/












































































































































































































































































Текст
ЕА.ЧЕРНОВ
В. П. КУЗЬМИН
С Г. СИНИЧКИН
ЭЛЕКТРОПРИВОДЫ
ПОДАЧ СТАНКОВ
С ЧПУ
спрлвочны
nocogin
Рецензенты
доктор техн, наук, проф. С. Н. Шевчук;
начальник отдела Горьковского авиационного завода
нм. С. Орджоникидзе В М. Дроздов.
Черно* Е. А., Кузьмин В. П., Синичкин С. Г.
4-49 Электроприводы подач станков с ЧПУ: Справочное посС
бие.— Горький: Волго-Вятское кн. нзд-во, 1986.—271 с., ил.
85 коп.
Справочное воеобпе восапаево оохсаияхэ вреиакаов работы и шложевяю м>
Тодах наладки наиболее распростоавенаш я стапостроеиаи приводов: БТУ 380
эта. «КемроЛа. «Меаомлтик» и TNP.
Клята рассчитана на инжеверно-техявчееких работников, ааяиыакхцихсл проект!
роваклем. жалхдхоа в иксплувтацлеа элехТрооворудоааихя станков е ЧПУ. эхехтр!
коа-валадчлкоа прожышлеивых аремраяти*. а Также студентов, специализирующих*;
в области мектропрпвом.
.. 2703000000—021
М140(03)-86
ББК 34.63
Волго-Вятское Книжное издительстао, 198$
ОГЛАВЛЕНИЕ
Предисловие .......................................................... 3
Глава первая. Краткие сведения о двигателях постоянного тока, при-
меняемых в электроприводах подач стаикоп с ЧПУ . . 5
Г юла вторая. Основные принципы работы тиристорных преобразовате-
лей электроприводов постоянного тока.....................................20
Г лава третья. Операпвониые усилители — основная элементная база
преобразователей современных электроприводов ... 38
Глава четвертая. Комплектный электропривод подачи типа БТУ3601 . . 53
Глава пятая. Комплектный электропривод подачи типа ЭТ6 . . . 112
Глава шестая. Комплектный электропривод подачи типа «Кемроп» . 139
Глава седьмая. Комплектный электропривод подачи типа <Мезоматик» 182
Глава восьмая. Комплектный электропривод подачи типа TNP . . 207
Глава девятая. Методика нистройкн переходных процессов .... 232
Глава десятая. Особенности работы электроприводов в следящем ре-
жиме .................................................25*
Литература.............................................................269
ПРЕДИ^ГЛПИЕ
Одним из приоритетных направлений * решении псхггавлеяиых партией на пе-
I до 2000 года задач по ускорению научно-технического прогресса и иТгЛвсН-
апна производства является комплексная автоматизация машиностроения на
ве широкого применения станков с числовым программным управлением,
лышленвых роботов гибких автоматизированных производств.
В последние годы выпуск такого технологического оборудования осуществ-
н опережающими темпами. Значительно расширились возможности станков
1У, в том числе в миогооиерациояиых. Резко возросли требования, предъяв-
ите к их техническим характеристикам, прежде всего к максимальным скоро-
< перемещения рабочих органов, плавности движения на низких скоростях,
гродействню. Этн характеристики а значительной степени определяют промэ-
ггелыюсть и качество обработки деталей н зависят в первую очередь от типа
меняемого привода подач н главного движения.
Наибольшее применение в отечественном станкостроении в настоящее время
ли шярокорегулируемые электроприводы постоянного тока для приводов no-
li как прааало, с высокомоментными двигателями. Средн них электроприводы
। БТУ3601 и ЭТ6 отечественного производства н типа <Кемрои>. «мезоиатнк»
ЧР производства стран — участниц <Иитерэлектро>, одиако литература, посая-
иая их описанию г наладке, практически отсутствует.
Предлагая вниманию читателя данную книгу, написанную ив основе богатого
та Горьковского станкостроительного производственного объединении по про»
ровен ню, наладке в внедрению в эксплуатацию комплектных электроприво
а также обобщения многолетнего опыта подготовки спсдиалмстов, авторы,
мялись ликвидировать этот пробел.
В целях облегчепя понимания основного материала приведены сведения о
-ателпх постоянного тока, выпускаемых отечественной промышленностью, рас-
грены принципы работы операционных усилителей как основной элементной
я современных преобразователей, а также основные сведения по теория ти-
-орных электроприводов.
Сановной раздел книга (главы 4—8) посвящен подробному описанию прип-
ав работы и иэложеижю методик наладки перечисленных выше электропривод
при этом акторы стремились максимально иллюстрировать текст фрагмеи-
а схем, характеристиками и диаграммами работы. В конце соответствующих
Г приведены полные лрпцвпиальиые схемы электроприводов. Сохранены ус-
яые обозначении мемеитое схем В соответствии с технической документацией.
Заключительный раздал (главы 9 и 10) посвящен оптимизация переходных
дессов электроприводов R особенностям их работы в следящем режиме.
3
При подготовке руконнси авторы набегали громоздких математических *м-
кладок, обращав основное виямаине на физическое понимание излагаемого ма-
гериала.
Книга предназначена для инженерно-технических работников, занимаюАихсв
проектированием, наладкой н эксплуатацией электроприводов ставков с ЧПУ,
электриков-наладчиков промышленных предприятий. Она может с успехом исЬоль-
зоваться на курсах повышения квалификации специалистов, а такжа студентам»,
спецналкзнрующнмнсн в области электропривода и автоматнзацян машвнострон-
тельного производства.
Поскольку такое издание, включающее в себя материалы по электроприводам
производства социалистических стран — участниц программы «Интерзлектро»,
предпринимается в СССР впервые, авторы полностью отдают себе отчет в том.
что оно не лишено определенных недостатков, и с благодарностью примут все за-
мечания н предложении, направленные на улучшение материала книги.
Авторы благодарят профессора С. Н. Шевчука и инженера В. М. Дроздова
за ценные вамечання, сделанные при рецензирования рукописи в способствовав-
шие улучшению книги.
ГЛАВА ПЕРВАЯ
КРАТКИЕ СВЕДЕНИЯ
О ДВИГАТЕЛЯХ ПОСТОЯННОГО ТОКА,
ПРИМЕНЯЕМЫХ В ЭЛЕКТРОПРИВОДАХ
ПОДАЧ СТАНКОВ С ЧПУ
Электрический привод с тиристорными преобразователями и двигателями
постоянного тока (ДПТ) является в настоящее время основным типом привода
станков с ЧПУ. В силу целого ряда эксплуатационных преимуществ он практи-
чески вытеснил гидравлический регулируемый и следящий привод, а также элек-
трогидравлический привод с шаговыми двигателями. Основные характеристики
указанного электропривода определяются главным образом типом применяемого
ДПТ.
Основным преимуществом ДПТ, определяющим их широкое применение в
станочных регулируемых и следящих приводах, является высокая линейность
механических характеристик, что позволяет плавно регулировать частоту враще-
ния вала двигателя в очень широких пределах (диапазон регулирования частоты
вращения современных ДПТ составляет 10 000 и более). К недостаткам ДПТ,
по сравнению с асинхронными электродвигателями переменного тока, относят
большие габариты, меньший к. п. д., необходимость в щетках и коллекторе для
подвода тока в обмотку якоря. Последнее существенно снижает нх перегрузоч-
ную способность из-за ряда ограничений, связанных с процессами коммутации и
опасностью образования кругового огня на коллекторе. Несмотря на эти недо-
статки, ДПТ продолжают совершенствовать в направлении повышения быстро-
действия и увеличения перегрузочной способности, повышения к. п. д., равномер-
ности вращения на низких скоростях и т. д.
Потребности совершенствования технических характеристик регулируемых
и следящих электроприводов станков с ЧПУ привели к разработке специальных
ДПТ. Общими особенностями двигателей для следящих приводов являются воз-
можность длительной работы на малых скрростях при полном моменте, что требует
специальных мер для их охлаждения, а также возможность многократной пере-
грузки по току в течение небольшого времени, что связано с необходимостью
достижения высокого быстродействия привода. В частности, специально для ста-
ночных следящих приводов были разработаны электродвигатели серии ПБСТ
(серия П безобдувная станочная со встроенным тахогенератором), особенностью
которых является наличие встроенного тахогенератора с большим числом (96)
5
коллекторных пластин и коллектора якоря также с увеличенным числом
пластин. Эти меры значительно повышают равномерность вращения вала двига-
теля на низких скоростях. Необходимый тепловой режим на этих скоростях обес-
печивается за счет снижения электромагнитных нагрузок, т. е. за счет недоисполь-
зования по току и напряжению, что приводит к увеличению габаритов таких дви-
гателей по сравнению с нормальными двигателями общепромышленной серии П,
но вместе с тем увеличивается и тепловая постоянная времени двигателя. Дви-
гатели этой серии допускают перегрузку на 40% в часовом режиме, четырех-
кратную перегрузку по току в течение 1 мин н десятикратную — в течение 1 с.
Были разработаны также специальные малоинерционные двигатели с глад-
ким якорем серии ПГ (ПГТ — со встроенным тахогенератором). Уменьшение
момента инерции, а следовательно, и постоянных времени (в 5—6 раз меньше,
чем у обычных) достигается за счет уменьшения диаметра и увеличения длины
якоря. Якорь такого двигателя имеет беспазовую конструкцию. Проводники об-
мотки якоря из меди прямоугольного сечения наклеиваются на гладкую наруж-
ную поверхность якоря (шихтованного из тонких стальных кружков), укрепля-
ются стеклотканью и заливаются эпоксидной смолой. Такая конструкция обмотки
обеспечивает малую индуктивность якорной цепи, что позволяет обеспечить хо-
рошую коммутацию тока при больших нагрузках двигателя (допускается проте-
кание 10-кратиых против номинального значений тока в переходных режимах).
Беспазовая конструкция позволяет также, при определенном распределении об-
мотки на поверхности якоря, исключить пульсации момента, обычно имеющиеся
при входе пазов в полюсную зону и выходе из нее. Увеличению перегрузочйой
способности таких двигателей способствует хорошее охлаждение обмотки якоря,
расположенной на его поверхности, обеспечиваемое за счет принудительной вен-
тиляции (от отдельного вентилятора с приводом от асинхронного двигателя, ук-
репляемого на корпусе двигателя серии ПГТ). Двигатели с-гладким якорем обес-
печивают отработку максимальных ускорений порядка (2-4-6)-104 рад/с2. Однако
нз-за сложности изготовления, высокой стоимости и малой надежности эти дви-
гатели не нашли широкого применения в станкостроении, кроме того-, из-за уве-
личенной длины они плохо встраиваются в станки.
Более удобными для приводов подач станков с ЧПУ оказались высокомо-
ментные электродвигатели с возбуждением от постоянных магнитов. Относитель-
но низкие значения номинальной частоты этих двигателей (500—1000 об/мин)
и возможность длительной работы на малых оборотах с большими моментами
позволяют обходиться без редукторов и связывать такой двигатель непосредст-
венно с ходовым винтом рабочего органа. При этом значительно упрощается ки-
нематика станка, увеличивается надежность и точность работы. Такие двигатели
в настоящее время стали основными для приводов подач станков с ЧПУ. По
этой причине ниже будут более подробно рассмотрены особенности конструкции
и характеристики высокомоментных электродвигателей.
Особенности высокомоментных двигателей (ВМД). ВМД впервые начали
выпускаться в 1968—1970 гг. в США на базе двигателей, применяемых в спе-
циальной технике. Большие преимущества таких двигателей по сравнению с ма-
лоинерционными с гладким якорем обеспечили быстрое их внедрение в приво-
6
дах подач станков с ЧПУ. Главные конст-
руктивные особенности ВМД следующие:
— возбуждение осуществляется от вы-
сокоэнергетических постоянных магнитов;
— увеличено число пазов якоря и число
коллекторных пластин;
— применение изоляционных материа-
лов с высокой допустимой температурой;
— усиленная конструкция вала и под-
шипников;
— ужесточенная конструкция корпуса;
— повышено отношение длины якоря к
его диаметру;
— используются специальные щетки с
большой перегрузочной способностью;
— высокие значения электромагнитного
вращающего момента.
Как правило, ВМД выполняются с вст-
Рис. 1.1. Система возбуждения вы-
сокомоментных электродвигателей
от постоянных магнитов
1 — корпус двигателя; 2 — феррито-
вые магниты для возбуждения; 3 —
якорь
роенными: тахогенератором (с малым уров-
нем пульсаций при малых частотах враще-
ния), датчиком пути высокой точности (многополюсный ВТ-резольвер) и электро-
магнитным тормозом.
Отмеченные конструктивные особенности придают ВМД ряд ценных свойств.
Так, замена электромагнитного возбуждения на возбуждение от постоянных вы-
сокоэнергетических магнитов обеспечила возможность мно'гополюсного (6—12
полюсов) исполнения двигателей (рис. 1.1) и полную компенсацию реакции яко-
ря без добавочных полюсов. При этом значительно повышается к. п. д. двигателя
(на 15—20%), достигаются высокие значения развиваемых двигателем моментов
при относительно небольших габаритах и массе (рис. 1.2). Работа двигателя с
большими пусковыми токами потребовала совершенствования конструкции кол-
лектора н щеточного аппарата. Использование пазового якоря с большим числом
пазов ц коллекторных пластин обеспечило равномерность вращения якоря дви-
гателя на малых частотах и сравнительно высокую температурную постоянную
времени (до 120 мни). Очень важно для повышения качества и устойчивости
следящего привода отсутствие люфтов в соединениях двигателя и датчиков ско-
рости и пути, что обеспечивается в ВМД наличием встроенных тахогенератора
и резольвера. ВМД обладают следующими техническими характеристиками [1]:
— относительно низкие номинальные (до 1000 об/мин) и максимальные ча-
стоты вращения (до 1500—2000 об/мин);
— высокие перегрузочные моменты (6—10-кратные) при малых частотах со
значительным их уменьшением (1,5—3-кратные) при номинальных и особенно
максимальных частотах вращения;
— большая термическая постоянная времени (60—120 мин);
— обеспечение равномерного вращения якоря на низких скоростях (до
0,1 об/мин);
7
Рис. 1.2. Сравнение ВМД с ДПТ обычного исполнения по габаритам (а),
общей массе (б), массе меди (в), потерям (г). ДПТ с электромагнитным
возбуждением и самовентиляцией (1) и ВМД с ферритовыми магнитами
(2) имеют момент 30 Нм при 1000 об/мин
— момент инерции ВМД сравним с моментом инерции ДПТ нормального
исполнения;
— относительно небольшие диаметр и вес двигателей, что позволяет встраи-
вать их в механизм подач станков с ЧПУ.
Необходимость значительного снижения допустимого максимального момен-
та по мере увеличения частоты вращении якоря связана с ухудшением коммута-
ции в двигателе при отсутствии добавочных полюсов. При этом требуется приме-
нение нелинейных схем токоограничения. В приводах подач станков с ЧПУ ВМД
соединяются с шариковыми ходовыми винтами при помощи специальных соеди-
нительных муфт.
Подробные технические данные, габаритные и присоединительные размеры
электродвигателей серий 2П, ПБСТ, ПСТ, ПСПТ и ПГТ приведены в [2]. Отече-
ственной промышленностью освоен выпуск высокомоментных электродвигателей
серий ПВ и ДК1, которые применяются для приводов подач станков с ЧПУ.
Технические данные этих двигателей приведены в [3, 4]. Двигателями этих
серий охватывается достаточно широкий диапазон моментов (табл. 1.1).
Таблица 1.1
Номинальный момент, Нм Тип электро- двигателя Номинальная частота вращения, об/мин Номинальный ' момент, Нм Тип электро- двигателя Номинальная частота вращения, об/мин
1,7 ДК1-1.7 1000 21 ПБВ112Ь 500
2,3 ДК1-2.3 1000 35 ПБВ132М 600
3,5 ДК1-3.5 1000 47,7 ПБВ132Ь 600
5,2 ДК1-5.2 1000 76,4 ПБВ160М 500
7,2 ПБВ100М 1000 105 ПБВЮОЬ 500
10,5 ПБВЮОЬ 1000 143 ПБВ1603 500
14 ПБВ1123 750 175 ПБВ160М 600
17,5 ПБВ112М 600
8
Электродвигатели серии ПВ предназначены для применения в приводах стан-
ков с управлением от тиристорных или транзисторных преобразователей. Конст-
руктивно двигатели этой серин имеют фланцевое исполнение и допускают эксплу-
атацию при любом положении в пространстве.
Расшифровка условного обозначения электродвигателей серии ПВ произво-
дится следующим образом:
П X В XXX X X УЗ
I Климатическое исполнение и категория
1-------- размещения по ГОСТ 15150—69
Шифр исполнения: Е—с тормозом: О —
-------------- с датчиком положения; ЕО — с тормо-
зом и датчиком положения
Условная длина якоря: S — короткая;
М — средняя; L — длинная
Высота оси вращения, мм
—•-------------------------- В — высокомоментиый
Исполнение: Б •— закрытое с естествен-
ным охлаждением, степень защиты IP44;
Ф — защищенное со степенью защиты
IP54
--------------------------------- П — электродвигатель постоянного тока
с тахогенератором
Для электродвигателей ПВ допустима в течение 1 мни перегрузка по току
на 50% сверх номинальной, в течение 0,2 с возможен ток, соответствующий
току максимального пускового момента, в течение 3 мин повышение частоты
вращения на 30% сверх максимальной, приведенной в табл. 1.2. Практически
режим работы двигателя должен выбираться с учетом кривых допустимых мо-
ментов [З].
Двигатели с номинальным моментом до 47 Н-м развивают максимальный
момент Л4шах~10 Л4НОм в диапазоне частот вращения от 0 до 0,3 пЯом- Двига-
тели с номинальным моментом 76,4 и 105 Н-м развивают максимальный момент
Л4тах^4,8 Мном в диапазоне частот вращения от 0 до пНом. Двигатели с но-
минальными моментами 143,2 и 175 Н-м развивают Afmax = 3 ЛТНом в диапазоне
частот вращения от 0 до пвок. Зависимость между величиной вращающего мо-
мента и тока якоря М=}(1Я) практически линейна до Л4=0,7—0,8 Л4тах- Допу-
скается длительная работа двигателей прн частоте вращения 0,1 мин-1 с момен-
том не менее номинального, при этом неравномерность вращающего момента не
превышает 6—8%.
Электродвигатели серии ПВ комплектуются тахогенератором ТС-1М со сле-
дующими техническими характеристиками: крутизна выходной характеристики,
9
о
Таблица 1.2
Параметр Величина параметра электродвигателя типа
ПБВ100 ПБВ112 ПБВ132 ПБВ160 ПФВ160
при условной длине якоря
L S м L м L м L
Номинальные: момент, Нм 7,16 10,5 14 17,5 21 35 47,7 76,4 105 143,2 175
частота вращения, об/мин 1000 1000 750 600 500 600 600 500 500 500 600
мощность, кВт 0,75 1,1 1,1 1,1 1,1 2,2 3,0 4,0 5,5 7,5 11,0
напряжение, В 52 56 44 47 50 53 70 66 78,5 58 82
ток, А 18 24 31,5 29 28 50 50 78,5 90 182 180
Длительный момент в за- торможенном состоя- нии, Нм 8,2 12 17,5 22 29 47 62 84 НО 157 185
Максимальный момент при пуске, Нм 70 100 130 170 210 350 470 490 510 490 510
Максимальная частота вращения в продол- жительном режиме, об/мин 2000 2000 2000 2000 . 2000 2000 2000 1000 1000 1000 1000
„ „ В мин Постоянная ЭД С, об 0,045 0,044 0,051 0,063
Момент инерции якоря электродвигателя, кг-м2
с тахогенератором 0,01 0,013 0,035 0,042
с тахогенератором и тор- мозом 0,0112 0,0142 0,0366 0,0433
Электромеханическая по- стоянная времени электродвигателя, мс:
с тахогенератором 10,3 7,6 13,2 10,1
с тахогенератором и тор- мозом 11,5 7,8 13,8 10,4
Электромагнитная посто- янная времени, мс 5,3 5,75 6,75 7,3
Сопротивление обмотки якоря при 15°С, Ом 0,222 0,139 0,109 0,123
Индуктивность обмотки якоря, мГн 1,18 0,8 0,732 0,898
Тепловая постоянная вре- мени, мин 60 70 60 70
Масса электродвигателя с тахогенератором, кг 27 33 41 45
0,065 0,077 0,105 0,118 0,141 0,094 0,118
0,049 0,188 0,233 0,242 0,298 0,194 0,242
0,0504 0,1901 0,2401 0,2464 0,3024 0,1984 0,2464
8,6 14,2 12,3 8,5 7,9 9,9 8,5
8,8 14,4 12,4 8,,63 8,02. 10,05 8,63
7,65 7,35 7,85 10,63 11,8 9,25 10,63
0,144 0,0574 0,0707 0,0317 0,0343 0,0292 0,0317
1,102 0,422 0,554 0,337 0,405 0,270 0,337
80 90 100 —, — —, —
52 83 100 168 182 162 176
Таблица 1.3
Высота оси вращения электродви- гателя, мм Типоразмер тормоза Момент тормоза, Нм Рабочий ток, А Сопротивле- ние обмотки при 20°С, Ом Момент инерции, кг • м3
100 ЭТДВ22УЗ 8 0,6 25,4 0,00119
112 ЭТДВ32УЗ 20 1,1 14,2 0,00130
132 и 160 ЭТДВ42УЗ 63 1,53 9,55 0,00214
160 ЭТДВ41УЗ 160 1,68 9,55 0,00214
В/об/мни — 0,02; сопротивление нагрузки, кОм, не менее — 4; сопротивление об-
мотки якоря при 15°С, Ом— 138; индуктивность обмотки якоря, Гн — 0,6. Датчик
положения типа ПМБ-1, которым комплектуются двигатели серии ПВ, имеет
следующие основные технические характеристики: число пар полюсов — 10, чис-
ло фаз источника питания — 2; сдвиг фаз источника питания, эл. град. — 0 или
90; напряжение питания, В — 5±0,25; частота питания, Гц —500; потребляемый
ток, мА, не более—10; выходное напряжение при сопротивлении нагрузки.
10 кОм, В—0,5; погрешность в статическом режиме при сопротивлении нагруз-
ки 10 кОм, угл. мин, не более — 20. Технические данные применяемых в электро-
двигателях серии ПВ электромагнитных тормозов серии ЭТДВ с напряжением
питания 24В (на ЭТДВ41УЗ—110В) приведены в табл. 1.3.
Электродвигатели серии ПВ комплектуются температурным датчиком, обес-
печивающим подачу сигнала в цепь управления при недопустимых для изоляции
перегревах.
Электродвигатели серий ПВ без тормоза и датчика положения характеризу-
ются следующими показателями надежности: средний ресурс работы электродви-
гателя— не менее 20 000 ч; средний срок службы—не менее 15 лет; вероятность
безотказной работы за период 10 000 ч составляет не менее 0,9 при доверитель-
ной вероятности 0,8.
Электродвигатели серии ДК1 предназначены для эксплуатации в составе
следяще-регулируемых электроприводов (преимущественно типа ПРП) механиз-
мов подач металлообрабатывающих станков и манипуляторах промышленных ро-
ботов. Двигатели имеют фланцевое исполнение МЗОО по СТ СЭВ 246—76, сте-
пень защиты IP44 по ГОСТ 14254—69 (закрытые), естественное охлаждение и
допускают эксплуатацию при любом положении в пространстве. Конструкция
ВМД серии ДК1 близка к конструкции ВМД серии ПВ, при уменьшении диа-
метра якоря, насколько это возможно, с целью максимального снижения момента
его инерции. Возбуждение осуществляется от литых постоянных магнитов из
сплава ЮНДК35Т5, обеспечивающих повышенную (до 0,6 Т) индукцию в воз-
душном зазоре и снижение диаметра и момента инерции двигателей. Исполнение
индуктора — четырехполюсное. Все типоразмеры двигателя имеют одинаковый
наружный диаметр, но разную длину с целью максимальной унификации деталей
и узлов. Расшифройка условного обозначения электродвигателей серии ДК1 про-
изводится следующим образом:
12
Индекс предприятия-разработчика
Шифр исполнения:
О — без тормоза;
1 —с тормозом
О — без датчику положения;
I — с датчиком положения;
О — без тахогенератора;
1 — с тахогенератором;
Номинальный момент, Нм
Серия: Д — двигатель;
К — коллекторный;
1 — порядковый номер серии.
Электродвигатели серии ДК1 могут находиться в заторможенном состоянии
при номинальном токе не более 3 ч, а в течение 1 мин выдерживают 1,5-кратную
перегрузку по току. Допускается работа электродвигателя в течение 2 мин при
повышенной до 2000 об/мин частоте вращения при номинальном моменте. В пе-
реходных режимах электродвигатели этой серии способны обеспечить макси-
мальный момент до 7-кратного номинального за счет соответствующего увеличе-
ния тока якоря. При этом кратность максимального тока не превышает крат-
ность максимального момента более чем на 10%. Технические характеристики
электродвигателей серии ДК1 приведены в табл. 1.4.
Двигатели серии ДК1 имеют следующие показатели надежности:
— минимальная наработка с заменой щеток в процессе эксплуатации —
16 000 ч; срок службы с учетом срока хранения — 12 лет.
В комплект электродвигателя могут входить тахогенератор типа ТГ1; тор-
моз типа ЭТДВ12УЗ и датчик положения типа ПМБ-1. Технические данные та-
хогенератора ТГ1 следующие: крутизна выходной характеристики'—0,03±
0,0015 В/об/мин; частота вращения— 1000 об/мин; сопротивление нагрузки,—
2000 Ом; момент инерции ротора тахогенератора не превышает 0,4-10-3 кг-м2.
Кроме описанных отечественных ВМД, в приводах подач станков с ЧПУ,
выпускаемых отечественными станкостроительными производственными объеди-
нениями, широко применяются ВМД производства социалистических стран: НРБ,
ЧССР, ПНР. Технические характеристики ВМД производства этих стран, а так-
же фирм Fanuc (Япония) и Inland motor (США) приведены в [3].
Статические и динамические характеристики ВМД. Как отмечено выше, ВМД
является электродвигателем постоянного тока (ДПТ) с некоторыми конструк-
тивными особенностями. Поэтому для ВМД справедливы уравнения, описываю-
щие работу обычного ДПТ, а также их статические и динамические характери-
стики при учете особенностей ВМД. Рассмотрим эти характеристики с учетом
особенностей ВМД и его использования в современных электроприводах, вы-
полненных по структуре подчиненного регулирования.
13
Таблица 1.4
Параметр Величина параметра электродвигателя типа:
ДК1-1.7 ДК1-2.3 дю-зл ДК1-5.2
Номинальные: момент, Нм 1,7 2,3 3,5 5,2
частота вращения, об/мин 1000 1000 1000 1000
мощность, кВт 0,177 0,24 0,364 0,54
напряжение, В 36 48 65 НО
ток, А 8,0 - 7,5 7,5 6,5
Максимальный момент, Нм, в диапазоне частот вра- щения, об/мин 0...500 11,9 16,1 24,5 36,4
500... 1000 11,9 16,1 17,5 26
1000...2000 11,9 11,5 10,5 15,6
Ток холостого хода, А 1,5 1,3 1,0 0,8
Сопротивление обмотки яко- ря при 20°С,- Ом 0,75 0,95 1,15 2,10
Электромагнитная постоянная времени, мс 2,5 3,0 3,5 5,3
Электромеханическая посто- янная времени двигателя с тахогенератором, тор- мозом и датчиком положе- ния, мс кпд, % 25 20 15 10
61,5 67 74,5 75,5
Тепловая постоянная време- ни, мин 45 50 60 60
Масса двигателя с тахоге- нератором, тормозом, дат- чиком положения, кг 22,9 25,5 28,1 33,3
На
симость
об
п ----
рис. 1.3 показана характеристика ВМД, определяющая зави-
момента, развиваемого двигателем от частоты вращения М(п), где
мин
— скорость (частота)
ростью (частотой) вращения «
вращения двигателя. Ее связь с угловой ско-
_Р£^_ определяется следующим образом:
Г РаД
<Й ----
L с
об
= п ---
2л ”
мин J 60
об
мин
9,55
с
На характеристике ВМД выделяют три зоны: длительной работы — 1; крат-
ковременной работы — 2 и работы в переходных режимах — 3. Из характеристи-
ки видно, что ВМД, в отличие от ДПТ обычного исполнения, способен во 2 н 3-й
зонах развивать моменты, намного превосходящие номинальные. Однако макси-
14
Рис. 1.3. Диаграммы зависимости допустимых моментов от частоты вра-
щения для высокомоментного электродвигателя:
I — зона длительной работы; 2 — зона кратковременной работы; 3 — зона ра-
боты в переходных режимах
мальный момент Ммакс такой двигатель способен развивать в течение весьма
короткого интервала времени (0,2 с). Если номинальный момент определяется
по допустимым условиям нагрева и является длительным, то максимальный мо-
мент при п=0 ограничен размагничивающим действием тока якоря (при приме-
нении высокоэнергетических постоянных магнитов для возбуждения максимально
допустимый ток якоря может в 10 и'более раз превышать номинальный), а при
увеличении частоты вращения допустимая величина максимального момента зна-
чительно снижается из-за ухудшения коммутации. Поскольку зависимость мак-
симально допустимого момента от частоты вращения имеет нелинейный вид, то
практически она обеспечивается специальной схемой нелинейного токоограинче-
ния, которая имеется в составе электропривода. ВМД допускает кратковремен-
ную работу и на повышенной частоте вращения, которая, с учетом возбуждения
от постоянных магнитов, может обеспечиваться только за счет увеличения на-
пряжения на якоре двигателя, что должно быть предусмотрено схемой тиристор-
ного преобразователя, от которого питается такой двигатель (рис. 1.4).
Как статические, так и динамические характеристики ВМД могут быть по-
лучены из следующих уравнений [5]:
и = е + 1лг + L——;
at
е=КФ<а;
(1-1)
15
Рис. 1.4. Эквивалентная схема подключения
ВМД к выходу тиристорного преобразователя:
итп ~ напряжение ТП; н гтп — индуктивность
и сопротивление выходной цепи ГЛ; La и гя — ин-
дуктивность и сопротивление якорной цепи двигателя
.. d и>
М — М.= J-—(1.4)
dt
Здесь г — полное активное сопротивление якорной цепи, Ом; L — полная ин-
дуктивность якорной цепи, Гн; е — ЭДС вращения двигателя, В; K—pNji ла—
конструктивный коэффициент двигателя, р, N, а — соответственно числа пар
полюсов, активных проводников и параллельных ветвей обмотки якоря; Ф — маг-
нитный поток возбуждения двигателя, Вб; со — механическая угловая скорость
двигателя, рад/с; М, Мс — соответственно момент, развиваемый двигателем, и
момент статического сопротивления на валу двигателя, Нм; J — момент инерции
привода, включающий в себя момент инерции двигателя 7Дв и приведенный к
валу двигателя момент инерции механической передачи /м-
Поскольку для ВМД произведение КФ является величиной постоянной, ее
обозначим как с=КФ. Значение с определяется по паспортным данным двигате-
ля для установившегося номинального режима
Т^ном /я.ном Г
с =---------. (1.5)
“ном
Совместное решение уравнений системы (1.1—1.4) относительно угловой
скорости со и момента М при с— const и Мс = const и последующая запись ре-
зультата в операторной форме при нулевых начальных условиях дают:
1 1 1 Г U(p)
Р2“КР) + — Р“(Р) + ~ “(р) = tv- ——-
----7“ ^с(р)
с2
Р2М(р) + — рМ(р) + 777- М(р) = -=~
J Э ' Э' М i 3* м
— pt/(p)+Mc(p) ,
с
(1-6)
(1-7)
где г/с2 Мо(р)=Д<Ос(р)—изображение статического перепада скорости, вызван-
ного падением напряжения от тока статической нагрузки на активном сопротив-
лении якорной цепи, рад/с; Ta=-L!r— электромагнитная постоянная якорной це-
пи, с; Тк—!г!с2 — электромеханическая постоянная времени, с.
16
Рис. 1.5. Структурная схема ДПТ, где промежу-
точная переменная — момент двигателя М
Из уравнений (1.6—1.7) легко записываются передаточные функции ВМД
при возмущении по управлению
^У(р) ='77777 = тТТГТтТТГ ’
t/(p) ТэТмр2 4- Ткр 4- 1
(1.8)
и при возмущении по нагрузке
где Кдв = 1/с.
Мс(р) ТвТмр2 + Тмр + 1'
(1.9)
По полученным уравнениям и передаточным функциям можно составить
структурную схему ВМД. При этом в качестве промежуточной переменной, от-
ражаемой на структурной схеме, может приниматься момент двигателя для. учета
момента статического сопротивления. При использовании двигателя в электропри-
воде, выполненном по структуре подчиненного регулирования для выделения
контура тока, необходимо в структурной схеме электродвигателя в качестве
промежуточной переменной принять ток якоря. Структурная схема ВМД для
первого случая приведена на рис. 1.5. Здесь U—U(p)—изображение напряже-
ния питания, а Е=е(р)—изображение ЭДС двигателя. Передаточные функции
звеньев структурной схемы легко получаются из системы уравнений (1.1—1.4)
после записи их в операторном виде
U—E=(r+Lp)ia(p)-, (1.10)
М=с1я(р)- (1.11)
М—Мс = 1р<й. (1-12)
Первое уравнение (1.10) после выноса г за скобку и, учитывая, что L)t=T3,
можно записать в виде
U—£,=г(И-Т8р)-г,я(р). (1.13)
Решая это уравнение относительно 1я(р) и подставляя его значение в урав-
нение (1.11), получим
с/г
, 7- n W-E). (1.14)
14-Т^эР
Полученное выражение соответствует первому звену, изображенному на струк-
17
турной схеме ВМД. Передаточная функция, соответствующая второму звену, по-
лучается из уравнения (1.12), если его записать относительно ш
и учесть, что 1=
Т„
г/с2
ш =-----(/И — Мс)
Jp
согласно введенному выше обозначению. Тогда
г/с2
<0 ---(М-Мс).
тыР
(1-15)
(1-16)
Обратная связь по частоте вращения изображается по выражению
Е=са>. (1.17)
Построение структурной схемы ВМД для второго случая, когда в качестве
промежуточной переменной принимается ток якоря, производится следующим
образом. Передаточную функцию, соответствующую первому звену структурной
схемы (рис. 1.6), можно записать непосредственно по уравнению (1.10), решая
его относительно ia(p)'.
Уравнение (1.12) с учетом уравнения (1.11) и, приняв Мс = 0, можно запи-
сать в виде
cin(p)=Jp®. (1.19)
или
(1-20)
JP
учитывая связь /и 7м, окончательно можно записать
“ = ----~ . г’я(Р)-
С^м(Р)
(1-21)
Последнее уравнение соответствует второму звену структурной схемы на
рис. 1.6.
При изображении структурной схемы ДПТ (в том числе и ВМД) в составе
электропривода, выполненного по структуре подчиненного регулирования, обрат-
ная связь по частоте вращения, как правило, не учитывается. Это связано со
следующими соображениями [6]. Как всякая замкнутая система, токовый контур
стремится воспроизводить на своем выходе входной сигнал, которым в данном
случае является напряжение регулятора скорости. Изменение ЭДС, возиикайщее
при изменении скорости двигателя, является для него возмущением и приводит
к отклонению тока якоря от значения, задаваемого входным сигналом. Если из-
менение скорости, вследствие значительной электромеханической постоянной вре-
мени Тм (что характерно для ВМД), происходит сравнительно медленно, а быст-
родействие токового контура велико, ток якоря изменяется в соответствии с из-
менением напряжения регулятора скорости независимо от действующего иа кон-
тур возмущения в виде изменения ЭДС двигателя. По этой причине на структур-
ной схеме эта обратная связь может не учитываться.
18
Рис. 1.6. Структурная схема ДПТ, где проме-
жуточная переменная — ток якорной цепи /я
Как известно, характер переходного процесса при ступенчатом приложении
напряжения к якорю двигателя зависит от соотношения постоянных времени Т3
и Ты. При выполнении условия 4 Т3>ТК переходный процесс носит колеба-
тельный характер, при условии 4 Т3<ТМ — апериодический характер, а переда-
точная функция двигателя (1.8) соответствует апериодическому звену второго
порядка и может быть представлена в виде
где
(1 + Тхр)(\ + Тгр) '
Т /* Г2
^=-у-±|/ П-
(1.22)
При условии, что Т’э'СТ’м, передаточная функция двигателя будет соответ-
ствовать апериодическому звену первого порядка и иметь вид
^у(р) =
Кпв
1 + Т мР
(1-23)
На практике для ВМД, устанавливаемого непосредственно на ходовой винт
в приводе подач стайка, электромеханическая постоянная времени, с учетом при-
веденного момента инерции механизма, оказывается весьма значительной, и пе-
реходный процесс соответствует апериодическому звену второго, а чаще первого
порядка. С учетом этого по рекомендациям СЭВ принято оценивать быстро-
действие двигателя по среднему угловому ускорению, которое определяется по
формуле [3]
0,63 <1>ном
?ср = .
‘0,63
рад
с2
(1-24)
где to,бз — время, за которое двигатель, нагруженный моментом инерции механиз-
ма, разгонится до 63% от шНом (для разгона по экспоненциальной кривой /о,ез=
’/a is, где tn — время переходного процесса).
ГЛАВА ВТОРАЯ
ОСНОВНЫЕ ПРИНЦИПЫ РАБОТЫ
ТИРИСТОРНЫХ ПРЕОБРАЗОВАТЕЛЕЙ
электроприводов постоянного ТОКА
Управление двигателями постоянного тока в электроприводах подач стан-
ков, с ЧПУ осуществляется в настоящее время с помощью тиристорных преоб-
разователей (в широтно-импульсных преобразователях небольшой мощности в
качестве силовых элементов могут применяться мощные транзисторы). Тиристор-
ный преобразователь ТП, работающий на нагрузку в виде ДПТ, состоит из двух
основных частей (рис. 2.1): силовой схемы и системы импульсно-фазового уп-
равления. Основное назначение силовой схемы — преобразование 3-фазного пе-
ременного напряжения сети в постоянное напряжение t/Tn для питания якорной
цепи ДПТ, величина которого зависит от величины управляющего напряжения
подаваемого на вход ТП. В отличие от обычного управляемого выпрями-
теля силовая схема ТП в определенных режимах работы ДПТ осуществляет об-
ратное преобразование напряжения постоянного тока в напряжение переменного
тока (так называемый инверторный режим). Для регулирования величины вы-
прямленного напряжения изменяют длительность проводящего состояния тири-
стора путем изменения фазового угла открывания тиристора а относительно на-
чала положительной полуволны анодного напряжения. Эту задачу решает си-
стема импульсно-фазового управления СИФУ, осуществляя преобразование не-
прерывного входного сигнала управления Uyap в фазовый сдвиг отпирающего
импульса а что иллюстрируется рис. 2.2. Здесь для фазы А показано пилообраз-
ное опорное напряжение с лииейно-нарастающим рабочим участком
а—d. Значение начального угла управления аНач, отсчитываемого
от момента естественного отпирания тиристора, устанавливается напряжением
смещения UCK. При увеличении действующего встречно смещению входного уп-
равляющего напряжения t/ynp угол управления а уменьшается. Зависимость уг-
ла а от t/ynp может быть определена из следующих соображений. Пусть измене-
те
нию <£>t= — (со— круговая частота напряжения питания) соответствует изме-
нение напряжения на выходе генератора пилообразного напряжения, равное Un,
тогда на основании соотношения, которое непосредственно следует из рассмот-
рения рис. 2.2,
20
Рис. 2.1. Блок-схема тиристорного преобразователя
анач “* а
д/2
(^упр
можно записать выражение, связывающее угол управления с сигналом на входе
СИФУ:
(2.1)
(2-2)
11 ^упр
а=аНач-у
Пракгическн в СИФУ в качестве опорного напряжения может использовать-
ся не только пилообразное напряжение, но и синусоидальное, косинусоидальное,
сформированное из отрезков синусоид напряжений нескольких фаз питающей
сети и т. д. Опорное напряжение должно быть синхронизировано с соответствую-
щей фазой питающей сети.
Структурная схема СИФУ для управления тиристором фазы А1 показана на
рис. 2.3. Она состоит из фазосдвигающего устройства ФСУ и усилителя-форми-
рователя импульсов УФИ. ФСУ состоит из блока опорного напряжения БОН, уз-
ла суммирования опорного напряжения t/On с входным управляющим напряже-
нием Uynp и нуль-органа НО. Формирование опорного напряжения в БОН осу-
ществляется из напряжения at, жестко привязанного по фазе к напряжению пи-
тающей сети А1. Напряжение с выхода узла суммирования подается на вход НО,
который формирует импульс в момент сравнения напряжений (70п и или
в момент прохождения через нуль суммарного напряжения. Далее этот импульс
после усиления и формирования подается на управляющий электрод тиристора
для его открывания. Управляющие импульсы должны иметь достаточную мощ-
ность и высокую крутизну, необходимую для четкого открывания тиристоров.
Ток в импульсе должен превышать ток управления спрямления тиристора, а дли-
тельность импульса должна превышать время нарастания силового тока тири-
стора до величины тока удержания.
21
Наибольшее применение нашел так называемый вертикальный принцип по-
строения СИФУ, при котором в результате суммирования Uon и £/уПр получает-
ся напряжение £/вх.Но, повторяющее по форме напряжение Uon, но Смещенное
по вертикали в ту или иную сторону в зависимости от величины,и знака напря-
жения t/ynp (рис. 2.4).
Ниже рассматриваются особенности и принципы работы силовых схем ти-
ристорных преобразователей (для краткости далее просто тиристорных преоб-
разователей). Тиристорные преобразователи выполняются однофазными и много-
фазными. Прн небольшой мощности нагрузки и невысоких требованиях к каче-
Рис. 2.3. Структурная схема СИФУ
22
ству управления применяются более простые однофазные ТП. В приводах подач
станков в основном применяются многофазные ТП, что связано с существенным
уменьшением пульсаций выпрямленного напряжения, более высоким быстродей-
ствием и т. д. Все многофазные силовые схемы ТП делятся на нулевые и мо-
стовые.
В нулевых схемах (рис. 2.5, а) нагрузка, например якорная цепь электро-
двигателя, подключается к нулевой точке вторичной обмотки трансформатора и
к общей точке, в которой объединяются тиристоры, подключенные к вторичным
обмоткам трансформатора. Если тиристоры объединены своими катодами, такое
включение называют катодной группой тиристоров, если же анодами — анодной
группой тиристоров. Для сглаживания пульсаций выпрямленного тока последо-
вательно с нагрузкой включается реактор, представляющий собой дроссель с
большой индуктивностью L. Мостовая схема (рис. 2.5, б) получается путем по-
следовательного соединения двух нулевых схем: анодной и катодной. При этом
используются оба полупериода переменного напряжения, однако число тири-
сторов в такой схеме в 2 раза больше, чем в нулевой. Мостовые схемы обеспе-
чивают более высокое выпрямленное напряжение, меньшую величину и большую
частоту пульсаций, лучшее использование силового трансформатора. Приведенные
схемы относятся к нереверсивным ТП.
На примере более простой нулевой схемы ТП (рис. 2.5) рассмотрим неко-
торые особенности и принцип работы ТП. Более подробные сведения по теории
работы управляемых вентильных преобразователей и необходимые соотношения
можно найти в работах [5—§]. Первоначально положим, что вместо тиристо-
ров включены обычные диоды VI—V3, аноды которых находятся под потенциа-
лами выводов соответствующих вторичных обмоток относительно нулевого выво-
да (напряжения ед, ев, ес). Эти напряжения сдвинуты относительно друг друга
на угол 2л/т (где m— число фаз), как показано на рис. 2.6. В промежуток вре-
мени fi—ts ток проходит только через диод VI, поскольку напряжение ел, при-
ложенное к катодам диодов V2 и V3, больше напряжений ев и ес, приложенных
к их анодам, и, следовательно, запирает их. В момент напряжение ев сравни-
23
Рис. 2.5. Схемы ТП:
а — нулевая; б — мостовая
вается с ее и далее превышает последнее. Следовательно, с этого момента начи-
нает проводить ток диод V2, а напряжение ев, приложенное к катодам диодов
VI и V3, запирает их. Процесс перехода тока с одного диода на другой под дей-.
ствием ЭДС вторичной обмотки трансформатора называется естественной комму-
тацией. Соответственно период h—tg называется периодом естественной комму-
тации. Естественная коммутация свойственна неуправляемым выпрямителям. При
этом среднее значение выпрямленного напряжения равно
, г— т я
tfd0 = V2 Е2—sin —, (2.3)
тс т
где Е2 — действующее значение ЭДС вторичной обмотки трансформатора. Реаль-
но процесс коммутации вентилей протекает не мгновенно, а в течение некоторого
промежутка времени. Это связано с действием индуктивности рассеяния вторич-
ных обмоток трансформатора, которая поддерживает ток в вентиле, выходящем
из работы и уменьшает ток в вентиле, входящем в работу. По этой причине су-
ществует период, когда ток проходит через два вентиля. Фазовый угол у, соот-
ветствующий этому периоду, называется углом коммутации (рис. 2.6). В комму-
тационный период потенциал общей точки катодов, который должен был иметь
значение ев, равен полусумме ЭДС двух фаз */2 (еА+ев). В конце процесса ком-
мутации, когда вентиль VI закрывается, этот потенциал скачком возрастает до
величины, определяемой ЭДС фазы В. В результате среднее значение выпрям-
ленного напряжения уменьшается на величину
24
Рис. 2.6. Коммутация токов в неуправляемом вы-
прямителе
д6/к=/н-^^, (2.4)
2тс
где х2т — индуктивное сопротивление рассеяния вторичной обмотки трансформа-
тора; /н — ток нагрузки. В контуре коммутации, состоящем из вторичных обмо-
ток трансформатора (фазы А1 и BJ) и вентилей VI, V2, действует разность ЭДС
ев—еА, показанная штриховой линией на рис. 2.6. Заштрихованные площадки
отражают эффект уменьшения выпрямленного напряжения, связанный с процес-
сом коммутации.
В управляемых выпрямителях вместо диодов применяют тиристоры, на уп-
равляющий электрод которых подается управляющий импульс, смещенный отно-
сительно точки естественного открывания на некоторый фазовый угол а, назы-
ваемый углом запаздывания зажигания, так как он. характеризует запаздывание
открывания тиристора по сравнению с моментом естественного зажигания
(рис. 2.7). При этом соответственно смещается во времени момент вступления
в работу очередного тиристора и затягивается работа предыдущего. Наблюдается
также процесс коммутации. Среднее значение выпрямленного напряжения Us
будет пропорционально cos а.
U3=Uda cos а. (2.5)
Эффект управления ТП иллюстрируется рис. 2.8, на котором показаны графи-
ки выходного напряжения при изменении угла управления а от 0 до 90°. Здесь
же показан минимальный угол amid, при котором ТП теряет управление, так как
ЭДС двигателя £дв в зоне amin больше мгновенного значения напряжения фазы,
и напряжение на тиристоре становится отрицательным. Кривая мгновенных зна-
25
Рис. 2.7. Коммутация токов в управляемом выпря-
мителе
чений выпрямленного напряжения выделена жирной линией. Для наглядности
на одном графике показано изменение угла а от 0 до 90°, тогда как реально при
каждом значении а может проходить любое количество периодов напряжения
фаз питающей сети. Можно видеть, что прохождение тока будет и прн отрица-
тельном значении фазного напряжения. Это объясняется наличием индуктивности
в цепи нагрузки. Также следует отметить, что при работе ТП напряжение на его
зажимах будет меньше, чем среднее значение выходного напряжения выпрями-
теля, Это связано с падением напряжения на тиристорах, на активном сопро-
тивлении силовой цепи, а также с процессом коммутации тиристоров. Последнее
имеет наибольшее значение и обычно превышает два предыдущих. Падение на-
пряжения на тиристорах можно принять примерно постоянным Д£7Т = О,5—1,0 В.
Падение напряжения на активном сопротивлении силовой цепи пропорционально
току нагрузки Д£/в=/я^яц.
Тот^да на зажимах ТП среднее выпрямленное напряжение равно
UB = Udo cos а—Д(/к— ДПН—Д(7.
(2.6)
или
t7B — t7joCOS а /н
Х2т-7П
Чт.
"Ь ^яц) ДГ7т-
(2-7)
Последнее выражение представляет собой внешнюю характеристику ТП
(рис. 2.9), из которой следует, что с увеличением угла а напряжение на зажимах
ТП уменьшается, а при постоянном значении а уменьшение этого напряжения
происходит с увеличением тока нагрузки. Наклон внешней характеристики от-
ражает внутреннее сопротивление ТП, которое определяется отношением
26
Рис. 2.8. Выходное напряжение ТП при различных углах управления
о
'Мтп —’ Л -
А 'нагр
(2.8)
Можно видеть, что в области больших тюков нагрузки Р;тп относительно
мало, однако с уменьшением тока нагрузки наклон характеристик увеличивается,
что говорит об увеличении внутреннего сопротивления ТП. Последнее связано с
тем, что ТП переходит из режима «непрерывного тока» нагрузки в режим «пре-
рывистых токов». Физическая картина появления прерывистых токов поясняется
рис. 2.10. При уменьшении тока нагрузки уменьшается количество энергии, за-
Рис. 2.9. Внешняя характеристика ТП
27
Рис. 2.10. Кривые выпрямленного напря-
жения:
а — режим непрерывного тока; б — режим
прерывистого тока
Г = Л
г₽ *2т + хЛ
пасаемой в индуктивности силовой
цепи, так как последняя в реальных
условиях имеет конечное значение, и
наступает момент, когда накоплен-
ной энергии оказывается недостаточ-
но, чтобы поддерживать ток при от-
рицательных напряжениях на аноде
тиристоров, вследствие чего ток в
цепи якоря уменьшается до нуля,
т. е. становится прерывистым. Умень-
шение энергии, запасаемой в индук-
тивности силовой цепи, при уменьше-
нии тока нагрузки отражается на
рис. 2.10 уменьшением заштрихован-
ной площадки S2, соответствующей
проводящему состоянию вентиля при
отрицательном напряжении на его
аноде. В промежутках ti—/2 при от-
сутствии тока в цепи нагрузки напря-
жение на зажимах ТП равно ЭДС
двигателя Едв.
Существует определенная связь
между углом регулирования а н гра-
ничным током нагрузки /гр, разделя-
ющим указанные два режима работы
ТП. По мере уменьшения напряже-
ния холостого хода UTT величина
граничного тока увеличивается, и ре-
жим прерывистых токов будет наб-
людаться при больших значениях то-
ка нагрузки. В общем виде эта связь
определяется формулой
~“7ctg'£’')slrla’ <2’9)
ТП Ш j
где хн — индуктивное сопротивление нагрузки.
Этому выражению на рис. 2.9 соответствует штриховая линия, ограничива-
ющая режим прерывистых токов и представляющая собой дугу эллипса.
Выше был рассмотрен выпрямительный режим работы ТП. Однако исполь-
зование только такого режима работы существенно ограничивает возможности
управления двигателем постоянного тока. Обратимся к рис. 2.2, 2.5, 2.8 и выра-
жению (2.5). При значении угла регулирования а=90° среднее значение выпрям-
ленного напряжения ТП UB = Q и двигатель находится в покое. Для пуска дви-
гателя и его разгона необходимо уменьшать угол а, при этом увеличивается UB
и двигатель разгоняется. Одновременно возрастает и ЭДС двигателя Едв. В ус-
28
тановившемся режиме работы электродвигателя, если пренебречь падениями
напряжения в силовой цепи, напряжение ТП будет уравновешиваться ЭДС дви-
гателя. Предположим, что требуется уменьшить частоту вращения двигателя.
С этой целью должен быть увеличен угол регулирования а, что вызывает соот-
ветствующее уменьшение напряжения ТП. Поскольку ЭДС двигателя мгновен-
но измениться не может, она оказывается больше напряжения ТП, при этом ти-
ристоры запираются и электродвигатель оказывается как бы отключенным от
ТП. Начинается свободное торможение двигателя, определяемое только момен-
том сопротивления нагрузки. В процессе торможения двигателя наступит мо-
мент времени, когда в результате уменьшения £дв она снова сравняется с Us.
При этом установится новое значение частоты вращения двигателя. Такой про-
цесс торможения оказывается, как правило, недопустимо длительным. С целью
его сокращения применяют динамическое торможение ДПТ, при котором якорь
двигателя подключается с помощью силовых ключей (в качестве которых также
могут использоваться тиристоры) к резистору динамического торможения. Од-
нако при этом наиболее интенсивное торможение наблюдается только в началь-
ный момент. Далее, по мере уменьшения тока якорной цепи двигателя, тормо-
зящий момент также уменьшается, что затягивает процесс торможения.
Наиболее рациональным с точки зрения сокращения времени торможения и
экономичности является так называемый режим рекуперативного торможения,
при котором часть энергии возвращается в сеть, а электродвигатель в процессе
такого торможения работает в качестве генератора. Таким образом, необходимо
реализовать обратное преобразование энергии из цепи постоянного тока в питаю-
щую сеть переменного тока. Такой процесс называется инвертированием, а уст-
ройство, с помощью которого осуществляется этот процесс,— инвертором.
Рассмотрим, при каких условиях ТП может работать в режиме инвертора.
Прежде всего необходимо, чтобы £дв стала больше t/B, именно с этого условия
начинается процесс торможения. Однако, как мы видели выше при рассмотре-
нии этого процесса на примере схемы ТП (рис. 2.5, а), в этом случае происходит
запирание тиристоров и отключение двигателя от ТП. Для осуществления ин-
вертирования энергии необходимо, чтобы проходил ток по силовой цепи, что
непосредственно не может быть реализовано вследствие односторонней прово-
димости тиристоров.
Для того чтобы появилась возможность создать ток через вентиль в процессе
торможения, необходимо изменить полярность подключения якоря электродвига-
теля к тиристорам, что можно сделать, например, с помощью контактной схемы.
В этом случае ЭДС двигателя и напряжение ТП совпадают по направлению и
ток силовой цепи будет проходить через вентиль, т. е. в том же направлении,
как и в двигательном режиме. Двигатель оказывается в режиме противовключе-
ния и начнет тормозиться, отдавая энергию в силовую цепь. Однако рекуперации
энергии в сеть переменного тока происходить не будет. Это объясняется тем, что
фазовые соотношения между током вторичной обмотки трансформатора, током
вентилей и ЭДС вторичной обмотки остались те же, что и в двигательном режи-
ме. Таким образом, для получения режима рекуперации необходимо изменить
фазу тока или напряжения во вторичной обмотке трансформатора на противо-
29
Рнс. 2.11. Схемы замещения нереверсивного
ТП:
а — выпрямительный режим; б — инверторный ре-
жим
двигателя. Таким образом, для осуществления
положную. Первое не представ-
ляется возможным из-за одно-
сторонней проводимости тири-
сторов, поэтому необходимо из-
менить фазу напряжения вто-
ричной обмотки. Следует иметь
в виду, что здесь речь идет не
об изменении фазы питающего
напряжения вообще, а об ее
изменении только в период про-
хождения тока через обмотку
трансформатора и тиристор в
процессе торможения электро-
режима инвертирования необхо-
димо выполнить два условия:
— изменить полярность ЭДС двигателя на противоположную;
— обеспечить подачу открывающих импульсов на тиристоры таким образом,
чтобы ток большую часть времени протекал бы при отрицательной полуволне
питающего напряжения (а>90°).
При выполнении этих условий двигатель работает в режиме рекуперативного
торможения генератором, вентиль и трансформатор — в инверторном режиме пе-
редачи энергии в сеть.
На рис. 2.11 в упрощенном виде показана работа ТП в выпрямительном (а)
и инверторном (б) режимах. Здесь регулировочные свойства преобразователя учи-
тываются йсточником регулируемого напряжения Udo cos а, а эффект односто-
ронней проводимости — включением диода VI. В выпрямительном режиме по-
лярность UB положительная, поскольку открывание тиристоров происходит при
7С
положительных полупериодах анодного напряжения рис. 2.8) н направ-
ление тока совпадает с направлением напряжения UB, но противоположно на-
правлению ЭДС двигателя Ддв.
В инверторном режиме (рнс. 2.11, б), наоборот, направление тока совпадает
с направлением £дв, полярности напряжения ТП и ЭДС двигателя противопо-
ложны по сравнению с выпрямительным режимом.
Протекание тока при отрицательных значениях питающего напряжения обес-
печивается заданием угла регулирования а большим, чем 90 эл. градусов
(7С \
a>yl, Кривые напряжений силовой схемы в инверторном режиме показаны
на рнс. 2.12. Отметим еще раз, что несмотря иа то, что импульсы для открыва-
ния тиристоров могут подаваться при отрицательных полупериодах анодного
напряжения, его включение и прохождение тока через тиристор обеспечивается
за счет положительного результирующего напряжения, приложенного между
анодом и катодом тиристора, поскольку в этом режиме, как было отмечено вы-
ше, должно выполняться условие |£дв | > | UB |.
Угол регулирования а в инверторном режиме больше 90°. Для удобства ана-
30
и
лиза его обычно заменяют углом, опережения зажигания р, который связан с уг-
лом а соотношением
Р=180°—а (2.10)
и тоже ие будет превышать 90°. Название «угол опережения зажигания» связа-
но с тем, что в инверторном режиме этот угол показывает, насколько момент
подачи открывающего тиристор импульса предшествует (опережает) момент ес-
тественного зажигания тиристора в этом режиме (рис. 2.12, например, р=60°).
Внешняя характеристика инвертора будет определяться выражением
“ + Ляц) +Д^Т- (2-11)
Необходимо отметить еще одну особенность осуществления режима инвер-
тирования. Она связана с необходимостью ограничения минимального значения
угла р. Для обеспечения нормальной работы тиристоров в инверторном режиме
минимальное значение угла опережения зажигания Р должно быть ограничено
таким образом, чтобы за время t\—t2 (рис. 2.12) закончились процессы комму-
тации и вентиль, выходящий из работы (ес), восстановил свои управляющие
свойства, т. е. полностью заперся. Отсюда
Pmin^y+6+ф, (2.12)
где у — угол коммутации (время спадания тока в вентиле);
6 — угол восстановления управляющих свойств;
Ф—угол запаса, связанный с несимметрией подачи управляющих импульсов
по фазам.
Если же это условие ие будет выполнено, то при коммутации тока с фазы
вс иа фазу ед к моменту времени t2 ток через тиристор фазы ес ие успеет стать
меньше тока удержания, и так как в этот момент тиристор фазы ес снова будет
находиться под более положительным потенциалом, чем тиристор с ЭДС ел, он
откроется вновь, выключив тиристор фазы еА (этому случаю сответствует жир-
31
Рнс. 2.13. Реверсивные схемы силовых цепей:
а — перекрестная; б нулевая; в — мостовая
ная линия —ЭДС ес и пунктирная еА иа
рис. 2.12. В результате полярность ЭДС
двигателя и напряжения ТП совпадут, т. е.
наступит короткое замыкание или, как гово-
рят, опрокидывание инвертора.
Для того чтобы иметь возможность осу-
ществить рекуперативное торможение элект-
родвигателя с использованием режима ин-
вертирования и не производить переключе-
ний в силовой цепи, применяют схемы с дву-
мя комплектами тиристоров. Достоинством
таких схем является возможность реверси-
рования двигателя. Поэтому такие двух-
комплектные тиристорные преобразователи
называются реверсивными.
Наиболее распространенные силовые
схемы реверсивных тиристорных преобразо-
вателей с двумя комплектами тиристоров
представлены на рис. 2.13: перекрестная (а)-,
нулевая (б) и мостовая (в). Эти схемы лег-
ко получаются объединением схем двух не-
реверсивных ТП. При этом в зависимости от
направления вращения электродвигателя
одни комплект ТП работает в выпрямитель-
ном режиме, а другой — в инверторном. Эк-
вивалентная схема (рис. 2.14), отражающая
работу двухкомплектного реверсивного ТП,
получается путем объединения эквивалент-
ных схем на рис. 2.11, соответствующих вы-
прямительному и инверторному режимам ра-
боты ТП. На рис. 2.14, а первый комплект
тиристоров работает в качестве выпрямите-
ля (1В), а второй — инвертора (2И), что
обеспечивает вращение двигателя по часовой
Рис. 2.14. Схемы замещения ре-
версивного ТП:
ч — выпрямительный режим; б — ин-
верторный режим
стрелке (для примера). На рис. 2.14, б, наоборот, первый комплект работает ин-
вертором (1И), а второй — выпрямителем (2В), чему соответствует вращение
двигателя в противоположном направлении — против часовой стрелки.
Для равновесного состояния схе-мы можно записать
= &U; (2.13)
£"дв — Пя 4* АСУ, (2.13)
где АСУ— падение напряжения иа тиристорах, откуда
Ua=UB— 2 АСУ, (2.14)
или Udo cos (3=СУ<£о cos а—2 АСУ. (2.15)
2 Заказ 4546
33
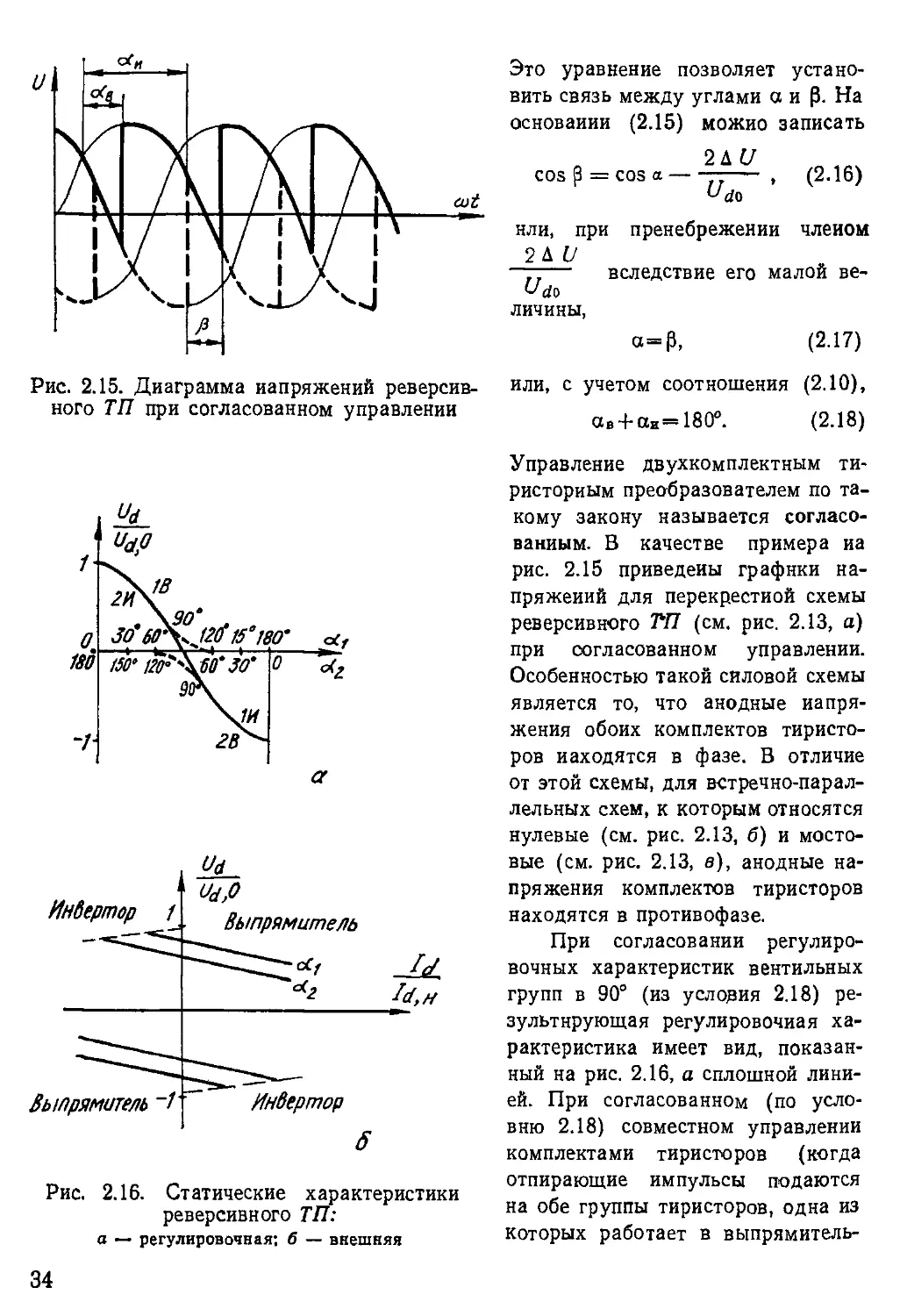
Рис. 2.15. Диаграмма напряжений реверсив-
ного ТП при согласованном управлении
Рис. 2.16. Статические характеристики
реверсивного ТП:
а — регулировочная; б — внешняя
Это уравнение позволяет устано-
вить связь между углами а и 0. На
основании (2.15) можно записать
2Д U
COS 0 = COS а---—---- , (2.16)
Vdo
или, при пренебрежении членом
2 Д U
~~г— вследствие его малой ве-
do
личины,
а=0, (2.17)
или, с учетом соотношения (2.10),
ав + аи=180°. (2.18)
Управление двухкомплектным ти-
ристорным преобразователем по та-
кому закону называется согласо-
ванным. В качестве примера иа
рис. 2.15 приведены графики на-
пряжений для перекрестной схемы
реверсивного 777 (см. рис. 2.13, а)
при согласованном управлении.
Особенностью такой силовой схемы
является то, что анодные напря-
жения обоих комплектов тиристо-
ров находятся в фазе. В отличие
от этой схемы, для встречно-парал-
лельных схем, к которым относятся
нулевые (см. рис. 2.13, б) и мосто-
вые (см. рис. 2.13, в), анодные на-
пряжения комплектов тиристоров
находятся в противофазе.
При согласовании регулиро-
вочных характеристик вентильных
групп в 90° (из условия 2.18) ре-
зультирующая регулировочная ха-
рактеристика имеет вид, показан-
ный на рис. 2.16, а сплошной лини-
ей. При согласованном (по усло-
вию 2.18) совместном управлении
комплектами тиристоров (когда
отпирающие импульсы подаются
на обе группы тиристоров, одна из
которых работает в выпрямитель-
34
Рис. 2.17. Природа статического уравнительного тока
иом, а другая в инверторном режимах) возникает так называемый урав-
нительный ток, который замыкается внутри выпрямительной и инверторной групп
вентилей, мииуя цепь нагрузки, и может быть непрерывным или гранично-не-
прерывным. В этом случае даже при отсутствии тока нагрузки устраняется зона
прерывистых токов и внешние характеристики становятся линейными. Если пре-
небречь падением напряжения в вентилях, то внешние характеристики будут
прямыми линиями, проходящими без излома из режима выпрямления в режим
инвертирования (рис. 2.16, б). Прохождение уравнительного тока, мииуя цепь
нагрузки, показано на эквивалентных схемах двухкомплектных ТП (см. рис.,2.14).
При совместном согласоваииом управлении, даже если допустить, что сред-
ние выпрямленные иапряжеиия выпрямителя и инвертора одинаковы, мгновенные
напряжения не равны и для ограничения уравнительного тока на требуемом
уровне необходимо в контур между выпрямителем и инвертором включить то-
коограничивающие реакторы (индуктивности L1—L4 на рис. 2.13). Индуктивность
реакторов выбирается такой, чтобы уравнительный ток не превышал 10% номи-
нального тока нагрузки.
2*
35
и,
U2
Рис. 2.18. Природа динамического уравнительного тока
В качестве примера, наглядно иллюстрирующего наличие уравнительного то-
ка, на рис. 2.17 приведены кривые фазных напряжений для выпрямительной и
инверторной групп (напряжения этих групп, как отмечалось выше, находятся в
противофазе), диаграммы уравнительных напряжений и токов для наиболее рас-
пространенной реверсивной нулевой силовой схемы (см. рис. 2.13, б). Как вид-
но из рис. 2.17, статический уравнительный ток имеет начально-непрерывный ха-
рактер, т. е. в конце своего периода достигает нулевого значения. Это обстоя-
тельство позволяет ограничивать статический уравнительный ток с помощью
индуктивности. Чем больше L, тем меньше уравнительный ток, однако при этом
уменьшается быстродействие привода, поскольку увеличивается индуктивность
якорной цепи электродвигателя.
При реверсах электропривода может появляться динамический уравнитель-
ный ток, что поясняется рис. 2.18 для перекрестной схемы, т. е. когда анодные
напряжения находятся в фазе. Пусть в момент времени ta подана команда на
реверс. При этом группа вентилей, работавшая в инверторном режиме (пунктир-
ная линия), переходит в выпрямительный режим мгновенно (при предельном
быстродействии системы управления преобразователем), тогда как группа вен-
тилей, работавшая в выпрямительном режиме (непрерывная линия), может пе-
реходить в другой режим лишь по отрезку синусоиды напряжения анода тири-
стора, проводившего ток в момент подачи команды на реверс. При этом, как вид-
но из кривых, несоответствие напряжений двух групп вентилей в переходном ре-
жиме вызывает толчок динамического уравнительного тока, который затем будет
уменьшаться до значения статического уравнительного тока. Очевидно, что наи-
больший динамический уравнительный ток будет в случае подачи команды на
36
реверс в момент открывания очередного вентиля. Следует отметить, что величи-
ну уравнительного тока можно значительно уменьшить и даже исключить совсем
за счет нелинейного согласования групп вентилей.
Уравнительных токов не будет при ,так называемом раздельном управлении
вентильными группами, когда отпирающие импульсы подаются только на одну
из групп в зависимости от требуемого режима работы ТП в данный момент. По-
скольку одна из групп вентилей всегда заперта, контур для протекания урав-
нительного тока отсутствует. Такой способ управления, несмотря на значитель-
ное усложнение схемы управления группами вентилей, нарушение непрерывности
управления и появление зоны неоднозначности в регулировочной характеристике
находит в настоящее время все большее и большее применение. Это стало воз-
можным за счет миниатюризации цифровых и аналоговых интегральных схем,
позволяющих устранить многие недостатки данного способа управления при
сохранении приемлемых габаритных размеров преобразователей. Экономия же в
силовой части (исключение уравнительных дросселей, полное использование га-
баритной мощности силового трансформатора и т. д.) очевидна.
ГЛАВА ТРЕТЬЯ
ОПЕРАЦИОННЫЕ УСИЛИТЕЛИ —
ОСНОВНАЯ ЭЛЕМЕНТНАЯ БАЗА
ПРЕОБРАЗОВАТЕЛЕЙ СОВРЕМЕННЫХ
ЭЛЕКТРОПРИВОДОВ
Название операционный усилитель (ОУ) было дано первоначально усилите-
лям с большим коэффициентом усиления, предназначенным для выполнения ма-
тематических операций сложения, вычитания, умножения н деления. Это были,
в основном, ламповые усилители, работающие с высокими напряжениями. От
них и заимствовал свое название современный линейный интегральный операци-
онный усилитель.
Интегральный ОУ обладает следующими основными свойствами:
— симметрия двух дифференциальных входов;
— нулевое напряжение на выходе при отсутствии сигналов на входах;
— большие коэффициенты усиления по напряжению, току и мощности (в иде-
але — бесконечность);
— большая полоса пропускания, начиная от постоянного тока (в идеале —
бесконечность);
— большое входное сопротивление (в идеале—бесконечность);
— малое выходное сопротивление (в идеале—нуль);
Такие замечательные свойства, приданные ему разработчиками, позволяют
ОУ служить схемотехнической основой разнообразных схем, свойства ко-
торых определяются подключенными к нему внешними компонентами,
На принципиальных схемах
ОУ обычно изображается в ви-
де треугольника или прямо-
угольника (рис. 3.1).
ОУ имеет пять основных
выводов:
— положительное напря-
жение питания +ОП;
— отрицательное напряже-
ние питания —Un',
— инвертирующий вход
(-);
а не собственно операционным усилителем.
Рис. 3.1. Схема подключения ОУ
38
— неинвертирующий вход
(+);
— выход.
Остальные выводы являются
вспомогательными и предназначе-
ны для подключения элементов
коррекции, указываемых в пас-
портных данных каждого ОУ.
Следует обратить внимание
на то, что для питания ОУ приме-
няется источник с расщепленным
питанием, при этом земля (общая
точка) не подключена к ОУ.
Полярность напряжения на
выходе ОУ зависит от разности
напряжений на входах усилителя.
^ВЫХ = Ко(^ВХ+--t^BX—),
где Ко—коэффициент усиления
ОУ по напряжению в
схеме включения без об-
ратной связи;
С7Вх+ — напряжение на неинвер-
тирующем входе;
1/Вх — напряжение на инверти-
рующем входе.
Величина Ко очень велика, по-
этому ОУ переходит в состояние
насыщения при малых входных
сигналах (рис. 3.2, 3.3).
Здесь можно говорить об ОУ
как об идеальном компараторе.
Входной сигнал сравнивается с
нулевым опорным напряжением на
втором входе, и переход входного
напряжения через ноль определяет
момент переключения выходного
напряжения.
Если на второй вход ОУ по-
дать некоторое опорное напряже-
ние, то получится детектор ненуле-
вого уровня (рис. 3.4).
Сделаем оценку диапазона
входного сигнала, при котором ОУ
работает в линейной зоне, т. е. не
достигает насыщения.
Рис. 3.2. Реакция ОУ при подаче вход-
ного сигнала на неинвертирующий вход
Рис. 3.3. Реакция ОУ при подаче вход-
ного сигнала иа инвертирующий вход
39
Рис. 3.4. Влияние смещения иа форму выходного напряжения
Очевидно, что ± С/Вхтах =
пряжение насыщения около 13
150 000 и более, то
±—г;—• Если учесть, что при 1/Пш = ±15 В, на-
Ао
В, а коэффициент усиления достигает величины
^вхтах
13
150000
= ± 87 мкВ.
В условиях производства и даже в лаборатории измерение подобных вели-
чии представляет собой весьма трудную задачу, поэтому можно сделать очень
важное упрощение: в практических случаях, если t/вых не равно насыщению,
напряжение между входными зажимами ОУ можно считать равным нулю.
Отрицательная обратная связь
в операционном усилителе (ООС)
Охват ОУ отрицательной обратной связью (рис. 3.5) позволяет получить
схему, коэффициент передачи которой определяется только внешними элемента-
ми, подключенными к ОУ, и не зависит от коэффициента усиления Ко самого ОУ.
Получить расчетную формулу для коэффициента передачи такой
схемы можно двумя способами: иа основе соотношения между напряжениями
или между токами, протекающими в схеме. Приведем оба способа, что позволит
лучше понять физику происходящих здесь процессов. При этом будем считать
ОУ идеальным (Ко-*-00; /?вх->-оо; Лвых-^0).
1. Анализ на основе токовых соотношений
Поскольку напряжение между входами ( + ) и (—) практически равно ну-
лю, то можно считать, что вход (—) потенциально заземлен, и, следовательно,
все входное напряжение приложено к Rt. Тогда
Весь входной Ток протекает через сопротивление Roc, так как ОУ тока не
потребляет (/?вх->°°). Следовательно, £/дос =7вхЛос- Одни вывод Roc подсо-
40
Рис. 3.5. ОУ с отрицательной обратной связью
едииеи к выходу, а второй—к потенциально заземленному входу (—), поэтому
1/яос=^вых-
„ , ^вх URoc ^вых
Итак, /Вх= ~7,— = ~п-----=—~d—• Знак «минус» учитывает разные по-
«М Ясс *\ос
ляриости напряжений t/вх и ивых.
Окончательно коэффициент передачи схемы
. ^вых _______ *ос
ос“ ивх ~ Rt
т. е. не зависит от параметров самого операционного усилителя.
2. Анализ на основе соотношений напряжений
В общем случае выходное напряжение ОУ равно:
UbMX = Ko(UbX+ ОВХ — )•
В нашем случае Увх+ = 0, a UBX- состоит из двух составляющих: части на-
пряжения UBX, снимаемого с делителя напряжения Ru Roc, и части выходного
напряжения 1/ВЫх, подаваемого через цепь обратной связи на вход. Величина
последнего определяется делителем Roc, R\-
Итак,
Тогда
f/вых = — K0UBX п ,р ~ ^о^вых „ ' =
/\1 Т Аос 'ЧТ^ОС
____ ____Wxfloc______ ~ Roc
„ I Я.+Яос “ "
*°пг
или коэффициент передачи Кос — — ~п
41
Рис. 3.6. Обобщенная схема ОУ
Ниже приводится выведенная аналогичным способом зависимость выходного
напряжения от входных для обобщенного дифференциального ОУ (рис. 3.6).
г- л 1 -1
У——
“ R~ т 1 л 1
Ry
О ] —
^вых—Rxq
Положительная обратная связь
в операционном усилителе (ПОС)
ПОС осуществляется путем подачи части выходного напряжения иа неин-
вертирующий вход. Это напряжение является своего рода «опорным», благодаря
которому достигается «гистерезис» в выходной характеристике ОУ (рис. 3.7).
Таким образом, ПОС цаех эффект триггера Шмитта и положительно сказы-
вается при работе с сигналами, имеющими большую амплитуду шумов. Если
«опорные» напряжения превышают по величине амплитуду шумов, то полностью
исключаются ложные срабатывания схемы (рис. 3.8).
Включив в цепь ПОС диод, можно получить одностороннюю гистерезисную
характеристику.
Дифференциальный усилитель (ДУ)
Дифференциальные усилители предназначены для усиления разности сигна-
лов, подключенных к инвертирующему и неинвертирующему входам и широко
42
Рис. 3.7. ОУ с положительной обратной связью
Рис. 3.8. Влияние ПОС на форму выходного напряжения при наличии «шумов»
на входе:
а—при отсутствии ПОС-, б —при наличии ПОС
используются в преобразовательной технике. Типовая схема такого усилителя
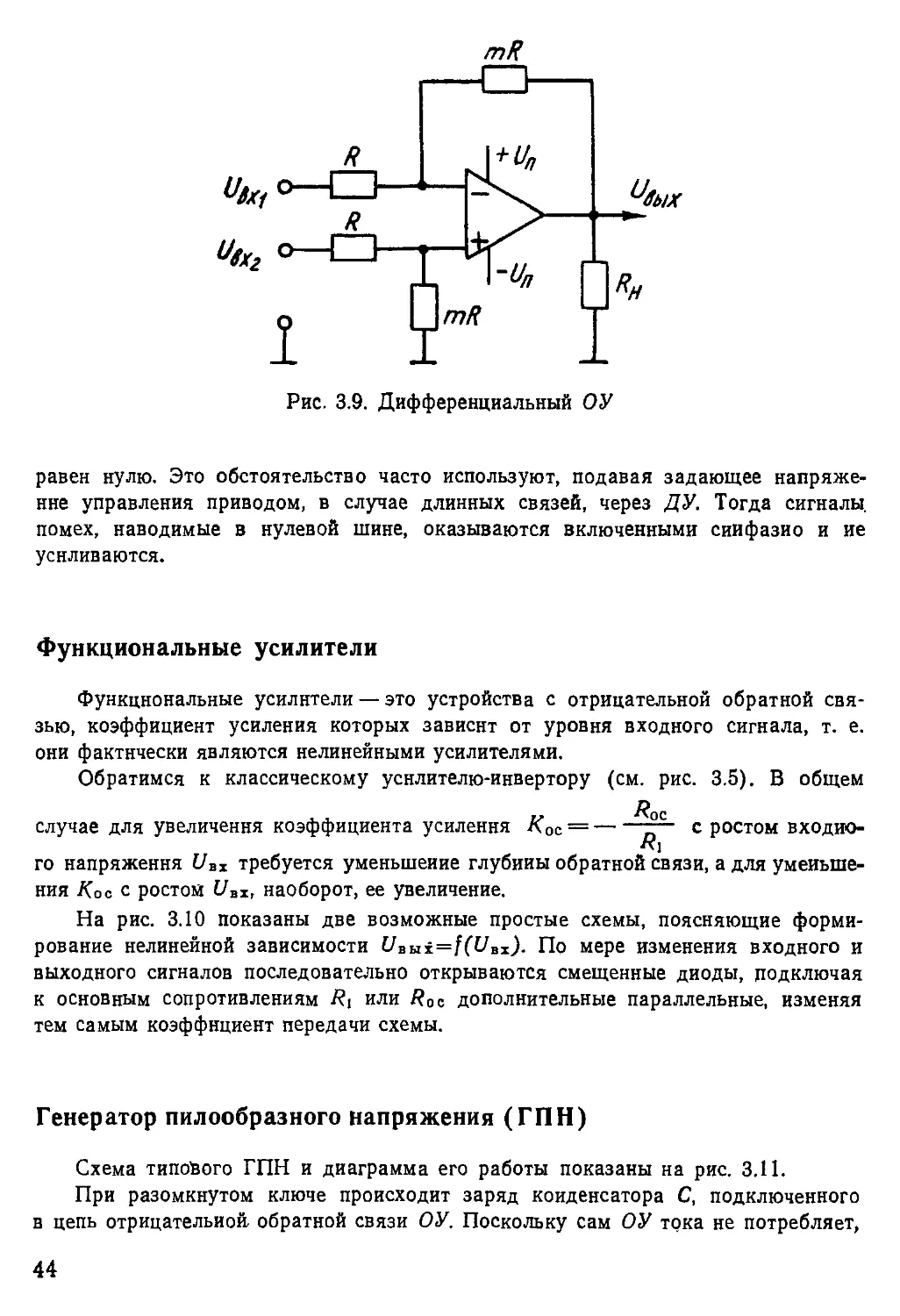
показана на рнс. 3.9.
Воспользовавшись формулой для выходного напряжения обобщенного уси-
лителя, получим
^вых = mR
1 1
mR R
mR R
— m(UByL^ U ВХ2 ).
Коэффициент т называют дифференциальным коэффициентом усиления.
При £/вх1 = {/Вх2 напряжение на выходе равно нулю.
Таким образом, коэффициент усиления Для синфазного входного напряже-
ния, т. е. напряжения, подаваемого одновременно на оба входа, будет также
43
mR
Рис. 3.9. Дифференциальный ОУ
равен нулю. Это обстоятельство часто используют, подавая задающее напряже-
ние управления приводом, в случае длинных связей, через ДУ. Тогда сигналы,
помех, наводимые в нулевой шине, оказываются включенными сиифазио и ие
усиливаются.
Функциональные усилители
Функциональные усилители — это устройства с отрицательной обратной свя-
зью, коэффициент усиления которых зависит от уровня входного сигнала, т. е.
они фактически являются нелинейными усилителями.
Обратимся к классическому усилителю-инвертору (см. рис. 3.5). В общем
. , Roc
случае для увеличения коэффициента усиления лОс = — —с ростом входио-
°i
го напряжения UBI требуется уменьшение глубины обратной связи, а для уменьше-
ния Дос с ростом 1/Вх, наоборот, ее увеличение.
На рис. 3.10 показаны две возможные простые схемы, поясняющие форми-
рование нелинейной зависимости UBat=f(UBT). По мере изменения входного и
выходного сигналов последовательно открываются смещенные диоды, подключая
к основным сопротивлениям Ri или ROc дополнительные параллельные, изменяя
тем самым коэффициент передачи схемы.
Генератор пилообразного напряжения (ГПН)
Схема типового ГПН и диаграмма его работы показаны на рис. 3.11.
При разомкнутом ключе происходит заряд конденсатора С, подключенного
в цепь отрицательной обратной связи ОУ. Поскольку сам ОУ тока не потребляет,
44
Ufa
Ши?
Рис. 3.10. Функциональные усилители:
а — увеличение Хус; б — уменьшение Хус
то ток заряда определяется входным
tZBX
током /С=/Вх=—т— • Тогда напря-
/\
жение на конденсаторе, как известно
из основ электротехники, равно
и _ и.™../ — гт —
С RC п т '
Напряжение на выходе ОУ имеет
обратный знак
Uвых — ^вх •
Постоянство тока заряда обес-
печивает линейность характеристики.
При замкнутом ключе конденса-
тор быстро разряжается, и выходное
напряжение падает до нуля.
Замыканием и размыканием клю-
ча в моменты достижения выходным
напряжением уровня насыщения до-
стигается формирование пилообраз-
ного напряжения. Частота генерации
Рис. 3.11. Генератор линейно-изме-
няющегося напряжения
определяется выражением
^ВХ 1 „ 1
/ = ,7—•—, а период Т = —
ь'нас t f
45
НИЯ
Рис. 3.13. Принцип формирования
треугольного напряжения
Генератор напряжения
треугольной формы
Схема генератора и диаграмма
напряжений его работы показана
на рис. 3.12. Схема включает два
элемента: генератор линейно-изме-
няющегося напряжения и компа-
ратор. Понять принцип работы
такой схемы довольно сложно.
Анализ значительно упростится,
если его разбить иа три этапа.
На первом этапе рассмотрим
работу генератора линейио-изменя-
ющегося напряжения, управляе-
мого вручную (рис. 3.13). Когда
переключатель находится в верх-
нем по схеме положении, на входе
ОУ напряжение —15 В и выход-
ное напряжение (/Вых растет; при
нижнем положении переключателя
l/вых падает.
В момент <?=0 при верхнем
положении переключателя на схе-
му подается питание. Напряжение
1/вх отрицательное, (/вых растет.
При достижении t/вых верхнего
порогового напряжения (/п в ключ
переключается в нижнее положе-
ние, (/вх становится положитель-
ным, а выходное напряжение спа-
дает. В момент достижения ниж-
него порогового напряжения (/п.н
вновь переключается ключ, (/Вых
снова растет и т. д. Чтобы добить-
ся автоматического переключения,
необходимо заменить ручной ключ
компаратором.
На втором этапе следует разо-
браться в работе компаратора, вы-
полненного иа операционном уси-
лителе с положительной обратной
связью (см. рис. 3.7). Принцип его
работы приведен выше, только
вместо синусоидального входного
46
сигнала в нашем случае используется сигнал треугольной формы (см.
рис. 3.13).
На третьем этапе подключим выход генератора линейно-нарастающего на-
пряжения ко входу компаратора, а выход компаратора — ко входу генератора,
т. е. получим полную схему генератора напряжения треугольной формы, пока-
занного иа рис. 3.12. Работа генератора ясна из приведенной на этом же рисун-
ке диаграммы.
Используя аналогичный принцип заряда-разряда конденсатора, можно стро-
ить различные схемы одновибраторов, мультивибраторов, временных элементов.
При необходимости следует обратиться к специальной литературе [9, 10].
Генератор синусоидальных колебаний
Как известно из теории колебаний, для возникновения самовозбуждения не-
обходимо выполнение двух условий:
— в замкнутой цепи коэффициент передачи должен быть равным единице,
т. е. выполняться баланс амплитуд.
— сумма фазовых сдвигов при прохождении сигнала определенной частоты
по тракту схемы должна быть равна 2Кл (где К=1, 2, ..., п), т. е. выполняться
баланс фаз,
На рис. 3.14 приведена одна
колебаний — мостового генера-
тора Вина. Предположим, что
на выходе генератора возникло
синусоидальное напряжение
Ивых определенной частоты
х 1
fo = “о—н амплитуды.
2 Я Ab
Это напряжение по цепи обрат-
ной связи подается на ЯС-цепрч-
ку, представляющую собой час-
тотный селектор по схеме моста
Вина. Напряжение f7Bx с выхо-
да этого моста поступает на
неннвертирующий вход ОУ. Ча-
стотный селектор ослабляет
сигнал с частотой fo в три раза.
Если коэффициент усиления ОУ
из возможных схем генератора синусоидальных
Рис. 3.14. Генератор Вина
сделать равным трем, что легко осуществить регулировочным потенциометром,
то на выходе возникнет такой же выходной сигнал t/вых, с которого мы начали
свои рассуждения. Таким образом, будут выполнены условия баланса амплитуд
н баланса фаз, т. е. возникнут незатухающие колебания.
47
D3 R
Рис. 3.15. Схема выделения модуля
UfitM- | Ufa |
Схема выделения абсолютной величины сигнала
(выделения модуля)
Подобные схемы применяются, когда нужно получить информацию о вели-
чине разнополярного сигнала, одновременно приведя его к одному знаку. При-
мер такой схемы показан иа рис. 3.15. Для сигнала отрицательной полярности
диод Д/ открыт, а диод Д2 заперт. При этом входной сигнал подается иа ин-
вертирующий вход ОУ, и выходной сигнал будет положительной полярности.
Для положительного сигнала заперт диод Д7, а диод Д2 открыт, что обеспечи-
вает поступление сигнала иа иеиивертирующий вход. Выходной сигнал в этом
случае будет также положительной полярности. При равенстве величин сопро-
тивлений всех резисторов коэффициент передачи схемы для обеих полярностей
входного напряжения будет равным единице.
Регулирование коэффициента передачи
Прн использовании ОУ часто необходимо изменять коэффициент передачи
схемы. На ряс. 3.16 показаны некоторые из возможных вариантов схем регули-
рования:
. ,, ,, Дос R' „
а) Овых = a Uнх , где а = I R^Rn,
Д1 Дп
.. а Дос R'
б) овых = — онх —--, где а = —;
Д1 Дос
. .. 1—» Д'
в) ^вых——ь'вх t где а — — ;
а Дп
. .. 1 .. Дос Д'
г) оных= — —онх—, где а=— ; дп«дос.
а Д1 Дп
48
Рис. 3.16. Способы регулирования коэффициента усиления
Рис. 3.17. Регулирование коэффициента
усиления дифференциального усилителя
На рис. 3.17 показана схема регулирования коэффициента передачи диффе-
ренциального усилителя. Зависимость коэффициента передачи от угла поворота
потенциометра обратно пропорциональная:
I \ \Ri
^вых = 211+ I (f^BX. — ^вх2)-
\ а ) R\ 1
Компенсация погрешностей ОУ
При использовании ОУ в реальных усилителях постоянного тока возникают
ошибки в выходном напряжении по сравнению с идеальным ОУ. Основные па-
раметры, вносящие ошибки, следующие:
— входные токи смещения;
— входной ток сдвига;
— входное напряжение сдвига;
— дрейф усилителя.
При использовании ОУ в усилителях переменного тока перечисленное пара-
метры практически не влияют на выходное напряжение.
С физикой причин возиикиовеиия ошибок можно познакомиться в специаль-
ной литературе [9], здесь же приведем несколько практических схем (рис. 3.18).
Для компенсации токов смещения и сдвига необходимо соблюдать следую-
49
Рис. 3.18. Способы компенсации погрешностей ОУ
щее правило: сопротивление постоянному току между входом ( + ) и общей точ-
кой должно быть равно сопротивлению между входом (—) и общей точкой. На
рис. 3.18, а в цепь неннвертнрующего входа включено компенсационное сопротив-
Я,ЯОС
ление величиной ^?см = —7—7—• На рис. 3.18, б, в, г показаны различные
/?i+#oc
способы компенсации напряжения сдвига, в зависимости от типа ОУ.
Унифицированные регуляторы на базе ОУ
В общем случае на входе и в цепи обратной связи ОУ, выполненного с ООС
(см. рис. 3.5), могут быть включены комплексные сопротивления z,(p) и гос(р).
Передаточная функция такого усилителя по аналогии будет иметь вид
пт,,.» ^вых(Р) Zoc(p)
м'(р) = ~г.---— = — ——- . При этом имеется возможность реализации бо-
Zt(p)
лее сложных математических операций и передаточных функций различных зве-
ньев. Легко реализуются различные законы регулирования: пропорциональный
(П), интегральный (И), дифференциальный (Д), интегрально-пропорциональный
(ИП), пропорционально-интегральный (ПИ), пропорциоиально-иитегральио-диф-
ференциальный (ПИД) и др.
Например, для ПИ-регулятора:
n , _L_
zoc(p) рСрс pRoeCoc 4-1 рТос-1-1
^l(P) рТи
где Гос=/?осСос — постоянная времени цепи обратной связи; Ta=RiCOe — посто-
янная времени интегрирования.
В табл. 3.1 приведены схемы наиболее распространенных регуляторов, их
передаточные функции и переходные характеристики.
50
Таблица 3.1
Активные корректирующие устройства на операционных усилителях
CS с 2 Схема корректирующего устройства Передаточная функция Переходная характеристика
1 Вх —IF—i ар Ct ъ Вых W(p)=- тк{. , 1\Р±\ где К = ; Я. Ti = 4}ых Щх t
2 г"г kx .Вых Wr(P) = -K(T1p + l), Я, где К- ; Г, = и!ых Wx
3 1—11^ Вх | ।— —1£- kx Вых Р +1 гдеА'~ Л = RiC р Т' 2 = ^2^2 ^1ых kUex
4 Вх /?г kx Вх W(p)=— Г.2Р+1 . Тр где Т^^Ср Г2 = Л2Ср Оных ^___U±R1 t
5 с. kx £ Вых W(p)= _(.Т 1 Р+1)(^грЧ~1) j Т'зР где Т^^Ср Р z—RiCi't Т3=^с2. ^lux ______*
51
Продолжение
№' n/n.l Схема корректирующего устройства Передаточная функция Переходящая характеристика
6 -I |-| |— c, Rz Вых W{p) К 1Р/ - т2р+1 tx Г] = /?3Cp T2 = и?2 + Яз)С] Ulblx kUtx д/ R3RZ \KUt* Rf(,R3+RZ)y t
7 r—II— Cx Rz Вых IT(P)= ЛР ' (7’,p+l)(7’2 p+1)’ где Г1 Т,2=/?2С'2> 7'3=7?jC|. х^\т,>тг / t
8 L|—ft. |ft вх , !*,[ pj R3 £ 8м U7(p) = к T2p2+4kTp+\' где K= V 7'=y'/?2/?3c1c2: f_ J-i/^c. 2 V r3c2' -C\. ки<ы t
ГЛАВА ЧЕТВЕРТАЯ
КОМПЛЕКТНЫЙ ЭЛЕКТРОПРИВОД
ПОДАЧИ ТИПА БТУ3601
Тиристорный преобразователь БТУ3601 (рис. 4.1) предназначен для регу-
лирования скорости вращения как обычных двигателей постоянного тока с неза-
висимым возбуждением, так и высокомоментных электродвигателей.
Силовая часть преобразователя состоит из двух трехфазных мостовых ком-
плектов тиристоров, работающих по принципу раздельного управления. Подклю-
чение преобразователя к силовой сети производится через согласующий транс-
форматор.
Управление скоростью вращения осуществляется двухконтурной системой ав-
томатического регулирования с ПИ-регуляторами тока и скорости.
Для линеаризации регулировочной характеристики преобразователя в зонах
прерывистого и непрерывного токов используется нелинейное звено с сигналом
положительной обратной связи по ЭДС двигателя.
Для повышения термостабильности и увеличения диапазона регулирования
электропривода применяется предварительный усилитель регулятора скорости,
выполненный по схеме модулятор — усилитель — демодулятор.
Преобразователь состоит нз двух печатных плат Е1 и Е2.
Плата Е1 содержит функциональные узлы, необходимые для управления
нереверсивным электроприводом:
— систему импульсно-фазового управления (СИФУ);
— регуляторы скорости и тока (PC и РТ);
— функциональный преобразователь ЭДС двигателя (ФПЕ);
— нелинейное звено (ИЗ);
— блок питания (БЛ);
— узел защиты и блокировки (УЗ и Б).
Плата Е2 выполняется в двух модификациях в зависимости от диапазона
регулирования скорости. Для диапазона регулирования 1:10000 плата Е2 содер-
жит следующие функциональные узлы:
— логическое устройство раздельного управления УЛ с переключателем
характеристик ПХ и датчиком проводимости вентилей ДПВ;
— узел зависимого от скорости тОкОограничения УЗТ;
53
Рис. 4.1. Общий вид привода
— предварительный усилитель регулятора скорости ПУРС.
Для диапазона регулирования Г.1000 из платы Е2 исключается узел ПУРС.
Взаимодействие узлов электропривода показано на функциональной схеме,
приведенной на рис. 4.2.
Выходное напряжение регулятора скорости PC ограничивается уровнем на-
сыщения операционного усилителя и с помощью переменного резистора делите-
ля, подключенного к выходу усилителя, может плавно регулироваться, задавая
уставку тока ограничения.
Параллельно узлу ограничения тока подключен узел зависимого от скорости
токоограничения, который осуществляет дополнительное ограничение тока в функ-
ции скорости.
Регулятор тока формирует напряжение, пропорциональное разности сигналов
задания на ток и отрицательной обратной связи по току.
При переключении комплектов тиристоров В и Н одновременно ключами В
и Н производится изменение полярности выходного напряжения датчика тока
для сохранения отрицательного знака обратной связи по току.
Нелинейное звено суммирует выходное напряжение регулятора тока (7рТ,
пропорциональное току двигателя, н напряжение t/в обратной связи по ЭДС
с разными коэффициентами передачи. Коэффициент передачи НЗ по входу t/pT
является нелинейным, имея зависимость, обратную коэффициенту передачи ти-
54
аве
Рис. 4.2. Функциональная схема электропривода БТУ3601
рибторного преобразователя в зоне прерывистого тока. Коэффициент передачи
НЗ по входу Ue является постоянным.
Сигнал Ue формируется функциональным преобразователем ЭДС, имеющим
характеристику, близкую к арксинусной, т. е. обратную регулировочной харак-
теристике тиристорного преобразователя. Этим осуществляется приведение сиг-
нала тахогенератора, пропорционального ЭДС двигателя, ко входу СИФУ.
Разнополярное напряжение управления t/y нелинейного звена преобразуется
переключателем характеристик в однополярное. Таким образом, в статическом
режиме работы привода на управляющий орган СИФУ подается только отри-
цательная полярность напряжения, независимо от работающего комплекта ти-
ристоров.
Управляющий орган СИФУ обеспечивает ограничение минимального и мак-
симального углов регулирования, установку начального угла регулирования..
СИФУ вырабатывает импульсы управления для тиристоров. Фазовый сдвиг
импульсов относительно силового напряжения на тиристорах пропорционален
напряжению, поступающему на СИФУ от УО.
Усилители импульсов согласуют по мощности выход СИФУ с импульсными
трансформаторами. Кроме этого, на УИ происходит сдваивание импульсов.
Логическое устройство раздельного управления служит для формирования
сигналов кл.В и кл.Н, управляющих ключами В и Н в датчике тока, переклю-
чателе характеристик и цепи импульсных трансформаторов.
Командой для УЛ на переключение комплектов является изменение полярно-
сти сигнала t/H3, пропорционального напряжению С/Рт и коэффициенту переда-
чи НЗ.
Контроль отсутствия тока через тиристоры производится датчиком прово-
димости вентилей.
Элемент И осуществляет логическое умножение блокировочных сигналов t/би
и t/ов и имеет на выходе логический сигнал единичного уровня в тот промежуток
времени, когда отсутствуют ток через тиристор и управляющий импульс на ти-
ристоре.
При появлении команды на переключение комплектов (напряжение t/H3 из-
менило знак) и наличии на выходе элемента И сигнала единичного уровня УЛ
формирует сигнал Up=0 нулевого уровня, который запускает элемент отсчета
выдержки времени. На период выдержки времени импульсные трансформаторы
обоих комплектов находятся в отключенном состоянии, дополнительно сигнал
Up—О запрещает формирование импульсов управления в СИФУ. По истечении
выдержки времени происходит подключение импульсных трансформаторов к за-
данному комплекту, одновременно сигналом Up=\ разрешается формирование
импульсов в СИФУ.
Силовая часть
Принципиальная схема силовой части электропривода приведена на рнс. 4.3.
Реверс выпрямленного напряжения достигается за счет антипараллельного со-
единения двух трехфазиых мостовых комплектов тиристоров. При работе одного
56
Рис. 4.3. Принципиальная схема силовой части
электропривода
комплекта устройство логики
запрещает подачу импульсов
управления на другой.
Спецификой работы трех-
фазной мостовой управляемой
схемы выпрямления в области
прерывистого тока является
необходимость формирования
сдвоенных импульсов для уп-
равления тиристорами. На
рис 4.4 приведена форма им-
пульсов управления одним из
тиристоров моста в стационар-
ном режиме. Один импульс уп-
равления пары определяет угол
открытия тиристора в положи-
тельной полуволне, другой — в
отрицательной полуволне фаз-
ного напряжения. Сдвиг между
парами импульсов на противо-
фазных тиристорах моста—180
эЛ. град., на тиристорах одной
группы (анодной или катод-
ной) — 120 эл-. град.
Временная диаграмма ра-
боты мостовой управляемой
схемы выпрямления в области
прерывистого тока, при ЭДС
двигателя, равной нулю, отсут-
ствии индуктивности в якорной
цепи и угле регулирования
а=90 эл. град приведена на
рис. 4.5. В мостовой схеме дол-
жны одновременно находиться
в проводящем состоянии минимум Два тиристора. Напряжения на анодах у них
сдвинуты относительно друг друга на 60 эл. град. Поэтому, чтобы первоначально
получить проводящее состояние тиристоров, необходимо хотя бы на один тири-
стор подать два сдвинутых на 60 эл. град импульса. Для режима непрерывного
тока этого будет достаточно, чтобы все последующие вступающие в работу
тиристоры поддерживали проводящее состояние преобразователя при управлении
ими одиночными импульсами, поскольку в режиме непрерывного тока включен-
ный ранее тиристор находится в проводящем состоянии до прихода импульса
на последующий тиристор. В области прерывистого тока преобразователь начи-
нает и прекращает работу шесть раз за период, а каждый тиристор два раза,
поэтому сдвоенные импульсы необходимо подавать на все тиристоры.
57
Рис. 4.4. Форма импульсов на тиристоре мостовой
схемы выпрямления
Рис. 4.5. Временная диаграмма работы мостовой схемы выпрямления в ре-
жиме прерывистого тока
Выпрямленное напряжение в режиме прерывистого тока принимает нулевое
значение при угле регулирования а=120 эл. град.
Регулятор скорости
В зависимости от диапазона регулирования электропривода PC имеет раз-
личную схемную реализацию. Принципиальная схема PC для диапазона регули-
рования 1:10000 приведена на рис. 4.6. Характерной особенностью исполнения в
этом случае является наличие предварительного усилителя PC, выполненного по
схеме модулятор — усилитель — демодулятор. Элементами, определяющими ПИ-
характеристику PC, являются сопротивление R18 и конденсатор C1L Резисторы
RIO, R14, конденсатор С4 не устанавливаются. Между лепестками 2—3 ставится
перемычка, включающая в обратную связь операционного усилителя А1 конден-
сатор СЗ. Полученное интегрирующее звено используется в качестве фильтра вы-
ходного сигнала ПУРС. Масштаб скорости подбирается сменным резистором R12.
58
Рис. 4.6. Принципиальная схема PC
Принципиальная схема
ПУРС
Для плавной регулировки задания на ток якоря используется делитель на
резисторах R13, R17. В режиме токоограничения выходное напряжение усилите-
ля А1 достигает уровня насыщения. При напряжении питания ±15В напряже-
ние насыщения усилителя имеет величину около ±12,5 В. Изменяя R17, можно
регулировать выходное напряжение PC в режиме насыщения от 0 до 10 вольт.
В приводе предусмотрен режим внешнего уменьшения уставки ограничения
тока путем параллельного подключения к резистору R17 дополнительного со-
противления.
При использовании в комплекте с преобразователем высокомоментных элект-
родвигателей ограничение тока осуществляется УЗТ, подключенным параллельно
резистору R17.
Исполнение PC для диапазона регулирования 1:1000 отличается отсутствием
ПУРС. При этом устанавливаются резисторы R14, R10, перемычками 54—51 и
53—52 входы задающего напряжения электропривода коммутируются на вход-
ные сопротивления усилителя А1, перемычка 2—3 отсутствует, ПИ-характери-
стика PC определяется элементами RIO, С4, масштаб скорости подбирается смен-
ным резистором R14 и допускает плавную регулировку резистором R9.
60
Рис. 4.8. Временные диаграммы сигналов ПУРС
Оба варианта исполнения PC предусматривают подключение потенциометра
задания скорости таким образом, что сигнал задания сравнивается с сигналом
тахогенератора относительно входной клеммы 22, которая соединяется с неин-
вертирующими входами ПУ PC и А1. Такая дифференциальная схема подключе-
ния позволяет исключить неконтролируемое падение напряжения (синфазная по-
меха) на проводе, соединяющем потенциометр задания скорости с общей точкой
питания преобразователя.
Включение перед операционным усилителем А1 предварительного усилителя,
не имеющего дрейфа выходного напряжения, позволяет уменьшить влияние на-
пряжения дрейфа усилителя А1 на скорость вращения двигателя в замкнутой
системе регулирования в К раз, где К — коэффициент усиления термостабильного
усилителя. Принципиальная схема ПУРС, имеющего коэффициент усиления
К=100, приведена на рис. 4.7.
Усилитель со структурой М—У—Д не имеет температурного и временного
дрейфов, поскольку они, являясь по своей природе низкочастотными, практически
не пропускаются разделительными конденсаторами С18 и С19. Внутренними ис-
точниками дрейфа в ПУРС являются операционные усилители А4 й А5.
Модуляция и демодуляция входного и выходного сигналов осуществляется
с частотой 2—3 кГц, вырабатываемой мультивибратором на операционном уси-
лителе АЗ. Временные диаграммы сигналов в характерных точках схемы приведе-
ны на рис. 4.8. ПУРС построен по двухтактной схеме — модуляторы V10, V11,
усилители А4, АЗ и демодуляторы V14, V15 работают в разные полупериоды ча-
стоты, затем происходит суммирование однополупериодных сигналов на усили-
теле А1. Усилитель А1 обеспечивает статический коэффициент усиления регу-
лятору скорости н является звеном, суммирующим и фильтрующим демодули-
рованный сигнал. Модуляция входного сигнала осуществляется полевыми тран-
зисторами типа КП301 с изолированным затвором, а демодуляция усиленного сиг-
нала— полевыми транзисторами типа КП302 с диффузионным затвором. Тран-
зисторы указанных типов являются взаимно инверсными, т. е. КП301 открывается
отрицательным напряжением затвора, а КП302 — нулевым. Поэтому, чтобы тран-
зисторы V10 и V14, VII и V15 работали в фазе друг с другом, а транзисторы
V10 и Vll, V14 и V15 в противофазе, выходное напряжение генератора инверти-
руется транзистором V13, а
затворы полевых транзисто-
ров соединены по перекрест-
ной схеме.
Работу схемы в режи-
мах модуляции-демодуляции
рассмотрим на примере ка-
нала V10—А4—VI4. Пере-
дача и усиление полезной
информации происходит во
время закрытого состояния
транзисторов V10 и V14.
Принципиальная схема уси-
62
Рис. 4.11. Расчетная схема усилителя А4
лителя А4 в рабочий полу-
период приведена на рис. 4.9
для случая входного напря-
жения положительной по-
лярности. Поскольку посто-
янная времени заряда — раз-
ряда конденсаторов С12 и
С13 т=С12-/?27=С13-/?28«
170 мс, то за время полупе-
риода частоты модуляции,
равное 0,3—0,5 мс, напря-
жение, поступающее на не-
инвертирующий вход А4
(Uru), будет оставаться по-
стоянным, как и усиленное
выходное напряжение А4.
Величина напряжения Unz?
будет меньше входного на-
пряжения AU на величину
напряжения на конденсаторе
С12, которое останется на
нем после полупериода от-
крытого, состояния транзи-
стора V10. Принципиальная
схема усилителя А4 в нера-
бочий полупериод частоты
модуляции приведена на рис. 4.10. В этот полупериод происходят независимо
два процесса: конденсатор С12 заряжается напряжением AJ7/2, а выходное на-
пряжение усилителя А4, принимая произвольное значение между уровнями на-
сыщения, выравнивает напряжения на С12 и С13, устремляя таким образом
входное дифференциальное напряжение к нулю. Последний процесс обеспечива-
ется наличием отрицательной обратной связи через R28. Поскольку алгебраиче-
ская сумма напряжений на С12 и С13 (дифференциальное напряжение усилите-
ля) должна быть равна нулю, то при нулевом входном напряжении AU уси-
литель будет поддерживать в среднем нулевую величину напряжений на
конденсаторах. Наличие напряжения Д1//2 приведет к тому, что конденсато-
ры С12 и С13 будут иметь в среднем напряжения Д1//2 указанной полярности.
Таким образом, к началу рабочего полупериода UQ}2=U«i3=AUI2. Расчетная
схема усилителя А4 для определения коэффициента усиления приведена на
рис. 4.11. В соответствии с полярностью напряжений и токов имеем
Рис. 4.10. Схема усилителя А4 в нерабочий полу-
период
Um—Uc 100
и+—
^вых + uBia 100
(_/ ~ » • /\ С/ г —“ ' ’(У р •
101/? 101 101
63
В линейном режиме работы усилителя U+ = U— Приравнивая выражения
для U+ и U-, находим
= 100,
то есть коэффициент усиления схемы не зависит от величины напряжений кон-
денсаторов. Важно, чтобы обеспечивалось равенство этих напряжений при соот-
ветствующей полярности. Как уже отмечалось, это достигается в нерабочий по-
лупериод за счет отрицательной обратной связи усилителя А4 через R28, кото-
рая дает возможность усилителю А4 поддерживать дифференциальное входное
напряжение равным нулю.
Рабочий импульс выходного напряжения усилителя А4 через разделитель-
ный конденсатор С18 поступает на резистор R34. Поскольку постоянная времени
дифференцирующей цепочки С18, R34 равна приблизительно 1,7 мс, за время по-
лупериода 0,3—0,5 мс наблюдается некоторое снижение уровня напряжения на
R34. Этот импульс напряжения пропускается ключом V14 на вход усилителя А1.
В следующий полупериод ключ V14 замкнут, а на вход А1 ключом V15 пропу-
скается импульс напряжения с резистора R35.
Регулятор тока, датчик тока
Принципиальная схема регулятора тока совместно с датчиком тока приведе-
на на рис. 4.12. РТ имеет ПИ-характеристику, которая определяется элементами
С7, R22. Уровень ограничения выходного напряжения РТ допускает плавную
регулировку резистором R33 в пределах от 0 до 10 вольт. Это позволяет в случае
необходимости использовать для ограничения тока режим так называемого уп-
реждающего токоограничения. Выходное напряжение PC поступает иа резистор
R20, которым устанавливается масштаб тока в режиме токоограничения.
Рис. 4.12. Принципиальная схема регулятора тока и датчика тока
64
В качестве измерительных элементов тока в силовой цепи используются
трансформаторы тока Т2—Т4, установленные в фазах вторичной обмотки силового
трансформатора. Сумма сигналов по току от всех трех фаз пропорциональна
току якорной цепи двигателя. Переменное напряжение трансформаторов тока,
пропорциональное току в фазах, выпрямляется двумя трехфазными нулевыми
схемами, которые создают иа резисторах R62 и R63 падения напряжений, про-
порциональные току якоря, ио противоположной полярности. С помощью ключей
V16 сигнал обратной связи по току становится реверсивным, т. е. полярность
сигнала, поступающего в точку сравнения РТ, меняется в соответствии с работа-
ющим комплектом тиристоров В или Н.
При работе комплекта тиристоров И иа управление ключом V16 поступают
сигналы: упр. кл. Н2 (+12 В) и упр. кл. В2 (—12 В), которые приводят ключ Н2
в разомкнутое состояние, а ключ В2 в замкнутое и, таким образом, в точку срав-
нения РТ через резисторы R65, R69 подается напряжение положительной по-
лярности (+й).
При работе комплекта тиристоров В состояния ключей меняются на проти-
воположные, а сигнал обратной связи по току имеет отрицательную полярность
(—м)-
Нелинейное звено
и функциональный преобразователь ЭДС
Принципиальная схема, отражающая основные особенности построения НЗ
и ФПЕ, приведена иа ряс. 4.13. Взаимодействие узлов основывается на уравне-
нии якорной цепи двигателя постоянного тока ия=Еял+1яРя. В соответствии
с этой зависимостью формируется управляющее напряжение для СИФУ
U-/=KB3-Up т+Кв-Ув, состоящее из двух слагаемых, первое из которых про-
порционально току якоря двигателя, а второе — ЭДС двигателя.
В режиме холостого хода двигателя Uа=Едв, поэтому напряжение управ-
Рис. 4.13. Принципиальная схема НЗ и ФПЕ
3 Заказ 4546
65
Рис. 4.14. Регулировочная характеристика преоб-
разователя при аНач=120°:
1 — выпрямительный режим группы <В»; 2 — инвертор-
ный режим группы «В»; 3 — выпрямительный режим
группы <Я>; 4 — инверторный режим группы «Я»
ления для СИФУ должно
определяться только сигна-
лом положительной обрат-
ной связи по ЭДС Ut=Ke-
Us, а выходное напряже-
ние регулятора тока должно
быть равно нулю С/рт=0.
При появлении момента
нагрузки на валу двигателя
напряжение управления (по
цепи — сигнал обратной свя-
зи по скорости, регулятор
скорости, регулятор тока,
нелинейное звено) возраста-
ет на величину ДНз-1/рт,
пропорциональную току яко-
ря. Этим увеличением UT
компенсируется падение на-
пряжения в якорной цепи
/Я-Ля> а скорость вращения
двигателя поддерживается
постоянной с точностью до
статической ошибки системы регулирования.
НЗ предназначено для улучшения динамических характеристик привода при
работе в области прерывистых токов, где регулировочная характеристика тири-
сторного преобразователя имеет участок с малым коэффициентом передачи. При-
мерный вид регулировочной характеристики реверсивного тиристорного преоб-
разователя с согласованием комплектов при анач=120 эл. град показан на рис.
4.14. Сплошная линия соответствует работе преобразователя в режиме прерыви-
стого тока, штриховая — в режиме- непрерывного. При ЭДС двигателя £дв = 0
режим прерывистых токов находится в диапазоне углов 90°<а<120° и характе-
ризуется низким коэффициентом передачи преобразователя, в области непрерыв-
ного тока при а<90° коэффициент передачи преобразователя возрастает. НЗ
имеет статическую характеристику (рис. 4.15), обратную регулировочной харак-
теристике преобразователя в области прерывистого тока. Последовательное вклю-
чение НЗ и преобразователя с взаимно-обратными- характеристиками обеспечи-
вает постоянство совместного коэффициента передачи /Снз-Ктп в контуре тока
при переходе из области прерывистого тока в область непрерывного. Этим до-
стигается независимость динамических характеристик системы регулирования
от режима работы якорной цепи.
Схемная реализация НЗ выполнена путем включения в обратную связь уси-
лителя А4 цепочки, имеющей нелинейное сопротивление и состоящей из диодов
V9—V13 и-резисторов R35, R36, R39.
В области малых входных сигналов сопротивление цепи обратной связи
определяется следующими последовательно включенными элементами: R35, V13
66
(V14), R39 и имеет максималь-
ную величину. При увеличении
входного сигнала последова-
тельно вступают в действие
сначала Vll (V12) и R36, затем
V9 (V10). На последнем участ-
ке характеристики, где прово-
дят три последовательно вклю-
ченных диода, дифференциаль-
ное сопротивление цепи обрат-
ной связи определяется величи-
ной резистора R39 и имеет ми-
нимальную величину.
При необходимости форму
характеристики НЗ можно из-
менять сменными резисторами
R35, R36. С помощью сменного
резистора R34 изменяется мас-
штаб характеристики по оси
{/рт-
НЗ, кроме линеаризации
канала регулирования в конту-
ре тока, выполняет функцию
суммирования сигналов UPT и
t/в, причем, чтобы нелиней-
ность цепи обратной связи не
влияла на коэффициент пере-
дачи по входу Ue, суммирова-
Рис. 4.15. Статическая характеристика
НЗ
ние происходит не на инверти- рис. 4.16. Расчетная схема НЗ
рующем входе усилителя А4, а
в точке соединения резистора
R39 с нелинейной цепочкой. Расчетная схема для пояснения принципа
суммирования приведена на рис. 4.16. Символом Rbs обозначено нелинейное со-
противление цепочки обратной связи. Направления токов указаны для положи-
тельной полярности t/y и отрицательной полярности сигналов t/pT и Ue. Такое
соотношение полярностей соответствует выпрямительному режиму комплекта ти-
ристоров «В». В соответствии с расчетной схемой определим зависимость напря-
жения управления от сигналов t/pT н Ue.
Из условия равенства токов /вх=/нз на инвертирующем входе усилителя А4
имеем t/H3 t/pT
/?ИЗ
Из условия равенства токов /вз9=/на+/вз7 в точке С7НЗ имеем
t/y ицз UH3 UH3—иЕ
—-------- = ----- 4- -------
/?39 Rh3 Rs?
3*
67
Uy=-uE -f—uj
i\*i \
^нз Д39 \
/?34 /?34 /
Исключая из приведенных соотношений промежуточную переменную С/Нз, по-
лучим
£?нз+^39
R34
Принимая во внимание, что Лзд//?з7=0,3 и /?ад<Янз, для последнего соотно-
шения получим
Uy = - 0,3UE - 1,3 -^-С/рт=-КЕ UE -КнзС/рт.
К34
Знаки минус перед слагаемыми показывают, что полярность выходного напряже-
ния Uy НЗ является инверсной по отношению к полярностям входных сигналов
С/р т и С/е. Кроме того, напряжение С/у имеет линейную зависимость от сигнала
С/е и нелинейную от С/р т-
Дополнительно поясним принцип работы схемы (рис. 4.16) в двух режимах:
а) С/е = 0. Величиной сигнала С/р т определяется входной ток СВх=С/р Т/Яз4.
При появлении входного тока усилитель А4 будет формировать такое вы-
ходное напряжение С/у, при котором обеспечится равенство входного тока и тока,
поступающего по цепи обратной связи иа инвертирующий вход /Нз=С/яз//?яз.
Итак, усилитель по цепи обратной связи поддерживает равенство токов на
Инвертирующем входе /яа=/вх. При этом полярность напряжения С/у должна
быть противоположной полярности сигнала С/рт;
б) С/р т = 0. В этом режиме /Вх = 0, поэтому при появлении сигнала С/е уси-
литель М будет формировать такое выходное напряжение С/у, при котором обес-
печится нулевой потенциал в точке С/нз и, следовательно, нулевой ток /нз, чтобы
сохранилось равенство /вх=/на. При этом полярность напряжений С/у и С/е дол-
жна быть противоположной.
Функциональный преобразователь ЭДС предназначен для преобразования
сигнала тахогенератора С/1Г, пропорционального ЭДС двигателя, в сигнал С/е, ко-
торый пропорционален ЭДС двигателя, приведенной ко входу СИФУ. Приведе-
ние ЭДС двигателя ко входу СИФУ осуществляется в связи с нелинейной регу-
лировочной характеристикой тиристорного преобразователя, которая в режиме
непрерывного тока описывается зависимостью
л С/у
C/d = C/dosln ——,
* V уо
где C/do и С/уо — напряжение тиристорного преобразователя и напряжение уп-
равления СИФУ при угле регулирования а=0 эл. град. Вид регулировочной ха-
рактеристики реверсивного преобразователя при непрерывном токе показан на
рис. 4.17. Для того чтобы привести напряжение преобразователя (ЭДС двига-
теля) ко входу СИФУ, необходимо осуществить обратное преобразование
2 Ud
Uy =Uy0 —arcsin ——.
® U do
68
Такую зависимость должна
обеспечивать статическая ха-
рактеристика ФПЕ. Практиче-
ски ФПЕ имеет характеристику,
состоящую из двух участков,
которая аппроксимирует арк-
сииусную зависимость. На рис.
4.18 приведена реальная харак-
теристика ФПЕ, здесь же для
сравнения показана арксинус-
ная зависимость.
Схемная реализация ука-
занной характеристики дости-
гается за счет включения в цепь
обратной связи операционного
усилителя АЗ (см. рис. 4.13)
резисторов R26, R30, диодов
V7, V8 и смещения их в пря-
мом направлении через резисто-
ры R31, R32 напряжением ±15
вольт. Для пояснения принципа
работы иа рис. 4.19 приведена
расчетная схема ФПЕ, отража-
ющая направления протекания
токов в цепях при напряжении
тахогенератора отрицательной
полярности.
Связь между входным н
выходным напряжениями уси-
лителя АЗ определим, исходя из
равенства токов /вх=/ос1+Уос2
на инвертирующем входе опе-
рационного усилителя
Ц,х _ Ub _
R\8 R26 + ЯЗО
— , ^ВЫХ ^08
Я26 + ЯЗО
Рис. 4.17. Регулировочная характеристика ре-
версивного преобразователя при непрерывном
токе
Первый участок характеристики ФПЕ соответствует такому диапазону измене-
ния выходного напряжения усилителя АЗ, в котором через оба диода V7 и V8
протекают токи Л? и Jvb-
Принимая падение напряжений Uv7 и Uvs на диодах V7 и V8 одинаковыми,
получаем коэффициент передачи ФПЕ в первой воне
г, ^вых /?261| R30 ~
К'~ UBX ~ Я18 -3’5-
69
Рис. 4.20. Принципиальная схема ПХ
Второй участок характери-
ристики ФПЕ соответствует та-
кому диапазону изменения вы-
ходного напряжения усилителя
АЗ, при котором ток через диод
V7 не протекает (ZB7=0). В
этом случае напряжение на
аиоде запертого диода V7 равно
UK = 15В----—-----~5В.
А Я26 + Я31 ~
Следовательно, при дости-
жении выходным напряжением
усилителя АЗ величины 5 В, ток
через диод V7 прекращается, и
при дальнейшем увеличении вы-
ходного напряжения диод V7
находится в непроводящем со-
стоянии за счет смещения в об-
ратном .направлении. Величина
выходного напряжения усили-
теля 5 В соответствует точке
излома характеристики ФПЕ.
На втором участке харак-
теристики при £7Вых>5 В при-
ращение входного тока будет
компенсироваться приращением
тока Zoc2> а ток Zoci будет ос-
таваться постоянным. Из ра-
венства приращений токов
Д/вх = АЛ>с2 на инвертирующем
входе усилителя АЗ находим
дифференциальный коэффици-
ент передачи на втором участке
характеристики ФПЕ
AZ/BX ___ AZ7B AZ/вых.
/?18 ~ /?30 = ЯЗО ’
Й2=
А£/Вых
AZ/Bx
Я® .
R18 ~
Таким образом, арксииусная зависимость аппроксимируется отрезками двух пря-
мых, наклоны которых отличаются в два раза, а точка сопряжения соответствует
выходному напряжению усилителя АЗ 1\ых=*5 В.
70
С помощью резистора R16 из-
меняется масштаб характеристики
ФПЕ по оси итт- Этим достигает-
ся совмещение характеристики
ФПЕ с реальной характеристикой
тиристорного преобразователя,
приведенной ко входу СИФУ. Со-
вмещение производится в одной
точке, соответствующей макси-
мальной скорости вращения элек-
тродвигателя. Критерием совпаде-
ния характеристик в выбранной
точке является равенство нулю
среднего значения выходного на-
пряжения РТ UBt=0 в режиме
холостого хода двигателя.
Переключатель характеристик
служит для согласования ревер-
сивного выходного сигнала НЗ U3
с однополярной регулировочной
характеристикой СИФУ a=f (£/Вх).
В статическом режиме работы
на выходе усилителя А1 формиру-
ется только отрицательная поляр-
ность напряжения.
При положительной полярно-
сти напряжения U7, которая в
стационарном режиме соответст-
вует выпрямительному режиму
комплекта тиристоров «В», ключ
Н замкнут, а ключ В разомкнут.
Напряжение управления через ре-
зисторы R1 и R12 поступает на
инвертирующий вход усилителя
А1 и с коэффициентом передачи
К=— /?14/(/?1 + /?12)=—1 приоб-
ретает на выходе отрицательную
полярность.
При отрицательной полярно-
сти U7, соответствующей выпря-
Рие. 4.21. Статические и динамические ха-
рактеристики ПХ;
1 — выпрямительный режим группы «В»; 2 —
инверторный режим группы «В»: 3 — выпрями-
тельный режим группы «Я»; 4 — инверторный
режим группы «Я»
мительному режиму комплекта ти-
ристоров «Н», ключ Н разомкнут, а ключ В замкнут. Напряжение управления
через резистор R2 поступает иа неинвертнрующий вход усилителя А1 с коэф-
* гг ^13 / , Я14 \
фициеитом передачи л = ~—-----—- 1 + — ----------- = 1.
Л12 +/?13 \ /?1 4-J?12 /
71
На но сифу
Рис. 4.23. Принципиальная схема УО СИФУ
Статические и динамические характеристики ПХ в четырех квадрантах ра-
боты привода приведены иа рис. 4.21. Отрицательная ось выходного напряжения
ПХ соответствует выпрямительному режиму работы комплектов тиристоров «В»
и «Н», положительная — режиму рекуперативного торможения (инверторный ре-
жим работы комплектов тиристоров «В» и «Н»), Стрелками указана последова-
тельность движения по характеристикам при реверсе преобразователя из выпря-
мительного режима комплекта тиристоров «В> в выпрямительный' режим комплек-
та тиристоров «Н». Выпрямительный и инверторный режимы комплектов тири-
сторов «В» и «Н> показаны для случая согласования комплектов при аНач=90
эл. град.
Управляющий орган СИФУ служит для ограничения минимального и макси-
мального углов регулирования, а также для установки начального угла регули-
рования, т. е. формирует регулировочную характеристику СИФУ a=f(Uai)
(рис. 4.22). Принципиальная схема УО СИФУ приведена на рис. 4.23. Реализа-
ция функции ограничения углов амвв и аМакс осуществляется путем включения
в обратную связь операционного усилителя А5 транзистора V15, а установка
начального угла регулирования производится подачей напряжения смещения
на вход усилителя А5 от делителя R41, R42.
Сигнал, поступающий с УО на нуль-орган СИФУ, снимается с резистора
R48 в эмиттерной цепи транзистора. В линейном режиме работы потенциал ин-
вертирующего входа операционного усилителя А5 практически равен нулю, по-
этому напряжение U3, поступающее на НО СИФУ, равно падению напряжения
на резисторе R48,
Коэффициент передачи подобной схемы определяется так же, как у обычного
инвертирующего усилителя, т. е. из соотношения равенства токов на инвертирую-
щем входе. Например, коэффициент передачи схемы по напряжению
Овх K=Ua/UВХ =---R48/R45.
72
1огр.мин 68к
Рис. 4.24. Расчетная схема УО
Отличие схемы с транзистором в цепи обратной связи заключается в том,
что ток в цепь резистора R48 поступает в основном через переход эмиттер — кол-
лектор транзистора (70с=/э) от источника напряжения—15 В. В этом случае
выходной ток усилителя, как равный току базы транзистора, в (3 раз меньше
тока обратной связи, поскольку /»=₽•/«, где р— коэффициент усиления транзи-
стора по току. Усилитель А5 автоматически формирует такое выходное напря-
жение, при котором обеспечивается равенство токои на инвертирующем входе.
При этом неважно, какой величины достигнет выходное напряжение (естествен-
но, до уровня насыщения), поскольку полезный сигнал снимается с резисто-
ра R48.
Расчетная схема, отражающая направления протекания токов в цепях уси-
лителя А5, приведена на рис. 4.24. Начальный ток /Нач определяет начальный
угол регулирования анач. В статическом режиме (отрицательная поляр-
ность £7Вх) ток /Вх вычитается из /Нач, уменьшая тем самым /ое н соответственно
падение напряжения на резисторе R48. Таким образом, чем более отрицательным
становится £7В1, тем больше уменьшается падение напряжения на резисторе R48
и тем больше закрывается транзистор. Для ограничения минимального угла ре-
гулирования падение напряжения на резисторе R48 должно оставаться постоян-
ным и равным некоторой минимальной отрицательной величине. Это происходит
следующим образом. В режиме ограничения аМив усилитель А5 выходит из ли-
нейной зоны работы, и его выходное напряжение достигает уровня насыщения
положительной полярности. Этим напряжением транзистор V15 полностью за-
крывается. Ток через резистор R48 определяется, с одной стороны, резистором
R50 и напряжением питания —15 В, которое является постоянным, с другой
стороны,— потенциалом инвертирующего входа усилителя А5. Поскольку уси-
литель не находится в линейном режиме, потенциал инвертирующего входа мо-
жет принимать произвольное значение, однако должен оставаться постоянным
73
при увеличении UaI в сторону отрицательной полярности, чтобы ток через рези-
стор R48 оставался неизменным. Это обеспечивается малым дифференциальным
сопротивлением цепочки из резистора R44 и диода V52, анод которого через
выход микросхемы в узле защиты н блокировки имеет практически нулевой по-
тенциал. Таким образом, увеличение тока /В1 компенсируется увеличением тока
Лаг, и за счет малого сопротивления V52 и R44 потенциал инвертирующего входа
практически остается постоянным. Величина напряжения в этом режиме мо-
жет изменяться путем подбора сменного резистора R50. Для уменьшения Оми
необходимо уменьшать Ua, следовательно, увеличивать R50. При соединении си-
лового трансформатора по схеме У/У рекомендуется выставлять Омкя= (5—10)
эл. град.
При изменении полярности UBI на положительную происходит сдвиг угла
регулирования в сторону Омане. Это соответствует увеличению падения напря-
жения на резисторе R48, т. е. приоткрыванию транзистора V15. Для ограничения
Омаке при увеличении иВх и достижении им некоторой величины, падение на-
пряжения на резисторе R48 должно оставаться постоянным. В этом режиме
выходное напряжение усилителя А5 достигает уровня насыщения отрицательной
полярности, а транзистор V15 полностью открыт. Ток через резистор R48 опре-
деляется резистором R49 и напряжением питания—15 В, резистором. R47 и на-
пряжением насыщении усилители, напряжением инвертирующего входа усилите-
ля, которое в этом режиме равно падению напряжения иа диоде V43 и поэтому
при увеличении UBI остается практически постоянным. Таким образом, функцию
ограничения ОмЯВ выполняет цепочка R44, V52, а Омане — диод V43. Величина
напряжения Ua в режиме ограничения Омане может изменяться путем подбора
резистора R49. Для увеличения Омаке необходимо увеличивать Ua, следователь-
но, уменьшать R49, и наоборот. При соедииеини силового трансформатора по
схеме У/У рекомендуется выставлять Омакс=(150—165) эл. град.
Начальный угол регулирования потенциометром R41 устанавливается рав-
ным 120 эл. град. Регулировочная характеристика управляющего органа СИФУ
для случая соединения силового трансформатора по схеме У/У приведена иа
рис. 4.22.
Ограничение, накладываемое иа минимальную величину угла регулирования,
не связано с особенностью работы тиристорного преобразователя в этом режи-
ме, а определяется минимальной длительностью выходных импульсов иуль-оргаиа
СИФУ, при которой сохраняется его устойчивая работа. Ограничение минималь-
ной длительности импульсов приводит к ограничению амяа- В случае соединения
первичной или вторичной обмоток силового трансформатора в треугольник, ког-
да силовое напряжение иа тиристорах отстает по фазе иа 30 эл. град от синхро-
низирующего напряжения, ограничение иа длительность импульсов выходного на-
пряжения НО СИФУ отсутствует, поскольку при амкк=0 эл. град ширина им-
пульсов составляет 30 эл. град и минимальный угол регулирования может уста-
навливаться равным 0 эл. град.
Ограничение, накладываемое иа величину Омане, определяется спецификой
работы тиристорного преобразователя в инверторном режиме, которая заключа-
ется в возможности возникновения при углах регулирования, близких к 180 эл.
74
град, аварийного режима работы, так называемого прорыва инвертора. Поэтому
от теоретически максимального угла регулирования в инверторном режиме
180 эл. град для надежной работы преобразователи оставляют запас Да=(15—
30) эл. град, и практически максимальный угол регулирования выставляется рав-
ным (150—165) эл. град.
Существует ограничение, определяющее н ннжиюю границу максимального
угла регулирования, т. е. такую величину, меньше которой не рекомендуется
устанавливать аМакс. Это связано с возможностью возиикиовеиии неконтролируе-
мых выбросов тока в режиме рекуперативного торможения. В этом режиме ток
якоря определяется выражением
. E^-Uинв Ецв + UdpCOSa
Ля Ля '
Если торможение двигателя происходит с максимальной скорости, соответству-
ющей амия—0 эл. град, то н /я — ~rf° (1 + cos а). Отсюда
Ля
наглядно видно, что уменьшение максимального угла регулирования приводит к
увеличению тока в режиме торможения с максимальной скорости. И если ограни-
чить аМанс недопустимо низкой величиной, то контур тока не сможет поддержать
начальный ток торможения иа заданном уровне, поскольку дли этого регулятору
тока потребовалось бы автоматически смещать угол регулироиаиия в сторону
увеличения, а вступающее в действие ограничение Омане не позволит этого сде-
лать. Это приведет к тому, что начальный ток торможения не будет контролиро-
ваться контуром тока и превысит величину уставки. Поэтому минимальное зна-
чение максимального угла регулирования должно выбираться таким образом,
чтобы при торможении с максимальной скорости начальный ток торможения не
превышал заданную величину.
Узел зависимого токоограничения служит для изменении уставки токоограии-
чеиия в функции скорости. Это необходимо осуществлять для высокомоментных
75
Рис. 4.26. Характеристика УЗТ:
1 — коммутационная кривая; 2 — реальная ха-
рактеристика УЗТ
двигателей в соответствии с комму-
тационной характеристикой, кото-
рая приводится в паспорте двига-
теля. Принципиальная схема УЗТ
приведена иа рис. 4.25, а его со-
единение с выходом регулятора
скорости показано иа рис. 4.6.
Действие УЗТ основано на
том, что напряжение иа резисторе
R17 регулятора скорости в режиме
токоограиичения определяется ве-
личиной выходного напряжения
усилителей Al (А2) и падением
напряжения иа диодах V4 (V5),
как элементов схемы с наиболее
низким дифференциальным сопро-
тивлением. При этом важно, чтобы
величина падения напряжения иа
резисторе R17 была достаточной для открытия диодов V4 и V5, которые смеще-
ны в обратном направлении выходным напряжением усилителей А1 и А2,
На рнс. 4.26 приведена статическая характеристика УЗТ, т. е. зависимость
выходного напряжения усилителя А1 от напряжения тахогенератора. Усилитель
А2 инвертирует выходное напряжение усилителя А1. Для сравнения на рнс. 4.26
показана типичная коммутационная кривая высокомоментного двигателя, приве-
денная к масштабу выходного напряжения регулятора скорости.
На характеристике УЗТ отмечены основные точки, которые можно изменять
путем подбора сменных резисторов R3, R5, R6 таким образом, чтобы достигалась
наиболее близкая аппроксимация и в то же время чтобы характеристика УЗТ
(кривая токоограиичения) не выходила за пределы коммутационной кривой.
Рассмотрим работу схемы УЗТ. При нулевой скорости вращения транзисто-
ры VI, V2, V3 закрыты, выходное напряжение усилителей определяется напря-
жением питания —15 В и суммой входных сопротивлений R4+R6. Поэтому ре-
зистором R6 устанавливается величина тока при нулевой скорости вращения.
При отрицательной полярности напряжения тахогенератора транзистор V3
остается закрытым, а транзистор V2 приоткрывается, создавая током коллекто-
ра падение напряжения на резисторе R2, которое приоткрывает транзистор VI.
Линейный режим работы транзистора V2 будет существовать до такого напря-
жения тахогенератора, при котором дальнейшее прноткрывание транзистора ста-
нет невозможным по причине наступления режима насыщения (£7а-к м^О). Гра-
ница линейного режима определяется из условия достижения током эмиттера
, Utt
величины, равной максимальному току коллектора транзистора V2 /э= " =
, 15В
= /к макс =-----, и соответствует напряжению тахогенератора
76
Рнс. 4.27. Расчетная схема УЗТ при положи-
тельной ПОЛЯРНОСТИ Utt
Следовательно, резистором R3 определяется величина скорости, при которой ток
отсечки достигает установившегося значения.
Резистор R1 в цепи эмиттера VI рассчитан таким образом, чтобы транзисто-
ры VI и V2 одновременно достигали границы линейного режима, т. е. насыще-
ния. При полностью открытых транзисторах потенциал точки 35 близок к нулю
(пренебрегая падениями напряжений UK-e У/-и.У2). Входное напряжение усили-
теля А1 определяется напряжением питания—15 В и делителем R4, R5, т. е.
резистором R5 устанавливается величина тока при максимальной скорости вра-
щения.
При положительной полярности напряжения тахогенератора транзисторы
VI и V2 закрыты, а транзистор V3 приоткрывается. Для транзисторов V2 и V3
используется схема включения с общей базой. Поскольку сопротивление R3 в
цепи эмиттеров транзисторов общее, а нагрузка в цепи коллекторов R2 и R4+R5
практически одинакова, то достигается симметрия характеристики УЗТ при раз-
личной полярности напряжения тахогенератора. Рассмотрим более подробно ра-
боту транзистора V3 на примере расчетной схемы, приведенной на рнс. 4.27. При
нулевом напряжении тахогенератора транзистор V3 закрыт, ток коллектора
/к = 0, ток входного резистора усилителя Al Z«x=15 B/(R4+R6), выходное на-
пряжение усилителя А1
R7
^ых=15В‘т?4 + 7?6
При появлении напряжения тахогенератора транзистор V3 ведет себя таким об-
разом, чтобы снести ток базы к минимальной величине (7б=7э/Р, где 0—коэффи-
циент усиления транзистора по току).
Это достигается приоткрыванием транзистора иа такую величину, чтобы
создаваемый ток коллектора примерно выровнился с током эмиттера, соблюдая
условие l«=h—/к- Пренебрегая падением напряжения U9-e, имеем 19=UitIR3,
а потенциал эмиттера
Приоткрывание транзистора V3 приводит к уменьшению 7Вх за счет парал-
лельного подключении (приняли £7э=0) к резистору R6 перехода эмиттер — кол-
лектор транзистора V3 последовательно с R5. Процесс линейного увеличения тока
коллектора будет продолжаться до тех пор, пока транзистор V3 не откроется
полностью (ив-к=0) и ток 7к достигнет максимальной величины. При R5<^R6
и R5<g.R4 будем иметь 7к.макс=15 &IR4. Из условия /к^/а находим напряжение
77
Управление
w/мж/ Нот УЛ
+129
R39
Юн
-*-К ИТ комплекта„Н
(НТ)
V25
-1Z6
Рис. 4.28. Узел управления ключами Н в ДТ, ПХ и цепи ИТ
И?7
ч
тахогенератора, соответствующее границе линейного режима £7тгэН5 В-(ЯЗ//?4),
что совпадает со значением, полученным для отрицательной полярности Urr, вви-
ду равенства R2=R4.
Прн дальнейшем увеличении UTr равенство между 1а и 1К нарушается, и при-
ращение тока эмиттера будет компенсироваться приращением тока базы. При
этом ток коллектора стабилизируется, сохраняется постоянным входное напря-
жение усилителя А1, которое определяется 77В1эИ5 В (7?5//?4), т. е. так же, как
и в случае отрицательной полярности Utv-
Логическое устройство раздельного управления (УЛ) предназначено для
формирования сигналов управления-ключами В и И, определяющими нахождение
в работе комплекта тиристоров «В» нли «Н», таким образом, чтобы полностью
исключался режим одновременной работы комплектов.
Нахождение в работе комплекта тиристоров «Н» («В») определяется ключом
Hl (В1), выполненным на составном транзисторе V23, V25 (V24, V26) (рис. 4.28),
через который подается питание —12 В на импульсные трансформаторы, при-
надлежащие этому комплекту. Кроме этого, через транзистор V21 (V22)
(рис. 4 28) УЛ управлиет ключами Н (В) в датчике тока (V16) и переключателе
характеристик (VI).
Принципиальная схема УЛ приведена на рнс. 4.29.
Сигналом на переключение комплектов является изменение полярности на-
пряжения промежуточного выхода нелинейного звена 77Яз=Квз-UVT. Напряже-
ние ивз пропорционально заданному току (Uv4) и коэффициенту передачи Квз
нелинейного звена. Поскольку при малых сигналах £7рт коэффициент передачи
Квэ имеет большую величину, нелинейное звено являетси чувствительным к ма-
лым изменениям полярности сигнала задания на ток.
78
но
Т1
I------
Up
НаСИФУ
UMC
Limp тон через тиристор
VIS
Св\^),22
Управление
ключамиВ
V14 ।
В22^У,1к
Х + 15Л
Есть 'импульс на
тиристоре
.}SMC
Ц<Гв
ОтДПВ
JJUlnr Л
Рис. 4.29. Принципиальная схема УЛ
Команда на
переключение
гомплентоС
ОС
Управление
ключами Н
U<fu
ОмСИФУ
Разнополярный сигнал UB3 поступает на нуль-орган (компаратор)УЛ, чем
еще более повышается чувствительность выделения команды иа смену комп-
лектов.
На элементах Д1.2, ДЕЗ выполнен триггер Т1 заданного направления тока,
который совместно с элементами Д1.1, Д1.4 представляет собой схемную реали-
зацию Д-триггера, т. е. может устанавливаться в новое состояние сигналом от
НО по информационному входу только при наличии иа тактирующем входе (ло-
гическое произведение блокировочных сигналов от ДПВ и СИФУ) сигнала еди-
ничного уровня.
Блокировочный сигнал от СИФУ Ивя представляет собой просуммированные
управляющие импульсы трех формирователей импульсов (шести тиристоров) и
запрещает переключаться триггеру Т1 в тот момент, когда иа каком-либо из ти-
ристоров. присутствует импульс управления.
Блокировочный сигнал от ДПВ Ut.s запрещает перебрасываться триггеру
Т1 и новое состояние, если в данный момент времени через какой-либо из тири-
сторов протекает ток.
Таким образом, триггер заданного направления тока Т1 может принимать
новое состояние при поступлении команды иа переключение комплектов только
при отсутствии в данный момент управляющих импульсов на тиристорах и от-
сутствии тока в силовой цепи.
На элементах Д2.1, Д2.2 выполнен триггер Т2 истинного направления тока,
состояние которого определяет, к какому комплекту тиристоров— «В> или «Н>—
были подключены импульсные трансформаторы до появления новой команды на
переключение.
На элементах Д3.2, ДЗ.З, Д3.4 выполнена схема совпадения СС, которая
формирует выходные сигналы УЛ, управляющие ключами В и И, блокировоч-
ный сигнал Up. Во время несоответствия состояний триггеров Т1 и Т2 сигнал Up
имеет нулевой уровень и блокирует в СИФУ прохождение управляющих импуль-
сов Иа тиристоры.
Одновременно нулевым уровнем Up запускается выдержка времени (tss 1 мс),
выполненная иа элементах Д3.1, С8. При появлении на входе Д3.1 нулевого
сигнала конденсатор С8 начнет заряжаться, и в течение времени т=*1 мс иа вы-
ходе Д3.1 будет присутствовать сигнал, воспринимающийся элементами Д2,3,
Д2.4 как нулевой.
На диодах V14, V15 выполнена схема логического умножения совместного
блокировочного сигнала ДПВ и СИФУ и выходного сигнала элемента выдержки
времени.
Совместное взаимодействие триггеров Tl, Т2, схемы совпадения СС, элемен-
та выдержки времени t и блокировочных сигналов (7 б. и. t/в.в, Up рассмотрим иа
примере переключения комплектов в соответствии с командой, указанной на
рнс. 4.29. Уровни логических сигналов (единичный или нулевой) на выходах
микросхем даны для случая положительной полярности напряжения (7ВЗ, соот-
ветствующей нахождению в работе комплекта тиристоров «В».
При изменении полярности напряжения UB3 на отрицательную с выхода НО
на информационный вход Д-триггера приходит логический сигнал единичного
80
уровня. Кроме того, изменение полярности UB3 приводит к увеличению угла ре-
гулирования, что сопровождается уменьшением тока в якорной цепи. При спа-
дании мгновенного значения тока в каком-либо импульсе тока до нуля (переход
в режим прерывистых токов) и отсутствии управляющего импульса на тиристоре,
т. е. при появлении иа тактирующем входе Д-триггера логической единицы
(£7в.в-^б.и=1) происходит переключение триггера Т1 в новое состояние. Схема
совпадения СС регистрирует несоответствие состояний триггеров Т1 и Т2 задан-
ного и истинного направлений токов и вырабатывает логический сигнал нулевого
уровня УР=0, запускающий элемент выдержки времени и блокирующий в СИФУ
формирование управляющих импульсов. В этот же момент времени ключом В1
снимается питание — 12 В с импульсных трансформаторов комплекта тиристоров
«В» и замыкаются ключи В в ДТ и ПХ. В течение выдержки времени обе поло-
вины ключей VI и V6 в ПХ и ДТ находятся в замкнутом состоянии. При появле-
нии на выходе элемента выдержки нремеии логического сигнала единичного
уровня и отсутствия в этот момент блокирующих сигналов £7а.в и происхо-
дит переключение триггера Т2 в состояние, соответствующее новому состоянию
триггера Т1. Происходит замыкание ключа Н1, подающего питание на импульс-
ные трансформаторы комплекта тиристоров «Н», и размыкание ключей Н в ДТ
и ПХ. Схема совпадения регистрирует совпадение состояний триггеров Т1 и Т2
и формирует логический сигнал единичного уровня £7Р=1, разрешающий СИФУ
формирование управляющих импульсов. Таким образом, бестоковая пауза реа-
лизуется отключением импульсных трансформаторов от обоих комплектов тири-
сторов и дополнительно сигналом £7Р, запрещающим формирование импульсов
в СИФУ.
Если во время отсчета выдержки времени поступает команда на включение
прежнего комплекта «В», триггер Т1 возвращается в исходное состояние, соот-
ветствующее триггеру Т2, и мгновенно происходит замыкание ключа В1 в цепи
импульсных трансформаторов комплекта «В», одновременно сигналом £/Р=1
разрешается выдача управляющих импульсов. Мгновенная выдача импульсов
во время выдержки времени на тиристоры первоначально работавшего комплек-
та позволяет уменьшить бестоковые паузы при переключениях комплектов.
Датчик проводимости вентилей
Поскольку в мостовой схеме выпрямления для протекания тока и проводя-
щем состоянии должны находиться минимум два тиристора из разных групп
(одни из анодной, другой из катодной), достаточно контролировать проводящее
состояние тиристоров в какой-либо одной нз групп. В преобразователе осуществ-
ляется контроль состояния тиристоров катодной группы комплекта «Н» (соответ-
ственно— анодной группы комплекта «В»). Принципиальная схема ДПВ приве-
дена иа рис. 4.30.
В непроводящем состоянии иа переходах анод — катод тиристоров сущест-
вует переменное напряжение, равное фазному напряжению вторичной обмотки
силового трансформатора. Параллельно тиристорам подключены ЯС-цепочки,
выполняющие функцию защиты тиристоров от перенапряжений.
81
+15t
Рис. 4.30. Принципиальная схема ДПВ
Величина сопротивления 2?С-цепочки при указанных иа схеме номиналах
/? и С составляет около 13 кОм иа частоте сети, т. е. оказывается вполне доста-
точной, чтобы обеспечить входной ток оптрону. Напряжение каждой 7?С-цепочки
через согласующие резисторы подается на диодные мосты V4, V5, V6, нагружен-
ные иа светодиоды оптронов V7, V8, V9. Непроводящее состояние тиристоров
соответствует засвеченному состоянию фотодиодов в оптронах, имеющих в этом
случае малую величину сопротивления, достаточную для того, чтобы транзисто-
ры V10, VII находились в закрытом состоянии, т. е. ДПВ вырабатывает логиче-
ский сигнал единичного уровня Ue.B=l.
Если какой-либо из тиристоров находится в проводящем состоянии, падение
напряжения иа соответствующей 7?С-цепочке равно нулю, поэтому через свето-
диод одного из оптронов ие будет проходить ток. Фотодиод этого оптрона будет
иметь большую величину сопротивления, приводящую к открытию транзисторов
V10 и VII. Таким образом, во время проводящего состояния какого-либо из ти-
ристоров ДПВ формирует логический сигнал нулевого уровня £7б.в = 0.
В зависимости от номинального выпрямленного иаприжеиия преобразовате-
ля (напряжения вторичной обмотки силового трансформатора) иа сопротивле-
ниях, согласующих силовое напряжение иа тиристорах с входным током оптро-
нов, устанавливаются следующие перемычки: для номинального выпрямленного
напряжения 115 В 3—9, 4—10, 5—11; для номинального выпрямленного иапри-
жеиия 230 В 3—6, 4—7, 5—8.
Практически ДПВ имеет зону нечувствительности, проявляющуюся в виде
провалов в сигнале (7бв в моменты перехода через нуль напряжений иа 2?С-це-
почках. Поэтому в случае, если ни одни тиристор моста ие проводит, в сигнале
Уив все равно имеются короткие импульсы нулевого уровни.
82
Узел управления ключами
Принципиальная схема узла управления ключами' комплекта тиристоров «Н»
приведена на рис. 4.28. На резистор R29 приходит сигнал с выхода микросхемы
ДЗ.З устройства логики. Нулевой уровень сигнала, соответствующий нахожде-
нию в работе комплекта тиристоров «Н», открывает транзистор V21, при этом на
управление ключами «Н» в ДТ и ПХ через диод V17 поступает напряжение
+ 12 В, приводящее к закрытию ключей. В то же время транзисторы V23, V25
открываются, подавая питание —12 В на импульсные трансформаторы комплек-
та. Таким образом, рабочему состоянию комплекта соответствует замкнутое со-
стояние ключа в цепи импульсных трансформаторов и разомкнутое состояние
ключей в ДТ и ПХ.
Система импульсно-фазового управления формирует для управления тири-
сторами сдвоенные прямоугольные импульсы, фаза которых относительно сило-
вого напряжения на тиристорах изменяется пропорционально напряжению, по-
ступающему на управляющий орган СИФУ. Функциональная схема СИФУ при-
ведена на рнс. 4.31 и включает в себя следующие узлы:
— источник синхронизирующего напряжения (ИСН);
— три идентичных формирователя импульсов (ФИ);
— управляющий орган (У О);
ИСН
Рис. 4.31. Функциональная схема СИФУ
83
— шесть усилителей импульсов (УД);
— двенадцать импульсных трансформаторов (ИТ).
В качестве ИСН используется вторичная обмотка W3 трансформатора TJ
питания и синхронизации преобразователя. При соединении силового трансфор-
матора по схеме Y/Y напряжения синхронизации совпадают по фазе с силовыми
напряжениями одноименных фаз на тиристорах.
Каждый ФИ синхронизирован со своей фазой и формирует импульсы уп-
равления двумя противофазными-тиристорами этой фазы, т. е. импульсы проти-
вофазных каналов каждого ФИ (а и а, b и Б, с и с) сдвинуты друг относительно
друга иа 180 эл.град., а импульсы одноименных каналов разных ФИ (а, Ь, с
или а, Б, с) сдвинуты друг относительно друга на 120 эл. град.
На усилителях импульсов, кроме усиления по мощности, осуществляется
сдваивание импульсов для управления тиристорами. Для этого на второй вход
УИ заводятся импульсы с того канала формирователей импульсов, где имеется
отставание их на 60 эл. град, от импульсов на первом входе УИ. Временная диа-
грамма формирования сдвоенных импульсов приведена на рнс. 4.32. Сдвоенные
импульсы с выхода каждого УИ поступают одновременно иа два ИТ, принадле-
жащих разным комплектам тиристоров.
Однако передача импульсов на тиристор тем или иным импульсным транс-
форматором определяется состоянием ключей В1 и Н1. Принципиальная схема
УИ и двух относящихся к нему ИТ канала <га> приведена на рис. 4.33. В исход-
ном состоянии транзисторы V69, V75 заперты положительным смещением на
84
базу через цепочку R93, V58, V57. С появлением на входах а или с импульса ну-
левого уровня транзисторы V69, V75 открываются. В этот момент к одному из
выводов первичной обмотки ЯГ прикладывается напряжение +12 В. Передача
импульса на тиристор в этот момент будет производиться тем ЯГ, иа второй вы-
вод первичной обмотки которого подано ключом В1 или Н1 напряжение пита-
ния —12 В.
Резисторы R1 служат для ограничения тока в цепи первичной обмотки ЯГ
в аварийном (установившемся) режиме. Диоды V1.2 предотвращают перенапря-
жения на коллекторах транзисторов V89, V75, V25, V26 при их закрывании. Дио-
ды VI.1 предназначены для защиты ЯГ от помехи в виде импульсного падения
напряжения на ключах V25 и V26 в открытом состоянии.
Принципиальная схема формирователя импульсов приведена на рис. 4.34
и включает^в себя следующие узлы: фильтр Ф, пороговые элементы ПЭ] и ПЭ2,
формирователь синхронизирующих импульсов F, генератор пилообразного на-
пряжения ГПН, нуль-орган НО, 2?8-триггер Г, формирователь длительности им-
пульсов ФДИ. Временные диаграммы сигналов на выходах названных узлов
приведены на рис. 4.35.
Фильтр осуществляет сдвиг синхронизирующего напряжения на угол 30
эл. град, совмещая тем самым начало зоны разрешения выдачи импульса на ти-
ристор с точкой естественной коммутации силового напряжения на тиристорах.
Выходное напряжение фильтра с помощью пороговых элементов ПЭ1 и ПЭ2 пре-
образуется в две противофазные последовательности прямоугольных импульсов.
Величина порога (зоны нечувствительности) определяется падением напря-
жения на переходах база — эмиттер транзисторов VI и V2. Длительность импуль-
са единичного уровня (около 176 эл. град) определяет зону разрешения выдачи
управляющих импульсов на соответствующий тиристор. В промежуток времени
перекрытия импульсов нулевого уровня на входах Д1.3, Д1.4 на выходе F фор-
мируется синхроимпульс единичного уровня длительностью около 8 эл. град.
Этот импульс открывает транзистор V8, осуществляющий разряд интегрирую-
щей емкости СЗ до нулевого напряжения. После исчезновения синхроимпульса
напряжение на выходе ГПН начинает линейно возрастать от 0 до 10 вольт за
Рис. 4.33. Принципиальная схема У И и ИТ канала «а»
85
Рис. 4.34. Принципиальная схема ФИ
Рис. 4.35. Временные диаграммы напряжений ФИ
счет подачи на инвертирующий вход усилителя А1 напряжения —15 В через ре-
зисторы Rll, R13. Уровень возрастания выходного напряжения ГПН до прихода
очередного синхроимпульса может изменяться сменным резистором RU.
Момент равенства по абсолютной величине разнополярных напряжений ГПН
и УО фиксирует нуль-орган, выполненный иа операционном усилителе А2, поляр-
ность выходного напряжения которого в этот момент меняется с положительной
иа отрицательную. Триггер Т воспринимает отрицательное выходное напряжение
А2 как логический сигнал нулевого уровня, изменяя при этом свое состояние, со-
ответствующее изменению логического сигнала иа выходе Д2.2 с единичного
уровня на нулевой. Появление на входе ФДИ нулевого сигнала приводит к раз-
ряду конденсатора С2 по цепи: R14, выход Д2.2, V7. Во время разряда, опреде-
ляемого элементами R14, С2, на диоде V7 создается падение напряже-
ния, запирающее транзистор V6. В этот момент на входах микросхем Д1.2, Д2.3,
Д1.1 появляется сигнал единичного уровня. Прохождение импульса ФДИ в ка-
нал а или а определяется наличием на втором входе микросхем Д1.2, Д1.3 еди-
ничного сигнала от пороговых элементов. Таким образом, единичными импульса-
ми пороговых элементов производится распределение импульсов ФДИ по кана-
лам а и а. Длительность импульса ФДИ может составлять (10—15) эл. град.
Через элемент Д2.3 проходят все импульсы ФДИ, которые путем параллельного
соединения выходов микросхем, аналогичных Д2.3 в других ФИ, представляют
собой просуммированные импульсы всех шести тиристоров. Кроме этого, воз-
можность прохождения импульсов в каналы а, а и УЛ зависит от присутствия
иа катоде диода V5 сигнала единичного уровня, поступающего из узла защиты
и блокировки.
После того как сформировался управляющий импульс, триггер Т ждет при-
хода очередного синхроимпульса, чтобы вернуться в исходное состояние и быть
подготовленным к формированию следующего управляющего импульса. Установ-
ка триггера Т в исходное состояние возможна только при одновременном наличии
на входах триггера сигнала единичного уровня от НО на входе Д2.1 и сигнала
нулевого уровня на каком-либо из входов микросхемы Д2.2. Во время стацио-
нарной работы комплектов тиристоров триггер Т устанавливается в исходное со-
стояние проинвертированными синхроимпульсами, поступающими с выхода мик-
росхемы Д2.4, и, таким образом, в начале каждого полупериода синхронизирую-
щего напряжения становится готовым для формирования следующего управля-
ющего импульса.
Кроме этого, триггер Т может подготавливаться к выдаче управляющего им-
пульса сигналом нулевого уровня Uf, поступающим от устройства логики. Времи
существования сигнала Пр нулевого уровня определяется элементом выдержки
времени в УЛ и составляет около 1 мс. Если за это время на второй вход триг-
гера Т поступит сигнал единичного уровня от НО, то триггер перебросится в ис-
ходное состояние и будет готов к повторной выдаче импульса.
Временная диаграмма напряжений ФИ при повторной выдаче каналом за
один полупериод синхронизирующего напряжения управляющего импульса при-
ведена иа рис. 4.36. Показанная ситуация соответствует переключению одного
комплекта тнрнсторов, находившегося в выпрямительном режиме с углом регули-
88
Рис. 4.36. Временные диаграммы напряжений ФИ при повторной выдаче уп-
равляющего импульса
роваиия at, на другой комплект, который начинает работать в инверторном ре-
жиме с углом регулирования а2, т. е. соответствует началу торможения электро-
двигателя с какой-то скорости. Командой на переключение комплектов является
изменение полярности напряжения UB3, что приводит одновременно к скачкооб-
разному изменению напряжения управления &U7=U7i—и7г- Команда иа пере-
ключение комплектов пришла после выдачи каналом очередного импульса уп-
равления с углом регулирования at в тот же полупериод синхронизирующего на-
пряжения. Если в этот момент .отсутствовал запрет на переключение от блоки-
ровочных сигналов Ивв, Ива. сигнал t/p мгновенно принимает нулевой уровень
и происходит отсчет выдержки времени. В течение выдержки времени оба ключа
В и И в ПХ замкнуты, поэтому U7=0 (UCm соответствует аВач). После пере-
ключения ключей напряжение на выходе ПХ сменит полярность на противопо-
ложную, поэтому в этот момент произойдет скачкообразное изменение U7, сим-
метричное относительно UaK. Таким образом, в течение выдержки времени на
одном входе триггера Т присутствует сигнал нулевого уровня, а на другом за
счет {7у=0 и перехода выходного напряжения НО в положительную поляр-
ность— сигнал единичного уровня. Это приводит триггер Т в исходное состояние
и через некоторый промежуток времени он формирует второй импульс управле-
ния с углом регулирования а2.
89
Узел защиты и блокировки (рис. 4.37) обеспечивает следующие виды защит:
— от превышения максимального тока;
— от длительной перегрузки двигателя;
— от понижения напряжения в питающей сети.
Кроме того, при отсутствии внешней команды «деблокировка» узел обеспе-
чивает бестоковое состояние преобразователю, запрещая формирование импуль-
сов СИФУ, и нулевые начальные условия регуляторам тока и скорости путем
закорачивания в них интегрирующей обратной связи.
Максимально-токовая защита должна срабатывать прн превышении током
двигателя уставки тока в режиме токоограничения. Пороговый элемент защиты
реализован на транзисторе V47, диоде V46, резисторе R60. В исходном состоя-
нии транзистор заперт падением напряжения на диоде V46 по цепи R60, —15 В.
При достижении сигналом -Н’л от ДТ уровня достаточного дли запирания V46
и протекания базового тока V47, происходит открытие транзистора V47, которое
запоминается ^S-триггером. Величина резистора R60, от которого зависит порог
срабатывания защиты, определяется из условия равенства токов иа базе V47-.
15 В/#60=ЛКдт/Я61, где Д — максимальная величина тока двигателя в режиме
токоограничения.
-ВОотДТ
Хл.15 l7g
49^50
Ш8 Ц <—
, 914 Ъд JZ2
От R 57,25250
Ж *80l
±-27* С22\\6800
Деблокировка
8
W
980\ \Юк
R56 750
С20
100.0Х25В
*
И
Г? /44 ~KV5B ФИ
К
97/П/,2к
У481
Up от УЛ, ФИ
Рис. 4.37. Принципиальная схема узла защиты и блокировки
90
При открывании транзистора V47 ^S-триггер (Д2.2, Д2.4) устанавливается в
состояние, которое характеризуется единичным уровнем сигнала на выходе Д2.4
и нулевым на выходе Д2.2. Единичный уровень приводит к открыванию транзисто-
ров V48, V49, при этом загорается сигнальная лампа защиты Н2. Нулевой уро-
вень приводит к появлению на выходе Д2.3 сигнала единичного уровня поло-
жительной полярности, который подается в управляющий орган СИФУ и осу-
ществляет сдвиг управляющих импульсов на тиристорах в положение, соответ-
ствующее максимальному углу регулирования амакс. Этим обеспечивается пре-
кращение протекания тока через преобразователь. Отметим, что простое снятие
импульсов с тиристоров, если преобразователь находится в режиме инвертиро-
вания, может привести к аварийному режиму прорыва инвертора. Для приведе-
ния триггера в исходное состояние необходимо снять и вновь подать питание иа
преобразователь.
Защита двигателя от длительной перегрузки током, превышающим номиналь-
ное значение, выполнена на операционном усилителе А6, включенном по схеме
интегратора, и пороговом элементе Д2.1, R80, имеющем порог срабатывания око-
ло +8 В. В исходном состоянии, при токе двигателя меньше номинального, вы-
ходное напряжение усилителя Аб имеет уровень насыщения отрицательной по-
лярности за счет подачи иа инвертирующий вход усилителя положительного сме-
щении от потенциометра R72. Напряжение +15 В подается иа потенциометр
путем коммутации на входном клеммнике преобразователя, что позволяет при
необходимости изменять во внешней цепи установку начала вступления в дей-
ствие защиты. При достижении током двигателя значения больше номинального,
напряжение иа выходе А6 начинает линейно изменяться в сторону положитель-
ной полярности со скоростью, прямо пропорциональной перегрузке по току и
обратно пропорциональной постоянной интегрирования. При достижении выход-
ным напряжением усилителя А6 уроиия срабатывания порогового элемента
(+8 В) происходит переключение 2?5-триггера, сопровождающееся, как и в слу-
чае максимально-токовой защиты, загоранием сигнальной лампы Н2 и переводом
угла регулирования в амакс.
Постоянная интегрирования определяется исходя из допустимого времени
протекании Л/ через двигатель максимального тока Ц режима токоограиичения,
в соответствии с переходной характеристикой интегрирующего звена
Д/
Д ^ВЫХ — Д ^ВХ I
1 и
где постоянная интегрирования Тя C23R73. Выходное напряжение уси-
лителя А6 до момента срабатывания защиты изменяется от —12 В до +8 В,
поэтому Л£/вых=20 В. Величина Д£/вх=Кдт(Л—/в). Отсюда постоянная интег-
рирования определится как
С23-Я73 = —— .М.
20В
Напряжение на движке потенциометра R72 определяет начало вступления
защиты в действие. Для того чтобы защита вступала в действие только после
91
превышения током двигателя номинального значения, необходимо выставить ве-
личину напряжения на движке потенциометра относительно общей точки в со-
ответствии с соотношением
U -« Г™.
и R72 — д73 •
Защита от понижения напряжения питающей сети, осуществляющая также
задержку выдачи СИФУ управляющих импульсов при подаче на преобразова-
тель напряжения питания, выполнена на пороговом элементе Д1.1 и элементах
С21, R66, R67. На вход Д1.1 подается напряжение с делителя R51, R52 (см.
рис. 4.38), которое имеет величину около +15 В. Делитель подключен к напря-
жениям: иеотфнльтровэнному +24 В и отфильтрованному —12 В.
При подаче питания на преобразователь за счет заряда конденсатора С21
через резистор R67 от +15 В напряжение иа С21 достигает уровня, восприни-
маемого микросхемами как единичный, через 20—50 мс. В течение этого времени
на выходные микросхемы ФИ поступает логический сигнал нулевого уровня, за-
прещающий выдачу управляющих импульсов. Этим же сигналом устанаиливает-
ся в исходное состояние /?£-трнггер.
При снижении питающего напряжения всех или одной из фаз более чем на
50% на вход Д1.1 с делителя R51, R52 приходит уровень напряжения, воспри-
нимающийся как логический сигнал нулевого уровня. Поэтому иа выходе Д1.1
появляется нулевой сигнал, приводящий к быстрому разряду С21 через R66. Это
вызывает снятие управляющих импульсов и через элемент Д1.2 включение ре-
ле К, контакты которого шунтируют цепи обратных связей РТ и PC. После вос-
становления питающего напряжения происходит отсчет выдержки времени (R67,
С21), и через 20—50 мс привод будет находиться в рабочем состоянии.
После подачи питания на преобразователь при отсутствии команды «дебло-
кировка» (цепь между входными клеммами 15, 20 разомкнута) преобразователь
находится в блокированном состоянии, которое обеспечивается подачей на вход
элемента Д1.2 через резисторы R57, R58 от напряжения — 15 В логического сиг-
нала нулевого уровня. При этом нулевое напряжение на выходе Д1.2 приводит
к запрету на формирование СИФУ управляющих импульсов (17Р=0), переводу
угла регулирования в амакс, включению реле К, шунтирующего своими контак-
тами обратные связи РТ и PC. Таким образом осуществляется бестоковое со-
стояние преобразователя и создаются нулевые начальные условия иа выходах РТ
н PC, необходимые для плавного вхождения в работу замкнутой системы регу-
лирования.
При появлении команды «деблокировка» конденсатор С20 через R58 с малой
постоянной времени перезаряжается от напряжения +15 В, на входе Д1.2 появ-
ляется логический сигнал единичного уровня.
Напряжение единичного уровня на выходе Д1.2 приводит к отключению ре-
ле К и снятию запрета на формирование Импульсов. Преобразователь принимает
рабочее состояние.
При снятии команды «деблокировка» конденсатор С20 перезаряжается по
цепи R58, R57, —15 В, в результате иа входе Д1.2 в течение примерно одной
92
ВУЗиЬ
-126
В ФИ
—3808 F3 Ц5
АЮ--EB-=fv’v''—
ctCrj^^
IV/
Т1
CIS
^^XSOOfi^OOO
*156 -i '‘~
-----------------— -248
R5324 431 37 38
^ [ 1_^ Т-О—с
I R34 Д2
1*^
[С/« \С18
1ооо^°± +Voo,o'
*5b8 В3^433 *256
/4 О ° +
Дигг
-156
сгв
8 ФИ
напи-
-t- m
017 C15\100,0*508такие
1*500,<Г|+ 36 TL
Т ДА
*158
R55 680
\R56
~0~ ™
гл
39 40
—О—О1—+
+246
КГ/
+156
+128
Рис. 4.38. Принципиальная схема БП
секунды поддерживается единичный уровень, после чего преобразователь бло-
кируется. Выдержка времени необходима в том случае, если команда «деблоки-
ровка» подается контактами реле В и Н, чтобы после снятия напряжения зада-
ния, до наступления бестокового состояния преобразователя, двигатель успел
затормозиться.
Блок питания
Принципиальная схема блока питания приведена на рнс. 4.38. Трехфазный
трансформатор Т1, кроме питающих обмоток W4, W5, имеет обмотку W3, которая
используется в качестве источника синхронизирующего иапряжения. Кроме транс-
форматора Т1. блок питания включает в себя: две мостовые схемы выпрямления,
формирующие совместно с конденсаторами С15, С14 отфильтрованное напряже-
ние ±24 В; две нулевые схемы выпрямления, вырабатывающие совместно с кон-
денсаторами СП, С16 отфильтрованное напряжение ±12 В; два стабилизатора
с выходным стабилизированным напряжением ±15 В, которое может ступенчато
изменяться в небольших пределах установкой перемычек 33—34, 32—34, 35—34,
36—34. Для исключения аварийного режима преобразователя в случае исчезно-
вения напряжения + 15 В иа микросхеме ФИ через V55 заведено питание +12 В.
93
Кроме того, для оперативного контроля за величиной напряжения сети в
блоке питания вырабатывается неотфильтрованное напряжение +24 В, которое
поступает иа делитель R52, R51, а с него в узел защиты и блокировки.
Методика наладки электропривода БТУ3601
в регулируемом режиме
Схема подключения тиристорного преобразователя БТУ3601 приведена на
рис. 4.39. Подача питании на клеммы Al, Bl, С1 преобразователя сопровожда-
ется загоранием лампы Н1 зеленого цвета, подключенной к источнику нестабили-
зированного напряжения —24 В относительно общей точки питания и сигнали-
зирующей-о наличии напряжения питания на печатных платах преобразователя.
Загорание лампы Н2 красного цвета сигнализирует о срабатывании максималь-
но-токовой защиты или защиты от длительной перегрузки двигателя. Для приве-
дения преобразователя после срабатывания одной из защит в рабочее состояние
необходимо снять н вновь подать питание иа преобразователь.
Рекомендуемый порядок проверки и настройки электропривода приведен
ниже.
1. Фазировка преобразователя при различных схемах соединения обмоток
силового трансформатора
Подключение преобразователя должно быть выполнено с соблюдением пра-
вильной последовательности чередования фаз на зажимах АЗ, ВЗ, СЗ силового
напряжения и клеммах Al, В1, С1 напряжения питания и синхронизации, а так-
же правильного сдвига фаз между напряжениями на одноименных зажимах и
клеммах. Для проведения фазировки необходимо:
— вынуть нз преобразователя печатные платы Е1 и Е2;
— подать напряжение на клеммы Al, Bl, С1 и зажимы АЗ, ВЗ, СЗ, включив
автоматы F1 и F6.
а) Соединение обмоток трансформатора по схеме Y/Y-.
Векторная диаграмма напряжений первичной и вторичной обмоток силового
трансформатора н напряжения питания преобразователя приведена иа рис. 4.40.
Произвести проверку последовательности чередования фаз напряжения пита-
ния преобразователя на клеммах Al, Bl, С1. Для этого установить осциллограф
в режим синхронизации от сети, общий конец осциллографа подключить к нуле-
вой точке сяловой сети (земля), а потенциальный последовательно к клеммам
Al, Bl, С1. Сдвиг фаз между наблюдаемыми напряжениями должен соответст-
вовать прямой последовательности чередовании фаз, показанной на рис. 4.41.
Произвести проверку прямой последовательности чередования фаз на силовых
зажимах преобразователя АЗ, ВЗ, СЗ в соответствии с рис. 4.41. Для этого об-
щий конец осциллографа подключить к общей точке вторичной обмотки силового
трансформатора, а потенциальный — последовательно к зажимам АЗ, ВЗ, СЗ.
Убедиться, что отсутствует сдвиг по фазе между напряжениями на клемме А1
94
~звов
Рис. 4.39. Принципиальная схема подключения
электропривода
н зажиме АЗ, т. е. напряжения Ua\ и Улэ находятся в фазе, как показано иа
рис. 4.42.
б) Соединение обмоток трансформатора по схеме У/Д—1.
Векторная диаграмма напряжений первичной и вторичной обмоток трансфор-
матора и напряжения питания преобразователя приведена на рис. 4.43.
95
Рис. 4.40. Векторная ди-
аграмма напряжений при
соединении силового
трансформатора по схе-
ме У/У
Рис. 4.42. Осциллограмма на-
пряжений £/д1 и Uаз для схе-
мы У/Y
Рис. 4.41. Осциллограммы трехфазиых
напряжений с прямой последователь-
ностью чередования фаз
Рис. 4.43. Векторная диаг-
рамма напряжений при сое-
динении силового трансфор-
матора по схеме У/Д—1
Рис. 4.44. Осциллограмма напряжений Uai
и I/аз-вз Для схемы У/Д—1
Рис. 4.45. Векторная диаг-
рамма напряжений при сое-
динении силового трансфор-
матора по схеме Д/У — 1
Проверка прямой последовательности чередования фаз на клеммах А1,В1, С1
производится так же, как и в предыдущем случае. Для проверки чередования
фаз иа зажимах АЗ, ВЗ, СЗ необходимо наблюдать напряжения между зажима-
ми АЗ—ВЗ, ВЗ—СЗ, СЗ—АЗ, подключая к зажимам, указанным первыми, потен-
циальный конец осциллографа, а к зажимам, указанным вторыми, общий конец
осциллографа. Наблюдаемые напряжения должны быть сдвинуты по фазе в со-
ответствии с рнс. 4.41. Убедиться, что отсутствует сдвиг по фазе между напря-
жениями на клемме А1 и зажимах АЗ—ВЗ, т. е. напряжения Uai и t/лз-вз нахо-
дятся в фазе, как показано на рис. 4.44.
в) Соединение обмоток трансформатора по схеме Д/У—1.
Векторная диаграмма напряжений первичной и вторичной обмоток силового
трансформатора и напряжения питания преобразователя приведена на рис. 4.45.
Проверка последовательности чередования фаз на клеммах Al, Bi, С/.произво-
дится так же, как и в предыдущих случаях. Для проверки чередования фаз на
зажимах АЗ, ВЗ, СЗ необходимо общий конец осциллографа подключить к об-
щей точке вторичной обмотки силового трансформатора, а потенциальный — по-
следовательно к зажимам АЗ, ВЗ, СЗ. При этом должна соблюдаться прямая по-
следовательность чередования фаз в соответствии с рис. 4.41. Убедиться, что
сдвиг по фазе между напряжениями Uai и (7аз на клемме А1 и зажиме АЗ равен
30 эл. град, как показано на рис. 4.46.
2. Проверка узлов преобразователя
при отключенном силовом напряжении
Выполнение этого пункта производится при выключенном автомате F6, сни-
мающем силовое напряжение с зажимов АЗ, ВЗ, СЗ. Автомат F1 должен быть
включен, подавая питание на тиристорный преобразователь. Сигналы в контроль-
ных точках проверяются осциллографом относительно общей шины источника
питания, которой соответствуют контрольная точка 34 платы Е1 и контрольная
точка 23 платы Е2.
4 Заказ 4546
97
2.1. Блок питания
Проверить стабилизированное напряжение питания на контрольных точках
40 (+15 В), 38 (—15 В) платы Е1, и 2 ( + 15 В) и 1 (—15 В) платы Е2. Вели-
чина напряжения может допускать отклонение в диапазоне ( + 54—15)%, а вели-
чина пульсаций (двойная амплитуда) должна быть не более 100 мВ.
2.2 Регулятор скорости
Деблокировать преобразователь. Установить величину задающего напряже-
ния на клемме 21 преобразователя не более 0,5 В. Реверсируя задающее напря-
жение, наблюдать выходной сигнал регулятора скорости в контрольной точке 46
платы Е2 при использовании ПУРС или в контрольной точке 5 платы Е1 при
отсутствии узла ПУРС. Переходная характеристика PC приведена иа рис. 4.47.
Высота ступеньки пропорционального участка и наклон интегрального участка
характеристики определяются величиной задающего напряжения и номиналами
элементов цепи обратной связи PC. Установившийся уровень выходного напряг
жения PC изменяется резистором R17 в пределах от 0 до 10 В. При проверке
переходной характеристики PC и для проверки последующих узлов установить
резистором R17 максимальную величину выходного напряжения PC.
При использовании в преобразователе узла ПУРС проверить сигналы управ-
ления ключами модулятора и демодулятора в контрольных точках 47 и 48 пла-
ты Е2.
Форма сигналов должна соответствоаать приведенной иа рис. 4.48.
2.3. Регулятор тока
Запаять параллельно цепи обратной связи регулятора скорости резистор ве-
личиной 2,7к иа контрольные точки 42—46 платы Е2 при использовании ПУРС
Рис. 4.47. Переходная характеристика PC и РТ
98
t
или на контрольные точки 3—5 платы Е1 при отсутствии узла ПУРС. Это обес-
печит коэффициент передачи регулятора скорости, равный единице.
Деблокировать преобразователь. Установить величину задающего напряже-
ния на входной клемме 21 преобразователя ие более 0,5 В. Реверсируя задающее
напряжение, наблюдать выходной сигнал РТ в контрольной точке 18 платы Е1.
Форма переходной характеристики должна соответствовать приведенной на
рис. 4.47. Величина выходного напряжения РТ изменяется резистором R33 в
пределах от 0 до 10 В. При проверке РТ и для проверки последующих узлов
установять резистором R33 максимальную величину выходного напряжения РТ.
2.4. Нелинейное звено
В условиях пункта 2.3 установить минимально возможную величину напря-
жения задания н наблюдать выходной сигнал НЗ в контрольной точке 24 платы
Е1 при реверсе задающего напряжения. Форма сигнала приведена на рис. 4.49.
После выполнения пунктов 2.3 и 2.4 отпаять наладочный резистор 2,7к с конт-
рольных точек 42—46 или 3—5.
Проверки 2.2—2.4 можно произвести без подачи задающего напряжения иа
вход преобразователя и не устанавливая наладочный резистор в обратную связь
PC. Для этого необходимо:
— деблокировать преобразователь;
— вращением движка резистора R3 установки нуля регулятора скорости ме-
нять полярность сигнала смещения на входе PC.
4*
99
Рнс. 4.50. Выходные напряжения PC, РТ и НЗ при
изменении полярности сигнала смещения на входе PC
Форма выходных напряжений PC, РТ и НЗ в этом режиме приведена на
рис. 4.50. После выполнения проверки вернуть движок резистора R3 в положе-
ние, соответствующее мииимальной скорости изменения выходного напряже-
ния PC.
2.5. Система импульсно-фазового управлении
Поскольку в состав СИФУ входят три идентичных узла формирования им-
пульсов ФИ1, ФИЗ, ФИЗ, последовательность проверки сигналов приводится для
одного ФИ.
— Проверить выходной сигнал генератора пилообразного напряжения в конт-
рольной точке 3 платы Е1. Форма сигнала должна соответствовать приведенной
на рис. 4.51.
— Деблокировать преобразователь.
— Наблюдать сигнал в контрольной точке 52 платы Е1, который является
Рис. 4.51. Выходное напряжение ГПН
100
суммой управляющих импульсов трех ФИ. Форма сигнала приведена на рис. 4.52.
Возможное отсутствие импульсов объясняется тем, что при подаче напряжения
питания иа преобразователь в устройстве логики триггеры заданного и истинного
направлений токов могут установиться в разные состояния. Поэтому схема со-
впадения вырабатывает сигнал £7р=0, запрещающий формирование импульсов.
Приведению триггеров в одинаковое состояние мешает блокировочный сигнал
с ДПВ, поскольку отсутствие силового напряжения иа тиристорах воспринима-
ется датчиком аналогично режиму непрерывного протекания тока через тири-
сторы. Для того чтобы дать возможность установиться триггерам в одинаковое
состояние, необходимо кратковременно замкнуть в ДПВ базу транзистора V10
TC-Y/a-f Х6
Рис. 4.53. Выходной сигнал ^S-триггера СИФУ при различных схемах соеди-
нения силового трансформатора
101
платы Е2 с общей точкой пита-
ния (контрольная точка 23).
На это время блокировочный
сигнал ДПВ исчезает, триггеры
устанавливаются в одинаковое
состояние, схема совпадения
вырабатывает сигнал t/p=l,
разрешающий формирование
импульсов управления.
— Произвести проверку и
установку углов регулирования
ССмкн Н Пмакс-
Для этого закоротить перемычкой на контрольных точках 23—29 резистор
R37 платы Е1. Это позволит изменяться выходному напряжению нелинейного
звена в пределах ±12,5 В. Наблюдать выходной сигнал ^S-триггера СИФУ в
контрольной точке 8 платы Е1 при реверсе задающего напряжения. Должно про-
исходить изменение угла регулирования от аМиВ до ам*ко. В соответствии с
рис. 4.53 путем подбора резисторов R50 и R49 управляющего органа СИФУ ус-
тановить минимальный н максимальный углы регулирования, учитывая при этом,
что уменьшение сопротивлений приводит к увеличению углов амия н ам»кс, н
наоборот.
— Проверить симметрию углов регулирования по фазам. Для этого перевес-
ти угол регулирования в минимум и сравнить по длительности импульсы еди-
ничного уровня в формирователях ФИ1, ФИ2, ФИЗ. В случае заметного расхож-
дения резисторами R1 фильтра СИФУ обеспечить одинаковую длительность им-
пульсов по фазам. Перевести угол регулирования в максимум и путем подбора
резисторов R11 ГПН выравнять, если это необходимо, длительность импульсов
нулевого уровня. Убедиться, что в выходном напряжении ГПН отсутствует уча-
сток насыщения.
— Проверить выходные сигналы усилителей импульсов в контрольных точ-
ках 53—58 платы Е1. Форма напряжения должна соответствовать приведенной
на рис. 4.54. При блокировке преобразователя управляющие импульсы должны
исчезнуть с выдержкой времени.
2.6. Логическое устройство раздельного управления
Для проверки функционирования устройства логики при Отсутствии силового
напряжения на тиристорах необходимо заблокировать датчик проводимости вен-
тилей, для этого установить перемычку между базой транзистора V10 ДПВ и
контрольной точкой 23. Если ДПВ заблокирован, в контрольной точке 13 платы
Е2 должен появиться потенциал величиной около 12 В.
Деблокировать преобразователь. В контрольной точке 13 должны появиться
просуммированные импульсы формирователей импульсов (контрольная точка 52
платы Е1 соединена с контрольной точкой 13 ДПВ). Реверсируя задающее на-
пряжение, наблюдать сигналы в контрольных точках УЛ:
102
14 — выход нуль-оргаиа УЛ;
16 (17) — триггер заданного направления тока;
18 (19) — триггер истинного направления тока;
20 — выход схемы совпадения (сигнал £/р разрешения на формирование уп-
равляющих импульсов СИФУ);
21, 22 — состояние ключей В1 и Н1, подключающих импульсные трансформа-
торы к комплектам;
12 — выходной сигнал переключателя характеристик.
Форма перечисленных сигналов приведена на рис. 4.55. После того как про-
103
верка УЛ произведена, снять перемычку, блокирующую ДПВ. Присутствие пере-
мычки прн работе преобразователя под нагрузкой приведет к аварийному режи-
му преобразователя (одновременному включению комплектов).
2.7. Узел защиты н блокировки
Произвести расчет подстроечных элементов защит от превышения макси-
мального тока и длительной перегрузки двигателя.
Уставка срабатывания макснмально-токовой защиты определяется резисто-
ром R60, величина которого находится исходя нз максимального тока двнгате-
15В
ля Л в режиме токоограннчення из соотношения /?60 = Я61 ———, где R61 = 10 к,
Адт-'1
Кдт=0,042 В/A для преобразователя с /н=!40 А, Кдт = 0,021 В/A для преобразо-
вателя с /н=100 А.
Постоянная времени интегрирования защиты от длительной перегрузки дви-
гателя определяется исходя нз допустимого времени протекания Д< максималь-
ного тока двигателя 1\ в режиме токоограннчення (перегрузочной характеристи-
ки двигателя) нз соотношения
Ги = С23-Л73 = At.
20В
Уставка начала вступления в действие защиты от перегрузки определяется
исходя нз величины номинального тока двигателя нз соотношения
UR12 — лДТ/и д73 •
где Вkj2 — напряжение на двнжке потенциометра R72, R74 = 27Q к, R73 нз пре-
дыдущего пункта расчета.
3. Проверка электропривода
с подключенным силовым напряжением
в разомкнутой системе регулирования
Для создания режима разомкнутой системы регулирования с функционирую-
щей силовой частью необходимо:
— отпаять входной резистор R45 управляющего органа СИФУ, на который
поступает управляющее напряжение с ПХ\
— снять активный конец тахогенератора с входной клеммы 23 преобразо-
вателя;
— включить автоматы F\ питания преобразователя и силового напря-
жения.
104
3.1. Проверка знака обратной связи по скорости
Выбрать направление вращения электродвигателя путем подачи на вход
преобразователя той или иной полярности задающего напряжения.
Деблокировать преобразователь.
Плавно поворачивая движок потенциометра R41 в сторону уменьшения угла
регулирования, установить произвольную скорость вращения электродвигателя.
Замерить полярность напряжения тахогенератора иа проводе, снятом с клем-
мы 23, которая должна быть противоположна полярности напряжения задания
на клемме 21 преобразователя. Это будет соответствовать отрицательному знаку
обратной связи по скорости. В случае совпадения полярностей поменять ме-
стами выводы, тахогенератора.
3.2. Проверка сигнала тахогенератора
Наблюдать осциллографом сигнал иа проводе, снятом с клеммы 23 преобра-
зователя. Задавая резистором R41 величину скорости вращения двигателя в диаг
пазоне от нуля до максимальной, убедиться, что в сигнале тахогенератора от-
сутствуют пульсации напряжения, вызванные неплотным прилеганием щеток к
коллектору или загрязнением самого коллектора. Произвести проверку сигнала
при противоположной скорости вращения, изменив для этого полярность напря-
жения задания иа входе преобразователя, снизив предварительно резистором
R41 скорость вращения электродвигателя до нуля.
3.3. Установка начального угла регулирования
Наблюдать осциллографом выходной сигнал датчика тока в контрольных
точках 45 или 46 платы Е1. Установить движок резистора R41 в положение, со-
ответствующее начальному появлению импульсов тока в силовой цепи, как пока-
зано на рис. 4.56. Произведенная установка аНач является окончательной и при
дальнейшей настройке преобразователя не нарушается.
После выполнения проверок пункта 3 снять с преобразователя напряжение
питания и силовое напряжение, подключить активный конец тахогенератора к
клемме 23, запаять резистор R45.
3,3мс
~е£нм <&Оэлград
1
1
<*нач = ?20 м град
----И------“-------В-----У0#
Рис. 4.56. Импульсы тока в силовой цепи при установке аНач
105
4. Проверка и настройка электропривода
в замкнутой системе регулирования
При выполнении настройки электропривода в замкнутой системе регулиро-
вания иа станке необходимо предварительно привести в соответствие с помощью
делителя в цепи тахогенератора действительную скорость вращения электродви-
гателя с заданной с пульта управления, н только после этого можно приступить
к настройке узлов преобразователя.
Включить автоматы F\ и F$, деблокировать преобразователь.
4.1. Настройка положительной обратной связи по ЭДС
Потенциометром задания скорости установить скорость вращения электро-
двигателя, соответствующую величине напряжения задания 10 вольт. Потенцио-
метром R16 функционального преобразователя ЭДС отрегулировать выходное
напряжение регулятора тока на уровне (0,1^0,2) вольта той же полярности,
что и задающее напряжение. Если потенциометром R16 добиться этого не уда-
ется, изменить величину сменного резистора R15.
Необходимо отметить, что отклонение от правильной настройки сигнала об-
ратной связи по ЭДС в большой степени влияет на устойчивость замкнутой си-
стемы регулирования, а сама настройка требует повышенной точности при ее
проведении. Это связано с наличием в контуре регулирования нелинейного звена,
имеющего в области малых входных сигналов от РТ зону большого коэффици-
ента усиления. При правильно подобранной обратной связи по ЭДС выходной
сигнал РТ должен иметь такую величину, которая обеспечивала бы рабочую
точку на характеристике НЗ в зоне большого коэффициента усиления. Это будет
верным, поскольку в режиме холостого хода двигателя ток якоря носит преры-
вистый характер и этому режиму должен соответствовать большой коэффициент
усиления контура тока.
Если сигнал обратной связи по ЭДС меньше необходимого, скорость враще-
ния двигателя будет поддерживаться на заданном уровне дополнительным вы-
ходным напряжением РТ, а это выведет рабочую точку нелинейного звена в зо-
ну с малым коэффициентом усиления. Несоответствие режиму прерывистого тока
коэффициента усиления контура тока приводит к низкочастотным автоколеба-
ниям в системе регулирования,
Если сигнал обратной связи по ЭДС больше необходимого для поддержания
заданной скорости, выходное напряжение РТ будет уменьшаться и стремиться
изменить знак. Соответственно будет меняться знак напряжения t/H3 на проме-
жуточном выходе НЗ, что будет приводить к включению другого комплекта ти-
ристоров, осуществляющего подтормаживание двигателя. Таким образом, будет
происходить постоянное переключение комплектов, сопровождающееся больши-
ми бросками тока.
Поэтому наиболее точно настройка обратной связи по ЭДС производится
при наблюдении осциллографом выходного напряжения РТ в контрольной точ-
ке 18 платы Е1. Выходные сигналы РТ для случаев слабой, оптимальной и силь-
106
Рис. 4.57. Выходные сигналы РТ при различ-
ных настройках обратной связи по ЭДС
ной обратной связи по ЭДС приведены иа рис. 4.57. Величина выходного напря-
жения РТ, указанная иа рисунке, соответствует току холостого хода двигателя,
близкому к нулю. При выполнении настройки обратной связи по ЭДС на станке,
где ток холостого хода приближается к номинальному току двигателя, необходи-
мо учитывать, что прн оптимальной настройке, соответствующей рис. 4.57, б, вы-
ходное напряжение РТ будет несколько больше (0,1—0,2) В, хотя качественный
вид процессов остается прежним.
4.2. Настройка токоограничения
При использовании в комплекте с преобразователем двигателя с независи-
мой обмоткой возбуждения, имеющего коммутационную кривую, независимую от
скорости, отпадает необходимость в узле зависимого токоограничения. В этом
случае настройка токоограничения производится следующим образом:
— отпаять диоды V4 и V5 в плате Е2 (этим отключается УЗТ от выхода
PC);
— установить движок потенциометра R33 в положение, соответствующее мак-
симальному диапазону изменения выходного напряжения РТ, а двнжок потен-
циометра R.17 в положение, ограничивающее выходное напряжение PC до нуля;
— отключить обмотку возбуждения двигателя;
— подать напряжение питания на преобразователь и силовое напряжение на
тиристоры;
107
Рис. 4.58. Характеристика УЗТ и коммутацион-
ная кривая двигателя:
1 — характеристика УЗТ; 2 — коммутационная ха-
рактеристика двигателя; 3 — характеристика токоог-
раиичення
— установить на входной
клемме 23 преобразователя на-
пряжение задания произволь-
ной величины;
— деблокировать преобра-
зователь;
— плавно поворачивая
движок резистора R17, устано-
вить необходимую величину
тока отсечки. Контроль тока
производить по амперметру в
цепи якоря двигателя;
— наблюдать осциллогра-
фом выходной сигнал ДТ в
контрольных точках 45 или 46
платы Е1. Убедиться, что при
скачкообразном изменении (или
реверсе) задающего напряже-
ния в токовой диаграмме от-
сутствует первоначальный вы-
брос тока, в противном случае
устранить его резистором R33.
Если достичь этого не удается,
вернуть движок резистора R33 в исходное положение и обратиться к пункту 4.4
«Настройка переходных процессов тока и скорости».
При использовании в комплекте с преобразователем высокомоментного элект-
родвигателя для ограничения тока в функции скорости используется узел зави-
симого токоограничения. Перед настройкой токоограничения определить в соот-
ветствии с коммутационной характеристикой двигателя характерные точки токо-
вой диаграммы Ц, nb 12, п2 таким образом, чтобы она не выходила за границу
коммутационной кривой двигателя (рис. 4.58).
Установить движок потенциометра R33 в положение, соответствующее мак-
симальному диапазону изменения выходного напряжения РТ.
Производить пуск двигателя- на скорость, соответствующую величине зада-
ющего напряжения 10 В.
Наблюдать осциллографом кривую тока в контрольных точках 45 или 46
платы Е1. Зиая коэффициент передачи ДТ Кд?, установить величину максималь-
ного тока Л потенциометром R17 PC, величину минимального тока 12 резистором R5
УЗТ. Точки излома характеристики токоограничения (рис. 4.58), соответствующие
скоростям П; и п2> можно установить по выходному напряжению УЗТ в конт-
рольных точках 37, 38 платы Е2 резисторами R6 и R3. Величины скоростей П;
и п2 легко контролировать по напряжению тахогенератора, если известен или
предварительно измерен его коэффициент передачи.
Выше было отмечено, что необходимо предпринять, если в токовой диаграм-
ме имеются первоначальный выброс или перерегулирование тока.
108
4.3. Балансировка регулятора скорости
Вывести движок потенциометра задающего напряжения в нулевое положе-
ние. Наблюдая за валом электродвигателя, потенциометром R3 смещения нуля
регулятора скорости установить минимальную скорость вращения двигателя.
4.4. Настройка переходных процессов тока и скорости
Для настройки переходного процесса тока необходимо отключить обмотку
возбуждения или затормозить вал электродвигателя.
Установить на входе преобразователя величину задающего напряжения 10 В,
что обеспечит скачкообразное изменение напряжения на выходе PC.
Потенциометром R17 ограничить ток двигателя на уровне (1—1,5) 1д. Наблю-
дать осциллографом переходный процесс тока в контрольных точках 45 или 46
платы Е1 при скачкообразной подаче задающего напряжения. Возможные пере-
ходные процессы тока при различных соотношениях постоянной интегрирования
Ts и постоянной времени обратной связи Гос регулятора тока приведены на
рнс. 4.59, где ГОс = С7-#22, ГИ=С7- (Я67+Я68). Переходный процесс тока, соот-
ветствующий оптимальной настройке регулятора, показан в центр'е рисунка. Оп-
тимальная настройка регулятора тока предполагает, что постоянная времени
цепи обратной связи РТ равна электромагнитной постоянной времени якорной
цепи ГОс?=Гэ, а постоянная интегрирования Гн обеспечивает достижение током
заданного уровня приблизительно за 3—4 импульса тока при апериодическом
характере переходного процесса.
При настройке переходного процесса варьируемыми элементами РТ являют-
ся С7 н R22, причем изменение R22 приводит к изменению только ГОс, тогда как
величина С7 определяет одновременно Ги н.Гос, поэтому при нахождении опти-
мального значения Ги путем изменения С7 необходимо во столько же раз скор-
ректировать R22, чтобы сохранить неизменной ГОо=Гэ. Иначе можно сказать, что
величина С7 при сохранении неизменным значения Гоо определяет время пере-
ходного процесса тока: чем меньше С7, тем большее быстродействие достигается
в контуре тока, и наоборот, увеличение С7 приводит к увеличению длительности
переходного процесса тока. Величина R22 определяет форсировочную способ-
ность РТ. Чем больше R22, тем большую форсировку переходному процессу
обеспечит РТ, тем большее перерегулирование может быть возможным в кривой
тока.
После выполнения настройки по кривой переходного процесса -тока опреде-
ляется постоянная времени контура тока Гкт нз примерного соотношения
ГКт = */з где /Пп — время переходного процесса тока (время, за которое кри-
вая тока достигает значения 0,95 установившейся величины). Если переходный
процесс тока завершается за 3—4 импульса тока, то можно принять ГКт = 3 мс.
Величина Гкт необходима для дальнейшей настройки переходного процесса ско-
рости.
Снять силовое напряжение и напряжение питания с преобразователя, под-
ключить обмотку возбуждения или растормозить вал электродвигателя, устано-
109
Рис. 4.59. Переходные процессы тока при различных соотношениях парамет-
ров РТ
вить движок резистора Ri7 в первоначальное положение, соответствующее ха-
рактеристике токоограничения двигателя.
Предварительно перед настройкой переходного процесса скорости запаять
в обратную связь регулятора скорости элементы RIO, С4 (или R18, С11), обес-
печивающие постоянную времени цепи обратной связи Гос=/?10-С4— (44-10) Тят.
Меньшие значения Тос будут соответствовать большему перерегулированию ско-
рости при скачкообразном нзмеиеиии задания, но лучшей динамике привода по
нагрузке, и наоборот. Практически величину Тос удобно варьировать путем из-
менения С4 (или СП), поскольку при этом остается неизменным коэффициент
пропорционального усиления PC. Таким образом, задаваясь в зависимости от
условий работы станка большим или меньшим значением постоянной времени
обратной связи из соотношения ГОс= (44-10) Гкт, можно приступить к настрой-
ке переходного процесса скорости.
Настройка переходного процесса скорости производится при такой величине
задающего напряжения, которая при скачкообразной подаче иа вход преобразо-
110
Рис. 4.60. Переходные процессы скорости при различных соотношениях парамет-
ров PC Кп и Тал
вателя не вводит PC в режим насыщения, т. е. в замкнутой системе регулирова-
ния переменные во всех звеньях (напряжение, ток, скорость) не должны дости-
гать ограничения во время переходного процесса.
Наблюдать осциллографом переходный процесс скорости в контрольной точ-
ке 6 платы Е1 при скачкообразной подаче иа вход преобразователя напряжения
задания.
Изменяя коэффициент пропорционального усиления регулятора скорости
Кп=/?10/(Я5+£9+7?14) путем изменения величины R10, произвести настройку
переходного процесса скорости в соответствии с рис. 4.60. Необходимо иметь
в виду, что величиной R10 одновременно определяются и Таа> поэтому, изме-
няя R10, необходимо скорректировать во столько же раз С4, Чтобы сохранить
неизменным выбранное значение Тос- На рисунке величина Кп при Тос=4 Тжт
соответствует настройке привода иа симметричный оптимум, а переходные про-
цессы 2, 5, 3 могут быть рекомендованы при настройке.
ГЛАВА ПЯТАЯ
комплектный электропривод
ПОДАЧИ ТИПА ЭТ6
Электропривод постоянного тока серии ЭТ6 предназначен для регулирования
частоты вращения электродвигателя постоянного тока в широком диапазоне и
применяется в качестве привода подач металлорежущих станков. Электропривод
состоит из тиристорного преобразователя ТП, электродвигателя постоянного тока
со встроенным тахогенератором, согласующего силового трансформатора ТС,
токоограничивающих дросселей РТП и задатчика частоты вращения. В качестве
ДПТ в составе привода ЭТ6 могут применяться электродвигатели типов: 2П,
ПБСТ, ПГТ и ПБВ. В настоящее время в приводах подач станков с ЧПУ широко
применяется привод ЭТ6 с высокомоментаым ДПТ типа ПБВ. Электроприводы
ЭТ6 обеспечивают работу во всех 4 квадрантах механической характеристики при
изменении управляющего напряжения в пределах ±10 В.
Электропривод конструктивно представляет собой комплектное устройство,
выполненное в открытом исполнении (степень защиты IP00). Тиристорный пре-
образователь предназначен для встройки в шкаф и имеет блочную конструкцию,
обеспечивающую оперативную замену блоков, а также возможность ремонта или
замены отдельных элементов. Внешний вид электропривода приведен на рис. 5.1.
Устройство и описание работы электропривода
Структурная схема электропривода серии ЭТ6 приведена на рис. 5.2. Элект-
ропривод выполнен по двухконтурной структуре подчиненного регулирования с
регуляторами тока РТ и скорости PC. РТ и PC представляют собой ПИ-регуля-
торы. Работа электропривода происходит следующим образом.
При наличии рассогласования по скорости ЫД между сигналами задания
£7зад и обратной связи по частоте вращения £7ТГ на выходе PC появляется управ-
ляющее напряжение £7рС, которое сравнивается с напряжением t/д.т, пропорцио-
нальным текущему значению тока якоря электродвигателя. Напряжение рассо-
гласования по току поступает на вход РТ, что вызывает появление на его
выходе соответствующего управляющего напряжения Uj,r, которое управляет
112
Рис. 5.1. Внешний вид тиристорного преобразователя электропривода серии ЭТ6
схемой импульсно-фазового управления (СИФУ). СИФУ обеспечивает форми-
рование и распределение импульсов управления силовыми тиристорами управля-
емого выпрямителя У В. СИФУ и УВ входят в состав тиристорного преобразова-
теля ТП. По мере уменьшения рассогласования (за счет действия отрицатель-
ной обратной связи по скорости) происходит стабилизация частоты вращения
электродвигателя п на уровне, пропорциональном значению напряжения зада-
ния Узад. Коэффициент усиления системы регулирования обеспечивает необ-
ходимый диапазон регулирования и точность поддержания частоты вращения
электродвигателя при различных возмущающих воздействиях.
Для обеспечения надежной и безопасной работы электропривода предусмот-
рено наличие: схемы ограничения тока якоря двигателя в динамических режи-
мах; схемы ограничения минимального угла регулирования УВ; схемы защиты
от неправильного чередования фаз питающей сети или их обрыва, исчезновения
напряжения стабилизированного источника питания и т. д.
Полная принципиальная схема электропривода ЭТ6 приведена на рнс. 5.19.
Ее рассмотрение удобно производить по узлам в соответствии со структурной
схемой.
Силовая часть (рис. 5.3) представляет собой управляемый выпрямитель, вы-
полненный по шестйпульсной реверсивной встречно-параллельней схеме, и состоит
из силового согласующего трансформатора, собственно выпрямителя и токоогра-
ничивающих дросселей. Трехфазный трансформатор Тр13 осуществляет согла-
сование напряжения электродвигателя с напряжением питающей сети и содержит
первичную, две силовые вторичные обмотки и отдельную обмотку для питания
цепей управления. Обмотка управления отделена от силовых обмоток экраном.
Первичная обмотка соединена в треугольник, вторичные — в шестифазную звезду
с нулевым выводом, обмотка управления — в звезду.
Выпрямитель выполнен на тиристорах Д01—Д12. Для защиты тиристоров
от перенапряжений включены защитные 7?С-цепочки. Управление группами тири-
113
J- 'разная сеть 3808
Рис. 5.2. Структурная схема электропривода ЭТ6:
ТП — тиристорный преобразователь; СИФУ — схема импульсно-фазового управления; £/зад — задающее напряжение; UTr — на-
пряжение датчика скорости; — напряжение рассогласования контура скорости; f/pC — напряжение на выходе регулятора
скорости; С/Дт — напряжение датчика тока; ДС/2 — напряжение рассогласования контура тока; Upt “ напряжение на выходе
регулятора тока; 1Я — соответственно напряжение и ток якорной цепи электродвигателя; п—частота вращения электро-
двигателя
TpU
Рнс. 5.3. Силовая схема электропривода ЭТ6
сторов совместное согласованное. Для ограничения уравнительного тока включе-
ны дроссели Др1 и Др2. Векторная диаграмма напряжений вторичных силовых
обмоток трансформатора приведена на рис. 5.5, б.
Схема формирования управляющих импульсов (рис. 5.4) служит для фор-
мирования и распределения управляющих импульсов на тиристоры силовой схемы
и состоит из 6 идентичных каналов управления. На рис. 5.4 представлена схема
канала фазы А1. Работа этой и других схем формирования управляющих им-
пульсов иллюстрируется рис. 5.5, на котором показаны процессы изменения на-
пряжений во времени в различных точках СИФУ и вторичных обмотках транс-
форматора Тр13 и Тр14, а также векторные диаграммы напряжений переменного
тока, которые поясняют процесс формирования управляющих импульсов. На вре-
менных и векторных диаграммах рис. 5.5 более жирными линиями показаны на-
пряжения и соответствующие им вектора, которые используются для формирова-
ния управляющих импульсов для силовых тиристоров фазы А1. Напряжение С^о-в
с выходной обмотки Тр14, сдвинутое на 90° в сторону опережения относительно
напряжения А1 (рис. 5.5 г), подается на фазосдвигающую цепочку, выполненную
на элементах R101, R102, С101. Регулировкой сопротивления резистора R101
обеспечивается сдвиг напряжения на конденсаторе С101 (точка 17А) относитель-
но напряжения А1 на 25° в сторону опережения (рис. 5.5 ж). Временные
и векторные диаграммы лапряжений в точках 17А—17Е показаны на рис. 5.5, д, е.
Каждое из этих напряжений является опорным для формирования управляю-
щих импульсов силовых тиристоров и сдвинуто в сторону опережения относи-
тельно напряжений соответствующих фаз на угол 25°; А1—17А; В1—17Б;
С1—17В; Х1—17Г; 71—17Д; Z1—17Е. Напряжение синусоидальной формы (точ-
ка 17А) поступает иа вход нуль-органа А101, на выходе которого происходит
переключение напряжения с одной полярности на другую в моменты прохожде-
ния нуля синусоидальным напряжением в точке 17А (рис. 5.5, з). При наличии
управляющего напряжения с выхода-регулятора тока, например, положительной
полярности моменты переключения выходного напряжения нуль-органа будут
соответственно изменяться в ту или другую сторону относительно моментов про-
хождения нуля напряжением в точке 17А, что обеспечивает сдвиг влево угла ре-
гулирования выпрямительной н вправо инверторной групп силовых тиристоров.
С помощью дифференцирующей цепочки R105, С105, С106, R108 из перепадов
выходного напряжения цуль-органа формируются разнополярные импульсы
(рис. 5.5, и). После усиления положительного импульса 1 транзистором ТЮЗ
на вторичной обмотке ТрО1 формируется импульс для управления тиристором
катодной группы Д01 (рис. 5.5, к). Отрицательный импульс 2 (рис. 5.5, и) после
инвертирования транзистором Т101 и усиления транзистором Т102 обеспечивает
формирование на вторичной обмотке Тр02 импульса для управления тиристором
анодной группы Д02 (рис. 5.5, л). Ширина управляющих импульсов 10—15° эл.
Поступление напряжения питания (точка 128 источника питания) на выход-
ные каскады СИФУ производится через контакт реле 1Р2 после его срабаты-
вания.
Регулятор тока. Внутренним контуром электропривода ЭТ6, выполненного
по структуре подчиненного регулирования, является контур тока. В этот контур,
116
!7А (К схеме огр. миним.
угла регулирования)
Рис. 5.4. Схема формирования управляющих импульсов (СИФУ)
Рис, 5.5. Согласование по фазе напряжений силовой и управляющей цепей (фа-
знровка) тиристорного преобразователя электропривода ЭТ6С:
а — напряжения вторичных обмоток трансформатора Тр13 в точках Al, Bl, Cl, XI, Yl, Z1;
б — векторная диаграмма напряжений в точках Al, Bl, Cl, XI, Yl, Z1; в — напряжения
вторичных обмоток трансформатора Тр14 в точках 4, 5, 6, 7, 8, 9; г — векторная диаграм-
ма напряжений в точках 4, 5, 6, 7, 8, 9; д — опорные напряжения в точках ПА, ПБ, 17В,
17Г, 17Д, 17Е; е — векторные диаграммы опорных напряжений в точках ПА, ПБ, ПВ, ПГ,
17 Д, ПЕ; ж — векторная диаграмма формирования опорного напряжения (ПА) со сдви-
гом +25° относительно вектора напряжения А1; з — сигнал на выходе иуль-органа А101;
и — сигнал на выходе дифференцирующей цепочки С105 — R108; к — управляющий им-
пульс на тиристор Д01 (Т103—Тр01); л — управляющий импульс на тиристор ДО2 (Т102—
Тр02)
кроме тиристорного преобразователя и якорной цепи электродвигателя, входит
регулятор тока РТ и датчик тока ДТ, принципиальные схемы которых приведены
на рис. 5.6. Основным назначением РТ является компенсация электромагнит-
ной постоянной времени якорной цепи электродвигателя и обеспечение управле-
ния током этой цепи в соответствии с сигналом рассогласования между задан-
ным значением тока с выхода регулятора скорости и фактическим значением,
которое определяется с помощью специального датчика тока.
РТ выполнен на операционном усилителе А601 и представляет собой про-
порционально-интегральный (ПИ) регулятор. Параметры такого регулятора оп-
ределяются резистором R604 и конденсатором С*, в качестве которого выбира-
ются при настройке конденсаторы С602, С603 и С604. Резистор R605 и конден-
сатор С601 (не показанный на рис. 5.6) относятся к элементам, обеспечивающим
устойчивую работу операционного усилителя, и практически не оказывают влия-
ния на параметры РТ (R605—SH) кОм, С601—6800 пФ, а сумма R602 и R603—
3,5 кОм). Резистор R607 обеспечивает защиту операционного усилителя ОУ от
перегрузки по току и также не влияет на параметры РТ, поскольку охватывается
обратной связью. Дноды Д601 и Д602 обеспечивают защиту ОУ по входу. В со-
став РТ входит схема ограничения производной (ООП) его выходного сигнала с
целью исключения динамического уравнительного тока в силовой схеме. ООП
выполнена на ОУ А701 н содержит дифференцирующую цепочку R705—С704,
формирующую сигнал на входе А701, зависящий от скорости изменения выход-
ного сигнала РТ, и делитель R702, R707, причем резистор R707 шунтирован дву-
сторонним стабилитроном Д701. Когда напряжение на выходе А701 превышает
напряжение пробоя стабилитрона Д701, последний пробивается и напряжение
с резистора R702 поступает через резистор R701 на неинвертирующий вход 5 ОУ
А601 РТ. При этом происходит ограничение скорости изменения выходного сиг-
нала РТ на заданном уровне. Датчик тока предназначен для передачи на вход
РТ сигнала обратной связи, пропорционального току якоря электродвигателя.
Датчик тока выполнен на основе магнитоднодов Д501 и Д502, включенных в
мостовую схему из резисторов R507, R5O8 н R506, который служит для балан-
сировки датчика тока. Для защиты от высокочастотных помех магнитодиоды
шуитироваиы конденсаторами С505, С506 (6800 пФ). Включение магнитодиодов
по мостовой схеме позволяет исключить влияние уравнительных токов, протека-
ющих по цепи 50—52, 51—52, поскольку при одинаковой величине этих токов
напряжение в диагонали моста будет равно нулю, что обеспечивается его балан-
сировкой с помощью резистора R506. При вращении электродвигателя в том нлн
ином направлении токи в указанных цепях силовой схемы оказываются ие рав-
ными, что приводит к соответствующей разбалансировке моста и появлению на-
пряжения в его диагонали, пропорционального разности токов. Это напряжение
усиливается с помощью дифференциального усилителя, выполненного на ОУ
А501 (коэффициент передачи ДУ около 51) и поступает на один из входов РТ
(резистор R601), иа другой вход которого (резистор R602) поступает сигнал от
регулятора скорости PC. Назначение резистора R503 аналогично R607 в РТ.
Сигнал с выхода РТ поступает на СИФУ.
Регулятор скорости (PC) входит в состав контура скорости (рис. 5.2) и пре-
119
Регулятор тола
С*(С 602,603,604) ReOj
R605
От схемы
огр. маним,
дгларегул.
Рие. 5.6. Схема регулятора тока и датчика тока
образует сигнал рассогласования между напряжением задания изля и напряже-
нием датчика скорости С/тг, в качестве которого используется тахогенератор,
встроенный в электродвигатель. Параметры PC совместно с РТ обеспечивают тре-
буемые показатели электропривода в статике и динамике, В целом PC, так же
как и РТ, является ПИ-регулятором, но отличается более сложной схемой, так
как PC входит в состав внешнего контура скорости и в основном определяет
качественные характеристики электропривода. С помощью PC компенсируется
электромеханическая постоянная времени электродвигателя. PC выполнен на
трех ОУ и является двухкаскадным (рис. 5.7). Первый каскад выполнен на ОУ
А301 и А302. Структура первого каскада и соответствующий выбор входящих в
его состав элементов обеспечивают термостабильность характеристик электро-
привода за счет компенсации теплового дрейфа ОУ А301 параллельно включенным
прецизионным ОУ А302. Последний реализован по структуре «модулятор—демо-
дулятор» н отличается практически отсутствием дрейфа при коэффициенте пере-
дачи 10 (К140УД13). Конденсаторы С309 и С311, включенные параллельно, С312,
С313 и резистор R317 обеспечивают стандартную схему включения ОУ типа
К140УД13. Элементы R311, R312, R313 и С304, С305 предназначены для обеспе-
чения устойчивой работы ОУ А301. Второй каскад на ОУ АЗОЗ служит для полу-
чения необходимого коэффициента усиления PC. Оба каскада охвачены обратной
связью (резисторы R319, R320 н емкость С*), соответствующей ПИ-регулятору.
В качестве С* могут использоваться конденсаторы С315, С316 или С317. На-
стройка PC осуществляется переменным резистором R319 и выбором соответству-
ющего значения конденсатора С*.
PC имеет два входа: 91— вход задающего сигнала Ц3ад и 90'—вход сигна-
ла обратной связи по скорости UtT. По обоим входам предусмотрены фильтры:
R301, R306 и С301 — по первому входу и R303, R304, R305 н С302— по второму
входу. С помощью переменного резистора R302, за счет изменения коэффициента
передачи цепи обратной связи, осуществляется регулировка максимальной ско-
ростп.
Сигнал с выхода PC поступает на вход РТ. Цепь, состоящая из размыкающе-
гося контакта реле 1Р1 и резистора R318, охватывает PC и РТ вместе и служит
для защиты электропривода, поскольку резко уменьшает коэффициенты переда-
чи последовательно включенных PC и РТ. При нормальной работе электропри-
вода цепь разорвана с помощью контакта реле 1Р1, входящего в состав схемы
защиты, и не оказывает влияния на работу электропривода. Цепочка из резисто-
ров R315, R322 и диодов ДЗОЗ, Д304 обеспечивает защиту по входу ОУ АЗОЗ.
Схема ограничения минимального угла управления. Назначение схемы — иск-
лючить превышение входным напряжением СИФУ (выход РТ) амплитуды опор-
ного напряжения в динамических режимах и при изменении напряжения питаю-
щей сети (рис. 5.8). С этой целью опорные синусоидальные напряжения всех
шести фаз (точки 17А...17Е) подаются на выпрямительный мост Д403—Д414 н
поступают после выпрямления и фильтрации (элементы R410, С405 и R414, С406)
иа делители напряжения R409, R411, R412 и R413, R415, R416. Потенциометры
R411 и R415 служат для регулировки уровня ограничения (уставки напряжения
ограничения).
121
79 С быходаРГ
С*(С375;С376,СЗП)
А-С309
/7313 Т СЗОЗ
ал R303
С302
736 Кйходу РТ
Рис. 5.7. Схема регулятора скорости
К Входу S А 601 РТ
Рис. 5.8. Схема ограничения минимального угла управления
Напряжения с движков потенциометров R411 и R415 поступают иа иеинвер-
тирующие входы ОУ А401 и А402, на инвертирующие входы которых через дели-
тель R408, R406 и резисторы R405, R407 поступает выходное напряжение РТ.
ОУ А401 и А402 выполняют функцию компараторов, полярность выходного на-
пряжения которых изменяется на противоположную, когда напряжение иа ин-
вертирующих входах (с выхода РТ) становится больше напряжения иа иеиивер-
тирующих входах (которое является в данном случае опорным). Изменение по-
лярности выходного напряжения одного из компараторов (в зависимости от по-
лярности напряжения с выхода РТ) приводит к открыванию соответствующего
диода Д401 или Д402 и через цепь 155, подключенную ко входу 5 А601 РТ, к ог-
раничению дальнейшего роста выходного напряжения РТ.
Таким образом, рассматриваемая схема представляет собой цепь отрицатель-
ной .обратной связи, охватывающей РТ и вступающей в действие при достиже-
нии напряжением иа выходе делителя R408, R406 величины напряжения уставки
ограничения. При изменении напряжения питающей сети величина уставки меня-
ется пропорционально изменению величины опорных напряжений (17А...17Е),
чем и обеспечивается исключение превышения напряжением управления (выход
РТ) уровня опорных напряжений.
Схема ограничения тока якоря (рис. 5.9) обеспечивает, в зависимости от на-
стройки, ограничение тока якоря иа заданном уровне и зависимое ограничение
тока в функции частоты вращения. Ограничение тока якоря осуществляется ог-
раничением выходного напряжения регулятора скорости, которым задается ток
якоря.
123
Как видно нз рис. 5.10, кривая
допустимой перегрузки по току для
двигателей ПБВ является существен-
но нелинейной и для практической
реализации аппроксимируется двумя
прямыми с углами наклона cti и аг.
Переход с одной прямой иа другую
осуществляется за счет изменения ко-
эффициента передачи узла аппрокси-
мации. в точке перегиба.
Схема ограничения тока якоря со-
стоит из трех частей: схемы выделе-
ния модуля — A20L, схемы аппрокси-
мации и выходных усилителей А202
и А203 с дйодами Д205 и Д206. На-
пряжение тахогенератора через дели-
тель из резисторов R304, R305 (PC)
подается на схему выделения модуля,
на выходе которой получается напря-
жение положительной полярности,
пропорциональное напряжению тахо-
генератора. Напряжение с выхода
А201 подается на вход схемы аппрок-
симации, состоящей нз элементов
R207, R210, Д203, R208, R209, R211.
Точка перегиба определяется величи-
ной напряжения подпора и'аад диода
Д203 н регулируется, в зависимости
от типа применяемого электродвига-
теля, резистором R208. Максимально
допустимое значение тока якоря опре-
деляется напряжением, поступающим
на неинвертнрующнй вход А202 с
движка потенциометра R213. Таким
образом, напряжение на выходе диф-
ференциального усилителя А202 бу-
дет определяться разностью напряже-
ний уставки (двнжок R213) и делите-
ля из резисторов R207, R210.
При этом с увеличением частоты вра-
щения напряжение подпора +1/"ПОд
диода Д203, являющегося выходным
напряжением А202, будет уменьшать-
ся в соответствии с зависимостью, оп-
ределяемой первым участком аппрок-
124
снмацнн (прямая с углом
наклона cci). Аналогично бу-
дет изменяться и напряже-
ние подпора — £/"ПОд Диода
Д206, которое отличается от
Н-^под только знаком (ко-
эффициент передачи усили-
теля А203= 1).
Когда напряжение на
выходе делителя R207, R210
превысит напряжение подпо-
ра £/'под диода Д203, пос-
ледний открывается и па-
раллельно резистору R210
подключается резистор R211,
вследствие чего коэффици-
ент передачи делителя суще-
ственно уменьшается (т. е.
большему приращению на-
Рис. 5.10. Кривая допустимой перегрузки по току
электродвигателей ПБВ и ее аппроксимация
пряжения тахогенератора будет соответствовать меньшее приращение напряже-
ния иа выходе делителя). Происходит переход на второй участок аппроксимации
(прямая с углом наклона аг на рис. 5.10).
Максимально допустимое напряжение на выходе PC, задающее ток якоря
(а следовательно, и момент двигателя), определяется в каждый момент времени
в процессе разгона электродвигателя величиной напряжения подпора ±С/"Под
диодов Д205 и Д206. Как только напряжение на выходе PC (15б) превысит
напряжение подпора и"ПОд, открывается соответствующий диод и оно фиксиру-
ется на уровне £7"ПОд. Диод Д204 ограничивает величину отрицательного напря-
жения на выходе А202.
Схема защиты (рис. 5.11) предназначена для осуществления защиты элект-
ропривода от неправильного чередования фаз питающей сети, обрыва любой из
фаз, исчезновения стабилизированного напряжения источника питания (+С7ИП>
—С/Ип), перегрева электродвигателя типа ПБВ.
Схема защиты состоит из выходных реле Р1 и Р2 с транзисторным ключом
Т908 н индикатора Д914, схемы совпадения на элементах Д910, Д911, R925,
R926, R919 и Т907, транзисторных ключей Т905, Т906 с соответствующими вход-
ными элементами.
В исходном состоянии транзистор Т907 заперт, а транзистор Т908 открыт за
счет протекания базового тока по цепи: + £/ип, R927, Д913, R928, общ. провод.
При нажатии кнопки «Пуск» включаются реле Р1 н Р2, получая питание от не-
стабилизированного выхода источника питания (128) через открытый ключ
Т908. Нормальной работе привода соответствует свечение светодиода Д914. При
включении реле Р1 размыкается общая цепь обратной связи PC и РТ, подготав-
ливая их к работе, а при включении реле Р2 подается напряжение на выходные
каскады СИФУ, после чего управляющие импульсы начинают поступать на ти-
125
tzs (т)
К источнику питания
+ Unn ’'^кп
Рис. 5.Н. Схема защиты
ристоры силовой схемы — происходит запуск электропривода. В аварийных си-
туациях транзистор Т908 закрывается, обеспечивая отключение реле Р1 н Р2.
Источник питании. Источник питания обеспечивает питание всех цепей управ-
ления стабилизированным напряжением и собран по схеме двухкаиального ста-
билизатора с последовательно включенными регулирующими транзисторами. В ка-
честве усилителей постоянного тока используются операционные усилители А901,
А902 (принципиальная схема электропривода ЭТ6С — рис. 5.19). Стабилизаторы
обеспечивают на выходах напряжения +12,6 В и —12,6 В относительно общего
провода. Нестабнлнзнрованное напряжение после выпрямителя (точка 128) по-
ступает на выходные каскады СИФУ и схему защиты.
Дополнительный усилитель. В составе электропривода предусмотрен допол-
нительный усилитель — регулятор А801, который может быть использован в ка-
честве регулятора положения. Входные и выходные цепи усилителя А801 выве-
дены иа внешний разъем. Подстройка «нуля» усилителя осуществляется потен-
циометром R810. Элементы коррекции — С801, С802, С803, R802, R803, R804.
Методика наладки
комплектного электропривода серии ЭТ6
Наладку электропривода серии ЭТ6 удобнее производить отдельно от станка
на специальном стенде, обеспечивающем его подключение в соответствии со схе-
мой рис. 5.12. Если это по какой-то причине невозможно, тогда желательно про-
126
л| #| d
V3
Рис. 5.12. Схема соединений электропривода ЭТ6
изводить иаладку электропривода по аналогии с наладкой иа стенде, обеспечив
при этом разъединение вала электродвигателя и ходового винта или вала редук-
тора.
Ниже приводится рекомендуемый порядок наладки.
1. Произвести внешний осмотр тиристорного преобразователя и всех других
компонентов привода. Устранить видимые повреждения.
2. Выполнить монтаж внешних соединений в соответствии со схемой рис. 5.12.
127
3. Выполнить следующие подготовительные операции:
1) отпаять перемычку в приводе (цепь 19 на выходе ОУ А601) для исклю-
чения поступления управляющего напряжения с выхода регулятора тока иа
СИФУ;
2) отключить вторичные обмотки силового трансформатора Тр13 (Al, В1,
Cl, XI, VI, Z1) от тиристоров;
3) подать напряжение на привод вводным автоматом F1, при этом подается
напряжение на источник питания и все цепи управления за исключением выход-
ных каскадов СИФУ.
4. Проверить наличие иестабилизированиого напряжения питания ±24 В в
точке 128N и стабилизированных напряжений на выходе источника питания в
точках 22 (—12,6 В) и 20 ( + 12,6 В). Допустимые погрешности составляют соот-
ветственно ±2 В и ±0,2 В.
5. Проверить правильность порядка чередований фаз на вторичных обмотках
силового трансформатора Тр13. Для этого на вход осциллографа последова-
тельно подают напряжения в точках Al, Zl, Bl, XI, Cl, VI относительно нуле-
вого провода 01. Переключатель синхронизации устанавливается в положение
«Сеть». При правильном порядке чередования фаз каждое последующее из пере-
численных синусоидальных напряжений отстает от предыдущего на 60° эл.
(рис. 5.5, а, б). В случае, если фактическое чередование напряжений не соот-
ветствует требуемому, то переключением обмоток трансформатора Тр13 необхо-
димо добиться правильного порядка чередования фаз.
6. Аналогично произвести проверку порядка чередования фаз на вторичных
обмотках трансформатора цепей управления Тр14 (точки 6, 8, 4, 9, 5, 7 относи-
тельно общей точки — общего провода). Каждое последующее из.указанных на-
пряжений должно отставать от предыдущего также на 60° эл. (рис. 5.5, в, г).
Из этих напряжений формируются опорные напряжения в каналах СИФУ для
управления силовыми тиристорами соответствующих фаз, поэтому должно вы-
полняться и условие согласования напряжений в точках 6, 8, 4, 9, 5,7 с напряже-
ниями в точках Al, Bl, &, XI, Yl, Z1. Между этими напряжениями должен быть
сдвиг по фазе на 90° в сторону опережения, т. е.:
напряжение в точке 6 опережает на 90° напряжение в т. АГ,
напряжение в точке 8 опережает на 90° напряжение в т. В1 и т. д. (рис. 5.5,
б, г; а, в).
Если чередование напряжений в т. 6, 8, 4, 9, 5, 7 не соответствует требуемо-
му (рис. 5.5, г) и фазовые соотношения этих напряжений с напряжениями Al, В1,
Cl, XI, VI, Z1 нарушены, то соответствующим переключением обмоток трансфор-
матора Тр14 необходимо добиться правильного чередования указанных напря-
жении и фазовых соотношений между ними.
7. Проверить правильность фазировки опорных напряжений.
Из напряжений в т. 6, 8, 4, 9, 5, 7 с помощью фазосдвнгающих цепочек по-
лучают опорные напряжения (например, цепочка R101, R102 и С101 в канале
СИФУ тиристоров Д01, Д02), которые снимаются относительно общего провода
соответственно с точек 17А, 17Е. 17Б. ИГ, 17В, 17Д (рис. 5.5, е).
Для правильного функционирования схемы тиристорного преобразователя
128
Таблица 5.1
Напряжение на Обмотке Тр13 Напряжение на обмотке Тр14 с фаз. сдвигом +90° Опорное напряжение с фаз. сдвигом 425° СИФУ тиристоров
А1 6 17А Д01, Д02
Z1 8 17Е ДИ, Д12
В1 4 17Б ДОЗ, Д04
XI 9 17Г Д07, Д08
С1 5 17В Д05, Д06
Y1 7 17Д Д09, ДЮ
Применение. Фазовые сдвиги проставлены для данных напряжений по отношению
к напряжению на обмотке Тр13 этой же строки таблицы: напр., 6 и 17А относительно АГ, 8 и
17Е относительно Z1 н т. д.
опорное напряжение должно опережать соответствующее напряжение иа тири-
сторах на 25° эл., что достигается регулировкой переменного резистора на входе
СИФУ (например, R101 СИФУ тиристоров Д01, Д02, напряжение АГ)—рис. 5.5, яс.
Связь напряжений по каналам СИФУ и фазовые соотношения между ними
представлены в табл. 5.1.
8. Произвести регулировку начальных углов управления анач.
Для этого с помощью переменных резисторов R101 необходимо установить
фазовый сдвиг между иаприжениями в точках 17А...17Д и напряжениями A 1...Y1
соответственно +25° эл. Практически из-за разброса параметров фазовращающих
цепочек и неточности- настройки иа заводе-изготовителе опорные напряжения
различных СИФУ имеют разброс по фазе и опережают соответствующие напряже-
ния на тиристорах иа угол, отличный от 25° эл. (30°4-20° эл.). Такой разброс
приводит к значительному искажению формы тока, протекающего через двига-
тель, и появлению недопустимого по величине уравнительного тока.
На рис. 5.5, д, з, и, к показано, в какой момент формируется управляющий
импульс для тиристора Д01 при отсутствии задающего (управляющего) напря-
жения. Можно видеть, что этот импульс поступает на тиристор с опережением
на 25° момента прохождения напряжением питания этого тиристора нулевого
значения (А1). Аналогично и для других тиристоров.
В теории управляемых выпрямителей принято отсчитывать момент подачв
импульса на тиристор не от нулевого значения питающего напряжения (как от-
мечено выше), а от момента естественного зажигания вентиля. На рис. 5.5, а для
напряжения А1 показан этот момент, при котором начальный угол регулирова-
ния на тиристорах равен аНач=95°. Перед установкой начальных углов регули-
рования необходимо проверить наличие управляющих импульсов на каждом
тиристоре. Далее необходимо подключить вторичные обмотки силового трансфор-
матора Тр13 к тиристорам. Установка начального угла регулирования произво-
дится с помощью переменных резисторов R101 СИФУ.
При правильно установленных начальных углах регулирования величина
уравнительного тока, контролируемого по амперметру в первичной обмотке
5 Заказ 4546 129
Рис. 5.13. Форма тока двигателя после регу-
лировки начального угла регулирования
(при равИЫХ ССиач)
трансформатора Тр13, не должна
превышать Ю-г-15% от 7И0М (элек-
тродвигатель ПБВ112БГУЗ, 21 Нм
750 об/мин). При этом форма то-
ка, протекающего через двигатель
и контролируемого с помощью ос-
циллографа в точке 120, должна
соответствовать рис. 5.13.
В большинстве случаев за счет
выбора начального угла регулиро-
вания с помощью резисторов R101
удается установить допустимый
уровень и форму уравнительного тока. При такой регулировке начального угла
не требуется его непосредственное измерение. При этом осуществляется косвен-
ный контроль правильности установки начального угла регулирования по форме
и величине уравнительного тока двигателя. Это наиболее быстрый и простой
способ.
Можно также произродить установку начального угла регулирования аиач,
осуществляя последовательно замеры этого угла для каждого канала СИФУ.
Ниже приводится одни из возможных способов замера и регулировки ааач с
помощью осциллографа С1-19Б. Порядок подключения осциллографа и регули-
ровки аИач следующий:
— отключить провода Al, Bl, Cl, XI, Yl, Z1 от тиристоров за исключением
провода того тиристора, для котором производится регулировка (например, А1
для тиристоров Д01, Д02). На снятые провода надеть Хлорвиниловые чулки;
— отпаять от тиристора Д01 провод 32, идущий на управляющий электрод;
— подключить провод 32 к гнезду «Внешняя синхронизация» осциллографа;
— на вход осциллографа подключить провода А1 и 50 (анод и катод тири-
стора Д01)\
— параллельно емкости С107 СИФУ подключить резистор сопротивлением
300 Ом;
— переключатель рода работы осциллографа установить на «Ждущий ре-
жим» и включить «Метки».
При таком подключении осциллографа развертка синусоидального напряже-
ния, приложенного к тиристору, начнется с момента поступления управляющего
импульса (провод 32) в гнездо инешией синхронизации осциллографа (рис. 5.14).
При этом необходимо установить длительность развертки таким образом, чтобы
иа экране просматривался примерно участок синусоиды, очерченный окружно-
стью.
Далее необходимо сосчитать количество меток, которые находятся в интер-
вале от начала развертки (/pi) до пересечения синусоидой нулевого уровня.
Если, например, на переключателе установлена цена метки 0,1 мс (что на
частоте 50 Гц соответствует 1,8° эл.), а количество меток в указанном интервале
равно 16, то измеряемый угол будет равен 1,8-16^29° эл. Этому углу соответст-
вует начальный угол регулирования ана«=91° эл. (120°—29°). После регулиров-
130
ки резистором R101, операция из-
мерения аНач повторяется до тех
пор, пока не будет получено
ССиач = 95 .
В случае, если регулировка
с помощью резистора R101 не да-
ет желаемого эффекта, следует
увеличить емкость конденсатора
С102 до 10000 или 22000 пФ н
повторить регулировку.
Встречаются отдельные приво-
ды, в которых регулировка формы
н величины уравнительного тока
очень трудно выполнима. В таких
случаях рекомендуется проводить
регулировку Иная при попарном
графу
подключении проводов, питающих
тиристорный выпрямитель. Первоначально подключают только провода А1 и XI
(остальные: Bl, Cl, Yl, Z1 — отключены), затем В1 и Yl (Al, Cl, XI, Z1—от-
ключены) н, наконец, С1 и Z1 (Al, Bl, XI, Y1—отключены). Регулировкой ре-
зисторов R101 добиваются приемлемой формы и величины уравнительного тока.
При этом также может осуществляться увеличение в некоторых каналах СИФУ
емкостей конденсаторов С102.
На этом заканчивается фазировка привода, регулировка формы и величины
уравнительного тока.
Ниже для справки приведены значения напряжений в некоторых точках
тиристорного преобразователя:
а) выходные напряжения трансформатора Тр13:
фазное напряжение обмоток А1—01; В1—01; С1—01; XI—01; Y1—01;
Z1 — 01 ~ 110 — 115 В;
линейное напряжение вторичной обмотки А2, В2, С2~ 96В;
б) трансформатор Тр14-,
линейное напряжение вторичных обмоток ~28—32 В;
в) источник питания, точка 128: +25 В.
9. Проверить правильность функционирования регулятора тока н регулятора
скорости.
Эти регуляторы являются пропорцноиально-ннтегральными (ПИ-регулятора-
ми). Упрощенная схема ПИ-регулятора (а) и его реакция на скачок входного
сигнала (б) показаны на рис. 5.15. Вначале его выходное напряжение изменяет-
ся скачком, затем линейно растет до ограничения на уровне напряжения источни-
ка питания.
Проверка регуляторов осуществляется следующим образом:
— отключить силовое питание;
— отключить регуляторы от СИФУ, сняв перемычку 19\
— деблокировать регуляторы;
5*
131
Рис. 5.15. Упрощенная схема ПИ-регулятора (а) и его реакция на скачок
входного сигнала (б)
— периодически изменяя полярность задающего напряжения, наблюдать
форму выходного напряжения PC, которая должна соответствовать рис. 5.16;
— снять перемычку 156, подать на вход РТ задающее напряжение и, пере-
ключая его полярность, наблюдать форму выходного напряжения (рис. 5.16);
— заблокировать регуляторы и, проведя аналогичные операции, наблюдать
иа выходах PC и РТ прямоугольную форму выходного напряжения (пунктирная
линия на рис. 5.16).
В случае неправильного функционирования PC и РТ необходимо определить
причину и устранить ее.
10. Проверить и установить минимальный и максимальный углы регулиро-
вания.
Проверка производится при отсутствии силового иапряжеиня на тиристорах
или разомкнутой якорной цепи электропривода.
На тиристорный преобразователь подается напряжение питания, регуляторы
Рис. 5.16. Осциллограммы выходных сигналов PC и РТ при их правильном функ-
ционировании: fj-i-tA — моменты переключения тумблера, меняющего полярность
задающего напряжения
132
У=(30-40)элград
360м град
360эл град
Ч>-(20-^0)элград
Рис. 5.17. Выходное напряжение иуль-органов
СИФУ в режиме ограничения углов:
а — при положительном £/зад; б — при отрицательном
£/зад
cut _
О
скорости и тока деблокируются. В плате «Регуляторы» перемычки (вых. PC — вх.
PC) и (вых. РТ — вх. СИФУ) должны быть вапаяны.
Наблюдать осциллографом выходной сигнал нуль-органов СИФУ (контроль-
ные точки 162) при изменении полярности напряжения задания величиной
(1—2) В. При положительной полярности задающего напряжения форма сигнала
приведена на рис. 5.17, а. Положение фронта минус-плюс соответствует <Хтах ка-
тодной группы, а фронта плюс-минус amin анодной группы. Резистором R411
установить ширину импульса положительной полярности (20—40) эл. град. Прн
аНач=90 эл. град и ширине импульса у=30 эл. град будем иметь amin=15 эл.
град, аШах = 165 эл. Град.
Форма сигнала при отрицательной полярности задающего напряжения при-
ведена на рнс. 5.17, б. Резистором R415 установить ширину импульса отрица-
tp=(300-500)MC
Рис. 5.18. Кривая тока двигателя в режиме токо-
ограничения при реверсе £/зад
133
Рис. 5.19. Принципиальная схема электропривода ЭТ6
^3909
А а с
Рис. 5.19. Принципиальная схема электропривода ЭТ6 (продолжение)
тельной полярности (20—40) эл. град. В этом случае положение фронта минус-
плюс соответствует ат1п катодной группы, а положение фройта плюс-минус <xmax
анодной группы.
1. Проверить фуикцяонярование электропривода в разомкнутой системе
регулирования и выполнить фазировку обратной связи по скорости.
Проверка работы электропривода в разомкнутой системе регулирования про-
изводится путем подачи задающего напряжения на вход СИФУ. Для этого сни-
мается перемычка (вых. РТ — вх. СИФУ) и на штифт, который соединяется со
входом СИФУ, запаивается провод от среднего вывода потенциометра задающего
напряжения. Поскольку в этом случае ток двигателя не ограничивается схемой
токоограиичения преобразователя, а также отсутствует ограничение минималь-
ного и максимального углов регулирования, необходимо плавно изменять напря-
жение задания на входе СИФУ, не превышая величины ±5 В.
Деблокировать преобразователь. Плавно увеличивая напряжение задания от
0 до 5 В, проверить работоспособность тиристорного преобразователя и двига-
теля. Плавно уменьшить задание до нуля. Произвести проверку в противополож-
ном направления вращения двигателя.
Наблюдать осциллографом сигнал тахогенератора. Убедиться в отсутствии
недопустимых провалов и пульсаций в напряжении тахогенератора. В противном
случае произвести осмотр и профилактику щеточно-коллекторного узла тахоге-
нератора.
Для проверки знака обратной связи по скорости необходимо замерить по-
лярности напряжений иа входе СИФУ и тахогенератора. Отрицательная обратная
связь по скорости соответствует противоположной полярности указанных напря-
жений. Если в процессе проверки полярности напряжений окажутся одинаковыми,
необходимо поменять местами выводы тахогенератора.
Снять с преобразователя силовое напряжение и напряжение питания, убрать
провод от потенциометра задания со входного штифта СИФУ, установить пере-
мычку (вых. РТ — вх. СИФУ).
12. Проверить н выполнить регулировку схемы токоогранячеиия.
Настройка кривой тока в режиме токоограиичения производится при скачко-
образном изменении на входе электропривода напряжения задания величиной
±10 В. Предварительно выполняется балансировка усилителя датчика тока (ОУ
А501, потенциометр R506).
Если известен коэффициент передачи датчика тока, контроль тока осуществ-
ляется осциллографом по сигналу датчика тока в контрольной точке 120. При
неизвестном коэффициенте передачи ДТ ток контролируется осциллографом по
измерительному сигналу шунта, установленного в якорной цепи двигателя. Вид
кривой тока двигателя при реверсе приведен на рис. 5.18. Величина тока /о, соот-
ветствующего нулевой скорости вращения, устанавливается потенциометром R213
равной (4—5) /ном, где /ном — номинальный ток двигателя. Величина тока /п,
соответствующего максимальной скорости вращения, устанавливается потенцио-
метром R303 равной (0,5—1,5) 1вом в соответствии с коммутационной кривой
используемого двигателя.
Если диапазон регулировки потенциометра R213 окажется недостаточным
137
для установки необходимой величины тока, то масштаб тока можно изменять
сменным резистором R501 в цепи обратной связи операционного усилителя дат-
чика тока. Ток якоря в режиме токоограничения будет уменьшаться пропорцио-
нально увеличению резистора R501.
Если перед началом настройки кривой тока отсутствует уверенность, что узел
токоограничения согласован с номинальным током двигателя, необходимо при
заблокированном преобразователе потенциометром R213 установить минималь-
ную величину выходного напряжения операционных усилителей А202, А203 в
контрольных точках 151, 152.
13. Установить максимальную величину частоты вращения. Установка про-
изводится при величине задающего напряжения 10 В. Регулировкой потенцио-
метра R3O2 устанавливается максимальная скорость вращения, указанная в пас-
порте электродвигателя. Обычно в станках с ЧПУ для двигателей серии ПБВ
величине задания 10 В соответствует скорость вращения 1000 об/мии. Контроль
скорости осуществляется тахометром либо по напряжению якоря двигателя, со-
ответствующему устанавливаемой скорости вращения.
14. Настроить оптимальный характер переходных процессов.
Порядок и принципы настройки переходных процессов в контуре тока и кон-
туре скорости, при которых электропривод обеспечивает максимальные динами-
ческие Характеристики, изложены в главе 9 «Методика настройки переходных
процессов».
Общая принципиальная схема комплектного электропривода ЭТ6 приведена
на рис. 5.19.
ГЛАВА ШЕСТАЯ
КОМПЛЕКТНЫЙ ЭЛЕКТРОПРИВОД
ПОДАЧИ ТИПА «КЕМРОН»
Электроприводы типа «Кемрон» производства НРБ находят широкое при-
менение в приводах подач металлорежущих станков благодаря высоким стати-
ческим и динамическим характеристикам, а также большому количеству типо-
размеров (от 1,5 Нм до 170 Нм).
В комплект привода входят:
— тиристорный преобразователь;
— высокомоментный двигатель- постоянного тока со встроенными тахогене-
ратором, резольвером, электромагнитным тормозом и позистором;
— силовой трансформатор;
— уравнительные дроссели;
— быстродействующие силовые предохранители.
Наличие тормоза, резольвера и величины передаточного отношения к нему
определяются заказчиком, так же как и количество координат при одном об-
щем силовом трансформаторе. Основные технические характеристики привода
полностью соответствуют требованиям «Иитерэлектро».
Общий вид преобразователя приведен на рис. 6.1. Он представляет собой од-
нокоординатный модуль, выполненный по блочной конструкции, обеспечивающей
свободный доступ ко всем элементам и контрольным точкам.
Описание работы преобразователя
Преобразователь выполнен по двухконтурной схеме подчиненного регули-
рования с регуляторами скорости и тока. Управление преобразователем — согла-
сованное нелинейное на низких скоростях и раздельное на высоких скоростях
(более 300 об/мин). Предусмотрено адаптивное управление коэффициентами уси-
ления контура скорости на низких скоростях.
Большое число электронных защит исключает выходы из строя элементов
преобразователя в аварийных ситуациях.
Блок-схема привода приведена на рис. 6.2, где PC — регулятор скорости;
139
*
Рис. 6.1. Общий вид электропривода
РТ — регулятор тока; РУТ—регулятор уравнительного тока; ИНВ— инвертор;
СИФУ—система импульсно-фазового управления; АР—адаптивный регулятор;
КЗ — корректирующее звено; ФП — функциональный преобразователь нелиней-
ного токоограиичения; ПЭ — пороговый элемент; НТО — нелинейное токоограни-
чение; ОС — защита от превышения максимального тока; OL — защита от дли-
тельной перегрузки; OS — защита от превышения максимальной частоты враще-
ния; TG—защита от обрыва цепи тахогенератора; СР — защита от обрыва фазы
и неправильного чередования фаз; БЗ— блок защиты; ТР — силовой трансформа-
тор; ТП — тиристорный преобразователь; Я— двигатель; ТГ — тахогенератор; L —
уравнительные дроссели; Sh—шунт (датчик тока); БП—блок питания.
Приступим к подробному описанию принципиальной схемы привода.
Силовая схема (рис. 6.3) преобразователя выполнена по реверсивной шести-
пульсной однополупериодной схеме выпрямления с уравнительными дросселями.
Такая схема обеспечивает высокую полосу пропускания привода (до 40 Гц) и
высокие динамические свойства, что оправдывает ее повышенную сложность.
Силовой трансформатор осуществляет согласование напряжения электродви-
гателя с напряжением сети питания. Обмотки трансформатора включены по схе-
ме «треугольник — двойной зигзаг», чем достигается исключение потока вынуж-
денного намагничивания и, как следствие, экономия стали. Векторная диаграмма
напряжений силовой части приведена на рис. 6.4.
Следует сделать некоторые пояснения к маркировке выводов силового транс-
форматора и построению векторной диаграммы. Применен трехфазиый трансфор-
матор с четырьмя обмотками на каждом стержне. Маркировка обмоток, располо-
женных иа одном стержне, имеет однотипные буквы, например, первого стержня:
(А—X) — первичная обмотка;
(а—х, aL—X], а2—х2) — вторичные обмотки.
140
380 В
Рис. 6.2. Блок-схема привода «Кемрон»
Рис. 6.3. Силовая схема
Соединения в точках а2—Ьг—с3 сделаны внутри иамотки и недоступны при
эксплуатации.
Пофазный принцип маркировки выводов вторичной обмотки трансформатора
может вызвать затруднения при анализе фазировок силового напряжения и уп-
равляющих импульсов СИФУ, поэтому на рис. 6.4 указано двойное обозначение.
Физической прямой последовательности фаз Л—S—Т—R—S—Т шестипульсиого
142
напряжения соответствует последова-
тельность Z\—Z—Xi—X—У]—У по фак-
тическим обозначениям на выводных
клеммах силового трансформатора.
При монтаже привода к выводам
выпрямителя Л 2, 3 подключаются ин-
версные фазы R, S, Т (или X, У, Z), а к
выводам 4, 5, 6 прямые фазы R, S, Т
(или Zit Хь У]) соответственно.
Для защиты тиристоров от комму-
тационных перенапряжений они охваче-
ны У?С-цепочками. Общая защита
выполнена на быстродействующих предо-
хранителях во вторичной цепи силового
трансформатора.
Регулятор скорости (рис. 6.5) пред-
ставляет собой пропорционально-интег-
ральный (ПИ) регулятор и выполнен на
Рис. 6.4. Векторная диаграмма сило-
вых напряжений
трех операционных усилителях с раздельной регулировкой коэффициентов про-
порционального усиления и времени интегрирования.
Первый каскад, на микросхеме ИС62, осуществляет пропорциональное усиле-
ние, второй каскад, на микросхеме ИС63,— регулирование времени интегрирова-
ния, и третий каскад, на микросхеме ИС64,— суммирование ошибки и ее интегра-
ла. Регулятор скорости инвертирует входной сигнал (рис. 6.6). Предусмотрен
«ключ» на встречно включенных полевых транзисторах Т106—Т107, блокирующий
регулятор скорости при срабатывании защиты. Он же создает нулевые начальные
условия интегрирования при первоначальном включении привода, В цепи обрат-
ной связи по скорости предусмотрено корректирующее звено (С247, R353), поз-
Рис.. 6.5. Регулятор скорости
143
Рис. 6.7. Влияние КЗ на
переходный процесс
волякяцее подстраивать ускорение и уменьшить перерегулирование (рис. 6.7).
Параметры /?С-цепочки подбираются иа заводе-изготовителе для конкретного
приводного двигателя.
Наладочное сопротивление R423 позволяет сделать регулятор пропорциональ-
ным, что полезно при первоначальном пуске привода.
Назначение регулировочных потенциометров следующее:
П17 — балансировка регулятора скорости; П18 — регулирование пропорцио-
нального усиления; П20— регулировка времени интегрирования.
Предусмотрено два входа для задающего сигнала t/зад — прямой и диффе-
ренциальный. Подключение осуществляется перемычками М23, М24 и М25 (см.
общую принципиальную схему—рис; 6.60). Регулирование максимальной скоро-
сти электродвигателя осуществляется изменением величины обратной связи по
скорости при помощи потенциометра П14.
Регулятор тока (рис. 6.8) также
представляет собой ПИ-регулятор и
выполнен на операционном усилителе
ИС65. Входным сигналом РТ являет-
ся выходное напряжение регулятора
скорости, определяющее величину то-
ка двигателя. В качестве датчика то-
ка применен шунт Sh, сигнал которо-
го через дифференциальный усили-
тель, выполненный иа ОУ ИС69, ИС70,
подается в цепь обратной связи РТ.
Сопротивление R415 позволяет регу-
лировать величину тока.
Предусмотрена блокировка регу-
лятора «ключом» иа полевых траизи-
Рис. 6.8. Регулятор тока сторах.
144
Рис. 6.9. Переходные процессы скорости и тока:
а — кривая скорости при пуске на nmax; б —кривая то-
ка; 9 — кривая скорости при пуске на nmIn
Запайкой сопротивления R397 регулятор можно сделать пропорциональным.
Сопротивления R424 и R425 предназначены для задания начальной величины
тока при остановленном двигателе, т. е. для задания при необходимости момента,
удерживающего, например, вертикальные координаты от падения. Однако, как
правило, эти сопротивления ие запаиваются.
При настройке PC и РТ следует помнить, что сопротивления, помеченные
знаком *, подобраны на заводе-изготовителе для конкретного типа двигателя и
менять их не следует.
Потенциометрами П18 и П20 добиваются оптимального переходного про-
цессса на высоких скоростях, при этом в кривых скорости и тока не должно быть
перерегулирования, а ток должен достигать максимального значения между 2-м
и 3-м пульсами (рис. 6. 9, а, б). Однако при снижении величины задающего на-
пряжения, иа низких скоростях, вновь появится перерегулирование (рис. 6.9, в).
Для его уменьшения необходимо увеличить коэффициент пропорционального
усиления и уменьшить время интегрирования. Для этой цели в приводе преду-
смотрен адаптивный регулятор коэффициента усиления.
Адаптивный регулятор предназначен для изменения коэффициента усиления
и постоянной времени интегрирования PC в функции частоты вращения, что
позволяет обеспечить высокие динамические характеристики привода. Принцип
действия АР основан на широтно-импульсцой модуляции (ШИМ). Параллельно
потенциометрам П48— пропорционального и П20— интегрирующего усилителей
PC через «ключи» на полевых транзисторах включены потенциометры П19 и П21
соответственно (рис. 6.10). Ключи и, следовательно, время параллельного вклю-
чения потенциометров П19 и П21 управляются от АР. При этом выделяется три
зоны (рис. 6.11).
145
Рис. 6.10. Фрагмент регулятора скорости
I зона. Малые скорости, усиление
большое, постоянная времени малая,
ключ замкнут, потенциометры П19 и
П21 включены параллельно П18 и
П20;
II зона. Средние скорости, плав-
ное изменение усиления и постоянной
времени в функции скорости, работа-
ет ШИМ;
III зона. Большие скорости, ма-
лое усиление, большая постоянная
времени, ключ разомкнут, потенцио-
метры П19 и П21 отключены.
Блок-схема узла адаптации пока-
зана на рис. 6.12 и включает в себя
1. Напряжение треугольной формы
ло 10 кГц;
следующие элементы:
— генератор треугольного напря-
жения, выполненный на ОУ ИС51 и
ИС52;
— сумматор входных сигналов
ИС66-,
— схема выделения модуля вход-
ного сигнала ИС67;
— компаратор ИС68, ИС53;
— Преобразователь уровня напря-
жения, транзистор Т101;
— ключи на полевых транзисто-
рах 7104, Т105 и Т108, Т109. На вход
компаратора подается три напряже-
ния:
от автономного генератора частотой око-
2. Отрицательное напряжение смещения, регулируемое потенциометром П23
и запирающее выход компаратора;
3. Выпрямленная сумма напряжений задания и тахогенератора положи-
тельного знака. Скорость изменения этого напряжения регулируется потенцио-
метром П22.
Работа узлов адаптации поясняется диаграммой рис. 6.13. При малых ско-
ростях положительное напряжение ИС67 меньше напряжения смещения с по-
тенциометра П23. ОУ ИС68 насыщен в положительном направлении. Напряжение
на неинвертирующем входе ИС53 больше, чем амплитуда треугольного напря-
жения на инвертирующем входе, следовательно, ИС53 насыщен также в поло-
жительном направлении. Транзистор Т101 открыт, на входе ключей напряжение
+ 15 В, ключ замкнут, подключено параллельное сопротивление, усиление боль-
шое.
146
Рис. 6.12. Блок-схема узла адаптации
При больших скоростях напряжение ИС67 больше напряжения смещения.
ИС68 и ИС53 насыщены в отрицательном направлении. Транзистор Т101 за-
крыт, на входе ключей напряжение — 30 В, ключ разомкнут, параллельное со-
противление не подключено, усиление малое.
На средних скоростях напряжения ИС67 и смещения соизмеримы, под дей-
ствием треугольного напряжения ОУ ИС53 переключается по закону широтно-
импульсной модуляции, обеспечивая плавное изменение коэффициента усиле-
ния и соответственно времени интегрирования.
Чем больше коэффициент усиления ОУ ИС66, тем уже зона адаптации.
Следует отметить, что адаптивный регулятор работает только при малой сум-
ме задающего напряжения н напряжения тахогенератора, при пуске и торможе-
Рис. 6.13. Диаграмма работы адаптивного регулятора
147
иии с больших скоростей АР не работает, что обеспечивается суммированием ука-
занных сигналов на ОУ ИС66.
Влияние регулировочных потенциометров на зависимость коэффициента уси-
ления от скорости показана иа рис. 6.11.
В качестве ГТН применена типовая схема, состоящая из генератора линейно-
изменяющегося напряжения на ИС52 и компаратора ИС51 с гистерезисной ха-
рактеристикой за счет положительной обратной связи. Подробное описание его
работы приведено в главе III.
Блок нелинейного токоограничения обеспечивает ограничение тока якоря в
функции частоты вращения, близкой -к коммутационной кривой высокомоментно-
Рис. 6.15. Схема функционального преобразователя
148
го двигателя. Принцип работы БНТО поясняется схемой рис. 6.14. Регулятор
скорости PC охвачен двумя цепями обратной связи, выполненными на операци-
онных усилителях ИС57 и ИС59, на входы которых подаются напряжения вы-
хода PC и напряжение функционального преобразования С/фП, выполненного
на ОУ ИС54+-ИС56. Напряжение ДфП является функцией частоты вращения, при-
чем форма кривой U$n=f(n) копирует коммутационную кривую электродви-
гателя.
Если С/р0<г/фП, то выход цепей обратной связи имеет полярность, запираю-
щую диоды Д258, Д260, и токоограничение не работает.
При С/ро>^фп открывается один из диодов, в зависимости от направления
вращения, и шунтируется вход регулятора скорости. Соответственно уменьша-
ется напряжение на выходе PC, т. е. задание для регулятора тока РТ, и проис-
ходит ограничение величины тока.
Схема функционального преобразователя приведена иа рис. 6.15. Операци-
онный усилитель ИС54 осуществляет выпрямление входного сигнала, и на его
выходе формируется модуль напряжения ] UTT |.
При нулевой скорости выходное напряжение ИС55 определяется величиной
сопротивления R.320, а напряжение ИС56 — наприжеиием смещения, снимаемого
с потенциометра П12 (рис. 6.16). До точки А при положительном напряжении
ИС55 диод Д257 заперт, напряжение иа выходе ИС56 отрицательное и постоян-
ное. По мере повышения скорости, после точки А напряжение на выходе ИС55
становится отрицательным, диод Д257 открывается, напряжение иа выходе ИС56
начинает уменьшаться по абсолютной величине. Открывающиеся последователь-
но диоды Д256, Д254, Д252 в цепи обратной связи ИС55 уменьшают его коэф-
фициент-усиления, формируя тем самым кривую токоограничения.
В идеале — это кривая постоянной мощности (рис. 6.17), реально—-на вы-
соких скоростях нужно несколько уменьшить нагрузку, а на низких скоростях
ее можно увеличить. Заштрихованная за /Отс зона не используется, так как на
Рис. 6.16. Принцип формирова-
ния кривой С/фп
Рнс. 6.17. Зависимость допустимого тока от ча-
стоты вращения
149
практике максимальный ток в худшем случае достигается на 3-м пульсе, и при
этом двигатель набирает такие обороты, что уже нужно ограничивать ток. Мак-
симальная величина тока отсечки обычно /Ото = (44-6) /ном.
Способность двигателя выдерживать большие перегрузки — до (104-12)
/ном—говорит лишь об общем качестве двигателей, их защищенности от размаг-
ничивания и не может быть реализована иа практике.
Напряжение коммутационной кривой £/фП подается также в СИФУ, где сум-
мируется с напряжением регулятора тока РТ, уменьшая величину уравнительно-
го тока.
Модуль напряжения |L/Tr| с потенциометра ПИ подается в схему защиты
от превышения максимальной скорости.
Система импульсно-фазового управления (СИФУ) привода выполнена по вер-
тикальному принципу и состоит из трех одинаковых каналов управления для
каждой из фаз питания R, S и Т.
150
TStfsftTS
йен иск T2I.K33 У/ШЛЬ! К34 К33(36) 1
1
1 1
1
— 1 1
- г <
--J 1 _
биыТЩГП K К h К
Т23(Т30) Т26((31) У6Ю(У61) Ц LL □I и нь п
УЕ7(У£4) п | -н-
Чл>/-Глл
Рис. 6.19. Диаграмма работы СИФУ
Р.ис. 6.20. Схема формирования управляющего
напряжения СИФУ
Блок-схема СИФУ по-
казана на рис. 6.18, а диаг-
рамма ее работы — на рнс.
6.19 и особых пояснений не
требуют.
Напряжение синхрони-
зации С/х (С/у, Uz) подается
на каналы СИФУ с транс-
форматоров Т13, Т14, Т15
соответственно. Это напря-
жение задерживается це-
почкой П1 — С31 прнбли-
зйтельно на 63 эл. град, и
подается иа ключи ИС 11 и
ИС12. Напряжения иа вы-
ходах ключей взанмоннверс-
ны, однако фронты этих на-
пряжений сдвинуты за счет
подачи разнополярного сме-
щения, регулируемого по-
тенциометром П7. Форми-
руемый на элементе «И» ко-
роткий отрицательный им-
пульс запускает ждущий
генератор пилообразного
напряжения, выполненный
на ОУ ИС13 и транзисторе
Т21.
На элементах ИС14 и
ИС15 осуществляется срав-
нение величины пилообраз-
ного напряжения с управляющими напряжениями, поступающими с ОУ ИС27
и ИС28. Выходные напряжения ИС14, ИС15 дифференцируются и через схемы
«И» управляют усилителями Т25, Т26 анодной группы тиристоров и ТЗО, Т31
катодной группы.
Следует особо отметить, что в формировании управляющего напряжения
СИФУ (рнс. 6.20) участвует напряжение функционального преобразователя.
Для анодной группы С/Аупр= + С/рт + С/Ом—1/фП; для катодной группы
С/Купр=—С/рт+С/Ом—С/фП. Видно, что в анодной группе напряжение 1/фП сни-
жает темп сдвига управляющих импульсов влево, а в катодной, наоборот, уско-
ряет их сдвиг вправо, что уменьшает уравнительные токи и обеспечивает согла-
сованно-раздельное управление приводом. Точка перехода от одного вида управ-
ления к другому лежит в районе частоты вращения ЗОО-т-500 об/мии.
Потенциометром П8 устанавливается начальный угол запаздывания зажига-
ния аНач, чему соответствует 1/уПр=—5 В.
152
+248
ДЮ Rf4
Рис. 6.22. Усилитель управляющих импульсов
Диод Д134 в цепи ООС ИС27 ограничивает положительное напряжение на
выходе до уровня 0,7 В, что исключает возможность «срыва» генерации управ-
ляющих импульсов, так как амплитуда положительного выброса напряжения пи-
лообразной формы составляет большую величину — 2 В.
Конденсатор СПЗ предназначен для фильтрации пульсаций тока.
На рис. 6.21 показана схема «И» и генератор пилообразного напряжения. При
закрытом транзисторе Т21 конденсатор С60 заряжается от источника питания
+ 15 В, формируя лииейно-изменяющееся выходное напряжение. Его крутизна,
и следовательно амплитуда, регулируются потенциометром П2. В короткие мо-
менты открытия транзистора Т21 конденсатор С60 быстро разряжается.
Сопротивление R88 и диод Д54 сформируют положительный импульс «пилы»
амплитудой 2 В.
Схема совпадения и усилителя управляющих импульсов приведена на
рис. 6.22. Положительный фронт напряжения ИС14 дифференцируется, конден-
сатором, открывая транзистор Т22 и один из транзисторов Т23 или Т24, у кото-
рого на обоих входных диодах Д55, Д56 или Д58, Д59 отрицательные напряже-
ния. Коллекторный ток транзисторов Т23 или Т24 открывает соответствующий
153
выходной усилитель Т25 или Т26, формируя управляющий импульс силовых ти-
ристоров длительностью около 200 мкс.
Каналы У и Z работают аналогично.
Система защит преобразователя
В приводе предусмотрены следующие защиты:
— от обрыва или неправильного чередования фаз;
— отсутствия пилообразного напряжения;
— отсутствия напряжения питания —30 В.
Эти три защиты объединены общим усилителем и индикацией СР — connec-
ting protection:
— превышения максимально допустимого тока и обрыва обратной связи по
току ОС — overcurrent;
— обрыва обратной связи, по скорости ГО — taxogenerator;
— длительной перегрузки OL — overload;
— превышения максимальной частоты вращения OS — overspeed.
Предусмотрено запоминание сигналов защит ОС, TG, OL и OS. При сраба-
тывании какой-либо из защит пуск привода возможен только после новой, подачи
сигнала включения привода.
Готовность привода к работе индикатируется светодиодом RD — ready.
При включении преобразователя загорается светодиод ON.
Все защиты при срабатывании блокируют регуляторы скорости и тока, а так-
же управляющие импульсы в СИФУ.
Рис. 6.23. Схема защиты от неправильного чередования и обрыва фаз
154
Отсутствие
пилообразного
напряжения
Обрыв фаз
-зов
Рис. 6.24. Схема защиты СР
Схема защиты от обрыва или неправильного чередования фаз приведена иа
рис. 6.23. Здесь же показана векторная диаграмма шестифазиого напряжения,
поясняющая принцип действия защиты. При правильном включении /?+^=0,
S+S=0 и 74-7=0. В случае обрыва фазы или неправильного соединения появ-
ляется неуравновешенное напряжение, отрицательная полуволна которого через
один, из диодов Д13—Д16 поступает в схему защиты СР и вызывает ее срабаты-
вание. Осциллограммы напряжений в контрольных точках приведены в разделе
«Наладка» (рис. 6,44—6.46).
Ниже приведена схема защиты СР (рис. 6.24).
Канал контроля пропадания напряжения —30 В одновременно является опор-
ным'' напряжением для компаратора иа ОУ ИС41. Нормально, когда на выходе
ИС41 отрицательное напряжение — транзистор Т66 закрыт.
Рис. 6.25. Работа схемы защиты при Рис. 6.26. Работа схемы защиты при от-
обрыве фазы сутствии «пилы»
155
1фант н РТ
Рис. 6.27. Блок-схема защиты ОС
При обрыве фазы на выходе ИС41 появляются импульсы положительного
напряжения, транзистор Т66 открывается, снимаются сигналы включения ON и
готовности RD. Конденсатор С153 осуществляет задержку при восстановлении
защиты около (0,54-0,8) с (рис. 6.25).
Принцип работы защиты от пропадания пилообразного напряжения анало-
гичен и поясняется рис. 6.26. При нормальной работе на входе транзистора Т65
большое отрицательное напряжение и он открыт, что соответствует нулевому на-
пряжению иа входе ОУ ИС41 по данному каналу. При пропадании одного из
пилообразных напряжений СИФУ транзистор Т65 периодически закрывается, и
на выходе ИС41 появляются положительные импульсы, вызывающие срабатыва-
ние защиты СР.
Защита от пропадания напряжения питания —30 В работает следующим об-
разом. При отсутствии напряжения —30 В входное напряжение неинвертирую-
щего входа ОУ ИС41 становится равным нулю и защита срабатывает по каналу
обрыва фаз.
Блок-схема защиты от превышения максимально допустимого тока ОС пока-
зана на рис. 6.27, а развернутая принципиальная схема усилителя тока и компа-
ратора— иа рис. 6.28.
Рассмотрим принцип действия защиты на примере двигателя типа 23МВН с
номинальным током /ном = 40 А и максимальным кратковременным током
/шах ==250 А. В качестве датчика тока используется шунт с выходным напряже-
нием Л/7в=200 мВ при токе /иом=40 А.
Коэффициент усиления дифференциального усилителя тока, выполненного
на ОУ ИС69 и ИС70 равен единице, поэтому максимально допустимое напряже-
ние на входе усилителя модуля тока равно:
= -^- = 0>2,“~_= 1,25В.
'НОМ
Вычислим напряжение на выходе усилителя модуля тока при разнополярных
выходных сигналах дифференциального усилителя.
1. На входе усилителя модуля тока +£7ВХ. Диод Д266 открыт, диод Д265
заперт, ОУ ИС71 работает как инвертор с К=1. Тогда
t/вых---t/вх W19 +[/вх Я420 1ок 20к] вх'
156
2. На входе усилителя модуля то-
ка — С/вх- Диод Д266 заперт, диод Д265
открыт, через ОУ ИС71 входное напря-
жение не проходит. Тогда
у _ _(_______у
иВых вх д420
Итак, коэффициент передачи усили-
теля модуля тока равен 3, а напряжение
иа его выходе всегда положительно и
равно:
U™* = =
ВЫЛ ВЛ
= 3-1,25 = 3,75В.
Порог срабатывания компаратора
ИС42 настраивается несколько выше,
/7Оп=4В. Двигатель при этом не размаг-
ничивается.
При превышении максимально допу-
стимой величины тока напряжение иа вы-
ходе ИС72 превышает опорное, что при-
водит к срабатыванию защиты ОС.
Схема памяти (рис. 6.29) представ-
ляет собой бестоковый триггер, выпол-
ненный иа транзисторах 770 и 771. В ис-
ходном положении оба транзистора за-
крыты под действием напряжения сме-
щения — 15В.
Положительный импульс с компара-
тора ИС42 включает транзистор 770 и,
как следствие, транзистор 771.
Выключение триггера осуществляет-
ся отрицательным сигналом сброса от
схемы деблокировки привода.
Снятием перемычки Мб можно иск-
лючить влияние защиты ОС на схему
готовности RD и отключение привода.
Схема защиты от обрыва обратной
связи по скорости показана на рис. 6.30.
Она включает в себя автоколебательный
мостовой генератор Вина, выполненный
иа ОУ ИС43, компаратор иа ИС44 и па-
мять иа транзисторах 772, 773.
157
Снятие п RD"
+
Рис. 6.29. Схема элемента
памяти сигналов защит
Рис. 6.30. Принципиальная схема защиты TG
Рис. 6.31. Диаграмма работы
«моста Вииа>
Рис. 6.32. Принципиальная схема защиты 0L
При нормальной работе низкое омическое сопротивление тахогенератора ТГ
через конденсатор С161 закорачивает генератор по высокой частоте и колебания
отсутствуют. На выходе ИС43 нулевое напряжение.
При обрыве цепи тахогенератора возникают колебания частотой
fas (1,2-т-1,3) кГц, вызывающие срабатывание защиты (рис. 6.31). Амплитуда и
форма колебаний определяются величиной сопротивления R261. При малом
R261 — колебания имеют прямоугольную форму, среднем — синусоидальную, а
большом — колебания срываются.
Небольшой фильтр С162 исключает срабатывание защиты от ложных помех
и отскоках щеток тахогенератора.
Схемы памяти н индикации аналогичны защите ОС.
Запайкой перемычки МИ действие защиты TG можно исключить.
Схема защиты от длительной перегрузки OL н осциллограмма ее работы
показаны на рис. 6.32.
Здесь ИС57 и ИС59 — операционные усилители цепей обратной связи нели-
нейного токоограничения.
Если £7р.с<£/фп, т. е. токоограничение не работает, то на выходе ИС57 на-
пряжение имеет положительный знак, а на выходе ИС59 — отрицательный. В этом
случае оба ОУ ИС58 и ИС60
насыщены в положительном
направлении, диоды Д259 и
Д261 заперты, а конденса-
тор С224 заряжен от поло-
жительного напряжения
+ 15В источника питания.
На выходе компаратора
ИС45 отрицательное напря-
жение, диод Д227 заперт и
защита не работает.
Рис. 6.33. Схема защиты OS
159
+Z4B
„СР"
Рис. 6.34. Принципиальная схема формирования сигналов готовности RD и вклю-
чения привода ON
Если иро>Офп, т. е. работает токоограничение, то на одном из ОУ, ИС57
или ИС59, в зависимости от полярности тока, напряжение на выходе станет рав-
ным —0,7 В или +0,7 В соответственно. Эти напряжения превышают опорные
ОУ ИС58 и ИС60 от делителей R338, R339 и R343, R344, следовательно, сработа-
ет одни из компараторов — ИС58 или ИС60. Напряжение иа их выходе станет
равным —15 В и конденсатор С224 начнет разряжаться через диоды Д259 и
Д261. Второй цепью разряда конденсатора С224 является сопротивление R334-,
подключенное к напряжению £7фП. Этим достигается определенная адаптация, так
160
как при малой частоте вращения величина отрицательного напряжения t/фп уве-
личивается и разряд происходит быстрее, соответственно при больших скоро-
стях — медленнее.
Если привод перегружен в течение времени больше /зад. то переключается
компаратор ИС45, что приводит к срабатыванию защиты.
Схемы памяти и сигнализации аналогичны.
Схема защиты от превышения максимальной скорости OS показана иа
рис. 6.33 и включает в себя компаратор на ОУ ИС46 и память на транзисторах
Т76 и Т77. Защита срабатывает при превышении заданной потенциометром П11
предельно допустимой частоты вращения, т. е. при превышении напряжения
модуля |1/тг| величины смещении задаваемого делителем на сопротивлениях
R276, R277.
Установкой перемычки М20 можно ограничить скорость на низком уровне
при первоначальном пуске.
Формирование сигналов готовности RD и включения преобразователя ON по-
казано на рис. 6.34.
Сигнал RD—«Готовность» выдается на станок н. о. контактом реле Р1 при
условии отсутствия всех сигналов защит и мгновенно пропадает при срабатыва-
нии любой из ннх.
Сигнал ON — «Включение привода» появляется с задержкой, обусловленной
зарядом конденсатора С151 (0,5—0,6 с) прн отсутствии сигнала защиты СР, на-
личии сигнала RD и деблокировки привода от стайка.
Деблокировка может осуществляться как по входу, так и по выходу тран-
зистора Т61.
Выключение привода происходит мгновенно, при этом блокируются регу-
ляторы скорости н тока, а также импульсы управления тиристорами.
Транзистор Т69 формирует сигнал сброса памятей электронных защит.
Источники питания. Питание схемы управления преобразователем осуществ-
ляется двумя стабилизированными выпрямителями с выходными напряжениями
±15 В и нестабилнзированными напряжениями +24 В и —30 В.
В источнике ±15 В предусмотрена внутренняя защита ограничения тока, н
он не боится коротких замыканий. Предусмотрена также защита от пропадания
напряжения —15 В, прн этом автоматически блокируется н выход +15 В.
Методика наладки электропривода «Кемрон»
в регулируемом режиме
Прежде всего следует сказать, что каждый комплектный электропривод про-
ходит на заводе-изготовителе тщательную наладку и испытание, поэтому полное
использование приведенной ниже методики целесообразно только для вышедших
из строя или разукомплектованных преобразователей.
При эксплуатаций приводов ее следует считать руководством, оговариваю-
щим последовательность проведения контроля привода, а также пособием при
устранении отдельных неисправностей.
6 Заказ 4546
161
Последовательность наладки привода
I. Сиять ленточные переходные кабели печатных плат.
2. Вытащить все платы преобразователя, кроме платы «Питание».
3. Снять провода YE\—УЕ12, подающие управляющие импульсы иа тири-
сторы, и во избежание замыканий надеть на ннх изолирующие хлорвиниловые
трубки.
4. Провести внешний осмотр преобразователя, всех его блоков, силового
трасформатора и двигателя. При необходимости устранить видимые повреж-
дения, подтянуть крепежные соединения.
5. Вставить последовательно платы СИФУ, защиты и регуляторов.
6. Подсоединить большой ленточный переходный кабель КП4—КП5—КП6.
ВНИМАНИЕ! Применяемые на платах и переходном жгуте разъемы не име-
ют установочного ключа. При правильном соединении надписи на колодке и встав-
ке должны быть наружу.
7. Выполнить монтаж согласно схеме соединений — рис. 6.35. При предва-
рительной проверке плат двигатель должен быть отключен.
8. Проверить правильность установки и исправность силового трансформа-
тора, для чего отключить силовые предохранители и измерить фазные вторичные
напряжения, которые должны быть равными ~ 120 В. Убедиться в правильно-
сти чередования фаз.
9. В плате «Регуляторы» установить наладочные резисторы R423— 20 к и
R397— 51 к, делающие регуляторы скорости и тока пропорциональными с коэф-
фициентом усиления, равным единице.
ВНИМАНИЕ! Все работы, связанные с пайкой, а также контактными соеди-
нениями, производить прн выключенном питании.
10. В плате «Регуляторы» установить перемычки М23, М24 и снять перемыч-
ку М25. Прн этом исключается дифференциальный усилитель задающего сигнала.
II. Включить силовое питание. Прн правильной работе загорится светодиод
RD — готовность. Если вместо светодиода RD горит какой-либо другой или не-
сколько сразу, необходимо устранить неисправность согласно разделу «Характер-
ные неисправности и методы их устранения» инструкции по эксплуатации иа
привод, а также материалам данной книги.
12. Проверить плату источников питания. Контроль напряжений ±15 В,—30 В
осуществляется тестером относительно нулевой точки платы К21.
Фазное напряжение вторичных обмоток трансформаторов Tpl3s-Tpl5 долж-
но быть 27±1 В. Большее отклонение показывает на несоответствие преобразо-
вателя силовому трансформатору нли на его неисправность.
13. Омметром проверить исправность импульсных трансформаторов Тр1-т-Тр12.
14. Проверить и настроить плату СИФУ. Нулевая точка платы — К60.
14.1. Установить сдвиг фаз, равный 63 эл. град. (3,5 мс), между напряжением
вторичной обмотки трансформатора Тр13- (контрольная точка КЗО) и входом опе-
рационного усилителя ИС 11 (контрольная точка К.31). Осциллограммы напря-
жений показаны на рис. 6.36.
Регулировка осуществляется потенциометром П1, имеющим символическое
162
6*
Рис. 6.36. Фазировка синхронизирующего напря-
жения
обозначение на плате фХ].
При регулировке для напря-
жения в точке К31 устано-
вить усиление канала осцил-
лографа в десять раз боль-
шее, чем для напряжения
точки КЗО, что обеспечит
необходимую точность уста-
новки сдвига фаз (рис.
6.37).
14.2. Провести анало-
Рнс. 6.37. Осциллограмма установки сдвига £7смх
на 63 эл. град
гичные регулировки для ка-
налов фазы У (контрольные
точки К37, К38, регулиро-
вочный потенциометр ПЗ,
обозначение на плате ф») и
для канала фазы Z (соот-
ветственно К44 и К45, П5,
<₽*)•
14.3. Потенциометром
П7 установить равенство
напряжений смещения опе-
рационных усилителей ИСН, ИС12, ИС16, ИС17, ИС21, ИС22 в контрольных точ-
ках К56 и К57 (рис. 6.38). Величина смещения ±230 мВ.
14.4. В контрольных точках К34, R41 и К48 проверить наличие и форму пи-
лообразных напряжений (рнс. 6.39).
Отрицательная амплитуда «пилы» должна быть равной —9 В. Регулировки
осуществляются потенциометрами П2, П4 и Пб соответственно. На плате они
обозначены знаком
В случае отсутствия пилообразного напряжения проверить правильность
сигналов по тракту формирования пилообразного напряжения (рис. 6.19).
230мб +
Рис. 6.39. Форма пилообразного Напряжения
Усм
К56
К57
230мб
Рнс. 6.38. Осциллограмма
напряжения смещения
164
КП4-9
Uynp
Рис. 6.41. Напряжение управ-
ления СИФУ
Put. 6.40. Форма сигнала защиты от пропада-
ния «пилы»
14.5. Проверить наличие суммарного сигнала защиты от пропадания пило-
образного напряжения на разъеме КП4-9. Наблюдать осциллограмму рис. 6.40.
14.6. Проверить величину напряжения управления СИФУ в контрольных точ-
ках К53 и К54 при нулевом задающем напряжении. Оно должно быть —5,5 В±
0,2 В. Настройка осуществляется потенциометром П8, имеющим мнемоническое
обозначение на плате а0.
14.7. Регулируя величину задающего напряжения, наблюдать изменение на-
пряжения в точках К53 и К54 (рис, 6.41). В случае отсутствия регулировки сле-
дует проверить функционирование платы «Регуляторы».
Примечание. Если привод пускается впервые или имеются какие-либо другие
опасения, то начальное напряжение в контрольных точках К53 и К54 рекоменду-
ется установить равным —7 В. При этом управляющие импульсы передвинуты в
область отрицательных значений напряжения силового трансформатора, что иск-
лючит возможные при неисправностях аварийные режимы.
14.8. Проверить наличие и форму управляющих импульсов на базах выход-
ных усилителей. Для быстрой проверки всех 12 каналов удобно наблюдать им-
пульсы на сопротивлениях R106, R108 и т. д. (рис. 6.42).
При данной проверке должен быть включен режим «Работа—ON», в про-
тивном случае управляющие импульсы будут блокированы сигналом +15 В конт-
рольной точки К55.
14.9. Изменяя величину задающего напряжения, наблюдать смещение управ-
ляющих импульсов. При неправильной работе проверить осциллограммы сигна-
лов в предыдущих точках тракта.
14.10. Установить малый соединительный жгут между платами СИФУ и «Пи-
тание».
R106 R1O8 R156
наблюдения
Рис. 6.42. Точки наблюдения управляю-
Рис. 6.43. Начальная фазировка уп-
равляющих импульсов
щих импульсов
165
14.11. Проверить начальную фазировку управляющих импульсов относительно
силового напряжения на плате «Питание и управление тиристоров». При управ-
ляющем напряжении СИФУ — 7 В и нулевом задающем сигнале фазнровка долж-
на соответствовать осциллограмме рис. 6.43.
Проверка осуществляется с помощью двухлучевого осциллографа следую-
щим образом:
Для катодной группы. Относительно общей точки К19 первым лучом наблю-
дать силовое напряжение в точке КТ7, а вторым — управляющие импульсы в точ-
ке YE1. Аналогично для остальных каналов КТ8 и YE2, КТ9 и YE3 и т. д. — до
КТ12 и YE6.
Для аиодиой группы. Относительно общей точки КТ7 первым лучом наблю-
дать силовое напряжение на общем аноде, а вторым лучом — управляющие им-
пульсы в точке YE7. Аналогично для остальных каналов КТ 8 и YE8, КТ 9 и YE9
и г. д. - до КТ 12 в YE12.
15. Проверить и настроить плату «Защита» (Логика). Нулевая точка пла-
ты К81.
15.1. Проверить действие защиты от обрыва н неправильного соединения фаз,
для чего вытащить какой-либо предохранитель силовой цепи. Прн правильной
работе схемы защиты загорается светодиод СР и гаснет светодиод RD.
15.2. Проверить функционирование схемы защиты от превышения максималь-
ного тока, для чего потенциометром П10 установить напряжение в контрольной
точке К78 равным 4 В и отсоединить активный провод от датчика тока Sh. При
этом должен погаснуть светодиод RD и загореться светодиод ОС.
15.3. Проверить функционирование схемы защиты от обрыва цепи обратной
связи по скорости, для чего отсоединить один из выводов тахогенератора. При
этом должен погаснуть светодиод RD и загореться светодиод TG. Следует пом-
нить, что должна быть установлена перемычка М10 и снята перемычка МП.
Форма колебаний генератора иа мосте Вниа определяется величиной сопротивле-
ния R261, причем при слишком большой величине R261 колебания срываются.
«Ложные» срабатывания защиты от помех устраняются конденсатором С160 иа
входе ОУ ИС43.
15.4. Проверить функционирование схемы защиты от длительной перегрузки
по току, для чего деблокировать привод, отпаять пропорциональное сопротивле-
ние R423 регулятора скорости и подать на вход преобразователя задающее на-
пряжение. Прн правильной работе схемы загорается светодиод OL. Закончив про-
верку, вновь запаять сопротивление R423.
15.5. Проверить функционирование схемы защиты от превышения макси-
мальной скорости путем подачи на иеинвертнрующий вход ОУ ИС46 положитель-
ного напряжения. Прн правильной работе должен погаснуть светодиод RD и за-
гореться светодиод OS.
Проверить наличие перемычки М20, ограничивающей максимальную ско-
рость.
ВНИМАНИЕ! Защиты ОС, TG, OL и OS выполнены с самоблокировкой иа
бестоковых триггерах. В исходном положении оба транзистора триггера закры-
166
Л74
лАЫЧд/ *
AAaAa
Рис. 6.44. Осциллограммы схемы защиты СР при правильной работе
ты, а цри срабатывании защиты оба открываются. Восстановление схемы защиты
производится путем повторной блокировки и деблокировки привода.
Исключив одну нз перемычек Af64-Af9, можно при необходимости исключить
действие той или иной защиты на снятие сигнала готовности RD.
Ниже приведены некоторые характерные диаграммы работы схем защиты.
Рис. 6.44 соответствует правильному чередованию фаз, рис. 6.45 — неправильному,
а рис. 6.46 — обрыву фазы.
167
Прочие диаграммы даны иа рис. 6.25, 6.26, 6.31, 6.32 раздела описания
принципиальной схемы преобразователя.
16. Проверить и настроить плату «Регуляторы». Общая точка платы К1П.
16.1. Провести балансировку схемы усилителя тока, выполненного иа ИС69,
ИС70, для чего:
— закоротить клеммы Кл2-1 и Кл2-2 на массу;
— потенциометром П24 установить нулевое напряжение на выходе ИС70
(в контрольной точке КП2)\
— закоротить клеммы Кл2-1 и Кл2-2 между собой и подать в эту точку от-
носительно общей точки платы К1П синусоидальное напряжение амплитудой
~ (2ч-3) В и частотой 300 Гц;
— потенциометром П25 установить ноль на выходе ИС70.
16.2. Проверить работу усилителя модуля тока ИС71, ИС72, для чего на вход
усилителя (Кл2~1, Кл2-2) подавать напряжения разной полярности, например,
пульсирующее амплитудой ±0,2 В и частотой 250—300 Гц. На выходе, в конт-
рольной точке КПЗ, наблюдать напряжение всегда положительной полярности
амплитудой 0,6 В, так как коэффициент усиления данной схемы равен трем;
16.3. При необходимости произвести аналогично балансировку дифференци-
ального усилителя ИС61 входного задающего сигнала.
Ниже дана таблица распайки перемычек, определяющих способ подачи за-
дающего напряжения.
Таблица 6.1
Способ включения перемычки Дифференциальный усилитель
исключен включен
М23 М24 (R362*) М25 (R425*) Условйя применения Есть Есть Нет Источник задающего напряжения УЧПУ не заземлен Нет Нет Есть Источник задающего напряжения заземлен
* В первых образцах преобразователей места перемычек на плате обозначены R362 и R425
16.4. Подключить провода YE1-S-YE12, подающие управляющие импульсы на
силовые тиристоры преобразователя.
16.5. Подключить двигатель к преобразователю. Клемма двигателя, обозна-
ченная знаком подсоединяется к общей точке уравнительных дросселей.
16.6. При наличии встроенного электромагнитного тормоза подать на него
напряжение и растормозить двигатель.
16.7. Провернуть вручную по часовой стрелке вал двигателя, наблюдая по-
лярность напряжения на якоре тахогенератора. Отрицательный вывод подключить
к клемме Кл2-9 преобразователя.
168
Рис. 6.47. Начальная диаграмма тока
*УР
t
16.8. Проверить правильность
подключения «активного» и «пас-
сивного» выводов шунта Sh обрат-
ной связи по току.
16.9. Включить силовое пита-
ние ~380В, деблокировать привод
н при малом задающем напряже-
нии иа ползучей скорости наблю-
дать диаграмму тока в контроль-
ной точке К.112 (рис. 6.47).
16.10. Потенциометрами П2,
П4 и П6 уравнять амплитуды то-
ков по среднему уровню (рис.
6.48).
16.11. Осуществить плавный
разгон и остановку привода на ма-
лой частоте вращений по и против
часовой стрелки.
16.12. Окончательно проверить
правильность фазировок обратных
связен по скорости и по току при
вращающемся двигателе следующим образом:
— отрицательная обратная связь по току. При отрицательных импульсах
тока в контрольной точке К112 напряжение на выходе регулятора скорости PC
в контрольной точке КЮ8 должно быть положительное. Можно наблюдать на-
пряжение задания на входе ОУ ИС62, которое должно быть отрицательным, так
как регулятор скорости инвертирует входной сигнал;
— отрицательная обратная связь по скорости. При отрицательном задаю-
щем напряжении напряжение тахогенератора на клемме Кл2-9 должно быть от-
Рис. 6.48. Правильная диаграмма
тока
рицательным.
16.13. Отпаять сопротивления R423 и R397, сделав тем самым регуляторы
скорости и тока пропорционально-интегральными.
16.4. Настроить токоограничеиие, для чего:
— при нулевом задающем напряжении Узад=0 потенциометром П12 выста-
вить на выходе ОУ ИС56 (контрольная точка КП6) напряжение, равное —11,5 В;
— снять перемычку ограничения скорости М20-,
— плавно разогнать двигатель до максимальной частоты вращения
(птах=1500 об/мин), величина которой выставляется потенциометром П14 в це-
пи тахогенератора. При Узад=10 В напряжение на клеммах тахогенератора со-
ставляет С\г = 45,5 В;
— на максимальной скорости потенциометром П13 установить в контрольной
точке КП6 напряжение, равное—3 В. В случае nmax=1000 об/мин выставляется
напряжение, равное —5 В, в соответствии с диаграммой рис. 6.49.
Общая зависимость кривой нелинейного токоограиичения от различных ре-
гулирующих элементов показана на рис. 6.16.
169
Рис. 6.49. Зависимость Уюи*=[(<о)
Рис. 6.50. Диаграмма пускового тока
Рис. 6.51. Высокочастотная ге-
нерация блока НТО
Кривой токоограничения
рис. 6.49 соответствует пуско-
вая диаграмма тока, приведен-
ная на рис. 6.50.
ВНИМАНИЕ! Все измене-
ния в кривой токоограничения
связаны с опасностью выхода
из строя высокомоментного
двигателя, поэтому все регули-
ровки следует проводить при
непрерывном наблюдении за
коммутацией двигателя при
переходных процессах;
— при блокированном пре-
образователе подать иа вход регулятора скорости задающее напряжение и на
выходе регулятора ИС64 (контрольная точка К.108) наблюдать высокочастотную
генерацию (рис. 6.51), что говорит о работе схемы токоограничения.
16.15. Проверить и настроить адаптивный регулятор коэффициента усиле-
ния, для чего:
— включить привод и установить задающее напряжение, равное 100 мВ;
— наблюдая осциллографом напряжение в контрольной точке К102, потен-
циометром П23 добиться перехода прямоугольного напряжения ИС53 в положи-
тельный уровень +15 В;
— установить задающее напряжение равным 300 мВ;
— потенциометром П22 добиться перехода прямоугольного напряжения
ИС53 в отрицательный уровень —15 В.
Принцип работы схемы адаптации и влияние регулировочных потенциомет-
ров на величину и зависимость коэффициента усиления регулятора скорости от
величины задающего напряжения (или частоты вращения) приведены на рис. 6.52.
В связи с взаимным влиянием регулировок потенциометрами П23 и П22 друг
на друга настройку адаптации следует проводить методом постепенного прибли-
жения, трижды повторив операции, изложенные в пункте 16.15.
16.16. Настроить величину уравнительного тока на уровне /УР^10% /ЯОм
(для двигателя 23МВН это =4 А), для чего:
170
— включить привод и установить
задающее напряжение, равным нулю;
— потенциометром П17 сбаланси-
ровать пропорциональный усилитель
ИС62 регулятора скорости, добившись
остановки вращения вала двигателя;
— подключить осциллограф к
контрольной точке К112 (ОУ ИС70
усилителя тока) и потенциометром
П8 выставить величину тока, равной
ss4A. При этом происходит деформа-
ция кривой тока в соответствии с
рис. 6.53, а начальный угол запазды-
вания зажигания тиристоров анач пе-
ремещается в область положительных
значений силового питающего напря-
жения, что соответствует напряжению
в контрольных точках К53 и К54
СИФУ, равному около —5В;
16.17. Настроить регулятор ско-
рости PC, для чего:
16.17:1. Убедиться, что величины
резисторов н конденсаторов, подклю-
ченных к регулятору, соответствуют
Рнс. 6.52. Регулировки узла адапта-
ции
указанным в паспорте и принципиаль-
ной схеме, например, для двигателя
23МВН —
R353 С247 R364 С229
30 к 0,1 51 к 1,0
R386 С231 R415
24 к 0,33 3,1 к
16.17.2. Убедиться, что перемыч-
ки М21 и М22, подключающие схему
токоограничения, запаяны.
16.17.3. Настроить переходный
процесс по скорости при пуске на
большую частоту вращения, для чего:
— подключить осциллограф к та-
хогенератору (левая точка сопротивления R368)-,
— подать скачкообразно задающее напряжение величиной 5 В на вход пре-
образователя и наблюдать форму переходного процесса (рис. 6.54).
16.17.4. Регулировочными винтами потенциометров П18 (регулирование
пропорционального усиления) и П20 (регулирование постоянной времени интег-
рирования) сделать 15—20 оборотов по часовой стрелке от упора, ио так, чтобы
не наблюдалось возбуждения привода (увеличивается усиление).
"ДДДД
t
П8
t
Рис. 6.53. Установка исходного урав-
нительного тока
171
Рис. 6.55. Регулирование переходного процесса при большой частоте вра-
щения
16.17. 5. Наблюдать вновь форму переходного процесса и плавным регулиро-
ванием потенциометров П18 и П20 добиться переходного процесса с минималь-
ным перерегулированием (рис. 6.55).
В зоне' нормальных значений перерегулирования его уменьшение достигает-
ся увеличением коэффициента пропорционального усиления (П18).
В случае больших колебательных процессов при пуске или торможении сле-
дует уменьшить коэффициент усиления уменьшением величины сопротивления
R364.
Первоначальный выброс можно также уменьшить подбором величин диф-
ференцирующей цепочки R353, С247 в цепи тахогенератора.
16.17. 6. Настроить переходный процесс при пуске на малой частоте враще-
ния, т. е. в зоне работы схемы адаптации, для чего:
— подать на вход регулятора скорости скачкообразное задающее напря-
жение амплитудой около 200 мВ и наблюдать переходный процесс. Устранить
перерегулирование, поворачивая регулировочные винты потенциометров П19 и
П21 от упора по часовой стрелке (рис. 6.56).
16.17. 7. Проверить характер переходных процессов во всей рабочей зоне ча-
стот вращения от Птш до nmai-
Обобщенное влияние коэффициента пропорционального усиления и постоян-
ной времени интегрирования на характер переходных процессов на высокой и
низкой частотах вращения приведен соответственно на рис. 6.57 и 6.58. Здесь же
показан оптимальный переходный процесс. Сравнивая с ним реальные осцилло-
граммы, легко определить направления необходимых регулировок.
16.18. Настроить и проверить регулятор тока. Параметры корректирующих
цепей регулятора тока подобраны для каждого конкретного типа двигателя и
изменению не подлежат.
172
Рис. 6.56. Регулирование переходного процесса при малой частоте вра-
щения
Рис. 6.57. Влияние КУе и Тя на
характер переходного процесса
на высокой частоте вращения
--------Ё
Рис. 6.58. Влияние и Тя на харак-
тер переходного процесса на низкой
частоте вращения
Подбором сопротивлений R424 и R425 можно задать необходимую началь-
ную величину тока якоря при нулевой скорости, что используется для уравнове-
шивания «падающих» координат, а также при затруднениях с позиционированием
больших масс.
173
Рис. 6.60. Общая принципиальная схема привода «Кемрои»
М2-//
скорости
Mt-n
КМ П&
КЛЧ-1
Коммутационная
кривая (в Cft+У)
Коммутационная.
клб-зо кривая с/а/ержкои
•^Tio (К
Схема л»мточ/юго момтажа
КЛ6
rjAtTmn
peijpramopos
Ik гг /з кг a re rr rt n»o
\2l U232i t5i(tJ2t2»39
КЛ*
тнгтсх
СК+У
Рис. 6.60. Общая принципиальная схема привода «Кемрон» (продолжение)
Транзисторы ; Т1, 72/, 122, г»7, 732,гзз, гзз,
793, 749, 74* 759, 755 373167;
72,79, Т23, 729, 723, 729, 159, 733;
739, 740, 793, 796, 730, 751, 756 - 2 73037;
73,73- 279735.
Т25, 726, 730, 731, 735, 7з7, 791, 792,
П7, Т93, Т32,753 - 273303
Ptsucm^bt: ЯЦ К92-на&ор 03 4-х сопроншЗхении w 7W О ч
Л97^-наЛризЗ-ти СОПротоМгны чо ч
Рис. 6.60. Общая принципиальная схема привода «Кемрон»
(продолжение)
ma-hiKnf-»
КП5-Ч/*ГЦ-&
Рис. 6.60. Общая принципиальная схема привода «Кемрон» (продолжение)
Рнс. 6.59. Огибающая якорного тока
при реверсе
16.19. Окончательно настроить
защиту от превышения- максимальной
скорости OS, для чего:
— подать задающее напряжение,
равное (7зад=НВ (>10В), и потен-
циометром ПН добиться срабатыва-
ния защиты;
— проверить срабатывание защи-
ты при плавном разгоне и прн необ-
ходимости внести коррективы.
16.20. Окончательно, подбором
сопротивления R334, настроить защи-
ту от длительной перегрузки по току OL при реверсе. Величину задающего напря-
жения при настройке установить равной С73ад^8В.
16.21. Окончательно проверить уровень ограничения величины максимально-
го тока якоря, для чего наблюдать переходный процесс тока при реверсе при
задающем напряжении £/3ад^(6-г7) В. Величина /щах для двигателя 23МВН не
должна превышать 250 А (рис. 6.59).
На этом настройку и регулирование комплексного электропривода «Кемрон»
можно считать законченной.
Общая принципиальная схема комплектного электропривода «Кемрон» приве-
дена на рнс. 6.60.
ГЛАВА СЕДЬМАЯ
КОМПЛЕКТНЫЙ ЭЛЕКТРОПРИВОД
ПОДАЧИ ТИПА «МЕЗОМАТИК»
Электроприводы типа «Мезоматик» производства ЧССР (рис. 7.1) выпуска-
ются в одно-, двух- и трехосевом исполнении и предназначены для приводов по-
дач металлорежущих станков с ЧПУ.
Типоразмеры привода охватывают ряд номинальных моментов двигателей
от 10 до 125 Нм.
В комплект привода входят:
— тиристорный преобразователь типа RTT;
182
— высокомоментный двигатель постоянного тока типа 3SHAT со встроенны-
ми тахогенератором, резольвером и электромагнитным тормозом;
— силовой трансформатор типа TNC, общий иезавнснмо от числа координат;
— уравнительные дроссели типа LJE-,
— коммутационные дроссели типа LTE.
В случае однокоордииатного исполнения коммутационный дроссель не по-
ставляется.
Тиристорный преобразователь конструктивно выполнен иа единой раме, тре-
бующей двустороннего обслуживания.
Типовое обозначение электроприводов:
Дополнительный знак
Код номинальных моментов по осям:
/ — 10 Нм; 2— 13 Нм;
3—17 Нм; 4-21 Нм;
5 — 28 Нм; 6 — 42х Нм;
7 — 56 Нм; 3 — 85 Нм;
9— 125 Нм
Реверсивный
С двигателем сернн 3SHAT
Количество координат
Привод
Пример обозначения привода:
P3HR 444А — трехкоординатный электропривод в комплекте с двигателями
С номинальными МОМеИтаМИ /Ином =21 Нм.
При многокоордннатиом исполнении привод может комплектоваться дви-
гателями с различными моментами Л/нйм-
Все основные технические характеристики привода соответствуют требова-
ниям сИнтерэлектро».
Описание работы преобразователя
Преобразователь выполнен по одноконтурной схеме регулирования только
с регулятором скорости. Характерной особенностью привода является работа
в зоне прерывистых токов при нагрузке вплоть до номинального тока во всем
диапазоне частот вращения, что исключает влияние электромагнитной постоян-
ной времени и, как следствие, позволяет создать простую одноконтурную схему
без регулятора тока.
Управление приводом — согласованное нелинейное в зоне рабочих частот
вращения н раздельное в зоне ускоренных перемещений.
183
Рис. 7.2. Блок-схема привода «Мезоматик»
Блок-схема привода приведена иа рис. 7.2, где PC — регулятор скорости;
ИНВ— инвертор; СИФУ — система импульсно-фазового управления; БИТО —
блок нелинейного токоограиичения; ТП — тиристорный преобразователь; ТР— си-
ловой трансформатор; Аур— уравнительный дроссель; £Ком — коммутационный
дроссель; Я — электродвигатель; ТГ — тахогенератор; Т — электромагнитный тор-
моз; Р — резольвер; БП — блок питания.
Прежде чем приступить к подробному описанию принципиальной схемы пре-
образователя, сделаем важное замечание: в преобразователе принято независимое
поплатное обозначение элементов схем, всегда'начинающееся с номера один, по-
этому в полной схеме много операционных усилителей, сопротивлений и конден-
саторов с одинаковыми обозначениями. Следует быть внимательным при изуче-
нии и иаладке привода.
Обозначение плат преобразователя следующее:
V21 — входные фильтры; Z-14A — регулятор скорости; G-08 — система им-
пульсно-фазового управления. Имеется две платы СИФУ, раздельно для анодной
и катодной групп преобразователя:
Z-16A — нелинейное токоограннчение;
Е-24 — источник питания.
Силовая схема (рис. 7.3) преобразователя выполнена по реверсивной трех-
импульсной однополупериодной схеме выпрямления.
Нагрузкой преобразователя является специальный высокомоментный элект-
родвигатель постоянного тока с возбуждением от постоянных магнитов типа
«Альнико», обладающий высокими перегрузочными свойствами. Двигатель име-
ет две дополнительные сериесные обмотки, осуществляющие его подмагничивание.
184
По этой причине он имеет три вывода:
общий А2 (красного цвета) н раздель-
ные 1Д (черный) н 2Д (белый). Пере-
ключение последних недопустимо, в про-
тивном случае произойдет размагничива-
ние двигателя. При необходимости изме-
нения направления вращения двигателя
при неизменной полярности задающего
напряжения производится переключение
каналов СИФУ.
Следует помнить, что прн разборке
двигателя и тахогенератора происходит
нх размагничивание. Избежать этого
можно, если вставить в статор стальную
болвашку соответствующего диаметра
либо прн повторной сборке производить
намагничивание (инструкция приводится
в паспорте электропривода).
Силовой трансформатор включен по
схеме «треугольник — зигзаг», что позво-
ляет исключить поток вынужденного на-
магничивания и дает экономию в сечении
магиитопровода.
Коммутационные дроссели исключа-
ют влияние приводов друг на друга в
случае многокоордннатного исполнения
при работе от одного общего силового
трансформатора.
Встроенный электромагнитный тор-
моз предназначен только для работы в
аварийных ситуациях.
Номинальный момент двигателя при
Рнс. 7.3. Силовая схема
питании от трехпульсной схемы выпрямления уменьшается в К=7ср/Лф раз по
сравнению с питанием от гладкого постоянного напряжения.
Регулятор скорости [Z-14A) выполнен в виде- пропорционально-интеграль-
ного регулятора и реализован на операционном усилителе XI (рис. 7.4).
Регулятор имеет четыре входа:
Un — вход подключения задающего сигнала;
Итп — вход подключения сигнала обратной связи по скорости;
Um, Um — входы для суммирования- при необходимости дополнительных зада-
ющих воздействий.
Все входы связаны с PC пассивными ДС-фнльтрамн (плата V-21). Макси-
мальное входное напряжение фильтров составляет ±10 В. Так как тахогенератор
на максимальной скорости имеет выходное напряжение, равное ±24 В, то пре-
дусмотрен делитель на сопротивлениях R4 и R5.
185
Транзисторы Т1 и Т2 работают в диодном режиме и предназначены для огра-
ничения максимального выходного напряжения PC. Величина ограничения опре-
деляется сопротивлениями R16, R17 и R18, R19 в соответствии с полярностью
выходного иапряжеиия. Для балансировки регулятора служит потенциометр R8.
Реле В2 предназначено для создания нулевых начальных условий интегри-
рования.
Передаточная функция регулятора имеет вид:
_ ч Zoc(p) Л1°+ рСЗ 1+рЛЮ-СЗ 1+рГос .
Грс(р) —ч— — — 1 = ' “ — ———
ZBX(p) ЯЗ + Я7 p(R3 + R7)C3 рТи
Постоянная времени цепи обратной связи Toc=R10-C3 определена заводом-
изготовителем привода н изменять ее не рекомендуется. Влияние Тае на качест-
во переходного процесса рассмотрено в главе 9.
Настройка регулятора осуществляется подбором постоянной времени интег-
рирования Ги в зависимости от момента инерции конкретного механизма.
Подбирая величину конденсатора СЗ, необходимо обязательно изменять ве-
личину R10, чтобы сохранить постоянство Гос.
Операционный усилитель ХЗ выполняет роль инвертора с коэффициентом
передачи, равным единице.
Выходные напряжения XI и ХЗ являются управляющими для СИФУ анод-
ной щжатодной групп преобразователя.
186
Как уже отмечалось, в
структуре привода отсутствует
регулятор тока, что связано с
его работой в зоне прерыви-
стых токов. Из теории тири-
сторных электроприводов изве-
стно, что наклон внешних ха-
рактеристик преобразователя в
режиме прерывистого тока рез-
ко возрастает (рис. 7.5). Это
можно интерпретировать воз-
растанием во много раз актив-
ного сопротивления преобразо-
вателя и, как следствие, стрем-
лением к нулю электромагнит-
ной постоянной времени
~ ^яц
Это же ивление можно
объяснить и другим способом,
рассмотрев реакцию привода на
скачок задании в режиме пре-
рывистого тока. Если скачком
изменить задающее напряжение
1/зад/ то не позже чем в сле-
дующем полупериоде питающе-
го Напряжения установится но-
вый режим преобразователя,
так как к следующему импульсу
рактер реакции преобразователя
управления ток в цепи будет равен нулю. Ха-
аналогичеи случаю активной нагрузки. В этом
случае можно говорить об исчезновении электромагнитной постоянной времени
и исключить в приводе регулятор тока.
Блок нелинейного токоограничения Z-16A (рис. 7.6) выполнен на операци-
онных усилителях XI и Х2 и предназначен для ограничения величины макси-
мально допустимого тока двигателя в функции частоты вращения и в соответст-
вии с коммутационной кривой. Блок подключается параллельно регулятору ско-
рости PC.
Ток, протекающий в якоре двигателя, определяется разностью напряжения
преобразователя и противо-ЭДС двигателя и сопротивлением якорной цепи.
Пренебрегая падениями напряжения от перекрытия анодных токов на вто-
ричной обмотке силового трансформатора и вентилях, можно записать
U—Е C7rf0-cosa — Сеп
/я=_£
*я
187
г
“I +15в
Рис. 7.6. Схема блока нелинейного токоограниче-
ння
Если считать, что /?я = const, то на основании информации о частоте враще-
ния двигателя, снимаемой с тахогенератора и пропорциональной величине ЭДС
двигателя, можно определить минимально допустимый угол управления а, огра-
ничив тем самым величину напряжения U и, следовательно, величину тока.
Расчетная схема одного канала БНТО приведена на рнс. 7.7. Выведем зави-
симость выходного напряжения 1Д от напряжения, снимаемого с тахогенератора,
U = К (J _к е _____—_______К U
° тг/?3+/?4 0 см Я1+Я2 *aU° Я1+Я2 ’
или
/ 7?4 R2 \
° \ Tr R3—R4 см /?1+/?2 / .. , /?4(/?1+/?2) /?2
° ~ / 1 R1 \ - тг Л?1(/гЗ+Л?4) см ‘
°[ Ко + Я1+&2 J
В реальной схеме величина напряжения смещения Есм снимается с потен-
циометров R4 и R9, а роль сопротивления R3 играют потенциометры R29—R32
в зависимости от квадранта работы привода.
Зависимость С,0=/(С,Тг) во всех четырех квадрантах работы приведена на
рис. 7.8. Здесь же показана статическая характеристика регулятора скорости.
Дноды Д1-:гД4 позволяют производить раздельную регулировку по квад-
рантам.
Жирными линиями на рнс. 7.8 показаны процессы пуска н реверса. В вы-
188
Рис. 7.7. Расчетная схема БНТО
Рнс. 7.8. Характеристика БНТО
прямительном режиме величина Едв,
соответствующая напряжению t/pc на
диаграмме, уравновешивается раз-
ностью между напряжением выпря-
мителя t/B и падением напряжения
InR, т. е. £SB = t/B—1R. Видно, что
обеспечивается обратная зависимость
допустимого тока от частоты враще-
ния.
В инверторном режиме ЭДС £дв,
равна сумме напряжения инвертора
t/H н падения напряжения в якорной
цепи £дв = ^и+/£. Несколько боль-
шее значение начального тока тормо-
жения объясняется нелинейностью
согласования групп преобразователя.
Если в переходных режимах соб-
людается неравенство t/Pc<t/0, то
токоограннченне не работает (заперты
дноды Д5 н ДБ). Прн t/Pc>t/0 от-
крывается одни из диодов Д5 нлн ДБ
н схема БНТО шунтирует выход ре-
гулятора скорости, снижая его выход-
ное напряжение до допустимой вели-
чины, а следовательно, н величину то-
ка якоря.
Осциллограмма огибающей тока
прн пуске и реверсе показана на рис.
7.9.
На операционных уеилнтелях ХЗ
и Х4 выполнена схема индикации ра-
боты токоограннчення (рис. 7.10). Прн
работе БНТО через дноды Д7 нлн Д8 открывается транзистор Т1, в коллектор
которого может включаться сигнальная лампочка.
Система импульсно-фазового управления G-08 предназначена для формиро-
вания и сннхроиизацнн подачи управляющих импульсов на силовые тиристоры.
Блок-схема одного канала СИФУ показана на рнс. 7.11, а диаграмма ее работы
иа рис. 7.12. В состав СИФУ входят:
— формирователи Фд, Фв и Фо;
— генератор пилообразного напряжения ГПН (ОУ Х1)\
— компаратор (ОУ ХЗ)-
— схемы совпадения и формирователи импульсов.
Кратко рассмотрим принцип работы схемы. На вход формирователя Фд.
(рис. 7.13) подается вектор синхронизирующего напряжения фазы А, положи-
тельная полуволна которого открывает транзистор Т1, и отрицательная полу-
189
Рис. 7.9. Диаграмма пуска и реверса
Рис. 7.10. Схема индикации работы токоогра-
ннчення
волна вектора напряжения
фазы В, стремящаяся за-
крыть транзистор. В итоге
открытое состояние транзи-
стора Т1 наступит в момент
равенства этих двух напря-
жений. Открытое рабочее
состояние транзистора имеет
длительность 120° и синхро-
низировано с силовой фазой
А (рис. 7.14).
Аналогично работают
формирователи Фв и Фс,
векторы подаваемых на их
входы синхронизирующих
напряжений приведены на
рис. 7.13 в скобках.
Напряжения формиро-
вателей дифференцируются
конденсаторами С1+СЗ, и
положительные импульсы
запускают ждущий генера-
тор пилообразного напряже-
ния. В момент прихода по-
ложительного импульса
ГПН насыщается до ниж-
него отрицательного порого-
вого уровня, и начинается
перезаряд конденсатора це-
пи обратной связи С4 от
источника смещения. Этот
процесс продолжается до
прихода следующего поло-
жительного импульса.
На компараторе ХЗ происходит суммирование сигналов регулятора скоро-
сти, ГПН и напряжения смещения. Время переключения компаратора из от-
рицательного насыщения в положительное, определяющее момент формирова-
ния управляющего импульса, зависит от величины напряжения регулятора ско-
рости С/р0 и напряжения смещения UCM-
Как видно из рис. 7.12, положительная и отрицательная амплитуды пило-
образного напряжения неодинаковы по величине, поэтому при увеличении уп-
равляющего напряжения происходит «срыв» управляющих импульсов инвертор-
ной группы, т. е. происходит автоматический переход от согласованного управ-
ления к раздельному.
190
Рис. 7.11. Блок-схема СИФУ
Выходное напряжение компаратора дифференцируется, и положительные
импульсы через диоды ДЮ, ДИ и Д12 поступают на схемы совпадения, выпол-
ненные на транзисторах Т4 и Т5, Т7 и Т8, Т10 н Т11, где логически умножаются
с выходными сигналами формирователей. Совпадение положительного диффе-
ренцированного импульса с нулевым рабочим уровнем формирователя опреде-
ляет момент открывания импульсного усилителя (транзисторы Тб, T9, Т12) и,
следовательно, фазу управляющего импульса.
Схема совпадения и усилителя приведена на рис. 7.15.
Второй канал СИФУ работает аналогично.
Начальный угол запаздывания зажигания «о и, следовательно, величина
начального тока в группах преобразователя и якорной цепи выставляются по-
тенциометром Я2б (рис. 7.16). При больших значениях этого тока улучшаются
динамические характеристики, но заметно увеличивается вибрация, поэтому сле-
дует принять компромиссное решение. Для двигателя с номинальным моментом
17 Нм рекомендуемая величина начального тока =*4 А.
Следует подчеркнуть, что наличие переменного тока, а следовательно и пе-
ременного момента, при нулевой скорости благоприятно сказывается иа умень-
шении неравномерности вращения при малых скоростях в случае больших зна-
чений трении покоя.
Принципиальной особенностью электропривода типа «Мезоматик» является
способ изменения направления вращения двигателя при неизменном задающем
напряжении. Как уже указывалось ранее, переключение выводов якоря двига-
теля приведет к его размагничиванию, а это недопустимо.
191
Упр V1
UСинхр
Анодная
группа
ъ
Рис. 7.12. Диаграмма работы СИФУ
Изменение направления
вращения осуществляется
за счет переключения кана-
лов управления СИФУ, ко-
торое выполняется перепай-
кой перемычек на задней
печатной плате. Прямому
вращению соответствует
распайка 1—2, 3—4, а обрат-
ному 1—4, 2—3. Естествен-
но, необходимо также изме-
нить полярность обратной
связи по скорости, т. е. пе-
реключить выводы тахогене-
ратора.
Источники питания. Пи-
тание схемы управления
преобразователем осущест-
вляется двумя стабилизиро-
ванными выпрямителями с
выходными напряжениями
±15В н нагрузочной способ-
ностью 400 мА и иестабнли-
Рис. 7.13. Формирователь
знрованным выпрямителем Рис. 7.14. Диаграмма работы формирователя
напряжением 15В для пита-
ния реле и сигнализации.
Выходное напряжение стабилизированных выпрямителей регулируется по-
тенциометрами R3 и R4. Источники имеют внутреннюю токовую защиту от пе-
регрузки.
Методика наладки электропривода «Мезоматик»
в регулируемом режиме
Несмотря на то что комплектные электроприводы серии «Мезоматик-А» про-
ходят на заводе-изготовителе «MEZ» (г. Брно) тщательную наладку на эталон-
ном двигателе и настройку оптимального переходного процесса, при установке
привода на конкретный механизм вновь необходимо- проверить его работоспо-
собность и провести необходимые регулировки, связанные с изменением приве-
денного к валу двигателя момента инерции механизма. Кроме того, необходимо
сфазировать обратную связь по скорости, задать нужные направления вращения,
отрегулировать уравнительные токи и др.
Ниже приводится рекомендуемая последовательность выполнения операций
при пуске электропривода в эксплуатацию:
1. Выполнить монтаж внешних соединений в соответствии с рис. 7.17 и
комплектностью поставки привода.
7 Заказ 4546 193
Рис. 7.15. Схема совпадения и усилитель
Рис. 7.16. Начальные токи групп преобразо-
ватели и якорной цепи
2. Провести внешний ос-
мотр всех компонентов элект-
ропривода, проверить надеж-
ность контактных и разъемных
соединений.
3. Проверить сопротивле-
ние изоляции силовых цепей
(при отключенном тиристор-
ном преобразователе).
4. Подать напряжение на
катушки электромагнитных тор-
мозов, растормозив двигатели.
5. Отключить все автома-
тические выключатели и выта-
щить из преобразователя все
платы.
6. Проверить правильность
чередования фаз напряжения
синхронизации, для чего:
6.1. Отключить двигатели
от силовых клемм преобразова-
теля 10, 11, 12 и 14, 15.
6.2. Подать напряжение
синхронизации U, V, W н про-
верить наличие прямого чере-
дования фаз.
7. Проверить правильность
чередования фаз силового на-
пряжения питания, дли чего:
7.1. Включить силовое на-
пряжение А, В, С и произвести
замеры напряжений между од-
ноименными фазами напряже-
ния синхронизации и силового
напряжения. Прн правильном
подключении первичной обмот-
ки силового трансформатора
напряжения между точками
А—U, В—V и С—W должны
равняться нулю.
7.2. Убедиться, что между
любыми другими парами зажимов присутствует линейное напряжение питающей
сети 380 В.
7.3. Подать напряжение иа силовые клеммы преобразователя 1, 2, 3; 4, 5, 6
и 7, 8, 9. Измерить напряжения между одноименными фазами иа входе преоб-
194
-3803 A 8 С
Рис. 7.17. Схема подключения электропривода
7*
Рис. 7.18. Расположение контрольных точек Z-14A и V-21
\R£V£R |
QR8
3 1
3 S
36(1)
|Z-Z»A|
разователя и вторичной обмотке силового трансформатора. При правильном под-
ключении иаприжение между точками а—1, Ь—2, с—3; а—4, Ь—5, с—6 и а—7,
Ь—8, с—9 должно быть равным нулю.
7.4. Убедиться, что между любыми другими парами зажимов существует ли-
нейное напряжение вторичной обмотки силового трансформатора, равное 270 В.
Примечание. При включении электропривода всегда следует сначала
подавать напряжение синхронизации U, V, W и потом силовое питание А, В, С.
При выключении последовательность обратная.
8. Проверить блок питания и синхронизации, для чего:
8.1. Отключить силовое питание.
8.2. Вставить плату Е-24.
8.3. Подать напряжение синхронизации U, V, IF и замерить следующие на-
пряжения на задней печатной панели тиристорного преобразователя:
— синхронизирующее трехфазное напряжение в точках 12, 13, 14 и 15, 16,
17 относительно узловой точки 25. Величина напряжения — 11,2 В;
— линейное напряжение питания выпрямителя дли реле блокировки при-
вода в точках 28, 29 я 30. Величина напряжения — 11,5 В;
— линейное напряжение питания выпрямителя стабилизированного источ-
ника питания в точках 18, 19 н 20 для выхода— 15 В и в точках 22, 23 и 24 для
выхода +15 В; величина напряжения —16,3 В;
— выходное напряжение постоянного тока питания реле блокировки между
точками 31 и 32. Величина напряжения 13,5 В;
— выходное стабилизированное напряжение +15 В между точками 27 я 25
я —15 В между точками 26 я -25. Точная настройка стабилизированных напря-
жений ±15 В ±0,1 В производится регулировкой резисторов R3 я R4 после 20-
мииутной работы источников под нагрузкой (все платы в кассете вставлены).
Величина пульсаций напряжений должна быть менее 20 мВ.
9. Проверить работу системы импульсно-фазового управления (генератора
зажигающих импульсов G-08).
В кассете преобразователя на каждую координату установлено по две пла-
ты G-08. Первая управляет анодной группой тиристоров, вторая—катодной.
Нумерация контрольных точек в плате идет последовательно сверху вниз.
196
Контромная
точна
к.
6,бис I 0,5нс
Рис. 7.19. Осциллограммы сигналов в контрольных
точках платы G-08
©
Поскольку в платах G-08 отсутствует нулевая контрольная точка, наблю-
дение сигналов следует проводить относительно контрольной точки «О вольт» лю-
бой другой платы.
Для проверки СИФУ необходимо обеспечить на ее входе нулевое напряже-
ние управления, для чего следует блокировать регулятор скорости (реле блоки-
ровки В2 выключено) н установить нулевое задающее напряжение.
9.1. Вставить в кассету все блоки преобразователи и проверить напряжение
в контрольных точках КТ1 и КТ5 платы регулятора скорости Z-14A (рис. 7.18).
Эти напряжения являются входными для блока, СИФУ и не должны превышать
20 мВ. В противном случае следует проверить работу PC (см. пункт 10);
9.2. Осциллографом наблюдать форму напряжений в контрольных точках
КТ1~КТ6 (рис. 7.19):
(КП-РгКТЗ) —выходные напряжения формирователей (Т1РгТЗ)\
КТ4 — синхроимпульсы запуска генератора пилообразного напряжения;
КТ5—пилообразное напряжение (OY XI)-,
КТ6—выходное напряжение компаратора (OY ХЗ).
197
Напряжения в точках KTl-i-KT6 платы G-08 анодной и катодной групп
сдвинуты относительно друг друга на 180 эл. град.
В случае несоответствия напряжений рис. 7.19 необходимо провести более
тщательную проверку работы всех элементов по тракту схемы.
Единственным внешним элементом настройки платы СИФУ является потен-
циометр R26 напряжения смещения компаратора. Этим потенциометром произ-
водится регулировка начального угла зажигания тиристоров.
9.3.. Установить начальное значение угла аНач. Эта операция выполняется
по сигналу в контрольной точке К.Т6. Задний фронт сигнала КТ 6 фиксирован
и определяется моментом перехода через ноль синхронизирующего напряжения.
Передний фронт необходимо установить на величину 1,4 мс от заднего фронта
регулировкой потенциометра R26. При этом напряжение в КТ7 составляет около
—1,3 В. Следует учитывать, что эта регулировка является предварительной,
так как окончательная настройка угла ав»ч производится по величине началь-
ного якорного тока и рассматривается в дальнейшем.
9.4. Проверить наличие и форму выходных импульсов управления тиристо-
рами. Длительность импульсов около 0,25 мс, амплитуда на первичной обмотке
импульсного трансформатора 30 В, на вторичной 24-4 В в зависимости от ин-
дивидуальных характеристик тиристоров.
10. Проверить работу регулятора скорости (Z-14A) и входных фильтров
(V-21), для чего:
10.1. Вытащить плату токоограиичения Z-16 Д.
10.2. Тумблером деблокировки проверить срабатывание реле В2.
10.3. Блокировать привод и подать на его вход Ut задающее напряжение
величиной 10 В. Убедиться, что напряжение в контрольной точке КТ1 регулято-
ра скорости неизменно равно нулю. Медленное увеличение напряжения говорит
о том, что PC не блокирован.
10.4. Деблокировать привод и подать на его вход задающее напряжение
величиной 0,5 В. Наблюдать медленное насыщение PC до величины 114-12 В.
10.5. Убедиться, что выходное напряжение изменяет полярность при реверсе
задающего напряжения.
10.6. Потенциометром R8 произвести балансировку регулятора скорости.
При этом подключить цепь обратной связи по скорости, установить нулевое за-
дающее напряжение и блокировать регулятор.
Величина выходного напряжения в точке КТ 1 не должна превышать 0,5 мВ,
а в точке КТ5 10 мВ.
10.7. Проверить работу схемы ограничения максимального выходного на-
пряжения PC, для чего при деблокированном приводе подать задающее напря-
жение ±10 В на вход Ut. Напряжение иа выходе в КТ1 должно быть 11,44-
11,5 В,-а в КТ5 отличаться от него не более чем на ±1%. При необходимости
подобрать величины сопротивлений R16, R17 и R18, R19 для отрицательного и
положительного выходного напряжения соответственно.
10.8. Проверить регулирование переднего фронта импульса в КТ6 платы
СИФУ при изменении величины задающего напряжения.
10.9. Проверить величину минимального угла зажигания тиристоров amin.
198
Рис. 7.21. Переходная характеристика скорости при реверсе 1/аад
наблюдая форму сигнала в К. Тб платы СИФУ при насыщенном регуляторе ско-
рости (рис. 7.20). В этом случае угол amin=30°+amin.orp^45 эл. град. Следует
помнить, что осциллограмма рис. 7.20 наблюдается только на одной из плат
G-08.
На второй плате компаратор ХЗ насыщен до напряжения —13,5 В. При из-
менении полярности задающего напряжения формы сигналов плат G-08 меняются
местами.
10.10. Окончательно убедиться в правильной работе регулятора скорости,
наблюдая форму сигнала в КТ1 платы Z-14 А (рис. 7.21) прн многократном
реверсе задающего сигнала величиной ±0,5 В н деблокированном приводе.
11. Проверить работу платы нелинейного токоограничения (Z-16 А).
Расположение контрольных точек и регулировочных сопротивлений на плате
показано на рис. 7.22.
11.1. Вставить плату Z-16A.
11.2. Деблокировать привод.
11.3. На вход Uг подать задающее напряжение величиной +(2-i-3) В и по-
тенциометром R4 выставить напряжение —7,8 В±0,2 В в контрольной точке КТЗ
платы Z-16 А (то же в КТ1 платы Z-14A). Эта регулировка устанавливает
максимальную величину тока якоря при нулевой скорости.
199
11.4. Изменить поляр-
ность задающего напряже-
ния и потенциометром R9
выставить в КТЗ напряже-
ние величиной +7,8 В±0,2 В.
11.5. Во входном фильт-
ре V-21 отпаять сопротив-
ление R4 н отключить тахо-
генератор с вывода 5. Пере-
мычкой 38—5 подать на
вход БНТО напряжение
Рис. 7.22. Расположение контрольных точек и по-
тенциометров платы Z=16A
Рис. 7.23. Осциллограмма уравнительного тока
якоря
—15В. (имитация сигнала
тахогенератора). Подать по-
ложительное задающее на-
пряжение + (2+3) В и по-
тенциометром R30 устано-
вить в КТЗ напряжение —
9В (режим пуска). Изме-
нить полярность задающего
напряжения и потенциомет-
ром R32 установить в КТЗ
напряжение +2.7В (режим
торможения).
11.6. Снять перемычку
38—5.
11.7. Перемычкой 7—5 подать на вход БНТО напряжение +15 В (имитация
сигнала тахогенератора). При задании —(2+3) В потенциометром R3I уста-
новить в КТЗ напряжение +9 В (режим пуска). Изменить полярность задаю-
щего напряжения на +(2+3) В и потенциометром R29 установить в КТЗ на-
пряжение—2,7 В (режим торможения).
11.8. Снять перемычку 7—5, запаять на место сопротивление R4.
На этом проверка и предварительная настройка плат преобразователя за-
канчивется.
12. Подключить двигатель к преобразователю таким образом, чтобы вывод
1Д (черного цвета) был подключен к клеммам 10, 12 или 14, а вывод 2Д (белого
цвета) к клеммам 11, 13 или 15 в зависимости от налаживаемой координаты.
Неправильное подключение может привести к размагничиванию двигателя.
ВНИМАНИЕ! Все работы, связанные с подключениями и пайкой, производить
только при выключенном силовом напряжении.
13. Отрегулировать величину начального тока якоря электродвигателя при
нулевой частоте вращения (в технической документации завода-изготовителя
его называют уравнительным током. Не путать с классическим уравнительным
током, протекающим по преобразователю, минуя цепь двигателя, при согласован-
ном управлении группами вентилей), для чего:
200
Рис. 7.24. Осциллограмма тока якоря и ия&я при
реверсе
13.1. Снять с ножки 5 вывод тахогенератора, установить нулевое задающее
напряжение и блокировать регулятор скорости.
13.2. Включить силовое питание.
13.3. Потенциометрами R26 в платах СИФУ (G-08) установить в анодной
и катодной ветвях преобразователя равные по величине токи таким образом,
чтобы длительность протекания тока была в два раза меньше длительности
паузы.
Для двигателя с Л4Ном = 17 Нм, • применяемого в серийных станках ГСПО,
величина тока устанавливается равной 4 А. Большая величина тока улучшает
динамические характеристики привода, но при этом усиливаются вибрации, по-
этому находят компромиссное решение.
13.4. Проконтролировать, чтобы все тиристоры находились в нормальном про-
водящем состоянии, наблюдая начальный ток в цепи якоря двигателя. Прн этом
время протекания тока должно быть в два раза больше паузы (рис. 7.23).
14. Выполнить фазировку обратной связи по скорости, для чего:
14.1. Блокировать регулятор.
14.2. Переключить задатчик скорости со входа Ur на вход Uff. При этом ре-
гулятор скорости будет иметь коэффициент передачи
7?10(Z14A)
К =------------------------— 6
Я2(У21) + Л2(214А)
14.3. Отключить с вывода 5 тахогенератор.
14.4. Установить задатчиком скорости минимально возможную частоту вра-
щения и определить полярности задающего напряжения и вывода тахогенератора,
отключенного от точки 5. Для получения отрицательной обратной связи поляр-
ности должны быть противоположны.
14.5. Вернуть на вход Ur задатчик скорости, подключить тахогенератор и
проверить работу привода во всем диапазоне, плавно изменяя задающее на-
пряжение для обеих полярностей.
201
Рис. 7.25. Оптимальная настройка
переходного процесса
15. Проверить наличие дрейфа при ну-
левой частоте вращения, для чего устано-
вить нулевое задающее напряжение н де-
блокировать регулятор.
В случае, если наблюдается вращение
вала электродвигателя со скоростью, боль-
шей чем 0,1 об/мин, потенциометром R8
в плате СИФУ (Z-14A) отрегулировать
частоту вращения до минимально возмож-
ной величины.
16. Проверить и отрегулировать кривую
токоограничения, для чего:
16.1. Установить в цепь якоря двигате-
ля шунт.
16.2. Подключить к шунту осциллограф с памятью луча таким образом, что-
бы общий вывод осциллографа был соединен с зажимом, идущим к нулевой
точке силового трансформатора.
16.3. Установить максимальное задающее напряжение ±10 В и осущест-
вить реверсы электродвигателя.
16.4. На экране осциллографа наблюдать кривую тока якоря (рис. 7.24).
Потенциометрами R9, R31, R29 и R4, R30, R32 на плате БНТО (Z-16 А) уста-
новить допустимые для конкретного двигателя величины начального тока тор-
можения, максимального тока и конечного тока пуска.
На рис. 7.24 показано назначение потенциометров для варианта распайки
перемычек, определяющих направление вращения: 4—3, 2—1. При перекрест-
ной распайке перемычек 4—1, 2—3 потенциометры платы Z-16 А, относящиеся
к осциллограмме положительного тока якоря, будут относиться к осциллограм-
ме отрицательного тока, и наоборот.
Величины токов рис. 7.24 соответствуют электродвигателю с Мном = 17 Нм
и номинальным током /ном=28 А.
17. Проверить и при необходимости установить масштаб частоты вращения.
Данная регулировка бывает необходима, если нужно точно выдержать со-
отношение максимального задающего сигнала к максимальной частоте вращения,
либо установить специально другое соотношение. Масштаб скорости определя-
ется соотношением делителя R4, R5 напряжения тахогенератора во входном
фильтре (V-21).
Для понижения максимальной скорости необходимо уменьшить R4, а для
повышения—уменьшить величину сопротивления R5.
18. Проверить и при необходимости настроить переходный процесс по ча-
стоте вращения.
Оптимальный характер переходного процесса (рис. 7.25) настраивается на
заводе-изготовителе для каждого типоразмера двигателя с дополнительным мо-
ментом инерции. При этом в цепи обратной связи регулятора скорости подби-
раются соответствующие величины сопротивления R10 и конденсатора СЗ.
На практике обычно не возникает необходимости изменять эти параметры.
202
Однако иногда возникают ситуации, когда по причине невысокого качества
сборки механизма управляемого приводом к валу двигателя прикладывается
момент нагрузки, зависящий от угла поворота. В этом случае заметно ухудша-
ется плавность перемещения узлов. Это особенно характерно для привода «Ме-
зоматик», имеющего худшие динамические характеристики по сравнению с дру-
гими приводами (Кемрон, ЭТУ3601, ЭТ6С).
Для улучшения равномерности вращения необходимо увеличить коэффици-
ент пропорционального усиления регулятора скорости, одновременно сохраняя
неизменной постоянную времени цепи обратной связи PC. Конкретные величины
цепи обратной связи для привода P3HR-444 А приведены в табл. 7.1.
Таблица 7.1
Коэффициент пропорционального усилия регулятора скорости R10, кОм СЗ, мкФ
220 0,15
1,5Я0 330 0,1
2,ОДо 440 0,075
2,5Я-0 550 0,06
з,оя0 660 0,05
Равномерность вращения оценивается по форме сигнала тахогенератора.
При этом следует помнить, что если неравномерность вызвана оборотными пуль-
сациями момента нагрузки, то частота соответствующих им провалов будет пря-
мо пропорциональна частоте вращения.
После подбора коэффициента пропорционального усиления, обеспечивающе-
го плавность перемещении еще раз убедиться, что электропривод устойчиво
работает во всем диапазоне скоростей.
На этом наладку привода в регулируемом режиме можно считать закон-
ченной.
Общая принципиальная схема электропривода «Мезоматик» приведена на
рис. 7.26.
Рис. 7.26. Общая принципиальная схема электропривода «Мезоматик»
-3tQt
Рееулятор напряжения Е~24
Рис. 7.26. Общая принципиальная схема электропривода
<Мезоматик» (продолжение)
ГЛАВА ВОСЬМАЯ
комплектный электропривод
ПОДАЧИ ТИПА TNP
Рис. 8.1. Общий вид привода TNP
Серия электроприводов подачи типа TNP производства ПНР выпускается
в двух исполнениях:
1. В виде отдельных модулей и подузлов, в состав которых для одной коор-
динаты входят:
— тиристорный преобразователь типа TNP1N (TNP2N);
— блок контактной аппаратуры управления, защиты и сигнализации типа
BS;
— силовой трансформатор типа ТЗ;
207
— уравнительные дроссели типа ДРО;
— высокомоментный электродвигатель постоянного тока серии «5680» со
встроенными тахогенератором, резольвером и электромагнитным тормозом.
Установка тормоза и резольвера, а также величина передаточного отноше-
ния мультипликатора определяются заказчиком.
На рис. 8.1 приведена фотография комплекта привода TNP.
Примечание. Модернизированное исполнение привода TNP/В отличает-
ся меньшим количеством печатных плат при неизменной принципиальной схеме
и заменой релейной защиты от пропадания фаз на электронную.
2. В виде комплектных станций управления типа ZSO на одну, две или
три координаты.
Все основные характеристики электроприводов типа TNP соответствуют тре-
бованиям международной организации «Интерэлектро».
Следует отметить, что высокомомеитиые электродвигатели серии «5680» из-
готавливаются по лицензии фирмы «Портер».
Описание принципиальной схемы привода
Блок-схема электропривода показана на рис. 8.2, где: PC — регулятор ско-
рости; ИНВ — инвертор; KI, К.2— ключи; СИФУ — система импульсно-фазового
управления; БИТО — блок нелинейного токоограиичения; УТ — усилитель тока;
Sh — шунт; РВТ — регулятор максимальной величины тока; БЗ — блок защиты;
ТП — тиристорный преобразователь; ТР — силовой трансформатор; L — уравни-
тельный дроссель; Я— электродвигатель; ТГ — тахогенератор.
Преобразователь выполнен по одноконтурной схеме с регулятором скоро-
сти и работает в зоне прерывистых токов. Управление — согласованное в зоне
рабочих скоростей и раздельное в зоне ускоренных перемещений. Предусмотре-
но нелинейное токоограничение, ограничение максимальной величины тока яко-
ря, защита от пропадания фаз силового питающего напряжения.
Приступим к подробному описанию принципиальной схемы.
Силовая схема (рис. 8.3) выполнена по реверсивной трехпульсной противо-
параллельной схеме выпрямления.
Нагрузкой преобразователя является высокомоментиый электродвигатель с
сегментными феррит-барневыми постоянными магнитами.
Предусмотрены уравнительные дроссели.
Силовые тиристоры защищены 7?С-цепочками.
Обмотки силового трансформатора включены по схеме «треугольник — зиг-
заг». Это исключает постоянное подмагничивание и, как следствие, позволяет
уменьшить сечение магиитопровода.
Первичная и вторичная цепи трансформатора защищены предохранителями.
Предусмотрена цепь динамического торможения при аварийном отключении
привода, а также шунт для контроля величины якорного тока.
Примечание. В приводе применено независимое поплатное обозиачеиие
электронных элементов. На каждом блоке их нумерация начинается с номера
208
toge
Hit ±Мв
8 Заказ 4546
-3808
Рис. 8.3. Силовая схема
Рис. 8.4. Схема регулятора скорости
один, поэтому в полной схеме имеется много одинаковых обозначений и следует
быть внимательным.
Обозначение блоков следующее:
1RN — регулятор скорости; ЮР — блок нелинейного токоограиичения;
1ZP— система импульсно-фазового управления; 1UZ— блок защиты; 1ZN — не-
стабилизированный блок питания; JZS — стабилизированный блок питания.
Регулятор скорости JRN (рис. 8.4) представляет собой пропорционально-ин-
тегральный регулятор, выполненный на операционных усилителях 4W, 1W и 2W.
Задающее напряжение с максимальным значением ±10 В подается на вход
дифференциального усилителя 4W с коэффициентом передачи, равным единице,
после чего сравнивается с сигналом обратной связи по скорости в пропорцио-
нальном усилителе 1W, коэффициент усиления которого — десять. Усиленный
ОУ 1W сигнал ошибки подается на вход ПИ-регулятора скорости, выполненного
на ОУ 2W. Выходной сигнал регулятора скорости, а также его инверсное значе-
ние с ОУ 3W управляют системой импульсно-фазового управления СИФУ.
Применение дифференциального усилителя 4W для задающего сигнала поз-
воляет отфильтровать напряжения «шумов», неизбежно присутствующих в ин-
формационных проводах и общей шине при длинных линиях связи (в данном
случае от устройства ЧПУ), так как эти напряжения подключаются к усилителю
синфазно и взаимоуничтожаются. Симметрирование усилителя 4W осуществля-
ется потенциометром 6РЗ.
Регулирование коэффициента пропорционального усиления PC выполняется
потенциометром ЗР, а его балансировка — потенциометром 2Р.
Потенциометр 1Р в цепи обратной связи по скорости предназначен для ус-
тановки масштаба скорости.
Замыкающиеся контакты реле 1R2 во входной цепи ОУ 1W и в цепи обрат-
ной связи ОУ 2W предназначены для блокировки регулятора скорости и созда-
ния нулевых начальных условий работы интегрирующей цепочки.
Электопривод типа TNP (TNP/В), так же как и привод «Мезоматик», в
8*
211
статических режимах работает в зоне прерывистых токов. В этом случае можно
говорить об отсутствии электромагнитной постоянной времени привода, в связи
с чем регулятор тока в системе подчиненного регулирования в данном приводе
отсутствует.
Блок нелинейного токоограиичения ЮР (рис. 8.5) ограничивает максимальное
выходное напряжение регулятора скорости и, следовательно, величину тока яко-
ря в динамических режимах в функциональной зависимости от частоты враще-
ния двигателя.
Принцип построения БИТО привода TNP также аналогичен блоку токоог-
раничения привода «Мезоматик», подробно рассмотренному в главе 7. Его ха-
рактеристики линейно аппроксимированы (рис. 8.6).
Отличительными особенностями являются следующие:
1. Введение усилительных звеньев на ОУ 1W и 3W в цепях разделительных
диодов 1Д-=г4Д, что позволило компенсировать нечувствительность диодов в
начальной части характеристики и, как следствие, совместить максимум тока
с нулевой скоростью (рис. 8.7).
2. Предусмотрено два выхода БНТО, шунтирующих как прямой, так и ин-
версный выходы регулятора скорости. Нужный канал выбирается диодами 5Д
и 6Д.
На рис. 8.8 показана форма огибающей тока якоря в переходных процессах
и влияние иа нее регулировочных потенциометров.
Рассмотрим работу схемы, например, прн пуске и положительной величине
задающего напряжения.
Поскольку дифференциальный усилитель задающего сигнала инвертирует
знак, напряжение тахогенератора будет также положительным. Диоды 1Д и 4Д
заперты, диоды 2Д и ЗД открыты.
4R
3R
Рис. 8.5. Схема нелинейного токоограиичения
212
Рис. 8.8. Диаграмма пуска, реверса
и торможения
На входе ОУ 2W напряжение отрицатель-
ное, а на входе 4W — положительное. Эти на-
пряжения суммируются с отрицательным на-
пряжением смещения, регулируемым потенцио-
метром 5Р при нулевой скорости.
Выходное напряжение усилителей 2W
и 4W положительное, однако с ростом частоты
вращения его величина на выходе 2W увеличи-
вается, а на выходе 4W уменьшается.
Управляющее напряжение на прямом вы-
ходе регулятора скорости (2W) отрицательное,
а на инверсном (3W) положительное.
При данном распределении полярностей
напряжений диод 6Д всегда заперт, а состоя-
ние диода 5Д определяется соотношением ве-
личии напряжений выхода токоограиичения
(2IF) и выхода регулятора скорости (3W).
Если ^рс<^бнто, т- е< величина тока
якоря не превышает допустимое значение, ди-
од 5Д заперт и токоограиичение не работает.
Если £/рс>£/внто, диод 5Д открывается,
шунтируя выход регулятора скорости. При этом
Рис. 8.6. Характеристики
блока НТО
Рис. 8.7. Влияние актив-
ного звена на огибающую
тока
снижается управляющее напря-
жение и, следовательно, величина тока. По мере разгона двигателя допустимая
величина тока снижается.
При торможении аналогичным образом работает диод 6Д.
Наличие блока нелинейного токоограиичения позволяет полностью исполь-
зовать перегрузочные возможности высокомомеитиых электродвигателей (рис. 8.9).
Здесь можно выделить три режима:
1. Режим непрерывной работы. 2. Режим повторно-кратковременной работы.
3. Режим кратковременной работы, т. е. режим безопасной коммутации при
переходных процессах.
Для двигателей серии «5680» рекомендуется устанавливать предельную ве-
личину тока, равную 60% указанной в каталоге. При этом обеспечивается ше-
стикратная перегрузка и полностью исключается возможность размагничивания.
Система импульсно-фазового управления 1ZP выполнена по вертикальному
принципу, состоит из трех аналогичных каналов и обеспечивает синхронизацию,
213
Рис. 8.9. Перегрузочная характери-
стика ВМД
формирование н распределение управ-
ляющих импульсов к силовым тиристо-
рам.
Блок-схема СИФУ и диаграмма, по-
ясняющая принцип ее работы, приведены
соответственно на рис. 8.10 и 8.11.
В связи с тем что предусмотрено трн
независимых канала СИФУ и синхрони-
зирующим напряжением является сило-
вое напряжение питания тиристоров, сни-
маемое со вторичной обмотки силового
трансформатора, тиристорный преобра-
зователь не требует фазировкн с первич-
ной стороны питания.
Синхронизирующее напряжение через
резистор R38 поступает на базы тран-
зисторов 1Т и 6Т блоков пилообразного напряжения (рнс. 8.12). Положитель-
ная полуволна открывает входной транзистор 1Т и закрывает транзисторы
2Т—4Т. Задержка переднего н заднего фронтов прямоугольных напряжений от-
носительно синхронизирующего составляет порядка 10 эл. град, и может быть
подобрана параметрами цепочки IR, 2С. Происходит заряд конденсатора ЗС
через открытый прямым смещением транзистор 5Т и потенциометр 1Р, при этом
формируется пилообразное напряжение. Прн отрицательной полуволне синхро-
низирующего напряжения транзистор 1Т закрывается, а транзисторы 2Т—47
открываются. Конденсатор ЗС разряжается через открытый транзистор 4Т и не-
большое сопротивление 7R. Выходное напряжение блока становится равным
-15 В.
Второй блок пилообразного напряжения работает аналогичным образом, од-
нако формирование «пилы» происходит прн отрицательной полуволне синхро-
низирующего напряжения.
Компараторы (рис. 8.13) выполнены на ОУ 1W н 3W по схеме с положи-
тельной обратной связью, что исключает появление «ложных» вторичных им-
пульсов при наложении «шумовых сигналов». За счет включения в цепь поло-
жительной обратной связи диодов гистерезисная характеристика компаратора —
односторонняя.
На вход компаратора подаются трн напряжения:
— пилообразное, наклон которого регулируется потенциометром 1Р’,
— напряжение смещения, регулируемое потенциометром 7Р, за счет кото-
рого устанавливаются начальные углы зажигания;
— управляющее напряжение, поступающее с выходов регулятора скорости.
Максимальная величина этого напряжения, а следовательно и минимальный угол
запаздывания зажигания амин, регулируется потенциометрами 4Р н 5Р дли анод-
ной н катодной группы соответственно.
При изменении величины управляющего напряжения обеспечивается согласо-
ванное управление преобразователем в зоне рабочих скоростей н раздельное в
214
Рис. 8.10. Блок-схема СИФУ
зоне ускоренных перемещений. Раздельное управление обеспечивается автомати-
чески за счет «срыва» формирования управляющих импульсов инверторной груп-
пы, ввиду неодинаковых положительной и отрицательной амплитуд пилообраз-
ного напряжения.
Выходное напряжение компаратора дифференцируется, и отрицательный им-
пульс открывает импульсный усилитель (рис. 8.14), выполненный на транзисто-
рах ЮТ и НТ. Длительность управляющего импульса около 200 мкс. При боль-
шей ширине происходит насыщение импульсного трансформатора.
Второй выход СИФУ формирует аналогичный импульс, сдвинутый в исход-
ном состоянии на 180 эл. град.
Предусмотрена блокировка управляющих импульсов от станка или при сра-
батывании внутренних защит преобразователя.
Форма начального тока в группах преобразователя и якорной цепи (рис. 8.15)
зависит от величины начального угла запаздывания зажигания аНач-
Их влияние на характеристики работы привода рассмотрены при описании
привода «Мезоматик».
Система защит преобразователя
В преобразователь типа TNP предусмотрены следующие защиты:
— от длительной перегрузки; от перегрева электродвигателя;
— от пропадания первичного и вторичного напряжения силового питания;
— от перегрузки стабилизированного источника питания.
Схема защиты от длительного превышения номинального тока (рис. 8.16)
выполнена на операционных усилителях 1W+3W и транзисторах ЗТ в блоке
защиты и 1Т-=г4Т в блоке токоограничеиия. Статические характеристики в коит-
215
Рис. 8.11. Диаграмма работы СИФУ
+ffB
Рис. 8.12. Схема блока пилообразного напряжения
рольных точках и диаграмма работы схемы защиты показаны на рис. 8.17 и
рис. 8.18 соответственно.
При достижении током якоря величины номинального тока 7НОм переключа-
ется пороговый элемент 21Г и запускает схему задержки, выполненную иа эле-
ментах <ЗС, 12R. Величина выдержки составляет еколо (ЗОО-т-500) мс, после чего
включается реле 1К.З и запирается транзистор ЗТ. Замыкающийся контакт реле
1КЗ подключает к выходу усилителя тока 1W пороговый элемент 3W, переклю-
чение которого происходит при токе 1,5 /ном. При этом открываются диоды 8Д
и 9Д, шунтируя прямой и инверсный выходы регулятора скорости. Ток якоря
ограничивается на уровне 1,5 7Ном. Если в течение выдержки времени ток спа-
дает до уровня меньше /Ном, то реле 1КЗ выключается, защита не срабатывает.
Пусковые токи в течение времени, большего, чем время срабатывания защи-
ты, вызовут перегорание предохранителей в силовой цепи.
217
Рис. 8.13. Компаратор
Рис. 8.14. Импульсный усилитель
Рис. 8.15. Форма начального тока в груп-
пах преобразователей и якорной цепи
Схема блокировки импульсов
СИФУ и включения реле блокировки
регулятора скорости приведена на
рис. 8.19.
Защита от перегрева электродви-
гателя осуществляется контактом ре-
ле термодатчика, встроенного в эле-
ктродвигатель и включенного в цепь
катушки силового пускателя С1
(рис. 8.20).
В этой же цепи включены раз-
мыкающиеся контакты реле d5, d.6 и
d7 защиты от перегорания предохра-
нителей во вторичной цепи силового
трансформатора, замыкающийся кон-
такт реле d4 контроля напряжения
стабилизироваииого источника пита-
ния и замыкающиеся контакты реле
d2 и d3 контроля напряжения в пер-
вичной цепи силового трансформа-
тора.
Источники питания. Питание схе-
мы управления преобразователем
осуществляется стабилизированными
выпрямителимн ± 15В, имеющими схе-
му контроля снижения уровня выход-
ного напряжения (реле 1К1) и неста-
билизированного выпрямителя с вы-
ходным напряжением ±24 В.
Методика наладки
электропривода TNP
в регулируемом режиме
Каждый комплектный электро-
привод типа ТИР проходит на пред-
приятии «Апена» тщательную налад-
ку и испытание, поэтому необходимо
неукоснительно соблюдать комплект-
ность привода в соответствии с пас-
портными номерами, проставленными
в руководстве по эксплуатации.
Приводимая ниже методика предназначена для наладки разукомплектован-
ных и полностью разрегулированных приводов, однако она позволяет глубоко
218
Рис. 8.16. Схема защиты от превышения максимального тока
Рис. 8.17. Статические характеристики защиты;
а - U3-f(U,); б - U,-f(U3); в - Ut-f(U2)
понять принцип работы привода и быстро устранять отдельные неисправности.
Обязательным условием перед наладкой является изучение принципиальной схе-
мы электропривода по материалам данного справочного пособия.
Последовательность иаладки привода
1. Выполнить монтажные работы в соответствии со схемой электрических
соединений рис. 8.21.
2. Вытащить все электронные блоки преобразователя.
3. Отключить якорные концы электродвигателя.
4. Провести внешний осмотр пре-
Рис. 8.18. Диаграмма работы защиты
образователя и электродвигателя.
При обнаружении повреждений уст-
ранить их.
5. Подтянуть все контактные сое-
динения на силовом трансформаторе,
дросселях, предохранвтелях, реле, пе-
реходных рейках и т. д.
•6. Включить силовое питание
~380В и проверить наличие напря-
жений на всех фазах. Напряжение
вторичной обмотки силового транс-
форматора должно быть Г/2ф=*140В.
7. Вставить плату иестабилизнро-
ванного источника питания 1ZN.
7.1. Проверить наличие напряже-
ния на всех трех фазах вторичной об-
мотки трансформатора источника пи-
тания. Величина фазного напряжения
должна составлять 172ф^18В.
7.2. Проверить величину и форму
выходных напряжений ИП ±24В на
всех выходах платы.
220
24R
Блокировка 7n
от защиты '-L
Блокировка
импульсов
СИФУ
Рис. 8.19. Схема блокировки СИФУ и PC
8. Вставить плату ста-
билизированного источника
питания 1ZS.
8.1. Проверить величи-
ну и форму выходных на-
пряжений ±15В иа всех вы-
ходных ножках платы. При
необходимости выставить
выходные напряжения при
помощи потенциометров 1Р
и 2Р.
0 &
/ (Станок)
Рис. 8.20. Схема включения силового контактора
С1
8.2. Проверить срабаты-
ваиие защиты от понижения
выходного напряжения пу-
тем перемыкания выходов
23—24 и 32—5. При этом должно выключаться реле IKI-
д. Вставить перемычку между ножками 1—3 «олодки платы токоограниче-
иня ЮР. При этом создается цепь питания реле d4.
10. Включить силовой контактор С1 и проверить работу связанных с иим
защит от:
10.1. Пропадания напряжения силового питания ~380 В путем вывинчива-
ния предохранителей е2. При правильной работе защиты силовой контактор вы-
ключается.
10.2. Обрыва во вторичной цепи силового трансформатора путем последо-
вательного вывинчивания предохранителей el. Прн этом включаются реле
d5-i-d7 и выключается контактор С1
11. Вставить первую плату системы импульсно-фазового управления 1ZP.
221
Рис. 8.21. Схема внешних подключений
Рис. 8.22. Напряжение синхрониза-
ции
Рис. 8.23. Регулировка пилообразного
напряжения
11.1. Проверить соответствие фазировки силового питания преобразовате-
ля в точке и синхронизирующего напряжения СИФУ в точке 30 платы 1ZP
(рис. 8.22).
11.2. Наблюдать пилообразные напряжения на конденсаторах ЗС и 6С.
11.3. Наблюдать наличие выходного импульса блока на коллекторах тран-
зисторов ИТ и 1ST.
11.4. Потенциометрами 1Р и 2Р произвести регулировку пилообразных на-
пряжений таким образом, чтобы вершина «пилы» была на уровне нулевого
напряжения (рис. 8.23). Данную регулировку легко выполнить, наблюдая на
экране осциллографа смещение выходного импульса. При правильной настройке
в момент касания вершиной «пилы» нулевого уровня в точке А выходной им-
пульс пропадает.
12. Вытащить настроенную плату IZP. Это необходимо сделать, так как
платы СИФУ взаимно влияют друг на друга при отсутствии платы регулятора
скорости 1PN и настроить следующую плату не удастся.
ВНИМАНИЕ! Перестановка всех плат допускается только при выключен-
ном питании.
13. Аналогичным образом провести настройку двух других плат СИФУ. Фа-
зировка напряжений проверяется соответственно между точками S—30 и Т—30.
14. Вставить плату регулятора скорости 1PN.
14.1. Установить бегунок потенциометра 1Р, определяющего глубину обрат-
ной связи по скорости, в верхнее положение, что обеспечит меньшую скорость
при первом включении двигателя.
14.2. На выходе задания смещения для компаратора СИФУ, в точках 16, 18,
потенциометром 7Р выставить напряжение около 3 В, что ориентировочно со-
ответствует начальному углу запаздывания зажигания аНач=130 эл. град.
14.3. Закоротить на ноль входы задающего напряжения регулятора 10 и 4
и при выключенном реле 1К2 (регулятор деблокирован) сбалансировать диф-
ференциальный 4W и пропорциональный 1W усилители. Балансировка осущест-
вляется потенциометрами 6Р и 2Р соответственно.
14.4. Подать на вход регулятора задающее напряжение (ЛадэНОО мВ и по-
223
Рис. 8.25. Установка начального угла Рис. 8.26. Установка минимального
зажигания авач угла зажигания amin
тенциометром ЗР выставить коэффициент пропорционального усиления порядка
к=15. При этом на выходе ОУ 1W напряжение равно =£1,5 В.
14.5. Изменяя знак задающего напряжения, наблюдать работу ПИ-регуля-
тора по плавному изменению напряжений на выходах усилителей 2W и 3W
(рис. 8.24). Пунктиром показано выходное напряжение при закороченном кон-
денсаторе 7С14.
15. Вставить все платы СИФУ.
16. При заблокированном регуляторе скорости (включено реле 1К.2) или
при выведенных в нуль потенциометрах 5Р и 4Р выставить начальный угол за-
жигания aHa4=130o, регулируя напряжение смещения потенциометром 7Р
(рис. 8.25).
Примечание. Установку угла авач можно также проводить по форме
выходного тока (см. п. 21).
17. Выставить ограничение минимального угла запаздывания зажигания
amin=30e, для чего:
224
17.1. Разблокировать регулятор скорости.
17.2. Подать иа вход регулятора скорости напряжение, достаточное для на-
сыщения ПИ-регулятора 2W и инвертора 3W.
17.3. Потенциометром 5Р установить величину угла amin=30e для катодной
группы (рис. 8.26). Первоначально необходимо смещать управляющий импульс
влево до пропадания, что связано с наличием однополярного гистерезиса в ха-
рактеристике компараторов 1W и 2W. После пропадания смещать управляющий
импульс вправо иа 60° от точки перехода синусоиды через нуль.
17.4. Изменить полярность задающего напряжения и потенциометром 4Р вы-
ставить amin для анодной группы, производя аналогичные операции.
17.5. Проверить равенство напряжений иа выходах потенциометров 5Р и
4Р. При разнице напряжений привести большее напряжение к меньшему.
18. Вставить плату нелинейного токоограиичения ЮР. Потенциометром 5Р
установить на выходах ОУ 4W и 2W блока токоограиичения напряжение около
6 В для первоначального ограничения максимального тока.
19. Подключить якорные концы двигателя к преобразователю.
20. Сфазировать отрицательную обратную связь по скорости и включить пре-
образователь при нулевом задающем напряжении. На малой частоте вращения
убедиться в работоспособности привода.
21. При нулевом задающем напряжении (7зад=0 наблюдать на шунте ос-
циллограмму тока якоря (рис. 8.27).
21.1. Потенциометрами 1Р и 2Р блоков СИФУ 1ZP выравнять амплитуды
токов относительно средней величины.
При этом разрешается регулировка в пределах не более (0,25-г-0,3) оборота
винта потенциометров. Большие отклонения говорят о неправильной предвари-
тельной настройке блоков.
Разность амплитуд верхних и нижних полуволн допустима.
21.2. Деблокировать регулятор скорости.
21.3. Проверить балансировку регулятора скорости.
225
Рис. 8.28. Диаграмма пуска и торможения
Рис. 8.29. Диаграмма реверсов
21.4. Потенциометром
7Р платы PC 1RN устано-
вить время протекания тока
н время паузы в пропорции
2:1.
22. Выставить макси-
мальную частоту вращения
двигателя.
Регулировка частоты
вращения осуществляется
потенциометром 1Р платы
регулятора скорости 1RN-
Контроль вращения произ-
водится по тахометру, стро-
боскопу или по напряжению
якоря тахогенератора. При
п=1000 об/мин напряжение
тахогенератора равно 31,5В.
Разгон и торможение
при данной регулировке сле-
дует производить плавно,
так как еще не выставлено
токоограничение.
Выполнить плавный ре-
верс и проконтролировать
величину /шах при враще-
нии в противоположную сто-
рону.
23. Настроить блок не-
линейного токоограиичения,
для чего:
23.1. Потенциометром
6Р платы токоограиичения
ЮР установить равенство
напряжения на входе платы
С/6Р и задающего напряже-
ния £/3ад на входе дифференциального усилителя регулятора скорости.
23.2. Подключить осциллограф с памятью луча к шунту якорной цепи дви-
гателя таким образом, чтобы нуль осциллографа был на нулевой точке шунта.
23.3. Выполнить прямой пуск на максимальную частоту вращения и тормо-
жение, наблюдая осциллограмму тока (рис. 8.28).
23.4. Оценить величины максимального тока /о, концевого тока разгона /в
н начального тока торможения /в.
23.5. В соответствии с допустимыми токами для конкретного двигателя
(см. руководство по эксплуатации на комплектный электропривод) провести пер-
226
W
лг Л 55
«тг
8 I
г
воначальную коррекцию
указанных токов соответст-
венно потенциометрами 5Р,
4Р и 1Р платы токоограни-
чения.
23.6. Пустить двигатель
на максимальную частоту
вращения и записать на эк-
ране осциллографа диаг-
рамму тока для двух ревер-
сов двигателя (рис. 8. 29).
23.7. Провести оконча-
тельную настройку блока
токоограничения, регулируя
потенциометры IP-iSP, в со-
ответствии с рис. 8.29. При
этом первый импульс тока в
начале переходного процес-
са в расчет не принимать.
Для удобства настрой-
ки токовой диаграммы рас-
положение потенциометров
1Р+-5Р на плате токоогра-
ничения ЮР соответствует
диаграмме тока (рис. 8.30).
Верхними потенциометрами
регулируют положительные
значения начального /а и ко-
нечного значения Ir токов,
нижними потенциометра-
ми — отрицательные значе-
ния. Левые потенциометры регулируют левые скачки тока, а правые — соответ-
ственно правые скачки.
24. Провести настройку платы защиты 1UZ, для чего:
24.1. Установить в плате защиты перемычки, необходимые для работы с
«регулятором тока> (не путать с регулятором тока РТ в системе подчиненного
регулирования).
24.2. Ползунки потенциометров 2Р и ЗР установить в среднее положение.
24.3. При выключенном силовом контакторе С1 потенциометром 1Р сбалан-
сировать усилитель 1W усилителя тока.
24.4. Отключить от преобразователя электродвигатель и подключить вместо
него силовую Перемычку.
24.5. Включить преобразователь и при небольшом задающем напряжении
и насыщенном регуляторе скорости PC потенциометром 2Р платы защиты выста-
вить максимальную величину тока на уровне 1,5 ZH0M. Контроль за величиной
Рис. 8.30. Расположение потенциометров регу-
лировки токовой диаграммы
t
t
t оборот двигателя
Рис. 8.31. Диаграмма <7тг и /хх при размагничива-
нии
227
Рис. 8.32. Полная принципиальная схема электропривода TNP
Рис. 8.32. Полная принципиальная схема электропривода TNP (продолжение)
тока можно проводить по напряжению на шунте (при 7=20 А напряжение на
шунте Uш егбО мВ).
24.6 Плавно осуществить реверс, чтобы ток в процессе реверса не превышал
1,5 /ном. Проверить величину ограничения тока при обратной полярности. При
необходимости уравнять токи балансировкой усилителя 1W.
24.7. Проверить действие выдержки времени при срабатывании защитного
реле 1КЗ, которая должна быть порядка (3004-500) мс.
25. Проконтролировать окончательно диаграмму переходного процесса ча-
стоты вращения электродвигателя при пуске, реверсе и торможении. Избыточ-
ную колебательность устранить снижением коэффициента усиления регулятора
скорости PC. Корректирующая цепочка ПИ-регулятора подобрана заводом-
изготовителем привода для конкретного двигателя, и ее изменение без необхо-
димости производить не рекомендуется.
26. Проверить работу привода на низкой частоте вращения.
Доп устимые пульсации напряжения тахогенератора прн п=10 об/мин со-
ставляют около (104-12)%.
На этом настройку электропривода в регулируемом режиме можно считать
законченной.
Приведем для справки возможные причины и признаки размагничивания
электродвигателя.
Причиной размагничивания может быть превышение максимально допусти-
мого тока якоря при неправильной настройке токовой диаграммы блока токо-
ограничения, а также длительное хранение двигателя (более 304-40 мин) при
его разборке с вынутым ротором. Во избежание размагничивания вместо ротора
следует вставить круглую металлическую болвашку того же диаметра.
Признаками размагничивания электродвигателя являются плохая коммута-
ция, неравномерность напряжения тахогенератора, зубцовые пульсации тока хо-
лостого хода якоря (рис. 8.31). 55 пульсаций тахогенератора с AUs(804-100) %
на одни оборот двигателя связаны с наличием 55 пазов ротора, а 8 пульсаций
тока якоря двигателя — с наличием 8 полюсов.
Полная принципиальная схема электропривода TNP приведена на рис. 8.32.
ГЛАВА ДЕВЯТАЯ
МЕТОДИКА НАСТРОЙКИ
ПЕРЕХОДНЫХ ПРОЦЕССОВ
Характеристика тиристорного преобразователя
как элемента системы автоматического регулирования
Из специфических свойств тиристорного преобразователя, которые влияют
иа динамические характеристики электропривода (или качество переходных про-
цессов), можно выделить следующие:
1. Дискретность и полууправляемость.
В [17] показано, что если полосу пропускания линейной части электроприво-
да (регуляторы, двигатель, датчики обратных связей) ограничить областью, где
влияние этих свойств на динамику незначительно, то тиристорный преобразова-
тель можно считать безынерционным звеном. Во всех электроприводах настрой-
ка регуляторов производится таким образом, что это условие является выпол-
ненным. Примерные величины предельных значений полосы пропускания [17]
для систем подчиненного регулирования в области непрерывного тока состав-
ляют:
— для трехпульсиой схемы выпрямления (ш=3):
Штах=0,515 Шо= 160 рад/с (/=26 Гц);
— для шестипульсной схемы выпрямления (ш=6):
Штах=0,77 о)о=240 рад/с (/=38 Гц).
Здесь о)О — круговая частота сети, равная 314 рад/с при /с = 50 Гц.
Настройка регуляторов, при которой величина полосы пропускания линей-
ной части электропривода превышает предельное значение, приводит к возник-
новению автоколебаний в системе автоматического регулирования.
2. Возможность возникновения в якорной цепи режима прерывистого тока.
Режим прерывистого тока имеет следующие особенности: электромагнитная
постоянная времени якорной цепи Тэ нё оказывает влияния на длительность про-
текании переходных процессов тока; значительно уменьшается коэффициент пе-
редачи тиристорного преобразователя по сравнению с коэффициентом передачи
в зоне непрерывного тока. Указанные факторы являются определяющими с точ-
ки зрения выполнения структур электроприводов.
232
Тиристорные преобразователи в электроприводах «Мезоматик»,и TNP в диа-
пазоне токов нагрузки до номинального тока двигателя работают в зоне пре-
рывистого тока. Поскольку в этом режиме действие Та иа переходные процессы
тока не проявляется, в указанных электроприводах отсутствуют регуляторы то-
ка, а система регулирования выполнена по одноконтурной структуре.
В электроприводе БТУ3601 раздельное управление комплектами тиристоров
приводит к тому, что в диапазоне токов до (0,3—0,8) /вом двигателя (в зависи-
мости от сглаживающего дросселя в якорной цепи) имеется режим прерывистого
тока. При увеличении тока нагрузки до номинального ток становится непрерыв-
ным. Поэтому для компенсации Тэ в зоне непрерывного тока используется регу-
лятор тока, а уменьшение коэффициента передачи тиристорного преобразователя
в зоне прерывистого тока компенсируется использованием нелинейного звена,
которое обеспечивает одинаковый совместный коэффициент передачи нелиней-
ного звена и тиристорного преобразователя в зонах прерывистого и непрерыв-
ного токов.
В электроприводе ЭТ6 с совместным управлением за счет согласования групп
тиристоров при угле регулирования авач=90 эл. град зона прерывистого тока
отсутствует полностью. Поэтому тиристорный преобразователь имеет линейную
регулировочную характеристику, а для компенсации Т3 используется регулятор
тока, то есть система, регулирования выполнена по обычной двухконтуриой
структуре.
В электроприводе «Кемрон» силовая часть реализована аналогично элект-
роприводу ЭТ6 с той лишь разницей, что согласование групп тиристоров произ-
водится при угле регулирования аНач = 100 эл. град. Это приводит к тому, что
якорная цепь в диапазоне токов до (0,1—0,3) /ВОм двигателя работает в режиме
прерывистого тока. Уменьшение коэффициента передачи тиристорного преобра-
зователя в зоне прерывистого тока компенсируется использованием адаптивного
регулятора скорости. Таким образом, в электроприводе «Кемрон» система регу-
лирования выполнена по двухконтуриой структуре с использованием адаптивно-
го регулятора скорости. Необходимо отметить, что выполнение системы регу-
лирования с адаптацией только в функции скорости (не контролируя режим
тока) является не совсем правильным и приводит в ряде случаев в условиях
работы электропривода на станке к возникновению автоколебаний. Это проис-
ходит при скорости вращения электродвигателя, близкой или равной нулю, когда
коэффициент пропорционального усиления регулятора скорости имеет макси-
мальную величину, при увеличении тока нагрузки двигателя до значения, при
котором тиристорный преобразователь переходит в режим непрерывного тока и
его коэффициент передачи возрастает. Если при этом контурный коэффициент
передачи превысит предельное значение, возникает автоколебательный режим.
Электропривод «Мезоматик»
Принимая во внимание равенство нулю электромагнитной постоянной вре-
мени якорной цепи Тэ = 0, представим структурную схему двигателя в следую-
щем виде (рис. 9.1), где /в — ток двигателя, вызванный нагрузкой на валу, Св —
233
Рис. 9.1. Структурная схема электродвигателя
Рис. 9.2. Принципиальная схема PC
m ^ЯЦ
постоянная ЭДС двигателя, / м = —-— — электромеханическая постоянная вре-
Ч
мени. Из структурной схемы получаем передаточную функцию двигателя по уп-
ч “дв(Р) 1/СЕ
равленню ЯдВ(р) = - = - -...-....
УЙ(Р) 1+р^м
Регулятор скорости электропривода настраивается таким образом, что
обеспечивает предельное значение полосы пропускания линейной части привода
(частоту среза разомкнутой системы) Шс=Ю0 рад/с. В этой полосе частот ти-
ристорный преобразователь можно считать безынерционным звеном с коэффи-
циентом передачи К™-
Датчик обратной связи по скорости (тахогенератор) также является безынер-
ционным звеном с коэффициентом передачи Ктг.
Принципиальная схем-а регулятора скорости, делителя и фильтра сигнала
тахогенератора приведена на рис. 9.2. Совместная передаточная функция дели-
Z7
теля и фильтра сигнала тахогенератора имеет вид W&(p) =--------——, где
1+рГф
^лел = _ _ ; 7’ф = 0,7мс.
Д4ТД5
234
Рис. 9.3. Структурная схема разомкнутой по скорости системы
Передаточная функция регулятора скорости 1^Рс(Р) =--Z.--. где Тоа =
рТ и
=Сз7?1() — постоянная времени цепи обратной связи регулятора скорости,
Т'и=Сз(/?7+7?з)—постоянная времени интегрирования регулятора скорости.
В соответствии с передаточными функциями звеньев структурная схема ра-
зомкнутой по скорости системы будет иметь вид (рис. 9.3). Логарифмическая
амплитудная характеристика, соответствующая структурной схеме разомкнутой
„ . ОС’А’о .
системы, приведена на рис. 9.4, где «с=—~——частота среза разомкнутой
‘m'Th
системы, а А,0=А'дел-А,Тп-т—’А,тг-контурный коэффициент передачи. Постоянной
с Е
времени Гс=— определяется быстродействие (или время переходного процесса)
(Ос
замкнутой по скорости системы. Для систем с логарифмической характеристи-
кой подобного вида время переходного процесса /пц=(7—-9) Гс [18].
Рис. 9.4. Логарифмическая амплитудная характеристика разомкнутой системы
235
Минимальное значение Гс ограничивается возможностью возиикибвения ав-
токолебаний в замкнутой системе регулирования, которые связаны с дискретно-
стью и полууправляемостью тиристорного преобразователя. Для трехпульсиой
схемы выпрямления предельное значение частоты среза находится в диапазоне
С0с*пред= (160—200) рад/с.
Вид или качество переходного процесса скорости зависит от соотношения
Гос и Тс. Приближение Гоо к Тс вызывает в переходном процессе скорости по-
вышенное перерегулирование. Правильная настройка предполагает следующее
соотношение между постоянными: Тое Те. Практическая настройка переход-
ного процесса скорости заключается в нахождении оптимальных значений Тое
и Тв путем варьирования величии Сз и Rio в цепи обратной связи регулятора
скорости. Связь элементов Сз и Rio с постоянными Гос и То определяется из
• т or т Т'м • Т’м R? + R$
соотношении Гос =ЛюС3; Ге — ' — = *тг~•—~ .откуда следует, что ве-
“0'' ОС
личина Сз влияет только на постоянную Гос и, таким образом, изменение Сз
сказывается лишь на качественном виде переходного процесса скорости (больше
перерегулирование или меньше), не изменяя быстродействия системы регулиро-
вания. Уменьшение или увеличение быстродействия системы регулирования (по-
стоянной Го) достигается изменением величины RK. Однако при этом необходимо
в соответствующее число раз изменить величину С3 для сохранения выбранного
значения Г0о. Из приведенного соотношения для Го следует также, что чем
больше момент инерции механизма (соответственно Гм), тем большей должна
быть величина йы, чтобы обеспечить системе регулирования максимальное бы-
стродействие.
Численные значения постоянных Гф и Гм составляют соответственно 0,7 мс
и 50 мс. Стационарная настройка регулятора скорости привода P3HR-444 А
характеризуется величинами С3=0,15 мкф, Rio=220 к, что обеспечивает
Гос=33 мс, Гс^Ю мс.
На рис. 9.5 приведены кривые переходных процессов скорости при различ-
ных соотношениях ГОс и Гс. За основу принят переходный процесс скорости,
соответствующий настройке регулятора скорости, произведенной заводом-изго-
товителем.
236
Электропривод TNP
Структурная схема и логарифмическая амплитудная характеристика систе-
мы автоматического регулирования электропривода аналогичны соответствующим
электропривода «Мезоматик». Примерные величины постоянных времени состав-
ляют Тф = 1 мс; Гс = 10 мс; Тос = 17 мс.
Отличие заключается в схемной реализации регулятора скорости (рис. 9.6),
который выполнен иа двух операционных усилителях, на первом из них постро-
ен пропорциональный регулятор, а на втором пропорционально-интегральный.
Это облегчает настройку переходного процесса скорости, поскольку элементами
7С и 3R достигается независимое друг от друга изменение постоянных времени —
соответственно ТОс и Гс.
Кривая переходного процесса скорости, соответствующая настройке регу-
лятора скорости, произведенной иа заводе-изготовителе, приведена на рис. 9.7.
Большое перерегулирование в кривой вызвано приближением частоты сопряже-
ния u>oc=zr— к частоте среза шс=—~ (соответственно Гос и Тс) на логариф-
Т ос. Тс
мической амплитудной характеристике (рис. 9.4).
Электропривод ЭТ6
Система регулирования в электроприводе ЭТ6 наиболее близка к линейной
по сравнению с другими приводами. Это обеспечивается при совместном спосо-
бе управления реверсивным тиристорным преобразователем согласованием групп
тиристоров при угле регулирования аНач=90 эл. град, что исключает зону пре-
рывистых токов в якорной цепи.
Кроме того, применение в СИФУ опорного напряжения синусоидальной фор-
мы приводит к тому, что регулировочная характеристика тиристорного преобра-
зователя становится линейной во всем диапазоне изменения управляющего на-
пряжения СИФУ.
Структурная схема системы регулирования электропривода приведена на
рис. 9.8, где
Рис. 9.6. Принципиальная схема PC
237
Рис. 9.7. Кривая переходного процес-
са скорости
ДТ— датчик тока; [7ДТ—выходное
эффицнент передачи датчика тока;
7Т — тахогенератор; [71г— выходное
эффициент передачи ТГ;
PC — регулятор скорости; £/рс —
выходное напряжение регулятора
скорости; Тос — постоянная времени
цепи обратной связи PC, Тя — посто-
янная интегрирования PC;
РТ — регулятор тока; [7рт — вы-
ходное напряжение регулятора тока,
Тос — постоянная времени цепи об-
ратной связи РТ; Тя — постоянная
интегрирования РТ; Тф — фильтрую-
щая постоянная времени РТ;
ТП — тиристорный преобразо-
ватель, включающий в себя СИФУ и
силовую часть; Ктп — коэффициент
передачи ТП;
напряжение датчика тока; КД1 — ко-
напряжение тахогенератора; Ктг — ко-
Пя — напряжение на якоре двигателя; £дв—ЭДС двигателя; СЕ — посто-
янная ЭДС двигателя; 7?Яц— эквивалентное сопротивление якорной цепи, вклю-
чая силовой трансформатор, тиристорный преобразователь, дроссели, двигатель;
Тз — электромагнитная постоянная времени якорной цепи; Ты — электромехани-
ческая постоянная времени; 7ДВ — ток якоря двигателя, 7НВгР — составляющая
тока якоря двигателя, вызванная иагрукой на его валу; 7ДИН— динамическая со-
ставляющая тока якоря двигателя, обеспечивающая изменение скорости вра-
щения; сода — угловая скорость вращения двигателя; {7зад— задающее напря-
жение.
Регуляторы скорости и тока в электроприводе являются пропорционально-
интегральными звеньями, поэтому в установившемся режиме- сигнал на входе
регуляторов, представляющий сумму сигналов задания и обратной связи, прак-
тически равен нулю. Это обстоятельство учитывается на структурной схеме вве-
дением условных дополнительных звеньев, включенных перед узлами сравнения
тока и скорости. Таким образом, для установившегося режима будут справед-
ливо U Дт Дзад ^тг п _
ливы соотношения—— =~— и ~— =~Z~ > где 7?3т и R3.c— резисторы в цепи
7?з.т 7?т 7?з.с 7?с
задания регуляторов тока и скорости (R3-i=R 602, R3.c=R 301+7? 306), 7?т
и RB— резисторы в цепи сигналов обратной связи по току и скорости (7?т=7?6О1,
RB=R 307+7? 302+7? 303). Приведенные соотношения отражают условие ра-
венства нулю алгебраической суммы токов иа инвертирующем или неинвертиру-
ющем входах операционных усилителей регуляторов тока и скорости.
238
^зад
Рис. 9.8. Структурная схема системы регулирования
Настройка регулятора тока
Принципиальная схема регулятора тока, отражающая его основные особен-
ности, как элемента системы автоматического регулирования, приведена иа
рис. 9.9. Передаточная функция регулятора тока имеет вид
1+рГ0С
^рт(Р)
рт(Р)== </дт(р) “ />Ти(14-рГф) '
„ C&M-RSW /?602 IIЯЗОЗ
где Г00=С 604-7? 604; Т* = С 601-R 604; Ти= ---П„А1 , П„пп „ —
К /?6014-7?302 ||/?503
При R 601=7? 602= 2 к и R 603 = 1,5 к К=0,3.
Постоянная времени Гф образуется за счет включения в обратную связь
операционного усилителя А601 конденсатора С601. Таким образом, производит-
ся фильтрация сигналов регулятора скорости и датчика тока.
Структурная схема контура тока без учета влияния обратной связи по ЭДС
в двигателе приведена иа рис. 9.10. При использовании в комплекте электропри-
вода ЭТ6 электродвигателя ПБВ 112 L коэффициенты передачи звеньев имеют
ил
следующие величины: Ятп = ~Т,— = 20; 7?я.ц^0,35 Ом.
С/ рТ
тг жж и
Коэффициент передачи датчика тока лдт = —— зависит от номинала рези-
*дв
стора R5O1 в цепи обратной связи операционного усилителя А5О1 датчика тока.
На заводе-изготовителе устанавливается R501— 51 кОм, при этом Кдт = 0,0235 В/А.
Номиналы резисторов R601 и R602 равны 2 кОм, поэтому /?т/7?3.т = 1 и в
установившемся режиме 17рс = £7ят.
Настройка регулятора тока производится в два этапа. На первом опреде-
ляется электромагнитная постоянная времени якорной цепи.
Для этого затормаживается вал электродвигателя. В плате регуляторов пре-
образователя распаивается перемычка 19—19 и иа тот из штифтов, который
соединен со входом СИФУ, подается задающее напряжение, величина которого
вызывает ток в якорной це-
пи двигателя не более но-
минального значения. Пере-,
ходиый процесс тока якоря
при скачкообразной подаче
на вход СИФУ напряжения
задания наблюдается осцил-
лографом по выходному -на-
пряжению датчика тока
(контрольная точка 120).
При этом осциллограф пе-
реводится в режим ждущей
развертки, а напряжение за-
дания одновременно подает-
Рис. 9.9. Принципиальная схема РТ
240
Рис. 9.10. Структурная схема контура тока без
учета влияния обратной связи по ЭДС в двигателе
Рис. 9.11, Осциллограмма тока якоря элект-
родвигателя в разомкнутой системе регули-
рования
ся иа вход внешней синхронизации. Осциллограмма тока якоря электродвигателя
ПБВ 112L приведена на рис. 9.11. Электромагнитная постоянная времени опреде-
ляется из соотношения Т'э = “Т'/жп, где /ап — время, за которое кривая тока до-
О
стигает уровня 0,95 от установившегося значения. В соответствии с приведенной
осциллограммой имеем Tasl8 мс.
После определения численного значения Тя в цепь обратной связи регуля-
тора тока запаиваются элементы С604, R604, образующие постоянную времени
Той = С604-Я604, равную Т3. Таким образом, осуществляется компенсация ре-
гулятором тока электромагнитной постоянной времени якорной цепи. Структур-
ная схема контура тока при условии полной компенсации (Т0С = Та) приведена
на рис. 9.12. Пренебрегая величиной постоянной времени Тф (численное значе-
ние ее получим в дальнейшем) и учитывая, что в данном случае £7рс=£/Дт, пре-
образуем структурную схему контура тока к виду (рис. 9.13), где
^ТП ‘
'<ЯЦ
9 Заказ 4546
241
Рис. 9.12.
тока при
электромагнитной постоянной времени
Upc
Рис. 9.13. Структурная схема кон-
тура тока без учета влияния об-
ратной связи по ЭДС в двигателе
Структурная схема контура
условии полной компенсации
В этом приближении передаточная
— постоянная интегрирования контура тока.
функция контура тока соответствует апериодическому звену первого порядка
пт / гЛ Uьт(Р) 1 .
и'кт(/О . == ~~—~, а переходная функция контура тока носит экспо-
^рс(Р) \+pTi {
ненцнальный характер с постоянной времени Тс I ~ I
гя = /уст\1“"“^ * •
Время переходного процесса тока в контуре тока зависит теперь только от
величины Tt, минимальное значение которой из условия отсутствия автоколеба-
ний в контуре тока составляет 2—3 мс. При этом переходный процесс тока бу-
дет заканчиваться за 3—5 импульсов тока (длительность импульса тока в шес-
типульсной схеме выпрямления т^З.З мс). На рис. 9.14 приведены осциллограм-
мы переходных процессов тока якоря и выходного напряжения регулятора тока
при скачкообразной подаче на вход РТ' задающего напряжения и величине
7\=3 мс.
С604.Я603
Из соотношения 7/=----------------- следует, что практически наиболее
К-ЛпгТГ ’^дт
Г<ЯЦ
удобно изменять Т{ путем изменения величины С604, корректируя одновременно
значение R604, чтобы оставалась неизменной Постоянная времени цепи обратной
связи
Toz=C604-R604~Ta.
Таким образом, второй этап настройки РТ заключается в определении рас-
четным или экспериментальным путем такой величины конденсатора С604, прн
которой переходный процесс тока в контуре тока завершался бы за 3—5 им-
пульсов тока прн апериодическом характере. Настройка производится в замк-
нутой по току системе регулирования. Для этого перемычка 19—19 должна быть*
установлена, а перемычка, коммутирующая выходное напряжение регулятора ско-
рости иа вход регулятора тока, снята. На штифт, соединяющийся со входом РТ,
подается напряжение задания такой величины, при которой ток якоря двига-
теля ие превышает номинального значения. Переходный процесс тока при скач-
кообразной подаче задающего напряжения наблюдается осциллографом в ре-
жиме ждущей развертки по выходному сигналу датчика тока.
242
При настройке необходимо
убедиться, что выходное на-
пряжение РТ не достигает
уровня насыщения (система ре-
гулирования тока должна быть
без ограничений).
Имея численные значения
коэффициентов (которые не-
трудно определить эксперимен-
тально), входящих в выраже-
ние, определяющее Л, можно,
задавшись значением Л=3 мс,
определить соответствующую
этому значению величину кон-
денсатора С604. В данном слу-
чае прн К=0,3; Ктп=20; Яяц=
=0,35 Ом; Кдт = 0,0235 В/А,
Р603= 1,5 кОм, имеем Сб04=
0,8 мкф.
Выбирая ближайшие стан-
дартные значения емкости, на-
пример 0,47 мкф илн 1 мкф (нз
Тэ
С604
выражения /?604 =
име-
ем соответствующие им зна-
чения сопротивления R604
39 кОм и 18 кОм), проверяем
переходный процесс тока, соот-
ветствующий этим параметрам
настройки регулятора тока. На
рис. 9,15 приведены осцилло-
граммы переходных процессов
тока якоря и выходного напря-
жения РТ, соответствующие
параметрам настройки С604=*
= 0,47 мкф, R604=“3S кОм (рас-
четное значение 7\яй,8 мс).
Необходимо отметить, что
дальнейшее уменьшение Л
(меньше 1,5 мс) может приве-
сти к режиму автоколебаний в
контуре тока. На рнс. 9.16 при-
ведены осциллограммы тока
якоря и выходного напряжения
регулятора тока в режиме ав-
Рнс. 9.14. Осциллограммы переходных процес-
сов в контуре тока при Г<=3 мс
Рис. 9.15. Осциллограммы переходных про-
цессов в контуре тока при Т< = 1,8 мс
9*
243
Ц>Т<
Рис. 9.16. Осциллограммы автоколебательного
режима в контуре тока
токолебаний, который был по-
лучен при Т<=1 мс (расчетное
значение С604=0,27 мкф).
Из осциллограмм, приве-
денных на рнс. 9.14 и 9.15,
видно, что удовлетворительный
переходный процесс тока наб-
людается при обоих вариантах
настройки РТ (Ti = 3 мс, Ti =
1,8 мс), однако, поскольку во
втором случае обеспечивается
большее быстродействие в кон-
туре тока, последующую наст-
ройку контура скорости реко-
мендуется производить при па-
раметрах РТ С604 = 0,47 мкф,
R604=00 оОм. Если при этих
параметрах РТ в системе регу-
лирования, замкнутой по ско-
рости, даже при малых значе-
ниях коэффициента пропорцио-
нального усиления PC наблю-
дается возникновение автоко-
лебательного режима, необхо-
димо перейти к параметрам РТ
С604=1 мкф, /?604=18 кОм и
дальнейшую настройку PC про-
изводить при этих параметрах
РТ.
Из осциллограмм (рнс. 9.11,
9.14, 9.15) видно также, что
применение регулятора тока
позволило сократить время пе-
Т
реходного процесса тока в —— _. (б-^ю) раз.
Если величина конденсатора С604 подбиралась экспериментально, то по ос-
циллограммам переходного процесса тока следует определить постоянную ин-
тегрирования контура тока Г(, исходя из соотношения Ti=l/i tas, где tnn— вре-
мя достижения кривой тока уровня 0,95 от установившегося значения.
Величина Т< будет использована в дальнейшем при настройке PC. Практи-
чески, если переходный процесс в контуре тока завершается в течение 3—5 им-
пульсов тока, можно принять 7\ = 3 мс.
Определим величину фильтрующей постоянной времени РТ из соотношения
T$=C601-R604 при параметрах РТ С604=0,47 мкф, R604=00 кОм.
При С607=6800 пф, R604 = 30 кОм получим Тф^0,27 мс. Такая величина
244
Гф прн Т> = 1,8 мс н тем более при Л = 3 дс практически ие оказывает влияния
иа переходные процессы в контуре тока, поэтому пренебрежение ею вполне до-
пустимо.
Настройка регулятора скорости
Упрощенная схема PC, отражающая его основные особенности, как элемента
системы автоматического регулирования, приведена на рис. 9.17. Передаточная
^рс(Р) l+pT”ОС
функция регулятора скорости имеет вид ^рс(р)., ' = -------->
^тг(Р) Р* и
где TOc = C315(R319+R320) и Ta = C315(R303+R302+R307). В дальнейшем бу-
дем считать величину резистора R319 равной нулю, тогда свободно варьируемы-
ми параметрами при настройке PC будут С315 и R320.
С учетом передаточной функции PC на рис. 9.18 приведена структурная
схема разомкнутого контура скорости в режиме холостого хода двигателя
(7нагр = 0), где контур тока представлен инерционным звеном первого порядка
с постоянной времени Т{. На основании структурной схемы построена логариф-
мическая амплитудная характеристика (ЛАХ) разомкнутой по скорости системы
регулирования (рис. 9.19) при настройке PC на симметричный оптимум, кото-
рый определяется соотношениями: 1) Гое=4 Те, 2) 7\.=—^—= 2Т\. Величина
на характеристике принята равной 7\=3 мс, что соответствует частоте сопря-
1
жеиия —
Ti
1000 1
= •— =; 170 рад/с; «ос = ~z~ = 85 рад/с.
О /Ос
Частота среза разомкнутой
системы, которой определяется
время переходного
при расположении в
ке между шое и
“с
—— ~ 333 рад/с. В соответствии с этим имеем “c = "Z~
3 л с
процесса,
промежут-
находится
Т ос^о
нз соотношения <»с = т _ »
1 * 'm'h
где Кц~ ~ • 7?Яц ‘Ктг—
Адт с е,
— коэффициент пропорциональ-
ного усиления контура скорости
Рис. 9.17. Упрощенная схема PC
Рис. 9.18. Структурная схема разомкнутой по скорости системы регулиро-
вания
245
(величина безразмерная). Раскрывая выражения для Гос и имеем
ш _________________________________Д320_____________ кокп
“с Ти ’ ДЗОЗ + Я302 + Я307 Тк ’
где Ки — коэффициент пропорционального усиления PC.
Кривая переходного процесса скорости формируется двумя постоянными
времени, указанными на Л АХ, это Тое н Те, а постоянная времени Г< определяет
предельное быстродействие системы регулирования. Связь параметров PC С315
и R320 с постоянными Тос и’’Те определяется из приведенных ранее соотношений,
для Гоо и Те, из которых вытекает практически важное следствие: изменение
величины С315 приводит только к изменению постоянной Гоо; постоянная Го
подбирается изменением величины R320, причем для сохранения выбранного зна-
чения Гое должна быть скорректирована в соответствующее число раз величина
С315.
Таким образом, настройка PC, так же как и РТ, состоит из двух этапов. На
первом в цепь обратной связи PC устанавливаются элементы С315, R320, имею-
щие постоянную времени Гоо=(4—10) Г<, причем меньшие значения Гоо будут
соответствовать большему перерегулированию в кривой переходного процесса
скорости, и наоборот. В случае необходимости получить в кривой переходного
процесса скорости минимальное значение перерегулирования, следует задаться
величиной Гос около 10 Г4. Практически для получения хорошей динамики элек-
тропривода по управлению и по возмущению рекомендуется выдерживать ве-
личину Гос в диапазоне 3 Г<<Гое<5 Г<, что соответствует при правильной на-
стройке РТ и шестнпульсной схеме выпрямления, то есть при Г<=3 мс, диапа-
зону значений Гос, лежащему между 9 и 15 мс.
На втором этапе настройки PC, подбирая величину R320 с одновременным
изменением С315, чтобы постоянная Гоо оставалась равной заданному значению,
необходимо получить возможно меньшую величину Те. Увеличение R320 прнво-
246
Рнс. 9.20. Переходные процессы скорости при различных настройках PC
днт к пропорциональному уменьшению Тв (логарифмическая амплитудная ха-
рактеристика перемещается вверх) и соответственно уменьшению времени пере-
ходного процесса. И наоборот, с уменьшением R320 время переходного процес-
са пропорционально увеличивается.
Практическая оценка того, в каком месте участка между фиксированными
Гос н Т{ находится значение Го, производится по кривой переходного процесса
скорости следующим образом. При увеличении Кв регулятора скорости (соот-
ветственно R320) до значения, при котором Го приближается к Л, переходный
процесс скорости начинает сопровождаться повышенной колебательностью, а при
дальнейшем увеличении Дп(Г0<Г4) может наступить режим автоколебаний (вы-
сокочастотные колебания скорости). При уменьшении Ra до значения, при кото-
ром Го приближается к Гос, переходный процесс скорости сопровождается уве-
личением перерегулирования, а при Г0>Г00 повышенной колебательностью (чис-
ло колебаний более двух).
Кривые переходных процессов скорости при различных настройках PC
(Г0 = Г00, Г0 = Г4, Го=2 Ть Т{<ТС<2 Ti) приведены на рис. 9.20. При этом в
PC принята величина постоянной времени Гое=4 Г< = 12 мс. За точку отсчета
регулятора скорости принято значение Кпо, соответствующее настройке системы
регулирования на симметричный оптимум (Тс — 2 Г4). Удовлетворительной яв-
ляется настройка PC, соответствующая кривой 2, а кривые 3 и 4 дают представ-
ление о качестве переходных процессов соответственно при Гс = Г00 и Г0 = Г4.
247
Технологически настройка PC производится следующим образом. Перемыч-
ка, соединяющая выход PC со входом РТ, должна быть установлена, вал элект-
родвигателя расторможен (двигатель в режиме холостого хода). Задающее на-
пряжение на входе электропривода устанавливается такой величины, скачкооб-
разная подача которой не вводит PC в режим насыщения (система регулиро-
вания без ограничений). Переходный процесс скорости наблюдается осцилло-
графом в режиме ждущей развертки по сигналу тахогенератора. Одновременно
задающее напряжение подается иа вход внешней синхронизации осциллографа.
В процессе изменения величины R320 необходимо контролировать, чтобы PC ие
входил в режим насыщения, в противном случае уменьшить величину напряже-
ния задания.
Имея в распоряжении значения коэффициентов передачи звеньев системы
регулирования, можно определить расчетные величины параметров PC, оттал-
киваясь от которых производится настройка PC иа желаемый переходный про-
цесс. Произведем расчет величии элементов С315, R320 при настройке системы
регулирования на симметричный оптимум, принимая Г< = 3 мс. При использова-
нии в комплекте с преобразователем электродвигателя ПБВ 112 L имеем
Св=1,2 В/рад/с, Яяц=0,35 Ом, Тм=16 мс; кроме этого ЯДт = 0,0235 В/А,
Яте=0,38 В/рад/с (40 В/1000 об/мин). Настройка иа симметричный оптимум,
как уже отмечалось, предполагает соблюдение двух условий: 1) Гоо=4 Т ;
Тк
2) Та=2 Ti. Из второго условия и соотношения для Тс = —• определяется
ЛоЛп
Гм
величина коэффициента пропорционального усиления PC Кп = —-------. При
%Til(0
указанных значениях коэффициентов передачи звеньев контурный коэффициент
пропорционального усиления равен Яо=—““•Яяц-~Д—•^тг~4>7,а искомый ко-
Ядт СЕ
эффициеит пропорционального усиления PC Кп=0,57.
Потенциометром R302 устанавливается скорость вращения двигателя
1000 об/мии при напряжении задании £Аад=10 В, при этом напряжение тахо-
генератора, соответствующее его коэффициенту передачи, составляет £7тг=40 В.
Из условия равенства входных токов операциоииого усилителя PC имеем
^зад = , где Ra c=R306+R301 — суммарное сопротивление в цепи задания
/\З.С *\С
скорости, a Re = R303-}-R302-]-R307— суммарное сопротивление в цепи сигнала
обратной связи по скорости.
Из приведенного соотношения при Язе =4,8 кОм определяется Яс = 19,2 кОм,
Я320
а из соотношения Кп = ———определяется Я320~9,1 кОм.
Яс
Из первого условия настройки ТОе = С375-Я320=12 мс определяется вели-
чина C315sil,3 икф.
Принимая стандартные значения элементов PC С315=\ мкф, R320—12 кОм,
получим переходный процесс скорости, соответствующий кривой 2 иа рис. 9.20.
248
Электропривод «Кемрон»
Структурная схема системы регулирования электропривода «Кемрон» ана-
логична структурной схеме электропривода ЭТ6 (рис. 9.8).
Настройка регулятора тока производится иа заводе-изготовителе, и в силу
комплектности электропривода дополнительной подстройки не требуется. Запре-
щение перенастройки РТ оговаривается также в сопроводительной документации
на электропривод. В случае необходимости настройка РТ должна производиться
с учетом рекомендаций, изложенных применительно к настройке РТ в электро-
приводе ЭТ6.
Регулятор скорости допускает подстройку вследствие различных моментов
инерции механизмов подач станков. Упрощенная схема PC, отражающая его ос-
новные особенности, как элемента системы автоматического регулирования, при-
ведена на рис. 9.21. В отличие от регуляторов скорости других приводов PC в
электроприводе «Кемрон» выполнен адаптивным, т. е. его параметры автомати-
чески изменяются в функции скорости. В связи с этим настройка переходных
процессов осуществляется раздельно в диапазоне малых (напряжение задания
£/зад<0,1 В) и больших (£/3ад>0,3 В) скоростей соответственно потенциомет-
рами П19, П21 и П18, П20. Другой особенностью PC является то, что схемная
реализация его выполнена на трех операционных усилителях: на усилителе ИС62
выполнено пропорциональное звено, на усилителе ИС63 интегрирующее, а на уси-
лителе ИС64 суммирующее. Структурная схема PC без учета цепочки С247,
R353 приведена на рнс. 9.22, где Лтг — коэффициент передачи тахогенератора;
Клал — коэффициент передачи делителя, состоящего из резисторов R349, R3'51
и потенциометра П14; Кп — коэффициент пропорционального усиления пропор-
ционального звена; Ти — постоянная интегрирования интегрирующего звена;
Сдея — напряжение на движке потенциометра П14. В соответствии с приведен-
ной структурной схемой передаточная функция PC (без учета корректирующей
цепочки С247, R353) запишется в виде
t/pc(p) ( 1 i 1 \ 1 Р?я
^дел(Р) \ рРя / Р?я
Рнс. 9.21. Упрощенная схема PC
249
Рис. 9.22. Структурная схема PC
где Afn=——— ; —------КДел-п— коэффициент передачи делителя, состоя-
7?350-|~/?357 лдел.п
щего нз резисторов R371, R372 и потенциометра П18.
Тв=С229'Р373‘КЯьВ и, где Кдел и — коэффициент передачи двигателя, со-
стоящего иэ резисторов R377, R378 и потенциометра П20. В соответствии с но-
миналами резисторов коэффициенты передачи делителей пропорционального и
интегрального звеньев могут регулироваться в диапазоне значений от 0,65 (движ-
ки потенциометров в верхнем положении) до 0,018 (движки потенциометров
в нижнем положении).
Логарифмическая амплитудная характеристика разомкнутого контура ско-
рости (аналогичная ЛАХ электропривода ЭТ6) приведена на рнс. 9.23, где
ТКТЯ Ти
Т{— постоянная времени контура тока, Tt = Ta; Тс= - „ „ Из соот’
‘иКпКо onA0
ношений для Г, и Гс наглядно видно, какое преимущество имеет схемная реа-
лизация PC на трех операционных усилителях, а именно: допускается независи-
мо друг от друга изменение постоянных Tj и Те соответственно потенциометра-
ми П20 и П18, что существенно облегчает настройку переходного процесса ско-
рости.
Качественный вид пере-
Рис. 9.23. ЛАХ разомкнутого контура скорости
ходных процессов скорости
при изменении параметра
логарифмической амплитуд-
ной характеристики 7\ при-
веден на рис. 9.24. Настрой-
ка переходных процессов
скорости производилась при
напряжении задания £/3ад=
0,4 В потенциометрами П18
и П20 без корректирующей
цепочки С247, R353. Кривая
1 соответствует прн величи-
не коэффициента передачи
делителя Кдел.и=0,65 (дви-
жок потенциометра П20 в
250
Рис. 9.24. Переходные процессы скорости при различных настройках PC
верхнем положении) постоянной Т1=Ти = С229-/?373-Кдел.и=1.0-220к-0,65=»
= 140 мс.
Кривая 2 соответствует Г1=ГИ=12 мс, которая устанавливалась по величи-
не коэффициента передачи делителя Кдвди=12 мс/220 мс^0,055.. Коэффициент
пропорционального усиления Кп подбирался при Ги = 12 мс таким образом, что-
бы кривая 2 наиболее близко совпадала с кривой, соответствующей настройке
на симметричный оптимум. Кривая 3 отражает изменение кривой 2 переходного
процесса скорости прн подключении корректирующей цепочки С247, R353, кото-
рая предназначена для уменьшения перерегулирования в кривой переходного
•процесса скорости.
Необходимо отметить, что отсутствие или уменьшение перерегулирования в
кривой переходного процесса скорости приводит к ухудшению динамики привода
по нагрузке. С другой стороны, при работе регулируемого электропривода в сле-
дящем режиме при тех величинах добротностей следящих приводов, которые
практически устанавливаются в станках, перерегулирование в кривой переходного
процесса скорости регулируемого привода не оказывает влияния на качество пе-
реходного процесса в следящем режиме. Поэтому установка корректирующей
цепочки для устранения перерегулирования в приводах, предназначенных для
работы в следящем режиме, не является необходимой, более того, является не-
желательной с точки зрения ухудшения динамики привода по возмущению.
Зона адаптации в электроприводе начинается в диапазоне скоростей, соот-
ветствующем напряжению задания 67аад<0,3 В, при этом происходит уменьше-
ние постоянных времени Т\ и Гс соответственно за счет уменьшения постоянной
интегрирования регулятора скорости Тл и увеличения коэффициента пропорцио-
нального усиления Кп. Настройка переходного процесса скорости в зоне адап-
тации производится прн 17зад<0,1 В потенциометрами П19 и П21 таким обра-
зом, чтобы сохранить качественный вид кривой переходного процесса скорости
тем же, что и в диапазоне скоростей, соответствующем 17аад>0,3 В.
Электропривод БТУ3601
Структурная схема и логарифмическая амплитудная характеристика линеа-
ризованной системы автоматического регулирования электропривода БТУ3601
аналогичны приведенным на рнс. 9.8 и рнс. 9.19 структурной схеме и ЛАХ элект-
251
Рис. 9.25. Рекомендуемые. кривые переходных процессов скорости
электропривода БТУ3601
ропривода ЭТ6. Практическая линеаризация системы осуществляется включени-
ем на входе СИФУ нелинейного звена, в результате чего совместный коэффициент
передачи нелинейного звена н тиристорного преобразователя остается приблизи-
тельно постоянным в зонах прерывистого н непрерывного токов.
Настройка переходного процесса тока в контуре тока производится соглас-
но рекомендациям, приведенным в разделе «Методика настройки электроприво-
да БТУ3601» четвертой главы. Отметим еще раз, что время переходного про-
цесса тока определяется постоянной интегрирования контура тока, которая под-
бирается при настройке путем изменения величины конденсатора С7 в цепи об-
ратной связи операционного усилителя регулятора тока (с уменьшением С7 про-
порционально уменьшается время переходного процесса то$са, и наоборот). Ве-
личина резистора R22 в цепи обратной связи ОУ РТ зависит от величины кон-
денсатора С7 и определяется при настройке из условия сохранения постоянной
времени цепи обратной связи ОУ РТ Tee — C7-R22, равной Тв. С другой стороны
при заданной С7 увеличение R22 приводит к увеличению форснровочной способ-
ности РТ и соответственно к увеличению перерегулирования в кривой переход-
ного процесса тока. При этом время переходного процесса тока остается прак-
тически неизменным. Регулятор тока можно считать настроенным правильно,
если кривая переходного процесса тока достигает установившегося значения за
3—4 импульса тока, тогда для дальнейшей настройки PC можно принять посто-
янную времени контура тока Т t—З мс.
Настройка PC, связь параметров PC с постоянными логарифмической ампли-
тудной характеристики Ti и Те, а также влияние Ti и Тс на кривую переходного
процесса скорости соответствуют аналогичным вопросам, изложенным примени-
тельно к электроприводам ЭТ6 и «Кемрон». Постоянную времени цепи обратной
связи ОУ PC рекомендуется выдерживать То с = Л = (34-5) Т<, т. е. при Т,=3 мс
в диапазоне (94-15) мс. В отличие от РТ влияние элементов цепи обратной связи
ОУ PC (RIO, С4), на кривую переходного процесса скорости является противо-
положным, т. .е. время переходного процесса скорости определяется величиной
R10 (с увеличением R10 время переходного процесса скорости уменьшается), а
величина С4 зависит От R10 и находится при настройке из условия сохранения
постоянной времени Тос в заданном диапазоне. В то же время увеличение С4
252
(Ti) при заданном R10 приводит к уменьшению перерегулирования в кривой пе-
реходного процесса скорости, и наоборот, с уменьшением С4 (Tt) перерегулирова-
ние возрастает. При этом время переходного процесса остается практически по-
стоянным.
В соответствии с изложенными рекомендациями была произведена настрой-
ка РТ н PC преобразователя БТУ3601 с высокомоментным двигателем электро-
привода «Кемрон» (при правильной настройке кривая переходного процесса ско-
рости не зависит от типа двигателя). Кривые переходных процессов скорости
приведены на рис. 9.25. Постоянная времени цепи обратной связи PC принята
равной 8 мс. Коэффициент пропорционального усиления PC, соответствующий
кривой 1, подбирался таким образом, чтобы качественный вид кривой переход-
ного процесса наиболее близко соответствовал настройке системы регулирования
на симметричный оптимум. Кривая 2 получена увеличением коэффициента про-
порционального усиления PC в два раза. Кривые переходных процессов скоро-
сти, попадающие в диапазон между приведенными кривыми, могут быть реко-
мендованы прн настройке.
ГЛАВА ДЕСЯТАЯ
ОСОБЕННОСТИ РАБОТЫ
ЭЛЕКТРОПРИВОДОВ В СЛЕДЯЩЕМ РЕЖИМЕ
Функциональные схемы
следящего привода фазового типа
применительно к устройствам ЧПУ
типа НЗЗ-2, Н55-2, 2С-42
Функциональная схема устройства управления следящим приводом (УУСП)
фазового типа, используемого в устройствах ЧПУ типа НЗЗ-2, Н55-2, приведена
на рис. 10.1. Узлы, указанные на рисунке, в соответствии с цифровым обозна-
чением имеют следующее назначение:
1 — интерполятор. В зависимости от направления перемещения импульсы
программы от интерполятора поступают на УУСП по каналам +Пр или —Пр.
Длительность импульса составляет (0,5-j-l) мкс, частота импульсов
fnp=»(0-i-8) кГц определяется запрограммированной скоростью перемещения.
Частота импульсов программы fnp=8 кГц при дискрете перемещения 6 = 0,01 мм
(поступление одного импульса программы вызывает перемещение исполнитель-
ного органа станка на 0,01 мм) соответствует скорости перемещения o = 6-fnp =
4800 мм/мин.
2 — генератор тактовых импульсов, вырабатывает две последовательности
тактовых импульсов с частотой fa =100 кГц, сдвинутых друг относительно друга
на 180°.
3 — узел синхронизации, сложения и вычитания. Производит операцию сло-
жения или вычитания (в'зависимости от направления перемещения) частоты им-
пульсов программы fnp с частотой тактовых импульсов fo.
4—делитель координаты, имеющий коэффициент деления Кдел=200 (или
100 — в зависимости от величины дискреты перемещения). Коэффициент деления
ч S-(mm/o6)
определяется из соотношения о(мм) = , где О — величина дискреты пе-
1рКДел
ремещения исполнительного органа станка; S — шаг винта исполнительного ор-
гана; I — коэффициент редукции между валом датчика обратной связи по поло-
жению и валом винта; р — число пар полюсов датчика обратной связи. Напри-
254
10
Рис. ЮЛ. Функциональная схема-УУСП фазового типа устройств ЧПУ типа НЗЗ-2, Н55-2
мер, при шаге винта 3=10 мм/об, коэффициенте редукции х = 5, датчике обрат-
ной связи типа ВТМ, имеющем р=1, дискрете перемещения 6 = 0,01 мм коэффи-
циент деления должен быть равен Хдел=200.
Импульсы на выходе делителя имеют частоту следования /дел =500 Гц±
±/пр/Кдел, при этом фаза импульсов изменяется в зависимости от числа им-
360°
пульсов программы на величину <? = N —----, где N — число импульсов прог-
удел
раммы.
5—делитель генератора, имеющий коэффициент деления Лдел = 200. На
выходе делителя формируются две последовательности прямоугольных импуль-
сов с частотой 500 Гц, скважностью, равной 2, сдвинутых относительно друг
друга на 90°.
6 — формирователь сигнала запитки датчиков. Преобразует прямоугольные
импульсы в сигналы синусоидальной формы sin at и cos at, где <в=3140 рад/с.
7—датчик обратной связи по положению, работающий в режиме измере-
ния фазы. Им может быть, например, вращающийся трансформатор типа ВТМ,
имеющий две измерительные обмотки для компенсации погрешности его изго-
товления, или резольвер, имеющий одну измерительную обмотку. Сигнал изме-
рительной обмотки имеет постоянную амплитуду и зависимую от углового по-
ложения ротора датчика фазу. Частота измерительного сигнала определяется
. л(об/мин)р
из соотношения /изм = 500Гц. ± ----—------, где п — скорость вращения вала
60
датчика, р — число пар полюсов датчика, знак зависит от направления вращения
вала (согласно с полем датчика или встречно).
8 — формирователь сигнала обратной связи. Из синусоидального измери-
тельного сигнала в момент перехода через нуль формирует импульс длительно-
стью (0,5—1) мкс. Частота импульсов сигнала обратной связи (СОС) равна ча-
стоте измерительного сигнала.
9— фазовый дискриминатор. В зависимости от знака рассогласования на
выходе рас. 1 или рас. 2 формируются прямоугольные импульсы, скважность ко-
торых зависит от величины разности фаз сигналов на входах ФД. В исходном
состоянии, при рассогласовании, равном нулю, импульсы на входах ФД сдвину-
ты относительно друг друга на 180°, при этом на выходах рас. 1 и рас. 2 сигналы
единичного уровня (скважность равна 1). При разности фаз входных сигналов
0° или 360° на выходе рас. 1 или рас. 2 скважность импульсов достигает величи-
ны, равной 2. Таким образом, диапазон линейной работы ФД триггерного типа
составляет ±180°. Используя приведенное выше соотношение для фазы выход-
ных импульсов двигателя, находим число импульсов программы W=±100, соот-
ветствующее диапазону линейной работы ФД, что при дискрете перемещения
6=0,01 мм соответствует рассогласованию по пути Д=±1 мм.
Д}— узел компенсации скоростного рассогласования. Формирует импульсы,
частота которых совпадает с частотой импульсов программы, а длительность
составляет 80 мкс (может изменяться путем перепайки перемычек).
Иными словами, скважность импульсов канала скоростной компенсации об-
ратно пропорциональна скорости перемещеиня. В следящих системах только с
256
налам скорости и пути
каналом положения величина рассогла-
сования определяется скоростью пере-
мещения и добротностью следящего при-
вода (физический смысл добротности бу-
дет определен ниже) из соотношения
Д=ц/Кв, где Д — величина рассогласова-
ния между заданным по программе и
фактическим положением исполнительно-
го органа станка; v — скорость переме-
щения исполнительного органа; К» — ко-
эффициент усиления по скорости, то же,
что добротность следящего привода. При
существующих регулируемых тиристор-
ных электроприводах максимальная ве-
личина добротности, при которой сохра-
няется устойчивая работа следящей си-
стемы, составляет около Лг=40 с-1.
Тогда при скорости быстрого хода s =
=4800 мм/мин имеем величину рассогла-
сования Д=2 мм, что в два раза превы-
шает диапазон линейной работы ФД.
Таким образом, для получения вы-
соких скоростей перемещения необходи-
мо либо расширять диапазон линейной
работы ФД, изменяя его принцип дейст-
вия, либо подавать на вход электропри-
вода дополнительное напряжение, про-
порциональное скорости перемещения,
которое будет компенсировать рассогла-
сование попути. Последнюю функцию
выполняет узел компенсации скоростного
рассогласования. В этом случае в уста-
новившемся режиме (при постоянной скорости перемещения) величина напряже-
ния, формируемого каналом скорости, подбирается путем регулировки таким об-
разом, чтобы свести к нулю рассогласование по пути.
11— блок связи. Формирует напряжение постоянного тока для управления
регулируемым электроприводом, а также осуществляет при помощи оптронов
гальваническую развязку источников питания +5 В УУСП от входных цепей
электропривода. Напряжение управления представляет собой сумму напряжений
путевого и скоростного каналов. Напряжение постоянного тока путевого канала
пропорционально рассогласованию по пути между заданным и действительным
положениями рабочего органа станка, а напряжение постоянного тока, форми-
руемое скоростным каналом, пропорционально частоте импульсов скоростного
канала. Характеристики блока связи отдельно по каналам пути и скорости при-
ведены на рис. 10.2. При помощи потенциометров, находящихся в блоке связи,
257
Рис. 10.3. Функциональная схема следящего привода устройства ЧПУ типа 2С-42
можно изменять наклон характеристик. Наклон характеристики по каналу ско-
рости определяется таким положением потенциометра, при котором рассогласо-
вание по пути в установившемся режиме (при постоянной скорости вращения)
равно нулю. Практически это соответствует величине Uy, находящейся в преде-
лах (8—10) В при максимальной скорости перемещения (fnp=8 кГц). От накло-
на характеристики БС по каналу пути зависит добротность следящего привода.
Практически величина Uy при рассогласовании Д=1 мм может находиться в
пределах (1,5—2,5) В. Методика практического определения и установки доброт-
ности будет приведена ниже.
Остальные узлы функциональной схемы имеют следующее назначение: 12 —
тиристорный преобразователь; 13—двигатель; 14— исполнительный механизм;
15 — тахогенератор.
На рнс. 10.3 приведена функциональная схема следящего привода фазового
типа, используемого в устройстве ЧПУ типа 2С-42, выполненного на базе микро-
ЭВМ «Электроника-60». В соответствии с цифровым обозначением выделенные
на рисунке узлы имеют следующее назначение:
1 — программная часть следящего привода. Алгоритм работы следящей си-
стемы реализован программным способом. Вычисления в программе производятся
с величиной дискреты 6=1 мкм. Следящий привод имеет только канал положе-
ния. Регулятор положения выполнен пропорциональным.
2 — узел изменения коэффициента передачи регулятора положения. Коэффи-
циент передачи может находиться в пределах К=1Ч-7 и изменяться путем соот-
ветствующей установки перемычек в субблоке уставок (SB-454). От величины
К зависит добротность следящего привода.
3 — цифроаналоговый преобразователь (субблок 449). Преобразует цифро-
258
вой код рассогласования в напряжение постоянного тока U7 для управления
регулируемым приводом.
4 — субблок запитки датчиков (SB-455). Вырабатывает синусоидальные
сигналы sin a>t и cos a>t, имеющие частоту f=2,5 кГц.
5 — датчик положения фазового типа, например вращающийся трансформа-
тор или резольвер.
6 — субблок оцифровки интервала (SB-457). Преобразует разность фаз
между опорным сигналом и измерительным сигналом датчика в цифровой код.
Обеспечивает коэффициент деления фазы датчика ЛдВл = 1000 (при увели-
чении частоты заполнения счетчиков в субблоке оцифровки интервала с f=2,5 мГц
до /=5 мГц коэффициент деления фазы датчика будет равен /СДел=2000).
7 — узел программного изменения коэффициента деления фазы датчика. Ма-
тематическая операция L- умножения на два, деления на два или умножения на
десять коэффициента деления фазы датчика Кдеп выбирается путем соответст-
вующей установки перемычек в субблоке уставок. Дискрета перемещения опре-
, 5(мм/об)
деляется из соотношения 8(мм) = ————-—,
где S— шаг винта; i— коэффициент редукции между валом датчика обратной свя-
зи и винтом; р — число пар полюсов датчика; Клеа—коэффициент деления фазы
датчика, обеспечиваемый субблоком оцифровки интервала; L — математическая
операция умножения на два, десять, или деления на два.
Операция L должна выбираться таким образом, чтобы обеспечить величину
дискреты для вычислений в программной части 6 = 1 мкм. Например, при шаге
винта 5 = 10 мм/об, датчике обратной связи типа резольвер, имеющем р=10 и
установленном на валу двигателя, коэффициенте редукции между валом двига-
теля и валом винта 1=1, коэффициенте деления субблока оцифровки интервала
Кдел = Ю00, используя приведенное выше соотношение, получаем £ = Х1, что со-
ответствует отсутствию перемычек в субблоке уставок.
Порйдок дискреты перемещения (1 мкм или 0,01 мм) определяется наличием
или отсутствием соответствующей перемычки в субблоке уставок. В соответствии
с этим изменяется на единицу число разрядов в информации о перемещении и
рассогласовании, выводимой на индикацию.
Назначение остальных узлов функциональной схемы: 8 — тиристорный пре-
образователь; 9 — двигатель; 10— тахогенератор; И — исполнительный меха-
низм.
Необходимо отметить следующую существенную разницу в следящих систе-
мах, реализованных аппаратным и программным способами.
В следящем приводе устройств ЧПУ типа НЗЗ-2 и Н55-2 период времени
считывания Т, через который происходит поступление в УУСП информации о
положении, а также выдача информации из УУСП на блок связи, составляет
Т=2 мс.
В следящем приводе устройства ЧПУ типа 2С-42 информация о положении
считывается, а также выдается в виде напряжения постоянного тока на регули-
руемый привод через период времени Т=14 мс. Значительное увеличение периода
дискретизации связано с тем, что кроме управления следящим приводом необ-
259
РП Регулируемый прМ Механизм
Рнс. 10.4. Структурно-блочная схема следящего привода
ходимо производить вычисления режимов интерполяции, позиционирования и др.
Таким образом, реализация устройства ЧПУ типа 2С-42 на базе одного комп-
лекта микро-ЭВМ «Электроиика-60» приводит к величине времени цикла вычис-
лений около 14 мс. При существующих тиристорных регулируемых приводах
время считывания может находиться в пределах 2 мс^Т^15 мс, однако увели-
чение времени считывания ухудшает качество регулирования в контуре положе-
ния. Иными словами, добротность следящего привода приходится устанавливать
меньше той величины, которую могли бы обеспечить динамические характеристи-
ки регулируемого привода.
Структурная схема,
добротность следящего привода
Структурная схема следящего привода приведена на рис. 10.4, где обозна-
чено: Хзад — заданная координата; ХОс—действительная координата; ДХ— рас-
согласование по пути; РП — регулятор положения; Хрп— пропорциональный ко-
эффициент передачи РП; U-f — напряжение управления регулируемым приво-
дом; Ка — статический коэффициент передачи регулируемого привода; при ап-
проксимации регулируемого привода инерционным звеном второго порядка
То —— ; шо — собственная частота недемпфированных колебаний, 5 — относи-
“о
тельный коэффициент демпфирования (современные тиристорные электроприводы
имеют 100 с-1^шо^2ОО с-1; 0.4 ^£<0.71: i—коэффициент редукции между
валом ходового винта и валом двигателя; S—шаг винта; Ум—‘линейная ско-
рость исполнительного механизма.
Статический коэффициент передачи регулируемого привода настраивается
на величину Хп=1000 об/мин/10 В. На структурной схеме не отображены звенья
с коэффициентами передачи, равными коэффициенту редукции между валом
датчика обратной связи и ходовым винтом, числу пар полюсов датчика, коэффи-
циенту деления фазы датчика, поскольку считаем, что соблюдена дискретность
величины перемещения 6=0,01 мм, наиболее распространенная в станках с ЧПУ.
Регулятор положения включает в себя в устройствах ЧПУ типа НЗЗ-2, Н55-2
канал пути блока связи (наклон характеристики блока связи по каналу пути со-
260
ответствует ЛрП), а в уст-
ройстве ЧПУ типа 2С-42
К₽п равен произведению
коэффициента передачи
ЦАП и организованного
программным способом ре-
гулятора положения с К=
14-7.
Преобразуем структур-
ную схему к виду, приведенному
Рнс. 10.5. Структурная схема следящего при-
вода
на рис. 10.5, где Тл — постоянная интегрирова-
ния контура положения, определяющая время переходного процесса в контуре
положения. Минимальное значение Тя из условия устойчивости данной структур-
Т
ной схемы 7'и> —— , т. е. определяется динамическими параметрами регули-
^5
руемого привода.
На практике для оценки динамики следящей системы пользуются величи-
ной, обратной постоянной интегрирования, которую называют добротностью нлн
коэффициентом усиления по скорости Kv = ——— = н определяют
Т и
в установившемся режиме как отношение скорости перемещения к рассогласо-
ванию по пути, т. е. Ло = Ум/ДЛ’. Если следящая система имеет канал скоростной
компенсации, то при определении добротности его необходимо отключать. На-
пример, если в устройстве ЧПУ типа 2С-42 при скорости перемещения
iz . v с v 5000 мм/мин
Ук=5000 мм/мин индикатируется рассогласование ДА =5 мм, то л0 = ------------
5 мм
=17 с-1, откуда Тя=60 мс, т. е. время переходного процесса в контуре положе-
ния будет составлять ?nn=(34-5) Тя= (1804-300) мс. Как уже отмечалось, при
современных регулируемых тиристорных электроприводах минимальное значение
постоянной интегрирования контура положения составляет ТЯ = ЗО мс
(Кв^ЗО с-1)- Из сказанного следует, что для практической установки необхо-
димой величины добротности в устройстве ЧПУ типа 2С-42 необходимо путем
подбора перемычек в субблоке уставок обеспечить при скорости перемещения
Ум = 5000 мм/мин рассогласование по пути, равное (34-5) мм.
В устройствах ЧПУ типа НЗЗ-2, Н55-2 ввиду невозможности получения высо-
ких скоростей без канала скоростной компенсации, такая же операция произво-
дится при задании частоты импульсов программы fn₽ = 500 Гц от пульта контроля
УУСП. При этом добротность определится из соотношения Л» = [пр/«, где п —
число дискрет на индикаторе рассогласования. Например, если при [Пр=500 Гц
п=30, то Кв = 500 Гц/ЗО= 17 с~>.
Необходимо отметить, что хотя координаты станка при движении имеют зна-
чительную величину рассогласования (без канала скоростной компенсации), при
этом ошибка (рассогласование) на контур не переносится, если добротности всех
координат установлены одинаковыми. Это следует из соотношения, Приведен-
ное К-оу
ного, например, в [19], при обходе окружности \ = Vo————------------ sin 2 а,
261
Рис. 10.6. Переходный процесс
в контуре положения при пози-
ционировании
Х,нх
0J2
0,06
0,06
0,16
Рис. 10.8. Осциллограм-
мы переходных процес-
сов при позиционирова-
нии в заданную точку в
следящей системе с кана-
лом скоростной компен-
сации:
1— Kv =17 с~1, V = 300 им/мии;
2— 7?О = 33 с-1, И = 300 мм/мин
_t,MC
~Ло ’
Рис. 10.10. Осциллограммы переход-
ных процессов при отработке шага
в следящей системе с каналом скоро-
стной компенсации;
/-^ = 17 с"1; £-*„=33 с-1
Рис. 10.7. Осциллограммы переходных про-
цессов при позиционировании в заданную
точку без канала скоростной компенсации:
1—Kv = 17 с-1; 5—Я^ЗЗс-1 при К=300 мм/мии
X
О.МС
Рис. 10.9. Осциллограммы пере-
ходных процессов при отработ-
ке шага:
7-7?о=17 с-*; 2~KV =33 с-1
262
где бк — величина отклонения реальной траектории от окружности; Vo — ско-
рость перемещения; Kvx, KvV — добротности следящих приводов координат
X и У.
Наибольшая величина ошибки получается при углах, кратных а=45°. При
Kvx=Kvv величина ошибки равна нулю.
Переходные процессы в контуре положения
Переходный процесс в контуре положения при скачкообразном задании ско-
рости показан на рис. 10.6, где Уо — установившаяся скорость перемещения; Хо—
заданная точка позиционирования.
Рассогласование ДХ и скорость со связаны между собой через добротность
следящего привода Х» = Уо/ДХ.
Осциллограммы переходных процессов в контуре положения в режиме по-
зиционирования при подходе к заданной точке при различных величинах Kv при-
ведены на рис. 10.7. Позиционирование осуществлялось на скорости
Уо=ЗОО мм/мин. В качестве регулируемого привода был использован привод типа
TNP производства ПНР. Осциллограммы в контуре положении при тех же ус-
ловиях, но с каналом скоростной компенсации, настроенным на полную компенса-
цию рассогласования, приведены на рис. 10.8. Как видно из осциллограммы, ка-
нал скоростной компенсации вносит значительное перерегулирование при пози-
ционировании координаты.
В [20] показано, что для того чтобы узнать отклик следящей системы на
ступенчатое задание по пути (Хэад изменяется скачком), можно не формировать
подобную входную функцию, а наблюдать скорость перемещения (или вращения)
при линейном изменении Х8ад. Исходя из этого принципа, на рис. 10.9 и рис. 10.10
приведены осциллограммы переходных процессов в контуре положения при скач-
кообразном изменении Хзад, которые получены осциллографированием сигнала
тахогенератора в условиях, соответствующих приведенным на рис. 10.7 и
рис. 10.8.
Методика настройки следящего режима
на станке ГФ1880
с устройством Ч ПУ типа 2С42
и электроприводами типа ЭТ6
Блок-схема контура положения. Совместное, взаимодействие устройства ЧПУ,
регулируемого привода, механизма подачи станка, измерительной системы пере-
мещения показано на блок-схеме, приведенной на рис. 10.11.
Устройство ЧПУ всегда выдает на привод задающее напряжение, пропор-
циональное разности между заданным и истинным значениями положения, то
есть пропорциональное рассогласованию положений:
£73ад = Крл Кцап-ДХ.
263
При этом регулируемый привод вращает механизм подачи с измерительной си-
стемой таким образом, чтобы измеренное значение положения приближалось к
заданному, а нх разность стремилась к нулю в заданной точке перемещения.
В режиме движения с постоянной скоростью имеется постоянное рассогла-
сование ДХ, за счет которого поддерживается заданная скорость. При этом ско-
рость перемещения не зависит от коэффициентов передачи регулятора положения
Лрп, цифроаналогового преобразователя Лцап, регулируемого привода Кир, а оп-
ределяется только величиной, заданной от ЧПУ. Перечисленные коэффициенты
передачи определяют величину рассогласования положения ДХ при дайной ско-
рости Уаад, то есть коэффициент усиления по скорости Хо = Узад/ДХ, илн коэф-
фициент усиления контура положения.
Проверка и установка отрицательной обратной связи по положению. При
задании от устройства ЧПУ перемещения в положительном направлении иа вы-
ходе цифроаналогового преобразователя всегда появляется напряжение также
положительной полярности.
Поэтому прн положительной полярности задающего напряжения регулируе-
мый привод должен перемещать координату стайка в направлении «+».
264
Рис. 10.12. Структурная схема контура положения
Прн подходе к заданной точке разность между заданным и измеренным
перемещением должна стремиться к нулю Азад—Аизм=0. Это будет соответст-
вовать отрицательной обратной связи в контуре положения.
Прежде чем включать электроприводы в следящем режиме с устройством
ЧПУ, необходимо проверить и установить отрицательную обратную связь в кон-
туре положения. Для этого нужно выполнить следующие операции:
— отключить выход ЦАП устройства ЧПУ от задающего входа привода;
— подать от внутреннего источника напряжения привода на задающий вход
привода величину напряжения (0,1—0,5) В положительной полярности;
— убедиться, что координата станка перемещается в положительном направ-
лении. В противном случае поменять местами выводы якоря двигателя и тахо-
генератора;
— подключить тестер к выходу ЦАП устройства ЧПУ; убедиться, что при
перемещении в положительном направлении координаты станка выходное на-
пряжение ЦАП изменяется в сторону отрицательной полярности. В противном
случае поменять местами синусный и косинусный сигналы запитки на обмотках
головки датчика;
— убедиться еще раз, что при подаче иа вход привода задающего напряже-
ния положительной полярности координата станка перемещается в направлении
«+», а выходное напряжение ЦАП изменяется в сторону отрицательной поляр-
ности.
После этого можно соединять выход ЦАП со входом привода и быть уве-
ренным, что в заданной позиции привод будет находиться в состоянии покоя
(при положительной обратной связи привод саморазгоняется из заданной по-
зиции).
Настройка коэффициента усиления контура положении. Структурная схема
контура положения приведена иа рис. 10.12.
Из приведенной структурной схемы следует, что коэффициент усиления кон-
тура положения равен произведению коэффициентов передачи звеньев контура
А«=АустКцапКпрг'р5в и определяется также отношением скорости перемещения
координаты V (мм/мин) к рассогласованию по положению ДА (мм)
Л» = У (мм/мии)/ДХ (мм), поэтому иначе называется коэффициентом усиления
по скорости или добротностью следящего привода.
Величина, обратная Kv, является постоянной интегрирования контура поло-
265
жения Гяп=Кв_1, ей определяется длительность протекания переходного процесса
в контуре fnn=(3—5) Гип-
Приемлемой с точки зрения динамических характеристик и наиболее рас-
пространенной в станках является величина А« = 1 м/мин/мм = 16,6 с"1. В этом
случае Тип=60 мс, а /пп= (180—300) мс.
Для стайка ГФ1880 ip=l, SB = 10 мм/об, Куст— безразмерный коэффици-
ент, играющий роль- коэффициента пропорционального усиления регулятора по-
ложения. Куст может быть выбран от 1 до 7 с шагом 1 в плате уставок устрой-
ства ЧПУ. При правильной настройке коэффициентов передачи ЦАП и привода
значение ЛуОт=1 будет соответствовать Kv = l м/мин/мм.
Перед настройкой коэффициентов передачи ЦАП и привода необходимо ус-
тановить Куот = 1.
1. Настройка коэффициента передачи ЦАП.
На рис. 10.13 приведена правильная и наиболее распространенная в отече-
ственных и зарубежных устройствах ЧПУ характеристика передачи ЦАП.
В скобках указана величина АХ в мкм, записанная в восьмеричном коде.
Для настройки приведенной характеристики необходимо:
— отключить автомат привода настраиваемой координаты;
— перевести устройство ЧПУ в режим диалога путем кратковременного
перемыкания ножек All, А13 в крайнем слева ряду на задней стороне монтаж-
ной панели микро-ЭВМ «Электроника-60» либо переключением тумблера «Коот»;
— пользуясь методикой настройки ЦАП (по документации устройства ЧПУ),
установить нулевое напряжение на выходе ЦАП настраиваемой координаты;
266
— по адресу ЦАП настраиваемой координаты (167640-А, 167642-У, 167644-Z,
167646-1/) задать код 23420. Потенциометром /?з ЦАП отрегулировать выходное
напряжение иа уровне (+9±0,01) В. Задать код 123420. Потенциометром /?ц
отрегулировать напряжение на выходе ЦАП (—9±0,01) В.
Напряжение измерять цифровым вольтметром. Выход ЦАП должен быть
соединен со входом привода. Коэффициент передачи ЦАП будет иметь величину
Кцап = 0,9 В/ММ.
2. Настройка характеристики передачи привода.
Предварительно на стенде электропривод должен быть настроен таким об-
разом, чтобы величине задающего напряжения Г/Зад=9 В соответствовало на-
пряжение якоря t/я—100 В, при этом скорость вращения составит
ПдвЗНООО об/мии.
Точная настройка коэффициента передачи привода производится иа стайке
в следящем режиме работы следующим образом:
— задать от устройства ЧПУ или от пульта станка скорость движения
У= 10 м/мии иа наибольшее возможное перемещение;
— отрегулировать потенциометром Язог в цепи сигнала тахогенератора в пла-
те «Регуляторы» электропривода ЭТ6 величину рассогласования, наблюдаемую
на дисплее устройства ЧПУ, сделать ее равной значению (10±0,1) мм.
267
В этом случае коэффициент передачи привода будет равным
Лпр = 1000 об/мин/9 В, а коэффициент усиления по скорости контура положения
Ая = 10 м/мии/10 мм = 1 м/мии/мм.
Характеристика передачи контура положения, соответствующая указанным
настройкам ЦАП и привода, приведена на рис. 10.14.
При отсутствии зазоров (люфтов) в механизме подачи станка и высоких
динамических характеристик регулируемого привода значение Кч может быть
дискретно увеличено до 2 м/мин/мм или даже 3 м/мин/мм. Это производится
установкой коэффициента Ауот в плате уставок устройства ЧПУ.
При правильной настройке коэффициентов передачи ЦАП н привода, ука-
занной выше, численные значения Ауот и Kv совпадают, т. е. Ауот=1 соответст-
вует Кя=1 м(мин(мм и т. д.
Для исключения ошибок при контурной обработке величины Ая всех коор-
динат должны быть установлены одинаковыми.
Установка времени разгона до скорости быстрого хода при позиционирова-
нии. При скачкообразном задании скорости быстрого хода в контуре положения
возникают либо большие ускорения в соответствии с зависимостью а=У-Ая,
либо регулируемый привод входит в зону токоограиичеиия, при этом возникает
отставание по пути, чаще всего превышающее допустимую величину, вследствие
чего в ЧПУ вырабатывается сигнал «сбой привода».
Для исключения этих явлений применяют закон линейного задания скорости.
Время разгона определяется следующим образом. При Кя = 1 м/мии/мм=
—16,6 с~* и скачкообразном задании скорости переходный процесс в контуре
положения завершается за
fnn= (З-г-5) К,-1 = (180—300) мс.
Чтобы не уменьшать быстродействия контура положения, при разгоне принимают
время разгона до скорости быстрого хода равным (180—300) мс.
С другой стороны, при заданном времени разгона и моменте инерции меха-
низма подачи электропривод не должен входить в зону токоограиичеиия, по-
скольку это приводит к большому перерегулированию по положению. В связи
с этим экспериментально было определено время разгона fp=400 мс до скорости
быстрого хода Vox = 10 м/мин, при котором удовлетворительно разгоняются и
тормозятся (без перерегулирования) все координаты станка.
Величина времени разгона и скорость, до которой за это время происходит
разгон, устанавливаются в плате уставок устройства ЧПУ.
Таким образом, для станка ГФ1880 в плате уставок должны быть установ-
лены скорость быстрого хода Vox=10 м/мии, а время разгона до скорости
10 м/мин fp = 0,4 с.
ЛИТЕРАТУРА
1. Михаилов О. П. Высокомомеитные электродвигатели для приводов по-
дач металлорежущих станков.— М.: НИИМаж^ 1979^-36 с.
2. Найдне В. А. Орлова Р. Т. Электроприводы и электродвигатели для
станков с ЧПУ: Рекомендации по применению в станкостроении.— М-: ОНТИ
ЭНИМС. 1976.— НО с.
3. Эффективность применения высокомоментных двигателей а станкострое-
нии j Э. Г. Королев. И. А. Волхомврсхий. А. М. Лебедев и. др — М.: Машино-
строение, 1981.—144 с.
4. Электродвигатели постоянного тока с возбуждением от постоянных магни-
тов для приводов подач металлообрабатывающих станков: Рекомендация по при-
менению / Г. И. Андреев, Э- Г. Королев к др. М.: ОНТИ ЭНИМС, 1961.— 35 с.
6. Справочник по аатоматиэироваиаому электроприводу г Под ред. Б. А Ели-
сеева а А. В. Шиияаского.— И.: Эяергоатомкздат, 1983.— 616 с.
6. Баварии А В., Новаков В. А, Соколовский Г. Г. Управление
электроприводами: Учебное пособие дня вузов.—Л.: Эвергоиздат, 1982 — 392 с.
7. Шипалло В. П. Автоматнзароваииый вентильный электропривод.—М.:
Энергия. 1969.—400 с.
8. Слежаяовсипй О. В. Реверсивный электропривод постоянного тока,—
Мл Металлургия. 1967.— 424 с.
9. Кофлаа Р., Дрискол Ф. Операционные усядггелп п линейные интег-
ральные схемы—М.: Мир. 1979,—360 с.
10. Шило В. Л. Линейные интегральные схемы —Мл Советское радио,
1979.—205 с.
11. Устройство управления тиристорное серии БТУ 3601. Техническое описа-
ние и инструкция по эксплуатации — Чебоксары-*^* с.
12. Комплектные системы управления электроприводами тяжелых металлоре-
жущих станков. / Под ред. А Д. Поздеева.— Мл Энергия, 1980.— 288 с.
13. Электропривод постоянного тока серия ЭТ6: Паспорт,— Прокопьевск.—
48 с.
269
14. Комплектный электропривод с высокомомеитиымв двигателями постоян-
ного тока: Техническая документация. 1983 — 71 с.
15. Электропривод постоянного тока типа «Мсзоматнк-А»: Техническая Доку-
ментация.
16. Тиристорные приводные системы с сервомеханизмами серии TNP: Эк-
сплуатационно-техническая документация.
17. Динамика вентильного электропривода постоянного токв / Под ред.
А. Д. Поздееви.— М.: Энергия. 1975.—224 с,
18. Справочное пособие по теории систем автоматического регулирования
и управления I Под ред. В. А. банковского.— Минск, Вышебшая школа, 1973.—
584 с.
19. Загальский Л. Н., Зильберблат М. Э. Частотный анализ систем
автоматизированного электропривода — М.: Энергии, 1968.— 112 С.
20. Киселев В. М. Фазовые системы числового программного управления
станками.— М.: Машиностроение, 1976.— 352 с.
ОГЛАВЛЕНИЕ
Предисловие .......................................................... 3
Глава первая. Краткие сведения о двигателях постоянного тока, при-
меняемых в электроприводах подач стаикоп с ЧПУ . . 5
Г юла вторая. Основные принципы работы тиристорных преобразовате-
лей электроприводов постоянного тока.....................................20
Г лава третья. Операпвониые усилители — основная элементная база
преобразователей современных электроприводов ... 38
Глава четвертая. Комплектный электропривод подачи типа БТУ3601 . . 53
Глава пятая. Комплектный электропривод подачи типа ЭТ6 . . . 112
Глава шестая. Комплектный электропривод подачи типа «Кемроп» . 139
Глава седьмая. Комплектный электропривод подачи типа <Мезоматик» 182
Глава восьмая. Комплектный электропривод подачи типа TNP . . 207
Глава девятая. Методика нистройкн переходных процессов .... 232
Глава десятая. Особенности работы электроприводов в следящем ре-
жиме .................................................25*
Литература.............................................................269