/












































































































































































Автор: Зозуля В.Б. Лалетин К.Н. Гученко Н.И.
Теги: авиация аэродинамика авиатехника вертолеты
Год: 1984




Текст
В Б Зозуля. ' И Палетин, Н.И.Гуче но
МИНИСТЕРСТВО ГРАЖДАНСКОЙ АВИАЦИИ
В. Б. Зозуля, К. Н. Лалетин, Н, И. Гученко
ПРАКТИЧЕСКАЯ
АЭРОДИНАМИКА
ВЕРТОЛЕТА
Ми-2
МОСКВА «ВОЗДУШНЫЙ ТРАНСПОРТ» 1984
В. Б. Зозуля, К. Н. Лалетин, Н. И. Гученко. Практическая
аэродинамика вертолета Ми-2. — М.: Воздушный транспорт,
1984, с. 176.
В книге рассмотрены особенности аэродинамики несуще-
го и рулевого винтов и планера вертолета Ми-2, особеннос-
ти балансировки, устойчивости и управляемости, рассмотре-
ны характеристики на установившихся режимах полета, а
также в особых случаях полета. Обосновываются летные ха-
рактеристики, действия пилота и ограничения на различных
этапах полета.
Книга предназначена для летного состава гражданской
авиации. Она может быть использована инженерно-техниче-
ским составом и слушателями учебно-тренировочных отря-
дов, факультетов и курсов повышения квалификации сред-
них и высших учебных заведений.
Илл. 101, табл. 9, библиогр. 27 назв.
Гл. 1, 2 написаны Зозулей В. Б., гл. 3 и параграф 6
гл. 4 — Лалетиным К. Н., гл. 5 и параграфы 1—5 гл. 4 —
Гученко Н. И.
Зав. редакцией А. П. Молодцов
Редактор Л. М. Бурдина
Глава 1. ОСНОВЫ АЭРОДИНАМИКИ ВИНТА
1. РАБОТА ВИНТА С ЖЕСТКИМ КРЕПЛЕНИЕМ ЛОПАСТЕЙ
К ВТУЛКЕ
ТЯГА ВИНТА НА ВЕРТИКАЛЬНЫХ РЕЖИМАХ ПОЛЕТА
Идеальным называется винт, который создает аэродинами-
ческую силу (тягу) без потерь мощности, подведенной к винту
извне. Следовательно, коэффициент полезного действия идеально-
го винта т]о=1. В теории идеального винта используются допуще-
ния о бесконечно большом количестве лопастей, об отсутствии
вязкости и сжимаемости воздуха. Эти допущения позволяют пред-
ставить индуктивную скорость постоянной по всему ометаемому
дйску и направленной строго параллельно оси винта.
Вращающийся несущий винт придает массе воздуха кинетиче-
скую энергию. На место отброшенной винтом массы воздуха под-
сасывается со скоростью Ui (индуктивная скорость подсасывания)
такая же масса воздуха. В плоскости вращения винта резко по-
вышается статическое давление, и за винтом происходит увели-
чение скорости движения массы воздуха (за счет выравнивания
избыточного статического давления до величины атмосферного
давления) до величины и2, называемой индуктивной скоростью
отбрасывания. Действие на винт массы воздуха, отброшенной им,
называется аэродинамической силой (или тягой —
в случае осевого обтекания) винта:
Ян=рЛ,(Уу + Vi)-v2, (1)
где Vy — вертикальная скорость перемещения винта
вдоль собственной оси;
FH — площадь, ометаемая винтом;
р—плотность воздуха.
Соотношение между индуктивными скоростями:
у1 = 2и2, поэтому (2)
для режима с Уу = 0
/?H = 2pFX (3)
Следовательно, аэродинамическая сила несущего винта про-
порциональна плотности воздуха, площади НВ и квадрату индук-
тивной скорости подсасывания.
/ 3
Необходимая для создания этой силы мощность У равна се-
кундной работе аэродинамической силы:
г*.) = 2pF„ (Vy + vtfv,. (4)
При работе на месте:
W = 2?F„-yf = (5)
Величина мощности, которая должна быть сообщена идеаль-
ному несущему винту для создания им определенной аэродинамиче-
ской силы, называется потребной индуктивной мощностью NHHJl *
Как следует из формул (4) и (5), увеличение полетной массы
вызывает увеличение потребной для висения мощности пропор-
з
ционально vi.
При выполнении висения можно считать, что аэродинамиче-
ская сила уравновешена силой тяжести и тогда
G = 2p.FHu; (6)
Потребная индуктивная скорость для выполнения режима ви-
сения называется характеристической индуктивной скоростью:
(7)
у, = 1 / ----= 1 / ,
V 2?FH V 2рсД
где р =---------нагрузка на ометаемую площадь (для макси-
F н
мально допустимой полетной массы т = 3550 кг,
6 = 34800 Н), при Fa = 165 м2,
34800/7 Н ,ni г «ч
Р ’ тк7"'. т211 ~Г <21’5 кгс м')’
165 № м2
Д = —-----относительная плотность воздуха, рс = 1,225 кг/м3 :
? с
— стандартная плотность воздуха.
В стандартных условиях для режима висения:
= I/ -----------— 9,3 м с,
1 У 21,2251
.V= 2-1,225-Ь 165-9,33 = 3,24-10’ Вт (440 л с.).
Определение аэродинамической силы (тяги) и потребной мощ-
ности по формулам (1), (3), (4), (5) дает большие ошибки. При-
чиной этого является пренебрежение в теории идеального винта
отличиями в механизме образования аэродинамической силы
(рис. 1.1):
а — распределение индуктивной скорости по радиусу винта у
реального несущего винта неравномерное. Наибольшая величина
индуктивной скорости получается на г~ 0,7; потери на перетека-
ние воздуха (концевые потери) составляют около 3%;
б — распределение индуктивной скорости по азимутам сметае-
мого диска у реального несущего винта тем более неравномерно,
4
чем меньше лопастей у винта; в целом неравномерность поля ин-
дуктивных скоростей ведет к увеличению потребной мощности
реального несущего винта, эти потери мощности на неравномер-
ность потока составляют 5—6% потребной мощности реального
несущего винта;
в — наличие вязкости воздуха образует у каждой лопасти кон-
цевой и комлевой вихри, поэтому струя за винтом состоит как
Рис. 1.1. Отличия в работе реального НВ от идеального:
1 — идеальный винт; 2 — реальный винт; 3 — перетекание воздуха
у комля и у конца лопасти
/
5
бы из намотанных на цилиндр по винтовым линиям вихрей, на
вращение воздушной массы в них и на вращение целиком всей
струи в направлении вращения винта потери мощности состав-
ляют около 0,2 %
г — у реального винта вследствие наличия вязкости появляет-
ся профильное сопротивление, и лопасть испытывает сопротивле-
ние врайгейию потери мощности на преодоление его сос-
тавляют 25—.30% потребной мощности реального несущего винта.
Дополнительная мощность, которая требуется реальному не-
сущему винту для создания такой же величины аэродинамической
силы, как и у идеального винта (при одинаковой величине ометае-
мой площади), называется профильной мощностью не-
сущего винта Л/пр. Она составляет 50—65 % мощности идеального
винта. Для оценки потерь, а также эффективности работы винта
на месте (в штиль) вводится относительный коэффициент полез-
ного действия п0, представляющий собой отношение мощности,
затрачиваемой идеальным винтом, к мощности Мр, фактически
затрачиваемой реальным винтом:
Ъ = . (8)
N, М„м+Л1„р
На режиме висения для полетной массы т = 3550 кг $=
= 3,24-105 Вт. Потребная мощность несущего винта для режима
висения вертолета Ми-2 составляет Мр =4,38-105 Вт (595 л.с.),
следовательно:
Часть ометаемой площади, на которой несущий винт работает,
как идеальный, называется эффективной площадью не-
сущего винта Гэфф. Она выражается через величину площади
НВ с помощью экспериментально определенного коэффициента
потерь х:
(9)
Тогда аэродинамическая сила тяги несущего винта при Vx =
= Vy = 0:
R и — 2 о • Fэфф • V[ — 2 р • Fu • z • 'Ц) cp = 2 pc • A • /^н • z • cp> (Ю)
где cp — средняя величина индуктивной скорости (см.
рис. 1.1, а и б).
Определяемая для условий режима висения характеристиче-
ская индуктивная скорость реального винта оказывается больше,
чем у идеального:
6
Для условий, приведенных выше, характеристическая скорость
составит 9,8—10,1 м/с. Аналогично потребная мощность реального
несущего винта для режима висения больше, чем у идеального не-
сущего винта: ,
= ЗрЛдфф-щ =2pFHxrfcp = 2pc-A-/:,H-x-t>i ср- (12)
Используя величину средней характеристической скорости,
полученную в приведенном примере, имеем:
Ар = 3,77.10-’...4,12-10’ Вт (512...560 л с.).
ТЯГА И МОМЕНТ СОПРОТИВЛЕНИЯ ВРАЩЕНИЮ ВИНТА
Элемент лопасти вращающегося винта обтекается со скоростью
Wtr под углом атаки аг. От этих двух параметров зависят вели-
чина и направление возникающей на элементе (в сечении) аэро-
динамической силы Rr, которая по основному закону сопротивле-
ния воздуха равна
р И
Rr = CR - 'b Lr- (13)
Увеличение угла атаки аг может быть выполнено без измене-
ния величины результирующей скорости г. Благодаря осевому
шарниру лопасти несущий винт приобретает свойства винта из-
меняемого шага.
Величина угла атаки сечения лопасти может изменяться при
неизменном угле установки фог и неизменной окружной скорости
war за счет изменения величины осевой скорости Vy-j-ulr.
При наборе высоты индуктивная скорость меньше, чем на ви-
сении, так как несущий винт, совершая движение вверх, встреча-
ет на своем пути большую массу воздуха и, следовательно, для
получения той же аэродинамической силы может сообщать ей
меньшее ускорение. Для обеспечения такого же угла атаки <хг се-
чения лопасти в режиме набора, как и на висении, угол установки
(а, следовательно, и лопасти <р0) должен быть больше.
При вертикальном снижении со скоростью, меньшей индуктив-
ной скорости, создаваемой винтом на висении, потребная индук-
тивная скорость увеличивается, так как скорость снижения вы-
читается из общей скорости потока. Но это увеличение индуктив-
ной скорости также примерно вдвое меньше величины вертикаль-
ной скорости снижения, поэтому при снижении углы атаки сече-
ний все-таки увеличиваются, а следовательно, на снижении тре-
буется меньший угол установки <рог, чем на висении.
Угол атаки сечения может изменяться также за счет измене-
ния распределения индуктивной скорости по диску несущего вин-
та (например, на режимах косого обтекания).
7
Раскладывая аэродинамическую силу Rr сечения лопасти в
скоростной системе координат, получаем подъемную силу
Р И
Yar = СУаГ-Ь-^г, (14)
где ( Суаг — коэффициент подъемной силы;
— хорда;
— толщина сечения,
и силу сопротивления
r W2
Xar^CXaP-^J- -b-lr, (15)
где С— коэффициент профильного сопротивления.
Более удобно для получения характеристик винта в целом раз-
ложение аэродинамической силы Rr сечения лопасти в • связан-
ной системе координат на тягу (нормальную силу) Yr и силу
сопротивления вращению Хг. Ввиду малости угла притекания
' можно считать тягу сечения приблизительно равной подъемной
силе:
у = Y
1 г 1 аг'
Сила сопротивления вращению Хг значительно отличается от
силы сопротивления Хаг. Проекция силы Хаг на плоскость враще-
ния— это часть силы сопротивления вращению, обусловленная
профильным сопротивлением сечения Хг пр. Проекция силы Yar на
плоскость вращения — это часть силы сопротивления вращению
Л”ГИНд, обусловленная увеличением подъемной силы сечения.
Итак, сила сопротивления вращению сечения
Хг — пр + ИНд. (16)'
Тяга лопасти может быть представлена как равнодействующая
тяг сечений лопастей: л
(17)
Точка приложения тяги лопасти Ул расположена на расстоя-
нии около 0,7 радиуса винта R и называется эффективным радиу-
сом гЭфф- Тяга всего винта может быть получена как равнодейст-
вующая системы параллельных сил тяг лопастей:
Г = Ун=кл.Гл, (18)
где кл — количество лопастей.
В осевом потоке тяга винта направлена по его оси, так как
тяги лопастей по величине равны и приложены каждая на своей
лопасти на одинаковом удалении от оси вращения винта гэфф-
8
Сила сопротивления вращению лопасти Хл может быть пред-
ставлена как равнодействующая сил сопротивления вращению се-
чения лопастей:
*,= U(. (19)
Сила Хл, приложенная на плече гэфф относительно оси враще-
ния винта, создает момент сопротивления вращению лопасти
•МВр. л — -^л'^эфф, (20)
направленный против направления вращения винта. В осевом
потоке моменты сопротивления вращению всех лопастей одина-
ковы, а их сумма равна моменту сопротивления вращению всего
винта:
-Мвр. н — к л * -Мер. л j (21)
где кл — количество лопастей.
Условием вращения винта с постоянной частотой вращения
<он = const является равенство момента сопротивления вращению
(реактивного момента) крутящему моменту, создаваемому на ва-
лу винта силовой установкой:
= (22)
Согласно основному закону сопротивления воздуха тяга винта
и момент сопротивления вращению винта могут быть выражены
через их коэффициенты (за характерный скоростной напор при-
„ Р (wh ^?)2
нимается скоростной напор концевого элемента лопасти — --- —
и за характерную площадь принимается площадь НВ EH=n;R2):
T=CT-^^F.-, Мк = тк iSa^-F.-R, (23)
где тк — коэффициент крутящего момента.
Величины аэродинамических коэффициентов С г и тк опре-
деляются по результатам испытания в аэродинамической трубе
модели винта или винта в натуральную величину:
Г Мк
СТ ~; тк --------------------------. (24)
Р(-н/?)2 р(<!>нЯ)2
2 Л ----F„R
Чем больше шаг <р0, тем больше потребный крутящий момент
(больше тк), но при этом развивается и большая тяга (больше
Ст). При увеличении общего шага потребный крутящий момент
увеличивается главным образом за счет увеличения индуктивного
сопротивления вращению (т. е. тк.инл растет интенсивнее, чем
Ж'. пр .
Если две зависимости Ст = [(<р0) и Щк = Л(<Ро) объединить, ис-
ключив общий параметр ф0, то полученная взаимосвязь коэффи-
9
циента тяги с коэффициентом крутящего момента называется по-
лярой винта (рис. 1.2).
Рис. 1.2. Поляра несущего винта вер-
толета Ми-2 по продувке винта
(£>н= 14,5 м; к=3; п=0,0527, где к —
количество лопастей, о — коэффици-
ент заполнения)
Условные обозначения: ------------
без учета влияния воздушной подуш-
ки, ------ с учетом влияния возду-
шной подушки
УПРАВЛЕНИЕ ДВИГАТЕЛЯМИ И НЕСУЩИМ ВИНТОМ
ВЕРТОЛЕТА
На рис. 1.3 показана характеристика системы «ШАГ—ГАЗ».
Приступая к запуску двигателей, пилот должен убедиться в том,
что рычаг «ШАГ—ГАЗ» стоит на нижнем упоре (<р0 = 1°), а ру-
коятка коррекции повернута до упора влево («левая коррекция»).
Выход двигателей на режим малого газа на графике соответству-
ет точке «а». Точке «б» соответствует так называемый режим по-
летного малого газа, когда рукоятка коррекции полностью повер-
нута вправо.
Особенностью системы управления шагом несущего винта и
двигателями вертолета Ми-2 является наличие однорежимного
регулятора частоты вращения несущего винта.
10
Регулятор частоты вращения несущего винта включается в ра-
боту автоматически после достижения несущим винтом частоты
вращения 78% при повороте рукоятки коррекции вправо. Рабочий
Рис. 1.3. Характеристика системы «Шаг—газ»:
а—б — нижний упор рычага «Шаг—газ»; г—в — максималь-
ная подача топлива; д—г — верхний упор рычага «Шаг—газ»;
1 — взаимосвязь ср0 и ауПРТ ПРИ «лев°й коррекции»; 2 —
взаимосвязь <р0 и аупрт ПРИ «правой коррекции»
диапазон регулятора частоты вращения составляет 78—84%,
в этом диапазоне заданная частота вращения (для данной регу-
лировки НВ и двигателей) поддерживается постоянной. Как по-
казано на рис. 1.4, б, при увеличении общего шага до 8° частота
вращения турбины винта сохраняется постоянной /гтв = 81%, не-
смотря на то, что частота вращения турбокомпрессоров увеличи-
вается (см. рис. 1,4, а).
При увеличении шага до значений, расположенных выше точ-
ки «в» (см. рис. 1.4) происходит самовыкручивание коррекции вле-
во, т. е. увеличение шага более 10° невозможно без освобождения
рукоятки коррекции. Это является сигналом развивающегося пе-
ретяжеления несущего винта. (Участки «а—д» и «д—г» характери-
стики системы «ШАГ—ГАЗ» используются только для проверки
11
регулировки объединенной системы управления несущим винтом
и силовой установкой при неработающих двигателях).
Рис. 1.4. Зависимость частоты вращения турбокомпрессоров и
турбин винта от величины общего шага НВ:
а — частота вращения турбокомпрессоров; б — частота враще-
ния турбин винта; / — зона крейсерского режима; II— зона
номинального режима, III — зона взлетного режима
ОБТЕКАНИЕ НЕСУЩЕГО ВИНТА КОСЫМ ПОТОКОМ
Вектор скорости несущего винта V можно представить в виде
двух составляющих (рис. 1.5):
Vt = V-sinaf[; V2 = У-cos aH. (25)
Составляющая У 2 скорости несущего винта характеризует воз-
душный поток, скользящий вдоль плоскости вращения несущего
винта. Отношение составляющей скорости вдоль плоскости вра-
щения несущего винта к окружной скорости конца лопасти назы-
вается характеристикой режима работы ц несущего винта:
V-cos ян
Р = --------
U>hR
Обычно угол атаки не превышает ан == 10°, поэтому можно счи-
тать cosaH ~ 1 и Уз—У.
Вращательное движение винта позволяет получить аэродина-
мическую силу на каждом элементе даже при отсутствии переме-
щения самого винта, но при этом скорость потока, вызывающего
образование аэродинамической силы в каждом сечении, примерно
равна окружной скорости. При перемещении же винта со ско-
12
Рис. 1.5. Обтекание НВ косым потоком:
а — разложение вектора воздушной скорости V НВ на составляющие; б — определение угла ази-
мутального положения лопасти; в — определение эффективной скорости элемента лопасти; 1 — ось
вращения НВ; 2—плоскость вращения НВ
ростью V величина аэродинамической силы каждого сечения ло-
пасти зависит от эффективной скорости УЭфф. Величина эффек-
тивной скорости определяется не только положением сечения по
радиусу лопасти, но и положением по отношению к набегающему
потоку V. Это положение характеризуется углом азимутального
положения ф лопасти несущего винта, измеряемым в направле-
нии вращения несущего винта от положения ф = 0, в котором
вектор скорости V направлен от оси несущего винта вдоль про-
дольной оси лопасти (см. рис. 1.5, б). Для сечения лопасти на
радиусе г в азимутальном положении ф эффективная скорость-
представляет собой сумму вектора окружной скорости и проекции
вектора скорости несущего винта на направление вектора окруж-
ной скорости:
Х^эфф = /* + V2 sin ф »<пн г + V sin ф. (27)
Лопасть, вращающаяся навстречу набегающему потоку, на-
зывается наступающей (от азимута 0 к азимуту л), а вращаю-
щаяся по направлению набегающего потока — отступающей (от
азимута л к азимуту 2л).
На отступающей лопасти имеется точка А, в которой окруж-
ная скорость <онг равна скорости V несущего винта, т. е. 1Лфф = 0.
Положение точки А зависит от частоты вращения несущего вин-
та (Он и от скорости V. На участке лопасти от точки А до оси
вращения несущего винта окружная скорость по абсолютной ве-
личине меньше скорости V, поэтому эффективная скорость на-
правлена от задней кромки лопасти к передней, и лопасть обте-
кается в обратном (по сравнению с остальными участками) на-
правлении. Круг диаметром d, расположенный в зоне отступаю-
щих лопастей от л до 2л, характеризует зону обратного обтека-
ния. Чем больше ц (больше скорость полета V при неизменной
частоте вращения а>,( = const или меньше частота вращения при
постоянной или увеличивающейся скорости полета), тем больше
зона обратного обтекания. Между диаметром зоны d и характе-
ристикой ц существует прямо пропорциональная зависимость:
d = ?R. (28)
Участок лопасти, проходящий через зону обратного обтека-
ния, создает отрицательную тягу; периодичность прохождения
всех лопастей через зону обратного обтекания вызывает вибра-
цию винта, которая имеет своей основой также и срывное обте-
кание обдуваемой с задней кромки лопасти. Вредное влияние зо-
ны обратного обтекания на вертолете Ми-2 ослабляется тем, что
на участке до г = 0,2 лопасть отсутствует. На шарнирном винте
такое конструктивное решение оправдывается необходимостью раз-
мещения шарниров.
На режиме горизонтального полета с VmlK ^210 км/ч при
птв=81% характеристика режима работы составляет ц = 0,312 и,
14
следовательно, в зоне обратного обтекания оказывается участок
лопасти ^ = 0,312’7,25 м = 2,26 м, т. е. до г = 0,312.
Изменение азимутального положения сечения лопасти
(рис. 1.6) вызывает изменение величины результирующего векто-
ра скорости. На наступающих лопастях скорость W73r>^4r, а
угол атаки сечения наступающей лопасти больше угла атаки от-
Рис. 1.6. Скоростной многоугольник элемента лопасти при косом
обтекании:
1 — ось вращения НВ; 2 — плоскость вращения НВ; 3 — элемент
лопасти в азимуте "фл/2; 4 — элемент лопасти в азимуте ф=3/2л
ступающей лопасти (а3г>а4г). В результате наступающая ло-
пасть развивает большую тягу Ул2, чем отступающая Улз, и воз-
никает опрокидывающий момент Мх, стремящийся опрокинуть
вертолет в сторону отступающей лопасти. Величина опрокиды-
вающего момента для вертолета Ми-2 при жестком креплении ло-
пастей к втулке составила бы около 71500 Н-м (7300 кгс-м) на
скорости полета V=160 км/ч. Для уравновешивания такого опро-
кидывающего момента пришлось бы сместить центр масс верто-
лета влево от оси несущего винта примерно на 2 м. Однако на
вертолет передается также и продольный момент Мг, изменяю-
щий свое направление с частотой, равной частоте вращения вин-
та, так как при вращении несущего винта изменяется положение
лопастей по отношению к поперечной оси OZ.
2. РАБОТА ВИНТА С ШАРНИРНЫМ КРЕПЛЕНИЕМ
ЛОПАСТЕЙ К ВТУЛКЕ
РАВНОВЕСИЕ ЛОПАСТИ С ГОРИЗОНТАЛЬНЫМ ШАРНИРОМ
Наиболее простым средством уменьшения опрокидывающего
момента является крепление лопастей к втулке с помощью гори-
/ 15
зонтальных шарниров (ГШ). При этом благодаря отсутствию
переменного по величине изгибающего момента увеличивается ре-
сурс несущей системы и уменьшается уровень вибраций, переда-
ваемых с лопасти на втулку. Выбором положения ГШ относитель-
но оси вращения НВ можно воздействовать на обеспечение при-
емлемой степени устойчивости и управляемости вертолета, на ве-
личину массы несущей системы.
Лопасть, соединенная с втулкой через горизонтальный шарнир,
на невращающемся винте под действием силы тяжести Gn про-
ворачивается в горизонтальном шарнире (рис. 1.7), но угол свеса
лопасти ниже плоскости вращения ограничивается нижним упором
ГШ. Он установлен так, чтобы обеспечить безопасный зазор ме-
жду концом свешивающейся лопасти и хвостовой балкой..
Рис. 1.7. Равновесие лопасти относительно горизонтального шарнира:
1 — ось вращения НВ; 2 — ось горизонтального шарнира; 3 — поло-
жение лопасти при большой частоте вращения и большом общем
шаге НВ; 4 — плоскость вращения; 5 — положение лопасти при ма-
лой частоте вращения и минимальном общем шаге НВ; 6 — центр
тяжести лопасти
Увеличение частоты вращения НВ при минимальном общем
шаге (см. рис. 1.7) ведет к увеличению центробежной силы Гц6 и
момента Л1(Гц5), создаваемого этой силой. При раскручивании
винта момент, создаваемый центробежной силой относительно
ГШ, превосходит момент, создаваемый силой тяжести.
Под действием избыточного момента 7И(ГЦб) лопасть подни-
мается к плоскости вращения до тех пор, пока уменьшающийся
момент от центробежной силы не уравновесится моментом силы
тяжести.
16
При частоте вращения 81 % FU6~ 134000 Н (13650 кгс), а плечо
h от центробежной силы (см. рис. 1.7) составит (считая, что на
минимальном шаге подъемная сила Y =0)
h Gji'lw = т^'1^ == 55 кг-9,81 м/са-3,58 м = Q q 145 м
Гцб Fu6 134000 Н ’
т. е. центр масс лопасти на 14,5 мм ниже плоскости вращения.
При плавном увеличении шага с полностью введенной вправо
коррекцией частота вращения не изменяется и не изменяется F^.
Появляющаяся подъемная сила YaJl создает момент Л4(Уал) от-
носительно оси ГШ, отклоняющий лопасть выше плоскости враще-
ния. Как только центр масс окажется выше плоскости вращения,
момент от центробежной силы изменяет свое направление и на-
чинает препятствовать отклонению лопасти вверх. Угол а®, на ко-
торый может отклониться вверх лопасть, невелик и на висении с
максимальной полетной массой составит около 4,7°, так как подъ-
емная сила Yan в несколько раз меньше центробежной силы
/у - = 34800 Н— 11600/7, т. е. ~ 1180 кгс
\ ал 3 3
Условием равновесия лопасти относительно ГШ является
уравновешивание моментбв всех сил, действующих на лопасть, от-
носительно ГШ, т. е. равенство нулю суммы моментов:
ЛНГ«л)-М(Гц6)-Л1(Ол) = 0; ЕМ = 0. (29)
Угол а0 между продольной осью лопасти и плоскостью враще-
ния зависит от соотношения массовых и аэродинамических сил.
Это соотношение определяется так называемой массовой харак-
теристикой лопасти 7л- Чем больше шаг винта .(при hH = const),
тем больше подъемная сила лопасти и больше угол п0; чем боль-
ше пн (при ф0 = const), тем больше центробежная сила и меньше
а0. Все лопасти винта имеют одинаковую массовую характери-
стику и у них получается одинаковый угол «о, называемый углом
конусности винта (воображаемого конуса вращения, описываемо-
го лопастями). Если же массовые характеристики лопастей раз-
личны, то каждая лопасть описывает свой конус вращения и ло-
пасти называются несоконусными. Несмотря на малое отличие в
величинах а0 отдельных лопастей, получается ощутимая разница
в величинах центробежных сил лопастей, что является причиной
тряски винта и может вызвать резонанс. (Например, отличие
в углах конусности а0 лопастей примерно на 0,5° ведет к появ-
лению отличия в центробежных силах на величину примерно
268 Н, т. е. около 27 кгс)'. Применяемые приемы устранения несо-
конусности основаны на изменении массовой характеристики ло-
пасти за счет величины аэродинамической силы (отгиб триммер-
ной пластины или изменение общего шага одной лопасти) при не-
изменной центробежной силе.
Образование аэродинамической силы НВ с шарнирным креп-
лением лопастей можно представить как результат геометрическо-
2 Заказ 4195 / 17
го сложения равнодействующих сил лопастей. На рис. 1.8, а по-
казано образование силы RH для двухлопастного винта.
Рис. 1.8. Сложение равнодействующих сил лопастей и образование
момента от разноса горизонтальных шарниров:
а — сложение сил в прямом потоке; б — сложение сил в косом по-
токе; 1 — ось вращения винта; 2— плоскость вращения винта; 3—
аэродинамическая ось вращения винта
В прямом потоке при наличии соконусности углы а0 одинако-
вы и условная точка С приложения силы RH находится на конст-
руктивной оси вращения. Направление силы RH совпадает с на-
правлением конструктивной оси вращения (оси вала НВ). Причем
так получается и для винта без разноса шарниров (/г=0) и для
винта с разносом шарниров (/,=/=0).
В косом потоке лопасти находятся под различными углами от-
носительно плоскости вращения, и поэтому условная точка С
18
приложения силы 7?н оказывается смещенной на величину h от-
носительно центра втулки (см. рис. 1.8,6). Благодаря этому воз-
никает момент
Mr = RH-h, (30)
направление действия которого совпадает с направлением накло-
на конуса вращения.
МАХОВОЕ ДВИЖЕНИЕ ЛОПАСТЕЙ
При косом обтекании винта эффективная скорость сечения ло-
пасти изменяется в зависимости от азимутального положения ло-
пасти (рис. 1.9, а), и подъемная сила Yог в соответствии с основ-
ным законом сопротивления воздуха рассчитывается по формуле:
Уа.= С, р|/8фф -S„ (3J)
уаг 2 '
где индекс «г»* обозначает параметры сечения лопасти, . находя-
щегося на радиусе г.
Рис. 1.9. Изменение за один
оборот параметров элемента
лопасти при косом обтекании:
а—эффективная скорость; б —
угол атаки при маховых дви-
жениях; в — тяга; 1 — тяга при
маховых движениях шарнир-
ной лопасти; 2 — тяга элемента
жесткой лопасти; 3 — критиче-
ский угол атаки
2*
19
/
Увеличение подъемной силы сечений нарушает равновесие ло-
пасти. Под- действием возрастающего момента от подъемной силы
лопасть начинает подниматься вверх. Увеличивается угол между
продольной осью лопасти и плоскостью вращения. Для каждого
азимутального положения этот угол имеет определенную, вели-
чину и называется углом взмаха 0. При движении лопасти от ази-
мута ф = 0 к азимуту ф = л/2 угловая скорость взмаха увеличи-
вается и достигает наибольшей величины в азимуте гр = гс/2, где
наибольшая эффективная скорость. Линейная скорость взмаха
каждого сечения лопасти пропорциональна угловой скорости
взмаха и расстоянию от оси ГШ. Чем быстрее происходит взмах
и чем ближе к концу лопасти расположено сечение лопасти, тем
больше изменение его угла атаки.
Следовательно, прирост подъемной силы сечений за счет уве-
личения эффективной скорости нейтрализуется уменьшением подъ-
емной силы из-за уменьшения углов атаки при взмахе лопасти
вверх (см. рис. 1.9,6). Эффективная скорость сечений лопасти, дви-
жущейся от азимута л/2 к азимуту л, хотя и Начинает умень-
шаться, но все-таки остается больше, чем в азимуте ф = 0. Поэто-
му угловая скорость взмаха уменьшается, а угол взмаха Р про-
должает увеличиваться до тех пор, пока полностью не исчезнет
причина, нарушившая равновесие лопасти относительно ГШ. Это
произойдет в момент достижения лопастью азимута л, где эффек-
тивная скорость, как и в азимуте 0, опять станет равной окруж-
ной скорости солг. Таким образом, в азимуте л лопасть бкажется
отклоненной от плоскости вращения н& самый большой угол
вверх.
При движении лопасти от азимута л к азимуту 3/2л эффек-
тивная скорость будет уменьшаться до минимальной величины в
азимуте 3/2л, где
Иэфф = г - V. (32)
Уменьшение эффективной скорости вызовет уменьшение мо-
мента, создаваемого подъемной силой, и лопасть начнет умень-
шать угол взмаха. При опускании лопасти углы атаки сечений
увеличиваются, что нейтрализует начавшееся уменьшение подъ-
емной силы лопасти от уменьшения Г9фф. Наибольшей величины
угловая скорость взмаха лопасти вниз достигнет в азимуте 3/2л,
а при движении лопасти к азимуту 2л лопасть будет опускаться
все медленнее, достигнув самого нижнего положения в азимуте
2л.
Движение лопасти относительно ГШ, происходящее из-за из-
менения величины подъемной силы сечений по азимутам, назы-
вается маховым движением. Изменение подъемной силы
может быть вызвано как изменением поля эффективных скоро-
стей винта (это характерно для всех режимов полета с поступа-
тельной скоростью и для висения вертолета при ветре), так и цик-
лическим изменением углов установки лопастей (это соответству-
20
ет отклонению кольца автомата перекоса от нейтрального поло-
жения по условиям балансировки).
Величина, на которую изменяются углы атаки сечений лопас-
тей, получается наибольшей для концевых сечений. Причем на
лопастях в азимутах от л до 2л она получается больше, чем на
лопастях в азимутах от 0 до л. Это можно объяснить меньшей
эффективной скоростью элементов отступающих лопастей при
большей скорости их взмаха.
С ростом скорости полета или с падением частоты вращения
винта угол атаки концевого сечения в азимуте 3/2л может достичь
критической величины (см. рис. 1.9,6), когда происходит срыв
потока с профиля лопасти. Чтобы исключить это явление, ог-
раничивается величина максимально допустимой скорости полета.
Изменение углов атаки сечений лопастей, происходящее вслед
за изменением величины эффективной скорости, приводит прак-
тически к выравниванию величины подъемной силы сечений в раз-
личных азимутах (см. рис. 1.9,в), но не устраняет отклонения
конуса вращения. Так, если в осевом потоке все лопасти находят-
ся под одинаковым углом взмаха, то в косом потоке лопасти в
азцмуте л приподнимаются дополнительно на угол й\ и образуют
с плоскостью вращения угол взмаха р = ао-}-«1, а в азимуте 2л
опускаются дополнительно на угол и образуют с плоскостью
вращения угол взмаха Р = «о—Яь Таким образом, ось воображае-
мого конуса вращения (рис. 1.10,а), которая перпендикулярна
плоскости концов лопастей, отклонится на угол назад. Чем
больше неравномерность поля эффективных скоростей, тем боль-
ше будут приподняты лопасти относительно исходного конуса
вращения в передней части и больше опущены в задней (рис. 1.11).
Завал конуса вращения по направлению ско-
рости набегающего потока обусловлен разли-
чием в .величине эффективных скоростей насту-
пающих и отступающих лопастей. Этот завал соз-
дает дополнительные аэродинамические отличия в обтекании ло-
пастей. В азимуте л набегающий поток притекает снизу, что вы-
зывает увеличение углов атаки сечений и прирост подъемной си-
лы. В таком случае возникнет еще дополнительное увеличение уг-
ла взмаха, которое достигнет наибольшей величины со смещением
на угол л/2, т. е. в азимуте 3/2л. Лопасти, идущие к азимуту 2л,
как бы обдуваются набегающим на винт потоком сверху. Это вы-
зывает уменьшение углов атаки сечений и уменьшение подъемной
силы. В таком случае’ возникнет еще дополнительное уменьшение
угла взмаха, которое достигнет наибольшей величины в азимуте
л/2. Таким образом, угол взмаха составит в азимуте 3/2л p =
+Ь1, а в азимуте л/2 р = а0—th. Ось конуса вращения оказывает-
ся наклоненной в сторону наступающей лопасти (влево) на угол
Ь\ (см. рис. 1.10,6). Итак, завал конуса вращения
вбок обусловлен различием в величине углов
атаки сечений лопастей
частях конуса.
в передней и задней
Рис. 1.10. Завал конуса вращения НВ:
а — по потоку на угол аг, б — вбок на угол br, 1 — ось вращения
НВ; 2— аэродинамическая ось вращения НВ; 3 — плоскость вра-
щения НВ
Изменение угла взмаха 3 лопасти в полете в зависимости от
угла азимутального положения представляет собой алгебраиче-
скую сумму периодических колебаний, наложенных друг на друга:
р = «о — «icos<p — 6xsin<p. (33)
Коэффициенты а0, а\, Ь\ называются коэффициентами махово-
го движения и имеют следующий геометрический смысл:
«о — представляет собой часть угла взмаха, не зависящую от
азимутального положения лопасти (на висении р = я0 и при мак-
симальной полетной массе составляет 4,7°);
«1 — представляет собой угол завала оси конуса вращения по
потоку, его величина изменяется от 0 на висении до 5,7° на мак-
симальной скорости в горизонтальном полете;
22
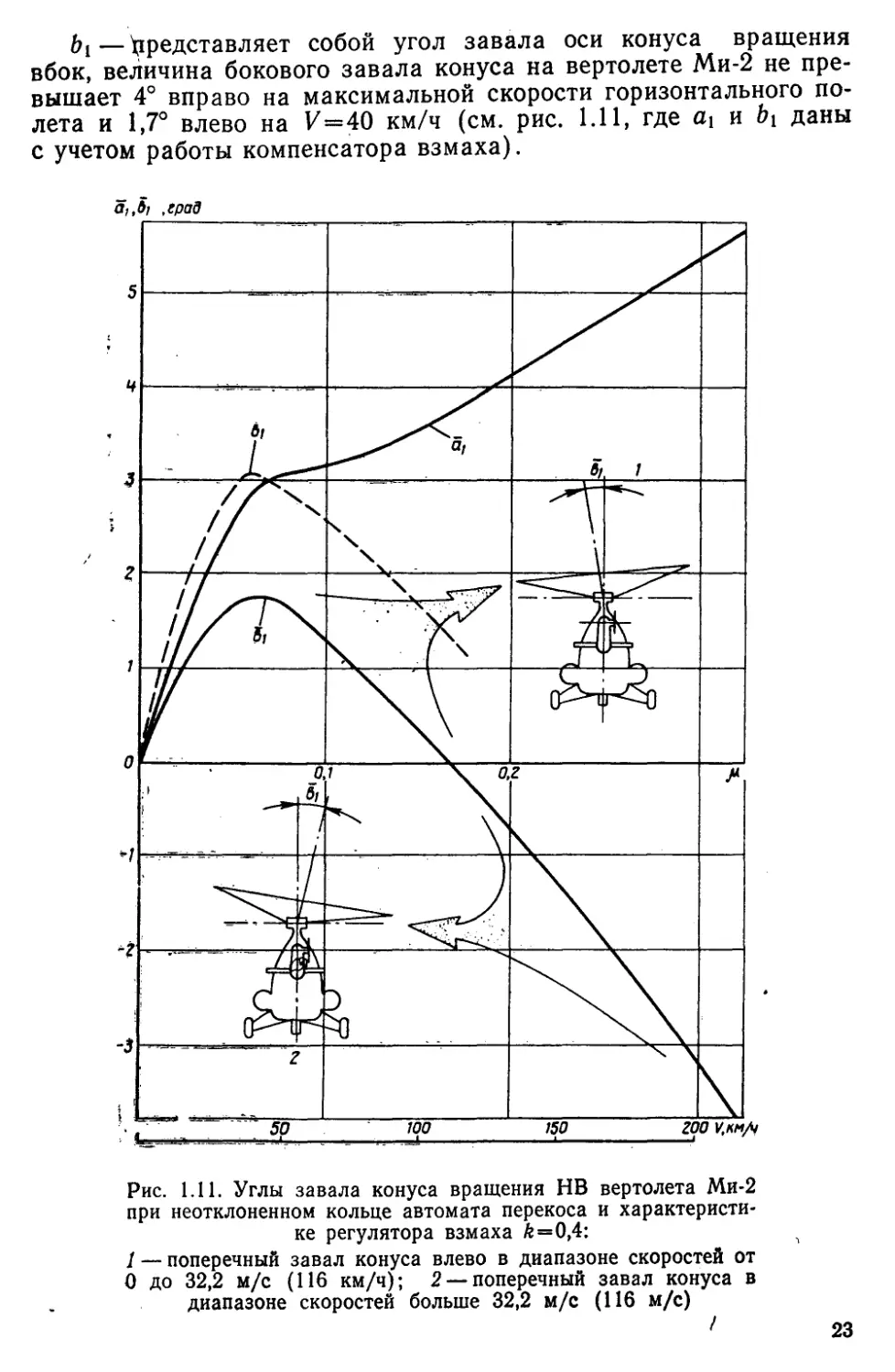
—Представляет собой угол завала оси конуса вращения
вбок, величина бокового завала конуса на вертолете Ми-2 не пре-
вышает 4° вправо на максимальной скорости горизонтального по-
лета и 1,7° влево на V=40 км/ч (см. рис. 1.11, где &i и Ь\ даны
с учетом работы компенсатора взмаха).
a,,bj ,ерад
. 50 100 150 ZOO У.км/ч
Рис. 1.11. Углы завала конуса вращения НВ вертолета Ми-2
при неотклоненном кольце автомата перекоса и характеристи-
ке регулятора взмаха k=0,4:
1 — поперечный завал конуса влево в диапазоне скоростей от
О до 32,2 м/с (116 км/ч); 2 —поперечный завал конуса в
диапазоне скоростей больше 32,2 м/с (116 м/с)
/
23
Величина завала конуса вращения вбок в большой, степени
зависит от изменения потока, проходящего сквозь диск йинта. На
висении индуктивная скорость распределена равномерно по оме-
таемой площади, и боковой завал конуса отсутствует. На малых
скоростях полета (V<40 км/ч), когда индуктивная скорость еще
велика, взаимодействие набегающего потока с индуктивным при-
водит к увеличению скорости протекания потока в задней части
диска. Разница в углах атаки лопастей в передней и задней ча-
стях конуса вращения, являющаяся следствием конусности, под
действием изменения скорости протекания еще больше увеличи-
вается, что приводит к возрастанию Ь\. Наибольшая величина
завала конуса вращения влево получается на скорости около
40 км/ч независимо от наличия компенсатора взмаха. При уве-
личении скорости полета более 40 км/ч неравномерность потока
сквозь диск винта постепенно уменьшается, к тому же диск винта,
наклоняясь вперед, начинает обдуваться и в передней, и в задней
частях конуса сверху, что еще больше сглаживает неравномер-
ность в углах атаки и уменьшает боковой завал конуса Ъ\ (см.
изменение Ь\ на рис. 1.11 на У>40 км/ч). На V> 110 км/ч увели-
чивается боковой завал конуса вправо.
КОМПЕНСАЦИЯ МАХОВОГО ДВИЖЕНИЯ
Ограничение амплитуды маховых движений происходит в не-
которой мере в процессе самого взмаха за счет двух факторов:
— момента, создаваемого центробежной силой относительно
ГШ, который всегда направлен так, чтобы прижать лопасть к
плоскости вращения;
— изменения углов атаки сечений лопасти в процессе взмаха,
называемого аэродинамической компенсацией махового движения
(или демпфированием). Для того чтобы достаточно эффективно
влиять на величину углов взмаха, на величину и направление за-
вала конуса вращения, применяется видоизмененная определен-
ным образом схема соединения шарнирной лопасти с тарелкой
автомата перекоса, называемая поводковым компенсатором (ре-
гулятором) взмаха (рис. 1.12, А). Компенсация взмаха (т. е.
уменьшение, ослабление взмаха) получается за счет того, что
шарнир 4 поводка, соединенный тягой с тарелкой автомата пере-
коса, вынесен с оси ГШ на расстояние а, поэтому лопасть, взма-
хивая вверх, вынуждена поворачиваться не относительно оси ГШ,
а относительно оси 5, проходящей через центр ГШ и центр шар-
нира поводка, это вызывает уменьшение угла установки, пропор-
циональное углу’ взмаха. Так, если угол взмаха изменится на ве-
личину Ар, то угол установки — на величину:
А<р = Л-А8, (34)'
где k — коэффициент (характеристика) компенсатора взма-
ха — величина, показывающая, насколько изменит-
24
ся угол установки лопасти при изменении угла взма-
ха на единицу.
Рис. 1.12. Компенсаторы взма-
ха на вертолете Ми-2:
А — поводковый компенсатор
взмаха лопастей несущего вин-
та; Б — кинематический ком-
пенсатор взмаха лопастей ру-
левого винта; 1 — ось вращения
винта; 2 — ось горизонтального
шарнира; 3 — ось осевого шар-
нира; 4 — шарнир рычага уп-
равления углом установки ло-
пасти; 5 — ось фактического
поворота лопасти НВ (на РВ
она совпадает с осью 2)
При взмахе лопасти вниз поворот лопасти относительно оси 5
вызывает вместе с уменьшением угла взмаха увеличение угла ус-
тановки.
Коэффициент компенсации взмаха возрастает при увеличении
угла о между осью ГШ (линией, перпендикулярной продольной
оси лопасти) и осью 5 фактического поворота лопасти. Для по-
водкового компенсатора взмаха, применяемого на несущем винте
вертолета Ми-2, коэффициент компенсатора взмаха составит:
k = tg а = = 0,4, (35)
ь
где а—расстояние от шарнира поводка до оси ГШ;
b—расстояние от шарнира поводка до оси ОШ.
Компенсация махового движения лопастей рулевого винта
Ми-2 осуществляется компенсатором более простой схемы — кине-
матическим компенсатором взмаха (см. рис. 1.12, Б). Здесь ком-
пенсация происходит за счет поворота оси совмещенного горизон-
25-
тального шарнира на угол сг=зт/6 относительно перпендикуляра
к продольной оси лопасти. Изменение угла установки сечения ло-
пасти при изменении угла взмаха объясняется прохождением его
задней кромкой по радиусу г3. к, большему, чем у передней кром-
ки (Гп.к). Коэффициент кинематического компенсатора взмаха
вертолета Ми-2 составит:
k = tg о = tg = 0,577. (36)
Положительное влияние компенсатора махового движения
заключается в следующем:
— возрастает демпфирование махового движения, что приво-
дит к уменьшению амплитуды углов взмаха;
— возрастание демпифирования махового движения практиче-
ски вдвое уменьшает прирост угла взмаха Ьг,
это влияет положительно на запасы управления в некоторых осо-
бых случаях полета;
— компенсатор взмаха приводит к изменению направ-
ления завала конуса вращения в положение, более
благоприятное для осуществления поперечной балансировки вер-
толета Ми-2 на крейсерских скоростях полета;
— улучшается переход НВ на режим само-
вращения.
Однако есть и отрицательное влияние (применение компенса-
тора взмаха уменьшает эффективность подрыва
общего шага и запас скорости полета, часто-
ты вращения НВдо начала развития флаттера).
КОЛЕБАНИЯ ЛОПАСТИ В ПЛОСКОСТИ ВРАЩЕНИЯ НВ
При взмахе лопасти вверх центр масс лопасти приближается
к оси вращения НВ (рис. 1.13,в), а при взмахе вниз — удаляется
от оси вращения, т. е. перемещается в радиальном направлении.
Очевидно, что кинетическая энергия лопасти в любом азимуталь-
ном положении вращающегося с постоянной частотой вращения
НВ постоянна и для азимутов л/2 и З/2л можно выразить это
равенством:
тл (<п2 г2)2 = ~ тя (<й, g)2 = Е = const, (37)
откуда получаем — т. е. при ri>r2 должно быть о)2>®1-
При взмахе лопасти вверх кинетическая энергия лопасти мо-
жет сохраниться постоянной только при условии, что лопасть
станет двигаться с большей угловой скоростью, чем движется
втулка НВ. Лопасть, приближающаяся к плоскости вращения,
может сохранить кинетическую энергию постоянной при условии,
что она станет двигаться с меньшей угловой скоростью, чем дви-
жется втулка НВ. Закон сохранения энергии для лопасти, нахо-
26
дящейся в сложном движении (переносное — вращение лопасти
относительно оси НВ и относительное — радиальное поступатель-
ное перемещение относительно оси НВ) соблюдается за счет воз-
никновения Кориолисова ускорения, проявляющегося в изменении
угловой скорости лоцасти вращающегося НВ. Ускорение является
признаком действия на лопасть инерционной силы, называемой
Рис. 1.13. Нагружение лопа-
сти вращения НВ:
а — равновесие лопасти от-
носительно вертикального
шарнира; б — силы, дейст-
вующие на лопасти в пло-
скости вращения; в — ради-
альное перемещение центра
масс лопасти при маховых
движениях; 1 — ось гори-
зонтального шарнира при
Гг=0; 2 — ось горизонталь-
ного шарнира при fr=/=0;
3 — ось вертикального шар-
нира; 4 — центр масс лопа-
сти
силой Кориолиса. Таким образом, взмахивающая вверх лопасть
испытывает действие ускоряющей (направленной по вращению)
силы Кориолиса FK (см. рис. 1.13,6), а взмахивающая вниз
лопасть испытывает действие тормозящей (направленной против
вращения) силы Кориолиса. Величина силы Кориолиса опреде-
ляется по формуле:
FK = 2 тд • юн • гц. м • р • <йвзм, (38)
где о)взм — угловая скорость взмаха, изменяющаяся в за-
висимости от азимута.
Из приведенной зависимости можно сделать следующие вы-
воды:
27
— маховые движения лопастей определяют величину возни-
кающих сил Кориолиса; чем интенсивнее маховое движение-
(больше углы взмаха 0 и больше угловые скорости взмаха совзм),
тем больше силы Кориолиса и больше динамические нагрузки на
несущую систему (например, увеличение скорости полета до мак-
симально допустимой, полет на большой скорости на большой вы-
соте) ;
— силы Кориолиса отсутствуют в тех азимутальных положе-
ниях, где угловая скорость взмаха (овзл = 0, и достигают макси-
мальной величины в тех азимутальных положениях, где угловая
скорость взмаха максимальна (в азимутах около л/2 и 3/2л).
При У = 210 км/ч, (он =25,81/с, тл=55 кг, гц.м = 3,682 м, а0 =
= 4,7°, ai = 5,50, bi = 3,7° величины сил Кориолиса и моментов, соз-
даваемых ими относительно оси вращения НВ, составляют:
в азимуте л/2 FK = 458 Н (46,7 кгс),
M(FK) = 1680 Н-м (172 кгс-м),
в азимуте 3/2л FK = 3800 Н (387 кгс),
/И(ГК) = 13900 Н-м (1420 кгс-м).
Из приведенных данных ясно, что силы Кориолиса создает-
знакопеременные изгибающие моменты, действующие на лопасть
в плоскости вращения. Вместе с переменными по величине и по
направлению силами Кориолиса переменные по величине силы
сопротивления вращению создают в комлях лопастей большие
изгибающие моменты и переменный по величине момент сопротив-
ления вращению, что в целом снижает ресурс конструкции и соз-
дает повышенный уровень вибраций всего вертолета. Для устра-
нения этих недостатков конструкции на втулке, помимо горизон-
тального, устанавливают и вертикальный шарнир (ВШ).
На рис. 1.13, а линия, проходящая через ось вращения НВ и
ось вертикального шарнира, называется радиальной линией. Уюл
£, измеряемый от радиальной линии до продольной оси лопасги,
называется углом качания лопасти НВ. Как только под действи-
ем моментов, создаваемых силой Кориолиса и силой сопротивле-
ния вращению, появляется угол качания £, между линией дейст-
вия центробежной силы и осью ВШ появляется плечо /. На этом
плече центробежная сила создает момент, стремящийся распо-
ложить лопасть вдоль радиальной линии. Очевидно, что в каждом
азимутальном положении лопасть будет устанавливаться дейст
вующими на нее силами на определенный угол качания. Усло-
вием равновесия лопасти под определенным
углом к радиальной линии является равенст-
во нулю суммы моментов всех сил, действующих
на лопасть, относительно вертикального шар-
нира:
± М (Л„) + М (А-.,) ± М (FM) + /И„япф = 0, т. е. Е М = 0, (39)
28
где -МдемПф — момент, создаваемый относительно оси ВШ
гидравлическим демпфером (гасителем колеба-
ний) .
Значительные колебания лопасти относительно ВШ могут при-
вести к разбалансировке НВ, к увеличению вибраций и, кроме то-
то. к развитию опасных самовозбуждающихся колебаний, назы-
ваемых «земным резонансом» вертолета. Чтобы исключить подоб-
ные явления, на каждой лопасти устанавливают гидравлические
гасители колебаний, так называемые демпферы, которые умень-
шают углы качания лопастей за счет того, что рассеивают кине-
тическую энергию колебаний.
При наличии вертикального шарнира угол качания лопасги
на моторных режимах полета, как правило, положительный (т. е.
продольная ось лопасти отстает, «идет» за радиальной линией),
поэтому при маховых движениях радиус взмаха задней кромки
сечений лопасти оказывается меньше, чем передней. Это создает
дополнительное увеличение угла установки при взмахе вверх и
уменьшение—при взмахе вниз, а в конечном итоге может приве-
сти к нежелательному явлению — потере устойчивости маховых
движений, под которым понимается самопроизвольное нарастание
амплитуды взмахов вплоть до ударов по упорам ГШ.
Для устранения этого явления и для улучшения условий ра-
боты подшипников ГШ втулка НВ вертолета Ми-2 имеет, кроме
разноса ГШ, еще и вынос ГШ (см. рис. 1.13, а) на величину tr =
= 35 мм, который подобран так, чтобы на расчетном режиме по-
лета продольная ось лопасти оказывалась перпендикулярной оси
ГШ (tr подобран на Ми-2 для ^ = 7°36,36,/).
3. ХАРАКТЕРИСТИКА ВИНТОВ ВЕРТОЛЕТА Ми-2
Несущий винт
Диаметр.......................................14,5 м
Количество лопастей .......................... 3
Хорда лопасти................................0,4 м
Коэффициент заполнения....................... 0,0527
Форма лопасти в плане........................Прямоугольная
Площадь несущего винта.......................165 м2
Угол установки оси несущего винта по отноше-
нию к нормали строительной горизонтали фю-
зеляжа .................................. 4°13'
Массовая характеристика лопасти на высоте Н =
= 9 м .............................. . • 0,762
Профиль лопасти до £==0,63 ...... N АСА 230 М
Профиль лопасти на г = 0,63...................N АСА 230
Характеристика компенсатора взмаха лопасти . 0,4
Статический момент лопасти винта относительно
оси горизонтального шарнира . . . • 197 кг-м
29
Момент инерции лопасти относительно горизон-
тального шарнира............................ 804 кг• м2
Передаточное отношение несущего винта . . 1,57
Частота вращения.............................81%1
Угловая скорость.............................25,8 '/с
Окружная скорость лопасти....................187 м/с
Относительный разнос горизонтальных шарниров 0,014
Расстояние от оси вращения несущего винта до
оси горизонтального шарнира . . . . 0,102 м
Относительный разнос вертикальных шарниров . 0,0362
Расстояние от оси вращения несущего винта до
оси вертикального шарнира.................... 0,262 м
Положение центра тяжести от оси несущего вин-
та по направлению плоскости вращения
предельно передняя центровка .... +0,185 м
предельно задняя центровка .... —0,010 м
Положение центра тяжести по оси несущего вин-
та от плоскости вращения
при предельно передней центровке . . 1,7 м
при предельно задней центровке . . . 1,4 м
Расстояние от оси вращения несущего винта до
оси вращения стабилизатора..................6,4 м
Угол установки стабилизатора относительно пло-
скости вращения несущего винта . . . —5° н- +11°
Масса лопасти................................ 55—56 кг
Масса втулки................................. 127—130 кг
Масса винта............................. 296 кг
Угол установки несущего винта (общий шаг по
УШВ).......................................1—13*
Рулевой винт
Диаметр......................................2,7 м
Количество лопастей ......................... 3
Коэффициент заполнения.......................0,105
Форма лопасти в плане........................Прямоугольная
Расстояние от оси несущего винта до оси руле-
вого винта по направлению плоскости враще-
ния несущего винта..........................8,64 м
Расстояние от конструктивной плоскости несуще-
го винта до оси рулевого винта . . . . 1,125 м
Характеристика компенсатора взмаха . . . 0,577
Угловая скорость.............................152 '/с
Угол установки рулевого винта
левая педаль на упоре.....................—10°
правая педаль на упоре . . . . +20°
педали нейтрально.......................+5°
30
СОСТАВЛЯЮЩИЕ АЭРОДИНАМИЧЕСКОЙ силы НВ и их
АЭРОДИНАМИЧЕСКИЕ КОЭФФИЦИЕНТЫ
Аэродинамическая сила несущего винта RH при обтекании ко-
сым потоком направлена по аэродинамической оси НВ, положе-
ние которой определяется коэффициентами махового движения
а0, а\, Ь\. Для определения пространственного положения силы
7?н используется разложение ее на составляющие по осям следую-
щих систем координат:
— связанной (рис. 1.14, а) системы, у которой оси координат
направлены параллельно конструктивным осям планера и изме-
няют свое положение вместе с вертолетом;
— полусвязанной (рис. 1.14,6), у которой одна из осей всег-
да совпадает с осью вращения НВ, т. е. связана с вертолетом, а
две другие ориентируются по отношению к вектору скорости;
— скоростной (см. рис. 4.1), где оси координат ориентируются
по отношению к вектору скорости;
— нормальной (см. рис. 4.17), где одна из осей ориентируется
по местной вертикали (нормали), а две другие ориентируются по
отношению к вектору скорости.
В различных системах координат составляющим силы 7?н при-
своены свои обозначения и наименования (табл. 1.1). В соответст-
вии с основным законом сопротивления воздуха аэродинамический
коэффициент силы получается делением величины силы на вели-
чину скоростного напора конца лопасти (вычисленного по окру-
жной скорости) и на величину характерной площади (либо пло-
щади несущего винта FH, либо площади лопастей несущего винта
oFH, где о — коэффициент заполнения). Например, в скоростной
системе координат имеются два вида аэродинамических коэффи-
циентов, в зависимости от принятой характерной площади. Коэф-
фициенты подъемной силы:
= Т-----------• (40)
~P(wh/?)2Fi —
Между ними существует связь: ty=CyaiJa.
Коэффициенты моментов получают также делением величины
момента на величину скоростного напора конца лопасти, на вели-
чину площади, принятой за характерную, и на радиус винта. На-
пример, коэффициенты крутящего момента:
- мк Мк
тк — I , тк — — .
“Р (шн/?)2FH-/? — Р («„ F)2 a Fn R
Коэффициент момента крена:
тх —---------------.
у Р (<он RY FH R
' /
(41)
(42)
31
Рис. 1.14. Разложение аэродинамической силы НВ на составляющие:
а — в связанной системе координат НВ; б — в полусвязанной системе ко-
ординат НВ; 1 — продольная ось; 2 — поперечная ось; 3 — ось вращения
НВ; 4 — плоскость вращения НВ
32
Таблица 1.
Составляющие полной аэродинамической силы НВ
Система координат Название силы (или момента) Обозна- чение Положительное направление Коэффг получ делени Fh щиент, енный ем на
Полусвязан- ная Продольная сила Тяга Боковая сила н т S || ПВ, противопо- ложно V || ОВ, вверх || ПВ, влево сн ст Cs ft t
Связанная Продольная сила Нормальная сила Поперечная сила **• S ГС |[ ПВ, противопо- ложно V || ОВ, вверх || ПВ, вправо С*н СУн —
« х о о X Пропульсивная сила Подъемная сила Боковая сила Адн Уан 2дн || V, противополо- жно V _!_ V, к верхней ча- сти вертолета J_ V и _L Yali впра- во Схап СУ«н CzaK tx ty
Нормальная Составляющая по оси 0^ Составляющая по оси оу g Составляющая по оси ozg Ag-H Ygn ZgH II К по V Вертикально, вверх Горизонтально, вправо СУ8н С^н —
Связанная Аэродинамический мо- мент крена Аэродинамический мо- мент рыскания Аэродинамический мо- мент тангажа мх му Mz Кренящий вправо Разворачивающий влево Поднимающий но- совую часть фюзе ляжа тх шу —
Примечание. ПВ — плоскость вращения;
ОВ — ось вращения.
3 Заказ 4195
33
РАСЧЕТНЫЕ АЭРОДИНАМИЧЕСКИЕ ХАРАКТЕРИСТИКИ НВ
В ПОЛЕТЕ С РАБОТАЮЩИМИ ДВИГАТЕЛЯМИ
Поляра НВ на режиме висения (см. рис. 1.2) —
это зависимость коэффициента тяги НВ t (или ty, так как Т^Ту
»УН на висении) от коэффициента крутящего момента тк. Каж-
дая точка на поляре соответствует определенному значению об-
щего шага НВ. Чем больше крутящий момент (при постоянной ча-
стоте вращения винта) подводится к НВ, тем больше потребный
общий шаг НВ и значительнее развиваемая винтом тяга. Если
винт входит в зону влияния воздушной подушки (расстояние от
плоскости НВ меньше его диаметра), то при том же крутящем
моменте (тот же тк) винт развивает большую тягу (больше ста-
новится i).
Зависимость коэффициента пропульсивной силы от коэффи-
циента крут'ящего момента (рис. 1.15, а) позволяет, исходя из урав-
нений движения (например, для режима горизонтального полета
эти уравнения: YaH = G, Ха„ =ХйПл), определять потребный коэф-
фициент крутящего момента тк и ему соответствующую величи-
ну потребной мощности для горизонтального полета Nn.
На рис. 1.15,6 показаны качественные соотношения между
tx
0,01
О
-0,01
Рис. 1.15. Зависимость коэф-
фициента пропульсивной силы
tx от коэффициента крутящего
момента тк:
а—полученные эксперименталь-
но при Мпол =0,075, 11=0,15,
Л1о=О,5, а = 0,0525,б — на ха-
рактерных режимах при СХср=*
=0, tу—const, и=const, Л10=
=const; А1Пол=const;/ — режим
самовращения НВ; 2 — мо-
торное снижение по наклон-
ной траектории; 3 — гори-
зонтальный полет; 4 — на-
бор ВЫСОТЫ на VymaxJ 5 —
ограничение по мощности си-
ловой установки
34
коэффициентами пропульсивной силы и крутящего момента несу-
щего винта для случая полного отсутствия вредного сопротивле-
ния, создаваемого планером (СхаПЛ==0). Надо иметь в виду, что
положительная пропульсивная сила (+G) направлена против дви-
жения винта, а отрицательная пропульсивная сила (—tx) направ-
лена в сторону движения винта. Угол наклона х кривой tx==f(m*)
характеризует величину пропульсивного к.п.д. (см. рис. 1.18),.
который может быть определен по формуле:
^ = Mg*. (43)
Зависимость угла атаки НВ от скорости и высоты полета
(рис. 1.16). С увеличением скорости горизонтального полета угол
атаки НВ уменьшается и составляет на скорости 100 км/ч около
—4°, а на скорости 210 км/ч — около —12,5°.
Рис. 1.16. Углы атаки НВ
на режиме горизонталь-
ного полета:
/—/7=0; 2—И=4000 м
С увеличением высоты полета абсолютная величина угла ата-
ки при той же истинной скорости увеличивается.
Зависимость пропульсивного к.п.д. НВ от скорости полета по-
казана на рис. 1.17. Пропульсивный к.п.д. выражается формулой:
ч “ • <44>
В рассматриваемом диапазоне полетных масс (см. рис. 1.17)
увеличение скорости полета (увеличение у.) сопровождается умень-
шением г), что означает все большие потери мощности на поддер-
жание уменьшающейся подъемной силы из-за наклона вперед оси
винта. Так, при у, = 0,3 (У=56 м/с) с максимальной полетной мас-
3* 35
/
сой 3550 кг (£у=0,19) т]~0,92, а
Т|~0,96.
Рис. 1.18. Поляра НВ на ре-
жиме самовращения (77=0,
хт = 0,165 м):
1 — ц=0,30; 2 — Ц=0,21;
3 — 1.1 = 0,15
Рис. 1.17. Качество k и пропульсивный
циент полезного действия несущего винта г|х по
экспериментальным данным:
1— М=0,3; 2 — М=0,25; 3 — М=0,2; 4 — М=
0,15; 5-/ymin (mmin=2375 кг); 6-/ymax
(/Птах =3550 кг).
Поляра винта на режиме самовращения
(рис. 1.18)—это взаимосвязь коэффициентов подъемной силы
(ty) и коэффициента сопротивления (tXc). С увеличением скоро-
сти полета поляра приближается к оси подъемной силы, что озна-
чает увеличение аэродинамического качества НВ (см. рис. 1.17):
к = (45)
Угол атаки НВ на режиме самовращения
(рис. 1.19) на всех скоростях полета положительный (ан>0). Уве-
личение скорости полета ведет к уменьшению угла атаки НВ.
Смещение центра масс вертолета назад ведет к увеличению угла
атаки НВ. Увеличение высоты полета увеличивает угол атаки, на
котором возможно планирование на режиме самовращения НВ при
постоянной скорости полета. На скорости около 100 км/ч, обеспе-
чивающей наибольшую продолжительность снижения, угол атаки
в зависимости от центровки вертолета и высоты полета составля-
ет 8...15,5°.
36
Рис. 1.19. Угол атаки НВ на
режиме самовращения (бв“0);
/, 3 — Я=0; 2, 4 — Н=4000 м;
Условные обозначения: -------
хт = 0,165 м,----------хт«"
= —0,05 м
4. ХАРАКТЕРИСТИКИ ПЛАНЕРА И СИЛОВОЙ УСТАНОВКИ
АЭРОДИНАМИЧЕСКИЕ ХАРАКТЕРИСТИКИ ПЛАНЕРА
ВЕРТОЛЕТА
При взаимодействии движущегося планера с воздушной сре-
дой возникает аэродинамическая сила 2?Пл, которая в скоростной
системе координат может быть разложена на составляющие:
Кд пл — £удпл рУ2 2 • 5ф — подъемная сила планера;
^апл = РУ2 2 — сила лобового сопротивления планера;
пл - а пл • рУ2 2 •Зф — боковая сила планера,
где Суа пл, СХа , CZa>ax — аэродинамические коэффициенты соот-
ветствующих сил, отнесенные к скоростному напору набегающего
37
на вертолет потока и к площади миделя фюзеляжа. Те же состав-
ляющие аэродинамической силы, но отнесенные к площади винта:
Уц ал = С!г, пл Д,; (46)
'f"; (47)
(48)
Судя по характеру изменения СУапл по углу атаки (рис. 1.20),
планер Ми-2 аэродинамически несимметричен, т. е. на одинаковых
по абсолютной величине, но различных по знаку углах атаки ве-
личина коэффициента подъемной силы получается различной. При
достижении положительного угла атаки 20° коэффициент подъем-
ной силы начинает уменьшаться. Однако в поступательном полете
подъемная сила планера по сравнению с подъемной силой винта
мала и ею можно пренебречь.
Рис. 1.20. Аэродинамические коэффициенты планера:
-------~СХ — коэффициент сопротивления;--------------------
О_ПЛ
С» —коэффициент подъемной силы
•'апл
Сопротивление планера оказывает значительное влияние на
летные характеристики вертолета. Доля потребной мощности, за-
трачиваемой на преодоление сопротивления планера на скорости,
близкой к максимальной, составляет до 40% всей потребной мощ-
ности. Для уменьшения величины силы сопротивления планера на
крейсерских режимах полета ось вала несущего винта наклонена
вперед и образует с перпендикуляром к строительной горизонтали
38
угол установки (так называемый угол заклинения) 4°13'. При этом
коэффициент сопротивления планера имеет минимальную величи-
ну именно около нулевого значения угла атаки планера. Обраща-
ясь к рис. 1.16, можно утверждать, что фюзеляж будет находиться
на углах атаки, близких к нулю, на скоростях полета 100... 140 км/ч.
Располагаемая мощность
Максимальная мощность, которую может развить двигатель в
определенных условиях на выходном валу, называется эффек-
тивной мощностью Ne двигателя. При установке двух
двигателей на вертолет вся развиваемая ими эффективная мощ-
ность может быть использована вертолетом, поэтому она назы-
вается располагаемой мощностью /Vp двух двига-
телей.
Величину функциональных потерь мощности двигателей выра-
жают в процентах от эффективной мощности. Их величина состав-
ляет для вертолета Ми-2:
— потеря на всасывание (из-за ухудшения условий работы
двигателей на вертолете) Мвсас =2,5%: Ne;
— потеря на трение в трансмиссии Мтр=3%
— потеря на привод вентилятора (на температурный режим)
Мохл = 1,15%
— потеря на приводы (генератор, гидронасос) МпРив =0,8% Ne;
— потеря на привод рулевого винта Мр. в (на балансировку),
значительно изменяющаяся в зависимости от скорости полета от
Np.B = 11,55% Ne на режиме висения до МР.В = 5,55% Мена скоро-
стях больше 168 км/ч.
Часть эффективной мощности, расходуемая на привод несуще-
го винта, называется располагаемой мощностью не-
сущего винта (Np. н). Она равна разности эффективной
мощности и потерь мощности (рис. 1.21):
Wp. н — Ne~~ ВСаС 4- WTp + А/'охл 4“ N прив + А^р. в. (49)
В связи с изменением потерь мощности на привод рулевого
винта при изменении скорости изменяется и располагаемая мощ-
ность НВ, составляя 81% на висении и 87% на У> 168 км/ч.
Потери мощности оцениваются по величине коэффициента ис-
пользования мощности £, характеризующего, какая часть эффек-
тивной мощности передается на привод несущего винта (см.
рис. 1.21, б):
e = , (so):
39
Рис. 1.21. Использование мощно-
сти силовой установки на верто-
лете
а — распределение мощности меж-
ду агрегатами вертолета; 1 — рас-
полагаемая мощность двигателей;
2, 3, 4, 5, 6 — потери мощности на
всасывание, трение в трансмиссии,
охлаждение, приводы, рулевой
винт; 7—располагаемая мощность
несущего винта; б — коэффициент
использования мощности
Коэффициент использования мощности изменяется в зависи-
мости от скорости полета от 0,81 на висении до 0,87 на У>
>168 км/ч.
Глава 2. БАЛАНСИРОВКА, УСТОЙЧИВОСТЬ
И УПРАВЛЯЕМОСТЬ ВЕРТОЛЕТА
1. ЗАГРУЗКА И ЦЕНТРОВКА
ПРИНЯТОЕ НА ВЕРТОЛЕТЕ Ми-2 ПРАВИЛО ЗНАКОВ
Для анализа пространственного положения вертолета исполь-
зуется система главных осей инерции, приблизительно совпадаю-
щих с осями связанной системы координат OXYZ (рис. 2.1), ко-
торая образует с осями нормальной системы координат OXgYgZg
(относительно Земли) углы ф, О, у.
Рис. 2.1. Правило знаков моментов, угловых скоростей и углов:
1 — местная вертикаль; 2 — местная горизонтальная плоскость; 3 — ха-
рактерный ориентир (приводная радиостанция); 4 — продольная ось фю-
зеляжа; 5 — поперечная ось фюзеляжа; 6 — нормальная ось фюзеляжа
(параллельна оси винта) /
41
Положительными моментами Мх, Му, Мг и угловыми скоро-
стями сох, Оу, со2 относительно осей считаются такие, при кото-
рых пилот, глядя из кабины в положительном направлении коор-
динатной оси (вперед, вверх, вправо), видит вращение вертолета
относительно неподвижного ориентира по часовой стрелке (кре-
нение вправо, кабрирование, разворот влево). Положительными
углами ip, р, у, ф а считаются такие, которые увеличиваются по
абсолютной величйне за счет вращения вертолета относительно
неподвижного ориентира по часовой стрелке.
Положительными углами 6Р, 6К, бн отклонения органов управ-
ления, положительными перемещениями рычагов управления
хв, хк, хн положительными усилиями Рв, Рк, Рн, прикладывае-
мыми пилотом к рычагам управления, считаются противодейст-
вующие положительным моментам:
-j-xB+PB — ручка от себя, «давить»;
+хк + Рк — ручка влево, «давить»;
4-хн+Рн — правая педаль вперед, «давить».
ЦЕНТРОВКА ВЕРТОЛЕТА. ДИАПАЗОН ЭКСПЛУАТАЦИОННЫХ
ЦЕНТРОВОК
Положение центра масс на вертолете определяет возможность
обеспечения балансировки вертолета и количественные характери-
стики устойчивости и управляемости. Определяющими на верто-
лете являются силы и моменты, создаваемые несущим винтом, по-
этому относительно его определяют положение центра масс вер-
толета. Начало отсчета помещается в центре втулки НВ, т. е. в
точке пересечения оси несущего винта с плоскостью вращения, в
которой располагаются оси горизонтальных шарниров. Центров-
кой вертолета называется положение его центра масс от-
носительно центра втулки несущего винта, которое характеризует-
ся тремя координатами:
ут — вертикальной центровкой (координатой по вертикаль-
ной оси ОУ);
гт — поперечной центровкой (координатой по поперечной
оси OZ);
хт — продольной центровкой (координатой по продольной
оси ОХ).
Изменение вертикальной центровки оказывает влияние на ре-
зультаты балансировки вертолета и на его характеристики устой-
чивости и управляемости. Однако из-за ограниченности вертикаль-
ных габаритов грузовой кабины изменение ут в эксплуатации,
а тем более в процессе одного полета, невелико и не приводит
к существенному изменению балансировочных значений углов и ха-
рактеристик устойчивости и управляемости. По этой причине вер-
42
тикальная центровка пилотом не определяется в процессе экс-
плуатации.
Изменение поперечной центровки существенно сказывается на
балансировочных характеристиках и характеристиках боковой ус-
тойчивости и управляемости, но при соблюдении правил перевозки
грузов и пассажиров изменение гт происходит в небольших пре-
делах и легко парируется на всех режимах полета. В связи с этим
в эксплуатации нет необходимости определять величину попереч-
ной центровки.
Изменение продольной центровки наиболее существенно влия-
ет на возможность балансировки вертолета на предельных режи-
мах полета (висение, полет на максимальной скорости), а отсут-
ствие контроля за величиной продольной центровки ведет к ухуд-
шению характеристик устойчивости и управляемости вертолета,
угрожающему безопасности полета. Поэтому в эксплуатации пи-
лот обязан определять величину продольной центровки и заранее
знать ее изменение в процессе полета.
Предельно передняя центровка (рис. 2.2, точка
3), равная +0,185 м, устанавливается для обеспечения баланси-
ровки вертолета с запасом отклонения ручки управления назад
от балансировочного положения не меньше 20 % полного хода на
режиме висения с ветром сзади не более 3 м/с. При максимально
допустимом ветре сзади 5 м/с запас управления составляет 8,2 %,
Рис. 2.2. Взаимосвязь положения центра тяжести с положением аэро-
динамической силы НВ:
а — установление пределов продольной центровки; б — установление пре-
делов поперечной центровки; I, II, III, IV — крайние положения равнодей-
ствующей силы НВ
43
Предельно задняя центровка (точка 4) устанав-
ливается, исходя из условия обеспечения балансировки вертолета
с запасом отклонения ручки управления вперед от балансировоч-
ного положения не менее 20 % полного хода, при полете с мак-
симально допустимой скоростью для данного варианта примене-
ния вертолета:
— для транспортного и пассажирского вариантов, имеющих
Цпах—210 км/ч, Хтп. з = —0,01 м;
— для транспортного варианта при транспортировке груза на
стреле, когда скорость ограничена не более 100 км/ч, х7П. з =
= —0,055 м (точка 5).
Запас управления до заднего упора будет уменьшен, если центр
тяжести переместится в точку 2. Если центр тяжести займет поло-
жение, соответствующее точкам 1 и 6, то вертолет станет неуправ-
ляемым.
Пределы поперечной центровки также обусловлены требова-
нием обеспечения минимального запаса поперечного управления
Дех. Смещение центра тяжести влево (точка 7) ограничивается
необходимостью обеспечения запаса управления до правого упо-
ра на режиме висения при скорости ветра справа до 10 м/с. Сме-
щение центра тяжести вправо (точка 8) ограничивается необхо-
димостью обеспечения запаса управления до левого упора при раз-
вороте вертолета влево на режиме самовращения несущего винта
с максимально допустимым креном.
ОПРЕДЕЛЕНИЕ ЦЕНТРОВКИ МЕТОДОМ МОМЕНТОВ
Момент, создаваемый равнодействующей относительно произ-
вольно выбранной точки, равен сумме моментов составляющих
сил относительно той же точки, т. е.
п п
Gnon -хх = S Gixl или тпол -хх = Е 'гпсхь (51)
1 1
где бпол и тПол — сила тяжести и масса всего вертолета, рав-
ные сумме сил тяжести и масс отдельных
агрегатов;
хх — координата центра масс всего вертолета;
Gt и — сила тяжести и масса каждого агрегата;
Xi — координата центра масс каждого агрегата.
Точкой, относительно которой рассматриваются моменты, вы-
бран центр втулки несущего винта; таким образом, все координа-
ты центров масс xt — это расстояния от центров масс агрегатов
до оси НВ, a yt —до плоскости вращения НВ. Обычно массы
агрегатов mit координаты центров масс xt известны, как известна
44
и полетная масса вертолета тПол=^ть поэтому координата цент-
ра масс вертолета (центровка) определяется по формуле:
п
хТ = —!-------. (52)
п
S гп{
1
Пример 1. Определить центровку пустого вертолета при ус-
тановке на вертолет комплекта дополнительных баков, если
масса пустого вертолета то=235О кг, центровка xTq =
— +0,041 м, дополнительные баки каждый массой по 29 кг,
координаты центров масс — левого хл = 0,58 м, правого хп =
= 0.
Решение:
Масса, кг Координаты, м т-х, кг>м
тэ =2350 хТо = +0,041 т0-Хт0 =96,3
тл = 29 Хл = +0,58 тл-хл=16,8
та= 29 хп =0 /пп-хп=0
=2408
-xz = 113,l
m<i *т0 + тл хл + тп • хп
т^+тл+тп S т1
= 0,0468 м. (53)
Пример 2. Определить потребную массу балансировочного гру-
за на хвостовой опоре для обеспечения центровки вертолета
на взлете хт = +0,185 м при полной заправке основного бака
в учебном варианте, если центровка пустого вертолета
-т-0,03 м.
Определяем, пользуясь центровочным графиком, центровку
вертолета без груза на хвостовой опоре; она оказывается равной
хто =0,205 м. Удаление пяты от оси несущего винта составляет
6,63 м. При установке балансировочного груза на пяту массой
/7гбал центровка вертолета должна стать равной 0,185 м.
Составим уравнение моментов относительно центра масс вер-
толета с грузом на хвостовой опоре:
°’185) = '"бал (6,63 + 0,185),
т _ /иВ()(хТп -0,185)
бал 015 •
45
При tn3o =23834-160+40 + 465 = 3048 кг, .rTo =0,205 м масса
груза тбал= 12,2 кг.
Если центровка пустого вертолета будет более передней, то
потребная масса балансировочного груза будет больше, чем
12,2 кг.
2. БАЛАНСИРОВКА ВЕРТОЛЕТА
Продольной балансировкой вертолета назы-
вается процесс уравновешивания моментов, действующих на вер-
толет относительно поперечной оси OZ. Это осуществляется из-
менением положения по отношению к центру масс аэродинамиче-
ской силы Rtl несущего винта (рис. 2.3). После уравновешивания
моментов сил сумма их становится равной нулю, вертолет пре-
кращает вращение относительно поперечной оси, и его продольная
ось оказывается^ под определенным углом тангажа по отношению
к горизонтальной плоскости, что выражается так:
S Mz = 0, о)г = 0, & = const.
1
В плоскости симметрии вертолета действуют следующие основ-
ные силы и моменты (см. рис. 2.3):
— сила тяжести G вертолета, приложенная в центре масс й
поэтому не создающая моментов относительно него;
Рис. 2.3. Продольная балансировка:
1 — ось вращения НВ; 2 — плоскость вращения НВ
46
— аэродинамическая сила планера 7?Пл (сюда относятся силы,
создаваемые фюзеляжем, шасси, подвесными баками и пр.), она
приложена в центре давления планера, положение которого силь-
но зависит от режима полета вертолета: на режиме висения и на
малых скоростях полета /?пл целиком определяется обдувкой пла-
нера индуктивным потоком от винта;
— момент Мгпл, создаваемый этой силой, кабрирующий на ре-
жимах полета с большой поступательной скоростью, когда сила
7?пл определяется главным образом набегающим потоком со ско-
ростью V и углом атаки фюзеляжа; момент Мотл, создаваемый
этой силой, пикирующий на моторных режимах (аф<0) и каб-
рирующий на режиме планирования на авторотации (аф>0);
— аэродинамическая сила стабилизатора 7?ст направлена вниз
и создает всегда кабрирующий момент jMzct, величина которого
изменяется за счет изменения угла установки стабилизатора при
изменении режима работы двигателей;
— продольный момент рулевого винта Мг р. в, состоящий из
активного момента рулевого винта, направленного всегда на каб-
рирование, и моментов от продольной и боковой сил рулевого вин-
та (последними двумя моментами можно пренебречь ввиду малос-
ти продольной и боковой сил РВ);
— продольный момент втулки Mzr за счет разноса горизон-
тальных шарниров, направление действия которого зависит от
центровки вертолета и от скорости полета: при средних центров-
ках и средних скоростях полета Mzr кабрирующий на всех режи-
мах полета, а при смещении центра масс назад MZT уменьшается
по абсолютной величине (особенно на малых скоростях) и стано-
вится пикирующим на скоростях около 70 км/ч при центровке
хт = —0,05 м на всех режимах полета;
— проекция полной аэродинамической силы Rn на плоскость
симметрии вертолета 7?н cose^., создающая момент Af2(7?H) =
= RHcosexxT.эфф, где Хт.эфф—плечо полной аэродинамической силы
в плоскости симметрии вертолета относительно центра масс,
называемое эффективной продольной центровкой вертолета.
Для уравновешивания всех продольных моментов (моментов
относительно поперечной оси OZ) пилот изменяет величину про-
дольного момента, создаваемого большой по величине аэродина-
мической силой RH • coseх на малом плече хт. эфф, поэтому момент
Мг (Ян) называется управляющим продольным моментом.
Условие завершения продольной балансировки в развернутом
виде может быть записано так:
S Мг = Mz пл 4- Mz ст 4~ Mz р. в 4- Mz (RH) 4~ Nlz г — 0. (54)
Каждому режиму полета будут соответствовать свои величи-
г. ны аэродинамических сил и создаваемых ими моментов, поэтому
Для каждого режима полета пилот должен подбирать определен-
47
i'- /
ную величину момента М2 (/?н), устанавливая вектор аэродинами-
ческой силы под балансировочным углом е2 к оси НВ. Угол
отклонения кольца автомата перекоса, соответствующий баланси-
ровочному углу eg, угол тангажа вертолета и угол атаки НВ на-
зываются также балансировочными. Графики балансировочных
значений отклонений кольца автомата перекоса в продольном на-
правлении, угла тангажа, угла атаки и других параметров в за-
висимости от скорости полета (для конкретных массы вертолета,
центровки, высоты полета и т. д.) называются балансировочными
кривыми продольной балансировки.
На рис. 2.4 показаны балансировочные значения бв отклоне-
ния кольца автомата перекоса в продольном направлении в зави-
симости от скорости полета, центровки, режима и высоты полета
вертолета. Балансировочные значения 6В приведены только для
режима висения (У=0) и для режимов полета с поступательной
скоростью более 60...70 км/ч. Характер изменения балансировоч-
ных значений 6В в зависимости от скорости полета для диапазона
скоростей 0...60 км/ч показан на рис. 3.12. Из рис. 2.4 следует:
— на положение кольца АП в продольном направлении зна-
чительное влияние оказывает продольная центровка. Чем центров-
Рис. 2.4. Зависимость положения кольца автомата перекоса в продольном
направлении от различных факторов:
а —Я==0; б — Я=4000 м; в — хт =0,05 м; г - хт=0,165 м; / -пре-
дельное отклонение АП вперед +7°±12'; 2 — предельное отклонение АП
назад — 6°± 12'; 3 — положение АП (+40'вперед), соответствующее сред-
нему положению ручки циклического шага
Условные обозначения:---------горизонтальный полет;-----------------
набор высоты;---------------самовращение; • — висение
48
ка более задняя, тем больше потребный балансировочный угол
отклонения кольца АП вперед;
— положение кольца АП зависит от поступательной скорости
полета;
— на одной и той же скорости полета положение кольца АП
зависит от режима полета вертолета;
— балансировочное положение кольца АП в продольном на-
правлении при одинаковых скоростях, режиме полета и центровке
на различных высотах полета отличается незначительно.
Регулировка продольного управления выполнена так, что при
нахождении ручки циклического шага в среднем положении коль-
цо АП оказывается наклоненным вперед на угол +40', что соот-
ветствует потребным балансировочным углам наклона кольца АП
на крейсерских скоростях полета с центровкой, близкой к пре-
дельно передней. Это удобно пилоту (см. рис. 2.4).
На рис. 2.5 показаны балансировочные значения углов танга-
жа вертолета в зависимости от скорости полета, центровки, режи-
ма полета и высоты полета вертолета. Углы тангажа приведены
только для режима висения и режимов полета с поступательной
скоростью более 70 км/ч. Из рис. 2.5 следует:
Рис. 2.5. Зависимость угла тан-
гажа от различных факторов:
а — Я=0; б — Я=4000 м; в —
—хх = —0,05; г — хт=0,165 м;
д — хт=—0,05 м, '0=8,1° (ви-
сение); е — Ху =0,165 м, О=
=2,4° (висение)
Условные обозначения: - ——»
горизонтальный полет; -------
набор высоты; ----•---- само-
вращение; • — висение
/ 49
— на угол тангажа вертолета значительное влияние оказыва-
ет продольная центровка. Чем центровка более задняя, тем боль-
ше угол тангажа;
— увеличение поступательной скорости полета сопровождает-
ся уменьшением угла тангажа;
— на одной и той же скорости полета угол тангажа зависит
от режима полета вертолета; наибольший угол тангажа получает-
ся в режиме набора, меньше — в горизонтальном полете и самый
малый — в режиме планирования на самовращении НВ, однако
по абсолютной величине самый большой угол тангажа получается
на режиме висения с центровкой, близкой к предельно задней;
— высота полета оказывает незначительное влияние (несколь-
ко более заметное в режиме набора высоты и пренебрежимо ма-
лое в режиме планирования на самовращении НВ).
УРАВНЕНИЯ РАВНОВЕСИЯ СИЛ И МОМЕНТОВ
ПРИ БОКОВОЙ БАЛАНСИРОВКЕ
Боковой балансировкой вертолета называется
процесс одновременного уравновешивания моментов, действующих
на вертолет относительно продольной оси ОХ и вертикальной реи
OY, для прекращения вращения вертолета относительно продоль-
ной и вертикальной осей.
Вращение относительно соответствующих осей прекращается,
т. е. угловые скорости становятся равными нулю (<ох = 0 и (>»у=0),
если суммы моментов, действующих относительно соответствую-
щих осей, становятся равными нулю:
п
если ЕМЛ = О, то <ov=0 и 7 = const (угол крена),
1
п
если SMy=0, то о)у = 0 и = const (угол скольжения).
В эксплуатации наиболее часто вертолет летает по прямоли-
нейной траектории.
Таким образом, условием боковой балансировки вертолета в
полете по прямолинейной траектории является одновременное вы-
полнение еле
ZAfx = O,
1
SMy =0,
п
ZZ =0,
трех условии:
обеспечивающее
обеспечивающее
обеспечивающее
7 = const
лр = const,
Уг= const
обеспечивают
Р = const.
Для упрощения анализа условий обеспечения боковой балан-
сировки ее условно подразделяют на поперечную и путевую. По-
50
перечной балансировкой называется условное уравновешивание
моментов относительно продольной оси ОХ в предложении, что
путевые моменты при этом не изменяются. Путевой балансировкой
называется условное уравновешивание моментов относительно
вертикальной оси OY в предположении, что поперечные моменты
при этом не изменяются. Из этих определений становится очевид-
ной условность деления на поперечную и путевую балансировки.
Такой прием справедлив только при рассмотрении малых откло-
нений от состояния равновесия.
В эксплуатации встречаются следующие разновидности боко-
вой балансировки в полете по прямой:
— балансировка с креном (7 = const) без скольжения (Р = 0)
используется, например, при полете вдоль линейного ориентира
(осевая ВПП, борозды на гоне, шоссе и т. п.) в штилевых усло-
виях;
— балансировка без крена (7 = 0) со скольжением (p = const)
используется в вышеперечисленных случаях чаще из-за большей
простоты ориентировки по отношению к линии горизонта;
— балансировка с креном 7= const и скольжением 0 = const,
так называемое координированное скольжение (полет по прямой
с креном и со скольжением), используется в случаях полета с бо-
ковым ветром, когда снос компенсируется скольжением навстречу
ветру за счет кренения.
БОКОВАЯ БАЛАНСИРОВКА БЕЗ СКОЛЬЖЕНИЯ
Как было установлено, условием обеспечения поперечной ба-
лансировки без скольжения является равенство нулю суммы мо-
ментов относительно оси ОХ и равенство нулю суммы сил, дей-
ствующих в направлении оси OZ-.
£Мх = 0, £Z = 0. (55)
1 1
2.6) заключается в уравнове-
~~ . на
гести
лт на
Поперечная балансировка (рис.
шивании момента MX(ZP.B), создаваемого тягой ZP.B рулевого г
та, моментом, создаваемым несущим винтом относительно осиге
Момент создается несущим винтом за счет того, что отклонеэт К
аэродинамической силы вправо на балансировочный угол ех пи-
лот обеспечивает нужную величину, плечо силы RH относительно
центра тяжести, называемое эффективной поперечной центровкой.
Однако момент:. создаваемый несущим винтом, больше момента,
создаваемого аэродинамической силой RH на плече £7.эфф на ве-
личину момента МхГ, возникающего за счет разноса шарниров
втулки. Моментом, возникающим за счет несимметричной обдувки
планера и несимметрии самого планера, можно пренебречь. Та-
ким образом, стремление вертолета к вращению относительно оси
4*
51
ОХ устраняется, если пилот отклонением ручки циклического шага
обеспечивает равенство:
- Мх (Zp. в) + Мх (Ян) + Мх г 0. (56)
Однако для того, чтобы вертолет не имел стремления к смеще-
нию вдоль поперечной оси OZ (чтобы Vz = 0), необходимо обес-
печить равновесие моментов и сил вдоль оси OZ. Конструктивно
вертолет выполнен так (см. рис. 2.6, а): расстояние центра втулки
х
Рис. 2.6. Боковая балансировка без скольжения:
а — поперечная балансировка; б — путевая балан-
сировка
9
полета
полнен
несущего винта от центра масс ут = 1,4...1,7 м, а расстояние цент-
ра втулки рулевого винта от центра масс /ip. в=0,275...0,575 м.
Вследствие этого при обеспечении равенства моментов, создавае-
мых относительно центра масс несущим и рулевым винтами, по-
перечная составляющая ZH аэродинамической силы /?н несущего
винта должна быть меньше тяги Zp. в рулевого винта, поэтому рав-
новесие сил и моментов может быть получено только при кренении
вертолета вправо на угол у. Образующаяся при этом составляю-
52
щая Gg силы тяжести вертолета вместе с поперечной составляю-
щей ZH уравновесят силу тяги Zp. в рулевого винта, т. е.
—Zp. в Ч" ZH Gz — 0. (57)
Условием обеспечения путевой балансировки без скольжения
является равенство нулю суммы моментов относительно оси OY
и равенство нулю суммы сил, действующих в направлении оси
OZ:
ЕМ =0, £Z = 0. (58)
1 у 1
Достигнутое в процессе поперечной балансировки равновесие
сил вдоль оси OZ используется и при рассмотрении условий пу-
тевой балансировки (см. рис. 2.6,6). Стремление вертолета к раз-
вороту влево под действием реактивного момента Мр несущего
винта пилот устраняет, перемещая правую педаль вперед, что
приводит к созданию нужной величины силы тяги Zp. в рулевого
винта, которая на плече I в создает момент My(Zp. в), действую-
щий вправо. При работе НВ на самовращении на планер верто-
лета передается не реактивный момент, а момент НВ, направлен-
ный в сторону вращения винта, поэтому для путевой балансиров-
ки необходимо создание силы Zp. в, действующей вправо. В соот-
ветствии с этим для поперечной балансировки на самовращении
НВ требуется создание левого крена. Моментом My(ZH) попереч-
ной силы ZH можно пренебречь ввиду малости как самой силы
ZH, так и плеча хг. Таким образом, рыскание вертолета устра-
няется пилотом при обеспечении равновесия моментов:
4-Л4р — Л1у (Zp. в) = 0. (59)'
При балансировке без скольжения шарик указателя скольже-
ния будет смещен вправо, как бы указывая на наличие скольже-
ния, однако на самом деле в полете по прямой при обеспечении
балансировки без скольжения он показывает наличие правого кре-
на вертолета, так как в действительности шарик реагирует не на
угол скольжения (это характеристика аэродинамическая), а на
возникновение боковой силы — составляющей сильг тяжести
Gz или центробежной силы (в данном случае он реагирует на
Лететь с креном неудобно, и выдержать такую величину кре-
на, при которой вертолет летел бы без сноса с намеченного курса,
очень затруднительно, так как потребный угол крена очень мал
и изменяется в зависимости от многих факторов. Поэтому дли-
тельное сохранение в полете боковой балансировки без скольже-
ния практически невозможно. Балансировка без скольжения при-
меняется в основном для выполнения режима висения. В этом слу-
чае балансировка облегчается тем, что, наметив ориентир, пилот
добивается, действуя ручкой циклического шага и педалями, не-
, 53
подвижного положения вертолета относительно ориентира (Vz II
= 0).
БОКОВАЯ БАЛАНСИРОВКА БЕЗ КРЕНА
Если в полете пилот устраняет правый крен отклонением руч-
ки циклического шага несколько левее от ее исходного балансиро-
вочного положения и удерживает вертолет в положении без кре-
на, то он обеспечивает таким образом отсутствие вращения верто-
лета относительно продольной оси ОХ (рис. 2.7, а).
Рис. 2.7. Боковая балансировка без крена:
а — поперечная балансировка; б— путевая балан-
сировка •
Однако из-за различного выноса по отношению к центру масс
втулок несущего и рулевого винтов (г/т>/гр. в) пилот, обеспечив
уравновешивание моментов относительно оси ОХ, не может при
нулевом крене обеспечить вдоль поперечной оси OZ суммарную
54
силу, равную нулю. Исчезновение составляющей Gz силы тяжести
(правый крен убран) приводит к нарушению равновесия сил вдоль
оси OZ, и под действием неуравновешенной силы AZ=ZP. в—ZH вер-
толет начинает ускоренно смещаться влево, увеличивая скорость
бокового смещения Vz, в результате чего вектор скорости V уве-
личивает свое отклонение от плоскости симметрии вертолета, т. е.
появляется угол скольжения 0.
В результате возникновения обдувки планера слева возникает
поперечная составляющая ZnJi аэродинамической силы планера,
величина которой тем больше, чем больше скорость полета и угол
скольжения. Скорость бокового смещения V-, а, следовательно,
и угол скольжения |3 растут до тех пор, пока не разовьется Znjl}
равная по величине неуравновешенной силе AZ. В этот момент
восстановится равновесие вдоль оси OZ, но при наличии постоян-
ной скорости (Vz — const) бокового смещения.
Таким образом, в общем виде условия поперечной балансиров-
ки без крена со скольжением выглядят так же, как и условия
балансировки с креном (но без скольжения):
Е = Мх = О, Е Z = 0. (60)
1 1
Равновесие сил вдоль поперечной оси OZ достигается только
при движении вертолета, с некоторой постоянной боковой состав-
ляющей Vz полной воздушной скорости полета V. В развернутом
виде условие отсутствия вращения относительно оси ОХ (сох = 0):
- (2„ „) + мх (/?„) + м, г + мх(z„,) =. о. (61)
Условие движения с постоянной боковой скоростью (У- =
= const):
4..« < 1-4., =0. (62)
Устранение правого крена оказывает значительно большее
влияние на условия обеспечения путевой балансировки (см.
рис. 2.7,6) при наличии скольжения, так как возникающая сила
2ПЛ приложена в центре давления планера, расположенном на зна-
чительном удалении от центра масс. Поэтому, хотя в общем виде
условия путевой балансировки выглядят так же, как и для балан-
сировки без скольжения:
Е = = 0 и EZ = 0, (63)
1 у 1
но равновесие моментов достигается при значительно увеличен-
ной тяге Zp.B рулевого винта, что вызвано появлением значитель-
ного по величине момента Afy(Z^), действующего влево. Если
при устранении правого крена не переместить дополнительно пра-
вую педаль вперед, то вертолет будет не только смещаться влево
под действием силы AZ=ZP.B — ZH, но и разворачиваться влево
под действием неуравновешенного момента Л4у (Z1M), изменяя пер-
/ 55
воначальный курс и стремясь уменьшить возникший угол сколь-
жения р. Для сохранения прежнего прямолинейного направления
полета необходимо, устранив крен, отклонением правой педали
развернуть вертолет вправо, изменив таким образом курсовой угол
на величину угла скольжения р. Угол скольжения, возникающий
при балансировке вертолета без крена и обусловленный особен-
ностями конструкции одновинтового вертолета, численно равен
в штилевых условиях углу сноса вертолета, поэтому его называют
аэродинамическим углом сноса.
Если на режимах полета с работающими двигателями устра-
нение правого крена приводит к появлению сноса влево (причи-
на— неуравновешенная часть тяги рулевого винта, направленной
влево), то на режиме самовращения НВ устранение левого
крена приводит к появлению сноса вправо (причина — неуравно-
вешенная часть тяги рулевого винта, направленной вправо).
Балансировка со скольжением хотя и более удобна для пило-
та, но характеризуется увеличенной потребной мощностью, так как
планер, движущийся под углом, р, создает большее сопротивление.
В условиях полета с малым избытком мощности (большая полет-
ная масса, малая плотность воздуха), особенно на малых скоро-
стях полета, отсутствие должной координации в управлении вер-
толетом может привести к непреднамеренному снижению с поте-
рей скорости. Увеличение мощности силовой установки ведет к
повышенным расходам топлива и к сокращению дальности и про-
должительности полета. В навигационные расчеты необходимо
вносить аэродинамический угол сноса, так как его величина сос-
тавляет около 10° при скорости полета 100 км/ч.
При балансировке без крена в полете по прямой шарик ука-
зателя скольжения будет находиться в центре, так как нет сил,
которые могли бы его сместить в сторону (сила тяжести совпада-
ет с плоскостью симметрии, а центробежной силы нет, потому
что полет прямолинейный).
БАЛАНСИРОВОЧНЫЕ КРИВЫЕ БОКОВОЙ БАЛАНСИРОВКИ
Балансировочными кривыми называются графики балансиро-
вочных значений отклонений органов управления, углов крена и
аэродинамического сноса в зависимости от скорости полета (или
от угла скольжения). Эти кривые показаны на рис. 2.8.
Зависимость балансировочного отклонения кольца автомата
перекоса в поперечном направлении от скорости полета при ба-
лансировке без скольжения показана на рис. 2.8, а.
На висении кольцо автомата перекоса должно быть отклонено
вправо на угол около 0,5° для создания потребной величины эф-
фективной поперечной центровки ZT. эфф.
При увеличении скорости горизонтального полета более
110 км/ч угол в1 естественного завала конуса вращения вправо
56
г
Рис. 2.8. Балансировоч-
ные кривые боковой ба-
лансировки в зависимо-
сти от скорости полета:
а — поперечное отклоне-
ние кольца АП при 0=0:
1 — предельное отклоне-
ние влево +4° ±15'
(0,0698 рад); 2 — пре-
дельное отклонение впра-
во —4° ±15' (—0,0698
рад); б — угол крена при
0 = 0; в — угол скольже-
ния при 7 = 0; г —угол
установки лопастей руле-
вого винта при 0=0:
1' — предельное откло-
нение правой педали до
упора 20° ±20' (0,349
рад); 2' — предельное от-
клонение левой педали
до упора — 10° ±20'
(—0,1745 рад); 3'— от-
клонение при нейтраль-
ном положении педалей
+ 5° ±20' (+0,087 рад)
Условные обозначения:
--------горизонтальный
полет;-------------на-
бор высоты;
-------------самовра-
щение; • — висение
возрастает, поэтому для сохранения потребной величины эффек-
тивной центровки ZT. эфф пилот должен увеличивать угол наклона
кольца автомата перекоса влево. В режиме набора высоты тре-
буется меньшее отклонение кольца АП влево по сравнению с от-
клонением его в режиме горизонтального полета на одних и тех
же скоростях. В режиме планирования на самовращении требуется
больше, чем в горизонтальном полете, отклонение кольца АП
влеьо.
Зависимость балансировочного угла установки рулевого вин-
та от скорости полета при балансировке без скольжения показана
на рис. 2.8, г. Наибольший угол установки рулевого винта +10,5°
требуется для компенсации реактивного момента несущего винта
на режиме висения, когда винт работает в условиях осевого обте-
кания. По м§ре увеличения скорости горизонтального полета уси-
ливается влияние косой обдувки несущего и рулевого винтов.
Из-за уменьшения режима работы двигателей при увеличении ско-
рости полета до 100 км/ч уменьшается реактивный момент НВ,
что требует меньшего угла установки рулевого винта. При уве-
личении скорости полета больше 100 км/ч происходит увеличение
потребной для горизонтального полета мощности, поэтому возра-
стает реактивный момент НВ. Однако потребный угол установки
РВ до скорости 140 км/ч не изменяется, составляя около 4-2°,
из-за продолжающегося роста влияния косой обдувки РВ. На ско-
рости более 140 км/ч увеличение реактивного момента НВ уже не
компенсируется усилением влияния косой обдувки РВ, поэтому
угол установки РВ необходимо увеличивать. Как следует из
рис. 2.8, г, в диапазоне скоростей 100...200 км/ч горизонтального
полета вертолет балансируется с отклоненной вперед левой пе-
далью.
В наборе высоты практически во всем диапазоне скоростей по-
требные углы установки рулевого винта больше, чем в горизон-
тальном полете на соответствующих скоростях.
На режиме самовращения требуется отрицательный угол уста-
новки РВ, что обеспечивает изменение направления тяги РВ —
она направлена на этом режиме вправо.
Зависимость потребного угла крена для балансировки вертоле-
та без скольжения показана на рис. 2.8, б. Максимальное значе-
ние правого крена -[ = 2,75° соответствует режиму висения. С ро-
стом скорости горизонтального полета правый крен уменьшается
и в диапазоне скоростей 100... 140 км/ч он составляет у —1,3°. При
увеличении скорости более 140 км/ч правый крен увеличивается
из-за необходимости уравновешивания возрастающей тяги руле-
вого винта при увеличении реактивного момента несущего винта.
На скорости около 210 км/ч величина правого крена практически
такая же, как и на висении.
В режиме набора высоты правый крен больше, чем в горизон-
тальном полете, так как величина правого крена пропорциональ-
на тяге рулевого винта.
58
В режиме планирования на самовращении НВ вертолет балан-
сируется с левым креном, слабо изменяющимся по скорости поле-
та и не превышающим величины у= —0,5°.
Зависимость аэродинамического угла сноса вертолета при ба-
лансировке вертолета без крена показана на рис. 2.8, в. На ско-
рости полета около 200 км/ч снос влево составляет — 4°.
При уменьшении скорости полета до 100 км/ч снос влево в го-
ризонтальном полете составляет — 9,5°.
3. УСТОЙЧИВОСТЬ ВЕРТОЛЕТА
Под продольной статической устойчивостью вертолета пони-
мается его свойство создавать продольные стабилизирующие силы
и моменты.
Под продольной статической устойчивостью вертолета по углу
атаки понимают свойство вертолета создавать аэродинамические
силы и моменты, направленные на возвращение вертолета к ис-
ходному значению угла атаки (до начала действия возмущения)
при неизменной скорости полета. Как показали летные испыта-
ния, вертолет статически устойчив по углу атаки на скоростях
полета более 70 км/ч. На меньших скоростях полета из-за потери
эффективности стабилизатора вертолет становится статически не-
устойчивым по углу атаки.
Под продольной статической устойчивостью вертолета по ско-
рости полета понимают свойство вертолета создавать аэродинами-
ческие силы и моменты, направленные на возвращение вертолета
к исходному значению скорости полета (до начала действия воз-
мущения) при неизменном угле атаки вертолета.
В результате анализа устойчивости по скорости отдельных ча-
стей вертолета с учетом влияния НВ на фюзеляж и стабилизатор
было установлено, что на малых скоростях и несущий винт, и фю-
зеляж, и стабилизатор устойчивы по скорости полета. Очевидно,
что и вертолет в целом также будет устойчив по скорости. Таким
образом, вертолет статически устойчив по скорости на тех режи-
мах установившегося полета, на которых большей скорости соот-
ветствует большее отклонение ручки циклического шага от себя.
Пользуясь этим выводом, можно утверждать, что вертолет Ми-2
статически устойчив по скорости также и на скоростях больше
60 км/ч. Однако так как наклон балансировочной кривой на этих
скоростях меньше, чем на малых скоростях, то можно сделать
вывод, что статический кабрирующий момент меньше при измене-
НИИ скорости на одну и ту же величину, следовательно, степень
статической устойчивости по скорости меньше, чем на малых ско-
ростях полета.
Диапазон скоростей, на которых вертолет неустойчив по скоро-
сти, распознается по наличию обратного наклона балансировоч-
ной кривой
Боковой статической устойчивостью называется свойство вер-
толета создавать статические аэродинамические ромеиты относи-
59
тельно осей ОХ и OY, направленные на устранение вызванного*
возмущением отклонения от исходного угла скольжения. На из-
менение угла скольжения вертолет отвечает креном и рысканием.
В связи с этим условно боковую статическую устойчивость подраз-
деляют на:
— поперечную устойчивость — стремление вертолета устранять-
отклонение от исходного угла скольжения накренением в сторону,,
противоположную скольжению;
— флюгерную (путевую) устойчивость — стремление вертолета
устранять отклонение от исходного угла скольжения рысканием в
сторону скольжения.
Наличие поперечной и путевой статической устойчивости вер-
толета оценивается на режимах полета по прямолинейной траек-
тории с постоянным общим шагом НВ и с различными постоянны-
ми углами крена. Такие режимы называются координированными'
скольжениями, так как каждому углу крена соответствуют опре-
деленный угол скольжения и положение ручки циклического шага
и педалей.
Как видно по рис. 2.9, А, вертолет Ми-2 устойчив относительно-
продольной оси ОХ на углах скольжения ±20° и на скоростях
100 ...200 км/ч на режимах горизонтального полета и набора вы-
соты, причем с увеличением скорости полета степень поперечной4
статической устойчивости увеличивается (наклон кривых больше).
На режиме планирования на самовращении НВ вертолет Ми-2‘
нейтрален относительно продольной оси ОХ по углу скольжения.
По рис. 2.8, Б видно, что вертолет Ми-2 обладает путевой статиче-
ской устойчивостью на всех режимах полета в диапазоне углов-
скольжения ±20° и скоростей 100 ...200 км/ч, за исключением пла-
нирования на режиме самовращения НВ на скорости 135 км/ч при
правом скольжении.
ДЕМПФИРОВАНИЕ ВОЗМУЩЕННОГО ДВИЖЕНИЯ
Демпфирующие моменты планера создаются дополнительными
аэродинамическими силами, возникающими за счет изменения уг-
лов атаки или скольжения частей планера (стабилизатора, хво-
стовой балки, фюзеляжа и т. п.) при вращении вертолета отно-
сительно центра масс. Возникающий при этом прирост момента
от дополнительной силы и является демпфирующим моментов
(рис. 2.10):
Мга. ст = А УСТ’/,СТ. (64)
Механизм образования демпфирующего момента несущего вин-
та при шарнирной подвеске лопастей следующий. При действии
возмущения в продольной плоскости, приводящем к вращению
вертолета с угловой скоростью гог, происходит отставание вектора
аэродинамической силы 7?н от оси вращения несущего винта на
угол 8. Это вызовет изменение махового движения лопастей так,
60
1 /МГ/Ш/мт
!к, град
Рис. 2.9. Положение органов управления вертолета при координи-
рованных скольжениях:
А — поперечное отклонение кольца АП: 1 — предельное отклоне-
ние влево; 2 — предельное отклонение вправо;
Б—угол установки лопастей рулевого винты: 1' — предельное от-
клонение правой педали до упора; 2' — предельное отклонение ле-
вой педали до упора; а — ц=0,15 (V=28,l м/с); б — ц=0,2 (У=
= 37,4 м/с); в — ц=0,25 (Р=46,8 м/с); г — ц=0,3 (V=56,l м/с)
Условные обозначения:----------------горизонтальный полет;
набор высоты;--------------самовращение
61
что плоскость вращения лопастей будет поворачиваться в сторо-
ну поворота, планера, но, пока продолжается вращение планера,
отставание силы от оси вращения НВ на угол 8 будет сохра-
няться. Момент аэродинамической силы /?„ относительно центра
масс, возникающий в результате вращения вертолета, называется
Рис. 2.10. Возникновение демпфирующих моментов НВ и стабилизатора:
1 — исходное положение Ц. Т.; 2— положение Ц. Т. в процессе возмущенного
движения с угловой скоростью кабрирования (ог; 3 — ось вращения вала НВ;
4 — плоскость вращения центров масс лопастей
демпфирующим моментом крена Мх л. „(если вращение происходит
относительно продольной оси ОХ) или тангажа М2Д. н (если вра-
щение происходит относительно поперечной оси OZ):
Н ^^н-Ут-Sins. (65)
Как следует из формулы (65), величина демпфирующего мо-
мента зависит от вертикальной центровки вертолета и от угла
отставания е, который обратно пропорционален частоте вращения
НВ и массовой характеристике лопастей. Демпфирующие момен-
ты, создаваемые несущим винтом, увеличиваются за счет возни-
кающих при наличии разноса горизонтальных шарниров момен-
тов втулки Mzr п Mvr, величина которых
Мг = Fn. в-h = Fa. б • Zr • sin г (66)
пропорциональна частоте вращения НВ и углу отставания 8. При
уменьшении частоты вращения НВ ниже минимально допустимой
величины происходит уменьшение демпфирующих моментов НВ
62
главным образом за счет уменьшения величины 7?н, одновременно
уменьшаются и моменты втулки М2Г и Мхг за счет уменьшения
F ц. 6j
Демпфирование возмущенного движения вертолета относитель-
но продольной оси в основном определяется демпфирующим мо-
ментом НВ, а относительно поперечной оси — моментом несущего
винта на малых скоростях полета и в равной мере моментом не-
сущего винта и стабилизатора на крейсерских скоростях полета.
Демпфирование возмущенного движения относительно верти-
кальной оси осуществляется главным образом за счет изменения
тяги рулевого винта при изменении осевой скорости потока через
его плоскость при движении рыскания. Поперечное демпфирова-
ние слабее, чем продольное и путевое.
ДИНАМИЧЕСКАЯ УСТОЙЧИВОСТЬ
Продольные демпфирующие моменты вертолета недостаточны
для гашения возникающих инерционных моментов, поэтому про-
дольное возмущенное движение вертолета Ми-2 имеет колеба-
тельный характер с постепенно увеличивающейся амплитудой от-
клонения от исходных параметров полета (скорость, тангаж), чго
свидетельствует о продольной динамической неустойчивости вер-
толета Ми-2. Однако степень ее такова, что при освобожденном
управлении (оно остается зафиксированным гидроусилителем) в
спокойной атмосфере возможен полет без вмешательства пилота
в течение 30... 40 с. Развивающиеся под действием малых возму-
щений продольные колебания, влияя на маховые движения лопа-
стей, ведут к кбчлебательному боковому возмущенному движению.
Вертолет Ми-2 обладает поперечной и путевой статической ус-
тойчивостью, однако это не означает, что вертолет обладает бо-
ковой динамической устойчивостью. При наличии поперечной и пу-
тевой статической устойчивости для обеспечения боковой динами-
ческой устойчивости должно быть выдержано определенное соот-
ношение между ними, т. е. определенное соотношение между уг-
ловыми скоростями крена и рыскания'в боковом колебательном
движении. У вертолета Ми-2 возмущение вызывает изменение угла
крена и угла скольжения, но угол скольжения устраняется быст-
рее рысканием, а крен полностью не устраняется, что ведет к
скольжению в сторону кренения вертолета. Таким образом, вер-
толет постепенно уходит с курса в одну сторону, а так как он не
выходит из крена, то аэродинамической силы НВ недостаточно
для сохранения высоты полета, и полет происходит со снижением.
Такой вид боковой динамической неустойчивости называется спи-
ральной неустойчивостью (вертолет снижается по спирали). При-
чем возмущение практически никогда не бывает чисто боковым
или продольным, поэтому из-за продольной динамической неус-
тойчивости движение вертолета происходит по спирали с одно-
временными колебаниями по скорости, тангажу и крену с перемен-
63
ной амплитудой отклонения этих параметров от исходного значе-
ния. Динамическая неустойчивость вертолета Ми-2 такова, что
при освобожденном управлении изменение угла крена на 10° от
исходного происходит за время не менее 15 с.
4. УПРАВЛЯЕМОСТЬ ВЕРТОЛЕТА
Способность вертолета изменять свое положение в пространст-
ве по воле пилота называется управляемостью вертолета. Управ-
ляемость оценивается по количественным показателям процесса
управления. Рассмотрим основные из них.
Эффективность управления М* определяется величиной управ-
ляющего момента, действующего на вертолет, при отклонении ры-
чага (ручки или педалей) управления на единицу хода.
В соответствии с направлением управляющего момента разли-
чают эффективность продольного Аф, поперечного Мхк и путе-
вого AfyH управления. Эффективность продольно-поперечного уп-
равления зависит от эффективной центровки и от аэродинамиче-
ской силы НВ. Эффективность продольно-поперечного управления
возрастает при более низком расположении центра масс вертоле-
та. С этой точки зрения выгоднее грузы в кабине распределять по
грузовому полу. Эффективность путевого управления незначитель-
но увеличивается при смещении центра масс в переднее положе-
ние. За счет косой обдувки рулевого винта эффективность путе-
вого управления больше в поступательном полете, чем на верти-
кальных режимах.
Для сравнения различных вертолетов знания абсолютной ве-
личины эффективности управления недостаточно, так как движе-
ние вертолета под действием управляющего момента определяет-
ся величиной момента инерции вертолета относительно соответст-
вующей оси вертолета (/х, Iy, Iz}.
Эффективность управления, отнесенная к моменту инерции от-
носительно соответствующей оси, называется относительной эф-
фективностью управления:
Ж = , т. е (67)
Мъ* = , ЛА = . (68)
х 'х 'z у 1у
Относительная эффективность пропорциональна величине уг-
лового ускорения, которое получает вертолет в момент начала
движения при ступенчатом отклонении рычага управления на еди-
ницу хода и составляет для Ми-2:
Л/Р*^0,017 мм-1-с-1,
0,039 мм-1-с-1,
44^0,0053 мм"1-с-1.
64
Величины относительных эффективностей управления (следо-
вательно, и угловые ускорения) уменьшаются с увеличением по-
летной массы вертолета, потому что при увеличении полетной мас-
сы моменты инерции вертолета увеличиваются быстрее, чем эф-
фективность управления.
Чем больше отклонен рычаг управления от балансировочного
положения, тем больше величина управляющего момента, тем
больше величина углового ускорения вертолета в начале движе-
ния. Наибольший управляющий момент получается при отклоне-
нии рычага управления от упора до упора. Однако при правиль-
ной загрузке вертолета рычаг управления находится в балансиро-
вочном положении, а не на упоре. Поэтому располагаемая вели-
чина управляющего момента меньше, чем конструктивно возмож-
ная. Наибольшая величина управляющего момента, которая мо-
жет быть получена при отклонении рычага управления от балан-
сировочного управления до упора, называется мощностью управ-
ления. Она обусловливает получение наибольшей величины уг-
лового ускорения:
Мх упр- max # Му упр- max упр- max
max = 7 , еу max 7 > ~z max == 7 •
1Х ' ‘V 1 у
(69)'
Испытаниями установлено, что мощность продольного и путе-
вого управления Ми-2 больше, чем у остальных вертолетов одно-
винтовой схемы, находящихся в эксплуатации в народном хозяй-
стве. В частности, для Ми-2 ег max— 0,85 с~2 и мощность управле-
ния Af^ynp.max ~Ю0 Н-М.
Как только вертолет под действием управляющего момента
начинает вращаться, сразу же возникает демпфирующий (гася-
щий) момент, направленный на прекращение движения, вызван-
ного управляющим моментом. Величина замедления вращения ха-
рактеризуется относительным демпфированием, которое опреде-
ляется соотношением
Л10=—у—, т. е. (70)'
_ Мшх
X
__ Мшу
У /у
с-1,
Лф^0,47 с-1,
М^^0,42 с-1.
Сравнивая величины относительного демпфирования, можем
отметить, что наибольшее замедление вращения у Ми-2 по крену
и примерно в четыре раза более слабое по тангажу, так как момент
6 Заказ 4195 / 65
инерции относительно поперечной оси (12) больше, чем относи-
тельно пррдольной (7Х), хотя демпфирующий момент относитель-
но обеих осей практически одинаков. Время выхода вертолета на
установившееся значение угловой скорости вращения при от-
клонении рычага управления обратно пропорционально относи-
тельному демпфированию:
^устан ~ • (71)
Оно составляет по крену 1,7 с, по тангажу 7,1 с, по рысканию
6,4 с.
Время выхода вертолета на установившееся значение угловой
скорости включает в себя время, которое проходит от момента
начала отклонения рычага управления до момента начала враще-
ния вертолета». Этот период времени называется запаздыванием в
управлении. Запаздывание объясняется применяемым на вертоле-
те принципом создания управляющего момента: большая сила
RH создается на малом плече хт.эфф (или zT.эфф). Чем больше
сила RH, тем больше масса воздуха, направление движения кото-
рой надо изменить, чтобы изменилось направление силы 7?н.
Важной для пилота характеристикой управляемости вертолета
является чувствительность управления, которая определяет время
перехода вертолета к новому режиму полета под действием управ-
ляющего момента.
Чувствительность управления по каждому каналу управления
определяется соотношением
= -Ж т. е. (72)
по крену 7(^ = 0,00944 мм-1 с~1, по рысканию 7(§у =0,0829 мм-1 с-1,
по тангажу 7(^=0,0126 мм-1 с-1.
Из приведенных величин видно, что наибольшей величиной чув-
ствительности управления Ми-2 обладает по рысканию, — это яв-
ляется его отличительной чертой.
Управляемость вертолета оценивается также по величине уси-
лий на рычагах управления, которые пилот должен прикладывать
для создания управляющих сил и моментов. Усилия на ручке
циклического шага создаются загрузочными механизмами. Если
усилия с ручки циклического шага сняты триммерным механиз-
мом в среднем положении ручки, то усилия в поперечном направ-
лении не превышают 6 кгс, в продольном направлении 10 кгс.
Если усилия сняты в одном из крайних положений ручки цикли-
ческого шага, то при отклонении в другое крайнее положение уси-
лия не превышают в поперечном направлении 10 кгс, в продоль-
ном — 20 кгс.
Усилия, прикладываемые пилотом к педалям, определяются
непосредственно величиной аэродинамических и инерционных сил
66
лопастей с грузами-противовесами и величиной сил упругой де-
формации торсиона. Усилия зависят от скорости полета: на висении
необходимо прикладывать усилие на правую педаль около 15 кгс,
с увеличением скорости полета до 60... 70 км/ч усилие на правую
педаль уменьшается до нуля, а при дальнейшем увеличении ско-
рости до 100... 150 км/ч возрастает потребное усилие на левую пе-
даль до 7 кгс. На скоростях, близких к максимальным, пилот дол-
жен прикладывать на левую педаль усилие около 1,5 кгс.
В любом из разрешенных режимов полета необходимо иметь
возможность сбалансировать вертолет, но, кроме этого, необхо-
димо быть уверенным, что в крайних условиях полета отклонения
рычагов управления будут достаточными, чтобы справиться с раз-
личного рода возмущениями. С этой точки зрения управляемость
вертолета характеризуется запасом управления, под которым по-
нимается разница между отклонением рычага до упора и его ба-
лансировочным отклонением. Запас управления выражают в про-
центах от полного хода рычага управления (от одного упора до
другого). По техническим требованиям к вертолету минимальный
запас управления на предельных режимах полета в целях безопас-
ности должен быть не меньше 20 % •
Предельными режимами полета для Ми-2 являются:
— горизонтальный полет с максимально допустимой скоростью
210 км/ч при предельно задней центровке —0,01 м, минимальный
запас продольного управления до переднего упора составляет
7,7%;
— висение при скорости ветра сзади 5 м/с при предельно пе-
редней центровке -4-0,185 м, минимальный запас продольного уп-
равления до заднего упора составляет 13 %;
— висение при скорости ветра слева 10 м/с, минимальный за-
пас путевого управления до упора правой педали составляет
14,5%;
— висение при ветре справа 10 м/с, минимальный запас по-
перечного управления до правого упора составляет 32,5%;
— планирование на режиме самовращения несущего винта, ми-
нимальный запас поперечного управления получается при разво-
роте влево.
Как следует из приведенных данных, без необходимости не сле-
дует выполнять полет в крайних условиях.
/
67
Глава 3. ВИСЕНИЕ, ВЗЛЕТ
1. ХАРАКТЕРИСТИКИ ВИСЕНИЯ И ВЕРТИКАЛЬНЫХ
РЕЖИМОВ ПОЛЕТА
ОБЩАЯ ХАРАКТЕРИСТИКА РЕЖИМОВ ПОЛЕТА
практической аэродинамике большинство режимов полета
рассматривается как установившиеся.
К установившимся режимам полета относят: висение, набор
высоты, горизонтальный полет, снижение, вираж. Наиболее ха-
рактерные неустановившиеся режимы полета — взлет и посадка.
Для уточнения места приземления, для проверки правильности
определения посадочной или взлетной массы, а также для выпол-
нения специальных работ, для обучения и тренировок применяет-
ся, режим висения.
„Режимом висения в аэродинамике называют такой режим по-
лета, когда отсутствуют любые перемещения вертолета относитель-
но воздуха. В эксплуатации под висением понимают отсутствие
перемещений вертолета относительно характерного ориентира.
Для облегчения анализа висения и вертикальных режимов по-
лета часто используется нормальная система координат.
УСЛОВИЯ РАВНОВЕСИЯ НА ВИСЕНИИ И ВЕРТИКАЛЬНЫХ
РЕЖИМАХ ПОЛЕТА
Предположим, что полет выполняется в штиль. Тогда на висе-
нии и при установившихся вертикальных режимах полета условия
равновесия вертолета в нормальной системе координат аналогич-
ны (рис. 3.1, а) .
Условия установившегося висения или вертикального полета
определяются величинами силы тяжести, вертикальной силы пла-
нера, силы тяги рулевого винта, величиной и направлением аэро-
динамической силы несущего винта. Для обеспечения постоянной
высоты^ на режиме висения или для сохранения заданной верти-
кальной скорости на вертикальных режимах полета сила тяжести
и отрицательная вертикальная сила планера должны быть урав-
новешены вертикальной составляющей аэродинамической силы не-
сущего винта:
= mg + или - Г?пл = mg, (73)
где tng = G — сила тяжести.
68
Рис. 3.1. Схема взаимодействия сил на режимах висения и
вертикального полета:
а — в штиль, б — при ветре
/
69
Левую часть второго уравнения называют свободной тягой
Too ; таким образом, Too = mg — условие отсутствия вертикальных
ускорений.
Для отсутствия боковых смещений поперечная составляющая
аэродинамической силы несущего винта в штиль уравновешивает
тягу рулевого винта:
^н^^р-в- (74)
При висении с боковым ветром дополнительно появляется бо-
ковая сила планера, поэтому величина поперечной составляющей
аэродинамической силы несущего винта, потребной для сохране-
ния места висения, изменяется:
Zga ~ ^р. в i ^ал. (75J
При воздействии ветра в направлении продольной оси верто-
лета для отсутствия продольным смещений необходимо, чтобы вы-
полнялись условия:
PG = А\ или Ха —Ха (76)
5Н о пл “н апл \1 м/
(в скоростной системе координат).
Схема взаимодействия сил при висении против ветра в скоро-
стной системе координат представлена на рис. 3.1, б.
ТЯГА ВЕРТОЛЕТА НА РЕЖИМЕ ВИСЕНИЯ
При решении практических задач необходимо знать не величи-
ну тяги несущего винта, а «свободную» тягу вертолета — mg,
характеризующую полетную массу т = !«>/§ и грузоподъемность
вертолета.
Коэффициент тяги обычно задают характеристикой (полярой)
несущего винта на режиме висения.
Коэффициент гпк находят по величине мощности, подводимой
к несущему винту. При этом расчетным режимом работы двига-
телей является взлетный режим.
Если поляра получена по осредненным характеристикам на-
турных экспериментов на вертолетах, то подсчитанная с исполь-
зованием поляры тяга отражает тяговые характеристики «средне-
го» вертолета. Именно для такого вертолета на рис. 3.2 приведены
тяговые характеристики, регламентирующие полетную массу вер-
толетов в условиях «сухого» неподвижного воздуха.
На постоянной барометрической высоте увеличение температу-
ры^ наружного воздуха вызывает уменьшение мощности двигате-
лей (рис. 3.3), поэтому тяга несущего винта и свободная тяга вер-
толета уменьшаются.
Чем больше барометрическая высота, тем меньше (при по-
стоянной температуре наружного воздуха) мощность двигателей.
Вследствие уменьшения мощности двигателей и плотности возду-
70
ха уменьшаются свободная тяга и полетная масса вертолета, с
которой может быть осуществлено установившееся висение.
Рис. 3.2. Зависимость максимальной свободной
тяги (полетной массы) вертолета от температуры
наружного воздуха и барометрической высоты
Рис. 3.3. Зависимость мощности дви-
гателя ГТД-350 от температуры на-
ружного воздуха (п==0)
71
Плотность воздуха и мощность двигателей уменьшаются с уве-
личением влажности воздуха. Например, при увеличении упру-
гости водяного пара от 0 до 50 мм рт. ст. (6666,12 Па) макси-
мальная полетная масса вертолета уменьшается на 420 кг. Это
составляет 13,5% величины максимальной полетной массы
«среднего» вертолета, для которого приводятся данные в РЛЭ, в
условиях «сухого» воздуха, на барометрической высоте, равной
нулю, и при температуре наружного воздуха +40° С. Причем
уменьшение полетной массы на 4% обусловлено непосредственным
уменьшением плотности влажного воздуха, а на остальные
9,5 %—уменьшением мощности двигателей под воздействием из-
менившихся газодинамических процессов.
Изменение свободной тяги вертолета при увеличении упруго-
сти водяного пара практически не зависит от температуры нару-
жного воздуха, и поэтому можно считать, что в любых климати-
ческих условиях увеличение упругости водяного пара на каждые
10 мм рт. ст. (1333,22 Па) приводит к уменьшению полетной мас-
сы вертолета примерно на 85 кг.
При дожде мощность двигателей и свободная тяга вертолета
на висении увеличиваются. Например, в штиль при /н.в= 18... 21° С,
р = 754...758 мм рт. ст., = 1... 19 мм рт. ст. возможно увеличение
максимальной полетной массы вертолета примерно на 100 кг по
сравнению с висением в условиях такой же влажности, но без
дождя.
Тяговые характеристики вертолета существенно ухудшаются
по мере выработки двигателями и вертолетом установленного ре-
сурса. При отработке полного ресурса взлетная мощность двига-
телей ГТД-350 уменьшается на 5,3... 14,6%. Такому изменению
мощности соответствует уменьшение максимальной полетной мас-
сы вертолета на 3,5... 9 %.
Максимальная мощность двигателей уменьшается с уменьше-
нием на взлетном режиме частоты вращения турбокомпрессоров.
В результате свободная тяга вертолета и максимальная полетная
масса также уменьшаются. Уменьшение частоты вращения турбо-
компрессоров на взлетном режиме на 1% (при неизменной час-
тоте вращения несущего винта) приводит к уменьшению полет-
ной массы примерно на 90 кг.
Дополнительное уменьшение мощности двигателей и макси-
мальной полетной массы вертолета вызывает отбор воздуха от
двигателей. Отбор воздуха для систем вертолета нежелателен и
разрешается только при температурах наружного воздуха ниже
+ 15°С.
Изменение отгиба триммерных пластин в разрешенном для
эксплуатации диапазоне углов (0...40), а также установка под-
весных топливных баков практически не влияют на величины
свободной тяги и полетной массы вертолета.
72
ПОТОЛОК ВИСЕНИЯ И ВЫСОТА РАБОЧИХ ПЛОЩАДОК
Теоретическим потолком висения называется максимально воз-
можная геометрическая высота (высота от горизонтальной плос-
кости, расположенной на среднем уровне моря, в стандартных ат-
мосферных условиях), на которой вертолет на взлетном режиме
работы двигателей с заданной полетной массой не перемещается
относительно воздуха.
На вертолете Ми-2 с полетной массой 3350 кг потолок висе-
ния примерно 1700 м (рис. 3.4), а с массой 3550 кг — около 1000 м.
Вследствие неодинакового износа комплектов лопастей и газовоз-
душного тракта двигателей, отличий в регулировках двигателей
и управления тяговые характеристики вертолетов отличаются друг
от друга, поэтому теоретические потолки висения также неоди-
наковы. Потолки висения, определенные на рис. 3.4, могут рас-
сматриваться лишь как средние значения.
Рис. 3.4. График для определения
теоретического потолка висения вер-
толета
Рис. 3.5. Зависимость относительной
тяги вертолета от высоты висения над
ровной площадкой при постоянной
мощности двигателей
Если висение выполняется вблизи экранирующей поверхности,
то тяговые характеристики вертолета изменятся, так как изменяет-
ся структура индуктивного потока от несущего винта. Увеличе-
ние тяги вертолета при зависании над плоским экраном, перпен-
дикулярным оси винта, получило название эффекта воздушной по-
душки. Эффект воздушной подушки на вертолете Ми-2 проявляет-
ся на истинных высотах ниже 15... 10 м. Чем меньше расстояние
от плоскости вращения несущего винта до экрана (земной поверх-
ности), тем больше прирост тяги (рис. 3.5). Наибольший прирост
тяги (примерно 20 %) соответствует приземлению вертолета; на
высоте 1,5 от колес до земли у вертолета Ми-2 прирост тяги 8%,
а на высоте 5 м — 2 %.
/ 73
В тех случаях, когда при заданных атмосферных условиях не
стоит задача получения наибольшей полетной массы, эффект воз-
душной подушки может быть использован для уменьшения рас-
ходов горючего в полете. При постоянной полетной массе умень-
шение истинной высоты висения приводит к уменьшению потреб-
ной мощности двигателей (рис. 3.6).
Рис. 3.6. Зависимость потребной частоты враще-
ния турбокомпрессора от высоты висения над
ровной площадкой при постоянных частоте вра-
щения несущего винта и полетной массе
Использование эффекта воздушной подушки дает возможность
выполнять висение в более сложных условиях, чем при отсутствии
этого эффекта. Например, висение с заданной полетной массой
при использовании эффекта воздушной подушки может быть вы-
полнено при более высоких температурах и влажности или на
большей барометрической высоте. Таким образом, высота рабо-
чих (посадочных) площадок вертолета может быть больше тео-
ретического потолка висения, при котором влияние воздушной
подушки не учитывается.
Однако следует помнить, что с понижением плотности воздуха
эффект воздушной подушки и истинная высота, начиная с кото-
рой он проявляется, уменьшаются. Эффект воздушной подушки
уменьшается также при работе над склонами или вершинами хол-
мов, над коническими ямами с крутизной стенок более 10°, над
водной поверхностью или растительностью, высота которой пре-
вышает толщину веерной струи. В этих случаях полетную массу
чаще всего рассчитывают без учета влияния воздушной подушки,
так как учесть поправки на снижение эффекта воздушной подуш-
ки очень сложно.
Над высокой растительностью (лесом), над коническими яма-
ми с большой крутизной стенок, а также вблизи вертикальных
стенок или над цилиндрическими ямами около несущего винта об-
разуется мощный вихревой тор, на поддержание которого непро-
изводительно расходуется мощность двигателей. В результате мак-
симальная тяга вертолета уменьшается, и возможно самопроиз-
вольное снижение вертолета. Чтобы исключить вредное воздейст-
74
вне вихревых потоков на вертолет, ограничиваются высота полета
и расстояние от несущего винта до стенок или крутых склонов.
Воздействие ветра на тяговые характеристики вертолета в ре-
жиме висения проявляется неоднозначно. С одной стороны, уве-
личение скорости ветра вызывает увеличение секундной массы
воздуха, взаимодействующего с несущим винтом, увеличение в
свободной атмосфере тяги вертолета или уменьшение потребной
мощности двигателей. С другой стороны, воздействие ветра на
струю несущего винта вблизи экрана вызывает дополнительные
вихреобразования, уменьшение эффекта воздушной подушки и сни-
жение высоты начала проявления этого эффекта.
Для скоростей ветра, отличаемых метеостанциями от штиля, и
для направления ветра спереди вдоль продольной оси вертолета
характерен прирост тяги несущего винта, потому что на высоте
контрольного висения (1,5 ...2,0 м) увеличение секундного расхода
воздуха через несущий винт более значительно, чем уменьшение
эффекта воздушной подушки. В результате тяга вертолета возра-
стает, а, значит, увеличивается высота рабочей площадки, над ко-
торой может быть выполнено зависание.
Влияние на тягу вертолета направления ветра будет рассмот-
рено после анализа балансировки вертолета на режиме висения,
так как в зависимости от условий балансировки изменяются потери
мощности двигателей на привод рулевого винта. Отметим лишь,
что при длительном висении с попутным или боковым ветром по-
вышается температура газов перед турбиной. Это может стать
причиной перевода двигателей на пониженные режимы и, как
следствие, ограничит полетную массу вертолета.
Эффект воздушной подушки незначительно увеличивается при
зависании над растительностью, высота которой не превышает
толщины веерной струи (например, над невысокой травой), а так-
же над коническими ямами с крутизной стенок до 10°. Однако в
этих случаях осуществить устойчивое висение вертолета сложнее,
чем над плоским экраном (например, над бетонированной поверх-
ностью). Смещения вертолета уменьшают эффект воздушной по-
душки. На практике возможное увеличение эффекта воздушной
подушки в расчетах не учитывается. Его проявление используется
для уменьшения мощности двигателей при зависании, что создает
запас мощности для маневрирования.
ЗАПАС МОЩНОСТИ И ХАРАКТЕРИСТИКИ ВЕРТИКАЛЬНЫХ
РЕЖИМОВ
Длительное установившееся висение вертолета при работе дви-
гателей на максимальном (взлетном) режиме практически невоз-
можно. Для парирования внешних возмущений у вертолета долж-
ны иметься энергетические запасы. Разность между мощностью
взлетного режима двигателей и потребной мощностью двигателей
' 75
для выполнения заданного режима полета называется запасом
мощности.
При полетной массе вертолета 3350 кг и плотности воздуха,,
соответствующей высоте Н=0, на висении имеется запас мощно-
сти 77,2 кВт. Увеличение высоты висения до 50... 100 м характе-
ризуется практически постоянной потребной мощностью двигате-
лей, так как плотность воздуха изменяется незначительно. Чем
больше высота висения, тем меньше плотность воздуха, больше
потребная индуктивная скорость и больше коэффициент тяги.
Увеличиваются индуктивная и профильная мощности, потери мощ-
ности на привод рулевого винта для компенсации возросшего ре-
активного момента, а следовательно, увеличивается потребная
для висения мощность двигателей.
Изменение мощности двигателей на взлетном режиме опреде-
ляется их высотной характеристикой. Располагаемая и потребная
мощности двигателей уравниваются на потолке висения (рис. 3.7).
Рис. 3.7. Баланс мощностей на
режиме висения
3200 3300 3400 3500 3600 3700 3600
Рис. 3.8. Зависимости максимальной
скорости вертикального подъема от
полетной массы вертолета
На меньших высотах имеется запас (избыток) мощности. На вы-
сотах выше потолка висения создается дефицит мощности. Если
на режиме висения к несущему винту подвести мощность больше
потребной, то образовавшийся избыток мощности
bN = (Ne-NeBlK)l (77)
будет израсходован либо на увеличение кинетической энергии при
перемещении вертолета, либо на увеличение потенциальной энер-
гии положения при наборе высоты. При подводе к несущему вин-
ту мощности Ne<NeBVC вертолет совершит работу при снижении
вследствие уменьшения потенциальной энергии положения.
Величина вертикальной скорости определяется величинами си-
лы тяжести, избытка или дефицита мощности:
± V„ = ±2АЛ' , (78)
76
где + 2АУ — удвоенный избыток мощности, учитывающий увели-
чение эффективности несущего винта в наборе высоты при увели-
чении секундной массы воздуха, проходящего через винт (умень-
шение потребной индуктивной скорости и индуктивной мощности);
—2АУ — удвоенный дефицит мощности, показывающий умень-
шение эффективности несущего винта при вертикальном снижении
за счет дополнительных вихреобразований.
Фактические величины максимальных вертикальных скоростей,
полученных на вертолете Ми-2 при частоте вращения несущего
винта 78,4... 79,0 %, частоте вращения турбокомпрессоров двига-
телей 95,05... 95,60 % и атмосферном давлении, соответствующем
1/=500 м, показаны на рис. 3.8.
Общее время полета определяем сложением времени на от-
дельных участках полета:
н н д н
-----. (79)
0 0 I Vy^cp|
На высоте потолка висения (статического теоретического по-
лолка) избыток мощности равен нулю, поэтому вертикальный
подъем возможен лишь до потолка висения. Практически высота
теоретического потолка недосягаема, так как при уменьшении
вертикальной скорости до нуля время подъема стремится к бес-
конечности. Обычно практическим статическим потолком вертоле-
та считается высота, набираемая без поступательного перемеще-
ния вертолета до получения вертикальной скорости подъема
0,5 м/с.
Дефицит мощности может быть создан после перехода на ну-
левую поступательную скорость на любой эксплуатационной вы-
соте, поэтому вертикальное снижение возможно с любых высот,
•если нет эксплуатационных ограничений.
Чем больше полетная масса вертолета, тем меньше избыток
мощности,- хуже скороподъемность вертолета и меньше практи-
ческий статический потолок. Вертикальная же скорость сниже-
ния с увеличенной полетной массой и с неизменным режимом ра-
боты двигателя возрастает, а время снижения уменьшается.
В реальных условиях эксплуатации атмосферные условия и
мощность двигателей отличаются от стандартных. Чем меньше
плотность воздуха (больше барометрическая высота, температура
и влажность), тем больше потребная индуктивная скорость и мощ-
ность для режима висения. Следовательно, для режима устано-
вившегося подъема избыток мощности уменьшается, а для режи-
ма установившегося снижения дефицит мощности увеличивается.
Уменьшение мощности двигателей в конечном итоге приводит к
таким же результатам. Увеличение частоты вращения несущего
винта способствует увеличению профильных потерь, поэтому при
прочих равных условиях потребная мощность и дефицит увеличи-
ваются. Снижение относительного кпд несущего винта в резуль-
тате абразивного износа лопастей вызывает увеличение потерь на
77
преодоление профильного сопротивления, а при искажении тео-
ретических профилей сечений лопастей уменьшаются и их несу-
щие свойства. Мощность, потребная для висения, и дефицит мощ-
ности увеличиваются. В соответствии с изменением избытка и де-
фицита мощности изменяются характеристики вертикальных ре-
жимов: вертикальная скорость и время полета.
2. ВЫПОЛНЕНИЕ ВИСЕНИЯ И МАНЕВРОВ С РЕЖИМА
ВИСЕНИЯ
ОСОБЕННОСТИ БАЛАНСИРОВКИ ВЕРТОЛЕТА
НА РЕЖИМЕ ВИСЕНИЯ
Продольная балансировка вертолета на режиме висения обес-
печивается при нейтральном положении тарелки автомата переко-
са при передней центровке примерно +90 мм, когда пикирующий
момент от нормальной силы (тяги) несущего винта уравновесит
кабрирующий момент планера (см. рис. 3.9, а).
В этом случае угол тангажа вертолета составляет 4°13'±5\
потому что такова величина угла установки вала редуктора отно-
сительно нормальной оси фюзеляжа.
С предельной передней центровкой вертолет Ми-2 балансирует-
ся на висении с углом тангажа около 2° (см. рис. 2.5). Чем боль-
ше полетная масса вертолета, тем больше потребный режим рабо-
ты двигателей на висении. Скорость индуктивного потока и каб-
рирующий момент фюзеляжа увеличиваются. Кабрирующий мо-
мент стабилизатора также увеличивается, но в меньшей мере, по-
тому что стабилизатор находится в зоне малых индуктивных ско-
ростей. Рост тяги несущего винта вызывает увеличение его пики-
рующего момента, причем в большей мере, чем увеличивается каб-
рирующий момент планера. В результате вертолет балансируется
с меньшим углом тангажа и при более значительном отклонении
ручки управления на себя.
При создании на вертолете задних (отрицательных) центровок
моменты, действующие на вертолет, становятся кабрирующими.
Вертолет увеличивает угол тангажа и стремится переместиться
назад. Для сохранения режима висения пилот отклоняет ручку
от себя и создает такой циклический шаг лопастей, при котором
полная аэродинамическая сила НВ параллельна силе тяжести, и
эффективная центровка остается положительной, но момент от
разноса горизонтальных шарниров втулки — пикирующий (см.
рис. 3.9,6).
При предельной задней центровке для балансировки вертолета
с полетной массой 3350 кг требуется отклонение тарелки автомата
перекоса вперед примерно на Г40', и вертолет балансируется с
углом ф «7°.
При висении вблизи земли индуктивная скорость несущего вин-
та и кабрирующий момент планера уменьшаются. Следовательно,
78
вблизи земли вертолет с максимальным режимом работы двига-
телей будет балансироваться с меньшим углом тангажа и при бо-
лее значительном отклонении ручки управления на себя, чем вне
зоны влияния эффекта воздушной подушки.
Изменение продольной балансировки вертолета под воздейст-
вием ветра при неотклоненной тарелке автомата перекоса в пер-
Рис. 3.9. Продольная балансировка вертолета:
а — с передней центровкой; б — с задней цент-
ровкой
79
вом приближении может быть пояснено с помощью схемы, при-
веденной на рис. 3.10. Если вертолет с предельной передней цент-
ровкой и с полетной массой 3350... 3550 кг балансируется на ви-
сении в штиль отклонением тарелки автомата перекоса назад на
1°40'... 3°, то при ветре спереди, чтобы исключить смещение вер-
толета назад и скомпенсировать кабрирующий момент, образо-
вавшийся при завале конуса вращения несущего винта по пото-
ку, отклонение тарелки автомата перекоса назад уменьшается. При
ветре спереди 5 м/с вертолет с предельной передней центровкой
и полетной массой 3470 кг балансируется на высоте 5... 10 м от-
клонением тарелки автомата перекоса назад лишь на 40'. При °
ветре слева на вертолет относительно поперечной оси действует
сумма кабрирующих моментов от боковой силы S0<zH0 и момента
от разноса‘горизонтальных шарниров . В этом слу-
чае вертолет балансируется при отклонении тарелки автомата пе-
рекоса назад на 2°20'. При ветре справа эти моменты становятся
пикирующими, поэтому отклонение тарелки автомата перекоса
назад увеличивается до 3°15'- Изменение величины балансировоч-
ного отклонения тарелки автомата перекоса оказывает влияние
на величину балансировочного угла тангажа. Существенное влия-
ние на величину угла тангажа оказывает также изменение йомен-
тов планера и взаимосвязь продольных и боковых моментов.
Боковая балансировка вертолета Ми-2 на режиме висения осу-
ществляется с правым креном-[ = 2... 3° (см. рис. 2.8). Поперечный
w
Рис. 3.10. Схема действия на верто-
лет продольной и боковой сил несу-
щего винта в зависимости от направ-
1 ления ветра
Рис. 3.11. Балансировоч-
ная кривая вертолета в
зависимости от скорости
полета
80
момент рулевого винта и угол крена вертолета изменяются при
изменении тяги рулевого винта. Чем больше тяга рулевого винта,
тем больше потребное отклонение ручки управления вправо.
Значительное влияние на балансировочное положение ручки
управления и педалей оказывают скорость и направление ветра.
Увеличение скорости встречного ветра вызывает скос индуктив-
ного потока от несущего винта в область рулевого винта. При ско-
рости ветра до 5 м/с эффективность рулевого винта несколько
ухудшается, и его потребный шаг увеличивается. Перемещение
вперед правой педали увеличивается, если увеличивается режим
работы двигателей (с целью создания большей аэродинамической
силы).
Отклонение конуса вращения несущего винта в сторону насту-
пающих на поток лопастей (см. рис. 1.11) вызывает необходимость
перемещения ручки управления вправо. При передних центровках
это увеличивает потребную тягу и углы установки лопастей ру-
левого винта (см. рис. 2.8).
Однако чем больше скорость встречного ветра, тем больше се-
кундная масса воздуха, взаимодействующего с рулевым винтом
при его плоском обтекании. Как следствие скорости ветра более
5 м/с и средним центровкам вертолета соответствует меньшее по-
требное отклонение вперед правой педали.
Увеличение скорости встречного ветра (рис. 3.11) требует для
сохранения места висения отклонения ручки управления вперед,
и пикирующий момент несущего винта увеличивается. Одновре-
менно вследствие увеличения скоса индуктивного потока от несу-
щего винта на стабилизатор и увеличения давления на хвостовую
часть фюзеляжа растет кабрирующий момент планера. На воз-
душной скорости до 20 ...35 км/ч (при скорости ветра примерно
6...9 м/с) прирост кабрирующего момента планера опережает
увеличение пикирующего момента несущего винта, поэтому балан-
сировочный угол тангажа увеличивается.
При обтекании вертолета ветром слева полет происходит с ле-
вым скольжением.
В полете со скольжением на планере вертолета образуются
дополнительные моменты крена и рыскания. При малых углах
скольжения влево планер вертолета стремится развернуться вле-
во и накрениться вправо.
При больших углах скольжения вправо на истинной скорости
J 5... 10 км/ч появляется режим путевой неустойчивости, а на ско-
г рости 35...40 км/ч — режим поперечной неустойчивости, поэтому
^меняется балансировочное положение ручки управления и педали,
t Причем потребный шаг рулевого винта существенно изменяется
I в зависимости от скорости и направления ветра. Влияние воз-
£-* душной подушки на тягу рулевого винта не выявлено.
При ветре справа взаимодействие индуктивного потока от ру-
блевого винта с ветром условно можно рассматривать как нало-
Жение индуктивного потока от винта на ветровой поток, что при-
8® Заказ 4195 / 81
1
водит к образованию на некотором удалении от винта условной
воздушной поверхности с суммарной воздушной скоростью, рав-
ной нулю. Индуктивный поток, израсходовавший, свою энергию
на преодоление противодавления от ветра и трения, вновь подса-
сывается рулевым винтом, и вокруг винта на концевом участке
образуется циркуляция потока. В центральной части' ометаемой
поверхности, где индуктивные скорости малы, ветровой поток про-
текает сквозь винт, создавая дополнительное вихреобразование
и корневые потери. Тяга рулевого винта уменьшается, и для ее
поддержания потребный шаг увеличивается. При скорости ветра
5 м/с увеличение балансировочного шага рулевого винта по срав-
нению с ветром спереди составляет более 2°. •
При ветре слева потребный шаг рулевого винта также увели-
чивается из-за уменьшения углов атаки сечений рулевого винта
при обтекании его осевым потоком. Если скорость ветра слева
5 м/с. то балансировочный шаг рулевого винта по сравнению с
шагом при ветре спереди увеличивается примерно на 5°.
Исследования показывают, что на некоторых режимах работы
несущего и рулевого винтов наибольшее падение тяги происходит,
если рулевой винт попадает в свободные вихревые жгуты от ло-
пастей несущего винта. Как правило, наибольшая вредная интер-
ференция рулевого винта с вихревыми жгутами несущего винта
происходит при угле между вектором скорости ветра и продоль-
ной осью вертолета 45.„90°.
При попутном ветре на висении вблизи земли вокруг рулевого,
винта образуется циркуляция воздушного потока в направлении
вращения винта. Это уменьшает скорость обтекания передних
кромок лопастей, эффективность рулевого винта падает, а потреб-
ное отклонение вперед правой педали увеличивается.
Попутный ветер создает завал конуса вращения несущего вин-
та относительно вертолета вперед и вправо (см. рис. 3.10), поэто-
му, чтобы исключить кренение и смещение вертолета, требуется
отклонять тарелку автомата перекоса влево и на себя.
Балансировочное положение командных рычагов существенно
изменяется при изменении условий висения, следовательно, судить
о центровке вертолета по их положению трудно.
ОСОБЕННОСТИ ПИЛОТИРОВАНИЯ ВЕРТОЛЕТОМ
НА РЕЖИМЕ ВИСЕНИЯ
Характер отклонения рычагов управления зависит не только от
закона изменения внешних возмущений, но и от характеристик
устойчивости вертолета.
Если на сбалансированный вертолет подействует порыв ветра,
то конус вращения Несущего винта отклонится по потоку (см.
рис. 2.3). Под действием пропульсивной силы несущего винта
и силы сопротивления планера /?Пл вертолет начнет смещаться на-
зад. Одновременно он будет изменять угол тангажа.
82
Чувствительность вертолета к внешним возмущениям на висе-
нии в продольном и поперечном каналах характеризует реакцию
вертолета по углу тангажа и углу крена на изменение скорости
ветра.
Отсутствие устойчивости вертолета на режиме висения требует
от пилота непрерывных вмешательств в управление для париро-
вания внешних возмущений. Как правило, время невмешательства
в управление не превышает 3 с. В зоне воздушной подушки умень-
шение высоты висения требует более частых вмешательств в уп-
равление из-за влияния земли.
У вертолета Ми-2 по сравнению с другими вертолетами, эксп-
луатирующимися в Аэрофлоте, на режиме висения самая высокая
относительная эффективность путевого и продольного управления,
а относительная эффективность поперечного управления меньше
лишь, чем у вертолета Ми-4. Чем больше полетная масса вертолета
и разнос грузов по осям, тем меньше относительная эффектив-
ность. При развороте вправо она меньше, чем при развороте вле-
во. Однако чувствительность путевого управления у вертолета
Ми-2 больше, чем у других вертолетов гражданской авиации. Чув-
ствительность продольного и поперечного управлений вертолета
Ми-2 на висении примерно соответствует их чувствительности у
вертолета Ми-8.
На режиме висения наименьший запас продольного управле-
ния до заднего упора, поперечного — до правого упора, а путево-
го— до упора вперед правой педали. Минимальный запас про-
дольного управления соответствует зависанию с режима поступа-
тельного полета с предельной передней центровкой при попутном
ветре 5 м/с. Для увеличения запасов продольного управления ви-
сение, перемещение, подлет, а также взлет и посадку с предель-
ной передней центровкой разрешается производить при ветре сза-
ди до 3 м/с. Наименьшие запасы поперечного управления — на
режиме висения с предельной поперечной центровкой. Минималь-
ный запас управления до правого упора соответствует предельно
левому и предельно переднему положению центра тяжести, а так-
же ветру справа. Минимальный запас путевого управления также
получается при висении с ветром сбоку 6... 10 м/с, но при пре-
дельной задней центровке. Уменьшение частоты вращения винта,
увеличение полетной массы и барометрической высоты уменьшают
запасы путевого управления.
ОСОБЕННОСТИ МАНЕВРИРОВАНИЯ С РЕЖИМА ВИСЕНИЯ
В ГОРИЗОНТАЛЬНОЙ ПЛОСКОСТИ
Анализ балансировочных кривых (см. рис. 3.11) показывает,
что отклонение ручки управления вперед увеличивается тем зна-
чительнее, чем больше требуемая воздушная скорость подлета
вперед. Управление при этом характеризуется взаимосвязями и
асимметрией.
6* 83
Первоначально увеличение воздушной скорости требует боль-
шего отклонения вперед правой педали и увеличивает потребное
отклонение ручки управления вправо. Чем больше скорость по-
лета, тем меньше потребное отклонение вперед правой педали,
так как эффективность рулевого винта увеличивается. До скоро-
сти 20... 35 км/ч ручка управления перемещается вправо, а на
больших установившихся воздушных скоростях полета распола-
гается ближе к нейтральному положению.
Как правило, подлеты выполняются в зоне влияния эффекта
воздушной подушки. Уменьшение вертикальной составляющей аэ-
- родинамической силы при отклонении ручки управления вперед и
•уменьшение влияния эффекта воздушной подушки за счет вихре-
,образований при взаимодействии индуктивного потока с потоком
"jQT перемещения требуют увеличения мощности двигателей.
Чем больше общий шаг несущего винта, тем больше потребный
'ШДГ рулевого* винта и значительнее отклонение вправо педали и
ручки управления. При скоростях полета, характеризующихся не-
г значительным влиянием эффекта воздушной подушки, изменение
скорости сопровождается двойными движениями рычагом «Шаг—
газ». Для получения большей пропульсивной силы рычаг «Шаг—
поднимается, и ручка управления отклоняется вперед. По
зДФ&гижении требуемой скорости потребный шаг несущего ви^та
уменьшается, так как за счет увеличившегося секундного расхода
воздуха через винт его тяга увеличивается. Изменение положения
рычага «Шаг—газ» в свою очередь требует перемещения ручки
управления и педалей в сторону нейтрали.
При смещении вертолета в штиль назад следует учесть, что
при движении рулевого винта впереди центра масс, вертолет ста-
новится статически неустойчив по скольжению (рис. 3.12), и пи-
лот должен быть предельно внимателен. Перед началом движе-
ния необходимо убедиться, что сзади нет препятствий, и немед-
ленно парировать внешние возмущения. Запас высоты должен
Рис. 3.12. Схема действия путевых
дестабилизирующих моментов плане-
ра и рулевого винта
быть несколько больше минимально допустимого, так как в этом
случае вертолет имеет тенденцию не только к потере высоты, но
и к опусканию хвостовой балки. Отклонять командные рычаги
управления необходимо плавно, своевременно и координированно.
Для парирования снижения вертолета за счет уменьшения вер-
тикальной составляющей аэродинамической силы несущего винта
и роста отбора мощности на привод рулевого винта следует свое-
84
временно увеличивать мощность двигателей. Необходимо пом-
нить, что чем больше задняя центровка, тем сложнее маневриро-
вание вблизи земли, так как при перемещении хвостовая балка
опускается еще ниже. Схема же шасси вертолета обеспечивает
посадочный угол <р<9°.
При перемещении вертолета в штиль влево параллельно ли-
нии намеченных ориентиров с путевой скоростью 5... 10 км/ч для
выдерживания направления требуется отклонение вперед правой
педали, и тем большее, чем больше скорость воздушного потока
слева. Обычно уменьшение аэродинамической силы несущего вин-
та из-за отбора мощности на привод рулевого винта больше, чем
прирост ее вертикальной составляющей за счет уменьшения пра-
вого крена (см. рис. 2.7). В результате при перемещении влево
вертолет будет стремиться незначительно уменьшить высоту. Тен-
денция вертолета к потере высоты увеличивается при перемеще-
ниях в зоне влияния эффекта воздушной подушки.
При перемещении вертолета в штиль вправо со скоростью до
5 км/ч увеличение правого крена и уменьшение вертикальной со-
ставляющей тяги несущего винта незначительны. Для выдержи-
вания вертолета параллельно линии намеченных ориентиров тре-
буется уменьшить отклонение правой педали вперед. В этом слу-
чае за счет уменьшения отбора мощности на привод рулевого
винта потребная мощность двигателей незначительно уменьшается.
При ветре и увеличении скорости перемещения вертолета откло-
нение ручки управления вправо и крен увеличиваются (до 5°), а
для сохранения курса перемещается вперед правая педаль. Для
сохранения постоянной высоты потребная мощность двигателей
увеличивается.
Перемещение в стороны с попутным ветром не рекомендуется,
так как у вертолета проявляется путевая неустойчивость.
Развороты вертолета в штиль особой сложности не представ-
ляют. При левом развороте уменьшение углов установки рулевого
винта вызывает увеличение частоты вращения несущего винта, и
в обычных условиях вертолет стремится увеличить высоту. На пра-
вом развороте явления обратные, поэтому не рекомендуется вы-
полнять развороты вправо при висении вертолета с двигателями,
работающими на взлетном режиме или режиме, близком к нему.
Рекомендуется для обеспечения достаточного запаса путевого уп-
равления выдерживать на правом развороте частоту вращения не-
сущего винта не менее 79% по указателю.
Демпфирование разворота вертолета вправо при таком же из-
менении углов установки рулевого винта, как для разворота вле-
во, больше, чем при левом развороте. Поэтому ввод в левый раз-
ворот следует выполнять плавно и своевременно парировать уве-
личение угловой скорости вращения.
Учитывая инертность вертолета, вывод из разворота начинать
своевременно. При энергичном отклонении вперед правой педали
для вывода из левого разворота или перед вводом в правый раз-
85
ворот происходит чрезмерная нагрузка рулевого винта и транс-
миссии. Для ограничения нагрузки педали должны отклоняться
плавно.
Выполнение разворотов при ветре усложняется, так как необ-
ходимо учитывать возможность увеличения температуры газов
перед турбиной выше допустимой и изменение углов тангажа и
крена под действием моментов несущего винта (см. рис. 3.10), ру-
левого винта и планера.
При изменении курса от заданного до 90° (разворот вправо)
вертолет стремится увеличить угол тангажа и крен вправо. При
отвороте на угол 90... 180° тенденция к увеличению крена нара-
стает, а угол тангажа уменьшается. В диапазоне курсовых углов
180 ...270° тангаж продолжает уменьшаться, и вертолет стремится
устранить правый крен. При довороте до 360° вертолет увеличи-
вает угол тангажа, для исключения смещения влево требуется
большее отклонение ручки управления вправо.
В зависимости от угловой скорости вращения и скорости ветра
амплитуда колебаний по крену и тангажу и их сдвиг по фазе
изменяются. Кроме того, изменяется угловая скорость разворота.
При углах отворота более 90° угловая скорость увеличивается,
особенно при обдуве вертолета ветром сзади. Если пилот сохраня-
ет постоянную угловую скорость, изменяя положение педалей, то
для сохранения места разворота он должен одновременно изме-
нять и угол крена, а высоту выдерживать, меняя положение ры-
чага «Шаг—газ».
Кроме того, чтобы исключить смещение вертолета, ручку уп-
равления необходимо держать отклоненной против ветра.
ОГРАНИЧЕНИЯ НА ВИСЕНИИ И ПРИ МАНЕВРИРОВАНИИ
У ЗЕМЛИ
Для упрощения пилотирования висение рекомендуется выпол-
нять против ветра. Максимально допустимая скорость ветра спе-
реди 18 м/с над ровной площадкой и 10 м/с над лесом.
Требуемые запасы управления и возможность маневрирования
обеспечиваются при боковом ветре не более 10 м/с и попутном —
не более 5 м/с.
Запрещается выполнять развороты на 360° при скорости ветра
более 5 м/с.
Перемещения у земли назад и вбок разрешается выполнять
лишь в тех случаях, когда суммарная воздушная скорость верто-
лета (Уп + Ю не больше максимально допустимой скорости вет-
ра. Путевая скорость перемещения назад и в стороны не должна
превышать 10 км/ч.
Путевая скорость подлета ограничена 20 км/ч. При скорости
ветра до 5 м/с подлет можно выполнять в любом направлении с
разворотом на 360°. При скорости ветра 5...7 м/с подлет следует
производить против ветра с отворотом на угол не более 90°. При
86
скорости ветра более 7 м/с при выполнении разворотов полетная
масса вертолета должна обеспечивать запас мощности двигателей
и путевого управления на случай проявления вредной интерферен-
ции несущего и рулевого винтов. При скорости ветра 10 м/с и
более развороты на висении и при подлете не выполняются из-за
недостаточных запасов управления.
Максимально допустимая угловая ^скорость вращения 20°/с —
для исключения значительных напряжений в конструкции руле-
вого винта и балок. По этой же причине ограничен темп переме-
щения педалей для прекращения разворота. Время прекращения
вращения при перемещении педалей от упора до упора должно
быть не меньше 3 с.
Рекомендуемая угловая скорость вращения 5... 107с.
Минимально допустимая высота для маневрирования 2...3 м
над ровной поверхностью и 10 мм над препятствиями (чтобы избе-
жать касания колесами шасси о препятствие и опрокидывания).
Минимально допустимая истинная высота подлета и перемещения
над самолетами и вертолетами 30 м (в целях уменьшения воздей-
ствия на них индуктивного потока от несущего винта).
Рекомендуется развороты и перемещения назад выполнять на
высотах 3...5 м. Уменьшение высоты полета создает опасность
столкновения с землей или препятствием вследствие тенденции
вертолета к уменьшению высоты при маневрировании. При невоз-
можности выполнения зависаний и перемещений над препятствия-
ми на относительных высотах не менее 10 м расстояние от пре-
пятствий до вертолета должно быть не менее 30 м.
Маневрирования и висения вертолета на высотах от 5 до 150 м
без крайней необходимости следует избегать, так как вертолет
будет находиться в опасной зоне в случае отказа одного из дви-
гателей.
Рекомендуется для выхода из опасной зоны на высотах
5... 10 м выдерживать воздушную скорость более 20 км/ч, но не
более 70 км/ч и не выходить на режим повышенных вибраций.
Для обеспечения нормальной управляемости вертолета полеты
над сильно пересеченной местностью следует выполнять на истин-
ных высотах не менее 20 м и на скорости по прибору не менее
50 км/ч. При висении и подлете даже над плотными лесными мас-
сивами и кустарником эффект воздушной подушки не образуется,
а на высотах ниже 4 м даже проявляется вредный эффект сетки.
Для обеспечения безопасности при работах над лесом зависание
должно выполняться строго против ветра на высоте не менее 7 м
с полетной массой, рассчитанной без учета эффекта воздушной
подушки и уменьшенной на 100 кг при спуске — подъеме грузов
или на 200 кг при спуске — подъеме людей.
Для обеспечения достаточных запасов путевого управления
частота вращения несущего винта должна быть не менее 78%.
Такая частота вращения обеспечивает также достаточный момент
инерции лопастей при переходе на режим самовращения несуще-
87
го винта, приемлемые нагрузки в главном редукторе и отсутствие
неустойчивых колебаний валов трансмиссии, допустимый уровень
вибраций и достаточную эффективность управления.
Максимально допустимая частота вращения несущего винта —
84 %, по указателю. Максимальная частота вращения ограничена
по условиям прочности агрегатов двигателей и вертолета. Общая
наработка каждого двигателя на взлетном режиме не должна
превышать 6 мин, или 5% ресурса двигателя.
На переходных режимах полета минимально допустимая час-
тота вращения несущего винта 77%, а максимально допустимая
на время не более 30 с — 86 %.
3. ВЗЛЕТ ВЕРТОЛЕТА
ВИДЫ ВЗЛЕТА И ОСНОВНЫЕ ВЗЛЕТНЫЕ ХАРАКТЕРИСТИКИ
В зависимости от условий старта для вертолета Ми-2 возможен
один из следующих видов взлета: вертикальный, по-вертолетному
и с разбегом (по-самолетному).
Вертикальным называют взлет с вертикальным отрывом верто-
лета от земли и последующим вертикальным подъемом до задан-
ной высоты висения. В зависимости от высоты на режиме висения
говорят о взлете с использованием эффекта воздушной подушки
или без использования его.
Чаще всего вертикальный взлет является лишь частью взлета
по-вертолетному, когда переход ца заданный установившийся ре-
жим полета осуществляется разгоном вертолета с режима висения
до скорости не менее минимально допустимой для набора высоты
или горизонтального полета (рис. 3.13,а).
Если взлетная масса вертолета не позволяет выполнить разгон
на безопасной для взлета по-вертолетному высоте, а также в ря-
де других случаев может быть выполнен взлет с разбегом по по-
лосе (см. рис. 3.13,б).
Взлет с разбегом характеризуется путевой скоростью отрыва,
длиной разбега и взлетной дистанцией. Чем больше свободная
тяга вертолета и скорость встречного ветра и чем меньше полет-
ная масса вертолета, тем меньше путевая скорость отрыва. Чем
больше скорость отрыва и меньше ускорение на разбеге, тем
больше длина разбега.
Среднее ускорение увеличивается, а длина разбега уменьшает-
ся при уменьшении полетной массы и вредного сопротивления вер-
толета, при уменьшении коэффициента трения, при увеличении
пропульсивной силы несущего винта.
Чем меньше путевая скорость отрыва и больше ускорение вер-
толета на разгоне (больше запас мощности), чем больше скорость
встречного ветра (угол подъема), тем меньше взлетная дистан-
ция.
88
Т5
Рис. 3.13. Схема действия сил при взлете:
а — по-вертолетному; б — с разбегом
При переводе вертолета на разгон с минимально допустимой
высоты и подъеме на скорости по прибору 60 км/ч с использовани-
ем взлетного режима взлетная дистанция вертолета с полетной
массой 3550 кг в штиль при давлении 761 мм рт. ст. и темпера-
туре наружного воздуха —6... —9 °C составляет 50 ... 55 м. При раз-
гоне до скорости 80 км/ч по прибору с последующим установив-
шимся подъемом взлетная дистанция составляет 60 м.
Малое отличие в величине взлетных дистанций для диапазо-
на скоростей набора высоты 60... НО км/ч по прибору объясняется
тем, что на высоте 10 м еще продолжается увеличение скорости.
Дистанция же набора высоты 25 м в этих условиях с увеличени-
89
ем скорости набора высоты возрастает и составляет 115, 150,
160 м соответственно для скоростей 60, 90, НО км/ч по прибору.
На высокогорных площадках для обеспечения балансировки
вертолета и уменьшения просадки темп разгона уменьшается,
поэтому дистанция набора высоты 25 м увеличивается. Чем мень-
ше запас мощности, тем ниже предельная теоретическая высота
зависания, больше взлетная дистанция и дистанция набора вы-
соты 25 м (рис. 3.14). Дистанция набора высоты 25 м практиче-
ски не изменяется, если вместо разгона с предельной высоты за-
висания разгон выполняется с меньшей высоты, но с использова-
нием взлетного режима работы двигателей.
Рис. 3.14. Зависимость дистанции на-
бора высоты 25 м от предельной вы-
соты зависания
При предельной высоте зависания 0,5 м выполняется только
взлет с разбегом, а дистанция разгона для набора высоты 25 м
составляет 245 м. Увеличение скорости подъема на высоте 25 м
на каждые 10 км/ч по прибору увеличивает дистанцию на
25...30 м.
Применение взлета с разбегом позволяет увеличить, по срав-
нению со взлетом по-вертолетному, при использовании эффекта
воздушной подушки взлетную массу вертолета на 7...8 %, а мас-
су перевозимого груза — на 25 ... 30 %.
При полетах с массой, рассчитанной без использования эффек-
та воздушной подушки, взлетные характеристики вертолета наи-
лучшие, но грузоподъемность вертолета минимальная. Взлетная
масса вертолета меньше, чем рассчитанная на эффект воздушной
подушки для взлета по-вертолетному, примерно на 7 % и меньше,
чем рассчитанная на эффект воздушной подушки для взлета с
разбегом, на 14 % (см. рис. 3.5). Это уменьшает грузоподъемность
вертолета примерно в два раза.
Зная взлетные характеристики и конкретные условия старта,
командир вертолета выбирает способ взлета, исходя из установ-
ленных ограничений.
ОСНОВНЫЕ ОГРАНИЧЕНИЯ НА ВЗЛЕТЕ
Взлет вертолета с места стоянки разрешается, если он не ме-
шает взлетно-посадочным операциям других воздушных судов, ес-
90
ли не создаются пыльные или снежные вихри, если расстояние ме-
жду концами лопастей несущего винта и препятствиями или кон-
структивными элементами самолета не менее 50 м и если расстоя-
ние между осями места стоянки и летной полосой или между ин-
дивидуальными стоянками вертолетов Ми-2 не менее 44 м. Для
исключения взаимовлияния индуктивных потоков расстояние от
осей индивидуальных мест стоянок вертолетов Ми-2 до осей мест
стоянок вертолетов Ми-6, Ми-6А, Ми-ЮК должно быть не менее
100 м, до осей мест стоянок вертолетов Ми-8, Ми-4 — не менее
63 м. до осей мест стоянок вертолетов Ми-1 или Ка-26 — не менее
42 м.
Разрешается пролетать над препятствиями на высоте не менее
10 м, а над воздушными судами, стоящими на земле, — на вы-
соте не менее 30 м.
При невозможности взлета со стоянки производится руление
или буксировка вертолета на летную полосу.
Схемы летных полос и воздушных подходов изображены на
рис. 3.15.
Рис. 3.15. Схема летной полосы и ее воздушных
подходов для взлета:
а без использования эффекта воздушной подуш-
ки; б с использованием эффекта воздушной
подушки
9
Максимальный допустимый продольный уклон грунтовой взлет-
но-посадочной полосы постоянного вертодрома 0,03, а попереч-
ный — 0,02. При искусственном покрытии предельная величина
уклонов уменьшается соответственно до 0,025 и 0,015.
Для повышения безопасности взлетно-посадочных операций и
возможности удержания вертолета на тормозах при опробовании
управления максимально допустимый уклон рабочей площади
временных площадок вперед, назад и вбок не должен превышать
0,05. На таких площадках маневрирование на земле запрещается.
Взлет с заснеженных, пыльных площадок или в горах выпол-
няется только против ветра. Изменение допустимых составляющих
бокового ветра для остальных случаев в зависимости от углов на-
правления ветра к оси взлетно-посадочной полосы вертодромов по-
казано на рис. 3.16. Максимально допустимая масса вертолета для
взлета определяется по номограммам (рис. 3.17).
Рис. 3.16. Зависимость макси-
мально допустимой скорости
ветра от направления ветра к
оси ВПП
Рис. 3.18. Зависимость по-
летной массы вертолета от
частоты вращения турбо-
компрессоров
Рис. 3.17. Зависимость максимальной полетной
массы для взлета по-вертолетному с использо-
ванием эффекта воздушной подушки:
а — от температуры наружного воздуха и вы-
соты над уровнем моря; б — от скорости вет-
ра спереди; в — от упругости водяного пара
92
При взлетах с разбегом разрешается' увеличивать полетную
массу вертолета, рассчитанную для висения на высоте 2 м не бо-
лее чем на 150 кг. ‘
При полетах над водным пространством и на ледовую авиа-
разведку максимально допустимая взлетная масса рассчитывается
на случай отказа одного двигателя.
У различных вертолетов тяговые характеристики могут отли-
чаться от указанных на номограммах, поэтому рассчитанная для
взлета масса вертолета должна быть проверена на контрольном
висении. Однако независимо от условий висения взлетная масса
вертолета ограничивается в соответствии с нормами прочности и
безопасности 3550 кг. На рис. 3.18 показана зависимость полетной
массы вертолета от частоты вращения турбокомпрессоров.
ОСОБЕННОСТИ ВЫПОЛНЕНИЯ ВЗЛЕТА ПО-ВЕРТОЛЕТНОМУ
Перед отделением вертолета от земли рукоятка коррекции ус-
танавливается в крайнее правое положение. После получения час-
тоты вращения несущего винта 73 ...80 %, чтобы исключить пе-
ретяжеление несущего винта и уменьшить разбалансировку верто-
лета, увеличение общего шага следует выполнять за время не ме-
нее 6 ... 8 с.
При отрыве вертолет стремится переместиться вперед, накре-
ниться и развернуться влево. Балансировка вертолета на верти-
кальной траектории осуществляется отклонением командных ры-
чагов. Для облегчения балансировки вертолета рекомендуется пе-
ред отрывом установить триммеры по указателю на 0,5... 1,0 де-
ление назад и вправо.
До выхода из зоны влияния воздушной подушки рекомендует-
ся выполнить контрольное висение на высоте 2...3 м с целью сня-
тия нагрузки с командных рычагов, проверки работы двигателей
систем и агрегатов, проверки центровки, частоты вращения несу-
щего винта и определения запаса по частоте вращения турбоком-
прессоров. При наличии запаса по частоте вращения турбоком-
прессоров не менее 3% и отсутствии ограничения по максимальной
температуре газов дальнейший подъем вертолета до требуемой
высоты осуществляется с вертикальной скоростью не более 2 м/с.
Частота вращения несущего винта при подъеме должна быть не
менее 77 % (76 % в течение не более 15 с). После набора задан-
ной высоты устанавливается частота вращения винта 78%. В слу-
чае меньшей частоты вращения следует плавно уменьшить общий
шаг винта. В зависимости от атмосферных условий и регулировок
управления частота вращения несущего винта 78% на взлетном
режиме работы двигателей устанавливается при общем шаге
9 ...9,5° (см. рис. 1.3).
Разгон вертолета при взлете без использования влияния воз-
душной подушки разрешается выполнять, если вертолет устойчи-
во висит на высоте не менее 10... 15 м над препятствиями или
93
площадкой в направлении взлета. Если препятствия вокруг пло-
щадки не позволяют выполнить взлет против ветра или если ветер
изменяет направление, то режим работы двигателей должен быть
меньше взлетного. Разрешается использование взлетного режима
работы двигателей при ветре справа до 5 м/с, а слева и сзади —
до 3 м/с.
Оптимальным направление для взлета является такое, когда
траектория проходит через препятствия, наиболее удаленные от
места взлета, так как это обеспечивает требуемую скороподъем-
ность на большем удалении от препятствий. Если же при этом
препятствия имеют наименьшую высоту, а траектория будет про-
ложена против ветра, то при полете над препятствиями будет
наибольший запас высоты.
Для разгона вертолета необходимо плавно отклонить ручку
управления от себя и создать пропульсивную силу Хдн . В резуль-
тате отклонения аэродинамической силы 7?н вперед (см.
рис. 3.13, а) ее вертикальная составляющая Уйн уменьшится, и
вертолет будет стремиться уменьшить высоту. При наличии на
висении запаса мощности следует предотвратить снижение вер-
толета, увеличивая общий шаг несущего винта. При отсутствии
запаса мощности на контрольном висении просадка вертолета на
разгоне будет тем меньше, чем меньше изменение угла тангажа и*
плавнее разгон вертолета до заданной скорости. При плавном и
медленном разгоне вертолет практически не снижается даже без
увеличения мощности. В процессе увеличения путевой и воздушной
скорости тяга несущего винта в косом потоке Rn увеличивается,
увеличивается на величину ДУа ее составляющая — подъемная
сила, и вертолет разгоняется с плавным набором высоты.
Если при выполнении контрольного висения на вертолете есть
запас мощности, то этот запас используется для исключения про-
садки вертолета в начале разгона. Одновременно с подъемом
командного рычага общего шага необходимо парировать ручной
управления и педалями чрезмерное уменьшение угла тангажа, кре-
нение и разворот вертолета влево. Не следует стремиться сохра-
нить прежний угол тангажа, так как уменьшится прирост скс-по-
сти, и вертолет перейдет на нерасчетный режим подъема.
Увеличение амплитуды взмахов лопастей в косом потоке вы-
зывает со скорости 20 ...40 км/ч стремление вертолета к увеличе-
нию угла тангажа и правого крена. Чем больше увеличение про-
пульсивной силы и угловой скорости тангажа на пикировании, тем
значительнее кренение вертолета вправо под действием гироско-
пического момента несущего винта.
Увеличение тяги рулевого винта в плоском потоке вызывает
у вертолета стремление развернуться вправо, и для выполнения
разгона без скольжения необходимо дополнительно отклонить
командные рычаги. • ' !
94 ' ;
Уменьшение шага рулевого винта вызывает уменьшение по-
терь мощности на его вращении и, следовательно, подвод мощно-
сти к несущему винту увеличивается. Для сохранения постоянной
частоты вращения несущего винта требуется увеличение его об-
щего шага. Однако увеличение общего шага должно соответство-
вать получению требуемой траектории полета и исключать пере-
тяжеление несущего винта. Чем плавнее изменение общего шага
и мощности двигателей, тем меньше разбалансировка вертолета.
На заданной восходящей траектории постоянный угол подъема
обеспечивается, если УДн = (?Уа(см. рис. 3.13, а). Разгон на восхо-
дящей прямолинейной траектории до скорости 60 ...70 км/ч по
прибору ведется за счет использования мощности двигателей
вплоть до взлетной. Чтобы обеспечить требуемый темп разгона,
на вертолете с предельно задней центровкой отклонение ручки
управления вперед увеличивается. По мере нарастания усилий на
командных рычагах нагрузка с них снимается триммерами. Чем
больше задняя центровка вертолета и внешние возмущения, тем
значительнее неустойчивость вертолета и необходимо более частое
вмешательство в управление.
По достижении требуемой скорости устанавливается пропуль-
сивная сила ] ХЯп1 + Gха , и вертолет переводится в установив-
шийся набор высоты.
Для взлета по-вертолетному с использованием влияния воздуш-
ной подушки необходимо после контрольного висения на высоте
не менее 2...3 м снизиться до высоты 0,5... 1,0 м и зависнуть.
(Меньшие значения соответствуют барометрическим высотам до
2000 м, а большие — высоте более 2000 м). Уменьшение высоты
висения перед разгоном позволяет полнее использовать эффект
воздушной подушки и увеличивает запас мощности. Если запас
мощности есть на высоте 2.. 3 м, то разгон разрешается выпол-
нять с этой высоты.
Режим разгона до скорости 5... 10 км/ч выполняется плавным
незначительным отклонением ручки, а для исключения просадки
вертолета одновременно плавно увеличивается мощность двига-
телей. Затем ручка управления отклоняется более энергично, а
мощность увеличивается вплоть до взлетной. Чем плавнее подни-
мается рычаг «Шаг—газ», тем меньше разбалансировка верто-
лета. Стремление к просадке и уменьшению угла тангажа при раз-
гоне в зоне влияния воздушной подушки больше, чем вне ее. До
скорости 20...30 км/ч разгон следует вести без набора высоты,
а дальнейшее увеличение скорости до 60 ...70 км/ч по прибору
/следует производить на взлетном режиме работы двигателей с од-
: повременным увеличением высоты. Этот режим выдерживать до
момента преодоления препятствий. При открытых воздушных под-
ходах можно увеличивать скорость до 80... 110 км/ч по прибору
у и даже до большего значения по условиям полета на аэродромах.
95
ОСОБЕННОСТИ ВЫПОЛНЕНИЯ ВЗЛЕТА С РАЗБЕГОМ
После контрольного висения следует приземлить вертолет и
уменьшить общий шаг, оставив рукоятку коррекции в крайнем
правом положении. Плавно отклоняя ручку управления от себя
примерно на 2/3 полного диапазона хода и увеличивая общий
шаг, произвести разбег по полосе. Чем больше увеличение обще-
го шага несущего винта, тем больше пропульсивная сила и, если
двигатели будут работать на взлетном режиме, то скорость от-
рыва будет достигнута при меньшей длине разбега. Однако не сле-
дует для уменьшения длины разбега чрезмерно отклонять ручку
управления от себя, так как отрыв может первоначально про-’
изойти у колес основной опоры вертолета. Для уменьшения на-
грузки на переднюю опору удерживать вертолет на разбеге в
трехточечном положении вплоть до отделения от земли.
Направление разбега выдерживать плавным отклонением пе-
далей, потому что при энергичном отклонении педалей вертолет
рыщет по курсу, и создаются большие нагрузки на хвостовую
балку.
Если условия для образования пыльного или снежного вихря
отсутствуют, то разрешается выполнение взлета с коротким раз-
бегом. Для уменьшения длины разбега отрыв производился на
скорости 20 ...30 км/ч. Если высота контрольного висения более
1 м, скорость отрыва может быть меньше 20 км/ч.
Если взлет выполняется с боковым ветром, то необходимо учи-
тывать, что вертолет стремится накрениться и сместиться по вет-
ру. В момент отрыва вертолета от земли парировать снос откло-
нением ручки управления против ветра. Особенно усложняется
взлет при ветре справа.
После отделения вертолета от земли довести скорость до
60...70 км/ч по прибору с одновременным плавным набором вы-
соты на взлетном режиме работы двигателей. После преодоления
препятствий установить требуемую скорость полета по прибору,
но не менее 60 км/ч.
Глава 4. УСТАНОВИВШИЙСЯ ПОЛЕТ
С ПОСТУПАТЕЛЬНОЙ СКОРОСТЬЮ.
ВИРАЖ. ПОСАДКА
1. ГОРИЗОНТАЛЬНЫЙ ПОЛЕТ
СХЕМА СИЛ, ДЕЙСТВУЮЩИХ НА ВЕРТОЛЕТ
В ГОРИЗОНТАЛЬНОМ ПОЛЕТЕ
Пользуясь схемой сил (рис. 4.1), условия выполнения горизон-
тального полета можно записать следующим образом:
Ха =Хйг)л — условие постоянства скорости;
Y-. — G— условие постоянства высоты.
^тттттттттттттттттттттттттттттттттттттттттттт?
, Рис. 4.1. Схема сил, действующих на вертолет в
горизонтальном полете
Чтобы добиться постоянства сил, действующих на вертолет
при постоянных параметрах, характеризующих состояние атмо-
сферы, необходимо в первую очередь выдержать пространствен-
ное положение вертолета, при котором он балансируется на дан-
ном режиме полета (постоянство углов тангажа, крена и курса).
ПОТРЕБНАЯ Й РАСПОЛАГАЕМАЯ МОЩНОСТИ
51 ГОРИЗОНТАЛЬНОГО ПОЛЕТА
Мощность, необходимая для выполнения горизонтального уста-
новившегося полета в данных условиях, называется потребной
Мощностью горизонтального полета.
£-Заказ 4195 I 97
В-
Мощность в горизонтальном полете необходима:
— для создания подъемной силы Уая, идущей на уравновеши-
вание силы тяжести (индуктивная мощность);
— для преодоления профильного сопротивления лопастей несу-
щего винта (профильная мощность);
— для создания пропульсивной силы Хан, идущей на уравно-
вешивание силы сопротивления вертолета (мощность движения),
на вращение рулевого винта, на привод агрегатов различных
систем вертолета.
Кроме того, необходимо учитывать, что часть мощности теряет-
ся из-за трения в трансмиссии.
Составляющие потребной мощности в различных условиях
имеют различную величину.
Индуктивная мощность с увеличением приборной (индикатор-
ной) скорости полета уменьшается (хотя на всех скоростях в го-
ризонтальном полете подъемная сила нужна одинаковая, на боль-
ших скоростях для создания этой силы нужна меньшая мощ-
ность, так как увеличивается секундная масса воздуха, проходя-
щая через несущий винт, и индуктивная скорость отбрасывания
требуется меньшая).
С увеличением полетной массы индуктивная мощность увели-
чивается, так как при большей полетной массе нужна и большая
подъемная сила. С увеличением барометрической высоты полета
и температуры наружного воздуха индуктивная мощность увели-
чивается, потому что при уменьшении плотности воздуха индук-
тивная скорость отбрасывания должна быть больше.
Профильная мощность с увеличением приборной скорости уве-
личивается (растет сопротивление лопастей). С увеличением по-
летной массы профильная мощность также увеличивается (для со-
здания большей подъемной силы требуются большие углы уста-
новки лопастей). С увеличением барометрической высоты и тем-
пературы наружного воздуха профильная мощность меняется мало
(хотя плотность воздуха уменьшается, однако на большей высо-
те и при большей температуре воздуха нужны большие углы уста-
новки лопастей).
Мощность движения с ростом приборной скорости увеличивает-
ся, так как растет сопротивление вертолета. От полетной массы,
барометрической высоты и температуры наружного воздуха мощ-
ность движения зависит мало, так как угол атаки и коэффициент
сопротивления фюзеляжа в различных условиях при одной и той
же приборной скорости и центровке практически одинаковы, ско-
ростной напор при одинаковых приборных скоростях также оди-
наков, следовательно, практически одинаково и сопротивление вер-
толета.
Мощность, потребляемая рулевым винтом, с увеличением при-
борной скорости уменьшается, так как улучшаются условия рабо-
ты рулевого винта в поступательном полете. С увеличением полет-
98
ной массы, барометрической высоты и температуры наружного воз-
духа мощность, потребляемая рулевым винтом, увеличивается
(общий шаг несущего винта больше, реактивный момент больше,
тяга рулевого винта должна быть больше).
Мощность, потребляемую агрегатами различных систем верто-
лета, можно считать примерно постоянной. Потери мощности из-за
трения в трансмиссии также можно считать постоянными.
Зависимость слагаемых потребной мощности и суммарной по-
требной мощности от приборной скорости показана на рис. 4.2.
Рис. 4.2. Зависимость
составляющих потребной
для горизонтального по-
лета мощности и сум-
марной потребной мощ-
ное™ от приборной ско-
рости
Рис. 4.3. Общий вид кривых потреб-
ной и располагаемой мощностей
С увеличением приборной скорости потребная для горизонталь-
ного полета мощность сначала уменьшается, а затем растет. Ско-
рость, для полета на которой нужна минимальная мощность, на-
зывается экономической. С увеличением полетной массы, баромет-
7* 99
пиарской высоты и температуры наружного воздуха потребная для
ринески же приборной скоростью мощность увеличивается,
полета сть пОТребной мощности от воздушной скорости вы-
ЯВ так же, как и зависимость ее от приборной скорости. По
ГЛпеИувеличения барометрической высоты кривая потребной мощ-
ности смещается вверх и вправо (уменьшается плотность воздуха,
следовательно при той же воздушной скорости уменьшаются со-
противление вертолета и мощность движения).
Г Максимальная мощность, развиваемая двигателями, при ра-
боте на расчетном режиме называется располагаемой мощностью.
В эксплуатационном диапазоне скоростей мощность, развиваемую
двигателями ГТД-350, можно считать не зависящей от скорости.
С ростом высоты полета до 750 м в стандартных атмосферных ус-
ловиях мощность, развиваемая двигателями ГТД-350, несколько
увеличивается, при -Дальнейшем увеличении высоты — уменьшает-
ся. С увеличением Температуры наружного воздуха располагае-
мая мощность уменьшается.
Мощность, развиваемую двигателями в данный момент, будем
называть подводимой мощностью. Пилот может менять подводи-
мую мощность в пределах располагаемой с помощью рычага
«Шаг—газ». В установившемся горизонтальном полете подводи-
мая мощность должна равняться потребной. #
На рис. 4.3 показан общий вид кривых потребной и распола-
гаемой мощностей. Вертолет выполняет горизонтальный полет на
скорости Vt, причем имеется запас мощности ДУ, который мож-
но использовать для набора высоты или разгона вертолета.
МИНИМАЛЬНАЯ И МАКСИМАЛЬНАЯ СКОРОСТИ
ГОРИЗОНТАЛЬНОГО ПОЛЕТА
Теоретически минимальная и максимальная скорости горизон-
тального полета ограничены мощностью силовой установки (на
скоростях, где NnoTp>ypacn, горизонтальный полет невозможен).
При изменении полетной массы, барометрической высоты по-
лета, температуры наружного воздуха, сопротивления вертолета
соотношение потребной и располагаемой мощностей изменяется,
изменяются летные характеристики вертолета.
Ниже статического потолка, в благоприятных для полета усло-
виях, соотношение потребной и располагаемой мощностей выгля-
дит так, как показано на рис. 4.4а. В этом случае Vmin =0, т. е.
возможно зависание.
Выше статического потолка, т. е. в неблагоприятных для по-
лета условиях (большая полетная масса, барометрическая высота,
температура наружного воздуха), соотношение потребной и распо-
лагаемой мощностей выглядит так, как показано на рис. 4.4, в.
В этом случае 1/гп!п>0. При увеличении полетной массы, высоты
полета и температуры наружного воздуха Vmin увеличивается, а
100
Утах уменьшается, так как уменьшается диапазон скоростей, в
котором возможен горизонтальный полет. На скоростях, больших,
чем Vmax и меньших, чем Vmin, установившийся полет возможен
только со снижением.
Рис. 4.4. Соотношение потребной и распо-
лагаемой мощностей в различных услови-
ях полета:
а — ниже статического потолка; б — на тео-
ретическом статическом потолке; в — выше
статического потолка; г — на теоретическом
динамическом потолке
Максимальная высота, на которой возможен установившийся
горизонтальный полет, называется динамическим потолком. Со-
отношение потребной и располагаемой мощностей на теоретичес-
ком динамическом потолке показано на рис. 4.4, г. Полет возмо-
жен на единственной экономической скорости, которая является
одновременно и минимальной, и максимальной. Динамический
потолок непостоянен, с увеличением полетной массы, температу-
ры наружного воздуха и коэффициента сопротивления вертолета
потолок уменьшается. /
101
ОГРАНИЧЕНИЯ ПО ВЫСОТЕ И СКОРОСТИ
В ГОРИЗОНТАЛЬНОМ ПОЛЕТЕ
Максимально допустимая высота полета — 4000 м (ограниче-
ния установлены из-за сложности пилотирования в связи с малым
запасом мощности, малыми диапазоном скоростей и запасами уп-
равления, плохой устойчивостью и управляемостью).
На практике минимально допустимая скорость ограничивается
не только мощностью двигателей, но также:
— по соображениям безопасности при отказе одного или двух
двигателей на малых высотах (большая вертикальная скорость
снижения);
— по соображениям прочности (повышенные вибрации на ско-
ростях 20...40 км/ч);
— из-за сложности пилотирования (плохая устойчивость и уп-
равляемость, мал запас мощности, малы запасы управления);
— из-за неустойчивых показаний указателя скорости на малых
скоростях (возможна непреднамеренная потеря воздушной скоро-
сти из-за ошибок в технике пилотирования или при воздействии
попутного порыва ветра. В результате возможно самопроизволь-
ное снижение вертолета, попадание в режим «вихревого кольца»,
«перетяжеление» несущего винта, самопроизвольное вращение вле-
во) ;
— с учетом возможных ошибок в технике пилотирования (рез-
кое гашение поступательной скорости, резкое увеличение общего
шага и т. д.).
Скорости, меньшие минимально допустимой, неизбежны на
взлете и посадке, однако в этих случаях вертолет находится на
нежелательных режимах короткое время.
Максимально допустимая скорость на практике ограничивает-
ся не только мощностью двигателей, но также:
— по прочности (большие нагрузки на несущую систему и дру-
гие агрегаты вертолета, высокий уровень вибрации);
— по срыву потока с лопастей и потере управляемости в ре-
зультате срыва;
— по соображениям безопасности при отказе одного или двух
двигателей (на предельно малых высотах);
— с учетом возможных ошибок в технике пилотирования (рез-
кое взятие ручки управления на себя, резкое увеличение общего
шага, большое скольжение и т. д.).
На вертолете Ми-2 в транспортном и пассажирском вариантах
горизонтальный полет разрешается в диапазоне скоростей по при-
бору, указанном в табл. 4.1.
102
Таблица 4.1
Высота полета Максимально допустимая скорость, км/ч Минимально допустимая ско- рость, км/ч
температура наруж- ного воздуха ниже стандартной температура наруж- ного воздуха выше стандартной
У земли на высоте ме- нее 5 м 60 60 0
У земли на высоте 5 м 60 60 20
У земли на высоте 10 м 70 70 40
У земли на высоте до 20 м 90 90 40
20... 500 м 210 180 40
500... 1000 м 200 180 40
1000... 1500 м 180 180 40
1500 ... 2500 м 160 160 40
2500... 3500 м 120 120 60
3500... 4000 м 90 90 70
Полеты над сильно пересеченной местностью (овраги, балки,
обрывы и т. п.) рекомендуется производить на высотах не менее
20 м над рельефом местности и на скоростях не менее 50 км/ч по
прибору (чтобы вертолет имел достаточный запас высоты и скоро-
сти и хорошую управляемость при воздействии восходящих и нис-
ходящих потоков, а также чтобы исключить неблагоприятное влия-
ние воздушной подушки).
ОСОБЕННОСТИ ТЕХНИКИ ВЫПОЛНЕНИЯ
ГОРИЗОНТАЛЬНОГО ПОЛЕТА
Техника пилотирования при выдерживании горизонтального по-
лета с постоянной скоростью отличается в зависимости от того, на
какой скорости выполняется полет.
Если на скоростях, больших экономической, пилот при постоян-
ной мощности (при постоянном общем шаге) отклонением ручки
управления от себя увеличит скорость на величину ДУ по срав-
нению с исходной скоростью V , то появится дефицит мощности
ДУ, т. е. следующим установившимся режимом будет не ГП, а ре-
жим снижения с большей скоростью. Чтобы сохранить горизон-
тальность полета, необходимо увеличить общий шаг несущего
винта. Если же скорость увеличится под действием случайного
возмущения, то, как для восстановления скорости, т&к и для вос-
103
становления высоты потребуется отклонить ручку управления на
себя.
Если пилот уменьшит скорость при постоянном общем шаге, то
появится избыток мощности и следующим установившимся режи-
мом будет набор ..высоты с меньшей скоростью. Чтобы сохранить
высоту, следует уменьшить общий шаг. Если скорость уменьшится
под действием случайного возмущения, то, как для восстановле-
ния скорости, так и для восстановления высоты потребуется от-
клонение ручки управления от себя.
Таким образом, на скоростях, больших экономической, пилот мо-
жет сохранять скорость и высоту полета при действии небольших
случайных возмущений отклонением ручки управления, не меняя
положения рычага «Шаг—газ».
На скоростях, меньших экономической, при отклонении ручки
управления от себя (при постоянном общем шаге) появляется из-
быток мощности. Следующим установившимся режимом полета
будет набор высоты с большей скоростью (в зависимости от темпа
отклонения ручки возможна «просадка» вертолета).
Если пилот уменьшит скорость при постоянном общем шаге, то
появится дефицит мощности, и следующим установившимся режи-
мом полета будет снижение (в зависимости от темпа отклонения
ручки управления из-за реализации кинетической энергии движе-
ния вертолета возможно «вспухание» вертолета). Если пилот бу-
дет уменьшать скорость взятием ручки на себя и сохранять высо-
ту полета, то интенсивность торможения будет все время увеличи-
ваться, так как будет возрастать дефицит мощности.
На скоростях, меньших экономической, пилот не может от-
клонением ручки управления сохранять и высоту, и скорость по-
лета. Необходимо одновременно отклонять и рычаг «Шаг—газ»
(при случайном увеличении скорости общий шаг несущего винта
необходимо уменьшить, а при восстановлении исходной скорости
снова увеличить, при случайном уменьшении скорости общий шаг
увеличить, а затем снова уменьшить при восстановлении скоро-
сти). Таким образом, для сохранения заданного режима полета
на скоростях, меньших экономической, при действии небольших
возмущений пилот должен постоянно выполнять двойные движе-
ния рычагом «Шаг—газ» и остальными рычагами управления.
При полете на скоростях, меньших экономической (особенно
на малых высотах), пилот должен своевременно, с учетом плохой
приемистости двигателей, увеличивать общий шаг при уменьшении
скорости, чтобы избежать самопроизвольного снижения вертолета.
При полете в диапазоне скоростей от 40 до 70 км/ч пилотиро-
вание дополнительно усложняется из-за неустойчивости вертолета
по скорости (в этом случае двойные движения ручкой требуются
не только для сохранения скорости и высоты, но и просто для со-
хранения скорости).
Для сохранения режима полета движения рычагами управле-
ния должны быть координированными между собой, так как вер-
104
толет не обладает независимостью управления. Например, при
увеличении общего шага необходимо одновременно отклонить
правую педаль для сохранения направления (увеличивается реак-
тивный момент несущего винта, вертолет стремится развернуться
влево), отклонить ручку управления от себя (растет кабрирующий
момент стабилизатора от обдувки индуктивным потоком, растет
стремление конуса НВ к завалу назад при увеличении общего ша-
га, растет кабрирующий реактивный момент рулевого винта при
отклонении правой педали), отклонить ручку управления вправо
(чтобы уравновесить увеличившуюся при отклонении правой пе-
дали тягу рулевого винта). Горизонтальный полет желательно вы-
полнять без скольжения (при скольжении увеличивается потреб-
ная мощность и нагрузки на конструкцию вертолета).
ФАКТОРЫ, ВЛИЯЮЩИЕ НА ДАЛЬНОСТЬ И ПРОДОЛЖИТЕЛЬНОСТЬ
ГОРИЗОНТАЛЬНОГО ПОЛЕТА
Дальностью горизонтального полета называется расстояние,
которое может пролететь вертолет по горизонтали в заданном на-
правлении до полного израсходования запаса топлива.
Продолжительностью горизонтального полета называется вре-
мя нахождения вертолета в воздухе до полного израсходования
запаса топлива.
При заданном запасе топлива дальность и продолжительность
полета зависят от расхода топлива. Расход топлива на час поле-
та (часовой расход) определяется по формуле
Q - се Ne, (80)
где Q — часовой расход топлива, кг/ч;
се — удельный эффективный расход топлива, кг/л.с.-ч, яв-
ляется характеристикой двигателя;
Ne — эффективная (подводимая) мощность двигателей,
л. с.
Поскольку в установившемся горизонтальном полете УПотР =
==А/Подв> ТО
Q = се /VnoTp. (81)
Расход топлива на километр пути (километровый расход) оп-
ределяется по формуле:
Q „ Ne „ А^потр
V ~ у у > >
ИП 'П г п
(82)
где q — километровый расход, кг/км;
Vn — путевая скорость, км/ч.
При безветрии путевая скорость равна воздушной, следователь-
но
= се
А^потр
Я
V
(83)
105
На величину дальности и продолжительности (на величину ки-
лометрового и часового расходов) влияют следующие факторы:
1. Скорость полета. Скорость влияет и на величину удельного
эффективного расхода (се уменьшается с увеличением скорости)
и на величину потребной мощности. Потребная мощность (рис. 4.5
и 4.6) определяет режим работы двигателей, который также вли-
яет на се (се уменьшается с увеличением режима работы двига-
Рис. 4.5. Соотношение
потребной и подводимой
мощностей вблизи задан-
ной скорости Vi в гори-
зонтальном полетб на
скоростях, больших эко-
номической
Рис. 4.6. Соотношения
потребной и подводимой
мощностей вблизи задан-
ной скорости Vt в гори-
зональном полете на
скоростях, меньших эко-
номической
телей). На рис. 4.7 показана зависимость часового и километро-
вого расходов топлива от скорости полета, полученная в одном из
испытательных полетов. Продолжительность полета получается
максимальной на той скорости, где минимален часовой расход.
Эта скорость близка к экономической скорости горизонтального
полета. У вертолета Ми-2 максимальная продолжительность полё-
та соответствует скорости 90... 100 км/ч по прибору.
Дальность полета максимальна на той скорости, при которой
минимален километровый расход топлива. Эта скорость называет-
ся крейсерской. Скорости, которые необходимо выдерживать в
106
• a
Рис. 4.7. Зависимость ча-
сового (а) и километро-
вого (б) расходов топ-
лива от приборной ско-
рости в горизонтальном
полете (транспортный ва-
риант с подвесными ба-
ками) при:
*/=500 м, р=9,95-10* Па
(746 мм рт.ст.), /Нвв
= —8° С, тПОлф=3020 кг,
7=0,805 кг/л
горизонтальном полете для получения максимальной дальности в
зависимости от высоты полета в транспортном и пассажирском
вариантах, указаны в табл. 4.2.
Таблица 4.2
Высота полета, м Скорость полета, км/ч
по прибору истинная
500 180 173
1000 180 177
2000 150 156
3000 120 133
2. Высота полета. По мере увеличения барометрической высо-
ты полета се уменьшается, а потребная для полета мощность
увеличивается. В зависимости от интенсивности изменения этих
величин с увеличением высоты километровый и расовой расход, а,
107
следовательно, дальность и продолжительность полета сначала
растут, затем падают. У вертолета Ми-2 максимальная дальность
и продолжительность — при полете на высоте 2000 м.
3. Ветер. Ветер меняет путевую скорость и не меняет воздуш-
ной, поэтому направление и скорость ветра влияют на дал?>ность,
но не влияют на продолжительность полета. Попутный ветер уве-
личивает дальность, встречный — уменьшает.
4. Частота вращения несущего винта. С точки зрения затрат
мощности тягу выгоднее создавать увеличением установочных уг-
лов лопастей, а не увеличением частоты вращения НВ. Поэтому
уменьшение частоты вращения приводит к некоторому увеличению’
дальности полета. Однако с точки зрения безопасности полета та-
кой способ увеличения дальности неприемлем (возможен срыв по-
тока с лопастей, усложняются действия пилота при отказе одного
или двух двигателей, ухудшаются устойчивость и управляемость
вертолета). На вертолете Ми-2 частота вращения несущего винта
поддерживается в определенных пределах с помощью автоматики.
5. Полетная масса. С увеличением полетной массы растет по-
требная для полета мощность, в результате при данном количест-
ве топлива дальность и продолжительность полета уменьшаются.
6. Вредное сопротивление вертолета. Увеличение вредного со-
противления вертолета приводит к увеличению потребной мощно-
сти, а, следовательно, к уменьшению дальности и продолжитель-
ности полета. Кроме того, уменьшаются экономическая и крейсер-
ская скорости (увеличение мощности движения приводит к тому,
что минимум кривой потребной мощности сдвигается в сторону
меньших скоростей).
2. НАБОР ВЫСОТЫ
СХЕМА СИЛ, ДЕЙСТВУЮЩИХ НА ВЕРТОЛЕТ В НАБОРЕ ВЫСОТЫ
С ПОСТУПАТЕЛЬНОЙ СКОРОСТЬЮ
Упрощенная схема сил, действующих на вертолет, в установив-
шемся наборе высоты с поступательной скоростью показана на
рис. 4.8 (на рисунке изборажена траектория полета в штиль, ко-
гда 'О’д —0). Разложение сил выполнено в скоростной системе ко-
ординат. Пользуясь схемой сил, условия выполнения установивше-
гося набора можно записать следующим образом:
Ха<л = Ха + GXa —условие постоянства скорости;
Удн = Gy — условие постоянства угла наклона траекто-
рии.
В наборе высоты, как и в горизонтальном полете, чтобы добить-
ся постоянства сил, действующих на вертолет, при постоянных па-
раметрах, характеризующих состояние атмосферы, необходимо, в
первую очередь, выдержать пространственное положение вертоле-
108
та, при котором он балансируется на данном режиме полета (т. е.
постоянство углов тангажа, крена и курса).
Рис. 4.8. Схема сил, действующих на вертолет
в наборе высоты с поступательной скоростью
ПОЛЯРА ТРАЕКТОРИЙ НАБОРА. ХАРАКТЕРНЫЕ СКОРОСТИ
В НАБОРЕ ВЫСОТЫ
Потребная для набора высоты мощность больше потребной
мощности горизонтального полета на величину избытка мощности,
необходимого для сообщения вертолету вертикальной скорости.
По кривым потребной и располагаемой мощности для каждой
поступательной скорости можно найти избыток мощности и воз-
можную в данных условиях вертикальную скорость набора высо-
ты. (В данном случае необходимо учитывать зависимость потреб-
ной мощности от воздушной скорости, а не от приборной). Затем
можно построить зависимость вертикальной скорости от поступа-
тельной при постоянной подводимой мощности (рис. 4.9). Эта за-
висимость называется полярой (указательницей) траекторий на-
бора. По поляре для любой поступательной скорости можно найти
возможную вертикальную скорость и угол набора высоты. (На
рисунке траектория полета изображена в штиль, когда ^ = 0).
При построении поляры иногда Vy откладывают в размерно-
сти м/с, а вместо поступательной скорости Ух откладывают ре-
зультирующую скорость УНаб в размерности км/ч. Ошибка при этом
получается небольшой, так как вертолет балансируется в наборе
высоты с очень небольшими углами тангажа, и указатель скорости
показывает горизонтальную составляющую скорости Ух. Однако
такая поляра более удобна для практического использования (ско-
рости Уу в м/с и Vna6np в км/ч пилот контролирует по приборам).
Следует однако учитывать, что по такой поляре угол набора не-
посредственно измерять нельзя, так как масштабы по осям раз-
личны, а приборная скорость отличается от воздушной.
На поляре имеются следующие характерные точки (рис. 4.10).
109
Точка 1 сооветствует неэкономичному режиму вертикального
набора, характеризующемуся вертикальной скоростью, намного
меньшей, чем при наборе высоты с поступательной скоростью.
Рис. 4.9. Кривые потребной и распо- Рис. 4.10. Характерные скорости в на-
лагаемой мощностей горизонтального боре высоты
полета и соответствующая им поляра
траекторий набора
Точка 2 соответствует скорости, на которой в пределах допусти-
мых скоростей угол набора получается максимальным. Для Ми-2
эта скорость составляет 60... 70 км/ч по прибору.
Точка 3 соответственно скорости, на которой избыток мощности
максимален и максимальна вертикальная скорость набора (или
для набора с заданной вертикальной скоростью требуется мини-
мальная мощность). Эта скорость близка к экономической скоро-
сти горизонтального полета и называется наивыгоднейшей скоро-
стью набора. Наивыгоднейшие скорости набора в зависимости от
высоты для Ми-2 в транспортном и пассажирском вариантах ука-
заны в табл. 4.3.
Таблица 4.3
Барометрическая высота полета, м Наивыгоднейшая скорость набора высоты по прибору, км/ч
0 .. 500 НО
500 ... 1500 105
1500... 2500 95
2500 ... 3500 90
3500... 4000 80
НО
Точка 4 соответствует максимальной теоретической скорости
горизонтального полета, на которой набор высоты невозможен.
По мере увеличения полетной массы, барометрической высоты
и температуры наружного воздуха соотношение потребной и рас-
полагаемой мощностей изменяется (см. рис. 4.4). Запас мощности
уменьшается, соответственно изменяется и поляра траекторий на-
бора высоты (рис. 4.11). По мере увеличения полетной массы, ба-
рометрической высоты и температуры наружного воздуха умень-
шается диапазон скоростей, в котором можно выдержать верти-
кальную скорость, большую некоторой заданной.
Поляра траекторий набора высоты, полученная в одном из ис-
пытательных полетов, показана на рис. 4.12.
Рис. 4.11. Изменение поляры траекто-
рий набора высоты при изменении
полетных условий:
1 — ниже статического потолка; 2 —
на теоретическом статическом потол-
ке; 3 — выше статического потолка
Рис. 4.12. Поляра траекторий набора
высоты:
/7=180 м, ^нвэ-20 °C, тПол =
= 3450 кг, режим работы двигате-
лей — номинальный
ВОЗМОЖНОСТИ ВЕРТОЛЕТА Ми-2 В НАБОРЕ ВЫСОТЫ
Зависимость вертикальной скорости и времени набора от вы-
соты полета для вертолета Ми-2 в транспортном и пассажирском
вариантах при наборе высоты на номинальном режиме работы
двигателей, на наивыгоднейшей скорости набора (см. табл. 4.3 ),
в стандартных атмосферных условиях, при полетной массе 3550 кг
показана на рис. 4.13. Вертикальная скорость набора до высоты
2000 м остается примерно постоянной, так как после достижения
высоты 1000 м разрешается повышать верхний предел частоты
вращения турбокомпрессоров на номинальном режиме на 1 % че-
рез каждые 500 м высоты (но не более чем на 5%).
Теоретический динамический потолок недостижим на практи-
ке (требуется бесконечно большое время для его набора). Прак-
тическим динамическим потолком принято считать высоту, на ко-
торой вертикальная скорость набора составляет 0,5 м/с.
На высотах от 0 до 1500 м изменение полетной массы на
500 кг приводит к изменению вертикальной скорости на 1 м/с, а
изменение температуры наружного воздуха на 10 °C приводит к
изменению вертикальной скорости примерно на 0,8 м/с.
111
Рис. 4.13. Зависимость вертикальной
скорости набора (а) и времени набо-
ра (б) от высоты в стандартных ат-
мосферных условиях при полетной
массе 3550 кг. Набор производится
на наивыгоднейшей скорости (см.
табл. 4.3) с использованием номи-
нального режима работы двигателей
3. СНИЖЕНИЕ С РАБОТАЮЩИМИ ДВИГАТЕЛЯМИ
СХЕМА СИЛ, ДЕЙСТВУЮЩИХ НА ВЕРТОЛЕТ ПРИ СНИЖЕНИИ -
ПО НАКЛОННОЙ ТРАЕКТОРИИ С РАБОТАЮЩИМИ ДВИГАТЕЛЯМИ
Упрощенная схема сил, действующих на вертолет при устано-
вившемся снижении по пологой траектории с большой поступа-
тельной скоростью показана на рис. 4.14, а. Разложение сил вы-
полнено в скоростной системе координат. (На рис. 4.14 траектории
снижения изображены для штилевых условий, когда Фа=0). В
этом случае пропульсивная сила НВ Хйн стремится увеличить ско-
рость движения по траектории. Условия установившегося сниже-
ния можно записать следующим образом:
Аган + GXa = Хапл — условие постоянства скорости;
Уан = ОУа — условие постоянства угла наклона траек-
тории.
Схема сил, действующих на вертолет при снижении по крутой
траектории с малой поступательной скоростью, показана на
рис. 4.14,6. В этом случае сила Хан стремится уменьшить скорость
движения по траектории. Условия установившегося снижения мо-
жно записать следующим образом:
GXa = Хан + Ха^ — условие постоянства скорости;
YaH = Gya — условие постоянства угла наклона траек-
торий.
На снижении, как и на других установившихся режимах поле-
та, добиться постоянства сил, действующих на вертолет при посто-
112
янных параметрах, можно, лишь выдержав пространственное по-
ложение вертолета, при котором он балансируется на данном ре-
жиме полета (т. е. постоянство углов тангажа, крена и курса).
Рис. 4.14. Схемы сил, действующих на вертолет при
снижении с поступательной скоростью с работающими
двигателями:
а — снижение по пологой траектории с большой ско-
ростью; б — снижение по крутой траектории на малой
скорости
ПОЛЯРА ТРАЕКТОРИЙ СНИЖЕНИЯ. ХАРАКТЕРНЫЕ
СКОРОСТИ СНИЖЕНИЯ
Мощность, потребная для снижения, меньше, чем в горизон-
тальном полете, так как часть работы по перемещению вертолета
выполняет сила тяжести. Чем меньше подводимая к несущему
Винту мощность, тем больше вертикальная скорость снижения.
По кривым потребной и подводимой мощности для каждой по-
ступательной скорости можно найти дефицит мощности по срав-
нению с потребной для горизонтального полета мощностью и вер-
тикальную скорость снижения. (В данном случае надо брать зат
8 Заказ 4195 113
висимость потребной мощности от воздушной скорости, а не от
приборной). Кроме того, можно построить зависимость вертикаль-
ной скорости снижения от поступательной скорости при постоян-
ной подводимой мощности (рис. 4.15). Эта зависимость называет-
ся полярой (указательницей) траекторий снижения. По поляре
для любой поступательной скорости можно найти вертикальную
скорость и угол снижения.
На поляре имеются следующие характерные точки (рис. 4.16).
с
Рис. 4.15. Кривые потребной и под-
водимой мощности и сответствующая
им поляра траекторий снижения
Рис. 4.16. Характерные скорсста на
снижении
Точка 1 соответствует режиму вертикального снижения, на ко-
тором для получения заданной вертикальной скорости потребная
мощность намного больше, чем при снижении с поступательной
скоростью, а поэтому режим неэкономичен.
Точка 2 соответствует минимально допустимой скорости полета
в данных условиях. При снижении на этой скорости получается
максимальным угол снижения (в пределах допустимых скоростей).
Точка 3 соответствует скорости, на которой минимален дефицит
мощности и вертикальная скорость снижения. Снижение на этой
скорости наиболее экономично (для снижения с заданной верти-
кальной скоростью требуется минимальная мощность двигателей).
Эта скорость называется наивыгоднейшей скоростью снижения.
По величине она близка к экономической скорости горизонтально-
го полета. Для вертолета Ми-2 в транспортном и пассажирском
вариантах зависимость наивыгоднейшей скорости снижения указа-
на в табл. 4.4.
114
Таблица 4.4
Барометрическая высота полета, м Наивыгоднейшая скорость снижения, км/ч
0.. 500 НО
500.. 1500 105
1500.. 2500 95
2500.. 3500 90
3500.. 4000 80
Точка 4 соответствует скорости, на которой при данной подво-
димой мощности получается минимальным угол снижения (мак-
симальная дальность снижения).
По мере увеличения подводимой мощности поляра траекторий
снижения смещается вверх. По мере увеличения барометрической
высоты, температуры наружного воздуха и полетной массы поля-
ра при той же подводимой мощности смещается вниз, диапазон
скоростей, в котором можно выдержать заданную вертикальную
скорость снижения, уменьшается.
4. ВИРАЖ
СХЕМА СИЛ, ДЕЙСТВУЮЩИХ НА ПРАВИЛЬНОМ ВИРАЖЕ.
УСЛОВИЯ ВЫПОЛНЕНИЯ ПРАВИЛЬНОГО ВИРАЖА
Правильным виражом называется разворот вертолета в гори-
зонтальной плоскости на 360°, выполняемый на постоянной ско-
рости с постоянным креном и без скольжения. Часть виража на-
зывается разворотом.
Для анализа сил, действующих на вертолет в процессе выпол-
нения виража, удобнее всего использовать нормальную систему
координат.
Обычно для простоты анализа пренебрегают тягой рулевого
винта /?р и поперечным завалом конуса вращения несущего винта,
необходимым для балансировки вертолета. Упрощенная схема сил
действующих на вертолет при вираже, показана на рис. 4.17.
Для искривления траектории необходимо, чтобы на вертолет
действовала неуравновешенная центростремительная сила. В дан-
ном случае такой силой является горизонтальная составляющая
равнодействующей силы несущего винта Zg^, для создания кото-
рой вертолет необходимо накренить в сторону виража.
X Пользуясь схемой сил, можно записать условия выполнения
правильного виража:
Xg = — условие постоянства скорости;
- Yo. = G— условие постоянства высоты полета:
.«• / 45
Zg^ = const — условие постоянства центростремительного
Чтобы добиться постоянства сил, действующих на вертолет
при заданных параметрах, характеризующих состояние атмосфе-
ры, необходимо, в первую очередь, выдержать пространственное
положение вертолета, при котором он балансируется на данном
режиме полета (т. е. постоянство углов тангажа и крена).
ПОТРЕБНАЯ ДЛЯ ВЫПОЛНЕНИЯ ПРАВИЛЬНОГО ВИРАЖА
МОЩНОСТЬ
Чем больше крен при выполнении виража, тем большей долж-
на быть величина равнодействующей силы несущего винта
чтобы ее составляющая Ygii уравновешивала силу тяжести, т. е.
чтобы оставалась постоянной высота полета (см. рис. 4.17). *
Поэтому с увеличением угла крена увеличивается и потребная
для выполнения правильного виража мощность. Таким образом,
правильный вираж возможен только при наличии избытка мощ- ♦
ности по сравнению с потребной для горизонтального полета мощ-
ностью в тех же условиях.
По мере увеличения барометрической высоты полета, темпе-
ратуры наружного воздуха и полетной массы вертолета запас
116
мощности уменьшается, в результате уменьшается максимальный
угол крена, с которым можно выполнить вираж без снижения, и
уменьшается диапазон скоростей, в котором можно выполнить
правильный вираж.
ХАРАКТЕРИСТИКИ ПРАВИЛЬНОГО ВИРАЖА
Используя упрощенную схему сил (см. рис. 4.17), можно вы-
вести формулы для расчета характеристик правильного виража.
Радиус виража можно рассчитать по формуле
V2
^впр — g > (84)’
где V — истинная скорость полета, м/с;
g — ускорение свободного падения, м/с2
7 — угол крена.
Время выполнения виража можно рассчитать по формуле:
U = 0,64-^-. (85)
Угловую скорость вращения вертолета относительно оси У^н
нормальной системы координат можно рассчитать по формуле:
^вир у > (об}
где о>вир — угловая скорость виража, 1/с;
g—ускорение свободного падения, м/с2;
7 — угол крена.
Из формулы 86 видно, что угловая скорость вращения верто-
лета увеличивается с увеличением угла крена и уменьшением ско-
рости полета.
Величину нормальной перегрузки при выполнении правильного
виража можно определить по формуле
n-v = ———, (87)
У cos 7 ’ \
где пу — нормальная перегрузка (безразмерная величина);
7— угол крена.
При небольших кренах перегрузки незначительны, однако при
кренах более 30° перегрузка начинает резко увеличиваться с уве-
личением крена, т. е. резко увеличиваются нагрузки на конструк-
цию вертолета и, в первую очередь, на его несущую систему.
Увеличение нагрузок на несущую систему является одной из
основных причин ограничения максимально допустимого крена.
111
ОСОБЕННОСТИ ТЕХНИКИ ВЫПОЛНЕНИЯ ПРАВОГО
И ЛЕВОГО ВИРАЖЕЙ
Поскольку на правом и левом виражах различны гироскопи-
ческие моменты несущего и рулевого винтов и роторов турбокомп-
рессоров, обтекание несущего и рулевого винтов, то изменяется и
балансировка вертолета. Самую большую роль в криволинейном
полете играет гироскопический момент несущего винта. При вводе
в правый вираж гироскопический момент несущего винта, кабри-
рующий, при вводе в левый вираж — пикирующий, а при выводе—
наоборот.
При вводе в правый вираж пилот должен отклонить ручку уп-
равления вправо. Одновременно, чтобы сохранить скорость и вы-
соту, пилот должен отклонить ручку от себя, так как под действи-
ем гироскопического момента несущего винта вертолет стремится
поднять нос. Кроме того, пилот должен координированно откло-
нять правую педаль, чтобы устранить возникающее при отклоне-
нии ручки правое скольжение (скольжение при выполнении виража
нежелательно, так как оно приводит к увеличению потребной для
полета мощности из-за увеличения вредного сопротивления и на-
грузок на конструкцию вертолета). Необходимо также отклоне-
нием рычага «Шаг—газ» вверх увеличить мощность двигателей,
потому что потребная для правильного виража мощность больше
потребной мощности горизонтального полета.
При вводе в левый вираж пилот должен отклонить ручку уп-
равления влево (чтобы накренить вертолет для создания неурав-
новешенной центростремительной силы). Одновременно, чтобы
сохранить скорость и высоту, ручку надо отклонить на себя, по-
скольку под действием гироскопического момента несущего вин-
та вертолет стремится опустить нос. Кроме того, необходимо ко-
ординированно, с отклонением ручки управления влево отклонить
левую педаль для устранения скольжения и увеличить мощность
двигателей (левый вираж имеет ту особенность, что при отклоне-
нии левой педали уменьшается мощность, потребляемая рулевым
винтом, и увеличивается мощность, подводимая к несущему вин-
ту, поэтому при выполнении левых виражей с креном до 15° уве-
личивать мощность двигателей нет необходимости, т. е. левый ви-
раж предпочтительней с точки зрения затрат мощности).
Разбалансировка вертолета при вводе в вираж тем сильнее,
чем энергичнее отклоняется ручка управления для создания кре-
на, так как величина гироскопического момента несущего винта
прямо пропорциональна угловой скорости вращения вертолета.
При выводе из виража гироскопический момент противополо-
жен гироскопическому моменту на вводе.
118
ОГРАНИЧЕНИЯ ПРИ ВЫПОЛНЕНИИ ВИРАЖЕЙ,
РАЗВОРОТОВ И СПИРАЛЕЙ
На вертолете Ми-2 виражи и развороты разрешаются во всем
диапазоне допустимых скоростей горизонтального полета, набо-
ра и снижения с работающими двигателями. При этом максималь-
но допустимый угол крена составляет:
30° в диапазоне скоростей от 60 до 180 км/ч по прибору;
20° в диапазоне скоростей от 180 до 210 км/ч по прибору;
10° на скоростях менее 60 км/ч по прибору;
20° при выполнении авиахимических работ на скоростях от
60 до 140 км/ч по прибору.
Ограничения установлены по запасам мощности и прочности
вертолета и с учетом возможных ошибок в технике пилотирования.
5. ПОСАДКА С РАБОТАЮЩИМИ ДВИГАТЕЛЯМИ
ОСНОВНЫЕ ТРЕБОВАНИЯ К ПОСАДОЧНЫМ ТРАЕКТОРИЯМ
Посадку на вертолете можно выполнять по большому числу
разнообразных траекторий, которые определяются имеющимся
запасом мощности. Однако далеко не все возможные траектории
удовлетворяют* требованиям безопасности полета и экономической
эффективности применения вертолетов. Основные из этих требо-
ваний следующие:
— траектория должна обеспечивать нормальную эксплуата-
цию вертолета с площадок ограниченных размеров при достаточ-
но высокой полезной нагрузке;
— траектория должна обеспечивать безопасность полета в
случае отказа одного двигателя, т. е. не должна проходить через
опасные зоны «высота—скорость» (рис. 4.18);
— траектория должна реализовываться при простых методах
пилотирования.
ПОСАДКА ПО-ВЕРТОЛЕТНОМУ С ИСПОЛЬЗОВАНИЕМ
ВЛИЯНИЯ ВОЗДУШНОЙ подушки
Основным видом посадки на вертолете Ми-2 считается посад-
ка по-вертолетному с использованием влияния воздушной подуш-
ки. Название посадки связано с тем, что окончательное гашение
поступательной и вертикальной скоростей и зависание при такой
посадке производятся на малой высоте над площадкой в зоне
действия воздушной подушки. При такой посадке вертолет может
иметь сравнительно большую полезную нагрузку, траектория по-
садки проходит вне опасных зон «высота—скорость», к размерам
площадки и состоянию ее поверхности предъявляются более уме-
ренные требования, чем при посадке с пробегом. Рекомендуемая
119
Рис. 4.18. Опасные зоны «высота—скорость» и сочетания вы-
сот и скоростей при различных видах посадок:
1 — посадка по-вертолетному без использования влияния воз-
душной подушки; 2 — посадка по-вертолетному с использова-
нием влияния воздушной подушки с реализацией крутой тра-
ектории; 3 — посадка с коротким пробегом; 4 — посадка с
пробегом
методика такой посадки и область возможных траекторий при
безветрии представлены на рис. 4.19.
Расстояние от точки приземления
Рис. 4.19. Рекомендуемые области посадочных траекторий и методика вы-
полнения посадки по-вертолетному с использованием влияния воздушной
подушки:
1 — установить Vnp=60... 70 км/ч, Vy=3... 5 м/с; 2 — начать торможение
поступательной и вертикальной скоростей плавным увеличением общего
шага; 3— поступательная скорость должна составлять не менее
40... 20 км/ч, вертикальная скорость снижения — не более 1,0... 1,5 м/с;
4 — начать окончательное гашение поступательной и вертикальной скоро-
стей; 5 — зависание производить на высоте 3...2 м; 6 — приземление; 7 —
рекомендуемая область посадочных траекторий; 8 — траектория при Упрв
=60 км/ч, Уу=5 м/с (в штиль); 9 — траектория при Vnp=70 км/ч,
Уу—З м/с (в штиль)
120
Ниже приведены объяснения к каждому из этапов:
1. Правильный выбор скорости планирования играет важней-
шую роль с точки зрения обеспечения безопасности полета. Пла-
нирование на скоростях, повышенных по сравнению с указанны-
ми, нежелательно, так как вертолет подводится к намеченной точ-
ке зависания на относительно большой скорости и малой высоте,
скорость гасится энергичным увеличением тангажа, а затем перед
самым зависанием пилот энергично поднимает рычаг «Шаг—газ»
вверх, чтобы парировать тенденцию вертолета к снижению. При
таком способе гашения скорости хвостовая балка опущена, не-
значительные ошибки пилота могут привести к удару рулевым
винтом и балкой о землю. Возможно также самопроизвольное сни-
жение и перетяжеление несущего винта при зависании.
При энергичном взятии ручки управления на себя увеличива-
ется угол атаки несущего винта, в результате при неизменных ус-
тановочных углах лопастей равнодействующая аэродинамическая
сила произвольного элемента лопасти увеличивается и отклоняет-
ся вперед по отношению к хорде элемента (рис. 4.20), тяга произ-
вольного элемента возрастает, а сила сопротивления вращению
уменьшается, т. е. возрастает тяга и уменьшается момент сопро-
тивления вращению всего несущего винта, происходит уменьше-
ние вертикальной скорости снижения и увеличение частоты вра-
щения несущего винта.
Рис. 4.20. Изменение аэродинамичес-
ких сил, действующих на элемент ло-
пасти при изменении угла атаки в
случае, если результирующая ско-
рость набегающего на элемент пото-
ка и угол установки элемента оста-
ются постоянными
Автоматическая система поддержания частоты вращения, пред-
отвращая раскрутку несущего винта, уменьшает мощность двига-
телей (причем этот процесс может проходить незаметно для пи-
лота, так как вертикальная скорость снижения не увеличивается).
Гашение скорости происходит очень энергично. К моменту зави-
сания, когда потребуется большая мощность, подводимая к винту
мощность окажется недостаточной. У вертолета появится тенденция
к снижению, парируя которую пилот может перетяжелить несущий
винт из-за плохой приемистости двигателей. При перетяжелении
из-за уменьшения частоты вращения несущего вин^а уменьшается
121
эффективность продольно-поперечного управления, и пилот может
не успеть отклонением ручки управления от себя придать верто-
лету посадочное положение, произойдет грубое приземление с по-
вреждением хвостовой балки.
При перетяжелении несущего винта растет реактивный момент.
Он определяется по формуле:
ЛЕМ„ = , (88)'
Реакт wH * ' А
где Мподв — подводимая к несущему винту мощность, Вт;
<он — угловая скорость вращения несущего винта, Vc.
Кроме того, уменьшаются частота вращения рулевого винта и
его тяга. Чтобы удержать вертолет от разворота, пилот вынужден
отклонять вперед правую педаль, но она может оказаться на упо-
ре, и начнется самопроизвольное вращение вертолета влево со
снижением. Кроме того, резкое увеличение угла и общего шага
приводит к сильной разбалансировке вертолета, требуют точной
координации движений, что отвлекает внимание пилота и способ-
ствует появлению ошибок.
Повышенные скорости на планировании нежелательны также
и по следующим причинам:
— при подходе по пологой глиссаде пилоту труднее точно оп-
ределить дальность, в результате часто происходит расчет с пере-
летом;
— из-за повышенной скорости мало время снижения, в резуль-
тате возможны поспешные, ошибочные действия пилота;
— на пологой глиссаде ухудшается возможность наблюдения
за площадкой, особенно если она закрыта препятствиями;
— при значительном увеличении угла тангажа при гашении
скорости также ухудшается возможность наблюдения за площад-
кой.
На вертолете Ми-2 планирование рекомендуется выполнять на
приборной скорости 60... 70 км/ч. Сравнительно малые скорости
позволяют увеличить время пребывания на глиссаде, что, в свою
очередь, позволяет выдерживать небольшую вертикальную ско-
рость и производить плавное, неторопливое выполнение необходи-
мых операций. Гашение малой поступательной и вертикальной
скоростей не требует создания значительного угла тангажа и рез-
кого увеличения общего шага несущего винта, не вызывает силь-
ной разбалансировки вертолета. При снижении по крутой траек-
тории улучшаются условия наблюдения за площадкой, облегча-
ется расчет, что увеличивает безопасность посадки, особенно на
площадки ограниченных размеров, окруженные препятствиями.
Так как общий шаг несущего винта увеличивается плавно, то
меньше вероятность его перетяжеления, а если перетяжеление все
же произойдет, то вертолет приземлится на шасси, а не на хвос-
товую балку.
122
Кроме того, на рекомендуемых скоростях обеспечивается нор-
мальная устойчивость и управляемость вертолета, режим работы
двигателей сравнительно высок, что облегчает уход на второй
круг в случае необходимости. В случае отказа одного двигателя
вертолет незначительно отклоняется от исходной траектории, что
облегчает выполнение посадки.
Однако опасно и снижение на скоростях, меньших рекоменду-
емых. На Ми-2 не допускается выполнение предпосадочного сни-
жения на скоростях менее 60 км/ч по прибору с вертикальной ско-
ростью более 3...5 м/с. В этом случае значительно усложняется
техника пилотирования при посадке, так как при гашении посту-
пательной скорости несущий винт начинает работать в режимах,
близких к режиму «вихревого кольца», что приводит к резкому уве-
личению вертикальной скорости снижения. Увеличение мощности
двигателей, вплоть до взлетной, не обеспечивает полного гашения
вертикальной скорости. Поэтому на скоростях менее 60 км/ч по
прибору вертикальная скорость снижения не должна превышать
2...3 м/с.
В процессе снижения пилот уточняет расчет изменением посту-
пательной и вертикальной скоростей, отклонением рычага «Шаг—
газ» и ручки управления. Чем меньше поступательная скорость,
тем с большей вертикальной скоростью и по более крутой траек-
тории снижается вертолет при той же мощности двигателей (см.
рис. 4.16).
Расчет на посадку с перелетом особенно опасен, так как при
попытке его исправить возможно попадание в режим «вихревого
кольца» (если пилот уменьшит поступательную скорость до недо-
пустимо малой величины и увеличит вертикальную скорость до не-
допустимо большой), задевание хвостовой балкой и рулевым вин-
том о землю (при попытке погасить большую поступательную ско-
рость на малой высоте), перетяжеление несущего винта при зави-
сании (если скорость гасится резким взятием ручки управления
на себя с последующим резким увеличением общего шага несуще-
го винта) и самопроизвольный разворот влево при зависании (из-
за роста реактивного момента и уменьшения частоты вращения
рулевого винта при перетяжелении несущего винта). Поэтому рас-
чет с перелетом необходимо исправлять уходом на второй круг.
Решение об уходе на второй круг должно быть принято своевре-
менно, так как при увеличении общего шага несущего винта и от-
клонении ручки управления от себя частота вращения несущего
винта стремится уменьшиться, в результате возможны его перетя-
желение, увеличение вертикальной скорости снижения и столкно-
вение с землей.
2. Высота, на которой начинается гашение поступательной и
вертикальной скоростей, должна быть такой, чтобы обеспечива-
лось торможение вертолета при нормальном темпе увеличения об-
щего шага и приемлемом угле тангажа. Чем больше поступатель-
ная и вертикальная скорости, тем на большей высоте и на боль-
123
шем удалении от намеченной точки зависания необходимо начи-
нать их гасить.
Гашение поступательной и вертикальной скоростей необходимо
производить плавно, почти не меняя угла тангажа, и по мере га-
шения скорости ниже 60 км/ч постепенно увеличивать общий шаг
несущего винта. Особенно значительное увеличение общего шага
требуется на скоростях менее 40 км/ч по прибору, так как на ма-
лых скоростях потребная для полета мощность резко возрастает.
Схема сил, действующих на вертолет при таком способе тормо-
жения, показана на рис. 4.21. Разложение сил выполнено в ско-
ростной системе координат. При увеличении общего шага несуще-
го винта увеличивается равнодействующая сила несущего винта
/?н, соответственно увеличиваются и составляющие этой силы
И У„„ . Увеличение составляющей ХЛн приводит к уменьшению
поступательной скорости, увеличение составляющей Уйн приводит
к уменьшению угла наклона траектории. Уменьшение поступатель-
ной скорости и угла наклона траектории приводит к уменьшению
вертикальной скорости снижения. Если в процессе такого гашения
скорости угол тангажа сохраняется неизменным, то ручку управ-
ления следует незначительно отклонять от себя, так как на уве-
личение общего шага несущего винта вертолет реагирует увели-
чением угла тангажа (усиливается стремление конуса к завалу на-
зад при увеличении установочных углов лопастей, увеличивается
.кабрирующий момент планера от обдувки индуктивным потоком,
увеличивается кабрирующий реактивный момент рулевого винта
при координированном отклонении правой педали).
Рис. 4.21. Схема сил, действующих на
вертолет при гашении поступательной
и вертикальной скоростей увеличени-
ем общего шага при постоянном уг-
ле тангажа
При гашении поступательной и вертикальной скоростей особое
внимание следует обращать на сохранение частоты вращения не-
сущего винта в пределах 78...84% по указателю; Не следует допус-
кать частоты вращения несущего винта выше 86% (увеличение
частоты вращения наиболее вероятно при взятии ручки управления
на себя и уменьшении общего шага винта) и ниже 77% (уменьше-
124
ние частоты вращения наиболее вероятно при увеличении общего
шага и отклонении ручки управления от себя).
3. Чтобы избежать попадания в опасную зону «высота—ско-
рость» (см. рис. 4.18), необходимо выдерживать скорость на вы-
сотах 10 и 5 м 40 и 20 км/ч соответственно. Кроме того, посколь-
ку при посадке с использованием влияния воздушной подушки по-
летная масса позволяет зависать только на небольшой высоте над
площадкой, а влияние воздушной подушки ослабевает по мере
увеличения высоты и скорости, то во избежание самопроизволь-
ного снижения нельзя преждевременно уменьшать воздушную
(приборную) скорость ниже указанных величин.
4. Окончательное гашение поступательной и вертикальной ско-
ростей производить в зоне влияния воздушной подушки.
Перед зависанием вертолет стремится:
— резко остановиться с увеличением угла тангажа (конус не-
сущего винта при гашении скорости завален назад);
— развернуться влево (при уменьшении скорости уменьшает-
ся эффективность рулевого винта, реактивный момент несущего
винта при увеличении общего шага растет);
— накрениться влево (при уменьшении скорости уменьшается
стремление конуса несущего винта к завалу вправо).
Указанные тенденции тем сильнее, чем энергичнее гасится ско-
рость. Пилот должен своевременно парировать эти тенденции, ина-
че возможны движение вертолета назад и грубая посадка.
5. На висении при безветрии при всех допустимых центровках •
вертолет Ми-2 балансируется с небольшим положительным углом
тангажа и небольшим правым креном. После устойчивого зависа-
ния плавным уменьшением общего шага несущего винта перевес-
ти вертолет на снижение. При уменьшении общего шага учиты-
вать, что по мере приближения к земле усиливается влияние воз-
душной подушки. Общий шаг несущего винта уменьшать в таком
темпе, чтобы избежать зависания на предельно малой высоте
(вертолет при зависании на предельно малой высоте ведет себя
неустойчиво из-за неравномерности индуктивного потока, возмож-
ны случайные крены и перемещения, в результате возможно опро-
кидывание вертолета).
6. К моменту приземления вертикальная скорость снижения
должна составлять не более 0,1...0,2 м/с. Приземление произво-
дить строго вертикально, на основные колеса, без боковых пере-
мещений, особенно влево (вероятность опрокидывания влево боль-
ше, чем вправо). Поскольку при безветрии вертолет висит с не-
большим правым креном, то при приземлении на ровную площад-
ку вначале касается земли правое основное колесо шасси, затем
левое, затем носовые.
Если площадка имеет уклон, то, чтобы избежать опрокидыва-
ния, приземление при безветрии следует выполнять носом или ле-
вым бортом на уклон.
125
Чтобы избежать опрокидывания, общий шаг несущего винта
после приземления уменьшать только при полной уверенности в
том, что вертолет устойчиво стоит на твердом грунте.
ВЛИЯНИЕ ВЕТРА НА ТЕХНИКУ ПОСАДКИ
Значительное влияние на технику пилотирования оказывают
скорость и направление ветра. Расчет на посадку желательно про-
изводить против ветра (в процессе пилотирования ветер сносит
вертолет назад, поэтому при тех же приборной и вертикальной
скоростях снижения траектория круче, посадочная дистанция ме-
ньше, при зависании несущий винт работает в условиях косого об-
текания, запас мощности и запасы управления больше, вероят-
ность опрокидывания при приземлении меньше).
Наиболее опасен попутный ветер, который значительно услож-
няет технику пилотирования. При правильном расчете на посадку
пилот должен выполнять планирование в некоторую точку, нахо-
дящуюся перед точкой зависания. При попутном ветре расстояние
между точкой, в которую производится планирование, и точкой
зависания должно быть больше, так как при попутном ветре пе-
ред зависанием необходимо загасить большую путевую скорость,,
чем при безветрии. Точка выхода из четвертого разворота также
должна находиться на значительно большем удалении от точки
зависания, так как в процессе планирования ветер сносит верто-
лет вперёд, при той же скорости по прибору и той же верти-
кальной скорости снижения угол снижения меньше. (Влияние
ветра на угол снижения показано на рис. 4.22).
Рис. 4.22. Влияние скорости ветра на
угол наклона траектории при плани-
ровании (Vnp = 60...70 км/ч):
1 — встречный ветер, №=15 м/с;
2 — встречный ветер, №=10 м/с; 3—
встречный ветер, №=5 м/с; 4—
штиль, №=0; 5 — попутный ветер,
№=5 м/с '
Осредненные траектории посадок, выполненных при встреч-
ном и попутном ветре, изображены на рис. 4.23. Запись парамет-
ров полета при посадке с попутным ветром приведена на
рис. 4.24.
Если при попутном ветре пилот закончит четвертый
разворот на том же удалении от точки зависания, что
и при безветрии, то на планировании он заметит, что
путевая скорость необычно большая и что расчет на посадку
126
выполнен с перелетом. Если вместо того, чтобы уйти на второй
круг, пилот решит во что бы то ни стало выполнить зависание в
намеченной точке, то при попытке исправить расчет возможно уве-
Рис. 4.23. Осредненные траектории посадок, выполненных примерно в одина-
ковых условиях при встречном и попутном ветре [р= 10,16-10* Па (762 мм
рт.ст.) <нв=— 6°С]:
1 — ветер встречный, №=4,3... 5,1 м/с, Упр = 60 км/ч; Уу=3,5... 4 м/с, мПос=
=3500... 3450 кг; 2 — ветер встречный, №=4... 5 м/с, Vnp=60 км/ч, Vув
=3,5... 4,5 м/с; тпос = 3500'... 3450 кг
Рис. 4.24. Запись параметров полета при посадке с попутным ветром
[№=4,6 м/с (попутный), р=10,16-104 Па (762 мм рт.ст.), /Нв=—6°С,
/лпос™3400 кг]
личение вертикальной скорости и уменьшение поступательной ско-
рости сверх допустимых величин, в результате вертикальная ско-
рость снижения начнет резко увеличиваться, так как несущий винт
будет работать на режимах, близких к «вихревому кольцу». Если
^ё этого не произойдет, то все равно к моменту начала гашения
127
поступательной и вертикальной скоростей вертолет будет иметь
повышенные вертикальную и путевую скорости.
Гашение большой вертикальной скорости требует большей вы-
соты, поэтому в такой ситуации возможно перетяжеление несуще-
го винта и самопроизвольное снижение вертолета. Кроме того, вер-
толет на малой высоте будет иметь повышенную путевую скорость,
при гашении которой возможно повреждение хвостовой балки и
рулевого винта. При окончательном гашении скорости перед зави-
санием вертолет очень неустойчиво выдерживает курс (вертолет
при обдуве сзади не обладает статической и путевой устойчивос-
тью), происходят колебания по тангажу (вертолет статически
неустойчив и по углу атаки при обдуве сзади).
Гашение путевой скорости при обдуве сзади требует создания
большого угла тангажа, что еще больше увеличивает вероятность
повреждения хвостовой балки. Пилотирование усложняется тем,
что ручка управления находится близко к заднему упору, особен-
но при передних центровках. Значительно отклонена вперед и
правая педаль, так как рулевой винт работает в неблагоприятных
условиях околоземного вихря. Возможно и перетяжеление несу-
щего винта при зависании, так как при попутном ветре требуется
большая мощность). Усложняется выдерживание направления и
места зависания. Увеличивается вероятность опрокидывания *при
приземлении и вероятность удара лопастями по хвостовой балке
при останове несущего винта. Таким образом, при выполнении по-
садки с попутным ветром требуются очень точные, плавные и ко-
ординированные движения рычагами управления. По перечислен-
ным причинам посадка с попутным ветром на вертолете Мй-2 за-
прещается.
При боковом ветре техника пилотирования также усложняется.
Часть мощности двигателей идет на борьбу со сносом. На малых
•скоростях и при зависании запасы поперечного и путевого управ-
ления могут оказаться недостаточными для борьбы с ветром. По-
ездка при ветре справа более сложна. При гашении скорости вер-
толет неустойчиво выдерживает курс, требуются значительные пе-
ремещения педалей, происходят колебания по тангажу. Причина
этих явлений — вредное взаимодействие индуктивного потока ру-
левого винта со свободными вихревыми жгутами несущего винта
на малых скоростях и работа рулевого винта в режиме «вихрево-
го кольца» при зависании с ветром справа. При приземлении с
ветром справа также более вероятно опрокидывание вертолета.
Более вероятен и удар лопастями по хвостовой балке при останове
несущего винта.
Поскольку вертолет несимметричен с точки зрения аэродина-
мики, то и бороться с правым и левым ветром целесообразно раз-
личными способами.
При боковом ветре справа борьба со сносом, креном и сколь-
жением нецелесообразна (рис. 4.25, а). В этом случае необходим
значительный правый крен, уменьшается составляющая равнодей-
128
ствующей силы несущего винта, уравновешивающая силу тяжести.
Малы запасы хода ручки управления вправо и правой педали.
(При гашении скорости рулевой винт попадает в свободные вих-
ревые жгуты НВ, направление вращения воздуха в которых сов-
падает с направлением вращения рулевого винта, эффективная
о б
Рис. 4.26. Борьба со сно-
сом при выполнении по-
садки при боковом ветре
слева созданием крена и
скольжения
Рис. 4.25. Различные методы борьбы со сносом
при выполнении посадки при боковом ветре
справа:
а — борьба со сносом созданием крена и сколь-
жения; б — борьба со сносом подбором курса
скорость обтекания лопастей рулевого винта уменьшается, тяга
рулевого винта падает, и пилот вынужден отклонять вперед пра-
вую педаль). При обдуве справа на зависании рулевой винт ра-
ботает в режиме «вихревого кольца» (при скорости ветра более
4 м/с). Тяга рулевого винта уменьшается, вертолет ведет себя не-
9 Заказ 4195 129
/
устойчиво по курсу, пилот вынужден часто перекладывать педали,
правая педаль может оказаться на упоре, «начнется самопроизволь-
ное вращение влево со снижением, что опасно вблизи земли и пре-
пятствия.
Поэтому при ветре справа целесообразно перед зависанием
бороться со сносом подбором курса (см. рис. 4.25, б). При этом
по мере гашения скорости необходимо разворачивать вертолет так,
чтобы зависнуть против ветра. В этом случае не требуется допол-
нительного отклонения ручки управления вправо и правой педа-
ли, рулевой винт все время работает в благоприятных условиях,
так как вертолет движется без скольжения, т. е. все время обдува-
ется спереди.
Однако при боковом ветре слева удобнее бороться со сносом
креном и скольжением. Вертолет Ми-2 в прямолинейном полете
без крена балансируется с левым скольжением. Причем по мере
гашения скорости балансировочный угол скольжения увеличива-
ется. Угол сноса также увеличивается по мере уменьшения скорос-
ти (рис. 4.26). Поэтому при ветре слева вертолет вплоть до момен-
та зависания балансируется с небольшим креном, гораздо мень-
шим требующегося для борьбы с ветром справа. Составляющая
равнодействующей силы несущего винта, идущая на уравновеши-
вание силы тяжести, больше, чем при ветре справа. При зависа-
нии вертолет сам стремится развернуться против ветра за счет пу-
тевой статической устойчивости.
На рис. 4.27 показаны осредненные траектории посадки при
встречном, боковом справа и боковом слева ветре, примерно, в
одинаковых условиях.
Рис. 4.27. Осредненные траектории посадок, выполненных в
одинаковых условиях (при встречном ветре, ветре слева и
ветре справа) при р= 10,13-104 Па (760 мм рт. ст.), /цВ =
= +18 °C:
1 — ветер встречный, №=6... 10 м/с, Упр = 60 км/ч, Vv =
= 3... 4 м/с, тпос =3520 ... 3450 кг; 2 — ветер слева, W=
=6... 10 м/с, Vnp=60 км/ч, Vy=4... 5 м/с, /ппос ==
=3600... 3500 кг; 3 — ветер справа, W=6... 10 м/с, Упр =»
60 км/ч, V у = 4... 5 j»+/wnOc=3600... 3500 кг
130
ПОСАДКА ПО-ВЕРТОЛЕТНОМУ БЕЗ ИСПОЛЬЗОВАНИЯ ВЛИЯНИЯ
ВОЗДУШНОЙ ПОДУШКИ
Если площадка имеет ограниченные размеры и окружена вы-
сокими препятствиями, применяется посадка по-вертолетному без
использования влияния воздушной подушки при гашении скорое
ти и зависании. Недостатками этого вида посадки являются низ-
кая грузоподъемность вертолета и длительное нахождение в опас-
ной зоне «высота—скорость» (см. рис. 4.18). Рекомендуемая ме-
тодика выполнения посадки по-вертолетному без использования
влияния воздушной подушки показана на рис. 4.28.
Рис. 4.28. Рекомендуемая методика выполнения посадки по-
вертолетному без использования влияния воздушной подуш-
ки:
1 — установить Гпр=60... 70 км/ч, Vy = 3... 5 м/с; 2— начать
торможение поступательной и вертикальной скоростей плав-
ным увеличением общего шага, не допуская уменьшения ча-
стоты вращения НВ ниже 77 %; 3 — зависание; 4 — верти-
кальное снижение с Vy=0,5... 1 м/с; 5 — приземление с Vy~
=0,1... 0,2 м/с
При выполнении посадки уменьшение скорости от 40 км/ч до
скорости зависания следует производить перед самой площадкой
или над ней, если позволяют размеры площадки, не допуская вер-
тикальной скорости снижения более 1,5... 2 м/с (чтобы избежать
самопроизвольного снижения вертолета). Вертикальное снижение
после зависания производить с вертикальной скоростью 0,5... 1 м/с
(такую вертикальную скорость при необходимости можно быстро
погасить).
ПОСАДКА С КОРОТКИМ ПРОБЕГОМ
Если запас мощности не позволяет выполнить зависание даже
в зоне влияния воздушной подушки, посадка возможна с коротким
пробегом. Грузоподъемность вертолета при такой посадке больше,
чем при других видах посадки. Однако при такой посадке предъ-
9* 131
являются повышенные требования к размерам и состоянию поверх-
ности площадки, а также к воздушным подходам. Рекомендуемая
методика выполнения посадки с коротким пробегом показана на
рйс. 4.29. Посадочная скорость зависит от запаса мощности. (Если
на скорости 40 км/ч возможен полет без снижения, то приземле-
ние можно производить на скорости менее 20 км/ч).
Рис. 4.29. Рекомендуемая методика выполнения посадки с
коротким пробегом:
1 — установить Рпр = 60... 70 км/ч, lzy = 3...5 м/с; 2 — начать
гашение поступательной и вертикальной скоростей плавным
увеличением общего шага несущего винта, не допуская умень-
шения частоты вращения НВ ниже 77%; 3 — поступательная
скорость должна быть не менее 40 км/ч, вертикальная ско-
рость снижения — не более 1,5 ...2 м/с; 4 — приземление на
колеса основной опоры, поступательная скорость 20...30 км/ч,
вертикальная скорость 0,2 ...0.5 м/с; 5 — использовать тормо-
за колес, ручку управления отклонять на себя для торможе-
ния при общем шаге не менее 3 ... 4°; 6 — установить в нейт-
ральное положение ручку управления, плавно опустить рычаг
«Шаг—газ», вывести влево коррекцию
Выдерживая заданную посадочную скорость, пилот плавным
уменьшением общего шага несущего винта производит приземле-
ние на колеса основной опоры вертолета (чтобы не повредить но-
совую стойку) при незначительно опущенной хвостовой балке (что-
бы не повредить хвостовую балку и рулевой винт). Чтобы избе-
жать удара лопастями по хвостовой балке, ручку управления при
торможении на пробеге разрешается отклонять на себя, при общем
шаге не менее 3...4° по указателю (чем больше углы установки
лопастей, тем больше углы взмаха лопастей и больше расстояние
от концов лопастей до хвостовой балки).
ПОСАДКА С ПРОБЕГОМ
Грузоподъемность вертолета максимальна при посадке с про-
бегом, рекомендуемая методика которой показана на рис. 4.30,
Однако траектория такой посадки частично проходит в опасной зо-
не «высота—скорость» (см. рис. 4.18). Максимально допустимая
посадочная скорость ограничена по условиям прочности шасси.
132
Такая посадка может производиться на аэродром или ровную,
проверенную площадку с открытыми воздушными подходами.
Рис. 4.30. Рекомендуемая методика выполнения посадки с пробегом:
1 — установить VIip =90 ... 100 км/ч, V'.,--^2... 5 м/с; 2 — начать тор-
можение поступательной и вертикальной скоростей плавным увели-
чением общего шага, не допуская уменьшения частоты вращения
НВ ниже 77%; 3 — поступательная скорость должна быть не менее
60 км/ч, вертикальная скорость снижения — не более 0,5 ... 1 м/с;
4 — приземление на колеса основной опоры, поступательная ско-
рость 40 ... 50 км/ч, вертикальная скорость вс более 0,2 ... 0,5 м/с;
5 — для сокращения длины пробега использовать тормоза колес,
ручку управления отклонять на себя для торможения при общем
шаге не менее 3 ... 4°; 6 — установить в нейтральное положение
ручку управления, плавно опустить рычаг «Шаг—газ», вывести вле-
во коррекцию
6. РУЛЕНИЕ
Руление является основным видом перемещения вертолета по
земле. Чаще всего оно применяется для освобождения летной по-
лосы после посадки с пробегом, а также для перемещения верто-
лета на стоянку. Для выполнения установившегося руления вер-
толет должен находиться в состоянии равновесия. Уравнения дви-
жения вертолета принимают вид:
£44 = 0— отсутствие угловых вращений;
У 4- LN — G— контакт с землей;
Хан = -|- S Ггр — постоянная скорость движения;
Zrtp.B=4H -отсутствие юза.
Схема взаимодействия сил при установившемся рулении пока-
зана на рис. 4.31. Аэродинамическая сила несущего винта
= YaH + Z*h ПРИ РУлении намного меньше, чем при перемеще-
нии (подлете) на малой высоте, так как необходимо уравновесить
лишь часть силы тяжести и меньшую тягу рулевого винта.
Следовательно, руление гораздо экономичнее подлетов и вы-
полняется во всех случаях, когда это возможно. Руление может
быть единственным средством перемещения на летную полосу пе-
133
ред взлетом, если невозможна буксировка, а полетная масса вер-
толета не обеспечивает в данных метеорологических условиях от-
рыв и полет вертолета с соблюдением установленных летных ог-
раничений и ограничений по нагрузке от индуктивного потока на
наземные средства и людей.
Рис. 4.31. Схема взаимодействия сил при установившем-
ся рулении
Перемещение вертолета по земле выполняется, если невозмо-
жен взлет со стоянки из-за препятствий, а также, если при зави-
сании и перемещении создаются пыльные (снежные) вихри, за-
трудняющие пилотирование. Однако руление разрешается произ-
водить только на ровной и прочной поверхности. При глубоком
снеге, непрочном или вязком грунте повышается вероятность воз-
никновения колебаний типа «земной резонанс» и создается опас-
ность опрокидывания вертолета (как правило, на левый бок). Ус-
ловия балансировки вертолета на земле могут быть определены с
помощью рис. 4.32. На этом же рисунке приведены параметры
шасси вертолета и изображены в условном масштабе вектора сил,
действующих на вертолет.
При заторможенных колесах основных опор вертолета или при
погружении колес в мягкий грунт даже при небольшом препятст-
вии (валике) у левого колеса основной опоры вертолет под дейст-
вием поперечного момента от тяги рулевого винта стремится на-
клониться влево. Вращение вертолета происходит относительно
линии опрокидывания, проходящей через центры площадей кон-
тактов левых колес (А и С). Правые колеса разгружаются.
134
Уравнение поперечных моментов относительно линии опроки-
дывания (точка Д) при нулевом крене в момент, когда Non = 0:
Zp.Byp.B — (G—Yn)l = 0. (89)
Из уравнения можно определить в первом приближении, при
каком соотношении тяги рулевого и несущего винтов начнется кре-
нение вертолета:
Zp. в (G Y„) //ур. в.
Рис. 4.32. Основные параметры шасси, определяющие балан-
сировку вертолета на земле
Чем меньше масса вертолета и больше общий шаг несущего
винта, тем больше вероятность накренения вертолета при отклоне-
нии впред правой педали. Тенденция к крену также увеличивает-
ся, если центр тяжести вертолета смещается вперед (уменьшается
плечо I, см рис. 4.32).
В случае незначительного левого смещения или кренения сле-
дует дополнительно учесть инерционные моменты, которые уве-
личиваются с увеличением массы и ускорения накренения верто-
лета.
В процессе кренения вертолета стабилизирующий момент от си-
лы тяжести уменьшается, а дестабилизирующие моменты руле-
вого и несущего винтов при исходном положении ручки управле-
ния и педали незначительно увеличиваются (см. рис. 4.33,а).
Если под действием ветра или в результате недостаточного от-
клонения ручки управления вправо аэродинамическая сила несу-
щего винта будет направлена влево, то вертолет начнет кренить-
ся влево при меньшей тяге рулевого винта.
135
Пон создании несущим пиитом пропульсивной силы креня.-ШЙ
момент увеличивается, так как относительно .h'ihiih опрокидыва-
ния действует больший момент от аэродинамической силы винта
(см. рис. 4.33, б).
Рис. 4.33. Поперечная балансировка вертолета на земле:
а — схема изменения момента при накренении вертолета; б — влияние на
критический угол крена пропульсивной и боковой сил несущего винта
Крснению вертолета влево способствует развернутое влево пе-
реднее колесо, кренящий момент фюзеляжа от несимметричной
обдувки планера ветром справа, а также наклон площадки влево
и вперед.
Уклон площадки вперед способствует появлению дополнитель-
ной движущей силы Gx = G • sin 9 ~ G 0, по своему действию ана-
логичной пропульсивной силе винта, но оказывающей меньшее
влияние на опрокидывание вертолета, потому что ут<ун (см. рис.
4.33, а). Уклон площадки влево создает дестабилизирующий момент
от составляющей силы тяжести Gy, тождественный уменьшению
стабилизирующего момента от силы тяжести при накренении вер-
толета (см. рис. 4.33, а).
ОСНОВНЫЕ ОГРАНИЧЕНИЯ И ОСОБЕННОСТИ ВЫПОЛНЕНИЯ
РУЛЕНИЯ
Для повышения безопасности движения вертолета Ми-2 про-
дольные уклоны рулежных дорожек должны быть не более 0,03,
а поперечные — не более 0,02. Минимальные уклоны рулежных
дорожек выбираются из условия обеспечения водоотвода: про-
дольный — не менее 0,002, а поперечный — не менее 0,005. Мини-
мальная ширина рулежных дорожек 6 м.
С целью уменьшения пылеобразования с боковой стороны ру-
лежных дорожек должны находиться полосы обеспыливания ши-
риной 4 м. Уклон этих полос (обочин) не должен превышать 0,03.
136
Расстояние .между осью несущего винта вертолета Ми-2. дви-
жущегося на собственной тяге по рулежной дорожке, до осей не-
сущих винтов, находящихся на стоянках вертолетов Мп-6, Л1и-6А,
Ми-ЮК, должно быть не менее 53 м, до осей несущих винтов вер-
толетов Ми-8, Ми-4 — не менее 32 м, а до осей несущих винтов
вертолетов Ми-1, Мп-2, 1\а-26 — не менее 22 м.
При выруливании вертолета с групповой стоянки расстояние
между концами лопастей должно быть не менее 7 м (3 м при бук-
сировке). Устанавливать вертолет на месте стоянки следует таким
образом, чтобы расстояние между осями несущих винтов у верто-
летов, находящихся в противоположных рядах, было не менее
43 м. Расстояние от вращающихся лопастей несущею и рулевого
винтов до края искусственного покрытия места стоянки должно
быть нс менее 2 м. Минимальный размер площади индивидуаль-
ной стоянки, обеспечивающей заруливание вертолета на тяге не-
сущего винта или установку вертолета с помощью буксиров-
щика, а также ра ворот вертолета вокруг основного колеса сос-
тавляет 18X14 м2. Максимальный допустимый уклон места сто-
янки 0,015. Удаление места стоянки вертолета от места стоянки
самолета должно обеспечивать расстояние между их конструктив-
ными элементами не менее 15 м.
Из условий ограничения раскачки вертолета и нагрузок на опо-
ры шасси, быстрой остановки и безопасного маневрирования мак-
симально допустимая скорость руления по бетону 10 км/ч, а по
грунту — 6...8 км/ч.
На бетонированной полосе при скорости движения вертолета
10 км/ч энергичное использование тормозов колес обеспечивает
тормозную дистанцию 25...35 м.
Рекомендуемый радиус разворота (по следу внутреннего коле-
са основного шасси) нс менее 12 м. Развороты рекомендуется вы-
полнять на пониженной скорости.
Увеличение скорости руления увеличивает радиус разворота.
При попытках разворота с малым радиусом и с повышенной ско-
ростью на заснеженном, вязком или скользком грунте под дей-
ствием центробежной силы возникает юз и создается опасность
поломки шасси или опрокидывания.
Ограничения по скорости ветра установлены аналогично огра-
ничениям на режиме висения. Перед выполнением разворотов от-
носительно ветра следует учитывать возможность увеличения тем-
пературы га ов перед турбиной. При скорости ветра более 12 м/с
вместо руления рекомендуется подлет.
Перед выполнением руления необходимо проверить располо-
жение рычагов раздельного управления двигателями на защелке
в среднем положении, рычага общего шага — на нижнем упоре
(1° по указателю шага винта), а рукоятки коррекции — в край-
нем правом положении (частота вращения винта по указателю
73 ... 80 %). Для страгивания вертолета плавным отклонением руч-
137
ки управления от себя создать вертолету требуемую пропульсив-
ную силу.
На пыльных и заснеженных площадках целесообразно выпол-
нение буксировки, так как при повороте рукоятки коррекции впра-
во пыльные и снежные вихри ухудшают видимость. До ухудше-
ния видимости следует просмотреть полосу руления и выбрать
направление по компасу. При встречном ветре до 5 м/с, в штиль
или при попутном ветре рекомендуется для уменьшения вихреоб-
разованпя рулить при уменьшенной частоте вращения винта, но
не менее 70% по указателю.
Если при минимальном общем шаге винта вертолет не страги-
вается с места, то следует плавно увеличить общий шаг до 1,5...
2,0е по указателю шага винта. При больших значениях шага, а,
следовательно, и подъемной силы несущего винта ухудшается ус-
тойчивость вертолета.
После страгивания вертолета с места следует уменьшить общий
шаг, так как трение качения колес меньше трения покоя.
Не следует для страгивания вертолета отклонять ручку управ-
ления к переднему упору, так как при этом увеличивается нагруз-
ка на переднюю опору вертолета, увеличиваются силы трения пе-
редних колес и страгивания не происходит, а возникает опасность
поломки шасси или опрокидывания.
Кроме того, при чрезмерном отклонении ручки управления от
себя возникают ударные нагрузки на ограничителях свеса лопас-
тей. воспринимаемые как стук и увеличение вибраций.
Не рекомендуется для уменьшения сцепления колес шасси с
грунтом раскачивать вертолет, изменяя тягу рулевого винта при
перемещении педалей. Большие знакопеременные нагрузки на хво-
стовую, концевую балки и агрегаты рулевого винта существенно
увеличивают напряжения, снижают ресурс и создают опасность
поломки вертолета. При невозможности руления из-за состояния
грунта необходимо выполнить подлет.
Скорость руления выбирается пилотом в зависимости от проч-
ности грунта, видимости, характера и расположения препятствий,
полетной массы вертолета. Регулируется скорость руления про-
дольными отклонениями ручки управления, рычагом общего ша-
га и тормозами колес. При опасности зарывания передних колес
в снег или грунт следует одновременно поддерживать вертолет
рычагом «Шаг—газ» и ручкой управления, не допуская юза.
Для улучшения видимости целесообразно рулить против вет-
ра. При скорости ветра более 5 м/с видимость существенно улуч-
шается. Скорость руления подбирается такой, чтобы вихри пыли
находились позади кабины экипажа. Если же при увеличении ско-
рости руления до максимально допустимой вертолет не выходит
из пыльной зоны, то необходимо рулить на малой скорости с пе-
риодическими остановками через 20... 25 м для просмотра полосы
руления.
138
При рулении с попутным ветром целесообразно выдерживать
малую скорость движения вертолета и расстояние от границы зо-
ны вихрей до вертолета 10... 15 м вперед.
При боковом ветре вертолет стремится развернуться против
ветра и накрениться по ветру, что необходимо парировать ручкой
управления и педалями. При длительном рулении снять нагрузку
с командных рычагов триммерами.
Развороты выполнять, плавно отклоняя педаль в сторону раз-
ворота с учетом безопасного расстояния до препятствий от ло-
пастей несущего и рулевого винтов.
Если в процессе разворота или при движении по скользкому
(вязкому) грунту возникает юз, то для прекращения юза необхо-
димо понизить мощность двигателей, уменьшить общий шаг несу-
щего винта до минимального с одновременным поворотом руко-
ятки коррекции влево и отклонением педали в направлении дви-
жения вертолета.
После остановки вертолета продолжать руление, но маневри-
рование выполнять на меньшей скорости.
Поперечная балансировка вертолета Ми-2 на земле определя-
ется величиной противокапотажного угла, зависящего от размеров
колеи шасси. При эксплуатации противокапотажный угол и крити-
ческий угол крена могут быть увеличены расположением центра
масс позади оси несущего винта и возможно ближе к полу кабины.
При смещении центра масс вертолета влево, при уклоне пло-
щадки влево и вперед, при правом боковом ветре, при развороте
вертолета вправо, при деформации шасси, при увеличении общего
шага несущего винта и отклонении ручки управления вперед и
влево, при уменьшении коэффициента трения площадки критичес-
кий угол крена уменьшается.
Не имея информации о величине критического угла крена, пи-
лот должен при малейшем накренении вертолета сразу отклонять
ручку управления в противоположную сторону и уменьшать об-
щий шаг до минимального. Следует учитывать, что на земле эф-
фективность поперечного управления меньше, чем на режиме ви-
сения. При запоздалом решении отклонение ручки управления до
упора будет неэффективно. При минимальном шаге наиболее эф-
фективное средство балансировки вертолета — выключение дви-
гателей. Кроме того, при уменьшении мощности двигателей уме-
ньшается дестабилизирующий момент рулевого винта. Для более
значительного уменьшения дестабилизирующего момента рулево-
го винта рекомендуется при левом крене отклонять вперед левую
педаль не менее чем на половину хода.
Однако уменьшение общего шага несущего винта при создав-
шемся крене следует производить плавно. Энергичное опускание
рычага «Шаг-газ» (сброс шага) вызывает удар лопастей несуще-
го винта по хвостовой балке и при левом крене сопровождается
ударом вертолета, о землю правым колесом. В результате возмож-
но развитие колебаний типа земной резонанс. Корме того, пилот
139
может непроизвольно увеличить общий шаг и отклонить вперед
правую педаль, что будет благоприятствовать опрокидыванию.
Перемещение рычага «Шаг-газ» вверх в темпе, соответствую-
щем приемистости двигателей, для отделения вертолета от земли и
последующей его балансировки в воздухе способствует увеличе-
нию крена. Поднявшийся в воздух накрененный вертолет начнет
смещаться влево. Если тяга несущего винта будет недостаточна,
то вертолет ударится о землю левым колесом. Отделившийся от
земли вертолет продолжает кренсние под действием дополнитель-
ного момента силы удара и снова падает. Подпрыгивая под дейст-
вием амортизации шасси, вертолет от ударной нагрузки и по инер-
ции все энергичнее накреняется, разворачивается в сторону кре-
на и уменьшает тангаж. В итоге неуправляемый вертолет опроки-
дывается.
К такому же результату приведет попытка отделить вертолет
от земли быстрым увеличением общего шага. Оторвавшийся от
земли вертолет вновь ударится о нее левым колесом, потому что
при перетяжелении винта его тяга уменьшается.
Глава 5. ОСОБЫЕ СЛУЧАИ В ПОЛЕТЕ
1. ОТКАЗ ОДНОГО ДВИГАТЕЛЯ
ВОЗМОЖНОСТИ ВЕРТОЛЕТА Ми-2 ПО ВЫПОЛНЕНИЮ ПОЛЕТА
С ОДНИМ ОТКАЗАВШИМ ДВИГАТЕЛЕМ
При полном отказе одного двигателя располагаемая мощность
уменьшается вдвое. Летные характеристики вертолета значительно
ухудшаются. На рис. 5.1 изображены кривые потребных и распо-
лагаемых мощностей при полете с двумя и одним работающими
двигателями и соответствующие им указательницы траекторий.
Вертолет при двух работающих двигателях может лететь гори-
зонтально и набирать высоту в диапазоне скоростей от Vj до V2,
но при отказе одного двигателя полет в этих условиях возможен
только со снижением. Наивыгоднейшей скоростью для полета с
одним работающим двигателем является экономическая (100...
120 км/ч в транспортном и 80 км/ч в сельскохозяйственном вари-
антах). При полете на этой скорости минимален дефицит мощ-
ности- по сравнению с потребной для горизонтального полета мощ-
ностью и минимальна вертикальная скорость снижения.
Рис. 5.1. Возможности вертолета по
выполнению полета с двумя работаю-
щими и одним неработающим двига-
телями:
а — кривые потребной и располагае-
мой мощности; б— траектории
снижения
На рис. 5.2 показаны траектории снижения для конкретных ус-
ловий (высота полета 500 м, температура наружного воздуха 12°С,
141
полетная масса 3260 кг, один двигатель работает на взлетном ре-
жиме, второй — выключен). При изменении полетной массы на
600 кг вертикальная скорость полета изменяется примерно на
1 м/с.
Рис. 5.2. Траектория снижения (//=500 м, /Нв =
= +12 °C, тПол = 3260 кг)
Максимальную полетную массу, при которой возможен полет
без снижения при использовании взлетной мощности работающе-
го двигателя на экономической скорости 100 ...ПО км/ч, можно
определить по графику (рис. 5.3). Этим графиком необходимо по-
льзоваться при расчете на полет над морем, горами и другой мест-
ностью, исключающей возможность безопасной посадки. График
построен для некоторого «среднего» вертолета и может служить
только для ориентировочных расчетов.
Рис. 5.3. Номограмма для определения максимальной
полетной массы, при которой возможен горизонтальный
полет с одним неработающим двигателем (второй дви-
гатель работает на взлетном режиме, скорость
100... ПО км/ч по прибору)
При уменьшении располагаемой мощности ухудшаются и ма-
невренные возможности вертолета. По сравнению с прямолиней-
ным полетом при развороте с креном 20° вертикальная скорость
142
снижения увеличивается примерно на 0,7 м/с, а с креном 30е — на
1,4 м/с практически независимо от направления разворота.
На рис. 5.4 показана потеря высоты при развороте на 180е с
одним неработающим двигателем в зависимости от скорости и уг-
ла крена. В условиях, для которых построены графики, вертолет
в горизонтальном полете снижался с Vy~—0,5 м/с. Из рисунка
видно, что минимальная потеря высоты получается при развороте
с креном 25 ...30° на скорости 60 ...80 км/ч (примерно 30 м при
развороте на 180°). Время разворота уменьшается с уменьшени-
ем скорости полета и увеличением угла крена. Хотя на скоростях
60 ...80 км/ч вертикальная скорость снижения больше, чем на
скоростях 100... 110 км/ч, но намного меньше время разворота, и
общая потеря высоты получается минимальной. С целью уменьше-
ния потери высоты маневрирование следует выполнять на взле-
тном режиме работающего двигателя (частота вращения несуще-
го винта 78... 79%, рычаг раздельного управления работающего
двигателя поднят вверх). Особое внимание следует обращать на
выполнение разворота без скольжения, так как скольжение при-
водит к значительному увеличению вертикальной скорости сниже-
ния и потере высоты.
Рис. 5.4. Зависимость потери высоты при разворотах
влево и вправо на 180° с одним неработающим двига-
телем от скорости и угла крена (второй двигатель ра-
ботает на взлетном режиме, //==500 м. /ьв=-|-12оС,
тпол =3500 ...3400 кг, пи = 78...79%)
ПОВЕДЕНИЕ ВЕРТОЛЕТА ПРИ ОТКАЗЕ ОДНОГО ДВИГАТЕЛЯ
При внезапном и полном отказе одного двигателя уменьшает-
ся частота вращения несущего винта, что приводит к разбаланси-
ровке вертолета. Вертолет стремится:
— развернуться вправо (резко уменьшается мощность силовой
установки и реактивный момент несущего винта, а сила тяги ру-
левого винта уменьшается медленнее);
— накрениться вправо (сила тяги рулевого винта, кренящая
вертолет влево, уменьшается, а конус вращения несущего винта
стремится сильнее завалиться вправо, так как уменьшается часто-
143
та вращения несущего винта и увеличивается угол атаки несуще-
го винта при появлении вертикальной скорости снижения);
— опустить нос (уменьшается скорость индуктивного потока,
создаваемого несущим винтом, а следовательно, уменьшается каб-
рирующий момент планера);
— уменьшить высоту полета (уменьшается подводимая к не-
сущему винту мощность).
Уменьшение частоты вращения несущего винта и разбаланси-
ровка вертолета тем значительнее, чем выше был режим работы
двигателей в момент отказа и меньше скорость полета.
При частичном отказе двигателя, когда мощность падает по-,,
степенно, автоматика двигателя поддерживает некоторое время
частоту вращения несущего винта в заданных пределах, и отказ
двигателя трудно обнаружить по поведению вертолета.
ДЕЙСТВИЯ ПИЛОТА ПО БАЛАНСИРОВКЕ ВЕРТОЛЕТА,
ПОДДЕРЖАНИЮ ЧАСТОТЫ ВРАЩЕНИЯ НЕСУЩЕГО ВИНТА
И УСТАНОВЛЕНИЮ НАИВЫГОДНЕЙШЕГО РЕЖИМА ПОЛЕТА
ПОСЛЕ ОТКАЗА ОДНОГО ДВИГАТЕЛЯ
При внезапном отказе двигателя (при наличии запаса-высо-
ты и скорости) необходимо:
— немедленно взять ручку циклического шага на себя. Если
отказ произошел на скорости более 100 км/ч, уменьшить ско-
рость до величины 90... 100 км/ч по прибору. Если отказ произо-
шел на скорости 60... 100 км/ч, уменьшить скорость до величины
не менее 50 км/ч по прибору. На скоростях менее 100 км/ч рас-
крутка НВ при взятии ручки на себя слабее, чем на больших ско-
ростях, так как меньше скорость набегающего потока; гашение
скорости в этом случае производить невыгодно, так как это при-
водит к увеличению вертикальной скорости снижения и потере вы-
соты. Отдача ручки от себя приводит к резкому уменьшению час-
тоты вращения несущего винта. До перехода на установившуюся
частоту вращения несущего винта отдача ручки от себя запреща-
ется;
— уменьшить углы установки лопастей несущего винта (на 1...
4' по указателю), отклонив вниз рычаг «Шаг-газ». При этом
уменьшается сопротивление лопастей и облегчается раскрутка не-
сущего винта. Чем более высоким был режим работы двигателей
в момент отказа, тем большей будет величина дефицита мощности
после отказа и тем на большую величину необходимо уменьшать
углы установки лопастей, чтобы частота вращения несущего вин-
та не уменьшалась ниже 70 ...74%. При этом не следует резко
уменьшать установочные углы до минимальных, так как это прак-
тически равнозначно выключению второго двигателя и приводит к
значительному увеличению вертикальной скорости снижения и
потере высоты (рис. 5.5);
144
— отклонением ручки циклического шага влево и левой педали
сбалансировать вертолет;
л -1 100 150 УПр,км/ч'
-----:—:—।—I—I—I—I—I—I—I—I—I
Рис. 5.5. Зависимость потери высоты
за время выхода работающего двига-
теля с режима малого газа на взлет-
ный режим от скорости полета тПол =
= 3190... 3570 кг, /нв=8... 14°С, Я=
= 900 м, пн=78... 79 %
— перевести оба рычага раздельного управления в крайнее
верхнее положение (чтобы не тратить время на выяснение того,
какой из двигателей отказал);
— рычагом «Шаг-газ» установить взлетную мощность работа-
ющего двигателя (частота вращения несущего винта не менее
78% или температура газов не выше максимально допустимой);
— выключить отказавший двигатель стоп-краном, закрыть по-
жарный кран отказавшего двигателя.
После выполнения этих действий установить скорость, соответ-
ствующую минимальной вертикальной скорости снижения (мак-
симальной продолжительности снижения), т. е. 100... 120 км/ч по
прибору в транспортном варианте и 80 км/ч в сельскохозяйствен-
ном. Затем заняться подбором площадки.
РЕЗЕРВЫ, ИМЕЮЩИЕСЯ В РАСПОРЯЖЕНИИ ПИЛОТА
ДЛЯ ГАШЕНИЯ ВЕРТИКАЛЬНОЙ СКОРОСТИ
ПРИ ОТКАЗЕ ОДНОГО ДВИГАТЕЛЯ
При выполнении посадки с одним работающим двигателем пи-
лот может погасить вертикальную скорость снижения, используя
следующие энергетические резервы:
— мощность работающего двигателя;
— кинетическую энергию движения вертолета. (При уменьше-
нии поступательной скорости увеличивается угол атаки несуще-
го винта, увеличивается подъемная сила, в результате уменьша-
ются угол снижения и вертикальная скорость снижения);
— кинетическую энергию вращения несущего винта. (Если бы-
стрым отклонением рычага «Шаг—газ» вверх увеличить устано-
вочные углы лопастей, то частота вращения несущего винта вна-
чале будет уменьшаться медленно, и сила тяги несущего винта
кратковременно возрастает. Это действие пилота называется «под-
рывом». «Подрыв» используется для гашения вертикальной скоро-
сти перед самой землей. После «подрыва» частота вращения не-
сущего винта и сила тяги быстро уменьшаются).
При «подрыве» можно погасить тем большую вертикальную
скорость: z
Ю Заказ 4195 145
— чем больше мощность работающего двигателя перед нача-
лом «подрыва»;
— чем больше частота вращения несущего винта перед нача-
лом «подрыва» (если не работают оба двигателя);
— чем больше время, в течение которого производится «под-
рыв».
Для увеличения эффективности «подрыва» его следует произ-
водить в нарастающем темпе по мере приближения к земле. При
наличии поступательной скорости «подрыв» более эффективен, чем
при вертикальном снижении (эффект «косой обдувки»). «Под-
рыв» особенно эффективен в сочетании с гашением поступатель- с
ной скорости (при гашении скорости увеличивается угол атаки
несущего винта, а частота вращения несущего винта уменьшается
медленнее).
ТЕХНИЧЕСКИЕ ВОЗМОЖНОСТИ ВЕРТОЛЕТА Ми-2
ПО ВЫПОЛНЕНИЮ ПОСАДКИ С ОДНИМ ОТКАЗАВШИМ
ДВИГАТЕЛЕМ
На рис. 5.6' показаны опасные зоны высоты и скорости, кото-
рые определены из условия обеспечения безопасной посадкй при
отказе одного двигателя в стандартных атмосферных условиях при
полетной массе 3550 кг.
Рис. 5.6. Опасные
зоны -'.высота —
скорость»:
1 — взлет по-вер-
толетному без ис-
пользования влия-
ния воздушной по-
душки; 2 — по-
садка по-вертолет-
ному с использова-
нием влияния воз-
душной подушки;
3 — взлет с реали-
зацией крутой тра-
ектории; 4 — по-
садка с коротким
пробегом с одним
неработающим
двигателем; 5 —.
взлет по пологой
траектории; 6 —
посадка по поло-
гой траектории
Если отказ двигателя произойдет при сочетаниях высоты и
скорости, соответствующих внутренним точкам зон, то пилот не
сможет выполнить безопасную посадку даже на подготовленную
площадку.
146
Если отказ двигателя произойдет при сочетании высоты и ско-
рости, соответствующих зоне 1, то вертикальную скорость нельзя
будет уменьшить до допустимой для приземления при самом энер-
гичном «подрыве» и максимальном использовании торможения
поступательной скорости (см. рис. 5.1).
В случае отказа двигателя при сочетаниях высот и скоростей,
соответствующих заштрихованной части зоны 1, попытки увели-
чить скорость для увеличения эффективности «подрыва» приводят
к уменьшению частоты вращения несущего винта и резкому уве-
личению вертикальной скорости снижения, которая приближает-
ся к критической по «вихревому кольцу» (примерно 4 м/с).
В случае отказа двигателя при сочетаниях высоты и скорости,
соответствующих зоне 2, трудность пилотирования вызывается не-
обходимостью гашения большой поступательной скорости на ма-
лой высоте у земли. У пилота может не хватить времени, чтобы
сбалансировать вертолет, погасить поступательную скорость и при-
дать вертолету посадочное положение.
При взлетах, полетах и посадках пилот должен выбирать тра-
екторию полета так, чтобы избежать нахождения в опасных зонах.
ПОСАДКА С ПРОБЕГОМ С ОДНИМ НЕРАБОТАЮЩИМ
ДВИГАТЕЛЕМ
Эта посадка наиболее проста по технике выполнения и требу-
ет минимальной мощности по сравнению с другими методиками.
Посадка с пробегом характеризуется значительной скоростью
приземления (более 30 км/ч) и большой длиной пробега. Такая
посадка разрешается на подготовленные площадки длиной не ме-
нее 120 м с открытыми воздушными подходами.
Схема такой посадки представлена на рис. 5.7.
Рис. 5.7. Посадка с пробегом с одним неработающим двигателем:
1 — установить Упр = 90... 100 км/ч, Vy =2... 3 м/с; 2 — начать
гашение поступательной и вертикальной скоростей; 3 — отклонени-
ем ручки от себя придать вертолету посадочное положение; 4 —
приземление на колеса основной опоры с поступательной скоростью
50... 30 км/ч и вертикальной скоростью не более 0,2.., 0,5 м/с;
5 — гашение скорости отклонением ручки на себя (при общем ша-
ге 4... 6°) и тормозами; 6 — установить в нейтральное положение
ручку, плавно опустить рычаг «Шаг—газ», вывести влево коррекцию
10* 147
/
ПОСАДКА С КОРОТКИМ ПРОБЕГОМ С ОДНИМ
НЕРАБОТАЮЩИМ ДВИГАТЕЛЕМ
Отличительными особенностями этой посадки являются:
— использование сравнительно малых скоростей на предпоса-
дочном планировании;
— использование кинетической энергии несущего винта для
гашения вертикальной скорости.
Посадка с коротким пробегом применяется при вынужденных
посадках на площадки, имеющие размеры меньше 120 м, углы ог-
раничения препятствий в зоне воздушных подходов не более 10е
и состояние поверхности, допускающее безопасный пробег.
Рекомендуемая методика посадки с коротким' пробегом пока-
зана на рис. 5.8. Ниже даны краткие пояснения к каждому из эта-
пов.
1. Расчет на посадку производить против ветра (в этом слу-
чае меньше посадочная скорость и длина пробега, больше запасы
управления).
Чем больше скорость встречного ветра, тем большей должна
быть поступательная скорость, чтобы сохранить тот же угол на-
клона траектории, так как точка приземления закрыта из-за недо-
статочности остекления пилотской кабины.
Расчет уточнять изменением поступательной и вертикальной
скоростей. (Из рис. 4.16 видно, что на скоростях, меньших, чем
скорость, соответствующая минимальному углу снижения, меньшей
поступательной скорости соответствует больший угол снижения и
большая вертикальная скорость снижения).
Указанные скорости обеспечивают крутую глиссаду, удовлет-
ворительную видимость точки приземления, небольшую посадоч-
ную скорость и посадочную дистанцию.
2. Высота, на которой начинается гашение вертикальной и по-
ступательной скоростей, зависит от их величины, полетной массы,
высоты площадки над уровнем моря и темпа гашения скорости.
Не следует уменьшать поступательную скорость ниже 30... 20 км/ч
на высоте более 7... 5 м. (Для полета на малых скоростях требу-
ется большая мощность, влияние воздушной подушки при таком
сочетании скорости и высоты практически отсутствует, возможно
резкое увеличение вертикальной скорости снижения).
3. На конечных этапах посадки высоту и вертикальную ско-
рость оценивать визуально, потому что вариометр и барометричес-
кий высотомер дают показания с запаздыванием.
4. Из-за недостаточной приемистости двигателя взлетный режим
должен быть установлен до начала «подрыва» общего шага (час-
тота вращения несущего винта должна быть примерно 78%).
5. «Подрыв» общего шага — наиболее ответственный этап. Ус-
тановочные углы лопастей увеличиваются до максимальных с тем-
пом 2...3° в секунду. В процессе «подрыва», оценивая визуально
высоту и вертикальную скорость, пилот может изменять его темп,
148
Рис. 5.8. Посадка с коротким пробегом с одним неработающим двигателем:
/ —установить V«p=70... 80 км/ч, если №сЗ... 5 м/с, и Упр=80... 120 км/ч, если V/ 5 м/с, Уу=3...4 м/с;
2 — взятием ручки на себя плавно увеличить угол тангажа на 5... 10°, одновременно начать плавное увеличе-
ние общего шага (не допуская падения частоты вращения НВ ниже 78%); 3 — перейти на визуальный контроль
вертикальной скорости и высоты; 4 — Vnp=40 км/ч, Vy=2... 3 м/с, мощность работающего двигателя взлет-
ная; 5 — начать энергичный «подрыв» соразмерно набеганию земли; 6 — на высоте 2... 1 м отклонением руч-
ки от себя придать вертолету посадочное положение; 7 — приземление на колеса основной опоры с посту-
пательной скоростью 0 ... 30 км/ч; 8 — гашение скорости отклонением ручки на себя (при общем шаге
4 .. .6°) и тормозами; 9 — установить ручку в нейтральное положение, плавно опустить рычаг «Шаг—газ», вы-
вести влево коррекцию; 10 — область посадочных траекторий (в штиль)
учитывая, что при слишком медленном увеличении установочных
углов лопастей уменьшается эффективность «подрыва», а при сли-
шком быстром возможен помпаж работающего двигателя и его
выход из строя. Это допустимо в аварийных ситуациях и недопус-
тимо при тренировочных посадках.
«Подрыв» производить с таким расчетом, чтобы вертикальная
скорость примерно равнялась нулю на высоте 1 ... 0,5 м от колес
до земли. Если «подрыв» начат преждевременно, замедлить его
темп или уменьшить установочные углы лопастей на 2...30 для
сохранения частоты вращения несущего винта, затем снова «за-
тяжелить» несущий винт. Если «подрыв» начат с опозданием, уве-
личить его темп.
При подрыве уменьшается частота вращения несущего и ру-
левого винтов. В результате возрастает реактивный момент несу-
щего винта и уменьшается сила тяги рулевого винта. Вертолет
стремится развернуться влево. Чтобы парировать этот разворот,
следует своевременно отклонить вперед правую педаль.
При «подрыве» вертолет также стремится увеличить угол тан-
гажа (поднять нос), так как возрастает естественный завал кону-
са вращения несущего винта назад и возрастает кабрирующий мо-
мент планера от обдувки индуктивным потоком.
6. Посадочное положение вертолету придается отклонением
ручки от себя. Не следует придавать вертолету посадочное поло-
жение на большой высоте, так как это приводит к увеличению по-
ступательной и вертикальной скоростей и увеличению длины про-
бега.
7. Приземление следует производить на колеса основных опор
вертолета с незначительно опущенной хвостовой балкой. Призем-
ление на колеса передней опоры вертолета может привести к ее
поломке. Приземление со значительно опущенной хвостовой бал-
кой может привести к поломке рулевого винта.
К моменту приземления вертикальная скорость должна быть
примерно равна нулю. Зависание на высоте более 2 м недопусти-
мо, так как может привести к поломке вертолета.
К моменту приземления допускается падение частоты враще-
ния несущего винта до 65 %. Управляемость при этом сохраняется
нормальной. Но уменьшение частоты вращения несущего винта
приводит к увеличению нагрузки на редуктор (крутящий момент
при постоянной мощности, подводимой к несущему винту, обрат-
но пропорционален частоте вращения несущего винта). Поэтому
после приземления желательно сразу начать уменьшение устано-
вочных углов лопастей несущего винта. Установочные углы умень-
шать плавно (чтобы лопасти не ударились о хвостовую балку).
8. На пробеге для гашения скорости используются тормоза, а
при необходимости и несущий винт. Допускается отклонение руч-
ки циклического шага на себя для гашения скорости при устано-
вочных углах лопастей не менее 4° (по указателю шага винта) во
избежание удара лопастями по хвостовой балке.
150
9. После остановки плавно установить рычаг «Шаг—газ» в
нижнее положение (предварительно установив ручку циклического
шага в нейтральное положение, чтобы лопасти не ударились о
хвостовую балку), вывести влево коррекцию. На рис. 5.9 показа-
на запись некоторых параметров при посадке с коротким пробе-
гом с одним неработающим двигателем.
Рис. 5.9. Запись основных параметров полета при посадке с коротким пробегом
с одним неработающим двигателем [р=9,96-104 Па (747 мм рт.ст.), /нв=21°С,
W—Ъ м/с (встречный), тп0 =3430 кг]
ПОСАДКА БЕЗ ПРОБЕГА С ОДНИМ НЕРАБОТАЮЩИМ
ДВИГАТЕЛЕМ
Посадка без пробега применяется при посадке на местность,
не допускающую послепосадочного пробега (лес, болото). Техни-
ка выполнения почти не отличается от посадки с коротким пробе-
гом. Гашение поступательной и вертикальной скоростей начина-
ется на высоте 25... 20 м энергичным увеличением угла тангажа
на 8... 10°. «Подрыв» общего шага начинается на высоте 7...5 м с
таким расчетом, чтобы вертолет завис на высоте 1... 0,5 м.
151
ОТКАЗ ДВИГАТЕЛЯ НА ВИСЕНИИ
При отказе двигателя на висении происходит резкое снижение
вертолета с разворотом и кренением вправо. Возможно несколько
случаев:
Высота менее 5 м.
Сбалансировать вертолет и начать «подрыв» соразмерно при-
ближению земли одним энергичным движением с выводом кор-
рекции влево с момента, когда она начинает ограничивать даль-
нейшее взятие рычага «Шаг—газ». Приземление выполнять по
возможности на колеса основных опор вертолета.
Высота 5 ... 10 м.
Сбалансировать вертолет. Незначительно уменьшить устано-
вочные углы лопастей несущего винта (до 6...6,5° по указателю)
для замедления темпа падения частоты несущего винта (психоло-
гически это очень трудное и непривычное для пилота действие).
Попытки увеличить скорость для увеличения эффективности
«подрыва» приводят лишь к уменьшению частоты вращения несу-
щего винта и увеличению вертикальной скорости снижения.
На рис. 5.10 приведена запись некоторых параметров при вы-
ключении правого двигателя на висении стоп-краном в испыта-
тельном полете.
Рис. 5.10. Запись основных
параметров полета при
имитации отказа одного из
двигателей на режиме
висения
[р= 10,04-104Па (753 мм
рт. ст), tнв = 8°С,
№=2,5 м/с (встречный),
т по =3420 кг]
152
2. ОТКАЗ ДВУХ ДВИГАТЕЛЕЙ
ВОЗМОЖНОСТИ ВЕРТОЛЕТА Ми-2 НА ПЛАНИРОВАНИИ
С ДВУМЯ НЕРАБОТАЮЩИМИ ДВИГАТЕЛЯМИ
Вертикальная скорость снижения зависит от величины дефи-
цита мощности по сравнению с потребной мощностью для гори-
зонтального полета. С увеличением полетной массы, высоты поле-
та, температуры наружного воздуха и других факторов, вызыва-
ющих увеличение потребной мощности, возрастают дефицит мощ-
ности и вертикальная скорость снижения. Дефицит мощности и
вертикальная скорость снижения зависят от величины поступа-
тельной скорости (рис. 5.11). Из рис. 5.12 видно, что:
Рис. 5.11. Возможности вертолета на
планировании с двумя неработающи-
ми двигателями:
а — кривая потребной мощности; б—
траектория снижения
Рис. 5.12. Траектория снижения вертолета с двумя нера-
ботающими двигателями (Я=1000 м, /нв = 23°C, п =81 %,
m пол = 3450 кг)
153
— наименьшая вертикальная скорость снижения (7,5 ...8 м/с)
и, следовательно, максимальная продолжительность снижения по-
лучается при планировании на скорости около 100 км/ч по при-
бору;
— наибольшая дальность планирования (минимальный угол
планирования получается на скорости, примерно, 140 км/ч по при-
бору. При этом Vy~8,5...9 м/с, 0min« 13° (в штиль).
Вертикальная скорость снижения зависит также от частоты
вращения несущего винта (рис. 5.13). Минимальная вертикаль-
ная скорость снижения получается при частоте вращения несуще-
го винта 80 %•
Рис. 5.13. Зависимость вертикальной скорости снижения от
частоты вращения несущего винта при снижении с двумя не-
работающими двигателями (Я=1100 м, /цвя 9°C, Vnp=
= 100... 120 км/ч, тпол = 3260 кг)
Переход от поступательного прямолинейного полета к полету с
креном 20° приводит к увеличению вертикальной скорости сниже-
ния на 0,5... 1 м/с.
Зависимость потери высоты от скорости при развороте с кре-
ном 20° показана на рис. 5.14.
Минимальная потеря высоты (примерно 180 м при развороте
на 180°) получается в полете со скоростью 60 км/ч и креном 20...
30°. Хотя в этом случае вертикальная скорость больше, чем при
скорости 100 км/ч, намного меньше время разворота, и потеря
высоты получается минимальной.
ПОВЕДЕНИЕ ВЕРТОЛЕТА ПРИ ВНЕЗАПНОМ ОТКАЗЕ
ДВУХ ДВИГАТЕЛЕЙ
При внезапном отказе двух двигателей резко уменьшаются ча-
стоты вращения несущего винта и турбокомпрессоров, изменяет-
ся уровень шума двигателей и трансмиссии. Вертолет стремится;
154
— развернуться вправо (исчезает реактивный момент, появля-
ется увлекающий момент за счет трения в трансмиссии, развора-
чивающий вертолет вправо, рулевой винт также еще некоторое
время создает силу тяги, разворачивающую вертолет вправо);
Рис. 5.14. Зависимость потери высоты при разворотах
влево и вправо на 180° с двумя неработающими дви-
гателями от скорости при угле крена 20°, тпол =
= 3260 кг, Я=1000 м, /ИВ=3°С, пн=84,5... 85,5 %
— накрениться вправо (сила тяги рулевого винта уменьшает-
ся, стремление конуса вращения несущего винта завалиться впра-
во увеличивается, так как появляется вертикальная скорость сни-
жения и увеличивается угол атаки несущего винта);
— уменьшить угол тангажа (индуктивный поток исчезает, пла-
нер начинает обдуваться не сверху, а снизу и создает пикирующий
момент);
— снизиться (к несущему винту перестает подводиться мощ-
ность) .
Таким образом, при внезапном отказе двух двигателей верто-
лет имеет те же тенденции, что и при отказе одного двигателя, но
проявляются они сильнее.
ДЕЙСТВИЯ ПИЛОТА ПО БАЛАНСИРОВКЕ ВЕРТОЛЕТА,
ПОДДЕРЖАНИЮ ЧАСТОТЫ ВРАЩЕНИЯ НЕСУЩЕГО ВИНТА
И УСТАНОВЛЕНИЮ НАИВЫГОДНЕЙШЕГО РЕЖИМА СНИЖЕНИЯ
ПОСЛЕ ОТКАЗА ДВУХ ДВИГАТЕЛЕЙ
При полном отказе двух двигателей необходимо:
— немедленно взять ручку циклического шага на себя (если
отказ произошел на скорости более 70 км/ч), чтобы не допустить
значительного уменьшения частоты вращения несущего винта (от-
клонение ручки управления на себя приводит к увеличению углов
атаки элементов лопастей, что способствует раскрутке несущего
винта). Величина перемещения ручки на себя зависит от скорос-
155
ти, на которой произошел отказ. При отказе на скорос-
ти более 100 км/ч уменьшить скорость до 90... 100 км/ч, а при от-
казе двигателей на скоростях 70... 100 км/ч скорость уменьшить
не более чем на 15... 20 км/ч. Взятие ручки управления на себя
на скоростях более 100 км/ч целесообразно, так как при этом про-
исходит раскрутка несущего винта, а скорость уменьшается до
скорости, соответствующей минимальной вертикальной скорости
снижения.
При взятии ручки управления на себя на скоростях менее
100 км/ч раскрутка несущего винта слабее (меньше скорость на-
бегающего потока), и уменьшение скорости в этом случае невы-
годно, так как приводит к увеличению вертикальной скорости сни-
жения и потере высоты. При наличии запаса скорости и высоты
над препятствиями в момент отказа запрещается отклонять руч-
ку управления от себя до восстановления частоты вращения несу-
щего винта, так как это приводит к резкому уменьшению часто-
ты вращения несущего винта;
— одновременно с отклонением ручки управления на себя не-
обходимо уменьшить общий шаг до минимального значения, что-
бы перевести несущий винт на режим самовращения. Задержка
в уменьшении общего шага недопустима, так как частота враще-
ния несущего винта при отказе двух двигателей уменьшается рез-
ко, а значительное уменьшение частоты вращения несущего винта
приводит к потере эффективности управления вертолетом. Не сле-
дует допускать уменьшения частоты вращения несущего винта ни-
же 76% по указателю и увеличения частоты вращения более
92%;
— одновременно сбалансировать вертолет, удерживая его руч-
кой управления от опускания носа и кренения вправо, педалями
— от разворота вправо;
— установить рычагом «Шаг—газ» частоту вращения несуще-
го винта 80... 84%;
— выключить двигатели, закрыв стоп-краны;
— закрыть пожарные краны двигателей;
— установить скорость планирования, обеспечивающую наи-
выгоднейшие условия для посадки на режиме самовращения на
подобранную площадку.
ПОСАДКА С ПРОБЕГОМ С ДВУМЯ НЕРАБОТАЮЩИМИ
ДВИГАТЕЛЯМИ
Посадка с пробегом проста по технике выполнения. Она ха-
рактеризуется значительной скоростью приземления (более 30
км/ч) и большой длиной пробега. Разрешается такая посадка на
подготовленные площадки длиной не менее 150 м с открытыми
подходами. Рекомендуемая схема выполнения этой посадки по-
казана на рис. 5.15.
156
/
зо-гом
20-15м
V777777777^V777777777777777777777777777777777777777777777777777^7777777^777777777^
Рис. 5.15. Посадка с пробегом с двумя неработающими двигателями:
1 — установить Vnp = 90... 100 км/ч и частоту вращения НВ 80 ...84 %; 2 — на-
чать гашение поступательной и вертикальной скоростей отклонением ручки на себя;
3 — начать плавное увеличение общего шага; 4 — отклонением ручки от себя при-
дать вертолету посадочное положение; 5 — приземление на колеса основной опоры
с поступательной скоростью 60 ... 30 км/ч и У^=0,5... 1м/с; 6 — гашение скорос-
ти отклонением ручки на себя (при общем шаге 4... 6°) и тормозами; 7 —
установить ручку в нейтральное положение, плавно опустить рычаг «Шаг—газ»
ПОСАДКА С КОРОТКИМ ПРОБЕГОМ С ДВУМЯ
НЕРАБОТАЮЩИМИ ДВИГАТЕЛЯМИ
Характеризуется небольшой скоростью приземления (менее
30 км/ч) и длиной пробега 15... 80 м в штиль. Она применяется,
если размеры площадки меньше 150 м, углы ограничения препят-
ствий в зоне воздушных подходов не более 15°, состояние поверх-
ности площадки допускает пробег. Рекомендуемая схема выпол-
нения такой посадки показана на рис. 5.16. Ниже даны краткие
пояснения к каждому из этапов:
1. Расчет желательно производить против ветра. В этом слу-
чае круче траектория снижения, меньше скорость приземления,
больше запасы управления. Расчет уточнять изменением поступа-
тельной скорости (меньшей скорости соответствует меньшая даль-
ность) .
• 2. Энергичное увеличение угла тангажа приводит к раскрутке
несущего винта. Раскрутка несущего винта перед началом «под-
рыва» целесообразна, так как приводит к увеличению кинетичес-
кой энергии вращения несущего винта и эффективности «подры-
ва» (допускается раскрутка несущего винта до 92%, но не более
5 с).
Правильный выбор высоты начала «подрыва» является одним
из важнейших условий безопасной посадки. Перед началом «под-
рыва» производится «подсечка» — энергичное увеличение общего
шага на 1,5... 2°. «Подсечка» приводит к уменьшению вертикаль-
ной скорости снижения на 1,5 ...2 м/с и позволяет:
157
— увеличить воемя на действия пилота в непосредственной
близости от земли;
Рис. 5.16. Посадка с коротким пробегом с двумя неработающими двигателями:
1 — установить lznp=90 ... 100 км/ч и частоту вращения НВ 80... 84 %; 2 — пе-
рейти на визуальный контроль вертикальной скорости и высоты. Начать гашение
скорости энергично, увеличив угол тангажа на 10... 15°. Одновременно увеличить
общий шаг на 1,5... 2° («подсечка»); 3 — начать энергичный «подрыв» сораз-
мерно набеганию земли с таким расчетом, чтобы Vy«*0 к высоте 0,5... 1 м; 4—
поступательная скорость должна составлять 40 ... 20 км/ч; 5 — на высоте 4... 2 м
отклонением ручки от себя придать вертолету посадочное положение; 6 — при-
земление на колеса основной опоры с поступательной скоростью не более
30 км/ч; 7 — гашение скорости отклонением ручки на себя (при общем шаге
не менее 4°) и тормозами; 8 — установить ручку в нейтральное положение, плав-
но опустить рычаг «Шаг—газ»; 9 — область посадочных траекторий (в штиль)
— оценить реакцию вертолета на увеличение общего шага (эф-
фективность «подрыва»). Таким образом, «подсечка» помогает пи-
лоту правильно выбрать высоту начала «подрыва».
3. «Подрыв» выполнять энергично, соразмерно набеганию зем-
ли, за 2... 4 с. Непосредственно перед приземлением общий шаг
несущего винта увеличивать более энергично. При этом учитывать,
что зависание на высоте более 1,5 ...2 м недопустимо, возможна
поломка вертолета. Если общий шаг несущего винта увеличен пре-
ждевременно, уменьшить его на 2...3°, а затем снова выполнить
«подрыв».
В процессе выполнения «подрыва» удерживать вертолет, от-
клоняя ручку управления от дальнейшего увеличения угла тан-
гажа. К моменту приземления допускается уменьшение частоты
вращения несущего винта до 60% по указателю.
4. На высоте 15... 10 м поступательная скорость должна сос-
тавлять 40 ...20 км/ч.
5. При создании вертолету посадочного положения на большой
высоте получается увеличенная длина пробега, так как при откло-
нении ручки управления от себя увеличивается поступательная
скорость. Однако создание посадочного положения на малой вы-
соте может привести к повреждению хвостовой балки.
6. Вертолет приземлять на колеса основных опор (чтобы не
повредить переднюю опору), но с незначительно опущенной хвое-
158
товой балкой (чтобы не повредить хвостовую балку и рулевой
винт).
7. Чтобы избежать удара лопастями по хвостовой балке, ручку
управления отклонять на себя (для торможения при общем шаге
несущего винта не менее 4°).
8. Чтобы избежать удара лопастями по хвостовой балке, об-
щий шаг несущего винта уменьшать плавно при нейтральном по-
ложении ручки управления.
Рис. 5.17. Запись основных параметров полета при посадке с
коротким пробегом с двумя неработающими двигателями [р =
= 9,97-104 Па (748 мм рт.ст.); /НВ=27°С; W=4 м/с
(встречный), шпос=3460 кг]
ПОСАДКА БЕЗ ПРОБЕГА С ДВУМЯ НЕРАБОТАЮЩИМИ
ДВИГАТЕЛЯМИ
Посадка без пробега применяется, если невозможен послепо-
садочный пробег (лес, болото, вода). По технике пилотирования
эта посадка почти аналогична посадке с коротким пробегом. Пла-
нирование выполняется на скорости 70... 80 км/ч по прибору. Га-
. 159
шение скорости начинается на высоте 25 ...20 м энергичным уве-
личением угла тангажа на 15...20°. С высоты 15... 10 м при пос-
тоянном угле тангажа выполнить энергичный «подрыв» общего
шага до максимального значения за 1 ...2 с. С высоты 5...3 м со-
здать посадочное положение.
3. ФЛАТТЕР НЕСУЩЕГО ВИНТА
ФИЗИЧЕСКАЯ СУЩНОСТЬ ФЛАТТЕРА
Флаттер представляет собой самовозбуждающиеся изгибно-
крутильные колебания лопастей.
Чаще всего встречается маховой флаттер. Движение лопасти
при таком флаттере состоит из махового движения, кручения и из-
гиба. Большая часть перемещений элементов вызывается маховы-
ми движениями.
Колебания возбуждаются аэродинамическими силами. Демп-
фируют колебания аэродинамические и упругие силы. Инерцион-
ные силы в зависимости от положения центров масс сечений по
отношению к центрам жесткости могут и гасить колебания, и уси-
ливать их. Источником энергии для колебаний является набегаю-
щий поток.
При флаттере крутильные и изгибные колебания усиливают
друг друга. Амплитуда колебаний увеличивается. Процесс продол-
жается до тех пор, пока лопасть не разрушится.
Флаттер не возникает, если центры масс сечений расположены
впереди центров давления, а центры жесткости совпадают с цент-
рами давлений или расположены немного впереди. При этом ис-
ключается вредное взаимодействие крутильных и изгибных коле-
баний.
Обычно это достигается установкой специальных противофлат-
терных грузов в носке лопасти и применением профилей, близких
по форме к симметричным, у которых центр давления почти не
перемещается при изменении угла атаки.
УСЛОВИЯ, в КОТОРЫХ ВОЗНИКАЕТ ФЛАТТЕР
При увеличении скорости потока, набегающего на лопасть, воз-
буждающие силы растут быстрее, чем демпфирующие. Флаттер
возникает при превышении определенной критической частоты вра-
щения несущего винта, которая, в свою очередь, уменьшается при
увеличении скорости. Поэтому флаттер наиболее вероятен на
больших скоростях, но возможен и на других режимах, в том чис-
ле и на висении.
Новые лопасти подвергаются испытаниям на флаттер, но в про-
цессе эксплуатации флаттер может возникнуть, если под дейст-
вием каких-либо эксплуатационных факторов центры масс сече-
160
иий лопасти сместятся назад (например, из-за нарастания льда
или при попадании влаги внутрь отсеков лопасти и т. д.).
Признаками флаттера являются:
— тряска вертолета с частотой, не кратной частоте вращения
несущего винта;
— ухудшение управляемости;
— нарушение соконусности лопастей («размыв» конуса враще-
ния несущего винта).
ДЕЙСТВИЯ ПИЛОТА ПРИ ВОЗНИКНОВЕНИИ ФЛАТТЕРА
Действия пилота должны быть направлены на уменьшение
подвода энергии для усиления колебаний, т. е. на уменьшение ско-
рости потока, набегающего на лопасти.
1. Вывести влево коррекцию, рычагом «Шаг—газ» уменьшить
частоту вращения несущего винта до минимально допустимой.
2. Одновременно с отклонением ручки на себя уменьшить ско-
рость на 30 ...40 км/ч по прибору. Флаттер должен прекратиться.
3. Выполнение задания прекратить. Возвратиться на аэродром
на скорости, на 30... 40 км/ч меньшей, чем та, на которой возник
флаттер.
4. Если флаттер не прекращается, немедленно произвести по-
садку.
4. «ЗЕМНОЙ РЕЗОНАНС»
ФИЗИЧЕСКАЯ СУЩНОСТЬ «ЗЕМНОГО РЕЗОНАНСА»
«Земной резонанс» — самовозбуждающиеся колебания верто-
лета, возникающие на земле при совпадении собственной частоты
колебаний вертолета на шасси с частотой колебаний лопастей от-
носительно вертикальных шарниров.
Вертолет, как и любая другая механическая система, имеет
собственную частоту колебаний на шасси, которая зависит, в част-
ности, от зарядки амортизаторов и пневматиков.
Лопасти несущего винта имеют собственную частоту колеба-
ний относительно вертикальных шарниров. При колебаниях ло-
пастей их общий центр тяжести смещается в сторону от оси вра-
щения несущего винта. Появляется неуравновешенная центробеж-
ная сила, раскачивающая вертолет.
Если частота колебаний лопастей относительно вертикальных
-шарниров совпадает с собственной частотой колебаний на шасси,
то колебания вертолета на шасси усиливаются. Усиление этих ко-
лебаний приводит к усилению колебаний лопастей относительно
вертикальных шарниров и т. д. Колебания быстро прогрессируют.
Развиваются колебания в основном в поперечной плоскости, так
как момент инерции вертолета относительно продольной оси мень-
31 Заказ 4195 1 161
ше моментов инерции относительно других осей. Источником энер-
гии для усиления колебаний являются двигатели.
С ростом амплитуды колебаний колеса основных опор верто-
лета начинают попеременно отрываться от земли. Возможны уда-
ры лопастей о землю, разрушение шасси, опрокидывание вертоле-
та, разрушение хвостовой балки и отрыв рулевого винта. «Земной
резонанс» может разрушить вертолет в течение нескольких секунд.
Основными конструктивными мерами борьбы с «земным резо-
нансом» является применение демпферов вертикальных шарниров
и специальных двухкамерных амортизаторов.
УСЛОВИЯ, В КОТОРЫХ ВОЗНИКАЕТ «ЗЕМНОЙ РЕЗОНАНС»
«Земной резонанс» может возникнуть при нарушении правил
эксплуатации амортизаторов шасси, пневматиков колес и демпфе-
ров вертикальных шарниров.
Непосредственной причиной начала колебаний может быть ка-
кой-либо фактор, вызвавший сильную разбалансировку несущего
винта:
порыв ветра;
резкое и значительное отклонение ручки;
наезд на кочку при рулении на большой скорости и т. д.
Возникновению «земного резонанса» способствуют:
1. Большой общий шаг несущего винта (с увеличением мощ-
ности двигателей увеличивается подвод энергии для развития ко-
лебаний, кроме того, увеличивается сила тяги несущего винта и
уменьшается обжатие амортизаторов, а следовательно, уменьша-
ется работа сил, демпфирующих колебания).
2. Высокая температура наружного воздуха (с увеличением
температуры уменьшается вязкость масла в демпферах вертикаль-
ных шарниров и уменьшается работа сил, демпфирующих колеба-
ния).
Действия пилота при возникновении «земного резонанса» дол-
жны быть направлены на уменьшение подвода энергии для разви-
тия колебаний, уменьшение разбалансировки несущего винта и
устранение причин, вызывающих разбалансировку несущего винта
и колебания лопастей относительно вертикальных шарниров.
При возникновении «земного резонанса» необходимо:
1. Полностью вывести влево коррекцию и одновременно энер-
гично опустить рычаг «Шаг—газ» до упора (уменьшается подвод
энергии для развития колебаний, увеличивается работа сил, демп-
фирующих колебания, так как увеличивается обжатие амортиза-
торов) .
2. Установить в нейтральное положение ручку (уменьшается
разбалансировка несущего винта).
Если «земной резонанс» возник при движении на земле (руле-
нии, пробеге, разбеге)то, кроме указанных действий, уменьшить
162
скорость торможением колес (а не отклонением ручки), при не-
обходимости до полной остановки.
Если после указанных действий поперечные колебания верто-
лета не прекратились, выключить двигатели.
ПРЕДОТВРАЩЕНИЕ ВОЗНИКНОВЕНИЯ «ЗЕМНОГО РЕЗОНАНСА»
Чтобы исключить возникновение «земного резонанса», необхо-
димо:
1. Соблюдать правила эксплуатации амортизаторов, пневмати-
ков и демпферов вертикальных шарниров.
2. Соблюдать ограничения по скорости руления и скорости вет-
ра.
3. Не рулить при больших значениях общего шага несущего
винта, избегать руления по неровному и мягкому грунту, глубоко-
му и рыхлому снегу, не рулить е левой коррекцией.
4. При взлете и посадке по-самолетному не превышать реко-
мендуемые скорости отрыва и посадочную скорость.
5. При взлете и посадке по-вертолетному не удерживать верто-
лет долго во взвешенном состоянии.
5. РЕЖИМ «ВИХРЕВОГО КОЛЬЦА»
ФИЗИЧЕСКАЯ СУЩНОСТЬ РЕЖИМА «ВИХРЕВОГО КОЛЬЦА»
При снижении с работающими двигателями с малой поступа-
тельной скоростью и большой вертикальной скоростью (равной
индуктивной скорости отбрасывания) под НВ встречаются
два потока—индуктивный поток сверху и набегающий поток сни-
зу. В результате отброшенный воздух снова подсасывается НВ
(НВ как бы «догоняет» отброшенный им воздух и таким образом
движется в замкнутой массе воздуха — воздушном «пузыре»). По
периметру НВ образуется кольцо вращающегося воздуха (рис.
5.18). Отсюда название режима — «вихревое кольцо».
Рис. 5.18. Обтекание несущего винта в режиме «вихревого кольца»
163
/
Тяга НВ значительно уменьшается. С точки зрения импульсной
теории это происходит потому, что НВ не отбрасывает массу воз-
духа вниз, а просто «перемешивает» воздух. Мощность двигателей
тратится бесполезно. Падение тяги объясняется тем, что в резуль-
тате ускорения одной и той же массы воздух подходит к плоскос-
ти вращения с большей скоростью, углы атаки элементов на кон-
цах лопастей уменьшаются.
В комлевых частях лопастей из-за торможения индуктивного
потока набегающим потоком происходит увеличение углов атаки
элементов. В результате возможно образование зоны срыва, что
также приводит к падению тяги.
Воздушный «пузырь» вокруг НВ неустойчив. Он постоянно про-
рывается то с одной, то с другой стороны, затем снова восстанав-
ливается. В результате тяга постоянно меняется по величине и на-
правлению.
УСЛОВИЯ, в КОТОРЫХ ВОЗНИКАЕТ РЕЖИМ
«ВИХРЕВОГО КОЛЬЦА»
Режим «вихревого кольца» возникает при моторном снижении
с поступательной воздушной скоростью меньше 60 км/ч и верти-
кальной скоростью больше 2...3 м/с. Условия для возникновения
«вихревого кольца» могут возникнуть, например, в следующих слу-
чаях:
1. При заходе на посадку с попутным ветром (ориентируясь на
малой высоте по земле, пилот может допустить потерю воздушной
скорости). j
2. При заходе на посадку с перелетом (при попытке пилота ис-
править расчет, уменьшив поступательную скорость и увеличив
вертикальную).
3. При заходе на посадку на площадку ограниченных размеров,
окруженную высокими препятствиями.
4. При выходе из режима авторотации на малой скорости уве-
личением общего шага без предварительного увеличения поступа-
тельной скорости.
5. При выполнении разворотов на малой скорости и высоте при
наличии ветра (ориентируясь по земле, пилот может допустить по-
терю воздушной скорости, в результате возможно самопроизволь-
ное снижение вертолета).
ПРИЗНАКИ ВОЗНИКНОВЕНИЯ «ВИХРЕВОГО КОЛЬЦА»
1. Быстрое самопроизвольное увеличение вертикальной скорос-
ти снижения.
2. Беспорядочные колебания вертолета по крену, тангажу и
курсу.
3. Усиление вибраций.
4. Колебания частоты вращения несущего винта.
5. Уменьшение эффективности управления вертолетом.
164
ДЕЙСТВИЯ ПИЛОТА ПРИ ПОПАДАНИИ В РЕЖИМ
«ВИХРЕВОГО КОЛЬЦА»
При начинающемся самопроизвольном снижении необходимо
попытаться уменьшить вертикальную скорость плавным увеличе-
нием общего шага несущего винта.
Тяга НВ при этом увеличивается за счет увеличения углов ата-
ки комлевых элементов. (Однако если в комлевых частях обра-
зовалась зона срыва потока, то вертолет может отреагировать на
увеличение общего шага увеличением вертикальной скорости сни-
жения из-за расширения зоны срыва).
Для того, чтобы устранить «вихревое кольцо», необходимо ис-
ключить встречу индуктивного и набегающего потоков.
Основным способом устранения «вихревого кольца» является
увеличение поступательной скорости.
При большом запасе высоты устранить «вихревое кольцо» мож-
но также переводом НВ на режим авторотации (на режиме авто-
ротации «вихревое кольцо» не возникает, так как НВ не отбрасы-
вает поток воздуха вниз и только тормозит набегающий поток).
МЕРЫ ПО ПРЕДОТВРАЩЕНИЮ ПОПАДАНИЯ В РЕЖИМ
«ВИХРЕВОГО КОЛЬЦА»
Поскольку вертолеты летают в основном на малых высотах, а
вывод вертолета из режима «вихревого кольца» требует значитель-
ной потери высоты, то попадания в режим «вихревого кольца» сле-
дует избегать, придерживаясь следующих рекомендаций:
1. Соблюдать ограничения по минимально допустимой скорос-
ти. Внимательно контролировать приборную скорость при полетах
на малых скоростях (особенно на малых высотах при наличии
ветра).
2. При моторном снижении на скоростях менее 60 км/ч не до-
пускать вертикальной скорости снижения более 2...3 м/с, а при
вертикальном снижении — более 2 м/с.
3. Не выполнять посадку с попутным ветром.
4. Расчет на посадку с перелетом исправлять своевременным
уходом на второй круг.
5. Помнить, что попадание в режим «вихревого кольца» наибо-
лее вероятно в условиях, когда для полета требуется большая мощ-
ность (большая полетная масса, большая высота полета, высокая
температура наружного воздуха, полет со скольжением и т. д.).
6. СРЫВ ПОТОКА С ЛОПАСТЕЙ
ФИЗИЧЕСКАЯ СУЩНОСТЬ СРЫВА
Отступающие лопасти взмахивают вниз. В результате углы
атаки элементов лопастей увеличиваются. На концах лопастей при
165
углах азимутального положения, близких к 270°, где дополнитель-
ная скорость потока, набегающего на элементы от маховых дви-
жений, самая большая, углы атаки элементов лопасти могут пре-
высить критические. Происходит срыв потока (рис. 5.19). На ри-
сунке для простоты рассматривается режим плоского обтекания
(а =0) и не учитывается индуктивная скорость подсасывания. С
увеличением скорости полета угол атаки выделенного элемента
увеличивается (уменьшается составляющая сонг—и увеличи-
вается составляющая VB3M, так как усиливаются маховые движе-
ния).
с ж '
Рис. 5.19. Срыв потока с лопастей несущего винта:
а — набегающий на вертолет поток; б — угол атаки произвольного эле-
мента лопасти; в—область срыва
На режиме самовращения срыв потока начинается ближе к
комлевым частям лопастей.
УСЛОВИЯ, в КОТОРЫХ ВОЗНИКАЕТ СРЫВ
Срыв потока обычно происходит при превышении максималь-
но допустимой скорости полета для данной высоты.
Срыву способствуют:
большая высота полета (с увеличением высоты уменьшается
плотность воздуха, усиливаются маховые движения лопастей, кро-
ме того, для полета требуется большая мощность и большие уста-
новочные углы лопастей);
большая полетная масса (для полета требуется большая мощ-
ность и, следовательно, большие установочные углы лопастей);
увеличение вредного сопротивления (например, установка сель-
скохозяйственной аппаратуры). Для полета в этом случае требу-
ется большая мощность и, следовательно, большие установочные
углы лопастей;
166
уменьшение частоты вращения несущего винта. Усиливаются
маховые движения, уменьшается составляющая <он —Voo (см. рис.
5.19);
создание перегрузки на маневре (требуется большая мощность
и большие установочные углы лопастей).
ПРИЗНАКИ ВОЗНИКНОВЕНИЯ СРЫВА ПОТОКА С ЛОПАСТЕЙ
1. Тряска вертолета.
2. Кренение вертолета вправо и кабрирование.
3. Ухудшение управляемости.
4. Усиление раскачки вертолета и полная потеря управляемос-
ти при дальнейшем развитии срыва.
ДЕЙСТВИЯ ПИЛОТА ПРИ ВОЗНИКНОВЕНИИ СРЫВА ПОТОКА
С ЛОПАСТЕЙ
Действия пилота должны быть направлены на уменьшение уг-
лов атаки лопастей и уменьшение маховых движений.
Пилот должен:
1. Плавно уменьшить установочные углы лопастей, опустив ры-
чаг «Шаг—газ».
2. Уменьшить скорость полета взятием ручки на себя.
7. ПЕРЕТЯЖЕЛЕНИЕ НЕСУЩЕГО ВИНТА
ФИЗИЧЕСКАЯ СУЩНОСТЬ ПЕРЕТЯЖЕЛЕНИЯ
Для того, чтобы несущий винт вращался с постоянной часто-
той, подводимая к нему мощность должна равняться потребной для
вращения. При увеличении установочных углов лопастей увеличи-
вается и подводимая к несущему винту мощность двигателей, так
что частота вращения остается, примерно, постоянной. В резуль-
тате при перемещении рычага «Шаг—газ» вверх увеличивается
сила тяги несущего винта.
Однако возможны случаи, когда при перемещении рычага
«Шаг—газ» вверх к несущему винту будет подводиться мощность,
меньшая потребной для вращения с заданной частотой. Частота
вращения несущего винта и сила тяги будут уменьшаться. Проис-
ходит перетяжеление несущего винта.
Перетяжеление возможно и при включенной системе автома-
тического поддержания частоты вращения несущего винта (при
полностью введенной правой коррекции) и при отключенной.
Возможны два случая:
1. Рычаг «Шаг—газ» поднимается вверх быстрее, чем возрас-
тает мощность двигателей (этот случай особенно характерен для
167
вертолетов с газотурбинными двигателями из-за плохой приемис-
тости двигателей).
2. Рычаг «Шаг—газ» поднимается вверх в нормальном темпе,
но выше того положения, при котором достигается взлетная мощ-
ность двигателей.
СЛУЧАИ, В КОТОРЫХ НАИБОЛЕЕ ВЕРОЯТНО
ПЕРЕТЯЖЕЛЕНИЕ НЕСУЩЕГО ВИНТА
Перетяжеление наиболее вероятно в условиях, когда для поле-
та требуется большая мощность (большая полетная масса, боль-
шая высота полета, высокая температура наружного воздуха и.
т. д.).
Чаще всего перетяжеление происходит в следующих случаях:
1. При взлете (например, если рычаг «Шаг—газ» поднимает-
ся вверх слишком быстро). Причем в этом случае за счет исполь-
зования кинетической энергии вращения несущего винта вертолет*
может набрать некоторую высоту, но не зависнет, а начнет резка*
снижаться.
2. При попытке быстро погасить поступательную скорость (на-
пример, при попытке исправить расчет на посадку с перелетом).
3. При попытке быстро погасить вертикальную скорость сни-
жения.
4. При попытке быстро набрать высоту перед препятствием.
5. При создании перегрузки при маневре.
6. При зависании на посадке (например, если посадочная мас-
са больше максимально допустимой или при посадке с попутными
ветром).
ПРИЗНАКИ ПЕРЕТЯЖЕЛЕНИЯ НЕСУЩЕГО ВИНТА
При перетяжелении несущего винта происходит падение часто-
ты вращения ниже минимально допустимой при увеличении обще-
го шага, начинается самопроизвольное снижение вертолета.
Кроме того, перетяжеление может сопровождаться:
1. Ухудшением управляемости и уменьшением запасов управ-
ления (из-за уменьшения частоты вращения несущего и рулевого
винтов). Правая педаль при перетяжелении может оказаться на
упоре (увеличивается реактивный момент несущего винта, так как
при постоянной подводимой мощности уменьшается частота вра-
щения несущего винта. Сила тяги рулевого винта также умень-
шается, потому что уменьшается частота вращения рулевого вин-
та, в результате пилот вынужден отклонять вперед правую пе-
даль) .
2. Увеличением температуры газов перед турбинами, помпажем
двигателей и уменьшением их мощности (при падении частотьв
вращения несущего винта ниже минимально допустимой возмо^-
жен срыв потока с лопаток свободной турбины).
168
3. Возникновение режима «вихревого кольца» (если при начав-
шемся в результате перетяжеления самопроизвольном снижении
вертолета вертикальная скорость превысит критическую).
ДЕЙСТВИЯ ПИЛОТА ПРИ ПЕРЕТЯЖЕЛ ЕНИИ НЕСУЩЕГО ВИНТА
При перетяжелении несущего винта необходимо для восста-
новления частоты вращения несущего винта незначительно умень-
шить общий шаг несущего винта (психологически это трудное для
пилота действие).
МЕРЫ ПО ПРЕДОТВРАЩЕНИЮ ПЕРЕТЯЖЕЛЕНИЯ
НЕСУЩЕГО ВИНТА
Чтобы избежать перетяжеления НВ, необходимо:
1. Рычагом «Шаг—газ» работать плавно, не допуская падения
частоты вращения несущего винта ниже минимально допустимой,
2. Помнить, что взлетная мощность двигателей снимается при5
частоте вращения несущего винта 78... 80 % и частоте вращения'
турбокомпрессоров, соответствующей взлетному режиму при дан-
ной температуре наружного воздуха (если отсутствуют ограниче-
ния по температуре газов).
3. Соблюдать ограничения и рекомендации по максимально*
допустимым взлетной и посадочной массам, размерам посадочных
площадок, воздушным подходам, вертикальным и поступательным-
скоростям при взлете и посадке и т. д.
8. ОТКАЗ ПУТЕВОГО УПРАВЛЕНИЯ
НАРУШЕНИЕ ПРОВОДКИ УПРАВЛЕНИЯ ОТ ПЕДАЛЕЙ^
К РУЛЕВОМУ ВИНТУ
При разрушении проводки управления лопасти рулевого вин-
та под действием центробежных, аэродинамических и упругих сидр
устанавливаются под углом, примерно, 5°. При таком установоч-
ном угле лопастей рулевого винта вертолет балансируется в го-
ризонтальном полете без скольжения на скорости около 70 км/ч'
по прибору. На меньших скоростях вертолет балансируется с пра-
вым креном и правым скольжением (реактивный момент НВ час-
тично компенсируется моментом боковой аэродинамической силы’
планера, возникающей при скольжении). При зависании верто-
лет начинает вращаться влево.
Признаками разрушения проводки управления является отсут-
ствие реакции вертолета на отклонение педалей, самопроизволь-
ный разворот вертолета.
В этом случае пилот должен:
1. Сбалансировать вертолет. (Балансировать вертолет и управ-
лять вертолетом по курсу можно отклонением ручки управления.
16^
Например, при отклонении ручки вправо создается правый крен
и правое скольжение. Вертолет благодаря путевой статической ус-
тойчивости стремится устранить скольжение, т. е. разворачивается
вправо)
2. Установить скорость 70 км/ч по прибору.
3. Выбрать ближайшую площадку, пригодную для посадки с
пробегом.
4. Выполнить посадку с пробегом. Посадку желательно произ-
водить против ветра (меньше путевая скорость в момент призем-
ления и длина пробега, больше запасы управления). При ветре
оправа также можно произвести приземление вертолета без сноса в
на меньшей путевой скорости.
ВЫХОД ИЗ СТРОЯ ТРАНСМИССИИ, ПЕРЕДАЮЩЕЙ МОЩНОСТЬ
НА РУЛЕВОЙ ВИНТ, ИЛИ ПОВРЕЖДЕНИЕ РУЛЕВОГО ВИНТА
В этих случаях тяга рулевого винта либо уменьшается, либо
полностью исчезает.
Признаками этих отказов являются:
— интенсивный разворот вертолета влево (под действием не-
сбалансированного реактивного момента НВ);
— кренение вертолета вправо (под действием несбалансиро-
ванного поперечного момента НВ);
— при отрыве рулевого винта с хвостовым редуктором вертолет,
кроме того, резко опускает нос (значительно изменяется центров-
ка, исчезает кабрирующий реактивный момент РВ).
В этих случаях пилот должен:
а) на режиме висения у земли:
— плавно уменьшая общий шаг, произвести посадку, удержи-
вая вертолет ручкой управления от кренения вправо и опускания
носа (приземление произойдет с вращением влево. Чтобы избе-
жать опрокидывания, следует немедленно после приземления
уменьшить общий шаг НВ до минимального, вывести влево кор-
рекцию и выключить двигатели);
б) в поступательном полете:
— немедленно вывести влево коррекцию и опустить рычаг
«Шаг—газ» вниз до упора (для уменьшения реактивного момен-
та НВ);
— отклонением ручки управления удержать вертолет от опус-
кания носа и кренения вправо;
— перейти к планированию на режиме авторотации НВ, не
выключая двигателя (при работающих двигателях легче подби-
рать площадку и уточнять расчет на посадку, кроме того, меняя
реактивный момент режимом работы двигателей, можно баланси-
ровать вертолет по курсу);
170
— на планировании балансировать вертолет скольжением
(ручкой управления), постепенно увеличивая режим работы дви-
гателей для уменьшения вертикальной скорости снижения;
— подобрать площадку, пригодную для посадки с пробегом;
— произвести посадку с пробегом, по возможности против вет-
ра.
Л ИТЕРАТУРА
1. Акимов А. И., Берестов Л. М., Михеев Р. А. Летные испытания вертолетов.
М., Машиностроение, 1980, 399 с. *
2. Альков Е. И. Из опыта освоения вертолета. Расчет на посадку на малых:
скоростях. Газета «Северная трасса» (Якутск), 28.5.77 г.
3. Алаян О. М., Ромасевич В. Ф., Совгиренко В. С. Аэродинамика и динамика
полета вертолета. Под ред. к. т. н. Загордана А. М. М., Воениздат МО
СССР, 1973, 446 с.
4. Артамонов Л. Т. Взлетный вес вертолета. «Гражданская авиация», 1970, № 11,
10—11 с.
5. Аэромеханика самолета. Под ред. Бочкарева А. Ф. М., Машиностроение, 1977,
414 с.
6. Браверман А. С., Перлштейн Д. М., Лаписова С. В. Балансировка одновинто-
вого вертолета. М., Машиностроение, 1975, 176 с.
7. Бородач А. И. Выбор направления вертолетного старта. «Наука и техника
гражданской авиации», 1971, № 3, 29—32 с.
8. Горбатенко С. А., Макашев Э. М., Полушкин Ю. Ф„ Шефтель Л. В. Механи-
ка полета. М., Машиностроение, 1969, 420 с.
9. Гессоу А., Мейерс Г. Аэродинамика вертолета. М., Государственное издатель-
ство оборонной промышленности, 1954, 255 с.
10. Гуревич А. X. Анализ разброса тяговых характеристик вертолета Ми-2. В кн.
«Вопросы аэродинамики, динамики полета и летной эксплуатации граждан-
ских летательных аппаратов». Труды ГосНИИ ГА, вып. 165. М. 1979 г.,
29—37 с.
11. Динамика полета. Под ред. д. т. н. Мхитаряна А. М. М., Машиностроение,
1978, 424 с.
12. Изыскания и проектирование аэродромов. Под ред. Глушкова Г. И. и
Д. А. Могилевского. М., Транспорт, 1979, 327 с.
13. Кожевников В. А. Автоматическая стабилизация вертолета. М., Машиностро-
ение, 1977, 152 с.
14. Котик М. Г., Павлов А. В., Пашковский И. М., Сардановский Ю. С., Щи-
таев И. Г. Летные испытания самолетов. М., Машиностроение, 1965, 380 с.
15. Краснов Н. Ф., Кошевой В. И. Управление и стабилизация в аэродинамике.
Под ред. Краснова Н. Ф. М., Высшая школа, 1978, 480 с.
16. Лалетин К. И., Г анус Г. Т., Иванов Ю. П., Николаев Л. М„ Русаков В. Г.
Практическая аэродинамика самолета Як-18Т. М., Транспорт, 1976, 216 с.
17. Лалетин К. Н., Артамонов Л. Т. Практическая аэродинамика вертолета
Ми-6. М., Машиностроение, 1979, 120 с.
18. Лалетин К. Н., Артамонов Л. Т. Практическая аэродинамика вертолета
Ми-6А. М., Транспорт, 1980, 166 с.
19. Лалетин К. Н. Практическая аэродинамика вертолета Ка-26. М., Транспорт,
1974, 192 с.
20. Миль М. Л., Некрасов А. В., Браверман А. С., Гродко Л. Н., Лейканд М. А.
Вертолеты. Расчет и проектирование. Кн. I. Аэродинамика. М., Машино
строение, 1966, 456 с.
172
21. Ромасевич В. Ф., Самойлов Г. А. Практическая аэродинамика вертолетов.
М., Воениздат, 1980, 384 с.
22. Теория несущего винта. Под ред. Мартынова А. К-, М., Машиностроение,
1973, 364 с.
23. Практическая аэродинамика маневренных самолетов. Под общей ред.
Лысенко Н. М., М., Воениздат МО СССР, 1977, 439 с.
24. Фабрикант Н. Я-, Аэродинамика. М., Наука. 1964, 814 а.
ОГЛАВЛЕНИЕ
Глава 1. Основы аэродинамики винта
1. Работа винта с жестким креплением лопастей к втулке 3
2. Работа винта с шарнирным креплением лопастей к втулке 15»
3. Характеристики винтов вертолета Ми-2 .,,..29'
4. Характеристики планера и силовой установки , ... 37
Глава 2. Балансировка, устойчивость и управляемость вертолета
1. Загрузка и центровка.............................41
2. Балансировка вертолета.............................’ . 46
3. Устойчивость вертолета............................. 59
4. Управляемость вертолета..........................64
Глава 3. Висение, взлет
1. Характеристики висения и вертикальных режимов полета 68
2. Выполнение висения и маневров с этого режима ... 78
3. Взлет вертолета..................................88
Глава 4. Установившийся полет с поступательной скоростью. Ви-
раж. Посадка.
1. Горизонтальный полет..........................97
2. Набор высоты...................................... 108
3. Снижение с работающими двигателями...........112
4. Вираж ..............................................115
5. Посадка с работающими двигателями . . . . . .119
6. Руление 133
Глава 5. Особые случаи в полете
1. Отказ одного двигателя.......................141
2. Отказ двух двигателей........................153
3. Флаттер несущего винта .......... 160
174
4. «Земной резонанс».................................161
5. Режим «вихревого кольца»..........................163
6. Срыв потока с лопастей...........................165>
7. Перетяжеление несущего винта......................167
8. Отказ путевого управления....................... 169
Литер атур а.........................................172
/
В. Б. Зозуля, К. Н. Лалетин, Н. И. Гученко
ПРАКТИЧЕСКАЯ АЭРОДИНАМИКА ВЕРТОЛЕТА Ми=2
Редактор Л. М. Бурдина
Художественный редактор Л. Г. Осипова
Технический редактор Т. Б. Родина
Корректор Ю. М. Тарасевич
Т-20696 Сдано в набор 27.02.84. Подписано в печать 28.11.84.
Формат 60X90/16 Гарнитура литературная Бумага тип.
Высокая печать. Усл. печ. л. 11,0 Усл. кр.-отт. 11,13 Уч.-изд. л. 10.8
'Тираж 6030 экз. Заказ 4195. Изд. № 183. Цена 1 р. 13 к.
Издательство «Воздушный транспорт»
1030121, Москва, Старопанский пер., 5
г. Владимир, типография имени 50-летия Октября.