/































































































































Текст
GA .CAI К ИСЯН, B.M АХУ1Щ0В Э.СМИНАЕВ
АНАЛИЗ
РАЗВИТИЯ Б( ШЬШИХ
СИСТЕМ
АКАДЕМИЯ НАУК СССР
Ордена Ленина Институт проблем управления
С. А. САРКИСЯН, В. М. АХУНДОВ, Э. С. МИНАЕВ
АНАЛИЗ
И ПРОГНОЗ РАЗВИТИЯ БОЛЬШИХ ТЕХНИЧЕСКИХ СИСТЕМ
ИЗДАТЕЛЬСТВО «НАУКА»
Москва 1983
УДК 658.589.011.46
Саркисян С. А., Ахундов В. М., Минаев Э. С. Анализ и прогноз развития больших технических систем. М.: Наука, 1982.
Монография посвящается методологии системного анализа, прогнозирования и оптимизации управления развитием больших технических систем. Рассматриваются аналитический аппарат и процедуры системного анализа применительно к энергоматериальным, человеко-машинным и информационным характеристикам объектов. Изложены теоретические основы формирования и выбора стратегий развития систем, включая альтернативные и модульные стратегии развития применительно к программноцелевому управлению. Предложены традиционные и комплексные методы прогнозирования развития применительно к формированию целевых комплексных программ. Книга рассчитана на научных работников, инженеров, интересующихся современными аспектами теории управления.
Ответственный редактор академик
В. А. ТРАПЕЗНИКОВ
С
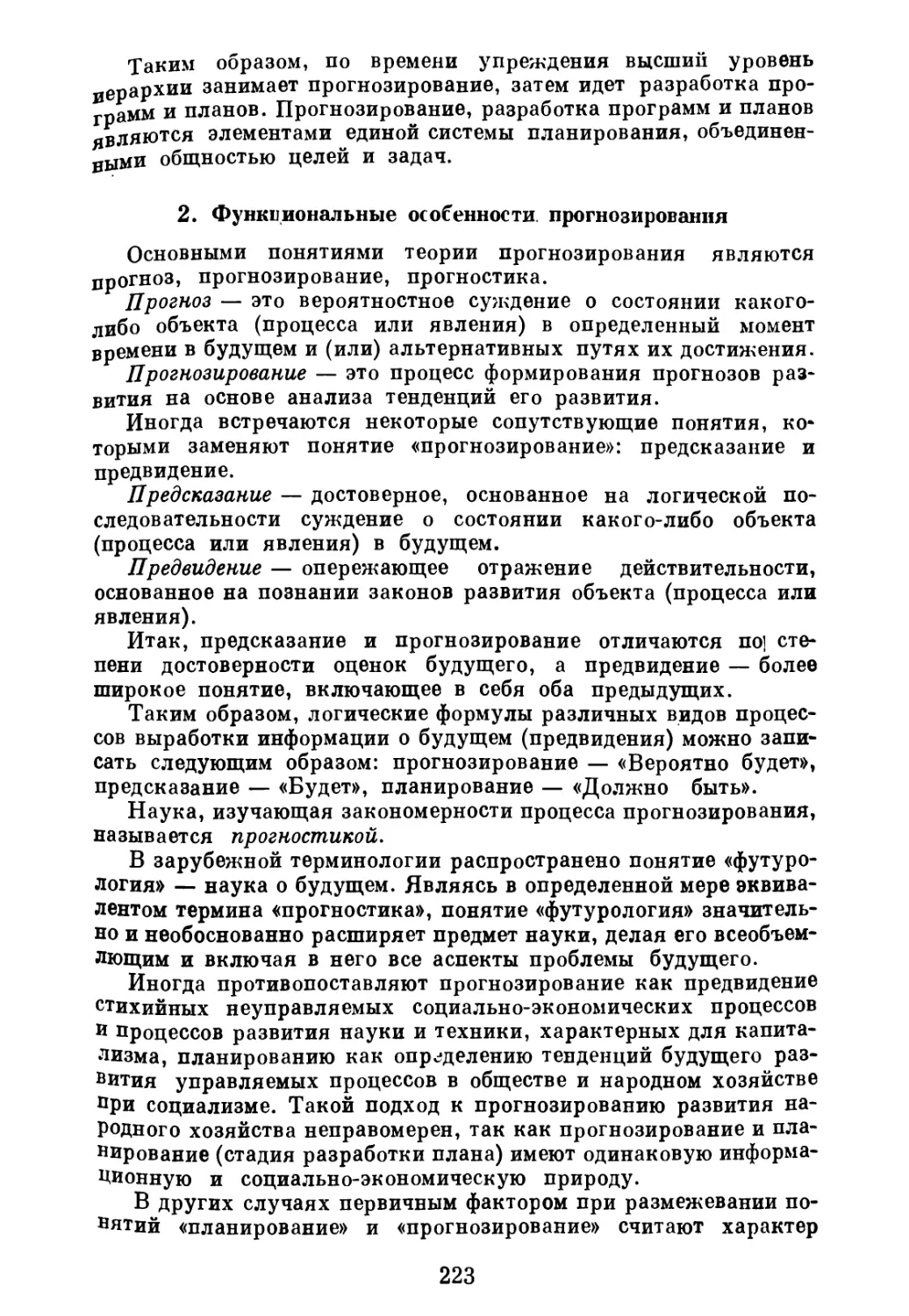
1502000000-031 055(02)—83
879—82, кн. 2
© Издательство «Наука», 1983 г.
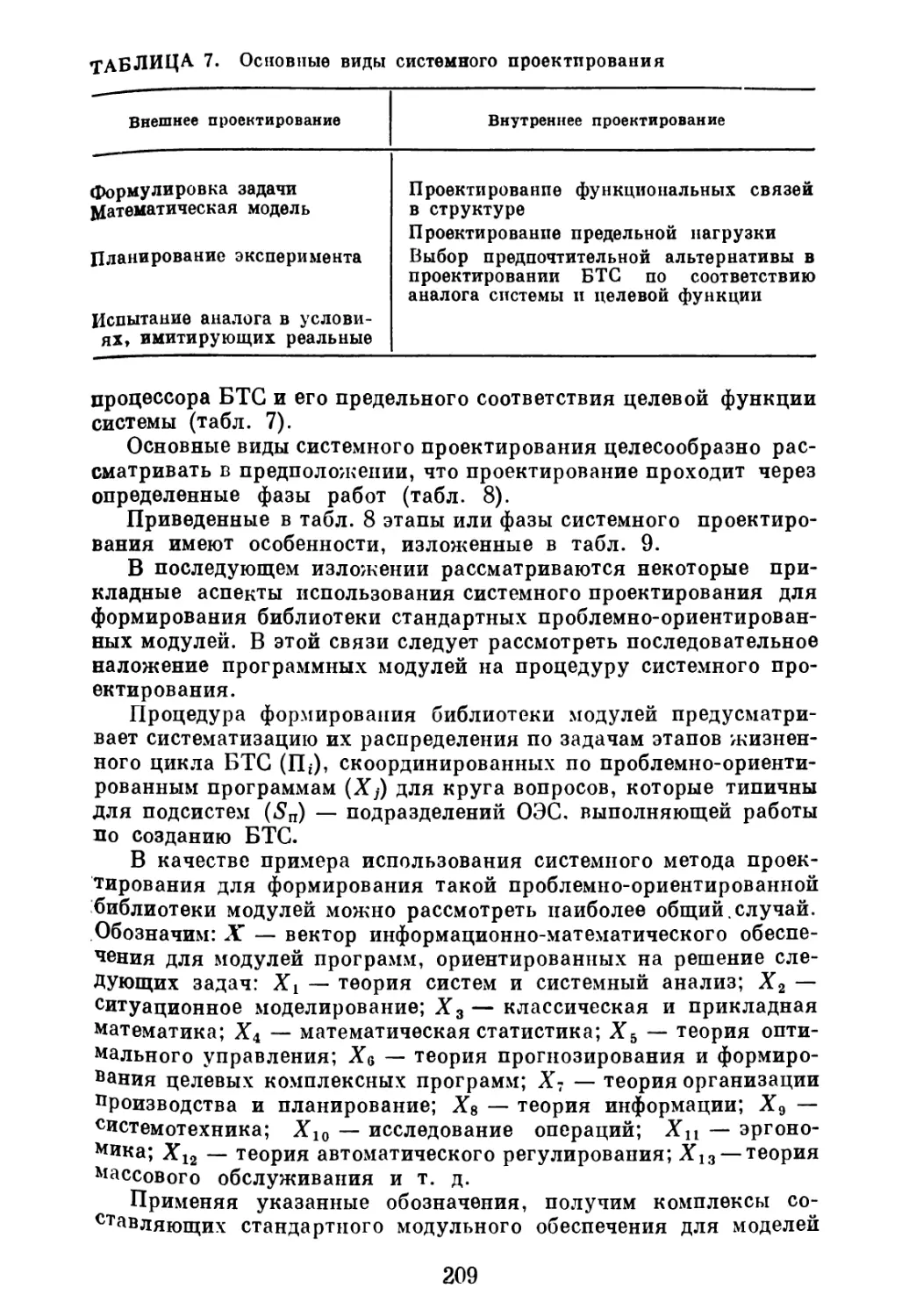
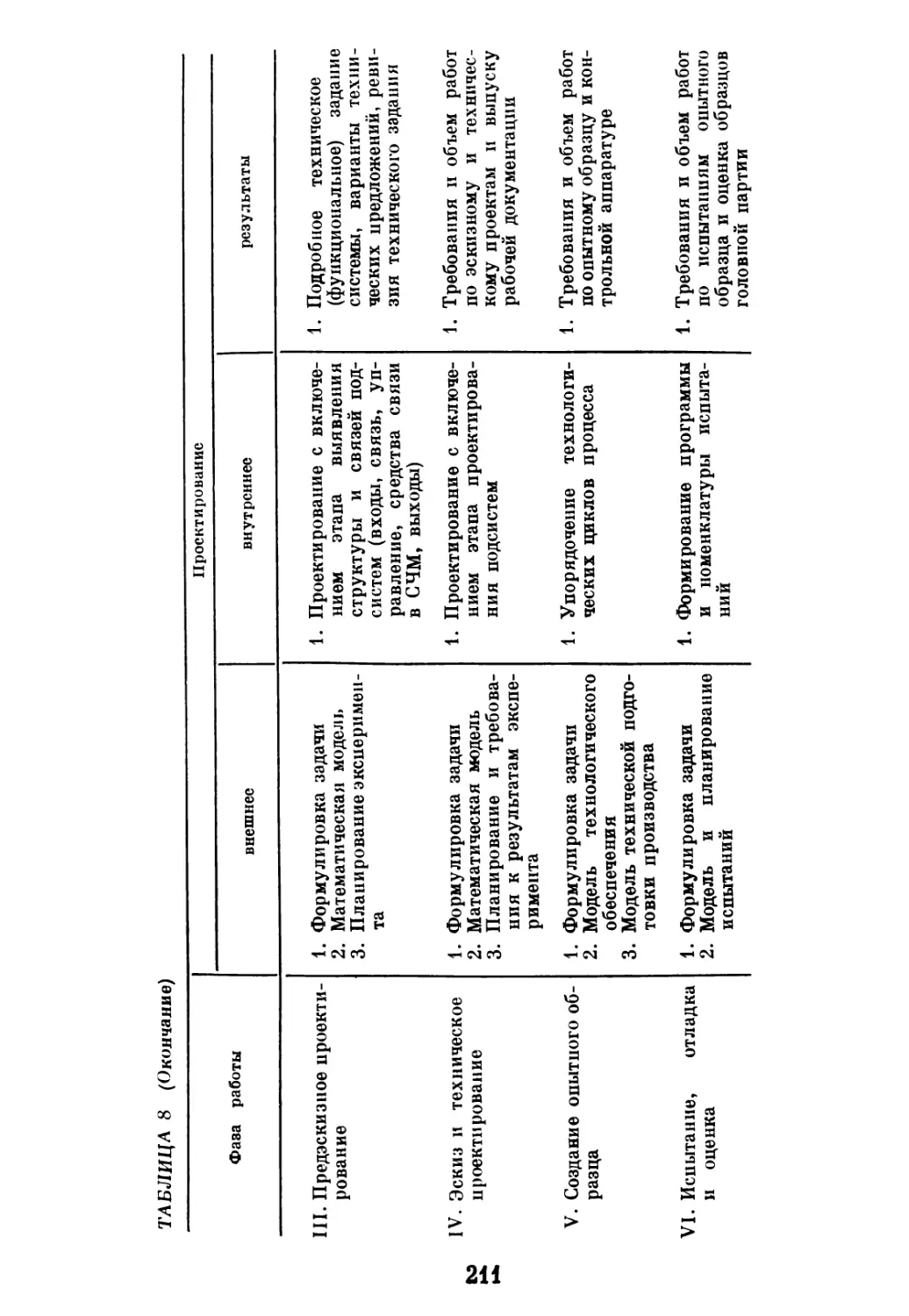
ПРЕДИСЛОВИЕ
Решение сложнейших вопросов управления современным производством, развитием науки и техники, комплексированием транспортных энергетических и информационных систем — словом, решение актуальнейших задач научно-технического прогресса выдвигает на первый план исследование больших технических систем (БТС), которые в первом приближении могут быть определены как совокупность технических средств, предназначенных для решения весьма широкого круга народнохозяйственных задач. Отличительной особенностью БТС является обязательное наличие в структуре сложной управляющей подсистемы.
Анализ, управление и прогнозирование развития БТС принадлежат к числу наиболее злободневных и вместе с тем сложнейших проблем управления научно-техническим прогрессом. Авторы вторично обращаются к изложению теоретических основ методологии системного анализа, управления и прогнозирования развития БТС. В предыдущей работе [52], имевшей характер введения в системологию и прогнозирование развития БТС, излагались главным образом концептуальные и методологические подходы к поставленным вопросам. Такая специфика обусловила необходимость широкоаспектного освещения поставленных проблем в диапазоне от элементарных определений и понятий до комплексных спстем прогнозирования и автоматизированной системы «прогноз— план». Кроме того, в главе, посвященной аналитическому представлению БТС, это потребовало обзорного освещения математического аппарата, используемого в моделях анализа систем. Кроме того, по этой же причине не представилось возможным акцентировать внимание на таких центральных проблемах развития БТС, как целепрограммные методы и комплексы, специфика формирования альтернативных стратегий, их реализации, особенности информационно-математического и модульного обеспечения таких задач и т. п.
Данная монография имеет более специализированный профиль: здесь теоретические аспекты системологии, управления и прогнозирования развития БТС изложены применительно к комплексным целепрограммным подходам к решению задач оптимального управления развитием БТС. В этой связи претерпела существенные изменения и структура монографии: материал сгруппирован в три раздела, посвященных соответственно теоретическим основам системологии, теории целепрограммного управления развитием БТС и, наконец, прогнозированию их развития применительно к формированию целевых комплексных программ.
3
Соответственно каждый из трех разделов, помимо переработанного применительно к новым задачам традиционного материала, содержит и новый: в первом разделе это прежде всего методы и алгоритмы классификации, построения дерева целей и задач, во втором разделе — методический аппарат формирования альтернативных и модульных стратегий развития БТС, особенности общих и частных задач программно-целевого управления, специфика информационно-математического обеспечения решения таких задач и т. п.
Следует отметить, что даже в рамках такого искусственно суженного специализированного изложения поставленные задачи были достаточно объемными для ограниченных рамок работы. Это заставило авторов пойти по пути изложения общетеоретических положений, сократив до предела иллюстративные примеры в предположении, что дальнейшее методическое развитие предложенных теоретических построений должно осуществляться в соответствующих прикладных методических работах, каждая из которых, по-видимому, будет посвящена своему классу технических систем.
Параграф 4.2 раздела I написан совместно с Ю. И. Мишиным, параграф 2.3 раздела II написан В. Г. Кореньковым и И. Л. Куприным, в написании главы 3 раздела III и параграфа 2.2 раздела I использованы материалы, подготовленные, соответственно, Р. И. Пе-селевой и В. В. Хмелевым, авторы выражают им глубокую признательность.
Принимая во внимание важность, масштабность и сложность рассматриваемых в данной монографии проблем, авторы далеки от мысли об исчерпывающем их решении и будут весьма благодарны за содержательную критику предложенных постановок.
РАЗДЕЛ ПЕРВЫЙ
ТЕОРЕТИЧЕСКИЕ ОСНОВЫ СИСТЕМОЛОГИИ
Возникшее сравнительно недавно научное направление, связанное с исследованием структур, связей, поведения, а также оптимального управления и прогнозирования развития больших технических систем (БТС), называется системологией. Как и всякое самостоятельное научное направление, системология имеет объект исследования — БТС.
Основой системологии является диалектический материализм— прежде всего с точки зрения методологической адекватности изучения всеобщих связей в структурах, процессах, поведении и управлении систем. Изложение материала данного раздела строится в следующей последовательности: от анализа особенностей научно-технической революции, появления БТС и социально-экономических особенностей их развития к структурному анализу БТС, далее к анализу связей в рамках системного анализа и, наконец, к моделям и аналитическому представлению БТС.
ГЛАВА ПЕРВАЯ
СОВРЕМЕННАЯ НАУЧНО-ТЕХНИЧЕСКАЯ
РЕВОЛЮЦИЯ И РАЗВИТИЕ БТС
1. Научно-техническая революция и развитие больших систем
Научно-технический прогресс в последнее время способствует появлению кардинальных изменений в области развития техники и производства, в области управления большими организационно-экономическими и техническими системами. С учетом положений, сформулированных академиком В. М. Глушковым [221, можно выделить следующие особенности научно-технической революции, оказывающие влияние как на прогрессирующую сложность технических систем, так и на сложность анализа, управления и прогнозирования их развития.
Первая особенность — это резкое и все возрастающее увеличение номенклатуры продукции, возросшей за последние два деся
5
тилетия на порядок в машиностроении, авиационной и судостроительной промышленностях, а в радиотехнике, электронике, приборостроении, химической промышленности — на полтора-два порядка.
Вторая особенность — существенное увеличение конструктивной сложности изделий, сложности технологических процессов их изготовления и, как следствие, резкий рост альтернатив конструктивных и технологических решений. Многофакторный анализ и расчет оптимальных альтернатив конструктивно-технологических решений сейчас немыслим без применения ЭВМ со специальным информационно-математическим обеспечением.
Третья особенность — ускорение темпов обновления выпускаемой продукции (и, следовательно, сокращение длительности жизненного цикла изделий). Так, в 70-х годах в США качественно новая продукция (не производившаяся еще пять лет назад) достигла почти 20% общего объема выпуска машиностроительной промышленности; причем в авиакосмической — около 50%, автомобильной, электротехнической и металлообрабатывающей — до 25% и в остальных отраслях менее 15% х.
Четвертую особенность следует рассматривать как следствие трех предыдущих — это рост сложности и комплексирование задач управления развитием и функционированием современных технических систем. Такое управление использует методы и аппарат системологии, исследования операций, экономики и кибернетики и реализуется с помощью сложнейших комплексов, в частности программно-целевых или АСУ.
Пятая особенность — превращение науки в производительную силу, определяющую уровень и темпы развития научно-технического прогресса. В этом аспекте следует отметить, что темпы приращения знаний связаны с увеличением численности квалифицированных ученых, уровнем и мощностью научно-технической базы, а также формами и методами организации информационных потоков. Продукция такого исследовательского комплекса представляет собой элементы новизны, внесение которых в конструкцию и технологию изделий способствует повышению производительности труда, эффективности производства и улучшению функциональных характеристик технических систем.
Вместе с тем необходимо отметить, что развитие технических систем подчинено и более общим закономерностям.
Темпы научно-технического прогресса периодически изменяются. В соответствии с диалектикой развития прогресс техники имеет стадии эволюционного и скачкообразного развития.
Процесс эволюции техники можно разделить на три фазы. В начальной фазе происходит зарождение новой техники и рост ее функциональных параметров. При этом скорость роста параметров еще небольшая, но непрерывно увеличивается. В следующей фазе происходит бурное развитие техники, сопровождающее-
r Congressional Records, 1978, vol. 76, N 1024, p. 8.
6
ся, как правило, ростом сложности структуры и связей. Для этого периода характерна наибольшая скорость приращения параметров техники. Однако темпы их роста постепенно замедляются, после чего скорость приращения параметров начинает непрерывно уменьшаться, что обусловливается влиянием сдерживающих факторов для данного вида техники. Обычно сдерживающие факторы приводят к образованию так называемых барьеров. Например, в 40-е годы сдерживающим фактором роста скорости самолета был поршневый двигатель, который не давал возможности преодолеть «звуковой барьер».
И, наконец, заключительная фаза — фаза морального старения техники, когда исчерпываются возможности ее дальнейшего резкого совершенствования на старых принципиальных основах. Только новое принципиальное решение, качественный скачок, устраняющий влияние сдерживающих факторов (например, замена винтовой тяги поршневого двигателя реактивной тягой), приводят к возможности дальнейшего резкого роста параметров техники. В этой фазе развития скорость приращения параметров непрерывно уменьшается.
Если рассматривать основные тенденции развития техники в широком историческом аспекте, можно говорить о трех циклах (ступенях) ее развития: орудийном, машинном и цикле автоматических машин (автоматов).
Каждый из этих циклов развития характеризуется различной степенью участия в производственном процессе техники и человека. Если на начальной (орудийной) ступени развития техники основные производственные функции оставались за человеком, то на высших этапах они все в большей степени передавались технике.
На орудийной ступени развития техники в процессе труда человек использовал простые, а затем сложные орудия. При этом они приводились в действие или мускульной силой человека, или силами природы. В этот период техника представляла собой, как правило, только исполнительный механизм.
На второй ступени развития техники ручной труд с использованием орудий все больше заменяется системой орудий — машиной. «...Машина заменяет не только живой труд, но также самого рабочего и его ремесленный инструмент» х. При этом машина представляет собой не простое количественное суммирование (набор) орудий, а является целостной системой орудий, имеющей определенную структуру и направленной на достижение определенных функциональных целей.
Характерная особенность для этой ступени развития техники — появление не только рабочих машин (машин-орудий), с помощью Которых происходит изменение форм, размеров и свойств предмета
1 Маркс К. Машины. Применение природных сил и науки.— Из рукописи 1861 —1863 гг. «К критике политической экономии», впервые опубликованной в журнале «Вопросы истории естествознания и техники» (1968, вып. 25,
7
труда, но и машин-двигателей, с помощью которых один вид энергии преобразуется в другой. Вместо одного, исполнительного механизма машина имеет уже три механизма — двигательный, передаточный и исполнительный. На смену простой технике приходит техническая система.
На высшей, третьей ступени развития техники появляется система машин, в которой наряду с двигательным, передаточным и исполнительным механизмами имеется механизм управления — электрические или электронно-вычислительные устройства. В связи с этим можно рассматривать уже не простую систему машин, а автоматическую систему с интегративными свойствами. Следовательно, не столько рост масштаба технических структур, их внешних и внутренних связей, сколько рост их сложности и интегративных свойств — целостности в аспектах управления и поведения — позволяют говорить о больших технических системах.
Итак, по мере изменения функций и структуры орудий труда мы постепенно переходим от понятий «орудия труда, система орудий труда — техническая система» к понятию «большая техническая система» — важному терминологическому понятию, введенному в жизнь именно в эпоху современной научно-технической революции. Диалектика понятий «орудия труда» и вообще «техника» отражает диалектику развития средств труда не только в структурном, но и функциональном плане. Как мы уже отмечали, по мере развития орудий труда все больше функций человека в производственном процессе передается технике. Если при переходе от орудийной техники к машинной технике машине передавались непосредственно исполнительские, технологические и энергетические функции, то на следующей ступени революционных преобразований — переходе к автоматической системе машин или большой технической системе — происходит замена человека машиной в функциях контроля и управления.
Если рассматривать отдельные эволюционные циклы, то их можно представить серией эволюционных циклов и скачков, имеющих во многом сходный характер. Так, эти локальные эволюционные циклы могут быть описаны S-образными кривыми роста количественных параметров техники, при этом S-образная кривая высшего порядка является огибающей кривой, определяющей тенденции изменения более частных кривых в шкале времени. В этом случае скачок наступает при переходе к использованию в технических средствах качественно новых физических явлений, видов энергии, конструкционных материалов. Примеров подобного рода скачков в истории развития техники много. Стоит назвать хотя бы переход от каменных орудий к металлическим (железным), от паровой машины к двигателю внутреннего сгорания, от деревянной конструкции самолета к цельнометаллической (дюралевой, а затем стальной и титановой), от поршневых авиационных двигателей к реактивным, от ламповой электронно-вычислительной техники к полупроводниковой, а затем к интегральной.
8
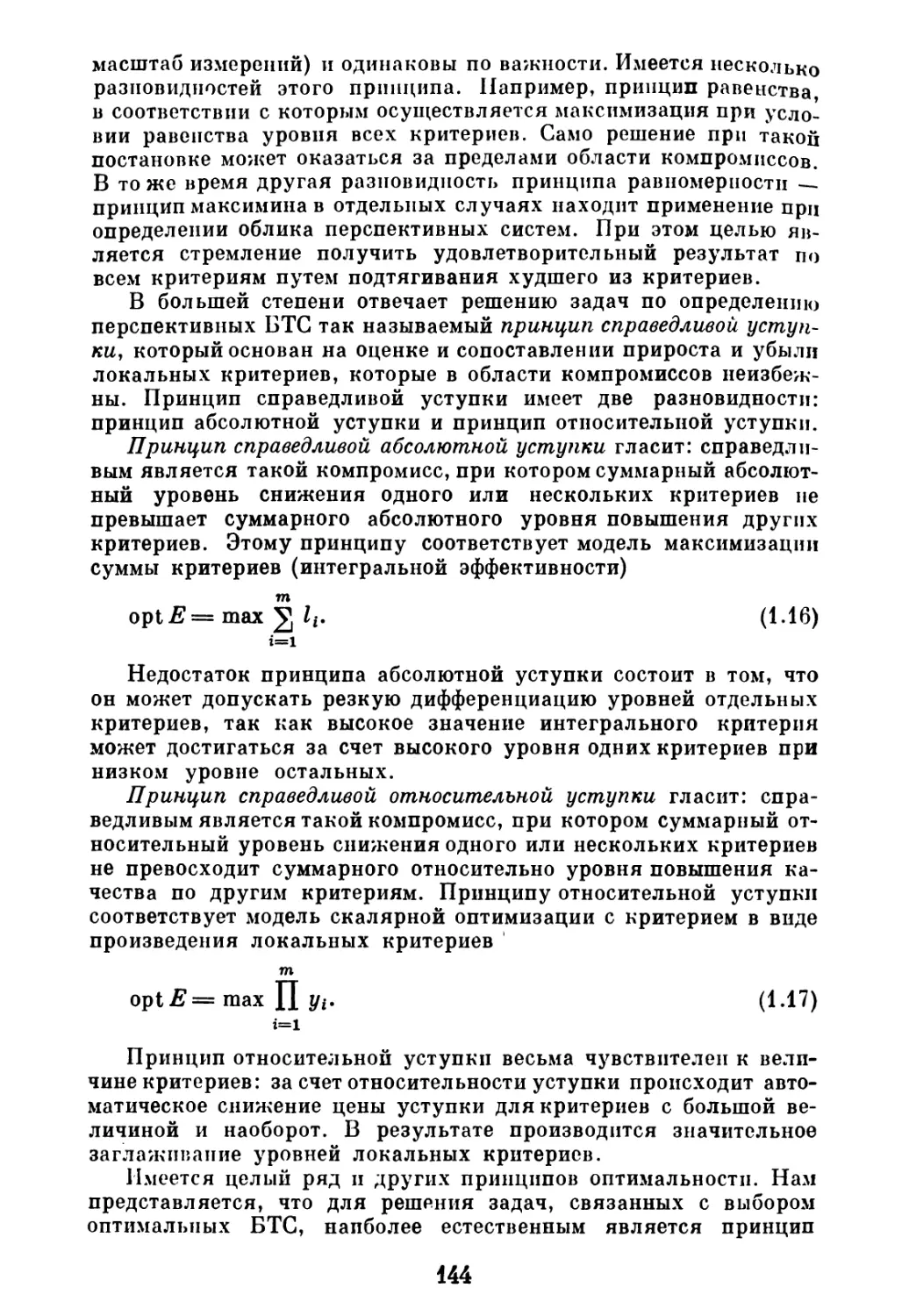
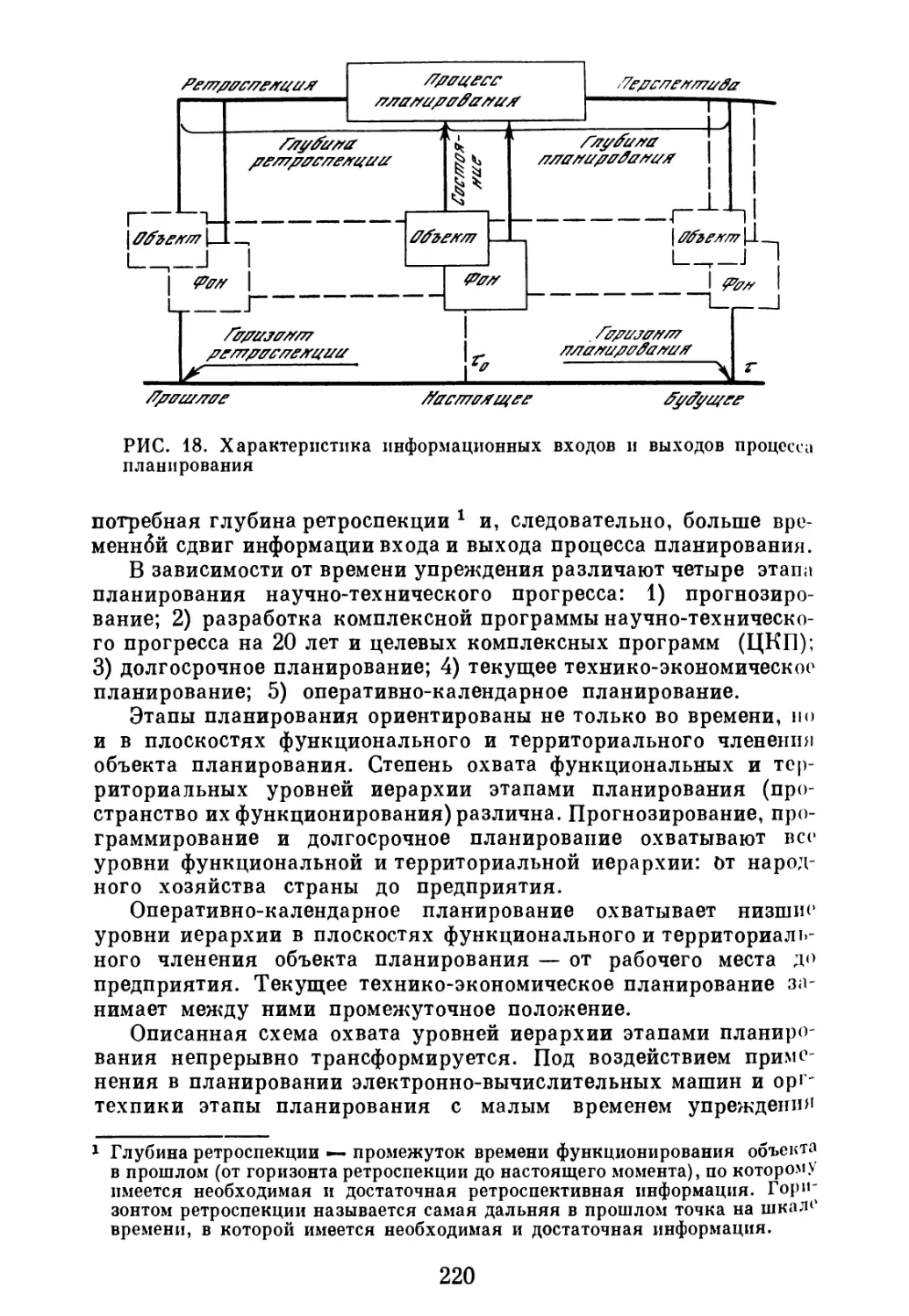
Образование скачков можно наглядно проследить, если рассматривать изменение основных параметров техники за значительный исторический промежуток времени (рис. 1). Видны периоды
f zmfo/
эволюционного развития различных видов транспортных средств, подготовивших появление больших транспортных технических систем. Таким образом, элементарным скачкообразным изменением можно считать создание каждого нового типа технического изделия (системы), а эволюцией изделий данного типа является его модификация и модернизация в течение жизненного цикла. Поэтому в процессе эволюционного развития техники следует особо выделить период «малых приращений параметров» — модификацию и модернизацию техники (а также конструктивно-технологические изменения в про-
цессе ее серийного производства). Модификация и модернизация техники позволяют увеличить ее функциональные параметры на сравнительно небольшую величину (в сопоставлении с базовым
РИС. 1. Эволюционное и скачкообразное развитие транспортных средств
1 — гупюыЛ. транспорт; 2 — железнодорожный транспорт; 3 — автотранспорт; 4 — поршневая авиация; 5 — реактивная авиация; 6 — химические ракеты; 7 — ядерные ракеты; 8 — кривая глобальной
изделием), НО С малыми зат- тенденции
ратами времени и ресурсов.
Последнее обстоятельство позволяет сохранить или даже увеличить скорость приращения параметров на отдельных участках S-образной кривой эволюционного периода развития БТС при высоком качественном потенциале базового изделия или центральной подсистемы данной БТС.
Модификация (или модернизация) проводится не только с целью увеличения параметров систем, но и с целью расширения или изменения их целевого назначения. Модификация технических систем либо их подсистем чаще всего бывает многократной, или многоступенчатой (первичная модификация — база для вторичной и т. д.).
С увеличением кратности модификаций, связанных с ростом параметров изделия, начиная с определенного уровня, скорость приращения параметров уменьшается. В этом случае сдерживающими факторами является конструктивная схема изделия, предназначенная для функционирования в ограниченном диапазоне изменения Параметров. Предельные для данной схемы параметры являются тем «барьером», к которому асимптотически приближается сублокальная S-образная кривая.
9
Технический прогресс, который создает базу и предпосылки Для появления соответствующих БТС, немыслим без прогресса в развитии науки.
Определяющим фактором в развитии науки на современном этапе является потребность в совершенствовании существующих и создании новых видов БТС, потребность в развитии материального производства, непроизводственной сферы и общества в целом. Анализируя взаимозависимость развития науки и техники, К. Маркс и Ф. Энгельс\)тмечали: «Если у общества появляется техническая потребность, то это продвигает науку вперед больше, чем десяток университетов» [2, с. 174[.
На заре развития человеческого общества, когда еще не сформировалась наука, а люди лишь обладали определенным опытом, некоторыми отрывочными знаниями, техника представляла собой как бы овеществленный опыт. В дальнейшем, по мере накопления знаний о законах развития природы, формирования науки как качественно новой ступени человеческого познания, появляются более совершенные технические средства, представляющие уже как бы кристаллизованные научные познания, создаются предпосылки для систематизации этих познаний, их овеществления в технических системах. В этой связи, по-видимому, следует проследить основные этапы развития науки.
Процесс развития науки, подобно технике, можно подразделить на эволюционную и революционную стадии: на определенных этапах истории человечества эволюционные процессы развития науки сменяются качественными изменениями, носящими революционный характер. Так же как и при развитии техники, скачки в развитии науки следуют за периодами плавного эволюционного развития.
В рассматриваемом аспекте научно-техническую революцию можно определить как коренное, качественное преобразование производительных сил, происходящее в исторически относительно краткий период времени, в который в результате скачкообразного развития науки и техники резко возрастает количество вновь созданных (изобретенных или открытых) процессов, изделий, комплексов, отличающихся качественно и функционально новыми признаками и называемых элементами новизны.
В процессе научной революции разрушается традиционный взгляд на предметы и явления, традиционный тип мышления. Изменяется система научных теорий, категорий и понятий. При этом на смену старым, отживающим приходят новые концепции, теории, новый научный понятийный аппарат.
Научная революция I типа х, протекавшая в основном в XVI — XVIII вв., была направлена на разрушение веры в видимость как истину вещей и явлений окружающего мира. Важным следствием этой революции является переход в науке от познания видимости вещей и явлений к познанию их сущности.’
1 Типизация научных революций дана по теории академика Б. М. Кедрова.
10
Именно на этом этапе меняется тип мышления ученых и происходит переход от живого созерцания природы к абстрактному мышлению, которое позволяет проникнуть в сущность процессов, протекающих в природе, познать сущность законов природы. Основным методом абстрактного мышления в этот период стал метод анализа, метод аналитического расчленения природы на отдельные части и элементы: были созданы, таким образом, предпосылки для возникновения метода декомпозиции как важнейшего инструмента системного анализа, изложенного во второй главе (раздел I).
Важным средством для перехода к абстрактному мышлению была математика, позволившая отойти от описания внешних специфических особенностей предметов и процессов и выявить, описать внутренние, присущие им законы и закономерности.
Первая революция в науке носила весьма длительный характер и привела к возникновению естествознания, свободного от схоластики. Ряд революционных преобразований произошел и в отдельных науках (в астрономии, физике, химии и др.).
Создание новых научных теорий и гипотез, развитие научных представлений о мире в дальнейшем начинают сдерживаться привычкой ученых рассматривать предметы и процессы обособленно друг от друга и в неизменном, неподвижном состоянии. Поэтому смысл революции II типа в науке заключается в разрушении веры в неизменность природы. В результате были разрешены метафизические барьеры, возникающие при аналитическом способе абстрактного мышления. Инструментом решения этой задачи революционного развития послужила диалектика, позволившая выявить общие закономерности и внутренние причины развития.
Научная революция III типа, начавшаяся в конце XIX в. ж завершившаяся в середине XX в., явилась непосредственной предшественницей современной научно-технической революции. Она заключалась в глубоком проникновении в микромир.
Специфика современного этапа научно-технической революции в части взаимодействия науки и производства заключается в создании и развитии специальных производительных сил, связанных прежде всего с преобразованием энергии и информации. Количественно этот процесс характеризуется резким увеличением элементов новизны или новых конструктивно-технологических решений при создании современных БТС. В результате современная наука стала выполнять качественно новые функции, состоящие в определении главных направлений научно-технического прогресса и научном обеспечении его развития.
Степень взаимодействия науки и техники, определяющая уровень развития научно-технической революции, зависит от двух взаимосвязанных факторов:
— Уровня научно-технического потенциала;
— темпов научно-технического прогресса.
Научно-технический потенциал — это способность специализированных производительных сил общества к изучению свойств и явлений окружающей среды и созданию на основании этих зна
11
ний качественно новых изделий. Научно-технический потенциал включает в себя три важнейших составляющих:
1) кадры научных и инженерно-технических работников соответствующей квалификации, участвующие в создании, апробации и внедрении элементов новизны;
2) научно-техническую базу, включающую традиционное и специализированное эксйериментальное оборудование, оборудование для имитационного и натурного моделирования и испытаний, стационарные и подвижные (включая летающие — авиационные и космические) лаборатории;
3) информационную базу, включающую комплекс информационно-технических средств, информационно-математическое обеспечение, а также банки данных, средства и фонды научно-технической информации.
С учетом положений, сформулированных академиком В. М. Глушковым [221, при резком увеличении темпов научно-технического прогресса (т. е. в период научно-технической революции) необходимо отметить существенное развитие трех важнейших составляющих научно-технического потенциала. Это не может не привести к резкому росту сложности и номенклатуры БТС. Последнее обстоятельство способствует в свою очередь развитию всех составляющих научно-технического потенциала, что приводит к ускорению темпов научно-технического прогресса. Таковы основные выводы, к которым может привести анализ взаимодействия развития научно-технического прогресса и БТС.
Научно-технический прогресс взаимосвязан с процессом производства в простых его элементах (предметы и средства труда, рабочая сила) и в формах их соединений (технологические методы и формы организации и управления производством). Совершенствование предметов и средств труда, а также технологических процессов проявляется в традиционных направлениях технического прогресса: в механизации, автоматизации, электрификации и химизации производства. Все перечисленные выше направления неразрывно связаны с созданием и использованием больших технических систем.
Научно-технический прогресс приводит к изменению системы организации и управления производством. Так, в промышленности он непосредственно связан с процессом дальнейшего разделения труда, специализацией и кооперированием, концентрацией и размещением промышленности (созданием сосредоточенных, локализованных или, наоборот, разветвленных больших организационно-экономических систем). Взаимодействие научно-технического прогресса и форм общественной организации труда проявляется в виде прямой и обратной связей. Орудийная техника привела к организации узкоспециализированного мануфактурного производства, что создало объективные условия для применения узкоспециализированной автоматической системы машин и в перспективе организации комплексно-автоматизированного производства.
12
Совершенствование форм организации и управления производством в свою очередь ускоряет темпы научно-технического прогресса. Вследствие создания больших технических систем в промышленности происходят непрерывные процессы повышения уровня концентрации производства, углубления специализации и расширения кооперирования. Это в свою очередь приводит к созданию больших организационно-экономических систем, к которым относятся в промышленности современные научно-исследовательские и опытно-конструкторские организации, заводы, научно-производственные и производственные объединения и отрасли промышленности.
В связи с этим резко возросли информационные потоки, сложность организационной структуры и процессов управления в больших организационно-экономических системах. Поэтому большое внимание в последнее время уделяется механизации и автоматизации не только производственных процессов, но и процессов хранения и переработки информации. В процессе переработки информации широко применяются современные математические методы и электронно-вычислительная техника.
Качественно изменяются состав информации, циркулирующей по каналам прямой и обратной связей управления, характер управленческого труда, технологии управления. Новые серьезные требования предъявляются к организационной структуре системы управления и кадрам, осуществляющим функции управления.
Трудно переоценить значение технических средств, широко внедряемых в сферу управления производством. Совершенствование управления тесно связано с развитием электронно-вычислительных машин, оргтехники, аппаратуры связи. Современная техника управления дает возможность резко повысить эффективность управления и, как следствие, эффективность производства.
Механизация и автоматизация процесса управления позволяет также высвободить трудовые ресурсы, которые могут быть использованы в сфере производства.
В процессе совершенствования форм организации и управления производством, как одной из форм соединений элементов процесса труда, происходит совершенствование элементов управленческого труда (предмета и средств труда, собственно труда управления), а также форм их соединений (технологии и форм организации тРУДа управления), которые в конечном счете выливаются в различные формы использования больших технических и организационно-экономических систем.
Научно-технический прогресс (НТП), вызывая необходимость совершенствования процесса производства, обусловливает дальнейшее развитие науки и техники. Такая возможность возникает вследствие увеличения научно-технического потенциала производства и роста производительности общественного труда.
Анализируя развитие производства с тех же позиций и в тех >ке аспектах, что и развитие науки и техники, целесообразно отметить следующее. Наличие эволюционных и революционных
13
периодов в развитии техники, составляющей техническую базу производства, а также наличие аналогичных периодов в развитии науки, определяющей научно-организационную и технологическую основу производства, объективно предполагает и неравномерное развитие производства. Однако ряд объективных причин (существование временного лага между научным открытием и возможностью его массового внедрения, ограничения чисто экономического характера, необходимость подготовки и переподготовки научно-технических кадров для производства) сглаживают неравномерности в развитии производства. А в эпоху современной научно-технической революции сложились объективные условия для развития производства адекватно развитым общественным потребностям, т. е. более или менее равномерно ускоряющегося развития производства.
Таким образом, развитие науки, техники, производства в прошлом состояло из стадий эволюционного развития и скачков. В процессе скачков качественно изменялись средства труда, наши представления о предметах и явлениях, формах организации общественного производства. От орудий к машинам, автоматическим системам машин и большим техническим системам в технике, от поверхностного созерцания к низшим, а затем и высшим ступеням абстрактного мышления, от ремесленничества и мануфактуры к крупному машинному производству, к комплексно-автоматизированному производству и большим организационно-экономическим системам — таков исторический путь развития науки, техники и производства.
2. Сущность и особенности БТС
Отличительной особенностью научных открытий последнего времени является разработка проблематики, лежащей «на стыках» нескольких наук. Так появились физхимия и химфизика, молекулярная биология и биофизика, космическая биология и математические методы диагностики в медицине.
Необходимость совмещенного исследования разнородных сложных объектов с учетом их внутренних и внешних связей с окружающим миром для определения закономерностей создания, развития и деградации этих объектов заставляет обратиться к системной методологии.
Возвращаясь к анализу простого и сложного в системных концепциях, следует прежде всего разобраться в том, что же такое система? Дело в том, что различные информационные подходы (или информационные потребности) дают различные отнюдь не однозначные ответы на такой, казалось бы, простой вопрос. Так, если нам необходимо выделить какую-то группу объектов, явлений или процессов для последующего управления ими и реализации определенной цели, то мы очерчиваем или выделяем из окружающей среды эту систему, исходя из того, какие объекты, явления или процессы могут способствовать либо, наоборот, препятствовать до
14
стижению поставленной цели. При этом мы начинаем анализировать систему «с конца», с ее выходов, непосредственно влияющих на достижение цели, либо препятствующих этому, затем находим составляющие системы, которые дают эти выходы (определяем структуру процессора системы), и уже в последнюю очередь переходим к вопросу *6 том, какие входы в выбранные структурные элементы будут безусловно необходимыми для получения полезных выходов, а какие — вредными. Такая исследовательская процедура, обязательный элемент системного подхода, позволяет канонизировать систему в познавательном плане и установить, что атрибутами системы является какое-то количество составляющих, подчиненных функционально (или по выходам) некоторой единой цели.
Другой подход основывается на системе как некотором искусственном отображении (модели) исследуемых объектов. При этом в первую очередь моделируются комплексы составляющих систему элементов с их свойствами и связями. Система не выделяется из окружающей среды, как в предыдущем случае, а синтезируется по выбранной и соответствующим образом обоснованной модели и затем уже накладывается на окружающую среду. Такая процедура конструирования (синтеза) системы позволяет увязать связи между составляющими системы и их свойствами п получить в результате единый функциональный комплекс. Такой подход получил наибольшее распространение, например, при проектировании машин и механизмов.
Третий подход соединяет в себе особенности двух первых: здесь к выделенному из окружающей среды и объективно существующему комплексу объектов добавляется ряд составляющих, позволяющих получить в результате искусственно созданное новообразование, более полно отвечающее целям исследователя. Этот подход как наиболее общий случай систематизации применим, в сущности, не только к любому научному исследованию, но и вообще к любому проявлению разумной созидательной деятельности человека.
Такая обзорная концепция позволяет сформулировать предварительное, самое общее определение системы: система есть совокупность объектов с данными свойствами с некоторым набором связей между этими объектами и их свойствами, объединенными в интересах решения проблем (задач), стоящих перед данной системой. Так, самолет гражданской авиации состоит из ряда объектов: планера, двигателей, механизмов и приборов управления, навигационных приборов и т. д., совокупность свойств которых определяет общие характеристики самолета: грузоподъемность, надежность, скорость, потребную длину взлетно-посадочной полосы и т. д. Причем вся эта совокупность элементов и их свойств нацелена на решение основной задачи данной системы — обеспечить заданный грузопассажирский оборот с минимальными затратами ресурсов на тонно-километр перевозок (при заданных параметрах транспортной сети и наземного комплекса).
15
В современной авиации и космонавтике, в средствах управления, энергетики и транспорта БТС являются центральным звеном научно-технического прогресса. На современном этапе научно-технической революции не представляется возможным изолированно обеспечить технический прогресс, например, за счет улучшения только летно-технических характеристик отдельных типов самолетов вне связи с системой, элементами (или подсистемами) которой они являются.
Несколько иной аспект имеет такая система, как современное предприятие — завод, научно-исследовательский институт (НИИ) или конструкторское бюро (КБ). Структурно она также состоит из ряда объектов (цехи, отделы), объединенных определенными связями друг с другом и нацеленных на решение единой задачи — обеспечить запланированный выпуск продукции высокого качества в заданные сроки при максимальной производительности труда и оптимальных затратах. Это уже пример большой организационно-экономической системы (БОЭС). Каждая такая БОЭС типа завода, НИИ, КБ в свою очередь является элементом (подсистемой) более крупной БОЭС: так, объединения являются элементами отрасли промышленности (авиационной, машиностроения и т. д.).
Имеют свои особенности и социально-экономические и политические системы.
В понятие система вообще включаются понятия структуры, функции, элемента,, процесса, связи, управления и поведения. Эти системные понятия применимы к самым различным областям науки и техники и придают системологии междисциплинарный характер, базирующийся на свойстве изоморфизма систем. Изоморфизм — это соответствие или отношение между объектами, выражающее тождество их структуры или свойств связей между структурными элементами.
По академику В. А. Трапезникову [561, к «большим системам» относят цехи, заводы, энергосистемы, стройки, организации массового обслуживания, отрасли промышленности, народное хозяйство в целом. Особенность большой системы — участие в ней человека и в качестве объекта управления, и в качестве управляющего звена. Большая система структурно состоит из огромного числа элементов, что существенно затрудняет задачу аналитического описания состояния и связей каждого такого элемента.
В одном из наиболее фундаментальных изданий по системам и теории управления — «Энциклопедии кибернетики» [581 термин «большая система» идентифицирован с понятием «сложная система» (естественно, оба понятия связаны с категорией управления). Понятию «сложная система» дается ряд определений, принадлежащих английскому ученому С. Биру, советским ученым Г. Н. Поварову, А. И. Бергу, Ю. И. Черняку и др. По С. Биру [11] (см. табл. 1), все системы делятся на две категории: детерминированные и вероятностные. По Г. Н. Поварову, системы делятся на четыре группы: малые (10—103 элементов), сложные (104—107 элементов),
16
ультрасло/кные (107—1030 элементов) и суперсистемы (1030—1О200 элементов) [58] А. И. Берг и Ю. И. Черняк определяют «сложную систему» как объект, который можно описать нФменее чем на двух математических языках х.
Наконец, известный исследователь в области теории систем М. Месарович считает обязательными атрибутами большой системы иерархическую структуру, масштабность, сложность, разнообразие, широкий спектр функциональной координации и т. д.
ТАБЛИЦА 1. Классификация систем по С. Биру [И]
Система Простая Сложная Очень сложная
Детерминированная Оконная задвижка Проект механических мастерских Цифровая электронно-вычислительная машина Автоматизация —
Вероятностная Подбрасывание монеты Движение медузы Статистический контроль качества продукции Храпение запасов Условные рефлексы Прибыль промышленного предприятия Экономика Мозг Деятельность фирмы
В результате целого ряда дискуссий, анализа различного рода публикаций, а также изучения реакции различных аудиторий на уставные положения и предложения, связанные с определением понятия «большая техническая система», авторы пришли к выводу: в определение «большая техническая система» не следует включать все, что характеризует формирование и деятельность таких систем, следует оставить в определении лишь те важнейшие положения, без которых немыслимо существование таких систем.
Можно оспаривать те или иные положения или методические особенности каждой из приведенных классификаций, однако в соответствии с работой [52] трудно возражать, что основными аспектами рассмотрения больших систем в любом случае являются структура, связи, управление, а также поведение системы.
По-видимому, достаточно применить все перечисленные характеристики в комплексе (чего, кстати, никто из известных по литературе авторов в явном виде не делал), чтобы получить если не однозначный, то по крайней мере обоснованно категорированный ответ на вопрос о том, что же такое «большая система» вообще и «большая техническая система» в частности.
Итак, можно считать, что определяющими для БТС характеристиками являются: структура; связи (внутренние в самой си-
1 Черняк Ю, И. Информация и управление. М.: Наука, 1976.
17
стеме и внешние с окружающей средой); вид управления по каналам внешних и внутренних связей, а также качественная и количественная оценки этого управления; характеристики неопределенности, связанные с функционированием (поведением) системы.
Учитывая указанные особенности, под «большой технической системой» будем понимать условно ограниченную в пространстве и во времени совокупность технических средств, имеющую единое целевое назначение и характеризующуюся:
а) по структуре: большим, иногда изменяющимся числом элементов, организованным в виде входов (воздействие внешней среды на систему), процессора (собственно элементов системы) и выходов (воздействие на внешнюю среду);
б) по связям: сложностью и разнообразием изменяющихся во времени качественно и количественно связей, организованных в несколько различных по важности рангов;
в) по управлению: обязательным различием в структуре собственно системы (процессора БТС) решающего устройства либо подсистемы (либо, наконец, аналога такого типа), минимизирующей рассогласование между заданными и действительно реализованными выходами (эти условия обязательно связаны с участием человека в управлении);
г) по поведению: обязательное наличие единой целевой функции, реализуемой в некотором, как правило, ограниченном множестве операций с наложением системы линейных или, чаще, нелинейных ограничений; поведение БТС всегда характеризуется большей или меньшей функциональной неопределенностью.
Современная научно-техническая революция базируется главным образом на комплексной автоматизации производства, контроля и управления с использованием ЭВМ, на открытии и использовании новых источников и видов энергии, на существенном повышении эффективности производительных сил, главным образом за счет разработки и внедрения новых человеко-машинных комплексов. Это и определяет важнейшие направления формирования и развития современных БТС.
Принимая во внимание то обстоятельство, что эволюция БТС непрерывно связана с развитием техники и науки (а в современных условиях —. с научно-технической революцией), следует считать целесообразным рассмотреть в данном разделе наиболее сложные БТС — информационные.
Краткое изложение перечисленных вопросов, по-видимому, может способствовать введению читателя в понимание общих методологических аспектов системологии и системной терминологии, которым посвящены последующие главы работы.
Информационные БТС. Под информационными большими техническими системами (инфо-БТС) будем понимать БТС, функционально направленные на сбор, обработку, хранение и передачу информации. Наиболее типичными инфо-БТС являются вычислительные комплексы в современном их виде. Поэтому проследим основные закономерности развития инфо-БТС, формирования их
18
структуры, усложнение и функциональное обособление входов, процессоров и выходов на примере возникновения и развития вычислительных машин. Внедрение ЭВМ в современную технику и производство обеспечило резкие качественные изменения в целом ряде областей, прежде всего в энергетике (особенно атомной), химии, машиностроении, радио- и приборостроении. Следует отметить, что ЭВМ, не подменяя человека в принятии решений (за исключением программных ситуаций), позволяет обеспечить принципиально новый уровень информационного обеспечения принятия решений.
Современные электронно-вычислительные машины (ЭВМ) представляют собой один из наиболее ярких примеров БТС. Поэтому именно в этой области представляет наибольший интерес проследить процесс превращения простейших технических средств обработки информации в сложные технические комплексы, способные работать в автоматическом режиме,— БТС.
Первые попытки использовать технические средства решения числовых задач были предприняты еще в глубокой древности. Почти 3000 лет назад в Восточной Азии был изобретен абакус — прибор, напоминающий школьные счеты. Этот прибор был характерен крайне малым быстродействием (сравнимым со счетом вручную) и ручным набором чисел, непосредственным участием человека в вычислительном процессе, если только этот термин можно отнести к простейшему арифметическому действию.
В XVIII в. были сконструированы первые механические вычислительные машины, которые выполняли простейшие арифметические действия,— прародители известного счетного устройства типа арифмометр. Здесь человек не принимал непосредственного участия в вычислительном процессе, который происходил механически по известному правилу, заложенному в самой конструкции устройства. Однако числа набирали (ввод в устройство) вручную, и быстродействие этих машин было невелико, хотя и превышало вычисление вручную.
На протяжении трех последующих веков вычислительные устройства непрерывно совершенствовались. Их возможности возросли до сложения, вычитания, умножения и деления многоразрядных чисел.
Появление идеи создания вычислительных автоматов относится к середине XIX в. Однако их техническая реализация стала возможна лишь в XX в. В 1937 г. берлинский инженер К. Цузе создал первый вычислительный автомат с программным управлением. Успешное функционирование этой модели доказало возможность создать автоматические вычислительные машины, что знаменовало собой новую эру в развитии вычислительной техники. Набор чисел осуществлялся механически с участием человека, однако ввод их в вычислительное устройство и процесс вычисления происходил автоматически по заданной программе. Быстродействие этих устройств резко возросло за счет использования электромеханических устройств.
19
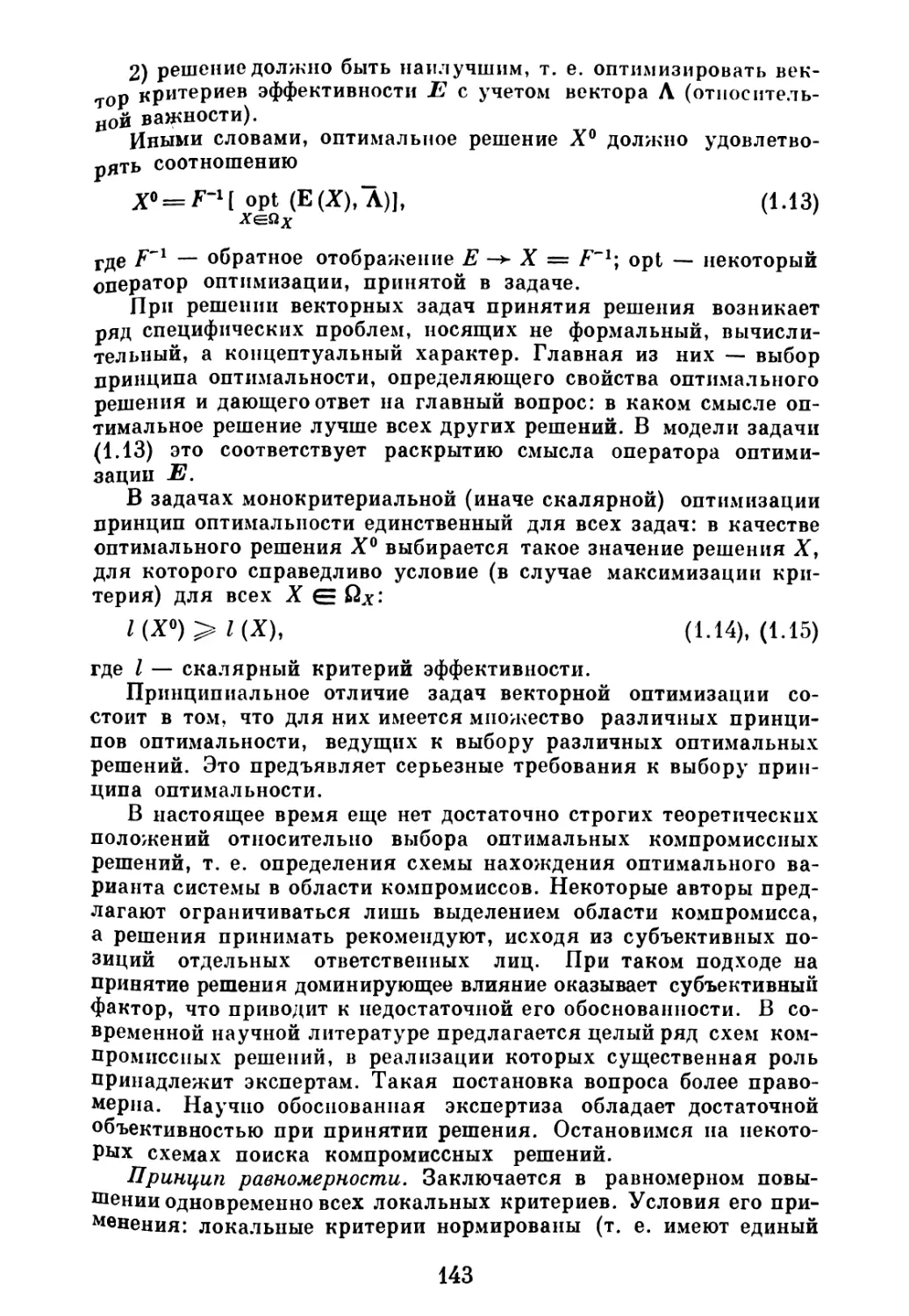
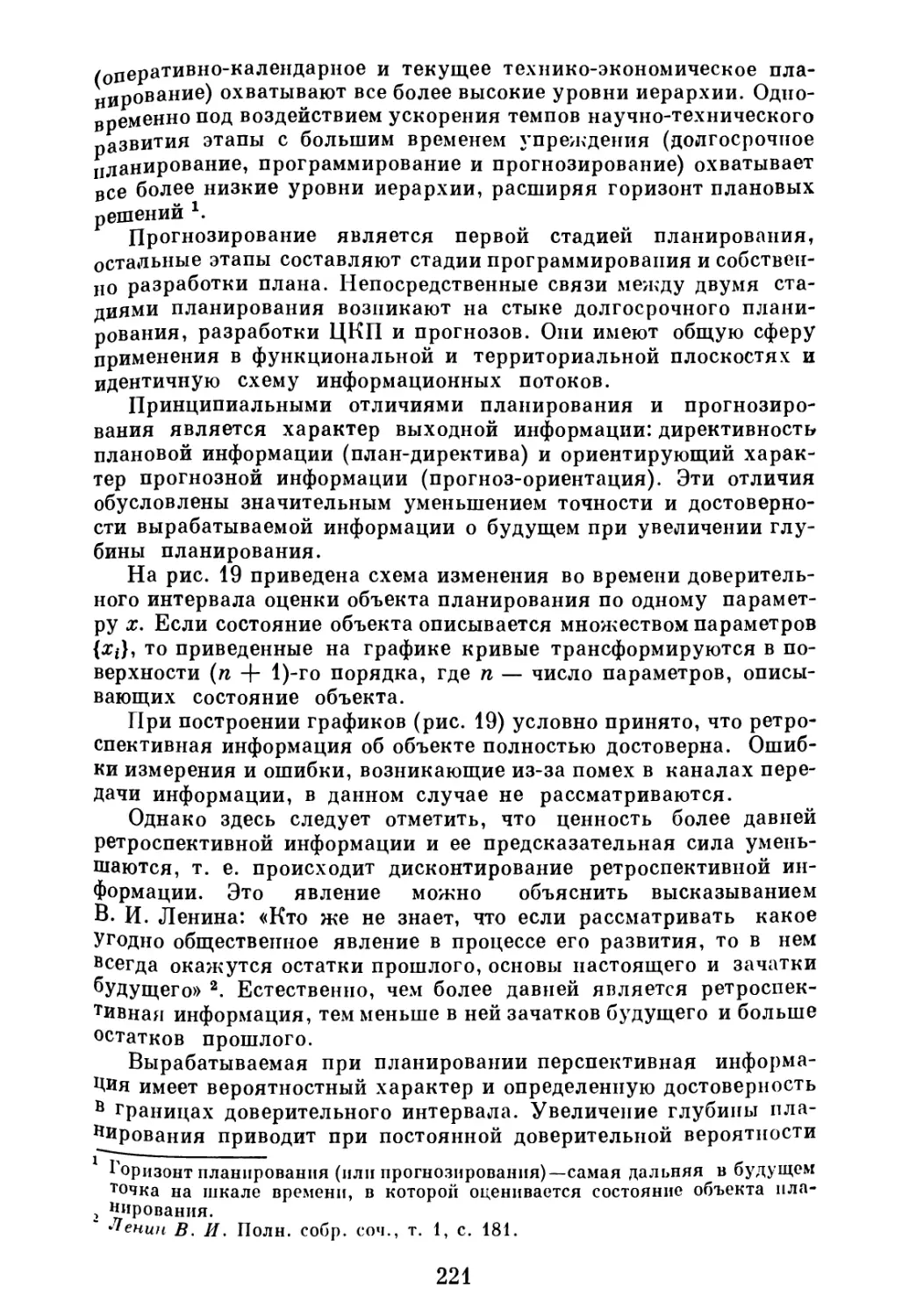
Впервые опытный образец ЭВМ был построен в США в 1946 г. В ЭВМ ЭНИАК содержалось 1800 электронных ламп и потреблялось для их питания 200 кВт электроэнергии. Однако уже на этой, архаичной с современной точки зрения, первой в мире ЭВМ можно видеть некоторые особенности их структуры, придающие этому классу технических средств свойства БТС. В этом нетрудно убедиться при рассмотрении функциональной структуры ЭВМ (рис. 2).
РИС. 2. Функциональная структура ЭВМ
В соответствии с этой структурой в ЭВМ можно выделить следующие функциональные подсистемы: устройство ввода, управляющая программа, устройство памяти, счетное (арифметическое) устройство, устройство вывода. Необходимо отметить, что устройства, аналогичные перечисленным выше, имелись и на ранних этапах развития вычислительных механизмов, однако выделение их в самостоятельные функциональные подсистемы, что дает качественно новое описание вычислительных механизмов как систем, стало возможным лишь на этапе возникновения ЭВМ.
Для более полной ясности целесообразно привести краткое описание функциональных подсистем ЭВМ с краткой исторической справкой об их эволюции.
Устройство ввода (вход вычислительной системы) необходимо для сообщения центральной подсистеме ЭВМ — счетному устройству — сведений о том, с какими цифрами и какие следует производить вычисления. Эффективность функционирования устройства ввода зависит от скорости передачи информации в счетное устройство и во многом определяет эффективность и быстродействие системы ЭВМ в целом. Устройство ввода до выделения в самостоятельную функциональную подсистему прошло сложный путь- развития.
Значительный прогресс в науке и технике, следствием которого явилась необходимость в переработке больших массивов информации, потребовал от вычислительной техники более высокого быстродействия. Для этого необходимо было усовершенствовать вводное устройство, разработать и применить новые способы ввода информации в счетное устройство. Усовершенствование устрой
20
ства ввода сопровождалось увеличением его сложности. Растущая сложность в свою очередь требовала конструктивного «отторжения» вводного устройства от всех прочих и прежде всего от счетного устройства и превращения его в самостоятельный сложный комплекс, состоящий из большого числа элементов.
Преобразование информации в вводных устройствах в электрические и магнитные сигналы увеличивало их сложность и завершило процесс превращения простых механических устройств в сложные комплексы, обладающие конструктивной и функциональной обособленностью с обязательным функциональным их подчинением всей вычислительной системе в целом.
Устройство вывода (выход вычислительной системы) данных в процессе эволюции прошло те же основные этапы, что и устройство ввода. Их отличительной особенностью является различие потребителей: для ввода потребитель—счетное устройство, поэтому вид выходного сигнала был определен техническими особенностями соответствующего счетного устройства, для устройств вывода потребитель—человек либо автоматическое устройство, и от этого зависит вид выходного сигнала (либо сигнал в виде, удобном для восприятия человеком, или сигнал электрический, магнитный и пр.).
Вычислительное (арифметическое) устройство (процессор вычислительной системы) является основной, центральной подсистемой ЭВМ, от характеристик которой существенно зависят характеристики остальных подсистем. В своем развитии оно прошло три ярко выраженные стадии развития.
В простейших вычислительных приборах функционирование вычислительных устройств было невозможно без участия человека по двум причинам: человек являлся источником механической энергии для работы вычислительного устройства и определял порядок производимых операций (т. е. программным элементом).
В механических счетных машинах (ручных) источник энергии остался тем же. Порядок проведения операций определялся программой, заложенной в конструкции вычислительного устройства, и операции производились механически. Однако управляющего элемента в счетных машинах не было, и они не могли функционировать без непосредственного участия человека.
Применение электрической энергии и электромеханических устройств в счетных автоматах обусловило новые принципы выполнения вычислительного процесса. Повышение быстродействия вычислительного устройства в результате этого оказало решающее влияние на рост быстродействия и сложности устройств ввода и вывода информации.
Переход на электронные элементы в системах ЭВМ, работающих с помощью устройств управления в автоматическом режиме, значительно усложнил вычислительное устройство и превратил его в сложную систему, состоящую из большого числа элементов, оказывающую определяющее влияние на развитие остальных подсистем ЭВМ.
21
Резкое повышение быстродействия работы вычислительного устройства привело к невозможности участия человека в управлении вычислительным процессом. Следствием этого явилось образование в структуре вычислительной машины нового устройства, конструктивно и функционально обособленного от вычислительного устройства,— устройства управления (носителя управляющих программ).
Устройство управления — неотъемлемая часть современных вычислительных машин, обеспечивающая высокое быстродействие в автоматическом режиме. Сведение сложных задач к простым арифметическим действиям неизбежно требует задания определенной последовательности этих действий, что и является основной задачей устройств управления. В эволюции устройств управления также можно проследить три четко выраженных периода развития. Вначале развития вычислительной техники простейшие счетные приборы способны были производить лишь отдельные вычислительные операции. Следовательно, не было необходимости упорядочить процесс функционирования самого счетного прибора. Те простейшие действия, на которые был рассчитан прибор, производил сам человек.
В механических счетных машинах можно было производить две и более вычислительных операций, предусмотренных конструкцией машины, для получения окончательного результата. Однако порядок операций определял, осуществлял и контролировал опять-таки человек. Устройство управления в этих машинах представляло собой не связанные между собой программы, каждая из которых обеспечивала проведение всего одной операции.
В вычислительных автоматах наряду с носителями программ отдельных операций в устройствах управления были предусмотрены и распределительные механизмы, которые осуществляли определенный порядок перехода от одной вычислительной операции к другой, что обусловливало автоматический режим работы вычислительного комплекса в целом. В этом случае устройство управления имело уже довольно сложную структуру. В специализированных вычислительных автоматах определенная устройством последовательность операций не изменяется. Для простых универсальных вычислительных автоматов изменение последовательности операций (т. е. программирование) осуществляется путем изменений в устройстве, например в коммутирующей схеме.
Для современных ЭВМ характерным считается программа, записанная в память ЭВМ. При этом управление последовательностью элементарных операций осуществляется не с помощью конструкции вычислительной машины, а за счет содержимого ее памяти. Это значительно расширяет возможности ЭВМ, обеспечивая ей высокую степень гибкости. Образование в структуре ЭВМ управляющей подсистемы (устройства управления) характеризует ее как БТС.
22
Подводя итог сказанному выше, необходимо отметить, что постоянно растущая сложность задач, решаемых с помощью вычислительной техники, неизбежно сопровождалась увеличением сложности отдельных агрегатов, с одной стороны, и большей согласованностью их работы в совокупности — с другой.
Бурный и непрерывный прогресс в электронной технике и развитие ЭВМ идут по линии микроминиатюризации, в результате чего их размеры, вес, потребляемая мощность непрерывно сокращаются, а этот процесс сопровождается ростом их надежности. В этом направлении можно различать определенные «поколения» ЭВМ в зависимости от типа применяемых элементов. К первому поколению ЭВМ относят вычислительные устройства с использованием электронных ламп, ко второму — с использованием полупроводниковых элементов. Третье поколение образуют ЭВМ на микромодулях и интегральных схемах. Четвертое поколение машин базируется на использовании больших интегральных схем (БИС).
Отличительными чертами каждого нового типа ЭВМ являются большая степень интеграции исходной элементной электронной аппаратуры в одном конструктивно оформленном модуле и рост функциональных возможностей модуля в обработке и хранении информации.
Следует отметить, что широкое практическое использование инфо-БТС позволяет анализировать широкий спектр альтернатив с глубокой прогнозной и плановой перспективой, избегая возможных ошибок и несогласованностей в составлении и корректировке планов развития научно-технического прогресса.
Подводя итог изложенному выше, следует отметить, что научно-технический прогресс в области приема, обработки, хранения и передачи информации привел к созданию информационных технических систем, обладающих всеми признаками БТС, т. е. к инфо-БТС. Этот процесс наглядно продемонстрирован на примере развития средств вычислительной техники.
3. Социально-экономические аспекты развития БТС
Непрерывный научно-технический прогресс в обществе является объективным процессом, свойственным разным ступеням развития общества. Однако характер развития науки и техники, результаты и последствия создания и эксплуатации БТС зависят в первую очередь от существующего способа производства. Поэтому наряда с общими положениями о научно-техническом прогрессе важное значение имеют социальные аспекты этого процесса.
Если научно-технический прогресс рассматривать как процесс развития производительных сил общества, то в нем можно обнаружить две основные составляющие: прогресс науки (научная составляющая) и прогресс производства (материально-техническая составляющая). Несмотря на наличие довольно прочных
23
причинно-следственных связей между этими процессами, они обла/ ают относительной самостоятельностью и могут в известной мере развиваться независимо друг от друга.
Процесс развития науки в современном понимании начался с изучения частных, казалось бы, несвязанных между собой явлений. По мере проникновения в глубь материи частности стали обобщаться, становятся все более универсальными. Человечество получает все больше информации о мире, в котором живет. Современная наука может достаточно четко определить строение материи и предложить несколько физически обоснованных гипотез относительно возникновения Вселенной. От элементарных понятий и определений к интеграции основных областей знания, от детального анализа прошлого к построению основных прогнозов развития Вселенной — таков путь развития науки.
За годы десятой пятилетки затраты на науку в СССР составили более 85 млрд, рублей, что на 25% превышает средства, выделенные на науку в девятой пятилетке Ч Советские ученые решают важнейшую задачу органического соединения достижений научно-технической революции с преимуществами социалистической системы хозяйства, широкого развития присущих социализму форм соединения науки с производством.
В современных условиях развитие самой науки является результатом коллективного творчества, причем не только ученых, но и специалистов во всех областях народного хозяйства, ибо превращение науки в непосредственную производительную силу общества означает прежде всего сближение и непосредственный контакт научно-исследовательских и опытно-конструкторских организаций с опытным и серийным производством. Средством обеспечения такой связи является научно-техническая информация, от развития которой зависит развитие науки, техники и производства.
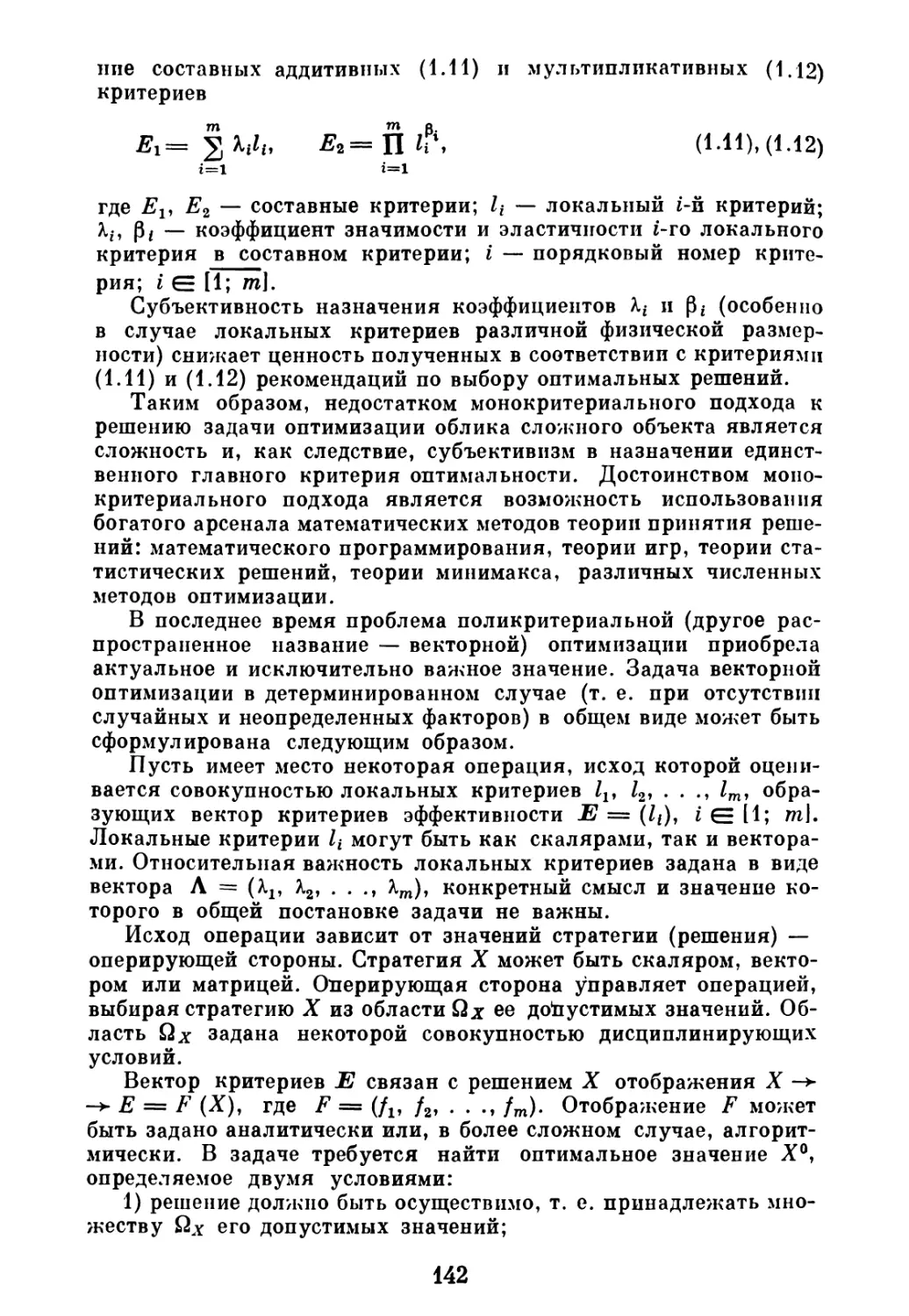
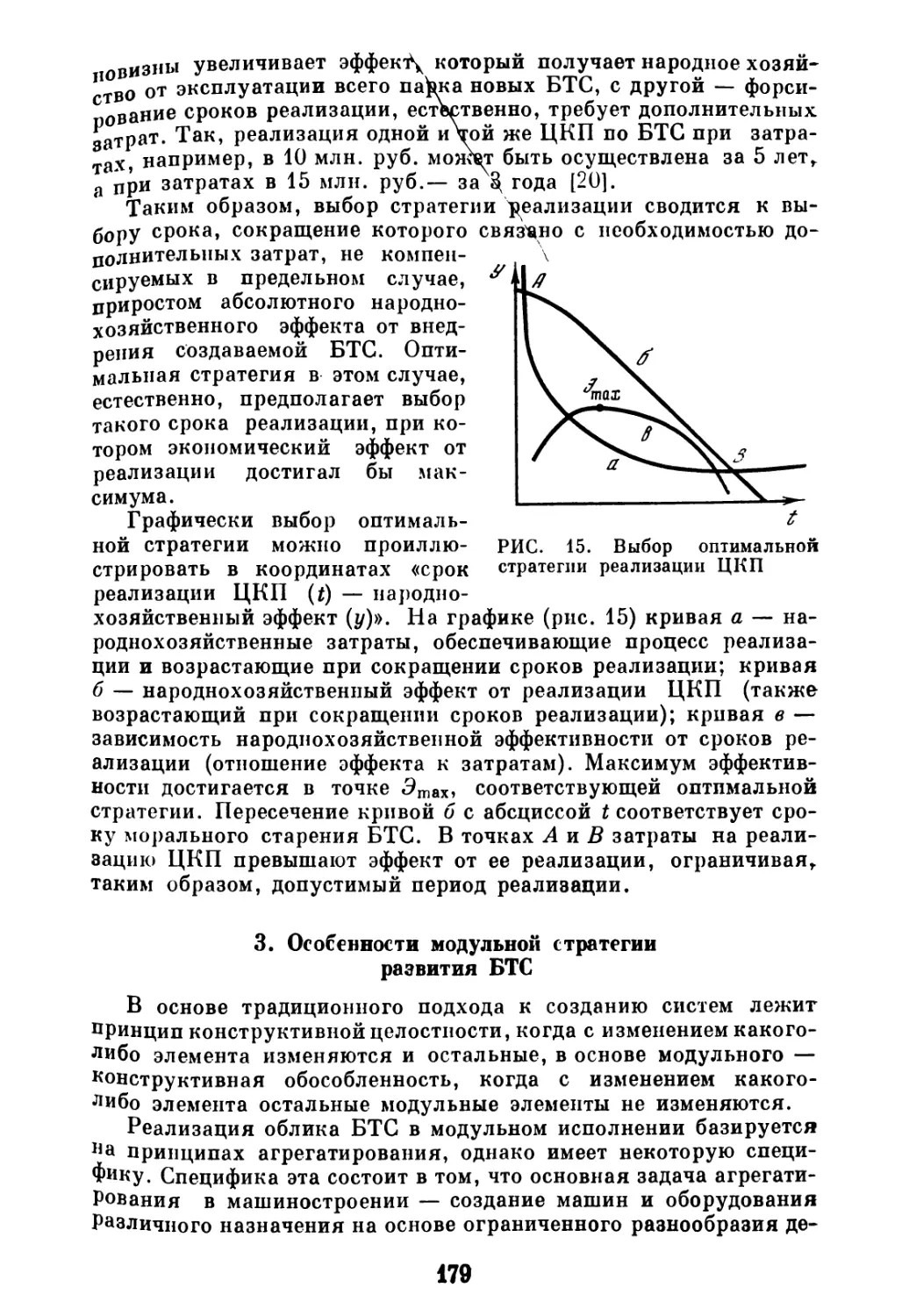
Непрерывный рост функциональных параметров и усложнение БТС приводит к непрерывному росту их стоимостных параметров. Эту тенденцию в соответствии со знаком изменения условно можно назвать «позитивной» тенденцией стоимостных параметров БТС. «Позитивная» тенденция стоимостных параметров БТС может быть описана монотонно возрастающей S-образной кривой, несколько отстающей по темпам от параметрической тенденции. Это объясняется «эффектом» уменьшения параметрического градиента стоимости 1 2 с ростом функциональных параметров БТС.
Одновременно величина стоимости параметров подвержена непрерывному воздействию «негативной» тенденции вследствие прогресса процесса труда и соответствующего роста производительности труда. Эта тенденция монотонно убывающая. В отличие от
1 СССР в цифрах. М.: Госстатиздат, 1976
2 Параметрический градиент стоимости характеризует скорость измерения стоимостных параметров БТС, т. е. величины их приращения при изменении функциональных параметров на единицу.
24
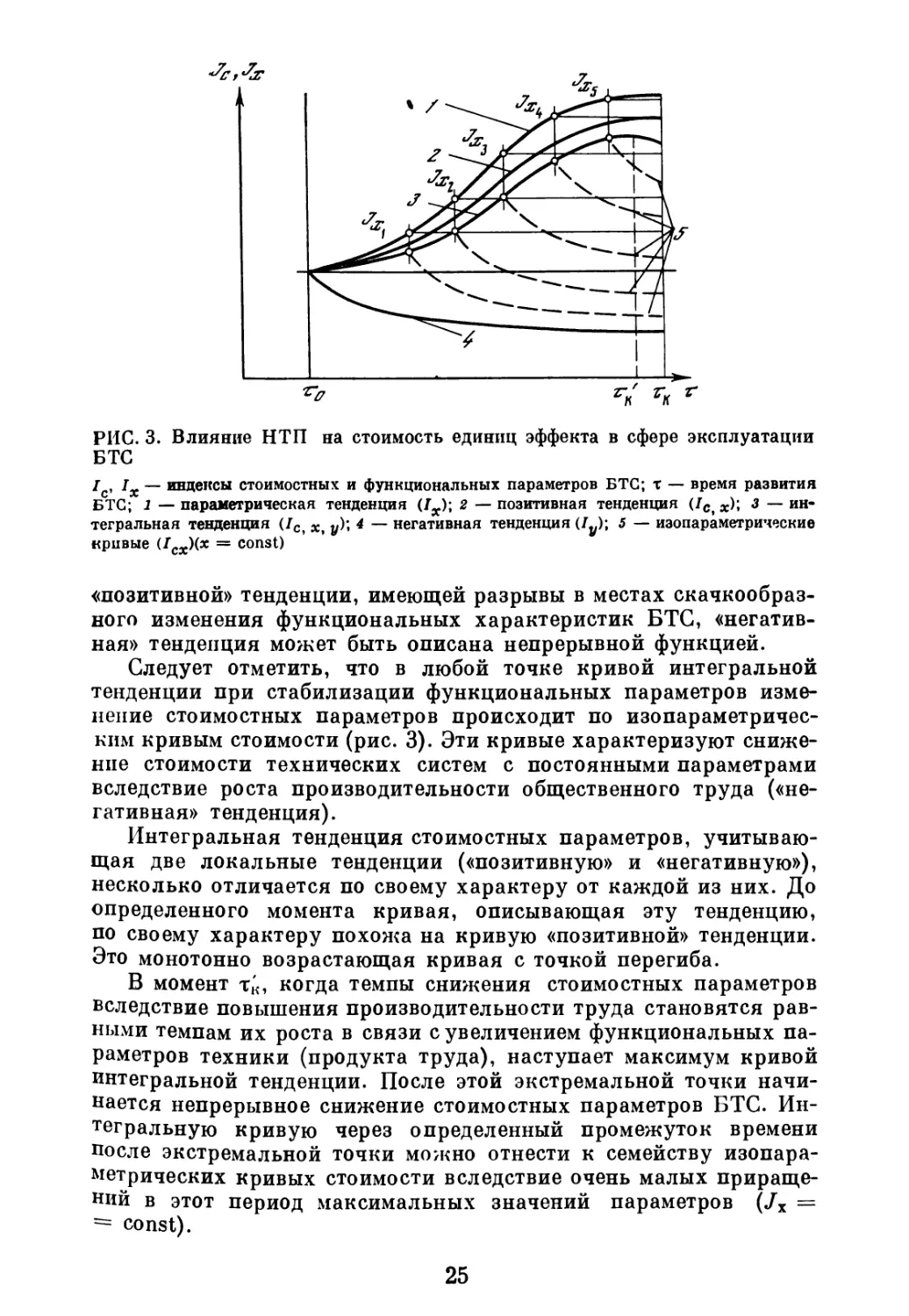
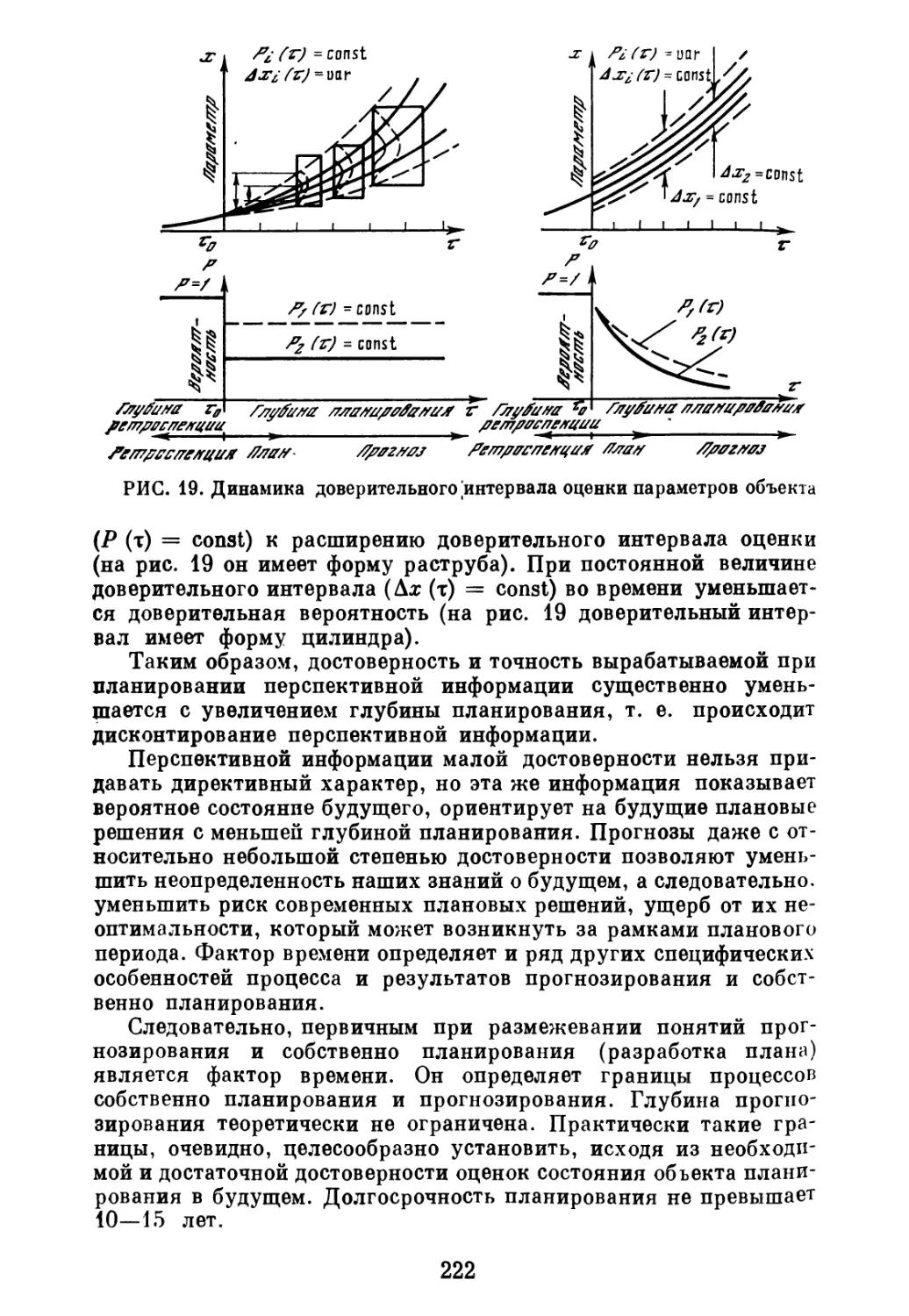
РИС. 3. Влияние НТП на стоимость единиц эффекта в сфере эксплуатации БТС
/ 1Х — индексы стоимостных и функциональных параметров БТС; т — время развития БТС; 1 — параметрическая тенденция (Zx); 2 — позитивная тенденция (ZC| х); 3 — интегральная тенденция (Zc> Х| у)\ 4 — негативная тенденция (1у); 5 — изопараметрические кривые (Тсх)(* = const)
«позитивной» тенденции, имеющей разрывы в местах скачкообразного изменения функциональных характеристик БТС, «негативная» тенденция может быть описана непрерывной функцией.
Следует отметить, что в любой точке кривой интегральной тенденции при стабилизации функциональных параметров изменение стоимостных параметров происходит по изопараметричес-ким кривым стоимости (рис. 3). Эти кривые характеризуют снижение стоимости технических систем с постоянными параметрами вследствие роста производительности общественного труда («негативная» тенденция).
Интегральная тенденция стоимостных параметров, учитывающая две локальные тенденции («позитивную» и «негативную»), несколько отличается по своему характеру от каждой из них. До определенного момента кривая, описывающая эту тенденцию, по своему характеру похожа на кривую «позитивной» тенденции. Это монотонно возрастающая кривая с точкой перегиба.
В момент Тк, когда темпы снижения стоимостных параметров вследствие повышения производительности труда становятся равными темпам их роста в связи с увеличением функциональных параметров техники (продукта труда), наступает максимум кривой интегральной тенденции. После этой экстремальной точки начинается непрерывное снижение стоимостных параметров БТС. Интегральную кривую через определенный промежуток времени после экстремальной точки можно отнести к семейству изопара-метрических кривых стоимости вследствие очень малых приращений в этот период максимальных значений параметров (Jx = = const).
25
Непрерывный рост производительности труда как следствие экономии общественного труда в сфере функционирования новой техники является основным и непреложным законом научно-технического прогресса. Особенно важно учитывать это положение в заключительной фазе эволюционного цикла технического прогресса — фазе развития морально устаревшего вида техники. В этот период даже незначительное приращение параметров в консервативных рамках старой конструктивно-функциональной схемы изделий требует значительных усилий творческих коллективов и больших затрат ресурсов. В этом аспекте особенно важное значение приобретает теория управления развитием БТС, важнейшими элементами которой являются прогнозирование, программирование и планирование. Современная постановка задачи об управлении развитием БТС предусматривает создание сложного управляющего комплекса (заменившего традиционные логикоаналитические подходы к количественному обоснованию принятия решения), центральным элементом которого является человек, как управляющий, обучающийся директивный элемент системы, преобразующий стохастические задачи в детерминированные путем раскрытия неопределенности на основании имеющегося опыта и соответствующей обработанной информации. Ниже по уровню иерархии в управляющем комплексе стоят ЭВМ — носители информации и механизма ее обработки, а также система математического обеспечения ЭВМ как инструмент активного вмешательства человека в процесс обработки информации. Еще ниже по уровню иерархии стоит адресат обработанной информации—человек или машина.
Таким образом, именно научно-технический прогресс, создавший качественно новую науку об управлении и организации, выдвинул на первый план задачи комплексного планирования и прогнозирования. Планирование и прогнозирование позволяет выбрать наиболее благоприятные стратегии (оптимальные правила поведения) при управлении развитием БТС в условиях неопределенности.
ГЛАВА ВТОРАЯ
ОСНОВНЫЕ ПРИНЦИПЫ И СТРУКТУРНЫЕ КОНЦЕПЦИИ СИСТЕМОЛОГИИ
1. Основные понятия
Необходимость в исследовании сложных объектов с учетом их внутренних и внешних связей с окружающим миром для определения закономерностей создания и развития этих объектов заставляет обратиться к методологии системного анализа.
Введение в монографии нового понятия системология (системная методология) отнюдь не рассчитано на «открытие» нового направления либо ветви в системных исследованиях. Наоборот, системология содержит комплекс понятий и концепций, используемых для анализа и обработки данных, связанных со структурой, процессами, управлением и поведением больших систем, и включающих категории, относящиеся к системному подходу, общей теории систем, системотехнике, к теории иерархических систем и системному анализу.
Следует отметить, что понятийный и классификационный аппарат в области системных исследований развит еще недостаточно: в предыдущей главе упоминалось, что даже такая основная семантическая категория, как система, еще не получила общепризнанного определения.
В этой связи, по-видимому, целесообразно вначале кратко изложить те системные понятия и категории, формулировка п (или) представление которых являются либо общепринятыми, либо не вызывающими особых дискуссий. Следуя традиции, в какой-то мере установившейся в системных исследованиях, прежде всего изложим сущность уже упомянутых категорий: системного подхода, общей теории систем, системотехники, системного анализа и теории иерархических систем, а затем уже попытаемся сформулировать основные системные понятия и изложить сущность системологии.
Системный подход — наиболее общая категория в системных исследованиях, которая исходит главным образом из комплексности анализа объекта и строгой «систематизации» исследования. Наиболее важной концепцией системного подхода является четкое представление о том, что система никоим образом не должна рассматриваться как простая сумма своих элементов или подсистем.
Системный подход является следствием известного принципа взаимосвязи и взаимообусловленности явлений и требует рассмотрения изучаемого объекта или процесса не только как самостоятельной системы, но и как части некоторой большей системы (суперсистемы), прослеживания как можно большего числа связей
27
для последующего их ранжирования, отбора существенных факторов и их оценки.
* Основными принципами системного подхода являются принципы целостности, сложности и организованности.
Принцип целостности предполагает исследование некоторого конкретного объекта, частично обособленного от других объектов и имеющего специфические закономерности функционирования п развития. Вместе с тем при использовании этого принципа необходимо проанализировать связи исследуемого объекта с другими.
Принцип сложности отличает системный подход от механистического (элементаристского), по которому внутреннее состояние объекта может полностью определяться внешними факторами. В соответствии с принципом сложности внутренние процессы объектов должны рассматриваться в комплексной зависимости как от внешних, так и от внутренних факторов.
Принцип организованности системного подхода основывается на результатах анализа структурной упорядоченности исследуемых объектов. При этом в процессе исследования элементов и связей объекта с упорядоченной структурой конкретизируются в прикладном аспекте упомянутые выше принципы целостности и сложности.
Реализация основных принципов системного подхода при исследовании БТС позволяет сформулировать следующие положения:
— выделение цели, достижение которой является результатом функционирования исследуемой БТС (целевой принцип);
— выделение комплекса технических средств как системы, в результате функционирования которой обеспечивалось бы достижение цели (принцип соответствия системы цели);
— рассмотрение выделенного комплекса технических средств, с одной стороны, как подсистемы некоторой большей системы (суперсистемы), с другой стороны, как комплекса, состоящего из ряда подсистем (принцип иерархии систем);
— подчинение функционирования системы целям системы более высокого уровня (принцип иерархии целей).
В прикладном аспекте системный подход можно интерпретировать как сочетание комплексного анализа, системного моделирования и системного управления (организации).
Комплексный анализ предусматривает всестороннее рассмотрение объекта или проблемы с привлечением различных теорий, методов, а следовательно, и специалистов.
Системное моделирование сводится к созданию единой модели, основанной на изоморфизме исследуемых объектов или проблем. Такая модель может быть абстрактной (знаковой), имитационной либо натурной.
Системное управление сводится к регулированию деятельности современных объектов на основе непрерывного процесса «прогноз — программа — план».
Развитие общей теории систем связано с созданием общих
28
подходов и процедур исследования систем различных классов и видов, с определением общих для этих систем закономерностей развития.
Специфической методологической чертой общей теории систем является ее междисциплинарный характер, основанный на изоморфизме процессов и параметров самых различных систем. Представители американской школы Л. фон Берталанфи [10]г Месарович [55], Рапопорт, Боулдинг (см. [29]), а также представитель английской школы У. Эшби [59] считают, что общая теория систем призвана изучать характеристики любых по сложности и назначению систем.
В строго теоретической постановке общая теория систем должна оперировать однозначными математическими определениями и терминами, ее основные положения должны быть достаточно фундаментальными и широкими для получения практически полезных перспектив и направлений. Следует отметить, что один из основателей общей теории систем Л. фон Берталанфи предлагал подразделить ее на две части: теорию систем в широком смысле, представляющую собой совокупность методов прикладной математики и кибернетики, и теорию систем в узком смысле (которая более известна как абстрактная теория систем), позволяющую получить описание исследуемых объектов на различных уровнях абстракции: теоретико-множественном, топологическом, логико-математическом, символическом, информационном и эвристическом.
Абстрактная теория систем позволяет моделировать процессы принятия решений, исследования операций, адаптации и реадаптации, организованного обучения и т. д. Прикладные аспекты теории предусматривают широкое изучение изоморфизмов процессов, объектов и закономерностей, включая создание адекватных теоретических моделей, систематизацию фронта научных исследований в различных областях.
Разнообразие систем потребовало развития прикладных системных исследований.
Системотехника возникла в результате усложнения процесса инженерного проектирования технических систем, его рационализации с системных позиций. В процессе становления системотехники расширяется область ее применения: она все более становится комплексной областью знания, объединяющей совокупность методов исследования и методов синтеза БТС на основе системной методологии. Это позволяет рассматривать в системотехнике процессы проектирования, создания, испытаний и эксплуатации БТС.
Аппарат и методы исследования системотехники в значительной мере основываются на методологическом фундаменте общей теории систем. Следует указать на сходство в определенных пределах между системотехникой и системным проектированием—методологией синтеза больших технических систем, рассчитанной на бригадный метод проектирования по принципу «группа людей —
29
группа машин». Вместе с тем отличительной чертой системного проектирования является более четкое подразделение процедур анализа на внешние (анализ взаимодействия с внешней средой) и внутренние (анализ процессора создаваемой БТС) с последующим делением на анализ структуры, связей, управления и поведения БТС.
Основным критерием системотехники является принцип достижения максимума математического ожидания эффективности БТС в классической постановке исследования операций. Иными словами, критерием эффективности является соотношение дохода (или стоимость предотвращенного ущерба) к затратам, связанным с получением дохода (предотвращением ущерба). Основные положения системотехники представляется возможным сформулировать следующим образом:
— решение любой системотехнической задачи сводится вначале к комплексу логических построений, которые затем преобразуются в математические модели;
— моделирование и формализация структуры объекта уже в начальных стадиях проектирования позволяют оценить все связи в системе (в том числе и в первую очередь иерархические), что дает возможность получить достаточную модель для процесса проектирования;
— подходы к решению системотехнических задач предусматривают прежде всего использование декомпозиции как метода деления систем на части (подсистемы, элементы), которая предусматривает, во-первых, структурную декомпозицию и анализ составляющих систем до элементного предела и, во-вторых, оценку тесноты связей, включая анализ числа связей, их важности (приоритетности) для всех подсистем и элементов объекта.
В целом процедура выполнения проекта БТС по системотехнической методологии предусматривает следующие этапы.
1. Комплексный общий анализ, включающий формирование целевой функции, общего и частных критериев. Такой анализ должен позволить сформировать общую функциональную и техническую концепцию системы.
2. Формирование алгоритмов основных процессов системы, позволяющих получить модель системы в целом (без учета функциональных особенностей подсистем и элементов).
3. Разработка системы информационного обеспечения проектирования БТС. включая организацию документооборота. Особенностью этого этапа является использование принципа централизации информации, предусматривающего создание единой систематизированной информационной базы (Банк данных). В рамках информационной системы осуществляется ранжирование и систематизация задач управления под глобальный (общий) и частные критерии.
4. Привязка и согласование схем системы информационного обеспечения с возможностями экспериментального комплекса и комплекса технических средств.
30
5. Организационная разработка системы, предусматривающая уточнение структуры и связей самого объекта, достоверности его м одели, соответствие информационной системы потребностям проектирования.
Следует отметить, что рассмотренная процедура достаточно полно отражает основные требования системного подхода.
Системный анализ начал складываться в самостоятельную научную дисциплину в рамках общего направления системных исследований. Название этого направления системных исследований не единственное и не самое удачное.
Историческая ретроспекция появления системного анализа приводит к разработкам известной американской «бесприбыльной» корпорации «Рэнд», посвященным созданию управляющего цикла «планирование—программирование—составление бюджета» в создании вооружения и военной техники. В этом аспекте следует принять во внимание определение, данное системному анализу участниками его разработки в «Рэнд» Д. Клиландом и В. Кингом х: «Системным анализом принято называть приложение системных концепций к функциям управления, связанным с планированием..^ Чтобы понять содержание методологии, которую принято называть системным анализом, необходимо прежде всего осознать характер анализируемых проблем, ибо само назначение системного анализа состоит именно в анализе проблем, подлежащих решению^ в ходе планирования».
В определении Ю. И. Черняка 2, «современный системный анализ есть ... методология исследования с помощью аппарата теории систем сложных и труднодоступных свойств объектов и явлений, которые в принципе невозможно исследовать непосредственным наблюдением объекта».
Таким образом, теоретически системный анализ представляет собой одну из разновидностей методологии анализа проблем для принятия управленческих решений, основанную на систематическом исследовании различных допустимых вариантов или альтернатив с учетом технико-экономического обоснования реализации каждой такой альтернативы.
Методы системного анализа включают широкое использование моделирования как средства отображения реальной системы, позволяющего оценивать в конкретной размерности изменения функциональных характеристик системы в зависимости от изменений во внешней среде либо в подсистемах или элементах самой системы. Важной концептуальной особенностью системного анализа является представление модели как совокупности связей, объединяющих цели системы со стратегиями ее создания, развития и эксплуатации в зависимости от изменений во внешней среде. Обычно это матричные модели, содержащие набор возможных результатов или исходов в зависимости от целей системы и средств их до-1 Клиланд Д., Кинг В. Системный анализ и целевое управление. М.: Сов. 2 Радио, 1974, с. 12.
Черняк К). И. Информация и управление. М.: Наука, 1976, с. 74.
31
стижения. В этом аспекте матрицы оценки исходов для различных стратегий можно рассматривать и как прогнозы результатов взаимодействия различных стратегий с условиями во внешней среде при корректном учете фактора времени. Значительное внимание в системном анализе уделяется обоснованному выбору критерия в условиях определенности и особенно в условиях неопределенности воздействия внешней среды.
В заключение следует отметить, что понятие системный анализ само по себе достаточно аморфно и неопределенно и вызывает ряд различных толкований. Использованная в данной работе системологическая формулировка «анализ сложных систем» лучше отражает сущность этих исследований, указывает область их применения. В самом деле, цель системного анализа — разработать на основе системной методологии упорядоченную структуру исследования прежде всего сложных (больших) систем.
Многими западными специалистами по исследованию сложных систем системный анализ трактуется как попытка применить формальные методы для упорядочения большого объема информации, необходимой для анализа сложных систем, т. е. как средство преодоления неопределенности в изучении сложных систем.
Теория иерархических систем предложена М. Месарови-чем[55]. Она явилась дальнейшим развитием общей теории систем для случая, когда исследуемый объект может рассматриваться как совокупность многоуровневых иерархически организованных подсистем. Качественные особенности анализа таких систем можно характеризовать тремя критериями: степенью агрегированности моделей или уровнем абстракции описания системы; уровнем сложности принятия решений (сложностью многоуровневого процесса управления); уровнем приоритета действий (правом вмешательства подсистем верхних уровней в деятельность низших по иерархии подсистем).
Математические модели иерархических систем изложены на формальном языке общей теории систем, который построен на теоретико-множественных концепциях. Основные процедуры анализа иерархических систем формируются для двухуровневой системы. Важно отметить, что такое «двухэтажное» представление иерархической системы позволяет перейти к концепции модуля иерархической системы, который затем может найти достаточно широкое применение при синтезе многоуровневых БТС.
Содержательная часть теории иерархических систем может быть представлена тремя основными категориями: концептуализацией, формализацией и координацией.
Концептуализация иерархических систем предусматривает введение уровней описания систем стратов, уровней последовательных стадий выработки решений слоев и, наконец, организационных уровней эшелонов. Концептуализация иерархических систем исходит из взаимосвязи трех указанных категорий иерархии: стратифицированности, многослойности и многоэшелонности систем.
32
формализация сводится к описанию трех основных концепций иерархических систем. Основной проблемой формализации, по-видимому, следует считать описание на языке теории множеств процедур принятия решений.
Центральное положение теории Месаровича сводится к тому, что в модуле (двухуровневой системе) рассматриваются три уровня целей: низший — цели низшего уровня, координационный — цели блоков верхнего уровня (координатора), глобальный — цели всей большой системы.
Основные понятия системологии. Выше уже приводилось определение системологии. Переходя к определению основных понятий, используемых в этой методологии, следует очертить ее основные направления: структурный анализ и анализ систем; анализ связей в аспектах энергоматериального, информационного и человеко-машинного представления технических и организационно-экономических систем; исследование стратегий управления и поведения при анализе оптимального развития БТС и БОЭС.
Ключевым в системологии является понятие «система». Под системой будем подразумевать определенное во времени и в пространстве множество элементов с известными свойствами и с упорядоченными связями между элементами и свойствами, ориентированными па выполнение главной задачи данного множества.
Различные неделимые (для заданного уровня взаимодействия и декомпозиции системы) объекты рассматриваются как элементы системы. Технические средства (средства труда) являются элементами технической системы. В определение БТС обязательно включаются особенности структуры, поведения и управления большой системой.
Система существует среди других объектов, не вошедших в систему, которые объединяются понятием «внешняя среда». Объекты внешней среды связаны с элементами системы, однако эта связь существенно слабее внутренних связей в системе. Связь системы с внешней средой упорядочена в организованные и случайные входы и выходы систем. Вход характеризует воздействие внешней среды на систему, выход — воздействие системы на внешнюю среду. Необходимо отметить, что некоторые объекты, не вошедшие в систему, настолько слабо связаны с этой системой, что вполне правомерно не включать их во внешнюю среду даппой системы.
Выше уже отмечалось, что система существует для достижения некоторой цели. Эта цель достигается в результате выполняемой к процессе функционирования системы определенной операции. Операция может быть сама по себе сложной и состоять из нескольких синхронно или последовательно выполняемых операций. В таком случае в системе существуют несколько подсистем, реализующих соответственно отдельные операции. Обязательным Условием такого расчленения следует считать соблюдение принципа Целостности для каждой подсистемы, т. е. каждая подсистема Должна выполнять определенную составляющую операции,
2 С. А. Саркисян 33
и выход этой подсистемы будет либо входом в другую подсистему либо выходом системы в целом.
Важно отметить и следующую особенность системы. Каждая система является целостностью, т. е. обладает свойствами, кото рые не есть простое суммирование свойств отдельных элементов При выделении какого-то числа объектов в систему мы характе ризу ем ее прежде всего как некоторую целостность. Следовательно, каждый элемент системы связан с остальными: изменени! этого элемента вызывает изменения в остальных элементах i в системе в целом. (Это объясняется тем, что выделенные в систему элементы участвуют в единой операции для достижения одной цели.)
Противоположным целостности является свойство разобщен ности, когда изменение отдельного элемента системы не вызывает изменений остальных элементов и совокупности в целом. Разоб щенность какой-либо совокупности базируется на особенностг составляющих ее элементов, для которой характерно отсутствие функционально необходимых связей между отдельными элементами.
Для полноты характеристики необходимо заметить, что системы обладают двумя этими свойствами (целостностью и разобщенностью), во-первых, на различных уровнях и, во-вторых, в определенной, ограниченной мере, т. е. системам свойственна весьмг сложная взаимосвязь целостного и разобщенного. Действительно, если каждый элемент системы участвует в выполнении строго определенного этапа единой операции, то он обладает свойством целостности, но по этой же причине ему присуща и некоторая степень обособленности, так как указанный выше этап операции выполняется именно этим элементом, а не каким-либо другим. Однако, учитывая, что этот элемент связан с другими элементами данной системы, мы вправе говорить лишь о частичной обособленности элемента. Связи между элементами, обусловливающие функционирование и взаимодействие всех элементов в единой операции, в сущности определяют и степень целостности самой системы. В последующем изложении при анализе вопросов управления развитием систем будет показано, что определение соотношения уровней целостности систем и обособленности составляющих их подсистем имеет важное значение для реализации той или иной стратегии развития систем.
Понятие «система» относительное, зависящее от цели исследования. По сути дела, выделение системы есть разделение некоторой области материального мира на две части, одна из которых рассматривается как система, а другая как внешняя среда. Такой методический прием весьма удобен и необходим при исследовании, причем содержательные утверждения начинаются лишь тогда, когда делается такая попытка разделения материального мира на эти две части.
Таким образом, основу системологии составляет восприятие системы как интегрального целого, определение всех видов воздей-
34
ий внешней среды на систему и, наоборот, системы па внешнюю СТ£Ду (другие системы). При первичном рассмотрении любой за-Сачи особенно важно суметь оценить объект исследования в целом в его взаимосвязях с внешней средой. Важно сразу же в результате такой интегральной оценки выявить наиболее важные и сложные связи, с тем чтобы впоследствии в процессе декомпозиции системы проследить эти связи в подсистемах (элементах) системы и попытаться найти для них соответствующие достоверные мо
дели. В этом смысле для системологического подхода к задаче необходимо, следуя меткому определению И. П. Павлова, быть художником в науке х. Действительно, для решения комплексных проблем науке нужны более исследователи, способные полностью охватить всю проблему в целом, нежели аналитики и регистраторы
фактов.
Рассмотрим основные параметры и характеристики систем. Основными параметрами системы являются вход, процесс, выход, связь, управление с помощью обратной связи и ограничений (дисциплинирующих условий).
Связи есть то, что соединяет объекты и свойства в системном процессе. Постулируется, что связи существуют между всеми системными элементами, системами и подсистемами. Различают три разновидности связей: связи 1-го порядка — функционально необходимые для выполнения основных задач, стоящих перед данной системой; связи 2-го порядка — дополнительные; связи 3-го порядка — избыточные или противоречивые (в частности, шумы).
Избыточность характеризует такое состояние системы, когда она содержит ненужные с точки зрения достижения цели объекты и, следовательно, связи. Противоречие существует тогда, когда система одновременно содержит два объекта, один из которых является действительным, истинным, а другой — ложным.
Прежде чем перейти к анализу разнообразных форм нарушений деятельности систем, следует отметить, что неправильное функционирование определяется как изменение связей 1-го или 2-го порядков объектов и свойств, при котором система переходит через точку возникновения критической ситуации. При этом изменения затрагивают по крайней мере один объект систвхмы, а в результате устанавливаются новые связи и соответственно новые выходы, не удовлетворяющие цели.
Термин процесс, применяемый также для описания текущего состояния системы, определяет способ получения данного результата взаимодействия объектов системы с использованием их свойств и связей.
Ранее было сказано, что всякая система существует в какой-то внешней среде, определяемой границей, относительно которой говорят, что система действует в ее рамках. Внешняя среда определяется как набор существующих в пространстве и во времени
1 Павлов И. П. Поли. собр. трудов. М.: Изд-во All СССР, 1949, т. III, с. 454в
35
2*
объектов, которые, по определению, оказывают действие на систему.
Граница указывает пределы, в которых объекты, свойства и их связи можно адекватно объяснить и обеспечить управление ими. Следовательно, системы и их границы могут быть определены весьма просто, если их объекты по своей природе являются абсолютными или конечными.
Изучение системы можно вести в двух направлениях: анализировать либо процесс, либо конечный исход процесса.
В первом случае система может изучаться как определенное количество связанных между собой подсистем. При этом вначале определяют промежуточные выходы системы. Затем исследуют средства, с помощью которых последние могут быть переведены в последовательно связанную совокупость процессов.
Во втором случае анализ конечного исхода процесса (выхода системы) обеспечивает макроскопическое рассмотрение системы. При использовании такого метода система рассматривается как интегральное целое. При этом больше внимания уделяется завершающим, конечным, а не промежуточным результатам. *
2. Декомпозиция систем
Декомпозиция при исследовании систем. Описание общих свойств сложных систем в процессе их исследования представляет большие трудности. Поэтому возникает необходимость в изучении системы по частям — подсистемам, а затем па основании свойств подсистем и связей между ними формируется вывод об общих свойствах системы в целом. Другими словами, при исследовании сложных систем возникают задачи анализа и синтеза. Подробно содержание этих задач будет рассмотрено в гл. 3 (разд. I). Здесь же рассматриваются лишь принципы декомпозиции систем.
Для того чтобы иметь возможность рассмотреть систему по частям, необходимо расчленить ее (декомпозировать). Расчлепи-мой системой называют такую систему, для которой существуют средства декомпозиции. Средства декомпозиции, или просто декомпозиции, могут быть как материальными, так и концептуальными (абстрактными).
Для дальнейшего анализа следует ввести понятие тождественной декомпозиции как операции, в результате которой любая система превращается в самую себя. Другими словами, это вырожденная декомпозиция, введенная для условного обозначения предела декомпозиции систем.
Применим декомпозицию DQ к некоторой системе 50 (представляя себе декомпозицию как операцию, которая па основании какого-либо признака расчленяет систему на подсистемы. Если декомпозиция не является тождественной, то система So разобьется на некоторое множество подсистем S2, • • Sk. Далее можно применить для подсистем 52, • • •, S* соответственно декомпозиции Di, /)2, . . ., Dk. Причем декомпозиции Z>i, D2, • • ,Dk
36
могут быть различными. В результате получают множества подсистем 5ц, S12, • • ^22» • • •» йъ ^А-2, * • •’ $кп-
Этот процесс можно продолжать до тех пор, пока не будут достигнуты тождественные декомпозиции как предел операции. В результате, с одной стороны, получают дерево декомпозиций (О0). а с другой — дерево систем {50}. В общем случае каждому дереву декомпозиций {£)0} будет соответствовать свое дерево систем {50). Различие декомпозиций, так же как и различие полученных в результате их подсистем, обусловлено признаком тех декомпозиций, па основании которых получепы эти декомпозиции.
Поскольку задача декомпозиции возникла в силу необходимости описать системы по частям, имеет смысл только декомпозиция подсистем, для которых имеются средства получения информации с каждой из них. Это условие накладывает существенное ограничение па выбор средств декомпозиции.
Если в основу дерева декомпозиций {Z)o} положить признак иерархии, то полученное дерево систем {50} будет деревом иерархической структуры систем, так как, рассматривая дерево систем от выделенной системы вниз по уровням иерархии, можно получить иерархическую структуру выделенной системы.
Иерархия больших технических систем. В БТС процесс существует на многих уровнях, причем действует принцип подчинения низших уровней высшим. Это означает, что каждая система по своему составу представляет часть более крупной системы (системы высшего уровня или суперсистемы) и цели каждой системы подчинены целям систем более высокого уровня и служат средством их достижения. Иерархия систем является отражением иерархии целей.
Процесс декомпозиции систем можно вести до некоторого уровня, па котором будут представлены лишь такие системы, в которых не рассматриваются подсистемы нижнего уровня.
От выделенной для рассмотрения системы подобное исследование можно вести вверх и вниз по уровням иерархии. При переходе к более высоким уровням иерархии рассматриваемая система переопределяется в подсистему некоторой суперсистемы. Соответственно будут переопределены и ее связи с внешней средой: часть этих связей будет теперь выражать отпошепйя данной системы внутри суперсистемы. При переходе к более низким уровням данная система расчленяется па подсистемы.
Вполне естественно, что в любом конкретном случае исследование иерархии систем будет неполным. «Полпота» иерархии, т. е. число и характер ее уровней, зависит от выделения некоторой совокупности объектов в качестве системы и последующего их переопределения при переходе па другой уровень.
Каждую систему в иерархии систем можно исследовать в двух аспектах: как элемент суперсистемы и как обособленную систему. В первом случае концентрируется внимание на связях системы с сУперсистемой. Система представляется здесь в виде так называемого черного ящика, исследуемого со стороны входов и выходов,
37
а суперсистема — в качестве внешней среды. Во втором случае исследуются главным образом связи внутри системы элементов.
При исследовании системы в иерархии систем на различных уровнях встает вопрос о соотношении целостности и обособленности систем. При переходе с уровня па уровень вверх по иерархии существенно увеличивается сложность задач, решаемых системами. Соответственно увеличивается и сложность систем. Чем сложнее задача, чем больше ее «удельный вес», тем более самостоятельной, обособленной становится система, ее реализующая. С другой стороны, усложнение системы по этой же причине вызывает ослабление целостности системы. Иными словами, при переходе к более высоким уровням иерархии увеличивается обособленность систем и снижается их целостность.
Практически все процедуры системного анализа так или иначе связаны с анализом структуры исследуемого объекта. Основу исходных операций структурного анализа составляет декомпозиция.
Структурное подразделение систем осуществляется по правилам классификации, системное понятие которой исходит из семантики класса. Под классом понимают совокупность объектов, обладающих некоторыми признаками общности. Классификацией называется разбиение некоторой совокупности объектов на классы по наиболее существенным признакам.
Специфика классификации БТС. Анализ ранее составленных классификаций с учетом логических правил деления объема понятия позволил сформулировать следующие требования к построению классификации:
— в одной и той же классификации необходимо применять одно и то же основание;
— объем элементов классифицируемой совокупности должен равняться объему элементов всех образованных классов;
— члены классификации (образованные классы) должны вза-имно исключать друг друга, т. е. должны быть непересекающимися;
— подразделение на классы (для многоступенчатых классификаций) должно быть непрерывным, т. е. при переходах с одного уровня иерархии па другой необходимо для исследования в качестве следующего класса брать ближайший по иерархической структуре.
В системологии классификации имеют место следующие логически обоснованные разновидности: неупорядоченное разбиение; упорядоченное разбиение; иерархическое разбиение.
Упорядоченное разбиение, соответствующее последовательному соединению подсистем (элементов) в системе, имее^г место в тех случаях, когда межклассовые связи достаточно сильны, что позволяет расположить объекты в цепочку по степени уменьшения тесноты связи между ними. Неупорядоченное разбиение, соответствующее параллельному соединению подсистем в системе, может осуществляться в тех случаях, когда межклассовые связи весьма слабы, так что объекты (классы) почти не связаны друг с другом.
38
Иеоархическая классификация соответствует случаям, когда система может распадаться па иерархические (древообразно) ооганизованные объекты (классы).
1 В теоретико-множественной постановке под классификацией некоторого множества М = 1, 2, . . ., т из т объектов (классов) понимается пара (N, v), в которой N = {Nlf N2, . . Nn}~ совокупность непустых подмножеств N, CZ М, особенностью которых является то, что каждый объект принадлежит одпому (и только одному) из подмножеств:
Nu . . Nn (/.(J Ni = aNt П Nj = 0 (j j). 1=1
Второй элемент классификационной пары v есть бинарное отношение на подмножествах N14 . . ., Nn, которое характеризует структуру связей между ними.
Таким образом, если v представляет собой отношение линейного типа и классификация может рассматриваться как фиксация линейного упорядочения подмножеств Ni, . . Nn, то такая классификация может считаться упорядоченным разбиением. Если же v = 0, то классификацию следует отнести к категории неупорядоченного разбиения множества М.
Введем далее понятие выборка, под которой следует подразумевать совокупность объектов, подлежащих классификации. В сущности такой выборкой может быть любое подмножество Nt (либо группа Nt -н Nj) = {nj, . . ., п*}. Разумеется, Nt CZ М, а к характеризует объем выборки.
Следует указать также, что в смысле решения задачи классификации исследование бинарных отношений v па подмножествах Nt в сущности адекватно исследованию подмножества N множества М. Пользуясь бинарным отношением v, можно записать: элемент х ЕЕ М находится в отношении v к элементу у ЕЕ М (или в записи xvy) в том и только в том случае, когда оба элемента принадлежат подмножеству N.
Таким образом, в данном случае можно считать, что бинарное отношение v может рассматриваться как отношение эквивалентности, если оно, кроме того, обладает по крайней мере тремя свойствами:
— • рефлексивностью Ух е М, (х) е N',
— симметричностью Ух, у е М, (х, у) N <-> (у, х) е N;
— транзитивностью Ух, у, z М, (х, у) е N П (у, z) е N -> -> (х, z) э N.
На основании этих исходных положений следует полагать, что отношение эквивалентности есть результат разбиения множества ™ на классы и, будучи заданным для некоторого множества М, отношение эквивалентности определяет разбиение этого множества на классы.
Критериальная функция. В зависимости от целей и особенностей задачи классификации (распознавание образов, структурный анализ или оптимальный выбор альтернативы) одну и ту же вы
39
борку Ni можно разбить на классы многими способами, т. е. на ней можно задать множество отношений эквивалентности v.
Для корректной формулировки цели классификации необходимо формализовать и задать для ЭВМ порядок предпочтений в определении v.
В данном случае, учитывая субъективность выбора того или иного вида задач классификации целесообразно воспользоваться функцией полезности U (v), отображающей v на множество действительных чисел. Таким образом, минимизация (максимизация) функции полезности U (v) в сущности адекватна решению задачи классификации, т. е. нахождению такого v на множестве М (выборке Л^), что
U (v)—> min. ж /олч
veM *
В решении задач классификации традиционно используют теорию графо^ Аналитически в этом случае мы исходим из двух положений:
1) из заданной топологии в исследуемом рассматриваемом множестве М\
2) из критерия классификации (см. 1.2.1), который различные авторы называют также критерием группировки, функцией качества классификации.
Для того чтобы задать топологию в исследуемом множестве, можно предложить ряд способов. Наиболее простой способ сводится к тому, что для каждой точки (объекта) множества определяется совокупность точек (объектов), близких к ней по критерию классификации.
Следует отметить, что применимость этого метода ограничена условием, по которому число объектов множества М или по крайней мере выборки Nt должно быть конечным. В этом случае такая дискретная топология может быть описана теорией графов. Каждая точка выборки отождествляется с вершиной детерминированного или стохастического графа. Далее пары точек (объектов), близких по критерию классификации, соединяются дугами.
Примечательно, что такой подход позволяет описать па языке теории графов и критерий классификации, который в этом случае может использоваться для получения качественной и количественной оценок. Качественная оценка имеет бинарный характер: позволяет судить только о допустимости (недопустимости) данной классификации. Количественная оценка позволяет ранжировать классифицируемые точки (объекты) по степени их близости пли получать взвешенные оценки. Заметим, что качественный показатель в такой постановке можно рассматривать как частный случай количественного, когда допустимая классификация равна единице, недопустимая — нулю.
В рамках рассматриваемого подхода классификация сводится к разбиению заданной системы, представленной графом, на подсистемы непересекающихся подграфов, а критерий классификации
40
сЛужит базой для сравнения или оценки качества (правильности) разбиений. Следует оговорить некоторые особенности качественного и количественного показателей.
Качественная оценка допускает только такие разбиения, при
которых в каждом подграфе нет отдельных несвязанных вершин. Количественная оценка исходит из того, что качество разбиений графа So на систему подграфов (Sn . . ., Sk)
Sq = Si IJ S2 U • • •
(2.2)
описывается соотношением вида
(2.з> ij
где a (Si, Sj) — число дуг, соединяющих Sf и Sy, b (Sj) — число дуг в подграфе Sj.
Количественные показатели представленного вида используются в классификации в тех случаях, когда частные составляющие системы группируются в подсистемы, например при образовании сводных или укрупненных структурных подразделений или КБ по признакам решения новых проблем. Укрупнение подразделений осуществляется при наличии дуги между вершинами графа, отождествленными с соответствующими подразделениями.
Важным направлением задач упорядоченной классификации является построение некоторой последовательности признаков, сходящихся к некоторому классифицирующему критерию. Такая классификация, учитывая ее существенную прикладную значимость (задачи ранжирования исходных данных, конструктивнотехнологических признаков и т. п.), осуществляется с использованием многошагового итерационного алгоритма, одна итерация которого сводится к преобразованию исходного многомерного признака в другой признак, характеризующий уже близость (степень близости, тяготение, принадлежность) объекта к дескриптивному (центральному) объекту подсистемы или системы.
Последовательность Sn получаемых таким образом признаков сходится к некоторому классификационному признаку Sn причем относящиеся к данной классификационной подсистеме объекты должны иметь полностью совпадающие (либо существенно близкие) значения по этому признаку. Объекты, попадающие в разные подсистемы, должны различаться по этому признаку.
Задача классификации в предлагаемом алгоритме решаётся по имеющейся выборке с использованием непараметрической оценки плотности вероятностей. Задаются некоторая выборка и начальный признак Ао = (Si, Si, . . ., Sn). Оценка для функции плотности вероятностей, построенная по данной выборке, имеет следующий вид:
N
PN (.S’) =с(Л) -1 У, ехр{— (S — 5°) 2"1 (5 —5^}, (2.4)
;=1
41
где С (h) = i/(h У2л)п+т У | 2 |; п + т — размерность выборки 2 — выборочная ковариационная матрица; h (N) — некоторо положительное число.
Процедура итераций алгоритма сводится к определению п< признаку Ак = (5i, ...» SCN) некоторого нового признака ЛА+1 = — (5j+1, . . ., S^+1), более существенного (по сравнению с пре дыдущим признаком Л*), определяющего принадлежность дан ного объекта к классу А:. При этом важно отметить, что каждьп объект классификации по исходному признаку Ло имеет вес UN а по признаку Ак — некоторый вес Р*, / = 1, . . ., N, где 0 < < PKj < 1-
Каждая итерация включает шесть последовательных про цедур:
1) вычисление ковариационной матрицы связи одномерны? признаков, составляющих Ак:
= s л- - 3 P*Si)T (•?* - S PeSkiY, (2.5
j=l i=l 1
2) вычисление меры связи между объектами по формуле
м (SkSkn) = exp {- (Sk - Skn) XSjV 0’-<2-4 5 6 *
где X — диагональная матрица весов одномерных признаков;
3) определение величин вероятностей л^ того, что объект относится к классу А^:
лгп —“1 ЛОуОп»
( '
1
4) вычисление P(n+1), n = 1, N:
N
/>(*+1)=* У . (2.8;
n TV л'гп’ '
1
5) определение признака Л(*+1):
N _________________
А^-'»=Л---------• ’ •п=1-^; (2-9)
Мп 1
6) проверка критерия, по которому информационная процедура прекращается:
max (б1* — 4+1) (5* — Sk+1)T < е, (2.10)
где 8 0 — заданное значение и (v).
42
Указанный теоретический подход к решению классификацией ной задачи в целом может дать удовлетворительные результаты только после составления и тарификации шкальных картосхем для типизированных объектов.
Вместе с тем при решении классификационных задач обработки информации целесообразно в ряде случаев воспользоваться методикой специального классификатора, пригодного на современном этапе для решения широкого класса прикладных задач в системах обработки данных.
Аналитическое представление классификатора систем. Исходное множество признаков здесь задается как последовательность объектов, каждый из которых может быть описан произвольной по длине фразой, состоящей из упорядоченного набора слов-признаков. Описание объекта строится на единичных признаках. Каждый из них выражается несколькими характеристиками, которые определяют физическую природу признака, степень распознавания объекта по данному признаку, число и тесноту связей с другими признаками, достоверность.
Такая декомпозиция характеристик по признакам всегда может и должна осуществляться (чаще всего экспертным путем) на предварительных этапах системного анализа информационной системы. Обычно такой анализ включает
— выделение целевого принципа (выделение цели распознавания объекта);
— выделение принципа соответствия системы-цели (выделение комплекса методов или средств, обеспечивающих достижение цели);
— выделение принципа иерархии систем (анализ выделенных методов или средств с точки зрения достоверности получаемых результатов);
— выделение принципа иерархии целей (соподчиненность целей анализа).
Такой подход к декомпозиции признаков позволяет получить предварительные оценки, весьма необходимые для построения автоматизированной системы классификаторов.
Описания объектов, выполненные в соответствии с предыдущим изложением, являются информационными входами классификатора, который по заданным критериям подобия относит их к соответствующему классификационному уровню («класс—подкласс-вид—подвид—тип»).
Если же информационный вход классификатора представляет собой разновидность, которая не может быть отнесена ни к одному из имеющихся классификационных уровней и критериев, то его относят к новым разновидностям, которые классифицируются с привлечением экспертных оценок, а также последующего уточнения этих оценок. Аналогичным образом уточняется описание по изложенной выше методике и других классов, включая формирование новых классов, более точно отражающих признаки или характеристики объектов, которые вводятся в классификатор.
43
Постулируется также, что априорно заданный словарь признаков удовлетворяет задаче классификации, поэтому известные методы формирования рабочего словаря здесь не рассматриваются.
Исходя из наблюдений и анализа характеристик классифицируемого объекта, устанавливается априорный словарь описания признаков па входе классификатора по всем аспектам и группам однородных признаков. Пусть таких групп однородных признаков будет L, при этом одни группы отражают количественные, а другие — качественные свойства последовательности.
Различная длина фраз в описании признаков типична для объектов рассматриваемого вида и является существенной трудностью при распознавании. С этой целью стандартизуем как длину фразы, так и описание отдельных свойств объектов, четко зафиксировав положение каждого признака по фразе. В результате каждый объект описывается позиционным кодом определенной длины, причем позиции кода занимают конкретные значения признаков для каждого объекта. В тех случаях, когда некоторый признак не участвует в описании объекта, его место резервируется «нулевым» значением, которое также входит в описание объекта.
Наличие множества свойств в описании объекта предъявляет определенные требования к критерию подобия объектов. Очевидно, что данная задача — многокритериальна, с иерархической двухуровневой структурой критерия. Будем полагать, во-первых, что описания отдельных свойств независимы, во-вторых, что два объекта подобны, если они подобны по всем своим свойствам Критерии подобия по отдельным свойствам будем рассматривать как частные критерии, тогда критерий подобия объектов, т. е. генеральный критерий, образуется в силу независимости описания свойств путем пересечения частных критериев: иными словами, два объекта подобны, если они подобны по всем свойствам. Такое утверждение кажется вполне естественным, если предположить, что каждое из свойств существенно для объекта.
Таким образом, общая задача распознавания подразделяется на ряд частных задач, решение которых зависит от того, в каких признаках, качественных или количественных, описаны то или иное свойство объекта.
Наиболее трудной проблемой представляется решение задачи распознавания и классификации на уровне составляющих подсистем.
Общая схема классификации для объектов имеет обобщенный вид, представленный на рис. 4, где структура образа объектов есть структура фразы стандартной длины с п позиций, каждую из которых для конкретного объекта занимает значение соответствующего /-го признака из (1, 2, . . ., п), а класс к содержит некоторое множество объектов 7\, подобных в рамках L-ro свойства (L ЕЕ 1, La к = ЕЕ 1, пь). При этом может оказаться, что один и тот же объект может принадлежать разным классам по своим свойствам; Tr = {sx, s2, . . ., sPf} — это множество объектов, подобных по всем свойствам, и образующих r-й класс (г ЕЕ 1, Л;
44
т, | ; 7’2 Н • • • U Tf = 5Г — это исходное множество объектов, а Т1 П П • • • П Тп = 0).
Целесообразно установить порядок построения классификатора или распознающей системы как обучающейся системы (распознавание без «учителя»). Рассмотрим два этапа построения
/0/7/70000
ла сбяйсгпаам
M/WJKf/mfa /0/7/7000#„ /V " /707'7,077/770.7
/fcj.'t/d/vj/?
Л7//00/000//7#0 007,077/770#
РИС. 4. Общая схема классификации объектов
системы: выделение эталонов на обучающей последовательности объектов и идентификацию новых объектов.
Решение задачи эталонизации связано с задачей укрупнения информации, характеризующей некоторый класс объектов. По этой информации, а также информации, описывающей объект, предлагаемый к распознаванию, оценивается его принадлежность к тому или иному классу.
Эталон, как всякая модель, должен быть подобен своим оригиналам. Это подобие не должно быть слишком отдаленным, так как иначе на основании такого подобия нельзя будет сделать достоверных выводов об оригинале. С другой стороны, подобие не должно быть и абсолютным, иначе оно превратилось бы в тождество и метод обобщения информации потерял бы смысл.
Здесь будет предложено два метода создания эталонов на базе последовательности реальных объектов. В основе методов положены идеи и понятия теории укладок и покрытий, теории графов 117, 34]. Методы легко программируются на ЭВМ.
В терминах теории множеств задача эталонизации объектов формулируется следующим образом. Задается множество объектов 5 = в каждый из которых определяется
значениями признаков словаря для данного свойства: S’ = ^21 • • .» Как было уже изложено, это множество одинаково для каждого объекта. Требуется определить множество эталонных объектов Ет = {Z?rlt • • • » (/ <С т) Для объек
45
тов подмножеств Ти Т2, • • •, Tf исходного множества S. таких, что:
1) = Ф (i ЕЕ J) (J— некоторое множество признаков);
2) Л и Т* U • • • U Tf = S;
3) Л А А . . . п Tf = Ф;
4) V*$b Si е Ti (к =/= Z) и соответствующие им значения при-
знаков из множества S' близки друг к другу согласно заданному критерию подобия.
Исходные данные о реальных объектах могут быть введены в ЭВМ для свойств, характеризующихся количественными отношениями в том виде, в каком они представлены в соответствующем документе об объекте. Пусть далее каждый признак из S' определяется набором значений Sr = {Srn Sr2, . . SVk), где r= 1, 2,.. . к = к (у). Тогда конкретный объект может быть описан множеством значений признаков Sj = S2j, . . • , SPj}, где S'ij — значение i-го признака (i = 1, 2, . . ., р) для реального объекта Sj (j = 1, 2, . . ., m).
Для решения задачи по эталонизации объектов могут быть использованы подходы, аналогичные тем, которые рассматривают ся в теории укладок и в теории транспортных сетей.
Определим дерево признаков как корневое информационное дерево D, общее число рангов которого р, а из каждой вершины г-го ранга выходит к (г) ребер. Каждая вершина (г — 1)-го ранга связана с множеством вершин гт = {гп, гГ2, . . ., гГЛ}, к = к (г), принадлежащих r-му рангу дерева признаков.
Влияние вершины в последнем р-м круге образует множество р
e = {Zi,Z2,...» М,/<П к (и). Знак < в последнем выражении Г=1
означет, что некоторые пути в дереве признаков исключаются, поскольку комбинации признаков, соответствующие этим путям, практически не имеют смысла.
Поставим в соответствие множеству висячих вершин е множество эталонных объектов 2?т, каждый из которых характеризуется множеством значений признаков словаря, лежащих на пути из корня дерева в каждую висячую вершину. Объекты, принадлежащие разным висячим вершинам, попарно различимы хотя бы по одному признаку. Назовем эти объекты эталонными (эталонами).
Сопоставим каждому ребру некоторую меру 8’Г{, i = 1, 2, . . . . . ., к (г). Тогда рангу дерева признаков соответствует набор мер S — {$Гр Srt1 . . .,
Определив таким образом дерево признаков, задачу эталонизации можно свести к построению для каждого реального объекта такого пути [о, ZJ (i = 1, 2, . . ., /) из корня дерева в висячую
46
вершийУ? чт°бы его полная мера, определяемая как р fc(n)
Y [о» Ц] = 2^ | ®Г]. $rj h 7 = 1» 2, . . 772,
была минимальной.
В результате такого построения для всех объектов множества S получается новое дерево D', которое частично или полностью накрывает дерево признаков Di и полная мера которого
т р fc(t)
;=1 r=i !=-1
минимальна.
Процедура построения дерева чрезвычайно проста и состоит в следующем. Для произвольно выбранного объекта SjES среди ребер первого ранга отыскивается такое, у которого мера | 8 ц — — Sun (минимальна. Затем к полученному ребру присоединяется ребро с минимальной мерой из второго ранга и т. д., пока не будет достигнута одна из висячих вершин. После этого та же самая процедура повторяется для остальных объектов из 5.
Нетрудно показать, что полученное дерево D' действительно обладает полной минимальной мерой.
После завершения эталонизации все объекты будут разбиты на подмножества Т1Ч Т2, • • Tf (некоторые из них могут быть пустыми) по числу висячих вершин графа D' • Каждому подмножеству соответствует эталон
Как видно, реализация алгоритма эталонизации сводится к перебору всех значений каждого признака 8’г. Если общее число признаков р, число объектов, подлежащих эталонизации, тп, а количество значений у всех признаков одинаково (т. е. к (1) = = к (2) = . . . = к (р) = тг), то число переборов равно (ртг) ш. Однако можно уменьшить перебор. Для этого на числовой оси необходимо упорядочить множество значений признаков 8Т^ построив для него некоторую шкалу, а перебор начинать с середины шкалы. Поиск минимальной меры осуществляется следующим образом. Если | S*.+1 — Sr(j) | > | Sr. — S'J, то поиск производится от середины шкалы в направлении уменьшения ее значений; если же ( S'.+1 — Srj | < | S'r. —- 5rJ , то — в направлении увеличения значений шкалы и продолжается до тех пор, пока предыдущее значение | 8Г. — ( не окажется меньше последующего.
Такой порядок поиска сокращает перебор более чем в два раза.
Рассмотрим вопрос о выборе 8Г. Очевидно, чем ближе Sr к г, тем точнее эталон отражает совокупность родственных объектов и при 8Г = Sr множество эталонов точно соответствует множеству реальных объектов.
47
Число эталонов можно регулировать, если ввести операцию квантования значений признаков
__Г । 1 1 А о
где скобка [ ] означает «целая часть»; AS — шаг квантования; Sr(j) — истинные значения признака; S*. — округленное значение Sr(j)
При квантовании важно то, что погрешность, вносимая квантованием,
не превышает половины шага AS, и, следовательно, находится под контролем.
Уменьшение числа эталонов путем увеличения AS соответствует «сжатию» дерева признаков, т. е. уменьшению числа вершин в каждой ветви круга. Упрощение структуры дерева уйрощает процедуру отождествления реального объекта с эталоном.
Суммарная максимальная ошибка от квантования для одного объекта по всем признакам может быть вычислена по формуле
где [r0, Z*] — путь с минимальной мерой из корня дерева в висячую вершину Zk, к = 1, 2, ...,/.
Следует заметить, что значения признаков на числовой оси расположены неравномерно, группами, поэтому целесообразно для каждой группы чисел ввести шкалы квантования со своими шагами ASf (i = 1, 2, . . ., Z) с учетом необходимой точности. Практически достаточно 1—3 шкал для признаков. Если такие шкалы определены, то из всех шкал Zn Z2, . . ., Zj на каждом ранге дерева признаков перед началом поиска ребра с минимальной мерой | Sr. — Sr(j) | выбирается такая шкала, для которой Sr(j) — Simin <С о максимально, где £irnill — крайнее значение шкалы Zf. Введение шкал при незначительном усложнении процедуры эталонизации сокращает число переборов на каждом ранге дерева признаков.
Приведенные выше рассуждения дают теоретическую основу для построения алгоритмов эталонизации. Для реализации алгоритма по данному методу эталонизации вся информация об объектах условно разбивается на три массива: массив — для дерева признаков; массив а2 — для множества объектов; массив а3 — для множества эталонов.
Алгоритм иерархической классификации.
Шаг 1. Выбираем i-й объект (i = 1, 2, 3, . . ., т). Для начала положим i=l.
48
Шаг 2. Из массива определяем помер шкалы i-го объекта.
Щаг 3, Из массива а2 берем значение /-го признака (/ — 1,2, 3 ., р) Для *"го объекта и сравниваем со значением /-го при-
знака в дереве признака массива oci в соответствии с процедурой, описанной в методе. Для начала / = 1.
Шаг 4. Определяем ошибку эталонизации по /-му признаку.
Шаг 5. Занесем результаты шагов 3 и 4 в массив а3. Если j Р, то образуем / + 1 и возвращаемся к шагу 2. Если j то для 1-го объекта вычисляем ошибку эталонизации и переходим к следующему шагу.
Шаг 6. Если i т, то образуем i 4- 1 и возвращаемся к шагу 1.
Изложенные выше положения относились к классификации любой совокупности элементов вообще. Однако если совокупность элементов представляет собой систему, т. е. совокупность взаимосвязанных элементов, целостность которой обусловлена общностью цели, то классификация приобретает некоторые специфические свойства. В частности, при исследовании БТС возникает необходимость в их декомпозиции с целью, выделения функциональных подсистем и последующего их описания. Другими словами, необходимо объединить элементы, составляющие БТС, в подсистемы, функционально реализующие вполне определенные задачи, т. е. необходима классификация по функциональному признаку.
Однако подчиненность задач подсистем общей цели функционирования БТС означает сохранение принципа иерархичности в такой классификации. Применяя функциональную декомпозицию в каждой подсистеме вплоть до самого нижнего уровня, обусловленного целями исследования, получим многоступенчатую, в данном случае многоуровневую, функциональную классификацию, представляющую собой иерархическую структуру системы. Если же элементы классифицируемой совокупности являются системами, то члены классификации будут объединять системы, обладающие некоторыми общими свойствами.
Наиболее общая классификация систем предусматривает деление их па два основных вида — абстрактные и материальные.
Материальные системы являются объектами реального мира. Среди всего многообразия материальных систем существуют естественные и искусственные системы. Естественные системы представляют собой совокупности объектов природы. Они в свою очередь подразделяются на астрономические и планетные, физические и химические. Искусственные системы могут быть классифицированы по нескольким признакам, главным из которых является роль человека в системе. Поэтому признаку можно выделить два класса систем: технические и организационно-экономические. В основе функционирования технических систем лежат процессы, совершаемые машинами, а в основе функционирования организационно-экономических систем — процессы, совершаемые человеко-машинными комплексами.
Абстрактные системы — это умозрительное представление образов или моделей материальных систем, которые подразделя
49
ются на описательные (логические) и символические (математические).
Логические системы есть результат дедуктивного или индуктивного представления материальных систем. Их можно рассматривать как системы понятий и определений (совокупностей представлений) о структуре, об основных закономерностях состояний и о динамике материальных систем.
Символические системы представляют собой формализацию логических систем, они подразделяются на три класса:
— статические математические системы или модели, которые можно рассматривать как описание средствами математического аппарата состояния материальных систем (например, уравнения состояния);
— динамические математические системы или модели, которые можно рассматривать как математическую формализацию процессов материальных (или абстрактных) систем;
— квазистатические (квазидинамические) системы, находящиеся в неустойчивом положении между статикой и динамикой, которые при одних воздействиях ведут себя как статические, а при других — как динамические.
БТС по своему составу (не принимая во внимание их уровень) можно подразделить на следующие классы:
— комплексные т. е. составленные из технических систем разных классов (например, транспортные системы, состоящие из авиационной и морской подсистем);
— однородные, т. е. составленные из технических систем одного класса (например, авиационный отряд транспортного назначения, состоящий из аэробусов и магистральных самолетов);
— тождественные, т. е. состоящие из одинаковых технических систем.
3. Особенности структуры и связей в системах
Понятие структуры в системологии основывается на следующем определении: структура системы есть совокупность объектов (подсистемы, элементов), связанных отношениями, подчиненными (или порождаемыми) целенаправленной деятельностью системы.
В соответствии с определением структуру может иметь только расчленимая по правилам декомпозиции (см. выше) система либо система, сочлененная (синтезированная) из конечного множества элементов под заданную цель.
Понятие отношения или связи между элементами структуры определяется как некоторая совокупность ограничений, налагаемых на состояния взаимодействующих, т. е. имеющих отношения или связи, объектов. При этом каждое такое ограничение можно описать, пользуясь аппаратом условной вероятности, т. е. состояние структурного элемента A\j будет A (SA), если состояние связанного с ним элемента A2j будет A (S2).
50
Изложенные особенности структуры больших систем, равно как и концепции жизненного цикла системы, которая будет рассмотрена ниже, отражают специфику подходов системной методологии при исследовании сложных систем. Особенность таких систем — наличие не только большого класса составляющих элементов, но и большого числа связей между ними, причем мпо-
------Дь/дяд
wt)
Г,?]
> Z&ZZZ7/
РИС. 5. Виды параметров систем
гообразие и изменения последних определяют большую сложность указанных систем.
Структура БТС может быть представлена в виде частных структур:
— иерархической, осуществляющей расчленение системы па уровням иерарахии;
— внешней, в которой система представляется в каноническом виде и все связи ее с внешней средой осуществляются посредством входов и выходов;
— внутренней, показывающей состав системы и связи между во элементами;
— структуры жизненного цикла, в которой отражается состав и взаимосвязи процессов существования систем.
Указанные виды структуры и совокупности характеризуют систему в пространстве и во времени.
Внешняя и внутренняя структуры системы находят широкое применение в задачах системного проектирования, где служат исходной схемой для формирования системы модульного информационно-математического обеспечения. Специфика формиро-Вания структуры жизненного цикла рассмотрена в 1.2.5.
Рассмотрим особенности структурного анализа БТС по основным параметрам.
51
Функционально вход является комплексом организованных воздействий, которые обеспечивают реализацию процессов системы. Вход может представлять одну (или более) из следующих разновидностей (рис. 5): выход предшествующей системы, последовательно связанной с данной, выход одной (нескольких) системы из предшествующего ряда систем, неупорядоченно связанных с данной, выход данной системы, который вновь вводится в нее по каналу обратной связи.
Подсистема
Ягод —
П »
/Г /Яг#/.... > Процесс-------дыход —
J) 0370# Т>7
Е &сод > Процесс дыаод
l7Tn #тп Ип ttfi1
РИС. 6. Неупорядоченная форма входа системы
Подсистема
Л teat? ОуШ-------/2 /?7-------------►z&azzw' —<z’ (t/= и К)
4 #fft) 2
*---- /^агггная eJjfj/, —<---------’
/7/ш<есс
I, ^23fy
-----►- фацесс ff?j (t)-Щ
П^ратная с^яо^ —<— —J I
Z ^еяотпорл/^ другим подсистемам — ддуа/пная '
М7ои системы
ПютемеВЯЗИП0ЛСИСТеМ КЯК сос™вляющих единого процесса, протекающего
52
в системах В и С выход предыдущей системы (подсистемы) функционально является непосредственным входом в следующую систему.
Часто несколько систем (подсистем) бывают объединены в комплекс (систему более высокого уровня), формирующий некоторый конечный выход, при этом частные системы (подсистемы) Л, В, С и т. д. связаны последовательно.
Обозначив оператором а действие процессов A ij последовательно связанных систем, получим соотношение вида
а2 [х2 (<2)], ап [*„ (/„)]. (2.11)
Неупорядоченная форма входа отличается от последовательной следующим образом (рис. 6). Пусть А и D являются входами, поступающими в систему Е условно-синхронно по времени. Подсистемы В и С связаны последовательно, как в предыдущем примере. Подсистемы Л, В и С (рис. 7) можно формально считать составляющими единого процесса. Третья форма входа, как уже отмечалось выше, является частным или же системы.
полным выходом этой
4. Сложность систем. Макро- и микроанализ
Категория сложности в системологии связывается обычно с наличием в системе большего числа не полностью детерминированных подсистем и элементов, а также с разнообразием связей между ними.
По сложности системы подразделяются на элементарные (или простые) и сложные.
Элементарные, или простые, системы являются совокупностью конечного числа объектов, объединенных для выполнения простейших или единичных задач. Отличительная особенность систем этого класса — полная детерминированность номенклатуры и числа элементов и связей внутри системы, а также основных связей системы с внешней средой.
Сложность в системах выявляется при построении дерева целей: в формировании подцелей и главное в ранжировании подцелей и связей между этими подцелями. Это обусловлено одновременным наличием свойств и параметров различных равномерностей, не позволяющих произвести сопоставительный анализ в единой шкале показателей.
Изложенное позволяет сделать вывод, что специфической особенностью сложной системы является
— наличие необходимости принятия решения для множества Функций цели; / = [ft (Л)] (i = 1, 2, . . ., N), здесь А — альтернатива, выраженная либо дискретной переменной, принимаю-Щей конечное множество значений, либо векторной переменной, пРинадлежащей замкнутой выпуклой области, которая описывайся системой неравенств;.
53
— наличие подсистем с различными трудносопоставимыми характеристиками, требующими различных моделей: F = = [Fj (Л/)] (/ = 1,2,..., п), где М — j-я модель, описываемая собственным j-м языком;
— наличие в системе комплекса равноправных критериев и систем ограничений без конкретных указаний по их приоритетности.
Следует отметить, что в последнее время принято ставить знак равенства между понятиями «сложная» и «большая» система, исходя из того, что сложность системы — суть неоднородность (неопределенность) структуры и связей в системе. «Большой» система становится в результате увеличения числа структурных элементов и связей между ними. Принято считать также, что отличительной особенностью сложной системы является то обстоятельство, что ее содержательный анализ возможен только по подсистемам с использованием различных языков описания (энерго-материальных, информационных и т. д.). Приведенные в предыдущем изложении определения призваны внести достаточную ясность в рассматриваемый вопрос.
Особенностью сложных систем являются также более или менее выраженная иерархичность и четко отслеживаемая целостность их структуры, это выражается в том, что изменения в любой ее подсистеме или элементе неизбежно влекут за собой изменения в связанных с ним элементах (подсистемах), причем характер и масштабы этих изменений полностью предсказать не всегда представляется возможным. Таким образом, можно, по-видимому, сделать вывод о том, что в сложных системах практически всегда имеется ряд разнородно действующих факторов, которые порождают комплексно взаимодействующие процессы трудно предсказуемого характера.
Сложная система имеет ряд неранжированных целей (которые к тому же не всегда сопоставимы) и, как правило, ориентирована на решение комплекса задач с равноправными (либо псевдоравно-правными) критериями, относящимися к деятельности многофункциональных объектов х.
Итак, сложные системы представляют собой совокупность, как правило, большого, не всегда ограниченного числа объектов, объединенных выполнением комплексных задач (проблем). Их отличительной особенностью является недетерминированность связей (число которых в процессе выполнения задачи может изменяться) как внутри системы, так и с внешней средой. Характер связей (а также изменение их числа) в таких системах зависит от случайных процессов, а поведение самих систем описывается стохастическими (вероятностными) моделями, достоверность которых зависит в первую очередь от массива исходной статистической информации по предыстории таких систем, либо их аналогов (или прототипов).
1 Многофункциональный объект — система, обеспечивающая достижение нескольких целей несколькими средствами.
54
13 настоящее время в литературе очень мало достаточно обоснованных классификаций разделения больших, или сложных, систем [47, 52, 56, 57]. В прикладном аспекте, видимо, следует согласиться с тем, что почти все известные большие системы относятся к категории сложных. Вместе с тем большие системы в соответствии с определением характеризуются, помимо сложности, наличием особенностей по структуре, связям, управлению и поведению. Здесь следует выделить и отличительные особенности собственно сложных систем. В этом смысле, по-видимому, целесообразно, пользуясь общими кибернетическими подходами, применить в качестве критерия классификации характеристики управления объектом (как наиболее значимые факторы, определяющие структуру и поведение системы). Следуя этому принципу, можно предложить в качестве признака классификации параметры, от которых зависит принятие решения как выбора альтернативы (может быть, с помощью случайного механизма в смысле индуктивного поведения)^
Решающей называется система, поведению которой присущ акт решения. Системы, включающие в себя в качестве одной из подсистем решающую систему, следует отнести к сложным. В частности, сами решающие системы входят в класс сложных систем. Объекты, которые не включают в себя в качестве подсистемы решающие системы, т. е. объекты, поведению которых не присущ акт решения, следует отнести к элементарным, или простым, системам.
Сложная система при фиксации ее цели определяется структурой (морфологией), процессами и связями в этой структуре, типом управления и поведением (функционированием).
Совокупности большого числа взаимосвязанных сложных систем можно классифицировать как большие системы, к которым в первую очередь относятся БТС.
Исходя из конкретных функциональных характеристик БТС, выявлены определенные закономерности поведения систем, особенностью которых является их прогрессирующее усложнение, выражающееся следующими показателями: 1) энергоматериальный баланс (на основе законов термодинамики и массообмена); 2) гомеостазис (на основе управления по каналам обратных связей); 3) информативная рефлексия (на основе принципов отражения); 4) выбор пердпочтительной альтернативы (на основе индуктивных методов принятия решения); 5) планирование (прогнозирование) перспективной деятельности (опережающей реакции).
В работах [14, 21, 29, 311 предложены возможные классификации систем в порядке их прогрессирующей сложности. В частности, закономерности, изложенные выше в п. 1 и 2, характерны для Поведения автоматических систем типа киберов-автоматов. Далее следует класс сложных систем, начинающийся с информационно-решающих систем, за которыми в порядке прогрессирующей сложности поведения следуют самоорганизующиеся предвидящие (прогнозирующие) системы. Их поведение так или иначе характеризу
55
ется закономерностями, приведенными выше в п. 3, 4 и 5. Следует отметить, что определенные (полностью детерминированные) характеристики или закономерности поведения свойственны лишь системам первичных или низших уровней сложности.
Макро- и микроподход к исследованию систем. При исследовании систем в зависимости от поставленной задачи возможны два направления: изучение взаимодействия системы с внешней средой; изучение структуры, элементов и их взаимосвязей.
Эти направления исследования получили соответственно название макро- и микроподхода.
При макроподходе к исследованию систем, целью которого является разработка внешней (канонической) модели, система представляется в виде «черного ящика» и функционирование ее наблюдается со стороны входов и выходов без учета структуры процессора.
При микроподходах к исследованию БТС изучаются внутренняя организация системы, свойства составляющих ее элементов, а также характер их взаимодействия. Оба этих подхода являются реализацией двойственного рассмотрения систем. Однако анализ системы, с одной стороны, как части целого более высокого уровня, с другой — как интегрального целого ее подсистем имеет два существенных отличия, а именно: микроподход к исследованию систем не требует четкого задания иерархии систем, а получение иерархической структуры самой системы не входит в его целевое назначение; макроподход к исследованию систем рассматривает взаимодействие системы со всей внешней средой непосредственно, а не с системой высшего уровня, являющейся только частью внешней среды.
Для полной характеристики обеих реализаций двойственного рассмотрения систем необходимо заметить, что хотя получение иерархической структуры системы не входит в задачу микроанализа, тем не менее оно возможно после более детального анализа взаимодействия элементов системы. Точно так же исследования системы как части целостного объекта, относящегося к более высокому уровню, акцентируют внимание на связях системы с суперсистемой. Однако можно получить информацию о связях системы со всей внешней средой, но для этого необходимо рассмотреть уровни более высокие, чем уровень суперсистемы.
Эти соображения необходимо учитывать при разработке функционального критерия, который должен учитывать условия, налагаемые на систему суперсистемой, внешней средой и подсистемой.
В наиболее общем виде важнейшие процедуры макро- и микроанализа БТС можно наглядно представить блок-схемой на рис. 8. Как видно, макроанализ начинается с формирования и анализа глобальной информационной модели системы, устанавливающей классификационную зависимость между целевой функцией (система-цель) и общим организационно-техническим обликом (система-средство) БТС. Анализ языка и классификация внешней
56
Этап макроанализа
Этап микроанализа
РИС. 8. Блок-схемы макро- и микроанализа
информации проводятся прежде всего как подготовительная операция перед выбором критерия: современные БТС могут описываться множеством языков, что требует для их увязки и ранжирования формирования иерархической модели внешней информации.
Макроанализ системы (т. е. сопоставление возможных входов с заданными и возможными выходами) позволяет непосредственно подойти к формированию общего и частных критериев оценки эффективности использования БТС. В завершение макроанализа строится комплексная макромодель, отражающая взаимодействие между элементами внешней среды, а также входами и выходами системы: это взаимодействие является определяющим для формирования управляющих контуров рассматриваемой системы.
Микроанализ БТС начинается с исследования и классификации структуры и функциональных связей процессора системы, прежде всего для оценки соответствия этой классификации, а также языка и семантики описания реальной БТС, ее целевой функции и системы критериев оценки ее эффективности.
Следующим шагом микроанализа является формирование вариантов структуры процессора БТС с различными вариантами схем управления деятельностью процессора. Этот анализ осуществляется с использованием модели альтернативного графа, что позволяет оценить приемлемость отдельных альтернатив структуры систем.
С учетом результатов оценки вариантов структуры и выбора предпочтительной альтернативы далее осуществляется анализ алгоритма управления на основании изучения и оптимизации модели информационных потоков в процессоре. После упорядочения структуры, связей и управления основных подсистем БТС микроанализ предусматривает проникновение вглубь, в структуру подсистем вплоть до функциональных элементов. Это осуществляется с использованием операторной модели микропреобразований, позволяющей упорядочить структуру и связи функциональных элементов в подсистемах.
На последнем этапе микроподхода осуществляется анализ возможных эквивалентных преобразований микромоделей функциональных элементов с целью формирования модулей — основных элементов системы информационно-математического обеспечения программ’ развития БТС (см. II.3.3).
5. Концепция жизненного цикла БТС
Одной из важнейших особенностей структурной концепции системологии является комплексный анализ БТС во времени ив пространстве. Для описания системы в пространстве в соответствии с изложенным в предыдущих разделах работы наряду с понятием «граница системы» вводится понятие «внешняя среда». Для описания системы во времени необходимо ввести понятие, отражающее период существования системы. Принято использовать для этого понятие «жизненный цикл». Последний условно
58
РИС. 9. Структура жизненного цикла БТС
Д1 — развитие БТС; Ц9 — целевое функционирование и деградация; Цп — создание аналога и формирование ТЗ; Ди — создание технической концепции; Цн — реализация технической концепции; Цы— развертывание системы; Дм—выполнение полезной работы; Цц — восстановление функцио нальных характеристик системы; Цп — сохранение уровня вффективности системы; Дм — снятие с| серийного производства; Цы — снятие с эксплуатации; Ц ш — технические предложения; Д122 — эскизное проектирование; Дна — техническое проектирование; Дш — вы пуск рабочей документации; Дш — изготовление опытного образца; Дхз( — заводски е испытания; Дш — государственные испытания; Д141 — серийное производство; Дш — подготовка кадров (обучение); Дш —- регламентные работы; Дш — капитальный ремонт и замена подсистем; Цт — модификация и модернизация
исчисляется от начала работ по созданию аналога и технического задания на систему до полной деградации БТС, которая завершается снятием системы вначале с серийного производства, а затем и с эксплуатации.
В соответствии с таким подходом для БТС различают два генеральных периода их жизненного цикла (рис. 9): развитие системы (Цг) и целевое функционирование с постепенно развивающейся деградацией (Ц2)- Каждый из них характеризуется специфическим комплексом процессов, из которых складываются основные этапы жизненного цикла.
Следует отметить при этом, что основной характеристикой периода развития является создание определенного комплекса требований к создаваемой новой системе с последующей реализацией этих требований вначале в «проекте», а затем» «в металле» Для соответствующей БТС, характеристики эффективности которой
59
в этот генеральный период достигают запланированного уровня и фиксируются на этом уровне. Для периода целевого функционирования с развивающейся деградацией характерна идея предельного но времени сохранения оптимизированных в первом периоде показателей эффективности с применением технических (регламентные и капитальные ремонты, а также замена вышедших из строя подсистем и элементов) и проектно-экспериментальных (модификации, модернизация) средств.
Два генеральных периода можно подразделить на ряд этапов жизненного цикла, перекрывающих и накладывающихся во времени друг па друга. Первый период жизненного цикла БТС включает этапы создания аналога и проекта технического задания на БТС, формирования, а затем реализации технической концепции и завершается этапом развертывания системы. Второй период накладывается па первый, так как целевое функционирование начинается уже на этапе развертывания БТС.
Рассматривая основные составляющие процесса развития БТС на этапе, создания аналога, следует прежде всего выделить проведение укрупненного и дифференцированного анализа изменения ситуаций во внешней среде. В результате такого анализа выявляется и оценивается рассогласование существующих характеристик эффективности действующей БТС и возросшего уровня задач и требований к этим характеристикам. Этот анализ осуществляется с применением методов исследований операций, позволяющих систематизировать исходные данные, а также анализа подобий в смежных областях. В результате анализа осуществляются выбор и обоснование общего (целевая функция) и частных критериев развития БТС, а также системы дисциплинирующих условий, ограничивающих процесс развития по ресурсам и во времени. Заключительной составляющей этого этапа (//п) является формулирование технического задания БТС, которое с учетом формализованной системы критериев и ограничении можно рассматривать как модель-аналог создаваемой системы.
Этап создания технической концепции /(12 иногда называют также этапом проектирования, так как он включает проектные процессы технических предложений /(\21, эскизного Цщ, технического /(12з и рабочего Ц1и проектирования (создание рабочей документации для опытного производства). Вместе с тем на этом же этапе проводится ряд научно-исследовательских работ (связанных с поиском и выбором предпочтительных конструктивно-технологических альтернатив, экспериментальным исследованием и макетированием центральных подсистем, а также решением других проектных задач), обеспечивающий необходимый научно-технический и качественный уровень создаваемой БТС.
На этапе реализации технической концепции 2(13 осуществляются внедрение и доводка проектной модели, включающие изготовление опытных образцов (/(131), проведение заводских /(132 и государственных (/(133) испытаний, завершающихся приемкой образца к серийному производству и эксплуатации.
60
Завершающий этап этого периода Ци посвящен развертыванию* системы в серийном производстве и подготовке кадров^ для человеко-машинного комплекса 7/142 вновь созданной БТС.
Таким образом, основной проблемой периода развития БТС является исследование и создание системы с оптимальными по качественному уровню характеристиками (отражающими структурное совершенство, надежность управления и оптимальное для заданных условий эксплуатации БТС поведение).
Второй период жизненного цикла БТС связан с выполнением полезной работы (Z(21), в течение которого осуществляются сохранение функциональных характеристик /(22 в процессе регламентных ремонтов и обслуживания /(221, восстановление уровня эффективности системы /(23 с применением капитальных ремонтов и заменой подсистем Zf23l, а также модернизации и модификации Ц'232- Далее, когда модернизация и другие методы восстановления уровня эффективности БТС уже не дают необходимого эффекта, прекращается их серийное производство /(24 и они снимаются с эксплуатации 7(2Г>. Принятие решений по двум последним этапам, как правило, подготавливается па основании информации о степени операционной готовности следующей вновь разрабатываемой БТС, которая должна заменить деградирующую систему.
Изложенное позволяет сделать общий вывод о том, что жизненный цикл БТС представляет собой достаточно сложную, упорядоченную во времени совокупность взаимосвязанных процессов. Это дает основание рассматривать жизненный цикл как разновидность сложной системы. В этой связи можно считать, что жизненный цикл как любая сложная система может характеризоваться тремя видами структур: внутренней, внешней и иерархической.
Иерархическая структура жизненного цикла характеризует подчиненность целей, достигаемых в каждом из процессов, целям процессов высших уровней.
Внутренняя структура жизненного цикла определяет упорядоченность процессов по времени и их взаимосвязи. Однако процессы жизненного цикла имеют суперпозиции по времени и определить продолжительность жизненного цикла системы непо-средственно через продолжительность отдельных его периодов, этапов или фаз невозможно.
Внешняя структура жизненного цикла системы определяет иэаимодействие процессов существования системы с процессами существования других систем. Внешняя структура жизненного Чикла позволяет определить и проанализировать важнейшие т °менты в исследовании выбранной БТС. В частности, совмест-е рассмотрение внешних структур жизненного цикла системы в се подсистем позволит сделать вывод об упорядоченности (по ремени и ресурсам) развития отдельных подсистем и формиро-‘Пия их в систему. Подобный анализ является необходимым для работки альтернативных стратегий развития системы спосле-10Щим выбором оптимально!’! стратегии.
61
ГЛАВА ТРЕТЬЯ
ТЕОРЕТИЧЕСКИЕ ОСНОВЫ АНАЛИЗА СИСТЕМ
В западных школах системных исследований (Р. Акоф, см. [29], Л. Ф. Берталанфи [10], К. Боу4динг, см. [29], и др.) традиционно противопоставляют системный анализ как один из прикладных аспектов общей теории систем анализу систем, точнее, исследованию систем (Systems Research). Платформой такого противопоставления служит междисциплинарный характер обеих разновидностей системных исследований.
В соответствии с постановкой Берталанфи научные понятия и представления различных дисциплин могут быть теоретически сведены к какому-то множеству первичных (пепреобразуемых) понятий или представлений. Однако принцип репродукции понятий, применяемый в системном анализе, вообще говоря, нельзя признать надежным средством междисциплинарного подхода. Причина этого заключается в том, что в начале анализа нет еще закономерностей, а есть лишь постулируемые гипотезы. Закономерности, которые в этой постановке являются исходными положениями, в действительности появляются (либо подтверждаются) в конце исследования. Таким образом, вместо попытки получить логическую цепь простых понятий, преобразованных из сложных, сторонники этого подхода пришли к формированию сложных понятий методом нагромождения простых.
В противоположность этому подходу анализ (или исследование) систем исходит из необходимости изучения проблем и явлений природы с учетом их феноменологии и комплексности. Иначе говоря, за исходное принимаются проблемы и явления в том виде, в котором они существуют, и в соответствии со спецификой и направленностью исследования последовательно подбираются и синтезируются в единой логической цепи различные законы и теории. Таким образом, эта постановка предусматривает ком-плексирование различных дисциплин «под задачи и процесс» анализа, что позволяет получить необходимую информацию. При этом теоретические обобщения такого анализа позволяют получить результаты несколько более широкие, чем следовалс бы ожидать от синтеза ряда известных дисциплин. Это объясняется прежде всего целостностью построений и возможностью поиска или выбора оптимума на широком поле альтернатив.
С учетом изложенного теоретические основы анализа систем опираются на системологию. И в этом аспекте анализ систем в данной работе представлен определениями, основными методологическими положениями построения дерева целей, логической моделью анализа и, наконец, теоретическими подходами к формированию и выбору альтернатив.
62
1. Анализ систем. Построение дерева целей
Анализ систем как процедура подготовки и принятия решения ио поводу какой-либо системы может быть применен при любом систематизированном подходе, который используется для сравнения альтернативных средств достижения определенных целей. Методы и методология могут быть различными в зависимости от факторов, присущих конкретному исследованию. Однако подход, характерный для анализа систем, отличается систематическим исследованием всех классов проблем, как простых так и сложных. Использование определенной процедуры анализа систем направлено на получение максимального количества информации, необходимой для выбора наилучшего варианта достижения цели. Причем, когда альтернативы не очевидны, процесс анализа систем может служить источником необходимой информации для разработки спектра альтернатив.
Систематизированная процедура анализа системы получила логическую завершенность при проведении таких сложных исследований, которые для заданных целей не имеют четко определенных исходных данных и в которых будущие неопределенности достигают значительного уровня. Поэтому определение понятия «анализ систем» по Э. Квейду [31, с. 17], имеющему в виду прежде всего сложные системы, следует считать наиболее полным: «Анализ систем — систематический подход, помогающий принимающему решение избрать курс действий путем исследования всей проблемы в целом, выявления целей, альтернатив и сравнения их по результатам по возможности в рамках аналитического рассмотрения, т. е. путем операций, которые приводят к формированию правильного суждения о данной проблеме».
При исследовании БТС целью анализа систем следует считать определение условий выполнения задачи с требуемой эффективностью и минимальными затратами ресурсов. Эта цель предполагает решение задачи управления ресурсами.
Как мы увидим позже, в логической схеме анализа систем значительное место отводится разработке и выбору критерия, по которому производится выбор альтернативных средств достижения Цели. При рассмотрении БТС различного типа, предназначенных Для решения определенной задачи, эта операция не поддается формальному описанию и содержит лишь весьма общие требования к критериям. Однако при исследовании однотипных (аналогичных) систем, предназначенных для решения определенной задачи, выбор критерия может быть формализован. В некоторых работах ранее был сделан вывод о целесообразности применения критерия типа «стоимость — эффективность — время», который сводится к определению затрат, соотнесенных с эффектом применения однотипных систем в некоторой типовой операции за какое-то ограниченное время. Поэтому в дальнейших рассуждениях под термином «анализ систем» будем понимать именно анализ одно-
63
типных систем в типовых ситуациях по критерию стоимость^ эффективность—время.
Определение целей является важнейшим разделом анализу систем.
Процесс определения целей подчинен некоторым правилам, важнейшими из которых являются следующие.
1. Цели систем низшего уровня должны быть подчинены це лям высшего уровня, а последние должны синтезироваться и; целей низшего уровня. Только при этом может быть обеспеченс единство потребностей и возможностей систем. Цели различны? уровней объединяются в систему-цель. Характер и значимост! этой системы (или отдельной цели) изменяется вместе с изменени ями внешней среды системы-цели (т. е. условий их существования положения целей в пространстве и времени). Именно поэтому npi формировании системы-цели необходим анализ динамики ее раз вития.
2. Анализ характера расположения целей в различных обла стях пространства позволяет определить фупкциопально-техни ческие требования к системе-средству, а также целесообразност] более глубокой ее специализации.
3. Для системы-цели характерно наличие периода эволюцион ного развития, при котором состояние системы-цели до насту пления конфликта (критического несоответствия внешней среде относительно устойчиво. Эта особенность позволяет создать отно сительно устойчивую систему-средство, соответствующую рассма триваемой системе-цели. Однако возможность появления новы? ситуаций, обусловливающая появление повой системы-цели, мо жет вызвать его несоответствие. Следовательно, неопределенност] поведения системы-цели ставит требование учета возможных си туаций при формировании ее в интересах развития системы-сред ства.
4. Достижимость цели зависит от расходов на ее выполнение Это очевидное утверждение также необходимо учитывать npi формировании системы-цели. Чтобы учесть это требование, не обходимо изучить взаимозависимости факторов «достижимост] цели», «сроки создания системы», «расход ресурсов».
Существенным разделом методологии анализа систем явля ется построение дерева целей—графа, иллюстрирующего деком позицию глобальной проблемы, в решении которой участвуе рассматриваемая система. Таким образом, под деревом целе] для БТС подразумевается ранжированная совокупность целевы: функций, относящихся к деятельности системы в целом с учето! важнейших функциональных особенностей ее подсистем. Пред полагается, что эти функциональные особенности оказываю влияние на эффективность рассматриваемой ‘системы.
Применительно к анализу БТС на этапах ее создания глобаль ные проблемы традиционно подразделяются на направления проблемы, темы.
Глобальная цель представляет собой основную задачу разви
М
тия БТС данного класса, которая вытекает из директивных материалов или формируется на основании схемы] прогноз — программа — план.
Направления содержат программу работ по реализации глобальных целей и обычно идентифицируются с классами или видами создаваемых БТС.
Проблемы — основные элементы или разделы реализации программы по основным направлениям создания БТС.
Темы — основные функциональные операции, осуществляемые при решении проблем создания БТС на уровне подразделений НИИ или КБ (отделение или отдел).
Непосредственному формированию дерева целей системы обычно предшествуют процедуры макро- и микроанализа системы с последующим ранжированием целей и подцелей по соответствующим уровням. Макро- и микроанализ обычно осуществляется по следующей схеме:
1. МАКРОАНАЛИЗ
3 а д а ч и формирование структурной моде» ли внешней среды / (МА е Мх^ Формирование информационной модели внешней среды MXr)
Формирование комплексной макромодели с применением операторов преобразования
Операции
Макрофункциональный экономический анализ системы
Макроанализ информационной связи вида / (Ан е= MXfJ С Мн)
Аналитическое построение гипотетического облика по структуре и функциональных характеристик системы
2. МИКРОАНАЛИЗ
Задачи
Формирование структурной модели процессора системы / (S^A р
Формирование информационной модели процессора системы / (Ял
Формирование алгоритма управления процессором с применением операторов преобразования / (Gs ) |Формирование альтернатив у равнения Fg (Aij U ... U
Операции
Анализ номенклатуры структурных элементов и видов связи между ними
Анализ информационных потоков в структуре процессора
Анализ алгомодели на соответствие / (Л ij) со/ (Gs )
Aij
Микрофункциональный анализ на соответствие. Исследование возможностей агрегирования
Анализ внешней среды сводится к анализу информационной связи, необходимой и достаточной для определения взаимодействия системы с внешней средой, включая регулярные и случайные формы этого взаимодействия.
3 С. А. Саркисян
65
РИС. 10. Блок-схема алгоритма построения дерева целей
а-вход — основная целевая функция системы; 1 — формирование и постановка задачи» анализ воаможных вариантов построения дерева целей; 2 — разработка графической структуры имитационной модели дерева целей; з — кодирование полученного графа; 4 — проверка наличия всех связей, разработанных в графе (если «да» — 5, если «нет» — JS); 5 _ разработка перечня элементов и подсистем, формирующих рассматриваемую БТС; в — формирование модели основных подсистем, включая внутренние связи в подсистемах (между элементами), и возможных связей между элементами прочих подсистем; 7 — проверка» удовлетворяет ли построенная таким образом БТС целевой функции а (если «да»— Я, если «нет» —19 через 20)\ 8—формулировка задач внутреннего проектирования системы; 9 — исследование возможности выполнения системой ее основной задачи а, оценка эффективности этого выполнения; 10 — корректировка соответствия характеристик по п. 9 основным задачам систем: при полном соответствии — 11, при частичном несоответствии — 18, при несоответствии — 21', 11 — построение имитационных моделей взаимосвязи элементов в подсистеме (не путать с п. 6); 12 — логическая проверка связей (если «да» — 13, если «нет» — 4); 13 — соответствие построенных связей задаче внешнего проектирования; 14 — промежуточная оценка полученных результатов; 15 — разработка программы для ЦВМ и анализ результатов счета для имитационных моделей; 16 — проверка возможного использования полученных результатов для управления развитием БТС (если «да» — 17, если «нет» — 4); 17 — завершение имитационного моделирования дерева целей; 18 — вывод на печать; 19 — корректировка модели; 20 — кодирование; 21 — блок проверки соответствия кодирования; 22 — корректировка и модификация общего технического задания а или корректировка структуры системы
Макрофункциональный анализ позволяет установить иерархию технико-экономических показателей исследуемой системы и в результате получить наиболее целесообразные формы взаимодействия этой системы с внешней средой.
В результате построения комплексной макромодели можно сформировать гипотезу по структуре, связям, функциональным характеристикам и поведению БТС. Обычно такая гипотеза ложится в основу общего технического задания на создание БТС.
Таким образом, исходными при построении дерева целей являются структурный функциональный анализ внешней среды, макроанализ и построение гипотетического облика БТС, исходя из которого представляется возможным осуществить ранжирование совокупностей целей на основании заданных или выбранных критериев.
Форма представления дерева целей. Критерий — это сравнительная шкальная мера для оценки эффективности операций, реализующих цель данного уровня. Вес критерия оценивается экспертом, затем под взвешенные критериальные характеристики осуществляется расстановка целей а, Ь, с... и определяется уровень каждой цели, следовательно, вес критерия — это экспертно-
66
Вес Цели Уровень
Критерии критерия а, Ь, ...» п цепи
а да А?- ••• Sa
0 '^тп * * ’ *$*3
“ S*
балльная оценка. Цели представляют собой последовательность функциональных характеристик либо цепочку операций, обеспечивающих выполнение данной задачи. В результате экспертнобалльной оценки по предложенной форме можно построить логическую модель дерева целей, которая формируется в рамках системы прогноз — программа — план.
Наиболее сложной проблемой построения дерева целей является алгоритмизация этого процесса. В качестве одного из первых подходов к решению указанной задачи авторы предлагают алгоритм, блок-схема которого представлена на рис. 10.
2. Основные положения логического анализа систем
Цель анализа систем — это определение условий выполнения поставленной задачи с требуемой (фиксированной или заданной) эффективностью и минимальными затратами ресурсов, обеспечивающих выполнение этой задачи в заданное ими оптимальное время.
Процесс анализа систем может быть представлен в виде логической последовательности этапов, каждый из которых характеризуется определенным специфическим содержанием и целевым назначением.
Этап 1. Описание исследуемого объекта ЕЕ Ма- Исследуем процессор Atj, который принадлежит множеству подобных процессоров МА, из числа нам известных.
Этап 2. Определение конечных целей системы
F(S0) = f[Atj (с, 0] | Ло|.
Функциональное выражение системы F (So) в пределах заданных затрат и времени преобразуется в процессор Ац(с, 0, который в конечном счете должен стремиться к экстремуму Ло, имеющему фиксированную эффективность. Иными словами, при определении целей системы процессор А и формализуется как функция от затрат с и времени f, и в этой связи мы записываем его как функцию, стремящуюся к экстремуму.
Этап 3. Разработка альтернатив
(c,t)/act = А (А„) U /2 (ЛО U • • • fn (Ant) |J Аж (W«
Этап 4. Выявление потребных ресурсов и ограничений на реализацию исследуемых альтернатив при обязательном условии выражения этих альтернатив в единой шкале измерения.
67
3*
Этап 5. Исследование моделей взаимодействия и чувствительности целей в различных альтернативах к энергоматериальному и информационному обеспечению, позволяющих формулировать условия и правила сопоставления и выбора альтернатив при логической и аналитической постановках и решениях оптимизационных задач системного анализа.
Этап 6. Формирование структуры и связей в БТС, являющихся объектом исследования.
Далее следует сравнение альтернатив по выбранному критерию, включая оптимизацию решения при аналитической форме критерия, а затем принятие решения о выборе предпочтительной альтернативы с учетом дополнительной информации о возможных ситуациях и располагаемых ресурсах.
Анализ систем, представленный настоящей логической моделью, может служить основой для разработки рациональных направлений и путей накопления информации, необходимой при планировании развития БТС (на высших уровнях) и при формировании замысла об их разработке (на уровне головных разработчиков). Последовательность процедур анализа упорядочивает исследования, непосредственно предшествующие началу жизненного цикла систем.
3. Формирование и выбор альтернатив
Под альтернативой подразумевается функция процеииира системы, которая представляет собой непересекающиеся взаимоисключающие варианты формирования структуры или связей (либо структуру и связи) процессора рассматриваемой системы и позволяющая при одной и той же номенклатуре входов и заданных выходов изменять облик и качественные или количественные характеристики (в первую очередь производительность) процессора исследуемой системы:
F(At]) = U А и - и Ап-
xt (t) = const.
/ (JG) = I У I •
При разработке БТС крайне трудно определить оптимальную стратегию достижения цели. Поэтому требуется рассмотреть несколько вариантов системы-средства (БТС) для последующей их оценки и выбора по некоторому критерию. Источником зарождения альтернатив являются, с одной стороны, сформулированные задачи, с другой — достижения науки и техники.
При рассмотрении методологической стороны разработки альтернатив следует различать альтернативы замысла и альтернативы средства.
Анализ систем на этапе разработки альтернатив не ограничивается задачей выбора альтернатив из числа имеющихся, а служит целям поиска оптимальных вариантов, комплексных решений.
68
Если потребность в той или иной системе определяется состоянием системы-цели, то ее создание зависит как от достижений научно-технического прогресса, так и от наличия достаточного количества различных ресурсов, необходимых для развития, сохранения и функционирования системы.
При анализе расходуемых ресурсов на альтернативные средства достижения цели основное внимание следует уделять материальным ресурсам.
Анализ альтернатив системы включает в себя ряд процедур: разработку моделей ситуаций и операций, выполняемых системой в этих ситуациях; формирование критерия оценки; выбор шкалы эффективности; проведение расчетов по исследованию операций; выявление неопределенностей и анализ их влияния на результаты расчетов; логический анализ.
При выбранной типовой операции, на которой производится сравнение альтернатив систем, необходимо оценить эффективность каждой альтернативы.
Основные правила формирования и выбора альтернатив. 1. Исходным положением формирования альтернатив при построении дерева целей является то, что цели и альтернативы формирования процессора подсистемы всегда должны быть подчинены целям или альтернативам системы высшего уровня. При этом число возможных альтернатив ограничено дисциплинирующими условиями создания и развития системы в целом:
F = 2J А^8п.
i=l
2. Структура альтернатив процессора и функциональные характеристики выходов системы связаны с целевой функцией этой системы. Так как всякая система способна действовать на заданном интервале времени и в какой-то локализованной области внешней среды, то и альтернативы, подчиненные единой системе-цели, должны формироваться на основании определенных элементов цели, условно фиксированных в определенной точке внешней среды для квазистационарного времени.
3. При формировании альтернатив необходимо учитывать, что для системы-цели характерно наличие эволюционного периода развития, поэтому число возможных альтернатив, а следовательно, и число конструкционно-технологических элементов новизны должно быть ограничено среднестатистической нормой для Данной БТС.
4. При формировании альтернатив необходимо учитывать прямые и косвенные ограничения, а также сроки реализации альтернатив.
69
ГЛАВА ЧЕТВЕРТАЯ
СТРУКТУРНЫЙ АНАЛИЗ БТС
1. Энергоматериальный анализ
Системология синтеза энергии и материалов, их представление в форме вход — процессор — выход различных систем создает определенные предпосылки для корректного аналитического представления систем с тремя генеральными видовыми совокупностями входов и выходов: энергоматериальными, информационными, человеко-машинными.
В соответствии с тремя генеральными видовыми совокупностями входов и выходов в структуре БТС организованы три вида подсистем: энергоматериальные, информационные и человеко-машинные. Каждый вид подсистем осуществляет связь через процессор между одноименным входом и каким-либо в общем случае выходом и имеет специфическое аналитическое представление.
Энергоматериальные подсистемы. В зависимости от уровня и целевой функции систем, а также характера связей с внешней средой энергоматериальные подсистемы могут выполнять следующие функции:
а) прием и хранение рабочих тел или источников энергии;
б) генерирование того или иного вида энергии или прием энергии и ее аккумулирование;
в) преобразование энергии из одной формы в другую или преобразование энергетических параметров;
1 г) коммутация источников энергии и рабочих тел относительно преобразователей и потребителей;
д) передача энергии от одних элементов системы к другим.
В зависимости от целевых функций и сложности энергоматериальные подсистемы могут быть подразделены на три группы: полные, осуществляющие все перечисленные выше функции; неполные, осуществляющие лишь функции приема, хранения и частичного, неполного преобразования энергии; элементарные, выполняющие лишь функции приема энергии и распределения ее потребителям.
Основные функциональные характеристики энергоматериальных подсистем. БТС могут иметь единую локализованную энергетическую подсистему, включающую несколько функциональных подсистем более низкого уровня и(или) несколько распределенных энергетических подсистем, из которых одна обычно является центральной, а другие — функционально зависимыми.
Весьма важной характеристикой энергоматериальной подсистемы является зависимость ее выходных параметров от нагрузки, которая обычно понимается как статум системы. Статум (S (Aij)) используется для оценки изменения выходной состав
70
ляющей системы (напряжения, мощности и т. д.) от значени холостого хода yj (Е)хх до уровня полной нагрузки у3 (£)maxe Следовательно,
5(Л,;) = (4.1)
\'хх
ИЛИ
= <4-2’ ' 'XX
где S (Л и) — статум; у^ (£)тах — значение при полной нагрузке; yj (Е)хх — значение при холостом ходе.
С помощью уравнений вида
E = ^m^dS и £’=JmVdV, (4.3), (4.4)
где т — масса; S — путь; V — скорость и t — время, представляется возможным проанализировать поведение механической системы в случае изменения уровня энергии на входе. Так, если питающая систему энергия ниже требуемой, то скорость на выходе (обусловленная этим уровнем) также будет ниже заданной. Далее, если эта пониженная скорость будет сохраняться в системе в течение некоторого промежутка времени, то и работа (эффективность выхода) системы может значительно ухудшиться. Также в электротермической системе при недостатке питания на входе уменьшается тепловой выход, так как
Nv = PR = £2/Я, (4.5)
где Ny — тепловая мощность; I — ток; R — сопротивление; Е — энергия входа.
Вместе с тем увеличение мощности может привести к более катастрофическим последствиям в работе системы.
Приведенные примеры указывают на возможность возникновения значительных отклонений в режимах работы системы любого типа в зависимости от заметных изменений энергетических уровней входов системы.
Следует отметить, что вообще требования к энергетическим входам устанавливаются, исходя из условий средней потребности в энергии, которую получают на основании анализа энергосистемы в установившемся режиме. Однако в системах часто возникают кратковременные «пики» нагрузки, которые должны быть удовлетворены системой энергоснабжения (пуск двигателя, переход производства с одного уровня выпуска продукции и т. д.). В некоторых системах можно заранее предусмотреть дополнительные статические мощности, способные компенсировать эти «пики». Однако практически более распространено применение динамических систем (емкостей), которые в промежутках между пиками накапливают энергию для компенсации очередного пика.
71
РИС. 11. Структура модели стоимости полезного энергетического выхода
Оценка источников энергии. С ростом прогресса в науке и технике возрастает номенклатура автономных генераторов или источников питания, используемых в БТС. К твердым и жидким топливам и гидроресурсам добавились атомные, ядерные, солнечные и другие источники энергии. Отдельные системы используют энергию взрыва или интенсивного горения, пневматические аккумуляторы и т. д.
Энергетические параметры системы определяют эффективность ее работы, поэтому проблема выбора источника энергии является важной оптимизационной задачей, влияющей на решение одной из главных задач определения — стоимости полезного выхода энергетической системы.
В соответствии с канонической моделью системы модель стоимости полезного выхода включает в себя стоимость входа, стоимость процесса и стоимость компенсации последствий вредного выхода (рис. И). Вектор выхода энергетической системы имеет по крайней мере две составляющие: характеризующую полезный результат работы процессора и характеризующую вредный (нежелательный) результат работы процессора.
Материально-энергетические аспекты оценки эффективности научных работ. В настоящее время, по-видимому, все виды научных работ, связанные с решением энергетических проблем, могут быть разбиты на три класса: открытие новых источников энергии, более эффективных, чем старые источники; новых способов пе-
72
еноса, транспортировки, аккумулирования и хранения энергии с меньшими потерями; новых способов преобразования энергии с более высокими коэффициентами полезного действия.
От этих работ, непосредственно определяющих уровень эффективности функционирования БТС, зависит в конечном счете производительность труда в народном хозяйстве. Вообще говоря, результатом любого открытия всегда является изменение производительности труда. Специфическим направлением в рассматриваемом аспекте является чистый научный поиск. Однако даже в этом случае следует по возможности сокращать недопустимый разрыв между наукой и практикой. Даже свободный поиск в фундаментальной научной работе должен отвечать хотя бы минимальной планируемой целесообразности. Причем это понятие «целесообразность» по отношению к обществу не обязательно должно выражаться в стоимостных категориях. Если затраты ресурсов (а следовательно, и энергии) на эту работу достаточно велики, а эффективность полученных результатов для общества невелика, то, очевидно, это неблагоприятно отразится на энергетическом бюджете общества в целом.
В соответствии с изложенным, учитывая тесную связь энергии, информации и управления, следует ввести понятие «энергетическое качество управления» как информационный результат научной работы в виде достижения максимальных, постоянно растущих темпов роста энерговооруженности.
Удовлетворение потребностей в определенных материальных и энергетических ресурсах позволяет допустить существование в человеческом организме некоторого слсжного механизма, который позволяет идентифицировать предметы по их объективной значимости и в зависимости от этого выполняет функцию сравнения затрат и результатов взаимодействия человека с природой. Очевидно, что целесообразность поведения будет зависеть от качества этого сравнивающего устройства: чем выше величина от-псшения результата к затратам, тем, следовательно, более целесообразно поведение человека.
Рассмотренный пример выявляет очевидную связь между целесообразностью поведения и управлением. (Целесообразная стратегия поведения индивидуума, при котсрой на каждую расходованную калорию он получает от природы шесть калорий, соответствует понятию «управление».) Подразумевается, что управление — это малое энергетическое воздействие, которое приводит в движение существенно большие по величине энергетические потоки. В этом смысле вся трудовая деятельность, начиная ст выбора стратегий целесообразного поведения, есть не что иное, как последовательная цепь процессов управления энергетическими Потоками природы, обеспечивающая выживание и прогресс человеческого общества. В этой связи можно заметить, что именно Функция мозга как наиболее совершенного механизма управления обеспечивает эту эволюцию посредством увеличения отношения результатов к затратам.
73
Понятие «энергия» в его современной семантике появилось в науке лишь в 60-х годах XIX в. До этого времени объективные количественные показатели развития общества, выражаемые через энергетические величины, не могли быть измерены непосредственно. Функция измерения выполнялась и выполняется до сих пор через посредство денежного обращения. Таким образом, следует полагать, что основная функция денег состоит в сопоставлении затрат и «поступлений» энергии, т. е. в эквивалентной оценке потоков получаемой от природы энергии с потоком доходов в денежной форме. Следовательно, оценка целесообразности экономического решения зависит от прибыли, которую оно приносит. В переводе на «язык энергетики» это означает, что человек стремится экономно расходовать энергию, а получать значительно больше, чем расходует. Разница между израсходованной и полученной от природы энергией соответствует приросту энергетического бюджета за рассматриваемый промежуток времени. Чем больше прирост в единицу времени, тем большую прибыль извлекает человек, тем выше темп роста энерговооруженности в данной социально-экономической формации. В этой связи напрашивается вывод о том, что рентабельность не всегда объективный измеритель эффективности труда, а для того чтобы придать непосредственный смысл выражению роста производительности тРУда, необходимо выразить это понятие в терминах действительных величин, (например, трудоемкости), а не через отражение этих физических величин, известное под названием денег.
Таким образом, анализ целесообразного поведения человека (на основе термодинамических соображений) показывает, что оценка полезности затрат, потребных для воздействия на природу, должна производиться по критерию темпов роста энергетического бюджета. Отражение этого бюджета в системе финансирования общественного производства достигается в итоге через большее или меньшее соответствие цен фактическим затратам на получение данного результата.
2. Информационные параметры сигтем
Одним из важнейших видов входных и выходных сигналов БТС являются информационные. Основное содержание организованных форм информационных сигналов (в противоположность шумам, которые также следует рассматривать как особую разновидность информационных входов и выходов) — это передача сигналов управления. При этом под организованными формами сигналов информации следует подразумевать не только искусственно созданные (генерируемые) и направленные к определенному объекту системы, но также объективное восприятие, отражение системой внешней среды либо воздействие системы на эту среду.
Истоки формирования основных законов теории информации восходят к теоретической физике конца XIX в., к науке, качест-
74
ьевно развивающейся в тот период особенно интенсивно. Бриллюэн отмечал, что потеря или недостаток информации увеличивает число взаимоисключающих возможных состояний системы, т. е. увеличивает энтропию [12]. Современная математическая теория информации была предложена К. Шенноном в 1948 г. (см. [58]). Цо определению Шеннона, информация есть мера того количества неопределенности, которая уничтожается после получения сообщения. При этом важность (эффективность для получателя) информации, содержащейся в этом сообщении, никак не учитывается.
Позднее Бриллюэном [12] был предложен новый аспект понимания информации, также связанный с энтропией системы. По второму закону термодинамики энтропия системы либо постоянна, либо увеличивается. В сущности это означает, что связи I и II порядков между ее элементами характеризуются все большей случайностью, стохастичностью. Вместе с тем при получении информации степень недетерминированности системы уменьшается: информация эффективно воздействует на процесс раскрытия неопределенности в системе. Таксе более или менее полное раскрытие неопределенности, по Бриллюэну [12], приравнивается к тому, что энтропия системы рассматривается как отрицательная энтропия — негентропия, иными словами, приращение информации адекватно увеличению негентропии и, наоборот, уменьшение негентропии системы адекватно потере информации.
В отечественной литературе получило распространение определение информации, сформулированное А. М. Яглом и И. М. Яглом [61], в соответствии с которым информация является мерой устранения неопределенности знания у получателя сигнала (сообщения) о состоянии передатчика или о некотором событии. При этом предполагается, что до получения информационного сигнала (сообщения) получатель (объект или система, принимающая информационный сигнал) оценивает вероятность реализации различных (в идеальном случае — равновероятных) событий как Ръ . . ., Рп, а после получения сигнала (сообщения) с достоверностью, приближающейся к единице, выбирает на основании информации только одно определенное событие из указанного множества. В этом случае информационная емкость (количество информации) этого сигнала (сообщения) равна
/ = -3^10^^ (i=:i,2,...,n). (4.6)
i=l
В сущности эта формула уже подводит достаточную базу под определение единицы измерения количества информации — бит. Бит — это бинарная единица такого количества информации, которое необходимо и достаточно для выбора одного из двух равновероятно возможных и взаимоисключающих вариантов реализации событий.
75
Нетрудно видеть, что почти все перечисленные выше концепции и формулировки информации практически игнорируют такую весьма существенную для получателя (особенно с точки зрения управления) особенность информации, как ее важность (семантика, своевременность, эффективность и т. д.).
В этой связи правомерно предложить следующее определение информации: информация есть некоторое приращение полезного объема знаний, являющееся проявлением случайного или организованного воздействия (отражения) среды на объект получения информации.
Оценивая фактор полезности информации с точки зрения функциональных характеристик системы, можно воспользоваться следующим несложным выражением. Пусть некоторая (безразмерная) эффективность функционирования БТС до получения информации или без этой информации имеет значение Эо, а при получении информации — эффективность 3/, тогда полезность информации можно оценить как
U = - Эо или U = (3/ - 30)/30. (4.7)
Такая оценка имеет смысл при сопоставлении различных сигналов информации с точки зрения единой целевой функции БТС.
Чтобы получить более полное представление о качестве и количестве потребной емкости информационных входов БТС, целесообразно оценивать относительное приращение эффективности функционирования БТС в долях не самого показателя эффективности, а лишь его приращения, которое дал бы информационный вход, если бы поступившая по нему информация была исчерпывающе полной, идеальной. В этом случае выражение (4.11) принимает вид
и= (Эх - Э0)/(Эх - Эо), (4.8)
где 3/ — показатель эффективности функционирования БТС при получении абсолютно полной информации.
К числу важнейших особенностей информационных входов, как уже отмечалось выше, относится использование их в качестве важнейшего инструмента управления. Поэтому дальнейший анализ информационных входов целесообразно строить в аспекте требований, которые предъявляются к органам управления.
Рассмотрим БТС, в которой процессор Atj — Р aih О является функцией времени t и сигнала управления I* = 1а, поступающего от управляющей подсистемы (ки) к объекту управления (материально-энергетическому преобразователю). Выходом системы является некоторый параметр (реакция процессора) у} (0, последовательность и характер воздействия которого на внешнюю среду определяют эффективность управления, а следовательно, и эффективность информации 3/.
76
Для упрощения анализа целесообразно считать, что структура одессора А и (0 в целом достаточно упорядочена и оптимизирована по целевой функции вида
—max Э, или
—min С,ft,5
(4.9)
где С и t — соответственно безразмерные ресурсные затраты и время. Анализ, по-видимому, следует проводить в предположении, что процессор Ац стабилизирован (либо нормативно упорядочен) по материально-энергетической входам, чем обеспечивается выполнение условия (4.9). В этом случае целесообразно рассматривать только те входы xt (t), которые так или иначе выводят процессор из нормального рабочего состояния, т. е.* создают некоторые «возмущения» (под этими возмущениями можно подразумевать недостаточность, избыточность или нерегулярность поступления во времени информации в процессор).
Орган управления к соединен с процессором Лг7 (£) каналом связи I порядка, но которому поступает управляющая информация /а. Каналы связи II порядка соединяют орган управления к с входом Xi (t) и выходом У] (t). По этим каналам в управляющий орган поступает информация о воздействии входа xt (0 на процессор Au(t) и информация о воздействии этого процессора на внешнюю среду в форме выхода yj (t). Задача органа управления — обеспечить такое функционирование А^ (0, при котором будет соблюдаться условие (4.9).
Используя аппарат теории информации, следует интерпретировать параметры х, у, I в виде рядов, характеризующих разнообразие возможных исходов с некоторыми значениями вероятности для каждого исхода. Такое разнообразие можно представить в виде соответственно Н (х), Н (у), Н (I). Неопределенность системы в целом может быть выражена как энтропия сложного события вида Н (х, I, у).
Целесообразно также дать описание определенных взаимосвязей между значениями различных параметров. Так, если xt (t) принимает значение хх (tx), то разнообразие управляющих информационных сигналов 1а ограничивается определенным числом вариантов, удовлетворяющих условию (4.9). Обозначение этих связей удобно выразить в форме условных параметров энтропии вида Нт (у), Нх (у), Нх (7), Нху (7).
Очевидно, возмущающие воздействия входов (0 в конечном счете результируются в некоторой дезорганизации рассматриваемой системы или в увеличении ее энтропии по выходу Н (у).
Учитывая, что область значений yj (£), удовлетворяющих Условию (4.9), очевидно, является только подмножеством всего множества значений этого параметра, можно считать, что максимальная энтропия выхода системы Н (j/)max (соответствующая СлУчаю равновероятности всех исходов yj (t)) будет отвечать соот-
77
ношению вида
Н (у9) < Н (у) < Н (у) max* (4* 10)
При этом получаем область значений Н (у), которая соответствует дезорганизующему воздействию входных сигналов х,(0.
Далее, предположив, что орган выдачи управляющей информации, согласующий связь Xi(t)n yi(t) по условию (4.9), работает не в оптимальном режиме (либо вообще отсутствует), можно исследовать указанную связь как сложное событие ху с энтропией
Н (х, у) = Н (х) + Нх(у). (4.11)
Принимая во внимание то обстоятельство, что по теории информации энтропия сложного события равна энтропии заключительного шага, т. е. в данном случае выхода системы формулу (4.11) следует представлять в виде
н (у) = Н (ху) = Н(х) + Нх (у). (4.12)
Основная задача органа (к), выдающего информацию управления, заключается в том, чтобы обеспечить поступление такой информации Z, которая удовлетворяла бы соотношению вида
Ну (У) < н (уа). (4.13
Уменьшение энтропии (увеличение негентропии) управляемой системы (процессора А и) обеспечивается количеством информации в сигналах управления 1а, которое равно
I (1а, у) = Н (у) - Н1а (у). (4.14)
Таково выражение для потребного количества информации в случае раздельного рассмотрения связей между xt (t) и yj (0, а также между 1а и У) (0-
Вместе с тем можно рассматривать параметры х, А, I и у как общую последовательность. Тогда на основании закона необходимого разнообразия по теории информации уровень разнообразия (энтропия, уровень неопределенности) в функционировании процессора Ai} при определенным образом ограниченной информации будет всегда меньше уровня разнообразия входных сигналов в той их части, которая выводит систему из организованного состояния, т. е.
Нт (у) > Нт (х). (4.15)
Такое положение сводится в сущности к тому, что генератор управляющей информации к должен выдавать различные сигналы на каждое возмущение на входе системы. С учетом этого обстоятельства можно представить энтропию входа процессора, который испытывает воздействие входа xt (t) и управляющей информации /а, в следующем виде:
Н (xla) = Н (х) + Нх (1а) = Я (1а) + Н1а(х). (4.16)
78
ца основании неравенства (4.15) представляется возможным записать соотношение вида
Н (х) + Нх (Z) < Н (/) + Я2 (у) < Н (1у). (4.17}
Вместе с тем, пользуясь правилами сложения энтропии, можно записать
я (1Х) < я (/) + н (у). (4.18)
В этом случае
я (х) + Нх (/) < Я (/) + Я (у),
(4.19)
Я (у) > Я (х) + Нх (у) - Н (/).
Таким образом, генератор управляющей информации (к) стремится к минимуму энтропии (разнообразия) системы и при уменьшении разнообразия возможных сигналов управляющей информации. Следовательно, величина сигнала регулирования (а следовательно, количество и разнообразие управляющей информации) находится в обратной зависимости от возможного числа (номенклатуры) сигналов управляющей информации, от чувствительности сигналов управляющей информации к воздействиям внешней среды (и, естественно, от степени неопределенности в воздействии внешней среды на систему).
В тех случаях, когда между воздействиями внешней среды или входными сигналами х (t) и сигналами управляющей информации 1а имеется взаимно-однозначное соответствие, разнообразие или условная энтропия Нх (/) = 0, а значит,
Н (y)min = Н (х) - Н (/), • (4.20)
ограничение энтропии доведения процессора может быть обеспечено только путем увеличения энтропии (разнообразия) управляющей информации.
Для любой системы должен существовать некоторый минимум информационных входов (поступающих в орган управления), который обеспечивает эффективный минимум разнообразия сигналов управления.
Впервые закон необходимого разнообразия применительно к кибернетике и теории информации сформулирован У. Эшби [59], который отмечает, что значение этого закона состоит в том, что он ставит абсолютный предел количеству регулирования или управления, которое может осуществляться, когда пропускная способность регулятора фиксирована.
Достоверность информации. Рассматривая задачу минимизации необходимой и достаточной информации, обеспечивающей исполнение условия (4.9), необходимо проанализировать такие основные качественные показатели информации, как достоверность и достаточность в какой-то момент времени Т. Производ-псми от этих двух основных показателей являются такие свойства информации, как объективность, своевременность и т. д.
79
Достоверность информации применительно к БТС может быть охарактеризована величиной, изменяющейся обратно пропорционально вероятности возникновения ошибок в данной подсистеме информационных входов.
В более общей форме достоверной следует считать информацию, обеспечивающую наибольшую эффективность функционирования данной системы с соблюдением условия (4.9). Учитывая, что оптимизация системы по достоверности сигналов информационных входов обусловливается целевой функцией W и эффективностью системы в целом, целесообразно оптимизировать систему по достоверности входной информации при ограничениях на стоимость и временные характеристики.
В этом аспекте можно записать задачу максимизации параметра 9i (эффективности функционирования БТС) по информационным входам при выполнении ограничений по затратам и времени следующим образом:
(5/ — Эq)/Эо шах, С Сзад, t ^эад* (4.21)
По аналогии с предыдущим (см. формулы (4.7)—(4.9)) зададимся условием, по которому БТС имеет некоторую первоначальную эффективность 30 при стоимости ее реализации Со. Повышение достоверности входной информации в любом случае можно (и нужно) рассматривать как получение некоторой дополнительной информации Д/а , воздействующей определенным образом на процессор системы и изменяющей первоначальную эффективность функционирования системы 30 до некоторого значения Эг (ДЭ0), полагая при этом, что достоверность информации может быть изменена каким-то f-м способом (fn i2, . . ., in ). Оценка целесообразности применения любого f-ro способа должна, по-видимому, производиться по приращению целевой эффективности БТС ДЭ, отнесенной к приращению затрат на создание и эксплуатацию БТС:
ДЭ/ДС = (Эт - Э0)/(С! - Со), (4.22)
где ДС — дополнительные затраты на получение дополнительной достоверности (информации); Ci — стоимость системы с учетом повышения достоверности исходной информации; Со — первоначальная стоимость системы.
Далее необходимо исследовать зависимость ДЭ от ДС, предположив, что все просмотренные варианты /-й БТС упорядочены по 3j (if) и для них справедливо условие вида
3,(7 + 1)>5И/) при ДС (/) > Со (/). ;4.23)
Анализ значительно упрощается в случае, если функция может быть аппроксимирована выпуклым многогранником, что возможно, если для некоторой совокупности систем справедливо
80
соотношение
л.9 (ft 4~ 0 ~~ Оо) & + п) ~ Зр (/о) . (4.24)
'TYli + О "" со (/о) ' (/ + п) ~' ^'0 (/о)
Изложенные в настоящем разделе основные методологические положения информационной оценки входа БТС применимы и к выходу БТС, так как эти составляющие системы структурно идентичны.
3. Анализ человеко-машинных систем
Человеко-машинная система или система человек—машина (СЧМ) — это комплекс, основным управляющим элементом которого является человек-оператор (группа операторов), взаимодействующий с машиной (машинами). В наиболее общем случае СЧМ представляет собой сложную иерархическую систему, в которой оператор может находиться на любом уровне.
В описании и моделировании СЧМ пользуются достаточно широким диапазоном абстракции: информационным, логическим, эвристическим, алгебраическим и т. п.
Одной из важнейших и сложнейших проблем СЧМ является проблема совместного функционирования человека и машины. Поэтому важным моментом в исследовании СЧМ является улучшение совмещения, т. е. способов и методов совмещения человека и машины для решения конкретных задач.
В этом аспекте методологию совмещения СЧМ следует строить на весьма точном определении академика М. В. Келдыша: «...Сила любых исследований в органическом сочетании способностей человека и возможностей автоматики. Этот вывод подсказывает весь ход развития науки за последние десятилетия, когда одной из величайших сил прогресса стала совместная работа человеческого разума и автоматических средств. Здесь важно разделить, что следует делать человеческому разуму и что мы настолько поняли, что можем поручить автоматике. И если мы что-то поняли действительно хорошо, то автоматика с этим делом справится лучше человека — быстрее, точнее, в более широком масштабе» [32].
Еще одна важная специфическая особенность задачи совмещения заключается в том, что очень часто СЧМ изучали исходя из того, что принципиальных различий между системой, включающей одного оператора и одну машину, и системой группа операторов — группа машин не существует. Однако даже методы анализа рабочих мест производственной СЧМ подтверждают это различие. Для решения задачи совмещения необходимо, чтобы СЧМ была предварительно декомпозирована на отдельные рабочие места, что не всегда возможно сделать.
Проанализировать совмещение в СЧМ — значит создать модель этой системы. Однако до сих пор нет методик или хотя бы обоснованных принципов, которыми можно было бы руководств
81
воваться при выборе модели СЧМ. Здесь, однако, можно предложить некоторые подходы: прежде всего следует исходить из сложности СЧМ, т. е. определить границы подлежащей исследованию СЧМ, а также ее место внутри суперсистемы.
В качестве второго критерия правильности выбора модели совмещения можно предложить цель функционирования СЧМ, так как это позволит уточнить относительные функции человека и машины.
Проблематика современных СЧМ — распределение функций между человеком и машиной, различные аспекты совместимости человека и машины — служит сейчас предметом самостоятельных исследований. В рамках данной работы авторы сочли достаточным ограничиться рассмотрением лишь некоторых важнейших аспектов участия человека в эксплуатации БТС, а именно функциональных, биофизических и энергетических показателей совместимости человека и машины. Именно эти вопросы имеют большое значение при исследовании эффективности функционирования БТС с участием оператора как разновидности сложных СЧМ.
Вопрос о роли человека в сложном современном комплексе управляющих, исполнительных механизмов и устройств является важнейшим операторным моментом в задачах системологии оценки эффективности и управления развитием современных БТС.
Так, если ранее машины выполняли в основном силовые функции (99% всей полезной силовой работы на земном шаре осуществляется машинами), то в настоящий момент возник вопрос о передаче машине таких функций, которые всегда считались присущими только человеку. К ним относятся вычислительные, логические операции, распознавание образов, прогнозирование и другие функции, реализуемые вычислительной техникой и автоматикой, которые, расширяя относительно узкие рамки возможностей человека, приводят к качественному изменению характера его труда (к интеллектуализации, освобождению от неквалифицированной работы, к изменению самих принципов общения человека с машиной). Главными функциями человека становится программирование, управление и контроль.
За последние 30 лет количество средств контроля и управления в кабине самолета увеличилось почти в 10 раз: на современном воздушном корабле их более 600. В то же время психофизиологические возможности человека, пилотирующего машину, почти не изменились. Более того, с ростом скоростей полета резко сократилось время, которым располагает пилот в критических ситуациях для принятия нужного решения.
По данным мировой статистики, каждые два из трех летных происшествий происходит из-за так называемых ошибок летного состава. Следует отметить, что в большинстве своем такие ошибки объясняются не низкой квалификацией или небрежностью операторов на земле или в воздухе, а скорее недостаточной совместимостью человека и машины [52].
С подобной ситуацией приходится сталкиваться не только
82
области авиации или скоростного транспорта, но и в ряде совре-В енных производственных процессов. Основы системологии, системного подхода не позволяют отрывать техническую систему от человека: оператор и сложная техническая система в рамках системного анализа образуют единое целое — систему человек — машина. Системология, следовательно, исходит из необходимости так сконструировать машину, чтобы она без ущерба для ее эффективности легко управлялась человеком. С другой стороны, необходимо так подобрать человека, управляющего машиной, так его обучить, чтобы он мог полностью использовать ее потенциальные возможности. Необходимо также правильно выбрать параметры внешней среды и алгоритмы деятельности операторов, чтобы в результате получить оптимальный, высоко надежный и сбалансированный биотехнический комплекс оператор — машина — среда.
Правильное понимание роли человека в функционировании БТС по существу возникло и развилось только с прогрессом сверхзвуковых и гиперзвуковых летательных аппаратов и связанных с их управлением быстродействующих и сверхбыстродействующих ЭВМ. Самым парадоксальным в этом было то обстоятельство, что автоматы появились и развивались как компенсаторы ограниченности возможностей человека в объеме и скорости вычислений, реакции, утомляемости и т. п. Однако если до появления летательных аппаратов и управляющих ЭВМ с тактовыми скоростями операций порядка нескольких наносекунд было практически безразлично, являются ли алгоритм и программа ЭВМ оптимальными по быстродействию и энергоемкости, то с их появлением каждое мгновение, каждый ватт и каждый грамм веса (особенно для бортовых ЭВМ) стали важнейшими проблемами.
Таким образом; даже в области управления быстропротекаю-щими процессами с большой степенью неопределенности в поведении систем — объектов управления решающая роль в системе человек — машина принадлежит человеку. Поэтому, по-видимому, целесообразно рассмотреть специфику функционирования человека в СЧМ.
Специфика функциональных характеристик человека в СЧМ» Анализ специфики функциональных характеристик человека в СЧМ необходимо проводить с учетом целостности СЧМ. Такой подход, естественно, накладывает ряд дополнительных ограничений как на характеристики технических средств, так и на характеристики человека-оператора. Поэтому при проектировании технических средств, обслуживаемых оператором, следует учитывать возможности человека. С другой стороны, необходимо разработать такую систему подготовки оператора, чтобы последний мог полностью использовать технические возможности машины.
Переходя далее к специфической роли человека в СЧМ, следует отметить следующие факторы: интуитивное принятие решений в непредвиденных ситуациях при непрерывно изменяющихся условиях во внешней среде; отсутствие типичного для БТС «про
83
клятия размерности» (надежность человека растет с увеличением числа задействованных элементов памяти); наличие системы предвидения — особого качества, свойственного только человеку, равно как и пластичности сенсорного выхода, позволяющей анализировать явления и комплексы по косвенной информации; наличие осознанно изменяемых адаптивных функциональных характеристик: пиковой и долговременной выносливости, помехоустойчивости. Эти факторы составляют основу для формирования в процессе подготовки оператора таких его функциональных возможностей, реализация которых позволяет решать задачи управления СЧМ за счет участия человека, а именно: определение оператором сущности поставленной проблемы и нахождение оптимальных подходов к ее разрешению; выбор оптимальных способов и режимов функционирования технических систем; нахождение источников необходимой информации, способов ее обработки и систематизации; разработка плана необходимых экспериментов, способствующих решению проблемы либо в минимальный срок при оптимальных затратах, либо в оптимальный срок при минимальных затратах.
Выше уже отмечалось, что наибольшую сложность в анализе человеческого фактора, существенно тормозящую прогресс в области самонастраивающихся и самообучающих БТС, представляет построение адекватной модели человека-оператора. В этой области, по утверждению ряда авторов [14, 20, 51, 541, предложено несколько заслуживающих внимания методов, из которых следует прежде всего отметить метод спектрального анализа и метод отслеживания параметра (эти два метода основываются на аналогиях моделирования других физических систем), а также метод оценки эффективности оператора и метод эвристических моделей [13, 54, 57]. Современными авторами в модели оператора вводятся различные по уровню значимости и времени действия характеристики. Анализируя эти показатели, можно выявить центральные характеристики оператора, к которым относятся реакция (осознанная, проявляющаяся как мотивированное воздействие на среду при восприятии внешнего воздействия, и неосознанная, проявляющаяся как моторное или подсознательное воздействие среды), характеризующаяся временем запаздывания от tQ — момента внешнего воздействия на рецепторы человека до — момента воздействия человека на внешнюю среду; индивидуальная зависимость (от времени, задачи и квалификации), для которой важно определить вид изменения передаточной функции; нелинейность, детерминированность и прерывистость, которые определяются в зависимости от квалификации оператора как возможность использования для его описания линейных (нелинейных), детерминистских либо импульсных сложных систем.
Передаточные функции оператора описываются квазилинейными и нелинейными моделями, в которых каждый из параметров оценивает только определенную сторону работы системы и деятельности оператора, потому он не может служить обобщенным
84
казателем работы всей системы. В качестве такой обобщенной П°пактеристики обычно используется параметр эффективности, Х частности, можно оценивать эффективность деятельности опера-0 а по его надежности и временным характеристикам реакций. Эффективность (Ж) оператора определяется количеством безошибочных операций, выполненных им за единицу времени, по формуле
IV = ksWtR'R",
(4.25)
где JVq — идеальная эффективность — количество операций по управлению, выполняемых оператором за единицу времени; д' — вероятность работоспособного состояния оператора перед началом выполнения заданного алгоритма; R" — вероятность сохранения работоспособного состояния оператора и недопущения им ошибки при реализации алгоритма; к0 — коэффициент теоретической {активности, определяющий возможную степень повышения эффективности за счет творческого применения заданного алгоритма.
К оценке эффективности оператора можно подойти и со следующих позиций. Полное описание деятельности оператора включает в себя описание как степени его соответствия своему назначению (качества), так и способности выполнять заданные функции в установленных условиях за определенное время при сохранении требуемого качества (надежности). Характеристики качества выражаются обычно в виде рабочих характеристик или количественных оценок.
Обозначим вероятность безошибочной работы оператора через Р (Л). Это событие может произойти при п различных несовместимых состояния его качества къ к2, . . ., Агп, которые наступают соответственно с вероятностями Р (Z^), Р (Zc2), . . ., Р (Агп).
Тогда средняя условная вероятность безотказной работы оператора при всех возможных состояниях качества определит эффективность оператора W:
W= 3 Р(А-г)Р(А.), (4.26)
i=l
где Р (ki) — вероятность появлении агго качества деятельности оператора; Р — вероятность безотказной работы оператора в условиях кгго качества:
В формуле (4.2) эффективность оценивается с точки зрения надежности действия оператора при различных значениях качества. Возможно также оценивать качество по математическому ожиданию эффективности по формуле вида
2 Р(*0н(^.), (4.27)
1=1
85
где U — характеристика деятельности оператора; р ус^
ловное математическое ожидание этой характеристики при качестве kt.
Формулы (4.26) и (4.27) могут применяться для оценки эффек-тивности работы как оператора, так и системы человек—машина в целом. Так, например, параметрами к^ к2, . . ., кп можно задать различные пределы точности действия оператора, а характеристиками Р (Л^), Р (Л^), . . ., Р (AkJ определить вероятность безошибочной работы оператора при заданных уровнях точности. Формула (4.26) позволяет оценить среднюю эффективность деятельности оператора с учетом точности и надежности его работы, а для оценки эффективности системы, исходя из ее быстродействия и точности, можно воспользоваться формулой (4.27), где параметр U может характеризовать быстродействие системы. Для каждого уровня точности системы къ к2, . . ., А ( можно определить условное математическое ожидание быстродействия |ll (U/ki), . . ., ц (U/kn). Зная вероятности выдерживания заданной точности Р (А^), Р (к2), . . Р (кп), по формуле (4.27) можно подсчитать среднюю эффективность системы с точки зрения ее быстродействия при различных условиях точности.
Касаясь теории эвристического программирования, следует отметить, что ее достоинства и недостатки обусловлены механическим переносом в эту область ряда положений из теории конечных автоматов. При этом главный недостаток эвристических моделей — это их неприспособленность к восприятию всей ситуации в целом, как это способен делать человек.
Преобразования информации, осуществляемые в эвристических моделях, состоят лишь в устранении различий между начальной и конечной ситуациями. Человек же только внешне так решает задачу. Фактически в процессе решения данной задачи он сам включается в проблемную ситуацию. При этом оператором усваиваются новые знания, способы действия, изменяется его опыт. Это заставляет искать более достоверные (неэвристические) способы формализации деятельности оператора в современных СЧМ.
Изложенное позволяет сделать вывод о том, что создать достаточно полную и достоверную математическую модель СЧМ в настоящее время пока еще не представляется возможным. Это объясняется в основном тремя причинами: чрезвычайной сложностью, видовой неоднородностью и динамической неустойчивостью функциональных характеристик человека, а также теоретической «слабостью» эргономики (отсутствие в четкой постановке основных, фундаментальных законов, характеристик процессов, происходящих в СЧМ при ее функционировании).
В инженерной психологии до настоящего времени еще не сложилось единой научно обоснованной классификации основного объекта ее исследования — систем человек—машина. Тем не менее некоторые подходы к классификации таких систем, используемые
86
практике, представляют определенный интерес. По функцио-надЬному признаку СЧМ подразделяются на детерминированные ианедетерминированные (стохастические) системы.
И функции человека в этих классах СЧМ принципиально азличны. В детерминированных системах человек не является центральным элементом СЧМ, выполняя в сущности функции контроля, распространяющиеся по связям II порядка. В недетерминированных СЧМ человек — центральный элемент, последовательно включенный связями I порядка в основу структуры системы.
Недетерминированные системы подразделяются на две группы: — системы, в которых ситуации, требующие принятия решения, возникают эпизодически, где в основном действует автомат;
— игровые схемы, в которых поведение человека определяется непрерывной последовательностью решаемых задач.
Некоторые авторы предлагают классифицировать недетерминированные системы человек — машина по признаку иерархической структуры [55], предусматривая разделение СЧМ на системы первого, второго и более высоких порядков. Системы первого порядка — одноуровневые по управлению (например, шофер — автомобиль). Системы второго и выше порядка имеют два и более уровня управления. В этих системах наряду с проблемой функ-
ционального согласования человека и машины возникает принципиально новая проблема согласования деятельности людей на различных уровнях, взаимосвязанных в пределах одной
системы.
В качестве признаков классификации недетерминированных игровых систем различные авторы предлагают число действующих в СЧМ людей (моноэргатические — системы с одним человеком и полиэргатические — в которые входит несколько человек); степень участия человека в выполнении системой возложенных на нее задач (системы первого рода, в которых человек выполняет функции контроля, и системы второго рода, в которых человек выполняет функции управления системой).
Рассматриваемые методы классификации имеют свои достоинства. но еще не отличаются достаточной полнотой и наличием четких связей.
В аспекте дальнейших исследований специфики функционирования человека в СЧМ в современной инженерной психологии можно выделить следующие главные направления развития: исследование психофизических характеристик человека; систематическое исследование деятельности человека в сложных автоматизированных системах, разработка методов оптимального согласования технических характеристик систем с возможностями человека, включая моделирование отдельных функций человека; приложение теоретических основ инженерной психологии к про-ектированию сложных автоматизированных систем; эксплуатационную инженерную психологию, исследующую работоспособность оператора в различных режимах нагрузок при стохастиче
87
ски меняющемся поведении системы (исследования точности, надежности и эффективности работы операторов); исследование эвристической деятельности операторов и методов принятия решения с целью выявления наиболее эффективных способов решения прикладных задач; инженерно-педагогическое исследование, связанное с систематизацией и анализом различных методов обучения операторов с учетом требований интенсификации их деятельности, повышения уровня и интенсивности нагрузок.
Аспекты функциональной совместимости человека и машины при управлении БТС. Информационная совместимость. В современной большой системе оператор управляет машиной, как правило, опосредствованно, через ее информационную модель. Следовательно, эффективность управления зависит от того, в какой степени информационная модель адекватна машине и насколько она приближена к возможностям оператора по приему и переработке всего потока закодированной информации. По этой модели оператор получает информацию о функциональном облике машины и затем соответствующим образом регулирует работу машины для приведения ее в требуемое функциональное состояние. Информационная модель объединяет две области: сенсорную (комплекс сигнальных устройств, приборов, индикаторов, мнемосхем, звуковых сигналов, цветовых устройств) и сенсомоторную (органы управления).
При создании информационной модели следует определить, какие параметры должны быть представлены в модели для имитации динамического образа поведения машины. Размещение составляющих информационной модели на пульте управления машиной должно обеспечить оптимальный вариант распределения внимания, учитывая, что минимальное время принятия решения для оператора средней квалификации примерно 2,3 с (в том числе сенсорный период 0,3 с, принятие решения в центральном нервном аппарате 1,5 с и моторный период 0,5 с) (табл. 2).
Информационная модель машины, по-видимому, не может быть рассчитана аналитически для всех систем в строгой постановке. Поэтому при разработке модели следует уделить большое внимание эргономическому эксперименту, имитирующему условия деятельности оператора при данных характеристиках машины. Это позволяет заметно повысить достоверность модели.
Обеспечение информационной совместимости оператора с машиной во многом способствует тому, чтобы в любых ситуациях увеличить надежность человека в СЧМ.
Биофизическая совместимость. Биофизическая совместимость оператора, машины и среды заключается в обеспечении разумного компромисса между физиологическим состоянием и работоспособностью оператора, а также различными факторами окружающей его среды с учетом длительности, объема, качества выполняемых им задач. Здесь должны быть обоснованы и выбраны поминальные и предельные значения параметров среды обитания оператора (микроклимат, уровень радиации, ионный
88
ТАБЛИЦА 2
Параметр сравнения Машина (ЭВМ с периферией датчиков и выходных устройств) Человек (центральная нервная система)
рлкость памяти» дв. ед. Время обращения к памяти, с Выдача и восприятие информации, дв. ед./с Время выполнения операции И, с ИЛИ, с Вероятность ошибочных действий Размеры компонентов, см3 Вес 1010 компонентов, кг Время оперативной памяти Чувствительность воздействий Распознавание Интерпретация и принятие решений Возможность работы в автономном режиме 105— 10« 10-8__10-2 1Са —10е 0,01 0,001 10-0 10-3—102 103 — 108 Несколько тыс. ч Широкий диапазон высокочувствительных датчиков, неустойчива к приему слабых сигналов, особенно при изменении программы Ограниченное программой число физических параметров неустойчиво при малом отношении сигнал/шум. Высокая емкость канала даже при запоминании сверхсложных моделей. Слабо различает глубину и рельеф Рассчитана на фиксированный код, отсюда слабые возможности к адаптации при перепрограммировании и к самообучению. Неустойчива в условиях неопределенности, особенно в непредвиденных ситуациях. Индукция и обобщение невозможны Слабые возможности к саморегулированию, по показанной программе работает в пределах ресурса 10»—10i« Ю“2—102 109 (неосознанно) 10а (осознанно) 0,6 О,2 IO'2 IO-’ 1 3 с (через 18 с остается 10% информации) Ограничена возможность органов чувств. Обнаруживает весьма слабые сигналы и при изменении программы Широкий расширяющийся Диапазон физических параметров. Небольшая емкость канала, но запоминает весьма сложные модели. Различает информацию при весьма малом отношении сигнал/шум. Различает глубину и рельеф Высокая адаптируемость даже при перепрограммировании. Широкие возможности самообучения. Самоинструктиро-вание (опыт) и модификация кодов (изобретательность). Возмож- ность использования косвенной и избыточной информации. Широкие возможности к индукции и обобщению Высокая независимость. Саморегулирование
89
ТАБЛИЦА 2. (Окончание)
Параметр сравнения Машина (ЭВМ с периферией датчиков и выходных устройств) Человек (центральная нервная система)
Надежность Может быть доведена до высоких значений. Весьма устойчива в пределах ресурса. Превышение возможностей и перегрузки недопустимы Изменяется во времени. Зависит от степени подготовки и утомления. Допустимость превыше-ния возможностей и перегрузок
состав и др.) и параметров связей II порядка для режима применения машины (вибрации, перегрузки, световые и акустические факторы и т. д.). Номинальные значения этих параметров долж ны выбираться и проверяться исходя из конкретных функциональных задач оператора в определенных условиях внешней среды, с обязательным учетом предельно допустимых знаний, с тем чтобы обеспечить резервирование, гарантирующее надежность СЧМ.
Энергетическая совместимость. Из-за ограничений энергетических возможностей человека (как по силе, так и по мощности) оператор не может обеспечить управление, если для перемещения управляющих приводящих устройств требуется либо слишком большое, либо, наоборот, мизерное усилие.
Следовательно, решение задачи энергетической совместимости в СЧМ сводится к созданию механизмов управления, гармонически сочетающих необходимые и достаточные усилия оператора с заданными характеристиками его реакции, скорости, темпа и точности управляющих действий в СЧМ. Рассматриваемая проблематика тесно переплетается с проблемами НОТ, особенно в части организации рационального режима труда и отдыха, а также выбора оптимальных комбинаций рабочих движений (количества и вида траекторий движений отдельных частей тела при управлении в СЧМ).
Резюмируя изложенное, следует отметить, что в решении задач по комплексной оценке совместимости СЧМ целесообразно придерживаться следующей последовательности анализа.
1. Определение возможного информационного рассогласования, снижающего надежность СЧМ вплоть до появления отказов.
2. Логический анализ алгоритма действий оператора в сопоставлении с полным комплексом функциональных характеристик СЧМ в аспекте информационной и биофизической совместимости. Результаты такого анализа обычно представляются в виде альтернативного графа с вероятностными оценками правильных и ошибочных действий СЧМ типа графа Свэйна \
3. Прогнозная оценка вероятности правильной работы (либо возникновения отказов) СЧМ. ' >
1 Swain A. J. Some Problems in the Measurement^ Human’kPerformance.— Human Factors, 1974, vol. 6, p. 687.
90
4 Опр©Деление степени влияния ошибок оператора на надеж-’ функционирования СЧМ и разработка превентивной програм-повышения надежности СЧМ.
М Аналитическое представление алгоритма действий операто-а приводит к модели, на вход которой должны быть поданы бедующие исходные данные:
1. Последовательность (перечень) ^-основных и ^.-вспомогательных действий, которые должен выполнить оператор в анализируемой операции с ранжированными показателями степени обязательности или важности результата действия па эффективность операции. Оформляется в виде матрицы {алц}.
2. Оценка инерциальнооти оператора (задержки Дт с, в тече
ние которых он не успевает воздействовать на устройства уп равления).
3. Оценка среднего времени 7f, которое затрачивает оператор на выполнение f-го действия при нормальном (не стрессовом) режиме работы.
4. Оценка вероятности Pt. правильного и своевременного
выполнения действия в нормальнохМ решении работы.
5. Оценка среднестатистического отклонения (yt. от величины tt для «типичного» (по уровню подготовленности, тренированности и реакции) оператора.
6. Оценка (принципиальная и вероятностная) компенсации {ахц} неправильного f-го действия оператора.
7. Оценка вероятности PfM правильного выполнения / + 1
действия при правильном выполнении /-го действия.
Обработка данных этой модели на ЦВМ осуществляется в зависимости от важности операции для трех режимов работы, соответствующих важности и срочности операций: нормального, особого и критического. При этом предполагается, что отказ в нормальном режиме компенсируется двукратными (по отношению к стоимости действия) затратами, отказ в особом режиме может
компенсироваться затратами, сопоставимыми со стоимостью операции, а отказ в критическом режиме ведет либо к срыву операции, либо компенсируется затратами, существенно превышающими стоимость операции.
Таким образом, нормальный режим работы можно представить по времени в виде
У G i=l
(4.28)
где t% — общее время на выполнение операции из п действий; ^-1 — время на выполнение всех действий до / — 1 включительно. Особый режим работы можно представить в виде
+ tBi = 2 i=l
(4.29)
91
где — общее время основных и — вспомогательных действий, оставшихся невыполненными. Следовательно,
"С (4.30)
и в особом режиме можно выполнить только все основные действия.
Критический режим Th связан с ситуацией, когда время операции равно или менее суммарного времени £/г{ на выполнение основных действий. Такая ситуация обычно рассматривается как стрессовая и может быть представлена в следующем виде:
П = т-^—>1. (4.31)
“ 4-1
г. е. как отношение невыполненных основных действий к времени, оставшемуся для их выполнения.
В результате обработки па ЦВМ данных для трех рассмотренных режимов представляется возможным получить: характеристики времени для ijOt. и оценить матрицу определить пороговое по времени значение Тп стрессовой ситуации, за которым следует срыв операции в целом; оценить и выбрать наиболее рациональные значения для компенсационной матрицы {ад:^}.
Практика работы с моделями, включающими не более 100 действий, показала их применимость для решения практических задач прогнозной оценки надежности операторов на ранних предэскизных стадиях создания БТС.
ГЛАВА ПЯТАЯ
АНАЛИТИЧЕСКОЕ ПРЕДСТАВЛЕНИЕ БТС
Среди особенностей современных методов создания БТС можно выделить метод поиска оптимальных решений в рамках всей системы в целом или по крайней мере применительно к основным подсистемам или центральным элементам системы. Поиск оптимальных решений в современных условиях предп олагает широкое использование математического аппарата.
Показатели, характеризующие структуру и свойства системы, описывающие ее поведение, могут быть определены путем обработки данных натурного либо имитационного эксперимента; методом моделирования процессов функционирования сложной системы; систематизацией, исследованием и расчетной обработкой данных научно-технической информации.
Экспериментальное изучение сложных систем возможно только при выполнении определенных условий, например принципиальной возможности изменения режимов функционирования си-
92
емн для облегчения решения задач эксперимента, принципиаль-с g возможности регистрации всей необходимой информации 11 т д. Выполнение таких условий зачастую представляется невозможным, поэтому для изучения БТС целесообразно сочетать экспериментальные методы с методом моделирования.
Метод моделирования — эффективное средство для оценки вариантов структуры и свойств БТС на предпроектной и ранних проектных стадиях. В этот период жизненного цикла моделирование БТС позволяет выявить недостатки проекта, оценить согласованность действия отдельных элементов системы. Этот метод позволяет улучшить принятый вариант, а характеристики системы выбрать более обоснованно. Таким образом, моделирование играет большую роль при создании сложных систем для оценки их потенциальной эффективности и имеет ряд преимуществ перед экспериментальными методами.
Несмотря на существенный прогресс в этой области, проблема методологии моделирования еще далека от решения. В настоящее время получили распространение только отдельные методические положения. Прикладные методики моделирования систем имеют частный характер, процесс построения моделей очень трудоемок, а соотношения, описывающие реальные объекты, все еще весьма громоздки. Между тем в этой области возникают новые, все более сложные задачи, такие, например, как моделирование многоуровневых иерархических систем.
Специфика моделирования в системологии объясняется тем, что БТС часто являются уникальными. Это не позволяет расходовать какую-то часть эксплуатационного ресурса на изучение характеристик БТС в процессе реальных испытаний. В других случаях системы предназначены для работы в особых условиях, которые невозможно воспроизвести при испытаниях. Часто исследования и испытания поведения реальных систем оказываются нецелесообразными из-за больших сроков, необходимых для таких исследований, или большой их стоимости.
К таким системам, в частности, относятся многие системы летательных аппаратов, при испытании которых часто нельзя полностью воспроизвести реальные условия выполняемых ими операций. Испытания таких систем приходится заменять испытанием элементов системы в приведенных или имитирующих условиях.
Модель является информационным представлением действительности. Но если создаваемые модели имеют такую же сложность, как реальные объекты, и ими столь же трудно управлять, то нет смысла использовать такие модели.
Однако можно строить более простые модели, чем объекты, и тем не менее практически применять такие модели для исследования сложных систем с довольно высокой точностью. Это объясняется тем, что для определения основных особенностей БТС обычно достаточно лишь относительно небольшого числа переменных. Сложность, однако, состоит в том, чтобы выбрать нужные переменные и правильно определить соотношения между ними.
93
Одной из важнейших задач, возникающих на ранних стадиях создания БТС, является оценка различных вариантов структуры систем и выбор из них оптимальной. Решение такой задачи методами эксперимента привело бы к большим затратам средств и времени и потребовало бы большого количества персонала. Оценка же вариантов структуры системы простейшими методами, без глубокого количественного анализа влияния случайных факторов на систему, может привести к грубым просчетам. Преимущество альтернативной оценки проявляется тогда, когда сравнение вариантов структуры системы проводится в условиях, близких к реальным, с учетом специфики и значимости действующих факторов.
К задачам оценки вариантов структуры сложной системы примыкают задачи, связанные с выбором тех параметров системы, которые обеспечивают связь элементов системы в процессе их функционирования. Метод моделирования позволяет проверить, обеспечивают ли выбранные параметры нужную согласованность в системе. Если качество синхронизации неудовлетворительно, метод моделирования позволяет выделить те параметры, связь между которыми подлежит коррекции.
Задачей, близкой к оценке вариантов структуры системы, является согласование элементов системы по их производительности. Для этого по результатам моделирования необходимо оценить производительность отдельных узлов, провести расчеты для выбора соответствующих параметров и проверить их приемлемость путем комплексного моделирования процесса.
Важное значение имеют исследования сложных систем в связи с вопросами управления. Современная система автоматического управления имеет дело с огромным количеством структурных элементов и представляет собой сложный комплекс, который с большой скоростью получает информацию, обрабатывает ее, оптимально планирует и вырабатывает управляющие сигналы.
Для моделирования и расчета системы управления такого сложного типа необходимо располагать подходами к решению задач анализа и имитации процессов функционирования систем с неопределенностью в поведении, иметь аппарат оценки информационных потоков и т. д. Здесь, в частности, метод моделирования позволяет провести сравнительную оценку и ранжирование уровней управления, когда в иерархической многоуровневой системе управления число уровней и их состав существенно влияют на требования к качеству оборудования (в первую очередь по критерию стоимость — надежность) при заданных режимах управления по точности и быстродействию.
Метод моделирования может применяться и для сравнения различных алгоритмов управления и обработки информации. Воспроизведение различных вариантов алгоритма управления в модели позволяет вскрыть недостатки того или иного алгоритма и выбрать оптимальный.
Обращаясь к наиболее удачным (на наш взгляд) общим концепциям аналитического представления систем, следует назвать из-
94
стную работу О. Ланге 1, в которой предложен специальный в тематический аппарат, позволяющий выразить способ действия М^стемы через способы действия ее элементов и через ее структуру /вНепп1ЮЮ, внутреннюю и иерархическую). Предложенный аппарат можно использовать для аналитического представления любой системы. Сущность аналитического аппарата сводится к использованию линейных операторов, причем предполагается, что каждая относительно обособленная система характеризуется тем, что состояние входов (t) преобразуется ею в состояние выходов Уг (0. Это преобразование yj = П (х^, где символ П-оператор преобразования, который определяет, что надо сделать с состоянием входа хь чтобы получить состояние yt на выходе.
Аппарат аналитического представления использует следующие основные линейные операторы: пропорциональное преобразование; дифференцирование (обозначается символом d/dt или Z>); интегрирование (определяет состояние выхода как первообразную состояния входа х = / (0, обозначается J ...dt или D"1), образование конечных разностей (обозначается символом А); суммирование (обозначается символом 5); оператор правого сдвига или опережения (—£); оператор левого сдвига или запаздывания
= Xi - 1).
Использование линейных операторов дает возможность аналитически представить следующие наиболее типичные системные*
ситуации.
1. Параллельная связь двух элементов, когда некоторое состояние X характеризует общий вход двух систем с линейными операторами Щ и П2, а результат преобразования представлен двумя состояниями выходов ух и у2, которые суммируются и сумма их обозначается через у^. В операторном выражении этот случай записывается в виде ух = П^; у2 = П2я; у = уг + у2 = = (П^ + П2) х или иначе Y = ПХ (где П = П^-f- П2), т. е. оператор преобразования, описывающий действие двух параллельно соединенных систем, равняется сумме операторов отдельных систем.
2. Последовательное соединение двух систем с линейными операторами П^ и П2 вида X -> Щ — уг — П2 У, где состояние выхода одной системы является состоянием входа другой и записывается следующим образом: уг = Щгг; Y = П2г/1->У = = ЩП^ —У = Па?! (где П = П2П0, т. е. оператор, соответствующий последовательному соединению двух систем, равен произведению операторов этих систем.
3. Обратная связь вида X —> Щ > у\ -> У П2 —>- Пп где У = П^; \х = П2У -> У = П^/! — П2П2, т. е. оператор первой системы Пх умножается на 1/(1 — ЩП2) (оператор обратной связи).
4. Система с оператором S и соединенные с ней параллельна
1 Ланге О. Целое и развитие в свете кибернетики.— В кн.: Исследования по общей теории систем. М.: Прогресс, 1969.
95
две системы обратной связи или два регулятора с операторами 7?! и Т?2 вида X -> S -> Y -> (Rx — Д^О (Т?2 — я, где
iq И п2 вида Л —> О —1 \*12 — 1ЛХ2) —*- X, ]
Y = ПХ; Y = S (X + Д^ + Дгг2) = S (X + R.Y + Л2У)
= SX 4- SR.Y + SR2Y, откуда Y (1 — SR. — SR2) = SX; Y = S/l — S (Ri + R2), t. e. вместо двух параллельно соедп^ ненных регуляторов можно использовать один, пропускная способность которого равна сумме пропускных способностей отдел ных операторов.
При использовании операторного и матричного исчисления для аналитического описания систем предполагается, что математический аппарат системологии можно рассматривать как попытку объединить механистический и организмический подходы. При этом система рассматривается как совокупность единиц и отношений между этими единицами, следовательно, добавление к системе новой единицы добавляет к ней не только отношения данной единицы с другими единицами, но и изменяет отношения между всеми единицами. Далее вводится понятие «действующий элемент», под которым понимается материальный объект с определенными связями. Множество других материальных объектов рассматривается как среда данного элемента.
Графически действующий элемент Е может быть представлен векторами: входной вектор X, выходной вектор Г.
Входной вектор образуют числа X = гг2, . . ., хт), где х2, . . ., хт — любые действительные числа. Выходной вектор образуют числа Y = (ур у2, . . ., уп).
Отношение между состояниями входов и выходов или способ действия элемента Е можно выразить математически как преобразование вектора X в вектор Y: Y = ПХ, где П — оператор преобразования.
Преобразование вектора X в вектор Y можно представить также в виде некоторой матрицы. Обозначив через &xt изменение i-й составляющей вектора X, а через Дг/;- — изменение /-й составляющей вектора Г, допустим, что i-я составляющая вектора X изменяется на AXf, а остальные составляющие остаются неизменными. Тогда согласно преобразованию Y = ПХ произойдет определенное изменение (ДУ/-й составляющей вектора Y. Отношение atj = At/j/Axi при AXfe = 0 для к i (i = 1, т; / -= 1, п) является показателем частичного воздействия изменения i-й составляющей вектора X на /-ю составляющую вектора Y, тц$ atj — коэффициент частичного эффекта. Сумма таких коэффициентов дает матрицу преобразования А, которая имеет следующий вид:
Лц ai2 . .. а1т
А =
021 ^22 • • • ^2т
(5.1)
- ап1 ап2 • • • О'пт -
Теперь правило преобразования можно представить системой
96
уравнений вида
ДУ1 == ацАХ1 + а12ДХа 4" • • • 4~ а1тДХт,
ДУ2 = а21Д^1 4" 022^^2 4- ... 4- (5.2)
ДУП = 4” Яп2ДХ2 4“ ••• 4“ ЯптДХт,
или иначе, в векторной форме, ДУ = ЛДХ, где
ДУ = (ДУР ДУ, . . ., ДУП); (5.3)
ДХ = (ДХр ДХ2, . . ., ДХт).
Правило преобразования, символизируемое оператором П, представлено здесь в виде алгебраических действий. В данном случае был получен дифференциальный вид правила преобразований. Для случая, когда = const, получаем интегральный вид правила Y = ЛХ. Для случая, когда ai} = / (X), уравнения (5.2) являются дифференциальными, если X — непрерывная величина. Решение этих уравнений (если оно существует) состоит из системы функций
У1 = /1 (#1» ^2» • • •>
Уъ = /2 (*i> (5.4)
Уп fn (^1» ^2» • • •> ^m)>
таких, что аи = ду^/дх^ (/ = 1, тп; у = 1, п).
Связь действующих элементов осуществляется только через их входы и выходы. Так, если Ег и Е2 — два действующих элемента, х^\ х(2} — их входные векторы, а у№ и у<® — их выходные векторы, то некоторые составляющие вектора у^ могут стать составляющими векторами х<® только при наличии связи элемента Ег с элементом Е2. Иными словами, элемент Ег связан с элементом Е2, если хотя бы для одной пары значений i и / выполняется равенство
(i|=17m)K/ = 1,'n)^ (5.5)
Для аналитического представления большого числа составляющих связи действующих элементов обычно пользуются квадратной матрицей связи (512) размерностью тп, если т п, и размерностью /г, если п т.
Элемент матрицы на месте £, / равен 1, если равенство (5.5) выполняется, и равен 0, если оно не выполняется.
Примерная форма матрицы имеет вид
г-0 0 0
512 = О О 1
• ч .0
.0
1 О О
и0 1 о ... о-1
4 С. а. Саркисян
97
Пользуясь матрицей связи 512 элемента с элементом £ можно записать (5.5) в следующем виде:
х<2> = S12yd).
Обобщение матриц связи позволяет перейти к матрицам структуры системы, отражающим сеть связей между элементами системы, т. е. получить законченное аналитическое представление структура — связи системы. Изложенное дает представление о возможностях операторного и матричного методов для аналитического представления БТС.
1. Виды и типология моделей БТС
Видовая классификация моделей в системологии основана на качественном и количественном представлении процессов в БТС, отображении существенных входных, выходных величин и внутренних характеристик.
По своему характеру модели могут быть следующих разновидностей.
По точности и полноте отражения информации: достаточно точно отражающая характеристики объекта; дающая параметры объекта в некотором приближении; достаточно полно описывающая объект, учитывающая все его элементы, процессы, функции, поведение; учитывающая частичную информацию об объекте, его подсистеме либо элементе.
По виду отображаемой информации: физическая, физического подобия моделируемому объекту; структурная, отражающая строение объекта; функциональная, описывающая работу системы; математическая, дающая математическое описание исследуемого процесса; динамическая, отражающая последовательно изменяющиеся состояния процесса или системы; вероятностная, связанная с процессами вероятностного характера, свойственными поведению системы; геометрическая, воспроизводящая пространственные и компоновочные характеристики моделируемого объекта; знаковая, дающая описание моделируемого объекта с помощью знаков или кода; логическая, использующая законы логики.
Все приведенные выше виды моделей могут применяться в комплексе, совместно.
Основные виды современных БТС можно представить формально-абстрактными категориями моделей: а) структурных; б) статических отношений; в) ситуационных отношений; г) обобщенных понятий; д) экстраполяции ситуаций и пр.
Структурные модели БТС. Структурные модели отражают качественный и количественный составы системы, которые характеризуются наличием множества связей между структурными элементами. Вместе с тем структура системы иерархпчна, с большим количеством уровней или рангов. В общем случае для большой системы характерны следующие особенности структурного анализа:
98
__ общая классификация, т. о. определение типа (класса, о^класса) системы, к которому относится данный объект; различают статические, функционально-динамические, генетические системы и т. д.; такая классификация обязательно предшествует выбору средств для дальнейшего макро- и микроанализа объекта;
— определение системообразующих, исходных (основных) компонентов и элементов системы (в отличие от других частей или дискретных образований, входящих в данную систему, но прямо пе связанных с целевой функцией БТС);
— выделение иерархических уровней и подсистемы, занимающих эти уровни, а также установление характера системообразующих связей между ними;
— фиксирование входов и выходов системы в отличие от входов и выходов ее элементов и подсистем, что позволяет в дальнейшем изучать зависимости между воздействиями на входы и реакциями (функциями) на выходы системы;
— установление максимальных и минимальных значений переменных систем, т. е. условий и границ ее существования.
Все это подводит к определению той или иной частной категории структуры системы. Такой метод анализа представляет собой разновидность более абстрактного и формализованного анализа — структурного подхода.
Все свойства изучаемого объекта как системы зависят (при данных условиях ее существования) от специфических свойств его компонентов и от их композиционной структуры. При этом компоненты в свою очередь могут быть классифицированы как системы более низкого уровня, и тогда их свойства можно представить таким же образом. Такой структурный подход учитывает природу компонентов лишь со стороны отличия их друг от друга, что выражается с помощью различных элементарных или комплексных соотношений. Тем самым содержание компонентов системы как элементов ее структуры может быть с достаточной точностью раскрыто только до определенного уровня организации данной системы. На основе изложенного можно следующим образом сформулировать суть структурного подхода.
Все особенности, все свойства изучаемого объекта как системы в принципе можно выразить посредством структур соответствующего уровня системы. Математически эти свойства можно выразить в виде функций, аргументами которых являются структуры системного объекта. Короче говоря, любое свойство у есть функция F от структуры системы с процессором Ац, т. е. у = F (Sa^)-
Диалектика взаимной связи (взаимное влияние компонентов подсистем) системы, элементов и структуры состоит в том, что, с одной стороны, свойства системы зависят от свойств компонентов, а с другой — свойства компонентов зависят от целостной системы. Математически это выражается в виде разнообразных нелинейных зависимостей (например, дифференциальных, интегральных и др.), которые реализуют следующую схему: А В, где А и 7? можно интерпретировать как попарно различные эле-
99
4*
меиты подсистемы и системы в разных сочетаниях. Односторонняя же связь А -> В и В -> А выражается, как правило, линейными функциональными зависимостями, отображающими так называемые линейные системы.
Исследование структур как собственных характеристик тех или иных систем позволяет решать задачи, обратные макро- и микроанализу системных объектов: задачи синтеза целостной системы (например, синтеза автоматов, начиная от абстрактных вплоть до технических устройств).
Интеграция системного и структурного подходов как двух этапов исследования и двух уровней абстракции представляет собой системно-структурный подход (или принцип) к исследованию БТС.
Можно теперь сформулировать чисто абстрактное положение: одни и те же элементы могут находиться в различных отношениях и быть по-разному упорядочены в этих отношениях, с другой стороны, в одну и ту же упорядоченность или композицию могут вступить различные элементы.
Фиксация или однозначное определение условий и границ существования данной реальной системы ограничивает в процедуре ее структурного анализа выбор отношений между элементами и порядок элементов по этим отношениям. Упорядоченность элементов становится устойчивой, инвариантной применительно к изменениям, преобразованиям системы.
В настоящее время установлено, что все внутренние и внешние свойства и функции целостного системного объекта зависят от свойств составляющих его компонентов и систем. Сами компоненты системы в свою очередь зависят от других компонентов, с которыми они взаимодействуют, от влияния на них целостной системы и условий ее существования. Все эти взаимозависимости в принципе могут быть выражены в соответствующих видах структур с помощью математического аппарата моделей.
Универсальность системно-структурных выражений любых категорий — это одно из перспективных направлений развития кибернетической цифровой техники, это создание нового класса модульных устройств и схем, которые состоят из соединенных между собой однотипных элементов. Эти элементы программно настраиваются на реализацию требуемых логических и вычислительных функций, имеющих соответствующую структуру.
Модели описания статических связей БТС. Модель описания статических связей представляет собой совокупность следующих четырех объектов:
Хо — множество базовых понятий;
a?(D, z(2), . . м #<n) — множество производных понятий;
Го — множество базовых отношений;
И — правила образования производных отношений.
Основными требованиями, предъявляемыми к этой модели, являются полнота и точность описания структуры элементов задачи в аспекте выделения основных (базовых) и подчиненных элементов
100
пуктуры. Эти параметры определяются прежде всего целевой функцией и характером решаемых задач. Управление отдельными летательными аппаратами связано с необходимостью иметь деталь-ное описание структуры единичного летательного аппарата. Одна-
ко такое детальное описание становится излишним для задач управления несколькими летательными аппаратами. Здесь определяющую роль играют летно-техническая характеристики летательного аппарата: взлетный вес, габариты, длина, ширина, вес полезной нагрузки и т. д. Для решения ряда задач требуется детализировать эти характеристики еще более подробно.
Использовать модель, обеспечивающую бблыпую, чем необ
ходимо, полноту и точность описания, по-видимому, нецелесооб-
разно, так как это приводит к излишним трудностям в процессе ее построения и последующем решении задач. Если для модели условия достижения необходимой степени полноты и точности отсутствуют, то использование такой модели неминуемо привело бы к искажениям в описании структуры элементов задачи. Поскольку искажение представляет большую опасность в передаче содержания, то целесообразнее обратиться к более точной модели. Для решения широкого класса практических задач лучше иметь несколько моделей, обеспечивающих различную полноту и точность описания, что позволяет в каждом отдельном случае выбирать нужную модель в зависимости от конкретных условий. Эти модели можно построить таким образом, чтобы каждая последующая модель, обеспечивающая большую, чем предыдущая, полноту и точность описания, включала в себя предыдущую. Подобная совместимость моделей позволяет использовать для них единый операционный аппарат.
Множество таких совместимых моделей мы будем считать одной моделью статических отношений с различными уровнями описания. Простейшими структурными единицами каждого уровня описания являются базовые понятия и базовые отношения. Базовые понятия обозначают элементы задачи. Из базовых единиц образуются производные структурные единицы по правилам грамматики модели. Эти понятия описывают совокупность элементов
задачи.
Построение словарей базовых единиц модели осуществляется в результате анализа класса задач и потоков информации, циркулирующие в системе управления. Вся информация делится следующим образом: общая информация содержит сведения о состоянии элементов системы, планах работы отдельных объектов (плановая информация), технических характеристиках подсистемы, элементов (нормативная информация) и т. д.; управляющая информация содержит сведения об изменении состояний и режимов функционирования элементов системы и задается в виде календарных планов; учетно-отчетная информация содержит сведения о результатах управления (технико-экономические показатели работы).
В результате анализа указанных материалов выделяются
101
классы понятий, характеризующие основные свойства элементов задачи. Поскольку в модели не накладывается ограничений на смену понятий, то можно построить понятие i-ro порядка любой точности. Практически мы всегда имеем дело с понятиями, характеризующими классы элементов.
Модель описания ситуационных отношений. Понятие исходной информации позволяет уточнить понятие «процесс структуризо-ванных элементов задачи». Структурирование — это установление динамических (ситуационных) отношений элементов базовой сферы знаний. Совокупность установления ситуационных отношений на множестве понятий базовой сферы знаний называется грамматикой образования ситуационных структур (корреляционной грамматикой).
Модель ситуационных отношений можно представить в виде композиции двух исходных генераторов. Генератор комбинаций понятий осуществляет построение множества разрешающих комбинаций понятий для заданного класса оперативных задач. К разрешающим комбинациям понятий относятся такие комбинации, которые определяются типовыми структурами понятий, задаваемыми в виде технологических карт. Для каждой ситуации задаются свои технологические схемы. Генератор ситуационных структур содержит корреляционную грамматику, осуществляющую построение структур из комбинаций понятий, поступающих с выхода генератора комбинаций.
Если на заданном множестве п понятий выполняется условие сочетаемости, определяемое правилом корреляционной грамматики, т. е. соответствующий предикат принимает значение «истинно», то строится ситуационная структура по правилу, соотносимому с этим предикатом. В противном случае корреляция понятий не происходит.
При формировании ситуационной структуры включение очередного понятия зависит от ситуационной структуры, полученной на предыдущем шаге корреляции.
Для заданной типовой технологической схемы (цели) корреляционная грамматика строит множество конкретных типовых технологических схем (подцелей), которые в свою очередь могут служить целями для других структур.
Модель обобщения понятий. Эта модель предназначена для построения классов на множествах ситуационных структур. В основу классификации положен принцип структурной общности формализации понятий.
Рассмотрим правила обобщения ситуационных структур. Пусть заданы две ситуационные структуры: Lx = SirkSj и L2 =SLrhSq', причем Gi, Gj, Gh uq — формализованные понятия структур Sj, S|. Sq соответственно; 6Ь 62 — формализованные внешние понятия, обусловливающие соответствующие отношения rh в структурах Lj и L2. Совокупность <тпА, rA, nh, 6А>, где mh = = g^igi, nh = GjnGq, = 6rn62, называется обобщенным понятием, соответствующим отношению гл.
102
рассмотрим пример построения обобщенного понятия. Пусть * д.з _ обычное транспортное средство для сухих грузов (суд-fl0 самолет, вагон и т. д.); Sq = х2 — транспортное средство для дерев°зки контейнеров. Введем следующие базовые понятия и отношения: Хн — кран-штабеллер, — автозахват, я?3 — грузовая площадка (перрон, пирс и т. п.); — специальный груз;
Гб___операция осуществляется на ...; — функционально связан с . . — предназначен для обслуживания....
Пусть Si = х2 = r1x?1r2x?2r5j:J3r4j:J — кран-штабеллер с авто
захватом для перегрузки сухих грузов механизированного склада; St = х3 = ^1^i1r2^?2r5^nr4^9 — кран-штабеллер для перегрузки контейнеров механизированного склада. Обозначим далее через 6i = х\ = сухие грузы, 62 = х} = г^х^г^ — контейнеры
для специальных грузов и, выделив одноименные фрагменты формализованных понятий, получаем обобщенное понятие L12 = = (ri^ir2xj2r6x?3)rft (r^rX) (Г1Х?!> £12) — кран-штабел-
лер с автозахватом механизированного склада на операции обслуживания транспортных средств, имеющих в структуре грузовой люк, грузовой отсек и т. д.
Таким же образом планы содержания 6364 внешних понятий обусловливают существование ситуационных отношений в ситуационных структурах L3 и L4. Обобщенным понятиям, возникающим в процессе функционирования модели, ставятся в соответствие технические схемы (решения), содержащие указания о технологических процессах, способах организации работ и т. п. Так, обобщенное понятие L12 соответствует следующей технологической схеме выполнения погрузочно-разгрузочных работ на транспортных самолетах: частичная разгрузка грузового отсека кра-ном-штабеллером с автозахватом; подготовка перрона для установки автопогрузчика; установка автопогрузчика; догрузка секции механизированного склада краном-штабеллером.
Модель экстраполяции ситуации. Эта модель предназначена для описания решений и изменения ситуаций на базовой сфере значений. Язык описания решений разрабатывается в результате анализа управляющей информации, циркулирующей в заданной технической системе. Управляющая информация большинства технических систем имеет иерархическую структуру. В нижних уровнях управления используются элементарные операции (команды), воздействующие непосредственно на технические исполнительные устройства (поднять груз, отцепить вагон). На высших уровнях управления используются сложные операции, являющиеся композицией элементарных и сложных операций.
Реализация этих операций на системе исходных данных состоит в следующем. В момент времени фиксируется ситуация: на перроне находится грузозахватывающее устройство с грузом, зацепленное краном-штабеллером. В момент ti+1 фиксируется понятие «грузозахватывающее устройство вместе с грузом движется
103
через кассетные ворота». После этого осуществляется переход к принятию нового решения. Фиксируется ситуация на системе исходных данных и для нее строится в корреляционной грамматике ситуационная структура и определяется класс, к которому она принадлежит. В общем случае экстраполяция может продолжаться как угодно долго, однако время ограничивается требованиями оперативной задачи, решаемой на модели.
Иерархичность структуры команд управления технической системой определяет иерархический характер базовой сферы знаний и всей модели в целом. Нижний уровень базовой сферы знаний детально описывает статическое состояние всей системы. Верхние уровни базовой сферы знаний для гиромата более удобны.
Уровни функционируют следующим образом. Пусть в момент времени tk на системе исходных данных модели AfJ зафиксирована ситуация Sj. В корреляционной грамматике строится ситуационная структура Lj и определяется класс, которому принадлежит Lj. В соответствии с этими операциями осуществляется изменение ситуации на системе исходных данных (Sj переходит в Sj+i). Далее] процедура экстраполяции повторяется для Последовательность функционирования классов Af} определяет последовательность функционирования моделей нулевого уровня. Если в течение первых трех тактов в сформировались последовательности ситуаций Sj, Sj+1, Sj+2, то этой последовательности соответствует следующая последовательность работы моделей нулевого уровня: Af? — MJ. Построение переходов между классами в модели Ml (i = 1, . . ., 4) аналогично построению в Mj.
Изложенный принцип экстраполяции ситуаций (сверху — вниз) справедлив для моделей, состоящих из любого числа уровней. Эффективность практической реализации принципа гиромата обусловливается возможностью построения обобщенных моделей решения задач управления для широкого класса больших систем (социальных, технических, экономических и др.).
С помощью библиотеки стандартных программ в настоящее время на ЦВМ построены модели, способные решать задачи календарного планирования, выбора маршрутов перемещения объектов и многие другие. В этих моделях экстраполятор ситуаций работает в режиме корреляции функционирования управляемого объекта. Экстраполируемые ситуации характеризуют состояния объекта в различные моменты времени. Исходная информация экстраполируется на отрезок времени, соответствующий периоду работы моделируемого объекта. В общем случае строится экстраполяционное дерево ситуаций.
Абстрактно-формальный классификатор моделей БТС, изложенный выше, соответствует системно-структурному подходу к анализу БТС. Вместе с тем можно составить иерархию типов моделей БТС, па высшем уровне которой стоит так называемая
104
явная модель. Различают три типа главной модели: обобщенную модель поведения, модель стоимости.
УОбобщенная модель включает в себя: схематическую модель, позволяющую определить центральный элемент (подсистему) исследуемой БТС; функциональную схему БТС; процедурное описание последовательности работы и связей БТС во времени.
Обобщенные модели чаще всего бывают качественными и ис
пользуются для получения общего представления о процессе или облике системы. Некоторые из них предназначены для нахождения наилучшего способа реализации или конструктивного вопло-
щения и определяют характеристические параметры системы. Они также могут учитывать топологию и взаимосвязи отдельных элементов БТС.
Схематическая модель служит отправной базой для более подробной детальной количественной модели, которая уже «проигрывается» на ЭВМ. Частной формой этих моделей является номен
клатура так называемого системного проектирования, которая рассматривается ниже.
Функциональные модели очерчивают круг работ над создаваемой системой, формой функциональной модели может быть логико-формальное описание или описание номенклатуры работ, необходимых для решения поставленных задач.
Процедурные модели описывают последовательные этапы выполнения программы или временной график выполнения всех этапов, включенных в программу.
Модель поведения системы чаще всего является количественной. Из нее определяют статистические или динамические характеристики, на основании которых может быть, например, выбрана аппаратура, устанавливаемая в системе для того, чтобы последняя удовлетворяла заданным требованиям.
В состав модели поведения могут входить модели входов, модели процессов соответствия, управления, модели выходов и временное модели поведения, которые согласовывают по времени обобщенные параметры входов процессов и выходов.
Примером временнбй модели является система СПУ (сетевого планирования и управления). Кроме того, в состав моделей поведения входят модели устойчивости, характеризующие устойчивость системы под влиянием внутрисистемных факторов и внешней среды. К числу моделей устойчивости могут относиться модели надежности, которые по своей природе являются количественными. Модели надежности принимаются для элементов, частей системы и систем в целом. Они характеризуют отход элементов из системы иод влиянием эксплуатационных факторов.
В моделях стоимости уделяется наибольшее внимание тому,* как разделяются факторы стоимости по своему значению. Установив различные факторы стоимости, проранжировав их по степени влияния на стоимость, можно формально описать соотношения между ними. Модели стоимости могут состоять иэ
105
моделей стоимости входов, моделей стоимости выходов, моделей стоимости процессов, моделей распределения во времени ресурс сов, создаваемых либо затрачиваемых данной системой.
Модели и моделирование дополняют друг друга. При этом под моделью подразумевается некоторое эквивалентное представление какого-либо процесса и последовательности каких-либо событий. А моделирование — это формализация путей управления этим процессом или определенной реакцией данного процесса на различные входные или возмущающие сигналы.
При построении моделей и моделировании важно, чтобы имеющиеся в распоряжении исследователя данные реального эксперимента и данные моделирования дополняли друг друга. Необходимо, чтобы реальный эксперимент подтверждал, что для принятых допущений модель с достаточной (для практических целей) точностью отражает реальный процесс и что данные, полученные на модели, удовлетворительно согласуются с данными эксперимента.
Метод моделирования может быть использован для получения комплексной оценки эффективности тех или иных вариантов комплексов типа множественных совмещенных стохастических динамических систем общего вида. Очевидно, что ранее созданные методологические подходы не были рассчитаны на решение таких современных проблем.
Комплексные модели имеют громоздкую форму как с точки зрения приемов программирования, так и методов анализа результатов моделирования. Это приводит к тому, что процесс составления модели оказывается трудоемким, а при реализации моделей па ЭВМ они занимают много места в памяти машины. В настоящее время разрабатываются и уже частично используются так называемые универсальные модели, построенные по модульному принципу с использованием различных видов моделирования.
2. Дерево моделей^системологии
Существует распространенное представление о том, что построение моделей усложняющихся систем сводится к увеличению объема и громоздкости математического аппарата методом аддитивного наращивания модели. На самом деле, такие модели должны быть, с одной стороны, не слишком сложными, с другой стороны должны отражать специфику усложняющихся связей, а также принципы поведения таких систем. Такой метод построения моделей является современным кибернетическим вариантом, получившим в теории название «бритвы Оккама». При этом изменение сложности систем позволяет воспользоваться рядом системных методов. Рассмотрим наиболее важные из них.
Декомпозиция системы по цепочкам связей (с учетом важнейших ответвлений во внешнюю среду). Она позволяет зачастую увидеть (и оценить) то, что не укладывается в традиционные рамки. Анализ иерархии связей дает возможность не проходить мимо,
106
залось бы, случайных явлений, не считать их досадной пометой а видеть в них ключ к проблематике задачи.
Кодирование и свертывание моделей. Системная схема решения задач позволяет оптимально использовать математический аппарат с учетом физических особенностей моделей. Так, для описания перемещений (движения) материальных тел удобно использовать дифференциальные уравнения, для электрических цепей — функции комплексного переменного, для решения транспортных и складских задач — линейное программирование и симплекс-метод.
Оценка важности различных цепочек взаимосвязей позволяет, кроме того, очень экономно пользоваться математическим аппаратом, свертывая менее важные либо более определенные цепочки связей в укрупненные (обобщенные) модели.
«Перенос», «сцепление» и сближение моделей. Поиски аналогий, универсализация прототипов, категорирование задач позволяют «переносить» методику решения одной задачи на решение другой, родственной только по структуре, схеме, но отнюдь не физическому смыслу объектов. «Сцепление» — это возможность дополнять наиболее сложные модели готовыми блоками (кусками) других моделей, аналогичными по структуре. Все перечисленное открывает возможности для широких ассоциаций, создания карточек типовых моделей.
В рассматриваемом аспекте заслуживают внимание современные подходы в так называемой абстрактной теории систем: дедуктивный, характеризующий стремление к построению систем путем обобщающих теорий, на основании которых классифицируются известные науки, и индуктивный, основанный на изучении различных свойств систем для различных уровней их абстрактного представления с последующими обобщающими выводами.
Особенностью современного подхода в абстрактной теории систем является методика абстрактно-алгебраического описания, по которой система определяется как некоторая совокупность соотношений, определенных на декартовом произведении множеств. Причем в случае наложения дополнительных ограничений выделяются те или иные абстрактно-алгебраические структуры: группы, подгруппы, кольца, модули над кольцами и т. д., которые используются для описания соответствующих систем.
«Перенос» и «сцепление» этих структур осуществляются с применением гомоморфного отображения одной из них в другую. В этом смысле «перенос» и «сцепление» используются, например, Для описания некоторых динамических систем совокупностями обыкновенных нелинейных дифференциальных уравнений, что изоморфно описанию этих систем как молекул над кольцом дифференциальных форм.
Таким образом, можно считать, что системология рекомендует в процессе создания модели прежде всего остановиться на центральных элементах системы и попытаться найти для них соответствующие достоверные модели. Помимо создания таких моде
107
лей, необходимо определить сопутствующие проблемы по иерархии системы, так как они накладывают дополнительные связи — связи 2-го порядка.
Затем определяется последовательность кодирования и свертывания моделей по цепочкам связей с учетом целевой функции объекта, что позволяет пользоваться математическим аппаратом с учетом физических особенностей модели. Кроме того, оценка важности отдельных цепочек связей позволяет очень экономно использовать математический аппарат, св'ертывая менее важные или наиболее детерминированные цепочки связей в укрупненные или обобщенные модели. При наличии четких семейств зависимостей изучение каждой зависимости представляется менее сложным процессом, чем изучение всего семейства в целом.
Возникает также необходимость в идентификации подходов и методов «переноса», «сцепления» и «сближения» моделей для полного представления облика анализируемой системы. Методика дополнения наиболее сложных моделей готовыми блоками других моделей с аналогичными структурами, с одной стороны, дает возможность для широких ассоциаций, а с другой — позволяет создать картотеки типовых моделей.
В связи с изложенным представляется целесообразным остановиться на вопросах оптимального использования математического аппарата, а также на возможных аспектах приложения математических методов в рамках дерева моделей системологии.
Системный подход уже на ранних стадиях создания БТС требует использования развитого математического аппарата в сочетании с экономикой и кибернетикой. Эти науки являются таким образом, комплексной базой системного анализа и системологии.
Методы математики, экономики, кибернетики, применяемые в решении задачи при реализации системного подхода, можно ук-рупненно подразделить на четыре ветви, соответственно их роли в системном методе проектирования.
1. Экономико-статистические методы, позволяющие представить модели состояния или структуры систем. Эти методы используются для анализа взаимосвязанных элементов системы, чтобы выявить основные закономерности и связи структуры.
2. Экономико-математическое моделирование или эконометрика, объединяющие модели процесса. Эта ветвь дерева систем связана с исследованием прототипа взаимодействий в системе и включает модели, которые описывают состояние и процесс рассматриваемой системы в аналитической форме в виде функционального ряда.
3. Экономическая кибернетика — раздел теории управления, посвященный созданию имитационных моделей (упрощенных систем, выраженных в других физических переменных и имитирующих основные зависимости функциональных воздействий на моделируемый объект, рассматриваемый в динамике).
4. Теория принятия решений или исследование операций рассматриваются как аналитическая форма теории поведения систем.
108
Задачей теории поведения является моделирование связей 1—3-го порядков и выработка решений, т. е. регулирование действия системы на основании определенных стратегий поведения, позволяющих в той или иной мере компенсировать неопределенность внешней среды. Здесь широко применяются методы оптимального программирования и принятия оптимальных решении.
Задача правильно классифицировать указанные методы представляется весьма важной в связи с необходимостью рационально использовать математический аппарат в моделях различных этапов создания системы. Заранее оговоримся, что одни и те же математические методы могут применяться с успехом в различных ветвях «дерева», выполняя при этом различную семантическую роль в соответствии с задачей, решаемой моделями данной ветви.
3. Обобщенные функциональные модели подсистем БТС
Модель должна включать в себя такие операционные (либо функциональные) переменные, чтобы разные по структуре, параметрам и целевой функции системы могли иметь сходные принципиальные схемы для оценки функциональных качеств и результатов действия систем. Такой функциональный изоморфизм позволяет четко сформулировать требования к структурной и динамической функциональным схемам любой БТС, что является обязательным условием оптимизации облика.
В этом аспекте следует рассматривать модель, как специфическую систему, куда вводятся входные параметры, которые затем преобразуются в выходные параметры. Простейшая модель системы должна содержать: модель входов; модель обратной связи, включающую в себя модель выхода; модель проверки соответствия информации, получаемой от модели выхода; модель управления или воздействия, вырабатывающую решение о необходимом и целесообразном воздействии на процесс с целью приведения качественных и количественных параметров выхода системы к виду, соответствующему целевой функции.
Модель входов представляет собой матричное выражение синхронно или последовательно воздействующих на процессор системы информационных, энергоматериальных либо человеко-машинных входов Xi (t). Особенность модели входов БТС заключается в том, что структура столбцов и строк матрицы недетермини-рована, а воздействие модели на процессор (существенно отражающее влияние внешней среды) имеет стохастический характер.
Модель выходов, также имеющая обычно матричную форму, в идеальном случае представляет собой заданную целевой функцией последовательность информационных сигналов, энергоматериальных потоков и человеко-машинных воздействий, направленных во внешнюю среду. Особенность модели выходов БТС в том, ’ito вид, величина и последовательность выходов случайным образом отклоняются от эталонных величин, причем величина этих
109
отклонений существенно зависит от двух факторов: изменения структуры и поведения входа, а также от эффективности модели (подсистемы) управления или регулирующих воздействий. В этом аспекте следует считать совершенно естественным то обстоятельство, что значения параметров строк и столбцов матрицы модели выходов, как правило, выражаются верхним и нижним пределами диапазона допустимых значений этих параметров.
Модель проверки соответствия можно рассматривать как матричное представление конечных разностей сопоставления величины сигналов действительных и эталонных значений выхода при заданных функциональных режимах управления для определенного математического ожидания колебаний (изменений) вида, структуры, последовательности и значений сигнала входа. Особенностью модели проверки соответствия является необходимость полного многократного перебора эталонных и действительных величин входа и выхода. В известной мере указанная особенность объясняется тем, что рассматриваемая модель связана с описанием наиболее сложного (громоздкого по аппарату расчета) процесса, обеспечивающего в сущности эффективность управления БТС при данном состоянии и изменениях внешней среды.
Модель управления, или регулирующих воздействий, формализует структуру, последовательность и величину сигналов управления, компенсирующих рассогласование эталонного и действительного значений выходного сигнала либо компенсирующих возмущения на входе системы путем воздействия па работу фильтров (регуляторов) на входе и выходе процессора.
Модель операции, имитирующая структуру, связи и функционирование процессора, формализует процедуру преобразования входных сигналов в выходные в соответствии с программой, определенной целевой функцией системы и критерием ее поведения (функционирования) при ограничениях по допустимым значениям информационного, энергоматериального и человеко-машинного входов системы.
Качество (полнота структуры и связей) укрупненной функциональной модели определяет в значительной мере ее адекватность, достоверность для данного уровня кодирования и свертывания, что в свою очередь зависит от квалификации авторов модели. В этом смысле, по-видимому, невозможно написать исчерпывающие инструкции или типовой учебник по построению моделей. Тем не менее общий анализ накопленного опыта построения математических и физических моделей позволяет сформулировать некоторые общие подходы.
1. В тех случаях, когда структура системы достаточно проста, можно непосредственно после укрупненного исследования системы воспользоваться готовой унифицированной моделью. Однако при использовании такой «готовой» модели может оказаться, что оценить значения неуправляемых переменных или констант очень трудно или вообще невозможно. Дело в том, что зачастую прежде всего номенклатура и особенности анализируемых данных тре-
110
буют модифицировать модель так, чтобы можно было количественно оценить входящие в нее параметры. Часто реализовать в конкретных программах ЭЦВМ эти модификации более сложно, чем выполнить многократно исходный анализ несколькими методами.
2. В случаях, когда структура системы достаточно проста,
а метод ее математического описания неясен, можно воспользоваться сходством исследуемой системы с рассмотренной в п. 1 системой. В таких случаях можно использовать унифицированную математическую модель.
3. В некоторых случаях структура системы не очевидна, но ее представляется возможным выяснить с помощью анализа функциональных характеристик системы. Предлагаемый подход позволяет получить самые общие исходные сведения: в результате анализа функциональных характеристик формируют лишь гипотезу о структуре системы, которую необходимо апробировать, используя экспериментальные данные.
4. В случае, когда анализ функциональных характеристик
не позволяет определить влияние отдельных переменных на показатели работы системы, позволяющие хотя бы приближенно выявить ее структурные данные, возникает необходимость в проведении эксперимента с целью ранжирования и выявления существенных переменных, к изменению которых модель наиболее чувствительна. Использование эксперимента является отличительной особенностью этого подхода.
5. В последнем, наиболее сложном случае необходимые и достаточные исходные данные об операциях системы либо ее функциональных характеристиках отсутствуют и их невозможно получить логико-математическим анализом, а проведение экспериментов на системе не представляется возможным. В этих случаях используется имитационная экспериментальная модель, искусственно воссоздающая (имитирующая) действительность. Такая имитационная модель должна удовлетворять следующим требованиям. Номенклатура входных и выходных параметров имитирующей системы должна быть достаточно обширной, чтобы можно было проверить целый ряд гипотез о структуре и свойствах исследуемой системы. Необходимо в явной форме определить переменные и шкалы их изменения, а также размерности, по которым осуществляется упрощение модели по методу последовательных приближений. Существенные функциональные параметры, подлежащие экспериментальной проверке, должны описываться коли-чественнр.
Следует предусмотреть возможность декомпозиции экспериментальной задачи на ряд более простых задач. Последовательность анализа предусматривает в начале эксперименты для элементарных подсистем, на которые декомпозируется имитирующая модель. При этом разрабатываются гипотезы микроструктуры для каждой элементарной подсистемы, в которую характеристики отдельных элементов входят как параметры. Далее предпринима-
111
ТАБЛИЦА 3
Вид элемента обратной свя-ви Функциональное определение элемента обратной СВЯ8И
1. Модель выхода Алгоритм или устройство, обеспечивающее прямые и обратные связи I и II порядков между целями, управляющими связями и критерием системы, а также функциональную динамику в оптимальном режиме
2. Модель проверки со- Алгоритм или устройство для обработки инфор-
ответствия ции по рассогласованию эталонных (или заданных) и действительных данных выхода системы (подсистемы) с учетом анализа источников, а также качественных и количественных характеристик рассогласования
3. Модель управления Алгоритм или устройство для предварительно-
(регулирующего воз- го анализа вероятного результата регулирова-
действия) ния действия системы
ются попытки обобщить полученные таким образом кусочные функциональные модели в некоторую единую модель, воссоздающую структуру и процессы действительной системы.
Затем единую модель модифицируют по точно определенной шкале в соответствии с подлинной размерностью реальной системы и предпринимают попытку обобщить первоначально построенную модель. В результате получают более общую модель. Такие итерации проводят, рассчитывая сформировать некоторый набор последовательно усложняющихся моделей, которые по мере усложнения постепенно приближаются к реальной системе.
Основные элементы блока обратной связи. Системологню и ее модели можно рассматривать как средство, позволяющее создать структуру, схему или итерацию формального подхода к решению проблемы. Таким образом, решение проблемы формализуется целевой функцией, а системные связи — управлением, удовлетворяющим целевой функции.
Выше уже указывалось, что в чисто формальной постановке система есть средство для моделирования соответствующей проблемы БТС в терминах объектов, свойств и связей систем. Возможности системологии особенно при создании БТС — это эффективное средство для итерации альтернативных решений и их оценки.
Сопоставление блока выхода с критерием производится в рамках подсистемы управления с помощью обратной связи. Для сравнения с критерием необходимо провести анализ по трем специфическим элементам (табл. 3).
Следует считать, что модели выхода содержатся (или должны содержаться) во всех типах систем и на всех уровнях подсистем. Модель выхода является обязательным элементом обоснования решений, определяющих процесс, удельные параметры и харак-
112
оЯстики конечного выхода системы. При этом результирующая ?асть модели выхода для решения, характеризующего процесс и удельные параметры БТС, всегда должна иметь конкретный /дискретный) характер. Модель выхода для решения, определяющего характеристики конечного выхода системы, может быть представлена в качественной (или аналоговой) форме, характеризующей процессы, действующие в системе, без учета параметров их деталей.
Следует отметить, что в последнее время для формализации модели выхода (в явной или неявной форме) широко применяются эвристические методы (как методы решения проблем с помощью самообучения или творческой деятельности), которые могут быть использованы при решении достаточно структуризованных проблем. Следует считать также, что модели проверки соответствия содержатся практически в любой подсистеме обратной связи в явном или неявном виде. Проверка соответствия существует для каждого вида входа и для каждой модели выхода. Наличие или отсутствие соответствия между действительным выходом системы и его моделью устанавливается с помощью трех операций: определения самого факта существования различия между действительным выходом и его моделью, оценки качественной характеристики различия и количественной оценки ее абсолютной величины и принятия решения о компенсации различия (регулирование системы).
Определение (выделение факта существования) различия может принимать либо количественную форму сравнения величины (мощности, емкости, количества, размера, порядка), либо качественную форму определения относительного различия (класс или вид, эффективность или завершенность).
Оценка различия осуществляется непосредственно за операцией определения выделения факта существования различия. Оценка различия предусматривает относительную и(или) абсолютную оценку величины или качества наблюдаемого различия. Результаты оценки различия являются скалярными величинами: они определяют степень различия или сходства между выходом и эталонной моделью выхода. Заключительным этапом проверки соответствия является составление решения, определяющего последовательность регулирующих воздействий для модели управления. Модель управления формируется и определяет форму регулирующего воздействия на выходе в соответствующие подсистемы.
Модель служит своеобразным дисциплинирующим условием Для процесса подсистемы обратной связи. Вообще границы этого регулирующего процесса в соответствии с целевой функцией системы в целом в зависимости от шкальных значений устанавливаются по операциям, осуществляемым по моделям проверки соответствия и управления.
Генеральным направлением передачи информации в подсистеме обратной связи является направление от модели проверки соот
113
ветствия к модели управления. Вместе с тем в этой схеме предус-мотрена обратная связь второго порядка — возврата информации с выхода модели управления в модель проверки соответствия; выделены также контуры итеративного процесса, охватывающего модели выхода, проверки соответствия, а также модели управления.
Модели выхода, проверки соответствия и управления функционально и операционно объединены в подсистеме обратной связи. Выборка с выхода процессора подсистемы поступает в подсистему обратной связи.
Наиболее распространенным видом формализации модели выхода представляется математическое ожидание выхода системы. Причем величина этого математического ожидания может быть в каком-то приближении представлена как критерий или стандарт (модуль). Таким образом, математическое ожидание выхода системы может быть стандартизовано и определено модулем.
Качественно такой стандарт или модуль может быть представлен принципом или концепцией, с помощью которых вообще возможно измерить отклонения от математического ожидания выхода системы, упорядочивая эти отклонения по иерархии сверху вниз, от лучших к худшим, от высших к низшим и т. д.
Ограничение математического ожидания выхода системы включает управление и целевую функцию. Управление регулирует последовательность, а также необходимые и достаточные условия достижения цели. Эти условия используются при формировании критерия, который вообще рассматривается как сравнительная база (шкала) альтернатив достижения цели. Семантически критерий может быть выражен в размерности целевой функции.
Формируемый критерий проверяется с применением модели проверки соответствия.
Модель проверки соответствия. Модель проверки соответствия входит в подсистему обратной связи как блок выработки решения, которое является результатом обработки по крайней мере двух входов: критерия из модели выхода и выборки действительного выхода процессора системы. Первый элемент процесса проверки соответствия — это результат операции определения различия, который является величиной, измеряющей качественно и количественно степень или вид различия объектов. Второй элемент процесса — это операция оценки различия между выходом и критерием, входящим в модель выхода. Оценка различия есть процесс анализа информации, поступившей в результате операции оценки различия.
Результаты операции оценки различия могут быть неприменимыми или неубедительными, что делает необходимым повторение процесса «определение различия — оценка различия» до тех пор, пока не будет получен удовлетворительный результат, пригодный для последующей обработки.
Модель управления. Постулируется, что вход в модель управления поступает от моделей выхода и проверки соответствия,
114
выход модели управления является входом в соответствующую ^систему БТС. „ к
Прежде чем выход, формируемый моделью проверки соответствия, станет входом в процессор системы, он должен пройти по крайней мере пять итеративных петель обратной связи. Каждая петля представляет обратную связь, контролирующую отдельный параметр процесса управления. Эти параметры служат как для оценки, так и для управления БТС по принятому критерию (стратегии). Оценка представляет собой многошаговый процесс, который позволяет определить, каким образом будет проводиться управление. Следует отметить, что выход модели управления обязательно должен апробироваться моделью проверки соответствия.
При определении или проверке параметров управления процесс оценки последовательности регулирующих воздействий может быть проведен следующим образом: 1) выбор места и времени регулирующего воздействия на БТС; 2) определение формы регулирующего воздействия, обеспечивающей функционирование БТС по заданной программе (критерию); 3) выбор вероятной степени отказов в работе системы, вызванных регулирующим воздействием; 4) определение однозначности, смысла, полезности регулирующего воздействия; 5) определение влияния на действие системы изменений скорости передачи, количества или качества информации.
Указанные процедуры накладывают дисциплинирующие условия на процесс решения, принимаемого по результатам операции проверки соответствия. Эти условия могут учитываться взаимозависимо либо независимо друг от друга, причем их значимость и иерархическая последовательность могут быть различными в зависимости от разнородности БТС. Оценка результативности и эффективности каждого из основных процессов модели управления может осуществляться по каналам обратной связи с использованием модели проверки соответствия.
4. Модели жизненного цикла БТС
Аналитическое представление БТС во времени, которое осуществляется с применением моделей жизненного цикла (ЖЦ) ЕТС, сводится к корректной формализации целевой функции и Дисциплинирующих условий для каждого этапа ЖЦ, а также достаточно обоснованному подходу к раскрытию информационной неопределенности при формировании моделей. Таким образом, важнейшей задачей анализа ЖЦ БТС является получение на возможно более ранних этапах их создания достаточно полной и достоверной информации, позволяющей оценить эффективность решений, принимаемых на различных этапах развития БТС. Отдельным этапам ЖЦ БТС посвящен целый ряд фундаментальных работ, дающих возможность оценить эффективность БТС на отдельных этапах проектирования, испытаний, производства, экс
115
плуатации и восстановления. В целом же наиболее существенным фактором формирования и последующего комплексирования моделей ЖЦ БТС является обоснованный выбор и последующая обработка системы исходных данных (СИД) для оптимизации облика и распределения ресурсов при создании БТС. Логический анализ ЖЦ современных БТС выдвигает задачи моделирования работ, разнородных по составу, по целям и по информационному и энергоматериальному обеспечению этапов ЖЦ БТС, связанных с научно-исследовательскими опытно-конструкторскими работами (НИОКР), серийным производством и эксплуатацией.
Сложность системного подхода к аналитическому представлению ЖЦ БТС никак не исчерпывается перечисленными выше особенностями. Еще большие трудности обусловлены тем, что перечисленные выше работы перекрываются и накладываются друг на друга в различных комбинациях: научно-исследовательские работы не всегда завершаются до начала опытно-конструкторского цикла, а могут продолжаться практически на протяжении всего ЖЦ БТС. Проектирование и испытания, составляющие вместе с изготовлением опытных образцов основное содержание ОКР, могут проводиться и в период серийного производства и эксплуатации, в частности, в связи с модификациями или модернизацией отдельных элементов либо подсистем БТС.
В задачах аналитического представления БТС и особенно в задачах моделирования ЖЦ, важнейшее значение имеют раскрытие и учет неопределенности, уровень которой экспоненциально понижается в процессе развития (создания и развертывания) системы. Максимальное значение уровень неопределенности имеет на этапе создания аналога БТС. Следовательно, в процессе формирования технических требований и технического задания неопределенность является не одной из составляющих модели, а непосредственно связана с самим процессом моделирования. Такая ситуация обусловлена тем, что неопределенность связана со структурой целевой функции БТС, а также с составом и формой проявления дисциплинирующих условий.
Следующий этап ЖЦ — создание технической концепции — по уровню неопределенности можно подразделить па два этапа: предэскизный, включающий технические предложения (аванпро-ект) и эскизное проектирование, и постэскизный, начинающийся после утверждения эскизного проекта (и технических требований) и включающий технический проект и создание рабочей документации. Первый подэтап следует рассматривать как информационно-неопределенный, когда известно множество возможных вариантов конструктивно-технологических решений БТС без априорной информации относительно математического ожидания реализации каждого из вариантов. Второй подэтап следует рассматривать как стохастический, когда известно не только множество приемлемых вариантов, но также априорное распределение вероятностей реализации вариантов на множество производственных и эксплуатационных ситуаций.
116
Создание БТС завершается в следующем периоде ее ЖЦ — алязации технической концепции, близком по уровню неопре-₽елеян0СТИ ко ВТ0Р0МУ подэтапу предыдущего периода ЖЦ. Действительно, в процессе опытного производства, стендовых, заводских и государственных совместных испытаний БТС на основании статистически обработанных данных по созданию прототипов данной БТС обычно бывает известно распределение вероятностей (либо функции плотности вероятности) на множестве ситуаций в опытном производстве и испытаниях.
Наконец, в процессе серийного производства и эксплуатации БТС (а также в процессе последующей ее деградации), которые соответствуют этапам развертывания и сохранения, информационное обеспечение моделей ЖЦ является в сущности детерминированным. Действительно, условия серийного производства и эксплуатации известны в достаточной мере, а задача моделирования на каждом этапе сводится в зависимости от особенностей ее постановки к поиску максимума или минимума целевой функции. Следовательно, основной концепцией моделирования в данном
случае является экстремальность при заданных дисциплинирующих условиях.
Изложенное позволяет сделать вывод, что основными проблемами моделирования ЖЦ БТС являются корректное аналитическое представление целевой функции и системы ограничений на каждом этапе, а также правильный подход к преодолению неопределенности при построении и решении моделей.
В этом аспекте представляется целесообразным рассмотреть особенности формализации целевых функций БТС на этапах развития системы: создание аналога (Д\); создание технической концепции (Ц2), реализация технической концепции (Д3); развертывание и сохранение системы (1Ц).
Целевые функции для периодов Цг — Ц± могут быть представлены соответственно следующим образом.
Для периода создания аналога
Ц1 = Fl = / (®1, хп) max
при
xi > ayi + аут + ayh,
х2 Ъуу -|- Ьур 4- Ьуч,
Хп > суп 4- cyt 4- cys •
или
— Соп — Cuj (т) Пу (т) dx,
То i=l j=l
(5-6)
(5.7)
где Хп _ параметры БТС; yt — ограничения;
~<ш — стоимость среднестатической операции с использованием БТС проектируемого облика; Сц} (т) — затраты на единицу
117
средств i-ro вида, участвующих в /-й операции в единицу времени;
(т)— количество средств f-го вида, необходимых для выполнения J-й операции; j — индекс локальных операций, составляющих глобальную совокупность операций для одной БТС; i — индекс типа БТС; т(), — соответственно время начала и окон-
чания операции.
Для периода создания технической концепции
п
Ц2 = ^2 = CoKI ! = (?о + Yl^n41) П (1 zb * "Ь
+ ^Н^уд 0КР1 при
1 П ^onrrax’ ^’Anin X'i /
То < ТП1ах,
где Cokpj — затраты на создание технической концепции до момента сдачи — приемки рабочей документации; А*р — коэффициент ранга системы, устанавливаемой экспертной оценкой или статистическим анализом; у0 — удельный вес условно-постоянных затрат в суммарных затратах на первый опытный компонент БТС; у] — удельный вес переменных затрат, причем у0 + Yi = 1*» иоп — размеры опытной партии БТС; Xn+i — коэффициент эластичности переменных затрат по отношению к размеру основной партии; ц — средняя вероятность успешного выполнения работ или отношение стоимостного объема успешно завершенных работ за период Дт — т* — т0 к стоимостному объему всех выполненных ОКР за тот же период
р, = Сдт/С^. (5*9)
С учетом формулы (5.8) период реализации технической концепции Ц3 удобно представить в виде суммы
тк т
#2|4-^(зГ=\СгОКр [ У^окр/т) Токг^ Снир~|(1 +^н) а^Т,
;=1 (5.10)
где fi0Kp — суммарные затраты за периоды Ц2 и Ц3, завершающиеся сдачей — приемкой БТС в серийное производство; тю тк — соответственно сроки начала и окончания ОКР; уокр — удельный вес затрат на разработку /-го элемента, отнесенных на Сх*, г0 — момент приведения затрат.
Применительно к развертыванию и сохранению системы определяющими являются совокупная себестоимость БТС, т. е. общая сумма затрат, необходимых для изготовления партии изделий N в виде
3 (5.11)
118
, ~q Ck__средняя себестоимость в к-м. периоде времени и nk —
программа выпуска в k-м. периоде), а также эксплуатационные затраты, которые удобнее всего представлять в форме стоимости едИничной операции С10п выполняемой данной БТС (один рейс, цикл в производстве и т. д.) вида
г । ЧУ С}П Gi°n — (О R
(5-12)
ion
или
С т С п
М(0 = ^1э 4" Rj~ ^в)"| "I"
где М — матожидание затрат за время t\ С1э — стоимость элемента БТС краткосрочного применения; 7?э — суммарный ресурс такого элемента; со — матожидание частоты операций в единицу времени; Cj — стоимость /-го элемента обеспечивающего комплекса многоразового применения; Rj — ресурс /-го элемента; П] — применяемость /-го элемента в системе; т — количество видов элементов в системе; Св — затраты на восстановительно-ремонтные работы по /-му элементу; /Сюп — удельные капиталовложения на одну операцию при N A, Rj^ В нт. д.
В период эксплуатации, когда деградация системы происходит особенно интенсивно (моральное и физическое старение), весьма важно дифференцированно проанализировать все компоненты затрат на эксплуатацию системы, используя для этого концепцию операционной готовности и затрат на резервирование. Особенное внимание, уделяемое эксплуатационным моделям, объясняется прежде всего тем, что модели НИОКР достаточно подробно рассматриваются во II разделе работы, и тем, что модели эксплуатации служат важным фактором оптимизации облика БТС. Одной из важнейших характеристик, определяющих облик и эффективность БТС на этапах развития и сохранения, а также деградации системы, является показатель так называемой операционной готовности.
*Под операционной готовностью подразумевается параметр, который определяется вероятностью того, что рассматриваемая система может быть пригодна к использованию в тот момент, когда это необходимо. Естественно, что время потребности в использовании системы является фактором неопределенным. В этом аспекте операционная готовность несколько отличается от параметра надежности, который, как известно, определяется вероятностью безотказного выполнения целевой функции системы при заданных изменениях внешней среды в течение определенного периода времени. Следует отметить, что в ряде зарубежных работ [31, 41, 55] делается попытка включить в понятие «надежность» результирующие составляющие сохранения системы (профилактическое обслуживание, ремонтно-восстановительные работы и т. д.). В сущ
119
ности, при этом делается попытка свести понятие «надежность» к понятию «операционная готовность».
Вместе с тем в целом ряде работ других авторов делается по-пытка объединить понятия «эффективность», «операционная готовность», «надежность», «универсальность по применению» ит. дф> включая также «сохранение», в какой-то интегральный комплексный показатель. Совершенно очевидно, что объединение важнейших факторов, различных по величине, источникам возникновения и степени влияния, в единый интегральный показатель может привести к путанице в понимании рассматриваемого вопроса. Действительно, понятие «надежность» относится только к характеристике распределения отказа систем, тогда как «операционная готовность» включает в себя в качестве основных составляющих и «надежность», и «профилактическое обслуживание» для предупреждения возможных отказов, и текущий ремонт систем.
Для ознакомления с общими методологическими принципами определения характеристик операционной готовности систем необходимо рассмотреть формальный пример.
Пусть рассматриваемая система считается нерабочей в том случае, если один из ее узлов отказал или если она находится в стадии периодического профилактического обслуживания или ремонта. Таким образом, система будет находиться в «рабочем» состоянии в период, предшествующий появлению отказов, либо в период до обслуживания или ремонта. Следовательно, в течение времени t рассматриваемая система может быть в одном из двух состояний: рабочем или нерабочем. Обозначим через P(t) вероятность того, что система находится в рабочем состоянии в заданное время t. Предположим далее, что характеристика времени потребности в использовании системы имеет случайное распределение. Если в рассматриваемом интервале времени (О, Т) имеется равновероятная возможность возникновения потребности в использовании системы, тогда
О, если t = 0, /’(/) = . t/T, если Т,
1, если
Эффективность системы в этом случае будет определяться интегральным соотношением
•* « л
Яэфф=| $ Р (<) dFT (0 = (1/Т) $ Р (0 dt.
В этом случае эффективность характеризуется осредненным временем операционной готовности системы в интервале времени от нуля до Т. Таким образом, операционная готовность системы Рраб может быть определена как дисциплинирующее условие для
120
эффективности, когда Т
Рраб=Ит
(5.13)
I—ОО о
При этом следует учитывать, что если система в течение длительного времени профилактически не обслуживается или не ремонтируется, ее операционная готовность в конечном счете приближается к нулю. В том случае, если время, необходимое для использования системы, характеризуется однородным распределением, операционная готовность может быть определена как период времени, в течение которого система находится в рабочем состоянии за время эксплуатации, т. е.
п ___Общее время рабочего состояния____
* раб Общее время операционного состояния * ^0.14)
Если предположить, что затраты на эксплуатацию системы рассчитываются для к интервалов времени эксплуатации, то, обозначив Ил и tk соответственно как время рабочего состояния и длительность Zc-го интервала, можно получить следующее выражение для операционной готовности системы Рраб •
П п
lim
П-*оо
^раб — <
п
lim —V
(5.15)
п
У ,U = EujEt,
где Еи и Et — соответственно осредненные величины времени рабочего состояния и длительности интервала. Отказы системы, выводящие ее из рабочего состояния, можно укрупненно подразделить на следующие типы.
Отказы за счет износа или старения, характеризующиеся потенциальным ухудшением качества системы. Случайные отказы, проявление которых может быть обусловлено превышением критических значений для режима отдельных блоков системы. В отличие от отказов за счет износа случайные отказы могут произойти в любое время, так как они являются результатом закономерных процессов (старение, ползучесть, коррозия). Этот вид отказов бывает, как правило, обусловлен различного рода нарушениями в процессе производства, сборки, транспортировки или эксплуатации системы. Первоначальные отказы, вызванные нарушениями технологического режима, дефектами в материалах и т. д. Эти отказы выявляются при первоначальной проверке или установке. Эти три разновидности отказов, в сущности, описывают почти все возможные случаи, которые могут встретиться на практике. Следует указать ряд особенностей, связанных с определением операционной готовности системы, в наиболее общих слу-чаях эксплуатации для последующего учета затрат на обеспечение операционной готовности.
121
1. Определение операционной готовности при обычной периодической проверке. В соответствии с ранее приведенной формулой (5.15) имеем
Рраб = Eu/Ef (5.16)
Для числа отказов 1 в течение заданного эксплуатационного периода эта формула имеет вид
Рраб = EnlEt = (1 - е^)/КЕг. (5.17)
Таким образом, в данном случае задача сводится к определению Et для каждой модели, рассчитанной на периодическую проверку системы. Предположим, что в данном, наиболее простом случае проверки вероятность того, что исправная система будет признана негодной, нуждающейся в ремонте (вероятность ошибки первого типа), будет равна нулю, а вероятность Е того, что неисправная система будет признана неисправной (эффективность проверки), будет равна 1. Таким образом, здесь мы исходим из предпосылки, что периодическая проверка системы имеет абсолютную эффективность, равную 1. Тогда осредненная длина интервала будет задаваться соотношением вида
Е f Р\Ец 4" РъЕ^,
* “ I (Т + Тс) [1 + g (1 - Рс) е-х‘] + Тр [1 - (1 - д)
где Ри Р2, Рс и т. д. — вероятность того, что отказ произойдет до испытания или проверки системы, если этот отказ вообще происходит в течение заданного периода проверки; q — вероятность отказа в течение проверенного периода; Т — длительность периода эксплуатации; Тс — длительность периода проверки.
Таким образом, имеем
Et = Т + Тс + Тр; (5.18)
Eh = (Т + Tc)q (1 - gc)e^< + Тр [1 - (1 - д)<гП
Подставив это соотношение в уравнение (5.17), получим уравнение
Рраб = (1 - (Г 4- Гс) [1 4- g (1 - Ре} е~“] +
+ ХТр[1 — (1 — д)^], (5.19)
где Тр — длительность ремонта.
2. Периодическая проверка в условиях реальной эксплуатации. Рассмотрим более общий случай, для которого 0 < а < 1 и 0 1 (исключив сразу случай, когда Е = 0, так как си-
стема при этом может случайно выйти из строя и никогда не будет восстановлена, т. е. Рраб = 0). Следовательно, в данном случае рассматривается возможность того, что отказ системы не будет обнаружен в течение некоторого конечного числа последовательных проверок. Таким образом, интервал первого класса может быть описан последовательностью вида
Л = (7ТС, ТТС... Тс7’р) = [7ТС („ - 1) 7ТсТр],
122
qeM отказ, который происходит в течение первого периода экс-пРуатации (т. е. до первого ремонта), не определяется (п — 1) по-пледовательными проверками (п = 1, 2, . . .). Интервал второго KTjacca может варьироваться в больших пределах (в том случае, когда °тказа до проверки не происходит), и мы имеем последовательность вида
/2 = (ТТСТТС, . . ТТСТ») == [ТТС (п - 1)7ТС], (5.20)
где ошибка, которая происходит в течение первого периода эк-сплуатаЦии Тс, могла бы быть определена, но все же не была определена в течение (п — 1) последовательных проверок или интервала
Z3 = (TTcnTTcTJ. (5.21)
В этом случае отказ происходит в течение Тс и слишком поздно, так что его нельзя определить, а в течение следующих (п — 1) проверок он также не определяется.
Итак, мы имеем последовательность вида
(5.22)
где проверка дала так называемую ложную тревогу: исправная система была признана неисправной. Однако это случилось до того, как произошел отказ, не обнаруженный проверками. Имела место последовательность вида /5 = (ТТС), при которой отказа не было.
Наконец для случая, когда была «ложная тревога», а отказа в системе не происходило, мы преходим к последовательности
1п = (7\, Тс, Тр). (5.23)
Здесь искомая величина интервалов для 7\:
%п(Т+ Тс)(1 — Е)п~1Е — Тр, (Т + Тс) Е~1 4- тр,
(5.24)
где 12 с учето.м формулы для Ц:
Eh = § п (Т + Тс) q (1 - Ре) (1 - Е)™Е + TvqPc +
1
4- § п (Т + Тс) q (1 - Pc) (1 - а) + (Т + Тс + Тр) X
х д(1 -Рс)а + (Т + Тс)(1-д)а + (Г+ Тс+Тр)х
X (1 - q) а = (Т + Гс) [1 + qPc (1 - Е) Е~1 + (5.25)
+ q (1 - Рс) (1 - а) Я’1] + ТР 1а + q (1 - а)].
В результате можно записать соотношение вида
Et = P^t, + Р.2Е,. = [(Т + Тс>1Е\ (1 - e~ufq (1-а + аРс--РсЕ)-(1 -£)]} + [1~(1 -?)(1 -а)е-н1, (5.26)
123
т. е. операционная готовность Рраб будет определяться следующим соотношением:
Рраб = (1 _ е-х<)Д (Г + Тс) Б"1 {1 + I? (1 - * + М’с -- РСЕ) - (1 - Я)]} + [1 - (1 - g) (1 - а) е-«]. (5.27)
Особое место в рассматриваемом аспекте занимает вариант, когда анализируются системы, позволяющие осуществлять непрерывный контроль операционной готовности. Учитывая, что при этом Е = 1/Х выражает среднее время между отказами в течение периода эксплуатации при непрерывном контроле, а также учитывая, что средняя длительность интервала при этом равняется Et = Еи + АТ + Тр = (1/Х) + АТ + Тр, можно считать, что операционная готовность для рассматриваемого случая будет описываться соотношением
Р ____ ______ _____1';^0_____ _________1 /Г QQ\
раб — Е'— 1/Хо + + ! + Хо (ДТ + Тр) • (O.Z6)
В заключение необходимо отметить, что определение операционной готовности прежде всего зависит от характера рассматриваемой БТС, подсистемы или элемента, их назначения и главным образом от статистического распределения отказов, которое в известной мере зависит от новизны БТС. Пользуясь изложенной выше методикой расчета, можно рассчитать также операционную готовность для подсистем, связанных с функциями рассматриваемой основной системы. Наконец, в процессе повышения операционной готовности весьма важно определить оптимальную или предельную точку, до которой мероприятия по повышению операционной готовности следует считать экономически оправданными.
Для наиболее характерного случая периодической проверки эффективность затрат СОбсп на обеспечение операционной готовности выражается следующей формулой:
4 .-ХТ(п+1)
Собсп =-------, (5.29)
[ХТДл? 1)] /(1Ч-_Р Л)
где Со — начальная стоимость разрабатываемой системы при среднем времени проработки для первого отказа tQ; Ср — затраты на ремонт или замену контролируемого объекта системы после цроверки, определяемые по среднестатистическим показателям для аналогичных изделий; п — число проверок изделия.
Таковы в общих чертах основные особенности аналитического представления целевых функций и дисциплинирующих условий для различных этапов жизненного цикла БТС.
Аналитический аппарат, рассмотренный в данной главе, в той или иной мере находит применение в задачах моделирования жизненного цикла. Действительно, структурные, статистические и ситуационные виды моделей используются для формализации системы исходных данных, описания фона и воздействия внешней
124
еды. Практически на каждом этапе жизненного цикла, харак-Серизующемся неопределенностью в структуре, связях, управления или поведения БТС, используется представительный арсенал дерева моделей системологии.
Д На этапе создания аналога значительное место занимает ап-парат исследования операций, на предэскизных стадиях НИР и ОКР существенную роль играют численные методы экономической кибернетики, а на последующих этапах — экономико-математическое моделирование (эконометрика) и экономико-статистические методы.
Таким образом, модели жизненного цикла БТС строятся па основании широкого использования аппарата математической оптимизации, системологии и математического анализа. Некоторые примеры постановок таких задач приведены в следующем разделе работы.
РАЗДЕЛ ВТОРОЙ
ОПТИМАЛЬНОЕ УПРАВЛЕНИЕ РАЗВИТИЕМ БТС
Современные методы управления большими техническими ц организационно-экономическими системами как синтез последних достижений экономики, информации и кибернетики есть продукт длительной эволюции теории управления, которая развивалась от элементарных задач контроля единичных параметров (температуры, веса, пути, давления и т. п.) до элементарных регуляторов, и далее до современной автоматизированной системы управления, основанной на использовании вычислительных машин.
Область применения теорий и законов управления поистине безгранична: от управления элементарным биологическим объектом (клеткой) до телеметрии и дистанционного управления комплексными операциями сложнейших больших технических систем в дальнем космосе.
Однако наиболее важным и сложным разделом теории управления являются задачи управления современными сложными организационно-экономическими системами (ОЭС) и функционально согласованными с ОЭС большими техническими системами (БТС), ОЭС, лежащие в основе управления научно-техническим прогрессом, включая комплексы или отдельные целевые программы научно-исследовательских и опытно-конструкторских работ (НИОКР). В капиталистических странах такое комплексирова-ние программ представляет собой почти неразрешимую задачу: в решении созванного под руководством ЮНЕСКО совещания ответственных за науку министров европейских стран прямо отмечалось, что координированные или совместные НИР, выполненные независимыми НИИ, все еще являются скорее исключением, чем правилом, в большинстве европейских стран. Лишь немногие страны в действительности интегрировали все виды научно-исследовательской деятельности в систематизированные целенаправленные и хорошо структурированные комплексы т.
В условиях социалистической интеграции (комплексные программы в рамках СЭВ) создаются все условия для благоприятного развития и эффективного внедрения целевых комплексных научно-технических программ.
Политика в области науки и европейские государства. Париж: ЮНЕСКО, 1970.
126
Интенсивный рост сложности БТС и связанных с их созданием эксплуатацией ОЭС резко увеличивает трудность решения задач управления.
J ДрУг°й важной особенностью постановки и решения задач правления является потребность в прогнозах и перспективных планах. Это обусловлено необходимостью четкого ресурсного обеспечения планируемых мероприятий с учетом эффективности вновь создаваемых и уже находящихся в эксплуатации БТС.
В теоретической или, точнее, кибернетической постановке уп-
равление развитием БТС предусматривает переработку необходимой и достаточной информации относительно функциональных условий, структуры, связей, режимов управления и поведения БТСГ а далее принятие решений о воздействии на систему. Таким образом, в процессе управления развитием БТС можно выделить три основных вида операций: планирование, организацию (информационные) и регулирование (управляющее воздействие).
Планирование включает процедуру формирования целей и условий (или сроков) их достижения при заданных дисциплинирующих условиях (ограниченных ресурсах).
Важнейшим достижением современного планирования развития БТС является создание непрерывно действующей системы прог
ноз — программа — план, обеспечивающей неразрывную процедуру прогнозирования, формирования и корректировки целе-
вых комплексных программ и планов реализации этих программ.
Большое значение в управлении развитием БТС имеет совершенствование организации проведения НИОКР. Существенной является и задача создания научно-производственных комплексов и объединений, обеспечивающих наиболее рациональные связи в научной организации процесса создания БТС.
В условиях научно-технической революции эффективность научно-технического прогресса в значительной мере зависит от правильного установления опережающих темпов развития НИОКР относительно серийного производства, а также от рационального распределения ресурсов между НИР и ОКР. Совершенствование экономических критериев оптимального управления развитием БТС также способствует повышению внимания к таким стадиям жизненного цикла БТС, как проектирование, стационарные, стендовые и натурные испытания.
Успех управления развитием БТС в конечном счете определяет третий важнейший элемент управления — регулирование, процедура, позволяющая удерживать функциональные характеристики управляемого объекта в рамках, ограниченных программой или планом. Обычно рассматривают две разновидности регулирования: по рассогласованию с заданными (или эталонными) выходными параметрами системы либо по предельным (или критическим) параметрам. В первом случае регулирующее воздействие на поведение системы является результатом отклонений от заданных параметров, обнаруженных по каналам обратной связи; во втором — результатом достижения управляемым объектом предельного зна-
127
чения параметра. Совершенствование системы регулирования основывается на непрерывном повышении точности и достоверности информации в каналах прямой и обратной связи, что создает прак. тические предпосылки для создания автоматизированных систем управления (АСУ).
ГЛАВА ПЕРВАЯ
АСПЕКТЫ ПОСТАНОВКИ ЗАДАЧ РАЗВИТИЯ БТС
Современные аспекты постановки задач управления, особенно в области созданид новой техники, исходят из методических и технических возможностей, которые обеспечиваются научно-техническим прогрессом. Методологической основой современных задач теории управления служат программно-целевой метод планирования (системы прогноз — программа — план) и системологии, которые дают возможность выбрать наиболее предпочтительную с точки зрения использования имеющихся ресурсов альтернативу с учетом максимального числа факторов, определяющих эффективность БТС на всех этапах ее жизненного цикла.
Важнейшие этапы и рубежи развития социалистического общества и народного хозяйства СССР определяются директивными программными документами партии и правительства, которые ставят важнейшие политические, социальные, экономические цели. Достижение этих важнейших целей связано с постоянно растущими затратами ресурсов различных видов. Их распределение и перераспределение зависит не только от иерархии важности и очередности поставленных целей, но также от определенных стратегий развития. Таким образом, реализация директивных целей и программ, которые разделяются на ряд подпрограмм по отраслям промышленности, строительства, транспорта, связи, сельского хозяйства, высшей и средней школы и т. д., осуществляется в условиях довольно жесткой системы ограничений.
Важнейшие направления исследований проблемы оптимального развития БТС включают: формирование критериев эффективности БТС; разработку моделей и алгоритмов задач оптимизации облика БТС, т. е. максимизации показателей целевой эффективности в рамках фиксированных бюджета и времени; разработку моделей и алгоритмов задач оптимизации распределения ресурсов (особенно в условиях многотемной ОЭС), т. е. минимизации затрат на создание БТС в рамках фиксированных целевой эффективности и времени; исследование различных стратегий развития БТС в рамках целевых комплексных программ и обширного поля конструктивно-технологических альтернатив.
128
Следует добавить, что успешное развертывание перечислениях важнейших направлений исследований было бы невозможным без соответствующего развития информационно-математического обеспечения и комплексов технических средств исследовательской базы.
Последующие разделы работы посвящены рассмотрению указанных вопросов применительно к процессам создания БТС, т. е. научно-исследовательским и опытно-конструкторским работам.
1. Особенности постановки задач развития БТС
Методы создания оптимальных систем предполагают наличие управления, которое позволяло бы получать проекты систем как интегрального целого, причем эти проекты должны отвечать высоким требованиям к качеству БТС, а процесс разработки проектов — соответствовать заданным срокам и бюджету. Предполагается также, что такие методы должны обладать высокой степенью адаптивности к изменениям во внешней среде, в частности, к изменениям условий в организационно-экономической системе, к методам выполнения отдельных операций, к изменению задач и стратегий создания БТС.
В этом аспекте необходимо, чтобы синтез соответствующей системы управления и ее моделей независимо от сложности этой системы выражался в форме надежно контролируемой последовательности операций.
Таким образом, основу оптимизации составляет выбор метода управления, который позволяет сформулировать на базе целей и операций некоторое множество стратегий, определяющих поведение руководителя в процедуре принятия решения относительно выбора предпочтительной альтернативы облика создаваемой БТС и планирования ресурсного и информационного обеспечения процесса их создания.
На каждом иерархическом уровне основными исходными факторами теории управления развитием современной БТС (или ОЭС) следует считать комплекс факторов цели — операции — уровень качества — заданные технические характеристики — ресурсы, этот комплекс разворачивается в оптимизационный процесс, развивающийся с учетом воздействия дисциплинирующих условий (рис. 12).
Вообще выбор оптимальных параметров системы, как в задачах оптимизации облика БТС, так равным образом и в задачах оптимального распределения ресурсов сводится к определению значений параметров, которые при заданных ограничениях позволяют получить наилучшие качественные показатели системы или процесса. Задачи выбора оптимальных параметров вообще типичны для исследования БТС и ОЭС.
В данном случае объектами оптимизации служат технические характеристики, определяющие облик БТС, а также ресурсные
5 С. а. Саркисян
129
параметры, которые одновременно входят в систему ограничений. Особенностью предложенной блок-схемы алгоритма оптимизации является совмещение моделей поведения с алгоритмом оптимального управления распределения ресурсов. При этом модели поведения вводятся в процесс через стратегии развития БТС, синтезирующие цели и операции развития, а алгоритм оптимального управления строится в предположении, что оптимизация распределения ресурсов осуществляется применительно к БТС с оптимальным (или субоптимальным) обликом. Следует отметить еще несколько особенностей предложенной блок-схемы. Определение перспективных направлений развития БТС осуществляется в результате двухступенчатой оптимизации, где на первом шаге последовательно оптимизируются целевые, технические и технологические характеристики, а затем уже осуществляется выбор оптимального соотношения коэффициентов преемственности и новизны БТС.
Таким образом, управление качеством новой техники осуществляется с обязательным учетом не только функционально-технических, но и производственно-технологических показателей.
Анализ типовых операций проектируемой БТС и выбор доминирующих стратегий ее разработки осуществляется с использованием стандартизированных программ (программных модулей), позволяющих заметно упростить процесс системного проектирования, выделить центральные функциональные параметры БТС и внести необходимую ясность в номенклатуру и масштабы необходимого имитационного и натурного эксперимента.
Естественно поэтому, существенным разделом подготовки стандартизованных программ управления является информационное обеспечение: достаточно указать, что этот раздел требует по крайней мере 30% затрат рабочего времени инженерно-технических работников НИИ и КБ. В сущности именно надлежащее информационное обеспечение гарантирует эффективность создаваемых БТС. В противном случае при неполном по количеству информации или недостаточно достоверном информационном обеспечении научно-исследовательские или опытно-конструкторские работы кончаются неудачей. По зарубежным данным, наибольшая (до 30—40%) доля неудач объясняется ошибками программирования или планирования работ, т. е. важнейшим аспектом управленческой информации, следующей по удельному весу причиной неудач являются ошибки в обработке экономической информации (25— 35%), а далее идут недостатки в информационном обеспечении при постановке работ (20—30%), т. е. недостаточно четкая формулировка целевой функции или неполный учет дисциплинирующих условий.
Важнейшим вопросом рассматриваемой блок-схемы оптимизации создания БТС является аспект выбора общего и частного критериев. Эти вопросы рассматриваются в п. 2, посвященном общему анализу критериев эффективности БТС.
В классическом понимании теория оптимальных процессов
130
/Л7/Г/77?ДЯ£77Л7/Г# Л£^/ fTC) j'f/nr
РИС. 12. Блок-схема оптимизации
управления развитием БТС
сводится к построению оптимального изменения во времени регулируемых величин и управляющих воздействий. Основная особенность применения этой теории заключается в учете дисциплинирующих условий, накладываемых на входные (в том числе регулирующие), а также выходные параметры БТС. В этом аспекте це-лесообразно обобщить изложенные ранее особенности постановки задачи управления развитием БТС в виде формы управления созданием БТС по этапам жизненного цикла (табл. 4). Эта форма в доступном виде отражает узловые моменты изменения во времени регулируемых величин («операции») и позволяет локализовать дисциплинирующие условия (в «побудительных причинах»).
Анализируя в целом предложенную методологию постановки и подходов к решению задач управления созданием БТС, следует отметить ряд центральных проблем, не нашедших отражения в предыдущем изложении. К ним следует отнести:
— особенности постановок задач управления развитием БТС, что составляет существенный раздел теоретической базы математического обеспечения указанных задач;
— вопросы формирования и анализа критериев оценки эффективности БТС как важнейшей проблемы оптимизационных исследований облика создаваемых БТС и распределения ресурсов при их создании;
— основные методологические положения и специфику формирования целевых комплексных программ применительно к альтернативным стратегиям развития как принципиально новым разделам в управлении созданием БТС;
— особенности управления развитием БТС с использованием системного проектирования как информационной модели НИР и ОКР.
Задача, связанная с формализацией оптимизации облика или распределения ресурсов при создании БТС, исключительно сложна. Это объясняется сложностью структуры систем; огромным количеством элементов, длительностью ее жизненного цикла, многоцелевым характером и значительным количеством показателей ее эффективности.
Точность и достоверность результатов решения оптимизационной задачи определяются важностью народнохозяйственных задач, решаемых рассматриваемыми системами, огромными затратами и сроками на их создание, производство и эксплуатацию.
Теория оптимизации как самостоятельная математическая дисциплина окончательно еще не сформирована, но уже сейчас она оперирует большим разнообразием методов, позволяющих ответить на широкий круг практических вопросов. Исследуемые в задачах такого рода реальные (физические, экономические, социальные и т. д.) процессы либо невозможно, либо весьма приближенно можно формализовать (описать) с помощью аппроксимаций. В частности, многими исследованиями был отмечен нелинейный характер связей между стоимостными параметрами, входящими в модели оптимизационной задачи, в состав критериальной
132
ТАБЛИЦА 4. Управление развитием БТС по этапам жизненного цикла
Этап жизненного цикла Воздействие внешней среды (побудительные причины) Управление Операции Математические обеспечения
Создание аналога G 00 Создание технической концепции Деградация прототипа Возникновение новых целей Возникновение новых концепций Обоснованная и четко сформулированная потребность в НИОКР Формирование заказчиком новых задач, выходящих за рамки возможностей действующих БТС Наличие планового и общего технического заданий на разработку с информационными ресурсным обеспечением Решение о целесообразности проработки проблемы с привлечением организаций заказчика, академических институтов, головных вузов и НИИ отрасли Выбор и обоснование общего и частного критериев Решение о целесообразности НИР и(или) ОКР Разработка технического задания Утверждение технических требований Планирование НИР и ОКР Утверждение эскизного проекта и выбор варианта для технического проектирования Решение об опытном производстве Анализ достоверности и полноты системы исходных данных Исследование подобий в смежных областях Исследование операций, в частности игровых конфликтных ситуаций Разработка спектра альтернатив операции — средства Прогнозные оценки потребностей в информационном и ресурсном обеспечении Системное проектирова-вание Анализ возможной номенклатуры и альтернатив качественно новых подсистем и элементов Анализ возможных требований НИР и ОКР Исследование возможных структурных композиций и оптимизация структуры БТС Общая теория систем, теория информации, математическая статистика Исследование операций Теория игр, массового обслуживания Мотоды оценки целевой эффективости БТС, метод Монте-Карло и т. д. Теория статистических решений, алгебра логики, теория графов и т. д. Теория прогнозирования, информации, экстремальное программирование Аппарат системного проектирования системологии Метод альтернативного графа, алгебра логики Теория игр и статистических решений Теория оптимизации
ТАБЛИЦА 4 (Окончание)
Этап жизненного цикла Воздействие внешней среды (побудительные причины) Управление
£ Реализация технической концепции Наличие планового задания на изготовление и испытание опытного образца (партии) БТС с информационным и ресурсным обеспечением Наличие комплекта рабочей документации Планирование опытного производства Планирование испытаний БТС Решение о принятии к серийному производству и эксплуатации
Развертывание и эксплуатация БТС Наличие планового задания на серийное изготовление БТС с информационным и ресурсным обеспечением Планирование серийного производства Решение о модификации (модернизации) элементов или подсистемы БТС
Деградация БТС Информация о существенном несоответствии функциональных характеристик БТС целям и ситуациям Решение о снятии с серийного производства и с эксплуатации
Операции Математические обеспечения
Технические предложения. Проект технических требований Эскизное проектирование и макетирование Создание технического проекта и рабочей документации Изготовление опытных образцов подсистем и элементов БТС Проведение стационарных имитационных и натурных испытаний Изготовление серии и подсистем БТС Эксплуатация, ремонт и модернизация элементов или подсистем БТС Контрольный анализ эффективности БТС Теоретические модели машинного проектирования Модели АСУ «опытное производство» Модели АСУ «испытания» и «программный эксперимент» Модели АСУ «производство» Модели теорий статических решений, игр, массового обслуживания и т. д.
хуНкдии или в систему дисциплинирующих условий, и оптимизируемыми функциональными параметрами системы.
В простейшем случае оптимальная система выбирается только по одному критерию. Но на практике чаще встречаются задачи, где эффективность системы оценивается не по одному, а по нескольким критериям. При этом в ряде случаев системы являются многоцелевыми и могут выполнять ряд типовых операций, но с разной эффективностью.
Одновременная оптимизация систем по двум и более критериям в строгой математической постановке невозможна. В этом случае может быть принято компромиссное решение, в котором предпочтение отдается тому альтернативному варианту, который, не являясь оптимальным ни по одному критерию, оказывается приемлемым по ряду критериев. Процесс выбора оптимального варианта системы в этом случае не может быть полностью формализован.
Одним из возможных вариантов решения поликритериальной
задачи в случае ограниченного количества рассматриваемых вариантов и критериев оптимальности может быть использование матрицы (или диаграмм) критериев, применение итеративных методов, многошаговая оптимизация.
К существенным недостаткам указанных способов решения поликритериальных задач следует отнести значительную их субъективность, т. е. зависимость результатов от коллектива людей, принимающих решение. В то же время сведение задачи на условный экстремум к задаче на безусловный экстремум, например обобщение метода Лагранжа, связано с большими вычислительными трудностями. Кроме того, в рассматриваемых задачах очень часто оптимальные значения функции лежат на границах области задания функции, где перестает действовать классическая теория вариационного исчисления.
Наиболее приемлемым решением поликритериальной задачи, как уже отмечалось, является сведение ее к задаче с одним (наиболее важным) критерием при наложении ограничений на другие критерии, достаточно существенные для решения поставленной задачи. В этом случае достоверность решения во многом зависит от предельных значений критериев, заложенных в качестве дисциплинирующих условий.
Для решения таких задач используются приближенные (неклассические) методы, например, такие, как метод случайного поиска, динамическое программирование, градиентные методы. При этом следует иметь в виду, что области их использования в большинстве случаев не безграничны, а возможность приведения экстремальной задачи к классическому виду всегда желательна, если в этом случае трудоемкость решения системы уравнений невелика.
Трудоемкость решения таких задач в основном зависит от вида оптимизируемой (критериальной, целевой) функции иотвида ограничивающих функций — условий. Так, если критериальная
135
функция и система ограничений линейные, то можно использовать такой хорошо исследованный и стройный математический аппарат, как линейное программирование, имеющий в своем арсенале множество универсальных методов определения экстремальных значений. Громоздкость задачи в этом случае определяется числом независимых переменных, входящих в исследуемую функцию, ц числом векторов-ограничений.
Если целевая функция квадратичная (наивысшая степень независимой переменной — вторая), а функции-ограничения — линейные (задачи такого типа объединены под названием квадратичных), то поиск экстремума осложняется. Однако и для подобного типа задач разработано много методов решений. Следует отметить, что данная задача не затруднена поиском множества локальных экстремумов. Дело в том, что эта функция имеет единственный экстремум, являющийся одновременно и локальным, и глобальным.
Аналогичный экстремум имеют функции, объединенные под названием выпуклых, где целевая функция квадратичная, а функции-условия нелинейные (выпуклое программирование).
В общем случае, если целевая функция и система ограничений нелинейны, трудоемкость решения задачи значительно возрастает. Такие задачи называются задачами нелинейного программирования. Сложность подбора метода и решения задач нелинейного программирования определяется как числом независимых переменных, так и степенью нелинейности функции. Чем выше степень нелинейности независимых переменных, определяющих функцию, тем больше точек локального экстремума приходится исследовать. Задачи такого типа удобно решать, применяя рекуррентные соотношения, а в случае стохастического характера процесса можно пользоваться марковскими процессами.
Кроме того, следует отметить в ряде задач наличие пологого экстремума критериальной функции в области допустимых решений (например, зависимости стоимость — время). В этом случае целесообразно использовать, например, метод покоординатного спуска с квадратичной аппроксимацией по каждой переменной или метод сопряженных градиентов. Пологий характер экстремума позволяет принимать компромиссное решение по нескольким критериям методом последовательных уступок.
Кроме того, учет бюджетных, габаритных и других ограничений определяет большую группу линейных неравенств. Решение может находиться на границе области допустимых значений. Таким образом, задача должна решаться методами нелинейного программирования.
Большая размерность оптимизационной задачи существенно влияет на целевую функцию и значительно усложняет процесс решения. При этом целевая функция может трансформироваться из одноэкстремальной в многоэкстремальную, могут появиться особые точки типа «овраг», «седло». Область допустимых значений может иметь самые различные формы. Выбор методов решения
136
вляется в свою очередь оптимальной задачей, так как число меТодов очень велико. Следует отметить, что в настоящее время разработаны не только методы оптимизации, но и способы определения их эффективности.
Вторая центральная оптимизационная задача — оптимальное распределение ресурсов при управлении развитием БТС. Наиболее сложным разделом формализации постановок задач является введение в модели различных по смыслу, важности и размерности соотношений время — ресурсы, время — ресурсы — вероятность реализации, время — ресурсы — вероятность реализации — качество и т. д. Такой многовариантный подход в соответствии с особенностями оптимизации, естественно, обусловливает необходимость в операционной интерпретации постановки задачи, так как введение понятия «операция» сразу же позволяет определить качественные и количественные размерности, необходимые для оценки эффективности распределения ресурсов. Кроме того, введение понятия «операция» позволяет приблизить постановки оптимизационных задач распределения ресурсов к приведенным выше постановкам задач оптимизации облика БТС.
2. Критерии оценки эффективности БТС
Одним из наиболее важных направлений системного анализа процессов управления созданием БТС являются критериальные исследования. Исходными материалами для критериальных исследований служат результаты целевых, проектных и ресурсных исследований.
Концепция комплексного технико-экономического критерия оценки эффективности БТС учитывает общественно необходимые затраты на создание и эксплуатацию современных БТС, обладающих достаточными показателями целевой эффективности. В этом аспекте критерий по идее представляет собой объективный показатель (базу для сравнения), отвечающий следующим требованиям: является характеристикой, широко используемой при создании современных БТС; наиболее полно отражает связь затрат с эксплуатационно-техническими характеристиками систем; обеспечивает достаточную объективность при расчете затрат в реальных ситуациях.
В настоящее время при выборе критериев для сравнительного технико-экономического анализа конкурирующих либо взаимно Дополняющих систем принято руководствоваться одним из двух основных принципов: минимизация затрат на выполнение операции при фиксированной целевой эффективности БТС (критерий оптимизации смеси наряда средств или оптимизации распределения ресурсов); максимизация целевой эффективности в рамках фиксированных бюджетных ассигнований на выполнение операций (критерий оптимизации облика БТС).
Наряду с указанными общими постановками в задачах оптимизации облика БТС представляется необходимым учитывать
137
следующие факторы: потери и противодействие конкурирующей стороны или среды в зависимости от принятой стратегии поведения или использования БТС; частные критерии или, в интерпретации некоторых авторов, основные дисциплинирующие условия, связанные с ресурсным обеспечением операционной готовности систем в широком понимании (резервирование для обеспечения интегральной надежности — на стадии эксплуатации, глубина качественных изменений прототипа — на стадии создания); особенности применения основных компонентов общего и частных критериев на достаточно широком поле альтернатив, характеризующих вариации как по облику, так и по стратегии применения БТС; возможность обеспечения исходным статистическим массивом количественных показателей критериев.
Одним из основных назначений критериальных исследований является выявление основных показателей, определяющих облик системы. Эти главные показатели переводятся в разряд критериев, которые служат базой для сравнения, оценки и окончательного выбора системы на стадии оптимизационных исследований. Менее важные показатели, влияющие на облик системы, могут учитываться при оптимизации и управлении в качестве дисциплинирующих условий. Очевидно, что выбор критериев оценки системы и установления дисциплинирующих условий является неформальной, творческой процедурой, которая должна проводиться с использованием логического анализа, интуиции и опыта руководителей.
Критериальные функции и функции дисциплинирующих условий БТС зависят от большего числа параметров системы и ее элементов. Эти параметры можно разбить на три группы: технические, технологические и экономические. Одним из наиболее дискуссионных вопросов при этом является количество критериев, необходимых для решения задачи оптимизации облика БТС.
В частности, при решении задач оптимизации облика летательных аппаратов получила широкое распространение триада критериев эффективность — стоимость — время (W — С — т). В зависимости от количества критериев можно говорить о двух постановках задачи: моно- и поликритериальной. При монокритериаль-ной постановке в качестве главного критерия выбирается один из триады критериев, а два других переводятся в разряд дисциплинирующих условий. Чаще всего в качестве главного критерия принимают один из двух первых критериев, т. е. эффективность или стоимость. В первом случае задача математически формулируется в следующем виде (оптимизация облика):
W —> max, С С, т т. (1.1)
Во втором случае задача приобретает смысл оптимизации распределения ресурсов. Она имеет вид
С ->min, W, т < (1.2)
В (1.1) и (1.2) W, С, т — заданные предельные значения W, С, т (соответственно эффективности, стоимости и времени).
138
Однако в некоторых критических ситуациях на первое место ыдвигается третий из триады критериев — время. Такая поста-в вка может встретиться в любой сфере деятельности. Математическая модель такой задачи имеет вид
х—>min, С<С. (1.3)
Очевидно, что (1.1), (1.2) и (1.3) дополнительно содержат ряд других дисциплинирующих условий, определяемых конкретным существом решаемой задачи. Эти условия выявляются в процессе целевых, операционных, проектных и ресурсных исследований.
Остановимся несколько более подробно на задаче (1.2), где в качестве критерия оптимальности взят критерий экономической эффективности — стоимость С, а целевая эффективность выступает в роли дисциплинирующего условия. Эта задача подробно рассмотрена и развита в [52], где показано, что в качестве критерия экономической эффективности системы следует принимать критерий «стоимость операции» с учетом фактора времени для сопоставления разновременности затрат ресурсов.
При выборе в качестве критерия экономической эффективности величины «стоимость операции» необходимо руководствоваться следующими исходными положениями. Экономическая эффективность в народном хозяйстве в конечном счете измеряется ростом производительности общественного труда, которая определяется либо количеством изготовленной продукции в единицу времени, либо затратами живого и овеществленного труда на одно изделие или единицу работы (стоимость изделия или единицы работы). Чем выше производительность труда, тем ниже стоимость изделия (единицы работы).
В сфере функционирования БТС в качестве единицы работы можно принять типовую операцию, а в качестве показателя производительности общественного труда — стоимость операции. В самом общем виде критерий «стоимость операции» можно аналитически выразить в следующем виде:
п т
Соп= $ 2 2 Ci,j(T)nu(T)dT, (1.4)
[То i=l j=l
где С1И — расходы па единицу средств i-ro вида, участвующих в 7-й операции в единицу времени; (т) — количество средств i-ro вида, необходимых в единицу времени для выполнения /-й операции; i — индекс типа БТС, участвующей в операции; j — индекс локальных операций (подоперации), из которых слагается рассматриваемая операций; т0, xh — соответственно время начала и конца операции. В простейшем случае формула (1.4) принимает вид
Соп = Сгп, (1.5)
где Cj — стоимость подсистемы или элемента БТС; п — количе
139
ство подсистем или элементов БТС, участвующих в операции «наряд средств».
Для различных типов БТС наряд средств, необходимых для выполнения операции, может быть разным. Он зависит от характера и параметров операции. Например, для локальной операции выполнения единичной задачи с вероятностью, не ниже заданной, наряд средств (в предположении независимости единичных циклов или шагов) определяется выражением
u-в)
где — заданная вероятность выполнения задачи; Wr — вероятность достижения цели при единичном цикле работы. В (1.6) квадратные скобки означают, что должна быть взята целая часть числа, стоящего в скобках.
Введение в расчетные формулы (1.4) и (1.5) величины наряда средств продиктовано необходимостью соблюдения непременного условия сравнительной технико-экономической оценки БТС, условия «тождества эффекта».
Стоимость единицы средств CL должна включать затраты на создание, производство и эксплуатацию системы с учетом эффективности капиталовложений:
= Ci-}-£н^удэ» (1*7)
где — себестоимость подсистемы или элемента БТС; К7Ла — удельные, т. е. в расчете на подсистему или элемент БТС, капиталовложения в эксплуатацию; Ен — нормативный коэффициент окупаемости капитальных вложений [52].
Схемы определения себестоимости подсистемы или элемента БТС, т. е. единицы наряда средств, имеют свои специфические особенности для систем одноразового и многоразового применения. Эти особенности обусловлены тем, что в первом случае (система одноразового применения) стоимость подсистемы полностью переносится на себестоимость единицы наряда средств, а во втором (система многоразового применения) — лишь частично. В связи с этим для расчетов себестоимости систем многоразового применения вводится промежуточная калькуляционная единица — величина затрат, приходящая на единицу времени работы:
Смр1 = (1*8)
где Смр1 — себестоимость единицы наряда средств систем многоразового применения: С1т — удельная себестоимость, приходящаяся на единицу времени; топ — продолжительности операции в часах.
Следовательно, для определения стоимости операции с использованием БТС многоразового применения наряду с удельными затратами необходимо располагать данными о времени выполнения плановых операций. Последние должны быть получены в процессе операционных исследований.
140
Величина себестоимости единицы наряда средств, входящая в состав критерия «стоимость операции», является в свою очередь сЛОя<и°й функцией большого количества различных стоимостных параметров. Выявление этих параметров и прогнозирование их значений на период существования рассматриваемой системы являются важными направлениями критериальных исследований.
Выше кратко описаны наиболее распространенные монокрите-риальные постановки задач оптимизации облика БТС. Однако рост сложности и стоимости БТС различного назначения привели исследователей систем ко все более отчетливому выводу о том, что задачи оптимизации облика этих систем не всегда укладываются в узкие рамки монокритериальной постановки задачи. Это связано с тем обстоятельством, что качество БТС как сложного объекта не может быть охарактеризовано одним критерием эффективности. Обычно такие объекты имеют несколько критериев, причем некоторые из них могут быть противоречивыми, так что решение, оптимальное по одному критерию, оказывается неудовлетворительным по другим. Для правильного принятия решения относительно облика сложного объекта необходимо учитывать несколько критериев.
Первоначально необходимость учета нескольких критериев для принятия решения привела к многочисленным попыткам конструировать составные критерии в виде различных функций от исходных критериев и применять их для решения оптимизационных задач в рамках поликритериального подхода. Использование составных критериев позволило хотя бы косвенно учесть несколько критериев в рамках поликритериальной постановки.
В качестве примера составного критерия можно привести так называемый дробный критерий, получивший довольно широкое распространение в задачах оптимизации облика БТС. Дробный критерий обычно имеет вид либо отношения полученного эффекта к затратам, связанным с получением данного эффекта,— удельный эффект £уд:
£уд == эффект/затраты, (1.9)
либо обратного отношения — удельная стоимость Суд:
Суд = затраты/эффект. (1.10)
Разные авторы вкладывают неодинаковый смысл в понятия «эффект» и «затраты», что приводит к различным формулировкам задачи оптимизации облика новой техники и к различным рекомендациям. В [52| содержится обзор различных критериев этого типа.
Применение дробного критерия типа (1.9) или (1.10) при монокритериальной постановке задачи вызвано стремлением косвенно оптимизировать систему сразу по двум критериям: целевой и экономической эффективности. Однако все критерии типа (1.9) и (1.10) обладают общими недостатками.
К попыткам учета нескольких критериев эффективности в Рамках монокритериальной постановки следует отнести примене-
141
пие составных аддитивных (1.11) и мультипликативных (1.12) критериев
т тп о
£,= 3^!. (1.11),(1.12)
г=1 г=1
где Е19 Е2 — составные критерии; Ц — локальный i-й критерий;
0^ — коэффициент значимости и эластичности f-ro локального критерия в составном критерии; i — порядковый номер критерия; i е= [1; т].
Субъективность назначения коэффициентов и (особенно в случае локальных критериев различной физической размерности) снижает ценность полученных в соответствии с критериями (1.11) и (1.12) рекомендаций по выбору оптимальных решений.
Таким образом, недостатком монокритериального подхода к решению задачи оптимизации облика сложного объекта является сложность и, как следствие, субъективизм в назначении единственного главного критерия оптимальности. Достоинством монокритериального подхода является возможность использования богатого арсенала математических методов теории принятия решений: математического программирования, теории игр, теории статистических решений, теории минимакса, различных численных методов оптимизации.
В последнее время проблема поликритериальной (другое распространенное название — векторной) оптимизации приобрела актуальное и исключительно важное значение. Задача векторной оптимизации в детерминированном случае (т. е. при отсутствии случайных и неопределенных факторов) в общем виде может быть сформулирована следующим образом.
Пусть имеет место некоторая операция, исход которой оценивается совокупностью локальных критериев Zn Z2, • • • » образующих вектор критериев эффективности Е — (Zf), i ЕЕ [1; ml. Локальные критерии Zf могут быть как скалярами, так и векторами. Относительная важность локальных критериев задана в виде вектора А = (Л1? Х2, . . ., Хш), конкретный смысл и значение которого в общей постановке задачи не важны.
Исход операции зависит от значений стратегии (решения) — оперирующей стороны. Стратегия X может быть скаляром, вектором или матрицей. Оперирующая сторона управляет операцией, выбирая стратегию X из области Ях ее допустимых значений. Область Ях задана некоторой совокупностью дисциплинирующих условий.
Вектор критериев Е связан с решением X отображения X -> -> Е = F (X), где F = (Д, /2, . . fm). Отображение F может быть задано аналитически или, в более сложном случае, алгоритмически. В задаче требуется найти оптимальное значение Х°, определяемое двумя условиями:
1) решение должно быть осуществимо, т. е. принадлежать множеству Яу его допустимых значений;
142
2) решение должно быть наилучшим, т. е. оптимизировать вектор критериев эффективности Е с учетом вектора Л (относитель-ЛОЙ важности).
Иными словами, оптимальное решение Х° должно удовлетворять соотношению
jo = F-i[ opt (Е(Х), А)], (1.13)
X^QX
где F'1 — обратное отображение Е —> X = F"1; opt — некоторый оператор оптимизации, принятой в задаче.
При решении векторных задач принятия решения возникает ряд специфических проблем, носящих не формальный, вычислительный, а концептуальный характер. Главная из них — выбор принципа оптимальности, определяющего свойства оптимального решения и дающего ответ на главный вопрос: в каком смысле оптимальное решение лучше всех других решений. В модели задачи (1.13) это соответствует раскрытию смысла оператора оптимизации Е.
В задачах монокритериальной (иначе скалярной) оптимизации принцип оптимальности единственный для всех задач: в качестве оптимального решения Х° выбирается такое значение решения X, для которого справедливо условие (в случае максимизации критерия) для всех X Gz fix -'
Z(X°)> Z(X), (1.14), (1.15)
где Z — скалярный критерий эффективности.
Принципиальное отличие задач векторной оптимизации состоит в том, что для них имеется множество различных принципов оптимальности, ведущих к выбору различных оптимальных решений. Это предъявляет серьезные требования к выбору принципа оптимальности.
В настоящее время еще нет достаточно строгих теоретических положений относительно выбора оптимальных компромиссных решений, т. е. определения схемы нахождения оптимального варианта системы в области компромиссов. Некоторые авторы предлагают ограничиваться лишь выделением области компромисса, а решения принимать рекомендуют, исходя из субъективных позиций отдельных ответственных лиц. При таком подходе на принятие решения доминирующее влияние оказывает субъективный фактор, что приводит к недостаточной его обоснованности. В современной научной литературе предлагается целый ряд схем компромиссных решений, в реализации которых существенная роль принадлежит экспертам. Такая постановка вопроса более правомерна. Научно обоснованная экспертиза обладает достаточной объективностью при принятии решения. Остановимся на некоторых схемах поиска компромиссных решений.
Принцип равномерности. Заключается в равномерном повышении одновременно всех локальных критериев. Условия его применения: локальные критерии нормированы (т. е. имеют единый
143
масштаб измерений) и одинаковы по важности. Имеется несколько разновидностей этого принципа. Например, принцип равенства, в соответствии с которым осуществляется максимизация при условии равенства уровня всех критериев. Само решение при такой постановке может оказаться за пределами области компромиссов. В то же время другая разновидность принципа равномерности —-принцип максимина в отдельных случаях находит применение при определении облика перспективных систем. При этом целью является стремление получить удовлетворительный результат по всем критериям путем подтягивания худшего из критериев.
В большей степени отвечает решению задач по определению перспективных БТС так называемый принцип справедливой уступки, который основан на оценке и сопоставлении прироста и убыли локальных критериев, которые в области компромиссов неизбежны. Принцип справедливой уступки имеет две разновидности: принцип абсолютной уступки и принцип относительной уступки.
Принцип справедливой абсолютной уступки гласит: справедливым является такой компромисс, при котором суммарный абсолютный уровень снижения одного или нескольких критериев не превышает суммарного абсолютного уровня повышения других критериев. Этому принципу соответствует модель максимизации суммы критериев (интегральной эффективности)
opt£= max у, Ц. (1.16)
i=i
Недостаток принципа абсолютной уступки состоит в том, что он может допускать резкую дифференциацию уровней отдельных критериев, так как высокое значение интегрального критерия может достигаться за счет высокого уровня одних критериев при низком уровне остальных.
Принцип справедливой относительной уступки гласит: справедливым является такой компромисс, при котором суммарный относительный уровень снижения одного или нескольких критериев не превосходит суммарного относительно уровня повышения качества по другим критериям. Принципу относительной уступки соответствует модель скалярной оптимизации с критерием в виде произведения локальных критериев
т
opt Е = max Ц Vi- (1.17)
1=1
Принцип относительной уступки весьма чувствителен к величине критериев: за счет относительности уступки происходит автоматическое снижение цены уступки для критериев с большой величиной и наоборот. В результате производится значительное заглаживание уровней локальных критериев.
Имеется целый ряд и других принципов оптимальности. Нам представляется, что для решения задач, связанных с выбором оптимальных БТС, напболее естественным является принцип
144
..деления главного критерия. При этом на установленный круг поКальных критериев должны быть наложены определенные ограничения. В отдельных случаях при реализации данного принципа целесообразно использовать эквивалентные взаимные мо-чели, в которых главные и наиболее важные локальные критерии,, находящиеся в системе ограничения, могут меняться местами. Оптимизация осуществляется на основе максимизации (или минимизации) локального критерия, выбранного в качестве главного, и определенной совокупности локальных критериев, отражающих важнейшие функциональные ресурсные, экономические и временные характеристики производства и эксплуатации БТС.
Системный подход к формулированию комплексного критерия ► Системный подход при выборе и обосновании критерия альтернативного выбора и сравнительной оценки БТС означает, что объек
тами рассмотрения и сравнения могут являться только комплексы, способные автономно решать конкретные задачи. Эти комплексы в рассмотрении принимаются как интегральное целое — «системы» — и для них формируется общий критерий, включающий в качестве частных критериев шкалы сравнительной оценки подсистем. При этол! общий критерий формируется с учетом оптимизации целевой функции.
Как уже упоминалось, в наиболее укрупненном виде существуют два основных типа комплексных технико-экономических
критериев:
а) минимум затрат на выполнение некоторой типовой операции при заданном уровне целевой эффективности W (заданная величина математического ожидания затрат на выполнение операции в заданный промежуток времени 0;
б) максимум целевой эффективности системы (решение типичной для данной системы задачи в рамках средств, ассигнованных на ее выполнение).
Системный подход предусматривает обычно использование обеих разновидностей комплексного критерия. При этом использование той или иной разновидности определяется прежде всего характером решаемой задачи.
Постановка задачи определяет, по существу, величину ассигнований, а следовательно, и характер возможных систем. Наиболее часто в этой постановке задачи используются специальные критерии, включающие максиминиый, минимаксный критерии, альфа-критерий Гурвица, критерий Лапласа и критерий полезности и т. п. Все перечисленные критерии предусматривают использование платежной матрицы, иллюстрирующей действительную (либо прогнозируемую расчетом) величину затрат оперирующей стороны в зависимости от ее поведения в конфликтной ситуации. Правила поведения оперирующей стороны — затраты определяются набором стратегий, которым и соответствуют технико-экономические кРитерии. В обобщенном виде платежная матрица, соединяя в еое элементы математического ожидания затрат и математическо-Го ожидания потерь, представляет собой (для случая альтернатив-
145
иого выбора конкурирующих систем) матричную форму, в которой строки соответствуют затратам или потерям для данной системы в различных тактических ситуациях, а столбцы — операционным вариантом решаемой проблемы.
Другой особенностью системного подхода является интегральная оценка системы по всему ее жизненному циклу, что подводит к выбору и обоснованию уже глобального критерия. В качестве глобального критерия в оптимизационных задачах, связанных с оценкой альтернатив облика БТС, можно воспользоваться критериальной матрицей, связывающей стратегии поведения (Sij) при /-м варианте создания и эксплуатации БТС г-го типа, вариации облика (KQ) с затратами на достижение определенного операционного потенциала обладающего операционной готовностью (Рог) в фиксированный период времени (т).
Концепция, на основании которой строится рассматриваемый полпкритериальный подход, предусматривает:
— возможность варьирования темпов и качественной глубины разработок БТС в зависимости от ресурсных и временных ограничений, а также темпов формирования смеси на этапе перехода ют государственных испытаний БТС к ее серийному производству, что отражает одно из основных требований программно-целевого планирования;
— идеологию системного подхода к формированию смеси наряда средств с учетом целевой функции БТС (оперативный потенциал, обеспечивающий решение конкретных задач с учетом полноты взаимодействия подсистем БТС);
— учет взаимодействия стратегий разработки БТС со стратегиями их применения, что создает определенные перспективы в развитии методик оптимизации и прогнозирования;
— создание исходных качественной и количественной баз для комплексной оценки риска поставщика и заказчика, что в определенной мере отражает их интересы;
— определенные предпосылки для построения достаточно представительных моделей, отражающих возможные альтернативы в выборе облика перспективных БТС с учетом ограничений в ресурсных и временных шкалах.
Возможное аналитическое представление такого критерия может быть записано в виде
Яобщ =Wd [^п] [Яо] [Рог]} < / {[Я] [Т]}, (1.18)
где Sij — стратегии поведения при создании и(или) использовании БТС г-го типа в /-й операции (ситуации) (см. II.2.2); Сп — стоимость достигнутого потенциала (платежная матрица, характеризующая затраты на выполнение определенной номенклатуры типизированных операций) в фиксированный промежуток времени для данной стратегии создания и(или) использования с различными эффективностью и операционной готовностью; Ко — параметр, характеризующий потенциал оперативных средств при фиксированных целевой эффективности и времени; Рог — пара-
146
р операционной готовности, характеризующий вероятность того, что в нужный момент времени (на интервале t0 — AZ) данная система будет готова к использованию; R — ресурсные ограничения уделенный бюджет); т — временньхе ограничения.
Матричное выражение критериев управления развитием БТС» 'Теоретическая концепция программно-целевого управления развитием БТС в виде иерархически организованного трехуровневого комплекса прогноз — долгосрочный и перспективный план — текуЩее планирование (табл. 5), естественно, требует соответствующего представления критериев, обеспечивающих оптимальное управление на всех уровнях.
Вместе с тем, исходя из сущности программно-целевого подхода, такое представление критериев в соответствии с предложенными схемами системного подхода должно целевые и программные ветви исследования с ресурсными и временными ограничениями совмещать с матричной формой выражения.
Попытка создать такую критериальную матрицу для трех уровней и трех контуров управления представлена в табл. 5.
Как видно из таблицы, матрица критериев имеет столбцы-контуры, а также строки-уровни. Учитывая, что фактор времени в создании БТС играет весьма существенную роль, следует считать закономерным отыскание подходов к формированию критериев по контурам.
В соответствии с этим будем исходить из наличия трех контуров управления (С7г, i = 1, 2, 3) и трех уровней управления (Т;-, 7 = 1,2, 3).
Контуры управления-. Ux — директивы партии и правительства по важнейшим направлениям развития; U2 — директивы по пятилетнему плану; U3 — текущие планы, обеспечивающие достижения максимальной целевой эффективности.
Уровни управления-. — государственный (межотраслевой} уровень; V2 — уровень отрасли; V3 — уровень объединения.
Управляемые векторы (в соответствии с уровнями управления): Р, q, s — комплекс различных классов с различными типами и поколениями систем; q, s — различные типы и поколения систем;
— различные поколения систем. Критерии Кп, К12 (см. табл. 5} являются определяющими для перспективного планирования и составления будущих пятилетних планов в государственных масштабах, т. е. определения государственной политики в области данного вида систем.
Исходя из сущности критерия (максимизация целевого эффекта в рамках выделенных ассигнований при наличии ряда других °граничений), представляется возможным выразить критерий в виде максимума линейной функции вида
Кп = ClX1 + СгХ2 ++ Спхп = 2 CiXi = М (1.19>
i=i
147
ТАБЛИЦА 5. Матрица критериев управления развитием БТС
Контуры
Уровни управлении Прогноз 14, Т > 15 лет (важнейшие направления развития; формирование программного решения важнейших научно-технических проблем) Долгосрочное и перспективное планирование Utt 15 > Т > 5 лет (формирование целевых комплексных научно-технических программ; директивы по пятилетним планам) Текущее планирование Г», ТС5 лет (реализация программ и пяти лети их планов с соответствующей корректировкой)
£ч 00 Государственный ^1(Р, 9, «) #11 Максимизация целевого эффекта БТС в пределах возможных ва-рантов бюджетных ассигнований по результатам оценки с использованием показателей; а) ранга (важности); б) ресурсного обеспечения; в) результатов расчетов по межотраслевому балансу (МОБ) Метод — нормативное прогнозирование #12 Оптимальное соответствие задачам перспективного плана в разрезе межотраслевого баланса и критерия важности, ранга Метод — прогнозирование затрат, долгосрочное планирование #13 Оптимизация выполнения планового годового задания при обеспечении МОБ, а также основных показателей плана по предыдущим периодам (годам) и в зависимости от изменений внешней среды и корректировок перспективных планов Метод — оптимизация распределения ресурсов на типовые операции
Отраслевой ^(Р. 9) #21 1 Максимизация целевого эффекта в рамках выделенных бюджетных ассигнований для выбранных типов систем, решающих поставленную перед отраслью задачу А 22 1 Максимизация целевого эффекта в рамках выделенных бюджетных средств для систем при условии выполнении работ в рамках перспективной пятилетки #23 Т Максимизация целевой эффективности при выполнении типовой операции с использованием возможных вариантов создания БТС в выделенных рамках ресурсов
Метод — исследовательское прогнозирование Метод — прогноз затрат на создание данного типа систем, долгосрочное планирование Метод — планирование и оптимизация по критерию выполнения типовой операции
#21 1 Минимизация затрат на создание варианта средств, решающих по- #22 1 Минимизация затрат на развитие систем в перспективной пятилетке х23 1 Минимизация затрат на выполнение типовой опер-ии для тех же условий
ТАБЛИЦА 5 (Окончание)
Уровни управления Прогноз Ui, Т > 15 лет (важнейшие направления развития; формирование программного решения важнейших научно-технических проблем)
►а. О Объединение V3(s) Модели ставленную перед отраслью задачу при оптимальном распределении ресурсов Метод — исследовательское прогнозирование *31 Оптимизация по темпам развития новых или модернизация существующих систем, оптимизация по объектам производства Метод — прогнозирование и долгосрочное планирование Динамические (приближенные)
Контуры
Долгосрочное и перспективное планирование и г, 15>Т>5 лет (формирование целевых комплексных научно-технических программ; директивы по пятилетним планам) Текущее планирование и», Т<5 лет (реализация программ и пятилетних планов с соответствующей корректировкой)
в целях оптимизации распределения ресурсов между исполнителями (объединениями) Метод — тот же
Метод — прогноз технико-экономических параметров, перспективное планирование
*32 Оптимизация темпов создания систем с учетом объемов производства в зависимости от принятых стратегии развития *33 Качественные и количественные конструкторско-технологические критерии облика систем (виды, габариты)
Метод — оптимизация сроков выполнения работ по созданию БТС с определенным обликом с использованием перспективного планирования и системного проектирования Метод — оптимизация облика систем
Динамические (уточненные) Статические
при соблюдении ограничений вида ai^i... >0,
«2^2- • • > 0,
£11^1 + £12^2 + • • • + glnxn = (1.20)
#21^1 + #22^2 4- . . . + ёЧпХп — ^2»
Smlxl 4" gm2x2 4" • • • 4- gmnxn —
где ah bt, gij — постоянные; Ct — коэффициенты стоимости.
Это значит, что аналитическое выражение основного критерия Кп сводится к классической задаче динамического программирования.
Для долгосрочного прогнозирования развития БТС при ограничениях по ресурсам эта особенность является наиболее важной. Следует указать, что способы задания и количественного выражения коэффициентов а также постоянных at, bt и gtj определяются стратегией (и частными стратегическими критериями) подхода и оценкой важности рассматриваемой системы, а также нивелированием развития системы на рассматриваемом интервале времени в аспекте обеспечения оптимальных темпов развития (с учетом динамики задач высшего по иерархии уровня управления БТС). Линейная форма Кп = М приемлема для выражения критериев КХ1 — К31, т. е. столбца, ориентированного на долгосрочный прогноз и предусматривающего использование нормативного прогнозирования для Кп, исследовательского для ЛГ21 на основе факторов, обусловленных ЛС31.
Сложнее обстоит дело с критериями А\2 — ЛГ32, так как их вид, а следовательно, и аналитическое выражение определяются не только видом (аналитическим выражением) критериев Кп — Кы, но и стратегиями подхода, которые могут существенно влиять на вид и форму критериев ЛГ12 — ЛГ32. Действительно, в зависимости от стратегии частного критерия при определении задач на пятилетку можно столкнуться с одним из трех случаев: 1) поддержание постоянного превосходства над уровнем потребности (стратегия максимакса); 2) поддержание равновесия относительно уровня потребностей (стратегия минимакса); 3) альтернативное планирование, предусматривающее: а) минимизацию ресурсов в разумных пределах стратегии планируемого отставания от потребностей до минимально допустимых пределов (в связи с предыдущим или последующим скачкообразным достижением превосходства по критериям максимина или минимакса); б) скачкообразное достижение уровня потребностей по стратегии максимакса.
В этой ситуации рационально использовать одну из разновидностей линейного программирования — симплекс-метод. Аналитическая форма критериев Л\2 — К32 в такой постановке сводится вновь к максимизации (либо минимизации) линейной формы
^12-32 = 4- Съх2 + • • • 4- Спхп — М (1.21)
150
при ограничениях вида
+ gl2X2 + • • . + gln-Tn <
gai^i + gvxz + • • • + gznxn < h, (1-22)
gmlxA 4” gtn2x2 4" • • • 4" gmn^n
которые в данном случае имеют вид
где система векторов Gb G2, . . Gn считается линейно-незави-симой для n-мерного построения и называется базисом этого пространства.
Для столбца критериев /fi3 — К2з целесообразно пользоваться любой формой расчета элементов платежной матрицы вида
с т с
(ЛГ («)} - (ЛГ„) + i (£ + СЯ) [. (1.24)
>=1 3
Для критерия] Лзз, кроме того, следует использовать семейство частных критериев KQ (см. ниже (1.26)), а также принцип суперпозиции линейной системы, который заключается в том, что если на вход линейной системы накладывается несколько отдельных возмущений, то на выходе системы должна появиться сумма выходов, соответствующих каждому из этих отдельных возмущений.
Аналитическое выражение этого принципа сводится к использованию линейного интегрально-дифференциального уравнения вида
ап^~ + On-х -Эг9- + • • • + а°М) + ^00(0^ = ^18(01, at cit v
(1.25)
где а — запас устойчивости параметра по модулю; 9 — параметр возмущения; е (£) — сигнал ошибки (рассогласования).
Для систем с обратной связью наиболее широко используемым видом чистого критерия следует считать критерий /f0, позволяющий дать качественную оценку основных характеристик системы (операционных характеристик) для времени ГЭфф.
В общем виде критерий KQ имеет вид
’ (1-26)
i=al 1 Эфф
Где ^гэфф"" число возможных характеристик i-й системы, реализующей задачу за время ГЭфф; Wi — вероятность выполнения единич-ной операции Z-й системой.
151
Таким образом, критерий Ко позволяет оценить отдельные системы по операционной эффективности, но такое аналитическое выражение критерия Ко не позволяет раскрыть, какой ценой дос-тпгнется значение W. Поэтому для более полной сравнительной оценки конкурирующих БТС целесообразно ввести дополнительные частные качественные критерии: весовое качество kgk = Ко/ lgk; габаритное качество kvksk = K0/Vk = K0/Skl энергетическое качество kEk = K0!Ek\ использование личного состава к^ — Ко/ }Nk. Здесь gk — вес технологического оборудования систем; Sk — соответственно объем системы и площадь, занимаемая системой; Ек — мощность, потребляемая комплексом; Nk — численность личного состава.
3. Особенности постановки задач оптимизации облика БТС
Сущность научно-технической революций заключается в резком увеличении количества созданных в результате научно-исследовательских и опытно-конструкторских работ (НИОКР) систем, подсистем иЛи элементов, обладающих качественно отличными функциональными характеристиками, что дает возможность рассматривать их как элементы новизны. Именно это обстоятельство позволяет науке превратиться в непосредственную производительную силу, определяющую темпы и основные направления научно-технического прогресса.
Сущность создания нового качества заключается в том, что его основу составляют элементы новизны, полученные в результате НИОКР, наряду с использованием элементов преемственности.
Еще в 1962 г. министерством обороны США для определения источников формирования нового качества была проведена программа «Хиндсайт». По ее результатам было установлено, что новое качество системы в современном машиностроении может быть обеспечено только в случае внедрения в НИОКР от 50 до 150 элементов новизны. В противном случае вместо создания нового качества произойдет «повторение старого». Так, создание нового качества при замене самолета С-130 «Геркулес» самолетом С-141 «Старлифтер» было обеспечено использованием в конструкции самолета более 80 элементов новизны. На рис. 13 изображена схема создания элементов новизны в рамках ЖЦ БТС [60].
Количество технических и научных открытий, а следовательно, и элементов новизны находится в прямой зависимости от мощности научно-технической базы, квалификации инженерно-технических кадров, организации их труда, выделяемых ресурсов, системы управления наукой, а также от системы подготовки кадров. На уровне НИИ или КБ количественная оптимизация элементов новизны для конкретной БТС сводится к выбору оптимальной стратегии НИОКР, диктующей последовательность реализации множества операций, позволяющих в конечном счете достиг-
152
Формирование элементов новизны
РИС. 13. Блок-схема создания элементов новизны
I_______________________________________________________________________________________________________________________________________________________________________________________________________J
Реализация элементов новизны
нуть поставленной цели. Важную роль при этом играет оценка важности и значимости изделия, которая обычно лежит в основе выбора соответствующей стратегии разработки или выбора альтернатив выполнения поставленной задачи.
Следует отметить, что некоторые авторы подходят к решению задачи планирования НИОКР на уровне НИИ и КБ с позиций «уравниловки» значимости разрабатываемых тем без учета степени важности разработки того или иного изделия, его качественных характеристик и т. д., что в определенной мере умаляет важность планового аспекта в управлении развитием БТС Ч
Анализ научно-технической сущности процесса создания нового качества позволяет установить, что определяющим для успешной разработки является наличие достаточного количества элементов новизны. Следовательно, для определения стратегий оптимального развития БТС следует найти модель элементов новизны и преемственности в НИИ и КБ, что позволяет воспользоваться критерием ^эффниокр (эффективности НИОКР) вида
^эффНИ0Кр = / (*o, 0» (1*27)
где KQ — характеристика качества НИОКР или облика создаваемой БТС; v — характеристика уровня разработки по показателям преемственности и новизны; R — характеристика ресурсного обеспечения НИОКР; t — временная характеристика НИОКР.
Анализ перечисленных составляющих, которые наиболее существенно влияют на эффективность НИОКР, естественно, следует начать с характеристик качества. Представляется достаточно очевидным, что создание высоких качественных показателей изделия, определяющих его облик, является центральным вопросом для достаточно широкого класса задач оптимального планирования НИОКР. Следует отметить, что точные решения таких задач (с числом итеративных шагов, меньшим числа шагов для полного перебора вариантов и ситуаций внешней среды), по-видимо-му, невозможно получить в удовлетворительные сроки, поэтому вместо получения точных решений задачу оптимального планирования сводят к поиску области, в которой должно лежать точное решение.
В этом аспекте задача оптимального планирования решается с использованием системы иерархических критериев (общий — частный) либо с применением эвристической процедуры принятия решения.
Процедура метода использования иерархических критериев схематически может быть рассмотрена на примере двух критериев Кг и где Кг — общий (глобальный) критерий, на основании которого формализуются требования к оптимальному плану НИОКР, а частный критерий кг отражает дополнительные требо-
1 См., например, работу Е.П. Голубкова «Оценка эффективности разработки технических изделий» (Изв. АН СССР. Сер. экон., 1973, № 5).
154
ания (иногда — дисциплинирующие условия) к оптимальному ВлаНу НИОКР, дополнительные в том смысле, что они могут рассматриваться как связи второго порядка и соответственно удовлетворяться во вторую очередь, после выполнения требований общего критерия Кг. Процесс оптимизации облика БТС сводится к выбору в пространстве решений некоторой области уи наиболее приемлемой (но не всегда оптимальной) и в смысле критерия
Эвристическая процедура в самой общей постановке может быть реализована методом иерархически организованного перебора, который сводится к интегральному процессу выбора предпочтительной альтернативы при движении по «дереву» декомпозиции задачи «сверху — вниз»: от общего решения Уо к решению подзадач у2, . . уп, обеспечивающих решение Уо, и далее к решению отдельных вопросов уп, у12, . . ., утп, обеспечивающих в свою очередь решение подзадач yv у2, . . ., уп, и т. д. Особенностью эвристической процедуры является применение метода «отсечения» заведомо «невыгодных» подзадач уп и вопросов утп. Метод «отсечения» основан на использовании так называемого альтернативного графа [52].
В заключение анализа характеристики качества следует отметить, что процесс его формирования можно разделить на шесть основных этапов: 1) изучение информации о соответствии ныне выпускаемых БТС запросам заказчика или потребителя и выявление направлений совершенствования продукции; 2) совместная с заказчиком разработки технического задания на НИОКР по созданию новой БТС; 3) создание технической концепции (в основном на стадиях технических предложений и эскизного проектирования); 4) формирование и добавка качественных показателей в процессе опытного производства и испытаний БТС; 5) сохранение качественного уровня в процессе серийного производства и эксплуатации БТС; 6) поддержание или восстановление качества в процессе модернизации.
Такая классификация формирования качества, естественно, выдвигает совершенно очевидное требование разработки комплекса стандартов качества научно-исследовательских работ и аттестации конструкторских работ. Разработку таких стандартов следует, видимо, рассматривать как обязательный этап создания комплексной системы управления качеством БТС. В этом аспекте понятны попытки оценить качество НИОКР по степени выполнения пунктов технического задания (см. II.2.2), хотя такая методика неизбежно связана с предпосылкой «идеального» технического задания, что далеко не всегда соответствует действительности.
Переходя к анализу следующего укрупненного фактора эффективности планирования — уровня НИОКР — по показателям преемственности и новизны, следует указать, что этот фактор в сущности является одной из важнейших составляющих предыдущего фактора — характеристики качества НИОКР или облика
155
создаваемой БТС. Принимая во внимание, что именно фактор v с одной стороны, является важнейшим показателем качества по уровню, масштабам и полноте использования основных и промежуточных результатов НИОКР, а с другой стороны, существенно влияет на характеристики ресурсного обеспечения R и времени t НИОКР, было признано целесообразным выделить его в индивидуальный показатель, который должен учитываться и анализироваться параллельно с показателем качества. При этом совместно с анализом уровня НИОКР определяются составляющие, связанные с масштабностью и полнотой использования результатов НИОКР, а также показателем важности разработки.
Оценка уровня совершенства разработки является весьма сложной задачей. В наиболее общем логико-формальном виде эта характеристика может быть представлена выражением
тп „ ъг
1 а i** С.
(1.28)
•tv 2=1
где т — число подсистемы или элементов БТС, перенесенных из прототипа БТС в новую систему без изменений в стуктуре, связях и управлении (функционально и параметрически преемственные элементы);
— подсистема или элемент г-го типа, функционально преемственные по прототипам;
Ксг — коэффициент усложнения (упрощения) по конструктивно-технологическим’ параметрам в машиностроении, равный 0,8 Кс. ^1,5 (определяется экспериментально по технической документации на этапе формирования технического задания или технических предложений);
— число деталей в подсистеме или элементе г-го типа;
Kv — коэффициент новизны БТС, определяемый экспертным путем и равный 1,0 Кт <^1,4 (отношение числа подсистем илп элементов с новыми функциональными характеристиками к общему числу соответственно элементов или подсистем БТС);
Кт — коэффициент масштабности внедрения результатов НИОКР с точки зрения использования ее результатов в различных ОЭС данной отрасли, а также в смежных отраслях народного хозяйства, который лежит в пределах 1,0 Кт ^1,4 (экспертнобалльная оценка по числу внедрений в данной и различных отраслях в зависимости от типоразмера БТС);
Ks — коэффициент полноты использования частных или промежуточных (попутных) результатов НИОКР в других отраслях или работах, равный в машиностроении для технологических БТС 1,0 Ks 1,95 и в авиапромышленности 1,0 Ks 1,3 (экспертно-балльная оценка по числу внедрений в данной отрасли в зависимости от типоразмера БТС).
Резюмируя изложенное, следует отметить, что параметр
156
771 Y Y
1 V1 ____l. можно рассматривать как коэффициент преемствен-
ni
сти Кт равный в машиностроении 0,8 Кп 1,3, и, следо-Н°тельно, суммарная оценка уровня НИОКР составит для БТС вапа авиатранспортных систем величину в пределах 0,8 О > з 25 а для технологических БТС — величину в пределах 0,8 ^v’<4,95 [52].
Переходя к анализу характеристики ресурсного обеспечения НИОКР, следует сразу же выделить три основные составляющие, формирующие научно-технический потенциал:
1) информационное обеспечение, т. е. научный задел, являющийся результатом ранее сделанных ресурсных ассигнований в фундаментальные, поисковые и прикладные НИР;
2) энергоматериальное обеспечение, т. е. капиталовложения в науку для создания экспериментальной и вычислительной баз опытного производства и решения связанных с этим строитель-
ных и транспортных задач, а также задач связи;
3) кадровое обеспечение, т. е. подготовка необходимого состава руководителей и исполнителей НИОКР в рамках директив и задач, которые формулируются перед соответствующими разрабатывающими ОЭС на определенные периоды времени.
Рассматривая соотношение между указанными составляющими ресурсного обеспечения, следует отметить, что динамика их развития имеет весьма неоднородный характер. Так, в 60-х годах опережающими темпами развивалась кадровая составляющая: число занятых в науке имело ежегодный прирост около 10%, тогда как энергоматериальное обеспечение увеличивалось в среднем на 7% в год, что, естественно, приводило к снижению фондовооруженности ученых. В 70-е годы это положение изменилось и темпы роста кадровой и энергоматериальной составляющих примерна уравнялись. Однако уже на ближайшую перспективу это соотношение, по-видимому, не будет считаться приемлемым по следующим причинам:
1) существенные качественные изменения процессов НИОКР связаны с широким внедрением автоматизации: реализованы первые варианты машинного проектирования, внедряется программный автоматизированный эксперимент с непосредственной обработкой данных на ЭВМ и т. д.;
2) в общей структуре затрат на создание БТС доля испытании Уже давно превысила 50% (и по затратам, и по срокам), что, естественно, требует увеличения доли энергоматериальной составляющей;
3) ускорение темпов научно-технического прогресса должно обеспечиваться интенсивным развитием науки, при котором темпы Роста (количественного и качественного) научных кадров должны монотонно снижаться (за счет нарастающей потребности в кадрах высшей и средней квалификации в отраслях народного хозяй
157
ства); кроме того, интенсивное развитие науки — это существенный рост потребности в информационном обеспечении НИОКР а следовательно, в ресурсном (в первую очередь в энергоматериальном) обеспечении фундаментальных, поисковых и прикладных НИР. По данным Г. Доброва (Институт кибернетики АН УССР), темпы роста энерготехнического потенциала в ближайший период должны в 2,5—3 раза превысить темпы роста кадровой составляющей 1.
С учетом специфики задач планирования ресурсное обеспечение НИОКР в некоторых случаях целесообразно представить как функцию некоторых стоимостных показателей:
/я = Л (Zn) и Л (МиИз (2ф). (1.29)
где Zn, Zcc, 2ф — соответственно плановые (директивные), среднестатистические и фактические затраты на НИОКР.
Введение таких показателей позволяет оценить эффективность использования ресурсов по показателю (Zn/Z$ -> 1) (следует отметить, что упрощенное понимание (7ф -> min) обычно резуль-тируется в сокращении номенклатуры или объемов работ), провести корректировку эффективности по показателю £п/2ф, который стимулирует принятие напряженного плана, если он несущественно больше или меньше единицы.
Оценка временных характеристик НИОКР является важнейшим показателем эффективности научной деятельности. По оценкам Института проблем управления АН СССР и Института кибернетики АН УССР, среднестатистический срок НИОКР (период между открытием финансирования по НИОКР и началом серийного производства) составил к середине 70-х годов 8—10 лет, причем по сравнению с 60-ми годами отмечается очевидная тенденция к увеличению этого срока, что в известной мере является отражением роста сложности современной техники вообще и БТС в особенности. Вместе с тем сокращение этого срока хотя бы на полгода (либо по наиболее сложным НИОКР на один квартал) позволило бы получить экономический эффект (для разработки БТС в машиностроительной и авиационной промышленности) от 1,6— 2,2 млрд. руб. в одиннадцатой пятилетке до 8—10 млрд. руб. к 2000 г. [52].
Оценка эффективности НИОКР по временным характеристикам является одной из наиболее важных и сложных проблем методологии и методики планирования, которой посвящено большое число работ. Укрупненную логико-формальную оценку деятельности НИОКР по аналогии с оценкой ресурсных показателей можно представить функцией
ft = fi(tn)[Jf2(tcc)(Jf3(t<b), (1.30)
1 Добров Г. Наука: пути развития.— Наука и жизнь, 1974. As 12.
158
e *сс, "" соответственно плановые (директивные), средне-Г^атистические и фактические показатели длительности НИОКР. СТ Используя эти показатели можно: оценить оперативность rjHOKP по показателю £п/^ф 1 (следует отметить, что tn max
п0 изложенным выше причинам существенно снижает народнохозяйственный эффект разработки); провести корректировку оценки оперативности по показателю tn/tcc min, стимулирующему принятие напряженного по срокам плана; осуществить анализ оперативности разработки (в частности, для получения обоснованных нормативов по длительности отдельных этапов; НИОКР) по показателю
/ф = tn + п т
где Af = 2 h + h (ti — длительность i-й корректировки пла-на разработчиком, tj — длительность j-й корректировки планов заказчиком в связи с изменением общего или частных технических заданий). В результате оперативность НИОКР можно оценить по выражению вида
п т
^эфф = tn Ип + 3 ti + 3 tj) 1 i=l j=i
(1.31)
4. Особенности постановки задач оптимального распределения ресурсов
Современный научно-технический прогресс характеризуется резким увеличением объемов и сложности научно-исследовательских (НИР) и опытно-конструкторских работ (ОКР) и затрат на их выполнение, в связи с чем увеличивается объем необходимых и привлекаемых в науку ресурсов. В этих условиях значительно возрастает роль системного подхода к прогнозированию и перспективному планированию процессов программно-целевого управления наукой.
Управление наукой — это система, включающая оптимальное распределение финансов и материально-технических средств, руководство деятельностью ученых и научными учреждениями, научную организацию. Одной из главных целей системы управления наукой является комплексная разработка оптимальных программ н планов на базе выбора наиболее перспективной научно-исследовательской тематики. Составлению оптимальных программ и планов научных исследований предшествует прогнозирование основных направлений научных исследований, цель которого решить тРи основные задачи: составить ранжированный перечень перспективных направлений научных исследований; сформировать и обосновать комплексные межотраслевые и отраслевые программы; Распределить (с технико-экономическим обоснованием) необходимые ресурсы между планируемыми научными исследованиями.
Поскольку объект прогнозирования в данном случае весьма
159
сложен, целесообразно применять комплексные системы прогнозирования, позволяющие учесть многофакторность процесса и сложность структуры объекта. В настоящее время для решения задач прогнозирования научных исследований и ОКР по управлению развитием БТС широко применяются методы, детально рассмотренные в разд. III.
Задачи оптимизации распределения ресурсов при развитии БТС. Рассмотрим более подробно задачи, которые решаются при планировании разработок БТС. Применяя терминологию операционного анализа систем, эти задачи можем разделить на три класса: 1) задачи стратегического планирования на основе нормативного прогнозирования; 2) задачи перспективного и долгосрочного (оперативно-стратегического) планирования на основе исследовательского прогнозирования; 3) задачи текущего (оперативно-тактического) планирования.
Решение задач первого класса предусматривает формирование глобальной цели и направлений развития данной организационно-экономической системы на рассматриваемый период. Решая задачи второго класса, сопоставляют потребности, объективно связанные с обеспечением достижения выбранной цели и направления развития с реальными возможностями данной организационно-экономической системы. При решении задач третьего класса устанавливают последовательность действий и последовательность обеспечения ресурсами, необходимыми для достижения ближайшей цели.
Очевидно, что все эти задачи связаны между собой так, что решения задач более высокого уровня являются исходными данными для решения задач более низкого уровня. В свою очередь результаты решения задач более низкого уровня могут влиять на условия решения задач более высокого уровня. Таким образом, выбор цели и направления развития организации на будущий период может быть рассмотрен как прогноз цели и направления развития организационно-экономической системы на этот период. Результатом такого прогноза может явиться «дерево целей», разрабатывающей ОЭС, причем на нижнем уровне иерархии этого «дерева» будут находиться темы НИОКР.
Очевидно, что выполнение любой научной тематики невозможно без наличия необходимых ресурсов, прежде всего финансовых. Таким образом, от прогноза возможных целей разрабатывающей ОЭС можно перейти к прогнозу финансовых ресурсов (затрат), необходимых для проведения НИР.
Зная общее количество ресурсов, необходимых для разработки, и установленные при ранжировании перечня перспективных исследований коэффициенты важности тем, можно перейти к постановке задачи о распределении ресурсов по темам, входящим в тот или иной проект. Предположим далее, что задачей планируемого периода является выполнение как можно большого числа тем, т. е. критерий решения задачи в данном случае — это максиму*1 завершенных тем.
160
Прежде чем перейти к постановке задачи, докажем, что средне число завершенных тем равно сумме вероятностей завершения зсех отдельных тем. Обозначим среднее число выполненных тем через
Хт = Х (Ат),
где случайная величина Ат — число выполненных тем. Рассмотрим группу, состоящую из п тем (Z1T Z2, . . ., Zn), и выведем формулу Для математического ожидания числа завершенных тем. Для этого представим общее число завершенных тем в виде суммы д случайных величин:
Ат = А2 + ... + Ап = 2 А[.
i-1
Каждой i-й единице Zj соответствует случайная величина Aif которую определим так: Ai = 1, если тема Z/ завершена, Л< = 0э если тема Zf не завершена. Общее число завершенных тем Ат равно сумме всех величин Л/. По теореме сложения математических ожиданий
X (Ат) = X (40 + X (А) + ... + X (Ат) = S X (4,). (1.32)
2=1
Обозначим через Wi вероятность выполнения i-й темы. Тогда по определению Хматематического ожидания X (Л/) ~ +
+ (1 — И4) О = Wt. Подставляя в это выражение равенство (1.32), получаем
Х(Лт) = 1У1 + 1Г2+ ... + Wn= 2wt
или окончательно
хт= S (1.33)
/=1
Т. е. среднее число завершенных тем равно сумме вероятностей завершения всех отдельных тем. Любая тема на этапе планирования имеет вероятность успешного завершения, меньшую единицы. Вероятность Wt успешного завершения i-й темы зависит от намеченного срока ее окончания, объемов (1>и, У/2, . . ., vin) используемых ресурсов, а также от подготовленности и квалификации исполнителя qt научного обеспечения темы Qi и т. д. Следовательно,
Wi = f (vilf i>i2, . . ., vim, qh Tf, Qi).
Целесообразно искать зависимость Wt от объема используемых ресурсов, предполагая остальные параметры заданными, т- Wi - / f (0) = 0.
6 С. А. Саркисян 161
Естественно предположить, что вероятность успешного завершения темы Wt (у) как функция v является неубывающей, а ее изменение пропорционально количеству используемого ресурса, т. е.
dW (у) = adv. (1.34)
где а — коэффициент, который находится в прямо пропорциональной зависимости от количества выделенного ресурса v и от степени близости обеспеченной им вероятности максимально возможной ТУщах.
Для каждой темы существует некоторый уровень используемого ресурса, превышение которого не приводит к заметному увеличению вероятности ее успешного выполнения. Следовательно, а = f [Жтах — W (i>), и]. Далее представим, что at = bp, а2 = = b2 [PVmax — W (р)]. Будем считать, что а = аг — а2. Тогда
а = bv [РУтах - 1У(0], (1.35)
где b = brb2. Учитывая (1.34) и (1.35), получим dW (у) = = bQ [jymax — W (у) dv] или следующее линейное дифференциальное уравнение первого порядка:
W' (у) + bvW (у) = bW^v. (1.36)
Его общее решение находится так:
__ bv2
Ж'(0 = и^1пах+сг 2. .
Константа С может быть найдена из условий W (0) == 0. Тогда (1.36) принимает вид
bv*
w (v) = WmaAi-e~ ~).
Алгоритм оптимального распределения ресурсов. Одной из важнейших особенностей постановки задач оптимизации стратегии развития БТС является вероятностный характер успешного завершения НИОКР, обусловленный неопределенностью в реализации (и далее во внедрении) полученных результатов. Поэтому постановка любой оптимизационной задачи, выбор той или иной стратегии развития БТС в условиях неопределенности (сказывающихся прежде всего в интервальной или вероятностной задаче задания ограничений), естественно, связана с введением больших или меньших допущений, которые можно рассматривать как средство «искусственного» снижения неопределенности.
В решении оптимизационных задач по распределению ресурсов в качестве основных допущений наиболее часто принимаются предположения о том, что комплекс программ, включающих НИОКР определенного тематического направления, может быть декомпозирован на некоторое конечное множество, включающее п независимых друг от друга по процедуре и информационному обеспечению тем Zf.
162
Другое, также весьма распространенное допущение вводит оедположение, по которому общий ресурс и, выделенный для решения данного программного комплекса НИОКР в виде конкретных ресурсных затрат (ии, vi2, . . ., vin), расходуется только на данный комплекс (без перераспределения на другие программные комплексы). Физически это последнее допущение адекватно случаю, когда в данном НИИ или КБ выполняется единственный комплекс НИОКР, что, естественно, на практике, за
весьма редкими исключениями, не встречается.
Оценивая эти два основных допущения, следует отметить, что первое из них в известной мере соответствует действительности (последовательным многоуровневым членением тем можно в конечном счете получить независимые по процедуре выполнения темы), тогда же как второе мало соответствует сложившейся практике исследований.
С учетом изложенного постановка задачи сводится к оптимизации распределения ресурсов ип фиксированного суммарного объема И по совокупности тем {ZJ (i = 1, 2, . . ., п), составляющих единый программный комплекс НИОКР, который должен быть
выполнен в плановом периоде.
Таким образом, с учетом первого допущения можно считать, что вероятность Wz = Wi max выполнения всего программного комплекса исследований и разработок (независимо от принятого или установленного порядка выполнения) тем будет равна ___
п^.
i—1
Далее следует ввести частное допущение, состоящее в том, что процедуры (или стратегии выполнения) программного комплекса НИОКР строятся в предположении использования конечного поля альтернатив для каждой темы Zf (соответствующей созданию подсистемы или элемента БТС), причем альтернативы решения тем задаются матрицами цели—средства, а выбираются с использованием альтернативного графа (см. ниже).
Распределение ресурсов по темам Zf может быть представлено в виде n-мерного вектора V (pn i?2, . . ., vn), составляющие которого подчинены следующим дисциплинирующим условиям:
п
(i = 1,2,..., n).
i=l
(1.37)
Дополнительным условием оптимизации распределения ресурсов является необходимость учета (и соответственно формализации) важности или приоритета выполнения тем в данном комплексе. По аналогии с предыдущим для формализации и учета приоритета в исполнении тем следует ввести n-мерный вектор коэффициентов важности а (ар а2, . . ., ап). Таким образом, по-СТановка задачи оптимизации распределения ресурсов на про-ГР 'ммныл комплекс из п тем сводится к поиску максимума функ-
163
ционала вида
F = П atWi (уг) -» max (1.38)
1=1
при ограничениях вида (1.37).
Функционал (1.38) может быть дополнен характеристиками альтернативных стратегий Si выполнения тем в планируемом периоде [т0 — tJ программного комплекса НИОКР и изменен следующим образом:
<Р = П (тг) Wi (vt), г~1
где Si (tJ определяется на основании экспертных оценок для диапазона реальных или допустимых (приемлемых) альтернатив, а т, предполагается заданным.
Для придания рассматриваемой постановке оптимизационной задачи большей достоверности целесообразно дополнить ее еще одним дисциплинирующим условием, в соответствии с которым распределение ресурсов vt ограничено также физической возможностью интенсивности освоения средств, зависящей от потенциала научно-технической и опытно-промышленной базы данной организационно-экономической системы, а также от потенциала (квалификации и численности) имеющихся кадров. Последнее дисциплинирующее условие имеет следующий вид:
’ 3 Vi (t) <
где Qm (t) — число работ (проектов, исследований), выполняемых исполнителем (отделом, лабораторией, цехом и т. д.) в момент t е [т0 — tJ.
Следует отметить также, что, принимая во внимание S-образный характер зависимости вероятности выполнения темы от выделенного на ее выполнение ресурса функционал (1.38) может быть выражен либо в виде
F*=f[ ajFimaxU-e»*’’-’’*),
г =1
либо в виде
п __Ь_ 2
/'’** = JJ аЖП1ах(1 — е
г=1
где vQ — минимально допустимый уровень ресурса vh обеспечивающий выполнение темы Zt.
Итак, в окончательном виде математическая постановка задачи оптимизации распределения ресурсов на программный комплекс
164
я3 п тем программного комплекса НИОКР может быть сведена к поиску максимума функционала
f = п (т*)Wi с1 -е 0 -39>
при ограничениях
рг>0, (1.40)
г—1
3 (i = 1,2,..., и; т = 1, 2,..., N).
Следует отметить, что предложенная здесь постановка задачи направлена прежде всего на качественное исследование ресурсов при различных вариантах их распределения в зависимости от изменений во внешней среде. Количественное определение этой зависимости возможно только с привлечением статистического массива, подкрепленного квалифицированными экспертными оценками.
В соответствии с изложенной выше математической постановкой оптимизационной задачи ее решение сводится к созданию алгоритма для определения функционала (1.39) с его ограничениями. При этом следует указать, что характеристика может быть аппроксимирована линейной функцией, что позволяет существенно упростить алгоритм решения, который сводится теперь к определению минимальных pmin и максимальных итдл ресурсов и соответствующих им максимальных значений вероятности выполнения тем Z/.
В этом аспекте для функционала (1.39) n-мерные параметры л (ах, а2, • • •> ап)» = (И\тах, JV2тах» • • •> И^птах), а также Si (тг) принимаются заданными либо определенными на основании экспертных оценок. Все характеристики Wi (у) аппроксимируются линейной функцией, т. е. для каждого i имеются соответствующие значения vt max, а также mjn; Wi (у) =
~ Ay — Bh где
Af = Wi max/(yi max — min) > 0,
Bi = AiVmin (i = 1,2,..., n).
В результате построение алгоритма сводится к поиску максимума функционала (1.38), в котором приравнивается к единице. При этом можно записать следующее равенство:
max* [W (vlt vn)] = max* Wt (vt) j =
i=l
i n i n гn 1
= max* L JJ (Ayt — | = A± max* (yt — Vi min) J »
i =^1 iel i =1
165
где max * обозначает максимум при условиях
п
min max» 3 •
i=l
Далее задача состоит в поиске максимума
max* J] (v,— Vi min). i=l
Для этого введем новые переменные рн = vt — т,п, после чего система ограничений примет вид
О Vil Vi max — Vi min = Vil max (i = 1, 2,..., д),
У »ц = — 2 min = V — C < px (C = const). (1.37a)
i=l i=l i=l
Таким образом, для оптимизации распределения ресурсов необходимо найти максимум функционала
П Vil = W' (Vil, vin) i=l
при
n
о < Vil < Vi! max (I = 1,2, . . . , II), 3 Vil = Vl.
i=l
Если максимум max W' (px, . . ., vn) достигается в некоторой точке, соответствующей ресурсу р, то в этом случае всегда можно выбрать такой параметр V 0, при котором
V, если Ptmax/4 V,
^imax, еСЛИ Pimax<V.
В результате представляется возможным применить следующий алгоритм определения значений ресурсов рн при которых W (рр р2, . . ., рп) достигает максимума при условиях (1.37). Итак, алгоритм строится следующим образом.
1. Находят величину = vln. При этом, если р/тах
Vi (i = 1, 2, . . ., /г), то, приравнивая v — Vp определяют точку максимума.
2. Если ?! > Vi max, то можно предположить, что vt = vt max для таких i. Затем следует найти величину
^2 = р2 max j »
где P — число индексов; Ц — множество индексов i, при которых Vi Р/ max*
3. Если V2 > Vi max и i £ /р то р = pt, i g Iv
166
4. Наконец, если V2 > vt max для отдельных i, то следует найти
lei
где I — множество индексов, для которых max < V; n3 — число индексов, для которых Vi max > V2.
Число шагов в предложенном алгоритме не может быть более п т. е. алгоритм конечен. Использование данной методики распределения ресурсов в сочетании с моделями оптимизации, изложенными в данной главе, позволяет заметно повысить эффективность управления программными комплексами НИОКР.
ГЛАВА ВТОРАЯ
СТРАТЕГИИ РАЗВИТИЯ БТС
В системологии, так же как и в теории исследования операций (или теории принятия решений), под стратегией развития подразумевается некоторая последовательность правил поведения (управляющих воздействий), обеспечивающих наиболее рациональное использование средств (ресурсов) для достижения поставленной цели. Следуя основным теоретическим положениям системологии, изложенным в разд. I работы, отправной точкой формирования или выбора стратегии после того, как цель операции и важнейшие дисциплинирующие условия определены (или заданы), являются исследование и учет математического ожидания воздействия неуправляемых (либо косвенно управляемых) факторов внешней среды. В результате такого выбора представляется возможным укрупненно определить допустимые диапазоны изменения управляемых переменных. Это особенно важно для управления развитием БТС, специфической особенностью которых являются многоэтапные, или многошаговые, процессы. В таких процессах стратегия является правилом для принятия решения по реализации последующих операций на основании накопленной к данному этапу управленческой информации. Учитывая специфику развития БТС, на каждом таком этапе предлагается спектр альтернатив по выполнению дальнейших операций, и тогда задача правильного определения стратегии развития сведется к выбору предпочтительной или оптимальной альтернативы.
Изложенное позволяет сделать вывод, что методы формирования стратегий охватывают аспекты управления и поведения НТС для заданных структуры и связей. Отсюда понятен тот организационно-методический подход к формированию управления Развитием БТС, который получил наименование программно Целевого управления.
167
Для формирования и реализации программ по решению важнейших научно-технических проблем и, равным образом, целевых комплексных научно-технических программ задачи выбора альтернатив приобретают смысл формирования альтернативных стратегий, построение которых имеет целый ряд специфических особенностей.
Таким образом, в анализе проблемы стратегий развития БТС наиболее существенным следует считать исследование аспектов программно-целевого управления; анализ стратегий развития БТС в рамках программно-целевого управления, включая альтернативные и модульные стратегии и анализ методов формирования и выбора альтернативных стратегий развития БТС.
1. Аспекты программно-целевого управления
Методология программно-целевого планирования представляет собой своеобразный синтез прогнозирования научно-технического прогресса и долгосрочного планирования с техникоэкономическим планированием.
В настоящее время можно указать следующие особенности программно-целевого планирования х.
1. Планирование осуществляется от конечных целей социалистического общества (цели в области народного благосостояния и обороны). При составлении народнохозяйственных планов исходят из конечного продукта с одновременным формированием крупных народнохозяйственных программ.
2. При программно-целевом планировании и управлении осуществляется интеграция (системное объединение) планирования и управления научно-техническим прогрессом и промышленным производством. Эта интеграция осуществляется за счет комплексного планирования по стадиям жизненного цикла систем.
3. Введение программно-целевого планирования и управления связано с определенными структурными дополнениями и корректировкой функций ряда организаций, направленными на развитие оргструктуры народного хозяйства в целом. Сущность изменения этой структуры сводится к образованию целевого управления в смысле создания целевых межотраслевых и межрегиональных объединений для руководства крупными народнохозяйственными терминальными программами и проектами. К таким программам можно отнести, в частности, создание территориальнопромышленных комплексов (например, Тюменского, Братского, Канско-Ачинского и т. п.), программы освоения и использования космоса, Мирового океана и т. д.
Вообще программа определяется как планируемый комплекс социальных, экономических, научно-исследовательских, проектных (конструктивно-технологических), технических и производ-
1 Поспелее Г. С. Программное планирование и управление.—В кн.: Энциклопедия кибернетики. Киев: Наук, думка, 1977, т. II, с. 244.
168
ственных мероприятий, направленных на достижение основной цели развития или ряда последовательно совершенствующихся целей. В этом аспекте программы, направленные на достижение определенной конечной цели, получили название терминальных, а программы, реализующие последовательность задач,— развивающихся программ.
Постановлением ЦК КПСС и Совета Министров СССР от 12 июля 1979 г. «Об улучшении планирования и усилении воздействия хозяйственного механизма на повышение эффективности производства и качества работы» 1 предусмотрена разработка в качестве важнейшей части государственных перспективных планов экономического и социального развития целевых комплексных научно-технических, экономических и социальных программ, а также программ развития отдельных регионов и территориально-производственных комплексов. В постановлении Госплана СССР2 от 3 июля 1980 г. указывается, что целевая комплексная программа щкп) — это директивный и адресный документ, представляющий собой указанный по ресурсам, исполнителям и срокам осуществления полный комплекс социально-экономических, производственных, научно-исследовательских, организационно-хозяйственных и других заданий и мероприятий, направленных на решение наиболее эффективными путями народнохозяйственной проблемы с участием ряда отраслей, а также министерств и ведомств СССР, советов министров союзных республик и местных органов управления.
По содержанию ЦКП подразделяются на следующие программы: социально-экономические, направленные на решение проблем повышения материального и культурного уровня жизни, улучшения условий труда, преобразования эффекта труда и т. д. (например, Продовольственная программа, Программа жилищного строительства в СССР и др.); научно-технические, направленные на решение важнейших научно-технических проблем и широкое применение в народном хозяйстве достижений науки и техники (упоминавшиеся программы освоения и использования космоса, Мирового океана и др.); территориальные (региональные), направленные на обеспечение комплексного хозяйственного освоения новых территориальных или преобразования сложившихся районов страны, формирование и развитие территориально-производственных комплексов (создание БАМ); экологические, направленные на осуществление крупных природоохранных или преобразовательных проектов (Программа по восстановлению и сохранению лесного богатства СССР); организационно-хозяйственные, направленные на совершенствование организаций управления отдельными хозяйственными системами или их комплексами.
По временном характеристикам ЦКП делятся на долгосрочные
о Правда, 1979, 15 июля.
дк°н. газ., 1980, И июля.
169
(на период свыше 5 лет) и среднесрочные (на период 5 лет и м< нее).
Все ЦКП имеют общие особенности: четко выраженный целс вой характер, проявляющийся в строгой ориентации всех вход; щих в них мероприятий заданий и используемых ресурсов на noj ное решение поставленных проблем и в порядке их составлени (начинается с постановки конечной цели с последующим развЕ тием до уровня заданий и мероприятий для конкретных ОЭС полную совокупность заданий, мероприятий и соответствующи ресурсов на весь период программы; высокую степень комплексш сти (по межотраслевым связям); соединение функций планировг ния и управления (включают наряду с комплексом плановых зг даний и мероприятий ряд оргмероприятий по управлению реалЕ зацией ЦКП); планируемый период реализации, не обязательн совпадающий с принятыми периодами планирования.
Наибольший интерес в изложенном материале с точки зрени формирования стратегий развития БТС, несомненно, представ ляют научно-технические программы, которые в свою очеред подразделяются на программы по решению важнейших научнс
^77/777 /// 4Z7J//7///7/'7e/7777Z7/76-
Z//7Z/7 77/7/7/7£’///7///7///7^
/7/77 ^7.-/77/77777^
/7/777/7/7777# /77/7/777777/777’//7/.<7 77/7/7/777 0
РИС. 14. Матрицы комплекса целепрограммного управления
Ар ajt otj (т) — задачи (операции) на уровнях прогноза, долгосрочного и перспективного плана, а также текущего планирования; Тд_; /с. та^ — временные характеристики; W, w — целевые функции НИОКР; О — альтернативные стратегии достижения целей; S — детерминированные стратегии ОКР; Яр Ср —соответственно ресурсное обеспечение на уровнях прогноза, долгосрочного, перспективного и текущего планирования
ОКР
C'77/7/z/77fzzz/z ОКР
S
170
ехлических проблем, имеющих важное народнохозяйственное значение и связанных с созданием принципиально новых видов техники и технологии (такие программы предусматривают развитие фундаментальных, поисковых и прикладных НИР с последующим проведением технических разработок для создания задела на предстоящий период); на целевые комплексные научно-технические программы для реализации наиболее значительных научно-технических достижений, что в ближайший период может обеспечить существенное повышение эффективности производства и качества продукции.
00777Д?^Д??/77? /7??£//7?//?Z? ?0??/7???//£/?
0ffJ6f?Jf6???/77? Д6~ 6ДД6//?г? 6066/76 ¥6/777? J? 0Д667? S’# .
Д//Д?/77777/06/ /76Д/77/7? 7/ /7Д?0?~ 7776/766/770? 77? 06J/6//??/??/7 /7?77/7/70/7?////?/у /7?J0///77l//f
Д7/Д6/7/777706/ /7? Д-?/¥Д 777777//Д
0?JA/?J/6//??/77/7 Д6-бДДб/WZ? 6066T76¥6/777? J? 0Д6М? 7c .
Д?777Д?0???777?
Д6ГДДГ///77? 6066/7? ¥6/7/7?
h1
4??44?//?z? ?0??/7????/Z0
^6/fffJW?ff?/77? /76-0ДД6ДД6Д ?4?С776¥?ДДД 0/76/f?
#?/r?0//6/? /%7////б/? /7?ДД?/Г/777/Д/70/Г/7 /776-/гд/дт/тг г/7/?/70б/л
77/7?//60 Г t)
Й1 *^4 Ш
I
к
I
h
I й
171
Каждая научно-техническая ЦКП^ю созданию новых БТС или технологических процессов предусматривает следующие этапы: научно-исследовательские работы; разработку технической (проектной) документации; изготовление и испытания образцов (опытно-промышленного производства); подготовку производства (с необходимой корректировкой документации); организацию серийного производства.
Таким образом, эта периодизация достаточно хорошо согласуется с периодизацией жизненного цикла БТС.
Обеспечение ЦКП предполагает первоочередное выделение необходимых ресурсов, финансирование, а также необходимое информационное обеспечение, включая приобретение в экономически обоснованных случаях зарубежных лицензий.
Методология формирования ЦКП в рамках системы прогноз — программа — план укрупненно может быть представлена следующим образом: программно-целевое управление развитием БТС может быть схематически моделировано многоуровневым комплексом двух- и трехмерных матриц (двумерных для сочетаний система-цель — система-средство и трехмерных для сочетаний цели — ресурсы — время).
В наиболее упрощенном виде удобно рассмотреть такую модель ЦКП развития БТС (рис. 14) на примере трехуровневого комплекса прогноз — программа — план, условно дифференцированного на фундаментальные, поисковые, прикладные, а также опытно-конструкторские работы (ОКР).
На каждом иерархическом уровне модель включает в себя по меньшей мере три составляющих: трехмерную платежную матрицу (объект последующей оптимизации по выбранному критерию) цели Aj — ресурсы Rj — время реализации ресурсов TR^ двумерную платежную матрицу фундаментальных или прикладных НИР цели W — альтернативы средств 0 (либо цели — стратегии — для уровня ОКР); матричную модель межотраслевого баланса (МОБ) производства и распределения продукции в народном хозяйстве для данного уровня (временного интервала) управления.
Такая постановка задачи управления позволяет использовать трехмерную матрицу для определения реальной потребности в ресурсах для выполнения поставленных целей с учетом комплексной целесообразности или эффективности их реализации в рамках всего народного хозяйства в зависимости от сроков внедрения результатов ЦКП.
Платежная матрица цели — средства (стратегии) исследований или разработок позволяет проанализировать достаточно широкий спектр альтернатив выполнения поставленных целей. Результаты ранжирования матриц могут быть использованы для формирования реальных целей таких же матриц нижнего уровня, а также при формировании модели межотраслевого баланса.
Обязательным компонентом предложенной матричной модели управления на любом ее иерархическом уровне является модель межотраслевого баланса производства и распределения продук-
172
в народном хозяйстве. На уровнях прогноза (формирования ЦооГрамм важнейших научно-технических проблем) и долгосроч-ого перспективного планирования (формирования ЦКП) эта модель позволяет на основе учет^ потребностей ресурсного обеспечения и результатов исследования (фундаментальные либо прикладные) на данном уровне оценить математическое ожидание возможностей соответствующего ресурсного обеспечения для нижнего уровня. Использование модели межотраслевого баланса в контурах управления развитием БТС позволяет укрупненно оценить целесообразность и главное своевременность появления в планируемом или прогнозируемом временном интервале той или иной разновидности БТС с точки зрения потребностей в ней отдельных отраслей и народного хозяйства в целом, а также с точки зрения перспектив ресурсного обеспечения ЦКП создания данной БТС в намечаемые сроки. Такой системный подход позволяет с переходом на уровень ОКР варьировать темпы развития различных БТС и, следовательно, создает реальные предпосылки для выбора стратегий при формировании ЦКП.
Следует отметить также, что предложенная многоуровневая
матричная модель предусматривает возможность такой комплексной постановки и использования фундаментальных и прикладных исследований, при которой исходные данные, цели и результаты этих исследований формировались бы в интересах различных отраслей народного хозяйства. При этом в рамках фиксированного либо незначительно увеличенного бюджета НИР станет возможным получить результаты, пригодные для использования ЦКП для различных отраслей народного хозяйства.
Важно отметить, что реальные процедуры управления развитием БТС, разумеется, не ограничиваются использованием трех рассмотренных типов матриц. Для каждой отрасли, а также для каждого тематического направления ЦКП (объединяющей, как правило, несколько отраслей народного хозяйства) необходимо разработать индивидуальную матричную систему. Тем не менее в любом специфическом случае предложенная методология позволит, по-видимому, получить обнадеживающие результаты.
2. Альтернативные стратегии развития БТС
Анализируя возможные методы формирования и реализации рассмотренных выше ЦКП, следует указать три важнейших фактора, определяющих важность создания оптимальных методических подходов к формированию альтернативных стратегий: увеличение количества допустимых конструктивно-технологических альтернатив на фоне лавинообразно увеличивающейся информации, пригодной к использованию в качестве системы исходных Данных (СИД); заметное увеличение реализационного периода ЦКП, которое аппроксимируется показательным законом в функции роста сложности создаваемой БТС и соответственно — в зависимости от коэффициента новизны; постоянный монотонно сокра
173
щающийся эксплуатационный цикл/современных БТС, в первую очередь авиакосмических, информационных и энергетических (последних в меньшей степени). /
В качестве наиболее широцо распространенных проблем, которые становятся объектом анализа и приложения соответствующих стратегий, можно назвать следующие разделы планирования развития БТС: определение оптимальных темпов реализации в координатах время — затраты при заданных структуре и эффективности БТС; оптимальное распределение ресурсов при создании БТС в координатах развитие научно-технической (экспериментальной) базы — коэффициент новизны БТС; модернизация комплекса технических средств и информационно-математического обеспечения вычислительной базы в зависимости от коэффициента новизны создаваемой БТС; определение оптимального соотношения коэффициент новизны — коэффициент преемственности в функции от времени создания при заданной эффективности и т. д.
Исходной методической базой для формирования моделей развития БТС являются стратегии развития, выработанные на основе анализа экономического, технического и других аспектов политики планирования развития БТС.
В самых общих случаях возможны несколько стратегий планирования развития БТС: 1) стратегия обеспечения постоянного превосходства над уровнем потребности; 2) стратегия поддержания равновесия относительно уровня потребности; 3) стратегия стремительного (скачкообразного) развития на базе интенсивного ресурсного и информационного обеспечения; 4) гибкая (комбинированная) стратегия обеспечения превосходства в развитии одних систем, равновесия — в развитии других и скачкообразного развития третьих.
Критериальные модели развития любой системы подразделяются по характеру распределения ресурсов на прямые, обеспечивающие достижение максимального уровня целевой эффективности (ресурсы и период развития заданы, требуется определить план развития БТС X (£)); обратные, обеспечивающие достижение минимального расхода ресурсов (задана целевая эффективность, требуется определить план ресурсов С (£)); на модели скачкообразного развития, обеспечивающие опережающее достижение максимальной целевой эффективности (в начальный период эффективность системы ниже заданного уровня).
Моделирование ситуаций может осуществляться с использованием статических или динамических моделей (задач). В статических задачах решение оптимизации плана находится в одной из точек планируемого интервала, обычно в конце периода. В динамических задачах показатели оптимизации плана фиксируются в ряде точек временного интервала, что позволяет более точно определять планы развития БТС. Постановка указанных задач и их место в управлении развитием имеют следующие особенности.
174
Для статических моделей^ледует выделить четыре постановки
Статическая бесконфликтная простая задача включает сле-у10щие этапы: определяются ресурсы СХ (t), выделяемые на развитие системы сторон X и Y за период Г; определяются форма и размерность прогнозируемого вектора Y (Г); определяется такой вектор X (Т), который обеспечивает максимальную эффективность системы в решении типовой операции
max Е (X, У), Сх = Сх (Г).
Критерий эффективности выбирается применительно к характерной операции в центральной ситуации для полного перебора ситуаций основного плана или в суженном множестве ситуаций только для корректировки плана. Могут быть наложены ограничения по возможностям производства, по эксплуатационным характеристикам БТС и т. д. Показатели целевой эффективности БТС предполагаются известными.
2. Статистическая конфликтная прямая задача формулируется следующим образом: в отличие от условий предыдущей задачи вектор У (Г) известен, однако не известны ресурсы Gy(T), выделенные стороной У (прогнозируются); определяются оптимальные векторы X (Т) и Y (Т), обеспечивающие max min [Е (х, у)1
X V
при ограничениях R (х) 0.
Следует отметить, что в двух рассмотренных задачах ресурсы задаются без учета их распределения по планируемому периоду и оптимизация решений не отражает расхода ресурсов, поэтому полученное решение не может считаться оптимальным по экономическому критерию.
3. В статической бесконфликтной задаче выбирается критерий эффективности Е (х, у) и задается требуемое его значение вида Е У) — ^зад*> задается (прогнозируется) вектор Y (Г); определяется вектор X (71), обеспечивающий оптимальный расход ресурсов с учетом распределения определенных долей на разработку, серийное производство и эксплуатацию систем к моменту времени Т\ определяется минимум Сх (71), позволяющий с учетом ограничения R (х) 0 найти оптимальные решения.
4. В статической конфликтной обратной задаче в отличие от предыдущей определяется не только вектор X (Т), но и вектор (Т), обеспечивающие min max (Cym — Cxm) при дополни-
V х
тельных ограничениях R (х) 0, R (у) 0; задается критерий
Целевой эффективности Е (х, у) = 2?аад’> накладываются некоторые дополнительные требования на эффективность системы (по критериям качества Хо); используется критерий ДС (Т) =
ICy (Г) — Сх (Т)|, который позволяет определить превышение приведенных (к точке t = Т) затрат по выбранной стратегии по сравнению с другими вариантами.
Следует отметить, что математические модели (п. 3) и (п. 4) формулированы без учета приведения затрат сторон X и Y к кон-
175
цу планируемого периода и в этом /мысле, по-видимому, не позволяют получить оптимальное решение по экономическому критерию. /
Для динамических моделей рледует ограничиться тремя вариантами постановок задач. /
1. Динамическая бесконфликтная прямая задача имеет следующие условия: задаются в интервале времени (О, Т) план развития системы стороны у — Y (Т) и ресурсы на развитие системы стороны х — Сх (Т); считаются известными технические характеристики и экономические показатели системы; определяется оптимальный план развития X (£), для чего составляется система дифференциальных или дискретных уравнений развития
dXJdt = Qi (Xt, UiY,
определяется оптимальный вектор-функция управления
d (/) = ut (О .
и соответствующий ей оптимальный план X (£), обеспечивающий максимальное значение критерия эффективности в момент времени Т:
max Е [X (Г), Y (Т)].
2. Динамическая конфликтная прямая задача в отличие от динамической бесконфликтной задачи имеет следующие особенности: неизвестен вектор Y (t) и, следовательно, должен определяться наряду с X ($); ресурсы [Сх (t); CY (01 сторон, выделяемых на развитие системы, задаются в интервале (О, Т); составляются дифференциальные (или дискретные) уравнения развития
dXildt= Qi (Хь Ui).
dYj/dt = Gj (Yj, Vj)
с соответствующими начальными условиями (где Ubvj — управляющие функции сторон х и у, изменяющиеся в замкнутых областях); определяются оптимальные вектор-функции управления U (t) и соответствующие им оптимальные значения развития х (t), Y (0, обеспечивающие
max min Е (Z). и v
В двух рассмотренных типах динамических задач ресурсы задаются в виде функций времени; это дает возможность определить расход (и распределение) ресурсов в период Т развития системы и, следовательно, получить оптимальное по экономическим критериям решение.
3. Динамическая обратная задача (бесконфликтная или конфликтная) в отличие от прямых динамических задач в общем виде может быть сформулирована лишь в дискретном варианте, так как требование обеспечения заданной эффективности в любой точке
170
вТервала (О, Т) может привести к скачкообразному изменению Иоказателя целевой эффективности.
Возвращаясь затем к приведенной матрице критериев управления развитием БТС (см. табл\5), следует обратить внимание ва особенности использования рассмотрений моделей в зависимости от принятой стратегии планирования развития БТС, контура и уровня управления. \
В стратегии обеспечения постоянного превосходства над уровнем потребности могут использоваться главным образом модели максимакса.
В стратегии поддержания равновесия относительно уровня потребности могут использоваться компромиссные модели планируемого отставания от заданного уровня потребности с учетом необходимости периодического увеличения планируемых темпов развития БТС, обеспечивающих в последующем достижение заданного уровня потребности.
В стратегии стремительного (скачкообразного) развития основными являются прямые модели (с заданными ресурсами) и модели интенсивного развития БТС.
В комбинированной стратегии планирования может потребоваться весь рассмотренный набор моделей.
Требования к точности решения задач формулируются в зависимости от контура управления (см. табл. 5), в котором используются результаты моделирования для принятия управляющих решений. Эти требования, по-видимому, повышаются в последовательности U± -> U2 -> U3. В той же последовательности сокращается интервал времени, на который распространяются управляющие решения, и повышается точность исходных данных. При этом целесообразно ориентироваться на применение в контуре UY динамических бесконфликтных моделей, которые позволяют проследить траекторию развития БТС в различных точках планируемого периода с учетом распределения ресурсов во времени; в контуре U2 — динамических конфликтных моделей, которые обеспечивают получение наиболее точных траекторий планируемого развития БТС с учетом оптимальной стратегии развития конкурирующей стороны при оптимальном распределении ресурсов во времени (для проверки решения на чувствительность к изменению стратегии конкурирующей стороны целесообразно использовать также бесконфликтные динамические модели); в контуре — статических бесконфликтных моделей (для проверки решения на чувствительность к изменению стратегии конкурирующей стороны рекомендуется использовать статические конфликтные модели).
Анализируя далее возможность и целесообразность использования тех или иных моделей планируемого развития БТС по уровням управления в матрице критериев (см. табл. 5), следует исходить из различий в целях и стратегиях управления.
Цель управления на уровне V\ — распределение ресурсов по классам систем для достижения заданного уровня целевой эффек
177
тивности при минимуме необходимых ресурсов. Цель управления на уровне У2 — достижение максймального уровня эффективности в пределах выделения ресурсов и распределения их по типам систем. Цель управления н«( уровне V3 — достижение максимального уровня эффективности в пределах выделенных ресурсов и распределения их по поколениям систем.
В соответствии с целями и условиями планируемого развития БТС на уровне V\ используются обратные модели, на уровнях V2, Уз — прямые модели.
Таким образом, на государственном уровне эффект выступает в форме заданного значения [Е (х, у) = 2?3ад]« На этом уровне по заданному эффекту распределяются ресурсы (Т) -> min].
При переходе к отраслевому уровню эти ресурсы рассматриваются уже как заданные [С (Т) = £зад]. И на этом уровне задача расчленяется на два этапа: вначале по заданным ресурсам максимизируется эффект [С (Т) = Сзад! при Е (х, у) £тах, затем система разделяется на несколько подсистем для дальнейшего использования в объединениях, для которых максимизированный на первом этапе эффект выступает как заданный. По нему минимизируются ресурсы [Е (х, у) = Еаад; С (Т) min] и далее производится распределение ресурсов по предприятиям.
На уровне научно-исследовательских, опытно-конструкторских предприятий эти ресурсы уже считаются заданными. По ним максимизируется эффект [С (Т) = Саад\ Е (х, у) max]. Следовательно, при анализе матричной модели критериев наиболее важным для решения конкретных задач планирования создания БТС следуе'т считать уровень У2, а наиболее точным контуром U2.
Прикладные аспекты рассматриваемых стратегий можно рассмотреть на принципе первой из перечисленных выше задач. При установлении оптимальных темпов (или, что то же самое, сроков) реализации создаваемых БТС в координатах время — затраты целесообразно вначале определить допустимый временной диапазон для формируемой стратегии. При этом за верхнюю границу диапазона (максимально допустимый срок реализации) можно принять срок морального старения БТС данного типа. Поэтому необходимо планирование внедрения БТС на период, выходящий за пределы сроков ее морального старения. В качестве нижней границы (минимально возможная длительность реализации ЦКП) следует принять период времени, соответствующий техническим и экономическим ограничениям. В данном случае подразумевается тот минимальный срок, определяемый ресурсным, информационным и другим обеспечением, ранее которого физически невозможно (при любых затратах) осуществить процесс реализации. Очевидно, в рамках верхней и нижней границ должен лежать оптимальный срок реализации, обеспечивающий максимальную экономическую эффективность реализации.
Дисциплинирующие условия реализации определяются следующими условиями: с одной стороны, форсирование сроков реализации и внедрение в серийное производство БТС с элементами
17в
овизны увеличивает эффект^ который получает народное хозяй-ство от эксплуатации всего па^ка новых БТС, с другой — форсирование сроков реализации, естественно, требует дополнительных затрат. Так, реализация одной и\гой же ЦКП по БТС при затратах, например, в 10 млн. руб. моя\т быть осуществлена за 5 лет, а при затратах в 15 млн. руб.— за\ года [20].
Таким образом, выбор стратегии реализации сводится к выбору срока, сокращение которого связано с необходимостью до
с необходимостью до-
полнительных затрат, не компенсируемых в предельном случае, приростом абсолютного народнохозяйственного эффекта от внедрения создаваемой БТС. Оптимальная стратегия в этом случае, естественно, предполагает выбор такого срока реализации, при котором экономический эффект от реализации достигал бы максимума.
Графически выбор оптималь-
ной стратегии можно проиллю- РИС. 15. Выбор оптимальной стрировать в координатах «срок стратегии реализации ЦКП реализации ЦКП (t) — народно-
хозяйственный эффект (у)». На графике (рис. 15) кривая а — на
роднохозяйственные затраты, обеспечивающие процесс реализа-
ции и возрастающие при сокращении сроков реализации; кривая б — народнохозяйственный эффект от реализации ЦКП (также возрастающий при сокращении сроков реализации); кривая в — зависимость народнохозяйственной эффективности от сроков реализации (отношение эффекта к затратам). Максимум эффективности достигается в точке Зтах, соответствующей оптимальной стратегии. Пересечение кривой б с абсциссой t соответствует сроку морального старения БТС. В точках АиВ затраты на реализацию ЦКП превышают эффект от ее реализации, ограничивая, таким образом, допустимый период реализации.
3. Особенности модульной стратегии развития БТС
В основе традиционного подхода к созданию систем лежит принцип конструктивной целостности, когда с изменением какого-либо элемента изменяются и остальные, в основе модульного — конструктивная обособленность, когда с изменением какого-либо элемента остальные модульные элементы не изменяются.
Реализация облика БТС в модульном исполнении базируется на принципах агрегатирования, однако имеет некоторую специфику. Специфика эта состоит в том, что основная задача агрегатирования в машиностроении — создание машин и оборудования Различного назначения на основе ограниченного разнообразия де
179
талей, узлов и агрегатов — в модульном машиностроении решается на базе комплексных агрегатов — модулей, представляющих собой отъемные унифицированные разнофункциональные части машины. В силу этого агрегатирование в условиях создания модульных машин назовем модальным агрегатированием и дадим определение модуля. z
Модуль есть совокупность разнофункциональных агрегатов, синтезированных в целостно-обособленную подсистему машины со стандартными связями крайних элементов. Под крайним элементом в анализе систем понимается элемент, выход которого реализует связь с внешней по отношению к рассматриваемой системе средой, в частности с другим модулем. К таким связям относятся энергетические, механические и геометрические связи модуля.
Таким образом, модуль представляет собой функционально и конструктивно обособленную отъемную часть машины со стандартными связями внешней совместимости: например, совокупность блоков системы стабилизированных источников электропитания телевизора, синтезированная с соответствующей панелью или корпусом конструкции и имеющая стандартные электронноэнергетические, механические и геометрические связи совместимости, является модулем. Под совместимостью понимается способность двух или более элементов функционировать в одной и той же системе или в окружающей среде без взаимной интерференции.
Модульная система есть упорядоченная совокупность модулей, комплексируемых в систему по определенному правилу, обусловленному обобщенным входОхМ внешней среды. Организованная и управляемая совокупность разнофункциональных модулей представляет собой БТС модульного ряда. Организация и управление здесь предполагают создание планируемого состава и структуры БТС и реализацию на их основе по месту и времени любого из возможных и потребных обликов БТС. Модульная система является специализированной и в этом плане сопоставимой с традиционной, а модульные БТС являются потенциально многоцелевыми, универсальными системами с переменной структурой, обладающими адаптивными свойствами. Такие системы способны выполнять широкий спектр функций, так как их комбинированные возможности, обусловленные модульным агрегатированием, позволяют реализовать необходимое разнообразие их обликов.
Введенные определения ограничили понятие «унификация» до уровня «модуль», однако остается неопределенность в содержании «модуль» в отношении дифференцирования входящих в него подсистем. В связи с этим необходимо ввести следующие ограничения. Определим эти ограничения через понятие «сменность модулей». Экономические, производственные и эксплуатационные условия требуют, чтобы при конструировании машин, в том числе и модульных, целесообразно стремиться к минимуму сменности БТС подсистем и, наоборот, к максимуму их стабильности. Сменность должна обусловливаться объективной необходимостью, например необходимостью изменений функциональных задач машины. Тогда
180
лабильным модулем будет совокупность систем, всегда присут-Ствующих при его комплексировании со сменными модулями. Такой стабильный модуль назове\ базовым модулем. Базовый модуль, являющийся совокупностью основных подсистем, обеспечивает выполнение конкретной целеврй функции машины только при его синтезе с тем или иным сменным модулем, например, сельскохозяйственная машина синтезируется на основе базового модуля (движителя) и сменных модулей (навесных или буксируемых орудий). В этом случае разнообразие сменных модулей при стабильном базовом модуле обеспечивает необходимое разнообразие выполняемых сельскохозяйственных работ.
Унификация на уровне базового модуля является весьма пер-
спективной в тех случаях, когда добавление новой подсистемы или замена одной или нескольких подсистем БТС не приводят по крайней мере к существенному снижению эффективности выполнения целевой функции и усложнению процесса ее эксплуатации.
Оценка технико-экономической эффективности модульных БТС.
В современных условиях развития научно-технического прогресса создание новой техники немыслимо без комплексного обоснования ее эффективности. Это обусловлено тем, что новая техника — чрезвычайно сложный продукт научной, конструкторской мысли и производства и представляет собой сложную систему с множеством элементов и связей. Более того, такая система предназначается для функционирования в составе систем и комплексов более высокого уровня, и оттого, какая эта система, как и какой ценой она выполняет свою задачу, зависит и выполнение задачи более высокого уровня.
Выполнить такую общую задачу можно различными системами и способами. Это различие обусловлено возможностью выпол
нить поставленную задачу разными типами и классами систем, по-разному организуя их в системы машин, и отражается в структуре и свойствах систем.
Многовариантность систем заставляет па ранних этапах их создания проводить их обоснование и выбор с целью выявления и Дальнейшего создания наиболее оптимальных.
Естественно, что различные системы способны выполнять поставленную задачу с разным уровнем эффективности и затрат на их разработку, производство и эксплуатацию.
Экономический потенциал государства определяет в конечном счете уровень его развития и обусловлен различными видами ре-сУрсов. Ресурсы, как известно, величина ограниченная. При этом ограниченность ресурсов характеризуется тем фактом, что вложение и использование их в одном месте означает их исключение в Другом. Поэтому в современных условиях так остро стоит вопрос
их экономном, эффективном использовании. С точки зрения народного хозяйства далеко не безразлично, ценой чего и как достигается требуемая эффективность. Ограниченность ресурсов, требование к их экономному, эффективному использованию порождают крупную технико-экономическую проблему.
181
Специфика оценки технико-экономической эффективности модульных БТС. Использование модульного принципа построения машин по всем стадиям жизненного цикла позволяет:
а) в ОКР — сократить сроки разработки и номенклатуру за_ ново разрабатываемых элементов нового облика БТС;
б) в серийном производстве — увеличить серийность производи ства модулей и способствует развитию специализации в отрасли-
в) в эксплуатации — уменьшить объемы и сложность работ по обслуживанию и подготовке к использованию, сократить номенклатуру оборудования и запасных частей.
Изложенное обусловливает тенденцию к снижению затрат на модульные БТС относительно традиционных БТС по всем стадиям жизненного цикла и отражает специфику модульной стратегии развития машиностроения.
Очевидно, что качественно новые свойства системы проявляются на более высоких уровнях ее рассмотрения, при анализе функционирования в составе суперсистемы. Для традиционных систем в соответствии с основными положениями анализа систем достаточно рассмотреть их специфику на следующем, более высоком по иерархии уровне. Для модульных систем такое рассмотрение недостаточно, так как здесь могут не проявлятьсяих специфические адаптивные свойства.
Вместе с тем па основе структурно-переменного синтеза модулей в системе можно реализовать облик машины любого класса.
Это характеризует модульные машины как относительно устойчивый элемент систем высшего уровня. Изменение этого элемента требует согласованного изменения и систем более высокого иерархического уровня, а в результате должен осуществляться поэтапный процесс взаимного согласования требований к видам и условиям использования.
Отметим, что эти свойства позволяют создать БТС с высоким уровнем целевого потенциала и адаптивными свойствами, рассматривать модульные машины в качестве конкурирующего центрального элемента БТС, обосновать выбор критерия комплексной эффективности.
Выявленные свойства обусловлены высоким уровнем структурной и временной подвижности облика системы, наличием в ней устойчивых во времени относительно стабильных элементов (например, базовый модуль). Этим в значительной степени характеризуются состояние и поведение модульных машин как системы с различными видами адаптации, следствием которой является специфика формирования экономических и технических характеристик.
Система показателей эффективности модульных машин. ДлЯ проведения оценки технико-экономической эффективности системы модульных машин необходимо ввести ряд частных и комплексных показателей. Частными показателями будем описывать локальные состояния системы, комплексными — поведение системы при функционировании в составе суперсистемы.
182
р качестве частных показателей, отражающих основные оУктурные особенности модудьных машин, введем следующие С казатели их конструктивного Совершенства.
П 1. Полное разнообразие модульных машин:
К2 = 1???‘У<"Г (2.1)
г = lcxr0 = 1, Р; i = l, J;
где S — структурный элемент системы —- модуль; i, г, d — индекс соответственно типа, класса и вида модуля; J — совокупность типов модулей одного из его классов в типе модульной машины; D — совокупность классов модульных машин; 1СХ — знак строгой упорядоченности.
Полное разнообразие модульных машин характеризует возможное количество обликов, теоретически реализуемое на основе комбинаторных свойств системы.
2. Номенклатурное разнообразие модулей:
Pv $ird-
d г i
Этот показатель характеризует возможный состав модулей различных типов, классов и видов в системе модульных машин.
3. Номенклатурный потенциал модуля:
Фгг = /S 3 ird-
Данный показатель позволяет оценить в среднем количество возможных обликов на базе данного типа модуля.
4. Номенклатурный потенциал системы модульных машин: фу = /?е/7?у.
Такой показатель отражает удельный потенциал качественной загрузки отрасли различными модулями и характеризует комбинаторные возможности системы.
5. Целевой потенциал системы модульных машин:
где Z2 — количество задач, операций в целевой функции машины. т°т показатель отражает потенциальные возможности системы Модульных машин к достижению идеального целераспределения а основе адаптивных свойств системы модульных машин.
Мащцн?0Тенциал кратковременной адаптации системы модульных
Фф == фт (М)/фТ(Т),
где фТ_____ „
целен м теРминальная адаптивная эффективность выполнения °а Функции модульной или традиционной системой машин.
183
Рассматриваемый показатель характеризует относительную ско-рость адаптации системы модульных машин и на этой основе достижение расчетных значений эффективности выполнения целевой функции.
7. Потенциал долговременной адаптации системы модульных машин:
Ф& = Ф« (М)/ФД (7),
где Фд — среднединамическая адаптивная эффективность выполнения целевой функции системами модульных или традиционных машин. Этот показатель аналогичен предыдущему по существу процесса, однако различен по масштабам времени.
Представленные показатели целесообразно рассматривать как методический инструмент формирования самостоятельных разделов технических заданий на разработку модульных машин. Они также необходимы для разработки структурных составляющих комплексных показателей технико-экономической эффективности, в частности моделей оценки затрат, эффективности выполнения целевой функции.
Рассмотренная выше специфика развития модульного принципа построения БТС имеет существенное значение для определения отраслевой себестоимости, так как характеризует особенности формирования затрат на разработку и серийное производство модульных систем. Как известно [53], отраслевая себестоимость представляет собой сумму затрат на НИОКР, отнесенную к программе серийно выпускаемых изделий, и собственно затрат на единицу серийного изделия:
п ^ниокр . г г
Ьотр =---дт----h ь 1 СП = ЬНИОКР-
1 СП
Учитывая специфику процессов создания (разработки и серийного производства) модульных машин, в модель отраслевой себестоимости целесообразно ввести показатель «удельные затраты на единицу разнообразия», а приведенную зависимость представить в виде
Г — Сй* _1_ГЙ — СНИОКР , vyr. m
С°ТР ~ + C1 сп — д NH----Г 2,21 С^,т'
/vcn лГ*сп г г
где СОтР — отраслевая себестоимость; CRi — удельные затраты на единицу разнообразия; Л’сп — программа серийного производства; — полное разнообразие обликов модульных систем; CiT — затраты на модуль i-типа и г-класса; ф — вектор обобщенного входа внешней среды.
Второе слагаемое конечного выражения представляет собой затраты на модульную машину в серийном производстве, комплек-сируемую из модулей по вектору <р обобщенного входа внешней среды в соответствии с основными принципами, рассмотренными выше.
184
реализация облика модульной БТС из ряда модульных под-истем отражает структурно-переменный синтез модулей. Суще-^вующяе в настоящее время методики укрупненной оценки зат-т главным образом применимы к системам с постоянной структурой и содержат прогнозные (в основном мультипликативные) экономико-математические модели, отражающие динамику затрат р функции технических параметров, характеризующих систему как единое целое и не учитывающих ее структурных изменений.
Для оценки затрат на модульные системы такие модели неприменимы, так как не отражают процесс комплексирования модульной системы из модулей, основанный на принципах конструктивной обособленности и динамики поведения системы. Это обусловливает принципиальное отличие и особенности формирования и оценки затрат на ОКР по созданию систем модульных машин.
Процесс развития систем модульных машин характеризуется
соответствующими структурными изменениями, суть которых в ос
новном сводится к изменению структуры системы за счет вновь разрабатываемых или совершенствуемых элементов и сохранению в структуре системы элементов, разработанных и отработанных ранее и находящихся в серийном производстве.
Тогда укрупненная модель затрат на ОКР системы модульных БТС должна состоять как минимум из двух частей (субмоделей) — изменяемой и постоянной. Первая часть может рассматриваться как модель развития, вторая — как модель стабилизации.
Модель развития в общем случае отражает динамику затрат на различные типы модулей из различных классов и учитывает специфику классов модулей в целом посредством включения в модель ряда обобщенных факторов, наиболее полно отражающих эту специфику. Модель развития может характеризовать любой набор классов модулей, качественно и количественно отражающий дискретную структурную адаптацию модульных БТС к изменениям внешней среды. Эта особенность описывается соответствующим математическим аппаратом, реализующим адаптивный характер модели, адекватной процессу разработки системы и формированию затрат на модульную систему.
Модель развития отражает стоимостную прогнозную характеристику процесса формирования микроструктуры разрабатываемого модуля.
Модель стабилизации учитывает затраты на серийные модули, привлекаемые в ОКР из состава уже имеющихся модульных систем для совместной отработки вновь создаваемых БТС. Такая модель характеризует формирование макроструктуры системы и ОтРажает уровень ее насыщения стабильными (не изменяющимися Во времени) подсистемами — модулями. Она представляет собой организованную совокупность модульных экономико-математических моделей затрат па серийное производство различных классов и типов модулей с аппаратом дискретной селекции субмоделей.
185
В условиях разработки модульных БТС в модели затрат на ОКР необходим специфический учет совместной отработки привлекаемых серийных и вновь создаваемых модулей. Это можно представить как модель отработки или модель синтеза модулей в систему.
Таким образом, модель укрупненной оценки затрат на ОКР модульных БТС можно представить следующим образом:
Corp = Cv + Cst -|- Си,
где Cv — модель развития; Cst — модель стабилизации; Си —-модель отработки. Каждая такая модель отражает специфику структурной адаптации модульной системы к внешней среде.
К предпосылкам, условиям и допущениям при разработке модели отнесем следующее.
1. Модульная система развивается строго по частям (по модулям) посредством включения или исключения классов и типов модулей на основе их унификации и модульного агрегатирования.
2. Тенденция развития модульных систем и классов модулей устойчива и распространяется на прогнозируемый период.
3. Уровень затрат на развитие любого из типов модулей в классе обусловливается обобщенными показателями, а также сложностью рассматриваемого типа модуля и соответствующими переводными коэффициентами по базовому типу модуля (коэффициент подобия).
4. Количественное значение коэффициента подобия по типам модуля возрастает во времени, характеризуя рост сложности типов основных подсистем и развитие научно-технического прогресса в данной отрасли.
5. В рамках ОКР разрабатывается либо полное разнообразие обликов модульных БТС, либо часть обликов, однако с соответствующей отработкой с учетом необходимого развития структуры модулей системы.
Специфику формирования экономико-математической модели затрат на ОКР по модульным системам можно представить следующим образом.
1. На первом этапе разрабатывается базовая модель развития модульных систем в ОКР на основе аппарата корреляционного и регрессионного анализов. При этом учитываются особенности структурной адаптации системы и необходимость их отражения в модели.
2. С учетом различных экспертных оценок формируются варианты типов модулей в различных классах. Определяются и динамические ряды коэффициентов подобия.
3. Строится ряд структурных вариаций развития модульных систем.
4. Структурная динамика модульных систем описывается мно-гопозиционпой бинарной функцией, реализующей дискретно динамический процесс структурно-переменного синтеза обобщенных показателей классов модулей в модели.
186
5. Проводятся идентификация и организация структурных коЭффициентов с помощью комбинированных методов прогнозирования.
г На основании изложенного экономико-математическую модель крупненной оценки затрат на ОКР по системам модульных ^ашин можно представить в следующем виде:
ct,w = !Unx?’l“IIax®s,,’ +
L 1 J г
+ Г Ast П Y*rMr(i - 3)1} (1 + адк1,2>) +
L [R г U
+ ЛиСи(1 + £н43))] (1 + Я)т°п(1,2-3),
где Av, Ast, Аи — постоянные коэффициенты моделей развития, стабилизации и отработки соответственно, учитывающие долю затрат, не зависящую от факторов-аргументов субмоделей; Хг — множество обобщенных характеристик системы, описывающих г-класс модулей в качестве факторов-аргументов ЭММ; Xj — множество общих характеристик системы, присущих любому из г-классов; Ru—количество серийных модулей, привлекаемых для ОКР по отработке вновь создаваемых разнообразий обликов; к — показатель эластичности затрат по данному фактору-аргументу модели; ау — управляющие коэффициенты констант соответственно модели развития и стабилизации; |3 — управляющий коэффициент эластичности стоимости аналога структурной адаптации машины; Q — управляющий коэффициент структурной адаптации модели Q = {0,1}; 0 — затраты на отработку полного разнообразия модульных машин; Ен — нормативный коэффициент эффективности капитальных вложений; Е—нормативный коэффициент приведения по фактору времени; топ (1,2,3)— время упреждения соответственно прошлых разработок относительно настоящей ОКР.
Использование предлагаемой модели, отражающей специфику формирования затрат па модульные машины в ОКР с учетом их адаптивных свойств, позволяет повысить достоверность прогнозных оценок затрат на развитие систем, построенных на принципах конструктивной обособленности.
Разработка прогнозной дискретной адаптивной модели развития с переменной структурой — самостоятельное экономическое исследование. Такая модель создана, она имеет сложную фор-Ыу и описывается системой моделей и процедур. В исходном виде °на представляет собой базовую полноклассную модель, структура и динамика которой определяются многопозиционной бинарной функцией и дискретно динамическими коэффициентами.
Модель затрат на серийное производство модульных БТС. Модель стабилизации характеризует процесс насыщения структуры модульных БТС стабильными серийными элементами. Оценка Затрат на серийное производство модульных БТС характеризует
187
один из принципов модульной стратегии развития машиностроения — разомкнутое специализированное модульное производство и поставку различных типов и классов модулей в эксплуатацию.
Из изложенного ясно, что модель стабилизации является моделью дифференцированной помодульной оценки затрат на серийное производство различных типов и классов модулей с аппаратом дискретной селекции субмоделей. Работа такого аппарата характерна для процесса включения или исключения соответствующих помодульных субмоделей из модели стабилизации при соответствующем исключении или включении этих субмоделей в модель развития. При этом модель стабилизации должна отвечать следующим требованиям: во-первых, она должна отражать специфику создания модульных БТС, во-вторых, должна отвечать требованиям комплексирования в рамках модели затрат на ОКР.
Эти требования обусловлены прежде всего тем, что рассматриваемые системы обладают в известном смысле адаптацией. Адаптация обусловливает специфику их создания, которая проявляется, в частности, в высоком уровне предметно-модульной специализации и в помодульной поставке как в эксплуатацию, так и в ОКР. Для оценки перспектив развития модулей необходим аппарат, обеспечивающий возможность варьирования параметрами и структурой модели в пространстве время — структура — параметр — затраты.
Одной из основных составляющих такого аппарата является тождество моделей развития и стабилизации по факторам-аргументам, определяющее взаимосвязь и взаимообусловленность помодульных моделей затрат как на серийное производство, так и на разработку систем. Это позволяет осуществлять управление моделью адекватно вариациям структурной адаптации БТС с учетом ограниченности состава технических характеристик на ранних стадиях создания системы.
Таким образом, основная специфика серийного производства модульных машин должна быть отражена помодульными экономико-математическими моделями с введением соответствующих показателей, характеризующих уровень специализации.
Переходя к ЭММ затрат, необходимо отметить следующее. Модуль представляет собой блок конструкции, включающий основной и вспомогательные функциональные агрегаты, синтезированные с блоком конструкции в единое целое. Это отражает следующая модель:
Сг = (Сф, а + Ск + СПр)г Ксг,
где Сгм— затраты на модуль данного класса; Сф, а — затраты на основной функциональный агрегат; Спр — затраты соответственно на конструкцию /с-класса модулей и на прочие неучтенные детали (например, коммутационно-кабельная сеть и др.); Ксг — коэффициент синтеза модуля, учитывающий долю затрат общей сборки, приходящейся на один модуль в среднем.
188
Для укрупненной оценки затрат можно воспользоваться следующей моделью:
С“ = С<р, акъ.
Здесь Кг = ККгКсг — коэффициент, учитывающий долю затрат на конструкцию модуля и его синтез; Кк? — коэффициент, учитывающий долю затрат на конструкцию модуля г-класса от затрат на основной функциональный агрегат; Кс? = 1 •(!—- Го.сб)1» где ^о.сб — удельный вес трудоемкости общей сборки в трудоемкости системы; С(р,а = ЛгПх^гЛ^г(1())ЛГпг(о» гДе — масштаб г
серийного производства модулей i-типа в г-классе; КПг(о — коэффициент подобия z-типов модулей в r-классе по затратам.
4. Методы выбора альтернативных стратегий создания БТС
В разд. II. 1.3 работы с достаточной ясностью была представлена важность факторов качества, затрат и времени в планировании НИОКР по созданию БТС. В сущности эта триада факторов «эффективность — время — стоимость» лежит в основе наиболее распространенного в настоящее время критерия оптимизации облика БТС, а также распределения ресурсов при их создании. Логика взаимосвязи этих основных факторов может быть укрупненно сформулирована в следующих шести положениях.
1. Качество создаваемой БТС всегда есть функция времени и затрат в том смысле, что качество, особенно новое, всегда требует некоторых распределенных в определенном времени затрат либо фиксированных затрат, распределенных в некотором времени.
2. Характеристика приращения качества НИОКР во времени и в затратах в современных условиях всегда имеет S-образный характер. С увеличением сроков реализации НИОКР неизбежно наступает момент, когда БТС начинает «стареть» быстрее, чем окончится разработка, увеличение затрат на НИОКР также приводит к «перегибу» характеристики эффективности БТС, при котором дополнительные средства на НИОКР не осваиваются, так как наступает «насыщение» разработки информационной и энергоматериальной обеспеченностью.
3. Иерархия критериальных факторов НИОКР расположена в последовательности эффективность время —» стоимость, причем вторая ступень (время -> стоимость) вызывает, на наш взгляд, Неоправданные возражения некоторых экономистов, пытающихся Доказать приоритет стоимости по отношению ко времени. Дела в том, что увеличение затрат на НИОКР прежде всего вызывается Увеличением сроков, так как большинство разрабатывающих ОЭС Имеет статистически равномерные характеристики затрат во времени (большая часть НИОКР оплачивается по затраченному календарному времени, так как выплата зарплаты ученым и ИТР,
189
равно как и загрузка экспериментального оборудования и парка -ЭВМ, амортизация и ослуживание основных фондов осуществляются в календарные сроки независимо от темпов появления нового качества, определяющего облик БТС).
4. Увеличение затрат (по сравнению со среднестатистическими) для данной разрабатывающей ОЭС способствует в определенной мере повышению качества создаваемой БТС (до предела насыщения), позволяя «запараллелить» основные расчетные, проектные и экспериментальные работы для нескольких конструктивно-технологических вариантов БТС, модернизировать экспериментальную и вычислительную базу.
5. Варианты оптимизационных задач планирования создания БТС предусматривают одну из двух генеральных постановок: максимизация качества при фиксированном бюджете в оптимальные сроки или оптимизация затрат на создание заданного качества в фиксированные (директивные) сроки.
6. Многообразие и сложность современных БТС, а также значительная информационная неопределенность в начале НИОКР всегда создают некоторое поле альтернатив, причем своевременный выбор предпочтительной альтернативы и оптимального плана НИОКР, по оценке академика В. Трапезникова х, позволяет в среднем на 15% в год поднять эффективность затрат на НИОКР по созданию БТС.
Изложенные положения можно рассматривать как логико-теоретическую основу формирования поля возможных альтернатив и выбора предпочтительного варианта разработки. Следует отметить, что в любой генеральной постановке оптимизационной задачи планирования наибольшую сложность представляет своевременное, т. е. по возможности раннее (на предэскизной стадии), принятие решения по выбору основного и резервного качественного вариантов (соответствующих обычно максимально возможной по стратегии максимакса либо допустимой по компромиссной стратегии максимина эффективности создаваемой БТС) конструктивно-технологического облика БТС, который, как уже упоминалось в предыдущем разделе, существенно зависит от коэффициента новизны для данной НИОКР.
При этом часто возникает типичная ситуация, когда на уровне принятия решения разрабатывающей ОЭС конструктивно-технологический облик определяется главным образом коэффициентом преемственности (чем выше — тем надежнее), обусловленным опытом предыдущей работы, информационным заделом и кадровыми ресурсами, а также их квалификацией, состоянием и уровнем экспериментальной базы, наличием парка ЭВМ и программ стандартного и специального математического обеспечения и т. д.
Изучение практики прогнозного планирования и прогнозных оценок различных конструктивно-технологических вариантов в облике создаваемой БТС в различных разрабатывающих ОЭС
1 Трапеэников В. Эффективность науки.— Наука и жизнь» 1972, № 1.
190
позволяет сделать следующий вывод. G увеличением коэффициента ювизны на предэскизных этапах неопределенность планирования НИОКР возрастает по показательному закону по этапам создания БТС, причем на этапе испытаний наблюдается резкий скачок неопределенности, связанный с согласованием взаимодействия принципиально новых, а также конструктивно и функционально преемственных подсистем и элементов БТС. В этой связи значительную остроту приобретает проблема создания обозримой и по возможности информационно-полной модели, отображающей календарный процесс НИОКР, с учетом совмещенного представления допустимых, различных по коэффициентам новизны и преемственности конструктивно-технологических вариантов облика создаваемой БТС.
В настоящее время в этих целях наибольшее распространение в теории и практике получили два метода планирования: линейный и сетевой графики.
Основу широко применяемой ранее линейной (ленточной) методологии планирования составляет описание планируемого процесса графиками, имеющими вид ленты. Основой сетевого графика планирования является описание планируемого процесса графиками, имеющими вид сети (логико-математической модели). На опытных предприятиях, связанных с созданием современных БТСГ в частности в авиационной промышленности, практикуется также сочетание линейной и сетевой методологии планирования [52].
Ленточные графики имеют ряд недостатков. В частности, планирование, в основу которого положен ленточный график, не позволяет: а) обеспечить четкую координацию работ всех исполнителей исследования (НИОКР); б) выделить «решающие звенья» в цепи событий и сосредоточить усилия коллектива на решении наиболее важных в данный момент задач; в) производить оценки выбранных плановых вариантов; г) учесть влияние случайных факторов на реальный процесс НИОКР.
Отмеченные недостатки могут быть уменьшены или устранены при использовании метода сетевого планирования и управления
В настоящее время хорошо известны методы и принципы по-строения, расчета и исследования полностью детерминированных сетей, т. е. таких сетей, для которых заданы как число событий, так и сроки для каждой работы.
На ранних, предэскизных стадиях построения сетевого графи-Ка Для НИОКР в силу изложенных выше причин недостаточно рас-иолагать только статистической определенностью сроков (и/или затрат) той или иной работы, входящей в сеть. Недостаточно эффективен в таких случаях и учет статистических флюктуаций определяющих параметров. Дополнительная степень свободы в данном СлУчае обусловлена тем, что основные плановые предварительные °Ценки конструктивно-технологических альтернатив в НИОКР JВ * 10 существу сводятся к определению выполнимости или невыпол-
ймости той или иной работы или процесса.
191
При этом последующие этапы НИОКР (и их результаты) зависят от итогов этих предварительных работ, определяющих реальность тех или иных вариантов. В результате создается некоторая неопределенность пути (или путей) построения сетевого графика, разрешаемая методом альтернативного выбора (т. е. с помощью альтернативного графа) [52]. Решение прикладных задач по этому методу сопряжено с целым рядом трудностей, среди ко-торых в первую очередь следует отметить две проблемы: количественное сравнение альтернативных путей или стратегий и оценка значения вероятности выбора каждой последующей альтернативы в зависимости от значения вероятности предыдущей.
Первая из указанных проблем (количественное сравнение альтернативных стратегий) может быть решена с применением следующей процедуры. Формируется матрица || Мае || альтернатив a,j и критериев 0f (или состояний природы) вида
fll ••• flj аш
91 ... Хх] ... х1т
хц ••• * xij ••• xim
О x .... x .... x , n nJ nm'
Где dj — альтернативы стратегий; 0f — критерии оценки или состояния природы; — фактические оценки (или математические ожидания) затрат или достигнутые значения эффективности для i-ro критерия или состояния природы при использовании /-й стратегии.
Для сопоставления результатов по критериям различной размерности следует определить в каждой строке минимальную (minAzj;) и максимальную (max xi7) оценки. При этом если по ус-
X J
ловиям задачи (например, оптимизация облика БТС) критерий необходимо максимизировать, то формируется платежная матрица относительных потерь по формуле вида
max
X.. — 3___________•
lJ max — min '
если же критерий необходимо минимизировать (например, оптимизация распределения ресурсов), то формируется платежная матрица потерь вида
X ___________1______е
W max — min г.у
В обратном представлении, поменяв формулы местами, можно построить матрицы относительных выигрышей соответственно для задач оптимизации облика или распределения ресурсов. Пред~ почтительная альтернатива соответствует случаю, когда сумма от-
192
сиТельных потерь %хц минимальна или, наоборот, когда сумма я°нОсительных выигрышей S (1 — максимальна.
° Суммируя элементы матриц потерь (или выигрышей) по столбам можно оцепить вероятность (математическое ожидание) достижения максимума или минимума критерия для заданного (вероятного) поля альтернатив. Такое нормирование можно провести по формулам вида
л ч S х.,
Р(0тах) =------— Для матрицы потерь,
2(1—
P(9min)= —“Г Для матрицы выигрышей.
Следует отметить, что значения вероятности выбора каждой последующей альтернативы устанавливаются с приемлемой достоверностью по методу взаимных воздействий с использованием вероятностных моделей. В соответствии с этой методикой предполагается, что коэффициенты взаимного воздействия альтернатив позволяют оценить условную вероятность реализации альтернативы Aj, если известно, что предыдущая альтернатива реализована хотя бы в одном из вариантов, т. е.
xl} = Р (AjlAt).
При этом предполагается, что альтернативы А и образуют марковское множество, т. е. если известно, что альтернативы Ai и A j реализованы, то условная вероятность реализации последующей за ними альтернативы Ак равно условному значению вероятности Р (A^/Ai, Aj) при заданном (известном) значении вероятности только At или только Af.
Р (Ak/Ah Aj) = Р (Ak/At) -= Р (Ak/Aj).
Анализ узловых событий альтернативного графа осуществляется с обязательной проверкой согласованности исходных Pt либо промежуточных оценок Р^\ оценок безусловных вероятностей реализации альтернатив Ац.
Процедура анализа также предусматривает корреляцию оценок pW (для к = 0,1, . . ., и), а также Р|0) = Pf. Такая корреляция контролирует сведение за некоторое число шагов (равное или несколько превышающее число альтернатив в единичной цепоч-Ке Узловых событий альтернативного графа) промежуточных оце-й°к к безусловным вероятностям Р/.
Проверка согласованности и коррекция оценок определяются °Делью взаимного воздействия Р< и Хц вида
p;+1=xtj (1 _ А) + {1 _ [xt} (1 - А) ]} pf\
С' А- Саркисян
193
ТАБЛИЦА 6. Матрица взаимных воздействий
Если альтернатива будет реализована, то вероятность альтернатив Aj реализации последующих
изменится на...
—
Ai Л2 . • Ak+1 * ' • Ап+1
— , . . 0 . . . 1х
Ак . . X . . . 2х
А —Зх
п
Исходные данные систематизируются по медианным срокам tj реализации альтернатив, устанавливаемых по анкетам экспортного, опроса. По результатам обработки этих данных формируется матрица взаимных воздействий (табл. 6).
Процедура анализа согласованности оценок Pi и а такиц коррекции оценок Pi объединяется в единый алгоритм, основан ный на методе Монте-Карло. Этот процесс осуществляется следую щим образом. В соответствии с последовательностью узловых событий альтернативного графа составляется очередность альтернатив во времени с использованием случайного механизма, па раметром которого является текущая оценка вероятности реализации предыдущей альтернативы, и определяется: реализуема ли последующая альтернатива в будущем или нет. Если для одной из ветвей альтернатив это событие не реализуется, то аналогичная операция проводится для всех прочих сочетаний альтернатив до полного перебора вариантов, отраженных в альтернативном графе.
Следует добавить, что использование альтернативного графа по предложенной методологии дает обнадеживающие перспективы по организации диалоговой процедуры оптимизации облика БТС при многовариантном плане НИОКР. Диалог осуществляется посредством вывода промежуточных результатов по вероятности реализации альтернатив в узловых событиях на графопостроители или дисплеи, причем наиболее интересные результаты удается получить с использованием пространственного (трехмерного) графопостроителя. Варьируя в таком графопостроении ресурсно информационное обеспечение и потребные характеристики качества относительно времени проведения НИОКР, можно получить поверхности возможных альтернатив и выбирать на этих поверх* ностях области оптимальных либо приемлемых решений.
Резюмируя изложенное, следует отметить, что предложенная методология многовариантного планирования НИОКР по созда* нию БТС с применением альтернативного графа и вероятной оцен' кой взаимного воздействия альтернатив по методу Монте-Карло-а также с использованием многошаговой «диалоговой» оптимизация обеспечивает удачное сочетание полной обозримости имеющейся и потребной информации для составления оптимального (основного) и приемлемого (резервного) вариантов плана НИОКР.
194
ГЛАВА ТРЕТЬЯ
ИНФОРМАЦИОННО-МАТЕМАТИЧ EGKOE
ОБЕСПЕЧЕНИЕ ПРОГРАММ РАЗВИТИЯ БТС
Теоретические основы современной науки управления развитием сложных систем представляют собой комплекс методов, непосредственно связанных с закономерностями экономики развитого социализма, в первую очередь методов прогнозирования, формирования целевых комплексных программ, выбора оптимальных вариантов или предпочтительных альтернатив в планировании. Все эти методы, равно как и основа управления — принятие решений, предполагают наличие достаточно полной информационной базы, а также современных методов обработки и систематизации информации. В. И. Ленин отмечал, что невозможно управлять без компетентности, без знания науки управления х, а наука управления, основанная на кибернетических методах, неразрывно связана с теоретическими и прикладными аспектами информации. Академик Н. П. Федоренко в числе шести важнейших разделов в разработке единой системы оптимального планирования и управления народным хозяйством называет систему экономической информации, обеспечивающую реализацию комплексной модели оптимального планирования и управления на основе автоматизации сбора, передачи и обработки информации 2.
Кибернетическое представление управляющих систем основывается на информационном подходе, в соответствии с которым управляющие системы рассматриваются в аспекте преобразования ими информации. Технической основой современных информационных систем являются автоматизированные системы обработки данных (АСОД).
Первые попытки применить ЭВМ для создания прогрессивных АСОД в США были предприняты еще в 1957 г. бесприбыльной корпорацией РЭНД, а также фирмами «Норт Амэрикэн» и «Рокуэлл Интернэйшнл», однако из-за несовершенства программного обеспечения и недостаточно четкого использования системного подхода к решению прикладных задач тогда существенных результатов достигнуто не было.
В 60-х годах в связи с появлением ЭВМ второго поколения и графопостроителей ввода—вывода информации наметилось возрождение интереса к разработке АСОД для обработки информации с перспективных метеорологических спутников, которые в это время находились на стадии испытаний. К этому периоду следует отпести работы по созданию первых в мире систем САПР—АСОД
2 В' ' П°лн- собр. соч., т. 40, с. 222.
Доренко jj и проблемы научной организации управления социалисти-°скпм производством. М.: Наука, 1968, с. 385.
195 7*
(систем автоматизированного проектирования) в американских фирмах «Локхид» и «Дженерал дайнэмикс». Примерно в это время в Научно-исследовательском центре им. Эймса была создана система САПР—АСОД. Перечисленные первые экземпляры САПР—АСОД имели в основном экспериментальный характер 1г предназначались для обоснования предложенной конструктивнотехнологической концепции на стадии предэскизного проектирования. Основными недостатками перечисленных систем САПР—АСОД было отсутствие диалоговых режимов, графоаналитических выводов, а также относительно малая емкость оперативной памяти.
Следующий этап разработки прогрессивных САПР—АСОД следует связать с созданием в конце 60-х годов ЭВМ третьего поколения, которые были оснащены развитыми операционными системами, предусматривающими, в частности, работу в режиме разделения времени, а также использование обширных периферических устройств, включающих средства ввода — вывода графической информации (дисплеи, графопостроители, координатографы). Это позволило реализовать диалоговый режим работы с ЭВМ, а следовательно, получить возможность комплексной АСОД системы машинного проектирования (СМП).
Следует отметить, что начиная примерно с 1970 г. разработкой и внедрением АСОД занимаются все ведущие фирмы США, связанные с авиацией, радиоэлектроникой и другой военной техникой. При этом практически все фирмы ориентировали АСОД на обработку статистических массивов исходной информации в целях выбора оптимальных по конструктивно-технологическим показателям вариантов обликов создаваемых образцов военной техники, которые вместе с тем были бы вполне конкурентоспособными (по показателям затрат на всех этапах жизненного цикла при заданной боевой эффективности) с соответствующими образцами потенциального противника. Следующим этапом разработки и освоения АСОД являлось создание подсистем автоматизированного пр оектир ов ания.
В 1974 г. фирмой «Нортроп» был создан специализированный отдел, который занимался анализом совместимости информационно-математического обеспечения различных АСОД, прежде всего в аспекте подготовки комплексных диалоговых человеко-машинных программ, результаты расчетов на которых можно было бы выводить на графопостроители. Это позволяло весьма наглядным образом производить сопоставительные оценки затрат на разработку, испытания и серийное производство альтернативных вариантов летательных аппаратов. Впервые в американской практике в процессе работы этого отдела было проведено экспериментальное исследование аппаратной и программной совместимости комплексных АСОД фирмы «Нортроп» и системы фирмы «Локхид»; В результате было установлено, что использование объединенной АСОД дает повышение производительности труда проектировщиков в 4—17 раз, но требует примерно шестимесячной подготовки к работе на терминале АСОД ежедневно по 3—4 ч [25].
196
дСОД позволяют: вводить во внешний накопитель памяти огромное количество модулей технических дисциплин, включая наиболее частые детали, узлы, техпроцессы, прочностные характеристики ит. д.; вызвать из внешнего накопителя и комплекси-оовать в любых сочетаниях (с применением блоков проверки соответствия) перечисленные выше модули; автоматизировать процесс перебора (полного, частичного и по эвристическим программам) различных вариантов облика создаваемого образца детального аппарата или военной техники, прежде всего на уровне предэс-кизных расчетов [52].
Вместе с тем комплексированные АСОД позволяют: создавать
ограниченные по параметрам спектры возможных характеристик БТС на основании их габаритов, энергетических данных и т. п.; прогнозировать (по прототипам и наиболее вероятным тенденциям) важнейшие направления развития БТС и их центральных подсистем; разрабатывать гипотезы и тренды наиболее вероятного развития основных отраслей по производству БТС, включая вероятные облики предприятий будущего.
Итак, АСОД — это система сбора, хранения, накопления, поиска и передачи (отображения) данных, применяемых в процессах управления. Часто АСОД рассматривают как подсистему АСУ, однако, по мнению Н. Н. Моисеева \ большинство современных АСУ, строго говоря, системами управления не являются. Они заняты переработкой информации и только. Самая трудная и важная часть АСУ (процедура принятия решений) в них отсутствует. Другими словами, автоматизация процессов управления началась с информационных систем. Однако АСОД имеет полное право на автономное существование в процессе управления (рис. 16). Как видно, АСОД структурно состоит из двух взаимосвязанных подсистем: централизованной и децентрализованной. Математическое обеспечение этих подсистем представляет собой пакеты стандартизованных программ или(и) модулей, программы обработки информации из банка данных, систематизации преобразования, накопления передачи, отображения, ввода и вывода. Комплекс технических средств обеспечивает выполнение математических операций по обработке информации. Выбор ЦВМ для АСОД обычно определяется спецификой обрабатываемых моделей с учетом требований к внешнему и операционному накопителям, быстродействию, системам отображения и т. д.
Изложенное позволяет сделать вывод, что в рассматриваемом аспекте важнейшими составляющими информационно-математического обеспечения целевых комплексных программ развития БТС являются системы формирования исходных данных (информационные банки), комплекс программно-математического обеспечения.
В последующем изложении рассматривается формирование системы исходных данных и информационно-математических модулей.
Моисеев Н. Н, с. 3.
Прогресс,
план,
ЭВМ.— Химия! и жизнь,
1980, № 1,
7* с.
А. Саркпслп
197
[ Автоматизированные системы обработки данных
Централизованные
I
АСУ управления программно- целевого планирования и прогнозирова ния (’’АСУ прогноз-план”)
Универсальные АСОД общего назначения
Децентрализованные
Системы автоматизации НИОКР
Строительство
Связь
Транспорт
Энергетика
Справочно- информационные и поисковые системы
Системы обслуживания по стандартным программам
1Z.
Автоматизированные классификаторы
Автоматизированная система поиска и обработки данных НТИ
Системы финансирования (БАНКИ)
Системы выполнения заказов на СИМ
Автоматизированный эксперимент
Торговля
Здравоохранение
Информационные обслуживающие системы
Система
авто матизированного проектирования
(САПР)
Образование
Отрасли промышленности
Гидрометеослужба
Автоматизированные испытательные стенды
РИС. 16. Автоматизированная система обработки данных (АСОД)
1. Формирование системы исходных данных
Основные проблемы создания крупных автоматизированны: информационных систем рассматриваются в работе Г. М. Доб рова и А. А. Коренного [25].
Основным методическим средством создания автоматизиро ванных систем и систем исходных данных (СИД) являются метод! системологии, позволяющие решить следующие задачи: системны] диагностический анализ структуры и связей СИД, исследовани потоков информации и возможностей эффективного управление этими потоками. Диагностический анализ сводится к следующш этапам.
1. Поиск источников информации. Основная цель этого этап, состоит в определении объема источников, т. е. минимально воз можного объема документации, отражающего всю информацию п< данному вопросу (теме, проблеме). Этот процесс должен осущест
198
1яТЬся на основе тематического плана системы в целом. Такое ^сЛовие совершенно необходимо для предупреждения как явного, так и скрытого дублирования. В результате поиска создаются пе-оечни конкретных источников информации по каждому вопросу. Строго говоря, этот этап является началом аналитической обработки, но не источников, а документации. Вместе с тем на нем заканчивается вся работа с документацией и дальнейший процесс аналитико-синтетической обработки касается только источников
информации.
2. Предварительная аналитическая обработка источников информации. Если основная цель первого этапа — определить круг источников информации, то задача второго этапа состоит в определении информационного содержания каждого конкретного источника. Характеристика каждого источника должна служить ос-
нованием для принятия решения относительно степени его дальнейшей обработки в зависимости от информационной плотности. Следует, однако, отметить, что информационная плотность является лишь одним из факторов, определяющих выбор характера дальнейшего использования источников. Не менее важное значение в этой связи имеют такие факторы, как потребности в соответствующих формах информационных документов по данной тематике, объем источников и т. д.
3. Полная аналитическая обработка источников информации. Основная цель этого этапа состоит в создании макетов информационных документов на основе анализа соответствующих источников и синтеза полученных информационных сведений. В связи с тем что к началу третьего этапа круг источников и их конкретное назначение уже определены, появляется возможность рассредоточить фронт работ без опасения возможного дублирования. Так, производство макетов информационных документов может быть распределено между несколькими информационными органами. Но для этого необходимо, чтобы каждый из этих органов имел конкретное плановое задание, перечень необходимых источников с указанием их назначения, информационную характеристику (паспорт) каждого источника и, разумеется, сами источники.
4. Размножение информационных документов. Этот этап относится целиком к полиграфическому процессу, поэтому не требует особых комментариев. Единственное, что следует отметить,— это целесообразность сосредоточения издательской деятельности в рамках одного органа, так как это позволит унифицировать формы изданий, их оформление и т. д.
5. Доведение информационных документов до потребителей. Этот этап сводится к рассылке документов заранее установленным адресатам.
Следует отметить, что все информационные документы, создаваемые на третьем этапе, независимо от их назначения должны вводиться в информационно-поисковую систему (ИПС) для последующего справочно-информационного обслуживания потребите-леи- Современные системы кодирования, даже применяемые для
199
7**
многоаспектного поиска (по ряду признаков), обеспечивают поиск документов, а не информации. В этом состоит их основной недостаток, ибо большинство документов, в том числе и информационных, отличается многотемностью. Поэтому при существующих системах кодирования получение необходимой информации неизбежно связано с «принудительным ассортиментом», т. е. информацией, не требующейся в данный момент.
В традиционных поисковых системах анализ документов, поступающих В СИСТему, ПРОИЗВОДИТСЯ ЛЮДЬМИ, форМИруЮЩИМИ ПО' исковые образы документов. Люди формируют и поисковые образы запросов. Такое положение неминуемо приводит к неполноте и избыточности при поиске информации, которые не могут быть оценены заранее. Однако эта проблема является не столько нераз-решимой, сколько еще неразрешенной. Основной путь ее решения — это создание таких документов, вводимых в ИПС, которые содержали бы минимально возможный объем информации. В этом случае можно было бы создать поисковые системы, практически обеспечивающие поиск «информации», а не документов, причем в самых различных комбинациях. Разумеется, выражение «поиск информации» является условным, ибо по известным причинам любая ИПС, равно как и любая система информации, может оперировать только документами. Речь идет лишь о создании таких документов, которые могли бы отражать не более единицы семантической информации. Однако это проблема пусть ближайшего, но все-таки будущего.
В настоящее время можно говорить лишь о кодировании информационных документов. Операция по кодированию документов состоит из двух частей: логической и технической. Логическая часть заключается в создании так называемого поискового образа, т. е. в выборе репрезентативных признаков или ключевых слов, именуемых также дескрипторами. Техническая часть состоит в нанесении кода, соответствующего этим признакам, на какой-то носитель. Таким носителем может быть перфокарта, перфолента, микропленка, магнитная лента и т. д.
Ввод документа в ИПС является сугубо технической операцией и осуществляется самыми различными способами в зависимости от системы и носителей. В целом, однако, можно назвать два основных варианта. Первый вариант состоит во введении в систему собственно документа, во втором в систему вводится не сам документ, а его заменитель, на котором фиксируется адрес документа (порядковый номер, инвентарный номер и т. д.).
При поступлении заявки или запроса производится составление на его основе соответствующего поискового образа, который затем переводится на поисковый язык, т. е. кодируется таким же способом, каким кодируются документы.
Поиск документов также осуществляется различными способами в зависимости от поисковой системы и носителей. В целом идея поиска сводится к сравнению поискового образа запроса с поисковыми образами документов и к извлечению документов, имею-
200
х поисковые образы, соответствующие поисковому образу запроса.
г Недостатки современных систем кодирования оказывают непосредственное влияние на поиск информации, о чем уже было сказано выше. Это вызывает необходимость в дополнительной аналитико-синтетической обработке документов для подготовки требуемого справочно-информационного документа.
Заканчивая рассмотрение технологических этапов и операций, связанных с созданием СИД, отметим, что первые два этапа, относящиеся одновременно к производству информационных документов, во избежание дублирования целесообразно осуществлять в пределах одного информационного органа. Что же касается третьего этапа, а также всех последующих операций, то здесь появляется возможность расширить фронт работ путем распределения общего объема их между территориальными органами информации. Однако в данном случае имеется некоторая специфика, состоящая в том, что при информационном обслуживании нет специализации. Поэтому все информационные органы должны иметь полные дубли справочно-информационного фонда, а также единые информационно-поисковые системы и информационно-поисковый язык. Только при этих условиях любой потребитель может рассчитывать на одинаковое информационное обслуживание независимо от того, в какой информационный орган он обращается.
2. Методология построения систем модульного информационно-математического обеспечения
По данным крупнейшей бесприбыльной корпорации США РЭНД, в настоящее время в зависимости от степени новизны вновь разрабатываемых образцов БТС (и, следовательно, степени риска при разработке) 50—60% НИОКР либо идут «в задел», либо вообще оканчиваются неудачей из-за экономической нецелесообразности серийного производства или эксплуатации вновь созданных образцов [18].
Можно предположить, что сложившаяся ситуация является следствием определенной недооценки теории и практики использования прогнозных оценок в оптимизации облика разрабатываемых БТС на предэскизных этапах жизненного цикла (ЖЦ) в период создания аналога таких БТС.
В свою очередь, эффективная разработка и использование прогнозов возможны только в условиях достаточно полного информационного обеспечения, основанного на автоматизированной обработке статистически достаточной системы исходных данных (СИД). Следует отметить, что для информационного обеспечения в настоящее время необходимо по крайней мере 30% затрат рабочего времени инженерно-технических работников НИИ и КБ. В сущности, именно надлежащее информационное обеспечение гарантирует необходимую эффективность создаваемых БТС. В приведенном иьипе случае, как уже указывалось, при неполной по количеству
201
или при недостаточно достоверной информации НИОКР заканчивались неудачей.
Анализируя данные «РЭНД корпорэйшн», следует отметить, что наибольшая (до 30—40%) доля неудач при выполнении этих работ объясняется просчетами при формировании моделей и алгоритмов, ошибками при составлении программ или планов работ, что интегрально можно отнести к ошибкам и неточностям в формировании управленческой информации.
Другой причиной неудач являются ошибки в обработке экономической информации (25—30%), а далее следует упомянуть недостатки подготовки СИД или постановке работ (20—30%), например недостаточно четкая или достоверная формулировка целевой функции или неполный учет дисциплинирующих условий.
В свете изложенного особую актуальность приобретает проблема разработки методологических принципов формирования модульных стандартизованных программ и алгоритмов информационного обеспечения НИОКР. При этом необходимо четко изложить сущность формирования проблемно-ориентированной СИД и математического обеспечения, а также сущность и принципы формирования стандартизованных модульных программ и алгоритмов.
Формирование проблемно-ориентированной СИД и МО. Система управления современными НИОКР в процессе развития БТС (смены периодов и этапов ЖЦ) претерпевает существенные изменения и по структуре, и по связям, т. е. она должна рассматриваться как динамическая система. Это требует достаточной мобильности СИД для внесения изменений, необходимость в которых диктуется развитием и совершенствованием систем управления и методов использования вычислительной техники (ВТ), применяемых в процессе ее управления развитием БТС.
По предлагаемой методике такая мобильность достигается за счет использования наборов или массивов отдельных функциональных независимых программных блоков — модулей, допускающих стандартное сопряжение. Набор модулей в необходимой последовательности и корректировка связей между модулями с введением при необходимости согласующих коэффициентов выполняется специализированной управляющей программой, ориентированной на проблему или на класс решаемых задач (коммутатор модулей). При этом разработка системы осуществлялась в предположении, что такая модульная система СИД и МО позволит учесть следующие положения.
1. Информационно-математическое модульное обеспечение должно достаточно гибко адаптироваться к изменениям во внешней среде. Следует отметить, что наряду с преимуществами модульных программ они неизбежно приводят к неполному использованию комплекса технических средств (КТС), а это в свою очередь приводит к ограничению круга решаемых задач. В модульной системе информационно-математического обеспечения достаточная адаптационная гибкость управляющей программы соче-
202
\гается с фиксированными рамками конкретного МО в пределах Единичного модуля.
। 2. Модульная система информационно-математического обеспечения строится с таким расчетом, чтобы в рамках фиксированных затрат на МО предельно расширить функциональные возможности системы. Эта возможность обеспечивается членением общей модели решаемой проблемы (задачи) на блоки моделей, которые в свою очередь членятся на модули, что позволяет обрабатывать массивы произвольной длины и с произвольным расположением реквизитов, и функциональной независимостью модулей, минимальной зависимостью от операционной системы, средствами реорганизации и обновления существующих массивов информации, а также средствами расширения проблемного языка.
3. Пользователю по предлагаемой методике предоставляются эффективные рабочие программы, а также средства для описания схемы решаемых задач.
4. Предполагаемая методика построения проблемно-ориентированной системы основана на принципе модульности, заключающемся в выделении отдельных вычислительных и логических процедур, оформление которых соответствует некоторым стандартам.
Аспекты формирования модульных программ. В соответствии с изложенным в предыдущем разделе программный модуль — это есть:
а) минимальная стандартизованная по входам функциональная программа с определенной элементарной единственной (неальтернативной) функцией, которая программируется один раз, но может использоваться многократно в рамках одной (комплексной) программы;
б) автономная унифицированная подпрограмма, которая может настраиваться на определенную структуру входной и выходной информации и позволяет создать функциональные (многократно используемые) адаптирующиеся к внешним условиям микропрограммы, предусмотреть возможность функционального расширения системы на основании указанной адаптируемости системы к внешней среде, классифицировать решаемые задачи по функциональным признакам и декомпозировать их в рамках проблемно-ориентированной группы, для того чтобы в каждой такой группе иметь возможность многократно повторять счет от определенных, заранее устанавливаемых контрольных точек или счет по измененной программе, что функционально обеспечивает Диалоговый режим решения задач.
Номенклатура системных требований, предъявляемых к программным модулям, предусматривает следующее: модуль выдает Управляющей (коммутирующей) программе требования на необходимые для обработки массивы (таблицы); модуль задает такт обработки массива и необходимый для распределения памяти кодированный сигнал; обращение к внешней памяти осуществляется порез специальный модуль — коммутатор вызова внешней памяти
203
(КВВП); модуль оформляется по стандартам ЕС третьего поколения.
Функциональные особенности модульной системы. Она рассчитана главным образом на решение следующих проблем:
— формализация и расчет входных информационных массивов, представленных сетевыми графиками;
— обеспечение задачи предварительной обработки информации в АСОД, т. е. ввод в запоминающее устройство (ЗУ), замена и обновление блоков исходных информационных массивов, диагностическая обработка данных (определение цепочек вход — процессор — выход, временных параметров по соответствию расчетных и плановых сроков выполнения этапов работы), выделение критической зоны граф и критических путей;
— разработка и ведение оперативного графика всей НИОКР и ее отдельных этапов, включая установление контрольных сроков для выполнения работ, а также определение трудоемкости работ по подразделениям для отдельных этапов и всей НИОКР;
— управление кадровыми ресурсами по методу определения сводной нагрузки для каждого подразделения по основным конструктивно-технологическим направлениям.
Информационная модель системы модульного МО представляет собой набор сетевых графиков, укрупненно сведенных в единый альтернативный граф, на основании которого строится дерево целей и задач (ДЦЗ) НИОКР и производится «сортировка» и упорядочение набора сетевых графиков в последовательность, подлежащую выполнению по этапам НИОКР. Под каждым таким отдельным сетевым графиком подразумевается граф
гп = (С, Р) (п = ТГЖ
где С — множество событий; Р — множество работ (обозначенных дугами графа), причем каждой отдельной работе (дуге) р Р может соответствовать какое-то множество характеристик
? (Р) = $ (Р) и ft (Р),
где i, у* — коды соответственно начала и конца работы; at, Ы — временное характеристики работы.
Особенность модульной системы МО в том, что решение задачи можно представить вычислением графа G = (X, Р), в котором X = {хд — матрица, характеризующая параметры модульной системы, а Р = {р} — матрица работ соответствующих модулей. Параметры модульной системы определяются содержанием массивов исходных данных, систематизированных в модуле в определенном порядке.
Таким образом, решение каждой задачи, подзадачи или вопроса управления моделируется связным подграфом Gf графа G, причем перечисление подграфов, соответствующих различным экономическим задачам, может быть не пусто, т. е.
Gi П Gj = Gij (f, 7 = 1, n; i =/= /), где n — число задач, входящих в граф.
204
Отметим, что в Gtj может быть некоторое конечное число вер-щин предельного уровня (ранга), которые рассматриваются как контрольные точки т = решения в подграфе Go-, характеризующие фиксированные события (состояния) системы графа.
При решении любой задачи выход в любую такую контрольную точку фиксируется как завершение этапа решения задачи. Это позволяет при расчете альтернатив начинать счет с любой такой контрольной точки, что существенно сокращает (примерна вдвое) время обработки данных и счета.
Особенностью предложенной методики является поэтапное решение задач в размерностях параметр — затраты (трудоемкость) — время с продвижением обрабатываемой информации от одного модуля к другому. При этом продвижение счета от модуля к модулю, вывод промежуточных результатов, возвращение к контрольным точкам, регистрация и хранение информации, обращение к оперативному и внешнему ЗУ осуществляется программным комплексом управляющих модулей, производящих операции с матрицами данного вида:
01, fci, ..., П!
п __ ^2» ^2» • • • ,
где а1ч пт — единичные значения информации.
Информация по строкам матриц делится на однородные элементы по конструктивно-технологическим признакам (агрегаты, блоки, узлы, детали БТС), а по столбцам представляет собой набор значений для каждого такого элемента. Количество столбцов и строк (а при необходимости — предельные значения элементов} в каждой матрице кодируется и передается в управляющую программу.
Управление модульной системой. Обработка числовой экономической информации осуществляется посредством последовательной обработки модулей, которые вводятся в ЭВМ в соответствии с графом G (X, Р), который моделируется таблицей связей. Такие таблицы связей, соответствующие всем задачам данной НИОКР - Gn, систематизируются также в табличном виде типа графа
G=.U Gt.
i—1
Ввод очередных модулей в соответствии с таблицами связи, вередача результатов счета от модуля к модулю, а также анализ пром еж уточных результатов счета осуществляются специальной Коммутирующей программой. Коммутирующая программа вы-Волняет задачи управления обработкой данных в диалоговом режиме с оператором. Непосредственную связь между модулями и Коммутирующей программой осуществляет третья стандартная врограмма «Дистрибютор», которая распределяет оперативную вамять перед выводом и вводом в программу очередного модуля.
205
Модульная система позволяет осуществить следующие виды обработки массивов: полную обработку, при которой информа-ционный массив должен полностью размещаться в оперативной памяти при обработке введенного модуля; фрагментарную обработку, при которой информационный массив подается в обработку по введенному модулю фрагментами, определенными по длине блоками, снимаемыми с внешних накопителей; смешанную обработку, при которой массив обрабатывается любым из двух указанных выше способов.
Реализация стандартных программ в модульной системе. Рассмотрим важнейшие стандартные процедуры, которые осуществляются в предполагаемой модульной системе. Прежде всего ввод и обоснование системы исходных данных (СИД) включает в себя комплекс стандартных программ, которые обеспечивают первичную обработку СИД, производят ввод и обновление информации о сетевых графиках с магнитных накопителей или перфокарт, диагностику достоверности вводимой информации (включая сигнализацию об обнаруженных ошибках).
В соответствии с изложенными процедурами в рассматриваемой системе предусмотрено использование трех основных стандартных модульных программ.
Первая программа — «стандартный вход» — осуществляет ввод с магнитных накопителей или перфокарт информации о единичном сетевом графике. Параллельно с этой сетевой стандартной программой работает вспомогательная модульная программа «Диагностик», которая осуществляет поиск элементарных ошибок, имеющихся в носителе (перфокарте и др.), и выдачу на печать информации об ошибках. После проверки обработанная исходная информация по сетевому графику уплотняется до бита, кодируется и вводится в массив «Архив».
Вторая программа — «ввод СИД» — производит ввод информационного массива по сетевым графикам. Особенность этого ввода заключается в том, что повторяющиеся блоки и участки сетевых графиков записываются только по одному разу и вводятся многократно по коду блока. Это позволяет существенно упростить программирование и сэкономить емкость накопителей. Аналогично предыдущей основной программе здесь также работает вспомогательная модульная программа «Диагностик», осуществляющая поиск, выявление и ликвидацию элементарных ошибок. Таким образом, по этой основной программе осуществляется ввод работ с магнитных или перфокарт, корректируется (в смысле устранения ошибок) содержание вводимого массива СИД, имеющего единую организацию файлов для всех тем и работ.
Третья основная программа — «обоснование СИД» — осуществляет корректировку содержания и замен блоков программ и отдельных модулей в «Архив». Извлеченная по коду из «Архива» информация заменяется новой, снятой с карты после соответствующей проверки вспомогательной программой «Диагностик» на корректировку ошибок.
206
Изменение структуры информационных массивов с примене-juieM стандартных программ. При обработке экономической информации САПР одним из важнейших требований является предельное использование возможностей ЭВМ, чтобы свести к минимуму трудоемкость расчетных операций. При этом необходимо учитывать, что емкость оперативной памяти (ОП) ЦВМ, особенно малых, типа ЕС-1020 (64—256 кбайт), мала и не позволяет «пропускать» информационные массивы экономических нормативов и параметров САПР.
С учетом этого ограничения приходится хранить информационные массивы экономических показателей во внешних накопителях ЭВМ (лентах, дисках, барабанах и т. п.), что увеличивает общее машинное время (из-за частого обращения к внешней памяти) и затраты.
Вместе с тем «экономические» информационные массивы суммируют, как правило, весь объем потребной экономической информации, включая весьма объемные статистические данные, обеспечивающие «полный перебор» конструктивно-технологических альтернатив. В этой связи целесообразно выделить из этого массива важнейшие показатели, обеспечивающие расчет наиболее вероятных вариантов методов укрупненных оценок. Это позволяет существенно (в 5—10 раз) уменьшить объем обрабатываемого массива. Если массив не уменьшается в оперативной памяти (ОП), то обращение к внешнему накопителю резко сокращается.
Следует отметить, что и сама процедура «компрессии» массива осуществляется специальным служебным модулем, который формирует строки массива для внесения в ОП из строк массива СИД по стандартной программе.
В результате компрессии расположение характеристик в массиве может измениться, но независимо от этого модуль, настроенный на поиск характеристик, осуществляет упорядочение данных для последующей обработки.
3. Методология системного проектирования
Оптимизационный процесс создания систем удобнее всего проиллюстрировать на примере системного метода проектирования сложных технических объектов (БТС), позволяющего наиболее полно использовать математический аппарат и кибернетические модели системологии.
Исходные положения, которые обусловили необходимость и Целесообразность разработки системного проектирования как комплексной информационной модели НИОКР, можно сформулировать следующим образом: ***
— резкое увеличение сложности структуры, связей, управления, а также неопределенности поведения создаваемых БТС;
— лавинообразный, не поддающийся логическому анализу рост Информации, заставляющий обратиться к специализированным системам обработки данных (СОД);
207
— основное противоречие развития современных БТС, заключающееся в постоянном сокращении их эксплуатационного цикла (за счет морального старения) и возрастания реализационного цикла (за счет сложности НИОКР);
— вытекающий из предыдущих положений существенным рост числа конструктивно-технологических альтернатив (КТА), которые определяют уровень и реализационный цикл НИОКР через соотношение преемственности и новизны;
— необходимость наличия мощностей современной научно-технической базы, а также комплекса вычислительных технических средств для проведения экспериментальной и расчетном работы.
Изложенное позволяет сформулировать проблему создания системного проектирования как разработку информационной модели создания БТС, включающей все важнейшие (определяющие) события НИОКР, требующие принятия решений по выбору наиболее предпочтительной из имеющихся альтернатив.
Системный метод проектирования БТС, учитывая комплексность постановок проектных задач и сложность создаваемых систем, предполагает применение бригадного метода проектирования по принципу группа человек — группа машин, рассмотренному в разд. 1.4.3 книги. Сущность этого метода состоит в использовании знаний ученого и инженера (человеческий фактор групповой СЧМ) как «универсалиста» (человека, по словам Р. Б. Перри, знающего все меньше и меньше о все большем, пока он не будет знать практически ничего обо всем), так и «специалиста» (человека, знающего все больше и больше о все меньшем, пока он не станет знать почти все ни о чем [29]). Групповая машинная составляющая в данном случае будет представлена цифровыми ЭВМ для машинного проектирования и управления и аналоговыми ЭВМ для решения объектово-параметрических задач. Кроме того, машинную составляющую групповой СЧМ следует дополнить экспериментальным стендовым аналоговым и имитационным оборудованием, а также оборудованием масштабного натурного эксперимента. Подразумевается, что все эти виды экспериментального оборудования используются в верификации моделей. Очевидно, что и «специалисты», и «универсалисты» осуществляют в этом комплексе жизненно важные функции, и задача заключается в том, чтобы при решении сложных проблем их функции были объединены в логически и количественно обоснованной процедуре создания БТС с участием всей СЧМ.
При этом процедура системного проектирования БТС распадается на две самостоятельные проектные стадии: 1) выбор и ограничения функт^й и структуры системы в целом — внешнее проектирование, анализирующее и оптимизирующее структуру и процессы системы при взаимодействии с внешней средой; 2) выбор и проектирование компонентов системы — внутреннее проектирование, анализирующее и оптимизирующее структуру и связи подсистем и элементов системы с точки зрения упорядочения работы
208
ТАБЛИЦА 7. Основные виды системного проектирования
Внешнее проектирование Внутреннее проектирование
формулировка задачи Математическая модель Планирование эксперимента Испытание аналога в условиях, имитирующих реальные Проектирование функциональных связей в структуре Проектирование предельной нагрузки Выбор предпочтительной альтернативы в проектировании БТС по соответствию аналога системы и целевой функции
процессора БТС и его предельного соответствия целевой функции системы (табл. 7).
Основные виды системного проектирования целесообразно рассматривать в предположении, что проектирование проходит через определенные фазы работ (табл. 8).
Приведенные в табл. 8 этапы или фазы системного проектирования имеют особенности, изложенные в табл. 9.
В последующем изложении рассматриваются некоторые прикладные аспекты использования системного проектирования для формирования библиотеки стандартных проблемно-ориентированных модулей. В этой связи следует рассмотреть последовательное наложение программных модулей на процедуру системного проектирования.
Процедура формирования библиотеки модулей предусматривает систематизацию их распределения по задачам этапов жизненного цикла БТС (ПО, скоординированных по проблемно-ориентированным программам (Х;) для круга вопросов, которые типичны для подсистем (5П) — подразделений ОЭС. выполняющей работы по созданию БТС.
В качестве примера использования системного метода проектирования для формирования такой проблемно-ориентированной библиотеки модулей можно рассмотреть наиболее общий.случай. Обозначим: X — вектор информационно-математического обеспечения для модулей программ, ориентированных на решение следующих задач: — теория систвхМ и системный анализ; Х2 — ситуационное моделирование; Х3 — классическая и прикладная математика; Х4 — математическая статистика; Х5 — теория оптимального управления; Xq — теория прогнозирования и формирования целевых комплексных программ; Х7 — теория организации Производства и планирование; Х8 — теория информации; Х9 — системотехника; Х1о — исследование операций; Х1Г — эргономика; Х12 — теория автоматического регулирования; Xi3 — теория массового обслуживания и т. д.
Применяя указанные обозначения, получим комплексы составляющих стандартного модульного обеспечения для моделей
209
ТАБЛИЦА 8. Фазы НИОКР в рамках системного проектирования
Проектирование
Фаза работы внешнее внутреннее результаты
I. Начало работы КЗ О I. Организация работы 1. Общая постановка задачи 1. Формулировка задачи 2. Математическая модель 3. Планирование эксперимента 1. Предлагаемое решение (альтернативы) 1. Проектирование связей между структурными элементами для систем с однотипными или многотип-ными входами 2. Проектирование предельной нагрузки для систем с входами, распределенными по времени 3. Проектирование для систем с входами, носящими конкурирующий характер 1. Формулировка проблемы 2. Предлагаемое решение по необходимому составу специалистов, потребной научно-технической базе, вычислительному комплексу и инфообеспечению 3. Укрупненная оценка времени и потребных ресурсов при заданной эффективности 1. Состав бригады проектирования 2. План работы над проектом 3. Оценка объема работ, научно-технической и вычислительной базы
ТАБЛИЦА 8 (Окончание)
Фаза работы
внешнее
III. Предэскизное проектирование IV. Эскиз и техническое ft? проектирование V. Создание опытного образца VI. Испытание, отладка и оценка 1. Формулировка задачи 2. Математическая модель 3. Планирование эксперимента 1. Формулировка задачи 2. Математическая модель 3. Планирование и требования к результатам эксперимента 1. Формулировка задачи 2. Модель технологического обеспечения 3. Модель технической подготовки производства 1. Формулировка задачи 2. Модель и планирование испытаний
Проектирование
внутреннее результаты
1. Проектирование с включением этапа выявления структуры и связей подсистем (входы, связь, управление, средства связи в СЧМ, выходы) 1. Подробное техническое (функциональное) задание системы, варианты технических предложений, ревизия технического задания
1. Проектирование с включением этапа проектирования подсистем 1. Требования и объем работ по эскизному и техническому проектам и выпуску рабочей документации
1. Упорядочение технологических циклов процесса 1. Требования и объем работ по опытному образцу и контрольной аппаратуре
1. Формирование программы и номенклатуры испытаний 1. Требования и объем работ по испытаниям опытного образца и оценка образцов головной партии
ТАБЛИЦА 9. Характеристика этапов проектирования
Этап
I. Постановка задачи
II. Математическая модель
Ш. Планирование эксперимента
Элементы
Внешнее проектирование
1. Ситуационное моделирование
Общее знакомство с существующей системой (про, тотипом). Ситуационное моделирование создает концепцию внешней среды и подготавливает решение задачи исследования операций
2. Анализ допустимых решений
Ограничения допустимых решений зависят от постановки задании общего критерия применительно к выбранной стратегии. Кроме того, допустимые решения ограничиваются: ресурсными параметрами, энтропией информации в исследуемой области, частными критериями и квалификацией проектировщиков
3. Критерии эффективности
Правильный выбор критерия эквивалентен правильности постановки задачи (см. II. 1.2). Различают общие и частные критерии эффективности; необходимы анализ и обработка информации по формированию критериев и ограничений. Критерий эффективности должен быть унифицированным и стандартным (типическим) и, по возможности, должен определяться по стандартизованным модульным программам
4. Исследование операций
Исследование поведения БТС и оценка принятых решений (верификация постановки задачи). Создаются математические модели системы в целом, а также ее подсистем на всех этапах внешнего и внутреннего проектирования. Математические модели подразделяются на группу аналитических (в основном — качественной оценки) и группу машинных (количественной оценки) моделей.
5. Оптимизация распределения ресурсов между видами эксперимента
При системном проектировании необходимо учиты вать не только количественные характеристики, н<» и систематизировать данные, которые всегда можно выразить в численной форме — природа входов выходов, функции и связи системы. Основным источником получения и систематизации таких данных является эксперимент, причем лаборатор ный эксперимент служит источником получения данных для математической модели, а нмитацион-ные испытания — получения данных, характеризу ющих качество работы системы. В этой связи пла-нирование способа эксперимента (увеличение контролируемых параметров или увеличение числа наблюдений) требует обширного анализа. Главная цель планирования эксперимента — получение максимальной точности при оптимальной стоимости эксперимента
212
ТАБЛИЦА 9. (Окончание)
Этап
IV. Анализ эксперимента
I. Проектирование связей между структурными элементами
II. Проектирование предельной нагрузки
III. Выбор предпочтительной альтернативы в проектировании БТС по соответствию аналога и целевой функции системы
Элементы
6. Оценка принятых решений по результатам эксперимента
Внутреннее проектирование
Проектирование единичных структурных ячеек (подсистем, элементов) систем, а также функциональных характеристик, порядков и иерархии связей между этими структурными элементами завершается тогда, когда можно хотя бы укрупненно описать характер и последовательность преобразований каждого возможного входа на каждом этапе его прохождения через систему. Для этого формируют:
1) функциональную блок-схему всех структурных элементов системы;
2) блок-схему связей в системе с их иерархией;
3) блок-схему возможной замены (подстановок) структурных элементов.
Проблема предельной нагрузки связана с одновременным обслуживанием многих входов или большим числом реакций (обратных связей) па выходы. При проектировании предельной нагрузки определяется оптимальное число информационных каналов, емкость и тип внешних и оперативных накопителей информации
Отличительным свойством альтернативных систем является то, что в зависимости от структуры или связей они могут иметь различную эффективность при одних и тех же входах. При проектировании таких систем прежде всего нужно учитывать возможные конфликтные ситуации
на различных этапах НИОКР в виде следующих наборов модулей (Xj) для каждой процедуры (ПО формирования математических моделей в системном проектировании (см. схему системного проектирования):
а) для научно-исследовательских работ
для Пх — -Xj (Xp Х%, X3);
» П2 - хп (х4, хб, Хе, х7, х8);
» П3 — Хщ (Х3, Хе, Х9, Х1о, Х11? Х12);
» п4 - xIV (х2, х4, х10, Хи, х18);
» Пб-Ху(Х2, Х9);
» Пв,7 — Xvi, VII (^l)j
213
РИС. 17. Структура системы-средство
б) для опытно-конструкторских работ
ДЛЯ П1,2 — -Xj-II (Х1, Х2, ^з)»
» Пз,в — -^in-vi (Х8, Хе, Х9, Х10, Хп, Х12);
» П7-11 — -Xvii-xi (Х2, Х4, Х9, Хп, Х12);
» П12- — -X’xii(X2, Х9, Хп, Х13);
* П13 — -Ххш (Х9, Х10, Хи, Х12, Х13).
Координируя далее полученные программно-модульные комплексы для основных процедур системного проектирования с задачами основных этапов НИОКР, следует «привязать» к соответствующим подразделениям ОЭС необходимые и типичные для их деятельности комплексы модулей.
В качестве примера можно рассмотреть типовую структуру ОЭС как систему-средство, представленную на рис. 17, где So — директор института; S2, S3 — заместители директора по основным направлениями НИОКР; S4 — заместитель директора по испытаниям; 5П, 512, 531, S32 — комплексные научно-исследовательские и проектные отделы по разработке систем; 513, 521, S33 — отделы по разработке аппаратуры; 514 — метрологический отдел; S22 —- отдел стандартизации; S23 — отдел технической документации; — отдел надежности; iS2q — научно-исследовательский отдел по испытаниям; 534 — отдел научно-технической ипформации;5131, 5132, 5133, 5134, 5211, 5212, 5213, 5214 — бригады по
214
разработке специальной аппаратуры и экспериментального оборудования [52].
Для использования системного проектирования НИОКР рассмотрим матрицы основных этапов НИР (схема 1). Аналогичные матрицы получаем и для основных этапов ОКР (схема 2).
На основании построенных матриц следует сделать выводы о потребностях и координации модулей информационно-математического обеспечения.
1. Этап «Изучение проблем и выбор возможных направлений» выполняется одним комплексным отделом по разработке системы, отделением по разработке аппаратуры и отделом научно-технической информации — всего не менее трех отделов, в которых систематически используются программные модули теории систем, ситуационного моделирования, а также классической и прикладной математики:
-Xi (Xj) U *31 U ^32*
2. Этап «Обоснование направлений исследований и составление календарного плана работ и программы исследований» выполняется теми же отделами. Здесь используются модули задач организации производства и планирования
(Х7) +sn и $31 и s32.
3. Этап «Проектирование и изготовление макетов и средств испытаний» выполняется с участием не менее 12 отделов, в том числе не менее пяти отделов по разработке аппаратуры, в которых в основном используются модули классической и прикладной математики, теории информации, системотехники, исследования операций, эргономики и теории автоматического регулирования:
Хщ (Х9, Х10) —> 5131-134 и 5211-216 U 5331-333-
4. Этап «Экспериментальные работы и испытания» предусматривает участие отдела по испытаниям аппаратуры и конструкции, комплексного отдела по разработке и проектированию систем и отдела надежности, в которых необходимо применение модулей ситуационного моделирования математической статистики, исследования операций, эргономики и теории массового обслуживания
Xiv (Ха, Хю, Х13) ->5и U 512 U 531 U 532 (J 535.
5. На этапе «Доработка и корректировка теоретической разработки темы по результатам испытаний» принимают участие не менее девяти отделов, в которых в основном используются модули ситуационного моделирования, модули системотехники, модули теории автоматического регулирования и др.:
-Ху (Х9) —>5ц (J 53i U 5за (J 5331 U 5382 (J 5333 (J 5131U
U 5i3a U 5i33 (J 5134 U 5ац (J S2i2 U 5а18.
6. На этапе «Обобщение результатов, выпуск техотчета и разработка ТЗ на ОКР» принимают участие не менее четырех отделов,
215
СХЕМА 1. Системное проектирование для НИР
to о
П1 Па П«
П4 Пь П« П?
Р СХЕМА 2. Системное проектирование для ОКР
00
• Саркисян
Пз
П4 Пв Пя Пю П12
1 1 217 Разработка аппаратуры Чертежи Подготовка производства и изготовление опытных образцов Опытный образец Конструкторские испытания и доработка аппаратуры по результатам испытаний Корректировка чертежей схемы Передача технической документации серийному заводу Узлы, детали Оказание технической помощи серийному заводу в освоении изделий Выпуск серии изделий
п5 п7 п9 Пи П13
Разработка схем системы Схемы Лабораторные испытания системы и доработка системы по результатам испытаний Система Стендовые испытания системы и доработка ее по результатам испытаний Система Натурные испытания системы Прототип Обработка результатов испытаний Выпуск эксплуатационной документации Действующая система
в которых необходимо применение модульных комплексов по те0-рии систем и системного анализа
XVI (-X'l) U $31 U 832 U ^331 U ^332 U *^333*
Статистический анализ таких матриц позволяет систематизировать потребности в информационно-математическом обеспечении различных подразделений ОЭС с распределением их во времени. Далее, пользуясь моделями массового обслуживания либо эвристическими моделями упорядочения, можно сформировать план подготовки стандартного информационно-математическою обеспечения и оптимизировать распределение или выбор основных и вспомогательных средств для вычислительного центра.
Изложенный метод формирования проблемно-ориентированных комплексов модульных программ, координированных по подсистемам ОЭС и распределенных по процедурам системного проектиро вания в соответствии с этапами жизненного цикла БТС, позволяет: обоснованно готовить необходимую информационно-математическую и вычислительную базу для САПР и автоматизированного программного эксперимента; систематически осуществлять плановую подготовку программ математического обеспечения НИИ и КБ; получить необходимый комплекс исходного статистического массива, а также банк модулей информационно-математического обеспечения для внедрения на первом этапе АСОД (а далее АСУ), что позволяет проводить НИОКР в оптимальные сроки и с минимальной трудоемкостью.
РАЗДЕЛ ТРЕТИЙ
ТЕОРИЯ ПРОГНОЗИРОВАНИЯ РАЗВИТИЯ БТС
В условиях современной научно-технической революции все большее значение приобретает выработка концепций и стратегии развития БТС на ближайшую и отдаленную перспективу, обеспечивающих целенаправленные регулирующие воздействия на характер их развития с учетом долговременных последствий.
Эти функции выполняют прогнозирование, разработка целевых комплексных программ и долгосрочное (стратегическое) планирование, являющиеся важными этапами планирования научно-технического прогресса.
ГЛАВА ПЕРВАЯ
ФУНКЦИИ И ЗАДАЧИ ПРОГНОЗИРОВАНИЯ
1. Эволюция задач п система прогнозирования БТС
Прогнозирование научно-технического прогресса как элемент управления является информационным процессом. Особенность этого процесса — наличие временного сдвига информации выхода процесса по отношению к информации входа. При планировании входными являются в основном потоки информации о прошлом (ретроспективная информация), выходными — потоки информации о будущем (перспективная информация) (рис. 18).
Наряду с ретроспективной информацией при принятии плановых решений используется информация о состоянии объекта планирования и внешней среды (фона) в момент разработки плана (информация о настоящем). По отношению к плановому периоду эта информация также является информацией о прошлом, поэтому ее можно условно отнести к ретроспективной информации.
Величина временного сдвига информационных выхода и входа Процесса зависит от глубины (времени упреждения) планирования. Глубина, или время упреждения, планирования определяйся как промежуток времени в будущем, на который разрабатывается план. Чем величина упреждения больше, тем больше
219
72r/nZJP/r/77
/7Г/77/7£7£’/7£’/ГЦШ/
. ^7/K/J&/f/77 77/й7/Ш/Ц7#а/Ш/Г
/fynras/nre
РИС. 18. Характеристика информационных входов и выходов процесса планирования
потребная глубина ретроспекции 1 и, следовательно, больше временной сдвиг информации входа и выхода процесса планирования.
В зависимости от времени упреждения различают четыре этапа планирования научно-технического прогресса: 1) прогнозирование; 2) разработка комплексной программы научно-технического прогресса на 20 лет и целевых комплексных программ (ЦКП); 3) долгосрочное планирование; 4) текущее технико-экономическое планирование; 5) оперативно-календарное планирование.
Этапы планирования ориентированы не только во времени, но и в плоскостях функционального и территориального членения объекта планирования. Степень охвата функциональных и территориальных уровней иерархии этапами планирования (пространство их функционирования) различна. Прогнозирование, программирование и долгосрочное планирование охватывают все уровни функциональной и территориальной иерархии: От народного хозяйства страны до предприятия.
Оперативно-календарное планирование охватывает низшие уровни иерархии в плоскостях функционального и территориального членения объекта планирования — от рабочего места до предприятия. Текущее технико-экономическое планирование занимает между ними промежуточное положение.
Описанная схема охвата уровней иерархии этапами планирования непрерывно трансформируется. Под воздействием применения в планировании электронно-вычислительных машин и оргтехники этапы планирования с малым временем упреждения
* Глубина ретроспекции — промежуток времени функционирования объекта в прошлом (от горизонта ретроспекции до настоящего момента), по которому имеется необходимая и достаточная ретроспективная информация. Горизонтом ретроспекции называется самая дальняя в прошлом точка на шкал1' времени, в которой имеется необходимая и достаточная информация.
220
(оперативно-календарное и текущее технико-экономическое планирование) охватывают все более высокие уровни иерархии. Одновременно под воздействием ускорения темпов научно-технического развития этапы с большим временем упреждения (долгосрочное планирование, программирование и прогнозирование) охватывает все более низкие уровни иерархии, расширяя горизонт плановых решений г.
Прогнозирование является первой стадией планирования, остальные этапы составляют стадии программирования и собственно разработки плана. Непосредственные связи между двумя стадиями планирования возникают на стыке долгосрочного планирования, разработки ЦКП и прогнозов. Они имеют общую сферу применения в функциональной и территориальной плоскостях и идентичную схему информационных потоков.
Принципиальными отличиями планирования и прогнозирования является характер выходной информации: директивность плановой информации (план-директива) и ориентирующий характер прогнозной информации (прогноз-ориентация). Эти отличия обусловлены значительным уменьшением точности и достоверности вырабатываемой информации о будущем при увеличении глубины планирования.
На рис. 19 приведена схема изменения во времени доверительного интервала оценки объекта планирования по одному параметру х. Если состояние объекта описывается множеством параметров {#/}, то приведенные на графике кривые трансформируются в поверхности (п + 1)-го порядка, где п — число параметров, описывающих состояние объекта.
При построении графиков (рис. 19) условно принято, что ретроспективная информация об объекте полностью достоверна. Ошибки измерения и ошибки, возникающие из-за помех в каналах передачи информации, в данном случае не рассматриваются.
Однако здесь следует отметить, что ценность более давней ретроспективной информации и ее предсказательная сила уменьшаются, т. е. происходит дисконтирование ретроспективной информации. Это явление можно объяснить высказыванием В. И. Ленина: «Кто же не знает, что если рассматривать какое Угодно общественное явление в процессе его развития, то в нем всегда окажутся остатки прошлого, основы настоящего и зачатки будущего» * 2. Естественно, чем более давней является ретроспективная информация, тем меньше в ней зачатков будущего и больше остатков прошлого.
Вырабатываемая при планировании перспективная информация имеет вероятностный характер и определенную достоверность в границах доверительного интервала. Увеличение глубины планирования приводит при постоянной доверительной вероятности
Горизонт планирования (или прогнозирования)—самая дальняя в будущем точка на шкале времени, в которой оценивается состояние объекта пла-
2 Пирования.
Ленин В. И. Поли. собр. соч., т. 1, с. 181.
221
Jtowawnruujr /7ла// /7/wzmzj aw tyffz/wj
РИС. 19. Динамика доверительного’интервала оценки параметров объекта
(Р (т) = const) к расширению доверительного интервала оценки (на рис. 19 он имеет форму раструба). При постоянной величине доверительного интервала (Ах (т) = const) во времени уменьшается доверительная вероятность (на рис. 19 доверительный интервал имеет форму цилиндра).
Таким образом, достоверность и точность вырабатываемой при планировании перспективной информации существенно уменьшается с увеличением глубины планирования, т. е. происходит дисконтирование перспективной информации.
Перспективной информации малой достоверности нельзя придавать директивный характер, но эта же информация показывает вероятное состояние будущего, ориентирует на будущие плановые решения с меньшей глубиной планирования. Прогнозы даже с относительно небольшой степенью достоверности позволяют уменьшить неопределенность наших знаний о будущем, а следовательно, уменьшить риск современных плановых решений, ущерб от их не-оптимальности, который может возникнуть за рамками планового периода. Фактор времени определяет и ряд других специфических особенностей процесса и результатов прогнозирования и собственно планирования.
Следовательно, первичным при размежевании понятий прогнозирования и собственно планирования (разработка плана) является фактор времени. Он определяет границы процессов собственно планирования и прогнозирования. Глубина прогнозирования теоретически не ограничена. Практически такие границы, очевидно, целесообразно установить, исходя из необходимой и достаточной достоверности оценок состояния объекта планирования в будущем. Долгосрочность планирования не превышает 10—15 лет.
222
Таким образом, по времени упреждения высший уровень иерархии занимает прогнозирование, затем идет разработка программ и планов. Прогнозирование, разработка программ и планов являются элементами единой системы планирования, объединенными общностью целей и задач.
2. Функциональные особенности, прогнозирования
Основными понятиями теории прогнозирования являются прогноз, прогнозирование, прогностика.
Прогноз — это вероятностное суждение о состоянии какого-либо объекта (процесса или явления) в определенный момент времени в будущем и (или) альтернативных путях их достижения.
Прогнозирование — это процесс формирования прогнозов развития на основе анализа тенденций его развития.
Иногда встречаются некоторые сопутствующие понятия, которыми заменяют понятие «прогнозирование»: предсказание и предвидение.
Предсказание — достоверное, основанное на логической последовательности суждение о состоянии какого-либо объекта (процесса или явления) в будущем.
Предвидение — опережающее отражение действительности, основанное на познании законов развития объекта (процесса или явления).
Итак, предсказание и прогнозирование отличаются по; степени достоверности оценок будущего, а предвидение — более широкое понятие, включающее в себя оба предыдущих.
Таким образом, логические формулы различных видов процессов выработки информации о будущем (предвидения) можно записать следующим образом: прогнозирование — «Вероятно будет», предсказание — «Будет», планирование — «Должно быть».
Наука, изучающая закономерности процесса прогнозирования, называется прогностикой.
В зарубежной терминологии распространено понятие «футурология» — наука о будущем. Являясь в определенной мере эквивалентом термина «прогностика», понятие «футурология» значительно и необоснованно расширяет предмет науки, делая его всеобъемлющим и включая в него все аспекты проблемы будущего.
Иногда противопоставляют прогнозирование как предвидение стихийных неуправляемых социально-экономических процессов и процессов развития науки и техники, характерных для капитализма, планированию как определению тенденций будущего развития управляемых процессов в обществе и народном хозяйстве при социализме. Такой подход к прогнозированию развития народного хозяйства неправомерен, так как прогнозирование и планирование (стадия разработки плана) имеют одинаковую информационную и социально-экономическую природу.
В других случаях первичным фактором при размежевании понятий «планирование» и «прогнозирование» считают характер
223
выходной информации: директивность плана и необязательность прогноза. Это различие планов и прогнозов является вторичным и обусловлено, как это уже указывалось, фактором времени и большим в связи с этим уровнем неопределенности прогнозов. Сторонники этой концепции считают, что план и прогноз развития народного хозяйства могут составляться на один и тот же период. Очевидно, наличие двух установок на один и тот же будущий период времени — директивного однозначного указания и необязательной многовариантной ориентации — способно только дезориентировать процесс производства, лишить единства цели трудовой коллектив.
Есть точка зрения, что прогнозирование является предплановой разработкой, т. е. процессом, предшествующим планированию.
Единство задач планирования и прогнозирования, общность их принципов и методов делают нецелесообразным принципиальное разделение и противопоставление этих понятий. Существует единая система планирования как система выработки информации о будущем, которая включает в себя имеющие ряд особенностей две стадии: стадию прогнозирования и стадию разработки плана.
Итак, планирование — это единая система выработки информации о будущем, не имеющая формального ограничения во времени и состоящая из двух стадий — прогнозирования и разработки плана. При наличии специфики этих стадий планирования их объединяет прежде всего общность целей (производство информации о будущем) и задач.
Прогнозирование является исходным пунктом планирования. Его основными функциями являются определение вероятных альтернатив развития, сужение исходного множества альтернатив (формирование области квазиоптимальных альтернатив) и оценка социально-экономических последствий реализации альтернатив развития.
Планирование научно-технического прогресса осуществляется на основе сознательного использования закона планомерного, пропорционального развития и сообразовывается с основным экономическим законом социализма. Научной основой теории планирования является марксистско-ленинская экономическая паука.
В нашей стране планирование народного хозяйства осуществлялось с первых лет основания Советского государства. В 1920 г. под непосредственным руководством В. И. Ленина был разработан план ГОЭЛРО. Этот первый план — прогноз социалистического переустройства народного хозяйства Советской республики на основе крупной машинной индустрии и электрификации — был рассчитан на 15 лет.
В последующие годы был разработан еще ряд прогнозов. В 1920 г. под руководством советского ученого С. Г. Струмилипя был разработан демографический прогноз — прогноз численности населения нашей страны на 1920—1941 гг. Перед Великой Отече
224
ственной войной под руководством Т. С. Хачатурова составлен прогноз развития транспорта на 10—15 лет. В 1945—1946 гг. Госпланом СССР подготовлен прогноз развития народного хозяйства [52].
Перспективные пятилетние планы, составленные с учетом этих прогнозов, сыграли важную роль в развитии социалистического народного хозяйства.
Начиная с 50-х годов в ряде капиталистических стран, в первую очередь в США, уделяется много внимания прогностике и прогнозированию, делаются попытки составить планы (программы) развития. Однако социально-экономический строй капиталистического общества, обусловленный частной собственностью на средства производства и капиталистическими производственными отношениями, не может создать предпосылок для эффективного управления, планирования и прогнозирования развития производства. Для капиталистической экономики характерны долгосрочные прогнозы лишь по отдельным относительно стабильным секторам (главным образом военные отрасли) и делаются безуспешные попытки объединить их результаты в так называемую макроэкономическую структуру.
Отклонения прогнозов и планов от реальной деятельности в капиталистическом мире обусловливаются рассогласованностью между частными закономерностями, характерными для отдельных промышленных комплексов, и общественными условиями их проявления.
Экономический кризис, который в последние годы охватил многие капиталистические страны, еще раз убедительно продемонстрировал невозможность эффективного управления экономикой в капиталистических странах.
3. Анализ методов прогнозирования развития БТС
Сложность БТС обусловливает трудности прогнозирования иХ развития с помощью какого-либо одного сингулярного метода. Поэтому при разработке научно-технических прогнозов в последнее время все чаще применяют комплексные методы (или системы) прогнозирования, синтезирующие в определенной последовательности алгоритмы сингулярных методов.
В отечественной и зарубежной практике прогнозирования Разработаны такие системы, как PATTERN, метод прогнозного гРафа, PROFILE, RDE, ЦППО, селективный метод, ФЭЙМ, метод взвешенных оценок, матричный метод, КВЕСТ и др.
При анализе комплексных методов прогнозирования основным является определение состава процедур и сингулярных методов, входящих в систему; их стандартной последовательности; логиче-с«их правил комплексирования систем.
225
Рассмотрим наиболее известные комплексные методы прогнозирования (КСП) под этим углом зрения, а также с точки зрения характера входной и выходной информации систем.
Метод прогнозного графа разработан группой специалистов Института кибернетики АН УССР под руководством В. М. Глушкова [22]. В состав данной КСП входят следующие процедуры и методы (рис. 20, а): выбор объекта прогноза (ОП); исследование фона (ИФ); классификация событий (КС); формулирование задачи прогноза (ЗП); выработка генеральной цели прогноза (ГЦП); анализ иерархии (АИ); формулирование событий (ФС); принятие внутренней структуры (ВтС); принятие внешней структуры (ВшС); анкетирование (А); математическая обработка (МО); количественная оценка структуры (КОС); верификация результатов (В).
Внутренняя структура представляет собой прогнозный граф, внешняя — его же элементы. Техника построения графа — дельфийская, т. е. при помощи повторных опросов экспертов близкие планы графа приводятся к совпадающим. Данный метод позволяет получить прогноз конечных целей, время и вероятность их свершения.
Входная информация, получаемая от эксперта i, содержит: перечень предпосылок для сформулированной цели S j; временную оценкуцели5у — tif, вероятностную оценку цели Sj — Р^; самооценку компетентности степень уверенности в прогнозе На выходе метода получают следующую информацию: перечень конечных. целей с их предпосылками; время свершения конечных целей графа fy; вероятность свершения конечных целей графа Pj.
Расчет производится по формулам
к
= ~^~к ’
2 PijYij i
;------------
i
где / — порядковый номер конечной цели; i — номер эксперта; к — количество экспертов; п— количество событий — предпосылок.
Метод позволяет осуществить предпрогнозную ориентировку! составить суждение о внутренней и внешней структуре объекта, оценить количественно данную структуру. Критерием отбора конечных целей графа является максимум вероятности их свершения в заданное время.
Система PATTERN (в переводе — обоснование планирования посредством научно-технической оценки количественных данных) была разработана в 1964 г. фирмой «Хониуэлл» (США) как сред-
226
РИС. 20. Структура систем комплексного прог-дозирования а — метод прогнозного графа; 6 — PATTERN; в — PROFILE
ство помощи руководству компании в принятии решений по важ* нейшим вопросам определения перспективы военного производства в США. Но принципы, заложенные в эту систему, позволяют осуществить прогноз и произвести анализ огромного количества данных в любой области деятельности. При помощи данной системы в США постоянно ведется и корректируется прогноз в области вооружения, космических исследований и в области медицины.
Структура PATTERN состоит из следующих элементов (рис. 20, б): выбор объекта прогноза (ОП); выявление внутренних закономерностей (ВВЗ); написание сценария (НС); выработка задачи прогноза (ЗП); выявление генеральной цели прогноза (ГЦП); анализ иерархии (АИ); формулирование целей (ФЦ); принятие ьнутренней структуры (ВтС); принятие внешней структуры (ВшС); анкетирование (А); математическая обработка (МО); количественная оценка структуры (КОС); верификация (В); Разработка алгоритма распределения ресурсов (РАРР); распределение ресурсов (РР); оценка распределения (OP). PATTERN Позволяет выявить предпрогнозную ориентировку, разработать
227
внутреннюю и внешнюю структуру объекта, произвести количест-венную оценку структуры объекта, разработать варианты ресурсного обеспечения элементов объекта. Внутренняя структура представляет собой дерево целей, внешняя структура является системой локальных критериев.
Уровни дерева содержат следующую информацию: национальные цели; мероприятия; задачи; задания; принципы систем; функциональные подсистемы; конструкции функциональных подсистем; научно-технические проблемы. Информация, получаемая на выходе системы, следующая: перечень конечных целей; суммарные веса целей, являющиеся показателем их научно-технической ценности.
Суммарные веса Kj определяются по формуле
D F G
К> = [ 2 х [ s х [ s KvijKa }Kni}], i=*A i=>E i=>G
где i — номер уровня; / — порядковый номер цели; Kv — коэффициент относительной важности; Ks — коэффициент состояния — срок; Кп — коэффициент взаимной полезности.
Показатели научно-технической ценности целей в данной системе получили название «коэффициенты относительной важности». Заключительный этап данной системы — рекомендации по распределению ресурсов — предполагает рациональное распределение ресурсов в соответствии с уровнем коэффициента относительной важности.
Методика PROFILE (Programmed Functional Indices for Laboratory Evaluation — программированные функциональные показатели для лабораторной оценки), разработанная Ситроном в 1965 г. (рис. 20, в), аналогична PATTERN. Внутренняя структура представляет собой дерево относительной важности, состоящее из четырех уровней: цель типа конфликта, форма деятельности, задачи и задания. Внешняя структура образована системой критериев — чувствительность, своевременность, содействие, внутренняя ценность, вероятность достижения цели задания, научно-технический прогресс и ресурсы.
Количественная оценка структуры значительно упрощена по сравнению с PATTERN:
п
i=l
где Г[ — оценка критерия; — оценка элемента j по критерию L Метод обеспечивает выявление предпрогнозной ориентировки, прогнозирование внутренней и внешней структур объекта, позволяет произвести количественную оценку структуры, дать рекомендации по рациональному распределению ресурсов в целях обеспечения прогнозируемого облика объекта.
Селективный метод прогнозирования (рис. 21, а) предназначен для прогнозирования программ НИОКР на уровне отрасли.
228
Принципиальное отличие структуры данной СКП от рассмотренных выше состоит в том, что внутренняя структура состоит из двух графов — дерева целей и стохастической сети, работающих последовательно. Внешнюю структуру составляют элементы дерева Целей. Дерево целей состоит из четырех уровней: I — задачи (требования); II — научно-технические направления; III — научно-технические проблемы; IV — программы НИОКР.
Итогом обработки дерева целей являются коэффициенты относительной важности НИОКР
п V
и{=*п = П 3
>, i=i Х=а
гДе i — номер уровня; j — номер цели; п — количество уровней;
229
a, . . ., x, . . ., v — номера критериев; qy. — вес критерия; _ вес цели j по критерию х.
Метод позволяет выявись предпрогпозную ориентировку, получить прогноз о внутренней и внешней структурах и об их количественных оценках, дает возможность выбрать альтернативные НИР путем решения стохастической сети, вырабатывает рекомендации по распределению ресурсов вида
j
Метод «двойного дерева» (рис. 21, б) разработан’Т. Гордоном п М. Раффенсбергером, предназначен для прогнозирования и установления предпочтительности как фундаментальных исследований, так и программ НИОКР. Внутренняя структура объекта представляет собой теоретическое дерево, состоящее пз событпп-вопросов, а внешняя структура — экспериментальное дерево. Экспериментальное дерево подтверждает или опровергает теоретическое. Ценность программы НИОКР определяется степенью ее критичности в сочетании с возможностью осуществимости. По теоретическому дереву определяются оценки относительной важности его элементов, по экспериментальному — возможность реализации тех же элементов.
Предпочтение отдается тем исследованиям, которые не только важны для решения технической проблемы, но и осуществимы. Математический аппарат количественной оценки структуры в публикациях по данной СКП не раскрыт, поэтому понятие критичности проблемы не является однозначным. Метод дает возможность проводить предпрогнозную ориентировку, строить внутреннюю и внешнюю структуры объекта и указывает возможное направление их оценки.
Система ЦППО (рис. 21, в). Центром перспективных исследований и экономических оценок Министерства национальной обороны Франции разработана система прогнозирования прикладных исследований, получившая название в соответствии с местом ее создания ЦППО [52]. Эта система является продолжением и дополнением систем прогнозирования, разработанных в США (рис. 21, в).
Цель системы ЦППО — дать прогноз будущих систем вооружения, произвести селекцию предполагаемых исследований, направленных на обеспечение требуемых характеристик систем.
В качестве внутренней структуры объекта по данной СКП выступает двойное дерево — дерево полезности и экономическое дерево — с общим нижним уровнем. Дерево полезности строится на основании требований заказчика и состоит из следующих уровней: стратегические задачи, тактические задачи (функции), потенциальные потребности, подсистемы и элементы исследовательских операций (ЭИО).
230
укономическое дерево учитывает интересы исполнителя.
Экономический граф имеет четыре уровня: конечные цели, уровень задач, уровень средств и уровень ЭИО, т. е. уровень ЭИО является общим для обоих графов.
Под внешней структурой в данной СКП понимается степень соответствия элементов деревьев нескольким критериальным признакам. При количественной оценке структуры элементам присваиваются индексы. При наличии нескольких признаков-критериев для получения индексов элементов используются комбинаторные матрицы. Индексы элементов являются показателем их относительной важности, в какой-то мере соответствуют рангам. Алгоритм количественной оценки структуры по данной системе чрезвычайно упрощен: индексы элементов, расположенных на ветвях, сходящихся на нижнем уровне, складываются.
Система ЦППО позволяет получить предпрогнозную ориентировку, разработать структуру прогнозируемого объекта и оценить ее количественно.
Метод взвешенных оценок (МВО) является СКП программ НИОКР на уровне отрасли (рис. 22, а). Согласно данной СКП внутренняя структура объекта строится по типу дерева целей, состоящего из пяти уровней: общие цели развития технического прогресса в отрасли; основные задачи развития науки и техники в отрасли; основные направления научно-технических исследований; основная тематика НИОКР; научно-технические проблемы.
Внешняя структура образуется элементами дерева целей, т. е. критериями оценки элементов являются элементы предыдущего уровня. Такие оценки называются взвешенными и выражаются соотношениями вида
к?1 = s К jaj?, 3 К} = 1,0, 3 а%1 = 1,0, ;=1 i V
где — частичный} удельный вес элемента с порядковым номером у на уровне i + 1, оцененного по элементу ] уровня i.
Метод дает возможность осуществить предпрогнозную ориентировку, построить прогноз внутренней структуры объекта, использовать ее в качестве внешней структуры и произвести количественную оценку структуры объекта.
Система ФОР К ACT (рис. 22, б) обеспечивает прогнозирование развития науки и техники на срок более 10 лет, имеет широкое распространение в США для прогнозирования направления развития научно-технических исследований применительно к системам вооружения [см. 52]. Внутренняя структура разрабатывается по Двум направлениям — задачи развития науки и техники, направления развития науки и техники. Внешнюю структуру образуют оценки по критерию затраты—эффективность.
В соответствии с классификационной схемой методов научно-технического прогнозирования данная система ^комплексирует в себе следующие процедуры и методы: выбор объекта прогнози-
231
РИС. 22. Структура систем комплексного прогнозирования
а — МВО (метод взвешенных оценок); б — ФОРКАСТ а — КВЕСТ
рования (ОП); исследование фона (ИФ); классификацию событий (КС); постановку задачи прогноза (ЗП); выявление факторов (ВФ); классификацию факторов (КФ); построение матриц влияния (ПМВ); принятие внутренней структуры (ВтС); принятие внешней структуры (ВшС); анкетирование (А); математическую обработку анкет (МО); количественную оценку структуры (КОС); верификацию (В); формулирование целевой функции (ФЦФ); формулирование ограничений (ФО); решение системы линейных уравнений (РСЛУ); оценку распределения ресурсов (ОР).
ФОРКАСТ дает возможность выявить предпрогнозную ориентировку, разработать структуру объекта, произвести количественную оценку структуры, подготовить рекомендации по распределению ресурсов в целях обеспечения прогнозируемого облика объекта.
232
РИС. 23. Структура систем комплексного прогнозирования а — матричный метод; б — RDE;e—метод функционального анализа
Система КВЕСТ (количественные оценки полезности для науки и техники) разработана М. Сетроном в 1966 г. (рис. 22, в). Прогнозирование структуры объекта ведется на основании результатов исследования в области науки и техники и отрасли техники и построения матриц их взаимного влияния. Количественная оценка структуры производится путем логической увязки матриц влияния, характеризующих области науки коэффициентами содействия, а отрасли техники — коэффициентами вклада.
Система КВЕСТ функционально решает все важнейшие этапы прогнозирования программ НИОКР: от выявления предпрогноз-ной ориентировки до выработки рекомендаций по распределению ресурсов. В публикациях по системе КВЕСТ не приводятся алгоритмы количественной оценки структуры и не дается описание критериальной функции в задаче ресурсного обеспечения прогно-
233
/ зируемого облика объекта, но указан класс методов решения задачи оптимизации — методы цинейного прогнозирования.
Матричный метод (рис, 23, а) имеет очень много общих моментов с СКП КВЕСТ. Нефункциональные структуры идентичны. В основе разработки структуры объекта по данной системе лежат классификация факторов, влияющих на конечную цель, и группировка независимых однородных факторов в отдельные комплексы. Количественная оценка структуры в матричном методе проводится путем оценки влияния комплексов друг на друга и в итоге — всех их на конечную цель.
' Располагая вектором, характеризующим степень важности конечных целей, и матрицами влияния различных комплексов факторов на конечные цели, получаем в виде векторов коэффициенты относительной важности факторов. Компоненты этих векторов являются тем основанием, по которому распределяются ресурсы:
а = 3
J=1 j i
где A — общие ресурсы; С* — ресурсы на комплекс /; А{ — ресурсы на фактор i комплекса /; Р[ — компонента вектора фактора i в комплексе /. Работа по матричному методу заканчивается решением эвристической задачи ресурсного обеспечения облика объекта.
Система RDE — метод прогнозирования поисковых исследований и разработок RDE (Research and Development Effectivens) (рис. 23, б) разработан А. Е. Наттом (США). Содержание данного метода несколько шире его названия (эффективность исследований и разработок), так как результатом применения данного метода являются коэффициенты относительной важности систем и их элементов (целей) и ресурсы, оптимально распределенные по критерию эффективности.
Структура объекта разрабатывается в виде матриц влияния по схеме: программа исследований — задачи исследований (п); задачи исследований — системы (&); системы — цели (2V); цели — исследовательские темы (i).
Согласно данной системе последовательно определяются коэффициенты относительной важности систем Rk, целей Rn, тем Rr.
^=^D[n] xD[k],
RN=^D[n] xD[N],
Ri = f’(R* RN, t, a, Kt, Ni),
где D [и] — матрица задач (элемент матрицы — относительная важность каждого варианта задачи); D [&] — матрица системы (элемент матрицы — вклад данной системы в решение данного варианта задачи); D [АП — матрица целей (элемент матрицы — вклад данной цели в решение данного варианта задачи); t — рас
234
сматриваемое время; а—степень завершенности; Kt — количества систем, которым тема i оказывает\содействие; — количества целей, которым тема i оказывает содействие.
Задача распределения ресурсов подданному методу представляет собой задачу линейного программирования вида
VT = ^ViXi~>|max г
с ограничениями типа
CliX} г
где vT — эффективность прогнозируемой программы исследований; Vi — эффективность темы /; xt — ресурс на тему г.
Эффективность темы vt определяется по формуле
где дРi/dt — темпы изменения вероятности успеха в течение рассматриваемого промежутка времени.
Метод дает возможность построить прогноз объекта в следующей последовательности: выявить предпрогнозную ориентировку^ разработать структуру объекта, произвести ее количественную оценку, дать рекомендации по распределению ресурсов в целях обеспечения прогнозируемого облика объекта.
Метод функционального анализа (рис. 23, в) предназначен для прогнозирования новой техники по технологическим параметрам и распределения средств на выявленный ряд научных исследований и разработок. Прогнозирование структуры объекта ведется по функциональным подсистемам.
При оценке структуры в качестве факторов, влияющих на уровень финансирования НИР и ОКР, приняты: индекс прогресса Jа (отношение между прогрессом технологического параметра при данном уровне финансирования и прогрессом этого же параметра, который мог бы быть достигнут при неограниченном финансировании за тот же период времени); индекс ценности Iw (результат обобщения двух матриц — целевой и технологической Ценности).
Для моделирования индекса прогресса использована экспоненциальная функция
с ограничением = С, где — уровень финансирования z-ir разработки; — уровень финансирования, при котором осуще ствляется технологический прогресс в размере 63%. При этом Функция дохода имеет вид аддитивной функции
235
Эта зависимость предполагает, что дополнительные доходы ют новых вкладов средств ув/личиваются замедленными темпами. Данная модель распределительной задачи может быть принята за основу, но реализаций ее в описанном виде представляет собой большую трудность из-за неоднозначности понимания значения Dt. Ценность метода — в обосновании принятия функциональной зависимости дохода от объема выделенных средств.
Следует также рассмотреть методику Дила и Хаузера, которая не является системой в полном смысле этого слова, но использованием в качестве входных данных информации о структуре объекта и об ее количественной оценке позволяет решать задачу ресурсного обеспечения прогнозируемого облика объекта.
В качестве исходных данных для прогнозируемых технических систем приняты ожидаемые затраты и ожидаемая вероятность реализации систем. В методике последовательно решаются три задачи:
— при фиксированном бюджете и заданном множестве систем распределить бюджет между системами наилучшим образом;
— при фиксированном бюджете на подсистему и заданном множестве подсистем распределить бюджет между подсистемами;
— выполнить оптимальный отбор технических подходов к реализации каждой подсистемы.
Для решения поставленных задач используются следующие критерии: 1) минимум ожидаемой стоимости реализации техниче ского подхода; 2) максимум вероятности реализации системы при ее фиксированной стоимости; 3) максимум общей ожидаемой ценности множества систем при фиксированной стоимости и одном из условий: а) системы не имеют приоритета; б) некоторые системы имеют приоритет; в) финансирование должны получить все системы; 4) максимум вероятности реализации множества систем при фиксировании общей стоимости.
При решении содержащихся в методике задач по указанным критериям приняты допущения о зависимостях ожидаемой ценности и вероятности реализации от стоимости.
Для решения задач по методике Дина и Хаузера используется метод динамического программирования. Постановка задач в имеющейся по методике публикации дается в общем виде, без раскрытия критериальных функций. Ценность данной методики заключается в формулировке принятых критериев и допущений.
Исследование комплексных методов прогнозирования показало, что их целевое назначение состоит в следующем: выявить предпрогнозную ориентировку; разработать внутреннюю и внешнюю структуры объекта; произвести количественную оценку структуры объекта; разработать рекомендации по ресурсному обеспечению прогнозируемого облика объекта.
На этапе проведения предпрогнозной ориентировки в исследуемых методах применяются с целью выявления внутренних закономерностей как написание сценария, так и докладные (аналитические) записки, для изучения фона — как анализ статистиче
236
ской отчетности (фактографический анализ) и анализ документальный, так и классификация событий.
На этапе разработки и принятия внутренней и внешней структуры объекта чаще всего используется построение корневых деревьев , а именно деревьев целей и стохастических сетей. В соответствии с принятой структурой объекта элементы этой структуры являются целями, событиями, подсистемами. Формулированию элементов структуры объекта предшествуют конкретизации задачи прогнозирования, т. е. выработка генеральной цели, и анализ иерархии, который выявляет необходимое количество уровней соответствующей структуры. Под внешней структурой понимается система критериев, по которым оценивается внутренняя структура. В некоторых методах (МВО, ФОРКАСТ) критериями являются элементы внутренней структуры, являющиеся исходными для оцениваемых элементов.
Другим вариантом разработки структуры объекта является построение матриц влияния, которому предшествует выявление факторов, влияющих на объект, и их классификация.
На этапе количественной оценки структуры все исследуемые методы предполагают либо анкетирование экспертов, либо работу экспертов по методу комиссий, либо математическую обработку анкет или мнений членов комиссий с целью получения достоверного обобщенного мнения репрезентативной группы экспертов, дальнейшее использование полученных результатов при расчетах по алгоритму количественной оценки структуры прогнозируемого объекта. Алгоритмы количественной оценки определяются как внутренней, так и внешней структурой объекта. На выходе этапа СКП методы позволяют получить следующий спектр количественных оценок: ожидаемое время реализации программы; вероятность реализации в заданное время; коэффициент относительной важности программы; ранг программы; эффективность программ.
Этап ресурсного обеспечения прогнозируемого облика объекта в системах комплексного прогнозирования имеет различную глубину проработки. Ряд методов ограничивается количественной оценкой структуры (метод прогнозного графа, метод двойного дерева, МВО).
Некоторые методы решают задачу распределения ресурсов эвристическими методами (PATTERN, PROFILE, селективный метод), однако большинство методов не решают оптимизационную задачу распределения ресурсов (ФОРКАСТ, КВЕСТ, RDE, метод функционального анализа, методика Дина и Хаузера).
Проведенное исследование комплексных методов прогнозирования позволяет сделать следующие выводы: для комплексного прогнозирования развития БТС могут быть использованы с определенной адаптацией к объекту прогнозирования следующие методы: метод прогнозного графа, PATTERN, PROFILE, селективный метод, МВО, матричный метод; некоторые методы могут быть рекомендованы к применению с условием доработки
237
их составляющих, так как в имеющихся публикациях они пред-ставлены описательно, без раскрытия математического аппарата (метод двойного дерева, ЦППО, ФОРКАСТ, метод функционального анализа).
ГЛАВА ВТОРАЯ
СИНГУЛЯРНЫЕ МЕТОДЫ ПРОГНОЗИРОВАНИЯ
1. Классификация методов прогнозирования
Бурное развитие прогностики как науки в последние десятилетия привело к созданию не равноценного множества методов, процедур, приемов прогнозирования. Отсутствие четкой систематизации этого множества приводит к продолжению спонтанного расширения инструментария прогностики зачастую малоценными и компилятивными методами.
По оценкам зарубежных и отечественных систематиков прогностики, уже насчитывается свыше ста методов прогнозирования. Безусловно, число базовых методов прогностики, которые в тех или иных вариациях повторяются в других методах, гораздо меньше. Многие из так называемых методов относятся скорее к отдельным приемам или процедурам прогнозирования, другие представляют собой набор отдельных приемов, отличающихся от базовых или друг от друга количеством частных приемов и последовательностью их применения.
В литературе имеется большое количество классификационных схем методов прогнозирования. Однако большинство из них или неприемлемы, или обладают недостаточной познавательной ценностью. Основной погрешностью существующих классификационных схем является нарушение принципов классификации. К числу основных принципов классификации методов прогнозирования относятся: достаточная полнота охвата прогностических методов, единство классификационного признака на каждом уровне членения (при многоуровневой классификации) и непересекаемость разделов классификации (возможность дополнения новыми методами).
Безусловно имеют право на существование частные классификационные схемы, предназначенные для определенной цели или задачи. Но при этом важно, чтобы на определенном этапе развития науки была создана базовая (или генеральная) классификация, обладающая многоцелевым характером и универсальностью.
Авторы не претендуют на универсальность предлагаемой ниже классификации методов прогнозирования, хотя и считают настоятельной необходимостью создать генеральную классификационную схему прогностических методов.
238
Целевая установка на проведение такой частной классификации определяется спецификой объекта прогнозирования, исследуемого в настоящей книге,— больших технических систем. Сложность и большая размерность БТС, наличие огромного множества альтернатив их развития исключают возможность разработки достаточно достоверного прогноза их развития сингулярными методами.
В этой ситуации целесообразно говорить о комплексных методах (системах) прогнозирования, представляющих совокупность методов прогнозирования, действующих в определенной последовательности. В интересах систематизации методов, наиболее часто используемых в комплексных системах, и с целью обеспечения возможности формализации процесса комплексирования систем прогнозирования БТС можно рассматривать четырехуровневую классификацию методов прогнозирования.
Каждый уровень детализации (членения) определяется своим классификационным признаком: степенью формализации, общим принципом действия и способом получения прогнозной информации.
По степени формализации все методы прогнозирования делятся на интуитивные и формализованные. Интуитивное прогнозирование применяется в тех случаях, когда объект прогнозирования либо слишком прост, либо настолько сложен, что аналитически учесть влияние множества факторов практически невозможно. В этом случае прибегают к опросу экспертов, используя полученные индивидуальные или коллективные экспертные оценки как конечные прогнозы или в качестве исходных данных в комплексных системах прогнозирования.
Важным с точки зрения выбора методов прогнозирования, комплексируемых в систему, является глубина упреждения прогноза. При этом необходимо знать не только абсолютную величину этого показателя, но и соотнести его с длительностью эволюционного цикла развития объекта прогнозирования.
Для этого можно использовать предложенный В. Белоконем (см. [52]) безразмерный показатель глубины прогнозирования т:
Т = ДМХ,
где St — абсолютное время упреждения; tx — величина эволюционного цикла объекта прогнозирования.
Если величина глубины упреждения укладывается в рамках эволюционного цикла (т 1), то действенными являются формализованные методы прогнозирования. При возникновении в рамках прогнозного периода «скачка» в развитии объекта прогнозирования (т ~ 1) необходимо использовать интуитивные методы как для определения силы скачка, так и для оценки времени его осуществления. В этом случае формализованные методы применяются для оценки эволюционных участков развития до и после скачка.
239
ТАБЛИЦА 10. Матрица применимости методов прогнозирования
Глубина прогнозирования Объекты прогнозирования
простые средней сложности сложные
В пределах эволюционного цикла, r<gcl Наличие скачка и периодов эволюции, 1 Несколько эволюционных периодов, т 1 Формализованные Формализованные, интуитивные Интуитивные, формализованные Формализованные Формализованные, интуитивные Интуитивные, формализованные Интуитивные, формализованные Интуитивные Интуитивные
Если же в прогнозном периоде укладывается несколько эволюционных циклов развития объекта прогнозирования (т^>1), то все большее значение при комплексировапии методов (систем) прогнозирования приобретают интуитивные методы.
Указанные обстоятельства позволяют следующим образом представить схему применимости интуитивных и формализованных методов прогнозирования (табл. 10).
2. Интуитивные методы прогнозирования1
Интуитивные методы получили широкое распространение в практике прогнозирования процесса развития БТС, поскольку отбор мнений одного или группы экспертов, обладающих необходимыми знаниями об объекте прогноза, позволяет получить вполне надежную, а для некоторых видов прогнозов единственно возможную информацию. Однако эксперты могут давать как верную, так и ошибочную оценку, а критический анализ полученных прогнозов затруднен из-за отсутствия четкой логики построения и исходных предпосылок экспертных суждений. Следовательно, главным при использовании этих методов является подбор экспертов, основанный на оценке их компетентности.
К интуитивным методам прогнозирования относятся методы экспертных оценок, как индивидуальных, так и коллективных. Экспертные оценки используются и как самостоятельный метод, и как вспомогательное средство в комплексных методах. Прогнозные экспертные оценки отражают индивидуальное и коллективное суждение о перспективах развития объекта, они основаны на профессиональном опыте и интуиции специалистов.
В основе этих методов лежат качественные либо количественные ответы на вопросы. Качественные ответы дальнейшей обработке не подвергаются, количественные же оценки подвергаются математической обработке для оценки показателей обобщенного мнения, закона распределения оценок, достоверности оценок.
1 В этом параграфе использованы материалы Александрова В. А.
240
В настоящее время являются распространенными следующие формы опроса экспертов: типа интервью, аналитические докладные записки и написание сценария.
Оценка типа интервью предполагает беседу прогнозиста с экспертом по заранее разработанной программе. При этом допускаются отклонения от подготовленных формулировок, дополнительные вопросы.
Аналитические докладные записки предполагают длительную самостоятельную работу эксперта по анализу тенденций и оценке будущего состояния и путей развития объекта прогнозирования. Результат оценки оформляется в виде докладной записки.
Методики коллективных экспертных оценок основываются на принципах выявления коллективного мнения экспертов о перспективах развития объекта прогнозирования. В основе использования коллективных экспертных оценок лежит следующая гипотеза: коллективное мнение специалистов отражает наиболее вероятную оценку объекта прогнозирования. Обоснованность принятия такой гипотезы подтверждена статистикой осуществленных прогнозов. Вероятность истинности коллективного экспертного мнения приблизительно равна 0,8. Наиболее распространенными из методов коллективных экспертных оценок являются метод анкетирования, метод комиссий и метод «мозговых атак» (коллективной генерации идей).
Метод анкетирования представляет собой наиболее конкретизированную форму опроса, требующую ответ заранее подготовленного вида, например отметить один из интервалов, которому, по мнению эксперта, будет соответствовать параметр объекта прогнозирования, ответить «да» или «нет» относительно выполнения предполагаемого события; указать предположительно вероятность его свершения, указать год вероятного свершения события.
При составлении прогноза, как правило, приходится сталкиваться с множеством альтернатив, и чем точнее описаны условия их выбора, тем качественнее будет прогноз. Для определения круга альтернатив необходимо выявить факторы, влияющие на объект прогнозирования. С этой целью при прогнозировании БТС применяется метод комиссий, который предполагает написание развернутого сценария.
Практически это означает создание нескольких групп экспертов, каждая из которых должна подготовить свою часть сценария, т. е. дать необходимую информацию об объекте прогноза.
Среди методов прогнозирования, основанных на интуиции экспертов, значительное место занимает метод КГИ (коллективная генерация идей), называемый в литературе методом «мозговых атак». Используя этот метод, можно получить прогнозную информацию за короткий промежуток времени в обстановке свободного творческого генерирования идей при непосредственном взаимном общении экспертов. Эмпирическим путем было найдено, что наиболее оптимальной в количественном отношении
2\\
является группа в 10—15 человек. Работа этой группы экспертов ведется по следующему принципу.
Одним из членов группы высказывается идея относительно объекта прогноза. Эта идея порождает либо творческую, либо критическую реакцию. Но поскольку критика во время «мозговой атаки» запрещена, то участники находят выход своей реакции в высказывании новых идей, идущих вразрез с только что высказанными идеями или улучшающих эти идеи.
Независимо от того, для решения каких проблем используется коллективная генерация идей, при работе по данному методу необходимо выполнять следующие правила: критика не допускается, оценка предложений осуществляется после высказывания всех идей; приветствуются оригинальные мысли; чем больше выдвигается идей, тем лучше, так как это увеличивает вероятность появления ценных идей; информация о подлежащем обсуждению вопросе сообщается участникам непосредственно перед заседанием; воспрещается высказывать сразу несколько идей, так как на каждую идею должна созреть реакция у других участников.
Результаты обсуждения считаются плодом коллективного труда всей группы, т. е. не фиксируется, кто какую идею высказал. Принимая во внимание этот факт, на рассмотрение экспертов не выносятся вопросы, затрагивающие научный приоритет. В противном случае должны выдаваться авторские свидетельства. Исследования эффективности «мозговых атак» показали, что групповое мышление производит на 70% больше ценных новых идей, чем сумма индивидуальных мышлений.
Для количественного выражения мнения экспертов чаще всего используются три формы их представления: метод ранга, метод шкальных оценок и метод парных сравнений.
При методе ранга каждому оцениваемому фактору присваивается ранг (число натурального ряда) в соответствии со степенью его важности. Самому значимому фактору присваивается 1, наименее важному — номер п (при наличии п факторов). Если, по мнению эксперта, некоторые факторы равнозначны, то для каждой группы равнозначных факторов берется сумма их порядковых номеров, делится на число факторов, входящих в группу. Затем каждому фактору группы присваивается один и тот же ранг, равный полученному среднему арифметическому. В любом случае сумма рангов всех факторов составляет
V _ п(п+1)
2.J Рп — 2
1
где п — число факторов.
Но чаще метод ранга применяется не самостоятельно, а как дополнение к методу шкальных оценок. В данном методе факторы оцениваются по заранее выбранной шкале. Выбор шкалы (10-балльная, 100-балльная) определяется количеством оцениваемых факторов. Результаты оценки всех экспертов сводятся в единую
242
таблицу; определяется_сумма баллов по каждому фактору далее Не представляет труда расположить полученные суммы в порядке убывания, присваивая им ранги в порядке возрастания. Д
На практике возможны случаи, когда эксперты затрудняются в ранжировке факторов, или случаи, когда факторов слишком много, чтобы их можно было обоснованно расположить в порядке убывания их важности. В таких ситуациях используют метод парных сравнений. Различают три вида парных сравнений: частичное парное, полное парное и последовательное парное сравнения.
При частичном парном сравнении готовится таблица (матрица), где строки и столбцы — оцениваемые факторы, расположенные слева направо и сверху вниз в одном и том же порядке. Эксперт записывает 1 (единицу) в том случае, если фактор, записанный в столбце, более важный, чем фактор, записанный в строке, и 0 (нуль) в противном случае. Суммирование по строкам дает возможность ранжировать факторы в порядке убывания сумм.
В методе полного парного сравнения перечень факторов удваивается за счет появления каждой пары факторов дважды: один раз в последовательности А — В, другой раз — в последовательности В — А. Оценка и суммирование по строкам и столбцам выявляет ошибку в оценке факторов. Последовательность сумм по строке и столбцу должна совпадать.
В методе последовательного сравнения применен принцип нахождения максимума последовательным перебором пар факторов. Определенному таким образом самому важному фактору присваивается 1 и далее оцениваются факторы без выбранного. Каждому выбранному фактору присваивается ранг на единицу больший, чем предыдущему, и так до тех пор, пока не останется один фактор.
В качестве показателей обобщенного мнения обычно используется среднее арифметическое оценок М каждого из направлений:
7И
МЭД = 2 г«1
где / — порядковый номер направления; i — порядковый номер эксперта; т — количество экспертов.
Другим показателем обобщенного мнения является показатель частоты максимальных оценок К/.
где т — число экспертов; т} — количество первых мест (максимальных оценок), присужденных /-направлению экспертами.
Поскольку компетентность экспертов, участвующих в работе, различна, перед прогнозистом обычно стоит задача оценки этой компетентности с максимальной объективностью. Существует много приемов оценки компетентности. При оценке компетент
243
ности следует обязательно учитывать специализацию, стаж работы, опыт работы в данной области, научную квалификацию и широту кругозора. При оценке компетентности эксперта чаще всего пользуются объективным показателем компетентности и относительной самооценкой эксперта. Этими показателями можно пользоваться отдельно, но более соответствующий реальности результат дает их комплексное применение.
Объективный показатель получается в результате заполнения экспертом анкеты — научной биографии. Варианты ответов в таких анкетах имеют свою весовую градацию, но эксперт не должен ее знать, так как в противном случае его ответы не будут объективны.
Показатель относительной самооценки эксперта получается путем оценки самим экспертом своих знаний по данному вопросу в пределах предлагаемой ему шкалы:
Кк = Асб.Ас/10,
где Кк — комплексный коэффициент компетентности; 7^Об — объективный коэффициент компетентности; Кс — коэффициент самооценки эксперта.
Коэффициент компетентности как результат самооценки может быть также определен следующим образом:
где К3 — коэффициент степени знакомства с вопросом; Кл — коэффициент аргументированности. К3 определяется как сумма коэффициентов влияния разных источников на его мнение эксперта: самостоятельный теоретический анализ, производственный опыт, обобщение работ других ученых, личная интуиция и т. д.
К показателям степени согласованности экспертов относятся: коэффициент вариации, коэффициент парной ранговой корреляции, коэффициент конкордации, коэффициент согласия.
Коэффициент вариации Vj характеризует степень согласованности мнений экспертов об относительной важности /-го направления:
/ т
V тгЕХ-л/^2
= ‘ *
где i — порядковый номер эксперта; / — порядковый номер направления; т — количество экспертов; — оценка /-го направления £-м экспертом; М [5У] — среднее арифметическое /-го направления. Чем меньше Vj, тем больше степень согласованности мнений экспертов относительно направления /.
Коэффициент парной ранговой корреляции рар для двух эк
244
спертов (а и 0) равен
РаР 1----------------’
— (Т а — Гр)
где ф, = | Ra. — R$. |; а и 0 — эксперты; Ra,, R$. — ранговые* оценки /-го направления экспертами а и [3; п — количество рангов; Та и — показатели связанных (равных) рангов оценок экспертов аир, которые вычисляются следующим образом:
а) если все п рангов оценок, назначенных a-экспертом, различны, то Та = 0;
б) если среди рангов оценок есть одинаковые, то
Та = s (t? - ti), 1=0
где L — количество групп связанных рангов; tt — количества связанных рангов в Z-й группе.
Пример расчета:
Эксперт Фактор
Xi Х2 Хз Х4 Хь Xi Хч Х’8
а 6 1 2 4 4 4 7 8
р 6 2 2 2 4 6 6 8
В результате получаем Та = 3 (9 — 1) = 24, Гр = 3 (9 — 1) 4-+ 3 (9 - 1) = 48.
Коэффициент рар интерпретируется следующим образом: Рар = +1 означает полную согласованность мнений экспертов; Рехр = —1 означает полную противоположность их мнений.
Отрицательные значения коэффициентов парной ранговой корреляции одного из экспертов со всеми другими свидетельствуют об оригинальности суждений этого эксперта.
Коэффициент конкордации применяется для оценки степени согласованности мнений всей группы экспертов в целом:
п
т2 (п3—п) —m Тt
w — количество эксперте :; п — количество рангов; Тt — связанные ранги. W изменяется в пределах [0-н 11; W = 0 означает, что не существует связи между ранжировками экспертов; ТУ = 1 означает, что все эксперты одинаково ранжируют факторы.
245
Коэффициент согласия показывает степень согласованности е оценке экспертами одинаковых факторов:
т п
V = 4 3 Су/т (т — 1) (п — 1) п,
7=1 5=1
где у — элемент суммарной матрицы; Су — число сочетаний из
у по 2. Пример: Х1 Xi Xi х* X*
— 1 1 1 1
*2 0 — 1 1 1
Хд 0 0 — 1 1
*4 0 0 0 — 1
*3 0 0 0 0 —
Каждый эксперт заполняет такую таблицу методом парных сравнений факторов. Затем все таблицы суммируются по элементам Хи. При полном согласии 7=1; при наличии рассогласования V уменьшается до величины, близкой, но не равной 0, так как, чтобы V было равно 0, нужно чтобы все слагаемые С* были равны нулю, а это возможно лишь в том случае, когда все элементы суммарной матрицы равны нулю.
Показатели степени согласованности мнений экспертов (рар, W, 7) определены так, что полностью несогласованным мнениям отвечают «критические» значения
раЭ = W = 0; V 0.
На практике значения рар, W, V, как правило, полагаются отличными от критических. Это не означает, что гипотезу о не-представительности мнений выбранной группы следует отвергнуть, так как полученные значения рар, Ж, V могут оказаться случайными. Иными словами, возникает вопрос о значимости полученных отклонений показателей степени согласованности от своих критических значений.
Ход рассуждений здесь таков. Выдвигается гипотеза, что каждый из экспертов ранжирует факторы . . ., хп совершенно случайным образом, т. е. для каждого эксперта любая из возможных п\ ранжировок является равновероятной. Тогда для группы из т экспертов является равновероятной любое из (n|)m возможных сочетаний ранжировок факторов хи. . ., хп. В связи с этим возникает вопрос об уровне значимости, т. е. об определении вероятности того, что согласованность мнений экспертов, характеризуемая определенной величиной, есть случайная величина. Для опреде-о 2
ления уровня значимости используется критерии согласия Хя-
246
Методика его определения состоит в следующем-
12 2
..2 _______J=1______________
Хк т
тп {п + 1) _ —1_ У| Т.
3. Методы экстраполяции тенденций
Из формализованных методов наибольшее распространение получили группы статистических методов экстраполяции тенденций. Экстраполяция тенденций включает в себя непосредственную экстраполяцию (слепую), интерполяцию, экстраполяцию по огибающим кривым и смысловую (так называемую прогнозную) экстраполяцию. Методы экстраполяции тенденций основаны на определенном постоянстве закономерностей развития объекта в течение некоторого отрезка времени.
Возможность использования экстраполяции тенденций обусловливается инерционностью развития БТС в пределах теоретически достижимых значений параметров, ограниченных природой протекающих в системах физических процессов.
В основе экстраполяции лежат математические модели, полученные путем установления и количественной оценки аппроксимирующей функции, наиболее точно отражающей динамику развития объекта за ретроспективный период.
Экстраполяция временных рядов (экстраполяция тренда) предполагает установление однофакторной статистической прогнозной модели, где в качестве фактора-аргумента выступает текущее время i, в качестве функции — прогнозируемая характеристика у.
Процесс сглаживания (аппроксимация) сводится к отысканию по известным значениям ряда yt (t = 1, 2, . . ., Т) такой функции у — / (£), которая позволяет предсказать его вероятное прогнозное значение в момент Т + Д£ (Д£ — время упреждения) с минимальной ошибкой прогноза е (£). Экстраполирующая функция yt = / (t) + е (i) позволяет получить вероятные значения временного ряда на экстраполируемом участке
Ут+ii Ут+М-
Более сложным случаем экстраполяции является экстраполяция статистических зависимостей по уравнениям множественной регрессии, чаще всего используемая при построении прогнозных экономико-математических моделей. Экономические показатели (себестоимость, циклы и т. д.) определяются большим числом факторов, степень влияния и характер которых различны.
Задачей экстраполяции в этом случае является отбор наиболее существенных факторов, выбор математической формы зависимости, формирование необходимого и достаточного массива ретро
247
спективной информации, решение модели, выработка гипотез об экстраполяционных возможностях модели и ее оценка. Экономико-математическое моделирование основывается на теории множественной корреляции и регрессивном анализе. Метод экстраполяции тенденций является основой поискового прогнозирования.
Сглаживание и экстраполяция временных рядов, а также определение параметров уравнений множественной регрессии могут осуществляться на основе метода средних и метода экспотенци-ального сглаживания.
Метод наименьших квадратов при сглаживании временных рядов можно рассматривать как некоторый вычислительный прием для получения оценки детерминированной компоненты, которая характеризует тренд изучаемого процесса.
При исследовании экономических процессов для сглаживания наиболее часто применяются функции
р
y(t) = a0+ (2.1)
i=l
P a0-F У|
y(t) = e i=1 (2.2)
Параметры функций (2.1) и (2.2) имеют экономический смысл и легко интерпретируются.
Уравнение прямой
у (0 = а0 4- art (2.3)
характеризует постоянный прирост, равный аг единицам, при начальном уровне а0.
В уравнении параболы второго порядка
у (0 = а0 + ait + a2t2 (2.4)
коэффициент аг выражает начальную скорость роста, а коэффи-циент а2 —постоянную скорость изменения прироста. Если уровень явления растет нелинейно, то величина ускорения за изучаемый период в среднем равна 2а2 единицам.
Экспонента в выражении
y(t) = ea°+ait (2.5)
отражает постоянный относительный рост, равный еа1 единицам, а экспонента
у — ^ao+aii+аг/2 (2.Ь)
характеризует постоянный относительный прирост, равный eil* единицам.
Оценки а0, . . ., ар в формулах (2.1) и (2.2) находятся ме-
тодом наименьших квадратов, сущность которого состоит в отыскании таких параметров, при которых сумма квадратов отклоне-
248
(2.7)
яий расчетных значений уровней, вычисляемых по искомой формуле, от их фактических значений была бы минимальной.
Для нахождения параметров прямой необходимо решить систему уравнений
2 ^2 == 3 у»
#о2^4"д12^=3 ty*
Система уравнений (2.7) упрощается, если значения t подобрать таким образом, чтобы их сумма равнялась нулю, т. е. начало отсчета времени перенести в середину рассматриваемого периода.
В общем виде систему уравнений для нахождения параметров полинома (2.7) можно записать как
2 У = 4" 2 4“ 2 ^2 + • • • 4~ Др 2
2 yt== До 2 4“ Дх 2 ^2 + Д2 2 + • • • 4“ Др 2 » (2*8)
2 У? = До 2 tp 4- Д12 *p+l 4- 2 *р+2 4- • • • 4- Др 2*2Р-
При сглаживании временнбго ряда по экспоненте (2.6) для определения параметров следует применить метод наименьших квадратов к логарифмам исходных данных.
Выбор формы кривой в определенной степени зависит от целей сглаживания: интерполяции или экстраполяции. В первом случае основной целью является достижение наибольшей близости к фактическим уровням временнбго ряда, во втором — выявление основной закономерности развития явления, в отношении которой можно выдвинуть гипотезу, что она на некоторое время сохранится в будущем. Теоретический анализ сущности изучаемого явления, изменение которого отображается временным рядом, есть основа для выбора кривой.
Сглаживание по показательной функции широко применяется в практике статистических исследований, поскольку характер динамики многих социально-экономических явлений соответствует гипотезе о росте геометрической прогрессии.
Сглаживание временнйх рядов методом наименьших квадратов используется для отражения закономерности развития изучаемого явления. В аналитическом выражении тренда время рассматривается как независимая переменная, а уровни ряда выступают как функции этой независимой переменной. Ясно, что развитие явления зависит не от того, сколько лет прошло начиная с отправного момента, а от того, какие факторы влияли на его развитие, в каком направлении и с какой интенсивностью. Развитие явления во времени выступает как результат действия этих факторов.
Выявить основную тенденцию — это значит придать однообразное развитие изменяющимся процессам в течение рассматриваемого периода.
Подбор вида функции, описывающей тренд, параметры которой определяются методом наименьших квадратов, производится
9 С. А. Саркисян
249
в большинстве случаев эмпирическим путем построения ряда функций и сравнения их между собой по величине среднеквадратической ошибки, вычисляемой по формуле
"n-P-i ’ (2.9)
где yi — расчетные значения уровней временнбго ряда; yt — фактические уровни временнбго ряда; п — число уровней во вре-меннбм ряду; р — число параметров, определяемых в формулах, описывающих тренд.
Практически для подбора вида функции, описывающей тренд, можно принять следующие рекомендации:
1) если значения t образуют арифметическую прогрессию, а соответствующие значения у — геометрическую прогрессию, то уравнение тренда выражается показательной кривой
У (0 = а0<& (2.10)
2) если связь между логарифмами у и t линейна, то описание тренда целесообразно производить по степеннбй модели
У(О = (2.11)
по уравнению (2.11) можно выбирать вид тренда, если значения t и соответствующие значения у будут расположены в порядке геометрической прогрессии;
3) если значения t расположены в порядке арифметической прогрессии, а первые разности соответствующих значений постоянны, то тренд может быть описан прямой вида
У (0 = ао + ai^ (2.12)
4) если значения yt расположены в порядке арифметической прогрессии, а р-е разности соответствующих значений yt постоянны, то в качестве функции, описывающей тренд, можно принять полином р-й степени
У(0 = Яо + + а2^2 + ••• + aptP- (2.13)
Необходимо отметить, что для сглаживания временных рядов нецелесообразно использовать функции, содержащие большое число параметров, так как полученные таким образом уравнения тренда (особенно при малом числе наблюдений) будут отражать случайные колебания, а не основную тенденцию развития явления. Можно рекомендовать следующую процедуру подбора аппроксимирующего полинома.
В том случае, когда логический анализ ничего не говорит о типе сглаживающей кривой, поступают формально, т. е. ищут сглаживающую кривую в виде параболы тп-го порядка:
У = ао + 01^+ а2^2 + •••+ • (2.14)
250
Если существование линейной тенденции (тп = 1) устанавливается сравнительно легко (даже на глаз), то наличие тенденции порядка т (т > 1) определить уже довольно сложно. Иногда здесь могут помочь разделенные разности, а именно если все разделенные разности первого порядка постоянны (в пределах некоторой точности), т. е.
[^^1+1] = -^—const (i = l,2,... п — 1), (2.15)
*i+l Ч
то имеем линейную тенденцию (гп = 1). Если линейной тенденции нет, но разделенные разности второго порядка постоянны (в пределах некоторой точности), т. е.
г. . . , Ui+l’*1+2] — 1Л’ *i+J _4 О „ О\
ИЬ ^г+1» ^г+2] —--1 7 CODSt (I — 1,2,. . . , YI
(2-16)
то имеем квадратичную тенденцию т = 2. Продолжая этот процесс, предположим, что нет тенденций порядка 1, 2, . . . ..., т— 1, но разделенные разности тп-го порядка постоянны (в пределах некоторой точности), т. е.
+ 1 ___ 1^г+1’ * * * ’ ^i+ml • • • » ^i+m-11
, . . . , Ci+7)1J - -
~ const (j = 1, 2,..., n — m).
(2.17)
Тогда заключаем, что имеет место тенденция порядка т и, следовательно, сглаживающую кривую следует брать в виде параболы тп-го порядка.
Заметим, что этот критерий весьма прост, особенно если точки $1, ” tn — равноотстоящие. Однако он малонадежен, так как
допускает несколько произвольное толкование постоянства разделенных разностей (в пределах некоторой точности).
Существует более надежный способ определения порядка параболической тенденции, позволяющий к тому же одновременно определять саму параболу приближенной регрессии (сглаживающую кривую). Представим сглаживающую кривую (2.4) в виде параболы тп-го порядка
У = ?<А (0 + Y1P1 (0 +- + УтРт (0. (2.18)
где P0(t) = 1; P^t), . . Pm(t) (2.19)
— система ортогональных на множестве точек t2, . . ., tn многочленов х, т. е. система многочленов, удовлетворяющая условию
п
S Pk(ti)Pl(tl)=Q, k^l,
i=l
а наилучшие в смысле методов наименьших квадратов значения
1 Если точки Ti, • •» Gi — равноотстоящие, т. е. t = то в качестве ^\(0 часто используют многочлены Чебышева.
251
9*
коэффициентов у0, ут находим по явной формуле 1 * *
= урУ? > * = 0,1,...,т. (2.20)
2j Vi'
Замечательное свойство этого метода — метода ортогональных многочленов — состоит в том, что оценки у0, . ., ут не за-
висят от к. Это означает, что при переходе от Л-го приближения к (к + 1)-му приближению нужно найти только значение коэффициента ук+1. Значения же коэффициентов у0, ух, . . ., ук остаются прежними. В этом отношении метод поиска сглаживающей кривой в виде (2.18) аналогичен интерполяции с помощью интерполяционного многочлена Ньютона, тогда как метод поиска сглаживающей кривой в виде (2.20) аналогичен интерполяции с помощью интерполяционного многочлена Лагранжа.
Степень сглаживающей параболы в этом случае определяют следующим образом. Начинают с линейного приближения. Как только «дисперсия»
Dm = S/(n - т - 1), (2.21)
где остаточная сумма квадратов Sm определяется по формуле
*Уя,= Е[ЗтЛ^)-^8. (2.22)
1=1 ;=0
перестанет быть значимо меньше «дисперсии» то следует прекратить дальнейшее увеличение степени in параболы приближенной регрессии. При этом значимость разницы между «дисперсиями» и Dm, как обычно, проверяются по критерию Фишера, согласно которому эта разница признается значимой, если окажется, что
Dm^/Dm > /р, (2.23)
где fp берется из таблицы распределения Фишера для [п — т, п — щ — 1] степеней свободы и доверительной вероятности Р.
Само собой разумеется, что дальнейшее увеличение прекращается также, если§
Dm ^т-1*
Это неравенство может возникнуть за счет уменьшения числа степеней свободы (для Dm число степеней свободы равно п — т — 1).
Заметим, что в этом случае ошибка прогноза на момент времени £Пр, соответствующая доверительной вероятности Р , не превосходит величины
Д /~ 1_I (*пр) . . ?т (*пр)
‘V * + SWP ’
(2.24)
1 Если исходить из параболы, то для определения ее коэффициентов а0«
ai, . . ., ат методом наименьших квадратов требуется решить систему
т + 1 линейных алгебраических уравнений с т + 1 неизвестными.
252
где U берется из таблицы распределения Стьюдента для тг — m — 1 степеней свободы и доверительной вероятности Р.
Следует отметить, что метод наименьших квадратов, с помощью которого находят коэффициенты сглаживающей кривой, не единственно возможный для этой цели. Метод наименьших квадратов наиболее разработан в теоретическом отношении и является самым действенным в том смысле, что он приводит обычно к несмещенным, состоятельным и эффективным оценкам. Однако метод наименьших квадратов требует сравнительно громоздких вычислений. Поэтому иногда для сглаживания используют более простой в вычислительном отношении, но менее эффективный в смысле погрешности прогнозирования метод — метод средних. В этом случае исходят из условия равенства нулю алгебраической суммы отклонений, т. е. из условия
у, — ...)] = о. (2.25)
i«=l
Для нахождения неизвестных коэффициентов а, Ь, . . . эту сумму разбивают на число слагаемых, равное числу неизвестных коэффициентов, и каждое слагаемое приравнивают пулю.
Необходимо отметить, что при экстраполяции следует соблюдать следующие условия: во-первых, нужно, чтобы период ретроспекции был больше периода упреждения; во-вторых, метод определяет основные тенденции и не позволяет прогнозировать специфические частные детали; в-третьих, метод экстраполяции тенденций желательно использовать в сочетании с другими методами.
Непосредственно экстраполяция (на основе корреляционных зависимостей) наиболее эффективно может быть использована на этапах эволюционного развития техники. Область ее применения— в основном краткосрочное и отчасти среднесрочное прогнозирование.
Предметом долгосрочного прогнозирования является научное предсказание принципиально новых БТС, поэтому методы непосредственной экстраполяции здесь практически не применимы. При среднесрочном и долгосрочном прогнозировании можно использовать экстраполяцию по огибающим кривым с оценкой изменения функциональных параметров систем на далекую перспективу. Это может дать представление о моментах наступления качественных скачков. Экстраполяцию по огибающим кривым целесообразно применять, когда прогнозируется система Широкого класса, так как в этом случае велика стабильность результатов (например, рассмотрение класса транспортных средств, летательных аппаратов, ЭЦВМ, ускорителей элементарных частиц и др.). Однако при долгосрочном прогнозировании, как уже отмечалось, предпочтение отдается интуитивным методам.
ГЛАВА ТРЕТЬЯ
• КОМПЛЕКСНЫЕ СИСТЕМЫ ПРОГНОЗИРОВАНИЯ
1. Логические правила и процедурные схемы комплексирования систем прогнозирования
Модификация существующих комплексных систем прогнозирования (КСП) и даже их капитальная реконструкция отнюдь не являются самой эффективной мерой при решении все более усложняющихся задач прогнозирования развития БТС. Лишь более гибко конструируемая КСП, не обладающая большим количеством жестких связей и ограничений в своей структуре и процедурной схеме реализации, позволяет учитывать специфику цели и объекта прогнозирования, объем и характер располагаемой информационной базы.
Анализ существующих КСП выявил, несмотря на многообразие подходов и приемов прогнозирования, наличие довольно ограниченного количества стандартных процедур, в той или иной последовательности входящих в системы. Не очень разнообразны и схемы их сочетания, направленные на решения частных задач отдельных этапов прогнозирования, причем начальные и конечные процедуры этих сочетаний, как правило, идентичны.
Такие сочетания последовательно выполняемых прогностических процедур, имеющие одинаковое целевое назначение и обеспечивающие функционирование сингулярных методов прогнозирования по принципу дизъюнкции, можно назвать модулем. Модуль является основным строительным элементом комплексных систем прогнозирования.
На рис. 24 представлена схема применимости сингулярных прогностических методов на основных этапах прогнозирования и процедурные схемы комплексирования модулей. На рисунке представлены 12 основных стандартных модулей, из которых может быть скомплексировано достаточно большое количество КСП.
Следует отметить, что внутри каждого модуля процедуры объединены либо по принципу конъюнкции (логическое умножение), либо по принципу дизъюнкции (логическое сложение). Так, модуль индивидуальных экспертных оценок на этапе пред-прогнозной ориентировки (М1А) в терминах алгебры символической логики (Булевой алгебры) запишется следующим образом (рис. 24):
[ОП л ВВЗ Л (И V дз V НС) д зп] - м1А,
где ОП — процедура анализа объекта прогноза; ВВЗ — процедура выявления внутренних закономерностей; И — метод интервью; ДЗ — метод подготовки докладных записок; НС — метод написания сценария; ЗП — процедура формулирования задачи прогноза на основе экспертных оценок.
254
a
б
//
00000/7/7706/0
#0/77006/
/Z 00/f0M0/7/77a/76-00-0/770/7700-/770¥60000 OOO/7OJ
Z/ 7/0777006/ 77/707OOJO/7O- 00007/ О//7/70О/77////О/ 0 0006 00/70606/7 06/760660 ZZ п 7/6/770067 77/70Z00JO/70- 06000 77O0O0770ZOO
Z77 Z/Z h £ i Z/J М j, h ZZ/ h н ZZZ § § и 223 h I*
прогнозирования
РИС. 24, а, б-, в, г, д. Схема применимости методов
научно-технического
Цифрами в классификаторе рисунка даны этапы, подэтапы, пяяцелы прогнозирования; цифры в модулях обозначают последовательность уровней прогноэа
Для достижения цели модуля (в данном случае формулирование задачи прогноза) достаточно выполнить центральную процедуру одним из экспертных методов —методом интервью, написания докладных записок или сценария, но правило дизъюнкции (соединительное ИЛИ) означает, что могут быть применены и все параллельно соединенные методы для дублирования прогнозной информации.
Одновременно для достижения цели модуля должны быть выполнены все его четыре процедуры: анализ объекта прогноза, выявление внутренних закономерностей, экспертиза, формулирование задачи прогноза (правило конъюнкции). В этом случае модуль М1А будет иметь полную структуру.
На этом же этапе может быть использован и модуль документально-статистического анализа М1В (см. рис. 24):
[ОП А ИФ д (АСО V АД) А КС А зп] - м1В,
255
в
ZJ
М77м/ WAWjf
0/Ш/77/7£7Г/ШХ cfjrjeri
Z4
М/7/НГ trCKrfe юялгЯМа/ш#
Д
7ff/77&fo/ 0/7-ЛШМ/7/76/Н770 /Л7£77/7М&/7£ -Л17/7 /7£/ty/7Wrf 4Z M07770J//7 jfi/tf-/77£/rf£7f/7Z/7 /7/7гл/7^еле////л pecyzwJ
4/7 Л {И III & 1 лЬ ИЙ 42/ th 4ZZ в
РИС. 24 (продолжение)
где ИФ — процедура исследования прогнозного фона; АСО — метод анализа статистической отчетности; АД — метод анализа
документов; КС — процедура классификации событий.
На втором этапе прогнозирования развития БТС (прогнози-
рования структуры) могут быть применены четыре стандартных модуля (МПа, Мпв, Мпс и Мпд):
— модуль корневых деревьев
МПА - Езп Л ГЦП Д АИ А ФК Д (ДЦЗ V СС V КДФ) Л ВтС Л ВшС],
— модуль структурной) аналогии
мпв’“* [зп Л ВВАЛ (ИА V ЛА V ФА)Д (ФС V ФП) Д ВтС Д ВшС],
— модуль внутренних связей
мпс “* Езп Л ДО Д (КК V МЯ)Д АЭД Д СЭЛВтС Д ВшС],
— модуль внешних связей
Л/ПР -* [зп Л Вф Д КФ Д (MB V ИЛМ) Д ВтС Д ВшС],
256
>/ /7# jz JJ /7& 77О777Ы/77£Г/>Г, J4 Tfr .ЯГ£77?/Г/77 -
J/7 А hl J/Z 1^1 1 J/J u IP '"'1 0 JZZ £ < JZJ % N ь Ш * 1 JJZ Ъ || 1 it J/Z
/Wfftfy/76 £7/7 /££ ^£ /Wrtysrt £7£
РИС. 24 (окончание)
где
гцп — процедура формулирования генеральной цели прогноза;
АИ — процедура анализа иерархии БТС;
ФК — процедура формулирования критерия;
ДЦЗ — метод построения дерева целей и задач;
СС — метод построения стохастической сети;
КФД — метод построения конструктивно-функционального дерева;
ВТС — процедура формирования внутренней структуры;
Вшс — процедура формирования внешней структуры;
ВВА — процедура выбора вида аналогии;
ИА — метод исторической аналогии;
ЛА — метод логической аналогии;
ФА — метод функциональной аналогии;
ФС(ФП) — процедура формулирования событий (подсистем);
ДО — процедура декомпозиции объекта;
КК — метод контекстуального картографирования;
МЯ — морфологический метод (составление морфологического ящика);
АЭД — процедура анализа элементов декомпозиции;
СЭ — процедура синтеза элементов;
257
ВФ — процедура выбора факторов;
КФ — процедура классификации факторов;
МВ — матричный метод (построение матриц влияния);
— информационно-логический метод (установление логической цели).
Количественная оценка структуры БТС проводится с помощью одного из четырех прогнозных модулей:
— модуль числовых зависимостей
мша-. [ВтС д ВшС а в + з д (ФЗ v кз v сз) А пф а кос а В]»
— модуль числовой аналогии
мшв [ВтС Л ВшС а ва а вп а (мпк v мво v ммо) а кос а В],
— модуль патентов и изобретений
Л/шс - [ВтС Л ВшС Л ви Л (ИИ V пи) лифа кос а в]»
— модуль коллективных экспертных оценок
miiid -* [ВтС Л ВшС л (А V мк) л мо а КОС а В],
где ВТЗ — процедура выявления типа зависимости;
ФЗ — метод функциональной зависимости;
КЗ — метод корреляционной зависимости;
СЗ — метод статистической зависимости;
ПФ — процедура подбора функции;
КОС — процедура количественной оценки структуры БТС;
В — процедура верификации;
ВА — процедура выбора аналога;
ВП — процедура выбора параметров;
МПК — метод переводных коэффициентов;
МБО — метод балльной оценки;
ММО — метод малых отклонений;
ВИ — процедура выбора вида информации;
ИИ — метод прогнозирования по информации об изобретениях: ПИ — метод прогнозирования по патентной информации;
А — метод анкетирования;
МК — метод комиссий;
МО — процедура математической обработки экспертных оценок На этапе прогнозирования ресурсного обеспечения программ развития БТС можно использовать два модуля:
— модуль оптимального распределения ресурсов
miva -* [К°с Л фЧф Л Ф0 Л (Рслу V рсну) а ор],
— модуль эвристического распределения ресурсов
minb [К°С A PAPP А (РРО V PPM) Л ОР],
где ФЦФ — процедура формирования целевой функции;
ФО — процедура формирования ограничений;
РСЛУ — метод решения системы линейных уравнений;
РСНУ — метод решения системы нелинейных уравнений;
ОР — процедура оценки распределения;
РАРР — процедура разработки алгоритмов распределения ресур сов;
258
РРО — метод распределения ресурсов однопараметрический; PPM — метод распределения ресурсов многопараметрический.
Объединение модулей всех четырех уровней в полную комплексную систему прогнозирования (Я) проводится по следующему правилу:
Л - [(М1А (И V ДЗ V НС) V (М1В (АСО V АД)] Л
Л [Л/ПА (ДЦЗ V СС V КДФ) V А/пв (ИА V ЛА V ФА) V
V MIIC ((КК V МЯ) V M11D (MB V ИЛМ)] д
А [мша (ф3 V кз v сз) v мтв (мпк V мбо v ммо) v
V Мшс (ИИ V ПИ) V M1UD (А V МК)] д
A Imiva (Рслу~\/ рсну) v ^ivb (рро V ррм)].
Значение спецзнаков здесь и в предыдущих логических формулах комплексирования модулей следующее: V — соединительное ИЛИ — событие свершится, если будет выполнена хотя бы одна из предпосылок; V — разъединительное ИЛИ — событие свершится, если будет выполнена только одна из предпосылок. Д — соединительное И — событие свершится, если будут выполнены все предпосылки.
Смысловая интерпретация правила состоит в следующем. Для комплексируемой системы достаточной структурой является структура, состоящая из четырех модулей — представителей различных классов, в модуле может быть использован один из альтернативных методов с обеспечивающими его процедурами. Избыточно-допустимой является структура, в которой на всех этапах прогнозирования объекта, за исключением последнего, может одновременно использоваться несколько модулей одного класса и в каждом модуле может одновременно использоваться несколько альтернативных методов.
Выбор модуля из одного класса, а также метода, обеспечивающего эффективное выполнение центральной процедуры включаемого в СКП модуля, осуществляется на основании максимальной их адаптации к цели и объекту прогноза, объему располагаемой информации. При этом используются соображения о применимости интуитивных и формализованных методов в зависимости от указанных параметров и другие логические соображения, полученные на основании опыта анализа и использования инструментария прогностики, практики функционирования СКП.
2. Комплексирование системы долгосрочного прогнозирования развития БТС
Объекты, исследуемые в данной работе, как правило, обладают большими размерностями и высокой степенью связности. Это определяет значительную сложность их структуры, высокую неопределенность динамики развития и потенциальной эффективности функционирования.
Характерными особенностями больших технических систем
259
являются длительные сроки их создания, дискретность развития, довольно частая сменяемость поколений. Отсюда важное требование к СКП: обеспечение большой глубины упреждения, позволяющей достоверно оценить наиболее реальные и предпочтительные альтернативы развития БТС и социально-экономические последствия их функционирования в перспективе. При этом в течение периода упреждения, как правило, происходит ряд больших или малых скачков в развитии БТС. Так, за 30 с небольшим лет развития электронно-вычислительной техники создано четыре поколения ЭВМ, каждое из которых представляет собой качественный скачок, прерывающий цепь эволюционных преобразований.
За последние 40—50 лет развития авиация претерпела по крайней мере четыре-пять крупных скачков в своем развитии: замена деревянных конструкций планера металлическими, поршневых двигателей реактивными, переход звукового барьера и создание сверхзвуковых, а затем и гиперзвуковых самолетов, преодоление теплового барьера и замена дюралевых конструкций планера стальными и титановыми, создание второго поколения газотурбинных самолетов. На очереди новые скачки, связанные прежде всего с возможностью применения водородного топлива для авиационных силовых установок [52].
Необходимость минимизации ущерба от неоптимальности принимаемых технико-экономических решений, определяющих стратегию и тактику развития БТС, обусловливает важность разработки комплексного прогноза уже на самых ранних этапах их создания (появлении принципиальной научно-технической идеи и начале ее исследовательской разработки). Этот период характеризуется наличием очень ограниченного объема информации об объекте прогнозирования и внешней среде (фоне).
Указанные обстоятельства приводят к предпочтительности использования в СКП интуитивных методов прогнозирования. Поэтому для данных условий функционирования систем прогнозирования развития БТС на этапе предпрогнозной ориентировки целесообразно выбрать модуль индивидуальной экспертной оценки Mia, на этапе количественной оценки структуры БТС — модуль коллективной экспертной оценки Мию и на этапе прогнозирования ресурсного обеспечения — модуль эвристического распределения ресурсов.
На этапе прогнозирования структуры БТС предпочтение нами отдано модулю корневых деревьев. Это связано с тем, что, как правило, БТС относится к классу сложных многоуровневых систем и более или менее достоверный прогноз невозможно сделать без декомпозиции системы по иерархическим уровням.
Таким образом, комплексную систему дальнесрочного прогнозирования развития БТС на ранних этапах их создания можно представить в следующем символическом виде:
Л1>1С = MiA (М VW3 V нс) л мпА (дцзу сс v кфд) д Л (А V МК) Л м„в (РРО V PPM).
260
В рамки данной структуры укладывается 36 вариантов систем комплексного прогнозирования с достаточной структурой — по возможному сочетанию альтернативных методов последовательно функционирующих модулей (3 X 3 X 2 X 2).
Процедуры и методы индивидуальных экспертных оценок достаточно описаны в отечественной и переводной литературе, поэтому нет необходимости их повторять в данной работе. В то же время остальные прогностические процедуры, входящие в выбранные модули, применительно к специфическому объекту прогнозирования — БТС требуют некоторого пояснения и описания процедурных схем функционирования.
В основе модуля Мил лежит корневое дерево — это ациклический связный оргграф, имеющий следующие характеристики: 1) корневое дерево имеет одну исходную вершину (корень); 2) любые две его вершины соединены единственной простой цепью; 3) если любую пару несмежных вершин соединить ребром, то в графе будет только один простой цикл; 4) любое нетривиальное дерево имеет минимум две висячие вершины; 5) при п вершинах имеет (п — 1) ребер.
Преимущества прогнозирования структуры объекта в виде корневого дерева заключаются в том, что логика построения прогноза вводится в определенную форму, структура имеет наглядный вид, удобный для формализации, анализа и количественной ее оценки.
Как и любой граф, корневое дерево можно представить матрицами инциденций, смежности, достижений, расстояний и обходов. Это дает возможность контролировать правильность построения графов больших размеров и вводить числовой материал для дальнейших расчетов па ЭВМ.
Прогнозирование структуры объекта с применением в СКП корневого дерева состоит из следующих этапов (модуль II — А):
1) определение и количественный просчет генеральной цели комплексного прогноза;
2) определение необходимого количества уровней и их направленности^
3) последовательное формирование двух соседних уровней с одновременным определением связей между ними;
4) формулирование критериев оценки;
5) присвоение каждому элементу дерева шифра, содержащего номер уровня элемента, порядковый номер элемента на уровне, номер уровня и порядковый номер элемента, исходного для данного элемента;
6) заполнение контрольных матриц;
7) выявление и исправление ошибок.
Критерии оценки элементов корневого дерева составляют внешнюю структуру объекта. Критерий — это средство измерения альтернативы при установлении предпочтительности. В качестве критерия могут выступать расчетные величины, экономические категории, социально-политические задачи, тактико-технико-эко
261
номические требования. Выработка критериев оценки — один из ответственных этапов проведения количественной оценки. Неправильный или неточный выбор критерия приводит к результатам, далеким от истинного положения вещей, т. е. фактически делает бесполезным и даже вредным проведение оценки по такому критерию.
Требования, предъявляемые к критерию, таковы: относительная простота; чувствительность к изменениям параметров; комплексность учета параметров; целенаправленность.
Критерии, вырабатываемые для корневого дерева, подразделяются в зависимости от масштабности их применения на глобальные, субглобальные и локальные. По глобальному критерию оцениваются все элементы дерева. Субглобальные критерии служат для оценки элементов нескольких соседних уровней. Локальные критерии отражают наиболее существенные признаки элементов одного уровня.
Если один уровень оценивается по нескольким локальным критериям, т. е. имеет место поликритериальная оценка, должно выполняться при этом условие ортогональности (непересекаемости) критериев.
Глобальные, субглобальные и те локальные критерии, которые выработаны в единственном числе к какому-либо уровню, количественно не оцениваются ввиду отсутствия конкурирующих критериев. В исследованных СКП, содержащих в своей структуре модуль (II — А), элементы корневых деревьев имеют навсех этапах количественной оценки структуры весовой характероцепки. Вес элемента является степенью соответствия данного элемента критерию.
При поликритериальной оценке вес элемента — это тот вклад, который вносит реализация элемента в реализацию генеральной цели в аспекте всех критериев, т. е. внешней структуры.
Процедурная схема функционирования СКП на этапе количественной оценки структуры содержит и элементы выбора варианта корневого дерева по типу критерия и виду оценки.
Схема состоит из шести блоков (рис. 25): блок проверки уровня (дерева) на тип критерия (А); блок пересчета групповых оценок в общеуровневые (5); блок расчета коэффициентов связи по уровням (С); блок расчета коэффициентов относительной важности по ветвям (блок ZJ); блок расчета функции предпочтительности по глобальному критерию (блок Е)\ блок расчета весов характеристик (блок G).
Блок А (рис. 26) является исходным в общей схеме анализа и количественной оценки структуры и имеет выход на блок В. Блок А содержит логические элементы, ответ на которые определяет выбор алгоритма. В том случае, если внешняя структура состоит из субглобальных или локальных критериев, вид оценки нужно выбирать весовой, ей соответствует алгоритм, представленный блоками В, С, D.
В случае глобального критерия вид оценки может быть как весовой, так и в единицах измерения характеристики. Оконча-
262
РИС. 25. Процедурная схема количественной оценки структуры
РИС. 26. Блок выбора алгоритма оценки (блок Л)
РИС. 27. Блок пересчета групповых оценок в общеуровневые (блок В)
тельный выбор алгоритма зависит от внутренней структуры объекта. Алгоритм, которому соответствует только оценка в единицах измерения характеристик, описывается блоками D и G.
Блок В (рис. 27) предназначен для пересчета групповых оценок в общеуровневые (нормированные). Введение групповых оценок при экспертной оценке элементов дерева облегчает задачу экспертов, так как, во-первых, это уменьшает количество оцениваемых одновременно элементов, во-вторых, дает возможность привлекать к оценке внутригрупповых элементов более узких специалистов, что повышает достоверность экспертных оценок.
Блок С (рис. 28) содержит расчет коэффициентов связи (zjj) на уровнях на базе весов критериев (дх) и весов элементов по данным критериям (rjixv)* Расчет производится по всем элементам уровня с учетом всех локальных критериев к уровню. В случае глобального и субглобального критериев блок С в расчете не участвует, что отражено блоком А, который имеет два выхода — на блок В и блок Е.
Блок D (рис. 29) содержит расчет коэффициентов относительной важности элементов дерева (/Q, оцененных экспертами в единицах измерения характеристик.
От степени улучшения характеристик в результате проведения прогнозируемых НИОКР и от их веса зависит приращение ДП1Н)> j функции предпочтительности П. Величины П и рассчиты-
ваются на основании экспертных оценок попарного сравнения характеристик и оценки уровня развития характеристик. В блоке есть обращение к блоку G, в котором происходит преобразование групповой матрицы оценок попарного сравнения характеристик с целью устранения нетранзитивности.
Блок Е (рис. 30) содержит расчет коэффициентов относительной важности элементов {Кц) по ветвям корневого дерева от нижнего уровня к корню при условии, что коэффициенты связи этих элементов (г^) просчитаны (блок С). В основе расчетов лежит логическое распознавание смежной цели по информации, содержащейся в шифре, а именно: i — номер уровня расчетного элемента; / — порядковый номер этого элемента на уровне (слева направо); к — номер уровня смежного элемента (сверху); I — порядковый номер смежного элемента на уровне (слева направо).
Данным блоком учтены как горизонтальные, так и вертикальные связи между элементами дерева. Горизонтальные связи учитываются экспертами при оценке весов и находят свое выражение в коэффициентах связи; вертикальные связи учитываются расчетом удельного веса каждого из коэффициентов связи в общей сумме смежных элементов по ветке и дальнейшим суммированием по ветке всех коэффициентов связи с учетом их удельных весов.
Блок G (рис. 31) служит для получения весов характеристик путем преобразования матриц попарного сравнения этих характеристик. Блок G замыкается на блок D, т. е. используется только при построении структуры объекта в виде КФД.
264
РИС. 29. Блок расчета коэффициентов относительной важности по ветвям (блок!))
РИС. 30. Блок расчета весов характеристик (блок Е)
Описанная процедурная схема функционирования СКП дает полную картину количественной оценки структуры, но для ее практического использования необходимо представить алгоритмы расчетов, раскрывающие содержание элементов, внесенных в блоки в агрегированном виде.
3. Прогнозирование с использованием модуля дерева целей и задач
Построение дерева целей и задач (ДЦЗ) начинается после проведения предпрогнозной ориентировки, цель которой выявить задачу прогноза. При построении ДЦЗ задача прогноза должна быть облечена в конкретную форму, имеющую количественное описание. Такая задача является генеральной целью прогноза, т. е. целью, на достижение которой направлены все элементы прогнозируемой структуры объекта. Генеральная цель может быть использована в качестве глобального критерия оценки. В этом случае внутренняя структура объекта будет и внешней структурой. Оценки элементов внутренней структуры в зависимости от степени учета элементов внешней структуры и смежных элементов внутренней структуры подразделяются на следующие виды: вес элементов в группе; вес элемента на уровне; коэффициент связи элемента; коэффициент относительной важности элемента.
266
fi/70K £
РИС. 31. Блок преобразования матриц попарного сравнения (блок G)
Вес элемента в группе, будучи исходной оценкой, определяет общую картину количественной оценки ДЦЗ. Поскольку вес элемента определяется методом анкетирования экспертов, для повышения степени его достоверности необходимо от эксперта получать эту оценку в нескольких вариантах, т. е. необходима система оценок. Авторами предлагается следующая система оценок: ранг; абсолютная оценка; относительная оценка.
267
Такая система оценок ориентирует эксперта, позволяет подойти к оценке одного и того же элемента с разных точек зрения, а следовательно, снижает процент ошибки, уменьшает нетранзи-тивность.
Присвоение абсолютной оценки (исходя из 10 баллов) осуществляется по следующей аргументации: 10 баллов присваивается наиболее значимому элементу, реализация которого для генеральной цели является существенно необходимым условием; 9—7 баллов присваивается элементу важному; 5—7 баллов — элементу средней важности в отношении реализации генеральной цели; 3—4 балла — элементу второстепенной важности; 1—2 балла — малозначимому элементу.
При присвоении относительной оценки эксперт должен понижать или повышать средний балл по уровню (или по группе на уровне), но баланс баллов должен выдерживаться, т. е. сумма баллов по всем элементам должна быть равна заданной (10 баллов, 100 баллов в зависимости от количества элементов на уровне или в группе).
На основании трех перечисленных оценок рассчитывается относительная нормированная к единице оценка, среднее математическое которых и есть относительный вес. Ранг переводится в относительную оценку при допущении, что разница в один ранг означает постоянный разрыв в относительной важности независимо от ранга элемента:
о а°тн = —-----------
J лотн
3
}
где aj — абсолютная оценка элемента /; а°тн — относительная оценка /-го элемента; rj — ранг, присвоенный /-му элементу.
Повышению степени обоснованности веса элемента служит также внутригрупповая оценка элементов. Это уменьшает количество одновременно оцениваемых экспертом элементов, облегчая его работу, создавая реальные условия для присвоения элементам логически оправданных значений. Группы элементов целесообразно образовывать, ориентируясь на связи элементов с предыдущим уровнем, это обеспечивает попадание в группу элементов одной направленности. В группу рекомендуется включать не более девяти элементов. Для каждой группы элементов с целью приведения внутригрупповых весов к общеуровневым весам рассчитывается групповой коэффициент нормирования
Ку i —— iTby t / т i.
268
При этом веса элементов пересчитываются:
Г jin ===
При экспертной оценке весов элементов и критериев должны быть соблюдены нормирующие условия
3 2l ^j(ixv)) = |l> 3 9х== !•
>1 j,V i;x=»a
Эти условия означают требование непересекаемости аддитивных критериев и элементов одного уровня.
Веса элементов и веса критериев являются исходными данными для получения коэффициентов связи элементов дерева
v
Tjl== 3 ffx^jix* i,x=a
Коэффициенты связи, следовательно, тоже удовлетворяют условию
Srj( = l.
В случае оценки элементов на уровне по глобальному или субглобальному критериям, не имеющим удельных весов вследствие своей единственности на уровне, коэффициенты связи принимаются равными весам элементов
Гд = гдх» так как = 1,0, v = 1,0.
Из опубликованных в литературе систем комплексного прогнозирования известно два варианта расчета коэффициентов относительной важности по весам (коэффициентам связи) элементов, находящихся на одной ветке дерева: умножение весов (коэффициентов связи); сложение весов (коэффициентов связи).
Если для одной и той же модели дерева воспользоваться этими двумя алгоритмами и сравнить их результаты, то отклонения полученных коэффициентов относительной важности составляют 25—30%. Отсюда следует, что важно не только правильно разработать систему экспертных оценок, организовать экспертизу, разработать алгоритм расчета коэффициентов связи при различных критериях, но и обосновать получение коэффициентов относительной важности по характеристикам (весам, коэффициентам связи) элементов, составляющим одну ветвь.
Автор предлагает при расчете коэффициента относительной важности элемента учитывать удельный вес этого элемента на ветке
Кц = г}1/% Гц. i=l
При этом формула расчета может иметь как мультипликативный,
269
так и аддитивный вид
Я*=ПгГ, аТ = 2агягя. 1=1 1=1
Здесь первая мультипликативная функция преобразуется в аддитивную:
lg** = 3^ lgГц.
i
Полученный коэффициент Kj нормируется, т. е. приводится к виду
5^ = 1,0 j
по формуле пересчета
Результаты по мультипликативной и аддитивной функциям получаются одинаковыми. Можно использовать любую из расчетных формул, но ввиду простоты расчета целесообразно пользоваться аддитивной моделью. Идентичность результатов объясняется свойствами логарифмической функции и проверена на практических расчетах.
Автором проведена аналогия с расчетом среднего переводного коэффициента при определении себестоимости нового изделия методом переводных коэффициентов.
Сравнение коэффициентов относительной важности, получаемых тремя описанными выше способами, показывает, что коэффициенты, рассчитанные по аддитивной формуле, имеют наименьший разброс при удовлетворительной дифференциации (на 5— 10% разброс меньше, чем при расчете по простой аддитивной функции).
Уменьшение разброса коэффициентов относительной важности имеет большое практическое значение, так как при решении задач ресурсного обеспечения прогнозируемого облика объекта это обстоятельство сокращает количество программ НИОКР, обеспеченных ниже допустимого уровня, т. е. повышает эффективность прогнозируемого уровня обеспечения комплекса программ НИОКР ресурсами.
Описанная выше комплексная система, согласно которой структура объекта прогнозируется и оценивается по дереву целей, нашла применение при разработке комплексного прогноза развития грузовых авиаперевозок.
Исходным материалом для разработки прогноза явились результаты анализа состояния и динамики грузовых перевозок на воздушном транспорте.
270
Достигнутый объем грузовых авиаперевозок отстает от потребностей народного хозяйства. Этот факт усугубляется еще тем, что по многим видам грузов воздушный транспорт незаменим. К ним относятся: аварийные грузы; короткоживущие грузы (изотопы, вакцины, биоаппараты, материалы в сосудах Дьюара); скоропортящиеся грузы; почтовые перевозки (газеты, журналы, матрицы газет и журналов, спецкорреспонденция). Воздушный транспорт незаменим для доставки грузов в бездорожные северо-восточные районы страны.
Анализ показал, что причины медленных темпов роста грузовых авиаперевозок следующие: недостаточное развитие самолето-моторного парка в направлении создания специализированных грузовых средств воздушного транспорта и конвертируемых самолетов; недостатки в планировании объема перевозок по видам грузов и направлениям перевозок (планируется лишь незначительная часть общего объема авиаперевозок); низкий уровень внутрисамолетной механизации, механизации погрузочно-разгрузочных работ; недостаточная контейнеризация; высокие тарифы по грузовым авиаперевозкам; недостаточное развитие транспортной сети (линии и аэропорты); несоответствие расписания движения самолетов требованиям отправителя.
Выявленные факторы, определяющие развитие грузовых авиаперевозок, положены в основу при разработке дерева целей и задач развития грузового авиатранспорта.
Формулирование генеральной цели является одной из важнейших задач построения ДЦЗ. От того, насколько она выражает сущность перспективной комплексной программы, в какой степени она конкретна, зависит мера ее активного влияния и на структуру ДЦЗ, и на количественную оценку его элементов. При построении дерева целей развития грузовых авиаперевозок до 1990 г. генеральная цель сформулирована на основании проведения расчетов по ретроспективным данным изменения объема грузовых авиаперевозок и исследовательского прогноза (в продолжение выявленной тенденции), а также принятых альтернатив ускоренного развития.
Данный разброс альтернатив вызван применением различных методов экстраполяции (экстраполяция по экспоненте, прогнозирование по логистической кривой с пределом, экстраполяция по степенной зависимости) в соответствии с гипотезами, оценивающими интенсивность роста грузопотоков при различном соотношении социальных потребностей и технико-экономических возможностей ускоренной доставки грузов.
Дерево целей развития грузовых авиаперевозок состоит из четырех уровней:
I уровень — генеральная цель ДЦЗ;
II уровень — основные направления развития грузовых авиаперевозок;
III уровень — задачи развития грузовых авиаперевозок;
IV уровень — программы развития грузовых авиаперевозок.
271
Программа (по Г. С. Поспелову) — это планируемый комплекс экономических, социальных, технических, проектных, производственных и научно-исследовательских мероприятий, направленных на достижение одной генеральной цели или одного генерального направления развития.
Ниже дается описание дерева целей по уровням.
Уровень II (основные направления) состоит из трех элементов:
— развитие грузового самолето-вертолетного парка воздушного транспорта;
— развитие грузовой воздушной транспортной сети;
— совершенствование организации и управления грузовых авиаперевозок.
Уровень III (задачи) состоит из 12 элементов: 6 элементов раскрывают содержание первой основной задачи, 2 элемента относятся ко второй основной задаче, 4 элемента характеризуют третью основную задачу.
Анализ самолето-вертолетного парка (СВП) воздушного транспорта по структуре показал низкий удельный вес специализированных грузовых самолетов в общем объеме СВП, используемого для грузовых авиаперевозок. Поэтому одной из важнейших задач по развитию грузового парка воздушного транспорта является увеличение удельного веса специализированных грузовых самолетов. К этой же группе задач (по развитию грузового парка воздушного транспорта) относятся:
— модификация пассажирских самолетов в грузовые;
— создание конвертируемых самолетов;
— переоборудование пассажирских машин, выработавших ресурс, в грузовые;
— совершенствование и создание грузопассажирских самолетов;
— развитие вертолетной авиации и самолетов с укороченными или вертикальными взлетом и посадкой.
Ко второй группе задач, направленных на развитие грузовой воздушной транспортной сети, относятся:
— строительство новых грузовых и грузопассажирских аэропортов и грузовых комплексов в аэропортах;
— реконструкция действующих аэропортов.
В третью группу задач, направленную на совершенствование организации и управления грузовых авиаперевозок, входят следующие задачи:
— оптимизация управления грузовыми авиаперевозками;
— совершенствование планирования грузовых авиаперевозок;
— совершенствование организации грузовых авиаперевозок;
— автоматизация управления грузовыми авиаперевозками.
Уровень IV^(программ) состоит из 16 блоков, объединяющих 55 элементов.
Для оценки элементов ДЦЗ использован один из методов экспертизы — анкетирование. Использована система оценок: ранг,
272
абсолютная оценка и относительная оценка, что в неявной форме дублирует точку зрения эксперта на относительную важность элемента в обеспечении достижения генеральной цели. Генеральная цель является глобальным критерием.
Процедура оценки дерева целей состоит из следующих этапов (эксперты работают самостоятельно):
1. Начиная со II уровня элементы каждого уровня ранжируются (rj = 1, 2 и т. д.). При этом 1 присваивается наиболее значимому элементу на данном уровне.
2. Каждому элементу на всех уровнях присваиваются баллы (О до 10) пропорционально степени важности (по его вкладу в генеральную цель). Оценки даются совершенно независимо от других элементов на уровне и от связи между уровнями.
3. Между элементами уровня соответственно потенциальному вкладу в реализацию генеральной цели распределяется следующее количество баллов по группам: на II уровне — 10 баллов (всего); на III уровне — 100 баллов (в каждой группе); на IV уровне — 100 баллов (в каждой группе).
Ориентиром для экспертов при относительной оценке элементов служит величина среднего балла по каждой группе элементов при условии № равнозначности.
Последовательность расчетов при определении коэффициентов относительной важности (Kj) элементов ДЦЗ следующая:
1) пересчет ранговых, абсолютных и относительных балльных оценок по каждому эксперту в относительные нормированные;
2) определение — математического ожидания трех относительных нормировнных оценок по каждому элементу j одним из экспертов у;
3) определение aj — усредненного математического ожидания по элементу / с учетом всех экспертов (коэффициентов связи);
4) расчет 2 и 22, (доверительных интервалов);
5) расчет коэффициентов относительной важности элементов по коэффициентам связи элементов по ветке с учетом их удельных весов по ветке.
В оценке элементов II и III уровней приняли участие 11 высококвалифицированных экспертов. Поскольку эксперты были подобраны по их уровню компетентности в вопросе развития грузовых авиаперевозок, оценивать и вводить в расчет (в качестве взвешенных оценок) коэффициент компетентности не имело смысла.
Результаты опроса экспертов по элементам II и III уровней дали следующие оценки: оценка элемента, усредненная по экспертам (а;); минимальное значение элемента из его оценок по всем экспертам (Г;ш1п)> максимальное значение элемента из его оценок всеми экспертами (г;шах); среднеквадратическое отклонение оценок экспертов (2); границы доверительного интервала (22, Я), нахождению элемента в котором соответствует Р = = 0,95.
Результаты свидетельствуют о высокой степени согласованности мнений экспертов.
273
По значению dj элементы ДЦЗ расположились в порядке убывания следующим образом.
По элементам II уровня: развитие грузового самолетомоторного парка воздушного транспорта; совершенствование организации и управления грузовыми авиаперевозками; развитие грузовой воздушной транспортной сети.
По элементам III уровня: совершенствование планирования грузовых авиаперевозок; увеличение удельного веса специализированных Самолетов в общем объеме перевозок; создание конвертируемых самолетов; реконструкция действующих аэропортов; оптимизация управления грузовыми авиаперевозками; совершенствование и создание грузопассажирских самолетов; развитие вертолетной авиации и самолетов вертикального взлета-посадки; строительство новых грузовых и грузопассажирских аэропортов; совершенствование организации грузовых авиаперевозок; модификация пассажирских самолетов в грузовые; автоматизация управления грузовыми авиаперевозками; переоборудование пассажирских самолетов, выработавших свой ресурс, в грузовые.
Таковы основные теоретические предпосылки проектирования систем комплексного прогнозирования развития J5TC. Реализация предлагаемой концепции проектирования систем позволяет повысить объективность комплексных прогнозов научно-технического прогресса и на этой основе повысить эффективность стратегических плановых решений.
ЗАКЛЮЧЕНИЕ
Резюмируя изложенное, следует отметить, что одним из важнейших аспектов экономических исследований, связанных с изучением особенностей, с выявлением определяющих факторов и проблематики, а также наиболее вероятных направлений развития прогрессивных БТС, являются исследования по совершенствованию производительных сил общества. В этой связи важно подчеркнуть, что прогрессивные БТС обладают не только определенным элементом новизны по сравнению с действующей техникой, но характеризуются и большей экономической эффективностью и более высоким качественным уровнем технических параметров.
Особенностью реализации каждого этапа научно-технической революции является возникновение новой информации об объективных связях в реальной действительности, которая позволяет более эффективно использовать производительные силы общества. Это придает особенное значение информационным входам процессов планирования создания БТС.
Информационные входы, организованные в интересах создания перспективных разновидностей БТС, могут быть параллельными, последовательными, альтернативными, встречными (на основе обратных информационных связей), а также ассоциативными. Систематизация и организация информационных потоков в планировании развития БТС определяются прежде всего постановкой (формулировкой) решаемой проблемы. Такая постановка предусматривает следующее:
— источник возникновения проблемы (например, расхождение ранее достигнутой производительности или эффективности с потребной на данном этапе для какой-то БТС);
— развернутое обоснование самого факта наличия рассогласований в таком исследовании;
— определение особенностей и специфики, а также обязательное операционное исследование возможных нежелательных последствий проблемы.
При этом достаточно определенно формируется только возможная область целей развития БТС, но никак не конкретные цели, так как в противном случае перечеркивалась бы возможность получения альтернатив, являющихся обязательным элементом решения любой проблемы.
Следующий этап планирования создания БТС — это план исследований проблемы, который должен основываться на факторах:
— техническом уровне имеющейся продукции (БТС) и возможных путях его совершенствования;
— техническом уровне организационно-экономических сис-
275
тем, связанных с созданием данной БТС, и возможных путях ее совершенствования;
— имеющихся и потребных ресурсах для решения проблемы, их использования и возможных путях перераспределения.
Следует отметить очевидную взаимосвязь и взаимодействие между БТС и разрабатывающими их ОЭС. Эти связи характеризуются повышением технического уровня и производительности разрабатывающей ОЭС, возросшим уровнем ОЭС, что позволяет намечать очередные рубежи по совершенствованию БТС.
В планирование создания БТС и необходимых для этого исследований в наиболее общем случае должно входить: определение области целевых функций и возможных путей выхода в эту область; определение общих и частных критериев решения проблемы в целом, а также ее этапов; построение иерархического дерева целей и соответствующего ему иерархического дерева возможных операций; логический анализ процесса исследования с выделением важных объектов по качественным признакам, что даст возможность построить блок-схему процесса исследования; моделирование процесса и выбор математического аппарата для решения задачи по итеративному принципу; исследование дисциплинирующих условий, ограничений и чувствительности модели, что позволит дать окончательную строгую математическую формулировку, которая ложится в основу алгоритма и программы для ЭВМ; предварительный программный поиск, позволяющий выйти в область целевых функций и наметить генеральные альтернативы; проверка полученного решения на достоверность и возможность функционирования создаваемой БТС; уточнение программы и получение окончательных альтернатив решения; оптимизация решения проблемы по полученным альтернативам.
Особое место в плане исследования должны занимать вопросы, связанные с проверкой соответствия ОЭС условиям решения поставленной проблемы. При этом объектом изучения в первую очередь должны быть: творческий потенциал ОЭС, опыт (иногда задел), квалификация и численность основного состава; орудия труда ОЭС (машины, оборудование, приборы, средства связи, наличие парка соответствующих ЭВМ и т. д.), возможность использования прогрессивных материалов и ресурсы этих материалов в распоряжении данной ОЭС, уровень и перспективы освоения прогрессивных технологических процессов, соответствие имеющейся системы управления, пути ее усовершенствования.
Принимая во внимание обязательное условие создаваемой БТС — прогрессивность, необходимо с допустимым доверительным интервалом очертить ее минимальные границы долговечности (период до начала деградации системы) и в этой связи сформулировать период, в течение которого данная БТС будет планироваться как прогрессивная техника. В этом аспекте можно предложить считать БТС прогрессивной только на период замены ею действующих систем, с тем чтобы после завершения процесса замены данная БТС перешла в разряд «действующих».
ЛИТЕРАТУРА
1. Маркс К. Капитал. М.: Политиздат, 1963, т. I, II.
2. Маркс К., Энгельс Ф. Соч., т. 39.
3. Ленин В. И, Поли. собр. соч., т. 36, 38, 39, 40.
4. Ленин В. И. Философские тетради. М.: Политиздат, 1962.
5. Материалы XXV съезда КПСС. М.: Политиздат, 1976.
6. Материалы XXVI съезда КПСС. М.: Политиздат, 1981.
7. Брежнев Л. И. О пятидесятилетии Союза Советских Социалистических Республик. М.: Политиздат, 1972.
8. Аганбегян А. Г. Оптимальное планирование и совершенствование управления народным хозяйством. М.: Наука, 1969.
9. Амосов Н. М. Моделирование сложных систем. Киев: Наук, думка, 1973.
10. Берталанфи Л., фон. Общая теория систем.— В кн.: Исследования по общей теории систем. М.: Прогресс, 1969.
И. Бир С. Кибернетика и управление производством. М.: Наука, 1965.
12. Брилюэн Л. Наука о теории Информации. М.: Физматгиз, 1960.
13. Бусленко Н. П. Метод статистического моделирования. М.: Наука, 1970.
14. Гнеденко Б. В. Большие системы, теория, методология, моделирование. М.: Знание, 1971.
15. Вентцель Е. С. Введение в|исследование операций. М.: Сов. радио, 1964.
16. Винер Н. Кибернетика и общество. М.: Иностр, лит., 1959.
17. Волкович В. Л., Радомский Н. Ф. Системный подход к исследованию графических систем управления. Баку, 1971.
18. Волков О. П., Платонов Н. Г. Управление научно-техническим прогрессом. М.: Наука, 1975.
19. Воронов А.А.и др. Теоретические основы построения АСУ. М.: Наука, 1978.
20. Воронов А. А., Чистяков Ю. В. Аналитические методы выбора технических средств АСУ. М.: Наука, 1976.
21. Гличев А. В. Экономическая эффективность технических систем. М.: Экономика, 1971.
22. Глушков В. М. Введение в АСУ. Киев: Наук, думка, 1972.
23. Гуд Г., Макол Р. Системотехника. М.: Сов. радио, 1962.
24. Добров Г. М. Потенциал науки. Киев: Наук, думка, 1968.
25. Добров Г. М., Коренной А. А. Наука: информация и управление. М.: Сов. радио, 1977.
26. Добров Г. М. Прогнозирование науки и техники. М.: Наука, 1969.
27. Дружинина Д. С., Конторов В. В. Проблемы системологии. М.: Сов. радио, 1976.
28. Еаекиел М., Фокс К. Методы анализа корреляций и решений. М.: Статистика, 1966.
29. Исследования по общей теории систем/Сб. подред. В. Г. Садовского. М.: Прогресс, 1969.
30. Канторович Л. В. Экономический расчет наилучшего использования ресурсов. М.: Изд-во АН СССР, 1953.
31. Квейд 9. Анализ сложных систем. М.: Сов. радио, 1969.
32. Келдыш М. В. Естественные науки и их значение для развития мировоззрения и технического прогресса.— Коммунист, 1966, № 17.
33. Клименко К. И., Петрова Е. В. Экономическая эффективность технического прогресса в тяжелой промышленности СССР. М.: Наука, 1971.
34. Кобринский И. Е. Основы экономической кибернетики. М.: Экономика, 1969.
35. Крапивин В.Ф. Теоретико-игровые методы синтеза сложных систем в конфликтных ситуациях. М.: Сов. радио, 1972.
36. Ланге О. В. Введение в экономическую кибернетику . М.: Прогресс, 1968»
277
37. Лахтин М. Н. Практика науки. Новосибирск: Наука, 1969.
38. Л о патников Л. И. Краткий экономико-математический словарь. М.: Наука, 1979.
39. Д • Основы экономического проектирования. М.: Экономика,
40. Макаров И. М. и др. Целевые комплексные программы. М.: Знание, 1980.
41. Макол Р. Справочник по системотехнике. М.: Сов. радио, 1970.
42. Мангейм М. А, Иерархические структуры. М.: Мир, 1970.
43. Моисеев Н, Н. Прогресс, план, ЭВМ.— Химия и жизнь, 1980, № 1.
44. Морз Ф. М., Кимбелл Д. Е, Методы исследования операций. М.: Сов. радио, 1956.
45. Моррис У, И. Наука об управлении. М.: Мир, 1971.
46. Немчинов В. С, Экономико-математические методы и модели. М.: Соцэк-гиз, 1962.
47. Никаноров С, П. Оптимизация больших систем. М.: Сов. радио, 1971.
48. Новожилов В. В, Проблемы измерения затрат и результатов при оптимальном планировании. М.: Наука, 1972.
49. Оптнер С, Системный анализ при решении деловых и промышленных проблем. М.: Сов. радио, 1969.
50. Пугачев В. Ф. Оптимизация планирования. М.: Мир, 1972.
51. Саймон Г. Наука об искусственном. М.: Мир, 1972.
52. Саркисян С. А., Ахундов В, М., Минаев Э, С. Большие технические системы: Анализ и прогноз развития. М.: Наука, 1977.
53. Саркисян С. А., Минаев Э. С. Экономическая оценка летательных аппаратов. М.: Машиностроение, 1972.
54. Современная теория систем управления / Сб. под ред. К. Леондеса. М.: Наука, 1970.
55. Теория иерархических многоуровневых систем / Пер. с англ. М.: Мир,
56. Трапезников В, А. Автоматическое управление и экономика.— АиТ, 1966, № 1.
57. Цыпкин Я. 3, Адаптация, обучение и самообучение в автоматических системах. М.: Наука, 1965.
58. Энциклопедия кибернетики. Т. I, II. Киев: Глав. ред. укр. сов. энциклопедии, 1974.
59. Эшби У, Введение в кибернетику. М.: Иностр, лит., 1953.
60. Янг С. Системное управление организацией. М.: Сов. радио, 1972.
61. Яглом A, М., Яглом И. М. Вероятность и информация. М.: Сов. радио, 1973.
ОГЛАВЛЕНИЕ
Предисловие.................................................... 3
РАЗДЕЛ I. ТЕОРЕТИЧЕСКИЕ ОСНОВЫ СИСТЕМОЛОГИИ . . 5
Глава 1. Современная научно-техническая революция и развитие БТС.......................................................... 5
1. Научно-техническая революция и развитие больших систем ..................................................... 5
2. Сущность и особенности БТС........................... 14
3. Социально-экономические аспекты развития БТС .... 23
Глава 2. Основные принципы и структурные концепции системологии 27
1. Основные понятия..................................... 27
2. Декомпозиция систем.................................. 36
3. Особенности структуры и связей в системах............ 50
4. Сложность систем. Макро- и микроанализ............... 53
5. Концепция жизненного цикла БТС....................... 58
Глава 3. Теоретические основы анализа систем .......... 62
1. Анализ систем. Построение дерева целей............... 63
2. Основные положения логического анализа систем .... 67
3. Формирование и выбор альтернатив..................... 68
Глава 4. Структурный анализ БТС ............... 70
1. Энергоматериальный анализ............................ 70
2. Информационные параметры систем...................... 74
3. Анализ человеко-машинных систем...................... 81
Глава 5. Аналитическое представление БТС ........... 92
1. Виды и типология моделей БТС......................... 98
2. Дерево моделей системологии......................... 106
3. Обобщенные функциональные модели подсистем БТС . . . 109
4. Модели жизненного цикла БТС......................... 115
РАЗДЕЛ II. ОПТИМАЛЬНОЕ УПРАВЛЕНИЕ РАЗВИТИЕМ БТС 126
Глава 1. Аспекты постановки задач развития БТС ........ 128
1. Особенности постановки задач развития БТС .......... 129
2. Критерии оценки эффективности БТС................... 137
3. Особенности постановки задач оптимизации облика БТС 152
4. Особенности постановки задач оптимального распределения ресурсов.......................................... 159
Глава 2. Стратегии развития БТС ............... 167
1. Аспекты программно-целевого управления.............. 168
2. Альтернативные стратегии развития БТС............... 173
3. Особенности модульной стратегии развития БТС...... 179
4. Методы выбора альтернативных стратегий создания БТС 189
Глава 3. Информационно-математическое обеспечение программ развития БТС.................................................. 195
1. Формирование системы исходных данных................ 198
2. Методология построения систем модульного информационно-математического обеспечения........................ 201
3. Методология системного проектирования............... 207
279
РАЗДЕЛ III. ТЕОРИЯ ПРОГНОЗИРОВАНИЯ РАЗВИТИЯ БТС . 219
Глава 1. Функции и задачи прогнозирования.................. 219
1. Эволюция задач и система прогнозирования БТС...... 219
2. Функциональные особенности прогнозирования........ 223
3. Анализ методов прогнозирования развития БТС....... 225
Глава 2. Сингулярные методы прогнозирования................ 238
1. Классификация методов прогнозирования............. 238
2. Интуитивные методы прогнозирования................ 240
3. Методы экстраполяции тенденций.................... 247
Глава 3. Комплексные системы прогнозирования............... 254
1. Логические правила и процедурные схемы комплексиро-вания систем прогнозирования......................... 254
2. Комплексирование системы долгосрочного прогнозирования развития БТС............................... 259
3. Прогнозирование с использованием модуля дерева целей и задач.............................................. 266
ВАКЛЮЧЕНИЕ ................................................ 275
ЛИТЕРАТУРА................................................. 277
Сергей Арамович САРКИСЯН, Василий Мамед-Багирович АХУНДОВ, Эдуард Сергеевич МИНАЕВ
АНАЛИЗ И ПРОГНОЗ РАЗВИТИЯ
БОЛЬШИХ ТЕХНИЧЕСКИХ СИСТЕМ
Утверждено к печати Ордена Ленина Институтом проблем управления
Редактор Ю. и. Мишин. Редактор издательства К. Ф. Пашковская» Художник М. Р. Ибрагимов. Художественный редактор Н. Н. Власик. Технический редактор Т. А. Прусакова. Корректоры Л. В. Лукичева, И. А. Та ла лай
ИБ № 21257
Сдано в набор 22.09.82. Подписано к печати 17.12.82. Т-22809» Формат 60x90>/ie.
Бумага типографская ЗД1. Гарнитура обыкновенная. Печать высокая. Усл. печ. л. 17,5. Усл. кр. отт. 17,5. Уч.-изд. л. 19,2. Тираж 2250. Тип. зак. 2088. Цена 2 р. 20 к. Издательство «Наука» 117864, ГСП-7, Москва, В-485,Профсоюзная ул., 90 2-я типография издательства «Наука» 121099, Москва, Г-99, Шубинский пер., 10