/







































































































































































































































































Текст
И. И. ИВАШКОВ, Г. М. БОВИН,
А. Г. МЕКЛЕР, В. А. ТУШМАЛОВ
ПОДЪЕМНИКИ
Под общей редакцией
канд. техн. наук И. И. ИВАШКОВА
Допущено Министерством высшего образования СССР
в качестве учебного пособия
для машиностроительных вузов специальности
„Подъемно-транспортные машины и оборудование11
МАШГИЗ
ГОСУДАРСТВЕННОЕ НАУЧНО-ТЕХНИЧЕСКОЕ ИЗДАТЕЛЬСТВО
МАШИНОСТРОИТЕЛЬНОЙ ЛИТЕРАТУРЫ
Москва 1957
В книге изложены основные сведения о лифтах,
многокабинных подъемниках и эскалаторах,
рассмотрены конструкции этих машин, их технические
характеристики, принципы работы и области
применения, даны основы теории и расчета.
Книга предназначена в качестве учебного пособия
по курсу „Подъемники" для машиностроительных
втузов.
Рецензенты: канд. техн. наук П. И. Бурмистров
д-р техн. наук проф. Н. Ф. Руденко
Редактор издательства инж. Н. В. Манакин
Редакция литературы по тяжелому машиностроению
Зав. редакцией инж. С. Я. ГОЛОВИН
ПРЕДИСЛОВИЕ
Книга содержит основные сведения о лифтах, многокабинных
подъемниках (патерностерах) и эскалаторах в объеме,
соответствующем программе машиностроительных втузов по курсу «Подъемники».
В книге изложены принципы работы этих машин, основы их
конструкции, способы расчетов и основные эксплуатационные
характеристики.
В целях облегчения выполнения расчетов, в ней приведены
основные справочные данные, а в отдельных случаях —примеры
расчетов. Специальные виды подъемников (шахтные, строительные
и др.) в настоящей книге не рассматриваются.
Книга составлена на основании отечественного и зарубежного
опыта. Сжатый объем книги как учебного пособия при весьма
большом многообразии типов и конструкций лифтов и эскалаторов
позволил изложить в ней лишь основные вопросы. Для более подробного
ознакомления с конструкцией отдельных узлов лифтов может быть
рекомендован атлас чертежей «Грузоподъемные машины», ч. II
(авторы атласа Л. Г. Кифер и И. И. Абрамович).
Для интересующихся более подробными материалами в конце
книги приведен список литературы.
ГЛАВА 1
ВВОДНЫЕ СВЕДЕНИЯ
§ 1. ОСНОВНЫЕ ВИДЫ ПОДЪЕМНИКОВ
Подъемниками называется группа грузоподъемных машин, в
которых перемещение грузов или людей с одного уровня на другой
производится в специальных грузонесущих устройствах (кабинах,
ковшах, тележках и пр.), движущихся в направляющих по строго
определенному пути.
Направляющие не допускают раскачивания груза в пути,
повышают плавность движения, предохраняют груз от ударов и
повреждений, что обеспечивает его большую сохранность. Подъемники, в
отличие от других грузоподъемных машин, получили применение не
только для подъема и опускания разнообразных грузов, но и для
перемещения людей с одного уровня на другой.
Имеется очень много типов и конструкций подъемников,
различающихся по виду установки, по характеру перемещаемых грузов,
по роду привода, по типу грузонесущих устройств, по способу
соединения этих устройств с приводным механизмом и по виду их
движения.
Классификация подъемников по этим признакам приведена на
фиг. 1. По виду установки подъемники делятся на стационарные
и передвижные.
По характеру перемещаемых грузов различают грузовые,
грузопассажирские и пассажирские подъемники. Первые служат
исключительно для подъема и опускания грузов. Грузо-пассажирские
подъемники применяются одновременно для перемещения грузов
и людей, а пассажирские — только для перемещения людей.
По роду привода подъемники делятся' на 'электрические,
гидравлические, пневматические, паровые и ручные. В настоящее время
наибольшее распространение имеет электрический привод. Он
обеспечивает легкое и надежное управление подъемниками, компактен,
дешев и не требует сложного ухода. Паровой привод в подъемниках
применяется теперь редко. Гидравлический привод применяется
преимущественно при малых высотах подъема (передвижные подъем^
ники для штучных грузов). Ручной привод используется лишь для
редко работающих грузовых подъемников малой грузоподъемности.
стационарные
передвижные
я
-э
. 1. Кл
В)
о
о
я
►в*
[кация
о
,новньс
со
я
Ja
О
СО
о
со
2
НИКОВ
грузовые
грузо-пассажирские
пассажирские
электрические
гидравлические
пневматические
паровые
ручные
однокабинные
многокабинные
клетьевые
ковшовые (скиповые)
с тележками
с вагонами
с платформами
канатные
цепные
винтовые
плунжерные
непрерывного действия
прерывного действия
вертикальные
наклонные
-з
со
О
СО
перс
2
п>
£з
со
2
О
X
"И
Со
РЧ
П>
роду
вода
о со _J
Н О О
чз я
о п> н
»О S
ю я
X
о
я
я
X
- - СО СО рГ
н о я °
^ я »
eiii
X
Основные виды подъемников
По типу грузонесущих устройств подъемники могут быть клетье-
выми, скиповыми, с подъемными платформами, с тележками или
вагонами.
По способу соединения этих устройств с приводным механизмом
различают канатные, цепные, винтовые, реечные и плунжерные
подъемники. Преимущественное распространение получили
канатные подъемники, в которых грузонесущие органы подвешиваются
на стальных проволочных канатах, навиваемых на барабаны лебедок
или огибающих канатоведущие шкивы, передающие тяговое усилие
трением. Широкое применение имеют также цепные подъемники.
В них грузонесущие устройства крепятся к двум параллельно
расположенным замкнутым цепям. Винтовые и плунжерные
подъемники применяются редко и исключительно при малых высотах подъема.
По виду движения грузонесущих устройств различают
подъемники прерывного и непрерывного действия, а также вертикальные
и наклонные подъемники. Прерывность движения грузонесущих
устройств (кабин, платформ, тележек) характерна для многих типов
подъемников. Грузонесущие устройства таких подъемников
совершают возвратно-поступательные движения с остановками в
определенных пунктах для загрузки или разгрузки. Наряду с этим
существуют подъемники, в которых загрузка и разгрузка производятся
при непрерывном безостановочном движении грузонесущих устройств
по замкнутому пути.
Многие виды подъемников могут иметь как вертикальную, так
и наклонную трассу движения грузонесущих устройств. У
некоторых же подъемников трасса может быть только наклонной,
вследствие чего вертикальному перемещению грузонесущих устройств
сопутствует их вынужденное горизонтальное перемещение. Для
уменьшения нагрузки на привод грузонесущие органы подъемников обычно
уравновешиваются или другими такими же устройствами, или
противовесами, движущимися также по направляющим. В некоторых
подъемниках уравновешивается также часть веса поднимаемого груза.
В зависимости от конструктивных особенностей и областей
применения различают следующие основные типы подъемников: одно*
кабинные для жилых, общественных и промышленных зданий (лифты),
шахтные или рудничные, ковшовые или скиповые, строительные,
передвижные, многокабинные пассажирские непрерывного действия
(патерностеры) фуникулеры, эскалаторы. Схемы этих подъемников
показаны на фиг. 2.
Лифтами (фиг. 2, а) называются стационарные подъемники
периодического (прерывного) действия, в которых перемещение
грузов или людей с одного уровня на другой производится в кабине,
движущейся по направляющим, установленным в огражденной со
всех сторон шахте. Наиболее широкое применение имеют лифты
с электрическим приводом и с кабинами, подвешиваемыми на
канатах. Лифты с гидравлическим приводом (плунжерные) в настоящее
время применяются редко и лишь при малых высотах подъема.
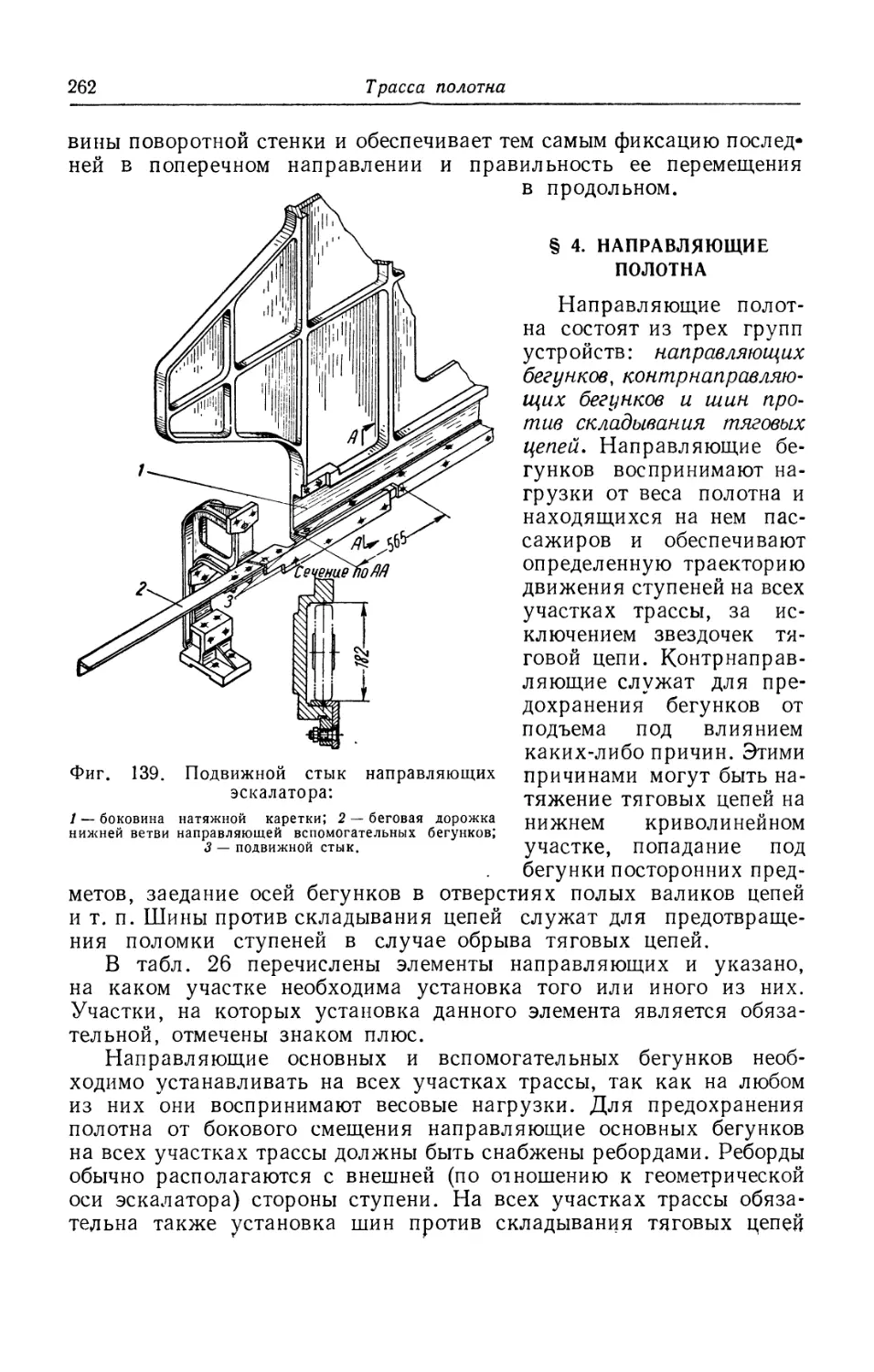
Вводные сведения
Гол о б на я часть стой
*и с берм и им 5/iQKQH И'
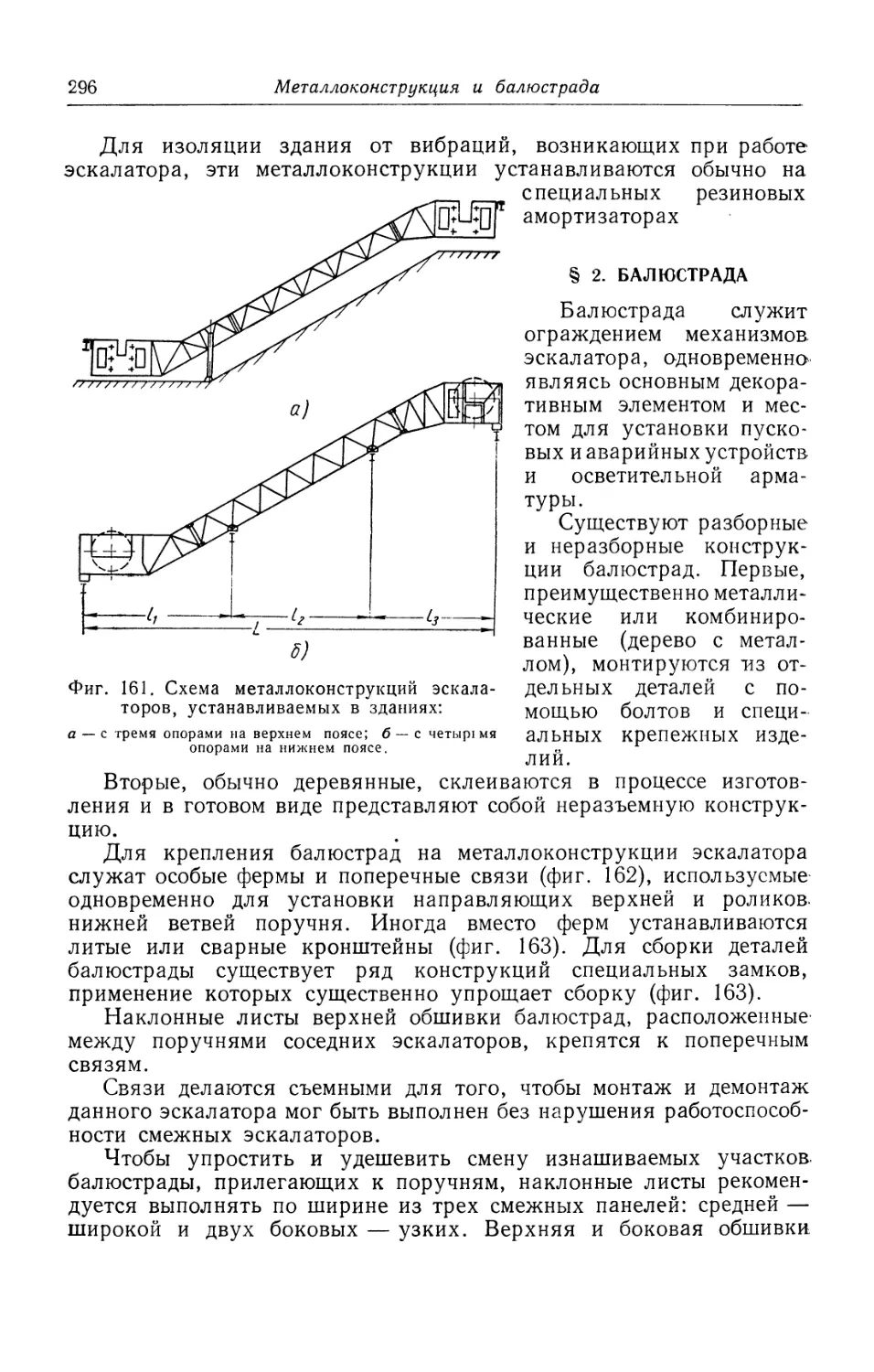
Фиг. 2. Схема основных
а — лифт; б — шахтный (рудничный); в — ковшовый (скиповый); г — строительный; д — пе-
з — фуникулер;
Основные виды подъемников
<*}
видов подъемников:
редвижной самоходный; е — передвижной несамоходный; ж — многокабинный (патерностер);
и — эскалатор.
10 Вводные сведения
Лифты с винтовыми и реечными подъемными механизмами не
применяются.
Шахтные или рудничные подъемники (фиг. 2, б)
по своей кинематической схеме мало отличаются от обычных лифтов.
Такие подъемники имеют обычно две уравновешивающие друг друга
кабины (клети). Они применяются на шахтах и в рудниках для выдачи
на поверхность полезных ископаемых (главный шахтный подъем),
а также для спуска и подъема людей, оборудования, материалов,
для выдачи пустой породы (вспомогательный подъем). В шахтах
и рудниках малой производительности главный и вспомогательный
подъем обслуживаются обычно одним подъемником. Для шахтных
подъемников характерны весьма большие высоты подъема,
достигающие нескольких сот метров, большие размеры кабин при высоких
скоростях их движения и больших мощностях привода.
Ковшовыми или скиповыми (фиг. 2, в) называются
подъемники периодического действия, предназначенные для подъема
различных сыпучих и кусковых материалов в саморазгружающемся
ковше (скипе), перемещаемом в жестких направляющих. Ковшовые
подъемники бывают стационарными и передвижными, вертикальными
и наклонными. Высота подъема достигает 1000 м и более. Емкость
ковша обычно равна 3—8 м3.
Строительные (фиг. 2, г) подъемники применяются
исключительно для перемещения строительных материалов и элементов
конструкций на строительстве. По сравнению с лифтами они имеют
упрощенную конструкцию. Применение их для перемещения людей
запрещается.
Передвижные самоходные (фиг. 2, д) и
несамоходные (фиг. 2, е) подъемники применяются для подъема штучных
грузов на небольшую высоту. Подъем грузов осуществляется с
помощью консольных платформ, движущихся по направляющим.
М н о г о к а б и н н ы м и подъемниками (патерносте-
рами) (фиг. 2, ж) называются стационарные пассажирские
подъемники непрерывного действия, в которых перемещение пассажиров
с одного уровня на другой производится в кабинах, подвешенных
к двум замкнутым цепям.
Для перемещения грузов такие подъемники применяются редко,
имеют специальную конструкцию и стоят, ближе к вертикальным
элеваторам, изучаемым в курсе машин непрерывного
транспорта.
Фуникулерами (фиг. 2, з) называются подъемники, в
которых перемещение людей с одного уровня на другой производится
в вагонах, движущихся по наклонным рельсам. Фуникулеры обычно
работают под открытым небом и служат для подъема пассажиров на
естественные возвышения (крутой берег, гора и т. п.). Фуникулер,
как правило, имеет два уравновешивающих друг друга вагона.
При движении одного из них вверх второй движется вниз, и
наоборот.- — — -
История развития и обзор конструкций подъемников 11
Эскалатором (фиг. 2, и) называется наклонный
пассажирский подъемник. непрерывного действия, в котором перемещение
людей с одного уровня на другой производится с помощью
специальных тележек-ступеней, движущихся по направляющим. Ступени
соединены шарнирно с двумя замкнутыми цепями. На наклонном
участке они образуют лестницу полного профиля, а на концевых
участках — горизонтальные площадки, облегчающие вход и выход.
Благодаря такому устройству эскалатор в случае его вынужденной
остановки может быть использован как обыкновенная лестница.
Из большого числа разновидностей современных подъемников
предметом изучения в данном курсе являются только три вида
машин этой группы, а именно: лифты, многокабинные
подъемники и эскалаторы.
Наибольшее внимание уделяется лифтам. Простейшие их
разновидности имеют одинаковое устройство с шахтными и строительными
подъемниками. Современные лифты характеризуются совершенной
конструкцией основных узлов, сложной системой управления и
большей приспособленностью к безопасному обслуживанию пассажирских
и грузовых перевозок. Поэтому изучение различных конструкций
лифтов может облегчить в дальнейшем ознакомление со
специальными видами подъемников, изучаемыми в особых курсах.
Многокабинные подъемники имеют значительно меньшее
распространение, чем лифты. Однако ряд их особых свойств, а именно
непрерывность движения кабин и возможность одновременного
использования одной установки и для подъема и для спуска людей,
представляют несомненный интерес и заслуживают внимания.
В последние годы все большее значение приобретают эскалаторы
как основное средство для массовых пассажирских перевозок.
Конструкция эскалаторов значительно сложнее, чем конструкции
подъемников других типов. Поэтому, наряду с лифтами, изучению их
отводится большое самостоятельное место.
§ 2. ИСТОРИЯ РАЗВИТИЯ И ОБЗОР КОНСТРУКЦИЙ ОСНОВНЫХ ВИДОВ
ПОДЪЕМНИКОВ
Лифты. Из всех видов подъемников лифты имеют наиболее
широкое и универсальное применение. Они служат основным средством
междуэтажного сообщения в жилых, фабрично-заводских,
административно-хозяйственных, учебных, торговых и других
многоэтажных зданиях. Тысячи лифтов обслуживают грузовые потоки
предприятий самого разнообразного профиля: она подают уголь в
бункеры котельных, чугун к вагранкам литейных цехов, перевозят
рулоны бумаги в типографиях, продукты и пищу на фабриках-
кухнях, доставляют товары из складских помещений к прилавкам
магазинов, подают книги в читальные залы из книгохранилищ боль-
щих. библиотек,.поднимают автомобили на верхние площадки
многоэтажных гаражей, В то время как пассажирские- лифты сосредото*
12 Вводные сведения
чены в основном в больших городах, с высокими домами, грузовые
лифты применяются в самых различных местах, обслуживая нередко
невысокие двух- и трехэтажные здания.
Прообразы современных лифтов появились в древнем Риме
в I в. до н. э. \ Более поздние упоминания о лифтах с кабиной,
подвешенной на канате и приводимой в движение вручную или
силой животных, датируются серединой VI в. (лифты Синайского
монастыря в Египте), первой четвертью XIII в. (во Франции)
и XVII в. (лифт Виндзорского замка в Англии, «летающий стул»
Велайера в одном из парижских дворцов). К середине XVIII в.
пассажирские лифты начали применяться в России (лифты
дворцовых построек Царского Села и подмосковной усадьбы Кусково).
В 1795 г. И. П. Кулибин разработал конструкцию винтового
пассажирского лифта (подъемных и спускных кресел) для Зимнего
Дворца. В 1816 г. лифт был установлен в главном доме
подмосковной усадьбы «Архангельское);. В середине XIX в. лифты появились
в США (лифт Г. Уотермена — в 1850 г., лифт Э. Отиса с ловителями,
удерживающими кабину при обрыве каната,—в 1852 г. и др.)-
С 60-х гг. XIX в. практику вошли лифты с паровым приводом, затем
с гидравлическим приводом. Применение последних в России
связано с именем И. А. Тиме. В 1880 г. в Германии появился первый
электрический лифт Сименса с реечным механизмом подъема. К
началу XX в. электрические лифты получали все более широкое
распространение, постепенно вытесняя лифты с другими видами приводов.
Серьезным толчком к развитию лифтов и расширению областей
их применения послужило появление в конце XIX столетия лебедок
с канатоведущими шкивами, в которых подъемное усилие создается
за счет трения между канатом и ручьем шкива. С 1904 г. начали
получать массовое распространение лебедки с двойным обхватом
канатоведущих шкивов, открывшие возможность применения лифтов
практически на неограниченную высоту подъема, что положило
начало процессу вытеснения лифтов с барабанными лебедками.
Еще быстрее этот процесс развивался после первой мировой войны,
с началом массового применения лебедок с простым (одинарным)
обхватом канатоведущих шкивов, которые имеют наиболее широкое
применение и в настоящее время.
В дореволюционной России лифтостроение значительно
отставало от зарубежных стран. Его развитие началось лишь после
Великой Октябрьской социалистической революции, когда наряду с
грузовыми и пассажирскими лифтами общего назначения стали
изготовляться лифты специальных типов. В конце 40-х годов в нашей
стране освоено серийное производство новых конструкций
нормальных и быстроходных лифтов. В 1955 и 1956 гг. ВНИИПТМАШ
совместно с Союзлифтом создали нормальный ряд конструкций пас-
1 Сведения из истории развития лифтов заимствованы из Большой Советской
Энциклопедии. См. «Под'ьемцики»,
История развития и обзор конструкций подъемников 13
сажирских лифтов для жилых домов и общественных зданий (3
типоразмера) грузоподъемностью от 350 до 1000 кг), нормальный ряд
грузовых лифтов (шесть типоразмеров грузоподъемностью от 250
до 5000 кг) и больничный лифт грузоподъемностью 500 кг.
Основными руководящими материалами для проектирования,
изготовления, монтажа и эксплуатации лифтов являются «Правила
устройства, освидетельствования и эксплуатации подъемников (лифтов)»,
изданные Главной государственной инспекцией Госгортехнадзора,
а также ряд стандартов на основные параметры лифтов и их узлов.
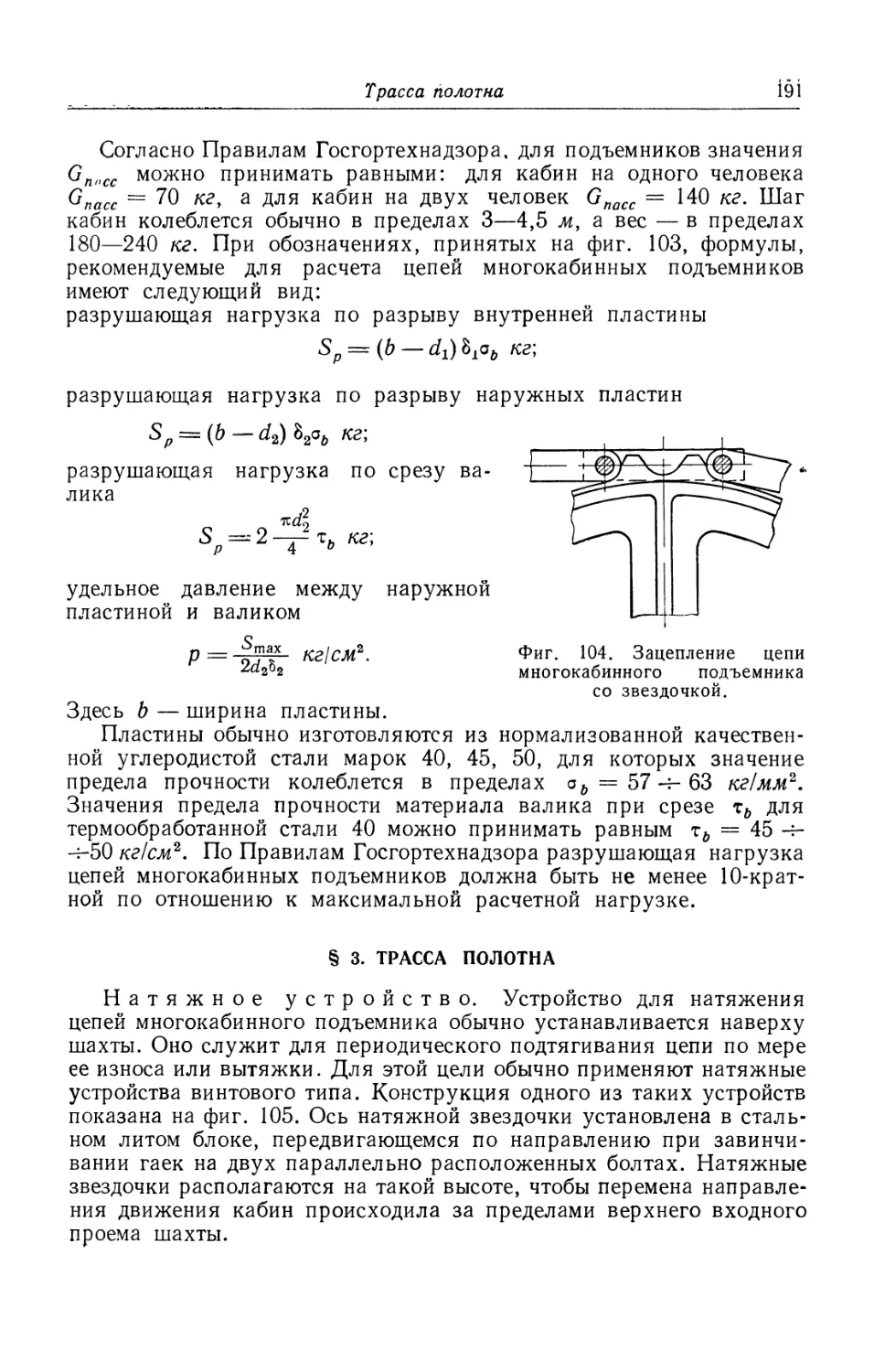
При всем многообразии типов и конструкций для всех
современных лифтов как пассажирских, так и грузовых характерно наличие
ряда узлов, имеющих одинаковое назначение. Кихчислу относятся:
а) подъемный механизм редукторного или безредукторного типа,
называемый обычно лебедкой;
б) подъемные канаты;
в) кабина с подвесками для канатов и ловителями,
предотвращающие ее падение в аварийных случаях;
г) противовес, уравновешивающий вес кабины и часть веса груза;
д) направляющие для кабины и противовеса;
е) буфера или упоры, смягчающие удар при проходе кабины
или противовеса через крайнее нижнее положение;
ж) ограничитель скорости, предотвращающий движение кабины
со скоростью, превышающей установленную;
з) электрооборудование;
и) шахта с приямком и машинным помещением.
На фиг. 3 показана схема наиболее распространенного
пассажирского лифта с редукторным приводом, применяемого в зданиях
высотой до 10—12 этажей. Скорость его кабины составляет 0,75 м/сек.
Привод (лебедка) 1 лифта установлен в машинном помещении 2,
расположенном над вертикальной шахтой 3. Шахта проходит через
все здание и ограждена сетчатыми или сплошными стенками. К
каркасу 4 шахты прикреплены направляющие 5 и 6 соответственно
для кабины 7 и противовеса 8. Кабина и противовес подвешены
на стальных проволочных канатах 9, перекинутых через канато-
ведущий шкив 10. Вращение шкива осуществляется от
электродвигателя // через упругую муфту и редуктор. Остановка производится
с помощью электромагнитного колодочного тормоза 12. Кабина
лифта и этажные проемы в шахте снабжены распашными дверями 13,
открывающимися вручную. Для обеспечения безопасной работы
лифта двери кабины и замки дверей шахты сблокированы так, что
пуск лифта, в кабине которого имеются пассажиры, может быть
произведен лишь после того, как будут закрыты двери кабины и
двери всех шахтных проемов. При переходе кабины через крайнее
верхнее и крайнее нижнее рабочие положения электродвигатель
отключается с помощью отводок конечных выключателей 14,
установленных в шахте. Для смягчения удара кабины о дно приямка
шахты в аварийных случаях прохода кабины через крайнее ниж-
14
Вводные сведений
Фиг. 3. Схема тихоходного
пассажирского лифта (с
редукторным приводом):_
— лебедка; 2 — машинное
помещение; 3 — ограждение шахты;
4 — каркас шахты; 5 —
направляющие кабины; 6 — направляющие
противовеса; 7 — кабина;,8 —
противовес; 9 — подъемные канаты;
10 — канатоведущий шкив;
// _ электродвигатель; 12 —
колодочный тормоз; 13 — распашная
дверь шахты; 14 — отводка
конечного выключателя; 15 —
пружинный буфер; 16 — ограничитель
скорости; 17 — ловители; 18 —
пусковой кнопочный аппарат;
19 — гибкий подвесной провод;
20 — панель управления; 21 —
переключатель; 22 — вызывной
аппарат.
История развития и обзор конструкций подъемников
15
нее положение в приямке шахты установлены пружинные
буфера 15.
В случае превышения кабиной установленной скорости
происходит автоматическое отключение
электродвигателя с помощью ограничителя
скорости 16. Падение кабины в аварийных
случаях предотвращается ловителями
17, установленными на кабине 7 и
заклинивающимися относительно
направляющих 5. Для подъема до заданного
этажа пассажир, войдя в кабину,
должен закрыть двери шахты и кабины и
нажать соответствующую данному
этажу кнопку на аппарате 18,
расположенном на стенке кабины. Этот аппарат
соединен гибким проводом 19 с панелью
управления 20, установленной в
машинном помещении. При подходе кабины к
заданному этажу электродвигатель
автоматически выключается
переключателем 21. Для возврата кабины вниз
нажимают кнопку или поворачивают ключ
вызывного аппарата 22У установленного
на стене шахты.
На фиг. 4 показан общий вид
быстроходного пассажирского лифта со
скоростью кабины свыше 2 м/сек. Такие
лифты применяются в зданиях с
числом этажей более 12—15.
Лебедка лифта не имеет редуктора.
Ее канатоведущий шкив посажен
непосредственно на вал электродвигателя,
вращающийся с малым числом оборотов
(не более 120 об/мин). Кабина лифта
снабжена автоматически
открывающимися раздвижными дверями,
требующими меньше времени на открывание и
закрывание, чем распашные двери
тихоходного лифта, показанного на фиг. 3.
Вместо пружинных буферов этот лифт
имеет масляные буфера. Лифт приме-
няется для перемещения пассажиров фиг. 4< общий вид быстроход-
как на подъем, так и на спуск. Управ- ного пассажирского лифта с
ление им производится обычно лифте- безредукторным проводом,
ром, находящимся в кабине лифта.
На фиг. 5 изображен общий вид грузового лифта с редукторным
приводом. Некоторые его основные узлы (лебедка, противовес,
16
Вводные сведения
буфера и др.) мало отличаются от соответствующих узлов
тихоходного пассажирского лифта, показанного на фиг. 3. Вместе с тем
грузовые лифты, предназначаемые для перемещения грузов без
проводника, имеют ряд существенных отличий. В их кабинах могут
совсем отсутствовать двери, что по условиям безопасности
совершенно недопустимо для пассажирских лифтов или для грузовых
лифтов с проводником. По правилам Госгортехнадзора допускается
подвешивание кабин грузовых
лифтов на меньшем числе кана/ов,
чем у пассажирских. В этих
лифтах могут также отсутствовать
ограничители скорости кабин.
В отличие от пассажирских
лифтов, управление движением
кабины этого лифта возможно только
снаружи, с какой-либо одной
этажной площадки. Для этой цели
лифт снабжается вызывной
сигнализацией, обеспечивающей вызов
кабины к месту управления из
любого другого пункта.
В жилых домах секционного
типа небольшой и средней высоты
пассажирские лифты
устанавливаются обычно по одному в каждой
лестничной клетке. В домах с
высотой более 10 этажей пожарной
охраной рекомендуется в каждой
секции ставить не менее 2 лифтов.
При установке лифта в проеме
(очке) лестничной клетки (фиг. j, a)
его шахта загораживает свет, в
связи с чем ее делают стеклянной
или сетчатой. Такая шахта быстро
загрязняется и занимает большую
площадь, чем у лифта,
установленного рядом с лестничной клеткой
(фиг. 6, б, в) в глухой шахте.
Лестничная клетка в этом случае
Фиг. 5. Общий вид грузового лифта ничем не загораживается,
экономится площадь зданий, сам лифт
безопаснее для пользования в глухой шахте, чем в сетчатой.
Высокие дома, занятые учреждениями, учебными заведениями,
гостиницами, магазинами, обычно нуждаются в большом количестве
лифтов. Здесь их устанавливают в специальных лифтовых
вестибюлях, располагаемых обычно в средней, более затемненной части
здания, как наименее подходящей для рабочих помещений. Уста-
История развития и обзор конструкций подъемников
17
новка лифтов производится группами, соответственно ожидаемому
распределению пассажиропотоков.
Грузовые лифты устанавливаются таким образом, чтобы
обеспечивалось удобное маневрирование при их загрузке и разгрузке и
исключалось пересечение обслуживаемого грузопотока с другими
(посторонними) грузо- и пассажиропотоками. Стремятся также к тому,
чтобы путь движения грузов был наиболее коротким. Чаще всего
грузовые лифты устанавливаются на периферии здания, у его
наружной стены. При установке грузового лифта внутри здания он обычно
примыкает к стене или колонне с тем, чтобы нагрузка от
механизмов лифта передавалась на конструкцию здания.
а)
Фиг. 6. Схемы размещения лифтов в плане:
а — размещение лифта в пределе лестничной клетки; б, в — размещение лифта
рядом с лестничной клеткой.
Лифты проще по конструкции и дешевле по капитальным
затратам,чем многокабинные подъемники и эскалаторы. Их
производительность и грузоподъемность можно варьировать в весьма широком
диапазоне. С уменьшением производительности стоимость лифтов
существенно снижается, что делает особенно экономичным их
применение при малых пассажиропотоках, когда установка более дорогих
подъемников непрерывного действия себя не оправдывает.
В отличие от многокабинных подъемников и эскалаторов вес
и стоимость механической части лифтов, а также эксплуатационные
затраты мало зависят от высоты подъема. С повышением высоты
увеличивается лишь длина несущих канатов и направляющих.
Благодаря этому свойству при больших высотах подъема (свыше
40—50 м) применение лифтов оказывается более экономичным ьне
только при малых, но и при больших пассажиропотоках.
Многокабинные подъемники (патерностеры). Прерывистый
характер движения кабин лифтов вызывает необходимость более или
менее длительного ожидания. Это неудобство устраняется много-
кабинными подъемниками. Кабины таких подъемников непрерывно
подходят к этажным площадкам, что до минимума сокращает время
2 Ивашков 2598
18
Вводные сведения
ожидания. Так как одна ветвь движется вверх, а вторая вниз,
подъемником одинаково удобно пользоваться как для подъема, так
и для спуска. Благодаря непрерывному движению кабин многока-
бинный подъемник при одинаковой
скорости с лифтом обеспечивает
большую производительность,
которая, кроме того, не зависит от
высоты подъема.
Многокабинные подъемники
появились впервые в конце XIX
столетия. К 1907 г. в Гамбурге было
установлено 42 таких подъемника. К тому
Л времени на них было перевезено
более 20 млн. чел., причем число
зарегистрированных несчастных
случаев при пользовании ими оказалось
меньше, чем при применении других
видов подъемников. К 1913 г. в
Гамбурге насчитывалось более 300 мно-
гокабинных подъемников. В других
городах Германии они получили
меньшее распространение, а в
Берлине были совсем запрещены.
Подъемники этого типа имеются во мио-,
гих странах Европы и в США..
Однако широкого применения они
не получили. В СССР установлено
небольшое число таких
подъемников. По имеющимся в литературе
данным, многокабинные подъемники
в ряде стран изготовляются и в
настоящее время.
Основным руководящим
материалом для проектирования и
эксплуатации многокабинных подъемников
является специальный раздел
«Правил устройства,
освидетельствования и эксплуатации подъемников»,
посвященный этим подъемникам.
Параметрические стандарты на
многокабинные подъемники в нашей
стране отсутствуют.
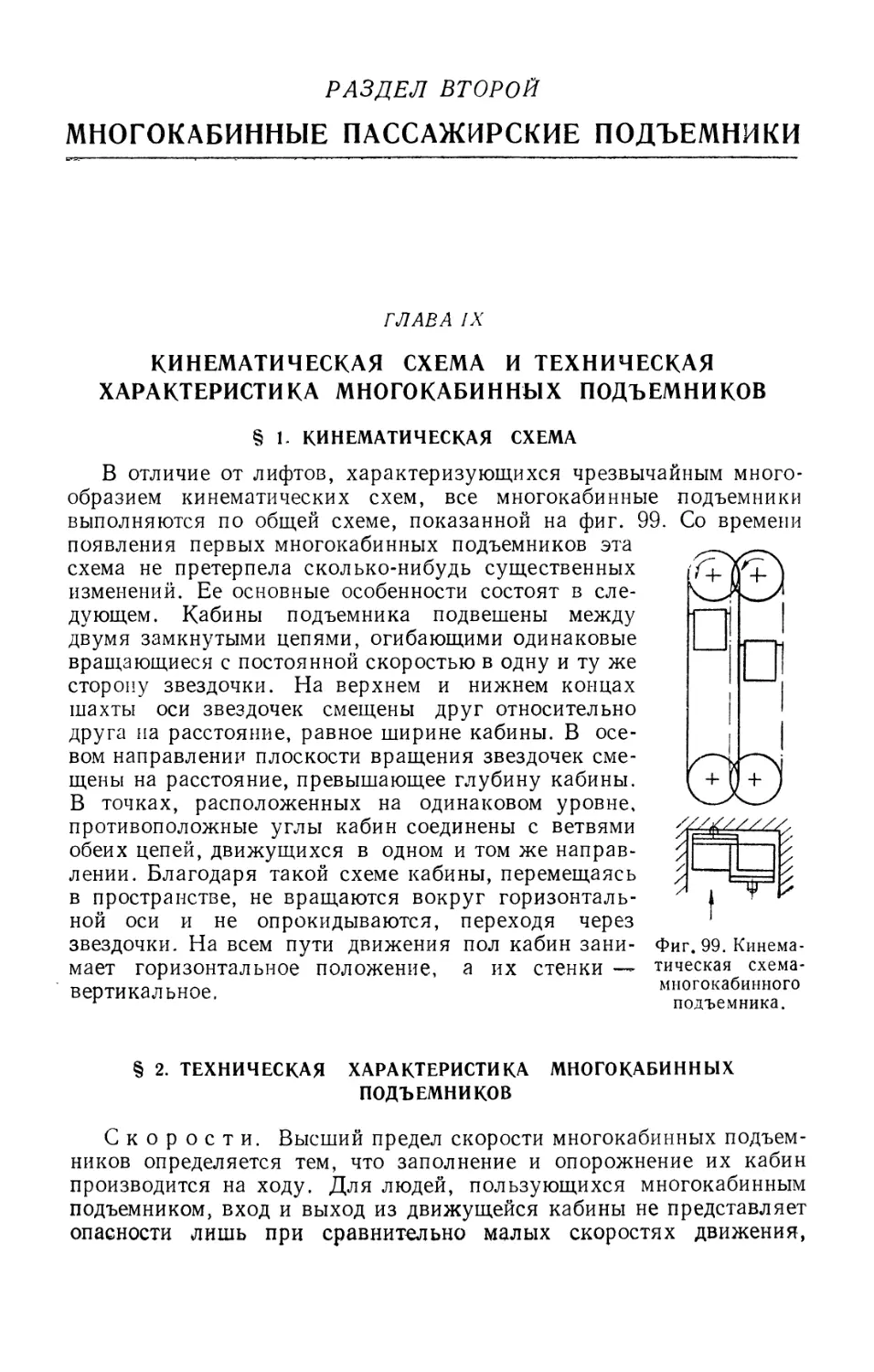
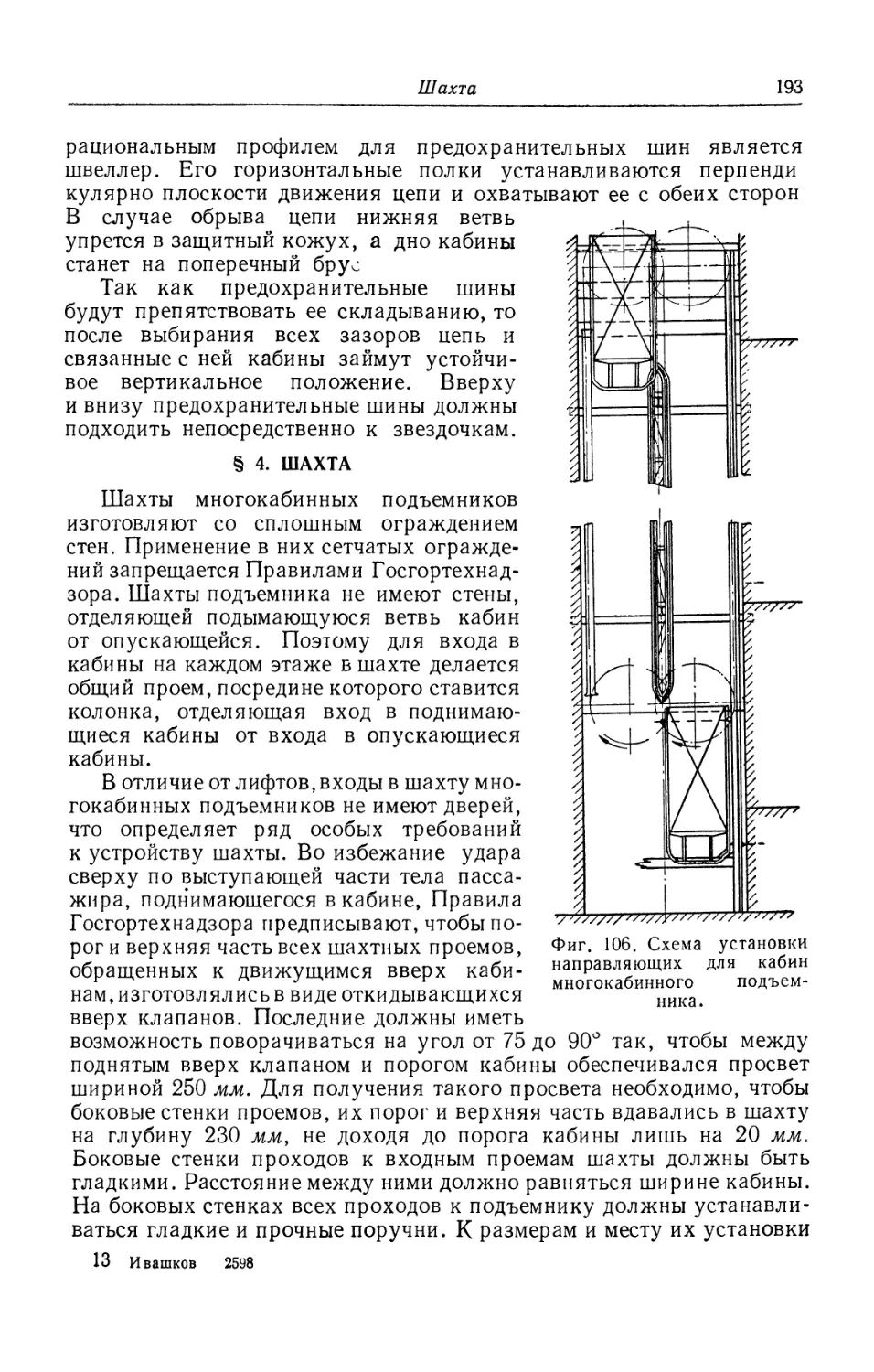
Схема многокабинного подъемника показана на фиг. 7.
Подъемник установлен в вертикальной шахте /, проходящей через все
здание. Кабины 2 подвешены к двум замкнутым цепям 3 и 4У огибающим
нижнюю ведущую и верхнюю натяжную звездочки 5 и 6. Соединение
кабин с цепями выполнено так, что при работе подъемника они совер-
о
Фиг. 7.
Схема многокабинного
подъемника:
/ — шахта; 2 — кабина; 3 и 4 — цепи;
5 — ведущая звездочка цепи; 6 —
натяжная звездочка цепи; 7 — электродвигатель;
8 — муфта; 9 — червячный редуктор;
10 — зубчатое колесо; // — направляющая
кабины; 12 — поручни кабины и шахты;
13 — подвижные щиты.
История развития и обзор конструкций подъемников 1§
шают движение по замкнутой траектории, поднимаясь по одной
стороне шахты и опускаясь по другой. При этом на любом участке
трассы, включая и переход через звездочки, кабины занимают
вертикальное положение, а входы в них как на поднимающейся, так
и на опускающейся ветви направлены в одну сторону. В много-
кабинных подъемниках принято движение кабин и цепей против
часовой стрелки. По условиям безопасности обратное их движение
не допускается. Привод подъемника, состоящий из электродвигате-
теля 7, муфты 5, червячного редуктора 9 и двух пар зубчатых
колес 10, расположен внизу шахты. Так как кабины и цепи обеих
ветвей подъемника уравновешивают друг друга, привод имеет
небольшую мощность. На всем пути, исключая участки, примыкающие
к звездочкам, кабина движется в направляющих 11. Внутри шахты
нет стенки, разделяющей правую и левую ветви кабин. Имеющиеся
на каждом этаже проемы в шахте разгорожены средней колонкой,
отделяющей входы в поднимающиеся кабины от входов в
опускающиеся кабины. В отличие от лифтов кабины и шахтные проемы
многокабинных подъемников не имеют дверей.
Безопасность пользования многокабинными подъемниками
обеспечивается рядом специальных устройств. Для облегчения входа
в кабины и выхода из них находу на боковых стенках кабин и
шахтных проемов устанавливаются специальные поручни 12. Для того
чтобы пассажир не мог попасть на потолок кабины вместо ее пола
пространство между соседними кабинами защищено специальными
щитами 13. Защемление между движущимися и неподвижными
элементами подъемника предотвращается устройством в кабине и шахте
открывающихся вверх подвижных порогов. Пассажиры, которые
почему-либо не успели выйти на определенном этаже, могут проехать
дальше и, обогнув звездочки, достичь желаемого этажа с
противоположной стороны. Для полной безопасности движения между
звездочками последние ограждены щитами. Все защитные устройства
сблокированы с электродвигателем, так что при их срабатывании
происходит автоматическая остановка кабин. Пуск и остановку
многокабинного подъемника можно производить на любом этаже
посредством кнопок управления. Кнопки, предназначенные для
остановки, остаются всегда открытыми, так что подъемник может
быть остановлен самими пассажирами. Пуск подъемника в ход может
быть произведен только проводником, у которого находится ключ,
запирающий пусковые кнопки.
Многокабинные подъемники применяются лишь в зданиях,
занятых учреждениями, где ими пользуется в основном постоянный
контингент пассажиров, т. е. служащие учреждений, расположенных
в данном здании. Применение их в жилых зданиях нецелесообразно—
из-за малых пассажиропотоков подъемник здесь большую часть
времени работал бы вхолостую.
Многокабиниые подъемники расходуют меньше электроэнергии
на подъем одного пассажира, чем лифты. Однако они сложнее по
20 Вводные сведения
конструкции и дороже по капитальным затратам. Для людей с
физическими недостатками (с больными ногами, слабым зрением) и для
престарелых эти подъемники менее удобны и не в такой степени
безопасны, как лифты. По этим причинам они применяются
значительно реже, чем лифты.
Несмотря на непрерывность движения кабин, многокабинные
подъемники непригодны для перемещения больших масс
пассажиров, так как имеют малую скорость и небольшую вместимость
кабин при значительных расстояниях между ними.
Эскалаторы. Лучшим видом подъемников для массовых
пассажирских перевозок являются эскалаторы. По сравнению с лифтами
и многокабинными подъемниками эскалаторы имеют в несколько
раз большую производительность, что достигается непрерывной
загрузкой грузонесущих органов —ступеней, наряду с сокращением
до минимума расстояния между ними. При одинаковом числе
пассажиров, размещающихся на ступени эскалатора и в кабине много-
кабинного подъемника, и при одинаковой вертикальной скорости
их движения производительность эскалатора в одном направлении
(на подъем или на спуск) будет во столько раз выше, во сколько
раз расстояние между ступенями меньше расстояния между
кабинами. Поэтому там, где по величине пассажиропотока требуется
установка нескольких лифтов или многокабинных подъемников,
оказывается достаточно одного эскалатора. Производительность
эскалатора, как и многокабинного подъемника, не зависит от высоты
подъема. Поэтому с увеличением высоты не возникает необходимости
увеличивать число установок для обслуживания заданного
пассажиропотока.
В отличие от лифтов и многокабинных подъемников эскалатор
может принимать пассажиров в любое время, посадка на него не
связана с ожиданием, пассажиры располагаются на ступенях
свободно, имея возможность перемещаться по ним. При отсутствии
электроэнергии или при неисправности эскалатор можно
использовать как обыкновенную лестницу. Его недостатками являются
высокая стоимость, вынужденное горизонтальное перемещение
пассажиров и длительное пребывание их на полотне при больших
высотах подъема. В последнем отношении эскалаторы значительно
уступают высокоскоростным лифтам.
Впервые «движущаяся лестница для транспорта людей» была
запатентована Д. Рено в Нью-Йорке в 1892 г. Она представляла
собой наклонный пластинчатый транспортер с неподвижными
входными площадками, установленными у тяговой и натяжной
звездочек. Пластины транспортера располагались в одной плоскости
и имели на наружной поверхности продольные рейки, входившие
в пазы гребней входных площадок. Более широкое развитие
производство эскалаторов получило в связи с подготовкой к Парижской
всемирной выставке 1900 г. В результате объявленного конкурса
на выставке было установлено 29 движущихся лестниц различных
История развития и обзор конструкций подъемников 21
конструкций. Наибольший интерес представляла лестница,
изготовленная фирмой Отис по патенту Доджа (1898 г.), которая, в
отличие от других, имела ступенчатое полотно. В отличие от патента
Д. Рено, на наружной поверхности ступеней этого эскалатора не
было реек, и выход с него производился в стороны. Одновременно
с этим французским изобретателем Оккаром был предложен
эскалатор со ступенчатым полотном реечного типа. В отличие от
современных эскалаторов, движущаяся лестница Оккара не имела
верхнего и нижнего горизонтальных участков. Позднее все эскалаторы
стали изготовляться только со ступенчатым полотном реечного типа,
которое по обоим своим концам имеет горизонтальные участки,
облегчающие вход и выход.
В Советском Союзе эскалаторы были впервые сконструированы
и изготовлены в 1935 г. в связи со строительством Московского
метрополитена. За прошедший с тех пор короткий период создано семь
типов эскалаторов для метрополитенов с расчетными высотами
подъема от 10 до 60 м. В последние годы разработано два типа
эскалаторов для зданий. Двадцатилетний опыт эскплуатации наших
эскалаторов показал их высокую надежность и долговечность.
Создана необходимая база для производства эскалаторов, накоплен
опыт их конструирования и эксплуатации, разработаны многие
вопросы теории эскалаторостроения.
Наиболее широкое применение эскалаторы получили в
административных и торговых зданиях, характеризующихся большими
пассажиропотоками. Обычно эскалаторы используют в комбинации
с лифтами для перемещения пассажиров на нижних этажах, где
пассажиропотоки имеют наиболее оживленный характер. Так, в
одном из 26-этажных зданий эскалаторы установлены на шестнадцати
нижних этажах (шестнадцатимаршевая эскалаторная установка).
В последние годы эскалаторы в зданиях используются и в качестве
основного транспортного средства для полной механизации
междуэтажного сообщения в зданиях. В настоящее время в США на долю
эскалаторов приходится свыше 75% пассажирских перевозок в
крупных зданиях.
Основным руководящим материалом для конструирования и
эксплуатации эскалаторов являются «Правила устройства и
безопасной эксплуатации эскалаторов», выпущенные Госгортехнадзором.
Параметрические стандарты на эскалаторы в нашей стране не
выпускались.
Применяются эскалаторы с одной (верхней) и двумя (верхней
и нижней) рабочими ветвями.
На фиг. 8 показан общий вид наиболее распространенного
эскалатора, в котором в качестве рабочей используется верхняя ветвь
лестничного полотна. Лестничное полотно состоит из ряда
ступеней /, соединенных шарнирно с двумя замкнутыми тяговыми
цепями 2. Цепи огибают верхние ведущие и нижние натяжные
звездочки 3 и 4. На всех участках, исключая звездочки, ступени катятся
W 9 8
I
с»
о
01
8.
Фиг. 8. Общий вид экскалатора с верхней рабочей ветвью полотна:
/ — ступень; 2 — тяговая цепь; 3 — ведущая звездочка тяговой цепи; 4 — натяжная звездочка тяговой цепи; 5 — направляющие; 6 — верхняя
входная площадка; 7 — нижняя входная площадка; 8 — электродвигатель; 9 — эластичная муфта; Ю — передачи привода; // — главный вал;
12 — натяжная каретка; 13 — поручень; 14 — аварийный тормоз.
История развития и обзор конструкций подъемников 23
на четырех колесах, называемых бегунками, по направляющим 5.
Очертания направляющих соответствуют требованиям,
предъявляемым к траектории ступеней. На наклонном участке верхней
(рабочей) ветви ступени образуют лестницу полного профиля, а
в верхней и нижней ее частях переходят в горизонтальные участки,
скрывающиеся под неподвижными входными площадками 6 и 7.
Переход от наклонного к горизонтальным участкам осуществляется
плавно, что достигается установкой на переходных участках
криволинейных направляющих. На всем пути между нижней и верхней
входными площадками настилы ступеней занимают строго
горизонтальное положение. Привод эскалатора устанавливается в его
верхней части и осуществляется от электродвигателя 8 через эластичную
муфту 9 и передачи 10, соединенные с валом 11 тяговых звездочек,
называемым главным валом. В нижней части лестничное полотно
поддерживается в постоянно натянутом состоянии с помощью
специального устройства 12, называемого натяжной кареткой.
Для безопасного пользования эскалатором в нем
предусматривается ряд специальных устройств. Во избежание падения
пассажиров при входе на эскалатор или при нахождении на нем, по обеим
сторонам полотна устанавливаются специальные поручни 13,
движущиеся с той же скоростью, что и ступени. Для безопасного схода
пассажиров с эскалатора на рабочих поверхностях ступеней делаются
продольные выступы (рейки), чередующиеся с пазами или
впадинами. В свою очередь, неподвижная входная площадка со стороны,
обращенной к ступеням, снабжается гребнем, клиновидные зубья
которого входят в пазы между рейками и снимают ногу пассажира
со ступени. Безопасность эскалатора в случае обрыва тяговых
цепей обеспечивается конструкцией самих цепей и применением для
них предохранительных шин, аналогичных применяемым в много-
кабинных подъемниках. Для удержания лестничного полотна в
случае нарушения кинематической связи в системе привода он
снабжается специальным тормозным устройством 14, устанавливаемым
или непосредственно на полотне или на главном валу.
Предусматривается также сложная система электрических блокировочных
устройств, автоматически останавливающих эскалатор в случае какой-
либо его неисправности.
Пуск эскалатора производится механиком из машинного
помещения или с помощью кнопок, установленных непосредственно на
эскалаторе.
Эскалатор, показанный на фиг. 8, реверсивен, т. е. он может
работать как на подъем, так и на спуск.
На фиг, 9 показан общий вид верхней части( приводной станции)
эскалатора менее распространенного типа, у которого обе ветви
(верхняя и нижняя) являются рабочими. Для использования нижней
ветви полотна в качестве рабочей главный вал 7 отнесен на
большое расстояние от верхней входной площадки 2 и опущен вниз.
Образовавшееся при этом пространство между верхней 3 и нижней 4
24
Вводные сведения
ветвями полотна использовано для входа на нижнюю ветвь с боков.
Перемена направления движения ступеней вверху эскалатора
производится с помощью ускорителя 5, на который попадают вспомо-
Фиг. 9. Приводная станция эскалатора с двумя рабочими ветвями:
/ — главный вал; 2 — верхняя входная площадка; 3 — верхняя ветвь полотна; 4 — нижняя ветвь
полотна; 5 — ускоритель; 6 — поручень; 7 — нижняя ветвь; 8 — верхняя ветвь; 9 — двигатель
45 л. с.\ 10 — двигатель 140 л. с.
гательные бегунки ступеней, не связанные с тяговыми цепями. Внизу
эскалатора поворот ступеней осуществляется замедлителем. На
Фиг. 10. Двухмаршевая схема размещения эскалаторов в здании:
/ — метталлоконструкция; 2 — привод нижнего эскалатора; 3 — привод верхнего экскалатора;
4 — поручень.
обеих ветвях эскалатора используется общий поручень в. Эскалатор
этого типа нереверсивен. Верхняя его ветвь всегда служит для
подъема, а нижняя — для спуска.
История развития и обзор конструкций подъемников 25
При установке эскалаторов в зданиях применяются
многомаршевые схемы их размещения. Одна из простейших таких схем показана
на фиг. 10. Установка состоит из четырех эскалаторов. Два из них
соединяют первый этаж со вторым, а два других — второй этаж
с третьим. Эскалаторы 1-го и 2-го марша, установленные справа
(глядя снизу вверх), работают в одном направлении, а эскалаторы,
установленные слева,— в противоположном направлении. Это
исключает пересечение пассажиропотоков. Применение многомаршевых
схем в метрополитенах нерационально, так как установка двух
эскалаторов всегда дороже установки одного эскалатора как по
стоимости механического оборудования, так и по строительным затратам.
Применение двух последовательных маршей в метрополитенах обычно
вызывается или строительной планировкой, или глубиной
расположения станционного туннеля. При двух последовательных маршах
эскалаторы метрополитенов обычно имеют раздельную
конструктивную компоновку, тогда как в эскалаторах зданий удается
осуществить общую конструктивную компоновку элементов различных
эскалаторов, располагающихся на одной и той же этажной площадке.
РАЗДЕЛ ПЕРВЫЙ
ЛИФТЫ
ГЛАВА II
КЛАССИФИКАЦИЯ, КИНЕМАТИЧЕСКИЕ СХЕМЫ
И ТЕХНИЧЕСКАЯ ХАРАКТЕРИСТИКА ЛИФТОВ
§ 1. КЛАССИФИКАЦИЯ ЛИФТОВ ПО НАЗНАЧЕНИЮ, КОНСТРУКТИВНЫМ
ПРИЗНАКАМ И ЭКСПЛУАТАЦИОННЫМ СВОЙСТВАМ
Классификация лифтов по назначению, конструктивным
признакам и эксплуатационным свойствам приведена на фиг. 11.
По назначению лифты делятся на пассажирские,
грузопассажирские и грузовые. Общая характеристика этих
лифтов дана в табл. 1.
Пассажирские лифты предназначаются для
перемещения людей с одного уровня на другой. В пассажирских лифтах,
устанавливаемых в жилых зданиях, допускается перевозка мебели
и других вещей при условии, если их вес вместе с весом пассажиров
не превышает грузоподъемности лифта. Разновидностью
пассажирских лифтоз являются больничные лифты, кабины которых при
сравнительно небольшой грузоподъемности имеют большие габариты,
необходимые для размещения кровати, носилок и пяти человек
медицинского персонала.
Грузо-пассажирские лифты служат для подъема
и опускания грузов в сопровождении проводников. В
промышленных зданиях и сооружениях эти лифты чаще используются для
перемещения грузов, не участвующих непосредственно в
технологическом процессе производства. В административных зданиях они
применяются для различных служебно-хозяйственных целен: для
перевозки мебели, сейфов, оборудования и пр. Грузо-пассажирские лифты
изготовляются с учетом всех требований безопасности,
предъявляемых к пассажирским лифтам, но имеют более простую отделку кабин
и ряд других особенностей, связанных со спецификой перевозимых
грузов.
Грузовые лифты предназначаются исключительно для
перевозки грузов. Правилами Госгортехнадзора проезд людей в таких
лифтах категорически воспрещается. Конструкция грузовых лифтов
и их размещение определяются особенностями перевозимых грузов,
интенсивностью грузопотоков и характером технологического
процесса, в котором они участвуют. Многие разновидности грузовых
лифтов получили свое название от места их установки( магазинные* ку-
КЛАССИФИКАЦИЯ ЛИФТОВ
I
По назначению
По конструктивным признакам
По эксплуатационным свойствам
По конструкции
привода
По размещению
привода
По скорости
движения
По точности
остановки кабины
'■
, -.
'к
in
: О
S
, оЗ
CJ
CJ
C3
с
S
a
Q.
s
CJ
CJ
аз
С
6
CO
Cu
u
CD
3
m
О !
CO
Q,
u
s
s
VO
CD
2?
3
в
VO
Q.
«3
CJ
s
%
02
S
1
X
X
a;
еду
aa
о
B
O3
i£
CJ
914
В
о
н
CD
CU
914
В
Q.
o
H
CD
CO*
CD
О
CD
3
В
О
X
о
X
X
н
см
<D
3
В
о
X
о
н
CJ
3
е (2,5—7 я/сек)
3
в
н
CJ
О
С
о
CJ
О
О
CJ
3
CQ
CQ
8
I
45
Фиг. 11. Классификация лифтов.
28 Классификация, кинематические схемы и характеристика лифтов
Таблица 1
Общая характеристика пассажирских, грузо-пассажирских и грузовых лифтов
Типы лифтов
Пассажирские
Общего
назначения
Больничные
Грузо-пассажирские
(грузовые с
проводником)
Грузовые (без проводника)
Общего
назначения
Малые
грузовые
Области
применения
Жилые дома
до 8 этажей
Жилые дома
до 14 этажей
Общественные
здания до 14
этажей
Высотные
здания любого
назначения
(свыше 14
этажей)
Больницы,
клиники,
госпитали
Промышленные, торговые
и другие здания
до 12 этажей
То же
Столовые,
библиотеки и
другие здания на
2 этажа
То же до 14
этажей
Грузоподъемность в кг
До 350
. 500
. 1000
1000—1500
500
250—5000
250—5000
100
100
Скорость
в м/сек
До 0,75
. 1,0
1-1,5
1,5—7
0,5
В среднем
0,5
То же
0.25
0,5
Управление
Кнопочное
внутреннее, без
проводника, с
вызовом пустой кабины
с этажей
Кнопочное
внутреннее, без
проводника, с вызовом
пустой кабины с
этажей и попутным
вызовом пустой
кабины при движении
вниз
Кнопочное
внутреннее, с
проводником и с вызовом
кабины с этажей
То же
•
Кнопочное или
рычажное
внутреннее, с проводником
и с сигнальным
вызовом с этажей
Кнопочное
наружное, с площадки
основного этажа и
с сигнальным
вызовом с этажей
То же
я
Классификация 29
хонные, библиотечные, вокзальные и т. д.). Особую группу
составляют малые грузовые лифты с грузоподъемностью до !00 кг.
Грузовые лифты отличаются от пассажирских меньшими скоростями
движения кабин, специальным выполнением последних,
пониженными запасами прочности несущих канатов и системой управления.
По конструкции привода различают лифты с барабанными
лебедками и лифты с канатоведущими шкивами.
Лифты с барабанными лебедками
характеризуются тем, что их кабины подвешиваются на одном или двух канатах,
жестко связанных с барабаном. Таким же образом осуществляется
связь противовеса с барабаном. При движении кабины вверх
происходит наматывание на барабан канатов кабины и сматывание с него
канатов противовеса. Основными недостатками лифтов этого типа
являются большие размеры барабанов, возрастающие по мере
увеличения высоты подъема и числа несущих канатов, а также
необходимость применения различных барабанов для лифтов одной
и той же грузоподъемности, но отличающихся по высоте подъема.
Лифты с канатоведущими шкивами
характеризуются тем, что в них отсутствует жесткое соединение кабины
и противовеса с ведущим элементом подъемного механизма — канато-
ведущим шкивом. Тяговое усилие в канатах этих лифтов создается
трением между канатами и стенками ручьев каматоведущих шкивов.
В целях повышения безопасности количество несущих канатов в
лифтах этого типа выбирается значительно большим (не менее 3 и не
более 8), чем у лифтов с барабанными лебедками. Малые габариты
лебедок, простота конструкции, большая безопасность работы
выгодно отличают лифты этого типа от лифтов с барабанными
лебедками. Благодаря этому лифты с канатоведущими шкивами в
настоящее время почти полностью вытеснили лифты с барабанными
лебедками.
По способу наложения канатов лифты с канатоведущими шкивами
делятся на лифты с простым (одинарным) обхватом и лифты с
двойным обхватом.
По конструкции привода различают также лифты с редукторным
приводом (см. фиг. 3) и лифты сбезредукторным приводом (см. фиг. 4).
По размещению привода различаются лифты с верхним
расположением привода и лифты с нижним расположением привода (с
приводом, расположенным в стороне от нижней части шахты или
непосредственно под шахтой). Выбор места установки привода
определяется, как правило, особенностями здания или сооружения, в
котором устанавливается лифт.
По эксплуатационным свойствам лифты делятся на тихоходные
(со скоростями до 1 м/сек), быстроходные (со скоростями 1,5—2 ч/сек)
и высокоскоростные (со скоростями 2,5—7 м/сек). Тихоходными
обычно выполняются пассажирские лифты, обслуживающие
небольшие высоты подъема, при малых пассажиропотоках и частых остат
новках (лифты жилых домов), а также больничные лифты и пода^
30 Классификация, кинематические схемы и характеристика лифтов
вляющее большинство грузовых лифтов. Быстроходные лифты
применяются для обслуживания больших пассажиропотоков в зданиях
с числом этажей от 14 до 20, а также в нижних зонах более высоких
зданий. Высокоскоростные лифты предназначаются для перемещения
больших пассажиропотоков в высотных зданиях (с числом этажей
более 20—25). Применение этих лифтов наиболее эффективно при
больших расстояниях между остановками.
По точности остановки кабин различают лифты с системой точной
остановки и лифты без точной остановки.
В лифтах с системой точной остановки требуемое совпадение
уровней пола кабины и входной площадки обеспечивается с помощью
специальных устройств. Системой точной остановки снабжаются,
как правило, все быстроходные и высокоскоростные пассажирские
лифты, а также больничные лифты и грузовые лифты,
предназначенные для перевозки тяжелых грузов в вагонетках, тележках или иных
перегрузочных приспособлениях. В лифтах без точной остановки
требуемая точность остановки кабин обеспечивается без всяких
дополнительных устройств. Сюда относится подавляющее
большинство пассажирских и грузовых лифтов со скоростями кабин до
0,75 м/сек.
§ 2. КИНЕМАТИЧЕСКИЕ СХЕМЫ ЛИФТОВ И РАЗМЕЩЕНИЕ
ОСНОВНЫХ УЗЛОВ
Исключительному разнообразию областей применения лифтов
соответствует неменьшее разнообразие их кинематических схем.
На фиг. 12 показаны наиболее характерные схемы лифтовых
установок. Некоторые из этих схем применяются как в лифтах с
барабанными лебедками, так и в лифтах с канатоведущимн шкивами. На
тех из них, которые применяются только для одного из указанных
типов листов, схематически изображен барабан или канатоведущий
шкив, соответственно тому, для какого типа лифтов применима
данная схема. На фиг. 12, а и б показаны схемы лифтов без
противовесов, которые принципиально не отличаются от схем лебедок обычных
грузоподъемных машин. Такие схемы пригодны только для лифтов
с барабанными лебедками, так как без противовеса создание
необходимого тягового усилия в лифтах с канатоведущими шкивами
было бы невозможно. Лифты без противовесов требуют повышенной
мощности для подъема кабины и поэтому применяются в редких
случаях: при малой грузоподъемности или когда устройство
противовеса по каким-либо причинам невозможно.
На фиг. 12, б, г, д, е, ж показаны кинематические схемы,
применяемые как для лифтов барабанного типа, так и для лифтов с
канатоведущими шкивами. Наиболее простыми и вместе с тем наиболее
распространенными являются схемы с верхним расположением
привода, изображенные на фиг. 12, ву г. Схема с отклоняющим
блоком (фиг. 12, г) применяется для лифтов с большими размерами
Кинематические схемы и размещение основных узлов
31
Фиг. 12. Основные кинематические схемы лифтов:
а — без противовеса, с верхним расположением привода; б — без противовеса,
с нижним расположением привода; в — с верхним расположением привода, без
отклоняющего блока; г — с верхним расположением привода, с отклоняющим
блоком; д — с нижним расположением привода; е — с полиспастным подвесом кабины
и противовеса; ж — с выжимной кабиной; з, и — с верхним расположением привода
и двойным обхватом шкивов; к — с нижним расположением привода и двойным
обхватом шкива; л—с уравновешивающими канатами.
32 Классификация, кинематические схемы и характеристика лифтов
кабин. Типичная схема лифта с нижним расположением привода
показана на фиг. 12, д. При такой схеме несущие канаты имеют большую,
чем при верхнем расположении, длину, перегибаются в
противоположных направлениях и в большем числе мест, что увеличивает их
износ, снижает к. п. д. лифта и повышает стоимость его
эксплуатации. Необходимость в дополнительном помещении для верхних
отклоняющих шкивов и повышенные нагрузки на здание приводят
также к увеличению капитальных затрат в лифтах, выполненных по
такой схеме. Поэтому нижнее расположение привода целесообразно
применять лишь в исключительных случаях, когда к установке
предъявляются высокие требования в части бесшумности работы
в зданиях с недостаточной звукоизоляцией.
На фиг. 12, еу ж показаны две специальные схемы лифтовых
установок. Схема с полиспастным подвесом (фиг. 12, с) и ее
разновидности применяются в тех случаях, когда требуется повысить запас
прочности канатов, уменьшить скорость кабины в целях снижения
мощности и габаритов привода или уменьшить ход противовеса по
сравнению с ходом кабины (полиспастный подвес одного
противовеса). Схема, показанная на фиг. 12, ж, применяется для
специальных конструкций вокзальных и магазинных лифтов с ограниченной
высотой подъема.
На фиг. 12, з, и> /с, л изображены кинематические схемы,
применяемые исключительно в лифтах с канатоведущими шкивами. Схемы
с двойным обхватом канатов с помощью контршкивов применяются
для высокоскоростных лифтов с целях повышения сцепления канатов
со шкивами и увеличения их несущей способности. Применение
двойного обхвата вызывает увеличение числа перегибов канатов,
снижение к. п. д., а следовательно, влечет за собой и некоторое
увеличение эксплуатационных затрат.
Схемы с уравновешивающими канатами, одна из которых
показана на фиг. 12, л, применяются при высотах подъема свыше 35—
40 м. Целесообразность применения уравновешивающих канатов
определяется тем, что при таких высотах подъема вес
неуравновешенной части несущих канатов может достигать значительной
величины, что требует дополнительного увеличения мощности при подъеме
кабины из нижнего положения.
Взаимное расположение кабины и противовеса в плане
определяется главным образом габаритами мест установки, расположением
входов в кабину и шахту и назначением машины. Чаще входы в шахту
устраивают на всех этажах с одной и той же стороны. Кабины при
этом снабжаются одной дверью, а противовесы располагаются или
сзади (фиг. 13, а), или сбоку (фиг. 13, о, в) кабины. В тех случаях,
когда по местным условиям входы в шахту на всех этажах нельзя
расположить с одной и той же стороны, кабины снабжаются двумя
(фиг. 13, г, д, е), а иногда и тремя (фиг. 13, ж) дверями. Кабины
с двумя дверями, расположенными в противоположных стенках,
иногда применяются в пассажирских лифтах с целью сокращения
Техническая характеристика
33
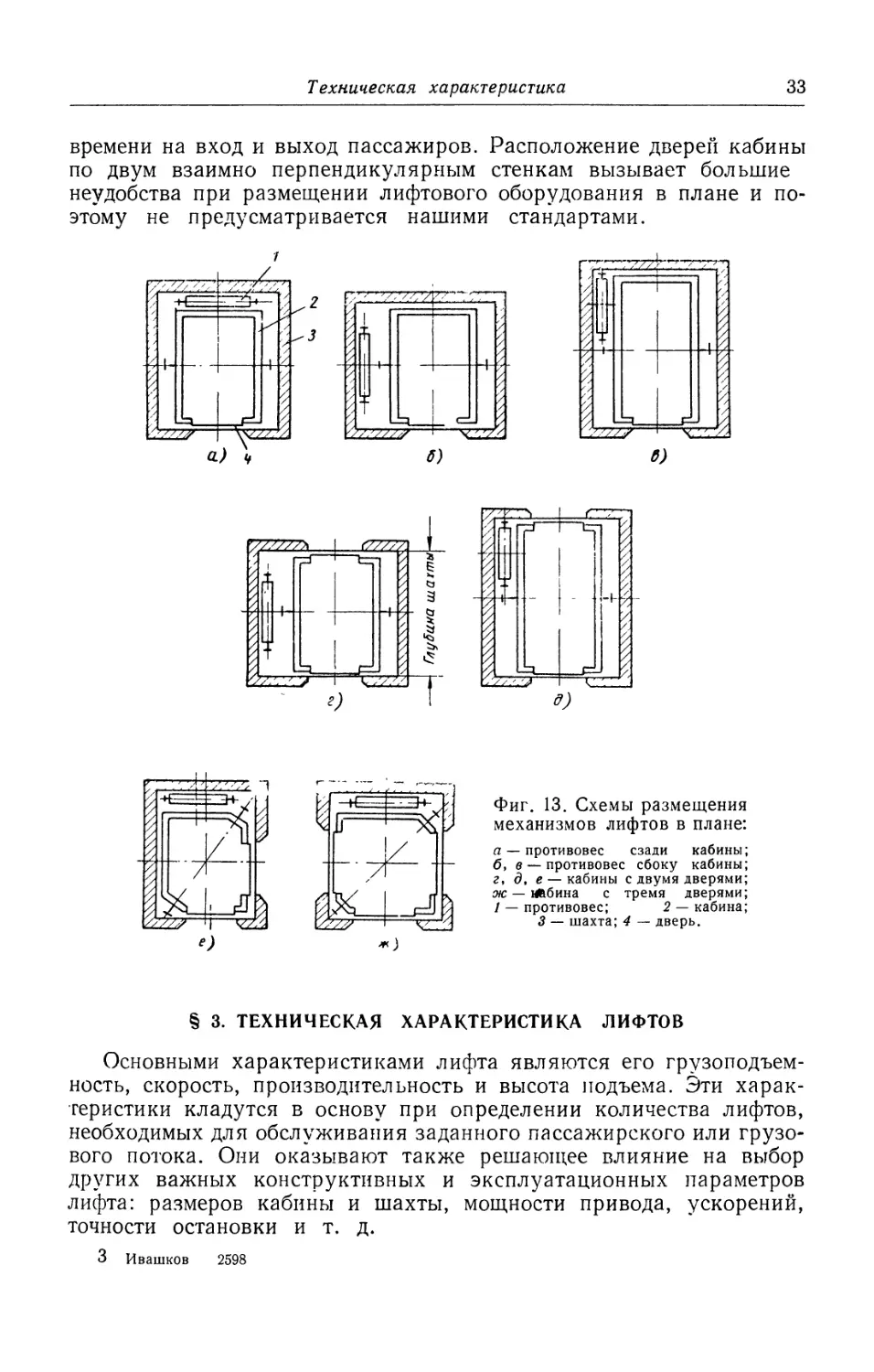
времени на вход и выход пассажиров. Расположение дверей кабины
по двум взаимно перпендикулярным стенкам вызывает большие
неудобства при размещении лифтового оборудования в плане и
поэтому не предусматривается нашими стандартами.
VZ2ZZL
а)
Фиг. 13. Схемы размещения
механизмов лифтов в плане:
а — противовес сзади кабины;
б, в — противовес сбоку кабины;
г, д, е — кабины с двумя дверями;
ж — й&бина с тремя дверями;
/ — противовес; 2 — кабина;
3 — шахта; 4 — дверь.
§ 3. ТЕХНИЧЕСКАЯ ХАРАКТЕРИСТИКА ЛИФТОВ
Основными характеристиками лифта являются его
грузоподъемность, скорость, производительность и высота подъема. Эти
характеристики кладутся в основу при определении количества лифтов,
необходимых для обслуживания заданного пассажирского или
грузового потока. Они оказывают также решающее влияние на выбор
других важных конструктивных и эксплуатационных параметров
лифта: размеров кабины и шахты, мощности привода, ускорений,
точности остановки и т. д.
3 Ивашков 2598
34 Классификация, кинематические схемы и характеристика лифтов
Грузоподъемность лифта и номинальная вместимость кабины.
Грузоподъемностью лифта называется наибольший допустимый вес
одновременно поднимаемых в кабине грузов или людей. Вес самой
кабины со всеми находящимися внутри и снаружи нее механизмами
и аппаратами управления лифта при определении грузоподъемности
не учитывается. Не учитывается также вес постоянно
расположенного в кабине вспомогательного оборудования (рельсовых путей,
устройств для погрузки и
разгрузки и т. д.). Грузоподъемность
грузовых лифтов определяется по
наибольшему весу одновременно
поднимаемых грузов и погрузоч-
но-разгрузочных приспособлении
(тележек, подставок и т. д.), не
входящих в комплект постоянного
оборудования кабины. Для
грузопассажирских лифтов в расчет
вводится вес проводника и
рабочих, сопровождающих груз.
Грузоподъемность пассажирских
лифтов определяется в зависимости
от полезной площади пола кабины
и нагрузки, приходящейся на
единицу этой площади. •
Опытным путем установлено,
что при свободном заполнении
кабины, т. е. в том случае, когда
оно не регулируется проводником,
нагрузка на единицу полезной
0,5 %5 2,5 3,5 мг площади пола кабины, или так на-
Полезная площадь кабаны
1800
1600
1400
1200
1000
800
600
гоо
7
/
L
/
!
/
/
1
/
[
-г
V
——
i
1
——'
i
1
ш. -
1
— —
Фиг. 14. График для определения
удельной нагрузки и
грузоподъемности кабины по Правилам
Госгортехнадзора:
1 — удельная нагрузка на 1 м2 пола кабины;
2 — грузоподъемность кабины.
зываемая удельная нагрузка,
возрастает по мере увеличения
площади пола. Графически эта
зависимость выражается прямой /,
показанной на фиг. 14. При этом
зависимость грузоподъемности от
полезной площади пола кабины
выражается прямой 2, показанной
на той же фиг. 14. По Правилам Госгортехнадзора эти зависимости
кладутся в основу расчетов при определении грузоподъемности
пассажирских лифтов.
В том случае, если кабина лифта при данной грузоподъемности
имеет большую полезную площадь пола, чем это следует из графика,
по Правилам Госгортехнадзора необходимо посадку пассажиров
в кабину производить под контролем проводника с тем, чтобы общий
вес входящих в нее людей не превосходил установленной
номинальной грузоподъемности лифта. В этом случае количество пассажиров,
Техническая характеристика
35
допускаемое к перевозке в кабине лифта, определяется по
формуле
-2-
G •
(1)
где Q — номинальная грузоподъемность лифта в кг;
G — средний вес человека в кг.
Величину Е принято называть номинальной вместимостью
кабины лифта. По Правилам Госгортехнадзора средний вес человека
принимается равным 70 кг. Грузоподъемности лифтов по ГОСТ 5745-51
приведены в табл. 2.
Таблица 2
Грузоподъемность грузовых и пассажирских лифтов в кг
(по ГОСТ 5745-51)
Малые
грузовые
50
100
—
—
Грузовые
250
500
750
жирские
250
500
750
Больничные
500
—
Малые
грузовые
—
Грузовые
1000
1500
2000
3000
5000
жирские
1000
1500
—
Больничные
—
Номинальная вместимость кабин в зависимости от их
грузоподъемности указана в табл. 3.
Скорость, ускорение и точность
остановки. В отличие от многокабинных
Таблица 3
Номинальная вместимость
кабин пассажирских лифтов
Грузоподъемность в кг
250
500
750
1000
1500
Номинальная
вместимость
кабины, чел.
3
7
11
14
21
7сек
«75
0,50
Q25
0
I
1
1
П
г>
1
1
1
1
Ш
\
X
\
2,0
3,0 S мет
Фиг. 15. Простейший график изменения
скорости кабины лифта.
подъемников и эскалаторов, перемещение пассажиров и грузов
в кабине лифта происходит с переменной скоростью. В простейшем
случае путь движения кабины может быть разбит по
характеру изменения скорости на три участка, показанных на фиг. 15.
На участке /, соответствующем периоду разгона, скорость кабины
изменяется от нуля до определенной величины, остающейся
постоянной на участке // пути. Эту величину называют скоростью устано-
3*
36
Классификация, кинематические схемы и характеристика лифтов
вившегося движения или номинальной скоростью лифта. На
участке ///, перед подходом кабины к остановке, ее скорость
снижается от номинального значения до нуля. В связи с наличием
участков разгона и замедления номинальная скорость лифта всегда
больше его средней скорости, равной отношению пути кабины между
двумя остановками к общему времени ее движения на этом пути.
В отличие от многокабинных подъемников и эскалаторов, скорость
пассажирских лифтов не лимитируется удобством входа в кабину
и выхода из нее, так как эти операции производятся при
неподвижной кабине. Поэтому максимальные скорости лифтов нередко в 7—
10 раз превосходят максимальные скорости полотна эскалаторов
и в 30—35 раз — скорости многокабинных подъемников.
Скорости современных пассажирских лифтов колеблются в весьма
широком диапазоне: от 0,5 до 7 м/сек. По ГОСТ 5745-51 (табл. 4)
для пассажирских лифтов рекомендуется шесть значений скоростей
в диапазоне от 0,5 до 3,5 м/сек. Скорость больничных лифтов
принята равной 0,5 м/сек. По Правилам Госгортехнадзора допускается
скорость до 5 м/сек. Скорости свыше 5 м/сек применяются в
исключительных случаях для экспрессных лифтов высотных зданий.
Скорости грузовых лифтов обычно принимаются меньшими, чем
скорости пассажирских лифтов; по ГОСТ 5745-51 для грузовых
лифтов предусмотрено шесть значений скорости в пределах 0,1 —
1,5 м/сек.
Таблица 4
Скорости
Пассажирские
0,50
0,75
Больничные
0,50
0,75
пассажирских и грузовых
(по ГОСТ 5745-51)
Грузовые
0,1
0,25
0,50
0,75
Малые
грузовые
0,25
0,50
Пассажирские
1,0
1,50
2,50
3,50
лифтов
Больничные
—
в м/сек
Грузовые
1,0
1,50
Малые
грузовые
—
Примечание. ГОСТ допускает отклонение от указанных скоростей
в пределах ± 15°/0.
Применение больших скоростей лифтов диктуется стремлением
к максимальному увеличению их производительности, к
сокращению числа лифтов, необходимых для обслуживания заданного грузо-
или пассажиропотока. Это особенно важно при интенсивных
грузовых и пассажирских потоках и стесненных габаритах помещений,
в которых устанавливаются лифты. При больших высотах подъема
увеличение скорости необходимо также для сокращения затрат
времени на подъем или спуск. Следует иметь в виду, что повышение
скорости, как правило, сопряжено с увеличением стоимости лифта
Техническая характеристика 37
и удорожанием его эксплуатации. С повышением скорости
увеличиваются мощность электродвигателя, размеры подъемного
механизма, расход энергии, износ канатов и расход смазки. В
практике лифтостроения при скоростях свыше 2 м/сек отказываются от
применения привода редукторного типа и заменяют его более
дорогим безредукторным приводом. С увеличением скорости усложняется
осуществление точной остановки кабины, в связи с чем возникает
необходимость в усложнении схемы управления и применении
дополнительной аппаратуры. Возрастает также шум при движении
кабины и противовеса. Для уменьшения шума приходится
повышать требования к точности изготовления и монтажа лифта, что
повышает его стоимость. Повышение скорости требует увеличения
степени надежности всех частей, механизмов и схемы управления.
По приводимым в литературе данным, скорость лифта и его
стоимость находятся в прямо пропорциональной зависимости. Так при
увеличении скорости с 0,5—0,75 м/сек до 2,5—3,5 м/сек стоимость
лифта возрастает в 4—5 раз. Поэтому выбор больших скоростей
оказывается оправданным лишь в том случае, когда он связан с
существенным увеличением производительности лифта и со
значительным сокращением времени пребывания в кабине. Применение
больших скоростей особенно выгодно при больших высотах подъема и
при малом количестве остановок, т. е. в том случае, когда
расстояния между остановками достаточно велики и средняя скорость
движения кабины лифта приближается к ее номинальному значению.
При больших высотах подъема, характерных для высотных зданий,
далеко не последнее значение имеет продолжительность поездки
в кабине лифта. Так, для подъема на высоту 80-этажного здания
в кабине тихоходного лифта (0,5 м/сек) потребовалось бы свыше
4 мин., что совершенно неприемлемо.
С выбором скорости тесно связан выбор величин ускорений
при пуске лифта и замедлений при остановке. На участках разгона
и торможения (остановки) средняя скорость движения кабины лифта
меньше его номинальной скорости и, следовательно, увеличивается
время движения кабины между остановками и снижается
производительность лифта. Поэтому для более полного использования
установленной номинальной скорости целесообразно сокращать время
разгона и остановки, увеличивая ускорения на этих участках.
Увеличение ускорений дает наибольший эффект при больших скоростях
лифтов. Как показывают подсчеты, увеличение ускорений в четыре
раза (с 0,5 м/сек2 до 2 м/сек2) позволяет при скорости лифта, равной
3,5 м/сек, увеличить его производительность на 20%. По тем же
подсчетам четырехкратное увеличение ускорений тихоходного лифта
(со скоростью 0,5 м/сек) увеличивает его производительность меньше
чем на 4%.
Увеличение ускорений кабины лифта, как правило, связано
с усложнением электрооборудования и возможно лишь в
ограниченных пределах. Большие ускорения оказывают неприятное физиолд-
38 Классификация, кинематические схемы и характеристика лифтов
гическое воздействие на пассажиров. Исследованиями установлено,
что ускорения свыше 2,5 м/сск2 вызывают болезненные ощущения.
При частых повторных воздействиях таких ускорений наблюдается
преждевременная усталость, появляются признаки укачивания. Так
как применение больших ускорений связано с усложнением и
удорожанием лифта и не дает при малых скоростях существенного эффекта,
для тихоходных лифтов назначают меньшие величины ускорений,
чем для быстроходных.
В табл. 5 приведены рекомендованные ВИИИПТМАШ
оптимальные величины ускорений, обеспечивающие необходимое удобство
пользования лифтом при наибольшей его производительности.
Таблица 5
Рекомендуемые ускорения при пуске и остановке пассажирских лифтов
Скорость лифта в м/сек
Максимальное ускорение в м/сек2 .
Средние расчетные ускорения
в м/сек2
0,5
1,0
0,5
0,75
1,0
0,5
1.0
1,5
0,8
1,5
1,5
1,0
2,5
2,0
1,5
3,5
2,0
1,5
Выбор величии скорости и замедлений при остановке в
значительной мере определяет точность остановки кабины,
характеризуемую высотой ступеньки, образующейся между уровнями пола
кабины и пола этажной площадки. Несовпадение этих уровнен
вызывается изменением величин пути торможения кабины при
изменении степени ее загрузки. Чем сильнее загружена кабина, тем
больше путь ее торможения при спуске и тем он меньше при подъеме.
Для уменьшения высоты ступеньки у порогов кабины и шахты
движение кабины регулируется так, чтобы при опускании с грузом ее
переход через уровень пола этажной площадки был равен недоходу
до указанного уровня при опускании без груза. Повышению
точности остановки способствует .также увеличение ускорений при
торможении лифта, так как при этом уменьшается тормозной путь кабины
и сокращаются пределы его изменения с изменением степени загрузки.
Требуемая точность остановки зависит от назначения лифта
и должна находиться в следующих пределах (в мм):
пассажирские лифты +35—50
больничные лифты +10—15
грузопассажирские и грузовые лифты с грузами на
тележках .".... +10—15
то же со свободно загружаемыми грузами +35—50
Производительность лифтов. Производительностью
грузового лифта называется общий вес (или общее количество)
грузов, перемещаемых лифтом в единицу времени. При определении
количества лифтов, необходимых для обслуживания заданного
Техническая характеристика 39
грузопотока, обычно исходят из их часовой производительности,
определяемой по формуле
где Q — грузоподъемность лифта в кг\
Р — коэффициент использования грузоподъемности;
7 — коэффициент загрузки;
Я — высота подъема в м\
v — скорость движения кабины в м/сек;
y^t — время, затрачиваемое на остановках за полный цикл работы
лифта, в сек.
Знаменатель приведенной формулы выражает время,
затрачиваемое на один полный цикл работы лифта и называемое временем
кругового рейса.
Коэффициентом использования
грузоподъемности В называется отношение веса полезного груза к общему
весу поднимаемого в кабине груза (определяемому с учетом веса
тары, транспортных средств и грузчиков). При размещении груза
в кабине навалом (без тележек) коэффициент |3 зависит только от
веса упаковочной тары и колеблется в пределах от 0,8 до 1. При
загрузке грузами, размещенными на ручных тележках, он снижается
до 0,6—0,8, а при размещении их на самоходных тележках до р =-■
=- 0,4 ч-0,5.
Коэффициентом загрузки 7 называется отношение
поднимаемого в кабине груза к ее номинальной грузоподъемности.
Он учитывает недогрузку кабины, которая почти всегда имеет место
потому, что точный вес грузов чаще всего неизвестен и проводник
из опасения перегрузки недогружает кабину на 15—20% (т =
= 0,8—0,85). При благоприятных условиях (вес грузов точно
известен и кратен номинальной грузоподъемности) значение
коэффициента загрузки можно принимать равным 7 — 0,9 ч- 0,95.
Время 2J/, затрачиваемое на остановках за полный цикл работы
лифта, определяется по формуле
2'='l+*2+'a+<4+'5, (3)
где (\ — время, потребное на открывание и закрывание дверей
щахты и кабины;
t2 — время, потребное на операции пуска;
ts — время, потребное на загрузку кабины;
*4 — время, потребное на разгрузку и возврат тары;
/5 — время, потребное для ускорения, замедления и
выравнивания кабины.
Время tl9 затрачиваемое на открывание и закрывание дверей
шахты и кабины, зависит от конструкции и размеров дверей. Число
40 Классификация, кинематические схемы и характеристика лифтов
операций открывания или закрывания равно числу остановок кабины
за время кругового рейса.
Затраты времени на одну операцию открывания или закрывания
дверей кабин и шахт грузовых лифтов приведены в табл. 6.
Таблица 6
Затраты времени на одну операцию открывания и закрывания
кабин и шахт грузовых лифтов
Тип и размер дверей (h — высота,
b — ширина)
Одностворчатые распашные h= 1 м,
b < 750 мм
Одностворчатые распашные к—2м,
b < 750 мм
Двухстворчатые распашные h — 2 м
Четырехстворчатые распашные h- 2 м
Раздвижные штанговые h — 2 м . . .
дверей
Требуемое время на одну операцию в сек.
для
зн-
2 +
открывания
дверей
2
2,5
Ь— 1000
500
Ь — 1500
500
b — 1250
500
для
4 +
закрывания
дверей
2,5
3,0
Ь— 1000
500
b — 1500
500
b— 1250
500
Время t2y затрачиваемое на операции пуска (подход к аппарату,
нажатие кнопки или поворот рычага) за один цикл работы лифта,
составляет 2—4 сек. Время t3 и /4> затрачиваемое на операции
загрузки и разгрузки кабины, зависит от ее размеров,
грузоподъемности и принятого способа загрузки. Кабины малых грузовых лифтов
загружаются и разгружаются исключительно вручную. Также
вручную обычно загружаются и разгружаются лифты
грузоподъемностью 250—500 кг, а иногда и 1000 кг. Для сокращения времени
простоя под погрузкой грузы предварительно подносятся к лифту.
Для ориентировочных расчетов суммарные затраты времени на
загрузку и разгрузку кабин вручную можно определять по формуле
t3
= (0,4 -5-0,5) Q сек.,
где Q — грузоподъемность кабины в кг.
Загрузка лифтов грузоподъемностью свыше 1000 кг обычно
производится с помощью ручных или самоходных тележек, что в несколько
раз уменьшает затраты времени на загрузку и разгрузку кабин.
В этом случае для лифтов грузоподъемностью 1000—3000 кг
суммарные затраты времени на погрузку, разгрузку и возврат тары "можно
принимать равными
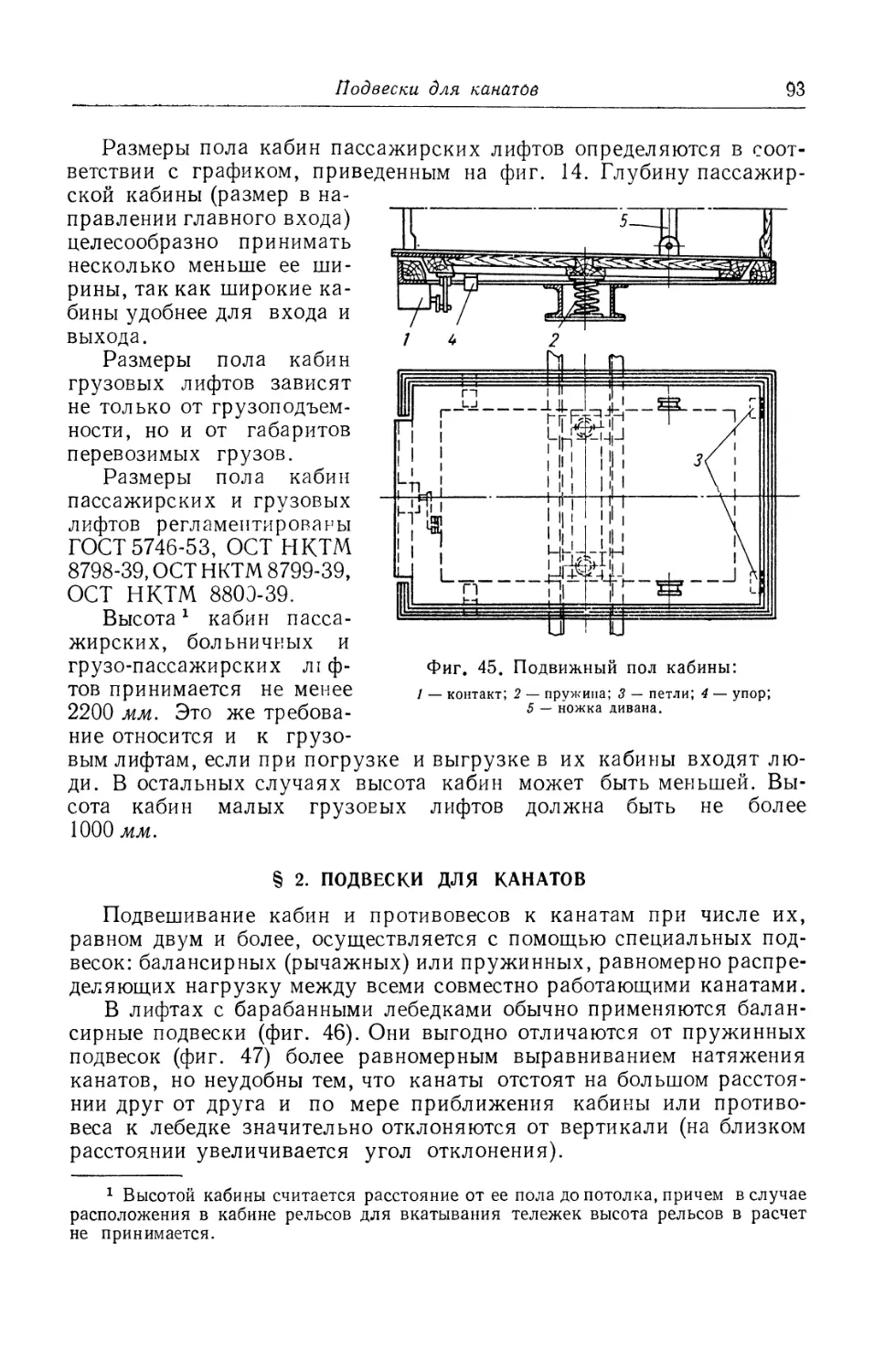
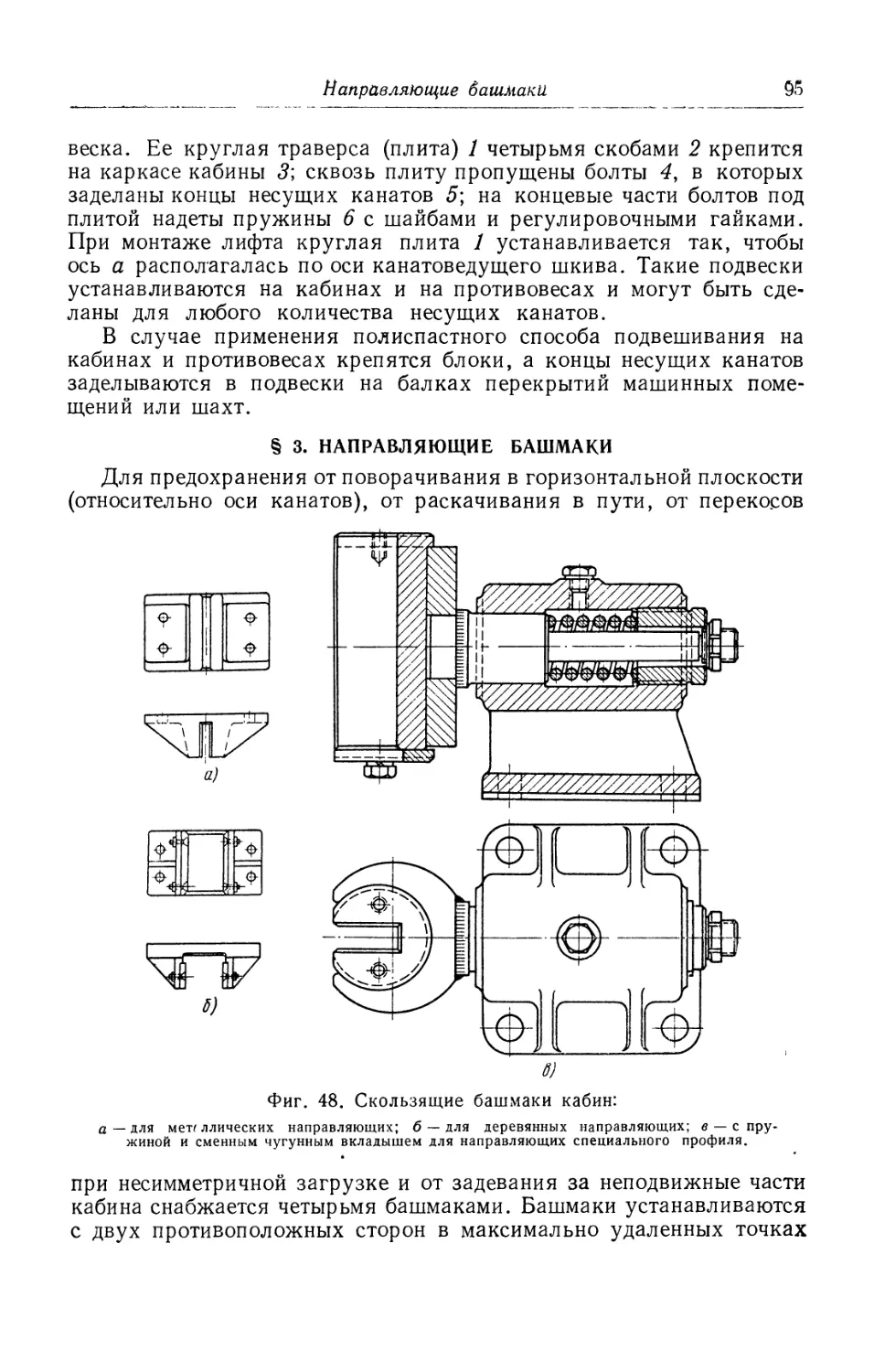
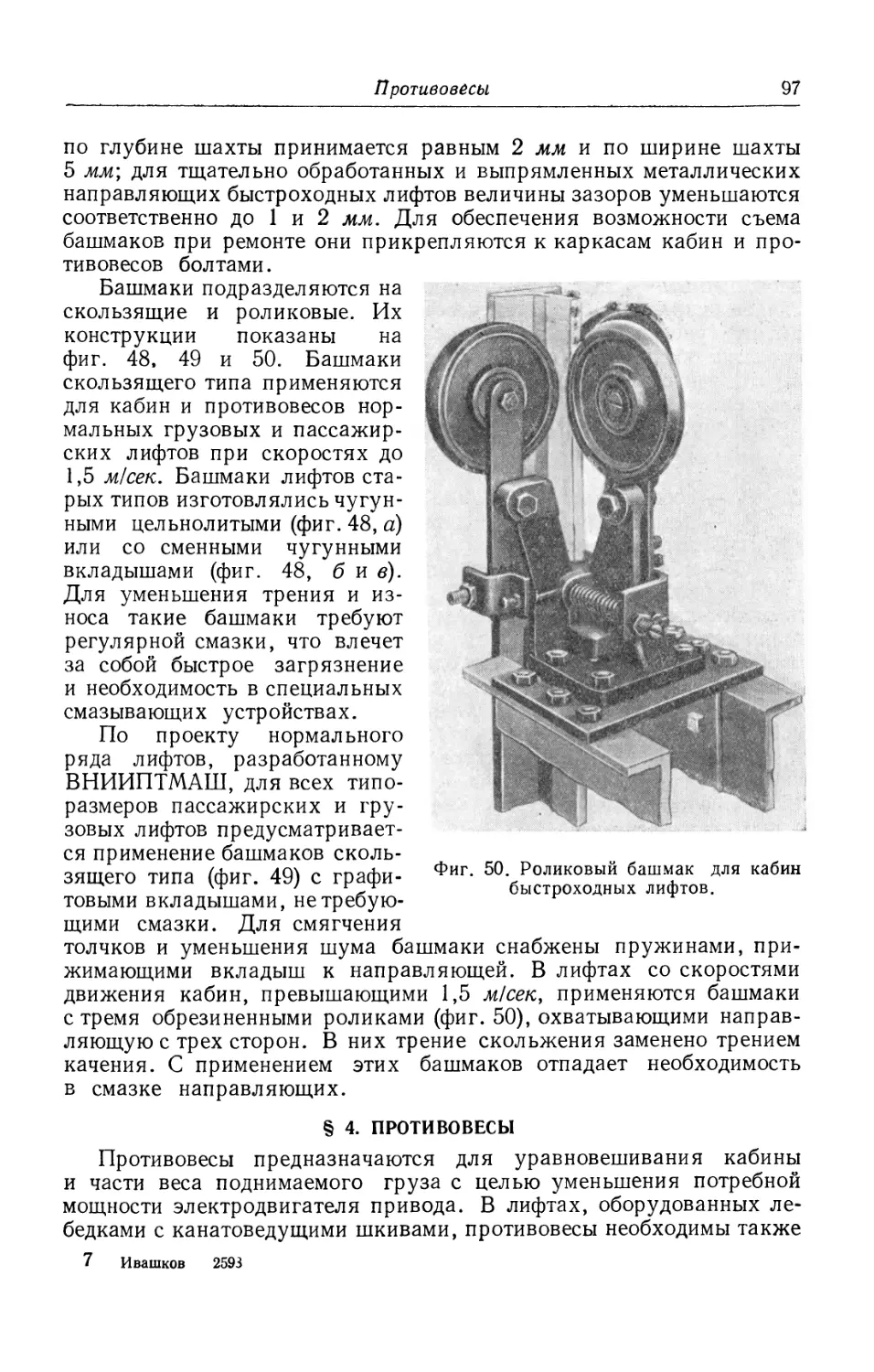
/3 + /4 = 40-f-45 сек..
Техническая характеристика 41
Время t5, потребное для ускорения, замедления и выравнивания
кабины, может быть определено по формуле
где ар — ускорение при разгоне в м/сек2;
ат — замедление при остановке в м/сек2;
v — скорость движения кабины в м/сек;
te — время на выравнивание кабины;
п — число остановок.
Время /в, расходуемое на выравнивание кабины, принимается
равным 1,5 сек.
Высота подъема лифтов промышленных предприятий редко
превышает 20 м. Поэтому на движение кабины затрачивается обычно
меньшее время, чем на ее стоянки. В этих условиях увеличение
скорости лифта не дает существенного повышения производительности.
Для повышения производительности грузовых лифтов
целесообразнее увеличивать их грузоподъемность, что дает почти прямо
пропорциональное увеличение производительности при сравнительно
небольшом повышении стоимости. По некоторым данным стоимость
лифта растет прямо пропорционально корню кубическому из
отношения грузоподъемностей.
Определение количества лифтов, необходимых для обслуживания
заданного грузопотока, производится по формуле
п =■?$■, (4)
где Ро6 — максимальный часовой грузопоток в т/час;
Р — часовая производительность лифта в ml час.
Производительностью пассажирского лифта
называется общее число людей, перемещаемых им в единицу времени
в одном направлении (на подъем или на спуск). Часовая
производительность пассажирского лифта подсчитывается по формуле
где Р — производительность лифта в чел.-час;
Е — номинальная расчетная вместимость кабины;
<р — коэффициент заполнения кабины;
Н — высота подъема в м;
v — скорость движения кабины в м/сек;
2^ — время, затрачиваемое при остановках кабины за полный
цикл работы лифта, в сек.
42 Классификация, кинематические схемы и характеристика лифтов
Коэффициент заполнения кабины <р зависит от
интенсивности пассажиропотоков, обслуживаемых лифтом, и от
метода заполнения кабины. Интенсивность пассажиропотоков, в свою
очередь, как видно из графиков, показанных на фиг. 16, зависит
от времени дня и места установки лифта. В жилых зданиях (фиг. 16, а)
пассажиропотоки невелики и почти равномерно распределены в
течение дня. Обследование этих лифтов, проведенное ВНИИПТМЛШ,
показывает, что от 50 до 75% всех подъемов их кабин совершается
с одним человеком при расчетной емкости кабины, равной обычно
3 чел. (грузоподъемность 250 кг). Это объясняется тем, что лифты
жилых зданий управляются самими пассажирами, которые не ждут,
когда кабина загрузится полностью. Поэтому при расчете их
производительности коэффициент ср рекомендуется принимать не более
0,6—0,7. В административно-хозяйственных зданиях (фиг. 16, б),
в зданиях учебных заведений и зрелищных предприятий
пассажиропотоки достигают большей величины и распределяются неравномерно
в течение дня, достигая максимума в часы начала и окончания
работы, занятий, представлений, называемые обычно часами пик.
Полное заполнение кабин этих лифтов до их номинальной
вместимости может происходить лишь в вечерние часы пик, когда имеется
достаточный «подпор» пассажиров. В этом случае коэффициент ф
может быть принят равным единице. В утренние часы поток
пассажиров несколько растягивается и кабины могут уходить
недогруженными. Кроме того, с целью облегчения выхода пассажиров на
промежуточных остановках проводник обычно не допускает полной
загрузки кабины. Поэтому при расчете производительности по
утренним пассажиропотокам коэффициент ср рекомендуется принимать
равным 0,8.
Время 2^> затрачиваемое при остановках кабины, складывается
из следующих слагаемых:
tx — время, потребное на ускорение и замедление;
t2 — время, потребное на операцию пуска;
4 — время, потребное на открывание и закрывание дверей;
/4 — время, потребное на вход пассажиров в кабину;
/5 — время, потребное на выход пассажиров из кабины;
/6 — дополнительное время, потребное на выравнивание,
задержки и т. п.
При числе вероятных остановок, не считая первую, равном Ne,
значение 2/ определяется так:
£/ = (*х 4 tt + t3) (Ne + 1) + h + t5 + te. (6)
При постоянной величине ускорений при пуске (а ) и
замедлений при остановке ат время tx определится по формуле
+ ), (7)
где v — скорость движения кабины в м/сек.
Чел.
100
80
60
20
0
22 23 Час
В 9 10 11 12 1В
к
)
Утренний
h
1
J L
IK
v
J Вечерний
-Q I'l
i§ 1
§
if
m
i
I
i
L
i
i
s
i
пик
Фиг. 16. Графики пятиминутных
пассажирских потоков:
а — жилой дом; б — административно-хозяйствнное
здание.
15 16 Л 18 19 20 21 22 23 Час
44 Классификация, кинематические схемы и характеристика лифтов
В тех случаях, когда лифт не снабжен автоматическими дверями,
а его кабина доводится до точного уровня с малой скоростью (0,1--
0,15 м/сек), время, вычисленное по формуле (7), следует увеличить
на 1,5 сек. Обычно же у лифтов, снабженных устройством для точной
остановки, кабины имеют автоматические двери, открывание которых
начинается за 1,5—2 сек. до полной остановки, что компенсирует
потери на выравнивание.
Время t2, затрачиваемое на операцию пуска, зависит от
конструкции пусковых устройств и размеров кабин. В кабинах с
проводником при ручном закрывании дверей время t2 составляет в среднем
2 сек., а при автоматическом закрывании — 1 сек. В лифтах,
управляемых самими пассажирами, время /2 увеличивается до 3—5 сек.
Время t8, затрачиваемое на открывание и закрывание дверей,
зависит от размеров и конструкции самих дверей.
По данным ВНИИПТМАШ, время в сек., затрачиваемое при
каждой остановке на открывание и закрывание одной двери (кабинной
и шахтной), составляет:
Распашные одностворчатые, шириной до 800 мм (шахты
небольших пассажирских лифтов) 5,5
Распашные двустворчатые шириной до 800 мм (кабины
небольших пассажирских лифтов) 4
Раздвижные одностворчатые шириной до 800 мм,
механизированные (кабины и шахты небольших пассажирских
лифтов) 4,5
Раздвижные двустворчатые шириной до 1000 мм,
механизированные (кабины и шахты пассажирских лифтов
общественных зданий) 3,5—4
В соответствии с приведенными данными при последовательном
открывании и закрывании дверей кабины и шахты на каждой
остановке расходуется около 10 сек., а при одновременном открывании
и закрывании механизированных дверей — около 3,5—4,5 сек.
Время входа в кабину /4 и время выхода из нее t5 зависит от
размеров дверей, конструкции кабины, точности ее остановки и
интенсивности пассажиропотока. При широких дверях пассажиры входят
в кабины и выходят из них быстрее, чем при узких. Неточная
остановка и плохое освещение порогов замедляют вход и выход и могут
вызвать падение пассажиров. Выход происходит быстрее из менее
глубоких кабин, для чего глубину обычно принимают меньше
ширины. Быстрота выхода зависит также от степени заполнения кабины.
Из полупустой кабины выходить легче, чем из переполненной. При
интенсивных пассажиропотоках вход в кабину совершается быстрее,
чем при разреженных потоках.
Техническая характеристики
При ширине дверей 1000 мм ВНИИПТМАШ рекомендует
принимать следующие значения времени на вход или на выход одного
пассажира в сек.:
При входе в пустую кабину на нижней или верхней
остановке при интенсивном пассажиропотоке 0,8
То же, при разреженном пассажиропотоке 1,0
При одновременном выходе из кабины всех пассажиров . . 0,7
При входе в кабину на промежуточных остановках
а) первого пассажира 2,0
б) следующих пассажиров 1,0
При выходе части пассажиров
а) первого пассажира 1,9
б) следующих пассажиров 0,9
Дополнительное время /6, расходуемое на выравнивание графика
движения и на случайные задержки, определяется в процентах
"
§. 8
! 6
3 и
1
1
1
1
1
i
t
z
V
/
A
/
/
-0*
mm*
—
,*—'
7*
100*
**•
**
00*
1—'
Щ
S4i
П
/1
/
+00
у
У
+0+
у
f
,Е
+Л
А
V7»
Е=5чел.
и-п
=10 чел
*-*
ее
***
!■■■
2 4 6 Ю 14 18 22 26 30 34 38 42 46 50
Количество этажей быте первого
Фиг. 17. Графики для определения числа вероятных остановок.
к общему времени кругового рейса. При обслуживании
пассажиропотоков, идущих в одном направлении, оно принимается равным
5—10% от полного времени рейса, а при двусторонних
пассажиропотоках 10—15% от времени рейса.
В том случае, когда лифт обслуживает этажи с одинаковой
заселенностью и курсирует до верхней остановки, независимо от наличия
на ней пассажиров, число вероятных остановок может быть
определено по графикам, изображенным на фиг. 17.
Наиболее существенное влияние на производительность
пассажирского лифта при прочих равных условиях оказывают вместимость Е
и скорость кабины v.
46
Классификация, кинематические схемы и характеристика лифтов
Результаты расчетов показывают, что при скорости кабины
1—1,5 м/сек и высоте подъема на 10 этажей увеличение
грузоподъемности кабины вдвое повышает производительность в 1,6—1,7 раза.
В связи с этим увеличение вместимости кабин (или грузоподъемности)
лифта оказывается наиболее простым и дешевым средством
повышения его производительности. Следует, однако, иметь в виду, что
с увеличением вместимости кабин увеличивается время кругового
рейса и тем самым — время ожидания кабин, которое не должно
превышать 30—35 сек. Скорость кабины оказывает наибольшее
влияние на производительность в среднем диапазоне скоростей и
при малом числе остановок. Так, увеличение скорости с 0,75
до 1,5 м/сек при малом числе остановок повышает
производительность в 1,5 раза. При большем числе остановок и при больших
скоростях увеличение скорости в 2 раза (с 1,75 до 3,5 м/сек) повышает
производительность лишь в 1,2 раза. Объясняется это тем, что
ускорения и замедления при остановках резко уменьшают среднюю
эксплуатационную скорость кабины.
Количество пассажирских лифтов, необходимое для обслуживания
заданного пассажиропотока, определяется по максимальному
пятиминутному пиковому пассажиропотоку по формуле
п=
(8)
где Ръмин — максимальный пятиминутный пиковый
пассажиропоток, чел.;
Р — часовая производительность лифта, чел.
Ориентировочные величины пятиминутных пиковых
пассажиропотоков для различных типов зданий приведены в табл. 7.
Таблица 7
Тип здания
Административно-хозяйственные
учреждения
Учебные заведения
Гостиницы
Торговые предприятия
Зрелищные предприятия
Жилые дома
Максимальный
пятиминутный
поток в % к
населению здания
15—20
15—25
5—10
10
15—20
5—10
Тип потока
Односторонний
Двусторонний
Односторонний
ГЛАВА III
ТЯГОВЫЕ РАСЧЕТЫ ЛИФТОВ
§ 1. ТЯГОВАЯ СПОСОБНОСТЬ КАНАТО В ЕДУЩЕГО ШКИВА
Распределение усилий натяжения каната по дуге касания с канато-
ведущим шкивом. Движение кабины и противовеса в лифтах с канато-
ведущими шкивами осуществляется за счет сил трения, возникающих
между несущими канатами и ручьями канатоведущего шкива.
Благодаря наличию сил трения усилие натяжения в одной из
ветвей каната может намного превосходить усилие в другой его
ветви. Однако в каждом конкретном случае существует вполне
определенное соотношение между усилиями S2 и St натяжения концов
каната (S2 обозначается большее усилие), при котором начнется
проскальзывание каната по шкиву и передача движения от шкива
к канату прекратится.
Это соотношение определяется из условий равновесия
элементарного участка каната, определяемого центральным углом dcp
(фиг. 18). По концам этого участка действуют усилия натяжения
S и S + dS; со стороны шкива на него действует нормальное
давление dN и соответствующая ему сила трения \xdN, где р, —
коэффициент трения скольжения. Уравнение проекций указанных сил на
направление усилия dN имеет вид
Вследствие малости угла -у-
. d<p dy
cin _L_ ^w L
поэтому
и отбрасывая бесконечно малые величины высшего порядка,
получаем
dN = S-du. (9)
Из уравнения моментов относительно оси вращения О следует, что
Тяговые расчеты лифтов
ИЛИ
(10)
dN
S+dS
Из уравнений (9) и (10) получаем
— — d
или, после интегрирования,
S = C-er*. (11)
Здесь е — основание натуральных логарифмов.
Постоянная интегрирования С определится из условия, что при
ср = 0 натяжение каната равно Sv Следовательно, С = Sly и
уравнение (11) приобретает вид
• S = Sr(P*. (12)
Это уравнение определяет
натяжение каната в
произвольной точке обхвата, поэтому оно
распространяется и на точку В,
где натяжение равно S2,
а ср = р:
Jf- = **- (13)
фиг lg c „ Уравнение (13) выражает
положенном**™ ^тТведущем^шкиве! предельную тяговую
способность канатоведущего шкива,
о
т. е. то наибольшее отношение усилий в ветвях каната -~ , при
котором исключается его проскальзывание по шкиву,
характеризуемому тяговым коэффициентом е^ . При соблюдении равенства
(13) сила трения между канатом и ручьем шкива полностью
используется для создания тягового усилия.
Соответствующий этому предельному случаю характер
изменения усилий натяжения каната по дуге охвата шкива представлен
на фиг. 19, а. Любое промежуточное значение усилия натяжения 5
на дуге обхвата, соответствующее углу ср, определяется по
уравнению (12).
Во избежание проскальзывания каната по шкиву на практике
всегда стремятся к тому, чтобы
-^<^р- (14)
Очевидно, что при этом условии сила трения между канатом и
ручьем шкива будет использоваться неполностью.
Тяговая способность канатоведущего шкива
49
Так как с уменьшением отношения -~ коэффициент р, остается
практически постоянным, из уравнения (13) следует, что по мере
уменьшения указанного отношения будет уменьшаться угол дуги
обхвата шкива <р', на котором усилие натяжения каната меняется от
значения Sx до значения 5г < S2. Соответствующий этому характер
St
Фиг. 19. Распределение усилий натяжения каната по дуге касания с канатове-
дущим шкивом:
а — при полном использовании сил трения; S2 — набегающая ветвь; St — сбегающая ветвь; б — при
неполном использовании силы трения; s' — набегающая ветвь; Si — сбегающая ветвь; в — при
неполном использовании силы трения; 5j — набегающая ветвь; 5 — сбегающая ветвь.
изменения усилий натяжения каната по дуге обхвата шкива
представлен графически на фиг. 19, б (усилие в набегающей ветви больше
усилия в сбегающей ветви) и фиг. 19, в (усилие в набегающей ветви
меньше усилия в сбегающей ветви).
В первом случае (фиг. 19, б) изменение усилия натяжения от 5Х
до S2 происходит на дуге АС, в то время как на дуге СВ оно остается
постоянным, равным Sr Во втором случае (фиг. 19, в) усилие натя-
4 Ивашков 2598
50
Тяговые расчеты лифтов
жения меняется от S2 до S[ на участке ВС, оставаясь постоянным
на участке СА. Угол <рх в обоих случаях одинаков и отсчитывается
от точки, в которой канат сбегает с ручья.
Участок с постоянным усилием натяжения (ВС — на фиг. 19, б
и СА — на фиг. 19, в) в обоих случаях примыкает к точке
набегания каната на ручей.
Напряжение смятия между канатом и ручьем. Для уменьшения
износа ручьев канатоведущих шкивов необходимо, чтобы удельное
Фиг. 20. Характер износа ручья и схема распределения сил но его контуру:
а ~ характер износа полукруглого ручья; б — схема распределения сил по контуру полукруглого
ручья с подрезом.
давление (напряжение смятия) между канатом и ручьем было
наименьшим. Величина напряжения смятия при прочих равных
условиях зависит от профиля ручья и определяется следующим образом.
Нормальное давление на единицу длины каната N' находится
из уравнения (9) путем деления его на длину рассматриваемого на
фиг. 18 элементарного участка:
л/'_ dN — s'd<? _ 2S
~~ D '
D
~2~
Канат в процессе работы практически не изнашивается, и по мере
износа ручья все его точки опускаются в вертикальном направлении
на одинаковую величину (фиг. 20, а). Из постоянства вертикальной
составляющей износа следует, что вертикальная составляющая
удельного давления остается по всему контуру опорной поверхности ручья
также постоянной, т. е.
_^_ = С = const. (16)
cos у
Тяговая способность канатов едущего шкива 51
На элемент опорной поверхности, определяемый центральным
углом do и единичной длиной в направлении оси каната, действует
элементарная сила dK, равная
dK = p^dv (17)
или, подставляя вместо р его значение из уравнения (16), получаем
dK = C~cosv-d<?. (17а)
Вертикальная и горизонтальная составляющие этой силы будут
соответственно равны:
dKeepm= С ^ cos2 vdv; (176)
dKaop = C-~y cos ? *sin ?**?• (17b)
Сумма всех вертикальных составляющих по линии
соприкосновения С С" должна равняться нормальной силе N' [уравнение (15)].
Интегрируя уравнение (176) в пределах, соответствующих
полукруглому ручью с подрезом (фиг. 20, б), получим
1 1
2 2
N'
,m=2~C fcos2cp-d-.
После интегрирования имеем
N' = С • ~ (7 — а + sin 7 — sin а).
Подставив значение N' из уравнения (15) и значение С из
уравнения (16), получим
8COS f S /1Qn\
Р= ^-a + siny-sina *TD • ^^
Для подрезанного ручья значение /? достигает максимума при
cp = y и равно
8cosT s s
^тах 1isin-tsina rf£) — ^ d£) »
где 5 — наибольшее усилие натяжения одного каната.
При обозначениях, принятых на фиг. 21 (Рг — вес кабины,
Р2 — вес поднимаемого груза, Р3 — вес неуравновешенных участков
канатов, Р4 — вес противовеса, Р5 — вес натяжного груза уравно-
4*
Тяговые расчеты лифтов
вешивающих канатов), и числе канатов п величина S определится
по формулам:
а) при отсутствии уравновешивающих канатов:
5 - pi + р2 + Л» .
б) при наличии уравновешивающих канатов:
(19а)
(196)
Величина W, входящая в формулу 186,
называется характеристикой профиля ручья. Для
полукруглого ручья с подрезом согласно
уравнению (186)
8cos
(20а)
Для изношенного
подрезом (^ = тс)
— а -+- sin Ч - sin а
полукруглого ручья с
W =■
w изн
8C0S-J
(206)
Для полукруглого
(a=0; T=u)
ручья без подреза
W,
8
= ^=2,54.
(20в)
Фиг. 21. Схема сил,
действующих в лифте:
/ — кабина; 2 —
противовес; 3 —
уравновешивающие канаты; 4 — натяжной
ГРУ3 уравновешивающих
канатов.
График зависимости характеристики профиля
ручья W от угла подреза показан на фиг. 22.
Наименьшее значение W соответствует
полукруглому ручью без подреза (а=0). При увеличении а
свыше 100—120° значения W резко возрастают.
Соответственно с этим резко растут и
напряжения смятия. Еще большие напряжения смя*
тия возникают в клиновых ручьях, где канат касается стенок ручья
на весьма ограниченных площадках, определяемых контактными
деформациями каната и шкива.
fib Допускаемые значения напряжений смятия для канатов крестовой
свивки и шкивов из модифицированного чугуна приведены на фиг. 23.
Для канатов односторонней свивки величины допускаемых
напряжений, определяемые по графику, могут быть повышены на 20—25%,
а для шкивов из серого чугуна они должны быть понижены на 20—
25%.
Действительный (результирующий) коэффициент трения. При
расчетах по уравнению (13) следует иметь в виду, что входящий
Тяговая способность канатов едущего шкива
53
в него коэффициент трения р, неравен действительному коэффициенту
трения скольжения каната по ручью ц0.
Соотношение между указанными коэффициентами определяется
следующим образом.
В соответствии с фиг. 20, б элементарная сила трения dF равна
где [х0 — действительный коэффициент трения скольжения.
W
у
/
1
/
/
/
20° Wo60°80°100ooC
Центральный угол подреза
Фиг. 22. Зависимость
характеристики профиля ручья W
от угла подреза а
(изношенный' полукруглый ручей с
подрезом).
нп
70
50
30
[
V
\
\
ч
\
\
«—-
— —
Q5 15 2,5 "/сек
Скорость движения каната
Фиг. 23. Допускаемые
напряжения смятия между канатом
и ручьем:
/ — пассажирские интенсивно
работающие лифты (8—9 час. в сутки);
2 — пассажирские редко работающие
лифты; 3 — грузовые интенсивно
работающие лифты; 4 — грузовые редко
работающие лифты.
Подставляя значение dK из уравнения (17а) и значение р
из уравнения (18а) для полукруглого ручья с подрезом, получим
F =:
2
Г»
sin "К — sin a)
или окончательно
D
— a + sin "J — sin a
(21)
54 Тяговые расчеты лифтов
В соответствии с уравнением (15) последнее выражение может быть
представлено в виде
F = МЛГ,
где
Ч а
sin у - sin у
** = 4 Т-а + sim-sina Л> (22а)
результирующий (кажущийся) коэффициент трения, учитывающий
профиль ручья:
для изношенного полукруглого ручья с подрезом (т =iu)
1 — sin ~
4 ^
«-—in,
для полукруглого ручья без подреза (а=0; 7 = я)
M^tV (22в)
для клиновидного ручья с углом Ь у основания
(a = y = тс — S):
О
и, после раскрытия неопределенности,
/* = —Ц-ftr (22г)
sin"2"
Значение коэффициента трения р,0 принимается равным: для
шкивов из серого чугуна и слабо смазанных канатов р,0 = 0,1, для
шкивов из модифицированного чугуна р.о = 0,084.
Статические и динамические соотношения усилий в канатах.
При проверке тяговой способности канатоведущих шкивов по
уравнению (13) необходимо учитывать как статические, так и
динамические соотношения усилий в несущих канатах.
о
Величины максимального отношения -=?- зависят от принятой
системы уравновешивания кабины, полезного груза и подъемных
канатов, т. е. от того, какая часть суммарного веса кабины и груза
уравновешивается противовесом и уравновешиваются ли подъемные
канаты, вес которых при больших высотах подъема может достигать
значительной величины1. Отношение веса противовеса Р4 к
суммарному весу кабины Рг и полезного груза Р2 принято называть коэффициен-
1 О противовесах и уравновешивающих канатах см. главу V,
Тяговая способность канатов едущего шкива 55
р
том уравновешивания, равным Cv = -5—^-5- . В зависимости от при-
нятой системы уравновешивания отношение -^ достигает макси-
мального значения при подъеме загруженной кабины из крайнего
нижнего положения или при опускании порожней кабины из
крайнего верхнего положения.
Сопротивления движению кабины и противовеса не оказывают
существенного влияния на величины указанных соотношений и
поэтому при определении последних обычно не учитываются.
Если обозначить: PL — вес кабины в кг, Р2 — вес поднимаемого
груза в кг, Р3 — вес неуравновешенных участков канатов в кг,
Р4 — вес противовеса в кг, Р5 — вес натяжного груза
уравновешивающих (компенсирующих) канатов в кг, mx, /n2, тэ, т4, гпъ —
соответствующие им массы, g = 9,81 м/сек2 — ускорение силы
тяжести, то соотношение усилий в несущих канатах при указанных
выше характерных положениях кабины определяется следующим
образом (фиг. 21):
а) Загруженная кабина в крайнем нижнем положении (без
уравновешивания канатов):
неподвижная кабина
S2\ __ Pi + P2 4- ^з __ ё(щ + гп2-\~тг) __ т± + т2 -\- т3
) ^l
торможение с ускорением а при спуске
/^2_\ = (mi + т2 + т3)
частное от деления уравнения (24) на уравнение (23) называется
динамическим коэффициентом работы лифта, который в данном
случае равен
(/72х 4- /я2 + т8) (g + a)
ie)(25)
(/72i 4- m
m
/72!
+
if — a
/722 +
(ёГ4
)
/723
-a)
g ~ CL
При известном значении \-£-\ величина {-^-\ определится
\ ^i I cm \ ^1 / дин
по формуле
(#) Ч#) • (25<)
дин
б) Загруженная кабина в крайнем нижнем положении (с
уравновешивающими канатами и натяжным грузом):
неподвижная кабина
тг + /w2 + /7*з + -тг
5Г^
56 Тяговые расчеты лифтов
торможение с ускорением а при спуске
(mx + m2 + mz) (g + a) +• ^~ g
(271
в) Порожняя кабина в крайнем верхнем положении (без
уравновешивания канатов):
неподвижная кабина
/|Л ± (28)
г ™l
торможение с ускорением а' при подъеме
(т4 4- m3) (g H
/дин
динамический коэффициент
г) Порожняя кабина в крайнем верхнем положении (с
уравновешивающими канатами и натяжным грузом):
неподвижная кабина
(**\ = L; (31)
торможение с ускорением а' при подъеме
+ m2 g • (32)
Из анализа уравнений (23) — (32) следует, что в лифтах с урав-
новешивающими канатами значения ■— при прочих равных усло-
1 л.
виях всегда меньше, чем соответствующие значения для лифтов
без уравновешивающих канатов.
о
Выбор расчетного соотношения -~ во всех случаях необхо-
димо вести применительно к наибольшему значению А.
Расчет тяговой способности канатоведущего шкива. Расчет
тяговой способности канатоведущего шкива сводится к определению
оптимальной формы ручья, обеспечивающей передачу тягового
усилия при любом соотношении усилий в канатах, а также достаточный
срок службы самого канатоведущего шкива.
Тяговая способность канатоведущего шкива 57
Расчет выполняется в следующем порядке:
а) определение допускаемых напряжений смятия pmax по графику
на фиг. 23;
б) определение характеристики профиля ручья W по
допускаемому напряжению ртах, предварительно выбранным диаметрам
канатов и шкива и числу канатов;
в) определение по фиг. 22 угла подреза ручья а,
соответствующего характеристике W;
г) определение результирующего коэффициента трения ^ по
формулам (22);
д) проверка тяговой способности шкива по уравнению (13).
В случае, если при проверке по уравнению (13) окажется, что
выбранная форма ручья не обеспечивает передачу тягового усилия
без проскальзывания канатов, тяговая способность шкива может быть
повышена следующими мероприятиями:
1) применением уравновешивающих канатов с целью
уменьшения отношения (-J-) ;
\ ^1 У max
2) увеличением угла обхвата;
3) увеличением угла подреза (без повышения напряжения смятия)
за счет увеличения диаметра канатов;
4) увеличением диаметра шкива или числа канатов;
5) уменьшением скорости, ускорений и замедлений.
" Если совокупность этих мероприятий не обеспечивает
удовлетворительного решения, канатоведущий шкив должен быть заменен
барабаном.
Пример. Определить оптимальную форму ручьев канатоведущего шкива
пассажирского лифта, если задано: высота подъема Н = 30 м, скорость кабины v =
= 1,5 м/сек, грузоподъемность лифта Р2 — 750 кг, вес кабины Рг = 850 кг, вес
противовеса Р4=1150л:г, число канатов 4, вес неуравновешенных участков канатов
Р3 = 4-30-0,77 = 83 кг, канаты крестовой свивки диаметром d = 1,5 см, шкив из
модифицированного чугуна диаметром D = 80 см, угол обхвата шкива (3 = 155°,
продолжительность работы 10 час. в сутки.
По табл. 5 а = 0,5 м/сек2.
Для загруженной кабины в крайнем нижнем положении по уравнениям (23)и (25')
52\ _ 9,81+0,5 850 4-750 4-83 1683
дин~ 9,81—0,5 1150 -1'11 1150 -1*"*-
Для порожней кабины в крайнем верхнем положении по уравнению (29)
9,81 +0,5 1150 + 83 1233
' 850 ~ '
duH 9,81-0,5 ' 850 ' 850
По графику 1 на фиг. 23 допускаемое напряжение смятия равно pmaiX=47 кг/см2.
Характеристика ручья W, соответствующая этому напряжению, определится
по уравнению (186):
^Г = 47!'° 13Л
85о!75О+83
58 Тяговые расчеты лифтов
* В соответствии с фиг. 22 при W"= 13,4 угол подреза ручья из условий смятия
не должен превышать а = 105°.
По уравнению (226) величина результирующего коэффициента трения fj^,
соответствующая углу а = 105°, равна
. Ю5°
1 — sin —^—
Hi=4 Где 0,084 = 0,21.
«-ш«-sin 105°
Проверка по уравнению (13) показывает, что
Отсюда следует, что при угле подреза а = 105° канатоведущий шкив при
заданных условиях обладает достаточной тяговой способностью и долговечностью.
§ 2. КРУТЯЩИЕ МОМЕНТЫ И МОЩНОСТЬ ЭЛЕКТРОДВИГАТЕЛЯ
Крутящий момент на валу шкива или барабана. При известных
усилиях натяжения в набегающей и сбегающей ветвях каната
величина крутящего момента на валу канатоведущего органа или
барабана определяется по формуле
МКи 0 = (^2-Si) Ас. о кем. (33)
На величину разности 52 —Sl9 помимо весовых нагрузок,
существенно влияют потери от сопротивлений движению кабины и
противовеса, не учитывавшиеся в предыдущем параграфе, а именно:
потери Р6 в башмаках 1 кабины и противовеса от трения о
направляющие, потери Р7 от трения в контршкивах и отводных канатных
блоках 2, потери Р8 от трения и изгиба канатов на канатоведущем
шкиве или барабане, потери Р9 на преодоление сопротивлений
воздуха в шахте.
При правильном монтаже направляющих, исключающем их
заклинивание в башмаках кабины и противовеса, наиболее существенное
значение имеют сопротивления Р6> возникающие в результате
смещения груза в сторону от центра кабины. При определении величины
Р6 это смещение обычно принимают равным -~- от ширины и
глубины кабины. В соответствии с обозначениями, принятыми на
фиг. 24,
Р2 -4 = дг (h + с) и Р2 • А = ?2 {h + с),
1 Башмаки устанавливаются по 4 шт. на каждой кабине и на противовесе (с обеих
сторон, по два внизу и вверху). Каждый башмак охватывает направляющую с трех
сторон, что исключает раскачивание кабины и противовеса, а также поворот
относительно вертикальной оси. Подробнее о конструкции башмаков см. гл. V.
2 Контршкивы и отводные канатные блоки применяются при сложных схемах
лифтов (см. фиг. 12),
Крутящие моменты и мощность электродвигателя
59
откуда
6 (Л + с)
(7а-
Сопротивление в башмаках кабины
или
6 (Л + с)
(34)
(35)
Зазор
Значение коэффициента трения принимается равным р/ = 0,12
для чугунных башмаков по стальным направляющим при слабой
смазке и р/ = 0,2 для
стальных башмаков по
деревянным
направляющим.
При смещении
подъемных канатов относительно
центра тяжести кабины в
башмаках последней
возникают дополнительные
сопротивления, величина
которых может быть
определена по формуле
Зозор
\ Ц
Зазор
А
й
6
i
-^
»—
■г4
I
Е
л
И
—
+в2В)/х' кг, (36)
Фиг. 24. Схема усилий, действующих на
направляющую при несимметричном
расположении груза в кабине:
/ — башмаки; 2 — направляющие.
где
и г2 — относительное смещение канатов соответственно в
направлении ширины и глубины кабины (в долях от
ширины и глубины).
Сопротивления от трения в огибных и отклоняющих блоках
определяются приближенно по ^формулам:
для блоков с подшипниками скольжения
|- кг;
для блоков с подшипниками качения
Р'[ = 0,02
Здесь |=
блоки.
sin i- кг.
(37)
(38)
угол обхвата блока;
наибольшее суммарное натяжение канатов, огибающих
60 Тяговые расчеты лифтов
Сопротивление движению в канатоведущем шкиве определяется
по формуле
P8 = 0,05"SSn.sinl кг. (39)
Сопротивление воздуха подсчитывается приближенно по
эмпирической формуле
(!)3Л.В, (40)
где v — скорость движения кабины в м1сек\
А, В — размеры пола или потолка кабины в ж2.
Величину полного сопротивления движению Рс = Р6 + Р7 +
+ Р8 + Р9 в практических расчетах часто выражают в долях
неуравновешенного груза Рн,уг Обычно принимают
/>с = 0,2Р„.у. (41)
Наибольший крутящий момент на канатоведущем шкиве или
барабане в зависимости от принятой системы уравновешивания создается
или при подъеме загруженной кабины из крайнего нижнего
положения, или при опускании порожней кабины из крайнего верхнего
положения. В первом случае, согласно фиг. 21,
S2-S1 = P1 + P2 + Ps — P^Pc; (42)
во втором случае
S2-S1 = P^ + P3 -рг + р'с (43)
или приближенно, в соответствии с выражением (41),
S2-51=1,2(P1 + P24-P3-P4); (44)
S2 — S1 = U2(PA + P3 — P1). (45)
При наличии компенсирующих канатов значение Р3 в последних
выражениях принимается равным нулю.
Мощность электродвигателя. Мощность электродвигателя лифта
определяется по величине наибольшего крутящего момента на валу
канатоведущего органа Мко> возникающего при установившемся
движении кабины. Мощность TV в кет вычисляется по формуле
N MKm0-n .
где п — число оборотов электродвигателя в минуту;
у\пр — к. п. д. привода;
inp — передаточное число привода, обеспечивающее заданную
скорость кабины при диаметре канатоведущего органа
DHt0 и числе его оборотов в минуту, равном nKaQ.
Крутящие моменты и мощность электродвигателя 61
Так как
v __ ,л
60
то
Величина Мк 0 при расчете мощности определяется по
выражению (33). Разность S2 —Sl9 входящая в это выражение,
вычисляется по одной из формул (42) — (45). Значения к. п. д. привода у\пру
рекомендуемые для расчетов, приведены в табл. 8.
Таблица 8
Значения к. п. д. передач в приводах (лебедках) лифтов
Тип передачи
Червячная с однозаходным червяком
Червячная с двухзаходным червяком
Червячная с трехзаходным червяком
Червячная с глобоидальным червяком
Зубчатая с цилиндрическими шестернями
Безредукторная лебедка
V
0,50—0,70
0,70—0,80
0,80—0,90
0,75—0,85
0,85—0,90
0,90—0,95
По найденной величине N по каталожным данным подбирается
нужный электродвигатель. Его номинальная мощность должна быть
не меньше вычисленной по формуле (46). Двигатель, выбранный таким
образом, должен быть затем проверен по условиям нагрева от
рабочих и пусковых токов. В течение рабочего цикла лифта мощность,
развиваемая двигателем, меняется. Во время разгона кабины она
значительно превышает мощность, определяемую по формуле (46).
Выбор двигателя по максимальному (пусковому) значению мощности
был бы неправилен, так как привел бы к излишнему запасу
установленной мощности и перетяжелению привода лифта. Поэтому
двигатель выбирают так, чтобы его фактическая переменная нагрузка
во время рабочего цикла была бы эквивалентна по условиям нагрева
номинальной нагрузке, на которую он рассчитан. В практических
расчетах приводов лифтов для проверки электродвигателей по
нагреву пользуются методом эквивалентного тока. Величина
эквивалентного тока определяется по формуле
(47)
Здесь Iр, /у, 1Т — ток в амперах [при пуске (разгоне), работе
с полной (установившейся) скоростью и при электрическом тормо:
62 Тяговые расчеты лифтов
жении, если оно применяется (при торможении механическим
тормозом 1Т = 0), t , ty, tTy t0 — продолжительность в секундах пуска,
работы с полной скоростью, торможения и паузы; р и рг —
коэффициент ухудшения охлаждения при разгоне и торможении; обычно
их принимают в пределах от 0,5 до 0,75.
Коэффициент ухудшения охлаждения во время пауз [30 < (J ;
он колеблется в пределах р0 = 0,25 ч- 0,5. Величина
эквивалентного тока 1е, определенная по формуле (47), должна быть меньше
номинального тока двигателя 1Н, выбранного по моменту
статического сопротивления. Величина 1Н указывается в каталоге. В том
случае, когда 1е > 1НУ выбранный двигатель должен быть заменен
двигателем большей мощности. Для того чтобы произвести проверку
двигателя лифта по нагреву, необходимо выявить степень загрузки
кабины лифта и график его работы, т. е. продолжительность и
последовательность отдельных операций за полный цикл работы.
Существенное значение при этом имеют время разгона и торможения,
число вероятных остановок, а также их продолжительность,
определяемая временем заполнения и опорожнения кабины, временем,
необходимым для открывания дверей и т. д. Проверку
электродвигателя по пусковому моменту можно не производить, так как
двигатели, применяемые в электроприводе лифтов, имеют достаточные
пусковые моменты. Более точным методом тепловой проверки
двигателей является метод средних потерь.
§ 3. ОПРЕДЕЛЕНИЕ ОСНОВНЫХ ХАРАКТЕРИСТИК ПРОЦЕССОВ РАЗГОНА
И ТОРМОЖЕНИЯ КАБИНЫ
Основными характеристиками процессов разгона и торможения
кабины являются продолжительность периодов разгона и торможен
ния (tp и tT в сек.), пути, проходимые кабиной за эти периоды
(sp и sT в м) и величины возникающих при этом ускорений (ар и ат
в м/сек2).
Величины tp и tT используются при определении
производительности лифта. Величины sp и sr позволяют судить о
целесообразности выбора данной скорости, исходя из того успевает ли кабина
нормально разогнаться и затормозиться при заданном расстоянии
между остановками. Кроме того, величины srnpn различных режимах
работы лифта позволяют судить о точности остановки кабины.
Величины ар и ат характеризуют безопасность и комфортабельность
работы лифта.
Основное уравнение движения. При определении основных
характеристик разгона и торможения используется основное уравнение
движения:
±МТ Мс = Мд (48)
или
MC = J^. (49)
Определение характеристик процессов разгона и торможения
Так как угловая скорость &= ^- и маховой момент GD2=4gJ
(g = 9,81 м/сек2 — ускорение силы тяжести),
- Мс = -5тТ • -ЙТ » (5°)
где М —- момент электродвигателя (при разгоне) или момент
механического тормоза (при торможении) в кгм;
Мс — момент статических сопротивлений, приведенный к валу
электродвигателя, в кгм (при разгоне Мс = Мг в- ;
при торможении Мс = г-в'Т1ПР \ ;
1пр . /
-п производная числа оборотов по времени;
GD2 — маховой момент всех вращающихся и поступательно
движущихся частей, приведенный к валу электродвигателя,
в кгм2.
Знаки перед моментами, входящими в формулу (50), при
характерных режимах работы лифта приведены в табл. 9.
Таблица 9
Знаки перед моментами
Режим работы
Разгон загруженной кабины на
подъем и порожней кабины на спуск
Торможение загруженной кабины на
спуск и порожней на подъем ....
Разгон загруженной кабины на спуск
и порожней кабины на подъем ....
Торможение загруженной кабины на
подъем и порожней на спуск ....
Знаки перед моментами
Момент
электродвигателя
Мэ
+
+
Момент тормоза
мт
+
+
Момент
статических
сопротивлений
+
64 Тяговые расчеты лифтов
При пуске (направление энергии от двигателя к канатоведу-
щему органу) величина CD2 равна
4^ + 4^"- (51)
При замедлении (направление энергии от механизма к
двигателю)
= GDs + у —- ч, + —г— Чпр* (52)
к
2
где GD9 — маховой момент электродвигателя и всех
других вращающихся частей, имеющих
одинаковое число оборотов с его валом
(муфта, тормозной шкив, канатоведущий
шкив безредукторной лебедки);
GDI ХП GD2K
-^— ч\к — приведенные к валу электродвигателя
маховые моменты вращающихся частей (кана-
товедущего органа редукторной лебедки
и элементов передач, вращающихся с
меньшим числом оборотов, чем вал
электродвигателя); при практических расчетах
этой величиной пренебрегают из-за ее
малости;
iK
Q1 Ql о
—^—=— и —-^— ч\пр — приведенные к валу электродвигателя ма-
пр пр пр ховые моменты поступательно
движущихся частей;
в последнем выражении Q—вес всех
поступательно движущихся частей.
При обозначениях, принятых на фиг. 21,
Q = Pi+P2 + P3 + P* кг. (53)
Если в выражениях (51) и (52) пренебречь средним членом и
вместо D2Km о подставить его значение из формул v = к'$цПк'°
и inp = ——, они могут быть представлены в более употребитель-
пк. о
ной форме, а именно:
^- (54)
ъ,,. (55)
Определение характеристики процессов разгона и торможения
65
Определение характеристик процесса разгона кабины. Для
процесса разгона (М -= Мэ, t= tp) из уравнения (50) следует:
__ GD2 Г1
~ 3/5 J
dn
Мэ
Мс
(56)
Если предположить, что в процессе разгона момент статических
сопротивлений Мс и пусковой момент электродвигателя Мэ остаются
постоянными, после интегрирования получим
GD2'n
375
Мс)
Г
(57)
г
1
Л
М j
п
.—v—
10
9
8
1
6
5
и
3
2
1
п
*~ —
Лпю
йп9
Дп8
Дп7
Дп6
Дп5
Дпи
Дп3
Дп2
Л/7/
V
/
/
/
/
/
г
I ,
/V
/ \\
1
' t
Мс
Фиг. 25. Построение зависимостей n = f (t) и v =/(0-
Постоянная интегрирования находится из условия, что при
■ = 0 и п = 0, а следовательно С = 0.
Тогда
(58)
375
Мс)
Величина Мс в процессе разгона практически не меняется.
Постоянным остается также пусковой момент двигателя в приводе,
работающем по системе Г — Д. В других случаях величина М9
может быть принята постоянной лишь в приближенных расчетах.
При более точных расчетах зависимость п = f (t) определяется
графоаналитическим путем. Для этого пусковую характеристику
двигателя представляют в графической форме, как показано на
фиг. 25, а затем, пользуясь формулой Д/ = 375 (М ~ М )' полУчают
кривую п — f (t) или, в другом масштабе, кривую v = f (t).
5 Ивашков 2598
66 Тяговые расчеты лифтов
В большинстве случаев можно ограничиться вычислением t
по формуле (58). Формула (58) соответствует равноускоренному
движению кабины, для которого справедливы равенства
vt.
(59)
Подставляя в выражение (59) значение tp из формулы (58) и
значение v = %d*^k о .= ^JfL , получим
ьр ~~ 45 000/ (Мэ ^~МС) '
В результате аналогичной подстановки значений tp и v в
уравнение (60) имеем
K. о (М9 Т Мс)
Значение ар, вычисленное по формуле (62), не должно превышать
среднего значения ускорения, указанного в табл. 5 для данной
скорости.
Определение характеристик процесса торможения кабины.
Торможение кабины может быть или одноступенчатым под действием
момента механического тормоза МТу или двуступенчатым под
действием тормозного момента двигателя МТд с последующим
наложением (при достижении малой скорости) момента механического
тормоза. И в том и в другом случае при определении характеристик
процесса торможения в уравнение (50) вместо М подставляется
величина Мт или МТщд, а знак момента Мс определяется по табл. 9.
В практических расчетах принимают, что величины МГшд, Мт
и Мс в процессе торможения остаются постоянными. Этому
соответствует равномерно замедленное движение кабины. При
одноступенчатом торможении под действием момента механического тормоза
справедливы равенства
/ GD2-n .
1
1т~37Б(МтЧ=Мс) '
«г = -£. (65)
Определение характеристики процессов разгона и терможения 67
После преобразований, аналогичных выполненным выше, имеем:
Ьт 45 000/ (Мт + Мс) '
_ 2gDK о (Мт + Мс)
ат ~ Taw '
Момент механического тормоза, определяемый из выражения
(63), равен
Мт=-Ш%±м<- (68)
При двуступенчатом торможении первая ступень торможения
начинается при числе оборотов электродвигателя п и заканчивается
при числе оборотов пм, соответствующем малой скорости vM. В
соответствии с этим для первой ступени торможения имеем:
St
45 000/ (Мт, д =F Mc)
(70)
ат=^. (71)
Величины времени торможения t\> пути торможения кабины st
и величины замедления а"т при второй ступени торможения (под
действием механического тормоза) могут быть определены по
формулам (63), (64) и (65), если в них подставить вместо п значение пю
соответствующее малой скорости, при которой начинается вторая
ступень торможения.
Определение точности остановки кабины. Точность остановки
кабины характеризуется величиной
' As= *T.»-sTi.t (72)
где sTn — путь торможения пустой кабины и sr г — путь
торможения'кабины с номинальным грузом при движении в одном и том же
направлении.
При одноступенчатом торможении величины sr n и sT г
определяются по формуле (66), а при двуступенчатом — по формуле (70)
для первой ступени и по формуле (66) — для второй. При обоих
режимах загрузки все величины, подставляемые в эти формулы,
имеют одинаковые значения, за исключением абсолютных величин
моментов Мс и маховых моментов GD2. Знаки этих моментов в обоих
случаях также одинаковы.
ГЛАВА IV
ПРИВОД ЛИФТОВ
§ 1. НАЗНАЧЕНИЕ, ОСНОВНЫЕ ТИПЫ И КОНСТРУКЦИИ ПОДЪЕМНЫХ
МЕХАНИЗМОВ
Перемещение кабин и противовесов лифтов (их подъем и
опускание) осуществляется подъемными механизмами, которые принято
называть лебедками. Подъемные механизмы устанавливаются в
специальных машинных помещениях, размещающихся вверху над
шахтой или внизу, обычно сбоку шахты.
Подъемные механизмы или лебедки современных лифтов
различаются по конструкции канатоведущих органов, по типам передач
от электродвигателей и по способам регулирования скорости
движения кабины. По конструкции канатоведущих органов лифтовые
лебедки делятся на два основных типа: барабанные и с канатоведущими
шкивами. Барабанные лебедки характеризуются тем, что в них
канаты, на которых подвешиваются кабина и противовес, имеют
жесткую связь с канатоведущим органом — барабаном. Общий вид
такой лебедки показан на фиг. 26. Она состоит из электродвигателя,
червячного редуктора, тормоза, барабана и пуско-регулировочной
аппаратуры, с помощью которой осуществляются включение,
выключение и изменение направления вращения электродвигателя.
Общим недостатком барабанных лебедок являются большие
габаритные размеры барабанов, возрастающие по мере увеличения
высоты подъема. Кроме того, для лифтов с различными высотами подъема
требуются барабаны с разными размерами по длине (или диаметру),
что значительно усложняет производство. Поэтому в настоящее
время барабанные лебедки применяются крайне редко,
преимущественно в грузовых лифтах большой грузоподъемности и с
большими габаритами кабин, или в грузовых лифтах, в которых по каким-
либо причинам приходится отказаться от использования
противовесов.
Лебедки с канатоведущими шкивами (фиг. 27—31) отличаются от
барабанных тем, что в них канаты кабины и противовеса огибают
канатоведущий шкив на сравнительно небольшой угол (менее чем
на два оборота). В связи с этим число ручьев канатоведущего шкива
не превышает удвоенного числа канатов, и шкив, в отличие от
барабана, имеет сравнительно небольшую ширину, практически не
зависящую от высоты подъема. Это способствует уменьшению общих
Назначение, основные типы и конструкции подъемных механизмов 69
Фиг. 26. Общий вид барабанной лебедки.
Фиг. 27. Общий вид лебедки с канатоведущим шкивом
для пассажирского лифта.
70
Привод лифтов
габаритов лебедки и создает благоприятные условия для
унификации лебедок у лифтов с различными высотами подъема кабин.
Применение лебедок с канатоведущими шкивами повышает
надежность работы лифта. Возможность увеличения числа несущих канатов
без существенного удорожания установки исключает их обрыв; как
только кабина или противовес встречают при опускании
препятствие на своем пути (буфер, упор), прекращается тяговое усилие и
Фиг. 28. Общий вид лебедки
с канатоведущим шкивом для
грузового лифта.
исключается удар противовеса о потолочное перекрытие. Общие
виды лебедок с канатоведущими шкивами показаны на фиг. 27—31.
По типу передач от электродвигателя к канатоведущему органу
лебедки лифтов делятся на редукторные и безредукторные. Редуктор-
ными называются такие лебедки, в которых вал канатоведущего
органа вращается с меньшим числом оборотов, чем вал приводного
электродвигателя, причем уменьшение числа оборотов первого
достигается применением специальных механических передач (обычно
зубчатых, червячных или цилиндрических). В лебедке
пассажирского лифта, показанной на фиг. 27, для этой цели служит
червячный редуктор с верхним расположением червяка, а в лебедке
грузового лифта, показанной на фиг. 28, — червячный редуктор с нижним
расположением червяка в комбинации с открытой цилиндрической
зубчатой передачей.
В последней лебедке (фиг. 28) входной вал червячного
редуктора / соединен упругой муфтой 2 с электродвигателем 3, а на
выходной вал (вал червячного колеса) насажена малая шестерня 4
открытой зубчатой передачи. Большая шестерня 5 этой передачи насажена
Назначение, основные типы и конструкции подъемных механизмов 71
на вал 7 канатоведущего шкива 6. На быстроходном валу передачи
между двигателем и редуктором помещается колодочный
электромагнитный тормоз (на фиг. 28 электромагнит не показан), в качестве
шкива для которого использована левая (ближняя к редуктору)
половина упругой муфты 2. Для удобства передвижения кабины по
шахте при монтаже и ремонтах редуктор снабжен съемным
штурвалом, позволяющим медленно вращать механизм вручную. Для
всех типоразмеров пассажирских и грузовых лифтов, разработанных
ВНИИПТМАШ совместно с Союзлифтом, применены лебедки с
глобоидальными редукторами. Конструкции этих лебедок с верхним и
нижним расположением червяка показаны на фиг. 29 и 30. Обе
лебедки предназначены для лифтов с одинаковой грузоподъемностью
и скоростью движения кабин (Q = 350 кг, v = 0,65 м/сек). Из их
сопоставления видно, что в лебедке с верхним расположением
червяка (фиг. 29) высота редуктора почти на 30% меньше, чем у
редуктора с нижним расположением червяка (фиг. 30). В связи с этим
последняя лебедка на 17% тяжелее первой.
Наряду с редукторными лебедками в лифтостроении получили
широкое применение безредукторные лебедки, в которых канатоведу-
щий орган и тормозной шкив размещаются непосредственно на валу
ротора тихоходного электродвигателя постоянного тока,
работающего по так называемой системе генератор — двигатель (сокращенно
Г-Д) *.
Одна из лебедок этого типа показана на фиг. 31. Благодаря
отсутствию механических передач она компактнее редукторной, несмотря
на то, что тихоходный электродвигатель имеет значительно большие
размеры по сравнению с обычным электродвигателем той же
мощности. В целом же привод, выполненный по системе Г—Д, как
правило, более громоздок, так как помимо лебедки в него входит ряд
других электрических машин, не входящих в комплект лебедки.
Редукторные лебедки с обычными электродвигателями и
безредукторные лебедки существенно различаются не только по способу
получения требуемого числа оборотов канатоведущего органа, но
и по своим эксплуатационным свойствам. В безредукторных
лебедках с приводом по системе Г—Д обеспечивается бесступенчатое
изменение скорости в широком диапазоне, что позволяет повысить
плавность пуска и остановки, уменьшить шум и вибрации,повысить
точность остановки.
Безредукторные лебедки получили широкое применение в
диапазоне больших скоростей кабин ( от 2 м/сек и больше). Дальнейшее
расширение области их применения в сторону малых скоростей
наталкивается на большие трудности, связанные с созданием тихоходных
электродвигателей малых габаритов. При современном состоянии
1 Привод по системе Г—Д, обладающий рядом особых положительных свойств,
применяется в отдельных случаях и для лебедок редукторного типа. Подробнее,
о приводе по системе Г—Д изложено в главе «Электрооборудование лифтов».
t
100
Фиг. 29. Лебедка
пассажирского лифта
грузоподъемностью 350 кг
(редуктор с верхним
расположением червяка):
/ — электродвигатель;
2—упругая муфта; 3 — тормоз с элек-
трогидротолкателем; 4 —
глобоидальный редуктор; 5 — ка-
натоведущий шкив.
Фиг. 30. Унифицированная лебедка
пассажирского лифта
грузоподъемностью Q = 350 кг (v = 0,65 м/секу
диаметр канатоведущего шкива 750 мм) и
грузового лиф га грузоподъемностью
" -- 500 кг (v = 0,50 м/сек, диаметр
канатоведущего шкива 600 мм):
1 — электродвигатель; 2 — упругая муфта;
3 — тормоз с электромагнитом; 4 —
глобоидальный редуктор; 5 — канатоведущий шкив.
74
Привод лифтов
электротехнической промышленности электродвигатели с числом
оборотов 40—50 в минуту (для скоростей кабин порядка 1,5—1,75 м/сек)
оказываются недостаточно компактными и применение их становится
нерациональным. При указанных скоростях более легкими и
экономичными оказываются редукторные лебедки.
По способам регулирования скорости движения кабин,
необходимого для осуществления плавного пуска, а также плавной и
точной остановки, различают
лебедки с электрическим
и механическим
регулированием скорости.
Наиболее простое электрическое
регулирование скорости
достигается применением
двухскоростных
двигателей (путем переключения
числа пар полюсов в
обмотке статора) или
применением двух
электродвигателей, последовательно
соединенных муфтой и
подключенных по особой
схеме. Более сложным
является электрическое
регулирование скорости
по системе Г — Д,
осуществляемое изменением
напряжения, подводимого к
электродвигателю.
Механическое
регулирование
скорости достигается
изменением передаточного
числа привода. Оно
примешь О1 гл* * * няется в лебедках редук-
Фиг. 31. Общий вид безредукторнои лебедки. ^ J
r J ^ торного типа со
скоростями подъема до 2—2,5 м/сек
и осуществляется применением дополнительного привода
(микропривода) или дополнительной передачи (микропередачи). На фиг. 32
показана одна из употребительных схем микропривода. В этой схеме
главный редуктор /, передающий вращение барабану или канатове-
дущему шкиву лебедки, соединяется муфтой 2 с основным
электродвигателем 3. Второй, открытый конец вала основного
электродвигателя соединен с помощью сцепной муфты 4 с редуктором 5
микропривода. Последний снабжен самостоятельным электродвигателем 6
и отдельным тормозом; муфта 4 включается пружиной 5, выключается
электромагнитом 7. Основной привод рассчитывают по номинальным
Элементы подъемных механизмов 75
грузоподъемности и скорости движения кабины, а микропривод —
по номинальной грузоподъемности и малой скорости порядка 0,1 —
0,25 м1сгк.
При подходе кабины к остановке выключаются основной
двигатель 3 и электромагнит 7 и включается двигатель 6 микропривода.
Сцепная муфта 4 в это время
работает как тормоз, пока
числа оборотов двигателей 3
и б не уравняются. После
выравнивания чисел оборо- | лпк/ S^SL^jX
тов и до остановки кабины \Z I гЙРГ "r^jP^Jjr
муфта 4 работает как обыч- J^2Ц
ная муфта сцепления. Окон-
чательное стопорение лебедки
после подхода кабины к за- Фиг- 32- Схема микропривода:
ДаННОМУ УРОВНЮ ОСущеСТ- 1 — главный редуктор; 2 — муфта; 3 — главный элек-
r J тродвигатель; 4 — сцепная муфта; 5 — редуктор мик-
ВЛЯеТСЯ ТОрМОЗОМ МИКрО- ропривода; 6 — электродвигатель микропривода;
ПрИВОДа. Последующий ПуСК 7 ~ электромагнит; 5 - пружина.
лебедки производится
включением основного электродвигателя 3 и электромагнита 7, который,
преодолевая действие пружины 5, отводит сцепную муфту 4 и
отключает микропривод. В некоторых схемах микропривод соединяется
не с валом основного электродвигателя, а с валом редуктора или
с канатоведущим шкивом. Аналогичный принцип работы имеют
лебедки с микропередачами. Микропередачи располагаются между
главным двигателем и редуктором. Обычно они представляют собой
планетарную шестеренную передачу, встраиваемую в тормозной
шкив и переключаемую при помощи электромагнитных устройств.
§ 2. ЭЛЕМЕНТЫ ПОДЪЕМНЫХ МЕХАНИЗМОВ (ЛЕБЕДОК)
Канатоведущие органы, отводные блоки и контршкивы.
Барабаны лебедок лифтов изготовляются чугунными или стальными
(последние изготовляются сварными или литыми). Свободные концы
несущих канатов кабины и противовеса порознь жестко закрепляются
на барабане зажимами (фиг. 33, а)у так что при разматывании
канатов кабины происходит наматывание канатов противовеса, и наоборот.
При размещении лебедки непосредственно над шахтой барабан
снабжается однозаходной двусторонней (правой и левой) винтовой
нарезкой с ручьями полукруглого профиля, а концы канатов попарно
закрепляются на обеих его половинах, как показано на фиг. 33, б.
При расположении лебедки в нижней части шахты или сбоку от нее
применяют барабан с двухзаходной односторонней нарезкой (правой
и левой); при этом несущие канаты кабины крепятся с одной стороны
барабана, а канаты противовеса с другой (фиг. 33, в).
Канатоведущие шкивы изготовляются литыми из
серого дли модифицированного чугуна, Конструкция канатоведущего
76
Привод лифтов
шкива показана на фиг. 29. Профили ручьев шкивов делают
полукруглыми без подреза (фиг. 34, а), полукруглыми с подрезом (фиг. 34, б)
и клиновыми (фиг. 34, в). Шкивы с полукруглыми ручьями без
подреза имеют наибольшее применение в лифтах с контршкивами,
обеспечивающими двойной обхват канатоведущего шкива (по схемам
на фиг. 12, з, и, /с). Ручьи полукруглой формы при прочих равных
условиях имеют меньший износ. Однако из-за серьезных недостатков
лифтов с двойным обхватом шкивов (повышенный износ канатов,
снижение к. п. д. установки)
на практике получили также
широкое распространение
шкивы с полукруглыми
подрезанными ручьями. Последние
явились производными от
клиновых ручьев, в которых передача
тягового усилия в начальный
период работы происходит пу-
К кабине^ Ж протибобесу
ш
^К проти\
бобесцА
V кабинет 6)
Фиг. 33. Закрепление канатов на барабане:
а — закрепление канатов на валу зажимами; б — при размещении лебедки над шахтой;
в — при размещении лебедки внизу шахты.
тем защемления каната. Так как по мере износа клинового ручья
он приобретает форму полукруглого подрезанного ручья, в
дальнейшем такая форма (фиг. 34, б) и стала основной. Главное
преимущество полукруглого ручья с подрезом по сравнению с клиновым
заключается в постоянстве угла подреза, а следовательно и в
постоянстве тягового коэффициента канатоведущего шкива в^ . При
клиновых же ручьях этот коэффициент уменьшается с износом ручьев,
причем при определенном износе тяговая способность шкива может
стать недостаточной. Выбор формы ручья определяется расчетом
в соответствии с положениями, изложенными в главе III.
Отводные блоки и контршкивы. В тех случаях,
когда подъемный механизм лифта расположен внизу или сбоку от
шахты (фиг. 12, д, /с), а также при необходимости увеличить
расстояние между канатами кабины и противовеса (фиг. 12, г), направление
канатов осуществляется через отводные блоки, а в лифтах с двойным
Элементы подъемных механизмов
77
обхватом канатоведущего шкива( фиг. 12, з, и, к) — через
контршкивы. В зависимости от схемы подвешивания кабины и противовеса
в лифте может быть применено от одного до семи и более отводных
блоков (нижнее расположение подъемного механизма, полиспастная
подвеска, дополнительные противовесы). Отводные блоки и
контршкивы изготовляются из серого или модифицированного чугуна
диаметром не менее 500 мм. Ручьи на ободьях [делаются
полукруглой формы. Диаметр
окружности профиля ручья несколько
превышает диаметр несущего
каната. Отводные блоки с
опорами устанавливаются обычно
на подлебедочные балки или на
специальные конструкции и
кронштейны.
Элементы передач.
Редукторы. Наиболее широкое
применение в лифтовых лебедках
редукторного типа имеют
червячные редукторы благодаря
их большей компактности и
меньшему шуму при работе по
сравнению с цилиндрическими.
В зависимости от конкретных
условий и удобства компоновки
такие редукторы выполняются
с верхним (см. фиг. 27) или
нижним (см. фиг. 28)
расположением червяка. Наиболее
удобную компоновку, с
уменьФиг. 34. Профили ручьев канато-
ведущих шкивов:
а — полукруглый; б — полукруглый с
подрезом; в — клиновой.
шением габаритов и веса, дают
редукторы с верхним
расположением червяка. Помимо
червячных редукторов с червяками простого профиля, в последнее
время получили применение червячные редукторы с глобоидальными
червяками. Конструкция глобоидального редуктора с верхним
червяком для лебедки пассажирского лифта по проекту ВНИИПТМАШ
и Союзлифта показана на фиг. 35.
Цилиндрические зубчатые передачи в лифтовых лебедках
применяются значительно реже и главным образом в комбинации с
червячными передачами, образуя обычно последнюю от
электродвигателя (тихоходную) ступень передачи (см. фиг. 28).
Муфты. Для соединения валов электродвигателей с валами
редукторов в лебедках лифтов чаще всего используются упругие
втулочно-пальцевые муфты. Конструкция такой муфты показана
на фиг. 36. Половина муфты устанавливается на валу редуктора
и используется как тормозной шкив.
78
Привод лифтов
Для соединения микропривода со вторым открытым концом.вала
главного электродвигателя обычно применяются фрикционные
дисковые муфты.
КОНУС 1:10
Фиг. 35. Глобоидальный редуктор лебедки пассажирского лифта
грузоподъемностью 350 кг.
Тормозные устройства. Каждый лифтовый привод оборудуется
электрическим автоматически действующим тормозом нормально-
замкнутого типа. Такой тормоз имеет два положения: при
выключении (обесточивании) электромагнита или электрогидравлического
толкателя он замыкается под действием пружины и затормаживает
привод, во втором положении при включении электромагнита или
Элементы подъемных механизмов
та
электрогидравлического толкателя тормоз размыкается и
растормаживает привод. Наиболее распространенным типом тормоза
в лифтовом приводе является пружинный двухколодочный тормоз.
Конструкции тормозов для лебедок лифтов по проекту ВНИИПТМАШ
и Союзлифта показаны на фиг. 37 и 38. В тормозе, показанном на
фиг. 37, размыкание рычагов осуществляется электромагнитом,
а в тормозе, показанном на фиг. 38, электрогидротолкателем.
Фиг. 36. Упругая муфта с тормозным шкивом диаметром 200 мм:
1 — тормозной шкив; 2 — моторная полумуфта; 3 — палец; 4 — распорное
кольцо; 5 — упорная втулка.
Тормоз устанавливается на быстроходном валу привода, а в
качестве тормозного шкива используется насаженная на конец вала
редуктора половина эластичной муфты, соединяющей вал
электродвигателя с редуктором. В безредукторном приводе тормозной шкив
насаживается непосредственно на вал электродвигателя или
составляет одно целое с канатоведущим шкивом.
Тормоза, устанавливаемые в микроприводах, имеют такое же
устройство.
Способ расчета режимов торможения рассмотрен в главе 3
«Тяговые расчеты лифтов».
80
Привод лифтов
Канаты. Для подвешивания кабин и противовесов, для
приведения в действие ограничителей скорости и для уравновешивания
Фиг. 37. Тормоз 0 200 мм с электромагнитом КМТ.
движущихся частей в лифтах применяются круглые стальные
канаты двойной (тросовой) свивки (обычно шести- и восьмипряд-
ные).
В качестве несущих канатов в последнее время все более широкое
применение получают канаты с прядями, свитыми из проволок
различных диаметров, например шестипрядные канаты типа ЛК-О
по ГОСТ 3077-55 и восьмипрядные канаты того же типа по ГОСТ
3080-55.
Элементы подъемных механизмов
81
В канатах указанного типа обеспечивается линейный контакт
проволок смежных рядов, так как они не пересекаются друг с другом.
Это приводит к резкому уменьшению удельного давления между
проволоками, к значительному улучшению гибкости и удлинению
срока службы каната.
Разрез по Й77
М10
Фиг. 38. Тормоз 0 200 мм с электрогидротолкателем.
В качестве несущих канатов малых грузовых лифтов,
уравновешивающих канатов и канатов ограничителей скорости чаще всего
применяются более дешевые канаты простой структуры с прядями
из проволок одинакового диаметра (например, канаты типа ТК по
ГОСТ 3070-55 и 3071-55).
Крепление концов каната осуществляется различными способами,
из которых наиболее часто применяются: а) заплетка, б) крепление
специальными зажимами, в) применение специальных клиновых
втулок, г) заливка концов каната в конических втулках. В
пассажирских, больничных и грузо-пассажирских лифтах Правилами
Госгортехнадзора запрещается применять канаты диаметром менее
6 Ивашков 2598
82 Привод лифтов
11 мм для подвешивания кабин и противовесов и канаты диаметром
менее 7 мм—для ограничителей скорости.
Расчет стальных проволочных канатов производится по
наибольшей величине усилия натяжения каната, по формуле
PK = K-S кг, (73)
где Рк — разрывное усилие каната в кг;
S — наибольшее натяжение каната, определяемое по формулам
(19а) или (196), в кг;
К — коэффициент запаса прочности.
При определении величины Рк для канатов противовеса (в лифтах
с барабанными лебедками) в формулу (73) вместо S подставляется
сумма веса противовеса и веса канатов, на которых он подвешен.
По величине Рк лаходят в ГОСТ на стальные проволочные
канаты ближайшее большее разрывное усилие и соответствующий ему
диаметр каната.
Согласно Правилам Госгортехнадзора, подвеска кабин и
противовесов пассажирских, больничных и грузо-пассажирских лифтов,
оборудованных лебедками барабанного типа, должна осуществляться
не менее чем на двух канатах; в лифтах, оборудованных лебедками
с канатоведущими шкивами, не менее чем на трех канатах при
предельной рабочей нагрузке до 320 кг и не менее чем на четырех
канатах — при нагрузке свыше 320 кг. В грузовых лифтах без
проводников и малых грузовых лифтах кабина и противовес могут
подвешиваться на одном канате при лебедках барабанного типа (за
исключением случаев, когда в кабины таких лифтов при проведении по-
грузочно-разгрузочных работ разрешается доступ людей) и не менее
чем на двух канатах при лебедках с канатоведущими шкивами.
При определении количества канатов все ветви одного каната в полис-
пастной подвеске рассматриваются как один канат.Необходимое число
канатов определяется с учетом напряжений смятия между канатами
и ручьями шкивов, согласно данным § 1 главы III. При
предварительном выборе числа канатов можно руководствоваться данными
табл. 10.
Допустимый коэффициент запаса прочности канатов
определяется по табл. 11.
Наименьший диаметр барабана (канатоведущего шкива) лебедки
или отводного блока DK 0, допустимый из условий износа канатов,
определяется по формуле
(74)
где dK — диаметр каната в мм;
d—коэффициент, зависящий от типа лифта;
е2 — коэффициент, зависящий от типа каната.
Элементы подъемных механизмов
Таблица 10
Число канатов, назначаемое для подвески кабин и противовесов
Группа лифтов
Число канатов для лебедок
барабанных
наименьшее по
нормам
Госгортех-
надзора
обычно
применяемое
с канатоведущими
шкивами
наименьшее (по
нормам
Госгортех-
надзора)
обычно
применяе-
Грузовые малые
Грузовые без проводников
Грузовые грузоподъемностью до
1500 кг с проводниками
Грузовые грузоподъемностью до
3000 кг с проводниками
Грузовые грузоподъемностью до
5000 кг с проводниками (с полиспаст-
ной подвеской)
Пассажирские грузоподъемностью
до 320 кг
Больничные и пассажирские
грузоподъемностью до 1250 кг
Пассажирские грузоподъемностью
до 3000 кг
2
2
2
2
2
2
2
2
2
2
4
4
4
3
4
4
2
4—6
4
6
4—6
4
4
6—8
Таблица 11
Величина коэффициента запаса прочности канатов кабин и противовесов
лифтов (по Правилам Госгортехнадзора)
Тип лифта
Скорость движения
кабин и
противовесов в м/сек
До 1
„ 1
1—2
До 1
, 1
1—2
2—4
Коэффициент
запаса прочности
канатов К
8
10
11
9
12
13
14
Грузовые без проводника и малые:
с лебедками барабанного типа
с лебедками с канатоведущими шкивами
То же
Грузовые с проводником, пассажирские и
больничные:
с лебедками барабанного типа
с лебедками с канатоведущими шкивами
То же
Коэффициент е\ имеет следующие значения:
Типы подъемников ех
Пассажирские и грузовые с проводником со скоростью
более 2 м/сек 45
То же со скоростью до 2 м/сек и больничные 40
Грузовые без проводника 30
с*
84
Привод лифтов
V//////
Разрез по АД
U—¥50-
__i
Амортизатор
75*75*50
-1591-
Фиг. 39. Установка привода пассажирского лифта грузоподъем
1 — электродвигатель лебедки; 2 — балка;
Элементы подъемных механизмов
85
ностью 500 кг (верхнее расположение машинного помещения):
3 — рама лебедки; 4 — амортизатор; 5 — упор.
86
Привод лифтов
Разрез по ГЕ-ДД-ЕЕ
Разрез по ДД
ны при нижнему по
ожени и кабины ^
Магнитная станция
Фиг. 40. Установка привода пассажирского лифта
грузоподъемностью 500 кг (нижнее расположение машинного помещения):
/ ■— электродвигатель лебедки; 2 — рама лебедки; 3 — ограничитель скорости;
4 — отводной блок; 5 — пружинный буфер противовеса; 6 — пружинный буфер кабины.
Установка привода 87
В зависимости от типа каната коэффициент е2 имеет следующие величины
Канат обычного типа 6x19=114+1 органический сердечник:
двусторонняя свивка 1
односторонняя свивка 0,9
Канат типа компаунд «Варрингтон» 6x19= 114+ 1
органический сердечник:
двусторонняя свивка 0,9
односторонняя свивка 0,85
Канат типа «Сил» 6x19=114+1 органический сердечник:
двусторонняя свивка * 0,95
односторонняя свивка 0,85
Канат 6x37 = 222+1 органический сердечник:
двусторонняя свивка 1
односторонняя свивка 0,9
§ 3. УСТАНОВКА ПРИВОДА
Компоновка механизмов привода лифта при его верхнем и
нижнем расположении показана соответственно на фиг. 39 и 40. При
установке привода принимаются специальные меры, затрудняющие
распространение шума и вибраций, создаваемых механизмами
привода и электрооборудованием.
Для пассажирских и больничных лифтов эти меры заключаются
обычно в установке рамы лебедки, изоляционных плит магнитных
станций, трансформаторов и других элементов электрооборудования
на специальных резиновых прокладках (амортизаторах). Эти меры
в случае необходимости применяются и при установке приводов
грузовых лифтов.
Уменьшению шума в здании способствует также установка
привода внизу шахты (фиг. 40).
ГЛАВА V
КАБИНЫ, ПРОТИВОВЕСЫ И УРАВНОВЕШИВАЮЩИЕ
КАНАТЫ
§ 1. КАБИНЫ
Назначение, устройство и размеры кабин. Пассажиры и грузы,
перевозимые в лифтах с одного этажа (уровня) на другой,
размещаются в кабинах. Конструкции кабин пассажирского, больничного
и грузового лифтов одинаковой грузоподъемности (Q = 500 кг)
показаны на фиг. 41, 42 и 43.
Основной частью кабины является стальной каркас. На фиг. 44
показан каркас кабины с установленным на нем оборудованием.
Каркас образуется вертикальной рамой У и горизонтальной рамой 2.
К нему крепятся направляющие башмаки 3, удерживающие кабину
в направляющих, ловители 4 с приводным механизмом 5, канатная
подвеска 6, при помощи которой кабина подвешивается в несущим
канатам, а также аппараты для смазки направляющих. К каркасу
крепится также деревянное или металлическое ограждение кабины
с дверными проемами и дверями. На каркасе и на ограждении
монтируются приборы управления, блокировки, сигнализации и
освещения кабины.
Каркас кабины обычно изготовляется из швеллеров и уголков.
Для удобства транспортирования к месту установки лифта и подачи
в дверные проемы здания каркас и ограждение кабины делаются,
как правило, разборными.
Полы (настилы) кабин для снижения веса обычно делают
деревянными достаточной прочности, и только в кабинах грузовых
лифтов большой грузоподъемности дерево заменяется листовой
сталью. В кабинах пассажирских лифтов с двойным (с наружным и
внутренним) управлением пол делают подвижным с целью
использования веса пассажиров для переключения лифта с одной системы
управления на другую. Подвижной пол выполняется в виде щита,
вставленного в неподвижную раму каркаса кабины. Конструкция
и принцип работы щита (пола) видны из фиг. 45. При входе пассажира
в кабину пол под его тяжестью опускается и вводит в действие
установленный под полом контакт, который включает цепь
электрического управления из кабины и контакты осветительной цепи. По
выходе пассажиров, когда воздействие подвижного пола на пружины
Кабины
89
и рычаги прекращается, контакты переключающего аппарата
автоматически включают цепь внешнего управления кабиной с этажных
площадок и размыкают осветительную цепь. Пол должен
приводиться в действие при нагрузке 20 кг и более.
Фиг. 41. Кабина пассажирского лифта грузоподъемностью 500 кг:
1 — кузов; 2 — каркас; 3 — платформа; 4 — подвижной пол; 5 — балансирная подвеска; 6 —
роликовый башмак; 7 — клещевые ловители; 8 — механизм включения ловителей; 9 — электромагнитная
отводка.
Ограждение кабин пассажирских лифтов выполняется обычно
деревянным. Деревянное ограждение кабины состоит из четырех
стен с дверями и потолочного перекрытия. Оно выполняется из
дерева хвойных пород и облицовывается внутри декоративной
фанерой. При установке лифтов в сетчатых или остекленных шахтах
Фиг. 42. Кабина больничного лифта грузоподъемностью 500 кг:
кузов; 2 — каркас; 3 — распашная дверь; 4 — балансирная подвеска; 5 — клещевые ловители; 6 — механизм
включения ловителей; 7 — электромагнитная отводка; 8 — скользящий башмак.
Кабины
91
отделка кабин декоративной фанерой производится также и снаружи.
В скоростных лифтах, двери которых обычно открываются
автоматически, под порогом кабины заподлицо с наружным его краем и во
всю ширину дверного проема устанавливается вертикальный щит.
Его высота должна быть больше расстояния, которое кабина может
Разрез по /1/1
850
Проем
б еде ту
1112-
Фиг. 43. Кабина грузового лифта грузоподъемностью 500 кг:
1 — каркас; 2 — раздвижная дверь; 3 — четырехканатная балансирная подвеска; 4 — клиновые
ловители; 5 — отводка ригельного замка.
проходить с открытыми дверями. Этот щит защищает ноги пассажира
от возможного попадания их в пространство, образующееся между
опускающейся кабиной и порогом шахтной двери. В боковых стенах
кабины вверху и внизу устраиваются отверстия для вентиляции.
Эти отверстия оформляются в виде художественно выполненных
решеток. По гигиеническим соображениям и для придания кабине
изящного вида пол пассажирской кабины часто покрывается
линолеумом, а в стену встраивается зеркало.
Ограждение кабин грузовых лифтов выполняется либо из
листовой стали толщиной не менее 1,4 мм, либо из металлической сетки
92
Кабины, противовесы и уравновешивающие канаты
с панелью из стальных листов на высоту 1 м от уровня пола и с
глухим потолочным перекрытием.
Дверные проемы кабин пассажирских и грузо-пассажирских
лифтов снабжаются распашными (открывающимися внутрь) или
раздвижными дверями. В потолках кабин этих лифтов устраиваются люки
1Т1Г X
Фиг. 44. Каркас кабины лифта:
вертикальная рама; 2 — горизонтальная рама; 3 — направляющие башмаки;
4 — ловители; 5 — механизм привода ловителей; 6 — канатная подвеска.
размером не менее 300 X 400 мм, используемые в качестве запасных
выходов в случае аварии. Они снабжаются раздвигающимися в
стороны или открывающимися вверх створками. В кабинах малых
грузовых лифтов и грузовых лифтов без проводников вместо дверей мбжно
применять закладные брусья, башмаки на рельсовых путях,
уложенных на полу кабины, и т. п.
Подвески для канатов
Размеры пола кабин пассажирских лифтов определяются в
соответствии с графиком, приведенным на фиг. 14. Глубину
пассажирской кабины (размер в на-
правлении главного входа) ~~Т"
целесообразно принимать IV
несколько меньше ее
ширины, так как широкие
кабины удобнее для входа и
выхода.
Размеры пола кабин
грузовых лифтов зависят
не только от
грузоподъемности, но и от габаритов
перевозимых грузов.
Размеры пола кабин
пассажирских и грузовых
лифтов регламентированы
ГОСТ 5746-53, ОСТ НКТМ
8798-39, ОСТ НКТМ 8799-39,
ОСТ НКТМ 8800-39.
Высота1 кабин
пассажирских, больничных и
грузо-пассажирских л\ ф-
тов принимается не менее
2200 мм. Это же
требование относится и к
грузовым лифтам, если при погрузке и выгрузке в их кабины входят
люди. В остальных случаях высота кабин может быть меньшей.
Высота кабин малых грузовых лифтов должна быть не более
1000 мм.
Фиг. 45. Подвижный пол кабины:
1 — контакт; 2 — пружина; 3 — петли; 4 — упор;
5 — ножка дивана.
§ 2. ПОДВЕСКИ ДЛЯ КАНАТОВ
Подвешивание кабин и противовесов к канатам при числе их,
равном двум и более, осуществляется с помощью специальных
подвесок: балансирных (рычажных) или пружинных, равномерно
распределяющих нагрузку между всеми совместно работающими канатами.
В лифтах с барабанными лебедками обычно применяются балан-
сирные подвески (фиг. 46). Они выгодно отличаются от пружинных
подвесок (фиг. 47) более равномерным выравниванием натяжения
канатов, но неудобны тем, что канаты отстоят на большом
расстоянии друг от друга и по мере приближения кабины или
противовеса к лебедке значительно отклоняются от вертикали (на близком
расстоянии увеличивается угол отклонения).
1 Высотой кабины считается расстояние от ее пола до потолка, причем в случае
расположения в кабине рельсов для вкатывания тележек высота рельсов в расчет
не принимается.
94
Кабины, противовесы и уравновешивающие канаты
Применять балансирные подвески можно либо на кабине, либо
на противовесе; при одновременном применении их на кабине и
противовесе нельзя достичь равномерного натяжения канатов.
Фиг. 46. Двухканатная балансирная подвеска:
/ — ось; 2 — каркас кабины; 3 — рычаги; 4 — распорная планка; 5 — несущие канаты.
Простая балансирная подвеска для лифтов малой
грузоподъемности, изображена на фиг. 46. На двух осях У, укрепленных в
планках на каркасе кабины 2, вращаются два Г-образных рычага 3,
нижние концы которых шар-
нирно соединены между
собой распорной планкой 4У
а к верхним концам
прикреплены несущие канаты 5. При
незначительном изменении
длины одного каната рычаги
поворачиваются, выравнивая
натяжение (штриховые
линии). При обрыве или
большом ослаблении одного из
канатов рычаг 5,
поворачиваясь относительно оси /,
размыкает контакт
электроблокировки в цепи
управления и включает механизм
ловителей.
Пружинные подвески
применяются преимущественно
в лифтах, имеющих большое
количество несущих канатов
и оборудованных лебедками
с канатоведущими шкивами.
На фиг. 47 показана ше-
стиканатная пружинная под-
Положение
канатоведущеео
иишва
2
Фиг. 47. Шестиканатная пружинная
подвеска:
1 — плита; 2 — скоба; 3 — каркас кабины; 4 — болт;
5 — несущий канат; 6 — пружины.
Направляющие башмаки
веска. Ее круглая траверса (плита) 1 четырьмя скобами 2 крепится
на каркасе кабины 3\ сквозь плиту пропущены болты 4, в которых
заделаны концы несущих канатов 5; на концевые части болтов под
плитой надеты пружины 6 с шайбами и регулировочными гайками.
При монтаже лифта круглая плита 1 устанавливается так, чтобы
ось а располагалась по оси канатоведущего шкива. Такие подвески
устанавливаются на кабинах и на противовесах и могут быть
сделаны для любого количества несущих канатов.
В случае применения полиспастного способа подвешивания на
кабинах и противовесах крепятся блоки, а концы несущих канатов
заделываются в подвески на балках перекрытий машинных
помещений или шахт.
§ 3. НАПРАВЛЯЮЩИЕ БАШМАКИ
Для предохранения от поворачивания в горизонтальной плоскости
(относительно оси канатов), от раскачивания в пути, от перекосов
ф
ф
о i />
а)
Фиг. 48. Скользящие башмаки кабин:
а — для метг ллических направляющих; б — для деревянных направляющих; в — с
пружиной и сменным чугунным вкладышем для направляющих специального профиля.
при несимметричной загрузке и от задевания за неподвижные части
кабина снабжается четырьмя башмаками. Башмаки устанавливаются
с двух противоположных сторон в максимально удаленных точках
96 Кабины, противовесы и уравновешивающие канаты
по высоте, что необходимо для обеспечения более устойчивого
положения кабины при несимметричной загрузке и для уменьшения
нагрузки, передаваемой при этом через башмаки на направляющие.
5
Фиг. 49. Скользящий башмак для пассажирских, больничных
и грузовых лифтов со скоростью до 1 м/сек (проект ВНИИПТМАШ):
/ — корпус; 2 — шток; 3 — железо-графитный вкладыш; 4 — пружина; 5 — планка.
Каждый башмак охватывает направляющую с трех сторон, что
обеспечивает устойчивое положение кабины в любом направлении.
Зазоры между башмаком и направляющей зависят от материала и
качества изготовления направляющих. Для деревянных и
металлических направляющих, выполненных из обычного проката, зазор
Противовесы
97
по глубине шахты принимается равным 2 мм и по ширине шахты
5 мм; для тщательно обработанных и выпрямленных металлических
направляющих быстроходных лифтов величины зазоров уменьшаются
соответственно до 1 и 2 мм. Для обеспечения возможности съема
башмаков при ремонте они прикрепляются к каркасам кабин и
противовесов болтами.
Башмаки подразделяются на
скользящие и роликовые. Их
конструкции показаны на
фиг. 48, 49 и 50. Башмаки
скользящего типа применяются
для кабин и противовесов
нормальных грузовых и
пассажирских лифтов при скоростях до
1,5 м/сек. Башмаки лифтов
старых типов изготовлялись
чугунными цельнолитыми (фиг. 48, а)
или со сменными чугунными
вкладышами (фиг. 48, бив).
Для уменьшения трения и
износа такие башмаки требуют
регулярной смазки, что влечет
за собой быстрое загрязнение
и необходимость в специальных
смазывающих устройствах.
По проекту нормального
ряда лифтов, разработанному
ВНИИПТМАШ, для всех
типоразмеров пассажирских и
грузовых лифтов
предусматривается применение башмаков сколь-
Фиг. 50. Роликовый башмак для кабин
быстроходных лифтов.
зящего типа (фиг. 49) с графи
товыми вкладышами, не
требующими смазки. Для смягчения
толчков и уменьшения шума башмаки снабжены пружинами,
прижимающими вкладыш к направляющей. В лифтах со скоростями
движения кабин, превышающими 1,5 м/сек> применяются башмаки
с тремя обрезиненными роликами (фиг. 50), охватывающими
направляющую с трех сторон. В них трение скольжения заменено трением
качения. С применением этих башмаков отпадает необходимость
в смазке направляющих.
§ 4. ПРОТИВОВЕСЫ
Противовесы предназначаются для уравновешивания кабины
и части веса поднимаемого груза с целью уменьшения потребной
мощности электродвигателя привода. В лифтах, оборудованных
лебедками с канатоведущими шкивами, противовесы необходимы также
7 Ивашков 2593
98
Кабины, противовесы и уравновешивающие канаты
для предотвращения проскальзывания несущих канатов в ручьях
канатоведущих шкивов.
Противовесы подвешиваются к несущим канатам, навиваемым
на барабаны лебедок, или к свободным концам канатов, огибающих
канатоведущие шкивы. Противовесы перемещаются по отдельным
направляющим, установленным в шахте, или (если это оказывается
необходимым по местным условиям) за ее пределами. В последнем
случае направляющие имеют соответствующие ограждения по всей
высоте, удовлетворяющие требованиям пожарной безопасности и
удобства обслуживания. При правильно подобранном весе
противовеса значительно сокращается эксплуатационный расход
электроэнергии.
Вес противовеса Р4 принимается равным
Р* = Рг + СР2, (75)
где Pi — собственный вес кабины в кг;
Р2 — номинальный вес поднимаемого груза (грузоподъемность
лифта в кг);
С — коэффициент уравновешивания.
При работе лифта с малой нагрузкой (например, пассажирские
лифты жилых домов) коэффициент уравновешивания рекомендуется
принимать равным 0,3 от веса полезного груза. При постоянной
работе с большой загрузкой в одном направлении (грузовой лифт)
в целях уменьшения расхода электроэнергии коэффициент
уравновешивания целесообразно увеличивать до 0,5. Очевидно, что
дальнейшее увеличение коэффициента уравновешивания С привело бы
к излишнему расходу электроэнергии при движении порожней
кабины.
В лифтах малой грузоподъемности противовесы выполняются
в виде цельных чугунных плит, отливаемых заодно с направляющими
башмаками. В лифтах средней и большой грузоподъемности
применяются противовесы сборной конструкции, состоящие из рамы с
грузами. К раме прикрепляются направляющие башмаки и ловители,
если они требуются по условиям безопасности. Потребное
количество грузов окончательно определяется во время монтажа и наладки
работы лифта, после чего они плотно укладываются друг на друга
и надежно закрепляются в раме.
Таблица 12
А
300
600
1000
1000
Б
60
120
120
200
в
60
60
60
40
Г
25
30
30
30
д
20
25
25
25
Вес
в кг
7А
30,6
51,0
57,6
Противовесы
99
Конструкция противовесов с чугунными грузами показана на
фиг. 51. Простая и удобная для изготовления и монтажа форма
чугунных грузов показана на эскизе к табл. 12. В этой таблице
приведены рекомендуемые размеры и вес чугунных грузов.
S"^" W "V •""'
а) б)
Фиг. 51. Противовесы с чугунными грузами:
а — с канатной подвеской; б — с канатным блоком.
В целях экономии металла, по проекту нормального ряда
лифтов, разработанному ВНИИПТМАШ и Союзлифтом, для всех
типоразмеров лифтов предусматривается применение противовесов с
бетонными грузами. Конструкция такого противовеса показана на фиг. 52.
Высота противовесов не должна превышать высоты кабины.
Если при большой грузоподъемности лифтов и при значительном
собственном весе кабин высота одинарных противовесов получается
излишней, применяют сдвоенные противовесы.
Противовесы в лифтах с барабанными лебедками подвешивают
обычно, как и кабины, с помощью балансирных или пружинных
подвесок.
-1300-
ь-150-*
-Z90-
Фиг. 52. Противовес с бетонными грузами для пассажирского лифта грузоподъемностью 350 кг:
1 — каркас; 2 — груз; 3 — направляющий башмак; 4 ~ канатная подвеска.
Уравновешивающие канаты 101
В лифтах с канатоведущими шкивами противовесы имеют жесткую
подвеску (фиг. 51, а); выравнивание натяжения канатов в этом
случае осуществляется подвеской кабины. При полиспастном
подвешивании на раме противовеса жестко крепится канатный блок
(фиг. 51, б).
§ 5. УРАВНОВЕШИВАЮЩИЕ КАНАТЫ
Если лифты обслуживают малоэтажные здания, вес несущих
канатов, составляющий относительно малую величину, не отражается
сколько-нибудь заметно на работе лебедки лифта. По мере
увеличения высоты подъема (свыше 35—50 м) вес этот достигает
нескольких сотен килограммов и отрицательно сказывается на
уравновешивании кабин и противовесов и на работе приводов. Так,
например, у лифта, в котором высота подъема кабины равна 70 му а кабина
и противовес подвешены на шести канатах типа компаунд
диаметром 16 мм (вес 1 пог. м такого каната равен 1 кг), общий вес канатов
составит 420 кг. При подъеме кабины из крайнего нижнего
положения произойдет постепенное перемещение канатов в сторону
противовеса. В результате такого перемещения привод лифта будет
испытывать дополнительную нагрузку от подъема груза весом 420 кг,
равного весу 6 чел.
Для устранения отмеченного влияния веса канатов в лифтах
с большими высотами подъема (от 45—50 м и выше) и с целью
возможно большего уравновешивания нагрузок на обоих концах
канатов применяются так называемые уравновешивающие,
компенсирующие канаты, прикрепляемые снизу к кабинам и противовесам.
Крепление уравновешивающих канатов производится с помощью
пружинных подвесок, а предупреждение раскачивания и спутывания
достигается установкой в приямках специальных натяжных устройств,
которые по мере вытягивания канатов при эксплуатации лифтов
имеют возможность смещаться в небольших пределах по своим
вертикально установленным направляющим. Вес уравновешивающих
канатов принимается равным весу несущих канатов.
На случай обрыва одного или нескольких канатов или
чрезмерной вытяжки их, на натяжном устройстве устанавливается контакт
электроблокировки.
Нагрузка на уравновешивающие канаты ограничивается
собственным весом, поэтому в качестве уравновешивающих канатов
применяются дешевые канаты простой конструкции. В грузовых лифтах
для этой же цели иногда применяются цепи. При работе лифта они
производят значительный шум, что ограничивает их применение.
ГЛАВА VI
ПРИСПОСОБЛЕНИЯ БЕЗОПАСНОСТИ
§ 1. ДВЕРИ ШАХТ И КАБИН
Назначение и основные типы дверей. Надежное закрывание
входов в кабину и шахту лифта является одним из важных условий
обеспечения безопасной его работы.
Двери шахт должны, кроме того, обеспечивать надежную защиту
от огня и дыма в случае пожара. Конструкция и размеры дверей
способ их открывания и закрывания оказывают существенное
влияние на производительность лифтов.
Имеется большое многообразие типов дверей, различающихся
по конструкции, виду движения и числу створок, по способу их
открывания и закрывания, по конструкции и расположению
предохранительных устройств и т. д.
По виду движения и числу створок двери шахт и кабин
лифтов могут быть распашными (поворачивающимися на петлях,
фиг. 53, а, б, в) и раздвижными (движущимися в специальных
направляющих, фиг. 53, г, <3, е), одностворчатыми (фиг. 53, а, г),
двустворчатыми (фиг. 53, б, д, ё) и многостворчатыми (фиг. 53, в).
Раздвижные двери изготовляются с решетчатыми и со сплошными
створками.
Раздвижные двустворчатые двери могут открываться или в
разные стороны от середины (фиг. 53, д) или в одну и ту же сторону
(фиг. 53, ё). В первом случае створки движутся с одинаковой
скоростью (односкоростные двери центрального открытия), а во втором
случае скорость одной створки в 2 раза превышает скорость второй
(двухскоростные двери). При наличии трех створок, открывающихся
в одну сторону, все они имеют различную скорость (трехскоростные
двери). Направление движения створок раздвижных дверей может
быть горизонтальным (горизонтально раздвижные двери) и
вертикальным (вертикально раздвижные двери). Двери, открывающиеся
вверх и закрывающиеся вниз, называются гильотинными.
Раздвижные двери изготовляются в виде отдельных створок
с жестким каркасом (створчатые двери) или в виде отдельных
стержней (штанг), соединенных решеткой (решетчатые или штанговые
двери).
Двери шахт и кабин 103
По роду привода различают двери ручные (открываемые и
закрываемые вручную проводником или пассажирами),полуавтоматические
(открываемые вручную и закрывающиеся автоматически пружинами
или рычагами при трогании кабины) и автоматические
(открывающиеся и закрывающиеся автоматически при остановке или
трогании кабины).
По роду обшивки створок двери изготовляются глухими
(металлическими, деревянными, остекленными), сетчатыми и решетчатыми
( y/////x<ss$ss\ \
г) д)
е)
Фиг. 53. Основные схемы дверей шахт и кабин лифтов:
а — распашная одностворчатая; б — распашная двустворчатая; в — распашная четырехстворчатая;
г — раздвижная одностворчатая; д — раздвижная двустворчатая (односкоростная, центрального
открытия); е — раздвижная двустворчатая (двухскоростная, бокового открытия).
(стержневыми). Соприкасающиеся кромки дверных створок
пассажирских лифтов снабжаются специальными резиновыми прокладками,
смягчающими удар при закрывании.
Распашные двери. Одностворчатые (фиг. 53, а) и
двустворчатые (фиг. 53, б) распашные двери применяются как для кабин,
так и для шахт. Четырехстворчатые двери (фиг. 53, в) для кабин
не применяются, так как их створки при повороте занимают слишком
большое пространство, что мешает нормальному заполнению кабины.
По соображениям безопасности распашные двери шахт
открываются только в сторону этажных площадок, а двери кабин — только
внутрь кабины. Открывание и закрывание распашных дверей
производится вручную. Так как створки распашных кабинных дверей
не выходят за габариты кабины, для их открывания не требуется
увеличивать ширину шахты. Благодаря этим свойствам распашные
двери получили широкое применение при стесненных габаритах
шахт, а также в тех случаях, когда продолжительность операций
открывания и закрывания дверей не имеет существенного значения
(грузовые и больничные лифты, пассажирские лифты жилых домов
высотой до 10—12 этажей). Распашные двери шахт пассажирских
лифтов малой грузоподъемности изготовляются Ольгою одноетвюр-
104
Приспособления безопасности
чатыми. Одна из таких дверей показана на фиг. 54. Распашные двери
шахт пассажирских лифтов большой грузоподъемности, а также
шахтные двери больничных и грузовых лифтов изготовляются чаще
всего двустворчатыми.
Распашные двери кабин изготовляются обычно двустворчатыми,
так как применение двух створок вместо одной позволяет сократить
пространство, занимаемое дверью
при открывании.
Ограждения распашных дверей
могут быть сетчатыми (при
сетчатом ограждении шахты, фиг. 54)
или сплошным (при сплошном
' ограждении шахты).
Распашные двери достаточно
просты по конструкции. Основной
их недостаток заключается в том,
что для их раскрывания нужны
значительные площади.
Раздвижные
решетчатые (штанговые) двери.
Конструкция одной из таких
дверей показана на фиг. 55. Створка
двери состоит из отдельных штанг,
соединенных складывающейся
решеткой. Раздвижные решетчатые
двери в раскрытом положении
занимают небольшое место и в этом
отношении удобнее распашных.
Но из-за наличия просветов между
штангами и элементами решетки
они не вполне безопасны. Поэтому
правила Госгортехнадзора разрешают применять их только для
кабин грузовых лифтов, в которых проезд людей запрещается.
Для некоторых лифтов штанговые двери выполняются в виде
задвигающихся штор, с закрытыми просветами между штангами
или элементами решетки (задвижные или шторные двери).
Горизонтально раздвижные створчатые двери
показаны на фиг. 56 и 57.
Каждая створка такой двери подвешивается на двух специальных
подвесках, движущихся по направляющей, прикрепленной к
верхней части обвязки дверного проема. К нижней части створок
крепятся направляющие ползуны или колодки, движущиеся в
специальных пазах, устроенных в пороге дверного проема. Описание привода
этих дверей дано ниже.
Для подвешивания створок применяются обычно подвески роли-
ковогатипа. Типовая подвеска показана на фиг. 58. Ролики с двух
охвашвдш\ направляющую и змест с пазами в порогах
Фиг. 54. Одностворчатая распашная
шахтная дверь.
Двери шахт и кабин
105
Фиг. 55. Шарнирная раздвижная дверь для кабины грузового лифта
106
Приспособления безопасности
обеспечивают устойчивое положение створки во всех направлениях.
Заклинивание створки при движении предотвращается
соответствующей регулировкой зазоров между направляющей и нижними
роликами подвесок.
В зависимости от требуемой ширины дверного проема и
допускаемой ширины шахты раздвижные двери выполняются одно-,
двух-, трех- и четырех-
створчатыми.
Двустворчатая дверь центрального
открытия занимает в
раскрытом положении
столько же места, что и
одностворчатая дверь, но
благодаря симметричному
расположению створок она
позволяет сократить
ширину шахты. Двух- и
трехстворчатые двери со
створками, сдвигающимися в
одну сторону, занимают в
раскрытом положении тем
меньшее место, чем
больше число створок.
Поэтому двери такой
конструкции при достаточно
большой ширине не
требуют большого увеличения
ширины шахты. Однако
они имеют и существенные
недостатки. Их створки
движутся с большей скоро-
створчатая двухскоростная дверь с
автоматическим приводом
стью, чем у дверей
центрального открывания,
Фиг. 56. Горизонтально раздвижная четырех- создают больший шум И
обладают большей силой
удара при закрывании.
В закрытом положении
двери имеют уступы, что придает им менее красивый внешний вид.
Раздвижные двери со сплошными створками снабжаются, как
правило, полуавтоматическими или автоматическими приводами.
Механизированные раздвижные двери удобны для пользования,
снижают затраты времени на открывание и закрывание и облегчают
труд лифтера. При большом числе этажей, обслуживаемых лифтом,
это позволяет значительно сократить время кругового рейса и
увеличить производительность. Поэтому их следует устанавливать во
всех случаях, применяя распашные двери лишь тогда, когда габариты
шахтй н£ пшгодают.,установить раздвижные
Двери шахт и кабин
107
В пассажирских лифтах с малой шириной дверных проемов
(600—750 мм) следует применять одностворчатые раздвижные двери,
а при средней ширине проемов — двустворчатые раздвижные двери
центрального открытия. Применение механизированных раздвижных
дверей целесообразно не только в быстроходных и высокоскоростных
лифтах, но и в тихоходных лифтах, что позволяет в последнем
случае отказаться от ненадежных подвижных полов в кабинах.
Фиг. 57. Горизонтально раздвижная дверь с полуавтоматическим приводом:
— в закрытом положении; б — в открытом положении; /, 2, 3 — рычаги; 4 — кронштейн; 5—
цилиндр; 6 — тяга; 7 — блок-контакт.
Грузовые лифты имеют обычно широкие дверные проемы, причем
время, расходуемое на операции открывания и закрывания, у них
составляет незначительную часть от времени кругового рейса.
Поэтому для них чаще оказывается целесообразным применение
более дешевых распашных дверей, открывающихся и закрывающихся
вручную. С точки зрения габаритов шахт для этих лифтов наиболее
выгодно применение вертикально раздвижных дверей( со створками,
перемещающимися вертикально). Однако Правила Госгортехнадзора
запрещают применение таких дверей во всех лифтах, исключая малые
грузовые, где разрешается применять раздвижные двери со
створками^ открывающимися вниз. Применение раздвижных дверей гильо-
тиннЬго типа (Ь№-ры^ющиой?я вУерх) сЪвьУм не ^
108
Приспособления безопасности
Дверные замки, отводки и контакты. Для безопасной работы
лифта необходимо, чтобы исключалась возможность открывания
любой шахтной двери до подхода к ней кабины загруженная;
пассажирская кабина не должна двигаться, если открыта какая-либо из
дверей — кабинная или любая шахтная. Удовлетворение этих
требований достигается установкой в шахтных дверях устройств
механической блокировки (затворов или замков), а
также установкой в шахтных и кабинных дверях
устройств электрической блокировки (контактов).
Замок шахтной двери должен обеспечивать
возможность ее открывания со стороны этажной
площадки только тогда, когда уровень пола
остановившейся кабины совпадает с уровнем
соответствующего дверного порога шахты. На фиг. 59
показан замок шпингалетного типа для
распашных шахтных дверей грузового лифта.
Вертикальные штанги /, связанные шестерней 2,
выдвигаются под действием пружин 3 за пределы каркаса
дверной обвязки и запирают дверь. При
отсутствии против нее кабины открыванию замка
препятствует задвижка 4 (ригельный замок),
расположенная под выступом 5 одной из штанг и
связанная со специальной отводкой. При подходе к
шахтной двери кабина отжимает ролик отводки и
выдвигает задвижку 4 из-под выступа 5, позволяя
тем самым открыть шахтную дверь как изнутри
шахты, так и со стороны этажной площадки.
Над штангой / замка устанавливается контакт
электроблокировки, прерывающий ток в цепи
управления при открывании шпингалетного замка.
Взаимодействие шпингалетного замка, ригель-
ного замка и отводки схематически показано на
фиг. 60. Замок для распашных шахтных
одностворчатых дверей пассажирского лифта показан на
фиг. 61. Одна из его частей (левая) помещается
на внутренней стороне створки шахтной двери, а вторая — на
стене шахты. Запирание двери осуществляется одновременно двумя
деталями: выступом рукоятки / и запорным шкворнем 2,
расположенным справа. Замок может быть открыт лишь тогда, когда
кабина станет против данной шахтной двери и установленная на ней
отводка, придя в соприкосновение с роликом 5, повернет рычаг 4
в положение, показанное на фиг. 61 штриховыми линиями. При
этом запорный шкворень 2 выходит из отверстия в двери шахты,
а рычаг 5, установленный в левой половине замка, поворачивается
под действием пружины 6 против часовой стрелки и освобождает
выступ личинки 7, соединенной с ключевым устройством 8. После
этого замок может- ^быть открыт как со стороны кабины (отодвига*
Фиг. 58. Роликовая
подвеска для
створок раздвижных
дверей.
Двери шахт и кабин
109
Фиг. 59. Шпингалет-
ный замок шахтных
дверей грузового
лифта (вид со
стороны шахты; крышка
коробки замка снята):
/ — штанга; 2 — шестерня;
3 — пружина; 4 —
задвижка; 5— выступ.
.czrz
/ Дберная
110
Приспособления безопасности
нием рукоятки 1 влево), так и со стороны этажной площадки
(поворотом ключа, вставленного в отверстие ключевого устройства 8).
После того как кабина, отойдя от данной шахтной двери,
освободит рычаг 4, все детали замка под действием пружин 6, 9 и 10
придут в положение, показанное на фиг. 61, и дверь будет заперта.
В замке устроен двойной контакт электроблокировки. Одна его
половина прерывает ток в цепи управления и выключает привод
(при открывании шахтной двери),
а вторая включает освещение
кабины.
Замки раздвижных шахтных
дверей конструируются по тем же
принципам, что и распашных.
В большинстве случаев
раздвижные двери шахт совсем не имеют
замков, так как рычажная система
связывающая створки, в
закрытом положении надежно
предохраняет двери от возможности их
открывания со стороны этажных
площадок. Двери кабин не
оборудуются замками и имеют лишь
специальный дверной контакт электро-
Фиг. 60. Взаимодействие шпингалет-
ного замка, ригельного замка и
отводки.
что загруженная кабина может
двигаться только тогда, когда
двери закрыты и контакт замкнут.
При открывании дверей и
размыкании контакта кабина
автоматически останавливается. Движение пустой кабины с открытыми
дверями обеспечивается устройством контакта в полу кабины
(подвижный пол).
Конструкция и принцип работы этих контактов подробно
рассмотрены в главе VIII.
Приводы дверей. Привод полуавтоматических дверей
(открываемых вручную и закрываемых автоматически) состоит из пружинного
устройства, связанного системой рычагов со створками. На фиг. 57
показана раздвижная дверь, оборудованная таким приводом. В
закрытом положении (фиг. 57, а) рычаги 1, 2 и 3, соединенные между
собой в точках А и Б и связанные со створками в точках В и Г,
вытянуты в одну горизонтальную линию. Крайний рычаг 3 соединен
шарнирно с кронштейном 4> укрепленным на дверной обвязке,
и со штоком цилиндра 5, подвижно укрепленного надверной обвязке.
Рычаг 3 тягой 6 связан с контактом электроблокировки 7. Для
открывания двери нажимают вниз ручку, укрепленную на среднем рычаге 2,
до тех пор, пока рычаги не станут в мертвое положение (фиг. 57, б).
При открывании двери происходит зарядка пружины, находящейся
Двери Шахт и кабин
111
Фиг. 61. Замок шахтных дверей пассажирского лифта:
/ — рукоятка замка; 2 — запорный шкворень; 3 — ролик; 4 — рычаг правый; 5 — рычаг левый;
6— пружина левого рычага; 7 — личинка; 8 — ключевое устройство; 9 — пружина рукоятки;
10 — пружина запорного шкворня; // — блок-контакт.
112
Приспособления безопасности
в цилиндре, накопленная энергия которой используется затем при
закрывании. Для закрывания двери необходимо лишь потянуть
ручку рычага 2 вверх и вывести тем самым рычаги из мертвого
положения. Для смягчения ударов при подходе створок к крайнему
положению служит воздушный демпфер, устроенный в цилиндре 5.
Рассмотренная конструкция привода применима также для
одностворчатых дверей и для двустворчатых дверей центрального открытия.
В последнем случае рычажная система крепится к одной из створок.
Другая створка, движущаяся в противоположном направлении,
соединяется с первой жесткой (фиг. 62) или гибкой связью (канатом,
цепью).
Фиг. 62. Связь створок зубчатой рейкой.
Приводы автоматических дверей (открывающихся и
закрывающихся автоматически) выполняются электрическими или
пневматическими. Благодаря относительной простоте наибольшее
распространение получил привод от специального тихоходного электродвигателя.
Движение от него к створкам передается через
вспомогательное винтовое устройство и систему рычагов, соединенных со
створками. Дверь, оборудованная таким приводом, показана на фиг. 56.
Существует две системы автоматизированных дверных приводов:
одна система состоит в том, что двери кабины и каждая дверь шахты
оборудуются самостоятельным электрическим приводом; по второй
системе открывание и закрывание дверей кабины и дверей шахты,
против которых в данный момент находится кабина, осуществляется
от одного электропривода, установленного на кабине. В
последнем случае привод имеет более сложную конструкцию, однако
вследствие сокращения числа приводов шахтных дверей в общей стоимости
лифта достигается существенная экономия.
Количество, расположение и размеры дверей. Количество
дверей, их расположение и размеры существенно влияют на время входа
и выхода пассажиров из кабины и на производительность лифта.
В нормальных пассажирских и грузовых лифтах кабины снабжаются
обычно одной входной дверью (фиг. 13, а, б, в).
Устройство в кабине двух, а иногда и трех дверей(фиг. 13,г, 3, е, ж)
вызывается чаще всего тем, что по местным условиям входы в шахту
на различйых этажах нельзя расположить с одной и той же стороны.
При обслуживании лифтом больших пассажирских потоков в
некоторых случаях в кабинах специально предусматривают две двери,
размещаемые в противоположных стенах. Такие кабины принято
Ловители
113
называть проходными. Одна из дверей постоянно служит для входа,
а другая для выхода. Открывание и закрывание выходной двери
производится с некоторым опережением по отношению к входной.
Однако значительную часть времени обе двери при остановке
остаются открытыми, что позволяет совместить операции входа и
выхода и тем самым существенно сократить продолжительность
этих операций. Применение проходных кабин особенно целесообразно
при малом числе остановок лифта (например, при обслуживании
лифтом пассажирских потоков в метрополитенах).
При центральном расположении дверей загрузка и разгрузка
кабины происходит быстрее, чем при боковом. Увеличение ширины
дверного проема кабины также способствует быстрому ее заполнению
и опорожнению. Выбор ширины дверного проема, как показано
выше, связан с шириной шахты и конструкцией самих дверей.
Размеры дверей по ширине, регламентированные стандартами,
приведены в табл. 13.
Таблица 13
Основные размеры дверей лифтов
Типы лифтов
Пассажирские . .
Больничные . . .
Грузовые
Малые грузовые
Грузоподъемность в кг
500
До 1500
От 1500
до 3000
100 |
Размеры в мм
Ширина
кабины
1000
1500
2000
2500
500
750
Ширина
дверей шахты
1000
1400
1800
2200
500
750
Ширина проемов
Не менее 650
„ 1300
1050
1450
1850
22 50
530
870
§ 2. ЛОВИТЕЛИ
По Правилам Госгортехнадзора все кабины лифтов должны быть
снабжены особыми предохранительными приспособлениями —
ловителями, предотвращающими падение кабины в аварийных случаях.
Падение кабины может быть вызвано обрывом несущих канатов
или нарушением кинематической связи в системе привода (поломка
валов, срез шпонок и т. п.). Равносильным падению принято считать
самопроизвольное увеличение скорости движущейся вниз кабины
сверх определенной величины, что может быть вызвано
неисправностью системы управления или блокировки. В современных лифтах
случаи обрыва канатов очень редки и встречаются главным образом
в лифтах барабанного типа при подвешивании кабин на одном канате.
8 Ив
2598
114 Приспособления безопасности
У лифтов с канатоведущими шкивами, кабины которых, согласно
Правилам Госгортехнадзора, подвешиваются не менее чем на трех
канатах, обрыв последних при правильном их выборе и надлежащем
уходе практически исключен. В соответствии с этим Правила
предписывают, чтобы в лифтах с барабанными лебедками ловители
останавливали кабину при обрыве или ослаблении одного
или.нескольких несущих канатов, в также в случае увеличения скорости
движущейся вниз кабины сверх определенной величины.
В лифтах с канатоведущими шкивами ловители могут не иметь
прямой связи с несущими канатами. В последнем случае они
приводятся в действие только от ограничителя скорости — специального
устройства, автоматически реагирующего на изменение скорости
кабины в определенных пределах. В грузовых лифтах без проводника
и в малых грузовых лифтах ограничители скорости разрешается не
устанавливать. В случаях, когда необходимо оградить кабину от
возможности разгона ее вверх и удара в перекрытие шахты, или
когда лифт установлен в таком помещении, где под приямком шахты
могут находиться люди, а перекрытие (дно приямка) недостаточно
прочно, чтобы выдержать удар упавшего противовеса, ловители
устанавливаются не только на кабине, но и на противовесе.
Работа всех типов ловителей, применяемых в лифтах, основана
на общем принципе. Он состоит в торможении и удерживании кабины
(или противовеса) на направляющих за счет сил трения или
заклинивания.
Ловители кабины обычно размещаются в ее нижней части и реже
(в лифтах малой грузоподъемности) — в верхней части на
горизонтальных балках ее каркаса.
Улавливающее устройство ловителей обычно состоит из
массивных неподвижно закрепленных на раме кабины деталей (колодок
корпусов и т. п.) и подвижных частей (эксцентриков, клиньев,
роликов, клещей и т. п.). Основной характеристикой работы
ловителей является плавность остановки, характеризуемая величиной
пути, проходимого кабиной с момента включения ловителей до
полной ее остановки. В зависимости от плавности остановки ловители
делятся на две основные группы: мгновенного действия,
останавливающие кабину на очень коротком пути (не более 50 мм) и
скользящие, осуществляющие остановку на большом пути (в несколько
метров). Решающее влияние на плавность остановки оказывает
конструкция захватывающих частей ловителей. В зависимости
от конструкции этих частей ловители подразделяются на
эксцентриковые, роликовые клиновые и клещевые. Первые два типа, а также
подавляющее большинство клиновых ловителей относятся к группе
ловителей мгновенного действия. Все клещевые ловители и некоторые
конструкции клиновых ловителей обеспечивают торможение кабины
на большом пути и относятся к группе ловителей скользящего
действия. Устройство и схемы включения ловителей мгновенного
действия показаны на фиг. 63. Подвижные (захватывающие) части
Ловители
115
Фиг. 63. Основные схемы ловителей и схемы их включения:
а — эксцентриковые; б — роликовые; в — клиновые; г — схема включения
клиновых ловителей при двухканатнои подвеске; д — схема включения
ловителей от обрыва канатов и от ограничителя скорости.
116 Приспособления безопасности
ловителей могут охватывать каждую направляющую только с одной
стороны (односторонние ловители, фиг. 63, а) или одновременно
с двух ее сторон (двусторонние ловители, фиг. 63, б, в).
Работа ловителей мгновенного действия основана на
самозаклинивании их подвижных деталей (эксцентриков, клиньев, роликов)
под действием веса опускающейся кабины. Самозаклинивание
начинается в тот момент, когда упомянутые детали, повернувшись или
сместившись по направлениям, указанным на фиг. 63, а, б, в
стрелками, придут в соприкосновение с направляющими. При схемах
включения ловителей, применяемых при одноканатной подвеске
кабин (фиг. 63, а, б, в), поворот эксцентриков (фиг. 63, а) или
рычагов, связанных тягами с роликами (фиг. 63, б) и клиньями (фиг. 63, в)
ловителей, происходит под действием сжатых пружин,
освобождающихся при обрыве каната. Схема включения клиновых ловителей при
двухканатной подвеске кабины показана на фиг. 63, г. На фиг. 63, д
дана более общая схема включения клиновых ловителей: от обрыва
канатов и от ограничителя скорости. Включение от обрыва канатов по
этой схеме осуществляется аналогично рассмотренному выше.
Включение от ограничителя скорости происходит при
заклинивании каната ограничителя, связанного системой рычагов и подвесок
с клиньями или роликами ловителей. Пружина на рычаге в данной
схеме (в противоположность рассмотренным) служит не для
приведения ловителей в действие, а для предохранения их от
включения.
Из ловителей мгновенного действия в лифтах отечественного
производства наиболее широкое применение получили клиновые
двусторонние ловители. Конструкция одного из таких ловителей
показана на фиг. 64. Ловители расположены на нижних швеллерах
каркаса кабины /. Системой рычагов и тяг 2 и 3 стальные клинья 4
ловителей, расположенные под башмаками 5, соединены с канатом
ограничителя скорости. При нормальной работе лифта клинья не
соприкасаются с направляющими. В аварийных случаях, когда
скорость движения кабины вниз превысит нормальную рабочую
скорость более чем на 15% и когда застопорившийся канат
ограничителя скорости повернет соединенный с ним рычаг механизма подъема
ловителей, тяги 2 и 3 заставляют клинья ловителей продвинуться
вверх (по отношению к кабине) по пазам колодок. При движении
клиньев вверх они сближаются друг с другом и придвигаются
вплотную к направляющим, как показано на фиг. 64 пунктиром. Затем
под действием веса опускающейся кабины клинья плотно зажимают
направляющие, а при наличии зубцов —врезаются в них и
осуществляют, таким образом, полную остановку кабины. Так как
несущие канаты при этом ослабевают, то под действием разгрузившейся
пружины балансирная подвеска смещается вниз и размыкает
контакт электроблокировки, что вызывает остановку двигателя
подъемного механизма. Чтобы снять кабину с ловителей, необходимо с
помощью лебедки приподнять ее с малой скоростью, после чего всю
Фиг. 64. Двусторонние
клиновые ловители мгновенного
действия:
/ — каркас кабины; 2,3 — тяги;
4 — клинья; 5 — башмак.
118 Приспособления безопасности
систему рычагов и тяг механизма ловителей, а также
электроблокировку, привести в исходное положение.
В связи с тем, что ловители мгновенного действия обеспечивают
остановку кабины на чрезвычайно коротком пути (по опытным
данным, этот путь приблизительно равен h = 25 мм), их можно
применять лишь при малых скоростях движения кабин. Предельное
значение скорости, при которой допустимо их применение, может
быть определено из уравнения движения кабины. В предположении,
что тормозное усилие при работе ловителей постепенно возрастает
от нуля до максимума, это уравнение получает вид
vA = УШ, (76)
где vA — скорость кабины в м/сек, при которой начинается действие
ловителей;
а — наибольшее допустимое замедление в м/сек2;
h — путь торможения в м.
Для пассажирских и больничных лифтов замедление при посадке
на ловители не должно превосходить 9,81 м/сек2.
Отсюда ил = 1/9,81-0,025 = 0,45 м/сек.
Согласно Правилам Госгортехнадзора, в лифтах со скоростями
до 2 м/сек ловители должны срабатывать при повышении скорости
не менее чем на 15% и не более чем на 40%. Отсюда следует, что
номинальная скорость пассажирского лифта, при которой можно
применять ловители мгновенного действия, не должна превосходить
v = 2± = Mi = 0,32 м/сек.
Для грузовых и грузо-пассажирских лифтов замедление при
посадке на ловители принимается в пределах 2 — 2,25g или не более
а = 24,5 м/сек2. Для этих лифтов
/24,5-0,025 0,78 Л -- .
v = у-т-^— = —г-г- = 0,55 м/сек.
При больших скоростях движения кабин должны применяться
ловители скользящего типа х.
Преимущественное применение имеют клещевые ловители
скользящего типа, в которых торможение происходит постепенно и плавно,
а тормозной путь достигает 5 м. Устройство и работа их сводятся
к следующему (фиг. 65). На нижних швеллерах каркаса кабины /,
По обеим сторонам ее, на осях 2 установлены клещи 3 со стальными
закаленными губками, зажимающими направляющие 12, и с роликами
4 — на внутренних удлиненных плечах клещевых рычагов. Между
роликами помещаются клинья 5 штоков 6, имеющих винтовую нарезку
1 По Правилам Госгортехнадзора их применение обязательно при скоростях
свыше 1 м/сек.
Ловители
119
(соответственно — правую и левую) и ввинчивающихся в барабан 7.
На барабан намотан вспомогательный канат 8, скрепленный с
канатом ограничителя скорости. В случаях, когда скорость опускания
кабины превышает на 15% установленную скорость ее движения,
канат ограничителя скорости застопоривается специальным зажимом!
Тогда при продолжающемся движении кабины вспомогательный
канат 5, сбегая с барабана 7, приводит его во вращение. При этом
клинья 5 выдвигающихся штоков 6 раздвигают ролики 4, а губки
клещей 3 сближаются и зажимают направляющие 12. Для
смягчения толчков к одному рычагу клещей 3 шарыирно крепится малый
7 b
Фиг. 65. Схема клещевых ловителей скользящего типа:
/ —- каркас кабины; 2 — ось; 3 — клещи; 4 — ролик; 5 — клин; 6 — шток;
7 — барабан; 8 — вспомогательный канат; 9 — малый рычаг; 10 — пружины
малого рычага; ;/ —пружина клещей; 12 — направляющая.
рычаг 9, постоянно прижатый к большому рычагу пружиной 10.
При растормаживании ловителей клещи возвращаются в исходное
положение пружиной П.
Различают клещевые ловители с постоянным усилием торможения
и с постепенно возрастающим усилием торможения. Ловителями
с постоянным усилием торможения называются клещевые ловители,
которые ■ имеют ограниченную длину вспомогательного каната 8
(фиг. 65), достаточную для того, чтобы довести губки клещей до
соприкосновения с направляющими, а усилие зажатия остается
неизменным на продолжении всего тормозного пути; ловителями с
постепенно возрастающим усилием называются клещевые ловители,
в которых длина вспомогательного каната достаточна для сбегания
с барабана в течение всего времени торможения, а постоянное
усилие торможения достигается лишь после того, как ролики 4
расположатся на параллельных гранях клиньев 5 выдвижного штока 6.
Регламентированные Правилами Госгортехнадзора величины
тормозных путей при работе клещевых ловителей лифтов со
скоростями кабин свыше 1 м/сек приведены в табл. 14.
Расчет всех типов ловителей производится по тормозному
усилию, которое расходуется на удержание падающей кабины с грузом
и на погашение их кинетической энергии. Для остановки падающей
кабины с грузом необходимо соблюдение равенства
:=k-Q-h +
(77)
120
Приспособления безопасности
Здесь R — тормозное усилие ловителей в кг\
Q — вес кабины с грузом в кг;
vA — скорость кабины в м/сек, при которой начинается
действие ловителей (согласно Правилам Госгортех-
надзора vA = 1,4 с;);
h — путь торможения в м\
g = 9,81 м/сек2 — ускорение силы тяжести;
k — коэффициент, зависящий от характера действия
тормозного усилия.
Таблица 14
Путь торможения ловителями при скоростях движения кабин свыше 1 м/сек
Скорость
движения, при которой
срабатывают
ловители, в м/сек
1
2
3
4
5
6
Путь торможения в мм
для ловителей
С ПОСТОЯННЫМ
усилием торможения
Наибольший
250
750
1400
2500
3800
5400
Наименьший
150
350
800
950
1400
2000
для ловителей с i
юстепенно возра-
стающим усилием торможения
Наибольший
1600
2300
2900
3600
4400
5200
Наименьший
600
800
1000
1300
1800
2400
Для ловителей с постоянным усилием торможения, у которых
тормозное усилие достигает максимальной величины на очень
коротком пути и сохраняется затем почти неизменным, значение k можно
принимать равным единице. Тогда
(78а)
Для ловителей с тормозным усилием, возрастающим постепенно
от нуля до максимума (клещевые ловители с постепенно
возрастающим усилием, ловители мгновенного действия), работа сил трения
Rh
равна -и-, откуда & = 0,5 и
(786)
eh
В выражениях (78а) и (786) второй член сомножителя,
заключенного в скобки, называется динамическим коэффициентом. Величина
суммарного нормального усилия, действующего на направляющие
от захватывающих частей ловителей, определяется по формуле
N=.\iRf (79)
где ^ — коэффициент трения между захватывающими частями
ловителей и направляющими.
Ограничители скорости 121
По усилию N производится расчет основных элементов ловителей
(эксцентриков и их осей, клиньев, клещей и рычагов с пружинами).
При расчетах рекомендуется принимать следующие значения
коэффициентов трения [х:
Характеристика трущихся поверхностей
Значение
коэффициентов трения (х
Зубчатая стальная поверхность по гладкой деревянной . .
Зубчатая стальная поверхность по гладкой стальной . . .
Гладкая стальная поверхность по гладкой деревянной . .
Гладкая стальная поверхность по гладкой стальной . . . .
Стальные шарики или ролики между гладкими стальными
поверхностями
0,3—0,5
0,2—0,3
0,15—0,20
0,08—0,15
0,01—0,03
§ 3. ОГРАНИЧИТЕЛИ СКОРОСТИ
Ограничители скорости предназначаются для приведения в
действие механизма ловителей в тех случаях, когда скорость движения
кабины вниз превысит ее нормальную рабочую скорость на
определенную величину. По Правилам Госгортехнадзора это превышение
скорости должно быть не менее 15%, но не более:
40% —для лифтов со скоростью до 2 м/сек;
33% —для лифтов со скоростью от 2 до 3,5 м/сек и
25% —для лифтов со скоростью выше 3,5 м/сек.
Связь ограничителя скорости с ловителями во всех лифтах
осуществляется канатами. Две наиболее распространенные схемы
установки ограничителей показаны на фиг. 66. В первой из них
(фиг. 66, а) бесконечный стальной канат ), огибающий верхний блок 2
ограничителя скорости и нижний блок 3 натяжного устройства,
соединяется с каркасом кабины фрикционным зажимом 4 и с
механизмом 5 ловителей вспомогательным канатом 6. Во второй схеме
(фиг. 66, б) канат 1 одним концом закрепляется на каркасе кабины,
а другим с помощью рычага 7, удерживаемого пружиной,
присоединяется к механизму ловителей. Для предотвращения
проскальзывания на блоках и для предохранения от спутывания канаты 1
поддерживаются в натянутом состоянии грузами 9, движущимися в
направляющих 10. При нормальной работе лифта канат / под воздействием
зажима 4 или рычага 7 движется со скоростью, равной скорости
кабины; система ограничителя при этом работает вхолостую. Когда же
скорость движения кабины превысит допускаемую, то аппарат 8
ограничителя заклинит канат У, который проскальзывая в зажиме 4
и, воздействуя на вспомогательный канат 6 (фиг. 66, а) или
преодолевая усилие пружины рычага 7 (фиг. 66, б), приведет в действие
механизм ловителей.
Действие всех типов ограничителей скорости, применяемых в
лифтах, основано на использовании центробежной силы. По своему
устройству они разделяются на две группы: шпиндельные (с верти-
Фиг. 66. Схемы соединения
ограничителя скорости с ловителями:
а — со вспомогательным канатом; б — без
вспомогательного каната; / — канат; 2 — верхний блок
ограничителя; 3 — натяжной блок; 4 —
фрикционный зажим; 5 — механизм ловителей; 6 —
вспомогательный канат; 7 — рычаг; 8 — зажимной
аппарат; 9 — груз; 10 — направляющая для грузов.
Фиг. 67. Шпиндельный ограничитель скорости:
канат; 2 — шкив; 3 — грузы; 4 — муфта; 5 — система рычагов; 6 — пружина;
7 — колодки.
Ограничители скорости
123
кальной осью вращения) и плоские (сгоризонтальной осью вращения).
На фиг. 67 показан шпиндельный ограничитель скорости с
вертикальной осью вращения. По мере возрастания скорости движения
каната /, огибающего шкив 2, увеличивается радиус траектории
вращения грузов 5, шарнирно соединенных с муфтой 4. Смещаясь
при этом вверх, муфта 4 через систему рычагов 5 освобождает
пружину б, которая с помощью колодок 7 заклинивает канат L
Фиг. 68. Плоский ограничитель скорости:
/ — станина; 2 — ось шкива и балансира; 3 — шкив; 4 — ось груза; 5 — груз; 6 — тяга; 7 -- балансир;
8 — пружина; 9 — гайки.
Не менее распространенный плоский ограничитель скорости с
горизонтальной осью вращения показан на фиг. 68. В станине 1 на
консольно укрепленной в ней оси 2 насажен шкив 3, огибаемый
канатом, связывающим ограничитель с кабиной. На осях 4,
закрепленных в стенке шкива, помещены плоские грузы 5, свободные концы
которых соединены тягами 6 с балансиром 7, вращающимся на оси 2,
Пружины 8, натяжение которых можно регулировать гайками 9,
постоянно отклоняют грузы 5 к центру. В случае превышения
шкивом 3 заданного числа оборотов возрастающая центробежная сила
преодолевает действие пружин и раздвигает грузы по направлению
от центра. При этом грузы или включают механизм канатного
зажима, или затормаживают канатный шкив 3 и приостанавливают
движение каната ограничителя. Для того чтобы проверить работу
ограничителя, не увеличивая нормальную скорость движения ка-
124
Приспособления безопасности
бины, на ободе шкива 3, помимо желобка расчетного диаметра,
проточен желобок уменьшенного диаметра. При переброске каната
ограничителя в этот желобок возрастает число оборотов шкива
ограничителя и при исправном его состоянии срабатывает механизм лови-
тел ей.
Для зажима канатов при срабатывании ограничителя скорости
применяются эксцентриковые (фиг. 69, а) и колодочные (фиг. 69, б)
Фиг. 69. Схемы зажимных приспособлений:
а — эксцентриковый зажим; б — колодочный зажим; 1 — тяга ограничителя;
2 — канат ограничителя.
зажимные приспособления. Работа приспособлений обоих типов
основана на самозатягивании эксцентриков и колодок движущимся вниз
канатом. Зажимное усилие каната зависит от величины коэффициента
трения, от первоначального положения колодок и эксцентриков
и пр. и может быть непостоянным. В целом же ряде случаев
величина этого усилия должна быть вполне определенной. Так, в лифтах
со скоростями движения кабин, превышающим 1 м1сек, путь
торможения достигает величины в несколько метров. Во избежание
обрыва каната ограничителя скорости он не должен заклиниваться
наглухо. Для этого упоры зажимного приспособления делаются
пружинными, так, чтобы под действием усилия 150—200 кг
(достаточного для приведения в действие механизма ловителей кабины)
канат продолжал свое замедляющееся движение до полной посадки
кабины на ловители.
§ 4. УПОРЫ И БУФЕРА
Для ограничения хода кабин и противовесов и для их
постепенной остановки в случае неисправного действия концевых
выключателей в приямках шахт лифтов устанавливаются специальные
приспособления — упоры или буфера.
Упоры или буфера, установленные под кабиной, предохраняют
ее от удара о пол приямка, а буфера под противовесом
предотвращают удар кабины о верхнее перекрытие шахты.
Упоры и буфера 125
По конструкции и своим эксплуатационным свойствам эти
приспособления делятся на три основные группы: жесткие упоры,
упругие пружинные буфера и масляные буфера.
Жесткие упоры, применяемые в грузовых лифтах со скоростями
движения кабин до 0,5 м1сек, выполняются обычно в виде
металлических, бетонных или деревянных брусьев или тумб, размещаемых
между направляющими кабин и противовесов. Упоры,
устанавливаемые в лифтах со скоростями кабин от 0,5 до 0,75 м/сек, должны
обязательно снабжаться упругими прокладками — подушками из
резины, пробки или других материалов.
Упругие пружинные буфера устанавливаются в пассажирских
и грузовых лифтах при скоростях движения кабин, не превышающих
1 м/сек. Для плавного погашения еще большей скорости
потребовалась бы чрезмерно высокая пружина, которая к тому же
отбрасывала бы кабину вверх настолько сильно, что это отразилось бы на
самочувствии пассажиров. Конструкция упругого пружинного
буфера показана на фиг. 70. Он установлен на стальных балках, надежно
прикрепленных болтами к обеим направляющим на соответствующем
расстоянии от дна приямка \ Витая цилиндрическая пружина 1
буфера опирается на чугунную плиту 2с направляющим приливом 5,
препятствующим боковому сдвигу пружины. Сверху на пружину
надевается колпак 4 с резиновой подушкой 5, смягчающей удар
в начальный момент. Под рамой кабины и противовеса
прикрепляются стальные упорные плиты, которые непосредственно
соприкасаются с буферами при посадке на них. Ход буфера (на фиг. 70
показан штрих-пунктиром) при полном сжатии нагрузкой
составляет около 120 мм. Расчет пружины буфера производится так,
чтобы наибольшее замедление не превышало величины 2,5g =
=2,5-9,81 M/ceK2(g—ускорение силы тяжести). Чтобы не увеличивать
глубины приямков, следует по возможности снижать высоту буферов.
В большинстве случаев как кабина, так и противовес имеют по два
буфера, каждый из которых воспринимает только половину
нагрузки. Наибольшее усилие, воспринимаемое одним буфером,
определяется по уравнению
1()г' (80)
где Q — наибольший общий вес груза, опускающегося на буфера
данной группы (на буфера кабины или на буфера
противовеса), в кг\
п — число буферов, установленных под кабиной (или
противовесом);
1 Высота и расположение упора или буфера у всех лифтов, кроме малых
грузовых, выбираются из расчета, чтобы после посадки на него кабины между ее полом
и дном приямка оставалось свободное пространство высотой не менее 750 мм; у малых
грузовых лифтов высота этого пространства должна быть не менее 75 мм.
126
Приспособления безопасности
а — замедление, с которым происходит остановка кабины (или
противовеса), в м/сек2;
g — ускорение силы тяжести (9,81 м/сек2).
При расчете буферов кабины значение Q определяется по
формуле (см. фиг. 21)
а при расчете буферов противовеса вместо Q подставляется вес
противовеса Р4.
Фиг. 70. Пружинный буфер:
а — буфер; 6 — установка буфера; / — пружина; 2 — плита; 3 — прилив плиты; 4 — колпак; 5 —
резиновая подушка.
Путь торможения кабины при посадке на буфера
(пропорциональный величине сжатия пружины) будет тем меньше, а замедление тем
больше, чем меньше загружена кабина. Поэтому максимальное
замедление имеет место при посадке на буфера пустой кабины.
Наибольший же практический интерес представляет случай, когда в кабине
находится один человек (проводник). Для того чтобы замедление
при этом не превосходило максимально допустимого (2,5g =
= 24,5 м/сек2), необходимо, чтобы замедление при максимальной
нагрузке, т. е. величина а, входящая в формулу (80), не превышала
значения, определяемого по формуле
Р2+Р1
(81)
Упоры и буфера 127
При расчете буферов для кабины грузовых лифтов без провод
ников и буферов для противовесов всех лифтов величина а может
приниматься равной 2,5g или 24,5 м/сек2.
При расчете буферов для лифтов с канатоведущими шкивами
необходимо учитывать влияние натяжения канатов на
противоположных ветвях путем введения в уравнение npofn6a (/) буферной
пружины тягового коэффициента канатоведущего шкива:
Для буферов кабин
. 0« (Pi+ Р*) (!+-
Для буферов противовесов
Значения Ръ Р2 и Р4 по фиг. 21.
По величине / и Рм производят выбор необходимой пружины.
Расчет пружины ведется по формулам для цилиндрических винтовых
пружин с круглым поперечным сечением витков:
р =1^. ^L
Гм 16 ' г
И л « R
1 = ~~d 5" '
отсюда следует: г _ 64/г-г3 Рм
где Рм — допускаемая нагрузка пружины в кг;
d — диаметр сечения проволоки пружины в см;
f — прогиб (величина сжатия) в см;
п — число витков;
г — средний радиус пружины в см;
G — модуль упругости второго рода (при сдвиге) в кг/см2;
Rx — допускаемое напряжение кручения материала пружины
в кг км2.
Необходимые величины / определяются по уравнениям (82).
Учитывая значительную силу удара, который получается при
большой скорости движения полностью нагруженной кабины,
рекомендуется применять для буферов хорошо закаленную пружинную
сталь с допускаемым напряжением кручения 6500 кг/см2. Модуль
упругости второго рода может быть принят G = 7,5-105 кг/см2.
Масляные буфера устанавливаются в приямках быстроходных
и скоростных лифтов при скоростях движения кабин свыше 1 м/сек.
Показанный на фиг. 71, а масляный буфер завода «Подъемник»
для скоростных лифтов высотных зданий в основном состоит из
корпуса 1У заполненного до определенной высоты маслом, поршня (плун-
128
Приспособления безопасности
жера) 2 и возвратной пружины 3. Нормально пружина удерживает
плунжер в крайнем верхнем положении (см. фиг. 71, а и б). Под
нагрузкой плунжер опускается, преодолевая действие пружины
и надвигаясь на конический шток 4.
При этом масло через кольцевое отверстие в днище плунжера
перетекает из корпуса во внутреннюю полость. Благодаря кониче-
Фиг. 71. Масляный буфер:
1 — корпус; 2 — поршень; 3 — возвратная пружина; 4 — конический шток;
5 — головка; 6 — шток ускорительной пружины; 7 — ускорительная пружина.
ской форме штока свободная площадь отверстия уменьшается, а
скорость движения плунжера при этом замедляется и постепенно
доводится до нуля.
Для смягчения удара при соприкосновении с кабиной или
противовесом плунжер снабжается грибовидной головкой 5 со штоком б,
опирающейся на так называемую ускорительную пружину 7.
Благодаря сжатию ускорительной пружины поршень буфера постепенно,
Упоры и буфера 129
без удара, приобретает скорость опускающейся кабины (или
противовеса).
В этот период плунжер не испытывает сопротивления, поскольку
жидкость свободно проходит через отверстия в его днище. Во втором
периоде происходит замедление, величина которого определяется
диаметром отверстия в днище и формой штока.
Наряду с рассмотренной конструкцией существуют масляные
буфера без; конического штока. Необходимое тормозное усилие
в них создается за счет выдавливания масла из внутреннего цилиндра
в полость между ним и наружным цилиндром.. Для этой цели стенки
внутреннего цилиндра снабжаются определенным числом
соответственно расположенных отверстий.
8 отличие от пружинных буферов и упоров масляные буфера
устанавливают по одному под кабиной и противовесом и
прикрепляют к плите приямка (фиг. 71, аи б) или к промежуточной опоре
(фиг. 71, в).
Установка буферов в приямке производится с таким расчетом,
чтобы вертикальная ось буфера, установленного под кабиной,
проходила через центр тяжести кабины, а вертикальная ось буфера,
установленного под противовесом, проходила через центр тяжести
противовеса.
Головка масляного буфера в нерабочем положении должна
располагаться на расстоянии около 75 мм от опорной поверхности
кабины или противовеса, находящейся на уровне нижней остановки.
Иногда масляные буфера размещаются непосредственно на
противовесе (фиг. 71, г). В этих случаях вес буферов учитывается при
определении веса противовеса.
Масляные буфера рассчитываются так, чтобы замедление кабины
или противовеса, вызываемое буфером, не превышало ускорения
силы тяжести, т. е. принимают а = g = 9,81 м/сек2. При этом
поднимающийся противовес (или кабина) будут самопроизвольно
замедляться с таким же отрицательным ускорением. Ход плунжера
при этом определяется по уравнению
s = -g|*|. (84)
Нагрузка на плунжер составляет
2Q, (85)
где Q—либо вес кабины с грузом (Pi+P2), либо вес противовеса (Р4)«
Рабочее давление жидкости в буфере определяется уравнением
р=Щ- \кг1см*\, (86)
где/7 — площадь сечения плунжера в см2 (в буфере, показанном на
фиг. 71 — площадь днища плунжера за вычетом площади
отверстия в нем).
9 Ивашков 2598
130 Приспособления безопасности
Рабочее давление должно сохраняться неизменным в течение
всего хода плунжера.
Скорость движения последнего должна в то же время
уменьшиться от номинальной до нуля. Поэтому количество жидкости,
вытесняемой плунжером на единицу длины его хода, также должно
постепенно уменьшаться. Скорость истечения жидкости vucm остается
постоянной в течение всего хода плунжера:
о«» = ТГ = const, (87)
где ипЛ — скорость опускания плунжера в некоторый
промежуточный период работы в см/сек;
z — число отверстий, через которые вытекает жидкость в тот
же период (в буфере, показанном на фиг. 71, z= 1);
X — площадь одного отверстия в см2; в буфере, показанном на
фиг. 71,— площадь отверстия в днище плунжера за
вычетом площади сечения штока.
Общее число отверстий в стенках внутреннего цилиндра
двухцилиндрового буфера определяется по уравнению
Z=V с\т) p ' (88)
где С — коэффициент истечения жидкости. По опытным данным:
для керосина С = 0,0065-^-0,01; для веретенного масла С = 0,007.
Для движения с постоянным замедлением отверстия должны быть
расположены таким образом, чтобы в любом положении плунжера
удовлетворялось условие
z? = z2.^-, (89)
где гх — число не перекрытых плунжером отверстий;
1п — оставшаяся длина хода плунжера в см;
Ln — полная длина хода плунжера в см.
ГЛАВА VII
ШАХТЫ, МАШИННЫЕ ПОМЕЩЕНИЯ И НАПРАВЛЯЮЩИЕ
§ 1. ШАХТЫ
Шахтой лифта называется сооружение, в котором движутся
кабина и противовес, размещаются направляющие и
предохранительные устройства, аппараты управления и сигнализации,
электропроводка и пр.
Основными конструктивными элементами шахты являются остов
или каркас, ограждение с дверными проемами, двери, приямок и
потолочное перекрытие, отделяющее шахту от машинного или
блочного помещения. В шахтах с кирпичными или железобетонными
стенами каркас и ограждение зачастую представляют собой одно целое.
При размещении лифта внутри здания для установки привода,
отводных шкивов и крепления направляющих чаще всего
используются элементы самого здания (стены, балки перекрытий и т. п.),
которые и воспринимают основные нагрузки, возникающие при
работе лифта. В этом случае шахта лифта служит лишь ограждением.
Металлический каркас такой шахты не воспринимает основных
нагрузок. Он изготовляется безраскосным и предназначается
исключительно для крепления элементов ограждений.
При установке внутри зданий или в лестничных клетках высоких
зданий лифты являются основными транспортными средствами для
эвакуации людей и имущества в случае возникновения пожара.
Поэтому правилами Госгортехнадзора требуется, чтобы шахты этих
лифтов были со всех сторон и по всей высоте ограждены сплошными
стенами из огнестойких материалов (кирпича, бетона, железобетона
и др.). Такие ограждения шахт позволяют пользоваться лифтом в
случае возникновения в здании пожара, а также препятствуют быстрому
распространению огня между этажами. Это же требование Правил
Госгортехнадзора относится к шахтам лифтов, устанавливаемых
в лестничных клетках зданий с числом этажей более десяти.
При размещении лифтов вне здания, в лестничных клетках
зданий или внутри зданий для обслуживания поэтажных открытых
площадок, галерей или балконов, их шахты могут служить не только
ограждением, но и являться одновременно основной несущей
конструкцией. Каркас такой шахты представляет собой металлическую
конструкцию, которая обычно состоит из четырех вертикальных
стоек уголкового профиля, жестко соединенных между собой гори-
9*
132 Шахты, машинные помещения и направляющие
зонтальными поясами и раскосами. Стойки устанавливаются на
горизонтальной раме, которая после сборки и выверки каркаса
заделывается в бетонную фундаментную плиту на дне приямка. Верхние
части вертикальных стоек также скрепляются между собой горизон:
тальной рамой, обычно выполняемой из швеллеров и используемой
в качестве опоры для машинного помещения лифта или для верхних
направляющих блоков. Горизонтальные пояса каркаса шахты
используются для крепления к ним направляющих кабины и противовеса.
При установке в лестничной клетке каркас крепится к
прилегающим частям здания. При установке вне зданий он хотя бы в одном
месте соединяется с прилегающим зданием мостками.
Согласно Правилам Госгортехнадзора, шахты лифтов,
устанавливаемых вне зданий и в лестничных клетках зданий с числом этажей
не более десяти, могут иметь как сплошные, так и сетчатые
ограждения. Последние изготовляются из металлической проволочной
плетеной сетки с толщиной проволоки не менее 1,2 мм с и линейными
размерами ячеек не более 20 мм. В качестве ограждения допускается
также применение стекла при толщине его не менее 4 мм. По
соображениям безопасности шахты с сетчатым и остекленным
ограждением со стороны этажных площадок, на которых могут находиться
люди, обшиваются стальными листами толщиной не менее 1,4 мм,
на высоту не менее 1 м от уровня пола площадки. Сетчатые
ограждения (перегородки) применяются также для разделения шахт при
групповой установке лифтов. Ограждение шахт пассажирских лифтов
иногда выполняется художественно оформленным.
В целях повышения безопасности пользования лифтами
ограждение шахты должно отвечать ряду особых требований. В глухих
шахтах, ограждение которых выполнено из кирпича, бетона и
других строительных материалов, внутренняя поверхность стен, особенно
со стороны, обращенной к двери кабины, должна быть строго
вертикальной, без впадин и ниш. На этой поверхности допускаются
выступы, не превышающие по ширине 125 мм, при условии, что на
верхней и нижней сторонах выступов сделаны скосы под углом
не менее 75° к горизонту. У выступов, расположенных
непосредственно под порогами автоматических, дверей шахт, снабженных
устройствами для точной остановки, скосы устраиваются только
с нижней стороны. Выступы шириной до 50 мм могут вообще не иметь
скосов.
Габариты шахты в плане определяются размерами кабины,
размерами и расположением в шахте противовеса, а также величиной
зазоров в свету между кабиной, противовесом и внутренними
поверхностями стен и дверей шахты. Величины зазоров устанавливаются
с расчетом, чтобы кабина и противовес при движении не
соприкасались друг с другом и с деталями шахты. При этом учитываются
возможные отклонения в размерах, а также износ и деформация деталей.
Зазор между порогами дверей шахты и кабины назначается в
пределах 15—50 мм. Расстояние в свету между внутренней поверх-
Шахты 133
ностью стены или двери шахты и кабиной со стороны двери
(размер И на эскизе к табл. 15) принимается не менее 25 мм, но не более
125 мм в лифтах с распашными дверями и не более 175 мм — в
лифтах с автоматическими раздвижными дверями. Расстояние между
кабиной или противовесом и внутренней поверхностью шахтной
стены, к которой не обращены двери кабины (размер К на эскизе
к табл. 15), принимается не менее 25 мм в глухих шахтах (со
сплошными стенами) и не менее 50 мм в шахтах с сетчатым ограждением.
Расстояние в свету между кабиной и противовесом во всех лифтах
назначается не менее 50 мм.
Высота шахты (без машинного помещения) определяется как
сумма трех слагаемых: глубины приямка (размер Е на эскизе к
табл. 15), высоты подъема кабины (расстояние между уровнями
крайних остановок) и расстояния от уровня верхней остановки до
потолочного перекрытия (размер Ж).
Приямки выполняются из кирпича, бетона и других
строительных материалов и предназначаются для установки в них нижних
частей металлического каркаса шахты, жестких упоров или буферов
кабины и противовеса, а также натяжных устройств ограничителя
скорости и уравновешивающих канатов.
Глубина приямка должна быть достаточной, чтобы обеспечивать
безопасность персонала, производящего осмотры и ремонт
лифтового оборудования.
При скорости движения кабины до 1 м/сек глубина приямка
принимается равной 1250 мм. Для быстроходных и скоростных лифтов
по Временным техническим условиям (ВТУ 102-48) глубина приямков
установлена до 3300 мм. Приямки глубиной до 1750 мм оборудуются
лестницами или скобами, устанавливаемыми со стороны шахтных
дверей. Более глубокие приямки снабжаются входными дверями,
открывающимися наружу и запирающимися на замки.
Расстояние от уровня верхней остановки кабины до потолочного
перекрытия шахты назначается из условий, чтобы:
1) после остановки противовеса в приямке на упоре или на
полностью сжатом буфере над кабиной еще оставалось свободное
пространство высотой не менее 600 мм;
2) при посадке кабины на упоры или на полностью сжатые буфера
над противовесом оставалось пространство высотой не менее 200 мм
в лифтах со скоростями движения кабин до 1 м/сек и не менее
600 мм — в лифтах со скоростями свыше 1 'м/сек.
Пространство до потолочного ^перекрытия шахты и приямок
необходимы также для предохранения органов подвешивания кабины
и противовеса и других их частей от поломок и повреждений при
случайном переходе кабины и противовеса за крайние верхнее или
нижнее рабочие положения.
Размеры шахт и кабин пассажирских и грузовых лифтов,
регламентированные стандартами и Временными техническими условиями
(ВТУ 102-48), приэедены в табл. 15 и 16.
ю»од
ll?
e
s
* ~ rt S
I"S§
•Htii
ft3 s to
ill
н 2 e
s^x
я ас ь»
P w -
ego
SM
о я а
?»Т) О
•о я
|Sa
So-3
HI
2 я «
Я v tt
о ж а
О П> {В
ill?
435
Islli
X g о »
& О
00 v,
i §
88SE
3SS^
tooo о So
СЛСл СЛ |_J
II I
£££>
00 О CO
o*o о
•О J=T3
£ » 2
о о
эоо to
58S
•e-5
Грузоподъемность лифта в кг
Вместимость кабины (чел.)
Скорость движения
кабины в м/сек
Глубина прия^мка в мм
Высота верхних этажей
шахты в мм
Высота помещения для
отводных блоков в мм *
- Высота подъема-^
2100
2100
Дберь
бсбету
■С <j •^—высота подъема*
Не менее
2500
2100
-Ж-
й
300
—■3500- ч
р
8
р
"О
о
•е-
00
<^1
136
Шахты, машинные помещения и направляющие
Таблица 16
Размеры шахт и кабин грузовых лифтов
Бетонировать при монтаже лифта
Назначение
лифта
Грузоподъемность
лифта в кг
От
До
Размеры шахт и кабин в плане в мм *
Буквенные обозначения по схеме
Ж
Глубина
приямка
в мм
Высота верх
него этажа
шахты в мм
И
Грузовой
250
550
500
500
1000
1000
1000
2000
2000
2000
2000
1000
1000
1500
1500
1500
1500
1500
2000
3000
3000
3000
3000
1000
1000
1500
1500
2000
2000
2000
2000
2000
2000
2500
2500
1000
1500
1500
2000
2000
2500
3000
2000
2500
3000
2500
3500
500
500
750
1600
1600
2100
2100
2600
2600
2600
2750
2750
2750
3250
3250
900
1150
1150
1200
1700
1700
2200
2200
2700
3200
2200
2700
3200
2700
3700
600
600
850
1400
1400
1900
1900
2400
2400
2400
2400
2400
2400
2900
2900
—
1350
1850
1850
2350
2350
2850
3350
2450
2950
3450
2950
3950
—
1050
1050
1450
1450
1850
1850
1850
1850
1850
1850
2250
2250
1250
Не менее
3600
Не менее
3700
Малый
грузовой
50
100
500
750
750
580
780
870
730
2500
* Размеры В, Г, Д и Е даны для глухих шахт (со сплошными стенами); для шахт с
металлическими каркасами и с ограждениями из проволочной сетки, стекла или листовой
стали размеры эти должны быть увеличены на 100 мм каждый. Числовые вертикальные
размеры для малых лифтов на схеме даны в скобках.
Направляющие кабин и противдвесов 137
§ 2. МАШИННЫЕ ПОМЕЩЕНИЯ
Стены, потолки, полы и двери машинных помещений, так же ка.к
и ограждения шахт, выполняются из огнестойких материалов в
соответствии с требованиями противопожарных норм.
Принимаемые в соответствии с этими нормами минимальные
размеры машинных помещений по ГОСТ 5746-51, ОСТ НКТМ 8798-39,
8799-39 и 8800-39 и ВТУ 102-48 приведены в табл. 17.
Полы машинных помещений рассчитываются на равномерно
распределенную нагрузку 500 кг/м2. Размеры отверстий в полах для
несущих канатов должны подбираться так, чтобы зазор между
кромкой отверстия и канатом в его крайнем рабочем положении не
превышал 50 мм; вокруг отверстий устраиваются бортики высотой не
менее 75 мм от уровня пола для предохранения от падения
случайных предметов.
Для нормальной работы смазочных устройств в машинных
помещениях должна поддерживаться температура не ниже +5° С.
Стены и перекрытия машинных помещений лифтов, установленных
в жилых домах и учреждениях, должны обладать способностью
максимально поглощать звук. Сзтой целью входы в машинные
помещения снабжаются двойными плотно закрывающимися дверями.
Для борьбы с выходом радиопомех из машинного помещения в его
стены, пол, потолок и двери закладывается заземляемая
металлическая сетка, служащая экраном.
§ 3. НАПРАВЛЯЮЩИЕ КАБИН И ПРОТИВОВЕСОВ
Направляющие предназначаются для направления движения
кабины и противовеса и служат в качестве опор для них в случае
посадки на ловители. Обычно кабины и противовесы имеют по одной
паре направляющих, но при очень больших размерах кабин число
направляющих для них может быть увеличено.
Материалами для изготовления направляющих служат дерево
и металл (сталь). Конструкции и способы крепления направляющих
показаны на фиг. 72.
Деревянные направляющие (фиг. 72, а, б, в, г)
используются преимущественно в пассажирских лифтах со скоростями
движения кабин до 1 м/сек и с небольшими высотами подъема. Они
изготовляются из древесины твердых и вязких пород (бука, реже
дуба, лиственницы, ясеня), провариваются в олифе для
предохранения от гниения. Деревянные направляющие имеют прямоугольное
сечение со сторонами прямоугольника, равными 50—70 мм. Брусья
направляющих длиной 1,5—2,5 м соединяют друг с другом встык
шипами и пазами и прикрепляют болтами к каркасу из швеллеров
(фиг. 72, а) или каких-либо других прокатных профилей.
Деревянные направляющие крепятся к элементам шахт жестко (фиг. 72, б, в)
или с помощью прижимов (фиг. 72, г). Во втором случае
обеспечивается лучшая возможность регулировки при монтаже,
Размеры машинных помещений лифтов
Таблица 17
Назначение лифта
Пассажирский (ГОСТ 5746-53)
Больничный (ОСТ НКТМ 8798-39)
Пассажирский и служебно-хозяй-
ственный
Грузовой до 1,5 т (ОСТ НКТМ
8799-39)
Грузовой от 2 до 3 т (ОСТ НКТМ
8799-39)
Грузовой малый (ОСТ НКТМ 8800-99)
Расположение машинных
помещений относительно шахт
Над шахтой (эскиз а)
Над шахтой (эскиз б)
Сбоку шахты (эскиз в)
Над шахтой
Над шахтой (эскиз а)
Сбоку шахты (эскиз в)
Над шахтой (эскиз а)
Сбоку шахты (эскиз в)
Над шахтой
Скорость
движения
кабины
в м/сек
До 1
0,5
1
1,5
2,5
3,5
До 1
. 1
- 0,5
Размеры машинных помещений
в плане в мм
А
2500
2700
3200
Б
2800
2700
2700
В
1000
1000
1000
По местным условиям с учетом
специфических особенностей
зданий и лифтов
2700
3000
2900
3200
1250
3000
2500
3400
2700
1250
1000
1000
1000
1000
-
Высота
машинных
помещений
в мм
2100
2200
2200
2500
2500
3500
3500
Не менее
1800
Не менее
1800
Не менее
800
Высота
дверных
проемов
в мм
1800
1800
1800
И!!
-
-
-
Направляющие кабин и противовесов
13д
Деревянные направляющие обеспечивают относительно
спокойное и бесшумное движение кабин, но для лифтов с большими
скоростями движения они не пригодны из-за невозможности применения
ловителей скользящего типа. Кроме того, стоимость их сравнительно
ж)
Фиг. 72. Конструкция и способы крепления направляющих:
а, б, в, г —деревянные направляющие; д, е, ж, з — направляющие уголкового профиля;
и — направляющие таврового профиля; к, л — направляющие специального профиля.
высока, а в то же время они подвержены короблению и небезопасны
в пожарном отношении. Поэтому в настоящее время деревянные
направляющие уступают место стальным.
Стальные направляющие изготовляются из различных
прокатных профилей. При малых скоростях движения кабин обычно при-
140
Шахты, машинные помещения и направляющие
меняются горячекатаные направляющие с необработанными
рабочими поверхностями (фиг. 72, д, е, ж, з, и).
Для кабин небольших размеров и малой грузоподъемности,
а также для противовесов широко применяется уголковый профиль
по фиг. 72, д, а для тяжелых кабин большой грузоподъемности —
комбинированные профили по фиг. 72, е, ж, з.
Направляющие уголкового профиля в последнем случае крепятся
к каркасу из швеллеров или других профилей болтами, заклепками
или с помощью электросварки (прерывистым швом). Отрезки
швеллеров длиной 4—6 м скрепляются между собой со стороны подошвы
стыковыми накладками на болтах. Места стыков выбираются по
возможности ближе к местам крепления направляющих в шахте.
В тех случаях, когда противовес не имеет ловителей, его
направляющие иногда изготовляются из таврового профиля (фиг. 72, з, и),
который неудобен для работы ловителей. Горячекатаные
направляющие с необработанными поверхностями не обеспечивают
плавного движения кабины и противовеса при работе с высокими
скоростями. Поэтому при скоростях движения свыше 1 м/сек
оказывается необходимым применение направляющих с тщательно
обработанными поверхностями головок. Наиболее распространены
профили, показанные на фиг.-72, /с, л, которые в настоящее время
применяются во всех типах лифтов и выбираются в зависимости от
их грузоподъемности (табл. 18).
Таблица 18
Основные размеры и вес направляющих специального профиля для кабин
и противовесов лифтов
Назначение направляющих
Для кабин
грузоподъемностью 1—3 пг
Для кабин
грузоподъемностью 0,75 пг
Для кабин
грузоподъемностью 0,25—0,5 m и
для противовесов
лифтов грузоподъемностью
1—3 пг
Для противовесов
лифтов
грузоподъемностью 0,25—0,5 пг и
для кабин малых
грузовых лифтов
№ профиля
1
2
3
4
Размеры в мм (буквенные обозначения
по фиг. 72, к)
В
130
120
90
50
ь
25
16
16
9
d
13
12
10
.7,5
е
12
10
9
6
н
ПО
90
60
50
h
63
53
37
32
Вес 1 пог. м
направляющих
в кг
33
22,7
14,8
7,0
Направляющие кабин и противовесов
141
////////////// у
Направляющие специального профиля также соединяются встык;
с накладками. Они скрепляются между собой так, чтобы на каждый
из соединяемых отрезков приходилось не менее четырех болтов.
Боковое смещение стыков предотвращается тщательно
обработанным шпунтом (на фиг. 72, к показан пунктиром). В зданиях, имеющих
металлический каркас, направляющие кабин и противовесов
крепятся в шахте к закладным частям,
заранее устанавливаемым и
привариваемым к каркасу.
Концевые участки
направляющих устанавливаются на
фундаментах приямков (фиг. 73, а) или
подвешиваются к балкам верхнего
перекрытия шахты (фиг. 73, б).
По высоте шахты
направляющие крепятся к опорным скобам
или балкам, заделанным в стенах
шахты, к горизонтальным поясам
металлических шахт и к маршам
лестниц (при установке лифтов в
лестничных клетках). Шаг
крепления а назначается обычно в
пределах 1,5—2,5 м\ в некоторых
случаях допускается увеличение
шага до 3,5 —4 м. Крепление
выполняется либо болтами, либо
прижимными планками. Последний
способ обеспечивает большие
возможности для точной выверки
положения направляющих и
потому более удобен. В высоких
шахтах, во избежание
выпучивания и искривления направляющих
вследствие температурных
воздействий и возможной осадки стен
нового здания, крепление их
осуществляется прижимными
планками. Нижние концевые участки направляющих не доводятся на
100—200 мм до фундамента и не опираются на него, верхние участки
также на 100—200 мм не доводятся до шахтного перекрытия. Таким
образом, допускается возможность небольшого перемещения
направляющих в вертикальном направлении в прижимных планках.
Такие направляющие носят название плавающих. Установка
направляющих в кирпичной шахте показана на фиг. 74.
Для спокойного, плавного и бесшумного движения кабины лифта
необходимо, чтобы направляющие были строго прямолинейны и
расположены в одной вертикальной плоскости.
-4,
Фиг 73. Схема крепления
направляющих в шахте:
а — опертая направляющая; б — подвешенная
направляющая.
142
Шахты, маШикные помещения и направляющие
Разрез по ДЙ-ВЬ
6-
Шпшмас напраОляю-
щах кабаны ZQ50-1
-1Z00—
-1150-
Отметка частого пола
I останоОка
Фиг. 74. Установка направляющих грузового лифта в кирпичной
(Q = 2000 кг, кабина 2000 X 3000 мм):
шахте
1 — опорная скоба для направляющих кабины и противовеса; 2 — опорная скоба для направляющих
кабины; 3 — стыковое крепление; 4 — направляющая кабины; 5 — направляющая противовеса.
НаправлШбщйё кабин и йротпбовёсбё 143
В лифтах со скоростями движения кабин до 0,75 м/сек
неточность установки направляющих в пределах 3 мм на каждые 4 м
высоты очень слабо ощущается пассажирами, находящимися *в
кабинах. Та же величина неточности в установке направляющих при
скоростях движения кабин свыше 1 м/сек совершенно недопустима,
так как приводит к значительному раскачиванию движущихся кабин,
вызывающему неприятные ощущения у пассажиров, к повышению
износа направляющих башмаков и разладке механизмов,
установленных на кабинах.
При скорости кабин свыше 1 м/сек допуски на установку
направляющих должны лежать в следующих пределах:
отклонение в расстоянии между головками (штихмас) + 1 мм;
отклонение в боковой плоскости + 1 мм;
поворот головки — не более 0,3 мм на ширину боковой плоскости.
ГЛАВА VIII
ЭЛЕКТРООБОРУДОВАНИЕ ЛИФТОВ
§ 1. ЭЛЕКТРОПРИВОД ЛИФТОВ
Типы электропривода лифтов и области их применения.
Большинство лифтов со скоростью кабины до 1 м/сек приводится
асинхронными электродвигателями трехфазного тока с фазовым ротором
и контактными кольцами или асинхронными двигателями с коротко-
замкнутым ротором. Двигатели с короткозамкнутым ротором в
приводе лифтов могут быть односкоростные (при скорости до 0,5—
0,7 м/сек) и двухскоростные (при скорости до 1—1,5 м/сек).
Последние применяются для повышения точности остановки кабины. Из-за
больших пусковых потерь двигатели с короткозамкнутым ротором
допускают ограниченное число включений в час. Конструктивно эти
двигатели наиболее просты и надежны. При скорости движения кабин
свыше 1,5 м/сек применяются двигатели постоянного тока с
независимым возбуждением, питаемые от отдельного генератора.
Генератор имеет регулируемое напряжение, что используется при пусках,
торможениях и регулировании скорости двигателя. Такая система
называется системой генератор — двигатель и сокращенно
обозначается Г—Д. Система Г—Д позволяет получить точную остановку
кабины при высоких рабочих скоростях. Данные о свойствах
основных систем электропривода лифтов и об их применимости в
различных случаях приведены в табл. 19.
Напряжение трехфазного тока, питающего силовые цепи
электродвигателя, обычно равно 220 или 380 в; напряжение, подводимое
к двигателям постоянного тока, обычно 220 в. Для обеспечения
наибольшей безопасности в цепях управления используется по
возможности низкое напряжение; наиболее распространены цепи
управления с напряжением 110 и 220 в, но применяются также и цепи с
напряжением порядка 24 в. При ремонтных работах для освещения рабочего
места применяется напряжение не выше 36 в. Специальным
требованием, предъявляемым к двигателям лифтов, является их
бесшумность. Бесшумность достигается применением тихоходных
двигателей и тщательной балансировкой и амортизацией. Кроме того,
двигатели рассчитываются так, чтобы по возможности устранить
магнитные шумы и шум в подшипниках. Магнитные шумы
устраняются применением соответствующей формы пазов и малым
насыщением магнитной системы.
Электропривод
145
Таблица 19
Общая характеристика основных систем электропривода лифтов
Тип двигателя
Асинхронный односко-
ростной с короткозам-
кнутым ротором
Асинхронный
двигатель с фазовым ротором
Асинхронный двухско-
ростной двигатель с
короткозамкнутым
ротором
Двигатель
постоянного тока, питаемый от
генератора с
регулируемым напряжением
(система Г-Д)
Свойства электропривода
Ограниченное число
включений в час.
Невозможность точной
остановки кабины при большой
скорости
Невозможность точной
остановки кабины при
большой скорости
Ограниченное число
включений в час.
Осуществима точная остановка
кабины
Допускается большое
число включений в час.
Осуществима точная
остановка кабины при
высокой рабочей скорости
Применяется для лифтов
Грузовых и
пассажирских со скоростью
до 0,5—0,7 м/сек
Грузовых и
пассажирских со скоростью
до 0,5—0,7 м/сек
Грузовых и
пассажирских со скоростью
до 1—1,5 м/сек
Пассажирских со
скоростью 1—1,75 м/сек
(редукторный привод)
и свыше 1,75 м/сек
(безредукторный
привод)
Конструктивно двигатели должны быть приспособлены для
сочленения с лебедкой лифта. Для этого применяются различные
конструктивные модификации — фланцевые щиты и т. д.
Как уже указывалось, асинхронные двигатели трехфазного тока
получили применение главным образом для грузовых лифтов и
пассажирских лифтов малоэтажных зданий. Преимуществом
двигателей с короткозамкнутым ротором является их конструктивная
простота, легкость эксплуатации и возможность получения двух
рабочих скоростей. Скорость вращения асинхронного двигателя
трехфазного тока (синхронная скорость вращения) не зависит от нагрузки
на валу двигателя и определяется лишь частотой сети / и числом
пар полюсов двигателя р:
60
Переключением обмотки статора или включением одной из двух
независимых обмоток можно у одного и того же двигателя с коротко-
замкнутым ротором получить две скорости вращения. Такие
двигатели называются двухскоростными и используются для получения
точной остановки кабины на этажных площадках. Механическая
характеристика двухскоростного асинхронного двигателя показана
на фиг. 75. Кривая а на этой фигуре является одновременно
механической характеристикой односкоростного двигателя с
короткозамкнутым ротором.
10 Ивашков 2598
146
Электрооборудование лифтов
Как видно из фиг. 75, асинхронный двигатель имеет довольно
жесткую характеристику, т. е. вплоть до значительных перегрузок
сравнительно мало меняет скорость вращения. Пуск двигателя
начинается под действием начального пускового момента МначУ
соответствующего скорости п = О (скольжение при этом 5=1). При
сверхсинхронной скорости п>п0, что имеет место при спуске
груженой кабины лифта, знак момента двигателя меняется и становится
отрицательным; это означает, что двигатель тормозит кабину, не давая
j
-м мя
-п
Фиг. 75. Механические характеристики асинхронных двигателей.
ей чрезмерно разогнаться. Энергия, освобождаемая при спуске
кабины, отдается в сеть, почему этот способ торможения и называется
генераторным. Тормозной момент двигателя на той же фиг. 75
обозначен Мт. Предельный тормозной момент, сверх которого
начинается режим неустойчивой работы, обозначен Afmax. Если
двигатель имеет вторую обмотку, используемую для получения скорости,
необходимой для точной остановки кабины, то при включении этой
обмотки взамен первой двигатель будет иметь синхронную скорость
п0 < я0, и механическая характеристика двигателя в этом случае
будет расположена ниже (кривая б). Необходимо обратить внимание
на то, что в момент переключения двигателя с большой скорости
на малую механизм лебедки лифта испытывает значительную
перегрузку. Если двигатель, работающий при скорости пн с нагрузкой
Мн переключить на малую скорость, то при переключении он
разовьет момент Мп (левая часть кривой б), затем, постепенно перейдя
значение момента УИтах» он опять станет развивать момент Мю
равный моменту нагрузки, но уже при меньшем числе оборотов пн%
Введением в цепь статора двигателя с короткозамкнутым ротором
Электропривод
147
сопротивлений можно ограничить величину перегрузок,
возникающих при переключении полюсов. Двигатели с фазовым ротором и
контактными кольцами сложнее других, но имеют преимущества,
из-за которых они находят значительное применение в лифтовом
электроприводе. Основным их достоинством является возможность
работать с большим числом включений в час, что очень важно для
лифтов. Введение сопротивления в цепь ротора широко
используется для двигателей лифтов, так как позволяет уменьшить пусковой
РГ
Фиг. 76. Принципиальная схема системы Г—Д.
ток, уменьшить пусковые потери и одновременно увеличить пусковой
момент. При небольшой мощности трансформатора, питающего
электроустановки жилого дома, возможность уменьшить пусковой ток
является существенным преимуществом двигателя с фазовым ротором.
Привод лифтов от системы генератор — двигатель. Двигатели
постоянного тока, а именно двигатели с независимым
возбуждением находят применение для высокоскоростных лифтов главным
образом в системах генератор — двигатель (Г—Д).
Упрощенная схема включения системы Г—Д показана на фиг. 76.
Система Г—Д состоит из электродвигателя ЭД трехфазного тока,
вращающего генератор постоянного тока Г. Регулировочным
реостатом РГ в цепи обмотки возбуждения генератора ОВГ изменяют
напряжение, подаваемое от якоря генератора на якорь
электродвигателя постоянного тока Д. Двигатель Д приводит в движение
механизм лифта. При уменьшении напряжения на генераторе
уменьшается также число оборотов двигателя при неизменном моменте
нагрузки, а наклон механических характеристик практически не
меняется. Реверсирование двигателя Д осуществляется путем
переключения возбуждения генератора переключателем Я. Пуск двига-
10"
148 Электрооборудование лифтов
теля и регулировка скорости производится регулятором
возбуждения генератора РГ. Чем больше пусковых ступеней имеет
регулятор, тем плавнее будет происходить пуск и торможение.
Практические схемы системы Г—Д значительно сложнее, так как
все указанные выше переключения осуществляются в этих схемах
автоматически при помощи специальных аппаратов — контакторов.
Пуск двигателя Д происходит без дополнительных сопротивлений
в цепи якоря и поэтому с минимальными потерями. Потребление
энергии из сети при пуске двигателя примерно в 2 раза меньше
потребления ее при реостатном пуске с добавочными сопротивлениями.
Также почти без потерь в реостатах происходит регулирование
скорости и торможение. При замедлении, которое начинается при
уменьшении напряжения генератора, двигатель вступает в генераторный
режим, отдавая энергию в сеть; двигатель ЭД в этом случае
работает как асинхронный генератор. На любой из промежуточных
характеристик двигатель Д может работать устойчиво, осуществляя
движение кабины лифта с разными скоростями. Пределы
регулирования скорости определяются минимально возможной скоростью
двигателя Д. Устойчиво, без колебаний скорости и момента
вращения, этот двигатель может работать лишь при скорости примерно
1 : 10 от номинального ее значения. Устойчивая работа с еще
меньшими скоростями (увеличение диапазона регулирования до 1 : 120)
при использовании системы Г—Д может быть достигнута с помощью
так называемой электромашинной автоматики. Электромашинная
автоматика, осуществляемая при помощи специальных электрических
машин малой мощности (электромашинные усилители, сокращенно
ЭМУ), позволяет регулировать скорости и ускорения в широких
пределах или по заданному графику, осуществлять частые пуски,
торможения перемены вращения и т. д. почти без применения
дополнительной сложной релейно-контактной аппаратуры. Именно поэтому
ЭМУ получили широкое применение в приводе высокоскоростных
лифтов, где они используются вместе с системой Г—Д, давая
большой технико-экономический эффект. Системы управления и
регулирования становятся при использовании ЭМУ более надежными, а
пуск и регулирование более плавными и быстрыми и практически
бесступенчатыми. Регулирование скорости в широких пределах
обеспечивает точность остановки кабины на этаже; бесступенчатость
разгона и замедления кабины повышает комфортабельность лифта,
устраняет неприятные ощущения пассажиров во время протекания
этих процессов. Так как основным свойством электромашинных
усилителей являются их большие коэффициенты усиления, то токи
управления при их применении становятся очень малыми и
аппаратура управления малогабаритной. Для высокоскоростных лифтов
электромашинные усилители используются как источники
возбуждения генераторов постоянного тока в системе Г—Д.
Капитальные расходы при применении системы Г—Д велики,
потому что вместо установки одного двигателя Д мощностью Рд
Аппаратура управления, защити и сигнализации 149
в этом случае требуются еще генератор мощностью Рг = —, дви-
Р ^
гатель трехфазного тока Р * = —— и возбудитель, имеющий мощ-
1 Чд^г
ность 0,1 -=- 0,15Рд. Полная стоимость системы Г—Д, учитывая
упрощение аппаратуры управления в этом случае (так как
приходится оперировать малыми мощностями), превышает стоимость
обычного одномоторного привода лифта в 2—2,5 раза.
§ 2. АППАРАТУРА УПРАВЛЕНИЯ, ЗАЩИТЫ И СИГНАЛИЗАЦИИ
Электрическая аппаратура, установленная на лифте, выполняет
функции управления, защиты и сигнализации. Во многих случаях
аппараты выполняют ряд функций, и не всегда можно отнести их
к одной определенной группе.
Управление осуществляется путем нажима кнопок или поворотом
рычажного выключателя. Эти аппараты дают команду для движения
кабины и поэтому называются командоаппаратами. Кнопки или
рычажные выключатели замыкают цепи катушек контакторов
непосредственно или через промежуточные реле. Будучи в основном
аппаратами управления, контакторы и реле являются также и
аппаратами защиты и блокировки. Эти аппараты отключают лифт при
снижении напряжения ниже нормы, при разрыве цепей управления
блокировочными контактами и защитными реле. Элементами
управления являются также этажные выключатели, отключающие с помощью
реле и контакторов двигатель при достижении кабиной заданного
этажа. Управление механическими тормозами лифта производится
при помощи тормозных магнитов или электрогидравлических
толкателей.
Защита двигателей и механизмов лифта выполняется
специальным автоматом, отключающим двигатель при перегрузках,
коротких замыканиях и при недопустимом снижении напряжения. Защита
двигателя при падении напряжения сети часто осуществляется также
электромагнитным реле и контакторами. Защита от перехода кабины
за предельные положения осуществляется специальными конечными
выключателями. В электрической схеме лифта предусматривается
ряд защитных-блокировок. Так, обеспечение невозможности
движения кабины при открытых дверях шахты или кабины осуществляется
дверными контактами. Наряду с этим дверные контакты могут
использоваться для замыкания цепей сигнализации. Контакты в цепях
управления служат также для осуществления ряда других
механических блокировок, обеспечивающих защиту лифта при
неисправностях. Такие контакты разрывают цепи управления двигателя при
ослаблении каната, при превышении скорости движения кабины и т.д.
Подробное описание их действия дается ниже.
Сигнализация о положении кабины обычно выполняется при
помощи сигнальных ламп, цепи которых замыкаются названными выше
контактами, реле и контакторами.
150 Электрооборудование лифтов
Контакторы служат для управления двигателями лифтов.
Применение этого вида аппаратуры обеспечивает надежную работу при
большом числе включений двигателя в час и дает возможность
осуществить необходимое в лифтах дистанционное управление из кабины
и с этажных площадок. Основным назначением контакторов в схеме
лифта является включение двигателя в направлении вверх и вниз,
для чего служат отдельные контакторы. Контактор представляет
собой аппарат, включая или выключая катушку которого можно
управлять контактами, замыкающими и размыкающими цепи обмоток
двигателей и цепи управления. Мощность, необходимая для цепей
управления, для питания катушек магнитов, незначительна по
сравнению с мощностью силовых цепей. Последнее очень важно при
дистанционном управлении приводом из многих мест, как это имеет
место в лифтах. Контакты, разомкнутые при обесточенной катушке,
называются нормально-открытыми (н. о.); контакты, замкнутые при
обесточенной катушке, называются нормально-закрытыми (н.# з.).
В одном контакторе может быть несколько силовых и
вспомогательных контактов. Вспомогательные контакты, используемые чаще всего
для целей блокировки, называются блок-контактами. При включении
контакторов с магнитной системой переменного тока возникают
значительные токи и сильные удары по набранному из листов магнито-
проводу, что уменьшает их срок службы при значительном числе
включений. Поэтому в лифтах находят применение магнитные системы
постоянного тока даже тогда, когда силовые контакты включены
в цепи трехфазного тока.
Реле представляет собой автоматический аппарат, включающий
или выключающий электрические цепи управления под воздействием
электрических, механических, тепловых и иных импульсов. В
электроприводе лифтов реле применяется для управления процессами
пуска, торможения, реверсирования, для защиты от перегрузок,
недопустимых изменений напряжения, для осуществления
автоматического управления и блокировок. Наибольшее распространение
в электроприводе лифтов имеют различные электромагнитные реле.
Электромагнитные реле действуют или мгновенно, или с выдержкой
времени. Последняя осуществляется в лифте чаще всего при помощи
электромагнитного демпфера. Катушки реле могут включаться
в цепь либо параллельно (шунтовые реле), либо последовательно
(сериесные). Электромагнитные реле с параллельным включением
катушек отличаются от небольшого контактора тем, что они имеют
только контакты вспомогательного тока. Такое реле может иметь
от одной пары до нескольких пар контактов; контакты могут быть
нормально-закрытыми и нормально-открытыми. В автоматических
лифтовых схемах в последние годы находят применение так
называемые слаботочные аппараты — миниатюрные телефонные, кодовые
и другие электромагнитные реле. Эти аппараты работают достаточно
надежно в высокоскоростных лифтах. Они питаются от
низковольтных источников постоянного тока (сухие выпрямители и т. д.)т При-
Аппаратура управления, защиты и сигнализации 151
мером таких реле, имеющих небольшие размеры и получивших
широкое применение в лифтах, являются реле типа МКУ-48,
работающие в цепях постоянного и переменного тока. Шунтовые реле
используются чаще всего как реле нулевого или минимального
напряжения и как промежуточные реле. В первом случае реле отключают
вспомогательные цепи электропривода лифта и не позволяют
включить их при отсутствии напряжения в сети или при очень малой его
величине. Во втором случае замыкание какой-либо вспомогательной
цепи (например, дверным контактом и т. п.) вызывает включение
катушки реле. Реле производит замыкание или размыкание ряда цепей,
что обеспечивается большим числом н. о. и н. з. контактов,
содержащихся в нем. Электромагнитные реле с последовательным
соединением катушек используются как защитные реле максимального тока;
для этого их катушки включаются последовательно с обмоткой якоря
двигателя постоянного тока с или двумя фазами двигателя
трехфазного тока. Наряду с плавкими предохранителями они служат также
для защиты лифтовых электроприводов от коротких замыканий и
других значительных перегрузок недопустимыми по величине токами.
Такое реле, называемое максимальным, будучи включено в две фазы
статора, может защитить двигатель от токов короткого замыкания
и от значительных перегрузок. При перегрузке током хотя бы одной
из двух его катушек происходит разрыв в цепи катушки контактора,
питающего двигатель. Такая защита двигателя от больших токов не
ограждает полностью механизмы лифта от механических перегрузок.
Защитить двигатель с короткозамкнутым ротором с помощью
максимального реле трудно, реле будет выключать двигатель при пусках.
Для того чтобы обеспечить правильную работу автоматических
схем лифтов, необходимо осуществить срабатывание отдельных
аппаратов в нужной последовательности и с соблюдением нужных
интервалов времени. Необходимость в такой работе возникает при пуске
двигателей с контактными кольцами, для работы механизмов дверей
в полностью автоматизированных лифтах и т. д. Для этой цели
служат реле времени. Для лифтов применяются главным образом
электромагнитные и механические реле времени. Принцип действия реле
времени постоянного тока основан на том, что величина тока при
закорачивании катушки реле падает в ней не сразу. Пока ток,
протекающий по катушке, способен удержать якорь электромагнита,
контакты реле остаются в неизменном положении, и только когда
он уменьшится настолько, что якорь отпадает, реле переключит свои
контакты. Время, прошедшее от начала процесса (замыкание
накоротко катушки реле) до переключения контакта реле, называется
выдержкой времени. Электромагнитные реле позволяют регулировать
выдержку времени в пределах от0,2 до 5сек. Регулирование выдержки
электромагнитного реле времени производится двумя путями —
изменением толщины немагнитной прокладки между якорем и
сердечником и натяжением пружины, открывающей якорь при уменьшении
магнитного потока. Чем тоньше прокладка, тем дольше магнитный
152 Электрооборудование лифтов
поток сохраняет значение, достаточное для преодоления действия
пружины, и тем дольше якорь будет удержан в притянутом
состоянии, т. е. тем больше время выдержки. При толстой прокладке
магнитный поток уменьшится и, следовательно, якорь оторвется раньше,
т. е. выдержка времени будет небольшой.
Точно так же при сильно затянутой пружине якорь оторвется
при прочих равных условиях раньше, чем при менее затянутой
пружине.
Недостатком электромагнитных реле времени является то, что
они могут работать лишь в цепях постоянного тока.
Механические реле времени (мятниковые, махо-
вичковые и др.) могут работать как при постоянном, так и при
переменном токе, но применяются главным образом при переменном
токе, при котором не могут работать электромагнитные реле времени.
Наибольшее распространение получило маятниковое реле,
приводимое в действие или непосредственно поворотом вала контактора, или
специальным соленоидом. Действие маятникового реле основано на
том, что скорость движения рейки, замыкающей или размыкающей
контакты реле, ограничивается движением маятника, имеющего
определенный период колебаний. Изменяя длину маятника
(перемещая грузик), регулируют выдержку времени от 1 до 10 сек. Кроме
того, в лифтах встречаются маховичковые реле времени, которые дают
выдержку времени обычно лишь в пределах от 0,5 до 1 сек., и реле
времени, основанные на использовании воздушных демпферов.
В качестве устройства, обеспечивающего безопасность в лифтах
и эскалаторах, служат реле скорости и контроля направления
вращения.
Обычно эти реле изготовляются по типу центробежного
регулятора или в виде тахометрического генератора с постоянными
магнитами. Напряжение такого генератора зависит от скорости
вращения его якоря. В качестве устройства, обеспечивающего
безопасность работы механизмов, чаще служат реле, основанные на
центробежном принципе, как более надежные. Более точными являются
махометрические реле (точность ± 1 % при пределах регулирования
от 400 до 2000 об/мин).
Панель управления. Для выполнения всех команд (приказов)
из кабины и этажных площадок служат контакторы и реле,
смонтированные обычно на одной общей панели, устанавливаемой в
машинном помещении лифта. Такая панель, предназначенная для
пассажирского лифта на 12 остановок, показана на фиг. 77. В нижней части
панели смонтированы контакторы для движения вверх (В) и вниз (Я),
контакторы для переключения двигателя на большую (Б) и малую (М)
скорости. Выше, на второй половине панели, смонтированы плавкие
предохранители (/Я, 2П и т. д.), электромагнитные реле (РТО, РВП
и т. д.) и защитный автомат (1А).
В верхней части панели размещаются малогабаритные реле
автоматики (например, типа МКУ-48) в защитных кожухах,
Аппаратура управления, защиты и сигнализации
153
о
-195-
Фиг. 77. Панель контакторно-релейнои аппаратуры"*"fпанель управления).
154
Электрооборудование лифтов
Кнопки управления. Для управления лифтами служат кнопки
управления, воздействующие на цепи катушек реле и контакторов.
Кнопки выполняются нормально-открытыми или
нормально-закрытыми одно- и многоцепными (действующие на несколько
электрических цепей). Для управления лифтами кнопки собираются в панели
Фиг. 78. Кнопочная станция (панель лифтера).
(кнопочные станции, посты управления). На фиг. 78 показана панель
лифтера (в кабине), состоящая из восьми кнопок. В зависимости от
назначения около кнопок делаются соответствующие надписи. В
нижней части чертежа панели (справа) показано электромагнитное
устройство, по принципу действия напоминающее электромагнитное реле.
Аппаратура управления, защиты и сигнализации
155
служащее для удержания кнопок во втянутом состоянии, пока
включен магнит («залипание» кнопок).
На фиг. 79 показана конструкция рычажного аппарата для
управления грузовыми лифтами, применяемого вместо кнопок.
Конечные выключатели. Для остановки в рабочих положениях
служат этажные выключатели или заменяющие их аппараты, но если
Фиг. 79. Рычажный аппарат управления.
эти аппараты из-за неисправности не отключают двигатель, то
при переходе кабиной верхней и нижней этажных площадок
дальнейшее движение ее может вызвать аварию. Для ограничения хода
кабины применяются конечные выключатели, на которые действует
кабина или непосредственно, или через механическую связь. Такая
механическая связь обычно осуществляется канатиком, натянутым
вдоль шахты и воздействующим на рычаг конечного выключателя,
расположенного в машинном помещении. При переходе кабиной
предельных положений она с помощью рычагов изменяет натяжение
канатика, что вызывает поворот рычага конечного выключателя и
разрыв электрических цепей двигателя.
Применяются конечные выключатели главного или
вспомогательного тока. Первые разрывают силовые цепи двигателя (все три или,
реже, два провода при трехфазном токе), что является наиболее
надежным способом остановки двигателя; вторые разрывают цепь
управления контакторной аппаратуры (питание катушки реле),
156
Электрооборудование лифтов
что, конечно, осуществить гораздо проще (разрывается одна
маломощная цепь). Конечные выключатели используются не только для
ограничения хода кабины, но во многих других случаях. В частности,
конечные выключатели используются как контактные устройства,
разрывающие цепь тока управления при действии ловителя,
ограничителя скорости, как устройства для контроля слабины канатов,
Фиг. 80. Конечный выключатель вспомогательного тока.
в качестве контакта магнитной отводки, как подпольные контакты
и т. д.
Устройство небольшого конечного выключателя
вспомогательного тока показано на фиг. 80. После отклонения рычага под
действием пружины мгновенно происходит переключение цепей (разрыв
или замыкание контактного мостика). Выключатель обычно позволяет
производить различную настройку рычагов и контактных мостиков.
В качестве ограничителей хода кабины и часто для остановки ее на
нужных этажах служат путевые (этажные) выключатели (фиг. 81).
Этажные выключатели устанавливаются в шахте и переключаются
специальной фасонной отводкой, устанавливаемой на кабине и воз-
Аппаратура управления, защиты и сигнализации
157
действующей на обрезиненный ролик (показан в нижней части
чертежа). Этажный выключатель снабжен поворачивающимся рычагом
и может иметь несколько н. о. и н. з. цепей, используемых в схеме
электрических соединений лифта. Простейший малогабаритный
конечный выключатель с одним н. о. и одним н. з. контактным мости-
П
Фиг. 81. Путевой (этажный) выключатель:
Л — левое положение; С — среднее положение; П — правое положение.
ком показан на фиг. 82. Такой выключатель используется как
устройство, воздействующее на электрические цепи (например, подпольный
контакт, замыкающийся при заполнении кабины, контакты
магнитных отводок и т. д.).
Дверные контакты. Для того чтобы предотвратить движение
кабины при открытых или неполностью закрытых дверях шахты и
кабины, все шахтные и кабинные двери снабжаются блокировочными
контактами, включаемыми в цепь управления (одинарные для одно-
15Й
Электрооборудование лифтов
створчатых и сдвоенные для двустворчатых дверей). Дверные
контакты представляют собой небольшие конечные выключатели.
Устройство простейшего одинарного дверного контакта показано на фиг. 83.
В его корпусе укреплена изоляционная планка 2 с медными лапками 3
и клеммами 4 (для подключения проводов). Между контактными
лапками находится штырь 5 с втулкой 6 из изолирующего материала
и пружиной 1. На втулке укреплено латунное кольцо 7. При откры-
Фиг. 82. Малогабаритный
конечный выключатель.
Фиг. 83. Одинарный дверной контакт.
тых дверях пружина выводит кольцо 7 из соприкосновения с
лапками 3 и разрывает цепь управления. При закрывании дверей штырь
преодолевает действие пружины, вдвигается внутрь корпуса дверного
контакта, кольцо 7 соприкасается с контактными лапками, и цепь
управления замыкается. Внешний вид дверного контакта с одним
н. з. и одним н. о. контактом показан на фиг. 84.
В современных лифтовых схемах блокировочные выключатели
дверей предназначаются не только для включения в цепи,
контролирующей открытие или закрытие дверей шахты, а также для
фиксации прибытия кабины лифта на этаж. Блокировочный выключатель
замка шахтных дверей устанавливается в шахте лифта совместно
с механической частью замка шахтных дверей. Он имеет две
контактные группы. На контакты первой группы воздействует личинка замка
шахтных дверей, а контакты второй группы связаны с механизмом
защелки замка, отодвигание которой осуществляется отводкой
кабины. Переключение контактов первой группы производится при
Аппаратура управления, защиты и сигнализации
159
закрывании двери шахты или при открывании ее путем ручного
воздействия на замок. Переключение контактов второй группы
осуществляется переводом рычага блокировочного выключателя из
правого положения в левое под действием отводки кабины. В ряде
конструкций замки дверей устроены таким образом, что их можно
открыть лишь при обесточенном специальном небольшом
электромагните замка и выдвинутом упоре.
Ряд электросхем лифтов
осуществлен с применением так
называемой магнитной отводки.
После остановки кабины
отводка своим выступом упирается
в замок шахтной двери
соответствующего этажа, что
позволяет открыть ее. Устройство
магнитной отводки
(конструкции треста «Союзлифт»)
показано на фиг. 85. Основными
частями магнитной отводки
является магнит 1 постоянного
тока и пружина 2,
воздействующая на собственно отводку 3.
При включении магнита якорь
его втягивается и, преодолевая
действие пружины, подтягивает
отводку; при отключении
магнита отводка выталкивается
пружиной.
Копир-аппараты. Вместо
установки путевых (этажных)
выключателей на этажах для
остановки двигателя в нужном
месте и для переключения его
на малую скорость иногда
применяются так называемые
копир-аппараты (механические
аппарат (фиг. 86) состоит из
Фиг. 84. Сдвоенный дверной контакт.
селекторы). Простейший копир-
неподвижных контактов /(/, К2,
/СЗ,..., расположенных на изоляционной рейке, и подвижных
контактов K'J, К'2, /('3,... Подвижные контакты изолированы от оси О
втулками В. Блок Б через тросик жестко связан с кабиной. В
зависимости от положения кабины в шахте замыкаются и размыкаются
контактные мостики и управляют переключением двигателя с полной
скорости на малую скорость и остановкой его. Для осуществления
точной остановки необходимо, чтобы переключение двигателя
производилось за несколько сот миллиметров до подхода к уровню этажной
площадки. Чтобы устранить влияние на точность работы селектора
проскальзывания тросика по блоку Б, предусмотрено корректирую-
160
Электрооборудование лифтоб
щее устройство, состоящее из электромагнита и двух упоров У
и У (на блоке Б). Вверху и внизу шахты имеются путевые
выключатели, отключающие магнит при переходе кабиной определенных
положений, чтобы с помощью упоров подтормозить блок Б и ось О.
Таким образом, происходит постоянное корректирование,
устраняющее неизбежное при таком устройстве разрегулирование схемы.
Индуктивные выключатели. При значительной скорости кабины
непосредственное воздействие кабины на этажные выключатели
Фиг. 85. Магнитная отводка.
становится непригодным (увеличивается шум при срабатывании
выключателей, возникают удары и т. д.). Поэтому для таких лифтов
вместо этажных выключателей используются более сложные, чем
описанные выше, механические селекторы, а также релейные селекторы.
Действие селектора сводится к замыканию и размыканию ряда
электрических цепей при помощи выключателей, различающихся по
принципу действия и по конструкции. Важнейшей частью
выключателя является датчик, дающий импульс для замыкания и
размыкания контактных мостиков выключателя.
Чаще всего применяются датчики, основанные на изменении
индуктивного сопротивления катушкн (индуктивные датчики), и
Аппаратура управления, защиты и Сигнализации 161
электронные датчики с колебательным контуром, действующие при
внесении в колебательный контур электронной лампы стальной скобы.
Конструкция индуктивного датчика, получившего широкое
применение для лифтов высотных зданий, показана на фиг. 87.
Индуктивный датчик
представляет собой
индуктивную катушку с малым
индуктивным
сопротивлением,
магнитная система которой
обычно разомкнута.
Замыкание
магнитной системы
происходит в момент
прохождения стальной пла- Фиг. 86. Копир-аппарат,
стины мимо датчика,
в результате чего индуктивное сопротивление катушки
увеличивается; когда магнитная система датчика разомкнута, реле включено;
i
Фиг. 87. Индуктивный датчик.
/ — магнитопровод; 2 — катушка; 3 — стальная пластина.
когда стальная пластина замыкает магнитную систему датчика,
реле отключается. Датчик включается последовательно с катушкой
реле (например, типа МКУ-48) на напряжение сети переменного
тока. К индуктивным датчикам могут предъявляться различные
11 Ивашков 2598
162 Электрооборудование лифтов
требования. Для них нормируются рабочие воздушные зазоры
между стальной пластинкой и магнитной системой датчика
(например, не менее 10 мм); толщина стальной пластины, от которой
работает датчик, должна быть не больше нескольких миллиметров; на
работу индуктивного датчика не должны влиять стальные массы,
находящиеся от датчика на расстоянии нескольких десятков
миллиметров, и т. д. Работа индукционного выключателя, частью
которого является датчик, должна оставаться надежной при колебаниях
напряжения питающей сети на + 10 и —20%. Потребляемая
мощность обычно не превышает 10—20 em.
Для автоматического замедления и точной остановки кабины на
этажах применяются индуктивные датчики, укрепляемые на кабине.
Устанавливаются один датчик замедления и два датчика для точной
остановки. В шахте лифта устанавливаются индуктивные датчики,
служащие для фиксации положения кабины. Такие датчики
называются датчиками селекции и устанавливаются по одному на каждом
этаже. При большом числе этажей часто некоторые лифты имеют
зоны безостановочного движения кабины. В этих случаях в начале
и в конце зоны безостановочного движения устанавливаются
датчики фиксации положения кабины. Если схема автоматического
замедления кабины по каким-либо причинам откажет в работе, то
действуют индуктивные датчики, устанавливаемые по одному на нижнем
и верхнем этажах здания. В шахте лифта устанавливаются стальные
скобы, воздействующие на индуктивные датчики, расположенные
на кабине лифта.
Тормозные электромагниты. Для управления тормозами
механизмов лифтов обычно служат тормозные электромагниты.
Применяются трехфазные и однофазные магниты и магниты постоянного
тока. Трехфазные магниты в зависимости от рабочего напряжения сети
включаются в звезду или в треугольник, так же как и обмотки
двигателей трехфазного тока. Основными техническими данными
магнита являются: рабочее напряжение и относительная
продолжительность включения катушки, ход (или угол поворота), тяговое усилие
(или момент) якоря и допустимое число включений магнита.
Трехфазные электромагниты (типа КМТ) имеют Ш-образную магнитную
систему и поступательное движение якоря; ход якоря составляет 30—
60 мм, что дает основание называть их длинноходовыми. Ход
однофазных магнитов, как правило, меньше хода трехфазных магнитов,
и якорь магнита поворачивается относительно сердечника с катушкой
на некоторый угол ос. Однофазные магниты типа МОБ, наиболее
распространенных габаритов, предназначаются для тормозов с диаметром
шкива 100, 200 и 300 мм при тормозном моменте магнита до 1000 кгсм
(при ПВ = 40%). Изготовляются эти магниты для напряжений сети
220, 380 и 500 в. Момент магнита соответствует напряжению сети не
меньше 0,85 от номинального значения. Допускается число
включений однофазных магнитов не больше 300 в час при ПВ=40% и не
больше 20 в час при ПВ = 100%. Так как однофазные магниты не
Электросхемы управления лифтами 163
допускают большого числа включений, то во многих случаях
они заменяются электрогидравлическими толкателями или
магнитами постоянного тока, питаемыми через выпрямители или от других
источников постоянного тока. В электроприводе лифтов применяют
тормозные магниты постоянного тока типа МП. Эти короткоходовые
магниты с небольшим ходом якоря работают очень надежно и лишены
многих недостатков, свойственных магнитам переменного тока.
Осветительная, сигнальная и вспомогательная аппаратура. Для
освещения кабин чаще всего применяются потолочные плафоны.
Сигнализация положения кабины и сигналы на постах управления
осуществляются световыми табло, звонками (безыскровыми),
нумераторами или различными механическими приспособлениями со
стрелочными указателями. Для выполнения различных соединений
проводов и кабелей служат штепсели и розетки. Переключения,
необходимые для изменения схемы лифта (нормальная работа, ревизия),
выполняются переключателями управления и небольшими
выключателями различных типов.
Для питания аппаратуры управления и тормозных магнитов
постоянного тока обычно используются селеновые выпрямители.
Такие выпрямители выполняются в виде столбиков и вспомогательных
аппаратов, смонтированных в общем кожухе.
§ 3. ЭЛЕКТРОСХЕМЫ УПРАВЛЕНИЯ ЛИФТАМИ
Общие сведения. Электрические схемы используются при монтаже
и ремонте электрооборудования лифтов, устранении неисправностей,
а также для уяснения принципа действия отдельных элементов
электрооборудования, устройств безопасности и т. д. Различают монтажные
и принципальные схемы. Первые служат для монтажных и ремотных
работ. В них по возможности выдерживается относительное
расположение отдельных частей электрооборудования на панелях, в шахте,
в кабине и т. д. Принципиальные схемы, как правило, выполняются
в виде так называемых разверток. В них взаимное расположение
электрооборудования не учитывается, и элементы одного и того же
аппарата, если этого требуют простота и наглядность, могут быть
показаны в различных частях схемы.
Всякая принципиальная электрическая схема лифта может быть
разделена на две части: схему силовых цепей, показывающую
включение обмоток двигателя и силовой аппаратуры, и схему цепей
управления и сигнализации. Как на принципиальных, так и на монтажных
схемах силовые цепи изображаются более толстыми линиями. При
составлении схем используются нормализованные условные
обозначения. Электрические схемы лифтов могут быть разбиты на несколько
групп как по выполнению силовых цепей, так и по системам
управления.
Силовые цепи наиболее распространенных типов лифтов
в зависимости от принятой системы привода следует разбить на
11*
164 Электрооборудование лифтов
группы, соответствующие включению следующих двигателей: одно-
скоростного двигателя трехфазного тока с короткозамкнутым
ротором; двухскоростного двигателя с короткозамкнутым ротором;
двигателя трехфазного тока с фазовым ротором; двигателя
постоянного тока, входящего в систему Г — Д. При использовании для
точной остановки так называемого микропривода в схеме лифта имеются
силовые цепи двух двигателей. Во всех случаях силовые цепи лифтов
предусматривают реверсирование двигателей (движение вверх и вниз).
Цепи управления лифтов выполняются различно. При
простейшем рычажном управлении с автоматической остановкой кабины
в последней устанавливается рычажный выключатель, поворотом
которого осуществляется ее пуск. Остановка кабины происходит под
действием конечных выключателей, смонтированных на кабине
и управляемых кулачками в шахте (на каждом этаже). При
индивидуальном кнопочном управлении кабина может быть вызвана
нажатием кнопок у каждого места посадки (в простейших системах
лишь с нижнего этажа) и направлена на тот или иной этаж нажатием
кнопки внутри кабины. Ее остановка осуществляется этажными
выключателями. При индивидуальном кнопочном управлении
кабина может проходить, не останавливаясь на промежуточных этажах.
Собирательное управление для лифтов высотных зданий позволяет
собирать вызовы, сделанные кнопками из кабины и с этажных
площадок; вызовы в порядке последовательности этажей выполняются
кабиной. При остановке кабины сначала забираются пассажиры,
сделавшие вызовы в направлении движения кабины, а вызовы в
противоположном направлении остаются зарегистрированными и
удовлетворяются на обратном пути. При входе в кабину пассажиры
сообщают проводнику нужный этаж и он нажимает кнопки, поворачивает
пусковую рукоятку; двери кабины и шахты при этом автоматически
закрываются и двигатель пускается. Если дан заказ на остановку на
промежуточном этаже по пути кабины, то на нем произойдут
автоматически остановка кабины и открытие дверей. Остановка не
зависит от проводника, но он может, нажав специальную кнопку,
отменить требование на остановку, если кабина заполнена, а заказ
может быть выполнен соседним лифтом, работающим в том же
направлении. При приближении кабины к остановке над дверью шахты
загорается сигнал, показывающий, какая кабина из данной группы
лифтов останавливается, и направление ее движения. При подходе
к этажу кабина продолжает двигаться с пониженной скоростью до
подхода к заданному уровню; в тех случаях, когда кабина переходит
заданный уровень остановки, двигатель автоматически реверсируется
и отклонение от заданного уровня автоматически выравнивается.
Для этого применяются индукционные концевые выключатели на
корпусе кабины или в шахте. Действие выключателя вызывается
изменением магнитной проницаемости сердечника при прохождении
между его полосами стальных пластин, укрепленных на шахте
перед каждой остановкой на этаже.
Электросхемы управления лифтами 165
Силовые цепи электрических схем лифтов. Для того чтобы не
повторять в различных случаях описание работы силовой
аппаратуры, разберем силовые схемы лифтов отдельно.
Схема включения асинхронного односкоростного короткозамк-
нутого двигателя показана на фиг. 88. Через вводное устройство ВУ,
содержащее трехполюсный рубильник IP, устройство для подавления
радиопомех РП и установочный защитный автомат А питание
подается к двигателю лифта АД и к тормозному магниту ТМ (или
двигателю электрогидравлического толкателя). Реверсивность
управления обеспечивается контакторами В (вверх) и Я (вниз),
переключающими чередование фаз, подводимых к обмоткам двигателя.
Лампы 1ЛС и 2ЛСУ включенные последовательно с добавочными
сопротивлениями, сигнализируют о наличии напряжения.
На фиг. 89 показано включение асинхронного двускоростного
короткозамкнутого двигателя. От предыдущей эта схема отличается
тем, что двигатель АД имеет две независимые обмотки статора, одна
из которых обеспечивает вращение с большой скоростью и включается
контактором Б, а другая обеспечивает вращение с малой скоростью
и включается контактором М.
На фиг. 90 приведена схема силовых цепей двигателя с
контактными кольцами. По этой схеме обмотки статора двигателя АД
подключаются к сети трехфазного тока через рубильник Р, плавкие
предохранители Я, двухполюсный конечный выключатель KB
и контакторы В (вверх) или Н (вниз). Вместо рубильника Р и
предохранителей П могут использоваться вводное устройство и
установочный автомат. Конечный выключатель KB может отсутствовать,
если конечное ограничение осуществляется на вспомогательном токе.
Выведение пусковых сопротивлений ПР производится автоматически
контакторами /У, 2У и ЗУ, катушки которых выключаются при
помощи реле времени.
Схема рычажного управления грузовым лифтом с проводником
(фиг. 91).
Схема предусматривает работу с односкоростным к. з. двигателем.
Возможны три режима: нормальная работа, ревизия лифта и
отключение лифта. При ревизии вызывные кнопки отключаются. Схема
управления подключается к фазам Л1, Л2 к нулевому приводу Л0
и к перЁой фазе после автомата (ЛИ). Управление кабиной
производится проводником при помощи рычажного аппарата из кабины
лифта. Этот аппарат имеет два положения рукоятки, кроме среднего
(нулевого) положения. В среднем (нулевом) положении рукоятки
аппарата электродвигатель отключен от сети и заторможен
механическим тормозом. Два других положения аппарата отвечают двум
направлениям движения — вверх и вниз. В положении вверх замкнут
контакт КК-1 ,в положении вниз — контакт КК-2 и в среднем
положении — контакт КК-0.
Для движения кабины вверх производится поворот рукоятки
рычажного аппарата по направлению стрелки «Вверх» в крайнее
166
Электрооборудование лифтов
Фиг. 88. Силовая цепь лифта с асинхронным односкоростным двигателем.
ВУ
"I _
ли
Фиг. 89. Силовые цепи лифта с асинхронным двухскоростным двигателем.
Электросхемы управления лифтами
167
положение. При этом включается контактор В, получает питание
электродвигатель лифта, открывается механический тормоз и
начинается движение вверх.
Контактор В может включиться в том случае, если в цепи его
катушки будет замкнут контакт реле контроля дверей РКД. Это реле
осуществляет контроль за состоянием блокировочных контактов
дверей шахты и блокировочных выключателей, ограничителя скорости
ОС, выключателей приямка ВП, дверей кабины ДК, дверей шахты
ДШ, выключателя слабины каната ограничителя скорости СКОС,
выключателей ловителей ЛК и слабины подъемных канатов СПК. Реле
ЗУ 2У 1У
Фиг. 90. Силовые цепи лифта с асинхронным двигателем
с контактными кольцами.
срабатывает в том случае, когда замкнуты контакты перечисленных
блокировочных выключателей и закрыты все двери шахты. Остановка
лифта осуществляется переводом рукоятки рычажного аппарата в
среднее (нулевое) положение. При этом цепь К К-1 разрывается, и
катушка контактора В обесточивается, что приводит к отключению
электродвигателя от сети и наложению тормоза. Для движения кабины
лифта вниз проводник переводит рукоятку в крайнее положение по
направлению стрелки «Вниз», что вызывает замыкание
контактов КК-2 и размыкание контактов КК-0.
Последовательность действия аппаратуры аналогична
приведенному для движения вверх, но в этом случае будет работать
контактор Н, а не контактор В. На крайних этажах схемой предусмотрено
отключение электродвигателя, если проводник не отпустил рукоятку
в среднее положение. Для этого на крайних этажах устанавливаются;
механические отводки, воздействующие на хвостовик рычажного
аппарата и принудительно переводящие контактную систему в
среднее положение.
Для вызова кабины на этажи служит сигнальный вызов, для чего
на этажах устанавливаются вызывные кнопки с удерживающими
электромагнитами, а в кабине — световое табло. Электромагниты
кнопок питаются от селенового выпрямителя ВС, а сигнальные
лампы — пониженным напряжением от трансформатора ТС. Вызов
подается нажатием на этажную кнопку. При этом кнопка залипает
и зажигает сигнальную лампу. Например* при нажатии кнопки ЗКВ
загорается лампа ЗЛС. Получив световой сигнал, проводник
направляет кабину на тот этаж, откуда он получен. Отпадение вызывной
168
Электрооборудование лифтов
/7/
/у/
/1
ло
1П
%
IP1
о
ЛР-1
и.
Освещение кабины
СП К Л К ДК
4//
IJ/7
/7/4?
вп
Ародъем"
*"9 н
В РКД BAB BAN
КК-2 ^ В
L-5o '
2KB ЗПЗ
Д
г-Л/WV4*
105
me 1K£
-^/W- 9 ^>-
1ДШ 2
-S3
2ДШ-2
^vw-—? o-
a-—i
-A/WVW
1ШР
-в-
1ЛС
2ЛС
1:
-в-п
/v/7
Резервное осдещеиие
Фиг. 91. Схема рычажного управления грузовым лифтом с проводником.
Электросхемы управления лифтами 169
кнопки происходит после прибытия кабины на этаж и открытия двери
шахты, вследствие шунтирования электромагнита кнопки
блок-контактом дверей шахты, замкнутым при открытой шахтной"двери.
Вызывные кнопки в режиме ревизии отключаются переключателем ПР-2
или выключателем ВМП.
Сигнал о вызыве дублируется звуковой сигнализацией,
действующей, короткое время, которое определяется выдержкой времени
реле 1РВ.
Схемой предусматривается выравнивание пола кабины и уровня
пола этажной площадки, что осуществляется путем
кратковременных включений электродвигателя. Выравнивание осуществляется
лишь в случае действительной необходимости поставить кабину более
точно, например, если в кабину вкапывается тележка с грузом.
Так как ревизию шахты, как правило, осуществляют, находясь
на крыше кабины, то для управления в этом случае предусматривается
кнопочный пост, подключаемый к цепи управления через специальный
штепсельный разъем ШР\ на штепсельной колодке вынимается
штепсельная вставка, создающая в схеме перемычки для нормальной
работы, и вставляется штепсельная вставка, соединенная с кнопочным
постом.
Автоматическое отключение приводного электродвигателя и
наложение механического тормоза происходит при ручном
воздействии на рубильник вводного устройства ВУ, при отключении
автоматического выключателя А под действием максимально-тепловой
защиты или вследствие ручного воздействия на механизм отключения,
при исчезновении напряжения в сети переменного тока, при возврате
рукоятки рычажного аппарата в среднее положение. Отключение
двигателя и наложение тормоза происходит также при действии
следующих блокировочных и защитных устройств: при размыкании
контактов конечных выключателей ВКВ или ВКН при
выравнивании кабины; при действии ограничителя скорости, когда размыкается
контакт ОС; при срабатывании ловителей кабины, когда размыкается
контакт выключателя Л/С; при ослаблении и обрыве каната
ограничителя скорости, когда размыкается контакт выключателя СКОС;
при ослаблении или обрыве одного из подъемных канатов, когда
размыкается контакт выключателя СПК\ при воздействии на
автоматический выключатель ВП (в приямке); при открывании во время
движения дверей кабины или шахтной двери.
Схемы кнопочного управления грузовыми лифтами. Для
управления грузовыми лифтами, кроме рычажных аппаратов, используются
также кнопки. Кнопочное управление встречается двух видов —
в н утре ннее и наружное. При внутреннем управлении
кнопки заменяют собой рычажный аппарат, при наружном
управлении кабина направляется на любой этаж по сигнальному вызову
из поста управления, находящегося вне ее.
Схема внутреннего кнопочного управления грузовым лифтом с
проводником приведена на фиг. 92. Пуск электродвигателя лифта вы*
170
Электрооборудование лифтов
II
X
ч
X
1
X
X
1
X
X
1
X
ПР-3
X
1
1
X
1
X
ПР-5
^х
гх"
XX
"X
ШР
PHP
в\ н\ рс
ЛЛ/v 1
//# t
/>У£
A*//?
/^4 2KB \MA 3Kb \ЗСД ЦКВ \^СД 5HB \5СД 6КВ \6СЛ
'I Z^Z^-г] i^Z^-Zl- ^MhZ\ 5&ШЛ 6ДШ-г\
1KB
Фиг. 92. Схема внутреннего кнопочного
управления грузовым лифтом (контакты этажного
переключателя в схеме показаны для случая, когда
, кабина находится на нижнем этаже).
172 Электрооборудование лифтов
полняется нажатием кнопки, соответствующей тому этажу, на
который вызывается кабина; движение начинается в том случае, если
закрыты двери кабины и шахты и нет неисправностей в цепи
блокировочных контактов; в этом случае реле РН включается. Выбор
направления движения происходит автоматически в зависимости от
места, где находится кабина. Если кабина находится на нижнем
этаже, то нажатие кнопок вызывает срабатывание реле РУВ (движение
вверх). Если кабина находится на любом этаже, то для кнопок приказа
этажей, расположенных выше данного, автоматически выбирается
направление вверх. Для кнопок приказа этажей, расположенных
ниже данного этажа, выбирается направление вниз (включается
реле РУН). Реле РУВ своим н. о. контактом включает катушку
контактора большой скорости Б, так как в режиме нормальной
работы будет замкнут н. о. контакт реле РВН. Другой н. о. контакт
реле РУВ подготавливает к включению цепь реверсирующего
контактора направления движения вверх — В. Контактор Б своим
нормально открытым (н. о.) блок-контактом включает реле РВБ,
один н. о. контакт которого замыкается в цепи реверсирующего
контактора Б, а другой н. о. контакт включает реле РТО. Реле РТО
своим н. о. контактом включает контактор В. Реле РН может быть
включено только в том случае, если замкнуты контакты
блокировочных выключателей ловителя Л/С, слабины канатов СПК и если
закрыты двери шахты и кабиры.
Включением контактора В на электродвигатель и
электротолкатель механического тормоза подается напряжение. Поднимается
механический тормоз, и электродвигатель разгоняется до
установившейся скорости. Кабина доходит до этажа, кнопка которого нажата.
Под действием отводки кабины этажный переключатель
зарегистрированного этажа дает импульс на замедление. Этажный
переключатель своим контактом отключает реле РУВ, катушка контактора Б
теряет питание. Нормально закрытый блок-контакт контактора Б
замыкается, Еключая катушку контактора /W, который своими
главными контактами подключает к сети обмотку малой скорости
двигателя, необходимой для точной остановки кабины. После
отключения контактора Б реле РВБ также отключается, но с выдержкой
времени контакт реле РВБ в цепи контактора В разомкнётся.
Катушка контактора В теперь будет получать питание через
замкнувшийся н. о. блок-контакт контактора М, который успел уже
включиться. Реле РТО теперь уже получает питание только через н. о.
контакт реле РИТО. Остановка кабины производится по импульсу,
даваемому индуктивным датчиком точной остановки ДТО. Датчик
точной остановки ДТО (на кабине) подходит к стальной полосе
(в шахте), и ток в цепи датчика уменьшается, после чего реле импульса
точной остановки РИТО отпадает. Н. о. контакт реле РИТО
отключает цепь катушки реле точной остановки РТО, которое своим н. о.
контактом разрывает цепь катушек контакторов Ми В. Двигатель
отключается7 и накладывается тормоз, Аналогично приведенному
Электросхёмы, управления лифтами 173
происходит управление при движении вниз, с той разницей, что
в этом случае включается контактор //.
Для вызова кабины на обслуживаемые этажи используется
сигнализация, аналогичная описанной на стр.167 (фиг. 91).
Нормально закрытый (н. з.) контакт кнопки вызова разрывает
цепь реле сигнализации PC, которое своим н. з. контактом замыкает,
если кабина находится на основном этаже, цепь вызывного звонка
кабины. Звонок дает сигнал, продолжительность которого задается
выдержкой времени реле 1РВ. Получив вызов, проводник направляет
кабину. Отпадение вызывной кнопки происходит после прибытия
кабины на нужный этаж.
При ревизии лифта переключатель режимов работы лифта
становится в положение «Ревизия», что вызывает отключение реле
нормальной работы РНР. Размыкается н. о. контакт этого реле в цепи
катушки реле РТО. Движение при ревизии можно производить,
находясь в кабине или на крыше ее. В последнем случае управляют
кабиной с помощью кнопочного поста, подключенного через
специальный штепсельный разъем. Схема наружного кнопочного управления
грузовым лифтом без проводника (фиг. 93) в своей большей части
аналогична схеме внутреннего кнопочного управления, изображенной
на фиг. 92. Значительно отличается лишь сигнализация и
добавляется цепь промежуточного реле 1РП, подключенного к точкам АБ.
Управление лифтом в данном случае происходит с помощью кнопок
приказа, расположенных на панели лифтера, которая находится на
основном этаже. Для вызова кабины на этажи служит вызывная
сигнализация, для чего на площадках устанавливаются кнопки
с удерживающими электромагнитами, а на основном погрузочном
этаже имеется световое табло и сигнальный звонок вызова. Сигнал
о вызове подается нажатием на этажную кнопку вызова, замыкается
цепь удерживающего электромагнита (кнопка залипает), подается
напряжение на одну из вызывных сигнальных ламп, расположенных
над панелью лифтера, дается кратковременный звуковой сигнал.
Контакт кнопки вызова размыкает цепь реле сигнализации PC,
что вызывает, если кабина находится на основном этаже, замыкание
цепи звонка на кабине. Продолжительность звонка задается реле 1РВ.
Получив сигнал, лифтер направляет кабину на этаж, откуда был дан
сигнал. Загорается лампа «Занято» на панели лифтера, которая
горит до тех пор, пока в том месте, куда отправлена кабина, не
произойдет освобождение кабины и не закроются двери шахты.
О прибытии кабины на этаж дает знать звонок, действующий
кратковременно во время замедления кабины. Отпадение вызывной кнопки
происходит, как только кабина прибудет на обслуживаемый этаж,
так как после открытия двери шахты удерживающий электромагнит
кнопки вызова шунтируется блок-контактом двери шахты.
Схемы кнопочного управления пассажирским лифтом. Наиболее
распространенные схемы кнопочного управления пассажирскими
лифтами могут быть разделены на три группы: а) внутреннее кнопоч-
174
Электрооборудование лифтов
РУВ
РУН\
РН
1РП
1РП
PHP
А
ПР-5
1РП
РН
6КВ
5КВ
6ЛВ
-В:
U KB
-о о-
6ЭП-Ш
-В
6ЛП
-#г II
53П-Ш 53П-Ш ^5ЛП
-я ib в—
ьзп-ш ш-ш
-в
ьлп
ззп-лг ззп-ш _^лп
23П-Ш 23П-Ш
кII
^2ЛП
1зп-ш*
PC
i
РУВ РУН
Занято
-е-
йТО
РИТО
\1ШРК
Резербное
осдещение
кабины
Фиг. 93. Схема наружного кнопочного управления грузовым лифтом
без проводника.
Электросхемы управления лифтами
175
ное управление с вызовом кабины на первый этаж; б) внутреннее
кнопочное управление с вызовом на любой этаж и в)
собирательное кнопочное управление.
Простейшей из них является схема внутреннего кнопочного
управления с вызовом кабины на первый этаж, но она является наименее
совершенной и обеспечивает работу лишь на подъем, так что
пассажиры лишены возможности вызова кабины на любой этаж. Такая
схема (фиг. 94) действует следующим образом. Включение катушек
контакторов вверх В или вниз Н возможно лишь если замкнуты
контакты дверей шахты — ДШ и кабины — Д/(. Если пассажира
Фиг. 94. Схема внутреннего кнопочного управления пассажирским лифтом с
вызовом кабины на первый этаж:
/7 — предохранители; Р — рубильник; ДШ — контакты дверей шахты; ДК — контакты дверей
кабины; КЛ — контакт ловителей; Н — катушка и контакты контактора „Низ"; В — катушка и
контакты контактора „Верх"; СП К — кнопочный вызывной аппарат кабины (цифры соответствуют
этажам); В А — вызывной аппарат на двери шахты первого этажа; ПК1 и ПК2 — подпольные контакты;
ЭР — катушки и контакты этажных реле; ЭП — этажные переключатели (цифры соответствуют
этажам).
Примечание. Схема показана в положении, когда все двери открыты и кабина
находится на 2-м этаже.
в кабине нет, то по вызову на первый этаж кабина может быть
отправлена и при открытой двери кабины, так как контакт ЦК в этом случае
шунтируется подпольным контактом Я/С/. Для включения катушек
контакторов необходимо также, чтобы был замкнут контакт
ослабления натяжения каната СП К- Движение кабины начинается, если
нажать одну из кнопок приказа КА1У КА2 и т. д. или кнопку вызова
на первом этаже. Нажатие кнопки замыкает цепь, состоящую из
катушки одного из этажных реле: ЭР1, ЭР2,...У одного из этажных
переключателей ЭП1, ЭП2У...У одной из катушек В или Н (в
зависимости от направления движения), цепочки блокировочных контактов
и кнопки «Стоп». Вся цепь управления подключается через
предохранители П и рубильник Р. Включение контакторов В или Н
вызовет замыкание силовых цепей (на фигуре не показаны) и начало
вращения двигателя в нужном направлении. Нажатие на кнопки
может быть кратковременным, так как цепь будет поддерживаться
176
Электрооборудование Лифтов
н. о. контактами этажных реле. При подходе кабины к нужной этажной
площадке отводка на кабине переведет этажной переключатель и,
если он был включен для движения вверх, то переключится на
движение вниз (или наоборот), что вызовет размыкание электрической
цепи, отпадение контакторов и реле и в конечном счете — отключение
двигателя и остановку кабины на нужном этаже. Дальнейшее дви-
О^-Освещение
кабаны
Сепенодый. выпрямитель
А
ОС ВКВ КНУдКНСПК К/1 ПК Стоп"
Диаграмма
работы
переключателя редизиа
ж
К1
KZ
КЗ
Kh
К5
Кб
Работа
X
-
-
X
-
X
-
X
X
-
X
-
х Контакт
замкнут
— Контакт
разомкнут
Фиг. 95. Схема внутреннего кнопочного управления пассажирским лифтом
с вызовом кабины на любой этаж:
В и И — контакторы направления; Б и М — контакторы большой и малой скорости; Т — контактор
тормоза; РД — реле дверей; РВ — реле времени; РП — реле переключения; ЭР — этажное реле;
РЭ — реле экономическое; ДШ — контакты шахтных дверей; ДК — контакты дверей кабины;
ПК — подпольный контакт; КП — кнопка приказа в кабине; ВК — кнопка вызова; ЭП — этажный
переключатель; ДС — добавочные сопротивления; ОД — контакт дверного ролика; ВКВ, ВКН —
конечные выключатели; СПК — контакт слабины подъемных канатов; КЛ — контакт ловителей;
КНУ — контакт натяжного устройства; ОС — контакт ограничителя скорости; К — контакт
переключателя ревизии.
жение возможно лишь после нажатия других кнопок. Если в кабине
нет пассажиров, то вызов кабины на первый этаж производится
нажатием кнопки В А. Это вызовет включение реле ЭР1 и катушки
контактора Я. После достижения первого этажа этажный
переключатель ЭП1 вызывает остановку двигателя.
Более совершенная схема кнопочного управления,
обеспечивающая движение пассажиров в обоих направлениях с вызовом кабины
на любой этаж, разработана заводом «Динамо» и трестом «Союзлифт»
(фиг. 95). Эта схема пригодна для скоростей кабины до 1 м/сек, так
как предусмотрена остановка кабины с точностью + 35 мм при по-
Электросхёмы управления лифтами 177
мощи двигателя с переключением скоростей 1 : 4. Применение
магнитной отводки обеспечивает высокую надежность лифтовой
установки, исключая возможность открытия шахтной двери при прохож-
дении кабины мимо этажа. Кабина останавливается на уровне
заданной этажной площадки под воздействием магнитной отводки на ролик
дверного замка, а принятое конкретное решение позволяет
ограничиться одним этажным выключателем на этаже. Пуск производится
кнопками приказа У/СЯ, 2КП,...У 6КП. Показана схема для шести
этажей; аппаратура для промежуточных этажей для простоты не
показана. Регистрация приказа осуществляется этажными реле 1ЭР,
2ЭР,..., 6ЭР. Выбор направления производится механическими
малошумными этажными переключателями 1ЭП', 2<9Я,..., 6ЭП. После
включения одного из контакторов В или Н замыкается контактор Б,
подключающий двигатель на работу с большой скоростью, и кабина
лифта начинает двигаться на полной скорости; одновременно
втягивается магнитная отводка, предотвращающая открытие дверей шахты
,до остановки. Отводка, установленная на кабине, воздействует на
этажный переключатель ЭП (с индексом соответствующего этажа).
Включается контактор М, и двигатель лифта переключается на работу
€ малой скоростью. Контактор большой скорости Б отпадает. Питание
катушки контактора направления (В или Н) происходит через реле
переключения — РП (реле времени с демпфером). Размыкание
нормально открытого контакта контактора Б прерывает питание
магнитной отводки, и она выпадает. Магнитная отводка воздействует на
ролик дверного замка, в результате чего разрывается контакт
дверного ролика ОД. Пустая кабина может быть вызвана на любой
этаж. Реле времени РВ обеспечивает принятие вторичного вызова
через 4 сек. после остановки кабины и предотвращает движение
кабины, если контакт ОД не закрылся. Ревизия шахты производится
на пониженной скорости; на фиг. 95 показан переключатель,
производящий перевод схемы с рабочего режима на режим ревизии.
На фиг. 96 дана полная схема цепей управления, а на фиг. 97 —
'схема сигнализации для собирательного управления лифтами
многоэтажных жилых зданий. Схема осуществлена трестом
«Электропривод» с использованием индуктивных датчиков и кнопок с залипа-
нием. Для повышения точности остановки применен двускоростной
двигатель. На схеме виден переход через штепсельные разъемы ZZ/P,
необходимые для осуществления ревизии шахты. Обозначения на
'схемах фиг. 96 и 97 в основном те же, что и на схемах фиг. 92 и 93.
Индексами МУ обозначен магнитный усилитель, Е — емкость,
подключенная к электромагнитному реле для создания выдержки
времени. Присоединение к сети выполняется включением
рубильника Р вводного устройства и автомата Л. Для включения в
нормальную работу или в режим ревизии рукоятку переключателя
<УП поворачивают в нужное положение.
В положении «Работа» замыкаются -контакты УП-1, УП-2, УП-3
и УП-4 и вместе с ними — цепь питания этажных индуктивных
12 Ивашков 2598
178
Электрооборудование лифтов
выключателей; через селеновый выпрямитель подается постоянный
ток в цепи управления, включается реле нормальной работы РНР
и резервное освещение. В том случае, когда кабина находится на
Л2
4/7
\
350-110/156
\5П
МУ
5П
(Ауп
101
РНР Су
■н
£
-о о-
102
101
1РИС2РЩЗРИС
19
29 \39
ЬРИС 5РИС\6РИС
59 69
7РИС\дРИСШИС
79 \89 \997
ЮРЩ1РИС
- i -
109 119
12РИС
102
ЗШР
-к> о)—
2ШР
УП-Ч
1ШР
Рез ер Оное освещены^
кабаны ^
КдП
ЗВ
Фиг., 97. Схема сигнализации для лифта с собирательным управлением.
первом этаже, включаются все этажные реле, за исключением
этажного реле данного первого этажа. Если шахтные двери всех этажей
закрыты, включатся также реле РКЦ и РН. При пустой кабине
замыкают свои контакты реле, IP ПК и2РПК, контролирующие
положение пола. Работу тормоза контролирует реле РКТ. Электромаг-
Электросхёмы управлений лифтами 179
нит подвижной отводки включится и выдвинет отводку, которая
откроет замок шахтной двери данного этажа. При входе пассажира в
в кабину отключаются реле РКДУ РН, 1РПК и 2РПК и в кабине
включается освещение. Реле РКД'к РН включатся вновь, когда
пассажир закроет за собой двери. Для отправки кабины достаточно
нажать залипающую кнопку нужного этажа. После нажатия кнопки
включаются реле РУВ, контактор основной скорости Б и
промежуточное реле времени РВБ и отключается электромагнит
подвижной отводки МО. Отводка освободит ригель замка, контакт замка ДЗ
(с соответствующим индексом) в цепи катушки реле РТО замкнется,
и реле включится. Создается цепь питания катушки контактора В,
и подается питание к статору двигателя и к тормозному магниту
(через выпрямитель). С помощью реле РКТ включение тормозного
магнита фиксируется (шунтируется часть сопротивления в цепи
катушки магнита; это сопротивление на схеме не показано).
При подходе кабины к нужному этажу на этажный индуктивный
датчик воздействует стальная полоса кабины. Сопротивление датчика
резко возрастает, и отпадают реле РИС, реле РУВ и контактор Б.
Вместо контактора Б включается контактор Му и двигатель
переходит на малую скорость. Отключение контактора Б вызывает перерыв
питания реле РВБ, которое выдержкой времени, нужной для
перехода на малую скорость, включит магнит подвижной отводки МО.
К уровню этажной площадки кабина подходит с малой скоростью и
с выдвинутой отводкой. При подходе к уровню этажа (точная
остановка) отводка кабины отжимает рычаг ригельного затвора замка
и размыкает контакт дверного замка ДЗ и катушки реле РТО.
Реле РТО с выдержкой времени отключает контакторы В и М,
электродвигатель отключается от сети, накладывается механический
тормоз, и кабина останавливается. После выхода пассажира на
данном этаже дальнейший пуск кабины возможен после закрытия
дверей.
Приказы пассажиров регистрируются поочередно в порядке
возрастания этажей при движении вверх или в порядке убывания при
движении вниз; каждый приказ регистрируется после выполнения
предыдущего приказа. Когда все приказы выполнены, то кабина
лифта остается на этаже, соответствующем последнему приказу.
За время выполнения приказов возможна регистрация нескольких
вызовов как на этажах выше кабины, так и на этажах ниже ее; для
регистрации вызовов на этажных площадках имеются кнопки с за-
липанием. Залипание кнопки вызова показывает, что лифт исправлен
и вызов зарегистрирован. Вначале выполняются вызовы,
зарегистрированные на этажах выше кабины, причем первым выполняется
вызов, зарегистрированный на наивысшем этаже. По прибытии
кабины по вызову регистрация вызова автоматически снимается
контактом ригельного затвора замка шахтных дверей, но остальные
вызовы остаются зарегистрированными. Нажатием кнопки вызова
лифта можно вызвать движение кабины лишь в том случае, если она
12*
180 Электрооборудование лифтов
пуста. Блокировочное реле замедления РБЗ во время движения
кабины вверх при выполнении приказов отключено, и его
нормально замкнутый контакт шунтирует контакты всех кнопок вызова в
цепи реле РЗ (реле замедления по вызову); вызовы в этом случае
не выполняются.
При движении кабины вниз она автоматически останавливается
на всех этажах, где зарегистрированы вызовы. Импульсы на
остановку при этом даются реле РЗ. Если расстояние от опускающейся
кабины до уровня площадки этажа, с которого поступил вызов,
недостаточно для ее нормального замедления, остановка не
происходит; это обеспечивается реле РБЗ. В том случае, если вызов поступил
в момент, когда этажный индуктивный датчик находится против
стальной полосы кабины и н. з. контакт РБЗ успел замкнуться, на
этом этаже кабина по вызову не остановится. Если же попутный
вызов с этажа, к которому приближается опускающаяся кабина,
получен до истечения выдержки времени реле РБЗ, замедление
произойдет нормально и кабина остановится по вызову на этом этаже.
После прибытия кабины на этаж создается выдержка времени порядка
5 сек., достаточная для открывания дверей пассажиром (действует
реле РВП).
Для точной остановки кабины па уровне данного этажа
предусмотрен специальный индуктивный выключатель точной остановки.
После отключения контактора Б и включения контактора М кабина
подходит к этажу на сниженной скорости. Датчик точной
остановки ДТОу установленный на кабине, проходит мимо установленной
в шахте стальной пластины. Реле импульса остановки РИТО
отключается и размыкает контакт в цепи реле точной остановки РТО,
вызывает отключение контакторов М и В. Реле точности
остановки РТО позволяет при помощи изменения выдержки времени
регулировать точность остановки. Грубую регулировку точности
остановки выполняют, кроме того, перемещением стальной полосы
в шахте по вертикали. При таком решении схемы подвижная отводка,
воздействующая на ригель замка, выдвигается только после
наложения тормоза; без этого нельзя открыть двери шахты.
Цепи сигнализации рассматриваемой схемы питаются от
понизительного трансформатора. На панели управления имеется кнопка
КВП, предназначенная для вызова обслуживающего
персонала при неисправностях в лифте. Эта кнопка действует на звонок
в помещении дежурного персонала. В большинстве схем управления
лифтами этажные переключатели могут быть заменены
копир-аппаратами. Схема лифта от этого меняется очень мало. Для определения
места нахождения кабины служат указатели положения. В данной
схеме применен стрелочный указатель положения. Стрелочный
указатель положения работает на принципе измерения величины
напряжения на потенциометре. Он представляет собой стрелочный
электромагнитный прибор, включенный на выход магнитного
усилителя, в обмотку управления которого подается напряжение с потен-
Электросхемы управления лифтами
181
120-2206
Фиг. 98. Монтажная схема лифта:
/ — электродвигатель; // — пусковая панель; /// — пусковое сопротивление; IV — электромагнит
тормоза; V—конечный выключатель; VI—понизительный трансформатор 220/120 в на линии
управления; VII — то же 120/12 в для сигнализации; VIII — панель этажных реле; IX — вызывной
аппарат на первый этаж; X — кнопочный аппарат управления; XI — этажные переключатели;
XII — дверные контакты шахты; XIII — дверные контакты кабины; XIV — контакт ловителей
(ослабления канатов); XV — подпольные контакты; XVI — клеммные щитки; XVII — подвесной
кабель; XVIII—лампа освещения кабины; XIX—выключатель в кабине; XX — звонок (сирена)
„Тревога"; XXI — кнопка сигнала „Тревога"; XXII — главный распределительный щит.
182 Электрооборудование лифтов
циометрического моста. Сопротивление последнего изменяется при
переключении контактов этажных реле. Плавность перехода стрелки
при движении кабины лифта обеспечивается параметрами усилителя.
Указатели положения могут находиться на нижнем этаже или
на всех этажах. Схема предусматривает возможность связи
диспетчерского пункта с кабиной, для чего предусматривается
двусторонняя громкоговорящая связь и следующие виды сигнализации:
сигнализация положения (местоположение и направление движения
кабины), световая сигнализация о задержке кабины в разных
случаях, о состоянии шахтных дверей и о неисправности лифта.
Монтажные схемы лифтов. Присоединение аппаратуры и
двигателей к сети и соединение их между собой легче всего проследить
на монтажной схеме лифта (фиг. 98). На схеме можно выделить
следующие основные узлы:
а) двигатель / и тормозной магнит IV, расположенные на
лебедке:
б) вводное устройство XXII;
в) пусковая панель // в машинном помещении, состоящая из
контакторов направления В и Н, контакторов ускорения 1У, 2У
и ЗУ, этажных реле VIII]
г) аппаратура в кабине, состоящая из кнопочного аппарата X,
дверных контактов XIII, контактов ловителя (ослабления канатов)
XIV, подпольных контактов XV, лампы освещения кабины XVIII
с выключателем XIX и сигнала тревоги XXI;
д) кнопка вызова IX;
ж) звонок «Тревога» XX;
з) дверные контакты XII и этажные переключатели XI,
расположенные в шахте;
и) понизительные трансформаторы для цепей управления VI
и сигнализации VII;
к)" гибкий многожильный подвесной кабель XVII, соединяющий
кабину с внешними цепями XIX; он присоединяется через клемм-
ные коробки XVI.
Изображенная схема является обычной электрической схемой
пассажирского лифта с внутренним кнопочным управлением (с
параллельным включением катушек реле и контакторов) и с вызовом
кабины на первый этаж;
Все цепи управления выполнены на переменном токе. Двигатель
трехфазного тока имеет контактные кольца; ступени пускового
реостата этого двигателя выводятся с выдержкой времени при помощи
реле. Следует обратить внимание на порядок выполнения монтажных
схем и на их отличие от принципиальных схем разверток (например,
схема на фиг. 96)t
РАЗДЕЛ ВТОРОЙ
МНОГОКАБИННЫЕ ПАССАЖИРСКИЕ ПОДЪЕМНИКИ
ГЛАВА IX
КИНЕМАТИЧЕСКАЯ СХЕМА И ТЕХНИЧЕСКАЯ
ХАРАКТЕРИСТИКА МНОГОКАБИННЫХ ПОДЪЕМНИКОВ
§ 1. КИНЕМАТИЧЕСКАЯ СХЕМА
В отличие от лифтов, характеризующихся чрезвычайным
многообразием кинематических схем, все многокабинные подъемники
выполняются по общей схеме, показанной на фиг. 99. Со времени
появления первых многокабинных подъемников эта
схема не претерпела сколько-нибудь существенных
изменений. Ее основные особенности состоят в
следующем. Кабины подъемника подвешены между
двумя замкнутыми цепями, огибающими одинаковые
вращающиеся с постоянной скоростью в одну и ту же
сторону звездочки. На верхнем и нижнем концах
шахты оси звездочек смещены друг относительно
друга на расстояние, равное ширине кабины. В
осевом направлении плоскости вращения звездочек
смещены на расстояние, превышающее глубину кабины.
В точках, расположенных на одинаковом уровне,
противоположные углы кабин соединены с ветвями
обеих цепей, движущихся в одном и том же
направлении. Благодаря такой схеме кабины, перемещаясь
в пространстве, не вращаются вокруг
горизонтальной оси и не опрокидываются, переходя через
звездочки. На всем пути движения пол кабин зани- Фиг. 99. Кинема-
мает горизонтальное положение, а их стенки — тическая схема-
вертикальное.
§ 2. ТЕХНИЧЕСКАЯ ХАРАКТЕРИСТИКА МНОГОКАБИННЫХ
ПОДЪЕМНИКОВ
Скорости. Высший предел скорости многокабинных
подъемников определяется тем, что заполнение и опорожнение их кабин
производится на ходу. Для людей, пользующихся многокабинным
подъемником, вход и выход из движущейся кабины не представляет
опасности лишь при сравнительно малых скоростях движения,
184 Кинематическая схема и характеристика многокабинных подъемников
не превышающих 0,3 м1сек. Поэтому по Правилам Госгортехнад-
зора запрещается изготовлять многокабинные подъемники со
скоростями выше 0,3 м/сек. Обычно их скорость равна 0,2—0,25 м/сек.
Из-за малых скоростей движения многокабинные подъемники
значительно уступают лифтам по продолжительности подъема, но
равноценны в этом отношении эскалаторам зданий, у которых
вертикальная составляющая скорости полотна обычно не превышает
указанных выше значений. Время ожидания кабин этих подъемников
не превышает 12—15 сек., что в неколько раз меньше времени
ожидания кабин лифтов любого типа. Так как остановки при работе
многокабинных подъемников относительно редки, вопросы ускорений здесь
не имеют такого значения, как для лифтов.
Вместимость кабин. Максимальная вместимость
кабин многокабинных подъемников, так же как и их скорость,
определяется удобством входа и выхода на ходу. Каждая кабина
и каждый проем в шахте могут иметь не более двух удобных для
пользования ручек, прикрепленных к боковым стенкам. Поэтому
по Правилам Госгортехнадзора кабины таких подъемников должны
вмещать не более двух человек. Обычно они изготовляются или на
одного или на двух человек.
Высота подъема. Многокабинные подъемники
изготовляются с высотами подъема до 40—45 м (10—12 этажей).
Дальнейшее увеличение высоты подъема влечет за собой быстрый рост усилий
натяжения цепей, их утяжеление и удорожание всей установки при
одновременном увеличении времени на подъем или спуск.
Производительность. Производительностью
пассажирского многокабинного подъемника называется число людей,
которое может быть поднято с нижней этажной площадки за
определенный промежуток времени. Часовая производительность такого
подъемника подсчитывается по формуле
р ——^l— чел./час, (9П
где Р — производительность в чел/час;
ср — коэффициент заполнения кабины;
Е — вместимость кабины;
v — скорость движения кабины в м/сек;
tK — расстояние между кабинами (шаг кабин) в м.
Теоретически ничто не препятствует заполнению кабины в
соответствии с ее номинальной вместимостью. Поэтому коэффициент
заполнения о при определении максимальной производительности
можно принимать равным единице. Максимального значения
производительность достигает при наибольшей вместимости кабин Е=
=2 чел,, наибольшей их скорости v = 0,3 м/сек и наименьшем шаге
б tK = 3 м, При коэффициенте заполнения <р = J она равна
Техническая характеристика 185
720 чел/час. Столько же человек за это время может быть перевезено
на спуск. В отличие от лифтов, спуск пассажиров с помощью много-
кабинного подъемника не снижает его производительности на
подъем.
Вторая положительная особенность многокабинных подъемников
состоит в том, что их производительность не зависит, как у лифтов,
от высоты подъема. Благодаря этому с увеличением высоты подъема
нет необходимости в увеличении числа установок для обслуживания
одного и того же пассажиропотока.
ГЛАВА X
МЕХАНИЧЕСКОЕ ОБОРУДОВАНИЕ, ШАХТЫ
И ЭЛЕКТРООБОРУДОВАНИЕ МНОГОКАБИННЫХ
ПОДЪЕМНИКОВ
§ 1. ПРИВОД
Приводом многокабинного подъемника называется система
механизмов, обеспечивающих движение и остановку цепей и связанных
с ними кабин. У большинства подъемников привод располагается
внизу шахты. Устройство привода одного из подъемников показано
на фиг. 100.
Электродвигатель соединен посредством упругой муфты с
червячным редуктором. На обоих удлиненных концах вала червячного
колеса посажены цилиндрические шестерни с равным числом зубцов.
Вращение от них передается двум установленным независимо
зубчатым колесам, посаженным на общих валах с ведущими звездочками
цепей. Мощность электродвигателя многокабинного подъемника под-
считывается по формуле
1квт' <92)
где Е — вместимость кабины;
т — число загруженных кабин на поднимающейся ветви;
v — скорость кабины в м/сек;
Т1 — к. п. д. установки.
При шаге кабин, равном высоте этажей, т = п — 1, где п.—
число этажей. Значение к. п. д. установки определяется по формуле
Ч = Ъ * Ъ' Чз»
где т\г — к. п. д. червячного редуктора;
ч[2 — к. п. д. зубчатой передачи;
fl3 — к. п. д. тяговой цепи.
При расчетах можно принимать: ч\г и т\а П9 табл. 7, ti3 — 0,92 -г-
-г- 0,95.
Кабины и цепи
187
Фиг. 100. Устройство привода многокабинного подъемника.
§ 2. КАБИНЫ И ЦЕПИ
Кабины. В отличие от кабин пассажирских лифтов, кабины
многокабинных подъемников не имеют дверей и изготовляются
открытыми со стороны входа. Во избежание попадания пассажиров на
потолок кабины вместо пола, потолок по всей его ширине снабжен
глубоким вырезом, а пространство между двумя кабинами ограждено со
стороны входа специальными подвижными щитами. Так как при
переходе кабин из одной половины шахты в другую меняется расстояние
между соседними кабинами, щиты изготовляют из двух половин,
смещенных друг относительно друга в направлении входа.
Расположение щитов схематически показано на фиг. 101. В связи с тем,
что кабины и проемы в шахте не имеют дверей, у пассажиров,
188
Оборудование и шахты многокабинных подъемников
находящихся в кабине или в проеме шахты, часть тела может
выступать за очертания кабины или входа в шахту. Во избежание
связанных с этим несчастных случаев передняя часть пола
кабины выполняется в виде клапана, откидывающегося вверх по
всей ширине так, чтобы в поднятом положении между клапаном
и порогом шахты обеспечивался просвет не менее 0,2 м. При
повороте клапана происходит автоматическая остановка подъемника.
Клапан порога кабины должен быть самозакрывающимся с углом
поворота не менее 90°. Подвижные
щиты кабины сопрягаются с клапанами
шарнирно, как это показано на фиг.
101. Благодаря такому устройству щит
при повороте клапана перемещается
параллельно самому себе и отходит в
глубь шахты, обеспечивая требуемый
Правилами Госгортехнадзора просзет.
Конструкция кабины многокабин-
ного подъемника показана на фиг. 102.
Ее каркас изготовлен из прокатных
уголковых профилей. С целью
повышения жесткости снизу он усилен
диагональными уголковыми связями.
Ослабленный вырезом потолок кабины
укреплен прочным стальным
обрамлением, охватывающим боковые и
заднюю стенки. Стенки по всей высоте
изготовляются сплошными. В верхней
части каркаса, в противоположных
углах кабины, к нему крепятся два
кронштейна для соединения с цепями.
Снаружи к боковым стенкам и полу
кабины крепятся скользящие башмаки.
Боковые башмаки при движении кабины на прямолинейных
участках охватывают установленные в шахте вертикальные
направляющие. Нижний башмак направляет кабину при перемене ею
направления движения внизу шахты. Стенки кабины и ее пол с
откидным клапаном имеют деревянную обшивку. К боковым
стенкам кабины рядом со входом крепятся прочные гладкие
вертикальные поручни. По Правилам Госгортехнадзора их длина должна
быть не меньше 275 мм при высоте средней части от пола,
равной 1100 мм. Размеры кабин влияют на безопасность
пользования подъемником и регламентированы Правилами
Госгортехнадзора. Кабина, рассчитанная на одного человека, должна иметь
площадь не менее 800 X 800 мм, и кабина на двух человек — не
менее 100GX1000 мм. Высота кабины должна быть не менее 2 м.
Величина минимального расстояния между кабинами определяется
из условия, чтобы кабина полностью сходила со звездочек на вер-
Фиг. 101. Устройство щитов
и клапанов кабины:
1 — кабина; 2 и 3 — подвижные щиты;
4 и 5 — откидные клапаны; 6 и
7 — тяги.
Кабины и цепи
№
1190-
-1000
Фиг. 102. Кабина многокабинного подъемника.
190
Оборудование и шахты многокабинных подъемников
тикальную ветвь своей траектории еще до того, как шарниры
цепей, соединенные со следующей за ней кабиной, вступят на
звездочки. Зазор между передней частью порога кабины и порогом
шахты должен быть не более 20 мм.
Цепи. Для многокабинных подъемников обычно применяют
блочные цепи. Конструкция такой цепи показана на фиг. 103.
Цепь состоит из последовательно чередующихся одной внутрен-
Фиг. 103. Цепь многокабинного подъемника.
ней (толстой) и двух наружных (тонких), пластин, соединенных
валиками. Из-за относительно большой толщины пластины
такой цепи часто называют блоками. Для обеспечения равной
прочности толщина внутренней (толстой) пластины должна быть
примерно равна суммарной толщине наружных пластин. При
допускаемых нагрузках 2000—3000 кг цепи многокабинных
подъемников обычно имеют следующие размеры в мм:
Шаг 155—200
Ширина пластин 50—60
Толщина наружных пластин 12—16
Толщина внутренних пластин ..... 25—30
Диаметр валика ' 25—30
При указанных размерах вес цепей равен 14—19 кг/пог. м.
Зацепление цепей с зубьями звездочек осуществляется через торцы
внутренних пластин, аналогично показанному на фиг. 104. Расчетное
усилие натяжения цепи вычисляется по формуле
(93)
где GK — вес кабины в кг;
Gnacc — вес пассажиров, находящихся в одной кабине, в кг;
<7Ц—вес 1 пог. м цепи в кг/пог. м\
Н — высота подъема в м\
tK —шаг кабин;
m — число загруженных кабин.
Трасса полотна
igi
Согласно Правилам Госгортехнадзора, для подъемников значения
Gnncc можно принимать равными: для кабин на одного человека
Gnacc = 70 кг> а Для кабин на двух человек Gnacc = 140 кг. Шаг
кабин колеблется обычно в пределах 3—4,5 м, а вес — в пределах
180—240 кг. При обозначениях, принятых на фиг. 103, формулы,
рекомендуемые для расчета цепей многокабинных подъемников
имеют следующий вид:
разрушающая нагрузка по разрыву внутренней пластины
Sp = (b-d1)hiab кг;
разрушающая нагрузка по разрыву наружных пластин
Sp = (b — d2) Ъ2°ь кг>
разрушающая нагрузка по срезу ва- i L
лика
удельное давление между наружной
пластиной и валиком
р = ™ах кг/см2. Фиг. 104. Зацепление цепи
2"2*>2 многокабинного подъемника
со звездочкой.
Здесь b — ширина пластины.
Пластины обычно изготовляются из нормализованной
качественной углеродистой стали марок 40, 45, 50, для которых значение
предела прочности колеблется в пределах о6 = 57ч-63 кг/мм2.
Значения предела прочности материала валика при срезе хь для
термообработанной стали 40 можно принимать равным хъ = 45 -г-
-г-50 кг/см2. По Правилам Госгортехнадзора разрушающая нагрузка
цепей многокабинных подъемников должна быть не менее
10-кратной по отношению к максимальной расчетной нагрузке.
§ 3. ТРАССА ПОЛОТНА
Натяжное устройство. Устройство для натяжения
цепей многокабинного подъемника обычно устанавливается наверху
шахты. Оно служит для периодического подтягивания цепи по мере
ее износа или вытяжки. Для этой цели обычно применяют натяжные
устройства винтового типа. Конструкция одного из таких устройств
показана на фиг. 105. Ось натяжной звездочки установлена в
стальном литом блоке, передвигающемся по направлению при
завинчивании гаек на двух параллельно расположенных болтах. Натяжные
звездочки располагаются на такой высоте, чтобы перемена
направления движения кабин происходила за пределами верхнего входного
проема шахты.
192
Оборудование и шахты многокабинных подъемников
Направляющие для кабин и ц е.п е й. Для
обеспечения плавного движения кабин, без раскачивания и
толчков, по всей их трассе, исключая участки перехода с одной ветви
на другую, устраиваются направляющие. Схема установки
направляющих для кабин многокабинного подъемника показана на фиг. 106.
Размещение направляющих в плане видно из фиг. 100. Все четыре
направляющие располагаются в одной плоскости, перпендикулярной
направлению входа. Крайние направляющие устанавливаются на
Фиг» 105. Конструкция натяжного устройства
многокабинного подъемника.
кронштейнах, прикрепленных к стенкам шахты. Средняя сдвоенная
направляющая крепится к горизонтальным балкам, заделанным
в стенках шахты. Внизу шахты в ее стенах заделан горизонтальный
направляющий брус, охватываемый при движении кабины ее нижним
башмаком. Для обеспечения плавного перехода кабин из одной
половины шахты в другую концы средней сдвоенной направляющей
имеют закругленную форму. На случай выхода ползунов кабин из
плоскости направляющих при перемене направления движения
кабин внизу шахты устанавливается устройство, автоматически
останавливающее подъемник. Безопасность пользования подъемником
в случае обрыва цепей обеспечивается устройством для них
предохранительных шин, расположение которых в плане видно из фиг. 100.
Для этой же цели в нижней части шахты, под звездочками,
устраивается защитный кожух, соединяемый с шинами цепи. Наиболее
Шахта
193
рациональным профилем для предохранительных шин является
швеллер. Его горизонтальные полки устанавливаются перпенди
кулярно плоскости движения цепи и охватывают ее с обеих сторон
В случае обрыва цепи нижняя ветвь
упрется в защитный кожух, а дно кабины
станет на поперечный брус
Так как предохранительные шины
будут препятствовать ее складыванию, то
после выбирания всех зазоров цепь и
связанные с ней кабины займут
устойчивое вертикальное положение. Вверху
и внизу предохранительные шины должны
подходить непосредственно к звездочкам.
§ 4. ШАХТА
Шахты многокабинных подъемников
изготовляют со сплошным ограждением
стен. Применение в них сетчатых
ограждений запрещается Правилами Госгортехнад-
зора. Шахты подъемника не имеют стены,
отделяющей подымающуюся ветвь кабин
от опускающейся. Поэтому для входа в
кабины на каждом этаже в шахте делается
общий проем, посредине которого ставится
колонка, отделяющая вход в
поднимающиеся кабины от входа в опускающиеся
кабины.
В отличие от лифтов, входы в шахту
многокабинных подъемников не имеют дверей,
что определяет ряд особых требований
к устройству шахты. Во избежание удара
сверху по выступающей части тела
пассажира, поднимающегося в кабине, Правила
Госгортехнадзора предписывают, чтобы
порог и верхняя часть всех шахтных проемов,
обращенных к движущимся вверх
кабинам, изготовлялись в виде откидывающихся
вверх клапанов. Последние должны иметь
возможность поворачиваться на угол от 75 до 90° так, чтобы между
поднятым вверх клапаном и порогом кабины обеспечивался просвет
шириной 250 мм. Для получения такого просвета необходимо, чтобы
боковые стенки проемов, их порог и верхняя часть вдавались в шахту
на глубину 230 мм, не доходя до порога кабины лишь на 20 мм.
Боковые стенки проходов к входным проемам шахты должны быть
гладкими. Расстояние между ними должно равняться ширине кабины.
На боковых стенках всех проходов к подъемнику должны
устанавливаться гладкие и прочные поручни. К размерам и месту их установки
13 Ивашков 2598
Фиг. 106. Схема установки
направляющих для кабин
многокабинного
подъемника.
194 Оборудование и шахты многокабинных подъемников
предъявляются те же требования, что и к поручням кабины. Высота
проходов к кабинам определяется соображениями безопасности. По
Правилам Госгортехнадзора она должна быть не меньше 2,6 м, но не
более 3,0 м. Минимальное значение устанавливается из расчета,
чтобы пассажир, не успевший сойти при точном совпадении уровней
пола кабины и прохода в шахте, не ударился затем головой о
верхнюю часть прохода.
Общая высота шахты должна быть такова, чтобы в крайних
верхнем и нижнем положениях кабины оставалось свободное
пространство не менее 500 мм. Высота верхней и нижней частей шахты
определяется из условия, чтобы перемена направления движения кабин
как вверху, так и внизу происходила за пределами входных проемов
шахты. Для обеспечения безопасности пассажиров, не успевших выйти
на крайних остановках, Правила Госгортехнадзора предписывают,
чтобы на участках, где происходит перемена направления движения
кабин, были установлены сплошные гладкие щиты на всю высоту
кабины, на расстоянии 20 мм от ее порога. Щиты снабжаются
устройствами, останавливающими подъемник при нажатии на щит.
§ 5. ЭЛЕКТРООБОРУДОВАНИЕ МНОГОКАБИННЫХ ПОДЪЕМНИКОВ
Электродвигатели. Для привода многокабинных
подъемников используются обычные двигатели трехфазного тока
(с контактными кольцами или с короткозамкнутым ротором); при
постоянном токе применяются двигатели с параллельным
возбуждением. Двигатель, подобранный по мощности, вычисленной по форму-
муле (92), обеспечивает удовлетворительный разгон и имеет
достаточную перегрузочную способность.
Аппаратура управления и защиты, требуемая для многокабинных
подъемников, принципиально мало отличается от применяемой для
небольших эскалаторов зданий. Тормозные электромагниты,
контакты, действующие при нажатии на защитные откидные клапаны
порогов кабин и шахтных проемов, максимальные и тепловые реле
в цепи обмоток двигателя обеспечивают исправность и безопасность
действия установки. Пуск двигателей с контактными кольцами
производится автоматически с помощью реле времени и осуществляется
нажимом кнопки в машинном помещении. Остановка подъемника
может быть осуществлена или нажатием одной из кнопок, имеющихся
на всех этажах, или под действием одного из блок-контактов
(контактов защитных откидных клапанов порогов кабин и шахтных
проемов, контактов защитных щитов, установленных на участках
перемены движения кабины, контактов удлинения или обрыва цепи
и т. д.).
После остановки пуск подъемника возможен лишь из машинного
помещения или из другого пункта, где находится обслуживающий
персонал.
РАЗДЕЛ ТРЕТИЙ
ЭСКАЛАТОРЫ
ГЛАВА XI
КЛАССИФИКАЦИЯ, КИНЕМАТИЧЕСКИЕ СХЕМЫ
И ТЕХНИЧЕСКАЯ ХАРАКТЕРИСТИКА ЭСКАЛАТОРОВ
§ 1. КЛАССИФИКАЦИЯ ЭСКАЛАТОРОВ
Основные узлы эскалаторов различных конструкций (приводы,
главные валы, тяговые цепи и т. п.) не имеют таких принципиальных
отличий, которые бы выделяли ту или иную конструктивную
разновидность машины в самостоятельный тип. Поэтому конструктивные
особенности отдельных эскалаторных узлов не могут быть положены
в основу классификации современных эскалаторов.
Наиболее важными признаками, по которым последние могут
быть классифицированы, являются характер использования
поднимающейся и опускающейся ветвей полотна ступеней, а также место
установки эскалатора.
По харг^трру использования ветвей полотна различают
эскалаторы с одной рабочей ветвью и эскалаторы с двумя рабочими ветвями.
Эскалаторы с одной (верхней) рабочей ветвью (фиг. 107)
получили наиболее широкое распространение.
Такие эскалаторы характеризуются небольшой высотой сечения
средней части, так как нижняя ветвь полотна ступеней максимально
приближена к его верхней ветви. При больших высотах подъема
эскалатор имеет значительную мощность привода, так как вес
поднимаемых на нем пассажиров ничем не уравновешивается.
Эскалаторы с двумя рабочими ветвями применяются редко,
несмотря на ряд преимуществ, которыми они обладают. У таких
эскалаторов вес поднимающихся и вес опускающихся пассажиров
в значительной мере уравновешивают друг друга, что уменьшает
количество электроэнергии, затрачиваемой приводом. При той же
скорости полотна рассматриваемый эскалатор имеет в 2 раза
большую производительность, но с использованием нижней ветви в
качестве рабочей увеличивается высота сечения эскалатора, что
затрудняет его установку в стесненных машинных помещениях зданий
и наклонных ходах метрополитенов. Поэтому применение
эскалаторов с двумя рабочими ветвями оказывается рациональным лишь
при установке их на открытых площадках (для подъема на
естественные возвышения и т. п.).
13*
По/г верхнего
вестибюля
Фиг. 107. Схема эскалатора:
— привод; 2 — главный вал; 3 — натяжная каретка; 4 — направляющие полотна; 5 — входные площадки; 6 — лестничное полотно;
7 — поручневые устройства; 8 — поручень; 9 — основная металлоконструкция; /0 — металлоконструкция для крепления балюстрады.
Кинематические схемы и правила их построения 197
По месту установки различают эскалаторы зданий и эскалаторы
метрополитенов.
Эскалаторы зданий характеризуются малыми высотами подъема
(5—7 м), малыми габаритами и сравнительно небольшим весом. Они
рассчитываются обычно на меньшую производительность.
Как правило, такие эскалаторы изготовляются с узкими
ступенями, предназначенными для одного человека. Эскалаторы зданий
должны отвечать ряду особых требований в отношении снижения
шума и вибраций, возникающих при их работе.
Эскалаторы метрополитенов применяются, как правило, при
значительных высотах подъема (10—60 м) и имеют сравнительно
больший вес, чем эскалаторы зданий.
Они рассчитываются на большую производительность и имеют
широкие ступени, предназначенные для размещения двух человек.
§ 2. КИ Н ЕМ АТИ ЧЕС КИЕ СХЕМЫ ЭСКАЛАТОРОВ И ПРАВИЛА
ИХ ПОСТРОЕНИЯ
Общие требования. Для удобного и безопасного пользования
эскалатором кинематика движения его ступеней должна
удовлетворять следующим основным требованиям.
1. При перемещении ступени по всей рабочей ветви полотна ее
настил должен сохранять горизонтальное положение во избежание
соскальзывания с него ног пассажиров.
2. При любых взаимных перемещениях соседних ступеней во время
движения их по рабочей ветви зазоры между соседними ступенями
должны оставаться неизменными во избежание заклинивания
ступеней или защемления ног пассажиров.
3. Переходы с наклонного участка на горизонтальные должны
осуществляться плавно с тем, чтобы у пассажира при движении не
возникало неприятного ощущения, а приближение к выходной
площадке не было неожиданным.
4. На участках, примыкающих ко входным площадкам, настилы
ступеней должны находиться в одной горизонтальной плоскости;
длина горизонтального участка должна быть достаточной для
подготовки пассажира к выходу. Разница в уровнях настилов ступеней
на горизонтальных участках должна исключать задевание за гребни
входных площадок или повреждение обуви пассажиров зубьями
гребней.
5. На наклонном участке ступени должны образовывать
лестницу полного профиля с высотой ступеней (подступью), удобной
для пользования эскалатором, как обыкновенной лестницей.
Кинематика эскалатора с верхней рабочей ветвью полотна. На
фиг. 108 показана траектория движения основных бегунков ступеней
эскалатора с верхней рабочей ветвью полотна.
Перемещение пассажиров происходит на участке трассы 7—12,
расположенном между кромками зубьев верхней и нижней входных
площадок. На горизонтальных участках 7—8 и 12—11, расположен-
198
Классификация, кинематика и характеристика эскалаторов
ных рядом со входными площадками, основные и вспомогательные
бегунки катятся по параллельным горизонтальным направляющим.
При этОхМ расстояние между последними по вертикали имеет
наибольшее значение. Длина горизонтальных участков выбирается исходя
из расчета, чтобы пассажир при входе на эскалатор успел принять
устойчивое положение перед началом подъема или спуска и чтобы
он смог подготовиться к сходу с эскалатора. На криволинейных
участках 8—9 и 11—10, соединяющих наклонный участок трассы
Пол верхнего дестибюля-
ТГ\ 4
хОсь натяжной каретки
Фиг. 108. Траектория движения центра основного бегунка ступени.
с ее горизонтальными участками, ступени образуют лестницу перемен»
ного профиля с подступью, изменяющейся от 0 до номинального
значения (или наоборот) Настилы при этом сохраняют горизонтальнее
положение, что достигается постепенным изменением расстояния по
вертикали между направляющими основных и вспомогательных
бегунков. При движении от горизонтального участка к наклонному
это расстояние сокращается, а при движении в обратном
направлении — увеличивается. На наклонном участке 9—10 основные и вспо-
магательные бегунки также движутся по параллельным
направляющим; при этом расстояние между плоскостями беговых дорожек
последних имеет минимальное значение и даже может равняться
нулю (качение основных и вспомогательных бегунков в одной
плоскости).
Как только ступень скрывается под гребенкой входной
площадки, она освобождается от пассажирской нагрузки. Теоретически
настил ее может при этом находиться в произвольном положении.
Однако горизонтальные участки полотна не заканчиваются тотчас
же под входными площадками. Между гребенками зходных площа-
Кинематические схемы и правила их построения 199
док и тяговыми или натяжными звездочками имеются горизонтальные
участки полотна 6—7 и 12—13, необходимые для конструктивного
размещения механизмов. На участках 13—0 и 5—6 ступени меняют
направление своего движения (с подъема на спуск или наоборот).
В том случае, если тяговая цепь на этих участках огибает звездочки,
для основных бегунков нет надобности устраивать специальные
направляющие. При отсутствии звездочек на натяжной каретке для
основных бегунков устраиваются специальные направляющие. Во
избежание неправильного движения ступеней при их переходе с
одной ветви на другую вспомогательные бегунки на этих участках
во всех случаях движутся в двусторонних криволинейных
направляющих, называемых поворотными стенками.
Нижняя ветвь полотна (участок 0—5) служит для возврата
(реверсирования) ненагруженных ступеней на вехнюю ветвь. На
нижней ветви переход ступеней с горизонтальных участков на
наклонный также осуществляется плавно с помощью криволинейных
участков /—2 и 3 4. Ступени на нижней ветви .движутся в опрокинутом"
положении. Основное требование, которому должна удовлетворять
кинематика их движения на участке трассы 0—5, сводится к
обеспечению необходимых зазоров, исключающих заклинивание ступеней
при переходе с прямолинейных участков на криволинейные и наоборот.
Правила построения трассы и компоновки узлов эскалатора
с одной рабочей ветвью. Координаты криволинейных
участков верхней (рабочей) ветви. Для того чтобы
при переходе ступени с горизонтального участка на криволинейный
и с криволинейного на наклонный ее настил оставался
горизонтальным, основные и вспомогательные бегунки данной ступени должны
одновременно вступить каждый со своего горизонтального на свой
криволинейный участок. При несоблюдении этого условия ступень
начнет совершать вращательное движение вокруг своей оси, и настил
потеряет горизонтальность.
В системе прямоугольных координат (фиг. 109) с началом в центре
окружности радиуса Ro6, являющейся траекторией движения оси
основного бегунка по верхнему криволинейному участку верхней
ветви, координаты произвольной точки вышеуказанной траектории
выражаются уравнением
xl + yl= Rl.e. (94)
Для того чтобы настил ступени оставался горизонтальным,
отрезок прямой пгп длиной /, соединяющий центры основного и
вспомогательного бегунков, должен сохранять постоянный угол ty с
вертикалью. Проекции отрезка / на координатные оси Ь = / sin ф и а =
= / cos ф сохраняют постоянное значение при любом положении
ступени на рабочей ветви полотна. Поэтому координаты оси
вспомогательного бегунка в произвольной точке криволинейного участка
выражаются уравнениями
200
Классификация, кинематика и характеристика эскалаторов
а траектория движения оси вспомогательных бегунков определяется
уравнением
Эта формула представляет собой уравнение окружности радиуса
Ro б ,центр которой Oi расположен на расстоянии Ь от оси ординат
Фиг. 109/Схема движения ступеней по криволинейному участку рабочей ветви
трассы:
а — у натяжной станции; б — у приводной станции.
и на расстоянии (—а) от оси абсцисс. Следовательно, траектории
движения центров основных и вспомогательных бегунков на верхнем
криволинейном участке являются дугами окружностей одинакового
радиуса Ro6, центры которых О и О\ расположены относительно друг
друга соответственно так же, как центр основного бегунка ступени
расположен относительно центра ее вспомогательного бегунка.
Рабочие поверхности направляющих и контрнаправляющих
основных и вспомогательных бегунков концентричны с
соответственными траекториями движения центров основных и
вспомогательных бегунков. Радиусы кривизны этих поверхностей (фиг. ПО, а, б)
определяются по следующим формулам для основных бегунков:
радиус направляющей
**о. н == Ro. б
радиус контрнаправляющей
Ro, К = %О. б
ГО "1"
Кинематические схемы и правила их построения
201
для вспомогательных бегунков:
радиус направляющей
радиус контрнаправляющей
Re. к = Ro. б + гв + ^v
Здесь г0 и гв — радиусы соответственно основных и вспомога-
• тельных бегунков;
Ьо и 8б — конструктивные зазоры между ободом бегунка
и контрнаправляющей.
Фиг. ПО. Трасса направляющих верхней ветви на криволинейных участках:
а — у натяжной станции; б — у приводной станции.
Как правило, контрнаправляющие для вспомогательных
бегунков на криволинейных участках верхней ветви не устанавливаются
в связи с невозможностью их конструктивного размещения. Обычно
основные и вспомогательные бегунки делаются одинакового радиуса.
При этом условия R0M = Ro6 — г0 и R0K = Ro6 + r0 + 5 с центром
в точке О; ReH = ROH и ReK = ROtK с центром в точке О\.
Построение траектории движения центров основных и
вспомогательных бегунков на нижнем криволинейном участке рабочей ветви
полностью аналогично построению, рассмотренному выше (фиг. 109,а):
о ~Ь Уо = Ro. б
(94')
202 Классификация, кинематика и характеристика эскалаторов
(95')
= Ro.6~~ ro —
с центром в точке О (фиг. ПО, а);
с центром в точке 0\.
Координаты центров кривизны криволинейных
участков верхней (рабочей) и нижней ветвей
направляющих. Координаты центров кривизны участков
направляющих нижней ветви, расположенных у приводной станции,
определяются с учетом следующих конструктивно задаваемых
параметров (фиг. 111, б);
1) расстояния А между горизонтальными параллельными ветвями,
зависящего от принятых размеров ведущих и натяжных звездочек;
2) расстояние h! между наклонными параллельными ветвями,
зависящего от принятых размеров и типа ступеней, а также от высоты
поперечных связей металлоконструкций наклонного хода;
3) радиусов R к Rx кривизны траекторий движения центров
основных бегунков на криволинейных участках верхней и
нижней ветви;
4) угла а между наклонными участком эскалатора и
горизонталью;
5) координат расположения центра кривизны О траектории
движения основного бегунка по верхней ветви относительно заданного
внешнего ориентира.
Искомыми координатами центра кривизны дуги криволинейного
участка нижней ветви Ох относительно заданного центра О являются
величины х и у, определяемые из следующих уравнений:
h V
% tga i (96)
y = h-(R-R1). (97)
В случае, если R = Rlt уравнения (96) и (97) приобретают вид:
Кинематические схемы и правила их построения
203
204
Классификация, кинематика и характеристика эскалаторов
При построении траекторий криволинейных участков верхней и
нижней ветвей у натяжной станции (фиг. 111, а) уравнения,
выражающие координаты х и у, имеют следующий вид:
Фиг. 112. Схема взаимного перемещения ступеней на криволинейных участках:
а — геометрическая схема; б — схема, поясняющая образование постоянного зазора между
ступенями (/ — кривая, очерчивающая подступенок при 6 = const; // — траектория движения точки А2
нижней ступени; /// — траектория движения центра О2).
и в случае, если R = Rly
h —
hr
cos a
cos a /nn'\
x= «,„ ; (96)
tga
У = Л. (97')
Радиусы криволинейных участков на нижней ветви обычно
принимаются либо равными, либо меньшими соответствующих радиусов
верхней ветви. Криволинейные участки, расположенные у приводной
станции, следует изготовлять по возможности пологими с тем, чтобы
снизить давление цепей на основные бегунки.
Расположение центра дуги, описывающей профиль подступенка.
Расположение центра дуги, описывающей подступенок, определяется
из условия, чтобы при переходе с прямолинейного участка на
криволинейный (или наоборот) зазор между соседними ступенями
оставался постоянным. При движении по криволинейным участкам
рабочей ветви центр основного бегунка одной из ступеней
совершает вращательное движение вокруг центра основного бегунка
другой ступени по дуге окружности радиуса tcm (фиг. 112, а). Сами
ступени при этом не поворачиваются вокруг своих собственных
Кинематические схемы и привила их построения 205
осей. Задача сохранения постоянного зазора между соседними
ступенями сводится к определению траектории, описываемой
затылочной частью настила (точкой Л2) нижней ступени при вращении
точки О2 последней вокруг условно неподвижной точки Ог верхней
ступени. Вращение происходит по дуге окружности радиуса tcm9
равного расстоянию между соседними ступенями (шагу ступеней).
Зададимся системой координат (х; у) (фиг. 112, б), начало которых
расположено в точке Оь ось абсцисс направлена горизонтально в
сторону натяжной станции, а ось ординат направлена вертикально вниз.
Уравнение траектории движения точки О2 относительно точки О\
имеет следующий вид:
Здесь х = tcm-cos р и у = tcm-sin p — координаты
произвольного положения точки О2 относительно принятого начала координат.
Так как ступень 2 движется, не совершая вращения вокруг
собственной оси, проекции р и q отрезка О2А2 на оси координат
сохраняют постоянное значение для любой точки траектории
движения ступени 2 в рассматриваемом квадранте принятой системы
координат; поэтому координаты точки Л2 равны:
ха2 = х — р;
Уа2 =У — Я,
откуда
Подставляя полученные значения х и у в уравнение траектории
движения точки О2, получим уравнение траектории движения
точки Л2:
(xA2 + p)2 + (yAa + q)2 = t2cm. (98)
Данное уравнение является уравнением окружности радиуса tcm>
центр которой расположен на расстоянии (—р\ —q) от принятого
начала координат. Таким образом, центр дуги окружности, по
которой движется точка Л2 нижней ступени, расположен в
соответственной точке А\ верхней ступени.
Кривая, очерчивающая подступенок, по условию сохранения
постоянного зазора эквидистантна траектории точки Л2, а так как
последняя является окружностью радиуса tcm> очерченной из центра А\
(—р\ —q), то искомая кривая может быть только концентрической
окружностью, радиус которой равен
R = tcm-b, (99)
Классификация, кинематика и характеристика эскалатдрдв
где & — произвольный зазор между подступенком верхней и
затылочной частью настила нижней ступени. Практически величина &
принимается рав'ной 5—8 мм. Размеры р и q ступени при
проектировании назначаются из конструктивных соображений. Размер q не
должен быть меньше расстояния от оси бегунка до рабочей
поверхности настила ступени. Несоблюдение этого условия приводит к
необходимости скашивать торцы реек настилов, чтобы при взаимных
перемещениях соседних ступеней затылочная часть настила нижней
I 8)
Фиг. 113. Траектория движения центров основных и вспомогательных бегунков:
/ — траектория движения центров основных бегунков; // — траектория движения центров
вспомогательных бегунков; а — на поворотной стенке; б — на наклонном и верхнем криволинейном участке
холостой ветви трассы Бри наличии эксцентриситета; в — там же, при отсутствии эксцентриситета.
ступени не упиралась, вследствие уменьшения зазора, в
подступенок верхней ступени.
Расположение направляющих на нижней ветви.
Взаимное расположение направляющих основных и вспомогательных
бегунков на нижней ветви должно обеспечить сохранение зазоров
между соседними ступенями при их переходе с наклонного на
горизонтальные участки (или наоборот). Положение настилов на этой ветви
может быть произвольным. Поэтому траектории центров основных
и вспомогательных бегунков для простоты изготовления и монтажа
обычно выбираются эквидистантными, с постоянным расстоянием с'
(фиг. 113, а). Казалось бы, наиболее целесообразно это расстояние
принимать равным расстоянию с между горизонтальными участками
траекторий основных и вспомогательных бегунков верхней ветви, так
Кинематические схемы и прибила их построения
20?
как в этом случае конструкция поворотной стенки с концентрично
расположенными направляющими была бы наиболее простой. При
таком значении с' ступени двигались бы по прямолинейным участкам
нижней ветви с настилами, расположенными в одной плоскости,
и с заданной величиной зазора 8Х между ними (фиг. 113, в). Однако
при переходе на криволинейные участки с эквидистантно
расположенными траекториями к поступательному движению ступеней
прибавляется вращательное движение вокруг осей О собственных ос-
Фиг. 114. Схема крайних положений ступени при определении длины
горизонтальных участков трассы:
а — у натяжной станции; б — у приводной станции; / — уровень настилов нижнего горизонтального
участка; // — начало нижнего криволинейного участка верхней ветви направляющей основных
бегунков; III — уровень настилов верхнего горизонтального участка; IV — начало верхнего
криволинейного участка верхней ветви направляющей основных бегунков.
новных бегунков, вследствие чего зазор на верхнем криволинейном
участке начинает уменьшаться и приводит к сближению затылка
настила данной ступени с поверхностью подступенка соседней.
Чтобы улучшить проходимость ступеней, увеличивают размер с±
по сравнению с с на величину, равную примерно двум толщинам
настила ступени, т. е. на 40—60 мм. При этом на прямолинейных
и криволинейных участках нижней ветви ступени принимают
положение, изображенное на фиг. 113, б, в котором затылочная часть
верхней ступени перемещается за пределами кромки подступенка m
нижней ступени.
Сопряжение верхней и нижней траекторий вспомогательных
бегунков при размере с' > с может быть осуществлено либо путем
введения эксцентриситета между осью главного вала (или натяжной
звездочки) и осью соответствующей поворотной стенки, либо путем
208 Классификация, кинематика и характеристика эскалаторов
введения участка направляющих вспомогательных бегунков,
непараллельного направляющим основных бегунков.
В первом случае центр кривизны поворотной стенки
располагается выше геометрической оси главного вала или натяжной
звездочки, в одной вертикальной плоскости с последней. Естественно,
что эксцентриситет К — -^тг- должен быть одинаковым как у
поворотных стенок главного вала, так и у поворотных стенок
натяжной каретки.
Во втором случае поворотные стенки устанавливаются соосно
с главным валом, прямолинейный же участок направляющих
вспомогательных бегунков располагается не горизонтально, а наклонно,
по касательной к криволинейному участку.
Расположение гребней входных площадок.
Горизонтальные участки трассы полотна 7—8 и 12—11 (фиг. 108),
расположенные между кромками зубцов нижней или верхней гребенок
и началом соответствующих криволинейных участков направляющих
рабочей ветви, согласно действующим Правилам Госгортехнадзора,
должны иметь длину:
1) для эскалаторов со скоростью полотна v < 0,5 м/сек не
менее 0,8 м\
2) для эскалаторов со скоростью полотна v > 0,5 м/сек не
менее 1,2 м.
В расчетную длину горизонтального участка входит ступень,
расположенная на криволинейном участке, при условии, если ее
настил находится ниже или выше уровня настилов ступеней
горизонтального участка не более чем на 15 мм.
При обозначениях, принятых на фиг. 114, координаты кромок
гребней входных площадок относительно центров кривизны
криволинейных участков определяется по следующим формулам:
А. Гребень у приводной станции:
1) для эскалаторов со скоростью полотна v < 0,5 м/сек
x,epx>800-\-b-) 30Reepx мм; (100')
2) для эскалаторов со скоростью полотна v > 0,5 м/сек
хверх > 1200 + b - УЪЪКверх (мм). (100")
Б. Гребень у натяжной станции:
1) для эскалаторов со скоростью полотна vn0A < 0,5 м/сек
(мм); (101')
2) для эскалаторов со скоростью полотна vn0A > 0,5 м/сек
> 1200 + а - V 30Яниж (мм). (ЮГ)
Размеры V^0RBepx и |/30 RHUM, обозначенные на фиг 114, аи б
соответственно сверх и снпж> представляют собой наибольшие расстоя-
Кинематические схемы и правила их построения 209
ния, на которые может удалиться основной бегунок от начала
криволинейных участков, чтобы ступень, в соответствии с Правилами
Госгортехнадзора, считалась входящей в горизонтальный участок.
Ход натяжной каретки. При проектировании
эскалатора обычно задаются максимальной расчетной высотой подъема Я.
В зависимости от конкретных условий установки, действительная
высота Ндейстпв может отличаться от расчетной, причем всегда
Ндейстпв< Н. В связи с этим число ступеней в полотне эскалатора
заранее не может быть установлено. Помимо этого, число ступеней
в эскалаторном полотне не всегда является произвольным. В том
случае, если шаг ступени tcm равен трем шагам цепи гцу эскалатор
должен иметь только четное число ступеней. В противном случае
потребовалось бы устройство в тяговой цепи специальных
соединительных пластин с изогнутыми звеньями.
При шаге ступени, равном двум шагам цепи, число ступеней
в полотне может быть как четным, так и нечетным. Возможность
соединения (замыкания) тяговых цепей при четном или при нечетном
числе ступеней предопределяет требуемую величину хода натяжной
каретки. Исходя из указанных условий, последний должен быть
не менее:
при tcm - Ыц
-50^450 мм; (102')
ПРИ *ст = 2*ц
х.= ip + a^ 200 + 50 ^ 250 мму (102")
где а — дополнительный ход, необходимый для срабатывания
концевых выключателей, принимаемый равным 50 мм.
Компоновка приводной станции. При
компоновке приводной станции (фиг, 115, а) в первую очередь
фиксируется положение начала криволинейного участка верхней ветви
направляющих основных бегунков относительно строительного
сооружения (наклонного хода, подэскалаторных балок и т. п.). Через
точку, соответствующую смыканию криволинейного участка с
верхним горизонтальным участком, проводится вертикальная ось,ив
дальнейшем от нее производятся все необходимые отсчеты по
горизонтали. После этого производится определение положения кромки
зубьев гребенки верхней площадки, согласно изложенным выше
правилам, и положения начала криволинейного участка
направляющих вспомогательных бегунков верхней и нижней ветви.
Ось главного вала должна быть настолько удалена от кромки
гребня входной площадки, чтобы при демонтаже вала вверх не
требовалось перемещать его в горизонтальном направлении.
Ширина прохода между эскалаторами, согласно Правилам
Госгортехнадзора, должна быть не менее 500 мм, а в отдельных местах
против выступающих частей, может быть уменьшена до 350 мм.
Так как приводная станция эскалатора, особенно в месте установки
14 Ивашков 2598
210
Классификация, кинематика и характеристика эскалаторов
1-50
Фиг. 115. Компоновка концевых станций эскалатора ЭМ-4:
а — приводной станции; б — натяжной станции; / — начало криволинейного участка
верхней ветви направляющих основных бегунков; // — уровень чистого пола верхнего
вестибюля; /// — уровень чистого пола нижнего вестибюля; IV — уровень настила.
Кинематические схемы и правила их построения 211
главного вала, как правило, значительно шире, чем средняя часть,
проход между эскалаторами в этом месте оказывается предельно
суженным.
Если бы главные валы соседних эскалаторов располагались
соосно, то между эскалаторами не осталось бы даже минимального
прохода, допустимого по Правилам Госгортехнадзора. При нескольких
эскалаторах, устанавливаемых рядом, задача обеспечения
достаточно широких проходов разрешается путем увеличения длины
среднего эскалатора. Этим путем наиболее широкое место среднего
эскалатора выносится за пределы крайних эскалаторов и ширина прю-
ходов. между крайними и средними эскалаторами доводится до
необходимого минимума.
Компоновка натяжной станции. Примерная
схема натяжной станции показана на фиг. 115, б. В связи с тем,
что рабочее положение натяжной каретки не может быть заранее
предусмотрено, необходимо проверять сопряжение последней с
другими узлами при обоих крайних положениях: ближнем и дальнем
(относительно приводной станции).
За исходную точку берется начало криволинейного участка
направляющей основного бегунка верхней ветви. Через эту точку
проводится вертикальная ось и от нее производятся все отсчеты по
горизонтали.
Определяется минимальное расстояние от указанной оси до
кромки зубцов гребенки, положение начала криволинейного участка
направляющих основных и вспомогательных бегунков нижней ветви.
Во избежание быстрого износа вспомогательных бегунков
рекомендуется удалять натяжную каретку от конца зубцов гребенки
настолько, чтобы вспомогательные бегунки любой данной ступени
переходили с неподвижных направляющих на подвижные
направляющие не раньше, чем настил ступени полностью скроется под
гребенкой и ступень освободится от пассажирской нагрузки.
Места сопряжения неподвижных и подвижных направляющих
должны целиком находиться на горизонтальном участке.
Если бы какой-нибудь из подвижных стыков нижней ветви
вклинивался в пределы криволинейного участка, то конструкция стыков
чрезвычайно усложнилась бы. Весь настил ступени должен не только
целиком войти под гребенку, но и выйти из-под нее прежде чем
вспомогательные бегунки вступят на поворотные стенки и ступень начнет
опрокидываться, поднимая заднюю часть настила выше уровня
настилов горизонтально расположенных ступеней. В дальнем
положении для простоты монтажа натяжная каретка должна находиться
(в плане) вне пределов балюстрады. Ход натяжных кареток,
достигающий 450 мм, также определяет дальнее положение каретки при
условии, что ближнее ее положение определилось.
Необходимо предусматривать, чтобы между боковой стеной
натяжной камеры и крайними эскалаторами были обеспечены проходы
достаточной ширины для производства ремонтных работ.
14*
212
Классификация, кинематика и характеристика эскалаторов
Кинематика эскалатора с двумя рабочими ветвями.
Специфической особенностью эскалатора с двумя рабочими ветвями полотна
являются дополнительные устройства для поворота ступеней,
вступающих на нижнюю ветвь полотна и сходящих с нее. Верхняя ветвь
Л.
Горизонтальный участок
32?-
7
*)
7ГТ 7 1 7Г" *;
Фиг. 116. Схема поворота ступеней эскалатора, у которого обе ветви полотна
являются рабочими:
а —на приводной станции; б — на натяжной станции; 1 — полотно; 2 — приспособление для
поворота ступеней (ускоритель); 3 — приспособление для поворота ступеней (замедлитель); 4 — главный
вал; 5 — натяжные звездочки; 6 — направляющие; 7 — гребенка.
полотна подобного эскалатора всегда работает на подъем, а
нижняя — на спуск.
Как видно из фиг. 116, а, вспомогательные бегунки ступеней,
сходящих с ведущих звездочек на нижнюю ветвь, попадают на
специальный ускоритель цепной конструкции. Продвигаясь по
направляющим со скоростью, превышающей скорость движения основных
Технические характеристики эскалаторов 213
бегунков, вспомогательные бегунки поворачивают движущуюся
ступень вокруг оси основных бегунков так, что после схода
вспомогательных бегунков с ускорителя настилы соседних ступеней нижней
ветви образуют сплошной горизонтальный участок, а
вспомогательные бегунки движутся впереди основных.
На фиг. 116, б показано такое же устройство, установленное на
натяжной станции эскалатора. Вспомогательные бегунки ступеней,
приближающихся к натяжным звездочкам, попадают на замедлитель,
который постепенно повертывает ступень в направлении, обратном
описанному выше. К моменту схода с замедлителя ступень
приводится в положение, нормальное для ее входа на натяжные звездочки,
при котором вспомогательные бегунки на верхней ветви обращены
в сторону натяжной станции.
Для того чтобы пассажиры, транспортируемые нижней ветвью,
могли стоять в полный рост, верхняя и нижняя ветви полотна
располагаются одна над другой на значительном расстоянии по высоте.
Как видно из фиг. 9 (гл. I), верхняя ветвь полотна на участке
между верхней входной площадкой и ведущими звездочками
образует наклонный участок, необходимый для увеличения расстояния
по высоте между рабочими участками верхней и нижней ветвей.
Нижняя рабочая ветвь полотна рассматриваемого эскалатора
должна удовлетворять всем изложенным выше требованиям,
предъявляемым к рабочей ветви лестничного полотна.
§ 3. ТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ ЭСКАЛАТОРОВ
Скорость полотна. Скорости полотна современных
эскалаторов колеблются в пределах 0,45—1,0 м/сек. Верхний предел
скорости определяется удобством и безопасностью входа на
движущееся полотно и схода с него. В соответствии с этим Правила
Госгортехнадзора запрещают изготовлять эскалаторы со скоростью
полотна больше 1,0 м/сек. Важное значение имеет также то
обстоятельство, что повышение скорости сверх 0,9—1,0 м/сек не дает
существенного увеличения производительности, так как чем больше
скорость, тем большее число ступеней уходят недогруженными.
Обычно эскалаторы изготовляются с односкоростными приводами.
В некоторых случаях применяют двухскоростные эскалаторы: в часы
наибольшей загрузки эскалатор работает с большой скоростью,
а в часы малой загрузки его переключают на меньшую скорость.
Во всех случаях вторая скорость достигается изменением числа
оборотов двигателя (двухскоростные двигатели), а* не за счет
изменения передаточного числа привода. Небольшие скорости полотна
(0,45—0,5 м\сек) принимаются обычно для эскалаторов зданий,
имеющих малые высоты подъема и рассчитываемых на сравнительно
небольшую производительность. Более высокие значения скорости
(0,75—1,0 м/сек) принимаются для эскалаторов метрополитенов,
где наряду с высокой производительностью существенное значение
214 Классификация, кинематика и характеристика эскалаторов
приобретает продолжительность подъема или спуска, так как
высота этих эскалаторов достигает 40—60 м. Скорость эскалаторов
советских метрополитенов колеблется от 0,75 до 1,0 м/сек.
Вместимость ступеней. Максимальная вместимость
ступени эскалатора, как и вместимость кабины многокабинного
подъемника, определяется удобством пользования поручнями. Так
как эскалатор всегда имеет два поручня, расположенных по бокам
полотна, то при размещении на ступени трех человек средний не смог
бы пользоваться поручнем, и его проезд на эскалаторе • не был бы
безопасным.
По этим соображениям каждая ступень рассчитывается исходя
из размещения на ней не более двух человек. Ширина ее при этом
принимается практически не более 1220 мм.
Высота подъема. Современные эскалаторы изготовляются
с высотами подъема в пределах от 4 до 60 м. Так как эскалатор в
основном состоит из двух горизонтальных участков и одного
наклонного, расположенного обычно под углом 30° к горизонту, общая длина
эскалатора максимальной высоты достигает 130—140 м.
При увеличении высоты сверх 60—65 м применение эскалаторов
становится невыгодным из-за большой продолжительности подъема
(3—3,5 мин.), а также из-за большого увеличения его стоимости
и веса, которые всегда возрастают значительно быстрее, чем высота.
Объясняется это тем, что по мере роста высоты увеличивается
не только длина эскалатора, но и погонный вес ряда его узлов
(тяговых цепей, ступеней, направляющих, металлоконструкций и т. д.).
В этом отношении эскалаторы невыгодно отличаются от лифтов,
у которых стоимость и вес механического оборудования мало зависят
от высоты подъема. Поэтому при больших высотах подъема
применение лифтов вместо эскалаторов может оказаться экономически более
выгодным.
Производительность. Производительностью
эскалатора называется число людей, перемещаемых на нем за единицу
времени. Часовая производительность эскалатора подсчитывается
по уравнению
Р= Ш?*Ео пасс/час, (103)
гсш
где ср — коэффициент заполнения полотна;
Е — вместимость ступени, чел.;
v — скорость полотна в м/сек;
tcm — шаг ступеней.
Коэффициент заполнения полотна представляет собой отношение
общего числа людей, перемещенных эскалатором за определенный
отрезок времени, к числу людей, которое можно было бы
переместить за тот же отрезок времени при заполнении всех ступеней в
соответствии с их номинальной вместимостью. Коэффициент заполнения
зависит от скорости движения полотна, снижаясь с увеличением
Технические характеристики эскалаторов 215
последней. На основании опытных данных зависимость
среднечасового коэффициента заполнения от скорости полотна выражается
следующим образом:
Скорость полотна vnoA в м/сек 0,4 0,5 0,6 0,75 0,9 1,00
Среднечасовой коэффициент заполнения ср 0,96 0,90 0,84 0,75 0,66 0,60
В более короткие промежутки времени (1—2 мин.) коэффициент
заполнения может достичь единицы.
Вместимость ступени Е, как указано выше, может составлять 1
или 2 человека. Максимальный шаг ступени определяется тем, что
он практически равен глубине настила (проступи), отличаясь от нее
лишь на величину зазора между соседними ступенями, который
равен 5—8 мм. Глубина настила, в свою очередь, определяется
габаритами человеческого тела и размерами ступни ноги. При
недостаточной глубине настила пассажирам практически невозможно
будет разместиться на соседних ступенях.
Максимальный шаг ступени определяется допускаемой разностью
уровней соседних ступеней (подступью) и углом наклона эскалатора
к горизонту. Для того чтобы пользоваться эскалатором как
лестницей, подступь не должна превышать 200 мм.
Угол наклона эскалатора к горизонту принимается обычно
равным 30°. При этом угле глубина настила не должна превышать
400 мм, что практически совпадает с минимальным значением,
которое определяется удобством размещения людей на ступени.
Шаг ступеней эскалаторов советских метрополитенов
принимается равным 400 или 405 мм.
ГЛАВА XII
ТЯГОВЫЕ РАСЧЕТЫ ЭСКАЛАТОРОВ
§ 1. УСИЛИЯ В ТЯГОВЫХ ЦЕПЯХ
Расчетные нагрузки на лестничное полотно. По правилам Госгор-
технадзора эксплуатационная нагрузка на 1 пог. м лестничного
полотна при определении усилий натяжения тяговых цепей
определяется по полуэмпирической формуле
195АВ(2 — v)
гму (104)
где qnac — эскплуатационная нагрузка на лестничное полотно
в кг/пог. м\
А —глубина (проступь) настила в м;
В — ширина настила в м\
v — скорость движения полотна в м/сек;
tcm — шаг ступеней в м.
Из уравнения (104) следует, что эксплуатационная нагрузка на
полотно при заданных величинах А, В и tCm уменьшается по мере
увеличения скорости v. Этот вывод согласуется с приведенными
в гл. XI значениями коэффициента заполнения полотна, зависящими
от скорости v.
Коэффициенты сопротивлений движению лестничного полотна. По
характеру сопротивлений движению участки трассы полотна
делятся на три группы (фиг. 117).
Первая группа — прямолинейные участки (наклонные и
горизонтальные), на которых тяговое усилие расходуется на
перемещение полотна (с нагрузкой или без нагрузки) и на преодоление сил
трения в подшипниках бегунков и между ободьями бегунков и
беговыми дорожками.
Вторая группа — криволинейные участки, на которых тяговое
усилие расходуется на преодоление тех же сопротивлений, что и на
участках первой группы, а также на трение в шарнирах тяговых
цепей, звенья которых сгибаются при входе на криволинейный
участок и разгибаются при сходе с него. Сопротивления качению
бегунков на этих участках возрастают вследствие дополнительного нагру-
жения бегунков составляющей от усилия натяжения согнутых цепей..
Третья группа — участки, на которых полотно огибает
тяговые или натяжные звездочки, где тяговое усилие расходуется на
Усилия в тяговых цепях
217
трение в шарнирах цепей, на трение в опорах оси или вала
звездочек, на трение между зубьями звездочек и роликами цепей, а также
на перемещение участка полотна, огибающего звездочки.
Сопротивление движению лестничного полотна определяется
с помощью соответствующих расчетных коэффициентов Сп , Ск и Сзв,
учитывающих потери натяжного усилия на прямолинейны/ (Спр)г
криволинейных (Ск) и участках, огибающих звездочки (Сзв).
-гор.
Фиг. 117. Схема трассы лестничного полотна:
1 — тяговые звездочки; 2 — гребни; 3 — верхняя (рабочая) ветвь полотна; 4 — нижняя
(холостая) ветвь полотна; 5 — натяжные звездочки..
Коэффициенты сопротивления движению на
прямолинейных участках трассы. Изменение тягового усилия
на прямолинейном участке трассы полотна выражается уравнением
. (105)
Здесь S
Я = Яп
n_x
— натяжение тягового органа в начале (считая
по направлению движения) рассматриваемого
прямолинейного участка в кг;
Sn — то же в конце участка в кг;
Упас —вес 1 пог- м полотна с учетом пассажирской
нагрузки на данном участке в кг/пог. м;
I—длина рассматриваемого участка в м;
Сполн—полный коэффициент тяги, учитывающий
изменения натяжения тяговых цепей как от работы сил
трения, так и от веса перемещаемого участка
полотна. Этот коэффициент выражается уравнением
/-> j , . | *~> \ / -I Г\/2\
/2 О Л ч \ —— Лр/' V /
218 Тяговые расчеты эскалаторов
где а — угол наклона данного прямолинейного участка к горизонту
(при направлении движения снизу вверх sin а
принимается со знаком плюс, при направлении движения сверху
вниз — со знаком минус);
Спр — коэффициент, учитывающий сопротивления движению на
прямолинейных участках;
п т1 _1_ T J_ Т _[_ Т V-ondpn . *l , гнУ ,
°л/7 ~ 1оп~Г1 кач ■ 1 реб I 1 бок — ^ Г ~^Г i ~q Г
London + 2/ + 2^ рХ + Dfi^X
= 5 * (107)
Коэффициент сопротивления движению на
криволинейных участках трассы. Значения натяжений
тягового органа в начале и конце криволинейного участка трассы
связаны между собой уравнением
^ti (108)
Здесь Ro6 — радиус кривизны направляющих рассматриваемого
участка в- м;
a — угол, стягиваемый дугой криволинейного участка,
обычно равный углу наклона средней части
эскалатора к горизонту;
Скр — коэффициент, учитывающий сопротивления
движению на криволинейном участке;
В практических расчетах значение Ск можно принимать
равным Скр = 1,01 ч- 1,02.
Коэффициент сопротивления движению на
звездочках. Значения натяжений тягового органа в местах сбегания
и набегания цепи на звездочку, не передающую крутящего момента,
связаны между собой уравнением
Sn-C^S^ + C*>+±q.D3(r (109)
где D3e — диаметр делительной окружности звездочки;
Сзв — коэффициент, учитывающий сопротивления движению на
звездочке.
Второй член правой части уравнения (109) выражает изменение
натяжения цепи от веса огибающего звездочки участка полотна
вследствие того, что начало и конец рассматриваемого участка
расположены на разных уровнях. Знак (—) соответствует случаю,
когда конец участка расположен ниже начала участка; знак (+) —
Усилия в тяговых цепях
219
Таблица 20
Значение величин, входящих в уравнение (107) (по данным ВНИЙПТМАШ)
Обозначение
Наименование
Расчетное
уравнение
т
1 on
Ткач
Треб
Тбок
D
Р
Составляющая, учитывающая потери в опорах
бегунков
Составляющая, учитывающая потери при
качении бегунков по направляющим
Составляющая, учитывающая потери от трения
торца бегунка о реборду
Составляющая, учитывающая потери от
трения, возникающего при боковом смещении
полотна между рабочей поверхностью обода
бегунка и направляющей
Коэффициент трения скольжения бегунков на
оси или коэффициент трения в
шарикоподшипнике, приведенный к диаметру шейки оси; для
подшипников скольжения {лоп = 0,12; для
подшипников качения \ьоп = 0,02
Коэффициент трения скольжения обода
бегунка по направляющей и по реборде:
резина по стали цн = 0,74;
пластмасса по стали \ьн = 0,22
Коэффициент трения качения обода бегунка
в см:
резина по стали / = 0,2 см;
пластмасса по стали / = 0,06 см
Диаметр шейки оси бегунка в см; для
бегунков с шарикоподшипниками — приведенный
диаметр качения
Наружный диаметр бегунка в см
Плечо сил трения торца бегунка о реборду
относительно мгновенной оси вращения бегунка:
вертикальная реборда высотой 12 мм
р = 2,7 см
наклонная реборда высотой 12 мм
р = 0,65 см
Коэффициент, учитывающий влияние
деформации обода бегунка при осевых нагрузках:
резиновый обод X = 0,15;
пластмассовый обод X = 0,6
Угол перекоса бегунков (отклонения осей
основных бегунков ступеней от перпендикуляра
к направлению движения полотна) 7 ^ 0,01 рад.
D
2L
D
D
220 Тяговые расчеты эскалаторов
случаю когда конец участка расположен выше его начала.
Коэффициент Сзв для звездочек с числом зубьев z > 20 определяется по
уравнению
1 4- (ц. А * +и й
1 "Г I Y-ц f — г V-зв
с ч ч
36 ~"
Здесь \i3e — коэффициент трения оси звездочки на ее опорах;
d3e — диаметр оси звездочки на опоре в см;
/ц — шаг зубьев звездочки (шаг цепи) в см;
а^ — коэффициент трения скольжения в шарнирах
тяговых цепей (р,ч%0,15);
йц — диаметр валика тяговой цепи.
Изменение тягового усилия в цепи при огибании звездочки, не
передающей крутящего момента, выражается уравнением
P3e = Sn-Sn_l = {C3e-\)Sn_1 + ^±± qD30. (Ill)
Статическое усилие натяжения тяговых цепей. Работа на подъем
с пассажирской нагрузкой.
Уравнения, выражающие изменения натяжения в тяговых
цепях при движении полотна, составляются последовательно для
каждого из участков трассы (фиг. 117), начиная от точки s0 по
часовой стрелке.
Участок s0 — sx: Sx = So + Cnp 10_г qn0A.
Известными являются коэффициент Спр, определяемый по
уравнению (107), длина участка 10_1 и погонный вес полотна qnoA, а
неизвестными— натяжения So и St в точках s0 и s1. Решить данное
уравнение пока не представляется возможным.
Участок s± — s2 :S2 = CKPl_2-S1 ^J Япол'Кг-* 0 ~ cosa)-
Значения величин R±_2 и a принимаются из геометрической
схемы.
Значение CKPl_2 определяется заранее по уравнению (108') или
принимается равным 1,01 — 1,02.
Второй член правой части уравнения берется со знаком (—),
поскольку полотно движется от точки 52 к расположенной ниже
точке s2.
Участок 52 - 53 : S3 = S2 + Спр - /2_3 • cos a • цпол — /2_3 • sin a • qnoA.
Участок s3 - s4 : 54 = CKp3^-S3 — C^~4+l . qnoy ^3_4 (l_Cos a).
Участок 54 - 55: S5 = 54 -j- Cnp • /4_5. qn ол.
Участок s5 - s6: 56 = Снали 3ft. 55 + c«"".» + l . qnoji DHam, 3e.
Значение Снатзв определяется заранее по уравнению (ПО);
значение DHam зв берется из геометрической схемы.
Усилия в тяговых цепях 221
Участок s6 -
Участок 57 -
Значение qn
Участок 58 -
S С
9 W
Участок 59
Sl0 = 59 + (
Участок 51о
С
Участок 5U •
— 57: S7 = S6 -f- C/2p/
~ 5g '. о8 = о7 -j- Cnp -
ас определяется по
-59:
^ ( ^Кр8—9 ~Т" А
р8-9 8 "Г 2
— «10 =
Спр-19-Ю'Ы**(Япол-
— 5П:
5и = СжМС
/ср ю—11 ~г (п |
2 (^«ол Т~ (
— 5l2 :
6-7 ' Япол'
11-*кЯпол + Я,
уравнению
-{ЯпоЛЯпас)
i-n-5l0 +
(104).
^8_э(1 —cos а).
о*{пос(Яп0л+Япас)-
— cos а).
-12 [Япол
Участок 512 — 513 :
^13 ,== *^12 ~Ь ^«Р * ^12-13 ' Япол'
Полученная система взаимосвязанных уравнений может быть
решена, если в уравнение участка s5 — s6 подставить вместо
усилия SQ его числовое значение А, равное предварительному
натяжению одной ветви полотна с помощью натяжной каретки:
д Г* С I С наш, зв ~Ь 1 т-\
™ ^нагп. зв'°5Т~ 2 Чпол'*^
пол'*^наш . зв-
Это уравнение решается относительно S5, а затем
последовательно решаются все остальные уравнения.
Оптимальная величина предварительного натяжения полотна А
определяется по эмпирической формуле
А = 8ЕН + 300 (кг),
где Я —высота эскалатора в м\
Е — число пассажиров, размещающихся на одной ступени.
После определения значений So, 513, Стягзв может быть
подсчитана величина окружного усилия на тяговых звездочках,
необходимого для движения полотна;
р Г <\ Стяг.зв-J- 1 П П 9 (\19\
гпол — итяг. зв'°13 £ Чполитяг. зв °0» V11Z;
или, пренебрегая весом полотна на тяговой звездочке,
Рпол = Стяг, зв'^13 — So. (1 13)
222 Тяговые расчеты эскалаторов
Динамическая составляющая усилия натяжения тяговых цепей.
Эта составляющая, возникающая в ветви полотна от
неравномерности движения цепей, определяется по уравнению
Sr* \ Z J QnoA + Qnac /i 1 л\
дин. ^=° J~4 g ' * '
Здесь v — скорость полотна в м/сек;
0>пол — вес Bce** рабочей ветви полотна в кг;
Qnac — вес всех пассажиров эскалатора (при коэффициенте
заполнения <р = 1) в кг;
g = 9,81 м/сек2 — ускорение силы тяжести;
z — число зубьев звездочки.
У
В уравнении (114) член 6 —- выражает ускорение
ц
цепи от неравномерности движения при набегании на звездочку,
а член Чпол-гчпас ВЫражает массу рабочей ветви полотна.
Суммарное (расчетное) натяжение тяговых цепей. Полное
расчетное натяжение одной тяговой цепи представляет собой полусумму
статического и динамического натяжений ветви полотна, причем
статическое натяжение принимается в точке S13 трассы для случая
работы на подъем с нагрузкой:
Sl3+2SdUH («)■ (115)
При определении крутящего момента главного вала и энергии,
потребляемой приводом, учитывать динамическую составляющую
натяжения цепей не следует.
§ 2. УСИЛИЯ В ПОРУЧНЯХ
Коэффициенты сопротивления движению и расчетные нагрузки.
Значения коэффициентов сопротивления движению поручней,
определенные ВНИИПТМАШ, приведены в табл. 21.
Типовая схема поручневой установки с одним ведущим блоком,
практически осуществленная на эскалаторах всех высот, показана
на фиг. 118. Отправной точкой трассы при составлении уравнений,
выражающих натяжение поручня как при работе на подъем, так
и при работе на спуск, является точка s0, где холостая ветвь касается
обода ведущего блока.
По характеру сопротивлений движению участки трассы
поручней, как и участки трассы полотна, делятся на три группы.
• Первая группа — прямолинейные участки, на которых
тяговое усилие расходуется на преодоление сил трения между
поручнем и поддерживающими его деталями (направляющими
роликами).
Усилия в поручнях
223
Изменение натяжения поручня на участках этой группы
выражается типовым уравнением:
Sn = S^±N (116)
(участки sx — s2j s3 — s4, s5 — s6, s8 — s9, s10 — sll9 5n — sI2, sl2 —
«is)-
К этой группе относятся также участки, на которых
натяжение в поручне остается неизменным, т. е. член ±N равен нулю
(участки s0 — sx и s6 — s7).
'-6-7
Фиг. 118. Расчетная схема поручневой установки:
1 — ведущий блок; 2 — отклоняющий ролик; 3 — неподвижный блок натяжки; 4 — подвижный блок
натяжки; 5 — поддерживающий ролик; 6 — отклоняющий блок холостой ветви; 7 — огибной блок
натяжной станции; 8, 9 — отклоняющие блоки рабочей ветви; 10 — поручень.
Вторая группа — криволинейные участки, на которых
тяговое усилие расходуется на протаскивание поручня по
направляющим или блокам. Сюда относятся участки огибания поручнем
ведущего блока и участки огибания криволинейных направляющих
(на фиг. 118 участки s13 — s0 и s9 — s10). На участках рассматривает
мой группы тяговое усилие расходуется также на сгибание и
разгибание поручня и на трение в опоре блока. Однако эти потери на
данных участках сравнительно малы и их можно не учитывать.
Изменение натяжения поручня на участках этой группы
выражается через тяговый коэффициент е№:
Sn = Sa^e^. (117)
Третья группа — криволинейные участки, на которых
происходит изгибание поручня без протаскивания по направляю-
Коэффициенты сопротивлений движению поручней
Таблица 21
Обозначение
расчетного
коэффициента
К
1 7/
9пор
Характеристика расчетного
коэффициента
Тяговый коэффициент К = е[х$
Коэффициент трения
скольжения поручня по направляющим
из стали, меди, латуни и
пластмассы
Коэффициент потерь в поручне
при огибании блоков
Дополнительные данные,
характеризующие работу поручня
Блок с обрезиненным
цилиндрическим ободом
Блок со стальным
цилиндрическим ободом
Блок со стальным фасонным
ободом с узким ручьем
То же при наличии графитовой
смазки
Для поручней с непроклеенны-
ми внутренними прокладками1
Для поручня с проклеенными
внутренними прокладками и для
любого поручня по
пластмассовым направляющим
Для блоков диаметром 800—
850 мм с цилиндрическим
ободом
Для блоков диаметром 600—
650 мм с цилиндрическим ободом
Для блоков диаметром 800—
850 мм с узким ручьем на
ободе
Для блоков диаметром 600—
650 мм с широким ручьем на
ободе
Значение расчетных коэффициентов
для поручней следующих конструкций
Обычный
С-образный
поручень
(фиг. 156, а)
6,8
4,3
С-образный
поручень
повышенной сце-
пляемости
(фиг. 156,6)
12,0
6,8
Малый клиновой
поручень
(фиг. 156, в)
18,0
(фиг. 156, г)
100
19,6
0,37
0,27
0,015
0,025
0,012
0,016
0,014
0,011
0,009
0,009
тлор
Фбл
Фрол
Упор
Я пасс
Кзакл
\
р
г разр
Коэффициент потерь в поручне
при огибании роликов на угол,
не превышающий 10°
Коэффициент потерь в блоках
Коэффициент потерь в роликах
Вес 1 пог. м поручня в кг
Пассажирская нагрузка на
1 пог. м поручня в кг
Коэффициент заклинивания
поручней на направляющих
Наименьшая разрушающая
нагрузка в кг
1 См. стр. 287
Для роликов диаметром 80—
100 мм
Для роликов диаметром 120—
160 мм
Для блоков диаметром 600—
850 мм при любой радиальной
нагрузке
Для роликов диаметром 80—
160 мм при любой радиальной
нагрузке
—
—
Для эскалаторов всех высот
Для С-образных поручней
шириной 112 мм
Для клиновых поручней
шириной 90 мм
0,15
0,08
0,12
0,07
0,12
0,07
0,09
0,05 |
0,002
0,025
2,5
Сс
(
1,85
гласно исследованиям
ВНИИПТМАШ: 4,2
Согласно Правилам
^осгортехнадзора 5,0
1,2
5000
4200
226 Тяговые расчеты эскалатордё
щим. Это — участки огибания блоков, свободно сидящих на оси.
Тяговое усилие здесь расходуется на преодоление жесткости поручня
и на трение в опорах блока (участки sL; s2—s3; 5*—ss> V> S7 —
Изменение натяжения поручня на участках этой группы
выражается уравнением
5л = 5я-1(1+?). (118)
При расчетах обход трассы следует производить по часовой
стрелке от точки s0.
Движение поручня по поддерживающим роликам определяется
уравнением
SS L^ilna), (116I)
(116")
где L — длина участка (из геометрической схемы).
Для участков, расположенных горизонтально,
Движение поручня по прямолинейному наклонному участку
направляющих:
а) при работе на подъем
Sn « Sn_t + (qnop + qnac) L (^ cos a + sin a); (116»i)
б) при работе на спуск
В последнем случае пассажирскую нагрузку не следует
учитывать, поскольку она облегчает движение поручня.
Движение поручня по прямолинейному горизонтальному
участку направляющих:
Движение поручня по прямолинейному наклонному участку
без соприкосновения с элементами поручневой установки
Участки этого рода имеются только на холостой ветви трассы.
Натяжения в набегающей и сбегающей ветвях поручня на
ведущем блоке связаны уравнением
е
где Sn — натяжение в сбегающей ветви поручня в кг\
Sn_x — натяжение в набегающей ветви поручня в кг\
е — основание натуральных логарифмов;
Усилия в поручнях 227
]хбл — коэффициент трения поручня об обод блока;
р — угол обхвата поручнем блока;
К — тяговый коэффициент; К = еЫл$ •
Опытные величины тягового коэффициента для различных
поручней приведены в табл. 21.
Практически, в целях предотвращения пробуксовывания
поручня на блоках, вводят коэффициент запаса Кзап > 1,3 и
коэффициент заклинивания поручня на направляющих Кзакл > 1,2.
В окончательном виде расчетное уравнение имеет следующий вид:
Изменение натяжения поручня от потерь на преодоление
жесткости при огибании ведущего блока, потерь в его опорах и от
влияния собственного веса участка поручня, расположенного на блоке,
учитывается коэффициентом запаса.
Движение поручня по нижнему криволинейному участку рабочей
ветви. При определении потерь тягового усилия на данном участке
не следует учитывать пассажирскую нагрузку, уменьшающую
работу сил трения, поскольку она направлена в сторону,
противоположную равнодействующей натяжения поручня. Криволинейную
направляющую можно условно рассматривать как обод блока
радиуса R, по которому протаскивается поручень.
Коэффициент трения в связи с малой кривизной участка
принимается таким же, как для прямолинейного участка, т. е. равным рн
(табл. 21).
Усилие натяжения поручня в конце участка определяется по
уравнению
Sn = Sn_ve^ ± qnopR (I -cosa). (117")
Здесь а — угол наклона эскалатора к горизонту.
Величина R (1 — cos а) выражает высоту точки s10 над точкой s9.
При \iH — 0,27 -ч- 0,37 потери тягового усилия на нижнем
криволинейном участке направляющих составляют 15 — 21% от
величины натяжения поручня.
Огибание поручнем блоков, отклоняющих его на угол 180°.
Усилия натяжения поручня в конце участка определяются по
уравнению
Sn = 5ЛХ (1+%
n
где D6a — принятый диаметр блока.
Огибание поручнем блоков и роликов, отклоняющих его на
произвольный угол (3:
Sn = Sn_, [l + sinl (%л + фяо:)] . (118")
15*
Тяговые расчёты эскалаторов
Ориентировочные значения предварительного натяжения
холостой ветви поручня вблизи точки s0 приведены в табл. 22.
Предварительное натяжение холостой ветви вблизи точки s0
Таблица 22
Тип поручня
Натяжение
10 м
70
60
50
20 м
120
100
80
в кг прр
30 м
170
150
100
i высоте
40 м
220
180
140
эскалатора
50 м
270
220
170
60 м
320
260
200
Обычный С-образный
С-образный, повышенной сцепляе-
мости с блоками
Клиновой поручень с проклейкой
внутренней прокладки
Окружное усилие на ведущем блоке определяется как разность
между натяжениями в набегающей и сбегающей ветвях:
при работе на подъем Рпор = S13 — So;
при работе на спуск Рпор = So—S13.
Запас прочности поручня определяется как отношение
разрушающей нагрузки Р
разр
поручня при работе на подъем в точке s14.
(табл. 21) к наибольшему натяжению
§ 3. КРУТЯЩИЕ МОМЕНТЫ, ПРИВЕДЕННЫЕ К ГЛАВНОМУ ВАЛУ
Крутящий момент на главном валу, необходимый для приведения
в движение полотна, определяется по формуле
АЛ О , DmK?. в
1ГХпол пол 2
или, согласно выражению (113),
АЛ (Г . Q С \ Ртя?. яв
тпол— У^тяг.зв °13 °о; о '
Крутящий момент на главном валу, необходимый для приведения
в движение поручней, определяется по уравнению
М 2=9 ^поР'^бл , *'бл —_ р .Г) '16а
Здесь 1бл — общее передаточное число передач от главного
вала к данному ведущему блоку;
бл " ^i'yl2---'r\n — общий к. п. д. передач от главного вала до
данного ведущего блока; к. п. д. каждой
цепной звездочки может быть принят равным
0,97 — 0,98.
Определение характеристик процессов разгона и торможения 229
Величина полного крутящего момента, приведенного к главному
валу, определяется по уравнению
Мг. е = Мпол + Мпор - Мизб кгм, (119)
где Мизб — избыточный момент.
Поскольку пассажирская нагрузка на поручни создается весом
людей, она не может одновременно действовать и на лестничное
полотно, и на поручни. Тем не менее указанная нагрузка входит не
только в расчет величины Мппл> но и величины Мпор.
При определении Мг в это обстоятельство учитывают избыточным
моментом Мизб, величина которого определяется по уравнению
мизб = ЯЯпас (поР)Н-csc a sin a-^i6A = qnac (пор) HD6ii6jl, (120)
где И — высота эскалатора в м\
ol — угол наклона эскалатора к горизонту;
qпас (пор) — пассажирская нагрузка на 1 пог.м поручня
§ 4. МОЩНОСТЬ ГЛАВНОГО ЭЛЕКТРОДВИГАТЕЛЯ
Мощность главного электродвигателя эскалатора определяется
по величине наибольшего крутящего момента, возникающего при
работе эскалатора на подъем с полной эксплуатационной нагрузкой.
Мощность N в квпг вычисляется по формуле
N= Jta:e'n кет, (121)
где п — число оборотов электродвигателя в минуту;
inp — пе'редаточное число привода, обеспечивающее заданную
скорость полотна;
у\пр— к. п. д. привода.
7. ъРтяг. звпг. g .
v
60
§ 5. ОПРЕДЕЛЕНИЕ ОСНОВНЫХ ХАРАКТЕРИСТИК ПРОЦЕССОВ РАЗГОНА
И ТОРМОЖЕНИЯ
При определении основных характеристик процессов разгона
и торможения полотна используется основное уравнение движения
(50). Входящая в это уравнение величина момента статических
сопротивлений, приведенного к валу электродвигателя, определяется
по следующим формулам:
при разгоне (направление энергии от двигателя к главному валу)
Lnp "7i/jp
230 Тяговые расчеты эскалаторов
при торможении (направление энергии от главного вала к
двигателю)
Ме=^ц„„. (125)
Величина махового момента GD2, входящая в уравнение (50),
определяется по формулам, аналогичным формулам (54) и (55),
а именно:
при разгоне (направление энергии от двигателя к главному валу)
GD2 = CD2 -f 365 {QnoA^~ Qnacc) v* ; (126)
3 п 'Чпр
при торможении (направление энергии от главного вала к двигателю)
GD2 = CD\ + 365(Q*" + Q™«-)Pa nnpy (127)
где QnoA — вес всего полотна (верхней и нижней ветви) в кг\
Qnacc — вес всех пассажиров, находящихся на эскалаторе
(включая горизонтальные участки), в кг.
При разгоне величины tp, Sp и ар определяются соответственно
по формулам (58), (59), и (60).
По правилам Госгортехнадзора ускорение в начальный момент
пуска не должно быть более арнач = 0,6 м/сек2, а в процессе
разгона — более ар = 0,75 м/сек2. Так как коэффициенты трения
покоя всегда больше коэффициентов трения движения, момент
статических сопротивлений при пуске Мс п превышает момент
статических сопротивлений при установившемся движении, определяемый
по формуле (124). Для эскалаторов это обстоятельство* имеет
существенное значение и учитывается в расчетах. При определении tp
по формуле (58) вместо Мс подставляется значение МСл = КМС (8)
где К = 1,2-5-1,25.
При разгоне незагруженного эскалатора на подъем и на спуск,
а также загруженного эскалатора на подъем перед моментом Мс
в формуле (58) ставится знак минус, а при разгоне загруженного
эскалатора на спуск — знак плюс.
При торможении величины tm, Sm и am определяются
соответственно по формулам (63), (64),( 65), а момент механического
тормоза — по формуле (68). При торможении незагруженного полотна,
а также загруженного полотна, движущегося вверх, перед
моментом Мс в формуле (63) ставится знак плюс, а в формуле (68) — знак
минус. При торможении загруженного полотна, движущегося вниз,
перед моментом Мс в формуле (63) ставится знак минус, а в
формуле (68) — знак плюс. Замедление aw при торможении не должно
превосходить величин, указанных выше для процесса разгона.
ГЛАВА XIII
ЛЕСТНИЧНОЕ ПОЛОТНО
Полотном эскалатора называется система ступеней,
соединенных шарнирно с двумя замкнутыми тяговыми цепями.
К элементам полотна предъявляется ряд особых требований,
важнейшими из которых являются следующие.
1. Высокая прочность, больший срок службы и
эксплуатационная надежность, обеспечивающие бесперебойную работу машины
в течение длительного периода между ремонтами.
2. Высокая точность изготовления, гарантирующая
взаимозаменяемость и правильное кинематическое взаимодействие на всех
участках трассы.
3. Минимальный вес как отдельных элементов, так и полотна
в целом.
4. Красивый внешний вид и бесшумность в работе.
§ 1. ТЯГОВЫЕ ЦЕПИ
Основные типы цепей. Для эскалаторов применяются
пластинчатые втулочно-роликовые цепи (фиг. 119—121). Такие
цепи состоят из последовательно чередующихся внутренних и
наружных звеньев. Внутреннее звено образуется двумя пластинами,
соединенными двумя втулками с надетыми на них роликами.
Наружное звено состоит также из двух пластин, связанных валиками.
По способу соединения звеньев тяговые цепи эскалаторов
делятся на два типа: разборные и неразборные.
У разборной цепи (фиг. 119) посадка пластин на валики и втулки
осуществляется с зазорами или небольшими натягами. Благодаря
этому любой ее элемент может быть отъединен от цепи или
присоединен к ней без значительных усилий и без повреждений других
деталей. Все звенья такой цепи равноценны для сборки и разборки.
Для фиксации валиков и втулок от проворота в пластинах эти
детали делают с лысками. Устройство лысок усложняет изготовление
деталей цепи.
Неразборная цепь (фиг. 120 и 121) состоит из отдельных плетей,
снабженных специальными соединительными звеньями. У всех
других звеньев такой цепи соединение валиков и втулок с пластинами
выполняется с большими натягами, вследствие чего их разборка
232
Лестничное полотно
и сборка требуют значительных усилий. Разборка нередко связана
с повреждением других деталей соединения. Любой дефект в одном
из звеньев неразборной цепи вынуждает заменять всю плеть,
состоящую из нескольких десятков деталей.
В отечественном эскалаторостроении более широкое
распространение получили неразборные цепи в связи с их более высокой
эксплуатационной надежностью. Вес одной плети цепи определяется
удобством монтажа и обычно не превышает 200 кг.
—1050—
Фиг. 119. Тяговая цепь эскалатора высотой 10 м\
1, 2 — наружные пластины; 3- внутренняя пластина; 4 — сплошной валик; 5 — полый валик;
6 — втулка; 7 — ролик; 8 — шплинт.
Шаг цепи. Шаг тяговой цепи является важнейшим ее
параметром. Шаг цепи tti должен быть кратным шагу ступени tcm.
Последний, за редким исключением, принимается у пассажирских
эскалаторов равным 400 или 405 мм, что определяется габаритами
человеческого тела.
Соответственно этим двум величинам получили распространение
следующие три размера шага тяговых цепей: 100 мм (некоторые
иностранные эскалаторы), 135 мм (все эскалаторы Московского
метрополитена) и 200 мм (эскалаторы Ленинградского метрополитена).
В целях повышения плавности и бесшумности работы эскалатора
желательно иметь шаг цепи наименьшим.
Однако с уменьшением шага увеличивается количество шарниров
цепи, что приводит к ее утяжелению и удорожанию. Так, при
уменьшении шага в 2 раза (с 200 до 100 мм) вес и стоимость цепи при
том же разрывном усилии повышается на 35—40%.
При одинаковых диаметрах звездочек и прочих равных условиях
цепи с различным шагом равноценны по сроку службы. Однако
с увеличением шага увеличивается неравномерность хода и шум от
ударов шарниров о зубья звездочки.
При больших высотах подъема (30 — 60 ж), когда вопросы веса
ходового полотна имеют особенно важное значение, целесообразно
лринимать щаг равным 200 дм.
0,9-2,5
Фиг. 120. Тяговая цепь эскалатора высотой 50 м (ЭМ-5):
/, 2 — наружные пластины; 3, 4 — внутренние пластины; 5 — соединительная пластина;7 — сплошной валик; 7 — полый валик; 8 —
соединительный валик; 9 — втулка; 10 — ролик; // — гайка; 12, 13 — стопорные шайбы.
-Шаг цепи 200-
'///Л
Фиг. 121. Тяговая цепь эскалатора высотой 60 м (ЛТ-1):
/ — наружная пластина; 2 — внутренняя пластина; 3 — соединительная пластина; 4 — сплошной валик; 5 — полый валик; 6 — соединительный
валик; 7 — втулка; 8 — ролик; 9 — упор цепи; 10 —• пружинное кольцо; // —стопорная шайба.
Тяговые цепи 235
У эскалаторов малых высот (10 — 25 м) экономия в весе цепей
с увеличением шага не столь значительна. Для них более оправдан
выбор малого шага. Однако и в этих случаях не следует его
принимать меньшим 135 мм.
Пластины цепей. Отличительной особенностью пластин
тяговых цепей эскалаторов является наличие у них специальных
упоров (замков) против складывания цепи при ее обрыве. Замки
выполняются в виде упоров в торцы соседних пластин (фиг. 120)
или в виде упоров торца одной из пластин в боковой выступ
соседней (фиг. 119 и 121). Устройства замков для шарниров, связанных
с осями ступеней, не требуется, так как цепь в этих шарнирах
предохранена от складывания направляющими и контрнаправляющими
бегунков.
Пластины изготовляются из полосовой стали путем вырубки
в специальном штампе. Боковые их кромки совсем не обрабатываются.
Облегченная форма (в виде «восьмерки») не применяется, так как
вырубка такой пластины из толстой полосы затруднительна,
требует мощных прессов и нерентабельна. Количество типоразмеров
пластин данной цепи зависит от конструкции замков, шага цепи и
способа соединения звеньев. При выполнении замков аналогично
показанному на фиг. 119 несколько усложняется конструкция вырубного
штампа. Но при этом уменьшается количество типоразмеров пластин
по сравнению с цепью, замки которой выполнены в виде упора в
торец (см. фиг. 120). Увеличение шага цепи от 135 до 200 мм также
позволяет сократить количество типоразмеров пластин.
Валики, втулки, ролики. Валики шарниров цепей,
через которые проходят оси ступеней, изготовляются полыми. Во
избежание заклинивания осей ступеней диаметр отверстия полого
валика должен превышать диаметр оси на 0,4—0,7 мм. Валики
остальных шарниров могут быть как сплошными, так и полыми.
У разборных цепей посадка концов валиков и втулок в
отверстиях пластин осуществляется по типу тугой посадки 2-го класса.
У неразборных цепей соединение валиков и втулок с пластинами
производится по специальной прессовой посадке с натягами 0,10—
0,25 мм. Посадка соединительных валиков в отверстиях пластин
производится с зазором 0,05—0,1 мм. Втулки цепей при запрессовке
в пластины с большими натягами сильно деформируются, принимая
бочкообразную форму. Это нарушает их контакт с валиками. Для
придания втулкам правильной цилиндрической формы их расшли-
фовывают после запрессовки в пластины.
Чтобы предотвратить соскакивание пластин с валиков, их
дополнительно закрепляют шплинтами (см. фиг. 119), пружинными
кольцами (см. фиг. 121) или расклепыванием концов валиков (см. фиг. 120).
Последний способ имеет существенные недостатки. Во избежание
смещения пластин при расклепке концы валиков приходится
снабжать заплечиками и омеднять их перед цементацией, с тем чтобы
лосле цементации они сохраняли достаточную пластичность. Это
236 Лестничное полотно
усложняет технологию механической и термической обработки
валиков и снижает их прочность. Кроме того, концы таких валиков
повреждаются после разборки и их нельзя повторно использовать
при ремонте цепи.
Для обеспечения доступа смазки к трущимся поверхностям
цилиндрических деталей в них предусматриваются радиальные
отверстия (см. фиг. 119 и 120), а в некоторых конструкциях—осевые
отверстия (см. фиг. 121). В первом случае смазка осуществляется
поливом. При загрязнении отверстий она оказывается
малоэффективной. Более эффективна смазка поливом между пластинами,
для чего используются имеющиеся между ними зазоры. Смазка
цепи, показанной на фиг. 121, производится через осевые отверстия
в валиках.
Материалы и термообработка деталей. Для
обеспечения минимального веса при максимальной прочности детали
тяговых цепей обычно изготовляют из легированных сталей:
пластины из стали 40ХН, втулки и ролики из стали 15Х и валики — из
сталей 15Х, 12ХНЗА и 12Х2Н4А. Все детали подвергаются
термической обработке: пластины —закалке и отпуску до твердости Нв —
= 285 -4- 340, валики, втулки и ролики — цементации на
глубину 1—1,3 мм, закалке и отпуску до твердости HRc = 54 ч-62.
Вместо стали 40ХН для пластин можно применять более
дешевую и почти равноценную ей по свойствам сталь 40Х, а для пластин
цепей эскалаторов малых высот — стали 40 и 50.
Вместо сталей 12Х2Н4А и 12ХНЗА для валиков можно
применять менее дефицитные и более дешевые стали марок 18ХГТ, 15Х
и 20Х, которые равноценны первым по износоустойчивости.
Расчет тяговых цепей на прочность. Для
расчета цепей на прочность могут быть рекомендованы приведенные
в табл. 23 формулы, учитывающие опытные данные по прочности
цепей отечественных эскалаторов.
Диаметр втулки следует выбирать по формуле
наружный диаметр ролика — по формуле
р > в/к"
Таблица 23
Формулы для расчета цепей
Вид нагрузки
Разрушающая нагрузка по
разрыву внутренних пластин
Разрушающая нагрузка по
разрыву наружных пластин
Расчетные формулы
Sp = 2kxk2 (62 — dem) Ъаь
Sp = 2kxk2 (b± — de) bab
Тяговые цейи
Продолжение табл. 23
Вид нагрузки
Разрушающая нагрузка по срезу
валика:
а) сплошной валик с
заплечиками
б) сплошной гладкий валик
в) гладкий валик с отверстием
Удельное давление между втулкой
и валиком
Расчетные формулы
Sp-2k1ktkt \в1 оь
ч2
Sp-2k1kikt-^-ab
Sp — 2k.xk.2ki ——~£ а6
р - ,Sm,ax кг/см*
В приведенных формулах:
de — диаметр валика;
d0 — диаметр отверстия валика;
de —диаметр шейки валика;
biy bo — соответственно ширина наружной и внутренней пластин;
v Km — соответственно диаметр и длина втулки;
Ъ — толщина пластин ;
kx — коэффициент неравномерности работы пластин звена;
зь — предел прочности материала детали по ГОСТ В1050-57
или 4543-48;
k2 — коэффициент понижения или повышения предела
прочности аь в зависимости от конструкции, материала
и термообработки детали ( /е2 = —) ,
а'ь —фактический предел прочности материала детали);
k3 — соотношение между пределом прочности при срезе zb
и фактическим пределом прочности при разрыве а&:
где
Smax — максимальная расчетная нагрузка, действующая^ на цепь.
В результате сопоставления данных по разрывной прочности
пластин собранной цепи и отдельно испытываемых пластин значение
коэффициента kx во всех формулах можно принимать равным 0,92.
Значения коэффициентов k2 в зависимости от конструкции,
материала и термообработки детали приведены в табл. 24.
Значения коэффициента k3 в зависимости от отношения момента
инерции полного сечения валика J к моменту сечения по отверстию
в валике Jo даны в табл. 25.
По Правилам Госгортехнадзора все детали цепи должны иметь
семикратный запас прочности по пределу прочности и пятикратный
Лестничное полотно
Значения коэффициента k2
Таблица 24
Наименование детали и марка
стали
Пластина, сталь 40ХН,
сталь 40Х
Пластина сталь 45
Валик сплошной, сталь 15Х
; Валик полый, сталь 15Х
Валик полый, сталь
12Х2Н4А
Валик полый, сталь 18ХГТ
Предел
прочности
в кг/м м2
по ГОСТ
1050-57 или
4543-48
100
60
70
70
ПО
100
Термообработка детали
Закалка и отпуск до
твердости Нв = 285 -г- 340
Закалка и отпуск до
твердости Нв= 196-=-241
Объемная закалка
Цементация, объемная
закалка
То же
»
0,95
1,1
0,88
1,2
0,95
0,95
Значение коэффициента k3
Таблица 25
Отношение -=- или —-
'• 4
Коэффициент k3
3
0,40
4
0,47
5
0,53
6
0,59
7
0,62
со
Сплошной
валик
0,65
запас по пределу текучести материала детали. Величина
максимальной нагрузки 5тах, действующей на тяговую цепь, определяется
по методам, изложенным в гл. XII.
Величины допускаемых удельных давлений р между валиками
и втулками цепей рекомендуется принимать по эмпирической
формуле р = 250 + ЪН кг/см2, где Н — высота эскалатора в м.
§ 2. СТУПЕНИ
Ступень эскалатора (фиг. 122—124) представляет собой тележку
специальной конструкции, снабженную четырьмя
колесами-бегунками. Бегунки, устанавливаемые в месте соединения ступени с
тяговыми цепями, называются основными, а два других —
поддерживающими или вспомогательными. Бегунки посажены на оси,
заделанные в металлоконструкцию, называемую каркасом. Сверху
каркас покрыт настилом, а сбоку —подступенком.
Геометрические параметры. К числу основных
геометрических параметров ступени относятся: шаг (расстояние
между основными бегунками смежных ступеней), глубина (проступь)
и ширина настила, подступь (расстояние между плоскостями
настилов смежных ступеней на наклонном участке трассы), продольная
база (расстояние между осями основных и вспомогательных
бегунков) и колея основных бегунков (расстояние между основными
бегунками).
Ступени
239
Шаг ступеней пассажирских эскалаторов принимается равным
400—405 мм, у грузо-пассажирских эскалаторов—до 1000 мм.
С выбором шага тесно связан выбор глубины (проступи) настила.
Она равна разности шага и зазора между ступенями. Зазор обычно
принимается равным 5—7 мм.
Ширина ступени зависит от количества размещаемых на ней
пассажиров. Наибольшее распространение получили эскалаторы
Фиг. 122. Короткобазовая ступень эскалатора высотой 10 м:
— каркас; 2 — основной бегунок; 3 — вспомогательный бегунок; 4 — настил; 5 — подступенок
6 — полуось основного бегунка.
со ступенями на двух человек. Их ширина, как правило, принимается
равной 1000 мм, реже 900 мм. Устройство эскалаторов со
ступенями, рассчитанными на трех и более человек, нецелесообразно
из-за недостаточной их безопасности, так как поручнями на
подобных эскалаторах могут пользоваться только пассажиры, стоящие
по краям ступени.
При размещении на ступени одного человека с багажом ее ширина
принимается равной 650—750 мм, а при размещении одного человека
без багажа 500—650 мм.
Подступь ступени зависит от ее шага и угла наклона
эскалатора к горизонту. При наиболее распространенном угле наклона,
равном 30°, величина подступи составляет половину шага.
Продольнаябаза ступени колеблется у различных
эскалаторов в весьма широком диапазоне: от 280 до 540 мм. Соображения
по выбору базы ступени изложены ниже.
Фиг. 123. Длиннобазовая ступень эскалатора высотой 40 м:
1 — настил; 2 - основной бегунок; 3 - полуось основного бегунка; 4 — каркас; 5 — вспомогательный бегунок; 6 — ось вспомогательных
бегунков; 7 - подступенок.
-400+0,5
1310-
1140-
О
I
1
45 ■—-
Фиг 124. Ступень с литыми кронштейнами:
/ — каркас; 2 — основной бегунок; 3 — вспомогательный бегунок; 4 — настил; 5 — съемный козырек настила; 6 —
облицовка подступенка; 7 — ось основных бегунков; 8 — ось вспомогательных бегунков; 9 — опора оси основных бегунков;
10 — резиновый изолятор вибраций.
242 Лестничное полотно
Размер колеи основных бегунков зависит от ширины настила,
тяговых цепей и самих бегунков, а также от расположения бегунков
относительно тяговой цепи и каркаса ступени. При размещении
бегунков между каркасом и цепью размер колеи имеет наименьшее
значение.
Основные схемы ступеней. В зависимости от размещения бегунков
и тяговой цепи различают следующие основные типы ступеней
современных эскалаторов.
Ступени с установкой основных"бегунков:
1) на полуосях (фиг. 122 и 123);
2) на сквозной оси (фиг. 124).
При установке основных бегунков на полуосях каркас ступени
воспринимает не только нагрузку от веса пассажиров, но и в
несколько раз большие по величине нагрузки от натяжения цепи на
верхних криволинейных участках трассы.
При установке бегунков на сквозной оси каркас освобождается
от изгибающих моментов и может быть сделан более легким и
простым. Поэтому, несмотря на увеличение веса сквозной оси по
сравнению с полуосями, общий вес ступени несколько снижается.
Кроме того, ступень со сквозной осью оказывается более удобной
в эксплуатации. Съемная ее часть имеет значительно меньший вес
и может быть одинаковой у эскалаторов различной высоты, поскольку
элементом, воспринимающим основную нагрузку, является ось.
Съем и установку ступени можно производить на многих участках
трассы, а операции съема и установки, при надлежащем креплении
оси, менее трудоемки.
Сквозная ось обеспечивает соосность основных бегунков, что имеет
большое значение для правильной работы полотна.
Учитывая перечисленные преимущества, предпочтение следует
отдать ступени последней конструкции.
Ступени с установкой вспомогательных бегунков:
1) на каркасе — короткобазовая модель (фиг. 122);
2) на выносных кронштейнах — длиннобазовая модель (фиг. 123
и 124).
Короткобазовая ступень более просто изготовляется, имеет
несколько меньший вес, ее применение позволяет максимально
уменьшить диаметры звездочек тяговой цепи.
Однако при укороченной базе ступень недостаточно устойчива.
Повышенная жесткость ее каркаса вызывает неровный ход, толчки,
качение на трех бегунках, значительный шум и вибрации.
Длиннобазовая ступень устойчивее под нагрузкой и имеет более
плавный ход.
В практике отечественного эскалаторостроения наибольшее
распространение получили ступени с базой в пределах 460—540 мм.
Ступени с размещением тяговой цепи:
1) за габаритами основных бегунков (фиг. 122);
2) между каркасом и основным бегунком (фиг. 123 и 124).
Ступени 243
Размещение тяговой цепи за габаритами основных бегунков
позволяет максимально уменьшить колею последних, приблизить
основные и вспомогательные бегунки друг к другу и применить
для них на наклонном участке общую направляющую. Кроме того,
ось основных бегунков и каркас в этом случае воспринимают
несколько меньшие изгибающие моменты.
Однако при этом затрудняется наблюдение за состоянием
основных бегунков и затрудняется их замена. Основные бегунки работают
в худших условиях, чем бегунки ступеней второго типа, беговые
дорожки которых лучше защищены от загрязнения. Эти
обстоятельства являются, как правило, решающими в эксплуатации и поэтому
предпочтение следует отдать ступеням последнего типа.
Каркас, Каркас ступени является ее основным несущим
элементом. Он представляет собой металлоконструкцию, состоящую
из двух боковин-кронштейнов, соединенных продольными связями
уголкового и листового профиля. Кронштейны снабжены втулками,
предназначенными для крепления осей основных и вспомогательных
бегунков.
Для обеспечения правильной кинематики движения ступеней
каркас должен иметь достаточно точные и неизменяемые размеры.
При несоблюдении этого требования наблюдается задевание ступеней
за неподвижные части эскалатора, задевание соседних ступеней
и боковое смещение полотна при движении. Все это, в свою очередь,
ведет к повреждениям и преждевременному износу деталей ступеней,
а в некоторых случаях и к их поломке.
Повышенные требования- к точности изготовления каркаса и
особенно мест соединения его с другими деталями определяются
также необходимостью обеспечения взаимозаменяемости как самих
ступеней, так и их отдельных деталей.
По способу изготовления кронштейнов различают каркасы со
сварными, литыми и штампованными кронштейнами.
1 Ступени со сварными кронштейнами показаны на фиг. 122 и
123. Основным их недостатком является коробление деталей после
сварки, вследствие чего даже у правильно собранных и сваренных
в кондукторе каркасов в процессе эксплуатации изменяются
первоначальные размеры.
Учитывая, что производство ступеней является обычно
крупносерийным, наиболее рациональным методом изготовления
кронштейнов является их штамповка. Она обеспечивает наиболее высокую
производительность по сравнению со сваркой или литьем.
Бегунки. Основные и вспомогательные бегунки ступеней
мало отличаются по диаметрам. Поэтому незначительно отличаются
и числа их оборотов. Последние обычно колеблются в пределах 80—
140 об/мин. Более существенное отличие состоит в характере их
нагружения.
Основные бегунки, помимо нагрузок от веса ступени и веса
пассажиров, воспринимают на криволинейных участках трассы
16*
244
Лестничное полотно
дополнительные нагрузки от усилий натяжения тяговых цепей,
которые в несколько раз превышают весовые нагрузки. При
сравнительно малых габаритах бегунков (диаметр до 180 мм, ширина до
50 мм) суммарная нагрузка на бегунок достигает на этих
участках 600—800 кг. Вспомогательные бегунки на всех участках трассы
воспринимают лишь часть весовой нагрузки, которая не превышает
50 кг на один бегунок.
R6Q0
а)
Фиг. 125. Бегунки из пластмассы:
а, б — бегунки ступеней эскалаторов Н-10 и Н-40; в — бегунок ступеней эскалатора Н-40;
г — бегунок ступеней эскалатора ЭМ-5.
Основными элементами, определяющими эксплуатационные
качества бегунков, являются материал обода и конструкция
подшипников.
Для изготовления ободов бегунков применяются пластмасса
(волокнит, карболит, текстолит), резина и прессованная ткань.
Бегунки из пластмасс имеют малый вес при достаточно высокой
прочности и сравнительно низкой стоимости. Наиболее характерные
конструкции таких бегунков показаны на фиг. 125.
Бегунки с подшипниками скользящего трения (фиг. 125, а, б)
требуют частой смазки, их ступицы и оси быстро изнашиваются,
по мере износа возрастает шум полотна. Поэтому в современных
эскалаторах все более широкое применение получают бегунки с
подшипниками качения (фиг. 125, в, г), свободные от этих недостатков.
Их подшипники имеют запас густой смазки, достаточный на 1 —
1,5 года, что значительно упрощает уход за ними.
Для нормальной работы бегунков из пластмасс важное значение
имеет выбор формы обода. На бегунок, помимо нормальных нагрузок,
Ступени
245
действуют, как правило, осевые касательные нагрузки, возникающие
при боковом смещении полотна. Эти нагрузки вызывают
опрокидывание бегунка относительно одной из его кромок. В том случае,
если бегунок имеет цилиндрическую форму (фиг. 125, а> б, в), это
опрокидывание сопровождается быстрым и интенсивным
разрушением рабочей поверхности обода и торцов. При выпуклой форме
обода (фиг. 125, г) вредное влияние бокового смещения полотна
на работу бегунков в
значительной мере ослабляется.
Кроме того, выпуклая форма
обода делает бегунок менее
чувствительным к влиянию
на его работу износа
направляющих и неточности их
установки.
Общим недостатком всех
бегунков из пластических
масс является значительный
шум при ! работе и
повышенный износ направляющих.
Бегунки с резиновым
ободом не имеют этих
недостатков. Однако при одинаковых
габаритах с пластмассовыми
они имеют значительно
меньшую прочность и более
высокую стоимость. На фиг. 126
показана конструкция
бегунков с резиновым ободом.
Обод основного бегунка на-
Фиг. 126. Бегунки с резиновым ободом:
а — основной бегунок; б — вспомогательный бегунок.
вулканизован на стальном
корпусе, а вспомогательного — на пластмассовом.
Опыт применения бегунков с резиновым ободом в качестве
основных бегунков ступеней эскалаторов больших высот пока не дал
положительных результатов из-за быстрого их разрушения и
интенсивного истирания торцов. В качестве вспомогательных бегунков они
применяются успешно, зарекомендовав себя высокой
долговечностью, малым износом направляющих и снижением шума.
Бегунки с ободом из прессованной ткани широко применяются
иностранными фирмами на эскалаторах малых высот, где они
зарекомендовали себя высокой долговечностью наряду с эластичностью
и бесшумностью в работе. Обод такого бегунка представляет собой
кольцо, спрессованное из радиально расположенных лепестков ткани
и прикрепленное к корпусу с помощью фланцев (фиг. 127, а) или
запрессованное непосредственно в корпус из пластмассы (фиг. 127, б).
Обод из прессованной ткани обладает той особенностью, что его
внутренняя часть имеет более высокую плотность по сравнении)
246
Лестничное полотно
с внешней, благодаря чему при высокой общей прочности бегунка
он оказывается достаточно бесшумным и эластичным в работе.
Проведенные ВНИИПТМАШ испытания таких бегунков на
эскалаторах высотой 30—40 м показали, что при работе по направляющим,
не загрязненным смазкой, они более износоустойчивы по
сравнению с пластмассовыми.
Однако в отечественном эскалаторостроении такие бегунки до сих
пор применения не получили.
Настил ступени. Все современные эскалаторы имеют
настилы ступеней только реечного типа. Их назначение состоит
в обеспечении безопасного схода
пассажиров с эскалатора. Это
достигается устройством на
входных площадках
специальных съемных гребенок с
зубцами клиновой формы.
Концы зубцов утоплены во
впадинах между рейками
настила так, что по мере прохода
ступени под гребенкой
поверхность зубцов последней
начинает выступать над
поверхностью реек настила и снимает
с него ногу пассажира.
Настилы изготовляются или
в виде деревянного покрытия с
прикрепленными к нему на
определенном расстоянии друг
от друга рейками (фиг. 122,123),
или в виде пластин-секций с
чередующимися выступами и
впадинами (фиг. 124)
Для изготовления настилов применяются дерево (бук),
пластифицированная древесина, легкие сплавы и пластмассы.
Материал настила должен быть достаточно износостойким, не
скользким и должен обеспечивать красивый внешний вид
покрытия.
Важнейшими параметрами настила являются шаг реек и просвет
между ними. По Правилам Госгортехнадзора запрещается
изготовление настилов с пазом между рейками свыше 12 мм, что диктуется
стремлением максимально обезопасить пассажиров при сходе с
эскалатора. При больших пазах наблюдаются случаи заклинивания в них
каблуков дамской обуви, тростей и других предметов. Однако
малый шаг имеет и свои недостатки. Он требует большей точности
изготовления ступеней и устройства специальных приспособлений
для направления ступеней при проходе через гребенки. Поэтому
нецелесообразно выбирать шаг меньшим 18 мм.
Фиг. 127. Бегунки с ободом из
прессованной ткани:
а — бегунок с ободом, закрепленным
металлическими фланцами; б - бегунок с ободом,
запрессованным в корпус из пластмассы /—обод;
2—фланец; 3 — подшипник; 4 — корпус; 5 — заклепка.
Ступени 247
Подступенок. Подступенок служит для предохранения
ног пассажиров от повреждений и выполняет одновременно чисто
декоративное назначение. Подступенок должен иметь
цилиндрическую поверхность, обеспечивающую постоянство зазора между
ступенями при взаимном их перемещении на криволинейных участках
рабочей ветви полотна.
Облицовка подступенка может быть выполнена за одно целое
с каркасом, в виде изогнутого по радиусу металлического листа
(фиг. 121) или в виде отдельной съемной детали, прикрепленной
к каркасу (фиг. 123 и 124). В последнем случае для изготовления
подступенков могут служить различные декоративные материалы:
дерево, полированная фанера, пластмассы, цветные металлы,
нержавеющая сталь.
Большие возможности красивого оформления ступеней дает
применение облицовки подступенка в виде пластифицированного
древесного шпона. Такая облицовка применяется для всех
отечественных эскалаторов последних конструкций.
Расчет ступени. Для обеспечения необходимой прочности
и срока службы ступени при минимальном ее весе необходимо
производить расчет на прочность всех ее основных элементов: осей
бегунков, каркаса, бегунков и их подшипников.
Расчет осей бегунков. Давление на основной
бегунок равно
%
где Рц — общее давление тяговой цепи на ось основного бегуна;
Qoch —часть веса нагруженной ступени, передаваемая на оба
основных бегунка.
Суммарное давление тяговой цепи на ось равно
РЦ = Р'Ц + Р"Ц, (133)
где Р'ц — вес участка цепи, приходящийся на одну ступень, т. е.
где, в свою очередь, q^ — вес 1 пог. м цепи;
Рц — давление цепи на ось ступени вследствие
сгибания натянутой цепи на
криволинейных участках трассы.
В соответствии с фиг. 128 величина Р"ц равна
р° = етг5— (135)
где R0H — радиус кривизны рабочей поверхности направляющей
П — радиус бегунка;
Sm-n — натяжение тяговой цепи на данном криволинейном
участке.
248
Лестничное полотно
Суммарное давление тяговой цепи на ось на криволинейном
участке равно
Ro
%
(136)
Величины tcm, R0H и п должны быть выражены в одинаковых
единицах измерения (в метрах).
Наибольшего значения величина Рц достигает на верхнем
криволинейном участке рабочей ветви.
Фиг. 128. Схема расположения полотна на криволинейном участке.
Пассажирскую нагрузку на одну ступень (в зависимости от
ширины последней) принимают равной весу одного, или двух
пассажиров, регламентированному Правилами Госгортехнадзора, т. е.
80, 160 или 240 кг. Бес ступени на двух пассажиров колеблется
в пределах 40—60 кг и на одного пассажира 25—30 кг.
Для короткобазовой ступени обычно принимают
Q
осн =
P собс
где
РСобсте — собственный вес ступени;
Рпасс —нагрузка на ступень от веса пассажира.
Для длиннобазовой ступени принимается
Чосн ~ ~о~ V совете \ * пасс) ^г.
Входные площадки 249
Расчетный момент, изгибающий ось, в зависимости от размещения
основных бегунков равен:
1) при размещении бегунков аналогично показанному на фиг. 122
2) при размещении бегунков аналогично показанному на фиг. 123
Ми = Рбег(<* + Ь) — Рц.Ь кгсм.
Согласно Правилам Госгортехнадзора оси должны быть
рассчитаны с пятикратным запасом по пределу прочности принятого
материала. Для изготовления осей рекомендуются стали 40ХН, ЗОХГС
и 40ХС. В связи с тем, что весовые нагрузки на оси вспомогательных
бегунков незначительны, их размеры назначаются по конструктивным
соображениям.
Расчет каркаса. У ступени со сквозной осью (фиг. 124)
каркас несет только местные весовые нагрузки, значение которых
невелико. Поэтому его расчет можно не делать.
Для ступеней с полуосями (фиг. 122, 123) в расчет каркаса на
изгиб вводят только балку, к которой приварены втулки, несущие
полуоси основных бегунков. Расчет выполняют по максимальному
значению изгибающего момента, который для ступени, изображенной
на фиг. 122, находится в месте заделки полуоси, а для ступени,
изображенной на фиг. 123, — в середине пролета.
Расчет бегунков из пластмасс производится с учетом их
одновременного нагружения нормальной и осевой касательной
нагрузками. Метод расчета таких бегунков подробно изложен в
специальных источниках1. Там же приведены расчеты бегунков с ободом
из прессованной ткани и резины, а также подшипников бегунков.
§ 3. ВХОДНЫЕ ПЛОЩАДКИ
Входная площадка эскалатора (фиг. 129) состоит из следующих
основных элементов: плиты, гребенки, коврика и устройства для
направления ступеней.
Плита. Плиты входных площадок изготовляются стальными.
Применение чугуна не допускается во избежание разрушения плиты
от случайного удара, а также потому, что для обеспечения
достаточной прочности она должна была бы иметь очень большую высоту.
Гребенка. Назначение гребенки состоит в обеспечении
безопасного схода пассажиров с эскалатора. Гребенки изготовляются
в виде стального листа с зубьями клиновидной формы, шаг которых
должен в точности соответствовать шагу впадин настила. Уклон зубьев
следует принимать равным 11Ь. Более крутые уклоны неудобны для
пассажиров, а более пологие требуют чрезмерного удлинения
зуба, что ведет к его ослаблению.
1 Г. М. Бовин, И. И. И в а ш к о в А. М.Олейник, Эскалаторы, Машгиз,
1955; И. И. Ивашков, Контактная"прочность бегунков, Труды ВНИИПТМАШ,
Машгиз, 1954,
ид по стрелке f
Фиг. 129. Входная площадка эскалатора ЭМ-4:
/ — плита; 2 — гребенка; 3 — коврик; 4 — направляющее устройство.
Входные площадки
251
Коврик. Коврик является деталью» на которую попадает
пассажир после схода с гребенки. Для того чтобы он не мог
поскользнуться, поверхность коврика делается рифленой, что придает ей
большую шероховатость. По мере сглаживания рифлений коврики
подлежат замене.
Направляющее устройство. Необходимость в
устройствах для направления ступеней при проходе через гребни
Фиг. 130. Устройство роликового типа для направления ступеней перед
гребенкой:
/ — устройство для направления ступеней; 2 — гребенка; 3 — ступень; 4 — тяговая цепь;
5 — направляющая бегунков.
входных площадок возникает лишь в случае применения малого шага
настила (15—18 мм). У ступеней с большим шагом реек (36 мм)
их роль выполняют реборды бегунков.
У эскалаторов различных типов направляющее устройство
выполняется или в виде планок, или в виде роликов. Конструкция
направляющего устройства роликового типа показана на фиг. 130.
Работа направляющих устройств при плохо отрегулированном
полотне сопровождается ударами о них ступеней. Наоборот, при точно
изготовленном и хорошо отрегулированном полотне эти устройства
совсем не работают, так как правильный заход ступеней в гребенках
обеспечивается точностью их изготовления и регулировки,
ГЛАВА XIV
ТРАССА ПОЛОТНА
Трассой полотна называется совокупность устройств,
установленных на пути движения ступеней, поддерживающих полотно и
обеспечивающих его перемещение в соответствии со строго
определенными кинематическими законами. К числу этих устройств относятся:
главный вал, натяжная каретка, поворотные стенки и направляющие
полотна ступеней.
Главный вал вместе с посаженными на нем тяговыми звездочками
непосредственно приводит полотно в движение и обеспечивает переход
ступеней с одной ветви на другую. Эту же задачу выполняет
натяжная каретка, которая, кроме того, поддерживает нижнюю часть
полотна в постоянно натянутом состоянии. Поворотные стенки
главного вала и натяжной каретки служат для направления бегунков
при переходе ступеней с одной ветви на другую. Направляющие
полотна поддерживают последнее на всех участках трассы, за
исключением звездочек тяговой цепи, и обеспечивают определенность
положения всех его элементов (ступеней, цепей) как при нормальной
работе машины, так и в аварийных случаях (обрыв тяговых цепей,
попадание под бегунки ступеней посторонних предметов и пр.).
§ 1. ГЛАВНЫЙ ВАЛ
Главным валом обычно называют сборный узел, состоящий
из самого вала, тяговых звездочек, подшипников и элементов передач
от привода к главному валу и от главного вала к ведущим блокам
поручневой установки. В ряде случаев на главном валу размещается
также аварийный тормоз, предназначаемый для остановки полотна
в случае нарушения кинематической связи между приводом и
тяговыми звездочками.
Наиболее распространенными конструкциями главных валов
являются следующие:
1) валы с приводным элементом (зубчатым колесом, цепной
звездочкой, ременным шкивом), расположенным на консоли;
2) валы с двумя симметрично расположенными зубчатыми коле*
сами;
3) валы, соединенные с приводом муфтой,
Главный вал
253
Вал первого типа показан на фиг. 131. Он приводится во вращение
посредством двухрядной цепной звездочки, прикрепленной к шкиву
аварийного ленточного тормоза. При такой схеме входной конец вала
(со стороны консоли) воспринимает полный крутящий момент, а
также значительное изгибающее усилие, равное геометрической
Фиг. 131. Главный вал эскалатора типа ЭЗ-5:
/ — главный вал; 2 — подшипник; 3 — тяговая звездочка; 4 — звездочка привода поручней; 5 — шкив
аварийного тормоза; 6 — приводная звездочка; 7 — металлоконструкция приводной станции; 8 —
пружинный амортизатор; 9 — звездочка блокировки повышения скорости полотна.
сумме веса приводной звездочки и тормозного шкива и натяжений
ведущей и ведомой ветвей приводной цепи. Наличие сильно
нагруженной консоли и неравномерное распределение нагрузки между
подшипниками являются серьезными недостатками подобной
конструкции.
На фиг. 132 изображен вал второго типа, приводимый во вращение
от двух симметрично расположенных на нем зубчатых колес. Венцы
тяговых звездочек этого вала и звездочки привода поручней
прикреплены непосредственно к зубчатым колесам. По концам вала
располагаются опорные подшипники траверсы. При подобном
расположении зубчатых колес и синхронной работе правого и левого
приводов главный вал должен работать в основном на изгиб, передавая
лишь небольшой крутящий момент к звездочкам привода поручней.
В действительности, как показал ряд исследований, равномерная
254
Трасса полотна
работа обоих параллельных зубчатых колес не всегда обеспечивается.
Недостатком подобной конструкции вала является также то, что он
имеет большой вес в сборе из-за наличия на нем массивных зубчатых
колес. В эксплуатации главные валы этой конструкции выходили
из строя из-за нарушения посадки ступиц. Помимо плохого качества
прессового соединения, этому способствовали неравномерная
нагрузка на колеса в моменты пуска машины, а также малая длина ступицы.
Фиг. 132. Главный вал эскалатора типа Н-40:
/ — главный вал; 2 — подшипник; 3 — тяговая звездочка; 4 — звездочка привода поручней;
5 — зубчатое колесо; 6 — опора траверсы.
На фиг. 133 показан вал третьего типа, приводимый во вращение
через зубчатую муфту. Консольная часть вала испытывает
незначительные изгибающие усилия и передает полный крутящий момент.
Тяговые звездочки совсем не имеют ступиц. Они посажены на
фланцы, откованные за одно целое с валом, и закреплены на них при
помощи призонных болтов. В каждой тяговой звездочке встроен
аварийный тормоз. Звездочка привода поручней выполнена из двух половин
с разъемом в диаметральном сечении и установлена в середине вала.
Соединение тяговых звездочек с главным валом в данной конструкции
осуществлено более надежно.
Тяжелонагруженные валы эскалаторов больших высот
устанавливаются на массивной станине. Корпуса подшипников выполняются
с двумя опорными плоскостями. Горизонтальная опорная плоскость
служит для воспринятая весовых нагрузок, а вертикальная — для
jfc
Фиг. 133. Главный вал эскалатора
ЭМ-5 (с аварийным тормозом).
256 Трасса полотна
воспринятия нагрузок от натяжения тяговых цепей Валы
изготовляются из качественных углеродистых и легированных сталей.
Тяговые звездочки отечественных эскалаторов изготовляются с
профилем зубцов по ГОСТ 591-41.
Во избежание тангенциального смещения зубцов одной
звездочки относительно зубцов другой нарезку зубцов обеих звездочек
производят совместно. С этой целью допускаются минимальные
деформации кручения валов. Существенное значение имеет выбор
диаметра тяговых звездочек, так как его увеличение связано с
увеличением крутящих моментов и передаточных чисел привода, а
следовательно с более или менее существенным удорожанием всей
машины. Возможность уменьшения диаметров звездочек на
практике лимитируется двумя обстоятельствами: числом зубцов,
минимально допустимым из условий бесшумности работы тяговой цепи
на звездочках и размерами приводной звездочки или зубчатого колеса,
расположенных на общей геометрической оси с главным валом. Для
снижения шума от ударов шарниров цепи при набегании их на
звездочку иногда применяют специальные пружинные амортизаторы,
устанавливаемые во впадинах зубьев звездочек. Валы
рассчитываются на долговечность по пределу выносливости по обычным
формулам, принятым при расчете валов.
§ 2. НАТЯЖНАЯ КАРЕТКА
Натяжные каретки эскалаторов различаются по типу натяжных
устройств, а также по конструкции и способам соединения устройств,
обеспечивающих направление цепей и ступеней при их переходе
с одной ветви на другую. На фиг. 134—136 показаны наиболее
типичные конструкции натяжных кареток. Натяжная каретка
эскалатора Э-1 (фиг. 134) имеет пружинно-винтовое натяжное
устройство. Последнее состоит из двух симметрично расположенных
пружин и двух тяг с резьбовой нарезкой. Натяжные звездочки
каретки связаны шарнирно с помощью параллелограмма —
устройства, состоящего из двух вертикальных параллельных рам. Такое
соединение звездочек позволяет создавать одинаковое натяжение
цепей независимо от разницы в их длинах. Каретка посредством
четырех колес опирается на металлоконструкцию натяжной станции.
Оси колес заделаны консольно в сварных поворотных стенках. На
двух осях располагаются натяжные звездочки, посаженные на
подшипниках скольжения.
На фиг. 135 показана натяжная каретка эскалатора типа Н-40.
От рассмотренной она отличается тем, что ее звездочки посажены
на общей оси, что исключает их независимое перемещение в
продольном направлении. Каретка снабжена комбинированным натяжным
устройством. Поворотные стенки этой каретки соединены между
собой двумя жесткими сварными рамами. В случае неодинаковой
длины цепей такая конструкция допускает перекос каретки лишь
•: II 7 /
Фиг. 134. Натяжная каретка эскалаторов типа Э-1:
/ — натяжная звездочка; 2 — сварная поворотная стенка; 3 — полуось натяжной звездочки; 4 — параллелограмм; 5 — натяжное устройство;
6— концевой выключатель; 7 — колесо каретки.
258
Трасса полотна
в пределах зазоров между направляющими и ребордами колес.
По сложности конструкции каретки с жестким и шарнирным
соединением поворотных стенок являются примерно равноценными.
Их основное отличие состоит в том, что шарнирное соединение
поворотных стенок (фиг. 134) обеспечивает независимую работу натяжных
устройств обеих цепей. Это облегчает регулировку прохождения
Фиг. 135. Натяжная каретка эскалатора типа Н-40:
а — общий вид; б — натяжное устройство; / — натяжная звездочка; 2 — литая поворотная стенка;
3 — ось натяжной звездочки; 4 — жесткая связь между поворотными стенками; 5 — звездочка
контрпривода поручней; 6 — опора оси звездочек; 7 — шарнирное устройство.
ступеней через гребенку нижней входной площадки. Однако при
неравномерной вытяжке цепей такая каретка создает возможность
перекоса осей ступеней, что ухудшает работу полотна, способствуя
увеличению его бокового смещения. На практике широкое
применение получили каретки обеих типов.
На фиг. 136 показана каретка, совсем не имеющая звездочек.
Поворот цепей и ступеней при переходе с одной ветви на другую
у этой каретки осуществляется с помощью специальных направ-
Поворотные ctetitcU
ляющих для основных бегунков, отлитых за одно целое с
поворотными стенками. Каретки без звездочек при всей их кажущейся
простоте обладают рядом существенных недостатков. Амплитуда
возвратно-поступательных пульсирующих движений такой каретки
значительно больше, чем у каретки обычного типа. Ее поворотные
стенки имеют более сложную конструкцию и требуют устройства
шин против складывания цепей
при обрыве, чтосопряжено с
большими трудностями. Монтаж такой
каретки более трудоемок, так как
она имеет в 2 раза большее число
стыков, требующих пригонки.
Увеличивается также путь трения
и износ деталей шарниров тяговой
цепи при их повороте на
натяжной станции. Все эти недостатки
ограничивают применение кареток
такого типа.
§ 3. ПОВОРОТНЫЕ СТЕНКИ
Поворотными стенками?'назы-
ваются направляющие бегунков,
установленные на участках
перехода ступеней с одной ветви на
другую. Поворотные стенки главного
вала и натяжных кареток,
снабженных звездочками, служат лишь для направления
вспомогательных бегунков. У натяжных кареток без звездочек они обеспечивают
также направление основных бегунков. Поворотные стенки главного
вала отличаются от поворотных стенок натяжной станции тем, что
они установлены неподвижно, тогда как поворотные стенки натяжной
станции по мере вытягивания и износа тяговых цепей должны
перемещаться в продольном направлении. Конструктивно это различие
выражгется в том, что поворотные стенки главного вала соединяются
с направляющими вспомогательных бегунков неподвижными
стыками, а стыки поворотных стенок натяжной станции выполняются
подвижными.
Поворотные стенки главного вала опираются или
непосредственно на главный вал и металлоконструкцию, или только на
металлоконструкцию. На фиг. 137 показаны поворотные стенки первого
типа. Они установлены на общем подшипнике скольжения,
смазываемом погружением смазочных колец в масляную ванну. Наличие
подшипника скольжения в неудобном для обслуживания месте
является серьезным недостатком такой конструкции. Поворотные
стенки рассматриваемой конструкции выполнены в виде стальных
отливок. Внутренние и наружные беговые дорожки вспомогатель*
17 *
Фиг. 136. Натяжная каретка без
звездочек:
/ — поворотная подвижная стенка с
направляющими для основных и вспомогательных
бегунков; 2 — параллелограмм; 3 — каток;
4 — тяга натяжного приспособления.
260
Трасса полотна
ных бегунков располагаются на одинаковом расстоянии друг от
друга. Расстояние между беговыми дорожками огибающей части
выбирается таким, чтобы при прохождении бегунков не
происходило их заклинивание. По мере износа бегунков и беговых дорожек
зазор между бегунками и наружной стенкой огибающей
увеличивается до 10—12 мм. Вследствие этого опрокидывание ступеней
сопровождается ударами, приводящими к еще большему износу
Фиг. 137. Поворотные стенки с неподвижными огибающими:
главный вал; 2 — вкладыш опоры; 3 — поворотная стенка; 4 — опорная балка; 5 — масляная
ванна.
наружной стенки огибающей. Образующиеся на ней выбоины
требуют систематической заварки. Прохождение ступеней по таким
поворотным стенкам связано с повышенным шумом.
^ На фиг. 138 показана поворотная стенка второго типа. Она
опирается только на металлоконструкцию, благодаря чему имеет
более простую конструкцию. Поворотная стенка установлена
относительно главного вала с эксцентриситетом 20 мм, назначение
которого состоит в обеспечении постоянного зазора между ступенями
на всех участках трассы (см. гл. XI). Кроме того, особенностью
поворотных стенок этого типа является то, что внутренняя
огибающая одной из стенок выполнена подвижной, а наружная огибающая
второй стенки — неподвижной. Внутренняя подвижная огибающая
с помощью пружины постоянно отжимается от центра звездочек,
прижимая тем самым вспомогательные бегунки к неподвижной
наружной огибающей противоположной поворотной стенки.
При этом у одной поворотной стенки требуемый зазор обеспечивается
между бегунками и внутренней огибающей, а у противоположной,
наоборот, между бегунками и наружной огибающей (см. схему
на фиг. 138). Благодаря этому вспомогательные бегунки при своем
Поворотные стенки
261
движении по поворотным стенкам остаются все время зажатыми
между внутренней подвижной огибающей одной стенки и
неподвижной огибающей второй стенки. Такая конструкция поворотных
стенок устраняет шум от опрокидывания ступеней и повреждения бего-
О О О
о о о
Гарантируемый
зазор 2 мм
Фиг. 138."^Поворотные стенки с подвижными огибающими:
/ — внутренняя огибающая подвижная; 2 — наружная фальшогибающая; 3 — внутренняя фальшоги-
бающая; 4 — наружная огибающая неподвижная; 5 — пружина; 6 - прокладка; 7 — дистанционная
трубка внутренней фальшогибающей; 8 — боковина поворотной стенки; 9 — вспомогательные
бегунки ступени.
вых дорожек огибающих. На случай поломки рабочих огибающих
предусмотрены фальшогибающие. Поворотные стенки натяжной
станции имеют значительное сходство с поворотными стенками
главного вала. Они стыкуются с направляющими бегунков
подвижными стыками. Койструкция подвижного стыка показана на фиг. 139.
Боковина поворотной стенки в месте подвижного стыка опирается
на направляющую планку, прикрепленную к неподвижной
направляющей. Направляющая планка входит в обработанный паз бокс-
262
Трасса полотна
вины поворотной стенки и обеспечивает тем самым фиксацию послед*
ней в поперечном направлении и правильность ее перемещения
в продольном.
§ 4. НАПРАВЛЯЮЩИЕ
ПОЛОТНА
Направляющие
полотна состоят из трех групп
устройств: направляющих
бегунков, контр
направляющих бегунков и шин про-
тив складывания тяговых
цепей. Направляющие
бегунков воспринимают
нагрузки от веса полотна и
находящихся на нем
пассажиров и обеспечивают
определенную траекторию
движения ступеней на всех
участках трассы, за
исключением звездочек
тяговой цепи.
Контрнаправляющие служат для
предохранения бегунков от
подъема под влиянием
каких-либо причин. Этими
причинами могут быть
натяжение тяговых цепей на
нижнем криволинейном
участке, попадание под
бегунки посторонних
предметов, заедание осей бегунков в отверстиях полых валиков цепей
и т. п. Шины против складывания цепей служат для
предотвращения поломки ступеней в случае обрыва тяговых цепей.
В табл. 26 перечислены элементы направляющих и указано,
на каком участке необходима установка того или иного из них.
Участки, на которых установка данного элемента является
обязательной, отмечены знаком плюс.
Направляющие основных и вспомогательных бегунков
необходимо устанавливать на всех участках трассы, так как на любом
из них они воспринимают весовые нагрузки. Для предохранения
полотна от бокового смещения направляющие основных бегунков
на всех участках трассы должны быть снабжены ребордами. Реборды
обычно располагаются с внешней (по отношению к геометрической
оси эскалатора) стороны ступени. На всех участках трассы
обязательна также установка шин против складывания тяговых цепей
Фиг. 139. Подвижной стык направляющих
эскалатора:
/ — боковина натяжной каретки; 2 — беговая дорожка
нижней ветви направляющей вспомогательных бегунков;
3 — подвижной стык.
Направляющие полотна
263
Элементы полотна по участкам
Таблица 26
Наименование элемента
Направляющая основных
бегунков верхняя
То же нижняя ,
Направляющая вспомогательных
бегунков верхняя
То же нижняя
Контрнаправляющая основных
бегунков верхняя
То же нижняя
Контрнаправляющая
вспомогательных бегунков верхняя
То же нижняя
Шина против складывания
тяговой цепи верхняя . . . . • ....
То же нижняя
П 1
ZD
№ участка
1
+
+
+
"Г
+
+
+
2
+
+
+
+
+
+
+
3
+
+
+
+
+
+
+
4 | 5
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
при обрыве последних. На верхней и нижней ветвях нижнего
криволинейного участка (участок 4) обязательна установка
.контрнаправляющих основных бегунков. Они должны предохранить полотно
от подъема на этих участках под действием усилия
предварительного натяжения тяговых цепей. При определенных усилиях
натяжения бегунки на этом участке могут катиться по
контрнаправляющим. Вопрос об установке контрнаправляющих основных бегунков
на других участках решается в зависимости от установки шин против
складывания цепи. В том случае, если на нижней ветви цепи
устанавливается только одна шина (под цепью), на этой ветви совершенно
обязательна установка контрнаправляющей основных бегунков.
Совместно с шиной она должна предотвратить складывание цепи
при обрыве. При установке на нижней ветви цепи двух шин (под
цепью и над цепью) необходимость в установке контрнаправляющей
264 Трасса полотна
основных бегунков на этой ветви отпадает. При надлежащей
регулировке зазоров между шиной и цепью в установке
контрнаправляющих основных бегунков на участках 1, 3 и 5 верхней ветви нет
необходимости, так как подъем основных бегунков при попадании под
них посторонних предметов могут предотвратить шины.
Установка контрнаправляющих вспомогательных бегунков на
криволинейных участках (2 и 4) весьма желательна, поскольку
здесь может иметь место подъем вспомогательных бегунков вследствие
заедания осей ступеней в отверстиях полых валиков тяговых цепей.
Однако их установка на указанных участках затруднена тем, что
они перерезали бы каркасы ступеней. Поэтому у большинства
конструкций эскалаторов на этих участках нет никаких устройств
против подъема вспомогательных бегунков. На верхней ветви
участков 1 и 5 (табл. 26) контрнаправляющие вспомогательных бегунков
устанавливаются с соответствующими заходами со стороны
криволинейных участков. Наличие таких контрнаправляющих
предохраняет вспомогательные бегунки от подъема у гребенки при попадании
под них посторонних предметов. Установка контрнаправляющих
вспомогательных бегунков на верхней ветви наклонного участка
не нужна, так как вспомогательные бегунки на этом участке
прижимаются к своим направляющим весом ступени и находящихся
на ней пассажиров. Если положение ступени на нижней ветви
наклонного участка недостаточно устойчиво, что, например, имеет место
у короткобазовых ступеней, здесь также должны быть
предусмотрены контрнаправляющие вспомогательных бегунков. Вопрос об
установке контрнаправляющих и шин против складывания тяговых
цепей у легких эскалаторов (со ступенями на одного человека и
высотой не более 10 м) разрешается несколько иначе. Вследствие малых
весовых нагрузок обрыв цепи и ее складывание в этом случае, как
правило, не угрожает непосредственно прочности ступеней. Поэтому
отсутствие шин против складывания цепи и контрнаправляющих
основных бегунков на нижней ветви у таких эскалаторов может быть
допустимым.
Конструктивно направляющие выполняются весьма различно.
У эскалаторов больших высот, в связи со значительными
радиальными нагрузками, верхние направляющие основных бегунков на
верхнем криволинейном участке должны изготовляться более
прочными и жесткими. Они, как правило, имеют сложную литую или
сварную конструкцию с обработанными беговыми дорожками для
бегунков. Поскольку эти направляющие испытывают наибольшую
нагрузку, они изнашиваются быстрее других участков. У отечественных
эскалаторов старых конструкций (Н-10, Н-30, Н-40) верхние
направляющие основных бегунков верхнего криволинейного участка
изготовлялись в виде массивных стальных отливок. Сечение такой
направляющей показано на фиг. 140, а. В связи с быстрым износом
беговых дорожек этих направляющих, при каждомfкапитальном
ремонте машины (через 4—5 лет) производят их обработку перенос-
Направляющие полотна
265
ным наждачным кругом, что сопряжено с большими неудобствами,
так как работа выполняется в условиях эскалаторной станции.
Поэтому направляющие на этом участке целесообразно делать сменными.
На фиг. 140, б показано сечение направляющих верхней Еетви
верхнего криволинейного участка эскалатора ЭМ-4. Эти
направляющие выполнены сменными. Они опираются на несущую стальную
Фиг. 140. Сечение по верхним направляющим верхнего
криволинейного участка:
а — литая направляющая; б — сварная направляющая.
стенку, установленную на металлоконструкции приводной станции.
Направляющая основных бегунков изготовлена в виде прокатного
профиля прямоугольного сечения с выступом, используемым в
качестве реборды для основных бегунков. Направляющая
вспомогательных бегунков и шина против складывания цепи имеют уголковый
профиль. Направляющие основных бегунков на всех остальных
криволинейных участках могут иметь профиль, одинаковый с
направляющими прямолинейных участков. При обрыве тяговых цепей
направляющие основных бегунков на криволинейных участках могут
воспринимать большие радиальные нагрузки, поэтому их
усиливают, уменьшая пролет между опорами или выбирая профиль
большого сечения. У эскалаторов малых высот (до 10—15 м)
направляющие основных бегунков могут иметь на всех участках
одинаковый профиль, что значительно упрощает их конструкцию.
Прямолинейные участки направляющих, контрнаправляющих
и шин против складывания цепей изготовляются из различных
прокатных профилей: уголков, швеллеров, полос и т. п.
На фиг. 141 и 142 показаны две наиболее характерные
конструкции направляющих наклонного участка трассы,
266
Трасса полотна
У эскалаторов типа Н-40 (фиг. 141) беговые дорожки основных
и вспомогательных бегунков на верхней ветви выполнены в виде
отдельных гладких лент шириной 100 мм и толщиной 4 мму
расположенных в одной плоскости. Каждая лента крепится к общему
основанию с помощью двух узких полосок, расположенных по ее
краям. Впадина, образующаяся между полосками, служит беговой
Фиг. 141. Поперечный разрез по направляющим средней части эскалатора
типа Н-40:
/ — направляющая основных бегунков верхняя; 2 — направляющая основных бегунков нижняя;
3 — направляющая вспомогательных бегунков верхняя; 4 — направляющая вспомогательных бегунков
нижняя; 5 — контрнаправляющая основных бегунков и шина против складывания тяговых цепей
верхняя; 7 — контрнаправляющая основных бегунков нижняя; 7 —контрнаправляющая
вспомогательных бегунков нижняя; 8 — шина против складывания тяговой цепи нижняя;
9 — металлоконструкция.
дорожкой бегунка. Наружная (по отношению к оси симметрии
эскалатора) полоска служит одновременно ребордой основных бегунков.
Полоски крепятся к основанию болтами, располагаемыми через
каждые 290 мм. Аналогичную конструкцию имеет нижняя
направляющая основных бегунков. Нижняя направляющая
вспомогательных бегунков имеет уголковый профиль. Для нормальной работы
ленты необходимо, чтобы она хорошо прилегала к основанию по
всей своей длине и ширине. При несоблюдении этого условия ленты
выпучиваются в отдельных местах и сравнительно быстро
разрушаются от усталости, что приводит к длительной остановке
эскалатора. Все направляющие наклонного участка этого эскалатора
крепятся непосредственно к металлоконструкции. Поэтому каждая
направляющая требует индивидуальной пригонки и независимой
регулировки, что сильно усложняет монтаж, Недостатком такой кон-
Направляющие полотна
267
струкции является также то, что в случае замены изношенных или
разрушенных калиброванных лент приходится демонтировать также
и основание, на котором они располагаются, поскольку установка
I— 690 -I- 690 -
Фиг. 142. Поперечный разрез по направляющим средней части эскалатора
типа ЭМ-4:
/ — направляющая основных бегунков верхняя; 2 — направляющая основных бегунков нижняя;
3 — направляющая вспомогательных бегунков верхняя; 4 — направляющая вспомогательных
бегунков нижняя; 5 — контрнаправляющая основных бегунков и шина против складывания тяговых цепей!
верхняя; 6 — контрнаправляющая основных бегунков нижняя; 7 — контрнаправляющая
вспомогательных бегунков нижняя; 8 — шина против складывания тяговой цепи нижняя; 9 — стыковой кронштейн
для крепления направляющих; 10 — промежуточный кронштейн для крепления направляющих;
И — металлоконструкция.
новых лент связана со сверлением большого количества отверстий
и может быть выполнена только в заводских условиях.
У эскалаторов ЭМ-4 (фиг. 142) качение основных и
вспомогательных бегунков ца наклонном участке осуществляется по направляю"
268
Трасса полотна
щим уголкового профиля, установленным на специальных сварных
кронштейнах, так что на каждой секции металлоконструкции
длиной 6 м они образуют два независимых сборочных узла, именуемых
правыми и левыми направляющими.
Кронштейны по длине
направляющих установлены на расстоянии 1,5 м
друг от друга. Все плоскости для
крепления направляющих
обработаны и приварены к кронштейнам в
кондукторе так, чтобы последующая
установка направляющих могла
производиться без пригонки. Благодаря
этому кронштейн служит
одновременно сборочным кондуктором, что
значительно облегчает монтаж
направляющих. Для регулировки
кронштейнов в горизонтальной и
вертикальной плоскостях предусмотрены
специальные регулировочные болты.
Сверление отверстий в кронштейнах
и направляющих производится в
заводских условиях, что существенно
уменьшает объем сборочных работ.
Кронштейны изготовляются
сварными, литыми или штампованными.
Предпочтения заслуживает
последняя конструкция как наиболее
технологичная. Лучшим материалом для
направляющих основных и
вспомогательных бегунков является
холоднокатаный стальной прокат.
Поверхность такого проката не имеет
шероховатостей, плен и других пороков,
свойственных поверхности обычного
проката. Благодаря этому
направляющие из калиброванного проката
более износоустойчивы и вызывают
меньший износ бегунков.
Изготовление контрнаправляющих и шин
против складывания цепей из такого
проката нецелесообразно, так как
эти детали в нормальных условиях не работают. Для обеспечения
плавного перехода бегунка с одной направляющей на другую стыки
обычно выполняются косыми. Стык, как правило, располагается на
опоре. Конструкция стыков показана на фиг. 143.
Направляющие вспомогательных бегунков у натяжной станции
заканчиваются стыками с подвижными поворотными стенками,
Фиг. 143. Крепление
направляющих средней части эскалатора
ЭМ-4 на стыковых кронштейнах:
1 — направляющая основных бегунков
верхняя; 2 — направляющая основных
бегунков нижняя; 3—направляющая
вспомогательных бегунков верхняя; 4 -
направляющая вспомогательных бегунков
нижняя; 5 — контрнаправляющая основных
бегунков и шина против складывания
тяговых цепей верхняя; 6 —
контрнаправляющая основных бегунков нижняя; 7 —
контрнаправляющая вспомогательных бегунков
нижняя; 8 — шина против складывания
тяговой цепи нижняя; 9 — стыковой
кронштейн.
Направляющие полотна 269
Шины против складывания тяговой цепи верхней ветви, а также
направляющие основных бегунков нижней ветви доводятся до
вертикальной геометрической оси натяжной каретки в ее наиболее
удаленном положении. С учетом возможности монтажа и демонтажа
каретки указанные шины и направляющие делаются на этом участке
съемными. Для установки и выема ступеней на одном из участков
трассы должен быть предусмотрен съемный участок
контрнаправляющих вспомогательных бегунков. Для ступеней с полуосями
наиболее удобным местом выема ступеней является нижняя ветвь
верхнего горизонтального участка. Ступени со сквозной осью позволяют
осуществлять съем и установку их каркасов во многих местах трассы,
однако на нижней ветви для них следует также предусматривать
съемный участок.
ГЛАВА XV
ПРИВОД
% 1. НАЗНАЧЕНИЕ, СХЕМЫ И КОНСТРУКЦИИ ПРИВОДОВ ЭСКАЛАТОРОВ
Приводом эскалатора называется система механизмов,
обеспечивающая движение и остановку главного вала и связанного с ним
полотна ступеней. Различают главный и вспомогательный или малый
приводы. Первый служит для перемещения полотна с нормальной
эксплуатационной скоростью. Малый привод предназначается для
медленного проворачивания эскалатора в ненагруженном состоянии
при осмотре, ремонте, смазывании и очистке частей. Наиболее
широкое применение получили схемы эскалаторных приводов,
показанные на фиг. 144. Привод, выполненный по любой из этих схем, состоит
из электродвигателя, передач от электродвигателя к главному валу
и тормозного устройства.
По принципу передачи крутящего момента на главный вал привода
делятся на односторонние (фиг. 144, а, б, г) и сдвоенные (фиг. 144, в).
В одностороннем приводе крутящий момент подводится к одному
концу главного вала, а в сдвоенном — к обоим его концам. Приводы
эскалаторов малых высот обычно изготовляются односторонними,
по схемам, показанным на фиг. 144, а и б. По первой схеме соединение
основных механизмов привода с главным валом производится с
помощью цепной передачи. На фиг. 145 изображен привод эскалатора
высотой 12 м, выполненный по этой схеме. Привод имеет
электродвигатель мощностью N = 46 кет при числе оборотов п = 750 об/мин,
червячный редуктор с передаточным числом / = 19,66 и тормозное
устройство с колодочным тормозом. Указанные механизмы вместе
с малым приводом установлены на общей плите на небольшой высоте
от пола, что обеспечивает удобное обслуживание. Передача от
редуктора к главному валу осуществляется втулочно-роликовой
пластинчатой двухрядной цепью с шагом 50 мм.
Аналогичную конструкцию имеет привод эскалаторов Э-1, ЭЗ-5
и ряда эскалаторов иностранных фирм. Цепная передача достаточно
проста в изготовлении и монтаже, сокращает габариты эскалатора
по ширине и позволяет наиболее удобно разместить привод в
машинном помещении. В эскалаторах больших высот применение цепной
передачи затруднено из-за больших изгибающих моментов,
возникающих на консольном конце главного вала, а также в связи с услож-
Назначение, схемы и конструкции приводов эскалаторов
271
4 (Ж!!
I I . a I I ' ' 1 111. It.
Фиг. 144. Схемы приводов
эскалаторов:
а — односторонний привод с цепной
передачей; б — односторонний привод с траверсой;
в — сдвоенный привод с траверсой; г —
односторонний привод с цилиндрическими
редукторами; / — электродвигатель; 2 — эластичная
муфта; 3 — тормоз; 4 — малый
(вспомогательный) привод; 5 — червячный редуктор;
6—цепная передача; 7 — набор зубчатых колес
(траверса); 8 — цилиндрический двухступенчатый
редуктор; 9— цилиндрический
одноступенчатый редуктор; 10 — зубчатые муфты.
272
Привод
нением самой передачи. При схеме, показанной на фиг. 144, б,
основные механизмы привода (электродвигатель, тормоза, редуктор)
также располагаются на общем основании на малом расстоянии
от пола машинного помещения. Для соединения их с главным валом
применяется набор зубчатых колес, называемый траверсой. Траверса
^ж^ФйШ
Фиг. 145. Привод эскалатора высотой 12 м с цепной передачей к главному
валу:
/ — электродвигатель; 2 — муфта; 3 — тормоз; 4 — червячный редуктор; 5 — звездочка двухрядной
цепи; 6— выносная^опора; 7 —двухрядная цепь; 8 — плита; 9 — электродвигатель малого привода;
10 — редуктор малого привода; 11 — кулачковая муфта.
увеличивает расстояние от потолка машинного помещения до подошвы
плиты привода, улучшает тем самым условия его обслуживания,
и создает возможность демонтажа привода без вскрытия люков в
потолке машинного помещения. Ведущая шестерня траверсы
располагается на выходном валу редуктора, а ведомая — на консольном
конце главного вала, который также испытывает значительные изги-
Назначение, схемы и конструкции приводов эскалаторов
273
18 Ивашкоз 2598
274
Привод
бающие усилия. По этой схеме выполнен привод эскалаторов
типа Н-10 и Н-30. [Передача в виде траверсы более сложна и
громоздка по сравнению с цепной.
4760-
Фиг. 147. Односторонний привод эскалаторов высотой 40 и 50 м:
1 — электродвигатель; 2 — эластичная муфта; 3 — тормоза (рабочий и дополнительный); 4 —
цилиндрический двухступенчатый редуктор; 5 — зубчатая муфта; 6 — цилиндрический одноступенчатый
редуктор; 7 — зубчатая муфта; 8 — малый привод; 9 — фундаментная плита.
Приводы эскалаторов больших высот (40—65 м) изготовляются
сдвоенными (фиг. 144, в) или односторонними (фиг. 144, г). На
фиг. 144, в изображена схема сдвоенного привода эскалатора
высотой 40 ж, а на фиг. 146 — конструкция этого привода. Привод состоит
из двух одинаковых установок, работающих на главный вал. Каждая
из установок по существу является самостоятельным приводом.
В нее входят электродвигатель, эластичная муфта, служащая одно-
Элементы передач от электродвигатели, к главному валу 275
временно тормозным шкивом, тормозное устройство и червячный
редуктор* мощностью N = 65 кет при числе оборотов входного
-вала п = 7.50*об/мин и передаточном числе / = 21,66. На выходном
валу каждого из редукторов посажены зубчатые шестерни. Движение
от них через паразитные колеса траверсы передается двум
симметрично расположенным на главном валу (фиг. 132) зубчатым колесам.
Ко второму открытому концу одного из электродвигателей главного
привода присоединен малый привод. Недостатками этой схемы
являются не вполне синхронная работа правого и левого приводов,
большое количество элементов, из которых состоит привод, наличие
на главном валу громоздких зубчатых колес, утяжеляющих его и
затрудняющих монтаж.
На фиг. 144, г показана схема одностороннего привода эскалатора
большой высоты. По этой схеме выполнен показанный на фиг. 147
привод эскалаторов высотой 40 и 50 м. Привод состоит из
электродвигателя, эластичной муфты с тормозами и двух цилиндрических
редукторов —двухступенчатого и одноступенчатого,
смонтированных на общей плите. Соединение привода с главным валом
осуществляется с помощью зубчатой муфты. Благодаря этому входной конец
главного вала не испытывает изгибающих усилий. Такой привод
имеет меньшее число зубчатых элементов по сравнению с
двусторонним приводом. Снижается также вес главного вала в сборе,
облегчается его монтаж. Вскрытие крышки тихоходного редуктора этого
привода может производиться лишь через люк в потолке машинного
помещения, что создает определенные неудобства при ремонте.
Тем не менее эта схема заслуживает предпочтения перед схемами
сдвоенных приводов.
§ 2. ЭЛЕМЕНТЫ ПЕРЕДАЧ ОТ ЭЛЕКТРОДВИГАТЕЛЯ К ГЛАВНОМУ ВАЛУ
Приводные цепи. Для привода эскалаторов применяются
двухрядные пластинчатые втулочно-роликовые цепи. Нагрузкз.
действующая на цепь, определяется по формуле
™ (137)
S = £-L9
где Мг в — приведенный крутящий момент на главном валу [см.
формулу (119)];
D3B — диаметр приводной звездочки.
Расчет приводных цепей на прочность производится по обычным
формулам, приведенным в курсах деталей машин. В соответствии
с Правилами Гссгортехнадзора в каждом элементе цепи должен быть
обеспечен семикратный запас прочности по отношению к
максимальной рабочей нагрузке. Величины удельных давлений между
валиками и втулками принимаются равными 250—300 кг/см2.
Траверсы. Траверса представляет собой комплект
паразитных зубчатых колес, смонтированных в стальных щеках. Сущест-
18*
276
Привод
вует два типа траверс, соответствующих двустороннему и
одностороннему приводу. Щеки траверсы двустороннего привода *(фиг. 148)
находятся на значительном расстоянии друг от друга. На
соединяющей их оси посажены два зубчатых колеса. Своими нижними
концами щеки опираются на выходные валы редукторов, а верхними
концами — на консоли главного вала. Окно, имеющееся в каждой
Фиг. 148. Траверса экскалатора высотой 40 м:
I — паразитное колесо; 2 — ось паразитных колес; 3 — щека траверсы; 4 — стяжка.
из щек, служит для осмотра зубчатого зацепления. После того
как траверсы смонтированы, на ведущую шестерню и паразитное
колесо надевается легкий кожух-ванна, заполняемый жидкой
смазкой (на чертеже не показан).
Щеки траверсы одностороннего привода сближены и заключают
между собой только одно паразитное колесо. В остальном
конструкция этой траверсы аналогична рассмотренной.
Червячные редукторы. Червячный редуктор до
последнего времени является наиболее распространенным типом
редуктора эскалаторного привода. По конструкции червячной пары эти
редукторы ничем не отличаются от редукторов, применяемых в общем
машиностроении. По числу опор вала червячного колеса они делятся
на двухопорные и трехопорные. На фиг. 149 изображен редуктор
эскалатора высотой 10 м с двухопорным валом червячного колеса.
Элементы передач от электродвигателя к главному валу
277
Червяк выполнен трехзаходным. Вал червячного колеса опирается
на корпус редуктора одним концом, второй же конец опирается
на стойку, не являющуюся органической частью редуктора. Эти
редукторы работают удовлетворительно более 20 лет. Большее
распространение получили редукторы с трехопорным валом
червячного колеса. Две опоры располагаются в корпусе редуктора, а третья
делается выносной. Такой редуктор может работать удовлетвори-
Фиг. 149. Двухопорный червячный редуктор эскалатора высотой 10 м
(мощность 55 кет),
тельно лишь при условии тщательного выполнения монтажа третьей
опоры. Имевшие место в практике случаи разрушения трехопорных
валов указывают на нежелательность применения подобной
конструкции.
'Цилиндрические редукторы. В последнее время
появились конструкции приводов, в которых червячный редуктор
и траверса заменены цилиндрическими редукторами. Зубчатые колеса
в редукторе работают в лучших условиях, чем колеса траверсы.
Привод имеет более высокий коэффициент полезного действия и почти
такой же уровень громкости шума, как и привод с червячными
редукторами. Он более прост в монтаже и обслуживании и надежнее
в эксплуатации.
Конструкции цилиндрических редукторов эскалатора высотой
50 м показаны на фиг. 150.
Быстроходный редуктор фиг. 150, а имеет разъем в
горизонтальной плоскости. Все его передачи выполнены косозубыми. Каждая
278
Привод
Фиг. 150. Конструкции цилиндрических редукторов эскалатора высотой 50 м
(мощность 130 квт)\
а — быстроходный двухступенчатый редуктор; б — тихоходный одноступенчатый редуктор.
Элементы передан от электродвигателя к главному валу
279
О
О
н
о
о
S
е-
280 Привод
из передач может быть демонтирована в машинном помещении без
вскрытия люков в потолке.
Тихоходный редуктор (фиг. 150, б) имеет два разъема в
горизонтальной плоскости. Зубчатые колеса выполнены прямозубыми.
Демонтаж этого редуктора связан с необходимостью вскрытия люков
в потолке машинного зала. Последнее обстоятельство, однако,
не имеет решающего значения. Поскольку редуктор является
тихоходным и рассчитан на длительный срок работы, неполадки в его
работе почти полностью исключены. Поэтому демонтаж такого
редуктора будет производиться весьма редко.
Глобоидальные редукторы. На фиг. 151 показан
червячный редуктор с глобоидальным зацеплением, применяемый
в приводе эскалатора для зданий высотой 5,5 м со ступенью на одного
человека. Редуктор имеет межцентровое расстояние 180 мм и
мощность N = 13,7 кет при числе оборотов червячного вала в минуту
п = 500 и передаточном числе / = 21,5. Компактность глобоидальных
редукторов делает особенно целесообразным их применение для
эскалаторов больших высот, у которых цилиндрическое зубчатое
колесо последней (тихоходной) ступени передачи имеет, как правило,
чрезмерно большой диаметр, что требует соответствующего
увеличения диаметров тяговых звездочек. Однако работоспособность таких
редукторов в указанных условиях до сих пор не проверена.
Муфты. Для соединения элементов эскалаторных приводов
применяются эластичные и зубчатые муфты. Соединение вала
электродвигателя с валом редуктора во всех конструкциях приводов
осуществляется эластичными муфтами, ничем не отличающимися от
обычных муфт, применяемых в подъемно-транспортном
машиностроении. Предпочтения заслуживают муфты с открытым разъемом.
При такой конструкции легко пр.оверяется правильность установки
полумуфт путем замера зазоров между ними. Отпадает также
необходимость в перемещении электродвигателя в осевом направлении при
его подъеме во время демонтажа. Зубчатые муфты, применяемые
в эскалаторных приводах, также мало отличаются от типовых
конструкций. Применяемые конструкции зубчатых муфт позволяют
компенсировать параллельное смещение валов до 1,5 мм при угле
перекоса до 4°.
§ 3. ТОРМОЗНЫЕ УСТРОЙСТВА
Виды тормозных устройств. Эскалаторы обычно
снабжаются двумя видами тормозов: рабочими и аварийными.
Рабочие тормоза служат для остановки исправного эскалатора,
а также при любой его неисправности, исключая нарушение
кинематической связи между электродвигателем привода и главным валом
(обрыв приводной цепи, поломка вала передачи и т. д.). В последнем
случае остановку полотна обеспечивает аварийный тормоз. По
Правилам технической эксплуатации Московского метрополитена каждый
Тормозные устройства 281
эскалатор должен быть оборудован двумя рабочими тормозами,
причем каждый тормоз в отдельности должен обеспечить нормальную
остановку при полной загрузке эскалатора пассажирами. Один из
этих тормозов является основным, а второй — дополнительным.
Последний предназначается для остановки эскалатора при отказе
в работе основного тормоза.
Рабочие тормоза. Рабочие тормоза эскалаторов должны
быть нормально замкнутыми. Под действием электромагнита
такой тормоз размыкается, а при обесточении магнита замыкается.
Основной и вспомогательный тормоза устанавливаются в месте
соединения вала электродвигателя главного привода с входным
валом редуктора, где крутящий момент имеет минимальное
значение. В качестве тормозного шкива обычно используется полумуфта,
посаженная на конце входного вала редуктора. Дополнительный
тормоз включается в работу или с определенным интервалом после
срабатывания основного тормоза, или одновременно с ним. Последний
режим работы более удобен, так как он позволяет избежать рывков,
возникающих при включении дополнительного тормоза до полной
остановки эскалатора. Исключается также разгон эскалатора при
работе на спуск в случае отказа в работе основного тормоза. Рабочие
тормоза эскалаторов обычно изготовляются двухколодочными
электромагнитными с - замыканием рычагов с помощью пружины
и грузов.
На фиг. 152 изображена схема рабочего тормоза эскалатора ЭМ-4,
снабженного масляным демпфером.
Масляный демпфер регулируется так, что наложение якоря
электромагнита происходит после полной остановкя эскалатора.
Благодаря этому весь процесс остановки протекает при постоянном
тормозном моменте и лишь после остановки полотна он увеличивается
настолько, чтобы обеспечить требуемый запас по отношению к
статическому моменту. В том случае, если момент, развиваемый пружиной,
окажется недостаточным, полная остановка полотна происходит
лишь после наложения якоря. При затянувшемся торможении
наложение якоря может произойти до полной остановки полотна и
вызывать такой же рывок, как и при тормозе с воздушным демпфером.
Поэтому масляный демпфер должен тщательно регулироваться с
учетом всех возможных режимов загрузки полотна.
Аварийные тормоза. Аварийными тормозами
оборудуются все эскалаторы с цепными передачами от привода к главному
валу. Местом их установки обычно служит главный вал (см. фиг. 131
и 133). На фиг. 153 показан аварийный ленточный тормоз
эскалатора ЭМ-1. Лента с обкладками из феродо состоит из трех склепанных
частей. Угол обхвата лентой шкива составляет 622°. Для
обеспечения равномерного прилегания ленты к шкиву, а также равномерного
отхода от него лента охвачена жестким обручем с рядом роликовых
упоров. Для повышения плавности торможения и увеличения запаса
тормозного момента тормоз снабжен масляным демпфером. В целях
282
Привод
повышения надежности в последнее время аварийные тормоза
устанавливаются на эскалаторах с любым типом привода.
На фиг. 154 показана схема аварийного тормоза эскалатора ЭМ-4,
установленного на тяговой звездочке главного вала (см. фиг. 133).
Фиг. 152. Тормоз с масляным демпфером эскалатора высотой 40 м:
\ — станина; 2 — вертикальный рычаг; 3 — пружинная тяга; 4 — пружина; 5 — коромысло; 6 —
нажимная тяга; 7 — грузовой рычаг; 8 — электромагнит; 9 — масляный демпфер; 10 —
регулировочный болт; // — гайка пружины; 12 — головка тяги; 13 — шток демпфера; 14 — гайка; 15 — фланец;
16 — упорное кольцо; 17 — боковой канал; 18 — игла.
При нормальной работе привода (фиг. 154) барабан 4 и гайка 3
вращаются вместе с тяговой звездочкой 1. При нарушении
кинематической связи в системе привода на храповик барабана
накладывается собачка и останавливает его. Гайка, навинчиваясь на винт,
нарезанный на ступице тяговой звездочки, сжимает пружину 5
и через нее все сильнее прижимает тормозной диск барабана к
тормозному диску тяговой звездочки, что и вызывает остановку
лестничного полотна. Такой тормоз, в отличие от ленточного тор-
Тормозные устройства
283
моза, показанного на фиг. 153, создает переменный тормозной
момент, зависящий от величины действующего крутящего момента:
чем больше внешние статический и динамический крутящие моменты,
тем больший тормозной момент создается тормозом. Благодаря
этому тормоз при правильной его регулировке обеспечивает необ-
j о * оо -' о о• ° " oqV'5'e.c о-в »-• ■««.« ib'
Фиг. 153. Ленточный аварийный тормоз
эскалатора высотой 10 м.
Фиг. 154. Схема
аварийного тормоза эскалатора
высотой 40 м:
1,— звездочка; 2 — винт;
3 — гайка; 4 — барабан с
храповиком; 5—пружины;
6 — феродо; 7 —шлицы.
ходимую плавность торможения при любом режиме работы эска"
латора.
Формулы для определения статических и динамических крутящих
моментов, необходимых для расчета и выбора тормозов, приведены
в гл. XII.
ГЛАВА XVI
ПОРУЧНЕВЫЕ УСТАНОВКИ
§ 1. ОБЩИЕ СВЕДЕНИЯ
Поручни служат для обеспечения устойчивого положения
пассажиров на движущемся полотне, особенно в моменты входа и схода
с него.
В отличие от обычных лестничных перил, эскалаторные поручни
делаются подвижными.
Во всех существующих конструкциях эскалаторов поручневые
установки представляют собой две бесконечные эластичные ленты
специального профиля, движущиеся по бокам полотна на таком
расстоянии от ступеней, чтобы пассажиры могли с удобством опираться
руками на верхнюю ветвь любой из лент поручня. Скорость движения
поручня не должна отличаться от скорости движения полотна более
чем на 2%.
Каждая из двух бесконечных лент поручней приводится в
движение самостоятельным ведущим блоком, вращаемым от главного
вала через систему цепных передач (фиг. 155).
Поручневые устройства с двумя и тремя ведущими блоками для
каждого из поручней, применявшиеся в эскалаторах старых
конструкций, оказались несовершенными. Наличие в них нескольких
ведущих блоков приводило к пробуксовыванию поручня и другим
неполадкам.
Обе (правая и левая) поручневые установки эскалатора
совершенно идентичны и являются зеркальными по отношению друг к
другу.
Чтобы обеспечить натяжение поручня, не изменяя расстояния
между верхним и нижним концевыми блоками, бесконечная лента
поручня, помимо основной петли, образующейся вследствие
огибания поручнем концевых блоков, делает вторую, дополнительную
петлю меньшего размера, получающуюся путем огибания поручня
вокруг блоков натяжного устройства.
Натяжные устройства с перегибанием поручня в направлении,
обратном направлению его огибания на блоках, не применяются
в связи с тем, что двусторонние перегибы значительно снижают
долговечность поручня. Чтобы образовать дополнительную петлю,
поручень выводят из плоскости ведущего блока, для чего подвижной
й блок выполняют наклонным (фиг. 155, разрез по А А).
6 5 Ч
Разрез по АА
Фиг. 155. Схема поручневой установки эскалатора ЭМ-4:
/ — поручень; 2 — главный вал; 3 — контрпривод; 4 — ведущий блок; 5 — звездочка для натяжки приводной цепи; 6 — приводные цепи;
7 — нижний огибной блок; 8 — отклоняющие блоки рабочей ветви; 9 — отклоняющий блок холостой ветви; 10 — отклоняющие ролики холостой
ветви; // — поддерживающие ролики; 12 — неподвижный блок натяжки; 13 — подвижной наклонный блок натяжки; 14 — ползун наклонного
блока; 15 — направляющие ползуна наклонного блока; 16 — грузовая натяжка поручня; 17 — рукоятка для выбирания троса; 18 — блок-контакт
на случай обрыва поручня; 19— натяжные грузы; 20 — направляющие поручня.
286 Поручневые установки
Концевой блок натяжной станции устанавливается в одной
плоскости с ведущим блоком. Переход отклоненной наклонным блоком
нижней ветви поручня в плоскость концевого блока натяжной
станции происходит постепенно на протяжении всего участка нижней
ветви поручня между этими блоками с весьма незначительным углом
отклонения от продольной оси эскалатора и поэтому безвреден для
поручня.
Неблагоприятными для долговечности поручня являются
условия работы на участке между подвижным и неподвижным блоками
натяжного устройства, где поручень закручивается по винтовой
линии на значительный угол, что приводит к истиранию внутренних
кромок бортов поручня об ободья блоков.
§ 2. ПОРУЧЕНЬ
Наиболее широкое применение получили поручни, изготовленные
в виде многослойных резино-тканевых лент с загнутыми внутрь
краями (фиг. 156). Отгиб краев вызван необходимостью удерживания
поручня на направляющих, в особенности на нижнем криволинейном
участке, где равнодействующая усилий натяжения поручня
стремится сорвать его с направляющей.
Конструкция и материал поручня должны обеспечивать
достаточную его прочность, жесткость и износоустойчивость, низкий
коэффициент трения между поручнем и направляющей, высокий
коэффициент трения между поручнем и ведущим блоком, небольшие
остаточные и упругие деформации при длительной работе в
натянутом состоянии и красивый внешний вид. Поручень изготовляется
из высококачественной полотняной ткани (бельтинга). Отдельные
слои или так называемые прокладки бельтинга склеены между собой
резиновым клеем. С лицевой стороны поручень покрыт слоем цветной
(обычно черной) резины толщиной 3—4 мм.
Так как слабым местом поручня являются стыки, поручень обычно
изготовляют в виде цельного куска, концы которого сращиваются
и вулканизируются после установки на эскалаторе, чтобы свести
количество стыков к одному. Поэтому длина поручней, изготовляемых
на заводах, иногда достигает 200 м и больше. В процессе
изготовления поручень вулканизируется отдельными кусками длиной до 3 м
в прессформе специального профиля.
Существует несколько разновидностей резино-тканевых поручней.
По форме сечения различают С-образные (фиг. 156, а и б) и клиновые
(фиг. 156, в и г) поручни.
С-образный поручень, показанный на фиг. 156, а, относится
к раннему периоду отечественного эскалаторостроения.
> Более рациональную конструкцию имеет поручень, показанный
на фиг. 156, б. Он состоит из 8 прокладок бельтинга и одного слоя
облицовочной резины. Поскольку долговечность поручня обусловлена
износом бортов, обкладочная резина в этом поручне не заканчивается
Поручень 287
на бортовых закруглениях, а запускается под нижнюю прокладку
вместе с прилегающей к ней верхней прокладкой. Таким образом,
разрушение бортов может наступить лишь после износа двух бель-
тинговых прокладок и заключенного между ними слоя облицовочной
резины.
д)
Фиг. 156. Эскалаторные поручни и их направляющие:
а — сечение С-образного обычного поручня; б — сечение С-образного поручня повышенной сцепляе-
мости с блоком; в — сечение обычного клинового поручня; г — сечение клинового поручня
повышенной сцепляемости с блоком; д — клиновой ручей ведущего блока; / — облицовочная резина;
2 — внутренняя прокладка; 3 — наружная прокладка; 4 — неполная прокладка; 5 — слой клея; 6 —
резиновая полоса в зоне сцепления с блоком; 7 — клин бельтинговый; 8 — слой резины между
клином и прокладками; 9 — направляющая; 10 — блок; // — регулируемая половина обода блока;
12 — шпонка; 13 — стяжной болт; 14—тарельчатые пружины; /5—резиновая облицовка обода блока.
Нижняя прокладка бельтинга выводится наружу и заканчивается
далеко за пределами бортовых закруглений, что исключает истирание
обкладочной резины об ободья блоков.
Эта прокладка предварительно, до склейки с остальными
прокладками, прорезинивается (проклеивается; см. табл. 21 и 22) с
внутренней стороны, что устраняет продавливание резины на рабочую
поверхность ткани при вулканизации и значительно снижает
коэффициент трения поручня по направляющим.
Перед вулканизацией на нижнюю прокладку бельтинга по линии
симметрии поручня наклеивается продольная полоса резины шири-
2§8 Норучнёвыё установки
ной 30—35 мм и толщиной 0,5—0,8 мм, образующая после
вулканизации узкую резиновую дорожку, не соприкасающуюся при работе
с направляющими, не повышающую, таким образом, коэффициента
трения поручня по направляющим, но зато придающую поручню
повышенную сцепляемость с ободом ведущего блока.
Наиболее широкую перспективу применения имеют клиновые
поручни (фиг. 156, в и г). Клиновые поручни имеют наибольшую
сцепляемость с ободьями ведущих блоков, что позволяет свести
их рабочее натяжение к минимуму и тем самым применять их
для эскалаторов большей высоты (60—65 м). Они не требуют
применения быстроизнашивающихся обрезиненных блоков, не изменяют
коэффициента сцепления с блоком при износе и при прочих равных
условиях легче С-образных поручней.
§ 3. ТРАССА ПОРУЧНЯ
Направляющие верхней (рабочей) ветви.
Направляющие верхней ветви поручня (фиг. 156) выполняются из
металлических полос специального профиля длиной 3—6 м,
установленных впритык друг к другу по обеим сторонам полотна на всем
протяжении от ведущих блоков приводной станции до огибных
блоков натяжной станции. У эскалаторов высотой свыше 10 ж в зоне
верхнего криволинейного участка полотна направляющие поручня,
для уменьшения трения, обычно устанавливаются не по дуге
окружности, а по ломаной линии. Перегиб поручня происходит на
одном, двух или трех отклоняющих блоках, в местах установки
которых между направляющими делаются проемы.
Все поверхности скольжения у направляющих поручня должны
быть полированными и не должны иметь царапин, вмятин, забоин
и тому подобных дефектов.
В качестве материалов для направляющих поручня применяются
латунь, красная медь или сталь.
Нижний и верхний, если таковой имеется, криволинейные
участки направляющих поручня очерчиваются по дуге окружности,
центр которой не совпадает с центром дуги окружности,
очерчивающей трассу основных бегунков на соответствующем криволинейном
участке полотна. Несовпадение центра этих дуг вызывается
необходимостью сохранить одинаковое расстояние по вертикали между
рабочими поверхностями настила ступени и поручня на
горизонтальных и на наклонном участках трассы. При очерчивании
указанных дуг из одного центра поручень на наклонном участке
расположился бы несоразмерно высоко и пользоваться им стало бы неудобно.
Блоки и ролики. Ведущим блоком поручня является
концевой блок приводной станции. Ведущий блок устанавливается на
кронштейне, смонтированном на металлоконструкции эскалатора.
Возможны два варианта установки блока и его ведущей звездочки:
на общем валу, вращающемся в подшипниках, встроенных в
кронштейн (фиг. 157, а)у и на неподвижной оси (фиг. 157, б).
Трасса поручня
289
Для увеличения коэффициента сцепления поручня с ведущим
блоком обод последнего покрывается слоем резины толщиной от 8
до 12 мм. Опыт показал, что такие обрезиненные блоки надежны
в работе и не изнашивают поручня, однако срок службы обода
зачастую не превышает 1—2 лет. Диаметр ведущих блоков, как правило,
выполняется близким к 800 мм.
Установка ведущего блока должна (u
быть вписана в крайне жесткие
габариты внутри балюстрады с весьма
Фиг. 157. Варианты установки ведущих блоков:
а — на валу; б — на оси; / — ведущий блок; 2 — приводная звездочка; 3 — вал; 4 — ось; 5 —
подшипник; 6 — опора- оси; 7 — прокладки для регулирования блока по высоте; 8 — вспомогательная
металлоконструкция.
стесненными проходами для приводных цепей. Поэтому при
проектировании должны быть тщательно проанализированы следующие
конструктивные факторы:
1. Правильность расположения оси ведущего блока относительно
кромки зубцов гребенки входной площадки. Для удобства
пользования эскалатором пассажир должен иметь возможность взяться
за поручень до входа на движущееся полотно, поэтому ось
ведущего блока располагают впереди кромки зубцов гребенки входной
площадки на 50—100 мм.
19 Ивашков 2598
-148-
Положен и9 поручня у ! + I Положение поручня у
прибодной станции i J! натяЖной станции
Фиг. 158. Ролики:
а — отклоняющий; б — поддерживающий; / — ролик; 2 — ось ролика; 3 — кронштейн; 4 — поручень.
1
Элементы натяжного устройства и привода 291
2. Возможность прохода приводных цепей между элементами
металлоконструкции, а также возле кромки пола вестибюля и
деталей крепления балюстрады. Зазор между движущейся цепью и
неподвижными элементами эскалатора принимают не менее 30 мм.
3. Возможность установки кронштейнов ведущих блоков и
размещения опорных частей входной площадки на металлоконструкции
эскалатора.
4. Наличие достаточно широкого свободного пространства внутри
балюстрады (не менее 350 мм) между наиболее выступающими частями
двух смежных эскалаторов или между эскалатором и стеной.
Отклоняющие блоки поручневои установки устанавливаются
на осях либо вращающихся вместе с блоками, либо неподвижно
укрепленных на металлоконструкции.
Все отклоняющие блоки, за исключением нижнего концевого
блока, выполняются диаметром 500—600 мм.
Нижний концевой блок имеет диаметр 800 мм.
На отклоняющих блоках обрезиновка обода не делается.
Ролики, отклоняющие нижнюю ветвь поручня при переходе
ее с верхнего горизонтального участка на наклонный (фиг. 158, а),
обычно выполняются небольших размеров и по конструкции сходны
с роликами, поддерживающими поручень на прямолинейном
наклонном участке нижней ветви (фиг. 158, б). Диаметр поддерживающих
роликов обычно равен 75—100 мм. Так как установка их должна
быть единообразной на всем участке, ролики делаются такой ширины,
чтобы поручень, переходя из плоскости неподвижного блока натяжки
в плоскость нижнего концевого блока, укладывался на ролике в
любом месте трассы" (фиг. 158, б).
Наружная поверхность роликов тщательно обрабатывается, так
как с ними соприкасается лицевая сторона поручня.
§ 4. ЭЛЕМЕНТЫ НАТЯЖНОГО УСТРОЙСТВА И ПРИВОДА
Натяжное устройство поручневои установки состоит из
неподвижного натяжного блока, подвижного наклонного натяжного блока,
установленного на ползунах, направляющих для ползунов, натяжки
и приспособления для автоматической остановки эскалатора в
случае обрыва поручня. Натяжное устройство располагается либо на
верхнем горизонтальном участке (у небольших эскалаторов), либо
на наклонном участке холостой ветви поручня.
Натяжное устройство, помимо основного назначения,—создания
необходимого натяжения поручня,—выполняет в известных
пределах и роль компенсатора остаточной и упругой вытяжки поручня.
Остаточная вытяжка поручня достигает в течение срока его
службы 4—5%. Ход натяжного блока принимается обычно равным 1—2%
от длины поручня. Необходимо отметить, что направление натяжения
поручня на натяжном устройстве не влияет на работоспособность
установки. На фиг. 155 изображено натяжное устройство с натяжным
19*
292
Поручневые установки
блоком 13, натягиваемым вверх по наклону. Но если бы натяжным
являлся блок 12, то это не изменило бы условий работы.
Неподвижный натяжной блок. Неподвижный
натяжной блок служит для поворота поручня на 180° при образовании
последним дополнительной натяжной петли. Он выполняется
значительно меньшего диаметра
(500—600 мм), чем ведущий.
Вызывается это
необходимостью размещения натяжного
устройства в тесных габари-
. 1 тах между верхней частью
балюстрады и
металлоконструкцией эскалатора.
Подвижный
натяжной блок.
Наклонный подвижный
натяжной блок:
1) отклоняет поручень из
плоскости ведущего блока с
тем, чтобы он мог образовать
дополнительную петлю;
2) поворачивает поручень
на 180° при образовании
второй половины петли;
3) натягивает поручень с
помощью троса,
соединенного с грузом, или штанги,
соединенной с пружиной.
Одна из конструкций
наклонного блока показана на
фиг. 159. Наклонный блок
имеет такой же диаметр, как
и неподвижный блок. Он
устанавливается на оси,
заделанной концами в обойму, движущуюся на специальных
ползунах по продольным направляющим.
Натяжка. Перемещение обоймы наклонного блока по
направляющим и создание необходимого усилия натяжения поручня
осуществляется особым устройством, называемым натяжкой.
В старых конструкциях эскалаторов натяжки выполнялись
в виде винтовой пары с пружинным компенсирующим
приспособлением. Такого рода устройства часто разверялись в работе, что
приводило к пробуксовыванию поручня на ведущих блоках.
В новых моделях эскалаторов введены грузовые натяжки,
оказавшиеся более совершенными по сравнению с
пружинно-винтовыми. Обойма натяжного блока в них натягивается с помощью
троса грузами, подвешенными на специальном полиспасте.
Фиг. 159. Подвижный натяжгой блок:
I — блок; 2 — ползун правый; 5 — подшипник; 4—пол>
зун левый; 5 — ось; 6 — направляющая ползуна.
Элементы натяжного устройства и привода 293
Благодаря этому натяжение остается неизменным при любом
удлинении поручня в пределах хода натяжного блока.
В натяжку встроен концевой выключатель, автоматически
останавливающий эскалатор в случае обрыва поручня.
Контрпривод. Контрпривод является промежуточным
звеном между главным валом и ведущими блоками поручней (фиг. 155).
В небольших эскалаторах иногда удается избежать устройства
этого узла и направлять приводную цепь непосредственно с поручне-
вых звездочек главного вала на звездочки ведущих блоков. В
эскалаторах значительной высоты осуществить такую упрощенную
конструкцию, как правило, не удается.
Контрпривод состоит из двух половин, соответственно для*правой
и левой лент поручня, которые приводятся в движение каждая
ют своей звездочки на главном валу.
Приводные цепи. Для поручневых установок
применяются обычные пластинчатые втулочно-роликовые цепи
стандартного типа с шагом до 50 мм.
Для натяжки приводных цепей, идущих с главного вала, опоры
осей валов контрпривода имеют регулировочные приспособления.
Для натяжки цепей, идущих со звездочек контрпривода на
ведущие блоки, устанавливаются специальные натяжные звездочки.
Для поддержки цепей, идущих от главного вала к контрприводу,
в местах, расположенных вблизи от поперечных балок
металлоконструкции, устанавливаются поддерживающие звездочки.
ГЛАВА XVII
МЕТАЛЛОКОНСТРУКЦИЯ И БАЛЮСТРАДА
§ 1. МЕТАЛЛОКОНСТРУКЦИЯ
Металлоконструкция является каркасом, на котором
устанавливаются все элементы эскалатора, исключая его привод.
Металлоконструкция выполняется в виде сквозных решетчатых
ферм. Она состоит из четырех основных частей: ферм приводной
станции, ферм наклонного хода, ферм натяжной станции и опоры
главного вала (для эскалаторов больших высот).
Некоторые из упомянутых основных частей, в свою очередь,
разделяются на несколько узлов. Каркас приводной станции состоит
из одного или двух горизонтальных участков и отъемных наклонных
(переходных) участков, предназначенных для установки
криволинейных направляющих. Наклонные участки называются «хоботом»-
приводной станции. Каркас наклонного хода состоит из ряда
одинаковых ферм (секций) и одной укороченной фермы, именуемой
ненормальной секцией, длина которой назначается индивидуально-
для каждого эскалатора*, в соответствии с заданной высотой
конкретной станции.
Каркас натяжной станции обычно выполняется в виде одной
неразъемной фермы.
Опора главного вала выполняется в виде двух сварных рам
(боковин), соединенных поперечными балками.
У эскалаторов, устанавливаемых в метрополитенах, собранная
конструкция всеми узлами нижнего пояса опирается на массивный
бетонный фундамент (фиг. 160). При таком способе опирания фермы
металлоконструкции работают не как стержневые системы, а как
жесткие станины с элементами, рассчитанными на прочность и на
устойчивость под действием только местных нагрузок.
В отличие от них металлоконструкции эскалаторов зданий
(фиг. 161), имея небольшое число опор (две, три или четыре),
работают как,стержневые системы. Из-за отсутствия поперечной решетки^
связывающей верхние пояса, они трудно поддаются расчету.
Разрез по ЯЛ
7820-
Разрез по 66
-—/600
l-h
i—И
1
— 18S0-
4Линии перегида
Место длй быема ступеней
Фиг. 160. Металлоконструкция приводной станции эскалатора ЭМ-4:
1— опора главного вала; 2 — горизонтальный участок; 3 — наклонный участок.
296
Металлоконструкция и балюстрада
Для изоляции здания от вибраций, возникающих при работе
эскалатора, эти металлоконструкции устанавливаются обычно на
специальных резиновых
амортизаторах
§ 2. БАЛЮСТРАДА
Балюстрада служит
ограждением механизмов-
эскалатора, одновременна
являясь основным
декоративным элементом и
местом для установки
пусковых и аварийных устройств
и осветительной
арматуры.
Существуют разборные
и неразборные
конструкции балюстрад. Первые,
преимущественно
металлические или
комбинированные (дерево с
металлом), монтируются бз
отдельных деталей с
помощью болтов и
специальных крепежных
изделий.
Вторые, обычно деревянные, склеиваются в процессе
изготовления и в готовом виде представляют собой неразъемную
конструкцию.
Для крепления балюстрад на металлоконструкции эскалатора
служат особые фермы и поперечные связи (фиг. 162), используемые
одновременно для установки направляющих верхней и роликов,
нижней ветвей поручня. Иногда вместо ферм устанавливаются
литые или сварные кронштейны (фиг. 163). Для сборки деталей
балюстрады существует ряд конструкций специальных замков,
применение которых существенно упрощает сборку (фиг. 163).
Наклонные листы верхней обшивки балюстрад, расположенные-
между поручнями соседних эскалаторов, крепятся к поперечным
связям.
Связи делаются съемными для того, чтобы монтаж и демонтаж
данного эскалатора мог быть выполнен без нарушения
работоспособности смежных эскалаторов.
Чтобы упростить и удешевить смену изнашиваемых участков,
балюстрады, прилегающих к поручням, наклонные листы
рекомендуется выполнять по ширине из трех смежных панелей: средней —
широкой и двух боковых — узких. Верхняя и боковая обшивки
Фиг. 161. Схема металлоконструкций
эскалаторов, устанавливаемых в зданиях:
а — с тремя опорами на верхнем поясе; б — с четырг мя
опорами на нижнем поясе.
Балюстрада
297
балюстрад соединяются между собой с помощью элемента
специального профиля, именуемого карнизом. Для маскировки стыков служат
боковой и верхний штапики. На карнизе крепится элемент,
называемый стойкой; на стойке монтируются фасонные направляющие
поручня. Иногда стойка и карниз выполняются в виде одного
элемента.
Боковая обшивка в нижней своей части соединена с продольным
плинтусом с помощью ряда замков, устанавливаемых на кронштей-
0620
0820
0620
\
Фиг. 162. Металлоконструкция для крепления балюстрады:
/ — металлоконструкция приводной станции (основная); 2, 3 и 4 — фермы для крепления
балюстрады (первая, вторая и третья секции); 5 — кронштейн ведущего блока поручне-
вой установки; 6 и 7 —кронштейны первого и второго отклоняющих блоков.
нах балюстрады. Для предотвращения дребезжания боковой обшивки
при неплотном ее прилегании к пазу замка служит фиксатор,
прижимающий обшивку к внешней стороне паза замка.
К нижней части плинтуса крепится вертикальный толстый лист,
называемый фартуком. Фартук находится на уровне настилов
ступеней. Он подвергается ударам ног пассажиров и иногда, при
недостаточно качественном монтаже, истиранию о торцовые части
ступеней. Фартук является быстроизнашиваемой деталью и должен
легко монтироваться и демонтироваться.
В местах установки верхних и нижних концевых блоков и блоков
натяжки поручней на балюстраде устраиваются дверцы,
необходимые для осмотра, смазки и мелкого ремонта механизмов,
расположенных в этих местах. На верхней и нижней головках балюстрад
предусматриваются шкафчики для телефонных аппаратов,
связывающих вестибюль с машинным помещением, места установки
пусковой кнопочной аппаратуры, аварийных кнопок, осветительной
арматуры и т. п.
Эскалаторы с большим числом опор не имеют ощутимых прогибов,
поэтому их балюстрады могут жестко крепиться как к балюстрадам
соседних эскалаторов, так и к стенкам наклонного туннеля,
вестибюля и т. п.
Эскалаторы, устанавливаемые на двух-четырех опорах, имеют
значительные прогибы под пассажирской нагрузкой; поэтому во
19 2598
298
Металлоконструкция и балюстрада
избежание коробления элементов балюстрады и расстройства
соединений предусматривают эластичные амортизаторы в местах
крепления обшивки к неподвижным частям сооружений.
Основная трудность при сборке балюстрад вызывается
необходимостью выдерживать небольшие зазоры между движущимися
1 1
Фиг. 163. Соединение элементов
балюстрады:
а — эскалатора типа ЭМ-4; б — эскалатора
фирмы ОТИС; 1 — верхняя обшивка;
2 — верхний штапик; 3 — карниз; 4 —
стойка; 5 — фасонная направляющая; 6 —
боковой штапик; 7 — боковая обшивка;
8 — замок; 9 — фиксатор; 10 — плинтус;
// — фартук; 12 — крепление фартука;
13 -— кронштейн для крепления
балюстрады.
и неподвижными частями. Правилами Госгортехнадзора
предусмотрены следующие зазоры для эскалаторных балюстрад:
1) зазор между балюстрадой и ступенями — не свыше 10 мм;
2) зазор между балюстрадой и поручнями — не свыше 5 мм;
3) зазор между балюстрадой и движущимися частями эскалаторов
с внутренней стороны — не менее 10 мм.
Балюстрада 299
Поскольку с балюстрадой постоянно соприкасаются одежда и
руки пассажиров, наличие на ней зазоров, неровностей,
шероховатостей и других дефектов должно быть совершенно исключено.
Материал деталей не должен пачкать одежду и руки.
Правила Гссгортехнадзора предписывают, чтобы при
изготовлении балюстрад из дерева последнее пропитывалось специальными
составами (антипиренами), сообщающими ему огнестойкость.
В отношении огнестойкости лучшим материалом для балюстрад
являются металлические покрытия.
Архитектурное оформление балюстрады должно гармонировать
с оформлением вестибюлей. В этом отношении наилучшими являются
комбинированные (дерево с металлом) балюстрады, позволяющие
выполнять наиболее красивое и разнообразное архитектурное
оформление эскалаторов. По акустическим (антишумовым) качествам они -
не уступают балюстрадам, изготовленным целиком из дерева.
ГЛАВА XVIII
ЭЛЕКТРООБОРУДОВАНИЕ ЭСКАЛАТОРОВ
§ 1. ЭЛЕКТРОДВИГАТЕЛИ
Для привода эскалаторов наиболее часто применяются
асинхронные двигатели трехфазного тока. При этом для эскалаторов с большой
высотой подъема чаще всего используются двигатели с контактными
кольцами, а для эскалаторов малых высот — двигатели с коротко-
замкнутым ротором. Установлено, что электропривод эскалатора
с одним двигателем работает надежнее привода с двумя двигателями.
Выбор двигателя для эскалатора сводится к подбору его по
длительной мощности [по формуле (121) ] и к проверке ускорений при разгоне,
возникающих при выбранной схеме включения. Из условий
получения определенного ускорения при пуске момент двигателя должен
быть не выше
M<(GD4rpap ч
\ Zg'U 1ьяг зв J
(знак плюс относится к работе загруженного эскалатора на подъем,
знак минус — к работе загруженного эскалатора на спуск). Проверка
по этой формуле производится для двух значений
регламентированных ускорений (ар.нач — 0,6 м/сек2 и ар — 0,75 м/сек2). Первым
значением определяется начальный момент двигателя Мнач, а вторым —
максимальный пусковой момент двигателя Мтах.
Для того чтобы при работе на подъем двигатель начал движение,
необходимо соблюдение второго условия Мнач>Мсп, т. е. начальный
момент должен быть несколько больше момента статического
сопротивления, подсчитанного с учетом трения покоя. Для того чтобы
получить нужные пусковые моменты, вводят добавочные сопротивления
в цепи ротора (для двигателей с контактными кольцами) и в цепи
статора (для ограничения начального момента двигателей с коротко-
замкнутым ротором).
§ 2. АППАРАТУРА УПРАВЛЕНИЯ И ЗАЩИТЫ
Для управления эскалаторами применяется контакторная
аппаратура обычного типа. Такая аппаратура, как и в электроприводе
лифтов, обеспечивает дистанционное управление с возможностью
остановки эскалатора из многих мест и позволяет осуществить необ-
Аппаратура управления и защити 301
ходимую блокировку и защиту. Описание контакторов,
промежуточных электромагнитных реле, реле времени, пусковых кнопок,
блокировочных контактов, пусковых сопротивлений, тормозных
магнитов здесь не приводится, так как эта аппаратура ничем не
отличается от применяемой в лифтах (гл. VIII). Помимо перечисленных
аппаратов, в электроприводе эскалаторов используется ряд других
аппаратов и устройств, которые обычно не применяются в лифтах.
К их числу относятся: тепловые реле, разрывающие цепь
управления и защищающие двигатель от длительных перегрузок;
электромагнитные максимальные реле, отключающие двигатель при
кратковременных значительных перегрузках, превышающих пусковой ток,
и при коротких замыканиях; контактные термометры,
сигнализирующие о перегреве ответственных подшипников и отключающие
при этом электродвигатель; рычажные аварийные выключатели,
расположенные вдоль балюстрады и выполняющие роль кнопок
«Стоп»; искатель повреждений, установленный в машинном
помещении и позволяющий простым поворотом ручки установить, какой
именно блокировочный контакт вызвал отключение эскалатора;
сигнальные лампы, позволяющие в машинном помещении проследить
за работой того или иного эскалатора и указывающие на готовность
к пуску. Сигнальные лампы связывают иногда с контактами у
барьерных шнуров, закрывающих проход на эскалатор.
На цепи аппаратуры управления непосредственно воздействуют
некоторые специальные аппараты механического характера. Часть
из них срабатывает автоматически, часть — под воздействием
обслуживающего персонала или пассажиров (кнопки вдоль балюстрады).
Автоматически срабатывает и разрывает цепь блокировочного
выключателя центробежное реле скорости (ограничитель скорости). Такой
ограничитель (фиг. 164), предотвращающий повышение скорости
(~ на 20%), устанавливается на быстроходном валу редуктора или
приводится от главного вала. Для автоматического включения
аварийного тормоза, в случае обрыва приводной цепи, служит
устройство, выполняемое либо в виде нажимного ролика с эластичным
ободом, поддерживаемого движущейся приводной цепью (фиг. 165),
либо в виде салазок, скользящих по движущейся цепи; включение
тормоза происходит вследствие отхода рычага, воздействующего
на контакт. Для остановки эскалатора в случае обрыва тяговой
цепи или при перекосе натяжной каретки служит устройство,
устанавливаемое на натяжной каретке (фиг. 166). Выключение
электродвигателя эскалатора происходит, когда кольцо, укрепленное на
тяге движущейся каретки, освобождает кнопку блок-контакта;
приспособление устроено так, что включение происходит не только
в случае обрыва, но и в случае неравномерной вытяжки одной из
тяговых цепей. Все эскалаторы имеют устройства, выключающие
двигатель в случае обрыва поручня. Необходимость такого
устройства вызывается тем, что при обрыве поручень останавливается и
возможны случаи падения пассажиров, опирающихся на поручень.
302
Электрооборудование эскалаторов
Конструкция такого предохранительного устройства аналогична
конструкции, изображенной на фиг. 166; в случае обрыва
поручня освобождается контакт, размыкающий электрическую цепь.
Фиг. 164. Центробежный ограничитель скорости.
Эскалатор должен автоматически остановиться и в случае обрыва
цепи привода поручней, так как такой обрыв влечет за собой
остановку поручня; это выполняется аналогично остановке эскала-
if- -fr-fr- -fr-ft hHf y-if
Фиг. 165. Предохрательное
устройство на случай обрыва приводной
цепи.
Фиг. 166. Предохранительное
устройство на случай обрыва
тяговой цепи.
тора в случае обрыва приводной цепи. Для предотвращения пуска
эскалатора от главного привода при включенном ручном
приспособлении для проворачивания эскалатора или при включенном малом
проводе применяется устройство, выполняемое в виде кожуха,
снабженного контактом на свободном конце вала электродвигателя,
или в виде контакта, установленного в специальном гнезде, в которое
Электросхемы управления эскалаторами 303
вставляется снятый штурвал. Блокировка включения главного
электродвигателя при включенной соединительной муфте малого
привода достигается установкой контакта на рукоятке,
переключающей муфту. Обслуживающий персонал может останавливать
работающий эскалатор из любого места в проходе между эскалаторами;
это необходимо для быстрой остановки эскалатора при несчастном
случае с кем-либо из обслуживающего персонала. Устройство состоит
из тонких стальных тросов, протянутых по бокам
металлоконструкции вдоль всего эскалатора. Нижние концы тросов неподвижно
закреплены на натяжной станции, а верхние концы связаны с
концевыми выключателями специального выключающего устройства,
блокирующего обрыв поручней. Для предупреждения обслуживающего
персонала об опасности выполнения каких-либо работ на данном
эскалаторе применяют сигнальные лампы, указывающие на
готовность эскалатора к пуску.
§ 3. ЭЛЕКТРОСХЕМЫ УПРАВЛЕНИЯ ЭСКАЛАТОРАМИ
На фиг. 167 изображена распространенная электросхема
управления эскалатором, имеющего двигатель с контактными кольцами.
Питание электропривода осуществляется по одному из фидеров —
рабочему или резервному — через переключатель ввода ПВ. Защита
от значительных перегрузок и токов короткого замыкания
выполняется максимальным реле 1РМ и 2РМ. Нулевая защита всей
установки выполняется реле 1РНТ, 2РНТ и ЗРНТ. Максимальное
реле включается через трансформаторы тока ITT, 2TT и ЗТТ.
Через те же трансформаторы тока часто питаются также обмотки
амперметра и теплового реле РТ. Через линейный рубильник ЛР
провода подводятся к контакторам направления KB и КН и к
дублирующему контактору ДКу имеющему блок-контакты в цепях
управления и сигнализации. Одновременно может быть включен один из
двух контакторов направления: вверх — KB и вниз — КН. Каждый
из контакторов направления включает одновременно обмотки
статора двигателя главного привода ГД и обмотки магнитов
тормозов — рабочего ТР и предохранительного 777. Если переключатель
механизмов ПМ находится в верхнем положении, то вместо главного
включится двигатель малого привода МД; кроме того, механически
должна быть переключена муфта на малый привод.
Проследим теперь работу аппаратуры в цепях управления и
сигнализации. Питание этих цепей производится через плавкие
предохранители ППУ понизительный трансформатор (для повышения
безопасности) 1ТН и двухполюсный рубильник IP—2Р. Перед
клеммами трансформатора присоединен вольтметр IV; лампа ЛЗ
показывает замыкание на землю. Для пуска на подъем главного
привода нажимается одна из трех кнопок ВГ (расположены на
верхнем или нижнем пультах управления и в машинном помещении);
для пуска на спуск нажимаются кнопки Я2. Для пуска малого при-
Фидеры
'очий резервный
-3801
IV ПН 380/1?0д
» 2ква
PJ КС, КС2 КС3 ТЦ2 СТ2 ЗКД П2 /7, 1КЙ П) А
ч ступень
3 ступень
2 ступень
1 ступень
ПРС
Фиг. 167.
Принципиальная схема
управления
эскалатором
(двигатель с
контактными кольцами).
Электросхемы управления эскалаторами
305
РПВ
©
L
ли
Фиг. 168. Схема искателя
повреждений.
вода служат соответственно кнопки Вм или Нм. Замыкаются цепи
катушек вспомогательных реле РПВ1 и РПН2, в цепи которых
включены контактные мостики всех вспомогательных предохранительных
устройств: центробежного реле ЦРУ ключи на балюстраде 1КА,
2КА, ЗКАУ кнопки «Стоп» КС1У КС2 и КСЗ> контакты подъема
ступеней СТ1 и СТ2У контакт теплового реле РТ, контакты поручня 1П
и 2П, контакты тяговой цепи ТЦ1 и ТЦ2, выключатели запрета В31
и В32 и контакты программного реле времени РВП. В эту же цепь
включаются (при наличии их) контакты, связанные с тросиком
в наклонном ходе. Если какой-
либо из контактов будет разорван,
включение вспомогательных реле
будет невозможно; установить
место обрыва можно передвигая
ползунок искателя
повреждений И. Лампа ЛИ будет гореть,
а вольтметр V будет указывать
наличие напряжения до тех пор,
пока не подойдет к месту разрыва
цепи. Принцип действия искателя
повреждений ясен из фиг. 168.
Если отключение катушки
реле РПВ произойдет в результате
разрыва цепи защитного
блокировочного выключателя /02, то
сигнальная лампа ЛИ не будет гореть в положении переключателя И1
и 2 и загорится лишь в положении 5; при отключении под действием
выключателя К4 лампа загорится лишь в положении 5 и т. д.
Одновременно с зажиганием лампы ЛИ вольтметр V покажет полное
напряжение цепи управления (между зажимами Л1 — Л2).
Включение двигателя ГД возможно лишь в том случае, если переключатель
малого привода МП замкнут; закрытые контакты ПМ находятся
в этом состоянии, если включается большой привод; открытые
контакты ПМ закрываются при включении переключателя на малый
привод, а открытый контакт ПМ1 закрывается в нейтральном
положении переключателя.
После того как пусковая кнопка будет отпущена, промежуточные
реле сохранят питание лишь в том случае, если не будет разорван
н. з. контакт промежуточного реле отклонения ПРО. На цепь
катушки реле ПРО действуют контакты защитных реле и контактных
термометров. Те же контакты действуют на промежуточное реле
сигнализации ПРС. Включение промежуточных реле (РПВ1 и РПВ2
или РПН1 и РПН2) позволяет замкнуться цепям катушек
контакторов ДК и KB (или КН). Дальнейший пуск происходит под
действием реле времени (маятникового типа): контакторы KB (при пуске
вверх) или КН (при пуске вниз) замыкают с выдержкой времени
цепь катушки 1КУ; замыкаются контакты контактора 1КУ, шун-
20 И ваш ков 2598
306
Электрооборудование эскалаторов
тирующие первую ступень роторного сопротивления PC; затем
с выдержкой времени включается 2КУ> шунтируется вторая ступень
сопротивления и т. д. Если пуск протекал ненормально, то
программное реле времени РВП отключит двигатель; пуск в этом случае может
произойти лишь при вновь нажатых пусковых кнопках.
На фиг. 169 приведена схема управления эскалаторами с
приводом от двигателей с короткозамкнутым ротором, применяемая при
двигателях мощностью до 10—12 кет.
0Ц 0L2 RP FS S3 Q2 LH RH 52
Выпрямитель
Фиг. 169. Принципиальная схема управления эскалатором
при двигателе с к. з. ротором.
В этой схеме питание подводится через вводное устройство
(автомат) Lly L2,Ls- Ot автомата провода подходят к силовым
двухполюсным контакторам Ul9 U2 — направления вверх, Dl9 D2 —
направления вниз и Р19 Р2 — подачи напряжения. После включения
контактора Рх, Р2 контакт РА замыкает сигнальные лампы у входа на
эскалатор. От контакторов силовые цепи через тепловые реле OLly
OL 2у ограничивающие длительные перегрузки, подходят к зажимам
двигателя 7\, Т2 и Г3. От автомата параллельно силовым цепям
идет линия, питающая катушки реле переменного тока,
контролирующего реверс фаз RP. При неправильном включении или обрыве
одной из фаз двигатель эскалатора не может быть включен.
Параллельно реле RP через Плавкие вставки питается сухой выпрямитель,
имеющий четыре выпрямительных столбика Е19 Е2> Е3 и £4.
Выпрямитель питает катушку тормоза и все цепи управления. Цепь
Электросхемы управления эскалаторами 307
катушки тормоза включается блок-контактами £/5, D5 и Р5
контакторов реверса и подачи напряжения. Rx — разрядное сопротивление
и R2 — сопротивление, регулируемое при изменении напряжения,
подаваемого от выпрямителя. Для той же цели служит
сопротивление R3, через которое происходит питание цепей управления.
Основной частью цепей управления являются катушки
контакторов U> D и Р, включаемые кнопками (ключами) одной из станций
(внизу и вверху эЬкалатора). Внизу справа показаны четыре кнопки.
Верхняя кнопка для движения вверх расположена вверху эскалатора,
под ней показана кнопка для движения вниз, расположенная там же.
Самая нижняя кнопка служит для движени-я вниз и расположена
на нижней станции, а под ней показана кнопка для движения вверх
на той же нижней станции. После нажатия одной из кнопок на
нижней или на верхней станции включаются катушки соответствующих
контакторов (U и Р — при движении вверх и D и Р при движении
вниз). Кнопку или ключ следует подержать включенными до тех пор,
пока не будет достигнута скорость 80% от номинальной, после чего
замкнется контакт G, реле скорости и начнется питание
контакторов U3 или D3 (в зависимости от направления движения).
Невозможность одновременного включения контакторов U и D обеспечена
наличием н. з. блок-контактов. Безопасность работы эскалатора
обеспечивается кнопками (выключателями) «Стоп» Sl9 S2 и Sp,
расположенными вверху и внизу эскалатора и в машинном помещении,
контактами реле скорости, контролирующими снижение (Gx) или
превышение (G2) нормальной скорости, левым (LH) и правым (RH)
контактами натяжения цепи и электрической защитой, обеспеченной
реле реверса фаз RP, реле перегрузки OL± и OL2 и специальным
противопожарным реле FS.
Контакты всех этих реле включены последовательно с
катушками контакторов. При неисправности или при нажатии кнопки
они прерызают питание двигателя и тормозного магнита. Вторичное
включение возможно лишь нажатием кнопки (поворотом ключа)
на станциях управления.
2Q*
ЛИТ ЕР АТУ Р А
Бовин Г. М., Эскалаторостроение, Машгиз, 1948.
Бовин Г. М., Ивашков И. И., Олейник A.M., Эскалаторы, Машгиз,
1955.
Воронец B.C., Подъемники, изд. Мин. коммунального хозяйства РСФСР,
1952,
ВНИИПТМАШ, Расчет крановых механизмов и деталей
подъемно-транспортных машин, Машгиз, 1957.
Ивашков И. И., Контактная прочность бегунков, Труды ВНИИПТМАШ,
Машгиз, 1954.
Кифер Л. Г., Абрамович И. И., Грузоподъемные машины, том II,
Машгиз, 1949.
Кифер Л. Г., Абрамович И. И., Грузоподъемные машины, Атлас,
том II, Машгиз, 1949.
К о р н е е в Г. К.,Вышесл авцев СИ., Систематизация отечественного
и зарубежного опыта по пассажирским и грузовым лифтам, ч. I—III, Труды
ВНИИПТМАШ, 1948.
Корнеев Г. К., Вышеславцев СИ., Расчет лифтовых установок,
Труды ВНИИПТМАШ, Машгиз, 1950.
Корнеев Г. К., Исследование ускорений движения кабины лифта, Труды
ВНИИПТМАШ, Машгиз, 1954.
Каплан Я. И., Рубинштейн Д. А., К вопросу усовершенствования
электрических схем управления лифтами, „Городское хозяйство Москвы" № 9,
1955.
Куницкий Н. П., Электрооборудование подъемно-транспортных
сооружений, ОНТИ, ч. I и II, 1944—1947.
Me к л е р А. Г., Электрооборудование подъемно-транспортных машин,
Машгиз, 1954.
Правила Госгортехнадзора и Правила устройства электроустановок, Госэнерго-
издат, 1957.
Прозоров В. И., Подъемники, ЗСМ, т. 9, Машгиз, 1949.
Спиваковский А. О., Руденко Н. Ф., Подъемно-транспортные
машины, Машгиз, 1949.
Т у ш м а л о в В/ А., Электрические лифты, Машгиз, 1952.
Хай мен с Ф., Хельборн А., Подъемники (лифты) с канатоведущими
шкивами безбарабанного типа. ОНТИ НКТП СССР, 1937.
Ч и л и к и н М. Г., Основы электропривода, Госэнергоиздат, 1956.
СОДЕРЖАНИЕ
Предисловие 3
Глава /. Вводные сведения 5
§ 1. Основные виды подъемников 5
§ 2. История развития и обзор конструкций основных видов
подъемников 11
Раздел первый
ЛИФТЫ
Глава II. Классификация, кинематические схемы и техническая
характеристика лифтов 26
§ 1. Классификация лифтов по назначению, конструктивным
признакам и эксплуатационным свойствам 26
§ 2. Кинематические схемы лифтов и размещение основных узлов . . 30
§ 3. Техническая характеристика лифтов 33
Глава III. Тяговые расчеты лифтов 47
§ 1. Тяговая способность канатоведущего шкива 47
§ 2. Крутящие моменты и мощность электродвигателя 58
§ 3. Определение основных характеристик процессов разгона и
торможения кабины 62
Глава IV. Привод лифтов 68
§ 1. Назначение, основные типы и конструкции подъемных механизмов 68
§ 2. Элементы подъемных механизмов (лебедок) 75
§ 3. Установка привода 87
Глава V. Кабины, противовесы и уравновешивающие канаты 88
§ 1. Кабины 88
§ 2. Подвески для канатов 93
§ 3. Направляющие башмаки 95
§ 4. Противовесы 97
§ 5. Уравновешивающие канаты 101
Глава VI. Приспособления безопасности 102
§ 1. Двери шахт и кабин 102
§ 2. Ловители 113
§ 3. Ограничители скорости 121
§ 4. Упоры и буфера 124
Глава VII. Шахты, машинные помещения и направляющие 131
§ 1. Шахты 131
§ 2. Машинные помещения 137
§ 3. Направляющие кабин и противовесов k 137
310 Содержание
Глава VIII. Электрооборудование лифтов 144
§ 1. Электропривод лифтов 144
§ 2. Аппаратура управления, защиты и сигнализации 149
§ 3. Электросхемы управления лифтами 163
Раздел второй
МНОГОКАБИННЫЕ ПАССАЖИРСКИЕ ПОДЪЕМНИКИ
Глава IX. Кинематическая схема и техническая характеристика многока-
бинных подъемников 183
§ 1. Кинематическая схема 183
§ 2. Техническая характеристика многокабинных подъемников . . . 183
Глава X. Механическое оборудование, шахты и электрооборудование
многокабинных подъемников 186
§ 1. Привод 186
§ 2. Кабины и цепи 187
§ 3. Трасса полотна 191
§ 4. Шахта 193
§ 5. Электрооборудование многокабинных подъемников 194
Раздел третий
ЭСКАЛАТОРЫ
Глава XI. Классификация, кинематические схемы и техническая
характеристика эскалаторов 195
§ 1. Классификация эскалаторов 195
§ 2. Кинематические схемы эскалаторов и правила их построения . . 197
§ 3. Технические характеристики эскалаторов 213
Глава XII. Тяговые расчеты эскалаторов 216
§ 1. Усилия в тяговых цепях 216
§ 2. Усилия в поручнях 222
§ 3. Крутящие моменты, приведенные к главному валу 228
§ 4. Мощность главного электродвигателя 229
§ 5. Определение основных характеристик процессов разгона и
торможения 229
Глава XIII. Лестничное полотно 231
§ 1. Тяговые цепи 231
§ 2. Ступени 238
§ 3. Входные площадки 249
Глава XIV. Трасса полотна 252
§ 1. Главный вал 252
§ 2. Натяжная каретка 256
§ 3. Поворотные стенки 259
§ 4. Направляющие полотна 262
Глава XV. Привод 270
§ 1. Назначение, схемы и конструкции приводов эскалаторов .... 270
§ 2. Элементы передач от электродвигателя к главному валу .... 275
§ 3. 'Тормозные устройства 280
Содержание 311
Глава XVI. Поручневые установки 284
§ 1. Общие сведения 284
§ 2. Поручень 286
§ 3. Трасса поручня 288
§ 4. Элементы натяжного устройства и привода 291
Глава XVII. Металлоконструкция и балюстрада 294
§ 1. Металлоконструкция 294
§ 2. Балюстрада 296
Глава XVIII. Электрооборудование эскалаторов 300
§ 1. Электродвигатели 300
§ 2. Аппаратура управления и защиты 300
§ 3. Электросхемы управления эскалаторами 303
Литература 308