х и Вг, а также общая точка соединением концов Сх и D2. Синусоидальное напряжение питания подают от источника к обмотке А х - А2 (зажимы 1, 3) либо к обмотке Bi — В2 (зажимы 2, 3). Электрическое напряжение, характеризующее угол поворота ротора относительно статора, получают между точками 4, 6 либо 5, 6. Это означает, что с помощью устройства токосъема снимают напряжение с обмотки — D2 либо Ci - С2.
При повороте ротора изменяется взаимная индуктивность обмоток статора и ротора. Действие вращающегося трансформатора основано на том, что взаимная индуктивность изменяется в функции угла поворота ротора а по синусоидальному закону. Обмотки ротора Сх - C2,Z>x ~&2 расположены так, что амплитуда синусоидального напряжения на обмотке С i - С2 изменяется пропорционально sina, а амплитуда синусоидального напряжения на обмотке Dx — D2 — пропорционально cos а. Принято различать напряжение и электродвижущую силу (ЭДС). Если используемая обмотка ротора нагружена током, протекающим через входное сопротивление некоторого устройства, подключенного параллельно обмотке, то приведенные выше рассуждения относятся к ЭДС, а не к напряжениям. Это означает, что правильнее говорить об ЭДС, наведенной в соответствующей обмотке ротора, амплитуда которой зависит синусоидально от угла поворота ротора а.
Особым способом включения всех четырех обмоток вращающегося трансформатора можно добиться того, что амплитуды напряжений, снимаемых с обмоток вращающегося трансформатора, будут пропорциональны углу поворота ротора с некоторой удовлетворительной точностью. Диапазон изменения измеряемого угла —55 ... +55 град (наибольшая ошибка измерения 0,1%).
СЕЛЬСИНЫ
Другим известным элементом системы приведения в движение, выполняющим функцию датчика угла поворота вала, является сельсин. Конструктивно он выполняется как асинхронный электродвигатель с фазным ротором. Сельсины бывают однофазными и трехфазными. Однофазный сельсин обычно имеет однофазную обмотку на статоре и трехфазную — на роторе. Если однофазная обмотка возбуждена протекающим в ней током, то ЭДС, наведенные в фазных частях обмотки неподвижного ротора, имеют одну и ту же неизменную временную фазу. Наоборот, если к каждой фазной части обмотки ротора, собираемой по схеме ’’звезда”, подвести синусоидально изменяющиеся потенциалы одной и той же временной фазы, то на однофазной обмотке статора можно получить при повороте ротора напряжение с амплитудой, синусоидально изменяющейся в функции угла поворота ротора а.
ИНДУКТОСИНЫ
Возможно и более точное измерение угла поворота вала с помощью индуктосинов — воздушных вращающихся трансформаторов. Они названы воздушными, так как магнитопроводы из стали
(или сплава) в них отсутствуют. Магнитопроводом является воздушный промежуток между двумя дисками. Один диск (ротор) поворачивается относительно другого неподвижного (статора). На дисках печатным способом нанесены обмотки с большим числом пар полюсов. Расстояние между дисками составляет десятые доли миллиметра. Поскольку магнитный поток проходит по воздуху, то индуктивность обмотки ротора (статора) составляет несколько микрогенри. Частота напряжения питания обмотки статора составляет 1 кГц, коэффициент трансформации напряжения 0,01 . . . 0,005, активное сопротивление обмотки ротора 1 ... 10 Ом.
В условиях современного промышленного производства применение индуктосинов пока затруднено. Это связано с большими силовыми воздействиями (деформациями валов), агрессивностью окружающей среды, воздействиями заводских магнитных полей.
КОДОВЫЕ МАСКИ
Известен способ высокоточного измерения угла поворота вала с помощью специальных кодовых масок-дисков с концентрическими полосами. Каждая полоса содержит затемненные и прозрачные участки. Диск освещается источником света, с другой стороны диска установлены фотодиоды. В одном из вариантов конструкции состояние фотодиодов в каждый момент времени есть двоичный код — двоичное число. В этом числе столько разрядов, сколько полос на диске. Известны кодовые маски с восемью и более полосами. Широкого применения в промышленности такие датчики пока не имеют, ибо не обладают высокой надежностью. В состав датчика входят интегральные микросхемы, которые преобразуют изменения электрических потенциалов анодов фотодиодов при вращении диска в измеряемую величину.
ИЗМЕРЕНИЕ ПЕРЕМЕЩЕНИЯ КОМБИНИРОВАНИЕМ ДАТЧИКОВ
Хорошие результаты получают, измеряя угол поворота вала привода следующим образом. Электромагнитный датчик устанавливают на валу Двигателя и измеряют его угловую скорость. На выходе датчика возникает последовательность импульсов напряжения. Число импульсов или длительность пауз между ними (двоичное число) характеризует угловую скорость вала. Полученное двоичное число интегрируют цифровым способом на заданном отрезке времени и с большой точностью получают полный угол поворота вала .двигателя.
Однако нас интересует только угол поворота выходного вала редуктора, непосредственно связанного со звеном манипулятора. Для его получения делают пересчет. При этом случайная помеха или ошибка могут исказить результат измерения. Для исключения ошибки на выходной вал редуктора дополнительно устанавливают потенциометр. Этот потенциометр не является прецизионным. Информация, снимаемая с него, дублирует цифровой код, полученный измерением и цифровым интегрированием результата измерения.
ДАТЧИКИ УГЛОВОЙ СКОРОСТИ
ВРАЩЕНИЯ ВАЛА
Измерение угловой скорости производится тахогенераторами — миниатюрными электрическими машинами. У тахогенераторов постоянного тока неизменен магнитный поток возбуждения (от постоянных магнитов). Электродвижущая сила, наводимая в обмотке тахогенератора, пропорциональна угловой скорости вращения вала. Чтобы сохранить малой инструментальную ошибку датчика, необходимо подключить обмотку тахогенератора к возможно более высокому сопротивлению. Допустимый ток нагрузки, протекающий в обмотке тахогенератора, обычно составляет 0,01 ... 0,1 А. Тахогенераторы, выпускаемые промышленностью, пригодны для измерения угловой скорости вращения вала, приближающейся к тысяче радиан в секунду.
Если звено робота приводит в движение электропривод, то можно измерять угловую скорость вращения вала не с помощью тахогенератора постоянного тока, а собрав так называемый тахометрический мост (рис. 12.3). Здесь Е — ЭДС источника питания, М — электродвигатель постоянного тока с постоянным магнитом. Напряжение Uна выходе схемы пропорционально угловой скорости вращения вала электродвигателя. При этом создают определенное отношение сопротивлений резисторов R1 и R2, Казалось бы, данный способ измерения выгоден, так как не требует установки тахогенератора. Однако управление электродвигателями производится путем непре-кращающихся переключений силовых транзисторов или тиристоров. А это несколько усложняет реализацию идеи, иллюстрируемой рис. 12.3. Проще оказывается установить тахогенератор постоянного тока.
Высокой точности измерения угловой скорости вращения вала достигают применением импульсных электромагнитных датчиков и микросхем, с помощью которых измеряется число импульсов напряжения на заданном промежутке времени либо отрезок времени между двумя соседними импульсами. Вместо электромагнитного импульсного датчика можно использовать электрическую машину переменного тока малой мощности.
Рис. 12.3. Схема тахометрического моста
Рис. 12.4. Схема измерения скорости изменения электрического потенциала
ИЗМЕРЕНИЕ УСКОРЕНИЯ
Очевидно, ускорение — это скорость изменения скорости. Но получение этого изменения не всегда дает удовлетворительные результаты. Возможная помеха во много раз может превысить результат измерения ускорения.
На рис. 12.4 изображена электрическая схема, на вход которой подается потенциал, пропорциональный угловой скорости, а на выходе формируется сигнал, характеризующий ускорение:
^вых “ AC7BX/Af, где ДС/ВХ — приращение входного сигнала, пропорционального угловой скорости, за время Д/; С/вых - сигнал,характеризующий ускорение.
Схема состоит из трех усилителей с резисторами и одного конденсатора. По существу, эта схема представляет собой систему автоматического регулирования, на входе которой потенциал С/вх, а на выходе — потенциал выхода микросхемы D3. Микросхема D2 представляет собой интегратор, обладающий следующим свойством. Если пренебречь ошибкой регулирования,т.е. разностью между С/вх и потенциалом выхода D2. то тогда С/вых, равный потенциалу входа D2, представляет собой отношение Д UBX/At.
Микросхема D3 использована здесь для построения инвертора — устройства, преобразующего входной сигнал в сигнал обратной полярности.
ОБ ИЗМЕРЕНИИ СИЛ (МОМЕНТОВ СИЛ)
Речь может идти о движущей силе сопротивления приводу со стороны подвижного звена робота данной степени подвижности. Для вращательного движения мы говорим о движущем моменте силы Мд и моменте силы сопротивления Мс. Представим, что в вашем распоряжении имеются два устройства. На выходе первого действует электрический потенциал, пропорциональный движущему моменту силы Мд, а на выходе второго — потенциал, пропорциональный ускорению вала привода £ . Тогда вы легко можете получить информацию о моменте силы сопротивления Мс. Для этого с помощью двух усилителей необходимо осуществить вычислительную операцию
ид-и£ = ис,
где t/д — потенциал, пропорциональный движущему моменту силыМд; U£-потенциал, пропорциональный величине Е; Uc — потенциал, пропорциональный искомому моменту силы сопротивления Мс.
Данная операция вычитания соответствует физически существующей связи
Мд-Jt -Мс,
где J = const - момент инерции механической части между двигателем и звеном робота.
Движущий момент силы Мд в гидроприводе пропорционален давлению жидкости на единицу площади в гидродвигателе, а в электроприводе — электрическому току в обмотке двигателя постоянного тока.
О КЛАССАХ ТОЧНОСТИ ДАТЧИКОВ
При создании робота необходимо знать, каких классов точности следует выбрать датчики перемещений и скоростей для установки на роботе. Это очень важный момент, так как класс точности датчика характеризует его наибольшую инструментальную ошибку.
Все определяется технологией. Задают допустимые ошибки выполнения технологических операций. Если известно механическое устройство робота, то исходя из этих ошибок устанавливают максимально допустимую ошибку отработки задания приводом каждой степени подвижности робота. И только потом выбирают датчики положения и скорости звена робота.
Глубокое проникновение в технологию позволяет в каждом конкретном случае установить наибольшую допустимую ошибку для каждого датчика силы.
Вопросы к уроку 12
1. Какова роль датчиков в одностепенной системе приведения в движение? 2. Какие средства существуют для измерения перемещений звеньев робота? 3. Какие датчики применяют для измерения скорости движения звена робота?
4. Как измерить ускорение звена?
5. Можно ли измерить силу, развиваемую приводом? Если можно, то как?
УРОК 13. УСТРОЙСТВА ОЧУВСТВЛЕНИЯ
ТЕХНИЧЕСКОЕ ЗРЕНИЕ
Опыт внедрения неочувствленных роботов показал необходимость специальной оснастки, упорядочивающей положение детали. Такой робот может оперировать деталью, если она находится в строго определенной исходной позиции. В противном случае нужны роботы, способные выполнять свои функции в условиях неопределенности положений детали. Следовательно, необходимы средства очувствления, т. е. радиоэлектронные функциональные узлы, информирующие о внешней среде в виде зрительных, тактильных образов, расстояний до предметов и т. д. Такие узлы входят в информационно-измерительную систему робота. Отметим, что очувствленные роботы могут обладать органами чувств, способными воспринимать сигналы, недоступные для органов чувств человека.
Одним из органов чувств робота является устройство технического зрения. В информационно-измерительных системах подвижных роботов используются активные или пассивные устройства технического зрения. Активное устройство содержит передатчик, излучающий первичный сигнал, например световой, и приемник, регистрирующий прошедший через среду прямой или отраженный от предметов внешней среды вторичный сигнал (рис. 13.1).
Пассивное устройство содержит только приемник. Роль излучателя играют объекты внешней среды, например светлая лента, расположенная на полу цеха под тележкой робота. Пассивные устройства проще и поэтому де-
Рис. 13.1. Принцип действия системы распознавания предметов:
1 — излучатель; 2 — первичный сигнал; 3 — распознава-
емый предмет; 4 — отраженный сигнал; 5 — приемник;
6 — отображение распознаваемого предмета на экране
шевле. Однако активные устройства технического зрения более совершенны. Среди них различают устройства с фиксированным и переменным (сканирующим) направлениями восприятия.
Пусть под зрением понимается процесс восприятия и анализа окружающей обстановки на основе изображений от телекамеры. Сложность анализа заключается в том, что изображение двухмерное, а сцена (объект) трехмерная. При получении изображения часть информации теряется, а на основе оставшейся необходимо восстановить трехмерный образ сцены и использовать его для управления движениями робота.
Разработка системы технического зрения — сложнейшая задача, которая включает ряд аспектов: выбор соответствующих телекамер; учет различных фотометрических закономерностей, связанных с условиями освещения и отражения света от предметов; учет характеристик телекамер; разработку способов анализа изображений.
В качестве чувствительных элементов телекамер используются вакуумные датчики (передающие телевизионные трубки с высокой чувствительностью — видиконы) или твердотельные. Поток отраженного от предметов сцены света проходит через объектив и фокусируется на светочувствительной поверхности датчика.
Датчик представляет собой миниатюрную стеклянную вакуумную трубку. Специально созданный электронный пучок сканирует по светочувствительным элементам, которые нанесены на прозрачную металлическую пленку, приклеенную изнутри к экрану трубки. Время взаимодействия электронного пучка с элементом определяется устройством управления видикона и для всех элементов одинаково. Электронный пучок выполняет роль подвижного контакта. Ток, протекающий через видикон, зависит от сопротивления светочувствительных элементов, которое меняется при изменении освещенности. На выходе видикона формируется сигнал, который последовательно несет информацию об освещенности всех элементов экрана. Недостатком видикона является инерционность, поэтому при наблюдении за движущимся объектом разрешающая способность видикона резко падает.
Уже при скорости движения объекта 0,5 м/с изображение, снимаемое с видикона, может оказаться смазанным по всей площади.
Этот недостаток практически отсутствует в современных твердотельных датчиках, механическая прочность которых значительно выше, чем видиконов. Их отличают малые массы и объем, а также возможность совмещения с электронными устройствами на микросхемах.
Известно несколько способов использования света во внешней среде при получении изображений. Один из них предполагает освещение предметов структурным светом. Структурный свет — совокупность светлых и темных полос, созданная в осветителе. На трехмерном предмете, освещенном такой совокупностью полос, появляется совокупность изломов полос, свойственная геометрической форме только данного предмета. Наблюдаемая совокупность изломов полос записывается для микроЭВМ в виде таблицы уровней яркости. Уровни яркости, меньшие определенного заранее заданного значения, записываются нулями, а большие этого значения - единицами.
Для очень простых технологических операций применяют датчики, состоящие из источника света и светоприемника. Могут быть также использованы светоизлучающие диоды и фотодиоды. При появлении ожидаемого предмета между источником света и светоприемником световой поток изменяется, что и фиксируется информационным устройством.
В некоторых случаях устройства технического зрения могут быть сравнительно простыми. Если перечень объектов внешней среды для конкретного применения робота небольшой, то можно специально организовать внешнюю среду. Например, объекты, которые во время эксплуатации робота надо будет распознавать, заранее маркируют, а распознавание объектов сводится к распознаванию маркировок.
ОПРЕДЕЛЕНИЕ РАССТОЯНИЙ
ДО ПРЕДМЕТОВ
Для определения расстояний применяют акустические датчики. Они содержат излучатель и приемник. Излучатель вырабатывает колебания ультразвуковой частоты, которые распространяются в воздухе узким пучком и, отражаясь от предметов, попадают в приемник. Обнаружение объекта происходит при приеме отраженного сигнала.
В качестве излучателя и приемника часто используется конденсаторный микрофон. Вся работа датчика разбивается на периоды. В первом периоде (активном) микрофон излучает пакет колебаний. Далее он переключается в пассивный режим и ожидает прихода отраженных колебаний. Время между началом излучения и началом возникновения отраженного сигнала измеряется с большой точностью и позволяет определить расстояние до предмета.
Ультразвуковые датчики позволяют также оценить направление на предмет. Например, два датчика устанавливают на концах пальцев схвата и по интенсивности отраженных сигналов довольно точно определяют направление на предмет. Если эти интенсивности равны, то предмет находится на направлении оси схвата робота. Известно также о применении изотопных датчиков в сварочных роботах для определения расстояния до сварного шва и оценки его кривизны.
ДАТЧИКИ УСТРОЙСТВ ОЧУВСТВЛЕНИЯ РОБОТОВ
При взятии хрупкого предмета нужно развивать такое усилие, чтобы удержать и не раздавить его, контролируя при этом усилие схватывания. Для этого схваты роботов оборудованы датчиками усилий. Один из таких датчиков представляет собой пару пластинок из тонкого металла, разделенных слоем упругого полиуретана. Под действием усилия, прикладываемого к внешней пластинке датчика, изменяется его сопротивление, пропорциональное усилию.
Два электрода датчика контактного усилия или так называемого тактильного датчика (рис. 13.2, а) размещают так, что под действием давления электроды прижимаются друг к другу. Один из электродов или оба электрода изготовляют из электропроводящего силиконового каучука и придают им выпуклую форму. Когда датчик находится в свободном состоянии, площадь контактного пятна электродов невелика, а электрическое сопротивление контакта значительно. Под влиянием внешнего давления каучук деформируется, что вызывает резкое уменьшение сопротивления контакта.
На рис. 13.2, б показана конструкция тактильной матрицы размерностью 4 X 4, в которой также используется проводящий силиконовый каучук. Эластомер 5 расположен поверх печатной платы 4, на которой вытравлено 16 пар концентрических проводников. Каждая пара проводников вместе с находящимся над ней участком проводящего силиконового каучука составляет тактильный элемент. Внешние кольца 1 соединены по четыре и образуют четыре столбца матрицы. Центральные проводники тактильных датчиков с помощью диодов 3 соединены в четыре строки 2. Эластомер прикрепляется к плате с помощью пластиковой пленки 6, которая предохраняет его от внешних воздействий. Электрически эластомер эквивалентен переменному резистору, который соединен последовательно с внешним постоянным резистором. Тактильные элементы образуют делитель напряжения, выходной сигнал которого изменяется в зависимости от деформации эластомера.
Рис. 13.3. Устройство электромеханического датчика проскальзывания
Рис. 13.4. Матричный контактный датчик на основе пьезоэлементов
Для сборочных роботов характерно использование трехкомпонентных датчиков, измеряющих усилия по трем осям. Датчик помещают между кистью робота и схватом. Если процесс сборки идет неудачно, то возникают сигналы о превышении усилий. Три сигнала позволяют вычислить полное усилие и его направление, а затем рассчитать коррекцию положения схвата.
Для процессов зачистки и шлифовки деталей также необходимо определенное усилие. Здесь датчик измеряет усилие по оси вращения инструмента.
Датчики проскальзывания предназначены для обнаружения движения предмета относительно пальцев схвата. Если с датчика проскальзывания поступает сигнал, то это значит, что необходимо увеличить усилие зажима схвата.
Электромеханический датчик проскальзывания (рис. 13.3) состоит из иглы 7, выступающей через отверстие 2 за поверхность схвата. Игла 7 и жестко связанный с ней через элемент 3 магнит 4 могут под действием скользящего предмета поворачиваться на эластичном подвесе. Положение магнита 4 определяется с помощью катушек индуктивности 5.
Матричный контактный датчик на основе пьезоэлементов (рис. 13.4) предназначен для определения места касания и расположения предмета. Он состоит из матрицы пьезоэлементов 7, наклеенных на поверхности схвата 3, и слоя полиуретана 2 для предохранения от повреждений.
Робот может быть очувствлен с помощью нескольких контактных датчиков. Можно предусмотреть следующее поведение робота: при входе схвата робота в зону возможной встречи с поверхностью скорость его движения снижается до минимальной, а затем при поступлении сигнала от оптического датчика робот останавливается (рис. 13.5). Появление детали 3 в луче света от осветителя 4 вызывает срабатывание фотоэлемента 5. Положение
Рис. 13.5. Вариант размещения контактного и оптического датчиков на схвате
схвата фиксируется. Далее польцы схвата сжимаются и деталь захватывается, что контролируется по сигналу от микровыключателей У, на которые воздействуют пластины 2. Контактные датчики могут быть установлены и на самих звеньях манипулятора.
Вопросы к уроку 13
1. Какие чувствительные элементы используют в телекамерах?
2. Что дает освещение наблюдаемого роботом предмета структурным светом?
3. Как определяется расстояние схвата до предмета?
4. Расскажите о тактильных датчиках.
УРОК 14. ЭЛЕКТРОННЫЕ ВЫЧИСЛИТЕЛЬНЫЕ МАШИНЫ
ОСНОВНЫЕ ПОНЯТИЯ
Под электронной вычислительной машиной (ЭВМ) понимают комплекс средств, построенных на электронных элементах (логических, запоминающих, индикаторных и др.). В память ЭВМ можно записать программу работы, соответствующую вычислительному процессу, а затем реализовать ее. МикроЭВМ называют такую ЭВМ, в которой значительная часть устройства, называемая центральным процессором, размещена на одной микросхеме.
Создание микроЭВМ стало возможным после появления больших интегральных схем (БИС) с программно-перестраиваемой логикой действия, выполненных на одной пластине полупроводникового материала и содержащих несколько сотен тысяч, а возможно, и миллионов компонентов. Их отличие от известных БИС состоит в том, что они содержат управляющие элементы, позволяющие настроить БИС на выполнение любой функции из множества функций (зависимостей между последовательностями входных и выходных электрических сигналов). Набор управляющих сигналов, настраивающий БИС с программно-перестраиваемой логикой действия на реализацию конкретной функции, получил название микрокоманды.
Дальнейшее развитие идеи программно-перестраиваемой логики действия привело к тому, что БИС стали выполнять не одну, а последовательность микрокоманд. В этой связи говорят о БИС с микропрограммным управлением, которая может реализовать большое число последовательностей функций. Большие интегральные схемы с микропрограммным управлением представляют собой микропроцессор. Микропроцессорный комплект состоит из набора универсальных элементов и применяется для конструирования ЭВМ. На основе комплекта можно построить микропроцессорную систему.
Сведения, вводимые в ЭВМ, называют информацией или данными. Они представляются с помощью букв, знаков препинания, цифр и знаков переноса действий и помещаются в основную память машины. На структурной схеме ЭВМ (рис. 14.1) показано, что данные поступают в устройство ввода
Рис. 14.1. Структура ЭВМ
вместе с программой. Программа состоит из совокупности команд. Для данной ЭВМ выполняемые в ней команды образуют ее систему команд. Программа, которая должна быть выполнена, также размещается в основной памяти. В устройстве ввода данные и программа преобразуются в совокупность электрических сигналов. Эти сигналы воздействуют на определен ные ячейки памяти так, что их состояние соответствует введенным данным и программе. Устройство управления управляет взаимодействием между различными частями ЭВМ. Для временного хранения некоторой информации устройство управления содержит набор регистров. Один из них называется регистром команд и служит для размещения кода выполняемой команды, выбираемой из основной памяти. Команда, находящаяся в данный момент времени в регистре команд, сообщает устройству управления адрес ячейки памяти, в которой находятся данные, место, в которое эти данные должны быть перемещены, и действие, которое должно быть выполнено.
Итак, устройство управления с помощью программы управляет потоками информации в ЭВМ. После выполнения команды счетчик команд, входящий в устройство управления, выдает адрес. Этот адрес обеспечивает выборку из основной памяти следующей команды.
Структурная схема ЭВМ (см. рис. 14.1) содержит арифметическо-логи-ческое устройство, которое осуществляет операции сложения и вычитания, а также логические операции при обработке кодов чисел. К арифметическо-логическому устройству добавлен вспомогательный регистр, называемый аккумулятором. Когда команда, находящаяся в регистре команд устройства управления, требует выполнения некоторой арифметической (логической) операции над данными, эти данные извлекаются из основной памяти м посылаются в арифметическо-логическое устройство, которое в соответствии с указанием устройства управления обрабатывает их. После завершения операции новые данные запоминаются в аккумуляторе.
В больших ЭВМ устройства управления, арифметическо-логическое и запоминающее устройства относятся к центральному процессору. В микро-
Ламять 38М
Память данных
Ос наб-> ная память
Память программ
Внешняя память
Регистры
Рис. 14.2. Перечисленные разновидности памяти ЭВМ
ЭВМ под центральным процессором понимают сочетание устройства управления, ариф-метическо-логического устройства и связанных с ними регистров, предназначенных для запоминания. Это объясняется тем, что в микроЭВМ устройство управления и арифметическо-логическое устройство реализуются в одном корпусе и физически отделены от основной памяти.
Память ЭВМ состоит из следующих частей (рис. 14.2). Основная память хранит совокупность команд, образующих программу, и обрабатываемые данные. Если предполагается использовать ЭВМ для решения только одной задачи, то программу хранят постоянно в основной памяти. Такую ЭВМ называют специализированной. Но может храниться несколько программ, которые вызываются по мере необходимости. Та часть основной памяти, которая используется для временного хранения данных, называется оперативным запоминающим устройством (ОЗУ).
Если требуется организовать хранение данных и программ с целью их последующего использования, то применяют внешние запоминающие устройства (ВЗУ). В микроЭВМ используют в качестве ВЗУ магнитные устройства кассетного типа.
Регистры представляют собой вспомогательную память для временного хранения информации. Регистры находятся не только в арифметическо-ло-гическом и управляющем устройствах, но и в устройствах ввода и вывода.
МИКРОКОНТРОЛЛЕРНОЕ
ИСПОЛЬЗОВАНИЕ МИКРОЭВМ
МикроЭВМ можно применить в системе управления робота, в информационно-измерительной и исполнительной системах (многостепенной системе приведения в движение). При таком специфическом использовании микроЭВМ принято называть микроконтроллером. В ее памяти хранится большое число программ, известных заранее и введенных в нее перед эксплуатацией робота.
Заметим, что для микроЭВМ существует понятие ’’программное обеспечение пользователя (человека-оператора)”. Чтобы микроЭВМ восприняла программу, вводимую пользователем, требуются вспомогательные (служебные) программы. Они принадлежат системе и называются системным программным обеспечением.
Для микроконтроллеров удобно хранить программы в постоянных запоминающих устройствах (ПЗУ), имеющих относительно большую емкость. Работа микроконтроллера происходит в реальном масштабе времени со скоростью, необходимой для управления подвижными частями роботов.
В системе управления робота вычислительное устройство работает в соответствии не только с программой его функционирования, но и с програм
мами выполнения отдельных циклов. В программах этих циклов указываются последовательность работы информационно-измерительной системы и последовательность заданий для исполнительной системы робота.
Вычислительное устройство внутри информационно-измерительной системы обрабатывает плоское изображение наблюдаемого предмета в оптическом устройстве, расположенное в его фокальной плоскости. В соответствии с программой работы данного вычислительного устройства производится синтез модели изображения и вычисляется номер наблюдаемого образа (код).
Вычислительное устройство исполнительной системы робота в каждый момент времени вычисляет оптимальные (наилучшие) значения напряжений или токов в обмотках электродвигателей либо значения токов в обмотках электромеханических преобразователей, изменяющих положения клапанов в гидро- и пневмоприводах. Программа вычислений связана с позиционным и контурным режимами робота. В общем случае код, поступивший к вычислительному устройству исполнительной системы от системы управления робота, вызывает из памяти программу, в соответствии с которой движения звеньев робота находятся во взаимосвязи друг с другом и с отсчитываемым временем. Результатом такой взаимосвязи является, например, необходимая нам походка шагающего робота либо взаимодействие робота с деталями изделия во время его сборки.
Известным вариантом применения вычислительных устройств в исполнительных системах роботов является включение микропроцессорного уст-
Обмен информацией манипулятора и От датчиков От ЭВМ На приводы технологического манипулятора 2-го уровня манипулятора оборудования
МикроЭВМ Электроника-60
Модуль сопряжения с кодовыми датчиками
Модуль ввода
Модуль
ипоадлеш МодУ/,ь Модуль
ввода
вывода
Центральный процессор
Оперативное запоминающее устройство
£
Плата интерфейсная
TEZZ
Внутренняя магистраль
Канал ЭВМ
Устройство управления
Контроллер
Плата интерфейсная пульта оператора и пульта обучения
Постоянное запоминающее устройство
Пульт обучения
Связь с фото-считывающим устройством
Пульт оператора
Кассетный накопитель
Рис. 14.3. Схема развитой системы управления робота на базе микроЭВМ
Оперативное запоминающее устройство
Интерфейсный блок
ройства в структуру системы приведения в движение звеньев, а также использование другого микропроцессорного устройства для связи работы остальных звеньев внутри исполнительной системы. В других вариантах контроллер может одновременно входить в структуру исполнительных систем восьми роботов. Это важно для гибких производств.
На рис. 14.3 приведена схема развитой системы управления робота на базе микроЭВМ. Читателю предлагается вдуматься в смысл ее составляющих.
Создание устройства искусственного интеллекта начинается с выбора элементов. Ими могут быть искусственные нервные сети и сама ЭВМ, реализующая требуемые функции в виде вычислительных операций. Однако существующие ныне ЭВМ достигли пределов быстродействия. Они последовательно выполняют вычислительные операции, не приспособлены к решению задач согласования двигательной активности роботов с непредвиденными обстоятельствами в окружающей среде.
Представляется правильным утверждение о том, что устройство искусственного интеллекта должно решать задачи методом параллельного одновременного преобразования информации. Ведь по высказыванию Джона фон Неймана, ’’язык мозга не есть язык математики. В нервной системе живого организма сообщения основываются на статистических процессах. В качестве функциональной единицы выступает не отдельный элемент, а их ансамбль, состав которого может меняться, так как участие элементов в том или ином ансамбле не фиксировано”.
Вопросы к уроку 14
1. Чем отличается микроЭВМ от ЭВМ?
2. Объясните смысл микроконтроллерного применения вычислительного устройства (ЭВМ или микроЭВМ).
3. Что можно сказать сегодня о пригодности микроЭВМ для создания интеллектуальных роботов?
УРОК 15. ИСПОЛНИТЕЛЬНАЯ СИСТЕМА С ПОЗИЦИОННЫМ УПРАВЛЕНИЕМ
ПОЗИЦИОННЫЙ РЕЖИМ
В зависимости от назначения робот отрабатывает либо позиции звеньев в соответствии с заданием, либо траектории движения концов звеньев (схватов, инструментов). В первом случае говорят о позиционном режиме работы робота или его исполнительной системы, во втором — о контурном.
В позиционном режиме на вход исполнительной системы от системы управления робота поступает задание. Устройством управления исполнительной системы оно преобразуется в команды (позиции) одностепенным системам приведения в движение звеньев.
В наиболее простом варианте позиционного режима работы исполнительной системы робота все звенья совершают повторяющийся цикл движений. Действия устройства управления описываются формулами двоичной алгебры Буля.
На рис. 15.1, а показана кинематическая схема манипулятора, звенья которого поворачивают схват на угол а и перемещают его вверх или вниз (/1) , вперед или назад (/2) • Схват (его геометрический центр) перемещается в цилиндрической системе координат и может занимать одно из 12 позиций Xlt Х2,... , Х12 (рис. 15.1,6).
Устройство управления одностепенной системы приведения в движение звеньев манипулятора подает команды UK. Их шесть:
Ui - поворот вправо (а); U4 - движение вниз (/1);
U2 — поворот влево (а) ; Us — движение вперед (I 2);
U3 — движение вверх (/1) ; U6 — движение назад (/2).
Условимся, что движение происходит, если UK = 1, и не происходит, если UK = 0. Команда выполняется до тех пор, пока звено не достигнет заданной позиции, т. е. пока не сработает конечный выключатель (датчик). В рассматриваемом примере семь датчиков. Обозначим их выходные сигналы:
Ki — правый поворот выполнен;
Y 2 — левый поворот выполнен;
Y 3 — верхнее положение достигнуто;
У 4 — нижнее положение достигнуто;
Y5 ... У7 — достигнуты соответствующие позиции выдвижения.
Примем, что У/ =1, если схват манипулятора достиг позиции, заданной командой, и У/ = 0 в противном случае. Из рис. 15.1 и из обозначения команд Uf следует связь между позицией схвата Хр (0) в начальный момент времени t = 0, позицией Xq (Т) в конечный момент времени t = Т и командой Ui, управляющей переходом из XD (0) в Xq (Т). Например, поворот от
Рис. 15.1. Манипулятор, работающий в цилиндрической системе координат (а) и часть его рабочей зоны (б)
(0) к Х2 (Т) осуществляется командой Ur = 1 (поворот вправо на угол а). Построим таблицу, в которой отразим все возможные переходы от Хр (0) к Xq (Т), где р = 1, 2, . . . , 12, q = 1, 2, ..., 12, и соответствующие команды Ui = 1, где i= 1,2, . . ., 6. В дальнейшем покажем читателю, как с помощью таблицы можно узнать формулы тех команд, которые необходимы для осуществления всех задуманных перемещений манипулятора.
В момент срабатывания конечного выключателя устройство управления исполнительной системы изменяет сочетание команд UK. Наступает новый отсчет времени t = 0, и схват манипулятора движется к новой позицииXq. Позиция при t = 0 снова обозначается Хр (0) (табл. 15.1).
Достоинство этой таблицы состоит в том, что из нее можно получить в аналитической форме все команды как булевы функции аргументов — позиций схвата в моменты времени t = 0 и t = Т.
Таблица 15.1
%р(0) а,=1 С/а=1 С/4 =1 1/,=1 ^=1
х,(0) Х2(Л — — Х.(Л X, (Л —
Хг (0) — X, (Г) — х, (Л Х4(Л —
х3 (0) — Х.(Л Х2(Л — х, (Л —
X. (0) X, (Л — X, (Л — х, (Л —
х,(0) Хб(Л — — X, (Л X, (Л х, (Л
хб(0) — X, (Т) — х7 (Л Х10 (Л х2 (Л
X, (0) — X, (Л Х.(Л — Х„(Л х, (Л
Х,(0) X, (Л — Xs (Л — Х„ (Л х„(л
X, (0) Х10 (Л — — Х12 (Л — х, (Л
х10 (0) — X, (Л — х„ (Л — Х.(Л
Х„ (0) — Х12 (Л Х,о (Л — — х7 (Л
Х12 (0) х„ (Л — X, (Л - — х, (Л
СВЕДЕНИЯ ИЗ АЛГЕБРЫ БУЛЯ
Алгебра Буля оперирует переменной, которая может принимать одно из двух возможных значений: 1 или 0. Такую переменную называют двоичной. Например, в электрической схеме в каждой ее точке высокий потенциал можно обозначить единицей, а низкий — нулем.
Задать алгебру означает определить математические объекты и операции над ними. Алгебра Буля представляет совокупность трех операций над двузначной переменной: дизъюнкции (логического сложения), конъюнкции (логического умножения) и инверсии (отрицания). Логическое сложение обозначается символом ”+”, логическое умножение — символом инверсия — чертой над переменной. Знак ”=” обозначает эквивалентность выражений, стоящих по обе стороны от него. В алгебре Буля используются также скобки. Они указывают порядок выполнения операций. Рассмотрим выражение
Z = Х- (У + И/).
Переменная Z эквивалентна конъюнкции переменной X и дизъюнкции переменной W и инверсии переменной Y.
Правила выполнения операций алгебры Буля определяются следующими постулатами:
Х = 0, еслиХ#=1; X = 1, еслиХ#= 0; 0-0 = 0; 1 + 1 = 1; 1 1 = 1; 0 + 0 = = 0; 10=01= 0;0+1 = 1+ 0=1;0=1; 1=0.
На основании постулатов можно доказать теоремы:
X + 0 = Х\ X \=Х\ X + 1 =1; X -0 = 0; Х + Х = Х; X Х = Х; Х + Х = = 1; X Х = 0; Х = Х\ Х + У = У + Х; X- Y= УХ; X- (У + Z) = Х- У + + X -Z; X + У Z = (X + У) • (X + Z) ; Х + Х • У = Х; X - (Х+ У) =Х;
X - У + У = <Г+ У; Х+ У + Z =Х - У Z; X - У Z =Х+ У + Z и др.
Для этого следует перебрать все сочетания значений X, У, Z слева и справа от знака эквивалентности ” = ”. Всегда получим результат 0 = 0 либо 1 = 1.
Булевой функцией п аргументов называют функцию, которая, как и ее аргументы, может принимать только два значения. Совокупность значений всех аргументов называют набором. У функции п аргументов количество всевозможных наборов конечно и равно 2п.
Пусть позиции схвата в момент времени t =Т - булевы функции, а позиции в момент времени t = 0 и команды — аргументы. Тогда, например, функции X! (Т) соответствуют в таблице сочетания обозначений строк и столбцов
U2 = 1 и Х2 (0) или
U3 = 1 и Х4 (0) или
С4 = 1иХ5 (0).
Существует простое правило перехода от последнего высказывания к булевой функции X! (7), зависящей от аргументов U2, Х2 (0), U3, Х4 (0), U6, Xs (0). Союз ”и” надо заменить логическим умножением, а союз ’’или” — логическим сложением. Получаем
Xt (Т) =и2'Х2 (0) + и3 • Х4 (0) + и6 • Xs (0).
Каждый из аргументов Х2 (0), Х4 (0), Xs (0) эквивалентен либо единице (тогда данная позиция имеет место в момент времени t = 0), либо нулю. Каждая команда (сигналы управления U2, U3, U6) также эквивалентна либо единице (тогда команда выполняется), либо нулю. Можно, проанализировав другие строки таблицы, получить-аналогично булевы функции Xq (Т), где q = 2,..., 12. В результате:
X. (Г) = Х2 (0) • U2 +Х4 (0) • % +*5 (0) • Ue\
Х2 (Г) =Х. (0) • иг +Х3 (0) • U3 +Х6 (0) • £76;
Х3(Т) =Х4(0) • и, + Х2(0) • U4 +Х7(0) • (76; Х4(Т) =Х3(0) • U2 (0) • U4 + Х8(0) • и6-
Х5 (Г) =Х6 (0) • и2 +Х8 (0) • и3 +Х1 (0) • Us +Х9 (0) • и6-
Х6(Т) =Х5(0) • и, + Х7(0) • и3 + Х2(0) • Us + Х1О(0) • t/6; Х7 (Т) = Х3 (0) • и. +Х6 (0) • и4 +Х3 (0) • Us + Хп (0) • и6; Х8(Г) =Х7(0) • и2 +Х5(0) • и4 +Х4(0) • Us +х12 (0) • иб; Х9(Т) = Х1о(0) • U2 + Х12 (0) • U3 +Х5 (0) • Us\ Х10 (Т) =Х9 (0) • и. + ХИ (0) • и3 +Х6 (0) • Us;
Хп (Т) =Х12 (0) • U, + Х10 (0) • и4 +Х7 (0) • Us; х12(Т) =хп (0) • и2 +Х9(0) • и4 +Х8(0) • Us.
БУЛЕВЫ ФУНКЦИИ, РЕАЛИЗУЕМЫЕ В УСТРОЙСТВЕ УПРАВЛЕНИЯ
Пусть команды UK — булевы функции, а позиции схвата Хр(О)9 Xq(T) — аргументы. В столбце каждой команды UK помещены конечные позиций схвата Xq (Т), которым соответствуют позиции Хр (0).
Словами так можно передать смысл информации, записанной в столбце U\: команда Ux должна выполняться, т. е. U\ =1, если задана позиция Х2 и исходной позицией является Х\, или задана Х3 и исходная позиция Х4, или задана позиция Х6 и исходная позиция Х5, или задана Х7 и исходная позиция Х8,или задана Х10 и исходная позиция Х9, или задана Хп и исходная позиция Х12. От этого высказывания переходим к булевой функции, заменив союз ’’или” на логическое сложение, а союз ”и” — на логическое умножение:
и. -X, (0) • Х2(Г) + (0) • Х3(D + Х5 (0) • Х6(Т) +
+ Х3 (0) • Х2 (Л + Х9 (0) • АГю (Л + Х12 (0) • Хп (Г).
Проанализировав все столбцы таблицы, получим набор булевых функций, реализуемых в устройстве управления:
V1 =Х> (0) • х2 (Г) +х4 (0) • х3 (Л +т5 (0) • х6 (Л +Х* (0) • X, (Л + + х9(0)- Х1О(Л+*и(0)- *П(Л;
и2 = х2 (0) • х. (Л +Х3 (0) • х< (Л +Х6 (0) • х5 (Л + Х2 (О) • х3 (Л + + х10 (0) • х9 (Л + Хп (0) • х12 (Л;
и3 = х3 (0) • х2 (Г) + х4 (0) • Xi (Л +х2 (0) • х6 (Л +*8 (0) • xs (Л + + xn(0) • х10(Л+^11(0) • х9(Л;
и4 = х, (0) • х4 (Л + Х2 (0) • х3 (Л +*5 (0) • х6 (Л +*6 (0) • (Л + + *9(0)-Хп(Л+*ю(0)-*п(Л;
Us = Xr (0) • Xs (T) + X2 (0) • X6 (T) + X3 (0) • X7 (T) +X4 (0) • X8 (Г) + + X5(0)- X9(T)+X6(0)- X10(T)+X7(0)- Хп(Г)+Х8(0)-Х12(Г);
U6 =X5 (0) • Xi (T) +X6 (0) • X2 (D + X, (0) • X3 (T) +X8 (0) • X4 (T) + + X9(0) • Х5(Г)+Хю(0) • Xt(T) + Хц(0) *Х7(Г)+ x12(0)< X3(T). После получения команд в виде булевых функций можно перейти к их реализации в логическом устройстве.
ЛОГИЧЕСКИЕ УСТРОЙСТВА
Назовем логическим элементом (рис. 15.2) функциональный узел, в котором реализована либо одна из операций над входными сигналами (дизъюнкция F = XY + Х2, конъюнкция F = Хх • Х2, инверсия F = X), либо одна из функций
F=Xi + Х2 + ...+*„, • Х2* ...• Хп.
Здесь X]q — входные сигналы {к = 1, 2,. .., и).
На основе логических элементов можно собрать логическое устройство, реализующее функции .. .U6 (см. выше). На рис. 15.3 изображена схема логического устройства, которая построена в соответствии с формулой функции Ui . Это устройство состоит из логических элементов, выполняющих операции логического умножения и логического сложения. Выпускаемые промышленностью микросхемы содержат, как правило, логические элементы, реализующие функцию f - a* b. С помощью элементов только этого типа можно построить любую сколь угодно сложную логическую схему.
На рис. 15.4 изображена схема логического устройства, которая реализует логическую формулу команды , но на логических элементах одного типа.
Важно помнить, что неизменная логическая схема, осуществляющая закон управления, применяется в автоматах, но не пригодна для роботов. В восьмом уроке мы приняли, что робот — устройство, которое можно перепрограммировать. Это означает, что память устройства управления можно переорганизовывать, получая новые совокупности формул для UK. Поэтому схем, изображенных на рис. 15.3 и 15.4, в роботе нет. Им соответствует программа работы устройства управления, записываемая в его память.
Если известны команды UK — булевы функции начальных и конечных позиций звеньев манипулятора, то при UK = 1 ясно, куда он движется. Однако необходимо выяснить, с какой скоростью происходит это движение (по-
а) б)
Рис. 15.2. Логические элементы и их соединения.
а — элемент И, реализующий функцию умножения; б — элемент ИЛИ, реализующий функцию сложения; в — элемент НЕ, реализующий функцию отрицания; г — элемент И—НЕ, реализующий функцию отрицания умножения; д — элемент ИЛИ—НЕ, реализующий функцию отрицания сложения
ИЛИ-НЕ
Рис. 15.3. Устройство, формирующее команду Ui
Рис. 15.4. Устройство, формирующее команду Uit построенное на логических элементах типа И-НЕ
ворот, подъем, опускание и др.). Зависимость линейной скорости И характерной точки звена (заданной, определенной, выбранной) от времени называют тахограммой.
Обычно для каждой степени подвижности манипулятора требуется реализовать тахограмму, аналогичную изображенной на рис. 15.5. Здесь показаны разгон от нулевой скорости до максимальной Vmax, движение с максимальной скоростью, торможение до минимальной скорости Vmtn, движение с минимальной скоростью и остановка. Под скоростью V подразумевается линейная скорость перемещения характерной точки подвижного звена робота. В соответствии с тахограммой вводятся в рассмотрение следующие состояния звена манипулятора, обозначенного номером j:
Xipy — состояние покоя/-го звена в р-й позиции манипулятора;
X2pj ~ разгон указанной точки /-го звена до скорости Vmax из р-й позиции манипулятора и движение с максимальной скоростью;
X3pj — торможение этой точки /-го звена, ушедшего из р-й позиции манипулятора, до скорости Vmin и движение с минимальной скоростью;
Х4ру — остановка /-го звена, ушедшего из р-й позиции манипулятора;
^i,p + i,/ ~ состояние покоя /-го звена в (р +’1)-й позиции манипулятора.
4nin ’
+ * Рис. 15.5. Тахограмма звена манипулятора
Д2
VI
Как узнать, когда переходить от одних скоростей к другим? Для этого используется информация датчиков скорости и положения (угла поворота вала). Движение начинается в момент t = 0 по команде устройства управления. Разгон прекращается в момент гр при достижении скорости Vmax. Далее скорость движения поддерживается постоянной. Торможение начинается в момент ГД1 всегда при одном и том же расстоянии до точки останова. Этот момент времени определяется по сигналу датчика положения. Управляемое торможение продолжается до момента tT, когда скорость снижается ДО ^min- На этой скорости звено почти достигает заданного положения и наступает торможение на последнем участке. Звено останавливается в момент t0.
Вопросы к уроку 15
1. Объясните различие между позиционным и контурным режимами работы роботов.
2. Объясните назначение устройства управления одностепенной системы привода.
3. Как получают аналитическое описание команд — булевы функции?
УРОК 16. ИСПОЛНИТЕЛЬНАЯ СИСТЕМА С КОНТУРНЫМ УПРАВЛЕНИЕМ
Контурный режим используется для выполнения роботом основных технологических операций: нанесения покрытий, дуговой сварки, газовой резки и т. д. В зависимости от технологического процесса исполнительная система робота обеспечивает либо высокую точность прохождения инструментом заданной траектории при малых рабочих скоростях (дуговая сварка), либо большие скорости при невысокой точности прохождения траектории (покрытие распылением).
Пусть устройство управления исполнительной системы робота для каждой одностепенной системы приведения в движение задает перемещение (линейное или угол поворота) звена как функцию времени. Совокупность этих перемещений образует в пространстве траекторию конца механической руки (инструмента, схвата). Эту траекторию можно было бы задать как последовательность позиций манипулятора. Но представьте, сколько надо помнить разных позиций, если точность задания траекторий весьма высока. Известен более экономичный способ задания траектории. Он предполагает применение устройств, называемых интерполяторами. Они осуществляют представление траектории в виде совокупности отрезков прямых линий либо парабол.
При использовании парабол в интервале времени Дг заданная скорость характерной точки /-го звена вдоль некоторой оси
Vj = VjK±\a.\t,
где Vj к - конечная скорость на предыдущем интервале Дг; I I = const -абсолютное значение ускорения; t — текущее время, отсчитываемое от начала данного интервала Дг.
Задаваемый путь - парабола — рассчитывается по формуле
Sj -VjKt ± 0,5 1а/ Г2.
Каждой /-й системе приведения в движение звена задается свое значение Sj
Одностепенные системы приведения в движение, работающие в контурном режиме, являются следящими и имеют структуру, сходную с изображенной на рис. 11.7. Следящая система по закону, записанному в устройстве управления, отрабатывает любую траекторию звена из заданного множества с допустимой ошибкой.
Введем понятие путевой и скоростной следящих систем. В путевой следящей системе устройству управления задается положение (перемещение) звена робота, в скоростной — скорость звена.
Существует связь между типом робота и типом следящих систем. Рассмотрим два робота: очувствленный и неочуветвленный. Очувствление обеспечивает непрерывное поступление информации о положении конца механической руки в систему управления робота, где сравниваются его заданное и действительное положения. В зависимости от результатов сравнения система управления выдает задание исполнительной системе в виде скоростей всех одностепенных следящих систем. В этом случае следящие системы скоростные.
Устройство управления неочувствленного робота задает исполнительной системе положения всех звеньев. С каждым звеном связана своя путевая следящая система. Отрабатываемые положения звеньев однозначно определяют положение схвата, которое не измеряется.
СТРУКТУРА ОДНОСТЕПЕННЫХ СЛЕДЯЩИХ СИСТЕМ
На рис. 16.1 изображена структура путевой следящей системы. На вход устройства управления УУ исполнительной системы ИС робота поступает задание на положение и ориентацию рабочего
Задание на положение Рис- 16.1. Структура одностепенной следящей системы и ориентацию ехдата робо та, не измеряющей положение и ориентацию схвата
Задание на положение и ориентацию схдата
Рис. 16.2. Структура одностепенной следящей системы, измеряющей положение и ориентацию схвата
органа. Положение характеризуют три пространственные координаты конца последнего звена (схвата, инструмента) манипулятора, ориентацию — еще три координаты конца предпоследнего звена. Это задание преобразуется в команду на движение (угол поворота выходного вала двигателя ап, линейное перемещение) устройству управления УУ каждой одностепенной системы приведения в движение ОСП, которое следит за заданным положением выходного вала своего привода. Кроме датчика ДУ развиваемого усилия F к приводу относятся датчики скорости Пп выходного вала привода ДС и пути ДП. Сигналы датчиков — это сигналы обратной связи, поступающие на входы устройства управления ОСП.
В схеме предусмотрено сравнение сигналов, поступающих из устройства управления U3 (задание) и с датчика усилия Uy. Сигнал рассогласования (разность) 6 воздействует на прямой канал привода (преобразователь, двигатель, передаточный механизм).
На рис. 16.2 представлена скоростная одностепенная система приведения в движение звена манипулятора. Это следящая система/-й степени подвижности манипулятора; в ней отсутствует датчик пути.
Еще одна путевая следящая система, изображенная на рис. 16.3, содержит прямой канал привода ПКП (устройство преобразования энергии, дви-
Рис. 16.3. Структура одностепенной следящей системы
гатель, передаточный механизм), датчики скорости ДС и положения ДП. Отсутствует контур регулирования усилия. При эксплуатации такой следящей системы необходим контроль развиваемого усилия на ее выходе для его ограничения во избежание поломки привода. Она имеет недостаток: если на некоторых участках механической характеристики привода наблюдается увеличение скорости с ростом нагружающей силы, то может проявиться неустойчивость системы ’’привод — механизм”. Во избежание такой неустойчивости целесообразно применять следящие системы с приводами-генераторами сил, т. е. содержащие контур регулирования усилия (рис. 16.1). Их точность слежения более высокая, так как контур регулирования силы значительно увеличивает быстродействие привода, что приводит к повышению точности отработки заданной траектории. Кроме того, в этих системах легче компенсируется влияние на их динамику движений других звеньев.
ОЦЕНКА КАЧЕСТВА СЛЕДЯЩЕЙ СИСТЕМЫ
Устройство управления исполнительной системы вычисляет задания одностепенным следящим системам, из множеств которых выбираются оптимальные. Их можно охарактеризовать точностью позиционирования рабочего органа, плавностью его движения, малыми затратами энергии и времени. Для отработки оптимальных заданий требуются качественные одностепенные следящие системы. Качество слежения тем выше, чем меньше текущая разность между заданными и действительными положениями звена, его скоростями, ускорениями.
Математическими называются оценки качества слежения, усредняющие указанные разности в некоторых интервалах времени. Известна следующая математическая оценка качества одностепенной следящей системы:
J = | I +Ai<P2l + А2'Рг] At.
Здесь Л о, Ai, А2 — весовые коэффициенты, указывающие на роль каж дой составляющей Ч>2 в оценочной сумме; <Р0 = -Х3 — X — разность заданного и действительного перемещений; = ДХ3/Дг — ДХ/Дг — разность заданной и действительной скоростей; Ч>2 = ДК3/Дг — ДИ/Д/ — разность заданного и действительного ускорений; Т — рассматриваемый интервал времени. Деление суммы на Т означает усреднение выражения.
Для скоростной одностепенной следящей системы коэффициент А 0 принимают равным нулю, так как путь не задается. Поэтому оценка качества/ содержит только составляющие и .
Оптимальный закон управления, реализуемый в устройстве управления следящей системы, соответствует наименьшему числовому значению оценки качества. Этот закон надо уметь найти. На его основе осуществляют программирование и ввод программы в устройство управления следящей системы.
В заключение отметим, что качество слежения зависит от классов точности датчиков скорости и положения. В высокоточных следящих системах датчик скорости — импульсный, датчик положения — комбинированный (см. урок 12).
Вопросы к уроку 16
1. В чем отличие одностепенной следящей системы от других одностепенных систем приведения в движение?
2. Одностепенные следящие системы робота должны быть путевыми или скоростными?
3. Какие структуры одностепенных следящих систем вам известны?
4. Как теоретически оценивают качество слежения?
УРОК 17. ОБРАТИМАЯ СЛЕДЯЩАЯ СИСТЕМА
ОБЛАСТИ ПРИМЕНЕНИЯ
Важнейшей областью применения робототехники являются агрессивные среды, опасные для жизни и здоровья человека. Примерами таких сред могут быть космос, ядерный и химический реакторы, вулканические выбросы газа и лавы и др.
Агрессивные среды разрушающе воздействуют на активные и изолирующие материалы робота. Под активными понимаются токопроводящие материалы (медь, серебро, золото и др.), рабочая жидкость гидропривода, магнитопроводы и др. Под изолирующими материалами понимают изоляцию электрических проводов, прокладки конденсаторов и др.
Агрессивная среда снижает срок службы оборудования роботов. Например, в обычных условиях электродвигатель может проработать 2 года, а в радиоактивной среде — лишь 2 месяца. Конечно, названные цифры весьма приблизительны, но отражают сравнительную долговечность работы двигателя в разных условиях.
Чтобы повысить срок службы робототехнического оборудования в агрессивных средах, применяют радиоактивную, химическую, биологическую и другие виды защиты, выносят двигатели, устройства преобразования энергии и управления неподвижных роботов за пределы опасной зоны. Выбирают особопрочные и устойчивые к данной среде материалы.
В агрессивных средах применяют следующие устройства робототехники: биотехническое с манипулятором на неподвижном основании; биотехническое с манипулятором на подвижном основании;
манипулятор на неподвижном основании, интерактивно управляемый оператором;
передвигающийся манипулятор, управляемый интерактивно.
БИОТЕХНИЧЕСКОЕ УСТРОЙСТВО
С КОПИРУЮЩИМ МАНИПУЛЯТОРОМ
Биотехническое управление с обратимыми следящими системами осуществляется по схеме, изображенной на рис. 17.1. Оно содержит две механические руки (задающую и исполнительную), действующие одновременно. Задающая рука — это механическое ложе, в которое помещается рука оператора. Исполнительная рука — копирующий мани-
Рис. 17.1. Структура биотехнического устройства - системы ’’задающая рука - исполнительная рука” (копирующий манипулятор)
пулятор, находящийся в агрессивной среде. На рис. 17.1 изображена обратимая следящая система для одной степени подвижности задающей и исполнительной рук. Таких следящих систем столько, сколько заданных степеней подвижности. Здесь Pl, Р2 — редукторы; Ml, М2 — электродвигатели; УУПЭ — управляемые устройства преобразования энергии; , а2 и , П2 — углы поворотов и угловые скорости выходных валов приводов; МП1 — момент силы, воздействующий на вал привода со стороны задающей руки; Л/п2 — момент силы противодействия со стороны исполнительной руки, воспринимаемой двигателем М2. Электрические сигналы, пропорциональные углам «i, а2, скоростям , П2 и моментам сил Mni, М^, поступают в соответствующие элементы сравнения, где сравниваются. В результате получаются сигналы рассогласования (ошибки) по положению, скорости, моменту сил:
6П = otj — а2, 5С = — Я2, 6М = МП1 — Мп2.
Сигналы, пропорциональные 8П, ^с, 5М, поступают в УУПЭ как компоненты сигналов управления прямыми каналами электроприводов задающей и исполнительной сторон. Объясним принцип действия обратимой следящей системы. (Сведения об устройстве и свойствах обычных следящих систем приведены в уроке 16.) Напомним, что в путевой одностепенной следящей системе воспроизводится заданная траектория звена робота, в скоростной — заданная скорость.
Обратимая следящая система содержит две обычные следящие системы. Одна расположена на задающей стороне, другая — на исполнительной. На задающей стороне измеряют момент силы Мт слева от редуктора, где он больше, скорость Dj — справа, где она больше, а угол поворота вала — слева от редуктора грубым потенциометром и высокоточным импульсным датчиком скорости. На исполнительной стороне момент силыЛ/п2 измеряют справа от редуктора, скорость П2 — слева, а угол а2 — так же, как , сочетанием двух измерений.
В обратимой следящей системе оператор задает момент силы Л/п1. Ему соответствуют скорость вала и угол поворота ai. Эти величины являют* ся заданными для следящей системы на исполнительной стороне, где измеряются Л/пз, П2, а2. Несовпадение Мщ и Мт, П2 и Пь а2 и cq означает, что 6М =£ О, 5С Ф О, 8П Ф 0. Электрические сигналы, пропорциональные этим ошибкам, поступают к УУПЭ исполнительной руки. В результате в обмотке М2 изменяется электрический ток, что способствует сближению значений а2 и eq. При 8П = 0 значение П2 приближается к значению fit. При 8П = = 0, 8С = 0 моментМщ приближается к ЛГП1.
В обычной следящей системе, если оператор высвободит свою руку из механического ложа, то неуправляемая ’’рука” на задающей стороне начнет отрабатывать состояние исполнительной ’’руки”. ЛевоеУУПЭ (см.рис. 17.1) заставит задающую руку двигаться так, что угол cq будет стремиться к а2, скорость Hi - к О2, момент силы Мпх — к .
При нормальной работе обратимой следящей системы оператор не позволяет задающей руке отрабатывать состояние исполнительной руки, в результате создаются силовые реакции, передаваемые задающей руке, а следовательно, и руке оператора. Человек чувствует несовпадение состояний следящих систем каждой степени подвижности, а также массу переносимого груза и все препятствия на исполнительной стороне.
Для проведения работ в агрессивной среде, если перегородка между ней и помещением оператора непрозрачная или если пульт оператора удален от места работы, применяют телевизионный способ наблюдения за исполнительной рукой. Для этого необходим канал связи, от помехоустойчивости и надежности которого зависит качество работы, выполняемой копирующим манипулятором.
Мы рассмотрели биотехническое устройство, содержащее манипулятор на неподвижном основании. Если манипулятор расположен на подвижном основании, то команды на перемещение основания подаются от рукоятки.
ИСПОЛНИТЕЛЬНАЯ СИСТЕМА РОБОТА С МОДЕЛЬЮ
Идею обратимости следящих систем можно использовать при создании роботов. Пусть в структуре робота есть задающая и исполнительная стороны. На задающей стороне можно разместить физическую или математическую модель следящей системы с неизменными параметрами. Например, ее записывают в память системы управления робота. Несовпадение значений Afni и Мп2, cq и a2, Oj иП2, где Л/п1, cq и — состояния модели, дает информацию о состоянии исполнительной руки.
Qi
Рис. 17.2. Механические характеристики приводов различных звеньев: Могр “ момент силы, обеспечивающий плавность хода звена; М'гр -момент силы, ограничивающий усилие сжатия схватом предмета 0
"огр "огр М
Если параметры исполнительной руки отражены в модели без отклонений, то неравенства 5М =# О, 5П =# О, 5С =# 0 характеризуют изменившиеся усилия в данном звене манипулятора. Если же силы одинаковы в модели и исполнительном звене, то эти неравенства характеризуют отклонения параметров следящей системы исполнительной стороны от параметров модели.
Операции, выполняемые схватом манипулятора, могут быть разнообразными. Важно, оперируя теми или иными предметами, действовать плавно, не встряхивая и не разрушая их. Ограничения усилий добиваются выбором вертикального участка механической характеристики привода (рис. 17.2).
Вопросы к уроку 17
1. Каковы особенности применения устройств робототехники в агрессивных средах?
2. Расскажите о структуре биотехнического устройства с копирующим манипулятором.
3. Как можно использовать идею обратимости специальных следящих систем в биотехнических устройствах при создании роботов?
УРОК 18. УСТРОЙСТВА, ПЕРЕМЕЩАЮЩИЕ РОБОТЫ
ПЕРЕДВИЖЕНИЯ В ЖИВОЙ ПРИРОДЕ И ТЕХНИКЕ
Известно, что по земле животные перемещаются ползком, шагом, прыжками, бегом, а в воде — волнообразно изгибая тело и т. п. Птицы машут крыльями или планируют.
Роботы в зависимости от назначения могут работать на земле, под землей, в воде, в воздухе, в космосе. Их устройства передвижения бывают гусеничными, колесными, шагающими, ползающими, прыгающими и т. п.
ШАГАЮЩИЕ РОБОТЫ
Предназначенные для шагания механические ноги в отличие от механических рук — манипуляторов — называются педипуляторами. Способ передвижения с помощью ног весьма распространен в живой природе, а в технике без комбинаций с другими способами он не получил пока практического применения. Причина этого заключается в сложности управления ногами и в состоянии современной робототехники. Шагающие устройства могли бы эффективно использоваться для передвижения по ’’трудной” местности с препятствиями, где колесные и гусеничные устройства не находят применения. Взаимодействие ног с грунтом происходит только в местах упора стоп. Поэтому энергии затрачивается меньше, чем в колесных и гусеничных устройствах. Кроме того, меньше разрушается грунт (колесные и гусеничные роботы оставляют после себя колею).
При передвижении по гладкой поверхности способ шагания уступает колесному по затратам энергии и скорости движения.
Рис. 18.1. Шагающая платформа
В общем случае шагающий робог
состоит из механической части с педи- иЗДП ШШД
пуляторами и манипуляторами, источ- ап '- X
ника энергии, исполнительной систе- М
мы, информационно-измерительной W / Ятл Cf"~
системы, системы управления робота, >- J яЛ 1£ч1
устройства связи с человеком-операто-
ром. Устройство управления исполнительной системы педипуляторов обеспечивает синхронное изменение состояний ног, т. е. походку, подходящую для данного участка местности, а также стабилизацию положения тела робота в пространстве, располагающегося на определенной высоте над землей. Информационно-измерительная система представляет сведения об окружающей среде, о дальности расположения препятствий. Система управления робота принимает решения о движении по определенному маршруту и выдает задания исполнительной и информационно-измерительной системам. Эти задания содержат тип походки.
На рис. 18.1 показана действующая модель космического шагохода ”Марс-1”, разработанного учащимися Одессы.
На рис. 18.2 изображена схема двуногого шагающего механизма, состоящего из тела массой т, перемещаемого горизонтально в вертикальной плоскости, ног 7, 2 и стоп массой ?ин, на которые опираются ноги в шарнирах А, С. С помощью приводов можно изменять длину каждой ноги и производить поворот ног в плоскости рисунка вокруг оси В. Периодическое движение механизма в направлении х складывается из четырех тактов. В первом такте происходит поворот ноги 1 вокруг оси В с одновременным укорочением, а затем — удлинением, во втором такте имеют место приращения длин Zb Z2, в третьем - поворот ноги 2 и приращение длины Z2, в четвертом— за счет изменения длин ног механизм возвращается в исходное состояние.
Конечно, двуногий механизм с узкими стопами неустойчив и поэтому может иметь весьма ограниченное применение. Однако, создав специальные тяжелые и широкие стопы, можно получить весьма устойчивый двуногий механизм. Но это возможно, лишь если он не переносит больших тяжестей, т. е. когда масса т много меньше массы одной стопы ти.
Рис. 18.2. Шагающий двуногий механизм
8 Зак 820
Успешное перемещение двуногого механизма по неровной местности возможно на ногах специальной конструкции с особо податливыми стопами при стабилизации положения той ноги, которая в данный момент времени вертикальна.
На основе двуногого механизма можно сконструировать подвижный робот с шестью ногами и более. Шестиножки уже давно известны как устройства, на которых проверяются способы управления разных уровней. Они могут преодолевать различные препятствия: перебираться через канавы, перелезать заборы. Устройство управления робота выдает задание исполнительной системе шестиножки. Оно преобразуется в команды одностепенным системам приведения в движение ног.
Задание, выданное исполнительной системе шестиножки, содержит тип походки, реализуемой шестью одностепенными системами. Можно придумать множество разных походок шестиножки (больше ста). Каждая походка целесообразна в конкретной ситуации на местности. Отметим сложность управления шестью ногами для получения требуемой походки. Весьма трудна работа проектировщика, решающего задачу синтеза управления в исполнительной системе подвижного робота.
КОЛЕСНЫЙ РОБОТ
На рис. 183 показан подвижный робот. На рис. 18.4 изображена его тележка с четырьмя колесами, у которой два передних колеса A, D — ведущие. Развороты тележки производятся рассогласованием скоростей ведущих колес. На рис. 18.4 Vi и v2 линейные скорости левого и правого колес, определенные по формулам
= Пд1*к// > = ^д2^к// >
где ПД1 и Пд2 — угловые скорости валов двигателей; Ек - радиус колеса;
7 > 1 — передаточное число от вала двигателя к колесу.
векторы Vi и v2 раскладываются на составляющие vlx, v и v2x, ?2у-Скорости v 1х, v2x направлены параллельно трассе, a v ly, v2y ~ перпендикулярно. Если скорости v ly, v2y не нулевые, происходит разворот тележки. Составляющие векторов рассчитываются по формулам
vix=vicosy; v1<y = Vi siny; v2x = v2 cosy; v2y = u2siny,
где у — угол между направлением трассы и продольной осью тележки FG (линия ЕК параллельна трассе). Он отсчитывается против часовой стрелки. В точках В и С, расположенных на продольной оси тележки, снизу установлены датчики отклонения оси от трассы. Трасса в условиях промышленного производства — это светлая узкая полоса, проходящая через цех около основного технологического оборудования. Подвижный робот объезжает это оборудование в соответствии с технологией. В качестве датчиков используются специальные матрицы, состоящие из светочувствительных элементов. Свет, отраженный от полосы, попадает на элементы матрицы. По состоянию всех элементов определяются отклонения и 62, равные BL и CNсоответственно.
Если подвижный робот имеет непромышленное назначение, то трассу он выбирает сам в соответствии с программами своих действий. После выбора трассы при перемещении по ней робот фиксирует свои отклонения от трассы и устраняет их. Выбор трассы означает, что робот обладает техническим зрением, т. е. различает предметы в окружающей среде и измеряет расстояния до них.
Рис. 18.5. Структура исполнительной системы подвижного робота и измерительное устройство
На рис. 18.5 изображены структура исполнительной системы подвижного робота и измерительное устройство. Здесь ИУ — измерительное устройство, являющееся частью информационно-измерительной системы робота (ИИС), УУ — устройство управления исполнительной системы, относящееся к тележке; МЭ — модули электропитания; ПКП — прямой канал привода, содержащий управляемую схему электропитания, электродвигатель, передаточный механизм.
Каждый из двух ПКП (для двух ведущих колес) входит в свой контур регулирования электрического тока (момента силы двигателя), замкнутый через устройство вычитания УВ; ПКП вместе с УВ и обратной связью по току образует привод.
В данной структуре одностепенная система привода состоит только из привода. Обозначим Ц, 12 электрические токи в обмотках двигателей; £2Д1, Пд2 — угловые скорости валов двигателей; £/с1, Uc2 — электрические сигналы датчиков скоростей Пд1, Пд2; C/ji > ^т2 — электрические сигналы датчиков токов Ц , /2; t73i, U32 ~ электрические сигналы, пропорциональные заданным токам двигателей; Кт, Кс, Ко — коэффициенты; UK — команду на движение или остановку тележки, поступающую от системы управления робота (СУР) ; 61 и 52 ~ расстояния точек В и Сна продольной оси тележки до трассы (см. рис. 18.4). Примем С31 =KrI31; U32 = Кг1з2.
В устройстве управления УУ вычисляется разность
Ди = i>i — и2 =ЛК (ПД1 - Яд2)// •
Для каждой совокупности значений 62 известен требуемый разбаланс линейных скоростей ведущих колес Диж = (ьц — и2)ж, который является функцией аргументов , 62. Эту функцию находят на этапе создания робота, когда разрабатывают его подвижное основание (тележку) и ту часть исполнительной системы, которая относится к нему. Реализация функции
Диж(81, S2) обеспечивает плавность отработки отклонения тележки от трассы и достаточное быстродействие.
Приведем один из способов управления приводами ведущих колес тележки. Сигналы задания токов двигателей t/31, U32 формируются устройством управления УУ по формулам
Л73 ! = К 1t + R2 *9 ^3 2 = —К 11 ^2 t ,
где/Сь/С2 — коэффициенты; t — время.
Зная одновременные значения Ду, Дуж, сумму Vi + v2 и среднюю скорость движения тележки вдоль трассы v^, можно определить коэффициенты Ki иК2:
Л*! >0 при Ди-Диж<0;
A*i<0 при Ди - Диж>0;
Я*2>0 при и ср -0,5(1?! + и2) >0;
Л*2 <0 при иср - 0,5 (i?i + и2) <0.
Возможны четыре сочетания разных неравенств для линейных скоростей в данный момент времени. Время t отсчитывается каждый раз от нуля, если произошла смена сочетания неравенств.
Для подвижного робота с собственным источником энергии, расположенным на тележке вместе с другими частями робота, устройство управления УУ должно обеспечивать наименьший расход энергии из источника. Очевидно, требуемый разбаланс скоростей ведущих колес как функция расстоя-' ний 51 и 52 должен в каждый момент времени соответствовать наименьшему расходу энергии от источника.
Укажем на две составляющие расходуемой энергии. Первую составляющую дают мощности ведущих колес, равные произведениям Пд17Ид1, Пд2Л/д2 и суммируемые во времени. ЗдесьЛ/д1 иТИд2 — моменты сил, действующие соответственно на валу первого и второго электродвигателей. Потерями энергии в передаточных механизмах от двигателей к колесам можно пренебречь. Вторая составляющая — энергия, которая тратится на нагрев отмоток двигателей. Мощности нагрева обмоток токами Ц и /2 равны 7?Дд1 и /2Яд2, где Яд1, — активные сопротивления обмоток. Суммируя мощности во времени, получаем расход энергии от источника.
Вопросы к уроку 18
1. Перечислите способы передвижения в живой природе и технике.
2. Имеются ли преимущества у шагающих роботов?
3. В каких условиях предпочтителен колесный робот?
УРОК 19. ТЕОРЕТИЧЕСКИЕ ЗАДАЧИ МЕХАНИКИ РОБОТОВ
ПРЯМАЯ И ОБРАТНАЯ КИНЕМАТИЧЕСКИЕ ЗАДАЧИ
Различают прямую и обратную кинематические задачи. В прямой задаче рассчитывают положение и ориентацию рабочего органа, расположенного на конце манипулятора, по заданной конфигурации манипулятора. В обратной задаче ищут конфигурацию манипулятора по заданным положению и ориентации рабочего органа. Что такое конфигурация манипулятора? Это положения всех его точек в пространстве. Если задать как независимые переменные углы поворота либо линейные перемещения выходных элементов всех приводов, связанных со звеньями манипулятора, то получим конкретную конфигурацию манипулятора. Данные независимые переменные называют обобщенными координатами. Итак, в прямой кинематической задаче обобщенные координаты заданы, в обратной - их требуется найти.
Из решения прямой или обратной кинематической задачи следует решение для скоростей и ускорений.
Положение и ориентацию рабочего органа в общем случае характеризуют шесть пространственных координат. Рабочий орган жестко связан с последним звеном механической руки, обычно представляющей разомкнутую кинематическую цепь. Пусть п — номер последнего звена. Положение рабочего органа в пространстве описывается тремя координатами: х2,л, хз,п-
Если задать положение предпоследнего (п — 1)-го звена, то, очевидно, будет задана и ориентация рабочего органа. Итак, ориентация характеризуется также дополнительными координатами Xi i, х2,п-1> хз,п-1 • Начало системы координат, о которой идет речь, располагается в месте крепления первого звена манипулятора к корпусу робота. Эту систему координат называют инерциальной.
При решении прямой кинематической задачи пользуются однозначной связью между заданной совокупностью обобщенных координат и значениями *2,л> *з,л, х\,п-\>х2,л-1’хз,л-1 в инерциальной системе координат. В обратной кинематической задаче такой однозначности нет. Действительно, одним и тем же положению и ориентации рабочего органа в инерциальной системе координат соответствует множество совокупностей значений всех обобщенных координат. Следовательно, обратная задача может быть решена только при наличии дополнительной информации об условиях эксплуатации робота.
КИНЕМАТИЧЕСКИЕ И ДИНАМИЧЕСКИЕ ОЦЕНКИ РОБОТА
Качество технологической операции зависит от точности соблюдения заданной временндй последовательности создаваемых сил,ускорений, скоростей, а также положений и ориентаций рабочего органа робота при его взаимодействии с предметами. На практике применяются технологические оценки кинематики манипуляторов: угол сервиса
рабочего органа, его мобильность, кинематическая точность. Угол сервиса — телесный угол, внутри которого можно подвести рабочий орган к рассматриваемой точке. Мобильность характеризует разнообразие скоростей, развиваемых рабочим органом во время перехода от точки к точке рабочей зоны. Точность определяется ошибкой отработки заданных положений и ориентаций рабочего органа.
К оценкам динамики робота относятся быстродействие, колебательность, плавность трогания и остановки рабочего органа.
Быстродействие — время, затрачиваемое на конкретное перемещение. Колебательность — амплитуда колебаний рабочего органа около заданной позиции. Плавность трогания и остановки — изменение ускорения или замедления.
Применяют кинематические и динамические оценки и к подвижным основаниям роботов: шагающим, катящимся, гусеничным.
ДИНАМИЧЕСКИЕ ЗАДАЧИ
Пусть в первой задаче требуется рассчитать силы (моменты сил), развиваемые приводами робота и создающие заданные во времени движения его звеньев. Необходимость решения такой задачи заключается в получении для некоторого цикла движений оценки нагрузок, испытываемых звеньями и приводами. А это позволяет сделать вывод о вероятном сроке службы робота, а может быть, и о его пригодности для выполнения конкретной работы.
Во второй задаче по заданию на движение от системы управления робота требуется рассчитать движение его механической части (манипулятора, пе-дипуляторов или колесного механизма). Истинное движение всегда отличается от заданного, так как вследствие инерционности звенья робота с приводами не успевают мгновенно отрабатывать изменяющиеся задания. Решение второй задачи позволяет оценить динамику исполнительной системы и механической части робота. Но чтобы его найти, надо сделать сложное математическое описание процессов в устройствах робота, относящихся к его исполнительному уровню. Следует учесть взаимовлияние движений отдельных звеньев робота.
Движения робота математически описать довольно сложно, потому что скорости или ускорения, развиваемые характерными точками звеньев робота в разных направлениях, приходится с помощью параллелограммов скоростей или ускорений складывать в результирующие векторы. Например, скорость центра тяжести z-ro звена манипулятора обеспечивается скоростью, созданной z-м приводом, и скоростью предыдущего (z — 1)-го звена. Чтобы найти результирующую скорость, надо построить параллелограмм из названных скоростей и определить его диагональ.
Рассмотрим кинематическую схему руки с ортогональными осями (рис. 19.1). Имеем следующие пары ортогональных осей (оси q2i <7з> Qa — перпендикулярны плоскости рисунка): qi и q2i qi и q3, qx и q4f q4 и qSi <7s и?6.
В этой схеме векторы мгновенных линейных скоростей движения звеньев вокруг ортогональных осей перпендикулярны друг другу. Следователь
но, образуются не параллелограммы скоростей, а прямоугольники. А это существенно упрощает математическое описание. Длину диагонали прямоугольника находим, пользуясь теоремой Пифагора. Предлагаем читателю отыскать пары ортогональных осей в схеме на рис. 19.2.
Теперь предложим упрощенный способ оценки динамики робота. Не будем учитывать сложного взаимовлияния движений звеньев робота друг на друга. Пусть каждый привод создает вращательное движение своего звена. Переносимый схватом груз, конфигурация манипулятора и взаимовлияние движений звеньев отражены в изменениях момента силы сопротивления МС9 действующего на валу привода анализируемого звена. Примем
М =М Л + ЛГ sin 2irf t, с с.0 A J м ’
где Мс0 - постоянная составляющая; МдЛы — амплитуда и частота гармонической составляющей; t - время.
Вычислим Мс для каждого звена, задавая сочетания числовых значений Л/с0, Мд и /м, которые допустимы при кратковременных и длительных нагрузках. Робот известен. Варьируя задания и допустимые сочетания значений Мс0, Мд,/м для каждой одностепенной системы привода в позиционном (контурном) режиме, рассчитываем движения звеньев как автономных устройств. Фиксируем наихудшее сочетание длительности, колебательности, плавности трогания и остановки у каждой системы. Для наихудшего варианта выделяем функцию времени — ошибку отработки заданного дви> жения. Затем решаем прямую кинематическую задачу, варьируя те же задания одностепенным системам привода. Ошибку отработки задания исполнительной системой (схватом) находим, принимая для каждой одностепенной системы привода одну и ту же ее ошибку, рассчитанную для наихудшего варианта. Из множества вариантов решения прямой кинематической задачи выбираем вариант с наихудшим сочетанием динамических свойств. Полученные данные принимаем за оценку, характеризующую динамику данного робота. Правильность результатов проверяем экспериментально.
Рис. 19.1. Кинематическая схема манипулятора
Рис. 19.2. Кинематическая схема мани-
п\ лятора
Механика как наука о движениях тел основывается на трех законах Ньютона. Если к этим законам прибавить математическое описание целей движений, то тогда получим целенаправленную механику.
Математическое описание целей задают в виде функционалов, устремляемых к минимуму или максимуму. Функционал устанавливает соответствие между множеством чисел и множеством функций. Множество чисел — это числовые значения функционала. Множество функций описывает действия робота. Варьируя те или иные действия робота, получаем разные функции из указанного множества и, как следствие, - разные числовые значения функционала.
Функционалы в целенаправленной механике весьма разнообразны. Для позиционного управления они могут выражать затраченное время, энергию, расходуемую из источника, нагрев оборудования, для контурного управления — ошибки следования рабочего органа за заданной траекторией. Функционал может включать описание качества выполнения технологической операции, например состояния сварного шва, точности установки детали и т. д. В какой-то технологии важна плавность трогания рабочего органа из состояния покоя и плавность остановки.
Приведем пример функционалов.
t=T
l.J= SPs(r)AG
t=0
где Ps(O — мощность, расходуемая всеми приводами робота в момент времени t\ At = const — малый интервал времени; Т — длительность цикла движений робота.
2.У=Цг'2 fAotf+Arf +Л2^]ДГ, т t=Q
где Ао, А19 А2 — постоянные коэффициенты, называемые весовыми; Т — длительность отработки заданной траектории звеном (его характерной точкой) ; ^о, Л , ^2 — соответственно ошибка отработки перемещения, скорости, ускорения.
Первый функционал может быть использован при проектировании робота, действующего в позиционном режиме. Надо найти такой закон действия устройства управления исполнительной системы за цикл, которому соответствует минимум J.
Второй функционал пригоден для оценки контурного режима. Чем меньше J, тем меньше усредненная сумма квадратов ошибок отработки помещения, скорости, ускорения звена (см. урок 16) .
При создании робота необходимо найти такой закон действия устройства управления каждого звена (следящей системы), которому соответствует минимум функционала J.
С помощью приведенных функционалов (специальных оценочных сумм) можно определить, лучше или хуже данный робот аналогичного, выполняющего тот же цикл технологических операций. Мы не привели математичес
ких выражений функционалов другого рода, которые оценивают качество изготавливаемого изделия, результаты воздействия робота на свариваемую конструкцию, собираемую часть автомобиля, на окружающую среду и т. д. Информация об этом поступает к роботу через информационно-измерительную систему (если она у робота есть). Тогда в математическое обеспечение управления робота можно включить часть, содержащую вычисление технологических функционалов, оценивающих результаты действий робота и состояние ближайшей к нему внешней среды. Совершенный робот, учитывая текущие результаты, изменяет свои действия, стремясь достичь наименьших значений технологических функционалов. Устройства управления роботов фирмы Siemens (ФРГ) делятся на две части: одни оптимизируют состояния самого робота (Allgemeine Funktionen), а другие — процесс взаимодействия робота с обрабатываемым предметом или со средой (Technologiefunk-tionen). Математическое обеспечение робота фирмы Siemens стоит 80%, а сам робот, вся его аппаратура — 20% от суммарной стоимости.
Вопросы к уроку 19
1. В чем состоит прямая и обратная кинематические задачи?
2. Сколько координат и какие можно использовать для описания положения и ориентации рабочего органа манипулятора (например, схвата)?
3. Какие оценки кинематических и динамических свойств робота известны? 4. Перечислите динамические задачи.
5. Что такое целенаправленная механика?
УРОК 20. УПРАВЛЕНИЕ И ИНФОРМАТИКА
ТОЛКОВАНИЕ ТЕРМИНА "КИБЕРНЕТИКА"
Известно, что кибернетика в переводе с древнегреческого — искусство управления кораблем. Однако Платон назвал в книге ’’Диалоги” кибернетиком администратора, управляющего провинцией, а Ампер в XIX в. определил кибернетику и теорию власти как составные части политики. В 1948 г. Норберт Винер в книге ’’Кибернетика или управление и связь в животном и машине” предложил обозначить словом ’’кибернетика” науку, изучающую общие закономерности процессов управления и передачи информации в машинах, живых организмах и в их объединениях. Идея такой общности процессов управления и информационных связей была тогда новой, необычной. Норберт Винер указывал на практическую полезность нового мышления. Он говорил, что в будущем это позволит расширять и восстанавливать утерянные способности людей и с помощью вычислительных машин можно будет, управляя другими машинами, получить сколь угодно сложное поведение новых устройств.
В ’’Философской энциклопедии” читаем про кибернетику: ’’Наука о процессах управления в сложных динамических системах, основывающаяся на теоретическом фундаменте математики и логики, а также на применении средств автоматики, особенно электронных вычислительных, управляющих и информационно-логических машин”. В ’’Энциклопедии кибернетики” читаем: ’’Наука об общих законах получения, хранения, передачи и преобразования информации в сложных управляющих системах”. Последнее определение охватывает и живую природу. Мы знаем также, что существуют техническая кибернетика, биокибернетика, медицинская кибернетика:
техническая кибернетика — наука о закономерностях процессов управления и информационных процессов в технике, использующая достижения в знаниях о живой природе;
биокибернетика — наука о закономерностях процессов управления и информационных процессов в живой природе, использующая достижения в теории и практике технических устройств;
медицинская кибернетика — разновидность технической кибернетики, относящаяся к медицине;
экономическая кибернетика — наука о закономерностях процессов управления и информационных процессов в экономике, использующая достижения в знаниях о технике и живой природе.
Современная кибернетика состоит из ряда разделов, представляющих собой самостоятельные научные направления. Теоретическое направление составляют теория информации, теория алгоритмов, теория автоматов, исследование операций, теория оптимального управления, теория распознавания образов и другие.
Основные технические средства для решения задач кибернетики - ЭВМ. Их применяют в устройствах управления и обработки информации.
ПРОСТОЕ И ПЕРЕПРОГРАММИРУЕМОЕ УПРАВЛЕНИЕ
Простым управлением назовем такое управление, которое осуществляется по жесткой, никогда не изменяемой программе. Если попытаться изменить эту программу, то потребуется переделать устройство, об управлении которого идет речь. По жесткой программе управления работают электростанции, предприятия химической промышленности, корабли, самолеты и т. д. Учет количества факторов, определяющих управление в этих устройствах, выходит за пределы возможностей человека. Поэтому понятие ’’простое управление” здесь может показаться неуместным. Тем не менее управление просто, ибо программа действия всего устройства неизменна.
Если говорить о таких объектах, как цех, завод, то при жестком программировании их управления переход на изготовление нового изделия может привести к переделке почти всего оборудования. Сейчас разрабатываются и внедряются роботизированные технологические комплексы, которые могут образовывать и линии, и целые участки, причем управление роботизированным технологическим комплексом перепрограммируемо. Но что осо-Ьенно важно, - это перепрограммируемость управления роботов. Теперь для изменения набора движений робота в отличие от простых автоматов, совершающих механические действия, переделывать робот не требуется.
Более совершенные роботы очувствлены. Они могут иметь ’’глаза” и ”уши” и воспринимать тактильные образы. Здесь идет речь об информационных процессах и о таком управлении роботом, которое происходит в функции результатов, полученных информационными устройствами. Следовательно, это управление более сложное. Представьте теперь, что оно также перепрограммируемо. А в интеллектуальных роботах есть еще одна, высшая ступень управления — процесс выработки программ устройствами искусственного интеллекта. К идее интеллектуальности роботов приходим, руководствуясь основной идеей кибернетики.
Конечно, интеллектуальные процессы могут быть свойственны не только роботам, но и устройствам, не совершающим механических действий. Ведутся работы по интеллектуализации не только роботов, но и ЭВМ на уровне математических абстракций. Этим заняты математики. На рис. 20.1 представлено нестрогое деление проблемы интеллектуализации ЭВМ. Известны следующие разновидности исследований интеллектуализации ЭВМ.
К первой разновидности относятся работы по созданию различных процедур, позволяющих решать так называемые творческие задачи. Эти процедуры используют логические методы обработки информации. Другая разновидность заимствует у природы способы мышления и организацию мозга человека или животного. Создаются имитирующие мыслительную деятельность системы с целью получения тех же результатов, какие свойственны деятельности естественного интеллекта. Третья разновидность — создание систем, в которые входят взаимодействующие между собой человек-оператор и интеллектуальная машина. На рис. 20.1 системы планирования процессов решения задач, системы распознавания образов, ситуаций и целеуказаний относятся к первой разновидности исследований, системы имитации
Рис. 20.1. Интеллектуализация ЭВМ
творческих процессов — ко второй, а системы общения с человеком -к третьей.
Выше, определяя техническую кибернетику, мы указали на то, что эта наука использует достижения в знаниях о живой природе. Речь идет об интеллектуализации роботов, т. е. попытке скопировать процессы в живой природе. Однако и управление с использованием привычных уже обратных связей и управление с помощью сменяемых человеком программ в интеллектуальных роботах опираются на заимствованные знания о процессах управления в живых организмах.
ОБ ИНФОРМАЦИОННЫХ ПРОЦЕССАХ РОБОТОВ
В винеровском определении кибернетики сказано, что эта наука кроме управлений изучает информационные процессы, точнее, общие закономерности передачи информации. На самом деле информацию сначала надо добыть, затем передать, потом преобразовать. А может быть, потребуется сначала добыть и преобразовать, а потом передать. Но в каждом варианте информацию надо сохранять перед передачей, преобразованием и после них. Можно вместо термина ’’передача информации” пользоваться термином ’’информационная связь” или просто ’’связь”.
Применительно к визуальной информации добыть ее означает распознать зрительные образы, наблюдаемые роботом. Уже сделаны попытки воспроизвести в технических устройствах процессы зрительного различения предметов живыми организмами. Изготовлены так называемые персептроны, классифицирующие объекты наблюдения. В одних случайным образом соединены со светочувствительными элементами усилители и ассоциирующие элементы, а с ними тоже случайно — исполнительные элементы. В других структура заранее детерминирована, т. е. предопределена. Способы классификации входных образов тоже могут быть вероятностными по своей природе или детерминированными по жесткой программе.
Преобразование информации происходит в вычислительных устройствах. Передаваться информация может внутри робота, или от человека-оператора к роботу, или в обратном направлении. Сегодня не имеется полностью автономных интеллектуальных роботов, не связанных информационно так или иначе с человеком-оператором. Передача информации происходит по радио или электрическому кабелю. Весьма важно решить проблему помехоустойчивости процесса передачи информации и компактности информационных
каналов. Необходимо, например, через заданное сечение кабеля передавать в единицу времени как можно больше разных типов информации от разных источников к разным приемникам. Существуют многочисленные способы кодирования передаваемой информации, в частности такие, которые позволяют выделить переданное сообщение, смешанное с помехами, во много раз большими по амплитуде.
Проблема хранения информации — одна из наиболее трудных. Для того чтобы хранить информацию в компактном виде, специалисты-робототехники ищут способы записи, хранения и воспроизведения информации. Часто они обращаются к живой природе. В настоящее время в условиях помех, создаваемых электромагнитными излучениями, лучшими являются химические способы.
ЧТО ТАКОЕ АДАПТИВНЫЙ РОБОТ?
Слово ’’адаптация” может быть заменено русским словом ’’приспособление”. Каждое приспособление имеет цель. Чтобы робот мог приспосабливаться, он должен быть достаточно очувствлен. Иногда очувствленные роботы называют адаптивными, хотя для многих остается неясным, почему этот робот не простой, а адаптивный. Ведь адаптивность или приспосабливаемое^ к проявлениям окружающей среды есть свойство, присущее живым организмам. А разве точно такое же свойство появилось у технического устройства, оснащенного техническими зрением, слухом, осязанием?
Нет, свойство приспосабливаемости появляется у робота не только в связи с тем, что его очувствили: требуются еще правила приспособления к проявлениям окружающей среды с той или иной целью, содержащиеся в памяти робота и реализующиеся его устройством управления. Пусть оператор обучил робота жесткой программе адаптации (при фиксированных внешней и внутренней средах). Во время эксплуатации робота при изменении состояния среды программа адаптации выработает новые правила поведения робота в незнакомых условиях среды, т. е. произойдет самостоятельное дообучение робота.
Обратимся к интеллектуальному роботу. Это устройство с искусственным интеллектом, совершающее механические действия. Его адаптацию уместно назвать интеллектуальной. Допустим, осуществлена первоначальная организация памяти такого робота. Затем начинается его эксплуатация. При этом включается устройство искусственного интеллекта, которое принимает новые решения в ситуациях, которые не анализировались в его устройстве управления. В памяти фиксируется новая программа. Итак, робот в интеллектуальном процессе меняет свою программу в соответствии с изменившимися условиями, т. е. дообучается. В этом случае адаптация робота приближается к адаптации живых организмов.
А теперь приведем пример. Робот с техническим зрением был обучен различать элементы фарфорового сервиза, проплывающего мимо него на конвейере. Затем его стали эксплуатировать здесь же, и он, узнавая элементы сервиза, стал брать их с конвейера и, как было задумано, по-разному упаковывать и укладывать в тару. Адаптация есть? Нет. Есть лишь реализация результатов обучения робота в прошлом.
Вопросы к уроку 20
1. Что вы понимаете под словом ’’кибернетика”?
2. Расскажите об информационных процессах.
3. Какое содержание надо вкладывать в термин ’’адаптивный робот”?
УРОК 21. АЛГОРИТМИЧЕСКОЕ И ПРОГРАММНОЕ ОБЕСПЕЧЕНИЕ РОБОТА
Прежде чем перейти к разъяснению понятий алгоритмического и программного обеспечений, дадим несколько определений.
Программа — это записанный на специальном языке алгоритм. Процесс записи программы называется программированием, а процесс введения программы в устройство управления (память) робота — обучением робота.
Алгоритм (от имени узбекского математика аль-Хорезми) — правило выполнения действий роботом или его частью. Различают алгоритмические уровни устройств управления и информационно-измерительных устройств. Первый алгоритмический уровень управления свойствен устройствам управления одностепенных систем приведения в движение, второй (более высокий) — многостепенной системе приведения в движение (исполнительной системе робота), третий (еще более высокий) — системе управления робота, которая воспринимает информацию от информационно-измерительной системы (образы, обнаруженные во внешней среде, данные о выполнении задания) и выдает новые задания информационно-измерительной и исполнительной системам.
Алгоритмы могут быть записаны в виде списка математических выражений и условий, в виде графика, в виде текста.
ПРИМЕР АЛГОРИТМА СИСТЕМЫ УПРАВЛЕНИЯ РОБОТА
Приведем словесное описание алгоритма системы управления подводного робота (перепрограммируемого автоматического манипулятора). Его рука имеет три степени подвижности и предназначена для сбора предметов на дне моря. Схват снабжен тактильными датчиками, фиксирующими попадание предмета между губками, т. е. соприкосновение левой, правой или обеих губок схвата с предметом. Фиксируется также соприкосновение внешней поверхности схвата с предметом. Робот выполняет следующие действия: обходит препятствия, ищет предметы на поверхности любого профиля, определяет возможность его взятия, выбирает положение схвата для взятия предмета, берет и переносит его. От некоторой начальной точки схват осуществляет сканирование пространства. Для отслеживания поверхности любого профиля схвату сообщается колебательное движение. При этом он касается поверхности на каждом шаге сканирования. Осмотрев так поверхность, схват возвращается в исходную точку. Одновременно со сканированием на каждом шаге происходит опрос
тактильных датчиков схвата. В зависимости от их состояния совершается одно из следующих действий:
обход препятствия, если манипулятор не может сдвинуть предмет, которого схват коснулся;
взятие предмета, если он попал между губками схвата;
сдвиг схвата влево или вправо, если сработал левый или правый датчик на внутренней поверхности схвата (объекта коснулась одна губка).
После того как предмет взят, манипулятор переносит его в заданную точку пространства и оставляет там. Затем продолжается поиск других предметов. Каждая из названных операций характеризуется тем, что для нее всегда назначается конкретная цель. Это входит в содержание алгоритма. Если задана цель для схвата, то звенья манипулятора двигаются так, что расстояние до цели уменьшается. При этом сначала движется конечное и-е звено. Другие звенья не перемещаются. Когда достигнуто минимальное расстояние до цели, фиксируется положение конечного звена. Потом варьируется положение предпоследнего (п — 1)-го звена. Это происходит до получения минимального расстояния от схвата до цели. Затем вновь варьируется положение конечного и предпоследнего звеньев. После того как будут исчерпаны возможности этих звеньев по приближению схвата к цели, начинается изменение положения (п — 2)-го звена, затем (п — 3)-го, и т. д. до первого. Обобщенные координаты изменяются до тех пор, пока расстояние от схвата до цели не станет равным заданному.
Для кинематической схемы манипулятора, напоминающей человеческую руку, последовательность описанных движений приближается к последовательности поисковых движений руки человека (зрительная система выключена) .
Те или иные степени подвижности (звенья) в качестве избыточных могут быть устранены из алгоритма.
ПРИМЕР АЛГОРИТМА УСТРОЙСТВА УПРАВЛЕНИЯ ВОДНОСТЕПЕННОЙ СИСТЕМЕ ЭЛЕКТРОПРИВОДА
Рассмотрим алгоритм (в виде математического выражения и последующих условий) устройства управления в системе приведения в движение с электродвигателем постоянного тока одного звена робота:
«и -Ц) + о - - У,)-F,.
Здесь U9t — сигнал на входе электропривода от устройства управления; U9 — электрический потенциал, нарастающий от нуля после появления условия sgn (U91F^a — U{) = 1 и уменьшающийся от нуля после появления условия sgn (U9iF^a — их) = —1; U9i = const >0; Ux — сигнал, пропорциональный угловой скорости вала привода; Uo — сигнал, пропорциональный действительному углу поворота вала привода a; USq — сигнал, пропорциональный заданному углу поворота выходного вала привода ; Ux — сигнал, пропорциональный угловой скорости вала привода; F/— сигнал защиты обмотки двигателя;
F A =1 при ae — a > aAZ, Да r S N’
F&a=~l ПРИ
FAa= 0 ПРИ 4 - al <aN> aN > 0 — пороговый уровень.
Договоримся также, что
sgn (U51FAa - Ur) = 1 при UnFAa - Ux >0. Если UnF ^a - Ux <0, to sgn (UnFьа — (7j) = — 1. Этот алгоритм соответствует интенсивному разгону вала привода и плавному торможению. Сначала lFAcJ = 1, а потом ^Да =
ПРИМЕР НЕПРЕДУСМОТРЕННОЙ СИТУАЦИИ В АЛГОРИТМИЧЕСКОМ ОБЕСПЕЧЕНИИ
Выше рассмотрены алгоритмы устройств разных уровней управления. Составляя их, важно наиболее полно учесть возможные ситуации. Неучет их на любом уровне может привести к прекращению действия робота. Пусть речь идет об уровне действия системы управления робота. Представим, что подвижный робот, выполнявший много раз одну и ту же транспортную операцию, переносил грузы по одному и тому же маршруту. Возвратившись по этому маршруту, он брал новый груз. Однажды на пути робота оказался предмет, не позволяющий продолжить привычный путь. Если у робота нет зрения, то он обнаружит предмет, натолкнувшись на него колесами или ногами. Резко возрастут силы сопротивления тем приводам, которые создают перемещение робота по поверхности. Если робот оснащен устройством технического зрения, то в его устройстве управления возникнет образ предмета. Если предмет (препятствие) не отражен в памяти робота (совершенно новый, неожиданный), то робот прекратит движение (остановится), или вернется в исходную позицию, или совершит еще что-либо.
О ЯЗЫКЕ ДВИЖЕНИЙ
Входной язык для робота определяется взаимодействием с оператором. Он должен быть настолько простым, чтобы ему мог быстро научиться неподготовленный человек. Одно из свойств языка общения с роботом — гибкость, т. е. возможность сужения или расширения его без изменения структуры. Оператор задает роботу некоторую задачу о движениях, но не указывает, как ее выполнить.
Единого и стройного языка движений человека, животных, технических устройств создать до сих пор не удалось. Такой язык требуется для описания колоссального числа разных производственных движений, в частности для описания движений роботов. Сейчас языки движений делят на проблемно-ориентированные и графические. Использование проблемно-ориентированного языка удобно в неожиданных ситуациях. Здесь человек может для робота перечислить возможные ситуации и порядок действий в каждой из них. Можно отдавать команды, например останавливать робот в неожиданно возникшей неудачной ситуации.
◄ ► *•
Рис. 21.1. Знаки направлений в кине-тографии
Рис. 21.2. Пример кинетограммы
Но не всегда удобно отдавать роботу команды о движениях на проблемно-ориентированном языке. Некоторые движения проще показать, чем объяснить словами. Английский хореограф Р. Лабан разработал язык для записи движений человека, названный им кинетографией. Этот язык можно использовать и для записи движений роботов. Кинетография — язык стенографического типа. С его помощью записываются только те изменения положения подвижного тела, которые не могут быть выведены из предыдущих символов кинетограммы. В качестве основных символов языка использованы знаки направления, показанные на рис. 21.1: 1 — основное направление, 2 — левая сторона вперед, 3 — левая сторона назад, 4 — правая сторона вперед, 5 — правая сторона назад, 6 — налево, 7 — направо, 8 — левая сторона налево вперед, 9 — левая сторона налево назад, 10 — правая сторона направо вперед.
В кинетограмме рядом с центральной линией (линией переноса) записывается та часть подвижного тела (правая или левая), в которой расположен центр тяжести. Точка в середине знака направления является признаком наличия здесь массы тела. Это показано на рис. 21.2. Положения, записанные в кинетограмме, различимы во времени t. Имеется возможность построить трансляторы для перевода с кинетографии на язык ЭВМ.
ЯЗЫК ОБЩЕНИЯ ЧЕЛОВЕКА И ИНТЕЛЛЕКТУАЛЬНОГО РОБОТА
Обучить интеллектуальный робот означает записать в его память большое число высказываний, относящихся к его деятельности.
Можно пользоваться обедненным естественным языком, организованным следующим образом.
Две части одного высказывания связывают конструкцией ’’если . . . , то . . . ”. Каждая часть обязательно содержит подлежащее (активный объект), сказуемое (действие активного объекта), обстоятельство или определение (окраска действия), дополнение (объект, на который направлено действие). Например:
1. Если робот вблизи видит куб, то исполнительная система плавно тормозит манипулятор.
2. Если тактильное устройство дает скачок силы, то исполнительная система быстро тормозит кисть.
3. Если устройство технического зрения много раз дает код 1101110, то робот видит вдалеке куб.
4. Если робот вдалеке видит куб, то исполнительная система движет к нему робот.
5. Если робот опять делает работу 1, то он быстро ищет куб.
6. Если робот быстро ищет куб, то устройство технического зрения грубо сканирует.
7. Если аккумулятор малый ток дает, то робот медленно делает работу 1.
Высказывания можно вводить в память интеллектуального робота (через УВВ — рис. 8.1) так, как это делает машинистка, печатающая на бумаге текст. Русские предложения преобразуются в высказывания, понятные запоминающему устройству в УИИ. Но удобнее всего рассматриваемое обучение (организацию состояния элементов памяти) осуществлять голосом. Фразы, произносимые человеком, также должны быть конструкциями обедненного русского языка, понятными интеллектуальному роботу. Информационно-измерительная система робота должна содержать в этом случае устройство, воспринимающее человеческую речь.
После допуска интеллектуального робота к работе в конкретной технологической среде оператор, наблюдающий за действиями своего ученика, оказавшимися вдруг неудовлетворительными, корректирует содержание его памяти новыми высказываниями. Процесс коррекции памяти интеллектуального робота необходим в начальной стадии эксплуатации.
По-видимому, взаимодействие конструктора и его детища или просто оператора и интеллектуального робота облегчится, если интеллектуальный робот тоже будет высказывать вслух принимаемые им решения (РУР — рис. 8.1). Тогда можно будет успеть скорректировать память робота до того, как будут получены неудовлетворительные результаты его практических действий.
ОБУЧЕНИЕ ПРОМЫШЛЕННОГО РОБОТА
Практически кинетограммы не используются как программы движений роботов. Ниже в уроках 22 и 23 рассказано о конкретных промышленных роботах М20.П40.01 и РМ-1, показаны способы записи программ в память роботов.
Обучение робота — это процесс целенаправленной организации состояния элементов его памяти.
Поэтому ввод программы действия робота в его память через устройство ввода можно назвать обучением робота, хотя это простейший вид обучения, присущий современным промышленным роботам.
На рис. 21.3 изображен ученый робот, в состав которого входят микроЭВМ, накопитель на магнитном диске и дисплей. Общеизвестны удобства, которые дает дисплей оператору, обучающему робота. По-видимому, в бу-
Рис. 21.3. Учебный робот, в состав которого входят микроЭВМ, накопительна магнитном диске и дисплей
дущем появятся роботы, обучаемые с помощью фраз, произносимых человеком вслух.
Подведем итоги.
1. Алгоритмическое обеспечение робота - это совокупность правил действия робота в целом и его частей.
2. Программное обеспечение робота — это записанная на некотором языке совокупность алгоритмов, представляющая собой алгоритмическое обеспечение робота.,Се го дня используются разные специфические языки движения робота. Программы, записанные с помощью таких языков, транслируются затем в вычислительные устройства, которые содержат роботы.
Алгоритмическое и программное обеспечение не может быть бесконечным. Поэтому действия каждого робота специализированы, пригодны для некоторой совокупности ситуаций во времени и пространстве, т. е. для той или иной технологии или группы технологий.
3. Обучить робота - значит ввести в его память программу действий робота в целом. При этом возможен режим ручного управления, позволяющий оператору в процессе обучения вручную перемещать части робота в желаемые позиции, исключая работу исполнительной системы.
Вопросы к уроку 21
1. Что такое алгоритм?
2. Приведите примеры алгоритмов.
3. Что вам известно о языке движений?
4. Что такое программное обеспечение робота?
5. Что такое обучение робота?
УРОК 22. ОБУЧЕНИЕ ПРОМЫШЛЕННОГО РОБОТА М20.П40.01
Промышленные роботы типа М20.П40.01 используются для обслуживания токарных станков-автоматов. На рис. 22.1 показано, что движение манипулятора происходит в цилиндрической системе координат. Здесь / — координата подъема, 0 — угол поворота,/? — координата выдвижения. Робот оснащен модулем, обеспечивающим ротацию схвата и угловую фиксацию его в двух либо в четырех положениях. Кроме того, он обладает захватными устройствами шести типов.
Устройство управления робота содержит ЭВМ, которая обрабатывает информацию, поступающую от пульта обучения, внешних ЭВМ, датчиков обратной связи, технологического оборудования, и вырабатывает команды приводам. Конструктивно ЭВМ выполнена в виде ряда функционально независимых модулей: центрального процессора, оперативной и постоянной памяти, служебных модулей, таймера, формирователя сигналов. Специальные согласующие модули подключены к блоку ЭВМ для приема сигналов от станка, выдачи сигналов управления к станку, управления приводами робота через цифро-аналоговый преобразователь, связи с датчиками, измеряющими угловые и линейные перемещения робота, связи с пультом оператора, содержащим кнопки и переключатели (рис. 22.2).
Ввод команд и инструкций производится от пульта обучения (ПОРП), снабженного клавиатурой (рис. 22.3). Сочетание нажимаемых функциональных кнопок и соответствующие этим сочетаниям команды приведены в табл. 22.1.
Пользуясь программным обеспечением устройства управления робота, можно обучать робот программам движений, проверять управляющие программы, вводить желаемые уставки и параметры, а также тестовые программы. Программное обеспечение размещается в памяти ЭВМ емкостью 200 шестнадцатиразрядных слов.
Работа с роботом начинается с его включения на пульте оператора (переключатель 1 на рис. 22.2). Загорается транспарант ’’Сеть”. Подав команду 1
на ПОРП, можно переместить робот в нулевую позицию (см. табл. 22.1). Затем стирают информацию, которая может возникнуть на дисплее ПОРП. Это осуществляют командой 5 (см. табл. 22.1).
Обратим внимание на двойную
id
функцию некоторых кнопок.
Если она нажимается совместно с кнопкой, на которой, например, указано ее двойное значение, то выполняется операция, нарисованная на верх-
ние. 22.1. Манипулятор М20.П40.01
Рис. 22.2. Передняя панель пульта оператора
Таблица 22.1
Номер Сочетание кнопок для ввода Вводимая команда (функция)
команды команды
Пуск
Стоп
Пошаговая работа
Стирание вводимой цифровой информации
Сброс номера ошибки
Повторный запуск программного обеспечения
Номер Сочетание кнопок для ввода Вводимая команда (функция)
команды команды
Знак
7.
8.
9.
10.
11.
12.
13.
14.
15.
16.
17.
18.
19.
Очистка регистров, уставок, ввод стандартного набора параметров, стирание всех управляющих программ
Прекращение работы
Ввод номера программы, кадра, (7-функции, F-подачи, S -функции
Ввод данных в регистры, уставки, выбор режима работы при редактировании программ. Запуск тестов
Ввод данных в параметры
Ввод (7-функции
Ввод скорости F
Ввод позиции Р
Ввод S-функции
Вызов индикации выбора программы
Вызов и задание кадра
Задание режима (при нажатии последовательно зажигаются индикаторы режима)
Номер Сочетание кнопок для ввода Вводимая команда (функция) команды команды
20.
21.
22.
23.
24.
25.
26.
27
28.
29.
30.
31.
32.
Функция Режим
л
7_
37
7
8
9 gg 9 3Z
5
5 1Г 6
6
Перебор номеров программ, кадров, координат (вверх)
Перебор номеров программ, кадров, координат (вниз)
Задание функции (при нажатии последовательно зажигаются индикаторы функции)
Координата Z вверх
Координата Z вниз
Координата в против часовой стрелки
Координата в по часовой стрелке
Координата R вперед
Координата R назад
Зажим схвата 1
Разжим схвата 1
Зажим схвата 2 или ротация схвата 1 вправо
Разжим схвата 2 (ротация схвата 1 влево)
Номер Сочетание кнопок для ввода Вводимая команда (функция) команды команды
Обучение текущей позиции
Стирание программ или кадров
* Робот М20.П40.01 может быть оборудован двумя схватами или одним схватом с при водом ротации.
ней части последней кнопки. Если кнопка с двойным назначением нажимается одна, то выполняется операция, нарисованная на нижней части кнопки (что не отражено в таблице).
Команда 19 (см. табл. 22.1) обеспечивает задание одного из режимов работы устройства управления промышленного робота. Кнопку нажимают до тех пор, пока не засветится индикатор желаемого режима. Ряд нажатий этой же кнопки в команде 22 обеспечивает выбор требуемой функции (загорается индикатор, см. рис. 22.3) .
Рис. 22.3. Пульт обучения промышленного робота
Если не мигает индикатор РАБОТА (см. рис. 22.3), то робот находится в исходной (нулевой) позиции, и тогда можно командой 19 вызвать режим обучения. Загорится индикатор ОБУЧЕНИЕ. Этот режим позволит ввести управляющую программу в память устройства управления робота. Например, пусть требуется обучить робот циклу перемещений, содержащему три позиции. Каждой позиции соответствуют три значения координат Z,9,R. Зададим цикл:
0. Переместиться в нулевую позицию.
1. Переместиться в позицию 1 и зажать схват.
2. Переместиться в позицию 2 прямо по вертикали.
3. Переместиться в позицию 3 и разжать схват.
4. Вернуться в нулевую позицию.
В режиме обучения предварительно надо подать команду 17 (см. табл. 22.1), что вызовет индикацию номера программы, если она была ранее введена или если введенные программы отсутствуют. Нажатием кнопок далее надо набрать свой номер программы; последняя цифра должна мигать. Подадим команду 10 (см. табл. 22.1). Это вызовет запись номера в список программ и появление на дисплее содержимого нулевого кадра нашей программы. Можно занести свою информацию в нулевой кадр (см. табл. 22.2).
В таблице 22.2 помещена программа, соответствующая сформулированному выше циклу движений робота (алгоритму). Далее следует разъяснение смысла символов G, F, Р, S и совокупностей десятичных цифр, помещенных в программу.
В кадре последовательно записываются так называемые G-функция, F-функция, P-функция, 5-функция.
G-функция определяет характер действий робота при считывании информации кадра:
код G00 — необходимо переместиться в точку с координатами, заданными аргументами функции Р;
код G28 - переместиться в точку 0;
код G98 — требуется работа схвата, зажим или разжим его;
код G31 — после прихода в заданную точку надо выполнить условие 5-функции.
Таблица 22.2
Номер Код кадра Примечание
кадра G F ПозицияР 5
Z 0 R
0 28 2 00 Перейти в нулевое состояние
1 00 8 287 5603 4954 00 Перейти в первую позицию
2 98 70.2.60.40.00 Зажать схват
3 00 5 2417 5603 4954 00 Перейти прямо во вторую по-
зицию
4 00 0 2417 13911 7275 00 Перейти в третью позицию
5 98 70.1.60.40.00 Разжать схват
6 98 99 Конец программы
Запишем G-функцию в кадр программы. Для этого подадим команду 13 (см. табл. 22.1). На дисплее возникнет код
10 0 0
Это означает, что введена функция G. Наберем номер нужной нам (7-функ ции, например (728, и введем его командой 10. Появится код
12 8 0
F-функция определяет скорость перехода к следующей позиции. Аргумент функции изменяется от 0 до 8, причем 0 означает отсутствие задания скорости, а 8 — движение с максимальной скоростью по координатам для Z (500 мм/с),в (60 град/с), А (1000 мм/с).
Для ввода F-функции подадим команду 14 (см. табл. 22.1). Далее наж-
мем кнопку S1 или . На индикаторе дисплея появится но-
%♦ %>♦
мер выбранной скорости, например
5 [ [ [ [
Можно ввести номер скорости, пользуясь кнопками
После этого автоматически установится готовность к вводу информации о позиции.
P-функция определяет три значения координат позиции, задаваемой в данном кадре. Готовность к вводу информации о позиции задается командой 15 (см. табл. 22.1).
Для обучения робота желаемой позиции необходимо, управляя с ПОПР, переместить манипулятор в эту позицию. Для этого нажимаем кнопки, указанные в командах 23, 24, 25, 26, 27, 28 (см. табл. 22.1). Манипулятор перемещается. После достижения желаемой позиции подаем команду 33. Управлять вручную состоянием схвата можно с помощью команд 29, 30, 31, 32. Получив желаемые состояния схвата, подаем команду 33. Устанавливается готовность к вводу S-функции.
S-функция предназначена для кодирования команд управления механизмами робота и станка. Все значения S-функции можно найти в инструкции по эксплуатации промышленного робота. Приведем некоторые из них:
S 70.1 — разжим схвата
S 70.2 — зажим схвата
S 60.40 — выдержка времени 4 с
S 00 — конец кадра (должен вводиться в конце каждого кадра)
S 99 - конец программы (должен вводиться в конце программы)
Пусть, например, имеем запись в кадре 70.2.60.40.00. Это означает, что робот должен зажать схват, подождать 4 с и перейти к выполнению задания следующего кадра программы.
Для полного определения действий робота в позиции требуется вводить два кадра программы. В первом кадре задаются значения координат и скорость движения к заданной позиции, во втором — S-функция, определяющая действие схвата робота или обслуживаемого роботом станка в задан
ной позиции. Переход от кадра к кадру в процессе ввода программы робота производится подачей команды 20 (см. табл. 22.1).
Для проверки программы надо перейти в режим повторения, подав команду 17. Затем командой 18 и цифровой клавишей надо ввести номер кадра, начиная с которого будет прогоняться программа. При подаче команды 3 и нажатии кнопки, соответствующей команде 1 (см. табл. 22.1), начнут поочередно отрабатываться кадры программы и позиции манипулятора. Прекратить отработку можно командой 2. В указанном режиме, кроме того, можно изменять уставки, параметры, запускать тестовые программы. Подробные сведения об этом содержатся в изложении программного обеспечения промышленного робота М20.П40.01.
В устройстве управления робота предусмотрен режим редактирования. Он позволяет изменять содержимое кадров программ и стирать их. Для просмотра значений координат позиций в кадрах программы надо подать команду 15, а затем команду 20 или 21. Для изменения значения любой координаты надо набрать ее новое значение и командой 10 ввести его. Аналогично можно ввести или убрать дополнительный кадр, при этом последующие кадры будут сдвинуты.
Стирание программ или кадров производится командами 17 или 18 и командой 34 (см. табл. 22.1). Для долговременного хранения программы предусмотрены ее пересылка и запись в цифровой кассетный накопитель в режиме редактирования.
Промышленный робот М20.П40.01 приспособлен для гибких производственных систем. Программное обеспечение робота позволяет воспринимать команды от внешней ЭВМ и выполнять их.
Вопросы к уроку 22
1. Расскажите о смысле G- и F-функций.
2. Расскажите о смысле Р- и S-функций.
3. Для чего предусмотрен режим повторения?
УРОК 23. ОБУЧЕНИЕ ПРОМЫШЛЕННОГО РОБОТА РМ-01
После усвоения этого урока читатель сможет самостоятельно вводить программы в память робота. Однако для полного овладения языком программирования и приемами обучения робота РМ-01 потребуется изучить специальную литературу.
Совместно с финской фирмой NOKIA в СССР выпускается электромеханический промышленный робот РМ-01. Внешний вид устройства управления ”Сфера-36” этого робота показан на рис. 2.31, а его состав на рис. 23.2. В состав устройства управления входят:
центральная микроЭВМ, которая вычисляет траекторию движения манипулятора, выдает необходимые команды внешнему технологическому оборудованию, воспринимает ответные сигналы и указания оператора;
Рис- 23.1. Устройство управления робота ”Сфера-36
блок управления с шестью микропроцессорами (МП), формирующими сигналы на входах приводов (усилителей мощности);
дисплей и клавиатура;
пульт ручного управления (ПРУ), позволяющий оператору перемещать манипулятор в желаемые позиции (рис. 23.3) ;
накопитель на гибком магнитном диске;
блок ввода-вывода технологической информации.
Все переключатели, лампы индикации, клавиатура, накопитель на гибком диске, дисплей и разъем для подключения ПРУ удобно объединены в операторный модуль. Микропроцессор ЭВМ воспринимает информацию, которая представлена в двоичном коде. Для перевода в двоичный код указаний инструкций, команд оператора, вводимых с помощью клавиатуры, создатели робота разработали специальную систему программирования ARPS. Эта система позволяет быстро составлять управляющие программы на специальном языке, использующем латинский алфавит. Список команд и некоторых инструкций, часто применяющихся в ARPS при программировании, их сокращение и содержание приведены в табл. 23.1.
Таблица 23.1
Команда или инструкция Сокращение Содержание
ABORT A Преждевременно прекратить
CALIBRATE (номер шарнира) CA Калибровать (номер шарнира)
CHANGE (имя позиции) CH Изменить (имя позиции)
CLOAD (имя файла) CL Загрузить (имя файла)
CONTINUE (целое число) CON Продолжение (целое число)
DISABLE (программного пе- DLS Запрет (программного переключателя)
реключателя) DLOAD (имя файла) DL Выгрузить (имя файла)
ENABLE (программного пе- EN Разрешение (программного переключа-
реключателя) , теля)
EDIT (имя программы) ED Редактор (имя программы)
EXIT EX Выход
HERE (имя позиции) H Запись (имя позиции)
LIST COMMANDS LIC Перечень команд
LIST STATUS LIS Перечень состояний (выходов и входов)
LLIST (позиций) LL Перечень (позиций)
LOAD (имя файла) LO Загрузить файл (имя файла)
LTEACH (позициям) LT Обучение (позициям)
MAXSPEED (значение) MA Задание наибольшей скорости (значение)
PLIST (имя программы) PL Перечислить инструкции (имя программы)
RUN (имя программы) R Прогон программы (имя программы)
SPEED (значение скорости) SP Задание текущей скорости (значение ско-
SPEED (%) SP% рости) Задание текущей скорости (% от МАХ
STORE (имя файла), (имена ST SPEED) Занести в память файл (имя файла), (име-
программ) на программ)
WHERE (имя) w Где информация? (имя)
ZERO DISK ZD Стереть диск
ZERO MEMORY ZM Стереть память
Команда или инструкция Сокращение Содержание
ZERO OUTS ZO Стереть уставку выходов
ALIGN AL Юстировать
BASE (x). (y), (z) (вращение) B База (х), (у), (z) (вращение)
CALL (имя программы) CALL Вызов программы (имя программы)
CDELAY (время) CD Задержка времени (время)
CLOSE CLOSE Закрыть схват
DELAY (время) DE Задержка времени (время)
GO (позиция) GO Перейти в (позиция)
GOS (позиция) GOS Перейти по прямолинейной траектории в
(позиция)
GOSN (позиции), (расстояние) GOSN Перейти в ряд (позиции) через (расстояние)
GO READY GO READY Перейти в позицию готовности
HALT (текст), (переменная) НА Останов (текст), (переменная)
J AMP (имя метки) JU Переход к метке (имя метки)
J 2. RIGHT J2R Шарнир 2 вправо
J2 LEFT > J2L Шарнир 2 влево
J3 UP J3U Шарнир 3 вверх
J3 DOUN J3D Шарнир 3 вниз
J5 PLUS J5P Шарнир 5 плюс
J5 MINUS J5M Шарнир 5 минус
LTOOL (позиция) LT Позиция инструмента (позиция)
MOVE (dx), (dy), (dz) MOVE Переместить инструмент
MOVES (dx), (dy), (dz) MOVES Переместить инструмент по прямой
MOVE JOINT (номер), (угол) MJ Переместить шарнир (номер) на (угол)
PRINT (текст), (переменная) PR Печать (текст), (переменная)
OPEN OP Открыть схват
RETURN (переменная) RE Возврат (переменная)
SPEED NEXT (значение ско- SPN Скорость со следующего шага (значение
рости) скорости)
STOP (текст), (переменная) ST Стоп (текст), (переменная)
TOOL (x), (у), (z), (о), (a), (t) TOO Положение инструмента (х), (у), (z), (о),
(a), (t)
WAIT IN (номер входа) WI Ждать сигнала со входа (номер входа)
WAIT LOAD WL Ждать загрузки
Система программирования ARPS хранится в запоминающем устройстве центральной микроЭВМ. Объем ЗУ составляет 16 834 слова, каждое из которых состоит из 16 двоичных разрядов (бит). Из них 2000 слов требуется для собственной (резидентной) программы ARPS. Остальной объем позволяет записывать программу длиной 560 шагов, содержащую 500 позиций. На гибком магнитном диске можно записать программу длиной 1000 шагов с 1000 позициями.
Включение питания робота производится специальным ключом на операторном модуле, при этом загорается лампа ’’Сеть”. Далее кнопкой ’’Питание СУ” (рис. 23.1) включается ”Сфера-36” и на дисплее возникает текст
NOKIA Advanced Robot Programming System
XXX.XXXX ZERO memory (Y, N) or AUTOSTART?
Рис. 23.2, Состав устройства управления
Задание значения скорости движения робота
Клавиши включения^ режимов ' (С подсветкой)
Буквенный дисплей
Управление охватом
Запись позиций
Калибровка (С подсветкой)
Клавиши управления движением шарниров робота
Рис. 23.3. Пульт ручного управления
10 Зак. 820
Если вам нужно ’’очистить” память ЭВМ для занесения программы, наберите на клавиатуре Y и RETURN на дисплее возникнет текст
Y (сг) > да
При этом стираются предыдущие программы. Если вам нужно продолжить работу по старой программе, то наберите
N (сг) > нет
Появится сообщение
ARM PWR OFF - выключено питание привода
Нажмите кнопку ПИТАНИЕ ПРИВОДА, переведите переключатель РЕЖИМ в положение РАБОТА и нажмите кнопку АВТОСТАРТ. Контролируйте правильность выполнения программы. При возникновении сбоя нажмите кнопку АВАРИЯ и снова повторите запуск программы.
Перед записью новой программы необходимо установить точное положение манипулятора. Для этого производится калибровка. Эта операция продолжается 5 с и запускается одной командой
> CAL
>OL
При этом центральная микроЭВМ считывает показания потенциометров для определения положений шарниров. Затем устанавливаются точные положения шарниров по информации от импульсных кодовых датчиков:
> SP 100 (сг)
> GO READY
По этой команде робот должен поднимать руку вертикально вверх. Теперь робот готов к обучению.
Предположим, что требуется обучить робот задаче перемещения детали через несколько точек в пространстве. Каждой точке соответствуют шесть значений углов шарниров манипулятора. Совокупность этих значений называется позицией. Перечислим этапы перемещения детали. Например, схвату надо:
переместиться в позицию 0,
переместиться в позицию 1,
переместиться в позицию 2, переместиться в позицию 3.
Для задания требуемых позиций используется пульт ручного управления (ПРУ). Нажмите на пульте кнопку JOINT и соответствующие кнопки управления шарнирами манипулятора.Назовите, например, одну позицию APPLE 1, тогда при наборе команды HERE произойдет запись позиции в память:
> Н APPLE 1
Можно задавать позиции (первую и остальные) командой LTEACH (обучение положениям). При этом надо с помощью ПРУ перемещать манипулятор
из позиции в позицию и, нажимая кнопку STEP, записывать очередную позицию в память центральной микроЭВМ. Пользуемся командой
> LT APPLE
На дисплей будут выводиться координаты шарниров манипулятора
I У Z 0 a t
APPLE 0 300.88 613. 33 331.91 110.616 131.329 -90.016 APPLE 1 300.00 691.20 121.57 110.616 92.609 - 90.016 APPLE 2 300.88 33-3.22 121.57 131.029 92.609 ~ 90.016 APPLE 3 358.33 333.22 121.57 92.029 12.822 - 90.016 Операции обучения заканчиваются при нажатии клавиши RETURN. Любую координату позиции можно изменить оператором CHANGE > CH APPLE 1 I у Z о о. t APPLE 300.00 621.20 121.57 110.616 92.609 -90.016 CHANCE location 0, , 300, , 85.008 (СГ) 0.00 621.20 300.00 110.616 85.008 -90.016 При заданных позициях манипулятор можно переместить в любую из них командами: >. GO APPLE 3
или
>. GOS APPLE 3
Скорость движения задается инструкцией SPEED, например > SP 200, что означает скорость движения 200 мм/с. Наибольшая разрешаемая скорость 500 мм/с.
Каждой программе необходимо присвоить название, делается это в режиме EDIT. Пример записи программы:
> ED EGOR (сг)
Program EGOR 1 GO APPLE 0 2 GO APPLE 1 3 GOS APPLE 2 4 GO APPLE 3 5 END(cr)
Для запуска программы нужно ввести требуемую скорость выполнения и число повторов с помощью инструкции RUN
> SP 150
> RUN EGOR, 2 прогон программы EGOR, 2 раза RUN>
После двукратного повторения программы робот остановится и на экране дисплея появится
RUN > EXIT
Stopped at STEP 5
Для бесконечного повторения программы количество прогонов задается отрицательным числом:
> RUN EGOR, -1 RUN>
Остановить программу можно переключателем ОСТАНОВ (см. рис. 23.1) или инструкцией ABORT, а для ее продолжения надо ввести инструкции CONTINUE и RETURN. С пульта ручного управления остановить робот можно кнопкой OFF (см. рис. 23.3).
При возникновении сбоя нажимают кнопку АВАРИЯ, для продолжения работы необходимо повторить все операции по запуску робота и вызову* программы.
Для программирования операций взятия деталей (разжим и зажим схвата) используются инструкции OPEN и CLOSE:
> ED EGOR Program EGOR 1 GO APPLE 0 2 GO APPLE 1 3 OPEN 4 GOS APPLE 2 5 CLOSE 6 GO APPLE 3 7 OPEN 8 END (cr)
При прогоне программы в позиции APPLE 1 схват откроется, в позиции APPLE 2 возьмет детали, в позиции APPLE 3 отпустит ее. Если необходимо вывести на дисплей содержимое программы, используется инструкция PLIST
>PL EGOR
Program EGOR 1 APPLE 0 2 APPLE 1 3 APPLE 2 4 APPLE 3
Наличие внешней памяти на гибком магнитном диске позволяет долговременно хранить нужную вам программу; для этого ее можно записать на диск. Возьмите диск, установите в накопитель и наберите инструкцию ZERO DISK (старая информация на диске может быть стерта) :
>ZD
Are you sure (Y, N)?
>Y
Здесь ARPS просит вашего подтверждения, и если вы согласитесь, то начнется стирание диска. Теперь можно записать программу на диск. Для этого выберем зону (файл) на диске, назовем ее EGOROW и оператором STORE запишем в нее нашу программу:
> ST EGOROW-EGOR
Program EGOR
Можно выполнить обратную операцию, т. е. с диска записать программу в память центральной микроЭВМ. Для этого оператором ZERO MEMORY стирают информацию из памяти микроЭВМ и оператором LOAD производят запись:
>ZM
A you sure (Y, N)? Y
>LO EGOROW
Program EGOR
>SP 200
>RUN EGOR, -1
RUN>
Содержание программы можно отредактировать инструкциями INSERT (внести) и DELETE (убрать):
>PL EGOR
Program EGOR
1 GO APPLE 0
2 GO APPLE 1
3 GO APPLE 2
4 GO APPLE 3
> RUN WAIT
ED EGOR
Program EGOR
1 GO APPLE 0
D 3
GOS APPLE 2
2 I
3 ISP N 50
4 I
GOS APPLE 2
E
> RUN WAIT
PL EGOR
Program EGOR
1 GO APPLE 0
2 GO APPLE 1
3 SP N 50
4 GOS APPLE 2
5 GO APPLE 3
> SP 200
> RUN EGOR, -1
RUN
Аналогично используется инструкция DELETE, например:
ED EGOR Program EGOR 1 GO APPLE 0 D 3 GO APPLE 2 3 D 3 SP N 50 END
Для останова робота переключатель РЕЖИМ следует перевести в положение ОСТАНОВ (рис. 23.1), или нажать клавишу OFF на пульте ручного управления (рис. 23.3). После остановки робота нажимается кнопка ”0” и отключается питание с помощью сетевого выключателя.
Вопросы к уроку 23
1. Перечислите известные вам команды ARPS.
2. Расскажите про состав устройства управления промышленного робота РМ-01.
УРОК 24. ПРОГРАММИРУЕМЫЕ КОНТРОЛЛЕРЫ И РОБОТЫ
Основное назначение любой ЭВМ состоит в том, чтобы вычислять. Это следует из ее названия. Развитие вычислительных машин, повышение быстродействия, уменьшение размеров и стоимости позволило использовать их в системах управления. Постепенно возникли специализированные вычислительные управляющие машины, которые получили название программируемые контроллеры (ПК).
Программируемые контроллеры можно использовать для управления любым технологическим оборудованием. Оказалось, что программируемые контроллеры очень удобны для создания систем управления роботов.
Программируемый контроллер в общем случае состоит из микропроцессорного модуля, модуля питания и сменных модулей для связи с объектом управления. Сменные модули выпускаются в широкой номенклатуре, и выбрать нужный набор модулей для управления каждым объектом нетрудно. Простота программирования делает ПК доступным для эксплуатации персоналу, не обладающему знаниями в области программирования.
Назовем некоторые типы ПК, выпускаемых в СССР: РЕМИКОНТ, ЛИМИ-КОНТ, МИКРО ДАТ, МКП-1, МК-01, Б9601. На рис. 24.1 показан вид наиболее распространенного ПК типа МИКРО ДАТ. Прибор программирования (ПП) МИКРО ДАТ изготовлен в виде небольшого чемодана (см. рис. 24.2).
Применим ПК МИКРО ДАТ для управления пневматическим промышленным роботом РФ-202М (рис. 24.3).
Промышленный робот имеет две руки с шестью степенями подвижности и по схвату на каждой руке. Подъем-опускание и поворот являются общи-
Рис. 24.1. Программируемый контроллер МИКРО ДАТ
ми степенями подвижности для обеих рук. Выдвижение рук и ротация кистей управляются независимо. Все движения осуществляются с помощью пневмо цилиндров, управляемых пневмоклапанами с электромагнитами. Внутри робота на пневмопанели установлены 16 электропневмоклапанов. Движения робота контролируются датчиками на базе герконов (герметизированных в стеклянной ампуле контактов, замыкающихся при воздействии магнитного поля). Датчики закреплены на приводах подъе-
МС35.18
-241
1 О 2 О з О
4 О 5 О б О
0
ма-опу скания, поворота колонны, выдвижения рук. Всего используется во-
семь герконов.
При отсутствии электропитания элекхропневмоклапан поджат специальной пружинкой так, что пневмоцилиндр управляемой им степени подвижности соединен с атмосферой. Включение клапана происходит при подаче на его обмотку напряжения 24В постоянного тока; при этом воздух под давлением из пневмомагистрали поступает в пневмоцилиндр и вызывает движение степени подвижности. В процессе управления ПК МИКРОДАТ подключает источник постоянного тока последовательно к тем или иным клапанам, вы
зывая движения и контролируя их выполнение по замыканию контактов герконов.
Для устранения взаимных помех цепей управления клапанами и цепей контроля сигналов от герконов применяются отдельные источники постоянного тока напряжением 24В. Источник 1 должен иметь большую мощность.
На рис. 24.1 видны позиции в каркасе ПК МИКРО ДАТ, обозначенные двоичным кодом: 00, 01, 10, 11. В позициях 00 и 10 устанавливаются модули входа (для приема сигналов от датчиков-герконов). В позициях 01 и 11 устанавливаются модули выхода (для сигналов управления электропневмоклапанами) .
На каждом модуле нанесена соответствующая маркировка.
Для того чтобы использовать ПК МИКРО ДАТ совместно с промышленным роботом РФ-202М, отсоединяется устройство управления робота. При
этом на корпусе робота освобождаются электрические разъемы ’’Клапан I”, ’’Клапан II”, ’’Датчик I”, ’’Датчик П”.
Эти электрические разъемы соединяются с контактами модулей входа/ выхода ПК МИКРО ДАТ согласно таблице соединений (табл. 24.1).
Далее переходят к изучению приемов программирования и вводу программы.
Для ввода программы в ПК МИКРОДАТ применяется прибор программирования ПП (см. рис. 24.2). Он снабжен клавиатурой, цифровым дисплеем и тумблерами включения. Программа набирается на клавиатуре последовательно, инструкция за инструкцией, и сразу вводится в рабочую память контроллера, соединенного специальным кабелем с ПП.
Память ПК МИКРОДАТ может вместить 4000 шестнадцатиразрядных двоичных слов. Каждое слово имеет четырехразрядный восьмеричный адрес. Адреса с 00008 до 77178 образуют рабочую память (память пользователя). Для управления роботом РФ-202М необходимо разделить рабочую память на две части. В первой части, начинающейся с адреса 01208, кодируются позиции робота (положения звеньев (табл. 24.2)). Во второй, начинающейся с адреса 10008, записывается служебная программа (табл. 24.3), которая преобразует коды позиций в управляющие сигналы на контактах модулей выхода ПК МИКРО ДАТ, а также согласует движения робота таким образом, чтобы последующие его движения начинались только после окончания предыдущих.
Коды позиций располагаются в младших восьми разрядах шестнадцатиразрядного двоичного слова.
17 16 15 /4 13 12 11 10 7 6 5 4 3 2 1 О
0 0 0 0 0 0 21_
Признак конца цикла1 -------------------- 1-сжать
Левый схват о-открыть
1- сжать
Правый схбат 0 - открыть
1-по часовой стрелке
Ротация левой кисти 0-против
1-по часовой стрелке
Ротация правой кисти 0-против___________
1-вперед
Правая рука 0 - назад
1 - вперед
Левая рука 0- назад
1- против часовой стрелки
Поворот робота 0-по часовой стрелке
Подъем робота-1;опускание-0
В 13-м разряде записывается 1,если позиция последняя в цикле.
Таблица 24.1
ПК МИКРО ДАТ Назначение соединения ПР РФ-202М
Код модуля Номер контакта Обозначение соединения Номер контакта
1 Источник I ”-24 В” Клапаны I и II 12 и 12
Подъем Клапан I 6
3 Поворот по часовой стрелке Клапан II 6и7
4 Поворот против часовой стрелки Клапан II 8 и 9
Выходы 5 Опускание Клапан I 2
01 6 Левая рука - выдвижение Клапан I 4
7 Левая рука - втягивание Клапан I 5
8 Правая рука - выдвижение Клапан I 3
9 Правая рука - втягивание Клапан I 1
10 Источник I ”+24 В” — —
1 Источник I ”-24 В” Клапаны I и II 12 и 12
2 Ротация кисти правой Клапан II 2
3 Ротация кисти правой Клапан II 4
4 Ротация кисти левой Клапан II 5
Выходы 5 Ротация кисти левой Клапан II 3
11 6 Правый схват Клапан II 1
7 Левый схват Клапан I 7
8 — — —
9 — — —
10 Источник I ”+24 В” - -
ПК МИКРОДАТ Назначение соединения ПР РФ-202М
Код модуля Номер контакта Обозначение соединения Номер контакта
1 Источник II **+24 В** Датчики I и II 5 и 7
2 Левая рука выдвинута Датчик I 1
3 Левая рука втянута Датчик I 2
4 Датчик поворота по часовой стрелке Датчик I 3
Входы 5 Датчик поворота против часовой Датчик I 4
10 6 стрелки Правая рука выдвинута Датчик 11 1
7 Правая рука втянута Датчик II 2
8 Руки внизу Датчик II 5
9 Руки вверху Датчик II 6
10 Источник II **-24 В** — —
Таблица 24.2
Адрес Движения робота, соответствующие позициям разряда в слове Основание робота (подъем 1, опускание 0) Восьмеричный код движения
Признак конца цикла (есть 1, нет 0) Схват (закрыт 1, открыт 0) Ротация кйсти (по ЧС 1, против ЧС 0) Рука (вытяну-, та 1, втянута 0) Поворот робота (против ЧС 1,по ЧС 0)
л п Л п П л
13 7 6 5 4 3 2 1 0
0120, 0 0 0 1 1 0 0 0 0 000060,
0122, 0 0 1 1 1 1 1 0 1 000175,
0124, 0 1 1 1 1 1 1 0 0 000374,
0126, 0 1 1 1 1 0 0 0 1 000361,
0130, 0 1 1 1 1 0 0 1 1 000363,
0132, 0 1 1 1 1 1 1 1 1 000377,
0134, 0 0 0 1 1 1 1 1 0 000076,
0136, 0 0 0 1 1 1 1 1 1 000077,
0140, 0 0 0 1 1 0 0 1 1 000063,
0142, 0 0 0 1 1 1 1 1 1 000077,
0144, 0 1 1 1 1 1 1 1 0 000376,
0146, 0 1 1 0 0 0 0 1 1 000303,
0150, 0 1 1 0 0 1 1 0 1 000315,
0152, 0 0 0 0 0 1 1 0 0 000014,
0154, 0 0 0 1 1 0 0 0 1 000061,
0156, 1 0 0 1 1 0 0 0 0 010060,
Примечание: Л — левый (ая), П — правый (ая), ЧС — часовая стрелка.
Инструкция Операнд Номер инструкции Инструкция Операнд Номер инструкции
нет 00 00 -(Я)- 00011 47
НБЛ 00 01 -(S)- 00012 48
СБС 020 02 чн 10103 49
СБС 021 03 ПБЛ 05 50
СБС 031 04 НБЛ 05 51
СБС 032 05 4F 02002 52
ОСТ 01 06 ПБЛ 06 53
ПБЛ 06 07 02002 54
НБЛ 06 08 -(«)- 00014 55
03216 09 -(«)- 00015 56
твд 032 10 ч н 10101 57
ПРК 0005 11 ПБЛ 07 58
нет 01 12 НБЛ 06 59
НБЛ 00 13 -(Я)- 00015 60
ч н 03216 14 -($)- 00014 61
ЧСФ 031 15 чн 10100 62
ПРС 0120 16 ПБЛ 07 63
ПРС 0020 17 НБЛ 07 64
ПРК 0999 18 Ч Н 02003 65
ПБЛ 01 19 ПБЛ 10 66
НБЛ 01 20 02003 67
ч I— 02013 21 -(Я)- 00016 68
СБС 031 22 -($)- 00017 69
ПБЛ 00 23 -И- 10104 70
ПБЛ 03100 24 ПБЛ 11 71
ПБЛ 21 25 НБЛ 10 72
41- , 02000 26 -(Я)- 00017 73
ПБЛ 02 27 -($)- 00016 74
02000 28 чь 10105 75
-(Я)- 00010 29 ПБЛ 11 76
-($)- 00013 30 НБЛ 11 77
4F 10106 31 чн 02004 78
ПБЛ 03 32 ПБЛ 12 79
НБЛ 02 33 02004 80
-(Я)- 00013 34 ВПП 00 81
-($)- 00010 35 чн 02116 82
нн 10107 36 -(Я)- 00111 83
ПБЛ 03 37 -($)- 00110 84
НБЛ 03 38 ПБЛ 13 85
чн 02001 39 НБЛ 12 86
ПБЛ 04 40 ВПП 00 87
02001 41 ЧН 02116 88
-(Я)- 00012 42 -(Я)- 00110 89
-($)- 00011 43 -($)- 00111 90
Hl- 10102 44 ПБЛ 13 91
ПБЛ 05 45 НБЛ 13 92
НБЛ 04 46 ЧН 02005 93
Инструкция Операнд Номер инструкции Инструкция Операнд Номер инструкции
ПБЛ 14 94 ВПП 00 116
02005 95 НН 02116 117
ВПП 00 96 - W- 00114 118
НН 02116 97 ПБЛ 17 119
-(«)- 00112 98 НБЛ 17 120
-(5)- 00113 99 н н 02007 121
ПБЛ 15 100 ПБЛ 20 122
НБЛ 14 101 н^н 02007 123
ВПП 00 102 ВПП 00 124
02116 103 НН 02116 125
-W- 00113 104 -($)- 00115 126
-(£)- 00112 105 ПБЛ 00 127
ПБЛ 15 106 нет 77 128
НБЛ 15 107 нпп 00 129
НН 02006 108 н н 02116 130
ПБЛ 16 109 СБС 021 131
Н^Н 02006 110 Н^Н 02116 132
ВПП 00 111 твд 021 133
НН 02116 112 ПРК 0005 134
-($)- 00114 113 НН 02116 135
ПБЛ 17 114 НБЛ 77 136
НБЛ 16 115 НПП 77 137 4
Последовательность двоичных слов, в каждом из которых записано положение звеньев робота, назовем файлом позиций. В табл. 24.2 приведен пример файла, обеспечивающего выполнение демонстрационной программы работы робота РФ-202М. Запись файла позиций начинается с адреса 01208 и кончается адресом 01568. Отметим, что запись слов в двоичном коде в ПК МИКРО ДАТ не разрешается. Поэтому сначала содержание слова в двоичном коде переводится в восьмеричный код, а затем с помощью клавиатуры ПП записывается в нужный адрес. Правый столбец в таблице с примером файла позиций содержит восьмеричный код, который соответствует двоичному содержанию слов.
Служебная программа также набирается с помощью клавиатуры ПП последовательно, начиная с нулевой инструкции. Если в специальную ячейку с адресом 37058 занести начальный адрес служебной программы 10008, то нулевая инструкция будет записана по адресу 10008, инструкция № 01 — по адресу 10018, инструкция № 02 - по адресу 10028 и т. д. Таким образом, номеру каждой инструкции будет соответствовать определенный адрес рабочей памяти.
После ввода файла позиций и служебной программы исполнение демонстрационной программы произойдет, если ключ на ПК МИКРОДАТ повернуть в положение РАБ (см. рис. 24.1). Программу, реализующую требуемую технологию, можно набрать, меняя содержимое слов файла.
?
Рис. 24.3. Пневматический промышленный робот РФ-202М. Стрелками показаны: 1,4 — движения схватов; 2, 5 — выдвижение, втягивание рук; 3, 7 — ротации; 6 — поворот основания; 8 — изменение высоты основания
Для изменения темпа работы робота нужно незначительно изменить служебную программу, приведенную выше, но для этого следует изучить Инструкцию по программированию ПК МИКРОДАТ.
Относительно простые в программировании ПК очень удобны для приобретения навыков в этой области. Программируемый характер устройства ПК ставит их в один ряд со средствами информатики. При использовании программируемого контроллера уменьшается стоимость устройства управления, расширяются его возможности, повышается надежность. Программируемые контроллеры могут соединяться между собой информационными каналами, что позволяет управлять очень сложными технологическими комплексами в реальном масштабе времени. С появлением ПК значительно упростилась разработка устройств управления, которая теперь сводится к выбору требуемой комплектации ПК и разработке управляющих программ.
Вопросы к уроку 24
1. В чем разница между микроЭВМ и программируемым контроллером?
2. Какие новые возможности появляются у робота при управлении от программируемого контроллера?
СПИСОК ЛИТЕРАТУРЫ
1 .Янг Дж. Ф. Робототехника/Пер. с англ, под ред. М. Б. Игнатьева. - Л.: Машиностроение. Ленингр. отд-ние, 1979. - 300 с.
2 .Попов Е. П. Робототехника и гибкие производственные системы. - М.: Наука, 1987. - 192 с. - (Пробл. науки и техн, прогресса).
З .Мысловский Э. В. Промышленные роботы в производстве радиоэлектронной аппаратуры. - М.: Радио и связь, 1988. - 224 с.
4 .Мацкевич В. В. Занимательная анатомия роботов. - 2-е изд., перераб. и доп. - М.: Радио и связь, 1988. - 128 с. - (Межизд. серия ’’Научно-популярная библиотека школьника”).
5 .Иванов Ю. В., Лакота Н. А. Гибкая автоматизация производства РЭА с применением микропроцессоров и роботов: Учеб, пособие для вузов. - М.: Радио и связь, 1987. - 464 с.
6 .Гордин А. Б. Занимательная кибернетика. - 2-е изд., перераб. и доп. - М.: Радио и связь, 1987. - 224 с. - (Межизд. серия ’’Научно-популярная библиотека школьника”) .
7 .Вейн А. М., Каменецкая Б. И. Память человека. - М.: Наука, 1973. - 208 с.
8.Егоров Ю. Н. Система привода роботов. - Л.: Изд-во Ленингр. ун-та, 1982. - 336 с.
9.Ильин О. П., Анхимюк В. Л., Бабук А. М. Основы технической кибернетики. -Минск: Вышейшая школа, 1975. - 348 с.
О.Хейзерман Д. Как самому сделать робот/Пер. с англ. В. С. Гурфинкеля. - М.: Мир, 1979. - 196 с.
1 .Тимофеев А. В. Роботы и искусственный интеллект. - М.: Наука, 1978. - 192 с.
2 .Не счесть у робота профессий: Пер. с англ./Под ред. В. С. Гурфинкеля. - М.: Мир, 1987. - 182 с. - (Библиотечная серия).
СОДЕРЖАНИЕ
От авторов...........................................................3
ПРОШЛОЕ, НАСТОЯЩЕЕ, БУДУЩЕЕ
Урок 1. Рождение робототехники....................................5
Урок 2. Развитие робототехники....................................9
Урок 3. Перспективы роботостроения...............................17
ПРИМЕНЕНИЕ РОБОТОВ
Урок 4. Роботы в гибких производственных системах................28
Урок 5. Роботы в космосе.........................................35
Урок 6. Устройства робототехники под водой.......................42
Урок 7. Роботы в быту............................................48
РОБОТ И ЕГО СОСТАВНЫЕ ЧАСТИ
Урок 8. Что такое робот?.........................................52
Урок 9. Манипуляторы.............................................57
Урок 10. Схваты..................................................62
Урок 11. Приводы.................................................67
Урок 12. Датчики состояния робота................................74
Урок 13. Устройства очувствления.................................80
Урок 14. Электронные вычислительные машины.......................85
ИСПОЛНИТЕЛЬНЫЕ СИСТЕМЫ
Урок 15. Исполнительная система с позиционным управлением........91
Урок 16. Исполнительная система с контурным управлением..........97
Урок 17. Обратимая следящая система.............................101
Урок 18. Устройства, перемещающие роботы........................104
Урок 19. Теоретические задачи механики роботов..................110
КИБЕРНЕТИКА РОБОТОВ
Урок 20. Управление и информатика...............................116
Урок 21. Алгоритмическое и программное обеспечение робота.......120
Урок 22. Обучение промышленного робота М20.П40.01...............126
Урок 23. Обучение промышленного робота РМ-01....................132
Урок 24. Программируемые контроллеры и роботы...................143
Научно-популярное издание
Егоров Юрий Николаевич Голубев Никита Львович
УРОКИ РОБОТОТЕХНИКИ
Заведующий редакцией Ю. Н. Рысев
Редактор Н. Н. Кузнецова
Художник И. А. Смирнов
Художественный редактор Н. С. Шеин
Технический редактор Т. Н. Зыкина
Корректор Г. Г. Казакова
ИБ № 1434
Подписано в печать 13.04.90 Формат 60x90/16 Бумага офс.№1 Гарнитура ’’Пресс-роман” Печать офсетная Усл.печл. 9,50 Усл.кр.-отт. 38,50 Уч.-издл. 11,04
Тираж 20 000 экз. Изд. № 22026 Зак. № 8Z0 Цена 75 к.
Издательство ’’Радио и связь”. 101000, Москва, Почтамт, а/я 693
Издательство ’’Калининградская правда”. 236000, г. Калининград, пр. Маркса, 18
75 к.