




















































































































































































Автор: Челпанов И.Б
Теги: детали машин передачи (механические) подъемно-транспортное оборудование крепежные средства смазка кибернетика машиностроение робототехника
ISBN: 5-217-00563-7
Год: 1989




И.Б.ЧЕЛПАНОВ
СЯКОЛПАШНИКОВ
СХВАТЫ
ПРОМЫШЛЕННЫХ
РОБОТОВ
Ленинград
"Машиностроение"
Ленинградское отделение
1989
ББК 32.816—04—2
4-40
УДК 621.865.8—781.2.001.63
Рецензент д-р техн. наук проф. Е. Г. Нахапетян
Челпанов И. Б., Колпашников С. Н.
Схваты промышленных роботов.— Л.: Машиностроение.
4-40 Ленингр. отд-ние, 1989.— 287 с: ил.
ISBN 5-217-00563-7
В книге разносторонне и с максимальной полнотой рассмотрены
механические захватные устройства промышленных роботов (схваты),
отличающиеся большим разнообразием схемных и конструктивных
решений. Обобщен опыт проектирования схватов, даны конкретные примеры
конструкций схватов и их кинематические схемы. На основе разделения
схватов на составные части разработана общая методика проектирования
по совокупности технических требований. Сформулировано и решено
большое число задач механики захватывания.
Для инженеров-конструкторов и расчетчиков, работающих над
созданием промышленных роботов, их внедрением и эксплуатацией.
2402020000—032
4 038(01)-89 32~89 ББК 32.816-04-2
ISBN 5-217-00563-7 © Издательство «Машиностроение», 1989
ПР ЕДИСЛОВИЕ
Схват является рабочим органом, одним из устройств
вспомогательного промышленного робота, предназначенного для
обслуживания оборудования производственной системы. По схеме и
конструктивному решению схваты обычно просты, они
значительно проще других устройств робота-манипулятора и устройства
передвижения.
Специалисты по теоретической механике и по теории
механизмов и машин видят в схвате простейший механизм с одной
степенью свободы, различные варианты которого могут
рассматриваться лишь в качестве примеров в разделах статики или
силового расчета. Для специалистов по прочностным расчетам
обычные конструкции схватов сводятся -к типовым расчетным схемам,
к задачам расчета на изгиб рычагов, на кручение валор и пр.;
при этом запасы прочности обычно оказываются большими, так
что по результатам прочностных расчетов корректировать
конструкцию схвата не приходится. Для специалистов по
управлению и информационно-измерительной технике схват представляет
интерес только тогда, когда промышленный робот имеет систему
очувствления.
Инженеры-конструкторы, проектирующие схваты, нередко
рассматривают их как традиционные зажимные устройства,
относящиеся к станочным приспособлениям, причем специфика
промышленных роботов видится только в ограничении масс и
габаритных размеров, а также, возможно, в применении иных двигателей
(пневмоцилиндров вместо гидроцилиндров). Вследствие
кажущейся простоты конструкторских и расчетных задач
проектирование схватов нередко рассматривается как простая работа, ее
поручают далеко не лучшим конструкторам, которые создают
новые схваты на основе лишь самых элементарных расчетов
(достаточно полных доступных инженерных методик расчетов не
существует), по случайным, в лучшем случае — по хорошим,
прототипам.
Авторы полагают, что пренебрежение к теории и к расчетным
задачам при проектировании схватов промышленных роботов
приносит большой вред. 'Создание наиболее полной теории
захватных устройств, обобщение накопленного опыта
проектирования схватов и разработка на этой основе общей методики проек-
1*
з
тирования схватов представляют для роботостроения одну из
самых актуальных задач, причем решение этой задачи необходимо
не только для разработчиков промышленных роботов, но и для
гораздо более широкого круга специалистов!' Почему так?
Большое разнообразие форм и размеров захватываемых
объектов, различие многочисленных дополнительных требований
к их захватыванию и удерживанию приводят к необходимости
использования очень большого числа захватных устройств. Если
число используемых схем манипуляторов промышленных роботов
исчисляется единицами, то схватов — многими десятками, а
число типоразмеров схватов не представляется возможным
оценить даже приблизительно/ При серийном производстве
промышленных роботов практически нельзя учесть разнообразие всех
требований к схватам, поэтому часто встречается ситуация, когда
при установке робота на рабочее место штатный схват снимают,
а на его место устанавливают новый, специально
спроектированный и изготовленный по месту эксплуатации. При этом в
проектирование схватов оказывается втянутым большое число научно-
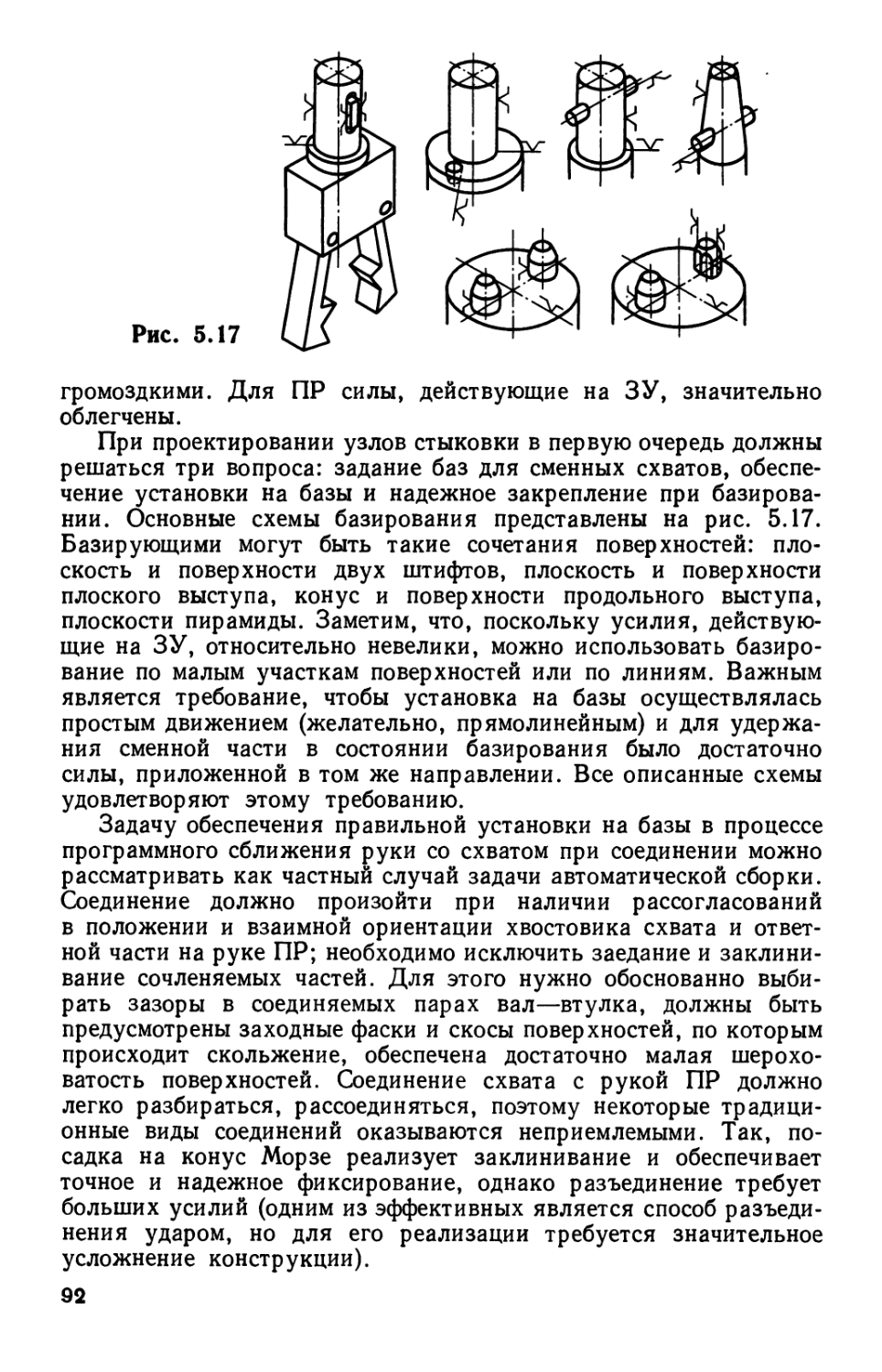
технических работников различного профиля (в первую очередь
технологов и конструкторов), которые не имеют прямого
отношения к роботостроению и не связаны с организациями,
проектирующими промышленные роботы. Наметившаяся тенденция
уменьшения числа используемых схем промышленных роботов,
установления их типоразмерных рядов на основе хорошо
отработанных базовых моделей, концентрации проектирования и
изготовления промышленных роботов в относительно небольшом числе
специализированных предприятий и связанная с этим тенденция
уменьшения и без того небольшого числа инженеров, занятых
проектированием промышленных роботов, не наблюдаются при
разработке захватных устройств. Положение, при котором
доделкой, переделкой, модернизацией, а часто и проектированием
новых схватов заняты преимущественно не специалисты по
робототехнике, а конструкторы и технологи, занимающиеся внедрением
промышленных роботов, является не временным,'
исключительным, а типичным; это положение сохранится на обозримое время.
Авторы данной книги работали над различными вопросами
теории, расчета и проектирования механических захватных
устройств более десятка лет. За это время ими опубликовано в нашей
стране и за рубежом много статей; наиболее важные из них указаны
в списке литературы [30—47, 79—86]. Настоящая книга
обобщает эти исследования. Отбор, расположение и характер
изложения материала подчинены общей цели — дать
проектировщикам научно обоснованные методы создания конструкций схватов
роботов для самых различных сочетаний технических требований.
При компоновке материала книги учтен накопленный опыт
роботостроения. Приведено много конкретных примеров
разработанных конструкций схватов, на основе их анализа выявлены
общие закономерности компоновки, выявлена роль различных тре.
4
бований, типа двигателя, вида механизма передачи и т. д. Именно
такой анализ явился основой для формулирования общих
принципов построения схватов по совокупностям технических
требований. Подробно обоснована разработанная авторами, многократно
опробованная, но еще не вошедшая широко в практику
проектирования логика построения схвата, при которой сначала на
основе сведений об объекте и требований к захватыванию
выбираются рабочие элементы, затем из условий перекрытия
требуемого диапазона изменения размеров объекта выбирается
двигатель, а после этого синтезируется механизм передачи. Основным
является требование надежного удерживания объекта в схвате
на всех этапах функционирования промышленного робота, поэтому
расчету несущей способности схвата уделяется особое внимание.
Последние главы являются проблемными, в них описываются
эффекты, которые могут представлять значительный интерес,
но соответствующие задачи решены лишь в самых простых
вариантах постановок. Широкий круг идей, содержащихся в
многочисленных изобретениях, отражен в книге лишь в
незначительной степени, предпочтение отдано проверенным и оправдавшим
себя техническим решениям.
При распределении материала в книге учтены интересы
различных групп специалистов, приняты все меры для того, чтобы
облегчить им активное освоение содержания. Три первые главы
необходимы специалистам любого профиля. Четвертая и пятая
главы адресованы преимущественно конструкторам.
Последующие главы ориентированы на специалистов, занимающихся
расчетом, и на инженеров-исследователей. В шестой главе основное
внимание уделяется построению и обоснованию схемы
проектирования в целом; содержание этапов раскрывается лишь на
качественном уровне. На первых этапах проектирования, в
особенности при выборе кинематических схем, должен быть активно
использован материал предыдущих четвертой и пятой глав.
Последующие главы конкретизируют различные этапы расчетов: именно
в них приводятся необходимые расчетные формулы, а для
примеров, представляющих наибольший интерес, приводятся
конечные результаты.
Книга не может претендовать на исчерпывающий охват
проблематики, в частности, исключены из рассмотрения
«экзотические» захватные устройства, не анализируется специфика схватов
с очувствлением и т. д. Это связано с общей установкой на решение
наиболее актуальных задач сегодняшнего дня. Методология
исследования и многие общие результаты могут быть перенесены
впоследствии на задачи, относящиеся к иным типам захватных
устройств, пока не нашедшим практического применения.
Отзывы и пожелания авторы просят направлять по адресу:
191065, Ленинград, ул. Дзержинского, 10, Ленинградское
отделение издательства «Машиностроение».
ВВЕДЕНИЕ
При построении теории захватных устройств учитывается опыт
роботостроения. К настоящему времени в различных
публикациях накоплен большой объем сведений о схватах промышленных
роботов. В первую очередь следует отметить хорошо известные
монографии по промышленной робототехнике [8, 19, 28, 61, 76],
в каждой из которых приводятся выборочные и фрагментарные
сведения о схемах, конструкциях и технических характеристиках
захватных устройств. Обычно это элементы технических описаний
захватных устройств конкретных моделей промышленных
роботов. Вопросы выбора схем, расчета параметров, типизации
конструкций не обсуждаются. Из книжных изданий по робототехнике
особо следует отметить справочник [28], в котором материалы по
захватным устройствам представлены наиболее полно. Имеются
некоторые сводные данные о схватах.
В целом по работе [28] следует отметить, что сведения о
конкретных схватах, безусловно, полезны и могут быть использованы
конструкторами при проектировании. Однако отсутствие общей
концепции проектирования схватов приводит к тому, что
важнейшие этапы принятия решений при проектировании остаются без
внимания.
Имеется обзорная и справочная литература по захватным
устройствам вообще и схватам в частности. Большим по объему, но,
к сожалению, практически недоступным для советских читателей
является обзор японского автора [90], в котором весьма полно
отражен опыт разработки схватов для промышленных роботов,
серийно выпускаемых в Японии.
Много интересного материала содержится в книге болгарских
авторов С. М. Делиева и В. Н. Накова [16].
Государственная публичная научно-техническая библиотека
Сибирского отделения АН СССР выпускает по ряду направлений
научно-технического прогресса аннотированные указатели
изобретений. По захватным устройствам промышленных роботов
выпущено два таких указателя: в 1980 и 1984 гг. В обзорах авторские
типовые аннотации со схемами воспроизведены без всяких
дополнений и комментариев. К сожалению, тираж обзоров невелик.
Интенсивная работа по поиску новых принципов, схемных и
конструктивных решений захватных устройств находит выраже-
6
ние в большом и все возрастающем потоке изобретений в этой
области. На настоящее время число изобретений,
зарегистрированных в СССР и других странах по способам и устройствам
захватывания, значительно превышает тысячу. Как принято, аннотации
к изобретениям публикуются в Бюллетене изобретений.
Значительная часть изобретений по захватным устройствам относится
к классу B25J15/00 по Международному классификатору
изобретений, однако немало изобретений относят к другим классам-,
даже далеким, что существенно усложняет патентный поиск.
Аннотации к изобретениям с незначительным запаздыванием
публикуются в Реферативном журнале (Выпуск 37. Промышленные
роботы и манипуляторы). В реферативном журнале
реферируются все публикации по промышленным роботам.
Публикациям по захватным устройствам должен присваиваться
УДК 621.865.8-521 (088.8), однако часто встречается
неправильное и неточное классифицирование.
Теоретическое обобщение обширного общедоступного
материала по схемам и конструктивным решениям захватных устройств
намного отстает от потребностей. Журнальные публикации (см.,
например, [32, 34, 39, 41, 83]) в свое время, конечно, сыграли
положительную роль в расширении кругозора конструкторов и
в пропаганде новых решений, но эти публикации малочисленны и
не претендуют на широкий охват тематики.
Необходимо отметить монографическую литературу, которая
не относится к робототехнике, но может быть полезной при
проектировании захватных устройств промышленных роботов. Это
книги по зажимным устройствам металлорежущих станков [52],
крановым грузозахватным устройствам [10], средствам
автоматизации кузнечно-штамповочного и других производств [48,
49, 54, 62, 78, 89]. В перечисленных монографиях не ставилось
целью проработать теоретические основы механики захватывания
и создать методики расчета и проектирования захватных или
зажимных устройств в сколько-нибудь полном виде; отдельные
вопросы теории проработаны лкшь в самом первом приближении
и лишь применительно к конкретным случаям.
Единственная монография на русском языке, посвященная
разработке вопросов теории захватных устройств, — книга
Ю. П. Боренштейна [9]. Предметом рассмотрения являются
захватные и зажимные устройства любых машин: грузоподъемных,
сельскохозяйственных, обрабатывающих, обслуживающих
технологическое оборудование. В числе других устройств встречаются
также и -захватные устройства промышленных роботов. Задачи
ставятся и решаются в традициях теории механизмов, проводится
структурный анализ, выводятся основные геометрические
соотношения, рассматриваются траектории различных точек и
распределение скоростей, получаются и анализируются уравнения
геометрических погрешностей механизмов передачи. Также уделяется
внимание силовому расчету механизмов захватных устройств.
7
Конкретных схем немного, чаще всего это схемы с большим числом
подвижных звеньев; расчет схем фигурирует исключительно в
иллюстрирующих примерах. Методологическая направленность
монографии и стиль изложения материала делают возможным и
целесообразным использование примеров в лекционных курсах и
упражнениях по теоретической механике и теории механизмов и
машин. Однако логика и основной смысл задач проектирования
захватных устройств промышленных роботов в монографии не
нашли отражения.
Настоящая книга значительно отличается от всех
перечисленных выше книг. Центр тяжести перенесен на теоретический
анализ различных аспектов взаимодействия объекта
манипулирования с рабочими элементами (губками, пальцами). В результате
удалось разработать общую методику расчетного определения
полных характеристик несущей способности любых схватов.
Разработаны общая теория погрешностей позиционирования и
ориентирования объекта в схвате, теория процессов захватывания.
Из прикладных задач необходимо отметить в первую очередь
разработку принципов и алгоритмов построения схватов по
совокупностям технических требований, принципов модульного
построения захватных устройств. Все эти задачи иллюстрируются
конкретным материалом — конструктивными схемами.
Применительно к схватам авторами описаны, формализованы
и для простых случаев решены задачи статики и динамики
конструкций схватов с упругими элементами. Освещены также
вопросы стандартизации и унификации захватных устройств и их
элементов, а также вопросы проведения испытаний схватов,
экспериментального определения их характеристик.
Глава 1
КЛАССИФИКАЦИЯ
ОБЪЕКТОВ МАНИПУЛИРОВАНИЯ
И ТРЕБОВАНИЯ К СХВАТАМ
1.1. КЛАССИФИКАЦИЯ
ОБЪЕКТОВ МАНИПУЛИРОВАНИЯ
Роботизация производственных процессов — способ
автоматизации производства, основанный на применении промышленных
роботов (ПР). Роботизация является дальнейшим развитием
процесса автоматизации, так как применение ПР позволяет
автоматизировать те производственные процессы или их части,
автоматизация которых простейшими средствами нецелесообразна. Целью
роботизации производственных процессов является повышение
технико-экономических показателей работы предприятия и
улучшение условий труда.
Применение ПР определяет специфику функционирования
роботизированных технологических комплексов. В настоящее
время разрабатываются и применяются ПР для обслуживания
кузнечно-прессового, металлорежущего, литейного, сборочного
и деревообрабатывающего технологического оборудования,
выполнения операций погрузки и окрасочных работ,
автоматизации процессов сварки, электротермической и плазменной
обработки, производства печатных плат и др.
Применение ПР практически во всех сферах промышленного
производства, условия их эксплуатации в едином цикле с
совокупностью различных средств технологического оснащения
определяют большое разнообразие объектов манипулирования:
предметов производства, инструмента, технологической оснастки,.
Основными классификационными признаками объектов
манипулирования являются: физическое состояние, форма, свойства
симметрии, подвижность и ориентация в момент захватывания.)
По физическому состоянию объекты могут быть жидкими,
сыпучими или твердыми. Как правило, объекты являются твердыми
и жесткими, но они могут быть упругими, хрупкими или
пластичными. Твердыми считаются такие объекты, которые в разумных
пределах не требуют наложения каких-либо ограничений сверху
на контактные усилия, жесткими — объекты, деформациями
которых в процессе захватывания и переноса заведомо можно
пренебречь. Такое деление в ряде случаев условно и может быть
расширено в более детальных классификациях.
Объекты могут представлять собой тела самой разнообразной
формы. Например, при загрузке металлорежущих станков они
обычно имеют форму цилиндров или призм прямоугольного
9
сечения, при обслуживании кузнечно-прессового оборудования —
плоскую или коробчатую форму. Применительно к задачам
захватывания и удерживания объекта схватом важное значение имеют
особенности формы поверхностей, по которым производится
захватывание, наличие точек, осей и плоскостей симметрии,
распределение инерционных характеристик по осям объекта (оно
различно для плоских, удлиненных и объемных объектов). Для
объектов сложной формы может быть существенно наличие отверстий,
выступающих штырей, облоя и др.
При описании объекта важно знать, неподвижен объект во
время захватывания или он находится на непрерывно
движущемся транспортере. Часто имеет место ситуация, когда объект
в момент захватывания фиксируется в специальных зажимных
приспособлениях или же может перемещаться по некоторым из
направлений (например, когда объект расположен на плоскости,
в гнездах, пазах, насажен на штыри и т. п.). Дополнением к
данной классификации могут служить соображения, изложенные
в работах [2, 16, 28, 62].
Набор количественных показателей для объектов различных
классификационных групп формируется из числа следующих.
1. Габаритные размеры.
2. Положение и ориентации характерных осей, линий и
поверхностей.
3. Диапазоны изменения погрешностей формы и положения
поверхностей.
4. Диапазоны изменения погрешностей установки.
5. Масса и другие инерционные характеристики.
6. Допустимые значения контактных усилий.
В каждом конкретном случае возможно расширение этого
перечня.
При постановке требований к способу и особенностям
захватывания следует определить желаемые направления подхода
схвата к объекту, указать поверхности, по которым целесообразно
производить захватывание, установить его способ. Может быть
предложена более детальная классификация по этому признаку
(67]. Часто при работе с деталями различных размеров, но
сходными по форме, захватывание необходимо осуществлять таким
образом, чтобы положение некоторых характерных осей,
плоскостей или поверхностей объекта оставалось неизменным
относительно основания схвата.
Условия работы схвата могут быть квалифицированы как
нормальные или аномальные, отличающиеся повышенным или
пониженным уровнем или интенсивностью факторов воздействий, в
частности температуры, давления, влажности, запыленности,
вибраций, концентраций в среде активных химических веществ,
радиоактивности и др.
Вид объекта манипулирования во многом определяет тип и
конструктивные особенности схвата, прежде всего поверхностей
10
его рабочих элементов, вступающих в непосредственный контакт
с объектом. Исходя из особенностей работы ПР с объектом, строится
классификация рабочих элементов схвата. Структура такой
классификации приведена в работах [81, 83]. Основными
классификационными признаками являются: геометрические особенности,
свойства поверхности, конструктивные особенности и кинематика
движения рабочих элементов.
Геометрические особенности рабочих элементов схвата
включают в себя общие особенности формы и степень согласованности
формы рабочих элементов с формой объекта. По общим
особенностям формы рабочие элементы могут быть простейшей формы
(образованные плоскостями, призматическими или цилиндрическими
поверхностями), с выступающими ребрами или штырями, сложной
формы. По степени согласованности с объектом могут быть
выделены согласованные рабочие элементы, форма которых
полностью совпадает с формой объекта (так называемые факсимильные
рабочие элементы), рабочие элементы полусогласованной формы
и рабочие элементы несогласованной формы.
По свойствам поверхностей рабочие элементы разделяют на
гладкие, с насечкой, с накладками, с роликами. Насечка или
накладки наносятся на поверхности рабочих элементов схвата для
увеличения сил трения в точках или зонах контакта, введение
роликов преследует обратную цель — снижение значений сил
трения. Кроме того, накладки вводятся для уменьшения износа
поверхностей рабочих элементов, улучшения условий контакта
с объектом, обеспечения сохранности объекта (см. гл. 9).
При классификации по конструктивным особенностям в
качестве основных признаков выделяются: способ крепления, варь-
ируемость формы, реализация специальных решений. Рабочие
элементы крепятся к основанию схвата или к одному из звеньев
механизма передачи, они могут иметь фиксированную форму или
форму, регулируемую вручную или автоматически. В ряде
случаев рабочие элементы выполняются сдвоенными, удлиненными,
разнесенными и др. Они перемещаются либо симметрично
относительно оси или плоскости, либо с заданным отношением,
совершая поступательное или вращательное движение.
Описание разработанных и используемых конструкций
схватов показывает, что большинство перечисленных вариантов
признаков реализуется на практике, но предпочтительными являются
немногие их сочетания. Так, для существующего парка ПР чаще
всего применяются схваты с рабочими элементами простейших
форм, несогласованные с объектом, перемещающиеся симметрично
относительно средней плоскости схвата. В ряде случаев
поверхности рабочих элементов изготовляются с насечкой, оснащаются
накладками.
Разработанные процедуры анализа совокупностей исходных
данных об объекте манипулирования и условиях эксплуатации
и характерных особенностей схвата имеют важное значение при
11
проектировании схватов на этапе выбора схемных решений и
характерных параметров. Применительно к гибким
производственным системам требования к схватам ПР в систематизированном
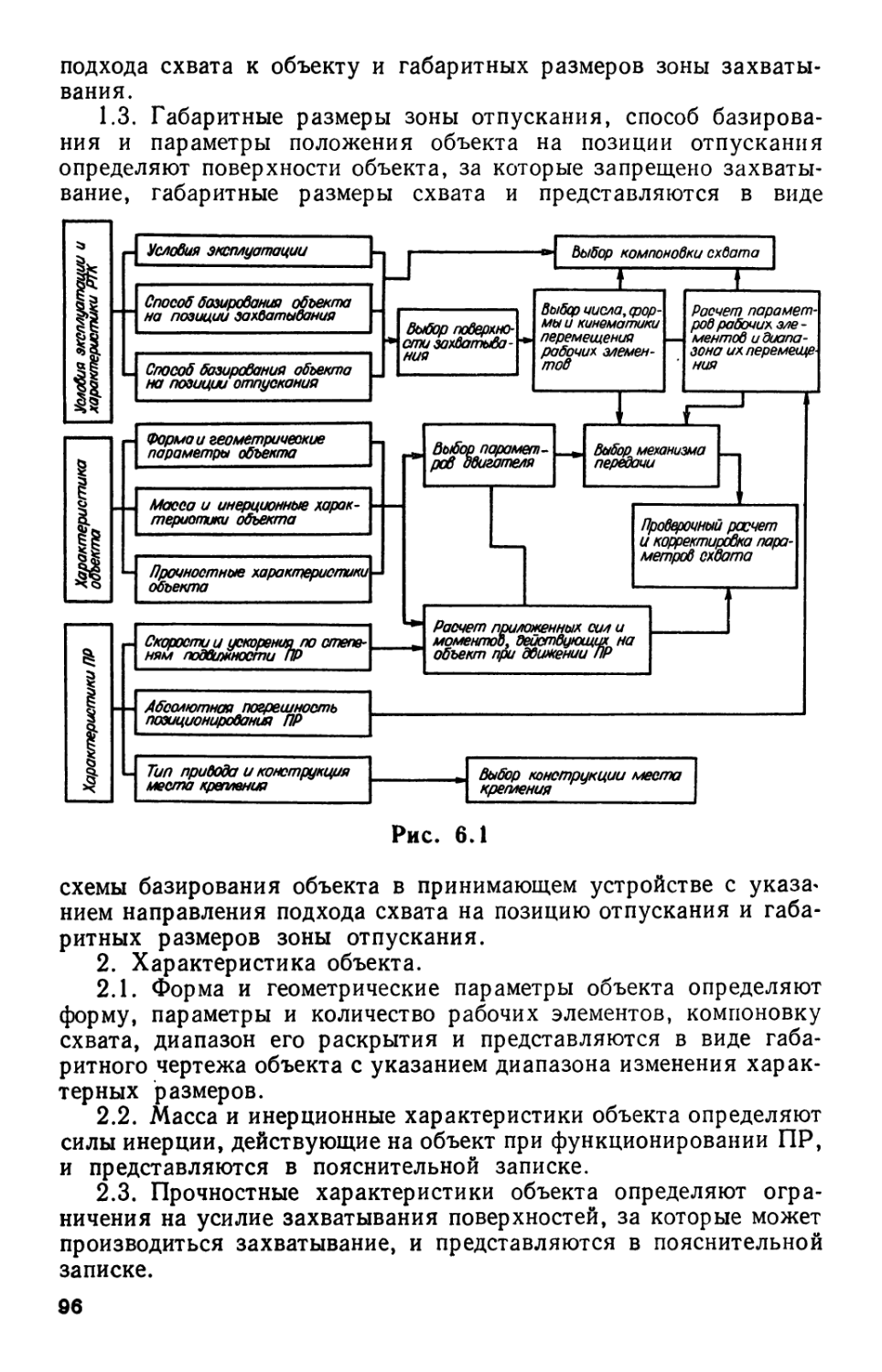
виде подробно изложены в п. 1.2.
1.2. ОСНОВНЫЕ ТРЕБОВАНИЯ
К КОНСТРУКЦИИ ВЫПУСКАЕМЫХ ИЗДЕЛИЙ
И ОБОРУДОВАНИЯ
При создании роботизированных технологических комплексов
и выборе номенклатуры используемых захватных устройств
необходимы технологический анализ конструкций изделий и
группирование изделий по конструктивно-технологическим признакам.
В РД 50-357—82 «Методические указания. Правила выбора
объектов роботизации» приведены результаты такого анализа и
установлены требования к конструкции выпускаемых изделий,
которые сводятся к следующему.
Детали, подлежащие обработке на роботизированном
технологическом комплексе, должны обладать возможностью
группирования по ряду признаков:
по конструктивно-технологическому сходству деталей в целом;
типовыми совокупностями в этом случае являются группы
шестерен, втулок, валов, шпинделей и др.;
по элементарным поверхностям деталей, что позволяет
установить единообразные варианты обработки этих поверхностей,
а из комбинации этих вариантов получить совокупный
технологический процесс обработки любой детали;
по видам обработки (типам оборудования), единству
технологического оснащения и общности настройки станков.
Такое группирование необходимо для применения групповой
формы организации производственных процессов обработки и
использования однородного основного и вспомогательного
оборудования и позволяет иметь:
явно выраженные базы и признаки ориентации, позволяющие
организовать их транспортирование, складирование в
ориентированном виде с использованием стандартизованной оснастки;
однородные по форме и расположению поверхности для
базирования и захватывания, позволяющие без дополнительной
выверки устанавливать детали в принимающие устройства
обрабатывающего оборудования, где для их базирования и закрепления
может быть применена универсальная технологическая оснастка.
При использовании ПР на операциях перемещения и при
вспомогательных переходах группирование деталей по
конструктивно-технологическим признакам должно способствовать
сокращению номенклатуры применяемых захватных устройств за счет
применения широкодиапазонных схватов. Переход от одних
типоразмеров деталей к другим в пределах одного роботизированного
технологического комплекса должен сопровождаться минималь-
12
ным количеством смен захватных устройств и других
переналадок ПР.
Роботизированные технологические комплексы, как правило,
создаются для обработки деталей простейших форм. К числу
таких деталей относятся детали классов 40 и 50. Характеристики
групп деталей с указанием возможного способа захватывания
приведены в РД 50-357—82.
Выделены семь основных групп деталей
общемашиностроительного применения:
I — тела вращения, длина которых не превосходит
удвоенного диаметра; II —детали, длина которых больше удвоенного
диаметра; III — коробчатые детали; IV — фигурные детали; V —
изогнутые детали; VI — плоскостные детали; VII —детали
арматуры.
РД 50-357—82 устанавливает следующие размерные и весовые
характеристики указанных групп деталей. Диаметр D и длина L
детали (мм), а также масса т детали группы I удовлетворяют
неравенствам:
D < 160 мм, L < 320 мм, т < 40 кг;
D < 250 мм, L < 500 мм, т < 80 кг;
D < 320 мм, L < 640 мм, т < 160 кг;
D < 400 мм, L < 800 мм, т < 250 кг;
D < 620 мм, L < 1250 мм, т < 320 кг.
Диаметр (ширина) В, длина L, высота Н деталей третьей
группы соотносятся с массой в соответствии со следующими
неравенствами:
В < 300 мм, L < 300 мм, Н < 300 мм, т < 40'кг;
В < 500 мм, L < 500 мм, Н < 500 мм, т < 160 кг;
В < 800 мм, L < 800 мм, Н < 800 мм, т < 250 кг;
В < 1000 мм, L < 1000 мм, Н < 1000 мм, т < 500 кг.
Аналогичные соотношения для деталей остальных групп
имеют вид:
В < 300 мм, L < 300 мм, Н < 60 мм, т < 20 кг;
В < 500 мм, L < 500 мм, Н < 100 мм, т < 40 кг;
В < 800 мм, L < 800 мм, Н < 160 мм, т < 80 кг;
В < 1000 мм, L < 1000 мм, Н < 280 мм, т < 160 кг.
Основное технологическое оборудование должно
обеспечивать: полную автоматизацию цикла обработки детали; точное
базирование заготовки, автоматизацию ее фиксации и зажима в
рабочей зоне обрабатывающего оборудования; отделение отходов
от обрабатываемой детали (дробление и смыв стружки,
сбрасывание пресс-остатка и др.), механизацию или автоматизацию их
уборки; очистку поверхностей базирующих и крепежных
приспособлений от отходов после каждого цикла обработки.
Основное оборудование должно иметь: форму и расположение
рабочей зоны, позволяющие работать совместно с ПР, обеспечи-
13
вающие безопасность работы и удобный доступ оператора к
органам управления; высокую производительность; высокий уровень
концентрации и совмещения операций; устройства контроля
наличия детали в рабочей зоне обрабатывающего оборудования,
правильности ее базирования и расположения в зажимных
приспособлениях, а также контроля технологических параметров
обработки.
Вспомогательное, транспортно-накопительное оборудование,
формирующее роботизированный технологический комплекс или
осуществляющее связь с ним, должно иметь возможность работы
в автоматическом режиме по сигналам, получаемым от ПР,
основного технологического оборудования и#и устройства управления
более высокого уровня. В зависимости от технического решения
и выполняемых задач оборудование должно обеспечивать:
накопление определенного числа ориентированных заготовок на
начальной позиции; поштучную выдачу заготовок на определенную
позицию для взятия захватным устройством ПР;
транспортирование изделий с одной рабочей позиции на другую;
переориентацию изделий; хранение межоперационного задела.
При создании групп принимается во внимание также вид
производимых работ. Например, на сборочных работах основными
признаками классификации являются общность схемы сборки,
характер сборочных соединений, габаритные размеры, степень
точности сборки, характер методов испытаний и контроля и др.
На станочных операциях выделяют такие признаки, как
конструктивное подобие деталей, элементы обрабатываемых поверхностей,
размеры, точность изготовления, характер используемого
оборудования, вид обрабатываемой заготовки и др.
Глава 2
СИЛЫ, ДЕЙСТВУЮЩИЕ НА ОБЪЕКТ
МАНИПУЛИРОВАНИЯ
2.1. ИСХОДНЫЕ ДАННЫЕ
ДЛЯ РАСЧЕТА НЕСУЩЕЙ СПОСОБНОСТИ
СХВАТОВ
Требования надежного удерживания захваченного объекта
являются основными для всех захватных устройств. Для
определения запасов несущей способности схвата или для выбора его
параметров по заданному запасу несущей способности
необходимо знать силы, действующие на объект, находящийся в схвате,
на всех этапах манипулирования с ним. В число приложенных
(заданных) сил включаются силы тяжести и инерции. Эти силы
должны быть приведены к базовой или к специальной системе ко-
14
ординат схвата, связанной с базовой. Вопросы выбора этой
системы и составления формул преобразования к этой системе
рассмотрены в п. 6.2. Результатом приведения являются три
составляющие главного вектора F (соответственно Fx, Fy, Fz) и три
составляющие главного момента М (соответственно MXf My, Мг).
При движении ПР все эти составляющие являются известными
функциями времени, так что в шестимерном пространстве всех
составляющих сил и моментов конкретному движению
соответствует определенная траектория. Если иметь в виду множество
выполняемых движений, то получается, что траектории
заполняют некоторую ограниченную область; по ее границам может
быть рассчитан запас несущей способности схвата при
удерживании данного объекта.
Чтобы не связывать указанную область с выполнением
определенных движений, целесообразно иметь в виду все возможные
движения, которые могут быть выполнены приводами
манипулятора ПР независимо от законов управления. Естественно ввести
предположение, что максимальные значения линейных и угловых
скоростей и ускорений не зависят от массы и моментов инерции
объекта. Однако, если для переносных степеней подвижности
манипулятора это предположение обычно выполняется, то для
ориентирующих степеней подвижности это предположение
иногда недопустимо. Когда схват проектируется для уже
готового робота, то аналогичное предположение приходится
принимать и относительно схвата.
Информация о кинематических характеристиках —
параметрах движения — может быть получена следующими путями.
1. Проводятся полные динамические расчеты ПР на ЭВМ.
Принципиальных трудностей проведения подобных расчетов нет.
Разработаны весьма полные модели динамики манипуляторов
с приводами, методики численных расчетов и пакеты прикладных
программ. Вообще, раздел динамики является наиболее
проработанным в теории промышленных роботов. Однако для составления
достаточно полных уравнений необходим большой объем данных
(параметров и характеристик). Их получение по
экспериментальным исследованиям часто не проще, чем непосредственное
измерение кинематических характеристик. Кроме того, при
математическом моделировании динамики системы с использованием
полной модели определение влияния различных факторов
превращается в самостоятельную сложную задачу. По указанным
обстоятельствам далее для определения кинематических
характеристик результаты численных расчетов при сложных моделях
не используются.
2. Исходя из простейших динамических моделей получаются
грубые оценки параметров движения (в первую очередь линейных
ускорений). Получению таких оценок посвящен п. 2.2.
3. Основой для данных о параметрах движения являются
экспериментальные исследования, проводимые во многих органи-
15
зациях; многие результаты экспериментальных исследований
опубликованы [27, 56]. В принципе можно рассчитывать все
кинематические величины — любые параметры движения по
результатам регистрации координат, линейных и угловых перемещений,
линейных и угловых скоростей, однако для оценки
максимальных значений сил инерции наиболее удобно использовать
результаты непосредственных измерений линейных ускорений,
осуществляемых с помощью линейных акселерометров. К сожалению, в
настоящее время требуемое единство измерений в испытаниях
промышленных роботов не обеспечивается, поэтому результаты
измерений не всегда достоверны, а точность результатов практически
не оценивается. Хотя вопросы испытаний промышленных роботов
выходят за рамки настоящей монографии, авторы-сочли
необходимым посвятить основам методики определения сил инерции по
экспериментальным данным п. 2.3.
4. Кинематические характеристики — параметры движения —
определяются по паспортным данным, а далее по ним
рассчитываются силы инерции. ГОСТ 25378—82 устанавливает
номенклатуру основных показателей, обязательных для включения в
документацию всех видов и справочную литературу по
промышленным роботам. Согласно этому стандарту в число технических
характеристик для каждой степени подвижности включаются
максимальные значения соответствующих линейных или угловых
скоростей и ускорений (пункты 2.4.3 и 2.4.4). Однако в
существующей справочной литературе, даже выпущенной после утверждения
стандарта, например в работах [28, 64, 66], данные о максимальных
значениях ускорений отсутствуют.
2.2. ПРИБЛИЖЕННЫЕ МЕТОДЫ
ОЦЕНКИ МАКСИМАЛЬНЫХ ЗНАЧЕНИЙ
УСКОРЕНИЙ
Получение приближенных аналитических и числовых оценок
ускорений базовой системы координат схвата целесообразно
всегда. Если иметь в виду, что окончательные данные об
ускорениях будут получены экспериментально, то оценки дают
возможность сформулировать требования к средствам измерения
(датчикам). Если данные будут получены на ЭВМ с использованием
полной динамической модели, то оценки позволяют
контролировать результаты расчетов. Если же нет возможностей ни
проведения испытаний, ни проведения расчетов на ЭВМ, то оценки
приобретают самостоятельную ценность и запасы несущей
способности схвата определяются непосредственно по ним.
Наибольший интерес представляет рассмотрение простейших
режимов движения, когда перемещения по координатам
происходят последовательно, т. е. на любом интервале времени работает
только один привод. Именно такие режимы чаще всего реализуются
для вспомогательных ПР. Типовая зависимость линейной
скорости схвата при переносе из начальной точки в конечную пред-
16
ставлена на рис. 2.1, а. Типичным является наличие участков
разгона, установившегося движения с приблизительно постоянной
скоростью и торможения. Примерный вид закона изменения
касательной составляющей ускорения показан на рис. 2.1, б.
Характерными являются импульсы ускорения: положительного при
разгоне и отрицательного при торможении. Иногда (при малых
перемещениях) средний участок с малыми ускорениями может
вообще отсутствовать, тогда торможение начинается сразу же
после разгона.
Численные расчеты показывают, что вне зависимости от того,
является ли рассматриваемое движение схвата прямолинейным
или вращательным, при переносных движениях максимальные
значения касательных ускорений на участ- а)
ках разгона и торможения значительно
превосходят нормальные ускорения на
всех интервалах. Поэтому при
получении приближенных оценок максималь- ^
ных значений ускорений переносных
движений можно рассматривать эти
движения на участках разгона и
торможения как прямолинейные,
независимо от действительной кинематики
механизма манипулятора.
Ориентирующие движения требуют
самостоятельного рассмотрения.
Применительно к переносным движениям, которые в силу
сказанного выше считаются прямолинейными, для участков разгона
и торможения ускорения оцениваются исходя из разных
соображений. Для разгона максимальное значение ускорения
оценивается следующим образом:
Wmax = Qmax/W»
где т — масса подвижной части; Qmax — максимальная
приведенная сила привода, определяемая для статического режима при
заторможенном выходном звене. Для пневмоцилиндра при
непосредственной передаче движения на подвижную часть имеем
Wmax = pF/m, (2.1)
где р—давление в пневмомагистрали; F — площадь поршня.
Оценка получена при упрощающем предположении, что при
включении пневмоцилиндра давление в рабочей полости
устанавливается за пренебрежимо малое время. В действительности
падение давления в распределителе и трубопроводе может
значительно уменьшать максимальное значение давления в рабочей
полости по сравнению с~(2.1). Анализ конструкций серийно
выпускаемых ПР с пневмоприводом показал, что из всех степеней
подвижности величина Wmax обычно достигает наибольших зна-
(Т-тв)
17
17
чений для механизма радиального перемещения (выдвижной руки)
30 м/с"2.
Для электропривода с редуктором и реечной передачей на
линейно перемещающуюся подвижную часть имеем
w max ^ ,-2
' i2I + mr2 '
где Mu — пусковой момент электродвигателя; / — момент
инерции его ротора; i — передаточное число редуктора; г — радиус
шестерни, сцепляющейся с рейкой. Анализ конструкций серийно
выпускаемых ПР с электроприводом показал, что для всех
степеней подвижности обычно основным является момент инерции
ротора, а максимальное значение ускорения подвижной части
при разгоне не превышает 5 м/с"2, т. е. значительно меньше, чем
для ПР с пневмоприводом.
Для участков торможения способ оценки максимального
значения ускорения существенно зависит от используемого
принципа торможения. Известно, что торможение может
осуществляться изменением работы двигателя (противодавлением в ПР
с пневмоприводом, переводом в режим генератора или
электромагнитного тормоза в ПР с электроприводом), с помощью
фрикционных тормозов, специальных демпферов, возможно,
включающих пружины. При торможении двигателем оценка
максимальных значений ускорений осуществляется так же, как и при
разгоне.
В случаях, когда торможение осуществляется с помощью
специальных тормозных устройств или демпферов, нужно
учитывать, что эти устройства являются перестраиваемыми, вследствие
чего характеристики и параметры могут изменяться в широких
пределах. Поэтому целесообразно ориентироваться не на
характеристики этих устройств, а на величины, под которые они
подстраиваются. Обычно при перестройке тормозных устройств и
демпферов контролируется тормозной путь L. Если иметь в виду,
что торможение подвижной части начинается от заданной
начальной скорости V0, то получается, что некоторые важные оценки
могут быть получены только при использовании кинематических
соотношений:
±V2=\W(s)ds; Т0=\ l/W(V)dV.
о о
В этих соотношениях ускорение W считается функцией
различных аргументов. Задание ускорения как функции
расстояния s естественно, когда торможение осуществляется упругими
силами, как функции скорости V — когда торможение
осуществляется силами вязкого сопротивления. Последнее выражение
целесообразно использовать для оценки времени торможения.
18
Предельные возможности определяются в предположении
постоянства W, т. е. при W = W0. В этом случае при заданном зна-
- чении тормозного пути L получается минимум максимального
значения ускорения или, наоборот, при заданном WmtLX —
минимум L. По отношению ко всем возможным законам изменения
ускорения оценка показывает, что для заданного L максимальное
ускорение не может быть меньше полученного значения W0.
Поскольку практически во время торможения ускорение является
переменным, соотношение между величинами L, Wmflx и V0
может быть записано в форме ~ л 0,
^ г Таблица 2.1
Wmax = fiV07(2L),
где коэффициент |х характеризует
степень непостоянства ускорения
(чем больше отличия от постоянного
значения, тем больше (х). Численные
расчеты и анализ экспериментальных
данных показывают, что когда
импульс ускорения имеет один
широкий максимум (на краю или в
середине интервала), то значение ji
лежит в пределах 1,5 <|г<3. Для
типового значения \i = 2 (что
соответствует удвоенному тормозному
пути по сравнению со случаем
постоянного ускорения при том же значении V0) значения
Wmax приведены в табл. 2.1. Поскольку хода
унифицированных демпферов [12, 541 составляют обычно от 10 до 50 мм, то при
скорости 1,5 м/с, нередко встречающейся у ПР с
пневмоприводом [16], получаются ускорения порядка 100 м/с2, что
удовлетворительно согласуется с экспериментальными данными.
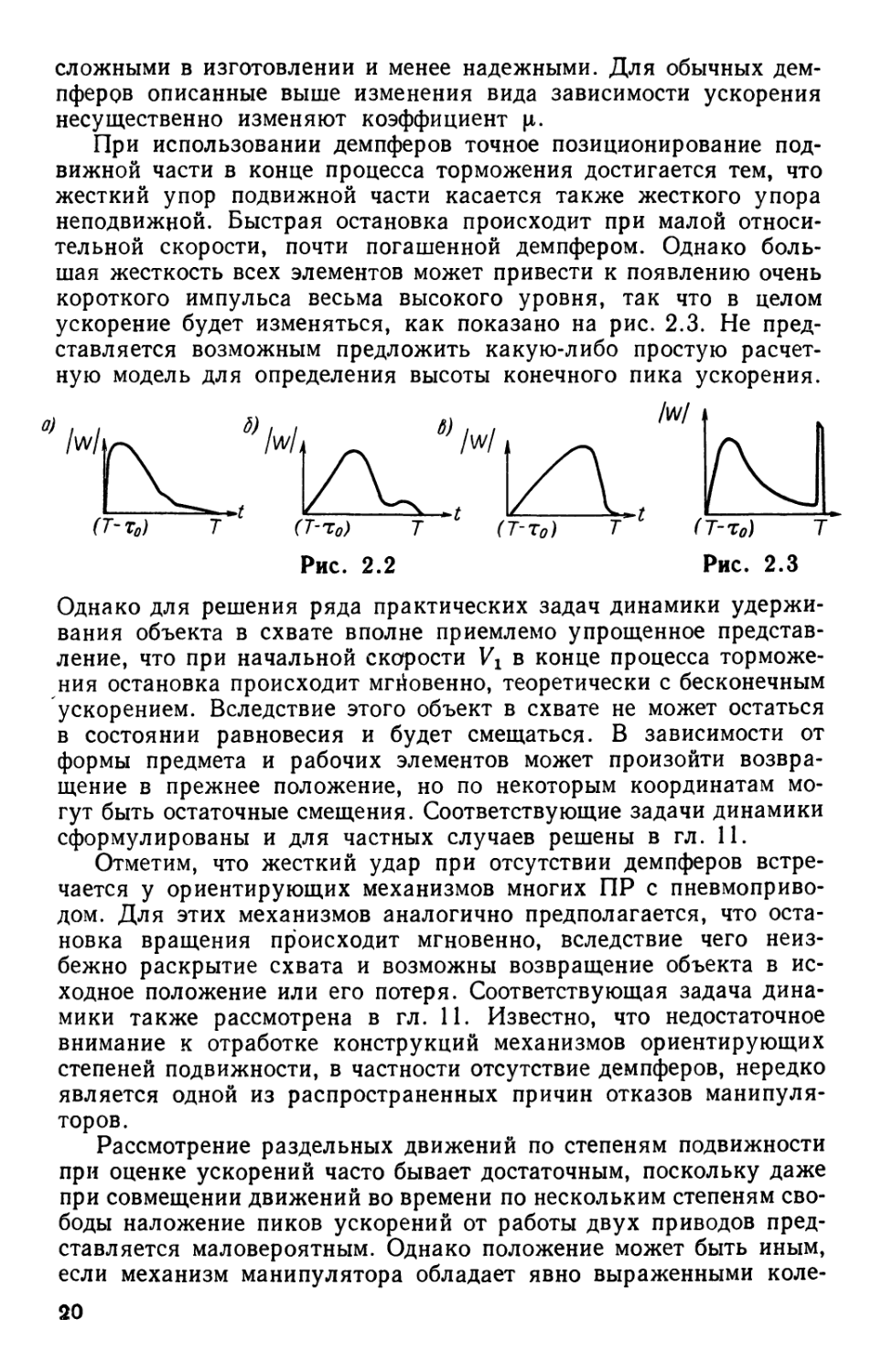
Качественные особенности законов изменения ускорений при
торможении существенно зависят от вида тормозных устройств.
При использовании гидродемпферов обычно наблюдается очень
быстрое нарастание ускорения до максимального значения, а
затем плавное спадание по мере уменьшения скорости (рис. 2.2, а).
При использовании пневмодемпфера нарастание ускорения
происходит относительно медленно (сказывается эффект сжимаемости
воздуха), так что максимум смещается к середине интервала
(рис. 2.2, б). Если возвратные пружины демпферов имеют малую
жесткость, то они несущественно влияют на характер изменения
ускорений. Если же жесткость пружины велика, то становится
существенным увеличение ее сопротивления по мере поджатия
и ускорение торможения к концу возрастает (рис. 2.2, в).
Специальные способы изменения проходных сечений при перемещении
поршня демпфера позволяют формировать требуемые законы изменения
ускорения в процессе торможения, в частности, приближая
ускорение к постоянному. Однако такие демпферы оказываются
L
*
5
10
20
50
100
м/с
сч
о
II
*?
8
4
2
1
0,5
^та*. м/с»
м/с
ю
о
II
ue
50
25
12
6
3
м/с
о
~
II
*г
200
100
50
25
12
м/с
е
сч
II
*
800
400
200
100
50
19
сложными в изготовлении и менее надежными. Для обычных
демпферов описанные выше изменения вида зависимости ускорения
несущественно изменяют коэффициент fx.
При использовании демпферов точное позиционирование
подвижной части в конце процесса торможения достигается тем, что
жесткий упор подвижной части касается также жесткого упора
неподвижной. Быстрая остановка происходит при малой
относительной скорости, почти погашенной демпфером. Однако
большая жесткость всех элементов может привести к появлению очень
короткого импульса весьма высокого уровня, так что в целом
ускорение будет изменяться, как показано на рис. 2.3. Не
представляется возможным предложить какую-либо простую
расчетную модель для определения высоты конечного пика ускорения.
(Т'Т0) Т (Т-То) Т (Т-То) Т (Т-То) 7
Рис. 2.2 Рис. 2.3
Однако для решения ряда практических задач динамики
удерживания объекта в схвате вполне приемлемо упрощенное
представление, что при начальной скорости Vx в конце процесса
торможения остановка происходит мгйовенно, теоретически с бесконечным
ускорением. Вследствие этого объект в схвате не может остаться
в состоянии равновесия и будет смещаться. В зависимости от
формы предмета и рабочих элементов может произойти
возвращение в прежнее положение, но по некоторым координатам
могут быть остаточные смещения. Соответствующие задачи динамики
сформулированы и для частных случаев решены в гл. И.
Отметим, что жесткий удар при отсутствии демпферов
встречается у ориентирующих механизмов многих ПР с
пневмоприводом. Для этих механизмов аналогично предполагается, что
остановка вращения происходит мгновенно, вследствие чего
неизбежно раскрытие схвата и возможны возвращение объекта в
исходное положение или его потеря. Соответствующая задача
динамики также рассмотрена в гл. И. Известно, что недостаточное
внимание к отработке конструкций механизмов ориентирующих
степеней подвижности, в частности отсутствие демпферов, нередко
является одной из распространенных причин отказов
манипуляторов.
Рассмотрение раздельных движений по степеням подвижности
при оценке ускорений часто бывает достаточным, поскольку даже
при совмещении движений во времени по нескольким степеням
свободы наложение пиков ускорений от работы двух приводов
представляется маловероятным. Однако положение может быть иным,
если механизм манипулятора обладает явно выраженными коле-
20
бательными свойствами (свободные колебания медленно затухают).
Тогда ускорения от колебаний, возбужденных предыдущим
движением, будут налагаться на ускорения последующего этапа.
2.3. МЕТОДЫ, СРЕДСТВА
И РЕЗУЛЬТАТЫ ЭКСПЕРИМЕНТАЛЬНОГО ОПРЕДЕЛЕНИЯ
МАКСИМАЛЬНЫХ ЗНАЧЕНИЙ УСКОРЕНИЙ
Измерение линейных и угловых ускорений может
производиться косвенными и прямыми методами. При косвенных методах
используются датчики перемещений, углов, линейных и угловых
скоростей. Уравнениями измерений являются кинематические
соотношения, которые связывают искомые ускорения с
координатами, углами и их первыми и вторыми производными. При
прямолинейном поступательном перемещении линейное
ускорение определяется однократным дифференцированием сигнала
датчика линейной скорости и двукратным дифференцированием
сигнала датчика перемещения. При дифференцировании значительно
возрастают случайные погрешности, вследствие чего обычно
используется дифференцирование со сглаживанием. Однако
сглаживание приводит к занижению пиковых (максимальных)
значений ускорения. Если импульсы ускорений достаточно короткие,
то даже при оптимальном выборе постоянной времени
сглаживания результаты определения максимальных значений ускорений
дифференцированием сигнала датчика скорости оказываются
недостоверными. Поэтому практически пригодным является только
прямой метод измерения ускорений с помощью линейных
акселерометров.
Однокомпонентный линейный акселерометр измеряет
проекцию вектора суммы линейного ускорения и отрицательного
гравитационного ускорения на направление его измерительной оси.
Поскольку максимальные значения линейных ускорений обычно
значительно превышают гравитационное ускорение, то в
дальнейшем им пренебрегают. Прежде всего встает вопрос о
необходимом числе линейных акселерометров и об их расстановке.
Если объект имеет малые размеры, то изменение ускорений
по его объему можно не учитывать, достаточно измерить три
составляющих ускорения по трем осям. Важно, что при установке
акселерометров в схвате составляющие ускорения измеряются
непосредственно в осях схвата и не требуется
перепроектирования на другие оси, как в случае косвенных измерений. При
прямолинейном поступательном перемещении схвата часто достаточно
одного линейного акселерометра с измерительной осью по оси
перемещения. Однако при недостаточной жесткости
направляющих или при их отсутствии (когда прямолинейное движение
создается за счет координированного вращения звеньев шарнирно-
рычажного механизма манипулятора) необходимо провести
измерение поперечных составляющих ускорений, которые могут
21
быть значительными (колебательными или импульсными),
несмотря на малость поперечных отклонений. Также при
прямолинейном движении необходимо измерение трех составляющих
ускорения, если при перемещении ориентация схвата изменяется.
Таким образом, не только для произвольных криволинейных,
но и для простейших прямолинейных движений необходимо
измерять три составляющие линейного ускорения.
Измерение трех составляющих линейного ускорения центра
схвата позволяет определять три составляющие силы инерции.
Для расчета моментов сил инерции необходимо провести прямое
измерение составляющих углового ускорения, которое в
принципе возможно с помощью угловых акселерометров. Однако,
хотя угловые акселерометры и существуют, они мало распростра-
д
у2 лГ\
А<
Vf
Рис. 2.4
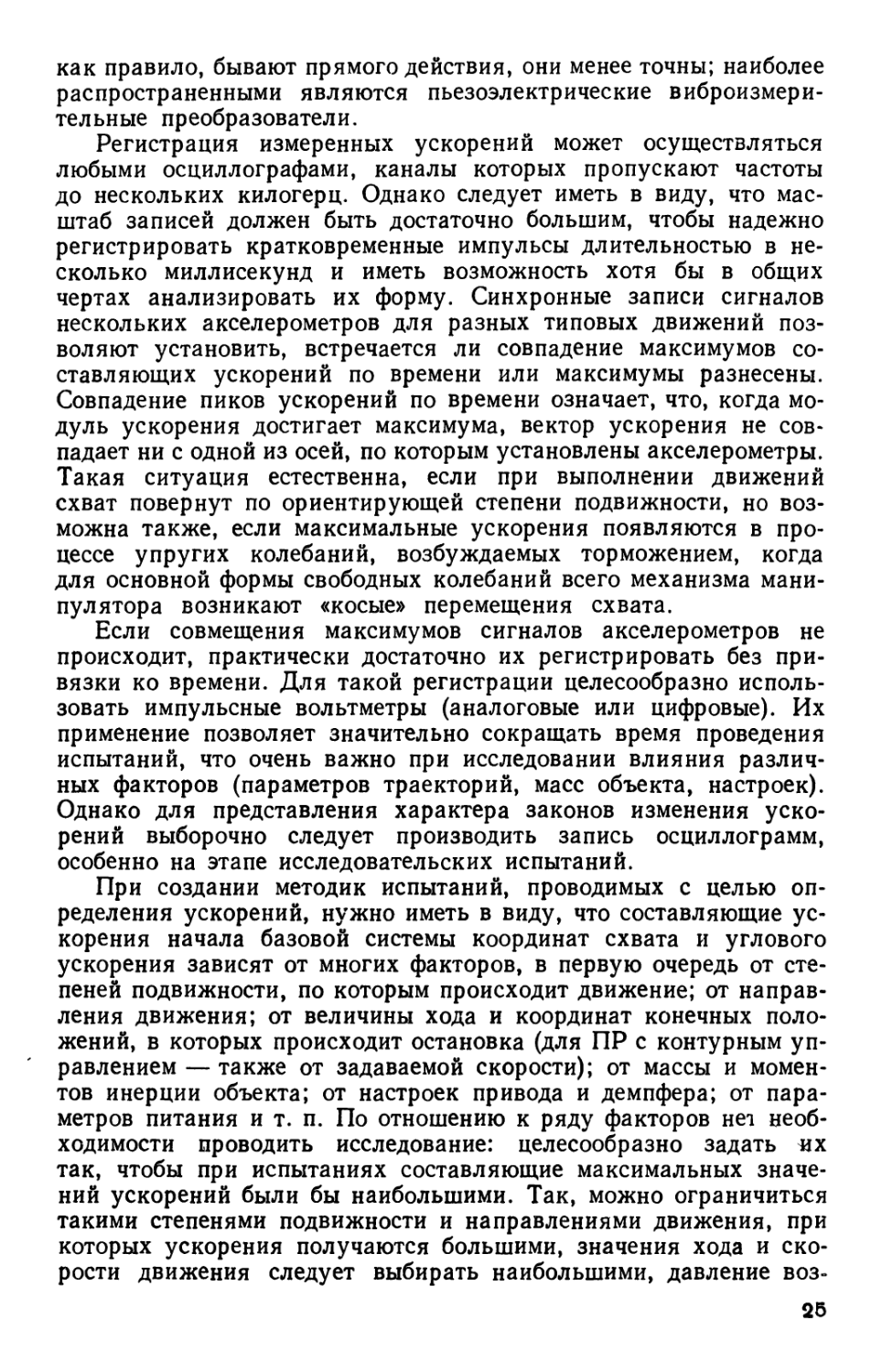
нены и не выпускаются крупными сериями. Поэтому
предпочтительным является косвенное измерение составляющих углового
ускорения с помощью системы линейных акселерометров,
разнесенных по объекту. Измерение углового ускорения таким методом
пояснено на рис. 2.4. Объект вращается вокруг оси х. Линейные
акселерометры установлены в точках А и В (рис. 2.4, а), их
измерительные оси направлены соответственно по осям уг и у2.
По измеряемым составляющим Wx и W2 ускорений точек А и В
угловое ускорение определяется следующим образом:
e, = (lPt- Wx)ll%
где / — расстояние между точками А и В. Точность измерения
углового ускорения повышается с увеличением расстояния /.
Описанная простейшая схема измерения может быть
использована для определения углового ускорения при работе привода
одной вращательной степени подвижности, переносной или
ориентирующей. Как отмечалось выше, нередко ориентирующие
степени подвижности не имеют демпферов, тогда возможные
значения угловых ускорений при ударной остановке по упору удобно
определять именно таким образом.
Для произвольного движения объекта задачи определения
линейного ускорения центра схвата и его углового ускорения яв-
22
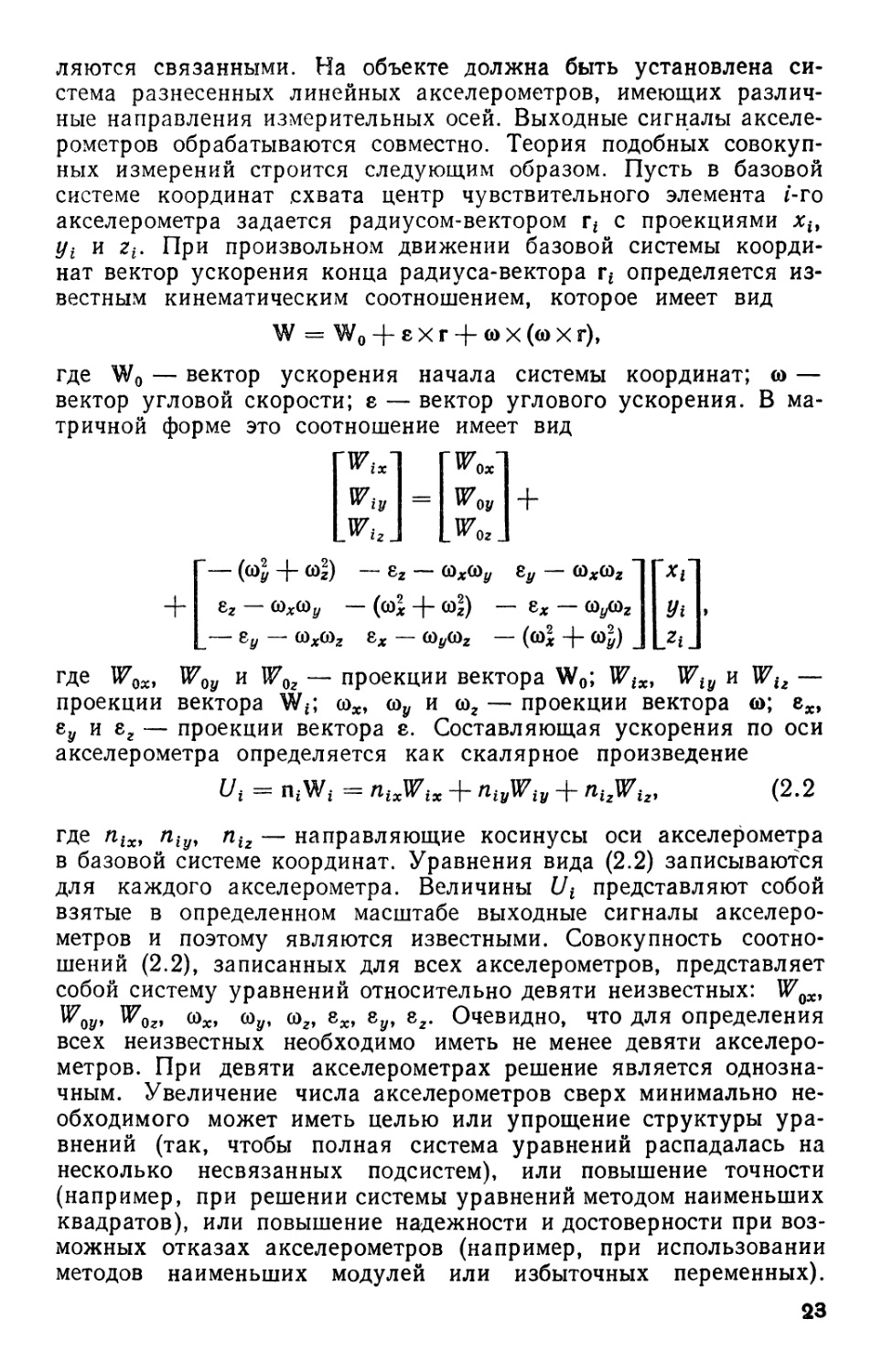
ляются связанными. На объекте должна быть установлена
система разнесенных линейных акселерометров, имеющих
различные направления измерительных осей. Выходные сигналы
акселерометров обрабатываются совместно. Теория подобных
совокупных измерений строится следующим образом. Пусть в базовой
системе координат схвата центр чувствительного элемента 1-го
акселерометра задается радиусом-вектором г^ с проекциями хи
Ui и zt. При произвольном движении базовой системы
координат вектор ускорения конца радиуса-вектора rt определяется
известным кинематическим соотношением, которое имеет вид
W = W0 + £ X г + *> X (со X г),
где W0 — вектор ускорения начала системы координат; со —
вектор угловой скорости; г — вектор углового ускорения. В
матричной форме это соотношение имеет вид
+
\wix-
Wiy
=
~woxi
Woy\
+
— by — <°xCD2
82 — toxG)y
л2 I /-.%2\
G)*G)2
- (co| -f- col) — ex — co^o);
Ex — (ду(д2 — (COJ + G>1) J
где W0x, W0y и W0z — проекции вектора W0; Wtx, Wiy и Wu —
проекции вектора Wf; cox, coy и <ог — проекции вектора со; ех,
еу и ег — проекции вектора г. Составляющая ускорения по оси
акселерометра определяется как скалярное произведение
U% = n,W£ - nixWix + niyWiy + nizWi2, (2.2
где nixy niyy niz — направляющие косинусы оси акселерометра
в базовой системе координат. Уравнения вида (2.2) записываются
для каждого акселерометра. Величины Ut представляют собой
взятые в определенном масштабе выходные сигналы
акселерометров и поэтому являются известными. Совокупность
соотношений (2.2), записанных для всех акселерометров, представляет
собой систему уравнений относительно девяти неизвестных: W0Xi
^оу» ^ог» ^х» юу, сог, 8Х, 8у, е2. Очевидно, что для определения
всех неизвестных необходимо иметь не менее девяти
акселерометров. При девяти акселерометрах решение является
однозначным. Увеличение числа акселерометров сверх минимально
необходимого может иметь целью или упрощение структуры
уравнений (так, чтобы полная система уравнений распадалась на
несколько несвязанных подсистем), или повышение точности
(например, при решении системы уравнений методом наименьших
квадратов), или повышение надежности и достоверности при
возможных отказах акселерометров (например, при использовании
методов наименьших модулей или избыточных переменных).
23
Наиболее простой получается структура системы уравнений, если
акселерометров двенадцать и они расположены так, как показано
на рис. 2.4, б (стрелки изображают направления измерительных
осей акселерометров).
Практически установка большого числа (девяти или
двенадцати) акселерометров может быть затруднительной или
невозможной. В будущем для сходных задач целесообразно объединение
малогабаритных акселерометров в унифицированные блоки с
соответствующими средствами преобразования сигналов. При малом
числе акселерометров (в частности, если акселерометр один)
может быть использован способ переустановки с многократным
повторением движений. Если предполагать, что при повторных
испытаниях движения точно воспроизводятся, то повторение
движений при различным образом установленных и
ориентированных акселерометрах дает тот же результат, что и однократное
выполнение движения при нескольких установленных
акселерометрах. Неточное воспроизведение движений при их повторении
приводит к дополнительным погрешностям, которые могут быть
значительными.
К точности измерения ускорений не предъявляется высоких
требований. Если диапазон частот измерения, определяемый
частотными характеристиками датчика, выбран правильно, то
могут быть использованы практически любые серийно выпускаемые
датчики (измерительные преобразователи) с погрешностями до
10 %. Однако требования к частотным характеристикам вопреки
распространенным представлениям являются достаточно
жесткими: для возможной длительности импульса ускорения при
торможении подвижной части порядка 0,01 с частотный диапазон
измерения линейного акселерометра должен быть не менее 1000 Гц.
При этом нижняя граница диапазона может быть не равной нулю.
Такой акселерометр может давать большие погрешности
измерения плавно изменяющихся ускорений на среднем этапе движения,
но позволит правильно оценить максимальные ускорения при
импульсах разгона и торможения. При использовании
акселерометров, не пропускающих постоянную составляющую (когда
нижняя граница диапазона измерения не равна нулю), следует
иметь в виду, что эта составляющая ускорения не измеряется и
в случае необходимости ее нужно учитывать расчетно.
Выпускаются различные типы линейных акселерометров.
Наиболее простыми по конструкции являются акселерометры прямого
действия, в которых непосредственно измеряется перемещение
инерционной массы относительно основания датчика или
деформация упругого элемента. Более точными являются
компенсационные акселерометры, в которых по сигналу цепи обратной
связи осуществляется автоматическое уравновешивание силы,
действующей на инерционную массу. Компенсационные
акселерометры обычно бывают более точными с собственной частотой в
несколько десятков герц. Высокочастотные линейные акселерометры,
24
как правило, бывают прямого действия, они менее точны; наиболее
распространенными являются пьезоэлектрические
виброизмерительные преобразователи.
Регистрация измеренных ускорений может осуществляться
любыми осциллографами, каналы которых пропускают частоты
до нескольких килогерц. Однако следует иметь в виду, что
масштаб записей должен быть достаточно большим, чтобы надежно
регистрировать кратковременные импульсы длительностью в
несколько миллисекунд и иметь возможность хотя бы в общих
чертах анализировать их форму. Синхронные записи сигналов
нескольких акселерометров для разных типовых движений
позволяют установить, встречается ли совпадение максимумов
составляющих ускорений по времени или максимумы разнесены.
Совпадение пиков ускорений по времени означает, что, когда
модуль ускорения достигает максимума, вектор ускорения не
совпадает ни с одной из осей, по которым установлены акселерометры.
Такая ситуация естественна, если при выполнении движений
схват повернут по ориентирующей степени подвижности, но
возможна также, если максимальные ускорения появляются в
процессе упругих колебаний, возбуждаемых торможением, когда
для основной формы свободных колебаний всего механизма
манипулятора возникают «косые» перемещения схвата.
Если совмещения максимумов сигналов акселерометров не
происходит, практически достаточно их регистрировать без
привязки ко времени. Для такой регистрации целесообразно
использовать импульсные вольтметры (аналоговые или цифровые). Их
применение позволяет значительно сокращать время проведения
испытаний, что очень важно при исследовании влияния
различных факторов (параметров траекторий, масс объекта, настроек).
Однако для представления характера законов изменения
ускорений выборочно следует производить запись осциллограмм,
особенно на этапе исследовательских испытаний.
При создании методик испытаний, проводимых с целью
определения ускорений, нужно иметь в виду, что составляющие
ускорения начала базовой системы координат схвата и углового
ускорения зависят от многих факторов, в первую очередь от
степеней подвижности, по которым происходит движение; от
направления движения; от величины хода и координат конечных
положений, в которых происходит остановка (для ПР с контурным
управлением — также от задаваемой скорости); от массы и
моментов инерции объекта; от настроек привода и демпфера; от
параметров питания и т. п. По отношению к ряду факторов нет
необходимости проводить исследование: целесообразно задать мх
так, чтобы при испытаниях составляющие максимальных
значений ускорений были бы наибольшими. Так, можно ограничиться
такими степенями подвижности и направлениями движения, при
которых ускорения получаются большими, значения хода и
скорости движения следует выбирать наибольшими, давление воз»
25
духа (для ПР с пневмоприводом) — по верхней границе диапазона
и т. д. По отношению к настройке демпфера ориентация на
наихудший вариант, по-видимому, не имеет смысла (наибольшее
значение максимума ускорения торможения получается при полном
перекрытии каналов, когда демпфер становится практически
жестким), поэтому настройка демпфера при испытаниях должна
устанавливаться на основе подробного обоснования. По отношению
к параметрам объекта максимизация ускорений, по-видимому,
неправильна. Можно ожидать, что при увеличении массы объекта
до предельно допустимого значения ускорения будут уменьшаться.
При этом вместо ускорения следует рассматривать произведение
массы на ускорение, которое, как можно ожидать, будет
наибольшим при наибольшей предельно допустимой массе. Однако для
многих ПР отношение массы объекта к массе подвижной части
мало и влияние увеличения массы на ускорение незначительно.
Если исследовать влияние моментов сил инерции при
вращении объекта, то следует рассматривать произведение его
момента инерции на угловое ускорение. При фиксированной массе
момент инерции объекта возрастает с увеличением его длины.
Однако для длинномерных объектов становится существенной
упругость, которая может приводить к большому снижению
максимальных значений ускорений.
Сведения о проведенных измерениях ускорений встречаются
в литературе [16]. Согласно этим сведениям, максимальные
значения линейных ускорений изменяются в довольно узких
пределах: от 80 до 150 м/с"2 для самых разных ПР. Такая устойчивость
труднообъяснима. К тому же при отсутствии сведений о
средствах измерения и методиках экспериментального определения
ускорений вопрос о достоверности результатов остается открытым.
Поэтому получение достоверных данных об ускорениях
представляет собой актуальную задачу.
Глава 3
ТЕРМИНЫ И ОПРЕДЕЛЕНИЯ
В ОБЛАСТИ ЗАХВАТНЫХ УСТРОЙСТВ
3.1. ОСНОВНЫЕ ПОНЯТИЯ
В ОБЛАСТИ ЗАХВАТНЫХ УСТРОЙСТВ
Захватным устройством ПР называется его рабочий орган,
предназначенный для захватывания и удерживания предмета
производства и (или) технологической оснастки, называемых
объектом. ГОСТ 26063—84 устанавливает следующие типы захватных
устройств ПР: механические, вакуумные, магнитные и прочие
(рис. 3.1).
26
Общим понятием для захватных устройств всех видов
является понятие «рабочий элемент». Рабочим элементом
называется элемент захватного устройства, вступающий
непосредственно в контакт с объектом. Для магнитных захватных устройств
рабочими элементами являются элементы магнитной системы,
к которым притягивается объект, для вакуумных —
контактирующая с объектом присоска, ограничивающая полость разряжения
воздуха. Наряду с термином «рабочие элементы» в литературе
употребляются антропоморфные термины: «губки», «пальцы»,
«челюсти» и др.
Механическими называются захватные устройства, в которых
удерживание объекта осуществляется под действием реакций
Захватные устройство промышленных роботов
X
Механические
Вакуумные У-л
Н пневматические
с приводом
(схваты).'
1
вез привода
\(лоддерживаюш,ие\
Магнитные Н
активные
Н гидравлические
Н электромеханические]
прочие
пассивные
Т
Прочие
электромагнит^
ные
с постоянными
магнитами
Рис. 3.1
в точках (зонах) контакта с рабочими элементами, создаваемых
двигателем или собственным весом объекта. Механические
захватные устройства разделяются на схваты и поддерживающие
захватные устройства. Охватом называется механическое
захватное устройство, представляющее собой механизм, удерживающий
объект посредством зажима рабочими элементами при их
перемещении двигателем. Поддерживающими называются механические
захватные устройства, не имеющие подвижных звеньев и
представляющие собой опоры, на которых объект удерживается под
действием сил тяжести (ковши для захватывания, транспортировки
и разливки жидкого металла, крюки, штыри, призматические
опорные элементы, лопатки и пр.).
Вакуумными называются захватные устройства,
удерживающие объект посредством разрежения воздуха в замкнутой полости
рабочего элемента — присоски. Различают активные вакуумные
захватные устройства, в которых разрежение воздуха создается
принудительно с помощью вакуумных насосов или эжекционных
устройств, и пассивные, — в которых разрежение воздуха
создается за счет его вытеснения при деформировании рабочих
элементов.
27
Магнитными называются захватные устройства,
удерживающие объект при действии магнитных сил, создаваемых
постоянным магнитом или электромагнитом.
По способу замены захватные устройства разделяются на
заменяемые вручную и автоматически. Несменные захватные
устройства, устанавливаемые с помощью неразъемных соединений,
как правило, не используются. Узел крепления захватного
устройства к руке манипулятора называется механическим
интерфейсом.
С основанием захватного устройства связывается
прямоугольная декартова система координат захватного устройства с
началом, расположенным в условном геометрическом центре
захватного устройства или удерживаемого объекта. В проекциях на оси
этой системы координат задаются основные геометрические,
точностные, статические и динамические силовые характеристики
захватного устройства.
Основными техническими характеристиками захватных
устройств всех типов являются: номинальная грузоподъемность,
усилие захватывания, предельно допустимые значения приложенных
сил и моментов по осям системы координат захватного устройства,
время захватывания и время отпускания, масса, габаритные
размеры, показатели надежности.
Усилие захватывания в стандартах не определяется; обычно
говорят, что это сила воздействия рабочих элементов на объект.
В схватах усилие захватывания создается приводом,
перемещающим рабочие элементы при захватывании вплоть до зажима ими
объекта. В пружинных схватах усилие захватывания
обеспечивается пружинами, удерживающими объект в положении
равновесия.
Временем захватывания называется время от подачи сигнала
устройством управления на захватывание до момента завершения
процесса, когда объект занимает устойчивое положение
равновесия в схвате, а усилие захватывания достигает своего
установившегося значения. Временем отпускания называется время от
подачи устройством управления сигнала на отпускание до момента
завершения процесса. Для схватов под завершением процесса
отпускания понимается высвобождение объекта и полное
раскрытие схвата.
Номинальной грузоподъемностью захватного устройства
называется наибольшее допустимое для данного захватного
устройства значение массы захватываемых объектов. При оснащении
таким захватным устройством ПР конкретной модели реальная
масса удерживаемого объекта не должна превосходить полезной
грузоподъемности ПР, т. е. того наибольшего значения массы
объекта, при котором гарантируются его захватывание,
удерживание и обеспечение установленных значений эксплуатационных
характеристик ПР.
28
Предельно допустимыми значениями приложенных сил
(моментов) называются наибольшие значения центрально
приложенной к объекту (в начале системы координат захватного устройства)
силы (момента), при которых объект удерживается захватным
устройством. Приложенные силы (моменты) создаются
действующими на объект силами тяжести, инерции, силами
взаимодействия с другими предметами и, оснасткой. К приложенным силам
не относится усилие захватывания и реакции в точках контакта
объекта с рабочими элементами.
Как правило, захватные устройства предназначены для
работы с одним объектом и выполняют только функции
захватывания, удерживания и отпускания. В то же время
применяются многообъектные и многофункциональные захватные
устройства. Многообъектными называются захватные устройства,
предназначенные для захватывания и удерживания двух и более
объектов. Многофункциональными называются захватные устройства,
предназначенные для выполнения наряду с основными функциями
технологических операций и операций измерения (см. п. 4.7).
Определения различных видов захватных устройств приведены
в работах [8, 28, 41].
3.2. НОМЕНКЛАТУРА ОСНОВНЫХ ПОКАЗАТЕЛЕЙ
ЗАХВАТНЫХ УСТРОЙСТВ
Основными эксплуатационными показателями захватных
устройств по ГОСТ 25378—82 «Роботы промышленные.
Номенклатура основных показателей» являются: усилие захватывания;
время захватывания; время отпускания; характерные размеры
захватываемого предмета (минимальный, максимальный).
Нормируемые эксплуатационные показатели должны
удовлетворять двум основным требованиям.
1. Необходимо, чтобы они могли быть определены
экспериментально или рассчитаны с достаточной точностью. Все
перечисленные показатели первому требованию удовлетворяют. Усилие
захватывания рассчитывается достаточно точно при
использовании известных методов силового расчета (например, принципа
возможных перемещений) или определяется экспериментально.
Значения времени захватывания и отпускания обычно
определяют экспериментально, их расчет дает, как правило,
недостоверные результаты. Предельные размеры предмета определяются по
чертежу или натурному образцу.
2. Необходимо, чтобы показатели можно было
непосредственно использовать при проектировании роботов,
программировании движений, формулировке требований к устройствам
основного и вспомогательного оборудования; они должны обеспечивать
достаточно полное описание свойств захватных устройств в
процессе эксплуатации. Перечисленные показатели лишь отчасти
отвечают этому требованию. Значения времени захватывания и
29
отпускания необходимы для выбора выдержки времени на
соответствующих этапах цикла при программировании движений.
Характерные размеры предметов (минимальный, максимальный)
ограничивают их номенклатуру. Однако эти показатели не
определяют такие важнейшие свойства схвата, как возможность
захватывания предмета при различных начальных рассогласованиях
(линейных и угловых) относительно схвата, точность
позиционирования и ориентирования предмета в схвате, несущая
способность схвата. Таким образом, перечень показателей по
ГОСТ 25378—82 не дает полного представления о захватном
устройстве как изделии и является явно недостаточным.
В соответствии с принципами, положенными в основу
ГОСТ 25378—82, номенклатура показателей серийно
выпускаемых захватных устройств должна включать рубрики «Общие
сведения» и «Технически^ характеристики». Причем целесообразно
группировать отдельно технические характеристики, общие для
всех типов захватных устройств, и специфические — для каждого
основного типа.
Такое представление данных ориентировано на различные
группы специалистов и, прежде всего, на занимающихся
разработкой захватных устройств при внедрении ПР, и создает основы
для их каталогизации, типизации и унификации, реализации
принципов их модульного построения, проведения работ по
стандартизации общих технических требований, правил приемки и методов
испытаний, оценки технического уровня серийно выпускаемых
захватных устройств.
В качестве общих сведений должны приводиться: назначение
захватного устройства; тип захватного устройства (механическое,
магнитное, вакуумное ЗУ или относящееся к прочим); чертеж
общего вида; способ замены; число рабочих элементов; наличие
средств очувствления; характеристика предмета; способ
базирования предмета при захватывании и отпускании.
При представлении назначения следует указывать вид
производства и операцию, для выполнения которой предназначен
промышленный робот, оснащенный данным захватным устройством,
а также параметры окружающей среды, если они значительно
превышают нормальные значения.
Чертежи общего вида следует приводить с указанием
конструкции места крепления к манипулятору и внешним
приводным элементам, а в случае встроенного привода — конструкции
мест подвода рабочего тела (воздуха, жидкости) или
электропитания, а также присоединительных размеров. При оснащении ПР
комплектом сменных захватных устройств чертежи общего вида
приводятся для каждого захватного устройства, входящего в
комплект.
Характеристика объекта — предмета производства —
включает его наименование (например, бак, прямоугольная коробка,
турбинная лопатка и т. д.), значение массы, габаритный чертеж
30
объекта с указанием диапазонов изменения характеристик
размеров поверхностей, характеристики свойств материала.
Характерные размеры захватываемого объекта указываются для
поверхностей, по которым происходит его захватывание.
Схемы базирования объекта целесообразно приводить с
указанием поверхностей, по которым производится захватывание, и
направления подхода при захватывании. Они приводятся для
деталей — представителей каждой группы предметов
производства, для работы с которыми предназначено захватное устройство,
и необходимы для обоснования требований, предъявляемых к
базирующим и центрирующим свойствам схватов, обеспечения
правильности выполнения процессов базирования при захватывании
и отпускании объекта.
Технические характеристики захватных устройств,
включающие показатели по ГОСТ 25378—82, делятся на четыре группы.
В первую группу объединяются показатели, общие для всех
типов захватных устройств, во вторую — показатели схватов,
в третью — вакуумных захватных устройств, в четвертую —
магнитных захватных устройств. Номенклатуру технических
характеристик составляют следующие показатели.
I. Номинальная грузоподъемность, кг.
• 2. Усилие захватывания, Н.
3. Предельные значения приложенных сил и моментов, Н или
Н-м (указываются предельные значения приложенных сил и
моментов по трем осям прямоугольной системы координат
захватного устройства).
4. Время захватывания, с.
5. Время отпускания, с.
6. Средняя наработка на отказ, ч.
7. Масса, кг.
8. Габаритные размеры, мм.
9. Эксплуатационные показатели схватов.
9.1. Кинематическая схема.
9.2. Усилие на выходном звене привода, Н.
9.3. Максимальное перемещение выходного звена привода, мм.
9.4. Давление рабочего тела привода, МПа.
9.5. Напряжение питания, В.
10. Эксплуатационные показатели вакуумных захватных
устройств.
10.1. Размеры контактной площади присоски, мм.
10.2. Номинальное давление в полости присоски, МПа.
II. Эксплуатационные показатели магнитных захватных
устройств.
11.1. Число ампер-витков.
11.2. Размеры площади контакта, мм2.
11.3. Напряжение питания, В.
Номинальная грузоподъемность ПР определена в
ГОСТ 25686—83.
31
Для захватного устройства номинальная грузоподъемность
является ограничивающим показателем и определяется
наибольшей массой объекта, по значению которой для различных режимов
эксплуатации производятся прочностные и жесткостные расчеты
конструкций. Очевидно, что значение массы объекта не должно
превышать значения номинальной грузоподъемности ПР.
Усилие захватывания имеет наиболее простой смысл для
вакуумных и магнитных захватных устройств: это притягивающая
сила. Для большинства схем схватов понятие усилия
захватывания нуждается (см. п. 4.5) в более детальном определении
(усилия в точках контакта зависят от формы предмета и величины
раскрытия схвата), поэтому паспортное значение усилия
захватывания является достаточно грубой оценкой. Для модульных
схватов со сменными механизмами передачи усилие захватывания
определяется для симметричных схем с указанием величины
перемещения рабочих элементов.
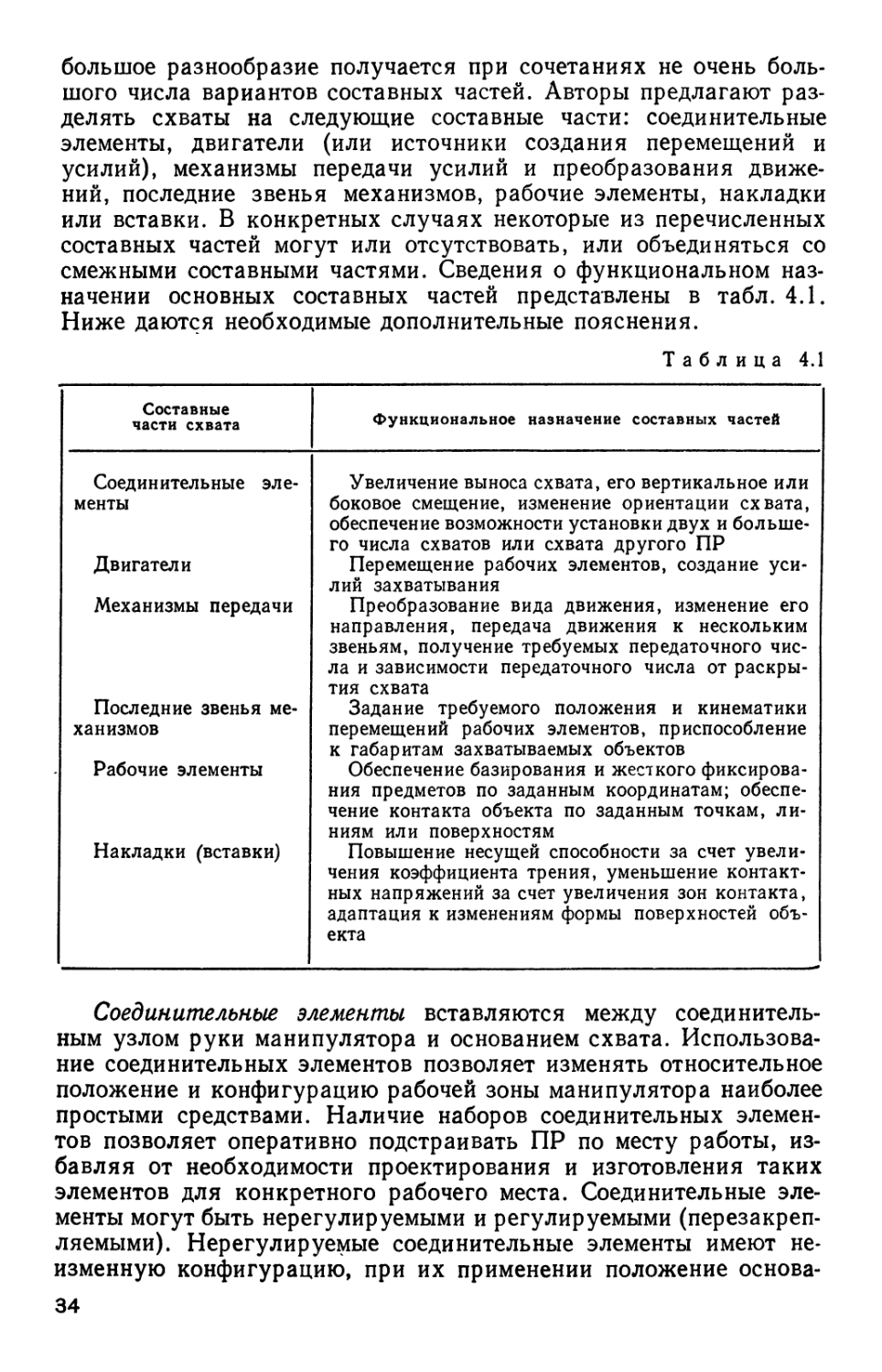
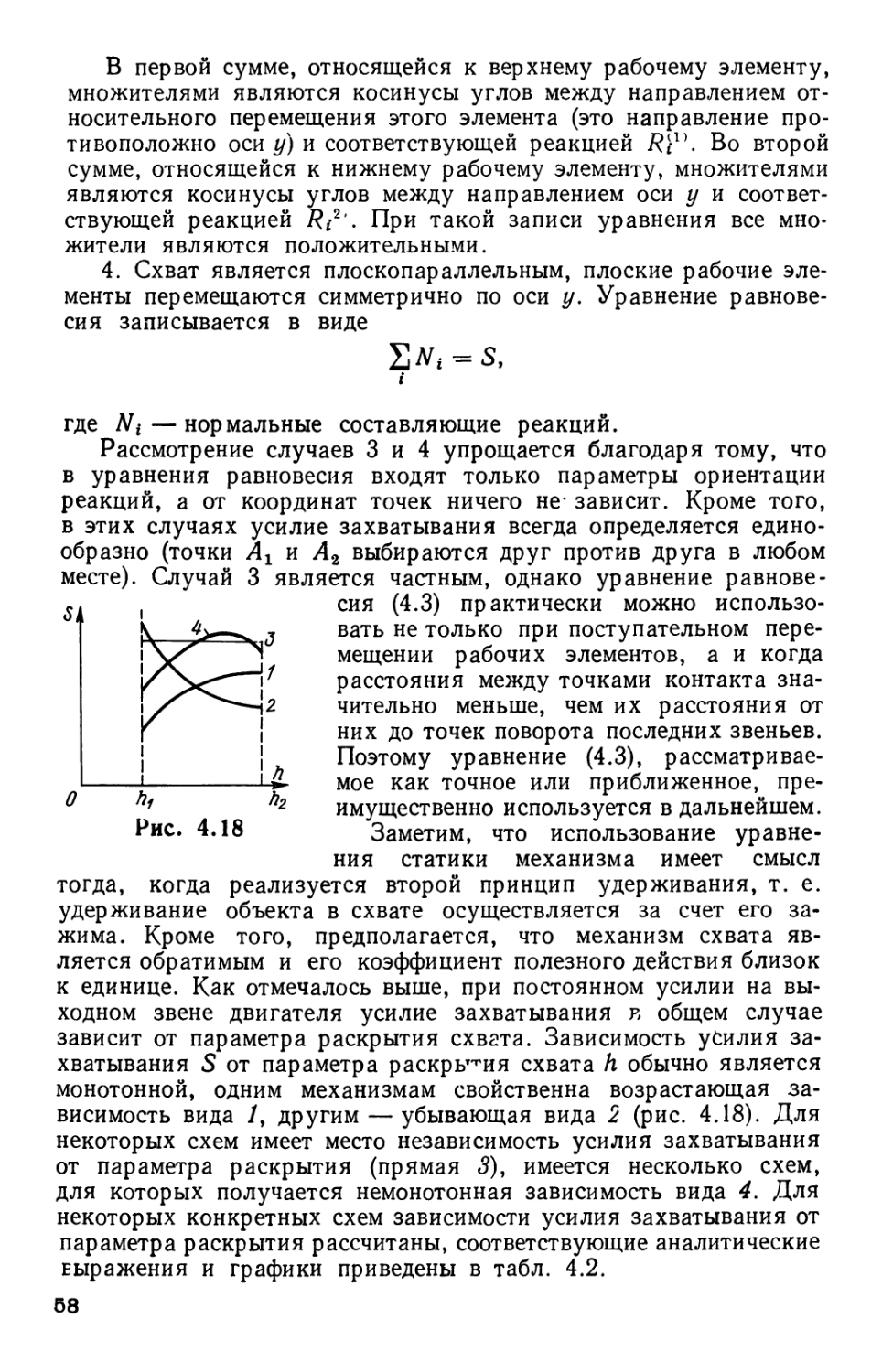
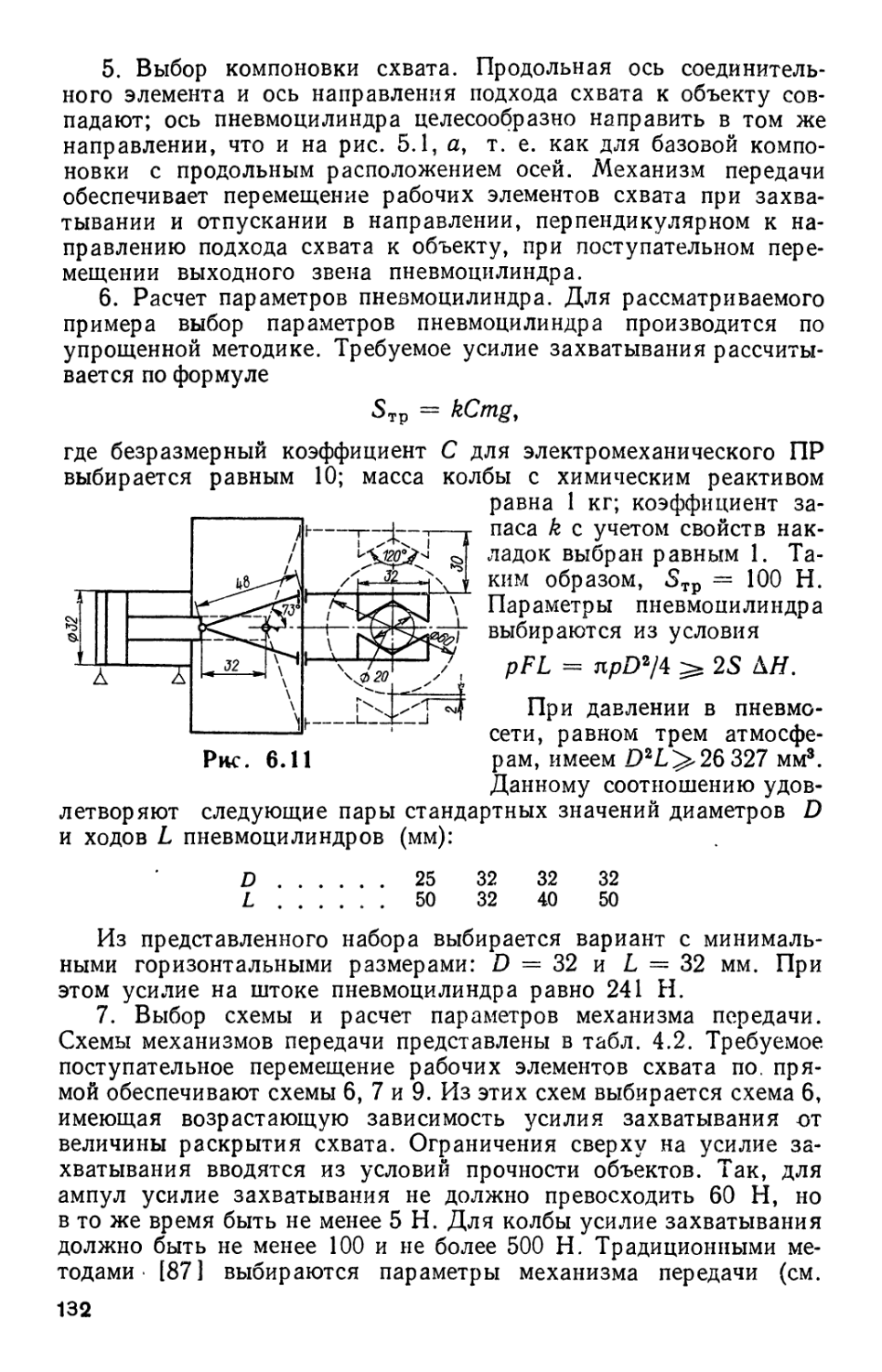
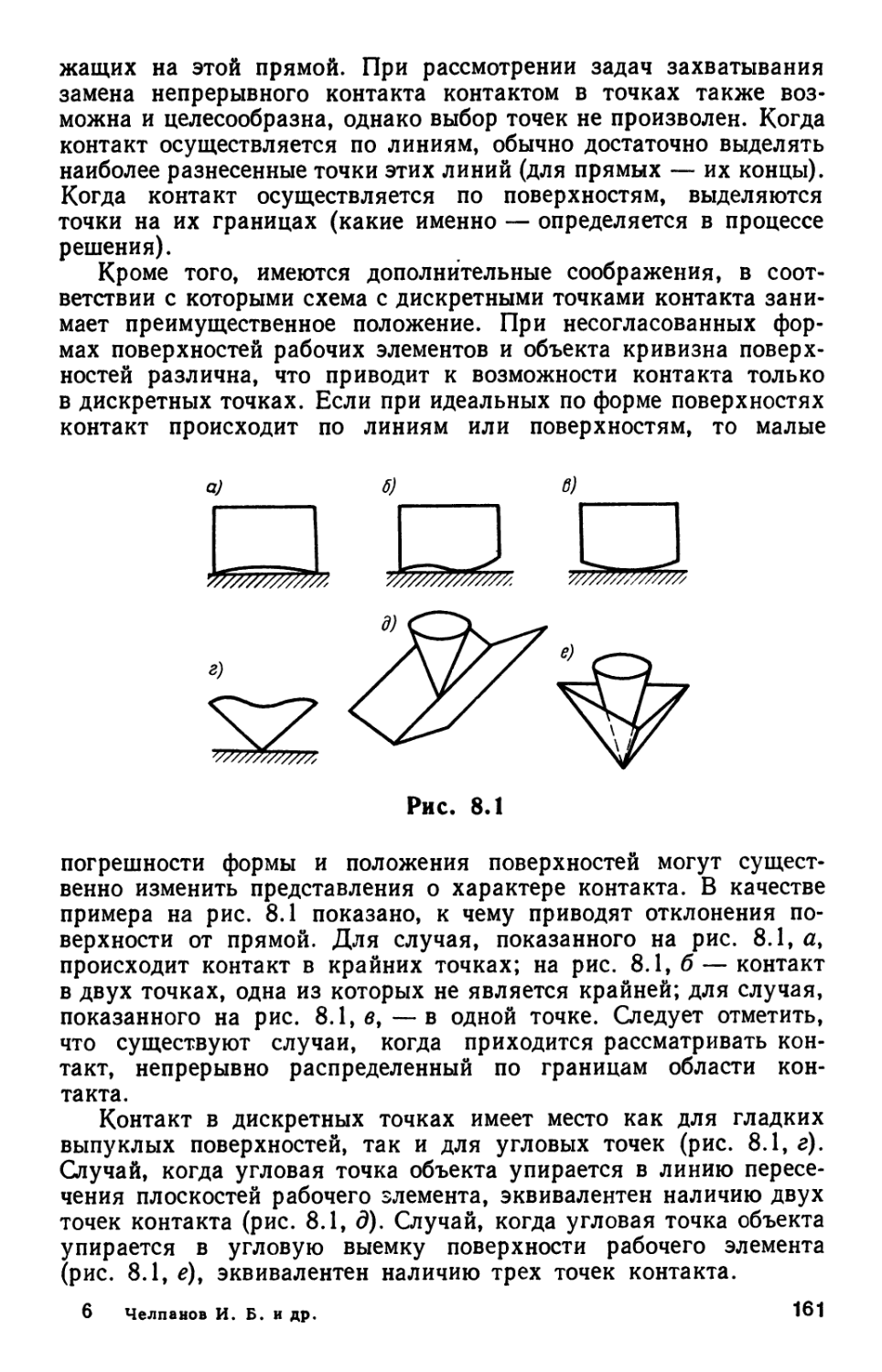
Основными характеристиками несущей способности
захватных устройств являются предельные значения приложенных сил
Таблица 3.1
Наименование
параметра
Полезная
грузоподъемность
Усилие
захватывания
Время
захватывания (отпускания)
Размеры
захватываемого объекта:
минимальный
максимальный
Предельно
допустимые значения
приложенных сил и
моментов по осям
системы координат схвата
Средняя
наработка на отказ
Параметры
питания:
напряжение
потребляемая
мощность
давление
рабочего тела
Типы захватных
устройств промышленных роботов
механические
с приводом (схваты)
гид-
равли-
1 чес-
кие
+
+
+
+
+
+
+
—
—
+
пнев-
мати-
чес-
кие
+
+
+
+
+
+
+
—
—
+
элек-
тр оме-
хани-
чес-
кие
+
+
+
+
+
+
—
без
привода
+
+
±
±
+
+
—
вакуумные
активные
+
+
+
+
+
+
+
—
+
+
сивные
+
+
—
+
+
+
—
—
—
|
магнитные
с
электро-
магнитом
| +
+
+
+
+
+
—
с
стоянным
магнитом
+
+
+
+
32
и моментов. Предельные значения приложенных сил и моментов
по трем взаимно ортогональным осям системы координат
захватного устройства рассчитываются в соответствии с общей
расчетной схемой, исходя из данных, приведенных в пунктах
«Характеристика предмета производства» и «Способ базирования предмета
при захватывании и отпускании», и общих сведений. Предельные
значения приложенных сил и моментов для определенных
объектов и захватных устройств определяются расчетно или
экспериментально и зависят:
для схватов — от усилия, развиваемого двигателем,
кинематической схемы и параметров механизма передачи, геометрии
рабочих элементов, формы поверхности, по которой происходит
захватывание, условий контакта, значения коэффициента трения
и некоторых других факторов;
для вакуумных и магнитных захватных устройств — от
усилия захватывания, формы и размеров плоскости контакта,
значения коэффициента трения и др.
Время захватывания и время отпускания являются
характеристиками быстродействия захватного устройства и, как
правило, определяются экспериментально.
Эксплуатационные характеристики схватов представлены
показателями, регламентирующими параметры питания (давление
рабочего тела и напряжение питания), выходные параметры
двигателя (усилие и максимальное перемещение выходного звена),
кинематическую схему механизма передачи. Применение
различных основных показателей для различных видов захватных
устройств указано в табл. 3.1.
При разработке конструкторской документации должны
дополнительно указываться показатели стандартизации и
унификации, технологичности, патентно-правовые, транспортабельности,
эргономические и эстетические показатели в соответствии с
рекомендациями РД 50-149—79.
Глава 4
СОСТАВНЫЕ ЧАСТИ И СХЕМЫ СХВАТОВ
4.1. СОСТАВНЫЕ ЧАСТИ СХВАТОВ И ИХ НАЗНАЧЕНИЕ
Несмотря на то, что чаще всего схват представляет собой
достаточно простое устройство, по многим причинам его
целесообразно разделять на составные части, имеющие
определенную конструктивную и функциональную самостоятельность. Это
удобно при упорядочении сведений о множестве вариантов схем
и конструкций схватов, а также при их проектировании.
Подробный анализ схем и конструкций схватов показывает, что их
2 Челпанов И. Б. и др.
33
большое разнообразие получается при сочетаниях не очень
большого числа вариантов составных частей. Авторы предлагают
разделять схваты на следующие составные части: соединительные
элементы, двигатели (или источники создания перемещений и
усилий), механизмы передачи усилий и преобразования
движений, последние звенья механизмов, рабочие элементы, накладки
или вставки. В конкретных случаях некоторые из перечисленных
составных частей могут или отсутствовать, или объединяться со
смежными составными частями. Сведения о функциональном
назначении основных составных частей представлены в табл. 4.1.
Ниже даются необходимые дополнительные пояснения.
Таблица 4.1
Составные
части схвата
Соединительные
элементы
Двигатели
Механизмы передачи
Последние звенья
механизмов
Рабочие элементы
Накладки (вставки)
Функциональное назначение составных частей
Увеличение выноса схвата, его вертикальное или
боковое смещение, изменение ориентации схвата,
обеспечение возможности установки двух и
большего числа схватов или схвата другого ПР
Перемещение рабочих элементов, создание
усилий захватывания
Преобразование вида движения, изменение его
направления, передача движения к нескольким
звеньям, получение требуемых передаточного
числа и зависимости передаточного числа от
раскрытия схвата
Задание требуемого положения и кинематики
перемещений рабочих элементов, приспособление
к габаритам захватываемых объектов
Обеспечение базирования и жесткого
фиксирования предметов по заданным координатам;
обеспечение контакта объекта по заданным точкам,
линиям или поверхностям
Повышение несущей способности за счет
увеличения коэффициента трения, уменьшение
контактных напряжений за счет увеличения зон контакта,
адаптация к изменениям формы поверхностей
объекта
Соединительные элементы вставляются между
соединительным узлом руки манипулятора и основанием схвата.
Использование соединительных элементов позволяет изменять относительное
положение и конфигурацию рабочей зоны манипулятора наиболее
простыми средствами. Наличие наборов соединительных
элементов позволяет оперативно подстраивать ПР по месту работы,
избавляя от необходимости проектирования и изготовления таких
элементов для конкретного рабочего места. Соединительные
элементы могут быть нерегулируемыми и регулируемыми
(перезакрепляемыми). Нерегулируемые соединительные элементы имеют
неизменную конфигурацию, при их применении положение основа-
34
ния схвата относительно руки манипулятора ПР вполне
определено. Параметрами нерегулируемых соединительных элементов
являются расстояния между плоскостями соединений, межосевые
расстояния и углы между осями. Некоторые типы соединений,
например фланцевые по ГОСТ 26083—84, допускают закрепление
схвата в нескольких положениях, повернутых друг относительно
друга на 45 или 90°.
Регулируемые соединительные элементы состоят из двух или
нескольких частей, которые могут соединяться и закрепляться
в различных положениях заданного диапазона. При этом могут
задаваться или линейные перемещения, или повороты (по одной
или двум осям), или совместно и то и другое. Примеры
регулируемых соединительных
элементов изображены на /7~\ /Т\ ^
рис. 4.1. Параметрами ре- Ть^ЗЕЕН" 7\Т ~
гулируемых соединитель- \fc/>^/ ^
ных элементов являются
диапазоны изменения
расстояний между плоскости- Рис- 4.1
ми соединений или между
осями или диапазоны изменения углов. Соединительные
элементы с различными типами соединений на обоих концах или
с различными параметрами соединений могут быть
использованы как переходные, они дают возможность использовать
схваты на различных ПР, когда между ними отсутствует
унификация типов соединений и (или) присоединительных размеров.
При конструировании соединительных элементов обычно
серьезных трудностей не возникает, однако необходимо обратить особое
внимание на стыковку трубопроводов и кабелей. При гибких
магистралях и малых размерах соединительных элементов часто'
какие-либо изменения трубопроводов и кабелей не нужны, при
большой их длине нужны сменные участки трубопроводов и
кабелей с соответствующими разъемными соединениями.
Соединительные элементы, используемые для установки
нескольких схватов, позволяют или реализовать многообъектный
схват, предназначенный для одновременного захватывания
нескольких объектов (подробнее об этом см. п. 4.5), или дают
возможность последовательного использования то одного, то другого
схвата (в частности, при наличии ориентирующей степени
подвижности манипулятора в результате поворота соединительного
элемента один схват может занимать место другого). В настоящее
время лишь очень немногие ПР имеют сменные соединительные
элементы для схватов, При проектировании новых ПР следует
иметь в виду, что включение наборов таких элементов в комплект
сменных узлов и деталей ПР лишь незначительно повышает
стоимость, но намного облегчает компоновку и наладку
роботизированных технологических модулей, участков и линий, что особенно
важно для гибких производственных систем.
2*
36
Число типов двигателей, используемых в схватах ПР, невелико.
Классификация двигателей по типу энергоносителя и по виду
движения выходного звена и их анализ даются в п. 4.3. Здесь
отметим, что по функциональным возможностям создания
перемещений рабочих элементов двигатели схватов удобно разделить
на три группы: с неограниченным перемещением выходного звена
(например, электродвигатели), с ограниченным перемещением
выходного звена (например, пневмоцилиндры и неполноповорот-
ные пневмодвигатели), с малым перемещением выходного звена
(например, мембранные двигатели). Двигатели с неограниченным
перемещением выходного звена целесообразно применять в
схватах, предназначенных для захватывания крупногабаритных
объектов, у которых расстояние между захватываемыми
поверхностями может изменяться в
широких пределах. Такие а) ff'~
ЪъЗ
-t-
0-
NO
двигатели целесообразно
применять в сочетании с
винтовыми механизмами. Для
двигателей с неограниченным рис. 4.2
перемещением (углом
поворота) основными параметрами являются номинальная частота
(угловая скорость) вращения, номинальный и максимальный
вращающие моменты. По номинальной частоте вращения и
номинальному моменту определяется номинальная мощность, которая
обычно считается главным параметром.
Двигатели с ограниченным перемещением (пневмоцилиндры)
используются в большинстве схватов. Для них основными
параметрами являются максимальный ход L и сила на выходном звене Q.
Авторами показано (см. п. 6.1), что главным параметром следует
считать работу, совершаемую за один рабочий ход,
А = QL.
Именно этот параметр определяется в первую очередь при
проектировании схвата.
Двигатели с малыми перемещениями обычно являются
простыми и надежными, но находят применение преимущественно
только в узкодиапазонных схватах, предназначенных для
захватывания объектов с одними и теми же размерами.
Заметим, что двигатель не является обязательной частью схвата.
На рис. 4.2, а, б приведены схемы схватов, в которых усилие
захватывания создается упругими силами от изгиба пластинчатых
пружин, заменяющих механизм схвата, или от растяжения
цилиндрических пружин при наличии обычного механизма.
Захватывание осуществляется при перемещении схвата манипулятором,
когда его рабочие элементы, вступая в контакт с объектом,
раскрываются и охватывают объект; при этом, естественно, объект
должен принудительно удерживаться на позиции захватывания.
Освобождается объект сдвиганием схвата в противоположную
36
сторону также при принудительном удерживании объекта.
Исключение двигателя из конструкции схвата приводит к ее
максимальному упрощению, однако несущая способность таких схватов
обычно мала, необходимость удерживания объекта во время
захватывания и освобождения существенно сокращает
возможности применения. Схваты без двигателей с упругими силами
захватывания используются чаще всего для переноса миниатюрных
деталей одних и тех же размеров.
Имеются также предложения по исключению двигателей
схватов с передачей их функций ближайшим двигателям приводов
степеней подвижности манипулятора. Для этого предусматривается
а) б) 6) г)
механизм передачи от этого двигателя на схват и муфты (например,
электромагнитные), переключающие двигатель с одного механизма
на другой.
Основное функциональное назначение механизмов передачи
схватов заключается в передаче движения и усилия с выходного
звена двигателя на рабочие элементы. Обзор наиболее
распространенных схем механизмов схватов с выявлением их особенностей,
установлением областей применения и анализом преимуществ и
недостатков дается в п. 4.4. Механизмы характеризуются:
типом преобразования движения, передаточным числом,
зависимостью усилия захватывания от раскрытия схвата.
Последние звенья механизма передачи, на которые крепятся
рабочие элементы, часто выполняются съемными, от их выбора
зависят передаточное число механизма схвата в целом и диапазон
раскрытия схвата.
Большинство схватов оснащаются сменными рабочими
элементами. Для возможностей захватывания и удерживания
объектов различной формы и для запаса несущей способности важна
форма поверхностей рабочих элементов. Классификация форм
по различным признакам дается в гл. 1, здесь же отмечены
наиболее распространенные варианты форм. Наиболее
употребляемые варианты форм изображены на рис. 4.3, а, б, е.
Призматические рабочие элементы (при их использовании схват обычно
называется уголковым) являются полусогласованными по отношению
к захватываемому круглому сечению. Обычно угол р выбирается
равным 120°, реже — 90°. Рабочие элементы с цилиндрической
37
поверхностью являются согласованными по отношению к
цилиндрическим объектам только одного, определенного, диаметра и
поэтому являются узко специализированными; они относятся
к частному случаю так называемых факсимильных рабочих
элементов. Специальное профилирование
рабочих элементов (рис. 4.3, в)
позволяет получить постоянное положение
центра круглого сечения объекта
с различными значениями диаметра,
когда последние звенья механизма пе-
^ис- 4.4 редачи совершают вращательное
движение (как в случае клещевого
охвата). Конические рабочие элементы (рис. 4,3, г) используются
для захватывания валов за центровочные отверстия на торцах.
При работе с объектами, ориентированными различным
образом, преимущества имеют комбинированные рабочие элементы»
Рис, 4.5
имеющие несколько участков поверхностей, используемых при
различной ориентации объекта. Так, рабочие элементы (рис. 4.3, д)
позволяют захватывать призматическими поверхностями
цилиндрический объект в двух положениях, повернутых друг
относительно друга на 90°. При разработке рабочих элементов
схватов ПР большой грузоподъемности целесообразно использовать
опыт проектирования унифицированных и стандартизованных
опор станочных приспособлений. На рис. 4.4 изображены два
варианта плавающих опор станочных приспособлений.
Последняя составная часть схвата — накладки, которые
крепятся к рабочим элементам, — представляется элементарно
простой. Однако роль накладок во взаимодействии рабочих
элементов с объектом и в обеспечении высокого уровня
эксплуатационных характеристик исключительно велика. Отметим сначала, что
выбором материала с повышенным коэффициентом трения для
накладок может быть существенно повышена несущая способность
схвата без всяких изменений остальных частей. Далее, накладками
из теплоизолирующих материалов может быть снижен нагрев
механизма при работе с горячими заготовками. Наконец, влияние
неизбежного износа в зонах контакта на погрешности
позиционирования может быть значительно уменьшено, если накладки
выполняются отдельно и являются сменными.
Имеется тенденция объединения составных частей схватов.
Так, рабочие элементы могут представлять собой
профилированные концевые части рычагов механизма передачи.
Разделение схватов на составные части тесно связано с идеями
модульного построения схватов, высказанными и развитыми в
работах авторов [38, 41, 43]. Модули, выпускаемые комплектами,
должны выполняться такими, чтобы их можно было соединять
в различных сочетаниях без подгонки и без изготовления новых
деталей. Виды модулей для модульных схватов целесообразно
устанавливать в соответствии с разделением схватов на основные
составные частив Принцип формирования комплекта модулей
пояснен на рис. 4.5. Номер 0 принят для узла крепления руки робота,
последующие номера соответствуют порядковым номерам типов
модулей.
4.2. ДВИГАТЕЛИ СХВАТОВ
, Из качественных требований к двигателям схватов основными
являются требования максимальной простоты, возможности
создания длительного усилия и высокой надежности. Количественные
требования по массе двигателя, создаваемой силе и диапазону
перемещений выходного звена зависят от грузоподъемности ПР.
Масса двигателя должна быть меньше номинального значения
массы объекта (чем больше грузоподъемность, тем меньше должно
быть отношение этих масс), максимальное усилие захватывания
должно в десятки раз превышать вес объекта, а ход выходного
звена должен иметь порядок характерного размера объекта
(последнее требование существенно зависит от того, является ли
схват узко- или широкодиапазонным).! Конкретная формулировка
этих требований приводится в гл. 6, посвященной описанию
методики проектирования схватов цо основным частям. Здесь лишь
для ориентировки укажем, что {усилие на выходном звене
двигателя должно составлять тысячи или сотни ньютонов, а
перемещения (хода) выходного звена — десятки миллиметров.
В целом всей совокупности требований наилучшим образом
удовлетворяют пневмодвигатели. Наибольшее распространение
39
в схватах получили линейные пневмо-
двигатели — пневмоцилиндры, они
применяются более чем в 90 % ПР. Им
свойственна простота конструкции, они
хорошо отработаны и выпускаются
серийно многими предприятиями
различных отраслей машино- и приборострое-
Рис- 4.6 ния./ Кроме того, многие крупные
предприятия имеют большой
накопленный опыт проектирования и выпуска специальных пневмодви-
гателей, в частности встроенных в корпуса узлов машин. [ При
обычных значениях давления сжатого воздуха (0,5 или
1,0 МПа) малые протечки воздуха несущественны, простейшие
уплотнения сводят их к минимуму. Применение фторопластовых
вставок совместно с резиновыми уплотнениями значительно
снижает силы трения и повышает наработку на отказ. Питание
может производиться от собственного насоса или компрессора,
однако чаще всего используется центральная пневмомагистраль.
Быстродействие, определяемое перемещением поршня из одного
крайнего положения в другое, оказывается обычно достаточным
(0,1—0,3 с). Для большей плавности выполнения движений
используются встроенные тормозные устройства. Управление
пневмоприводом схватов, как правило, является цикловым, в
положении зажатия объекта схватом давление в соответствующей
рабочей полости цилиндра поддерживается постоянным, однако
уровень давления иногда можно перестраивать с помощью
редукционных клапанов. Таким образом, в простейших ПР с
пневмоприводом (включая привод схвата) достигается единство типов
двигателей, управления и единообразие конструктивных решений.'
! В устройствах управления пневмоцилиндров применяются
распределители клапанного и золотникового типа с
пневматическим, механическим, пневмомеханическим или
электропневматическим управлением. Распределители могут быть с двух- и
односторонним управлением. Распределители с двухсторонним
управлением «запоминают» положение после снятия управляющего
сигнала, управление может быть импульсным. При
одностороннем управлении положение зависит от наличия или отсутствия
одного управляющего сигнала. Для применяемых чаще всего'
пневмоцилиндров одностороннего действия, у которых одна
рабочая полость, характерно, что движение под действием сжатого
воздуха происходит только в одну сторону, а под действием
возвратной пружины — только в другую, используются
трехходовые распределители, а для пневмоцилиндров двухстороннего
действия с двумя рабочими полостями — четырехходовые)
(соответственно .рис. 4.6, а и б).
Для основных приводов ПР, в первую очередь для приводов
переносных степеней подвижности, пневмоцилиндры являются
длинноходовыми, в то время как пневмоцилиндры схватов обычно
40
короткоходовые. Перемещение поршня в одну сторону (на
раскрытие схвата) осуществляется до крайнего положения, в другую
сторону (на сжатие) — до различных положений, зависящих от
размера захватываемого объекта, эти положения ограничиваются
естественным упором поршня в крышку/ Однако иногда
предусматриваются специальные регулируемые упоры у звеньез
механизма передачи.
Поскольку пневмоцйлиндры схватов обычно короткоходовые,
они часто могут быть заменены на мембранные пневмодвигатели.
Схема мембранного двигателя с распределителем изображена на
рис. 4.7. Как и у пневмоцилиндра одностороннего действия,
рабочая полость здесь только одна, для движения в обратную
сторону используется возвратная пружина. Подвижная часть имеет
центральную жесткую вставку, мембрана выполняется из
материалов, допускающих большие деформации (например, резины
или прорезиненной ткани). Если материал не допускает больших
деформаций (металл), то мембрана выполняется гофрированной.
Обычно коробка и мембрана выполняются круглыми, это дает
более равномерное распределение напряжений в мембране.
Именно изгибными напряжениями ограничивается ход, он может
достигать нескольких десятых от диаметра. Мембранные
двигатели значительно дешевле и проще в изготовлении (не требуется
точной и чистой обработки гильзы пневмоцилиндра и поршня),
исключаются протечки, трение, характерные для поршневых
пневмодвигателей. Однако обычно существенно снижается их
надежность вследствие действующих в мембране больших
напряжений. Кроме того, надежность резиновых мембран сильно
снижается при повышении температуры.
Методы расчета линейных пневмоприводов хорошо и детально
разработаны [12, 53]. При расчете динамики основные трудности
заключаются в учете сжимаемости воздуха и особенности выбора
термодинамической модели (процесс может считаться
изотермическим, адиабатическим или политропическим). На динамику
пневмопривода существенно влияют сопротивление трубопровода,
характеристики распределителей. Однако опыт проектирования и
имеющиеся методики расчета позволяют выбирать параметры так,
чтобы время срабатывания лежало в разумных пределах. Для
приводов схватов основной характеристикой является статическая
сила Q на выходном звене (штоке) пневмодвигателя. Для
пневмоцилиндра
Q = bpF,
где р — статическое давление в полости (в
магистрали); F — площадь поршня; X — коэффициент,
близкий к единице. Для мембранных
пневмодвигателей справедлива та же формула, но
коэффициент X может изменяться в достаточно широких
пределах (0,3 < X < 0,9) в зависимости от парамет- Рис. 4.7
41
ров мембраны. Диаметры цилиндров (поршней) пневмоцилиндров
стандартизованы. ГОСТ 26059—84 устанавливает следующий
параметрический ряд диаметров (мм): 12, 16, 20, 25, 32, 40, 50, 63,
80, 100. Для пневмодвигателей, выпускаемых серийно
специализированными предприятиями, стандартизованы основные
размеры и технические характеристики.
, Имеются случаи применения в схватах поворотных
(ротационных) пластинчатых (лопастных) пневмодвигателей. Они имеют
некоторые преимущества лишь в немногих вариантах конструкций
схватов (например, типа трехкулачкового патрона) и обычно
применяются лишь тогда, когда подобные же двигатели используются
в конструкции манипулятора ПР (в приводах переносных
поворотных и ориентирующих степеней подвижности).
ШФ ^^ feggft
Рис. 4.8
В описаниях изобретений и в статьях имеются многочисленные
предложения по построению двигателей в виде надувных
оболочек. Специальным выбором толщины оболочки по поверхности,
гофрированием части поверхности, наложением каркаса и
расположением нитей корда при подаче давления внутрь оболочки
можно получить разнообразные изменения формы: вытягивание
по продольной оси практически без утолщения (рис. 4.8, а),
изгиб (рис. 4.8, б), кручение (рис. 4.8, в) или их различные
комбинации. Подобные элементы по отдельности или по группам
могут быть использованы как двигатели, приводящие в движение
обычные механизмы схватов, или же могут быть совмещены с
рабочими элементами, непосредственно захватывающими объект.
Имеются сведения о действующих макетных образцах подобных
захватных устройств. Однако в отечественных и зарубежных
серийно выпускаемых ПР такие захватные устройства не
используются, хотя соответствующие способы и устройства предложены
и описаны достаточно давно. По-видимому, имеется много причин:
сложность технологии изготовления, необходимость длительной
отработки с целью повышения надежности, значительное снижение
надежности при повышенной температуре, трудность получения
высокой точности и воспроизводимости положений, ограничения
по силам и перемещениям.
Гидродвигатели, которые широко используются в различных
зажимных приспособлениях станков, так как при малых габаритах
позволяют получать очень большие усилия захватывания, иногда
42
Iftft
используются и в схватах ПР, причем в тех случаях, когда другие
приводы ПР — также гидравлические и имеется насосная
станция. Заметим, что часто ПР с гидроприводом оснащаются
пневматическими схватами. Это объясняется тем, что основное
преимущество гидродвигателя (возможность получения больших сил
при малых габаритах вследствие высокого давления жидкости)
уже несущественно, поскольку при относительно небольших
требуемых силах диаметр цилиндра получается весьма малым.
В то же время проявляются недостатки: высокие требования
к точности изготовления пар, протечки, трудности подвода
жидкости при ее высоком давлении. Поэтому применение
гидродвигателей в схватах доступно только производствам с соответствующей
специализацией. В схватах применяются исключительно объемные
гидродвигатели, чаще всего —линейные, гидро- /Т\__
цилиндры. Вследствие малости требуемой пло- Ц^Г]
щади поршня чаще всего используют
гидродвигатели плунжерного типа как обычной схемы |
(подвижным является плунжер), так и
обращенной (подвижным является цилиндр). Известны
также случаи применения в схватах поворот- "ИСв 4#9
ных пластинчатых гидродвигателей.
Для ПР с электроприводом чаще всего применяются схваты
с пневмодвигателями, однако определенные преимущества может
дать использование электродвигателей. Вопросы проектирования
схватов с электродвигателями обсуждаются в гл. 6.
В качестве двигателей, приводящих в движение механизмы
схватов и создающих усилие захватывания, могут быть
использованы электромагниты. Одна из простейших схем таких
двигателей изображена на рис. 4.9. Сжатие схвата происходит при
подаче напряжения на обмотку электромагнита, раскрытие — под
действием пружины. Предложено много различных вариантов
схватов с электромагнитами, различающихся конфигурацией
магнитопроводов, распределением зазоров между полюсами, чис-
лом и расположением обмоток. Основные недостатки схватов
с электромагнитами связаны с сильной зависимостью предельно
допустимых значений приложенных сил или моментов от зазора
в зоне контакта с объектом. Достаточно большие усилия
захватывания могут быть достигнуты только при малых зазорах,
поэтому схват рассматриваемого типа может быть только
узкодиапазонным. При раскрытии схвата усилие быстро уменьшается,
поэтому для надежности срабатывания схвата его предельное
раскрытие должно быть ограничено, т. е. ход должен быть малым.
Сочетание противоречивых требований существенно ограничивает
возможности применения схватов с электромагнитами. Методика
расчета таких схватов разработана М. Г. Лямпертом [51].
Во всех описанных устройствах один и тот же двигатель
используется для перемещения рабочих элементов и для создания
усилия захватывания. Однако возможно разделение этих функций.
43
В схеме (рис. 4.10) перемещение рабочего элемента осуществляется
электродвигателем через винтовую передачу, после захватывания
объектл электродвигатель отключается, усилие создается
поджатой пружиной, а сохранение этого
усилия обеспечивается
самоторможением передачи. На рис. 4.11, а
изображена схема схвата, в котором
подвижный якорь 1 может
притягиваться к электромагнитам 2 или 3.
В первом случае схват раскрывается,
во втором — сжимается, причем в
этом состоянии усилие захватывания создается поджатыми
пружинами. Рычаг перебрасывается при включении
электромагнитов (рис. 4.11, б) 1 или 2, а удерживается постоянными ма-
Рис. 4.10
Рис. 4.11
гнитами 3 или 4 (в сжатом состоянии должен быть зазор, чтобы
создать усилие захватывания). Все перечисленные схваты могут
быть только узкодиапазонными, но их достоинством является то,
что сохранение усилия захватывания создается пассивными
средствами и это состояние сохраняется неограниченно долго.
4.3. МЕХАНИЗМЫ ПЕРЕДАЧИ СХВАТОВ
Как отмечалось в п. 4.1, механизм передачи и преобразования
движений и усилий предназначается для передачи движения от
выходного звена двигателя к звеньям механизма, несущим
рабочие элементы, с возможным преобразованием вида движения
(например, вращательного в поступательное или наоборот), с
изменением усилий и направлений перемещений. Число описаниях
в литературе схем механизмов передачи схватов исчисляется
сотнями, на практике используется несколько десятков. В этой
книге принят следующий принцип представления многообразия
схем механизмов схватов: описывается последовательность
приемов видоизменения и усложнения схем, которые иллюстрируются
конкретными примерами, обсуждаются преимущества и
недостатки как самих схем, так и схватов, выполняемых по этим
схемам. Каждый из приемов иллюстрируется на минимальном числе
схем, поэтому рассматривается в общей сложности небольшое
число возможных сочетаний приемов; при этом преимущество от-
44
дается схемам, нашедшим более широкое применение. Для
каждой из схем анализируются достоинства и недостатки,
проявляющиеся как при изготовлении схватов по этим схемам, так и при
эксплуатации. Рассматриваются почти исключительно механизмы
с жесткими звеньями. В большинстве схем в качестве двигателя
используется пневмоцилиндр (он чаще всего применяется на
практике), некоторые схемы предполагают использование
вращательного двигателя (электродвигателя или пневмодвигателя). Схемы
сначала группируются по видам механизмов: прямая передача,
шарнирные, ползунные, кулисные механизмы, зубчатые и
винтовые передачи. Схемы комбинированных механизмов схватов
не выделяются в самостоятельную группу, а разнесены по
группам простых механизмов. Большинство составляют схемы
плоских механизмов с одним двигателем и одной степенью свободы,
они чаще всего используются для захватывания призматических
(любого сечения) и плоских объектов, при длинномерных объектах
они обеспечивают захватывание одного сечения. Механизмы с
несколькими степенями свободы и пространственные механизмы
представлены немногими примерами. На практике чаще всего
используются механизмы с двумя выходными звеньями,
симметрично расположенными и симметрично перемещающимися
относительно средней плоскости, однако приводятся также и схемы с
несимметричным движением выходных звеньев. Для всех схем
место крепления схвата к руке ПР предполагается слева,
ориентация схвата соответствует случаям, чаще всего встречающимся
на практике, однако нередко схемы работают в повернутом
положении (не в горизонтальном, а в вертикальном).
Простейшими являются схемы (рис. 4.12, а, б) с прямой
передачей, в которых единственный подвижный рабочий элемент
жестко связан со штоком пневмоцилиндра и поэтому перемещается
по его оси. Введение объекта в зону между рабочими элементами
(рис. 4.12, а) осуществляется вертикальным движением по оси z,
а в схеме (рис. 4.12, б) — горизонтальным движением по оси у
(цилиндрические объекты захватываются с торца). Схваты,
выполняемые по обеим схемам, могут иметь малые габаритные
размеры, особенно по оси z. Одним из недостатков схемы, приведенной
на рис. 4.12, а, является нагруженность штока поперечной
силой.
В схеме, приведенной на рис. 4.12, в, с простейшим шарнир-
но-рычажным механизмом осуществляется преобразование
линейного горизонтального движения штока во вращательное
движение верхнего рабочего элемента. Введение объекта в зону
между рабочими элементами осуществляется горизонтальным
движением по оси х (обычно выдвижением руки). Схема, приведенная
на рис. 4.12, б, обычно дает существенно большие габаритные
размеры схвата, чем две предыдущие. Схема (рис. 4.12, г) имеет
две характерные особенности: цилиндр вкомпонован в механизм
и является качающимся. Расположение цилиндра внутри меха-
46
а)
Кит?
Ць "ггь.
д)
I х
$&
е)
ЩЕЙ Lb Шг
га^5 ^К
^^jV:] нЦбч
Рис. 4.12
46
низма позволяет сократить размер по продольной оси х (при
заданной длине вращающего рычага). Применение качающегося
цилиндра упрощает схему, но ограничивает возможность
изменения параметров при конструировании и обычно приводит
к снижению надежности (в частности, вследствие использования
гибких трубопроводов). Все схемы, кроме приведенной на рис.
4.12, г, имеют неподвижные цилиндры, что чаще всего встречается
на практике. Четыре схемы (рис. 4.12, а, б, в, г) имеют один
подвижный рабочий элемент, из них симметричной является только
схема на рис. 4.12, б. Последующие схемы являются
симметричными, за исключением вариантов, отмеченных особо.
На рис. 4.12, <Э, е> ж, з изображены очень распространенные
схемы клещевых схватов, в которых выходные звенья вращаются
симметрично относительно оси х вокруг неподвижных осей в
противоположные стороны. Все эти схемы выполнены так, чтобы
сжатие схвата осуществлялось при подаче давления в левую
полость пневмоцилиндра, не имеющую штока. В схемах,
приведенных на рис. 4.12, ^ие, используются рычаги второго рода,
цилиндр может быть вкомпонован в механизм (рис. 4.12, д), этим
достигается сокращение размеров схвата по оси х. Но увеличение
диапазона раскрытия требует увеличения размеров по оси х.
В схемах на рис. 4.12, ж и з используются рычаги первого рода,
в схеме, показанной на рис. 4.12, з, коромысла имеют большую
длину, за счет чего происходит большее раскрытие при тех же
габаритных размерах схвата. Общим недостатком клещевых
схватов является вращение рычагов, при жестком закреплении на
них рабочих элементов не может быть обеспечено захватывание
плоских предметов различной толщины, поэтому клещевые схваты
чаще используются для захватывания цилиндрических объектов..
В схемах, приведенных на рис. 4.12, и и /с, выходные звенья
совершают поступательное движение без вращения, поэтому
плоскости рабочих элементов, установленные первоначально
параллельно друг другу, остаются параллельными и схват
оказывается приспособленным для захватывания объектов за
параллельные плоскости. Параллельность обеспечивается входящими в
схемы параллелограммными механизмами. В схеме рис. 4.12, и
точки выходных звеньев и рабочих элементов перемещаются по
окружностям; смещение рабочих элементов по оси х иногда
считается существенным недостатком. Этого недостатка лишена схема
на рис. 4.12, /с, здесь рабочие элементы перемещаются
прямолинейно по оси г. Схемы с параллелограммными механизмами
сложны, но достаточно часто используются в реальных конструкциях.
Имеется большое число различных вариантов таких схем,
различающихся расположением параллелограммов и их вершин.
Механизм на рис. 4.12, л построен по той же схеме, что и
механизм, приведенный на рис. 4.12, к, но условие равенства плеч
рычагов не соблюдается, поэтому перемещение рабочих элементов
не является прямолинейным. Тем не менее перемещения можно
47
получить близкими к прямолинейным для не очень широкого
диапазона раскрытия схвата; для этого должно быть выполнено
условие: a cos P «с cos а. При малых углах аир отсюда
получается требуемое соотношение между длинами плеч Ь2 = ас.
За счет уменьшения длины а рычагов механизм может быть более
компактным.
Перемещения, близкие к поступательным, могут быть получены
при применении шарнирных четырехзвенников, отличающихся
от параллелограммов. Механизм, изображенный на рис. 4.12, м,
построен по той же схеме, что и механизм на рис. 4.12, и, но
внешние рычаги четырехзвенников выполнены короче. Для
изображенного положения, в котором рычаги параллельны,
перемещения рабочих элементов в узких диапазонах раскрытия близки
к поступательным (но в данной схеме — не к прямолинейным).
При дальнейшем раскрытии рабочие элементы поворачиваются,
увеличивая вход в схват и облегчая захватывание.
При совместной постановке требований на наилучшее
приближение в определенных диапазонах к прямолинейному
перемещению, перпендикулярному к продольной оси, к поступательному
движению могут быть сформулированы задачи синтеза
механизмов (при этом необходим учет также и других требований). Из
шарнирных механизмов последней приведена схема (рис. 4.12, «),
в. которой один механизм присоединен к другому. Необходимость
такого соединения состоит в том, что при подходящем выборе
параметров может быть получено очень широкое раскрытие рабочих
элементов, необходимое в некоторых случаях. Рабочие элементы
вращаются вместе с рычагами, как у обычного клещевого схвата.
Все рассмотренные шарнирные механизмы имеют только
вращательные пары, поэтому они просты в изготовлении, что особенно
важно при доделке и модернизации схватов по месту работы
роботов. Увеличенные зазоры и погрешности сопрягаемых
поверхностей несущественно сказываются на стабильности положения
объекта, поскольку при захватывании зазоры выбираются в одну
сторону; при правильном выборе параметров и ограничении
перемещений и углов поворота звеньев заклинивание и застревание
объекта практически исключаются.
В схеме, приведенной на рис. 4.12, о, имеется пара,
допускающая перемещение и вращение. Параллельность выходных звеньев
обеспечивается параллелограммными механизмами,
расположенными иначе, чем в схемах на рис. 4.12, и, к. При сжатии схвата
рабочие элементы перемещаются прямолинейно по оси z, схема
приспособлена для захватывания объекта изнутри. В схватах
иногда используются иные шарнирные четырехзвенники, чем
параллелограммные механизмы. На рис. 4.12, г изображена
схема с антипараллелограммными механизмами. Высказываются
мнения, что подобные механизмы позволяют получать более
широкое раскрытие схватов, однако преимущества подобных схем
с шарнирными четырехзвенниками (они часто встречаются в ли-
48
тературе и редко применяются на практике) по сравнению с
простейшими схемами (рис. 4.12, ж или з) неясны.
Достаточно распространенной является схема (рис. 4.12, р)
с двумя ползунами, перемещающимися по одной или двум
параллельным направляющим. При простоте схемы изготовление пар
скольжения может представить определенные трудности, особенно
при жестких ограничениях на габаритные размеры по оси z.
На большинстве схем рычаги шарнирно-рычажных механизмов
для единообразия изображались прямыми. Однако в реальных
конструкциях обычно оси шарниров не лежат на одной прямой
и рычаги выполняются ломаными или криволинейными. Так,
варианты схемы на рис. 4.12, д могут иметь такой вид, как
показано на рис. 14.12, с, т. Соответственно изменяются и элементы
конструкций механизмов схватов. Смещения осей шарниров
позволяют улучшать компоновку, изменять передаточные отношения
и увеличивать или уменьшать границы диапазона раскрытия
схвата при тех же длинах плеч рычагов*
Схема на рис. 4.13, а изображает вариант клещевого схвата,
она часто используется, однако высокая надежность захватывания
обеспечивается только при достаточно точном выполнении
конструкций кинематических пар. На рис. 4.13, виг изображены два
варианта схемы клещевого схвата с кулисным механизмом.
Выбором профиля кулис можно формировать требуемые зависимости
усилия захватывания от раскрытия схвата. В схеме, приведенной
на рис. 4.13, б кулисы перемещаются поступательно. В схеме
(рис. 4.13, д) используется кулачковый (клиновой) механизм,
выбором профиля кулачка можно изменять как вид упомянутой
зависимости, так и направление перемещения рабочих элементов
при одном и том же направлении перемещения штока. На
рис. 4.13, е изображена схема схвата с упругими пластинчатыми
пружинами; предложено и описано большое число схем схватов
с гибкими и упругими элементами, однако они находят весьма
ограниченное применение и только при захватывании очень легких
предметов.
В последующих схемах используются зубчатые передачи.
На рис. 4.13, ж представлена схема клещевого схвата с реечной
передачей. Важным отличием ее от похожей схемы (рис. 4.12, ж)
шарнирного механизма является то, что при реечной передаче
может быть получено произвольно большое раскрытие схвата.
Поступательное перемещение рабочих элементов достигается в
схеме (рис. 4.13, з) с параллелограммными механизмами,
расположенными так же, как и в схеме, приведенной на рис. 4.12, и.
Широкий диапазон изменения диаметров захватываемого
кругового сечения может быть получен в схеме несимметричного
механизма (рис. 4.13, и). Чтобы при изменении диаметра положение
центра сечения изменялось незначительно, углы поворота
рычагов должны быть различными, т. е. зубчатые колеса должны иметь
различные числа зубьев. Реечная передача может быть исполь-
49
зована в схватах в обратном направлении, как в схеме
(рис. 4.13, /с), в которой используется вращательный двигатель
(в чтстности, электродвигатель) и осуществляется преобразова-
Рис. 4.13
ние вращательного движения в прямолинейное поступательное.
При применении электродвигателя обычно требуется
дополнительная редукция. Цилиндрическая зубчатая передача исполь-
60
зуется в схеме, приведенной на рис. 4.13, л, коническая — в схеме,
приведенной на рис. 4.13, м. Обе схемы клещевых схватов также
обычно предполагают дополнительную редукцию. Во всех схемах
с зубчатыми передачами может быть предусмотрена смена
шестерен с изменением передаточных чисел, конструктивно это проще
всего делается на первых ступенях редукторов. Схваты с
зубчатыми передачами обычно используются в тех роботах, в которых
зубчатые передачи входят в4 состав механизмов переносных и
ориентирующих степеней подвижности, что чаще всего бывает
в роботах с электроприводом.
В схеме (рис. 4.13, н) клещевого схвата используется
червячная передача, достоинствами которой являются большое
передаточное число и возможность обойтись без дополнительной
редукции. Если передача обладает свойством самоторможения, то
появляется возможность удерживания объекта при снятии
момента с двигателя (применительно к электродвигателю — при его
отключении), что может быть очень важным при относительно
большой длительности интервалов удерживания объекта. В схеме
(рис. 4.13, о) с двумя ползунами используется винтовая
передача. Для получения симметричного перемещения двух рабочих
элементов половины ходового винта имеют правую и левую резьбы.
Схема обладает существенными преимуществами, когда
необходимы весьма большие значения ходов (например, при
захватывании с торцов валов различной длины). Если имеет место
самоторможение, то для винтовой передачи характерны те же особенности,
что и для червячной. Отметим, что быстродействие схватов с
винтовыми и червячными передачами обычно оказывается низким,
что ограничивает их применение.
Для захватывания сечений призматических (в частности,
цилиндрических) объектов иногда используются схваты с числом
подвижных рабочих элементов, большим двух. Такая схема
представлена на рис. 4.13, п. По существу эта схема объединяет схемы,
приведенные на рис. 4.12, б и е. В результате объединения
обеспечивается перекрытие несколько большего диапазона допусти^
мых изменений диаметра объекта. Более широкие возможности
открываются при предоставлении элементам механизма схвата
дополнительных степеней свободы, для чего некоторые
неподвижные соединения заменяются подвижными, в частности
шарнирами. В схеме рис. 4.13, р, полученной из схемы рис. 4.12, е
введение*м дополнительных шарниров в точках Л, В и С,
добавляется три лишних степени свободы. В результате достигается
способность схвата надежно фиксировать прямоугольное (или
трапецеидальное, близкое к прямоугольному) сечение при
достаточно больших (но ограниченных) линейных и угловых
рассогласованиях схвата с зажимным устройством, из которого
захватывается объект. Схват с дополнительными степенями свободы не
обеспечивает базирования объекта в положении, не зависящем от
начального рассогласования; удерживание объекта осуществля-
61
ется в том положении, в котором произошло захватывание. При
этом фиксирование осуществляется за счет сил трения по
поверхностям контакта. Несущая способность схватов с
дополнительными степенями свободы оказывается ниже, чем схватов,
выполненных по исходным схемам. Чтобы исключить нежелательные
смещения звеньев и фиксировать их положение в средних
положениях в свободном состоянии (при отсутствии объекта), в
шарнирах ставятся упругие элементы (они могут устанавливаться с
первоначальным натягом).
Схема схвата с одной дополнительной степенью свободы
изображена на рис. 4.13, с (ее прототипом является схема
рис. 4.12, и). Наличие шарнирных параллелограммов
обеспечивает поступательное движение рабочих элементов. Шарнир на
штоке пневмоцилиндра позволяет рабочим элементам
согласованно вмещаться вверх или вниз, пока объект не захвачен; после
зажатия объекта его положение оказывается фиксированным за
счет сил трения. Другая схема с одной дополнительной степенью
свободы представлена на рис. 4.13, т. Ее основной особенностью
является конический дифференциал, через который вращаются
ходовые винты. Поступательное и прямолинейное движение
рабочих элементов достигаются с помощью ползунов,
дифференциал позволяет фиксировать объект в любом положении в
пределах диапазона, фиксирование обеспечивается заклиниванием
винтовой передачи.
Вопросы методики исследования схватов с дополнительными
степенями свободы подробно обсуждаются в п. 9.2. Здесь лишь
отметим, что введение дополнительных степеней свободы в
механизмы схватов является одним из средств приспособления схвата
к объекту. Большинство механизмов схватов строится так, чтобы
приводить объект к положению, задаваемому схватом. Последние
примеры иллюстрируют противоположную тенденцию —
приведение рабочих элементов к положению, задаваемому объектом.
Сложность схемных и конструктивных решений при реализации
этой задачи заключается в том, что во время захватывания рабочие
элементы должны свободно смещаться под действием реакций
со стороны объекта, но в конечном положении объект должен быть
жестко фиксированным. Базирование при этом следует считать
нежестким, переменным.
Следующие четыре схемы (рис. 4.14, а, б, в, г) обеспечивают
захватывание двух сечений объектов различных размеров и,
возможно, форм.
В схеме, приведенной на рис. 4.14, а, введена лишняя степень
свободы: поворот вокруг оси верхнего рычага. За счет этого
обычная схема клещевого схвата приобретает свойства удерживания
двух сечений различных размеров при одном двигателе (на схеме
не показан). Новое подвижное соединение выполняет роль
дифференциала. Существенным недостатком схемы является
несимметричность механизма относительно средней плоскости при раз-
62
личии размеров сечений. Симметрия может быть получена за счет
усложнения механизма. В схеме (рис. 4.14, б) двойного
клещевого схвата предполагается два независимых двигателя (на схеме
не показаны). Наличие двух двигателей делает схему более
гибкой, но снижает надежность схвата. Схемы схватов с двумя и
более двигателями практически используются в двух основных
вариантах: когда они работают на одно выходное звено (замена
одного двигателя несколькими, работающими параллельно, обычно
невыгодна, но иногда имеет смысл по соображениям удобства
компоновки) и когда они через механизм не связаны (при этом
механизм в целом может быть разделен на части, каждая из которых
Рис. 4.14
решает свою задачу: фиксирование одного сечения, базирование
по одной координате или по некоторым из координат).
В качестве примера на рис. 4.14, д приведена схема схвата
с двумя независимыми приводами. Схват осуществляет независимое
базирование и фиксирование по двум ортогональным базам. По
существу такой схват представляет собой совмещение в одной
конструкции двух независимых простейших схватов.
Из пространственных механизмов схватов выделяется группа
трехэлементных схватов с осесимметричным перемещением
рабочих элементов типа трехкулачкового патрона. Отметим, что
большинство схем плоских механизмов, в которых рабочие элементы
перемещаются поступательно, может быть трансформировано
в осесимметричные трехэлементные схемы. Это относится к
схемам, приведенным на рис. 4.12, и, к, /?, 4.13, d, e и др.
Половина любой такой схемы разворачивается вокруг оси в три
положения, так что углы между плоскостями составляют 120°. В
частности, из схемы рис. 4.13, е получается обычная цанговая головка
для захватывания деталей типа тел вращения снаружи. Вообще,
все схваты рассматриваемой группы приспособлены для
захватывания- объекта за цилиндрические поверхности (снаружи или
изнутри) с торца, когда только подход с торца остается свободным
53
или когда высота значительно меньше диаметра (втулки, кольца)
Имеются также осесимметричные трехэлементные схемы, которые
не имеют аналогов в плоских механизмах. В схеме, приведенной на
рис. 4.14, в, используется зубчатая цилиндрическая передача,
двигатель вращательный (в частности, электродвигатель). Эта
схема проста, компактна, обеспечивает широкий диапазон
раскрытия схвата, но на ее основе трудно обеспечить высокую жест-
кость. В схеме (рис. 4.14, г) сначала используется передача гайка—
винт, а затем — такая же цилиндрическая зубчатая передача,
как и в предыдущей схеме. Чтобы схват надежно работал, шаг
нарезки должен быть достаточно большим. Компактность
конструкции может быть получена, если совместить винтовую передачу
с поршнем и штоком.
Для определения взаимодействия рабочих элементов схвата
с объектом важно движение последних звеньев механизма, не-
HTF
£r&B=mJ
Рис. 4.15
н
__rfpsL7_
^**V~~^7^v—
^"^f A
Рис. 4.16
сущих эти элементы. Как видно из приведенного обзора схем,
реализуются только три основных варианта движений:
прямолинейное поступательное, вращательное поступательное при
движении всех точек по одинаковым окружностям и вращательное
вокруг неподвижной точки. Лишь в очень немногих схемах
имеется иной тип движения, которое совершает шатун четырехзвен-
ного механизма; как отмечалось выше, четырехзвенники,
отличающиеся от параллелограммов, встречаются в схемах схватов
достаточно редко.
Имеются многочисленные предложения по введению в
механизмы схватов гибких элементов. При этом могут преследоваться
разные цели. Гибкие звенья, работающие только на растяжение,
могут использоваться для передачи усилий и движения вместо
рычагов. Это имеет смысл в тех случаях, когда велики или
размеры схвата, или расстояния от двигателя до схвата, так что при
таких длинах рычаги не могут работать не только на изгиб, но и
на сжатие, и цепи или тросы оказываются вполне приемлемыми.
Недостатки гибких звеньев при больших длинах общеизвестны:
необходимо обеспечивать их постоянное натяжение, механизмы
плохо работают при больших ускорениях в динамике. Одна из
простейших схем, в которой используются тросы, изображена на
рис. 4.15.
Предложены также схемы механизмов, в которых
используются гибкие упругие ленты, работающие на изгиб. Такие ленты
64
позволяют объединять функции механизма передачи движения
и рабочих элементов. Выбором формы таких упругих элементов
достигается приспособление к форме захватываемых объектов.
Два варианта таких схем изображены на рис. 4.16, а и б.
Достоинством является простота конструкции: одна стальная лента
заменяет целый механизм с рабочими элементами. Однако
подобные схваты ненадежны, низка их несущая способность, могут
быть большими погрешности позиционирования, при
изготовлении пружин трудно получить стабильность их размеров и
характеристик. Поэтому подобные схваты на практике распространения
не получили.
4.4. ПЕРЕДАТОЧНОЕ ОТНОШЕНИЕ МЕХАНИЗМА ПЕРЕДАЧИ
И УСИЛИЕ ЗАХВАТЫВАНИЯ
По отношению к основной задаче схвата — удерживанию
захваченного объекта — механизм передачи рассматривается как
средство преобразования усилия Q, развиваемого двигателем
привода, в усилие захватывания. Понятие усилия захватывания
кажется элементарно простым; в ряде нормативно-технических
документов усилие захн.-нывания определяется как сила, с которой
рабочие элементы схвата воздействуют на захваченный объект.
Однако такое определение очень приблизительно. Это недопустимо,
поскольку усилие захватывания является важнейшим
показателем схвата, оно включается в паспортные данные ПР, его
необходимо измерять и контролировать. Определять усилие
захватывания через силы взаимодействия рабочих элементов с объектом
без уточнений нельзя, поскольку для различных объектов точки
контакта с рабочими элементами различны, а силы взаимодействия
зависят от этих точек. Эту принципиальную трудность нельзя
устранить, следует лишь так оговорить условия, чтобы усилие
захватывания стало вполне определенным.
Рассмотрим плоский механизм схвата. На каждом из рабочих
элементов отметим по одной точке (на рис. 4.17, а точки Аг и Л2),
вставим между этими точками шарнирно-опертый прямолинейный
стержень. Усилие сжатия этого стержня при действии усилия
двигателя привода определим как усилие захватывания.
Очевидно, что это усилие будет зависеть от положения обеих выбран-
65
ных точек на рабочих элементах, поэтому их координаты должны
быть заданы. Если рабочие элементы симметричны и
перемещаются симметрично относительно оси х (см. рис. 4.17, б), то обе
точки целесообразно выбрать симметричными относительно этой
оси. Если же схват плоскопараллельный (поверхности обоих
рабочих элементов плоские и они остаются параллельными друг
ДРУГУ)» то целесообразно выбрать точки Ах и А2 на общей
нормали к этим поверхностям. При симметричных механизмах схвата
и расположении рабочих элементов (рис. 4.17, в) такой выбор
точек очевиден, если же рабочие элементы расположены
несимметрично (рис. 4.17, г), то такой выбор положения точек уже
неочевиден. Отметим, что после задания положения точек Аг и А2
измерение и контроль усилия захватывания становятся
определенными: датчик силы следует помещать между теми же точками.
Введем в рассмотрение параметр h раскрытия схвата,
определяемый как расстояние между точками Вх и 52, которые могут
занимать фиксированное положение на рабочих элементах, но
могут и перемещаться относительно них. Так, для клещевого
схвата (рис. 4.17, д) параметр h может быть введен для вершин
уголков (Ви В2) или для нормали, отстоящей от точки О на
фиксированном расстоянии L (Si, B£. Соответственно при разных
значениях параметра раскрытия h различным может быть и
положение точек Вх и В2 на поверхностях рабочих элементов. При
любом способе выбора пар точек Аг и Л2, Вх и В2 расстояние s
между точками Аг и А2 может быть получено как функция
параметра раскрытия Л, т. е. s = s (h).
В пренебрежении потерями в механизме усилия
захватывания S может быть выражено через усилие двигателя Q исходя из
условия обращения в нуль обобщенной силы в положении
статического равновесия. Предположим, что двигатель является
линейным, перемещение его выходного звена обозначим через /.
Тогда будем иметь
Q6/+S-g-6s = 0. (4.1)
с _ л ^ ds _ п I dl
Отсюда получаем общее выражение для усилия захватывания
= tt ds
ds dh ~~ ^ I ds
В частном случае, когда точки Аг и Bl9 А2 и В2 соответственно
совпадают, будем иметь
dl
S = Q
dh
Передаточное число (передаточное отношение)
*(Л) =
зависит от параметра раскрытия Л
ds
dh
56
Рассмотрим теперь случай захватывания объекта
произвольной формы, предполагая, что контакт объекта с рабочими
элементами происходит в дискретных точках. Обозначим через rt
радиусы-векторы точек контакта, через Rt — реакции объекта,
действующие на рабочие элементы в точках контакта. Тогда
уравнение равновесия, аналогичное (4.1), будет иметь вид
Qbl + 2 R,ar, = 0.
Выразив Q через S, окончательно получим следующее линейное
уравнение связи реакций с усилием захватывания:
п
*■*-*
/=1
В сокращенной записи это уравнение приобретает вид
Sei(*)*i = S. (4.2)
Рассмотрим важные частные случаи взаимодействия объекта
с рабочими элементами схвата.
1. Один из рабочих элементов схват-а (верхний) подвижен, а
другой (нижний) — неподвижен (жестко связан с основанием
схвата). Тогда вместо вида (4.2) уравнение записывается как:
i
где суммирование распространяется только на точки контакта
объекта с подвижным рабочим элементом.
2. Объект, рабочие элементы схвата и точки контакта
симметричны относительно оси х, рабочие элементы перемещаются
симметрично относительно той же оси. Тогда уравнение
равновесия записывается в виде
Ea,(A)/?ll)=(l/2)S,
i
где суммирование распространяется на точки контакта с одним
рабочим элементом (для единообразия можно считать, что с
верхним).
3. Рабочие элементы перемещаются поступательно,
симметрично относительно оси х, в силу симметрии их относительное
перемещение происходит по оси' у (совместно они могут также
перемещаться по оси х). Расположение точек контакта произвольно,
возможно, несимметрично. Тогда уравнения равновесия
записываются в виде
I] /?incos(-yT>i,,)+ 2 *i5'cos(OH = S. (4.2)
i i
57
В первой сумме, относящейся к верхнему рабочему элементу,
множителями являются косинусы углов между направлением
относительного перемещения этого элемента (это направление
противоположно оси у) и соответствующей реакцией Ril). Во второй
сумме, относящейся к нижнему рабочему элементу, множителями
являются косинусы углов между направлением оси у и
соответствующей реакцией Ri2'. При такой записи уравнения все
множители являются положительными.
4. Схват является плоскопараллельным, плоские рабочие
элементы перемещаются симметрично по оси у. Уравнение
равновесия записывается в виде
i
где Nt—нормальные составляющие реакций.
Рассмотрение случаев 3 и 4 упрощается благодаря тому, что
в уравнения равновесия входят только параметры ориентации
реакций, а от координат точек ничего не- зависит. Кроме того,
в этих случаях усилие захватывания всегда определяется
единообразно (точки Аг и А2 выбираются друг против друга в любом
месте). Случай 3 является частным, однако уравнение
равновесия (4.3) практически можно использо-
j вать не только при поступательном
перемещении рабочих элементов, а и когда
1 расстояния между точками контакта зна-
2 чительно меньше, чем их расстояния от
них до точек поворота последних звеньев.
Поэтому уравнение (4.3), рассматривае-
JL мое как точное или приближенное, пре-
hz имущественно используется в дальнейшем.
Заметим, что использование
уравнения статики механизма имеет смысл
тогда, когда реализуется второй принцип удерживания, т. е.
удерживание объекта в схвате осуществляется за счет его
зажима. Кроме того, предполагается, что механизм схвата
является обратимым и его коэффициент полезного действия близок
к единице. Как отмечалось выше, при постоянном усилии на
выходном звене двигателя усилие захватывания к общем случае
зависит от параметра раскрытия схвата. Зависимость усилия
захватывания S от параметра раскрытия схвата h обычно является
монотонной, одним механизмам свойственна возрастающая
зависимость вида 7, другим — убывающая вида 2 (рис. 4.18). Для
некоторых схем имеет место независимость усилия захватывания
от параметра раскрытия (прямая 5), имеется несколько схем,
для которых получается немонотонная зависимость вида 4. Для
некоторых конкретных схем зависимости усилия захватывания от
параметра раскрытия рассчитаны, соответствующие аналитические
Еыражения и графики приведены в табл. 4.2.
R
68
Таблица 4.2
ЛЬ
п/п
Кинематическая
схема
Усилие захватывания S
и параметр раскрытия К
Графики зависимости S
от углов а и ф
Графики зависимости h
от углов а и \|)
А 25
5 =
Q 1г cos (a + ^)
2 /2 sin а
Л = а + /2 sin t|>
f f *
5 = 4тгсо^
h = а + /2 sin ф
/7 Ж я &
иг
5 = -
Ji sin (a + t|))
я|> = arcsin
/х + /2 cos а
/s sin а — а
h
L^
lr-l
4r-~-
k = a + (lx + /2) sin \|)
0arcsin & к ct,
k 2
a
0 % z_ ф
4 2
Q lt sin (a -f1|)) costft
2
sintj) =
(/i + /2) cos а
/8 sin а + а
П = a-+ (/i + /2) sin \|) — /4
О Л 7£ а
k 2
h
О й £ Ф
2 4 r
о
Продолжение табл. 4.2
п/п
Кинематическая
схема
Усилие захватывания 5
и параметр раскрытия h
Графики зависимости S
от углов а и "ф
Графики зависимости h
от углов а и oj)
5 =
Qa
2/2 sin а
п 71 п <t
1 2
a+2U
О к % а,
v4 2
S = Q tg а/2
h = 1г sin а
4=5
S = const (/i)
а
S = Q tg а/2
h = lx sin а
Продолжение табл.4.2
п/п
Кинематическая
схема
Усилие захватывания S
и параметр раскрытия h
Графики зависимости S
от углов а и \|)
Графики зависимости h
от углов а и ф
М
т 25
S= Q/2
10
o_Q [ /1sin(a4-^)
2 \Yi\ + Ч — Uih sine'
cos a
sin*4) =
/3 sin a — a
2SYF2cosG
h = a — /x sin i|> + /2 sin (\|> + 6)
arcstna/un_ a,
lf*l2-l 2
11
5= Q Г /iSln(a + 4>) _ 1 1
2 L//I4-/5-2/X/2COS6 cosaj
\zm-2cosQ
sin i|) =
cosG cos<
/ + /ssina
/1
Q
/
h~ a — lx sin ф + /2 sin (ф + О)
0 % a
12
S =
Q sin(a + 4>) lx
2 cos a /o
* 2J
4
sin a
sin i|> = -—-sir
n
h = a + /2 sin (0 + i|>)
0 ;г ос
Изменение передаточного числа и усилия захватывания при
раскрытии схвата обычно происходит за счет изменения углов
между осями звеньев. Обычно изменение усилия захватывания
при раскрытии схвата рассматривается как нежелательный факт;
для уменьшения диапазона изменения ограничивают диапазоны
изменения углов. Так, для клещевых схватов углы поворота
рычагов обычно ограничиваются значениями от ±10 до ±20°. В
соответствии с этим при заданном перемещении каждого из рабочих
элементов на величину (1/2) Л0 расстояние его середины до оси
вращения должно быть не менее 3h0 или 2Л0. Тем самым
определяются габаритные размеры схвата по оси х. Для схем,
приведенных на рис. 4.12, д, е, ж, з, аналогичные ограничения на углы
поворота рычагов, непосредственно передающих движение от
штока пневмо цилиндр а, определяют габаритные размеры по
оси z.
4.5. СХЕМЫ МНОГООБЪЕКТНЫХ СХВАТОВ
Многообъектные (многопредметные, многопозициоиные) схваты
предназначаются для захватывания и одновременного
удерживания нескольких объектов. Как правило, многообъектные схваты
являются узкоспециализированными, они приспособлены для
захватывания вполне определенных одинаковых объектов,
ориентированных определенным образом. Установка на ПР
многообъектных схватов преследует цель повышения
производительности участков или уменьшения простоев оборудования. Так,
при загрузке тары деталями, поступающими по конвейеру,
допустимый темп ограничивается временем цикла ПР; захватывание
сразу нескольких деталей позволяет заполнять тару за меньшее
число циклов, т. е. за меньшее время. В тех случаях, когда нужно
установить несколько заготовок для одновременной обработки
(например, шлифования) или обжига, многообъектный схват
позволит значительно сократить простои оборудования.
К многообъектному схвату предъявляются те же требования,
что и к обычному, а также специфические требования,
определяемые характером поступления объектов на позиции захватывания
и их относительным размещением. Чаще встречается ситуация,
когда перед захватыванием все объекты находятся на
фиксированных позициях и ориентированы, как это требуется. При этом
захватывание всех объектов может производиться одновременно.
Однако иногда объекты поступают последовательно (например,
по конвейеру). Тогда можно пойти по двум путям: или
накапливать поступающие объекты (при этом схват будет выполнять также
функции накопителя), или захватывать их поочередно по мере
поступления. В дальнейшем предполагается, что перед
захватыванием все объекты находятся на своих позициях.
Размещение объектов характеризуется плотностью
прилегания (разреженностью) и конфигурацией пачки. При п/отном раз-
62
мещении объекты прилегают друг к другу, если они касаются
по плоскостям (например, диски или параллелепипеды), то их
совокупность образует компактную пачку, которая может
рассматриваться как самостоятельный целый объект, допускающий
относительное смещение своих частей. При разреженной расстановке
объектов их следует рассматривать отдельно. Обычно при
захватывании совокупности объектов стремятся сохранить их
относительное положение, заданное перед захватыванием, или
осуществить их выравнивание, однако иногда от схвата требуется, чтобы
он перемещал объекты или в сторону компактной группировки,
или в сторону большего разреживания.
Конфигурации совокупностей объектов обычно выбираются
правильными. Имеются два основных типа размещения объектов:
Рис. 4.19
линейный и плоскостной. При линейном типе объекты
размещаются по одной линии (чаще всего — по прямой или по
окружности), при плоскостном — в узлах регулярной сетки
(прямоугольной или треугольной). Более сложные варианты размещения
(по совокупностям различных линий, по сеткам на криволинейных
поверхностях) также могут быть использованы, но пока не нашли
применения.
Схемное и конструктивное выполнение многообъектных
схватов определяется преимущественно плотностью размещения
объектов. Если объекты образуют компактную пачку, то схват
выполняется как для захватывания целого объекта, однако могут
потребоваться некоторые изменения конструкции схвата.
Рассмотрим возможность построения многообъектного схвата,
предназначенного для захватывания пачки объектов в виде
прямоугольных параллелепипедов (например, толстых
пластин—заготовок, кирпичей, коробок), образующих составной объект такой
же формы. В соответствии с общими принципами удерживания
рабочие элементы выбираются или из условий исключения
перемещений объектов при фиксированном положении рабочих
элементов, или из условий обеспечения достаточно больших
удерживающих сил. Варианты форм рабочих элементов, исключающих
перемещения объектов при фиксированном положении рабочих
элементов, показаны на рис. 4.19, а, б. Согласованная форма
(рис. 4.19, а) обеспечивает наилучшие условия для объектов
низкой прочности, но не допускает изменений размеров
объектов и числа их в пачке, кроме того, предъявляются особые
требования к установке объектов на позиции захватывания
(должны быть свободными соответствующие кромки). При
63
малых ускорениях переноса можно исключить 11
плоскости, ограничивающие перемещения вверх i l^J
(рис. 4.19, б), если при этом рабочие эле- \\^*
менты могут быть фиксированы на различном *^
расстоянии, то не допускается изменение раз- рис# 4.21
мера пачки только по оси у. Возможность
изменения этого размера обеспечивается, если ввести еще один
рабочий элемент с самостоятельным приводом, перемещающийся
независимо от двух других.
Для захватывания по принципу создания достаточно больших
удерживающих сил могут быть использованы
плоскопараллельные рабочие элементы, сжимающие всю пачку (рис. 4.20, а).
Однако для обеспечения требуемых запасов несущей способности
необходимы большие усилия захватывания, зависящие от
толщины пачки. Заметим, однако, что плоскопараллельными
рабочими элементами можно захватывать пачки плоских предметов
любой формы (в частности, дисков). Способ захватывания, при
котором средние объекты в пачке удерживаются только
соседними, но не касаются рабочих элементов, применим только при
достаточно малом отклонении от плоскостности. В противном
случае при выпуклости поверхностей, даже при сильном сжатии
пачки, возможно перекатывание объектов друг по другу, что
приводит к значительному снижению несущей способности.
Использование плоскопараллельных рабочих элементов для
захватывания пачки в таком положении, в котором каждый объект
должен контактировать с обоими рабочими элементами
(рис. 4.20, б), допустимо только тогда, когда приняты
специальные меры для обеспечения надежности этого контакта. Если
рабочие элементы являются жесткими, то даже малые различия
размеров объектов, а также изменения формы торцевых поверхностей
будут приводить к тому, что зажатым в схвате окажется только
один объект, а остальные будут выскальзывать. Для равномерного
распределения усилия захватывания между объектами
необходимо введение упругих элементов. Для этого может быть
произведено секционирование рабочих элементов с независимым
креплением частей к общему основанию с помощью пластинчатых
пружин (рис. 4.21); могут быть использованы упругие накладки,
лучше также секционированные. Коэффициент упругой податливости
для контакта с каждым объектом g должен быть достаточно
большим, так чтобы
64
где Д — максимальная погрешность размера объекта; F —
номинальное усилие захватывания для одного объекта.
Для захватывания объектов в пачке могут использоваться
рабочие элементы полусогласованной формы (рис. 4.22, а). При
неизбежной разности размеров необходимо надежно фиксировать
крайние объекты. Это может быть обеспечено, как и в предыдущем
случае, введением упругих элементов, а также за счет изменений
формы рабочих элементов: введением ограничителей (рис. 4.22, б)
или искривлением профиля с добавлением свободы поворота
вокруг вертикальной оси (рис. 4.22, в). При этом жестко
фиксироваться должны только крайние объекты, а средние могут
получать только малые перемещения, т. е. для них реализуется
принцип исключения перемещений объекта при фиксированном
положении рабочих элементов. Схваты, предназначенные для
объектов типа дисков или колец, касающихся по плоскостям, могут
строиться по аналогичным схемам. Как при захватывании
одиночных круглых объектов с торца, так и при захватывании пачки
целесообразно использование трех рабочих элементов,
симметрично перемещающихся относительно оси. Объекты типа колец
часто удобно захватывать изнутри, если внутренний диаметр
изменяется в узких пределах. Схват выполняется в виде штыря,
входящего в отверстие с небольшим зазором, ненамного
превышающим погрешность позиционирования ПР, причем подвижные
элементы представляют собой защелки, фиксирующие первый и
последний объекты.
В тех случаях, когда объекты не имеют по две параллельные
плоскости, пачка может быть сформирована искусственно, путем
введения специальных согласующих элементов, связанных со
Рис. 4.22
схватом и свободно перемещающихся по оси захватывания
(рис. 4.23). Форма поверхностей этих элементов должна быть
согласована с формой объектов.
В тех случаях, когда объекты не могут быть объединены в
компактные пачки или такое объединение нецелесообразно, их
захватывание осуществляется раздельно, и
многообъектный схват по существу
строится как объединение простых
схватов. Наибольшие • возможности
предоставляет такое решение, при
котором схваты для отдельных объектов
являются полностью самостоятель- Рис. 4.23
£s
г?
£
3 Чел па нов И. Б. и др.
66
ными, каждый схват имеет собственные привод и механизм
передачи. При этом разными схватами можно захватывать
последовательно различные детали (каждый схват настраивается на
определенную деталь), и таким образом формировать комплекты
деталей. Захватывание может производиться или при одном
положении манипулятора, или при перемещении манипулятора
в разные положения, а выдача всех захваченных объектов —
одновременно. Могут быть ситуации, когда выдача должна
осуществляться последовательно, возможно, на различных позициях.
Схваты для отдельных объектов крепятся на одну раму обычно
так, чтобы направление подхода к каждому объекту было одним
и тем же. Для обеспечения боль- 6)
шей универсальности может
предусматриваться перезакрепление
1
М
Щ
1 1
1
чЧчч^ч4чч(чччч4ч^^^
Рис. 4.24
схватов на раме в различных положениях или изменение
конфигурации самой рамы. Важными недостатками многообъектных
схватов, построенных по принципу объединения, являются их
большая масса и громоздкость.
Упрощение конструкции, уменьшение масс и габаритных
размеров схватов достигаются в первую очередь за счет объединения
частей отдельных схватов. На рис. 4.24, а изображена схема
многообъектного схвата с объединенным двигателем (пневмо-
цилиндром), раздельными механизмами передачи и рабочими
элементами. Схват предназначен для захватывания предметов,
расставленных по окружности. Объединение двигателей
позволяет захватывать и отпускать объекты только одновременно,
существенно ограничиваются возможности перекомпоновки, в
частности изменения числа пар рабочих элементов. Отметим, однако,
что при этом сохраняется возможность поворота вокруг оси
симметрии. Возможно также объединение механизмов и рабочих
элементов. На рис. 4.24, б изображена схема схвата,
предназначенного для захватывания малых цилиндрических объектов,
установленных по прямоугольной сетке в несколько рядов. Рабочие
элементы представляют собой пластины со специальными
упругими вставками, обеспечивающими равномерное распределение
усилий по объектам. Применение подобных схватов позволяет за
один цикл загружать целиком тару или ее часть. Методы расчета
многообъектных схватов пока не разработаны.
66
4.6. СХЕМЫ МНОГОФУНКЦИОНАЛЬНЫХ СХВАТОВ
В некоторых случаях имеются возможности передачи схватам
не только функций захватывания и удерживания объектов. Такие
схваты в дальнейшем будем называть многофункциональными.
Рассмотрим последовательно задачи, которые могут решаться
с помощью многофункциональных схватов, и дадим минимальные
пояснения относительно того, какими средствами достигается их
многофункциональность.
По отношению к операциям захватывания и удерживания
дополнительные функции могут быть подготовительными
(вспомогательными) или посторонними. Выполнение подготовительных
(вспомогательных) функций облегчает захватывание объектов,
повышает надежность их удерживания и тем самым расширяет
возможности схвата и повышает его соответствующие показатели.
Обычные схваты обеспечивают захватывание объектов, которые
с помощью других средств, внешних по отношению к ПР, с
достаточной точностью ориентированы, разделены друг от друга и
установлены на позиции захватывания. 'На многофункциональный
схват могут быть возложены функции поиска объекта (не в очень
широких пределах), при необходимости — его отделения от
остальных (сепарации), доориентирования. Эти задачи могут
решаться как активными, так и пассивными средствами. Активные
средства основаны на применении датчиков очувствления,
сигналы которых используются в системах управления; в этой книге
они не рассматриваются. Пассивные средства сводятся к
изменениям формы рабочих элементов (специальной профилировкой
рабочих элементов облегчается самоустановление объекта при
захватывании), добавлению отсекателей, защелок с пружинами
или с самостоятельными простейшими двигателями. Возможно
также применение магнитов и электромагнитов.
Специфической, но часто очень важной является задача
«выдергивания» заклиненного или застрявшего предмета. Такая
задача возникает, например, при вытаскивании инструмента с
конусным хвостовиком из инструментальной головки, а также при
автоматической разборке различных изделий. Часто статического
усилия приводов ПР недостаточно, чтобы вывести объект из
начального состояния, для этого необходим короткий импульс,
который должен прикладываться после захватывания объекта.
Схемы двух вариантов устройств для создания подобных импульсов
изображены на рис. 4.25, а и б. В обеих схемах импульс
создается при жестком ударе подвижной массы, притягиваемой
электромагнитом. В схеме (рис. 4.25, а) масса перемещается
поступательно, импульс направлен по продольной оси; в схеме
(рис. 4.25, б) масса вращается и импульс является вращательным
или комбинированным. Может быть предусмотрено многократное
повторение импульсов. Для решения той же задачи могут быть
использованы специальные вибраторы, однако для преодоления
3*
67
заклинивания кратковременные импульсы более эффективны, чем
вибрации. Чтобы импульсы или вибрации не передавались на
механизм манипулятора, целесообразно предусмотреть упругое
соединение схвата с рукой.
В последние годы высказываются идеи о целесообразности
использования схвата ПР в качестве станочного приспособления —
технологического спутника, чтобы можно было обрабатывать
заготовку, зажатую в схвате. Это позволяет исключить трудно
автоматизируемые операции переустановки, базирования и
закрепления заготовок. Но к схватам ПР при этом предъявляются новые
серьезные требования. Схват должен обеспечивать достаточно
точное базирование заготовки, должны оставаться свободными
поверхности, предназначенные для обработки, необходимо точное
oor^o-J
Рис. 4.25
базирование самого схвата на столе станка. Кроме того, требуется
значительное увеличение усилий захватывания, поскольку
технологические усилия обычно значительно превышают силы
инерции при переносе. К настоящему времени все эти задачи в
комплексе удовлетворительным образом не решены.
Многофункциональные схваты могут выполнять и
технологические функции. Сам схват может выполнять только операции
типа обжатия заготовок, для этого нужна специальная
профилировка рабочих элементов. Для выполнения всех других операций
необходима установка на схвате или на руке ПР вблизи от схвата
специальных устройств. В схвате могут осуществляться
индукционной нагрев (для этого на нем должен быть установлен
индуктор), точечная сварка, нанесение маркировки, сборка. Выполнение
технологических операций в схвате позволяет уменьшить число
технологических позиций на автоматических линиях и сократить
технологический цикл, поскольку операция производится во время
переноса объекта. В большинстве случаев выполнение
технологических операций в схвате ПР возможно только для миниатюрных
изделий. Заметим, что тенденция объединения технологического
и вспомогательного оборудования характерна для современного
машиностроения. Чаще всего встречаются случаи, когда
вспомогательное оборудование встраивается в технологическое
(например, все большее распространение получают встроенные ПР
устанавливаемые непосредственно на станинах или столах
станков). Однако возможны и другие решения, описанные выше, ко-
68
±U U V
гда технологическое оборудование или его элементы
устанавливаются на вспомогательном оборудовании, например на ПР.
Многофункциональные схваты могут выполнять также
функции измерения и контроля. После захватывания они могут
измерять или контролировать параметры формы и положения
поверхностей объекта непосредственно в схвате. При этом элементы схвата
играют роль базирующих приспособлений и, возможно, звеньев
измерительных устройств. Измерительных преобразователей
может быть один ,-или несколько. В простейшем случае измеряется
только один параметр, например толщина плоскопараллельного
или диаметр цилиндрического объекта. При выборе схемного
решения можно пойти по двум противоположным путям: или
отделять средства измерения и контроля от конструкции схвата,
или в максимальной степени объединять их. В первом случае один
из рабочих элементов исполь- ^, . . ^
зуется и для базирования /Г*
объекта, и как носитель
совершенно автономного измеритель- 9-
ного преобразователя (рис. п
4.26, а). Базирование цилиндри- А-
ческого объекта осуществляется рис. 4.26
по двум плоскостям, по
линейному перемещению штыря датчика определяется диаметр. Второй
рабочий элемент в измерении не участвует. В рассматриваемом
случае могут быть использованы стандартные датчики, которые
при такой схеме не выполняют силовых функций. Во втором
случае звенья механизма схвата одновременно являются звеньями
устройства измерения (рис. 4.26, б). Здесь диаметр определяется
по расхождению рычагов клещевого схвата. При такой схеме
достигается большая простота конструкции, однако, как правило,
измерения оказываются менее точными, поскольку
измерительный механизм является одновременно и силовым.
Используемые преобразователи могут иметь различный
принцип действия, их выходные сигналы могут быть электрическими
или пневматическими. Как и в других случаях, преимуществами
обладают бесконтактные датчики. Информация, получаемая от
датчиков, может использоваться для подналадки технологического
оборудования (в этом случае датчики входят в систему активного
контроля), для сбора статистических данных, для сортировки
объектов по группам. В последнем случае результаты контроля
непосредственно поступают в устройство управления ПР, который
раскладывает объекты разных групп в разную тару. Контроль
параметров во время переноса позволяет исключить на линии
отдельные контрольные позиции. Средства измерения и контроля
являются средствами очувствления, предназначенными для
решения вполне определенных частных задач; если ставятся и
другие задачи, то указанные датчики могут входить в состав общей
системы адаптации.
69
Имеются случаи, когда в процессе измерения требуется
перемещать деталь (заготовку) относительно чувствительного элемента
преобразователя (например, при измерении профиля или при
контроле размеров в нескольких сечениях). Предложены варианты
конструкций схватов, в которых самостоятельный привод может
вращать цилиндрический объект. Однако целесообразность
использования столь сложных и тяжелых схватов сомнительна.
Имея в виду большое разнообразие функций, которые могут
выполнять многофункциональные схваты, следует предвидеть
ситуации, когда при проектировании схвата заранее неизвестно,
что именно будет реализовано. Для этих случаев необходимо
предусматривать точные базы для объектов и установки самого
схвата, приводы с большими усилиями и места для установки
датчиков.
Глава 5
КОМПОНОВКИ И КОНСТРУКЦИИ СХВАТОВ
5.1. КОМПОНОВКИ СХВАТОВ
При рассмотрении готовых конструкций схватов и
проектировании новых главной является компоновка. При анализе
объемной компоновки определяются общая конфигурация и взаимное
расположение объемов, занимаемых основными составными
частями схвата. Далее на схемах, изображающих основные варианты
компоновки, цифрой 1 обозначается узел крепления к руке или
кисти ПР, 2 —двигатель, 3 — механизм передачи и
преобразования движений и усилий вместе с необходимой несущей
конструкцией, 4 — рабочие элементы. Проекции всех объемов условно
изображаются прямоугольниками. Крепление к руке везде
изображено слева. Основным по распространенности и логике
построения является вариант, представленный на рис. 5.1, а, в котором
узел крепления, двигатель и механизм располагаются
последовательно. Компоновка симметрична относительно продольной
оси ху эта же ось обычно определяет направление подхода к
объекту. Корпус двигателя является несущим, несущую
конструкцию часто бывает необходимо достраивать в зону механизма.
В варианте, представленном на рис. 5.1, б, двигатель встроен
в руку ПР, при замене схвата он может оставаться на месте или
также быть сменным. Подобная компоновка позволяет сократить
длину схвата от места соединения с рукой до рабочих элементов
и вследствие этого повысить жесткость и прочность конструкции,
что особенно важно для ПР средней и высокой грузоподъемности.
Однако встраивание двигателя бывает возможно, когда размеры
70
сечения руки достаточно велики. Все остальные варианты
построены так, что узел крепления занимает крайнее положение,
это чаще всего и бывает в реальных конструкциях.
В схеме на рис. 5.1, в двигатель не выходит за пределы площади,
занимаемой механизмом схвата. Это позволяет удлинять
основные звенья механизма в пределах габаритных размеров схвата
(чаще всего основные рычаги клещевого схвата), что обеспечивает
максимальный диапазон расхождения рабочих элементов. К узлу
крепления непосредственно крепятся элементы несущей
конструкции; при этом корпус двигателя может или не может быть несущим
для других элементов конструкции. Вариант, показанный на
о) „
6)
Г
т
в)
^ш
2 \ 3 *
г)
д)
£1 3
3)
ж)
V
7
4
1
Г]
2 J \4
~—I Ц-
1
Рис. 5.1
рис. 5.1, г, отличается тем, что рабочие элементы смещены в сто
рону от продольной оси, также несимметричным может быть и
механизм. Такое смещение может понадобиться для того,
например, чтобы брать плоский предмет с плоскости. При этом
направление подхода к объекту может быть или по оси #, или по оси г.
В варианте (рис. 5.1, д) корпус двигателя является несущим,
механизм ориентирован по оси z, при этом типичен подход по
оси г. В варианте рис. 5.1, е двигатель вынесен вверх. Такая
компоновка, используемая чаще всего при применении
электродвигателя, позволяет значительно улучшать условия охлаждения и
упрощать замену электродвигателя при сокращении габаритных
размеров по оси х и при высокой жесткости конструкции. Однако
для этого варианта типично увеличение размера по оси г.
Схваты для длинномерных объектов при необходимости
разнесения точек захватывания имеют свою специфику. Для
варианта, изображенного на рис. 5.1, ж, характерно разнесение
только рабочих элементов, двигатель для схвата один. В варианте,
приведенном на рис. 5.1, з, использованы два двигателя, каждый из
них имеет свои рабочие элементы.
Перечисленными вариантами компоновочные решения не
ограничиваются, однако основные приемы компоновки представлены
71
достаточно полно. Соотношение пропорций и объемов составных
частей схватов изменяется в широких пределах; характерные
примеры приведены на рис. 5.2 и 5.3. Вытянутая вдоль
продольной оси компоновка (рис. 5.2, а) характерна для
широкодиапазонных схватов, особенно малой грузоподъемности. Для схватов,
предназначенных для захватывания громоздких, но нетяжелых
объектов (например, ящиков, коробок и пр.), характерны
компоновки с увеличенными поперечными габаритными размерами
(рис. 5.2, б). Обычно они являются узкодиапазонными. Если же
такой схват должен захватывать объекты только одного и того же
размера (например, стандартизованные контейнеры), то основой
Рис. 5.2 Рис. 5.3
компоновки является несущая конструкция (рис. 5.3), а
двигатели с рабочими элементами занимают малые объемы и
вписываются в эту конструкцию.
Исходным пунктом выбора компоновки схвата является
определение конфигурации, положения и размеров поверхности
объекта, по которой производится захватывание, а также способа
базирования объекта при захватывании и отпускании. Выбор
компоновки производится в результате сопоставления характерных
осей. Требуемое направление оси и соединительного элемента при
выходе схвата на позицию захватывания и отпускания
обеспечивается переносными и ориентирующими степенями подвижности
ПР в соответствии с возможностями кинематической схемы
манипулятора. Направление перемещения рабочих элементов
определяется расположением поверхностей объекта, по которым
происходит захватывание.
На рис. 5.4 показаны примеры основных вариантов
расположения осей при захватывании параллелепипеда, цилиндра и
втулки; штриховкой отмечены поверхности, за которые
допускается захватывание. Для объектов, изображенных на рис. 5.4, а—
в, подход v схвата к объекту обычно осуществляется по оси у
или z, а перемещение рабочих элементов w — по оси х. Для
захватывания втулки могут быть применены конические рабочие
элементы, вводимые в отверстия втулки поступательным
перемещением по оси х. Захватывание цилиндрического объекта за
цилиндрическую поверхность (рис. 5.4, г) осуществляется
уголковыми рабочими элементами, которые при поступательном пере-
78
мещении по прямой обеспечивают центрирование оси цилиндра,
а при вращательном и поступательном перемещениях по дуге
окружности — центрирование плоскости симметрии цилиндра,
перпендикулярной к оси схождения рабочих элементов.
Захватывание цилиндров и втулок (рис. 5.4, д, ё) может осуществляться,
как в случае, показанном на рис. 5.4, г, а также тремя
поступательно перемещающимися параллельно оси х плоскими рабочими
элементами, зажимающими внешнюю цилиндрическую
поверхность втулки снаружи или распирающими внутреннюю
поверхность.
Рассмотрим теперь некоторые особенности конструктивного
выполнения основных составных частей. Тип соединения и при-
Рис. 5.4
соединительные размеры чаще всего определяются при
проектировании манипулятора независимо от схвата, а при
проектировании схвата считаются заданными. Однако не все типы соединений
подходят для сменных, особенно быстросменных, схватов, поэтому
часто для соединений схвата с рукой целесообразно
предусматривать переходные элементы, так что при замене схватов соединение
и разъединение производятся только в узле крепления схвата
к переходному элементу. При модульном построении схватов
переходные (соединительные) элементы могут также выполнять
другие функции (см. п. 4.2). Во всех случаях к узлу крепления схвата
предъявляются требования достаточно точного базирования и
надежного закрепления, исключающего перемещения основания
схвата относительно руки во всех расчетных режимах (для
аварийных режимов могут быть предусмотрены специальные упругие
амортизирующие устройства, их схемные решения рассмотрены
в п. 5.3). Наиболее распространенными являются фланцевые
соединения, именно они стандартизованы в ГОСТ 26063—84
(см. гл. 12). Стандартизованные фланцы имеют по 4 или 8
отверстий, это позволяет перезакреплять основание схвата в положе-
73
ниях, повернутых на 90°. Для базирования используются штифты,
шпонки, цилиндрические и конические соединения (хвостовик
схвата входит в отверстие руки) и т. п., затяжка соединения
осуществляется накидной гайкой. Для быстросменных схватов
используются иные схемные решения, они рассмотрены в п. 5.4.
В качестве двигателей чаще всего применяются пневмоци-
линдры. Пневмоцилиндр может включаться в несущую
конструкцию или быть конструктивно самостоятельным. В первом случае
наиболее распространенными являются два варианта: цилиндр
вытачивается в корпусе схвата и цилиндр является основанием
для последующих элементов несущей конструкции. Типовые
примеры конкретных конструктивных решений приведены далее.
Обычно используются короткие пневмоцилиндры одностороннего
действия, для которых ход меньше диаметра (обычно в два-три
раза). Чаще всего поршень перемещается от упора до упора,
однако иногда специальные упоры (нерегулируемые или
регулируемые) устанавливаются у звеньев механизма. Для пневмоцилиндра
одностороннего действия возвратная пружина сжатия обычно
помещается в полость цилиндра. Использование пневмоцилиндров
двухстороннего действия предоставляет дополнительные
возможности (например, становится возможным захватывание как
снаружи, так и изнутри). В большинстве конструкций усилие
пружины значительно меньше силы на штоке двигателя при подаче
давления, поэтому трудностей с размещением пружины не
возникает, а регулирование ее натяга обычно не предусматривается.
Рабочее давление воздуха невелико (0,4—1,0 МПа), поэтому
достаточно простейших уплотнений. При коротких цилиндрах
износ уплотнений существенно зависит от боковых (поперечных)
усилий, их необходимо учитывать при выборе конструкций и
размеров уплотнений.
Несущая конструкция схвата начинается от узла крепления
схвата к руке и заканчивается подшипниками или направляющими
подвижных частей механизма схвата. Корпус вместе с узлом
крепления может представлять собой одну деталь, изготавливаемую
из отливки (стальной или из алюминиевого сплава), или состоять
из нескольких частей, собираемых на резьбовых соединениях.
Первый случай типичен для ПР, изготавливаемых набольших
предприятиях крупными сериями, второй — для мелкосерийного
производства, особенно тогда, когда схваты изготавливаются не
предприятиями — поставщиками ПР, а предприятиями —
изготовителями по месту эксплуатации. Для звеньев механизма обычно
выполняют простейшие подшипники скольжения, иногда с
запрессованными вкладышами; подшипники качения используются
только в редукторах высокооборотных двигателей.
Прямолинейные направляющие обычно получаются фрезерованием в самом
корпусе, реже они изготавливаются накладными.
Конструкция и способы изготовления звеньев шарнирно-ры-
чажных механизмов различны в зависимости от грузоподъемности
74
ПР, серийности и традиций предприятий. Для схватов малой
грузоподъемности при высокой серийности рычаги часто
изготавливают вырубкой и гибкой из тонкого листового материала, при
низкой серийности — фрезерованием из толстого листового или
стандартного профильного материала. Для ПР средней и большой
грузоподъемности рычаги механизмов схватов обычно
изготавливаются из специальных отливок, обрабатываются только
поверхности, по которым детали соприкасаются. К зазорам в
подшипниках и направляющих не предъявляется высоких требований.
Зубчатые передачи (чаще всего рейка — зубчатое колесо) обычно
позволяют получать меньшие габаритные размеры при широком
диапазоне раскрытия схвата, но такие схваты обычно применяются
только для ПР с подобными передачами в других приводах.
Кроме того, следует иметь в виду, что шарнирно-рычажные
механизмы относительно просто допускают переделку и модернизацию
путем замены рычагов, а зубчатые — такую возможность не
предоставляют.
Рабочие элементы, о выборе формы которых подробно
говорилось в гл. 3, чаще всего представляют собой самостоятельные
детали, но иногда они являются профилированными концевыми
частями рычагов механизмов. Рабочие элементы изготавливаются из
стали, алюминиевых сплавов (фрезерованием или гибкой) или
из пластмасс (литьем или прессованием). Необходимо
обеспечивать простоту их замены, на что очень часто не обращается
внимания. Целесообразно предусматривать крепление на рабочих
элементах сменных накладок (возможно, из различных
материалов и разной толщины). Для этого должны быть унифицированы
способы их крепления и размеры.
Вопросы выбора конструкции и элементов трубопроводов для
пневмоцилиндров часто считаются второстепенными. Однако
иногда значительная доля отказов происходит из-за обрывов
трубопроводов. Наиболее простой и часто применяемой является схема
свободного подвешивания, когда штуцеры на руке и пневмоци-
линдре соединяются свободно висящим гибким шлангом. Однако
наличие висящего шланга в рабочих зонах оборудования обычно
нежелательно, а при работе с печами и нагревателями вообще
недопустимо. Поэтому предпочтительным является другой способ,
когда сжатый воздух передается по каналам в корпусе схвата.
Подавляющее большинство выпускаемых ПР не имеют средств
очувствления, даже самых элементарных. Однако для
конструкторов проектируемых ПР уже в настоящее время актуальна задача
размещения на схвате средств очувствления. Накопленный опыт
в этом отношении недостаточен. Многочисленные макетные и
экспериментальные образцы схватов с очувствлением выполнены
непрофессионально, чаще всего такие схваты не могут
удовлетворительно выполнять основные функции. Вопросы унификации
типов датчиков, их размеров, способов установки и закрепления
должны рассматриваться в ближайшие годы. При этом также ста-
75
новится важной задача размещения и соединения сигнальных
кабелей.
При проектировании схватов необходимо учитывать
требования техники безопасности. Общие требования безопасности,
предъявляемые к ПР, роботизированным технологическим комплексам
и участкам, сформулированы в ГОСТ 12.2.072—82 ССБТ.
Применительно к схватам наиболее эффективными являются
следующие меры повышения безопасности.
1. Требуется, чтобы при падении давления объект удерживался
в схвате, по крайней мере, ограниченное время.
2. Целесообразно ограничивать усилие захватывания.
3. Желательно закрывать механизм или его большую часть
кожухами без острых углов и кромок.
4. Для схвата и его элементов используется защитная окраска.
6.2. ТИПОВЫЕ КОНСТРУКЦИИ СХВАТОВ
Рассмотрим конструкцию штатного схвата ПР моделей
«Стрела-2», «Стрела-3», «Стрела-ЗС», «Стрела-4». Согласно
паспортным данным, схват имеет грузоподъемность 0,6 кг и
предназначен для захватывания тел вращения за цилиндрическую
поверхность диаметром от 33 до 52 мм. Привод схвата —
пневматический, двигателем является пневмоцилиндр. При давлении
воздуха 0,4 кПа усилие захватывания составляет 150 Н. Механизм
передачи движения от штока пневмоцилиндра к рабочим
элементам шарнирно-рычажный, плоский, симметричный.
Кинематическая схема схвата изображена на рис. 5.5, а, она представляет
один из самых простых вариантов клещевого схвата. Последние
звенья механизма — рычаги—занимают всю длину схвата, что
типично для случаев, когда при ограниченном габаритном размере
клещевого схвата стремятся получить максимальный диапазон
раскрытия. Использование рычагов первого рода, однако, дает
меньшее раскрытие схвата при ограничениях на угол поворота
по сравнению с рычагами второго рода. Длины плеч выбраны
таким образом, чтобы передаточное число механизма (переменное,
как для большинства клещевых схватов) составляло в среднем
0,5, в результате чего линейное перемещение каждого рабочего
элемента примерно в два раза больше хода поршня, а усилие
захватывания — в четыре раза меньше силы на штоке
пневмоцилиндра. При сближении рабочих элементов усилие
захватывания возрастает, на всем диапазоне это усилие изменяется
примерно в 1,6 раза. Конструкция схвата изображена на рис. 5.5, б.
Основу конструкции составляет корпус /, концевая часть которого
представляет собой хвостовик для крепления в руке ПР.
Базирование осуществляется по посадочной цилиндрической
поверхности и плоскости кольца, а по повороту вокруг продольной
оси — по поверхностям специальных выступов. Закрепление
схвата осуществляется накидной гайкой по резьбе М42х1,5.
76
Такой тип соединения для схватов ПР пока не стандартизован.
По оси узла крепления ввинчен штуцер, через который сжатый
воздух подается в рабочую полость пневмоцилиндра. Цилиндр
выточен в корпусе 4, его размещение между рычагами
механизма и ориентирование (шток выдвигается в сторону руки)
обусловлены выбором кинематической схемы с рычагами первого рода.
Поршень и шток выполнены в виде одной детали 3. Поршень
имеет уплотнение в виде резинового кольца. Передача движения
на рычаги осуществляется шатунами 2. Сжатие схвата
осуществляется при подаче давления в левую рабочую полость; при снятии
давления поршень возвращается в исходное положение под
действием цилиндрической пружины сжатия 5. Концевые части
составных рычагов 6 крепятся к основным частям 8 винтами, а их
базирование осуществляется штифтами. Винтами крепятся
уголковые (призменные) рабочие элементы 7. Часть механизма
закрывается коробчатым кожухом. На корпусе расположен датчик,
который выдаёт сигнал при захватывании заготовки, положение
датчика может переустанавливаться в зависимости от диаметра
заготовки.
Отметим некоторые особенности конструкции. Обращает
внимание стремление облегчить схват при довольно широком
диапазоне его раскрытия. Компактен корпус, цилиндр, выточенный
в корпусе, облегчает конструкцию. Однако излишне массивной
выполнена хвостовая часть. Основные рычаги, получаемые вы-
77
306
Рис. 5.6
рубкой и гибкой из листового материала, имеют небольшую массу,
но обеспечивают запасы прочности и жесткости. Достаточно
узкая специализация схвата определяется тем, что рабочие элементы
имеют малую ширину и смещены вниз от оси руки. Поэтому схват
приспособлен для захватывания деталей типа колец и втулок
с короткими цилиндрическими частями, причем захватывание
удобно производить с плоскости. Возможности модернизации
ограничиваются заменой концевых частей рычагов (они могут
быть сделаны большей длины) и рабочих элементов. При
доработке конструкции желательно предусмотреть меры по более
надежному фиксированию рабочих элементов и по исключению
самоотвинчивания винтов. Конструкция в целом технологична при
серийности производства, однако она не вписывается в концепцию
модульного построения. В целом же описанный схват является
примером хорошо проработанной конструкции захватного
устройства для ПР малой грузоподъемности.
Иные тенденции иллюстрирует конструкция схвата ПР модели
Р505Б (рис. 5.6) грузоподъемностью 10 кг. Он имеет узкую
специализацию и спроектирован для захватывания валов диаметром
53 — 60 мм и, таким образом, является узкодиапазонным.
Привод схвата — пневматический, двигателем является пневмоци-
линдр, создающий усилие захватывания 1700 Н. Схема шарнирно-
рычажного механизма схвата представлена на рис. 4.12, ж (см.
гл. 4). Схват является клещевым, в нем также используются
рычаги первого рода. Рычаги короткие (их длина составляет
около 40 % общей длины схвата), так как не требовался широкий
диапазон раскрытия рабочих элементов. Передаточное число
механизма составляет на расчетных значениях диаметра примерно
1,7, т. е. в 1,7 раза увеличивается сила, передаваемая от штока
78
поршня к рабочему элементу. При длинах плеч рычагов,
указанных на рис. 5.6, усилие захватывания увеличивается за счет
малости угла а в положении, когда объект захвачен. Такое решение
представляется рискованным, расчеты показывают, что при
изменении угла ос до нуля относительное смещение рабочих элементов
составляет около 1 мм. Таким образом, схват по существу может
использоваться без переналадки для захватывания деталей только
одного диаметра, при изменении диаметра более чем на 1 мм
требуется замена рабочих элементов. Кроме того, следует иметь в виду,
что при малых углах а на усилии захватывания сильно сказываются
даже малые погрешности формы детали, упругие деформации
рычагов, износ подшипников и пр.
В конструкции ярко выражена тенденция замены сложных
деталей сборочными единицами, состоящими из простых деталей.
Корпус состоит из двух стоек 7 и рамы 8. Винтами ,рама
привинчивается к стойкам, а стойки — к фланцу (на рис. 5.6 не показан).
Цилиндр является сборным, отдельно выполняются гильза 2
и обе крышки / и 3; крышки стягиваются болтами. Шток 4 и
поршень 6 также представляют собой отдельные детали. Усилие
захватывания создает цилиндрическая пружина сжатия 5, при
подаче воздуха в левую полость схват раскрывается. Рычаги
являются составными, рабочие элементы представляют собой
профилированные концевые части рычагов. Во всех винтовых
соединениях приняты меры против самоотвинчивания. Хорошо
проработаны уплотнения.
Отличительными особенностями конструкции являются
массивность звеньев механизма и недостаточная жесткость крепления
к фланцу. Явно завышены диаметр штока и толщина рычагов.
Цилиндр не входит в несущую конструкцию, это облегчает его
установку и замену, но не увеличивает жесткость.
Исключительной простотой конструкции отличается один из
схватов ПР модели «Бриг-10» (рис. 5.7). Он имеет грузоподъемность
5 кг и предназначен для захватывания деталей типа втулок,
стаканов и колец изнутри.
Диапазон изменения
диаметров внутренних
цилиндрических поверхностей—
от 20 до 54 мм, усилие
захватывания составляет
около 500 Н. Двигателем
является пневмоцилиндр.
Три кулачка,
осуществляющие захватывание,
представляют собой концы
рычагов, которые
поворачиваются при смещении
штока. Таким образом,
механизм имеет минимум
Рис. 5.7
79
Рис. 5.8
подвижных деталей. Передаточное число механизма равно 0,5,
поэтому усилие на кулачке в шесть раз меньше силы на штоке.
Корпус 3 составляет одно целое с цилиндром и фланцем, которым схват
крепится к руке ПР. Таким образом, цилиндр является составной
частью несущей конструкции. Поршень 4 и шток 5 представляют
собой отдельные детали. Уплотнения упрощенного типа имеются
только у поршня. Три фигурных рычага / вращаются вокруг
своих осей, буртики штока упираются в специально
профилированные выступы этих рычагов. При такой передаче неизбежны
большие зазоры и возможны достаточно большие смещения
центров захватываемых деталей от продольной оси схвата (порядка
1 мм). К крышке цилиндра 2 винтами крепится крышка схвата 6,
в трех прорезях которой перемещаются концы рычагов. Таким
образом, механизм схвата оказывается полностью закрытым.
Как отмечалось выше, основными особенностями схвата являются
предельная простота конструкции, технологичность деталей,
сборка проста и не требует регулировки. Однако схват обладает
невысокой точностью, практически не допускает модернизации
или даже просто переделки под другой диапазон диаметров деталей,
невозможна установка датчиков срабатывания.
На рис. 5.8 представлена конструкция трехкулачкового схвата
грузоподъемностью 2 кг, предназначенного для захватывания
деталей типа втулок, стаканов и колец как изнутри, так и
снаружи. При захватывании снаружи диапазон диаметров составляет
от 2 до 100 мм, изнутри — от 25 до ПО мм. Таким образом, схват
является широкодиапазонным. Усилие захватывания изменяется
в довольно широких пределах, оно минимально в середине диапа-
80
зона и увеличивается к его краям. Минимальное усилие
захватывания составляет около 100 Н. Важной отличительной
особенностью схвата является пневматический неполноповоротный
двигатель двухстороннего действия. Использование такого двигателя
обеспечивает захватывание деталей как снаружи, так и изнутри
с одинаковыми усилиями, причем из конструкции исключается
возвратная пружина. Механизм представляет собой зубчатую
передачу, вращение от шестерни на валу пневмодвигателя
передается зубчатым секторам 2, которые поворачивают рычаги /
с рабочими элементами. Крепление схвата к руке осуществляется
с помощью фланца 3. Крышки 4 и 6 и гильза 5 цилиндра
изготавливаются в виде отдельных деталей. Крышки образуют
основную несущую конструкцию, отверстия в них служат
подшипниками для осей рычагов. Положение крышек относительно
гильзы, фланца относительно крышек, рычагов относительно
зубчатых секторов фиксируется штифтами. Во всех винтовых
соединениях используются пружинные разрезные шайбы против
самоотвинчивания. Лопасть и стенка пневмодвигателя имеют
специальные уплотнения, среднее положение по оси и осевой зазор
устанавливаются регулировочными винтами. Конструкция схвата
в целом хорошо проработана, использование поворотного
пневмодвигателя обеспечивает широкие возможности (захватывание
снаружи и изнутри, широкие диапазоны изменения диаметров).
Однако конструкция сложна и может быть изготовлена только
на предприятиях с достаточно широкими возможностями.
Поворотные пневмодвигатели часто бывают недостаточно надежными.
Модернизация схвата возможна. Но изменение длин рычагов с
целью увеличения максимальных значений диаметров приводит
81
к значительному увеличению их минимальных значений,
вследствие чего относительный диапазон сужается.
На рис. 5.9 представлена конструкция плоскопараллельного
схвата ПР модели «Пума 560» грузоподъемностью 2,5 кг,
предназначенного для захватывания деталей за параллельные плоскости,
155
Рис. 5.10
расстояние между которыми может изменяться от нуля до 80 мм.
Усилие захватывания постоянно и составляет примерно 300 Н.
Кинематическая схема схвата изображена на рис. 4.13, б.
Перемещающийся штоком пневмоцилиндра палец, входящий в прорези
кулис, задает поперечное движение ползунам, к которым крепятся
рабочие элементы, перемещающиеся, таким образом,
прямолинейно. Основной особенностью конструкции является то, что
корпус вместе с цилиндром выполнены из пластмассы. Это
значительно снижает массу схвата, а при крупносерийном
изготовлении методом прессования — существенно уменьшает стои-
82
мость изготовления. Применение специальной пластмассы
(полиакрила) обеспечивает высокую точность поверхностей без
механической обработки и достаточную прочность. В наиболее
ответственном месте — в парах скольжения — использованы
накладные бронзовые направляющие, закрепляемые на корпусе винтами.
Пневмодвигатель двухстороннего действия, поэтому возвратная
пружина отсутствует. Соединение основных частей схвата с
рукой ПР осуществляется наиболее экономными средствами: с
помощью четырех болтов, прижимающих корпус с направляющими
к цилиндру, а цилиндр — к руке ПР. На рычагах могут
закрепляться различные рабочие элементы.
Типичной для нескольких ПР является конструкция схвата
электромеханического робота «Универсал-5» (рис. 5.10). Схват
имеет грузоподъемность 5 кг. Рабочие элементы перемещаются
поступательно, поэтому схват может быть использован для
захватывания как плоских, так и цилиндрических объектов. Диапазон
перемещения каждого рабочего элемента относительно средней
оси составляет 25 мм. Двигателем является пневмоцилиндр
одностороннего действия с ходом около 10 мм, создающий усилие
захватывания около 800 Н. Параллельность перемещения рабочих
элементов обеспечивается параллелограммным механизмом.
Отметим некоторые конструктивные особенности схвата.
Пневмоцилиндр очень короткий, штоковая полость является рабочей.
Это позволяет выполнить конструкцию более компактной.
Основание схвата выполняется отдельно, на фланце оно фиксируется
штифтами. Гильза цилиндра выполнена заодно с крышкой. Шток
запрессован в поршень, в крышку цилиндра впрессована
антифрикционная втулка. Уплотнение поршня является
комбинированным. Возвратных пружин шесть, отказ от одной пружины
несколько понижает надежность. Шток является коротким, в него
ввернута тяга, несущая ось. На оси посажены камни, входящие
в вилки поворотных рычагов. Конструкция в целом хорошо
продумана и обеспечивает высокую надежность, но она достаточно
сложна. Подобные конструкции штатных схватов обычно
встречаются у ПР, имеющих столь же хорошо проработанные другие
механизмы.
Специфические особенности схвата с гидроприводом видны
на рис. 5.11, на котором изображена конструкция схвата
грузоподъемностью 20 кг. В механизме используются реечная передача
и параллелограммные шарнирно-рычажные механизмы. Диапазон
раскрытия рабочих элементов с параллельными плоскостями
составляет 120 мм (от 50 до 170 мм). Усилие захватывания составляет
около 5 кН, передаточное отношение составляет в среднем 0,3,
так что перемещение каждого рабочего элемента примерно в три
раза больше хода гидродвигателя. Передачи со значительным
увеличением хода от гидродвигателя к рабочим элементам типичны,
поскольку высокое давление жидкости позволяет получать
большие силы в двигателях относительно малых размеров. Важной кон-
83
структивной особенностью является то, что подвижным является
корпус гидроцилиндра, а поршень с двухсторонним штоком
неподвижен. Шток и поршень представляют собой одну деталь,
Рис. 5.11
рабочая жидкость подается по каналам изнутри штока. Во всех
местах возможных протечек поставлены уплотнительные кольца.
Зубчатые рейки нарезаны на наружной поверхности стакана —
гильзы цилиндра. Такое
решение возможно практически
только при малом диаметре
цилиндра. Направляющей
реек служит шток. Рейки
сцепляются с зубчатыми
колесами. Колеса и рычаги па-
раллелограммных
механизмов соединяются с валами
с помощью шпонок. Схват
является массивным,
основной объем составляет
механизм передачи; в
противоположность схватам с пневмо-
Рис. 5.12 приводом двигатель занимает
малое место.
Конструкция относительно редко встречающегося
несимметричного схвата с одним неподвижным рабочим элементом и с
качающимся пневмоцилиндром изображена на рис. 5.12. Схват
предназначен для захватывания заготовок за цилиндрические
поверхности, диаметр может изменяться от 125 до 170 мм.
Грузоподъемность схвата 10 кг, усилие захватывания составляет около
1000 Н. Особенностью геометрии взаимодействия объекта с рабо-
84
чими элементами является то, что в одном сечении контакт
осуществляется в трех точках. Обычно схваты, выполняемые по
такой схеме, являются широкодиапазонными. Узкий диапазон
диаметров (в соответствии с требованиями конкретного
производства) позволил применять короткий рычаг. Это обстоятельство,
а также использование качающегося пневмоцилиндра дали
возможность значительно сократить габаритные размеры. Схват
отличается простотой при достаточно большой грузоподъемности,
но имеет довольно узкую специализацию.
5.3. УСТРОЙСТВА КРЕПЛЕНИЯ СХВАТОВ
К МАНИПУЛЯТОРУ
Схват соединяется с узлом крепления на конце последнего
звена механизма манипулятора, которое обычно является
выходным звеном механизма ориентирования. Однако в дальнейшем для
краткости говорится о креплении схвата к руке манипулятора ПР.
Крепление схвата к руке может быть жестким, не допускающим
относительных перемещений схвата относительно руки на всех
этапах работы при любых условиях, или упругим (подвижным),
допускающим малые относительные перемещения на всех или
некоторых этапах, возможно, в зависимости от действующих
сил или специальных сигналов (команд). Рассмотрим сначала
встречающиеся чаще всего жесткие крепления, относящиеся
исключительно к типу неподвижных разъемных соединений
(ГОСТ 23887—79) и к классу IV разъемных соединений,
осуществляемых различными крепежными и фиксирующими деталями
(винтами, болтами, шпильками, цилиндрическими и коническими
штифтами и т. п.).
Во всех случаях основным является требование надежного
закрепления, исключающего самоотвинчивание, появление люфта
и пр. Дополнительным, но практически очень важным является
требование простоты сборки и разборки соединения, которое
вытекает из необходимости оперативной замены схватов. Вследствие
этого нежелательны большие усилия затяжки соединений,
исключаются также некоторые способы предотвращения
самоотвинчивания. Требуется, чтобы разборка и сборка могли производиться
без применения специального инструмента и тем более без средств
контроля. В тех случаях, когда после установки схвата
предусматривается подналадка с целью более точного согласования ПР
с обслуживаемым оборудованием, в точном базировании схвата
(например, с помощью штифтов) нет необходимости.
Такая необходимость возникает тогда, когда требуется
взаимозаменяемость схватов: при замене схвата на такой же схват
точность позиционирования должна сохраняться без подналадки,
компенсирующей различия их параметров и погрешности
базирования. В будущем точное базирование схвата потребуется при
аналитическом программировании движения ПР, когда будет
85
обеспечено достаточное точное базирование ПР относительно
остального оборудования. Заметим, что во всех случаях не требуется
высокой точности базирования схватов: по-видимому, всегда
допустимыми будут погрешности порядка 0,1 мм, а часто они могут
быть еще больше. Однако необходимо, чтобы такая точность
сохранялась при многократной замене схватов. Конкретные способы
базирования и закрепления схватов и соответствующие
устройства рассмотрены в п. 5.4.
Нежесткое крепление схвата к руке ПР может преследовать
различные цели: уменьшение сил и моментов взаимодействия
объекта с внешними приспособлениями и устройствами, исключение
застревания и заклинивания при сборке, приспособление к
изменениям положения и формы поверхностей объекта, уменьшение
вероятности поломки механизма ПР в аварийных ситуациях.
Задачи уменьшения сил и моментов взаимодействия объекта,
зажатого в схвате, с зажимными приспособлениями станков
(например, направляющими или стенками гнезд тары), возникают
при существенных линейных и (или) угловых рассогласованиях
схвата относительно требуемого положения. Метод расчета сил
и моментов по рассогласованиям при линейности упругих
характеристик механизма манипулятора описан в п. 6.3. Повышение
упругой податливости механизма за счет упругого крепления
схвата к руке, естественно, приведет к снижению сил и моментов
при заданных рассогласованиях. При аварийных ситуациях
с ударами упругое соединение схвата с рукой играет роль
амортизатора, который может предотвращать поломки. При
использовании ПР для операций сборки пар с малыми гарантированными
зазорами правильный выбор характеристик упругого соединения
схвата с рукой исключает застревание и заедание. Требования
к упругому элементу, реализующему упругое соединение схвата
с рукой, подробно сформулированы в работах [44, 81].
Из перечисленных задач следует, что нежесткое крепление
схвата требуется для целого ряда ситуаций, поэтому нужна
разработка принципов работы соответствующих упругих (или
квазиупругих) устройств и их конструктивных решений. Наиболее
простым следует считать вариант линейных характеристик
упругого устройства.
Линейные характеристики могут быть получены пассивными
(упругое устройство построено на пружинах) или активными
средствами (в этом случае квазиупругое устройство строится
по принципу системы с обратной связью, в которой сигналы
датчиков обратных связей преобразуются в силы и моменты
двигателями того или иного типа). Активные средства в дальнейшем
полностью исключаются из рассмотрения, принципы их
построения изложены в ряде работ. Выбор элементов матрицы
податливости для пассивных средств применительно к задачам сборки
обсуждался в работах авторов совместно с В. М. Стояновым [21,
45], они кратко рассматриваются в п. 9.4.
86
Введение постоянно работающего упругого элемента в
механизм манипулятора вблизи конца кинематической цепи, вообще
говоря, ухудшает динамику движений (увеличиваются амплитуды
колебаний, вследствие этого возрастает опасность ударов) и может
значительно увеличить погрешности. Поэтому применительно
к разным задачам рядом исследователей была высказана идея
создания регулируемого упругого устройства, которое обладало бы
достаточной податливостью при контакте объекта с другими
устройствами и приспособлениями и становилось бы достаточно
жестким при свободном переносе объекта. В зависимости от
исходных причин, определяющих и задающих изменения упругих
характеристик, устройства делятся на две группы. В устройствах
первой группы изменение характеристик происходит в
зависимости от одной или нескольких обобщенных сил; по существу
устройство при этом представляет собой нелинейную упругую
систему со специально подобранными нелинейностями. Она может
быть реализована при определенных ограничениях как
пассивная, только с использованием пружин. В устройствах второй
группы изменение характеристик задается внешними сигналами
или воздействиями, задаваемыми от системы управления. Для
этого обычно предусматриваются специальные приводы
(возможно, упрощенные), а управление ими может осуществляться,
например, по этапам цикла (по командам) или по сигналам
датчиков.
К свойствам управляемого упругого устройства могут
предъявляться различные требования. Так, может быть необходимым,
чтобы после захватывания объекта «плавающим» схватом (при
большой податливости упругого устройства) повышение жесткости
приводило захваченный объект к вполне определенному
положению относительно руки. Это требуется тогда, когда положение
ПР хорошо согласовано с устройством, в которое будет
передаваться объект, а положение объекта на позиции захватывания
характеризуется большими погрешностями. В других случаях
после захватывания объекта «плавающим» схватом желательно
жестко зафиксировать именно то положение схвата, при котором
произошло захватывание. Это требуется тогда, когда положение
ПР хорошо согласовано с позициями захватывания и передачи,
но поверхности объекта, за которые производится захватывание
схватом ПР, имеют большие погрешности положения и формы.
Возможны промежуточные варианты требований, когда после
захватывания объекта одни координаты должны быть приведены
к прежним значениям, а другие — сохранять значения,
получающиеся к моменту окончания процесса захватывания.
Использование пассивных средств изменения упругих
характеристик, как отмечалось выше, означает построение нелинейного
упругого устройства со специально формируемыми
характеристиками. Формирование характеристик проще всего достигается
введением упругих элементов с первоначальным натягом; пока
87
F M
Рис. 5.13
<ЭД <Э<) <0O
Рис. 5.14
сила первоначального натяга не преодолена, элемент работает
как жесткий, при преодолении первоначального натяга — как
упругий. Свойства элемента с первоначальным натягом в первую
очередь определяются тем, какие силы или моменты могут быть
«отпирающими», т. е. снимающими с упора, и по каким
координатам (линейным перемещениям или углам поворота) происходит
изменение жесткости (податливости). Простейшая схема показана
на рис. 5.13, а\ она допускает перемещение только по оси х в одном
направлении. При действии силы F в противоположном
направлении преодолевается сила первоначального сжатия и «включается»
упругость. В схеме, приведенной на рис. 5.13, б, упругость
включается в действие при силах, действующих в обоих направлениях.
В схеме, изображенной на рис. 5.13, в, «включение» в действие
упругости происходит при приложении не только силы по оси х,
но и момента М в плоскости ху. При преодолении силы
первоначального натяга упругость появляется одновременно и по
отношению к силе, и по отношению к моменту. Для соответствующей
пространственной схемы добавляются упругости по отношению
к моментам в плоскостях хг и yz.
Возвращение основания схвата к положению, которое он
занимал до отпирания элемента с первоначальным натягом,
после снятия или уменьшения отпирающей силы может быть
обеспечено выбором форм поверхностей, по которым происходит
посадка. Если посадка происходит по граням пирамиды
(рис. 5.14, а), то возвращение к прежнему положению происходит
по всем координатам; если по поверхности кругового конуса —
то возникает остаточное смещение по углу поворота вокруг оси
конуса (рис. 5.14, б). Если посадка происходит по поверхности
сферы (рис. 5.14, в), то остаточные смещения получаются по всем
трем углам. Во всех приведенных примерах фиксирование по
координатам, по которым могут быть остаточные смещения,
осуществляется за счет сил трения. Существует много простейших
форм и их комбинаций, которые могут быть использованы для
формирования поверхностей посадки. При больших смещениях
возвращения к требуемому положению может не происходить,
поэтому важными параметрами являются предельно допустимые
88
отклонения (линейные и угловые). Первоначальный натяг
выбирается так, чтобы на всех этапах переноса объекта отпирания
упругого элемента не происходило, а статические силы и моменты,
развиваемые приводами, были достаточными для преодоления
первоначального натяга. Если упругие элементы вводятся только
для предотвращения аварийных ситуаций, то значения
первоначального натяга могут выбираться намного большими. В
большинстве случаев, кроме автоматической сборки, допускаются
значительные изменения коэффициентов упругости и
первоначального натяга, однако упругие элементы целесообразно
выполнять перестраиваемыми или со сменными пружинами.
Использование активных средств открывает более широкие
возможности, но при этом, естественно, усложняется
конструкция. Выходные звенья приводов активных устройств могут
выполнять функции только закрепления (фиксирования) в любом
положении или приведения в определенное положение с
последующим закреплением. На рис. 5.15, а, б приведены схемы
устройств, в которых используется пневмоцилиндр. Если давление
в рабочую полость не подается, то параллелограммный механизм
дает свободу перемещений, при подаче давления подвижная часть
или фиксируется в любом заданном положении (рис. 5.15, а)
в ограниченном диапазоне, определяемом предельными углами
поворота рычагов, или приводится к единственному
определенному положению (рис. 5.15, б). В подобных устройствах могут
быть использованы другие двигатели с малыми ходами. В
некоторых случаях удобно, чтобы в каждом устройстве было несколько
двигателей. Фиксирование в произвольном положении может
осуществляться также с помощью других средств, например,
порошковых электромагнитных муфт.
Заметим, что нежесткое крепление, а) р ^г р 6) t
схвата с применением дополнительных
приводов по существу означает
введение дополнительных степеней
подвижности. Поэтому встает вопрос о том,
необходимы ли новые дополнительные
степени подвижности или их функции
могут быть переданы основным
степеням подвижности. При этом важным Рис. 5.15
показателем является сложность
конструкции.
5.4. СМЕННЫЕ СХВАТЫ
И УСТРОЙСТВА АВТОМАТИЧЕСКОЙ ЗАМЕНЫ
СХВАТОВ
Часто одного схвата недостаточно для требуемой широкой
номенклатуры предметов производства, и приходится
предусматривать возможность замены схватов или их элементов. Для части
серийно выпускаемых ПР предусматривается комплектация смен-
mm
Я Я
89
ными схватами (например, для отечественных ПР УМ160Ф2.81
и финских Пума 560), однако нередко штатных схватов, имеющихся
в комплектах, оказывается недостаточно, и комплекты приходится
пополнять новыми конструкциями, проектируемыми и
изготавливаемыми по месту их эксплуатации.
Возможны и практически используются сменные устройства
схватов различных уровней.
1. Сменными являются рабочие органы целиком (если
захватные устройства, — то вместе с приводом — рис. 5.16, а). При этом
появляется возможность вводить в комплект схваты с
двигателями, имеющими различные энергетические характеристики и
значения хода выходного звена, включать в комплекты захватные
устройства, имеющие другие принципы действия
(электромагнитные, вакуумные). Если ПР используется как технологический,
то предусматриваются сменные рабочие органы (например,
сварочные клещи), если как измерительный—то измерительный
преобразователь. Основным недостатком способа замены всего
рабочего органа является громоздкость заменяемого блока.
2. Сменными являются механизмы схвата (рис. 5.16, б), а
двигатель (обычно пневмоцилиндр) остается несменным. При этом
принцип действия схвата остается, естественно, тем же, но можно
выбором механизма передачи задавать различные направления
перемещений рабочих элементов, увеличивать диапазон раскрытия
схвата за счет уменьшения усилия захватывания, и наоборот.
При смене схвата не возникают трудности, связанные со стыковкой
90
силовых магистралей; вследствие этого не снижается надежность
соединений и уплотнений.
3. Сменными являются звенья механизма схвата. На рис. 5.16, в
показано, как заменой рычагов У, совершающих качательное
движение, другими и установкой крышки 3 с серьгами 4 на корпусе 2
схвата можно изменить кинематику схвата и обеспечить
плоскопараллельное схождение рабочих элементов.
4. Сменными являются рабочие элементы (рис. 5.16, г). При
этом обеспечивается приспосабливаемость схвата к форме
поверхности предмета, за которую производится захватывание, в
определенных пределах можно смещать диапазон раскрытия.
В конструкциях серийно выпускаемых ПР чаще всего замена
всего ЗУ осуществляется на первом, высшем уровне, реже
сменным является механизм в целом; устройства замены на третьем
и четвертом уровнях в настоящее время разрабатываются.
Замена ЗУ может осуществляться вручную, автоматизиро-
ванно и автоматически. Возможность замены ЗУ в принципе
предусматривается в большинстве выпускаемых ПР; для
обеспечения такой возможности осуществляются стандартизация и
унификация типов соединений и присоединительных размеров ЗУ
(ГОСТ 26063—84). Однако в обычных конструкциях смена схвата
с его базированием и закреплением, производимая вручную,
является трудоемкой, развинчивание и свинчивание при
приложении больших усилий приводят к снижению надежности
соединений. К настоящему времени разработано немало конструкций
быстросменных схватов, узлы крепления которых позволяют
соединять схваты с рукой ПР простейшими движениями, и часто
без применения специального инструмента. При конструировании
стыковочных узлов широко используется накопленный опыт
в смежных областях машино- и приборостроения. Вручную могут
выполняться все операции снятия старого схвата, установки и
закрепления нового или только некоторые из них. В последнем
случае, при автоматизированной замене ЗУ сам процесс
соединения может выполняться в режиме ручного управления с основного
или выносного пульта. Такой способ замены является
предпочтительным для ПР большой грузоподъемности с тяжелыми ЗУ.
В ПР, предназначенных для работы в гибких
производственных системах, замена ЗУ должна осуществляться автоматически.
При проектировании ПР с автоматической заменой ЗУ наибольшие
сложности вызывает конструирование достаточно простых и
надежных узлов стыковки ЗУ с рукой ПР. Опыт станкостроения
может быть использован в первую очередь в части базирования и
закрепления хвостовиков инструмента на рабочих позициях
у многооперационных металлорежущих станков. Однако в станках
на инструмент действуют значительные силы, а к точности
положения режущих кромок предъявляются высокие требования;
поэтому закрепление инструмента в станках должно быть весьма
жестким и прочным, а узлы крепления являются тяжелыми и
91
р
Рис. 5.17 ЦД
громоздкими. Для ПР силы, действующие на ЗУ, значительно
облегчены.
При проектировании узлов стыковки в первую очередь должны
решаться три вопроса: задание баз для сменных схватов,
обеспечение установки на базы и надежное закрепление при
базировании. Основные схемы базирования представлены на рис. 5.17.
Базирующими могут быть такие сочетания поверхностей:
плоскость и поверхности двух штифтов, плоскость и поверхности
плоского выступа, конус и поверхности продольного выступа,
плоскости пирамиды. Заметим, что, поскольку усилия,
действующие на ЗУ, относительно невелики, можно использовать
базирование по малым участкам поверхностей или по линиям. Важным
является требование, чтобы установка на базы осуществлялась
простым движением (желательно, прямолинейным) и для
удержания сменной части в состоянии базирования было достаточно
силы, приложенной в том же направлении. Все описанные схемы
удовлетворяют этому требованию.
Задачу обеспечения правильной установки на базы в процессе
программного сближения руки со схватом при соединении можно
рассматривать как частный случай задачи автоматической сборки.
Соединение должно произойти при наличии рассогласований
в положении и взаимной ориентации хвостовика схвата и
ответной части на руке ПР; необходимо исключить заедание и
заклинивание сочленяемых частей. Для этого нужно обоснованно
выбирать зазоры в соединяемых парах вал—втулка, должны быть
предусмотрены заходные фаски и скосы поверхностей, по которым
происходит скольжение, обеспечена достаточно малая
шероховатость поверхностей. Соединение схвата с рукой ПР должно
легко разбираться, рассоединяться, поэтому некоторые
традиционные виды соединений оказываются неприемлемыми. Так,
посадка на конус Морзе реализует заклинивание и обеспечивает
точное и надежное фиксирование, однако разъединение требует
больших усилий (одним из эффективных является способ
разъединения ударом, но для его реализации требуется значительное
усложнение конструкции).
92
Самостоятельной и наиболее сложной является задача
закрепления (удерживания, фиксирования) при базировании ЗУ,
соединенного с рукой ПР. Устройство, создающее удерживающую
силу при базировании ЗУ по функциональному назначению, само
по себе представляет собой узко специализированное захватное
устройство, предназначенное для захватывания и удерживания
только одного предмета — хвостовика основного ЗУ. Как и для
основного ЗУ, удерживающее усилие может создаваться
различными средствами и на основе различных физических принципов:
с помощью упругих элементов, самостоятельными активными
приводами (пневматическими, гидравлическими или электрическими
двигателями), магнитами или электромагнитами, вакуумными
камерами, а также их различными сочетаниями. Рассмотрим
качественные особенности перечисленных средств и
проиллюстрируем эти особенности на конкретных примерах.
При использовании упругих элементов — пружин — усилие
создается за счет их поджатия или растяжения при работе
приводов ПР, когда хвостовик схвата, находящегося в гнезде,
взаимодействует с перемещающейся приводами ответной частью. Пример
приведен на рис. 5.18. Фиксирование хвостовика схвата
происходит в фигурном пазе, вырезанном в корпусе. Движение выступа
на хвостовике сменного схвата изображено штриховой линией
со стрелками. На первом этапе движения поджимается пружина,
она осуществляет фиксирование в конечном положении.
Закрепление и освобождение осуществляются при относительно
небольших усилиях (моментах), которые развиваются двигателями
основных приводов ПР. Регулирование усилий может осуществляться
предварительным поджатием пружин. Характерным для
использования пружин в качестве источника усилий является
необходимость выполнения сложных, многоэтапных движений. В данном
случае необходимо двойное движение: сначала выдвижение руки
вперед до упора, а затем вращение вокруг продольной оси руки.
Соединение с помощью описанного устройства оказывается
достаточно надежным, если на всех этапах переноса предмета
продольная составляющая силы инерции, действующей на схват вместе
с предметом, меньше силы поджатия пружины в положении
фиксирования схвата. Это характерно для ПР с не очень мощными
двигателями (в первую очередь для ПР с электроприводом) и плавным
торможением. При работе ПР с пневмоприводом, у которых
позиционирование осуществляется по упорам, при ударах, хотя
и смягчаемых демпферами, возникают большие перегрузки и
возможно самопроизвольное освобождение
схвата.
Для быстроразъемных соединений
в качестве фиксирующих элементов
часто применяются различные защелки.
Клиновые защелки при действии
продольных сил обеспечивают поджатие Рис. 5.18
93
хвостовика схвата к ответной части, поскольку направление
перемещения защелки выбирается всегда перпендикулярным к
основному относительному перемещению соединяемых деталей.
Источниками продольных перемещений защелок и необходимых
усилий поджатия могут быть пружины или специальные
управляемые силовые элементы (маломощные пневмоцилиндры,
мембранные приводы, электромагниты). Силовые элементы могут
быть расположены на руке ПР, на сменном схвате, на магазине
или на приспособлении, в котором происходит смена схвата.
Возможны конструкции, в которых защелка срабатывает от
перемещения или поворота руки ПР. Наиболее удобными в
эксплуатации являются устройства, в которых защелка переключается
то в одно, то в другое положение при последовательных нажатиях
руки на схват.
Имеются также конструкции сменных схватов, удерживание
которых осуществляется с помощью электромагнита или
вакуумной камеры. Удерживающая способность таких узлов ограниченна,
но может быть вполне достаточной, особенно если принять меры
для облегчения схвата и увеличения стыковочной поверхности.
В настоящее время наибольшее распространение получили
сменные схваты с самостоятельными приводами (чаще всего —
пневматическими). Некоторые варианты схем изображены на
рис. 5.19. Чаще всего основание сменного схвата подтягивается
к руке и прижимается к базовой плоскости продольной силой,
создаваемой двигателем. Прижимы, через которые передается сила,
могут быть расположены как снаружи, так и внутри (рис. 5.19, а,
б). Подтягивание и прижатие к базовой плоскости могут
осуществляться с помощью винта, вращаемого поворотным
двигателем (рис. 5.19, в), или от пневмоцилиндра через специальную
передачу. Продольная сила может создаваться клиновой
передачей, ось пневмоцилиндра в этом случае перпендикулярна к про-
94
дольной оси руки (рис. 5.19, б). Использование узлов сменных
схватов с самостоятельными приводами позволяет получать
практически любые требуемые значения удерживающих сил, но при
этом увеличивается масса, усложняются конструкция и система
управления. Иногда используется совмещение основного привода
схвата с приводом узла крепления (например, за счет того, что
в различных диапазонах хода поршня один и тот же пневмоци-
линдр выполняет различные функции).
Самостоятельной задачей является дтыковка коммуникаций
(трубопроводов, кабелей). Стыковка трубопроводов необходима
тогда, когда сменным является схват вместе с пневмоцилиндром
или вакуумное захватное устройство. Штекерные разъемы нужны
для электрических каналов связи датчиков очувствления с
устройством управления. Для узлов стыковки трубопроводов
необходимы уплотнения, которые не препятствовали бы стыковке и
допускали бы многократное соединение.
На половинах стыковочных узлов сменных захватных
устройств целесообразно устанавливать контактные или
бесконтактные датчики контроля выполнения операций соединения или
отсоединения.
Глава 6
ОСНОВНЫЕ ЭТАПЫ
ПРОЕКТИРОВАНИЯ СХВАТОВ
6.1. ВЫБОР СХЕМ И ПАРАМЕТРОВ СХВАТОВ
ПО СОВОКУПНОСТИ ТЕХНИЧЕСКИХ ТРЕБОВАНИЙ
Основными группами требований, определяющих выбор схвата,
являются: условия эксплуатации и геометрические характеристики
робототехнического комплекса (РТК), характеристики объекта
и ПР. Рассмотрим каждую из этих групп в отдельности.
1. Условия эксплуатации и геометрические характеристики
РТК.
1.1. Условия эксплуатации определяют исполнение
(нормальное, пылезащищенное, взрывозащищенное и др.) схвата и
представляются в виде предельно допускаемых параметров внешней
среды, при которых должны обеспечиваться значения показателей
схвата, указанные в техническом задании на проектирование.
1.2. Габаритные размеры зоны захватывания, способ
базирования объекта и параметр положения на позиции захватывания
определяют поверхности объекта, за которые запрещено
захватывание, кинематику перемещения объекта при захватывании,
габаритные размеры схвата и представляются в виде схемы
базирования объекта в выдающем устройстве с указанием направления
95
подхода схвата к объекту и габаритных размеров зоны
захватывания.
1.3. Габаритные размеры зоны отпускания, способ
базирования и параметры положения объекта на позиции отпускания
определяют поверхности объекта, за которые запрещено
захватывание, габаритные размеры схвата и представляются в виде
Условия эксплуатации
hi
Способ базирования объекта N
на позиции захватывания П
LI Способ базирования объекта
на позиции отпускания
N выбор поверхноА
гНсто захватывав
ния
выбор компоновки схвата
—г
выбор числа,
формы и кинематики
\*\ перемещения
рабочих
элементов
X
Расчет параметЛ
род рабочих эле-
ментов и
диапазона их
перемещения
т
II
г-| Формой геометрические
параметры объекта
Масса и инерционные
характеристики объекта
М Прочностные характеристики^-*
объекта
Скорости и ускорения пс
ням подвижности ПР
J дыбор парамет-
ров
»| выбор механизма
1 п передачи
U.
Проверочный расчет
и корректировка
параметров схвата
Расчет приложенных сил и
моментов, действующих на
объект при движении ПР
Ц-1 Абсолютная погрешность
позиционирования ПР
Ц Тип привода и конструкция
места крепления
Выбор конструкции места
крепления
Рис. 6.1
схемы базирования объекта в принимающем устройстве с указа*
нием направления подхода схвата на позицию отпускания и
габаритных размеров зоны отпускания.
2. Характеристика объекта.
2.1. Форма и геометрические параметры объекта определяют
форму, параметры и количество рабочих элементов, компоновку
схвата, диапазон его раскрытия и представляются в виде
габаритного чертежа объекта с указанием диапазона изменения
характерных размеров.
2.2. Масса и инерционные характеристики объекта определяют
силы инерции, действующие на объект при функционировании ПР,
и представляются в пояснительной записке.
2.3. Прочностные характеристики объекта определяют
ограничения на усилие захватывания поверхностей, за которые может
производиться захватывание, и представляются в пояснительной
записке.
96
Для схватов, предназначенных для захватывания и
удерживания нескольких объектов существенно различных форм и
материалов, показатели 2.1—2.3 приводятся для каждого объекта.
3. Характеристики промышленного робота.
3.1. Скорости и ускорения по степеням подвижности ПР
определяют силы инерции, действующие на объект при
функционировании ПР, и представляются в виде паспорта ПР.
3.2. Абсолютная погрешность позиционирования ПР
учитывается при определении диапазона раскрытия схвата и
представляется в паспорте ПР.
Выбор схемы и параметров схвата проводится в соответствии
со схемой принятия решений, приведенной на рис. 6.1.
1. Определение поверхностей объекта, по которым допускается
захватывание, производится с учетом показателей 1.1—1.3 и
2.1—2.3 (способа базирования и параметров объекта при
захватывании и отпускании, геометрических параметров объекта, качества
обработки его поверхностей). Для захватывания не могут быть
использованы участки поверхностей, по которым базируется
объект при захватывании и отпускании. Нежелательно
захватывание за грубообработанные участки поверхностей, на которых
имеются заусенцы, облой и пр., а также за поверхности,
прошедшие чистовую обработку, без принятия дополнительных мер
предосторожности.
2. Выбор поверхностей объекта, по которым производится
захватывание, и схемы базирования объекта в схвате
осуществляется с учетом показателя 2.2. Основные положения
базирования и схемы базирования приведены в гл. 8. При выборе схем
базирования не следует допускать больших смещений центра масс
объекта относительно центра схвата.
3. Выбор числа, формы и кинематики перемещения рабочих
элементов схвата с учетом показателей 1.2, 1.3 и 2.1 как результат
согласования требований к базированию объекта при
захватывании и отпускании, форма поверхностей объекта, по которым
производится захватывание. Рассмотрим, пример такого
согласования, используя следующую буквенную нотацию. Принимается,
что рабочие элементы схватов, обозначенных буквой Л,
перемещаются относительно основания схвата поступательно, по прямой;
буквой В, — перемещаются поступательно по дуге окружности;
С, — совершают вращательное движение в плоскости чертежа.
При этом рабочие элементы могут перемещаться симметрично — а;
несимметрично, когда один из них жестко связан с основанием
схвата, — Рис заданным отношением — у. В табл. 6.1 приведены
различные варианты плоскопараллельного, уголкового и
ромбического схватов, соответствующих требованиям к базированию
при различных значениях характерного размера d объекта.
Для точного базирования объекта на опорную плоскость,
как правило, применяются плоскопараллельйый или уголковый
схваты с поступательным несимметричным перемещением рабочих
Челпанов И. Б. и др.
97
элементов (см. позиции 1, 4, 7 табл. 6.1); при захватывании
пластины возможно применение симметричного уголкового схвата
с поступательным перемещением рабочих элементов по прямой.
Если необходимо зафиксировать положение срединной плоскости,
то (см. позиции 2, 5, 8 табл. 6.1) применяются схваты с
симметричным поступательным перемещением рабочих элементов: плоско-
Таблица 6.1
Форма
' объекта
по нижней плоскости
2
Требования к базированию объекта
г = •
по срединной
плоскости 2 = 0
по оси симметрии х
2 = 0; у = 0
1
2- S± А>*-
±Я=-л А.б.сс
№-
A,B,J3
фЦ А,В,а
\ХТ Л,Ь,Г
=j<Q A,B,C,ct
|0 '•*
кп л.
Ь/>
/www/
A,B,fi
^П А.В,* 8
параллельный для всех рассматриваемых объектов и
ромбический для цилиндра и параллелепипеда. Для этих объектов
возможно применение уголковых схватов, перемещающихся
поступательно с заданным отношением. При фиксации оси х для всех
рассматриваемых объектов целесообразно применять
ромбический схват, рабочие элементы которого поступательно
перемещаются по прямой, или уголковый схват, рабочие элементы
которого перемещаются с заданным соотношением (см. позиции 6, 9).
Видно, что некоторые варианты обладают большей
универсальностью, чем другие. Чаще всего (6 раз) в табл. 6.1 встречается
вариант ромбического схвата Л, а. Менее универсальными
являются схваты, рабочие элементы которых совершают
вращательное движение.
Число вариантов, приведенные в табл. 6.1, может быть
увеличено как в рамках рассматриваемых моделей схватов, так и за
98
счет расширения номенклатуры объектов и рабочих элементов
различной формы. Данные, получаемые из такого типа таблиц,
являются основой для проектирования схватов, их унификации
и модульного построения.
4. Расчет параметров рабочих элементов и диапазона
раскрытия схвата с учетом показателей 2.1 и 3.2 (диапазона изменения
характерных размеров объекта, направления подхода,
погрешностей позиционирования ПР) проводят на основе анализа
области допустимых отклонений, рассматриваемой в гл. 7.
Параметры рабочих элементов и диапазон раскрытия схвата должны
обеспечить захватывание объектов во всем диапазоне изменения
параметров размеров объекта, а также прохождение объекта
максимального характерного размера между рабочими элементами при
выходе схвата на позицию захватывания в заданном направлении.
Размеры и положение требуемой поверхности контакта рабочих
элементов задаются координатами точек контакта с объектом
в положении равновесия, определяемыми методами, изложенными
в гл. 7.
5. Выбор компоновки схвата с учетом требований 1.1—1.3,
2.1—2.3, 3.1—3.2. Выбор основных вариантов компоновок
производится в соответствии с рекомендациями, данными в гл. 5.
6. Расчет параметров пневмоцилиндра может осуществляться
по основной и упрощенной методикам. Расчет по упрощенной
методике может применяться для приближенных расчетов на
начальной стадии проектирования или вместо основной методики
в случаях, когда нет жестких ограничений на массогабаритные
характеристики проектируемого схвата, а также ограничений на
усилие захватывания для легкоповреждаемых объектов.
По упрощенной методике с учетом требований 2.1 и 2.2
рассчитывается требуемое значение усилия захватывания STP для
полезной грузоподъемности т по формуле
STP = kCmg, (6.1)
где С — безразмерный коэффициент, который выбирается
равным 10 — для электромеханических ПР и 25—для
пневматических; коэффициент запаса k выбирается в интервале от 1 до 2,5.
Значения k > 2 выбираются при удерживании объектов с сильно
смещенным центром масс и в случае, когда коэффициент трения
/ «< 0,1. Площадь сечения F и ход пневмоцилиндра L выбираются
по ГОСТ 26059—85 из условия
pFL>AiS(/i2—Ах),
где А2 и кг — параметры максимального и минимального раскрытия
схвата соответственно; п — количество подвижных рабочих
элементов; р—давление воздуха.
Основная методика расчета параметров пневмопривода
включает следующие этапы:
4*
99
расчет инерционных характеристик объекта по данным 2.1
и 2.2;
расчет приложенных сил F и моментов М, действующих на
объект в схвате по методам, изложенным далее в этой главе;
определение для каждого из захватываемых объектов (далее
отмечаемых индексом /) предельно допустимых значений
приложенных сил fxh fyjt fzj и моментов \xxjy \х^у \izj при единичном
усилии захватывания (S = 1) по методике, изложенной в гл. 8;
расчет требуемого усилия захватывания, обеспечивающего
удерживание /-го объекта,
5тр'*~шахи^' та9 иг их/'йг1 ^i*
где Fx, Fy, F29 Mx, Myj M2 — максимальные значения
приложенных сил и моментов, действующих по осям системы координат
схвата [полученное значение может быть представлено в виде
(6.1)1;
для объектов, удерживаемых при значении параметров
раскрытия hj, в осях S—h строятся точки, соответствующие
расчетным значениям STpj-, затем .по полученным точкам строится
огибающая 5 (Л);
выбор параметров пневмоцилиндра осуществляется по
ГОСТ 26059—85 из условия
pFL^n^ S(h)dh. (6.2)
hi
Условию (6.2) могут удовлетворять различные сочетания
параметров F и L; значения их произведения могут быть близки для
длинноходовых цилиндров малой площади сечения и коротко-
ходовых цилиндров большого сечения, мембранных приводов.
7. Электродвигатель схвата выбирается исходя из массогаба-
ритных ограничений и необходимой мощности. Требуемое усилие
захватывания обеспечивает редуктор. Расчет на быстродействие
производится как проверочный.
8. Схема и параметры механизма передачи схвата выбираются
из условий обеспечения требуемой кинематики перемещения
рабочих элементов и формирования требуемой зависимости усилия
захватывания S от h параметра раскрытия схвата.
Вращательное перемещение рабочих элементов обеспечивается
рычагами первого и второго рода (см. схемы 1—4 и 10—12
табл. 4.2), поступательное перемещение по дуге окружности —
параллелограммным механизмом (см. схемы 4, 5, 8 табл. 4.1),
поступательное перемещение по прямой — парами скольжения.
Рекомендации по условиям применения основных схем механизмов
передачи даны в гл. 4.
100
Вид зависимости S (h) механизма передачи должен
обеспечивать при захватывании объектов по размеру hj требуемое
значение усилия захватывания. Кроме того, максимальное
значение усилия захватывания не должно превосходить допустимых
значений 5огр7-, обусловленных требованиями сохранения
качества поверхностей захватывания и прочности объектов. На всем
интервале изменения параметра раскрытия должно выполняться
неравенство
SrvJ<S(hj)^SorvJ. (6.3)
При работе ПР с разнородной продукцией ограничения (6.3)
для ряда значений hj могут существенно отличаться, так что
будет невозможен синтез механизма
передачи. В этом случае применяются
двигатели с переменным усилием на
выходном звене или
конструктивно-унифицированные сменные схваты.
9, Для выбранных параметров схвата
проверяют принадлежность приложенных
сил и моментов, действующих на объект
при функционировании ПР, области
жесткого фиксирования методами,
изложенными в гл. 8. При больших запасах по удерживающей
способности схвата его параметры могут быть откорректированы
с целью уменьшения массогабаритных характеристик. Если
условия удерживания нарушаются, то могут быть увеличены площадь
сечения и ход пневмоцилиндра, передаточное отношение
редуктора и механизма передачи, изменена форма рабочих элементов,
установлены накладки.
Важность правильного и обоснованного выбора схем и
конструкций схватов общепризнана. Однако глубина научной
проблематики расчета и исследования схватов ученым-механикам,
специалистам расчетных отделов конструкторских бюро неизвестна,
поскольку сложность задач механики схватов неочевидна. Обычно
конструктор или специалист по теоретической механике видит
в схвате только механизм с одной степенью свободы, для которого
нужно решать только задачу статики, т. е. определять усилие
захватывания S по известному усилию Q на штоке пневмо- или
гидроцилиндра, как это описывается в п. 4.5. Несмотря на то
что схемы механизмов схватов разнообразны, для подавляющего
большинства этих схем решение задачи статики элементарно.
Действительная специфика задач механики схватов начинается
с более подробного рассмотрения взаимодействия объекта с
рабочими элементами. Простейшая расчетная схема, отражающая
особенности взаимодействия объекта с рабочими элементами,
изображена на рис. 6.2. Механизм схвата исключается из рассмотрения;
для наглядности показано, что рабочие элементы перемещаются
прямолинейно и симметрично относительно средней линии (оба
101
£
I
I
1
I
I
//
X
12 W
рабочих элемента могут перемещаться только на одинаковую
величину Д/i). В положении равновесия, когда внешние силы на
объект не действуют (кроме реакций в точках контакта), внешние
усилия захватывания, действующие на каждый из рабочих
элементов, одинаковы и равны S. Для описываемой простейшей
расчетной схемы предполагается, что объект жесткий и контакт
осуществляется в дискретных точках. Вопросы расчета реакций
в точках контакта (сначала только нормальных, а затем с учетом
трения) при действии на объект дополнительных внешних сил
входят важной составной частью в
первый цикл исследований механики
схватов и подробно рассматриваются
в гл. 8.
•Анализ взаимодействия объекта с
рабочими элементами схвата часто
необходимо углублять, вводя в рассмотрение
более сложные частные модели,
например, учитывая упругие деформации
накладок, устанавливаемых на рабочих-
элементах, контактные деформации
объекта и рабочих элементов схвата в
малых зонах контакта. Специфика
решения задач механики системы схват—
объект на этом уровне отражена в гл.9.
Авторы в течение ряда лет работали
над постановкой, формализацией и
решением различных задач механики
схватов. В результате систематизации и
обобщения этих задач была создана и
разработана общая теория
захватывания, в рамках которой формулируются общие подходы к
постановке комплекса задач исследования, определяются содержание
и математическая формулировка отдельных групп задач,
устанавливаются их взаимоотношение и последовательность решения,
а также тип используемых математических моделей. Структура
общей теории захватывания наглядно представлена на рис. 6.3.
Исходные данные / и пути их получения, описанные в гл. 2
и п. 6.1, используются для решения основных задач расчета схвата,
выделенных на рис. 6.3 в левый столбец, и дополнительных и
вспомогательных, выделенных в правый столбец. Основными
задачами являются: 2 — определение множеств положений, в которых
имеет место контакт объекта с рабочими элементами схвата;
3 — определение множества положений равновесия объекта
в схвате; 4 — определение характера положений равновесия;
5 — определение несущей способности схвата (области жесткого
фиксирования); 6 — определение сил и моментов, действующих на
объект со стороны рабочих элементов схвата при относительных
перемещениях объекта; 7 — квазистатический анализ процессов
I
13 LJ
Рис. 6.3
102
захватывания и отпускания; 8 — исследование ударных
процессов захватывания объекта.
К вспомогательным задачам теории захватывания относятся:
9 — определение сил инерции, действующих на объект и рабочие
элементы схвата, а также сил и моментов, действующих на объект
при наложении на него механических ограничений, связей; 10 —
расчет механизма передачи и определение усилия захватывания;
)/ — определение погрешностей базирования объекта в схвате;
12 — проверка условий отсутствия перемещений объекта
относительно рабочих элементов схвата; 13 — исследование
процессов относительного перемещения объекта в схвате в
динамике.
Определение множества положений объекта, в которых он
взаимодействует с обоими рабочими элементами схвата, является
чисто геометрической задачей. Большинство таких положений не
являются положениями равновесия; выделение положений
равновесия составляет вторую основную задачу. Естественным
продолжением этих задач является определение характера положений
равновесия и исследование устойчивости этих положений,
включая анализ условий контакта (выявление числа и расположения
точек контакта; наличия контакта по линиям и поверхностям;
влияния погрешностей формы и положения поверхностей,
вступающих в контакт, на характер положения равновесия);
определение вида потенциальной энергии системы схват—объект по
различным координатам и др. В теоретической механике такое
сочетание задач является традиционным, однако применительно
к схватам они имеют существенную специфику: во-первых,
положений равновесия может быть много (более десятка); во-вторых,
распространены важные для практики расчета случаи, когда
положения равновесия объекта в схвате являются безразличными по
некоторым координатам и его удерживание осуществляется
силами сухого трения в точках контакта; в-третьих, в каждой из
рассматриваемых задач по всем или нескольким координатам
осуществляется жесткое фиксирование, при этом положение
равновесия является неклассически устойчивым. В простых случаях
определение положений равновесия и выделение среди них устойчивых
осуществляются с помощью простейших геометрических
построений; при сложной форме объектов эти задачи должны решаться
численными методами. Названным задачам, а также чисто
геометрической задаче определения погрешностей базирования объекта
в схвате посвящена гл. 7.
Центральной в общем перечне выделенных на рис. 6.3 задач
является задача определения несущей способности схвата. В гл. 8
она ставится в общем виде, описываются методы аналитического
построения границ области жесткого фиксирования, их сечений
и предельных значений приложенных сил и моментов. Основой
для расчета несущей способности схвата является определение
значений реакций в точках контакта при анализе характера взаи-
103
модействия объекта и поверхностей рабочих элементов схвата
и структуры механизма передачи схвата.
Наиболее сложными по постановке и методам решения
являются задачи анализа процесса захватывания и отпускания,
описанные в гл. 10. При захватывании и отпускании изменяются
число и положение точек контакта, что, с одной стороны, делает
необходимым решение задачи по этапам, а с другой, — требует
знания сил и моментов, действующих на объект со стороны
рабочих элементов схвата при больших отклонениях объекта от
положения устойчивого равновесия. Простейшим по постановке (но не
по решению) является квазистатический анализ процессов
захватывания или отпускания, когда рассматривается
последовательность положений равновесия системы
схват—объект—принимающее (выдающее) устройство. ^
Для прочностных и жесткостных расчетов схватов, при
анализе их быстродействия и работоспособности в штатных и
аварийных режимах производятся динамические расчеты. Задачи
динамики ударов при захватывании и переносе объекта многообразны
и подробно описаны в п. 10.4 и гл. 11.
Для некоторых из перечисленных задач математические модели
определены однозначно: так, при определении положений
равновесия и исследовании устойчивости достаточно рассматривать
объект и рабочие элементы схвата как абсолютно жесткие.
Погрешности положения и формы можно рассматривать как
детерминированные и как случайные. Упругость элементов схвата и объекта
может учитываться во многих задачах, например в большинстве
задач динамики. Модели упругих элементов наиболее
многообразны, некоторые из них описаны в гл. 9.
В следующих параграфах этой главы основное внимание
уделяется вспомогательным задачам, решение которых необходимо
при обосновании и выборе схем и конструкций схватов, при
получении исходных данных для решения задач, описанных в
главах 7—11.
6.2. РАСЧЕТ СИЛ И МОМЕНТОВ, ДЕЙСТВУЮЩИХ НА ОБЪЕКТ
В ДИНАМИЧЕСКИХ РЕЖИМАХ
Данные о силах и моментах, действующих на объект,
удерживаемый в схвате, могут быть получены различными путями (см.
гл. 2). Для того, чтобы дать представление о принципах расчета,
в этом параграфе в общем виде рассмотрена задача аналитического
определения сил инерции и их моментов, действующих на объект
в динамических режимах.
Все силы инерции приводятся к центру (полюсу) схвата. Центр
схвата выбирается с учетом формы и размеров объекта. Результат
приведения представляется в виде силы F и момента М, заданных
проекциями на оси системы координат схвата.
104
Динамическая сила Т и момент Lc реакции, определяющие
воздействия схвата на объект вследствие движения схвата и
объекта как жесткого целого, в общем виде определяются из
законов изменения импульса в и кинетического момента Кс объекта,
записываемых во вращающейся системе координат:
^ + (0X6 = 7; ^£ + «xKc = Lc. (6.7)
Здесь производные с индексом берутся в подвижной системе
координат, как в неподвижной, а со — вектор угловой скорости
системы координат. Импульс 6 проще всего находится через
вектор скорости Vc центра масс объекта и массу т объекта
О = mVc,
а кинетический момент — через вектор угловой скорости со
объекта и линейной скорости Vc центра масс, положение которого
относительно полюса схвата задается вектором гс:
Kc = Ic«> + "ircxVc, (6.8)
где 1с — тензор инерции объекта. В расчет должны войти
суммарные силы и моменты, действующие на схват со стороны объекта:
F = —T + P; M = -L + rcxF, (6.9)
где Р — сила тяжести; гс — радиус-вектор, определяющий
положение центра масс объекта относительно полюса схвата. После
проектирования F и М на оси схвата xyz определяются
составляющие Fxy Fyy FZi Mx, Myy Mz. Для этих составляющих
непосредственно проверяются условия надежности удерживания объекта,
сформулированные в п. 8.5.
Если массу и момент инерции объекта нельзя считать малыми
по сравнению с массами и моментами инерции подвижных частей
манипулятора, то линейные и угловые ускорения нельзя считать
заданными и независящими от свойств объекта. В этом случае
заданными следует считать силы и моменты, развиваемые
приводами.
Непосредственное использование приведенных выражений
требует весьма полного знания динамики движения манипулятора
ПР. Приближенные подходы к оценке параметров движения
предложены в гл. 2.
Процедура приведения динамических сил и моментов к осям
схвата робота сводится к последовательности матричных
преобразований по схеме, приведенной в табл. 6.2. Предполагается, что
с последним звеном манипулятора связана система координат
основания схвата х0у0г0 с началом в центре схвата. С центром схвата
связана система координат схвата xyz. Ориентация схвата (осей
xyz) относительно осей х0у^0 определяется углами Эйлера \|э0,
Фо» Фо — значениями соответствующих координат трех ориенти-
106
Таблица 6.2
Система координат
основания схвата
ХоУо^о
Система координат
схвата
xyz
Система координат
объекта
VxB
Vyo
Ьо
вхО
вуо
вгО
Т
Шко
Шуо
и>гО
Туо
Tz0-
РхОРуОРгО
Т/
Шх toy Шг
TJ
Г\гу
Мк
My
м7
Рх Ру Pz
ЪоГуОЪо
То
Lx
t-2
*сУсгс
Ш.Ш,
>$Ш?Ш$
in
рующих степеней свободы. Положение центра масс объекта
относительно полюса схвата задается вектором гс = [хСУ yC9 zc]T;
ориентация осей объекта £т)£ задается углами Эйлера г|э, ф, ft
так, что относительно осей xyz схвата матрица направляющих
косинусов системы координат £т]С имеет вид
Г =
COS \|) COS ф — COS 1(5 Sin ф — Sin Ур Sin ft
— sin ty sin ф cos ft — sin \J? cos ф cos ft
sin \|) cos ф + sin \|) sin ф + — cos ф sind
+ cos ф sin ф cos ft + cos г|? cos ф cos ft
sin i|> sin ft cos ф sin ft cos ft
Совершенно аналогично записывается матрица направляющих
косинусов Г0 (г|?0, Фо, $о), определяющая ориентацию осей схвата
относительно осей основания схвата. Углы \|э, ф, ft, \|)0, Фо> $о
считаются постоянными.
По обобщенным скоростям qt (t) звеньев определяются
вектор ю угловой и вектор V линейной скоростей в проекциях на
оси x0y0z0. Затем умножением полученного вектора со на
соответствующую матрицу направляющих косинусов Г0 или Г
осуществляется его перепроектирование последовательно на оси схвата
и оси объекта. В проекциях на оси £т)£ объекта определяются век-
106
тор Кс кинематического момента и далее вектор момента Lc
согласно (6.7). Умножением на матрицу Г вектор Lc приводится
к осям схвата. Динамическая сила Г определяется в осях х0, r/0, z0
согласно уравнениям (6.7) по вектору о и вектору импульса в,
выраженному через обобщенные скорости приводов,
приведенные к осям основания схвата. Умножением на матрицу ГI
вектор Т приводится к осям схвата. Подстановка полученных таким
образом значений векторов Т и Lc в уравнения (6.9) завершает
процедуру приведения векторов силы и момента к полюсу схвата.
Значения составляющих L^ 1Л, Ls определяются в общем виде
следующим образом:
Ц = h*i + (h - 7л) ®л®с - hr\ К - °>1«>д -
- hi (Ч - "W - /л; (Ц - о)|);
Ln = (h - h) <*i°>t + 1ц&п - hri (*>* + co^) -
li = (h - h) ю&юп — h&z - /|т, (co| - со?,) -
(6.10)
Тогда составляющие вектора момента М, приведенного к
полюсу схвата, могут быть получены подстановкой формул (6.10)
в выражения:
Мх = — L|Vii - ^t,Yi2 - ^Yis + y*Fz - zcFy; 1
M, = — £|721 - Lr,Y22 - ^гТгз + 2CFK - xc/y,
Мг = — Цуп - ^nYsa - ^Yss + xcFy - ycFx, J
(6.11)
rAe Yo* — элементы матрицы Г направляющих косинусов. При
независимой работе приводов выражения (6.10) и (6.11)
упрощаются, поскольку на различных этапах движения изменяются
только некоторые координаты. В динамических режимах могут
иметь место случаи, когда из-за неудачной ориентации схвата ось
наименьшей несущей способности схвата совпадает по
направлению с осью наибольшего ускорения. Такие наиболее
неблагоприятные ситуации должны учитываться при выборе ориентации схвата
в процессе движения манипулятора. Например, если объект
цилиндрической формы захвачен по образующей, то ось наименьшей
несущей способности совпадает с осью симметрии цилиндра.
В этом случае схват желательно ориентировать таким образом,
чтобы проекция вектора силы F на эту ось была бы по возможности
минимальной. Для объектов сложной формы решение задачи
оптимального ориентирования схвата при заданной динамике
манипулятора требует детального изучения геометрии и
инерционных свойств объекта.
107
6.3. РАСЧЕТ СИЛ И МОМЕНТОВ,
ДЕЙСТВУЮЩИХ НА ОБЪЕКТ ПРИ ОГРАНИЧЕНИЯХ
НА ПЕРЕМЕЩЕНИЯ И ПОВОРОТЫ
Режим свободного переноса для транспортирующих и
обслуживающих ПР наиболее типичен, поскольку именно он обычно
занимает большую часть рабочего цикла и в этом режиме
реализуются большие перемещения. Однако наиболее ответственными
часто являются режимы, в которых налагаются механические
ограничения, связи, осуществляется силовое замыкание механизма
манипулятора через объект.
Для транспортирующих и обслуживающих ПР связи
существенны на начальной и конечной фазах движения (например,
когда объект, находящийся в зажимных приспособлениях, в
центрах, в гнезде, уже взят схватом манипулятора, скользит по
направляющим или по опорной поверхности и пр.). Для сборочных
роботов и при манипулировании одним объектом одновременно
несколькими схватами, установленными на манипуляторах
различных роботов, наложение связей характерно для основных
рабочих операций. Ответственность режимов с наложенными
связями выражается в том, что именно для них могут получаться
недопустимо большие силы и моменты, действующие на объект.
Причиной их появления является рассогласование положений
схвата ПР и связей. Ниже рассматривается только задача
статического равновесия манипулятора, схват которого удерживает
объект под действием внешних связей.
Если на перемещения и углы поворота объекта, а вместе с тем
и схвата наложены связи, то граничные условия для схвата, т. е.
конца последнего звена механизма, могут ставиться как по
некоторым составляющим сил и моментов, так и по некоторым
проекциям векторов перемещения и малого угла поворота. Во всех
случаях на последнем звене механизма задаются шесть величин
из числа проекций перемещений, углов поворота, сил и моментов
или шесть их линейных комбинаций, а определению подлежат все
неизвестные проекции этих величин. Установление соотношений,
связывающих эти величины при силовом замыкании механизма
манипулятора, формулируется как задача расчета статики
упругого механизма.
В дальнейшем упругая система механизма манипулятора
считается линейной. При расчете могут учитываться
распределенные упругие податливости самих звеньев, рассматриваемых как
стержни, работающие на изгиб или кручение, и сосредоточенные
податливости в шарнирах и сочленениях, обусловленные как
упругостью элементов конструкции, в частности звеньев, привода,
так и, возможно, статической податливостью приводов следящих
систем по нагрузке. При линейности характеристик удобно
использовать матричные методы расчета стержневых систем, которые
включают в себя методы податливостей и жесткостей, усовершен-
108
ствованные в том отношении, что все уравнения записываются
в матричной форме и все преобразования и вычисления проводятся
при помощи аппарата матричного исчисления. Применение матриц
делает записи более систематическими, компактными, хорошо
приспособленными для программирования на ЭВМ.
Расчет матриц податливостей для механизма манипулятора
осуществляется последовательным переходом от звена к звену.
При этом осуществляется последовательное умножение на
матрицы направляющих косинусов, определяющих положение
каждого последующего этапа относительно предыдущего.
Будем приводить все величины к введенной ранее системе
координат схвата. Отклонение центра схвата от исходного
положения, определяемое вектором перемещения 8, изменение
ориентации схвата, определяемое
вектором малого угла поворота 6,
действующие силы и моменты,
приведенные к полюсу схвата,
будут задаваться составляющими
по этим осям. Введем в
рассмотрение матрицу-столбец .
перемещения и ориентации
ft
Рис. 6.4
d = [бх, а„ 82, е„ е„ ejy
и матрицу-столбец обобщенных сил
Q = [FX9 Fyi F„ Mx, М9,МЖ]Т.
При решении конкретных задач часто бывает удобно в
матрицах-столбцах D и Q менять элементы местами. Линейная связь
между ними может быть представлена в форме
D = CQ,
где С — квадратная матрица податливости размерности 6X6.
Предположим, что с каждым звеном i связана система
координат XifjiZi. Взаимное расположение двух смежных систем
координат i и i + 1 определяется матрицей Г, (1-+о и вектором L(f+i)t
заданным проекциями на оси хьу^ь и определяющим положение
начала системы координат *f+i#f+iz*+i (рис. 6.4). Матрица Г*(*+1),
содержащая компоненты в системе координат х{у^ь трех ортов
системы координат xMyi+1zuu имеет вид
I\ (t
(4-1)
COS (*,+1, Xt) COS (tfui9 Xt) C0S(ZJ+1, Xi)
cos (xf+1> yt) cos (yM, yt) cos (z,+1, yt)
|_cos (xi+1, zt) cos (yi+1, zt) cos (z,+lf zty
и может быть представлена в виде блочной матрицы
Г{ (*4-i) = [X* (*-и)> Y* (л_1), Ъ{ (^+1)]г,
109
где X/ </+i) — вектор-столбец проекций орта оси х^\\ Yj^+d —
вектор-столбец проекций орта оси #*+ь 1щ+\) — вектор-столбец
проекций орта оси zi+\.
Предположим, что если к началу координат системы / + 1
приведена матрица-столбец Qt+i обобщенных сил, то к началу
координат системы i она приводится с помощью следующего
матричного соотношения:
*' = 1т^7хТГ(7+7^ *|+1э
где Ё— единичная матрица размерностью 3x3. Перепишем ее
в виде
Qt = Gi (<+i)Q<+i-
Если перемещение начала системы координат ад*?*
представить матрицей-столбцом Dh заданной проекциями на оси этой
системы координат, то соответствующая матрица-столбец Qi+\
смещений начала координат системы / + 1 в проекциях на ее
оси может быть представлена как
Di+\ = Gi v+i)Di.
Введем двойную индексацию матрицы JD, Q и Г, полагая,
что первый индекс определяет систему координат, на которую
проектируется вектор, а второй — порядковый номер
рассматриваемого звена. Предполагается, что базовая (абсолютная) система
координат имеет нулевой индекс, а все остальные звенья
пронумерованы последовательно от нулевого звена к схвату. Тогда,
если к полюсу схвата приведена нагрузка Q0w> компоненты
которой заданы в базовой системе координат, то к t'-му шарниру
манипулятора (с ним связана /-я система координат) будет
приложена нагрузка
Qoi =
N N N
/-H-1 /-H-1 /=t+l
CON
или Qoi = GiNQ0N,
где GiN — матрица приведения к /-му шарниру нагрузки,
приложенной к полюсу схвата.
Соответственно перемещение Doi — i шарнира вызовет
перемещение схвата
Don = Git/Dot.
Если ввести блочную матрицу
110
~ L "оТго J'
то перемещение начала /-го звена (/-го щарнира) относительно
(/ — 1)-го шарнира в базовой системе координат может быть
представлено в виде
где Cit — матрица податливости /-го звена. Нетрудно видеть,
что перемещение D0n схвата в базовой системе координат,
обусловленное упругими деформациями звеньев, под действием
приложенной к нему силы определяется выражением
Don = 2j SkNCkkSkN \QoNt (6.12)
где
ShN = ®0hPhN-
Часто необходимо учитывать упругие перемещения,
обусловленные сосредоточенной податливостью шарниров. Упругие
свойства /-го шарнира задаются матрицей податливости Си.
Ориентация осей шарнира обычно отличается от ориентации осей смежного
звена манипулятора и определяется относительно базовой системы
координат матрицей yoi размерностью 3x3 или блочной матрицей
Г*-1° 1
L о I toi J
Тогда выражение (6.12) следует переписать в виде
Don = j 2j [SkNCkkSkN + $&#£**S/wvJf Qow, (6.13)
где shN = (uoffikN-
Матрица податливости C0N упругого механизма
манипулятора, определенная в базовой системе координат и учитывающая
свойства распределенных и сосредоточенных в шарнирах упругих
элементов, будет иметь вид
N
Con = 2j [SkNCkkSkN-\-SkNCkkSkN}-
Полученные выше выражения справедливы и в случае, когда
связи налагаются на перемещение удаленных точек объекта,
вступающих в контакт с другими предметами. В этом случае
необходимо знать радиус-вектор г = [гж, ryt гг\т точек контакта,
матрицу податливости объекта относительно этой точки, а также
ориентацию относительно базовой системы координат осей связей
и системы координат, в которой определены упругие свойства
объекта. При расчете объект рассматривается как дополнительное
111
N + 1-е звено, продольная ось которого направлена по вектору г,
тогда выражение (6.13) принимает вид
(ЛН-1
^о (лч-п
(N+1 \
= | 2j [Sk (N+l)CkkSk (ЛН-1) + Sk(N+\)CkkSk (N+l)]\ Q(
О (ЛЧ-1)>
где Qo (л^+i) — нагрузка, приложенная в точке контакта.
Матрица податливости C0(#+i) описывает упругие свойства
объекта в точке контакта, а матрица S(w+i) (w+n определяется
положением вектора г в базовой системе координат. Второе
слагаемое в квадратных скобках при k = (N + 1) необходимо,
если сочленение последнего
звена и схвата не является
жестким.
Рассмотрим пример.
Предположим, что во всем
механизме манипулятора достаточно
учитывать упругую
податливость только одного звена —
руки, которая рассматривается
как прямолинейный стержень
постоянного сечения. Примем
также, что ось схвата х
совпадает с продольной осью, оси у
и z совпадают по направлению с главными осями инерции
поперечного сечения звена. Легко получить, что упругие свойства
манипулятора в осях xyz задаются матрицей податливости С
-Jrr О
EF
О
О
О
О
I3
3£/„
0
0
0
/2
2Е1и
0
3EIZ
0
/2
2EIZ
0
0
0
Glx
0
0
о
El r
2EI2
Eh
О
El
v -i
где / — длина звена; F — площадь сечения звена; 1Х — момент
инерции сечения на кручение; Iyy Iz — моменты инерции
сечения на изгиб; Е — модуль упругости; G — модуль сдвига.
По структуре матрицы видно, что выделяются одно уравнение
продольного растяжения-сжатия, две пары уравнений плоского
изгиба и одно уравнение кручения.
Получим выражения для элементов матрицы С,
определяющей упругие свойства манипулятора в осях x'y'z\ считая, что
112
оси z и z' совпадают, а угол, образованный осями х и х\ равен а
(рис. 6.5).
Искомая матрица определяется с помощью матричного
преобразования
С = QTCQ, (6.14)
Г Г| 0 1
где Q = г— — блочная матрица размерностью 6x6,
состоящая из нулевых матриц и матрицы направляющих
косинусов Г, которая в рассматриваемом примере имеет вид
[cos a sin a 0"
— sin a cos а О
О 0 1
Решая уравнение (6.14), находим элементы матрицы С. Ниже
приведены ненулевые элементы матрицы С:
С'ц =gpCOS2CC
/3
3£/,
sinaa; c[2 —
I sin 2a
EF~2~~
/*
I2 r I sin 2a
Cl6 = _2£77Sina; C2l=EF—Г"
/3
3£/,
6EIt
sin 2a;
sin 2a;
/ Is /3
^22 = ttf sin2a + ^y- cos2a; c'26 = -^7-;
£f'
3£/
3£/z
C34 =
2£/2
■ sin a;
C43 =
c'45
c'54 =
I2
2EIZ
I2 sin 2a
GIX 2
/2 sin 2a
sin a; C44 =
C35 =
I2
2EI2
COS a;
GK
cos2a + jj
I sin 2a
EIZ 2
/ sin 2a
С53 =
-sin2a;
2EL
•cos a;
GIX
Eh
Съъ
12 , 2
G77sina
EL
-cos^a;
/2 , , I2 /
Сб1 = — 2EI~ Sin a; Сб2 = — 2£Г" Sina; C66==£T~•
После соответствующей перестановки переменных матрица С
может быть представлена в виде четырех блочных матриц
размерностью 3x3, из которых две недиагональные матрицы равны
нулю, и выражение (6.14) имеет вид
Fx
М,
гьх-
ьу
б2
е*
1_е„_
=
с\\
СП
с'ы
С\2
С22
Сб2
0
^16
С26
^66
^33
С43
см
0
С34
с'и
с'м
Сз5
с'аь
с'ьь
мх
113
Соответственно система уравнений разделяется на две подсистемы
несвязанных уравнений.
Продолжим рассмотрение задачи в общем виде. Граничные
условия на конце манипулятора (в центре схвата) целесообразно
записывать в специально выбранной системе координат, а именно,
в системе координат связей. В общем случае задаваемые величины
при заданных связях представляют собой линейные комбинации
перемещений и углов или сил и моментов; в этих случаях конечные
условия называются комбинированными. Иногда, за счет удачного
выбора системы координат связей, можно представить конечные
условия в такой форме, когда заданными можно считать
отдельные составляющие перемещения, малого угла поворота, силы или
момента. Такие граничные условия в дальнейшем будем называть
простыми. Для простых граничных условий в табл. 6.3 приведены
чаще всего встречающиеся варианты постановки задачи. Здесь
в четвертом столбце вписаны задаваемые величины, в пятом —
определяемые.
Вариант 1 реализуется в режиме свободного переноса при
отсутствии ограничивающих связей: задаются три составляющие Fx,
Fyy Fz вектора силы F и составляющие Мх, Муу Mz вектора
момента М для центра схвата; определяются составляющие 8Ж,
бу, б2 вектора перемещения б центра схвата и составляющие 9Х,
8у, 6Z вектора его малого угла поворота в. Формулировка задачи
не зависит от выбора системы осей, в которых задаются конечные
условия.
Для варианта 2 объект манипулирования жестко фиксирован
(например, внешними зажимными устройствами) и одновременно
захвачен схватом манипулятора. При этом предполагается, что
и зажимное устройство, и схват одновременно центрируют объект.
При идеально согласованном положении схвата и зажимного
устройства наложение связей не создает сил и моментов.
Отклонения от этого положения, которые определяются составляющими
векторов перемещений и угла поворота, приводят к появлению
сил и моментов. Как и для варианта 1, формулировка задачи не
зависит от выбора системы координат. Граничные условия этого
типа характерны для выполнения операций установки заготовки
в кулачковый или цанговый патрон токарного станка, а также
при извлечении обработанной детали, когда она удерживается
и схватом, и патроном.
Вариант 3 реализуется, когда объект находится в центрах
и может вращаться вокруг оси (/, при этом отличие от варианта 2
заключается в том, что для оси у задается не угол, а момент,
причем угол поворота 0у подлежит определению. Такие же
граничные условия имеют место при закручивании гайки гайковертом.
В случае варианта 4 предполагается, что объект может
перемещаться по прямолинейным направляющим по оси *, причем
не допускаются ни поперечные перемещения, ни повороты (в
частности, перекосы). Отличие варианта 4 от варианта 2 заключается
114
Таблица 6.3
Номер
варианта
Вариант
конечных условий
Рисунок
Параметры,
заданные на
конце
Параметры,
подлежащие
определению
Свободное
перемещение
гх, гуу г2,
Мх, Му, М2\
6Х, 6у, бг,
0Х, 0у, 02
Жестко
зажатая деталь
6Х, ду, 62,
0Х, 8у, 02
'X» * У» '2
Л1Ж, Л4у, М2|
Деталь
зажата в центрах
-*
иХ» иУ» и2»
е„ му, е,
^Х> ^У» ^2»
Мх, 6у, М2|
Перемещение
детали по
направляющим
%У
Fx, бу, б2,
0Х, 6у, 02
х» Fy> ^г» |
Мх, Му, М2\
Насадка
втулки на вал
^Х» V 52>
Мх, 9у, 02
X» ^> ^2»
|ех, му, мг
Перемещение
детали по
плоскости
S
<h
6х. Fy> Fz>
мх, еу, е2
Fx, Ьу, 62,
ех, Му, м21
Деталь
острием упирается
в плоскость
■с+т
X. V fi2»
|МХ, My, М2|
^Х» fy» ^2»|
0Х, By, 92
Закручивание гайки
¥
■#
^Х» ^у, ^2»
мх, еу, е2
^Х» ^У» ^2»
0Х, Му, М2|
в том, что по оси х задается сила, а не перемещение. Вариант
представляет практический интерес при перемещении объекта по
направляющим (лотку, монорельсу, рельсам и т. п.), при введении
обработанных деталей в гнезда накопителя, при выполнении
сборочных операций.
Вариант 5 может быть реализован при сборке, когда
соединяются детали типа вал—втулка. При этом для объекта (одной
115
из деталей) допускается перемещение по оси х и поворот вокруг
нее; соответственно должны быть заданы составляющие Fx и МХУ
силы и момента.
Вариант 6 встречается при выполнении операций
складирования, при загрузке металлорежущих станков.
Граничные условия могут считаться простыми лишь при
определенных выборе положения точки конца последнего звена и
идеализации связей. Если связи налагаются на определенные
характерные точки или плоскости объекта, то граничные
условия, приведенные к центру схвата, как правило, являются
комбинированными. Так, если объект может свободно вращаться
вокруг оси у (рис. 6.6), то условие,
налагаемое связью, после приведения
к центру схвата имеет вид: аву + бх=
= 0. Однако, если размеры объекта
малы и расстояния от всех его точек
до центра схвата значительно
меньше размеров звеньев, то связи,
наложенные на объект, можно считать
приведенными к центру схвата.
Математическое описание статики
упругой конструкции манипулятора
при произвольных граничных условиях в предположении
линейности системы строится на основе матричных соотношений.
Рассмотрим теперь ситуацию, когда граничные условия в осях
схвата можно считать простыми, но наложены они частью на
элементы матрицы-столбца Z), а частью на элементы матрицы-
столбца Q (общее их число должно быть равно шести). Остальные
элементы этих векторов подлежат определению. В таких случаях
следует вводить матрицу-столбец (вектор) V задаваемых и
матрицу-столбец (вектор) U искомых величин. Элементы
квадратной матрицы В, определяющей уравнение связи U = BV, могут
иметь различную размерность, они могут представлять собой
жесткости, податливости, а также просто коэффициенты
пропорциональности или величины, имеющие размерность длины и
единицы, деленной на длину. Естественно, вид и содержание
матрицы В могут быть определены, если матричное уравнение
D = CQ решить относительно искомых величин. Предположим,
что в матрице-столбце D содержится т создаваемых и п
определяемых компонент, причем всегда т + п = 6. Тогда в матрице-
столбце Q содержится п задаваемых и т определяемых компонент.
Осуществим перестановку компонент матрицы-столбца D таким
образом, чтобы з числе ее первых т компонент оказались лишь
задаваемые величины, остальные п компонент были бы
представлены лишь определяемыми величинами. После перестановки
компонент матрица-столбец D может быть представлена в виде
блочной матрицы
D = [Df, D\Yt
116
где Dx — матрица-столбец задаваемых величин размерностью
1 X т\ D2 — матрица-столбец определяемых величин
размерностью 1 X п.
Аналогичное преобразование произведем с
матрицей-столбцом Q, которую после перестановки ее составляющих можно
представить в виде блочной матрицы-столбца
Q = [Qf, QDT>
где Qx — матрица-столбец задаваемых величин размерностью
1 X п\ Q2 — матрица-столбец определяемых величии размерностью
1 X т.
В результате произведенных преобразований матричное
равенство D = CQ можно переписать, представив матрицу С в виде
блочной
rDi]_r^iif"] [Qi]
LAjJ L^ikaJ LQ2 J '
а матрицы-столбцы V и U записать следующим образом:
V = [Dl, Q?V;
U = [Dl QT]T.
Тогда блоки матрицы В, соответствующей преобразованию
Р21 ГВц|Д1а1 Г^Т
Q2 J U21U2 J LQiJ'
определяются матричными выражениями:
В\\ = ^22^12 » В\2 = С21 — С22С\2 ^Ib #21 = С\2 ', ^22 = —^12 С\\.
В общем случае построение матрицы В представляет
значительные трудности, обусловленные громоздкостью матричных
преобразований. Для расчета численных значений компонент
матрицы-столбца определяемых величин целесообразно
использовать программу машинного расчета на ЭВМ.
Анализ структуры и выражений элементов матрицы В
позволяет оценивать при различных видах операций как точностные
характеристики, так и силы и моменты, действующие на объект
манипулирования при различных конфигурациях механизма
манипулятора.
Рассмотрим пример. Пусть объект манипулирования,
находящийся в схвате, может свободно перемещаться по опорной
плоскости, с которой связана система координат х'у'т! (см. рис. 6.5).
Продольная ось звена манипулятора х образует с осью х' угол а.
Вектор V в этом случае задается следующим образом:
V = [F'x, 6у, Fzy в;, My, Q'2]T.
117
Вектор определяемых параметров в осях х'у'г' имеет вид
U = [б;, F'y, б;, М'х, Q'y, М'г]т.
Определим реакцию Fy и момент М'2, возникающие при
смещении опорной плоскости по оси у' на величину 8^, считая, что
из всего механизма манипулятора достаточно учитывать упругую
податливость только одного звена — руки. Граничные условия
задаются в точке А объекта, положение которой в системе осей
схвата задается вектором г. Искомые величины могут быть
выражены через элементы матрицы В следующим образом:
Fy = (с;2 _ _£i^)-' в;: мг = (ck - -ig^)"1 в;.
В частности, если размерами схвата и объекта можно
пренебречь, то эти выражения переписываются в виде:
Fy = (-gjrsin2 a -f {2EJ cos2а) Ь'у\ (6.15)
-gy sin2 a + 12£/ cos2 a ) -y-cosa6^. (6.16)
При этом объект манипулирования смещается в направлении
оси х' на величину
/ sin 2a /3 sin 2a
б;
2EF
I sin2 a
24EIy
, /3 cos2 a
12£/y
8'
°y
Анализ этих выражений позволяет оценить влияние пара-
метров руки и ее ориентации относительно опорной плоскости.
Если пренебречь растяжением звена, то
б; = — 6^tga
независимо от длины и размеров поперечного сечения. При этом
вместо уравнений (6.15) и (6.16) получаем:
При увеличении длины звена при постоянном 6i значения силы
и момента вследствие снижения его жесткости убывают.
6.4. ОСОБЕННОСТИ РАСЧЕТА УСИЛИИ ЗАХВАТЫВАНИЯ
ПНЕВМАТИЧЕСКИХ СХВАТОВ
По ГОСТ 25378—82 «Роботы промышленные. Номенклатура
основных показателей» основным показателем схвата является
усилие захватывания. В соответствии с общей методикой проек-
118
тирования, изложенной в п. 6.1, требуемое усилие захватывания S
определяется по массе т объекта и сведениям о кинематике
движения манипулятора (как отмечалось в п. 6.1, при отсутствии
данных о максимальных значениях ускорений можно принимать
S = 20-Т-50 mg).
Последовательность этапов проектирование пневматического
схвата упрощенно выглядит следующим образом: сначала
устанавливается требуемое усилие захватывания S, затем по нему и
требуемому диапазону раскрытия схвата определяется работа W,
которая должна совершаться за один ход поршня; далее, исходя
из выбранного соотношения между диаметром и ходом поршня,
рассчитывается требуемое усилие Q на штоке. После этого
передаточное отношение I механизма передачи выбирается в
предположении отсутствия потерь как
отношение №
i = Q/S
4J
Т
ш
и по нему подбираются параметры I 1[ у^
механизма передачи. к А
При описанной методике расчета
упрощенно предполагается, что уси- рис# е.7
лие захватывания S не зависит от
движения схвата. В
действительности силы инерции, действующие на подвижные элементы
двигателя и звенья механизма передачи, приводят к изменению
усилия захватывания. Поскольку пиковые значения ускорения
в режимах быстрого разгона или ударной остановки достигают
10g и более, возможно даже самопроизвольное раскрытие
схвата. Правильные расчетные оценки несущей способности схвата
могут быть получены только при учете инерционности подвижных
звеньев схвата. Влияние сил инерции элементов механизма схвата
тем больше, чем больше их масса. Анализ конструкций схватов
выпускаемых промышленных роботов показал, что в ряде случаев
масса подвижных элементов схвата в десятки раз превосходит
массу переносимого предмета. Поскольку расчетное значение
усилия захватывания выбирается пропорциональным массе
предмета, а возможное снижение усилия захватывания
пропорционально приведенной массе предмета и подвижных элементов
механизма схвата, то в ряде случаев такое снижение может быть
значительным.
В качестве иллюстрации рассмотрим показанный на рис. 6.7
схват. Усилие Q пневмоцилиндра через шток непосредственно
передается на рабочий элемент и определяет усилие
захватывания 5. Если пренебречь силами трения, инерционностью
подвижных элементов привода и приравнять силы S и Q, то может быть
сделан вывод о том, что раскрытие схвата начнется при действии
силы Fx = —Q и, следовательно, наибольшее допустимое
ускорение ах схвата по оси х будет равно ах = Q/m, где т — масса
119
предмета. В действительности ускорение ах действует на все
подвижные элементы схвата и уравнение равновесия для
предельного состояния записывается в виде
Q = (т + тс + тп) аХ1 (6.17)
где тс — суммарная масса подвижного рабочего элемента и
штока двигателя; тп — масса поршня. При этом на подвижный
рабочий элемент действует усилие захватывания: S = Q — (тс +
+ я*п) Ях и раскрытие схвата начнется при Fx = —5. Из
уравнения (6.17) определяется предельное значение ускорения
Таким образом, для анализируемого эффекта основным
параметром является отношение (тс + ти)/т. Если отсутствуют
ограничения на усилие захватывания, то параметры двигателя
схвата следует выбирать с большим запасом, чтобы для
максимальных значений ускорений обеспечить требуемый запас
несущей способности схвата. Серьезные трудности могут возникнуть,
когда усилия ограничены вследствие, например, упругости или
хрупкости объекта. Ограничения сверху на усилие захватывания
могут оказаться не совместимыми с условиями надежного
удерживания предмета на интервалах времени, когда ускорение
уменьшает усилие захватывания, особенно когда масса предмета мала
и несущая способность схвата используется в незначительной
степени, а отношение (тс + ти)/т велико. Формализуем теперь
задачу оценки уменьшения несущей способности схвата в
общем виде.
Рассмотрим случай, когда схват имеет только одну степень
свободы. Движение основания схвата, удерживающего объект,
считается произвольным, но заданным. Для решения задачи
могут быть использованы два метода.
1. По параметрам движения основания или центра схвата
рассчитывается распределение ускорений всех подвижных
элементов схвата, а затем сил инерции. Далее используется принцип
виртуальных работ для относительных перемещений. Если
рабочие элементы перемещаются поступательно и симметрично
относительно средней линии или плоскости, то уравнение имеет вид
25 6Л - Q 6/ - 2 rntW, 6г, = 0, (6.18)
i
где 6А — перемещение рабочего элемента; б/ — соответствующее
перемещение поршня пневмоцилиндра; W* — вектор ускорения
произвольной точки механизма; бг* — вектор приращения
радиуса-вектора этой точки. Суммирование осуществляется по всем
120
точкам подвижных частей механизма схвата. Из уравнения (6.18)
получаем общее выражение
L i
Ускорения W* в общем случае являются функциями
обобщенных координат соответствующих точек механизма схвата, их
первых и вторых производных. При кратковременных импульсах
при разгоне и торможении необходимо дополнительно учитывать
ускорения, вызванные упругими колебаниями манипулятора.
2. По параметрам движения основания или центра схвата
при дополнительном задании раскрытия схвата, определяемого
параметром А, рассчитывается распределение скоростей, а затем
суммарная кинетическая энергия Т. Далее записывается
уравнение Лагранжа второго рода
dt \ dh ) dh - v dh zo>
которое рассматривается как выражение для обобщенной силы.
В этом выражении следует положить h = h0> и h = 0. Таким
образом, получаем
*-r«-i—И-ИтгЬтНк- (619)
/i=0
В режимах кратковременного разгона и торможения с
большими ускорениями можно раздельно рассматривать влияние
движений по степеням подвижности и в выражении (6.19) сохранять
слагаемые только со вторыми производными обобщенных координат
манипулятора, которые входят в уравнения линейно. Поскольку
при разгоне и торможении знаки ускорений противоположны, то
на одной из этих фаз усилие захватывания увеличивается, а на
другой — уменьшается. Слагаемые, которые представляют собой
квадратичные формы производных обобщенных координат,
применительно к обычным движениям ПР малы. Относительный вклад
ускорений по различным степеням подвижности зависит от
кинематической схемы манипулятора, характеристик приводов и
расположения осей схвата. Обычно движения по переносным
степеням подвижности дают больший эффект, чем движения по
ориентирующим степеням подвижности. Относительный вклад
различных звеньев в изменение усилия захватывания также зависит от
кинематической схемы и ориентации схвата; обычно наибольший
вклад вносят непарные элементы, наименьший — парные,
перемещающиеся симметрично относительно средней оси или
плоскости.
Описанные выше эффекты требуют изменения предложенного
ранее алгоритма анализа несущей способности схвата и выделения
следующей последовательности анализа.
121
1. Определяются максимальные значения вторых
производных обобщенных координат положения схвата на отдельных
этапах движения манипулятора при перемещении объекта по
заданной программе.
2. Для максимального значения второй производной
обобщенных координат на каждом t-м этапе движения в соответствии
с обобщенным уравнением (6.19) определяется минимальное
усилие захватывания St и строится гарантированная область
жесткого фиксирования в осях системы координат схвата.
3. Для каждого этапа определяются приложенные сила Ft
и момент Ми и проверяется их принадлежность к гарантированной
для этого этапа области жесткого фиксирования по методике,
изложенной в гл. 8.
При практическом расчете несущей способности схватов удобно
использовать следующий прием: считать усилие захватывания S
постоянным и не зависящим от динамических эффектов, а
инерционные добавки, определяемые вторым слагаемым в правой
части выражения (6.19), рассматривать как дополнительную
составляющую внешних приложенных сил. В этом случае
алгоритм анализа несущей способности схвата остается неизменным,
но несколько усложняется процедура расчета приложенных сил
и моментов.
Уточненная методика расчета несущей способности
использовалась в ЦНИИ РТК для анализа результатов экспериментального
определения надежности удерживания предмета схватами
отечественных пневматических роботов.
6.5. ОСОБЕННОСТИ ПРОЕКТИРОВАНИЯ СХВАТОВ
С ЭЛЕКТРОПРИВОДОМ
В настоящее время ПР с электроприводом получают все
большее распространение. Их преимущества общеизвестны: не
требуется подвод сжатого воздуха или насосная станция,
исключаются недостаточно надежные электропневматические и
электрогидравлические преобразователи и уплотнения, открываются
широкие возможности унификации приводов, упрощаются наладка
и обслуживание. Однако в большинстве ПР, имеющих
электрические приводы переносных и ориентирующих степеней
подвижности, схваты выполняются с пневмоприводом, причем обычно
двигатель является линейным. Для этого имеются серьезные
основания: пневмопривод4 имеет лучшие массогабаритные
характеристики, простую конструкцию, обеспечивает более высокое
быстродействие. Следует иметь в виду, что передача от
электродвигателя требует достаточно высокой редукции, а также принятия
специальных мер для сохранения усилия захватывания при
отключенном двигателе.
122
Перечисленные трудности действительно являются
серьезными, однако при надлежащей проработке схемных и
конструктивных решений они оказываются либо частично, либо полностью
преодолимыми. Если удается создать схваты с электроприводом,
имеющие удовлетворительные технические показатели, то это
позволит унифицировать типц приводов для
электромеханических роботов, упростить структуру и аппаратуру систем
управления, повысить надежность и упростить замену схватов, в том
-шсле и автоматическую. В настоящее время нет схемных и кон
структивных решений схватов с электроприводом, которые
могли бы считаться образцовыми или, по крайней мере, типовыми.
Приведенные далее положения могут явиться основой методики
проектирования таких схватов, но они пока не подтверждены в
широких масштабах практикой конструирования.
Применение в схватах электродвигателей связано с появлением
двух основных требований: большое передаточное число
обусловливает применение таких передач, которые могут его обеспечить;
отключение привода после окончания процесса захватывания
делает необходимым использование фиксатора того или иного
типа, препятствующего возможному обратному вращению
двигателя и, следовательно, раскрытию схвата.
Рассмотрим сначала пути осуществления первого требования,
Для получения большого передаточного числа могут быть
использованы зубчатые редукторы, многоступенчатые (обычных схем)
или специальные (планетарные или волновые). Однако при этом
Бначительно усложняется конструкция, увеличивается ее вес у.
снижается надежность, в частности, вследствие тяжелых режимов
работы (частое включение—выключение с ударами). Применение
червячных и винтовых передач, т. е. передач с самоторможением,
позволяет получить большое передаточное число наиболее
простыми средствами. Ограничимся рассмотрением только этих
передач.
Выбор компоновочных решений для электромеханических
схватов осуществляется с учетом ограничений на габаритные
размеры и на кинематику движения рабочих элементов. Могут быть
предложены четыре основных варианта компоновки (рис. 6.8).
Для вариантов, показанных на рис. 6.8, а и б, ось
электродвигателя параллельна оси руки, на рис. 6.8, виг — перпендикулярна
к ней. Во всех вариантах электродвигатель вынесен в сторону,
что улучшает условия теплоотдачи и облегчает его замену.
Подобное размещение электродвигателей встречается в большинстве
манипуляторов ПР с электроприводом. Передача вращения
осуществляется через муфту. Один червячный механизм
используется в вариантах, показанных на рис. 6.8, б и г. В варианте,
приведенном на рис. 6.8, а, используется сочетание пары винт—
гайка и шарнир но-рычажного механизма, что позволяет
одновременно получать большую редукцию и формировать требуемый
вид зависимости усилия захватывания от раскрытия схвата,
Ш
однако при этом усложняется конструкция. Выступающий
электродвигатель обычно существенно увеличивает габаритные
размеры; дополнительное применение конической зубчатой
передачи позволяет частично устранить этот недостаток.
Основные особенности взаимодействия рабочих элементов
электромеханического схвата с червячной или винтовой передачей
обусловлены свойством самоторможения. В таких механизмах
в зависимости от выбора параметров может быть реализован или
первый принцип захватывания и удерживания объекта, когда
фиксируется относительное положение рабочих элементов, или
второй, — когда удерживание осуществляется за счет зажатия
достаточно большими силами, или комбинация этих принципов.
с)
6)
6 \, Т
Рис. 6.8
Основными факторами, влияющими на способ фиксирования и
удерживания, являются способ отключения двигателя и упругие
характеристики кинематической цепи. Остановка
электродвигателя при захватывании объекта может осуществляться в
фиксированном положении по сигналу датчика момента или силы, по
повышению силы тока, после определенной заданной выдержки
времени. В зависимости от способа остановки усилие
захватывания может быть неопределенно малым или значительно большим,
чем усилие захватывания, создаваемое в статическом режиме.
Такое увеличение усилия в конце процесса захватывания
обусловлено динамическим эффектом торможения под действием
возрастающей силы сопротивления. Возрастание силы происходит
тем быстрее, чем больше жесткость кинематической цепи от
двигателя до рабочих элементов.
Далее необходимо знать, что будет происходить с усилием
захватывания после отключения двигателя при действии на объект
различных сил (в первую очередь сил инерции). Напомним, что
для обратимого механизма передачи (например, передающего
усилие от пневмоцилиндра, по необходимости постоянно
включенного во время удерживания объекта) усилие захватывания
остается постоянным. Для необратимого механизма с самотор-
124
можением все получается иначе. Если пренебречь упругостью
элементов схвата, то получается, что положение рабочих
элементов фиксировано, а усилие захватывания, определяемое суммой
реакций в точках контакта, не ограничено. При этом несущая
способность схвата в принципе является неограниченной;
практически она ограничена только условиями сохранения прочности.
Заметим, что в зависимости от конкретных условий высокая
несущая способность схвата может оцениваться как положительно (при
больших ускорениях движения объект не будет потерян), так
и отрицательно (при столкновении с препятствием или в другой
аварийной ситуации выгоднее потерять объект).
В случаях, когда форма поверхностей рабочих элементов при
их фиксированном положении в состоянии контакта с предметом
полностью исключает его перемещения (что обычно возможно
только при согласованной с объектом форме рабочих элементов),
начальное значение усилия захватывания может быть любым,
в частности достаточно малым. Малость начального усилия
захватывания выгодна потому, что раскрытие схвата при меньшем
усилии начального заклинивания его механизма требует
меньшего момента. Если же выбор формы рабочих элементов не
исключает перемещений объекта в схвате (например, при захватывании
объекта плоскопараллельными рабочими элементами) и
удерживание объекта может быть обеспечено только за счет достаточно
сильного сжатия рабочих элементов, то для создания стабильного
усилия захватывания и его сохранения целесообразно ввести
в кинематическую цепь от двигателя до рабочих элементов
упругие звенья.
Роль упругости кинематической цепи проявляется практически
независимо от способа отключения двигателя, если не
используются специальные средства его торможения. Качественно
процесс захватывания протекает следующим образом. Сближение
рабочих элементов происходит до их контакта с объектом После
этого ротор двигателя продолжает вращаться, независимо от
того, произошло или не произошло отключение двигателя.
Вращение замедляется под действием растущего сопротивления упругих
сил. При остановке двигателя вся кинетическая энергия
механизма (и работа вращающего момента, если двигатель не
отключается) переходит в потенциальную энергию упругих деформаций.
Энергия упругих деформаций элементов, расположенных между
парой самоторможения и рабочими элементами, сохраняется при
удерживании объекта, упругие деформации будут поддерживать
усилие захватывания. Упругие деформации элементов между
двигателем и элементом самоторможения могут приводить к
обратному вращению двигателя после остановки или к
нежелательным упругим колебаниям, поэтому эту часть кинематической цепи
следует выполнять возможно более жесткой. В дальнейшем
учитывается упругая податливость только элементов между
рабочими элементами и парой самоторможения.
126
Усилие захватывания может быть оценено следующим
образом. Учтем кинетическую энергию только ротора двигателя,
имеющего момент инерции / и вращающегося с установившейся
угловой скоростью со0, и предположим, что отключение его
осуществляется в момент остановки (по сигналу датчика момента или
силы тока). Тогда упомянутое выше энергетическое соотношение
записывается следующим образом:
4-/о>о2 + МсФ=4-^' (6.20)
где Мс — средний вращающий момент двигателя (его удобно
ввести, чтобы не вводить в рассмотрение механическую
характеристику); ф — угол поворота ротора до остановки; S — усилие
захватывания в момент остановки двигателя; с — приведенная
жесткость всех упругих элементов. Угол ф выражается через
усилие
Ф = Sj/c, (6.21)
где / — передаточное число, определяемое как отношение угла
поворота ротора к перемещению рабочего элемента и имеющее
размерность м""1. После подстановки уравнения (6.21) в (6.20)
получаем квадратное уравнение относительно S
S2 - 2jMcS - Iml = 0.
Его решение имеет вид
S = jMc + V{jMzf + Iml. (6.22)
При (jMc)2 > Icml получаем: S « 2/Мс, т. е. основной вклад
в усилие захватывания вносит статический момент двигателя
(момент Мс пропорционален ему), причем величина S в этом
случае не зависит от жесткости с. При (jMc)2 < 1ш\ получаем
приближенно: S « |/7с(о£, при этом усилие захватывания
определяется исключительно динамическими эффектами и
увеличивается с возрастанием жесткости с. Практически увеличение
жесткости ведет к большей неопределенности усилия S, поскольку
малые смещения, пластические деформации дают большие
изменения этой силы. Поэтому жесткость не следует завышать, ее нужно
выбирать по требуемому значению S с небольшим запасом.
Специфика схватов с самоторможением также проявляется
в случаях захватывания объекта, находящегося в зажимном
выдающем устройстве. Процесс захватывания такого объекта можно
представить в виде двух последовательных этапов. На первом
этапе происходит сближение рабочих элементов до остановки
двигателя, в момент которой усилие захватывания достигает
значений согласно уравнению (6.22). На втором этапе при остановке
двигателя схвата происходит отпускание объекта выдающим
устройством. Если положения схвата и объекта перед захваты-
126
ванием были точно согласованы, то в конце первого этапа объект
будет полностью захвачен и второй этап не изменит его положения
в схвате. Рассогласование положений схвата и объекта перед
захватыванием может привести к тому, что к концу первого этапа
объект еще не займет требуемого положения в схвате (будет
«недозахвачен»). «Дозахватывание» на втором этапе при
отпускании выдающего устройства у схватов с включенным
пневмоприводом происходит естественным образом: под действием двигателя
схвата рабочие элементы сближаются по мере раскрытия
выдающего устройства при практически постоянном усилии
захватывания. Иначе получается у схвата с электродвигателем, отключаемым
в конце первого этапа. Для них дозахватывание со сближением
рабочих элементов может происходить только за счет уменьшения
упругих деформаций, что приводит к уменьшению усилия
захватывания. Это уменьшение может привести к недопустимому
снижению несущей способности схвата. Очевидный путь устранения
таких отрицательных явлений — оставлять двигатель схвата
включенным вплоть до полного раскрытия выдающего устройства.
Однако при этом теряется эффект динамического увеличения
усилия захватывания, а кроме того, режим работы двигателя с
остановленным ротором может быть недопустимым в течение обоих
этапов.
При передаче объекта схватом в приемное устройство могут
возникать иные трудности. На первом этапе, когда зажимное
приемное устройство захватывает объект, а схват ПР еще не
раскрывается (двигатель схвата не работает), рассогласование
положений объекта и приемного устройства приводит к увеличению
сил и моментов, действующих на схват через объект. Эти силы
могут быть недопустимо большими. Их можно уменьшить
снижением жесткости кинематической цепи от рабочих элементов до
пары самоторможения.
Одним из важных моментов проектирования
электромеханических схватов является выбор двигателя и передаточного числа
механизма передачи. Когда реализуется первый принцип
захватывания, требуемое усилие захватывания определяется не из
условий надежного удерживания объекта, а исходя из требований
сведения рабочих элементов до заданного положения. При этом
учитываются силы сопротивления в кинематических парах
механизма схвата и возможное сопротивление перемещению
захватываемого объекта. Получающееся при таких оценках усилие S
может быть значительно меньше усилий, действующих на объект
в процессе переноса. Когда реализуется второй принцип
удерживания объекта, т. е. когда объект удерживается за счет зажатия
рабочими элементами, усилие захватывания S определяется из
условий жесткого фиксирования объекта в схвате при заданных
нагрузках на объект. Это усилие обычно оказывается больше
этих нагрузок. В любом случае усилие захватывания S является
заданным.
127
По усилию S на основе соотношения (6.22) определяется
зависимость между моментом двигателя Мс и передаточным
числом механизма передачи /. Заметим, что этот момент определяется
как средний, в случае необходимости он может быть связан с
номинальным и пусковым моментами. Окончательно выбор
двигателя может быть произведен, исходя из требований на его
быстродействие. Обозначим через Л0 максимальный ход рабочих
элементов, а через Т — время перемещения. Тогда для
установившегося движения с постоянной скоростью получаем
Отсюда на основе соотношения S = 2jMc окончательно
получаем момент электродвигателя
Мс = S/i0/2(o0r.
Выбор электродвигателя осуществляется по угловой скорости со0
и полученному значению момента Мс. Однако следует иметь
в виду, что необоснованное задание малых труднодостижимых
значений времени Т перемещения рабочих элементов может
привести к недопустимо большим значениям массы электродвигателя.
Поэтому целесообразно задавать массу электродвигателя,
соизмеряя ее с грузоподъемностью схвата. Тогда определение параметра
быстродействия осуществляется в ходе проверочного расчета.
В случае необходимости может быть учтено дополнительное
запаздывание вследствие разгона двигателя и его торможения. Часто
быстродействие схвата с электроприводом оказывается
значительно ниже, чем схвата с пневмоприводом. Для повышения
быстродействия могут быть использованы такие приемы, как
установка рабочих элементов перед захватыванием в положения, при
которых раскрытие схвата является минимально необходимым.
Это уменьшает ход рабочих элементов и соответственно повышает
быстродействие.
6.6. ПРИМЕР ВЫБОРА И РАСЧЕТА ПАРАМЕТРОВ
СХВАТА ПРОМЫШЛЕННОГО РОБОТА ПО СОВОКУПНОСТИ
ТЕХНИЧЕСКИХ ТРЕБОВАНИЙ
Рассматривается пример выбора схемы и расчета параметров
схвата ПР, применяемого для работы с химической посудой в
нормальных по ГОСТ 12997—76 климатических условиях, в
химически активных средах. Типовая выполняемая ПР функция
включает: взятие из штатива посуды определенной формы, слив
содержащегося в ней химического реактива, установку сосуда в
другой штатив.
Объектами, для работы с которыми предназначен схват,
являются: тонкостенные сосуды из стекла и пластмассы (ампулы,
пробирки, колбы и т. д.), показанные на рис. 6.9.
128
Выдающими и принимающими устройствами являются
штативы. Схемы базирования объектов на позиции захватывания и
отпускания представлены на рис. 6.9. Направления подхода
схвата указаны стрелками. Масса пробирок с реактивами и ампул
не превышает 0,05 кг, масса колбы с реактивами — не более 1 кг.
Схват предназначен для оснащения робота с
электромеханическим приводом, максимальные значения ускорений по степеням
подвижности которого не превосходят 5g, где g — ускорение
свободного падения. Абсолютная погрешность позиционирования
робота — 0,5 мм. Кинематическая схема робота обеспечивает
требуемые направления подхода к объектам, указанные на рис. 6.9.
Рис. 6.9
Выбор схемы и расчет Параметров схвата производится в
соответствии с последовательностью, приведенной в п. 6.1.
1. Определение поверхностей объекта, за которые допускается
захватывание. Нецелесообразно захватывать объект за
поверхности, отличающиеся от цилиндрической, например, за верхнюю
расширяющуюся часть пробирки или верхнюю
нецилиндрическую часть ампулы. Запрещено захватывание объектов за
внутренние участки поверхностей, которые могут быть покрыты
химическими реактивами. Таким образом, допускается захватывать
объект за цилиндрические участки внешних поверхностей,
лежащие выше плоскости z = z0, фиксирующей объект в штативе:
для ампул и пробирок — за один участок, для колб — за два
участка, показанные на рис. 6.9 штриховкой.
2. Выбор поверхностей объектов, за которые производится
захватывание, и схемы базирования объекта и схвата. Для
пробирок и ампул при выборе поверхностей захватывания
необходимо учесть особенности процесса выливания жидкости из сосуда:
при выливании верхняя кромка сосуда не должна сильно
смещаться по горизонтали. Следовательно, ампулы и пробирки надо
захватывать за разрешенные поверхности, показанные на рис. 6.9
двойной штриховкой, несколько отступив от края пробирки, дабы
5 Челпавов И. Б. и др.
129
избежать попадания химических реактивов на рабочие элементы
схвата во время слива. Для колб захватывание предпочтительнее
производить за участок большего диаметра, во-первых, при этом
существенно снижаются значения приложенных моментов,
действующих при движении ПР вокруг осей х и у, во-вторых,
создается возможность значительно увеличить усилие захватывания
более массивной колбы по сравнению с легкими и хрупкими
ампулами и пробирками выбором механизма передачи схвата с
возрастающей зависимостью усилия захватывания от величины
раскрытия схвата.
Для всех объектов захватывание производится за
цилиндрические поверхности, при этом по двум обобщенным координатам
(смещению объекта вдоль оси симметрии цилиндрической
поверхности и повороту вокруг этой оси) объект может быть
зафиксирован только силами трения, жесткое фиксирование принуди-
Рис. 6.10*
тельным базированием по остальным четырем координатам,
определяющим положение и ориентацию vобъекта в пространстве,
возможно, если обеспечить контакт объекта с рабочими
элементами схвата не менее чем в пяти точках [82]. Для более
равномерного распределения реакций в точках контакта и снижения
их значений при захватывании крупных объектов выбирается
схема базирования с восьмью точками контакта, плоское сечение
которой показано на рис. 6.9. С целью увеличения предельно
допустимых значений приложенных моментов вокруг осей х и у
точки контакта максимально разнесены по оси г.
3. Выбор числа, формы и кинематики перемещения рабочих
элементов схвата. При базировании каждого объекта,
установленного в штативе, фиксируется его вертикальная ось симметрии.
В соответствии с табл. 6.1 целесообразно применять симметричный
ромбический схват (см. позицию 6), имеющий два подвижных
рабочих элемента, перемещающихся поступательно по прямой.
4. Выбор параметров рабочих элементов и диапазона
раскрытия схвата. Рабочие элементы ромбического схвата имеют четыре
130
основных размера: а—толщина; Ь — ширина; с — длина полки
и а — угол раскрытия рабочего элемента (рис. 6.10, а). Толщина
рабочего элемента выбирается из условий прочности и жесткости
с учетом особенностей технологии изготовления. Ширина Ь должна
обеспечивать распределение точек базирования по оси z в
соответствии со схемой базирования (в рассматриваемом примере
она должна быть равна 20 мм).
Угол а выбирается из диапазона допустимых значений.
Наименьшее значение угла а = 10° задается из условия отсутствия
заклинивания при захватывании. Наибольшее значение угла а
определяется из условий нормального захватывания объектов
с заданным отношением минимального RQ и максимального Rx
радиусов: ах = arcsin V RJRi- Для рассматриваемого примера
R0 = 10 мм, Rt = 30 мм и, следовательно, а = 33°. Из
полученного диапазона изменения угла в интервале 10—33° выбирается
наиболее предпочтительное значение — 30°.
Длина полки рабочего элемента с выбирается с учетом
следующих требований. При захватывании объекта минимального
радиуса R0 рабочие элементы не должны упираться друг в друга
(рис. 6.10, а), т.е. должно выполняться неравенство
с < 2#0/sin a.
При захватывании объекта максимального диаметра /?х
крайняя точка рабочего элемента не должна вступать в контакт с
объектом (рис. 6.10, б), т. е. должно выполняться неравенство
с > 27?! sin a.
Для выбранных параметров возможные значения параметра с
определяются неравенством 30 <с < 40 мм. С целью уменьшения
габаритных размеров схвата выбираем с = 32 мм.
Диапазон раскрытия схвата определяется следующим образом.
В качестве параметра раскрытия схвата выбирается расстояние
между вершинами уголковых рабочих элементов—точками Аг
и А2 (рис. 6.10, в). При удерживании объекта радиусом R0
параметр положения рабочего элемента схвата Н0 равен: Я0 = R0/cos a.
Захватывание колбы по цилиндрической части радиусом Rx
обеспечивается при максимальном раскрытии схвата
#i = /?i + -ytgcc+A.
Таким образом, ход рабочих элементов схвата: АН = Нх —
— Н0 = 30 мм, где А —требуемый зазор между рабочими
элементами схвата и колбой, который при захватывании
представляет собой сумму двух составляющих: абсолютной погрешности
позиционирования ПР Ах и погрешности базирования А2 колбы
в штативе по осям х и у. Для рассматриваемого примера Ах =
= 0,5 мм и Д2 = 1,5 мм, следовательно, А = 2 мм.
5*
131
5. Выбор компоновки схвата. Продольная ось
соединительного элемента и ось направления подхода схвата к объекту
совпадают; ось пневмоцилиндра целесообразно направить в том же
направлении, что и на рис. 5.1, а, т. е. как для базовой
компоновки с продольным расположением осей. Механизм передачи
обеспечивает перемещение рабочих элементов схвата при
захватывании и отпускании в направлении, перпендикулярном к
направлению подхода схвата к объекту, при поступательном
перемещении выходного звена пневмоцилиндра.
6. Расчет параметров пневмоцилиндра. Для рассматриваемого
примера выбор параметров пневмоцилиндра производится по
упрощенной методике. Требуемое усилие захватывания
рассчитывается по формуле
STp = kCmg,
где безразмерный коэффициент С для электромеханического ПР
выбирается равным 10; масса колбы с химическим реактивом
равна 1 кг; коэффициент за-
jli- г—^—.—г паса k с учетом свойств
накладок выбран равным 1.
Таким образом, 5тр = 100 Н.
Параметры пневмоцилиндра
выбираются из условия
pFL = npD2/4 ^ 25 Д#.
При давлении в пневмо-
сети, равном трем
атмосферам, имеем D2L>26 327 мм3.
Данному соотношению
удовлетворяют следующие пары стандартных значений диаметров D
и ходов L пневмоцилиндров (мм):
Рис. 6.11
D . . .
L . . .
... 25
... 50
32
32
32
40
32
50
Из представленного набора выбирается вариант с
минимальными горизонтальными размерами: D = 32 и L = 32 мм. При
этом усилие на штоке пневмоцилиндра равно 241 Н.
7. Выбор схемы и расчет параметров механизма передачи.
Схемы механизмов передачи представлены в табл. 4.2. Требуемое
поступательное перемещение рабочих элементов схвата по.
прямой обеспечивают схемы 6, 7 и 9. Из этих схем выбирается схема 6,
имеющая возрастающую зависимость усилия захватывания от
величины раскрытия схвата. Ограничения сверху на усилие
захватывания вводятся из условий прочности объектов. Так, для
ампул усилие захватывания не должно превосходить 60 Н, но
в то же время быть не менее 5 Н. Для колбы усилие захватывания
должно быть не менее 100 и не более 500 Н. Традиционными
методами [87] выбираются параметры механизма передачи (см.
132
схему 6 табл. 4.2): длина рычага /lf его начальное и конечное
положения так, чтобы обеспечить на диапазоне перемещения
рабочих элементов АН требуемое изменение усилия захватывания.
Выбор 1г = 48 мм обеспечивает захватывание ампулы с усилием
захватывания, равным 36 Н (р = 17°), и колбы с усилием
захватывания, равным 155 Н (р = 52°). Максимальному значению
раскрытия схвата соответствует |5 = 73°.
Выбранная таким образом схема схвата с расчетными
параметрами показана на рис. 6.11, она является основой для
проведения работ по проектированию схвата и созданию комплекта
конструкторской документации.
Глава 7
ИССЛЕДОВАНИЕ ГЕОМЕТРИИ
ВЗАИМНОГО РАСПОЛОЖЕНИЯ ОБЪЕКТА
И РАБОЧИХ ЭЛЕМЕНТОВ СХВАТА
7.1. КРИТЕРИИ СООТВЕТСТВИЯ
ФОРМЫ ЗАХВАТЫВАЕМОГО ОБЪЕКТА
ФОРМЕ ЗОНЫ ЗАХВАТЫВАНИЯ
Захватыванию объекта рабочими элементами схвата
предшествует перемещение раскрытого схвата, в результате чего объект
оказывается в зоне захватывания (т. е. в пространстве ме^кду
рабочими элементами). Это перемещение схвата перед
захватыванием обычно осуществляется движением манипулятора по одной
степени подвижности, однако в зависимости от конкретных
условий движение может осуществляться по разным направлениям
(например, выдвижением руки, опусканием, поворотом). Для
успешного выполнения этого этапа необходимо, во-первых, чтобы
объект помещался с гарантированными зазорами в заданном
положении и при заданной ориентации в зоне захватывания
(вписывался в пространство между рабочими элементами, раскрытыми
до заданных фиксированных положений), во-вторых, чтобы при
перемещении схвата рабочие элементы и другие детали схвата не
задевали объект и установочные или зажимные устройства. При
этом требуется обеспечить достаточно большие зазоры, чтобы
возможные погрешности установки объекта на позиции
захватывания и погрешности механизмов манипулятора в статических
и динамических режимах с гарантией не приводили к касанию
рабочих элементов с объектом до сжатия схвата.
Однако недостаточно установить возможность нахождения
объекта в зоне захватывания или вхождения в эту зону без каса-
133
ния рабочих элементов, необходимо введение количественных
показателей, определяющих пределы допустимых смещений объекта
относительно рабочих элементов без касания с ними. Те же самые
геометрические задачи встают при реализации первого принципа
захватывания, когда удерживание объекта осуществляется не за
счет усилия захватывания, а при фиксировании рабочих элементов
в заданных положениях; при этом объект имеет возможность
малых перемещений в зоне между рабочими элементами, и
необходимо знать диапазоны изменения параметров положения и
ориентации объекта в схвате. Результаты расчета границ
диапазонов допустимых смещений объекта необходимы, в первую
очередь, для обоснованного выбора диапазона изменений параметра
раскрытия схвата (максимального разведения рабочих элементов),
они также могут быть использованы при выборе формы и
размеров поверхностей рабочих элементов, кинематики их
перемещений, а также при выборе взаимной ориентации объекта
относительно схвата перед захватыванием.
Рассмотрим в общем виде всю группу задач определения
границ диапазонов допустимых смещений объекта относительно
рабочих элементов в зоне захватывания. Положение и ориентация
объекта в зоне захватывания задаются шестью обобщенными
координатами. Некоторые из этих координат считаются заданными,
другие координаты являются свободными; именно для свободных
координат определяются диапазоны допустимых изменений.
Заданные обобщенные координаты (пусть их число т) представляют
собой постоянные величины, обозначим их через аи ..., ат.
Свободные обобщенные координаты (их число равно г = 6 — т)
обозначим через ql9 ..., qr. Дополнительным параметром является
параметр раскрытия схвата Л, он также считается заданным и
постоянным. Поверхности рабочих элементов и захватываемого
объекта считаются известными, в этом разделе их погрешностями
пренебрегается.
При определении конкретных значений заданных координат
и параметра раскрытия схвата объект может быть размещен в зоне
захватывания между рабочими элементами или (вследствие
недостаточного раскрытия схвата) это сделать невозможно. Примем,
что раскрытие схвата достаточно для размещения объекта в зоне
захватывания. Диапазоны допустимых изменений г свободных
координат оказываются взаимосвязанными, поэтому в общем
случае изменения свободных координат нужно рассматривать
совместно. Введем для рассмотрения г-мерное пространство
свободных координат так, что по каждой из ортогональных осей
откладывается значение соответствующей обобщенной координаты; при
этом совокупность значений свободных координат изображается
точкой в этом г-мерном пространстве. Перемещения объекта
допускаются до контакта любых точек его поверхности с рабочими
элементами или до касания выделенных (в частности, крайних)
точек объекта с условными ограничивающими поверхностями.
134
Введение дополнительных условных геометрических ограничений
обязательно тогда, когда рабочие элементы физически не
ограничивают перемещений объекта в некоторых направлениях
(например, схват с призматическими рабочими элементами не
ограничивает перемещений вдоль по образующим поверхностей).
В этих случаях искусственно вводимые ограничения могут
выражать, например, требования, чтобы при захватывании весь
объект не выступал за габаритные размеры схвата, чтобы в
пределах габаритных размеров схвата находился центр масс объекта
или чтобы в пределах схвата находилась заданная часть длины
объекта.
Множество точек, соответствующих положениям объекта, в
которых отсутствует контакт поверхностей объекта с рабочими
элементами и выделенные точки находятся в пределах, ограниченных
условными геометрическими поверхностями, образует область
допустимых отклонений (ОДО); границам этой области
соответствует появление контакта объекта с рабочими элементами или
попадание выделенных точек на указанные поверхности. Важно
отметить, что ОДО существенно зависит от заданных координат
и параметра раскрытия схвата. Характерные особенности ОДО
соответствуют общим свойствам множества возможных
положений объекта в схвате. Если ОДО вырождается в точку, то при
данных значениях заданных координат и параметра А возможно
лишь единственное положение объекта в зоне захватывания.
Если же при этом все координаты являются свободными
(заданные координаты отсутствуют), то эта точка соответствует
единственно возможному при данных условиях положению объекта
в схвате, которое часто (но необязательно) является положением
устойчивого равновесия. При увеличении параметра А (по мере
расхождения рабочих элементов) размеры ОДО обычно растут.
При достаточно больших значениях параметра А ОДО является
единой (односвязной); это означает, что при этом рабочие
элементы схвата не препятствуют переводу объекта путем линейных
и угловых перемещений их любого исходного допустимого в
любое конечное положение в пределах ОДО. При уменьшении
параметра А (сближении рабочих элементов) единая ОДО часто
разбивается на изолированные, ограниченные со всех сторон или
частично подобласти в виде «островов». При таком разбиении
перемещения объекта, соответствующие переходам из точки одной
подобласти в точку другой, невозможны. При дальнейшем
уменьшении параметра Л подобласти одна за другой превращаются
в точки, линии или поверхности, а затем исчезают.
Анализ изменений конфигурации ОДО в целом и ее
подобластей дает возможность сделать некоторые предварительные
выводы относительно протекания процесса захватывания. Если ОДО
при начальном значении А0 единая, то в результате процесса
захватывания из любого начального положения в принципе
возможен переход в любое из положений равновесия. Если же при
136
начальном значении h0 ОДО разбита на подобласти и начальное
положение объекта соответствует точке определенной подобласти,
то возможен переход в положение равновесия (единственно
возможное или одно из возможных), соответствующее именно этой
подобласти; переход в другие подобласти при сжатии схвата
исключается, т. е. невозможно опрокидывание объекта. Однако
следует иметь в виду, что в реальном процессе захватывания
возможны застревание и заклинивание в промежуточных
положениях. Протекание процесса захватывания в квазистатическом
режиме исследуется по методике, описанной в гл. 10. Понятие
ОДО и факт распадения ее на подобласти используются в
методике крайних положений.
Необходимо отметить, что ОДО определяется только
геометрическими ограничениями; действительные положения объекта как
в процессе захватывания, так и в конечном положении, находятся
в пределах ОДО, но они могут быть рассчитаны лишь на основе
иных представлений, а именно: по решениям уравнений статики
(гл. 8), квазистатики (гл. 10) или динамики (гл. 11).
При числе свободных координат, большем двух, необходимо
вводить в рассмотрение трехмерные и более пространства, что
исключает наглядность. В этих случаях целесообразно
ограничиваться рассмотрением двухмерных или даже одномерных
сечений ОДО. Одномерное сечение задает пределы допустимых
изменений одной обобщенной координаты при условий, что остальные
равны нулю, взаимосвязь ограничений по каждой из координат
при этом не учитывается. Границы ОДО или их сечений могут
определяться любыми методами — от непосредственных
геометрических построений с последующим использованием
тригонометрических соотношений до расчетов на ЭВМ по специально разрабо-
136
тайным программам. Разработка программ численных расчетов
для ЭВМ в дальнейшем необходима в рамках создаваемой системы
автоматизированного проектирования схватов.
Рассмотрим два простейших примера, для которых построение
ОДО и их сечений осуществляется аналитически и достаточно
просто.
1. Объект в форме прямоугольного параллелепипеда в
плоскопараллельном схвате (рис. 7.1, а). Номинальное положение
центра объекта выбирается в плоскости, средней между
параллельными плоскостями рабочих элементов. Поскольку все
геометрические соотношения не изменяются при перемещениях по
осям х и у и при повороте вокруг оси г, три соответствующие
координаты целесообразно считать заданными и произвольными,
а перемещение по оси z и два угла поворота — свободными; если
вращение производится одновременно по двум углам, но углы
поворота малые, то можно считать, что они происходят вокруг
осей х и у, сохраняющих неизменные направления. Если же
поворот производится на один угол, то этот угол поворота вокруг
оси х или у может быть и большим. Будем считать заданным
и равным нулю угол поворота вокруг оси у. При этом одно из
предельных положений изображено на рис. 7.1, б. С учетом
различных возможных комбинаций знаков условие касания одного
из рабочих элементов записывается в виде
|*| + /sln(a + |9x|)=^(/i-a),
где
/ =4-^*4-"^ tga=a/b.
Область допустимых отклонений на плоскости параметров (z, 8Х)
имеет такой вид, как показано на рис. 7.1, б, пока выполняется
условие
| z | + / > Л/2.
В противном случае, т. е. при условии
\г\ + К ft/2,
которое выполнимо лишь при достаточном раскрытии схвата,
угол поворота становится неограниченным и ОДО имеет такой
вид, как на рис. 7.1, г. Аналогично строится ОДО для свободных
координат z и 6V. Если свободными считаются координаты х
и у, то ограничения по ним задаются непосредственно, исходя
из того, что значительная часть объекта должна находиться
между рабочими элементами.
2. Объект в виде кругового цилиндра в уголковом схвате,
рабочие элементы которого перемещаются прямолинейно и
поступательно (рис. 7.2, а). Номинальное положение оси объекта
выбирается совпадающим с осью призмы, образуемой плоскостями
137
Рис. 7.2
рабочих элементов.
Если свободными
считаются только
перемещения по осям х и у
(что соответствует
плоской задаче
захватывания круглого сечения),
то на плоскости этих
параметров границы
ОДО, соответствующих различным значениям параметра А,
имеют такой вид, как на рис. 7.2, б. При небольших значениях
параметра раскрытия схвата ОДО получаются в виде ромбов,
при достаточно большом раскрытии схвата ОДО становится
открытой, появляется возможность введения объекта в зону
захватывания. Перед захватыванием ОДО должна быть
ограничена так, как показано штриховкой; это ограничение нужно,
чтобы в результате процесса захватывания объект остался в схват'е.
Определение предельного положения этой прямой требует
достаточно подробного анализа самого процесса захватывания, что
выходит за пределы рассмотрения только геометрии захватывания.
Для объектов более сложных форм приближенные оценки
удобно получать на основе замены их поверхностей более
простыми (в частности, при описании вокруг них кусочно-линейных
или цилиндрических поверхностей), для получения более точных
результатов целесообразно предусмотреть численные расчеты на
ЭВМ. Применительно к рассматриваемым задачам не имеет смысла
учитывать отклонения формы и положения поверхностей объекта
и рабочих элементов, поскольку эти погрешности всегда
значительно меньше размеров ОДО при обычных значениях параметра
раскрытия схвата. Однако они могут быть соизмеримыми или даже
близкими при реализации первого принципа захватывания, когда
рабочие элементы фиксируются в заданных положениях, и
желательно, чтобы зазоры между объектом и рабочими элементами были
возможно меньшими.
7.2. ОПРЕДЕЛЕНИЕ ПОЛОЖЕНИИ РАВНОВЕСИЯ
ОБЪЕКТА В СХВАТЕ
Рассмотрим сначала задачу определения положений
равновесия при отсутствии дополнительных приложенных сил (F = О,
М = 0) и без учета сил трения в точках контакта. Эти положения
в дальнейшем называются исходными. Устойчивые исходные
положения равновесия находятся из условия минимального
расстояния между рабочими элементами схвата, что соответствует
минимуму потенциальной энергии системы схват—объект.
Расчетное получение множеств возможных состояний для объектов
сложной формы часто является громоздкой задачей. Практический
138
интерес представляет выявление из всего множества возмржных
состояний системы схват—объект положений устойчивого
равновесия, которые определяются формой и размерами объекта,
конфигурацией рабочих элементов схвата, его кинематической схемой,
а также взаимным расположением схвата и объекта в момент
захватывания. Обычно положений устойчивого равновесия объекта
в схвате может быть несколько. Для простейших и часто
встречающихся вариантов формы объекта и конфигурации рабочих
элементов схвата, в особенности для плоских задач, положения
равновесия угадываются непосредственно. На рис. 7.3 приведено
четыре из двенадцати возможных (при определенном соотношении
размеров сторон объекта и геометрии схвата) положений
равновесия объекта прямоугольного сечения в треугольном схвате.
Большое число положений устойчивого равновесия может иметь
место и при гладких и строго выпуклых поверхностях объекта.
Если положение равновесия объекта в схвате является
безразличным, то положений равновесия бесконечное множество.
Для объектов сложной формы приходится использовать
формализованные постановки задачи определения положений
равновесия и необходимые аналитические и вычислительные методы.
Минимально возможное число точек контакта для схвата с двумя
рабочими элементами в положении равновесия равно двум. Если
в этих точках контакта поверхности объекта и рабочих элементов
схвата гладкие, то в положении устойчивого равновесия, если
оно имеется, нормали в точках контакта направлены по одной
прямой. Минимум потенциальной энергии в этом случае является
аналитическим и достигается не более чем по четырем из пяти
обобщенных координат, определяющим положения объекта при
условии контакта в двух точках. По отношению к углу поворота
объекта вокруг оси, проходящей через точки контакта, равновесие
является безразличным. В частных случаях имеются также и
другие координаты, по отношению к которым положение равновесия
является безразличным, например, если рабочие элементы
схвата являются призматическими, положение равновесия
является безразличным по координате перемещения вдоль
образующей.
Математическая задача поиска устойчивых положений
равновесия объекта может быть формализована следующим образом.
Предполагается, что система координат схвата хуг жестко связана
с одним из рабочих элементов схвата, который условно будем
Рис. 7.3
139
называть нижним рабочим элементом. Уравнение поверхности
нижнего рабочего элемента записывается в виде
* = /i (*. У)-
Уравнение поверхности верхнего рабочего элемента при его
поступательном прямолинейном перемещении по оси записывается
в виде
* = h (*. У) + h.
В положении устойчивого равновесия параметр раскрытия
схвата h достигает минимума (локального или глобального), т. е.
задача состоит в минимизации:
min ( hlfx (xh yt) < zt < /2 (*,, yt) + hy i = 1, 2,..., N\ j
1 gj(x9 y)<Q, /=1, 2,..., m У
где N — число возможных точек контакта; I — номер точки
контакта; gj (х, у) — функции ограничения области поиска
экстремума.
Ниже описана вычислительная процедура поиска устойчивых
положений равновесия объекта в схвате, при использовании
которой эта задача может быть решена на ЭВМ.
Предполагается, что известно аналитическое представление
поверхности объекта, которая аппроксимируется многогранником.
Каждая грань объекта задается полным набором угловых точек
А) (/ = 1, /г), где k — номер грани. Если каждая грань задается
тремя угловыми точками (п = 3), то алгоритм поиска положений
равновесия имеет наиболее простой вид. Блок-схема программы,
соответствующая этому случаю, представлена на рис. 7.4: 1 —
начало; 2 — ввод данных; 3 —выбирается грань многогранника;
4—фиксируются точки этой грани А(1), Л(2), А(3), начальные
значения координат которых в системе координат хуг определены;
5 — совмещение угловых точек с поверхностью нижнего
рабочего элемента осуществляется последовательное совмещение
точек Л(1), Л(2), Л(з) с нижним рабочим элементом. Точка Л(1)
совмещается смещением объекта по оси z так, что координата z{{)
точки А{{) принимает значение z{{) = fx (л*(1), #(1)). Затем,
поворачивая тело вокруг оси, проходящей через точку Л(1)(л:(1),
#(i)> /i (Х(\)У{\)))> добиваемся совмещения с нижним рабочим
элементом точки А{2). После этого поворотом объекта вокруг
оси Л(1)Л(2) совмещается точка Л(3). Проще всего организовать
программу совмещения точек А{2) и л(3) в виде итерационной
процедуры, когда на каждом шаге определяются знак и величина
отклонения совмещаемой точки от рабочей поверхности,
например, по координате 2, и в зависимости от этого выбираются
величина и направление очередного шага по углу поворота,
обеспечивающего приближение совмещаемой точки и поверхности.
При этом целесообразно использовать блочный принцип
построения, когда программа неоднократно обращается к
стандартно
ным блокам, в число которых входят: блок вычисления функции
Zi = /1 (х, у) и z2 = f2 (х, у) + ft; блок преобразования
координат вершин многогранника при плоском вращении объекта; блок
сравнения.
После того как рассматриваемая грань совмещена, в блоке
определения координат вершин многогранника вычисляются
координаты вершин многогранника в осях xyz.
В блоке совмещения поверхности г = f2 (x, у) + h с вершиной
многогранника вычисляются величины ht = zi —/2 Кхь Уд и
происходит последующий выбор h = max ht.
Этим обеспечиваются касание поверхности
верхнего рабочего элемента хотя бы
одной вершины и расположение всех
вершин, не контактирующих с рабочими
поверхностями, в пространстве между ними.
Перемещение грани Л(1), Л(2), Л(3) в
пространстве при условии, что ее угловые
точки касаются поверхности нижнего
рабочего элемента, определяются пятью
параметрами. В блоке выбора
направления и величины перемещения опорной
грани выбираются вектор оптимального
направления движения Ху величина шага
d и осуществляется шаг
D = d%.
Если при очередной итерации норма
шага или изменение величины раздви-
жения рабочих элементов схвата Д/i
станет меньше заранее заданной малой
величины (блок 9), то цикл прекращается,
проверяются необходимые условия
равновесия — 10 (проверка нужна, если при рис 7.4
решении конкретной задачи минимизации
приходится учитывать ограничения на перемещения объекта в
схвате). Если эти условия выполнены, то положение равновесия
и величина параметра h запоминаются (блок 12) и решение задачи
повторяется последовательно для каждой из оставшихся граней.
В положении, соответствующем минимуму А, условия
устойчивости равновесия могут быть невыполненными в силу одной из
двух причин: во-первых, если положения равновесия при касании
фиксированной гранью объекта поверхности z = fx (л;, у) в
области ее определения g (х, #) < О вообще не существует;
во-вторых, когда в области определения функции возможно
несколько решений рассматриваемой задачи, причем некоторые
точки локального минимума соответствуют положению
равновесия, а некоторые — нет (как правило, это решение,
удовлетворяющее равенству g (х, у) = 0). В этом случае для отыскания устой-
Hen
1
ч
\ 2
«
J
•
♦
*
5
Ч
е
f
;
*
8 \
[Да
I
^7>*^ пет
\йа
11 |
12 |
\
4* I
/»
J
141
чивых положений равновесия могут быть применены известные
методы решения многоэкстремальных задач. Блок 11 изменения
стратегии поиска реализует один из возможных методов решения
многоэкстремальной задачи.
В результате работы алгоритма определяются возможные
положения равновесия и соответствующие им значения
параметра А. Заметим, что в случае, когда число вершин грани больше
трех, в блок-схему программы следует включить цикл выбора и
фиксации различных вариантов трехточечного контакта грани
с нижней рабочей поверхностью. При этом для выбранного набора
точек контакта осуществляется изложенная процедура
минимизации с учетом дополнительного условия расположения
незафиксированных поверхностей грани выше нижней рабочей
поверхности. Как только такой минимум получен, осуществляется
переход к трем другим угловым точкам и, если это возможно,
производится дальнейшая минимизация Л.
Выше описана основная процедура программы поиска
устойчивых положений равновесия объекта в схвате, обеспечивающая
поиск min h при условии контакта объекта с рабочими
элементами схвата в четырех точках. Аналогично строятся
последовательно вступающие в процесс поиска процедуры совмещения
с одним из рабочих элементов схвата других точек контакта
объекта.
7.3. ПОГРЕШНОСТИ БАЗИРОВАНИЯ ОБЪЕКТА
В РАБОЧИХ ЭЛЕМЕНТАХ СХВАТА
Анализу погрешностей позиционирования объекта,
перемещаемого манипулятором ПР, посвящена обширная литература.
Чаще всего объект рассматривается как точка и считается, что
определению подлежат только погрешности ее трех координат.
Практически необходимо определять также погрешности углов
ориентирования (обычно погрешности углов поворота вокруг
трех осей). Как и для свободного твердого тела, положение
которого определяется шестью обобщенными координатами,
погрешности положения объекта задаются совокупностью шести величин.
Однако часто требуется определять погрешности положения
определенных выделенных точек объекта, а погрешности координат
центра объекта и углов поворота используются как промежуточные
результаты. В дальнейшем будет единообразно кратко говориться
о погрешностях положения объекта вне зависимости от того,
подлежат определению погрешности координат центра и углов
поворота или координат выделенных точек.
Погрешности положения объекта обусловливаются многими
факторами. Вклад захватного устройства в суммарные
погрешности может быть значительным, однако до последнего времени
расчет этих погрешностей не производился, не имелось четких
представлений о происхождении этих погрешностей и необходимых
142
математических моделей, отсутствовали методики их расчета.
Авторами совместно с А. Б. Макаровым разработаны научные
основы подобной методики. При разработке методики активно
использован опыт разработки элементов теории точности
станочных приспособлений. Постановки задач анализа точности
приспособлений для конкретных случаев имеются в монографиях
12] и [48], посвященных рассмотрению всех основных вопросов,
связанных с проектированием станочных приспособлений, но
наиболее подробно именно задачи анализа точности
сформулированы и частично решены в работе [55]. Погрешности положения
объекта, обусловленные станочным приспособлением,
квалифицируются как погрешности установки. Процесс установки
разделяется на два этапа: базирование и закрепление. Погрешности
базирования определяются чисто геометрически, по смещениям
баз, т. е. по предельным отклонениям определенных точек,
линий или участков поверхностей объекта от идеальных положений,
задаваемых измерительными базами. Погрешности закрепления
обусловливаются упругими деформациями, возникающими при
зажимании объекта. В работе [55] помимо перечисленных
анализируются также смещения объекта при установке вследствие
зазоров в соединениях, погрешностей изготовления
приспособлений, неточностей установки и выверки по месту.
Большое внимание уделяется разделению погрешностей на
систематические и случайные составляющие. Систематические
составляющие могут быть скомпенсированы при наладке и настройке,
случайные — не могут быть устранены и оцениваются по
максимуму или по среднеквадратичным значениям. Рассмотрение
погрешностей часто производится независимо по координатам.
Применительно к захватным устройствам целесообразно
раздельно рассматривать погрешности базирования и закрепления.
В этом параграфе рассматриваются только погрешности
базирования, для анализа погрешностей закрепления требуется
привлечение разнообразных моделей упругих элементов; это сделано
в гл. 9.
Отметим сначала, что на различных этапах манипулирования
объектом представляет интерес положение различных точек,
линий и участков поверхности объекта.
1. При подаче объекта на позицию захватывания он базируется
специальными устройствами и приспособлениями. Соответственно
способу базирования должны быть указаны базы (точки, линии
или поверхности) и оценены погрешности, которые в дальнейшем
называются погрешностями базирования на позиции захватывания.
2. После окончания процесса захватывания объект базируется
в схвате по другим базам (точкам, линиям, поверхностям).
Соответствующие погрешности в дальнейшем называются погрешностями
базирования в схвате.
3. После передачи объекта в приемное устройство он снова
изменяет базирование и базируется по иным точкам, линиям или
143
поверхностям. Соответствующие погрешности в дальнейшем
называются погрешностями базирования в приемном устройстве.
В конечном счете при работе ПР в составе роботизированного
технологического комплекса важны погрешности конечного
положения, т. е. погрешности базирования в приемном устройстве.
Поэтому задача расчета в целом ставится так: задаются
погрешности базирования на позиции захватывания, погрешности
базирования в схвате, погрешности позиционирования и
ориентирования самого схвата (определяемые погрешностями манипулятора
ПР); необходимо рассчитать погрешности базирования в
приемном устройстве. Рассматриваемый процесс является, по крайней
мере, трехэтапным (захватывание—перенос—передача в
приемное устройство), каждый из этапов характеризуется своими
погрешностями. Относительно преобразования этих погрешностей
от этапа к этапу могут быть выдвинуты две простейшие
гипотезы.
1. Происходит прямое накопление погрешностей, они
суммируются от этапа к этапу как независимые (в частности, как
случайные) величины. Так происходит, когда захватывание и
перезахватывание происходят при удерживании объекта по некоторым
координатам без принудительного базирования.
2. На каждом этапе погрешности принимают новые значения,
не зависящие от погрешностей предыдущего этапа. Такое
положение имеет место тогда, когда при захватывании происходит полное
базирование по всем шести обобщенным координатам; при
перезахватывании одно полное базирование сменяется другим, также
полным, но по новым базам, так что накопления погрешностей не
происходит. Подобные ситуации возможны, но также
встречаются редко.
Гораздо более общей и соответствующей действительности
является комбинированная модель, при построении которой
предполагается, что для очередного этапа одни составляющие погреш
ностей суммируются с предыдущими (начальными для данного
этапа), а другие — принимают новые значения (не зависящие от
начальных для данного этапа). В соответствии с этим предлагается
разделить погрешности на две группы. Погрешности первой
группы сохраняют накопленные значения, они соответствуют
обобщенным координатам, по которым не осуществляется
базирование при захватывании (по отношению к ним положение
равновесия объекта в схвате является безразличным). Погрешности
второй группы теряют прежние значения и приобретают новые,
они соответствуют обобщенным координатам, по которым
осуществляется базирование. Так, для задачи захватывания объекта
плоскопараллельным схватом три погрешности (перемещения по
осям х и у и угол поворота вокруг оси г) относятся к первой группе
(по ним базирование не происходит), а три другие (перемещение
по оси г и углы поворота вокруг осей х и у) относятся ко второй
группе.
144
В общем случае необходимо рассматривать преобразование не
отдельно погрешностей обобщенных координат, а их комбинаций;
при этом будут допускаться произвольные преобразования
координат, в частности любые повороты осей. Тогда формализованное
описание правила преобразования погрешностей при
захватывании строится следующим образом. Для погрешностей первой
группы уравнения записываются в виде
ф,(дя. д,, д„ ея, е„ e2) = <MAi°\ ду>\ д;°\ ел %°\ е;°>) +
+ 8i (t = l,..., т). (7.1)
Здесь первое слагаемое в правой части представляет собой
начальное значение комбинации погрешностей, а второе
слагаемое отражает влияние собственных погрешностей схвата. Для
погрешностей второй группы первое слагаемое отсутствует,
уравнения записываются следующим образом:
Ф, (Дх, Д„, Д2, 0Ж, Qyt 92) = et (i = m + 1,..., 6).
Здесь et имеют тот же смысл, что и в уравнениях (7.1).
Описанная модель является весьма упрощенной. В
действительности для погрешностей первой группы имеет место
трансформирование различных погрешностей, поэтому каждая
погрешность сложным образом зависит также от начальных значений
остальных. Расчетная модель при этом строится как система
уравнений, описывающих процессы захватывания с учетом
изменения числа точек контакта, их расположения и возможного
проскальзывания в этих точках, а погрешности рассчитываются по
решениям этих уравнений. Пути решения этих сложных задач
описываются кратко в гл. 10. Здесь же в рамках описанной выше
модели будут рассмотрены только погрешности второй группы,
которые могут быть определены на основе лишь геометрических
соотношений. Они рассчитываются для конечного положения
объекта в сжатом схвате без учета протекания самого процесса
захватывания, поскольку «предыстория» захватывания на этих
погрешностях не сказывается.
Причины появления рассматриваемых погрешностей второй
группы обусловлены многими факторами, которые могут быть
разделены на четыре основных группы.
1. Погрешности формы и положения поверхностей объекта.
Эти погрешности существенно зависят от способа обработки, если
объект представляет собой заготовку. Количественно предельные
погрешности поверхностей, для которых точность обработки
задается, определяются системой квалитетов и дополнительно
взаимосвязанными стандартами. Погрешности формы и
положения поверхностей достаточно велики для заготовок, полученных
литьем или ковкой. Они могут быть существенными также для
заготовок, прошедших только черновую токарную или
фрезерную обработку. Возможны случаи, когда в зонах контакта
заготовки с рабочими элементами могут оказаться сварной шов, за-
145
•=0 '-О :£? ':Q
Рис. 7.5 Рис. 7.6
усенцы, оставшиеся после операций штамповки и обрубки, облой
после литья, технологические выступы, выточки или пазы. В
некоторых случаях необходимо учитывать изменения формы и
положения поверхностей объекта вследствие упругих деформаций
под действием усилий захватывания.
2. Погрешности формы и положения поверхностей рабочих
элементов схвата. Эти погрешности могут быть обусловлены
изготовлением, наличием насечки, износом поверхностей, выбоинами,
а также упругими деформациями.
3. Погрешности механизма, приводящие к погрешностям
положения рабочих элементов.
4. Наличие между объектом и поверхностями рабочих
элементов посторонних предметов (например, стружки).
При расчете второй группы погрешностей базирования объекта
в схвате в этом разделе несущественно, к какой из групп
относятся причины их появления, важны лишь общие геометрические
свойства условий контакта и характер изменения этих условий.
Покажем на примерах, что при малых изменениях формы и
положения поверхностей объекта и рабочих элементов условия
контакта в одних случаях изменяются мало, а в других —
значительно. На рис. 7.5, а изображено захватывание объекта
прямоугольного сечения уголковыми рабочими элементами, так что
контакт происходит в угловых точках. При одном срезанном
угле (вследствие смятия или скола), как видно на рис. 7.5, б,
происходят малые смещение и поворот сечения. На рис. 7.6, а
изображен случай, когда при отсутствии погрешностей контакт
происходит на гладких участках, но поверхности рабочих
элементов существенно различны (сечения представляют собой
прямую и окружность). При срезанном контуре окружности (рис. 7.6,6)
точка контакта смещается, причем смещения могут быть
значительно больше, чем в предыдущем случае. Смещения могут быть
еще больше, если в точках контакта при отсутствии погрешностей
значения радиусов кривизны гладких поверхностей близки друг
другу (рис. 7.7).
На рис. 7.8, а изображено захватывание круглого сечения
уголковыми рабочими элементами. При отсутствии погрешностей
контракт имеет место в четырех точках. Однако практически при любых
изменениях формы и положения поверхностей одна из четырех
точек контакта теряется (рис, 7.8, б), причем при параллельности
или близости к параллельности противоположных сторон обоих
рабочих элементов получается целая зона возможных положений
146
объекта, контакте рабочими элементами может оставаться только
в двух точках. Наиболее существенные изменения (в условиях
контакта объекта с рабочими элементами) могут быть тогда, когда
формы их поверхностей согласованы и при отсутствии
погрешностей контакт происходит по поверхностям или линиям. Для
наиболее простого случая захватывания плоского объекта
плоскопараллельным схватом с жесткими рабочими элементами
контакт по всей плоскости осуществляется только теоретически.
Вследствие погрешностей формы область контакта распадается
на пятна, которые в первом приближении обычно можно
рассматривать как дискретные точки контакта. Даже при рассмотрении
плоской задачи (захватывания одного сечения) возможны
различные варианты: определенное положение при трех точках
контакта (рис. 7.9, а), неопределенное положение при двух точках
контакта на одном конце (рис. 7.9, б), неопределенное положение
при двух точках контакта в середине (рис. 7.9, в).
Некоторые из перечисленных эффектов (малые или
относительно большие перемещения точек контакта, пропадание
некоторых точек контакта, переход от контакта по поверхностям или
линиям к контакту в дискретных точках, неопределенность
положений объекта при малых изменениях положений точек контакта)
могут быть важны сами по себе. Например, неопределенность
положения равновесия объекта в схвате (даже при малых
изменениях формы) приводит к случайным погрешностям базирования,
которые не могут быть скорректированы; при переносе объекта
становятся возможными перескоки объекта из одного положения
в другое. Однако чаще всего основным является эффект изменения
(чаще всего снижения) несущей способности схвата (см. гл. 8).
Для количественного анализа изменений положения объекта
в схвате при изменении формы необходимы математические
модели погрешностей формы и положения поверхностей. Прежде
всего следует провести разделение этих погрешностей на
локальные (не связанные для различных точек контакта) и общие
(связанные для различных точек). Локальные погрешности типичны
для случаев попадания в зону контакта посторонних предметов
(стружки), малых по площади выбоин, сколов и т. п. Общие
погрешности обычно изменяются плавно, они проявляются на
поверхностях в целом или на их значительных частях. Для общих
(связанных) погрешностей удобно использовать показатели апла-
нарности (для объектов с плоскими поверхностями), показатели
некруглости, непрямолинейности направляющих (для сечений
тел вращения) и пр. При более детальном описании изменений
а) ^^ д) ^^ а> ^ д) ^>^
=о о кз =®
Рис. 7.7 Рис. 7.8
147
формы и положения поверхностей используется математический
аппарат разложения функций двух переменных в ортогональные
ряды (например, для прямоугольной поверхности, плоской при
отсутствии погрешностей — разложение в двойной ряд Фурье).
Для цилиндрических поверхностей разложение производится по
функциям кругового цилиндра. При подобных представлениях
смещения координат всех точек поверхности будут выражаться
через коэффициенты разложения. Сохранение малого числа
слагаемых в разложениях допустимо, если только искажения формы
являются достаточно плавно изменяющимися. Необходимо
отметить, что способ представления погрешностей формы должен
быть тесно связан со способами нормирования показателей
точности обработки поверхностей, а также с методами измерения и
контроля этих показателей.
Для поверхностей простых геометрических форм расчет
погрешностей базирования объекта в схвате вследствие погрешностей
Рис. 7.9
формы и положения поверхностей может быть произведен на
основе использования простейших геометрических представлений.
В табл. 7.1 приведены значения погрешностей базирования
выделенных точек объектов для изображенных конфигураций сечений.
Значения погрешностей задаются относительно системы
координат, жестко связанной с основанием схвата. На схемах 1 и 2
изображено 'захватывание плоскопараллельным схватом объекта
в форме параллелепипеда, на схеме 3 — захватывание объекта
в форме кругового цилиндра схватом, который имеет плоский
и призматический (уголковый) рабочие элементы. Видно, что
при захватывании плоскопараллельным схватом увеличение
толщины объекта на величину б приводит к смещению выделенных
точек А и В по оси z на величину 1/26. Отклонение от
параллельности плоских поверхностей объекта приводит к неопределенности
положения объекта в схвате. На схеме показано одно из
возможных положений объекта, приведены оценки пределов изменения
смещений выделенных точек. При захватывании объекта, форма
которого вследствие погрешностей из цилиндрической становится
конусной, положение его в схвате также является
неопределенным. При этом центр правого торца будет лежать в пределах
треугольника Ог02Ог\ координаты его вершин приведены в таблице.
Задачи оценивания погрешностей базирования объекта в схвате
решаются столь просто только для случаев, когда положения
точек контакта определяются без вычислений или когда при
наличии погрешностей форма поверхности сохраняется. Для
148
более сложных случаев необходима общая методика расчета
погрешностей положения объекта; ее основы изложены ниже.
Методика разработана для случаев, когда малые изменения формы и
положения поверхностей приводят к малым смещениям точек
контакта (как следует из предыдущего, это имеет место не всегда,
Таблица 7.1
Схема захватывания
Номер
Эскиз
Установочная
точка
Ось
отсчета
Отклонение
установочной точки
А
В
-6/2
+6/2
А
В
А
В
2L
i-k-')
(4с->)
ы
2L
2А Вид А
*»х
г
+6/sin (a/2)
О
+ «/tg
я —а
— «Лв-
а только при существенном различии кривизны поверхностей
в точках контакта). При малости изменений формы и положения
поверхностей, смещений и поворотов захватываемого объекта,
а также смещений точек контакта при сохранении их числа
методика исследования основана на составлении и решении уравнений
в вариациях. Предполагается, что все элементы схвата и объект
абсолютно жесткие и имеют произвольную (заданную) форму,
верхний рабочий элемент — подвижный, нижний — неподвижный
149
(относительно основания схвата). Положение верхнего рабочего
элемента относительно нижнего характеризуется параметром
раскрытия А. Предполагается, что при идеальном положении контакт
объекта с рабочими элементами осуществляется в г дискретных
точках, положение этих точек определяется
радиусами-векторами г*, заданными своими проекциями в базовой системе
координат относительно ее начала О. Эта система координат
0(1)^(1)^(1)20) предполагается связанной с нижним,
неподвижным рабочим элементом. В общем случае необходимо также
ввести систему координат 0<2>x<2>#(2>2<2>, связанную с верхним,
подвижным рабочим элементом, и систему координат oxyz,
связанную с объектом.
Изменения формы поверхностей рабочих элементов и объекта,
вообще говоря, должны задаваться распределениями приращений
радиусов-векторов в собственных системах координат (для
нижнего рабочего элемента — в системе О^Ь^1^1^1), для верхнего —
в системе 0^2)x^2)y^zi2\ для объекта — в системе Oxyz). Однако
в дальнейшем предполагается, что можно задавать для каждой
поверхности непосредственно приращения Дг[п , Дг}2) и Дг*
радиусов-векторов в зонах вблизи точек контакта, предполагая,
во-первых, что эти приращения можно считать постоянными в
пределах возможных изменений положений точек контакта (как было
указано ранее, эти изменения предполагаются малыми), а во-
вторых, что эти приращения могут быть заданы проекциями на
оси любой системы координат: Ox<l)yil)z(]\ Ox<2)y<2)zW или Oxyz,
поскольку их относительным поворотом вследствие смещений
объекта и изменений положения точек контакта можно пренебречь.
Поэтому при одинаковой начальной ориентации эти системы
координат можно не различать.
В каждой из точек контакта определим нормали, внешние
к поверхностям рабочих элементов, через nf обозначим орты
нормалей. Поверхности рабочих элементов в зонах контакта
предполагаются гладкими, так что в пределах возможных
изменений положений точек контакта изменения параметров
направления нормалей являются малыми (первого порядка малости).
Отметим, что в любой точке контакта поверхность объекта имеет
ту же нормаль, что и поверхность рабочего элемента (если эта
поверхность является гладкой), или эта нормаль не определена
(если объект имеет в этом месте угловую точку).
При введенных предположениях в конечные результаты
расчета погрешностей будут входить не непосредственно вектора
приращений радиусов-векторов, а их суммарные нормальные
составляющие перемещений
At// = (Дг*11 + ДгГ + An) п,. (7.2)
Вследствие погрешностей формы и положения поверхностей,
заданных суммарными нормальными составляющими
перемещений Д[/|, возникают перемещение центра объекта, определяемое
150
вектором Дг0, и поворот вокруг центра, определяемый вектором
малого угла поворота Д<р. При этом также происходит
изменение АЛ параметра раскрытия схвата Л. В соответствии с
кинематической схемой схвата обусловленная его раскрытием
составляющая вектора перемещения точки контакта для верхнего,
подвижного рабочего элемента записывается следующим образом:
дг<2>
Если контакт с рабочими элементами происходит в угловых
точках объекта, то для совокупности точек контакта с нижним
и верхним рабочими элементами будем иметь следующие
выражения векторов смещений точек контакта:
дг(2)
ДгГ = Дг0 + Дф х т\2) +-д{- АА.
(7.3)
Проектируя эти вектора на соответствующие нормали к
поверхностям рабочих элементов (умножая уравнения скалярно на
орты tit), получим систему уравнений:
(Дг0 + Аф хгН nj" — AC/J";
(Дг0 + Дф X гГ + Д£- Aft) п}2> = АЩ
(7.4)
Если контакт происходит на гладких участках поверхности
объекта, нужно иметь в виду, что любая точка контакта не
занимает в осях объекта фиксированного положения, а перемещается
как по поверхности рабочего элемента, так и по поверхности
объекта (в первом приближении — по касательной к поверхности,
перпендикулярной к орту нормали). Поэтому для смещения
каждой точки контакта вместо уравнений (7.3) будем иметь:
ДгГ = Дг0 + ДфХг^ + Д8ГП
ДгГ = Дг0 + Дф X гР> + Asr, J ( '
где AsiT) и Asir2) — неизвестные вектора малых перемещений по
касательным, ортогональные соответствующим ортам njl) и п*2\
Таким образом, в задаче появляются новые неизвестные. Однако
после скалярного умножения на nll) или п*2\ как и в случае
контакта в угловых точках, получаются уравнения (7.4), поскольку
в силу ортогональности:
AsW'^O и Asi2 ni2) = 0.
Система уравнений (7.4) содержит семь неизвестных: три
проекции вектора Дг0, три проекции вектора Дф и
приращение ДА. Правые части, характеризующие суммарные отклонения
по нормали поверхностей в точках контакта, считаются
известными, заданными.
151
Для числа точек контакта т — 7 система уравнений (7.4)
имеет однозначное решение, т. е. в результате решения однозначно
определяются вектора Аг0 и Аф и, следовательно, погрешности
положения всех выделенных точек объекта. Случай т — 7
соответствует базированию объекта по всем шести обобщенным
координатам, и поэтому также однозначно определяются
погрешности базирования. Случай т < 7 соответствует неполному
базированию, т. е. базированию по некоторым из координат;
естественно, что при этом могут быть определены лишь некоторые
погрешности, которые относятся ко второй группе, а именно,
погрешности тех обобщенных координат, по которым
осуществляется базирование. Для определения этих погрешностей
векторы, входящие в уравнения (7.4), должны быть записаны в такой
системе координат, чтобы неопределяемые погрешности
(погрешности первой группы) в них не входили. Свойство базирования
по всем координатам при т — 7 в дальнейшем (см. гл. 8)
связывается со статической определимостью задачи расчета несущей
способности.
Для плоской задачи захватывания одного сечения число
неизвестных равно четырем (две составляющие вектора Аг0, угол
поворота Дф вокруг оси z и Ah), поэтому все погрешности
определяются при четырех точках контакта.
Разработанная методика может быть основой для расчета
характеристик случайных погрешностей базирования,
задаваемых вероятностными характеристиками. Линейные уравнения
(7.4) связи параметров перемещения объекта и составляющих
суммарных смещений Ut по нормалям в точках контакта
сохраняются, если эти суммарные смещения считать случайными.
Вероятностные характеристики совокупности случайных
величин Ut удобно задавать ковариационной матрицей. В этом случае
неизвестные величины также являются случайными и их удобно
характеризовать также ковариационной матрицей, в общем
случае размерностью 7x7. В силу линейности исходных уравнений
для погрешностей также линейными будут уравнения связи
элементов ковариационных матриц задаваемых и искомых величин.
Заметим, что если даже задаваемые величины статистически
независимы, погрешности положения точек объекта оказываются
коррелированными.
7.4. СОВМЕСТНЫЙ УЧЕТ
ПОГРЕШНОСТЕЙ МЕХАНИЗМА ОХВАТА
И ПОГРЕШНОСТЕЙ БАЗИРОВАНИЯ ОБЪЕКТА
В РАБОЧИХ ЭЛЕМЕНТАХ ОХВАТА
Как отмечалось выше, погрешности формы и положения
поверхностей объекта и рабочих элементов относятся только к
одному из факторов, вызывающих погрешности положения и
ориентирования объекта. Необходимо учесть также и другие факторы.
152
Они проявляются различным образом. Если источники
погрешностей лежат между рукой ПР и подвижными частями схвата
(сюда относятся, например, погрешности базирования схвата,
т. е. узла крепления основания схвата к руке), то эти
погрешности можно относить к тем погрешностям механизма манипулятора,
которые можно рассматривать как независимые от погрешностей
базирования объекта в схвате и суммировать с ними. На первый
взгляд кажется естественным, что также независимыми и
аддитивными можно считать погрешности, обусловленные
погрешностями механизма схвата, предназначенного для передачи
движений и усилий от выходного звена двигателя к рабочим
элементам. Однако это не так. Погрешности положения объекта,
обусловленные погрешностями этого механизма, существенным
образом зависят от рабочих
элементов и от схемы базиро- а) б)
вания в них объекта. Опи- \ /**~*\
шем основные ситуации и |—Y V г
поясним их примерами, от- \^r I !| м
носящимися к плоской за- ^
даче захватывания одного Рис. 7.10
сечения.
1. Погрешности механизма передачи могут совсем не
приводить к погрешностям положения объекта. Так, на схеме рис. 7.10, а
базирование осуществляется по нижнему уголковому элементу,
который неподвижен относительно основания схвата, и'поэтому
положение объекта и, следовательно, погрешности положения не
будут зависеть от положения верхнего, подвижного элемента и,
следовательно, от механизма передачи движения и его
погрешностей. Независимость положения объекта от погрешностей
механизма передачи всегда будет иметь место, когда базирование
осуществляется полностью по неподвижному рабочему элементу,
а подвижный рабочий элемент только создает усилие
захватывания.
2. Погрешности механизма передачи приводят к погрешностям
положения объекта.лишь по некоторым координатам. Так, на
схеме (рис. 7.10, б) базирование по оси г осуществляется по
неподвижному рабочему элементу, он же задает угловое положение
объекта. В то же время погрешность положения объекта по оси х
зависит от погрешностей механизма передачи. В подобных
случаях независимость погрешности положения объекта имеет место
только по тем координатам, по которым базирование
осуществляется по неподвижному рабочему элементу.
3.. Погрешности механизма передачи приводят к погрешностям
положения объекта по всем координатам. Этот случай является
общим, он реализуется, когда все рабочие элементы являются
подвижными.
При проектировании механизмов передачи важно оценить
вклад, который вносят различные звенья механизма и кинема-
153
тические пары. Проявляется обычно следующая закономерность:
влияние звеньев, расположенных по кинематической цепи ближе
к рабочим элементам, всегда оказывается более существенным.
Наибольшее влияние оказывают погрешности последних звеньев
и последних кинематических пар, например, смещения осей
рычагов, смещения осей подшипников, перекосы и искривления
осей звеньев и т. п. В тех случаях, когда рабочие элементы должны
перемещаться симметрично относительно плоскости или оси,
важны только те погрешности предыдущих звеньев, которые
приводят к несимметрии перемещений. Для симметричного схвата
погрешности начала кинематической цепи от двигателя до ее
разветвления к двум рабочим элементам могут не вызывать
погрешности базирования объекта в схвате, если они не приводят
к нарушению симметрии.
Погрешности механизмов передачи схватов целесообразно
приводить к погрешностям положения и ориентирования рабочих
элементов. Действительно, любые кинематические погрешности
этих механизмов приводят к смещению условно задаваемых
центров рабочих элементов и к их повороту, так что в общем
случае для каждого рабочего элемента, как для свободного
твердого тела, нужно задавать шесть параметров положения и
ориентирования (для плоской задачи — три параметра). По этим шести
параметрам рассчитываются векторы смещений точек контакта
поверхностей рабочих элементов, а затем и их проекции по
нормалям к поверхностям, через которые потом, в соответствии
с методикой п. 7.3 по решениям системы уравнений (7.4)
рассчитываются погрешности положения объекта в схвате. Таким
образом, основой является общая методика расчета погрешностей
положения объекта в схвате по изменениям формы и положения
поверхностей рабочих элементов (или объекта), а погрешности
механизма пересчитываются на дополнительные погрешности
положения поверхностей рабочих элементов.
При анализе точности и сопоставлении различных
кинематических схем схватов целесообразно вводить коэффициенты или
функции влияния конкретных видов погрешностей звеньев
механизмов передачи (погрешностей межосевых расстояний, углов
перекоса осей, длин звеньев и пр.) на погрешности положения
и ориентирования рабочих элементов или погрешности положения
точек контакта.
Отметим, что погрешности положения объекта, обусловленные
погрешностями механизма передачи, проявляются чаще всего
как систематические, в то время как погрешности от изменений
формы и положения поверхностей объекта обычно следует
рассматривать как случайные.
Рассматриваемая задача близка к решаемой в различных
постановках в теории механизмов задаче анализа механизмов с
замкнутой кинематической цепью. При этом задача захватывания
интерпретируется следующим образом. Раскрытый схват пред-
164
ставляет собой механизм с разветвленной разомкнутой
кинематической цепью. Захватывание объекта представляется как введение
замыкающего звена между последними звеньями ветвей, в
результате чего осуществляется замыкание механизма. Специфика задачи
захватывания заключается в том, что кинематические пары,
получающиеся при введении замыкающего звена, являются,
во-первых, нетипичными (с неудерживающими связями), а во-вторых,
очень разнообразными по схемам и характеристикам (с изменением
объекта и рабочих элементов меняются количественные и
качественные характеристики этих кинематических пар). Если
базирование объекта осуществляется по всем шести координатам, то
при его захватывании, т. е. при замыкании механизма, он должен
превращаться в жесткую неизменяемую систему. При этом
неизменяемость и в то же время статическая определяемость
механизма имеют место в общем случае при семи точках контакта
с рабочими элементами. Если же базирование осуществляется
не по всем координатам, то механизм становится не полностью
неизменяемым, т. е. становится жесткой неизменяемой системой,
за исключением замыкающего звена (объекта), который
сохраняет некоторые степени подвижности.
Глава 8
РАСЧЕТ НЕСУЩЕЙ СПОСОБНОСТИ
МЕХАНИЧЕСКИХ ЗАХВАТНЫХ УСТРОЙСТВ
8.1. ЗАДАЧИ ИССЛЕДОВАНИЯ
МЕХАНИЧЕСКОЙ СИСТЕМЫ СХВАТ - ОБЪЕКТ
На различных этапах выполнения технологического цикла
(захватывание, перенос, установка объекта в заданное положение
и освобождение его из схвата) даже при нормальной работе
механизма манипулятора могут произойти следующие нарушения
режима работы:
схват может не захватить объект вследствие недопустимо
большого рассогласования с объектом его положения и
ориентации в момент захватывания;
захватив объект, схват может не зафиксировать его в
требуемом положении (вследствие проскальзывания объект может
занять другое положение);
совместное действие сил тяжести и сил инерции при переносе
могут привести к смещениям объекта в схвате или даже к потере
объекта;
при приведении объекта в конечное положение ошибки
расположения объекта в схвате могут быть слишком большими, так
165
что объект не встанет в направляющие устройства, не будет взят
захватными приспособлениями и пр.;
вследствие больших ошибок позиционирования в конечном
положении при взятии захватными приспособлениями объекта,
еще находящегося в схвате манипулятора, возникнут
недопустимо большие силы и моменты.
Помимо перечисленных необходимо учитывать возможность
следующих аварийных ситуаций: во время переноса объект или
сам схват может задеть за неподвижное препятствие, при этом
вследствие ударов могут возникнуть смещение или срыв объекта
или поломки самого манипулятора; в конечном положении в
нужный момент может не произойти отпускание схвата и
освобождение объекта. При этом объект, фиксированный в захватном
приспособлении, может начать перемещение и поворот в схвате.
В результате он или будет вырван из схвата, или займет новое
положение в схвате, или произойдет поломка схвата.
Чтобы исключить возможность или уменьшить вероятность
перечисленных нарушений, а также минимизировать
нежелательные последствия, необходим геометрический, статический и
динамический расчет схвата вместе с объектом. Задачи
геометрического расчета были рассмотрены в гл. 7.
Задачами силового расчета являются: определение возможных
положений равновесия и их устойчивости, расчет запасов
устойчивости, определение предельных положений и состояний. На
осснове статического силового расчета решаются также некоторые
простейшие задачи динамики схвата.
Конкретные практические цели, достигаемые в результате
исследования данных геометрического и силового расчета захва^
тывания, могут быть следующими:
выбор наиболее подходящих вариантов конфигураций
рабочих элементов, обеспечивающих надежное фиксирование объектов
с определенными формами поверхностей, по которым происходит
захватывание;
выбор наиболее подходящих вариантов ориентации объекта
в схвате, обеспечивающих устойчивость положения равновесия
и надежность удерживания;
на основе анализа влияния отклонения формы и других
геометрических погрешностей выбор требований к допускам на
соответствующие параметры, а также, возможно, выработка
рекомендаций к выбору схем, обеспечивающих меньшую
чувствительность по отношению к изменениям характеристик
параметров;
определение запасов надежности но силам и моментам при
заданных законах переноса, а также, возможно, формулировка
ограничений на ускорения при разгоне и торможении;
обоснованный выбор усилия захватывания и допустимых
значений параметров положения объекта в схвате (в частности,
смещения центра масс относительно центра схвата);
166
■н, на основе требований к ограниченности контактных усилий
формулирование требований, обеспечивающих сохранение
прочности, долговечности и качества поверхностей как самого схвата,
так и объекта;
формулирование требований к необходимой жесткости
элементов схвата и, если это нужно, к используемым упругим
накладкам;
определение условий, при которых в аварийных ситуациях
(в частности, при ударах) схват совместно с объектом выполняет
функции амортизирования и снижает вероятность поломки
механизма манипулятора.
С ориентацией на эти цели ниже разрабатываются общие
вопросы механики захватывания. Поскольку специфика процессов
захватывания заключается в контактном взаимодействии объекта
с рабочими элементами, ключевым является анализ механики
взаимодействия жесткого объекта с перемещающимися по
заданным законам жесткими поверхностями рабочих элементов схвата
произвольной формы.
При объяснении механики взаимодействия рабочих элементов
схвата с объектом исходным является положение, что при
захватывании осуществляется силовое замыкание одной, двух или
нескольких кинематических цепей механизма схвата, каждая
из которых до захватывания была разомкнутой. Обычно при
захватывании механизм схвата образует неизменяемую систему.
Однако способ силового замыкания может быть различным;
основными являются два принципа захватывания.
Первый принцип заключается в том, что замыкание механизма
осуществляется только через рабочие элементы, образующие
полость, в которой помещается объект (конечно, поверхности
полости могут быть не сплошными, а состоящими из отдельных
элементов). Фиксирование рабочих элементов при их смыкании
обычно обеспечивается за счет достаточно большого усилия
захватывания, создаваемого приводом (когда механизм передачи
является обратимым, а двигатель схвата остается все время
включенным). Рабочие элементы могут фиксироваться также без
их смыкания, когда используется необратимый хмеханизм передачи
с самоторможением. При этом положение рабочих элементов
после отключения двигателя и остановки привода зависит не
только от элементов схвата, но и от ряда других факторов
(размеров объекта, способа отключения двигателя и т. д.): при
удерживании объекта положение рабочих элементов остается
фиксированным (если пренебрегается упругостью элементов схвата).
При реализации первого принципа рабочие элементы
ограничивают перемещения объекта в образованной ими полости.
В идеальном случае перемещения объекта в рабочих элементах
полностью исключаются. Это, в частности, возможно, когда схват
является факсимильным (т. е. когда поверхности рабочих
элементов точно повторяют поверхности объекта, за которые про-
157
исходит захватывание). Учет возможных отклонений параметров
формы и положения поверхностей объекта и рабочих элементов
требует задания гарантированных зазоров, в пределах которых
возможны малые перемещения объекта. При этом, если не
учитывается упругость элементов схвата, силовое взаимодействие
рабочих элементов с объектом является вторичным фактором.
Отметим, что при симметрии формы объекта (например, когда имеет
место симметрия вращения) по некоторым координатам возможно
свободное неограниченное перемещение (вращение), если зазоры
гарантированы. При теоретическом рассмотрении схватов,
работающих по первому принципу, принимается, что поверхности
рабочих элементов создают неудерживающие связи.
Второй принцип заключается в том, что силовое замыкание
механизма схвата осуществляется только через объект. При
ограничении сил, действующих на объект, независимо от формы
объекта при достаточно большом усилии захватывания исключаются
перемещения объекта относительно рабочих элементов. Задание
определенных усилий захватывания осуществляется
преимущественно обратимыми передачами. При теоретическом
рассмотрении схватов, работающих по второму принципу, считается
заданным усилие захватывания, а не положение рабочих элементов.
Второй принцип получил гораздо большее распространение,
поэтому в этой книге рассматриваются схваты, которые
удерживают объект за счет его зажатия в рабочих элементах.
8.2. ВИДЫ ПОЛОЖЕНИЙ. РАВНОВЕСИЯ
ОБЪЕКТА В ОХВАТЕ
Базирование объекта в схвате происходит в результате
процесса захватывания. Основные положения теории базирования,
изложенные в ГОСТ 21495—76, справедливы и применительно
к задачам захватывания объекта схватом ПР. Как и общая теория
базирования, разработанная авторами теория базирования объекта
в схвате основана на предположении, что объект и рабочие
элементы схвата можно считать абсолютно жесткими.
Поверхности объектов могут быть простыми, но часто бывают
сложными, комбинированными и образуются сочетанием и
сопряжением простейших геометрических форм: плоскостей,
цилиндрических, конических и сферических поверхностей. При анализе
взаимодействия рабочих элементов с объектом естественно
принимать во внимание только те участки (зоны) поверхностей, в
которых происходит контакт. Сначала достаточно рассматривать
условия контакта для этих участков (зон) по отдельности,
независимо. Поэтому далее дается краткий анализ условий контакта
простейших типовых поверхностей.
Контакт объекта с рабочими элементами схвата может
осуществляться по поверхностям, линиям и дискретным точкам. Если
пренебречь упругостью рабочих элементов и объекта, то для
158
контакта по поверхностям или линиям необходимо идеальное
совпадение или соответствие форм их участков поверхностей.
Контакт по поверхностям чаще всего встречается тогда, когда
участки поверхностей плоские. Захватывание плоских деталей или
заготовок плоскопараллельными рабочими элементами типично,
например, на участках штамповки. Отметим то обстоятельство,
что характер контакта сохраняется при различных значениях
толщины объекта. Все остальные случаи контакта по неплоским
криволинейным поверхностям (цилиндрическим, коническим,
сферическим) реализуются в факсимильных, узко
специализированных схватах, не допускающих каких-либо изменений формы
поверхностей объекта.
Если контакт осуществляется по линиям, то наиболее
распространенным является случай, когда эти линии — прямые. Это
чаще всего происходит, когда поверхности рабочих элементов
и объекта являются призматическими; тогда линии контакта
представляют собой образующие. Для призматических
поверхностей контакт по прямым линиям сохраняется при изменении
размеров объекта и формы сечения. Это определяет
распространенность и достаточно высокую степень универсальности схватов
с призматическими рабочими элементами. Встречается также
контакт по окружностям (например, при захватывании за
сферические и конические поверхности), но степень универсальности
таких схватов ниже. Следует отметить, что контакт по линиям
осуществляется чаще всего тогда, когда поверхности рабочих
элементов и объекта частично согласованы (являются
полусогласованными). При несогласованных поверхностях по форме и
взаимному положению контакт рабочих элементов с объектом
осуществляется в дискретных точках.
Разнообразие возможных условий контакта поверхностей
рабочих элементов и объекта на одном участке удобно представить
наглядно, рассматривая возможные сочетания простейших
типовых поверхностей: плоскости, цилиндра, двугранного угла, сферы
и конуса (для конуса предусматривается только возможность
контакта с вершиной — острием). Различные варианты контакта
перечисленных поверхностей представлены в табл. 8.1. Контакт
по поверхности (плоскости) имеет место^только для варианта 1,
контакт по линиям (прямым)—для вариантов 2, 3, 6, 7, 10,
11, 18, 19. Для остальных вариантов контакт происходит в одной
или двух точках. Степень распространенности вариантов
существенно различна. Часто встречаются варианты 1, 2, 10, 18;
варианты 17, 20, 21, 28 маловероятны.
В общей теории базирования принято заменять
распределенный контакт контактом по дискретным точкам, чтобы при такой
замене объект лишался бы тех же степеней свободы и оставалось
бы неизменным число налагаемых связей. Так, контакт по
плоскости заменяется контактом в трех точках, лежащим в этой
плоскости, контакт по прямой — контактом в двух точках, ле-
169
Таблица 8.1
Плоскость
Цилиндр
Призма
Сфера
ч
С
о.
9
X
§
S
о.
С
СО
О.
О
>>
Я
о
160
жащих на этой прямой. При рассмотрении задач захватывания
замена непрерывного контакта контактом в точках также
возможна и целесообразна, однако выбор точек не произволен. Когда
контакт осуществляется по линиям, обычно достаточно выделять
наиболее разнесенные точки этих линий (для прямых — их концы).
Когда контакт осуществляется по поверхностям, выделяются
точки на их границах (какие именно — определяется в процессе
решения).
Кроме того, имеются дополнительные соображения, в
соответствии с которыми схема с дискретными точками контакта
занимает преимущественное положение. При несогласованных
формах поверхностей рабочих элементов и объекта кривизна
поверхностей различна, что приводит к возможности контакта только
в дискретных точках. Если при идеальных по форме поверхностях
контакт происходит по линиям или поверхностям, то малые
а) 6) 6)
Рис. 8.1
погрешности формы и положения поверхностей могут
существенно изменить представления о характере контакта. В качестве
примера на рис. 8.1 показано, к чему приводят отклонения
поверхности от прямой. Для случая, показанного на рис. 8.1, а,
происходит контакт в крайних точках; на рис. 8.1, б — контакт
в двух точках, одна из которых не является крайней; для случая,
показанного на рис. 8.1, в, —в одной точке. Следует отметить,
что существуют случаи, когда приходится рассматривать
контакт, непрерывно распределенный по границам области
контакта.
Контакт в дискретных точках имеет место как для гладких
выпуклых поверхностей, так и для угловых точек (рис. 8.1, г).
Случай, когда угловая точка объекта упирается в линию
пересечения плоскостей рабочего элемента, эквивалентен наличию двух
точек контакта (рис. 8.1, д). Случай, когда угловая точка объекта
упирается в угловую выемку поверхности рабочего элемента
(рис. 8.1, е), эквивалентен наличию трех точек контакта.
6 Челпанов И. Б. и др.
161
Реакции рабочих элементов схвата, действующие на объект
в точках контакта, представляются в виде суммы
R* = N, + Q„
где / — номер точки контакта; Nt — нормальная составляющая
реакции, направленная по орту щ нормали в /-й точке контакта;
Qt — сила сухого трения, находящаяся в касательной плоскости
в точке контакта объекта и рабочего элемента схвата.
Помимо реакций R* в точках контакта на объект, зажатый
в схвате, действуют приложенные силы и моменты. К ним
относятся сила тяжести объекта; объемные силы инерции,
возникающие при переносе и переориентировании объекта;
поверхностные силы, возникающие при контакте объекта с другими
предметами и оборудованием. Приложенные силы и моменты
приводятся к условному центру схвата — точке 0, являющейся началом
декартовой системы координат схвата, и представляются
проекциями на эти оси, как было показано в п. 6.3.
При правильном захватывании для всех положений
равновесия объекта в схвате осуществляется его жесткое фиксирование
в том смысле, что для выведения его из положения равновесия
необходимо приложение сил и моментов, комбинации которых
превышают предельные значения. Равновесие объекта при
жестком фиксировании качественно отличается от обычно
рассматриваемого в механике устойчивого равновесия, в дальнейшем
называемого классически устойчивым. Для классически
устойчивого равновесия, когда пренебрегают силами трения, при
приложении сколь угодно малых сил и моментов возникают
смещения того же порядка, а при жестком фиксировании смещения
теоретически точно равны нулю. Жесткое фиксирование является
необходимым условием надежного удерживания объекта в схвате
ПР, поскольку при работе ПР на предмет действуют конечные
по величине приложенные силы и моменты.
Жесткое фиксирование объекта в схвате осуществляется или
за счет сил трения, или за счет принудительного базирования
объекта по участкам поверхности рабочих элементов. Обычно по
одним координатам жесткое фиксирование осуществляется только
за счет сил трения, а по другим — за счет принудительного
базирования.
Исследование свойств положений равновесия координат, для
которых жесткое фиксирование может осуществляться
исключительно за счет принудительного базирования, целесообразно
проводить, пренебрегая силами трения и учитывая только
нормальные составляющие реакций. Положение равновесия объекта
в схвате при учете только нормальных реакций называется
исходным и может быть неустойчивым, безразличным, классически
устойчивым, положением жесткого фиксирования.
Примеры различных видов исходного положения равновесия
и графики зависимости потенциальной энергии П системы схват—
162
объект вблизи этих положений показаны на рис. 8.2. В
неустойчивых положениях равновесия (рис. 8.2, а) потенциальная
энергия имеет максимум; в безразличных положениях равновесия она
постоянна (рис. 8.2, б). В классически устойчивых положениях
равновесия потенциальная энергия имеет гладкий минимум
(рис. 8.2, в); в положениях жесткого фиксирования она имеет
минимум в угловой точке (рис. 8.2, г). На рис. 8.2 приведены
графики зависимости предельных значений приложенной силы Fx
а)
*/7
*/7
О х
Fx
-PStga
2Stga
0 л
Рис. 8.2
от малого смещения по оси х для заданного усилия захватывания 5.
Следует отметить, что под действием сил трения жесткое
фиксирование реализуется для положений, которые без учета сил
трения относятся к положениям классически устойчивого,
безразличного или неустойчивого равновесия (рис. 8.2, а, б, в). Для
каждого из этих случаев предельные значения приложенной
силы одинаковы: под действием сил трения в точках контакта,
величина которых определяется значениями коэффициента
трения / и усилия захватывания 5, положение равновесия
сохраняется до тех пор, пока приложенная сила Fx не превысит
предельного значения, равного 2/S. Для жесткого фиксирования за
счет принудительного базирования (рис. 8.2, г) минимум
потенциальной энергии — неаналитический — достигается в угловой
точке, где ее производная претерпевает разрыв. Предельные зна-
6*
163
а) д)J->
т -
в) ш\
во
1
0,5
О 2L п
г
Рис. 8.3
чения приложенной силы Fx определяются согласно принципу
виртуальных перемещений и имеют вид
Fx = 2S tg a sign x.
Рассмотрим особенности определения положений равновесия
объекта в схвате применительно к плоской задаче. В
рассмотренных примерах поверхности объекта и рабочих элементов схвата
призматические или цилиндрические с параллельными
образующими; контакт осуществляется по дискретным образующим.
В таких случаях в плоскости, перпендикулярной к образующим,
рассматривается плоская задача. При рассмотрении плоской
задачи об образующих контакта говорится, как о точках. Полагая,
что направление оси z совпадает с направлением образующих
контакта, а ось у совпадает по направлению с вектором h
перемещения рабочих элементов, положение объекта в схвате при
наличии контакта с обоими рабочими элементами определяем двумя
параметрами: линейным перемещением по оси х и углом
поворота Э вокруг оси z.
Предположим, что силами трения можно пренебречь.
Устойчивые исходные положения равновесия находятся из условий
h = min.
х. е,
Минимум в исходном положении равновесия может быть
аналитическим или неаналитическим, строгим или нестрогим.
Например,-при захватывании выпуклого объекта
плоскопараллельным схватом (рис. 8.3, а), когда контакт осуществляется только
в двух точках, полс*жению равновесия соответствует нестрогий
аналитический минимум потенциальной энергии. По
координате х положение равновесия является безразличным. В
частности, если объект имеет эллиптическое сечение, то для
произвольного значения 9 значение параметра раскрытия h схвата
определяется выражением
A = 2>/a2sin2e + fc2cos26.
164
Восстанавливающий момент определяется по принципу
виртуальных перемещений и удовлетворяет равенству М = Sdh/dQ9
следовательно,
м_ S (a2 + ft2) sin 26
Ка2 sin2 в + б2 cos2 О
Соответствующие графики представлены на рис. 8.3, б, е.
Устойчивым является положение равновесия, при котором
большая полуось эллипса направлена по оси х и h = 26. Функции А
и М непрерывны и дифференцируемы. В положении равновесия
достигается аналитический минимум и потенциальная энергия
может быть представлена в виде знакоопределенной
положительной квадратичной формы координаты 0. При малых угловых
отклонениях от положения равновесия величина
восстанавливающего момента имеет тот же порядок малости, что и угол
поворота 0. При повороте эллипса вокруг оси z в контакт с
поверхностями рабочих элементов схвата непрерывно вступают все
точки контура сечения, при этом число точек контакта неизменно
и равно двум.
Если объект имеет фиксированные (угловые) точки контакта
с рабочими элементами схвата, то, как правило, минимум
потенциальной энергии в исходном положении равновесия
неаналитический. На рис. 8.4 приведены графики зависимостей h (0) при
линейном перемещении и повороте объекта квадратного сечения
в уголковом схвате (рис. 8.4, а), а также зависимости
восстанавливающей силы и момента, рассматриваемые на интервале
изменения угла от 0 до я/2. Из симметрии задачи следует четность
h (0) и нечетность М (0) относительно значения угла, равного я/2.
В положении устойчивого равновесия, соответствующем
жесткому фиксированию, контакт объекта с рабочими элементами
осуществляется в четырех точках. При перемещении объекта
относительно схвата происходит потеря контакта хотя бы в одной
Рис. 8.4
166
точке. В положении равновесия наблюдается разрыв зависимости
силы и момента. Даже при одной и той же форме объекта, но при
изменении коэффициента формы рабочих элементов схвата может
меняться число устойчивых положений равновесия, границы
области устойчивости каждого из этих положений. На рис. 8.4, б
показаны зависимости потенциальной энергии системы схват—
объект для различных значений угла а. Видно, что при а = 45°
и а = 60° число положений равновесия различно. Отличаются
по величине и значения восстанавливающего момента, график
изменения которого показан на рис. 8.4, д.
На рис. 8.4, в показан характер изменения параметра
раскрытия схвата А, определяющего величину потенциальной энергии
системы в зависимости от изменения координаты х. На верхний
рабочий элемент действует сила S, нижний рабочий элемент
неподвижный. Минимум потенциальной энергии в исходном
положении равновесия — неаналитический — достигается в
угловой точке. При этом производная потенциальной энергии
претерпевает разрыв. Из принципа виртуальных перемещений
следует, что при смещении объекта по оси х действует конечная
восстанавливающая сила
Fx = 5 tg a sign (6a:).
Аналогичный результат может быть получен из условий
достижения предельного состояния. Предположим, что на объект
действуют реакции Nt в точках контакта. Тогда уравнение
равновесия верхнего рабочего элемента запишется в виде S = (Nx +
+ N2)cosa. Уравнения статического равновесия объекта под
действием силы Fx и реакций в точках контакта представляют
собой уравнения равновесия сил в проекциях на оси х и у:
Fx + #4 sin а — Nx sin a = 0;
Nz+ N2^ (Nt + N4) cos a = 0
и уравнение равновесия моментов вокруг оси z
(N3 -N2)a = (N* - NJ b.
Исключая из полученных уравнений неизвестные реакции
в точках контакта, находим:
М — S I F* М — ^ | F* b ♦
1 2cosa "Г 2sina ' iV2 ~~ 2 "^ 2sina a '
\r S Fx b . «г о Fx
3 ~" "2 2 sin a IT' 4 ~ 2 cos a 2 sin a •
При смещении объекта в положительном направлении по оси х
произойдет отрыв в одной из точек контакта с верхним рабочим
166
элементом и обратится в нуль реакция Af4. Из условия NA = О
находим значение силы: Fx = S tg а, при котором нарушается
равновесие системы. При перемещении объекта в отрицательном
направлении по оси х вследствие потери контакта обратится
в нуль реакция Nt. Это произойдет при Fx = —S tg а (рис. 8.4, г).
8,3. УРАВНЕНИЯ СТАТИКИ
СИСТЕМЫ МЕХАНИЧЕСКОЕ ЗАХВАТНОЕ УСТРОЙСТВО
БЕЗ ПОДВИЖНЫХ ЭЛЕМЕНТОВ - ОБЪЕКТ
Рассмотрим поддерживающее захватное устройство, не
имеющее взаимно перемещающихся элементов. В этом случае
единственный рабочий элемент, жестко связанный с основанием схвата,
реализует неудерживающие связи (Rt ^ 0), налагаемые на объект
в точках контакта. В положении равновесия выполняются шесть
уравнений статики:
SR* + F=0; |
2 г, X R, + M = 0.
i
Если пренебречь силами трения в точках контакта, реакции
в точках контакта будут нормальными R^ = К^. Предположим,
что при действии основных приложенных сил существует
устойчивое положение равновесия, называемое исходным, для которого
уравнения (8.1) должны удовлетворяться при F = 0 и М •= 0.
Свойства положения равновесия определяются числом т точек
контакта, а условия жесткого фиксирования объекта — по
результатам анализа разрешимости системы уравнений кинематики
малых перемещений.
Пусть относительно точки О, связанной с объектом, положение
которой в системе координат схвата определяется радиусом-
вектором г0, точки контакта задаются радиусами-векторами г*.
Малые перемещения объекта из исходного положения
равновесия зададим приращением бг0 вектора г0 и вектором 6 малого
угла поворота. Изменения Ьть радиусов-векторов положений
точек контакта определяются выражениями
вГ|=вг0 + в X г,+ 61, (i = l, 2,..., т), (8.2)
где вектора 61, ортогональны ортам п, и учитывают перемещение
точек контакта по поверхности объекта. Для угловых точек
контакта 81, = 0. Предположим, что при перемещениях объекта
сохраняется контакт во всех точках, тогда должны выполняться
условия
бг,П| =0 (i = 1, 2,..., /я), (8.3)
(QA)
167
Рис. 8.5
в которые не входят неизвестные вектора 61Ь поскольку они
ортогональны соответствующим ортам пг.
При т < 5 система уравнений (8.3) относительно шести
компонент векторов бг0 и 0 имеет решения, определяемые с точностью
до (6 — т) произвольных параметров. При т = 6 при условии,
что все уравнения системы являются линейно-независимыми,
эта система имеет только нулевые решения. Таким образом, при
т = 6 даже малые перемещения, появляющиеся при приложении
дополнительных сил и моментов, возможны лишь при потере
контакта по крайней мере в одной точке. Для захватных устройств
без перемещающихся элементов устойчивость исходных
положений равновесия возможна лишь при действии основных
приложенных сил, при этом в положении равновесия все Rt > 0.
Если в качестве основной приложенной силы рассматривается
только сила тяжести Р, то все Rt имеют порядок | Р |. При потере
контакта в Z-й точке соответствующая реакция Rh которая имела
конечное значение в исходном положении равновесия, обращается
в нуль. Для этого необходимо, чтобы дополнительные силы и
момент принимали конечные значения. Поэтому наличие шести
точек контакта при линейной независимости уравнений системы
(8.3) является условием жесткого фиксирования объекта для
захватного устройства без перемещающихся элементов. При этом
система уравнений (8.1) относительно шести реакций R$ имеет
единственное решение, т. е. механическая система является
статически определимой. При т ;> 7 система становится статически
неопределимой. Если число точек меньше, чем необходимо для
жесткого фиксирования, то строго устойчивое положение
равновесия может быть только классическим. Исследование таких
положений представляет интерес при учете сил трения, когда силы
сухого трения обеспечивают жесткое фиксирование.
При произвольно заданной форме поверхности объекта условие
т = 6 может быть выполнено приспособлением геометрии
рабочего элемента, причем согласование может быть «грубым», так
что малые изменения поверхностей не приводят к нарушению
условий жесткого фиксирования. Для примера на рис. 8.5, а
изображен рельеф поверхности рабочего элемента,
осуществляющего жесткое фиксирование объекта с основанием в виде треуголь-
168
ника. В точке А реализуется упор в вершину пространственного
угла (эквивалентно трем точкам контакта), в точке В — в ребро
плоского угла (эквивалентно двум точкам контакта), в точке С —
в плоскость.
На рис. 8.5, б приведен пример жесткого фиксирования
параллелепипеда в опоре, образованной тремя взаимно
перпендикулярными плоскостями. При рассматриваемом способе базирования
реализуется 6 точек контакта: три — с одной плоскостью, две —
с другой и одна — с третьей плоскостью. На рис. 8.5, в приведен
пример жесткого фиксирования предмета, представляющего Т-
образное соединение двух труб, на опоре, образованной тремя
уголковыми вилками.
Представляют практический интерес задачи фиксирования,
когда могут быть сделаны независимыми только s уравнений
системы (8.3). Часто это выражается в том, что при определенном
выборе системы координат некоторые из уравнений системы
удовлетворяются тождественно, и при этом п = 6 — s компонент
векторов бг0 и в не входят в остающиеся уравнения.
Соответствующие п координат, определяющих положение объекта,
являются нефиксируемыми. Так, для объекта в виде кругового
цилиндра с торцами, захватывание по которым недопустимо
(рис. 8.6, а), из системы уравнений (8.3) тождественно
удовлетворяются уравнения смещений по оси х и поворота вокруг оси х\
Рис. 8.6
169
смещение по оси х и угол поворота вокруг оси х являются нефикси-
руемыми. Фиксирование остальных четырех координат
осуществляется при четырех точках контакта. Для этой и многих
других задач свойство нефиксируемости имеет место только в
пренебрежении силами сухого трения.
Два варианта жесткого фиксирования по пяти координатам
приведены на рис. 8.6, б, в. Параллелепипед в угловой выемке
имеет пять точек контакта. Соответственно нефиксированной
является координата линейного перемещения вдоль ребра
угловой выемки. Другой пример, когда при реализации пяти точек
контакта остается нефиксированной угловая координата, приведен
на рис. 8.6, в. При базировании параллелепипеда на плоскости
(рис. 8.6, г) имеются три нефиксированные координаты: линейные
смещения и угол поворота в плоскости контакта. Три нефиксируе-
мые угловые координаты имеются при базировании шара в
угловой выемке (рис. 8.6, д).
При наличии п нефиксируемых координат система уравнений
(8.1) статически определима, если контакт объекта и
механического захватного устройства осуществляется в т0 = 6 — п
точках и ранг определителя системы уравнений (8.3) равен т0.
Жесткое фиксирование принудительным базированием в этом случае
имеет место по 6 — п координатам, а предельные состояния
по ним определяются из условия обращения в нуль реакций в
точках контакта. Если число точек контакта равно /л0, а ранг
системы уравнений (8.3) равен т1 < т0, то жесткое фиксирование
принудительным базированием осуществляется только по т1
координатам и система уравнений (8.1) становится статически
неопределимой. При этом контакт во всех точках возможен только
в идеальном случае строго согласованных поверхностей объекта
и рабочего элемента поддерживающего механического захватного
устройства, поскольку малые изменения формы и положения
поверхностей контакта приводят к потере контакта в «лишних»
т0—тг точках.
Наличие нефиксируемых координат может быть обусловлено
либо выбором формы рабочих элементов и способа захватывания,
либо особенностями формы захватываемого объекта. Так, шар
имеет три нефиксируемые координаты — углы поворота вокруг
трех взаимно перпендикулярных осей симметрии. Ранг системы
уравнений (8.3) при базировании шара на поддерживающей опоре
любого профиля будет не больше трех, поэтому при выборе схемы
базирования следует исходить из условия создания трех точек
базирования, а распределять их по поверхности шара исходя из
требований технологического использования поддерживающей
опоры и условий надежного удерживания шара при изменении
ее ориентации и действии динамических нагрузок при движении
манипулятора ПР. В первом приближении эти условия будут
выполнены, если расположение точек контакта выбрать таким
образом, чтобы при перемещении опоры роботом равнодействую-
170
щая дополнительно приложенных сил и силы тяжести,
приложенные к центру шара, не выходили за пределы круга, ограниченного
окружностью, проходящей через выбранные точки контакта.
По аналогичным соображениям при выборе схемы базирования
цилиндра число точек контакта в общем случае не должно
превышать пяти, а при базировании на опоре только по цилиндрической
поверхности — четырех. При задании большего числа точек
контакта система уравнений (8.1) будет статически неопределимой,
вероятность реализации контакта в «лишних» точках —
маловероятна, а положение объекта на опоре в пределах погрешностей
формы и положения
поверхностей контакта объекта и рабочих
элементов схвата —
неопределенным.
Аналогично выбираются схемы
базирования объекта в
вакуумных и магнитных захватных
устройствах. В вакуумных захватных
устройствах базирование
осуществляется за счет притяжения
объекта к базирующей
поверхности силами разряжения в полости
присоски, в магнитных —
силами притяжения, создаваемыми
постоянными магнитами или электромагнитами. При этом, как
правило, базирование в зоне создания сил притяжения
осуществляется по плоскости или плоскому контуру контакта, а
дополнительные базирующие поверхности обеспечивают жесткое
фиксирование принудительным базированием по трем координатам
перемещения и поворота в плоскости контакта, т. е. по тем
координатам, по которым несущая способность рассматриваемых
захватных устройств наименьшая.
Выбор профиля базирующей поверхности поддерживающего
механического, вакуумного и магнитного захватных устройств
и распределение на ней точек контакта с объектом определяются
формой и размерами объекта, требованиями к ориентации в
пространстве его характерных осей и поверхностей, условиями
надежного удерживания при движении ПР. Большое значение при
этом имеет анализ малых погрешностей формы и положения
поверхностей контакта, различные аспекты которого рассмотрены
в гл. 7 и п. 8.7.
Рассмотрим равновесие объекта, имеющего форму Т-образного
соединения двух однородных цилиндров, геометрические размеры
которого показаны на рис. 8.7, на опоре, представляющей
соединение трех V-образных вилок. Начало системы координат связано
с центром масс объекта — точкой О, расположенной на
расстоянии (L + D)/4 от оси симметрии поперечного цилиндра.
Предполагается, что оси х и у лежат в горизонтальной плоскости, сила
Рис. 8.7
171
тяжести Р действует в отрицательном направлении по оси г.
Система уравнений статики (8.1) записывается в виде:
Fx — /?e cos а + #5 cos а = 0;
Fy + (#i + #2) cos а - (#з + #4) cos а = 0;
Fz- P + (RX + R2 + R3 + RA + Rb + Re) s\n a = 0;
М* + (#5 + Яв)Сг sin a — (Rx + /?2)c!Sina — (R3 + /?4)qsina = 0;
My + (Яз + #г) о. sin a — (/?! + /?4) a sin a = 0;
Mz + (i?! — #4) a cos a + (R3 — R2) a cosa + (Re — /?6)c2 cos a = 0,
где сг = (L + D)/4 и c2 = fc — (L + D)/4.
В исходном положении равновесия, когда F = 0 и М = 0,
реакции в точках контакта определяются только силой тяжести Р
и равны:
D -D -Р - D _ Plb-(L + D)m.
/>(L+P).
^5 — Re =
86 sin a
3
при Ь = -J- (L + D) все реакции в точках контакта равны.
Исключением из полученной системы уравнений равновесия
неизвестных реакций могут быть определены условия
предельного состояния, когда происходит потеря контакта и реакция в
соответствующей точке обращается в нуль. Эти условия
записываются в виде:
d _ Fx с2 Fy FzC* 1
1 4 cos a a 4 cos a 4 (cx + c2) sin a '
+
My Mz , Pc2
r 4 (cx + c2) sin a ' 4a sin a 4a cos a ' . 4 (cx + c2) sin a '
n __ - Fx c2 F_y Fzc2 ,
2 4 cos a a 4 cos a 4 (cx + c2) sin a '
, M* My . Мг | Pc2
4 (cx 4- c2) sin a 4a sin a ' 4a cos a ' 4 (cx + c2) sin a '
D _ ^oc C2 , Fy ^2g2 1
3 4 cos a a ' 4 cos a 4 (ct + c2) sin a *
, Mx My Мг | Ръ
4 (c2 + c2) sin a 4a sin a 4acosa T 4 (cx + c2) sin a *
n __. ** g2 I Fy Fzc2 1
4 4 cos a a ' 4 cos a 4 (cx +,c2) sin a '
1 ^x , Afy , Mz , Pc.
4 fd -I- ЛЛ Sin nt ' 4./T ein rt l~ 4/т глс nr '
2
4 (cx + c2) sin a ' 4a sin a ' 4a cos a, * 4 (cx + c2) sin a *
172
D _ Fx Mx
Б 2 cos a 2 (cx + c2) sin a
Fzci | Pcx
2 (cx + c2) sin a '2 (cx + c2) sin a
^ = Ft Af,
2 cos a 2 (c2 + c2) sin a
/^i | Pci
2 (cx + c2) sin a "■" 2 (cx + c2) sin a •
Из полученных выражений легко определить предельные
значения сил и моментов, превышение которых приводит к
смещению объекта из положения равновесия. Предельные значения
приложенных сил получаются из условия, что остальные
составляющие главного вектора силы и вектора момента равны нулю.
Для рассматриваемого случая они равны:
\рх\= и ПРИ й > Сз;
, г , aP(L + D)ciga .
\FX\= v \ ' —г при а < с2;
/\1 =
Р r^--j-(L + D)lcosa
* ' "" 6 sin a
| Afx | = P [ft — -J-(JL + £»] ;
\Mw\ = p[b-±-(L + D)]alb\
\M2\ = P[b--±r(L + D)]a ctg a/b.
Как было отмечено выше, исходные устойчивые положения
равновесия объекта на опоре сохраняются, если дополнительные
приложенные силы и моменты таковы, что удовлетворяют
неравенствам Rt > 0.
Если опора ориентирована так, что ось х расположена
горизонтально, а ось г/, совпадающая с осью поперечного цилиндра,
ориентирована под углом р к горизонту, то реакции в точках
контакта определяются следующими выражениями:
D — PfrcosP I Psinp .
1 ~" 4 (ct + c2) sin a 4 cos a '
D Pc2cosP i Psinp .
2 ~" 4 (q + c2) sin a ' 4 cos a '
P _ Pc2 cos P P sin P .
8 ~~ 4 (Ci -f c2) sin a ~~ 4 cos a '
173
п ___ Рс2 cos ft Р sin ft
4 "~ 4 (сг + с2) sin a 4 cos а
^ Рсх cos ft .
2 (сх + ^2) sin а
о = P^i cos ft
2 (q + c2) sin а *
Из полученных выражений видно, что удерживание объекта
возможно при значениях угла Р в интервале
|P|<arctg[6-(L + D)/4]cosa.
1 г ' s Ь sin a
При р = arctg - ( + V J cos а обращаются в нуль
реакции в третьей и четвертой точках, т. е. происходит потеря
контакта в этих точках, начинается проскальзывание объекта в схвате.
При учете сил трения, определяемых коэффициентом трения /,
предельные значения угла оказываются несколько большими, они
равны
. ft , _ № - (I + Z>)/4] cos а + / {sin а \Ь - (I + Р)/4] + (L + Р)/4>
,р1 6 sin а — /cos а [6 — (L + D)/4]
Аналогичные оценки могут быть получены при произвольных
ориентациях опоры.
8.4. УРАВНЕНИЯ СТАТИКИ
МЕХАНИЧЕСКОЙ СИСТЕМЫ СХВАТ - ОБЪЕКТ
Рассмотрим теперь задачу о жестком фиксировании объекта
схватом с двумя рабочими элементами, причем подвижными могут
быть оба рабочих элемента или только один из них. Перемещение
рабочих элементов в процессе захватывания и создание усилия
захватывания в положении равновесия осуществляются от
двигателя с помощью любого механизма передачи. Предполагается,
что механизм схвата является плоским, в дальнейшем один
рабочий элемент называется верхним, а другой — нижним. Точки
контакта объекта с верхним и нижним рабочими элементами
необходимо различать: величинам, относящимся к точкам контакта
с верхним рабочим элементом, приписывается верхний индекс 1,
а с нижним, — индекс 2.
Для рассматриваемого типа схватов к системе шести уравнений
статики (8.1), определяющих условия равновесия объекта,
добавляется седьмое уравнение статики — уравнение равновесия
механизма схвата как механизма с одной степенью свободы,
положение которого задается одной обобщенной координатой q.
В общем виде это уравнение выглядит следующим образом:
S at Ы Rll) + E bt Ы R\2) = S, (8.4)
174
где S — усилие захватывания, определяемое в соответствии с
соображениями, приведенными в п. 2.5; at (q0) и bt (q0) —
коэффициенты, зависящие от параметра раскрытия схвата, т. е. от
значения обобщенной координаты в рассматриваемом положении
равновесия. Как отмечалось ранее, уравнение' равновесия
системы объект—схват может быть легко выведено на основе
принципа виртуальных перемещений (работ).
Рассмотрим сначала случай, когда верхний рабочий элемент
является подвижным, а нижний — неподвижным. По
качественным особенностям такой схват близок к захватным устройствам
без подвижных элементов, рассмотренным в п. 8.3. Так, если
с нижним рабочим элементом имеется шесть точек контакта,
а с верхним — одна, то можно считать, что нижний рабочий
элемент осуществляет жесткое фиксирование (базирование), а
верхний — обеспечивает увеличение реакций и тем самым устраняет
недостатки, обусловленные неудерживающим характером связей.
Основные уравнения кинематики малых перемещений точек
контакта объекта с подвижным верхним и неподвижным нижним
рабочими элементами записываются различно. Для точек
контакта с неподвижным рабочим элементом они записываются
в виде
6гГ=бг0 + 9г^ + 81Г, (8.5)
т. е. аналогично выражению (8.2). Для точек контакта с
подвижным рабочим элементом учитывается его перемещение
8п" = бг0 + 6if' + eii*' + (-^-)o bq. (8.6)
Три первых составляющих приращения — те же, что в
предыдущем выражении, четвертая — характеризует изменение
положения точки контакта при раскрытии схвата.
Если нижний рабочий элемент также является подвижным,
для точек контакта с ним уравнения кинематики малых
перемещений будут иметь вид
8if > = бг0 + ОгН> + Ы'Г + (^Г )0 «?•
Условия сохранения контакта во всех точках при перемещении
объекта и одновременном раскрытии схвата записываются в виде
системы уравнений (8.3). Полная система уравнений получается
после добавления к ним уравнения (8.4). Общее число неизвестных
в этой системе равно семи; неизвестными являются три
составляющих вектора бг0, три составляющих вектора 0 и приращение 8q
(составляющие векторов 81г в полную систему уравнений не
входят).
Как и в случае захватного устройства без подвижных
элементов, возможность относительного перемещения объекта без потери
контакта во всех точках зависит от числа точек контакта т.
175
При т = 7 и независимости всех уравнений полной системы
имеются только нулевые решения для всех семи неизвестных,
т. е. перемещения объекта в схвате возможны только при потере
контакта, по крайней мере, в одной точке. Поскольку для потери
контакта необходимо изменение реакции в этой точке от конечного
значения до нуля и, следовательно, приложение конечных
дополнительных сил и моментов, то отсюда вытекает, что при принятых
предположениях выполняются условия жесткого фиксирования.
Заметим, что реакции конечны за счет принудительного сведения
рабочих элементов; усилия захватывания обычно значительно
Рис. 8.8
больше сил веса, поэтому силы веса могут быть отнесены к числу
дополнительных. Тогда исходные положения равновесия
определяются без их учета. При т = 7 в пренебрежении силами
трения система объект—схват является статически определимой,
неизвестные нормальные реакции находятся из системы семи
уравнений статики: шести уравнений равновесия механизма объекта
и одного уравнения равновесия механизма схвата. На рис. 8.8
приведены примеры жесткого фиксирования объекта при т = 7.
Распределение числа точек контакта между рабочими
элементами схвата может быть различным. Для схватов с двумя
рабочими элементами возможны следующие сочетания распределения
точек контакта: четыре с одним рабочим элементом и три с другим,
пять с одним рабочим элементом и две с другим, шесть с одним
рабочим элементом и одна с другим. На рис. 8.8, а рабочие
поверхности схвата образуют два двугранных угла со скрещивающимися
ребрами: нижнее основание объекта представляет собой
прямоугольник, верхнее — треугольник. Линии контакта заменяются
176
угловыми точками. На рис. 8.8, б имеет место контакт объекта
в виде цилиндра с двумя вилками в четырех точках; конус,
входящий сверху в отверстие цилиндра, обеспечивает условия,
эквивалентные трем точкам контакта.
На рис. 8.8, в, г приведены примеры реализации пяти точек
контакта с нижним рабочим элементом и двух — с верхним.
В первом случае объектом является шестигранная призма,
опирающаяся на двугранную угловую выемку и поджимаемая сверху
вилкой. Вилка обеспечивает жесткое фиксирование по координате
линейного перемещения вдоль образующих призмы. Для жесткого
фиксирования цилиндра с круглым отверстием используются:
нижний рабочий элемент в виде конуса, обеспечивающий контакт,
эквивалентный трем точкам, и вилки, а также верхний рабочий
элемент, обеспечивающий контакт в двух точках.
Примеры базирования по всем шести координатам на нижнем
рабочем элементе, реализующем шесть точек контакта, и
использования верхнего рабочего элемента для увеличения реакций
в точках контакта за счет действия усилия захватывания
приведены на рис. 8.8, дне. Для этих примеров важно, что при
отсутствии дополнительных сил реакции в точках контакта объекта
и рабочих элементов схвата пропорциональны усилию
захватывания и не зависят от ориентации схвата в пространстве. Это
свойство определяет основное преимущество схвата с одной
степенью свободы по сравнению с механическим захватным
устройством, не имеющим подвижных элементов, в виде опоры, форма
которой совпадает с формой нижнего рабочего элемента.
Для т = 7 число точек контакта сохраняется при малых
изменениях формы и размеров поверхностей объекта и рабочих
элементов, что видно из приведенных примеров. Случай т > 7
соответствует статически неопределимым системам. При этом
малые изменения формы поверхностей приводят к потере
контакта в лишних точках.
При т < 7 имеются несущественные координаты, по которым
жесткое фиксирование принудительным базированием не
осуществляется. Число несущественных координат п может быть от 1
до 5, причем п = 5 реализуется, если число точек контакта равно
двум. Необходимым и достаточным условием существования п
несущественных координат при удерживании объекта схватом с
одной степенью свободы является реализация контакта в т0 =
= 6 — п + 1 точках при равенстве ранга определителя системы
уравнений (8.3) для схвата с одной степенью свободы числу точек
контакта т0. Жесткое фиксирование объекта в схвате в этом
случае осуществляется по б — п координатам, п уравнений
системы (8.1) и (8.4) удовлетворяются тождественно, а неизвестные
реакции /?, определяются из т0 остальных уравнений этой
системы. Так же как и в случае, рассмотренном в п. 8.3, выбирать
форму и размер рабочих элементов схвата следует таким образом,
чтобы при выбранном числе и расположении точек контакта
177
определитель системы уравнений кинематики малых перемещений
объекта в схвате (8.3) имел ранг, равный выбранному числу точек
контакта. Выбор числа точек контакта осуществляется исходя из
условий обеспечения минимального числа п несущественных
координат для объекта данной формы.
Примеры жесткого фиксирования объектов, имеющих
несущественные координаты, приведены на рис. 8.9. Шар имеет три
несущественные координаты — углы поворота вокруг трех
ортогональных осей. Жесткого фиксирования по этим координатам
без сил трения не обеспечить. Жесткое фиксирование по трем
координатам линейного перемещения обеспечивается
реализацией контакта в четырех точках. Примеры реализации такого
контакта приведены на рис. 8.9, aw б. При захватывании цилиндра
Рис. 8.9
за цилиндрическую поверхность две координаты — смещение
вдоль продольной оси симметрии цилиндра и поворот вокруг
нее — не фиксируются. Жесткое фиксирование по остальным
координатам осуществляется контактом в пяти точках. Если
допускается захватывание тел, имеющих цилиндрическую форму,
за торцы, то можно обеспечить жесткое фиксирование по пяти
координатам (не фиксируется только координата поворота вокруг
продольной оси симметрии цилиндра). На рис. 8.9, д приведен
пример жесткого фиксирования трубы двумя конусами по
торцам. Пример жесткого фиксирования шестигранной призмы по
пяти координатам приведен на рис. 8.9, е.
Методика исследования условий равновесия объекта в схвате
и основные качественные выводы полностью сохраняются, если
механизм схвата по-прежнему имеет одну степень свободы, но
число рабочих элементов больше двух (как отмечалось в гл. 4,
распространены схваты с тремя рабочими элементами типа трех-
кулачковых патронов, предназначенные для захватывания
цилиндрических объектов с торца). При одной степени свободы
178
записывается одно уравнение равновесия механизма, аналогичное
выражению (8.4), следовательно, для жесткого фиксирования по
всем координатам необходимы также семь точек контакта.
Снижение числа жестко фиксируемых координат требует снижения
числа точек контакта на столько же единиц.
Если механизм схвата имеет несколько независимых приводов,
то число записанных уравнений равновесия механизма должно
соответствовать числу приводов. Поэтому для жесткого
фиксирования объекта по всем координатам необходимо увеличение числа
точек контакта (по одной точке на каждый привод). Так, для
случая двух приводов число точек контакта должно быть равно восьми,
для / приводов — т0 = 6 — п + /.
Заметим, что расчеты числа координат, жестко фиксируемых
без сил трения, справедливы тогда, когда все уравнения статики
линейно независимы. Это налагает ограничения как на
расположение точек контакта, так и на углы наклона поверхностей в месте
контакта. При наличии симметрии (в первую очередь осевой)
возможное число независимых уравнений оказывается меньше
семи.
Условия жесткого фиксирования для захватных устройств
любого типа целесообразно связать с общими представлениями
теории устойчивости положений равновесия. Положение объекта
и, следовательно, положение системы объект—схват задается
совокупностью обобщенных координат qh отсчитываемых от
положения равновесия. Если вблизи классического положения
равновесия потенциальная энергия представляется в виде
квадратичной формы обобщенных координат и эта форма является
знакоопределенной положительной, то в положении равновесия, в
котором имеет место жесткое фиксирование, потенциальная энергия
приближенно представима в виде суммы модулей линейных форм
V= EI53 Ъ№\ (/. i=U 2,..., 6).
При всех фиксируемых координатах минимум потенциальной
энергии достигается в угловой точке и модульная форма является
знакоопределенной. Однако ее производные но аргументам или их
линейным комбинациям, взятые в нулевой точке, претерпевают
разрыв. Если же некоторые из обобщенных координат являются
нефиксируемыми, то приведенная модульная форма является
знакопостоянной, при этом переход к пространству меньшей
размерности только фиксируемых координат приводит к
знакоопределенной форме.
8.5. РАСЧЕТ НЕСУЩЕЙ СПОСОБНОСТИ СХВАТОВ
Основной и наиболее важной задачей расчета механической
системы схват—объект является определение условий
удерживания объекта в схвате в статических и динамических режимах,
когда на объект действуют переменные нагрузки. Приведенные
179
к условному центру схвата, они могут быть представлены в виде
главного вектора силы F = [Fxt Fyy FZ]T и вектора момента
ДА = [МХ9 Му, MZ]T. Способность схвата фиксировать объект
при действии дополнительно приложенных сил и моментов
наглядно представляется в виде области жесткого фиксирования
(ОЖФ) в шестимерном пространстве составляющих главного
вектора силы и вектора момента. ОЖФ является исчерпывающей
характеристикой несущей способности схвата. Если
изображающая точка значений дополнительно приложенных сил и моментов,
определяющая условия нагружения, находится внутри ОЖФ, то
условия равновесия объекта в схвате сохраняются и перемещения
объекта в схвате не происходят. Выход изображающей точки на
границу ОЖФ соответствует предельному состоянию, при котором
становится возможным перемещение объекта в схвате. Понятие
ОЖФ было введено в гл. 6 без объяснений, как она получается.
Ниже описана методика определения границ ОЖФ, включающая
следующие этапы.
1. Определение вида положения равновесия объекта в схвате.
Для механической системы схват—объект выявляются обобщенные
координаты, по которым жесткое фиксирование объекта в схвате
осуществляется без трения, и координаты, по которым жесткое
фиксирование обеспечивается только силами трения (без учета
сил трения по каждой такой координате реализуется
безразличное или классически устойчивое положение равновесия объекта
в схвате). В основе этого этапа методики лежат составление и
анализ уравнений кинематики малых перемещений объекта в схвате
[см. уравнение (8.3)]. Обобщенные координаты, по которым
жесткое фиксирование обеспечивается только силами трения,
определяются по ненулевым решениям этой системы уравнений. Как
было показано в п. 8.4, существование таких решений говорит
о том, что соответствующие перемещения объекта в схвате
происходят без отрыва в точках контакта. С другой стороны,
перемещения по координатам, по которым реализуется жесткое
фиксирование, возможны только при потере контакта хотя бы в одной
точке.
2. Составление уравнений статического равновесия системы
схват—объект. Для случаев, когда контакт объекта и рабочих
элементов схвата осуществляется в дискретных точках, эту
систему образуют уравнения (8.1) и (8.4); вид системы уравнений
статического равновесия для случая распределенного контакта
по линиям или поверхностям приводится в этом параграфе;
методы составления этой системы уравнений для схватов с упруго
или свободно подвешенными рабочими элементами описаны в п. 9.2,
для схватов с упругими накладками — в п. 9.3.
3. Определение условий предельных состояний, т. е. таких
соотношений между составляющими векторов дополнительно
приложенных сил и моментов, при которых еще сохраняется
положение равновесия, но их увеличение на сколь угодно малую вели-
180
чину приводит к выходу объекта из положения равновесия.
Предельные состояния определяют границы области жесткого
фиксирования ОЖФ. Этот этап включает две стадии исследования. На
первой стадии производится оценка условий достижения
предельных состояний для координат, по которым жесткое фиксирование
осуществляется без сил трения. На второй стадии рассчитываются
условия достижения предельных состояний для координат,
жесткое фиксирование по которым обеспечивается силами трения,
а также определяются поправки к результатам, полученным на
первой стадии, учитывающие влияние сил трения. На первой
стадии условия предельных состояний получаются для случая
контакта в дискретных точках при разрешимости системы уравнений
(8.1) и (8.4) непосредственно из решений этой системы. Для случаев
статически неопределимых задач при дискретном (в точках)
и распределенном (по линиям или поверхностям) контакте
применяются геометрический метод или методы решения задач поиска
экстремумов, описанные ниже.
4. Построение ОЖФ по совокупности условий достижения
предельных состояний, анализ влияния параметров механической
системы схват—объект на конфигурацию и размеры ОЖФ.
Далее основное внимание уделяется третьему этапу — этапу
построения границ ОЖФ. На первой стадии этого этапа для
статически определимых задач при дискретном распределении точек
контакта методика определения предельных состояний, если
пренебречь силами трения, заключается в следующем. Как было
показано в п. 8.4, в этом случае предельные состояния реализуются
при отрыве, по крайней мере, в одной, 1-й точке контакта, т. е. при
обращении в нуль соответствующей реакции Rt. Разрешая
систему уравнений (8.1) и (8.4) относительно неизвестных реакций
в точках контакта и полагая Иг = 0, находим одно из условий
предельного состояния. Полагая Rt ^ 0, получаем линейное
неравенство для составляющих векторов F и М; это неравенство
определяет всю совокупность дополнительно приложенных сил
и моментов, при которых сохраняется контакт объекта и рабочего
элемента схвата в /-й точке. Полагая последовательно / = 1,
2, ..., т0, где т0 <; 7 — число точек контакта, получаем
семейство т0 линейных неравенств для дополнительно приложенных
сил и моментов. Совокупность линейных неравенств выделяет
в шестимерном пространстве составляющих Fx, Fyy FZJ Mx,
Му, Mz замкнутую или разомкнутую ОЖФ, охватывающую
начало координат. На практике удобно рассматривать двухмерные
(плоские) сечения ОЖФ или только предельные значения сил и
моментов. Наглядны и трехмерные сечения ОЖФ, на рис. 8.10
изображены трехмерные сечения этой области для двух видов
схватов. Для схвата с неподвижным нижним рабочим элементом
по переменной Fy ОЖФ является неограниченной (рис. 8.10, а),
для схватов с симметричными перемещениями рабочих элементов
сечения ОЖФ являются ограниченными и, как правило, симме-
181
Рис. 8.10
тричными (рис. 8.10, б).
Границы ОЖФ в рассматриваемом
случае представляют собой
гиперплоскости, максимальное
число которых имеет место при
жестком фиксировании по всем
координатам и равно семи.
В случаях, когда имеются
нефиксируемые без трения
координаты, объем ОЖФ в
шестимерном пространстве равен
нулю и имеет смысл
рассматривать ОЖФ в пространстве
только фиксируемых
координат. Так, для
плоскопараллельного схвата, изображенного на
рис. 8.11, строится трехмерная
область в пространстве
параметров Fyy Mx, Mz.
Если имеется несколько
положений равновесия
объекта в схвате, то ОЖФ
различны для каждого из них.
Для определенного
положения характерные размеры и конфигурация ОЖФ зависят
от геометрии и параметров рабочих элементов. Для захватных
устройств, не имеющих подвижных элементов, размеры ОЖФ
пропорциональны весу объекта. Для схватов эти размеры
пропорциональны усилию захватывания S. Как было показано в п. 3.5,
усилие захватывания, а следовательно, и параметры ОЖФ
зависят от параметра раскрытия схвата, т. е. для объектов
одинаковой формы, но различных размеров поверхностей, по которым
производится захватывание, размеры ОЖФ могут быть различны.
При имеющихся сведениях о действующих на объект силах при
эксплуатации ПР на конкретном рабочем месте (в первую
очередь о диапазонах их изменения, об оценке которых шла речь
в гл. 2) могут быть поставлены и решены задачи оптимизации
(например, задача минимизации усилия захватывания при
обеспечении условий жесткого фиксирования, непосредственно
связанная с решением проблемы снижения массы схвата ПР).
Задачи, решаемые на второй стадии этапа определения
предельных состояний, связаны с учетом сил трения в точках
контакта. Принимается простейшая модель сухого трения: в каждой
точке контакта модуль силы трения удовлетворяет условию Qj <^
<; fNly где коэффициент трения / считается одинаковым для
всех точек. Определение предельных состояний равновесия при
наличии сил сухого трения производится кинематическим
методом, суть которого заключается в следующем. Задается малое
182
перемещение объекта, совместимое с условиями сохранения
контакта с рабочими элементами во всех или нескольких исходных
точках и определяемое векторами бг0 и 8. Находятся
соответствующие перемещения точек объекта относительно точек рабочих
элементов, в которых происходит контакт. Для неподвижного и
подвижного рабочих элементов эти перемещения соответственно
определяются выражениями (8.5) и (8.6).
Если при принятых бг0 и 9 получается | бг^ | Ф О, то считается,
что в соответствующей точке сила трения достигает своего
предельного значения и определяется так
■JN,
дп
\дп\
(8.7)
Если же при данных бг0 и 9 получается | 6тг \ = О, то две
составляющие силы трения, ортогональные орту п^, являются
лишними неизвестными.
В зависимости от числа m точек контакта необходимо
различать следующие основные ситуации.
При выполнении условий жесткого фиксирования без учета
сил трений (т = 6 для захватного устройства без подвижных
элементов и т = 7 для схвата с одной степенью свободы)
перемещение начинается с потерей контакта в одной точке. Предположив,
что контакт нарушается в 1-й точке (при этом объект приобретает
одну степень свободы), и исключив из системы кинематических
уравнений (8.3) соответствующее уравнение, получим систему
пяти или шести уравнений относительно неизвестных компонент
векторов бг0 и 9, а также bq (для схвата). Решение определяется
с точностью до одной произвольной постоянной. Далее
определяются векторы относительных перемещений 6rf, а затем по
формуле (8.7) — силы трения, выраженные через нормальные
составляющие реакций. После этого из системы уравнений статики
получается одно уравнение связи составляющих векторов F и М,
т. е. уравнение одной из границ ОЖФ. Аналогичные
преобразования производятся для всех точек контакта. Из описания
процедуры решения следует, что учет сил трения приводит к
изменению каждого линейного участка границы ОЖФ в пространстве
сил и моментов, причем этот участок остается линейным.
Результатом является
расширение области жесткого /—~7| iu
фиксирования, причем от-
носительное приращение
характерных размеров
области имеет порядок
коэффициента трения.
Поэтому для малых значений
/ пренебрежение силами
трения при определении
ОЖФ позволяет сохранять
Рис. 8.11
183
правильное качественное и частично количественное описание
свойств несущей способности захватного устройства; одни
границы ОЖФ остаются неизменными, а другие изменяются
незначительно, так что конфигурация области изменяется мало.
При наличии одной или нескольких координат, не
фиксируемых при отсутствии сил трения, учет сил трения обеспечивает
фиксирование по всем координатам. При аналитическом
определении границы области необходимо разбить на две группы,
соответствующие двум вариантам предельных состояний. В первой
группе они связаны с опрокидыванием и реализуются при потере
контакта, по крайней мере, в одной точке. Уравнения границ
для этих состояний определяются следующим образом.
Предварительно исключаются из рассмотрения k нефиксируемых
координат и соответствующие силы или моменты. Границы ОЖФ
определяются сначала в пространстве 6 — k составляющих сил
и моментов, а затем переносятся в шестимерное пространство.
Предельные состояния второй группы связаны с
проскальзыванием при сохранении контакта во всех точках. Малые
перемещения точек объекта, совместимые с контактом во всех точках,
задаются обобщенными координатами. Относительные
перемещения в точках контакта при произвольных перемещениях
определяются по формуле (8.5), а силы трения в точках контакта —
по выражению (8.6). После этого при использовании уравнений
равновесия (8.1) или (8.1) совместно с (8.4) получаются
соотношения, в которые входят k произвольных параметров. В результате
эти соотношения определяют соответствующие участки границ
ОЖФ. При этом необходимо рассмотреть случаи, когда в одной
из точек контакта предельное состояние не достигается и две
составляющие силы трения в этой точке являются неизвестными.
В простейших случаях возможно введение таких координат, при
которых границы ОЖФ, обусловленные только силами трения,
определяются независимо. Так, для плоскопараллельного схвата
предельные значения сил по двум направлениям в плоскости
рабочих элементов равны 2fS. Во всех случаях при наличии
координат, не фиксируемых при отсутствии трения, одни характерные
размеры ОЖФ пропорциональны силе захватывания S, а другие —
произведению /S.
Отметим основные качественные особенности результатов,
получаемых с учетом сил сухого трения.
Если в отсутствие сил трения имеется исходное положение
равновесия (безразличное, устойчивое или неустойчивое, есть
нефиксируемые координаты или нет), то для него при учете сил
трения обеспечивается жесткость фиксирования по всем
координатам. Вблизи изолированных без учета сил трения классически
устойчивых или неустойчивых положений равновесия возникают
конечные зоны положений равновесия. Границы ОЖФ,
получаемые с учетом сил трения, не обязательно имеют вид
гиперплоскостей в пространстве составляющих векторов приложенных сил и
184
моментов; они могут иметь вид криволинейных поверхностей
второго порядка (см. п. 8.6).
Случаи контакта в достаточно большом числе дискретных точек
(больше семи), по линиям и по поверхностям (соответственно
при полусогласованной и согласованной формах поверхностей
рабочих элементов) объединяет то, что в этих случаях задача
статики становится статически неопределимой. Вследствие этого
необходимо привлечение более сложных моделей, чаще всего
разнообразных моделей упругих деформаций элементов схвата и
объекта. Выбор этих моделей (в первую очередь выяснение того,
упругость каких элементов необходимо учитывать) требует
подробного анализа конструкций, после выбора расчетных моделей
необходимо получение исходных данных (по упругим
характеристикам и искажениям формы), что на практике часто представляет
серьезные трудности. Поэтому очень
важно установить общие свойства решений
статически неопределимые задач и вы- i
делить случаи, когда границы ОЖФ или f
их оценки сверху или снизу могут быть А
получены без конкретизации распределе- I
ний нормальных составляющих реакций
или упругих моделей, позволяющих
рассчитывать эти распределения.
Целесообразно выделить следующие случаи, представляющие
наибольший интерес.
1. Жесткое фиксирование осуществляется по всем
координатам. Несмотря на то что в положении равновесия объекта в схвате
контакт осуществляется по линиям (или поверхностям), при любых
перемещениях объекта происходит переход к контакту в
дискретных точках (рис. 8.12). При любом перемещении объекта контакт
по одному ребру или всем ребрам переходит в контакт в угловой
точке или угловых точках. Поэтому в подобных задачах контакт
по ребрам можно заменять для предельных состояний контактом
в угловых точках, положение которых известно, что и
подразумевалось при описании этого примера.
2. Жесткое фиксирование осуществляется по всем
координатам, контакт происходит по гладким поверхностям, не имеющим
угловых точек. При этом при любых перемещениях контакт
переходит в точечный, как и в предыдущем случае. Однако
положение точек контакта не может быть определено
непосредственно, а необходимо решение самостоятельных геометрических
задач.
3. Жесткое фиксирование осуществляется по некоторым
координатам только за счет сил трения. При этом предельные
значения сил и моментов могут быть определены только для тех
обобщенных координат, при изменении которых происходят изменения
условий контакта (контакт в нескольких точках, по линиям или
поверхностям переходит в контакт в одной точке). При этом
о-
185
соответствующие силы и моменты не зависят от упругих
характеристик элементов схвата. Простейшим является пример
захватывания плоского объекта плоскопараллельным схватом (см.
рис. 8.11). Непосредственно могут быть оценены предельные
значения моментов вокруг осей х и z и одной силы по оси у.
4. Имеется только одна координата, по которой жесткое
фиксирование осуществляется только за счет сил трения. При этом
иногда предельные значения всех сил не зависят от распределения
нормальных составляющих реакций в точках контакта. Так, при
удерживании призматического объекта схватом с
призматическими рабочими элементами предельное значение осевой силы не
зависит от распределения нормальных давлений по образующим.
Для объекта в форме кругового цилиндра предельное значение
момента вокруг оси его симметрии также не зависит от этих
давлений.
Однако имеются случаи, когда распределение напряжений по
поверхности контакта существенно влияет на предельные
значения сил и (или) моментов. Для плоскопараллельного схвата
предельное значение момента вокруг оси у (момента верчения)
в наибольшей степени зависит от распределения напряжений.
Если контактная поверхность объекта номинально плоская и тем
самым задана, то момент Му вокруг оси у может быть оценен
по максимуму. Максимум получается при вырождении
распределения нормальных напряжений, когда распределенные
напряжения переходят в сосредоточенные силы в наиболее разнесенных
друг от друга точках контура области контакта. Таким образом,
модель совокупности дискретных точек контакта появляется в
задаче максимизации несущей способности при ограниченности
поверхностей контакта. Заметим, что минимальное значение
оцениваемого момента равно нулю, т. е. практически может быть весьма
малым. Естественно, для определения гарантированной несущей
способности такое решение непригодно. При гладких выпуклых
поверхностях объектов вблизи контакта размеры пятен контакта
заранее неизвестны, они зависят от значений приложенных сил
и определяются только в процессе решения. Пример
использования известных решений контактных задач теории упругости для
определения предельного значения момента верчения приведен
в п. 9.3. Без использования конкретных моделей упругости
контактирующих элементов подобные оценки не могут быть
получены.
В рамках рассмотрения моделей абсолютно жестких объекта
и схвата может быть выделен широкий класс практически важных
задач, решение которых сводится к решению задач с дискретным
распределением точек контакта по изложенной выше методике.
Это относится прежде всего к случаям, когда выход системы
схват—объект из положения равновесия непосредственно связан
с переходом от распределенного контакта к контакту в дискретных
точках.
186
Для решения задач об определении предельных состояний
равновесия при распределенном контакте может быть использован
следующий подход. Предположим, что составляющие векторов F
и М монотонно увеличиваются по модулю. При этом происходит
перераспределение напряжений по линиям или поверхностям
контакта. Пока не достигнуто предельное состояние, в каждой
точке поверхности контакта должны выполняться условия,
определяемые характером связей, а именно, во всех точках нормальные
составляющие реакций не должны изменять знака, а касательные
составляющие должны быть ограниченными по модулю
значениями произведений коэффициента трения на нормальную
составляющую.
Формализация задачи может быть произведена следующим
образом. Модуль вектора Т обобщенной силы
' I Т | = {a2 [Fl + Fl + Fl] + Ml + Ml + Afjp
является функционалом от функции распределения реакций.
Максимизация модуля вектора обобщенной силы при упомянутых
ограничениях приводит к выходу на границу ОЖФ. Чтобы
получить все точки границ ОЖФ, необходимо потребовать выполнение
дополнительных условий:
Fx = №У; Fy = Щ»; Fz = %FT\ Mx = Ш'0';
Му = ХМ{у0)\ М2 = Ш<0),
где Fx°\ F(y°\ Fz°\ Мх°\ М^ и Мг0) — произвольно задаваемые,
но фиксированные в процессе максимизации величины, а к —
множитель, по которому осуществляется максимизация. В
результате максимизации значение X = Хт, соответствующее
максимуму функционала | Т |2, определяется как функция величин
Fx°\ F{y°\ Fz°\ Мх°\ М{у0) и Мг°\ после этого произведения XmFx°\
XmR0), XmFz°\ XmMx°\ ХтМ{у°\ ХтМ{г0) определяют точки границ
ОЖФ. Сформулированная таким образом задача представляет
собой одну из типовых задач вариационного исчисления, она
может решаться численно хорошо разработанными методами.
Если решение является вырожденным, т. е. искомые
распределения по поверхности контакта получаются в виде линейной
комбинации б-функций, то это означает, что для предельных
состояний распределенный контакт переходит в контакт в дискретных
точках. Для частных случаев удается доказать в общем виде,
что решение должно быть вырожденным, тогда процедура
максимизации функционала сводится к поиску экстремума функции
нескольких переменных — неизвестных координат точек контакта.
Чаще всего такая ситуация возникает в тех случаях, когда
под действием обобщенной силы соответствующее обобщенное
перемещение происходит с сохранением геометрического контакта
по линиям или поверхностям на отдельных участках, а нарушение
187
условий жесткого фиксирования происходит с потерей контакта
в одной или нескольких дискретных точках. Так, для случая,
показанного на рис. 8.12, под действием момента Mz объект
выходит из положения равновесия, поворачиваясь вокруг оси г. При
этом происходит отрыв в одной из точек контакта с верхним
рабочим элементом, а контакт с нижним рабочим элементом
сохраняется. В этом случае решение задачи производится методами,
описанными выше для распределения реакций в дискретных
точках контакта, и не требует определения закона распределения
реакций по линии контакта объекта с нижним рабочим элементом.
Для решения многих задач с распределенным контактом может
быть использован геометрический (кинематический) метод,
согласно которому задается обобщенный вектор виртуальных
перемещений
d = [и^б*, ц26у, ц382, М,, Му> V>$zYi
и для различных значений коэффициентов \it из условий
геометрической совместимости контакта (8.3) определяются точки,
линии или поверхности, контакт по которым сохраняется. Затем
решается задача статики системы схват—объект для
соответствующего предельного состояния. Геометрический метод часто
эффективен для решения статически неопределимых задач, когда
число точек контакта больше, чем номинальное, и система
уравнений статики не позволяет получить значения реакций в точках
контакта. Анализ влияния малых перемещений на условия
контакта позволяет определить две и более реакций, обращающихся
в нуль при выходе объекта из положения равновесия. Тогда,
разрешая систему уравнений статики относительно линейных
комбинаций этих реакций, можно получить условия предельного
состояния.
Когда контакт объекта и рабочих элементов является
распределенным, т. е. вместо дискретных точек контакта имеются линии
или поверхности контакта, в уравнения статики входят
распределения реакций соответственно по линиям или поверхностям.
Рассмотрим частный случай плоского схвата с двумя рабочими
элементами, плоскости которых параллельны и перемещаются
симметрично относительно средней плоскости. Оси х и у направим
в плоскости рабочих элементов, а ось z — по направлению их
перемещения. Как и ранее, величины, относящиеся к верхнему
рабочему элементу, будем отмечать верхним индексом 1, а к
нижнему рабочему элементу, — индексом 2. Область контакта объекта
с верхним рабочим элементом обозначим через Qn>, а с нижним —
через Q(2). Распределения реакций по поверхностям
(плоскостям) контакта обозначим соответственно через Rd) (х> у) и
R<2> (*, у).
Уравнения статического равновесия объекта в схвате в
векторной форме записываются следующим образом:
188
F+ J RM{x9y)dQ+ J R<2> (x, y) dQ = 0; )
(Q(l)) (Q(2))
M= J R<«>(x, r/) X г <*>(*, у)Д1 +
+ J R(2) (x, y) X r<2> (x, y) dQ = 0,
(Q<2>) I
где г*1* (x, t/) и г<2> (х, #) — радиусы-векторы произвольных
точек в области контакта. К этим уравнениям должно быть
добавлено уравнение равновесия механизма схвата
[ Ril) (х, y)dQ + J R^ (jr. у) dQ = 25.
(QH>) (Q(2))
Общее число уравнений равно семи. Использование этих
уравнений для решения задачи расчета несущей способности возможно
только тогда, когда в соответствии с выбранными моделями
взаимодействия или общими соображениями задается вид
распределений (с точностью до неизвестных параметров). Если число
неизвестных параметров не превышает числа уравнений, то этих
уравнений статики достаточно для полного решения задачи. В гл. 9
в качестве примера подробно рассмотрено решение подобной
задачи, в которой учитывается упругость прокладок на рабочих
элементах.
8.6. ПРИМЕРЫ РАСЧЕТА ПАРАМЕТРОВ
ОБЛАСТИ ЖЕСТКОГО ФИКСИРОВАНИЯ
Рассмотрим задачу построения ОЖФ применительно к системе
схват—объект, приведенной на рис. 1 в табл. 8.2. Расстояние между
вилками, на которых удерживается цилиндр, равно 2а, угол
раскрытия вилок — 2а. Предполагается, что кинематика
механизма передачи обеспечивает поступательное перемещение
верхнего и нижнего рабочих элементов по оси z.
Запишем уравнения статики системы схват—объект, считая
контактирующие поверхности абсолютно гладкими (силы трения
не учитываются). Эти уравнения имеют вид:
( Fx=0;
Ру + (#i + #,) cos а - (tf3 + NJ cos а = 0;
F2 - N6 + (N± + N2 + N3 + NJ sin а = 0;
Мх = 0; (8.8)
Му + (N2 + #3) a sin a — (Nx + NA) a sin a = 0;
Мг + (Nt + N4) я cos a — (Nx + N2) a cos а = 0;
[ (Nx + N2 + NS + NA) sin a + Nb = 5,
189
Т а б л и ц а 8.2
п/п
Рисунок
Неравенства, определяющие ОЖФ
и предельно допустимые значения
приложенных сил и моментов
2М2
S — Fz + —^- tga + 2Fy tga —
I ДА
a
2Л1»
S — F
2M2
2 — tg a — 2Fy tg a +
2M,
>0;
2M
S-Fz + —^ig*-2Fyig*-
*->0;
9M
S-Fz + -^-lga-2Fy^a +
a
S + F^O-.^Mjry + F'*
2 \ sina /
\Fy\ = -^-clga; \FZ\ = S;
' *' 2 \ ' sin a /
I Af-
5a —
— ctga.
190
Продолжение табл. 8.2
п/п
Рисунок
Неравенства, определяющие ОЖФ
и предельно допустимые значения
приложенных сил и моментов
( М
S-Fz+^-tga + Fvtga~
Ми
>0;
S-Fz-J^.
tga- fj,tga +
S-Fz
a
Mt
tga + Fj,tga —
Mv
>0;
Мг
S-Fz+ _2-tga-fytga +
vm+"-
<
I </ (s-Fz + _jL-Y
I ^ V sin a /
11 \ sin a /
\Fy\ = Sctga;
F2 = + S, — oo;
\Mx\ = fSr(\+—— V
1 *' \ sin a /
| My | = 5a;
| Mz | = S actg a.
191
Продолжение табл. 8.2
п/п
Рисунок
Неравенства, определяющие ОЖФ
и предельно допустимые значения
приложенных сил и моментов
Нефик-
|сируемые|
координаты
(/= 0)
2 Ах
\FZ\<S;
\Mx\^Sb;
\МУ\< Sa;
[ YFl + F2y-(MzJdf^fS.
d=]fa2 + b*
1**1 = to |Fy| = /5; \FZ\ = S;
\Mx\ = Sb; \My\ = Sa; \Mz\ = fS.
FZ<S;
\Mx\^2Sb;
\My\^2Sa;
yfF2x + Fl + (Mz/d)2^f(2S-Fz).
d=V'ct2 + b2
1**1 = to \Fyl = fS; Fz = St -oo;
\Mx\=2Sb; \My\ = 2Sa;
\Mt\ = 2fSa.
[ |F2|<S; |M2|<Sactga;
IFyKSctga; |Afj,|<5a;
/(м^)Ч^</-—-
\Fx
fS
sin a
•; |Fj,|=:Sctga;
Sfr
| Fz I = 5; I Mx | =
|Afy| = 5a; | Mz | = Sa ctg a.
192
Продолжение табл. 8.2
п/п
Рисунок
Неравенства, определяющие ОЖФ
и предельно допустимые значения
приложенных сил и моментов
F2<5; | Mz К 25а ctg a;
I lfj,|<2Sctga; | My | < 25a;
sin a
\F*
2Sf
sin a
; |Fv| = 2Sctga;
2Sfr
Fz = +S, — oo; | Af ж | = .
1 ' • i xi sma
I Mv | = 2Sa; | Mz | = 2So ctg a.
S-Fz>0; 2|F„|tga<S + F*;
21 Mz | < Sa ctg a; | My | < Sa;
■/(Mx/rf + F% <
<-2-'S(1+Hnir) +
+-r^(^-1)-
'^' = -Г/5(1+-^):
|Ff|—J-Sctga; |F,|-S;
I Mx | = -4- fSr (1 + -Д— );
1 2 \ sin a /
\My\ = Sa; \MZ\=-Lsactga.
S-F2>0; |F„|<Sctga;
| Mz | <Sa ctg a; |Afv|<2Se;
/(Л**//-)2 + F| <
<4s-f^^inV)-
|Fj,| = Sctgo; FZ = S, —oo;
lM*l = ^(1+Hn^):
| My I = 25a; | M2 | = 5a ctg a.
7 Челпанов И. Б. и др.
193
Продолжение табл. 8.2
п/п
Рисунок
Неравенства, определяющие ОЖФ
и предельно допустимые значения
приложенных сил и моментов
S-FT
S-Fz
My
b
мл
cos a b
>0;
+
0;
b cos a b
j |Fy|<5ctga; |Mz|<5actga
| My К 25a;
1^1 =
5 ctg a;
5 cos a -г-.
h
FZ = S, — oo; 1^1 = 56;
| My | = 25a; | Mz | = 5a ctg a;
Л = 6 ^2" cos P; p = Зя/4 — a.
10
F2 + F2<25ctga; |F,|<25;
y^Alj + M2y < 5actg a;
|Mx|<2/5r/sina;
/F2+M2/a2<25ctga;
|/ Z7! + МЦ& < 25 ctg a;
\FX\ = 2R\ |/?y| = 25ctga;
| Fz | = 25 tg a; \MX\ = 25/r/sin a;
| Afy | = 25actga; | Mz | = 25actga
11
/Ж7
Щ?
(■/F% + Fl^2Sf; \Ft\^2S;
\j/M% + Ml<2Sr, \Mz\<2Sfr.
Fx\ = 2fS; |FtfJ = 2/S; |FZ| = 2S;
\Mx\ = 2Sr; \My\=2Sr,
\Mz\ = 2Sfr.
194
Продолжение
табл. 8.2
п/п
Рисунок
Нерпвенства, определяющие ОЖФ
и предельно допустимые значения
приложенных сил и моментов
Нефик-
сируемые|
координаты
</== 0)
12
\Fy\<[S + FJ2)ciga;
\Fx\<(S-Fz/2)ctga;
\Mx\^fr[2S(l+sm*) +
+ Fz (I — sin a)]/2 sin a;
I M„ I < fr [25 (I + sin a) —
— F~ (1 — sin a)]/2 sin a;
\Mz|<2S/rctga.
\Fx\ = Sctga; |Fy| = 5ctga;
|Fzl-2S;
| Mx | = S/r (1 + sin a)/sin a;
| My | = S/r (1 + sin a)/sin a;
|Mz| = 2S/rctga.
13
F OAff
5 + -^--Fytga-^tga>0
S + -^-^tga-f-
2Мг
tga>0;
s-4
a
Mh
t+-a
a
M.
-tga>0;
tga>0;
+ _!_)+-£-Л l—))
sin a / 2 V sin a / /
l'"l-s'"(,+!57r);
|FB| = Sctga; |F,| = 2S;
\MK\-Sfr(l + -}— );
1 ' V. sin a /
|My| = So; |Mz| = 5/2ctga.
7*
195
Продолжение табл. 8.2
п/п
14
Рисунок
sb^to*)
2fiWyt
\w*
Неравенства, определяющие ОЖФ
и предельно допустимые значения
приложенных сил и моментов
' 2S + F* 2F* 2M* >0.
sinp cosp Ai "" '
2S + FZ 2FX 2MX
sinp cosp ~*~ ^ ^ '
2S + FZ 2MX 2FX
sinp Ai "t* cosp ^u'
2S + F, 2FX 2MX
sinp "•" cosp ■*" At ^"'
2Л*у 2FA ^
^ ' '2 ' a a cosp ^°'
, a ^ a cos p -^
' 2S-F2-i^-tga>0;
a
2S-Fz+^-tga>0;
2S — Fz 2Af x cosp
sin a Лх cos a
cos a
2S —fz 2МЛ cosp
sin a hx cos a
i 2/7y -^0
J - ^? U.
cos a
, г imin /о cosp . acosa \.
\Fy\ = Sctga\ |F2| = 25;
1X1 V sin a cos p / '
\My\ = Sa; \Mz\ = Sactga;
*i-(«-rde|»)co* + 1jJr)
R — радиус цилиндра; г — радиус
отверстия.
Нефик-
сируемые
координаты
(/ = 0)
1
6*
196
Продолжение табл. 8.2
№
п/п
Рисунок
Неравенства, определяющие ОЖФ
и предельно допустимые значения
приложенных сил и моментов
15
2S-FZ
2Ми , 2Af.
+ -ft£--/rytga>0;
2S-FZ+^1.
z a
2MT
tga +
FBtga>0;
2S-FZ+™JL+™1
1 a 'a
tga —
-^- + /7frtga>°J
25-Fz
2MU
2MZ
tga —
M
25 + Fz + -~^- sin a + Fy tg a>0;
25 + Fz — -тт5- sin a + Fy tg a>0;
ИЪК
25/
sin a
\Fx\ = StT> \Fy\ = 2Sctga;
I Мж | = 25
sin a
|FZ| = 2S;
sin a
|Mz| = 5actga;
V= 6 cos (120° —a).
I My | = 5a;
197
Продолжение табл. 8.2
№
п/п
Рисунок
Неравенства, определяющие ОЖФ
и предельно допустимые значения
приложенных сил и моментов
16
/л П6
2S-FZ
2S — Fz
2S —Fz-
tga>0;
tg a > 0;
2Mtt
/7xtga>0;
2S-Fz+^JL + Fxt^a>0;
25 + /7z + Fxtga>0;
2S + FZ —/^tgaX);
|M*1 , \FW\ ^
*i
cos a
<'(■%£?•) (V-)+
/2S-FZ\ / 1 Aj\ .
^' V 2sina A cos a ^ ht J y
/i1 = 6cos(120o —a);
h2 = ft cos (a — 30°); /ig = ft—
|Fx| = Sctga;
|Fy|==,s/(irctga+irctga+
+ !Unr+1);
1 Vsma cosa
Ai
+
Jin a / '
sinacDsa sine
| Mу | = 25a; \Mz\ = Sactga.
198
Продолжение табл. 8.2
п/п
17
18
Рисунок
У0
(\\
\Z
S /)
un)
7° *
а
га
а
12*
*'2* ■ ""•
fa
^У JjfeV
Щ0$°
sJmy
s^s&y
Неравенства, определяющие ОЖФ
и предельно допустимые значения
приложенных сил и моментов
•
Г 2S-Fz-4tga(Fx-Fj,) +
+ -j (M* + 2Afу — 2Мг tg a) > 0;
2S-Fz-4tga(Fx + F,,) +
+ -|- (Mx - 2УИ„ + 2Л1г tg a) > 0;
2S-F2 + 4tga(Fx + F„) +
+ -|- (Mx — 2My — 2MZ tg a) > 0;
2S-F2-4tga(Fx-F„) +
+-2r(A**+2M,,+2AMga)>o;
2S — F, + 4FX tg a — 2Mx/a > 0;
2S — Fz — 4FX tg a — 2Afx/a > 0;
2S + FZ>0.
l^xl = 5ctga/2; | Fy | = Sctga/2;
1^1 = 25;
\Mx\ = Sa; \My\ = Sa/2;
|MZ| = Sa ctg a/2
<
3S + 2FX-JL^. + -JL>0;
3S + 2fz + i^k_i^>0:
3S-Fz-i^>0;
35 — Fz-]TbFv^Q\
35 —F2 + K3 Fy>0;
/(Ag?f+T|<3s/.
|FX| = 3S/; |F„| = S КЗ";
F« = 3S;-i-S;
\Mx\ = 3Sfr, \M„\ = Sa;
\Mz\ = SaV"5.
Нефик-
сируемые
координаты
(/ = 0)
—
Ьх
вх
199
где S — усилие захватывания; Fx, Fyy Fz, Mx, My, Mz —
проекции главного вектора силы и главного вектора момента,
приведенные к началу системы координат xyz\ Nt — нормальные
реакции в точках контакта объекта и рабочих элементов.
Из полученной системы уравнений видно, что две координаты —
смещение и поворот вокруг оси х — являются нефиксируемыми
(предельные значения силы Fx и момента Мх равны нулю).
Определяя из третьего и седьмого уравнений системы (8.8) реакцию Ыъ
и полагая ее равной нулю, находим условие предельного
состояния
ЛГ6 = (S + /д/2 = 0.
Отсюда видно, что отрыв в пятой точке произойдет, если сила,
действующая в отрицательном направлении по оси z, по величине
будет более S, независимо от того, каких значений достигают
другие составляющие главного вектора силы и вектора момента.
Из третьего уравнения системы (8.8) видно, что под действием силы
Fz = S происходит отрыв объекта от нижнего рабочего элемента
во всех четырех точках; при этом обращаются в нуль
соответствующие реакции Nl9 N2, N9j #4- Таким образом, жесткое
фиксирование объекта по координате z сохраняется, если сила F2
удовлетворяет неравенству
\F.\<S.
Следует отметить, что отрыв от нижнего рабочего элемента
может происходить лишь в части точек контакта. Как правило,
этот случай реализуется, когда наряду с силой Fz действуют
другие составляющие. При этом объект, перемещаясь поступательно,
может одновременно поворачиваться вокруг осей у и z, а
предельное состояние может достигаться за счет действия моментов вокруг
осей Му и Mz и составляющей силы Fy. Действительно, из третьего
и пятого уравнений системы (8.8) с учетом уравнения (8.8)
находим условия отрыва в следующих парах точек: второй и третьей,
первой и четвертой:
2,8 4а sin a '
#l + #4= Sa-Fza-2My
11 4 4а sin а
(8.9)
Полученные выражения описывают случаи потери контакта
в указанных точках при повороте цилиндра вокруг оси у под
действием соответствующего момента, создаваемого приложенной
силой Fz и моментом Муу компенсирующими восстанавливающий
момент, создаваемый усилием захватывания.
Аналогично из третьего и шестого уравнений системы могут
быть получены условия отрыва в парах точек контакта при
повороте цилиндра вокруг оси z под действием приложенных силы Fz
200
и момента Mz. Соответствующие уравнения предельного
состояния имеют вид:
N2 + Nt
S-Fz
4 sin a
S-Fz
4 sin а
M.
+
2а cos а
2а cos а
0;
0.
Отметим, что полученные уравнения не зависят от значения
силы Fy.
Потеря контакта в двух точках возможна также при его
поступательном перемещении вдоль полок нижнего рабочего
элемента. Такое состояние достигается при реализации следующих
условий:
Nx + N2 =
N3 + N,=
4 sin a
S-Ft
4 sin a
2 cos a
Fy
2 cos a
= 0;
= 0.
Эти уравнения получаются при совместном решении второго и
третьего уравнений системы (8.8). Заметим, что при
отрыв в этом случае возможен только в четырех точках
Границы ОЖФ определяются уравнениями:
Fy = 0
#4 =
S-F,
8 sin a
S-Fz
8 sin a
S-Ft
8 sin a
S-Fz
8 sin a
Mh
Mz
4 cos a
Fu
v
4a sin a
My
+
+
4 cos a
Fy
4 cos a
Fy
4 cos a
4a sin a
My
4a sin a
My
4a cos a
Mz
4a cos a
Mz
4a cos a
Mz
4a sin a . 4a cos a
= 0
= 0
= 0
= 0
Nb = (S + Ft)l2.
Предельные значения составляющих главного вектора силы и
вектора момента равны:
^ = 0; \Fy\ = ±-Sctga; |F,|=S;
М* = 0; |iW,| = i-5a; | Mz = у Sactga.
Рассмотрим задачу определения несущей способности этого же
схвата с учетом действия силы трения в точках контакта. Оценим
влияние сил трения для некоторых случаев выхода объекта из
положения равновесия.
При смещении объекта в схвате поступательно по оси г
проскальзывание объекта относительно рабочих элементов
отсутствует, следовательно, условие предельного состояния остается
201
неизменным. При относительном перемещении объекта по оси х
первое уравнение системы (8.8) приобретает вид
|^|-/(ЛГ1 + ЛГ, + Л7, + ЛГ4 + ЛГ,) = 0.
Остальные уравнения остаются неизменными. Условие
достижения предельного состояния получается в результате совместного
решения первого, третьего и седьмого уравнений системы и имеет
вид
1'.|-т/[5 + '« + ТЕГ-Т&ёг]-
Предельное значение силы Fx в этом случае равно
1^1 = т/5(1+'Ж5-)-
При повороте вокруг оси х силы трения в точках контакта
направлены по касательной к дуге окружности, проходящей через
эти точки в плоскости, параллельной плоскости yz. Четвертое
уравнение системы (8.8) приобретает вид
IM^-frM + Nt + Nt + Nt + NJ^O.
Решая совместно третье, четвертое и седьмое уравнения
системы, получаем выражение для предельного значения момента,
которое имеет вид
"•-Т^О+ТЕПГ)-
В зависимости от условий нагружения могут быть
реализованы различные варианты проскальзывания объекта по двум,
нефиксируемым без трения, координатам в виде винтового
движения вдоль оси х. Для виртуальных перемещений 6х — по оси х
и бв — поворота вокруг этой оси такое движение описывается
в виде линейной комбинации
бг = (1 - X) бх + Ш х г, (8.10)
где X — множитель, изменяющийся в интервале от нуля до
единицы. При % = 0 выражение (8.10) описывает чистое смещение,
при 1 — X = 0 — поворот вокруг оси х. Для каждого значения К
из этого интервала предельное состояние достигается, когда
действие дополнительных приложенных сил достигает уровня
сил трения в точках контакта, направленных противоположно
векторам бг в этих точках. Так, при Fz = 0 в каждой точке
контакта равнодействующая определяется как геометрическая сумма
векторов Fx и вектора силы, действующей по касательной к дуге
окружности, проходящей через точку контакта, и численно
равной значению MJr. В этом случае условия предельного состояния
записываются в виде
202
Полученное выражение в пространстве параметров Fx и MJr
описывает окружность, радиус которой определяется правой
частью этого выражения. Таким образом, действие сил трения
приводит к появлению границ ОЖФ в виде неплоских
поверхностей, описываемых нелинейными уравнениями. Появление таких
границ характерно для случаев, когда система схват—объект
имеет несколько координат, нефиксируемых без трения.
Рассмотрим особенности учета сил трения для случая, когда
предельное состояние достигается при потере контакта объекта
и схвата в одной или йескольких точках, на примере отрыва во
второй и третьей точках. Условия отрыва в этих точках
описываются уравнениями (8.9). С учетом сил трения может быть
рассчитан дополнительный момент, препятствующий
проскальзыванию объекта в схвате при повороте вокруг оси у.
Так же как и при рассмотрении предыдущей задачи, важное
значение имеет анализ кинематики перемещения объекта при
нарушении условий жесткого фиксирования. Предположим, что
проскальзывание при отрыве во второй и третьей точках
осуществляется во всех остальных точках контакта. Тогда третье, пятое
и седьмое уравнения системы (8.7) переписываются в виде:
F, —JV» + (tfi + tf4)slna = 0; I
My — iNi + NJaslna — Njr-iNi + NJfrsiaa^O; (8.11)
(#i + #4)sina + tf6 = S, J
откуда имеем систему трех уравнений относительно трех
неизвестных Nlt NAi Nb. Исключая неизвестные, находим условие
предельного состояния
Му/а - Sfr/a + F2/2 = S/2.
Предельное значение момента при Fz = 0 увеличивается на
величину, пропорциональную значению коэффициента трения,
оно равно
My = \Sa + Sfr.
Задача оценки предельного состояния при условии Му = О не
имеет смысла, поскольку под действием только силы Fz поворот
вокруг оси у осуществлен быть не может.
Определим условия предельного состояния в предположении,
что проскальзывания в пятой точке не происходит. Тогда во
втором уравнении системы (8.11) третье слагаемое будет равно нулю,
и условие предельного состояния приобретает вид
AV(a + /r) + F,/2 = S/2
откуда получается, что при Fг = 0 предельное значение момента
равно
My = ±(Sa + fr).
203
0,58
-12~ \
"^^C
-0.58/"
\ifjL
8
K0,85
485
1Л
(w
Sa
7'V
4
I
Лг
4
-1
S
«^
>
^'*
^Mz
Sa
ZMX
* Sr
Рис. 8.13
Приведенные примеры показывают, что расчет несущей спо-
собности схватов роботов с учетом сил трения требует не только
статического силового анализа системы объект—схват, но и
подробного исследования кинематики виртуальных перемещений
при нарушении условий равновесия. Как правило, эти задачи
связаны с изучением уравнений малых перемещений, зависящих от
одного или нескольких непрерывно изменяющихся параметров,
причем предельные значения сил и моментов для различных
вариантов проскальзывания различаются. Так, значения
добавок к предельным значениям момента Му в рассмотренном
примере различаются в два раза. Следует отметить, что эти добавки
имеют порядок малого коэффициента трения. Поэтому в практике
204
инженерных расчетов оценка влияния сил трения на размеры
области жесткого фиксирования для координат, по которым
осуществляется жесткое фиксирование без трения, может быть
сделана приближенно по оценкам предельных значений сил и
моментов, действующих по отдельным осям.
В табл. 8.2 для различных сочетаний форм рабочих элементов
схватов и объектов представлены ОЖФ в пространстве
составляющих дополнительных приложенных сил и моментов в виде
неравенств, при выполнении которых обеспечивается жесткое
фиксирование объекта в схвате. На рис. 8.13 и рис. 8.14 изображены
сечения ОЖФ для уголкового схвата, удерживающего цилиндр,
и плоскопараллельного схвата, удерживающего параллелепипед
(см. рис. 1 и рис. 3 табл. 8.2). На рис. 8.13 приведены численные
;1МХ2
-21
f ом
\-2
-ом
\6rl
S
2
if М
Sa -Щ
Sa
"Ш2
ом
-ом
4*
S
TVA -W
s
-2<U^2_
-Л
Щ/2
Sa
Sb
-1\
ом
-ж
0М-2Л]
2A J
I S
OM
-2~
-ом
fu*
s
2
"2Jt
ДзС?
Sb
♦£.
-am
2Л
-и
к
л
2МХ
Sb
2А
Sa
>
2Л
к
-2А
Ж
\2rfz
Sa
—А
ом
-ОМ '
2MZ
Sa
f+
i'-г-
&
ОМ -2U
2MZ
Sa
-ОМ
Рис. 8.14
JA
Sa
205
значения параметров области жесткого фиксирования для
значений угла а = 60° и коэффициента трения / = 0,2; на рис. 8.14
для соотношения размеров а = b и коэффициента трения / = 0,2.
Толстыми линиями показаны границы области жесткого
фиксирования при / = 0, тонкими — при / = 0,2.
На рис. 10 табл. 8.2 приведена схема фиксирования втулки
с отверстием радиуса г коническими рабочими элементами. При
отсутствии трения жесткое фиксирование втулки осуществляется
по пяти координатам; нефиксируемой координатой является
поворот вокруг оси х. Форма конусов и отверстий считается
идеальной, контакт осуществляется по окружностям. Распределение
реакций по линиям контакта левого торца втулки обозначим
Ri (ф)» правого — R2 (ф), где ф — угловая координата в
плоскости г/2, отсчитываемая от оси у. Тогда уравнения статики
системы схват—объект записываются в виде:
2Я
F* + sina f [l?i (Ф) — /?» (ф)] Лф = 0;
о
2я
Fy + cos a J [Rx (ф) + R2 (ф)] cos q> dq> = 0;
о
2Я
Fz + cos a J [/?! (ф) + R2 (ф)] sin ф dy = 0;
Мя
0;
(8.12)
My + a cos a J [/?x (ф) + R2 (ф)] sin ф dy ■= 0;
о
2Jt
Mz + acosa J [Rx((p) + #2(ф)]cosфdф = 0;
о
2Л
2S = sin<x J[|/?,(9)|+|/?,(9)|]d9.
Для построения границ области жесткого фиксирования
воспользуемся геометрическим методом, принимая во внимание, что
малые линейные перемещения по осям у и г и малые угловые
перемещения — повороты вокруг них — приводят к точечному
контакту. Так, при виртуальном линейном перемещении в
плоскости уг, задаваемом вектором
6г0 = Пб/^соБф!, |6r0|sin9i]7',
реализуется контакт в точках с координатами а, г cos фъ г sin фх
и —я, г cos фх, г sin фх. Второе, третье и седьмое уравнения
системы (8.12) в этом случае принимают вид:
206
Fy + cos a cos фх [Nt (фх) + ЛГ2 (ф^] = 0;)
Fz -f cos a sin фх [Ni (фх) + ЛГ2 (фх)] = 0;
2S=sina[tfl(<p1) + tf1(<Pi)l-
(8.13)
Из этой системы уравнений находятся предельные значения
приложенных сил:
Fy = 25 ctg a cos фх; Fz = 25 ctg a sin фх.
Равнодействующая этих сил направлена под углом ц>г к оси у;
ее модуль равен
/F2 + /r2 = 25ctga
и не зависит от значений угла фх. Таким образом, граница области
жесткого фиксирования в пространстве параметров Fyi Fz
представляет собой окружность, радиус которой равен 25 ctg a.
Полученный результат не зависит от значений моментов Му и Mz,
поскольку при линейном перемещении объекта момент может
изменить значения реакций Nx и N2, но их сумма, входящая
в каждое из уравнений (8.13), останется неизменной,
удовлетворяющей третьему уравнению этой системы.
При виртуальном угловом перемещении
е = [|е|cosф1э leisiinpj7,
контакт реализуется в точках, лежащих в плоскости поворота
втулки с координатами (а, г sin <рь —г cos фх) и (—а, —г sin q>lf
rcostpx). Из совместного решения пятого, шестого и седьмого
уравнений системы (8.12) определяются составляющие вектора
момента, вызывающего малое угловое перемещение 0:
Му = 25a ctg a sin фх; Mz = 25a ctg a cos фх.
Границы области жесткого фиксирования в пространстве
параметров Му, Мг представляют собой окружности радиуса 25г ctg a.
При совместном действии силы Fz и момента Мг в зависимости
от величины и соотношения их значений возможен выход втулки
из положения равновесия, при котором происходит ее поворот
на малый угол 9Z, а также смещение Ьг по оси z. В этом случае
контакт конусов — рабочих элементов — с внутренней
поверхностью втулки по окружности переходит в двухточечный контакт
и виртуальные перемещения Ьгх каждой точки контакта
описываются выражением
бп = бгк + 662кг; + Sh,
где к — орт оси г; 6h — вектор малого смещения рабочего
элемента. В силу симметрии условий нагр ужения относительно оси z
модули углов поворота фх и ф2, определяющие положения точек
контакта на торцах втулки в плоскости xz (рис. 8.15, а), равны:
I <Pi I = | Ф2 | = ф.
207
Условия (8.3) сохранения контакта в точках контакта на
первом и втором торцах втулки при виртуальном перемещении
записываются соответственно в виде
Ь*и 2^1,2 = 6z cos a cos ф + 60za cos a sin ф +
+ 60гг sin a sin ф ± bh sin а.
В результате суммирования этих уравнений в предположении,
что а > г, определяется значение угла ф = arctg (a8Qz/z).
а)
ы?
ft
it
*nt
%-
kz
I*
\?2
Ш
^Ж
fN
тс
2
Рис. 8.15
Соотношение между смещением торца втулки и поворотом
вокруг оси z может быть задано в общем виде вектором
Д = [Ха692, (1 -%)bz]T.
Случай А, = О соответствует линейному перемещению втулки по
оси z (при этом Фх = Ф2 = 0), случай К = 1 — повороту вокруг
оси z (при этом | Ф11 = | Ф2 | = я/2). Графики изменения углов
Фг (Ц и ф2 (к) при произвольных значениях X приведены на
рис. 8.15, б.
Условия предельного состояния под действием силы Fz
момента Mz определяются из третьего, шестого и седьмого
уравнений системы (8.12) и имеют вид
VFl + (M2/a)2 = 2Sctgaf
т. е. сечение ОЖФ в пространстве составляющих Fz и Mz/a
представляет собой окружность.
Простейший пример системы схват—объект с поверхностным
контактом приведен на рис. 11 табл. 8.2. В этом примере, также
как и в рассмотренном выше, сечение области жесткого
фиксирования в пространстве параметров МХУ Му представляет собой
окружность радиуса 2Sr. Приведенные примеры показывают, что
208
для задач с распределенным контактом границы области жесткого
фиксирования могут быть образованы криволинейными
поверхностями, что существенно меняет представления об области
жесткого фиксирования как о многограннике в шестимерном
пространстве приложенных сил и моментов, характерном для расчетных
моделей системы схват—объект с дискретными точками контакта.
Примеры жесткого фиксирования шара по трем координатам
(линейным перемещениям) приведены на рис. 12 табл. 8.2. Три
угловые координаты 6Х, Qy> 6Z являются нефиксируемыми без
трения. Реакции в четырех точках контакта получаются из трех
уравнений статики, записанных для составляющих вектора F
приложенных сил и одного уравнения равновесия механизма
схвата. Решение системы уравнений статики дает следующие
выражения для уравнений границ области жесткого фиксирования
для системы схват—объект, показанной на рис. 12 табл. 8.1:
S
2 sin a
5
2 sin а
S
2 sin а
S
2 sin а
i Рг
4 sin а
Рг
4 sin а
Рг
4 sin а
Fz
4 sin а
Ру
2 cos а
Ру ■
2 cos а
Fx
2 cos а
2 cos а
Жесткое фиксирование по угловым координатам
осуществляется за счет сил трения. Оценим предельные значения
составляющих момента, действующих вокруг оси системы
координат схвата. Поворот вокруг оси х возможен, если момент Мх
удовлетворяет неравенству
|^M>/'(#i + ^2 + #3Sina + #4sina)
или с учетом (8.14)
IМ*I>1ЖГ[2S V + sina> + F*Q ~ sln«)!•
Аналогичное выражение получается для виртуального углового
перемещения вокруг оси у
l^l>2^[25(1+slna)"-/7^1~slna)l-
Из полученных уравнений видно, что предельные значения
момента при повороте вокруг осей х и у зависят от значений силы Fz.
Предельные значения моментов Мх и Му при Fz = О равны
между собой.
Поворот вокруг оси возможен, если
|M2|>2/Srctga
*4 =
209
независимо от значений приложенных сил. Отметим, что для
а = я/2, соответствующего задаче фиксирования шара в
плоскопараллельном схвате, предельное значение Мг равно нулю.
Оценка момента Mz возможна только с учетом упругих свойств
объекта и схвата (см. п. 9.3).
8.7. ВЛИЯНИЕ ПОГРЕШНОСТЕЙ ФОРМЫ
И ПОЛОЖЕНИЯ ПОВЕРХНОСТЕЙ ОБЪЕКТА
И РАБОЧИХ ЭЛЕМЕНТОВ
НА НЕСУЩУЮ СПОСОБНОСТЬ СХВАТА
В гл. 4 перечислены основные эффекты влияния изменения
формы и положения поверхностей захватываемых объектов и
рабочих элементов схвата на число и положение точек контакта.
Изменение схемы базирования объекта в схвате сказывается на
размерах и конфигурации ОЖФ. Малые или большие смещения
точек контакта, пропадание некоторых из них, переход от контакта
по линиям или поверхностям к контакту в точках,
неопределенность положений равновесия чаще всего приводят к снижению
несущей способности схвата.
Следует учитывать основные качественные эффекты этого
влияния. Если контакт происходит в угловых точках и система схват—
объект статически определима (нет «лишних» точек контакта), то
малые смещения точек контакта незначительно изменяют несущую
способность схвата. Если при идеальной форме контактирующих
поверхностей число точек контакта меньше номинального, то
изменения формы могут привести к увеличению несущей способности
вследствие появления новых точек контакта и их разнесения.
Если же при идеальной исходной форме имеются лишние точки
контакта или он происходит по линиям или участкам
поверхностей, то при изменении формы и положения поверхностей
контакта переход к дискретным точкам контакта может существенно
изменить несущую способность схвата по некоторым из
направлений.
Так, для плоскопараллельного схвата предельно допустимое
значение момента вокруг оси поступательного перемещения
рабочих элементов в наибольшей степени зависит от распределения
напряжений. Если поверхность контакта номинально плоская,
то этот момент может быть оценен по максимуму в
предположении, что напряжения являются силами, сосредоточенными в
наиболее разнесенных друг от друга точках контура области
контакта. Модель совокупности дискретных точек контакта
появляется при решении задачи максимизации модуля вектора
обобщенной приложенной силы, сформулированной выше.
Минимальное значение оцениваемого момента, когда контакт реализуется
в двух точках, лежащих на общей нормали к поверхностям
рабочих элементов, теоретически точно равно нулю. Так, для
бочкообразного объекта при действии приложенного момента вокруг оси,
210
соединяющей две точки контакта, этот момент может стать весьма
малым, а сам схват — практически неработоспособным.
Чтобы при изменениях положения и формы объекта и рабочих
элементов предельно допустимые значения приложенных сил и
моментов значительно не уменьшались, можно идти по двум
путям: изменять форму рабочих элементов или вводить упругие
накладки. Изменения формы рабочих элементов должны быть
такими, чтобы обеспечить максимальное разнесение точек контакта.
Для уголкового схвата, например, можно ввести сужение
поверхностей рабочих элементов к крайним точкам, удаленным от центра
схвата, т. е. заменить призматические поверхности
пирамидальными. Если объект выступает за пределы контура схвата, то
целесообразно рабочие элементы выполнять не сплошными, а
разрезными; при этом во многом устраняется неопределенность в
положении точек контакта и достигается снижение массы схвата.
Введение упругих накладок способствует не только увеличению
коэффициента трения, но и увеличению размеров пятен контакта.
Так, при захватывании плоского объекта плоскопараллельным
схватом достаточно упругая накладка обеспечивает контакт по
всей поверхности объекта, несмотря на малые изменения его
формы. Проблемы выбора характеристик накладок, при которых
обеспечивается контакт по всей плоскости, рассмотрены в гл. 9.
В случае жесткого фиксирования объекта принудительным
базированием по всем координатам погрешности формы и
положения поверхностей контакта приводят к задаваемым векторами
Дгг изменениям положения точек контакта, отклонениям An* ортов
нормалей в этих точках и малому раскрытию схвата на величину
ДА. Соответствующее изменение AR* векторов реакций в точках
контакта приводит к изменению ОЖФ. Векторы ARt определяются
варьированием уравнений статического равновесия системы
схват—объект и последующим решением полученной таким
образом системы семи уравнений:
Ц(А^п< + /?|п|) = 0;
т I
S (Ann*/?* + ххщ ARi + г, ДМО = 0; |
т I
*=1 J
где ns — орт направления действия усилия захватывания;
неизвестными являются семь величин Д/?ь а параметры АЛ, Дпг,
Дг* заранее определяются из уравнений (8.4). Величины А/?*
находятся решением полученной системы уравнений и далее
используются для корректировки уравнений равновесия системы
схват—объект с учетом погрешностей их размеров и форм.
211
Как отмечалось выше, для поддерживающих механических,
вакуумных и магнитных захватных устройств жесткое
фиксирование объекта принудительным базированием по всем координатам
осуществляется при реализации контакта в шести точках. В этом
случае малые изменения векторов AR^ находятся из первых шести
уравнений полученной системы.
Определение предельно допустимых составляющих сил и
моментов требует знания конкретных особенностей искажений формы.
При заданных ограничениях на величины этих искажений могут
быть определены наихудшие ситуации, когда предельно
допустимые значения сил и моментов минимальны. Именно они должны
учитываться при расчете запаса по несущей способности при
функционировании робота.
Глава 9
РАСЧЕТ СХВАТОВ С УПРУГИМИ ЭЛЕМЕНТАМИ
9.1. ЗАДАЧИ РАСЧЕТА СХВАТОВ
С УПРУГИМИ ЭЛЕМЕНТАМИ
В зависимости от особенностей конструкций схватов, формы
и параметров объекта учитываются один или несколько факторов,
основными из которых являются следующие: упругая
податливость элементов механизма схвата, прежде всего рычагов и
уравновешивающих пружин, контактная упругая податливость
поверхностей объекта и рабочих элементов в зонах контакта;
упругая линейная или нелинейная податливость накладок рабочих
элементов; упругая линейная податливость стенок тонких или
тонкостенных объектов.
Целью статического расчета системы схват—объект с
упругими элементами может быть определение: характера, положения
и размеров пятен контакта; погрешностей закрепления объекта
в схвате; несущей способности схвата, которая задается ОЖФ;
напряжений в элементах объекта (это необходимо, если объект
тонкостенный).
Исходными данными для расчета являются: номинальная
геометрия, конфигурация и геометрические параметры объекта и
схвата; параметры отклонения от номинальной геометрии; силы
и моменты, действующие на объект; упругие свойства материала
объекта и схвата.
Основные качественные эффекты, обусловленные упругостью,
заключаются в следующем.
1. Необходимо изменить и конкретизировать понятие жесткого
фиксирования. При дискретных точках контакта и при линейной
212
упругости объекта или рабочих элементов схвата приложение
к объекту любых малых сил и моментов приводит к линейно
зависимым от них перемещениям и углам поворота объекта. Изменение
положения объекта в схвате, вызванное упругими деформациями,
имеет порядок, соизмеримый с этими деформациями. Например,
при упругой деформации звена АВ схвата, показанного на
рис. 9.1, а, поворот на угол 8 его сечения в точке В приводит
к смещению объекта по оси х на величину порядка 0. При высокой
жесткости объекта и схвата эти перемещения малы. Большие
перемещения объекта возникают, когда действующие силы или
моменты достаточно велики, при этом происходит потеря контакта,
по крайней мере, в одной точке — нарушаются условия жесткого
фиксирования объекта. Состояния, для которых имеются упругие
перемещения объекта в схвате без потери контакта в любой из
дискретных точек, соответствуют точкам, принадлежащим ОЖФ.
Рис. 9.1
Зависимости потенциальной энергии U и силы Fx от любой из
обобщенных координат (в частности, перемещения бх) имеют
такой вид, как показано на рис. 9.1, б, в (пунктиром показаны
те же зависимости, получаемые в случае пренебрежения
упругостью). График потенциальной энергии имеет вблизи нуля малый
участок, в котором зависимость квадратичная, для этого участка
зависимость силы или момента от соответствующей обобщенной
координаты — линейная.
2. Учет упругих деформаций может привести к заметным,
а иногда и существенным, изменениям границ ОЖФ. На рис. 9.1, б
в качестве примера показано, что при изгибе рычагов схвата
смещаются точки контакта, при этом модуль предельного
значения силы FXJ направленной влево, увеличивается, а вправо, —
уменьшается. ОЖФ становится несимметричной. Если исходная
ОЖФ мала, то влияние упругих деформаций может быть
значительным, при неблагоприятных условиях ОЖФ может исчезнуть
совсем.
3. Упругая податливость элементов схвата и объекта
приводит к дополнительным погрешностям позиционирования и
ориентирования в конечном положении вследствие упругих деформаций
при действии силы тяжести и усилия захватывания. В работе [55]
они называются погрешностями закрепления. Если
рассматривается захватывание последовательно одинаковых объектов, то
213
повторяющиеся упругие смещения корректируются при настройке
робота и интерес представляют только те составляющие
погрешностей (случайные), которые не воспроизводятся. К ним относятся
Таблица 9.1
Классификационные
признаки
Требования, в силу
которых
упругая
податливость
становится
существенной
Расчетная
модель
Влияние
упругости
на:
Приме
тов может бь.
Упругие элементы
Уменьшение массы схвата
» контактных
напряжений
Обеспечение более плотного
контакта
Увеличение коэффициента
трения
Уменьшение ударных нагрузок
при захватывании и амортизации
объекта
Упругая стержневая система
» пластина или оболочка
Контактная задача
Линейные модели упругого слоя
Нелинейные модели упругого
слоя
изменение числа точек контакта
» положения точек
контакта
изменение нормалей в точках
контакта
возникновение микропятен контакта
возникновение зон контакта
изменение формы и размеров ОЖФ
положение объекта в схвате
характер приложенных сил
упругие деформации объекта
ч а н и е. Знак -}- означает, что влияние у
ть существенным, а знак —, — что их вл
• ««
Меха
низм
схват
4-
i
—
—
—
—
+
+
+
—
—
+
+
+
—
—
+
+
4-
—
ipyrocTi
иянием
5*
Рабо
элем<
ты
_
—
—
+
—
+
+
—
—
—
—
—
+
—
+
+
—
—
л указа
можно
Я м-
~\Г
+
+
+
+
—
—
+
+
—
—
—
—
+
+
+
+
+
иных э.
прекебр
ее
~г\
—
—
—
+
+
+
—
—
—
+
+
—
—
+
+
+
+
пемен-
ечь.
погрешности, обусловленные разбросом масс объектов (для
необработанных заготовок этот разброс может быть значительным)
и отличиями от номинального значения усилия захватывания
(эти отличия явно проявляются вследствие несимметричности
механизма схвата, действия переменных инерционных нагрузок,
а также при нелинейности материала упругих накладок). Если
формы поверхностей рабочих элементов и объекта были
согласованы без учета деформаций упругих элементов, то вследствие
214
деформаций согласование может нарушиться; при этом часто
возникает неопределенность положения равновесия.
Перечисленные эффекты являются отрицательными, поэтому
желательно уменьшать их влияние. В то же время упругая
деформируемость элементов конструкций схватов может быть
использована для повышения надежности и улучшения условий
захватывания. Это может быть осуществлено тремя путями.
1. Применением схем схватов [88], в которых захватывание
осуществляется упругим элементом, например, упругой лентой.
2. Повышением упругой податливости некоторый звеньев
схватов иногда удается обеспечить контакт в большем числе точек
или более полное прилегание поверхностей рабочих элементов
и поверхности объекта.
3. Введением упругих накладок, которое приводит к
появлению больших площадей контакта и позволяет сохранить
нормальные условия контакта при отклонениях формы объекта от
расчетной и обеспечивает большую равномерность распределения
контактных напряжений. Вследствие этого может, например,
значительно возрастать момент сил трения верчения, что особенно
важно при захватывании объектов с поверхностями,
обладающими двоякой кривизной.
Для выработки рекомендаций по выбору схемы и параметров
схватов, а также для количественного описания перечисленных
эффектов используется целый комплекс математических моделей
упругих элементов и звеньев. В табл. 9.1 содержатся результаты
анализа влияния упругости. Выделены только те звенья или
элементы, упругость которых может влиять на надежность и условия
захватывания: последние звенья механизма передачи (обычно
рычаги), рабочие элементы, накладки, объект.
9.2. СХВАТЫ С ДОПОЛНИТЕЛЬНЫМИ СТЕПЕНЯМИ
СВОБОДЫ
Схваты с дополнительными степенями свободы разделяются на
несколько групп, из которых чаще всего встречаются следующие:
со свободным подвешиванием рабочих элементов (РЭ), когда силы
и моменты, устанавливающие РЭ в процессе захватывания,
создаются только силами реакций в точках контакта с объектом;
с упругой установкой РЭ, когда силы и моменты создаются
пружинами или пружинными устройствами, а также силами реакций
в точках контакта с объектом; с ориентированием или установкой
РЭ с помощью дополнительных приводов.
Первый и третий варианты в ПР используются редко.
Дополнительные степени свободы чаще всего реализуются
вращательными кинематическими парами, реже — поступательными. Для
обеспечения больших углов поворота РЭ предусматриваются
подшипниковые узлы, малые углы поворота могут обеспечиваться
215
за счет увеличения мертвых ходов, повышения упругой
податливости некоторых звеньев.
Введение дополнительных степеней свободы РЭ может
преследовать следующие основные цели.
1. Увеличение числа точек контакта с РЭ без согласования
формы РЭ с формой объекта. Это способствует более
равномерному распределению усилий и важно при работе с хрупкими,
пластичными или упругими тонкостенными объектами.
2. Улучшение условий захватывания, а именно: расширение
диапазона допустимых смещений объекта от заданного положения
при захватывании.
3. Изменение формы ОЖФ и, в первую очередь, некоторое
уменьшение предельных значений приложенных сил и моментов,
что может оказаться полезным для обеспечения сохранности
объекта при возможных ударах.
4. Обеспечение хорошей воспроизводимости заданного
положения объекта, когда при отклонениях положения и формы
поверхностей объекта от расчетной возможна неоднозначность
его положения в схвате. Так, в плоскопараллельном схвате,
хорошо удерживающем объект с параллельными поверхностями,
перекос верхней грани от идеального положения приводит к тому,
что надежно фиксируется только одно сечение объекта.
Неопределенность углового положения объекта исключается, если
верхний РЭ имеет две дополнительные угловые степени свободы (по
одной в каждой плоскости).
5. Повышение степени универсальности схвата, а именно
обеспечение возможности захватывания схватом объектов существенно
различной формы.
Наиболее простым и достаточно гибким средством решения
перечисленных задач является использование подпружиненных РЭ.
Подобная схема была приведена и описана в гл. 4 (см. рис. 4.13, р).
При проектировании схватов с дополнительными степенями
свободы следует добиваться полной геометрической неизменности
системы объект—схват. Не претендуя на полноту постановки и
решения задачи, сформулируем некоторые подходы, которые
позволяют получать схемы схватов, удовлетворяющие требованиям
геометрической неизменяемости системы. Предположим, что один
РЭ (допустим, верхний) имеет только одну точку контакта с
объектом, а другой (нижний) — все остальные. Тогда условие
геометрической неизменяемости системы при введении вместо
жесткого крепления верхнего РЭ дополнительных г степеней свободы
будет выполняться, если будет обеспечен контакт объекта с
верхним РЭ в г +1 точках. Для задачи удерживания кругового
сечения цилиндрического объекта основной является схема с тремя
точками контакта (рис. 9.2, а), когда положение объекта
фиксируется двумя точками А и В. Введение одной дополнительной
степени свободы дает возможность получить четыре точки
контакта (рис. 9.2, б); трех дополнительных степеней свободы —
216
шесть точек контакта (рис. 9.2, в). Во всех схемах опорные
точки А и В остаются неизменными, а условие геометрической
неизменяемости системы обеспечивается выбором формы РЭ (в
рассмотренном примере — в виде уголков).
Требование полной геометрической неизменяемости системы
при введении дополнительных степеней подвижности сводится
к обеспечению однозначного положения всех элементов схвата.
Для этого каждый элемент должен быть жестко фиксирован, т. е.
иметь в общем случае эквивалент семи точек контакта с объектом
и другими элементами схвата (нужно учитывать, что
цилиндрический шарнир со свободным перемещением по оси реализует
четыре точки контакта, сферический — три), а для фиксирования
Рис, 9.2
одного плоского сечения — четырех точек контакта плоскости
(цилиндрический шарнир реализует две точки контакта). При
этом положение самого объекта может задаваться с точностью до
несущественных координат (на рис. 9.2 круговое сечение
фиксируется с точностью до угла поворота). Для ряда практических
задач требование полной геометрической неизменяемости системы
может быть излишним, тогда увеличение числа степеней свободы
реализуется таким образом, что не приводит к увеличению числа
точек контакта: например, для схвата на рис. 9.2, г
допускается неоднозначность углового положения роликов, введенных
в точках контакта по углу поворота.
При определении ОЖФ рассматриваемых схватов ее границы
находят из условия обращения в нуль реакций в точках контакта
так же, как и в разработанной авторами методике построения ОЖФ
для жестких схватов с одной степенью свободы. Для определения
реакций в точках контакта к семи уравнениям статики системы
схват—объект добавляются уравнения равновесия для каждого
элемента, реализующего дополнительную степень свободы.
217
Немногочисленные схемы схватов со свободным подвесом РЭ
применяются прежде всего для ПР, предназначенных для
транспортировки заготовок большой массы; диапазон угла поворота
свободно подвешенного РЭ, как правило, ограничен и не
превосходит 30°. В большинстве случаев схваты с дополнительными
степенями свободы имеют упруго подвешенные РЭ. Обычно в
исходном положении упругий элемент подвеса устанавливается с
начальным натягом, величина которого согласуется с
характеристиками жесткости подвеса и значением усилия захватывания
таким образом, чтобы обеспечить возможность правильного
захватывания объекта. При расчете ОЖФ для схватов с упруго
подвешенными РЭ учитываются силы и моменты, обусловленные
действием реакций в точках контакта и силами, задаваемыми
упруго деформированным подвесом РЭ.
Рассмотрим пример. Схват, показанный на рис. 9.2, д, имеет
подпружиненный верхний РЭ. В исходном положении верхний
РЭ смещен по оси х относительно нижнего на величину Д. При
захватывании круглого объекта реализуется контакт в четырех
точках: верхний РЭ смещается по оси х до совмещения его
вершины с осью I/,пружина жесткости k растягивается на величину
Д. Пренебрегая силами трения, запишем уравнения статики
системы схват—объект, включая уравнения равновесия верхнего
РЭ:
Al — /?2 — As ~Г *М =
Н\ -\" А2 — Аз — А4 =
sin a
Fv
*l + *2 + *8 + #4 =
cos а
25 .
cos а '
(9.1)
Условия предельных состояний равновесия системы схват—
объект определяются из условий Rt = 0 (i = 1, 4) и имеют вид:
Fv = 2S - 2FX ctg a + 2ЛД ctg а (Rx = 0); )
Fy = 2S + 2FX ctg а — 2ЛД ctg a (R2 = 0);
Fy = —2S - 2ЛД ctg a (R9 = 0);
Fy = — 2S + 2£Д ctg a (RA = 0).
Из последнего уравнения системы (9.1) видно, что для
обеспечения контакта объекта и РЭ схвата в четырех точках необходимо
выбирать параметры схвата таким образом, чтобы выполнялось
соотношение &Д < S tg а, т. е. усилие захватывания S должно
быть достаточным для того, чтобы деформировать пружину на
величину Д. Поскольку отрыв в точке 3 невозможен, границы
ОЖФ определяются первым, вторым и четвертым уравнениями
системы (9.1), они показаны на рис. 9.2, е сплошными линиями.
218
Для схвата со свободно подвешенным верхним РЭ (k = 0)
вид ОЖФ показан на рис. 9.2, е штрихпунктирной линией. Для
этого случая характерно, что при Fy = —25 происходит потеря
контакта одновременно с двумя точками верхнего РЭ независимо
от величины Fx. При жесткозакрепленном РЭ (k = оо, Д = 0)
для рассматриваемого примера в предположении, что контакт
реализуется в четырех точках, вид ОЖФ для контакта в первой,
второй и третьей точках показан на рис. 9.2, е штриховой
линией.
Следует обратить внимание на тот факт, что даже при
выполнении условия отрыва в точке 4 (рис. 9.2, д), когда Fv = —2S +
+ 2k Actg а, но Fy > —2S, не происходит потери объекта: при
некотором раскрытии схвата деформация пружины Дх < Д и
объект удерживается в трех точках 1,2,3. Только при Fy = —25
и Д = 0 происходит отрыв в точках 3 и 4 (это происходит при
раскрытии схвата на величину hx =»Atga), причем в каждой
промежуточной точке 0 < Дх < Atg a любое сколь угодно малое
изменение силы Fy будет приводить к перемещению РЭ
относительно объекта, зависящему линейно от изменения силы F у.
Потенциальная энергия в этом случае может быть представлена
однородной квадратичной формой.
Одновременный отрыв в точках 1 и 4 как в исходном, так и
в любом промежуточном положении происходит при
Fx = 2S tg a.
Это значение силы не зависит от текущего значения Д, в то время
как отрыв в точке 2 происходит при предельном значении
Fx = —(25 tg a — £Д),
которое зависит от Д.
9.3. СХВАТЫ С УПРУГИМИ НАКЛАДКАМИ
Часто на поверхностях РЭ закрепляются упругие накладки
из резины, пластических и композитных материалов. Как правило,
выбор материала и толщины накладок ничем не обосновывается.
Между тем от выбора параметров накладок существенно зависит
распределение поверхностных напряжений в зонах контакта.
Сначала необходимо обсудить условия необходимости
перехода к модели с распределенным контактом. Модели контакта,
в дискретных точках применимы в предположении, что размерами
пятен контакта можно пренебречь. Для схватов с упругими
накладками и объектов из упругих и пластичных материалов
контакт осуществляется по поверхностям, размеры которых
соизмеримы с размерами объекта. Распределенность контакта по
большим поверхностям при тех же усилиях захватывания позволяет
сохранить качество поверхности объектов, выполненных из
мягких материалов, обеспечить сохранность хрупких предметов,
219
уменьшить деформации упругих объектов и износ поверхностей
РЭ.
Для обеспечения контакта по большим площадям поверхности
объекта и РЭ должны быть согласованы. Наиболее
распространенным случаем согласованности является захватывание объекта
за параллельные плоскости плоскопараллельным схватом.
Контакт по плоскости естественно приписать идеализированному
случаю, когда поверхности — идеальные плоскости и условие
параллельности выполнено точно. Неидеальность формы и
относительного положения поверхностей приводит к тому, что
поверхность контакта распадается на совокупность пятен контакта.
Площадь и конфигурация каждого из них, помимо искажений
формы, зависит от усилия захватывания, упругих характеристик
объекта и звеньев схвата. Увеличение площади пятен контакта
вплоть до заполнения всей площади достигается установкой
упругих накладок.
Накладки могут бьать с гладкими поверхностями или
профилированными; различными могут быть способы крепления к
рабочим элементам. Эти обстоятельства могут заметно изменять
упругие свойства накладок; от них зависят не только параметры
расчетных моделей, но и сами модели, которые могут быть достаточно
сложными. Для получения правильных качественных результатов
и грубых количественных оценок достаточно использовать
простейшую модель накладки постоянной толщины, считая, что в каждой
точке поверхности накладки нормальное напряжение о зависит
только от смещения и в той же точке
(Г =7 («).
Дополнительно принимается, что в каждой точке контакта
с предметом касательное напряжение т ограничено предельным
значением
h'Kfa (a>0).
Даже при столь простой модели сложность получения решения
определяется возможностью отрыва и проскальзывания по части
поверхности контакта. Учет сил трения осуществляется
кинематическим методом. Для этого необходимо вводить модели упругой
характеристики накладки по отношению к касательным
напряжениям. Сложность анализа системы объект—накладка—схват
во многом определяется необходимостью находить зоны
проскальзывания; для решения таких задач приходится использовать
численные методы. Аналитические выражения могут быть получены
лишь для простейших задач.
Рассмотрим последовательность расчета в предположении, что
поверхности объекта и РЭ согласованные, так что при малых
усилиях захватывания контакт происходит по максимально
возможным поверхностям, а силы трения отсутствуют. Накладка
считается тонкой, нормаль П; в точке контакта (рис. 9.3) считается об-
220
щей для объекта и РЭ. Относительно единого центра задается
радиус-вектор г, определяющий положение произвольной точки
контакта. Для тонкой накладки можно считать, что
радиус-вектор относится и к поверхности объекта, и к поверхности РЭ.
В соответствии с гипотезой о свойствах накладки предполагается,
что напряжение а зависит только от деформации ut накладки
(относительного смещения точек поверхностей накладки по общей
нормали):
a(l) = f(l) (U(l)> Г(1)); а(2) = f(2) (W(2)) r(2))f (9.2)
где верхние индексы 1 и 2 относятся к первому и второму РЭ
соответственно. Функции /(1) и /(2) могут быть различны и
изменяться по поверхности контакта, если толщина накладок
переменна. Выражения (9.2) справедливы при и > О (когда происходит
6)
t\
Рис. 9.3
сближение поверхностей), при и < О происходит отрыв. Далее
предполагается, что функция / определена как при
положительных, так и при отрицательных значениях и и имеет такой вид,
как показано на рис. 9.3, в.
Положение равновесия объекта в схвате с упругими
накладками в первом приближении может быть определено следующим
образом. Предположим, что известно исходное положение
равновесия объекта в схвате с жесткими РЭ (оно показано на рис. 9.3, а),
в котором задается центр О. При наличии упругой накладки под
действием распределенной нагрузки схват раскрывается на вели-
личину ДА, а объект из исходного положения приходит в новое
положение равновесия, перемещаясь на величину Дг0и
поворачиваясь на малый угол 8. При этом произвольная точка поверхности
объекта перемещается на величину
Дг = Дг0 + вхг.
Изменение толщины накладки, определяемое по нормали п, равно
(Дг^ - Дг) п = и, (9.3)
где Дг^ — вектор изменения положения точки поверхности РЭ,
являющийся функцией от единственной обобщенной координаты h
механизма схвата.
221
В новом положении равновесия совместно с уравнениями (9.2)
и (9.3) выполняются шесть уравнений статики
J n(»oW dQ + J n<2><7<2> dQ = 0 (9.4)
<Q') (V)
и
J n<1>r<*>a<1>dQ + J „<2>r<2>or<2> dQ = 0 (9.5)
<Q') (Q")
и одно уравнение равновесия механизма схвата
\ n'tl)on) dQ + J nfW" dQ = Г, (9.6)
(О (ОТ)
где Q — поверхность контакта объекта и схвата; 1 — единичный
вектор направления малого перемещения РЭ при раскрытии
схвата; Т — усилие захватывания. Таким образом, имеем систему
семи уравнений относительно семи неизвестных Дг0, в и АЛ,
т. е. задача является статически определимой. Решением системы
уравнений (9.4), (9.5), (9.6) находятся значения Дго, 9°, ДА0,
определяющие отклонения объекта в схвате с упругими
накладками под действием распределенных реакций в области контакта
от исходного положения равновесия, которое имело бы место при
отсутствии накладок.
Помимо расчета нормальных напряжений по поверхности
контакта представляет интерес исследование погрешностей
базирования объекта в схвате с упругими накладками под действием
приложенных сил и моментов. Если считать накладки тонкими
и величины Дг<*, 9*, ДА* малыми, то ОЖФ для схватов с упругими
накладками с большой степенью точности может быть построена
без учета толщины и упругости накладок, т. е. в предположении,
что рабочие элементы схвата абсолютно жесткие. Если
приложенные силы и моменты, приведенные к главному вектору сил F
и главному моменту М, принадлежат ОЖФ, то обеспечивается
надежное удерживание объекта в схвате, поскольку значений
этих сил и моментов недостаточно, чтобы преодолеть приведенное
к рабочим элементам усилие на выходном звене двигателя
(усилие захватывания) и разжать схват. Вместе с тем действие
приложенных сил и моментов, принадлежащих ОЖФ, приводит
к дополнительным погрешностям базирования объекта в схвате,
обусловленным малыми отклонениями объекта от исходного
положения равновесия, возникающими в результате
перераспределения напряжений в зонах контакта и дополнительных
деформаций накладок. Отклонения от исходного положения равновесия
в системе координат схвата задаются вектором малого линейного
перемещения Дг0 и малого углового перемещения 9. Значения этих
отклонений зависят от значений приложенных сил и моментов и
для простейших задач могут быть получены из решения системы
уравнений (9.6), (9.4) и (9.5), в левые части которых добавлены
222
слагаемые F и М соответственно. Для более сложных задач,
когда трудно установить однозначное соответствие между
приложенными силами и моментами и вызываемыми ими линейными
и угловыми перемещениями объекта в схвате, такой путь
определения малых перемещений объекта связан с решением системы
интегральных уравнений, в подынтегральные выражения которых
неизвестные параметры входят как аргумент функции а,
определяемый подстановкой уравнения (9.3) в (9.2). Более простым и
эффективным является решение обратной
задачи, когда заданными считаются
геометрические величины, а определяются
силы и моменты, под действием которых
эти перемещения возникают. Методика ее
решения заключается в следующем.
Для заданного векторами Аг и 0
смещения объекта в схвате по уравнению
(9.3) определяется изменение толщины
накладки и для каждой точки контакта
объекта и упругой накладки. Далее по
уравнениям (9.2) определяется закон
распределения напряжений а для каждой из
поверхностей контакта. Подстановкой
полученных выражений для напряжений в
уравнения (9.4) и (9.5), в левые части
которых добавлены слагаемые F иМ
соответственно, находят составляющие
векторов F и М, которые вызывают
перемещения, заданные векторами Аг и 0.
Описанная методика лежит в основе
итерационной процедуры определения
значений линейных и угловых отклонений
объекта от исходного положения
равновесия в схвате с упругими накладками
под действием приложенных сил и
моментов. Блок-схема этой процедуры показана на рис. 9.4,
где обозначено: / — начало; 2 — ввод исходных данных
(геометрических характеристик схвата и объекта, параметров
исходного положения объекта в схвате, упругих характеристик
накладок, усилия захватывания и некоторых других); 3 — блок
задания векторов малого линейного и углового перемещения;
4 — блок определения деформаций упругих накладок и закона
распределения нормальных напряжений; 5 — блок решения
уравнения (9.6) и определения размеров зон контакта и величин
нормальных напряжений; 6 — блок решения системы уравнений
статического равновесия системы и определения значений сил
и моментов, соответствующих заданным малым смещениям
объекта; 7 — блок проверки на принадлежность ОЖФ полученных
значений сил и моментов; 8 — блок изменения стратегии поиска,
it
//5/77
1
*
2
. L_
J
*
ч-
«
5
*
6
4>
\нет
8
4>
Н \
<
I
10
Рис. 9.4
223
о)
%
$ШШ
5)
Mz\ ^"
*^А
h
Рис. 9.5
обеспечения изменения процедуры задания векторов малого
перемещения в блоке 3 при достижении рассчитанными значениями сил
и моментов предельных состояний (границ ОЖФ); 9 — правило
остановки счета; 10 — память; 11 — конец.
При решении обращенной задачи на каждом шаге
итерационного процесса проводится проверка рассчитанных сил и моментов,
соответствующих заданным приращениям геометрических
параметров, на принадлежность в ОЖФ- После этого реализуется
новая последовательность значений приращений с целью выхода на
границу ОЖФ. После многократного повторения расчета
осуществляется построение замкнутой области в шестимерном
пространстве геометрических параметров, являющейся отображением
ОЖФ.
Для простейших постановок решение может быть получено
аналитически. Например, при захватывании плоского объекта
плоскопараллельным схватом при линейности характеристик
накладок а = ku, если область контакта не изменяется, то сила Fy
и момент Мг связаны с перемещением Ду0, углом 9Z и
геометрическими параметрами, обозначенными на рис. 9.5, а, следующим
образом:
Fy = 2k [(a + Ь) Ау0 - 4"(&2 - а2) 9*] '•
М,
= 2k [4-(*>2 - а*) Д*/0 - ±-(Ь> - я3) 9*] •
Если в результате отрыва объекта площадь контакта
изменяется, то зависимости (9.2) и процедура расчета усложняются.
Зависимость восстанавливающего момента от угла 82 становится
нелинейной (рис. 9.5, б) жесткость накладки снижается в два
раза. Этот эффект следует учитывать при расчете погрешностей
базирования объекта под действием приложенных сил, процессов
перезахватывания в статике и динамике.
Значения приложенных сил и моментов, при которых
начинается отрыв, определяются из условия обращения в нуль деформаций
накладки хотя бы в одной точке. Из рис. 9.5, в видно, что для а =
= Ъ область отсутствия отрыва меньше ОЖФ (значение момента
Мг, при котором начинается отрыв, втрое меньше предельного).
224
Учет изменений (погрешностей) формы объекта или поверхности
РЭ осуществляется заменой выражения (9.3) на
(Дг, —Дг)п + »п =и,
где vn — заданное или рассчитанное начальное смещение
поверхности по нормали п.
Рассмотрим плоскую задачу захватывания объекта
плоскопараллельным сх^атом, предполагая, что контактирующие
поверхности остаются гладкими. Тогда можно принять, что при
фиксированном положении условной средней линии объекта смещение
точек верхней линии определяется выражением
Vi = v10 + агх + Ьгх2,
а нижней линии
v2 = fl20 + <*2* + Ь2х2.
Коэффициенты аг и а2 определяют перекос поверхностей,
К и Ь2 — выпуклость или вогнутость. Ограничимся рассмотрением
случая, когда предмет целиком находится между РЭ схвата.
Положение и величина областей контакта зависят в первую
очередь от конфигураций поверхностей. На рис. 9.6 представлены
основные варианты для жестких РЭ. Имеем для варианта а две
точки контакта на гладких участках; для варианта б — три точки
контакта; для варианта в — контакт в двух угловых точках
(имеется зона неопределенности), в крайних положениях объекта
возможен контакт в третьей точке.
Как отмечалось ранее, если имеются упругие накладки, вместо
точек контакта возникают зоны контакта, которые расширяются
при увеличении силы захватывания, т. е. при сближении РЭ.
Представляет интерес расчет зависимостей площади Q (S) зоны
контакта от силы S захватывания и значения силы 5 = 50, при
которой контакт происходит по всей поверхности. Для точек
контакта на гладких участках зависимость имеет такой вид, как
показано на рис. 9.7, а, а в угловых точках, — как на рис. 9.7, б.
Выражение для S0 получается из общего выражения (9.6) и
применительно к случаю, приведенному на рис. 9.6, а, имеет вид
2
S0 = — (bx + b2) kd3. Аналогичные выражения получаются и
для других случаев.
При S = S0 действие любых сил и моментов приводит к
отрыву по части поверхности контакта. При S > S0 в пространстве
сил и моментов имеется область сохранения контакта по всей по-
а) а а *) и* $
b1<0;b2<0 b1<0; Ь2>0 bf>0; b2>0
Рис. 9.6
8 Челпанов И. Б. и др.
225
верхности, при увеличении искажений формы эта область
сужается.
Если объект и РЭ можно считать жесткими, то увеличение
силы захватывания при заданных отклонениях формы приводит
к более равномерному распределению давлений по поверхности
контакта. Влияние упругости объекта и РЭ приводит к более
медленному выравниванию напряжений или к возрастанию
неравномерности. Задачи определения влияния упругости объекта
рассмотрены в п. 9.5.
Распределение напряжений по поверхности контакта влияет
на конфигурацию и параметры ОЖФ в наибольшей степени в тех
случаях, когда по некоторым из координат жесткое фиксирование
осуществляется только за счет сил трения. Так, для объекта с
нормально плоскими поверхностями в плоскопараллельном схвате
(см. рис. 9.6) распределение напряжений сильнее всего влияет
Рис. 9.7
на предельное значение момента Му\ большие значения момента
получаются, если в зоне вблизи контуров напряжения больше,
а в центре области — меньше (или происходит отрыв). Оценка
Му по максимуму получается тогда, когда напряжения
распределяются по внешнему контуру, точнее, когда распределенные
напряжения выражаются в сосредоточенные силы, приложенные
в некоторых точках контура. Так, для объекта в виде
параллелепипеда оценка сверху Му = 2S -\fc? + b2 получается, если
реакции сосредоточены в углах. Оценки снизу при произвольных
распределениях напряжений, как правило, не существуют (в
приведенном примере Му mln = 0).
Начальное изменение формы может быть задано также тогда,
когда РЭ не могут быть сделаны достаточно жесткими и
желательно компенсировать упругие деформации предварительным
искривлением поверхностей РЭ, однако при этом компенсация
будет обеспечиваться только при вполне определенной силе
захватывания.
Таким образом, задачи, в которых необходим учет упругого
контакта поверхностей схвата с объектом, даже в рамках
описанных расчетных моделей многообразны и требуют систематических
исследований.
226
Как отмечалось выше, учет контактной упругости элементов
схвата (особенно накладок) и объекта приводит к тому, что вместо
точек контакта возникают зоны контакта с конечными размерами.
Вследствие этого оказывается возможным оценить момент трения
верчения. Под действием момента трения верчения оказывается
конечной область жесткого фиксирования в случае, если контакт
объекта с выпуклой поверхностью и схвата происходит только по
двум пятнам контакта.
Рассмотрим случай двухточечного контакта, показанный на
рис. 9.8. Нормальные реакции в точках контакта равны по
величине усилию захватывания S и направлены по прямой,
соединяющей точки контакта. Предполагается, что материалы объекта и
схвата однородны и изотропны. Приложенные нагрузки создают
в зоне контакта только упругие деформации, подчиненные закону
Гука. Площадь контакта мала по срав- А
нению с размерами поверхности объек- s I ^^^!!:ai^Fess::^r^^
та, силы давления нормальны к по- jL^^/^^ Тл/^*Ч*^\
верхностям контакта. г ~i
В этих предположениях теория уп- "Т^^^^^^^>^^
ругих деформаций тел в местах кон- s' <m»*r<~~^
такта позволяет определить форму и
размеры площади Я контактирующих Рис. 9.8
тел при их деформации, а.также
величину и распределение давления р, оказываемого одним телом на
другое и передаваемого через площадку контакта Q. Эти данные
являются достаточными для определения момента трения
верчения.
Предполагается, что при повороте объекта вокруг оси АВ
в каждой точке площади Q действует малое касательное
напряжение, пропорциональное давлению р и направленное
противоположно вектору линейной скорости в этой точке. Тогда для схвата,
показанного на рис. 9.8, момент трения верчения может быть
определен по формуле
М = 2 [ fpr dQ, (9.7)
(Ь)
где г — расстояние от центра площадки контакта до элемента
площадки dQ; / — коэффициент трения.
В частности, если поверхности объекта и схвата в точках
контакта можно приближенно аппроксимировать сферами,
имеющими радиусы кривизны роп, р£2) и р£1\ р{с2) соответственно,
то площадка контакта Я имеет форму круга радиуса
а = 0.98 I^Sffft
где
Рс
11 ~ Ec 1- £0
8*
227
|лс и |х0 — коэффициенты Пуассона; Ес и Е0 — модули упругости
первого рода материалов РЭ схвата и объекта соответственно.
Распределенная нагрузка р может быть представлена
ординатами полусферы, построенной на этой площадке
р = Ро V\-{xlaf-{yla)\
где
Тогда выражение (9.7) принимает вид
М - 0.22,^- (f=рЩ= + $-$&г).
При использовании конкретных моделей упругих свойств
возможно рассчитывать контактные напряжения и оценивать
запасы прочности и долговечности.
9.4. УЧЕТ УПРУГОСТИ ОБЪЕКТОВ
ПРИ ИХ ЗАХВАТЫВАНИИ
В ряде случаев необходим учет упругих свойств объектов или
совместно объекта с элементами схвата. Вытекающие из общих
положений, изложенных в п. 9.1, цели расчетных и, возможно,
экспериментальных исследований, направленных на выявление
роли упругости объекта, могут быть следующими.
1. Определение нормальных напряжений в зонах контакта
объекта с рабочими элементами. Как отмечалось ранее,
предположение о жесткости объекта и поверхностей рабочих элементов не
позволяет оценивать эти напряжения. Если рабочие элементы
имеют мягкие накладки (резиновые или из пластмасс), то часто
достаточно учитывать только их податливость. Если же
поверхности рабочих элементов и объект металлические, то желателен
совместный учет упругости объекта и рабочих элементов. При этом
могут появляться следующие эффекты: превращение дискретных
точек контакта в пятна контакта, распадение сплошных зон
контакта (при согласованной форме поверхностей объекта и рабочих
элементов) на пятна контакта. При расчете определяются границы
этих пятен и распределение напряжений в их пределах.
2, Определение напряжений в сечениях объекта для оценки
запасов прочности. Это особенно важно для тонкостенных
объектов, для них обычно наибольшими являются изгибные
напряжения. Отметим, что принципиальному или техническому решению
задачи о надежном захватывании и удерживании хрупкого
тонкостенного объекта посвящены многие изобретения, однако при
обосновании их целесообразности обычно не приводится
никаких данных о допустимых значениях действующих на объект сил.
228
3. Определение смещений базовых точек поверхностей объекта
вследствие упругих деформаций и изменений параметров формы и
положения этих поверхностей. Решение этих задач особенно важно
при исследовании процессов сборки, когда упругие деформации
могут затруднять или даже исключать сопряжение собираемых
деталей.
4. Определение жесткости зоны взаимодействия объекта с
рабочими элементами. По полученным коэффициентам упругой
податливости могут оцениваться дополнительные погрешности
базовых точек объекта при действии постоянных сил (например,
вследствие поворота при эксцентрично приложенной силе
тяжести) и изменения собственных частот упругих колебаний
механизма манипулятора, что может быть
существенным для длинномерных
объектов.
5. Определение жесткости объекта
по отношению к усилиям
захватывания. В п. 10.4 рассматривается задача об
ударном взаимодействии рабочих
элементов при захватывании объекта.
Упругая податливость объекта
амортизирует удар, снижает максимальные
значения ускорений и сил взаимодействия.
Упругая податливость накладок
сказывается таким же образом.
Расчетные модели определяются Рис. 9.9
структурой и формой объекта,
соотношением его размеров, а также эффектами, подлежащими
описанию. Если формы объекта и поверхностей рабочих элементов
не согласованы, пятна контакта малы по размерам, и тогда
распределения напряжений рассчитываются в соответствии с
решениями известных контактных задач теории упругости. Как
известно, для использования этих решений требуется, чтобы в
зонах контакта поверхности были гладкими, причем для каждой
поверхности должны быть известны по два главных радиуса
кривизны. Соответствующие расчетные формулы для размеров пятна
контакта и максимальных значений нормальных напряжений
приведены в п. 9.3. Если контакт осуществляется по острым кромкам
или углам (для схватов это допускается), то может происходить
смятие этих углов или кромок; при этом напряжения,
естественно, не оцениваются. При наличии упругих накладок пятна контакта
не являются малыми, классические решения контактных задач
теории упругости неприменимы, и распределение нормальных
напряжений производится на основе какой-либо гипотезы
относительно упругих свойств накладок (например, с использованием
коэффициента k, как это сделано в п. 9.3).
Расчетные модели для определения напряжений в сечениях
тонкостенных объектов зависят от соотношений основных раз-
229
Рис. 9.10
меров. Объект в виде тонкого кольца рассматривается как
криволинейный брус, работающий на изгиб. При захватывании такого
тонкого кольца прямоугольного сечения снаружи тремя
узкими рабочими элементами (рис. 9.9) радиальные смещения
к центру окружности максимальны по линии действия сил, а
вовне — посередине точек приложения. Выражения для
максимального растягивающего напряжения от изгиба и для
максимального радиального смещения имеют вид:
Л _ U62SR . Л _ 0,024S/?3 /Q fi.
«max — jj2 > ° — £jjs > V*-°)
где S — усилие захватывания (оно равно силе воздействия
каждого рабочего элемента); R — средний радиус кольца; / —
толщина; / — ширина. Первое из выражений (9.8) используется в
условии сохранения прочности атах < адош где адоп —
допускаемое значение напряжения. Радиальные смещения могут иметь
значение, если кольцо одевается на штырь в процессе сборки или
на оправку патрона станка.
Широкое кольцо может приближенно рассматриваться как
криволинейный брус, если его ширина не превышает диаметр; длинную
втулку или стакан следует рассчитывать как тонкую
цилиндрическую оболочку. При достаточной длине цилиндра напряжения
к свободному концу уменьшаются до малых значений, и при
расчете оболочку можно принимать бесконечной. Расчет существенно
осложняется, если оболочка имеет переменную толщину (в
частности, является ступенчатой) или в ней имеются отверстия или
вырезы.
Тонкостенные объекты типа прямоугольных коробок с
плоскими поверхностями обычно захватываются плоскими рабочими
элементами. Поскольку при этом поверхности объекта и рабочих
элементов являются согласованными, необходим совместный учет
упругой податливости стенок коробки и накладок рабочих
элементов. Стенки рассматриваются как тонкие плоские плиты
(пластины), упругость надкладок учитывается по коэффициенту k.
Граничные условия задачи могут быть различными в зависимости
от того, какое положение коробка занимает в рабочих элементах
(рис. 9.10, а б). В общем случае на одной части поверхности
задаются усилия (нормальные напряжения), а на другой —
зависимости между перемещениями и нормальными напряжениями.
230
Наиболее простой является задача, когда вся коробка находится
в пределах рабочих элементов (рис. 9.10, б). Предположим при
этом, что размер коробки по оси у значительно больше размера /
по оси х. Тогда при расчете напряжений и прогибов достаточно
рассматривать одно из средних сечений в плоскости хг
(рис. 9.11, а). В этом случае задача сводится к расчету рамы в виде
прямоугольника, по линиям AD и ВС действует распределенная
нагрузка, пропорциональная относительному прогибу (пока
сохраняется контакт с упругой прокладкой). Для упрощения
решения будем считать участки АВ и CD достаточно жесткими, так
что их упругой податливостью можно пренебречь и концы
участков AD и ВС можно считать заделанными.
Все упругие характеристики пластины, рассматриваемой в
виде балки, и упругой накладки будем относить к единичной
ширине по оси у. Обозначим через w упругий прогиб каждой из
балок AD и ВС по направлению к средней оси х, которая
считается неподвижной. Примем, что при деформации накладок
жесткие пластины рабочих элементов смещаются по направлению
к средней оси симметрично, сохраняя взаимную параллельность,
на одно и то же расстояние w0 (отсчет w0 ведется от момента
касания упругой накладки). В соответствии с принятой моделью
упругих свойств прокладки линейная нагрузка на выделенную
полосу единичной ширины верхней пластины (только она будет
рассматриваться в дальнейшем) пропорциональна относительному
сближению соответствующих точек рабочего элемента и пластины
q (х) = k [ш0 — w (*)],
где k — коэффициент пропорциональности. Этот коэффициент
зависит от материала и толщины накладки, однако далее эта
зависимость не раскрывается. Дифференциальное уравнение изгиба
рассматриваемой полосы единичной ширины имеет вид
1
12
.Е1*45- + кш
dx*
kwn
(9.9)
для участков, на которых сохраняется контакт, и
d'w
dx*
= 0
на участках, на которых контакта нет. В уравнении (9.9) Е —
модуль нормальной упругости; Р/12 — момент инерции полосы
1:
**
Т\
*****
Ц|Ц*АААЛ^
m _
')
flV^Jl
Рис. 9.11
231
единичной ширины. Заранее неясно, сохраняется ли контакт по
всей длине. Поэтому сначала предположим, что контакт по всей
длине сохраняется и найдем условия, при которых это
действительно имеет место. Дифференциальное уравнение (9.9) перепишем
в виде:
d*w +ЪЧю = ЪЪЛ b*= l2k
dx* ~ " w "~ °' "" Et* •
Общее решение однородного уравнения записывается
следующим образом:
wi = Ci cos bx ch bx + C2 cos bx sh bx +
+ C3 sin bx ch bx + C4 sin bx sh bx.
При граничных условиях
w\ (1/2) = wx (—1/2) = — w0\ w[ (1/2) = ш! (—//2) = 0
получаем искомое решение. Составляющие общего решения
однородного уравнения затухают от концов интервала/^ jp, "о")
к середине. При условии
Ы < 1 или I2kl*/Et* « 1,
что соответствует малой жесткости накладки и (или) высокой
жесткости пластины, получается w (x) « w0 и происходит
распределение нормальных напряжений, близкое к равномерному
(рис. 9.11, б), отрыв пластины от накладки не может иметь места.
Наоборот, при условии
Ы » 1 или \2kl*IEtz > 1,
когда велика жесткость накладки и (или) мала жесткость пластины,
распределение нормальных напряжений имеет вид (рис. 9.11, в),
в средней зоне происходит отрыв. В этом случае контакт
происходит по контуру, что существенно сказывается на несущей
способности. Кроме того, для этого случая наблюдается малая
чувствительность по отношению к искажениям формы номинально
плоских поверхностей пластины и накладки.
Для некоторых задач могут быть использованы еще более
простые расчетные схемы. Так, при захватывании объекта в виде
тонкого стержня вилочным схватом стержень может
рассчитываться как балка, работающая на изгиб; при этом легко
рассчитываются и искривление, и напряжения. Для тонкостенных
объектов все задачи решаются на основе теории упругости — теории
тонких оболочек.
232
Глава 10
АНАЛИЗ ПРОЦЕССОВ ЗАХВАТЫВАНИЯ
10.1. ЗАДАЧИ АНАЛИЗА ПРОЦЕССОВ ЗАХВАТЫВАНИЯ
В гл. 8 рассматриваются условия нахождения объекта в
положении равновесия после того, как объект уже занял это
положение в результате процесса захватывания. При правильном
протекании процесса захватывания действительное конечное
положение может существенно отличаться от требуемого (когда в
положении равновесия базирование осуществляется не повеем
координатам), кроме того, процесс захватывания вообще может
протекать неправильно, не приводя к требуемому положению. Поэтому
анализ процессов захватывания важен для определения условий
работоспособности схвата. Основным фактором, влияющим на
результат процесса захватывания, является смещение положения
захватываемого объекта по отношению к идеальному положению,
при котором в процессе схождения рабочих элементов
одновременно появляются все точки контакта и процесс захватывания
заканчивается сразу же после появления этих точек контакта.
При рассогласовании положений процесс захватывания
представляет собой последовательность этапов, различающихся между
собой числом и расположением точек контакта и условиями
относительных перемещений. Обычно сначала появляется только
одна точка контакта, взаимодействие в ней предмета с рабочим
элементом приводит к их относительному перемещению, пока не
появится вторая точка контакта, вследствие чего изменяются
условия относительного движения, и т. д. Целью этого параграфа
является описание способов математической формализации
задачи захватывания (а также аналогичной по постановке задачи
отпускания или передачи объекта из схвата в другое устройство),
приведение указанных задач к виду, удобному для численного
решения.
В машиностроительной литературе задачи анализа механики
передачи объекта от одного устройства к другому рассматривались
применительно к автоматической сборке, в частности в том плане,
как это было сделано в п. 9.4. Для задач поштучной передачи
заготовок постановка была дана в работах авторов совместно с
И. А. Трубиным [46, 75], полная формализация с доведением до
программ для ЭВМ была осуществлена И. А. Трубиным [73].
Задача ставится следующим образом. Перед захватыванием объект
находится в выдающем устройстве (например, на установочной,
двойной направляющей или опорной базах) в полностью
закрепленном (по всем координатам) или частично закрепленном (по
некоторым координатам) состояниях. При этом базирование
может быть неподвижным (жестким) или подвижным (плавающим).
233
Задано рассогласование (по координатам и углам поворота) объекта
относительно схвата. Считаются известными приведенные упругие
характеристики выдающего устройства (по отношению к силам и
моментам, приложенным к объекту) и такие же приведенные
упругие характеристики манипулятора ПР.
Влияние упругих характеристик несложно оценить
качественно. При фиксированных значениях составляющих
рассогласований объекта относительно схвата при сжатии рабочих элементов
происходит как бы принудительное согласование выдающего
устройства и схвата за счет упругих деформаций; повышение
жесткости ведет к увеличению сил и моментов взаимодействия.
Увеличение сил выше допустимых пределов может привести к
деформациям или поломкам объекта или к тому, что усилия захватывания,
создаваемого двигателем схвата, оказывается недостаточно,
чтобы завершить захватывание. Естественный путь снижения
усилий путем уменьшения жесткости устройств или включения
специальных упругих элементов часто невозможен, поскольку
при этом снижается точность позиционирования, а в
динамических режимах становятся более вероятными нежелательные
явления удара. Имеются также и другие пути снижения усилий,
в частности, возможно совмещение процессов захватывания
объекта схватом и освобождения его выдающим устройством.
Разработанная теория, общие уравнения и программное обеспечение
позволяют исследовать процессы захватывания (и отпускания) также и
при учете любых устройств, снижающих усилия.
Процесс захватывания объекта схватом манипулятора в
общем случае можно разбить на два этапа. На первом этапе
двигатель схвата через передачу сводит рабочие элементы, увеличивая
силовое воздействие на объект. Второй этап начинается с момента
начала раскрытия выдающего устройства и заканчивается полной
потерей контакта объекта с выдающим устройством. В конце
первого этапа может быть несколько типов промежуточных
положений.
1. Положение совпадает с требуемым и не зависит от
начального рассогласования объекта со схватом. Это возможно, если
в требуемом положении осуществляется жесткое фиксирование
по всем координатам, а усилия захватывания достаточно, чтобы,
несмотря на начальное рассогласование, сжать схват настолько,
чтобы появились все требуемые точки контакта. При выполнении
этих условий на второй стадии при раскрытии выдающего
устройства объект и схват ПР как одно жесткое целое перемещаются
относительно выдающего устройства.
2. Положение не зависит от начального расположения объекта
относительно схвата, но отличается от требуемого. Это означает,
что в условиях жесткого фиксирования объект зажат в
опрокинутом положении.
3. Положение объекта в схвате близко к требуемому, имеются
все точки контакта, но по некоторым координатам получаются
234
остаточные отклонения, которые зависят от начального
рассогласования положения объекта относительно схвата и протекания
самого процесса захватывания. Остаточные отклонения
получаются по тем координатам, по которым положение равновесия в
схвате является безразличным.
4'. Положение объекта в схвате существенно отличается от
требуемого, некоторые точки контакта могут отсутствовать.
Такая ситуация имеет место тогда, когда усилия, развиваемого
двигателем схвата, недостаточно для того, чтобы довести объект до
требуемого положения, деформировав механизм манипулятора.
Процесс захватывания при этом останавливается на
промежуточном этапе и его завершение с приходом в требуемое положение
возможно только на второй ^ ^^-№
стадии при раскрытии вы- f-^TT4 f-^fESL j_/ |j I]
дающего устройства. I I I a l! II ♦"ч L li
5. Положение объекта в ; 2 3
схвате существенно отлича- х_^^ь. у х •_> ^рч
ется от требуемого, процесс '"jT4 ^ л/ \с\ /
захватывания останавлива- a j\ t\ ^"Х Чч/Г ♦"Ч ! N/
ется, причем продолжение * 5 б
процесса в правильном на- рис jq j
правлении невозможно ни
при увеличении усилия захватывания, ни при раскрытии
выдающего устройства. Такая ситуация возникает при заклинивании
объекта в схвате.
Если объект оказывается в положении первого, второго или
пятого типа, то положение объекта относительно схвата
оказывается окончательно определенным к концу первого этапа, а
второй этап не меняет этого положения. Для положений третьего и
четвертого типов окончательное положение достигается только
на втором этапе. К концу второго этапа объект может перейти в
положение любого из перечисленных типов, но возможно также и
полное высвобождение объекта (потеря). Типы промежуточного
и окончательного положений показаны на рис. 10.1 применительно
к плоской задаче захватывания одного сечения. Номера
изображений соответствуют номерам типов промежуточного положения,
последнее изображение условно показывает высвобождение
объекта. Пунктиром показаны требуемые положения объекта.
В дальнейшем процесс захватывания предполагается достаточно
медленным, так что силами инерции в процессе захватывания
можно пренебрегать по сравнению с силами взаимодействия рабочих
элементов с объектом. Тогда процесс можно считать
квазистатическим и принимать, что каждое положение является положением
равновесия. Последовательный переход из одних состояний в
другие происходит вследствие сжатия рабочих элементов схвата и
(или) раскрытия рабочих элементов выдающего устройства.
Введем в рассмотрение параметры кг и А2, определяющие раскрытие
рабочих элементов схвата и выдающего устройства соответственно.
235
« -V Каждый из этих параметров выбран
Начало ) так, что при раскрытии он
увеличивается, а при сжатии — уменьшается. На
последовательных этапах процесса
параметр Лх убывает или остается
постоянным, а параметр h2 остается
постоянным или возрастает, причем
возрастание может быть как пассивным (под
действием сил, передаваемых от схвата
через объект), так и активным (при
работе собственного двигателя).
В общем случае весь процесс может
включать четыре элементарных этапа.
Рис. 10.2 1- Этап чистого захватывания. На
этом этапе изменяется только А1э а Ь^
остается неизменным, т. е. не меняется положение объекта в вы-
дающем устройстве.
2. Этап захватывания с высвобождением. На этом этапе
изменяются оба параметра, причем увеличение А2, т. е. раскрытие
выдающего устройства, происходит пассивно, принудительно.
3. Этап отпускания с дозахватыванием. На этом этапе также
изменяются оба параметра, но раскрытие выдающего устройства
происходит активно, от собственного привода, а сжатие схвата
осуществляется «по возможности», по мере раскрытия выдающего
устройства.
4. Этап чистого отпускания. На этом этапе схват полностью
сжат, так что параметр hx сохраняет постоянное значение, а
выдающее устройство раскрывается активно, так что параметр Л2
возрастает.
Возможные варианты последовательности смены состояний
представлены на рис. 10.2, цифры соответствуют номерам
перечисленных этапов.
При заданных параметрах манипулятора вместе со схватом,
выдающего устройства и объекта конечный результат передачи
объекта зависит от начального рассогласования положений
объекта и схвата. В общем случае, как и ранее, это рассогласование
задается шестимерным вектором р, т. е. совокупностью шести
величин: трех составляющих линейных перемещений (Дх, Ду,
А2) и трех составляющих вектора малого угла поворота (0Х,
0j,, 02). В шестимерном пространстве составляющих вектора
начального рассогласования может быть выделена область
нормального функционирования, такая, что если в качестве
начальной взять любую точку этой области, то в конце процесса объект
перейдет в допустимое (требуемое или достаточно близкое к
требуемому) состояние. Область нормального функционирования
является полной характеристикой работоспособности или свойств
самоустановления объекта в процессе захватывания. Более
удобными для использования являются частные характеристики:
236
двухмерные и одномерные сечения области нормального
функционирования. Границы одномерных сечений представляют собой
предельные значения допустимых начальных рассогласований по
каждой из составляющих в отдельности.
И. А. Трубиным [73] предложены и разработаны два метода
расчетного определения границ областей нормального
функционирования: метод траекторий и метод крайних положений.
Процедура расчета границ области нормального функционирования
первым методом сводится к следующему. Шестимерное
пространство начальных
рассогласований представляется совокуп-
стью значений в узлах
задаваемой сетки. Из каждого узла
сетки строится траектория
путем математического
моделирования процесса захватывания.
Для каждой траектории
определяется конец и
производится идентификация конечного
состояния. Если конечное
положение является допустимым,
то отмечают принадлежность
исходной точки к области
нормального функционирования, в
противном случае
констатируется, что исходная точка
выходит за пределы этой области.
После определения узлов
сетки, принадлежащих области
нормального
функционирования, могут быть построены
аппроксимации границ этой
области, в частности, может быть
построен вписанный
параллелепипед, стороны которого
приближенно определят границы
допустимых начальных
рассогласований. Алгоритм
расчетного определения конечного
положения и его идентификации
представлен на рис. 10.3. Блок-
схема состоит из двух больших
частей: первая моделирует и
анализирует захватывание
объекта схватом, а вторая —
отпускание выдающим
устройством. Блоки моделирования
самих процессов на схеме не
Исходные донные
±
Моделирование
процесса захватываний
<
Усилие захватывания
достигло предельного значения
3
¥
Моделирование
процесса отпускания
<
Потерян ли контакт с
выдающим устройство***
¥
<
Допустима ли остаточная
погрешность ?
Е
>и
Отказ
Успешное
завершение процесса захва
тывания
Рис. 10.3
237
раскрыты. Важное место занимают проверки состояний или
процедуры идентификации положений; номера блоков
идентификации положений соответствуют номерам типов промежуточных
положений (см. с. 234). Алгоритм сортирует точки пространства
начальных рассогласований по принадлежности к области
нормального функционирования. Расчет по алгоритму производится
многократно для всех точек заданной части пространства.
Метод крайних положений не требут расчета самого процесса
захватывания. Рассматриваются только начальное и конечное
положения. Отыскивается такое множество начальных
положений, при которых объект не может перейти в недопустимое
положение. В первую очередь учитываются геометрические
ограничения, вследствие которых объект не может, например,
опрокинуться или выскользнуть из схвата. Также важными являются
силовые ограничения, вытекающие из условий статического
равновесия.
Оба подхода не дают совпадающих результатов, они взаимно
дополняют друг друга. Метод траекторий достаточно универсален
и дает правильные результаты с точностью до шага сетки, но
является трудоемким и требует больших затрат машинного
времени. Метод крайних положений в принципе является оценочным,
в зависимости от конкретных особенностей задачи близость
оценок к точным решениям может быть различной. Однако он
является гораздо более простым в реализации, в некоторых случаях
даже возможно получение оценок в аналитической форме.
10.2. МЕТОД ТРАЕКТОРИЙ
Как отмечалось выше, метод траекторий при математическом
моделировании процесса захватывания заключается в построении
последовательности состояний для невозрастающей
последовательности значений параметра hx (схват сжимается, но в
некоторых положениях сжатие может останавливаться) и неубывающей
последовательности значений параметра Л2 (выдающее устройство
сначала сжато, а потом раскрывается). В соответствии с принципом
квазистатики в каждом состоянии выполняются условия
статического равновесия. Процесс захватывания разбивается на
последовательные фазы, каждая из которых характеризуется
определенным числом и расположением точек контакта объекта с рабочими
элементами схвата и выдающего устройства, а также
определенными условиями в точках контакта, в которых возможно
проскальзывание. Сложность рассматриваемых задач также
заключается в том, что в общем случае ни число, ни последовательность
фаз, а также условия в точках контакта заранее не известны, а
могут определяться только в процессе решения. На каждой фазе
структура уравнений задачи остается неизменной, конечные
условия каждой фазы являются начальными для последующей.
238
При пошаговом решении задачи предварительно проверяется
полная совокупность условий, определяющих принадлежность
к тому или иному состоянию, и тем самым устанавливается,
продолжается ли предыдущая фаза или происходит переход к
следующей.
Формальной особенностью предложенного метода является то,
что при задании последовательности шагов независимой
переменной считается не время, а тот из параметров hx или Ag, для
которого режим изменения является активным (под действием
соответствующего привода). Для формализации задач необходимо
классифицировать точки контакта. Оказывается достаточным
рассматривать шесть типов точек контакта: гладкая поверхность с
гладкой поверхностью, гладкая поверхность с ребром, ребро с
гладкой поверхностью, гладкая поверхность с углом (острием), угол
с гладкой поверхностью, два ребра. Необходимые соотношения
дифференциальной геометрии для уравнения связей в точках
контакта для точек разных типов имеют различный вид.
Полная система уравнений задачи включает уравнения статики
(для сил и моментов), уравнения связи упругих перемещений и
углов поворота с силами и моментами для механизма
манипулятора и выдающего устройства, уравнения связей во всех точках
контакта в дифференциальной форме, выражения для сил сухого
трения в точках контакта при наличии проскальзывания,
дополнительные уравнения связей геометрических параметров с
параметрами hx и Аз раскрытия схвата и выдающего устройства.
Общее число уравнений для произвольной пространственной задачи
зависит от числа точек контакта и их вида и составляет несколько
десятков. При сложной и разнообразной структуре уравнений
разработка программ и практическое выполнение вычислений
представляют серьезные трудности.
Для плоской задачи серьезные упрощения связаны как с
упрощением структуры самих уравнений, так и с тем, что
некоторые соотношения исключаются. В частности, для плоской задачи
однозначно определяется линия действия силы трения в каждой
из точек контакта. Для плоской задачи общее число уравнений
равно
N = 12 + Зт + /г,
где т — общее число точек контакта; п — число точек контакта
типа гладкая поверхность — гладкая поверхность;
максимальное число уравнений равно 24.
Пошаговая процедура решения системы уравнений сводится
к следующему. Сначала задается такое значение параметра
hi [0], при котором контакт схвата с объектом отсутствует. Далее
hi уменьшается до появления первой точки контакта. Начиная
с этого, на всех последующих шагах проверяется, происходит
или не происходит проскальзывание в точке контакта; в зависи-
239
6)
0
J<
*l
}&OCT
\
>
A
X
^^
Рис. 10.4
мости от результата проверки на данном шаге устанавливается
вид уравнений взаимодействия в точке контакта на следующий
шаг. Фаза одноточечного контакта заканчивается появлением
второй точки контакта или застреванием. При двух точках
контакта проверка на проскальзывание производится независимо для
двух точек и соответственно выбираются варианты уравнений.
Аналогично процесс продолжается и далее. На этапе отпускания
выдающего устройства задается последовательность значений Л2,
а не Ах.
Ниже приведены результаты численного решения задачи
захватывания объекта круглого сечения схватом с поступательно
перемещающимися рабочими элементами (рис. 10.4, а).
Учитывалась только упругая податливость манипулятора в соответствии
с типовыми данными. Для плоской задачи область нормального
функционирования является трехмерной, но при решении
практических задач удобно рассматривать смещения центра объекта
по двум осям. На рис. 10.4, б, в в качестве примера на плоскостях
параметров Дя, Ду и Дх, 0 приведен пример траектории,
состоящей из трех участков. На участке АВ происходит движение при
одноточечном контакте без проскальзывания (перекатывание по
одному рабочему элементу), на участке ВС — движение при
одноточечном контакте с проскальзыванием, на участке CD —
движение при двухточечном контакте сначала с проскальзыванием
по верхнему рабочему элементу, а затем — по обоим. На
рис. 10.4, г изображено сечение области нормального
функционирования по двум параметрам Дх и Ду. В пределах области
нанесены кривые равных значений остаточных углов поворота 60СТ
240
(рис. 10.4, в). Для плоской задачи и некоторых пространственных
задач были разработаны программы для ЭВМ и решена большая
серия задач, имеющих практическое значение.
10.3. МЕТОД КРАЙНИХ ПОЛОЖЕНИЙ
Как отмечалось выше, метод крайних положений является
оценочным, но он более прост, чем метод траекторий. Сначала
требуется выяснить, существует ли область начальных положений
(рассогласований), которым соответствуют допустимые положения
равновесия в конце процесса, а затем найти конструктивный
способ определения границ области.
Вопрос о существовании указанной области решается
следующим образом. Перечислим условия существования области
нормального функционирования.
1. Равновесие объекта в требуемом конечном положении
должно быть устойчивым, по крайней мере, по одной координате,
а по другим координатам оно может быть безразличным.
2. Усилия, развиваемого двигателем, должно быть заведомо
достаточно, чтобы привести объект к требуемому положению.
3. Если в требуемом конечном положении есть координаты,
по которым положение равновесия является безразличным, то
необходимы механические ограничения на смещения объекта по
этим координатам (в противном случае не было бы препятствий для
неограниченного увеличения смещений по этим координатам).
В некоторых простейших случаях вопрос о существовании
области допустимых рассогласований решается на основе простых
соображений. На рис. 10.5 представлен пример захватывания
прямоугольного сечения плоскопараллельным схватом, рабочие
элементы которого имеют ограничители смещения по оси х. Очевидно,
что если первоначально объект находится между рабочими
элементами, причем последние раскрыты не слишком широко, так,
что угол 0О больше угла трения и опрокидывание и заклинивание
невозможны, то всегда сжатием схвата с достаточной силой объект
будет приведен в положение, близкое к требуемому.
Метод крайних положений в ряде конкретных задач,
представляющих практический интерес, позволяет получать границы
областей в аналитическом виде, что дает возможность
исследовать зависимости конфигурации облас-
ти нормального функционирования и А
ее размеров от параметров
манипулятора, схвата и выдающего устройства, а I
затем проводить оптимизацию по пара- f
метрам, которые допускают измене- А
ния. Разработанные в Л ПИ им. I
М. И. Калинина программы позволили
рассчитать на ЭВМ большое число Рис. 10.5
241
конкретных схем поштучной передачи, в том числе
распространенные схемы установки заготовок в кулачковый патрон
токарного станка и вытаскивания деталей из гнезд тары.
10.4. ЗАДАЧИ ДИНАМИКИ ПРОЦЕССОВ ЗАХВАТЫВАНИЯ
В п. 10.1 перечислены основные физические эффекты, которые
могут быть исследованы на основе квазистатической модели
процесса захватывания, в предположении, что каждое из состояний
в ходе процесса можно считать положением равновесия. Однако
процесс захватывания можно считать квазистатическим лишь при
достаточно медленном перемещении рабочих элементов. В связи
с этим ставятся два вопроса: необходимо установить ожидаемые
эффекты и определить условия, при которых они могут возникать.
При малых перемещениях, происходящих во время захватывания,
все динамические эффекты являются исключительно следствием
ударов. Число ударов может совпадать с числом точек контакта
в конечном состоянии, когда точки контакта появляются
последовательно и каждая появившаяся точка контакта сохраняется,
но может быть и значительно большим, когда реализуются
многоударные режимы с отрывом в появившихся точках контакта.
Ниже перечислены основные динамические эффекты,
представляющие интерес при исследовании задачи захватывания.
1. Перемещения и повороты в конечном положении. Следствием
смещений и поворотов в многоударных режимах могут быть
возрастание остаточных смещений или поворотов по тем
координатам, по которым положение равновесия является безразличным,
переход в «неправильное» положение (опрокидывание) и, наконец,
потеря объекта. Все эти явления могут рассматриваться и в
квазистатической постановке, но ударный характер взаимодействия
объекта с отскоками от рабочих элементов может существенно
влиять на конечное состояние.
2. Ускорения движения объекта в процессе его захватывания.
Как и в других подобных задачах, пиковые значения ускорений
при ударах могут быть значительными.
3. Увеличение сил взаимодействия объекта с рабочими
элементами в процессе захватывания. Эти силы могут многократно
превышать статические и приводить к деформациям, объекта в
целом и к повреждениям его поверхностей. Известны случаи, когда
при захватывании происходило смятие тонкостенных объектов,
хотя статическое усилие захватывания было допустимым.
4. Воздействие ударов на манипулятор. Прямое воздействие
ударных импульсов на манипулятор обычно бывает невелико,
однако возбуждаемые колебания могут быть существенными
для самого процесса захватывания.
Возможность построения расчетных моделей для исследования
этих эффектов и практичность их использования существенно
различны. Если при определении перемещений чувствительность
242
. результатов по отношению к конкретным особенностям моделей
часто невелика (можно принимать простейшее предположение
о мгновенности удара), то при определении ускорений и усилий
(точнее, их пиковых значений при ударах) необходим учет
упругих свойств. В зависимости от конкретной задачи может
понадобиться учет упругости объекта, накладок или рабочих элементов
(если они выполнены из упругих материалов), звеньев механизма
передачи схвата, контактной упругости. Получение параметров
упругости всех этих элементов часто представляет серьезные
трудности, а результаты расчетов имеют частный характер. Поэтому
модели целесообразно использовать только для получения
качественных выводов.
Как отмечалось выше, расчетные модели для определения
перемещений, с одной стороны, и ускорений и сил, с другой,
целесообразно выбирать различными. Расчетная модель для
определения перемещений (и поворотов) должна .
правильно отражать геометрию задачи, Vol "у
а собственно явления удара в ней
могут представляться упрощенно (можно
считать, что удар происходит в точке и v А
мгновенно). Простейший пример пред- °\~т
ставлен на рис. 10.6. Задача
захватывания — плоская, лежащий свободно
на плоскости предмет в виде стержня рис. ю.б
захватывается плоскими рабочими
элементами схвата. При первом ударе в точке Б возникает ударный
импульс /, имеющий две составляющие: нормальную /н и
касательную /т. Вследствие воздействия импульса начинается
плоское движение предмета.
Возможны три варианта окончания этапа свободного движения
по плоскости: предмет выходит из пространства между рабочими
элементами (положение Л), ударяется о противоположный
рабочий элемент (положение Б), останавливается между рабочими
элементами (положение В). В первом случае констатируется потеря
предмета, во втором и третьем случаях необходимо рассматривать
следующий этап после второго удара, а затем — последующие
этапы. После каждого удара возможна потеря предмета. Если
потери объекта не происходит, то реализуется захватывание с
остаточными смещениями; эти смещения могут быть оценены только
по результатам расчета всего процесса. Грубые оценки могут быть
получены аналитически, для уточнения результатов требуются
численные расчеты.
Для определения ускорений и сил можно упрощенно задавать
геометрию задачи, но необходимо учитывать упругие свойства
элементов системы. Простейшая расчетная схема изображена
на рис. 10.7. Задача представлена как одномерная, перемещение
происходит только по оси х. Масса т1 изображает захватываемый
предмет, массы т, перемещающиеся симметрично от привода схва-
243
та, вместе образуют приведенную массу механизма схвата,
который, как предполагается, можно считать жестким. Упругие
элементы с коэффициентами жесткости сх и с2 изображают упругую
податливость соответственно накладок и самого предмета. Упругие
элементы включены последовательно, так что эквивалентный
коэффициент жесткости равен
с = <W(Ci + с2).
Максимальное значение упругого перемещения массы т от
момента касания обоих рабочих элементов предмета определяется
из закона сохранения энер-
3. _ vo гии и выражается следующим
i cu , °2\—2il—, с2 с1Гш образом:
^СЬ^ $\ М Y^\m
А = V0 ут/с.
Рис. 10.7 Выражение для
соответствующего
максимального усилия захватывания имеет вид
Sg = с А = V0 /I
cm.
В этих выражениях V0 — скорость каждого из рабочих
элементов в момент касания; предполагается, что она определяется
или экспериментально, или по результатам расчета динамики
разгона двигателя. Видно, что максимальное значение усилия
пропорционально корню из приведенной жесткости, это
качественное свойство сохраняется и для более сложных расчетных
моделей.
Можно дать еще более грубую оценку. Если принять, что
разгон механизма схвата перед касанием осуществляется на пути /
под действием постоянной силы (или постоянного момента)
двигателя, соответствующей номинальному значению статической
силы захватывания S0, то максимальное усилие захватывания
определяется выражением
Sg « /2c/S0.
Введенное предположение дает завышенное значение скорости
и, следовательно, усилия Sg.
Если захватываемый предмет первоначально расположен на
различных расстояниях от рабочих элементов, то захватыванию
обоими элементами предшествуют удары рабочих элементов по
отдельности. Усилия при таких ударах обычно оказываются
меньшими.
244
Глава 11
ЗАДАЧИ ДИНАМИКИ СИСТЕМЫ
СХВАТ —ОБЪЕКТ
11.1. ОСНОВНЫЕ ЗАДАЧИ РАСЧЕТА
СИСТЕМЫ СХВАТ - ОБЪЕКТ В ДИНАМИЧЕСКИХ
РЕЖИМАХ
При решении задачи сохранения надежности удерживания
объекта после его захватывания следует учитывать кинематику
движения схвата и законы изменения ускорений во времени.
Простейшими .являются: прямолинейное движение при работе
только одного привода поступательной степени подвижности и
угловое перемещение схвата при работе только одного привода
вращательной степени подвижности. На практике обычно
реализуется совместное движение по нескольким степеням подвижности.
Рис. ИЛ
Основные оценки для законов движения и изменения ускорений
в режиме разгона и торможения привода приведены в гл. 2.
Необходимо также учитывать возможность возникновения
аварийных ударных режимов. Во время переноса объект или сам
схват могут задеть за неподвижное препятствие или за
незакрепленный предмет. Следствием возникающих при этом ударов могут
быть смещение или потеря объекта, поломки манипуляторов или
вспомогательного оборудования.
При кратковременных воздействиях высокого уровня
(например, ударных) условия надежности захватывания не могут
быть выполнены и объект неизбежно проскальзывает в схвате.
После окончания времени действия импульса в результате
проскальзывания возможны следующие эффекты.
1. Произойдет срыв объекта из схвата (рис. 11.1, а).
2. Объект переходит в новое положение устойчивого
равновесия, которое в определенных пределах может быть
произвольным (рис. 11.1, б). Переход в новое положение равновесия
определяется формой импульса и его величиной.
3. Объект возвращается в исходное состояние устойчивого
равновесия (рис. 11.1, в). Именно этот исход является желатель-
245
ным, если обеспечить отсутствие смещений в схвате невозможно.
4. Объект переходит в новое положение устойчивого
равновесия (рис. 11.1, г).
В случаях, показанных на рис. 11.1, а, в, а, задачей расчета
является определение условий возвращения в прежнее или
перехода в новое состояние, на рис. 11.1, б — определение
смещений и углов поворота.
Может быть поставлена и обратная задача определения
предельных режимов движения из условия, что в любой момент
времени силы, действующие на объект, находятся в пределах
жесткого фиксирования или, напротив, достаточны для того, чтобы
объект был вырван из схвата.
Основными факторами, определяющими надежность
удержания объекта в динамических режимах, являются: геометрия
рабочих поверхностей схвата; кинематика относительного перемещения
его рабочих элементов; упругость элементов конструкции схвата
и накладок; значение коэффициента трения в точках контакта;
смещение центра масс объекта относительно центра схвата;
инерционные и упругие свойства объекта.
11.2. НАДЕЖНОСТЬ УДЕРЖИВАНИЯ ОБЪЕКТА
ПРИ ОТНОСИТЕЛЬНЫХ ПЕРЕМЕЩЕНИЯХ В СХВАТЕ
Для постановки и решения задач динамики захватывания,
когда происходит проскальзывание объекта в схвате, необходимо
задать силы и моменты, действующие на объект не только в
положении равновесия, но и при его произвольных положениях в
схвате. При нахождении решения необходимо учитывать изменение
действующих на объект сил вследствие проскальзывания и
решать совместно уравнения движения манипулятора и объекта,
причем этот эффект тем существеннее сказывается на режиме
работы манипулятора, чем больше масса объекта по отношению
к приведенной массе звеньев манипулятора. В дальнейшем
предполагается, что масса объекта относительно мала и закон движения
схвата не зависит от перемещения объекта. Уравнение движения
объекта целесообразно составлять в системе координат, жестко
связанной с основанием схвата, перемещающейся и
поворачивающейся со схватом.
Методика определения сил, действующих на объект со стороны
схвата для предельных состояний равновесия, была описана
в п. 8.5. Силы сухого трения направлены по касательным к
поверхностям контакта в направлении, обратном к скорости перемещения
точек объекта относительно элементов схвата. При перемещении
объекта в схвате некоторые точки могут оставаться неподвижными;
в этих случаях происходит поворот объекта вокруг неподвижной
точки или оси. Часто движение состоит из нескольких фаз,
различающихся числом и расположением точек контакта. Если
существуют конечные зоны контакта, в пределах которых напряже-
246
ния распределены непрерывно, то в процессе движения размер
и конфигурации зон могут изменяться; это следует учитывать
в решениях.
При расчете режимов, связанных с ударными воздействиями,
обычно возможны упрощения: если на преграду натыкается объект,
то решается задача динамики только для манипулятора без
объекта, если происходит резкая остановка схвата, так, что возникает
проскальзывание, то схват считается неподвижным и
рассматривается только движение объекта.
В качестве первого примера рассмотрим простейшую задачу
динамики плоского объекта в плоскопараллельном схвате
АС
Г]
I
I
Ш
I
Рис. 11.2
&'
и
W
(рис. 11.2). Предполагается, что площадь контакта при движении
не изменяется, а распределение нормальных напряжений по
поверхностям контакта равномерно и одинаково по верхней и
нижней плоскостям. Считается, что упругой податливостью
объекта и элементов схвата в плоскости движения (*, z) можно
пренебречь. Центр объекта выбран в центре масс С объекта.
Перемещение центра объекта задается составляющими скорости:
Vcx = dx/(dt)\ Vcz = dz/(dt), а вращение — угловой скоростью
w = dy/(dt). При перемещении объекта в схвате дифференциальные
уравнения его плоского движения имеют вид:
т dVcx/dt = Fx; ]
mdVcz/dt = Fz\ (11.1)
Id(d/dt = My9 ]
где / — момент инерции объекта относительно центра масс. Силы
и момент сил трения определяются по касательным напряжениям
г = fo следующим образом:
Мг
Fx = -2 f/aV;/|V'|dQ;
<а>
Fz = -2 J/aV;/|ir|dO;
(Q)
= -2 f ta[zV',l\V'\-xV'J\V\\du,
(O)
(11.2)
247
где V'x и V'z — составляющие относительной скорости точки
объекта относительно соответствующей точки поверхности схвата.
Распределение скоростей точек поверхностей схвата считается
заданным, распределение скоростей точек объекта определяется
выражениями:
Vx = Vex - сог; Vz = VC2 = сол:. (11.3)
После подстановки уравнений (11.2) и (11.3) в уравнение (11.1)
получается замкнутая система трех уравнений с тремя
неизвестными *, z и ф. Нелинейность системы
определяется множителями V'x/\ V | и
Vzl\ V | в выражениях сил и момента.
Поэтому возможны или решения
численными методами, или приближенные
решения.
Ниже приведены решения точного
численного и приближенного
аналитического решений для двух частных
задач. Численное решение системы
дифференциальных уравнений (11.1)
производилось методом Рунге—Кутта
на ЭВМ. На графиках, приведенных
на рис. 11.3 и 11.4, результаты точного
расчета показаны сплошной линией,
приближенного — пунктирной.
9
»и>
Рис
Ь/а-2
Рис.
Предполагается, что первоначально схват двигался вместе
с объектом. В момент времени / = 0 схват мгновенно
останавливается, а объект при движении по инерции смещается и
поворачивается. Предполагается также, что окончательные смещения SCx
и SCz центра масс С и угол поворота а малы. Целью расчета
является установление зависимостей перемещения некоторой точки
В объекта и угла поворота объекта от параметров, определяющих
положение центра масс С относительно центра площади контакта.
Положение центра площади контакта относительно центра масс
248
определяется вектором rA = [xAi уА, zA]T'. Характер движения
объекта после остановки схвата зависит от начальных значений
скоростей.
Рассмотрим случай, когда схват до момента остановки двигался
поступательно со скоростью V0 по оси х. Предполагается, что
площадь контакта — круг радиуса а, а положение центра
площади контакта определяется координатами: хА = О, гА = Ь.
Таблица 11.1
Начальные
условия
= v„
Vyo = 0
ш0= 0
\vxo = o
Vyo =
= Щ X
X 1л
ю0 = ш
Примечание
, mVl
*—щ~
Al_~27S~
SC*I
1 1
W\
ч *а v
2 L4 Л
Л 1 + р*/6»
SC*II
ЗА, 6
Т~х
х (1+Р2/*2)2
2 L2 Х
wl-3pV*86/a
Х 1—ра/6а
«Лх
+[-
1 1
(WJ
2 /* Х
л 1+р»/6»
а
15" х
1
V
Х 1 + р2/*2
2<
[0 +
+62/Р2)2 +
v +*2/Р2]
x(l+6Vp2)a
В этом случае линейная скорость Vcx центра масс и угловая
скорость о) объекта изменяются, как показано на рис. 11.3. Графики
изменения нормированного смещения центра масс
4/5
Scx (6/р) = Scx (b/p)
mVl
где р — радиус инерции объекта, для различных значений
параметра b/а приведены на рис. 11.4, а\ причем для значений b/а > 1
на всем интервале изменения b/р величина смещения центра масс
изменяется не более чем в ЗЬ/а раз. Зависимость приведенного
угла
4/Sa
a = a
ЪтУ1
от b/p (см. рис. 11.4, б) существенно нелинейна: при b/р < 1
угол а сначала остается малым, а затем быстро растет.
Детальный анализ решений показывает, что при не очень
малых значениях b/р процесс движения можно разбить условно на
два этапа: первый, на котором значительно уменьшается скорость
центра масс, а угол поворота остается малым, и второй, на
котором основным является вращение объекта. Потеря объекта может
249
произойти только на первом этапе. В соответствии с этим
разделением на этапы может быть использован прием, на основе
которого получаются простые расчетные формулы. На первом этапе
движение приближенно считается поступательным, но
рассчитывается приращение угловой скорости. На втором этапе
предполагается, что движение представляет собой вращение вокруг
центра площади контакта.
Получающиеся при этом выражения для оценки перемещений
Scxi и Scxii центра масс соответственно на первом и втором
этапах и угол поворота а, а также относительное перемещение
объекта в схвате SAx приведены в первой строке табл. 11.1. От
размера площади контакта а существенно зависит только
перемещение центра масс SCxii на втором этапе. При малых значениях
Рис. 11.5
а/b больший вклад в перемещение центра масс вносит
составляющая от поворота SCx и •
Рассмотрим теперь случай, когда схват до момента остановки
совершал вращательное движение вокруг оси у, перемещаясь по
дуге окружности радиуса 1ЗЬ с угловой скоростью со0. Начальные
условия движения объекта в схвате следующие:
VcxO = 0; VczO = <°о'з6» CD = (00.
Смещение по оси z может быть приближенно определено из
закона изменения кинетической энергии поступательно
движущегося тела следующим образом:
Scz = '
m<oil\
2/2
0*36
2/5
Наибольший интерес представляет исследование перемещений
объекта по оси х. Численные расчеты показывают, что
зависимости приведенных значений а и SAx от b/р имеют вид,
показанный на рис. 11.5, а и б. Видно, что смещение при b/р < 1
невелико, а при fc/p > 1 практически не изменяется. В то же время
зависимость а от b/р на всем интервале возможных значений
аргумента изменяется слабо. Вид этих графиков дает основание
предположить, что для малых Ь/р смещение центра масс объекта
определяется в основном за счет поворота вокруг неподвижной
точки контакта А. Для больших значений 6/р смещение центра
250
масс объекта по оси х происходит главным образом при
поступательном проскальзывании объекта в схвате. На первом этапе
происходит значительное уменьшение скорости VAx в точке
контакта и угловой скорости со. В конце первого этапа угловая
скорость объекта уменьшается до некоторого значения о)х, а скорость
У ах обращается в нуль (рис. 11.6, а). На втором этапе происходит
вращение объекта вокруг неподвижной точки центра площади
контакта, которая является мгновенным центром скоростей, до
полной остановки объекта. Из графика, приведенного на
рис. 11.6, б, видно, что при малых значениях Ь/р уменьшения
угловой скорости на первом этапе практически не происходит.
Напротив, при Ь/р > 1 с полным гашением скорости VAx практически
прекращается вращение объекта.
В зависимости от соотношения параметров объекта, длины
звена манипулятора и схвата относительные смещения по оси х
могут быть существенными. Так, при малых Ь/р смещение центра
3 Ь/9
Рис. 11.6
масс по оси х будет превосходить смешение по оси г, если
выполняется соотношение Зр2//з*> > Ь/а.
Для грубых расчетов, с учетом графика на рис. 11.6, б,
результирующее значение угла поворота объекта может быть
оценено по формуле
а =
Зтр2
2fSa
со0.
Приближенные расчетные формулы, полученные на основании
предложенной методики, приведены во второй строке табл. 11 .1.
Эти формулы правильно описывают получающиеся качественные
закономерности и дают удовлетворительную точность.
Вторая практически интересная группа задач связана с
ударами объекта о препятствие. Такие удары возникают в аварийных
режимах, когда отклонения центра схвата от заданной
программой траектории принимают недопустимо большие значения или
в рабочем пространстве на пути движения манипулятора
появляется посторонний предмет. Известны случаи, когда для
уменьшения времени выполнения технологической операции на пути
перемещения детали, удерживаемой схватом робота, специально
устанавливается отражатель, при ударе о который деталь
выбивается из схвата и попадает в бункер.
261
А
^3
vi
Методику решения динамической
задачи при ударных воздействиях
проиллюстрируем на следующем примере.
Схват манипулятора перемещается
поступательно со скоростью Vx0 = —V0 вдоль
оси х. Объект представляет собой
однородный стержень постоянного сечения
длиной /. В момент времени / = О объект
наталкивается на препятствие (рис. 11.7).
Расстояние h от центра площади контакта
до препятствия и расстояние б от препят-
стви я до ближайшего конца объекта
удовлетворяют условию: б + h < /.
Необходимо рассмотреть два следующих случая.
Абсолютно неупругий удар. В
результате абсолютно неупругого удара
стержень начинает вращаться вокруг
мгновенного центра скоростей (точки 0).
Начальная угловая скорость определяется из
закона сохранения кинетического момента К0 = const.
Учитывая, что после абсолютно неупругого удара кинетический
момент определяется через начальную угловую скорость <о0
выражением /Со = /0Юо> где /0 — момент инерции стержня
относительно точки 0, нетрудно получить выражение для начальной
скорости
14
Уо
w
Рис. 11.7
<00 =
ЗУ0
2/
1 — 26//
1 — 26// + 3 (б//)2 •
Начальное значение линейной скорости VAx центра площади
контакта равно
где
V0xh/l,
_ 3 1 — 2 (б//)
х " Т 1~з (б//) + з (б//)2
Начальная относительная скорость объекта в точке контакта
может быть как положительной, так и отрицательной в
зависимости от значений параметра h/l и 8/1. На рис. 11.8, а показан
график изменения безразмерных параметров h/l и б//, при которых
проскальзывание объекта в схвате в начальный момент времени
отсутствует. Для значений безразмерных параметров, лежащих
ниже этой кривой в заштрихованной области, проскальзывание
объекта относительно схвата начнется в отрицательном
направлении оси х (см. рис. 11.7).
Движение объекта в схвате может быть разбито на три этапа:
на первом этапе происходит уменьшение угловой скорости до
тех пор, пока относительная линейная скорость перемещения
объекта в схвате не обратится в нуль. После его окончания на
252
втором этапе объект поворачивается на угол ф (/) вокруг центра
площади контакта так, что угловая скорость со (/) изменяется
в соответствии с кинематическим равенством со (t) = V0 cos2 q> (t)/h
до тех пор, пока объект не сорвется с препятствия. После этого
наступает третий этап, на котором происходит гашение угловой
скорости объекта силами трения.
Движение объекта в схвате может прекратиться на любом этапе.
Одним из возможных вариантов завершения движения является
срыв объекта. Он может произойти только на первом этапе. Если
срыв не произошел на первом этапе, то он не произойдет и на
следующих этапах, когда объект только поворачивается вокруг
неподвижной точки. Как правило, срыв объекта при ударе о
препятствие нежелателен.
Дифференциальное уравнение движения на первом этапе
имеет вид
т [р2 + (1/2 - б)2] (о = —2fSh sign (VAx - Vx0)f
где т [р2 + (1/2 — б)2 ] — момент инерции J0 стержня
относительно точки 0 (см. рис. 11.7). Если предположить, что на первом
этапе объект поворачивается на малый угол, то линейное
перемещение точки контакта А определяется из закона сохранения
энергии. Действительно, кинетическая энергия стержня,
вращающегося относительно точки 0, в начальный момент определяется
выражением; /0со*/2. Проскальзывание объекта в схвате
прекращается в момент времени tki когда угловая скорость принимает
значение: со (tk) = Vx0/h, т. е. относительная скорость
перемещения объекта в схвате упадет от значения a>0h— V0 до нуля.
При этом стержень поворачивается на малый угол: а = &SAx/h
и работа Е момента сил сопротивления может быть представлена
выражением: Е = 2fSASAx, а линейное перемещение ASAx
может быть определено по формуле
до тУ0[р» + (//2-6)»П1-хА/д»
а°Ах ~ 4fSh2
Если на первом этапе срыва объекта не произошло, то
существенным будет изменение ориентации объекта в схвате при движе-
Рис. 11.8
253
нии до полной остановки на втором и третьем этапах. Расчет
соответствующего значения угла <р* может быть произведен
простейшими методами.
Абсолютно упругий удар. Начальные значения угловой
скорости со0 объекта и линейной скорости Vc его центра масс,
рассчитанные из условий постоянства кинетической энергии и
кинетического момента объекта до и после удара, определяются из
закона сохранения кинетического момента. При абсолютно
упругом ударе вектор скорости в точке 0 сохраняется по величине, но
меняет направление на противоположное
\V*o\ = \Vo\.
С учетом этого условия из закона сохранения кинетического
момента получаются следующие значения начальной угловой
скорости со и линейной скорости VAx центра площади контакта:
„ - v v//. V -1± 1-6(6//)+ 6(8//)»
u-vwh Vax- 2 1-3(6//)+3(6//)а •
На рис. 11.8, б заштрихована область значений параметров
6// и Л//, при которых проскальзывание объекта относительно
схвата происходит в отрицательном направлении по оси х (см.
рис. 11.7). Уравнения движения объекта относительно
неподвижных осей, совпадающих в начальный момент времени с центром
масс объекта, приближенно можно представить в виде:
т
4p_=-2/S; /*?-=-2/S(A + 6-//2). (11.4)
Методика решения уравнений (11.4) рассматривалась в
предыдущем примере.
Одним из возможных результатов воздействия сил инерции
может быть переход из одного положения устойчивого
равновесия в другое (опрокидывание объекта). Процесс опрокидывания
может происходить в несколько этапов. Рассмотрим задачи
опрокидывания, когда этапов два. На первом этапе движения
происходит раскрытие схвата до тех пор, пока величина h не достигнет
максимального значения, соответствующего положению
неустойчивого равновесия. В течение второго этапа объект перемещается
в схвате так, что параметр h уменьшается до некоторого
минимального значения, соответствующего другому положению
устойчивого равновесия. На каждом этапе движения может быть
выделено несколько фаз, в каждой из которых остается неизменным
число точек контакта, а реакции в точках контакта остаются
постоянными или изменяются непрерывно. Опрокидывание
начинается, если опрокидывающий момент превосходит
восстанавливающий момент реакций в исходном положении равновесия.
Рассмотрим задачу опрокидывания прямоугольного объекта
со сторонами а и с, имеющего смещенный центр масс О', в
плоскопараллельном схвате (рис. 11.9). Схват первоначально движется
254
поступательно по оси х со скоростью V0 и в момент времени / = О
мгновенно останавливается. На объект кроме нормальных
реакций, действуют сила трения и вес объекта Р. Если Ру = Р, то
условия начала опрокидывания имеют вид:
arctg -
•<4>
(11.5)
В =
fSc
РЧ
2S2c
mp*(\+PblSc)
2b im om _
mp2 (1
( S \ 2c2 c2 2 /
_ 2b \ u2 Sc [(y , Pb у , fP*ab )
с у * - mp*(\-Pb/Sc\\\l "Г Sc У "Г 2S2c2 /'
0'
IT
При Px = Py = 0 неравенство (11.5) переписывается
следующим образом:
а/с < 2fb/c,
откуда видно, что опрокидывание может произойти только при
малых значениях отношения
сторон а/с. В дальнейшем
предполагается, что а < с.
Если условие (11.5)
выполнено, то опрокидывание имеет
две фазы. В первой фазе
объект проскальзывает в схвате до
тех пор, пока не прекратится
относительное перемещение
точки контакта объекта с нижним
рабочим элементом. Во второй
фазе объект вращается вокруг
неподвижной точки А контакта
(см. рис. 11.9).
Полагая угол 6 поворота объекта в схвате малым,
приближенно запишем дифференциальные уравнения движения в
первой фазе следующим образом:
А±
Рис. 11.9
rf29
Л2
= £29-f-B;
dVc
dt
= —2/S/m,
где Vcx — скорость перемещения центра масс объекта.
В первом из уравнений системы угол отсчитывается от
положения, когда диагональ прямоугольника по направлению
совпадает с осью у.
Начальное отклонение по углу 60 = а/[с(1 + Pb/Sc)]
соответствует положению, показанному на рис. 11.9. Закон изменения
угла в (/) и угловой скорости о (/) = в (/) имеет вид:
в (t) = (60 + B/k2) ch kt — B/k2;
о (t) = (80 + B/k') k sh kt.
255
Уравнение движения во второй фазе, когда происходит
поворот объекта вокруг точки А, имеет вид
d2e,
ah = № + Bu (11.6)
где
,2 __ *2Р2 . о _ f(S-P/2)C
1 ~ Р2 + (^ + с/2)2 ' Д1 ~ т [p^ + (^ + с/2)2] ■
Начальные условия движения во второй фазе имеют вид:
02 (0) = 9 (У; 6, (0) = 9 &),
где /х — время окончания первой фазы — определяется из
условия
К* (к) = е &) (& + с/2).
Законы изменения 92 (t) и 02 (/) имеют вид:
е2 (0 = [е2 (0) + Bjkl] ch kit + t'e2 (0)/*i] sh kit - Bi/kb
92 (/) = [92 (0) + BilkW ki sh kit + 62 (0) ch kit. (11.7)
Время /2 окончания второй фазы определяется из условия
HhB-M+w- (1Ь8)
Подставляя полученное из уравнения (11.8) значение £2 в
выражения (11.7), находим соответствующее значение угла 92.
Если 92 < —/, то происходит опрокидывание объекта.
В остальных случаях происходит остановка объекта в
положении, при котором 9 = 92 (/J.
В тех случаях, когда поверхности рабочих элементов схвата
имеют изломы, насечку, случайные выступы и заусенцы,
опрокидывание происходит иначе. Если объект натыкается на выступ
некоторой точкой D, начинается фаза вращения, когда объект
поворачивается вокруг неподвижной точки D. В зависимости от
конкретных условий задачи объект может возвратиться в
исходное положение, опрокинуться или (при наличии сил трения)
занять некоторое промежуточное положение, близкое к
положению неустойчивого равновесия.
Рассмотрим случай проскальзывания объекта
прямоугольного сечения в плоскопараллельном схвате. После мгновенной
остановки схвата объект поступательно проскальзывает в схвате.
Допустим, что в момент t = 0 объект натыкается на выступ D
и происходит абсолютно неупругий удар. В результате удара
начинается процесс опрокидывания: объект приобретает начальную
угловую скорость (см. предыдущий пример) и поворачивается
вокруг неподвижной точки 5. В этом случае для малых значений
отношения а/с остается справедливым дифференциальное уравне-
256
ние (11.6). Начальные условия имеют вид: 90= arctg а/с и а)0 =
= сов
Исследование процесса опрокидывания производится по
изложенной выше методике.
11.3. УЧЕТ УПРУГОЙ ПОДАТЛИВОСТИ
МАНИПУЛЯТОРА,ЭЛЕМЕНТОВ ОХВАТА
И КОНЕЧНОСТИ ВРЕМЕНИ ИМПУЛЬСА УСКОРЕНИЯ
ПРИ РЕШЕНИИ ЗАДАЧ ДИНАМИКИ
Если необходимо учитывать динамику механизма
манипулятора как упругой конструкции, то, строго говоря, необходим
расчет всего процесса от включения первого привода до полной
остановки. При этом роль упругости может быть двоякой. С одной
стороны, при включении привода упругая податливость может
существенно снижать пиковые значения ускорений. С другой
стороны, наложение ускорений от упругих колебаний на
ускорения, возникающие при включении приводов или тормозных
устройств, приводит к росту пиковых значений ускорений или
к появлению составляющих ускорений по другим осям.
При захватывании или отпускании объекта наложение
колебаний на движение закрытия или раскрытия схвата может стать
причиной значительного перемещения объекта и даже его
опрокидывания. Приближенные методы исследования упругих
многозвенных механизмов манипуляторов с учетом лишь нескольких
или одной из низших форм свободных колебаний дают
возможность достаточно хорошо описать колебательные движения схвата
манипулятора.
В качестве примера рассмотрим плоское движение
манипулятора, работающего в цилиндрической системе координат.
Пусть сначала привод вертикального перемещения смещает
схват на величину Л. Амплитуда ускорения объекта при свободных
вертикальных колебаниях после остановки привода
вертикального перемещения легко может быть оценена по формуле: Wy max=
= 3EJh/ml3, где EJ — жесткость горизонтального звена; / —
его длина.
При последующем включении привода горизонтального
перемещения упругие свойства горизонтального звена вместе с
объектом не проявляются (на растяжение—сжатие звено работает как
жесткое) и ускорение по оси х9 создаваемое приводом
горизонтального перемещения, воспроизводится без изменения.
Пренебрегая затуханием свободных колебаний, получаем, что расчет
надежности захватывания должен производиться для наиболее
неблагоприятного сочетания ускорений.
Вибрационные воздействия могут оказывать заметное влияние
на надежность удерживания объекта в схвате. В частности, если
объект удерживается в схвате силой трения, а вибрационные
нагрузки достаточно велики, то может произойти срыв или смеще-
9 Челпанов И. Б. и др.
257
ние объекта под действием сколь угодно малой внешней силы.
В общем случае наложение колебаний приводит к уменьшению
области жесткого фиксирования по одной или нескольким
координатам шестимерного пространства сил и моментов. Это влияние
может быть учтено группой коэффициентов. Для упругих систем
с большим числом степеней свободы или с распределенными
параметрами целесообразно учитывать несколько низших форм
свободных колебаний.
Влияние упругой податливости элементов схвата (накладок)
и формы импульса ускорения рассмотрим на примере плоско-
* параллельного схвата в предположе-
W(t)] нии> что центр масс объекта лежит в
продольной плоскости симметрии
схвата. В этом случае достаточно
учитывать только поступательное
перемещение объекта по оси х, причем
линейный участок соответствует смещению
^ объекта на упругой накладке без прос-
Ь Ь t! кальзывания. Максимальная энергия,
Рис 11.10 поглощаемая упругой накладкой при
перемещении, с которого начинается
проскальзывание, равна П = (fS)2/c, где с — жесткость
упругого элемента; /—коэффициент трения; S —усилие захватывания.
Если начальная скорость V0 движения схвата вместе с
объектом такова, что mV20/2 < (fS)2/c> то упругий элемент полностью
поглощает энергию импульса и проскальзывания не возникает.
В противном случае проскальзывание начинается со скорости Vlf
которая определяется следующим образом:
mV\l2 = mVl/2 - (fS)2/c.
Максимальное смещение Amax объекта в схвате определяется
по формуле
Amax = mV\UfS.
Если необходимо учитывать конечность времени импульса
ускорения при остановке и вид закона изменения ускорения во
времени и считать элементы схвата жесткими, появление
проскальзывания определяется непосредственно по закону изменения
ускорения. Если ускорение в импульсе по модулю достаточно
мало, так, что т\ W (t)\ < 2/S, то проскальзывания не возникает
вовсе. Если это условие не выполняется, то проскользывание
возникает в момент времени tx> определяемый из условия
m\W{tl)\ = 2fS. (11.8)
Если до начала действия импульса, имеющего простую форму
с одним максимумом (рис. 11.10), объект двигался со скоро-
258
стью V0f то в момент tx начала проскальзывания его скорость
равна
*i
V{tx) = V,-\\W{x)\dx.
о
Если импульс ускорения имеет один максимум, то
проскальзывание происходит монотонно в один этап, причем начало
проскальзывания определяется из условия (11.8), а конец t* — из
условия V (/*) = 0, если /* > t2, или из условия
J | W (т) | dx = 2/5 (t* - /х)/т,
если /* < t2.
Смещение при проскальзывании определяется следующим
образом:
А =
4/5
Г/* "12
И | W (т) | dx I
Если же импульс ускорения имеет сложную форму (что
возможно при ударном возбуждении собственных колебаний упругой
конструкции манипуляторов), то проскальзывание может
происходить в несколько этапов, которые чередуются с этапами
остановок, причем проскальзывание может происходить как в одну,
так и в противоположную сторону. Для исследования влияния
таких импульсов следует использовать опыт решения задач
упругой амортизации объектов и аппаратуры [29].
Глава 12
СТАНДАРТИЗАЦИЯ ЗАХВАТНЫХ УСТРОЙСТВ
ПРОМЫШЛЕННЫХ РОБОТОВ
12.1. ЗАХВАТНОЕ УСТРОЙСТВО
КАК ОБЪЕКТ СТАНДАРТИЗАЦИИ
Стандартизация захватных устройств имеет следующие цели:
значительно повысить производительность труда при
конструировании, сократить стоимость и сроки разработки захватных
устройств и их элементов;
повысить технический уровень и качество захватных устройств,
закладывая в основу унификации лучшие технические решения,
результаты оптимального синтеза конструкции;
9*
259
Таблица 12.1
Наименование
объекта
стандартизации
Термины
и определения
Классификация
Номенклатура
основных
показателей
Типы и
присоединительные
размеры
Ряды
основных
параметров
Общие
технические
требования
Методы
испытаний
Основные
положения
унификации
Методы
расчета основных
показателей
Правила про-
| ектирования
Категория НТД
ГОСТ 1
ГОСТ
ГОСТ
ГОСТ 26063—84
ГОСТ, ОСТ
ГОСТ
ГОСТ, МУ
1 МУ
1 МУ
1 МУ
Наименование основных
показателей,
намечаемых к стандартизации
Термины и
определения видов,
составных частей и
характеристик
захватных устройств
Классификация по
технологическим и
конструктивным
признакам
Перечень и
определение основных
показателей, их
обозначения
Типы,
конструкции мест крепления
и
присоединительные размеры
Типоразмер ные
ряды основных
параметров
Требования к
конструкции захватных
устройств и их
элементам
Требования к
испытаниям ^типовые
методики испытаний
Основные
положения унификации и
модульного
построения схватов
Методы и методики
расчета показателей
схватов, вакуумных и
магнитных
захватных устройств
Правила
проектирования захватных
устройств при
внедрении ПР
Связь с другими
стандартами
по робототехнике
ГОСТ 25686—85, 1
ГОСТ 26063—84
ГОСТ 25685—83,
ГОСТ 26063—84
ГОСТ 25378—82
— 1
ГОСТ 25204—82,
ГОСТ 26062—84
ГОСТ 26050—83 1
ГОСТ 26053—84
1 РД 50—355—82, 1
РД 50—356—82,
МУ 7—01—83
260
Продолжение табл. 12.1
Наименование
объекта
стандартизации
Интерфейсы
сменных
схватов
Средства
очувствления
схватов
Категория НТД
МУ
МУ
Наименование основных
показателей,
намечаемых к стандартизации
Типы
быстросменных схватов;
требования,
предъявляемые к конструкции
и испытаниям
механических
интерфейсов; методы расчета
Основные
требования к средствам
очувствления
схватов, способам
измерения параметров
правильного
функционирования схвата
Связь с другими
стандартами
по робототехнике
обеспечить разработку конструктивно-унифицированных и
параметрических рядов захватных устройств различных типов для
захватывания широкой номенклатуры предметов производства
при изменяющихся требованиях к базированию предмета при
захватывании и отпускании;
обеспечить перекрестную взаимозаменяемость различных
моделей промышленных роботов за счет создания комплекса
захватных устройств, пригодных для установки на всех промышленных
роботах данного типоразмера (прежде всего автоматически
заменяемых);
устранить неоправданное дублирование при проведении про-
ектно-конструкторских работ по созданию новых моделей
захватных устройств;
разработать единые методологические основы проектирования
и расчета захватных устройств с последующим созданием системы
их автоматизированного проектирования.
Трудности стандартизации обусловлены большим
разнообразием типов, схемных и конструктивных решений захватных
устройств, в которых проявляются традиции разработчиков, часто
различные и совершенно несоместимые, особым местом, которое
занимают захватные устройства в системе «технологическое
оборудование — объект—промышленный робот», определяющим
необходимость учитывать в совокупности требования к условиям
эксплуатации, форме и размерам предмета, условиям его
сохранения при захватывании, переносе и отпускании, точности,
быстродействию, надежности и безопасности работы промышленного
робота. Необходимо отметить отсутствие комплекта нормативно-
261
технических документов и методических рекомендаций,
обобщающих результаты научных исследований и передовой опыт
создания захватных устройств в СССР и за рубежом, традиций
стандартизации и унификации. В этих условиях особенно важно
системно и последовательно проводить работы по стандартизации
захватных устройств, и в особенности схватов и их составных
частей, опираясь на разработанный в СССР комплекс стандартов
на промышленные роботы.
Номенклатура элементов стандартизации захватных устройств,
наименование основных показателей, намечаемых к
стандартизации, связь с другими стандартами даны в табл. 12.1. На рис. 12.1
приводится общая схема взаимосвязей основных нормативно-
технических документов на захватные устройства и их составные
части (конструкции и присоединительные размеры мест
крепления, типы и основные параметры передаточных механизмов,
двигателей схватов, рабочих элементов,прокладок и др.), разработка
которых позволит установить единые нормы и требования к
конструкциям захватных устройств различных типов, методам их
расчета, проектирования, испытаний, правилам выбора
захватных устройств при внедрении промышленного робота на рабочем
месте, в том числе в условиях гибкого многономенклатурного
производства. Исходным пунктом является стандартизация
терминов и определений.
В 1983 г. введены в действие разработанные в СССР
методические указания МУ 2.10—82 «Промышленные роботы. Захватные
устройства. Классификация. Основные технические требования»
Минстанкопрома, устанавливающие термины и определения,
классификацию по ряду основных признаков, основные технические
требования к конструкции и исполнению. Результаты
последующих работ по стандартизации терминов и определений и
классификации в области захватных устройств нашли отражения
в ГОСТ 26063—84. В этом документе вопросы терминологии
рассматривались применительно к решению сравнительно узкой
проблемы терминологического обеспечения — стандартизации
наименований типов захватных устройств, потому создание термино-
системы, охватывающей общие понятия, виды, составные части
и технические характеристики захватных устройств, по-прежнему
является одной из актуальных задач стандартизации.
Стандартизация классификации захватных устройств должна
проводиться в рамках создания соответствующего раздела
общесоюзного классификатора продукции. Необходимость ее
обусловлена устойчивой тенденцией к созданию унифицированных
захватных устройств и их серийному производству.
В 1984 г. утвержден ГОСТ 26063—84 «Роботы промышленные.
Типы. Присоединительные размеры». Дальнейшим этапом должна
стать разработка государственного стандарта на общие
технические требования, ряды основных параметров, методы испытаний
захватных устройств. Стандартизацию методов испытаний, рядов
262
основных параметров, а также разработку унифицированных
методов расчета и правил проектирования целесообразно
проводить для каждого типа захватных устройств^ из-за существенного
различия их конструкций и принципов действия.
Работы по стандартизации захватных устройств проводятся
также в рамках СЭВ. Программой комплексной стандартизации
средств промышленной робототехники стран — членов СЭВ
предусмотрена разработка стандарта СЭВ «Роботы промышленные.
МУ2.10-82
Классификация.
Основные
технические требования
ГОСТ 26063-М
Типы.
Присоединительные рОд-\
меры
ГОСТ. Термины
и определения
ГОСТ. Номенкпа\
\mupa основных
1 показателей
МУ. Основные
{положения
унификации
Комплет НТД
для
интерфейсов
быстросменных ЗУ
ГОСТ. Одщие
технические
требования
MP. Средства
очувствления ЗУ\
Классификация,
технические
треШания
ГОСТ. Методы]
испытаний.Про\
вила приемки
ГОСТ. Ряды
основных
параметров
.МУ. Методы .
[расчета основ-}
Ыных показателей^
МУ. Правила г
проектирования
MP. Правила
.проектирования
\ЗУ сборочных ПР
\механическихдУ\
иь
вакуумных ЗУ
магнитных дУ\
{механических ЗУ\
*—*\вакуумных ЗУ
магнитных ЗУ
Рис. 12.1
Устройства захватные. Номенклатура основных показателей.
Присоединительные размеры», который был утвержден в 1985 г.
с присвоением регистрационного номера СТ СЭВ 5460—85.
В программу работ технического комитета 184 (секция ПК2)
Международной организации по стандартизации (ИСО) включена
разработка стандарта ИСО «Промышленные роботы и
манипуляторы. Механические интефейсы рабочих органов», объектом
стандартизации которого являются конструкции мест крепления
и присоединительные размеры заменяемых вручную и
автоматически рабочих органов промышленных роботов и
манипуляторов.
263
12.2. СТАНДАРТИЗАЦИЯ И УНИФИКАЦИЯ
МЕХАНИЧЕСКИХ ИНТЕРФЕЙСОВ ЗАХВАТНЫХ УСТРОЙСТВ
ПРОМЫШЛЕННЫХ РОБОТОВ
ГОСТ 26063—83 «Роботы промышленные. Устройства
захватные. Типы, присоединительные размеры» устанавливает
присоединительные размеры фланцевых мест крепления и диаметры
цилиндрических хвостовиков захватных устройств ПР.
ГОСТ 26063—84 разработан ЦНИИРТК взамен ГОСТ 26062—83
(ВТУ) и лег в основу разработки одноименного стандарта СЭВ.
Стандарты ИСО на присоединительные размеры и конструкции
мест крепления рабочих органов ПР отсутствуют, хотя в
техническом комитете ИСО ТК/184/ПК2 планируется разработка
стандарта «Промышленные роботы и манипуляторы. Механические
интерфейсы рабочих органов».
Конструкции мест крепления и присоединительные размеры
являются важными характеристиками захватных устройств,
влияющими на их применяемость, надежность работы ПР, удобство
эксплуатации и ремонта. Результаты опроса значительного числа
организаций — разработчиков и изготовителей — показали, что
для легких и средних ПР фланцевый способ крепления захватных
устройств к манипулятору ПР является наиболее
распространенным. У легких и сверхлегких ПР распространены также
крепления захватных устройств на манипуляторе посредством клеммо-
вого соединения, цанговых и тангенциальных зажимов,
переходных втулок. Такие способы крепления предполагают наличие
у захватных устройств цилиндрических хвостовиков. Эти
обстоятельства определили объекты стандартизации ГОСТ 26063—84,
который распространяется на ПР грузоподъемностью до 200 кг.
Стандарт* устанавливает, что диаметры цилиндрических
хвостовиков захватных устройств должны выбираться из ряда: 6,0;
10,0; 14,0; 20,0; 25,0; 30,0; 40,0; 50,0; 60,0; 80,0; 100,0; 125 мм.
Значения диаметров цилиндрических хвостовиков соответствуют
ряду нормальных размеров R10 (кроме размера 14,0 мм, взятого
из ряда R20 вместо значений 12 и 16 ряда #10, и исключенного
размера 8 мм с целью сокращения числа типоразмеров
конструкций мест креплений). Вследствие того, что различные
конструкции соединений с использованием цилиндрических
хвостовиков имеют свои особенности базирования и закрепления
захватного устройства на манипуляторе, а также учитывая, что
допуск диаметра хвостовика обусловливает точность соединения,
требования к которой различны для разных технологических
операций, в стандарт не введены требования на допуски размеров
цилиндрических хвостовиков. На рис. 12.2 показаны два вида
исполнения фланцев с восемью и четырьмя отверстиями. Стандарт
также устанавливает, что присоединительные размеры фланцев
манипулятора для закрепления захватных устройств должны
соответствовать указанным на рис. 12.2, айв табл. 12.2. При-
264
Таблица 12.2
D
20
40
60
80
Dt
30
52
76
100
d
M5
Мб
Мб
M8
М8
М10
d\
5,5
6,6
6,6
9,0
9,0
11,0
полнение
2
1
2
1
2
2
1
2
D
100
125
160
Dx
120
125
145
145
185
185
d
М8
М10
М10
M8
M10
M12
M10
M12
dt
9,0
11,0
11,0
9,0
11,0
14,0
11,0
14,0
полнение
1
2
2
1
1
2
2
1
2
1
Исполнение 1 Исполнение 2
вотв a horned
А-А повернуто
Исполнение 1
вотв. d>4
Испопнение2
А-А повернуто
Рис. 12.2
266
соединительные размеры захватных устройств, имеющих
фланцевые места крепления с манипулятором, должны соответствовать
указанным на рис. 12.2, бив табл. 12.2.
В конструкцию мест крепления введены центрирующие
элементы — отверстия на манипуляторе и выступ на захватном
устройстве диаметра D. Этот диаметр принят в качестве основного
конструктивного параметра. Значения диаметра соответствуют
ряду /?10 по ГОСТ 6636—69 со значениями от 32 до 160 мм, за
исключением размера 45 мм, взятого из ряда #20 вместо
значений 40 и 50 мм с целью уменьшения числа типоразмеров фланцев.
Поскольку в ряде случаев эксплуатационным требованиям
удовлетворяет способ установки захватного устройства на
манипуляторе, при котором захватное устройство базируется только по
стыковочной плоскости фланца, ГОСТ 26063—84 допускает не
выполнять посадочные элементы диаметром D.
Предусмотрено два исполнения фланцев — с восемью и
четырьмя отверстиями. Принятое расположение отверстий
обеспечивает, во-первых, взаимозаменяемость фланцев разных
исполнений одного диаметра и, во-вторых, позволяет осуществлять
переустановку захватного устройства с поворотом вокруг
продольной оси на 45° и, что часто бывает важно, на 90°. Допуск
расположения осей отверстий для крепежных деталей задан по
ГОСТ 14140—81 при коэффициенте использования зазора k = 0,6:
0,2 мм — для отверстий с резьбой Мб и dx = 6,6 мм; 0,3 мм —
для отверстий с резьбой М8, М10 и dx = 9 мм, ^=11 мм; 0,6 мм—
для отверстий с резьбой М12 и dx = 14 мм. База — отверстие или
выступ диаметром D (допуск зависимый). Предельные отклонения
размеров: отверстия D — по #9; выступа D — по #9 или /9;
отверстий dx — по Я14.
Допускается использовать в конструкциях мест крепления
дополнительные конструктивные элементы, например шпоночные
пазы, штифтовые отверстия и пр.
Перспективы работ по стандартизации мест крепления
захватных устройств связаны с созданием сменных модульных
схватов и их элементов.
12.3. ПОСТРОЕНИЕ ПАРАМЕТРИЧЕСКИХ РЯДОВ
УНИФИЦИРОВАННЫХ СХВАТОВ
Широкая номенклатура предметов производства на
роботизированных участках требует проектирования и изготовления
схватов разной конструкции и с различными количественными
значениями параметров. Необходима разработка
взаимоувязанных типоразмерных и конструктивно-унифицированных рядов
схватов. Типоразмерный ряд схватов представляет собой
совокупность типоразмеров (схватов данного типа и исполнения
с определенными значениями параметров), числовые значения
главного параметра которых расположены в параметрическом
266
ряду. Конструктивно-унифицированный ряд схватов включает
базовый схват и его модификации, соответствующие одному
значению главного параметра.
Представляются наиболее приемлемыми два варианта, когда
в качестве главного параметра выступает или масса, или
характерный размер предмета.
Выбор массы в качестве главного параметра для типоразмеров
схватов позволяет сохранить единство при построении типораз-
мерных рядов по номинальной грузоподъемности. По данным
каталогов, в зависимости от вида производства ряды ПР по
грузоподъемности строятся с показателем геометрической прогрессии,
равным 2—4 (значительно большим, чем для ряда R5).
Например, для объема отливок с машин литья под давлением
используются роботы МЛ5Ц.91.01, МЛ10Ц.83.01, МЛ20Ц.46.01 с
грузоподъемностью 5, 10 и 20 кг соответственно; ПР для
обслуживания металлорежущих станков М20Ц.48.01, СМ40.Ф2.80.01,
УМ160.Ф2.81.01 имеют грузоподъемность 10, 40, 160 кг
соответственно. Типоразмерным рядам ПР для обслуживания
определенных групп оборудования должны соответствовать типоразмерные
ряды схватов и их составных частей (конструкций мест крепления,
параметров привода, механизма передачи и др.) по массе
предмета производства.
Типоразмерные и конструктивно-унифицированные ряды
схватов могут быть построены для одного типоразмера ПР. В этом
случае в качестве главного параметра, определяющего
типоразмеры схватов для данной модели ПР, целесообразно принять
характерный размер захватываемого предмета. Анализ
распространенных схем схватов показывает, что они без труда могут
захватывать предметы, имеющие различие характерных размеров
в 2 раза. Поэтому для этих размеров (с учетом коэффициента
запаса по раскрытию схвата р = 1,3-=-1,8) следует принять
ряд R5 с показателем прогрессии, равным 1,6; при этом
обеспечивается перекрытие смежных диапазонов типоразрядов не менее
чем на 10 %. Соответствующее этому ряду изменение массы
предмета производства в большинстве случаев определяет число
типоразмеров схватов для ПР, перекрывающего определенный
диапазон значений номинальной грузоподъемности. Например,
для стержней круглого сечения постоянной длины их масса
пропорциональна квадрату диаметра сечения. При изменении
значений диаметра по ряду R5 соответствующий ряд значений
масс деталей образуется каждым вторым, нечетным членом ряда R5
(показатель прогрессии равен 2,5). Например, если максимальному
значению диаметра соответствует масса детали, равная 40 кг, то
следующему значению диаметра из ряда будет соответствовать
масса 16 кг. Для каждой модели ПР, по-видимому, достаточно
двух или трех типоразмеров схвата.
Если для максимальных размеров захватываемой детали
принять ряд #5, то для основных геометрических параметров базовых
267
конструкций схватов (длин рычагов, межосевых расстояний,
размеров рабочих элементов и др.) естественно принять тот же ряд R5.
При этом сохраняется полное геометрическое подобие и для
различных типоразмеров все передаточные числа механизмов
будут постоянны.
Конструктивно-унифицированные ряды модульных схватов
состоят из базовой модели и ее модификаций, число которых
определяется номенклатурой и типоразмерами изделий. Для деталей
существенно различных форм целесообразно предусматривать
модификации схватов (отдельно для дисков, валов, фланцев,
брусков) с различными рабочими элементами и механизмами
передачи. Поскольку усилие захватывания пропорционально массе,
требования к построению рядов параметров механизмов передачи
устанавливаются исходя из зависимости массы детали от ее
характерного размера.
Параметры приводов должны выбираться из рядов,
установленных соответствующими стандартами. Так, для пневмоприводов
стандартизованы диаметры пневмоцилиндров и хода поршней.
ГОСТ 26059—85 для значений диаметров D пневмоцилиндров
принят ряд R10 с показателем 1,25. Примем, что значения
диаметра D и хода L связаны соотношением
L = сс£>, (12.1)
где коэффициент а равен: для коротких цилиндров 1 или 1,6
для длинных 2,5 или 4,0. Для конструктивно-унифицированного
ряда можно задавать или постоянное значение коэффициента а
и совместно менять значения L и D, или фиксировать D и
задавать различные значения а и L.
Совместное решение уравнений (6.2), (6.3), (12.1) и
уравнений, связывающих значения массы и размеров деталей данной
группы, позволяет установить взаимосвязь параметров пневмо-
цилиндра и диапазона раскрытия схвата (характерных размеров
деталей). Например, для группы стержней круглого сечения,
длина которых пропорциональна диаметру d сечения (/ = rd)
и масса т = яргсР/4, где р — плотность материала, из
выражений (6.2), (6.3) и (12.1) получается уравнение
откуда видно, что в пренебрежении вторым слагаемым в скобках
диаметр цилиндра D пропорционален d4/3. Если диаметр детали
выбирается из ряда /?5, то для диаметров D должен быть принят
нестандартный ряд с показателем 1,87. Этот ряд целесообразно
заменить или рядом R5 с показателем 1,6, или производным
рядом с показателем 2,0, включающим каждый третий член
ряда R10. Так как выражение (12.2) содержит ряд
коэффициентов, которые в известной степени произвольны, представляется
268
возможным использовать оба ряда. Для первого из них
получаются большие значения коэффициентов запаса при меньших
диаметрах d, для второго — наоборот. Принятие ряда R5 для
диаметров пневмоцилиндров имеет практические преимущества,
поскольку в этом случае для всех геометрических параметров
конструкции (включая и параметры двигателя) сохраняется
полное геометрическое подобие. Численные оценки показывают, что
для деталей типа валов, для которых l/d = 5, значения диаметров
цилиндров получаются близкими к максимальным значениям
диаметров захватываемого предмета, что удовлетворительно
подтверждается имеющимися данными по конкретным моделям ПР.
Глава 13
ИСПЫТАНИЯ СХВАТОВ
ПРОМЫШЛЕННЫХ РОБОТОВ
13.1. ПРАВИЛА ПРИЕМКИ СХВАТОВ
Для схватов ПР устанавливают следующие виды испытаний:
для опытных образцов (опытных партий) — приемочные по
ГОСТ 15.001—73; для установочной серии (первой промышленной
партии) — квалификационные по ГОСТ 15.001—73; для схватов
серийного производства — приемо-сдаточные, периодические,
типовые; для схватов единичного производства —
приемо-сдаточные; для схватов разового изготовления — приемо-сдаточные или
приемочные.
Испытания опытных образцов, квалификационные, типовые
и все виды государственных испытаний проводят по программам
и методикам испытаний (ПМИ), утвержденным и (или)
аттестованным в установленном порядке. Приемо-сдаточные и
периодические испытания проводят в соответствии с правилами и методами,
установленными в технических условиях (ТУ) на конкретный
схват.
Приемо-сдаточные испытания схватов проводят методом
сплошного контроля. В случаях, предусмотренных техническими
условиями на конкретные схваты, допускается выборочный контроль.
При выборочном контроле испытаниям следует подвергать схваты
выбранные в соответствии с ГОСТ 18321—73. Если в процессе
приемо-сдаточных испытаний будет обнаружено несоответствие
схвата хотя бы одному требованию нормативно-технической
документации, результаты испытаний считают .
неудовлетворительными. После устранения всех выявленных дефектов испытания
повторяют в полном объеме.
269
Периодическим испытаниям подвергают схваты, выдержавшие
приемо-сдаточные испытания, не реже одного раза в два года.
Число схватов, подвергаемых периодическим испытаниям,
устанавливают в технических условиях на конкретные схваты.
При внесении изменений в конструкцию, материалы или
технологию изготовления серийно выпускаемых схватов, влияющих
на их технические характеристики или работоспособность, должны
проводиться типовые испытания с целью оценки эффективности
указанных изменений. Типовым испытаниям подвергают головной
образец схвата из новой серии, изготовленной после изменения
конструкции, материалов, технологии по специально
разработанным ПМИ в объеме, необходимом для проверки
функциональной работоспособности измененной составной части схвата и
оценки влияния на работу схвата в целом.
Контрольные испытания схватов на надежность следует
проводить по ГОСТ 13216—74 и ГОСТ 20699—75. Контролируемые
показатели надежности выбираются по ГОСТ 25378—82.
Периодичность проведения испытаний показателей надежности
устанавливают в технических условиях и ПМИ на конкретные схваты.
Испытания схватов проводят в эксплуатационных условиях
или на испытательных стендах, в которых обеспечивается
имитация эксплуатационных условий.
Должны быть обеспечены свободный доступ к
контролируемым элементам, а также удобство визуального наблюдения за
работой схвата, контрольно-измерительной аппаратуры и
приборов. На месте проведения испытаний должны быть обеспечены
безопасные условия работы специалистов, принимающих участие
в испытаниях, согласно ГОСТ 12.2.072—82.
Подготовку к испытаниям начинают с проверки наличия
энергоносителей и значений их параметров на соответствие
требованиям, установленным для конкретных схватов.
Испытываемый образец должен передаваться для испытаний в окончательно
готовом и пригодном для эксплуатации состоянии с полным
комплектом принадлежностей. Испытываемый образец должен быть
так отрегулирован и обкатан, чтобы исключить возможность
существенного изменения свойств образца при испытаниях.
Испытываемые схваты должны быть установлены на
специальном стенде или руке ПР в соответствии с требованиями
руководства по эксплуатации. При этом схват рассматривается как
самостоятельное изделие. Средства измерений, обеспечивающие
проверки параметров схвата с требуемой точностью, должны быть
поверены или аттестованы в установленном порядке. При
проведении приемочных испытаний проверяют комплектность
представленного образца схвата, степень подготовленности схвата
к проведению испытаний, комплектность следующего перечня
документов.
1. Техническое задание по ГОСТ 15.001—73, утвержденное
в установленном порядке.
270
2. Проект технических условий по ГОСТ 2.114—70,
подписанный руководителем организации-разработчика.
3. Эксплуатационные документы по ГОСТ 2.601—68.
4. Программа и методика испытаний по ГОСТ 2.106—68.
5. Карта технического уровня и качества изделия по
ГОСТ 2.116—84.
6. Технико-экономическое обоснование целесообразности
производства конкретных ПР; обоснование значений показателей
надежности, установленных в технических условиях, и методов
их подтверждения.
7. Принципиальные схемы по ГОСТ 2.701—76 (при отсутствии
их в эксплуатационной документации) и сборочный чертеж.
8. Протокол предварительных испытаний образца,
представляемого на приемочные испытания.
9. Программа и методика контрольных испытаний на
надежность по ГОСТ 20699—75.
По результатам приемочных испытаний должны быть
составлены протоколы испытаний, а на основе протоколов — акт
приемки опытного образца (опытной партии) по форме, установленной
в приложениях 6 и 7 к ГОСТ 15.001—73. На основании
результатов приемо-сдаточных испытаний заполняют сопроводительную
документацию (отметка о приемке в паспорте на ПР). Результаты
периодических испытаний оформляют протоколом по форме,
установленной в приложении 2 к ГОСТ 15.001—73. Протокол
периодических испытаний подписывают представители
организаций, принимавших участие и проводивших испытания, и
утверждает руководитель организации (предприятия), проводившей
испытания. Результаты типовых испытаний оформляют
протоколом, включающим описания всех проведенных проверок и
заключение о целесообразности внесенных в конструкцию,
материалы или технологию изготовления изменений. Протокол
утверждает руководитель организации (предприятия), проводившей
испытания. Результаты испытаний на надежность оформляют
протоколом с обоснованием выбора показателей надежности и
методики их проверки.
13.2. МЕТОДЫ ИСПЫТАНИЙ СХВАТОВ
При разработке методов испытаний необходимо определить
номенклатуру измеряемых величин, методы и средства измерений.
В исходном состоянии проверяют основные параметры и
размеры схвата. Измерительным инструментом по ГОСТ 427—75,
ГОСТ 7502—80 определяют габаритные размеры схвата и, если
этого требуют технические условия на конкретные схваты,
размеры его составных частей и (или) модулей. Однократным
взвешиванием определяют массу схвата в целом или, если этого
требуют технические условия на конкретные схваты, раздельно
массу его составных частей и (или) модулей. Далее проверяют
271
выполнение требований к изготовлению схвата. Прямым
измерением проверяют точность изготовления и визуально качество
обработки базовых деталей схвата, качество сборки согласно
ПМИ конкретных схватов. При необходимости проводят
контрольную разборку и сборку. В ПМИ конкретных схватов
указывают требования к качеству отделки образца, которые
визуально проверяют во время испытаний.
Должна быть проверена электрическая часть (силовые и
сигнальные цепи) схвата с целью обеспечения электробезопасности
в соответствии с требованиями ГОСТ 26053—84.
Герметичность гидросистем схватов с гидроприводом
проверяют по отсутствию утечек масла. При оценке герметичности
пневмосистемы пневматических схватов устанавливают
максимальное давление и мыльным раствором проверяют соединения
подводящих трубопроводов, места уплотнений и крышек или
проверяют соответствие падения давления в системе за
определенное время величинам, приведенным в ТУ, при заполненной сжатым
воздухом пневмосистеме и перекрытой подводящей магистрали.
Проверку систем смазки осуществляют согласно ПМИ
конкретных схватов. После этого проводятся испытания схватов на
холостом ходу.
В режиме ручного управления визуально проверяют
возможность перемещения рабочих элементов схвата на максимальную
величину в прямом и обратном направлениях путем включения—
выключения двигателя не менее трех раз.
Усилие захватывания определяется или непосредственно одно-
компонентным датчиком силы, или тензометрическим методом.
Для многих моделей схватов усилие захватывания существенно
зависит от величины раскрытия схвата, поэтому и измерения
производят для различных (как минимум, для крайних) значений
величины раскрытия схвата. Обычно в схват ПР вставляется
однокомпонентный датчик силы сжатия вместе с устройством,
измеряющим размер. Если от положения датчика зависит
измеряемое усилие захватывания (как для клещевых схватов), в
протоколе испытаний это положение должно быть указано.
Наиболее перспективными являются методы измерения,
основанные на определении упругих деформаций упругого элемента,
поскольку они позволяют определять не только установившееся
значение усилия захватывания, но и параметры ударного усилия
взаимодействия рабочих элементов схвата и объекта в момент
захватывания, контролировать величины нормальных реакций
в точках контакта в статике и динамике при выполнении ПР
операций в ходе исследовательских испытаний или в
технологическом процессе.
Для измерения усилия захватывания электрическим методом
между рабочими элементами схвата вводят упругий элемент
с электрическими преобразователями, чаще всего резистивными,
например тензорезисторами, включенными в измерительные цепи.
272
В процессе захватывания элемент деформируется и с
измерительных цепей снимаются сигналы, регистрируемые осциллографами.
По записям определяется значение усилия захватывания. Тензо-
резисторы целесообразно располагать в местах максимальных
напряжений деформируемого упругого элемента. Упругий
элемент может быть выполнен в виде рамки, стакана, кольца. На
рис. 13.1 изображены схемы размещения тензорезисторов на
кольце, захватываемом плоскопараллельным, трехкулачковым и
симметричным уголковым схватами. Изгибающий момент в кольце
Рис. 13.1
радиуса г, показанном на рис. 13.1, а, определяется по формуле
[711
М (а) = Sr (-«- - 0,5 sin а) /2, а € [0, я].
Нормальные напряжения а в местах установки
тензорезисторов (а = я/2) равны
°(«/2)=-i£-(4--0'5)'
где t — толщина кольца; Ь — ширина кольца.
По этой формуле в каждом конкретном случае выбираются
рациональные параметры кольца и тип тензорезистора исходя из
диапазона раскрытия схвата и расчетной оценки усилия,
передаваемого от привода к рабочим элементам.
Перед проведением испытаний производят тарирование
(градуирование) схемы. Измерительное кольцо с наклеенными на
него в соответствии с технологическими условиями тензорезисто-
рами устанавливают в приспособление для тарировки (рис. 13.2).
Нагружая кольцо последовательно грузами различного веса и
снимая каждый раз выходной сигнал преобразователя, строят
тарировочную характеристику, по которой определяют
коэффициент преобразования (масштаб записи по ординате).
Описанный метод может быть использован для измерения
времени захватывания и времени отпускания. Особенность этого
измерения состоит в том, что на вход шлейфного осциллографа
подаются и команда на сжатие или раскрытие (она регистрируется
в виде импульса), и выходной сигнал преобразователя; этот сиг-
273
0100
А
ki
д
kl
Рис. 13.2
нал воспроизводит закон изменения усилия захватывания во
времени
Измерение параметров схвата производят по записанным на
ленте осциллографа графикам (рис. 13.3). По записи определяются
максимальное импульсное значение усилия захватывания Smax«
установившееся усилие захватывания 5СТ, время захватывания
и время отпускания.
Измерения усилия захватывания производят для различных
значений величины hv раскрытие схвата. Число положений
рабочих элементов схвата, при которых производятся измерения,
определяется исходя из требований точности экспериментального
определения зависимости усилия захватывания от величины
раскрытия схвата. Предварительные расчетные значения
измеряемого усилия захватывания, а также данные о характере
зависимости S (h) получают по методике, изложенной в п. 4.5.
Расчетные значения используются для подготовки к эксперименту и
для ориентировки в ходе его проведения.
Измерения усилия захватывания для каждого из
определенных программой испытаний значений ht производятся п раз.
Затем результаты измерений Sn осредняются и в качестве
действительного значения усилия захватывания принимается
среднее арифметическое значение
*-4-2**
л=1
Точность измерения оценивается по разбросу данных. Мерой
разброса является среднеквадратическое отклонение,
определяемое по формуле
-/55
2 (5<> - 5*)а
*=i
274
Время захватывания t3aLT определяется по формуле tBaj =
= IJV, где lx — длина ленты осциллографа от начала подачи
команды на захватывание объекта до момента завершения
процесса захватывания; V — скорость протяжки ленты шлейфового
осциллографа. Процесс захватывания считается завершенным
с момента, когда усилие захватывания становится больше 0,7SCT
и во все последующие моменты времени не становится меньше
этого значения. Время отпускания /опт определяется по формуле:
*опт = УУ% где /2 — длина ленты осциллографа от начала
подачи команды на отпускание до момента полного расхождения
рабочих элементов. На рис. 13.3 показаны параметры 1г и /2,
а также сигналы 1 и 2, подаваемые с устройства управления на
включение и выключение схвата. Сигнал 3 снимается с датчика
полного раскрытия схвата.
Следует отметить, что экспериментальное определение усилия
захватывания дает возможность оценить надежность удерживания
объекта в схвате только расчетно, используя формулы границ
ОЖФ, куда усилие захватывания входит как один из параметров.
В большинстве случаев более простым и эффективным способом
оценки несущей способности схватов является непосредственное
измерение предельных значений дополнительно приложенных сил
и моментов. На рис. 13.4, а показана схема установки для
определения предельного значения силы. Схват удерживает объект 4.
Приложенная сила создается нагружением предмета объекта
через динамометр 2 с помощью винта 3. В качестве предельного
значения регистрируется показание динамометра в момент, когда
индикатор перемещения / зарегистрирует начало раскрытия
схвата (или относительное смещение объекта). Схема нагружения
моментом изображена на рис. 13.4, б.
Значение момента определяется по измеряемому значению Fnv
и расстоянию / = 21г по формуле: Мир = Fuvl> где / —
расстояние между точками приложения сил " ~ ~
приложения силы Fnp
определяется из условия
/2 = R + 1ц где R —
радиус блока. Для схватов с
переменным усилием
захватывания или с
вращательным перемещением
рабочих элементов
предельно допустимые значения
приложенных сил и
моментов зависят от
размера захватываемого
объекта. Для таких схватов
предельно допустимые
значения приложенных сил
и моментов определяются
Fnp/2 к объекту. Точка
*та*
оСт
1
ь
«
/
/
/
1,
S^H
J
1
2
1 1
\1,
3
Г
1
1
1
[ ^
Рис. 13.3
275
для объектов различных размеров, причем их число
выбирается исходя из требований точности воспроизведения
зависимости этих параметров от величины раскрытия схвата.
Обработка результатов измерения предельно допустимых значе-
1
ний приложенных сил и моментов производится так же, как и
для усилия захватывания. В ряде случаев вместо винта 3 может
использоваться схема нагружения троса, перекинутого через блок,
грузами различной массы.
13.3. ДИАГНОСТИКА СХВАТОВ
Отказы и снижение качества функционирования ПР часто
обусловлены нарушением правильного взаимодействия объекта
со схватом. Выделяют две группы отказов. Первая группа
связана с нарушением функций захватывания и удерживания
объекта, когда схват не захватывает объект или при переносе
происходит срыв объекта из схвата.
Диагностика таких отказов сводится к регистрации наличия
или отсутствия объекта в схвате и осуществляется тактильными
датчиками, датчиками усилия захватывания или перемещения
выходного звена привода схвата.
Другую группу составляют отказы, при которых захватывание
и удерживание осуществляются, но неправильно, в частности:
захватывание объекта происходит с большими погрешностями
положения и ориентации; при переносе возникают смещения
объекта в схвате вследствие нарушения условий жесткого
фиксирования; в конечном положении объект не становится на опорную
плоскость, не попадает в зону действия зажимных
приспособлений; при раскрытии схвата его рабочие элементы задевают и
сбивают объект; для объектов малой массы может быть
существенным эффект прилипания к рабочим элементам.
Причины этих и подобных явлений могут быть условно
разделены на две группы. К первой группе относятся причины,
являющиеся внешними по отношению к системе схват—объект и
характеризующие внешние условия. Сюда относятся, например,
большие пиковые ускорения при разгоне и торможении приводов
276
ПР, вибрации высокого уровня, большой разброс параметров
положения и ориентации объекта в исходном положении и т. д.
Вторая группа причин условно может быть названа внутренней
по отношению к системе схват—объект. Сюда относятся такие
факторы, как выбор неудачных конструктивных решений
механизма схвата, явное несоответствие форм рабочих элементов и
объекта, упругое деформирование и износ поверхностей рабочих
элементов, а также упругих накладок, если таковые имеются.
Часто внешние и внутренние причины проявляются в
неразделимых сочетаниях, и поэтому отказы можно объяснить
несоответствием характеристик схватов условиям эксплуатации.
Приведение в соответствие этих двух групп факторов чаще всего
осуществляется практически за счет изменения параметров схвата.
Так, часто опасность потери объекта при его переносе может быть
устранена путем увеличения усилия захватывания.
Непосредственной задачей технической диагностики системы
схват—объект, так и любой технической системы, является
установление конкретных причин наблюдаемых явлений отсутствия
захватывания, потери объекта и т. п. Конечной целью является
выработка конкретных качественных и количественных
рекомендаций по устранению или уменьшению вероятности отказов.
Применительно к захватным устройствам актуальным является
создание систем как тестового, так и функционального
диагностирования. Тестовое диагностирование занимает основное место на
этапах исследовательских испытаний, отработки и наладки
оборудования; функциональное диагностирование является основным
для режимов эксплуатации.
В зависимости от необходимой глубины диагностирования
требуется различный объем информации. Средства информации
и саму получаемую информацию целесообразно разделить на
категории.
1. Феноменологическое описание, т. е. качественное описание
явления. Варианты такого описания приведены выше.
2. Проверка наличия или отсутствия признаков или условий.
В частности, может проверяться, имеет ли место контакт всех
рабочих элементов схвата с объектом или только некоторых из
них, происходит ли при раскрытии схвата однократная и
окончательная потеря контакта или при колебаниях возникают
соударения. Для проверки этих условий на практике требуется
специальная аппаратура, включающая комплекс средств контроля.
3. Количественное определение механических величин,
характеризующих взаимодействие объекта со схватом (линейных
и угловых погрешностей взаимного положения объекта и
элементов схвата, действующих ускорений, приложенных сил и
моментов и др.), основных показателей захватных устройств, таких
как усилие захватывания, предельные значения приложенных
сил, действующих по осям захватного устройства, время
захватывания и отпускания, масса, габаритные размеры, характерные
277
размеры (максимальный, минимальный) поверхностей объекта,
по которым производится захватывание; кроме того, для схватов
необходимо знать усилие на выходном звене привода,
максимальные перемещения выходного звена, кинематическую схему, для
вакуумных захватных устройств— размеры контактной площади
присоски, номинальное давление в полости присоски, для
магнитных захватных устройств — размеры площади контакта,
напряжение питания.
Теоретической основой для анализа конкретных причин
отказов являются диагностические модели, определяющие предельные
значения параметров положения или силовых факторов.
Сравнение действительных значений параметров с наблюдаемыми и
измеряемыми позволяет давать формализованное описание причин
отказов.
Применительно к задачам захватывания проработаны
некоторые частные диагностические модели, приспособленные для
выявления некоторых причин отказов. Для построения
соответствующих частных алгоритмов диагностирования необходимы
различные наборы контролируемых и измеряемых параметров.
Диагностика нарушений функционирования, связанных с
процессом захватывания, часто может опираться на чисто
геометрические интерпретации задачи. Как указывалось в гл. 7, при
анализе геометрических условий захватывания наиболее полной
характеристикой, определяющей условия* нормального
захватывания, является многомерная область в пространстве параметров
положения и ориентации объекта.
Если объект имеет малые размеры, то ошибки ориентирования
могут быть несущественными и область нормального захватывания
строится в трехмерном пространстве перемещений.
Если условия нормального захватывания выполнены, то в
результате захватывания объект занимает одно из возможных
положений равновесия. Устойчивые положения равновесия
находятся из условия минимального расстояния между рабочими
элементами схвата (что соответствует минимуму потенциальной
энергии механической системы схват—объект). Измерение
параметра раскрытия является простейшим и наиболее эффективным
способом определения правильности расположения объекта
в схвате.
Число положений равновесия может быть большим. Попадание
объекта в то или иное положение равновесия в значительной
степени зависит от погрешностей взаимного положения и
ориентации объекта и схвата в момент захватывания. Каждому
положению равновесия может быть поставлена в соответствие область
устойчивости, которая в пространстве погрешностей положения
и ориентации является частью области нормального захватывания.
Попадание изображающей точки погрешностей в эту область
с большой вероятностью определяет попадание объекта в
соответствующее ей положение равновесия.
278
С учетом сил трения результирующие эффекты процесса
захватывания усложняются. Важно, что с учетом трения возможна
жесткая фиксация объекта на трении в таких положениях,
которые в идеализированной постановке, при отсутствии сил трения,
являются безразличными или неустойчивыми. При этом около
классически устойчивых и неустойчивых положений равновесия
возникает множество новых положений, в которых обеспечивается
жесткая фиксация на трении. Такие эффекты следует иметь в виду
при диагностике нарушений работы схвата.
Определение условий надежности удерживания объекта в схвате
в заданном положении равновесия при его переносе
формулируется как задача определения нагруженных состояний объекта,
после достижения которых может происходить его перемещение
в схвате.
Последний этап технологической операции — установка
объекта в заданное положение и его отпускание — является наиболее
сложным, особенно для ПР, выполняющих сборочные операции,
когда характерны узкие поля допусков на погрешности
положения и ориентации, наличие неудерживающих связей. В
большинстве случаев нарушения на этом этапе обусловлены большими
значениями погрешностей как в начале операции, так и в ходе
ее выполнения, увеличением реакций, возникающих при
контакте объекта с базовой поверхностью, и силами сухого трения,
которые могут приводить к заеданию или заклиниванию. Условия
надежного выполнения сборочной операции рассмотрены в гл. 9.
Для диагностики таких нарушений сборки, как застревание или
заклинивание, повреждение сопрягаемых поверхностей,
нарушение условий удерживания, как правило, используются
многокомпонентные датчики сил и моментов.
Системы диагностики могут строиться как для всего процесса
в целом, так и для отдельных этапов или последовательностей
этапов (например, только для захватывания объекта или только
для переноса). В соответствии с этим ставятся задачи
диагностирования и формируется комплекс средств контроля и измерения.
Рассмотрим в качестве примера этап переноса, когда
представляет интерес выяснение причин возможного проскальзывания
объекта в схвате или полной потери объекта. Для диагностики
этих явлений используются следующие группы датчиков:
вырабатывающих сведения о силах инерции; определяющих усилие
захватывания; регистрирующих проскальзывание объекта в схвате:
измеряющих статические усилия в процессе захватывания объекта.
Вопросы измерения ускорений и вычисления сил инерции
рассмотрены в главах 2 и 6. Описанная задача является частным
случаем общей задачи комплексного определения совокупности
параметров движения. Структурная избыточность в
измерительной системе позволяет повысить точность и надежность
определения искомых параметров. Так, интегрирование сигналов
акселерометров позволяет уточнять сведения о фронтах законов измене-
279
ния скорости на интервалах действия больших ускорений,
добавление «лишних» линейных акселерометров позволяет
контролировать работу всего комплекса, а при определенных условиях —
выявлять отказавшие приборы и получать оценки точности
выполняемых измерений.
Датчики, измеряющие усилие захватывания, обычно
реализуются в виде датчиков усилий в точках контакта или на
выходном звене привода. Для вакуумных захватных устройств и
схватов с пневмо- и гидроприводом могут быть использованы датчики
давления.
Датчиками проскальзывания могут служить тактильные
датчики, контактные и бесконтактные датчики положения,
специальные датчики проскальзывания.
Для измерения статистических усилий, действующих на
закрепленный в зажимном устройстве объект, в систему
закрепления объекта на фиксированной позиции вводятся датчики сил
и (или) моментов. Объект захватывается схватом манипулятора
и для различных малых линейных перемещений и углов поворота
схвата, специально задаваемых при подаче соответствующих
команд управления, определяются составляющие задаваемых
сил и моментов. Получаемые данные являются исходным
материалом для расчета режимов взятия объекта из зажимного
устройства и передачи объекта в зажимное устройство при наличии
погрешностей позиционирования и ориентирования схвата ПР.
Измерение усилий воздействия схвата ПР с другими
предметами важно для ПР, предназначенных для выполнения операций
сборки, шлифования поверхностей. Заметим, что подобные ПР
обычно имеют собственные датчики силомоментного очувствления,
их сигналы используются в системах управления. Выведение этих
сигналов и их регистрация могут дать предварительные сведения
об искомых силах и моментах. Однако метрология требует, чтобы
данные поступали от независимых средств измерений, специально
аттестуемых и поверяемых, что и может быть реализовано
введением в систему закрепления объекта датчиков сил и (или) моментов.
Если в одной из рассмотренных групп датчики отсутствуют,
то берутся расчетные значения соответствующих параметров.
Наоборот, наличие в каждой группе разнородных датчиков
позволяет производить более глубокое диагностирование.
Порядок диагностирования, перечень контролируемых
параметров зависят от особенностей эксплуатации ПР, его
функциональных возможностей. Например, при захватывании
подвижного объекта, перемещаемого транспортером, необходимо
контролировать его скорости перемещения относительно схвата, при
захватывании хрупких и пластичных предметов — ударные
эффекты при захватывании.
Особые проблемы возникают при диагностике нарушений,
связанных с работой автоматически заменяемых схватов,
применяемых в условиях многономенклатурного гибкого производства.
280
Для них дополнительно решаются вопросы диагностирования
правильности автоматической установки сменных схватов на руке
манипулятора и в гнезде магазина. Кроме того, возможно,
окажется необходимым изменение диагностического алгоритма при
переходе от одного захватываемого объекта к другому в связи
с тем, что изменение параметров схвата, движения
манипулятора, взаимодействия системы схват—объект должно
производиться синхронно на всем этапе выполнения технологической
операции. Только при сопоставлении всей полученной таким образом
информации может быть проведен детальный анализ причин того
или иного отказа.
СПИСОК ЛИТЕРАТУРЫ
1. Андреев А. Ф. Грузозахватные устройства с автоматическим и
дистанционным управлением. М.: Атомиздат, 1978. 136 с.
2. Ансеров М. А. Приспособления для металлорежущих станков. М.:
Машиностроение, 1975. 656 с.
3. Артоболевский И. И. Механизмы в современной технике: В 2 т. М.:
Машиностроение. Т. 1. 1980. 210 с.
4. Артоболевский И. И. Теория механизмов и машин. М.: Наука, 1975.
640 с.
5. Аспекты систематизации видов и методов испытаний промышленных
роботов/С. Н. Колпашников, И. Б. Челпанов, Т. М. Шолуха
и д р.//Испытания и техническая диагностика промышленных роботов. Сер.
«Опыт внедрения ЕСТПП». Вып. 28. Изд-во стандартов, 1986. С. 44—52.
6. Белов А. П. Манипуляторы. М.: Атомиздат, 1978. 136 с.
7. Белоликов С. В., Колпашников С. Н., Челпанов И. Б. Выбор расчетных
схем при описании упругих характеристик манипуляторов/Роботы и робототех-
нические системы. М.: Машиностроение, 1980. С. 46—51.
8. Белянин П. Н. Промышленные роботы и их применение. М.:
Машиностроение, 1983. 343 с.
9. Боренштейн Ю. П. Исполнительные механизмы захватывающих
устройств. Л.: Машиностроение, 1982. 302 с.
10. Вайсон А. А., Андреев А. Ф. Крановые грузозахватные устройства:
Справочник. М.: Машиностроение, 1982. 302 с.
11. Виды и методы испытании промышленных роботов/С. Н.
Колпашников, И. Б. Челпанов, Т. М. Шолуха и д р.//Стандарты и
качество, 1984, № 9. С. 25—29.
12. Герц Е. В., Крейнин Г. В. Расчет пневмоприводов: Справочное пособие.
М.: Машиностроение, 1975. 272 с.
13. Голдстейн Г. Классическая механика. М.: Мир, 1975. 416 с.
14. Гусев А. А. Адаптивные устройства сборочных машин. М.:
Машиностроение, 1979. 352 с.
15. Давыденко Э. П., Канаев А. С. Автоматизация производства средствами
ЭМАГО. Рига. Зинатне, 1984. 224 с.
16. Делиев С. M.t Наков В. Н. Хващащи механизми за промишлени
манипулятор и и роботи. София: Техника, 1982. 302 с.
17. Динамика управления роботами/Под ред. Е. И. Ю р е в и ч а. М.:
Наука, 1984. 336 с.
18. Доннел Л. Г. Балки, пластины и оболочки. М.: Наука, 1982. 318 с.
19. Жавнер В. Л., Крамской Э. И. Погрузочные манипуляторы. Л.:
Машиностроение, 1979. 262 с.
20. Жуковский Н. Е. Полное собрание сочинений. В 8-ми т. Т. 1, 3. М.:
ОНТИ, 1937. 368 с.
21. Задачи механики в автоматической сборке с применением
промышленных роботов/С. Н. Колпашников, А. И. Полевой, В. М.
Стоянов, и д р.//Роботизация сборочных процессов. М.: Наука, 1985. С. 185—188.
22. Зангвилл У. Нелинейное программирование. М.: Сов. радио, 1973. 312 с.
23. Захваты промышленных роботов: Аннотированный указатель
изобретений (1972—1981). Новосибирск: Изд-во Сибирск. отд-ния АН СССР, 1984. 244 с.
282
24. Ивович В. А. Переходные матрицы в динамике упругих систем. М.:
Машиностроение, 1969. 199 с.
25. Каталог промышленных роботов СССР/Под ред. Е. И. Ю р е в и ч а.
М.: НИИМаш, 1978. 64 с.
26. Катковыми В. Я., Тимофеев А. Н., Челпанов И. Б. Оборудование
гибкого автоматизированного производства. Л.: Изд-во ЛПИ, 1984. 80 с.
27. Квалиметрия и диагностирование роботов/Под ред. Е. Г. Нахапе-
т я н а//Эксп ер и ментальное исследование и диагностирование роботов. М.:
Наука, 1981. С. 15—17.
28. Козырев Ю. Г. Промышленные роботы: Справочник. М.:
Машиностроение, 1983. 373 с.
29. Коловский М. 3. Нелинейная теория виброзащитных систем. М.: Наука,
1966. 317 с.
30. Колпашников С. Н., Челпанов И. Б. Выбор и проектирование схватов
роботов//Тез. докл. 3-го Всесоюз. совещ. по робототехническим системам.
Воронеж: 1984. С. 77—78.
31. Колпашников С. Н., Челпанов И. Б. Задачи и методы расчета
характеристик схватов манипуляционных роботов//Тез. докл. 2-го Всесоюз. совещ. по
робототехническим системам. Минск: 1981. С. 32—33.
32. Колпашников С. Н., Челпанов И. Б. Задачи механики захватных
устройств манипуляционных роботов//Изв. АН СССР. Механика твердого тела.
М.: 1984, № 4. С. 32—36.
33. Колпашников С. Н., Челпанов И. Б. Задачи механики схватов
промышленных роботов//Тр. 5-го Всесоюз. съезда по теорет. и прикладной механике.
Алма-Ата: 1981. 203 с.
34. Колпашников С. Н., Челпанов И. Б. Методы расчета характеристик
схватов роботов//Промышленные роботы на погрузочно-разгрузочных работах.
Л.: Изд-во ЛДНТП, 1984. С. 52—56.
35. Колпашников С. Н., Челпанов И. Б. Нормирование точностных
характеристик промышленных роботов при комплексной стандартизации их испыта-
ний//Стандарты и качество, 1986, № 3. С. 31—34.
36. Колпашников С. Н., Челпанов И. Б. Обеспечение надежности
захватывания в динамических режимах/Сер. «Робототехника». Вып. 3. Л.: Изд-во ЛПИ,
1981. С. 61—66.
37. Колпашников С. Н., Челпанов И. Б. Общая теория захватывания и
задачи механики схватов роботов//Тр. 6-го Всесоюз. съезда по теорет. и
прикладной механике. Ташкент: 1986. 159 с.
38. Колпашников С. Н., Челпанов И. Б. Принципы проектирования
захватных устройств для промышленных роботов, предназначенных для работы в
гибких автоматизированных производственных системах//Промышленные роботы
для гибких автоматизированных производств. Куйбышев: Из-во КПИ, 1985.
ч^. О—О.
39. Колпашников С. Н., Челпанов И. Б. Проектирование
унифицированных схватов промышленных роботов//Проблемы машиностроения и
автоматизации, 1986, № 8. С. 80—85.
40. Колпашников С. Н., Челпанов И. Б. Техническая диагностика
захватных устройств промышленных роботов, применяемых в ГПС/Испытание и
диагностика промышленных роботов//Сер. «Опыт внедрения ЕСТПП». Вып. 28, Изд-во
стандартов, 1986. С. 23—30.
41. Колпашников С. Н., Челпанов И. Б. Стандартизация и унификация
захватных устройств промышленных роботов//Стандарты и качество, 1985, № 9.
С. 25—29.
42. Колпашников С. Н., Челпанов И. Б., Макаров А. Б. Сменные схваты
для роботов и манипуляторов//Современные средства механизации и
автоматизации на погрузочно-разгрузочных и складских работах. Л.: Изд-во ЛДНТП,
1984. С. 18—22.
43. Колпашников С. Н., Корытко О. Б., Челпанов И. Б. Пути разработки
унифицированных схватов модульного типа//Промышленные роботы и их
применение. Л.: Изд-во ЛДНТП, 1981. С. 32—36.
283
44. Колпашников С. Н., Челпанов И. Б., Стоянов В. М. Выбор
характеристик упругого элемента сборочной головки роботов//Тр. ЛПИ. Л.: 1982, № 382.
С. 63—67.
45. Колпашников С. Н., Челпанов И. Б., Стоянов В. М. Механика и
управление процессами сборки при применении промышленных роботов//Тр. Междунар.
конф. «Проблемы управления пром. роботами». Варна, 1981. 12 с.
46. Колпашников С. Н., Челпанов И. Б., Трубин И. А. Анализ ошибок
позиционирования, возникающих в процессе захватывания и отпускания объекта
манипулирования//Тр. МВТУ. М.: 1983, № 404. С. 44—51.
47. Колпашников С. Н., Челпанов И. Б., Трубин И. А. Задачи механики
захватных устройств манипуляционных роботов//Тр. 2-го Всесоюз. съезда по
теории механизмов и машин. Одесса: 1982. С. 24—26.
48. Корсаков В. С. Основы конструирования приспособлений в
машиностроении. М.: Машиностроение, 1983. 285 с.
49. Лапкин Ю. П., Малкович А. Р. Перегрузочные устройства:
Справочник. Л.: Машиностроение. 1984. 224 с.
50. Лойцянский Л. Г., Лурье А. И. Курс теоретической механики: В 2-х т.
ОГИЗ, Гостехиздат. Т. 1. 1948. 129 с.
51. Лямперт М. Г. Применение систем электромагнитного ориентирования
в промышленных роботах//Технология электротехнического производства.
Вып. 3 (118), 1979. С. 8—10.
52. Малов А. Н. Захватные устройства металлорежущих станков. М.:
Машиностроение, 1972. 396 с.
53. Маталин А. А. Технология машиностроения. Л.: Машиностроение,
1985. 512 с.
54. Машиностроительный гидропривод/Под ред. В. Н. Прокофьева.
М.: Машиностроение, 1978. 495 с.
55. Микитянский В. В. Точность приспособлений в машиностроении. М.:
Машиностроение, 1984. 128 с.
56. Нахапетян Е. Г. Определение критериев качества и диагностирования
механизмов. М.: Наука, 1977. 234 с.
57. Норицын И. А., Власов В. И. Автоматизация технологических
процессов ковки и штамповки. М.: Машиностроение, 1967. 388 с.
58. Пневматические устройства и системы в машиностроении: Справочник/
Под ред. Е. В. Герц. М.: Машиностроение, 1982. 312 с.
59. Попов Е. П., Верещагин А. Ф., Зенкевич С. Л. Манипуляционные
роботы. Динамика и алгоритмы. М.: Наука, 1978. 400 с.
60. Принципы создания измерительных роботов/С. Н.
Колпашников, Г. И. С а ф р о н о в, Т. М. Ш о л у х а, И. Б. Ч е л п а н о в//Испыта-
ния,' контроль и диагностирование гибких производственных систем/Под ред.
И. М. Макарова, Е. Г. Нахапетян а. М.: Наука, 1987. 184 с.
61. Промышленная робототехника/Под ред. Я. А. Шифри на.М.:
Машиностроение, 1986. 415 с.
62. Промышленная робототехника и гибкие автоматизированные
производства. Опыт разработки и внедрения./Под ред. Е. И. Юревича. Л.: Лениздат,
1984. 223 с.
63. Промышленные роботы для миниатюрных изделий/Под ред.
В. Ф. Ш а н ь г и н а. М.: Машиностроение, 1984. 224 с.
64. Роботизированные комплексы «Оборудование — робот»: Каталог. М.:
НИИМаш, 1983. 132 с.
65. Ройтман М. А., Шапиро Г. С. Методы оптимального проектирования
деформируемых тел. М.: Наука, 1976. 266 с.
66. Современные промышленные роботы: Каталог/Под ред. Ю. Г. Козы-
реваи Я. А. Шифрина. М.: Машиностроение, 1984. 152 с.
67. Стандартизация проектирования модульных схватов промышленных
роботов/С. Н. Колпашников, А.Б.Макаров, А. В. Фигурин,
И. Б. Челпанов. Тр. ЛПИ. Л.: 1987, Nb 419. С. 36—41.
68. Тимофеев А. Н., Тимофеев Ан. Н., Челпанов И. Б. Оборудование гибких
автоматизированных производств механообработки. Л.: Изд-во ЛПИ, 1985.
80 с.
284
69. Тимофеев А. Н., Трубин И. А. Вопросы проектирования захватных
устройств промышленных роботов. Робототехнические системы в отраслях
народного хозяйства/Тез. II Всесоюзного совещ. по робототехническим системам.
Ч. 1. Минск: 1981. С. 124—126.
70. Тимошенко С. П., Гере Дж. Механика материалов. М.: Мир, 1976. 700 с.
71. Тимошенко С. П., Гудьер Дж. Н. Теория упругости. М.: Наука, 1975.
575 с.
72. Требования к аттестационным испытаниям промышленных роботов/
С. Н. К о л п а ш н и к о в, А. Г. Конюхов, О. Б. К о р ы т к о,
И. Б. Челпано в//Экспериментальное исследование и диагностирование
роботов. М.: Наука, 1981, № 7. С. '32—38.
73. Трубин И. А. Анализ процессов захватывания и отпускания детали
схвата манипулятора//Тр. ЛПИ. Л.: 1982, № 382. С. 88—94.
74. Трубин И. А., Челпанов И. Б. Расчет и проектирование устройств
передачи объектов манипулирования между оборудованием ГАП//Промышленные
роботы и их применение. Л.: 1983. С. 56—62.
75. Труби» И. А. Исследование процессов захватывания объектов
манипулирования промышленными роботами//Дис. ... канд. техн. наук: 05.02.05. Л.:
ЛПИ, 1986. 278 с.
76. Устройство промышленных роботов/Под ред. Е. И. Ю р е в и ч а. Л.:
Машиностроение, 1981. 333 с.
77. Яхимович В. А. Ориентирующие механизмы сборочных автоматов. М.:
Машиностроение, 1975. 166 с.
78. Яхимович В. А. Транспортно-загрузочные и сборочные устройства и
автоматы. Киев: Техника, 1976. 192 с.
79. Attestation of industrial robots/A vetikovB., KolpashnikovS.,
Konjuhov А., С h e 1 p a n о v I.//Proc. 10th 1SIR. Milan: IFS, 1980. P. 433—
440.
80. Kolpashnikov $., Chelpanov I. Definig of the scheme and parametrs of
an industrial robot gripper by a group of specifications//Proc. 11th ISIR. Tokyo:
IFS, 1981. P. 301—309.
81. Kolpashnikov S., Chelpanov I. B. Formalization of requirements imposed
on elastic characteristics and control laws of manipulators of assembly robots/AProc.
1st ICZZ, March 1980. Brighton: IFS, 1980. P. 325—330.
82. Kolpashnikov S., Chelpanov I. Goals of robot gripper mechanics//Mecha-
nism and Mashine Theory. 1986. Vol. 21, N 3. P. 481—487.
83. Kolpashnikov S., Chelpanov I. Problems with the mechanics of industrial
robot grippers//Mechanism and Machine Theory. 1985. Vol. 18, N 4. P. 295—299.
84. Kolpashnikov S., Chelpanov I. Tasks and methods of costructing mechanical
fasilities and control system of industrial robots with taking into account their
force interaction in respect of equipment//Proc. 6th CISM—IFToMM Symposium
Ro. man. sy.—86, Krakov: 1986. P. 517—528.
85. Kolpashnikov S.f Chelpanov I. Theory of Gripping Devices with elastic
organs//Proc. 16th ISIR. Tokyo: IFS, 1985. P. 597—604.
86. Kolpashnikov S., Chelpanov I. The problem of mechanics of industrial robot
grippers//Proc. 4th CISM—IFToMM Symposium Ro. man. sy-82, Warszaw: 1982.
P. 223—230.
87. Konstantinov M. S. Law-Type gripper mechanism//Proc. 5th ISIR.
Chicago: IFS, 1975. P. 323—337.
88. Lundstrom G., Glemmer В., Rooks B. W. Industrial Robots//Gripper
review. Bedford: IFS, 1977. P. 87.
89. Robot Grippers. (International trends in manufacturing technology)/Ed. by
Pham D. Т., Haginbotham W. B. Bedford: IFS. 1986. P. 443.
90. Wichiro Kato. Mechanical hands illustrated/Survey. Tokyo, 1982. P. 214.
ОГЛАВЛЕНИЕ
Предисловие 3
Введение 6
Глава 1. Классификация объектов манипулирования и требования
к схватам 9
1.1. Классификация объектов манипулирования 9
1.2. Основные требования к конструкции выпускаемых
изделий и оборудования 12
Глава 2. Силы, действующие на объект манипулирования 14
2.1. Исходные данные для расчета несущей способности схватов 14
2.2. Приближенные методы оценки максимальных значений
ускорений 16
2.3. Методы, средства и результаты экспериментального
определения максимальных значений ускорений 21
Глава 3. Термины и определения в области захватных устройств . . 26
3.1. Основные понятия в области захватных устройств .... 26
3.2. Номенклатура основных показателей захватных устройств 29
Глава 4. Составные части и схемы схватов 33
4.1. Составные части схватов и их назначение 33
4.2. Двигатели схватов 39
4.3. Механизмы передачи схватов 44
4.4. Передаточное отношение механизма передачи и усилие
захватывания 55
4.5. Схемы многообъектных схватов 62
4.6. Схемы многофункциональных схватов 67
Глава о. Компоновки и конструкции схватов 70
оТ 1. Компоновки схватов 70
5.2. Типовые конструкции схватов 76
5.3. Устройства крепления схватов к манипулятору 85
5.4. Сменные схваты и устройства автоматической замены схватов 89
Глава 6. Основные этапы проектирования схватов 95
6.1. Выбор схем и параметров схватов по совокупности
технических требований 95
6.2. Расчет сил и моментов, действующих на объект в
динамических режимах 104
6.3. Расчет сил и моментов, действующих на объект при
ограничениях на перемещения и повороты 108
6.4. Особенности расчета усилий захватывания пневматических
схватов 118
6.5. Особенности проектирования схватов с электроприводом 122
286
6.6. Пример выбора и расчета параметров схвата
промышленного робота по совокупности технических требований ... 128
Глава 7. Исследование геометрии взаимного расположения объекта
и рабочих элементов схвата 133
7.1. Критерии соответствия формы захватываемого объекта
форме зоны захватывания —
7.2. Определение положений равновесия объекта в схвате ... 138
7.3. Погрешности базирования объекта в рабочих элементах
схвата . i 142
7.4. Совместный учет погрешностей механизма схвата и
погрешностей базирования объекта в рабочих элементах схвата 152
Глава 8. Расчет несущей способности механических захватных
устройств 155
8.1. Задачи исследования механической системы схват—объект —
8.2. Виды положений равновесия объекта в схвате 158
8.3. Уравнения статики системы механическое захватное
устройство без подвижных элементов — объект 167
8.4. Уравнение статики механической системы схват—объект 174
8.5. Расчет несущей способности схватов 179
8.6. Примеры расчета параметров области жесткого
фиксирования 189
8.7. Влияние погрешностей формы и положения поверхностей
объекта и рабочих элементов на несущую способность схвата 210
Глава 9. Расчет схватов с упругими элементами 212
9.1. Задачи расчета схватов с упругими элементами 212
9.2. Схваты с дополнительными степенями свободы 215
9.3. Схваты с упругими накладками 219
9.4. Учет упругости объектов при их захватывании 228
Глава 10. Анализ процессов захватывания 233
10.1. Задачи анализа процессов захватывания 233
10.2. Метод траекторий 238
10.3. Метод крайних положений 241
10.4. Задачи динамики процессов захватывания 242
Глава 11. Задачи динамики системы схват—объект 245
11.1. Основные задачи расчета системы схват—объект в
динамических режимах 245
11.2. Надежность удерживания объекта при относительных
перемещениях в схвате 246
11.3. Учет упругой податливости манипулятора, элементов схвата
и конечности времени импульса ускорения при решении
задач динамики 257
Глава 12. Стандартизация захватных устройств промышленных
роботов 259
12.1. Захватное устройство как объект стандартизации 259
12.2. Стандартизация и унификация механических интерфейсов
захватных устройств промышленных роботов 264
12.3. Построение параметрических рядов унифицированных
схватов 266
Глава 13. Испытания схватов промышленных роботов 269
13.1. Правила приемки схватов 269
13.2. Методы испытаний схватов 271
13.3. Диагностика схватов 276
Список литературы 282
ПРОИЗВОДСТВЕННОЕ ИЗДАНИЕ
Челпанов Игорь Борисович,
Колпашников Сергей Николаевич
СХВАТЫ ПРОМЫШЛЕННЫХ РОБОТОВ
Редактор Е. М. Миронченкова
Обложка художника Я. В. Зимакова
Художественный редактор С. С. Венедиктов
Технические редакторы: Т. М. Жилич, П. В, Шиканова
Корректоры: А. А. Румянцева, 3. С. Романова
ИБ № 6008
Сдано в набор 16.06.88. Подписано в печать 09.02.39. М-28898.
Формат 60X90Vi«. Бумага офсетная № 2. Гарнитура литературная.
Печать офсетная. Усл. печ. л. 18,0. Усл. кр.-отт. 18,0. Уч.-изд. л. 19,23.
Тираж 10 000 экз. Заказ 508. Цена 1 р. 30 к.
Ленинградское отделение ордена Трудового Красного Знамени
издательства «Машиностроение»,
191065, Ленинград, ул. Дзержинского, 10
Ленинградская типография № 6 ордена Трудового Красного Знамени
Ленинградского объединения «Техническая книга» им. Евгении Соколовой
Союэполиграфпрома при Государственном комитете СССР
по делам издательств, полиграфии и книжной торговли.
193144, г. Ленинград, ул. Монсеенко, 10.