



















































































































































































































































































































































































































Автор: Мищенко А.С. Фоменко А.Т. Соловьев Ю.П.
Теги: математика геометрия топология решение задач дифференциальная геометрия сборник задач учебное пособие для вузов издательство физматлит
ISBN: 5-94052-078-2
Год: 2004
А.С.Мищенко
Ю.П.Соловьев
А.Т.Фоменко
СБОРНИК ЗАДАЧ
ПО ДИФФЕРЕНЦИАЛЬНОЙ
ГЕОМЕТРИИ И ТОПОЛОГИИ
Под общей редакцией
академика А. Т. Фоменко
ФК
Москва
Физматлит
2004
ББК 22.151
М 57
УДК 513
Рецензенты:
профессор А. Н. Паршин
профессор И. X. Сабитов
МИЩЕНКО А. С, СОЛОВЬЕВ Ю. П., ФОМЕНКО А. Т. Сборник задач по
дифференциальной геометрии и топологии: Учеб. пособие для вузов.—
2-е изд., перераб. и доп.—М.: Издательство физико-математической ли-
литературы, 2004.—412 с—ISBN 5-94052-078-2.
Сборник состоит из двух частей. Часть первая содержит задачи по диффе-
дифференциальной геометрии. Во вторую часть включены задачи по топологии. Пода-
Подавляющее большинство вошедших в сборник задач снабжены либо подробными
решениями и указаниями, либо ответами. Многие задачи иллюстрированы.
Для студентов математических специальностей университетов. Сборник мо-
может быть использован преподавателями вузов.
Ответственный редактор Ф.Ю.ПОПЕЛЕНСКИЙ
85940^520788
ISBN 5-94052-078-2
© Физматлит, 2004
© Коллектив авторов, 2004
СОДЕРЖАНИЕ
Предисловие 4
Предисловие ко второму изданию 7
Часть 1
§ 1. Системы координат 9
§ 2. Уравнения кривых и поверхностей 17
§ 3. Классические метрики на сфере и плоскости Лобачевского,
их свойства 20
§ 4. Теория кривых 26
§5. Риманова метрика 37
§ 6. Вторая квадратичная форма, гауссова и средняя кривизны .... 45
§7. Многообразия 51
§8. Тензоры 62
§ 9. Векторные поля 66
§ 10. Связности и параллельный перенос 68
§ 11. Геодезические на двумерных поверхностях 74
§ 12. Тензор кривизны 80
§ 13. Дифференциальные формы и когомологии де Рама 84
§ 14. Топология 93
§ 15. Гомотопия, степень отображения и индекс векторного поля .... 100
Часть 2
§ 16. Системы координат (дополнительные задачи) 109
§17. Кривые и поверхности: уравнения и параметризации ....... ПО
§ 18. Теория кривых (дополнительные задачи) 122
§ 19. Риманова метрика (дополнительные задачи) 141
§ 20. Гауссова и средняя кривизны 150
§ 21. Параметризации известных двумерных поверхностей 157
§ 22. Поверхности в R3 . . 162
§ 23. Топология двумерных поверхностей 165
§24. Линии на поверхностях . 168
§ 25. Многообразия (дополнительные задачи) 176
§ 26. Тензорный анализ 183
§ 27. Геодезические на многообразиях 186
§ 28. Тензор кривизны 190
§ 29. Векторные поля . . . 193
§ 30. Группы преобразований 198
§31. Дифференциальные формы 204
§32. Теория гомотопий 208
§ 33. Накрытия и расслоения 220
§ 34. Критические точки, степень отображения, теория Морса 226
§ 35. Простейшие вариационные задачи 233
§ 36. Общая топология 236
Ответыирешения 241
Список литературы 410
ПРЕДИСЛОВИЕ
Настоящий «Сборник задач по дифференциальной геометрии
и топологии» предназначен для обеспечения учебного процесса по
курсам дифференциальной геометрии и топологии на механико-
математических специальностях университетов и педагогических
вузов. «Сборник» призван максимально отразить существующие
требования к курсам дифференциальной геометрии и топологии
как со стороны новых программ, так и со стороны других кур-
курсов математики, физики, механики. Кроме того, издание «Сбор-
«Сборника» сделает доступными для широкой математической обще-
общественности новые научно-методические разработки ведущих уче-
ученых в области дифференциальной геометрии, топологии, алгебры
и механики.
«Сборник» может служить основой для практических занятий
по курсам дифференциальной геометрии и топологии на математи-
математических и механических специальностях университетов и педаго-
педагогических вузов как российских, так и стран СНГ — таких, как Бе-
Белоруссия, Украина, Грузия, Казахстан, Туркменистан, Литва, —
откуда в последние годы неоднократно поступали заявки на сбор-
сборник задач такого рода.
Он может быть также использован для поддержки разнообраз-
разнообразных специальных курсов по различным разделам современной
геометрии и ее приложениям к механике и математической фи-
физике.
«Сборник» состоит из двух частей. Первая часть содержит за-
задачи по стандартным разделам дифференциальной геометрии и
топологии. Этот материал перекрывает необходимый минимум за-
задач по стандартным курсам геометрии и топологии. Вторая часть
содержит задачи, предназначенные для более глубокого усвоения
современной геометрии и ее приложений.
В книге представлены следующие темы: теория кривых (вклю-
(включая эволюты и эвольвенты), теория поверхностей, системы ко-
координат, риманова геометрия, классические метрики (на сфере,
плоскости Лобачевского и т. п.), топологические пространства, мно-
многообразия (включая элементы расслоенных пространств, фазовые
и конфигурационные пространства), топология двумерных поверх-
поверхностей, двумерные поверхности в трехмерном евклидовом про-
пространстве, группы и алгебры Ли (включая маломерные группы Ли,
их параметризации, часто используемые в механике), векторные
поля и тензоры, дифференциальные формы (включая интегриро-
интегрирование и теорию де Рама и т.п.), связности и параллельный пе-
Предисловие
ренос, геодезические, тензор кривизны, элементы алгебраической
топологии (эйлерова характеристика, индекс векторного поля, ин-
индекс пересечения и т.п.), связности и группы Ли.
Книга также содержит как дополнительные задачи по темам,
отраженным в первой части, так и задачи по некоторым новым
темам, затрагивающие более глубокие вопросы дифференциаль-
дифференциальной геометрии и топологии. Среди новых тем, представленных
во второй части, следует отметить компьютерную геометрию и то-
топологию, кинематику и геометрию, геометрические конструкции
(такие, как джеты, многообразия Штифеля и Грассмана и т.п.),
производная Ли, задачи на упаковку, комбинаторная геометрия на
плоскости и в пространстве, элементы гамильтоновой механики.
Настоящий сборник задач является естественным дополнением
к учебнику А. С. Мищенко и А. Т. Фоменко «Курс дифференциаль-
дифференциальной геометрии и топологии», переизданному в 2000г. В значи-
значительной степени настоящий «Сборник» базируется на книге
А.С.Мищенко, Ю.П.Соловьева, А.Т.Фоменко «Сборник задач по
дифференциальной геометрии и топологии», вышедшей в Изда-
Издательстве Московского университета в 1981 г. Здесь следует отме-
отметить, что по истечении многих лет, в 1998 г., электронная версия
этого предыдущего задачника была создана А. А. Ошемковым. За-
Затем в 1998-1999 гг. на механико-математическом факультете МГУ
по инициативе кафедры дифференциальной геометрии и приложе-
приложений был организован специальный научно-методический семинар
по составлению нового «Сборника задач по дифференциальной гео-
геометрии и топологии». Семинаром руководили профессора А. С. Ми-
Мищенко и Ю. П. Соловьев и академик А. Т. Фоменко. В силу пере-
перечисленных обстоятельств в качестве авторов на обложке книги
указаны именно эти три фамилии. Однако фактически в созда-
создании «Сборника» принимал участие большой коллектив известных
ученых, выдающихся специалистов в области современной гео-
геометрии, топологии, алгебры, механики и приложений: академик
РАН В. В. Козлов, проф. В.В.Федорчук, проф. А. В.Волсинов,
проф. Э.Р.Розендорн, проф. В.В.Трофимов, проф. А.А.Бори-
сенко (Харьков), проф. И. X. Сабитов, проф. Е. В. Троицкий, проф.
А.О.Иванов, проф. А.А.Тужилин, ст.н.с. Г.В.Носовский, н.с.
А. И. Шафаревич, доцент А. А. Ошемков, м.н.с. Ф. Ю. Попеленский,
асе. Е.А.Кудрявцева.
Самое активное участие в работе семинара, составлении задач
и их решении принимали практически все студенты и аспиранты
кафедры дифференциальной геометрии и приложений механико-
математического факультета МГУ. Всем им выражаем глубокую
благодарность.
В области дифференциальной геометрии и топологии суще-
существует несколько сборников задач, учебников и учебных пособий.
Предисловие
Небольшой список наиболее известных изданий мы приводим в
конце книги.
Следует заметить, что сборники задач по дифференциальной
геометрии и топологии, изданные в последнее время, выходили
малыми тиражами и поэтому практически недоступны. Книги
же, изданные ранее и более крупными тиражами, уже разошлись,
стали редкостью. Кроме того, материал некоторых книг в значи-
значительной мере устарел и нуждается в обновлении. Это связано как
с совершенствованием программ математических курсов, так и с
тем, что со стороны других курсов, использующих или опираю-
опирающихся на методы дифференциальной геометрии и топологии, зна-
значительно изменились и усилились требования к геометрическим
курсам. Все это сделало издание «Сборника задач по дифференци-
дифференциальной геометрии и топологии» особенно актуальным.
Мы собрали большой научно-методический материал, по боль-
большей части неизвестный широкой математической общественно-
общественности. Неизвестный в силу нескольких причин, основными из ко-
которых являются следующие. Во-первых, многие задачи возникли
во время собственных научных исследований участников упомя-
упомянутого выше семинара. Во-вторых, некоторые задачи появились
в результате дискуссий на заседаниях семинара. Наконец, доста-
достаточно большое количество задач было извлечено из старой мате-
математической литературы, уже давно ставшей библиографической
редкостью и поэтому недоступной современным студентам и пре-
преподавателям.
Из собранного таким образом научно-методического материала
и сформировался настоящий «Сборник задач по дифференциаль-
дифференциальной геметрии и топологии».
Особо отметим абсолютно неоценимую роль Ф.Ю.Попеленского
при подготовке к изданию настоящей книги. Объем выполненной
им работы по упорядочиванию задач, по организации проверки их
условий и решений, а также по набору текста и т.п. был настолько
велик, что лишь благодаря его неутомимым усилиям эта книга,
наконец, увидела свет.
А. С. Мищенко
Ю. П. Соловьев
Москва, МГУ, май 2000 г. А. Т. Фоменко
ПРЕДИСЛОВИЕ КО ВТОРОМУ ИЗДАНИЮ
Перед читателем лежит второе издание «Сборника задач по
дифференциальной геометрии и топологии». Первое его издание
вышло в 2001 г. в издательстве «Физматлит». На протяжении по-
последующих двух лет велась активная работа по улучшению задач-
задачника. Особо активное участие в этой работе приняли сотрудники
кафедры дифференциальной геометрии и приложений механико-
математического факультета МГУ. Мы учли многочисленные по-
пожелания как преподавателей, так и студентов, возникшие при
использовании первого издания на занятиях. Были устранены
замеченные опечатки и неточности, добавлены новые задачи. Осо-
Особенно это коснулось первой части задачника, наиболее активно
используемой на семинарских занятиях по обязательным курсам
механико-математического факультета МГУ «Классическая диффе-
дифференциальная геометрия» и «Дифференциальная геометрия и топо-
топология». Мы также изменили структуру некоторых параграфов и
добавили новые, стремясь к более четкому распределению яадач
по темам. Кроме того, в целях повышения наглядности добавлено
много новых рисунков.
Несмотря на то, что дифференциальная геометрия — наука
зрелая, процесс улучшения задачника оказался «расходящимся».
Чем больше мы углублялись в работу, тем больше находилось
сравнительно элементарных и в то же время весьма полезных за-
задач, которые просто «невозможно было не включить» в задачник.
Мы сознательно прервали этот процесс, постаравшись добиться
большой содержательности при разумном объеме. Кроме того, мы
отдаем себе отчет в том, что отразить в одной книге все богатство
и разнообразие современной геометрии практически невозможно.
Тем не менее, нам представляется, что настоящее издание явля-
является не только самым современным, но и наиболее полным задач-
задачником по университетским курсам дифференциальной геометрии
и топологии.
А. Т. Фоменко
Ф. Ю. Попеленский
Комментарий А.Т. Фоменко:
Хочу особо подчеркнуть важную роль Ф.Ю. Попеленского при подготовке на-
настоящего издания. Он не только глубоко проанализировал большинство задач и
их решений, обнаружил и исправил многие опечатки и неточности, но и предло-
предложил исключительно ценные и изящные новые серии задач.
Сфера Александера: топологическое вложение двумерной сферы в R3, при кото-
котором образ сферы разделяет JR3 на две открытые области. Одна из них — шар, а
вторая — неодносвязна (рисунок А. Т. Фоменко)
Часть 1
§ 1. Системы координат
Рассмотрим область U пространства Еп, в котором заданы декар-
декартовы координаты (ж1, ..., хп). Предположим, что в другом экземпляре
пространства Еп с координатами (д1, ..., qn) задана область V и устано-
установлено взаимно однозначное соответствие между точками областей U и V.
В этом случае для задания точки области U мы можем использовать на-
набор чисел (д1, ..., qn) — декартовы координаты соответствующей точки
области V. Будем говорить, что (д1, ..., qn) являются криволинейными
координатами в области 17, если:
1) функции
задающие взаимно однозначное соответствие между точками областей U
и F, имеют непрерывные производные всех порядков в области F;
дх1
2) якобиан J =
оличен от 0 во всех точках области V.
Заметим, что в подавляющем большинстве случаев достаточно предпо-
предполагать, что функции x%(ql} ..., qn) имеют непрерывные производные до
третьего порядка включительно.
Из определения криволинейных координат следует, что обратные
функции q%(xl, ..., хп) также имеют непрерывные производные всех по-
дд*
рядков в области 17, причем якобиан J' =
отличен от нуля (он
равен J).
Функции хг = xt(q1, ..., qn) удобно рассматривать одновременно для
всех г = 1, ..., п, используя для этого вектор-функцию
г = г(?1,...,/), где г = (х1,...,хп).
В области U условия qi = const определяют п семейств координат-
пых гиперповерхностей. Координатные гиперповерхности одного и того
же семейства не пересекаются.
Любые п-1 координатных гиперповерхностей, принадлежащих раз-
различным семействам, пересекаются по некоторой кривой. Такие кривые
называвэтся координатными. Будем также называть их координат-
координатными линиями.
10
Часть 1
дт
Векторы г* = —г имеют направления касательных к координатным
oqK
линиям. В каждой точке области U эти векторы линейно независимы.
Они определяют в окрестности некоторой точки M(q1i q2, ..., qn) беско-
бесконечно малый вектор
t=i
Квадрат его длины, выраженный в криволинейных координатах, опре-
определяется из равенства
ds2 = (dr, dv) =
где (,) — скалярное произведение в Еп.
Величины g{j = g^ = (г., г^) определяют метрику в криволинейной
системе координат (д1, ..., qn).
Ортогональной криволинейной системой координат называется
такая система координат, для которой
Величины Hi > 0 называются коэффициентами Ламе. Они равны моду-
модулям длин векторов г«:
Квадрат линейного элемента в ортогональных криволинейных коорди-
координатах задается выражением
ds2 = H2{dq1J + H2{dq2J + ... + H2n(dqnJ.
В задачах 1.1-1.5:
а) установите формулы, выражающие криволинейные коорди-
координаты точки плоскости R2 через декартовы и обратно;
б) найдите координатные линии;
в) подсчитайте определители
дх\ дх\
дщ
дх2
дщ
дщ дщ
дх\
дщ
2
дщ
§ 1. Системы координат П
и выясните, в каких точках плоскости R2 нарушается взаимная
однозначность соответствия между криволинейными и декарто-
декартовыми координатами точки на плоскости для следующих криво-
криволинейных координат (ui )
1.1. Для обобщенной полярной системы координат, определяе-
определяемой равенством Ь г— = ще™2, где 0 ^ щ < оо, —тг < ад $С тг,
п\ &2
а\ > О, а>2 > 0. При каких условиях эти координаты совпадают с
обычными полярными?
1.2. Для эллиптической системы координат, определяемой ра-
равенством х\ + ix2 = ch(^i + гад), где 0 ^ и\ < 00, —тг < ад ^ тг.
1.3. Для параболической системы координат, определяемой ра-
равенством х\ + 1X2 = (^1 + ^2J, где —оо < щ < оо, 0 ^ ад < оо.
1.4. Для биполярной системы координат, определяемой равен-
А, (щ +гад\
ством х\+гх2 = th I ~ 1 , где —оо < г^х < 00, —тг < ад ^ тг,
без точек (щ = 0, ад = тг) = (х\ = Х2 = оо), (щ = +оо) = (#i =
= 1, Х2 = 0), (wi = —оо) = (#i = —1, Х2 = 0).
1.5. Для системы координат, определяемой равенством х\ +
+ ix2 — (^1 + ^гK? где ад ^0, щ + ад\/о ^ 0.
В задачах 1.6-1.12:
а) найдите координатные поверхности и координатные линии;
б) подсчитайте определители
дщ
и установите, в ка-
каких точках пространства R3 нарушается взаимная однозначность
соответствия между криволинейными и прямоугольными декарто-
декартовыми координатами для следующих криволинейных систем коор-
координат щ, ад, мз пространства R3;
в) являются ли эти системы координат ортогональными?
1.6. Для обобщенной цилиндрической системы координат,
определяемой равенствами
Х\ = Ci\U\ COS ад, Х2 =
где wi ^0, 0 < ад ^ 2тг, —оо < щ < оо, а\ > 0, п2 > 0 (см.
рис. 1).
1.7. Для обобщенной сферической системы координат, опреде-
определяемой равенствами
где г*1 ^ 0, 0 ^ ад ^ тг, 0 ^ г^з < 2тг, а\ > 0, а2 > 0, а3 > 0 (см.
рис. 2).
1*
12
Часть 1
1st
—-—.
7
7
jX
/-_, ,
X
Рис. 1. Цилиндрическая система координат, а\ = аг = X
Рис. 2. Сферическая система координат, а\ = аг = аз = 1
§ 1. Системы координат
13
Рис. 3. Эллипсоидальная система координат
Рис. 4. Эллипсоидальная система координат
1.8. Для эллипсоидальной системы координат, определяемой
равенствами
2 _ (ai — ^i)(ai — u2)(ai — щ)
1 @2-01X03-01) '
2 _ @2-tXi)@2-"
2
- a2)(ai - a2)
(oi -a3)(a2-a3) '
где a\ > a2 > a3 > 0, ni < a3 < ^2 < a2 < щ < а\ (см. рис. З, 4).
14
Часть 1
1.9. Для параболической системы координат, определяемой ра-
равенствами х\ = u\U2cosn3, X2 = щщsinn3, #з = — {и\ — и!}), где
О ^ Щ < ОО, О < U2 <ОО, —7Г < Пз ^ 7Г.
1.10. Для системы вырожденных эллипсоидальных координат,
определяемой равенствами х\ = sh^i sin^cos^, ^2 = sh^i x
х sin^2sinn3, жз = chuicos^2, где 0 ^ и\ < оо, 0 ^ ^2 ^ тг,
— 7Г < Щ < 7Г (СМ. рИС. 5).
Рис. 5. Вырожденная эллипсоидальная система координат
1.11. Для системы вырожденных эллипсоидальных координат,
определяемой равенствами х\ = chnisin^cosns, X2 = ch^i x
х sin^sin^, Х3 = shnicosw2? где О ^ щ < оо, 0 ^ U2 ^ тг,
—тг < г^з ^ тг (см. рис. 6).
1.12. Для системы тороидальных координат, определяемой ра-
равенствами
sh u\ cos из sh u\ sin из
х\ = — , Х2 = -г » з;з =
ch^i — cos^2
где 0
< оо, —7Г <
г, —7Г <
7г (см. рис. 7).
§1. Системы координат
15
Рис. 6. Вырожденная эллипсоидальная система координат
Рис. 7. Тороидальная система координат
16 Часть 1
1.13. Преобразовать выражение у- ж— к новым коорди-
ох оу
натам г/, v, связаным еж, у соотношениями и = #, v = ж2 + у2.
Проверьте, действительно ли предложенная система г/, v является
криволинейной системой координат. Укажите ее область опреде-
определения и область значений.
1.14. Преобразовать к полярным координатам х = г cos у?, у =
= г sin у? выражения:
ч ди ди . ди ди '(ди\2 (ди\2
. д2и д2и ,
г) -T-J2 + ^-j (оператор Лапласа).
1.15. Преобразовать выражение тт^ "~ а тгч к новым коорди-
аж^ оу1
натам и, г/, где и = у + ах, v = y — ax. При каких а предложенная
замена дает регулярную систему координат?
d2z d2z
1.16. Преобразовать выражение -^гъ + тг"о + №z = 0 к новым
координатам u, v, где а; = -(гх2 — г;2), у = гхг/.
1.17. Преобразовать к сферическим координатам г, ^, у?, свя-
связанным с х, у, z равенствами х = г sin в cos у?, j/ = r sin 0 sin у?,
z = r cos 0, следующие выражения:
2 (dv\2 (dv\2 cx d2v d2v d2v
1.18. Пусть а; = /(г/, г;), у = (р(щ v) — такая система ко-
df dip df dip _
ординат, что т^ = тт") тг — "~тг"- Докажите, что выполнено
ди ov dv ди
соотношение
ди2 + dv2 V y) \
d2V d2V d2V
1.19. Вычислите оператор Лапласа -77-5- + -r-x- + -тгт в Ци"
ox1 ay1 azl
линдрической системе координат г, (р, z такой, что х = г cos у?,
у = г sin </?, z = z.
1.20. Покажите, что при переходе от декартовых координат х, у
ди dv
к полярным координатам р, (р условия Коши-Римана — = —,
ди dv ди ldv dv 1 ди
-г- = -тг принимают вид — = ~-^-, — = —-г-.
ду дх др рд(р др рдер
§ 2. Уравнения кривых и поверхностей 17
1.21. Вычислите оператор Лапласа -т-т + -тгт в системе коор-
дхг дуг
динат u, v такой, что w = г2, где w = х + iy, z = u + iv.
d2V d2V
1.22. Вычислите оператор Лапласа -77-5" + тто" в системе коор-
дх1 ду1
динат м, v такой, что w = a ch 2, где гу = а; + гу, z = u + iv.
d2V d2V
1.23. Вычислите оператор Лапласа -ттт + о в системе коор-
динат и, г; такой, что w — ez, где w = х + iy, z = u + iv.
§ 2. Уравнения кривых и поверхностей
2.1. Точка М равномерно движется по прямой OJV, равномерно
вращающейся вокруг точки О. Составить уравнение траектории
точки М (спираль Архимеда).
2.2. Прямая OL вращается вокруг точки О с постоянной угло-
угловой скоростью ш. Точка М движется по прямой OL со скоростью,
пропорциональной расстоянию \ОМ\. Составить уравнение траек-
траектории, описываемой точкой М (логарифмическая спираль).
2.3. Круг радиуса а катится по прямой без скольжения. Соста-
Составить уравнение траектории точки М, жестко связанной с кругом
и находящейся на расстоянии d от его центра. Кривая, получен-
полученная при d = а, называется циклоидой, при d < a — укороченной
циклоидой, при d > a — удлиненной циклоидой.
2.4. Окружность радиуса г катится без скольжения по окружно-
окружности радиуса i?, оставаясь вне ее. Составить уравнение траектории
точки М катящейся окружности {эпициклоида).
2.5. Окружность радиуса г катится без скольжения по окруж-
окружности радиуса i?, оставаясь внутри ее. Составить уравнение тра-
траектории точки М катящейся окружности {гипоциклоида).
2.6. Найти кривую, задаваемую уравнением г = г(<), с < t < d,
зная, что rf{t) = A(i)a, где \{t) > 0 — непрерывная функция, а —
постоянный ненулевой вектор.
2.7. Найти кривую, задаваемую уравнением г = г(<), —оо <
< t < 00, если vff{t) = а — постоянный ненулевой вектор.
2.8. Пусть вектор-функция r{t) удовлетворяет дифференциаль-
дифференциальному уравнению г" = г'ха, где а — постоянный вектор. Выразить
через а и г7 следующие величины: а) |г7 х г"|2; б) (г', г", г'").
2.9. Плоская кривая задана уравнением r{t) = {(p{t), t(p{t)).
При каком условии это уравнение определяет прямую линию или
ее часть?
2.10. Найти функцию г = г{<р), зная, что это уравнение в по-
полярных координатах на плоскости определяет прямую линию.
18 Часть 1
2.11. а) Доказать, что материальная точка М под действием
центральной силы F = Fr описывает траекторию, лежащую в не-
некоторой фиксированной плоскости, проходящей через начало ко-
координат. Отметим, что функция F может зависеть как от длины
вектора г, так и от его направления.
б) Составить уравнение движения точки М в этой плоскости в
полярных координатах.
в) Показать, что для центральной силы F, задаваемой фор-
г
движение точки М происходит по кривой второго порядка. Здесь
га — масса материальной точки М, г — длина вектора г, а к > 0.
2.12. Движение электрона в постоянном магнитном поле опре-
определяется дифференциальным уравнением
г" = г7 х Н, Н = const.
Доказать, что траектория электрона является винтовой линией.
2.13. Найти кривые, определяемые дифференциальным урав-
уравнением
где и> — постоянный вектор.
2.14. Найти кривые, определяемые дифференциальным урав-
уравнением
г7 = е х (г х е),
где е — фиксированный вектор единичной длины.
2.15. Найти кривые, определяемые дифференциальным урав-
уравнением
г' = ое + е х г,
где число а и вектор е постоянны.
2.16. Найти кривые, определяемые дифференциальным урав-
уравнением
r' = I|r|2e-r<r,e>,
где е — фиксированный вектор единичной длины.
2.17. Под каким углом пересекаются кривые
2.18. Под каким углом пересекаются кривые
з
' 2 — х
§ 2. Уравнения кривых и поверхностей 19
2.19. Под каким углом пересекаются кривые
8 rt
я = 4у, у =
х2 + 4'
2.20. Найти натуральный параметр (или длину) следующих
кривых:
а) у = a ch (ж/а) — цепная линия;
б) у = ж3/2; в) у = х2\
г) у = 1пж; д) г = аA + cosy?);
е) r(t) = (a(t — sini), аA — cost));
ж) r(t) = (a(cos? + ?sin?), a(sin? — tcost));
з) r(<) (|
и) r(t) = (acos3t, asin3i); к) у = еж;
л) r(<) = I a I lnctg- — cost j , asint 1.
2.21. Найти длину дуги кривой
х = —f'{ot) sin a — /"(a) cos a,
у = /'(a) cos a — /"(a) sin a.
2.22. Вокруг оси Oz вращается окружность х = a + bcosv,
z = bsinv @ < b < a). Составить уравнение поверхности вра-
вращения.
2.23. Прямая движется поступательно с постоянной скоростью,
пересекая другую прямую под прямым углом, и одновременно
равномерно вращается вокруг этой прямой. Составить уравнение
поверхности, которую описывает движущаяся прямая. Эта поверх-
поверхность называется прямым геликоидом.
2.24. Составить уравнение поверхности, образованной враще-
т
нием цепной линии у = ach- вокруг оси Ох. Эта поверхность
a
называется катеноидом.
2.25. Составить уравнение поверхности, образованной враще-
вращением трактрисы
( /тг А . \ тг тг
р= I alntg I- + -J -asmf, acosfl , -- < t < -,
вокруг ее асимптоты. Эта поверхность называется псевдосферой.
2.26. На круговом торе вращения, кроме параллелей и мери-
меридианов, являющихся плоскими окружностями, существует еще
два семейства плоских окружностей, называемых окружностями
20
Часть 1
Виларсо. Они получаются пересечением тора его касательной плос-
плоскостью, касающейся тора в двух точках. Получить уравнения этих
Тор
Рис.8
окружностей, проверить, что все они имеют один и тот же радиус и
пересекают все параллели тора под постоянным углом (см. рис. 8).
§ 3. Классические метрики на сфере
и плоскости Лобачевского, их свойства
3.1. Вычислить метрики на стандартной единичной сфере в К3
в следующих координатах:
а) в декартовых координатах ж, у;
б) в сферических координатах 0, (р\
в) в декартовых координатах м, v на плоскости z = 0, являю-
являющейся образом сферы при стереографической проекции из север-
северного полюса сферы (см. рис. 9);
Рис. 9. Стереографическая проекция
г) в полярных координатах р, <р на плоскости z = 0, являю-
являющейся образом сферы при стереографической проекции (см. пре-
предыдущий пункт);
д) в комплексных координатах z = х + гу, !z = х — iy на плос-
плоскости z = 0, являющейся образом сферы при стереографической
проекции.
3.2. Рассмотрим псевдоевклидово пространство с координатами
t, ж, у и со скалярным произведением ds2 = — dt2 + dx2 + dy2.
§ 3. Классические метрики на сфере и плоскости Лобачевского 21
Вычислить метрику псевдосферы мнимого радиуса — t2 + х2 + у2 =
= -1 в следующих координатах:
а) в декартовых координатах ж, у;
б) в координатах </?, х? гДе Р> ?>> X — псевдосферические коор-
координаты в нашем псевдоевклидовом пространстве;
в) в декартовых координатах u, v на плоскости t = О, являю-
являющейся образом стереографической проекции псевдосферы из ее
южного полюса @, 0, —1) (см. рис. 10);
г) в полярных координатах г, </? на плоскости t = 0, являю-
являющейся образом стереографической проекции псевдосферы из ее
южного полюса @, 0, —1);
д) в комплексных координатах z = х + iy,
z = х — iy на плоскости t = 0, являющейся
образом стереографической проекции псевдо-
псевдосферы;
е) от комплексных координат предыдущего
пункта перейти к новым комплексным коор-
координатам в верхней полуплоскости при помощи
дробно-линейного преобразования, переводя-
переводящего круг единичного радиуса в верхнюю по-
полуплоскость;
ж) для предыдущих двух пунктов нарисо-
нарисовать образы обеих компонент связности псев-
псевдосферы при ее указанных проекциях на плос-
плоскость;
з) доказать, что длина р отрезка прямой,
соединяющего точки с радиус-веторами а и
b на верхней половине псевдосферы задается
формулой chp = (a, b), где скалярное произ-
произведение вычисляется в псевдоевклидовом про-
пространстве;
и) доказать, что расстояние р от точки с
радиус-вектором а на верхней половине псев-
псевдосферы до прямой, определяемой условием (х, е) = 0, ]е| = 1,
задается формулой shp = |(a, е)|. Здесь скалярное произведение
вычисляется в псевдоевклидовом пространстве.
3.3. В моделях метрики Лобачевского в единичном круге (мо-
(модель Пуанкаре) и на верхней полуплоскости показать, что угол
между пересекающимися кривыми равен углу между теми же кри-
кривыми в евклидовой метрике.
3.4. Доказать, что при стереографической проекции сферы S2
на плоскость произвольная окружность переходит либо в прямую,
либо в окружность.
3.5. Покажите что группа дробно-линейных преобразований,
являющихся движениями метрики:
а) задачи 3.1д — изоморфна SUB)/{±E};
Рис. 10. Стереографи-
Стереографическая проекция
22 Часть 1
б) задачи 3.2д — изоморфна SU(l, 1)/{±E};
в) задачи 3.2е — изоморфна SXB, Ш)/{±Е].
3.6. Показать, что группа дробно-линейных преобразований,
являющихся движениями метрики плоскости Лобачевского в мо-
модели на верхней полуплоскости (см. задачу 3.2е) порождается пре-
преобразованиями z^z + anz^ —, где абМ.
z
3.7. Рассмотрим на плоскости Лобачевского произвольные пря-
прямые 1\ и /2 с точками Ai, B\ и А2, i?2 на них соответственно,
причем расстояние от А\ до В\ равно расстоянию от А2 до 1?2-
Показать, что существует движение, которое переводит:
а) h в /2;
б) 1\ в /2 и А\ в ^2;
в) Zi В /2, Ai В ^2 И Bi В i?2-
3.8. Найти дробно-линейное преобразование верхней полуплос-
полуплоскости, являющееся движением плоскости Лобачевского, которое
переводит:
а) прямую х2 + у2 = 1 в прямую х = 0;
б) прямую (х — IJ + у2 = 4 и точку A,2) в прямую я; = 3 и
точку C,2).
3.9. Пусть точки плоскости Лобачевского А\} ^2, A3, J5i, B2,
2?з таковы, что p(Aj, Aj) = pEj, Sj) для всех i и j. Показать, что
существует единственное движение плоскости Лобачевского, кото-
которое переводит точку А\ в В{, г = 1, 2, 3. Вывести отсюда, что
группа всех движений плоскости Лобачевского порождается пре-
преобразованиями z*-+ z + а, 2н+ —, z ь» —?, где a G К.
z
3.10. а) Показать, что на плоскости Лобачевского существует
единственная прямая, перпендикулярная данной и проходящая че-
через данную точку.
б) Пользуясь предыдущим пунктом, определить симметрию от-
относительно прямой на плоскости Лобачевского и показать, что это
преобразование является движением.
в) Найти формулу для симметрии относительно прямой
г) Найти формулу для симметрии относительно прямой х = 0.
3.11. а) Показать, что движение, заданное как дробно-линейное
преобразование, разлагается в композицию четного числа симме-
симметрии относительно прямой. Показать, что можно обойтись двумя
симметриями.
б) Показать, что остальные движения, т.е. не представимые
в виде дробно-линейного преобразования, разлагаются в компози-
композицию нечетного числа симметрии относительно прямой.
§ 3. Классические метрики на сфере и плоскости Лобачевского 23
3.12. Доказать, что группа всех изометрий плоскости Лобачев-
Лобачевского в модели на верхней полуплоскости состоит из преобразова-
преобразований вида:
az + b . . __ .
z ^ o,6,c,oGK, ad — be = 1;
cz + a
¦ az + b , , _ , ,
z ^ _— a,o,c,aGK, ad — bc= — 1.
cz + a
3.13. Доказать, что при произвольном дробно-линейном пре-
преобразовании комплексной плоскости z н* -, где a, b,c,d G С,
С2 + d
ad — be ф 0, окружности и прямые переходят в окружности или
прямые.
3.14. Доказать, что для любых попарно различных точек z\, ^2,
zs и попарно различных точек w\, г^2, ws, принадлежащих расши-
расширенной комплексной плоскости, существует единственное дробно-
линейное преобразование, отображающее Z{ в г^, % = 1, 2, 3.
3.15. Показать, что длина отрезка прямой, соединяющего две
любые фиксированные точки на плоскости Лобачевского, меньше
длины любой другой кривой, соединяющей эти точки (см. рис. 11).
Рис. 11. Прямые на плоскости Лобачевского (модели в единичном круге и на
верхней полуплоскости)
3.16. Доказать, что через любые две точки плоскости Лобачев-
Лобачевского проходит единственная прямая (см. рис. 11).
3.17. Докажите, что в моделях метрики Лобачевского в единич-
единичном круге и на верхней полуплоскости окружности изображаются
обычными окружностями.
3.18. Найдите длину окружности и площадь круга радиуса R
на: а) плоскости Лобачевского; б) сфере радиуса 1. Сравните с
формулами на плоскости.
3.19. а) Найти центр окружности в метрике Лобачевского на
верхней полуплоскости, которая задается уравнением
х2 + (у-2J = 1.
б) Докажите, что при стереографической проекции сферы на
плоскость окружности на сфере переходят в окружности или пря-
прямые.
24 Часть 1
в) Рассмотрим окружность х2 + (у — 2J = 1, являющуюся обра-
образом некоторой окружности на сфере при стереографической про-
проекции (см. выше). Возьмем центр этой сферической окружности,
лежащий на сфере. Найти его образ на плоскости.
3.20. Найдите середину отрезка АВ на плоскости, где А =
= (-;-), В = @,9; 0,3), в следующих метриках:
а) метрике плоскости Лобачевского в верхней полуплоскости;
б) метрике сферы (при стереографической проекции).
Рис. 12. Треугольники на плоскости Лобачевского и на сфере
3.21. Выразить площадь треугольника (см. рис. 12) через его
углы: а) на сфере единичного радиуса; б) на плоскости Лобачев-
Лобачевского.
3.22. Доказать для прямоугольного треугольника на плоскости
Лобачевского формулы:
a) chc = chachb; б) sh6 = shcsin/?;
в) th a = th с cos /?; г) ch с = ctg a ctg /?;
д) cosa = chasin/?; e) tha = shbtga.
Здесь с — длина стороны, противолежащей прямому углу.
3.23. Рассмотрим на сфере радиуса 1 прямоугольный треуголь-
треугольник ABC, у которого Z.C = -, Z.B = /?, Z.A = а, АС = Ь,
АВ = с, ВС = а. Доказать следующие соотношения:
а) cos с = cos a cos 6; б) cos a = cos a sin /?;
в) sin a = sin с sin a; r) tg a = tg с cos /?;
д) cos с = ctg a ctg /?; e) tg a = sin b tg a.
3.24. Докажите теоремы косинусов для треугольников на плос-
плоскости Лобачевского:
а) sin /3 sin 7 ch a = cosa + cos/? cos 7;
б) cos a sh b sh с = ch b ch с — ch a.
§ 3. Классические метрики на сфере и плоскости Лобачевского 25
3.25. Докажите теоремы косинусов для треугольников на сфере
единичного радиуса:
а) cos a = cos b cos с + sin b sin с cos a;
б) cosa = — cos C cos 7 + sin /3 sin 7 cos a.
3.26. Докажите теоремы синусов для:
а) плоскости Лобачевского:
sha shb she
sin a sin/3 sin7 sin a sin /3 sin7'
где Q = cos2 a + cos2 /3 + cos2 7 + 2 cos a cos /? cos 7 — 1;
. , . sina sin b sine
б) сферы радиуса 1: —— = —.—- = -.—.
sin a sinp sin 7
3.27. При каких целых п существуют правильные многоуголь-
2тг
ники с углом —: а) на сфере; б) на плоскости Лобачевского?
п
3.28. Докажите, что на комплексной плоскости точки z\, ^2,
23, 24 лежат на одной окружности (или прямой) тогда и только
zs — z\ Z4 — z\
тогда, когда двойное отношение w = : является
Z2 — Zs Z2 — Z4
вещественным числом.
3.29. Докажите, что на плоскости Лобачевского синус угла а в
прямоугольном треугольнике равен отношению длины окружности
радиуса, равного противолежащему катету, к длине окружности с
радиусом, равным гипотенузе. То же самое для сферы.
3.30. Докажите, что в треугольнике с равными сторонами все
углы: а) на плоскости Лобачевского меньше тг/3; б) на сфере
больше тг/3.
3.31. Докажите следующие формулы для расстояния между
точками А и В (см. рис. 13) в метрике плоскости Лобачевского
на верхней полуплоскости:
в
о
Рис. 13
а) если они имеют одинаковую абсциссу, то р(А, В) =
In
OB
ОА
где О — точка пересечения соединяющей их прямой с абсолютом;
26
Часть 1
б) если они имеют разные абсциссы, то р(А, В) =
In
tga
tg/3
где О — точка пересечения абсолюта и прямой плоскости Лоба-
Лобачевского, проходящей через А и В, а а и /? — углы между по-
положительным направлением действительной оси и лучами О А и
OS соответственно;
в) в общей ситуации: если z\, z*i произвольные точки верхней
полуплоскости, то
1 + \{zi-z2)/(zi-z2)\
-l + \(zi-z2)/(zi-z2)\
)¦
или, что то же самое,
3.32. Верно ли, что вокруг любого треугольника можно описать
окружность: а) на сфере; б) на плоскости Лобачевского?
3.33. Покажите, что на плоскости
Лобачевского через точку, лежащую
внутри угла, не всегда можно провести
прямую, пересекающую обе стороны
угла.
3.34. Сравните сторону правильно-
правильного шестиугольника с радиусом описан-
описанной около него окружности: а) на сфе-
сфере; б) на плоскости Лобачевского.
3.35. Найдите площадь правильно-
правильного треугольника со стороной а: а) на
плоскости Лобачевского (см. рис. 14);
б) на сфере.
3.36. Найдите площадь круга и дли-
длину окружности, задаваемой уравнением
2 2
Рис. 14. Правильный треуголь-
треугольник на плоскости Лобачев-
Лобачевского
( ) (у) ,
а) плоскости Лобачевского в ее модели на верхней полуплоскости;
б) сфере в координатах стереографической проекции.
3.37. Выразить радиус описанной около треугольника окружно-
окружности через его стороны и углы: а) на плоскости Лобачевского; б) на
сфере.
§ 4. Теория кривых
Вообще говоря, мы будем считать, что кривизна плоской кривой
г = r(s), где s — натуральный параметр, определяется формулой к —
= |r| = |v|. Нормаль к кривой при этом задается формулой n = v/|v|.
§ 4. Теория кривых 27
Она не определена в точках, в которых к = 0. Более того, в точках пере-
перегиба поле нормалей разрывно, т. е. левый и правый пределы различны
(см. рис. 15).
В некоторых задачах о глобальном поведении кривой удобнее поль-
пользоваться непрерывным полем нормалей. В таких случаях поле нормалей
можно определить, поворачивая в каждой точке вектор скорости на угол
Рис. 15
тг/2 в положительном направлении. В частности, в каждой точке кривой
пара векторов v(s), 11E) образует положительно ориентированный репер
на плоскости. Формулы Френе остаются в силе, при этом кривизна к
может менять знак.
4.1. Вычислить кривизну следующих кривых:
а) у = sinх в вершине (синусоида);
б) у = ach (х/а) (цепная линия);
в) г2 = a2cos2<p (лемниската);
г) г = a(l + cos ip) (кардиоида, см. рис. 16);
д) г = сир (спираль Архимеда, см. рис. 17);
е) r(t) = (acos3i, asin3t) (астроида, см. рис. 18);
ж) r(t) = (a(t — sint), a(l — cost)) (циклоида, см. рис. 19).
4.2. Вычислить для лемнискаты Бернулли, заданной в по-
полярных координатах (г, ф) уравнением г2 = 2a2 cos 2<p, интег-
интегралы
fk(s)ds и f\k(s)\ds,
где 5 — длина дуги, afc(s) — кривизна кривой. См. пояснение в
начале параграфа.
4.3. Найти кривизну эллипса с полуосями а и Ъ в его вершинах.
4.4. Найти кривизну кривой, заданной уравнением F(ж, у) = 0.
4.5. Кривые заданы своим дифференциальным уравнением
Р(#, у) dx + Q(x, у) dy = 0. Найти их кривизну.
28
Часть 1
Рис. 16. Кардиоида
Рис. 17. Спираль Архимеда
-а
Рис. 18. Астроида
—2ла
О
Рис. 19. Циклоида
2яа х
Рис. 20. Винтовая линия
§ 4. Теория кривых
29
4.6. Вывести формулу для кривизны плоской кривой, заданной
в полярных координатах уравнением г = г(ф).
4.7. Заменить параметр t на винтовой линии (см. рис. 20)
r(t) = (acost, asini, Ь?), b > 0,
на натуральный параметр 5.
4.8. Заменить параметр t на кривой
r(t) = (e*cos?, e^intf, ег)
на натуральный.
4.9. Заменить параметр t на кривой r(t) = (chf, shf, i) на на-
натуральный.
4.10. Найти кривизну и кручение в произвольной точке следу-
следующих линий:
а) г(*) = (е*, е"*, <V5); б) r(t) = Bt, lnt, <2);
в) г(«) = (е*sin*,e*cost, е*); г) г(«) = C-t-t3, 3-t2, 3t + t3);
д) r(f) = (cos3f, sin3f, cos2<).
4.11. Найти кривизну и кручение кривой, заданной уравне-
уравнениями
у2 - 2х + z = 0,
в точке МA, 1, 1).
4.12. Найти кривизну и кручение
кривой, заданной уравнениями
х + sh# = siny + у,
в точке М@, 0, 0).
4.13. Вывести формулы для вычи-
вычисления кривизны и кручения кривой,
заданной уравнениями у = у{х), z =
= z(x), и найти репер Френе этой кри-
кривой.
4.14. Дана кривая
Найти репер Френе. Вычислить кри-
кривизну и кручение этой кривой. Рис. 21. Репер Френе винто-
4.15. а) Доказать, что кривизна и вой линии
кручение винтовой линии постоянны.
б) Определить, при каком значении h винтовая линия х =
= a cost, у = asint, z = ht имеет наибольшее кручение.
30 Часть 1
в) Найти репер Френе для винтовой линии (см. рис. 21)
r(t) = (acost, asinf, ht).
г) Найти все кривые с постоянными кривизной к и круче-
кручением X.
4.16. При каком условии центр кривизны винтовой линии ле-
лежит на том же цилиндре, что и сама линия?
4.17. Пусть 7 — плоская кривая. Обозначим через S площадь
области, ограниченной кривой 7 и секущей, проведенной на рас-
расстоянии h от касательной в некоторой фиксированной точке Р Е 7-
Выразить lim (S2/h?) через кривизну кривой.
/i>0
4.18. Доказать, что оператор Y: х н-> у х х, действующий на
векторах М3, записывается кососимметрической матрицей. На-
Напомним, что у х х — векторное произведение векторов х и у.
Найти связь коэффициентов этой матрицы с координатами век-
вектора у. Показать, что для любой кососимметрической матрицы
найдется вектор у, что ее действие как линейного оператора в К3
представится в виде х »-> у х х. Вектор у называется вектором
Дарбу кососимметрической матрицы.
4.19. Пусть Y, Z — матрицы операторов векторного умножения
на векторы у, z. Доказать, что матрица оператора векторного
умножения на у х z равна [У, Z] = YZ — ZY.
4.20. Пусть кривизна к регулярной пространственной кривой
r(s) обращается в нуль в конечном числе точек. Предположим, что
на кривой есть гладкое векторное поле n*(s) такое, что в тех точ-
точках, где к ф 0, оно совпадает либо с 11E), либо с -n(s), где 11E) —
главная нормаль кривой. Определим b*(s) формулой b* = v x п*,
а кривизну к и кручение к из формул v = /ш*, Ь* = — хп* (где
v = r(s)). Доказать, что тогда формулы Френе будут верны и в
точках, где к = 0, но при этом кривизна пространственной кривой
может оказаться знакопеременной.
Натуральным уравнением плоской кривой называют уравнение од-
одного из следующих видов:
l)fc = fc(s),
2) F(k, s) = 0,
3) k = k(t), s = s(t).
Если известно натуральное уравнение кривой, то параметризация
кривой может быть задана в виде
х = / cosa(s)ds, у— I sina(s)ds,
где a(s) = / k(s) ds.
§4. Теория кривых 31
4.21. Составить натуральные уравнения кривых:
а) х = a cos3 t, у = a sin31;
б) у = я3/2;
в) у = ж2;
г) у = 1пя;
е) у = ex;
ж) х = a I lntg- + cost 1, у = asini;
з) г = a(l + cos<p);
и) ж = a(cost + tsint), у = a(sint — tcost);
к) r(t) = (a(t - sint), a(l - cost)).
4.22. Найти параметрические уравнения кривых, зная их на-
натуральные уравнения (здесь Л = 1/А;):
s2 Л2
а) Л = as; 6) — + — = l; B) Rs = a2;
s2
г) Л = a + —; д) Л2 = 2as.
а
4.23. В каких случаях кривая имеет следующие параметриче-
параметрические уравнения: х = 5, у = y(s), z = z(s), где 5 — натуральный
параметр?
4.24. Рассмотрим «перевернутую» вьшуклостью вниз циклоиду
x(t) = R(t + n + sint), y(t) = Л- Л cost, t G [-7Г, 7г].
Здесь точка t = 0 соответствует самой нижней точке циклоиды.
Ускорение свободного падения обозначим через д. Поместим в
циклоиду материальную точку массы т. Показать, что период
колебаний материальной точки, движущейся по циклоиде без тре-
трения в поле силы тяжести, не зависит от ее начального положения.
Написать дифференциальное уравнение для расстояния от мате-
материальной точки до нижней точки циклоиды.
4.25. Найти плоскую кривую, у которой касательная образует
постоянный угол а с радиус-вектором кривой.
4.26. Пусть р — расстояние от начала радиус-векторов до ка-
касательной к кривой 7 в точке М, а / — расстояние от точки О до
точки М (см. рис. 22). Доказать, что
32
Часть 1
4.27. Пусть 7 — гладкая регулярная замкнутая кривая. Дока-
Доказать, что
frdk + f
xbds =
4.28. Пусть плоская выпуклая дуга L\ касается плоской строго
выпуклой дуги L2) оставаясь по одну сторону от нее. Доказать,
что в точке касания кривизна кривой L\ не меньше, чем кривизна
кривой 1^2.
Рис. 22
4.29. В некоторой точке го = r(so) кривой г = r(s) имеем:
ко = k(so) ф О, k(so) ф 0. Рассмотрим уравнение соприкасаю-
соприкасающейся окружности \р — го — ЯоПо| = Ro в этой точке исходной
кривой, Щ = —. Здесь р — радиус-вектор точки на соприкаса-
ющейся окружности. Доказать, что соприкасающаяся окружность
пересекает данную кривую в окрестности указанной точки, т.е.
Рис. 23. Кривая и соприкаса-
соприкасающаяся окружность
Рис. 24. Кривая и соприкасающа-
соприкасающаяся окружность
малая дуга кривой, соответствующая значениям параметра из ин-
интервала («о — в, $о), и малая дуга кривой, соответствующая значе-
значениям параметра из интервала (so, so+?), лежат по разные стороны
от соприкасающейся окружности (см. рис. 23).
§4. Теория кривых
33
Пояснение. Порядок касания кривой и ее соприкасающейся окруж-
окружности равен 3. Наложенные на кривую условия гарантируют, что в дан-
данной точке порядок касания в точности равен 3, а не выше.
4.30. В некоторой точке кривой выполнены условия: ко ф 0,
ко = 0, ко ф 0. Доказать, что соприкасающаяся окружность кри-
кривой в этой точке не пересекает кривую в достаточно малой окрест-
окрестности этой точки (см. рис. 24).
4.31. Пусть а — угол между постоянным вектором а и каса-
касательным вектором v к кривой (см. рис. 25). Составить параме-
параметрическое уравнение кривой, если известна зависимость:
a) R = /(а), где R — радиус кривизны кривой; б) а = /(i?);
в) s = /(а), где s — дуга кривой; г) а = f(s).
4.32. Кривая, по которой сфера пересекается с круглым ци-
цилиндром в два раза меньшего радиуса, причем цилиндр проходит
через центр сферы, называется кривой Вивиани (см. рис. 26).
Рис. 25
Рис. 26. Кривая Вивиани
Составить уравнение кривой Вивиани в неявной и параметриче-
параметрической форме. Найти уравнения касательной, нормальной плоско-
плоскости, бинормали, главной нормали и соприкасающейся плоскости.
Найти также репер Френе, кривизну и кручение.
4.33. Доказать, что линия
х2 = 2az, у2 = 2bz
является плоской.
4.34. Доказать, что если в некоторой точке М кривой С кри-
кривизна и кручение отличны от нуля, то части кривой, близкие к
точке М, лежат по разные стороны от соприкасающейся плоско-
плоскости.
34 Часть 1
4.35. Доказать, что если все соприкасающиеся плоскости кри-
кривой проходят через одну и ту же точку, то кривая плоская на ка-
каждом участке бирегулярности (т. е. на участке, где к ф О во всех
точках).
4.36. Выразить —г, т^7г? ттг через v, n, b, к и х.
as as1 as6
4.37. Доказать, что ( v, b, —b J = x, где (•, •, •) обозначает
ешанное произведение трех векторов.
4.38. Вычислить [ —Ь, То Ь, ттЬ ].
\ds ds2 ds3 )
4.39. Доказав, что ^-v, ^v, —^ = fc*- (j).
440 Д
4.40. Доказать, что если главные нормали кривой образуют
постоянный угол с направлением вектора е, то
ds \k(d/ds)(x/k)
и обратно, если выполнено последнее соотношение, то главные
нормали кривой образуют постоянный угол с направлением не-
некоторого вектора. Найти этот вектор.
4.41. Доказать, что если кривая бирегулярна (т. е. k(s) ф О при
всех s) и все нормальные плоскости кривой содержат вектор е, то
данная кривая плоская.
4.42. Доказать, что если все соприкасающиеся плоскости кри-
кривой 7) не являющейся прямой линией, содержат один и тот же
вектор, то кривая плоская (на любом связном участке бирегуляр-
ности кривой).
4.43. а) Доказать, что если кривая регулярна и к = 0, то это —
прямая линия.
б) Доказать, что если b = const, то кривая плоская. Напишите
уравнение этой плоскости.
в) Доказать, что если к ф О во всех точках кривой, то кривая
плоская в том и только в том случае, когда х обращается в нуль
повсюду.
г) Привести пример неплоской кривой, у которой х = 0.
4.44. Доказать, что если соприкасающиеся плоскости кривой
имеют один и тот же наклон (т. е. все они ортогональны некото-
некоторому фиксированному ненулевому вектору е), то кривая плоская.
4.45. Для каких функций f(t) кривые:
a) p(t) = (е*, 2е-*, /(*)); б) v(t) = (a gob*, а sin*, /(*))
будут плоскими?
§4. Теория кривых
35
4.46. Доказать, что кривые плоские и найти их плоскости:
'1 + t 1 1
6) r(t) = {ait2 + bit + cu a2t2 + b2t + c2) a3t2 + b3t + c3).
4.47. Пусть s — длина касательного сферического образа кри-
кривой г = r(s) (см. рис. 27):
S
= J\v'(a)\da.
ds
а) Доказать, что — = k.
as
б) Найти необходимые и достаточные условия для того, чтобы
касательный сферический образ был регулярной кривой.
Рис. 27. Касательный сферический образ кривой
в) Доказать, что для замкнутой кривой выполняется неравен-
неравенство kds > 2тг.
4.48. Пусть s* — длина вдоль нормального (соответственно, би-
бинормального) сферического образа кривой г = г(s). Доказать, что
ds*
ds
= v k2 + к2 (соответственно, |х|).
Сферическая кривая — это кривая г = г(?), для которой
существуют постоянный вектор m и действительное число R такие, что
(r{t) - m, r{t) - m) = Д2.
36 Часть 1
4.49. Доказать, что если г = r(s) — кривая, параметризованная
натуральным параметром, к ф О, х ф О, то г($) — сферическая
кривая тогда и только тогда, когда
х _ ? /dk/ds\
к~ ds\ хк2 )'
4.50. Пусть неплоская кривая 7 имеет постоянную отличную
от нуля кривизну и я ф 0. Рассмотрим 7* — множество центров
ее кривизны. Доказать, что кривизна 7* также постоянна. Найти
кручение 7*-
Пусть m — постоянный вектор, г = r(s) — некоторая кривая, c(s) =
= |r(s) -m|2 и а — некоторое положительное число. Говорят, что кривая
r(s) имеет в точке s = so сферический контакт j-ro порядка со сферой
радиуса а с центром в точке т, если
4.51. Если к ф 0, выразить первые три производные функции
c(s) (определение см. выше) через v, n, b, A;, x и их производные.
4.52. Пусть г = г($) — кривая, параметризованная натураль-
натуральным параметром, к ф 0, хфОир = 1/fc, a = 1/х. Предположим,
что р2 + (р'сгJ = а2 = const, a > 0. Доказать, что образ кривой
г = r(s) лежит на сфере радиуса а.
4.53. Доказать, что кривая г = r(s) имеет сферический контакт
второго или более высокого порядка в точке s = so тогда и только
тогда, когда k(so) > 0 и радиус-вектор центра сферы задается
формулой
m = г(*о) + тт-тпEо) + Ab(s0),
k{s0)
где А — произвольное число.
4.54. Пусть fc(so) Ф 0, x(so) Ф 0. Доказать, что кривая г = r(s)
имеет сферический контакт третьего или более высокого порядка
в точке s = sq тогда и только тогда, когда центр сферы задается
формулой
m = r(s0) + тт--тп(зо) - u2( \ ( \
k(s0) k2{so)x{so)
а ее радиус
4.55. Доказать, что для любой замкнутой кривой на сфере
существует точка, в которой кручение кривой равно 0.
§ 5. Риманова метрика 37
4.56. Пусть гладкая регулярная кривая касается в точке М
некоторой окружности Г, центр которой расположен на том же
нормальном к кривой луче, что и центр круга кривизны. Пока-
Показать, что:
а) если кривая в окрестности точки М расположена вне (вну-
(внутри) окружности Г, то радиус кривизны кривой не меньше (не
больше) радиуса R окружности Г;
б) если радиус кривизны кривой больше (меньше) Л, то кривая
в окрестности М лежит вне (внутри) Г;
в) если окружность Г совпадает с окружностью кривизны и
в точке М радиус кривизны кривой имеет локальный максимум
(минимум), то кривая в окрестности М лежит внутри (вне) окруж-
окружности Г.
4.57. Пусть регулярная гладкая простая замкнутая кривая L на
плоскости всюду имеет положительную кривизну. Доказать, что
L является выпуклой в целом. Получить то же самое утверждение
в предположении неотрицательности кривизны.
4.58. Может ли точка двигаться по регулярной кривой так, что
величина скорости движения пропорциональна длине пройденного
с начала движения пути?
§ 5. Риманова метрика
5.1. Вычислить первую квадратичную форму следующих по-
поверхностей:
а) г(гх, v) = (acosucosv, asinucosv, asinv) (сфера, рис. 28);
б) г (гх, v) = (a cos u cos v, b sin u cos v, с sin v) (эллипсоид, рис. 29);
в) г(гх, v) = (cwcosu, bvsmu, со) (конус, рис. 30);
г) г(гх, v) = (acosix, bsinu,co) (цилиндр, рис. 31).
5.2. Вычислить первую квадратичную форму следующих по-
поверхностей (здесь s — натуральный параметр на кривой p{s)):
а) r(s, A) = p(s) + Ае, е = const (цилиндрическая поверх-
поверхность, рис. 32);
б) r(s, v) = vp(s) (коническая поверхность);
в) r(s, A) = p(s)+Xe(s) (|e(s)| = 1) (линейчатая поверхность,
рис. 33);
г) r(s, ф) = p(s) + n(s)cosip + b(s)sirup (каналовая поверх-
поверхность, рис. 34);
д) г(гх, v) = (ip(v)cosu, (p(v)sinu,ip(v)) (поверхность враще-
вращения);
е) г(гх, v) = ((a + bcosv)cosщ (a + bcosv)smu, bsinv) (тор);
ж) г(щ v) — (ucosv, usinv, av) (геликоид);
з) r(s, A) = p(s) + An(s) (поверхность главных нормалей);
38
Часть 1
Рис. 28. Сфера
Рис. 29. Эллипсоид
Рис. 30. Конус
х
7
Рис. 31. Цилиндр
Рис. 32. Цилиндрическая поверхность Рис. 33. Линейчатая поверхность
§ 5. Рималова метрика 39
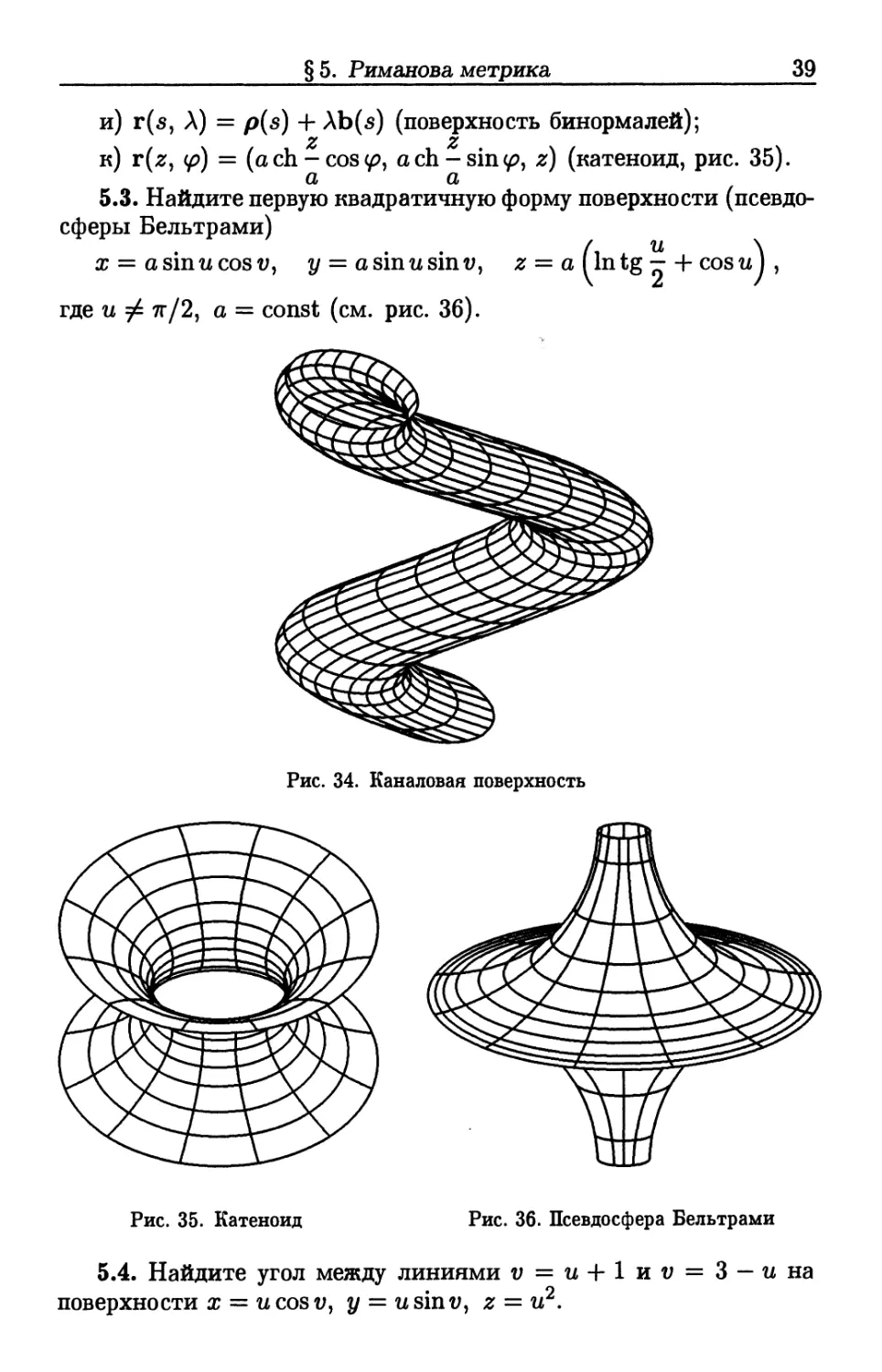
и) г(8, Л) = p(s) + Ab(s) (поверхность бинормалей);
к) r(z, ф) = (ach-cos<p, ach-sin<p, z) (катеноид, рис. 35).
a a
5.3. Найдите первую квадратичную форму поверхности (псевдо-
(псевдосферы Бельтрами)
х = asinucosv, у = asinusinv, z = a flntg ~ + cosuj ,
где u t^ 7г/2, a = const (см. рис. 36).
Рис. 34. Каналовая поверхность
Рис. 35. Катеноид Рис. 36. Псевдосфера Бельтрами
5.4. Найдите угол между линиями v = u + lnv = 3 — u на
поверхности х = ucosv, у = usinv, z = u2.
40 Часть 1
5.5. На плоскости с координатами (u, v) дана метрика ds2 =
= du2 + 2dv2. Найдите угол между линиями v = 2и и v = — 2и.
Рис. 37. Две линии на геликоиде
5.6. На поверхности (ucosv, usinv, av) найти угол между пе-
пересекающимися кривыми (см. рис. 37)
и + г; = 0, и — v = 0.
5.7. Найдите угол между линиями v = 2u + lnv = —2u +1 на
плоскости с координатами (u, v), если метрика задается матрично-
значной функцией
G
¦CD-
5.8. Проверьте, что на плоскости с координатами (щу) мат-
рично-значная функция
R2 A + v2 -uv \
(l+u2 + v2J V -uv 1 + и2)
задает метрику. Найдите длину кривой и = v.
5.9. Проверить, что матрично-значная функция
Д2 /1-г;2 w \
1 - и2 - v2 \ uv 1 - и2/
задает некоторую метрику в единичном круге на плоскости с
координатами (u, v):
а) в этой метрике найти длину кривой —1<и< 1,^ = 0;
§ 5. Риманова метрика
б) в этой же метрике найти длину кривой Sa- u2 + v2 = a =
= const. Найти угол, под которым кривая v = ku пересекает
кривые Sa-
5.10. Проверить, что матрично-значная функция
Д2 /1 - v2 -uv \
1 — и2 —V2 \ —uv 1 — и2)
на плоскости с координатами (u, v) задает некоторую метрику в
единичном круге. В этой метрике найти длину кривой — 1 < и < 1,
v = 0.
5.11. Проверить, что на плоскости с координатами (ж, у) мат-
матрично-значная функция
1 Dх2 + (х2 + у2L 4ху \
(х2 + у2L { Аху Ау2 + (х2 + у2L)
задает метрику. Вычислите длину кривой х2 + у2 = а, где а —
некоторое фиксированное число. Вычислить, под каким углом эти
линии пересекаются с кривыми у = кх.
5.12. Найдите угол пересечения линий u + 2v = 0h4u — v = 0
на прямом геликоиде
х = ucosv, у = usinVj z = av.
5.13. На поверхности
х = и Cv2 -и2 - - J , y = v [Зи2 -v2 - - J , z = 2uv
найти угол между координатными линиями.
Рис. 38 Рис. 39. Линии на параболоиде вращения
5.14. Найти уравнения кривых, которые делят пополам углы
между координатными линиями параболоида вращения (см.
рис. 38, 39)
1 9
х = ucosv, у =
3 Зак. 149
42 Часть 1
5.15. Найти на поверхности
x = ucosv, у ==usinv, z = а\п(и+ у/и2 — а2)
кривые, пересекающие кривые v = const под постоянным углом в
(см. рис. 40).
5.16. Найти кривые, пересекающие прямолинейные образую-
образующие гиперболического параболоида ху = az под прямыми углами.
Рис. 40. Локсодромии
5.17. Кривая, расположенная на сфере и пересекающая все
меридианы сферы под данным углом, называется локсодромией
Рис. 41. Локсодромия на сфере Рис. 42. Локсодромия на сфере
(см. рис. 41, 42). Составить уравнение локсодромии. Найти век-
векторы v, n, b репера Френе этой кривой в произвольной точке,
вычислить ее кривизну и кручение.
§ 5. Рималова метрика
43
5.18. Написать уравнение локсодромии в полярных координа-
координатах стереографической проекции сферы на плоскость.
5.19. Пусть первая квадратичная форма поверхности имеет вид
а) найти периметр криволинейного треугольника, образован-
образованного пересечением кривых
u = ±-av2, « = 1;
б) найти углы этого криволинейного треугольника;
в) вычислить площадь треугольника, образованного пересече-
пересечением кривых
u = ±av, v = 1.
5.20. Дана поверхность r(u, v) = (usinv, ucosv, v). Найти:
а) площадь криволинейного треугольника 0 ^ и ^ shv, 0 *
\ v < vq (см. рис. 43);
б) длины сторон этого треугольника;
в) углы этого треугольника.
Рис. 43. Треугольник на геликоиде
S2
Рис. 44. Сферический двуугольник
5.21. Сферический двуугольник — это фигура, образованная
двумя большими полуокружностями, имеющими общие концы
(см. рис. 44). Вычислить площадь S сферического двуугольника
с углом а при вершине.
5.22. Вращением окружности вокруг прямой, лежащей в плос-
плоскости окружности, образован тор. Радиус окружности г, расстоя-
расстояние от прямой до центра окружности i?, R > г. Найти площадь
тора в индуцированной метрике.
44
Часть 1
5.23. Доказать, что отображение, являющееся конформным и
сохраняющим площадь, является локальной изометрией.
5.24. Зафиксируем на плоскости некоторую точку. Найти все
конформные преобразования плоскости, оставляющие эту точку
на месте.
5.25. Написать общий вид конформного отображения сферы S:
х2 + у2 + z2 = 1 на себя с условием сохранения ориентации и
неподвижности северного и южного полюсов.
5.26. Доказать, что деформация гиперболического параболоида,
определяемая следующими формулами, сохраняет площадь:
х =
ll 2
-vl) +uvcost.
5.27. Доказать, что поверхностью вращения, локально изоме-
тричной геликоиду
г(гл, г;) = (usinv, ucosv, av),
является катеноид.
Пояснение. На самом деле, верен более общий факт. А именно,
после разрезания катеноида по меридиану полученная поверхность мо-
а б в г д е
Рис. 45. Изгибание катеноида на часть геликоида
жет быть изогнута, как показано на рис. 45, так, что получится часть
геликоида.
5.28. Показать, что винтовая поверхность (коноид)
x = pcosv, y = psinv, z = p + v
локально изометрично отображается на гиперболоид вращения
x = rcos<p, y = rsin<?>, z = y/r2 — 1,
если соответствие точек устанавливается уравнениями
(р = у + arctg р, г2 = р2 + 1.
§ 6. Вторая квадратичная форма, гауссова и средняя кривизны 45
5.29. Показать, что винтовая поверхность
x = pcosv, j/ = psinv, z = a (In- + v)
локально изометрично отображается на поверхность вращения
х = г cos у?, у = г sin у?, z = о\/21п(г + у г2 — а2)-
5.30* Показать, что всякая винтовая поверхность
x = ucosv, y = usinv, z = F(u)+av
локально изометрично отображается на поверхность вращения так,
что винтовые линии переходят в параллели.
5.31. а) Доказать, что любая изометрия Шп (даже локальная)
задается линейным отображением х *-> Ах + xq.
б) В условиях пункта а) доказать, что А — ортогональная ма-
матрица.
5.32. Доказать, что любая цилиндрическая поверхность локаль-
локально изометрична плоскости.
5.33. Доказать, что любая коническая поверхность локально
изометрична плоскости.
5.34. Существует ли изометрическое отображение области на
прямом круговом цилиндре, заданной в виде х2+у2 = i?2, 0 ^ z <
^ Я, на какую-либо область на выпуклой конической поверхно-
поверхности?
§ 6. Вторая квадратичная форма,
гауссова и средняя кривизны
В этом параграфе средней кривизной называется сумма главных
кривизн.
6.1. Вычислить вторую квадратичную форму следующих по-
поверхностей:
а) r(u, v) = {Rcosucosv, i?cosusinv, Rsinu) (сфера);
б) r(u, v) = (a cos u cos v, a cos u sin v, csinu) (эллипсоид вра-
вращения);
в) r(u, v) = ((a + 6cosu)cosv, (a +bcosu)sinv, bsinu) (тор);
г) r(u, v) = (ach — cosv, ach-sinv, u) (катеноид);
\ a a /
д) r(u, v) = (asinucosv, asinusinv, a flntg — + cosim J;
е) r(u, v) = (ucosv, usinv, av) (прямой геликоид);
ж) xyz = a3.
6.2. Доказать, что при каждой параметризации плоскости ее
вторая квадратичная форма равна нулю.
46 Часть 1
6.3. Доказать, что при любой параметризации сферы ее первая
квадратичная форма пропорциональна второй.
6.4. Дана поверхность вращения
г{щ <р) = {х{и), p{u)cos(p, р{и) sin <p).
а) Найти вторую квадратичную форму.
б) Найти гауссову кривизну К в произвольной точке поверхно-
поверхности. Выяснить зависимость знака К от направления выпуклости
меридиана.
в) Вычислить кривизну К в частном случае р(и) = м,
a>0
(псевдосфера). Эта поверхность называется также поверхностью
Бельтрами.
Доказать, что поверхность Бельтрами локально изометрична
плоскости Лобачевского.
г) Найти среднюю кривизну Н в произвольной точке поверх-
поверхности вращения.
д) В частном случае х(и) = и выбрать функцию р = р{и) так,
чтобы Н = 0 на всей поверхности.
е) Найти главные кривизны поверхности вращения, не вычи-
вычисляя ее вторую форму.
6.5. Доказать, что у поверхности, полученной вращением па-
параболы вокруг ее директрисы, отношение главных кривизн посто-
постоянно.
6.6. Доказать, что если у поверхности тождественно равны
нулю гауссова и средняя кривизны, то это поверхность является
плоскостью или ее частью.
6.7. Дана кривая р = p{s) с натуральным параметром s, кри-
кривизной к = k{s) ^Ои кручением я = x(s) ф 0. Пусть v = v(s) —
орт касательной к этой кривой. Для поверхности, образованной
касательными к данной кривой, т. е.
r(s, и) = p(s) + uv(s),, и > 0,
найти кривизны К и Н.
6.8. Найти гауссову и среднюю кривизны поверхности:
)¦? ( \ а\ -С/ / 2 i 2\
z = j ух, у); О) х = / \ у х -т у ).
6.9. Найти гауссову и среднюю кривизну поверхности, задан-
заданной уравнением F(x, у, z) = 0.
6.10. Показать, что поверхность
г(щ v) = (у/и2 + a2 cosv, у/и2 + a2 sinv, a In {и +
является катеноидом. Найти ее вторую форму.
§ 6. Вторая квадратичная форма, гауссова и средняя кривизны 47
z
6.11. Найти главные радиусы кривизны поверхности у= х tg -.
a
6.12. Найти главные радиусы кривизны поверхности
х = cos г; — tzsinv, у = sin г; + ucosv, z = u + v.
6.13. Вычислить гауссову и среднюю кривизны винтовой по-
поверхности
i z = u + v.
6.14. Вычислить гауссову и среднюю кривизны поверхности
х = Зи + Зш;2 -и3, у = v3 - 3v - 3u2v, z = 3(u2 - v2).
6.15. Найти главные кривизны и главные направления:
а) геликоида (ucosv, usinv, fcv);
б) катеноида (a ch - cos v, a ch — sin v, гм;
\ a a /
в) поверхности z = xy в точке A, 1, 1).
6.16. Для поверхности (u2 + v2, u2 — v2, uv) найти главные
кривизны в точке Р: (u, v) = A, 1). Найти кривизну нормального
сечения в точке Р, касающегося кривой u = v2.
6.17. Пусть поверхность в R3 задана функцией г{щ v). Рассмо-
Рассмотрим выражение rfn2 = (dn, dn), где п(щ v) — вектор единичной
нормали к поверхности. Проверить, что это выражение является
квадратичной формой относительно дифференциалов du, dv. Эта
форма называется третьей квадратичной формой поверхности.
Выразить ее через первую и вторую формы поверхности, а также
через гауссову и среднюю кривизны.
6.18. Показать, что сферическое отображение минимальной по-
поверхности является конформным, и обратно, если сферическое
отображение некоторой гладкой регулярной поверхности является
конформным, то эта поверхность либо минимальная, либо явля-
является сферой (частью сферы).
6.19. Доказать, что на линейчатой поверхности или всюду
К = 0, или всюду К < 0. Кроме того, доказать, что на линейча-
линейчатой поверхности К = 0 тогда и только тогда, когда поверхность —
развертывающаяся.
6.20. Доказать, что на неразвертывающейся линейчатой по-
поверхности кривизна поверхности при уходе точки в бесконечность
вдоль любой образующей стремится к нулю.
6.21. Показать, что средняя кривизна геликоида (задача 6.1)
равна нулю.
6.22. Пусть S — некоторая заданная поверхность. Отложим на
нормалях к поверхности S в одном направлении отрезки постоян-
постоянной длины. Концы отложенных отрезков описывают поверхность
48 Часть 1
5*, «параллельную» поверхности S (см. рис. 46). Если поверх-
поверхность S задана в виде г = г(щ v), то поверхность S* задается в
виде
р — r(u, v) + an(u, v),
где n(u, v) — единичный вектор нормали к S.
Рис. 46. Параллельные поверхности
Выразить коэффициенты первой и второй квадратичных форм
поверхности S* через коэффициенты первой и второй квадратич-
квадратичных форм поверхности S. Доказать, что свойство параллельности
двух поверхностей взаимно.
6.23. При каких длинах отрезков, отложенных по нормалям,
поверхность, параллельная данной, будет регулярной?
6.24. Выразить гауссову кривизну К* поверхности ?*, «па-
«параллельной» поверхности *?, через гауссову и среднюю кривизны
поверхности.
6.25. Выразить среднюю кривизну Н* поверхности S"*, «па-
«параллельной» поверхности «S, через гауссову и среднюю кривизны
поверхности.
6.26. а) Доказать, что у параллельных поверхностей гауссовы
и средние кривизны связаны соотношением
Н2-4К Н*2 - 4К*
К2 " К*2 '
б) Составить уравнение минимальной поверхности 5*, «па-
«параллельной» поверхности «S, если для поверхности S отношение
Н/К = const.
в) Дана поверхность постоянной средней кривизны Я. На всех
ее нормалях отложены отрезки длиной 1/#. Доказать, что у по-
построенной таким образом поверхности, «параллельной» данной,
гауссова кривизна постоянна.
г) На всех нормалях поверхности постоянной положительной
гауссовой кривизны К отложены отрезки длиной 1/у/К. Доказать,
§ 6. Вторая квадратичная форма, гауссова и средняя кривизны 49
что средняя кривизна построенной таким образом поверхности по-
постоянна. Вычислить эту среднюю кривизну.
6.27. Доказать, что на параллельных поверхностях точки,
соответствующие друг другу вдоль нормалей, одновременно явля-
являются или не являются омбилическими.
6.28. Доказать, что если замкнутая поверхность имеет нерав-
неравную нулю постоянную среднюю кривизну и положительную гаус-
гауссову кривизну, то она сфера.
6.29. Доказать, что Я2 ^ 4К. Когда достигается равенство?
6.30. Пусть ei и в2 — ортогональные касательные векторы еди-
единичной длины, приложенные к некоторой точке поверхности. До-
Доказать, что
Я = П(е1,е1) + П(е2,е2),
где П(,) — вторая квадратичная форма поверхности.
6.31. На поверхности z = х2 найти кривизну нормального се-
сечения в точке B, 2, 4) в направлении кривой у = ж2/2, z = ж2.
6.32. На поверхности z = 2z2 + 9y2 найти кривизну нормаль-
нормального сечения в начале координат в направлении вектора, соста-
составляющего с осью Ох угол тг/4.
6.33. Предположим, что две поверхности М\ и Мч пересекаются
по кривой 7- Пусть к — кривизна 7? А* — нормальные кривизны
7 в Mi и в — угол между нормалями М\ и Мг. Доказать, что
к2 sin2 в = \\ + \\- 2Ai A2 cos 0.
6.34. Исходя из того, что эллипс можно спроектировать в ок-
окружность, с помощью теоремы Менье и формулы Эйлера найти
кривизны эллипса в его вершинах.
6.35. Доказать, что кривизна кривой на поверхности положи-
положительной кривизны нигде не обращается в нуль.
6.36. Доказать, что для того чтобы точка на поверхности была
сферической, необходимо и достаточно, чтобы выполнялись усло-
условия К ф 0, 4К = Я2.
6.37. Определить тип точек тора, эллипсоида, гиперболоида,
параболоида вращения.
6.38. Определить тип точек на поверхностях:
а) г = а2*4 + Ь2у4; б) z = х4 + у4 + s2y2; в) у = хА.
6.39. Доказать, что если метрика поверхности r(u, v) в R3 за-
записана в изотермических координатах, т.е. ds2 — A2(du2 + dv2),
то Ar = —ЯЛ2п, где п — нормаль к поверхности, а Я— средняя
кривизна.
6.40. Доказать, что если поверхность в IR3 минимальна, то ее
радиус вектор — гармоническая функция относительно конформ-
конформных координат.
50 Часть 1
6.41. Доказать, что если гауссовы кривизны двух поверхнос-
поверхностей постоянны и равны, то эти поверхности локально изомет-
ричны.
6.42. Показать, что существуют аналитически диффеоморфные
аналитические поверхности, которые не изометричны, и тем не
менее, их гауссовы кривизны в соответствующих точках равны.
Другими словами, равенства гауссовых кривизн двух поверхностей
в соответствующих точках недостаточно даже для их локальной
изометрично сти.
6.43. Найти гладкую регулярную и связную поверхность враще-
вращения, переходящую в себя под действием центральной симметрии
относительно начала координат, гауссова кривизна которой посто-
постоянна и равна ЛГ = —1.
В задачах 6.44, 6.45, 6.47 через д# dx% dx* обозначается первая ква-
квадратичная форма поверхности, а через bijdxldx^ — вторая квадратич-
квадратичная форма. Кроме того, (д^) — матрица, обратная к матрице (</#). По
индексу, появляющемуся сверху и снизу подразумевается суммирование.
6.44. Что представляет собой поверхность, для которой gklbik =
= Ф
6.45. а) Показать, что коэффициенты третьей квадратичной
формы поверхности равны bikbjigkl.
б) Доказать, что g^jij = Н2 — 2К, где Н — средняя, К —
гауссова кривизна поверхности, a 7tj — коэффициенты третьей
квадратичной формы поверхности.
6.46. Что представляют собой поверхности, на которых первая
и третья квадратичная форма пропорциональны?
6.47. Доказать, что средняя кривизна поверхности определя-
определяется формулой Н = gi:>bij.
6.48. Пусть &i, ..., кт — нормальные кривизны поверхности
в направлениях, разбивающие плоскость на углы тг/га. Доказать,
что hi + ... + кт = тН/2.
6.49. Доказать, что если на гладкой регулярной поверхности
есть три различных семейства прямолинейных образующих, то
эта поверхность является плоскостью или областью на ней.
6.50. Доказать, что если на гладкой регулярной поверхности
есть два различных семейства прямолинейных образующих, то
эта поверхность является поверхностью 2-го порядка.
6.51. а) Показать, что омбилическая точка, в которой гауссова
кривизна равна нулю, обязательно является точкой уплощения.
б) Показать, что на поверхностях отрицательной кривизны нет
омбилических точек.
6.52. Показать, что среднюю кривизну Н поверхности можно
рассматривать как интегральное среднее всех нормальных кри-
§ 7. Многообразия 51
визн, т. е.
2тг
О
где к((р) — нормальная кривизна в направлении </?, отсчитываемом
от одного из главных направлений.
§ 7. Многообразия
7.1. Доказать, что n-мерная сфера 5П, задаваемая в Rn+1 урав-
уравнением Xq + х\ + ... + х\ = 1, является гладким многообразием.
а) Построить атлас карт.
б) Построить атлас из минимального числа карт.
в) Построить атлас из минимального числа карт при условий,
что каждая карта гомеоморфна диску.
г) Построить минимальный атлас из карт, гомеоморфных дис-
диску, такой, что всевозможные непустые пересечения любого числа
карт гомеоморфны диску.
7.2. Доказать, что 2-мерный тор Г2, заданный как поверхность
вращения вокруг оси Oz окружности, лежащей в плоскости Oxz и
не пересекающейся с осью Oz, является гладким многообразием.
а) Построить атлас карт.
б) Построить атлас из минимального числа карт.
в) Построить атлас из минимального числа карт при условии,
что каждая карта гомеоморфна диску.
г) Построить минимальный атлас из карт, гомеоморфных дис-
диску, такой, что всевозможные непустые пересечения любого числа
карт гомеоморфны диску.
7.3. Доказать, что n-мерное проективное пространство ЖРп
является гладким (и вещественно-аналитическим) многообразием.
7.4. Доказать, что n-мерное комплексное проективное про-
пространство СРп является гладким (и комплексно-аналитическим)
многообразием.
7.5. Доказать, что:
а) график непрерывной функции хп+\ — /(яъ ..., хп) явля-
является гладким многообразием;
б) график гладкой функции хп+\ = /(#i, ..., хп) является
гладким подмногообразием в JRn+1.
в) Привести пример непрерывной функции хп+\ = f(x\,..., хп),
график которой не является гладким подмногообразием в JRn+1.
7.6. Ввести структуру гладкого многообразия на множестве
всех прямых в IR2. Доказать, что полученное многообразие го-
меоморфно листу Мёбиуса.
7.7. Установить диффеоморфизм S2 и СР1.
52 Часть 1
7.8. Доказать, что формулы
хк
у = . =, & = 1,...,п,
у/е2 - (ж1J-... - (хпJ
хк - У к-1 п
задают взаимно обратные диффеоморфизмы Rn и шара радиуса е
с центром в начале координат пространства Шп.
7.9. Показать, что стереографическая проекция сферы на ка-
касательную плоскость из полюса, противоположного точке касания,
является диффеоморфизмом всюду, за исключением полюса про-
проекции.
7.10. Доказать, что у композиции гладких отображений ма-
матрица Якоби является произведением матриц Якоби сомножителей.
7.11. Доказать, что ранг матрицы Якоби не зависит от выбора
локальной системы координат.
7.12. Вычислить ранг матрицы Якоби отображения
/: R2->R2, f(x,y) = (x,0).
7.13. Доказать, что из гладкости функции в некоторой карте
следует ее гладкость в произвольной системе координат.
7.14. Пусть тор Г2 С Е3 образован вращением окружности во-
вокруг оси (стандартное вложение). Доказать, что координаты х, у,
z — гладкие функции на торе Г2.
7.15. Пусть тор Г2 С К3 стандартно вложен в R3, функция /:
Г2 —> S2 ставит в соответствие каждой точке р € Г2 вектор еди-
единичной длины, нормальный к тору Т2 в точке р. Записать отобра-
отображение / в координатах. Доказать, что / — гладкое отображение.
7.16. Доказать, что отображение /: S2 -» МР2, ставящее в со-
соответствие точке р на сфере S2 прямую, проходящую через начало
координат и точку р, является гладким отображением. Записать
отображение / в координатах.
7.17. Рассмотрим Е4 = С2 с координатами (г, w). Пусть поверх-
поверхность М2 является пересечением трехмерной сферы |z|2 + |w|2 = 1
и конуса \z\ = \w\.
а) Доказать, что М2 диффеоморфна двумерному тору Г2.
б) Доказать, что индуцированная на М2 метрика локально ев-
евклидова.
в) Доказать, что каждая из частей трехмерной сферы \z\2+ \w\2=
= 1, выделяемая неравенствами \z\ ^ |ги| или \z\ ^ |гу|, диффео-
диффеоморфна полноторию, т. е. S1 x D2.
§7. Многообразия 53
7.18. Рассмотрим в R5 двумерную поверхность, задаваемую
формулами:
Xi
X\ -
x2 -
У2
r— ,
_ У?
:>
hy2
xz
-2z2
где х2 + у2 + z2 = 1. Она называется поверхностью Веронезе.
Доказать, что поверхность Веронезе является гладким вложением
RP2 вЕ5.
7.19. Доказать, что группа 50B) диффеоморфна окружности.
Какому многообразию диффеоморфна группа 0B)?
7.20. Доказать, что группа 50C) гомеоморфна проективному
пространству RP3. Построить диффеоморфизм.
7.21. Доказать, что 50C) является гладким подмногообразием
в пространстве IR9 всех квадратных матриц третьего порядка.
7.22. Доказать, что {(*!,..., хп) е Сп:?>? = 0, ?>г|2 = 2}
есть множество единичных касательных векторов к сфере единич-
единичного радиуса.
7.23. Доказать, что множество единичных касательных векто-
векторов к S2 гомеоморфно 50C). Построить диффеоморфизм.
7.24. Рассмотрим в 50C) подмножество матриц А = {cnj) та-
таких, что
и +1 ai2 ахз
а22 + 1 #23
= 0.
Доказать, что это подмножество диффеоморфно RP2.
7.25. Доказать, что уравнение х\ + х\ + х2 = 0 задает в СР2
подмногобразие диффеоморфное 52.
7.26. Доказать, что группа 517B) диффеоморфна сфере 53.
7.27. Доказать, что группы GL(n, E), GL(n, С) являются глад-
гладкими многообразиями.
2
7.28. Группу 0(п) можно рассматривать как подмножество Rn .
Доказать, что 0(п) лежит в сфере 5п2~х радиуса у/п.
7.29. Рассмотрим «комплексную окружность» X = {(zi, z<i) €
€ С2 : z2 + z% = l}. Доказать, что пространство X гомеоморфно
цилиндру без границы.
54 Часть 1
7.30. Найти касательное пространство к группе 50C) в точке
Л ^ О
2 2
k О 0 1/
7.31. Найти координаты вектора (\/2, V% 2), касающегося
ооо, / 1 1 \
сферы яг + yz + zz = 1 в точке ( —-р, —р, О 1:
а) в сферических координатах;
б) в координатах стереографической проекции.
7.32. Найти координаты произвольного вектора, касающегося
большого круга единичной сферы, лежащего в плоскости
x + 2y-3z = 0:
а) в сферических координатах;
б) в координатах стереографической проекции.
7.33. Для проективной плоскости ШР2 в аффинных картах
найти координаты вектора скорости кривой r(<) = (cost: sint: t)
при t = 7г/4.
7.34. Доказать, что объединение двух координатных осей в R2
не является многообразием.
7.35. Являются ли гладкими многообразиями следующие кри-
кривые на плоскости: а) треугольник; б) два треугольника, имеющие
только одну общую точку — вершину?
7.36. Будут ли гладкими подмногообразиями граница квадрата
и восьмерка вК2?
7.37. а) Доказать, что при п ф т пространства Шп и Rm не
диффеоморфны.
б) Доказать, что гладкие многообразия разных размерностей
не диффеоморфны.
7.38. Привести пример гладкого гомеоморфизма, не являюще-
являющегося диффеоморфизмом.
7.39. Привести пример нехаусдорфова многообразия.
Две гладкие структуры (два гладких атласа) на многообразии назы-
называются согласованными, если каждая карта одного атласа согласована со
всеми картами другого атласа, и наоборот.
7.40. Привести пример многообразия с двумя несогласован-
несогласованными гладкими структурами.
7.41. Доказать, что две гладкие структуры на многообразии
согласованы тогда и только тогда, когда совпадают пространства
гладких функций для этих гладких структур.
§ 7. Многообразия 55
7.42. Рассмотрим на R1 следующие отображения (pki Ш1 ~> К1,
4>к{х) = х2к~~1, где к — целое положительное число. Доказать,
что каждое cpk задает карту на Ш1 с областью определения, совпа-
совпадающей со всей прямой К1. Доказать, что эти карты попарно не
согласованы. В частности, это означает, что атлас А&, задавае-
задаваемый картой (fk, не согласован с атласом Ai при I ф'к. Казалось
бы, отсюда следует, что на Е1 существует бесконечное множество
попарно неэквивалентных гладких структур. На самом деле это
не так: доказать, что все многообразия (R1, Ak) попарно диффео-
морфны.
7.43. Доказать, что любое гладкое многообразие имеет такой
атлас, что каждая карта гомеоморфна евклидовому пространству.
7.44. Показать, что на плоскости IR2 можно ввести такую струк-
структуру гладкого двумерного многобразия, что множество у = х2 не
будет гладким одномерным подмногообразием.
7.45. Доказать, что произведение гладких многообразий явля-
является гладким многообразим, причем проекции — гладкие регуляр-
регулярные отображения.
7.46. Доказать, что овеществление n-мерного комплексного
многообразия является гладким вещественным ориентируемым
многообразием размерности 2п.
7.47. Доказать, что край гладкого многообразия Мп является
гладким (п—1)-мерным многообразием. При этом в качестве глад-
гладкого атласа края многообразия можно взять ограничения карт
многобразия на его край. Показать, что край — ориентируемое
многообразие, независимо от того, ориентируемо ли Мп.
7.48. Показать, что окружность, двумерная сфера, тор — ори-
ориентируемые многообразия.
7.49. Проверить, ориентируемы ли следующие многообразия:
а) сфера 5П; б) тор Тп.
7.50. Доказать, что лист Мёбиуса, проективная плоскость,
бутылка Клейна — неориентируемые многообразия.
7.51. Построить такое погружение листа Мёбиуса в трехмерное
евклидово пространство, чтобы его граничная окружность была
стандартно вложена в двумерную евклидову плоскость.
7.52. Доказать, что двумерное многообразие тогда и только
тогда ориентируемо, когда оно не содержит в себе листа Мёбиуса.
7.53. Доказать, что лист Мёбиуса не гомеоморфен прямому про-
произведению отрезка на окружность.
7.54. Доказать, что декартово произведение двух многообразий
тогда и только тогда ориентируемо, когда ориентируемы оба со-
сомножителя.
7.55. Доказать теорему о существовании римановой метрики на
любом гладком многообразии: а) с помощью разбиения единицы;
б) с помощью теоремы Уитни.
56
Часть 1
7.56. Пусть г: N -» М — погружение, ад — риманова метрика
на М. Доказать, что i*g — риманова метрика на N. Почему это
неверно для произвольного гладкого отображения г?
7.57. а) Доказать, что два кольца, склеенные, как показано на
рис. 47, образуют поверхность, гомеоморфную тору с выброшен-
выброшенным маленьким диском.
Рис. 47
б) Доказать, что поверхность, полученная склейкой двух листов
Мёбиуса, как показано на рис. 48, гомеоморфна листу Мёбиуса с
дыркой или, что то же самое, проективной плоскости с двумя дыр-
дырками.
)«A* \D2
Рис. 48
в) Доказать, что поверхность, изображенная на рис. 49, гомео-
гомеоморфна тору с дыркой.
г) Доказать, что поверхность, изображенная на рис. 50, гомео-
гомеоморфна бутылке Клейна с дыркой.
д) Доказать, что поверхность, изображенная на рис. 51, гомео-
гомеоморфна бутылке Клейна с дыркой.
е) Чему гомеоморфна поверхность, изображенная на рис. 52?
ж) Чему гомеоморфна поверхность, изображенная на рис. 53?
§ 7. Многообразия
57
7.58. Доказать, что велосипедная камера с оторванным ниппе-
ниппелем (тор с дыркой) может быть вывернута наизнанку.
Рис. 49
Рис. 50
Рис. 51
Рис. 52
Рис. 53
7.59. Рассечь стандартный тор вращения в К3 двумя парал-
параллельными плоскостями так, чтобы часть тора, заключенная между
58
Часть 1
ними, была гомеоморфна поверхности с краем, показанной на
рис. 54. Доказать, что эта поверхность гомеоморфна тору с двумя
дырками.
»T2\(D2uD2)
Рис. 54
7.60. Доказать, что поверхность, изображенная на рис. 55, го-
гомеоморфна бутылке Клейна с двумя дырками.
= KL\(D2UD2)
Рис. 55
7.61. Доказать, что плоскость с приклеенной к ней ручкой го-
гомеоморфна двум кольцам, склеенным, как показано на рис. 56.
Рис. 56
§ 7. Многообразия
59
7.62. Доказать, что две из трех поверхностей, изображенных на
рис. 57, гомеоморфны проективной плоскости с тремя дырками, а
оставшаяся — бутылке Клейна с двумя дырками.
RP2\(D2UD2UD2)
KL\(D2UD2)
Рис. 57
7.63. Провести на торе такой разрез, чтобы получилась поверх-
поверхность, изображенная на рис. 58.
<lJ
Рис. 58
7.64. Рассмотрим две поверхности в R3 с нарисованными на
них кривыми, изображенные на рис. 59. Можно ли путем гладкой
деформации поверхности в R3 без самопересечений и разрывов
(изотопией) перевести одну поверхность в другую так, чтобы кри-
кривая, нарисованная на одной поверхности, переходила в кривую,
нарисованную на другой.
7.65. Рассмотрим две поверхности в R3 с нарисованными на
них парами кривых, изображенные на рис. 60. Можно ли пу-
путем гладкой деформации поверхности в R3 без самопересечений
60
Часть 1
а-Ъ
Рис. 59
и разрывов (изотопией) перевести одну поверхность в другую так,
чтобы кривые, нарисованные на одной поверхности, переходили в
кривые, нарисованные на другой.
а,Ь
а, а-Ь
Рис. 60
7.66. Рассмотрим «топологического человека», т.е. сферу с дву-
двумя ручками.
а) Может ли топологический человек «расцепить» руки путем
гладкой изотопии (см. рис. 61)?
Рис. 61
§ 7. Многообразия
61
б) Тот же вопрос при условии, что одна из рук зацеплена с
окружностью (на руку надеты часы), рис. 62.
Часы
Рис. 62
7.67. Выяснить, является ли отображение прямой в плоскость
с декартовыми координатами (#, у) вложением или погружением,
если:
v ,.v 2 + t2 2t + t2
7.68. Выяснить, является ли гладким подмногообразием в R3
с декартовыми координатами (#, у, z) множество, заданное урав-
уравнением:
a) x2(z-l)+y2z = 0;
6)z(x2 + y2)n = y2n.
7.69. Выяснить, является ли гладким подмногообразием в R2
с декартовыми координатами (#, у) множество, заданное уравне-
уравнением:
) у у
б) х6 + 18хгу - у3 = 0.
7.70. Рассмотрим на двумерной сфере S2 координаты стерео-
стереографической проекции (u, v). Является ли замыкание М гладким
подмногообразием в 52, если множество М задается уравненим:
а) у2 - хъ + 2х2 - х = 0;
б) у3 - хг + у - 2х = 0;
в) (х2-у2J-2х = 0;
22
)
д)
62 Часть 1
§ 8. Тензоры
8.1. Определить валентность следующих тензоров:
а)Тг- да*9
d2f
б) T{j = . . в точках, где градиент функции / равен нулю;
¦; охг охэ
в) Tj — компоненты матрицы линейного оператора векторного
пространства;
г) Tij — компоненты матрицы билинейной формы на вектор-
векторном пространстве.
8.2. Пусть е
i _ Г 0, если г ф j,
•? \ 1, если г = j.
Показать, что Щ} образует тензор валентности A, 1). Также по-
показать, что набор чисел ^, заданный в каждой системе координат
формулой
не является тензором типа @, 2).
8.3. Пусть {?г:>} — тензор валентности B, 0). Показать, что
числа rjij, удовлетворяющие условию C^Wjk = <%> образуют тензор
валентности @, 2).
8.4. Пусть матрица (gij{x)) — симметрическая невырожденная
положительно определенная в некоторой системе координат х =
= (ж1, ..., хп). Доказать, что все эти ее свойства сохраняются
при любой регулярной замене координат.
8.5. Привести пример, показывающий, что операция переста-
перестановки верхнего и нижнего индексов не является тензорной.
8.6. Показать, что операция, которая тензору 21*1 "'jp ставит в
соответствие набор чисел 5j-j."jp x по формуле
qil---lp О грЧ'-Лр
jl3+l ~" gjl 32J
не является тензорной.
8.7. Пусть V™ — пространство всех тензоров типа (т, п). По-
Показать, что если /: V™ -> Vq — линейное отображение тензорных
пространств, то компоненты отображения образуют тензор. Опре-
Определить его валентность.
8.8. Определить размерность тензорного пространства V^71.
§8. Тензоры 63
8.9. Показать, что любой тензор валентности B, 0) однозначно
разлагается в сумму симметрического и кососимметрического сла-
слагаемых. Привести пример тензора валентности C, 0), для кото-
которого это не верно.
8.10. Доказать, что операторы альтернирования и симметриро-
симметрирования являются проекторами в пространстве тензоров. Доказать,
что если п > 2, то сумма этих операторов не равна 1. Привести
пример тензора (при п > 2), лежащего в ядрах операторов альтер-
альтернирования и симметрирования.
8.11. Доказать, что операция перестановки индексов коммути-
коммутирует с операциями альтернирования и симметрирования.
8.12. Доказать, что композиция операций альтернирования и
симметрирования (в любом порядке) дает нулевой тензор для лю-
любого тензора типа @, к), где к > 1.
8.13. Пусть размерность пространства V равна п. Определить
размерность пространства AkV кососимметрических тензоров.
8.14. Пусть размерность пространства V равна п. Определить
размерность пространства SkV симметрических тензоров.
8.15. Описать все инвариантные тензоры рангов 0, 1, 2, 3, 4.
Здесь тензор называется инвариантным, если его компоненты не
меняются ни при каких заменах координат.
8.16. Показать, что смешанное и векторное произведения в R3
задаются тензорами типа @,3) и A,2) соответственно. Выписать
их компоненты в произвольном базисе. Показать, что компоненты
этих тензоров связаны операцией опускания и поднимания ин-
индексов.
8.17. Выразить через коэффициенты характеристического мно-
многочлена оператора (с*) величины detc, c\, с?{сг^ с^с^сгк и т.д.
8.18. Представить определитель линейного оператора как ре-
результат выполнения последовательности элементарных тензорных
операций.
8.19. Пусть дан набор величин Sll"lp. Доказать, что если при
некотором фиксированном q набор величин
S*1"'^...^ q<p,
является тензором при любом выборе тензора Т^...^, то и Sn'lp
также тензор.
8.20. Если V{j — тензор и в некоторой системе координат имеет
место уравнение avij + bvji = 0 (а и b — числа), то это уравнение
справедливо в любой другой системе координат. Кроме того, если
Уц ф 0, то или а = Ь, или а = —Ь.
8.21. Пусть gij — метрический тензор. Доказать, что если тен-
тензоры gijPl и QijQ3k симметричны, то после опускания верхнего
индекса тензор PQ + QP симметричен, a PQ — QP антисимме-
антисимметричен.
64 Часть 1
8.22. Пусть / — гладкая функция на римановом многообра-
многообразии М с метрикой gij. Доказать, что векторное поле v = grad/,
компоненты которого задаются равенством
перпендикулярно поверхностям уровня функции /.
8.23. Пусть Alj — тензорное поле типа A, 1) на многообра-
многообразии М. Доказать, что формула
iV(X, Y) = А2[Х, Y] - А[АХ, Y] - А[Х, AY] + [AX, AY],
где X, Y — векторные поля на М, определяет тензорное поле Щк
типа A, 2).
Если дан оператор А: V -> V, то определены операторы
Л®* А : A®kV -> Л®*,
S®kA : S®kV -
8.24. Найти trAqA через коэффициенты характеристического
многочлена А в n-мерном пространстве V.
8.25. Выразить через след и определитель оператора А вели-
величины tr A ® A, tr A®k, det A ® А.
8.26. Доказать, что для ^ 6 ЛР(У), ш € A1(Vr) равенство ^ Л
Л и = 0 выполняется тогда и только тогда, когда ? = о> Л г) для
некоторого 77 € Ap~l(V).
8.27. Доказать, что если тензор Т^ симметричен по первым
двум индексам и кососимметричен по второму и третьему, то он
равен нулю.
8.28. Доказать, что если а^ — симметрический, W — косо-
симметрический тензоры, то aijW = 0.
В следующих задачах векторы е» образуют базис пространства V, а
ег — дуальный базис пространства V*, т.е. el(ej) = 6*.
8.29. Найти значение тензора б2 ® е1 + (ei + Зез) ® е2 на паре
е1 + е2 + е3, е\ + 5е2 + 4е3.
8.30. Найти значение тензора
(е1 ® е2 + е2 ® е3 + е2 ® е2) ® (е1 ® е1 ® (е1 - е3)) -
- (е1 ® е1 ® (е1 - е3)) ® (е1 ® е2 + е2 ® е3 + е2 ® е2)
на наборе ei, ei + e2, в2 + ез
§8. Тензоры
65
8.31. Все координаты тензора Т типа B, 3) в базисе (ei, е2,
равны 1. Найти координату Т^з этого тензора в базисе
/1 2 3>
(ei, е2, е3) = (еь е2, е3) 0 1 2
\0 0
8.32. Найти координаты:
а) Т2\ тензора е\ ® е1 ® е2 + е2 ® е1 ® е2 в базисе
(ei, e2) = (
б) Т312 тензора ез ® e\ ® e2
e2)
B
е1 +
е3 ® е3 в базисе
/1 0
(ei, e2, e3) = (eb e2, e3) 2 1
\3 2
8.33. Найти координаты тензоров:
а) (ei + e2) ® (ei — e2);
б) (ei + 2e2) <g) (ei + e2) — (ei + e2) <g) (ei + 2e2).
8.34. Найти свертку тензоров:
а) (ei + 3e2 - e3) ® (e1 - 2e3 + 3e4) - (ei + e3) ® (e1 - 3e3 + e4);
б) ei ® (e1 + e2 + e3 + 3e4) + e2 ® (e1 + 2e2 + 3e3 + 4e4) + 2e3 ®
®(e1~e2~e4).
8.35. Применить линейный оператор, заданный тензором ез ®
® е1, к вектору е\ + е2 + ез + е4.
8.36. Тензор (ei + е2) ® Bе1 — е3) задает линейный оператор А.
Какой тензор задает оператор А2?
8.37. Скалярное произведение задано матрицей
/2 1 0 0\
110 0
0 0 11
\0 0 1 2/
Поднять и опустить индекс у тензоров:
aj ез Qy e + е4 ® е ;
б) (ез + е±) ® (е1 + е2) - ез ® (е1 + е3).
66 Часть 1
§ 9. Векторные поля
9.1. Доказать эквивалентность трех определений касательного
вектора в точке Р к многообразию:
а) тензор валентности A, 0);
б) дифференцирование гладких функций в точке Р;
в) класс соприкасающихся в точке Р кривых.
9.2. Найти производную функции / в точке Р по направлению
вектора ?:
а) / = y/x2 + y2 + z2; Р = A, 1, 1), ? = B, 1, 0);
б) / = х2у + xz2 - 2; Р = A, 1, -1), ? = A, -2, 4);
в) f = xey + ye*-z2; Р = C, 0, 2), ? = A,1,1);
У х
9.3. Найти производную функции / = 1/г, г = у/х2 + у2 + z2,
по направлению ее градиента.
9.4. Найти производную функции / = yzex по направлению ее
градиента.
9.5. Пусть V — векторный дифференциальный оператор в
которого равны V = ^-, -, -J.
зать, что:
a)gradF = VF; б) divX = (V, X); B)rotX = VxX.
9.6. Доказать формулу
div {иХ) = и • div X + (X, grad г/),
где X — векторное поле, аи — функция в R3.
9.7. Доказать формулу
rot (tiX) = и • rot X — X х grad и.
9.8. Доказать, что вектор X = w grad v ортогонален к rotX.
9.9. Показать, что:
а) div (rot X) = 0;
д2 д2 д2
б) rotrotX = graddivX - ДХ, где Д = 77-7 + тгъ + "ТТ-
ox1 ay1 oz2
9.10. Пусть X = (ж, у, z). Показать, что:
a)divX = 3; 6)rotX = 0; в)
компоненты
г) rot (w)=0; Ij^f jlj
Найти такую функцию <р, что X = grad tp.
9.11. Показать, что коммутатор векторных полей, рассматри-
рассматриваемых как операторы дифференцирования гладких функций,
является векторным полем.
§ 9. Векторные поля 67
9.12. Рассмотрим в Шп векторное поле Уд, которое в точке
х € Шп принимает значение Ах, где А — некоторая квадратная
матрица порядка п. Такое векторное поле называется линейным.
Доказать, что [Уд, VB] = ~V[a,b]- Здесь [А, В] = АВ - ВА —
коммутатор матриц.
9.13. Пусть М — многообразие и N — его подмногообразие.
Доказать, что для любых векторных полей X и Y на М выпол-
выполняется равенство [X, Y]|^= [Х|#, Y|#]. Здесь X|;v означает век-
векторное поле X, ограниченное на подмногообразие N.
9.14. Вычислить коммутатор двух векторных полей на 53
(х2 + у2 + z2 + w2 = 1), одно из которых в точке (ж, у, z, w) € 53
равно (у, -ж, w, -z), а другое — (z, w, -я, -у).
9.15. Пусть (pt — однопараметрическая группа диффеоморфиз-
диффеоморфизмов, соответствующая векторному полю ?. Показать, что
К, Ч] = !(?*A)-¦?)•
9.16. Пусть ?, г} — векторные поля, /, д — гладкие функции.
Доказать формулу
[Я, 9v) = fg[Z, v] - <m(f)t + Mg)v-
9.17. Пусть ?, г) — векторные поля, (pt, i\)t — соответствующие
им однопараметрические группы преобразований. Показать, что
если [?, г;] = 0, то преобразования (pt коммутируют с преобразо-
преобразованиями Tpf
9.18. Построить интегральные траектории следующих вектор-
векторных полей на плоскости:
х t д , д *ч > д д
9.19. Пусть ? — постоянное векторное поле в угловых коор-
координатах двумерного тора Г2. Выяснить, при каких условиях на
координаты поля ? интегральные траектории будут замкнутыми
кривыми.
9.20. Обобщить предыдущую задачу на случай тора Гп.
А именно, пусть ? = (?*, ..., ?п) — постоянное векторное поле в
угловых координатах на торе Гп. Доказать, что замыкание любой
траектории гомеоморфно тору Тк, где к — число линейно незави-
независимых чисел ?*, ..., ?п над полем рациональных чисел.
68 Часть 1
9.21. Пусть векторное поле Y фиксировано. Можно ли задать
такое тензорное поле А типа A, 1) (тензорное поле операторов),
чтобы выполнялось равенство А(Х) = [Y, X] для всех векторных
полей X?
§ 10. Связности и параллельный перенос
10.1. Доказать следующие утверждения.
а) Если Г^ и 7§ — коэффициенты некоторых связностей, то
а?Г^-+/?7у также являются коэффициентами некоторой связности.
Здесь а и C — гладкие функции, причем а + C = 1.
б) Если связности с коэффициентами Г^- и 7у имеют оди-
одинаковые геодезические, то те же геодезические имеет связность
аГу + /?7Jj-; здесь а и /3 — гладкие функции, а + /3 = 1.
в) Доказать, что разности коэффициентов Г^- — Г^ двух связ-
связностей V и V образуют тензор типа A, 2) и что любой тензор типа
A,2) можно представить в таком виде. Доказать, что если к коэф-
коэффициентам связности прибавить тензор типа A, 2), то получатся
коэффициенты связности.
10.2. Доказать, что тензорное поле <$!• символов Кронекера па-
параллельно вдоль любой кривой для любой связности.
10.3. Показать, что ковариантная производная тензорного поля
вдоль кривой зависит от значения коэффициентов связности и
поля только на этой кривой. Иными словами, если тензорное поле
задано только в точках кривой, то, тем не менее, можно вычислить
ковариантную производную этого тензорного поля вдоль вектора
скорости кривой.
10.4. Доказать, что при одновременном параллельном перене-
перенесении нескольких тензоров вдоль данной кривой параллельно пе-
переносятся и тензоры, полученные из исходных операциями тен-
тензорной алгебры.
10.5. Пусть /: М —> М1 — изометрия римановых многообра-
многообразий, х1 = /(ж), х Е М, х1 Е М'. Снабдим М и М' соответству-
соответствующими римановыми связностями. Доказать, что дифференциал
df: ТМ -» ТМ1 перестановочен с параллельными переносами г
и т' на М и М' соответственно.
10.6. Снабдим раманово многообразие соответствующей симме-
симметричной римановой связностью. Доказать, что тогда операция ко-
вариантного дифференцирования коммутирует с операциями под-
поднятия и опускания индексов.
10.7. Дано векторное поле, векторы которого имеют одну и ту
же длину. Пусть многообразие снабжено симметричной римановой
связностью. Доказать, что ковариантная производная этого век-
вектор ного поля в произвольном направлении ортогональна векторам
поля.
§ 10. Связности и параллельный перенос 69
10.8. Пусть N — гладкое подмногообразие в М, j — гладкая
кривая на iV, ? — векторное поле вдоль кривой 7? касательное
к N. Доказать формулу
где V, V — симметрические римановы связности на многообра-
многообразиях М и N соответственно (на N рассматривается индуциро-
индуцированная метрика), рг — ортогональная проекция на касательное
пространство к N.
10.9. Показать, что если два подмногообразия:
а) евклидова пространства;
б) произвольного риманова многообразия,
соприкасаются вдоль некоторой кривой 7? т0 результаты парал-
параллельного перенесения вектора вдоль этой кривой на одном под-
подмногообразии и вдоль этой же кривой на другом подмногообразии
совпадают (см. рис. 63).
Рис. 63
10.10. Пусть дана поверхность с метрикой gij. Положим по
определению V</? = g^^UpVjip, V(y?, ф) = g^VitpVjif). Дока-
зать,что угол 0 между кривыми (р = const и ф = const на поверх-
поверхности определяется равенством
10.11. Пусть дано многообразие М, снабженное связностью V,
и его подмногообразие N. Доказать эквивалентность следующих
условий:
а) в результате перенесения по кривой, расположенной в iV,
касательного к N вектора, получается вектор, касающийся N;
б) для любых векторных полей X и Y, касающихся iV, V
тоже касается N.
70 Часть 1
10.12. Вычислить символы Кристоффеля евклидовой метрики
плоскости в полярных координатах.
10.13. Вычислить символы Кристоффеля метрики
ds2 = \(u, v)(du2+dv2).
10.14. Вычислить явно символы Кристоффеля на сфере, если
метрика задана в виде:
10.15. Вычислить явно символы Кристоффеля на плоскости
Лобачевского, если метрика имеет вид:
у2 A-х2-у2J
_ 4(rfr» + r»V)
*>dS - A-Г2J •
10.16. Вычислить явно символы Кристоффеля в сферической
системе координат в М3.
10.17. Вычислить символы Кристоффеля на поверхности вра-
вращения в К3, заданной в виде
г(щу) =(f(u)cosv, /(u)sinv, g(u)).
10.18. Вычислить символы Кристоффеля псевдосферы Бельт-
рами, заданной в виде
г(щ v) = (asinucosv, asinusinv, a flntg— + cosuJJ .
10.19. Найти символы Кристоффеля метрики
ds2 = du2 +sh2udv2.
10.20. Вычислить символы Кристоффеля на катеноиде
(х(и, г;), у (и, г;), z(u, v)) = fach — cos г;, ach — sin г;, и) .
10.21. Вычислить символы Кристоффеля на геликоиде
(х(и, г;), у(и, г;), z(u, г;)) = (ucosv, usinv, hv).
10.22. Вычислить, на какой угол повернется касательный век-
вектор на прямом круговом цилиндре в R3 в результате параллель-
параллельного перенесения вдоль замкнутой кривой. Зависит ли результат
от вида кривой?
§ 10. Связности и параллельный перенос
71
10.23. Вычислить, на какой угол повернется касательный век-
вектор на прямом круговом конусе в R3 в результате параллельного
перенесения вдоль замкнутой кривой. Установить зависимость от
вида кривой.
10.24. Выписать в явном виде и решить уравнения параллель-
параллельного переноса на сфере с метрикой ds2 = dO2 + sin2 6d(p2:
а) вдоль кривой 0 = во = const, т. е. вдоль параллели;
б) вдоль кривой (р = (ро = const, т. е. вдоль меридиана.
10.25. Выяснить, на какой угол повернется касательный вектор
на сфере в результате перенесения вдоль параллели.
10.26. Рассмотрим сферу S2 со стандартной метрикой. Пусть
вектор X касается S2 в точке Р, а вектор Y — в точке Q, причем
||Х|| = ||Y||. Доказать, что существует такая гладкая регулярная
кривая на сфере S2 с концами в точках Р
и Q, что в результате параллельного пере-
переноса вектора X вдоль нее получается век-
вектор Y.
10.27. На поверхности вращения перене-
перенести касательный вектор вдоль параллели.
Найти угол между начальным и конечным
положением вектора.
10.28. а) Доказать, что при параллельном
перенесении вдоль меридиана поверхности
вращения вектора, касающегося параллели,
результат перенесения будет параллелен ис-
исходному вектору в объемлющем евклидовом
пространстве (см. рис. 64).
б) Перенести по поверхности вращения
вектор, касательный к меридиану, вдоль это-
этого меридиана.
10.29. Перенести параллельно по прямо-
прямому геликоиду
(ucosv,
, hv)
Рис. 64
вектор, касательный к поверхности. Перенос осуществить вдоль
витка винтовой линии
(a cos v, а sin г;, Ли), а = const, 0 ^ v ^ 2тт.
Найти угол (в пространстве) между исходным и конечным век-
вектором.
10.30. Выписать в явном виде и решить уравнения параллель-
параллельного переноса на плоскости Лобачевского в модели на верхней по-
полуплоскости:
а) вдоль кривой х — хо = const;
б) вдоль кривой у = уо = const.
72 Часть 1
10.31. Вычислить, на какой угол повернется касательный век-
вектор к сфере в результате параллельного перенесения вдоль замкну-
замкнутой кривой 7? если:
а) 7 — параллель;
б) 7 составлена из двух меридианов и части экватора, заклю-
заключенного между ними;
в) 7 составлена из двух меридианов и части параллели, за-
заключенной между ними.
10.32. Найти ковариантные производные вдоль координатных
линий г = const и <р = const следующих векторных полей, задан-
заданных в полярной системе координат:
р
= [cosy?, --
v2 = @, 1), v3 = (г, 1).
Все вычисления выполнить в полярной системе координат.
10.33. На плоскости заданы полярные координаты (г, ф). Пе-
Перенести параллельно вектор vo = (v\, v%) вдоль кривой г = 2 из
точки <р = 0 в точку <р = тг/2. Все вычисления выполнить в по-
полярной системе координат.
10.34. а) Написать и решить уравнения параллельного пере-
переноса вектора по кривой в = const для метрики ds2 = d02+sh2 0d<p2.
б) Вычислить угол, на который повернется вектор при одно-
однократном перенесении вдоль кривой в = const для метрики ds2 =
= d92 + sh29d<p2.
10.35. Параллельно перенести вектор вдоль пространственной
кривой по поверхности, составленной из:
а) касательных к этой кривой;
б) нормалей к этой кривой;
в) бинормалей к этой кривой.
10.36. Найти формулу, устанавливающую зависимость между
углом поворота а касательного вектора к сфере единичного радиуса
в результате параллельного перенесения вдоль замкнутой кривой
7 и S — площадью области, ограниченной кривой 7-
10.37. Найти формулу, устанавливающую зависимость между
углом поворота а касательного вектора к плоскости Лобачевского
в результате параллельного перенесения вдоль замкнутой кривой
7 и S — площадью области, ограниченной кривой 7-
10.38. Найти все связности на окружности. Установить фор-
формулу для параллельного переноса для произвольной связности на
окружности.
10.39. На плоскости с координатами и1, и2 найти аффинную
связность, относительно которой векторные поля ? = (еи , 1), г/ =
= @, еи ) ковариантно постоянны.
10.40. Оператором Лапласа-Бельтрами на римановом многооб-
многообразии называется оператор Д/ = VlVi/, где V — симметрическая
§ 10. Связности и параллельный перенос 73
риманова связность, V1 = <?г<7 Vj. Найти явную формулу для этого
оператора на поверхности вращения.
10.41. Рассмотрим риманово многообразие с соответствующей
симметричной римановой связностью. Определим градиент функ-
функции / как векторное поле grad/ = #^Vj/, а дивергенцию divv
векторного поля — как свертку ковариантной производной вектор-
векторного поля v (она имеет валентность A, 1)): divv = Viv1.
а) Доказать, что в евклидовом пространстве так определенные
операции градиента и дивергенции совпадают с обычными.
б) Доказать, что на римановом многообразии оператор Лапласа
divgrad/ совпадает с оператором Лапласа-Бельтрами Д/.
10.42. Пусть на многообразии, снабженном аффинной связно-
связностью без кручения, заданы два ковариантно постоянных вектор-
векторных поля. Доказать, что они коммутируют.
10.43. Доказать следующие равенства (здесь д = det ||<ftj||):
б>
г) если A*> = -A'\ то V^' = -L A
jdx1
10.44. На плоскости даны два линейно независимых вектор-
векторных поля с нулевым коммутатором. Доказать, что существует
единственная связность, относительно которой эти два векторных
поля ковариантно постоянны. Выяснить, является ли она симме-
симметрической. Привести контрпример для случая некоммутирующих
векторных полей.
10.45. Найти в!2с координатами (ж, у) область, в которой
линейно независимы следующие векторные поля:
а) и = (-у, ж), v = (l, 0);
б) u = (cos ж, sinx), v = (—sinx, cos ж);
ч (х У\ ( У х\ ГТ~,—9
в) и = ^-, -J, v = у—, -J, где г = yjx1 + у2.
Найти коэффициенты связности, относительно которой эти поля
ковариантно постоянны.
10.46. Рассмотрим пространство IR3 с координатами ж1, ж2, ж3.
Найти область в Е3, в которой линейно независимы векторные
поля
и = A,0,0), v = @,1,0), w = @,s\l).
Найти коэффициенты связности, относительно которой эти поля
ковариантно постоянны.
74 Часть 1
§ 11. Геодезические на двумерных поверхностях
11.1. Доказать, что геодезическая линия на двумерной поверх-
поверхности в евклидовом пространстве Е3 вполне характеризуется од-
одним из следующих свойств:
а) в каждой точке линии, где ее кривизна отлична от нуля,
нормаль к поверхности является главной нормалью кривой;
б) в каждой точке линии ее геодезическая кривизна равна
нулю;
в) в каждой точке линии ее кривизна равна абсолютной ве-
величине нормальной кривизны в направлении касательной к этой
кривой.
11.2. Пусть поверхность в Е3 такова, что на ней лежит некото-
некоторая прямая линия. Доказать, что эта прямая является геодезиче-
геодезической линией на поверхности.
11.3. Две поверхности в Е3 касаются по линии I. Доказать,
что если I — геодезическая линия на одной поверхности, то она
должна быть геодезической и на другой поверхности.
11.4. Пусть две поверхности пересекаются трансверсально по
линии /, причем линия / является геодезической на каждой из
этих поверхностей. Доказать, что эта линия — прямая.
11.5. На поверхности в Е3 находится материальная точка, ко-
которая может свободно двигаться по поверхности. Точка приведена
в движение. Доказать, что точка будет двигаться по геодезической
линии поверхности.
11.6. На поверхности в Е3 лежит невесомая нить, причем эта
нить не может оторваться от поверхности, но может по ней сво-
свободно скользить. Доказать, что если натянуть нить между двумя
точками поверхности, то нить пройдет по геодезической. (На нить
действуют только силы натяжения и реакции поверхности.)
11.7. Доказать, что геодезическая кривизна линии и = u{s),
v = v(s) на поверхности г = г (и, v), лежащей в Е3, может быть
вычислена по формуле
m, —r
где m — единичный вектор нормали к поверхности.
11.8. а) Доказать, что дифференциальное уравнение геодезиче-
геодезических линий и = u(s), v = v(s) поверхности г = г(гх, г?), лежащей
где m —
в Е3, можно представить в виде (т, —г, —гт) = О,
\ as dsL J
вектор нормали поверхности.
б) Вывести отсюда, что через каждую точку в каждом напра-
направлении на поверхности проходит ровно одна геодезическая.
§ 11. Геодезические на двумерных поверхностях
75
11.9. Доказать, что при параллельном перенесении вектора
вдоль геодезической на римановом многообразии угол между ним
и касательным вектором геодезической остается постоянным.
11.10. Доказать, что геодезическими линиями плоскости явля-
являются прямые и только они.
11.11. Найти условия, при которых координатные линии будут
геодезическими на двумерной поверхности М с координатами я1,
х2 и символами Кристоффеля Гу.
11.12. Показать, что для любой связности V существует связ-
связность V без кручения с теми же геодезическими.
11.13. Доказать, что меридианы поверхности вращения явля-
являются геодезическими линиями.
11.14. Доказать, что параллель поверхности вращения будет
геодезической тогда и только тогда, когда касательная к мериди-
меридиану в ее точках параллельна оси вращения.
11.15. Найти геодезические линии двумерной сферы.
11.16. Найти геодезические линии цилиндрической поверхно-
поверхности в Е3 (см. задачу 5.2а).
11.17. Доказать, что через каждую точку цилиндра (необяза-
(необязательно прямого кругового) проходит только одна замкнутая геоде-
геодезическая.
11.18. Найти геодезические линии круглого конуса х2+у2 = z2.
11.19. Найти геодезические линии произвольной конической
поверхности в К3 (см. задачу 5.26).
\
Рис. 65. Геодезическая на конусе
11.20. Доказать, что на бесконечном конусе (без границы) с
углом развертки при вершине a < тг единственной самопересека-
самопересекающейся геодезической, исходящей из данной точки образующей,
тг — a
будет та, которая пересекает эту образующую под углом —-— (см.
76 Часть 1
рис. 65). Найти угол, под которым эта геодезическая пересекает
саму себя. Если же а ^ тг, то на таком конусе нет самопересекаю-
самопересекающихся геодезических.
11.21. Показать, что геодезические линии поверхности с первой
квадратичной формой
ds2 = v(du2 + dv2)
изображаются параболами на плоскости с декартовыми координа-
координатами и, v.
11.22. Найти геодезические линии геликоида
г(гл, г;) = (ucosv, usinv, hv).
11.23. Показать, что на поверхности с первой квадратичной
формой
(поверхность Лиувилля) геодезические определяются уравнением
du , dv _
= = и.
где а — произвольная постоянная.
11.24. а) Привести метрику поверхности вращения
(<р(и) cosv, (p(u)sinv, ф(и))
к виду, указанному в задаче 11.23.
б) Найти геодезические на поверхности вращения.
11.25. Доказать, что на поверхности с метрикой
ds2 = (и2 + cost; + 2)(du2 + dv2)
линия v = тг является геодезической.
11.26. Показать, что на поверхности вращения
г(?, (р) = (x(t)cos(p, x(t)sin(p, z(t))
можно выбрать параметр r(t) вдоль меридиана так, чтобы первая
квадратичная форма поверхности имела вид ds2 = p(r)(d(p2+dr2).
Показать, что р(т) — это расстояние от точки (г, ср) на поверхно-
поверхности до оси вращения. Написать уравнение геодезической линии
(т(з),(р(з)).
11.27. Теорема Клер о. Доказать, что радиус геодезиче-
геодезической кривизны параллели поверхности вращения (величина обрат-
§11. Геодезические на двумерных поверхностях
77
ная геодезической кривизне) равен отрезку касательной к мери-
меридиану, заключенному между точкой касания и осью поверхности
(см. рис. 66).
Рис. 66
Рис. 67
11.28. (Другая формулировка теоремы Клеро.) Доказать, что
на поверхности вращения вдоль каждой геодезической линии про-
произведение радиуса параллели на синус угла между геодезической
линией и меридианом постоянно (см. рис. 67).
11.29. Доказать, что если геодезическая на поверхности вра-
вращения пересекает все встречающиеся параллели под постоянным
углом, то она является или меридианом, или параллелью, или же
поверхность является прямым круговым цилиндром.
11.30. Доказать, что все геодезические на поверхности вра-
вращения
16a2(x2+y2) = z2Ba2-z2)
замкнуты. В цилиндрических координатах (г, </?, z) эту поверх-
поверхность можно параметризовать так:
a ( . u u\
г = - cos u, z = a (sin — — cos — 1 , (p = v.
11.31. Привести пример поверхности вращения, на которой су-
существует замкнутая геодезическая, отличная от меридиана и па-
параллели. Поверхность вращения должна быть отлична от сферы и
поверхности из предыдущей задачи.
78 Часть 1
Заметим, что в действительности пример поверхности с зам-
замкнутой геодезической, отличной от параллели и меридиана не
является чем-то исключительным: многие поверхности вращения
обладают этим свойством.
11.32. Привести пример поверхности вращения, на которой нет
замкнутых геодезических.
11.33. Является ли видимый контур эллипсоида геодезической
на нем? Здесь считается, что «наблюдатель» находится в беско-
бесконечности, т. е. все лучи зрения параллельны между собой.
11.34. Рассмотрим на римановом многообразии пучок геодези-
геодезических, исходящих из некоторой фиксированной точки О, т. е. в
каждом направлении в точке О выпустим геодезическую. Отметим
на каждой из них точку, удаленную от точки О вдоль этой геоде-
геодезической на одно и то же расстояние R. Получившееся множество
точек называется геодезической сферой радиуса R. Доказать, что
геодезическая сфера ортогональна ко всем геодезическим радиу-
радиусам, т. е. ко всем геодезическим указанного пучка.
11.35. Найти геодезическую кривизну винтовой линии
r(i) = (acost, asint, hv):
а) на геликоиде (х(и, г;),у(п, г;),г(п, г;)) = (ucosv,usinv,hv);
б) на цилиндре (#(и, г;), у(п, г;), z(u, v)) = (a cos г;, a sin г;, и).
11.36. Вычислить геодезическую кривизну линии и = shv,
О ^ v ^ г;о, на геликоиде
x = ucosv, y = usinv, z = v.
11.37. На поверхности с метрикой ds2 = du2 + ch2udv2 найти
геодезическую кривизну линии v = Inchn.
11.38. Доказать, что если линии однопараметрического семей-
семейства линий на поверхности таковы, что длины дуг ортогональ-
ортогональных траекторий между любыми двумя кривыми семейства равны
между собой, то ортогональные траектории являются геодезиче-
геодезическими.
11.39. Доказать, что кручение к геодезической линии, прохо-
проходящей в направлении вектора du-ru+dv-tv, находится по формуле
_ (LF - ME) du2 + (LG - NE) du dv + (MG - NF) dv2
K~ (EG- F2)(Edu2 + 2Fdudv + Gdv2)
11.40. Определить геодезическую кривизну параллелей и ме-
меридианов поверхности вращения
(/(u) cos г;, /(и) sin г;, и).
11.41. Найти геодезические кривизны координатных линий
поверхности с метрикой ds2 = Edu2 + Gdv2.
§11. Геодезические на двумерных поверхностях 79
11.42. Пусть поверхность образована касательными к линии с
кривизной k(s). Отложим на касательных от точки касания в обе
стороны отрезки длины I. Определить геодезическую кривизну
линий, образованных концами этих отрезков на поверхности ка-
касательных (см. задачу 6.7).
11.43. Показать, что на любом компактном римановом мно-
многообразии любые две достаточно близкие точки можно соединить
геодезической, причем имеется единственная геодезическая наи-
наименьшей длины.
11.44. Доказать, что гладкая кривая, совпадающая со связной
компонентой множества неподвижных точек некоторой изометрии
риманова многообразия, является геодезической.
11.45. а) Описать геодезические тора Т2 в плоской метрике.
б) Доказать, что торы, полученные склеиванием из прямоуголь-
прямоугольника с вершинами {@,0), B,0), A,0), B,1)} и из параллелограм-
параллелограмма с вершинами {@,0), B,0), A,1), C,1)} не изометричны.
в) Рассмотрим параллелограммы единичной площади и с об-
общим основанием. Выяснить, в каком случае торы, полученные
склейкой из таких параллелограммов изометричны.
г) Описать все плоские метрики на торе Т2.
11.46. Показать, что геодезическими на открытом круге с ме-
метрикой Лобачевского (модель Пуанкаре) являются диаметры круга
и дуги окружностей, пересекающие границу круга под прямым
углом.
11.47. Показать, что геодезические на верхней полуплоскости
в метрике Лобачевского — это вертикальные полупрямые и дуги
окружностей, перпендикулярные абсолюту, т. е. оси абсцисс.
11.48. Найти римановы метрики вида
ds2 = e2X^v^\du2 + dv2 + dw\
у которых кривые v = const и w = const — геодезические (при
надлежащей параметризации этих кривых).
11.49. Привести пример:
а) метрики на евклидовой плоскости, не являющейся геодези-
геодезически полной;
б) метрики в открытом круге, являющейся геодезически
полной.
11.50. Пусть дана поверхность постоянной гауссовой кривизны.
Найти формулу, устанавливающую зависимость между углом по-
поворота а касательного вектора к поверхности в результате парал-
параллельного перенесения вдоль замкнутой кривой у и S — площадью
области, ограниченной кривой у.
11.51. а) Найти все замкнутые геодезические на бесконечном
цилиндре с замкнутой направляющей.
б) Для двух данных точек найти соединяющую их крат-
кратчайшую.
80 Часть 1
в) В каком случае любая дуга геодезической на цилиндре явля-
является кратчайшей между своими концевыми точками?
11.52. Исследовать поведение кратчайших на конической по-
поверхности в зависимости от значения полного угла при вершине
конуса. Существуют ли кратчайшие, проходящие через вершину
конуса?
11.53. Пусть замкнутая поверхность представляет собой прямой
круговой конус с круговым основанием. Эта поверхность имеет
особую линию — окружность, в которой склеены конус и его плос-
плоское основание. Описать кратчайшие, соединяющие две данные
точки, в зависимости от расположения этих точек: обе они распо-
расположены на боковой поверхности конуса, обе на основании, одна на
боковой поверхности, другая — на основании.
11.54. Описать кратчайшие на кубе и на тетраэдре, соединяю-
соединяющие две точки. Исследовать зависимость от расположения точек
на поверхности.
Рассмотрим точку Р на римановом многообразии М. Для вектора
V € ТрМ через 7v(?) обозначим геодезическую такую, что 7v@) = Ри
7v@) = v. Определим геодезическую экспоненту формулой ехрР (v) =
= 7v(l) для тех v ? ТрМ, для которых определена точка 7v(l)-
11.55. а) Доказать, что отображение ехрР задает диффеомор-
диффеоморфизм некоторой окрестности V нуля пространства ТрМ и некото-
некоторой окрестности U точки Р в М. Таким образом, ехрр определяет
некоторую систему координат в окрестности U С М, которая на-
называется нормальной.
б) Показать, что в нормальных координатах с центром в точке
Р матрица метрики является единичной, а символы Кристоффеля
в точке Р обращаются в 0.
в) Рассмотрим нормальные координаты на стандартной дву-
двумерной сфере. Как устроена максимальная область определения
нормальной системы координат?
§ 12. Тензор кривизны
12.1. Вычислить тензор кривизны одномерного многообразия с
произвольной метрикой.
12.2. Вычислить скалярную кривизну следующих римановых
многообразий:
а) сфера S2 радиуса R в Е3;
б) тор Т2, вложенный в Е3 как поверхность вращения (см.
задачу 6.1в);
в) тор Т2 вложенный в Е4 = C2(z, w), задаваемый уравнени-
уравнениями \z\2 + \w\2 = 1 и \z\ = \w\\
г) плоскость Лобачевского (см. задачи 3.2 и 3.3);
д) прямой круговой конус в Е3;
§ 12. Тензор кривизны 81
е) цилиндрическая поверхность в R3;
ж) сфера Sn радиуса R в En+1;
з) поверхность Бельтрами (см. задачу 6.4в).
12.3. Доказать, что риманова метрика двумерного многообра-
многообразия является локально евклидовой тогда и только тогда, когда ее
тензор кривизны тождественно равен нулю.
12.4. Вычислить тензор кривизны на сфере 52 в сферических
координатах.
12.5. Пусть ds1 = A(#, y)(dx2 + dy2). Выразить в явном виде
скалярную кривизну этой метрики через функцию А(ж, у) и ее про-
производные.
12.6. Пусть М — многообразие вЕп (п > 2). Пусть х € М,
а Р — двумерное подпространство ТХМ. Определим число а(Р)
формулой
а(Р) = (Я(еь е2)е2, ех),
где ei, в2 — ортонормальный базис плоскости Р.
Число <j(P) называется секционной кривизной поверхности М
в направлении двумерной плоскости Р, или, как еще говорят, в
двумерном направлении Р.
а) Доказать, что сг(Р) не зависит от выбора ортонормального
базиса Р.
б) Доказать, что если п = 2, то секционная кривизна ог(Р)
совпадает с гауссовой кривизной поверхности М2 в точке х.
в) Пусть Р — двумерное подпространство TXS. Доказать фор-
формулу
где R(V) — гауссова кривизна двумерной поверхности V, обра-
образованной геодезическими, касательные векторы которых лежат в
плоскости Р.
12.7. Пусть Sn — n-мерная сфера х\ + ... + а^+1 = г2 с инду-
индуцированной метрикой.
а) Показать, что тензор кривизны сферы Sn вычисляется по
формуле
Я(Х, Y)Z = 1«Y, Z)X - (X, Z)Y),
где X, Y, Z — векторы, касательные к сфере.
б) Показать, что секционная кривизна сферы Sn постоянна:
сг(Р) = -j для всех точек х.
в) Показать, что метрика
имеет постоянную секционную кривизну.
82 Часть 1
12.8. а) Найти символы Кристоффеля для поверхности с ме-
метрикой ds2 = du2 + G(u, v) dv2.
б) Найти гауссову кривизну поверхности с метрикой
ds2 = du2 + G(u, v)dv2.
12.9. Найти гауссову кривизну поверхности с метрикой
ds2 = du2 + 2 cos u>(u, v) du dv + dv2.
12.10. а) Доказать, что у двумерной поверхности тензор Риччи
пропорционален метрическому. Найти коэффициент пропорцио-
пропорциональности.
б) Доказать, что на трехмерном многообразии справедливо ра-
равенство
Rlmnk = 9lnRRR+R
Здесь R[m — тензор Риччи, R — скалярная кривизна.
12.11. Доказать равенства:
-2R9v) о, ^
б) для двумерного многообразия Ду — -Rg%j = 0.
12.12. Пусть V — каноническая связность в Е3 со стандартной
евклидовой метрикой. Рассмотрим новую операцию
Доказать, что это — связность. Найти ее тензоры кручения и
кривизны.
12.13. Пусть М — многообразие, снабженное связностью, а х —
некоторая фиксированная точка М. Пусть Q = {—l<u, v < 1} —
квадрат, X, Y, Z 6 ТХМ. Далее, пусть /: Q -> М — такое
гладкое отоображение, что /@, 0) = #, df(d/du) = X, df(d/dv) =
= Y. Для \t\ < 1 рассмотрим параллельный перенос г по пути
х -> /(i, 0) -> /(*, t) ~> /@, t) ~> х. Доказать, что
lim
12.14. Найти компоненту Дшг тензора кривизны следующих
метрик:
a) ds2 = du2 + и2 dv2; б) ds2 = du2 - и2 dv2;
в) ds2 = a2(de2 + cos2 dd(p2), a = const.
§12. Тензор кривизны 83
12.15. Риманово многообразие, в котором Rij = X(x)gij назы-
называется пространством Эйнштейна. Доказать, что:
а) для пространства Эйнштейна выполняется равенство \(х) =
= R(x)/n, где R — скалярная кривизна, an — размерность мно-
многообразия;
б) любое двумерное риманово многообразие является простран-
пространством Эйнштейна.
12.16. Доказать, что при п > 2 скалярная кривизна простран-
пространства Эйнштейна постоянна.
12.17. Тензор Эйнштейна на римановом многообразии опреде-
определяется формулой
Gij =Rij - —giy
Доказать, что V^Gf = 0, где G\ — gklGu.
12.18. Доказать, что связность на n-мерном многообразии, до-
допускающая п ковариантно постоянных линейно независимых в
каждой точке векторных полей, имеет нулевой тензор кривизны.
12.19. Пусть в каждой точке секционная кривизна риманова
многообразия размерности п > 2 постоянна, т. е. не зависит от
двумерного направления. Такие многообразия обычно называются
пространствами постоянной кривизны. Показать, что в простран-
пространстве постоянной кривизны секционная кривизна К связана со ска-
скалярной соотношением К = —; —.
п(п - 1)
12.20. Показать, что пространство постоянной кривизны явля-
является пространством Эйнштейна. С учетом задачи 12.16 получаем,
что в пространстве постоянной кривизны при п > 2 скалярная
кривизна постоянна, а секционная не зависит ни от точки, ни от
двумерного направления.
12.21. Доказать, что в пространстве постоянной кривизны лю-
любой симметричный невырожденный ковариантно постоянный тен-
тензор типа @,2) имеет вид aij = Xgij, A = const.
12.22. Доказать, что на четырехмерном многообразии с мет-
метрикой
ds2 = 2dul du4 + (u4J(du2J + 2du2 du*
тензор кривизны ковариантно постоянен, а тензор Риччи нулевой.
12.23. Доказать, что если тензор кривизны риманова много-
многообразия ковариантно постоянен и размерность многообразия боль-
больше 2, то пространство имеет постоянную кривизну.
12.24. Показать, что на двумерной поверхности в Е3 компо-
компоненты тензора кривизны представляются в виде
- 9ik9ji),
где К — гауссова кривизна.
84 Часть 1
12.25. Доказать, что символы Кристоффеля в некоторой си-
системе координат равны 0 тогда и только тогда, когда тензор кру-
кручения связности Sjfj и тензор кривизны R\jk тождественно равны
нулю.
§ 13. Дифференциальные формы и когомологии де Рама
В этом параграфе внешним произведением векторов vi, .,., \р G V,
dim V = n, называется тензор
vi Л ... Л vp =
где Sp — группа перестановок на р элементах, а (— l)a — знак переста-
перестановки сг.
При таком определении значение внешней формы е1 Л ... Л еп на
наборе векторов vi, ..., vn равно объему параллелепипеда, натянутого
на векторы vi, ..., vn. Здесь е1, ..., еп — базис сопряженного про-
пространства У*.
13.1. Доказать, что если векторы vi, ..., vp G V линейно за-
зависимы, то
T(vb ...,vp) = 0
для любой формы Т G Ap(V*).
13.2. Доказать, что если формы </?i, ..., (рр G V* линейно зави-
зависимы, то (pi Л ... Л (рр = 0.
13.3. а) Записать линейную форму ш = f(x2 + y2)(xdx + ydy)
в полярных координатах.
б) Записать форму и = у/х2 + у2 dx Л dy в полярных коорди-
координатах.
в) Записать форму ш = х dx + у dy + z dz в сферических коор-
координатах.
г) Записать форму
_ xdy Adz + ydz Adx + zdx Ady
Ш= (x2 +y2 + z2fl2
в сферических координатах.
д) Форму предыдущего пункта записать в цилиндрических
координатах.
е) Записать форму и = dxAdyAdz в сферических координатах.
13.4. Пусть отображение ср: R4 —» R4 задано формулами
У1=х1-х2х3х\ у2 = х2-х1х*х\
у3 = х3 - х1х2хА, у4 = хА - хгх2х3.
§ 13. Дифференциальные формы и когомологии де Рама 85
Вычислить форму (р*ш, если:
а) ш = у1 dy1 + у2 dy2 + у3 dy3 + у4 dy4;
б) ш = dy1 Л dy2 + dy3 Л dyA;
в) и = dy1 Л dy2 Л dy3 Л dy4.
13.5. Пусть отображение ц>\ R2\{0} -* R2\{0} задано формулой
(я, У)
Вычислить (p*cv, если:
а) ш = х dx + у dy;
б) ш = xdy — у d#;
в) о; = (ж2 — у2) dy — 2xydx.
13.6. Пусть отображение ц>\ Rn\{0} -» Rn\{0} задано формулой
ф)=щ-
где х = (ж1, ..., ж71). Для формы
о; =
1 Л ... Л dxfc Л ... Л dxn
найти (р*ш и доказать, что d((p*u;) = 0.
ж dy — у dx
13.7. Пусть ш = —^ ^—• Найти (р*ш, если отображение <^
# + у1
задается формулой:
а) (р: (я, у) н> (excosy, exsiny);
б) у?: (ж, у) н> (chycosa;, —shy sin ж);
в) у>: (ж, у)н> (ж2-у2, 2ху).
13.8. Пусть ^i, ..., ipn G V*; vi, ..., vn G V. Доказать, что
(у>1 Л ... Л y>n)(vi, ... , vn) = det ||??i(vj)||.
13.9. Доказать, что на ориентированном многообразии с рима-
новой метрикой, заданной в локальных координатах (ж1, ..., хп)
набором функций gij, выражение вида ^/det (д#) dx1 Л ... Л dxn
является дифференциальной формой, корректно определенной на
всем многообразии. Эта форма называется формой объема.
13.10. Показать, что операцию внешнего дифференцирования
дифференциальной формы можно представить как композицию
операции ковариантного градиента и альтернирования для про-
произвольной симметрической связности на многообразии.
86 Часть 1
13.11. Вычислить внешний дифференциал следующих диффе-
дифференциальных форм:
а) z2 dxAdy + (z2 + 2у) dx Л dz\
б) \Ъх dx + у2 dy + xyz dz;
в) (х + 2у3) (dz Л dx + - dy Л dx j;
г) (xdx + ydy)/(x2 + y2);
д) (ydx-xdy)/(x2+y2);
е) f(x2 + y2){xdx + ydy);
ж) fdg, где /ид — гладкие функции;
B)f(g(x\...,xn))dg(x\...,x").
13.12. Доказать формулу Картана
(<М(Х, Y) = X(w(Y)) - У(ЦХ)) - w([X, Y]),
где гу — одномерная дифференциальная форма; X, Y — вектор-
векторные поля. Как изменится формула, если определить внешнее про-
произведение формулой
vi Л ... Л vp = i J2 (~1)<7у^A) Л • • • л v^(p)?
13.13. Доказать следующие обобщения формулы из предыду-
предыдущей задачи (они также называются формулами Картана).
а) Если и — форма степени 2, то
da;(X, Y, Z) = Xw(Y, Z) - Yu;(X, Z) + Zw(X, Y) -
-o;([X, Y], Z) +u;([X, Z], Y) -o;([Y, Z], X).
б) Если и — форма степени р, то
г=1
^([Xi, х,], Xi 5с* х^-
Пусть cj — дифференциальная р-форма. Обозначим через г'х^, где
X — векторное поле, дифференциальную (р— 1)-форму, значение которой
на векторах Xi, ..., Xp_i определяется формулой
txw(Xi, ... , Xp_i) = ы(Х, Хь ... , Xp_i).
Форма ixu называется внутренним произведением формы и и поля X.
§13. Дифференциальные формы и когомологии де Рама 87
13.14. Пусть ш — р-форма, а Хо, ..., Хр — векторные поля.
Доказать, что
Ь ... , Хр) +
X0o;(Xi, ... , Xk) - ]Ta;(Xi, ... , [Хо, XJ,
13.15. Пусть X — векторное поле, а ш\ и ш2 — дифференци-
дифференциальные формы. Доказать, что
г'х(^1 Л и2) = (ix^i) Л ш2 + (—l)ro;i Л г'х^2>
где г — степень формы cji.
Пусть в векторном пространстве Еп задано скалярное произведение.
Введем следующие две операции. Первая ставит в соответствие каждому
вектору X такую линейную форму и = V(X), что (X, Y) = V(X)(Y).
Вторая операция каждой полилинейной кососимметрической форме и
степени р ставит в соответствие форму *(и) степени п — р следующим
образом. Пусть u>i, ..., ип — ортонормированный базис линейных форм,
и = /о^ Л. . .AUip. Тогда *(и) = {—lyfu^A.. -Aujn_p, где а — четность
перестановки
/1 ... р р+1 ... п
[ii ... iP h ... jn-г
Эта операция обычно называется «операцией звездочка».
Заметим, что первая операция задает хорошо известный линейный
изоморфизм между пространством V и пространством V*. Вторая опе-
операция устанавливает изоморфизм между пространством внешних форм
степени р и пространством внешних форм степени п— р.
13.16. Выписать в явном виде результат применения опера-
операции * к дифференциальным fc-формам (к = 0, 1, 2, 3), заданным
в R3 с метрикой ds2 = Ai dx2 + \2 dy2 + A3 dz2, где Х{ — гладкие
функции.
13.17. Доказать, что *(*Т) = (~1)к(п-к)т
13.18. Показать, что в пространстве Е3 выполнены следующие
формулы для векторных полей:
a) gradF = V~l{dF)\ б) divX = *d* V(X)\
13.19. Рассмотрим Е3 со стандартной евклидовой метрикой.
Доказать, что значение 2-формы V{Xi) Л F(X2) на паре векто-
векторов Yi и Y2 может быть вычислено по формуле
V(Xi) Л F(X2)(Yb Y2) = det ||(Xf, У^||.
13.20. Показать, что формулы Грина, Стокса и Гаусса-Остро-
градского являются частными случаями общей формулы Стокса
для дифференциальных форм.
88 Часть 1
13.21. Вывести формулу интегрирования по объему F, ограни-
ограниченному замкнутой поверхностью Е:
а) III {<рАф + (grad</>, gradt/>)) dV = 11 (p-? da\
V E
б) Щ&Аф - фА<р) dV = Л Ljjt - ф~?\ da.
V E
Здесь д/дп — производная вдоль нормали к поверхности ?.
13.22. Найти градиенты функций в сферических координатах:
а) u(r, 0, (р) = r2cos0;
б) п(г, в, ф) = Зг2 sin^ + er cos ^ — г;
в) u(r, 0, у?) = cos в /г2.
13.23. Доказать, что
vlsl
13.24. Вычислить дивергенцию векторного поля на плоскости в:
а) полярных координатах; б) эллиптических координатах; в) па-
параболических координатах (см. задачи 1.1, 1.2, 1.3).
13.25. Вычислить дивергенцию векторного поля в трехмерном
пространстве в: а) сферических координатах; б) цилиндрических
координатах.
13.26. Найти закон преобразования форм связности
при переходе от одной карты к другой. Заметим, что формы связ-
связности, вообще говоря, не образуют глобально определенную диф-
дифференциальную форму.
13.27. Пусть на многообразии М задана связность. Тогда в
каждой системе координат определена 1-форма j = Tlkidxk.
а) Доказать, что 2-форма dj корректно определена на всем мно-
многообразии, т. е. не зависит от выбора системы координат.
б) Доказать, что при замене координат с якобианом J к форме
7 добавляется слагаемое d(ln J).
в) Доказать, что для римановой связности
13.28. Пусть Мп — риманово многообразие с метрикой
Доказать, что ковариантная производная формы объема
относительно римановой связности на Мп равна нулю.
§ 13. Дифференциальные формы и когомологии де Рама 89
13.29. Пусть F — векторное поле в 3-мерной области W с глад-
гладкой границей dW", п — единичный нормальный вектор к dW.
Доказать, что
f{divF)dxdydz = f (n,F) da,
w dw
где da — элемент площади на 5W, a (n, F) — скалярное произ-
произведение.
13.30. В условиях предыдущей задачи доказать, что
у (rot F, n) da = у (Л dxi + /2 dx2 + /з dx3),
s as
где S — гладкая поверхность с гладкой границей dS и F =
= (Л, /2, Л)-
13.31. Вывести из формулы Стокса теорему Коши о вычетах.
13.32. Пусть р и q — произвольные многочлены от переменных
z1, ..., zn\ fc, I — вещественные числа. Пусть существует такая
дифференциальная форма w, что dp Aw =pdz, dw = 1 dz, dqAw =
= kqdz. Доказать, что d(p~k~~lqw) = 0. Здесь dz = dz1 A.. .Adzn.
13.33. Пусть cj = Uij dxl A dx^ — невырожденная 2-форма на
многообразии, akl — обратный тензор, т.е. ак1шц = 6к. Доказать,
что два следующих условия эквивалентны:
а) форма ш замкнута;
б) операция
заданная на пространстве гладких функций тензором аы, удовле-
удовлетворяет тождеству Якоби.
13.34. Пусть Xi, ..., Хп — линейно независимые векторные
поля на n-мерном многообразии, о;1, ..., ип — двойственные
1-формы, т.е. cj1(Xj) = Slj. Доказать формулу
dk kl A7
где гладкие функции с^- определяются из соотношения [Xf, Xj] =
4
13.35. Доказать, что если на многообразии существует невыро-
невырожденная форма максимального ранга, то многообразие ориенти-
ориентируемо.
13.36. Пусть и = Wij dxl А сЫ — невырожденная 2-форма на
многообразии М. Доказать, что размерность многообразия М
90 Часть 1
четна и справедлива следующая формула:
иА.^Аш = ± — yfdet{u)ij)dx1 Л ... Л dx2n.
п раз
Здесь dimM = 2п.
13.37. Пусть на многообразии существует невырожденная
2-форма. Доказать, что многообразие ориентируемо.
13.38. Пусть 0, ip — стандартные координаты на сфере. Явля-
Являются ли гладкими на всей сфере следующие дифференциальные
формы:
d0, dip, cosQdQ, sinOdO, cos в dip, sin в dip, dOAdipl
В каких случаях можно к этим формам применять формулу
Стокса?
13.39. Пусть п — дифференциальная р-форма, и — дифферен-
дифференциальная 1-форма, не равная нулю. Показать, что П представля-
представляется в виде О = в Л cj тогда и только тогда, когда О Л ш = 0.
13.40. Пусть на многообразии М задана невырожденная 2-фор-
2-форма. Доказать, что на М существует тензорное поле J типа A, 1),
удовлетворяющее условию J2 = — Е, т.е. J\Jm = — 6гт. Такое
поле J называется почти комплексной структурой на М.
13.41. Показать, что ограничение формы
х dy — у dx
ш =
на любой конус с центром в начале координат является замкнутой
формой.
13.42. Вычислить интеграл от формы П = х2dy Adz + y2 dz Л
A dx + z2 dx A dy по области D = {—1 < и < 1, — 1 < v < 1} на
поверхности х = и + v, у = и — v, z = uv. Система координат
и, v считается положительно ориентированной.
13.43. Записать внешнюю дифференциальную форму в R3\{0}:
xdy Adz + ydz Adx + zdx Ady
B+2 +
в цилиндрических и сферических координатах. Показать, что ин-
интеграл от этой формы по гладкой поверхности, взаимно-однозначно
и гладко проектирующейся из начала координат на единичную
сферу, равен площади проекции.
13.44. Рассмотрим форму
х dy — у dx
х2 + у2
§ 13. Дифференциальные формы и когомологии де Рама 91
Вычислить du и / cj. Вывести отсюда, что форма ш замк-
нута, но не точна в R\{0}.
13.45. Пусть
xdy Adz + ydz Adx + zdx Ady
Вычислить du). Показать, что в полупространстве z > О суще-
существует такая 1-форма 0, что d6 = ш. Показать, что в R3 \ {0} не
существует такой 1-формы 0, что dO = ш.
13.46. Доказать, что ограничение замкнутой (точной) формы
многообразия М на подмногообразие N С М является замкнутой
(точной) формой.
13.47. Доказать, что Я°(Е) = R и Н{{Ш) = 0 при г ^ 0.
13.48. Вычислить 0-мерные когомологии де Рама для произ-
произвольного гладкого многобразия.
13.49. Показать, что любая форма степени п на W1 точна.
13.50. Лемма Пуанкаре. Доказать, что
Доказательство можно провести по следующей схеме. Пусть i:
W1 ->> Rn x R1 задано формулой i: х н> (ж, 0), а р: Rn x R1 ^ Rn
формулой р: (ж, t) и-> х. Так как рог = 1: Rn —>• Rn, то i* op* = 1:
Я*(Rn) -> #*(Rn). Если показать, что р* о г*: Я*(Rn+1) ->
—>• #*(Rn+1) также является тождественным, то отсюда будет сле-
следовать, что р*: #*(Rn) -> Я*(Rп+1) и г*: Я*(Rп+1) -> Я*(Еп)
являются взаимно обратными изоморфизмами. Определим ото-
отображение S: №{Rn xK1)-) fi^-^R" x R1) следующим образом.
Форма и G ?F(Rn x R1) однозначно представляется в виде суммы
ш = cji + CJ2? где форма cji не содержит d?, a CJ2 — содержит.
Форма CJ2 имеет вид р*б • /(ж, ?)d?, где б G f)p~1(Rn). Положим
S{u>)=p*eff{x,t)dt.
о
а) Показать, что (dS — Sd)u) = (—l)^^, где р — степень
формы cj.
б) Показать, что отображение
*ог*
1-р*ог
переводит замкнутые формы в точные. Вывести отсюда, что р*ог*:
ff*(Rn xl1)-^ ^*(Rn x R1) является тождественным отображе-
отображением.
92 Часть 1
13.51. Пусть ft: X х [О, 1] -> Y — гладкое отображение, ш —
дифференциальная форма на У, du) = 0. Доказать, что
/о» - /Г И = <*а
для подходящей формы $7 на X.
13.52. Доказать, что если /: X -+ Y гомотопическая эквива-
эквивалентность, т.е. существует такое отображение д: Y -> X, что
/ оg ~ idy и до f ~ id^-, то /*: H*(Y) —>> Н*(Х) — изоморфизм.
13.53. Доказать, что если многообразие X стягиваемо, то для
любой замкнутой формы и (т. е. вы = 0) разрешимо уравнение
dQ, = cj.
13.54. Доказать, что n-мерные когомологии гладкого замкну-
замкнутого n-мерного ориентируемого многообразия нетривиальны.
13.55. Пусть М — замкнутое компактное симплектическое
многообразие, т. е. на нем существует невырожденная замкнутая
2-форма и = Uijdx1 A dxK Доказать, что вторая группа когомоло-
когомологии многообразия М нетривиальна.
13.56. Пусть М = M1UM2 — несвязная сумма двух многообра-
многообразий одинаковой размерности. Доказать, что для всех р имеется
разложение в прямую сумму НР(М) = НР(М\) ф НР(М2).
13.57. Пусть М = М\ U M2, где Mi и M<i — открытые под-
подмногообразия, причем пересечение М\ П Мг диффеоморфно Rn.
Доказать, что НР{М) = НР{М{) 0 НР{М2) при р > 0.
13.58. а) Доказать, что замкнутая форма и на Мп х Ш71 точна
тогда и только тогда, когда для некоторой точки t G Km ограниче-
ограничение формы и на Мп х {?} является точной формой.
б) Привести пример многообразия Мп и дифференциальной
формы и € пр(Мп х Rm) такой, что для всех t G Mm ограничение
ш на Мп х {*} замкнуто, но сама форма и незамкнута.
13.59. а) Показать, что форма и € fi1(Sfl) точна тогда и только
тогда, когда / ш = 0.
s1
б) Показать, что форма ш € un(Sn) точна тогда и только тогда,
когда / ш = 0.
Sn
13.60. Доказать, что формула и н» / и задает изоморфизм
sn
Hn{Sn) = К.
13.61. Вычислить когомологии 5П.
13.62. Вычислить когомологии:
а) тора Г2;
б) плоскости R2 без к точек;
в) бутылки Клейна;
г) проективной плоскости IELP2;
д) пространства W1 без к точек.
§14. Топология 93
13.63. Доказать, что на сфере 5П, где п > 1, не существует
замкнутых 1-форм, ненулевых в каждой точке сферы.
13.64. Пусть М — замкнутое многообразие, на котором су-
существует невырожденная замкнутая 2-форма. Доказать, что
dim#2(M)>0.
13.65. а) Пусть Xi, X2, Хз — попарно коммутирующие вектор-
векторные поля на сфере 53. Доказать, что они не могут быть линейно
независимыми во всех точках сферы.
б) Привести пример двух векторных полей на сфере 53, ли-
линейно независимых в каждой точке и коммутирующих друг с
другом.
13.66. Теорема Брауэра.
а) Доказать, что не существует непрерывного отображения г:
D —> 3D = б71, неподвижного на точках сферы Sn~l. Для
этого рассмотреть композицию гиг: Sn~l -> Dn (вложение 571
на граничную сферу шара Dn) и отображение, которое оно инду-
индуцирует в когомологиях сферы. Здесь Dn — замкнутый шар.
б) Доказать, что у всякого непрерывного отображения шара Dn
в себя обязательно существует неподвижная точка.
13.67. Рассмотрим сферу 52 и экватор 51 на ней. Доказать, что
не существует непрерывного отображения 52 —> 51, неподвижного
наЯ1.
13.68. а) Доказать, что не существует непрерывного отображе-
отображения /: 52 --> 51 такого, что f{—x) = —f(x) для всех х Е 52.
б) Пусть /: S2 -> R2 — непрерывное отображение такое, что
f(—x) = —f{x) для всех х € S2. Доказать, что существует точка
х е 52, в которой f(x) = 0.
13.69. Пусть М — ориентируемое многообразие с границей дМ.
Доказать, что не существует непрерывного отображения М —> дМ,
неподвижного на границе. Доказательство можно провести по ана-
аналогии с теоремой Брауэра.
§ 14. Топология
14.1. Доказать эквивалентность двух определений внутренно-
внутренности Int У подмножества У топологического пространства X:
а) Int У — это совокупность всех внутренних точек простран-
пространства У, т. е. таких точек, которые содержатся в У вместе с неко-
некоторой своей окрестностью;
б) Int У — это наибольшее содержащееся в У открытое мно-
множество, т. е. Int У = (J U.
иет(х),
UCY
94 Часть 1
__ 14.2. Доказать эквивалентность двух определений замыкания
У подмножества У топологического пространства X:
а) У — это совокупность всех точек прикосновения множе-
множества У, т. е. таких точек, в любой окрестности которых есть точки
из У; _
б) У — это наименьшее содержащее У замкнутое множество,
т.е.
Y= П F.
F— замкнуто,
FDY
14.3. Доказать, что Inty — открытое, а У — замкнутое мно-
множества.
14.4. Доказать, что:
а) У открыто тогда и только тогда, когда У = Int У;
б) У замкнуто тогда и только тогда, когда Y = Y.
14.5. Доказать, что A U В = Аи В. Показать, что А П В может
не совпадать с А П В.
14.6. Показать, что Int (A\JB) может не совпадать с Int i4Ulnt В.
Доказать, что Int (А П В) = Int А П Int В.
14.7. Пусть Gel1 — открытое множество на прямой. Дока-
Доказать, что G — объединение непересекающихся интервалов.
14.8. Доказать, что канторово множество на отрезке [0,1]
замкнуто.
14.9. Пусть множество X состоит из трех точек. Описать все-
всевозможные топологии на нем. Сколько из них хаусдорфовых?
Сколько связных? Сколько линейно связных?
14.10. Доказать, что в хаусдорфовом топологическом простран-
пространстве все одноточечные подмножества замкнуты.
14.11. Доказать, что топологическое произведение двух хаус-
хаусдорфовых топологических пространств хаусдорфово.
14.12. Доказать, что топологическое пространство X хаусдор-
хаусдорфово тогда и только тогда, когда диагональ А = {(#i, х%) \х\ =
= Х2] замкнута в X х X.
14.13. Пусть X — бесконечное множество. Его конечные под-
подмножества объявим замкнутыми. Проверить, что получилась не-
хаусдорфова топология.
14.14. Пусть X — метрическое пространство. Доказать, что
каждое одноточечное множество замкнуто.
14.15. Доказать, что метрическое топологическое пространство
удовлетворяет аксиоме отделимости Хаусдорфа.
14.16. Верно ли, что расстояние между двумя непересекающи-
непересекающимися, замкнутыми множествами на плоскости (на прямой) всегда
больше 0?
§ 14. Топология 95
Отображение /: X —> Y метрического пространства X в себя назы-
называется сжимающим, если существует вещественная постоянная А < 1,
такая, что p(f(x), f(y)) ^ А/о(ж, у) для любых двух точек х, у € X.
14.17. Доказать, что любое сжимающее отображение метриче-
метрического пространства непрерывно.
14.18. Доказать, что любое сжимающее отображение полного
метрического пространства в себя всегда имеет неподвижную
точку, причем эта точка единственна.
14.19. Привести пример, показывающий, что от условия пол-
полноты метрического пространства в задаче 14.18 отказаться нельзя.
14.20. Доказать, что для любого компакта К С W1 существует
гладкая вещественнозначная функция / такая, что К = /"@).
14.21. Привести пример метрического пространства, в котором
существуют два шара, причем шар большего радиуса строго содер-
содержится в шаре меньшего радиуса.
14.22. Пусть (X, рх) и (У, ру) — метрические пространства.
Определим на X xY следующие «расстояния»:
У\), (#2, У2)) = тах(рХ{хи Х2),
Доказать, что:
а) это метрики на X х У;
б) соответствующие им топологии на X xY совпадают.
14.23. Доказать равносильность следующих определений не-
непрерывности отображения топологических пространств /: X —>Y.
Отображение / непрерывно тогда и только тогда, когда:
а) для любого открытого U С У прообраз f~l(U) С X тоже
открыт;
б) для любого замкнутого F С У прообраз f~l(F) С X тоже
замкнут;
в) для любой точки х G X и любой окрестности U ее образа
f(x) G У существует окрестность V точки х такая, что f(V) С JJ\
г) график /, т.е. множество {(х, у) : f(x) = у}, замкнут в
X xY при условии, что У — хаусдорфово. _ __
14.24. Пусть /: Е -> F, Е = A U В, А = А, В = В. Тогда
/ непрерывно тогда и только тогда, когда /Ц и /|^ непрерывны.
Если А ф А то это, вообще говоря, неверно. Привести пример.
14.25. Доказать, что если /п: X —> У — последовательность
непрерывных отображений и /п равномерно сходятся к / (здесь
X nY — метрические пространства), то / непрерывно.
14.26. Пусть отображение /: X —> X непрерывно, а тополо-
топологическое пространство X хаусдорфово. Доказать, что множество
96 Часть 1
{х е X: х = f(x)} неподвижных точек отображения / замкнуто.
Привести пример, показывающий, что от требования хаусдорфо-
хаусдорфовости отказаться нельзя.
14.27. Пусть топологическое пространство У хаусдорфово, а
отображения /: X -> Y и д: X -> У непрерывны. Доказать,
что множество {х Е X: f(x) = g(x)} замкнуто. Показать, что от
требования хаусдорфовости отказаться нельзя.
14.28. Пусть А — всюду плотное подмножество в топологиче-
топологическом пространстве 1, а У — хаусдорфово. Пусть непрерывные
отображения /: X —> Y и д: X -» У таковы, что f\A= д\А- Дока-
Доказать, что f(x) = д(х) для всех х € X.
14.29. Доказать, что всякое бесконечное замкнутое множество
прямой является замыканием своего счетного подмножества.
14.30. Построить пример метрического пространства X, такого,
что его некоторое подмножество Y С X (указать У) замкнуто и
ограничено, но при этом не является компактом.
14.31. Пусть отображение f: Е -+ F является непрерывным
отображением «на» и пусть Е компактно. Доказать, что F ком-
компактно.
14.32. Доказать, что куб 1п — компактное пространство.
14.33. Доказать, что n-мерная сфера (п < оо) компактна. Верно
ли это для п = оо?
14.34. Пусть X С У и У — компактное пространство. До-
Доказать, что X — компактное пространство тогда и только тогда,
когда X — замкнутое пространство.
14.35. Показать, что группа ортогональных матриц размера
3x3 — компактное топологическое пространство.
14.36. Доказать, что группа ортогональных преобразований
n-мерного евклидова пространства — компактное топологическое
пространство.
14.37. Выяснить компактны ли GL(n, M), SX(n, M), SX(n, С),
U(n), SU{n), SO{n).
14.38. Пусть X — компактное, У — метрическое простран-
пространства, /: X -> У — непрерывное отображение. Доказать, что / —
равномерно-непрерывное отображение.
14.39. Пусть А и В — связные подмножества некоторого топо-
топологического пространства, причем АПВ Ф 0. Доказать, что Аи В
связно.
14.40. Доказать, что если Е, F связны, то и Е х F связно.
14.41. Пусть /: X -> У — непрерывное отображение и его образ
совпадает с У. Доказать, что если X связно (линейно связно), то
У тоже связно (линейно связно).
14.42. Доказать, что:
а) интервалы 0 < я? < 1, O^x^l, 0<х<1 связны и
линейно связны;
§14. Топология 97
б) если множество Ас!1 связно, то А имеет вид: а < х < Ь,
а^х^Ь, а < х ^ Ъ или а ^ х < Ь, где а, Ь могут принимать
значения ±оо.
14.43. Доказать, что куб 1П и сфера Sn связны.
14.44. Пусть X — метрическое компактное связное простран-
пространство. Можно ли две его точки соединить непрерывным путем?
14.45. Доказать, что SO(n) — связное топологическое про-
пространство; О(п) состоит из двух компонент связности. Доказать,
что U(n), SU(n) — связные топологические пространства.
14.46. Доказать, что группа GL(n, С), рассматриваемая как
подмножество в пространстве всех комплексных матриц размера
пхп, — открытое и связное подмножество.
14.47. Доказать, что группа GL+(n, R) вещественных матриц
размера пхп с положительным определителем — связное тополо-
топологическое пространство.
14.48. Доказать, что группа GL(n, R) вещественных невыро-
невырожденных матриц размера пхп — топологическое пространство,
состоящее из двух связных компонент.
14.49. Доказать, что замыкание связного подмножества топо-
топологического пространства связно.
14.50. Пусть А и В — подмножества топологического простран-
пространства X. Верно ли, что если A U В и А П В связны, то А и В тоже
связны? Аналогичный вопрос про линейную связность.
14.51. Пусть Аи В одновременно либо замкнутые, либо откры-
открытые подмножества топологического пространства X. Доказать, что
если A U В и А Г) В связны, то А и В тоже связны.
14.52. а) Доказать, что с помощью операций замыкания и пере-
перехода к внутренности множества из данного подмножества тополо-
топологического пространства можно получить не более семи различных
подмножеств. Привести пример такого подмножества R, из кото-
которого получаются в точности семь различных подмножеств.
б) Доказать, что с помощью операций замыкания и перехода к
дополнению из данного подмножества топологического простран-
пространства можно получить не более 14 различных подмножеств.
14.53. Пусть Y — связное (линейно связное) подпространст-
подпространство X. Исследовать связность (линейную связность) внутренности
Int Y и границы dY = Y \ Int Y.
14.54. Доказать, что если X — связное компактное простран-
пространство, а /: X —> Ш1 — непрерывное отображение, то образом /
является отрезок.
14.55. Пусть А — открытое подмножество Rn. Доказать равно-
равносильность условий:
а) А связно;
б) А линейно связно;
98 Часть 1
в) любые две точки А можно соединить ломаной, состоящей
из конечного числа отрезков, целиком лежащей в А.
14.56. Доказать, что следующее множество А связно, но не
является линейно связным.
а) А состоит из графика функции у = sin-, х ф О, и отрезка
х
{(О, у)'- У € [—1, 1]} (координаты декартовы);
б) А состоит из окружности г = 1 и спирали г = е"/^, <р > 0.
14.57. Привести пример двух метрических пространств X и У
и отображений /: X —> У и д: У -» X таких, что fug взаимно
однозначны и непрерывны, и тем не менее X и У не гомеоморфны.
Напомним, что взаимная однозначность означает одновременную
сюръективность и инъективность отображения.
14.58. Привести пример непрерывного биективного отображе-
отображения двух гомеоморфных топологических пространств /: X —> У,
не являющегося гомеоморфизмом.
14.59. Доказать, что открытый диск х2 + у2 < 1 и плоскость
R2(#, у) гомеоморфны. Доказать, что открытый квадрат {\х\ < 1,
\у\ < 1} и плоскость Ш2(х, у) гомеоморфны. Доказать, что интер-
интервал 0 < х < 1 и открытый квадрат {\х\ < 1, \у\ < 1} не гомео-
гомеоморфны.
14.60. Доказать, что куб {\х{\ ^ 1, г = 1, 2, ..., п} и шар
гомеоморфны. Доказать, что открытый куб и от-
открытый шар диффеоморфны.
{п Л
Y2 х2 ^ 1 > и верхнее полушарие
г=1 J
сферы < ^ #i = 1? #n+i ^ 0 > гомеоморфны.
U=l J
Гп-f 1 ?? >|
14.62. Доказать, что эллипсоид s Г 4 = 1? гомеоморфен
1г=1 Ч J
сфере Sn.
14.63. Гомеоморфны ли отрезок 0 ^ х ^ 1 и буква Т?
14.64. Доказать, что интервал (-1, 1) гомеоморфен прямой
(—оо, оо). Доказать, что любые два интервала гомеоморфны.
14.65. Гомеоморфны ли шар и сфера?
14.66. Доказать следующие гомеоморфизмы:
а) МП\М* &Sn~k-1 xk
б) Sn \ Sk « S71-*-1 x
14.67. Доказать гомеоморфность пространств
М3\5Х и М3 \ ({у = * = 0} U {A, 1, 1)}).
§ 14. Топология
99
14.68. Доказать, что:
а) пространства R1 и К2 не гомеоморфны;
б) пространства Ш1 и Шп не гомеоморфны.
14.69. Доказать, что ни для какого топологического простран-
пространства X его квадрат X х X не гомеоморфен К.
14.70. Пусть /: D2 —> D2 — гомеоморфизм. Доказать, что
тогда граничная сфера отображается на граничную сферу.
14.71. Доказать, что сфера S2 не гомеоморфна никакому под-
подпространству R2.
14.72. Определить топологический тип поверхности, получен-
полученной склейкой строк шестиугольника в соответствии со словом:
а) abca~lb~lc~l;
б) аЪса~1Ъ~~1с.
14.73. Рассмотрим шаровой слой, ограниченный двумя кон-
концентрическими сферами. Топологический червяк прогрыз ход в
шаровом слое от одной граничной сферы до другой, который
Рис. 68
заузлен так, как показано на рис. 68. Определить топологический
тип поверхности, ограничивающей полученное пространственное
тело.
14.74. Дать классификацию с точностью до гомеоморфизма
букв русского алфавита.
100 Часть 1
§ 15. Гомотопия, степень отображения
и индекс векторного поля
15.1. Доказать, что /: X -> Y гомотопно отображению в точку,
если:
а) Х = Шп] б) Y = МП.
15.2. Пусть / — отображение единичного отрезка [0, 1] в себя,
причем /@) = 0, /A) = 1. Доказать, что существует гомотопия,
неподвижная в концах отрезка и деформирующая отображение /
к тождественному отображению.
15.3. Стягивается ли по себе в точку векторное простран-
пространство Rn?
15.4. Пусть пространство X стягивается по себе в точку. До-
Доказать, что любые два пути с одинаковыми концами гомопотны
между собой (гомотопия неподвижна на концах).
15.5. Доказать, что на сфере 5П, п > 1, всякие два пути гомо-
гомотопны (концы одинаковы, гомотопия неподвижна на концах).
15.6. Дать классификацию букв русского алфавита с точностью
до гомотопической эквивалентности.
15.7. а) Доказать, что двумерное плоское кольцо гомотопически
эквивалентно окружности.
б) Доказать, что лист Мёбиуса гомотопически эквивалентен
окружности.
15.8. а) Доказать, что пространство R2 \ {0}, полученное вы-
выбрасыванием из плоскости некоторой точки, гомотопически экви-
эквивалентно окружности.
б) Доказать, что Rn \ {х\, ..., #&}, где х\, ..., Xk — различные
точки Еп, гомотопически эквивалентно букету к сфер размерности
п - 1.
Напомним определение букета связных пространств Хх, ..., Хь-
Выберем в каждом из них по одной точке щ ? Х{. В несвязном объеди-
объединении Х\ U X2 U... U Xk отождествим все точки р\, ..., pk (и только их).
Полученное пространство называется букетом пространств Х\, ..., Xk и
обозначается Х\ V Х2 V ... V Xk.
15.9. Доказать, что двумерный тор без точки гомотопически
эквивалентен букету S1 V S1.
15.10. Выяснить, чему гомотопически эквивалентен п-мерный
тор без точки.
15.11. Выяснить, чему гомотопически эквивалентно проектив-
проективное пространство ШРп без точки.
15.12. Выяснить, чему гомотопически эквивалентны следую-
следующие пространства (см. рис. 69):
а) тор, меридиан которого заклеен диском;
б) тор, параллель которого заклеена диском;
в) тор (е^, е^), на котором траектория (е2™*/?, e2nit/q), где р
ид — взаимно простые целые числа, заклеена диском;
§ 15. Гомотопия, степень отображения и индекс векторного поля 101
г) сфера, у которой экватор заклеен диском;
д) сфера, у которой отождествлены две точки;
е) сфера, у которой отождествлены р точек.
Рис. 69
15.13. Рассмотрим линейно связные достаточно хорошие про-
пространства ХиУ (например, многообразия). Выберем в каждом из
них А: попарно различных точек Xi,...,^eIh j/i, ..., у^ Е Y.
Отождествим точки Х{ и у{ для ъ = 1, ..., к. Доказать, что по-
полученное пространство (см. рис. 70) гомотопически эквивалентно
X V Y V S1 V ... V 51, где окружность S1 встречается к — 1 раз.
15.14. Доказать следующие гомотопические эквивалентности:
а) Rn\Rk ~ S"-*-1;
б) Sn\Sk - 5П"/С;
в) Wl\S1 -^"-^V^-1.
г) Рассмотрим в W1 попарно непересекающиеся аффинные
подпространства П*1, ..., П^ размерностей fei, ..., kj соответ-
соответственно. Букету каких сфер гомотопически эквивалентно про-
пространство МП\(П/С1 U ... U ПЧ)?
102 Часть 1
Рис. 70
д)* Рассмотрим в Sn набор попарно непересекающихся сфер
Skl, ..., Skf. Чему гомотопичеси эквивалентно пространство
Sn\(SklU...USkf)?
15.15. Доказать, что любое векторное поле гомотопно нулевому.
15.16. Доказать, что на связном многообразии векторное поле с
изолированными особыми точками гомотопно векторному полю с
одной особой точкой в классе векторных полей с изолированными
особенностями.
15.17. Доказать, что если при гомотопии векторного поля v
(в классе полей с изолированными особенностями) две особые
точки Х\ и Х2 слились в одну, то ее индекс равен сумме индексов
ind^! v + indx2 v.
15.18. Изобразить на плоскости R2 качественную картину рас-
распределения интегральных траекторий потоков
Vi = grad Re / (z), v2 = grad Im / (z)
для перечисленных ниже комплексно-аналитических функцийДг).
Найти особые точки потоков vi, V2-
Исследовать устойчивость особых точек.
Изобразить качественную картину поведения траекторий пото-
потоков vi, V2 на сфере S2 (пополненная плоскость R2: S2 = R2U(oo)).
Изобразить процесс распада особенности z = 0 этих векторных
полей при малом возмущении исходной функции /(z), при котором
получается функция g(z), для которой все особые точки потоков vi,
V2 невырождены:
а) f(z) = zn (n — целое число);
б) f(z) = z + - (функция Жуковского);
в)/(*) = * + -?; г)/(*) = г4;
Z л ^
§ 15. Гомотопия, степень отображения и индекс векторного поля 103
д)/(г) = 1пг; е) f(z) = In |5|;
ж) /(z) = z4BG—5J + 12z6) (исследовать в окрестности точки
)
)() ()()
и) /(г) = 2z-lnz;
к) /(z) = 1 + z4(z4 — 4L4 • (г44 — 44L44 (исследовать в окрест-
окрестности точки z = 0);
3
wn I , fz-2i\3
л) f{z) = Шln (тттJ ;
I
н) /(z) = - + 21 ln (z2); o) f(z) = z5 + 2 ln г;
n) f(z) = 2\n(z- IJ - ^1п(г + ЮгK;
О
p) /(z) = 7 - G^j3;
f(z)= (I-1-)* In
2/ \10z+l
15.19. Найти индекс особых точек векторных полей grad Re f(z)
и gradlm/(;z), где:
r)f(z) = z+-z, a) f(z) = In j~.
15.20. Доказать, что на всяком связном компактном замкну-
замкнутом многообразии существует гладкое векторное поле ровно с
одной особой точкой. Найти индекс этой точки как особой точки
векторного поля.
15.21. Пусть некомпактное многообразие М является откры-
открытой областью в некотором компактном замкнутом многообразии.
Доказать, что на М существует векторное поле без особых точек.
15.22. Построить гладкое векторное поле ровно с двумя особен-
особенностями на следующих ориентированных поверхностях:
а) на сфере; б) на торе; в) на сфере с g ручками.
15.23. Построить гладкое векторное поле с одной особой точ-
точкой на следующих поверхностях: а) на сфере; б) на торе; в) на
кренделе; г) на сфере с g ручками; д) на проективной плоскости;
е) на бутылке Клейна; ж) на сфере с к листами Мёбиуса. Найти
индексы этих особых точек.
104 Часть 1
15.24. Доказать, что индекс (вращение) векторного поля вдоль
замкнутой кривой на плоскости не меняется при гомотопии кри-
кривой, не проходящей через особые точки векторного поля.
15.25. Доказать, что индекс векторного поля вдоль замкнутой
кривой равен нулю, если векторное поле не имеет особенностей
внутри контура.
15.26. Показать, что индекс векторного поля вдоль замкнутой
кривой равен сумме индексов особых точек векторного поля внутри
контура.
15.27. Доказать, что не существует гладкого векторного поля
без особенностей:
а) на сфере 52;
б) на проективной плоскости ЕР2.
15.28. Показать, что на бутылке Клейна существует гладкое
векторное поле без особенностей. Доказать, что для любых двух
гладких векторных полей на бутылке Клейна существует точка, в
которой они линейно зависимы.
15.29. Найти степень векторного поля X на гиперповерхно-
гиперповерхности Г:
2 2
а) ? = А (?)> где А € 5ОB)' и Г: ^Т + Та = !;
б) ? = Az(<p) I у I, где Az(ip) — матрица поворота на угол (р
0.0 О
X* 4- yz z
вокруг оси Oz, и Г: ^ [- — = 1.
а1 о1
15.30. Найти степень векторного поля X на гиперповерхно-
гиперповерхности Г:
2 х2 2 \
б) X = B*2 - у2 - 4, 2х2 + z2 - 1, х2 + у2 + z2 - 1) и
Г:а* + ? + * = 1;
в) X = (у2 + 3z2 -x2-4,x2 + 2y2 + z2-l,x2-y2 + 2) и
Г: х2 + у2 + z2 = 9.
15.31. Доказать, что индексы двух векторных полей на про-
произвольной 2-мерной замкнутой поверхности равны. Верно ли это
утверждение для многообразия любой размерности?
15.32. Пусть v(a;) — гладкое векторное поле на плоскости М2;
L — гладкий самопересекающийся контур на плоскости М2; jL —
индекс контура L в векторном поле v(a;); j — число точек вну-
внутреннего касания поля v и контура L; Е — число точек внешнего
§ 15. Гомотопия, степень отображения и индекс векторного поля 105
касания. Доказать, что если число всех точек касания поля и кон-
контура конечно, то jL < -B + J - Е).
15.33. Рассмотрим на римановом многообразии Мп векторное
поле v = grad/, где / — гладкая функция. Пусть хо Е Мп —
изолированная особая точка поля v, т.е. v(xq) = 0. Пусть гес-
гессиан функции /, т. е. ( . . ), — невырожденная в точке
\ ox1 oxJ)
(
\ )
матрица, причем ее индекс (число отрицательных собственных
значений) равен А. Доказать, что ind^ v = (—1)Л.
15.34. Пусть Мп~1 С Шп — гладкая поверхность и ?: М71 ->
-> Sn~l — гауссово отображение. Пусть I — прямая, проходящая
через начало координат и точку х € Sn~l. Рассмотрим функцию
высоты //: Mn~~l -> R, задаваемую ортогональным проектирова-
проектированием М71" на I.
а) Доказать, что все критические точки // являются прообра-
прообразами точек х и —х при гауссовом отображении ?.
б) Доказать, что гессиан функции fi в этих критических точках
совпадает с матрицей Якоби отображения ?, вычисленной в тех же
точках.
15.35. Пусть A G GLn(R). Найти особые точки и их индексы
векторного поля, значение которого в точке жбЕп равняется:
а) Ах; б) Ах + яо? где xq e Кп.
15.36. Найти критические точки и критические значения ото-
отображения /: 51 -> 51, f(z) = zkj z e Sl С С, \z\ = 1. Найти его
степень.
15.37. а) Найти критические точки и критические значения
отображения /: S2 -> 52, где f(z) = zs + 3z2 + 3z + 1, здесь S2 —
пополненная комплексная плоскость, т.е. S2 = Си {оо}. Найти
его степень.
б) Сделать то же самое для f(z) = zs — 3z2 — 9z + 27.
в) Рассмотреть общий случай f(z) = zn + a\zn + ... + an,
a,k G C, k = 1, ..., n.
15.38. а) Найти критические точки и критические значения
z2 + 4
отображения /: S2 -> 52, заданного формулой f(z) = —.
Найти его степень.
z + 4
б) Сделать то же самое для f(z) = ———^—-.
z3 + 2z2 + 5
P(z)
в) Рассмотреть общий случай f(z) = для многочленов
P(z) = zn + aizn~l + ... + on, Q(s) = 2гт + bi^ + ... + bm с
комплексными коэффициентами.
106 Часть 1
15.39. а) Для отображения 50B) -> 50B), заданного форму-
формулой Л и Л7 найти критические точки и критические значения.
Найти степень отображения.
б) Сделать то же самое для отображения 0B) —> 0B), задан-
заданного той же формулой.
в) Отображение SUB) -> SUB) задано формулой i 4 i3.
Найти его критические точки, критические значения и степень.
г) Отображение 50C) -> 50C) задано формулой А ь-> А3.
Найти его критические точки, критические значения и степень.
д) Решить задачи а)-г) для отображения А *-> Ак.
15.40. Пусть X, Y и Z — гладкие замкнутые ориентируемые
многообразия и/: X -» Y, д: Y -» Z — гладкие отображения.
Доказать, что degg о / = degg • deg/.
15.41. Пусть Mi, M2, JVi, JV2 — ориентируемые замкнутые
гладкие многообразия, причем dim Mi = dimiVi, dimM2 =
= dim7V2. Пусть f\: M\ -> N\ и f^ M2 -> N2 — гладкие ото-
отображения. Доказать, что deg/i x /2 = deg/i • deg/2, где /i x /2:
Mi x M2 -> N\ x JV2.
15.42. Пусть /: X —> Y — гомотопическая эквивалентность,
причем X и Y — гладкие замкнутые ориентируемые многообразия
одинаковой размерности. Тогда deg/ = ±1.
15.43. Доказать, что если /: М -> N гомотопно отображению
в точку, то у / обязательно есть критические точки. Здесь М и
N — гладкие замкнутые ориентируемые многообразия одинаковой
размерности.
15.44. Доказать, что замкнутые ориентируемые многообразия
разных размерностей не могут быть гомотопически эквивалентны.
15.45. а) Доказать, что замкнутое ориентируемое многообразие
не стягивается.
б) Останется ли утверждение верным, если отбросить предпо-
предположение об ориентируемости?
15.46. Пусть /: Sn —> Sn — центральная симметрия.
а) Вычислить deg/.
б) Доказать, что при нечетных п отображение / гомотопно то-
тождественному.
15.47. Пусть /: Sn —> Sn — непрерывное отображение. Пусть
п — четное. Доказать, что найдется точка х G 571, для которой
либо х = /(ж), либо х = —/(я).
15.48. Пусть на сфере 52 заданы две функции /ид такие, что
/(#) = —f(jx) и д(х) = —д(тх), где г — центральная симметрия.
Доказать, что у / и д имеется общий нуль.
15.49. Пусть на 52 заданы непрерывные функции f(x) и д(х).
Доказать, что обязательно найдется точка х G 52 такая, что f(x) =
= f(rx) и д(х) = д(тх), где г — симметрия сферы относительно
ее центра.
§ 15. Гомотопия, степень отображения и индекс векторного поля 107
15.50. Пусть / — непрерывное отображение /: Sn —> Sn такое,
что f(x) ф —х ни для каких х Е Sn. Доказать, что:
a)deg/ = l;
б) если п — четное, то существует точка х Е Sn такая, что
f(x)=x.
15.51. Доказать, что отображение /: Sn -> 571, не имеющее
неподвижных точек, гомотопно центральной симметрии сферы т:
х н> — х.
15.52. Пусть отображение /: Sn -> Sn имеет степень 2к+1. До-
Доказать, что существует пара диаметрально противоположных точек
сферы, которые под действием / переходят в диаметрально проти-
противоположные точки, т.е. f(—x) = —f(x).
15.53. Пусть /: X -> Sn, g: X -» Sn — два непрерывных
отображения. Доказать, что если для всех х точки f(x) и д(х) не
являются диаметрально противоположными, то отображения / и
д гомотопны.
15.54. Напомним, что многообразие ШРП при п = 2к +1 ориен-
ориентируемо. Найти степень канонического отображения /: S2k+1 ->
2*1
15.55. Доказать, что степень любого гладкого отображения
S2k+l в ЕР2/с+1 четна.
15.56. Привести в явном виде пример отображения /: Sn —> Sn
степени А;.
15.57. Доказать, что на сфере S2k+1 не существует четного ка-
касательного векторного поля (т.е. такого, что v(#) = v(—x)) без
особенностей.
15.58. а) Доказать, что не существует непрерывного отображе-
отображения А векторного пространства Е3 в себя такого, что вектора х и
А(х) ортогональны для всех х Е Е3.
б) Тот же вопрос для Е4.
15.59. Пусть М2— замкнутая вложенная поверхность в Е3.
Пусть /: М2 -4 S2 — отображение нормалей (гауссово отображе-
отображение). Пусть а; и а/ — формы площади сферы 52 и поверхности
М соответственно. Доказать, что f*(u) = JKa/, где К — гауссова
кривизна поверхности М. Доказать также, что
2deg/= f Kd
м
и равняется эйлеровой характеристике М.
15.60. а) Построить гладкое отображение степени 1 тора Т2 на
сферу S2. Описать отображение геометрически для тора и сферы,
стандартно вложенных в Е3.
108 Часть 1
б) Построить гладкое отображение тора Г2 на сферу S2 сте-
степени к.
в)* Выяснить, существует ли отображение степени 1 сферы S2
на тор Т2.
г)* Для каких #1 и #2 существует гладкое отображение М91 на
М92 степени 1, где Мд — замкнутая ориентируемая поверхность
рода д (сфера с д ручками)?
д)* Для каких pi и #2 существует гладкое отображение М91 на
М92 ненулевой степени?
15.61. Доказать, что два гладких отображения Sl -> S1 гомо-
гомотопны тогда и только тогда, когда они имеют одинаковую степень.
15.62. Теорема Хопфа. Пусть Мп — замкнутое ориенти-
ориентируемое многообразие. Доказать, что два отображения Мп —> Sn
гомотопны тогда и только тогда, когда они имеют одинаковую сте-
степень.
15.63. Привести пример отображения степени 0, не гомотопного
отображению в точку.
15.64. Пусть Pn(z) = zn + a\zn~x + ... + ап — полином сте-
степени п с комплексными коэффициентами. Он задает отображение
сферы S2 в себя, где в качестве 52 рассматривается пополненная
комплексная плоскость С U {оо}.
а) Доказать, что формула
#i(*, t) = zn + A - t)(aizn-1 + .. .on),
где t G [0, 1], задает гомотопию исходного отображения к отобра-
отображению z »-> zn.
б) Пусть ап Ф 0. Рассмотрим отображение
H2(z, *) = A - t)(zn + ... an-iz) + an.
Оно является гомотопией исходного отображения к отображению
z ь-> ап, которое, очевидно, имеет нулевую степень. Следовательно,
многочлен Pn(z) не имеет комплексных корней. Найти ошибку в
рассуждениях.
Часть 2
§ 16. Системы координат (дополнительные задачи)
В задачах 16.1-16.4:
а) найдите координатные поверхности и координатные линии;
б) вычислите определители
дщ
duj
и установите, в каких точках пространства R3 нарушается взаим-
взаимная однозначность соответствия между криволинейными и прямо-
прямоугольными декартовыми координатами для перечисленных ниже
криволинейных систем координат tii, ^2, щ пространства М3;
в) являются ли эти системы координат ортогональными?
16.1. Для биполярной системы координат, определяемой равен-
равенствами
ashui
х\ = , Х2 = г» хг = uSi
СП U\ — COS U2 СП U\ — COS U2
где а — постоянный множитель.
16.2. Для бисферической системы координат, определяемой
равенствами
с sin щ cos щ с sin щ sin щ cshb,2
х = % = ^ =
Ch U2 — COS U\ ' ChU2 — COS Щ ' dlU2 — COS U\ '
где с — постоянный множитель, 0 ^ щ < U2, —оо < U2 < оо,
—7Г < 1^3 ^ Я"»
16.3. Для системы вытянутых сфероидальных координат,
определяемой равенствами
Х\ = СЩП2, Х2 = C\J{u\ - 1)A - и\) COS U3,
- и\) sin из,
где |txi | ^1, — 1 ^ U2 ^ 1, 0 ^ щ < 2тт, с — постоянный мно-
множитель.
110 Часть 2
16.4. Для системы сплюснутых сфероидальных координат,
определяемой равенствами
Х\ =
где \и\ | > 1, -1 < ^2 ^ 1, 0 ^ ^з < 2тг.
16.5. Преобразовать выражение
2d2v o ay 2aF ay ay
ая2 дх ду ду2 дх ду
к полярным координатам г, у?, т.е. х = rcos<?, у =
16.6. Преобразовать выражение
к новым координатам u, v таким, что х = uv, у = -. Найти
область определения и область значения этой системы координат.
d2V d2V
16.7. Вычислите оператор Лапласа -г-т + тгт в системе коор-
агг2 ду2
ду
динат (п, и) такой, что w = lnlnz, где w = х + iy, z = u + iv.
d2V d2V
16.8. Вычислите оператор Лапласа 0 + 0 в системе коор-
arr2 ду2
динат (w, и) такой, что w = In In——, где w = # + гу, z = u + iv.
z- z2
d2V d2V
16.9. Вычислите оператор Лапласа -т-тт + -тгт в системе коор-
агг2 5у2
динат (w, v) такой, что w = z3 — Zz2 +1, где w = x + iy, z = u + iv.
§ 17. Кривые и поверхности: уравнения и параметризации
Обычно в настоящем задачнике кривую г = r(t) мы называем глад-
гладкой, если существуют и непрерывны производные всех порядков вектор-
функции r(t). Однако в некоторых задачах мы уточняем класс гладко-
гладкости. Именно:
а) кривая называется гладкой класса Сп, если она допускает пара-
параметризацию г = г(?), где вектор-функция г(?) имеет непрерывные про-
производные до порядка п включительно;
б) кривая г = r(t) называется аналитической, если вектор-функция
г(?) является вещественно-аналитической, т. е. допускает разложение в
сходящийся степенной ряд.
§ 17. Кривые и поверхности: уравнения и параметризации 111
17.1. а) Привести примеры нерегулярных кривых, допускаю-
допускающих аналитическую параметризацию.
б) Доказать, что кривая, допускающая аналитическую пара-
параметризацию, может иметь только такие точки излома, в которых
вектор скорости скачком поворачивается на угол 7Г.
в) Доказать, что если гладкая кривая не допускает аналитиче-
аналитической параметризации, то в ее особых точках угол поворота вектора
скорости может быть любым. Построить примеры.
17.2. Доказать, что если кривая определена аналитическим ото-
отображением окружности в Rn, n ^ 2, то ее регулярность может
нарушаться только в конечном числе точек.
17.3. Представить график функции у = \х\ как кривую следую-
следующего типа:
а) с Сп-гладкой параметризацией для любого натурального п,
но не являющуюся Сп+1-гладкой;
б) с С°°-гладкой параметризацией;
в) показать, что для нее не существует аналитической параме-
параметризации.
17.4. Пусть плоская кривая задана отображением х = tk, у =
= <п, к ^ п, где кип — натуральные числа, t ? (—1, 1). Иссле-
Исследовать, при каких кип кривая является:
а) регулярной, но неаналитической в любой регулярной пара-
параметризации;
б) регулярной аналитической;
в) нерегулярной в любой гладкой параметризации.
В пунктах а) и б) привести соответствующие регулярные пара-
параметризации. Во всех трех случаях нарисовать качественный вид
кривых в окрестности начала координат.
17.5. Пусть пространственная кусочно-регулярная кривая со-
состоит из двух плоских дуг. Какая возможна максимальная глад-
гладкость кривой в целом?
17.6. Найти регулярную аналитическую параметризацию ле-
лемнискаты Вернул ли (х2 + у2J = а2(х2 — у2).
17.7. Можно ли продеформировать лемнискату в классе регу-
регулярных кривых в кривую без самопересечений?
17.8. Пусть 7 — некоторая плоская кривая, М — точка кри-
кривой 7? хОу — заданная в плоскости кривой прямоугольная си-
система координат. Обозначим через Т и N точки пересечения
касательной и нормали к этой кривой с осью Ох, и пусть Р —
проекция точки М на ось Ох (см. рис. 71).
а) Найти уравнение кривой 7? если длина отрезка PN посто-
постоянна и равна а.
б) Найти уравнение кривой 7? если длина отрезка РТ посто-
постоянна и равна а.
112
Часть 2
в) Найти уравнение кривой
тоянна и равна а.
если длина отрезка MN пос-
Т х
Рис. 72
17.9. Найти уравнение кривой 7 с постоянной длиной касатель-
касательной МТ = а (см. рис. 72). Такая кривая называется трактрисой.
17.10. Произвольный луч ОЕ пересекает в точке D окружность
х
а в точке Е — касательную к ней, проходящую через точку 7?
диаметрально противоположную О. Через точки D и Е прове-
проведены прямые, параллельные соответственно осям Ох и Оу, до пе-
пересечения в точке М. Составить уравнение кривой, образованной
точками М {локон Аньези) (см. рис. 73). Нарисовать эту кривую.
О х
Рис. 73. Локон Аньези
17.11. Пусть 7 — замкнутая гладкая кривая. Доказать, что для
любого вектора а найдется точка х G 7? B которой касательная к
7 ортогональна а.
§ 17. Кривые и поверхности: уравнения и параметризации 113
17.12. Пусть две точки движутся в пространстве так, что рас-
расстояние между ними остается постоянным. Доказать, что проек-
проекции их скоростей на направление прямой, соединяющей эти точки,
равны между собой.
17.13. Доказать, что, если на некотором сегменте [а, Ь] вектор-
функция r(t) непрерывна вместе со своей производной г', причем
вектор г параллелен г', и при этом г' ф О и г ф О, то годограф
вектор-функции г = r(t) есть отрезок прямой линии.
17.14. Пусть на некотором отрезке [а, Ь] задана гладкая век-
вектор-функция г(?), причем производные г' и г" отличны от нуля
при всех t е [а, 6], и, кроме того, они коллинеарны, т.е. вектор г'
параллелен г" при всех t Е [а, Ь]. Доказать, что годографом такой
вектор-функции г = r(t) является отрезок прямой линии.
17.15. Пусть по плоскости движется твердый стержень, при-
причем его концы описывают кривые ri(t) и Г2(?). Найти уравнение
неподвижной центроиды. Неподвижной центроидой называется
множество точек пересечения прямых, проходящих через концы
стержня перпендикулярно направлениям скоростей его концов.
17.16. Рассмотрим движение стержня, описанное в предыдущей
задаче. Подвижной центроидой называется множество мгновен-
мгновенных центров вращения относительно
движущегося стержня. Составить урав-
уравнение подвижной центроиды, если за-
заданы законы движения концов стер-
стержня ri (?) и Г2(?).
17.17. Пусть движение плоскости
(т.е. изометрия) задано движением
по плоскости жесткого стержня. До-
Доказать, что тогда линейная скорость
v точки определяется соотношением
v = <j[r], где г — радиус-вектор рас-
рассматриваемой точки M(R) относи-
относительно мгновенного центра вращения
(см. задачи 17.15, 17.16), а [г] — век-
вектор, полученный из г поворотом на угол тг/2 против часовой стрел-
стрелки. Выразить и через ri и Г2, а также найти скорость v точки
M(R) (см. рис. 74).
17.18. Составить уравнения касательной и нормали к следую-
следующим кривым:
а) r(t) = (acost, bs'mt) (эллипс);
б) r(t) = (| (* + 7) ' 5 (* ~ !)) (гипеРбола);
в) r(t) = (acos3?, asin3?) (астроида);
Центр
'мгновенного
вращения
О
Рис. 74. Движение твердого
стержня
114
Часть 2
г) r(t) = {a(t — sin?), a(l — cost)) (циклоида);
Д) r(t) = Qi2 - \t\ \t* + ^ в точке t = 0;
e) r(t) = (a<p cos (p, cup sirup) (спираль Архимеда).
17.19. Доказать, что длина отрезка касательной к астроиде
Рис. 75. Астроида
заключенного между осями координат, равна а (см. рис. 75).
17.20. Доказать, что кардиоиды, задан-
заданные в полярных координатах уравнени-
уравнениями
г = аA + cos</?), г = аA — cos</?),
ортогональны в точках пересечения, от-
отличных от начала координат.
17.21. Найти огибающую семейства пря-
прямых, соединяющих концы пар сопряжен-
сопряженных диаметров эллипса.
17.22. Найти огибающую семейства пря-
прямых, отсекающих от сторон прямого угла треугольник постоян-
постоянной площади.
17.23. Найти огибающую семейства прямых, отсекающих от
данной параболы сегменты данной площади.
17.24. Найти огибающую семейства прямых, отсекающих от
сторон данного угла треугольник данного периметра.
17.25. Найти огибающую семейства окружностей, построен-
построенных, как на диаметрах, на параллельных хордах некоторой окруж-
окружности.
17.26. Найти огибающую семейства эллипсов, имеющих общие
главные оси и заданную сумму полуосей.
17.27. На плоскости расположено зеркало, имеющее форму ок-
окружности. На него падает пучок параллельных лучей. Найти оги-
огибающую отраженных лучей. Эта кривая называется каустикой.
17.28. Найти огибающую семейства эллипсов, имеющих задан-
заданную площадь и общие главные оси.
17.29. Найти огибающую семейства окружностей, имеющих
центры на эллипсе и проходящих через один из его фокусов.
17.30. Найти огибающую семейства окружностей радиуса а с
центрами на кривой г = г(?).
17.31. Пусть вектор-функция r(t) определена, непрерывна и
дважды дифференцируема на сегменте [а, 6]. Далее, пусть в ка-
каждой точке этого сегмента векторы г' и г" неколлинеарны. Найти
огибающую нормалей кривой г = r(f).
17.32. Найти огибающую лучей, отраженных от окружности,
если светящаяся точка находится на окружности.
§ 17. Кривые и поверхности: уравнения и параметризации 115
17.33. Для кривой
r(t) = {t3 - t2 - 5, Ы2 + 1, 2ts - 16)
написать уравнение касательной прямой и нормальной плоскости
в точке, для которой t = 2.
17.34. Найти касательную прямую и нормальную плоскость в
точке АC, —7, 2) кривой
r(t) = (*4 + t2 + 1, 4*3 + 5t + 2, t4 - *3).
17.35. Найти касательную прямую и нормальную плоскость в
точке АB, 0, —2) кривой
r(t) = (?2 ~ 2t + 3, t3 - 2t2 + t, 2t3 - 64 + 2).
17.36. Составить уравнения касательной прямой и нормальной
плоскости для кривой, заданной в R3 трансверсальным пересече-
пересечением двух поверхностей:
Fi(s,y,*) = 0, F2(rr, у, ^)=0.
17.37. Найти длину дуги винтовой линии
х = За cos ?, у = За sin ?, я = 4а?
от точки пересечения с плоскостью хОу до произвольной точ-
точки M(t).
17.38. Найти длину дуги одного витка между двумя точками
пересечения с плоскостью хОу кривой
х = a(t — sin?), у = аA — cost), z = 4аcos -.
17.39. Найти длину дуги кривой
х3 = За2у, 2xz = a2
между плоскостями у = а/3 и у = 9а.
17.40. Найти длину замкнутой кривой
х = cos3 ?, у = sin3 ?, z = cos 2t.
17.41. В каждой точке кривой г = r(t) задан касательный
вектор Т = T(t) ф 0. Функция r(t) определена, напрерывна и
имеет непрерывную производную r'(t) на сегменте [а, Ь]. Функ-
Функция T(t) непрерывна на сегменте [а, Ь]. Доказать, что на данной
dv
кривой можно ввести такую параметризацию, при которой — = Т.
at
Иными словами, всякое достаточно хорошее векторное поле, каса-
касательное к кривой, можно сделать полем ее скорости при подходя-
подходящем выборе параметра вдоль кривой.
116 Часть 2
17.42. Найти необходимое и достаточное условие, при котором
данное семейство прямых
в пространстве IR3 имеет огибающую. Найти эту огибающую.
17.43. Составить параметрическое уравнение цилиндра, для
которого кривая р = р(и) является направляющей, а образующие
параллельны вектору е.
17.44. Составить параметрическое уравнение конуса с верши-
вершиной в начале радиуса-вектора р(?), для которого кривая р = p(t)
является направляющей.
17.45. Составить параметрическое уравнение поверхности, об-
образованной касательными к данной кривой р = p(t). Такая по-
поверхность называется развертывающейся поверхностью.
17.46. Окружность радиуса а перемещается так, что ее центр
движется по заданной кривой р = p(s), а плоскость, в которой она
расположена, является в каждый момент нормальной плоскостью
к данной кривой. Здесь для простоты записи ответа параметр 5 на
кривой взят натуральным. Составить параметрическое уравнение
поверхности, описываемой окружностью.
17.47. Вокруг оси Oz вращается плоская кривая х = <p(v),
z = ф(у). Составить параметрические уравнения поверхности
вращения. Рассмотреть частный случай, когда меридиан задан
уравнением х = f(z).
17.48. Составить уравнение поверхности, образованной глав-
главными нормалями винтовой линии.
17.49. Составить уравнение поверхности, образованной семей-
семейством главных нормалей данной кривой р = p(s).
17.50. Прямая движется так, что точка М пересечения ее с
окружностью движется по данной окружности, причем эта прямая
остается в нормальной плоскости к окружности в соответствующей
точке и поворачивается на угол, равный углу МОМо, который
прошла точка, двигаясь по окружности. Составить уравнение по-
поверхности, описываемой движущейся прямой, считая, что началь-
начальным положением движущейся прямой была ось Оя, а окружность
задана уравнениями х2 + у2 = a2, z = 0.
17.51. Даны две кривые г = г (и) и р = p(v). Составить уравне-
уравнение поверхности, описываемой серединой отрезка, концы которого
лежат на данных кривых. Такая поверхность называется поверх-
поверхностью переноса.
17.52. Пусть даны: плоскость (направляющая плоскость), не-
непараллельная ей прямая (направляющая прямая) и некоторая кри-
кривая (направлящая кривая). Через каждую точку направляющей
кривой проведем прямую /, параллельную направляющей плоско-
плоскости и пересекающую прямую. Рассмотрим поверхность, заметае-
заметаемую прямой I при ее движении. Такая поверхность называется
§ 17. Кривые и поверхности: уравнения и параметризации 117
коноидом (см. рис. 76). Составить уравнение коноида, если даны:
направляющая плоскость yOz, направляющая прямая у = О,
о о
X V
z = Л, и направляющая кривая -^ + -рт = 1, 2 = 0 (эллипс).
Направляющая
кривая
Коноид
Направляющая \
прямая \
Направляющая
плоскость
Рис. 76. Коноид
17.53. Составить уравнение коноида, для которого направляю-
направляющие прямая, плоскость и кривая заданы соответственно уравне-
уравнениями:
а) х = а, у = 0; б) z = 0; в) у2 = 2рг, ж = 0.
17.54. Цилиндроидом называется поверхность, образованная
прямыми, параллельными некоторой плоскости (см. рис. 77).
Цилиндроид может быть задан двумя направляющими кривыми
направляющая плоскость
Рис. 77. Цилиндроид
(лежащими на нем) и направляющей плоскостью (которой парал-
параллельны образующие цилиндроида). Частным случаем цилиндро-
118 Часть 2
ида является коноид, описанный в задачах 17.52 и 17.53. Цилин-
Цилиндроид превращается в коноид, если одна из двух направляющих
кривых является прямой линией. Составить уравнение цилиндро-
цилиндроида, если его направляющими являются окружности х2 + z2 —
— 2ах = О, у = 0 и у2 + z2 — 2ау = 0, х = 0, а направляющей
плоскостью является плоскость хОу.
17.55. Пусть в М3 задана кривая р = р(и) и в каждой ее точке
задан вектор а(и). Линейчатой называется поверхность, задавае-
задаваемая параметрическим уравнением
г(щ v) = р(и) + va(u).
Прямые, проходящие через точки кривой р(и) в направлении век-
вектора а(м), называются прямолинейными образующими линейча-
линейчатой поверхности. Отметим, что коноид и цилиндроид являются
линейчатыми поверхностями.
Составить уравнение линейчатой поверхности, образующие ко-
которой параллельны плоскости у — z = 0 и пересекают параболы
у2 = 2рж, z = 0 и z2 = —2рх, у = 0.
17.56. Составить уравнение линейчатой поверхности, образую-
образующие которой пересекают ось Oz, параллельны плоскости хОу и
пересекают линию xyz = а3, х2 + у2 = Ь2.
17.57. Составить уравнение линейчатой поверхности, образую-
образующие которой пересекают прямую г = а + wb, кривую р = p(v) и
перпендикулярны вектору п.
17.58. Составить уравнение линейчатой поверхности, образую-
образующие которой параллельны плоскости хОу и пересекают два эл-
эллипса
"о + То = 1> х = -а.
17.59. Составить уравнение линейчатой поверхности, образо-
образованной прямыми, пересекающими кривую р — (w, w2, w3), парал-
параллельными плоскости хОу и пересекающими ось Oz.
17.60. Составить уравнение поверхности, образованной прямы-
прямыми, параллельными плоскости х + у + z = 0, пересекающими ось
Oz и окружность р = (Ь, acosw, asinu).
17.61. Составить параметрические уравнения поверхности, об-
образованной прямыми, пересекающими окружность х2 + z2 = 1,
у = 0 и прямые у = 1, z = 1 и х = 1, z = 0.
17.62. Составить уравнение поверхности, образованной каса-
касательными к винтовой линии p(v) = (a cos?;, a sin?;, bv). Такая
поверхность называется развертывающимся геликоидом.
§ 17. Кривые и поверхности: уравнения и параметризации 119
17.63. Составить уравнение конической поверхности с верши-
вершиной в точке @, 0, —с) и направляющей — кривой (х2 + у2J =
= а?(х2 — у2), лежащей в плоскости z = 0.
17.64. В плоскости тг дана прямая АВ и кривая р = р(и).
Кривая р равномерно перемещается в плоскости тг так, что каж-
каждая ее точка движется параллельно АВ. В то же время плоскость
тг равномерно вращается вокруг АВ. Составить уравнение поверх-
поверхности, описываемой кривой р. Эта поверхность называется вин-
винтовой поверхностью. Частным случаем винтовой поверхности
является прямой геликоид. В этом случае р = р(и) — прямая,
ортогональная АВ.
17.65. Пусть г = т{и) — кривая с отличной от нуля кривизной
к. Через каждую ее точку проведена нормальная плоскость, и в
этой плоскости построена окружность с центром на кривой г =
= г (и) и заданным радиусом а, причем а > 0, ак < 1. Эти окруж-
окружности заметают в пространстве трубкообразную поверхность S.
Такие поверхности называются трубками или каналовыми по-
поверхностями.
а) Составить уравнение поверхности S.
б) Доказать, что любая нормаль поверхности S пересекает кри-
кривую г = г(и) и перпендикулярна вектору скорости этой кривой.
17.66. Найти поверхность 5, зная, что все ее нормали пересе-
пересекаются в одной точке О.
17.67. Показать, что объем тетраэдра, образованного пересече-
пересечением координатных плоскостей и касательной плоскости поверх-
поверхности
а3
х = щ y = v, z = —,
uv
не зависит от выбора точки касания на поверхности.
17.68. Показать, что сумма квадратов длин отрезков, отсекае-
отсекаемых на осях координат касательной плоскостью поверхности
х = иг sin3 v, у = иг cos3 v, z = (a2 - u2K/2,
постоянна.
17.69. Показать, что касательная плоскость к коноиду
x = ucosv, y = us'mv, z = asin2v
пересекает коноид по эллипсу.
17.70. Доказать, что плоскости, касательные к поверхности
z = xf (у/ж), проходят через одну и ту же точку.
17.71. Составить уравнение касательной плоскости и нормали
к геликоиду
г(u, v) = (vcosu, vs'mu, ku).
120 Часть 2
17.72. Составить уравнение касательной плоскости к поверх-
поверхности
xyz = a3.
17.73. Пусть поверхность образована касательными к кривой j.
Доказать, что эта поверхность во всех точках одной и той же ка-
касательной к кривой 7 имеет одну и ту же касательную плоскость.
17.74. Пусть поверхность образована главными нормалями кри-
кривой 7- Составить уравнение касательной плоскости и нормали в
производной точке этой поверхности.
17.75. Составить уравнение касательной плоскости и нормали
к поверхности, образованной бинормалями кривой 7-
17.76. Доказать, что нормаль поверхности вращения совпадает
с главной нормалью меридиана и пересекает ось вращения.
17.77. Доказать, что если все нормали поверхности пересекают
одну и ту же прямую, то поверхность будет поверхностью вра-
вращения.
17.78. Линейчатая поверхность (см. определение в задаче
17.55) называется развертывающейся, если во всех точках про-
произвольной прямолинейной образующей касательная плоскость к
поверхности одна и та же. Докажите, что линейчатая поверхность
r(u, v) = р{и) + va(u)
является развертывающейся тогда и только тогда, когда
17.79. Докажите, что любая развертывающаяся поверхность
может быть разбита на следующие части: 1) часть плоскости;
2) часть цилиндра; 3) часть конуса; 4) часть фигуры, состоящей
из касательных к некоторой неплоской линии. В последнем случае
указанная линия называется ребром возврата.
17.80. Найти огибающую и ребро возврата семейства эллипсо-
эллипсоидов
2 „,2\ J1
где а — параметр семейства.
17.81. Найти огибающую семейства сфер, построенных на хор-
хордах, параллельных большой оси эллипса
— + ъ2 _ 1, z _ и,
как на диаметрах.
17.82. Найти огибающую и ребро возврата семейства сфер, диа-
диаметрами которых служат хорды окружности
х2 + у2 - 2х = 0, z = 0,
проходящие через начало координат.
§ 17. Кривые и поверхности: уравнения и параметризации 121
17.83. Две параболы расположены в перпендикулярных плос-
плоскостях и имеют общую вершину и общую касательную в вершине.
Найти огибающую семейства плоскостей, касательных к обеим
параболам.
17.84. Найти огибающую семейства сфер постоянного радиуса,
центры которых расположены на данной кривой р = p(s) (кана-
ловая поверхность).
17.85. Найти ребро возврата семейства сфер постоянного ради-
радиуса а, центры которых расположены на кривой р = p(s).
17.86. Найти огибающую и ребро возврата семейства сфер ра-
радиуса а, центры которых расположены на окружности
17.87. Найти огибающую и ребро возврата семейства сфер, про-
проходящих через начало координат, центры которых расположены
на кривой
т{и) = К, и2, и).
17.88. Найти огибающую семейства эллипсоидов
9 9 9
а2 + Ъ2 + С2
с заданной суммой полуосей
a + b + c = l.
17.89. Найти поверхность, касательные плоскости которой от-
отсекают на осях координат отрезки, сумма квадратов длин которых
равна а2.
17.90. Найти поверхность, касательные плоскости которой от-
отсекают от координатного угла тетраэдр постоянного объема а3.
17.91. Найти огибающую и ребро возврата семейства плос-
плоскостей
ха + уа + z = 0,
где а — параметр семейства.
17.92. Найти огибающую и ребро возврата семейства плос-
плоскостей
х sin a — у cos a + z = aC,
где а — параметр семейства.
17.93. Найти огибающую, характеристики и ребро возврата
семейства соприкасающихся плоскостей данной кривой.
17.94. Найти огибающую, характеристики и ребро возврата
семейства нормальных плоскостей данной кривой.
17.95. Найти характеристики, огибающую и ребро возврата
семейства плоскостей
(г, n)+?> = 0, n = n(u), D = D{u), |n| = l,
где и — параметр семейства.
122 Часть 2
17.96. Найти развертывающуюся поверхность, проходящую
через две параболы:
у2 = 4аж, z = О
и
х2 = 4ау, z = Ь.
17.97. Показать, что поверхность
х = cosv — (и + v) sin?;, у = sinv + (и + v) cosv, z = и + 2v
является развертывающейся.
17.98. Показать, что поверхность
о V Л о 4 2u2V
х = и2 + -, y = 2u3+uv, z = uA + ——
является развертывающейся.
17.99. Дан параболоид
х = 2aucosv, у = 2businv, z = 2u2(acos2 v + bsin2t>),
где а и b — постоянные. Определить уравнение кривых на по-
поверхности так, чтобы касательные плоскости к поверхности обра-
образовывали с плоскостью хОу постоянный угол вдоль кривой.
Показать, что характеристики этого семейства касательных
плоскостей образуют постоянный угол с осью z. Найти ребро воз-
возврата огибающей.
17.100. Найти ребро возврата развертывающейся поверхности,
которая касается поверхности az = xy вдоль линии пересечения
ее с цилиндром х2 = by.
17.101. Показать, что развертывающаяся поверхность, прохо-
проходящая через окружности х2 + у2 = a2, z = 0 и х2 + z2 = Ь2, у = 0,
пересекает плоскость х = 0 по равносторонней гиперболе.
§ 18. Теория кривых (дополнительные задачи)
18.1. Вычислить кривизну кривых:
Г x(t) = аA + т) cos mt — am cos A + m)t,
а) < ,' ' , ч . , • /n , \. (эпициклоида);
' у у (t) = a(l +m) sin mt — am sin A + m)t
б) x2y2 = (a2 - у2){Ъ + уJ (конхоида);
18.2. Вычислить кривизну следующих кривых:
а) у = —In cos ж;
б) х = 3?2, у = 3t-ts при 4 = 1;
в) х = a(cost + tsint), у = a(sint — tcost) при t = тг/2;
г) х = aBcost — cos2t), у = aBsint — sm2t).
§18. Теория кривых (дополнительные задачи) 123
18.3. Найти кривизну следующих кривых, заданных в поляр-
полярных координатах:
а) г = aip\ б) г = cupk\
в) г = о? в точке (р = 0.
18.4. Найти кривизну следующих кривых:
а) у = sin ж; б) у = shx;
в) у = chrr; г) у = tgrr;
д) у — thx; е) у = cthx.
18.5. Определить кривизну кривой
ж = ? — sint, y = l —cost, ? = 4 sin-.
18.6. Найти параметрическое уравнение кривой:
а) 52 + 9Д2 = 16а2;
2 2 2
18.7. Доказать, что если координаты точек кривой удовлетво-
удовлетворяют соотношению
/О 2i 2 2\/j2ij2i,j2\
(xdx + ydy + zdzJ
то касательные к кривой также касаются сферы х2 + у2 + z2 = a2.
18.8. Доказать, что касательные к кривой
к*) = ?
(-(sint + cost), -(sint — cost), е Ч
2 2 /
пересекают плоскость жОу по окружности х2 + у2 = 1.
18.9. Пусть О — центр эллипса, А — конец одной полуоси
(ОА = а), В — конец другой полуоси (ОВ = Ь). Рассмотрим точку
С такую, что САОВ является прямоугольником. Перпендикуляр,
опущенный из С на АВ, продолжим до пересечения с АО в точке
Р и до пересечения с ВО в точке Q. Доказать, что Р — центр
кривизны эллипса в вершине А, а Q — центр кривизны в J5.
18.10. Написать уравнение соприкасающейся плоскости к кри-
кривой г (и) = {и2, щ иг - 20) в точке А(9, 3, 7).
18.11. Показать, что кривая
г (и) = (аи + Ь, си + d, и2)
имеет во всех точках одну и ту же соприкасающуюся плоскость.
18.12. Составить уравнения соприкасающейся плоскости, глав-
главной нормали и бинормали кривой
у2 = х, х2 = z
в точке A, 1, 1).
124 Часть 2
18.13. В каждой точке кривой
x(t) =t — sint, y(t) = 1 — cost, z(t) = 4 sin-
в положительном направлении главной нормали отложен отрезок,
равный учетверенной кривизне кривой в этой точке. Найти урав-
уравнение соприкасающейся плоскости кривой, описанной концом
отрезка.
18.14. Дана винтовая линия
r(t) = (acost, asint, bt).
Составить уравнения касательной, нормальной плоскости, бинор-
бинормали, соприкасающейся плоскости, главной нормали.
18.15. Дана кривая
Составить уравнения касательной, нормальной плоскости, бинор-
бинормали, соприкасающейся плоскости, главной нормали в точке t = 1.
18.16. Доказать, что если:
а) все соприкасающиеся плоскости регулярной гладкой кривой
параллельны между собой, то кривая плоская;
б) все соприкасающиеся плоскости регулярной гладкой кривой
имеют общую точку, то кривая плоская;
в) все касательные к кривой перпендикулярны одному напра-
направлению, то кривая плоская;
г) все нормальные плоскости параллельны одному и тому же
направлению, то кривая плоская.
18.17. Доказать, что в окрестности точки, где кручение кривой
отлично от нуля, выполняются нижеследующие свойства. В обоих
случаях определить, каковы при этом главные члены отклонения
d кривой от этих плоскостей по сравнению с длиной дуги, отсчи-
отсчитываемой от рассматриваемой точки:
а) кривая пересекает свою соприкасающуюся плоскость, рас-
располагаясь по разные ее стороны;
б) кривая располагается по одну сторону от своей спрямляющей
плоскости.
18.18. Вычислить радиусы кривизны и кручения кривой
х3 = За2 у, 2xz = a2.
18.19. Дана кривая
г (и) = (vcosu, vsinu, kv),
где v = v(u). Доказать, что эта кривая расположена на конусе.
Определить функцию v(и) так, чтобы эта кривая пересекала обра-
образующие конуса под постоянным углом в.
§18. Теория кривых (дополнительные задачи) 125
18.20. Обобщенной винтовой линией или линией откоса на-
называется пространственная линия, касательные которой образуют
постоянный угол с фиксированным направлением. Доказать, что
линия будет обобщенной винтовой тогда и только тогда, когда вы-
выполняется одно из следующих условий:
а) главные нормали перпендикулярны фиксированному напра-
направлению;
б) бинормали образуют постоянный угол с фиксированным на-
направлением;
в) отношение кривизны к кручению постоянно.
г) все спрямляющие плоскости кривой параллельны некоторой
прямой (напомним, что спрямляющая плоскость в данной точке
кривой проходит через эту точку перпендикулярно главной нор-
нормали);
ч ( d d2 d3 \
R) [ —v v v ] = n- e
ж) вектор
v/k + b/x _ xv + A;b
y/l/k + 1/X ~
постоянный.
18.21. Доказать, что кривая
х
= а / sina(t) (ft, у = a cos a(t) dt, z = ht
является обобщенной винтовой линией.
18.22. Доказать, что кривая х2 = Зу, 2ху = 9z является обоб-
обобщенной винтовой линией. Найти вектор, с которым касательные
к линии образуют постоянный угол.
18.23. При каких значениях параметров a, b и с кривая r(t) =
= (at, b?2, ct3) является обобщенной винтовой?
Пусть задана кривая г = r(s), где s — натуральный параметр. Кри-
Кривая р = r(s) лежит на сфере единичного радиуса с центром в начале коор-
координат и называется касательным сферическим образом кривой. Анало-
Аналогично определяются нормальный и бинормальный сферические образы.
Так, например, из определения ясно, что кривая г = r(s) является обоб-
обобщенной винтовой линией тогда и только тогда, когда ее касательный
сферический образ является дугой окружности.
18.24. Доказать, что бинормальный сферический образ обоб-
обобщенной винтовой линии является окружностью.
18.25. Найти касательный, нормальный и бинормальный сфе-
сферический образы винтовой линии
r(t) = (acost, asint, bt).
126 Часть 2
18.26. Пусть г = r(s) — кривая, параметризованная натураль-
натуральным параметром.
а) Доказать, что касательный сферический образ кривой г =
= r(s) вырождается в точку тогда и только тогда, когда г = r(s) —
прямая линия.
б) Доказать, что бинормальный сферический образ кривой г =
= r(s) вырождается в точку тогда и только тогда, когда г = r(s) —
плоская кривая.
в) Доказать, что нормальный сферический образ кривой не
может быть точкой.
18.27. Пусть г = r(s) — кривая, параметризованная натураль-
натуральным параметром, причем кн ф 0. Доказать, что касательная к
касательному сферическому образу параллельна касательной к би-
бинормальному сферическому образу в точках, соответствующих од-
одному и тому же значению параметра s.
18.28. Пусть г = r(s) — кривая, параметризованная натураль-
натуральным параметром. Доказать, что если касательный сферический
образ этой кривой лежит в плоскости, проходящей через начало
координат, то кривая г = r(s) — плоская.
18.29. Показать, что при инверсии плоскости соприкасающа-
соприкасающаяся окружность к данной кривой переходит в соприкасающуюся
окружность образа этой кривой. При этом предполагается, что
центр инверсии не совпадает с точкой соприкосновения кривой с
окружностью.
Напомним, что сферическая кривая — это кривая г = г(?), для
которой существуют такой постоянный вектор m и такое постоянное
вещественное число Л, что \r(t) — m| = R.
18.30. Пусть г = r(t) — регулярная кривая, и пусть существует
точка а, лежащая во всех нормальных плоскостях кривой г = г(?).
Доказать, что г = r(t) — сферическая кривая.
18.31. Доказать, что
r(t) = (—cos2?, —2cost, s'm2t)
— сферическая кривая.
Указание. Показать, что точка (—1, 0, 0) лежит в каждой нор-
нормальной плоскости рассматриваемой кривой. См. задачу 18.30.
18.32. Используя результаты предыдущих задач, доказать, что
кривая г = r(s) лежит на сфере тогда и только тогда, когда суще-
существуют такие постоянные вещественные числа А и J5, что
fs s
Г Г
A cos / xds + Bsm I
J J
xds =
§ 18. Теория кривых (дополнительные задачи)
127
18.33. Кривые 7 и 7* называются кривыми Бертрана, если
между точками этих кривых можно установить взаимно одно-
однозначное соответствие, при котором главные нормали (как аффин-
аффинные прямые) в соответствующих точках кривых совпадают (см.
рис. 78). Это означает, что отрезок, соединя-
соединяющий соответствующие точки кривых, явля-
является отрезком главной нормали для обеих
кривых.
Доказать следующие свойства кривых
Бертрана 7И7*:
а) расстояние между соответствующими
точками кривых постоянно;
б) кривизна и кручение каждой из кри-
кривых Бертрана связаны соотношением
ак + Ьн = 1,
где а и Ъ — некоторые постоянные числа.
При этом числа а и Ь для каждой кривой —
свои;
в) касательные к кривым 7 и 7* в соот-
соответствующих точках образуют постоянный
угол.
18.34. а) Доказать, что две произвольные концентрические
окружности в плоскости образуют пару кривых Бертрана.
б) Пусть
Рис. 78. Кривые Бер-
Бертрана
Доказать, что ri(t) и Г2(?) образуют пару кривых Бертрана.
18.35. Показать, что если кривизна и кручение кривой 7 свя-
связаны линейной зависимостью ак + Ън = 1, где а и Ъ — числа,
отличные от 0, то существует кривая 7* такая, что кривые 7 и 7*
образуют пару кривых Бертрана.
18.36. Доказать, что для кривой с постоянной кривизной обя-
обязательно найдется вторая кривая, вместе с которой они образуют
пару кривых Бертрана.
18.37. Доказать, что кривая r(t) является кривой Бертрана то-
тогда и только тогда, когда ее можно задать векторным уравнением
где e(t)
r{t) =a I e(t)dt + c e{t) x e'(t)dt,
вектор-функция такая, что \e(t)\ = 1 и \ef(t)\ = 1.
128 Часть 2
18.38. Пусть г = r(t) — регулярная гладкая кривая, причем
х ф 0. Доказать, что r(t) является обычной винтовой линией
тогда и только тогда, когда существуют по крайней мере две раз-
различные кривые, каждая из которых образует с r(t) пару кривых
Бертрана.
18.39. Доказать, что если между точками двух различных кри-
кривых 7 и 7* установлено взаимно однозначное соответствие, при
котором бинормали кривых в соответствующих точках совпадают
(как аффинные прямые), то эти кривые плоские.
18.40. Пусть для гладкой кривой 7 существует такая кривая
7*, что главные нормали 7 являются бинормалями к 7* в соответ-
соответствующих точках. Доказать, что кривизна и кручение кривой 7
удовлетворяют соотношению к = Х(к2 + х2), где А — некоторое
постоянное число.
18.41. Пусть между точками кривых 71 и 72 можно установить
такое соответствие, при котором касательные в соответствующих
точках параллельны. Доказать, что отношения кручения к кри-
кривизне в соответствующих точках кривых равны по абсолютной ве-
величине. Также показать, что в соответствующих точках нормали
(бинормали) параллельны.
18.42. Пусть между точками кривых 71 и 72 установлено та-
такое соответствие, что в соответствующих точках касательные 71
параллельны бинормалям 72- Доказать, что в соответствующих
точках бинормали 71 параллельны касательным 72 и главные нор-
нормали обеих кривых параллельны между собой. Кроме того, пока-
показать, что их кривизны и абсолютные значения кручений обратно
= JX2J
к2
Овалом называется регулярная простая замкнутая плоская кривая
с к > 0. Вершина регулярной плоской кривой — это точка, где кривизна
к имеет относительный максимум или минимум.
Пусть r(s) — овал и Р — точка на r(s). Тогда существует точка
Р', где касательный вектор v к овалу противоположен касательному век-
вектору в точке Р, т. е. v(P') = —v(P). Касательные в точках Р и Р'
параллельны. Ясно, что такая точка Р' единственна. Она называется
противоположной точкой к точке Р.
Шириной w(s) овала в точке Р= r(s) называется расстояние между
касательными прямыми к овалу в противоположных точках в Р и Р'.
Говорят, что овал имеет постоянную ширину, если его ширина в
точке Р постоянна, т. е. не зависит от выбора Р.
18.43. Доказать, что понятие вершины кривой не зависит от
выбора параметризации.
18.44. Если г = г($) — овал, доказать, что вектор v" паралле-
параллелен вектору v по крайней мере в четырех точках.
18.45. Теорема о четырех вершинах. Доказать, что
любой овал имеет по меньшей мере четыре вершины.
§ 18. Теория кривых (дополнительные задачи) 129
18.46. Показать, что теорема о четырех вершинах (см. задачу
18.45) неверна, если опустить условие замкнутости.
18.47. Доказать, что если г($) — овал постоянной ширины w,
то его длина равна irw.
18.48. Пусть г = r(s) — овал постоянной ширины. Доказать,
что прямая, соединяющая пару противоположных точек Р и Р1
овала, ортогональна к касательным в точках Ри Pf.
18.49. Пусть r(s) — плоская кривая постоянной ширины. По-
Показать, что сумма радиусов кривизны 1/fc в противоположных точ-
точках является постоянной, не зависящей от выбора точек.
18.50. Пусть r(s) — овал длины L, заданный в натуральном
параметре. Обозначим через в угол между горизонталью и каса-
касательным вектором v(s).
а) Доказать, что отображение в: [0, L] -> [0, 2тг] является вза-
взаимно однозначным. Показать, что отображение г о Q~~l является
гладкой регулярной параметризацией овала.
б) Пусть р(в) — параметризация овала такая, что r(s) = p(9(s))
(см. предыдущий пункт). Доказать, что противоположная точка к
r(s) есть Щз) = р(в(з) + тг).
в) Доказать, что кривая R(s) регулярна.
18.51. Пусть р(в) — овал, параметризованный углом 0, как в
предыдущей задаче. Пусть wF) — ширина овала в точке р@).
Доказать, что
2тг
w d9 = 2L,
о
где L — длина овала.
18.52. Пусть р(в) — овал, параметризованный углом в; к(в) и
w(9) соответственно его кривизна и ширина. Доказать, что
d2w 1 1
СЮ2 к(в)
18.53. Доказать, что кривизна кривой j в точке М равна кри-
кривизне проекции 7 на соприкасающуюся плоскость в точке М.
18.54. Выразить кривизну и кручение эвольвенты кривой через
кривизну и кручение исходной кривой.
18.55. Доказать, что эвольвента линии откоса — плоская кри-
кривая. Определение линии откоса см. выше.
Подерой пространственной кривой по отношению к точке О называ-
называется множество оснований перпендикуляров, опущенных из точки О на
касательные к данной кривой.
18.56. Найти уравнение подеры линии г = r(t).
130 Часть 2
18.57. Найти подеру винтовой линии r(t) = (acost, а sint, ht)
относительно начала координат. Доказать, что она лежит на од-
нополостном гиперболоиде
zV у2 h2z2
а2 + а2 а4
18.58. Пусть кривая г = r(s) имеет постоянную кривизну. До-
Доказать, что соприкасающаяся сфера и окружность имеют один и
тот же радиус.
18.59. Доказать, что радиус кривизны кривой на сфере радиуса
R не может быть больше, чем R.
18.60. Доказать, что на сфере неплоская регулярная гладкая
кривая не может иметь постоянную кривизну.
18.61. Найти общий вид кривизны сферической кривой с по-
постоянным кручением.
18.62. Доказать, что кривая на сфере определяется заданием
своей кривизны или кручения как функции длины дуги.
18.63. а) Доказать, что на сфере имеются кривые с постоянным
ненулевым кручением.
б) Доказать, что на сфере нет замкнутой регулярной кривой со
знакопостоянным кручением, отличным от 0.
в) Из предыдущих пунктов вытекает, что на сфере кривая с
постоянным ненулевым кручением не может быть замкнутой. Во-
Вопрос — как «далеко» простирается сферическая кривая с посто-
постоянным кручением: обязательно ли она имеет конечную длину или
же она бесконечной длины и обматывает сферу плотно?
18.64. Доказать, что если кривая задана уравнением г = r(s)
в натуральном параметре s, то радиус-вектор центра соприкасаю-
R
щейся сферы задается формулой р = г + Rn H Ь, а радиус со-
соприкасающейся сферы равен
5 V x2*
18.65. Найти соприкасающуюся окружность кривой:
а) r(t) = (t — sint, 1 — cost, sint) при t = 0;
б) r(t) = Bt, lnt, t2) при t = 1.
18.66. Найти радиус соприкасающейся сферы кривой r(t) =
= (t, t2, t3) в точке t = 0.
18.67. Найти радиус соприкасающейся сферы в произвольной
точке следующих кривых:
a) r(t) = (a cost, а sint, /it); б) r(t) = (е*, е~*,
в) r(t) = (e*sint, e*cost, е*).
§ 18. Теория кривых (дополнительные задачи) 131
18.68. Доказать, что соприкасающаяся плоскость кривой пере-
пересекает соприкасающуюся сферу по соприкасающейся окружности
в той же точке.
18.69. Найти геометрическое место центров соприкасающихся
сфер винтовой линии
r(t) = (acost, asint, /it).
18.70. Доказать, что если радиус соприкасающейся сферы по-
постоянен, то кривая либо лежит на сфере, либо имеет постоянную
кривизну.
18.71. Пусть кривая 71 является геометрическим местом цен-
центров соприкасающихся сфер кривой 72 и наоборот. Доказать, что
кривизны кривых 7i и 72 постоянны и равны, их соприкасающи-
соприкасающиеся плоскости взаимно перпендикулярны, а произведение круче-
кручений в соответствующих точках равно квадрату кривизны.
18.72. Доказать, что если в каждой своей точке кривая имеет
со своей соприкасающейся плоскостью касание третьего порядка,
то эта кривая плоская.
18.73. Рассмотрим всевозможные кривые второго порядка, про-
проходящие через данную точку плоской регулярной кривой j. Пока-
Показать, что среди них есть единственная, порядок касания которой
с кривой 7 равен 4. Определить тип и параметры этой кривой
второго порядка через кривизну k(s) кривой 7-
18.74. Из начала координат на плоскую кривую г = r(s) падает
пучок лучей. Составить уравнение огибающей отраженных лучей
(каустика).
18.75. Какой вид примет уравнение каустики плоской кривой
относительно начала координат, если уравнение кривой задано в
виде г = r(t) в произвольном параметре?
18.76. На плоскую кривую, заданную уравнением г = r(s), па-
падает пучок параллельных лучей, имеющих направление вектора
е (|е| = 1). Составить уравнение огибающей лучей, отраженных
от данной кривой (каустика). Рассмотреть случаи, когда кривая
задана уравнением г = r(t) в произвольном параметре, а также,
когда она задана уравнением у = f(x).
18.77. Пусть IV. [0, а] —> Ш2 — сегмент кривой, параметризо-
параметризованной натуральным параметром, и Г2(з) — кривая
Ы3) = riE) + (ao - s)v(s),
где v(s) — касательный вектор к ri(s), ao > a — некоторая кон-
константа. Показать, что единичная касательная к T2{s) в каждой
точке ортогональна к v(s).
Заметим, что кривая ri является эволютой кривой Г2, а кри-
кривая Г2 является эвольвентой кривой ri.
132 Часть 2
18.78. Найти эволюты, эвольвенты и радиусы кривизны сле-
следующих кривых:
v ( х = a(t — sin?),
\j/ = a(l -cost);
д) г = a(l + coscp) (в полярной системе координат);
е) j/ = ach-;
ж) г = Хер (в полярной системе координат);
з) г2 = 2a2 cos2<p (в полярной системе координат);
и) rm = am cos пир (в полярной системе координат), где га —
некоторая целая положительная постоянная;
к) г = a ctg (p.
18.79. Найти эволюту логарифмической спирали г = а^. Дока-
Доказать, что это — та же самая спираль, но повернутая вокруг начала
координат на некоторый угол. Найти этот угол.
18.80. Расположенный на плоскости Оху луч равномерно вра-
вращается в плоскости вокруг своей начальной точки О. Точка М на
луче движется по лучу со скоростью, пропорциональной расстоя-
расстоянию ОМ, В этих условиях:
а) вывести уравнение траектории движения точки в полярных
координатах с полюсом в О;
б) показать, что на полученной кривой (называемой логариф-
логарифмической спиралью Бернулли) касательные образуют с радиус-
вектором кривой постоянный угол;
в) это свойство логарифмических спиралей является для них
характеристическим;
г) спираль стремится к своему полюсу г = 0, имея конечную
длину;
д) выписать натуральные уравнения логарифмической спи-
спирали;
е) радиус кривизны спирали пропорционален длине ее дуги,
отсчитываемой от полюса, и это свойство тоже является характе-
характеристическим свойством логарифмических спиралей;
ж) эволюта данной логарифмической спирали конгруентна
самой спирали;
з) указать значение параметра а, для которого эволюта спи-
спирали совпадает с ней самой, т. е. когда спираль является огибаю-
огибающей своих нормалей;
и) каждая логарифмическая спираль является орбитой дей-
действия группы G линейных преобразований плоскости, которое
состоит в преобразовании подобия с коэффициентом подобия t > 0
§18. Теория кривых (дополнительные задачи) 133
с последующим поворотом плоскости на угол a = lnt (центр подо-
подобия и центр вращения — в общем полюсе спиралей);
к) для дуги спирали г = е^, ср\ ^ tp ^ <р2? указать элемент
группы G, который переводит ее в дугу этой же спирали, начинаю-
начинающуюся в точке с полярными координатами tp = тг + <^i, г = е71*"*"^1;
будет ли образ дуги иметь такой же угловой раствор величиной
<^2 "~ ^ь чт0 и исходная дуга?
18.81. Найти особые точки эволюты эллипса. Сколько норма-
нормалей можно провести к эллипсу через произвольную точку плос-
плоскости?
18.82. Найти эвольвенту окружности.
18.83. Найти радиус кривизны кривой Штейнера
t 2t Л . t . 2t
х = 2r cos - + r cos —, у = 2r sin - — r sin —
So 3 3
в произвольной точке. Кривая Штейнера — это гипоциклоида,
образованная в результате качения окружности радиуса г по окруж-
окружности радиуса Зг.
18.84. Доказать, что эволютой кривой Штейнера является кри-
кривая Штейнера, подобная исходной, причем коэффициент подобия
равен 3. При этом эволюта повернута относительно исходной кри-
вой на угол —.
о
18.85. Найти эволюту астроиды. Доказать, что ее эволютой
является астроида, подобная исходной с коэффициентом подобия,
равным 2, и повернутая относительно исходной на угол —. Заме-
Заметим, что астроида является гипоциклоидой, образованной в ре-
результате качения окружности радиуса г по окружности радиуса 4г.
Далее, свойства эволюты астроиды, описанные в этой задаче, ана-
аналогичны свойствам эволюты кривой Штейнера (см. предыдущую
задачу).
18.86. Исследовать эволюты гипоциклоид, образованных в ре-
результате качения окружности радиуса г по окружности радиуса R
для различных отношений R/r (см. задачи 18.84 и 18.85).
18.87. Найти эволюту листа Декарта
3at 3at2
18.88. Найти кривизну плоской кривой, у которой кривизна
равна кривизне ее эволюты (в соответствующих точках).
18.89. По натуральному уравнению кривой R = ip(s) составить
натуральное уравнение эволюты.
18.90. Написать натуральное уравнение эвольвенты по нату-
натуральному уравнению кривой.
134 Часть 2
18.91. Доказать следующие утверждения:
а) касательные к эволюте являются нормалями к исходной
кривой;
б) любая ортогональная кривая семейства касательных к кри-
кривой является эвольвентой исходной кривой;
в) длина дуги эволюты равна абсолютному значению разности
радиусов кривизны в соответствующих точках исходной кривой;
г) радиус кривизны эволюты равен
1 d(R2)
2 ds '
где R — радиус кривизны самой кривой.
18.92. Пусть неплоская кривая имеет постоянную отличную от
нуля кривизну, и пусть ее кручение отлично от нуля. Рассмотрим
множество центров кривизн этой кривой. Полученную кривую обо-
обозначим 7*- Доказать, что кривизна кривой 7* постоянна. Найти
кручение 7*-
18.93. Пусть гладкая кривая С задана уравнением г = г(?),
где функция г(?) определена на отрезке [а, Ь]. Пусть в некоторой
точке М производные г', г", г'" некомпланарны. Доказать, что
соприкасающаяся плоскость кривой С в точке М пересекает кри-
кривую С.
18.94. Пусть гладкая кривая С задана уравнением г = г(?), где
функция r(t) определена на отрезке [а, Ь]. Пусть в некоторой точке
M(t) вектор г' не параллелен вектору г". Вычислить предел
А
lim
где d — расстояние от точки M(t + At) до соприкасающейся плос-
плоскости кривой С в точке M(t). Рассмотреть частный случай, когда
кривая задана уравнением г = r(s) в натуральном параметре.
18.95. Доказать, что кручение асимптотической линии на по-
поверхности с К < 0 равно ±у/—К.
18.96. Пусть кривизна поверхности вращения строго отрица-
отрицательна. Существуют ли на ней замкнутые асимптотические ли-
линии?
Пусть г = r(s), 5 G [0, о], — плоская кусочно-регулярная класса С2
кривая, параметризованная натуральным параметром. Индексом (чис-
(числом) вращения ггE) этой кривой называется число
г=0
§ 18. Теория кривых (дополнительные задачи)
135
где к — кривизна кривой, Si @ ^ i ^ n — 1) — точки нерегулярности,
v~(si) = lim v(s), v+(si) = lim v(s), Д0» — угол между векторами
8—>SJ~ f
v~(si) и v+(si) (см. рис. 79).
Рис. 79. Индекс вращения кривой
18.97. Вычислить индексы вращения кривых, заданных сле-
следующими уравнениями:
а) г(<) = (а + pcosi, psini), 0 < t < 2тг, |а| < р;
б) r(t) = (а + pcos?, psini), 0 ^ i
в) г(<) = (pcos2i, -psin2<), 0 < t
г) r(t) = (A/2) cosi, sini), 0 < <
д) г(<) = Bcost, -sint), 0 ^ t
е) r(t) = (cos t, sin21), 0 < t <
18.98. Пусть 7 С К2 — замкнутая кривая (не обязательно про-
простая, т.е. допускаются самопересечения). Доказать, что
2тг, 0 < р < |а|;
2тг, р > 0;
2тг;
бтг;
2тг.
I2
г J u{x)ds,
R2
где функция и(х) есть число вращений кривой 7 вокруг точки
х GR2.
136 Часть 2
18.99. Доказать, что если r(s) — простая замкнутая регуляр-
регулярная плоская кривая, то касательный круговой образ v: [О, L] -» S1
этой кривой является отображением «на».
18.100. Доказать, что если г = r(s) — регулярная замкнутая
кривая, то ее касательный сферический образ не может лежать ни
в какой открытой полусфере.
18.101. Доказать, что касательный сферический образ регуляр-
регулярной замкнутой кривой не может лежать ни в какой замкнутой
полусфере, за исключением случая, когда он является большой
окружностью, ограничивающей полусферу.
18.102. Пусть 7 — гладкая замкнутая кривая на единичной
сфере S2. Доказать, что она содержится в открытой полусфере,
если:
а) длина / кривой 7 строго меньше 2тг;
б) длина / кривой 7 равна 2тг, но кривая не является объеди-
объединением двух больших полуокружностей.
Тотальным кручением регулярной пространственной кривой г =
= r(s) длины L, параметризованной натуральным параметром, называ-
L
число I xds. Заметим, что тотальные кривизна и кручение кривой
о
в R3, определенные выше для натурального параметра 5 вдоль кривой,
можно вычислять в произвольном параметре t = t(s). При этом соответ-
соответствующее выражение, например, для кручения имеет вид
ь
«) i *
dt
> = t(L).
18.103. Используя результаты задач 18.100-18.102, доказать
следующее утверждение: тотальная кривизна замкнутой прост-
пространственной кривой 7 не меньше 2тг, причем она равна 2тг тогда и
только тогда, когда 7 — плоская выпуклая кривая (теорема Фен-
Фенхеля).
18.104. Пусть 7 — пространственная замкнутая кривая. Пред-
Предположим, что 0 ^ k ^ 1/R для некоторого вещественного числа
R > 0. Доказать, что длина / кривой 7 удовлетворяет неравенству
ется
18.105. Вычислить касательный сферический образ для эл-
эллипса
r(t) = Bcost, sin*, 0), 0 ^ * ^ 2тг.
Что можно сказать об этом образе с учетом теоремы Фенхеля?
§ 18. Теория кривых (дополнительные задачи)
137
Рис. 80
Рассмотрим стандартную единичную двумерную сферу S2 в Е3. Мно-
Множество ориентированных больших окружностей сферы находится во
взаимно однозначном соответствии с точками
самой сферы 52. Это соответствие устанавли-
устанавливается следующим образом. Каждой большой
окружности нужно сопоставить конец единич-
единичной положительной нормали, которая перпен-
перпендикулярна плоскости окружности и выходит
из начала координат. При этом нормаль на-
называется положительной, если именно вдоль
нее перемещается правый штопор, вращае-
вращаемый в направлении, указанном на большой
окружности (см. рис. 80).
Мерой множества ориентированных боль-
больших окружностей будем называть меру соот-
соответствующего множества точек S2.
Если х е 52, то через w = xL обознача-
обозначается соответствующая точке х большая ориен-
ориентированная окружность. Для регулярной кривой 7 на сфере через пу(х)
обозначается число точек в^Пх1- (которое может быть бесконечно). За-
Заметим, что число пу(х) не зависит от параметризации кривой 7-
18.106. Пусть 7 — регулярная кривая длины / на сфере S2.
Доказать, что мера множества ориентированных больших окруж-
окружностей, которые пересекают j (с учетом кратностей), равна 4/.
Другими словами, / riy(w)da = 4/ (формула Крофтона).
S2
Замкнутая простая кривая 7 в Е3 называется незаузленной, если
существует взаимно-однозначная непрерывная функция g: D2 —> Е3
(D2 — единичный диск), которая отображает границу S1 диска D2 на
образ кривой 7- В противном случае кривая называется заузленной.
18.107. Доказать, что если 7 — простая заузленная регулярная
кривая, то ее тотальная кривизна больше или равна 4тг.
18.108. Используя формулу Крофтона, доказать, что для любой
замкнутой пространственной регулярной кривой ее тотальная кри-
кривизна
/ k(s) ds не меньше 2тг (частный случай теоремы Фенхеля).
18.109. Пусть для замкнутой гладкой регулярной кривой 7 сфе-
сферическая индикатриса ее бинормалей не имеет самопересечений.
Доказать, что тогда для ориентированной (см. задачу 4.20) кри-
кривизны к кривой 7 выполняется неравенство
-2тг <
ds < 2тг,
138 Часть 2
где / — длина L. Вывести отсюда, что кривизна кривой L обя-
обязана изменять свой знак.
18.110. Доказать, что для любого вещественного числа г су-
существует такая замкнутая кривая 7? что ее тотальное кручение
xds равно г.
7
18.111. Доказать, что для замкнутой кривой 7? заданной в виде
г = r(s) и расположенной на сфере ?2, ее тотальное кручение
x(s) ds равно нулю.
7
18.112. Пусть М — такая поверхность в R3, что / xds = О для
7
всех замкнутых кривых 7? расположенных на М. Доказать, что
М есть часть плоскости или сферы.
18.113. Доказать, что для любой замкнутой сферической кри-
кри,
/ —ds
вой 7 интеграл / —ds равен нулю
7
18.114. Найти геодезическую кривизну линии и = const на
поверхности г = (иcost;, itsinv, av).
18.115. Найти геодезическую кривизну линии ах + by + с = О
в верхней полуплоскости с метрикой
ds2 =
18.116. Доказать, что если каждая нормаль плоской замкнутой
регулярной кривой делит ее на две равные части, то эта кривая —
окружность.
18.117. Доказать следующее утверждение: периодическая с пе-
периодом S функция k(s) является функцией кривизны некоторой
плоской замкнутой кривой тогда и только тогда, когда выполня-
выполняются следующие два равенства:
s s
о о
где С — некоторая константа.
/ cos ( / k(t)dt + С Jds = 0,
о о
S 8
I sin Г I k(t) dt + Cjds = 0,
§ 18. Теория кривых (дополнительные задачи) 139
Опорной функцией h(t) плоской кривой г = r(t) называется рассто-
расстояние от Фиксированной точки О до переменной касательной к кривой в
точке r(t).
18.118. Пусть дана плоская выпуклая кривая. Тогда в качестве
параметра на кривой можно взять угол а, который составляет ка-
касательная в точке кривой с фиксированным направлением на плос-
плоскости. Доказать, что для радиуса кривизны этой кривой имеет
место формула
где h(a) — опорная функция кривой.
18.119. Доказать, что площадь области, ограниченной плоской
1 г
выпуклой регулярной замкнутой кривой 7? равна ~ / h(t) dt, где
7
h(t) — опорная функция данной кривой.
18.120. Пусть замкнутая плоская выпуклая регулярная кривая
длины L ограничивает область площади S. Пусть R — радиус
описанной окружности, а г — вписанной. Доказать следующие
неравенства:
а) L2 - 4тг5 ^ 0;
б) L2-4nS^7r2(R-rJ;
д) 2^ <r<i?< Y, '
причем равенства достигаются только в том случае, если кривая
является окружностью.
18.121. Доказать, что овал, имеющий четыре вершины, пере-
пересекается с произвольной окружностью самое большее в четырех
точках.
18.122. Доказать, что если овал пересекается с некоторой
окружностью в 2п точках, то у него по меньшей мере 2п вер-
вершин.
18.123. Пусть 7 — пространственная кривая постоянной кри-
кривизны, а кривая 7* — множество ее центров кривизны. Доказать,
что кривая 7* имеет ту же кривизну, что и 7. Доказать, что кривая
7 является множеством центров кривизны кривой 7*-
18.124. Доказать, что соприкасающаяся сфера имеет постоян-
постоянный радиус тогда и только тогда, когда кривая либо лежит на
сфере, либо имеет постоянную кривизну.
140 Часть 2
18.125. Доказать, что пространственная кривая, заданная в
следующем виде:
о
имеет постоянное кручение х. Здесь b(t) — произвольная кривая
на единичной сфере, ах — произвольное ненулевое вещественное
число.
И обратно, любая пространственная кривая с постоянным от-
отличным от нуля кручением х может быть представлена в таком
виде для подходящей кривой Ь(?).
18.126. Доказать, что всякая кривая непостоянной кривизны,
для которой выполняется соотношение
/d(l/k)\2 _ 2 {г>2 1
лежит на сфере радиуса R.
18.127. Доказать, что если кривая лежит на сфере, то ее кри-
кривизна и кручение удовлетворяют соотношению
х d ( 1 d ( 1
к ds \x ds \k
И обратно, если кривизна и кручение некоторой кривой удовле-
удовлетворяют этому соотношению, что кривая лежит на сфере.
18.128. Если кривизна и кручение пространственной кривой не
обращаются в нуль, то кривая сферическая тогда и только тогда,
когда
х d
к ds \ нк2 ds
1 Г
Если положить р = -, о = / xds, то уравнение можно перепи-
переписать в следующем виде: , Л
18.129. Показать, что для кривой общего положения, располо-
расположенной на сфере, соотношения предыдущих трех задач равно-
равносильны (см. также задачу 4.52).
18.130. Доказать, что для произвольного числа А существует
бирегулярная замкнутая кривая такая, что / xds ^ А. Напо-
7
мним, что кривая называется бирегулярной, если г ф 0 и г ф 0.
§ 19. Рималова метрика (дополнительные задачи)
141
18.131. Если плоская кривая вместе с хордой, стягивающей
ее концы, ограничивает выпуклую область, то при скручивании
кривой, т. е. при замене ее на пространственную кривую с той же
кривизной, длина хорды увеличивается.
18.132. Пусть 7 — замкнутая регулярная гладкая кривая. До-
Доказать, что множество направлений, по которым касательные пря-
прямые касаются кривой в точках с нулевой кривизной, имеет нулевую
угловую меру. Доказать, что направлений, по которым касатель-
касательные касаются кривой более чем в одной точке с ненулевой кривиз-
кривизной, может быть только конечное число.
18.133. Доказать теорему Якоби: если сферическая индика-
индикатриса главных нормалей замкнутой кривой не имеет самопере-
самопересечений, то она делит сферу на две равновеликие части.
§ 19. Риманова метрика (дополнительные задачи)
19.1. Докажите, что в прямоугольном треугольнике на плоско-
плоскости Лобачевского перпендикуляр, опущенный из середины гипоте-
гипотенузы на один из катетов, меньше половины другого катета.
D
HaJT
Рис. 81
19.2. Пусть три точки А, 5, С принадлежат одной прямой, а
точка D ей не принадлежит. Докажите, что середины отрезков
DA, DB и DC не лежат на одной прямой:
а) на сфере; б) на плоскости Лобачевского.
Напомним, что на евклидовой плоскости этот факт неверен (см.
рис. 81).
19.3. Рассмотрим плоскость Лобачевского в модели Пуанкаре
на открытом круге радиуса 1 с метрикой
ds2 =
A — и2 - v2
+ dv2).
Рассмотрим диаметр круга, задаваемый уравнением v = 0. Как из-
известно, он является прямой плоскости Лобачевского. Найти экви-
дистанту этой прямой.
142
Часть 2
19.4. Для модели плоскости Лобачевского в верхней полуплос-
полуплоскости найти площади треугольников, ограниченных прямыми:
а) х = —а, ж = а, х2 + у2 = а2;
б) х == а, х = 2а, (ж — аJ + у2 = а2;
в) ж = 0, ж = а/2, ж2 + у2 = 4а2;
г) ж = 0, ж = а/2, х2 + у2 = а2;
д) х = —а, ж = а, ж2 + у2 = 4а2;
е) ж = —а, ж = а, ж2 + у2 = 2а2;
ж) ж = а, ж = 6, (ж — аJ + у2 = 262.
19.5. Для модели плоскости Лобачевского в верхней полуплос-
полуплоскости найти площадь треугольника с вершинами (—2, 2), @, 2),
B, 2).
19.6. Для модели плоскости Лобачевского в верхней полуплос-
полуплоскости найти площадь четырехугольника, ограниченного прямыми
х = 0, ж = а, у = а/2, у = а.
19.7. Для модели плоскости Лобачевского в верхней полуплос-
полуплоскости найти площадь четырехугольника с вершинами в точках
(О, ал/12), @, 2а), (а, а), (а, ал/%).
19.8. Какой области в круге с метрикой Лобачевского (модели
Пуанкаре) изометрична псевдосфера Бельтрами с разрезом по ме-
меридиану? Какой области изометрично универсальное накрытие
над псевдосферой Бельтрами (без разреза)?
Пояснение. После разрезания по меридиану псевдосфера Бель-
Бельтрами оказывается изометрична области на плоскости Лобачевского,
ограниченной так называемым орициклом (см. рис. 82).
Рис. 82
19.9. Рассмотрим G — множество изометрий вида z
az
cz + d
плоскости Лобачевского в модели на верхней полуплоскости, име-
имеющих ровно одну заданную неподвижную точку жо G R. Найти ор-
орбиту произвольной точки плоскости Лобачевского под действием G.
§ 19. Риманова метрика (дополнительные задачи) 143
19.10. Рассмотрим G — множество изометрий вида z »->
cz + d
плоскости Лобачевского в модели на верхней полуплоскости, име-
имеющих ровно две заданные неподвижные точки х\, x*i € Ш. Найти
орбиту произвольной точки плоскости Лобачевского под дейст-
действием G.
19.11. Найти дробно-линейное преобразование w = -, при
cz + a
котором:
а) верхняя полуплоскость отображается на себя, причем w@) =
= 1, w(l) = 2, wB) = оо;
б) верхняя полуплоскость отображается на единичный круг,
причем w(i) = 0, argw'(i) = — тг/2;
в) верхняя полуплоскость отображается на единичный круг,
причем гу(—1) = 1, w@) = г, w(l) = —1;
г) единичный круг отображается на нижнюю полуплоскость,
причем w(l) = 1, w(i) = 0, w(—i) = —1;
д) единичный круг отображается на верхнюю полуплоскость,
причем гу(—1) = оо, w(l) = 0, w(i) = 1;
е) единичный круг отображается на себя, причем w A/2) = 0,
axg<i/(l/2) =тг/2.
19.12. Рассмотрим на плоскости Лобачевского треугольник
ABC, около которого описана окружность, причем сторона АВ
является ее диаметром. Доказать, что в треугольнике ABC вы-
выполняется равенство ZC = ZA + ZB.
19.13. Рассмотрим на плоскости Лобачевского треугольник со
сторонами а, Ь и с. Пусть г — радиус вписанной окружности,
la и ma — соответственно биссектриса и медиана, проведенные
к стороне а, противолежащий к ней угол — а. Доказать ра-
равенства:
ч t , 2 shbshe cos (a/2)
a) th'«= —?T3—;
=
ch (a/
wl2 sh (p - a) sh (p - b) sh (p - c) 1, ч
B)th2r = —— —^ —— -, где р= -(a + b + c).
shp l
19.14. Рассмотрим преобразование единичного круга с центром
в начале координат, заданное формулой
144 Часть 2
а) Доказать, что при этом единичный круг отображается в себя
диффеоморфно.
б) Вычислить метрику, в которую переходит метрика плоско-
плоскости Лобачевского при указанном преобразовании.
в) Найти символы Кристоффеля метрики пункта б).
г) Вычислить параллельный перенос вдоль хорд единичного
круга в метрике пункта б).
д) Найти геодезические метрики пункта б).
19.15. В единичном круге х2 + у2 < 1 рассмотрим метрику с
матрицей
„2
1 /1-1/ ху \
1 - х2 - у2 \ ху 1-х2 J '
Показать, что преобразование
х = х1 cos а —у' sin a, y — x1 sin а + у' cos а
является движением этой метрики.
19.16. Доказать, что угол <р между окружностями на единичной
сфере S2 с центром в начале координат, заданными плоскостями
а,{Х + biy + C{Z = rfj, г = 1, 2, вычисляется по формуле
cos (р = —р
\ + b\ + с\
19.17. Вычислить первую квадратичную форму следующих по-
поверхностей в R3:
а) г(«, v) = (| (v + i) cosu, \ [v + i) sinu, § (« - ^))
(однополостный гиперболоид);
( uv + l v-u uv-l\
б) г (и, г;) = а , о , с (однополостный
f v ' \ v + u v + u v + u ) v
гиперболоид);
в) г(«, v) = (§(«- 1) cosu, | (« - ^) sinu, f (« + ^))
(двуполостный гиперболоид);
/ v2\
г) г (и, v) = I Vy/pcosu, Vy/qsmu, — 1 (эллиптический пара-
параболоид);
д) г (и, г>) = ((и + v)y/p, (и - v)y/q, 2uv) (гиперболический
параболоид);
е) г(м, г;) = (acosu, bsinu, г;) (эллиптический цилиндр);
§ 19. Рималова метрика (дополнительные задачи) 145
ж) r(u, v) = ( т: (^— l?o(u ) > v) (гиперболический
\2 V u) 2 V V /
цилиндр).
В следующих задачах 19.18 и 19.19 доказать, что рассматрива-
рассматриваемые поверхности являются поверхностями второго порядка (ино-
(иногда их называют квадриками), и установить их тип.
19.18. Найдите первую квадратичную форму поверхности
х = achucosv, у = achusinv, z = cshu, а, с = const.
19.19. Найдите первую квадратичную форму поверхности
х = a sh u cos v, у = a sh u sin v, z = с ch u, a, c = const.
19.20. Доказать, что при соответствующем выборе криволиней-
криволинейных координат на поверхности вращения ее первая квадратичная
форма может быть приведена к виду
19.21. Привести первую квадратичную форму сферы, тора,
катеноида и псевдосферы Бельтрами к виду
ds2 = du2 + G(u)dv2.
19.22. Система криволинейных координат на поверхности на-
называется изотермической (иногда ее называют конформной),
если первая квадратичная форма поверхности в этих координатах
имеет вид
ds2 = Х(щ v)(du2+dv2).
Найти изотермические координаты на псевдосфере Бельтрами.
19.23. Поверхностью Лиувилля называется поверхность, пер-
первая квадратичная форма которой может быть приведена к виду
ds2 = (f(u)+g(v)){du2+dv2).
Доказать, что поверхность, локально изометричная поверхности
вращения, есть поверхность Лиувилля.
19.24. Доказать, что любую поверхность вращения можно ло-
локально конформно отобразить на плоскость.
19.25. Доказать, что метрика ds2 = dx2+f(x)dy2, 0<f(x)<oo,
приводится к виду
ds2 =g(u,v)(du2 +dv2)
(изотермические координаты).
19.26. Для поверхности вращения
х = /(г) cos<?, у = f(r) sin</>, z = g(r),
146 Часть 2
где и € (а, Ь), <р Е [0, 2тг], найти изотермические координаты
(и, г>), в которых р = л/и2 + v2 является функцией от г. В частно-
частности, найти для катеноида
х = ch z cos </?, у = ch z sin <p, z = z
представление его радиус-вектора в таких изотермических коор-
координатах.
19.27. На плоскости с координатами а;, у задана матрично-
значная функция F(x, у). Проверить, что функция F определяет
риманову метрику. Найти координаты, в которых метрика имеет
вид du2 + G{u)dv2:
б) F(x v)~(
V * (*, У) - у 16ху{х2 + у2J х + щ2{х2 + у2J
в) в единичном круге F(x, у) = 1_х\_у2 { ~
(х, у) -
у
У2L
19.28. Доказать, что на всякой вещественно-аналитической по-
поверхности М2 можно ввести локальные изотермические коорди-
координаты.
19.29. Доказать, что любое конформное отображение сферы на
плоскость является композицией некоторого движения сферы по
себе и стереографической проекции сферы на эту плоскость (см.
рис. 83).
19.30. Проекция Меркатора поверхности земного шара опре-
определяется следующим образом. На карте вводятся прямоугольные
координаты (ж, у), такие что любой прямой на карте соответствует
линия постоянного азимута (фиксированного положения стрелки
компаса) на поверхности земного шара (см. рис. 84).
а) Доказать, что в проекции Меркатора точке на поверхности
земного шара со сферическими координатами @, (р) на карте со-
соответствует точка с координатами х = <?>, у = lnctg0/2.
б) Записать метрику сферы в координатах ж, у проекции Мер-
Меркатора.
19.31. Найти метрику в двумерном пространстве скоростей в
специальной теории относительности.
19.32. В предыдущей задаче произвести замену координат v —>
-» thx {v — скорость движущейся точки).
§ 19. Риманова метрика (дополнительные задачи) 147
19.33. Записать метрику предыдущей задачи в полярных ко-
координатах единичного круга.
Рис. 83. Стереографическая проекция сферы на плоскости
Рис. 84. Проекция Меркатора
148 Часть 2
19.34. Доказать, что в классе поверхностей 2-го порядка любая
поверхность 2-го порядка ненулевой кривизны однозначно опреде-
определена своей метрикой, даже локально. Говорят, что поверхность S
определена однозначно своей метрикой, если любая изометричная
ей поверхность получается из S движением с возможным добавле-
добавлением зеркального отражения.
19.35. Пусть на плоскости заданы две изометричные области.
Показать, что они конгруентны.
19.36. Доказать, что две изометричные области на сфере всегда
могут быть получены одна из другой вращением пространства, т. е.
они конгруентны.
19.37. Пусть на цилиндрической поверхности заданы две изо-
изометричные области. Будут ли они обязательно конгруентными
в R3? Указать условия, при выполнении которых любые две изоме-
изометричные области на цилиндрической поверхности являются кон-
конгруентными в R3.
19.38. Рассмотрим на псевдосфере Бельтрами всевозможные
круги одного и того же внутреннего радиуса г. Выяснить, какие
из этих кругов конгруентны в!3, а какие нет.
19.39. Изометричны ли метрики ds2 = — (dx2 + dy2) и ds2 =
= -^ (cto2 + dy2), афЪ, О < г2 — х2 + у2 < оо? Найти реализацию
каждой из них в М3 на поверхности цилиндра.
19.40. Показать, что любая поверхность трехмерного простран-
пространства изгибается с «выходом» в четырехмерное пространство.
19.41. Доказать, что две полные цилиндрические поверхности,
гомеоморфные кольцу, изометричны тогда и только тогда, когда
их перпендикулярные образующим плоские сечения имеют одина-
одинаковую длину.
19.42. Построить изометрическое отображение области ф\ <
^ Ч> ^ ?>2? zi ^ z ^ Z2 на цилиндре х = JRcosy?, у — Rsinip,
z = z, О ^ ip ^ 27Г, —оо ^ z ^ +оо на какую-либо изометричную
область на поверхности прямого кругового конуса с известными
параметрами.
19.43. Дать пример полной евклидовой метрики в открытом
единичном круге.
19.44. Доказать, что компактная полная локально выпуклая по-
поверхность является выпуклой в целом.
19.45. Доказать, что односвязное полное локально евклидовое
двумерное многообразие изометрично в целом евклидовой плоско-
плоскости со стандартной метрикой
dx2 + dy2.
19.46. Доказать, что в круге нельзя задать полную евклидову
метрику в изотермическом виде.
§19. Риманова метрика (дополнительные задачи) 149
19.47. В некоторой области изменения переменных (#, у) дана
метрика ^ о _ . о
с непрерывными коэффициентами Е(х) > О, G(y) > 0. Доказать,
что:
а) эта метрика является локально евклидовой;
б) если эта метрика задана в замкнутой односвязной области,
то ее можно непрерывно продолжить на внутренность выпуклой
оболочки области;
в) если эта метрика задана в многосвязной области, то ее можно
непрерывно продолжить на область, ограниченную выпуклой обо-
оболочкой внешней границы области;
г) эта метрика в целом является евклидовой, т. е. область ее
задания в целом можно изометрически отобразить в евклидову
плоскость со стандартной метрикой du2 + dv2.
При каких условиях на область и коэффициенты эта метрика
является полной?
19.48. Дана метрика
а) Считая г и (р полярными координатами на плоскости #, у,
показать, что эта метрика является невырожденной во всем круге
D: х2 + у2 = г2 < 1.
б) Найти все геодезические линии, выходящие из начала ко-
координат, и определить значения рид, при которых эта метрика
является полной в круге D.
в) Убедиться, что эта метрика является локально евклидовой
только при р = 4, g = 2 и найти при этих р и q ее изометрическое
отображение на евклидову плоскость со стандартной метрикой.
19.49. Поверхности с радиус-вектором х = ucosv, у = usinv,
z = hv + f(u) называются общими винтовыми поверхностями.
а) Проверить, что на участке, где v изменяется в некотором
интервале длины 27Г, сечения общей винтовой поверхности плос-
плоскостями, проходящими через ось Oz, состоят из кривых, каждая
из которых конгруентна кривой z = /(#), у = 0.
б) Убедиться, что при h = 0 общая винтовая поверхность пре-
превращается в поверхность вращения и что при f(u) = const общая
винтовая поверхность превращается в геликоид.
в) Доказать теорему Бура: метрика общей винтовой поверхно-
поверхности изометрична метрике вида
реализуемой на поверхности вращения, т.е. любая общая вин-
винтовая поверхность локально изометрична некоторой поверхности
150 Часть 2
вращения, и обратно, любая поверхность вращения в окрестности
любой своей точки, кроме полюса, локально изометрична некото-
некоторой общей винтовой поверхности.
г) Теорему Бура можно уточнить: общая винтовая поверхность
локально допускает наложение на некоторую поверхность враще-
вращения, т. е. она непрерывно деформируется с сохранением метрики
или, по-другому, изгибается на поверхность вращения.
д) Общая винтовая поверхность S допускает изгибание сколь-
скольжения по себе, а именно, существует деформация S —> 5^, выра-
выражаемая через радиус-векторы по закону Sf. r(u, v\ t) = r(u, v + t),
которая переводит точки поверхности S в другие точки той же по-
поверхности с сохранением метрики. При этом расстояния между
точками на S равны расстояниям между их образами на 5*. По-
Покажите, что это изгибание является тривиальным, т. е. оно полу-
получается движением всей поверхности в пространстве как твердого
тела.
19.50. Доказать, что если поверхность допускает изгибание
скольжения по себе, то ее метрика изометрична метрике вра-
вращения.
х2 у2 z2
19.51. Эллипсоид -г- + 77 + ~т = 1 представлен в параметри-
а о с
ческом виде
х = uf (v)cosv, у = uf (v)sinv, z = g(u),
где
/(«) =
Va2 sin2 v + b2 cos2 v
Подобрать функцию ф(у) таким образом, чтобы деформация с па-
параметром t
tdu
х = uy/f2 — t2 cos Ф, у = uyf2 — t2 sinФ, z = / ygf +
была изгибанием некоторой части эллипсоида. На какую часть
эллипсоида распространяется эта деформация при малых tl
§ 20. Гауссова и средняя кривизны
В задачах 20.1-20.4 требуется найти вторую квадратичную
форму поверхностей.
20.1. а) г (и, v) = (achucosv, achusinv, cshu);
6) r(u, v) — (ashucosv, ashusinv, cchu).
20.2. r(u, v) = (ucosv, usinv, u2).
20.3. y(u, v) = (Rcosv, Rsinv, u).
20.4. r(u, v) — (ucosv, usinv, ku).
§ 20. Гауссова и средняя кривизны 151
20.5. Показать, что главные кривизны прямого коноида
x = ucosv, у = usinv, z = f(v),
где f(v) — произвольная гладкая функция с отличной от нуля
производной, имеют разные знаки.
20.6. Найти гауссову и среднюю кривизны поверхности, обра-
образованной бинормалями данной кривой.
20.7. Найти гауссову и среднюю кривизны поверхности, обра-
образованной главными нормалями данной кривой.
20.8. Проверить, что для тора вращения интегральная гаус-
гауссова кривизна равна нулю, а интегральная средняя кривизна
отлична от нуля, т. е.
ПKdS = 0, П
Заметим, что равенство / / К dS = 0 выполняется для любого
тора.
20.9. Найти линии кривизны на поверхности
x--(u-v), y--(u + v), Z~Y'
20.10. Найти линии кривизны геликоида
20.11. Доказать, что при локально изометричном наложении
геликоида
х = ucosv, у = usinv, z = av.
на катеноид
a2 cos v, у = v гл2
z = a In (u + y/u2 + a2}
линии кривизны переходят в асимптотические линии.
20.12. Найти линии кривизны поверхности
ф, и) = p(s) + f(u)si + g{u)(v(s) x a),
где v(s) = p(s), |v(s)| = 1, (v(s), a) = 0, |a| = 1, a — постоян-
постоянный вектор.
20.13. Плоская кривая 7 задана уравнением р = p(s), где s —
натуральный параметр; k = k(s) — ее кривизна, 0 < к < 1/а;
п — главная нормаль к 7? Ь — орт нормали к плоскости кривой 7-
Поверхность S задана уравнением
r(s, ср) = p(s) + an(s) cos(p + dbsimp.
152 Часть 2
а) Проверить, что поверхность S регулярна.
б) Найти гауссову кривизну поверхности S.
в) Найти среднюю кривизну поверхности S.
г) Найти линии кривизны поверхности 5.
20.14. Найти линии кривизны поверхности
г(s, (p) = p(s) + an(s) cos ip + ab(s) sin <p,
здесь n и b — орты главной нормали и бинормали кривой р =
= p{s), имеющей натуральный параметр s, кривизну k(s) < 1/а
и кручение x(s).
20.15. Найти линии кривизны поверхности
(«, v) = (и
- и2 - i
20.16. Предположим, что первая квадратичная форма поверх-
поверхности имеет вид
2 2 2
Доказать, что
К -
д_ /dE/dv\ j9_ fdG/du
d \ /Ш ) + d \ /EG
2VEG \dv \ у/Ш ) + du \
20.17. Найти выражение для гауссовой кривизны поверхности,
отнесенной к таким координатам, в которых первая квадратичная
форма имеет вид
ds2 = du2 + G(u, v)dv2.
20.18. Найти гауссову кривизну поверхности, если ее первая
квадратичная форма имеет вид
ds2 = В(щ v)(du2 + dv2).
20.19. Найти кривизну поверхности, первая квадратичная фор-
форма которой имеет вид
ds2 = du2 + e2udv2.
20.20. Доказать, что гауссова кривизна К двумерной поверхно-
поверхности выражается только через метрику, т.е. через коэффициенты
первой квадратичной формы и их производные. Отсюда следует,
что гауссова кривизна не меняется при изометриях поверхности.
20.21. Можно ли подобрать А, <^, ф так, чтобы поверхность
г(гл, в) = (ip(u) cos А0, ip(u) sin A0, ^(u))
имела гауссову кривизну 1?
а) Найти пример, отличный от сферы.
б) Описать все такие поверхности (см. задачу 6.4).
§ 20. Гауссова и средняя кривизны
153
20.22. Можно ли подобрать А, <?, ф так, чтобы поверхность
г(щ в) = (<^(u)cosA0, (p{u) sin А0, ^Ы)
имела гауссову кривизну —1? Найти пример, отличный от псевдо-
псевдосферы.
20.23. Доказать, что любая поверхность вращения постоянной
отрицательной кривизны относится к одному из следующих трех
типов:
1) катушка Миндинга (выглядит как китайские фонарики);
2) волчок Миндинга, т. е. поверхность с острием на оси вра-
вращения;
3) псевдосфера Бельтрами.
Графики образующих, соответствующих этим трем типам
поверхностей, приведены на рис. 85, 86.
I
I
Китайский фонарик
Волчок
Псевдосфера
Рис. 85
Рис. 86. Катушка Миндинга, волчок Миндинга, псевдосфера Бельтрами
154 Часть 2
20.24. Доказать, что каждая поверхность вращения (замкну-
(замкнутая или с краем по параллели) допускает изгибание в классе по-
поверхностей вращения с отображением параллелей в параллели и с
сохранением формы площади.
20.25. Доказать, что при проективном преобразовании прос-
пространства Mr сохраняется свойство точки поверхности быть элли-
эллиптической, параболической или точкой уплощения.
20.26. Доказать, что все точки любой поверхности 2-го порядка
имеют один и тот же тип (эллиптический, гиперболический или
параболический).
20.27. Пусть в изотермических координатах (u, v) поверхность
задана в виде
где Fk(w), к = 1, 2, 3, — аналитические функции комплексного
аргумента w = и + iv. Такое представление называется предста-
представлением Вейерштрасса.
а) Какому необходимому и достаточному условию должны
удовлетворять эти функции, чтобы поверхность была минималь-
минимальной?
б) Вычислить метрическую форму этой минимальной поверх-
поверхности.
20.28. Пусть минимальная поверхность М, заданная предста-
представлением Вейерштрасса (см. задачу 20.27), подвергается деформа-
деформации Mt вида
х = Re {F1(w)eit), у = Re (F2(w)eit), z = Re {Fz{wyl)
с параметром деформации t. Доказать справедливость следующих
утверждений:
а) эта деформация является изгибанием поверхности М.
В частности, все поверхности Mt изометричны друг другу;
б) изгибания происходят в классе минимальных поверхностей;
в) все поверхности Mt имеют параллельные нормали в соот-
соответствующих по изометрии точках.
20.29. Минимальные поверхности, определяемые формулами
из задачи 20.28, называются ассоциированными. Показать, что
изгибание минимальной поверхности в классе минимальных по-
поверхностей происходит только в семействе ассоциированных ми-
минимальных поверхностей.
20.30. Рассмотрим поверхность М:
х = и - -и3 + 4ш;2, у = v - -V3 + Au2v, z = 2(и2 - v2)
о о
§ 20. Гауссова и средняя кривизны 155
и ее деформацию Mf.
х = и — ( -v? — Auv2 ] cos 2t + ( Au2v — -v3 ) sin 2t,
\3 / \ 3 /
D \ / 4 \
-u3 - 4гш2 I sin2t + f Au2v - -v3 ) cos 2t,
3 / V 3 /
z = 2(n2 — v2) cos t — Auv sint.
Доказать, что эта деформация является изгибанием и что исходная
поверхность М и все ее деформации Mt являются минимальными
поверхностями. При каком значении параметра поверхность Mt
является зеркальным образом поверхности М#?
20.31. Пусть поверхность М такова, что существует ее непре-
непрерывное изгибание на ее центрально-симметрический образ М*.
В таких случаях говорят, что М наложима на М*. Доказать,
что М также наложима на свой зеркальный образ (отражение в
плоскости).
20.32. Доказать, что минимальная поверхность наложима на
свой зеркальный образ.
20.33. Доказать, что на поверхности постоянной кривизны
окрестности двух любых точек имеют трехпараметрическое семей-
семейство изометрических отображений друг на друга. Отметим, что
при этом центры этих окрестностей не обязаны переходить друг в
друга.
20.34. Доказать, что не существует поверхности, на которой
окрестности двух любых точек имели бы в точности двупараме-
трическое семейство изометрических отображений друг на друга
(см. предыдущую задачу). Отметим, что поверхности, имеющие в
точности однопараметрическое семейство изометрий, существуют.
Ими являются поверхности вращения, не являющиеся поверхно-
поверхностями постоянной кривизны.
20.35. Доказать, что если две изометричные поверхности в со-
соответствующих по изометрий точках имеют параллельные нор-
нормали, то их средние кривизны или равны, или отличаются знаком.
20.36. Доказать, что если две изометричные поверхности в со-
соответствующих по изометрий точках имеют параллельные нор-
нормали и средняя кривизна хотя бы одной из них не равна нулю,
то эти поверхности конгруентны. Если же обе поверхности мини-
минимальные, то они могут быть неконгруентными. Более того, любая
минимальная поверхность допускает изгибание с сохранением на-
направления нормалей в соответствующих по изометрий точках.
20.37. Пусть известно, что две метрики ds2 = gijduldu^ и
da2 = 7ijd?ld?J, 1 < г, j < п, локально изометричны. Вывести
систему уравнений, которым должна удовлетворять изометрия /:
(и) —> (^), где через (и) и (?) обозначены окрестности соответ-
соответствующих точек в двух областях задания метрик. Рассмотреть
156 Часть 2
отдельно случай п = 2 и показать, что в этом случае нахождение
искомого отображения может быть сведено к решению квазили-
квазилинейной системы.
20.38. На плоскости переменных (и, v) задана метрика
Убедиться, что эта метрика положительной кривизны, что она не-
неполная и что она не может быть реализована ни на какой выпуклой
поверхности в Е3.
20.39. а) Проверить, что метрика
,2 du2 + dv2
ds =
-Kr2{A + In A/r)J'
где г2 = и2 + г>2, имеет постоянную кривизну К < 0.
б) Является ли эта метрика в кольце 0 < г < еА полной?
20.40. а) Проверить, что метрика
ТУ*
где г2 = и2 + v2 и А = ——, имеет постоянную кривизну К < 0.
б) Пусть а > 0. Является ли тогда метрика пункта а) в кольце
(\\112а
0 < г < -г полной?
W
в) Рассмотрим две метрики из пункта а): одну при а > 0, дру-
другую при а < 0. Определить максимальные области существования
обеих метрик и проверить, являются ли эти метрики изометрич-
ными в этих областях.
20.41. а) Проверить, что метрика
d2 (du2 + dv2),
ds =;2 (du
[гу/—К(А sin (a In r) + В cos (а In r)))
где г2 — u2+v2 и А2 + В2 = 1, имеет постоянную кривизну К < 0.
б) Определить максимальные области существования метрики
пункта а) и проверить, является ли она в этих областях полной.
20.42. Найти для метрик из предыдущих трех задач их изоме-
изометрические погружения в R3 в виде поверхностей вращения вида
х — f(r)cosmp, у = f(r)s'mmp, z = #(г), где и = г cosy?,
v = r sin ip. Описать области погружения этих метрик в зависимо-
зависимости от значений целочисленного параметра п.
20.43. Рассмотрим семейство поверхностей вращения, получен-
полученных друг из друга параллельным переносом вдоль оси вращения.
§ 21. Параметризации известных двумерных поверхностей 157
Рассмотрим поверхность вращения М, имеющую ту же ось и пе-
пересекающую поверхности семейства под прямым углом. Доказать,
что в точке пересечения поверхности семейства и поверхности М
они имеют одинаковые по абсолютной величине и противополож-
противоположные по знаку гауссовы кривизны.
§ 21. Параметризации известных двумерных поверхностей
В этом параграфе требуется проверить, что указанные в задачах фор-
формулы задают параметризации вложений или погружений известных по-
поверхностей.
21.1. Поверхность с особенностями, параметрически задавае-
задаваемая в М3 следующими уравнениями:
г@, у) = (A + cos 20) cos 2</>, A + cos 20) sin 2<^, sin 20 sin ^),
является одной из моделей (см. рис. 87) проективной плоскости
ШР2. Описать особые точки этой поверхности.
Доказать, что сфера
г@, ф) = (cos0cos</?, cos0sin</?, sin0)
двулистно накрывает эту поверхность. Найти соответствие между
парами точек сферы и точками RP2 в терминах параметров 0, ср.
АС
Рис. 87. Склейка проективной плоскости из квадрата
Отметим, что если от описанной модели проективной плоско-
плоскости отрезать плоскостью небольшой диск, то оставшаяся часть
является моделью листа Мёбиуса. Она называется скрещенным
колпаком (см. рис. 88). Линия самопересечения колпака соответ-
соответствует (р = 0. Точками пинча (см. рис. 89) являются @, ip) =
= @, 0) и 0 = тг/2.
158
Часть 2
Рис. 88. Скрещенный колпак
Рис. 89. Окрестность точки пинча
21.2. Напомним, что одной из моделей проективной плоскости
является поверхность Боя в Ш? (см. рис. 90, 91).
Рис. 90. Поверхность Боя — погружение проективной плоскости в R3
Рис. 91. «Прозрачная» поверхность Боя. Здесь хорошо видно, как устроено ее
множество точек самопересечения
Параметризация Апери поверхности Боя:
*i cos 2ip
г@, <р) =
1
cos2 9
l-bsin3<?sin20'
Г2 COS (f
+ В ( -r2sm(p
О
sin 9 cos 9
— 6sin3v?sin20'
Здесь ri = л/2/3, г2 = 2/3. При 1/л/б < b < 1 точек пинча на
поверхности нет.
Доказать, что стандартная сфера накрывает эту параметризо-
параметризованную поверхность двулистно.
§ 21. Параметризации известных двумерных поверхностей 159
Структура поверхности Боя показана на рис. 92, 93.
О
Рис. 92. Начало процесса построения поверхности Боя из листа Мёбиуса
Рис. 93. Завершение процесса построения поверхности Боя из листа Мёбиуса
21.3. Пусть 0 и (р — сферические координаты на S2 (угол 0
отсчитывается от горизонтальной плоскости). Доказать, что фор-
формулы
г@, ф) = (w, х, у, z),
w@, ф) = (cos вJ cos 2<p, х(в, ip) = sin 20 cos <p,
?, ф) = sin 20 sin (p, z@, ф) = (cos0Jsin2y>.
задают вложение проективной плоскости в R .
21.4. Доказать, что следующие вектор-функции задают погру-
погружения бутылки Клейна в R3 (см. рис. 94).
a) r(u, v) = (Rx, Ry, В2), где Rx, Ry, Rz — компоненты в
декартовых координатах следующей вектор-функции:
R(u, v) = Rq (u) + p(u) (ei (u) cos v + ег sin v).
160
Часть 2
Рис. 94. Погружение бутылки Клейна
Здесь
(a sin 2u
О
bcosu
(bsintt \ j /О
О т^тт, е2 = 1
acos2?x / l^ol у О
Иными словами, ei и е2 — единичные векторы, ортогональные Rq,
Р = Ро + Pi sin2n (и - щ).
Здесь, например, можно положить
a = -, 6=1, ро = 0,1, pi = 0,6, щ = 0,3, п = 4.
б) Еще одна параметризация, где a — вещественное число:
r (a + cos --smv — sm-sin2v I cosu }
\ Z Z /
*а(Щ V) =
{
( а
\
u • • u • Л \ •
cos — sin v — sm ~ sm Iv 1 sm w
sm — sm г? + cos — sm Zv
21.5. Доказать, что следующая вектор-функция задает параме-
параметризацию листа Мёбиуса в М3:
г(?, (р) = (A + t sin — J cos </?, f 1 +1 sin — J sin </?, < cos — J .
/1 1\
Доказать, что для t G -, -
\Z ZJ
жением.
это отображение является вло-
§ 21. Параметризации известных двумерных поверхностей 161
21.6. Зададим открытый лист Мёбиуса как косое (скрученное)
произведение окружности на интервал. Окружность назовем осе-
осевой, а длину интервала — шириной листа Мёбиуса (см. рис. 95).
Осевая окружность
Рис. 95. Лист Мёбиуса в R3
а) Доказать, что лист Мёбиуса бесконечной ширины с плоской
метрикой в R3 не вкладывается.
б) Найти максимальное отношение длины осевой окружности
к ширине листа Мёбиуса, при котором существует изометричное
вложение плоского листа Мёбиуса в R3.
21.7. Доказать, что следующая алгебраическая поверхность в
R3 является скрещенным колпаком, т. е. моделью листа Мёбиуса:
(кгх2 + к2у2)(х2 + у2 + z2) - 2z(x2 + у2) = О,
где к\ ф &2- Доказать, что эту поверхность можно параметризовать
следующим образом:
х =
cos в cos ip
cos в sin ip
k\ cos2
sin2
k\ cos2
sin2 ip'
z =
l+sin0
k\ cos2
sm2
а) При этом требуется доказать, что первое уравнение (алгебра-
(алгебраическое) задает поверхность, т. е. указанная выше параметриза-
параметризация действительно задает множество всех решений этого уравне-
уравнения.
б) Доказать, что указанные формулы задают гладкую регуляр-
регулярную параметризацию вне особых точек. Найти особые точки.
в) Проверить, что при этой параметризации квадрат —тг/2 ^
^ в ^ тг/2, 0 ^ ср ^ тг склеивается в лист Мёбиуса.
21.8. Доказать, что формулы х = и2 — V2, у = uv, z = uw,
t = vw задают регулярное погружение сферы и2 + v2 + w2 = 1
162 Часть 2
в R4. Заметим, что при этом отображении противоположные точки
сферы переходят в одну точку, поэтому возникает регулярное ото-
отображение RP2 в R4. Доказать, что при этом получается вложение
проективной плоскости в R4.
§ 22. Поверхности в Е3
22.1. Доказать, что если в некоторой точке поверхности в R3
гауссова кривизна К > О, то поверхность локально лежит по одну
сторону от касательной плоскости в этой точке.
22.2. Пусть две поверхности М\
и M<i касаются одной и той же
плоскости в некоторой общей точ-
точке. При этом в некоторой окрест-
окрестности этой точки обе поверхности
находятся по одну сторону от плос-
плоскости, причем поверхность М\ це-
целиком лежит внутри поверхности
М2 (см. рис. 96). Доказать, что
для гауссовых кривизн справедли-
справедливо нестрогое неравенство К\^К2.
Этот факт является локальным.
22.3. Можно ли реализовать
лист Мёбиуса в R3 в виде гладкой
рис gg поверхности всюду положитель-
положительной кривизны?
22.4. Можно ли вложить лист Мёбиуса в R3 в виде гладкой
поверхности, однозначно проектирующейся на какую-либо плос-
плоскость?
22.5. а) Доказать, что неориентированную поверхность (за-
(замкнутую или с границей) нельзя погрузить в R3 так, чтобы в
каждой ее точке либо гауссова кривизна К была строго положи-
положительна, либо гауссова кривизна К была нулевой, но средняя кри-
кривизна Н отлична от нуля.
б) Построить вложение плоского листа Мёбиуса (т. е. с локально
евклидовой метрикой) в R3. Объяснить, почему наличие такого
вложения не противоречит предыдущему пункту.
22.6. Доказать, что замкнутая гладкая поверхность в R3 всегда
имеет точку, в которой:
а) гауссова кривизна не меньше 0;
б) гауссова кривизна строго больше 0.
22.7. а) Доказать, что гладкая замкнутая поверхность отрица-
отрицательной гауссовой кривизны не погружается в R3.
б) Доказать, что гладкая замкнутая поверхность неположитель-
неположительной гауссовой кривизны не погружается в R3.
§ 22. Поверхности в R3 163
в) Доказать, что плоский тор нельзя гладко и изометрично
погрузить в R3.
22.8. а) Доказать, что на гладкой ориентированной погружен-
погруженной в R3 поверхности рода не меньшего, чем 2, обязательно най-
найдется точка, в которой гауссова кривизна К строго меньше 0.
б) Пусть тор (или бутылка Клейна) гладко погружен в Е3. До-
Доказать, что тогда обязательно существует точка, в которой К < 0.
22.9. Доказать, что сферическое отображение минимальной по-
поверхности в окрестности каждой точки, не являющейся точкой
уплощения, конформно.
22.10. Доказать следующие утверждения:
а) на листе Мёбиуса существует метрика постоянной положи-
положительной кривизны. Это пример метрики, которая не погружается
изометрично в R3 (см. задачу 22.3);
б) на листе Мёбиуса можно ввести метрику постоянной отри-
отрицательной кривизны.
22.11. Можно ли изометрично вложить в R3 лист Мёбиуса с
метрикой постоянной отрицательной кривизны?
22.12. Можно ли реализовать лист Мёбиуса в М3 как область на
некоторой поверхности вращения?
22.13. Рассмотрим поверхность вращения относительно оси z
и введем на ней действие группы Z/2: (#, у, z) —> (—#, —у, z).
Профакторизуем поверхность по этому действию. Получим новую
поверхность с метрикой.
Расмотреть пример однополостного гиперболоида вращения и
полученную описанным образом фактор-поверхность изометриче-
изометрически реализовать в 1R3 как поверхность вращения.
22.14. Найти площадь сферического образа поверхности
Г = r(u, ^), U\ < U < U2, V\ < V < V2,
с первой квадратичной формой
22.15. Найти площадь сферического образа эллиптического
параболоида.
22.16. Найти образ гауссова отображения для:
а) однополостного гиперболоида;
б) двуполостного гиперболоида;
в) катеноида.
22.17. Найти сферический образ тора, реализованного в М3
стандартным образом как поверхность вращения.
22.18. Доказать, что площадь сферического образа одной поло-
полости двуполостного гиперболоида меньше 2тг.
164 Часть 2
22.19. Исследовать сферические образы следующих выпуклых
поверхностей:
а) овалоид, т.е. гладкая замкнутая выпуклая поверхность. До-
Доказать, что его сферический образ покрывает всю сферу и что, если
овалоид строго выпуклый, то сферическое отображение взаимно-
взаимнооднозначно;
б) параболоид z = х2 + у2;
в) поверхность, полученная вращением вокруг оси Oz кривой
z = х2, z ^ а, гладко продолженной до бесконечности касатель-
касательной. Показать, что за счет выбора а > 0 сферический образ такой
поверхности может заполнять область на сфере с любой площадью
S <2тг.
22.20. Построить пример полной поверхности строго положи-
положительной кривизны, сферический образ которой имеет площадь
меньше 2тг.
22.21. Доказать, что существует конформное отображение по-
поверхности вращения на плоскость, при котором меридианы и
параллели поверхности переходят в прямые линии плоскости.
22.22. Доказать, что существует конформное отображение по-
поверхности вращения на плоскость, при котором меридианы пере-
переходят в прямые, проходящие через начало координат, а парал-
параллели — в окружности с центром в начале координат.
22.23. Вычислить интеграл // \K\dS, где К — гауссова
м
кривизна поверхности М, если М:
а) эллипсоид; б) эллиптический параболоид; в) тор.
22.24. На сфере вырезан прямоугольник Р, ограниченный
двумя параллелями и двумя меридианами. Края, соответству-
соответствующие меридианам, отождествлены по равенству длин склеивае-
склеиваемых отрезков, так что получается многообразие М, гомеоморфное
кольцу. Проверить, что метрика на М является аналитической, и
получить вложение MbR3b виде поверхности вращения.
22.25. В условиях предыдущей задачи отождествление дуг ме-
меридианов проводится так, что топологически получается лист
Мёбиуса. Показать, что полученная метрика постоянной положи-
положительной кривизны на листе Мёбиуса будет гладкой.
22.26. Найти все поверхности вращения постоянной отрица-
отрицательной гауссовой кривизны К = — 1. Они называются поверх-
поверхностями Миндинга. Указать в единичном круге с метрикой Лоба-
Лобачевского (модель Пуанкаре) области, изометричные поверхностям
Миндинга (после разреза по меридиану) и их универсальным на-
накрывающим.
22.27. Найти все поверхности вращения постоянной средней
кривизны.
§ 23. Топология двумерных поверхностей 165
§ 23. Топология двумерных поверхностей
В этом параграфе мы будем рассматривать разбиения поверхности
на конечное число замкнутых многоугольников, которые пересекаются
по общим ребрам и вершинам. Разбиение, в котором любые два много-
многоугольника либо не пересекаются, либо пересекаются по одному общему
ребру, либо по одной общей вершине, называется правильным. Раз-
Разбиение поверхности на треугольники будем называть триангуляцией.
Далее в этом параграфе через V обозначается число вершин, через Е —
число ребер, а через F — число граней (многоугольников) разбиения
поверхности. Число V — E + F называется эйлеровой характеристикой
х(М) поверхности М. Это число не зависит от выбора разбиения по-
поверхности и, следовательно, является топологическим инвариантом по-
поверхности.
23.1. Построить какие-нибудь триангуляции сферы, тора, про-
проективной плоскости и найти эйлеровы характеристики этих по-
поверхностей.
23.2. Из того факта, что эйлерова характеристика сферы
{2) = 2, вывести существование ровно 5 комбинаторно пра-
правильных многогранников (см. рис. 97). Напомним, что разбиение
Рис. 97. Тетраэдр, октаэдр, куб, додекаэдр, икосаэдр
поверхности называется комбинаторно правильным, если у всех
граней одинаковое число ребер и в каждой вершине сходится одно
и то же число ребер.
23.3. Доказать, что число вершин правильной триангуляции
двумерной замкнутой поверхности удовлетворяет оценке
7+у/49-24Х(М)
166 Часть 2
В частности, правильная триангуляция тора содержит не менее
7 вершин, а правильная триангуляция ЕР2 — не менее 6.
23.4. Привести пример правильной триангуляции:
а) тора с 7-ю вершинами;
б) проективной плоскости с 6-ю вершинами.
23.5. Доказать, что минимальное число треугольников пра-
правильной триангуляции тора равно 14. Построить пример такой
минимальной трингуляции. Сравнить с примером из предыдущей
задачи.
23.6. а) Выяснить, сколько существует правильных триангу-
триангуляции тора с минимальным числом вершин. Сколько существует
правильных триангуляции тора с наименьшим числом треуголь-
треугольников? Существуют ли правильные триангуляции тора, мини-
минимальные в одном смысле, но не минимальные в другом?
б) Ответить на все эти вопросы для проективной плоскости.
23.7. Доказать неравенство Хивуда
для всех замкнутых двумерных поверхностей за исключением
сферы и бутылки Клейна. Здесь через col (M) обозначено хрома-
хроматическое число поверхности М, т. е. минимальное число красок,
необходимое для раскраски разбиения поверхности таким обра-
образом, чтобы многоугольники с общим ребром имели разные цвета.
Что можно сказать об этом неравенстве для бутылки Клейна и для
сферы?
23.8. Доказать, что col(Mg) = col(M*), col(Na) = col(JV*).
Здесь Мд — сфера с д ручками, JVQ — сфера с а пленками Мёбиуса,
Мд — сфера с д ручками, из которой выброшено к непересекаю-
непересекающихся дисков, a JV* — сфера с а пленками Мёбиуса, из которой
выброшено к непересекающихся дисков (см. рис. 98).
23.9. Привести пример карты на проективной плоскости, кото-
которая не допускает раскраски в 5 цветов.
23.10. Доказать, что операция связной суммы поверхностей не
зависит от способа склейки граничных окружностей, т. е. от вы-
выбора их ориентации при склейке.
23.11. Доказать, что Г2#ЕР2 = RP2#RP2#RP2. Здесь через
X#Y обозначена связная сумма поверхностей X и У.
23.12. Разрезать бутылку Клейна на два листа Мёбиуса.
23.13. Разрезать крендель (сферу с двумя ручками) так, чтобы
получился плоский связный восьмиугольник.
23.14. Разрезать сферу с тремя ручками так, чтобы получился
плоский связный двенадцатиугольник, все вершины которого
представляют одну точку поверхности.
§ 23. Топология двумерных поверхностей
167
Ориентируемые
Неориентируемые
Рис. 98. Двумерные поверхности с краем
23.15. Доказать, что связная сумма X#Y поверхностей X и Y
ориентируема тогда и только тогда, когда обе поверхности ориен-
ориентируемы.
23.16. Доказать, что
23.17. Доказать, что
23.18. Доказать, что
Здесь из сферы выброшено к непересекающихся дисков.
23.19. Если сфера разбита на п-угольники и в каждой вершине
встречаются ровно к ребер, то
п
L
Е'
168 Часть 2
Графом «п домиков и m колодцев» будем называть граф, у которого
n-hm вершин разбиты на две непересекающиеся группы из п и т элемен-
элементов соответственно, причем каждая вершина из одной группы соединена
единственным ребром с каждой вершиной другой группы. Других ребер
у графа нет.
23.20. Доказать, что на сфере (плоскости) нельзя разместить
следующие графы так, чтобы любые два различных ребра пересе-
пересекались самое большее по общей вершине:
а) граф «3 домика и 3 колодца»;
б) граф с пятью вершинами, у которого каждая пара различ-
различных вершин соединяется единственным ребром.
23.21. Доказать, что граф «3 домика и 3 колодца» можно без
самопересечений разместить на проективной плоскости (листе
Мёбиуса).
23.22. Доказать, что комбинаторно правильное разбиение тора
состоит из треугольников, четырехугольников или шестиуголь-
шестиугольников (определение комбинаторно правильного разбиения см. в
задаче 23.2).
23.23. Пусть замкнутая поверхность Q комбинаторно правиль-
правильно разбита на шестиугольники, причем в каждой вершине схо-
сходятся четыре грани. Доказать, что если число вершин нечетно, то
Q неориентируема.
23.24. Пусть на замкнутой поверхности проведены три линии р,
qnr с общими концами и не имеющие попарно общих внутренних
точек. Если разрез по одной из линий р U g, qU г или г U р
оставляет поверхность Q связной, то таким же свойством обладает
по крайней мере одна из двух оставшихся линий.
23.25. Показать, что если в замкнутой неориентируемой по-
поверхности Na вырезать дырку, то полученная поверхность может
быть расположена в пространстве R3 без самопересечений.
23.26. Доказать, что граф «4 домика и 4 колодца» нельзя распо-
расположить на проективной плоскости без самопересечений, но можно
расположить на торе.
23.27. Доказать, что если граф «га домиков и п колодцев» мож-
можно без самопересечений расположить на поверхности Q, то
/^\ TUTI
X\Q) <m + n~—.
§ 24. Линии на поверхностях
Рассмотрим в Е3 двумерную поверхность М2 с параметризацией
r(u, v) и второй квадратичной формой Ldu2 -f 2M dudv -f N dv2. Рас-
Рассмотрим на М2 два семейства линий. Эти семейства называются сопря-
сопряженными, если в каждой точке Р направление линий первого и второго
семейства, проходящих через точку Р, сопряжены друг другу относи-
относительно второй формы поверхности. Точнее, пусть в точке Р линия пер-
§ 24. Линии на поверхностях
169
вого семейства имеет направление (?i, 771), а линия второго семейства —
(&> *72)- Тогда условие сопряженности можно записать в виде
ЦхЬ + М(?щ2 + &T7i) + Nrnm = 0.
Если линии одного семейства известны, то это условие дает дифферен-
дифференциальное уравнение линий сопряженного семейства.
Кривая (u(?), v(t)) на поверхности М2 называется асимптотичес-
асимптотической, если в каждой точке вектор скорости кривой имеет асимптотическое
направление относительно второй формы поверхности. Соответствующее
дифференциальное уравнение можно записать в виде
L(u'J + 2Af uV + N(v'J = 0.
Асимптотическая линия определяется условием, что нормальная кри-
кривизна поверхности вдоль асимптотической кривой равна нулю.
Кривая (u(?), v(t)) называется линией кривизны поверхности М2,
если в каждой ее точке вектор скорости имеет главное направление.
В каждой точке поверхности, не являющейся омбилической, имеется два
главных направления, они сопряжены и ортогональны. Если (?i, 771) и
(&> V2) — векторы, имеющие главные направления, то они удовлетво-
удовлетворяют двум уравнениям:
Отсюда следует, что
В частности, кривая (u(t), v(t)) является линией кривизны тогда и
только тогда, когда она удовлетворяет дифференциальному уравнению
E
L
1% + ^
-km
F
M
2»7i)-
2»?l) '
G
= 0.
= 0,
i = 0.
(u'J -u'v' (v'J
Е F G
L M N
= 0.
24.1. Дана поверхность
2 2
у = u + v ,
z = 2uv
2 = с. Найти дифференциальное
х = u + v,
и семейство линий на ней и2 — со
уравнение сопряженного ему семейства.
24.2. Пусть а — поверхность, I — прямая, {71} — семейство се-
сечений поверхности плоскостями, проходящими через прямую ли-
линию I, a {72} — семейство линий, в которых конусы, имеющие
вершины на /, касаются поверхности. Показать, что семейства
{7i} и {72} образуют сопряженную сеть.
170 Часть 2
24.3. На поверхности
х = ucosv, у = и sinv, z = hv
задано семейство линий и. Найти сопряженное семейство.
24.4. Найти поверхности z = /(я, у) с такой сопряженной се-
сетью, которая проектируется в сеть координатных линий прямо-
прямоугольной декартовой координатной системы на плоскости хОу.
24.5. Показать, что отображение двух поверхностей друг на
друга, при котором каждая сопряженная сеть одной поверхности
переходит в ортогональную сеть другой, переводит вторую квадра-
квадратичную форму одной поверхности в форму, пропорциональную пер-
первой квадратичной форме первой поверхности.
24.6. Найти асимптотические линии однополостного гипербо-
гиперболоида
а2 Ь2 с2
24.7. Найти асимптотические линии поверхности
* = /(*)-/(V)
и определить функцию / таким образом, чтобы линии одного асим-
тотического семейства были ортогональны асимптотическим ли-
линиям другого семейства.
24.8. Найти асимптотические линии поверхности z — жу3—уа;3,
которые проходят через точку A, 2, 6).
24.9. Найти асимптотические линии катеноида.
24.10. Показать, что на прямом геликоиде одно семейство асим-
асимптотических линий состоит из прямых, а другое — из винтовых
линий.
24.11. Доказать, что:
а) координатные линии и = const являются асимптотическими
тогда и только тогда, когда коэффициент N второй квадратичной
формы равен 0;
б) для того чтобы координатная сещ> состояла из асимптотиче-
асимптотических линий, необходимо и достаточно, чтобы коэффициенты L и
N второй квадратичной формы были равны 0.
24.12. Доказать, что если поверхность минимальна, то асим-
асимптотические линии на ней ортогональны.
24.13. Доказать, что на плоскости любая линия является асим-
асимптотической, и наоборот, поверхность, на которой любая линия
является асимптотической, является частью плоскости.
24.14. Доказать, что если асимптотическая линия на поверх-
поверхности плоская, то она является или параболической, или прямой
линией.
24.15. Найти асимптотические линии поверхности, которая со-
составлена из точек, являющихся серединами хорд винтовой линии.
§ 24. Линии на поверхностях 171
24.16. Пусть кривизна поверхности вращения строго меньше 0.
Доказать, что на ней не существует замкнутых асимптотических
линий.
24.17. Пусть поверхность образована главными нормалями ли-
линии 7- Доказать, что линия 7 является асимптотической линией
этой поверхности.
24.18. Доказать, что если асимптотические линии поверхности
пересекаются под постоянным углом, то гауссова кривизна поверх-
поверхности пропорциональна квадрату средней кривизны.
24.19. Найти асимптотические линии поверхности
(u cos г>, usinv, acosXv),
где а и А — постоянные.
24.20. Найти асимптотические линии поверхности
(Зи + 3v, Зи2 + 3v2, 2u3 + 2v3).
24.21. Найти асимптотические линии поверхности z = у cos х.
24.22. Параметризовать гиперболический параболоид
х2 v2
— - ^- - 2z
так, чтобы координатные линии были асимптотическими.
24.23. Показать, что линии
= (t, a, a2t) и ( ^ ^
являются асимптотическими на поверхности z = ху2.
24.24. Доказать, что если координатная сеть на поверхности
асимптотическая, то имеют место равенства
dln\K\ _ FEV-EGU д\ъ\К\ _ FGU-GEV
ди " EG-F2 ' dv ~ EG-F2 '
где К — гауссова кривизна поверхности.
24.25. Доказать, что асимптотические линии на поверхности
постоянной отрицательной кривизны образуют сеть Чебышева, и
обратно, если асимптотическая сеть на поверхности чебышевская,
то гауссова кривизна поверхности постоянна. Сеть называется
чебышевской, если у любого четырехугольника, образованного ли-
линиями сети, длины противоположных сторон равны.
24.26. Теорема Бельтрами-Эннепера. Доказать, что
если асимптотические линии различных семейств имеют в их об-
общей точке отличные от нуля кривизны, то они имеют равные по
модулю, но противоположные по знаку кручения. Кроме того, ква-
квадрат кручения асимптотической линии равен модулю гауссовой
кривизны в этой точке.
172 Часть 2
24.27. Две поверхности пересекаются под прямым углом. Дока-
Доказать, что если на одной поверхности линия пересечения явля-
является асимптотической, то она является геодезической на другой, и
наоборот.
24.28. Найти линии кривизны прямого геликоида.
24.29. Найти линии кривизны на произвольной цилиндриче-
цилиндрической поверхности.
24.30. Найти линии кривизны на произвольной конической
поверхности.
24.31. Доказать, что на плоскости и на сфере любая линия
является линией кривизны. Наоборот, если на поверхности любая
линия является линией кривизны, то такая поверхность является
плоскостью или сферой (или их частью).
24.32. Теорема Лиувилля. Доказать, что при конформном
отображении пространства на себя сфера (плоскость) переходит в
сферу или плоскость.
24.33. Доказать, что если координатная сеть состоит из линий
кривизны, то главные кривизны поверхности задаются формулами
U L и N
к k
24.34. Теорема Родрига. Доказать, что для того чтобы
линия 7 на поверхности г = r(u, v) была линией кривизны, необ-
необходимо и достаточно, чтобы вдоль кривой выполнялось равенство
dm = —kdr,
где m — единичный вектор нормали к поверхности, а к — нор-
нормальная кривизна поверхности вдоль кривой 7-
24.35. Доказать, что:
а) если две поверхности пересекаются вдоль некоторой линии
под постоянным углом и эта линия является линией кривизны на
одной поверхности, то она является линией кривизны и на другой
поверхности;
б) если две поверхности пересекаются по линии, являющейся
линией кривизны на каждой из поверхностей, то поверхности пе-
пересекаются под постоянным углом.
24.36. Теорема Дюпена. Даны три семейства поверхностей
/i(jc, у, z) = const, /2(я, у, z) = const, /3(я, у, z) = const,
причем якобиан
D(x,y,z)
Пусть поверхности пересекаются попарно под прямым углом.
Это — так называемая триортогональная система поверхностей.
§ 24. Линии на поверхностях 173
Доказать, что линии пересечения поверхностей из различных се-
семейств являются линиями кривизны на каждой поверхности.
24.37. Доказать, что каждую поверхность в Е3 можно включить
в триортогональное семейство поверхностей.
24.38. Пусть заданы два семейства поверхностей, пересекаю-
пересекающихся ортогонально по кривым, являющимся для поверхностей
обоих семейств линиями кривизны. Доказать, что существует
третье семейство поверхностей, образующее с данными триорто-
гональную систему поверхностей.
24.39. Поверхности М\ и М2 называются параллельными, если
нормали одной поверхности, как аффинные прямые, являются
нормалями другой поверхности. Точки поверхностей Mi и М2,
лежащие на общих нормалях, назовем соответствующими. Дока-
Доказать, что при таком соответствии линии кривизны переходят в
линии кривизны.
24.40. Доказать, что при конформном отображении простран-
пространства на себя линии кривизны исходной поверхности преобразуются
в линии кривизны преобразованной поверхности.
24.41. Пусть 7 — линия кривизны поверхности М, причем
нормальная кривизна кп линии 7 постоянна и отлична от нуля.
Доказать, что поверхность М касается по линии 7 некоторой
сферы радиуса 1/кп.
24.42. Доказать, что при локально изометрическом наложении
геликоида на катеноид (см. задачу 5.27) его асимптотические ли-
линии переходят в линии кривизны, а линии кривизны — в асим-
асимптотические линии.
24.43. Доказать, что геодезическая линия на поверхности яв-
является линией кривизны тогда и только тогда, когда эта линия
плоская.
24.44. Доказать, что если на поверхности все геодезические
являются плоскими линиями, то поверхность или плоскость, или
сфера.
24.45. а) Пусть области на двух поверхностях 2-го порядка скле-
склеены вдоль общей дуги границы так, что в целом получилась
С^-гладкая поверхность. Показать, что тогда линия склеивания
является плоской кривой. Всякие ли две поверхности 2-го порядка
допускают такое склеивание?
б) Пусть области на двух поверхностях 2-го порядка S\ и $2
склеены вдоль общей дуги границы, образуя в целом С2-гладкую
поверхность S. Тогда Si и $2 как поверхности 2-го порядка со-
совпадают. Другими словами, склеиваемые области являются смеж-
смежными областями на одной и той же поверхности 2-го порядка, так
что S на самом деле будет аналитической.
24.46. Если неразвертывающаяся линейчатая поверхность име-
имеет гладкость класса Cn, n ^ 2, то на ней можно ввести асим-
асимптотическую параметризацию (когда образующие являются одним
174 Часть 2
из семейств координатных линий), в которой поверхность имеет
гладкость класса С71.
24.47. Пусть линейчатая поверхность является С^-гладкой в
некоторой асимптотической параметризации. Показать, что на
ней можно ввести С^-гладкую асимптотическую параметризацию,
в которой направляющая линия ортогональна к пересекающим ее
образующим.
24.48. Описать метрики поверхностей, на которых внутренние
координаты и и v являются натуральными параметрами на коор-
координатных линиях.
24.49. Описать поверхности, на которых координаты в линиях
кривизны одновременно являются натуральными параметрами
линий кривизны.
24.50. Описать поверхности, на которых линии кривизны явля-
являются геодезическими.
24.51. Если на гладкой регулярной неразвертывающейся ли-
линейчатой поверхности М есть прямолинейный отрезок, пересе-
пересекающий все образующие, то на М можно ввести внутренние
координаты, в которых асимптотические линии можно найти в
квадратурах.
24.52. Доказать, что неразвертывающаяся линейчатая гладкая
регулярная поверхность не может иметь постоянную гауссову кри-
кривизну.
24.53. Показать, что среди линейчатых поверхностей мини-
минимальной поверхностью, кроме плоскости, является только прямой
геликоид.
24.54. Показать, что линейчатые поверхности, за исключением
плоскости и геликоида, не могут иметь постоянную среднюю кри-
кривизну.
24.55. Показать, что единственной минимальной поверхностью
с постоянной гауссовой кривизной является плоскость.
24.56. Будем говорить, что поверхность в Еп, п ^ 3, имеет по-
постоянную внешнюю геометрию, если любые две ее точки имеют
конгруентные в Еп окрестности.
а) Показать, что в Е3 поверхностями с постоянной внешней
геометрией являются только плоскость, сфера и прямой круговой
цилиндр (или области на них).
б) Показать, что поверхность в Е4
х\ = R\ cos u, X2 = i?i sinw, #3 = i?2 cos г;, x\ = i?2 sin г;,
где 0 ^ ii, v ^ 27Г, a i?i и i?2 — постоянные числа, гомеоморфна
тору, имеет нулевую гауссову кривизну и ее внешняя геометрия
в Е4 постоянна. Эта поверхность называется обобщенным то-
тором Клиффорда. Ее можно задать еще одним способом. Отождест-
Отождествим Е4 с комплексным пространством С2 с координатами z, w.
§ 24. Линии на поверхностях 175
Тогда тор Клиффорда получается как пересечение трехмерной сфе-
сферы \z\2 + \w\2 = 1 с конусом \z\ = \w\. Отметим, что индуцирован-
индуцированная метрика на торе Клиффорда является плоской,
в) Показать, что поверхность в R5
ху yz xz
_ х2 - у2 _ х2 + у2 - 2z2
ХА' хъ~ 6
с условием х2 + у2 + z2 = 1 является гомеоморфным вложением в
К5 проективной плоскости, имеющим постоянную внешнюю гео-
геометрию. Эта поверхность называется поверхностью Веронезе.
24.57. Доказать, что если асимптотическая линия на поверхно-
поверхности одновременно является геодезической, то она будет прямой.
24.58. Доказать, что свойство линии на поверхности быть асим-
асимптотической инвариантно при проективных преобразованиях объ-
объемлющего пространства.
24.59. Доказать, что если поверхность содержит прямую ли-
линию, то эта линия будет асимптотической линией поверхности.
24.60. Доказать, что асимптотические линии поверхности со-
составляют ортогональную сеть тогда и только тогда, когда поверх-
поверхность минимальная.
24.61. Доказать, что если асимптотическая кривая на поверх-
поверхности состоит из параболических точек, то эта кривая плоская и
ее плоскость является касательной плоскостью к поверхности во
всех точках кривой. Верно и обратное, — если плоскость плос-
плоской кривой на поверхности является касательной к поверхности
во всех точках кривой, то эта кривая асимптотическая, состоящая
из параболических точек.
24.62. Доказать, что если линия кривизны L является асимпто-
асимптотической, то гауссова кривизна поверхности вдоль L равна нулю
и кривая L — плоская.
24.63. Показать, что на поверхности отрицательной кривизны
бинормаль к асимптотической линии совпадает с нормалью к по-
поверхности.
24.64. Доказать, что если при изгибании поверхности, отлич-
отличной от линейчатой, все асимптотические линии одного семейства
переходят снова в асимптотические линии, то поверхность оста-
остается конгруентной самой себе.
24.65. Показать, что неразвертывающаяся линейчатая поверх-
поверхность не допускает изометрических преобразований, при которых
все асимптотические линии исходной поверхности переходят в
асимптотические линии преобразованной поверхности.
24.66. Доказать, что если на поверхности постоянной гауссо-
гауссовой кривизны К = — 1 координатные линии u = const и v = const
176 Часть 2
являются асимпотическими линиями поверхности, то в этих ко-
координатах первая форма имеет вид ds2 = du2 + 2 cos и du dv + dv2,
где и — угол между асимптотическими линиями.
24.67. Показать, что в условиях предыдущей задачи угол
o;(ii, г;) удовлетворяет уравнению «sin-Гордона» ш1^ = sinо>.
24.68. Показать, что если на поверхности отрицательной кри-
кривизны изометрические координаты (гл, г;) являются одновременно
асимптотическими, то поверхность является минимальной с усло-
условием М — const.
24.69. Доказать, что на односвязной поверхности отрицатель-
отрицательной кривизны нет замкнутой асимптотической линии.
§ 25. Многообразия (дополнительные задачи)
Напомним, что многообразие называется замкнутым, если оно ком-
компактно и не имеет края.
25.1. Доказать, что группы SX(n, E) и SX(n, С) являются глад-
гладкими подмногообразиями в пространствах соответственно веще-
вещественных и комплексных квадратных матриц порядка п. Найти
их размерности. Найти количество компонент связности этих ма-
матричных групп.
25.2. Доказать, что группа SO(n) является гладким подмного-
образием в пространстве Шп всех квадратных матриц порядка п.
Найти размерность и число компонент связности этой группы.
25.3. Доказать, что группы C/(n), SU(n) являются гладкими
подмногообразиями в пространстве Сп комплексных квадратных
матриц порядка п. Найти размерность и число компонент связно-
связности этих групп.
25.4. Показать, что отображение матриц Аиел является глад-
гладким гомеоморфизмом в окрестности нулевой матрицы в прообразе
и окрестности единичной матрицы в образе. Показать, что обрат-
обратное отображение задается соответствием В —>> ln(JB).
25.5. Доказать, что на каждой из групп, перечисленных в зада-
задачах 25.1-25.3, в качестве локальных систем координат в окрестно-
окрестности UA матрицы А можно взять некоторые из декартовых коорди-
координат матрицы ^(А^Х). Показать, что в указанных координатах
функции замены координат являются гладкими функциями
класса С°°.
25.6. Показать, что проективное пространство ШРп является
фактор-пространством Sn)Ъ^ при некотором действии группы Ъ<1
на сфере Sn. Найти это действие.
25.7. Показать, что комплексное проективное пространство
СРп является фактор-пространством S2n+1 /S1 при некотором дей-
действии группы S1 на сфере Sf2n+1. Найти это действие.
§ 25. Многообразия (дополнительные задачи) 177
25.8. Построить в Еп гладкую (класса С°°) функцию /, такую,
что / = 1 на шаре радиуса 1, / = 0 вне шара радиуса 2 и 0 < / ^ 1.
25.9. Пусть М — многообразие, р Е U С М — окрестность
точки р. Доказать, что существует такая гладкая функция /, что
О < / < 1, /(р) = 1 и f(x) = О на M\U.
25.10. Пусть М — многообразие, А — А — замкнутое множе-
множество, U Э А — открытая область. Доказать, что существует такая
гладкая функция /, что 0 ^ / ^ 1, f\A = 1 и /|м^ = 0.
25.11. (Слабый вариант теоремы Уитни.) Доказать, что ком-
компактное гладкое многообразие Мп вкладывается в евклидово про-
пространство RN для подходящей размерности N < оо.
25.12. Доказать, что гладкая функция на гладком компактном
многообразии М может быть представлена как координата при
некотором вложении М С KN.
25.13. Доказать, что произведение сфер вкладывается в RN как
подмногообразие коразмерности один.
25.14. Доказать, что если dimX < dim У, а /: X —> У —
гладкое отображение, то образ отображения / не совпадает с У.
25.15. а) Доказать, что 2-мерное гладкое замкнутое многообра-
многообразие погружается в R3.
б) Доказать, что 2-мерное гладкое замкнутое ориентируемое
многообразие вкладывается в М3.
в) Доказать, что 2-мерное гладкое замкнутое неориентируемое
многообразие вкладывается в М4 и не вкладывается в М3.
25.16. Теорема Уитни. Доказать, что гладкое замкнутое
многообразие Мп можно вложить в евклидово пространство M2n+1
и погрузить в Ш2п.
Примечание. Воспользоваться задачей 25.11. После этого по-
подобрать направление проектирования таким образом, чтобы избежать
появления самопересечений и особых точек на проекции. См. рис. 99.
25.17. Привести пример погружения многообразия в Кп, вза-
взаимно однозначного с образом, но не являющегося вложением.
25.18. Доказать, что для компактных многообразий вложение
всегда является гомеоморфизмом на образ.
25.19. Привести пример такого вложения, что образ не является
подмногообразием.
25.20. Пусть М — многообразие с границей дМ. Доказать, что
многообразие М можно так вложить в полупространство (#jv+i ^
^ 0) евклидова пространства RN+1, что дМ лежит в подпростран-
подпространстве (xN+i = 0).
25.21. Пусть граница дМ состоит из двух компонент связности
дМ = М\ U М2, М\ П М2 = 0. Доказать, что многообразие М
можно вложить вРх [0, 1], причем Mi лежит в RN x 0, a M<i
лежит в RN х 1.
178
Часть 2
Рис. 99
25.22. Доказать, что некомпактное гладкое многообразие Мп
(без края) можно вложить в евклидово пространство R2n+1 и по-
погрузить в R2n.
25.23. Рассмотрим половинку бутылки Клейна, изображенную
на рис. 161 (см. ответы). Будем поднимать плоскость, содержа-
содержащую край Г этой поверхности, одновременно с этим деформируя Г
так, как показано на рис. 100. Полученную в результате плоскую
о
Рис. 100
окружность заклеим диском. Доказать, что получившаяся поверх-
поверхность М (состоящая из исходной части бутылки Клейна, следа
деформации Г и диска) является погружением RP2 в R3. Дока-
Доказать, что М является поверхностью Боя (см. задачу 21.2).
25.24. Описать множество точек самопересечения построенного
в предыдущей задаче погружения RP2 в R3. Указать кратности
этих точек, т. е. указать, сколько листов поверхности пересекается
в этой точке самопересечения поверхности.
§ 25. Многообразия (дополнительные задачи) 179
25.25. Рассмотрим описанное в двух предыдущих задачах по-
погружение ШР2 в М3. Обозначим через i{RP2) образ ЕР2 в М3.
Рассмотрим в каждой точке х Е г(КР2), не являющейся точкой
самопересечения поверхности, отрезок длины 2е, ортогональный
г(ШР2) с центром в точке ж, где е — достаточно мало. Поскольку
% — гладкое отображение, то полученый пучок ортогональных от-
отрезков можно доопределить и в каждой точке самопересечения.
При этом в каждой точке получится ровно столько отрезков, ка-
какова кратность точки. Рассмотрим в R3 множество, состоящее из
концов всех ортогональных отрезков. Доказать, что это — образ
двумерной сферы при некотором гладком погружении в R3.
Пусть /: X -» У — гладкое отображение гладких многообразий,
М С Y — гладкое подмногообразие. Отображение f называется
трансверсальным вдоль подмногообразия М, если для любой точки
х Е f(M) касательное пространство Tf(x)(Y) к многообразию Y есть
сумма (вообще говоря, не прямая) касательного пространства Tf(x^(M) к
Трансверсальные Нетрансверсальные
пересечения пересечения
Рис. 101
многообразию М и образа df(Tx(X)) касательного пространства к мно-
многообразию X. Два подмногообразия М\ и Мч в многообразии X пере-
пересекаются трансверсально, если вложение одного из них является транс-
трансверсальным вдоль другого подмногообразия (см. рис. 101).
25.26. Пусть /: Хп —> Yn — гладкое отображение компакт-
компактного замкнутого многообразия X в многообразие Y той же самой
размерности п. Пусть уо — регулярное значение отображения /.
Доказать, что /~х(уо) состоит из конечного числа точек.
25.27. Доказать, что если у ? Y — регулярная точка отображе-
отображения /: X -> У, то / — трансверсальное вдоль у отображение.
25.28. Доказать, что определение трансверсального пересече-
пересечения не зависит от выбора порядка в паре М\ и М2.
25.29. Доказать, что если /: X -> Y — трансверсальное ото-
отображение вдоль подмногообразия М С У, то прообраз f~l(M)
является подмногообразием в многообразии X. Вычислить раз-
размерность /Х
180 Часть 2
25.30. Доказать, что любая простая замкнутая дуга с самопере-
самопересечениями в Ш2 малым движением превращается в простую замк-
замкнутую дугу в К3 без самопересечений.
25.31. Выяснить, трансверсально ли пересекаются следующие
подмногообразия:
а) плоскость ху и ось 2bR3;
б) плоскость ху и плоскость, натянутая на векторы C, 2, 0) и
@, 4, -1) в М3;
в) подпространство V х {0} и диагональ в произведении V х V;
г) пространства симметрических и кососимметрических ма-
матриц в пространстве всех матриц.
25.32. Выяснить, для каких значений а поверхности х2 + у2 —
— z2 = 1 и х2 + у2 + z2 = а пересекаются трансверсально.
25.33. Показать, что множество Vn,k всех ортонормированных
систем из к векторов в евклидовом пространстве W1 допускает
структуру гладкого многообразия. Найти его размерность. По-
Показать, что VnA = Sn~\ Vn,n = О(п).
25.34. Показать, что множество GUik всех fc-мерных подпро-
подпространств в евклидовом пространстве Шп допускает структуру глад-
гладкого многообразия. Найти его размерность. Показать, что <2пд =
1
25.35. Пусть f:Sn-> ШРп — отображение, сопоставляющее
точке х Е Sn прямую, проходящую через точку х и начало коор-
координат в Rn+1. Доказать, что / гладкое и что у него все точки
регулярны.
25.36. Пусть /: SO(n) -> Sfn сопоставляет каждой ортого-
ортогональной матрице ее первый столбец. Доказать, что отображение /
гладкое и что у него все точки регулярны. Найти прообраз /~1(у).
25.37. Пусть /: U(n) -» S2n~l сопоставляет каждой унитарной
матрице ее первый столбец. Доказать, что отображение / гладкое
и что у / все точки регулярны. Найти прообраз /~1(у).
25.38. Пусть /: Vn^ —> V^M, 5 ^ fc, — отображение, сопоста-
сопоставляющее ортонормированной системе из к векторов первые 5 ее
векторов. Показать, что каждая точка является регулярной для
отображения /. Показать, что прообраз f~l{y) гомеоморфен мно-
многообразию Vn-sJk-8-
25.39. Пусть /: О(п) -> GUik — отображение, сопоставляющее
каждой ортогональной матрице подпространство, порожденное
первыми к столбцами. Показать, что у отображения / все точки
регулярны. Показать, что прообраз /~х(у) гомеоморфен много-
многообразию О(п - к) х О (к).
25.40. Пусть /: XxY -> М — гладкое отображение, то Е М —
регулярная точка. Рассмотрим семейство отображений fy: X —>
§ 25. Многообразия (дополнительные задачи) 181
—> М, fy{x) = /(ж, у). Доказать, что точка то регулярна для
отображений fy почти для всех значений параметра у, т. е. когда
у пробегает открытое всюду плотное подмножество в Y.
25.41. Решить задачу 25.40 с заменой точки то на подмного-
подмногообразие N С М и условия регулярности на условие трансверсаль-
трансверсальности отображений вдоль подмногообразия N.
25.42. Пусть поверхность М в Kn, n ^ 3 (например, п = 3),
задана уравнением f(x\, ..., жп) = с, где с является регулярным
значением гладкой функции /. Доказать, что тогда М является
ориентируемой поверхностью.
25.43. Проверить, ориентируемы ли следующие многообразия:
а) группа GL(n,R); б) группа U(n)\ в) группа SO(n).
25.44. Доказать, что проективное пространство RPn ориенти-
ориентируемо в точности для нечетных п.
25.45. Показать, что комплексное проективное пространство
СРП ориентируемо.
25.46. Доказать, что произвольное комплексно-аналитическое
многообразие ориентируемо.
25.47. Доказать, что пространство касательного расслоения
многообразия является многообразием, причем всегда ориентиру-
ориентируемым.
25.48. Доказать, что Т*М является многообразием. Ориенти-
Ориентируемо ли оно?
25.49. Доказать, что объединение единичных сфер слоев каса-
касательного расслоения риманова n-мерного многообразия М явля-
является гладким многообразием размерности Bп — 1). Доказать, что
это многообразие расслаивается над М со слоем 5ГП~1.
25.50. Доказать, что плоское кольцо, бутылка Клейна и тор
являются расслоенными пространствами.
25.51. Доказать, что расслоение над стягиваемой базой триви-
тривиально, т. е. является прямым произведением базы на слой.
25.52. Показать, что окружность, евклидово пространство и
тор — параллелизуемые многообразия.
25.53. Доказать, что параллелизуемые многообразия ориенти-
ориентируемы. В частности, касательные расслоения проективной плос-
плоскости и бутылки Клейна нетривиальны.
25.54. Доказать, что если из двумерной замкнутой ориентиро-
ориентированной поверхности выколоть точку, то полученное многообразие
является параллелизуемым.
25.55. Доказать, что многообразие размерности п тогда и
только тогда параллелизуемо, когда на нем имеется п линейно
независимых гладких векторных полей.
25.56. Доказать, что многообразие, на котором определена
структура группы Ли, параллелизуемо.
25.57. Доказать, что сфера S2 не параллелизуема.
182 Часть 2
25.58. Привести пример гладкого отображения многообразий,
при котором образ гладкой регулярной кривой перестает быть ре-
регулярным в некоторых точках.
25.59. Доказать, что лицейно независимые векторы ai, ..., а^
в точке А Е Мп, к < п, можно считать базисными векторами
некоторой карты многообразия, т.е. существуют координаты
(я1, ..., хп) в окрестности точки А такие, что
= а^, 1 $С г ^ к.
25.60. Доказать,что векторное поле а на многообразии, не обра-
обращающееся в нуль в точке А, является базисным для некоторой
карты, содержащей точку А.
25.61. Рассмотрим векторные поля ai, ..., а& на многообра-
многообразии Мп, где к < п, линейно независимые в окрестности некоторой
точки А Е Мп и такие, что [а^, а^] = 0 для всех г и j. Доказать,
что в некоторой окрестности точки А можно задать координаты
(ж1, ..., хп) такие, что
25.62. Доказать, что ориентируемая 2-мерная поверхность име-
имеет комплексную структуру.
25.63. Доказать, что многообразия S1 x Sr2n, Sr2n x S2n~l
имеют комплексную структуру.
25.64. Доказать, что замкнутое нечетномерное риманово мно-
многообразие положительной кривизны ориентируемо.
25.65. Пусть /: X —> Y — гладкое отображение замкнутых
многообразий. Пусть / — наложение, причем все точки Y регу-
регулярны. Доказать, что для любой точки у Е Y прообраз ее доста-
достаточно малой окрестности U(y) гомеоморфен прямому произведе-
произведению U(у) х /~х(у), тем самым, / — расслоение. В частности,
если Y — связное многообразие, то слои /""х(у) попарно диффео-
морфны.
Функция w = /(я1, ..., zn), zk = xk + iyk называется голоморфной,
если она непрерывно дифференцируема, а ее дифференциал является
комплексной линейной формой в каждой точке (я1, ..., zn).
25.66. Показать, что если /(г1, ..., zn) — голоморфная функ-
функция, то
dRef _ dim/ dim/ _ dRef
дхк " дук ' дхк ~~ дук
§ 26. Тензорный анализ 183
25.67. Пусть w7 = P(zl) ..., zn) — голоморфная вектор-функ-
вектор-функция, отображающая Сп в Ст. Найти соотношение между веще-
вещественной матрицей Якоби этого отображения и его комплексной
матрицей Якоби.
25.68. Доказать, что голоморфная вектор-функция /: Сп ~> Сп
образует локальную систему координат тогда и только тогда, когда
ее комплексный якобиан отличен от нуля.
25.69. Показать, что S2 допускает комплексно-аналитическую
структуру. Описать в явном виде простейший атлас карт.
25.70. Показать, что комплексные проективные пространства
СРп допускают комплексно-аналитическую структуру. Описать в
явном виде простейший атлас карт.
§ 26. Тензорный анализ
26.1. Пусть V\ и V2 — линейные пространства. Доказать изо-
изоморфизмы
= ф A'(Vi) ® A'(V2),
i+jk
26.2. Доказать, что
rp[h rpip] rp[ii rpip] rpii rpip
1h •••¦Ljp -i[;i -'-Ljp] Ui'JpV
26.3. Доказать, что если yl^^syj^js = q? t0 vlni2i3vji]J2J3 = q.
26.4. Верно ли, что если трехвалентный ковариантный тензор
удовлетворяет условиям
при любом выборе контравариантного вектора м, то компоненты
тензора удовлетворяют условию
Tijk + Tjki + Тщ = 0.
26.5. Доказать, что если соотношение
ufapvavpw1 = 0
справедливо при любом выборе тензоров va, wa, удовлетворяющих
условию vawa = 0, то
где sa — некоторый тензор.
184 Часть 2
26.6. Доказать, что если размерность пространства V больше 2,
то Л2(Л27) ф A4V.
26.7. Доказать, что если tr KqA = 0 для всех q > О, то оператор
А нильпотентен.
26.8. Пусть в пространстве V размерности п задан линейный
оператор А. Если оператор Ап~1А в пространстве Kn~lV ненуле-
ненулевой, то он либо невырожден, либо имеет ранг 1.
26.9. Доказать, что если оператор А диагонализуем, то оператор
А®к также диагонализуем.
26.10. Доказать, что ранг тензора Ац = aibj равен единице, а
ранг тензора a{bj + ajbi равен 2.
26.11. Какому условию должен удовлетворять тензор А^, чтобы
он имел вид Aij = aibj?
26.12. Доказать, что если тензор Т^к симметричен по первым
двум индексам, то
T
26.13. Доказать, что если тензор Тф кососимметричен по пер-
первым двум индексам, то
T
26.14. Даны тензоры а^ и Ьк1т. Построить из них путем од-
одного умножения и свертывания тензоры первой, третьей и пятой
валентностей. Сколько их будет?
26.15. Пусть тензор Тцы обладает свойствами
= 0, Тщк + Thjki + Thkij = 0.
а) Доказать, что если Тщк - Thjik - 0, то Thijk = 0.
б) Доказать, что если Thijk + T^ik = 0, то Тщк = 0.
26.16. Показать, что если трехвалентный тензор Т^ удовлетво-
удовлетворяет условиям
rph _ rph T^qtij — О
для любого тензора (вектора) w7, то тензор Т^ нулевой.
26.17. Показать, что если тензор Тг1...;ш удовлетворяет усло-
условиям
Т • nin <iilm — О
при любом выборе тензора (вектора) иг, то T^lmirn^ = 0.
Пусть ip\ U -> V — диффеоморфизм областей евклидова простран-
пространства. Пусть тензорное поле Т типа (р, q) на V имеет в координатах
(х) — (ж1, ..., хп) компоненты Т%?[")?- Ясно, что композиция (х о ф)
§ 26. Тензорный анализ 185
определяет криволинейные координаты на U. Определим тензорное поле
ip*T на U в этой системе координат следующей формулой:
Пусть X — гладкое векторное поле, а Т — некоторое гладкое тензор-
тензорное поле. Поле X определяет однопараметрическую группу <pt (напомним,
что (ft определяется из дифференциального уравнения -r<Pt(P) =
* t=o
= X(P)J. Определим производную Ли тензорного поля Г вдоль вектор-
векторного поля X формулой
26.18. Доказать, что если тензорное поле Т имеет тип @, 0),
т. е. является гладкой функцией, то <р*Т = Т о (р.
26.19. Доказать, что если тензорное поле Т имеет тип A, 0),
т. е. является векторным, то
26.20. Доказать, что если тензорное поле f имеет тип @, 1),
т. е. является ковекторным, то
Здесь d(p\p: TpU -> T^p^V — дифференциал отображения (р в
точке Р G С/, a {d(p\p)*i T*,p^V -> TpU — сопряженное отображе-
отображение кокасательных пространств.
26.21. Показать, что операция Т н-» ср*Т сохраняет алгебра-
алгебраические операции с тензорными полями: сумму, умножение на
функцию, тензорное произведение, свертку.
26.22. Пусть X и Y — векторные поля в области V, а (р: U ->
-> V — диффеоморфизм. Доказать, что [</?*Х, <p*Y] = </?*[X, Y].
26.23. Доказать, что производная Ли — линейная операция.
26.24. Доказать, что если Т и S — тензорные поля, а X —
векторное поле, то
Lx {T®S) = LXT ®S + T®LXS.
26.25. Доказать, что производная Ли перестановочна со сверт-
сверткой.
26.26. Доказать, что если X — векторное поле, а / — гладкая
функция, то / X/
186 Часть 2
26.27. а) Пусть (ж1, ..., хп) — локальные координаты в обла-
области С/, а X — векторное поле с компонентами (-Х, ..., Хп) в ко-
координатах (х). Доказать, что
б) Доказать, что для ковектора ? = & da;1 имеет место формула
26.28. Доказать, что если X и Y — векторные поля, то
= [X, Y].
26.29. Получить формулу для производной Ли тензорного поля
типа (р, q).
26.30. Доказать, что для дифференциальной формы и и век-
векторного поля X имеет место равенство dLxu = L>x du.
26.31. Доказать, что
Lxu = ixdu + dixu,
где и — дифференциальная форма, а X — векторное поле.
26.32. Для векторных полей X и Y доказать формулу:
a) [Lx, %y] = *[x,Y]5 б) [?х, LY] = L
§ 27. Геодезические на многообразиях
27.1. Доказать, что геодезическое кручение линии и = u(s),
v = v(s), расположенной на поверхности г = r(w, v), вычисляется
по формуле
кд = (г, т, т),
где т — единичный вектор нормали поверхности.
27.2. Доказать следующее утверждение: для того чтобы линия
на поверхности была линией кривизны, необходимо и достаточно,
чтобы в каждой ее точке геодезическое кручение равнялось нулю.
27.3. Найти геодезические линии развертывающейся поверх-
поверхности.
27.4. Доказать, что кручение геодезической линии, касающейся
линии кривизны поверхности, равно нулю.
27.5. Доказать, что каждая плоская геодезическая линия, от-
отличная от прямой, есть линия кривизны поверхности.
27.6. Доказать, что уравнения геодезических на многообразии
М с метрикой (gij) можно записать в кокасательном расслоении
Т*М в гамильтоновой форме:
ф?__ dx{ _ дН
dt " дх{' dt " dpi'
§ 27. Геодезические на многообразиях 187
где (ж1, ..., хп, pi, ..., рп) — стандартные координаты на кока-
сательном расслоении, #(р, ж) = -g^{x)piPj. Кроме того, pi =
== 9ij%3 •> где i-7 — вектор скорости геодезической.
27.7. Рассмотрим поверхность с римановой метрикой. На ней
имеются два типа кривых: окружности Дарбу и окружности Гаусса.
Окружностью Дарбу называется линия на поверхности, имею-
имеющая постоянную геодезическую кривизну. Окружностью Гаусса
(геодезической окружностью) называется множество точек, отсто-
отстоящих от одной фиксированной точки на одно и то же расстояние,
измеренное вдоль геодезических радиусов. Доказать, что мно-
множество окружностей Дарбу совпадает с множеством окружностей
Гаусса тогда и только тогда, когда поверхность является поверхно-
поверхностью постоянной кривизны.
27.8. Доказать, что двумерная поверхность, на которой длина
любой окружности Гаусса равна 2тгД, где R — радиус, отложенный
вдоль геодезических, локально изометрична плоскости.
27.9. а) Доказать, что на компактном односвязном многообра-
многообразии Мп всегда существует пара сопряженных точек.
б) Что будет, если Мп неодносвязно?
в) Рассмотрим на многообразии пучок геодезических, исходя-
исходящих из одной точки. На каждой ли из них найдется сопряженная
точка?
27.10. Описать все поверхности вращения, на которых все гео-
геодезические замкнуты.
27.11. а) Доказать, что на линейчатой поверхности любой отре-
отрезок образующей является кратчайшей между его конечными точ-
точками.
б) Доказать более общий факт: на полной односвязной поверх-
поверхности отрицательной кривизны дуга любой геодезической явля-
является кратчайшей между своими концевыми точками.
27.12. Дать пример двух неизометричных римановых много-
многообразий с общими геодезическими. Многообразия считаются
имеющими общие геодезические, если существует диффеомор-
диффеоморфизм одного многообразия на другое, переводящий геодезические
в геодезические.
27.13. Доказать, что все компактные замкнутые поверхности
геодезически полные.
Следующие задачи посвящены матричным группам Ли. В дальней-
дальнейшем, в одном из следующих параграфов, группы Ли будут рассматри-
рассматриваться в полной общности, т. е. как гладкие многообразия, снабженные
структурой группы в гладкой категории.
В этом параграфе в целях упрощения изложения мы ограничимся
рассмотрением лишь тех групп Ли, которые реализуются в виде тех или
иных групп матриц. Такие группы Ли называются матричными. Рас-
Рассмотрим полную линейную группу GL(n, К) — группу невырожденных
188 Часть 2
матриц размера пхпс вещественными элементами. Она является от-
открытой областью в евклидовом пространстве Еп всех вещественных
2
матриц размера пхп. Рассмотрим на Кп обычную евклидову метрику,
заданную в следующем виде:
где YT — транспонированная матрица. Эта метрика индуцирует на
группе GL(n, К) и на всех ее подгруппах риманову метрику. Такая ме-
метрика на матричной группе G называется метрикой Киллинга. Можно
также рассматривать случай GL(n, С), где риманова метрика задается
формулой __
(X, Y)=RetiX-Y .
Однопараметрическими (одномерными) подгруппами матричной
группы G являются в точности подгруппы вида {etx : t Е Е}, где X —
произвольная матрица из касательного пространства к группе G в ее
единице Е.
Напомним, что касательное пространство L к матричной группе
G в единице, снабженное билинейной кососимметрической операцией
[X, Y] = XY — YX, является алгеброй Ли, в частности, выполняется
тождество Якоби
[[X, Y],Z] + [[Z, X],Y] + [[Y, Z],X] = 0.
Здесь XY — обычное произведение матриц. Операция [X, Y] называ-
называется коммутатором. На алгебре Ли L матричной группы G определены
линейные операторы Ad^ и adx, задаваемые формулами
Adg(X) =gXg-\ adx(Y) = [X,Y],
где д € G, X, Y e L.
Векторное поле V на группе G называется левоинвариантным (пра-
воинвариантным), если оно переходит в себя при всех левых (правых)
сдвигах группы. Такое поле однозначно определяется своим значением
в единице группы, т. е. некоторым вектором X из алгебры Ли L. Такое
поле обозначается Lx (соответственно Rx)-
27.14. а) Доказать, что оператор adx является дифференциро-
дифференцированием алгебры Ли L, т. е.
ad*([Г, Z)) = [adx(Y), Z] + [У, ad*(Z)].
Показать, что эта формула эквивалентна тождеству Якоби.
б) Доказать, что определенная выше риманова метрика на про-
произвольной подгруппе G группы GL(n, К) является биинвариант-
ной, т. е. правые и левые сдвиги на G являются ее изометриями.
в) Доказать аналогичное предыдущему пункту утверждение
для подгрупп группы GL(n, С).
г) Доказать, что для любого X G L оператор adx кососимме-
тричен относительно метрики Киллинга:
(bdx(Y),Z)=-(Y,a.dx(Z)).
§ 27. Геодезические на многообразиях 189
д) Доказать, что для любого g Е G оператор Adp сохраняет
метрику Киллинга, т.е. (Adp(X), Adg(Y)) = (X, Y).
27.15. Пусть G — матричная группа, L — ее алгебра Ли. Вве-
Введем связность V на группе G, полагая для левоинвариантных по-
полей Lx, Ly
L L ^
Отметим, что эта формула, как следует из пункта а) этой задачи,
однозначно определяет связность не только на левоинвариантных,
но и на произвольных векторных полях на группе G.
а) Показать, что приведенная выше формула однозначно опре-
определяет символы Кристоффеля Г^.
б) Доказать, что эта связность на группе G симметрична и
согласована с метрикой Киллинга.
в) Доказать, что геодезическими матричной группы G с опи-
описанной выше римановой метрикой, проходящими через единицу,
являются все ее однопараметрические подгруппы и только они.
Доказать, что все остальные геодезические на G получаются пра-
правыми (левыми) сдвигами однопараметрических подгрупп.
г) Доказать, что тензор кривизны R описанной в этой задаче
связности на матричной группе G задается на левоинвариантных
векторных полях Lx, Ly и Lz формулами
R(LX, LY)LZ = -^%Y,y],z]>
(R(LX, LY)LZ, Lw) = ~([X, Y], [Z, W]).
Отметим, что этих формул достаточно для задания тензора кри-
кривизны R на произвольных векторных полях на группе G,
д) Показать, что из указанных соотношений однозначно вос-
восстанавливаются компоненты тензора кривизны ift/w*
27.16. Доказать, что экспоненциальное отображение ехр : L —»-
—> G является диффеоморфизмом некоторой окрестности нулевой
матрицы в алгебре Ли L на некоторую окрестность единичной ма-
матрицы в группе G.
27.17. а) Вывести для группы 5LB, К) явную формулу для
экспоненциального отображения.
б) Показать, что для группы SXB, E) экспоненциальное ото-
отображение не является отображением «на».
в) Исследовать случай группы 5LB, С).
г) Доказать, что экспоненциальное отображение для связной
компактной группы G всегда является отображением «на».
190 Часть 2
§ 28. Тензор кривизны
28.1. Вычислить скалярную кривизну группы SO(ri) с двусто-
двусторонней инвариантной метрикой.
28.2. Пусть в n-мерном римановом пространстве выбраны ли-
линейно независимые векторные поля Xi, ..., Хп. Пусть д^ =
= (Хг, Xj) и [Х<, Xj] = tfjXk- Выразить Г*, через дц и <ф, если
28.3. Доказать, что тензор кривизны n-мерного многообразия
п2(п2 - 1)
имеет —- алгебраически независимых компонент. Иными
±z
словами, у тензора кривизны общего вида нет других симметрии,
кроме «известных».
28.4. При каком условии симметрическая связность V явля-
является римановой, т. е. существует риманова метрика дц такая, что
Vfctftf = 0?
28.5. а) Доказать, что на iV-мерном многообразии набор ве-
величин
Qmnk = Rlmnk — jy о ^9ln^mk ~~ 91к^тп ~ QmnRlk + 9mkRln) +
R
~ 9lk9mn'
является тензором. Тензор С^1к называется тензором Вейлл.
б) Доказать, что он имеет те же алгебраические свойства, что
N(N + 1)
и тензор кривизны, и, кроме того, удовлетворяет усло-
условиям С1т1к = 0.
в) Доказать, что две римановы метрики с одинаковыми тензо-
тензорами Вейля конформно эквивалентны.
28.6. а) Показать, что на n-мерном многообразии (n ^ 3) из
метрического тензора д^ и его тензора кривизны Rijki можно по-
n(n-l)(n-2 (п-3)
строить — — алгебраически независимых ска-
скаляров.
б) Показать, что для п = 3 такими величинами являются ска-
лярная кривизна R, свертка RijRlJ и — -, где Rij — тензор
det gij
Риччи.
28.7. Доказать, что если тензор кривизны риманова многообра-
многообразия тождественно равен 0, то результат параллельного перенесе-
перенесения вдоль кривой 7 не зависит от гомотопии пути 7 при условии,
что концы пути неподвижны.
§ 28. Тензор кривизны 191
28.8. а) Если у риманова односвязного многообразия Щы = О,
то ТМп = Мп х Rn, где ТМ — касательное расслоение много-
бразия М. Иными словами, в этом случае касательное расслоение
тривиально, а само многообразие параллелизуемо.
б) Выяснить, что происходит в неодносвязном случае.
28.9. Доказать, что любое направление в ТХМ в произвольной
точке риманова многообразия М является главным направлением
тензора Риччи в том и только в том случае, когда М является
пространством Эйнштейна.
28.10. Показать, что следующие метрики имеют постоянную
кривизну. Найти эту кривизну:
а) ds2 = du2 + dv2\
б) ds2 =du2 + cos2-dv2\
a
в) ds2 = du2 + ch2 - dv2, a = const ф 0.
a
28.11. Доказать, что аффинная связность общего вида удовле-
удовлетворяет тождеству Бьянки V[jJSJ.my = S^R1^.
28.12. Пусть ulj = FJL- duk — формы связности,
— формы кривизны связности. Доказать, что выполняются струк-
структурные уравнения Картана
28.13. Показать, что формулу Бьянки можно записать в виде
28.14. Пусть фиксирована произвольная аффинная связность
без кручения. Пусть в окрестности U некоторой точки О выб-
выбраны координаты (х1, ..., хп), причем координаты точки О равны
(rcj, • •., #о)- Введем новые координаты (х1', ..., х71') в С/, полагая
(
- 4)-
Доказать, что в новой системе координат точка О имеет нулевые
координаты и что символы Кристоффеля обращаются в точке О в
нуль. Такая система координат называется геодезической,
28.15. Проверить, что в геодезической системе координат в
точке О значения компонент тензора кривизны и его ковариант-
192 Часть 2
ных производных задаются формулами
дхкдх1 '
28.16. а) Учитывая предыдущую задачу, проверить справедли-
справедливость формулы Бьянки
б) Доказать для тензора Риччи Rlm и скалярной кривизны R
равенство
2дхт
28.17. Пусть ifi, Я2, #3 — коэффициенты Ламе некоторой кри-
криволинейной системы координат в М3. Доказать соотношения:
д г ( 1 эн2 Л д 2( i днх л 1 днх чая2 о
V
93=0;
д 2( 1 дн3 л д 3( 1 эн2 Л 1 ая2 ^Яз х _
з 1
Н3 dsQ dsq + H2 dsQ ds
d2ff2 J
dsq dsq + Щ dsq ds
JL^2 хаез 2 JL^i xdih 2
" Я2 dsq ds9 Hi ds9 dsq '
28.18. Доказать, что гладкие функции
Нг(д\ q2, q3), H2{q\q\q% H3(q\q2,q%
удовлетворяющие соотношениям предыдущей задачи, являются
коэффициентами Ламе для некоторого преобразования
xs=Xs{q\q2, 93), 5 = 1,2,3.
28.19. Доказать, что фундаментальная группа полного рима-
нова многообразия неположительной кривизны не содержит эле-
§ 29. Векторные поля 193
ментов конечного порядка. Доказать, что 7Ti(M), где М — полное
риманово многообразие строго отрицательной кривизны, обладает
следующим свойством: если два элемента коммутируют (т. е. аЪ =
= Ьа, где a, b ? 7Ti(M)), то а и b принадлежат одной циклической
подгруппе.
28.20. Доказать, что замкнутое ориентируемое риманово мно-
многообразие Мп строго положительной кривизны и четной размер-
размерности односвязно.
28.21. а) Доказать, что любое компактное замкнутое риманово
многообразие постоянной положительной кривизны 7 изометрично
либо сфере ?п, либо ШРП (радиуса l/v/т)-
б) Пусть Мп — компактное замкнутое односвязное полное ри-
риманово многообразие и пусть СA) — множество первых сопря-
сопряженных точек для некоторой точки / ? Мп. Доказать, что если
Мп — симметрическое пространство, то дополнение МП\СA) го-
меоморфно открытому диску.
28.22. Доказать, что полное некомпактное риманово многообра-
многообразия положительной кривизны и размерности га, где либо m = 2,
либо m ^ 5, диффеоморфно Rm.
28.23. Пусть х, у — две близкие точки на стандартной сфере
S2 и пусть функция f(z) — площадь геодезического треугольника
с вершинами в точках х, j/, z.
а) Является ли функция f(z) гармонической функцией на сфе-
peS2?
б) Исследовать случай n-мерной сферы (здесь f(z) — объем
геодезического симплекса, одна грань которого фиксирована, а
z — свободная вершина).
в) Исследовать тот же самый вопрос на плоскости Лобачев-
Лобачевского.
28.24. Доказать, что если Мп — полное односвязное риманово
многообразие, такое, что п — нечетно и на Мп существует точка
р, такая, что множество первых сопряженных с р точек регулярно
и имеет постоянный порядок fc, то к = п — 1 и Мп гомеоморфно
сфере Sn (под порядком точки понимается ее кратность).
§ 29. Векторные поля
29.1. Найти производную функции / = In (х2 + у2) в точке Р =
= A, 2) по направлению кривой у2 = Ах.
29.2. Найти производную функции / = arctg (у/х) в точке Р =
= B, —2) по направлению кривой х2 + у2 — Ах = 0.
29.3. Найти производную функции / в точке Р по направлению
кривой 7:
194 Часть 2
2 2
б)/ = 2ху + у2, Р = (у/2,1), т Y + I2~ = 1;
в)/ = х2-у2, Р = E,4), 7:х2-у2 = 9;
г) / = 1п(ху + yz + xz), Р = (О, 1, 1), 7: ж = cost, у = sint,
1
д) / = 1п(х2 + у2 + ^2), Р= ^0, Я, у), 7- z =
у = jRsint, z = at.
х2 у2 z2
29.4. Найти производную функции / = — + — + — в пронз-
пронзен сг сг
вольной точке Р = (х, у, z) по направлению радиус-вектора этой
точки.
29.5. Найти производную функции / = /(х, у, z) по направле-
направлению градиента функции д.
29.6. Пусть v(x, у, z) — поле скоростей твердого тела, враща-
вращающегося вокруг некоторой оси. Показать, что:
а) div (v) = 0;
б) rot (v) = 2w, где w — вектор угловой скорости.
29.7. Пусть X = (х, у, z), Y — постоянное векторное поле.
Показать, что rot (Y х X) = 2Y.
29.8. Показать, что rotgradF = 0.
29.9. Доказать формулу
A(FG) = FAG + GAF + 2(gradF, gradG).
29.10. Решить уравнение rotX = Y:
a) Y = A, 1, 1); 6) Y = By, 2z, 0);
в) Y = @, 0, ex - еУ); г) Y = Fy2, 6z, 6x);
e) Y = @, 2cosa;z, 0);
У x
з) Y = (yex\ 2yz, -Bxyzex2 + z2)).
29.11. Доказать, что каждому гладкому векторному полю
на компактном многообразии соответствует однопараметрическая
группа диффеоморфизмов щ, траектории которой касаются дан-
данного векторного поля.
29.12. Пусть У — линейное конечномерное пространство век-
векторных полей, замкнутое относительно коммутатора, т.е. [?, rj] G
G V при ?, т] G V. Показать, что V является алгеброй Ли.
29.13. В предыдущей задаче показать, что соответствующая
алгебре V односвязная группа Ли G действует на компактном мно-
многообразии, причем каждое поле ? € V задает одномерную под-
подгруппу в группе G, орбиты действия которой касаются векторного
поля ?.
§ 29. Векторные поля 195
29.14. Пусть P,Q — две произвольные точки в диске Dn С Еп.
Найти такой диффеоморфизм <р пространства Rn, чтобы <р{Р) =
= <2, (р(х) = я, если х ^ Dn.
29.15. а) Построить на стандартной сфере 53 три линейно
независимых в каждой точке гладких векторных поля.
б) Найти в явном виде интегральные траектории полей, полу-
получающихся умножением радиус-вектора точки сферы на мнимые
кватернионы г, j, fc. Здесь сфера 53 реализована как множество
кватернионов единичной длины.
29.16. Доказать, что на многообразии каждой однопараметри-
ческой группе гладких гомеоморфизмов соответствует гладкое век-
векторное поле скоростей траекторий точек.
29.17. Привести пример векторного поля на некомпактном мно-
многообразии, траектории которого не порождаются действием какой-
либо однопараметрической группы преобразований.
29.18. а) Доказать, что для любых двух точек х\ и Х2 открытого
о
шара Dn существует диффеоморфизм (р шара на себя, который
меняет точки х\ и Х2, т.е. <р{х\) = Х2 и <р{х2) = х\.
о
б) Доказать, что для любых двух точек xi, Х2 ? Dn существует
однопараметрическая группа диффеоморфизмов <pt такая, что
(ро — тождественное отображение и <pi{xi) = Х2-
в) Пусть X — гладкое связное многообразие, жо, #1 — две
произвольные точки. Найти такую однопараметрическую группу
диффеоморфизмов <pt, чтобы (ро было тождественным отображе-
отображением и ipi{xo) = x\. Показать, что без ограничения общности
можно считать, что все преобразования (ft тождественны вне не-
некоторого компакта.
29.19. Пусть конечная группа G гладко действует на гладком
многообразии X. Доказать, что если действие группы G свободно
(т. е. каждая точка х G X остается на месте только при действии
единицы группы G), то фактор-пространство X/G является мно-
многообразием.
29.20. Пусть f(z) — комплексно-аналитическая функция одной
переменной. Доказать, что особые точки (нули) векторных полей
gradRe/(^), gradIm/(^) совпадают с нулями производной f'(z).
29.21. Найти интегральные траектории потока vi(x), ортого-
ортогонального потоку V2(x), где v2(x) = grad/(x), x G R2, f(x) —
значение угла АхВ. Здесь А, В — фиксированные точки плоско-
плоскости R2, х — переменная точка.
29.22. Доказать, что безвихревой поток v = (Р, Q), где P,Q —
компоненты потока на плоскости Е2(х, у), потенциален, т.е. v =
= grad/(x, у) для некоторой гладкой функции /. Что можно ска-
сказать о потенциале /, если поток еще и несжимаем, т. е. div(v) = 0?
196 Часть 2
29.23. Пусть векторное поле ? удовлетворяет условию div (?) =
= 0. Показать, что оператор сдвига вдоль интегральных траекто-
траекторий унитарен.
29.24. Найти все гомотопические классы векторных полей без
особенностей на торе Т2. Гомотопия должна проходить в классе
векторных полей без особых точек.
29.25. Доказать, что если векторное поле X на 2-мерном торе
д
гомотопно в классе векторных полей без особых точек полю -—,
dipi
то оно имеет периодическую траекторию.
29.26. Найти наибольшее число линейно независимых каса-
касательных векторных полей на гладкой замкнутой поверхности М2.
29.27. Пусть т,п — числа вращений векторного поля на торе
Т2, Л = (га, п). Доказать, что у этого поля существует Л периоди-
периодических решений (замкнутых траекторий).
29.28. Теорема Пуанкаре-Бендиксона. Пусть в неко-
некоторой области на плоскости задано векторное поле. Зафиксируем
в этой области некоторое компактное множество К, не содержащее
особых точек векторного поля. Если в К существует точка такая,
что интегральная траектория векторного поля, выходящая из этой
точки, не покидает К, то в К обязательно существует периодиче-
периодическая траектория векторного поля.
29.29. Пусть точка Р на плоскости является предельной для
некоторой траектории векторного поля, т.е. она принадлежит за-
замыканию этой траектории. Доказать, что траектория, проходящая
через Р, является предельной для исходной траектории.
29.30. Доказать, что множество векторных полей, обладающих
только изолированными особенностями, линейно связно.
29.31. Доказать, что сумма индексов особенностей векторного
поля на замкнутом многообразии не меняется при гладких дефор-
деформациях.
29.32. Доказать, что множество всех интегральных траекторий
векторного поля v(x) = (ж1, —ж0, ж3, —ж2), где
ж = (ж0, ж1, х2, х3) е S3: (|ж| = 1) С Ш\
гомеоморфно сфере S2. Найти связь с расслоением Хопфа S3 ->
-> S2. Как связно это векторное поле с кватернионами?
29.33. Положим
(i
dz "" 2 \дх 1ду
dz 2\дх ду)'
Показать, что функция / голоморфна тогда и только тогда, когда
-zr(/) = 0 для всех к (см. также задачу 25.66).
azK
§ 29. Векторные поля
197
29.34. а) Доказать, что произвольное двумерное ориентирован-
ориентированное многообразие после выбрасывания одной точки становится па-
пара ллелизуемым.
б) Верно ли это утверждение для неориентируемых поверхно-
поверхностей?
в) Можно ли сделать неориентируемую поверхность (с краем
или без) параллелизуемой, выбрасывая из нее точки и вложенные
окружности?
29.35. а) Построить на замкнутой двумерной поверхности глад-
гладкую функцию ровно с тремя критическими точками.
Рис. 102
б) Для какой поверхности такая функция может являться функ-
функцией Морса (это означает, что все ее критические точки невыро-
невырождены) (см. рис. 102)?
Рис. 103
198 Часть 2
29.36. а) Построить на замкнутой двумерной поверхности глад-
гладкую функцию ровно с четырьмя критическими точками.
б) Для какой поверхности такая функция может являться функ-
функцией Морса (это означает, что все ее критические точки невыро-
невырождены) (см. рис. 103)?
§ 30. Группы преобразований
30.1 Пусть конечная группа G гладко действует на многообра-
многообразии X и xq 6 X — неподвижная точка для действия любого
элемента группы G. Доказать, что в окрестности точки xq най-
найдется локальная система координат, в которой действие группы G
линейно.
30.2. Обобщить предыдущую задачу на случай произвольной
компактной группы Ли.
30.3. Доказать, что множество всех неподвижных точек дей-
действия конечной группы G на гладком многообразии является объ-
объединением гладких подмногообразий (вообще говоря, различных
размерностей).
30.4. Пусть G — группа Ли. Показать, что действие группы G
на себе с помощью левых (правых) сдвигов является гладким.
30.5. Пусть группа Ли G действует на себе с помощью внутрен-
внутренних автоморфизмов. Доказать, что множество неподвижных точек
совпадает с центром группы G.
Рис. 104
30.6. Доказать, что группа изометрий евклидового простран-
пространства порождается ортогональными преобразованиями и параллель-
параллельными переносами (см. рис. 104). На этом рисунке репер Oxyz —
§ 30. Группы преобразований 199
фиксированный, а репер O'x'y'z', жестко связанный с самолетом,
получается из репера Oxyz с помощью изометрии евклидова про-
пространства.
30.7. Доказать, что группа изометрии стандартной п-мерной
сферы изоморфна группе ортогональных преобразований (п + 1)-
мерного евклидового пространства.
30.8. Доказать,что группы Ли Sp(l) и SUB) изоморфны. До-
Доказать, что они диффеоморфны сфере 53. Установить связь с ква-
кватернионами.
30.9. а) В пространстве кватернионов Н зададим линейное пре-
преобразование La формулой L^: жи Ах, где я, A G И и модуль А
равен 1. Доказать, что множество всех линейных преобразований
вида La образует группу, изоморфную SUB).
б) В пространстве кватернионов Н рассмотрим линейные пре-
преобразования, заданные формулой La,b'- # ¦-* АхВ, где я, Д В ? Н
и модули А и В равны 1. Доказать, что множество всех таких пре-
преобразований образует группу, изоморфную 50D).
в) Доказать, что 50D) изоморфна фактор-группе 53 x 53/Z2,
где 53 снабжена структурой группы SUB) = Sp(l).
г) Найти фундаментальную группу SO(n) для любого п. Рас-
Рассмотреть вначале случаи п = 3 и п = 4.
30.10. Обозначим через Az (</?), А^ (</?), Аж(</?) соответственно
следующие матрицы:
coscp simp 0\ / coscp 0 sin<
— sin</? cos</? 0 j , I 0 1 0
0 0 l) y— simp 0 cos</?y
'10 0
0 cos cp sin (p
— sin </? cos (pj
Ясно, что это матрицы поворотов относительно соответствующих
осей координат. Любую матрицу A G 50C) можно представить в
виде
трех вращений относительно двух осей координат. Здесь индексы
г и j принимают значения в множестве {ж, у, г}, причем г ф j.
Рисунок 105 соответствует представлению матрицы А в виде про-
произведения Az(<p)Ax(O)Az(ip).
Углы </?, в, ф называются углами Эйлера.
а) Сколько различных вариантов имеется для выбора углов
Эйлера?
б) Доказать, что углы Эйлера являются локальными регуляр-
регулярными координатами почти на всей группе 50C). Найти мно-
200
Часть 2
Рис. 105. Углы Эйлера, ось и является пересечением плоскостей Оху и Ох'у'
жество матриц из 50C), для которых углы Эйлера не являются
регулярными координатами.
в) Найти выражение для метрики Киллинга на 50C) в углах
Эйлера.
г) Найти объем группы 50C).
Рис. 106. Навигационные углы — углы поворотов относительно указанных осей
§ 30 Группы преобразований 201
30.11. Не только углы Эйлера могут служить координатами на
группе 50C). В самом деле, произвольная матрица А Е ?0C)
представляется в виде
где индексы г, j, к принимают различные значения в множестве
{ж, у, z}. В этом случае углы </?, в и ф называются навигацион-
навигационными углами (см. рис. 106).
а) Сколько различных вариантов имеется для выбора навига-
навигационных углов?
б) Доказать, что навигационные углы являются локальными
регулярными координатами почти на всей группе ?0C). Найти
множество матриц из ?0C), для которых навигационные углы не
являются регулярными координатами.
в) Найти выражение для метрики Киллинга на ?0C) в нави-
навигационных углах.
1 + А
30.12. Доказать, что О = является ортогональным пре-
1 — А
образованием Е3. Найти его ось вращения, угол поворота и углы
Эйлера, если:
/ О 1 2\
а) А = -1 0 -3 , б) А =
\-2 3 О/
/ 0 2 2
в) А = [ -2 0 2
\-2 -2 0
30.13. Найти ось вращения и угол поворота, если все углы
Эйлера ортогонального преобразования равны:
а) тг/3, б) тг/4.
30.14. а) Доказать, что группы Ли SO(n), ?C/(n), ?/(n), Sp(n)
связны.
б) Доказать, что в группе 0(п) две связные компоненты.
в) Найти число связных компонент группы движений псевдо-
псевдоевклидова пространства Щ.
г) Доказать, что группа SLB)R)/{±E} связна.
30.15. Реализуем группу U(n) и ее алгебру Ли и(п) подмного-
подмногообразиями в евклидовом пространстве всех квадратных комплекс-
комплексных матриц размера n x n (естественное вложение унитарных и
косоэрмитовых матриц в это пространство).
а) Доказать, что U(n) С ?2n2-1, где сфера ?2п2~1 вложена
стандартно в М2™2 =Сп2 и имеет радиус
13 Зак. 149
202 Часть 2
б) Доказать, что риманова метрика, индуцированная на группе
SU(n), рассматриваемой как подмногообразие в S2n -1, совпадает
с двусторонне инвариантной метрикой Киллинга на группе SU(n).
в) Найти пересечение U{n) П и(п) как подмногообразие в про-
странстве Сп .
30.16. Сформулировать и решить аналогичные задачи для
групп О(п) и Sp(n).
30.17. Доказать, что группа всех изометрий риманового много-
многообразия является гладким многообразием, т. е. является группой
Ли. Оценить сверху ее размерность через размерность риманова
многообразия.
30.18. Перечислить все конечномерные группы Ли преобразо-
преобразований прямой R1.
30.19. Найти группу всех дробно-линейных преобразований,
сохраняющих диск \z\ ^ 1 в комплексной плоскости. Доказать,
что эта группа изоморфна группе SLB, R)/Z2, а также группе всех
преобразований, сохраняющих форму dx2 + dy2 — dt2 в М3(я, у, t).
Установить связь с геометрией Лобачевского.
30.20. Доказать, что связная компонента единицы группы изо-
метрией плоскости Лобачевского (в стандартной метрике постоян-
постоянной кривизны) изоморфна SXB, R)/Z2- Найти полное число ком-
компонент в группе движений плоскости Лобачевского.
30.21. Доказать, что фазовое пространство системы, состоящей
из одной материальной точки, скользящей по двумерной сфере с
постоянной по модулю скоростью, диффеоморфно RP3.
30.22. Материальный шар зажат между двумя параллельными
плоскостями, касательными к нему. При движении плоскостей, со-
сохраняющем параллельность плоскостей и расстояние между ними,
шар вращается без скольжения в точках контакта. Рассмотрим все
такие перемещения шара, индуцированные движением верхней
плоскости, при которых нижняя точка контакта шара описывает
замкнутую траекторию на нижней плоскости, т. е. точка контакта
возвращается на прежнее место. Какая часть группы 50C) может
быть получена такими вращениями шара (фиксируются повороты
шара после возвращения в исходную точку)?
30.23. Найти фактор-группу G/Gq, где G — группа движений
плоскости Лобачевского со стандартной метрикой, Go — связная
компонента единицы. Указать все конформные преобразования
этой стандартной метрики.
30.24. Найти все дискретные подгруппы в группе G аффинных
преобразований прямой К1.
30.25. Доказать, что левоинвариантные векторные поля на
группе Ли G находятся во взаимно-однозначном соответствии с
векторами касательного пространства Te(G) в единице группы G.
§ 30. Группы преобразований 203
30.26. Доказать, что коммутатор двух левоинвариантных век-
векторных полей на группе Ли G снова является левоинвариантным
векторным полем, т. е. операция коммутирования превращает про-
пространство Te(G) в алгебру Ли.
30.27. Пусть ? — левоинвариантное векторное поле, щ — со-
соответствующая ему однопараметрическая группа преобразований.
Доказать, что <pt является правым сдвигом при любом ?, т.е.
i) = Фи гДе Ы — некоторый элемент группы G.
Пусть G — группа Ли, ж1, ..., жп — локальная система координат
в окрестности единицы (координаты которой будем считать нулевыми).
Тогда операция умножения индуцирует векторнозначную функцию q =
= q(z, у) = xyx~ly~~l, x = (ж1, ..., жп), у = (у1, ..., уп). Разложение
функции q = q^, у) в ряд Тейлора имеет вид
где е\ — величина третьего порядка малости относительно координат
ж*, уг. Билинейное выражение
определяет некоторую операцию над касательными векторами в единице
группы G. Эта операция обозначается ? = [?> v]i a С называется комму-
коммутатором векторов ? и г\. Таким образом, касательное пространство
Te(G) превращается в алгебру, которая называется алгеброй Ли группы
MuG.
30.28. Показать, что в алгебре Ли L выполнены следующие
свойства:
а) К, 1?] = -[1?, €];
б) тождество Якоби
[К. v], С] + [to, С], €] + [[С, t], v]=o.
30.29. Проверить, что операция в алгебре Ли L переходит в
коммутатор векторных полей на группе Ли G, если вектору ?
сопоставляется (право-) левоинвариантное векторное поле.
30.30. Пусть х(?), y(t) — две кривые, проходящие через еди-
единицу группы G, причем ? = — @), г/ = ~г@)- Показать, что
at at
К, id = l(
30.31. Пусть 7(*) — однопараметрическая подгруппа группы
Ли. Предположим, что 7 пересекает сама себя. Показать, что су-
существует такое число L > 0, что j(t + L) = 7W Для всех t E R.
204 Часть 2
Отсюда, в частности, следует, что любая однопараметрическая под-
подгруппа группы Ли, рассматриваемая как одномерная группа Ли,
гомеоморфна либо прямой, либо окружности.
Примечание. Некомпактная однопараметрическая подгруппа мо-
может быть вложена в группу Ли довольно сложно, например, в виде так
называемой иррациональной или плотной обмотки тора некоторой раз-
размерности.
30.32. Пусть G — компактная связная группа Ли. Показать, что
каждая точка х Е G принадлежит некоторой однопараметрической
подгруппе.
30.33. Пусть G — компактная группа, гладко действующая на
многообразии М. Показать, что на М имеется такая риманова
метрика, для которой G — группа изометрий.
30.34. Показать, что коммутативная связная группа Ли локаль-
локально изоморфна конечномерному векторному пространству.
30.35. Показать, что компактная коммутативная связная груп-
группа Ли изоморфна тору.
30.36. Показать, что коммутативная связная группа Ли изо-
изоморфна произведению тора на векторное пространство.
30.37. Пусть группа Ли G — подгруппа в группе матриц
GL(n, С) С Сп = End(n, С). Показать, что в алгебре Ли L
группы G, понимаемой как подпространство в End(n, С), опера-
операция коммутирования совпадает с обычным коммутатором матриц,
т.е. [?, т/] = ?т/ - т/?, где ?, г) е L.
30.38. Описать алгебры Ли следующих матричных групп Ли:
SL{n, С), SX(n, R), C/(n), O(n), O(n, m), Sp{n).
30.39. Доказать, что конечная группа не может эффективно дей-
действовать на W1.
§ 31. Дифференциальные формы
31.1. Вычислить геодезическую кривизну кд кривой х = x(s),
у = y(s), z = z(s), расположенной на сфере радиуса i?, и вывести
отсюда следующую формулу для нахождения площади S области
на сфере, ограниченной замкнутой линией L:
Здесь к — кривизна кривой. Обратим внимание, что при инте-
интегрировании следует учитывать знак геодезической кривизны кд =
= \ к2 — —2 • А именно, если вектор геодезической кривизны на-
V ?
V
правлен внутрь области, то берется знак «—»; в противном случае
§31. Дифференциальные формы 205
берется знак «+». Впрочем, это правило автоматически учитыва-
(г', г", п)
ется формулой для геодезической кривизны кд = ——^— (см.
задачу 11.7).
31.2. Найти / uj в следующих случаях:
м
х у
а) и = (х + у) dx + (х - у) dy, М: -г + — = 1;
а ог
б) и = Bа — y)dx + xdy, М: х = a(t — sint), у = аA — cost),
0 ^ t ^ 2тг;
в) uj = (у2 — z2) dx + 2yz dy — х2 dz, М: x = t, у = t2, z = t3,
г) uj = у dx + z dy + x dz, M: x = a cos t, у = a sin t, z = Ы,
0^t^2n;
д) uj = (y + z)dx + (x + z) dy + (x + y) dz, M: x = a sin21,
у = 2a cos tsint, z = a cos2 ?, 0 ^ ? ^ 2тг;
е) u; = (y — z) da; + (z — x) dy + (x — y) dz, M: x2 + y2 = a2,
x z __
)/ *? О\ i / О O\ т / О O\ i ъ г О О 0
Ж/.i — I <ji^ _J_ y& 1 /irpJL. I rp& _|_ y^ 1 /771 _J_ f or»^ _J_fli^ 1 /7 у Л/Т• or»^ _J_<ji^ _i~ y^ —
wt/ ^^ l у \^/O I IJbJb \^ \Jb \^/O I Lvyi^XJU |^ у I LL/O, AVI. • JU \^ у \^ At —~
= 2Rx, x2 + y2 = Rx;
з) u) = (y — z) dy A dz + (z — x) dz Adx + (x — y) dx A dy, M:
и) uj = x dy A dz + у dz A dx + z dx A dy, M: x2 + y2 + z2 = a2;
ч dy Adz dz Adx dx A dy „ ^ x2 y2 z2
к)uj = — + + -, M: — + f- + — = 1.
x у z a о с
Поверхности ориентировать внешней нормалью. В пункте а) кри-
кривая ориентирована против часовой стрелки, в е) и ж) — против
часовой стрелки, если смотреть с положительного направления
оси Ох.
ГГ дф
31.3. Вычислить поверхностный интеграл / / о?— da для сле-
JJ on
дующих замкнутых поверхностей S:
а) для (р = z2, ф = х2 + у2 — z2, если S ограничивает область
х2 + у2 + z2 ^ 1 и у ^ 0;
б) для (р = 2х2, ф — х2 + z2, если S ограничивает область
гр I яу I у
в) для ср = ф = т=—> если S есть сФеРа х2 + у2 + z2 — г2;
206 Часть 2
г) для (р = 1, ф = ех sin у + еу sin х + z, если Е есть трехосный
х2 у2 z2 1
эллипсоид -— + — + — = 1.
а2 Ь1 с1
Здесь через — обозначена производная в направлении внеш-
оп
ней нормали к поверхности.
31.4. Найти градиенты следующих функций в цилиндрических
координатах:
а) и = р2 + 2р cos (р — ez sin (p\
б) и = р cos (/? + z sin2 (p — ер.
31.5. Найти divX в цилиндрических координатах для следую-
следующих векторных полей:
а) X = (/9, zsiny
б) X = (<^arctg?, 2, — z2ez).
31.6. Найти дивергенцию векторного поля
= (г2,-
в сферических координатах.
31.7. Найти ротор следующих векторных полей в сферических
координатах:
а) X = Br + acos<^, —asin^, rcos^), a = const;
б) X=(r2, 2cos0, -ф).
31.8. Проверить, что следующие векторные поля в сферических
координатах (г, б, ф) являются потенциальными:
a)X = Bcos0/r3, sin0/r3, 0);
б)Х=(/(г),0,0).
31.9. Найти потенциалы следующих векторных полей в цилин-
цилиндрических координатах (р, ip, z):
^) ^^ в) X = (<pz, z, p<p);
д) X = ((pcosz, cosz, — pip sin z).
31.10. Найти потенциалы следующих векторных полей в сфе-
сферических координатах (г, 0, ф):
а) X = @, 1, 0); б) X =
§31. Дифференциальные формы 207
г) X = (cos</?sin0, cos <p cos 0, —sin уз);
31.11. Вычислить циркуляцию векторного поля
Х = (г, 0, OR + r)sin0)
в сферических координатах по окружности {г = Д, 0 = тг/2}.
31.12. Вычислить линейный интеграл векторного поля X вдоль
линии L, заданной в цилиндрических координатах, если:
а) X = (z, pep, cosy?), L — отрезок прямой: {р = а, </? = 0,
}
}
б) X = (р, 2ру?, z), L — полуокружность: {р = 1, z = 0,
0 < tp ^ тг};
в) X = (epcosy?, /9sin</?, /?), L — винтовая линия: {р = i?,
z = </?, 0 < (р < 2тг};
г) X = (лг, ря, р), L — окружность: {р = 1, лг = 0};
д) X = (psin<?, — р22г, р2), L — окружность: {р = R, z = i?};
е) X = (zcos</?, p, </?2), L: {р = smy>, z = 1}.
31.13. Вычислить линейный интеграл векторного поля X вдоль
линии L, заданного в сферических координатах, если:
а) X = Dr3tg</?/2, 0<p, cosV), L: {tp = тг/2, в = тг/4, 0 ^
}
}
б) X = (sin2^, sin0, r</?0), L: {(p = тг/2, г = l/sin0, тг/4 ^
^ в ^ тг/2};
в) X = (гб, 0, rsin0), L: {r = 1, в = тг/4, 0 ^ (р ^ 2тг};
г) X = (rsin0, 0е^, 0), L: {г = simp, в = тг/2, 0 ^ (р ^ тг};
д) X = @, 0, г</?0), L — контур, ограничивающий полудиск:
{г ^ Д, tp = тг/4};
е) X = (г, 0, (R + г)sine), L: {г = Д, 0 = тг/2};
ж) X = (er cos0, 20cos<?, </?), L: {г = 1, 0 = 0, 0 ^ (р ^ тг}.
31.14. Найти поток векторного поля X через поверхность 5,
заданного в цилиндрических координатах, если:
а) X = (р, —cosy?, z), S ограничивает область {р ^ 2, 0 ^
^ ^ ^ 2};
б) X = (р, р(р, —2z), S ограничивает область {р ^ 1, 0 ^ (р ^
< тг/2, -1 < z ^ 1}.
31.15. Найти поток векторного поля X через поверхность 5,
заданного в сферических координатах, если:
а) X = A/г2, 0, 0), S окружает начало координат;
б) X = (г, rsin0, —Згу? sin 0), S ограничивает область {г ^ Я,
208 Часть 2
в) X = (г2, 0, R2cos(p), S: {г = Л};
г) X = (г, 0, 0), S ограничивает область {г ^ R, 9 ^ тг/2};
д) X = (г2, 0, R2r sin в cosy?), S ограничивает область {г ^ Я,
0 ^ ip < тг/2, в < тг/2}.
31.16. Доказать, что биинвариантные формы на группе Ли
замкнуты.
§ 32. Теория гомотопий
32.1. Представить в виде клеточного комплекса:
а) тор;
б) бутылку Клейна;
в) надстройку над клеточным комплексом К.
32.2. Доказать, что сфера S°° и шар D°° являются клеточными
пространствами.
32.3. Доказать, что топология CW-комплекса является слабей-
слабейшей среди топологий, в которых все характеристические отобра-
отображения непрерывны.
32.4. Доказать, что на CW-комплексе функция непрерывна то-
тогда и только тогда, когда она непрерывна на каждом конечном
подкомплексе.
32.5. Доказать, что тор с диском, натянутым на меридиан,
гомотопически эквивалентен букету Sl V S2.
32.6. Доказать, что тор с диском, натянутым на меридиан и
параллель, гомотопически-эквивалентны сфере S2.
32.7. Обобщить задачи 32.5 и 32.6 на случай произведения Sk x
х Sn-k.
32.8. Доказать гомотопическую эквивалентность пространств:
32.9. Доказать гомотопическую эквивалентность:
а) S(X V У) - Ш V SY;
б) Е{Х Л У) - Е(Х х Y)/(SX V SY).
32.10. Пусть Р(Х] А, В) — пространство путей с началом в А
и концом в В. Пусть А С В. Доказать, что Р(Х\ А, В) содержит
подпространство, гомеоморфное А.
32.11. Пусть /: X -> S — непрерывное отображение симпли-
циальных комплексов, Y С X — подкомплекс, на котором ото-
отображение / симплициально. Доказать, что существует такое под-
подразбиение комплекса X, тождественное на У, что отображение /
гомотопно некоторому симплициальному отображению д, причем
гомотопия постоянна на У.
32.12. Пусть X — симплициальный комплекс, Sx — звезда
вершины х € X. Доказать, что любые два симплекса звезды Sx
пересекаются по некоторой грани.
§ 32. Теория гомотопий 209
32.13. Доказать, что симплициальное отображение симплици-
альных комплексов непрерывно.
32.14. Пусть X — симплициальный комплекс и е > 0. Дока-
Доказать, что существует такое подразбиение комплекса X, что диа-
диаметр каждого нового симплекса меньше е.
32.15. Доказать, что одномерный клеточный комплекс есть про-
пространство типа К(п, 1), где тг — свободная группа.
32.16. Доказать, что стягиваемое пространство гомотопически
эквивалентно точке.
32.17. Доказать, что любые два пространства типа К(тт, 1)
слабо гомотопически эквивалентны.
32.18. Доказать:
а) Sn Л Sk = Sn+k;
б) Sn/Sk гомотопически эквивалентно Sn V Sk+1\
в) Sn\Sk гомотопически эквивалентно Sn~~k~l;
г) Sn\Sk диффеоморфно 5n~A:~1 x R*+1.
Здесь Sk С Sn — стандартное вложение.
32.19. Доказать, что на СТУ-комплексе функция непрерывна
тогда и только тогда, когда она непрерывна на каждом конечном
подкомплексе.
32.20. Доказать, что если произведение двух топологических
пространств гомеоморфно надстройке над каким-нибудь тополо-
топологическим пространством, то либо оба сомножителя стягиваемы,
либо один из них сводится к точке.
32.21. Пусть пространство X стягивается к подпространству
У, причем гомотопия неподвижна (постоянна) на У. Доказать,
что любой путь в X с концами в У гомотопен пути, полностью
лежащему в У (гомотопия неподвижна в концах).
32.22. Доказать, что всякий связный клеточный комплекс гомо-
гомотопически эквивалентен клеточному комплексу с одной вершиной.
32.23. Доказать, что сферу Sn~l можно представить в виде
объединения {Sr x Dn~r) U (JDr+1 x Sn~r~l) с общей границей
Sr х S71'7.
32.24. Рассмотрим в евклидовом пространстве Rn стандартную
сферу Sn~1 и две вложенные в нее сферы
S7-1 = {xr+t = ... = хп = 0}, S71-'-1 = {xi = ... = xr = 0}.
Доказать, что любая пара точек у G S7*, x G Sn~r~1 соединяется
большой дугой без общих точек вне этих сфер.
32.25. Найти топологический тип замкнутого однополостного
гиперболоида Г = {х2 + у2 — z2 = 1} в проективном простран-
пространстве RP3.
32.26. Разрезать вложенный в R3 лист Мёбиуса по средней ли-
линии. Ориентируемо ли получившееся многообразие? Повторить
210
Часть 2
процесс разрезания несколько раз. Описать получившееся несвяз-
несвязное многообразие и найти индекс зацепления произвольных двух
компонент связности (см. рис. 107).
Лист Мебиуса
Кольцо
32.27. Доказать, что пространство многочленов степени 3 без
кратных корней гомотопически эквивалентно дополнению к три-
трилистнику в сфере 53. Построить явную деформацию.
32.28. Рассмотрим в 1R3 две зацепленные окружности S\ и S%
(см. рис. 108). Предъявить геометрическое доказательство соот-
соотношения aba~lb~l = 1 в группе тгх(IR3\(Л U В), х0)-
Рис. 108
32.29. Рассмотрим ЕР2 как сферу с отождествленными проти-
противоположными точками. Обозначим через а путь в RP2, который
на сфере представляется дугой большого круга, соединяющей две
диаметрально противоположные точки сферы. Предъявить геоме-
геометрическое доказательство соотношения а2 = 1 в группе 7ri(RP2).
32.30. Рассмотрим множество точек Сп с попарно различными
координатами. Показать, что полученное пространство имеет тип
комплекса Эйленберга-Маклейна #(тг, 1).
§32. Теория гомотопий 211
32.31. Построить пример двух гомотопически не эквивалент-
эквивалентных пространств Xi, X2 и взаимно-однозначных непрерывных
отображений /: Х\ —> X<i, g: X<i —> Х\.
32.32. Обозначим через {X, У} множество всех непрерывных
отображений из пространства X в пространство У. Пусть h: X —>
—> X' — непрерывное отображение, и соответствие Ф: {X', У} —>
-> {X, У} определяется формулой Ф(а) = ah. Доказать, что соот-
соответствие Ф переводит гомотопные отображения в гомопотные.
32.33. Доказать, что имеет место гомотопическая эквивалент-
эквивалентность
ЕEП х Sm) ~ 5n+1 V 5m+1 V 5n+m+1.
32.34. Доказать, что бесконечномерная сфера S°° стягиваема
по себе в точку.
32.35. Доказать, что связный конечный граф гомотопически
эквивалентен букету окружностей VS1.
32.36. Пусть отображение р: X —> У удовлетворяет аксиоме о
накрывающей гомотопий. Доказать, что прообразы точек гомото-
гомотопически эквивалентны.
32.37. Пусть пространство X стягивается к своему линейно-
связному подпространству А. Доказать, что пространство X ли-
линейно связно.
32.38. Фиксируем в пространстве X точки хо и х\. Пусть У —
пространство путей с началом в точке хо и проходящих через точку
х\. Доказать, что пространство У стягиваемо.
32.39. Доказать, что пространство всех путей Р(Х\ X, X) стя-
стягивается к X С Р(Х\ X, X) неподвижно на X.
32.40. Пусть задана последовательность пространств Хп С
С -Уп+ь причем Xn+i стягивается к Хп неподвижно на Хп. До-
Доказать, что пространство
= \Jxn
стягивается к Хо неподвижно на Xq.
32.41. Доказать, что всякое открытое n-мерное многообразие
гомотопически эквивалентно (п — 1)-мерному комплексу.
32.42. Доказать, что если пространство X стягивается по себе
к подпространству А неподвижно на -А, то А гомотопически экви-
эквивалентно X.
32.43. Рассмотрим следующее пространство X (ясно, что оно
является клеточным комплексом). Через М2 обозначим обычный
лист Мёбиуса с границей 9М2, гомеоморфной окружности. «Трой-
«Тройной» лист Мёбиуса Ms строится так: пусть Г состоит из трех от-
отрезков равной длины, расположенных в одной плоскости под рав-
равными углами. Отождествим в произведении Г х / подпространства
Г х 0 и Г х 1, подкрутив их на угол 2тг/3. Граница полученного
212 Часть 2
пространства Ms также гомеоморфна окружности. Пространство
X получается из М2 и Мз отождествлением отрезков 1\ С дМ2 и
12 С дМ%. Доказать, что дХ является ретрактом (не деформаци-
деформационным) пространства X.
32.44. Вычислить множества тг^1 xS\ 52) и 7r(SkxSn-k, Sn).
32.45. Для топологического пространства X обозначим через
(X) (соответственно, Cat2 (X)) минимальное число замкну-
замкнутых подпространств Х{ таких, что X = \JX и вложения Х{ С X
i
гомотопны постоянным отображениям (соответственно, Х{ стяги-
стягиваемы). Найти Cati (RPn) и Cat2 (RPn).
32.46. Вычислить Cati (К) и Cat2 (К) для сферы с тремя ото-
отождествленными точками.
32.47. Пусть М2 — компактное замкнутое ориентированное
2-мерное многообразие рода /i, т. е. М2 — сфера S2 с h ручками.
Найти S2M2 (двухкратная надстройка) с точностью до гомотопи-
гомотопического типа.
32.48. Рассмотрим в ШРп какую-либо стандартную карту с
неоднородными координатами х\, ..., хп. Найти гомотопический
тип следующих множеств:
a) RPn\Sk, где Sk = {x\ + ...+x\+l = 1, хк+2 = ... = хп = 0}\
= 0, xk+q+i = ... = хп = 0};
в) 5*; т)Мк.
32.49. Рассмотрим в открытом многообразии Шп х Sn~k малый
шар Dn и вклеим вместо него проективное пространство RPn, т. е.
отождествим точки х и —х на границе шара Sn~l = dDn. Дока-
Доказать, что полученное пространство гомотопически эквивалентно
Rpn-l у дп-ки
32.50. Дано топологическое многообразие Мп, край которого
есть топологическое многообразие Р71. Известно, что край Рп~1
стягивается по многообразию Мп в точку.
а) Доказать, что многообразие стягивается в точку.
б) Доказать, что если многообразие Рп~1 односвязно, то мно-
многообразие Мп гомеоморфно диску Dn (в предположении, что Рп~1
стягивается по Мп в точку).
в) Построить пример такой пары (М^Р71), что многообра-
многообразие Р71 стягивается по многообразию Мп в точку, но Мп не
гомеоморфно диску Dn. В качестве следствия доказать, что
1
32.51. Найти гомотопический тип пространства Cn \ А, где
Д = U Ду, Ду = {хЕ Cn\xi = Xj}.
§32. Теория гомотопий 213
32.52. Вычислить, сколько имеется отображений (с точностью
до гомотопий):
a) RP71 -> RPn; б) СРП -> СРП; в) RPn+1 -> ШРП-
г) CPn+1 -> СРП; д) SRPn -> RPn; е) ЕСРП -> СРП;
ж) S1RP71 -+ MPn+1; з) ЕСРП -> CPn+1.
32.53. а) Пусть пространства X и Y связны. Доказать, что
Cat (join(X, У)) = min (Cat (X), Cat (У)),
где символом Cat обозначена категория Люстерника-Шнирель-
Люстерника-Шнирельмана (Cati в обозначениях задачи 32.45).
б) Найти Cat E1 х 52).
32.54. Пусть пространства Х{, 1 ^ г ^ ЛГ, линейно-связны и
X — Х\ х Х2 х ... х XN. Доказать, что
N
Cat (Xi) < Cat (X) ^ 1 + ]T(Cat (Х{) - 1).
г=1
32.55. а) Вычислить Cat(RPn), Cat(Tn), Cat Em x Sn).
б) Доказать, что если сфера Sn покрыта q замкнутыми мно-
множествами (не обязательно связными) Vi, F2, ..., F9, где q ^ n, то
всегда существует хотя бы одно множество V{, такое, что оно содер-
содержит две диаметрально противоположные точки —х и х сферы Sn.
32.56. Пусть М С Кп — произвольное подмножество в ев-
евклидовом пространстве (например, гладкое подмногообразие) и
пусть Rn С Rn+1 — стандартное вложение. Доказать, что имеет
место следующая гомотопическая эквивалентность: Rn+1\M ^
(\)
32.57. Связь меэюду категорией Люстерника-Шнирельмана
и так называемой когомологической длиной комплекса (или
многообразия). Пусть Мп — гладкое, компактное, связное, за-
замкнутое многообразие. Рассмотрим кольцо Н*(Мп, G), где G =
= Z, если Мп ориентируемо, иС = Z2, если Мп неориентируемо.
Обозначим через l(Mn\ G) наибольшее целое число, для которого
существует последовательность элементов х\, #2, •••» Х1 кольца
ff*(Mn; G) (degxa > 0, 1 ^ а < /), таких, что их произведение
ziAz2A. • .Axi (Mn; G) ф 0 в кольце Н*(Мп; G). Число /(Mn; G)
называется когомологической длиной многообразия Мп. Дока-
Доказать, что
32.58. Доказать, что для любого линейно-связного топологиче-
топологического пространства X и любой его точки хо группа тгх (П-Х", хо) —
абелева.
214 Часть 2
32.59. Доказать, что всякое стягиваемое пространство одно-
связно.
32.60. Доказать, что группа tti(\/S1) — свободная группа с А
А
образующими.
32.61. Доказать, что если Y\ и У2 гомотопически эквивалентны,
то имеют место изоморфизмы: tti(Yi) = 7ri(l2) и tt^(Yi) = ()
fc>2
32.62. Доказать, что щ(Х V Y) = т(Х) * тг(У), где щ{Х) *
* 7Гх(У) — свободное произведение групп тг\(Х) и 7ri(y).
32.63. Найти фундаментальную группу дополнения к узлу-три-
узлу-трилистнику в R3 (а также в сфере 53) и доказать, что трилистник «не
развязывается», т. е. не существует гомеоморфизма евклидова про-
пространства (или сферу) на себя, который переводил бы трилистник
в стандартно вложенную незаузленную окружность, т.е. в триви-
тривиальный узел.
32.64. Найти фундаментальную группу дополнения к узлу Г в
К3, задаваемому так: окружность, изображающая узел, располо-
расположена на двумерном, стандартно вложенном торе Т2 С К3, на кото-
котором она обходит р раз параллель тора и q раз его меридиан, причем
числа р и q взаимно просты. (Узел-трилистник может быть пред-
представлен как такой узел Г, где р = 2, q = 3.) Разберитесь, в чем
роль условия взаимной простоты двух чисел: рид.
32.65. Пусть X = Y\JZ,TueY,Z,W — конечные CW-kom-
w
плексы, W = Y П Z, W линейно-связно, через X = Y\JZ 060-
w
значен комплекс, получающийся при склейке Y и Z по общему
подмножеству W. Вычислить группу tti(X), если группы tti(Y),
tti(Z), ni(W) известны. Особо рассмотреть тот случай, когда W
несвязно.
32.66. Задана произвольная группа G с конечным числом обра-
образующих и соотношений. Доказать, что существует конечный ком-
комплекс X, фундаментальная группа которого изоморфна G. Можно
ли выбрать в качестве такого комплекса X конечномерное много-
многообразие, например четырехмерное?
32.67. Вычислить группу tti(X), где X — букет трех окружно-
окружностей.
32.68. Построить двумерный комплекс X, фундаментальная
группа которого равнялась бы Z/pZ. Для каких р в качестве такого
комплекса можно выбрать двумерное гладкое замкнутое компакт-
компактное многообразие?
32.69. Вычислить фундаментальную группу двумерной сферы с
тремя ручками. Выяснить, коммутативна ли эта группа, и найти
ее коммутант. Вычислить фундаментальную группу двумерного
тора.
§32. Теория гомотопий 215
32.70. Пусть симплициальный коплекс X имеет N одномерных
симплексов. Доказать, что его фундаментальная группа имеет не
более чем N образующих.
32.71. Доказать, что tti(X) = тгхр^), где X — CW-комплекс,
a X<i — его двумерный остов, т.е. объединение всех клеток раз-
размерностей 1 и 2.
32.72. Найти тг2(Х), где X = Sl V S2. Будет ли эта группа
конечнопор ожденной?
32.73. Найти фундаментальную группу «восьмерки» (букета
двух окружностей).
32.74. Пусть / — путь в Х\ а Е ki(X, жо), /@) = жо- Дока-
Доказать, что существует путь #, такой, что д@) = жо, зA) = /A)? и
fg-1 € a.
32.75. Пусть X — линейно-связное пространство. Доказать,
что группа tti(X, x) изоморфна группе tti(X, у) для любых двух
точек я, у € X.
32.76. Вычислить, ж\{Х) и тгп(Х), где X — букет 51 V 5П.
32.77. Доказать, что если X — одномерный CW-комплекс, то
ni(X) — свободная группа.
32.78. Доказать, что группа G = Z®Z©Z®ZHe может быть
фундаментальной группой никакого 3-мерного многообразия.
32.79. Вычислить 7Ti(Pp), где Рд — 2-мерная компактная,
замкнутая, ориентируемая поверхность рода д.
32.80. Вычислить тг^ТР^), где ТРд — многообразие линейных
элементов поверхности рода д.
32.81. Вычислить фундаментальную группу «бутылки Клейна»,
построив накрывающее пространство с действием дискретной
группы.
32.82. Пусть Р — 2-мерная поверхность с непустым краем (от-
(открытая поверхность). Доказать, что fti(P) — свободная группа.
32.83. Доказать, что если X — CW-комплекс, то ni(X) —
группа, образующие которой являются одномерными клетками,
а полный набор соотношений определяется границами 2-мерных
клеток.
32.84. Пусть G — непрерывный группоид с единицей. Дока-
Доказать, что G гомотопически прост во всех размерностях и как след-
следствие, что tti(G) — абелева группа.
32.85. Пусть X — непрерывный группоид с единицей, G С
С tti(X) — подгруппа. Доказать, что:
а) в Xq можно ввести умножение так, что pG: Xq -> X (где
pG — проекция накрытия Xq на X) станет гомоморфизмом;
б) если X — группа, то Xq (накрытие по подгруппе G) — тоже
группа. Разобрать пример Z2 -> Spin(n) -> SO(n), n > 2.
216 Часть 2
32.86. Доказать, что имеет место изоморфизм
тгп (Sn V ... V Sn) 9* 7rn{Sn) © ... © тгпEп).
к раз к раз
32.87. Доказать, что группы щ(Х) коммутативны при г > 1
для любого CW-комплекса X.
32.88. Показать на примере, что для группы тгД-Х", У) неверна
аксиома вырезания (которая выполняется для обычных теорий
(ко)гомологий), т.е. существуют такие пары (X, У), что
32.89. Доказать, что для любого линейно-связного простран-
пространства У и любой точки xq E У имеет место изоморфизм 7г&(У, xq) =
= тга;_1(ПЖоУ, wXq), где wXo — постоянная петля в точке xq.
32.90. Доказать, что ni(RPn) = Z2, n > 1, и пк(ШРп) =
= 7Tjfc(S'n), п ^ 1, А; > 1, где RPn — вещественное проективное
пространство.
32.91. Доказать следующие утверждения:
а) если А — стягиваемое подпространство в пространстве X
(X и А — CW-комплексы) к точке xq E А, то при п ^ 1 гомо-
гомоморфизм г*: ftn(A, xq) —> 7ГП(-Х", жо) тривиален и при n ^ 3 имеет
место разложение
Ф 7rn_i(A
б) если i: XVY—>XxY — вложение, то имеет место точная
последовательность тгр(Х V У) ^> пд(Х х У) -> 0.
32.92. Доказать, что 7Ti(CPn) =0; тг2 = (CPn) = Z, n > 0;
^1
) ()
32.93. Доказать, что если СЖ-комплекс X не имеет клеток
размерностей от 1 до А; включительно, то щ(Х) = 0 при i ^ к.
32.94. Пусть X, У — CW-комплексы. Доказать, что
Вычислить действие tti(X х У) на Ki(X x У). Построить универ-
универсальное накрытие над X xY.
32.95. Найти гомотопические группы тгдEп), 0 < q ^ п, и
доказать, что тгпEп) = Z, где 5П — сфера.
32.96. Доказать, что ttjE3) = ttjE2) при г ^ 3, и как следствие
доказать, что тгзE2) = Z.
32.97. Доказать, что:
а) тпEОC)) = Z2, тг2EОC)) = тг2EО) = 0, где 50 =
= lim50(n);
§ 32. Теория гомотопий 2Г7
б) тг3EОD)) = Z, тп(и) = Z, тг2(С/) = 0, где U = 1ипС/(п)
(вложения С/(п) С С/(п + 1) и SO(n) С 50(п + 1) стандартные);
b)tt3(SOE))=Z.
32.98. Найти группы n9(SlV Sl), $ > 0.
32.99. Вычислить группы tti(X), тгп(Х) и действие группы
Х) на группе тгп(-Х") в случаях:
) )
в) X = 3B(?n+1), где B(?n+1) — пространство нетривиального
0(п + 1) расслоения дисков на S1.
32.100. Если отображение /: (X, А) -> (У, В) для всех к уста-
устанавливает ИЗОМОрфиЗМ 7Tk(X) « 7Tib(y) И 7ГД;(А) « 7ГД;(В), ТО ОНО
устанавливает для всех & изоморфизмы тгд;(Х, А) « тг^(Х, S).
32.101. Вычислить группы тгп-ь(У?к), где V*k — веществен-
вещественное многообразие Штифеля.
32.102. Доказать, что группы 7Tk(Sn) с ростом к не могут стать
тривиальными, начиная с некоторого номера к.
32.103. Доказать, что тг3E2) = Z и 7rn+iEn) = Z2 при п > 3.
32.104. Найти tt3(S2VS2), tts^V^2), тг3E2 V 52 V 52).
32.105. Вычислить первые относительные гомотопические
группы пары (СР2, 52), где вложение S2 = СР1 С СР2 стан-
стандартно.
32.106. Доказать следующие утверждения:
а) если 3-мерное компактное замкнутое многообразие М3 од-
носвязно, то М гомотопически эквивалентно сфере (т. е. М3 —
гомотопическая сфера);
б) если Мп — гладкое, компактное, замкнутое многообразие,
причем 7Ti(Mn) = 0 при i < — , то Мп гомотопически эквива-
эквивалентно сфере Sn.
32.107. Построить пример 3-мерного замкнутого компактного
многообразия М3, такого, что М3 — гомологическая сфера (т.е.
имеет такие же целочисленные гомологии, что и 53), однако
tti(M3) ф 0. Построить пример конечнопорожденной группы G,
совпадающей со своим первым коммутантом.
32.108. Доказать, что множество гомотопических классов ото-
отображений [5П, X] изоморфно множеству классов сопряженных эле-
элементов группы тгп(Х, xq) при действии tti(X, xq) (X — связный
комплекс).
32.109. Вычислить 7Г2(М2, X), где R2 — плоскость, X — «вось-
«восьмерка», вложенная в 2-мерную плоскость.
32.110. Вычислить 7Гг(СРп) при i ^ 2п + 1.
218 Часть 2
32.111. Пусть тгп(Х) = 0, и пусть на X и У действует без
неподвижных точек конечная группа G. Доказать, что существует
и единственно с точностью до гомотопии отображение f:Y->X,
перестановочное с действием группы G.
32.112. Доказать, что [СР2, S2] = тг4E2), где [X, У] — множе-
множество гомотопических классов отображений ХвУ.
32.113. Пусть (X, А) — пара топологических пространств, где
X линейно-связно и X D А. Пусть Л — множество путей в про-
пространстве X, начинающихся в фиксированной точке хо и кончаю-
кончающихся в точках подпространства А. Доказать, что тгр(Х, Л, а) =
= 7To_i(A, Аа), где Аа — произвольный путь из xq в a Е А.
32.114. Доказать, что следующие условия эквивалентны п-связ-
ности:
а) no(Sq, X) состоит из одного элемента при q ^ n (пунктиро-
(пунктированные отображения);
б) любое непрерывное отображение Sq -> X продолжается до
непрерывного отображения диска Dq+1 -> X, q ^ n.
32.115. Доказать, что тго(Х, fifiZ) — абелева группа, где X,
Z — топологические пространства, fiZ — пространство петель
пространства Z. Доказать, что Q.Z является iJ-пространством.
32.116. Пусть А — ретракт X. Доказать, что при п ^ 1 для
любой точки xq E А гомоморфизм, индуцированный вложением
г*: тгп(А, х0) ->тгпрС, ж0),
является мономорфизмом и при п > 2 определяет следующее раз-
разложение в прямую сумму:
7ГП(Х, Xq) = 7ГП(А, Xq) ©7Гп(Х, А, Ж0).
32.117. Доказать, что tto(SEZ, X) — абелева группа. Устано-
Установить связь с 7ro(Z, ОПХ).
32.118. Пусть TSn -> 5П — стандартное касательное рассло-
расслоение над сферой 5П. Вычислить гомоморфизм д*: 7rn(Sn) ->
-> TTn-^S71) в точной гомотопической последовательности ас-
ассоциированного расслоения.
32.119. Пусть /: X -> У — непрерывное отображение (/(#о) =
= уо)- Доказать, что индуцированное отображение /*: 7гп(-Х", xq) —>
—> тгп(У, уо) является гомоморфизмом групп.
32.120. Пусть У —> X — расслоение с фиксированными точ-
точками д:о? Уо и слоем F, причем Fq — слой над точкой xq hijq ? Fq.
Доказать, что тгп(У, Fo\ у0) = пп(Х, xq).
32.121. Пусть Е, X — топологические пространства, X линей-
линейно-связно, р: Е —> X — непрерывное отображение, такое, что для
любых точек х G -X", у G р"^) имеет место изоморфизм
р*: тгг(?;, р~г{х), у) -^ тгДХ, ж), t ^ 0
§ 32. Теория гомотопий 219
(для i = О, 1 имеет место изоморфизм множеств без дополнитель-
дополнительной структуры групп). Доказать, что для любых точек xi ИЖ2
топологические пространства р~1{х\) ир^) слабо гомотопиче-
ски эквивалентны.
32.122. Доказать точность последовательности для гомотопиче-
гомотопических групп пары (X, А):
... -> щ(А) -> щ(Х) -> щ(Х,А) -> 7n-.i(A) -> ...
32.123. Доказать, что если X — гладкое компактное замкнутое
подмногообразие коразмерности один в евклидовом пространстве,
то X — ориентируемо.
32.124. Доказать, что если фундаментальная группа компакт-
компактного замкнутого многообразия тривиальна, то многообразие ори-
ориентируемо. Доказать, что если многообразие X не ориентируемо,
то в ni(X) имеется подгруппа индекса 2.
32.125. Доказать, что если X — неориентируемое простран-
пространство, то надстройка Т,Х не является многообразием.
32.126. Доказать, что эйлерова характеристика х(-^0 любого
нечетномерного ориентируемого замкнутого многообразия триви-
тривиальна.
32.127. Привести примеры:
а) не ориентируемого многообразия, вложенного двусторонне в
некоторое другое многообразие (на единицу большей размерно-
размерности);
б) ориентируемого многообразия, вложенного односторонне в
некоторое другое многообразие.
32.128. Пусть Xi и X<i — два полнотория, /: дХ\ -> dX<i —
диффеоморфизм, Mj = X\ U/ X<i. Предъявить такие диффеомор-
диффеоморфизмы /, для которых многообразие Mj диффеоморфно:
а) 53; б) S2 х 51; в) RP3.
32.129. В терминах предыдущей задачи рассмотрим отобра-
отображение /*: ni(dXi) -> тг^дХг), т.е. /*: Z®Z -> Z®Z, индуциро-
индуцированное диффеоморфизмом полноторий Х\ иХг- Гомоморфизм /*
задается, очевидно, целочисленной матрицей
а Ъ
с d
Доказать, что эта матрица унимодулярна и вычислить фундамен-
фундаментальную группу многообразия М? в терминах матрицы /*.
32.130. Пусть Хп — пространство полиномов /п(г) (от одной
комплексной переменной) без кратных корней. Найти группы
)
п)
32.131. Доказать, что конечный CW-комплекс гомотопически-
эквивалентен многообразию с краем.
220 Часть 2
§ 33. Накрытия и расслоения
33.1. Пусть р: X -> У — такое накрытие, что /*(ni(X, хо)) —
нормальный делитель группы tti(Y, уо), р(%о) = Уо- Доказать, что
всякий элемент а Е tti(Y, уо) порождает гомеоморфизм накрытия
<р, т.е. р(р(х) =р(х).
33.2. Пусть р: X —> У — накрытие, р(хо) = уо« Доказать, что
р*: tti(X, xq) —> 7Ti(y, j/o) является гомоморфизмом.
33.3. Пусть р: X -> У — накрытие, р(#о) = уо- Доказать, что
индуцированное отображение р*: tti(X, xq) -> 7ri(y, уо) является
мономорфизмом.
33.4. Пусть р: У -> X — накрытие, 7ri(y) = 0. Доказать, что
каждый элемент а € tti(-X") определяется гомеоморфизмом про-
пространства У на себя, a: Y —>Y, таким что диаграмма
Y -2* У
Р \ i/P
-/С
коммутативна.
33.5. Пусть р: X -> У — связное накрытие, F = р(уо) —
прообраз точки уо Е У, ^о € F. Доказать, что между F и 7ri(y, уо)
имеется взаимно-однозначное соответствие, если tti(-X", ^о) = 0.
33.6. Пусть р: X -> У — накрытие, F: /2 -> У — непрерывное
отображение, где /2 — квадрат, /: I1 -* X также непрерывно,
причем pf(t) = F(t, 0). Доказать, что существует и единственно
непрерывное отображение G: I2 -л X такое, что G(t, 0) = f(t) и
pG(*, s) = F{t, s).
33.7. Пусть р: X -> У — накрытие, /, g — пути на X, /@) =
= д@). Пусть р/A) = Pff(l), и пути р/ и рд гомотопны. Доказать,
ЧТО /A)= 0A)..
33.8. Пусть р: X -> У — накрытие, /, # — пути на X, /@) =
= #@). Обязательно ли /A) = #A), если р/A) = Pff(l)?
33.9. Пусть р: X -> У — накрытие,_/, g — пути на У, /, </ —
пути на X, такие, что р/ = /, р~д = д, /@) = д@). Доказать, что
если f и д гомотопны, то гомотопны /ид.
33.10. Пусть р: X -> У — накрытие, / — путь в У, яо —
точка в X, такая, что р(#о) = /@). Доказать, что существует
единственный путь д в X, такой, что рд = f-
33.11. Доказать, что любое накрытие является расслоением в
смысле Серра.
33.12. Доказать, что всякое 2-листное накрытие регулярно. Ка-
Какой чисто алгебраический факт соответствует этому утверждению?
33.13. Построить 3-листное нерегулярное накрытие кренделя
(сферы с двумя ручками).
§33. Накрытия и расслоения 221.
33.14. Пусть М2 — неориентируемое, компактное, гладкое, за-
замкнутое многообразие. Доказать существование 2-листного на-
накрытия р: М\ —>• М2, где М\ — ориентируемое многообразие, и
предъявить М\ в явном виде. Каким свойством обладает фунда-
фундаментальная группа неориентируемого многообразия?
33.15. Построить накрытие Sn —>• ШРп со слоем Z2 и доказать:
а) ШРп ориентируемо при п = 2к — 1 и неориентируемо при
п = 2к;
б) 7Ti(RPn) = Z2, 7Гг(ЕРП) = 7ГгEП) При П > 1, t > 1.
33.16. Доказать, что накрытие будет регулярно тогда и только
тогда, когда либо все его пути, лежащие над одним и тем же пу-
путем в базисе, одновременно замкнуты, либо все одновременно не
замкнуты.
33.17. Пусть р: X —> X — накрытие. Доказать, что всякий
путь в X накрывается в X однозначно с точностью до выбора на-
начала пути в прообразе и кратность проекции р одинакова во всех
точках базы.
33.18. Построить все накрытия над окружностью и доказать,
что TritS1) = Z, щ{Б1) = 0 при г > 2.
33.19. Построить регулярное накрытие р: Р& -4 Р2 со слоем
Zfc_i, где к > 2, а Рь — сфера с к ручками.
33.20. Построить универсальное накрытие над \J S1 и доказать,
А
что ?Ti(V S1) = 0 при г > 1. Найти tti(V S1).
А А
33.21. Построить накрытие ср: X —> P<i (крендель), такое, что
X стягивается к графу и как следствие доказать:
а) универсальное накрытие над P<i стягиваемо, P<i ~ if (тг, 1);
б) если М2 — 2-мерное замкнутое многообразие и tti(M2) —
бесконечная группа, то М2 ~ К(тг, 1) (гомотопически эквива-
эквивалентно) .
33.22. Установить связь между универсальными накрытиями
над Pk (сферы с к ручками) и плоскостью Лобачевского.
33.23. Доказать, что все накрытия тора Т2 регулярны, и найти
их. Постоить пример двух неэквивалентных, но гомеоморфных
накрытий тора Т2.
33.24. Может ли тор Т2 накрывать:
а) сферу; б) проективную плоскость?
33.25. Может ли проективная плоскость RP2 накрывать тор?
33.26. Пусть X — конечный комплекс. Найти связь между
произвольной подгруппой G С tti(X), эйлеровой характеристикой
х{Х) и x(^g)? где XG — накрытие, построенное по подгруппе
()
222 Часть 2
33.27. Построить универсальное накрытие тора Р\ (сфера с руч-
ручкой) и бутылки Клейна N2 (сфера с двумя пленками Мёбиуса);
вычислить гомотопические группы Р\ и N2. Может ли тор Р\
2-листно и регулярно накрывать бутылку Клейна? Если да, то
предъявить накрытие и вычислить в ^\{N2) образ ъ\{Р\) при
мономорфизме накрытия.
33.28. Доказать, что если -к\{Мп) = 0 или 7Ti(Mn) — простая
или конечная группа порядка р ф2(р — простое), то многообразие
Мп ориентируемо.
33.29. Построить в явном виде семь гладких линейно незави-
независимых векторных полей на сфере 57. Использовать алгебру октав
(чисел Грэвса-Кэли). Построить интегральные траектории этих
векторных полей.
33.30. Доказать, что если в Шп заданы к линейных операторов
j4i, ..., Afc, таких, что А? = —Е и A{Aj + AjAi = 0 (для всех
г, j), то на сфере Sn~1 С Шп можно задать к линейно-независимых
векторных полей.
33.31. Если гомотопические группы базы и слоя расслоения
имеют конечный ранг, то гомотопические группы пространства
расслоения также имеют конечный ранг, причем ранг д-мерной
группы пространства расслоения не превосходит суммы рангов
g-мерных гомотопических групп базы и слоя.
33.32. Доказать, что универсальное накрывающее простран-
пространство над X является накрывающим для всякого другого накрыва-
накрывающего пространства.
33.33. Доказать, что стандартное расслоение ЕХ —> X (рас-
(расслоение Серра), где X — многообразие, является локально-триви-
локально-тривиальным расслоением.
33.34. Пусть расслоение р: Е -> В допускает секущую поверх-
поверхность х: В -» Е, причем ео = х(&о)- Доказать, что при п ^ 1
отображение р* — эпиморфизм, а при п ^ 2 определяет разложе-
разложение в прямую сумму
7гп(?, е0) = тгп(В, 60) © М-Р, ео).
33.35. Доказать, что если все гомотопические группы базы и
слоя конечны, то гомотопические группы пространства расслоения
также конечны и порядки не превышают произведения порядков
гомотопических групп базы и слоя той же размерности.
33.36. Пусть ЕХ — пространство всех путей на -X", исходя-
исходящих из фиксированной точки, а ИХ" — пространство петель на
X. Определим отображение р: ЕХ -> X как отображение, сопо-
сопоставляющее пути его конечную точку. Доказать, что р: ЕХ —> X
удовлетворяет аксиоме накрывающей гомотопии, т.е. является
расслоением в смысле Серра, причем его слоем является пх- Опи-
Описанное расслоение иногда называют расслоением Серра.
§ 33. Накрытия и расслоения 223
33.37. Доказать, что если pi^- Xi^—tX— накрытия и Im(pi)* =
= Im(p2)*> то (^ь Рь ^0 и 0^2ч Р2? X) послойно гомеоморфны.
Здесь 1т(рг)* С к\{Х).
33.38. Доказать, что над всяким связным комплексом X су-
существует накрытие р: X —> X, такое, что tti(X) = 0. Такое
накрытие называется универсальным.
33.39. Доказать, что множество векторных расслоений с ли-
линейно-связной структурной группой G над сферой Sn изоморфно
(G)
33.40. Показать на примере, что не существует «точной гомоло-
гомологической последовательности расслоения».
33.41. Пусть р: Е -» В — локально-тривиальное расслоение со
слоем F и базой В, причем F и В — конечные комплексы. Тогда
(E)(B)(F)
33.42. Материальная точка движется с постоянной по модулю
скоростью: а) по тору Тп; б) по сфере Sn. Найти фазовое про-
пространство этой системы.
33.43. Пусть р: Е -> В — расслоение с линейно-связными
базой В и слоем F. Пусть Cat = Cat —I — приведенная категория
Люстерника-Шнирельмана, т. е. Cat (точки) = 0. Доказать, что
Cat(S) ^ Cat*OF) • Cat(B) + Cat(B) + Cat^(F),
где Cattf(F) — относительная категория слоя F по отношению к Е.
33.44. Доказать, что если р: X —> Y — расслоение в смысле
Серра, то р — отображение «на».
33.45. Доказать, что если р: X —> Y — расслоение в смы-
смысле Серра, то p~1(j/i) и р~1(У2) гомотопически эквивалентны для
любых ух, у2 G Y.
33.46. Доказать, что многообразие линейных элементов много-
многообразия М является расслоением с базой М.
33.47. Доказать, что любое локально-тривиальное расслоение
(косое произведение) является расслоением в смысле Серра.
33.48. Доказать, что пространство путей ЕХ с фиксированной
начальной точкой пространства X является расслоением в смысле
Серра с базой X.
33.49. Доказать, что прямое произведение топологических про-
пространств X х У с проекцией на один из сомножителей является
расслоением в смысле Серра.
33.50. Пусть р: X -> Y — накрытие, p{xq) = уо, /, д —
пути, такие, что /@) =^@) = Уо; /A) = 0A). Пусть fg~l G
G p*(tti(X, хо)). Пусть /, ^ — накрытия этих путей. Доказать,
что/A)=
224 Часть 2
33.51. Представим тор Т2 в виде Т2 = {д}, где
,«?>! О
о
¦(
Рассмотрим следующие отношения эквивалентности R:
а) (е^,е^^>
б) (е^,е
в) (е^еЦ()
Найти пространство X = T2/R и вычислить образ /*(tti(T2)) С
С tti(X), где /: Т2 -> X = Т2/Х — проекция, связанная с отно-
отношением R. Является ли / накрытием?
33.52. Сколько существует расслоений вида:
а) Т3 -» S1, где Т3 — 3-мерный тор;
б) Тп —> 51, где Тп — n-мерный тор (расслоения рассматри-
рассматриваются с точностью до гомотопической эквивалентности)?
33.53. Пусть С = А * В — свободное произведение произволь-
произвольных групп А и В. Доказать, что для любой подгруппы М С С
выполнено равенство М = А\ * В\ * F, где А\ С -A, JBi С 5, F —
свободная группа. Дать топологическое доказательство, используя
накрытия.
33.54. Пусть G — односвязная компактная группа Ли и a: G —>
—» G — произвольный инволютивный автоморфизм (т. е. а2 = 1).
Положим Я = {9Е G|a(g) = g}; У = {g € G\a{g) = g}.
Доказать, что G = VHV, т. е. любой элемент д ? G допускает
представление в виде
д = vhv, v G V, h Е Н.
Доказать, что V = G/Я (однородное пространство).
33.55. Известна следующая конструкция (Картана). Пусть а:
G —» G — произвольный инволютивный автоморфизм компактной
связной группы Ли. Положим
Я = {д € GVE) =g}:V = {ge G\o(g) = «Г1}.
Тогда V = G/ff и V С G — вполне геодезическое подмного-
подмногообразие, а потому V — симметрическое пространство. Подмно-
Подмногообразие V называется картановской моделью симметрического
пространства G/H. Любое симметрическое пространство допус-
допускает (причем почти всегда однозначно определенную) картанов-
скую модель.
а) Доказать, что проекция р: G —> V, определяемая формулой
р(д) = да(д~1)^ задает главное расслоение 0 —> Н —> G —> G/H -»
-Ю.
§ 33. Накрытия и расслоения 225
б) Пусть V — картановская модель и пусть 7Ti(F) = 0, е ?
EG, e Е V, е — единица в G. Доказать, что если точка х Е V
сопряжена с е вдоль геодезической ^(t) С V ъ группе G, то точка
х сопряжена с е вдоль у и в самом многообразии V С G.
33.56. Вычислить гомотопические группы 7Г((Мд), г^1, 2-мер-
ного многообразия Мд рода д.
33.57. Пусть М2 — компактное замкнутое ориентированное
2-мерное многообразие рода д. Найти гомотопический тип 22М2.
33.58. Пусть S1 х S1 С 83 — стандартное вложение тора в
евклидово пространство. Доказать, что не существует гомеомор-
гомеоморфизма пары (R3, S1 х S1) на себя, ограничение которого на тор
определяется матрицей
° М
33.59. Пусть тг — фундаментальная группа 2-мерной поверхно-
поверхности, /: 7г —> тг — эпиморфизм. Доказать, что / является изомор-
изоморфизмом.
33.60. Доказать тремя существенно различными способами,
что на сфере S2 не существует непрерывного векторного поля без
особых точек (т.е. отличного от нуля в каждой точке).
33.61. Пусть р: X —> Y — двулистное накрытие. Доказать, что
тогда любой путь в Y накрывается в точности двумя путями.
33.62. Построить универсальное накрывающее пространство
для ортогональной группы SO(n).
33.63. Доказать, что любое двумерное замкнутое ориентирован-
ориентированное гладкое многообразие рода д ^ 2 может быть локально изоме-
трично накрыто плоскостью Лобачевского (снабженной стандарт-
стандартной метрикой постоянной отрицательной кривизны). Другими
словами, доказать, что фундаментальная группа поверхности ука-
указанного вида может быть представлена как дискретная подгруппа
в группе изометрий плоскости Лобачевского, действующая эффек-
эффективно.
Отсюда, в частности, следует, что двумерное компактное за-
замкнутое ориентируемое гладкое многообразие может быть снаб-
снабжено римановой метрикой постоянной отрицательной кривизны.
33.64. Какие пространства могут накрывать бутылку Клейна?
33.65. Пусть Sg — сфера с д ручками. Какие Sh могут накры-
накрывать Sgt
33.66. Доказать, что для любого компактного не ориентируемого
двумерного многообразия имеется ровно одно компактное двумер-
двумерное ориентируемое многообразие, накрывающее его двулистно.
33.67. Доказать, что поверхность Бельтрами (поверхность по-
постоянной отрицательной кривизны, стандартно вложенная вК)
может быть бесконечно-листно и локально изометрично накрыта
226 Часть 2
некоторой областью, лежащей в плоскости Лобачевского. Найти
эту область. Доказать, что она гомеоморфна двумерному диску.
Найти соответствующую группу этого накрытия.
33.68. Может ли двумерный тор двулистно накрывать бутылку
Клейна?
33.69. Вычислить группу перестановок листов римановой по-
поверхности агебраической функции w = $/i, возникающую при
обходах вокруг точки ветвления этой функции (точки 0).
§ 34. Критические точки,
степень отображения, теория Морса
34.1. Пусть /, д: Sn —> Sn — симплициальные отображения.
Доказать, что:
а) прообраз каждой внутренней точки симплекса старшей раз-
размерности состоит из одного и того же числа точек, взятых со зна-
знаком ориентации;
б) если /, д гомотопны, то числа точек прообраза, взятых с
ориентацией, совпадают;
в) если числа точек прообраза с ориентациями совпадают, то
отображения / и д гомотопны.
34.2. Доказать, что каждое непрерывное отображение замкну-
замкнутого шара Dn в себя всегда имеет неподвижную точку.
34.3. Пусть /: SU(n) -> SU(n) — гладкое отображение, f(g) =
= дк. Найти deg/.
34.4. Пусть /: Мп —> W — гладкое погружение связного ком-
компактного ориентируемого замкнутого n-мерного (п < р) много-
многообразия в W. Пусть v(f) — нормальный пучок этого погружения
и Sv(f) — ассоциированный пучок сфер, т.е. Sv(f) = dv(f) —
граница некоторой, достаточно малой трубчатой окрестности под-
подмногообразия f(Mn) С МР. Пусть Т: Sv{f) -» Sp~l — обычное
гауссово отображение (сферическое).
Найти степень degT (dim Sv(f) = р — 1), если известна эй-
эйлерова характеристика многообразия Мп. Зависит ли deg Г от
способа погружения Мп вК3? Что происходит, если Мп неориен-
тируемо? Особо разобрать случай, когда р = п + 1.
34.5. Известно, что 2-мерное ориентируемое замкнутое ком-
компактное многообразие М2 рода д можно вложить в евклидово про-
пространство Е3(ж, у, z). Найти минимальное число седловых точек
(вообще говоря, вырожденных) у функции f(p) = z, p E г(М2),
г — вложение, где / — функция высоты.
34.6. Доказать, что невырожденные критические точки гладкой
функции на гладком многообразии изолированы.
34.7. Пусть f(x) — функция на 2-мерной компактной ориен-
ориентируемой поверхности рода д (сфера с д ручками), имеющая ко-
§ 34. Критические точки, степень отображения, теория Морса 227
нечное число критических точек, причем все они невырождены.
Доказать, что число минимумов минус число седел плюс число
максимумов равно 2 — 2д.
34.8. Пусть /: Мп —> Ш — гладкая функция на гладком мно-
многообразии. Доказать, что почти каждое значение функции / регу-
регулярно.
34.9. Доказать, что альтернированная сумма особых (крити-
(критических) точек гладкой функции f(x) (в предположении, что все
ее особенности невырождены), заданной на гладком компактном
многообразии, не зависит от функции (под альтернированной сум-
п
мой точек понимается ]Г) (—1)Лтд, где n = dimM, A — индекс
А=о
критической точки, т\ — число критических точек индекса А).
34.10. Пусть f(x) — комплексно-аналитическая функция од-
одного переменного х. Доказать, что множество критических значе-
значений функции S2 -> S2 имеет меру нуль.
34.11. Пусть М™ = {x\f(x) = с}. Доказать, что если М™ не со-
содержит критических точек функции /, то М™ — подмногообразие
HCodimMcn = 1 в Мп.
34.12. Доказать, что понятие невырожденной критической
точки гладкой функции не зависит от выбора локальной карты,
содержащей эту точку.
34.13. Показать, что для стандартного вложения тора Г2 С 1R3
(поверхность вращения вокруг оси Oz) координата #, ортогональ-
ортогональная оси вращения тора Г2, имеет только невырожденные крити-
критические точки.
34.14. а) Построить на ШРП и СРП функции, имеющие только
невырожденные критические точки, причем так, чтобы во всех
критических точках значения функций были различны.
б) Построить на ШРП и СРП функции, для которых f(x\) =
= А = икЦжд), где х\ — невырожденные критические точки ин-
индекса А.
34.15. Пусть F(x, у) — невырожденная билинейная форма на
Rn. Рассмотрим гладкую функцию f(x) = F(x, ж), где |ж| = 1,
т.е. f(x) — функция на сфере Sn~l С Шп. Пусть Ао ^ Ai ^ ...
... < An_i — все собственные числа формы F (напомним, что все
Aj, О^г^п — 1, вещественны).
Доказать, что Af являются критическими значениями функции
f(x) на сфере 5П. Найти все критические точки функции /(#)•
Доказать, что Аг- = inf {max/(ж)}, где S1 — стандартные г-мерные
экваторы в сфере Sn~l.
34.16. Доказать, что если точка р является критической невы-
невырожденной точкой для гладкой функции f(x) на гладком много-
228 Часть 2
образии, то тогда существует такая локальная система координат,
в которой функция f(x) в окрестности точки р представляется в
виде квадратичной невырожденной формы.
34.17. Доказать, что если Мс — некритический уровень для
функции f(x) на многообразии М (т.е. гиперповерхность уровня
f(x) = с = const, не содержащая критических точек для /(ж)), то
окрестность Мс диффеоморфна Мс х i*.
34.18. Если МС1 и МС2 — последовательные критические
уровни, то промежуток между ними диффеоморфен Мс х /, где
С\ < С < С2-
34.19. Если между МС1 и МС2 нет критических уровней (т. е.
гиперповерхностей уровня f(x) = const с критическими точками)
и МС1, МС2 — также некритические, то они диффеоморфны.
34.20. а) Построить на произвольном компактном ориентируе-
ориентируемом 2-мерном гладком многообразии М2 гладкую функцию /(ж),
имеющую одну точку минимума, одну точку максимума (невы-
(невырожденные точки) и еще одну критическую точку, быть может,
вырожденную. Найти связь между такой функцией и представле-
представлением М2 в виде римановой поверхности некоторой многозначной
аналитической функции. Выяснить ситуацию для случая неори-
ентируемого 2-мерного многообразия М* (например, случай про-
проективной плоскости RP2).
б) Построить на произвольном компактном многообразии М2
гладкую функцию /(ж), имеющую: только невырожденные крити-
критические точки; ровно одну точку максимума, ровно одну точку ми-
минимума и 5 седловых точек (найти число s). Построить функцию
так, что }{х) принимает одно и то же значение во всех седловых
точках. Изучить неориентируемый случай. Указать связь с за-
задачей пункта а), построить слияние всех седловых точек в одну
вырожденную критическую точку.
Пусть X — хаусдорфово топологическое пространство. В основном
нас будет интересовать случай, когда X — гладкое многообразие. Пусть
/ — непрерывная функция на X. Определим граф Риба Г = Г/ для
функции /. Для этого введем на X следующее отношение эквивалент-
эквивалентности. Точки х\ и #2 пространства X будем считать эквивалентными,
если f{xi) = /(#2) и х\ и #2 принадлежат одной компоненте связности
{) ()
множества f (с), где с = /(#i) = /(#2)- Соответствующее фактор-
пространство X по этому отношению эквивалентности называется гра-
графом Риба функции /. Легко видеть, что Г является одномерным графом.
При этом его концевые вершины (вершины кратности 1) отвечают ло-
локальным минимумам и максимумам функции /, а остальные вершины
(кратности большей 1) отвечают «седловым» критическим значениям
функции /. На рис. 109 показаны примеры графов Риба для функций
высоты (на рисунке — слева от поверхности) на торе и кренделе, стан-
стандартно вложенных в К3.
§ 34. Критические точки, степень отображения, теория Морса 229
Пусть теперь / — гладкая функция на многообразии. Тогда ее граф
Риба можно снабдить дополнительной информацией о структуре крити-
критических уровней функции /. Покажем как это делается на примере функ-
функции Морса / на двумерной замкнутой поверхности М. Пусть с ? К —
.. ..
с—
•L
А
6
о
Рис. 109
произвольное критическое значение функции /. При этом /-1(с) мо-
может содержать несколько критических точек функции /. Рассмотрим
прообраз /-1([с — ?, с + е]), где е > 0 — такое число, что на отрезке
[с — ?, с -f- е] других критических значений, кроме с, нет.
Легко видеть, что /~1([с—е, с+е]) является двумерной поверхностью
с краем. Край /-1([с — е, с + е]) является объединением окружностей.
Назовем окружность положительной, если на ней / равняется с + е, и
отрицательной, если / равняется с — е. Поверхность f~x([c — е, с + е])
с такой дополнительной структурой на крае называется атомом.
Заменив в графе Риба все вершины атомами, отвечающими критиче-
критическим значением функции /, получим граф, содержащий дополнительную
информацию о критических точках функции. Такой граф называется
молекулой (пример см. на рис. 109, справа от поверхности).
230
Часть 2
№
Сложность 1
Ориентируемые
Л Л
Неориентируемая
Е
I
Сложность 2
Ориентируемые
Рис. 110
§ 34. Критические точки, степень отображения, теория Морса 231
№
А А
А А
А А А
D2
А А
D2
А А
Неориентируемые
П
Рис. 111
Бутылка
Клейна
Проективная
плоскость
Проективная
плоскость
§ 35. Простейшие вариационные задачи 233
34.21. а) Построить на торе Т2 функцию Морса в точности с
четырьмя критическими точками так, чтобы две седловые точки
лежали на одном критическом уровне. Нарисовать линии уровня
такой функции на квадрате, склейкой сторон которого получается
тор. Нарисовать молекулу для такой функции.
б) Реализовать такую функцию как функцию высоты на торе
при подходящем его вложении в Е3.
34.22. Построить на бутылке Клейна функцию Морса с четырь-
четырьмя критическими точками и четырьмя различными критическими
значениями. Нарисовать ее линии уровня на квадрате, склейкой
сторон которого получается бутылка Клейна. Нарисовать соответ-
соответствующие атомы и молекулу.
34.23. Построить на бутылке Клейна функцию Морса с четырь-
четырьмя критическими точками и тремя критическими значениями.
Нарисовать ее линии уровня на квадрате, склейкой сторон ко-
которого получается бутылка Клейна. Нарисовать соответствующие
атомы и молекулу.
34.24. Построить на проективной плоскости ШР2 функцию
Морса с тремя критическими точками и тремя различными кри-
критическими значениями. Нарисовать линии уровня на квадрате,
склейка сторон которого дает ЕР2. Нарисовать соответствующие
атомы и молекулу.
34.25. Построить на сфере, торе, проективной плоскости и на
бутылке Клейна функции Морса с указанными на рис. 110-112
атомами (окрестностями седловых критических уровней) и мо-
молекулами. Нарисовать их линии уровня на квадрате, склейкой
сторон которого получается рассматриваемая поверхность.
§ 35. Простейшие вариационные задачи
35.1. Доказать, что экстремальными траекториями для функ-
1
ционала действия Е[у] = / I7I2 dt на гладком римановом много-
о
образии Мп (где 7(*) — гладкие траектории на Мп, 0 ^ t < 1,
7(<) — вектор скорости 7(*)) являются геодезические.
35.2. Установить связь между экстремальными траекториями
1
функционала длины L[y] = / I7I dt и функционала действия
о
1
Е[у] = / |7|2di. Доказать, что любая экстремаль 7о(*) Ддя
234 Часть 2
является экстремалью для L[y]. Доказать, что если so{t) — экс-
экстремаль для L[y], то путем замены параметра t = ?(т) на so{t)
можно превратить эту траекторию в экстремаль для Е[у].
35.3. Пусть
= f y/EG-F2dudv
D
— функционал, сопоставляющий каждой гладкой функции z =
= /(я, у), определенной на ограниченной области D = D(z, у) С
С Е2(я, у) (здесь ж, у, z — декартовы координаты в Е3), пло-
площадь графика функции z = /(ж, у). Доказать, что экстремаль-
экстремальность функции /о относительно функционала S эквивалентна усло-
условию: Н = О, где через Я обозначена средняя кривизна графика
z = /о(#> у)? рассматриваемого как двумерное гладкое подмного-
подмногообразие в R3.
35.4. Доказать утверждение, сформулированное в предыдущей
задаче, для случая (п — 1)-мерных графиков хп = /(ж1, ..., хп~1)
в!п.
35.5. Доказать,что функционалы действия Е[у] и длины L[y]
связаны соотношением: (I/[7]J ^ Е[у], причем равенство имеет
место тогда и только тогда, когда 7(*) — геодезическая.
35.6. Доказать, что функционал площади
5[г]= f VEG-F2dudv
D
(где г = г (и, v) — радиус-вектор в Е3, гладко зависящий от (и, v))
и функционал Дирихле
ЩА-f
D
E + G J
—г— dudv
связаны соотношением 5[г] < D[r].
35.7. Радиус-вектор г(гх, и), задающий двумерную поверхность
М2 в трехмерном евклидовом пространстве, называется гармо-
гармоническим, если r(u, v) является экстремалью функционала Ди-
1 г
рихле D[r] = - (E + G)dudv. Доказать, что если средняя кри-
D
визна Н поверхности М2, задаваемой некоторым радиус-вектором
r(u, г>), равна 0, то тогда в окрестности каждой точки на поверхно-
поверхности можно ввести такие локальные координаты (р, д), в которых
радиус-вектор r(p, q) станет гармоническим.
§ 35. Простейшие вариационные задачи 235
35.8. Построить пример такого гармонического радиус-вектора
г (и, г>), чтобы описываемая им поверхность М2 С К3 не была
минимальной (т.е. чтобы Н ф 0).
35.9. Неравенство Виртипгера. Пусть Н — эрмитова, симме-
симметричная, положительно определенная форма в Сп, пусть а: Сп ->
-> Ш2п — овеществление Сп, тогда
где Н = S + гА\ 5, А — вещественные матрицы; ST = S; АТ =
= - А; НТ = Я.
Форма 5 задает в R2n евклидово скалярное произведение; фор-
форма А задает в Е2п внешнюю 2-форму и/2). Для простоты можно
считать, что u/2) = J2 dzk Л dzk. Рассмотрим форму
к=\
= -о;Л...Ла;, г < п.
г!N v '
г
а) Если a;i, ..., о;2п — произвольный ортонормированный
базис в М2п = Сп относительно скалярного произведения S =
= Re#, то
"ъ...,г)|^1 и
тогда и только тогда, когда плоскость L{lo\, ..., а;2Г), порожден-
порожденная векторами a;i, ..., а;2г, является комплексным подпростран-
подпространством в R2n ^Cn.
б) Пусть Wr С Сп, г < п (г — комплексная размерность) —
комплексное подмногообразие в Сп (если Wr — алгебраическое
подмногообразие, то допускаются особые точки на Wr). Пусть
у2г — вещественное подмногообразие в Сп, такое, что V UW =
= dZ2r+1, где Z2r+1 — вещественное Bг + 1)-мерное подмного-
подмногообразие в Сп, имеющее своим краем V U W. Пусть К = V Г\\?,
тогда vol2r (V\K) > vol2r (W\K).
Замечание. Это утверждение означает, что комплексные подмно-
подмногообразия W в комплексном пространстве Сп являются минимальными
подмногообразиями, т. е. при любом «возмущении» V 2г-мерный объем
(vobr) не уменьшается.
в) Доказать, что утверждение задачи б) остается справедливым,
если заменить Сп на любое кэлерово многообразие, т. е. на ком-
комплексное многообразие, снабженное внешней 2-формой о/2), невы-
невырожденной и замкнутой.
236 Часть 2
35.10. Рассмотрим на Rn(o:1,..., хп) функции вида ^(а;1,..., хп)
и функционал J[F] = / |gradF|d<7n, где D — область определе-
D
ния функций F. Пусть Fo — экстремаль функционала J. Дока-
Доказать, что поверхности уровня Fq(x1^ ..., хп) = const, рассматри-
рассматриваемые как гиперповерхности в En(rr1, ..., #п), являются локально
минимальными поверхностями.
35.11. Пусть п(я, у) — показатель преломления плоского про-
прозрачного изотропного, но неоднородного вещества, заполняющего
2-мерную плоскость. Траекториями световых лучей являются ин-
интегральные линии векторного поля gradn(#, у). Доказать, что они
являются геодезическими линиями метрики
ds2 = п(я, y){dx2 + dy2).
§ 36. Общая топология
36.1. Пусть М = X х У, где X, У — топологические простран-
пространства. Пусть множество из М открыто, если оно является про-
произведением открытых множеств из X и У или объединением
таких множеств в любом числе. Доказать, что такая система удо-
удовлетворяет всем аксиомам, определяющим топологию на множе-
множестве М.
36.2. Доказать, что если пространства X и Y хаусдорфовы, а X,
кроме того, еще и локально-компактно, то для любого простран-
пространства Т пространства Н(Х х У, Т) и Я (У, Н(Х, Т)) гомеоморфны,
где Н{Х, Y) = YX.
36.3. Доказать, что существует гомеоморфизм канторова дис-
дисконтинуума на себя, переставляющий две заданные точки.
36.4. Пусть X — локально-линейно-связное метрическое про-
пространство. Доказать, что если X — связно, то X — линейно-
связно.
36.5. Пусть АП В ^ 0, X = Аи В. Доказать, что если А и
В — связные пространства, то X — связное пространство.
36.6. Доказать, что хеммингова метрика в n-мерном кубе не
вкладывается ни в какое Rn, т. е. не существует такого вложения,
что хеммингова метрика индуцирована стандартной евклидовой
метрикой (куб рассматривается только как набор своих вершин,
т.е. как дискретное множество, и тогда расстояние р(а, Ь), где а
и b — вершины куба, равно числу координат, в которых различа-
различаются две вершины).
36.7. Доказать, что группа унитарных матриц U(n), рассма-
рассматриваемая как топологическое пространство, гомеоморфна пря-
прямому произведению S1xSU(ri) (как топологических пространств).
§36. Общая топология 237
36.8. Доказать, что группа GL(n, Ш) вещественных невыро-
невырожденных матриц размера пхп — топологическое пространство,
состоящее из двух связных компонент.
36.9. Доказать, что любой конечный CW-комплекс можно вло-
вложить в конечномерное евклидово пространство RN (достаточно
большой размерности).
36.10. Если в качестве CW-комплекса взять компактное глад-
гладкое замкнутое многообразие Мп, то результат, сформулированный
в предыдущей задаче, может быть уточнен.
а) Доказать, что Мп можно вложить в евклидово пространство
R2n/:, где к — число открытых шаров Dn) образующих покры-
покрытие Мп.
б) Доказать, что Мп можно вложить в евклидово пространство
k, где число к определено в пункте а).
36.11. Доказать, что всякий конечный симплициальный ком-
комплекс является подкомплексом симплекса достаточно большой
размерности. В частности, он может быть вложен в евклидово
пространство так, что вложение линейно на каждом симпликсе.
36.12. Пусть /: М2 ->• S2 — отображение класса С2 замкнутого
гладкого компактного многообразия М2 на 52, причем / открыто
(образ любого открытого множества открыт) и конечно-кратно
(прообраз каждой точки х Е S2 есть конечное число точек). Дока-
Доказать, что М2 — диффеоморфно сфере S2. Что можно сказать об
аналогичном отображении /: Mn -> Sn?
Пусть X — топологическое пространство. Через ехрХ обозначим
множество всех непустых замкнутых подмножеств пространства X. Для
открытых множеств J7i, ..., Uk С X положим
О (С/ь ... , Uk) = {FeexpX\Fc\JUuFnUi? 0 Vt}.
36.13. Доказать, что множества вида O(C/i, ..., Uk) образуют
базу некоторой топологии. Эта топология называется тополо-
топологией Вьеториса, а множество ехр X, наделенное топологией Вье-
ториса, называется гиперпространством (замкнутых множеств)
пространства X.
36.14. Пусть X есть Ti-пространство. Доказать, что тожде-
тождественное вложение X С ехрХ, переводящее точку х в множество
{ж}, является топологическим.
36.15. Пусть X есть Т\-пространство. Тогда X регулярно в том
и только том случае, когда ехрХ хаусдорфово.
36.16. Доказать, что для Ti-пространства Х следующие усло-
условия эквивалентны: а) X нормально; б) ехрХ вполне регулярно;
в) ехрХ регулярно.
238 Часть 2
Пусть п — натуральное число. Обозначим через ехрп X множество
всех непустых замкнутых подмножеств -X", состоящих из не более чем
п точек. Будем считать тождественное вложение ехрпХ С ехрХ топо-
топологическим, т. е. наделим ехрп X топологией Вьеториса.
36.17. Доказать, что если X хаусдорфово, то ехрп X замкнуто
в ехрХ.
36.18. Доказать, что если X является Ti-пространством и
ехрх X замкнуто в ехр2 X, то X хаусдорфово.
Обозначим через 7гп: Хп -> ехрп X отображение, переводящее точку
(xi, ..., хп) G Хп в множество {xi, ..., хп) ее координат (предполага-
(предполагается, что X является Т\-пространством).
36.19. Доказать, что отображение 7гп непрерывно. Более того,
оно факторно, т. е. множество V С ехрп X открыто тогда и только
тогда, когда tt^CV) открыто.
Таким образом, гиперпространство ехрп X получается из n-й степени
пространства X посредством факторизации, определяемой следующим
отношением эквивалентности: точка (xi,..., xn) эквивалентна точке
(х[, ..., х'п) тогда и только тогда, когда множества {xi, ..., хп} и
{х[, ..., х'п} совпадают.
Это является основанием того, что гиперпространство ехрп X назы-
называется гиперсимметрической п-й степенью пространства X.
Наряду с только что описанным отношением эквивалентности на
произведении Хп естественным образом возникают и другие симме-
симметрии. На Хп действует свободная группа Sn как группа перестановок
координат. Более общим образом, пусть G — подгруппа группы Sn.
Определим на Хп отношение эквивалентности ~о следующим образом:
(xi, ..., хп) ~о (х[,..., х'п) тогда и только тогда, когда существует под-
подстановка а ? G, для которой Х{ = х'а<{у
Фактор-пространство Xn/G обозначается SPqX и называется
G-симметрической степенью пространства X.
Если G = {е}, то SP?X = Хп.
Если G — 5П, то SPqX обозначается через SPnX и называется
симметрической п-степенью пространства X.
Естественную проекцию Хп -> Xn/G будем обозначать через ?rg.
Если G = Sn, то ?rg = тгп.
36.20. Доказать, что если G' С G, то существует единствен-
единственное отображение Kq,g'. SPq,X -* SPqX, удовлетворяющее ус-
условию
36.21. Доказать, что отображение ttq открыто и замкнуто.
36.22. Доказать, что отображение тг^,^ открыто и замкнуто.
§36. Общая топология 239
Поскольку отношение гиперсимметричности сильнее отношения сим-
симметричности, существует единственное отображение
qn:SPnX-+expnX
такое, что тгп = qn о тгп.
36.23. Доказать, что отображение qn факторно.
Вернемся к гиперпространствам. Компактом будем называть би-
бикомпактное хаусдорфово пространство.
36.24. Доказать, что если X — компакт, то ехрХ — т&кже
компакт.
36.25. Доказать, что если X — компакт, то ехрп X — также
компакт.
36.26. Доказать, что если X — компакт, то SPqX — компакт.
36.27. Доказать, что в определении топологии Вьеториса (в слу-
случае компактного X) в качестве базисных множеств можно брать
множества вида О (C/i, ..., С/*), где C/i, ..., Uk пробегают некото-
некоторую базу пространства X.
Через wX будем обозначать вес пространства X, т.е. наименьшую
из мощностей баз пространства X.
36.28. Доказать, что если X — бесконечный компакт, то
wX = w ехр X = w ехрп X = wSPqX.
Пусть (X, р) — ограниченное метрическое пространство. Через рн
обозначим следующую функцию расстояния на ехр-Х":
Ph{Fu F2) = inf {e > 0\Fi С OeF2, F2 C
где О? А обозначает открытый Е-шар вокруг множества А.
36.29. Доказать, что функция рн является метрикой на множе-
множестве ехрХ, совпадающей с метрикой р на X = ехрх X.
Функция рн называется метрикой Хаусдорфа, порожденной мет-
метрикой р.
36.30. Доказать, что метрика Хаусдорфа на ехрп X порождает
топологию Вьеториса.
36.31. Доказать, что если пространство X метризуемо, то
SPqX также метризуемо.
36.32. Доказать, что если (X, р) — метрический компакт, то
метрика Хаусдорфа на ехрХ порождает топологию Вьеториса.
36.33. Доказать, что если X — метризуемый компакт, то ехр X,
ехрпХ, SPqX также являются метризуемыми компактами.
Через Нп обозначим n-мерное замкнутое полупространство Еп, т.е.
Нп = {х\х\ > 0}. Через Х(п) обозначим циклическую п-степенъ
пространства X. т.е.
X()
240 Часть 2
где Ъп — свободная циклическая подгруппа Sn с образующей
/12... п \
\ п 1 ... п-1 )'
В задачах 36.34-36.46 установить гомеоморфность топологиче-
топологических пространств:
36.34. ехр2 /й/2. 36.35. ехр2 Нг^Н2.
36.36. ехр2М«Я2.
36.37. ехр2 S1 гомеоморфно листу Мёбиуса.
36.38. /C) « I3. 36.39. SP3(I) » I3.
36.40. ехрз / « /3. 36.41. Я*C) « Я3.
36.42. SP^iH1) « Я3. 36.43. ехрз Я1 « Я3.
36.44. ЖC) и М3. 36.45. SP3(R) и Я3.
иО.40. expg ^Ж.у ^ U& .
36.47. Доказать, что пространство ехр3 E1) односвязно.
36.48. Доказать, что пространство SP3(S1) неодносвязно.
36.49. Доказать, что пространство 5ХC) неодносвязно.
В задачах 36.50-36.58 установить гомеоморфность топологиче-
топологических пространств:
36.50. ^C) « S1 х S2. 36.51. SPS{S1) « S1 х I2.
36.52. ехрз^1) « S3. 36.53. ехр4/ ^ М4.
36.54. ехр4 / не является топологическим многообразием.
36.55. SPnI&In, n^4.
36.56. SPnHl «Я71, п > 4. 36.57. SPnR «Я71, n ^ 4.
fl м J71, n — четно
36.58. ил и ~ ^ „1 TTI_i
х J71 x, n — нечетно.
Здесь через S1 м 1п~1 обозначено единственное нетривиальное
расслоение над S1 со слоем 1п~1.
36.59. Доказать, что пространство МD) не является топологи-
топологическим многообразием ни для какого топологического многообра-
многообразия М.
36.60. Показать, что пространство ехр3М2 не является топо-
топологическим многообразием.
В задачах 36.61-36.66 установить гомеоморфность топологиче-
топологических пространств:
36.61. SPnI2 « I2n. 36.62. SPnH2 « Я271.
36.63. SPnR2 » R2n. 36.64. S'P71^2 « СР71.
36.65. 5Р71(М2\{0}) » (М2\{0}) х М271.
36.66. S'P71^1 x/)«5!x
ОТВЕТЫ И РЕШЕНИЯ
Часть 1
1.1. a) Xi = O1U1COSU2, #2 = ci2iii sin иг; б) см. рис. 113; в)
1
взаимная однозначность нарушается в начале координат xi
<р-я/3
= х2 = 0.
<р-5я/6
<р-я
— 5я/6
<р-я/6
<р—я/6
<р—я/2
Рис. 113. Полярная система координат, ai = аг = 1, х\ = х, Х2 = у, iti = г,
1.2. а) #1 =
. 2
+ S111 U2
#2 =
; б) см. рис. 114; в) sh2 u\
+ S111 U2' T2 7~^2 *
sh u\ + sin U2
1.3. a) x\ = uf—ul, X2 = 2u\U2] б) см. рис. 115; в) 4(uf-
1.4. a)
COSU2
х2 =
COSU2 +
; б) см. рис. 116;
в)
242
Ответы и решения
и2- 2я/3
u2-tc/2
x2
U2-7C/3
U2-7t/6
u2—5tc/6
U2-~7t/6
u2—2m/3
U2—7t/2
Рис. 114. Эллиптическая система координат
х2
Рис. 115. Параболическая система координат
Ответы и решения
243
-9л/10
?2--9я/10
Рис. 116. Биполярная система координат
= 3i*ii*2 - м!> B) 9(iiJ
\2*
1.5. a) x\ = u\ —
1.6. 6) aiu2Ui1 , взаимная однозначность нарушается при х\ =
= Х2 = 0; в) нет, если а\ ф аг, и да, если а\ = п2-
1.7. б) а^аз^2 sinu2, т~- > взаимная однозначность нару-
нарушается при х\ = Х2 = 0; в) нет, если ai ^ аг, и да, если ai = аг-
/ з
1.8. б) — Ц2 Ц3 Ul U2_ Ц3 ^
3
- П (ъ-ч)
; в) да.
1.9.6) u?u2+ului, -
U^U2 "Г
при xi = Х2 = 0; в) да.
1.10. б) sh ui sin г/2 (sh2 щ + sin2142),
1.11. 6) chui sin i*2(sh2 u\ — sin2
1.12. б)
взаимная однозначность нарушается
1
sh щ sin U2(sh2 u\ + sin2112)
1
— COSU2K
sinu2(sh2 u\ — sin2
; в) да.
-; в) да.
; в) да.
1 — COSU2K'
1.13. >Jv — и2—. Область определения: у > 0; область значений: г; > и2.
244 Ответы и решения
1.14. a)-; 6)rcoS2^--sm2??-; в) (^-j + -
cflz
, , ^v\2 , i (dv\
Л7-а) Ы + ^ Ы
^V J_^K 1 g^ ctgg^F 28V_
' dr2 + r2 d02 + r2sin20 5<p2 + г2 дв+ г dr'
1.18.
d2v fdf\2 d2v dfdf ava2/ av a2/
du) + 8y2 \dv) дхду dudv + 8x du2 8y dvdu
(Py(dj\2 d2v df a/ dv&j dv a2/
+ ) + + +
(dj\
\du)
dv df a/ dv_&j_ dv
+ dddd + d d2 + d
dv) + dy2 \du) + dxdydudv + dx dv2 + dy
du2 dv2
i
1.20. Указание. Воспользоваться формулами
du _ 8u sin ip du du _du . cos tp du
= cosc^ , - smip+
dv dv sin <? dv dv dv . cos ф dv
_ = _C0S?,____ _ = _siny,+___
121 -
4(
+ u2) \du2 dv2)'
122 __L_
*2(h2 i2)
Ответы и решения 245
2.1. г = а<р.
2.2. г = гоек(р, где ^ = ut.
2.3. х = at — dsint, у = а — dcost.
(
2.4. a; = (i? + r) cos •— -rcos -—=т-^-, у = (i? + r) sin — -rsin -———.
' Л it it /t
2.5. x = (i? — mi?) cosmt + mi? cos (? — mt),
у = (R — mR) sin m? — mi? sin (t — m?), m = r/R. Ср. с задачей 2.4.
2.6. Уравнение искомой кривой
где b — постоянный вектор, /х(?) — первообразная для функции
с < t < d.
Геометрически возможны следующие случаи:
d
— прямая, коллинеарная а, если / X(t) dt расходится при t = с и
при t = d; с
d
— луч, имеющий направление вектора а, если / \(t)dt сходится
при t = с, но расходится при t = d; с
с*
— луч, имеющий направление вектора —а, если / X(t) dt расходится
при t = с, но сходится при t = d\ с
d
— открытый отрезок, коллинеарный а, если / X(t) dt сходится.
[ \(t)dt
с
I\(t)dt
2.7. Уравнение искомой кривой
с
t2
r(t) = ~a + *b + c,
где b и с — произвольные постоянные векторы. Если а и b линейно
независимы, то это уравнение (при фиксированных Ь, с) задает параболу
с осью, имеющей направление вектора а. Если а и b линейно зависимы,
то получим дважды взятый луч, параллельный а.
2.8. a) |rf |г' х а|2; б) -(г', a)|r' x а|2.
2.9. г' = {iff, у + V), г" = {iff1, 2iff + tiff'), |r' x r"| = 2<p'2 - W".
Данное уравнение определяет прямую тогда и только тогда, когда 2(р' —
— фу" = 0. Решая это уравнение, находим ip = -—г-, где а и Ь —
1 ~т~ ut
константы.
246
Ответы и решения
2.10. Будем через г обозначать длину вектора г. Пусть вектор е определя-
dr de
ется формулой г = re. Тогда — = г'е + г—. Так как е = (cos<^, sin<^),
dip dip
de.de ¦
то — = (— sin<?, cosip), т.е. -т— получается из е поворотом на угол тг/2.
dip dip
Обозначим вектор, получающийся из е поворотом на угол тг/2, через f.
Следовательно, — = r'e + rf. Далее,
—=¦ = r"e + 2r'f - re = (r" - r)e + 2r'f,
dip2
dr d^r
dip dip2
Полагая г' = и, находим
г"-г 2г'
dw
= 2r'2 - rr" + r2 = 0.
„ dw duj , duj
г" = — = —г1 =cj-j-»
d(/? ar ar
du; 9 2cj cj da;
-с^г-т-Ч-г2 =0, —= г- + 1 = 0.
dr r2 r dr
Положим cj2 = p, r2 = g, тогда ф/d^ = 2p/q + 1. Решая это уравнение,
найдем р = aq2 — g или cj2 = ar4 — r2,r' = r\/ar2 — 1. Производя в этом
уравнении подстановку 1/г = ?, легко получаем
- = Cisi
г
где Ci, C2 — произвольные числа.
Случай прямой, проходящей через начало координат, оставляем на
рассмотрение читателю.
2.11. а) Рассмотрим вектор r(t) x г'(?). Его производная равняется r(t) x
х r"(t). Согласно второму закону Ньютона, F = гаг"(?), где т — масса
материальной точки М. Отсюда
По условию F = Fr и, следовательно, ^r(r(t) x r'(t)) = 0. Таким обра-
образом, вектор r(t) x r'(t) — постоянный. Тем самым, движение матери-
материальной точки М происходит в неподвижной плоскости, ортогональной
вектору r(t) х г'(?);
, 2 fcPu \ F 1
б) U1 —г + U = г, U = -, С = <
\d<^r у mr r
const;
Ответы и решения 247
в) обозначим постоянный вектор r(t) х r'(t) через а. Здесь через г
обозначена длина вектора г. Имеем
// F k k t /ч . rr' -r'r d /r\
ах г" = ах— = —-ах г = —ггхг' хг = -к = -к— (-) .
m г3 г3 г2 dt \r/
dr
На всякий случай отметим, что г' — это —, а не
dt dt
Итак,
Интегрируя, получаем
а х г + к- = Ь = const,
г
Скалярно умножая обе части этого равенства на г и замечая, что
(а х г', г) = (а, г' х г) = -|а|2, имеем -|а|2 + fc|r| = (b, г). На-
Напомним, что движение происходит в фиксированной плоскости, пер-
перпендикулярной вектору а (так как из соотношения г х г' = а следует
(а, г) =0). Введем в этой плоскости полярную систему координат, со-
совмещая ее начало координат с началом радиус-векторов и направляя
полярную ось по вектору Ь. Получим — |а|2 + А;|г| = |Ь| • |г| cos<^, откуда
|г| = |a|2/(fc — |b|cos<^) — кривая второго порядка. Отсюда, в частно-
частности, следует, что вектор b направлен по оси найденной кривой второго
порядка.
2.12. Введем декартову прямоугольную систему координат, располагая
ось Oz коллинеарно вектору Н. Тогда г = х\ + у} + гк, и данное диф-
дифференциальное уравнение принимает следующий вид:
х" = ау', у" = -ах', *" = (), где а = |Н|.
Из соотношения z" = 0 находим z = Cit + Съ', из соотношений х" = ау',
у" = —ах' находим
х = Сз cosat + С4 sin at + С5, у = -Сз sin at + С4 cosat + C6.
При С\ ф 0 это — семейство винтовых линий, оси которых коллинеарны
вектору Н; при С\ — 0 получаем семейство окружностей, лежащих в
плоскостях, ортогональных вектору Н.
2.13. Окружности, центры которых расположены на прямой, проходящей
через начало радиус-векторов коллинеарно вектору а;, а плоскости этих
окружностей перпендикулярны к указанной прямой.
248
Ответы и решения
2.14. Прямые, по которым пересекаются плоскости, перпендикулярные
вектору е, с плоскостями, проходящими через прямую, проведенную че-
через начало координат коллинеарно вектору е.
2.15. Введем декартову прямоугольную систему координат, располагая
ось Oz коллинеарно вектору е. Тогда ае + е х г = — ух 4- xj + ае, и дан-
данное дифференциальное уравнение принимает следующий вид: х1 = —у,
у1 = ж, z1 = а. Из соотношений х1 = —у, у1 = х находим х2+у2 = С\ —
семейство круглых цилиндров, оси которых совпадают с прямой, прохо-
проходящей через начало радиус-векторов коллинеарно вектору е. Далее:
dx _ у dy _ х
a' dz а'
откуда
xdy — ydx
dz
dz
x2 + у2
dz
xdy — ydx
I
x
— семейство прямых геликоидов, для которых осью является упомяну-
упомянутая выше ось цилиндров. Интегральные линии — винтовые. Наконец,
z = at + Сз. Из полученных соотношений легко выразить ж, у, z через t.
2.16. Окружности, касающиеся оси Oz (коллинеарной вектору е) в на-
начале координат.
2.17. arctg3.
2.18. тг/4 и тг/2.
2.19. arctg3.
X
2.20. a) s = f
б) s =
= ^(D + 9яK/2-8);
+ 4ж2 + 7 In B - х + \Л + 4ж2);
1 + а;2-У2-1п(ч/2-1);
д) 5 = / \/r2 4- {dr/dipJ dip = 4asin ^;
Ответы и решения 249
t
) а = I Jx'2+y'2dt = 4а (l - cos |);
и) s = f ^x'2+y'2dt = у sin2*;
0
x
к) 5 = / у 1 + у'2 dx =
л) 5= f y/x^+^dt = a]n(smt).
тг/2
2.21. /(а) + /"(а), если /'(а) + /'"(а) > О.
2.22. г (u, v) = ((а + b cos v) cos и, (а + Ь cos v) sin и, bsinv).
2.23. Пусть в начальный момент движущаяся прямая совпадает с осью
Ох, вторая прямая, о которой говорится в условии, — с осью Oz. Тогда
уравнение прямого геликоида имеет вид
г = (vcosu, vsinu, ku).
Здесь v — расстояние от точки геликоида до его оси (ось Oz), u —
долгота точки.
2.24. г = (v, acosuch -, asinuch - ), где и — долгота, v — ориентиро-
V а а/
ванное расстояние от точки поверхности до горлового сечения катеноида.
2.25. г = f alntg ( — + - 1 - asint, acostcosu, acostsinu j.
2.26. Пусть
x = (a + R cos в) cos (p, у = (a + R cos в) sin ip, z = R sin в
— параметрическое представление тора. Здесь R — радиус мериди-
меридиана, т.е. вращаемой окружности, а > R — расстояние от центра ме-
меридиана до оси вращения, идущей вдоль Oz. Пары точек, в которых
250 Ответы и решения
кривизна тора отрицательна (в точках К > 0 касательная плоскость
не пересекается с тором) и касательные плоскости совпадают, имеют
внутренние координаты (</?о> #о) и (ipo 4- тг, тг + во) с cos во = —R/a.
Для получения этих точек нужно воспользоваться тем, что эта касатель-
касательная плоскость пересекает плоскость xOz по прямой, касающейся двух
диаметрально противоположных меридианов тора. Дальше прямыми
вычислениями получаем, что касательная плоскость имеет уравнение
-R(xcosip0 + ysimpo) + у/а2 - R2z = 0, а пересечение этой плоскости с
тором дает объединение двух пересекающихся кривых с уравнениями
х = у/а2 — R2 sin в cos ipo =F (a cos в + R) sin y>o,
у = \/а2 - fl2sin0sin<?O ± (acosfl 4- i?)cos<^0)
z = RsinO.
Отсюда легко получить радиус окружности Виларсо (он равен а) и угол
между этой окружностью и параллелью тора: arcsin(i?/a).
3.1. а) Уравнение сферы единичного радиуса х2 + у2 + z2 = 1:
z = ±у/Т-х2-у2, г(ж, у) = (ж, у,
Wi,o, 2 V r;=(o,i, 2
\ у/1-Х2 -у2) У \ \/\-Х2-у2
Отсюда (при любом выборе знака координаты z)
х2 1-у2
9п = (гж, Гд.) = 1 + 5 q = ^^ Ъ. 2 »
1 - ж2 - у2 1-х2 -у2
912 = Л1 = (Гх, Гу) = 1_а;2_2/2?
1 -ж2
^22 = (Гу, Гу) = Y^TTtf '
^2 A - у2) &а + 2x2/ cfa dy + A - х2) dy2
as = : о о •
1-х2 -у2
б) Рассмотрим следующую параметризацию сферы:
х = sin в cos (py у = sin ^ sin (p, z = cos в.
Ответы и решения 251
Отсюда
т=(х(в,<р),у(вУч>)уг(ву<р))у
т'в = (cos в cos (p, cos в sin (р, — sin в),
т'<р = (—sin0sin<?, sin в cos у?, 0),
9п = (г*, г?) = 1, 012 = 021 = (г'„ г^) = 0, 022 = (г'^, г^,) = sin2 0,
ds2 = d0
B^5 -
(
Д) d2
= .
A + wwJ
3.2. a) t2 - x2 - y2 = 1, ds2 = dz2 + ф2 - d*2,
2 (y2 + l)dx2 - 2xydxdy + (x2 + l)dy2
~ 1 + х2+у2 ;
б) г = (x, y, t), t = chx, x = shxcosy?, у = shxsin</?, ds2 =
1-U2_u2J' ^dS " A_r2J
Adzdz
e)ds =
3.3. Указание. Докажите более общее утверждение — о совпадении
углов в метриках ds2 = dx2 + dy2 и Л2 = G(x, j/)(dx2 + dy2).
3.18. а) Будем решать задачу в модели Пуанкаре. Воспользуемся резуль-
результатами задачи 3.2г:
о
ея-1
-г\
r =
;
2)г I 2ir
/ / 4г2 / 2г
. 4,
1 - «е» - 1)/(е» + 1))
252 Ответы и решения
г
0
2тг
f ^Т
0 С
г2
г
1 о
г2
П
л
- 47Г —
г2
-г2
ЯJ
4ен
4тгчЬ2Й-
- 47TSn ,
б) I = 2тг sin Я, 5 = 4тг sin2 — .
3.19. а) Выведем формулу расстояния для точек @, yi), (О,2/2)•
г/2
Г
Ответ: @, y/S).
в) Используя соображения симметрии, заключаем, что прямая х =
= 0 пересекает нашу окружность по диаметру. Осталось найти середину
этого диаметра:
|Г2 ГО — 7*1
dr = 2 arctgr = 2 arctg .
Iri 1 + Г1Г2
r-1
-r2 + 3r - r + 3 = 3r2 - 3r + r - 1,
4rz - 4r - 4 = 0,
Центр окружности имеет координаты [0,
3.20. а) Пусть А = 0,5 + 0,5г, В = 0,9 + 0,3г. Найдем дробно-линейное
преобразование верхней полуплоскости в единичный круг, которое А пе-
переводит в 0, а В — в точку вещественной оси. Нетрудно показать, что в
A + 3Qz 4- A - 2t)
качестве такого преобразования можно взять р: z н> —— ——г^г-
Тогда р: А н> 0, р: В *-> -.
Расстояние в метрике Пуанкаре между 0 и - равно 1пЗ (см. за-
задачу 3.18). Тогда середина отрезка АВ под действием дробно-линейного
Ответы и решения 253
преобразования р переходит в точку вида с + Ог, где с > 0. Расстояние
от этой точки до 0 должно быть равно -1пЗ. Отсюда (см. задачу 3.18)
1 1 + с 1^ о г л/3-1
получаем условие на с: In- = -1пЗ. Следовательно, с = —р .
1 — с 2 у 3 + 1
Сделав обратное дробно-линейное преобразование, получим, что середи-
Л А
ной отрезка АВ является точка р г I -^—- + Ог I =
\у/3 + 1 )
3.21. Пусть углы треугольника равны а, C и 7:
а) 5д = -7г + а + /3 + 75 б) 5д = тг - а - /3 - 7-
3.27. а) При п ^ 2 (существует правильный двуугольник, который при
п = 2 является окружностью); б) при п ^ 2 (существует правильный
А;-угольник при любом А; > -; при п = 2 — это окружность).
3.28. Указание. Воспользоваться геометрическим критерием суще-
существования описанной окружности для четырехугольника и выражением
для аргумента частного двух комплексных чисел.
3.29. Указание. Воспользоваться формулой синусов и выражениями
для длины окружности из задачи 3.18.
3.30. Указание. Воспользуйтесь результатом задачи 3.21.
3.31. а) Пусть 2/i = О А, у2 = ОВ. Тогда
3/2
3/2
3/1
In
ОВ
ОА
3/1
б) пусть О и О\ — точки пересечения вещественной оси с полуокруж-
полуокружностью, проходящей через А и В и лежащей на вещественной оси как
на диаметре, причем О\ лежит левее О. Проведя инверсию / с центром
в О и радиусом OOi, мы отобразим нашу окружность на вертикаль-
вертикальную прямую, причем ординаты образов А и В при этом будут равны
ОО\ • |tga| и |tg/3|; далее воспользуемся результатом пункта а) и тем,
что / — движение метрики плоскости Лобачевского;
в) переведем прямую, соединяющую точки А и J5, в вертикальную
прямую с помощью подходящего дробно-линейного преобразования из
задачи 3.5.
3.32. а) Да, верно; б) нет, неверно. Рассмотрим в модели на верхней по-
полуплоскости точки 1+г, -1-И, 2г. Тогда, с одной стороны, мы знаем, что
в данной модели окружности в метрике Лобачевского совпадают с «обыч-
254 Ответы и решения
нымш; с другой стороны, окружность, проходящая через рассматривае-
рассматриваемые три точки, имеет «точку касания» на абсолюте и, следовательно, не
является окружностью в смысле метрики плоскости Лобачевского.
3.33. Например, можно рассмртреть в модели на верхней полуплоскости
прямые Rez = 0 и ^г = 1 и точку 5 + г вместе с пучком прямых,
проходящих через нее.
3.34. а) Пусть а — сторона правильного шестиугольника, аи — радиус
описанной около него окружности/Тогда по задаче 3.24
ch a = ch2 R — cos — sh2 R,
о
2cha = 2ch2i?-sh2i?=l + ch2i?,
1 + ch2 R . „ , „ . лЧ
cha=—— >chi? (Д^О), a>R\
z
6) решение аналогично пункту а). Ответ: а < Д.
3.35. а) По 3.246, косинус угла треугольника равен — -. По 3.216,
ch a + 1
5д = тг — 3 arccos :—;
1 + cha
6) решение аналогично. Ответ: 5д = —тг + 3 arccos .
cosa + 1
3.36. а) Ясно, что центр окружности лежит на прямой х = — 1. Пусть он
имеет координаты (—1, 4+а). Так как расстояния от центра окружности
до точек (—1, 4) и (—1, 6) должны быть равны, то получаем уравнение
in-^=ini±A
4 + a 4
Решим его:
D + аJ = 24, а = 2л/б — 4.
Таким образом, центр окружности имеет координаты (—1, 2<\/б). От-
Отсюда легко найти радиус окружности в смысле метрики Лобачевского.
Остается воспользоваться задачей 3.18а.
Ответ: 5 =
б) используя соображения симметрии, заключаем, что прямая Ъх +
+ у = 0 пересекает нашу окружность по диаметру, длина которого равна
расстоянию между точками (—1 + —т=,5—у= ) и ( — 1 — -
Ответы и решения 255
в смысле метрики из задачи 3.1в, т.е. равна
= 2 arctg ——v ' v — = 2 arctg —.
1 __ /i I /OfiWi _ /e)f\\ 14
Итак, окружность имеет радиус R = arctg —. По задаче 3.186, получаем
г, л . 2 R Л Л 13 \ , Л . „ 2тг
5 = 47rsm2-r = 2тг 1 т= Ь / = 27rsiiuR = -==.
2 V >Д70/ \/Ш
4.1. В задачах а), б), е), ж) докажите и используйте формулу кривизны
кривой г = r(t):
||r|2f-(f,r)rl l[f,r]|
И4 " |г|3 •
В задачах в), г), д) докажите и используйте общую формулу для
кривизны кривой, заданной в полярных координатах уравнением г =
= r(v>):
а)!; 6) та; в) тг; г) ^^л./ом? д)
а2' ' 4в|сов(?>/2)Г м; а(
1 , 1
' ; 4o| sin
4.3. ± и А-
Ь2 а2
4.4. А; =
., \P(Q(dQ/dx) - PjdQ/ду)) + Q(P(dP/dy) - QjdP/дх)) [
(P2 + Q2K/2
|2fr'J -r"r + r2l
4.6. ft(V) = ' IL . '
f s s bs \
4.7. r(s)= «cos / 2 , r7'Qsin~7TTtf' / 2 ¦ ^2 '
\ Vo2 + b2 va + b2 Va2 + b2 J
256
Ответы и решения
4.8.
л/5
4-9.
4Л0-
у/2 2*
+ е-*K; ; A + 2*2J '
УС =
2*
д)А;=
2*2J'
3
_v^ _ _J_ u.
____
25|sin*cos*|' 25 sin* cos*
4.11. Jb = i, x = l.
v6
4.13. Jfc =
л/?/ + z
у'2
х =
y"z'" _
+ j/'2 + г'2
*, Ь =
(y'z" - y'V, -г", у")
у + г + (y'z" - y"z'J'
(-z'z"-y'y",y"-z'(y'z"-y"z'),z" + y'(y'z"-y"z'))
' z'z" + y'y"J + (y" - z'(y'z" - y"z')f + (z" + y'(y'z" - z'y")
A-9*4, 2*+ 9*3, 3* + 6*3)
- 9*4J + B* + 9*3J + C* + 6*3J'
(-3*, -3*2, 1) _ 2A + 9*2 + 9*4I/2 3
Vl+9*2+9*4 ' ~ A + 4*2 + 9*4K/2 ' *~ 1 + 9*2 +9*4>
4.15. а) к =
-; б) при /i = a;
b)v =
/a2 + h2
(-asint, a cost, /i), n = (-cost, -sint, 0),
b =
=(/isint, —hcost, a).
4.16. Если длина окружности цилиндра равна шагу винтовой линии.
Ответы и решения
257
4.18. Указание.
: х = \ х2
О / \хи
поэтому оператор Y представляется кососимметрической матрицей
4.19. Указание. Проверьте тождество Якоби:
х х (у х z) + у х (z х х) + z х (х х у) = 0.
Выведите отсюда, что
(у х z) х х = у х (z х х) - z х (у х х).
4.21. a) R2 + 4s2 - 6as = 0 при 0 ^ * ^ ~;
2
- 1 + УШ+ ^ln (уПВ? - 1 +
г) параметрические натуральные уравнения:
я2K/2'
д) R = a + s2/a;
е) параметрические натуральные уравнения:
*: =
е2*K/2'
ж) R2 + а2 = а2е-2а'а\ з) s2 + 9Д2 = 16о2 при 0 ^ <р < |;
и) Д2 = 2as; к) Д2 + s2 - 8as = 0 при 0 < t ^ 2тг. Здесь Д
-.
258 Ответы и решения
4.22. а) г = Cea<fi — логарифмическая спираль, где г, (р — полярные
aeaarctga
координаты, С =
, ;
a2 + 1
• (° + ь)* , Ь . (a-b)t
Sin - + ^Sm-
б) Х(<) = 2
/л а ( Ь (о + b)t Ъ (а - b)t\
8 8
в) r(s) = ( / cos (s2/2a2) ds, / sin(s2/2a2)ds J — клотида;
о о
г) x(t) = aln (tg 7 + - J, 2/(t) = — цепная линия, 0 ^ t^ -;
\ 4 2 / cos с 2
д) r(t) = (a(costH-tsint), a(sint-tcost)) — эвольвента окружности.
4.23.2/(s) = const,z(s) = const. Указание. yfx'(sJ+y'(sJ+z'(sJ = 1.
4.25. r = Ce±k(p, к = ctga, С = const, r, (^ — полярные координаты.
4.26. p = | (г, n)|. Предположим, что (г, n) > 0; тогда р = (r,n). Отсюда
fg = (r, n) + (r, n) = -k(r, v) = -fc(r, f).
Заметим, что (г, г) = I2. Отсюда (г, г) = //. Таким образом,
dp _ a
as as
откуда и получается требуемое соотношение.
4.29. Уравнение соприкасающейся окружности запишем в виде
(р - т0- ЯоПоJ = #о- Отсюда (р - г0, р - г0) - 2Ло(по, р - г0) = 0.
Рассмотрим функцию
ip(s) = (г - г0, г - г0) - 2До(по, г - г0).
Имеем:
^(в) = 2(г-р0, у)-2Ло(по, v),
Vn(s) = 2 + 2&(п, г - г0) - 2ДоА;(по, п),
Vm(s) = 2А;(п, г - г0) - 2A;2(v, г - г0) - 2ЛоА;(по, п) + 2До&2(по, v).
Таким образом,
ip1 (s0) = 0, if"(s0) = 0, if1"(s0) = -2Rok(s0) ф О
и, значит, (p(s) меняет знак при переходе s через $о> ^то и доказывает
утверждение.
Ответы и решения 259
4.30. См. решение задачи 4.29. Имеем:
<р'Ы = if/'(во) = <А*о) = 0,
(s) - 2Jb(n, г - ro> - 2fcA;(v, г - r0) - 4&jfc(v, r - r0) - 2A;3(n, r - ro> -
- 2k2 - 2Ro'k(no,n) + 2ДоА;А;(по, n) + 4ДоА;А;(по, v) + 2Д0А;3(п0,п),
^D)Eo) = _2*g - 2Ro'ko + 2k20 = -2Roko ф О,
значит, степень точки кривой относительно соприкасающейся ок-
окружности не меняет знака при переходе s через sq.
4.31. Будем считать, что вектор а имеет единичную длину и b другой
постоянный вектор, так что аи b образуют положительно ориентиро-
ориентированный ортонормальный базис в плоскости. Пусть х, у — координаты
точки относительно базиса а, Ь. В пунктах а), б) предполагается, что
da n
ds
)к d /
= /(a) cos a da, y= f (a) sin a da;
х=[ Rf'(R) cos (f(R)) dR, y=[ Rf'(R) sin (f(R)) dR;
в) x = / f (a) cos a da, у = f (a) sin a da;
r) x = / cos (f(s)) ds, у = / sin (f(s)) ds.
4.32. Выбирая соответствующим образом систему координат, запишем
уравнения кривой Вивиани в виде
Для составления параметрических уравнений положим
а а а
ж- - = 2C0S*> 2/=
Тогда —A + cos^J + — sin2t + z2 = a2. Отсюда z = asin- (знак
можно опустить, так как если к t прибавить 2тг, то х и у не изменятся,
260 Ответы и решения
a z изменит знак). Итак:
г = ( ^A+cost), |sint, asin-J .
Касательная:
г = ( ~A + cost) - Asint, -sint + Acost, asin- + A cos- ) .
\2 Z 2 2/
t
Нормальная плоскость: x sin t — у cos t — z cos - = 0.
Бинормаль:
r= (-A +cost) + AB + cost)sin-,
~ sin t - A(l + cos t) cos -, a sin - + 2A ) .
Z 2 2/
Главная нормаль:
/ / f \
г = I -A + cost) — A ( 2cost + A + cost) cos2 - ) ,
- sin t — — F + cos t) sin t, a sin - — A sin - ) .
Соприкасающаяся плоскость:
xB + cost) sin ~ - 2/A + cost) cos - + 2z - -E + cost) sin - = 0.
2 Z Z 2
(-sint, cost, cos (t/2))
yi + cos2(t/2) :
n =
(-cos2t-6cost- 1, -sintF + cost), -2sin (t/2))
+ 6 cos t + IJ + sin21F + cos tJ + 4 sin2 (t/2)
b = ]/u^l (B + cost)sin5 "A + cost}cos i2);
1 / J3 + 3cost 12 cos (t/2)
~ a\j^2A +cos2 (t/2)K' X" aA3 + 3cost)'
4.33. Параметризация уравнения кривой: r(t) = (v^2at, >/2bt, t2). Значит,
кривая лежит в плоскости xyb — уу/а = 0.
4.34. Рассмотрим функцию
Ответы и решения 261
где r(so) = М. Имеем:
4>{а) = (Ъ(в0), v(«)), /(«) = (b(s0), *(в)п(в)),
Таким образом,
<p(s0) = (p'(s0) = (p"(s0) = 0, <p'"(so) = -*(«оМ*о) Ф О
и, значит, </?($) меняет знак при переходе s через $о> что и доказывает
утверждение.
4.35. Пусть к ф О, т.е. кривая бирегулярна. Пусть все соприкасающиеся
плоскости проходят через точку tq. Имеем:
(Ь, г0 - г) = 0, (-хп, г0 - г) - (Ь, v) = 0, х(п, г0 - г) = 0.
Если х ^ 0, то
(п, г0 - г) = 0, (-*v + xb, го - г) - (n, v) = 0,
(v, г0 - г) = 0, (*п, г0 - г) - (v, v) = 0, (fcn, г0 - г) = 1.
Противоречие. Значит, х = 0 — кривая плоская, см. задачу 4.43.
4.36. —г = v, —гт = Am, —гг = -к2\ + А;п + кхЪ.
ds ds2 ds3
4.37. b = — xn, откуда следует требуемое равенство.
ds
4.39. См. ответ к задаче 4.36. Имеем:
v = г = А;п, v = г = —kv + A; n + кхЪ,
v'" = гD) = -2кк'\ - А;3п + *" п + к' (-kv + xb) + jfc' xb + jfcx b - jfcx2!!,
откуда получаем искомый ответ.
4.40. (e,n) = С, (e,-*v + xb) = 0, (e,v) - ^(е,Ь> = 0, (e,n)jfc =
(x\; x^ Aj^ + x^
-J (e,b) - у (e,n) = 0, (e,b) = С . Дифференцируя еще
раз, получаем требуемое соотношение. Отметим, что в силу приведенных
выше соотношений можно считать, что
А^ + х
k(x/k)'
262 Ответы и решения
Если выполнено соотношение [ -г-,—ттт ) + и = 0, то этот вектор посто-
\к(х/кI;
янный. Этот постоянный вектор е образует с вектором п угол, косинус
которого равен 1/|е| = const.
4.41. Пусть кривая бирегулярна. Тогда (e,v) = 0, А;(е,п) = 0, откуда
(е, п) = 0. Если (е, п) = 0, то (е, -fav + хЬ) = 0, откуда х = 0 (линия
плоская).
4.42. Пусть кривая бирегулярна. Тогда (е,Ь> = 0, х(е,п> = 0; откуда
х = 0. Так как если бы было х ф 0, то (е, п) = 0, (е, — fav -I- хЪ) = 0,
А;(е, v) = 0, но (е, v) ф 0, значит, А; = 0 — прямая линия.
4.43. a) v = fan = 0, v = const, г = го -I- vs — прямая линия;
б) (r,b)' = (v,b> = 0, (r,b> = (ro,b> — плоская линия;
в) b = -хп = 0, b = const.
4.44. (b,e) = const, x(e,n> = 0. Далее см. решение задачи 4.42.
4.45. а) /(*) = CieQt + С2е-* + С3;
б) f(t) = С\ sin* + С2 cost + С3.
dv
4.47. a) f =
as
= |jfcn| = jfc;
ds
б) к ф0 — бирегулярная кривая;
в) пусты' = г'(s) = v(s) — касательный сферический образ замк-
замкнутой кривой г = r(s). Тогда г' = r'(s) — замкнутая кривая длины
/ |v'(s)| ds = / kds, лежащая на сфере единичного радиуса.
Способ I. Предположим, что Jkds < 2тг, т.е. кривая v имеет
длину, меньшую длины большой окружности. Можно показать, что та-
такая кривая v целиком лежит в некоторой полусфере. Значит, для под-
подходящего ненулевого вектора е имеем (v(s),e) > 0. Так как кривая
r(s) замкнута, то fv(s)ds = fr'(s)ds = 0, откуда f(v(s),e)ds = 0 —
противоречие.
Способ П. Так как Jy(s)ds = 0 и кривая v(s) компактна, точка
О принадлежит выпуклой оболочке conv(v) кривой v(s). Покажем, что
/ |v'(s)|ds ^ 2тг для любой замкнутой кусочно-регулярной кривой v(s),
лежащей на сфере радиуса 1 и такой, что О е conv(v). Если О явля-
является внутренней точкой этой выпуклой оболочки, нетрудно построить но-
новую кусочно-регулярную замкнутую кривую v(s), длина которой меньше
длины v(s), такую, что О G conv(v), но О не является внутренней точ-
точкой conv(v). Если О не является внутренней точкой conv(v), поло-
Ответы и решения 263
жим v = v. Покажем, что длина кривой v не меньше 2тг. Так как
О е conv(v), найдутся 0 < sq < si < S2 < 53 ^ I такие, что О € Д =
= conv(v(so), v(si), v(s2), vE3)). Так как точка О не является внутрен-
внутренней точкой тетраэдра Д, она принадлежит одной из граней Д, скажем,
грани До = conv(v(si),vC2),v(s3))' Рассмотрим плоскость, проходя-
проходящую через точки v($i), v($2)> ^E3) и О. Она пересекает сферу по боль-
большой окружности и, значит, длина ее дуги, заключенной между точками
v(sj) и v(sj), не больше, чем длина любой кривой, соединяющей эти
точки. В частности, сумма длин всех трех дуг не больше длины кривой
v(s). Это доказывает неравенство / |у;(з)|^з ^ 2тг.
4.48.
db ,
ds
ds
4.49. Пусть r(s) — сферическая кривая. Имеем:
(г- т,г- т) = Д2, (v,r-m) = 0, (fcn, г - т>-I-(v, v) = 0,
значит,
(n,r-m) = -~, (А;п- к2\ + кхЪ,г - т) -I- (A;n,v) = О,
к
Отсюда получаем требуемое соотношение — = т I тт~ I- Если это
к ds \k2xl
соотношение выполнено, то вектор m = г -|- -п — Тд-Ъ постоянный.
Так как вектор г — m ортогонален вектору v, его длина постоянна, т.е.
r(s) — сферическая кривая.
4.50. Пусть r(s) — кривая 7» параметризованая натуральным параме-
параметром. Параметризация кривой 7* имеет вид г*E) = r(s)+-n(s). Имеем:
к
d . d2
значит,
d^r = (ij b - Tn - Ы n - T{~
264 Ответы и решения
Получаем ( —г*, -г-хг*, -гтг* I = 77 v- Кривизна и кручение:
\а$ as1 as6 ) к1
= A;, x* =
4.51. c(s) = (r{s) - m, r(s) - m),
c'"(s) = (Aj;(«)nE) - Jfc(sJv(s) + *(e)x(e)b(e), r(e) - m).
4.53. См. решение задачи 4.51. Условие c'(so) = c/;Eo) = 0 равносильно
следующему:
г(«о) - m = -
где А — произвольное число.
4.54. См. решение задачи 4.53. Условие c'(s0) = c"(so) = c"'(so) = О
равносильно следующему:
r(s0) - m = -77—7-11E0) + ,0/ f°/ 4b(so)-
A;E) A;2E)xE)
Из условия y/c(so) = R* следует соотношение для радиуса Д*.
4.55. Пусть г = r(s) — замкнутая кривая на сфере. В силу задачи 4.53,
x(s)
кривизна кривой всюду положительна. Если х ф 0, то функция -тт-у
h(s)
1 dk
не меняет знака, а значит, по задаче 4.49 функция —rj — строго моно-
монотонна, что противоречит замкнутости кривой г = r(s). Таким образом,
существует точка кривой, в которой кручение равно 0.
5.1. a) a2 (cos2 vdu2
б) (а2 sin2 u + b2 cos2 u) cos2 v du2 + 2(a2 — b2) sin u cosu sinг> cosvdudv +
+ ((a2 cos2 u + 62 sin2 u) sin2 v + c2 cos2 v) dv2\
в) v2(a2 sin2 u + 62 cos2 u) du2 + 2F2 - a2) sinucosududv +
+ (a2 cos2 u + b2 sin2 u + c2) dv2\
r) (a2 sin2 u + b2 cos2 u)du2 + c2dv2.
Ответы и решения 265
5.2. a) ds2 + 2(v, e) ds dA + (е, e)dA2;
б) v2 ds2 + 2v{v,p)dsdv + (p,p)dv2;
• 2
в)
sde
v + A—
2{e,v)dsd\
ds
r) (A - A;cos^J + x2) ds2 + 2xdsd<p+
a) <p2 du2 + (ipa +1/>'2) dv2; e) (a + bcosvJ du2 + b2 dv2;
ж) du2 + (u2 + a2) dv2; з) (A - AfcJ + л^А2) ds2 + dA2;
и) A + A2*2) ds2 + dA2. к) a2 ch2 -dip2 + sh2 - dz2.
it n
5.3. a2ctg2udu2 + a2sin2udv2.
5.4. cos в = -.
5.5. cos0 = -.
1-a2
5.6. cos0= r.
1 + a2
5.7. cos6 =-¦-!=.
5.8. Z = тгД.
5.9. a) I = тгД; б) Za =
5.10. Z = тгД.
5.11. Z = 2тга; 0 = |.
5.12. cosfl = 2 *"
5.13. тг/2.
-y/lA2 + 1 — l\
л/и2 + 1 + In + const.
)
5.15. г> = -2— • In (и + л/и2 — a2) + const.
5.16. Два семейства кривых:
а) у2 + z2 = const, од = az\
б) я2 + z2 = const, ху = az.
5.17. Пусть уравнение сферы имеет вид
т = (a cos v cos u, a cos г> sin u, a sin v).
Уравнение локсодромии:
266 Ответы и решения
где 0 — данный угол,
v = cos0(— sinvcosu — sinutg0, — sinvsinu + cosutg0, cosv),
cos 0 / . cos u о Л
n = , — cosucosv + tgvsmutg0 tg 0,
y/l + tg2 0/ COS2 V \ COSV
sin u о \
— sin u cosv — tgvcosutg0 tg 0, — smv ,
cosv /
_ (sinu, — cosu, tg0/cosv)
cos0 Г
= — v1
cos2 v' a(cos2 v + tg2 0)'
5.19. а) Кривые u = av2/2, u,= —av2/2 и v = 1 пересекаются в точках
A (u = О, V = 0), В (и = a/2, v = 1), С (u = -a/2, v = 1). При
этом дифференциалы криволинейных координат на этих кривых свя-
связаны следующими соотношениями: du = avdv, du = —avdv, dv = 0
на кривой AB f уравнение u = —- J ;
/ 2 \
на кривой АС ( уравнение u = —— J ;
на кривой ВС (уравнение v = 1).
Подставляя эти соотношения в первую квадратичную форму, получаем:
кривой AB ds2 = а2 ( ~- + v2+l j dv2, ds = ( V— + 1 j dv;
/v4 \ /v2 \
на кривой AC ds2 = a2 f — + v2 + 1J dv2, ds = f — + 1J dv;
на кривой ВС ds2 = du2, ds = du.
Остается взять интеграл в пределах, определяемых координатами точек
А, В, С:
v=l 2 ti=a/2
AB = AC = a f (у + 1J dv = у, CB = / du = a.
v=0 u=-o/2
1Oa
Итак, периметр треугольника равен —-;
на
Ответы и решения 267
2 2
б) cos А = 1, cos 2? = cos С = -, т. е. А = О, В = С = arccos -;
3 о
5.20. a) (vq +sh2i>o)/4; б) г>о, shi>o, л/^shvo; в) тт/2, тг/4, тг/4.
5.21. 5 = 2аД2, где R — радиус сферы.
5.22. 4тг2гД.
5.23. Пусть отображение / : X -» Y задано в локальных координа-
координатах уравнениями у1 = уг(хг,х2),у2 = у2(хг,х2). Пусть квадратичные
формы д = gijdx%dxi и Л = hijdxtdx^ определяют римановы метрики
на!иУ соответственно. Отображение / индуцирует на X риманову
метрику
h = h{j\
Конформность отображения / равносильна тому, что метрики д и h! на
X конформно эквивалентны, т.е. угол между пересекающимися кри-
кривыми по отношению к метрике д равен углу между ними по отношению
к метрике h . Отсюда следует существование конформного множителя
Х(х) > 0, гладко зависящего от точки и связывающего коэффициенты
метрик равенством Н'^(х) = X(x)gij(x). Индуцированная отображением
/ форма площади на X равна da = д/det К (x)dxx Л dx2 = X(x)da. Так
как / сохраняет площадь, da = da , откуда А = 1. Следовательно, h = g,
т.е. / является локальной изометрией.
5.25. Пусть 5 Э (#, у, z) *-» (х\, j/i, z\) G 5. При стереографической
проекции с северного полюса на экваториальную плоскость Р с коорди-
координатами ?, т] имеем:
,-_ х -_ У
'"
26 _ 277i
Так как конформное отображение сферы на себя порождает конформное
отображение плоскости Р на себя с сохранением нуля и бесконечности,
то Ci = f 1 + Щ\ = а( = а(? + it]), где a — ненулевое комплексное
число. Остается подставить в вышеприведенную формулу вместо & и щ
их значения через ?(ж, у) и //(ж, у).
268 Ответы и решения
5.26. Метрика гиперболического параболоида задается матричнозначной
функцией
/ 1 + u' -uv \
G=[-uv 1+..J-
поэтому форма площади равна
da = ydetGdu Adv = \/\ + и2 + г>2 du Л dv.
Деформация индуцирует метрику, задаваемую матрицей
г, _( 1 + (usin? + vcos?J (usin?+vcos?)(ucos?—i>sin?)\
I (usin^+vcos^)(ucos^—i>sin?) 1 + (ucos^ — i>sin?J I '
индуцированная форма площади равна
da' = л/det G du Л dv = \/l + u2 + v2 du Л dv.
Таким образом, da = da', т.е. данная деформация сохраняет площадь.
va2 + и2 cosv, у/a2 +u2sinv, aln I, или
R(z, ip) = (ach-cos<?, ch-sin<?, z). Это катеноид (поверхность вра-
V a a /
щения цепной линии х = ach —).
a
5.28. Метрика коноида: 2dp2 + 2dp dv + (р2 + l)dv2; метрика гиперболоида
2г2 — 1
вращения: —z——dr2 + r2dip2. Остается проверить, что при указанном
rz — 1
соответствии точек вторая метрика принимает вид первой метрики.
5.29. Указание. Первое из уравнений, определяющих соответствие то-
точек, имеет вид г2 = р2 + а2.
5.30. Метрика винтовой поверхности:
A + F'(uJ)du2 + 2aF'dudv + (и2 + a2)dv2.
Метрика поверхности вращения г = (гcosy?,rsin(p,G(r)) равна
Пусть соответствие точек устанавливается уравнениями г2 = и2 + а2,
(р = v+H(u). Оно определяет локальную изометрию, если в координатах
(u,v) вторая метрика принимает вид первой. Отсюда получаем условие
Ответы и решения 269
на функции G и Н:
G'(rJ = F\uf + ?, Н'(и) = ^-^
5.32. Указание. Взять уравнение цилиндрической поверхности в виде
г = 7 + г>е, где е — постоянный вектор единичной длины, *y(s) — кри-
кривая, параметризованная натуральным параметром и лежащая в плоско-
плоскости, ортогональной вектору е. Сравните первую квадратичную форму
этой поверхности с квадратичной формой плоскости.
5.33. Указание. Взять уравнение конической поверхности в виде г =
= ve(u), где |е(и)| = 1, и сравнить ее первую квадратичную форму с
квадратичной формой плоскости в полярных координатах.
5.34. Нет, так как краям цилиндрической поверхности и соответствую-
соответствующей области D на конической поверхности на их развертке на плоскость
должны соответствовать отрезки кривых одинаковой длины, что невоз-
невозможно осуществить для развертки конуса.
6.1. а) Имеем:
ru = (—iJsinucosv, — iJsinusinv, Rcosu),
rv = (—iJcosusinv, iJcosucosv, 0),
ru x rv = (—R2 cos2 u cos г>, — R2 cos2 u sin г>, — R2 cos u sin u),
|ru x rv| = R2cosu,
Г X Г
n= r-^ ^r = (—cosucosv, — cosusinv, — sinu),
|rXr|
ruu = (—i
ruv = (iJsinusinv, — iJsinucosv, 0),
rvv = (—iJcosucosv, — iJcosusinv, 0),
L = (rulA, n) = i?(cos2 u cos2 г> + cos2 u sin2 г> + sin2 u) = Д,
M = (ruv, n) = R (— cos u cos v sin u sin v + (— cos u sin г>) (— sin u cos г>)) = 0,
Л/" = (rvv, n) = i?((-cosucosv)(-cosucosv) +
+ (— cosusinv)(— cosusinv)) = Rcos2u.
Ответ: R du2 + R cos2 u dv2.
б) Имеем:
ru = (—asinucosv, —asinusinv, ccosu),
rv = (—acosusinv, acosucosv, 0),
270 Ответы и решения
ru x rv = (—ас cos2 u cos г>, —ас cos2 u sin г>, —a2 cos u sinu),
|ru x rt, | = a cos uу с2 cos2 и Л-a2 sin2 u,
ru x rv 1 , . . ч
n==- -= , (—ccosucost>, — ccosusint>, —asinu),
I r u x rv | -y/C2 C0S2 u+a2 sin2 u
rUw = (—acosucosv, -a cos u sin v, —с sinu),
ruv = (a sinu sin v, — asinucosv, 0),
rvv = (—acosucosv, -acosusinv, 0),
L = (ruu, n) = == x
V c cos^ и + az sin u
x ac(cos2 u cos2 г> + cos2 u sin2 v + sin2 u) =
Vc2 cos2 u + a2 sin2
(—С COSU COS Ш SJn USIUV +
Л^ (Гщ;, П) ==
V c2 cos2 u + a2 sin2 u
+ (—ccosusinv)(—asinucosv)) =0,
N = (rvv, n) = i =((—ccosucost>)(—acosucost>) +
2 2 + 2 i2
V c2 cos2 u + a2 sin
2
accos2u
V c2 cos2 u + a2 sin2 u
2
+ (—ccosusmv)(—acosusmv)) =
Ответ: ==(du2 + cos2 udv2).
V c2 cos2 u + a2 sin2 u
в) Имеем:
ru = (—bsinucosv, —bsinusinv, 6cosu),
rv = (—(a + 6cosu) sinv, (a + 6cosu) cosv, 0),
tuxtv = 6(a +6cosu)(—cosucosv, — cosusinv, — sinu),
|ru x rw| = b(a + 6cosu),
Г X Г
n= — ~ = (— cosucosv, — cosusinv, — sinu),
|ru X Гг,|
ruu = (—bcosucosv, —bcosusinv, —6sinu),
ruv = (b sin u sin г>, — bsinu cos v, 0),
rvv = (—(a + 6cosu)cosv, —(a + 6cosu)sinv, 0),
L = (ruu, n) = b(cos2 u cos2 г> + cos2 u sin2 г> + sin2 u) = 6,
M = (ruv, n) = — cos u cos г>6 sinu sin г>+(— cosusinv)(—bsinucosv) = 0,
N = (rVVi n) = (—cosucosv)(-(a + 6cosu)cosv) +
+ (—cosusinv)(—(a + 6cosu)sinv) = (a + 6cosu)cosu.
Ответ: b du2 + (a + b cos u) cos u dv2.
Ответы и решения , 271
г) Имеем:
ru = I sh — cos v, sh - sm v, 11,
\ a a /
rv = ( — a ch — sin v, a ch — cos г>, 0),
\ a a J
ru x rv = — a ch — cos г>, — a ch — sm г>, a ch — sh — ),
\ a a a a/
i i л u I ^ Г~2 , о u , о г/
ru x rv = ach — a /cos2 г> + sin г> + sh - = ach —,
ay a a
ruxrv 1 / . u\
n= ¦ = (-cost;, -sinv, sh-1,
|ru x rv| ch(u/a) V a/
/1 , u 1 , u . Л
Tuw = I - ch — cos v, - ch — sm v, 0 ,
\a a a a /
rUv = ( — sh — sin v, sh — cos v, 0),
V a a /
( л U , U . л\
rvv = 1 —a ch — cos v, — a ch — sin v, 0 J,
V a a /
r I \ 1 / i U 9 i^-2\ 1
L = (rUu, n) = — ч ( - ch - cos^ v - ch - sur v J = —,
ach(u/a) \ a a J a
M = (ruv,n) =
— л / / ч ((-cosv) (-sh-sinv) + (-sinv) (sh-cosv)) = 0,
ch(u/a) \ V a / \ a //
iV = (rvv,n) =
= - . . ч ((-cosv) (-ach-cosv) + (-sinv) (-ach-sinv)) = a.
ch (и/а) \ \ a J \ a J J
Ответ: —du2+adv2.
a
д) Имеем:
( • , a \
ru = I a cos и cos v, a cos u sin v, —a sin u + —— J,
\ smu/
rv = (—a sin u sin v, a sin u cos v, 0),
ruxrv = (a2 sin2 и cos v—a2 cos v, a2sin2usinv—a2sinv, a2cosusinw) =
= (—a2 cos2 и cos v, —a2 cos2 и sin v, a2 cos u sin u),
|ru x rv | = a2 cos uv cos2 u cos2 u + cos2 u sin2 и + sin2 u = a2 cos u,
T X 1*
n= r-^ П" = (~ cosucosv, — cosusinv, sinu),
|ru x rv\
272 Ответы и решения
/ . acosiA
*W = —asinucosv, —asinusinv, -acosu x— I,
\ sin и )
ruv = (—a cos u sin v, a cos и cos v, 0),
*w = (—о sin u cos v, — a sin u sin v, 0),
L = (rutt, n) = a cos и sin и cos2 v +
. 9 . a cos и sin u
+ a cos u sin u sin v — asinucosu «^ = —actgu,
sin и
M = (ruv, n) = (— cosucosv)(—a cos u sin v) +
+ (—cosusinv)acosucosv = 0,
N = (rvv, n) = (~cosucosv)(—asinucosv) +
+ (— cos и sin v) (—a sin u sin v) = a cos u sin u.
Ответ: —a ctg и du2 + a cos и sin u eft;2.
e) Имеем:
ти = (cosv, sinv, 0),
rv = (—usinv, ucosv, a),
ru x rv = (asinv, —acosv, u),
__ гц x rv __ (asinv, —acosv, u)
~~ |ru x rv| ~~ y/u2 + a2 '
rUu = @, 0, 0), ruv = (-sinv, cosv, 0),
rvv = (—ucosv, —usinv, 0),
L = (rtttt, n) = 0,
a sin v(— sin v) -f (—a cos v) cos v a
M = (ruv, n) =
.. . . asinv(—ucosv) + (—acosv)(—usinv)
ЛГ = (rvv, n) = / о , о
Vw2 + a2
л —2adudv
Ответ:
/u2 +
ж) Выражая z через остальные переменные, имеем z = /(x, у), где
а3
а
= —. Тогда
ху
/ж — о » /l/ — о"» Jxx — о )
х2у ху2 х6у
Ответы и решения 273
По формулам для второй квадратичной формы поверхности z —
= f(x, у) получаем
fx
M= -
а6у2'
а3
Ответ: , ( - dx2 + dx dy + - dy2 ).
V^zV + а6х2 + а6у2 V^ V J
6.4. a) ru = (x', p'cosy?, p'siny?), r^ = @, -psiny?, pcosip). Здесь
штрих означает дифференцирование по и. Матрица первой квадратич-
квадратичной формы
о
ru x rv = (pp1, -px'cos<p, -px'simp), \ru x rv\ = py/(x'J +
ru x rv (p', —x'cosy?, — x'siny?)
n = i = 1 ,
rUu = (#"> pn cosip, p"siny?), ruv? = @, — p'siny?, p1 cosy?),
rw = @, -pcosy?, -psiny?), L = (ruu, n) = =,
V(*'J + (P'J
M = (ruv?, n) = 0, N = (rw, n) = ^——-
Вторая квадратичная форма: .
б) Найдем гауссову кривизну поверхности вращения:
LN-M2 рх'(х"р'-х'р") _ sW-s'p")
Направление выпуклости меридиана определяется знаком выражения
<Рр
-т-~. Вычисляя его по формулам для производной неявной функции,
ах1
274
Ответы и решения
получаем
dx2 " dx
~ Р'х"
(x'J
(x'K
Сравнивая полученное выражение с формулой для К, находим К =
(х'L dPp . г^ Л d2p Л
= // /\2 , / /\2\2TT- Отсюда имеем, что К > 0, когда —о < О,
р((х'J + (р JJ dx2 dx2
т. е. когда выпуклость меридиана направлена от оси вращения; К < О,
когда выпуклость направлена в сторону оси вращения; К = 0, если
меридиан имеет точку перегиба или ортогонален оси вращения (х' = 0).
в) Пусть р(и) = и,
Тогда р1 = 1, р" = О,
\ и а
а —и и \ _
¦ /о о /о о /о о 1
; + у Л — 14 уО — 14 V Л "~ 14 /
и а —аи + и(а + va2 — и2)
\ 14 (а + л/о2 - и2)у/а2 - и2
_ ( a
u \ __
a2-u2) ~
¦fa и r-z -Л у/а2 - и2
\ и а2 —(а2—и2) у и
/1 а2 - п2 \ а2
х'х" _ -а2/ц3 _ _ J^
и((х'J + 1)а «(aV«4) аг
г) Вычислим среднюю кривизну поверхности вращения:
EN + GL- 2FM рх' ((х'J + (р1J) + Р2(х"р' - х'р") _
EG-F2
Ответы и решения 275
д) Найдем решение уравнения Я = О, когда х = и. Подставляя
выражение х в формулу для Я, получаем Я = — /2 . Из усло-
условия Я = 0 получим дифференциальное уравнение р" р — (р1J — 1 = 0.
Так как р > 0, то р" > 0. После дифференцирования уравнения по-
получим ршр + р"р' - 2р"р' = 0. Отсюда р'"р - р"р1 = 0, ^ = -,
р" р
(lnp")' = (lnp)'. Таким образом, задача свелась к решению диффе-
дифференциального уравнения р" = Ср, где С = к2 > 0, к > 0, — некоторая
постоянная. Общее решение полученного дифференциального уравнения
имеет вид
р{и) = A ch ки + В sh fcu.
Подставляя это решение в исходное уравнение и приводя подобные
члены, получаем условие на коэффициенты
1 = р"р - (р'J = к2 ((А2 - В2) ch2 ки + (В2 - A2) sh2 Jfeu),
откуда к2(А2 — В2) = 1. Поскольку р(и) > 0 для всех и, то Л > 0. Тогда
Л и В можно представить в виде
А = -гсЪкщ, В — --rshkuo;
р(и) = т(сЬ кщ ch ки — sh кщ sh ки) = - ch (к{и — щ)).
/с /с
Таким образом, решением уравнения Я = 0, когда х = и, являются
функции р(и) = — ch (&(u — щ)), где А; > 0, tio произвольное.
6.7. В этой задаче через m будем обозначать нормаль к поверхности.
Пусть v, n, b — репер Френе данной кривой. Тогда r8 = v + кип,
ru = v. Матрица первой квадратичной формы
A + tV l\
Г X Г
т8 х ги = кип х v = —fcub, |ru x rv| = ки, m = г-2 ^т = —b,
|re х ги|
ree = кп + &вш1 + ku(-kv + xb) = -fc2uv + A + к8и)п
L = (r88, m) = -kvx, М = (т8и, т) = 0, N = (тии, т) = 0, где
т — нормаль к поверхности.
276 Ответы и решения
Отсюда
LN-M*
К~ EG-F* -°'
EN + GL-2FM -kvx к
EG-F2 "fcV + l-l" kv'
6.8. Поверхность, определяемая уравнением z = f(x, у), может быть
задана параметрически в виде
r(x,y) = (x,y,f(x,y)), Tx = (l,O,fx), ry = (O,l,fy).
Матрица первой квадратичной формы имеет вид
гх х ту = (-/х, -/„, 1), \гх х гу| = ^1 + /2 + /а,
(-/„ -Л, 1),
= @, 0, /хх), Гху = @, 0, /ху), Гуу = (О, О, fyy),
fx
L = (rxx,n)=
/
м = (rxy, n> =
fxx
h
= (ryy, n) =
Матрица второй квадратичной формы имеет вид
det II ?АГ - M2 ^ /хх/уу -
detl ~ EG-F2 ~ A + /I + /2J'
EN + GL-2FM
p5 =
A + /x2)/vv + A + /y2)/
Ответы и решения 277
6.9. Пусть Fz ф 0. Тогда по теореме о неявной функции в некоторой
окрестности поверхность можно задать уравнением z — f(x, у), причем
Fx F
zx = fx = — -—., zy = fy = — тг- Найдем вторые производные функ-
функции /:
/ _ д (FA- Fxx + Fxzzx , FX(FXZ+Fzzzx)
Fxx - FXZ(FX/FZ) FX(FXZ - FZZ(FX/FZ)) _
Fz F2
FXXF2 - 2FXZFXFZ
771 JP% JP JP TP ^_ TP JP Jp I Tp Tp Tp
fxy = рт )
z
JP Z?2 о TP TP TP _i_ TP J?2
г _ ryyrz ~ *ryZryrz -h rzzry
fyy — ~pi •
z
Воспользуемся результатами задачи 6.8 для нахождения гауссовой и
средней кривизны:
т? __ fxx fyy — fxy jj _ A + fx)fyy + A + fyjfxx ~" fxfyfxy
/1 i ?0 i ^9\9 ' /1 i ?0 i
F2 + F2 4- F2
Jx i" Jy — rp2
fxx fyy — fxy =
xy
XF? - 2FXZFXFZ + FzzFl){FyyF2z - 2FyzFyFz + FZZF$) -
- {FxyF2z - FxzFyFz - FyzFxFz + FzzFxFyJ) =
^ \FxzFvzFxFyFl + F2ZZF2XF2 - 2FxxFyzFyFzz -
*Z
- 2FxzFvyFxFl + FXXFZZF2F2 + FyyFzzF2F2 - 2FXZFZZFXF2FZ -
- 2FyzFzzF2xFyFz) - (F2xyFl + F2ZF2F2 + F2ZF2F2 + F2ZF2F2 -
- 2FxyFxzFvF3z - 2FxyFyzFxF3z + 2FxyFzzF2F2F2 -
- 2FXZFZZFXF2FZ - 2FyzFzzF2FyFz + 2FxzFyzFxFyF2z)) =
-pi(FxxFyyF2 + FXXFZZF2 + FyyFzzFx - FxyFz - FxzFy - FyzFx +
278
Ответы и решения
+ 2FxzFyzFxFy + 2FxyFxzFyFz + 2FxyFxzFxFz —
— 2FxxFyZFyFz — 2FxzFyyFxFz — 2FXyFzzFxFy) =
Отсюда
Fxx Fxy Fxz Fx
F F F F
J. Xy J. yy ± yZ ± у
Fxz Fyz Fzz Fz
Fx Fv Fz 0
Fxx
Fxy
Fxz
Fx
Fxy
Fyy
Fyz
Fy
Fxz
Fyz
Fzz
Fz
Fx
Fy
Fz
0
K
Пусть Fz > 0:
A + /x)/yy + A + /V2)/xx - fXfyfXy =
= ~^((FX2 + F2z){FvvFl - 2FyzFyFz + FzzF2y) +
rz
+ (Fy2 + F2Z){FXXF2Z - 2FXZFXFZ + FZZF2) -
- 2FxFy{FxyF2z - FxzFyFz - FyzFxFz + FzzFxFy)) =
= -j^(FyyF2F2 - 2FyzF2FyFz + FZZF2F2 +
+ FxxF2yFl - 2FXZFXF2FZ + FZZF2F2 +
+ (Fxx + Fyy)Fi - 2(FXZFX + FyzFy)F3z + F2Z{F2 + F2)F2 -
- 2(FxyFxFyF2 - FXZFXF2FZ - FyzF2FyFz + FZZF2F2)) =
- 2FxyFxFy - 2FXZFXFZ - 2FyzFyFz) =
FZZF2 + 2FxyFxFy + 2FXZFXFZ + 2FyzFyFz)),
Tj _
Fxx
¦ Fyy F2 + FZZF2 + +2FxyFxFy + 2FXZFXFZ + 2FyzFyFz
(F* + F* + F22K/2
Ответы и решения
279
Среднюю кривизну можно также записать в виде
H(gradF, gradF) trH
|gradF|3 |gradF|'
где gradF = (Fx, Fy, Fz) — градиент функции F, буквой Н обозначена
матрица вторых производных (гессиан), а также соответствующая ей
билинейная форма. Если Fz < О, то выражение для Я просто меняет
знак.
в.Ю. Имеем:
/ ucosv usinv a \
ru = I / 9 , г? / 9 , ?> / 9 ¦ ? ) '
rv = (—\Л*2 + a2sinv, V^2 +a2cosv, 0),
ru x rv = (—acosv, —asinv, гх),
|ru x rv| = y/u2 +a2,
(—acosv, — asinv, u)
+ a2
_
ru x rv
\ru xrv|
cos v
аг/
L-
M =
' (г/2+а2K/2' "(г/2+
_ / г/sinv г/cosv Л
\ y/u2 + а2 угх2 + a2 /
= (— cosvy/u2 + a2, — sinv\/i/2 +a2, 0),
—a cosi> a2 cosi> +(—asinv)a2sinv+u(—агх)
(u2+a2J
, n) =
—a cos v(—и sin v) + (—о sin v)u cos v
» n> = TTTTi = °>
N = (rvv, n) = — acosi>(— cost;) + (—asinv)(— sinv) = a.
Ответ: — du2 +adv2.
u2 +a?
6.11. Перейдем к цилиндрическим координатам х = ucosv, у = usinv,
z = z. Тогда уравнение поверхности можно записать в следующем пара-
параметрическом виде: х = ucosv, у = usinv, z = aarctg— = av. Таким
образом, поверхность представляет собой прямой геликоид. Воспользо-
Воспользовавшись результатами задачи 6.1, получаем
г = (ucosv, usinv, av), ru = (cosv, sinv, 0), rv = (-usinv, ucosv, a),
E = l, F = 0, G = a2+u2, L = 0, M = —
. N = 0.
280 Ответы и решения
Тогда
LN-M2 a2 EN + GL- 2FM
EG-F2~ (u2 + a2J' EG-F2
Главные кривизны Ai,2 являются решениями уравнения А2—Н\+К = 0.
Так как Н — 0, то
а
A1>2 = ±y/-K = ±-
ir +a
1 ,u2 + a2
1,2 =
г/2+а2 _ , х2 +у2 + а2
7
AiJ
Ответ: Ri = , R2 = .
а а
6.12. Имеем:
г(г/, v) = (cosi> — usinv, sinv + ucosv, u +1>),
ru = (— sini>, cosv, 1), rv = (—ucosi> — sinv, — usini> + cosv, 1),
E = (tU9 ru) = 2, F = (tU9 rv) = 2, G = (rv, rv> = 2 + г/2,
ru x rv =*(usinv, -ucosv, u), \ru x rv\ = uy/2,
ru« = @, 0, 0), г„„ = (-cosv, -sinu, 0),
rvv = (usinv — cosu, —ucosu — sinu, 0),
L = (ruu, n) = 0, M = (ruv, n) = 0, N = (rvv, n) = -y=u,
LN-M2
K °
H ^
EG-F2 -°'
EN + GL-2FM uy/2 1
EG-F2
Главные кривизны Ai,2 являются решениями уравнения А2—НХ+К = 0.
1 . „ 1 . „ 1
°ТВеТ: Ж = °' К = Т
6.13. Имеем:
г = (ucQsvy г/sint;, tt + v), ru = (cosi>, sinv, 1),
rv = (—i/sini>, г/cosv, I),
# = (rtt, ru) = 2, F = (ru, rv> = 1, G = (rv, rv) = 1 + г/2,
ru x rv = (sini> — ucosi>, — cosv — г/sinv, г/),
Ответы и решения
281
х г„| =
п =
ini> — ucosv, — cosi> — usinv, u),
тии = (О, 0, 0), ги„ = (-sinu, cost;, 0), rvv = (-ucosv, -usinu, 0),
L = <ruu, n) = 0, M = (ruv, n) = --
LN-M2
N = (rVVi n) =
EN + GL- 2FM 2г/2 + 2 2A + u2)
EG-F2 " A + 2г/2K/2 ~ (i + 2u2K/2 *
Ответ: К = —
6.14. Имеем:
2A +г/2)
2г/2J'
г = (Зи + 3uv2 - г/3, v3 - 3v - 3u2v, 3(г/2 - v2)),
ru = C + 3v2 - 3u2, -6uv,
rv =
- 3u2 - 3, -6v),
= (ru, ru> = 9(A + v2 - u2J + 4uV + 4г/2) = 9(г/2 + v2 + IJ,
= (ru, rv) =
- u2
- г/2 - 1) -
= 0,
G = (rv, rv> = 9DuV + (г/2 - v2 + IJ + 4v2) = 9(г/2 + v2 + IJ,
ru x rv = 9Bг/(г/2 + v2 + 1), 2v(u2 +v2 + 1), (г/2 + v2I - 1),
xrv| =
n =
ru x
1
2г/, 2v, г/2 +v2 - 1),
ru x rv| u2 + v2 + 1'
Гщ* = (-6ti,--6v, 6), ruv = Fv, -6u, 0), rvv = Fг/, 6v, -6),
2i/(-i/) + 2t;(t;) + (i/2+t;2l)l
L = (ruu, n) = 6
M = {ruv, n) = 6
N = {rvv, n) = 6
„ LN - M2
u2 + v
(—li
U2 + V2 + 1
= 0,
г/2 + v2 + 1
36
= 6,
4
EN + GL- 2FM _ (u2 +v2 + lJ(-6) + (u2 + v2 + 1J6 _
EG - F2 81(u2 + v2 + IL 9(u2 + v2 + IL'
(ц2+ц2
Ответ: ЛГ = -—-г—^—гтт, Я = 0.
9(и2 + v2 + IL
6.17. ЯП - KI. См. решение задачи 6.22.
282 Ответы и решения
6.20. Воспользоваться явной формулой для гауссовой кривизны поверх-
поверхности в координатах (г/, s), где и — координата вдоль прямолинейной
образующей, as — натуральный параметр на кривой, по которой сколь-
скользит прямая.
6.21. Параметрическое уравнение геликоида имеет вид х = г/cost;, у =
= usinv, z = av. Тогда
г (и, v) = (ucosv, usinv, av),
ru = (cosv, sinv, 0), rv = (—usinv, ucosv, a),
JS = 1, F = 0, G = a2 + u2,
ru x rv = (asinv, -acosv, и), \ги х rv\ = y/u2 + a2,
_ ruxrv _ (asinv, —acosv, гх)
П~ |ru xrv| ~ y/u2 + a2 '
r«u = @, 0, 0), ruv = (-sinv, cosv, 0), rvv = (-ucosv, -usinv, 0),
L = (ruti, n) = 0,
,. , v asinv(— sini>) + (-a cos v) cos v a
M = (ruv, n> = * vWa2 = - / 2 + a2>
лг __ / \ _ л sin v(—ix cos v) + (—acosi>)(—usinv) __
>/tx2 + a2
n „ EN + GL-2FM n
Отсюда получаем Я = =г=—zr; = 0.
М? - F2
6.22. Имеем:
Pu = ru + anu, pv = rv -f
E* = (pu, pu) = (ru, ru) + 2a(ru, nu) + a2(nu, nu) =
Аналогично,
F* = (pu, pv) = F — 2aM + a2(nu, nv),
G* = (pv, pv) = G- 2aN -f a2(nv, nv).
Для дальнейших вычислений нам понадобится явное выражение для
пи и nv. Найдем его. Так как |п| = 1, то пи In, nv I n. Тогда
пи = Ъти + crv, nv = dru + erv,
-L = -(n, ruu) = (nu, ru) = b(ru, ru) + c(rv, ru) = bE + cF,
-M = -(n, ruv) = (nu, rv) = b(ru, rv) + c(rv, rv) = 6F + cG,
Ответы и решения 283
Е F\
где 1=1 1 — матрица первой квадратичной формы;
\F G)
т-1 1 ( G -F
где1 = eg^T2[-f е
Аналогично,
Тогда
(nU) nu> = (b, с) I г) = (L, М) ГЧГ1
)
/ v /, *^TifM\ EMN-FLN-FM2
(nU) n.) = (L, M) I ^ j =
/ v ixt лп j-i fM\ EN2-2FMN +
(nv, nv) = (M,N)I^Nj= -^—
С другой стороны,
EM2 - 2FLM + GL2
(п„, nu) =
(nu, п„) =
EG-F2
GL2 + ELN - 2FLM + EM2 - ELN
EG-F2 ~ •
_ L(GL + EN- 2FM) - E(LN - M2) ^LH-EK
EG-F2 ~ EG-F2'
EMN - FLN - FM2 + GLM
EG-F2
M(GL + EN- 2FM) - F(LN - M2) _ MH - FK
EG-F2 EG-F2 '
. . EN2 - 2FMN + GM2
(nv, nv) = EG_F2 =
N(GL + EN - 2FM) - G(LN - M2) ^NH-GK
EG-F2 ~ EG-F2 '
что соответствует задаче 6.17.
284 Ответы и решения
Следовательно,
Е* = <Р„, Р„> = Е - 2aL + a2(LH - ЕК) =
= A - а?К)Е + а(аН - 2)L,
F* = (р„, Pv)=F~ 2аМ + а?(МН - FK) =
= A - a?K)F + а(аН - 2)М,
G* = (pv, pv) =G- 2aN + a2(NH - GK) =
= A - a2K)G + a(aH - 2)N.
Так как векторы ru, г,,, nu, n,, ортогональны вектору п, то pu, pv орто-
ортогональны n и n* = n.
L* = (Pu«. n) = (ru«, n) + о(пи„, n> = L - o(nu, nu> =
= L - a(LH - EK) = aKE + A - aH)L,
M* = (Puv> ») = (Гшм П> - О(П„, П,,) =
= M - a(MH - FK) = aKF + A - aH)M,
N* = (pvv, n) = (rvv, n) - a(nv, nv) =
= N- a(NH - GK) = aKG + A - aH)N.
Ответ: E* = A - a2K)E + a(aH - 2)L,
F* = (l- a2K)F + a{aH - 2)M, G* = (l- a2K)G + a(aH - 2)N,
L* = aKE + A - aH)L, M* = aKF + A - aH)M,
N* = aKG + A - aH)N.
L*N* - M*2
6.24. Как известно, К* = =-r-. Подставляя в эту формулу явные
выражения для Е*, F*, G*, L*, M*, N* из задачи 6.22 и производя
... К
элементарные вычисления, получаем ответ: К =
1-аН + а*К'
сос „ _. E*N*+G*L*-2F*M*
6.25. Как известно, Н = ——— . Подставляя в эту
формулу явные выражения для Е*, F*, G*, L*, M*, N* из задачи 6.22
и производя элементарные вычисления, получаем ответ:
Я - 2аК
6.26. а) Пусть данные параллельные поверхности S и S* задаются
уравнениями: г = г (г/, г>), г* = г (г/, v) + ап(г/, v). Тогда согласно
Ответы и решения 285
ту- тт е\ ту-
задачам 6.24 и 6.25 имеем К* = — —, Я* =
1аН + аК 1-аН + а2К'
Отсюда получаем
Я*2 - 4К* (Я - 2аКJ - 4КA - аН + а2 К)
К*2 К2
Я2 - АаКН + 4а2К2 - 4(К - аКН + а2К2) _ Н2-4К
К2 К2 '
б) Минимальная поверхность задается уравнением Я* = 0. Согласно
Н-2аК
задаче 6.25 имеем Н = — —. Отсюда видно, что уравнение
1 — an. + azK
Я* = 0 равносильно выполнению равенства 2а = Н/К. Так как отно-
отношение кривизн постоянно, то поверхность 5*, задаваемая уравнением
2Я
р(щ v) = г(г/, v) + -дГп(и> v),
будет минимальной поверхностью.
в) Согласно задаче 6.25 имеем
ту* тт2
= 1-аН + а2К = 1-Н/Н + К/Н2 = Щю = = const*
г) Согласно задаче 6.25 имеем
„„ Н-2аК Н-УК г-
Н = —: -T—Z = 7= 7=— = —\К = Const.
1 - аН + а2К 1 - Н/у/К + K/(VKJ
Ответ: Я* = -у/К.
6.27. Указание. Согласно задаче 6.26, для параллельных поверхностей
Я2 - 4К Я*2 - 4К* п
выполняется следующее соотношение: г^— = гт^ • оаме-
тим, что точка является омбилической тогда и только тогда, когда в этой
точке Я2 — 4К = 0. Отсюда очевидным образом вытекает решение.
6.28. Воспользуемся задачей 6.26. Она известна как теорема Бонне.
Запишем для простоты метрику заданной поверхности в изотермиче-
изотермических координатах. Отложим по нормалям к поверхности отрезки длины
а = —. Тогда для параллельной поверхности имеем неравенство
Н
286
Ответы и решения
где Л — конформный множитель метрики. Получается регулярная по-
поверхность с постоянной гауссовой кривизной. Известно, что такая по-
поверхность изометрична стандартной сфере. Отметим, что если бы поверх-
поверхность была незамкнутой, то она могла бы быть изометричной части
сферы, но не совмещаться с ней движением объемлющего пространства.
Дело в том, что, например, часть сферы допускает нетривиальные изги-
изгибания.
6.29. Напомним, что если Ai и А2 — главные кривизны поверхности
и Я = Ai + А2, К = А1А2, то А» являются корнями уравнения А2 —
— Я А + К = 0. Так как А» — вещественные числа, то дискриминант
уравнения неотрицателен: D = Я2 — 4К ^ 0. Равенство Я2 = 4К (т. е.
D = 0) равносильно равенству Ai = A2. Таким образом, квадрат средней
кривизны равняется учетверенной гауссовой кривизне в омбилических
точках, т.е. в точках, где Ai = A2 (см. рис. 117).
Рис. 117. Омбилические точки
на эллипсоиде
Рис. 118
6.30. Согласно известной формуле Я = trll • I *, где I — первая квадра-
квадратичная форма, а след берется от произведения соответствующих матриц.
Тогда средняя кривизна равняется следу оператора А, канонически со-
сопряженного форме II относительно метрики, задаваемой формой I. Опе-
Оператор А и форма II связаны соотношением II(ei, е2) = (Aei, е2), где
скалярное произведение (•, •) задается симметрической матрицей I. След
оператора в произвольном ортонормированном базисе ei, е2 вычисляется
по формуле tr A = (Aei, ei) + (Ae2, е2). Тогда
Я = «Аеь ei) + (Ае2, е2» = П(еь ei) + Н(е2, е2),
что и требовалось доказать.
Ответы и решения 287
6.33. Пусть у(з) — вектор касательной к кривой 7> a n(s) — единичный
dv
вектор нормали к кривой 7 (см. рис. 118). Тогда — = An, А* = &(п,п*),
as
где п» — нормаль к поверхности М», и v ± п. Так как v — вектор, ка-
касательный к поверхностям М\ и Мг, то v _L щ, v ± пг- Следовательно,
ni, пг, п лежат в одной плоскости.
1) 9 = 0. Тогда ni = пг, Ai = Аг и
\\ + А^ - 2AiA2 cos б = (Ai - А2J = 0 = A2 sin2 0;
2) 0 = тг. Тогда ni ¦= —Пг, Ai = —А2 и приходим к тождеству 0 = 0;
3) 0 < 9 < тг. Тогда ni и пг образуют базис пространства, ортого-
ортогонального v, и п = ап\ + Ьп2- Следовательно,
Ai = ка(п\, п\) + АЬ(п2, ni) = Аа + kb cos в,
Аг = Aa(ni, пг) + АЬ(п2, пг) = Aacos^ + kb,
А? + А^ - 2Ai A2 cos в = (*а + kb cos вJ + (fca cos в + JfcbJ -
- 2(fca + kb cos 9)(ka cos в + kb) cos0 = A2 (a2(l + cos2 0-2 cos2 0) +
+ 2abB cos0 - A + cos2 9) cos0) + 62(l + cos2 9-2 cos2 9)) =
= fc2 sin2 9(a2 + 2abcos0 + b2) = jfc2 sin2 0,
так как 1 == (n, n) = (ani + Ьпг, ащ + Ьпг) = a2 4- 2abcos0 4- b2.
6.41. Указание. Считая, что метрика поверхности имеет вид du2 -f
4- Gdv2, выразить G через гауссову кривизну К.
6.42. Рассмотрим следующие поверхности вращения:
х = г cos (p, у— г sin if,
\ (t /1+
¦)•
Z = \ (arctg }/-1+c + fr ~V-(C + 2г)A + 2С + 2r)
У этих поверхностей if = -, ds2 = — ——— dr2+r2 d</?2. Отсюда видно,
г G -f 2r
что, меняя число С, мы получаем однопараметрическое семейство по-
попарно неизометричных поверхностей с одинаковой гауссовой кривизной
в соответствующих точках.
6.49. Показать, что каждая точка поверхности является точкой уплоще-
уплощения. Иными словами, в каждой точке обе главные кривизны равны нулю.
288 Ответы и решения
7.1. В качестве карт можно взять множества ?/*, к = О, ..., п, задава-
задаваемые следующими неравенствами: U? = {xk > 0}, U^ = {xk < 0}.
В качестве координатных функций в карте U^ следует взять все декар-
декартовы координаты за исключением Xk- Минимальный атлас содержит
две карты.
7.2. Воспользоваться тем, что тор Г2 гомеоморфен декартову произведе-
произведению S1 х 51, и свести задачу к предыдущей при п = 1.
7.3. Проективное пространство RPn есть множество классов эквивалент-
эквивалентности наборов (хо : х\ : ... : хп), где х\ Е М, Ylxl Ф 0» а отношение
эквивалентности задано следующим образом:
(хо : х\ : ... : хп) ~ (Хх0 : Xxi : ... : \хп),
где А € R, А ф 0. Введем на ЕРП вещественно-аналитическую струк-
структуру. Для этого покроем RPn набором из (п + 1) карты. Рассмотрим
наборы (xq :х\ : ... : хп), для которых Х{ ф 0. Множество таких наборов
естественно отождествляется cln, а именно:
:xi :
Легко видеть, что это соответствие корректно определено. Осталось рас-
рассмотреть функции перехода от г-й карты к j-й карте. Пусть х)*' — к-я
координата набора (хо : х\ : ... : хп) в г-й карте, а х\ — 1-я координата
в j-й карте (пусть для простоты г < j). Тогда
@ _ «2.
Х - , ... ,
x
x J- x fm x ^L
Xi+1 " TU) ' Xi+2 " Ji) ' * * * ' n " T(i) *
Таким образом, функции перехода не только гладкие, но и вещественно-
аналитические.
7.4. См. задачу 7.3.
7.5. а) Атлас состоит из одной карты с координатными функциями
(#i, ..., хп).
7.9. Используя локальные координаты, вычислить ранг матрицы Якоби
отображения.
Ответы и решения
289
7.10. Указание. Воспользоваться правилом дифференцирования слож-
сложных функций.
7.12. Ранг равен 1.
7.14. Указание. Композиция гладких отображений является гладким
отображением.
7.15. Указание. Написать формулы, явно выражающие координаты
нормали в локальных координатах тора.
7.16. Однородные координаты прямой гладко зависят от локальных ко-
координат на сфере, а локальные координаты на JLP2, в свою очередь,
выражаются через однородные координаты.
7.19. Представить элементы группы 50B) как повороты плоскости на
некоторый угол вокруг начала координат. Группа 0B) гомеоморфна
объединению двух экземпляров 51.
7.20. Представить элементы группы 50C) как повороты пространства
вокруг некоторой оси на некоторый угол.
7.27. Группы GL(n} R) и GL(n, С) являются открытыми множествами в
пространствах соответственно всех вещественных и всех комплексных
матриц.
Ъ т ^ п
1
а
- \]
• • .
. t .
•
• * 1
.. • .
. ' • '
•4-fc
Top
т ft n
Рис. 119
i
а
• * •
•
Ъ
• •
•
. *.' .1
4тА
VI d
п р т
RP2
Рис. 120
290
Ответы и решения
j
a
• * •
. . •.
b
• •
%
L
'.'4'Id
KL
Рис. 121
Вывернули
Рис. 122
7.34. Любая окрестность начала координат распадается не менее чем на
4 компоненты связности при выбрасывании начала координат, чего не
может быть на многообразии.
Ответы и решения
291
7.35. а) Да; б) нет.
7.37. Указание. Использовать свойства ранга произведения двух ма-
матриц.
7.38./: R1 -+R1, /(ж) = ж3.
7.41. Координатные функции являются частным случаем гладкой функ-
функции на многообразии.
7.43. Воспользоваться задачей 7.8.
7.51. См. рис. 88 из §21.
7.57. а) См. рис. 119.
б) См. рис. 120.
г) См. рис. 121.
д) См. рис. 121.
е) Указание. Ответ зависит от четности чисел р и q. Могут
получиться только три поверхности из пунктов а), б) и г).
7.58. См. рис. 122.
7.59. Рассмотрим сечение тора плоскостью, проходящей через ось враще-
вращения. Пусть плоскость П перпендикулярна плоскости сечения и проходит
max
П
Рис. 123
так, как показано на рисунке. Искомые плоскости отстоят от П на рас-
расстояние е в обе стороны. См. рис. 123 и рис. 124.
292
Ответы и решения
m P n
1 /
/3
X
Рис. 124
т /3 п
1 /
/3
X
Рис. 125
7.60. См. рис. 125.
7.64. Два варианта ответа показаны на рис. 126 и на рис. 127. Заметим,
что если поверхность неподвижна, а деформировать можно лишь кривую
(посредством изотопии), то нельзя одну отмеченную кривую перевести в
другую, так как они представляют разные элементы в фундаментальной
группе поверхности: а и а • Ь.
7.65. Два варианта искомой деформации показаны на рис. 128 и рис. 129.
Так же, как и в предыдущей задаче, одну пару кривых нельзя перевести в
другую их изотопией на неподвижной поверхности, так как они образуют
разные пары элементов фундаментальной группы поверхности: а, Ь и а,
а-Ь.
7.66. а) Да, деформация показана на рис. 130.
б) Нет, см. объяснение на рис. 131.
Ответы и решения
293
Рис. 126
Рис. 127
294
Ответы и решения
Рис. 128
Рис. 129
Ответы и решения
295
Рис. 130
296
Ответы я решения
Рис. 131
Ответы и решения 297
8.1. а) @, 1); б) @, 2); в) A, 1); г) @, 2).
8.8. Если diml/ = к, то diml^" = fc(n+ra).
-7 , е
)
3
9.3. 1/г2.
9.4. 1.
9.11. Проверить действие коммутатора на произведение двух гладких
функций.
9.17. Рассмотреть случай, когда ? = д/дх1.
10.9. Указание. См. задачу 10.8.
10.12. Будем считать координату г первой, а координату у? — второй.
Тогда Г\, = Г\2 = Ц, = 0, Т\2 = -г, Т\, = Т\2 = 0, Г?2 = Г^ = \.
10.13. Будем считать, что координата и — первая, а координата v —
вторая, тогда Г}, = ^, Г}2 = Г^ = ^, Т\2 = -^, Г?: = -^,
Г2 _ 2 _ Aw 2 _ Xv
12 — L 21 — 5Т> 22 — ^Т-
10.14. а) Г^ = Г}2 = Г^1 = 0, Т\2 = -sin^cose, Г?х = Г|2 =. 0, Г^ =
= Tl2 = ctg9. Здесь координата в считается первой, а координата ip —
второй;
*\ Г1 2х Г1 Г1 2^ г1 2х
Г2 - 22/ Г2 _ Г2 _
111 " 1-Ьх2-Ь2/2' 12 " 21 " 2/ 2
Здесь координата а; считается первой, а координата 2/ — второй;
тЛ г1 - 2г г1 - Г1 - П Г1 - г ~г г2 - П Г2 -
в/ L 11 — ~^ , о ' 12 ~ Х21 — и> Х22 — 1 i Г2' 1Х "" ' 12 ""
1_Г2
= Гзх = -^ 2\", Г22 = 0. Здесь координата г считается первой, а
координата <р — второй.
10.15. а) Г}2 = Г*! = -1, Г?х = 1, Г|2 = -1, ГЬ = Г|2 = Г?2 =
= Г21 = 0. Здесь координата х считается первой, а координата у —
второй;
б^Ц- l-x2-y2> i12-l21-1_a;2_J/2, 122- Х.^.^'
298 Ответы и решения
_ Г2 _
j, у у
координата а; считается первой, а координата у — второй;
n\ pi _ 2r pi _ pi _ о pi _ г +г г2 _п Г2 -
В; 1 11 — i 2 ' 12 "~ L 21 — и» L 22 — 1 _ r2 J X 11 "~ U» X 12 "~
1 + Г2
= ^21 = ~~Тл оТ» ^22 = 0. Здесь координата г считается первой, а
r(l-r2)
координата у? — второй.
10.17. Будем считать координату и первой, a v — второй. Тогда Г\г =
Г1 _ pi _ n pi _ / / p2 _ л Г2 -
() 2 " l " " ~(/'J + (p'J' " 2 "
ft
— Г2 — i- Г2 — П
— x 21 — ^> х 22 — u-
10.18. Будем считать координату и первой, а координату v — второй.
Тогда ГК = К—, Г}2 = I*! = 0, Т\2 = -^^, Г?! = 0,
coswsinu " ^ " cosu "
Г?2 = 111 = ctgu, Ti2 = 0.
10.19. Будем считать координату и первой, а координату v — второй.
Тогда Г\х = Г}2 = Г^1 = Г?! = Г|2 = 0, Т\2 = -shtxchtz, T\2 = Г21 =
= cthtx.
10.20. Будем считать координату и первой, а координату v — второй.
Тогда r}i = ^th|, T\2 = T|i = ith J, Г\2 = Г^ = Г?х = Г|2 = 0,
2
10.21. Будем считать, что координата и — первая, а v — вторая. Метрика
имеет вид ds2 = du2 + (г/2 + h2)dv2. Символы Кристоффеля равны
Гц = Г12 = Г21 = Гп = Г22 = 0, Г22 = —и, Г12 = Г21 = 2.
10.24. а) Параметризация линии в = 60, ф = t. Уравнения параллель-
параллельного переноса:
^- - sin 0О cos во? = 0, ^-,+ ctg Oot1 = 0.
Общее решение уравнений:
?г = -d sin 0o cos (* cos 0o + C2), ^2 = Ci sin (t cos 0O + C2);
б) параметризация линии 6 = t, (f = (fo> Уравнения параллельного
переноса:
Общее решение уравнений: f1 = Ci-—, ?2 =
sin &
Ответы и решения
299
10.25. Указание. См. задачу 10.23, см. также рис. 132; либо восполь-
воспользоваться результатом предыдущей задачи.
Рис. 132
10.27. Пусть поверхность образована вращением графика функции /. То-
Тогда угол а между начальным и конечным векторами определяется равен-
2тг
ством cos a = cos
/ F
10.28. а) Указание. Ковариантно продифференцировать векторное
поле, состоящее из векторов, касательных к параллелям.
2тг
10.29. Угол поворота равен ,
10.30. а) Параметризация кривой: x(t) = х0, y(t) = t, t e @, +оо).
Уравнения параллельного переноса: — ?* = 0, — ?2 = 0.
at t at t
Общее решение уравнений: ?* = Cit, ^2 =
б) параметризация кривой: x(t) = t, y(t) = уо, t € (—оо, +оо).
Уравнения параллельного переноса: — ?2 = 0, ——I—-?* = 0.
at 2/о at 2/o
Общее решение уравнений:
? = d sin (— + С2),
\Уо )
= Ci cos
(— + С2).
\Уо )
10.31. а) Указание. Заменить сферу на конус и воспользоваться ре-
результатом задачи 10.22.
б) Указание. Заменить сферу на цилиндр.
в) Воспользоваться результатами предыдущих двух пунктов.
10.36. тг + 5 = а.
10.37. тг - 5 = а.
300
Ответы и решения
11.7. По теореме Менье радиус кривизны R кривой у в некоторой точке
равен проекции радиуса геодезической кривизны Rg = l/kg на соприка-
соприкасающуюся плоскость кривой 7? т.е. R = \Rg cos6\. Вектор е = v x m —
единичный вектор, лежащий в касательной плоскости к поверхности и
ортогональный к кривой 7, вектор п — единичный вектор главной нор-
нормали кривой 7- Отсюда |cos#| = |(е, п)| и, следовательно,
кд = к\ cos0| = fe|(e, n)| =
= |(v x m, v)| =
x f,
11.16. Предположим, что прямолинейные образующие параллельны оси
Oz. Тогда уравнение поверхности можно взять в виде
r(u, v) = f(u)ex + (p(u)e2 + г>е3,
где и — натуральный параметр направляющей линии. Будем искать
уравнение геодезической в виде
Тогда
v = v(u).
m = [ru x rv] = y?'ei - /'e2,
(ХГ == (y G\ -j~ ^ e2 ~h V 63 j (Z1/,
(*)
и уравнение для определения геодезических линий имеет вид (см. за-
задачу 11.8)
ч* -/' о
/' iff V1
f" у" v"
= 0,
или
Но <^'2 Н- /'2 = 1, следовательно,
Таким образом, v" = 0, т. е. v = c\u+C2. Векторное уравнение семейства
геодезических имеет вид
Р(и) =
с2)е3.
Заметим, что
cos в = cos
Ответы и решения 301
Следовательно, найденные геодезические являются обобщенными винто-
винтовыми линиями. Кроме того, геодезическими являются прямолинейные
образующие. Они не вошли в найденное семейство геодезических, по-
поскольку уравнения прямолинейных образующих нельзя представить в
виде (*).
11.18. Уравнения геодезических имеют вид
, ч / С cost; Csinv С \
r(v) =
sin ((Ci ± v)/y/2)' sin ((d ± v)/y/2)' sin
11.19. Рассмотрим параметрическое уравнение конуса в виде
г(г/, v) = up(v) и будем считать, что \р\ = 1, \р'\ = 1. Тогда уравнения
геодезических будут иметь вид r(v) = -—777 \P(V)-
sin (G — v)
11.20. Доказательство получается из рассмотрения развертки конуса, на
которой геодезические являются отрезками прямых. Замкнутые геоде-
геодезические на конусе имеют вид, показанный на рис. 65. В точке самопе-
самопересечения геодезическая пересекает саму себя под углом, отличным от 0
и тг. Этот угол зависит только от угла при вершине конуса.
11.22. v = d + [ , U
J y/(u2 + h2)(u2 + h2 -С2)
11.23. Будем рассматривать v как функцию и вдоль геодезической.
Символы Кристоффеля имеют вид (см. задачу 10.13)
pi = Фи г1 = Г1 = Г1 = —
Отсюда получаем уравнения геодезических:
с?2г> d^ dipdv d/ф (dv\2
0= ^+2——- ^ f—V
? d d d d
dv du du \duj
dv
Умножим второе уравнение на — и прибавим к первому уравнению,
du
получим
d2v _ di\) dip dv dty (dv\2 dip (dv\
du \duj
302 Ответы и решения
Легко видеть, что это условие равносильно равенству
A (rl>-if{dvlduf\_
du \ 1 + (dv/duJ )
Интегрируя это равенство, получаем искомые уравнения.
11.26. (р + 2?Шфт = 0.
11.29. Указание. Воспользоваться теоремой Клеро.
п.36. shv
11.37. Геодезическая кривизна равна 1.
11.40. Геодезическая кривизна меридианов равна 0, а параллелей равна
/'()
11.41. Геодезическая кривизна линий v = const равна t ——, а
y/EG dv
1 ду/G
линий и = const равна
12.5. Д=--^
-•1 _ pi _ р2 _ п г2 — u pi — и р2 — v
11 — А 12 — х 11 — и> 12 — 2G' 22 ~ ~~У' 22 "~ 2G*
sino;'
13.11. a) 2(z — l)dxAdyAdz; б) yzdxhdz + xzdyhdz; в) 6у2dxAdyAdz;
г) 0; д) 0; е) 0; ж) d/ Л dg\ з) 0.
13.12. Свести задачу к случаю постоянных коэффициентов.
13.22. a) Brcos0, -rsin0, 0);
б) Fr sin в + ег sin </?r sin 0);
Ответы и решения
303
13.39. Указание. Рассмотреть векторное поле X, двойственное
форме и. Показать, что существует система локальных координат
(ж1, ..., хп), в которой X = тг-г. Далее рассмотреть формы п и и в
ох1
этой системе координат.
14.30. В качестве пространства X возьмем пространство /г» элементами
которого являются последовательности действительных чисел х =
00
= (ж1, х2, ..., хп, ...), удовлетворяющих условию ||ж||2 = ? |хп|2 < сю.
п=1
В качестве пространства У С X возьмем сферу в X, т.е. множество
таких х, для которых ||х||2 = 1. Рассмотрим в Y последовательность
точек Х{, у которых на г-м месте стоит 1, а на остальных — 0. Эта
бесконечная последовательность не имеет предельной точки, поскольку
\\х{—Xj\\ = \/2 для любых г, j. Следовательно, Y не является компактом.
14.44. Нет. Если топологическое метрическое компактное пространство
связно, оно не обязательно линейно связно. Известный пример — мно-
множество точек на плоскости (х, у), задаваемое так:
14.57. Пример см. на рис. 133.
304
Ответы и решения
15.18. а) Интегральными траекториями векторного поля grad (Re zn)
являются линии уровня сопряженной функции Im zn = rn sin nip. Един-
Единственной особой точкой поля grad (Rezn) является z = 0, так как только
в этой точке f'(z) = 0. Точка z = 0 — вырожденное седло. См. рис. 134.
grad Re0ГЛ), я >0
(/г-3)
gradRe(zw),n>0
(л-3)
gradIm(z~w),rt>0
(n-3)
Кратный полюс
gradIm(zw),n>0
(n-3)
Кратный ноль
Рис. 134
Сделаем малое возмущение функции zn -> П (z ~ ег)- Тогда особая
г=1
точка распадается на п — 1 невырожденных седел 2-го порядка. Рассмо-
Рассмотрим поведение интегральных траекторий вблизи одной из особых точек.
Разложим функцию в ряд Тейлора:
№ = f(ai) + f'(oi){z - а-) + ?М(г - а,J + ...
Разложение начинается с члена 2-го порядка, так как /'(а*) = 0. При
этом f"(ai) ф 0 (невырожденная критическая точка), поскольку $"(сц) =
Ответы и решения
305
= 0 тогда и только тогда, когда а* является кратным корнем для f(z).
(См. также рис. 137, 138.)
б) Для функции f(z) = z H—, переходя к полярным координатам
(z = рег(р), имеем:
Re (/(*)) = ( Р + - J cos <p, Im (f{z)) = ( р - - J sin ^.
Начало координат является особой точкой, так как функция - разрывна.
Производная функции f(z) равна 1 ~> т-е- особые точки — это z = 1
Функция Жуковского
Поток на полусфере
Вид сбоку
Найти индекс
полюса первого порядка
Рис. 135
и z = — 1. Обе точки невырождены. Рассмотрим интегральные траекто-
траектории поля grad (Re f(z)). Они задаются уравнениями 1р J sin у? = с.
Для интегральных траекторий, входящих в особые точки и выходящих
306
Ответы и решения
Обтекание диска (шара) в потоке жидкости
/(z) - z + — (функция Жуковского)
Нарисуйте второй, сопряженный поток
Рис. 136
Одна
/(z)-lnz
"Параллели"
и "меридианы"
00
или ^^^^gsr^^g^^^' или
/(z) - zn или /(z) - z~~n
/(z) -| или f{z)-z
Поток на полусфере
Вид сбоку
Рис. 137
Ответы и решения
307
из особых точек, т. е. для сепаратрис, с = 0. Отсюда получаем, что сепа-
сепаратрисы задаются уравнениями (р = ±тг (единичная окружность, состоя-
состоящая из двух сепаратрис) и р = 1 (вещественная ось, состоящая из четы-
четырех сепаратрис). Аналогичным образом можно построить сепаратрисы
поля grad (Jmf(z)), которые задаются уравнением [р + - ) cos<^ = 2
и имеют вид двух касающихся петель. См. рис. 135, 136. См. также
рис. 137.
grad Re (i)
Полюс 1-го порядка
grad Re (z2)
Невырожденное седло
Распад нуля кратности п
в объединение простых нулей
Нарисуйте распад кратного
полюса на простые полюсы
Рис. 138
1
в) f(z) = z+—^. Рассмотрим grad Re f(z). Интегральные траектории
этого потока являются линиями уровня функции lmf(z):
bn/(z)=y-
2xy
= r sin (p —
(x2 + 2/2J ' r'
Аналогично ищем линии уровня функции Re f(z) = г cos (p — •
г) Особые точки функции f(z) = z Л-
1
z-2
— это z — 1 (полюс) и
z = 1, z = 3 (нули функции ff(z)). Особые точки z = 1 и z = 3 являются
308
Ответы и решения
невырожденными седлами, так как /"A) Ф 0 и /"C) ф 0. В окрестности
точки z = 2 интегральные траектории векторных полей grad (Re/(z))
и grad (lm/(z)) качественно устроены так же, как и соответствующие
траектории для функции f(z) = - в окрестности нуля.
д) См. рис. 139.
е) См. рис. 140.
з) Особые точки функции f(z) = zs(z - lI00(z - 2)900, т.е. нули
производной f'(z), следующие: z\ = 0 — седло второго порядка, zi =
= 1 — седло 99-го порядка, zs = 2 — седло 899-го порядка, z± « 0,005
"Диполь"
grad Re (In z) и grad Im (In z)
Рис. 139
(f?)
Нарисуйте второй,
сопряженный поток
Рис. 140
и zb « 1,1 (это корни квадратного уравнения 1003z2 — 1109z + 6 = 0) —
невырожденные седла. Локально в окрестности каждой особой точки
интегральные траектории ведут себя так же, как в окрестности седел
со ответствующего порядка.
к) Функцию f(z) = 1 +z4(z4 — 4L4(z44 - 44L44 в окрестности точки
z = 0 можно заменить на f(z) = 1 + 44444444z4. От этого качественная
картина поведения линий в окрестности точки z = 0 не изменится. Но
добавление постоянной не изменяет вид траекторий, поэтому можно рас-
рассматривать функцию fi(z) = cz4 в окрестности нуля, где с = 44444444.
Точка z = 0 является вырожденной особой точкой для функции f\(z)
(а значит, и для функции f(z)). При подходящем малом возмущении
эта особая точка распадется на три невырожденные особые точки.
Ответы и решения 309
ч . ?, ч 1 . fz-2i\3
л) Функция f(z) = —- In ( — 1 имеет логарифмические осо-
особенности в точках z = 2г и z = 4. Кроме них особых точек нет.
м) Для упрощения записи функции f(z) = —— сделаем сдвиг
Z "г ^? — JL
iy = z + 1. Тогда #(w) = f(w - 1) = ——- Точки w = ±\/2 —
особые точки (полюса) функции g(w). Особые точки векторных по-
полей grad (Ref(z)) и grad (imf(z)) совпадают с нулями функции f'{z).
Отсюда w = 0 — особая точка, причем невырожденная, поскольку
д"@) ф 0.
2
н) Точка z = 0 является особой точкой для функции f(z) = - +
+ 211nz2. Кроме того, z = 1/21— особая точка векторных полей
grad (Re/(z)) и grad (lm/(z)), поскольку /'A/21) = 0.
о) Точка z = 0 является особой точкой для функции /(г) = г5 4-2 In г.
Нули производной /'(г) — это корни уравнения г5 = —2/5 (вершины
пятиугольника). В этих точках zi, ..., z5 имеем: /(z) ~ /(^»)+
+fci(z - г*J + ..., где fci ф 0, г = 1, ..., 5.
п) Точки z = 1 и г = — Юг — особые точки функции
/(*) = 21n(z - IJ - ^ln(z + ЮгK.
о
При этом f'(z) ф 0 для всех значений z.
р) Точки z = 0 и z = г являются особыми точками функции /(г) =
= — — — (полюса третьего порядка). Дифференцируем: f'(z) =
z [z — г)
3 1
= j + -. tj = 0. Получаем четыре точки, в которых f'{z) = 0:
З гл/3- #3
Интегральные траектории векторных полей
grad (Re /(*)) и grad(lm/(z))
на бесконечности ведут себя так же, как и интегральные траектории
соответствующих векторных полей для функции 1/z4.
15.19. а, б) См. рис. 141.
15.22. а) См. рис. 142.
15.23. См.: а) рис. 143,144; б) рис. 145; в) рис. 146; г) рис. 147; д) рис. 148,
149; е) рис. 150, 151; ж) рис. 152.
310
Ответы и решения
f{z)-zn
Полюс порядка п Ноль порядка п
Рис. 141
Источник
Векторное поле на S
с двумя особенностями
В
а А
Векторное поле на S2
с одной особенностью
211
Рис. 142
Рис. 143
Ответы и решения
311
* с
В а А
Рис. 144. Векторное поле на сфере с одной особенностью S2 = abb а
Структура особенности
Рис. 145. Векторное поле на торе с одной особенностью Т2 = aba~lb~l
Структура особенности
Рис. 146. Векторное поле на кренделе aba b с d cd
312
Ответы и решения
Рис. 147. Векторное поле с одной особой точкой на ориентированной поверхности
рода д: aibiai1bi1... agbga~lbgl
О
b Р
Р b Q
Рис. 149. Поле на RP2 с одной особой
точкой RP2 = abab
Q
Q Ь Q Структура особенности
Рис. 150. Векторное поле на бутылке Клейна с одной особенностью KL = аба6
Ответы и решения
313
Q Ь
a Q
Q Ь
Найти индекс
Рис. 151. Поле с одной особенностью на KL = ааЬЬ (бутылка Клейна)
Рис. 152. Поле с одной особой точкой на неориентируемой поверхности общего вида
314 Ответы и решения
Часть 2
„л .. . —а2 — (chili — COSU2J ч
16.1. б) — rj, -* 1— =*-; в) да.
(chu - COSW2J а2
ч*« х\ csiimi (chu2-cosmK
16.2. б) — Г7> Г": в) ДЭ.
(ch U2 ~ cos i*iK с3 sin ui
16.3. 6) c3(wl - u?), 3 a 2 ; в) да.
с \w2 — ux)
16.4. 6) (?uxui—j= \ =, -^4 /9 ; ол ; в) да.
16.5. 54 +F.
9F 9F 9F
16.6. -?-r- + 2wv2-r- + 2v(l - v2)"tt- + w2v2F = 0, область определения
ouz ou ov
y/0, область значения v ф 0.
16.7. ^ In2 (u* + ,2) + axctg2 - j (u2 + ,2) (— + -у j.
+ arct 2 (^ ~ U2)(v -vi)-{u- ui)(v - V2)
{u - ui){u - u2) + {v- vi)(v - v2)
{{u - u2J + {v- v2J) {{u - щJ + {v- VlJ) fd2V 82V\
(U2 - WiJ + (V2 - V!J V 52 + d2 )
169 ____J-___ ^ +
' 9B + 2)(BJ+2) V^2
17.1. а) Например: х = t2, у = ?3. См. рис. 153.
tn \t\n
17.3. а) Например: х = —
17.4. а) к — нечетно и п ф mk, m € N; 6) & — нечетно и n = &m,
m € N; в) Л — четно.
17.5. Если кривизна в точке перехода кривой из одной плоскости в другую
отлична от нуля, то гладкость не выше С1; если же кривизна в этой точке
может равняться нулю, то С°°.
17.6. Один из возможных ответов для аналитической параметризации:
v/l + cos2 (p simp r n
-* -щ—-, y = acos(p——-, ^€[0, 2тг].
Ответы и решения
315
Рис. 153. Нерегулярная кривая с аналитической параметризацией
17.7. Нет. Препятствием является число вращения регулярной замкну-
замкнутой кривой.
17.8. а) у2 = 2ах — 2С — парабола с осью ОХ и параметром р = \а\.
Кривая обращена вогнутостью влево в случае а < О и вправо в случае
а > 0; б) у = Се~х1а\ в) {х - СJ + у2 = а2 — окружность радиуса а с
центром на оси ОХ.
17.9. Условие постоянства длины касательной записывается в виде
I fdx\2
У\ /1+ ( 1~) = а- ^ы будем рассматривать кривую лишь в верх-
V \dyJ
ней полуплоскости и поэтому положим \у\ = у > 0. Рассмотрим угол
</?, 0 < ip < тг, определяемый из условия tg</? = dy/dx. Заменяя
dx/dy через ctgy>, получим у/ sirup = а или у = asin</?. Отсюда dy =
= a cos <pd(p. Но из условия, определяющего угол </?, следует, что dx =
= ctg <pdy. Подставив сюда полученное для dy выражение, получим dx =
COS2 (p ( 1 -Ajtt
= a—: aa?, или аж = а — sin ф\ пф. Интегрируя почленно,
sin у? \sin</? /
найдем х = а (In tg ¦— + cos </? J + С Уравнение этой кривой можно запи-
записать иначе:
17.10. у = а3/(я2 + а2); я = a ctg*, у = a sin21.
17.11. Указание. Применить теорему Ролля к функции (а, г(?)—
17.12. Использовать тот факт, что |r2(?) — ri(?)| = const, где ri, гг —
радиус-векторы движущихся точек, t — время.
г'
17.13. Положим — = А; А(?) — непрерывная на сегменте [a, b] функция,
сохраняющая определенный знак. Имеем г'—Аг = 0, откуда г =
316 Ответы и решения
Так как производная от функции efxdt равна \efXdt, то она сохраняет
знак на сегменте [а, Ь], т.е. efXdt — монотонная и непрерывная функ-
функция t.
17.14. Применяя метод решения предыдущей задачи, будем иметь г' =
= ae-f лл, откуда
r = a fefxdtdt + b.
Производная от / e^xdtdt равна efxdt > 0; значит, efXdtdt — мо-
монотонно возрастающая функция от t 6 [а, Ь].
Примечание. Через [г] будем обозначать вектор, полученный из г
поворотом на угол +—.
17.15. Радиус-вектор р произвольной точки неподвижной центроиды мо-
может быть определен одним из соотношений: р = n -f A[ri] = Г2 + /4Г2]>
ri - r2 + A[rl] = ц[т>2], <п - га, r^> + (Aft], r>2) = 0, А = ^J^ ¦
1Г1 х Г21
(Г2 — Гь Го) г .,
Следовательно, р = п + -Ц-т Г| LriJ-
1Г1 Х Г21
В координатах:
Х1У2 Х2У\
17.16. Рассмотрим вектор AfrJ], где А = ^-j-,—ь 2 ; если этот век-
1Г1 Х Г21
тор отложить от конца М\ стержня, то его конец попадет в мгновенный
центр вращения. Проекции вектора А[г'х] на векторы Г2 — ri и [гг — т\]
соответственно равны:
<A[rj],ra-n) и {\[А\ЛЪ-П])
|г2 — ri | |r2-ri|
Поэтому уравнения подвижной центроиды:
(ra-ri.rDK x(ra-ri)| (r2 -гь r2) (rj, r2 - п)
Х~ |rixr2| Ira-nl ' У Кхг2| |га-п| '
Ответы и решения
317
или
@*2-
хл)х
x —
А
i +
I
У*
(г/2 -глМ)
xi
х2-:
2 + (j/2
г/i
Cl J/2 ~
-2/iJ
У\
_ ((а;2 -
B/2 - 2/1J/2) ((^2 -
B/2 - Уг)у[)
y'l
У'2
17.17. R = ri + ?a 4- т)[а]9 где а = r2 — ri, ? = const, 77 = const
(точка М жестко связана со стержнем); R/ = r[ + ?a' + r;[a']. Так
как |а| = |r2 — ri| = const, то а' ± а; значит, a' = s[a], 1*3 — r^ =
= 5[Г2 -Г1], (Г^ -ri, [ri]) = S([r2 -Г1], [ri]), ([ri], Г'2) = E(Г2 -Г1), pj),
= г Итак: а' = i
Л Л
= -r(^ri +
Л
~ Ча)- С Другой стороны,
г = R - р = п + ^а + т?[а] - п - A[r'x] = ?а + т)[&] - A[ri],
„. 1Г1 1
значит, R = -г[т\, ш = —.
A A
17.21.
J 2/
'—=—1 ^=— = 1, где аи b — полуоси данного эллипса.
(a/v2J (fc/v2J
17.22. xy = ±5/2, где s — данная площадь.
1ffoo о , 3/9as2 о
17.23. 2/ = ax* + а/ "ттг") где парабола задается уравнением у = ах*, а
V 16
s — площадь сегмента.
( I \2 ( а\2
17.24. [ х 1 + 2/2 = (/tg — ) » где a — данный угол,
\ cos (a/2) J \ 2/
I — полупериметр треугольника.
х2 у2
17.25. —г + —z = 1, где а — радиус данной окружности.
а1 2аг
17.26. г = (/cos3 v, /sin3 v), где / — заданная сумма полуосей.
17.27. х = -Ccosv — cos3v), у = -Csinv — sin3v) — гипоциклоида.
17.28. xy = ±-у/с, где с — заданная площадь.
318
Ответы и решения
17.29. (х—сJ+у2 = 4а2, где а — большая полуось эллипса, с = у/а2 — Ь2.
17.30. р = г±аИ.
17.31. p = г + [г'] j ; в координатах:
17.32. Кардиоида.
17.33. (re + 1)/2 = (у - 13)/3 = z/6; 2s + Ъу + 6z - 37 = О.
17.34. Для указанной точки А имеем: t = — 1.
Касательная прямая: (х - 3)/6 = (у + 7)/(-17) = (z - 2)/7.
Нормальная плоскость: 6я - 17у + 7z- 151 = 0.
17.35. Для указанной точки А имеем: t = 1. Так как г'A) = 0, а
г"A) = B, 2, 12) ф О, то направление касательной определяется этим
последним вектором или коллинеарным ему A, 1, 6).
Касательная прямая: (х — 2)/1 = у/1 = (z + 2)/6.
Нормальная плоскость: х + у + 6z + 10 = 0.
17.36. Уравнение касательной:
dy
z =
dz
dF2
dz
z + X
y
~dx~
dF2
dx
У
~dy~
~dj
dz
dFi
dz
¦
dx
dFi
dx
Нормальная плоскость:
17.37. s = bat.
17.38. s = 8a>/2.
17.39. s = 9a.
X-x Y-y Z-z
~9аГ ~ду ~dz~
~дх ~ду ~dz~
= 0.
Ответы и решения 319
17.40. s = 10. Кривая имеет четыре точки возврата с изменением знака
ds/dt в точках t = 0, тг/2, тг, Зтг/2.
17.42. Необходимое и достаточное условие: е' ф О, (р', е, е') = 0. Урав-
Уравнение огибающей: г = р — -—Ly-е.
17.43. г = р + ve.
17.44. г = vp.
17.45. г = р + vp'.
17.46. r(s, </?) = p(s) + n(s) cosip + b(s) sin<^, где 11E) и b(s) — главная
нормаль и бинормаль соответственно.
17.47. r(tz, v) = (</?(v)costz, (p(v)sinu, ip(v)). В частном случае: г =
= (f(v)cosu, f(v)sinu, v).
17.48. Если уравнение винтовой линии задано в виде
р = (acost/, asintz, bu),
то n = (— cost/, — sintz, 0) — вектор главной нормали. Отсюда искомое
уравнение
г = р — An = ((a + A) cos u, (a + A) sin u, bu) = (v cos tz, v sin tz, 6tz)
задает прямой геликоид.
17.49. г = p(s)+A(n(s) cos<p(s)+b(s) sin</?($)), где</?($) — произвольная
функция переменной 5.
17.50. Векторы n = (cos u, sintz, 0) и к = @, 0, 1) определяют нор-
нормальную плоскость к окружности р = (acostz, asintz, 0). Вектор, ле-
лежащий в нормальной плоскости и наклоненный под углом и к вектору
п, есть вектор a = n cos it + ksintz. Поэтому уравнение искомой поверх-
поверхности
г = р + vol = (acostzH-vcos2u, asintz + vsintzcostz, vsinu).
Исключая параметры и и v, находим
х = ctg u(a sin и Н- z cos tz), у = (a sin и + z cos tz),
g, 4 (
2/ sin2 tz
Итак, 2/2(rc2 + у2) = (ay + rczJ — поверхность четвертого порядка.
17.51. R(u,v) = i(r(u)+p(t;)).
17.52. Уравнение данной прямой ri = (tz, 0, /1). Уравнение эллипса г2 =
= (acosv, bsinv, 0). Далее, ri — г2 = (tz — acosv, — bsinv, /1). Отсюда
320 Ответы и решения
при и — acosv = 0 имеем ri — г2 = @, — bsinv, Л). Искомое уравнение
коноида:
г = (acosv, bsinv, 0) + А@, -bsinv, h) = (acosv, 6A - A)sinv, АЛ).
Исключая параметры А и v, получим уравнение коноида в неявном виде:
2 у2
17.53. ri = (а, 0, tz), г2 = 1О, v, — j, ri -r2 = (a, -v, и- — J. Если
V2
и — — = 0, то ri — Г2 = (а, — v, 0). Отсюда
2р
г = (о, v, Q + A(a, -v, 0) = (аА, «(I - А), ^ ,
или а2у2 = 2pz(rc — aJ.
17.54. Параметрические уравнения данных окружностей:
П = (аA + cosw), 0, asintz), г2 = @, аA + cosv), asmv).
Находим: n — г2 = (a(l + costz), -a(l + cosv), a(sintz — sinv)). Имеем
sintz — sinv = 0, откуда: 1) v = и + 2&тг, 2) v = тг — tz + 2&тг. В первом
случае п — г2 = (a(l + costz), —аA + costz), 0) параллелен A, —1, 0).
Таким образом, получаем эллиптический цилиндр
р(и, А) = (a(l + costz), 0, asintz) + АA, —1, 0) =
= (аA + costz) + A, —A, a sin it).
Во втором случае п — г2 = (a(l + costz), —аA — costz), 0) параллелен
A, —1, 0), и вторая поверхность, составляющая данный цилиндроид,
определяется уравнением
R(tz, A) = (a(l + costz), 0, a sin и) + А(аA + cos и), —аA — costz), 0) =
= (аA + A)(l + cosu) + А, —аАA — costz), asintz).
Исключая параметры А и и, получим:
z4 + z2 ((х - уJ - 2а(х + у)) + 4а2ху = 0.
(и2 \ (-V2 \ fu2+v2
17.55. п = [^u,OJ, r2= (^—, O,vJ, Г1-г2= ^-^-|tf|
Условие коллинеарности вектора ri — г2 и плоскости у — z = 0 дает
Ответы и решения 321
(и2 \
и + v = О, v = — и, ri — Г2 = ( —, и, и . Искомое уравнение:
{и2 \ {и2 \ {и2 \
г(щ v) = ( —, щ 0) + v ( —, и, и) = ( —A + 2v), иA + v), u«J .
Исключая параметры и и v, получим у2 — z2 = 2р# — гиперболический
параболоид.
17.56. Уравнение оси Oz имеет вид ri = @, 0, и); уравнение данной
кривой —
/ з \
Г2(^) = (bcosv, bsinv, -rz :— | .
\ b2cosvsmvj
Отсюда
Л . . о3 \ a3
r2 - ri = bcosv, bsmv, -^ : и , и = r^ :—,
\ o^cosvsinv / o^cosvsinv
Г2 — ri = Fcosv, bsinv, 0),
тогда
/ аз \
= I 0, 0, t^ :— + A(bcosv, bsinv, 0) =
\ bz cos v sin v /
= (Afccosv, Absinv,
a3
b2 cos v sin v
inv/ '
Исключая параметры А и v, получим: b2xyz = a?(x2 + y2).
17.57. Из условия (а + иЪ — р, п) = 0 находим и = —;—гт—. Отсюда
(n, b)
R = р + А(а + иЪ - р) = A - \)р + А (а
\п» ь)
17.58. Возьмем уравнения данных эллипсов в виде
П = (a, bcostz, csintz), Г2 = (—a, ccosv, bsinv).
Вектор Г1—Г2 = Bа, b cos и—ccosv, с sin и—bsinv) параллелен плоскости
хОу, поэтому с sin и — bsinv = 0. Отсюда
sinv = rsintz, cosv = ±-y/b2 — c2sin2tz,
b b
П — Г2 = Ba, bcostz ± туЬ2 — с2 sin2 tz, Ol .
322 Ответы и решения
Искомое уравнение:
R = (a, bcosu, csintz) + v \2а, bcosu± ту/b2 - c2sin2u, Oj
или
(/ с / о—\ \
а + 2av, bcosu + v [bcosu± ryb2 — с2sin u) , csintz] .
\ b ) )
17.59. Уравнение оси Oz: p = @, 0, v). Находим:
p-p=(u, u2,u3-v), u3-v = 0, p=@, 0, u3).
Искомое уравнение:
г = p + v(p - p) = @, 0, u3) + v(u, u2, 0) = (uv, u2v, u3).
17.60. г = (bv, avcosu, (b + acostz)(l - v) +asintz).
17.61. Уравнения данных прямых: р = (u, 1, 1) и р = A, v, 0). Урав-
Уравнение прямой, проходящей через две произвольные точки этих прямых,
имеет вид г = A, v, 0) + A(tz, I, 1). Для точки пересечения этой пря-
прямой с плоскостью xOz имеем: v + А = 0, г = A, v, 0) — v(u, I, 1) =
= A — uv, 0, — v). Эта точка должна лежать на окружности х = cosy?,
у = 0, z = sin <р. Следовательно, 1 — uv = cos (p, v = — sin ip, от-
1-cosy? (p
куда u — : = — tg—. Остается составить уравнения прямой,
— sin ip 2
проходящей через точки ( — tg—, 1, lj и A, — sin</?, 0). В результате
получаем:
г = A, -sin^, 0) + ф (A, -sinу?, 0) - (-tg|, I, l)) =
17.62. г = (a(cosv — usinv), a(sinv + ucosv), b(u + v)).
17.63. c2(x2 + y2J = a2(x2 - y2)(z + cJ.
17.64. Будем считать, что в плоскости тг заданы прямоугольные декар-
декартовы координаты (?, г)). Тогда уравнение кривой р = р(и) можно запи-
записать в координатной форме: ? = ?(tz), rj = f)(u). Кроме того, предполо-
предположим, что прямая АВ представляет собой ось z в пространстве и что по
ней скользит ось ц движущейся плоскости тт. При надлежащем выборе
осей х, у и положительных направлений на координатных осях имеем:
R(u, v) = (f(tz)cosv, f(tz)sinv, tj(u) +av).
Ответы и решения 323
17.65. R(tz, v) = r(u) + an(u)cosv + ab(u)sinv, где n и b — главная
нормаль и бинормаль кривой г = г (и); точки (и, v) и (и, v + 2n) отожде-
отождествляются.
17.66. Возьмем точку пересечения нормалей за начало отсчета радиус-
векторов. Тогда (г, ги) = 0, (г, г„) = 0, откуда |г|2 = const. Следова-
Следовательно, данная поверхность — сфера или часть сферы.
17.67. Объем тетраэдра равен 9а3/2.
XV Z
17.68. Касательная плоскость: —: 1 \- , = = а2. Искомая
usmv ucosv у/а2—и2
сумма равна а6.
17.69. Уравнения линии пересечения в криволинейных координатах: и =
= и\ cos(v + v\)l cos2v\ (кроме образующей v = vi), где щ, v\ — ко-
координаты точки касания; параметрические уравнения той же линии в
декартовых координатах:
cos(v + vi) cos(v-\-v\) . . _
х = u\ — -cosy, y = ui sinv, z = asm2v.
cos 2^i cos 2^i
Уравнение ее проекции на плоскость ху:
х +у = —(a:cosvi — t/sinvi).
cos 2^i
Поскольку проекция есть окружность, то сама линия (плоская линия)
есть эллипс.
17.70. Уравнение касательной плоскости:
или Z = (/ /') X + Yf, т.е. все касательные плоскости проходят
V х /
через одну точку — начало координат. Впрочем, это ясно и из того, что
данное уравнение определяет конус с вершиной в начале координат (z —
однородная функция от х и у).
17.71. Касательная плоскость: кхsinu — ky cosuЛ-vz — kuv = 0; нормаль:
г = (vcosu + Afcsintz, vsinu — Xkcosu, ku + Xv).
17J2.X+~ + - = 3.
x у z
17.73. Пусть уравнение кривой j имеет вид р = p(s). Уравнение поверх-
поверхности: г = р + Av, где v — единичный вектор,* касательный к кривой 7-
Находим:
дт w дт дт дт
=v + Afcn, -=v, _x- =
324 Ответы и решения
при s = const (т. е. в точках одной и той же касательной) этот вектор
имеет неизменное направление (ибо тогда b = const). Отсюда также
следует, что касательной плоскостью к такой поверхности во всех точках
кривой 7 является соприкасающаяся плоскость этой кривой.
17.74. Уравнение поверхности: г = р + An;
дт f . дт дт дт
— = у + (_A;v + х ), ^ = п, ^ х ^д = A ~
Уравнение касательной плоскости: (R — р — An, b — AA:b — Axv) = О,
или (R, b - \xv) - (p, b - A>rv) + A2x = 0. Уравнение нормали: R =
= p + An + ?(b — Xxv).
17.75. Уравнение поверхности: г = p + Ab;
С/5 С/Л С/5 ил
Уравнение касательной плоскости: (R — р — Ab, n + Xxw) = 0, или
(R-p, n-f Xxv) = 0. Уравнение нормали: R = p + Ab + ?(n + Axv).
17.77. Если а — направляющий вектор заданной прямой и начало ра-
дт дт
диус-векторов взято на этой прямой, то векторы г, а и — х — лежат в
ои ov
одной плоскости и
/г, ах ( — х — 1 \ = 0.
Отсюда
вг\ / вг\ / вг\ / дт
Но это равенство можно записать в виде равенства нулю функциональ-
функционального определителя:
9|г|2 9(а, г) 9|г|2 9(а, г) _
"9tz dv dv 1кГ "
Отсюда следует, что между величинами |г|2 и (а, г) существует функци-
функциональная зависимость |г|2 = /((а, г)). Выбирая ось Oz вдоль вектора
а, получаем поверхность вращения х2 + у2 = f(z).
(х2 у2\
17.80. Огибающая: Az2 ( — + tj I =1; ребро возврата мнимо.
2
17.81. Огибающая: х2 + -^—т^у2 -{- z2 = а2.
17.82. Огибающая: (х2 Л-у2 Л- z2 - хJ = х2 + t/2; ребро возврата выро-
вырождается в точку @, 0, 0).
Ответы и решения 325
17.83. Взяв уравнения парабол в виде у2 = 2рх, z = О и у2 = 2qz, х = О,
получим уравнение огибающей в виде у2 = 2рх + 2qz — параболический
цилиндр с параметром у/р2 + q2.
17.84. Дифференцируя выражение |R — р\2 = а2 по s, получим
(R - р, v) = 0. Отсюда R - р = АЬ + цп. Так как |R - р\2 = а2, то
Л2 + ц2 = а2 и можно положить А = а cos <p, ц = a sin </?. Таким образом,
уравнение огибающей:
R = p + a(bcosy> + nsiny>).
17.85. Ребро возврата представляет собой кривую, точки которой получа-
получаются при пересечении осей кривизны кривой р = p(s) с соответствую-
соответствующими сферами данного семейства сфер.
17.86. Уравнение семейства: (х — bcos<pJ + у — bsin2 <p + z2 — a2 =0.
Огибающая — хор (поверхность четвертого порядка):
(х2 +y2 + z2 + b2- а2J - 46V + у2) = 0.
Это уравнение получается при исключении <р из уравнений F = 0 и
QF
-7г-(р = 0. Ребро возврата в случае а > Ь вырождается в две точки
us
@, 0, ±у/а2 — Ь2), а в случае а = Ь вырождается в одну точку @, 0, 0).
17.87. Уравнение семейства: x2-{-y2-\-z2-2u3x-2u2y-2uz = 0. Исключая
и из этого уравнения и уравнения 3u2x+2uy+z = 0, найдем огибающую:
Зя(9я(я2 + у2 + z2) - 2zyJ + 2у(9х(х2 + у2 + г2) - 2*») -
- A2а* - 4t/2) + zA2xz - Ay2J = 0.
Ребро возврата найдем, присоединяя к двум указанным выше уравне-
уравнениям еще уравнение бих + 2у = 0. Отсюда и = —у/Зх, и уравнение
ребра возврата:
21х2(х2 + у2 + г2) - 4г/3 + 18жуг = 0, у2 - Zxz = 0.
Ребро возврата можно получить и в параметрической форме:
2и3-6г^
_
Г "
^
\ 9и2 + 1' 9tz4 + 9tz2 + 1' 9и4
17.88. rr2/3+2/2/3+^/3
17.90. xyz = 2a3/9.
17.91. Огибающая: у2 = Axz\ ребро возврата вырождается в точку, со-
совпадающую с началом координат.
326 Ответы и решения
17.92. Ребро возврата — винтовая линия:
х = С cos а, у = С sin а, z = С а.
17.93. Пусть р = p(s) — уравнение данной кривой. Уравнение семей-
семейства соприкасающихся плоскостей (г — р, Ь) = 0. Дифференцируя по
s, получим (г — р, v) = 0. Характеристикой является касательная:
(г — р, Ь) = 0, (г — р, п) = 0. Огибающая: г = р + Av — поверх-
поверхность, образованная касательными к данной кривой. Дифференцируя
соотношение (г — р, п) = 0 еще раз, получим (г — р, Ь) = 0. Отсюда и
из соотношений (г — р, Ь) = 0, (г — р, п) = 0 имеем г = р, т. е. ребром
возврата является данная кривая.
17.94. Характеристики — оси кривизны данной кривой. Огибающая —
поверхность, образованная осями кривизны. Ребро возврата — кривая,
описываемая центрами соприкасающихся сфер данной кривой.
17.95. (г, n') + D1 = 0, г = an + /?n' + An x n', a = (г, п) = -?>,
(г n') D1 D'n1
8 = ,' _ = — -——. Уравнение огибающей: г = — Dn — -—— + An x
In'l2 In7J In'l2
x n7 (параметры u и А). Характеристики — прямые и = const. Ребро
возврата определим, разрешая уравнения (г, n)+D = 0, (г, n^+ZO = 0,
(г, п") + D" = 0 относительно г:
= (г, п)(п7 х п") + (г, п')(п" х п) + (г, п")(п х п') _
Г (п, п', п")
_ Дп7 х п" + Р'п" х п + Р"п х п7
(п, п', п")
17.96. Огибающая семейства плоскостей, касательных к обеим парабо-
параболам. Уравнение семейства:
\ 6 Ьа) а
где a — параметр семейства.
17.97. Вектор нормали п = (и 4- v)(isinv — jcosv + k) параллелен век-
вектору i sin v — j cos v + k, который не меняется, если параметр v сохраняет
постоянное значение. Отсюда линии v = const — прямолинейные обра-
образующие поверхности, а линия и + v = 0 — ребро возврата, так как во
всякой ее точке модуль вектора п обращается в нуль.
Ответы и решения
327
17.99. Уравнение кривой: и = const; ребро возврата:
х = 2(а — Ь)и cos2 v, у = 2(а — Ъ)и sin3 v,
z = 2и2 ((а - 26) cos2 v + (b - 2а) sin2 v).
17.100. x = 3*, у = -St2/b, z = -ts/ab.
17.101. Искомая развертывающаяся поверхность огибает семейство плос-
плоскостей
Xx + Y
где х — параметр семейства.
4am(l
Sm2; 6)
a(y4 -
a2b2K/2
у*\2а2Ъ-у*-ЗЬу2\ '
12 3
18.2. a) |cosa:|; 6) -; в) —; г)
-; в) —; г) „ , . , , ч|.
6' у атг' у 8a|sin(*/2)|
б) В
|sinrr|
A + cos2 xfl2'
18.4. а)
18.6. a) r= ^(si
б) г = (aBt + sin 2^), aB — cos 2?)) — циклоида;
в) г = I acos^, a In (tg т + « ) ~ asin? ) — трактриса.
18.10. 9x - 27y - z + 7 = 0.
18.11. Для соприкасающейся плоскости находим уравнение сх — ay =
= be — ad, не содержащее параметра и. Подставляя в это уравнение
выражение для х, у через и, получаем тождество, откуда заключаем, что
кривая действительно лежит в своей соприкасающейся плоскости.
18.12. Соприкасающаяся плоскость: 6х—8у—z+З = 0. Главная нормаль:
х = 1-31А, у = 1-26А, z = 1 + 22А. Бинормаль: х = 1+6А, у = 1-8А,
z = 1 - А.
328 Ответы и решения
18.13. у = 1.
18.14. Касательная: г = (acos? — aAsin?, asin? + aAcos?, b(\ + t)). Нор-
Нормальная плоскость: ах sin t — ay cost — bz + b2t = 0. Бинормаль: г =
= (acos?+6Asin?, asin?—6Acos?, bt+a\). Соприкасающаяся плоскость:
bxsint — by cost + az — abt = 0. Главная нормаль: г = ((a + A) cos?,
(a + A)sin*, 6*).
18.15. Касательная: x = 1 + 2A, у = -A, z = 1 + ЗА. Нормальная
плоскость: 2х - у + 3z - 5 = 0. Бинормаль: х = 1 - ЗА, у = -ЗА,
z = 1 + А. Соприкасающаяся плоскость: Зх + Зу — z — 2 = 0. Главная
нормаль: х = 1 — 8А, у = НА, z = 1 + 9А.
18.17. а) d ~ -Ajoxos3, 5 -> 0; б) d ~ -A;gs2, 5 ->> О.
и z
1818 Д-ЖГ4. V
18Л8' Д " 2 U 2^ J '
18.19. v =
18.20. а) Пусть а — единичный вектор фиксированного направления.
Тогда (а, v) = cosv (v = const). Так как -т~(а> v) = (а, v) = 0,
ds
то А(а, п) = 0. Исключая случай, когда к = 0 (прямые), получаем
(а, п) = 0. Следовательно, нормали перпендикулярны фиксированному
направлению. Обратно, если п перпендикулярен фиксированному напра-
направлению, то (а, v) = const.
б) Пусть х/0. Из (а, п) = 0 и третьей формулы Френе вытекает
(а, Ь) = 0, откуда (а, b) = const. Обратно, дифференцируя это равен-
равенство, получаем (а, п) = 0.
в) Дифференцируя равенство (а, п) = 0? получаем &(а, v) = х(а, Ь),
откуда — = у-1—г = const. Обратно, из первой и третьей формул Френе
v b х. • л х
следует — Л— = 0, откуда 7v -f b = 0, -r\ + b = const = а. Умножая
к х к к
х (а, v)
v b
скалярно на п, получаем (а, п) = 0.
к
18.21. Показать, что для этой кривой — = const, и воспользоваться за-
задачей 18.20.
к
18.22. Показать, что — = 1, и воспользоваться задачей 18.20. Искомый
х
вектор е = v + b = A, 0, 1).
Ответы и решения 329
18.24. Согласно задаче 18.20, ( —Ь, -г-тЬ, -гтЬ I = 0, поэтому сфери-
\ds ds* ds6 J
ческая индикатриса является плоской кривой. А так как она лежит на
сфере, то она является окружностью.
18.33. а) Пусть г = r(s) — уравнение кривой 7 в натуральном параметре.
Тогда кривую 7* можно задать в виде г* = r(s) + 0EI1E), где n(s) —
главная нормаль к кривой 7> a a(s) — некоторая скалярная функция.
Ясно, что, вообще говоря, 5 не является натуральным параметром на
кривой 7*- Имеем —г* = v + n—a + a(—kv + хЪ). Далее, из условия
CIS (tS
вытекает, что / j-r*» п) = (;гг*> п* )• Так как вектор —г* паралле-
параллелен вектору v*, то / -т-г*, п* \ = 0. Итак, доказано, что / -г-г*, п\ = 0.
Подставляя выражение для -т-г*, получаем, что —а = 0, т. е. а = const.
as as
б) Из решения предыдущего пункта следует, что
¦^¦г* = v(l - ак) + ахЪ.
as
Продифференцируем это равенство по 5 и воспользуемся формулой
Френе. Получим
ds2 ds \ds J
Заметим, что в соприкасающейся плоскости кривой 7* лежат векторы
d d2 fd\
—г, 77r> n*- Но по условию n = in*, поэтому векторы —г хп =
ds as* \ds )
\
» —о I -г-н v коллине-
арны. Следовательно, координаты этих векторов пропорциональны, т. е.
(d/ds)(l-ak) a(d/ds)x d fl-k\
^_i—^—. l = _-i-i—?— чт0 эквивалентно равенству -т-
a- ak ax ds
= 0. Отсюда = b = const, т. e. ak + bx = 1, где а и b — некоторые
постоянные.
18.35. Пусть исходная кривая задана в виде г = гE). Покажем, что в
качестве кривой, составляющей с исходной пару Бертрана, можно взять
кривую p(s) = гE) + an(s), где 11E) — вектор нормали к исходной
кривой.
330 Ответы и решения
Легко показать, что — р = A — ak)v(s) + axb(s) перпендикулярен
n(s). Далее, легко проверить, что
—р = A - ак)к\ + а ( —к) v + а—хЪ -
ds2 \ds ) ds
Для доказательства того факта, что p(s) = r(s) H- an(s) составляет с ис-
исходной кривой пару Бертрана, достаточно показать, что векторы — р,
-jrjp и п компланарны, т. е. параллельны одной плоскости. Для этого
достаточно проверить, что векторы ( -гр) х п и ( "Т^р) х п пропор-
пропорциональны. Легко показать, что
xn = t1-^-^ (s?') xn = -a (?
l~ajfc d /l-ajfc\ n _
Так как = Ь = const, то — = 0. Это равенство
х ds \ х )
-a(d/ds)k a(d/ds)x _
можно переписать в виде — ;— = —• . Отсюда следует, что
1 - ак ах
fd\ [d? \
векторы I — р I х п и I т^Р I x n пропорциональны.
18.36. Воспользоваться задачей 18.35. Положить 6 = 0, a = 1/к.
18.39. Пусть кривая 7 задана в натуральной параметризации г = r(s).
Тогда кривая 7* задается в виде p(s) = r(s) + Ab(s). Так как бинормаль
кривой 7* параллельна Ь, то ( Ь, —р ) = 0. Отсюда —А = 0, т. е. А —
\ ds I ds
постоянная величина. Поэтому — р = v — \хп и -гтР = кп — Ххп —
ds ds*
— Ххп + Xxkv — Хх*Ъ. Заметим теперь, что ( "Т^Рч Ь ) = 0, поэтому
Ах2 = 0. Так как кривые 7 и 7* различны, то х = 0.
18.40. Пусть г = r(s) — натуральная параметризация кривой 7- За-
Запишем уравнение кривой 7* в виде p(s) = r(s) + A(s)n(s), где n(s) —
вектор главной нормали кривой 7> а A(s) — некоторая скалярная функ-
¦—р = v Н- А(—A:v + хЪ) + An. Так как ( -
ds \t
( —р, п\ = 0. Отсюда А = const и — р = v + A(-A:v + xb). Далее,
\ds I ds
ция. Имеем -j^p = v Н- A(-A:v + хЪ) + An. Так как ( —р, b* \ = 0, то
Ответы и решения 331
вектор ~т~$Р = —A>rv + (А; — АА;2 - Ах2)!! + ХкЪ ортогонален вектору
CIS
b* = п. Следовательно, к - Хк2 - Ах2 = 0, т. е. к = А(А;2 + х2).
18.54. Пусть А: и х — соответственно кривизна и кручение исходной кри-
кривой, параметризованной натуральным параметром 5, а А:* и х* — соот-
соответственно кривизна и кручение ее эволюты. Тогда
_
/С —
к
18.55. У линий откоса отношение — постоянно. Отсюда по задаче 18.54
х
получаем требуемое.
18.56. Уравнение подеры будем искать в виде p(t) = r(t) -f
Скалярную функцию А найдем из условия (р, г7) = 0. Имеем А =
= -^- Отсюда p(t) = r -г'<^.
.57. х = a [cost+ -г—rrsin* ), у = a [sint
\ az + № ) \ a
2
18
a2ht
"" a2 + ft2'
18.65. а) Единичный вектор бинормали b = (—1, 0, 0) параллелен оси
Ох. Соприкасающаяся плоскость кривой в рассматриваемой точке совпа-
совпадает с плоскостью хОу. Центр соприкасающейся окружности находится
в точке @, 1,0). Радиус этой окружности равен 1. Соприкасающуюся
окружность можно задать уравнениями (у — IJ + z2 = 1, х = 0;
б) (z-0 +(j/ + 3J + (Z-4J = j, 2x-2y-z-3 = 0.
18.66. Воспользуемся задачей 18.64. Радиус кривизны кривой равен
Далее,
f
Отсюда получаем, что радиус соприкасающейся сферы равен -.
18.67. а) 2-±?-; б) (е' + е-'J,/и(е'-е-(J; в)
а у 2
h4
18.69. Винтовая линия, которая лежит на цилиндре х2+у2 = -г и имеет
шаг 1.
332
Ответы и решения
18.72. Пусть рассматриваемая кривая имеет параметризацию х = x(t),
У = y(t), z = z(t). Рассмотрим функцию
x(t)-x(t0) y(t)-y(t0) z(t)-z(t0)
x'(t0) y'(t0) z'(t0)
x"(t0) y"(to) z"(t0)
Разложим x(t), y(t) и z(t) в ряды Тейлора и в выражении для функции
коэффициент при (t — toK приравняем к нулю. Получим
*"'(*о) y'"(to) z'"(t0)
x"(to) V"(to) z"(t0)
x'(to) y'(t0) z'(to)
= 0.
Следовательно, кручение рассматриваемой кривой равно 0.
18.74. R = г + м|г|^ n) ((,,->,- (г, v>v).
18.76. R = rH- ' (n(e, n)-v(e, v)). Если кривая задана уравнением
(*)
г =
), то
Если кривая задана уравнением у = /(ж), то
п*)-
2f"(x)
Y ~f{X) + 2f"(x) W(x) f [X)'
где е = (/, m).
18.78. а) Пусть эллипс задан в параметрическом виде: x(t) = a cost,
y(t) = bsint. Тогда эволюта эллипса задается в виде
x(t) =
cos31, y(t) = ^-r
о
¦ sin3 t.
Ответы и решения 333
_ (gsin* + bcos*) __
Радиус кривизны равен ; —. Чтобы найти уравне-
ао
ние эвольвенты эллипса, запишем выражение для длины дуги эллипса:
s(t) = / y/atsi
s(t) = / V a2 sin21 + b2 cos21 dt.
Заметим, что этот интеграл в элементарных функциях не берется. От-
Отсюда получаем уравнение эвольвенты:
х = acost + (s(t) - О^-р У = bsint- (s(t) -
Здесь С — произвольная постоянная.
б) Пусть гипербола параметризована следующим образом: x(t) =
= acht, y(t) = bsht. Тогда уравнение эволюты имеет вид
3
r*.
(asht
Радиус кривизны гиперболы равен -1 .
пи
в) Параметризуем параболу следующим образом: x(t) = t, y(t) =
t2 t3 3t2
= —. Эволюта задается в виде х = —г, у = р+ -г—. Радиус кривизны
2р р* 2р
( *2\3/2
параболы равен р \ 1 + — 1
г) Эволюта этой кривой задается в виде х = —атг + a(t' — sin^), у =
= — 2о + аA — cos?7), t1 = ^ + тг. Радиус кривизны данной кривой равен
= 4a
sin -
д) Указание. Перейти к декартовым координатам.
Уравнение эволюты имеет следующий вид: х = -(cosy? — cos21 + 2),
3
2/ = -A — cos ф) sin </?. Эта кривая является кардиоидой. Чтобы убе-
диться в этом, достаточно сделать замену </? = тг — ? и произвести замену
/ 2 \
координат X = — 1х — -a), Y = у. Радиус кривизны исходной кривой
равен -a
о
2l
XX X
е) Эволюта: х = х — ash — ch—, у = 2ach—. Радиус кривизны:
а а а
2 X -^
ach —. Эвольвента цепной линии, проходящая через ее вершину, зада-
виде [ a (In tg - Н- cos t) , a sin t j, т. е. является трактрисой.
a
ется в
334 Ответы и решения
ж) Эволюта:
сир cosu) a(u>2) . a<p sirup а(ц>2
р
Радиус кривизны:
2 + у2 '
Эвольвента:
cos у?-у? sin у?
х = aipcosfp — (С + s)
sin <р + ч> cos у?
2/ = aipsirup — (С + 8)~
Н-</?2 Н- 1п(</?+ ^/1 Н-у?2)), а С — произвольная по-
постоянная.
18.79. Эволюта логарифмической спирали задается в виде
х = —a^lnasirup, у = o^lnocosy?.
Легко проверить, что эти формулы можно переписать следующим об-
образом:
х = (a-*/2 In а)а«12+* cos (| + у?),
t/ = (a"*/2 In ojo*/2^ sin (!+v).
Теперь легко проверить, что эти уравнения задают логарифмическую
спираль с тем же самым параметром о, повернутую относительно исход-
ной на угол —.
18.82. х = acos? + (at - С)sin*, у = asint - (at - С)cos*, где С —
произвольная постоянная.
18.8S.8r sin-.
18.85. Зададим астроиду параметрически: х =Rcos3 -, у =i?sin3 -.
Эволюта:
t ( о t nt\ ^ . t ( . 2* о 2 Л
х = Л cos- I cos^ - +3sin^-1 , у = i?sin- ( sin^ - +3cos^ -I .
Ортогональным преобразованием X = -7= (ж - у), F= -^(i + y), т.е.
v2 v2
7Г
поворотом на угол -j, уравнения эволюты приводятся к виду
Ответы и решения 335
18.88. Натуральные уравнения таких кривых: к = —, гДе С ~
—5 Н- G
произвольная постоянная.
18.89. р = </?(s)</?'(s) и а = </?(s) + const.
18.92. Пусть кривая 7 задана в натуральном параметре уравнением г =
= r(s). В этом случае кривая 7* задается уравнением p(s) = r(s) +
+ Tn(s)> где n(s) — вектор главной нормали к кривой 7- Заметим, что,
вообще говоря, s не является натуральным параметром на кривой 7*-
Имеем:
, х „ d (х\ х2 , „ х3
р=~къ' р =Ts[-k)-Tn> рхр =?v-
к2
Отсюда к* = к. х* = —.
х
1 (г' г" г'") 1
18.94. -^т~]—'—гг~; в частном случае: -к\х\.
о |г х г"| о
18.96. Показать, что асимптотическое направление не может быть пер-
перпендикулярно оси вращения.
18.110. Надо взять произвольную дугу винтовой линии с параллельными
касательными в концевых точках и соединить эти точки плоской кривой.
Концы дуги винтовой линии, конечно, сначала надо немного продлить
так, чтобы кручение непрерывно перешло в нуль.
18.133. Воспользоваться формулой Гаусса-Бонне и формулой для про-
прообраза формы площади сферы при гауссовом отображении.
19.1. Пусть а, Ь, с, х и /3 — катеты, гипотенуза, перпендикуляр на катет
а и угол, противолежащий стороне Ь, соответственно. Тогда по теореме
синусов
sh х = sh - sin /3,
а с другой стороны,
Ь Ь ее
shb = shcsin/3, 2sh-ch- = 2sh- ch- sin/3.
sha: ch(c/2) Л ,
Таким образом, . ,_ йл. = - ; ' :. Остается заметить, что функции ch
sn(o/2; cii(b/z)
и sh возрастают на R+.
336 Ответы и решения
19.4. а) тг; б) тг/2; в) тг/2; г) тг/6; д) тг/2; е) тг/2; ж) тг/4.
19.5. 4arcsin~7= - ;т-
уД 2
19.7. тг/2.
19.14. б) ds2 = A-
A - ж2 - у2J
2х
) Гп = 2Г12 = 2Г21 = - ~2 Г?» ^22 = 2Г12 = 2Г21 =
1 X у
д) Хорды и диаметры единичного круга.
19.16. Рассмотрим Rf с псевдоевклидовым скалярным произведе-
произведением, заданным формой dx2 + dy2 + dz2 — dw2. Пусть С — конус
х2 + у2 + г2 - w2 = 0. Тогда 52 = Cn{w; = -1}. Окружности на сфере
S2 — это сечения ее гиперплоскостями П«: п{Х + Ь{Х + C{Z — d{W = 0,
i = 1, 2. Пусть 7» = (а»> &»> й> ^»)- Остается проверить, что cos</? =
Gь72)
МЫ'
1 / 1\2
19.17. а) - I v + - 1 (о2 sin2 u + Ь2 cos2 и) du2 +
+ -(Ь2 - о2) sin и cos и ( v з )
+ iff1"^J(fl2cos2и + fe2sin2и
б) ^ (a2(t;2 - IJ + 4bV + c2(v2 + IJ) du2 +
+ 2(a2(u2 - l)(v2 - 1) - 4b2uv + c2(u2 + l)(v2 + 1)) dudv +
+ X (a2(и2 - IJ + 4bV + c2(u2 + IJ) dv2;
b) i fv " u)
^(b2 — a2)sinucosu [v =¦ 1 dudv +
2V V v )
2 fe2 sin2 u)+°2 f1" ^
1 f f1+h) (fl2 cos2
Ответы и решения 337
г) (р sin2 u + q cos2 u)v2 du2 + 2{q — p) sin u cos ududv +
+ (p cos2 u + q sin2 u + v2) dv2;
д) (p + g + 4v2) du2 + 2(p - g + 4w) dudv + (p + q + 4u2) dv2;
е) (a2 sin2 u -h b2 cos2 u) dw2 -h dv2\
19.21. Сфера: ds2 = du2 + Д2 cos2(u/R) dv2.
Top: ds2 = du2 + (a + bcos ff dv2.
Катеноид: ds2 = du2 -I- (a2 + u2) dv2.
Псевдосфера: ds2 = du2 + e~2u/a dv2.
Указание, u — натуральный параметр меридиана.
19.22. ds2 = du2 +e~2*/adv2. Полагая u = v, v = ae"/a, получаем
2
v*
19.26. Пусть г = F(p) — искомая зависимость. Имеем:
ds2 = {f + g'2) dr2 + f2 d<p2 = (/'* + g'2)F'2 dp2 + f2 d<p2 =
= A2(dv? + dv2) = A2(dp2 + p2 dip2),
P f
откуда получаем уравнение f, . = —y====, решая которое, полу-
получаем искомую связь
In р =
fir)
Применение к катеноиду этой формулы дает р = ez и, положив и =
= pcos</?, v = p sirup, получаем
1 ( v \ 1^ ( • Л
2 \ и2 + v2/ 2 V к;/
^ = -In (u2 + v2) = Re In w, w = u + iv, 0 < |w| < oo.
19.28. Пусть поверхность М2 С Е3 задана уравнениями Х{ = ж»(р, д),
г = 1, 2, 3, а переменные р и q изменяются в некоторой области на
338 Ответы и решения
плоскости. Пусть функции Х{ = Х{(р, q) — вещественно-аналитические.
Пару (р, q) можно рассматривать как координаты точки на поверхности
М2. Кривая С на М2 задается уравнениями
Элемент длины дуги выражается через вектор х = (х\, #2,
ds2 = (dx, dx) = (хр dp + xq dq, xp dp + xq dq),
или
ds2 = (xp, xp) dp2 + 2(xp, xq) dpdq + (xq, xq) dq2 =
= Edp2
где E = (xp, Xp), F = (xp, xq), G = (xq, xq).
В силу того, что элемент длины ds2 всегда положителен, W2 = EG —
— F2 также положителен. Найдем систему координат (u, v) с элементом
дуги ds2 = A(u, v)(du2 + dv2). Имеем:
Предположим, что мы можем найти такой интегрирующий множитель
а = (Ji +г<т2, что
( r*j F + iW . \ .
a VE dp И т=— dq] = du + г dv.
\ VE )
Тогда
/ f=J F-iW Л J
а ( v E dp H ^=r— dg 1 =du-idv
и, наконец, |<т|2 ds2 = du2+dv2. Полагая а2 = I/A, мы получаем искомые
изотермические координаты (u, i>). Таким образом, мы получили изо-
изотермические координаты, найдя интегрирующий множитель, который
превращает выражение y/Edp-\ j=—dq в полный дифференциал.
VE
Дифференциал du + г dv может быть записан в виде
Далее,
ди .dv r= du .dv F + iW
_ + z__aVi?) _ + ,_<,.
Ответы и решения 339
Исключая <т, получим
u ,dv
ИЛИ
du _ du dv dv _ du dv
ag dp ap ag dp dp
Разрешая эту систему относительно неизвестных dv/dp и dv/dq, по-
получим
dv = F(du/dp) - E(du/dq) dv _ Gjdu/др) - F(du/dq)
dp " VEG^F^ ' dq ~ /^W ' (*^
Аналогично,
du E(dv/dq) - F(dv/dp) du _ F(dv/dq) - G(dv/dp)
dp ~ y/EG - F2 ' dq ~ y/EG - F2
Следовательно, и удовлетворяет уравнению
d_ (F(du/dp)-E(du/dq)\ d_ (F(du/dq)-G(du/dp)\
dq\ W ) + dp\ W ) ~ '
которое называется уравнением Бельтрами-Лапласа. Если известно вто-
второе семейство изотермических координат (ж, у) в окрестности точки, то
ds2 = fj,(dx2 + dy2). Используя координаты (ж, у) вместо координат
, , „ ^ „ n av аи dv du
(p,<7), получаем Я = G = /i, F = 0n- = --, - =-.
Итак, получены уравнения Коши-Римана, откуда видно, что функ-
функции и и v являются сопряженными гармоническими функциями, а функ-
функция / = u + iv — аналитической от z = х + iy. Уравнение Бельтрами
принимает вид известного уравнения Лапласа d2u/dx2 + d2u/dy2 — 0.
Говорят, что комплекснозначная функция /(р, q), определенная на М2,
называется комплексным потенциалом на М2, если ее действительная
и мнимая части удовлетворяют уравнениям (*). Таким образом, дей-
действительная и мнимая части комплексного потенциала на многообразии
М2 дают изотермические координаты в окрестности каждой точки М2.
Отметим, что эти координаты — локальные: они не определены, вообще
говоря, на всем 2-мерном многообразии; при переходе от одной точки к
другой комплексный потенциал будет меняться.
340 Ответы и решения
19.30. а) Рассмотрим на поверхности сферы некоторую кривую ip = ip@).
При движении по этой кривой стрелка компаса образует с направлением
dip
движения угол ^, определяемый соотношениями tg^ = sin 0—. Здесь
угол ф измеряется от оси у по часовой стрелке. На карте мы получим
— = tg (V> + — ) = -. Из этих двух соотношений следует
dx \ 2/ tgy)
. Лр _ dx/dO _ дх/дв + (dx/dip)(dip/dO)
sin do " dy/do " ду/де + (dy/d<p)(d<p/de)'
(ду ^^P\^f_ • л_ ^? 9х dip
\дв дерde) H§ ~~do~ diplw'
Поскольку это соотношение должно выполняться в рассматриваемой
точке при любом значении dip/dO, то, приравняв коэффициенты при оди-
одинаковых степенях производной dip/dO в правой и левой частях, получим
. йду дх
дв дер
Из двух предпоследних соотношений следует, что левая часть послед-
последнего зависит только от 0, в то время как правая зависит только от ср,
поэтому обе части этого соотношения должны быть постоянными. Эту
постоянную мы положим равной единице. Таким образом, в проекции
Меркатора отображение задается формулами
б) ds2 = de2 + sin2 в dip2 = sin2 0(dx2 + dy2) = t
chJj
A - v2/c2J
19.32. ds2 = dx2 + sh2
19 33 ds2 _ dP2
19.33. ds - {1_p2J .
19.40. Указание. Построить изометрическое отображение трехмерного
пространства в четырехмерное в виде трехмерной цилиндрической по-
поверхности.
Ответы и решения 341
19.49. Указание. Лучше доказывать обратный ход изгибания: поверх-
поверхность вращения 5 вида
х = g{u) cos (р, у = g(u) sin (p,
с метрикой ds2 = du2 + g2(u)dip2 изгибать в винтовые поверхности 5д
вида х = у/д2 - h2 cos (<p + hF(u)), у = v^P2 - h2 sin (у? + hF(u)), z =
= h<p + h2F(u) + G(u,h).
Решение. Пункты а) и б) очевидны. Для доказательства пункта
в) вычислим сначала метрику общей винтовой поверхности. Получим
ds2 = A + f'2(u)) du2 + 2ft/'(u) du dv + {h2 + u2) dv2. Сделаем замену
переменных u = u(r), i> = #(r) + <?. В новых переменных метрика
представится в виде
(г)) dv2 +
и2(г))Я'(г)) dr d^ + ((/i2 + u2(r)) d^2.
Чтобы прийти к метрике вращения, достаточно потребовать, чтобы
hf'(r)u'(r) + (h2 + u2(r))H'(r) = 0 и A + /'2(u(r))u'2(r) + 2hf'(r)u'(r)x
хН'(г) Н- (h2 Н- u2(r))#'2(r)) = 1. Получим требуемые замены:
Я(Г) = У Г?-
где u =u(r), приводящие к метрике вращения вида ds2 = dr2+G2(r) d</?2,
гдеС2 = /12 + и2(г).
Обратно, имея метрику вида ds2 = dr2 + G2(r) d</?2, легко так подо-
подобрать замены г = г(и), ф = у — Н(г), чтобы получилась метрика общей
винтовой поверхности с соответствующей функцией f(u);
г) требуемое изгибание дается формулами
x = yjg2{u)-h2 cos {if + fcF(u)),
z — hip-V h2F(u) + G(u, I),
где
gRdu
и R2 = g2 - h2 - g2g'2, a h — числовой параметр;
342 Ответы и решения
д) так как x(u, v; t) = ucos(v + t), y(u,v;t) = usin(v + t),
z(u, v; t) = /i(i> + ?)-f- f(u), то изгибание скольжения порождается винто-
винтовым движением всего пространства, состоящим из поступательного дви-
движения параллельно оси Oz с постоянным вектором скорости v = (О, О, К)
и вращательного движения вокруг оси Oz с постоянной угловой скоро-
скоростью 1. Выпишите закон перехода от точки (ж, 2/, z) к ее положению в
момент ?, выделив в нем поступательную и вращательную части.
19.50. Пусть 7о: и = и(?; г/о, vo), v = v(?; г/о, vo) — траектория точки
(wo, vo) при изгибании скольжения. Пусть точка (г/о, ^о) соответствует
значению t = 0. При изометрии, порожденной изгибанием скольжения
при данном значении параметра ?, каждая дуга кривой 7, начинающаяся
в («о, ^о), переходит в дугу той же кривой, начинающейся в ее точке,
соответствующей значению t. Проведем через точки кривой 7о ортого-
ортогональные к ней геодезические Г* и отметим на каждой из них точку Mt(d)
на некотором одинаковом расстоянии d от соответствующей точки на 7о-
Так как окрестность точки (г/о, vo) изометрична окрестности точки
и = и(*; г/о, vo), v = v(*; гх0, v0)
при любом малом t, то при этой изометрии геодезической Го, выходящей
из точки (г/о, vo) ортогонально к 7о> соответствует геодезическая 1\, тоже
выходящая ортогонально к 7о в соответствующей точке, и в силу сохра-
сохранения расстояний, точке Mo(d) € Го окажется соответствующей точка
Mt(d). Следовательно, при разных d точки Mt(d) будут траекториями
точек Mo(d), которые мы обозначим через 7d- В силу соответствия дуг на
7d по изометрии, геодезическая кривизна каждой кривой 7<* постоянна.
Введем полугеодезическую систему координат, взяв за семейство парал-
параллельных геодезических линии 1\ и за ортогональные к ним линии —
кривые 7d- Для удобства записи оставим за новыми координатами преж-
прежние обозначения (г/, v). Форма длины в полугеодезических координатах
имеет вид ds2 = du2 -h G(w, v)dv2, причем кривым jt соответствуют
линии u = const. Вычисляя геодезическую кривизну кд этих линий,
1 dG xi
получаем, что ка = -z^^r- Но так как она постоянна вдоль каждой ли-
2Сг ои
dlnG
нии u = const, то выражение —— от v не зависит, следовательно, на
самом деле С?(гх, v) = G(u), а это и означает, что метрика ds является
метрикой вращения.
Ответы и решения 343
20.1. а) Имеем:
ru = (ashucosv, ashusinv, cchiz),
rv = (—achizsinv,achizcosv, 0),
ru xrv = (—ac ch2 г/cos z;, — ac ch2iz sin v, a2chizshiz),
\ru x rv| = achuy c2 ch2u + a2sh2iz,
гц x iy _
r« xrv| ~"
i
(-cchizcosv, -cchizsinv, ashiz),
n =
V c2 ch2 w + a2 sh2 iz
vuu = (achizcosv, achizsinv, cshiz),
rut; = (—ashizsinv, ashizcosv, 0),
rvv = (—achizcosv, —achizsinv, 0),
L = (riiii, n) = . =ac(— ch2 iz cos2 v —
V c2 ch iz 4- a2 sh u
i 2 • 2 i 2 \ ac
— ch u sm v + sh u) = , ,
V c2 ch iz -h a2 sh2 u
M = (ги1,, n) = , = ((—с ch ц cos v) (—a sh iz sin v) 4-
V c2 ch u 4- a2 sh iz
+ (—cchizsinv)(ashizcosv)) = 0,
N = (rvv, n) = , = ((—с ch iz cos v) (—a ch iz cos ц) 4-
V с2 ch u + a2 sh iz
-h (—cchizsinv)(—achizsinv)) =
V c2 ch2 u + a2 sh2 iz
Ответ: . (-diz2 -h ch2
V c2 ch u 4- a2 sh iz
б) Имеем:
ru = (achizcosv, achizsinv, cshiz),
rv = (-ashizsinv,ashizcosv, 0),
ru x rv = (—acsh2izcosv, —acsh2izsinv, a2chizshiz),
\ru x rv| = a sh uy/a2 ch2 iz -h c2 sh2 iz,
ru xrv
|r« x rv|
= =(—cshttcost;, —cshizsinv, achiz),
V a2 ch2 u + c2 sh iz
ruli = (ashizcosv, ashizsinv, cchiz),
344 Ответы и решения
ruv = (-achizsinv, achizcosv, 0),
rvv = (—ashizcosv, — ashusinv, 0),
L = (ruu, n) = / 2 ac(~
Va2ch iz + c2sh iz
— sh2 гх sin2 v + ch2 iz) = —. ,
у a2 ch2 u + c2 sh2 гх
((—с sh u cos t;)(—a ch iz sin v) +
) n) . =
V a2 ch u + c2 sh гх
+ (-cshizsinv)(achizcosv)) =0,
n) = . =((~cshizcost;)(—ashizcost;) 4-
V a2 ch u + c2 sh iz
+ (—cshizsinv)(—ashizsinv)) =
у/a2 ch2 и + с2 sh2 и
Ответ: , (du2 +sh2iz<fo2).
у a2 ch2 iz + с2 sh2 iz
20.2. Пусть для определенности и > 0. Имеем:
ru = (cosv, sinv, 2iz), rv = (-izsinv, izcosv, 0),
ru x rv = (—2iz2cosv, —2iz2sinv, iz), |ru x rv| = uy/1 4-4iz2,
ru x rv 1
n — ^ . = (~2izcosi;? —2tzsinv, 1),
Tim = @, 0, 2), vuv = (-sinv, cosv, 0), rvv = (-tzcosv, -izsinv, 0),
о
L = (ruti, n) =
4iz2'
((—2izcosv){— sinv) 4- (—2izsinv)cosv) = 0,
1 + 4iz2
= (rVv, n) = . ((-2u cos v)(-u cosv) +
2iz2
-h (~2izsinv)(-izsinv)) =
Ответ: y
1 4-
20.3. Имеем:
*u = @, 0, 1), rv = (-Rsinv, Rcosv, 0),
ru x rv = (-Rcosv, -Rsinv, 0), \ru x rv| = Д,
Гц X I"v / . Л\
n = = (— cosu, - smu, 0),
|r x r|
Ответы и решения 345
i*tm = @, 0, 0), ruv = @, 0, 0), rvv = (-Rcosv, -Rsinv, 0),
L = (ruu, n) = 0, M = (r™,, n) = 0,
TV = (rvv, n) = ((-cosv)(-i?cosv) + (-sinv)(-#sinv)) = Д.
Ответ: Rdv2.
20.4. Пусть для определенности и > 0. Имеем:
ru = (cosv, sinv, A;), rv = (—usinv, ucosv, 0),
, -fcizsinv, гх), |ru x rv| = u
Тип = @, 0, 0), ruv = (—sinv, cosv, 0),
rvv = (—г/ cos v, —usinv, 0),
L= (ruti, n) =0,
Л^ = (гщм n) = . ~ ((-A: cosv)(- sin v) + (-A;sinv)cosv) = 0,
v x "i /v
N = (rvt;, n) = --((-kcosv)(-ucosv) +
-h (—A;sinv)(—гх sin v)) =
л ки dv2
Ответ: ,
20.5. Имеем:
г = (tzcosv, u sin v, /(v)), ru = (cosv, sinv, 0),
rv = (—u sin v, гх cos v, /'),
? = (ru, ru) = 1, F = (tu, tv) = 0, G = (rv, 1Ч,) = и2
ruxrv = (/'sinv, -f'cosv, iz), |rtt x г„| = д/гх2 + (fJ,
^ (/)
riiV = (— sinv, cosv, 0), rvv = (-ucosv, —usinv, /")>
L = (rtt> n) = 0, M = (pw, n) = Г/
Л^ /r n\ Uf" К
F2 " (гх2 4- (/02J'
Таким образом, К = A1A2 < 0 и, следовательно, главные кривизны Ai и
Аг имеют разные знаки.
20.6. Пусть v, n, b — репер Френе данной кривой. Тогда поверхность
задается уравнением r(s, u) = p(s) 4- izb(s), где s — натуральный пара-
параметр кривой р. Тогда т8 = v — гххп, ru = b, JS = (rs, rs) = 1 4-
346 Ответы и решения
F = (г«, гц) = О, G = {ти, ти) = 1, т8 х ти = -п - tixv, |r, x г«| =
= л/1 -ht/2>tr2,
=
|г. х
= А;п - uxn - ux(-kv + xb) =
rsxru 1
m = = (шпг 4- п),
|г. х Г||| /ГТЛ?
, . Ы^ 4- fc - их
r8U = -fcn, rttfl = О, L = (rM, m) = A ,
V1 +
x
M = (reu, m) = —, , N = (ruu, m) = 0,
Vl + u2x2
LN-M2 x2
# =
EG-F* ~ ( )
EN + GL-2MF HfaV-ux
EG-F2
Ответ: К = —-г—
20.7. Пусть v, n, b — репер Френе данной кривой. Тогда поверхность
задается уравнением r(s, и) = p(s) 4-tm(s), где s — натуральный пара-
параметр кривой р. Тогда т8 = v — ки\ 4- ихЬ = A — ки)\ 4- ихЪ, ти = п,
Е = (г,, г.) = A - киJ 4- г/2*2, F = (г„ ти) = 0, G = (ru, ru) = 1,
• 4- A - ки)Ъ, \та х г„| =
= — ukv 4- A;(l — ки)п 4- г/xb — гхх2!! =
m = ,Га Х Гц, = t l =(-uxv 4- A - *ti)b),
|г х г| /AкJ+22У V ;
т8и = ~к\ 4- хЬ, rUtt = 0, L = (ги, т) =
= —ки\ 4- (А; — к2и — х^и)^. 4- хиЪ,
(кх - кх)и2 4- хи
- киJ 4-
М = (т8и, т) = ; /[ ===, Л^ = (тии, т) = 0,
у/{\ - киJ 4- гх2х2
LN-M2 = х2
~ EG-F*- (A-киJ+)
EN + GL- 2MF __ (кх - А:х)гх2 4- >ш
EG-F2 "(A^J + ^'
х2 (fex - А:х)гх2 4- х
Ответ: К = Я = —
(A - ЫJ 4- u2x2f (A - ЫJ 4- г/2*2K/2
лл л __ /а, ч Ъ. ч izv\ /а Ь гЛ
20.9. Имеем: r= I -(ti-v), ^(u + v), у 1, ru = I -, -, -J,
Ответы и решения
347
v=(-§• И)'Е=<ги'ги>=\(а2+ь2
+v2)>
F = (ru, rv) = -(b2 - a2 4- tit;), G = (rv, rv) = -(a2 4- b2 4- гх2),
гихг„ = т(Ь(гх - v), -а(гх 4- v), 2ab),
n =
(b(u - v), -a(u + v), 2аЬ)
х г„| л/а?(и + уJ + Ь2(и - уJ + 4а2Ь2'
= @, 0, 0), ги„ = И), О, |J, rvv = @, 0, 0), L = (гии, п) = О,
аЪ
¦-, N = (rvv, n) = 0.
М = (ruv, n) = —. : ,
y/a2(u + уJ + Ъ2(и - уJ + 4аЧ2
Запишем дифференциальное уравнение, определяющее линии кривизны
поверхности:
0 =
dv2 —du dv du2
E
F
M
N
Отсюда получаем
du2
dv2
= -M(Gdv2-Edu2) =
ab((a2 + Ь2+ v2) du2 - (а2 + Ь2+ u2) dv2)
4y/a2(u + vJ + b2(u - vJ + 4a2b2
du . dv
o2 + b2 + u2 a2 + b2 + v2'
arsh
sh arsh
b2 4- v2 y/a2 4- b2 4- u2
Va2 + b2 y/a2 + b2
= shC,
так как sh(x±y) = shxchj/± chxshj/ и cha; = vl-hsh2a;. Таким
образом, линии кривизны данной поверхности задаются уравнением
и у/а2 -f b2 -h v2 ± vy/a2 + b2 + v2 = const.
20.10. Как известно (см. соответствующие задачи для геликоида в
первой части книги), имеем Е = (ги, ти) = 1, F = (ru, rv) = 0,
G = (rv, rv) = а2 4- гх2, L = (ruti, n) = О, М = (ги1;, п) = --
348
Ответы и решения
N = (rvt;, n) = 0. Запишем дифференциальное уравнение, определяю-
определяющее линии кривизны поверхности:
dv2 -dudv du2
0 =
Е
F
М
N
= -M(Gdv2-Edu2) =
du2
Отсюда получаем dv2 = — г-, dv = ±
а2 4- и2
a(du2-(a2 + u2)dv2)
у/а2 4- и2
du
. Следовательно,
Л-и2
v = ±1п (и 4- у/а2 4- и2) + С.
20.11. Согласно задаче 20.10, линии кривизны геликоида задаются урав-
уравнениями v = ± In (г/ 4- \/а2 4- г/2) 4- С. Как известно, вторая квадратич-
adu2 . 9 _
ная форма катеноида имеет вид —г «4-ааг; . Тогда значение второй
и2 Л-а2
квадратичной формы на касательных векторах к кривым, являющимися
образами линий кривизны при изометрии, равно
2
Таким образом, линии кривизны при наложении переходят в асимпто-
асимптотические линии катеноида.
20.12. Из условия следует, что p(s) — плоская кривая. Пусть n, b —
векторы нормали и бинормали кривой p(s). Тогда а = ±Ь. Будем счи-
считать, что а = Ь. Отсюда следует, что vxn = a, vxa= —n, n x a = v.
т8 - v + kgv = A 4- kg)v, ru = fa - g'n,
E = (г., т.) = A4- kgJ, F = (г., ru) = 6,
G = (ru, ru) = (fJ 4- (g1J, r8xru = -A 4- кд)д'ъ - A 4- -
v8 x ru 1 ,
m =
(9'J
= k'gv + k(l + kg)n, rsu = kg'v, ruu = /"a - g"n,
kf'jl + kg) ... . n
-^-^ ^-, M = (r,u, m) = 0,
Ответы и решения 349
Уравнения линий кривизны имеют вид
du2 —dsdu ds2
0 =
Е F G
L M N
= (EN-GL)duds.
Отсюда видно, что линиями кривизны являются кривые, определяемые
уравнениями s = const, u = const.
20.13. Имеем: а, 6) r8 = v - v a cos (pk = v(l - ak cos cp),
E = <r.,r.) = A - akcosyJ, F = (г., rv> = 0, G = <г„, rv> = a2,
r8 x r^ = —b a(l — aA; cos y?) simp — na(l — aA; cos ф) cos y?,
Г X Г
|re x г^| = a(l — akcosip), m = r-^ ~ = — bsimp — ncosy?,
\t8 x r^l
H =
r88 — nA;(l — afccosy?) — vafccosy?, rsv? = vafcsiny?,
rw = — n a cosy? — basing, L = (rss, m) = —A;(l — aA; cos y?) cos tp,
M = (r8(p, m) = 0, N = (rw, m) = a,
_ LiV — M2 _ к cos y?
= EG-F2 = ~a(l-akcos<p)'
EN + GL- 2MF
EG-F2
_ (I — akcos(pJa + a2(—k(l — akcosip)cosip) _ I — 2akcos(p
a2(l — ak cos (pJ a(l — ak cos (p)'
в) запишем уравнение на линии кривизны:
d(p2 —dsdip ds2
0 =
Е F G
L M N
= {EN - GL) dsdip = a{l- ak cos ф) ds dxp.
Так как 1 — ak cos (p > 0, то dsdip = 0 и линии кривизны имеют вид
s = const, (p = const.
20.14. Имеем:
r8 =v + o(-b + >сЬ) cos у? — ахп sin у? =
= v(l — aA;cos<^) — пах simp 4-
г^> = - па sin <^ + ba cosy?, E = (rs, rs) = A -aA;cosy?J
350
Ответы и решения
F = (г„ i>) = а2х, G =
= а2,
•e x Ту = v(—a2 x sin у? cos у? 4-a2x cos у? sin у?) 4-
4- n(afc cos ip — l)a cos ip 4- b(afc cos ip — l)a sin ip =
= —a(l — aA; cos <^)(n cos ip 4- b sin ip),
* x r<*
— = —n cos y? — b sin ip,
m =
ss = v(—ak cos у? -h afcxsin ф) 4-
4- n(-axsin(/?4- А;A — akcosip) — ах2 cosф) 4-b(axcos<^ — ax2 sin(p),
rS(p = vafc sin у? — пах cos у? — baxsin </?,
г^«^ = -паcos<?-basing, L — (r88, m) = ax2-A;cosy?4-aA;2cos2ip,
M = (rsv>, m) = ax, ЛГ = (rw, m) = a.
Запишем уравнение на линии кривизны:
dip2 —dsdip ds2
0 =
E
F
M
A
ax2
G
=
dtp2
— ak cos y?):
— A; cos (p +
2+aV
ak2 cos2 и
—dsdip
a2x
ax
ds2
a2
a
dip2
—ds dip ds2
A — ak cos ipJ 4- a2x2 a2x a2
fc cos ip
a
0
0
= a(l—akcosip)(dip+xds)ds.
dip
Так как 1 — ak cos ip > 0, то имеем ds = 0 или — = —x. Следовательно,
as
линии кривизны имеют вид s = const
20.15. Имеем:
xds 4-const.
' (P = ~ J
rv = Uv2 -3u2 - |, 6uv, 2v\, ru = Uuv, 3u2 - iv2 - i,
E = (ru, ru) = ^3t;2 - Згг2 - |) + Збг/V 4- 4гх2 = Uu2 4- 3t;2 4- i)
Ответы и решения
351
&uv
F = (ru, rv) = ( 3v2 - 3u2 - - ) 6uv +
G = (rv, rv) = Збг/V -h (in2 - 3t
/2 2
•„ = 6it2v -h 6v3 + -v, 6u3 + 6uv2 + -u ,
\ о 3
- 3v2 ~\
= О,
Зг>2 + ^
Г„ X Г
\ru x rv| =
-l ,
ru x г„ Bv, 2ц, 1/3 - Зц2 - Зг>2)
П ~ |г„ х г„| ~ 3u2 + 3u2 + 1/3
ruu = (-6«, 6v, 0), ruv = Fv, 6u, 2), гет = Fu,
-6v, 0),
6v2v + 6u2u + 2A/3 - 3u2 - Зи2)
п
= 2'
Запишем уравнение на линии кривизны:
dv2 —du dv du2
0 =
E
F G
M N
^ (d2u-d2v).
Отсюда получаем
d2u - d2v = (du -h dv)(du -dv) =
= const.
Ответ: и ± v = const.
20.16. Так как Е = (ru, ru), то ru = y/El, |1| = 1. Аналогично,
rv = \/Gm, |m| = 1. Гауссова кривизна поверхности выражается через
коэффициенты первой и второй квадратичных форм следующим обра-
образом: К = ——, где L = (гии, п), М = (ruv, n), N = (rVVi n);
.с/Сх
ruu = --7= * + >/i51u. Так как (ги, п) = 0, то L = л/?Aи, п). Так как
2t
/
A, 1) = 1, то (lu, 1) = 0 и отсюда lu =
352 Ответы и решения
Аналогично, N — \/G(mv, n), mv = P21+ фп.
Тогда LN = y/EG(lu, n)(mv, n) = \fEGqiq2 = <JEG(\U, mv).
Точно так же показывается, что
М2 =
(lu, m)v - (luv, m), (lv, mu) = (lv, m)u - (luv, m).
т>- (lu, m)v - (lv, m)u
к = Teg '
2dv\ y/EG ) 2dv\ /W )
В этой выкладке мы два раза воспользовались тем, что (ru, г„) = 0.
Аналогично,
д .. ,19 fdG/du\
fa{lv'm) - 2&1 \7Ш)'
В итоге получаем
К - * f _д_ (dE/dv\ д__ fdG/du\ j
20.17. Воспользуемся формулой для гауссовой кривизны поверхности с
квадратичной формой ds2 — Edu2 4- Gdv2 (см. задачу 20.16). Гауссова
кривизна такой поверхности равна
к = 1 Г д (dE/dv\ д (dGidu\\
2VEG\d\^EG ) d\fEG ))'
Полагая в выражении для кривизны Е = 1, получаем
\_д_ (dG/du\ 1_д_ GdVG\ _ (d2/du2)VG
2y/Gdu { VG )~ 2VGdu [ du ) ~ ^G '
Ответ: К = —
у/G du2 '
20.18. К = -—Д1пВ, где Д — оператор Лапласа.
2x7
Ответы и решения 353
20.19. Для вычисления кривизны можно воспользоваться формулой, вы-
выведенной в задаче 20.17. Имеем G(u) v) = e2u, откуда
1 d2eu
e" du2 "
20.20. Показать, что через метрику выражаются скалярные произведения
(гу, гк) и разности (гу, rw> - (riJfc, гд).
20.24. Рассмотрим поверхность вращения М с уравнением
у = r(u) sin <?, z = h(u))
где a^u^b, 0 ^ <? ^ 2тг. Элемент площади этой поверхности ра-
равен da = r(u)\/r/2 + z'2 dudip. Будем искать деформацию поверхности
вращения в виде х = i?(u, e)cos</>, j/ = i?(u, e)siny>, 2: = H(u) e) с
условием равенства элементов площади
= R\/R'2+H'2dudip.
Положим Д(и, е) = er(u), е -* 1 - 0. Тогда это уравнение допускает
решение
Я(и, е) = () +
о
которое и определяет искомое семейство поверхностей вращения, удовле-
удовлетворяющих условию задачи.
20.27. а) F'?H + F'22(w) + F'23(w) = 0; б) ds2 = A2(w)(du2 +
где
2 [F^Hi + l^
2
20.29. Указание. Использовать связь между тремя квадратичными
формами поверхности.
20.38. Кривизну К считаем по формуле К = — 7ГГ& ^п Л> где Л = ё~2п , и
находим, что К = 2е2и > 0. Неполнота метрики следует из существова-
существования уходящего в бесконечность пути конечной длины, а именно, v = 0.
Изометрическое вложение метрики в Е3 в виде выпуклой поверхности
невозможно, так как интегральная кривизна
II
KdS = 2e2u dudv = 00,
354 Ответы и решения
а интегральная кривизна выпуклой поверхности, равная площади ее
сферического изображения, не превышает 4тг.
22.3. Нет, так как в противном случае на листе Мёбиуса существовало бы
непрерывное поле нормалей. В самом деле, так как гауссова кривизна
положительна, то поверхность локально лежит по одну сторону от каса-
касательной плоскости. Поэтому можно определить гладкое поле «внешних
нормалей», что противоречит неориентируемости листа Мёбиуса.
22.5. а) При указанных условиях можно определить гладкое поле «внеш-
«внешних нормалей» (см. задачу 22.3), что противоречит неориентируемости
поверхности.
22.6. а) У к а з а н и е. Из бесконечности придвигать плоскость до момента
соприкосновения с поверхностью. Рассмотреть гауссову кривизну по-
поверхности в точке касания.
б) Указание. Выбрать сферу достаточно большого радиуса так,
чтобы она содержала поверхность внутри. Затем непрерывно уменьшать
радиус сферы до момента соприкосновения с поверхностью. Рассмотреть
гауссову кривизну поверхности в точке касания.
22.7. Указание. См. задачу 22.6.
22.8. Указание. Применить теорему Гаусса-Бонне.
22.10. а) Рассмотреть часть сферы х2 + у2 + z2 = R2, \z\ ^ a, a < R.
Отождествить противоположные точки.
б) Указание. Найти поверхность вращения постоянной отрица-
отрицательной кривизны, инвариантную при центральной симметрии относи-
относительно начала координат (см. задачу 20.23). Отождествить по подходя-
подходящему действию группы Z/2.
Другой вариант решения. Рассмотрим на прямоугольнике П: —а ^
^ u ^ a, —b^v^b метрику ds2 = ch2 vdu2 + dv2. Отождествим теперь
стороны и = -о и и = а по равенству длин склеиваемых отрезков так,
чтобы получился лист Мёбиуса. Легко показать, что на листе Мёбиуса
получится аналитическая метрика кривизны —1. При достаточно малых
b эта метрика реализуется на «катушке» Миндинга, имеющей уравнение
V
х = ch v cos u, у = ch v sin u, z = / v 1 — sh21 dt.
Ответы и решения 355
V2 U2
22.14. fdvf(VG)uudu.
22.15. 2тг.
22.17. Двукратно покрытая сфера.
22.20. Поверхность вращения кривой z = -я2, 0 ^ х ^ 2, z = х — In я,
а; ^2.
22.21. Пусть поверхность вращения параметризована следующим обра-
образом: (ucosv, usinv, f(u)). Ее параллели задаются уравнениями и =
= const, а меридианы — уравнениями v = const. Первая квадратичная
форма этой поверхности имеет вид ds2 = (l + (/'(^)J) du2 + u2 dv2.
Сделаем замену переменной и на переменную С/, где
Обратную зависимость и от U обозначим и = X(U). Первая квадратич-
квадратичная форма при такой замене переменных принимает вид ds2 = А2(?/)х
x(dU2 + dv2). Заметим, что параллели поверхности задаются уравне-
уравнениями U = const, а меридианы — прежними уравнениями v = const.
Рассмотрим евклидову плоскость с координатами (ж, у) и метрикой
dx2 + dy2. Нетрудно проверить, что отображение, задаваемое в коорди-
координатах формулой (?/, v) i-> (ж, 2/), обладает необходимыми свойствами.
22.23. а) 4тг; б) 2тг; в) 4тг.
22.24. Пусть в сферических координатах у?, ^ прямоугольник Р задан не-
неравенствами —а^ф^тг, --^ < b ^гр ^. с < —. Тогда изометрическое
вложение Р вШ3 дается следующим образом:
an . а . тг .
ж = - cos -у? cos ф, у = - sin -у? cos V>,
тг а тг а
откуда легко установить аналитичность и погружения, и метрики.
22.25. Метрика единичной сферы в сферических координатах имеет вид
ds2 = cos2 tp dip2 + dxjj2. Отождествление производится по отображению
(-а, ф) -» (а, 6 + с - -0)- Остальное очевидно.
356
Ответы и решения
23.1. Разбиения показаны на рис. 154.
Ь Ь b
" T2 » S2 " ^2 " Rp2
Рис. 154. Триангуляции тора, сферы, бутылки Клейна и проективной плоскости
23.3. Указание. Требуемая оцен-
оценка следует из системы неравенств
V(V - 1) > 2Я,
Рис. 155. Триангуляция тора
3F = 2Е.
23.4. См. а) рис. 155,156; б) рис. 157.
23.5. Минимальная триангуляция
тора может быть построена путем
рассмотрения плоской решетки, со-
состоящей из правильных треуголь-
ников (см. рис. 158). Следует взять
Рис. 156. Триангуляция тора —
другой вариант
Рис. 157. Триангуляция про-
проективной плоскости
вторую решетку, порожденную векторами ei, ег, указанными на ри-
рисунке. Фундаментальной областью этой второй решетки, является па-
параллелограмм со сторонами ei, ег. Отождествляя его противоположные
Ответы и решения
357
стороны, получим тор, на котором треугольники исходной правильной
решетки задают искомую триангуляцию.
7 вершин, 14 треугольников
Рис. 158. Решетки, порождающие триангуляцию тора
23.9. См. рис. 159.
Рис. 159. Карта на проективной плоскости
23.11. Указание. Построить гомеоморфизмы, показанные на рис. 160.
Рис. 160
23.12. См. рис. 161.
23.13. См. рис. 162.
23.14. См. рис. 163.
358
Ответы и решения
Рис. 161. Склейка бутылки Клейна из двух листов Мёбиуса
Рис. 162
Ответы и решения
359
Рис. 163
д\—
Рис. 164. Граф «3 домика и 3 ко-
колодца» на листе Мёбиуса
Рис. 165. Граф «3 домика и 3 ко-
колодца» на листе Мёбиуса
Рис. 166
360
Ответы и решения
23.21. См. рис. 164. В более симметричном виде искомое вложение изо-
изображено на рис. 165.
23.25. См. рис. 166.
23.26. См. рис. 167.
12 3 5 6 7 8 9 10 11
12 3 5 6 7 8 9 10 11
Рис. 167. Граф «4 домика и 4 колодца» на торе
24.1. Продифференцируем уравнение, задающее данное семейство ли-
_ udu _
ний. Получим с = ——. Подставим это выражение для с в уравне-
v dv
ние семейства. Получим дифференциальное уравнение линий семейства:
_ Подставляя в дифференциальное уравнение, определяющее
аи uv
сопряженное семейство
Ldu5u + M(du Sv + dv Su) + Ndu5u = 0,
получим — = —1. Здесь L, M и N — коэффициенты второй квадра-
ди
тичной формы поверхности, (du, dv) — направление вектора скорости
линии исходного семейства, a (Su, Sv) — направление вектора скорости
линии сопряженного семейства. Следовательно, сопряженное семейство
состоит из линий и + v = Ci, где С\ — произвольная постоянная.
24.3. Дифференциальное уравнение линий сопряженного семейства имеет
вид — = —s\n2vdv. Интегрируя, получаем уравнения линий сопря-
и 4
женного семейства и = CeA/8)cos2v, где С — произвольная постоянная.
24.4. Условие сопряженности указанных в условии задачи семейств
линий легко сводится к дифференциальному уравнению fxy = 0.
Ответы и решения 361
Отсюда /(#, у) = д(х) + h(y), где д и h — произвольные гладкие функ-
функции одной переменной.
24.5. Введем на поверхностях координаты так, чтобы соответствующие
точки на поверхностях задавались одной и той же парой чисел. Из усло-
условия задачи получаем
Ldu5u + M(du Sv + dv Su) + NdvSv =
du Su + Fi (du Sv + dv Su) + Gx dv Sv),
L\ du Su + Mi (du Sv + dv Su) + Ni dv Sv =
= ц(Е du Su + F(du Sv + dv Su) + Gdv Sv).
Здесь А и /л — некоторые множители пропорциональности. Отсюда по-
получаем, что
Е\ F\ G\ E F G
24.6. Дифференциальное уравнение асимптотических линий имеет вид
Отсюда у = х— ± \ Ь2 + а2 1 — ) . Легко видеть, что полученное диф-
ах у \ах J
ференциальное уравнение является уравнением Клеро. Решая его, по-
получаем
где С\ и Сг — произвольные постоянные. Заметим, что асимптотиче-
асимптотическими линиями однополо стного гиперболоида являются его прямолиней-
прямолинейные образующие.
24.7. Дифференциальное уравнение асимптотических линий имеет вид
f"(x)dx2 — f"{y)dy2 = 0. Условие ортогональности асимптотической
/"(#) f"(y)
сети записывается в виде равенства ——г = г- Отсюда
l + (/'()J l + (f>(y))
немедленно получаем, что
362 Ответы и решения
где а — некоторая постоянная. Решая эти уравнения, получаем
J'(x) = tg (ах + Ь), f(x) = — In | cos (ax + Ь)| + с,
а
Г (у) = tg (ay + Ь), f(y) = — In | cos (ay + b)| + с
a
Отсюда получаем уравнение искомой поверхности:
_ 1, cos (ax + 6)
а
cos (ay + b)
24.8. Легко показать, что дифференциальное уравнение асимптотических
линий имеет вид
ху dx2 + (х2 - у2) dxdy-xy dy2 = 0.
Это уравнение распадается: (х dx -у dy)(x dy+y dx) = 0. Отсюда немед-
немедленно получаем, что асимптотическими линиями являются х2 — у2 = Ci,
ху = Сг, где С\ и Сг — произвольные постоянные. Асимптотические
линии, проходящие через точку Мо, имеют уравнения х2 — у2 = —3,
24.9. гх + v = Ci, и — г> = С2, где С\ и Сг — произвольные по-
постоянные.
24.10. Параметризовать геликоид следующим образом:
(ncost;, usini>, av).
Показать, что асимптотические линии задаются уравнениями и = С\ и
v = Сг, где Ci и Сг — произвольные постоянные.
24.15. Параметризуем поверхность следующим образом:
х = -(cosw-hcost;), 2/ = -(sinw + sinv), z = -(u + v).
Тогда дифференциальное уравнение асимптотических линий имеет вид
du2 — dv2 — 0. Отсюда получаем уравнения асимптотических линий:
и + v = d, u — v = C2, где Ci и С2 — произвольные постоянные.
24.17. Заметим, что касательная плоскость к поверхности в точках кри-
кривой совпадает с соприкасающейся плоскостью этой кривой. Отсюда не-
немедленно вытекает требуемое утверждение.
24.18. Примем за координатную сеть на поверхности сеть, состоящую из
асимптотических линий. Тогда косинус угла между асимптотическими
Ответы и решения 363
F г,
линиями равен cos<^ = . Кроме того,
у EG
-FM
-" —
EG-F2' EG-F2'
Я2
Отсюда получаем, что cos2 <p = ———. Следовательно, К = —Я2 tg2 (p.
H — К
24.19. v = Cu u2 = C2 sin Xv.
24.20. u + v = Cu u-v = C2.
24.21. x = Ci, y2 sin x = C2.
24.22. x = -(u 4- г>), т/ = -(u — v), ^ = ~-иг>.
2V /J 2 2
24.24. Если координатная сеть является асимптотической, то L = N = 0.
-М2
В этом случае К = —^——, а уравнения Петер сона-Кодацци прини-
мают вид
F2)MU - BF(jBv - Fu) - (jBC?u - GEU))M = 0,
- F2)MV - BF(FV - Gu) - (EGV - GjBv))M = 0.
Отсюда легко получить требуемые формулы.
24.25. Заметим, что сеть, состоящая из координатных линий, является
чебышевской тогда и только тогда, когда Еи = Gv = 0. Примем за
координатные линии поверхности ее асимптотические линии и восполь-
воспользуемся результатом задачи 24.24.
24.26. Легко показать, что касательная плоскость к поверхности в неко-
некоторой точке является соприкасающейся для каждой из асимптотических
линий, проходящих через эту точку. Следовательно, бинормали к асим-
асимптотическим линиям в точке их пересечения являются нормалями к по-
поверхности, т. е. m = ±b, где b — вектор бинормали к асимптотическим
линиям, am — вектор нормали к поверхности. Продифференцируем это
равенство по дуге асимптотической линии и, используя формулы Френе,
d d
получим —m = ±—b = ^хп. Здесь п — вектор главной нормали
as as
асимптотической кривой. Отсюда получаем, что
/ d d \ III
= (-7-m, —m) = —.
\ds ds I I
Здесь через I и III обозначены значения первой и, соответственно, тре-
третьей квадратичной форм на векторе скорости асимптотической кривой.
364 Ответы и решения
Из соотношения между квадратичными формами поверхностей III =
= #11 — К\ и того факта, что в асимптотическом направлении II = О,
получаем —- = —К. Отсюда х2 = —К = \К\.
24.28. Дифференциальное уравнение линий кривизны, как легко прове-
проверить, имеет вид du2 — (u2 + a2) dv2 = 0. Интегрируя, находим
v = С\ - In (и + yju2 -ha2), v = С2 + In (и + \Д*2+а2),
где Ci и Сг — произвольные постоянные.
24.29. Линиями кривизны цилиндрической поверхности, отличной от
плоскости, являются ее прямолинейные образующие и линии, по ко-
которым пересекают поверхность плоскости, ортогональные образующим
поверхности.
24.30. Линиями кривизны конической поверхности, отличной от
плоскости, являются ее прямолинейные образующие и линии, по кото-
которым пересекают поверхность всевозможные сферы с центром в вершине
конической поверхности.
24.31. Воспользоваться тем, что только у сферы и плоскости соответ-
соответствующие коэффициенты первой и второй квадратичных форм пропор-
пропорциональны.
24.44. Указание. Показать, что все геодезические являются линиями
кривизны. Воспользоваться тем, что если на поверхности в каждом на-
направлении проходит линия кривизны, то все точки омбилические.
24.47. Пусть r(s) -f tl(s) — радиус-вектор линейчатой поверхности в не-
некоторой асимптотической параметризации. Введем новые координаты
S
s, г, где т — t + t(s), t(s) = / A, r')ds. Тогда получаем требуемую
о
параметризацию R(s) -f rl(s), в которой новая образующая имеет вид
ВД = г(«)-«(«I(«).
24.48. ds2 = du2 4- 2F du dv + dv2.
24.49. Прямой круговой цилиндр или область на нем.
24.52. Вывести формулу для гауссовой кривизны в асимптотических ко-
координатах.
24.56. а) Очевидно, любая поверхность с постоянной внешней геометрией
имеет постоянные гауссову и среднюю кривизны. Рассмотрим два случая.
Ответы и решения
365
1) К = 0. Поверхность развертывающаяся. Если на ней Н = 0,
то это плоскость. Пусть Н ф 0. Напишем уравнение поверхности в
ортогональной асимптотической параметризации r(s) -f tl(s), в которой
средняя кривизна вычисляется по формуле (в обозначениях Рашевского)
^ п A(s)t2+B(s)t + C(s)
Так как при фиксированном s на это равенство можно смотреть как на
алгебраическое относительно t, то имеем (при t -> оо), что (V, V) = 0,
т. е. вектор 1 постоянный. И так как A, г') = 0 в силу ортогональности
параметризации, то направляющая — плоская. Далее получаем, что
A(s) = (г", г', 1) = const, следовательно, кривизна плоской кривой r(s)
постоянна, т. е. она является окружностью.
2) К = const = С\ ф 0. Введем на поверхности координаты в
линиях кривизны. Тогда Е = М = 0 и 2Н =— + -; = 2Сг, К =
G Ь
LN
= —— = С\. Решив эту систему алгебраических уравнений, получаем
EC
L = Е(С2 т VH2- Ю, N = G(C2 ± \/Н2-К).
Теперь из одного из уравнений Петерсона-Кодацци, например, из Lv =
= C2EV, получаем: EV(C2 T VH2 - К) = C2EV, т.е. Н2 - К = 0.
Если Ev = 0, то применим другое из уравнений Петерсона-Кодацци.
Следовательно, все точки поверхности омбилические, т. е. поверхность —
сфера;
б) поворот пространства Е4 с матрицей
COS о:
— sin о:
0
0
sin о:
COS о:
0
0
0
0
cos/2
— sin/3
0 )
0
sin^3
cos/3 J
где а = Щ — u2, C = v\ — v2, переводит окрестность точки
(Ri cos u\, R\ sin U\, R2 cos v\, R2 sin v\)
в окрестность точки (R% cosu2, R\ sinu2, R2 cosi>2, R2 sin^
366 Ответы и решения
24.64. Воспользоваться теоремой Бельтрами-Эннепера о кручении асим
тотической линии на поверхности отрицательной кривизны.
24.65. См. предыдущую задачу.
24.67. Применить формулу для гауссовой кривизны К.
25.17. См. рис. 168 с тремя вариантами ответа.
Рис. 168
25.19. См. рис. 169.
25.24. Множество точек самопересечения гомеоморфно букету из трех
окружностей: S1 V S1 V 51. Вершина этого букета — трехкратная точка
самопересечения, а любая точка букета, отличная от вершины, — двух-
двухкратная.
Ответы и решения 367
*«¦ ^
Рис. 169
25.25. Граница М2 построенной нормальной трубчатой окрестности ра-
радиуса ?, очевидно, проектируется на ЕР2 (две концевые точки нормаль-
нормального отрезка переходят в его центр, лежащий на ЕР2). Таким образом,
М2 является гладким двумерным компактным замкнутым многообра-
многообразием, двулистно накрывающим проективную плоскость. Если мы до-
докажем, что это многообразие связно, то тем самым будет доказано, что
это — двумерная сфера, так как S2 — единственное двулистное связное
накрытие над ЕР2.
Для установления связности достаточно рассмотреть две точки на
М2, являющиеся концами одного и того же нормального отрезка, и
предъявить на М2 путь, соединяющий эти две точки. Для построе-
построения такого пути достаточно рассмотреть точку Т на ЕР2, являющуюся
центром рассматриваемого отрезка, и взять на ЕР2 замкнутый путь, на-
начинающийся и заканчивающийся в точке Т и при передвижении вдоль
которого меняется ориентация двуместного репера, скользящего вдоль
пути и остающегося все время касательным к ЕР2. Тогда, дополнив
этот репер третьим вектором, ортогональным к ЕР2, и рассмотрев след
этого вектора, высекаемый им при непрерывном передвижении репера
по замкнутому пути, мы и получаем на М2 непрерывный путь, соединя-
соединяющий две выбранные нами точки.
Дополнительное замечание. Построенное погружение дву-
двумерной сферы в трехмерное евклидово пространство позволяет доказать
замечательный топологический факт — возможность «выворачивания
368
Ответы и решения
Лист Мёбиуса
Рис. 170. Тор, кольцо, бутылка Клейна
Слой-окружность
Рис. 171. Бутылка Клейна
Ответы и решения 369
наизнанку» двумерной сферы в К3. Эта задача находится за преде-
пределами нашего курса, поэтому ограничимся только кратким пояснением.
Указанное погружение S2 таково, что позволяет, оставаясь в классе ре-
регулярных погружений, поменять местами внешность и внутренность
двумерной сферы. В самом деле, достаточно рассмотреть гладкую дефор-
деформацию двумерной сферы вдоль нормального векторного поля, определяе-
определяемого описанными выше нормальными отрезками. При этом внутренняя
и внешняя поверхности сферы поменяются местами.
25.50. Структуры расслоенных пространств показаны на рис. 170, 171.
Жирной линией показана база расслоения, а тонкими линиями — слои.
25.58. Рассмотрим отображение К2 в К2, которое задается формулами
(х, у) ь-> (х2, у3). При этом отображении прямая х — у переходит в
полукубическую параболу у3 = х2.
29.1. 3V2/5.
29.2. 1/4.
29.3. а) 0; б) -^-(л/г + З); в) 0; г) -2; д)
О
29.5. (grad/, grad#).
29.10. а) @, х, у - х); б) @, 0, у2 - 2xz); в) @, ех - хе*, 0);
г) @, Зх2, 2у3 - 6xz)- д) @, -х(х + у2), х3 + у3);
е) @, xz2 4- yzex , —2xyz); ж) (sinxz/x, 0, — sinxz/y);
29.11. Использовать теорему о существовании и единственности реше-
решения системы обыкновенных дифференциальных уравнений.
29.15. Сферу S3 представить как группу кватернионов единичного мо-
модуля.
29.20. Пусть zq = хо 4- гуо — особая точка векторного поля grad (Re/),
где f(z) = u(z) 4- iv(z), т.е.
ди
дх
(хо>г/о)
Согласно условию Коши-Римана
ди _ dv
д
х ~ ду'
ди
ду
(хо
ди
дг
/
г/о)
dv
дх'
370 Ответы и решения
следовательно, fz(z0) = 0. Обратно, пусть fz(zo) = 0. Так как /i = 0, то
а"-(*о) = ^-(^о) = 0, т.е. grad(Re/)(z0) = 0. Для поля grad(Im/)
ох оу
доказательство аналогично.
29.21. Будем искать интегральные траектории только в полуплоскости,
лежащей выше прямой АВ. Линии уровня для функции f(x) — это
дуги окружностей, для которых отрезок АВ является хордой. Вектор
grad/(x) ортогонален линии уровня. Следовательно, ортогональный ему
вектор является касательным к линии уровня, т. е. к окружности, и все
описанные дуги окружностей являются интегральными траекториями
потока Vi(x).
29.22. Пусть поток v = (P, Q) — безвихревой, т. е.
дР dQ л ЭР 8Q
rotv=-r -?-=0 или — = —.
ду дх оу дх
Найдем такую функцию /, что Р = df/дх, Q = df/dy. Для этого
проинтегрируем первое соотношение по х от 0 до х:
х
/(*,») = IPdx + g{y).
о
Для того чтобы найти д(у), продифференцируем последнее соотношение
по у:
X
d
(x, у) = ~Q^y{x, У) = J
о
х
= / —х dx + д'(у) = Q(x, у) - <5@, у) + д'{у).
о
Таким образом, Q(x, у) = Q(x, у) - E@, у) + д'(у). Поэтому д'(у) =
= Q@, у), т.е.
у
д(у) = / E@, у) dy 4- С.
о
Следовательно,
х у
/(х, у) = J P(x, y)dy + j E@, у) <*у + С.
о о
Ответы и решения 371
Пусть 7i и 72 — Два пути из @, 0) в точку (х, у) в плоскости (х,
Тогда, если rotv = 0, то
f(Pdx + Qdy)= [(Pdx + Qdy).
71 72
Следовательно,
f(x,y) = J(Pdx + Qdy) + C,
7
где 7 — произвольный путь из @, 0) в (х, у).
_ дР 8Q . _
Пусть поток еще и несжимаем, т. е. ——h тг- = 0. Рассмотрим
поток v' = (—Q, Р). Очевидно, rotv' = 0, следовательно, поле v'
потенциально. Таким образом, существуют такие функции а(х, у) и
Ь(х, у), что v = grada(x, у), v' = gradb(x, у). Ввиду того, что divv =
= divv' = 0, получаем, что а(х, у) и Ь(х, у) — гармонические функции,
т. е. Аа = ДЬ = 0. Рассмотрим функцию / = а + г'Ь. Она комплексно-
аналитическая, так как имеют место уравнения Коши-Римана:
ось дЬ , ч да до
дх ду ' ' ду дх
Такая функция / называется комплексным потенциалом потока.
29.25. Указание. dip2 гомотопно dipi.
29.32. Рассмотрим в Е4 линейное дифференциальное уравнение х = Ах,
где
/0 -1
А= ' ° о -1
и х = (хо, xi, X2, хз). Интегральные траектории этого уравнения, при-
принадлежащие сфере S3 = {х : |х| = 1}, и есть искомое множество.
Ясно, что х(?) = eAtx@). Если рассматривать R4 как C2(^i, ^2), где
z\ = xi + i^o, Z2 = X3 4- г*Х2, то интегральная траектория, проходя-
проходящая через точку (z\y z^) G 53, имеет вид (eltzi, eltz2), поскольку eAt
( е« 0 \
имеет комплексную запись I и I. Поставим в соответствие этой
траектории точку (z\ :z2)> принадлежащую пространству СР1 (которое
372 Ответы и решения
гомеоморфно 52). Соответствие корректно, поскольку любая другая пара
(z[ : ^2), лежащая на той же траектории, отличается от (z\ : z<i) лишь
множителем егЬ и, следовательно, задает ту же точку в СР1. Остается
заметить, что построенное отображение взаимно-однозначно и непре-
непрерывно.
30.21. Зафиксируем ортонормированный репер {ei, в2, ез} в Е3. Произ-
Произвольное состояние описанной системы однозначно задается точкой х Е
Е 52 и вектором скорости v(x) Е TX(S2), где |v(x)| = с = const ф 0.
Отображение х -» х, v(x) -» v(x)/c, очевидно, является гомеоморфиз-
гомеоморфизмом; х — единичный вектор в Е3, выходящий из точки 0, v(x) — еди-
единичный вектор в Е3 (начало v(x) перенесем в точку 0). Это преобразо-
преобразование тождественно на векторах х и v(x); x и v ортогональны. Пусть
у 6 Е3 — такой вектор, что |у| = 1, он ортогонален векторам х и v, и
система {ei, в2, е3} одинаково ориентирована с системой {х, v, у}. Ото-
Отображение (х, v) -» {x, v, у}, очевидно, гомеоморфизм. Каждая система
{х, v, у} взаимно-однозначно и непрерывно задается матрицей, соот-
соответствующей линейному преобразованию в Е3, переводящему ортонор-
ортонормированный репер {ei, в2, е3} в ортонормированный репер {х, v, у}.
Эти матрицы образуют группу 50C) = {А : ААТ = Е, det A = 1}.
Таким образом, пространство состояний нашей системы гомеоморфно
многообразию 50C). Любое ортогональное преобразование Е3, сохра-
сохраняющее ориентацию, есть вращение вокруг некоторой оси на угол <^, где
-7Г < if < 7Г.
30.22. Указание. Прокатить шар таким образом, чтобы его точка каса-
касания с нижней плоскостью описала границу прймоугольника с вершинами
в указанном порядке: @, 0), Gг/2, 0), Gг/2, <^), @, <^), @, 0). Показать,
что при этом шар повернется на угол ip вокруг оси, проходящей через его
центр параллельно оси Ох. Аналогично реализовать поворот на угол ф
вокруг оси Оу. Обозначим эти повороты соответственно Ax(ip), Ay{%j)).
Показать, что композициями этих поворотов можно получить любой эле-
элемент группы 50C) См. задачу 30.10 про углы Эйлера.
30.39. Пусть G — конечная группа, действующая эффективно на Еп, т. е.
если дх — х для некоторого х ? Еп, то д = е. Группа Z^, порожденная
Ответы и решения 373
некоторым элементом д ф е, тоже эффективно действует на Rn. Рас-
Рассмотрим пространство X = G/Zfc, где х ~ у, если у = д1х. Так как
Rn -» X является накрытием, то п\{Х) = Z^, П{(Х) = 7гДЕп) = 0 при
г > 1. Значит, пространство X гомотопически-эквивалентно простран-
пространству K(Zk, 1), т.е. линзовому пространству. Но гомологии K(Zk, 1)
нетривиальны в бесконечном числе размерностей, в то время как X не
имеет клеток размерностей больше п. Таким образом, для завершения
доказательства необходимо лишь обосновать следующие утверждения:
а) если на Еп действует без неподвижных точек дискретная группа G
и Xq = M.n/G — пространство орбит, то естественное отображение р:
Rn -» Xq является накрытием; б) 7Ti(Xg) = G. Доказательство этих
утверждений остается читателю.
32.3. Напомним определение топологии CW-комплекса. Если К есть
CW-комплекс, то множество F С К замкнуто тогда и только тогда,
когда для всех клеток е\ полный прообраз (//)-1(^) С Bq замкнут в
Bq. Будем обозначать эту топологию символом (W).
Предположим, что в пространстве X есть две топологии {Ua} и {Vp}.
Скажем, что {V@} ^ {Ua} (сильнее), если для каждой точки х € X и
для каждого Vp0 Э х найдется такое Uao Э х, что Uao С Vp0.
Предположим, что в CW-комплексе, помимо топологии (W), есть
еще некоторая топология {Ua}- Возьмем произвольную точку х G К,
т.е. точку, принадлежащую CW-комплексу и Uao Э х. Окрестность
является объединением попарно-непересекающихся открытых пересече-
пересечений (eq П Uao). Рассмотрим полный образ (//)~1(f^a0)- OH открыт в
Вя (это следует из непрерывности отображений /?). Значит, для до-
дополнения (K\Uao) полный прообраз (/?)~1(i(r\C/ao) замкнут в Вя для
всех е\. По аксиоме (W) следует, что (K\UQo) замкнуто в К, значит,
Uao открыто в топологии (W), т.е. Uao принадлежит системе открытых
множеств (W).
32.25. Бутылка Клейна.
32.32. Пусть c*i, «2 G Я(Х', У), а\ ~ с*2. Это значит, что существует
гомотопия F: X' х I ~> У, такая, что F(x, 0) = ai(a?), F(x, 1) = а2(х).
Положим F' = FoV. Тогда F': X х / -> У, F'(x, 0) = F(h(x), 0) =
374 Ответы и решения
= ai(h(x)), F'(x, 1) = F(h(x), 1) = a2(h(x)). Следовательно,
п\ О h ~ OL2 О Н.
32.34. Пусть S°° = lim 5П, где Sn+l является надстройкой над Sn.
п-юо
Так определенная сфера 5°° является CW-комплексом. Рассмотрим
ос Е 7Г;E°°) и / Е а: /: S{ -» 5°°, и / переводит отмеченную точку
в51в отмеченную точку S°°. Пусть /: К -» L — непрерывное отобра-
отображение комплекса К в комплексе L, причем на подкомплексе К\ С К
отображение клеточно. Тогда существует такое отображение д: К —> L,
что: а) / гомотопно д; б) # клеточно на К; в) /|^2 = ^|^2; г) гомо-
топия, соединяющая / и д, тождественна на К\. Этот факт означает,
что для / существует гомотопное ему отображение, которое S1 перево-
переводит в г-мерный остов 5°°, т.е. в 5г, но S1 С 5i+1 С 5°°. Значит,
д: S1 -» 5г+1. Поскольку 7ГгEп) = 0 при i < n, то любое отображе-
отображение i € а Е тгД^00) гомотопно отображению, переводящему всю S* в
отмеченную точку Sn (постоянному отображению). Это и означает, что
отображение /: S1 ~> 5°° гомотопно постоянному. Отображение / выби-
выбиралось произвольно, следовательно, 7Г*E°°) = 0.
Если X и Y — клеточные комплексы и отображение /: X -» Y инду-
индуцирует изоморфизм всех гомотопических групп, то / — гомотопическая
эквивалентность. В качестве / возьмем отображение S°° -»- *. Изомор-
Изоморфизм гомотопических групп индуцируется, так как все они равны нулю.
Значит, сфера S°° гомотопически эквивалентна точке. Следовательно,
5°° стягивается к точке.
32.36. Пусть р~г(х0) = Fo, p(a?i) = Fi. Пусть <р0- Fo -> X — вло-
вложение. Тогда р о (р0: Fo -» хо € Y. Соединим х$ и Х\ путем, т.е.
устроим гомотопию между отображением Fq в хо и х\, а именно: ^:
Fo ~> F, if>t(Fo) = 7@» гДе 7 — наш путь. Тогда из аксиомы о на-
накрывающей гомотопии следует, что существует накрывающая гомотопия
(семейство отображений (pt: Fo -» X), такая, что (po<pt)(Fo) = y(t), т.е.
(p°<Pi){Fo) = 7A) = xi- Отсюда следует, что ^i(JFo) С F\. Итак, по
пути 7 мы построили отображение y(pi: Fo ->• F\. Докажем, что y(pi за-
зависит только от гомотопического класса пути 7> т-е- если 71 гомотопно
72, то yi(pi гомотопно 72^i. Заметим, что построенное нами отображение
Fo -> F\ не зависит от выбора накрывающей гомотопии в том смысле,
что любые два таких отображения гомотопны. Действительно, пусть <pt
и ?t накрывают %j)t. Тогда отображение <pi: Fo ~> F\ гомотопно щ:
Fo -» Fo, ipo = ^0? а последнее, в свою очередь, гомотопно &: Fo —>- Fi.
Ответы и решения
375
Пусть теперь дано семейство 7* путей. Покажем, что yoipi гомотопно 7l<^i.
Имеем отображение
уор : Fo х / -> X; (р о yo(p)(Fo х I) = <у0.
В Y существует гомотопия 7о в 7ъ которую можно накрыть таким отобра-
отображением Ф: (^оХ/)х/->Х,ЧТОФ|(р,оХ/)хо=7о^. ПуСТЬ Ф|(р.оХ*)х1 =Л,
ясно, что (pof)(FoxI) = 7i- Следовательно, отображение ft можно взять
в качестве накрытия для 7ъ Л = 7iVi- Тогда Ф|(Рох1)х/ является го-
мотопией между 7l</?i и 7oy?i. Заметим далее, что аналогично можно по-
построить по пути (—7) отображение (_7)Xi: Pi -> ^о- Осталось доказать,
что отображение ((-7)Xi * 7^i): ^o ~> -Fb гомотопно тождественному. Но
это отображение можно рассматривать как отображение, индуцированное
путем 7 H" (~)) который, очевидно, гомотопен отображению в точку.
32.43. Решение ясно из рис. 172.
с з
Рис. 172
376 Ответы и решения
32.44. Пусть Sk х Sn~k — клеточный комплекс, у которого имеются
лишь четыре клетки: е°, ек1 еп~к1 еп. Рассмотрим отображение
/: Sk х Sn~k -» Sn, f(e°) = * — некоторая точка в Sn; возьмем ее
за нульмерную клетку в Sn.
По теореме о клеточной аппроксимации существует отображение д:
SkxSn~k -> 5П, которое уже является клеточным и которое гомотопно /,
причем на е° /(е°) = д(е°) и вся гомотопия, соединяющая / и д, совпа-
совпадает на е° с /. Поскольку Sn состоит лишь из двух клеток: нульмерной
(*) и n-мерной, то при отображении д клетки ек и еп~к переходят в точку
на 5П. Получаем, что отображение д может быть не равным постоянному
лишь на n-мерной клетке. Значит, все отображения Sk x Sn~k -» Sn
отличны лишь на некоторое отображение n-мерной клетки в Sk x Sn~k,
а затем в 5п, переводящее всю границу в точку на Sn (из-за линейной
связности Sn выбор точки не играет роли). Но эти отображения явля-
являются отображениями Sn -» 5П, что устанавливает взаимно однозначное
соответствие между тгEЛ х Sn~k, Sn) и тгEп, 5П).
32.56. Пусть (х1,..., хп) -» (х1,..., хп, 0) — стандартное вложение Еп -»
-» En+1 в виде гиперплоскости. Рассмотрим две точки А = @, ..., 0, 1),
В = @, ..., 0, —1) в En+1 и построим конусы САМ и СВМ с верши-
вершинами в точках А и В соответственно и с общим основанием Н С Шп.
После этого любая деформация подмножества Еп\Яв1п может быть
продолжена до деформации подмножества S(En\if) в En+1.
32.57. Предположим противное: пусть Cat(Mn) < /(Мп; С?), т.е. су-
существует покрытие Мп замкнутыми множествами Xi, ..., Х&, к <
< 1{Мп\ G), каждое из которых стягивается по Мп в точку. В силу двой-
двойственности Пуанкаре Нк{Мп\ G) = Нп~к(Мп\ G), коциклам xi, ..., xi
соответствуют циклы j/i, ..., yi; при этом произведению h = х\ Л ... Axi
коциклов xi, ..., х\ соответствует цикл а = j/ifl.. .Dyi, являющийся пере-
пересечением всех циклов у\,..., у\. Так как оператор D двойственности Пун-
каре является изоморфизмом, то пересечение у\ П... Dyi = а отлично от
нуля (т.е. цикл а не гомологичен нулю). Так как каждое подмножество
Х{ A ^ г ^ *) стягивается по Мп в точку, то Н*(Мп; Х{) = Н*(Мп)
(где * > 0). Поэтому можно считать, что цикл yi G Н*(Мп) гомологи-
гомологичен циклу yi Е Н*(Мп; Х{), т.е. носитель цикла у{ лежит в Мп\Х{,
1 ^ i ^ к. Отсюда следует, что пересечение уг П ... П ук (гомологич-
(гомологичное пересечению у\ П ... П ук) лежит в дополнении к (объединению)
Хги...иХк; тем более, у1П...ПукП...Пу1 С Mn\(XiU.. .UXk) = 0,
так как Хь ..., Хк образует покрытие Мп. Так как пересечение носите-
Ответы и решения 377
лей циклов уг П ... Г\уь = 0, то соответствующее произведение коциклов
х\ Л ... Л х\ = О, что противоречит условию: х\ Л ... Л х\ ф 0. Теорема
доказана.
32.58. Рассмотрим расслоение (Е, р, X), где Е — пространство всех пу-
путей пространства X, начинающихся в точке Жо, а р — отображение, со-
сопоставляющее каждому пути его концевую точку. Пространство Е рас-
рассматривается при этом к компактно-открытой топологии. Слоем этого
расслоения является пространство ПХ = пХо всех петель пространства
X в точке xq. Легко видеть, что пространство Е стягивается по себе в
точку (каждый путь стягивается по себе в точку xq). Поэтому 7ГП(Е) = 0,
и, следовательно, гомотопическая последовательность этого расслоения
. . . -> 7Tn+i(?) -> 7Tn+i(X) -> 7ГП(ПЖО) -> 7ГП(Е) -> . . .
порождает изоморфизм тгп(ПХо) « 7rn+i(X), в частности 7Ti(fix0) »
» 7Г2(Х). Группа тгп(Х) абелева при n ^ 2.
32.59. Напомним два определения.
Пространство X называется стягиваемым, если тождественное ото-
отображение X -» X гомотопно отображению X -> X, приводящему все X
в точку.
Связное пространство X называется односвязным, если tti(X) = 0.
Так как X стягиваемо, то существует tpt: X -» X, </?о — тождествен-
тождественное отображение X -» X, <pi — отображение X ->• xq € X. Так как
определение фундаментальной группы не зависит от отмеченной точки
(с точностью до изоморфизма), то пусть 7: / -> X — произвольный
путь на X, 7@) = 7A) = ^о; S(r) = жо, <5: / -> X. Та же гомотопия
щ\ X -> X устанавливает гомотопность петель 7 и ^- Таким образом,
любые два пути на X гомотопны, т.е. tti(X) = 0.
32.60. Утверждение задачи вытекает из следующих двух утверж-
утверждений:
а) всякий элемент из 7ri(J5^) {В\ — букет окружностей) представим
в виде конечного произведения элементов г)~1 и rjay где rja G 7ri(J5^) —
класс отображения ia, являющегося стандартным вложением;
б) такое представление единственно с точностью до сокращения иду-
идущих подряд сомножителей rja и г)~1.
Докажем утверждение а). Рассмотрим отображение /: 51 -» В\.
Представим каждую окружность 51 в 5^ G В\ в виде суммы трех одно-
одномерных симплексов Р, Q, R и Ра, Qa, Ra. По теореме о симплициальной
аппроксимации, отображение / гомотопно симплициальному отображе-
378 Ответы и решения
нию F некоторого подразделения комплекса S1 в В\. Отображение F
умножим справа на гомотопию ipt, где (ро — тождественное отображе-
отображение, (fi переводит Ра, Ra в отмеченную точку и растягивает Qa на всю
5?. Получим отображение i*\, гомотопное исходному. Отображение F\
переводит каждую из равных частей, на которые разделена 51, либо в
точку, либо наматывает на одну из 5^, a Е А. Класс такого отображе-
отображения в 7Ti(J5^) представляет собой произведение элементов вида rja, т)~1,
е — единицы фундаментальной группы, т. е. класса постоянного отобра-
отображения.
Перейдем к утверждению б). Произведение т]^\- • -rf<fk (e8 = ±1),
к ^ 1, в котором не встречаются подряд т]а и 7?, не равно единице в
7Ti(B\), т.е. не существует никаких соотношений в 7Ti(B\). При на-
накрытии р: Т -» X прообраз каждой точки р~г* = D находится во вза-
взаимно однозначном соответствии с классами смежности группы tti(X) по
подгруппе p*(tti(T)). В частности, если xi, х2 Е Г, х G X и р(х\) =
= р(х2) = х, 5 — любой путь из х\ в Ж2, то петля p(S) с вершиной
в точке х не гомотопна нулю, так как в противном случае х\ = Х2-
Пусть т] = rja\ • • -rjakk, Va\ — петля, проходимая в направлении окруж-
окружности букета в зависимости от знака €{. Возьмем к + 1 экземпляров
букета и расположим их друг над другом. Берем rjai в первом и втором
букетах, вырежем из обоих экземпляров по отрезку, а концы соединим
«крест-накрест», продолжив на них проекцию тг. Аналогично соединим
второй букет с третьим, используя rfa2 и т.д. Если в слове г) идут под-
подряд две одинаковые буквы, то надо вырезать два отрезка из одной и той
же окружности. При этом вторая операция предшествует первой, если
Е{ = 1, и следует за ней в противном случае. Получим (к + 1)-листное
накрытие над В\. При этом путь г) накрывается путем, начинающимся в
нижней точке и кончающимся в верхней. Эта петля не гомотопна нулю.
32.61. Пусть /: Yi -» Y2 и д: Y2 -» Y\ — гомотопические эквива-
эквивалентности, т.е. д о / ~ Idyi; / о д ~ Idy2. Определим отображение
/*: тп(У1) -> 7п(У2) и #*: 7п(У2) -+ пМ). (Если а: 51 -> Yu
а е а е 7Ti(Yi), то /f — класс петли /* о a: S1 -> Y2.) Так как
f*9* = (f°9)*> то /*#*: 7Ti(y2) -> тп(У2) и ^*/*: тг^УО -> 1Гг(Уг) —
изоморфизмы. Отсюда 7ri(yi) = 7Ti(y2).
32.62. Пусть Жг(Х) * K\(Y) — свободное произведение tti(X) и 7Ti(Y).
Пусть X и У — универсальные накрытия над X и У соответственно.
Пусть жо — отмеченная точка X, У и букета X V У. Построим следую-
Ответы и решения 379
щее пространство Z: возьмем X, рассмотрим р~1(хоI где р: X -» X —
накрытие, и в каждой точке хг0 G р~г(хо) приклеим Y. Отождествим хг0
с хг0, где хг0 — некоторая точка из р^г(хо), р\\ Y -» Y — накрытие.
В каждой оставшейся точке из Pi1{xq) в каждом экземпляре «приклеен-
«приклеенного» Y приклеим таким образом X и т. д. Проекцию р": Z -» X V У
определяем естественным образом: каждый экземпляр Y посредством р1
отображается в У и каждый экземпляр X посредством р отображается
в X. Очевидно, что полученное пространство является накрытием над
X V Y. Рассмотрим фундаментальную группу X V У, точки ?i, t2 из Z
такие, что ti, t2 € (р")~1(а;о)? и путь, соединяющий t\ и ?2- При проек-
проекции У этот путь перейдет в некоторую петлю а, представляющую класс
а в 7Ti(X V У). Заметим, что из конструкции накрытия и из односвяз-
односвязности X и Y следует, что путь из t\ в t2 единственный с точностью до
гомотопии.
Пусть a G tti (X V У) разлагается по образующим ci G tti (X) и fcj G
G tti(F), т.е. a = c^b^c^.. .6J^. Тогда это представление однозначно
с точностью до соотношений в tti(X) и 7ri(y). Действительно, пусть
Р = cf/K«- • -cfnfc?n ~ 1, где 1 — постоянная петля в точке хо и не все
?*; и <7д равны нулю (мы берем редуцированное слово). Тогда /3 можно
накрыть путем в Z, который, как очевидно следует из вида накрытия,
не будет замкнутым, и, следовательно, /3 = 1. Итак, мы получили, что
7Ti(X V Y) = 7Ti(X) * 7Ti(y). Этот же результат следует из теоремы
Ван-Кампена о выражении фундаментальной группы комплекса через
фундаментальные группы его подкомплексов и пересечений.
32.63. Определение. Если К — узел, то фундаментальная группа
7Ti(lSL3\K) называется группой узла.
Найдем копредставление этой группы. Рассмотрим верхнее (ниж-
(нижнее) копредставление трилистника. Пусть РК — его проекция. Точки
К{ (г = 1, ..., 6) делят узел на два класса замкнутых связных дуг —
класс переходов и класс проходов, чередующихся друг с другом. Пусть
Аи А2) As — переходы, J5i, J52, J53 — проходы, F3 — свободная группа
с образующими re, t/, z. Назовем путь ивЕ2 простым, если он является
объединением конечного числа замкнутых прямолинейных отрезков, его
начальная и конечная точки не принадлежат РК, он пересекает РК в
конечном числе точек, не являющихся вершинами РК или v. Каж-
Каждому пути v сопоставим и# G F3: v# = х\\..х\1^ Xik — образующие
свободной группы, Sk = 1 или -1, в зависимости от того, как v про-
380 Ответы и решения
ходит под Aih. Верхнее копредставление группы 7ri(E3\AT) имеет вид
(х, у, z\ ri, Г2, гз), где т% = vf — соотношения. Известно, что верхнее
копредставление, задаваемое этой формулой, является копредставлением
7Ti(R3\K). Петли vi, V2, уз вокруг переходов (ж, у, z — образующие)
удовлетворяют равенствам:
э? —1 —1 эй —1 —1 эй —1
Vi=x lyzy \ У2=У zxz \ ^ =^
Получаем копредставление (жу z\ x = yzy~x, у = гжя, z = жуя).
Подставим 2? = жуж". Получим
7Ti(R3\jRr) = (ж, у; ж = yxyx~ly~l, у = жуя).
Итак, 7Ti(E3\iir) = (ж, у; жуя = уху). Трилистник нельзя развязать,
так как его тип отличен от типа тривиального узла. Если узлы К1 и К"
имеют один и тот же тип, то их дополнительные пространства обладают
совпадающими фундаментальными группами. Группа G = (ж, у; хух =
= уху) не является бесконечной циклической групой Z. Действительно,
можно построить гомоморфизм в: G -» 5з, где 5з порождается циклами
A2), B3).
Пусть К1 и if" — связные подкомплексы связного n-мерного симпли-
циального комплекса К, причем каждый симплекс из К принадлежит
по крайней мере одному из этих подкомплексов. Пусть D = К1 П К" —
пересечение, которое не пусто и не связно. Пусть F, F', F", Fd —
фундаментальные группы комплексов К, К1, К", D. В качестве началь-
начальной точки замкнутых путей возьмем 0 G D. Тогда каждый замкнутый
путь подкомплекса D является одновременно путем комплексов К1 и К".
Сошлемся здесь на известную теорему Ван-Кампена. Группа F получа-
получается из свободного произведения F1 x F", если отождествить каждые
два элемента F' и F", соответствующие одному и тому же элементу Fp,
т. е. полагая эти элементы равными, тем самым добавляя соотношения
между образующими групп F' и F".
32.64. Найдем фундаментальную группу винтового узла, определенного
следующим образом: на боковой поверхности кругового цилиндра про-
проведем образующие на расстоянии 2тг/т друг от друга, а затем повернем
верхнее и нижнее основания друг относительно друга на 2тга/т. После
этого отождествим основания. Присоединим к Ш3 одну несобственную
точку (оо), превратив Е3 в 53. Удалим из S3 все точки, принадлежащие
трубчатой окрестности узла. Получим полиэдр К, являющийся допол-
дополнением узла. Разобьем S3 на две части тором, на котором лежит вин-
винтовой узел. Комплескс К распадается на два полнотория, у каждого из
Ответы и решения 381
которых на поверхности выброшена трубчатая окрестность узла. Одно
полноторие возьмем в качестве К1, другое (с несобственной точкой) —
в качестве К". Фундаментальная группа F'(F") полиэдра К1 (К") есть
свободная группа с одной образующей А(В). Образующую А можно пред-
представить средней линией полнотория полиэдра К (аналогично поступим
с В). Пересечение D обоих полноторий представляет собой закручен-
закрученное кольцо. Фундаментальная группа D также является свободной с
одной образующей, в качестве которой возьмем среднюю линию круго-
кругового кольца. Группа F1 О F11 есть свободная группа от образующих А
и В. При надлежащей ориентации путей А и В путь С, рассматрива-
рассматриваемый как элемент группы F', равен Ат, а как элемент группы F" он
равен Вп. Получаем соотношение Ат = Вп. Итак, копредставление
группы ttiE3\7) = {А, В; А2 = В3}, где 7 — трилистник.
Два полученных копредставления фундаментальной группы трилист-
трилистника эквивалентны. Проверку этого мы предоставляем читателю.
32.65. Выберем в качестве начальной точки замкнутых путей точку О,
принадлежащую W. Тогда каждый замкнутый путь комплекса W явля-
является одновременно путем комплексов Z, F, т. е. каждому элементу группы
tti(W) соответствует элемент группы tti(X) и элемент группы tti(F).
Представим Z, F, W в виде симплициальных комплексов. Соединим
каждую вершину X путем с 0. Если вершина лежит в W, то путь можно
целиком провести в W в силу связности. Симплекс произвольной раз-
размерности комплекса X принадлежит либо Z (но не F), либо Y\Z, либо
Y П Z. Множество всех симплексов разбивается на три непересекаю-
непересекающихся подмножества Z, F, W. Образующие о» группы tti(X) могут
быть поставлены во взаимно-однозначное соответствие с ребрами ком-
комплекса X. В зависимости от того, какому симплициальному комплексу
принадлежит это ребро (Z, F или W), переименуем о» в z^ yi или W{.
Таким образом, ni(X) имеет своими образующими фундаментальные
группы 7Ti (F) и 7Ti (Z) (образующие тгх (W) входят в число образующих
tti(Z) и tti(F)). Соотношения в группе Ki(X) взаимно-однозначно соот-
соответствуют ребрам и треугольникам комплекса X. Вследствие разбиения
комплекса X на три подмножества эти соотношения также разбиваются
на три класса. Запишем соотношения:
= 1 ( в ^)> <РЛ">*> У^^1 ( в ^)> Mw*) = 1 ( в
Соотношения третьего типа являются определяющими для группы
tti(W); соотношения второго и третьего типов определяют группы tti(F)
382 Ответы и решения
и 7Ti(W); соотношения первого и третьего типов определяют группы
tti(Z) и tti(W); и, наконец, сотношения всех трех типов определяют
группу 7Ti(X). Эти соотношения можно переписать следующим образом:
Соотношения первых четырех типов определяют свободное произведение
групп tti(Z) и tti(F). Последнее соотношение означает, что элементы
групп tti(Z) и 7Гх(У), соответствующие одному и тому же элементу wi
группы tti(VF), должны быть отождествлены. В доказательстве исполь-
использован тот факт, что W связно, так как в противном случае полученное
утверждение о группе тгх (X) неверно.
Пример. Z = Y = I — отрезок, W = 5°, X = S\ тп(Х) = Z,
32.85. Как известно, для любой подгруппы G С к\{Х) существует на-
накрытие р: Xq -л X, такое, что Ъптг^тгхрГа)) = G. Введем на Xg
умножение. Пусть е G р~1(е), где е — единица в1, JjG Х<з. Соеди-
Соединим ес?и|/ путями 2?t и ^: xq = е, Ji = ж, ^Ь = е, j/i = ^. Пусть
р(х) = х, р(у) = ?/. Тогда жиу соединены с е путями р(х^) = xt и
РB/) = 2/* соответственно. Эти два пути мы можем умножить в X, т. е.
рассмотреть путь zt = xt х у^ который соединяет е с точкой z\ = z = ху.
Пусть Zt можно поднять в Xq в путь 2i. Положим х х у = Ji. Оста-
Остается проверить корректность определения. Можно доказать следующее
утверждение. Пусть X — группоид с единицей, а, /3 € tti(-X", e). Тогда
а/3 = а х /?, где слева — умножение в tti(X, e), а справа — умноже-
умножение в X.
Доказательство мы опускаем, предоставляя его читателю. Коррект-
Корректность определения следует непосредственно из этого утверждения.
32.86. При р > 0 и q > 0 для любого п < р -Ь q — 1 имеет место изо-
изоморфизм 7гпEр V Sq) « тгпEр) + тгпE9). Поскольку пара (Sp x 59,
5Р V Sq) является относительной (р + д)-мерной клеткой, то отсюда сле-
следует, что тгтEр х 59, Sp V 59) = 0 при т < р + q. Следовательно,
7rm(S*vS*)=7rm(SP) + 7rmE*).
Если для тройки (X, А, хо) пара (X, А) является относительной
n-мерной клеткой, то тгт(Х, А, ж0) = 0 при 0 < тп < п. Доказатель-
Доказательство предоставляется читателю.
32.88. Из теоремы Фрейденталя следует утверждение: гомоморфизм вы-
вырезания тгш(С/, 5П) -> тгтEп+1, V) является изоморфизмом при га < 2п
и эпиморфизмом при m = 2n, где U и V — северная и южная полусферы
Ответы и решения 383
5n+1. Найдем тг3(?>2, dD2):
. . . -4 7ГП@Д2) -> 7Г„(?»2) -4 7Tn(D2, 0Д2) -4 TTn-j
При n = 3 имеем тг3(<9?>2) = ^(S1) = 0, тг3(?>2) = О, тг2(<91>2) = О.
Отсюда тгз(.О2) s» тгз(.О2, 3D2) = 0. Из точной последовательности
n(S2) = тгзE2, Я2) = Z.
32.89. Доказательство следует из точной гомотопической последователь-
последовательности расслоения Серра.
32.90. Доказательство следует из клеточного представления проективного
пространства и из рассмотрения стандартного накрытия.
32.92. Докажем, что ni(CPn) = 0. Здесь СРп — клеточный комплекс,
который имеет по одной клетке в каждой четной размерности, т. е. одно-
одномерных клеток у него нет. По теореме о фундаментальной группе клеточ-
клеточного комплекса с одной нульмерной клеткой получаем, что ?ri(CPn) = 0.
Далее, сфера 52n+1 расслаивается над СРп со слоем S1. Действительно,
пусть 52n+1 С Cn+1 (стандартное вложение). Точка (zi, ..., zn+i) при-
принадлежит S2n+1 тогда и только тогда, когда ^ \zi\2 = 1- Далее,
СРп = {(zi, ... , zn+i) с точностью до умножения на А},
т.е. A(zi, ..., zn+i) и (*i, ..., zn+i) определяют одну и ту же точку в
СРп. Устроим отображение р: 52n+1 -> CPn, p(zu ...) = (zu ...). Оно
непрерывно и его образ — все пространство СРп. Над точкой из СРп
«висит» следующее множество точек из 52n+1: пусть (зх, ..., 2n+i) G
€ СР», тогда /^(zi, ... , zn+1) = {e'^zi, ... , *n+1)} C 52n+1, где
/-1 — полный прообраз, 0 ^ ф ^ 2тг. Действительно, et</?1(zi, ..., 2n+i)
и ег</?2(^1, ..., 2n+i) — одна и та же точка в СРП, но если </?i ф if2, то в
52п+г являются расслоением. Осталось применить точную гомотопиче-
гомотопическою последовательность расслоения.
32.93. Утверждения следуют из теоремы о клеточной аппроксимации.
32.94. Пусть рх: X xY -* У, pY: X xY -> Y — проекции. Устроим
гомоморфизм (р: тгг(Х х У) -> 7Гг(Х) 0 7Гг(У), а именно: ф(а) =
= {рх*&, Py*ol). Докажем, что ip — гомоморфизм:
ip(a + Р) = {рх+ (а + /3), Рх* (а + ^)) =
= (Рх*а, Ру*«) Ф (Px*iS, pY+l3) = (/?(а) 0 </?(/?).
Докажем, что ip — мономорфизм. Пусть ip(a) = 0, т.е. рх*« = 0,
pY*a = 0. Следовательно, фх =рхоа: Sn -> X гомотопно постоянному,
т.е. существует t/>x*: 5n -> X, такое, что фхо = ^х, фх1 = *. Тогда
384 Ответы и решения
устроим гомотопию Ф* следующим образом: Ф*(а) = С0*«(а), ру*а).
Фг(а) — отображение 5пв(*)хУс1х7, (*, pY*(а)) € 7ГП((*) хУ) =
= Кп(У)> Но ру*(а) — стягиваемый сфероид, т.е. а — стягиваем.
Докажем, что (р — эпиморфизм. Пусть /3 € тгп(Х), 7 € ЯпОО» Тогда
а = (/?, 7) при (р переходит в /3 © 7.
Пусть есть универсальные накрытия: Е\ •?+ X, 1?2 -^> Y. Рас-
Рассмотрим отображение pi x p2: Е\ х Е2 -* X х У, (pi х p2)(ei х е2) =
= (pici х р2е2). Утверждается, что это — накрытие. Доказательство мы
опускаем, предоставляя его читателю.
Пусть 71 6 7Ti(A>o), 72 € тп^уо), «1 € 7Гп(Х,ж0), а2 € тгп(У,Уо),
и пусть задана некоторая гомотопия Ft вдоль пути 71 сфероида ai так,
что F0(ai) = ai, Fi(ai) = 71 [«i]. ^i(«i) € тгп(Х, 7i(«)). Анало-
Аналогично для Ф4(а): Фо(а2) = а2, Ф1(а2) = 72[«2], *t(<*2) € тгп(Г, 7г@)-
Определим гомотопию вдоль петли 7 = Gi Ф 72) @ в X xY сфероида
a = (ai0a2) как^(а1)хФ^(а2). Тогда Fi(ai)x$1(a2) = 7[ai]®72[^2]«
Итак, [7i 0 72][<*i Ф 0L2] = 7i[ai] Ф 72[^г]5 но так как любая петля 7 и
любой сфероид из X х Y имеют вид 71072 и &\ ® #2 для некоторых 71 €
€ 7Ti(X), 72 € 7ГП(Г), ai G тгп(Х), a2 G тгп(Г), то действие щ(Х х Y)
на тгп(Х х У) полностью определено.
32.96. Воспользуемся расслоением Хопфа S3 -> S2. Оно устроено следу-
следующим образом:
S3 = {(гь га): Ы2 + \z2\2 = 1} 6 С2, 52 = СР1,
т.е. S2 = {(^i, 2:2): (Azi, Az2) ^ (zi, г2)}. Получаем расслоение 53 ->
-> 52. Для этого расслоения напишем точную последовательность
Из свойства последовательности 7ГгE3) = 7ГгE2) при г ^ 3. По теореме
Фрейденталя, гомоморфизм тг»-1Eп") -> 7ГгEп) является эпиморфиз-
эпиморфизмом при г ^ 2п — 2 и изоморфизмом при i <2п — 2, т. е. гомоморфизмы
7TiE1) -» тг2E2) -> тгзE3) являются изоморфизмами. Следовательно,
7Г3E3) = Z. Так как тг*E3) = 7ГгE2), i > 3, то тг3E2) = Z.
34.21. а) См. рис. 173. б) См. рис. 174.
Рассмотрим вложение тора в Е3, при котором его ось вращения го-
горизонтальна, т.е. тор «стоит вертикально». На рис. 174а показаны кри-
критические уровни функции высоты. Начнем «заваливать тор набок». При
Ответы и решения
385
m+ b Р
Рис. 173
Рис. 174
А
В
В
этом критические значения, соответствующие седловым критическим
точкам, сближаются. На рис. 1746 показан момент, когда седловые кри-
критические точки оказались на одном уровне. Изображен соответствующий
386
Ответы и решения
Ь Р
Рис. 176
Q Ь
Q Ъ
Рис. 177
Ответы и решения 387
критический уровень функции высоты. На рис. 174в изображен атом,
т. е. окрестность седлового критического уровня.
34.22. См. рис. 175.
34.23. См. рис. 176.
34.24. См. рис. 177.
35.1. Достаточно рассмотреть уравнения Эйлера функционала действия
и записать эти уравнения в локальных координатах. При этом следует
использовать явные формулы для символов Кристоффеля.
35.2. Следует выписать уравнения Эйлера для обоих функционалов, за-
затем рассмотреть, что происходит с функционалами при замене параме-
параметра (времени) на экстремалях-решениях. Искомое утверждение следует
из того, что функционал длины инвариантен при замене параметра, а
функционал действия — не инвариантен.
35.3. Доказательство сводится к прямому вычислению. Следует записать
уравнение Эйлера в декартовых координатах и воспользоваться явными
формулами для средней кривизны, подсчитанной для графика гладкой
функции.
35.4. Доказательство аналогично доказательству предыдущей задачи.
Эта аналогия основана на том, что в обеих задачах коразмерность гра-
графика функции равна единице, поэтому тензор средней кривизны задается
одной функцией — а именно, средней кривизной.
35.5. Использовать классическое неравенство
Ь 2 Ь Ь
()(
а а а
35.6. Возвести в квадрат подынтегральные выражения и срав-
сравнить их.
35.7. Использовать локальную теорию уравнения Бельтрами-Лапласа,
записанного в криволинейной системе координат. Из этой теории сле-
следует, что на двумерной поверхности, заданной аналитическими функци-
функциями, локально всегда можно ввести конформные координаты. Добавле-
Добавление условия, что средняя кривизна равна 0, превращает эти координаты
в гармонические.
35.8. Например, функция г(u, v) = (и, г;, и2 — г?2).
35.9. а) Указание. Пусть г = 1, u>i, u>2 — ортонормированная пара
векторов. Надо доказать, что u>(u>i, и)^) ^ 1? гдео;(и>1, и?) = А(ь>1,
388 Ответы и решения
Рассмотрим
Я =(u>i, о;2) =E+ii4)(cji, u;2) =S(u>i, o;2)+i<A(u>i, 0*2) = i
Отсюда |#(u>i, u>2)| = |A(wi,4J2)| ^ |wi| • |о;2| = 1. Пусть теперь
A(wi, 4J2) = 1. Тогда #(u>i, а;2) = г, т.е. S(iu>i, u>2) = 1. Так как
1^21 = |wi| = 1? то отсюда следует, что и>2 == м*>ь т.е. двумерная
плоскость, натянутая на cji, W2, является комплексной прямой. Для
г > 1 нужно воспользоваться соотношением: fiBr)(a>i, 4J2) = ^/det^,
где pij — кососимметрическое скалярное произведение, определяемое
2-формой о;^2).
б) Указание. Утверждение вытекает из неравенства Виртингера
(см. выше) и из формулы Стокса. В самом деле, рассмотрим внешнюю
2-форму
и = 2_J dzk Л d^fc и fiBr) = —о; Л ... Л и (г раз).
Так как duj = 0, то и du^ = 0. Из формулы Стокса следует:
При интегрировании формулы fiBr) по 2г-мерному подмногообразию сле-
следует рассмотреть (в локальных координатах х1,..., х2г) выражение вида
fiBr)(cji, ..., W2r)dxlЛ.. .ЛсЬ2г, гдеа;1,..., u>2r — ортонормированный
базис касательной плоскости к подмногообразию (в римановой метрике,
индуцированной объемлющей евклидовой метрикой в Сп = Е2п). Если
подмногообразие W — комплексное, то
= 1 и vol
(W) = /
Если подмногообразие V — общего вида (т.е. вещественно), то
fiBr)(u>i, ..., u>2r) ^ 1, т.е. / П^2г^ ^ vol(V), что и доказывает утвер-
. v
ждение.
в) Вычисления, проведенные в пункте б), носят локальный характер,
что позволяет провести их в окрестности каждой точки на кэлеровом
многообразии. Формула Стокса, напротив, имеет место на любом глад-
гладком многообразии. Напомним, что кэлерова внешняя 2-форма замкнута.
Ответы и решения 389
35.10. По теореме о неявной функции, одну из координат, например хп,
можно выразить (на поверхности уровня Fo = const) как гладкую функ-
функцию от остальных координат. После этого следует подставить эту функ-
функцию в уравнение Эйлера для эктремали функционала J.
36.9. Заметим, что открытый шар Вп и сфера Sn с выколотой точ-
точкой гомеоморфны. Докажем наше утверждение индукцией по размер-
размерности комплекса. Если размерность п = 0, то утверждение очевидно.
Пусть утверждение верно для всех чисел, меньших п. Тогда по пред-
предположению индукции (п - 1)-мерный остов К71 нашего комплекса
вкладывается в евклидово пространство EN. Это значит, что на Кп~1
заданы непрерывные вещественные функции /i(#), ..., fN(x), такие,
что (Д(ж), ..., fN(x)) ф (Л(у), ..., fr(y)) при х ф у. Пусть еу, j =
= 1, ..., А:, — все n-мерные клетки нашего комплекса. Тогда функции
fi(x) определены на границе каждой клетки е" (обозначим ее через ер.
Пусть е™ гомеоморфна внутренности Вп замнутого шара Dn. Тогда
можно считать, что функции /;(х) заданы на Dn\Bn. Непрерывность
их при этом сохраняется, взаимная однозначность может быть потеряна.
Продолжим эти функции с Dn\Bn на Вп (т.е. с де" на ер следующим
образом. Пусть ze Bn и z ф 0. Полагаем fi(z) = \z\fi(z/\z\). Если z = 0,
то полагаем fi(z) = 0. Итак, мы продолжили функции fi до непрерыв-
непрерывных функций на всем комплексе К. Теперь определим функции д[ (ж), ...
..., gJn+i(x). Вне е" положим д{{х) = 0, 5 = 1, ..., п Л- 1, на е" по-
полагаем
= ( -j—г sinTrlxL ... , 7^rsin7r|a;|, costtIxI + 1 I .
\\x\ \x\ )
Определим F: К -» EN+fc(n+1) равенством
F(x) = (/x(a;), ... , fN(x); g{(x), ... , <^+1(z), g\{x), ... , g*+1(x)).
Отображение F взаимно-однозначно. Утверждение доказано.
36.11. Пусть ei, ..., es — вершины комплекса К. Возьмем в R2n+1 точки
е^, ..., е'8 в общем положении, т.е. при j ^ 2п + 2 любые j точек будут
линейно независимы. Каждому остову Т = \ei0.. .eir\ ? if поставим в со-
соответствие симплекс Т' = \e[Q.. .e^| G M2n+1. Этот симплекс существует,
так как в силу общего положения точек е'1? ..., е'8 в R2n+1 и неравенства
390 Ответы и решения
г ^ п точки ei0, ..., е{г линейно независимы. Симплексы образуют ком-
комплекс, изоморфный комплексу Т', так как каждой вершине соответствует
одна и только одна вершина из К.
Комплекс К — триангуляция. Для доказательства этого достаточно
показать, что никакие два симплекса Т/, Tj G К' не пересекаются. Пусть
ei0' * * •' eiP — вершины Г/; е^о, ..., е^ — вершины Tj (некоторые вер-
вершины могут быть общими). Пусть e'fco,..., е'кг — все точки, являющиеся
вершинами хотя бы одного из симплексов Т/ и Tj. Число г+1 этих точек
удовлетворяет неравенству
г + 1 < (р + 1) + (в + 1) ^ (п + 1) + (п + 1) = 2п + 2.
В силу общего положения точек е[, ..., е'8 в R2n+1 точки ej.o, ..., е'кг
являются вершинами некоторого невырожденного симплекса То размер-
размерности не выше 2п + 1. Симплексы Т/ и Tj являются гранями То, а
значит, не пересекаются, если они различны.
36.13. Проверим, что для любого F G ехрХ найдется множество вида
О {Ui, ..., Un) такое, что F G О (Uu • •., Un). Это очевидно: FeO (X).
Проверим теперь, что для любых О\ = (9 (Z7i,..., f/n), O2 = О (Vi, ..., V*)
таких, что О1ПО2 ^ 0, и для любого F G ехрХ такого, что F G О1ПО2,
найдется О3 = О (Wi, ..., Wm) такое, что О3 С OiDO2i причем F G О3.
Пусть F G Oi П 02- Для любого i = 1,..., п рассмотрим множе-
множество Fi = UiD F. Так как F G Ou F{ ф 0. Так как F G О2, най-
дутся Т/}2(i), ..., Vj^i) такие, что Fi С (J V}p(i). Можно считать, что
{^jp(*)} — все те из множеств Vi> •••> Vk> которые пересекаются с F{.
Пусть И^1, ..., Wm — нумерация множеств {Vjp^} по всем г. По постро-
построению множеств Wi, F е О (Wi, ..., Wm). Кроме того, нетрудно видеть,
что О (Wi, ..., Wm) С О\ П 02- Итак, проверено, что множества вида
O(Ui, ..., С/п) образуют базу некоторой топологии, что и требовалось
доказать.
36.14. Поскольку X — Ti-пространство, все его одноточечные подмно-
подмножества замкнуты, следовательно, отображение / определено корректно.
Ясно, что / — биекция на свой образ f(X) = ехрх X. Далее, пусть
п
О (Ui, ..., Un) — окрестность точки {х} в ехрХ. Положим U = f] U\.
i=l
Множество U непусто, так как х eUi для всех г. Множество О (U) явля-
является окрестностью точки {х} в пространстве ехрХ, причем О (U) С
Ответы и решения 391
С O(C/i, ..., Un). Очевидно, что / 1(O(U)) = U, следовательно, / —
непрерывно, так как U = f~x(O{U)) С f~l(O(U\, ..., Un)). Откры-
Открытость / очевидна, так как f(U) = О (U) П ехрх X для любого открытого
U вХ.
36.15. а) Пусть X — регулярно. Пусть F\ G expX, F2 G ехрХ и Fi ф
Ф F<i* Можно считать, что F<2\F\ ф 0. В силу регулярности пространства
X найдутся такие окрестности U точки х и V множества Fi, что U П
П V = 0. Если F2 = {я}, то О (U) и О (У) являются дизъюнктными
окрестностями точек F\ и i*2 в пространстве ехрХ. Если F2 ^ {а:},
то О (U, Х\{х}) и О (V) являются требуемыми окрестностями. Таким
образом, ехр X — хаусдорфово.
б) Пусть ехрХ — хаусдорфово. Пусть х Е X, F — замкнутое под-
подмножество X такое, что х ? F. Точки F и FU{x} являются различными
точками в пространстве ехрХ. Следовательно, найдутся непересекаю-
непересекающиеся окрестности О (Ui, ..., Un) и О (V\, ..., Vk) точек F и F U {х}
соответственно. Пусть V = П{У; | х G Vi}. Покажем, что V П ( Q Щ ) =
\г=1 /
= 0. Предположим, что найдется точка у € V П I [J Ui). Тогда у G
G U Ui. Следовательно, {у} U F G О (C/b ..., ?/„> П О (Vi, ..., V*), что
г=1
противоречит выбору множеств О (?Д, ..., Un) и О (Fi, ..., Vk). Итак,
/ п \ п
V П I (J Ui I =0, кроме того, a: G У и F С (J С/*. Следовательно,
\г=1 / г=1
п
У и U = (J f/i — дизъюнктные окрестности точки х и множества F
г=1
соответственно, поэтому X — регулярно.
36.16. Докажем эквивалентность условий а) и б). Пусть X — нормально,
F — замкнутое подмножество X, O(U\, ..., Un) — его окрестность в
пространстве ехрХ. Заметим, что семейство {U\, ..., C/n, X\F} явля-
является открытым покрытием X. Так как X нормально, по лемме об ужатии
конечного открытого покрытия существует замкнутое конечное покры-
покрытие {Fi, ..., Fn, Fn+i} пространства X, причем F» С ?/*, i = 1, ..., п,
Fn+i С X\F. Заметим, что Fi можно дополнить одной точкой так,
чтобы выполнялось условие F; П F ф 0 (точку можно выбрать из мно-
множества Щ П F ^ 0), поэтому можно считать, что условие Fi П F ф 0
выполняется.
392 Ответы и решения
Так как X нормально, по лемме Урысона найдутся непрерывные на
X функции ff. X -> [0, 1], i = l,..., п+1, причем fi\Fi = 0, fi\x\U{ = 1.
Для произвольного t > О, г = 1,..., п положим
Для любых q и г из отрезка [0, 1] таких, что q < г, верно условие V^ С
С Vi,r (где через А здесь и далее обозначается замыкание множества А).
Для дальнейших рассуждений нам понадобятся две вспомогатель-
вспомогательные леммы. Для подмножества Хо пространства X обозначим через
ехр (Хо, X) множество всех F С Хо таких, что F ф 0 и F замкнуто в X.
Лемма 1. Пусть Хо С X, где X — Ti-пространство. Тогда
Доказательство. Очевидно, что ехр (Хо, X) С ехр (Хо, X). За-
Заметим, что ехр (Хо, X) замкнуто в ехрХ, следовательно, ехр (Хо, X) С
С ехр(Хо, X). Проверим обратное включение. Пусть Fo — произволь-
произвольная точка из ехр (Хо, X), О (Ui, ..., Un) — произвольная окрестность
этой точки. Имеем Fo С Хо и для всех г = 1,..., п Ui П Fo Ф 0.
Следовательно, Ui П Хо Ф 0, поэтому Ui П Хо Ф 0 для всех г.
Выберем Xi ? UiD Хо. Положим F = {Хь ..., Хп}. Тогда F G
€ ехр (Хо, Х)ПО (UUj: ., Un), т.е. ехр(Х0, X) П О (Е/ь ..., Un) ф 0.
Итак, включение ехр(Хо, X) С ехр(Хо, X) проверено, что и доказы-
доказывает лемму.
Лемма 2. Пусть {U\, ..., Un} u {Vi, ..., Vn} — два семейства
открытых в Ti-пространстве X множеств и для любого г = 1, ..., п
верно, что Vi С 17», тогда
-ехрХ
O(Vu...,Vn) * CO(C/b...,t/n).
Доказательство:
O(VU .. , Vn) =ехр Ш VI, х\ П (f](expX\exp(X\^, X))) С
так как замыкание пересечения содержится в пересечении замыканий
С ехр (J Vi , X П (Л (ехрХ\ехр (X\Vt,
Ответы и решения 393
по лемме 1
ехр Ш Vit х) П т(ехрХ\ехр(Х\^, Х))\
по условию леммы
С ехр (\Juu х) П т(ехрХ\ехр(Х\С/ь X))) = О(С/Ь ... , Un).
Лемма 2 доказана.
По лемме 2 выполняется включение [Wq] С Wr. Это означает, что
пространство ехрХ допускает плотное дробление между произвольной
точкой F и произвольным замкнутым множеством
F1=expX\O(Uu...,Un),
следовательно, ехр X вполне регулярно.
То, что из условия б) вытекает в), — очевидно.
Докажем, что из в) вытекает а). Пусть Fq и F\ — непустые замкну-
замкнутые непересекающиеся подмножества X. Рассмотрим
W = exp(X\F1,X);
W открыто в ехрХ, причем Fq € W. В силу регулярности простран-
пространства ехрХ найдется окрестность O(Ui, ..., Un) точки Fq такая, что
дтгц V" П
O(Ui, ..., Un) С W. Следовательно, Fo С |J U{. Покажем, что
г=1
п п п
IJ UiDFi — 0. Предположим противное. Тогда |J (UiOFi) = |J (Ui) D
i=l г=1 г=1
п
П Fi = |J C/i D Fi ф 0 и найдется по крайней мере один индекс j =
г=1 _
= 1, ..., п такой, что Uj П Fi ф 0. Для каждого г = 1, ..., п выбе-
выберем по точке Х{ е Ui, если г ^ j5 и ж< € 17» П Fi, если г = j. Пусть
F = {ж» | г = 1, ..., п}. Легко видеть, что любая окрестность точки F
в пространстве ехрХ содержит точки из множества О (C/i, ..., Un), по-
поэтому F G О(С/Ь..., С/п)еХРХ С W = ехр (X\Fb X). Но F П Fx ф 0.
Противоречие.
п
Итак, (J Ui П Fi = 0. Ввиду произвольности Fo и Fi это означает
г=1
нормальность пространства X.
394 Ответы и решения
36.17. Покажем, что ехрХ\ехрпХ открыто в ехрХ. Пусть F е
е ехрХ \ ехрпХ. Тогда |F| > п. Пусть #i, ..., xn+i — различные
точки, принадлежащие F. Так как X хаусдорфово, для любого г най-
найдется окрестность Щ точки Х{ такая, что UiDUj = 0 при г ф j. Положим
W = О (X, Uu • •., f^n+i). Тогда F e W. Кроме того, W П ехрп X = 0,
так как если G Е W, то |G| > п по построению множеств C/i, ..., ?/n+i-
Итак, ехрХ\ехрпХ открыто, следовательно, ехрпХ замкнуто.
36.18. Пусть х и у — две различные точки в пространстве X. Положим
F = {ж, у}. Тогда F G ехр2Х\ехр!Х. Поскольку ехрх X замкнуто
в ехр2Х, то ехр2Х\ехр1Х открыто. Следовательно, для F найдется
W = О (Ui, ..., Un) — окрестность F в пространстве ехр2 X такая, что
W П ехрх X = 0.
Положим Ох = 0{Ui | х е Ui}, Оу = D{Ui | у е Щ}. Нетрудно видеть,
что х G О2) у € Оу и Ох П Оу = 0. Итак, X хаусдорфово, что и
требовалось доказать.
36.19. а) Пусть V — О (Vi, ..., Т4), где V{ открыты в X. Докажем, что
тг^ открыто в Хп. Пусть х = (#1, ..., хп) е к^У- Так как тгпж Е У,
не ограничивая общности рассуждений, можно считать, что х±, ..., Xj1 G
е Vi, ..., ?jfc_1+i, ..., ?jfc € T4. Положим
О = Vj x ... x Vi x ... x ft x ... x VK.
h jk-jk-i
Тогда О — окрестность точки х в Хп такая, что О С тг!^. Следова-
Следовательно, тг~х Т^ открыто.
б) Пусть тг!^ открыто. Докажем, что V открыто. Пусть х = (х\, ...
• • •) Хщ) € V, m ^ п, где xi, ..., жт — различные точки в X. Пусть
?/ G тг^. Тогда ?/ = (у{), где j = 1, ..., m, ?/i = Xj. Так как тг^
п
открыто, то для любого у е Кп1х найдется окрестность Оу = YI О\(у)
г=1
такая, что Оу С k~1V. Положим
о*= П
Тогда W = O(Oi, ..., Om) — открытая окрестность точки ж, причем
^n1^ ^ ^п1^) следовательно, W С V, поэтому V открыто в ехрпХ.
Ответы и решения 395
36.20. Пусть [х] е SP&X = Xn/Gr. Рассмотрим точку (a?i, ...
..., хп) — любой представитель класса эквивалентности [х]. Для вы-
выполнения условия Kq/q о тг§/ = тг§ необходимо, чтобы выполнялось
^G'gCM) = Mg, где [x]G = {OMi), • •., ха(п)) \ а G (?}. Таким образом,
единственность отображения 7rg,G проверена. Остается доказать незави-
независимость от выбора представителя (х\, ..., хп). Пусть (xg(i), ..., хд(п)) —
другой представитель класса [х], где д G G'. Поскольку G' С G, то <? G G,
откуда (жрA), ..., хд(п)) G {(rcff(i), ..., жа(п)) | а € С?}, что и требовалось
доказать.
п
36.21. Пусть О С Хп открыто, О = YI О{. Докажем, что KqO ot-
г=1
крыто. Для этого, согласно определению топологии в фактор-простран-
фактор-пространстве Xn/G, достаточно проверить, что (kq) (kqO) открыто в Хп. В са-
самом деле,
= U ооA) х... х оа(п) = U Д[о,@.
Итак, открытость отображения тг§ проверена.
Пусть F С Хп замкнуто. Необходимо проверить, что 7rgF за-
замкнуто. Пусть [х] е SPgX\7rgF. Тогда [х] = [(хаA), ..., ха{п))}, где
(xi, ..., хп) —какой-нибудь представитель класса [х], причем (#<r(i), ...
..., av(n)) ^ F для любого о G G. Так как F замкнуто, для любого д € G
найдется множество Охд — окрестность точки хд = (жрA), ..., #р(п)) та"
кая, что OxgnF = 0. Можно считать, что Ожр = П Of, причем ж^) G
г=1
п
G Of для всех г = 1, .. .п. Положим Vi = f] Of, V = П ^* Тогда для
G il
п
любой д € G имеем Ц Vg(i) П F = 0. Следовательно, ?rgF D TrgF = 0.
г=1
Кроме того, по доказанному, ttqV открыто в SPq(X), и, по построению,
[х] G тг§ТЛ Итак, SPq{X)\k%F открыто, следовательно, TrgF замкнуто.
36.22. Докажем следующий общий факт:
Лемма. Пусть X, Y, Z — топологические пространства, /:
X ->• У, д: Y -У Z, h: X -» Z — непрерывные отображения, причем
h = ро/, и отображение f сюръективно. Тогда, если h открыто
(замкнуто), то и g открыто (замкнуто).
Доказательство. Пусть h открыто. Докажем, что g открыто.
Пусть V — открытое подмножество в Y. Тогда f~lV открыто в силу
396 Ответы и решения
непрерывности /. Кроме того, g(f(f 1Vr)) = g{V), так как / сюръ-
ективно. С другой стороны, g(f{f~lV)) = h(f~lV) открыто, так как h
открыто. В случае, когда h замкнуто, доказательство аналогично. Лемма
доказана.
В нашем случае / = ?rg,, g = ?rg,G, /i = ?rg, где 7rg,G — отобра-
отображение, существующее в силу задачи 36.20. Открытость и замкнутость
отображений itq, и тг§ следует из задачи 36.21. Применяя лемму, полу-
получаем, что 7Tq,g открыто и замкнуто.
36.23. Необходимо проверить, что V С ехрп X открыто тогда и только то-
тогда, когда q^lV открыто в SPnX. Пусть V открыто в ехрп X. Проверим,
что q~lV открыто в SPnX. Для этого, согласно определению фактор-
топологии в SPnX, необходимо доказать, что (тгп)~1(^п1^) открыто в
Хп. Но (тгп)~1(^п1^г) = я'п1^ так как ^п — Qn °7rn, а множество tt^V
открыто в силу факторности отображения тгп. Так как q^lV открыто
в SPnX, то (тг")-1^1^) открыто в Хп. Но (тг")^1^) = ^п1^
поэтому в силу факторности отображения тгп, V открыто в ехрп X.
36.24. Указание. Применить лемму Александера.
Решение. Пусть X — компакт. Тогда X регулярно, следовательно,
ехрХ хаусдорфово (см. задачу 36.15). Нам потребуется следующая вспо-
вспомогательная лемма (лемма Александера): пусть в пространстве X су-
существует такая предбаза #, что из любого покрытия пространства X
элементами этой предбазы можно выбрать конечное подпокрытие, то X
бикомпактно.
Заметим, что множества вида О (U) и О (X, U) образуют предбазу
топологии Вьеториса. Пусть V — покрытие, состоящее из элементов этой
предбазы. Покажем, что V содержит конечное подпокрытие. Положим
W = Х\иП, где п = {V | О (X, V) G V}. Если W = 0, то П является
открытым покрытием X. Поскольку X бикомпакт, П содержит конечное
подпокрытие {V\, ..., Vn}. Тогда семейство {О (X, V\), ..., О (X, Vn)}
является покрытием пространства ехрХ, поскольку для любой точки
F G ехрХ соответствующее замкнутое множество F пространства X
пересекается с каким-либо Vi, следовательно, F G О (X, V*).
Если же W не пусто, то W не пересекается ни с одним элементом
семейства П. Следовательно, найдется открытое множество U такое, что
О (U) е ?>, причем W CU.
Ответы и решения 397
Заметим, что П является покрытием компакта X\U. Выберем из
него конечное подпокрытие {Vi, ..., Vn}. Тогда семейство {О (U),
О (X, Vi), ..., О (X, Vn)} является покрытием пространства ехрХ, по-
поскольку для любой точки F Е ехр X либо F е О (X, VJ) для некоторого г,
либо F П ( О V^ I = 0, а тогда Fct/и, следовательно, F е О (U).
Итак, из Т> можно выбрать конечное подпокрытие, следовательно, по
лемме Александера, ехр X — компакт.
36.25. Согласно задаче 36.24, ехрХ — компакт. Согласно задаче 36.17,
ехрпХ замкнуто в ехрХ. Следовательно, ехрпХ — компакт как за-
замкнутое подмножество компакта.
36.26. Так как X — компакт, то по теореме Тихонова Хп — компакт.
Заметим, что SPQX является образом Хп при непрерывном отображе-
отображении тг§. Итак, SPgX — компакт как непрерывный образ компакта Хп.
36.27. Пусть В — база топологии пространства X, F — замкнутое под-
подмножество X. Пусть F Е О (Vi, ..., Vn), где множества Vi, г = 1, ..., п,
открыты в X. Для каждого г = 1, ..., п найдутся ?/""' G В, а* Е А{
(где Л{ — некоторое множество индексов) такие, что V{ = \J U*{ (no
oaeAi
определению базы топологии). Тогда {17"' |г = 1, ..., n,aj G Л*} — от-
открытое покрытие компакта F. Выберем из него конечное подпокрытие
И7!, ..., Wm. Без ограничения общности рассуждений можно считать,
что W{C\ F ф 0 для любого г = 1, ..., ш.
Очевидно, что F € О (Wu ..., Wm) С О(УЬ ..., Уп). Таким обра-
образом, для любой точки пространства ехрХ и для любой ее окрестности
существует лежащая внутри нее другая окрестность вида О (Ui, ..., Un),
где Щ ? В, а В — база пространства X, что и требовалось доказать.
36.28. Поскольку компакт ехрХ содержит ехрп X и, в частности, подпро-
подпространство ехрх X, гомеоморфное X, выполняются неравенства w ехр X ^
^ wexpnX ^ wX. Пусть wX = г. Согласно задаче 36.27, на ехрХ
существует база топологии мощности г. Следовательно, wexpX ^ wX,
откуда мы заключаем, что wexpX = wexpn X = wX.
Наконец, SPgX является непрерывным образом Хп и содержит X,
следовательно,
wX = wXn > wSPgX ^ wX,
что и требовалось доказать.
398 Ответы и решения
36.29. 1) Неравенство pH(Fu F2) ^ 0 очевидно. Пусть pH(Fi, F2) = 0.
Предположим, что F\ ф F2. Можно считать, что F2\F\ ф 0. Пусть
х G jF2\jF\. Положим d = inf р(х, у). Так как F\ замкнуто и х ? i*\,
J/GF
то d > 0. Но 1*2 С OeFi для любого е > 0, в частности, i<2 С Od/2F\.
Значит, найдется точка ж' G F\ такая, что р(х, х1) < -. Противоречие с
выбором d, следовательно, i*\ = i<2.
2) Очевидно, что pH{Fu F2) = pH(F2, Fi).
3) Проверим неравенство треугольника pH(F\, F3) ^ Ph(F\, F2) +
+ pH{F2, Fs). Множество F2 содержится в (pH(Fi, F2) + е)-окрестности
множества F\. Множество Fs содержится в (pH(Fi, F2) +е)-окрестности
множества F2. Из аксиомы треугольника для р следует, что любая точка
из jF3 удалена от i*\ не более, чем на pH(Fi, F2) +e + pH(F2, F3) +e. Так
как е произвольно, отсюда следует неравенство треугольника для рн.
4) Наконец, очевидно, что р(х, у) = рн{{х}, {у}).
36.30. Пусть 5 = {5i, ..., sm} G ехрХ, га ^ п.
а) Покажем, что каждая окрестность точки 5 в смысле топологии
Вьеториса содержит окрестность этой же точки в смысле метрики Хаус-
дорфа. Пусть O(Ui, ..., Uk) — окрестность точки 5. Выберем е > 0
так, что для всех i = 1, ..., га и j = 1, ..., к из S{ G Uj следует включе-
включение Oe(si) С Uj. Пусть Т G ехрпХ — такая точка, что pH(S, T) < е.
Тогда для всех t G Г существует S{ € S такая, что p(sj, t) < е, т.е.
? G OeEj) С C/j для некоторого./. Следовательно, Г С U Uj. Кроме того,
г=1
для каждого Uj можно выбрать точку Si G Uj такую, что найдется t G Т,
для которого p($i, ^) < е. Тогда ? G OeEj) С Uj. Поэтому TOUj ф 0 для
каждого j = 1, ..., к. Следовательно, Г G 0([/ъ ..., 17*). Итак, е-ок-
рестность (в смысле метрики рн) точки 5 додержится в О (E/i, ..., Uk)-
б) Покажем, что каждая окрестность точки 5 в смысле метрики Хаус-
дорфа содержит окрестность этой же точки в смысле топологии Вьето-
Вьеториса. Пусть е > 0. Положим Щ = Oe(si), г — 1, ..., га. Тогда из условия
Т G O(UU ..., Um) следует, что ряE, Т) < е, т.е. О (Uu • •., ^m) со-
содержится в е-окрестности точки 5.
36.31. Пусть (X, р) — метрическое пространство. Для точек [х] и [у] из
SPqX положим
?(И, [у]) = minmaxр(х{, ya{i)),
crfcCr г
Ответы и решения 399
где (a?i, ..., хп), B/i, ..., уп) — представители классов [х] и [у] соответ-
соответственно. Очевидно, что pq не зависит от выбора представителей классов
[х] и [у].
а) Проверим, что рв — метрика.
1) ро ^ 0 — очевидно. Докажем, что условие р<з(М, [у]) = О равно-
равносильно совпадению классов [х] и [у]. Действительно, если [х] = [у], то для
а = е имеем maxp(xi, уаи)) = maxp(xi, 2/г) = maxp(#i, яЛ = 0 (можно
г v ' i г
считать, что для совпадающих классов [х] и [у] выбраны одинаковые
представители, т.е. Х{ = yi). Обратно, пусть р<з(И, [у]) = 0. Тогда
найдется такая перестановка a G G, что Х{ = уа^ для всех г — 1, ..., п,
откуда следует совпадение классов [ж] и [у].
2) Докажем, что Pg{[x], [у]) = Pg{[v], [x]). Действительно,
Pg{[x], [у]) = minmaxp(xi, уф)) = minmaxр(уа{{), х{) =
crtCr г сгЕСг г
= mmmaxpiyj, xa-iW)) = minmax^j/j, xg(j)) = ра([у], [х]).
crGCr j ptCr j
3) Проверим неравенство треугольника Pg{[x], [у]) + РвЦу], И) ^
PC?(И, И). Пусть рс(И, [2/]) = рс?(яв, 2/m), Pg([2/], [*]) = PgB/p, ^z),
, [z]) = pG(xk, Zj). Пусть далее p(xt, zt) = maxp(xi, zt). Тогда,
согласно определению р<з> выполняется следующее неравенство:
р(хк, Zj)
Аналогично имеем р(ур, zx) ^ p(ym, z{), p(x8, ym) ^ p(xu 2/ш). Исходя
из этих трех неравенств, имеем цепочку неравенств
Pg{[x], Ы) + Ро{[у], [z]) = р(х„ ут) + р(ур, z{) >
ут) + р(ут, Zi) ^ p(xt, Zi) > р(хк, Zj) = po{[x], [*]),
что и требовалось доказать.
Проверим, что ро порождает фактор-топологию в SPqX. Пусть [х] G
G SPqX, Ое[х] — открытая е-окрестность точки [х] в метрике ро-
Покажем, что О€[х] открыто в SPqX. Для этого нужно показать, что
{кЪ)-1Ое[х) открыто в Хп. Пусть у = B/ь ..., уп) е Aг%)-гОв[х]. Тогда
minmaxp(a;i, уаи)) = Е\ < е. Положим e<i = е — е\ > 0. Пусть V = {z G
G Xn | рB/г, ^г) < ?2}. Заметим, что V является открытой окрестностью
точки 2/ в пространстве Хп. Легко проверить, что V С (ttS)^^]*
400 Ответы и решения
Пусть теперь U — открытое подмножество в SPqX и точка [х] лежит
в U. Так как (Trg)^ открыто в Хп, для любой подстановки a G G
найдется еа > 0 такое, что
{у G Хп | р(хфЬ Уг) < еа} С (тгЗГ1^
Положим е = min?v. Тогда Ое[х] С U. Итак, ро — метрика, ПОрОЖДа-
ющая топологию на SPqX, определяемую факторизацией Xn/G, что и
требовалось доказать.
36.32. Проверим, что тождественное отображение г: ехрХ -» (ехрХ, рн)
непрерывно. Из этого будет следовать утверждение задачи, так как не-
непрерывная биекция компактов является гомеоморфизмом (напомним,
что ехрХ — компакт по задаче 36.24).
Пусть точка Fo лежит в (ехрХ, рн). Рассмотрим произвольное е > 0.
Для каждой точки х G Fo фиксируем Ое/2(х) — открытую --окрестность
точки х в метрике р. Семейство {Ое/2{х)\х G Fo} является откры-
открытым покрытием компакта Fo. Выберем из него конечное подпокрытие
{E/i, ..., Un}. Заметим, что Fo € О (U\, ..., Un). Пусть F — произволь-
произвольная точка из О (Ui, ..., Un). Если у G F, то у G Uj для некоторого j. За-
Заметим теперь, что FoDUj Ф 0 при всех j и diamC/j = -. Следовательно,
р(у, Fo) < -. Поскольку точка у была выбрана произвольно, а также из
компактности множества F следует, что F С Oe/2(Fo). Аналогично,
Fo С O?(F). Следовательно, pH(Fo, F) < е. Таким образом, множество
i(O(Ui, ..., Un)) содержится в е-окрестности точки Fo, следовательно,
отображение г непрерывно в точке Fo. В силу произвольности точки
Fo отсюда следует непрерывность отображения г, что и требовалось до-
доказать.
36.33. Это утверждение следует из задач 36.24-36.26 и 36.29-36.32.
36.34. Пусть / = [0, 1]. Заметим, что отображение ттг: I2 -» ехр2/ ото-
отождествляет точки квадрата /2, симметричные относительно диагонали
Д = {(ж, х) | х G /}. В результате такого отождествления получается
треугольник, который, очевидно, гомеоморфен I2.
36.35. Отображение тгг: Я1 х Я1 ч ехр2 Hi отождествляет точки первой
четверти плоскости Е2, симметричные относительно луча х = у. В ре-
результате этого отождествления получается пространство, состоящее из
тех точек (ж, у) G К2, что х ^ 0 и х ^ у, которое, очевидно, гомео-
морфно Н2.
Ответы и решения 401
36.36. Отображение тгг: Е х R2 = К2 -> ехр2Е отождествляет точки
плоскости R2, симметричные относительно прямой х = у. В результате
получается полуплоскость, состоящая из тех точек (я, у) G К2, что х ^ у.
Эта полуплоскость гомеоморфна Я2.
36.37. Реализуем окружность как отрезок / = [0, 1] с отождествленными
концами. Легко видеть, что 51 х 51 получается из квадрата / х / отожде-
отождествлением точек вида @, х) с точками вида A, ж) и точек вида (я, 0) с
точками вида (я, 1). Обозначим это отождествление через р. Проекция
тгг: S1 х S1 -> expSi реализуется как композиция отождествления р и
проекции тгг: / х / -» ехр2 /.
Пусть Т = {(я, у) Е I2 \y ^ х}. Легко видеть, что тгг реализуется
как отождествление точек множества Т, имеющих вид (ж, 1), с точками
того же множества вида @, х). Обозначим это отождествление через ~.
Итак, ехр2 51 гомеоморфно Т/ ~. Нетрудно проверить, что пространство
Г/ ~ гомеоморфно листу Мёбиуса.
36.38. Пусть Т — множество точек куба /3, координаты которых удовле-
удовлетворяют условию х\ ^ Х2 и х\ ^ хз- Легко видеть, что /C) получается
из множества Г отождествлением точек, лежащих на гранях множества
Г, удовлетворяющих условиям х\ = x<i и х\ = хз и переходящих друг в
друга при повороте вокруг прямой х\ = Х2 = ?з на угол 2тг/3. Заметим,
что результат этого отождествления гомеоморфен конусу над квадратом
/2, а этот конус в свою очередь гомеоморфен /3, что и требовалось до-
доказать.
36.39. См. решение задачи 36.55.
36.40. Пусть Г — множество точек куба /3, координаты которых удо-
удовлетворяют условию х\ ^ Х2 ^ хз- Очевидно, что Т — трехмерный
симплекс. Заметим, что ехр3 / получается из Т отождествлением точек,
лежащих на гранях х\ = Х2 и х^ = хз этого симплекса, при котором
точка (?, ?, z) переходит в точку (г, z,t). В результате этого отожде-
отождествления получается конус, который гомеоморфен /3.
36.41. Заметим, что Н\ гомеоморфно полуинтервалу [0, 1). Положим
Т = {(Si, Х2, Хз) Е [0, 1 K | XI ^ Х2, Хг }> Х3}.
Заметим, что ЯхC) получается из Т отождествлением точек граней х\ —
= Х2 и х\ = хз множества Г, переходящих друг в друга при повороте на
402 Ответы и решения
угол 2тг/3 вокруг прямой х\ = х2 = #3- В результате такого отождествле-
отождествления получается множество, гомеоморфное конусу без точек основания.
Легко видеть, что такой конус гомеоморфен Я3.
36.42. Заметим, что Н\ гомеоморфно полуинтервалу [0, 1). Положим
Т = {(а*, х2, xz) € [0, IK | хг > х2 > х3}.
Легко видеть, что Т гомеоморфно SP*(Hl). С другой стороны, Т —
трехмерный симплекс, у которого выброшены точки одной из граней,
следовательно, Т гомеоморфен Я3.
36.43. Заметим, что Н\ гомеоморфно полуинтервалу [0, 1). Положим
Т = {(si, я2, хг) € [0, IK | хг ^ х2 > х3}.
Тогда ехрз (Я1) получается из Т отождествлением точек граней х\ = х2
и х2 = хз множества Т, при котором полуинтервал {х2 = х3 = 0} пе-
переходит в полуинтервал {х\ = х2, х$ = 0}, интервал {х2 = хз, х\ =0}
в интервал {х\ = х2 = 1}. В результате такого отождествления получа-
получается множество, гомеоморфное конусу без точек основания, а оно в свою
очередь гомеоморфно Я3, что и требовалось доказать.
36.44. Заметим, что R гомеоморфно @, 1). Далее, аналогично решению
задачи 36.41, получаем, что ЕC) гомеоморфно конусу без точек границы,
т.е. открытому шару, который, очевидно, гомеоморфен Е3.
36.45. Заметим, что R гомеоморфно @, 1). Далее, дословно повторяя рас-
рассуждения из задачи 36.42, видим, что 5P3(R) гомеоморфно трехмерному
симплексу, у которого выброшены точки двух граней, а такой симплекс
гомеоморфен Я3.
36.46. Заметим, что R гомеоморфно @, 1). Далее, аналогично решению
задачи 36.43, получаем, что ехр3 (R) гомеоморфно конусу, у которого
выброшены точки основания и боковой поверхности. Это множество го-
гомеоморфно открытому шару, который в свою очередь гомеоморфен R3.
36.47. Пусть X — клеточное пространство. Через Хп будем обозначать
n-мерный остов X. Нам потребуется следующее вспомогательное пред-
предложение.
Теорема о фундаментальной группе клеточного про-
пространства. Пусть X — клеточное пространство с единственной
нульмерной клеткой е°, одномерными клетками {е*}^ и двумерными
Ответы и решения 403
клетками {е2}^. Пусть Cj Е tti(-АГ1) — элемент группы
порожденный «приклеивающим» отображением gi : S1 -» X1 (j =
= 1, ..., М). Тогда tti(X, e°) есть группа с системой образующих
{е}} и системой определяющих соотношений /3j = 1 (j = 1, ..., М).
Доказательство этой теоремы можно найти в стандартных руковод-
руководствах по гомотопической топологии.
Реализуем окружность как отрезок J = [0, 1] с отождествленными
концами. Тогда E1K получается из /3 отождествлением точек противо-
противоположных граней куба /3.
Пусть Т = {(х\, х%, хз) ? I3\xi ^ X2 ^ хз}- Легко видеть, что
Т — трехмерный симплекс. Положим А = @, 0, 0), В = A, 0, 0),
С = A, 1, 0), ?> = A, 1, 1). Тогда А, В, С и D — вершины сим-
симплекса Т.
Легко видеть, что ехр3 E1) получается из Т отождествлением точек
граней ABC и BCD, причем точка В отождествляется с точкой А, точка
D отождествляется с С, точка С отождествляется с В, а также отожде-
отождествлением точек граней ADC и ABD, причем точка В отождествляется
с точкой С. Заметим, что при таком отождествлении точки Л, В, С, D
переходят в одну точку. Обозначим ее через е°. Кроме того, ребра АВ,
ВС, CD, AC и BD переходят в окружность, которую обозначим через
а, а ребро BD переходит в окружность, которую мы обозначим через
р. Теперь нетрудно заметить, что ехр3E1) является клеточным про-
пространством с нульмерной клеткой е° и одномерными клетками а и /3.
Согласно теореме о фундаментальной группе клеточного пространства,
7Ti(exp3 E1), е°) есть группа с системой образующих {а, /3} и опреде-
определяющими соотношениями а2 о а = 1, а2 о /З = 1. Отсюда мы
заключаем, что а = /3 = 1, следовательно, группа 7Ti(exp3 E1), е°) три-
тривиальна. Остается только заметить, что в силу связности ехр3 E1) фун-
фундаментальная группа не зависит от выбора отмеченной точки е°. Итак,
ехр3 E1) односвязно, что и требовалось доказать.
36.48. Как и в решении задачи 36.47, реализуем 51 как отрезок / =
= [0, 1] с отождествленными концами и полагаем Т = {(#i, #2, хз) ?
G I3 \х\ ^ Х2 ^ хз} — симплекс с вершинами А = @, 0, 0), В =
= A, 0, 0), С = A, 1, 0), D = A, 1, 1). Нетрудно видеть, что SP3(S1)
получается из Т отождествлением точек граней ABC и BCD, причем
404 Ответы и решения
ребро АВ отождествляется с ребром ВС, ребро ВС — с ребром DC,
а ребро АС — с ребром BD. При этом, как легко заметить, все точки
А, В, С, D переходят в одну, которую мы обозначим через е°. Да-
Далее, окружность, в которую переходят ребра АВ, ВС и CD, обозначим
через а, окружность, в которую переходят ргбра АС и BD, обозначим
через /?, и, наконец, окружность, в которую переходит ребро AD, обо-
обозначим через 7-
Легко видеть, что SP3(SX) является клеточным пространством с вер-
вершиной е° и одномерными клетками а, /?, j. Согласно теореме о фунда-
фундаментальной группе клеточного пространства (см. решение задачи 36.47),
7TiEP3E1), e°) является группой с образующими а, /3, j и с определяю-
определяющими соотношениями а2/? = 1, /3aj~x = 1. Легко видеть, что система
определяющих соотношений равносильна системе а2 = /?, а3 = 7- Та-
Таким образом, любой элемент группы ttiEP3E1), e°) представим (при-
(причем единственным образом) в виде ап, п G Z, откуда мы заключаем,
что 7TiEP3E1), е°) « Z. Следовательно, SP3(S1) неодносвязно.
36.49. Полагаем
Т= {(a?i, х2, х3) G/3|a;i ^ х2, хх *>х3}.
Нетрудно видеть, что Т — многогранник с вершинами А = @, 0, 0),
В = A, 0, 0), С = A, 1, 0), D = A, 1, 1), Е = A, 0, 1). Заметим,
что 5ХC) получается из Т отождествлением граней AED и ACD, при
котором «склеиваются» точки, получающиеся друг из друга поворотом
на угол 2тг/3, в частности, точка Е отождествляется с точкой С, а также
отождествлением точек треугольников ABE, BED, ABC и BCD. Обо-
Обозначим это отождествление через ~. Тогда АВ ~ ВС ~ CD ~ BE ~ ED,
АС - BD.
Обозначим окружности, в которые переходят при таком отождествле-
отождествлении ребра АВ, АС и AD, через а, /3 и 7 соответственно, через е° обо-
обозначим точку, в которую переходят вершины Т. Нетрудно видеть, что
51 C) является клеточным пространством с вершиной е° и одномерными
клетками а, /3 и j. По теореме о фундаментальной группе клеточного
пространства (см. решение задачи 36.47), группа ttiE1C), е°) явля-
является группой с образующими а, /3, 7 и определяющими соотношени-
соотношениями а2/? = 1, /За7~х = 1. Эта система определяющих соотношений
Ответы и решения 405
равносильна системе а2 = 0 и а3 = 7> следовательно, любой элемент
группы ttiE1C), е°) однозначно представим в виде an, n G Z. Итак,
ttiE1C), е°) « Z, в частности, 51C) неодносвязно.
36.53. Предположим противное: пусть существует вложение прост-
пространства ехр4 / в Е4. Пусть Ui = П, - J, U2 = (-, - J, U3 = I-, 1J —
открытые дизъюнктные подмножества отрезка /. Пусть
V = {х е ехр4/|а; = {х\, ж2, ж3} и Xi eUi для г = 1, 2, 3}.
Нетрудно видеть, что V гомеоморфно Е3. Пусть О = (C/i, [/2? С^з)- По-
Положим Wi = {х е ехр4/|а; G О, \х\ = 4 и \х П C/i| = 2}. Нетрудно
заметить, что И^ гомеоморфно Е4 для каждого г и W» П W) = 0 \Цф j.
Кроме того, очевидно, что множество У является общей границей для
множеств Wi, i = 1, 2, 3. Следовательно, в Е4 нашлось множество,
гомеоморфное Е3 и являющееся общей границей для трех непересекаю-
непересекающихся множеств, каждое из которых гомеоморфно Е4, что противоречит
теореме Жордана. Итак, ехр4 / <jt E4, что и требовалось доказать.
36.54. Предположим противное: пусть ехр4 / является 4-многообрази-
ем. Рассмотрим произвольную точку х = {a;i, Ж2, #3} ? ехр4 /, где
0 < х\ < Х2 < #з < 1- Согласно нашему предположению, у точки х
найдется окрестность, гомеоморфная Е4. Можно считать, что эта окрест-
окрестность имеет вид О = O(U\, Ui, С^з)? где f/i, [/2 и [/з — дизъюнктные
окрестности точек xi, Ж2 и хз соответственно, причем 0 ^ U\ и 1 ^ С/з-
Пусть V = {х G О | \х\ = 3}. Пусть W = O\V. Нетрудно заметить, что
з
W = (J Wi, причем Wi — открыто-замкнуты в W. Легко видеть, что
г=\
Wi nWj = 0 Vi ф j. Таким образом, W имеет по крайней мере три
компоненты связности, откуда следует, что множество, гомеоморфное Е3,
разбивает пространство Е4 более чем на две компоненты связности, что
противоречит теореме Жордана. Полученное противоречие показывает,
что ехр4 / не многообразие, что и требовалось доказать.
36.55. Построим отображение h: SPnI ->• In следующим образом.
Пусть [х] е SPnI. Тогда полагаем h([x]) = (a?i, ..., хп), где
(a?i, ..., хп) — такой представитель класса [ж], что х\ ^ Х2 ^ ... ^ хп.
Пусть Тп = {х е Хп\х1 ^ х2 ^ ... ^ хп}. Заметим, что Тп — гг-мер-
ный замкнутый симплекс. Таким образом, h отображает SPnI на Тп.
406 Ответы и решения
Очевидно, Тп гомеоморфно n-мерному кубу 1п. Следовательно, нам
достаточно проверить, что h — гомеоморфизм. Инъективность и сюръ-
ективность отображения h очевидны. Заметим, что h~l непрерывно, так
как Л = тгп|т". Кроме того, согласно задаче 36.26, SPnI — компакт.
Следовательно, h~l — гомеоморфизм (как непрерывная биекция компак-
компактов), поэтому и Л — гомеоморфизм.
36.56. Заметим, что Н\ гомеоморфно полуинтервалу [0, 1). Пусть [х] G
SPnHl, (a?i, ..., хп) € [0, 1)п — такой представитель класса [ж], что
#1 ^ %2 ^ • • • ^ хп. Положим h([x]) = (#!,..., хп). Тогда h является
биекцией пространства SPnHl на пространство
Покажем, что h — гомеоморфизм. Действительно, h~l непрерывно, так
как Л = тгп|у. Проверим, что h непрерывно. Пусть U — открытое под-
подмножество в Y. Тогда h~l{U) = тгп(С7) открыто, поскольку отображение
тгп открыто. Итак, h — гомеоморфизм.
Далее, легко видеть, что Y является n-мерным симплексом, у кото-
которого выброшены точки грани хп = 1, а такой симплекс гомеоморфен
Нп, что и требовалось доказать.
36.57. Заметим, что R гомеоморфно @, 1). Так же, как и при реше-
решении задачи 36.56, строим гомеоморфизм h: SPnR —> Y, где Y = {х G
G @,l)n|a;i ^#2 ^ ¦•• ^a;n}. Легко видеть, что Y является n-мерным
симплексом, у которого выброшены точки граней хп = 1 и х\ = 0; сле-
следовательно, Y гомеоморфен Нп, что и требовалось доказать.
36.59. Пусть М — произвольное n-многообразие, п ^ 1. Предположим
противное, а именно, что МD) является 4тг-многообразием. Пусть а —
произвольная точка многообразия М, U(a) — окрестность этой точки,
гомеоморфная Е4. Обозначим через М' множество точек [х] G МD),
у которых найдется представитель (a?i, #2, #3, %4) класса [х] такой, что
Xi G U(a) для всех г. Заметим, что по определению топологии в МD)
подпространство М' открыто в МD) и, в частности, также является
многообразием. С другой стороны, по выбору окрестности С/(а), имеем
М1 = МпD). Таким образом, нам достаточно свести к противоречию
предположение о том, что ЕпD) — многообразие.
36.60. Предположим противное. Рассмотрим любые различные точки
х, у G М2. Тогда {#, у} G ехр3М2. По нашему предположению, най-
Ответы и решения 407
дется окрестность этих точек в пространстве ехр3М2, гомеоморфная
Е6. Можем считать, что эта окрестность имеет вид О (С/, F), где U и
V — дизъюнктные окрестности точек х и у соответственно. Более того,
поскольку М2 — двумерное многообразие, можно считать, что U и V
гомеоморфны Е2. Так как U П V = 0, то ехрх М2 П О (?/, V) = 0.
Положим
А = ехр2 М2 П О ([/, У), В = {z e expg M2 | \z\ = 3} П О (С/, V).
Тогда нетрудно видеть, что А гомеоморфно Е4. Кроме того, О (С/, V)\A
несвязно. Действительно, О (С/, V)\A = B\ U Дг, где
Si = {z = {xu х2, х3} е в\хг е с/, х2 еи,х3е V), в2 = в\вг
и точку из В\ нельзя соединить с точкой из В% путем, лежащим в В.
Будем говорить, что пространство X разбивается своим подпростран-
подпространством F, если X\Y несвязно. Тогда из сказанного выше следует, что
О (С/, V) разбивается множеством А. Напомним, что О (С/, V) « Е6,
А гомеоморфно Е4. Следовательно, пространство Е6 разбивается мно-
множеством, гомеоморфным Е4, что противоречит следующей известной
теореме:
Теорема. Пространство Еп не разбивается никаким лежащим
в нем множеством размерности, не превосходящей п — 2.
Из полученного противоречия мы заключаем, что ехр3 М2 — не мно-
многообразие, что и требовалось доказать.
36.63. Пусть (ж, у) G Е2. Полагая z = х + iy, отождествляем Е2 с ком-
комплексной плоскостью С. Таким образом, надо показать, что SPnC =
= Сп. Пусть [(^i, ..., zn)\ G SPnC. Поставим в соответствие классу
[(^i, ..., zn)] набор коэффициентов многочлена P{z) = (z—zi).. .(z—zn):
[(zu ... , zn)] ^ (an_i, ... , a0) € Cn.
Легко видеть, что полученное отображение /: SPnC ->• Сп является
сюръективным и инъективным (действительно, любой многочлен над
полем комплексных чисел имеет ровно п корней, которые однозначно
определяются его коэффициентами). Кроме того, коэффициенты много-
многочлена непрерывно зависят от его корней и обратно, корни многочлена
408 Ответы и решения
являются непрерывными функциями его коэффициентов, откуда мы за-
заключаем, что построенное отображение / является гомеоморфизмом, что
и требовалось доказать.
36.64. Обозначим через С расширенную комплексную плоскость. Заме-
Заметим, что сфера S2 гомеоморфна С, следовательно, SPnS2 гомеоморфно
SPnC Построим отображение /: С ->• СРП, ставящее в соответствие
вектору (zi, ..., zn) ? С класс эквивалентности
[оо, • •., On] = {(са0, ..., сап) \ с е С\{0}} G СРп
таким образом, что zi, ..., zn — корни многочлена
P(z) = а0 + axz + ... + anzn,
а вектору вида (zi, z<i, ..., z&, оо, ..., оо) — класс эквивалентности
п-к
[оо, ..., а*,0, ..., 0],
причем zi, ..., Zk — корни многочлена P(z) = ао + oi^ -f ... + akZk.
Докажем, что отображение h непрерывно, замкнуто и сюръективно.
Сюръективность / очевидна, так как любой многочлен степени п имеет
ровно п корней над полем С. Непрерывность / в точках (zi, ..., zn),
где Zi ф оо для всех г, следует из того, что вектор (ао, ..., ап-ъ 1)?
составленный из коэффициентов многочлена P(z) = (z — z\).. .(z — zn)
и рассматриваемый как функция от набора z\, ..., zn, непрерывен по
совокупности переменных {^i, ..., zn}.
Покажем на примере С , что / непрерывна в точке (z\, оо). Пусть
Z2 Ф оо, Z2 Ф 0. Тогда
= [ZXZ2, "B1 + *2), 1]
lim /(zi, z2) = [*i, -1, 0] = /(zi, oo),
2>OO
2
т.е. / непрерывна в точке (zi, оо) € С . В случае произвольного п
непрерывность доказывается аналогично.
Отображение / порождает на С** = E2O1 естественное отношение
эквивалентности ~/: х ~ у <-> f(x) = f(y). Легко видеть, что это отно-
Ответы и решения 409
шение совпадает с отношением эквивалентности, порожденным отобра-
отображением тгп: Сп = E2O1 ->• SPnC Напомним, что образом / является
СРп. Итак,
SPnS2 = SPnC a Cn/ ~*»а сГ/ ~/a СРП,
что и требовалось доказать.
36.65. Как и при решении задачи 36.63, отождествляем Е2\{0} с С\{0}
и строим отображение /: 5Рп(Е2\{0}) ->• Сп. Образом этого отображе-
отображения являются векторы (an-i, ..., ao), удовлетворяющие условию ao ^ 0,
и только они. Множество этих векторов естественным образом гомео-
морфно произведению С71 х (С\{0}), которое в свою очередь гомео-
морфно (R2\{0}) х R2n~2, что и требовалось доказать.
СПИСОК ЛИТЕРАТУРЫ
1. Мищенко А.С, Соловьев Ю.П., Фоменко А.Т. Сборник
задач по дифференциальной геометрии и топологии.—М.: Изд-во
Моск. ун-та, 1981.
2. Кованцов Н.И. и др. Дифференциальная геометрия, топология,
тензорный анализ.—Киев, 1989.
3. Васильев A.M., Соловьев Ю. П. Дифференциальная геометрия
(методические указания).—М.: Изд-во Моск. ун-та, 1988.
4. Трофимов В. В. Задачи по теории групп и алгебр Ли.—М.: Изд-во
Моск. ун-та, 1990.
5. Рохлин В. А., Фукс Д.Б. Начальный курс топологии (геометри-
(геометрические главы).—М.: Наука, 1977.
6. Розендорн Э.Р. Задачи по дифференциальной геометрии.—М.:
Наука, 1971.
7. Дубровин Б.А., Новиков СП., Фоменко А.Т. Современная
геометрия.—М.: Наука, 1986.
8. Новиков СП., Фоменко А.Т. Элементы дифференциальной
геометрии и топологии.—М.: Наука, 1987.
9. Мищенко А. С, Фоменко А. Т. Курс дифференциальной геоме-
геометрии и топологии.—М.: Факториал Пресс, 2000.
10. Шварц Дж. Дифференциальная геометрия и топология.—М: Мир,
1970.
11. Бляшке В. Введение в дифференциальную геометрию.—М: Мир,
1957.
12. Р а ш е в с к и й П. К. Риманова геометрия и тензорный анализ.—М.:
Наука, 1967.
13. Рашевский П. К. Курс дифференциальной геометрии.—М.: Го-
стехиздат, 1956.
14. Торп Дж. Начальные главы дифференциальной геометрии.—М.:
Мир, 1982.
15. Мант у ров О. В. Элементы тензорного анализа.—М.: Просвеще-
Просвещение, 1991.
16. С терн б ер г С. Лекции по дифференциальной геометрии.—М.:
Мир, 1970.
17. Буземан Г. Геометрия геодезических.—М.: Физматгиз, 1962.
18. Погорелов А.В. Дифференциальная геометрия.—М.: Наука,
1974.
Список литературы 411
19. Погорелов А.В. Внешняя геометрия выпуклых поверхностей.—
М.: Наука, 1969.
20. Александров А.Д. Внутренняя геометрия выпуклых
поверхностей.—М.: Гостехиздат, 1948.
21. Фиников С.П. Курс дифференциальной геометрии.—М.: Гостех-
Гостехиздат, 1952.
22. Громол Д., Клингенберг В., Мейер В. Риманова геометрия
в целом.—М.: Мир, 1971.
23. Гильберт Д., Кон-Фоссен С. Наглядная геометрия.—М.: Го-
Гостехиздат, 1961.
24. Gerd Fischer. Mathematical Models. В 2-х томах.—
Draunschweig/Weisbaden (Germany): Priedr. Vieweg & Sohn.
Учебное издание
МИЩЕНКО Александр Сергеевич
СОЛОВЬЕВ Юрий Петрович
ФОМЕНКО Анатолий Тимофеевич
СБОРНИК ЗАДАЧ
ПО ДИФФЕРЕНЦИАЛЬНОЙ ГЕОМЕТРИИ И ТОПОЛОГИИ
Редактор Л.А. Панюшкина
Компьютерная графика М.В. Ивановский
Компьютерная верстка Г.М. Красникова
ИД №01389 от 30.03.2000
Гигиеническое заключение № 77.99.10.953.Д.005466.07.03
от 25.07.2003
Подписано в печать 21.06.2004. Формат 60x90/16.
Бумага офсетная JY* 1. Печать офсетная.
Усл. печ. л. 25,75. Уч.-изд. л. 28,33.
Тираж 3000 экз. A-й завод — 1500 экз.)
Заказ № 149
Издательство Физико-математической литературы
119071 Москва В-71, Ленинский проспект, 15
Отпечатано с готовых диапозитивов
ГП «Облиздат»
248640 Калуга, пл. Старый торг, 5